























































































































































































































































































































































Автор: Белов М.П. Зементов О.И. Козярук А.Е.
Теги: электротехника электроэнергетика механика
ISBN: 5-7695-2448-0
Год: 2006




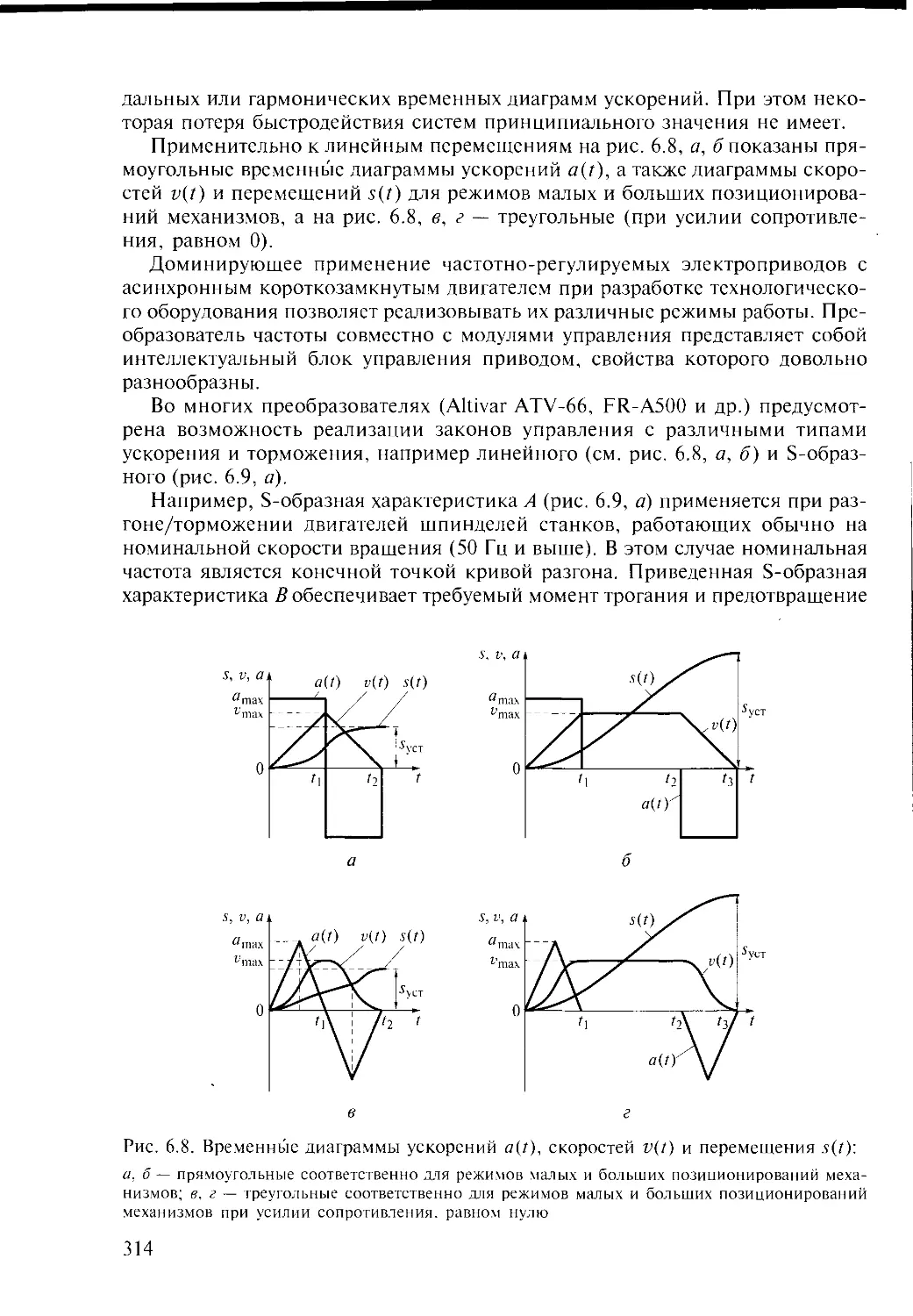
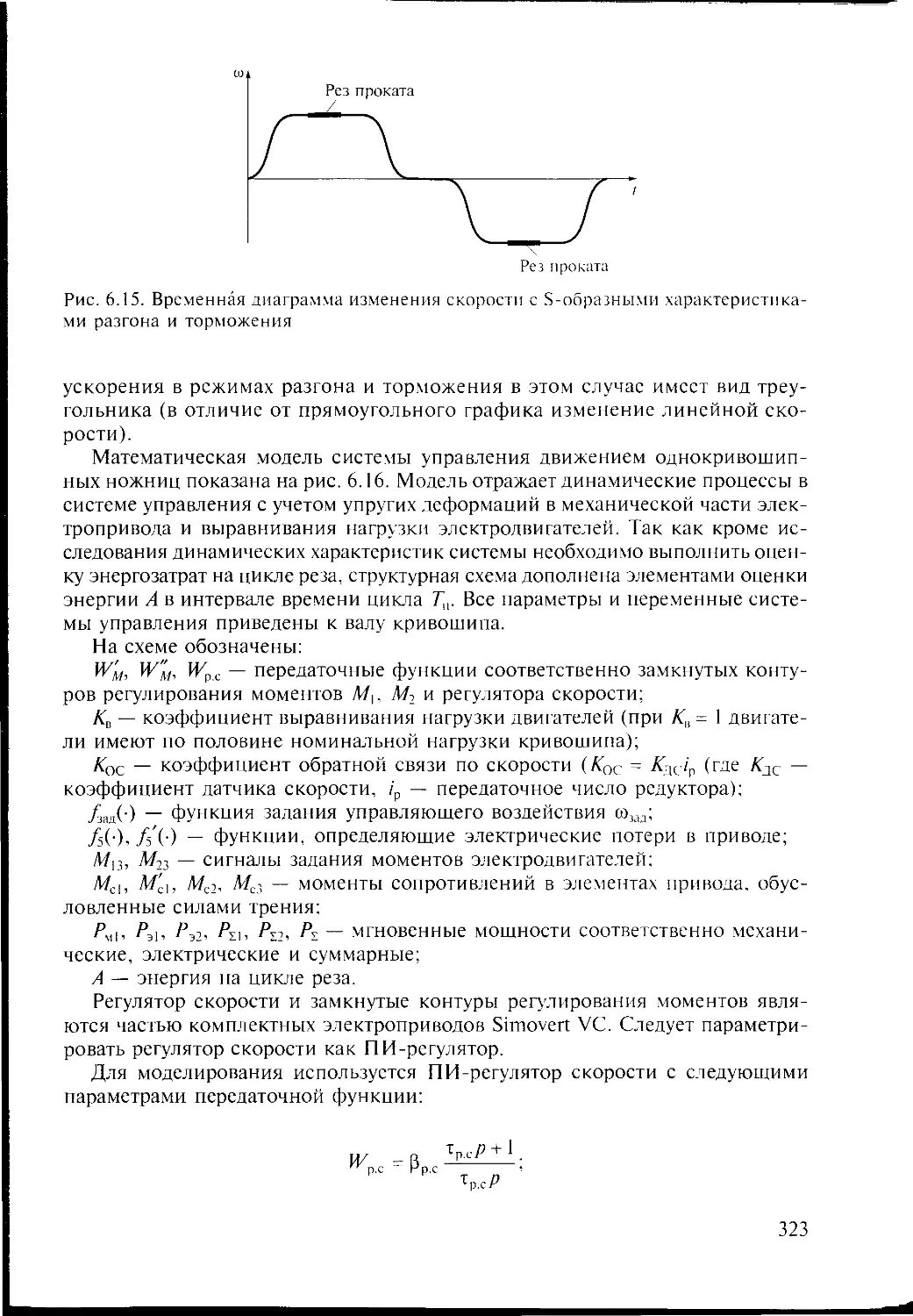
Текст
ЫСШЕЕ ПРОФЕССИОНАЛЬНОЕ ОБРАЗОВАНИЕ
ИНЖИНИРИНГ ЭЛЕКТРОПРИВОДОВ И СИСТЕМ АВТОМАТИЗАЦИИ
Под редакцией В.А.Новикова, Л.М.Чернигова
Допущено
Учебно-методическим объединением по образованию в области энергетики и электротехники в качестве учебного пособия для студентов высших учебных заведений, обучающихся по специальности 140604 «Электропривод и автоматика промышленных установок и технологических комплексов»
селения подготовки 140600 «Электротехника, электромеханика и электротехнологии»
Москва
academ'a
2006
Рецензенты:
проф. кафедры «Автоматизированный электропривод» МЭИ С. К. Козырев'. зав. кафедрой «Автоматизированный электропривод и электротехника» Санкт-Петербургского государственного технологического университета растительных полимеров, д-р. техн, наук, проф. В. Д. Кулик', проф. кафедры «Системы автоматического управления» СПбГПУ, д-р техн, наук С. А. Ковчин
Авторы:
М.П. Белов, О. И. Зементов, А. Е.Козярук, Л. П. Козлова, В. А. Новиков. С. В. Савва, Л.М.Чернигов, С.Г.Горохов, Н.И.Татаринцев
Инжиниринг электроприводов и систем автоматизации : учеб, пособие И57 для студ. высш. учеб, заведений / [М. П. Белов, О. И. Зементов, А. Е. Козя-рук и др.] ; под ред. В. А. Новикова, Л. М. Чернигова. — М. : Издательский центр «Академия», 2006. — 368 с.
ISBN 5-7695-2448-0
Рассмотрены основные виды инжиниринговой деятельности, направленные на создание и эксплуатацию электроприводов и систем автоматизации производственных машин и технологических комплексов. Представлена вся цепочка деятельности, определяемая понятием «работа под ключ», т. е. от бизнес-плана и технического задания до монтажа, наладки и сервисного обслуживания. На уровне пользователя даны основные приемы применения современных информационных технологий. Особое внимание уделено расчету и выбору средств и систем электропривода и автоматизации, разработке конструкторской и программной документации.
Для студентов высших учебных заведений. Может быть полезно инженерно-техническим работникам, занятым разработкой, проектированием и эксплуатацией электроприводов и систем автоматизации для разнообразных производств.
УДК 621.3(075.8)
ББК 31.2я73
Оригинал-макет данного издания является собственностью Издательского центра «Академия», и его воспроизведение любым способом без согласия правообладателя запрещается
ISBN 5-7695-2448-0
© Коллектив авторов. 2006
© Образовательно-издательский центр «Академия», 2006
© Оформление. Издательский центр «Академия». 2006
Посвящается светлой памяти Артемия Васильевича Башарина и Льва Николаевича Рассудова
ПРЕДИСЛОВИЕ РЕДАКТОРОВ
В энциклопедическом понимании инжиниринг (от лат. ingenium, анг. engineering — изобретательность, выдумка, знания) — деятельность по проработке вопросов создания объектов промышленности, строительства, инфраструк--ры и др.; предоставление на коммерческой основе комплекса услуг по под-- товке и обеспечению процесса производства, обслуживанию строительства • деконструкции промышленных, городских и других объектов.
В настоящей книге рассматривается часть системного и электротехническо- инжиниринга, включающая в себя следующие виды деятельности по созда-- ию электроприводов и систем автоматизации для разнообразных объектов:
• маркетинговые и технико-экономические исследования по разработке -: зого электрооборудования;
• связь с разработчиками технологического оборудования, производствен-— \ машин и механизмов;
• проектирование и разработку конструкторской документации по комп-'гитам электрооборудования, связь с поставщиками и консультантами уни-z щированных средств систем электроприводов и автоматизации;
• заказ и производство электрооборудования;
• монтаж и наблюдение за монтажом электрооборудования на объекте за-- азчика;
• обучение операторов технологического оборудования и обслуживающего ггсонала;
. выполнение пусконаладочных работ;
• гарантийное и сервисное обслуживание;
• менеджмент на всех стадиях создания электрооборудования.
Актуальность предметной области настоящей книги определяется следу-- кими факторами:
электроприводы и системы автоматизации, являющиеся эффективными .т кствами автоматизации производственных машин и технологических ком--ексов большинства отраслей промышленности, в значительной мере обес-у-ивают повышение производительности технологического оборудования и •..-юство производимой продукции;
применение современных автоматизированных электроприводов, адапти-: .энных к технологическим режимам работы машин и комплексов, обуслов-кет существенную экономию электроэнергии, что способствует снижению .: 'естои.мости продукции и энергетических потребностей предприятий.
Всем известно, что в России действует Единая энергетическая система, но к ? кто знает о фактическом наличии распределенной (не единой) электро-
'зодческой системы, так как она не существует юридически. Однако при-кно две трети всей электроэнергии, вырабатываемой РАО «ЕЭС России»,
3
превращается электроприводами в механическую энергию, т. е. в движение разнообразных механизмов, машин и комплексов в объектах городского хозяйства и производствах всех отраслей промышленности. И такая ситуация характерна для всех промышленно развитых стран мира.
На что же расходуется электроприводами столь значительная часть вырабатываемой электроэнергии в масштабах страны? Ответ на этот вопрос можно найти в нашей повседневной жизни. Это холодное и горячее водоснабжение, отопление, бытовая техника, лифты, насосы, вентиляторы, кондиционеры, электротранспорт (трамвай, троллейбус, поезд, эскалатор метрополитена); подъемно-транспортные машины. Во всех приведенных примерах применяются автоматизированные электроприводы, которые незаменимы также в строительстве, агропромышленном комплексе, горнодобывающей, металлургической, машиностроительной промышленности и др. [8].
Современные компьютеризированные энергосберегающие электроприводы, интегрированные с информационными сетями производств, применяются для выполнения самых разнообразных технологических процессов. Мировой объем продаж регулируемых электроприводов достигает 3 млрд долл, в год. При этом происходит быстрое обновление промышленных электроприводов, так как окупаемость этого обновления составляет во многих случаях 1—2 года. Для России это особенно актуально, так как неизбежное повышение тарифов на электроэнергию приводит к повышению стоимости продукции, изготавливаемой на машинах с неэффективными и энергозатратными электроприводами старых поколений. Вступление РФ в ВТО потребует реконструкции существующих электроприводов в больших масштабах в целях обеспечения производства продукции, конкурентноспособной на мировом рынке.
Наряду с созданием новых технологий, машин и комплексов актуальным является реконструкция уже действующих. Так как многие машины в России создавались с большим запасом прочности и надежности, реконструкция электроприводов и систем автоматизации является во многих случаях экономически оправданным способом обновления производства.
Использование современных электроприводов отвечает государственным интересам страны и в связи с обязательствами Российской Федерации по уменьшению загрязнения атмосферы, в котором значительна роль электростанций. Экономия электроэнергии, обеспечиваемая применением энергосберегающих электроприводов, приведет если не к закрытию некоторых действующих электростанций, то к отказу от строительства новых.
Успех выполнения столь масштабной работы по реконструкции промышленного оборудования напрямую зависит от уровня подготовки и информационного обеспечения дипломированных специалистов по электроприводам и системам автоматизации.
Настоящее учебное пособие является первым по названию и содержанию в Российской Федерации, ранее ничего подобного не издавалось. Имеющиеся издания по отдельным видам того, что в настоящее время называется инжинирингом (например, по проектированию, конструированию или наладке), устарели, т.е. устарели рассматриваемые в них методы и средства решения задач профессиональной деятельности специалиста.
Авторы надеются, что данное учебное пособие станет настольной книгой студентов и выпускников вузов и активно поможет им в практической дея-
4
-ельности. В связи с этим сделаны акценты на «пользовательские» возможности учебного пособия с привлечением современных компьютерных и информационных технологий, а также с иллюстрацией применения этих технологий на конкретных примерах.
Решение такой задачи потребовало привлечения к написанию учебного тособия авторского коллектива, включающего в себя как представителей вузов, так и представителей научно-исследовательских, научно-производственных и инжиниринговых фирм, имеющих большой опыт обучения студентов и заботы с выпускниками вузов.
Материал книги распределяется между авторами следующим образом:
введение, гл. 1, приложение — В. А. Новиков, Л. М. Чернигов;
гл. 2 — зав. кафедрой Санкт-Петербургского государственного горного института, д-р. техн, наук, проф. А. Е.Козярук;
гл. 3 (кроме подразд. 3.5, 3.6), приложение — начальник отдела автоматизации ВСС Company, канд. техн, наук С. В. Савва;
гл. 4 — канд. техн, наук, доц. СПбГЭТУ «ЛЭТИ» Л. П. Козлова;
гл. 5, подразд. 3.5, 3.6 — технический директор НПФ «Ракурс» С. Г. Горохов и директор учебного центра НПФ «Ракурс» Н.И.Татаринцев;
гл. 6, приложение — канд. техн, наук, доц. СПбГЭТУ «ЛЭТИ» М.П. Белов;
гл. 7, подразд. 5.4.2, 5.4.3 — начальник отдела «Электроприводы и автоматизация» ОАО КО ВНИИМЕТМАШ, канд. техн, наук О. И. Зементов.
Общая разработка содержания книги выполнена В. А. Новиковым.
Авторы выражают благодарность за предоставленный материал своим коллегам: д-ру техн, наук, проф. НГТУ О. В. Федорову (подразд. 2.3) и начальнику тлела проектирования технической документации НПФ «Ракурс» А. А. Прокопову (примеры отдельных схем и чертежей к гл. 5).
профессор Санкт-Петербургского Генеральный директор научно-
^ударственного электротехнического производственной фирмы
-иверситета (СПбГЭТУ «ЛЭТИ») «Ракурс» канд. техн, наук
--п техн, наук В. А. НОВИКОВ Л.М. ЧЕРНИГОВ
ВВЕДЕНИЕ
Данное учебное пособие ориентировано на помощь в практической работе студентам старших курсов при выполнении курсового и дипломного проектирования, на молодых дипломированных специалистов при адаптации их к конкретному виду профессиональной деятельности по созданию и эксплуатации электроприводов и систем автоматизации (ЭП и СА), а также на амбициозных молодых специалистов, намеревающихся создать свой бизнес по инжинирингу ЭП и СА.
В книге раскрываются методы и средства решения основных задач профессиональной деятельности, предусмотренных государственным образовательным стандартом для выпускников вузов направления «Электротехника, электромеханика и электротехнологии».
Проектно-конструкторская и технологическая деятельность предусматривает:
• формулирование целей проекта (программы), критериев и показателей достижения целей, построение структуры их взаимосвязей, выявление приоритетов при решении задач;
• разработку обобщенных вариантов решения проблемы, анализ этих вариантов, прогнозирование последствий, отыскание компромиссных решений в условиях многокритериальности и неопределенности, планирование реализации проекта изделия или технологического процесса;
• использование информационных технологий при проектировании и конструировании электротехнического оборудования и систем, а также технологических процессов и технологических операций;
• разработку проектов технических условий, стандартов, технических описаний, а также описаний технологических процессов и регламентов;
• прогнозирование надежности разрабатываемых изделий, систем и их элементов с учетом технологии производства.
Исследовательская деятельность включает в себя:
• анализ состояния и динамики объектов деятельности;
• создание теоретических моделей, позволяющих прогнозировать свойства и поведение объектов деятельности;
• разработку планов, программ и методик проведения испытаний электротехнических изделий, систем электрооборудования и их элементов;
• применение методов анализа, синтеза и оптимизации процессов обеспечения качества, испытаний и сертификации продукции;
• разработку и использование систем автоматизированного проведения эксперимента;
• использование компьютерных технологий моделирования и обработки результатов.
6
Эксплуатационное и сервисное обслуживание предусматривает:
• разработку эксплуатационной документации;
• проведение испытаний и определение работоспособности установленного и ремонтируемого оборудования;
• выбор оборудования для замены в процессе эксплуатации;
• руководство проведением работ по техническому обслуживанию электротехнического оборудования.
Монтажно-наладочная деятельность включает в себя:
• разработку монтажной, наладочной и ремонтной документации;
• планирование монтажно-наладочных работ по вводу в эксплуатацию электротехнического оборудования;
• руководство монтажно-наладочными работами в соответствии с нормативной документацией;
• разработку программ и проведение приемосдаточных испытаний электротехнического оборудования.
Многие автоматизированные технологические комплексы включают в себя машины и агрегаты, осуществляющие технологические процессы обработки, переработки различных веществ и изготовления готового продукта производства. Технологии, основанные на движении различных механизмов машин и агрегатов, доминируют над другими технологиями в промышленности и являются наиболее энергоемкими. Использование систем многодвигательных автоматизированных электроприводов совместно с компьютерными средствами является мощным и высокоэффективным инструментом многих технологий.
По официальным данным уровень износа оборудования в большинстве отраслей промышленности РФ составляет в среднем 30... 60 %, а в горной промышленности достигает 80 %. Полностью изношена пятая часть всех производственных фондов, а ежегодно обновляется в последние пять лет не более 2.0...2,5 %. Повышение цен на электроэнергию и контроль качества электроэнергии создают новые проблемы для отечественного производства, приводящие к нерентабельности его в условиях свободного рынка. В существенной степени возможность обновления и повышение рентабельности производства определяются использованием современных автоматизированных электроприводов и новых высокоавтоматизированных технологий, что объясняет зысокую потребность в соответствующих молодых специалистах. Спрос здесь превышает предложение.
О масштабах и темпах развития работ в области ЭП и СА можно судить по постоянно увеличивающему числу работающих здесь инжиниринговых фирм и компаний. Инжиниринговые подразделения имеют все крупные электротехнические корпорации, производящие средства и системы ЭП и СА.
Слово «инжиниринг» — новое для русского языка, но, как и другие новые слова, появившиеся в последние годы, оно прочно входит в обиход. Широко используемое в экономически развитых странах это понятие включает в себя исследование, проектирование, монтаж, наладку, сервисное обслуживание и др. Для большинства выпускников вузов практическая деятельность является именно инжиниринговой и в наше динамичное время эта деятельность требует наличия хорошо подготовленных по всем вопросам создания ЭП и СА специалистов для многих технологий. Все эти вопросы последовательно раскрыты в настоящей книге. При изложении материала использованы многие
7
термины, понятия и определения, закрепленные законами и стандартами. Приведем наиболее общие из них.
Стадия создания — период в создании изделия, имеющий свои качественные особенности.
Этап создания — часть стадии создания изделия.
Изделие — изготовленный, выработанный кем-либо продукт (сделанная вещь).
Продукция — результат деятельности, представленный в материально-вещественной форме и предназначенный для дальнейшего использования в хозяйственных целях; совокупность продуктов, производимых каким-либо предприятием.
Производство — процесс создания материальных благ, работа по непосредственному изготовлению продукции.
Завод, фабрика — производственное предприятие.
Предприятие — производственная или торговая хозяйственная единица или объединение нескольких таких единиц, имущественный комплекс.
Фирма — производственное и (или) торговое предприятие, пользующееся правом юридического лица, под маркой которого выпускаются и (или) продаются изделия..
Организация — учреждение, не производственное предприятие.
ГЛАВА 1
СОДЕРЖАНИЕ ИНЖИНИРИНГА
1.1. Системный инжиниринг
1.1.1. Объекты и характеристика системного инжиниринга
Объектами системного инжиниринга являются: технологические процессы производства продукции; производственные машины и комплексы, на базе которых реализуются технологические процессы; электротехническое оборудование и системы электроснабжения; системы автоматизации производств; строительные конструкции и помещения.
Характеристики производственных механизмов, машин и комплексов, а также реализуемых на их базе технологических процессов в разных отраслях промышленности подробно изложены в [9, 58]. Создание строительных конструкций и помещений, а также относящихся к ним инженерных систем водоснабжения, водоотвода, вентиляции, кондиционирования воздуха и других выполняется в соответствии со Строительными нормами и правилами (СНиП), а промышленных механизмов и технологических комплексов — в соответствии с государственными стандартами (ГОСТ). Объект любого вида (будь то металлообрабатывающий станок, мостовой кран, конвейерная линия и т.д.) в ГОСТе называется изделием.
Процесс разработки и постановки изделий на производство определяет ГОСТ 15 СРПП, который предусматривает следующие его основные стадии:
• разработка, согласование и утверждение технического задания (ТЗ);
• разработка технической документации;
• изготовление опытных образцов (опытных партий);
• испытания и приемка опытных образцов (опытных партий), принятие решения о постановке продукции на производство;
• подготовка производства продукции;
• освоение производства продукции.
В стандартах определены функции заказчика (потребителя), разработчика и изготовителя продукции.
Заказчик предъявляет разработчику исходные требования к продукции, определяемые в результате изучения потребности и современных достижений в области ее производства, принимает участие в оценке технического уровня и качества выпущенной продукции и на стадиях ее разработки, подготовки производства и проводимых испытаний.
Разработчик разрабатывает ТЗ на основе исходных требований заказчика, согласовывает их с заинтересованными организациями, разрабатывает весь комплекс технической документации, проводит необходимые научно-иссле
9
довательские и опытно-конструкторские работы, патентные исследования, функционально-стоимостный анализ, моделирование, руководствуясь нормативно-техническими документами. На основе нормативно-технической документации разработчик определяет требования к техническому уровню заказанной продукции, а также к ее взаимозаменяемости и совместимости, безопасности для здоровья людей и природы.
Принципиальная особенность ТЗ состоит в том, что оно устанавливает технический уровень, который затем должен быть обеспечен на всех стадиях создания продукции. ТЗ, как правило, составляется разработчиком, но в отдельных случаях может быть разработано заказчиком или совместно с ним. ТЗ должно содержать технические требования к продукции, определяющие показатели ее качества, эксплуатационные характеристики, требования к надежности, технологичности, уровню стандартизации и унификации, безопасности для людей и природы, а также эстетические, эргономические требования и др. В ТЗ обязательно должны содержаться экономические показатели: эффективность, срок окупаемости, цена и другие, а также должны быть установлены порядок контроля, испытаний, приемки готовой продукции и порядок экспертизы технической документации.
Изготовитель согласовывает ТЗ, принимает участие в рассмотрении разрабатываемой технической документации, проводит технологическую подготовку производства, обеспечивает освоение производства, стабильное качество продукции и выпуск ее в количестве, соответствующем производственной программе. Изготовитель также организует контроль, периодические испытания серийно изготавливаемой продукции и обеспечивает своевременное снятие с производства устаревшей продукции.
В случае необходимости подтверждения соответствия разработанной технической документации требованиям технического задания изготавливают опытные образцы (опытные партии) продукции, которые подвергают двум видам испытаний: предварительным (заводским) и приемочным. Предварительные испытания проводятся, как правило, на заводе-изготовителе в целях проверки соответствия образца техническому заданию, требованиям стандартов и технической документации, выявления возможных дефектов, недоработок технической документации и определения возможности предъявления данного образца для приемочных испытаний. Приемочные испытания дают возможность оценить технический уровень продукции и определить возможность постановки ее на производство.
Новая продукция должна пройти процедуру сертификации соответствия требованиям технических регламентов и положениям стандартов.
1.1.2. Унификация, агрегатирование и типизация в системном инжиниринге
При разработке новых изделий используют приемы унификации, агрегатирования и типизации, что существенно сокращает сроки и стоимость их разработки и обеспечивает соответствие требованиям стандартов [3].
Унификация — это рациональное сокращение видов, типов и размеров изделий одинакового функционального назначения. Унифицированным являет
10
ся изделие, созданное на базе нескольких ранее существовавших различных его исполнений путем приведения к единому исполнению, заменяющему любое из них.
Степень унификации оценивается степенью насыщенности нового или проектируемого изделия элементами других изделий, уже освоенных в производстве. Высокая степень унификации обеспечивает возможность сокращения сроков проектирования и изготовления изделий, повышения производительности труда, увеличения гибкости и мобильности производства при переходе на выпуск новых видов продукции, а также повышения качества, надежности и долговечности изготавливаемых изделий. Унификация позволяет также снизить стоимость производства новых изделий, повысить уровень автоматизации производственных процессов, расширить специализированное производство.
Объектами унификации могут являться модули и блоки комплектных устройств, сборочные единицы, готовые изделия, технологические процессы, управляющие и информационные системы, технические требования, правила эксплуатации, термины и определения, системы документации и т.д. Унификация изделий осуществляется на основе определенного подобия выполняемых ими функций. Унификация изделий, целесообразность которой экономически обоснована, должна завершаться стандартизацией этих изделий.
Агрегатирование — это метод компоновки приборов, оборудования и машин из взаимозаменяемых, унифицированных узлов или агрегатов, каждый из которых представляет собой законченное изделие, выполняет определенную функцию и может быть использован при создании других изделий.
Применение агрегатирования связано с тем, что конструкции большинства изделий (оборудования, машин, комплексов, технологических процессов) можно разделить на ряд автономных агрегатов (узлов). Эти автономные функциональные узлы выделяются на основе структурного анализа их составных частей в целях использования в других изделиях. После разделения изделий полученные агрегаты унифицируют, стандартизируют и составляют для них конструктивно-унифицированные (типоразмерные) ряды. При этом агрегаты, изготавливаемые независимо друг от друга, обладают взаимозаменяемостью по всем эксплуатационным показателям и присоединительным размерам. Следовательно, они должны иметь оптимальную конструкцию, оптимальные показатели качества, состоять по возможности из наименьшего числа деталей, просто и надежно собираться с использованием различного рода соединений.
Агрегатирование обеспечивает возможность расширения области применения машин посредством замены отдельных их узлов и блоков, а также возможность компоновки машин, приборов, оборудования разного функционального назначения из отдельных узлов, изготавливаемых на специализированных предприятиях. Агрегатирование позволяет увеличить номенклатуру выпускаемых машин и оборудования за счет модификации их основных типов и различных исполнений [58].
Внедрение агрегатирования позволяет перейти от конструирования и производства дорогостоящих оригинальных оборудования, машин и приборов к созданию их на основе стандартных унифицированных агрегатов. Примером такого оборудования в машиностроении может служить агрегатный металлообрабатывающий станок (обрабатывающий центр), имеющий систему авто
11
матической смены инструментальных средств, которая обеспечивает с помощью устройства числового программного управления выполнение токарных, сверлильно-расточных, фрезерных и других операций.
Примером агрегатированного оборудования в металлургическом производстве могут служить сортовые прокатные станы, клети которых являются унифицированными агрегатами, набор которых определяется конкретным сортаментом прокатываемого металла. Соединение (объединение) клетей в единый технологический комплекс осуществляется с помощью рольгангов [8].
В машиностроении используется метод базового агрегата, при котором, присоединяя к базовой модели машины дополнительное оборудование, получают ряд производных машин разнообразного назначения, например конструктивно-унифицированный ряд конвейеров или подъемно-транспортных машин. Применяют и метод секционирования — разделения машин на одинаковые унифицированные секции, из которых также можно собрать ряд производных машин. Например, унифицированный гусеничный ход, состоящий из двух гусеничных тележек и оснащенный автоматизированными электроприводами, используется в экскаваторах, буровых станках и другом горном оборудовании [8].
Принцип агрегатирования используется также при создании электрооборудования. Примерами блочно-модульного принципа комплектования электрооборудования являются комплектные трансформаторные подстанции, комплектные распределительные устройства, комплектные электроприводы [8].
Типизация — метод стандартизации, заключающийся в установлении типовых объектов для данной совокупности систем электроприводов промышленных механизмов, принимаемых за основу (базу) при создании других объектов, близких по функциональному назначению. В процессе типизации выбирается объект с оптимальными свойствами, наиболее характерный (типовой) для данной совокупности систем, который при получении конкретного объекта — изделия или технологического процесса — может претерпевать лишь некоторые частичные изменения или доработки. Таким образом, типизация — это распространение большого количества функций на малое число объектов, обеспечивающее сохраняемость только типовых объектов изданной совокупности систем. Типизация как эффективный метод стандартизации применяется для следующих объектов: технологических процессов; технологических агрегатов; систем управления технологическими агрегатами и процессами; программного обеспечения систем управления; изделий общего назначения; руководящих технических материалов, устанавливающих рекомендуемый порядок проведения работ, расчетов, испытаний и т.п.
Особенно эффективна типизация в применении к системам управления технологическим оборудованием. Объединяя множество машин и механизмов, выполняющих одинаковые или аналогичные операции в технологических процессах разных отраслей промышленности, в типовые функциональные группы можно существенно облегчить разработку систем управления и обеспечить экономичную технологию проектирования компьютерных систем управления технологическими комплексами [8].
12
1.2. Электротехнический инжиниринг
1. 2.1. Объекты и характеристика электротехнического инжиниринга
Объектами электротехнического инжиниринга являются электроприводы производственных механизмов, машин и комплексов; оборудование электротехнологий (сварочное, термическое, гальваническое); электроустановки, предназначенные для производства, преобразования, трансформации, передачи, распределения электрической энергии; электроосветительные приборы и сети; электропреобразовательные и зарядные станции, предназначенные для питания специальных устройств и подзарядки аккумуляторных батарей электротранспорта.
Электротехнический инжиниринг разделяется на составляющие, определяемые видом электрооборудования: силовое, осветительное, обеспечивающее эле ктроснабжение.
Проектирование силового электрооборудования является наиболее емким и сложным вследствие его разнообразия и, как правило, включает в себя проектирование системы распределения электроэнергии от источника питания до потребителей, рассосредоточенных по технологическому оборудованию, используемому для конкретного производства (т.е. проектирование распределительной сети электроснабжения). Проектирование электроснабжения в этом случае сводится к проектированию питающих сетей [8].
Проектирование электроосвещения сводится к расчету и выбору электроосветительных приборов и их сетей питания. Питающие сети электроосвещения, как правило, развязаны с питающими сетями силового электрооборудования.
Разработка отдельных проектов электроснабжения не выполняется для мелких предприятий, где суммарная мощность силового электрооборудования невелика. Проектирование питающих сетей совмещается в этом случае с проектированием силового электрооборудования.
При выполнении проектов силового электрооборудования придерживаются следующих положений.
1. Соблюдение требований нормативно-технических документов.
2. Обеспечение электромагнитной совместимости, надежности и удобства эксплуатации электрооборудования. Максимальное его соответствие технологическому оборудованию и технологическому процессу. Учет опыта эксплуатации электрооборудования на предприятиях.
3. Использование блочно-модульных принципов комплектования электрооборудования. Максимальное использование типовых унифицированных изделий, имеющихся на рынке электрооборудования.
4. Обеспечение на предприятиях методики выполнения электромонтажных работ, приближенных к сборочным работам. Применение крупных узлов, блоков и комплектов электрооборудования и сетей, уменьшающих объемы электромонтажных работ. Максимальный учет требований выполнения ниш, лотков, отверстий в межэтажных перекрытиях и капитальных стенах для прокладки кабелей при строительстве зданий и сооружений.
13
5. Обеспечение экономичности принимаемых решений на основе анализа возможных вариантов (альтернатив). Выбор наиболее экономичного из вариантов, равноценных по другим оценкам, а также определение оптимального запаса по основным показателям электрооборудования (мощности, току нагрузки, температуре и др.).
При выполнении проектов электрооборудования разрабатываются строительные задания на следующие сооружения и элементы:
электропомещения;
фундаменты под электрические машины и электроагрегаты, устанавливаемые отдельно от технологического оборудования;
каналы, траншеи и блоки для кабельных сетей;
проходы и закладные части в элементах строительных конструкций зданий;
каналы для воздуховодов систем вентиляции электропомещений, отдельных электрических машин и электроагрегатов.
Разработка проекта начинается с ознакомления с заданиями на строительные сооружения, технологическое и механическое оборудование. Решение основных вопросов при проектировании выполняется в соответствии с ТЗ в следующем порядке:
расчет и выбор электрооборудования;
выбор питающих и распределительных электрических сетей;
выбор системы управления и автоматизации;
принятие конструктивных решений в отношении установки электрооборудования, монтажа информационных и электрических сетей.
1. 2.2. Нормативно-технические документы, используемые в электротехническом инжиниринге
В России нормативно-техническими документами являются ГОСТы, Строительные нормы и правила (СНиП), Правила пользования электрической энергией (ППЭ), Правила устройства электроустановок (ПУЭ), Правила технической эксплуатации электроустановок потребителей (ПТЭ), Правила техники безопасности электроустановок (ПТБ).
Стандарты РФ рассматриваются в подразд. 2.5. К ПУЭ [8, 46] применительно к электроприводам и СНиП будем обращаться, раскрывая конкретные прикладные вопросы создания электрооборудования. ПТЭ см. в гл. 7 и [47]. Здесь остановимся коротко на ППЭ и ПТБ.
Правила пользования электрической энергией регламентируют взаимоотношения между энергосистемой и электропотребителями. В них определены [38]:
порядок присоединения электроустановок потребителей к энергосистеме;
балансовая принадлежность оборудования и сетей и эксплуатационная ответственность потребителя и энергосистемы;
соответствующие тарифы и системы расчета за электроэнергию;
условия электроснабжения потребителей в период возникновения в энергосистеме временного дефицита мощности или энергии в целях сохранения устойчивого режима ее работы и порядок разгрузки за счет отключения части потребителей;
14
порядок допуска персонала энергосистемы к электроустановкам потребителей для оперативных переключений и контроля режима электропотребления;
ответственность энергосистемы и потребителей за электроснабжение, качество электроэнергии и несоблюдение настоящих правил.
Технико-экономические вопросы взаимоотношений между энергосистемой и потребителем включают в себя разработку и выполнение:
технических условий на присоединение электроустановок потребителей к энергосистеме;
схем размещения приборов контроля качества электроэнергии;
схем размещения приборов учета;
нормативов по компенсации реактивной мощности и оптимальных режимов работы компенсирующих устройств;
правил и норм, обеспечивающих надежную и экономичную эксплуатацию электроустановок потребителей.
Оперативно-диспетчерские взаимоотношения определяются необходимостью обеспечения:
электроснабжения потребителей в соответствии с выбранным уровнем надежности схемы внешнего подвода электроэнергии;
нормальных условий эксплуатации и ремонта оборудования, сетей и приборов энергосистемы и потребителей;
установленных стандартом норм качества электроэнергии;
разгрузки энергосистемы для сохранения устойчивого режима ее работы при возникновении временного аварийного дефицита мощности.
Единство электрической схемы энергосистемы и потребителей обусловливает необходимость строгой регламентации взаимоотношений между оперативно-диспетчерским персоналом.
Координация взаимоотношений между энергосистемой и потребителем возложена на Энергосбыт.
Правила техники безопасности электроустановок определяют условия, исключающие воздействие опасных и вредных факторов на персонал, занятый обслуживанием, эксплуатацией или ремонтом электрооборудования. К числу указанных воздействий относятся электрический ток и создаваемые при выработке, преобразовании и потреблении электроэнергии электрическое и магнитное поля, а также шум и вибрации.
Допустимое воздействие электрического тока на человека определяют ГОСТ 12.1.038 — 82 и рекомендации МЭК 479. В нормальном (неаварийном) режиме работы, когда изоляция электроустановок не повреждена, человек может контактировать с частями электроустановки, но при этом напряжения прикосновения и токи, протекающие через его тело, не должны превышать значений, указанных в ГОСТе.
При повреждении изоляции или контакте человека с токоведущими частями электроустановки в аварийном режиме работы предельно допустимые значения напряжения прикосновения и тока, протекающего через тело, зависят от времени нахождения человека под их действием и нормируются стандартом.
Электробезопасность человека при эксплуатации электроустановок обеспечивается основными техническими защитными мероприятиями, к которым относятся недоступность токоведущих частей и их надежная изоляция, а
15
также дополнительными техническими мероприятиями, т.е. применением устройств и средств защиты, обеспечивающих безопасность при повреждении основных средств зашиты. Выбор конкретных средств защиты осуществляется на основании классификации электроустановок по параметрам используемых в них напряжений питания, а производственных помещений — по степени опасности поражения электрическим током.
Различают электроустановки с напряжением питания до 1000 В и свыше 1000 В. По частоте питающей сети различают оборудование постоянного тока, оборудование низкой (промышленной) частоты (до 60 Гц), среднечастотное оборудование (свыше 60 Гц и до 10 кГц), высокочастотное оборудование (свыше 10 кГц и до 300 МГц) и сверхвысокочастотное оборудование, рабочая частота которого превышает 300 МГц [55].
Электрооборудование классифицируется по степени защиты от электрического тока человека и степени защиты от проникновения в него пыли, твердых объектов и влаги. Согласно ГОСТ 14254—80 и рекомендациям МЭК 529—89 различают семь степеней защиты от нерегламентированного доступа к внутренним частям изделия и девять степеней защиты токоведущих частей от проникновения в них воды через корпус изделия. В зависимости от предполагаемых условий эксплуатации изделия выбирается в соответствии с номером международной классификации (IP-хх) степень его защиты оболочкой — корпусом (см. подразд. 2.5 и [8]).
Для защиты человека от прикосновения к металлическим частям изделия, находящимся под напряжением, и для защиты изделия от коротких замыканий и замыканий на корпус служит электрическая изоляция. Выбор изоляции изделия и его частей зависит от значения рабочего напряжения. Предусмотрены пять классов защиты от поражения электрическим током (см. подразд. 7.1), которая обеспечивается не только основной изоляцией, но и дополнительной изоляцией и дополнительными средствами.
Основная рабочая изоляция — это электрическая изоляция токоведущих частей, обеспечивающая нормальную работу изделия и защиту человека от поражения электрическим током. Дополнительная изоляция предусматривается для защиты от поражения током в случае повреждения рабочей изоляции. Двойной изоляцией называется совокупность рабочей и дополнительной изоляции, при которой доступные прикосновению человека части не приобретают опасного потенциала при повреждении только рабочей или только дополнительной изоляции. Усиленная изоляция — это улучшенная рабочая изоляция, обеспечивающая такую же степень защиты от поражения током, как и двойная изоляция. Двойную или усиленную изоляцию применяют в изделиях, номинальное напряжение которых выше 50 В переменного тока и которые не имеют элемента для защитного заземления.
Причинами повреждения изоляции могут являться токи, значения которых выше допустимых для данного проводника или контактного соединения, что может повысить температуру нагрева изоляционных конструкций сверх допустимой (например, до значения температуры самовоспламенения). Такие токи возникают при неотключенных аппаратурой защиты коротких замыканиях и перегрузке. Дополнительными защитными мероприятиями от поражения током при повреждениях изоляции или оболочки изделия являются заземление, зануление, защитное отключение.
16
Заземление применяется в сочетании с контролем изоляции или защитным отключением в сетях с изолированной нейтралью и напряжением до 1000 В и в любых сетях с напряжением свыше 1000 В. В сетях с напряжением до 1000 В в случае замыкания токоведущих частей на заземленный корпус за счет его малого сопротивления по отношению к прочим сопротивлениям утечек фаз сети на землю напряжение замкнувшейся фазы относительно земли снижается до безопасного уровня, а средства контроля изоляции сигнализируют о возникновении неисправности и позволяют осуществить поиск места замыкания. В высоковольтных электроустановках при правильном расчете и выборе средств защиты от коротких замыканий участок сети с возникшим повреждением автоматически отключается.
Сопротивление защитного заземления корпуса электроустановки в сети с изолированной нейтралью не должно превышать:
при напряжении до 1000 В и мощности трансформатора больше 100 кВ • А — 4 Ом, а при меньшей мощности — 10 Ом;
при напряжении выше 1000 В — 125// (где / — расчетный ток замыкания на землю, А).
В сетях с напряжением до 1000 В и глухозаземленной нейтралью в качестве защитной меры выполняют зануление корпусов, т.е. соединяют их с нулевой точкой источника. Отдельное использование заземления в этих установках запрещено ввиду малой его эффективности и опасности совместного использования заземления корпусов одних электроприемников и зануления корпусов других электроприемников, так как при этом на последних возникает опасная разность потенциалов относительно земли при замыкании токоведущих частей на заземленный корпус.
Действие защитного зануления основано на переводе режима аварийного однополюсного снижения сопротивления изоляции токоведущих частей электротехнического изделия относительно металлического корпуса электроприемника в режим короткого замыкания в цепи фаза —нуль. Это вызывает в питающей сети срабатывание аппаратов защиты и отключение (обесточивание) участка сети с повреждением.
При оценке быстродействия защиты следует учитывать особенности работы аппаратов защиты от токов короткого замыкания, в качестве которых используются либо предохранители, либо автоматические выключатели.
Зануление является достаточно грубым видом защиты и предназначено только для защиты от повреждения изоляции типа замыкания на корпус, т.е. оно не защищает от частичного ухудшения сопротивления изоляции, когда защита еще не срабатывает, но уже может протекать опасный для человека ток утечки.
Для защиты от такого повреждения, а также для защиты от прикосновения к корпусу электроприемника, оказавшегося под напряжением, используются устройства защитного отключения (УЗО) или дифференциальные автоматические выключатели. В ряде стран мира такие устройства называются устройствами дифференциальной зашиты на остаточных токах нулевой последовательности. Эти устройства регламентирует ГОСТ Р 50807 — 95, разработанный на основе МЭК 755 — 83. В основном такие устройства применяются в сетях с глухозаземленной нейтралью, где их установка дополняется выполнением защитного заземления металлических корпусов электроприемников.
17
Все элементы установок, по которым протекают токи, являются источниками излучения электромагнитных полей. В зависимости от интенсивности излучения, рабочей частоты и места нахождения оператора относительно источника поля возможно воздействие его электрической или магнитной составляющей или их сочетания. Человек подвергается тепловому и нетепловому воздействию электромагнитного поля. Переменное электрическое поле вызывает нагрев тканей человека за счет переменной поляризации диэлектрика (хрящей, сухожилий и т.п.) и появления токов проводимости в тканях, обладающих ионной проводимостью. Перегрев особенно вреден для тканей со слаборазвитой сосудистой системой или недостаточным кровообращением (глаз, мозга, почек, желудка, желчного и мочевого пузырей).
Длительное постоянное воздействие радиоволн умеренной интенсивности, не дающее явного теплового эффекта, может вызвать функциональные изменения в центральной нервной и сердечно-сосудистой системах человека, а также гормональные сдвиги и нарушение обменных процессов. При длительном воздействии электромагнитного поля происходит либо физиологическая адаптация к нему организма, либо ослабление его иммунологических реакций.
В соответствии с ГОСТ 12.1.002—84, 12.1.006—84, 12.1.045 — 84, 12.2.007.10— 87 и санитарными нормами СанПиН 42—128—4262—87, СН 1742 — 77, СН 1757 — 77 в РФ определены предельно допустимые уровни напряженности магнитного и электрического полей на рабочих местах для восьмичасового рабочего дня. Например, при частоте 50 Гц напряженность магнитного поля не должна превышать 1300 А/м, а электрического — 5000 В/м. При частоте 1...12 кГц эти показатели соответственно составляют 50 А/м и 50 В/м. Если обслуживающий персонал подвергается воздействию электромагнитного поля не полный рабочий день, то допустимые уровни возрастают [55].
Основными источниками электрического и магнитного полей установок являются трансформаторы, реакторы, преобразователи частоты и конденсаторные батареи. Если данное оборудование размещается в закрытых металлических корпусах и шкафах, то за их пределами электромагнитное поле мало и не может вызвать нежелательные последствия для обслуживающего персонала.
К защитным мероприятиям от воздействия электромагнитных полей относятся:
периодическое измерение уровней полей в рабочей зоне персонала (особенно после ремонта электрооборудования);
размещение рабочих мест в зонах с интенсивностью излучений ниже предельно допустимой;
подавление электромагнитных полей посредством экранирования источника.
1.3. Инжиниринг электроприводов и систем автоматизации
1.3.1. Создание автоматизированных электроприводов механизмов, машин и комплексов на базе типовых средств
Возможны два варианта создания автоматизированных электроприводов (АЭП):
18
в составе вновь создаваемых механизмов, машин или комплексов; при реконструкции имеющихся механизмов, машин или комплексов.
В каждом из этих вариантов важна возможность тиражирования полученных результатов на другие аналогичные объекты.
В настоящее время в РФ создан развитый рынок типовых унифицированных средств ЭП и СА, т.е. имеется возможность выбора типовых средств от простых комплектных АЭП с невысокими динамическими показателями, предназначенных для управления автономными производственными механизмами, до интегрированных систем многодвигательных высокодинамичных АЭП, предназначенных для управления технологическими комплексами. При этом всегда предусматривается возможность сопряжения систем управления механизмами, машинами и комплексами с распределенными системами автоматизации технологических процессов (см. гл. 3 и приложение).
Большинство задач создания или модернизации АЭП конкретного объекта можно решить с использованием типовых средств. При этом важны выбор и компоновка этих средств, которые должны быть в максимальной степени адаптированы к конкретному объекту и режимам функционирования в технологическом процессе.
Принципы построения автоматизированных электроприводов механизмов, машин, агрегатов и комплексов основаны на блочно-модульной идеологии и типизации структур систем управления [8].
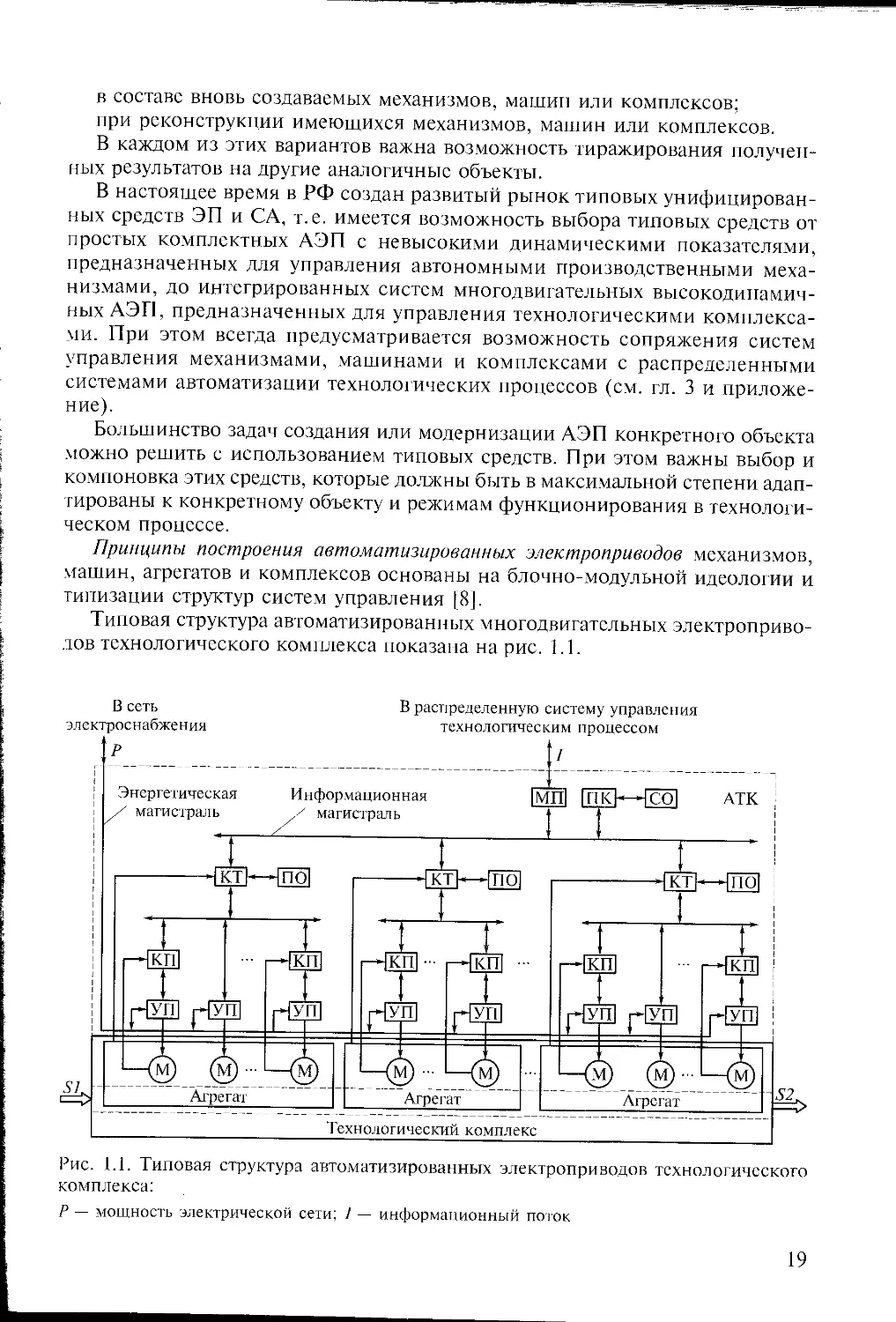
Типовая структура автоматизированных многодвигательных электроприводов технологического комплекса показана на рис. 1.1.
Рис. 1.1. Типовая структура автоматизированных электроприводов технологического комплекса:
Р — мощность электрической сети; / — информационный поток
19
Исполнительные органы рабочих машин и технологических агрегатов оснащаются индивидуальными электроприводами с электродвигателями (М), управляемыми преобразователями (УП) и программируемыми контроллерами приводов (КП). Совместно эти устройства составляют основу комплектного электропривода. Работу приводов и механизмов, входящих в состав технологического агрегата, координирует технологический программируемый контроллер (КТ). Координацию совместной работы агрегатов технологического комплекса выполняет один из микроконтроллеров (КТ) или промышленный компьютер (ПК), входящий в состав станции оператора (СО). Через магистральный преобразователь (МП) осуществляется связь автоматизированного технологического комплекса (АТК) с распределенной системой управления технологическим процессом. Контроллеры взаимодействуют через коммуникационную связь, структура которой в соответствии с существующими стандартами по индустриальным сетям средств вычислительной техники может быть различной. Контроль агрегатов и управление ими могут осуществляться с периферийных пультов операторов (ПО). Функции контроллеров привода и технологических контроллеров подробно раскрыты в [8].
Остановимся на общих вопросах расчета, выбора и проектирования автоматизированных электроприводов.
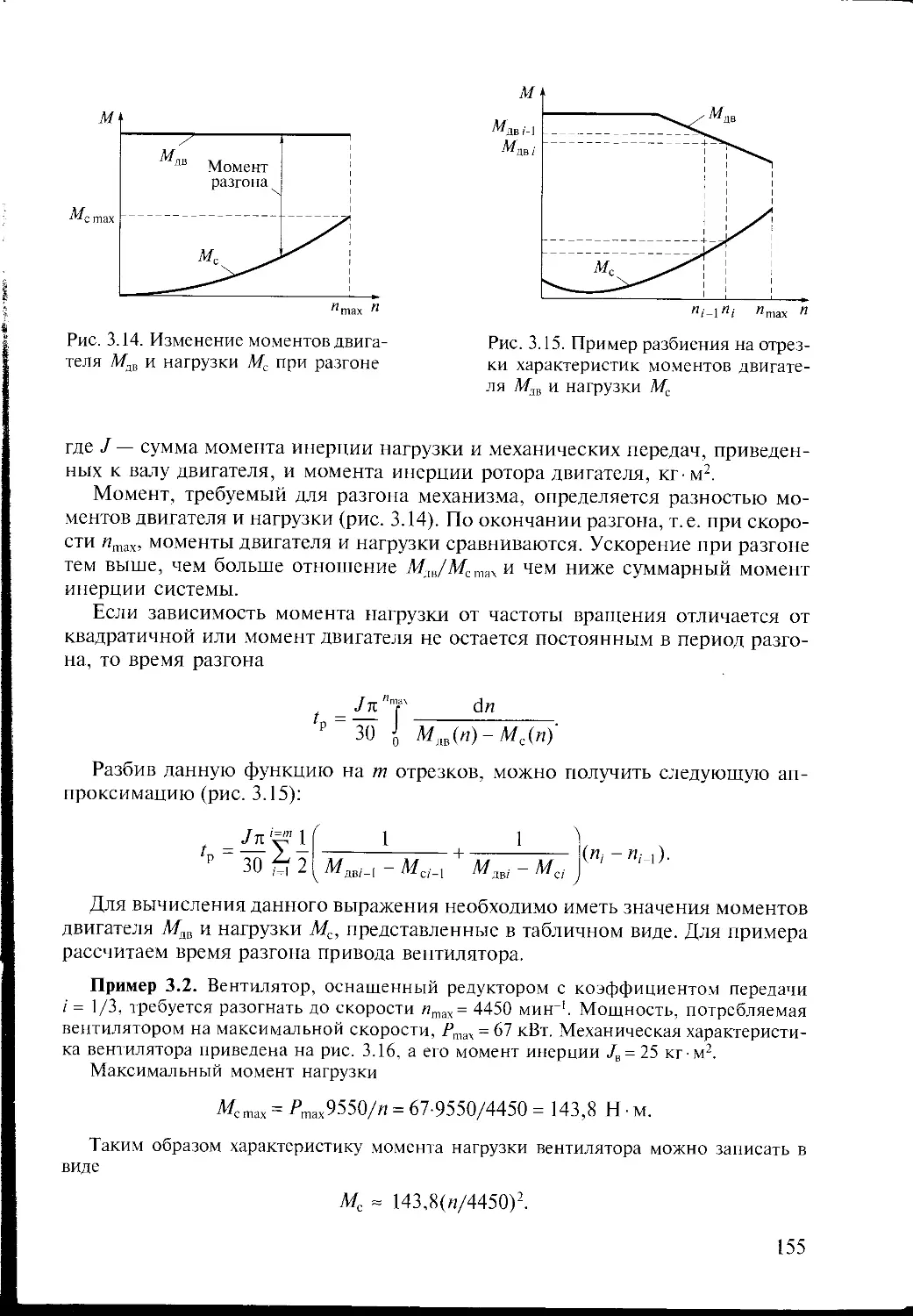
Расчет автоматизированного электропривода связан с расчетом мощности электродвигателя, который выполняется в соответствии с режимами S1...S8 работы механизмов технологического оборудования на основании нагрузочных и скоростных диаграмм. Методы расчета и выбора мощности двигателей для длительного, кратковременного и повторно-кратковременного режимов работы рассмотрены в [8, 23, 35, 36, 57]. Отдельные примеры расчетов электроприводов для непрерывных и циклических режимов работы см. в гл. 3.
Выбор системы электропривода производится в соответствии с данными питающей электросети, мощностью, скоростью, режимами 57... У? работы и перегрузочной способностью электродвигателя, а также на основании требований к регулированию скорости (рабочему диапазону, плавности изменения и точности поддержания заданной скорости) и динамическим показателям качества процесса регулирования (быстродействию, перерегулированию и др.).
Для примера требования к точности и быстродействию АЭП некоторых рабочих машин приведены в табл. 1.1 [62].
На выбор системы электропривода могут влиять также условия пуска механизмов. Многие механизмы (например, конвейеры) требуют обеспечения пуска под нагрузкой, а некоторые (например, центробежные вентиляторы главного проветривания шахт, дробилки крупного дробления) обладают значительными инерционными массами. В случае применения асинхронных короткозамкнутых двигателей или синхронных с асинхронным пуском может оказаться, что время пуска механизма недопустимо велико и за это время двигатель перегревается. Завышение мощности и момента вращения двигателя по условиям пуска приводит к его недоиспользованию в режиме рабочего функционирования и ухудшению энергетических показателей. При пуске механическая часть двигателя может испытывать большие перегрузки, что будет неблагоприятно сказываться на ее долговечности, особенно при наличии упругих элементов (канатов лебедок, конвейерных лент и др.). Вследствие этого может
20
Таблица 1.1
Рабочая машина Максимальная ошибка, % Частота среза, с-1
Непрерывные прокатные станы: частота вращения высота петли натяжение полосы 0,5 1 5 50... 100 10...20 50...80
Ножницы: скорость положение (место резания) 0,1 ...0,05 1 ...0,3 50...80 25...40
Бумагод е лате л ьные (картонод елате л ьн ы е) машины: скорость полотна соотношение скоростей соседних секций 0,01(0,05) 0,01(0,05) 100
Каландры для обработки синтетических материалов: скорость полотна соотношение скоростей соседних секций 0,5 0,5 50
Механизмы подачи станков: скорость точность позиционирования 0,5 0,001 ...0,0001 100 50
оказаться необходимым применение устройства плавного пуска или регулируемого привода.
Возможно применение редукторного привода или безредукторного с тихоходным двигателем. Рациональный выбор может быть выполнен на основании технико-экономического сравнения, которое должно учитывать не только различные стоимости тихоходного и быстроходного (с дополнительным редуктором) двигателей, но и их массу и габаритные размеры, влияющие на необходимые размеры помещения, фундамента и затраты на несущие конструкции при его размещении.
При номинальной скорости исполнительного органа не менее 300 мин предпочтительным является безредукторный привод с прямым соединением вала двигателя с валом рабочей машины (насоса, вентилятора). При меньшей скорости рабочего органа выбор не однозначен, хотя чаше всего редукторный привод имеет меньшие массу и габаритные размеры. Для механизмов, не требующих регулирования скорости, достаточно сравнения только по этим показателям.
Для механизмов с частыми пусками и реверсами важно сравнение двигателей по динамическим показателям. Безредукторные электроприводы более динамичны и предпочтительны для регулируемых электроприводов, так как их проще разгонять, тормозить, регулировать скорость. Поэтому они широко применяются для шахтных подъемных установок и прокатных станов.
Несомненным преимуществом безредукторных электроприводов являются их высокие динамические свойства. При этом обеспечиваются высокие частоты упругих механических колебаний в кинематических трактах приводов, а
21
Рис. 1.2. Функциональная схема системы управления многодвигательными электропри 1...10 — технологические агрегаты: 11 — электромагнитные клапаны; 12 — индивидуальные рямители с фильтрами; 15 — контроллеры управления группами электроприводов; 16, 17 - -ные сетевые шины; 22 — системная шина
22
водами картоноделательной машины:
преобразователи частоты; 13 — автономные инверторы напряжения; 14 — неуправляемые вып-технологические контроллеры; 18 — станции оператора; 19 — сканер; 20, 21 — информацион-
23
следовательно, высокие частоты среза в системах регулирования скорости и положения. Переход на безредукторные электроприводы и мехатронные модели является перспективным направлением развития приводной техники. Особенно это перспективно для непрерывно-поточных производств.
При выборе системы электропривода необходимо учитывать характер нагрузки, создаваемой рабочим механизмом. Выравнивание момента двигателя для нерегулируемых электроприводов с неравномерной или пульсирующей нагрузкой достигается увеличением инерционных масс электропривода (поршневых компрессоров, дробилок крупного дробления), хотя это может затруднить его пуск.
Значительно сложнее решать этот вопрос для регулируемых реверсивных электроприводов, так как увеличение механической инерции снижает их быстродействие (что очень важно в электроприводах реверсивных прокатных станов).
Наличие в нагрузке пиков тока требует дополнительной проверки приводов по допустимой перегрузке.
В случаях, когда возможны перегрузки, которые не может преодолеть привод, необходимо предусмотреть соответственно настроенную защиту или систему управления, обеспечивающую ограничение тока и момента двигателя, а также динамические нагрузки в механических передачах (например, в экскаваторных электроприводах).
Выбор систем многодвигательных электроприводов помимо сказанного включает в себя решение еще двух основных задач.
1. Выбор структуры и средств распределительной силовой сети электроприводов.
2. Выбор структуры и средств системы координированного управления электроприводами.
Первая задача решается применением:
индивидуальных преобразователей частоты для каждого электропривода и энергетической магистрали переменного тока;
группового источника электропитания, энергетической магистрали постоянного тока и индивидуальных автономных инверторов напряжения для каждого электропривода;
смешанной структуры, включающей в себя две предыдущие.
Для систем с большим числом электроприводов и большой суммарной мощностью целесообразно применение структуры распределительной силовой сети с несколькими групповыми источниками электропитания. Пример такой структуры применительно к многодвигательным АЭП картоноделатель-ной машины показан на рис. 1.2. Автономные инверторы напряжения 13 в этой системе получают питание от выпрямителей 14. Последние распределены по группам электроприводов секций машины. Часть электроприводов управляются от индивидуальных преобразователей частоты 12. Описание многодвигательных АЭП и системы управления машиной см. в [8].
Вторая задача решается с учетом структуры АТК, числа и мест расположения агрегатов, числа исполнительных механизмов. В распределенной системе управления, показанной на рис. 1.2, применены контроллеры 75 управления группами электроприводов, объединенные информационной сетевой шиной 21, технологические контроллеры 16 и 77, станции оператора 18 и системная шина 22.
24
В многодвигательных системах сервоприводов групповые источники питания не используются, так как даже для сложных объектов суммарные мощности приводов невелики и экономический эффект оказывается небольшим.
Применяют индивидуальные сервоприводы для каждого механизма, входящего в рабочую машину, с координированным управлением от высокодинамичного специализированного технологического контроллера (см. подразд. 3.1.2).
Каждый сервопривод, обладающий высокими динамикой, точностью и перегрузочной способностью в широком диапазоне регулирования частоты вращения, включает в себя серводвигатель и преобразователь частоты. Возможна установка в серводвигателях энкодаров и электромагнитных тормозов. Рациональными областями применения сервоприводов являются обеспеч’ение подач в металлообрабатывающих станках, промышленных манипуляторах, механизмах автоматизированных конвейерных линий в пищевой, химической промышленности и др.
Динамическое управление и синхронизация работы нескольких сервоприводов выполняются программируемым технологическим контроллером МС402. Одновременно им обеспечивается взаимодействие всех компонентов линии.
Проекты нового технологического оборудования выполняются в основном с использованием систем автоматизированных электроприводов переменного тока. Доля электроприводов постоянного тока в новых проектах незначительна.
Иначе обстоят дела в проектах модернизации действующего оборудования, так как в базовых отраслях промышленности РФ (металлургической, машиностроительной, целлюлозно-бумажной и др.) действующее оборудование оснащено в основном регулируемыми электроприводами постоянного тока с устаревшими средствами и системами управления, а зачастую и с высоким уровнем энергозатрат в технологических процессах с глубоким регулированием скорости.
Существует четыре основных варианта проектов модернизации действующего оборудования в автоматизированных электроприводах.
1. Замена аналоговых и релейно-контактных систем управления на цифровые с использованием промышленных компьютеров, технологических и логических контроллеров, интеллектуальных модулей периферии и других модулей, соответствующих нижнему и среднему уровням автоматизации.
2. То же, и замена аналоговых блоков управления комплектных электроприводов постоянного тока цифровыми с использованием контроллеров привода.
3. То же, и замена силовых блоков комплектных электроприводов. При этом электродвигатели и сети электропитания остаются неизменными.
4. Полная модернизация автоматизированных электроприводов. Замена электроприводов постоянного тока электроприводами переменного тока.
Для крупных АТК затраты на модернизацию имеют параболическую зависимость от глубины модернизации.
Так, относительные стоимости затрат на модернизацию автоматизированных электроприводов мелкосортного прокатного стана 250, функциональная схема которого показана на рис. 1.3, в соответствии с приведенными варианта
25
ми составят: Cj = 1; С2 = 4; С3 = 12; С4 = 50 (где С, = С,-/Сб; i - 1, 4, а за базовое значение стоимости Сб принята стоимость первого варианта модернизации). Наиболее затратным, но и наиболее эффективным здесь является четвертый вариант модернизации.
Основные составляющие эффективности модернизации заключаются в следующем: снижение энергозатрат за счет некоторого повышения КПД прокат-
Рис. 1.3. Упрошенная функциональная схема системы автоматизированных электро 1 — газовая печь; 2 — рольганг; 3 — трайб-аппарат; 4 — вертикальная клеть; 5 — горизонтальная лектных электроприводов; 9 - информационная магистраль электроприводов; 10 — контрол АСУП — автоматизированная система управления производством
26
ного стана и увеличение коэффициента мощности до единицы без использования дополнительных средств; увеличение производительности благодаря сокращению времени технологического цикла прокатки и времени переналадки стана при смене сорта проката; повышение качества управления и соответственно стабильности характеристик производимых высококачественных марок стали, а также исключение брака.
Чистовая группа (8 клетей)
Проволочная группа (4 клети)
На холодильник
приводов прокатного стана 250:
клеть; 6 — ножницы; 7 — индукционная печь; 8 — силовые блоки и блоки управления комп-лер; 11 — пульт оператора; 12 — информационная магистраль АТК; 13 — станция оператора;
27
1.3.2. Анализ и выбор альтернатив оптимального варианта системы
Процедура выбора оптимального варианта системы управления многодвигательными электроприводами соответствует общей процедуре проектирования сложных систем управления на основе системно-технического подхода и сводится к решению таких типовых задач, как определение обшей структуры системы, организация взаимодействия между подсистемами, учет влияния внешних воздействий, выбор оптимальных структур подсистем и оптимальных алгоритмов функционирования системы. Проектирование ведется исходя из целей создания системы и решаемых ею задач. Оценка соответствия системы поставленным целям и задачам производится по критериям ее качества.
При проектировании сложных систем может существовать несколько частных критериев качества, не всегда согласованных между собой. Например, необходимо спроектировать систему, обеспечивающую максимальную динамическую точность обработки вещества при минимальном электропотреблении в переходных и установившихся режимах, минимальной стоимости и заданной надежности. Для совмещения частных критериев используют обобщенные критерии. Заданный критерий является основой для принятия решения при выборе структуры электромеханической системы, средств и алгоритмов управления из множества существующих вариантов, которые называют множеством альтернатив. Общую постановку задачи о выборе оптимального варианта системы управления можно представить следующим образом.
I. Имеется некоторое множество вариантов построения системы (альтернатив) А, причем каждая альтернатива в, характеризуется определенной совокупностью свойств щ, а2, ат.
2. Имеется совокупность критериев qt, q2, ..., qn, отражающих количественно множество свойств системы. Каждая альтернатива характеризуется вектором ?/= ki(«/) qn(aj)]T.
3. Необходимо принять решение о выборе одной из альтернатив. Решение называется простым, если выбор производится по одному критерию, и сложным, если выбор производится по совокупности критериев.
4. Задача принятия решения по выбору альтернативы по совокупности критериев формально сводится к отысканию отображения Q, которое векторам а, и q: ставит в соответствие действительное число Е = Q(a7, ?,) (где / = 1,
7 = 1, т), определяющее степень предпочтительности данного решения. Оператор Q называют обобщенным критерием. Обобщенный критерий присваивает каждому решению по выбору альтернативы соответствующее значение Е, что позволяет упорядочить множество решений по степени предпочтительности.
При проектировании электромеханических систем обобщенные критерии составляются по частным критериям, включающим в себя такие оценки, как динамическая точность и связанное с ней качество изделий, быстродействие и связанная с ним производительность, энергопотребление, надежность, сложность — составляющие эксплуатационных показателей, габаритные размеры, массу, условия эксплуатации и др.
Наиболее простой метод формирования обобщенного критерия заключается в том, что один из критериев qk принимается в качестве обобщенного, а все 28
остальные учитываются в виде ограничений, определяющих область допустимых альтернатив:
Q = qk
z = 1, /;
i = I + 1, и; i ф к.
где <7,(()) — величины, определяющие допустимые значения по всем критериям, кроме qk.
В этом случае задача сравнения альтернатив сводится к принятию решений со скалярным критерием, а все остальные критерии учитываются в виде заданных ограничений. Оценки альтернатив, не соответствующих заданным значениям <7,(0), показывают, что их можно дальше не рассматривать.
Задача принятия оптимального решения при выборе альтернативы формулируется как задача математического программирования:
max [^(я,)] или min [^(а,-)]
а&А а&А
при q\a, )> ^0); / = 1,/; #,-(«/)< <7,(0); / = / + !,«; i Ф к; j = \,m.
В тех случаях, когда не возможно выделить один из критериев qk, в качестве обобщенного применяют более сложные методы его представления, напри-п
мер в виде суммы Q - (где Ь}, Ь2, ..., Ь„ — положительные или отрица-(=1
тельные коэффициенты).
Если ставится задача найти Qmax, то положительные коэффициенты используют при частных критериях, которые максимизируются, а отрицательные при тех, которые минимизируются. Имеются и иные, более сложные формы записи обобщенных критериев.
При решении задач структурной оптимизации систем в соответствии с обобщенным критерием могут использоваться различные методы программирования, в частности методы, входящие в программные пакеты MATLAB и MathCad (см. подразд. 6.1).
Для предварительного выбора варианта системы можно использовать упрошенные методики на основе шкал оценок (например, пятибалльной системы), характеризующих степень выполнения заданного свойства системы в каждом из вариантов [62]. Если все свойства системы равноправны, решение находят простым суммированием оценок. Если их значимость различна, находят взвешенную сумму оценок с учетом коэффициентов веса Ь, каждой оценки. После чего выбирается вариант, соответствующий максимальной сумме простых или взвешенных оценок.
1.3.3. Создание средств электроприводов и автоматизации
Разработка средств электроприводов и автоматизации выполняется при создании их новых поколений, а также при необходимости реализации специальных функций (например, по показателям быстродействия, надежности, перегрузки), ограничения конструктивных размеров, учета особых условий
29
эксплуатации и в других случаях, не обеспечиваемых типовыми унифицированными средствами.
Развитие комплектных АЭП идет по пути совершенствования силовых блоков и блоков управления с целью повышения их экономических, функциональных и эксплуатационных показателей. В преобразователях частоты находят широкое применение активные выпрямители, совершенствуются схемы с инверторами тока, применяются новые полупроводниковые приборы. Использованием дополнительных компонентов силовых блоков (см. подразд. 3.1) добиваются оптимальных условий электромагнитной совместимости преобразователей частоты с сетью электропитания и электродвигателями. Направления развития электродвигателей раскрыты в [8]. Одно из направлений связано с созданием асинхронных и синхронных электродвигателей, ориентированных на работу от автономных инверторов с высокочастотной широтно-импульсной модуляцией (ШИМ), и оснащением этих двигателей конструктивными элементами, ограничивающими емкостные токи.
Совершенствование блоков управления идет по пути применения новых микроконтроллеров, созданных для применения в частотно-регулируемых приводах переменного тока и серийно выпускаемых фирмами — производителями микропроцессорной техники. Такие микроконтроллеры, имея высокую производительность центрального процессора (десятки миллионов операций в секунду), широкую номенклатуру встроенных периферийных устройств (таймеров, последовательных интерфейсов, параллельных портов ввода-вывода, аналогово-цифровых преобразователей — АЦП, модулей обработки прерываний и др.), генераторы и модули широтно-импульсной модуляции, обеспечивают реализацию новых алгоритмов векторного управления автономными инверторами с ШИМ, в частности алгоритмов, основанных на использовании нечеткой логики и нейронных сетей. Предусматривается включение в состав микроконтроллеров специализированных модулей, ориентированных на реализацию таких алгоритмов управления. Также в микроконтроллерах реализуются алгоритмы самонастройки параметров и режимов регулирования потокосцепления, момента, скорости и положения электропривода. Это выполняется для конкретных электроприводов, а также при изменении их параметров (сопротивлений статора, характеристик намагничивания, моментов инерции и др.) и режимов нагрузки (моментов сопротивления в зависимости от скорости, при разных сочетаниях режимов SI... S8 и др.).
Развитие технологических контроллеров происходит в тех же направлениях, что и развитие контроллеров приводов. Помимо реализации общих функций, характеризующих их как изделия широкой области применения, создаются высокодинамичные технологические контроллеры, ориентированные на применение именно в приводных системах. Такие контроллеры обеспечивают управление большим числом электроприводов, входящих в состав машин, станков, автоматизированных производственных линий, технологических комплексов непрерывно-поточных производств и других объектов.
Разработку новых микропроцессорных средств и систем выполняют на основании анализа целей и задач управления объектом:
выбирают тип микроконтроллера и разрабатывают его структуру;
разрабатывают аппаратные средства микропроцессорной системы, ее программное и информационное обеспечение;
30
выполняют совместную отладку программного обеспечения и аппаратных средств;
дают оценку разработанной системе управления [20].
Анализ объекта управления и возможных вариантов построения системы включает в себя:
описание алгоритма и схемы работы объекта управления;
разработку технического задания;
анализ альтернатив построения системы и выбор лучшего варианта;
математическое описание системы управления и моделирование основных режимов ее работы;
разработку общего алгоритма работы системы;
разделение функций системы на программно- и аппаратно-реализуемые;
определение требований к микроконтроллерам, промышленным компьютерам и другим устройствам системы;
разработку структурной схемы системы.
Общий алгоритм работы системы состоит из отдельных алгоритмов работы каждого ее устройства. При разработке алгоритмов устанавливают требования к микроконтроллерам и другим устройствам по следующим показателям:
точность и скорость работы аналогово-цифровых и цифроаналоговых преобразователей (определение минимально допустимой разрядности);
скорость расчета регулирующих воздействий и времени реакций на изменение входных сигналов (по частоте дискретизации);
требуемый объем памяти;
скорость передачи информации к другим контроллерам и персональным компьютерам.
Правильность выбора микроконтроллера по быстродействию оценивается посредством написания пробного фрагмента программы. Для этого выбирается наиболее критичная к времени выполнения программно реализуемая функция системы, выполняется ее запись на языке ассемблера для выбранного микроконтроллера и подсчитывается время выполнения функции, как суммарное время выполнения всех команд фрагмента. По этому времени оценивается правильность выбора микроконтроллера. Рекомендации по разработке микроконтроллеров, аппаратного, программного и информационного обеспечения микропроцессорных систем управления даны в [20, 29].
Предметом разработки могут быть также разнообразные электротехнические устройства, используемые в приводной технике: бесконтактные коммутационные аппараты, источники питания, устройства пуска и торможения электродвигателей, низковольтные комплектные устройства и др. (см. подразд. 2.2).
При разработке электротехнических устройств выполняют расчет их основных параметров и выбор элементов, а также расчет тепловых характеристик и режимов, выбор охладителей, анализ и расчет способов защиты от механических воздействий, расчет электромагнитной совместимости и надежности элементов. Методики расчетов см. в [50].
1.3.4. Создание распределенных систем автоматизации
Создание систем автоматизации, включающее в себя разработку, внедрение и эксплуатационное сопровождение, производится на базе типовых средств
31
Таблица 1.2
Основные этапы Цели Результаты
1. Анализ объекта управления Определение функций СА Выработка требований к КАПС Детализированная схема ОУ Перечень Д и ИМ (входов-выходов) Перечень ФЗ
2. Разработка структуры СА Формулирование характеристик КАПС Анализ и описание функционирования СА Требования к алгоритмам Параметры локальной сети СА
3. Разработка схемной документации КАС Оценка стоимости СА Выбор наилучших решений Обеспечение эксплуатационной надежности СА ТЭО разработки Схемная документация
4. Определение состава КПС СА Оценка стоимости КПС СА Определение взаимодействия ФЗ, средств ЧМИ ПО на носителе Инструкция для разработки прикладных программ Освоение КПС разработчиками
5. Разработка и программирование алгоритмов СА Реализация ФЗ Обеспечение диагностики состояния КАС Обеспечение ЧМИ Схемы и программы алгоритмов Инструкции для пользователей и персонала системы
6. Оценка работоспособности и эффективности разработанных алгоритмов в составе КАПС СА Повышение эффективности СА Обеспечение эксплуатационной надежности СА Инструкции по эксплуатации и диагностике СА
7. Корректировка КПС Обеспечение эксплуатационной надежности ПО Откорректированное ПО на носителе Откорректированная документация по КПС СА
8. Формализация функций персонала, работающего в составе СА Обеспечение эффективности применения средств ЧМИ Разделение функций персонала и СА Должностные и производственные инструкции персонала СА
9. Определение путей развития СА Обеспечение возможности реализации новых и развитие действующих ФЗ Развитие КАПС СА Перечень новых ФЗ ТЗ на разработку новых ФЗ СА
Примечание. В таблице использованы следующие обозначения: СА — система автоматизации; ОУ — объект управления; Д — датчик; ИМ — исполнительный механизм; КАС — комплекс аппаратных средств; КПС — комплекс программных средств; КАПС — комплекс аппаратно-программных средств; ПО — программное обеспечение; ЧМИ — человекомашинный интерфейс; ФЗ — функциональная задача; ТЗ — техническое задание; ТЭО — технико-экономическое обоснование.
32
Devicenet
CS1 I
Profibus/DP
Devicenet
Compobus/S
Input/Otput Tetminal
" 1 a «_•
Рис. 1.4. Схема средств системы комплексной автоматизации фирмы Omron
промышленной автоматики: промышленных компьютеров, программируемых контроллеров, промышленных терминалов, сетевых средств и др.
Стадии внедрения и эксплуатационного сопровождения систем автоматизации аналогичны соответствующим стадиям создания автоматизированных электроприводов технологических комплексов. Стадии и этапы создания систем автоматизации устанавливают ГОСТ 24.602—86 и 34.601—90 (см. подразд. 1.5).
Основные этапы разработки системы автоматизации, ее цели и результаты приведены в табл. 1.2 [51].
Подход к разработке системы автоматизации, показанный в табл. 1.2, позволяет, с одной стороны, определить ее главные функциональные задачи, а <. другой — выбрать структуру, способную постепенно (поэтапно) наращивать свою функциональную мощность по принципу «открытой» системы и, как следствие, достаточно просто реализуемую средствами промышленной автоматики с обеспечением гибкости и распределенности системы управления.
33
Технические и программные средства, имеющиеся на рынке, обеспечивают возможность создания единых систем автоматизации от станков и рабочих машин до участка, цеха и предприятия. В качестве примера на рис. 1.4 приведена схема средств системы комплексной автоматизации фирмы Omron. Описание средств приведено в гл. 3.
1.4. Бизнес-планы создания нового
и модернизации действующего электрооборудования
1.4.1. Бизнес-план инвестиционного проекта
Бизнес-план как средство решения проблем практической организации бизнеса конкретной фирмой включает в себя ряд положений, в которых раскрываются суть ее деятельности, потенциальные возможности, политика. Это не только внутренний документ фирмы, он также определяет привлекательность фирмы для получения внешних инвестиций. Методики составления бизнес-плана в целях создания и развития бизнеса подробно раскрыты в [17, 21, 44]. Общая схема бизнес-плана имеет примерно следующий вид:
титульный лист;
формулировка цели;
оглавление;
введение (резюме);
описание фирмы (компании, предприятия);
описание продукции, услуги;
план маркетинга (оценка внешней среды, потенциальных покупателей, потенциальных услуг, конкурентов; комплексное исследование рынка; стратегия маркетинга);
производственный план;
схема управления фирмой;
финансовые ресурсы (источники и направления финансирования);
финансовый план (планы прибыли и движения денежных потоков, анализ безубыточности и сравнительный анализ эффективности производства);
оценка степени риска;
приложения.
В инвестиционном бизнес-плане следует не только определить срок окупаемости инвестиций и рентабельность предприятия, но и проанализировать, как будут изменяться его выручка и доход, издержки производства, прибыль, фондоотдача, производительность труда, материалоемкость и др.
При выполнении крупных проектов или проектов, имеющих большую перспективу на тиражирование, разрабатывается бизнес-план инвестиционного проекта. Приведем в качестве примера схему бизнес-плана инвестиционного проекта по разработке научно-технической продукции [20]:
общие сведения о заявителе;
резюме (реферат бизнес-плана, ключевые слова, научно-технический задел по проекту);
34
описание продукции (назначение, определяющие технико-экономические показатели, основные технические параметры, оценка научно-технического ровня, области применения, а также перспективы совершенствования);
план маркетинга (форма реализации продукции, анализ рынка, стратегия реализации, планируемая организация рекламы, а также сервис и гарантии);
организационный план производства (состояние работ по проекту и планируемая организация производства продукции, в том числе технология создания);
правовая охрана продукции;
финансовая часть (часто носит иллюстративный характер, дающий представление о типовом соотношении статей затрат, возможных источниках финансирования и вероятных финансовых результатах);
приложения.
На основании прогноза и предварительных расчетов устанавливают, например, следующие технико-экономические показатели, определяющие: новизну продукции (патенты, свидетельства на полезные модели, ноу-\ау);
уровень продукции (наличие прямых аналогов, мирового уровня или выше);
устойчивость существования продукции на рынке;
относительную эффективность затрат потребителя на приобретение продукции;
рентабельность создания первого опытного образца при базовом значении 20 % (для повышения конкурентоспособности возможно снижение рентабельности до 6 %);
рентабельность тиражирования;
срок возврата инвестиций (при базовом значении 3,5 г.);
финансовую обоснованность срока возврата инвестиций;
ценовую рыночную перспективность продукции (с указанием цен зарубежного и отечественного аналогов);
ресурсосбережение;
повышение безопасности продукции для населения;
создание рабочих мест;
улучшение экологии.
Экономические показатели, используемые при сравнении различных инвестиционных проектов, см. в подразд. 2.3. Вопросы новизны, уровня продукции и форма ее правовой охраны, устанавливаемые в результате патентных исследований, раскрываются в подразделе 1.8.2. Здесь рассмотрим маркетинговые исследования, выполняемые при разработке бизнес-планов.
1.4.2. Маркетинговые исследования
В ходе маркетинговых исследований делается прогноз сегмента рынка продаж продукции, возможных показателей объема продаж и цены. Возможные покупатели определяются как в среде государственных унитарных предприятий с использованием госзаказа, так и в среде предприятий других форм соб-гдвенности. При этом выделяют покупателей, постоянно потребляющих ана
35
логичную продукцию, и потенциальных покупателей разрабатываемой продукции, не удовлетворенных уровнем ранее выпускаемой продукции, которые могут отдать предпочтение новой продукции.
Объемы продаж устанавливаются по статистическим данным, экспертным оценкам и другими методами, причем целесообразно использовать одновременно несколько методов прогнозирования и сравнить полученные результаты. Общий объем продаж складывается из отдельных объемов, определенных по каждой группе покупателей.
Помимо сегментации рынка и прогноза объема продаж необходимо спрогнозировать цену изделия. При этом объектом исследований является цена аналогов, выпускаемых разными коммерческими предприятиями. Статистическую информацию о цене аналогов можно получить путем анализа публикаций. Важно построить модель, которая свяжет потребительские свойства изделия и цену, для чего необходимо собрать статистические данные по 3...5 аналогам, так как чем больше информации будет собрано, тем более модель цены будет способствовать реальным предпочтениям покупателя и его оценке отдельных свойств исследуемой продукции.
При прогнозировании объема продаж и цены необходимо в общем случае учесть [20]:
объемы производства, импорта и экспорта продукции;
структуру и емкость отдельных сегментов рынка;
сведения о поставщиках;
сведения о различных группах покупателей и их предпочтениях;
вид спроса и его прогноз на предстоящий период;
планы развития фирмы и ее конкурентов;
уровень доходов потенциальных покупателей;
политику цен на рынке;
издержки производства (себестоимость);
планы расширения продаж конкурентов;
сведения о научно-исследовательских и опытно-конструкторских работах (НИР и ОКР), а также о модернизации продукции;
технологию производства, уровень качества и технологичности продукции; патенты и возможность их нарушения;
рекламу продукции и ее успех;
финансовые возможности предприятия и его конкурентов;
проникновение на зарубежные рынки.
Далее необходимо разработать маркетинговую стратегию и указать рекомендуемый тип маркетинга [6, 39, 40].
1.5. Международные и российские системы
стандартов
1.5.1. Международные системы стандартов
Проблемой упорядоченности различных видов человеческой деятельности путем стандартизации в том числе по тематике, рассматриваемой в данной
36
•/-иге. занимаются международные, национальные, профессиональные организации, а также фирмы — производители конкретной продукции.
Главными из них являются Международная организация по стандартизации — МОС (International Organization for Standardization — ISO) и Междуна-гадная электротехническая комиссия — МЭК (International Electrotechnical Г ammision — IEC). В отечественной практике вместо МОС используют обозначите ИСО, соответствующее англ. ISO.
В работе данных международных организаций участвуют органы стандарти-...ции большинства промышленно развитых стран мира. В них имеются техни-еские комитеты и подкомитеты, в ведении которых находятся конкретные 5 и.ды деятельности и продукция. Координация деятельности технических ор-и.нов ИСО и МЭК выполняется объединенным техническим программным -,/митетом. Имеются так же объединенные технические комитеты (Joint Technical Committee — JTC).
Национальные организации (органы) по стандартизации разрабатывают национальные стандарты которые, как правило, гармонизированы с между--е.родными. Руководство работами по стандартизации в РФ осуществляет Национальный орган РФ по стандартизации, исполнение функций которого Правительством РФ возложено на Государственный комитет РФ по стандартизации и метрологии.
В США таким органом является Американский национальный институт стандартов (American National Standard Institute — ANSI), в Германии — Ненецкий институт стандартов (Deutsches Institut fur Normung — DIN). Аналогичная ситуация имеет место и в других странах.
Для гармонизации стандартов стран — членов Европейского союза (ЕС) создан Европейский комитет по стандартизации в электротехнике СЕНЭЛЕК и введен европейский стандарт EN.
Примером профессиональных организаций, занимающихся разработкой ра-бочих документов по стандартизации, может служить Институт инженеров по электротехнике и радиоэлектронике (Institute of Electrical and Electronics Engineers — IEEE) — международный орган представителей инженеров. В РФ стандартизацией в области систем электроприводов занимается ассоциация Автоматизированный электропривод совместно с ОАО «Электропривод».
1.5.2. Техническое регулирование и системы стандартов в РФ
Техническое регулирование — правовое регулирование отношений в областях .становления, применения и исполнения обязательных требований к продукции. процессам производства, эксплуатации, хранения, перевозки, реализации и утилизации, выполнения работ или оказания услуг, а также в области сценки соответствия (в соответствии с Федеральным законом «О техническом регулировании» от 27.12.02 № 184-ФЗ).
Стандарт — документ, в котором в целях добровольного многократного использования устанавливаются характеристики объектов технического регулирования (ОТР), к которым относятся продукция, правила осуществления и характеристики процессов производства, эксплуатации, хранения, перевозки. реализации и утилизации, выполнения работ или оказания услуг.
37
Стандартизация осуществляется в целях:
повышения уровня безопасности жизни и здоровья граждан, имущества физических и юридических лиц, государственного и муниципального имущества, экологической безопасности, безопасности жизни и здоровья животных и растений и содействия соблюдению требований технических регламентов;
повышения уровня безопасности объектов с учетом риска возникновения чрезвычайных ситуаций природного и техногенного характера;
обеспечения научно-технического прогресса;
повышения конкурентоспособности продукции, работ, услуг;
рационального использования ресурсов;
обеспечения технической и информационной совместимости;
сопоставимости результатов исследований (испытаний), измерений, технических и экономико-статистических данных, а также взаимозаменяемости продукции.
Национальные стандарты и общероссийские классификаторы технико-экономической и социальной информации, в том числе правила их разработки и применения, представляют собой национальную систему стандартизации. Выделим основные национальные системы и комплексы стандартов, отвечающие тематике настоящей книги:
Государственная система стандартизации Российской Федерации (ГОСТ Р 1);
Единая система конструкторской документации (ГОСТ 2);
Единая система технологической документации (ГОСТ 3);
Система показателей качества продукции (ГОСТ 4);
Унифицированные системы документации и Единая система классификации и кодирования технико-экономической информации (ГОСТ 6);
Система информационно-библиографической документации (ГОСТ 7);
Государственная система обеспечения единства измерений (ГОСТ 8);
Система стандартов безопасности труда (ГОСТ 12);
Единая система технологической подготовки производства (ГОСТ 14);
Система разработки и постановки продукции на производство (ГОСТ 15);
Единая система программных документов (ГОСТ 19);
Единая система стандартов автоматизированных систем управления (ГОСТ 24);
Система стандартов «Надежность в технике» (ГОСТ 27);
Система стандартов эргономических требований и эргономического обеспечения (ГОСТ 29);
Информационная технология (ГОСТ Р 34);
Система сертификации (ГОСТ Р 40);
Система аккредитации в РФ (ГОСТ Р 51).
Раскроем содержание некоторых систем стандартов, определяющих проектирование, подготовку к производству и производство изделий.
Государственная система стандартизации РФ. На территории России введены следующие категории стандартов: государственные стандарты; стандарты отраслей; стандарты научно-технических, инженерных обществ и других общественных объединений; стандарты предприятий. Стандарты каждой категории применяются в пределах установленной сферы их действия и области применения.
38
Государственные стандарты распространяются на субъекты хозяйственной деятельности независимо от форм собственности и подчиненности, а также на граждан, занимающихся индивидуальной трудовой деятельностью.
Государственные стандарты распространяются:
на организационно-методические и общетехнические объекты, единый технический язык, типоразмерные ряды и типовые конструкции изделий общего применения, информационные технологии, организацию работ по метрологическому обеспечению, достоверные данные о свойствах веществ и материалов, классификацию и кодирование технико-экономической информации (ТЭИ);
элементы крупных народно-хозяйственных комплексов;
объекты государственных научно-технических и социально-экономических целевых программ;
продукцию межотраслевого и широкого применения, производимую как для удовлетворения внутренних потребностей страны, так и поставляемую на внешний рынок.
Аспекты государственных стандартов:
требования к продукции, работам и услугам по их безопасности для окружающей среды, жизни, здоровья людей и их имущества, а также требования техники безопасности и производственной санитарии;
требования по технической и информационной совместимости, а также взаимозаменяемости продукции;
основные потребительские (эксплуатационные) характеристики продукции;
правила и нормы, обеспечивающие техническое и информационное единство при разработке, производстве, использовании (эксплуатации) продукции, выполнении работ и оказании услуг.
Обозначение государственного стандарта включает в себя сокращение ГОСТ или ГОСТ Р (применяется с 1992 г.) регистрационный номер и отделенные тире две (четыре) последние цифры года его утверждения. Если стандарт входит в комплекс стандартов, то в его регистрационном номере первые цифры, отделенные точкой, определяют номер этого комплекса.
Стандарты отраслей (ОСТ) разрабатываются и применяются государственными органами управления в пределах их компетенции на продукцию, работу и услуги отраслевого значения, а также могут применяться на добровольной основе иными предприятиями и гражданами, занимающимися индивидуальной трудовой деятельностью, путем ссылок на них в технической документации и договорах. Стандарты отраслей разрабатываются в случае отсутствия государственных стандартов или установления более высоких требований, чем требования государственных стандартов.
Стандарты предприятий (СТП) разрабатываются на создаваемые на данном предприятии продукцию, услуги, процессы. В качестве стандартов предприятий допускается применение международных, региональных и национальных стандартов других стран на основе международных соглашений о сотрудничестве или с разрешения соответствующих региональных организаций и национальных органов, если отсутствуют государственные стандарты и стандарты отраслей. Утверждает стандарты предприятия его руководитель. Срок действия стандартов предприятий, как правило, не устанавливается.
39
Стандарты научно-технических и инженерных обществ (СТО) разрабатываются в связи с развитием ассоциативных форм организации работ в науке и технике для динамичного отражения и распространения знаний, полученных в определенных областях и сферах профессиональных интересов, результатов фундаментальных и прикладных исследований. Применение СТО является добровольным и определяется субъектами хозяйственной деятельности самостоятельно.
В зависимости от требований к объекту стандартизации ГОСТ Р 1.0—92 устанавливает следующие виды стандартов: основополагающие стандарты, стандарты на продукцию (услуги), стандарты на процессы, стандарты на методы контроля (испытаний, измерений, анализа).
Основополагающие стандарты включают в себя основополагающие организационно-методические стандарты и основополагающие общетехнические стандарты. В соответствии с ГОСТ Р 1.5 — 2002 основополагающие организационно-методические стандарты устанавливают:
цели, задачи, классификационные структуры объектов стандартизации различного назначения, а также общие организационно-технические положения по проведению работ в определенной области и т.п.;
порядок (правила) разработки, утверждения и внедрения нормативно-технических и технических (конструкторских, технологических, проектных, программных) документов.
Основополагающие общетехнические стандарты устанавливают:
научно-технические термины и их определения, многократно используемые в науке и различных сферах народного хозяйства;
условные обозначения (наименования, коды, символы) для различных объектов стандартизации (цифровые, буквенно-цифровые и др.), в том числе обозначения единиц физических величин;
требования к построению, изложению, оформлению и содержанию различных видов документации;
общетехнические величины, требования и нормы, необходимые для технического обеспечения производственных процессов.
Стандарты на продукцию (услуги) устанавливают требования к группам однородной продукции (однородных услуг) или конкретной продукции (услуге). К этому виду стандартов относятся:
общие технические условия, которые должны содержать общие требования к группам однородной продукции (однородных услуг);
технические условия, которые содержат требования к конкретной продукции (услуге) или группе конкретной продукции (конкретных услуг).
В случае стандартизации отдельных требований к группам продукции могут разрабатываться стандарты, устанавливающие классификацию, основные параметры, требования безопасности, охраны окружающей среды, общие технические требования, методы испытаний, типы, сортамент, марки, правила приемки, маркировку, упаковку, правила транспортирования, хранения, эксплуатации, ремонта и утилизации.
Стандарты на процессы устанавливают основные требования к методам (способам, приемам, режимам, нормам) выполнения различного рода работ в технологических процессах, связанных с разработкой, изготовлением, хранением, транспортированием, эксплуатацией, ремонтом и утилизацией про
40
дукции, и обеспечивают их техническое единство и оптимальность. Стандарты на процессы могут устанавливать требования к технологическим операциям, имеющим самостоятельное значение, а также к совокупности последовательно выполняемых технологических операций.
Стандарты на методы контроля устанавливают методы (способы, режимы и др.) проведения испытаний, измерений, анализа продукции при ее создании, сертификации и использовании. Методы контроля, устанавливаемые в стандартах на продукцию, должны обеспечивать объективную проверку всех обязательных требований к качеству продукции, установленных в стандартах на данную продукцию.
Общие требования к построению, изложению, оформлению, содержанию и обозначению стандартов и изменений к ним устанавливает ГОСТ Р 1.5 — 2002.
Единая система конструкторской документации. ЕСКД — это комплекс стандартов, устанавливающих взаимосвязанные нормы и правила по разработке, оформлению и обращению конструкторской документации, выполняемой и применяемой на всех стадиях жизненного цикла изделия (при проектировании, изготовлении, эксплуатации, ремонте и др.), т.е. единые правила выполнения конструкторской документации.
ЕСКД включает в себя 158 межгосударственных и государственных (национальных) стандартов и шесть рекомендаций, которые гармонизированы с соответствующими стандартами ИСО и МЭК, т.е. конструкторская документация, выполненная в соответствии со стандартами ЕСКД, отвечает требованиям международных стандартов.
Все стандарты ЕСКД разбиты на 10 квалификационных групп.
0. Общие положения ЕСКД — ГОСТ 2.001—93 ...2.004—88 (назначение; область применения; классификация; обозначение стандартов ЕСКД).
1. Основные стандарты — ГОСТ2.Ю1—68...2.125 —88 (виды изделий; виды и комплектность конструкторских документов; стадии разработки; общие правила выполнения конструкторских документов — текстовых, чертежей, спецификаций, технических условий и др.; нормоконтроль).
2. Классификация и обозначение изделий и конструкторских документов — ГОСТ 2.201-80.
3. Общие правила выполнения чертежей — ГОСТ2.301—68...2.321 —84 (форматы, масштабы; шрифты; изображения — виды, разрезы, сечения; обозначения материалов, шероховатости, покрытий, видов обработки, сварных и других швов, неразъемных соединений, резьбы, крепежных деталей; нанесение размеров и предельных отклонений; нанесение надписей, таблиц).
4. Правила выполнения чертежей изделий машиностроения и приборостроения — ГОСТ 2.401—68...2.428 —84 (правила выполнения чертежей пружин, л. бчатых колес и реек, звездочек цепных передач, шлицевых соединений, металлических конструкций, труб, оптических, электротехнических и радиотехнических изделий, печатных плат, тары и др.).
5. Правила обращения конструкторских документов — ГОСТ 2.501 —
...2.506—84 (правила учета и хранения, дублирования, внесения изменений. внесения изменений с нарушением взаимозаменяемости составных частей изделий).
6. Правила выполнения эксплуатационной и ремонтной документации — ГОСТ 2.601—95...2.608 —78 (эксплуатационные документы и ремонтные до
41
кументы, внесение изменений в эксплуатационную и ремонтную документацию, чертежи ремонтные, плакаты учебно-технические).
7. Правила выполнения схем — ГОСТ 2.701 —84...2.797—81 (виды и типы схем, общие требования к выполнению схем, правила выполнения электрических, кинематических, гидравлических и пневматических схем, условные графические обозначения для схем всех видов).
8. Макетный метод проектирования — ГОСТ 2.801 —74...2.804—84 (геометрическая форма, размеры моделей; техническая информация на рабочем макете; требования к конструкции и размерам макетов и моделей; техническое содержание рабочего макета).
9. Прочие стандарты.
Обозначение стандартов ЕСКД строится по классификационному признаку, т.е. первая цифра номера означает класс стандарта ЕСКД, следующая — его классификационную группу, затем две цифры — номер в данной группе, а две цифры после тире указывают год регистрации.
В ЕСКД действует обезличенно-классификационная система обозначения конструкторских документов. Эта система предусматривает шифровку отдельным индексом каждого классификационного подразделения, характеризующего основные показатели изделия, например, его функциональное назначение, конструктивную форму, основные размеры и т.п.
Обезличенность заключается в том, что шифруются только классификационные признаки документа и обозначение не привязывается к конкретному изделию, входящему в номенклатуру предприятия. Такая система обозначения позволяет группировать документы при их учете и хранении, а следовательно, затем получать систематизированную информацию, что в свою очередь создает условия для развития унификации с использованием ранее разработанной конструкторской документации.
Единая система технологической документации. К технологическим относятся графические и текстовые документы, определяющие технологический процесс изготовления или ремонта изделия с учетом его контроля и перемещения, комплектацию деталей и сборочных единиц, а также маршрут прохождения изготавливаемого изделия по службам предприятия. Технологическая документация сопровождает изделие на всех стадиях, начиная от проектирования и заканчивая эксплуатацией и ремонтом, и является одним из важнейших факторов, влияющих на эффективность производства. На основе технологической документации получают информацию, необходимую для технико-экономических и нормативных расчетов. Кроме того, технологическая документация связывает определенным образом участников производства (технолога, мастера, исполнителя) и устанавливает взаимоотношения между основным и вспомогательным производством, выполняя роль организационной документации.
Стандарты ЕСТД являются основой для разработки и издания организационно-методической и инструктивно-производственной документации, определяющей и регулирующей деятельность, связанную с составлением, обращением и обработкой технологических документов, технологической подготовкой, планированием и организацией производства.
В настоящее время в комплекс стандартов ЕСТД входит 41 стандарт и ряд рекомендаций, которые учитывают возможность разработки и применения
42
технологических документов для автоматизированных систем управления (АСУ), систем автоматизации проектирования (САПР) и автоматизированных систем технологической подготовки производства (АСТПП).
В зависимости от назначения различают следующие технологические документы:
основные, содержащие сводную информацию, необходимую для решения инженерно-технических, планово-экономических и организационных задач, полностью и однозначно определяющие технологический процесс или операцию изготовления изделия;
вспомогательные, применяемые при разработке и функционировании технологических процессов и операций (например, карта заказа на проектирование технологической оснастки, акт внедрения технологического процесса и др.).
Основными технологическими документами являются маршрутная карта (МК) и карта технологического процесса (КТП).
Маршрутная карта — это технологический документ, содержащий описание технологического процесса изготовления или ремонта изделия (включая контроль и перемещение) по всем операциям различных видов в технологической последовательности с указанием данных об оборудовании, оснастке, материальных и трудовых нормативах.
Карта технологического процесса — это технологический документ, содержащий описание процессов изготовления или ремонта изделия по всем операциям одного вида работ, выполняемых в одном цехе в технологической последовательности с указанием данных об оборудовании, оснастке, материальных и трудовых нормативах. В случае, если технологический процесс полностью охватывает весь маршрут изготовления изделия, КТП полностью заменяет МК, которая в этом случае не разрабатывается. В состав технологической документации входят также технологические инструкции, различные зедомости, операционные карты и другие документы.
Единая система технологической подготовки производства. ЕСТПП является программой, обеспечивающей комплексное решение проблем подготовки производства. Создание этой системы обусловлено необходимостью сокращения сроков и стоимости подготовки производства в связи с частой сменой абъектов производства. Технологическая подготовка производства включает в себя обеспечение технологичности конструкции изделия и выбор и разработку технологических процессов изготовления изделия и его узлов, проектирование и изготовление средств технологического оснащения, подготовку технологической документации, обеспечение измерительным инструментом, а также организацию и управление данного процесса.
Применение ЕСТПП обеспечивается комплексным использованием ее стандартов, ОСТов и СТП конкретно к специфике отрасли или предприятия, а также нормативно-технической и методической документации на методы и .детства технологической подготовки производства.
Стандарты ЕСТПП разделены на классификационные группы, включающие в себя правила организации и управления процессом технологической т заготовки производства, обеспечения технологичности конструкций, разра-:?ткп и применения технологических процессов, средств технологического жнашения и др.
43
ЕСТПП направлена на обеспечение высокой мобильности промышленности, оперативное переключение ее на выпуск необходимой номенклатуры изделий без существенных изменений действующих элементов производства при сохранении высоких производственно-технических показателей. ЕСТПП является системой перестройки методов и средств технологической подготовки производства и позволяет перейти при освоении производства новых изделий от перестройки производства к его переналадке.
Система разработки и постановки продукции на производство. СРПП — это комплекс взаимоувязанных основополагающих организационно-методических и общетехнических документов, устанавливающих основные положения, правила и требования, обеспечивающие техническое и организационное единство выполняемых работ на всех стадиях жизненного цикла продукции, включающего в себя исследование и обоснование разработки, разработку, производство, эксплуатацию (применение, хранение) и ремонт (для ремонтируемой продукции), и регламентирующих взаимодействие заинтересованных сторон (см. подразд. 2.3.1).
Стандарты СРПП распространяются на все, расположенные на территории России субъекты хозяйственной деятельности независимо от форм собственности, которые имеют прямое и (или) непосредственное отношение к разработке, производству, эксплуатации продукции.
Стандарты СРПП устанавливают порядок проведения научно-исследовательских, опытно-конструкторских, опытно-технологических работ, патентных исследований, прогнозирования сроков разработки, способов упаковки и транспортирования изделий, а также порядок постановки на производство продукции, изготавливаемой по лицензиям зарубежных фирм, и порядок снятия с производства продукции, не соответствующей современным требованиям.
Основные положения СРПП должны обеспечивать:
технико-экономическое обоснование возможности и целесообразности разработки (модернизации) продукции;
разработку и производство продукции высокого технического уровня и качества, отвечающей современным достижениям научно-технического прогресса, с учетом новых технологий, безопасности ее для жизни и здоровья людей, окружающей среды, совместимости и взаимозаменяемости с другими видами продукции, а также экономии материально-технических и энергетических ресурсов;
сокращение сроков и затрат на разработку, производство и ремонт, а также затрат на эксплуатацию (применение, хранение) продукции;
обоснование состава количественных и качественных показателей продукции;
стабильность показателей качества изготавливаемой и ремонтируемой продукции;
повышение ответственности исполнителей работ за качество разработки, изготовления и обеспечения эксплуатации и ремонта продукции;
своевременное обновление устаревшей продукции;
производственные возможности мобилизационной готовности промышленности;
формирование правил и процедур, определяющих качество продукции, а также нормативной базы сертификации самой продукции и систем качества
44
производств, гармонизированных с международными (региональными) стандартами, правилами, нормами.
Так как СРПП является системой организационно-методических стандартов, то соответственно объектами стандартизации в ней являются основные положения, обеспечивающие проведение работ на всех стадиях жизненного цикла продукции и взаимодействие заинтересованных сторон при проведении этих работ.
Схема взаимодействия СРПП с другими общетехническими системами (ЕСКД, ЕСТД, ГСП и др.) на различных стадиях жизненного цикла продукции определена в приложении к ГОСТ Р 15.000—94.
Единая система программной документации. ЕСПД содержит ряд стандартов, устанавливающих общие требования к содержанию и оформлению программных документов для компьютеров, компьютерных систем и комплексов. Система данных стандартов распространяется на следующие документы: спецификацию; пояснительную записку; текст программ; описание программ; описание применения программы; руководство системного программиста; руководство программиста; руководство оператора; схемы алгоритмов, программ, данных, систем и др. В связи с интенсивным распространением компьютерных средств управления в промышленности, на транспорте, в городском хозяйстве и других областях выполняется подготовка новых стандартов в этой системе и гармонизация существующих стандартов с международными стандартами. Отдельные положения ЕСПД раскрыты в подразд. 5.8.
Единая система стандартов автоматизированных систем управления. В ЕСС АСУ входят следующие основные стандарты: ГОСТ 24.104—85 (Автоматизированные системы управления. Общие требования); ГОСТ 24.301—80 (Общие требования к выполнению текстовых документов); ГОСТ 24.302—80 (Общие требования к выполнению схем); ГОСТ 24.303 — 80 (Обозначения условные графические технических средств); ГОСТ 24.304—82 (Требования к выполнению чертежей); ГОСТ 24.401—80 (Внесение изменений); ГОСТ 24.402 — 80 (Учет, хранение и обращение); ГОСТ 24.602—86 (Состав и содержание работ на стадиях создания); ГОСТ 24.701—86 (Надежность автоматизированных систем управления. Основные положения); ГОСТ 24.702—85 (Эффективность АСУ. Основные положения); ГОСТ 24.703 — 85 (Типовые проектные решения в АСУ. Основные положения).
ГОСТ 24.602 — 86 подробно раскрывает состав и содержание работ на стадиях создания АСУ.
1. Исследование и обоснование создания.
2. Техническое задание.
3. Эскизный проект.
4. Технический проект.
5. Рабочая документация.
6. Изготовление несерийных компонентов комплексов средств автоматизации (КСА).
7. Ввод в действие.
В соответствии с указанными стадиями установлены этапы создания АСУ.
1. Обследование автоматизируемого объекта. Разработка и оформление требований к системе.
45
2. Научно-исследовательские работы. Разработка аванпроекта. Разработка технического задания на АСУ.
3. Разработка предварительных решений по выбранному варианту АСУ и отдельным видам обеспечений.
4. Разработка окончательных решений по общесистемным вопросам. Разработка решений по организационному и техническому обеспечению. Разработка или выбор алгоритмов системы. Разработка решений по информационному, лингвистическому, программному и методическому обеспечению. Разработка соответствующей проектно-сметной строительной документации. Согласование решений по связям различных видов обеспечения между собой и разработка общесистемной документации на АСУ в целом. Составление заказной документации на компоненты и комплексы средств автоматизации (КСА) или ТЗ на их разработку.
5. Разработка рабочей документации по информационному, организационному, методическому, лингвистическому обеспечению. Разработка или адаптация программ и программной документации. Разработка документации на технические средства разового изготовления. Разработка соответствующей проектно-сметной строительной документации.
6. Изготовление компонентов КСА. Автономная отладка и испытания компонентов КСА.
7. Подготовка организации к вводу АСУ в действие, обучение персонала пользователя. Комплектация АСУ. Строительно-монтажные работы. Пуско-наладочные работы (комплексная отладка КСА). Проведение опытной эксплуатации АСУ. Проведение приемочных испытаний. Устранение недостатков, выявленных при испытаниях. Приемка АСУ в промышленную эксплуатацию.
1.6. Сертификация и лицензирование
1.6.1. Сертификация соответствия требованиям технических регламентов, положениям стандартов и условиям договоров
В соответствии с Федеральным законом «О техническом регулировании» от 27.12.02 № 184-ФЗ сертификация определяется как форма осуществляемого органом по сертификации подтверждения соответствия объектов технического регулирования требованиям технических регламентов, положениям стандартов и условиям договоров. Органом по сертификации является юридическое лицо или индивидуальный предприниматель, аккредитованные в установленном порядке для выполнения работ по сертификации.
Под техническим регламентом понимается документ, принятый международным договором РФ, который устанавливает обязательные для применения и исполнения требования к объекту технического регулирования (ОТР). Технические регламенты учитывают степень риска причинения вреда здоровью граждан или имуществу физических и юридических лиц, т. е. устанавливают минимально необходимые требования, обеспечивающие безопасность излучения, биологическую, механическую, пожарную, промышленную, термическую, химическую, электрическую, ядерную, радиационную и взрывобезо-
46
пасность, а также электромагнитную совместимость, определяющие безопасность работы приборов, оборудования и единство измерений.
Документом, удостоверяющим соответствие ОТР требованиям технических регламентов, положениям стандартов или условиям договоров, является сертификат соответствия. Подтверждение соответствия на территории России может носить добровольный и обязательный характер. Добровольное осуществляется в форме добровольной сертификации, а обязательное в форме принятия декларации о соответствии или обязательной сертификации.
Обязательное подтверждение соответствия проводится только в случаях, установленных соответствующим техническим регламентом, и исключительно относительно требований технического регламента. В нем же оговариваются форма и схемы обязательной сертификации.
Декларация соответствия принимается на основании собственных доказательств производителя и доказательств, полученных с участием органа по сертификации и (или) аккредитованной испытательной лаборатории.
Обязательное подтверждение соответствия проводится только в тех случаях. когда принят технический регламент, устанавливающий необходимость обязательного подтверждения соответствия, и проводится оно исключительно на соответствие требованиям технического регламента.
В техническом регламенте содержатся исчерпывающие обязательные требования к ОТР, правилам и формам оценки соответствия, правилам идентификации, характеристикам продукции, терминологии, упаковке, маркировке или этикеткам и правилам их нанесения, имеющие прямое действие на зсей территории России. В техническом регламенте содержатся также правила л формы оценки соответствия и в том числе схемы подтверждения соответствия, определяемые с учетом степени риска нарушения сроков выполнения, и предельные сроки оценки соответствия в отношении каждого объекта. Оценка соответствия проводится в форме государственного контроля (надзора), аккредитации, испытаний, регистрации, подтверждения соответствия или иной форме. Требования и правила, не включенные в технические регламенты, не могут носить обязательный характер.
Объектом обязательного подтверждения соответствия может быть только продукция, выпускаемая в обращение на территории России.
В номенклатуру продукции и услуг, в отношении которых законодательными актами России предусмотрена обязательная сертификация, входят в том числе машины электрические, оборудование и материалы электротехнические, вычислительная техника, приборы и средства автоматизации общепромышленного назначения, приборы и средства автоматизации специального назначения.
При добровольной сертификации орган по сертификации подтверждает соответствие ОТР государственным стандартам, стандартам организаций и .словиям договоров; выдает сертификат соответствия; предоставляет заявителям право на применение знака соответствия, если его применение предусмотрено соответствующей системой добровольной сертификации; приостанавливает или прекращает действие выданных им сертификатов.
Аккредитация (признание компетентности) органов по сертификации и испытательных лабораторий осуществляется в порядке, установленном пра-зительством России.
47
Таблица 1.3
Страна Организация по сертификации Знак
Россия Госстандарт России
Бельгия Comite Electrotechnique Beige Belgisch Elektrotechnisch Comite (CEBEC) CEBEC
Дания Danmarks Elektriske Materielkontrol (DEMKO) ©
Финляндия Sahkotarkastuslaitos
Франция Union Technique del’ Electricite (UTE) /^oo~X X. xx J
Германия Verband Deutscher Elektrotechniker (VDE) 1 r
Нидерланды NaamlozeVennootschap tot Keuring van Electrotechnische Materialen (KEMA) 1/ EMA l\ EUR
Норвегия Norges Elektriske Materiellkontroll (NEMKO)
Швеция Svenska Elektriska Materielkontrollanstalten (SEMKO)
Швейцария Schweizerischer Elektrotechnischer Verein (SEV)
США Underwriters Laboratories (UL)
Канада Canadian Standards Association (CSA)
48
Общее руководство по сертификации и аккредитации выполняет Госстандарт России. Создана также Российская система аккредитации (РОСА). Методической основой РОСА является серия стандартов ГОСТ Р 51.000, которые максимально гармонизированы с Руководствами ИСО/МЭК 7 в области аккредитации и европейскими нормами.
Учитывая, что на электротехническом рынке России много иностранной продукции, дадим краткую информацию об иностранных системах сертификации и знаках соответствия.
Ведущие экономические страны имеют развитые системы сертификации. Немецкий институт стандартов (DIN) учредил в Германии знак соответствия стандартам DIN, который распространяется на все виды продукции (за исключением газового оборудования, оборудования для водоснабжения и некоторой другой продукции, для которой предусмотрен специальный порядок .проведения испытаний образцов и надзора за производством). Система сертификации электротехнического и электронного оборудования в Германии действует под эгидой Немецкой электротехнической ассоциации. Это одна из первых систем, созданных в стране. Она организует разработку национальных стандартов в области электротехники, электроники и связи и осуществляет р\ ководство системой сертификации этой продукции.
Аналогичные организации имеются и во многих других странах. Названия национальных организаций по сертификации и соответствующие знаки сертификации приведены в табл. 1.3.
Наличие большого числа национальных систем сертификации в странах Западной Европы, основанных на нормативных документах этих стран, привело к ситуации, когда однородная продукция оценивалась разными методами по разным показателям. Это являлось техническим препятствием в торговле между .гранами — членами ЕС и мешало реализации идеи создания пространства без внутренних границ, в котором обеспечивалось бы свободное перемещение людей. товаров и услуг. Решение этой проблемы было найдено путем принятия Советом ЕС Глобальной концепции по сертификации и испытаниям. В соответ-епвии с этим документом формирование доверия к товарам и услугам осуществляется путем использования сертификации и аккредитации, построенных по единым европейским нормам. При этом был создан ряд международных эганизаций по сертификации и аккредитации, а также введен знак «СЕ».
Несмотря на наличие национальных сертификатов соответствия вся иностранная электротехническая продукция, распространяемая на территории России, проходит сертификацию в органах сертификации РФ.
1.6.2. Лицензирование отдельных видов деятельности
В соответствии с Федеральным законом «О лицензировании отдельных видов деятельности» от 08.08.01 № 128-ФЗ к лицензируемым в России «относятся - иды деятельности, осуществление которых может повлечь за собой нанесе--ие ущерба правам, законным интересам, здоровью граждан... и регулиро-?.:ние которых не может осуществляться иными методами, кроме как лицензированием». Здесь же приводится перечень видов деятельности, требу-ши.х лицензирования.
49
Лицензия — специальное разрешение на осуществление конкретного вида деятельности при обязательном соблюдении лицензионных требований и условий, выданное лицензирующим органом юридическому лицу или индивидуальному предпринимателю.
К лицензионным требованиям и условиям относятся: соблюдение требований нормативных правовых актов РФ и нормативных технических документов; наличие сертификатов на оборудование, используемое при осуществлении лицензируемой деятельности; подтверждение документами наличия производственных помещений и сооружений, соответствующих техническим нормам и требованиям эксплуатации технологического оборудования и инвентаря; наличие работников, имеющих специальное высшее или среднее профессиональное образование и др.
На каждый вид деятельности имеются соответствующие положения по лицензированию, например: Положение о лицензировании деятельности по переработке нефти, газа и продуктов их переработки или Положение о лицензировании деятельности по эксплуатации электрических сетей.
На региональном уровне предусматривается также контроль объектов горнорудной, химической, металлургической промышленности; контроль лифтов, экскалаторов, подъемного и другого оборудования, который выполняет, например, Госгортехнадзор России. Контроль объектов электроснабжения выполняет Госэнергонадзор.
1.7. Организационные структуры фирм, занимающихся инжинирингом электроприводов и систем автоматизации. Взаимодействие фирм при реализации крупных проектов
Ведущей фирмой в России, занимающейся исследованием, разработкой и производством электроприводов является ОАО «Электропривод». Фирма включает в себя несколько научно-производственных центров (НПЦ), часть из которых является отраслевыми, ориентированными на определенные производства (горное, металлургическое, агропромышленное и т.п.), а часть — функциональными, т.е. межотраслевыми (НПЦ «Электротехнические комплексы», «Средства и системы автоматизации» и др.).
Самостоятельно и во взаимодействии с другими фирмами, производствами (в том числе и зарубежными) ОАО «Электропривод» выполнил большое число заказов для промышленности России и стран ближнего и дальнего зарубежья. Развитие работ, выполняемых предприятием в настоящее время, идет в следующих направлениях [43]:
ориентация на широкое применение электроприводов переменного тока и все более возрастающих единичных мощностей;
широкое применение средств микропроцессорной техники для управления электроприводами и решения задач АСУ ТП;
повышение уровня автоматизации и надежности, в том числе за счет использования современных диагностических средств;
50
создание энергосберегающих систем электропривода и систем, обеспечивающих энергетическую совместимость установок;
создание объектно-ориентированных систем для уникальных установок.
В общем объеме выполняемых заказов объем научно-исследовательских НИР) и опытно-конструкторских работ (ОКР) составляет около 70%.
В целом ОАО «Электропривод» является межотраслевой фирмой. Имеются также отраслевые фирмы, ориентированные на выполнение крупных системных проектов, связанных с созданием производственного оборудования, технологических комплексов, производственных цехов. В кооперации такие фирмы выполняют задачи системного инжиниринга. Например, в области металлургического производства ОАО ВНИИМЕТМАШ занимается разработкой технологий, автоматизированных производственных машин и комплексов, ОАО Гипромез — строительными конструкциями и сооружениями, предназначенными для размещения машин и комплексов, а ОАО Тяжпромэлектропроект — системами электроснабжения и электрооборудованием. Заказчиками таких проектов являются собственники металлургических производств. Разработкой электроприводов и систем автоматизации машин и комплексов занимается одно из подразделений ОАО ВНИИМЕТМАШ.
В современных условиях развития промышленности и при наличии свободного, развитого рынка средств электроприводов и систем автоматизации в России получают распространение инжиниринговые фирмы, характерные для экономически развитых стран. Эти фирмы с высокой эффективностью и оперативно выполняют разнообразные работы, связанные с электрооборудованием. автоматизированными электроприводами и системами автоматизации, однако их успех определяется наличием высокоразвитой организационной струк-м ры и высококвалифицированного персонала.
Рассмотрим для примера организационную структуру научно-производственной фирмы «Ракурс» (Е1ПФ «Ракурс»), сертифицированной в соответствии с международными стандартами, которая показана на рис. Е5. Центральными подразделениями этой фирмы являются производственно-инжиниринговый комплекс (ПИК), возглавляемый директором, и управления развития и инноваций, возглавляемые техническим директором. Задачами ПИК являются разработка проектно-конструкторской и эксплуатационной документации, программного обеспечения контроллеров, терминалов и компьютерных средств автоматизации верхнего уровня, а также производство разрабатываемого оборудования, тестирование и наладка изготавливаемого оборудования и разрабатываемого программного обеспечения; диагностика и ремонт технических средств автоматизации.
Задачами подразделения управления развития и инноваций являются: разработка учебно-методических материалов в области технических и программных средств автоматизации; обучение и консультирование клиентов и сотрудников фирмы; научно-техническая поддержка деятельности инжиниринговых подразделений и отделов продаж средств и систем автоматизации; реализация маркетинговой политики фирмы; управление информационными ресурсами фирмы в части технических средств, программного обеспечения и используемой информации; создание, развитие и поддержка компьютерной системы менеджмента; разработка нестандартных средств и методов измерения; ведение и актуализация архива нормативных документов, технической документации и
51
Рис. 1.5. Организационная структура научно-производственной фирмы
тературы; ведение архива проектной документации по завершенным проекте.': поддержание инфраструктуры фирмы в надлежащем состоянии.
Продажу широкой номенклатуры средств и систем автоматизации, а также . дтем автоматизации, производимых НПФ «Ракурс», консультационную ра-' ?т\ с клиентами, сбор и анализ информации о потенциальных клиентах осуществляют специальные подразделения по продажам.
Маркетинговые подразделения фирмы обеспечивают разработку маркетин-_: зои политики и стратегии, управление маркетинговой деятельностью, изу-е ние стратегических тенденций рынка и потребительских секторов экономи-• . разработку и осуществление рекламной политики, организацию и прове-и-:ие рекламно-стимулирующих мероприятий.
Разработкой, внедрением и непрерывным совершенствованием системы знеджмента качества в отдельных подразделениях и фирме в целом занима-. -;я подразделение по качеству, в составе которого имеется отдел техничес- о контроля, выполняющий технический и метрологический контроль про-... -шин, производимой НПФ «Ракурс».
Подразделение по экономике осуществляет планирование и экономиче-. ий анализ деятельности и развития фирмы, отслеживание своевременности т нансовых расчетов по договорам и юридическое обеспечение деятельности : (рмы.
Планированием финансовой деятельности, разработкой и обеспечением : то.тнения бюджета, разработкой ценовой политики, своевременным обес-- з лением фирмы необходимыми материально-техническими ресурсами зани-..ется финансовое подразделение. В его составе имеется бухгалтерия, осуше-.~з.тяющая расчетно-кассовое обслуживание и бухгалтерский учет, а также -дел закупок и логистики, осуществляющий приобретение продукции, уп--..зление покупной продукцией, организацией работы с поставщиками, эф-. активное функционирование склада.
Как видно из организационной структуры фирмы (см. рис. 1.5), работой каж-
-.? подразделения руководит директор. Главным организующим и управляю-
?.! элементом этой структуры является генеральный директор, которому полнены директора подразделений, а также служба персонала. Эта служба обес-ечпвает подбор, обучение и развитие персонала, организацию внешнего 'з ления в соответствии с запросами подразделений, поддержание и развитие эпоративной культуры и другие составляющие кадровой политики фирмы.
Данная организационная структура является одним из средств достижения элегической цели, которую ставит перед собой НПФ «Ракурс»: развитие : ламы как производителя систем управления, имеющего безупречную репу--..д:лю на рынке, пользующегося доверием клиентов и обеспечивающего доенный уровень жизни своим сотрудникам.
Задачами тактического уровня являются повышение эффективности пред--.-тятия и удовлетворенности клиентов, а также обеспечение уверенности новых .••ентов в возможностях фирмы.
В своей профессиональной деятельности сотрудники руководствуются це-п: и задачами фирмы, распоряжениями вышестоящего руководства, доку-: - ламп, введенными в действие на предприятии, положениями трудовых . воров и должностных инструкций. На соответствие этому оценивается де--з.-.ьность каждого сотрудника фирмы.
53
1.8. Оформление правовых отношений сторон, участвующих в создании новой техники
1.8.1. Договора и контракты
Студенты старших курсов и молодые специалисты, начинающие свою практическую деятельность, заключив трудовые договора с руководителем фирмы, могут привлекаться к подготовке договоров на выполнение инжиниринговых работ, а также участвовать в оформлении лицензионных договоров. При этом имеются и другие виды договоров. Несмотря на разнообразие договоров их заключают на основе положений Гражданского кодекса РФ, который трактует понятие договор как соглашение двух или нескольких лиц об установлении, изменении или прекращении гражданских прав и обязанностей.
В зарубежной практике используется понятие контракт (от лат. contractus — сделка). Употребляется это понятие и в российской юридической практике, но в качестве договора. При этом рекомендуется употреблять только понятие договора, так как понятие сделки более широкое.
Граждане и юридические лица свободны в заключении договора, за исключением случаев, когда обязанность заключения договора предусмотрена законом или добровольно принятым обязательством. Стороны могут заключить договор как предусмотренный, так и не предусмотренный законом или иными правовыми актами, а также договор, содержащий элементы различных договоров, предусмотренных законом или иными правовыми актами (смешанный договор). Стороны свободны в выборе условий договора кроме случаев, когда содержание соответствующего условия предписано законом или иными правовыми актами.
Исполнение договора оплачивается по цене, установленной соглашением сторон. В предусмотренных законом случаях применяются цены (тарифы, расценки, ставки и т.п.), устанавливаемые или регулируемые уполномоченными на то государственными органами. Изменение цены после заключения договора допускается в случаях и на условиях, предусмотренных договором, законом, либо в установленном законом порядке.
Договор считается заключенным, если между сторонами в требуемой, т.е. надлежащей случаю форме, достигнуто соглашение по всем существенным его условиям. Существенными являются условия о предмете договора и условия, которые названы в законе или иных правовых актах как существенные или необходимые для договоров данного вида, а также все те условия, относительно которых’по заявлению одной из сторон должно быть достигнуто соглашение. Договор заключается посредством направления оферты (предложения заключить договор) одной из сторон и акцепта (принятия предложения) другой стороной.
Договор вступает в силу с момента его заключения и действует до определенного в нем момента окончания исполнения сторонами обязательств.
Соглашение сторон может быть оформлено предварительным договором, по которому стороны обязуются заключить в будущем основной договор на условиях, предусмотренных этим договором. Предварительный договор заключа-54
ется в форме, установленной для основного договора, и должен содержать словия, позволяющие установить существенные условия основного договора. и срок, в который стороны обязуются заключить основной договор. Если .рок не установлен, то основной договор должен быть заключен в течение одного года с момента заключения предварительного договора. Необоснованное уклонение от заключения основного договора может повлечь решение .уда о понуждении заключить договор и возместить убытки, причиненные . клонением от его заключения.
Договор на выполнение и передачу научно-технической продукции, сторонами которого являются два предприятия, именуемые «Заказчик» и «Исполнитель» т лицах руководителей предприятий, содержит следующие основные разделы: предмет договора; права, обязанности и ответственность сторон; стоимость лабот и порядок расчетов; изменение условий или условия расторжения договора; порядок сдачи и приемки работы; дополнительные условия; срок действия договора; юридические адреса и реквизиты сторон. Приложениями к договору являются техническое задание, календарный план и протокол соглашения о договорной цене на научно-техническую продукцию.
1.8.2. Охрана интеллектуальной собственности в условиях конкуренции
При выполнении НИР и ОКР создается значительная часть объектов ин--еллектуальной собственности (ОИС), к которым относятся оригинальные разработки элементов и систем управления, новых технических средств, алгоритмов управления, программных средств и др. [10]. При этом возникает необходимость прогноза дальнейшего успеха на рынке тех результатов, которые 'ылп достигнуты при выполнении конкретного проекта, и выбор одной из возможных форм охраны интеллектуальной собственности: получение патен-свидетельства на полезную модель или документа на промышленный образец и документальное оформление коммерческой тайны (ноу-хау). Выбор торны охраны определяется целесообразностью придания гласности своей разработки, что происходит при подаче заявки на патент, модель или промышленный образец, или превращение разработки в собственное достояние, : храняемое как ноу-хау. Решение этого вопроса зависит от коммерческих ин-“ересов фирмы и активности конкурентов.
Патент — это право на установленную законом монополию. В конкурентной среде патент имеет большое значение. Даже если конкуренты смогут самостоятельно выполнить аналогичную разработку, получив доступ к инфор-ггдии о ней, они рискуют быть наказанными за нарушение исключительных -?ав патентообладателя, который имеет возможность предложить патент большой значимости для использования другими разработчиками в обмен на лицензионные платежи. Полученные от лицензионных платежей средства могут 'ыть использованы на погашение расходов, связанных с первоначальными сследованиями и разработкой. Таким образом, патенты обеспечивают воз-: тот средств, инвестированных в исследования.
Для определения значимости патентования проводят патентно-информа-_тонные исследования, на основании которых определяется уровень новой
55
разработки. В стандартизированную систему ГОСТ 15 введен ГОСТ 15.011 — 86 «Порядок проведения патентных исследований», который содержит формы документов, отражающих оценку новизны и патентно-правовой зашиты разработки. При разработке конструкторской документации в соответствии с ЕСКД выполняют патентный формуляр, предназначенный для оценки патентоспособности и патентной чистоты следующих объектов: изделий, подлежащих самостоятельной поставке потребителю; технологических процессов и систем управления ими (в том числе АСУ ТП); методов измерений и испытаний; способов производства работ (в том числе монтажных) и др.
Патент выдается в соответствии с государственным законодательством, при этом связанные с ним права носят территориальный характер и географически ограничиваются рамками страны или региона. Следовательно, российские патенты на изобретение не имеют силы на территории других стран. Основным государственным органом страны, который осуществляет деятельность по выдаче охранных документов, является Патентное ведомство. Если интересы бизнеса выходят за границы России, возникает необходимость зарубежного патентования. Права на получение иностранных патентов российскими гражданами и юридическими лицами определяются международными договорами, в которых участвует РФ, в частности Парижской конвенцией по охране промышленной собственности или Договором о патентной кооперации.
Международные обязательства России отражены в Патентном законе Российской Федерации от 23.09.92 № 3517-1, в соответствии с которым объектами патентного права признаются изобретения, полезные модели и промышленные образцы. На них выдаются охранные документы — патент или свидетельство, которые отличаются лишь сроком действия. Срок действия патента на изобретение — 20 лет, а свидетельства на полезную модель — 5 лет. Патенты на промышленные образцы действуют 10 лет.
Патент выдается на изобретение, удовлетворяющее следующим критериям патентоспособности: новизна, наличие изобретательского уровня, промышленная применимость.
Изобретательский уровень означает превышение известного специалистам технического уровня нестандартным решением технической задачи. Новым признается изобретение, которое не было известно ранее до даты подачи заявки ни из одного источника информации. Причем новизна должна быть мировой.
Объектами изобретения в области электропривода и систем автоматизации являются разнообразные устройства (преобразователи частоты, фильтры, электроприводы, системы управления и др.), способы управления конкретными объектами, автоматической оптимизации, самонастройки, диагностики, компьютерные алгоритмы и программы.
В качестве полезной модели могут охраняться устройства, не обладающие изобретательским уровнем, или устройства, в отношении которых этот уровень трудно доказать. Чаще всего полезная модель используется для охраны устройств, имеющих короткий срок службы. Выдача свидетельств на полезные модели производится в России с 1994 г. В соответствии с законом к полезным моделям относят конструктивное выполнение средств производства и предметов потребления, а также их составных частей. При этом полезной модели
56
предоставляется правовая охрана, если она является новой и промышленно применимой.
Требования к новизне технического решения, заявляемого в качестве полезной модели, в сравнении с требованиями к новизне изобретения гораздо ниже. При выдаче свидетельства на полезную модель Государство доверяет лицу, утверждающему в поданной заявке, что заявляемое устройство соответствует критериям патенспособности полезной модели, и на основании этого утверждения после формальной проверки правильности оформления этой заявки выдает охранный документ. Таким образом, патентование полезных моделей выгодно отличается от патентования изобретений возможностью быстрого получения охранного документа. Однако следует иметь в виду, что проверка новизны выполняется заявителем. Если заявитель по незнанию или преднамеренно подал заявку на устройство, которое не обладает новизной, а конкурент, узнавший об этом, подал в Апелляционную палату возражение против действия выданного свидетельства, такое свидетельство будет аннулировано.
Патент на промышленный образец не содержит формулу промышленного образца и существенно отличается от патента на изобретение и свидетельства на полезную модель. Формула характеризуется простым перечислением существенных признаков и в первую очередь признаков образца.
В соответствии с Патентным законом Российской Федерации от 23.09.92 № 3517-1 к промышленным образцам относится художественно-конструктивное решение изделия, определяющее его внешний вид. При этом промышленному образцу предоставляется правовая охрана, если он является новым, оригинальным и промышленно применимым. В частности, к промышленным образцам можно отнести художественно-конструктивные решения шкафов и блоков комплектных устройств электроприводов, мотор-редукторов. пультов оператора, низковольтных комплектных устройств и др.
Правовая охрана предоставляется промышленным образцам, имеющим мировую новизну. Так же, как и для изобретений и полезных моделей, во всех странах используется принятая на основе международной конвенции Международная классификация промышленных образцов.
Для получения патента или свидетельства необходимо подать заявку в Патентное ведомство. Требования к заявкам устанавливают соответственно Правила составления, подачи и рассмотрения заявки на выдачу патента на изоб-детения, Правила составления, подачи и рассмотрения заявки на выдачу свидетельства на полезную модель и Правила составления, подачи и рассмотрения заявки на выдачу патента на промышленный образец. Подготовленная в соответствии с правилами заявка направляется в Москву в Федеральный институт промышленной собственности (ФИПС) Российского Агентства по патентам и товарным знакам, являющегося исполнительным органом Патентного ведомства Российской Федерации.
При положительном решении по рассмотренной заявке Патентное ведомство РФ публикует сведения о выдаче патента или свидетельства в официальном бюллетене. Одновременно изобретение, полезная модель, промышленный образец вносятся в соответствующий государственный реестр (Государственный реестр изобретений РФ, Государственный реестр полезных моделей РФ, Государственный реестр промышленных образцов РФ). Охранный
57
документ — патент или свидетельство (оформляемые в единственном экземпляре) — направляется на имя и по адресу лица, указанного в заявке.
Патент выдается автору (авторам), физическим и (или) юридическим лицам (при условии их согласия), которые указаны автором (авторами) или его (их) правопреемником в заявке на выдачу патента, или работодателю. Право на получение патента принадлежит работодателю, если изобретение, полезная модель, промышленный образец созданы работником в связи с выполнением им своих служебных обязанностей или полученным от работодателя конкретным заданием.
Патентообладатель — это собственник изобретения, полезной модели, промышленного образца, на которые выданы охранные документы, обладающий исключительными правами на их использование.
В любой стране защита прав и интересов авторов и патентовладельцев осуществляется путем использования соответствующих законов при обращении в административные и судебные органы власти. Общим является судебный порядок защиты прав и интересов патентовладельцев. Российское законодательство наряду с гражданско-правовой предусматривает и уголовно-правовую ответственность за нарушение прав авторов и патентообладателей.
Коммерческая тайна — это особая разновидность объектов интеллектуальной собственности. Наряду с другими видами тайн (государственной, медицинской, личной) она охраняется законом. Наряду с термином «коммерческая тайна», принятым в правовых документах России, в международной практике используются следующие аналогичные термины: ноу-хау, секреты производства, торговые секреты, деловые секреты, конфиденциальная информация [10].
В соответствии с Гражданским кодексом РФ информация составляет служебную или коммерческую тайну, если имеет действительную или потенциальную коммерческую ценность в силу неизвестности ее третьим лицам и если к ней нет свободного доступа на законном основании, т.е. обладатель информации принимает меры к охране ее конфиденциальности.
Если объектам патентного права законодательная охрана обеспечивается в результате их обнародования, то объектам коммерческой тайны правовая охрана предоставляется только при условии, что сам правообладатель принял необходимые меры к сохранению этой тайны. Следовательно, существование коммерческой тайны зависит от полноты и эффективности принимаемых мер по охране фактической монополии на знания, опыт и информацию.
Коммерческая тайна распространяется на сведения технического, организационного и финансового характера. Например, это могут быть: изобретение, на которое умышленно не подана заявка, в целях избежания его открытой публикации; конструкторская рабочая документация; формулы и методики расчетов; инструкции по настройке систем управления и отдельных элементов систем; методики и результаты экспериментальных исследований: программные средства для контроллеров и компьютеров и др. Коммерческая ценность объектов коммерческой тайны устанавливается при их продаже.
Правообладатель коммерческой тайны должен принимать меры к ограничению возможности раскрытия информации при опубликовании различных материалов, экспонировании на выставках, передаче для ознакомления возможным партнерам или внедрении результатов разработки.
58
приятиями только в рамках внешнеэкономической деятельности. Принятые в последние годы специальные законы об ОИС положили начало формированию российского лицензионного рынка.
Торговля лицензиями включает в себя как объекты патентного права (патенты, свидетельства на полезные модели и промышленные образцы), так и коммерческие тайны, результаты инжиниринга и др. Приобретающий лицензию не только выплачивает правообладателю денежное вознаграждение, определяемое лицензионным договором, но и принимает на себя обязательство не раскрывать ноу-хау третьим лицам, за исключением тех случаев, когда на это имеется согласие передающего лица.
Контрольные вопросы
1. Назовите объекты системного и электротехнического инжиниринга.
2. Дайте характеристики системного и электротехнического инжиниринга.
3. В каких целях выполняются унификация, агрегатирование и типитизация изделий?
4. Какие нормативно-технические документы используются при выполнении электротехнического инжиниринга?
5. Какие виды деятельности характерны для инжиниринга ЭП и СА?
6. В чем состоит сущность бизнес-плана создания нового электрооборудования?
7. Назовите основные системы стандартов, применение которых предусматривается при создании ЭП и СА производственных машин и технологических комплексов.
8. Каким образом системы стандартов РФ гармонизированы с международными системами стандартов?
9. Назовите квалификационные группы, входящие в ГОСТ 2 ЕСКД.
10. В каких случаях и каким образом выполняется сертификация соответствия объектов технического регулирования требованиям технических регламентов, положениям стандартов и условиям договоров?
11. Назовите виды договоров, используемых при создании новой техники и организации инжиниринговой деятельности.
12. Назовите основные разделы договора на выполнение и передачу научно-технической продукции.
13. Что является патентом на изобретение, свидетельством на полезную модель, патентом на промышленный образец?
14. Что может быть объектом интеллектуальной собственности при создании новых ЭП и СА?
15. Как регулируются правовые отношения на рынке интеллектуальной собственности и в чем состоит сущность лицензионных соглашений?
Охрана конфиденциальности информации является частью управленческой . 'стемы, обеспечивающей безопасность бизнеса в условиях конкуренции. Оформляется это внутренними нормативными документами фирмы: положениями о •юммерческой тайне, правилами внутреннего распорядка, инструкциями по тлботе с документацией, должностными инструкциями, трудовыми договора-.щ. В крупных фирмах имеются информационно-аналитические подразделе--,:я. в задачи которых, в частности, входит и охрана коммерческих тайн.
Зашита права на коммерческую тайну осуществляется посредством обращения в административные и судебные органы, например в Арбитражный ; .д с иском о защите нарушенных прав, если речь идет о предприниматель-_ чои деятельности. В случае если в качестве ответчика выступает работник, ?.-згласивший коммерческую тайну вопреки условиям трудового договора, дело ? .осматривается в федеральном суде района.
При этом в любом случае предусматривается возмещение причиненных . Зытков. Причем компенсации подлежит как реальный ущерб, гак и упущен--ая выгода. Обязанность обоснования размеров убытков возлагается на потерпевшую сторону.
1.8.3. Правовые отношения на рынке интеллектуальной собственности
В условиях рыночной экономики интеллектуальная собственность выступале в качестве товара наряду с материальными объектами. Товаром являются лава на ОИС, передача которых оформляется договором. Существует возможность распорядиться ОИС как в форме полной уступки прав (продажи), -щк и в форме выдачи исключительной либо неисключительной лицензии, т.е. для правообладателя ОИС существует выбор — продать право на объект либо ледоставить его во временное пользование [10]. При продаже правооблада-~ель полностью уступает свои права новому владельцу и обладателю исключи--ельных прав на ОИС. При лицензировании правообладатель предоставляет долгому физическому или юридическому лицу разрешение на совершение в определенной стране или какой-либо иной территории в ограниченный период времени одного или более действий с ОИС. При этом исключительные -рава остаются у правообладателя. Юридический документ, подтверждающий такт выдачи разрешения владельцем ОИС, называется лицензионным догово-::.м (контрактом), или лицензией. Следует обратить внимание на то, что эта лицензия существенным образом отличается от лицензии, о которой шла речь : подразд. 1.6.2. Владельца ОИС, дающего такое разрешение, называют лицен-...аром, а физическое или юридическое лицо его получающее — лицензиатом. Л ицензиат выплачивает денежную компенсацию за предоставленную лицен-ию в виде фиксированной суммы в определенное время или в виде сумм, пвисящих от экономического эффекта, обусловленного использованием дан-- его ОИС.
Для России внутренняя торговля лицензиями на промышленные ОИС яв-ение новое, так как ранее все научно-технические достижения принадле-- пи государству и любое предприятие могло свободно их использовать, не сормляя лицензионных договоров. Лицензирование осуществлялось пред-
59
ГЛАВА 2
ОБЩИЕ ПОЛОЖЕНИЯ О ПРОЕКТИРОВАНИИ ЭЛЕКТРОПРИВОДОВ И СИСТЕМ АВТОМАТИЗАЦИИ .
2.1. Стадии проектирования и состав проектов
Принципы проектирования и состав проектной документации ЭП и С А определяются соответствующими нормами и стандартами. Общественно-политические и социальные изменения в стране влияют на технические и правовые отношения сторон, участвующих в создании нового производственного оборудования, однако состав работ и процедура проектирования остаются неизменными. Переход от полной государственной собственности к частной обусловливает возможные отклонения от требуемой процедуры проектирования । например, возможны объединение стадий и этапов проектирования, понижение требований по контролю и испытаниям и др.), однако смена собственника не должна влиять на качество ведения проектных работ и качество изделия. Поэтому рассмотрим все стадии проектирования, следуя стандартам ЕСКД и ГОСТ 34.602—89. Учитывая информацию, представленную в гл. 1 и специфику периода, обусловленного изменением правил стандартизации и сертификации, студенты смогут при проектировании внести необходимые изменения в стадии и состав конкретных проектов.
Разработка конструкторской документации в общем случае включает в себя несколько стадий: техническое предложение, эскизный проект, технический проект, рабочая документация.
Номенклатура конструкторских документов, разрабатываемых на разных стадиях проектирования, представлена в табл. 2.1. Зачерненными кружками в таблице обозначены обязательные документы. Необходимость остальных документов (помеченных светлыми кружками) определяется в зависимости от характера, назначения или условий производства изделия.
Техническое предложение — совокупность конструкторских документов, которые должны содержать техническое и технико-экономическое обоснования целесообразности разработки документации изделия на основе анализа технического задания заказчика, различных возможных вариантов его решения и сравнительной оценки этих решений с учетом конструктивных и эксплуатационных особенностей разрабатываемого изделия, а также патентные исследования. Техническое предложение включает в себя следующие документы: в обязательном порядке пояснительную записку и ведомость технического предложения, а также чертеж общего вида, схемы, таблицы, расчеты и др.
Эскизный проект — совокупность конструкторских документов, которые лолжны содержать принципиальные конструктивные решения, дающие общее
61
Таблица 2.1
Шифр документа Наименование документа Техническое предложение Эскизный проект Технический проект Рабочая документация
Деталь Сборочная единица Комплекс Комплект
— Чертеж детали О •
СБ Сборочный чертеж •
ВО Чертеж общего вида О О •
ТЧ Теоретический чертеж о о О О О
ГЧ Габаритный чертеж о о о о о о
МЭ Электромонтажный чертеж о
мч Монтажный чертеж о о О
УЧ Упаковочный чертеж о о о о
По ГОСТ 2.701-84 Схемы о о о о о о
— Спецификация • • •
пт Ведомость технического предложения •
ЭП Ведомость эскизного проекта •
тп Ведомость технического проекта •
пз Пояснительная записка • • •
ТУ Технические условия о о о о о
ТБ Таблицы о о о о о о о
рр Расчеты о о о о о о о
и Инструкции о о о о
представление об устройстве и принципе работы разрабатываемого изделия, а также данные, определяющие его назначение, основные параметры и габаритные размеры. Обязательными документами здесь являются пояснительная записка и ведомость эскизного проекта. Сюда могут быть включены чертеж общего вида, теоретический и габаритный чертежи, схемы и другие документы.
Технический проект — совокупность конструкторских документов, которые должны содержать окончательные технические решения, дающие полное пред-
62
сдавление об устройстве разрабатываемого изделия, и исходные данные для разработки его рабочей документации. Обязательными документами здесь являются чертеж общего вида, пояснительная записка и ведомость технического проекта. Сюда могут быть также включены чертежи деталей, теоретические и габаритные чертежи, схемы и т.д.
Рабочая конструкторская документация — совокупность конструкторских документов, предназначенных для изготовления и испытания опытного образца (опытной партии) изделия, а также изготовления и испытания его установочной серии. Рабочая документация обязательно содержит чертеж детали. а также возможно теоретический, габаритный, упаковочный чертежи, технические условия и другие документы.
Рабочая документация на сборочную единицу обязательно содержит спецификацию и сборочный чертеж, а также при необходимости другие чертежи. схемы и текстовые документы.
В комплект конструкторской документации на стадиях проектной разработки (технического предложения, эскизного и технического проектов) входит ведомость проекта, являющаяся обязательным документом. В ведомость записывают все вновь разработанные для данного комплекта конструкторские документы, а также документы из рабочей документации на используемые эанее разработанные изделия.
Ведомость проекта представляет собой таблицу, составленную в специальной форме. Запись документов в нее производят по разделам в следующем порядке: документация общая, документация по сборочным единицам. При этом каждый раздел должен состоять из подразделов: вновь разработанная документация, примененная документация.
Документы технического предложения, эскизного и технического проектов комплектуют в папки, книги или альбомы.
2.2. Технические задания, требования и условия
Научиться разрабатывать и согласовывать технические задания (ТЗ) на проектирование, технические требования (ТТ) и технические условия (ТУ) чвляется одной из наиболее важных задач в процессе обучения и формирования специалиста. Разработка этих документов является неотъемлемой частью дипломного проекта или выпускной работы специалиста, что обязательно должно быть отражено в методических указаниях по дипломному проектированию. Процедура разработки и состав таких документов, как ТТ, ТЗ и ТУ, даскрыты в специальной литературе по проектированию электротехнических .стройств и электроприводов [2, 13, 50, 52, 56].
Техническое задание разрабатывают на основе исходных требований заказчика, изложенных в заявке, а также на основе результатов выполненных научно-исследовательских и экспериментальных работ, научного прогнозирования. анализа передовых достижений и технического уровня отечественной и -.-.рубежной техники, перспективных типажей систем машин, оборудования и почтой техники, изучения патентной документации (на продукцию, предназначенную для экспорта, обязательно с учетом требований внешнего рынка). На продукцию машиностроения, имеющую важное значение, ТЗ разрабаты
63
вают на основе аванпроекта, выполняемого разработчиком по заданию заказчика в целях технико-экономического обоснования создания данной продукции и изыскания путей реализации в разработке высокоэффективных технических решений.
Требования, включаемые в ТЗ, должны основываться на современных достижениях науки и техники, необходимости обеспечения опережающих показателей технического уровня продукции, использовании прогрессивных изобретений и включать в себя прогнозируемые показатели технического уровня и качества продукции, в том числе уровня ее стандартизации и унификации с учетом наиболее полного удовлетворения потребностей рынка. Техническое задание должно содержать необходимые и достаточные требования для разработки продукции и не ограничивать инициативу разработчика при поиске и выборе им оптимального решения поставленной задачи. При этом ТЗ является исходным документом для разработки продукции и технической документации на нее. Техническое задание на продукцию, разрабатываемую и выпускаемую по документации, предусмотренной стандартами ЕСКД, должно состоять из следующих разделов:
1. Наименование. Область применения (использования) и основание для разработки.
2. Назначение и выполняемые функции.
3. Технические требования.
4. Экономические показатели.
5. Стадии и этапы разработки.
6. Порядок контроля и приемки.
Техническое задание оформляют в соответствии с общими требованиями к текстовым конструкторским документам на листах формата А4 без рамки, основной надписи и дополнительных граф к ней. Номера листов проставляют в верхней части листа над текстом.
В разделе ТЗ «Технические требования» указывают требования и нормы, определяющие показатели качества и эксплуатационные (потребительские) характеристики продукции с учетом действующих стандартов и норм, а также современного технического уровня.
Этот раздел в общем случае должен состоять из следующих подразделов:
3.1. Состав продукции и требования к ее конструктивному устройству;
3.2. Назначение и показатели экономного использования сырья, материалов, топлива, энергии;
3.3. Конструктивные параметры;
3.4. Требования к надежности;
3.5. Требования к технологичности и метрологическому обеспечению разработки;
3.6. Требования к унификации и стандартизации;
3.7. Требования к безопасности и охране природы;
3.8. Эстетические и эргономические требования;
3.9. Требования к патентной чистоте;
3.10. Требования к составным частям продукции, сырью, неходовым и эксплуатационным материалам;
3.11. Условия эксплуатации (использования), требования к техническому обслуживанию и ремонту;
64
3.12. Дополнительные требования;
3.13. Требования к маркировке и упаковке;
3.14. Требования к транспортированию и хранению;
3.15. Требования к категории качества.
В подразд. 3.1 указывают: наименование, число и назначение основных составных частей продукции; конструктивные требования к самой продукции и ее составным частям (габаритные, установочные, присоединительные размеры, способы крепления, регулировки органов управления, соответствие эталонам образцов, виды покрытий и т.п.); требования монтажной пригодности; требования к массе продукции и при необходимости к ограничению массы отдельных ее составных частей; требования к удельной материалоемкости; требования к средствам защиты (от влаги, вибрации, шума, вредных испарений, коррозии, микроорганизмов и др.); требования к взаимозаменяемости продукции и ее составных частей; требования устойчивости к моющим средствам, топливу, маслам и др.; требования к виду и составу запасных частей, инструмента и принадлежностей.
В подразд. 3.2 указывают основные технические параметры продукции, определяющие ее целевое использование, а также свойства, отражающие ее техническое совершенство по уровню потребления сырья, материалов, топлива и энергии при эксплуатации. Например, мощность, производительность, чувствительность, удельный расход сырья (материалов), топлива, энергии, коэффициент полезного действия.
В подразд. 3.8 отражают требования технической эстетики и эргономические требования: степень удобства обслуживания, уровень комфортабельности, усилия, необходимые для управления и обслуживания и т.д.
В подразд. 3.10 приводят требования к сырью, комплектующим, жидкостям, краскам, смазочным и другим материалам, намечаемым для применения в составе разрабатываемой продукции, при ее изготовлении и эксплуатации, а также указывают физико-химические, механические и другие свойства материалов, возможность их применения и ограничения в применении дефицитных материалов и комплектующих.
В подразд. 3.11 описывают условия эксплуатации, при которых обеспечивается использование продукции: допустимое воздействие климатических условий (температуры, влажности, пыли, агрессивных сред), допустимые механические воздействия и др.
В разделе ТЗ «Экономические показатели» указывают ориентировочную экономическую эффективность и срок окупаемости затрат на разработку и освоение производства новой продукции, предполагаемую ее годовую потребность, а также экономические преимущества разрабатываемой продукции по сравнению с лучшими отечественными и зарубежными образцами.
Техническое задание является обязательным исходным документом для разработки новых и модернизации старых электроизделий и технической документации к ним. Требования к продукции должны задаваться в ТЗ с учетом действующих государственных стандартов, а также рекомендаций международных организаций (ИСО, МЭК и др.).
Общие правила составления ТЗ рассмотрим на примере проектирования электротехнических устройств преобразовательного типа [50].
В процессе проектирования ТЗ может корректироваться и уточняться.
65
Рассмотрим содержание отдельных пунктов технического задания.
1. Наименование — электротехническое устройство (ЭТУ). После анализа и описания работы конкретизируется назначение данного преобразовательного устройства. Например:
симметричный коммутатор для включения и отключения асинхронного двигателя;
регулятор напряжения с токоограничением и последующим шунтированием контактором;
тиристорно-контакторное пусковое устройство;
регулятор напряжения (скорости) асинхронного двигателя;
трехфазный регулятор напряжения постоянного тока;
широтно-импульсный преобразователь;
автономный инвертор напряжения (тока);
преобразователь частоты с непосредственной связью и т.д.
2. Назначение и выполняемые функции:
формирование пусковых режимов;
ограничение пусковых токов;
защита от перегрузок и аварийных токов;
регулирование угловой частоты вращения;
обеспечение повышенной частоты включений в час;
сигнализация о включенном и отключенном состояниях;
обеспечение различных режимов управления; ручного, автоматического, дистанционного и т.д.
3. В технических требованиях указывают показатели качества, по которым сравниваются заданные устройства, условия (У) проектирования и ограничения (О) при проектировании, производстве и эксплуатации.
• Состав и требования к конструктивному устройству ЭТУ. Здесь описывается состав устройства с выделением функционально законченных узлов и аппаратов, не разрабатываемых в проекте. Например, автоматический выключатель, преобразователь, блок питания и пульт управления, размещенные в несущей оболочке, выполненной в виде блока (подвесного устройства, шкафа, стойки, панели, модуля и тому подобное с выносным пунктом управления).
• Показатели ЭТУ:
напряжение питания, частота с допустимыми отклонениями;
мощность электрической машины;
диапазон токоограничения в пусковых и тормозных режимах;
допустимая мощность для собственных нужд или потребляемая мощность; номинальные выходное напряжение, ток и частота;
диапазон изменения выходных параметров и т.п.
• Конструктивные параметры:
степень защиты IP, т. е. обеспечение защиты от твердых тел размером ..., а также от попадания воды и влаги;
ограничения по габаритным размерам (Н < ...; L < ...; В <...) и массе (т <...) согласно степени защиты;
обеспечение подключения к сети медным (алюминиевым) кабелем сверху, а нагрузки снизу, наличие элементов крепления кабелей;
уровень помех не более 40 дБ при частотах < 104 Гц;
66
далее указывают ограничения на расположение элементов и аппаратов, а также ограничение на монтаж электрических цепей и нагрев составных частей ЭТУ устройства.
• Надежность:
коэффициент готовности (0,95...0,98);
среднее время наработки на отказ 10000...30000 ч;
среднее время восстановления 1 ч;
гарантийный срок эксплуатации не менее двух лет.
• Показатели технологичности — удельная трудоемкость, энергоемкость, материалоемкость. Численные значения некоторых из этих показателей рассчитываются после определения параметров несущей конструкции ЭТУ.
• Показатели стандартизации и унификации определяются объемом применения типовых элементов, профилей и модулей. Для оценки уровня стандартизации устройства используется коэффициент применяемости Лпр стандартизированных, нормализованных и унифицированных его составных частей. Хорошим считается значение кпр = 0,6.
• Патентно-правовые показатели.
• Эргономические показатели, оцениваемые по балльной системе.
• Требования или показатели безопасности определяют ГОСТ 18.142 — 80 и 12.1.004-84.
Ограничения и требования к составным частям и материалам устройства. Здесь могут быть указаны форма устройства, цвет, материал покрытия, обеспечение запоров, расположение лицевой панели или пульта управления. Например, панель управления при вертикальном расположении должна иметь элементы включения и отключения установки, управления уровнем параметров (напряжения на входе и выходе, тока на выходе), контроля и сигнализации (о включении устройства, готовности его к работе, срабатывании защит с указанием уставок защит).
• Условия эксплуатации, хранения и транспортирования (устойчивость к внешним воздействиям) приводятся согласно климатическому исполнению и категории размещения.
4. Экономические показатели наряду с другими показателями качества задаются в виде весовых коэффициентов, которые учитываются при выборе элементов, материалов и несущей конструкции устройства в процессе проектирования.
Для систем электропривода ТЗ должно содержать требования по системе автоматизации управления, блокировкам, диагностике, защите (с указанием уставок защиты, контроля, диагностики и сигнализации, а также рода и вида сигналов защиты, контроля, диагностики, технологических и защитных блокировок).
Так как в современных системах управления электроприводом и системах автоматизации широко применяются информационно-управляющие микропроцессорные средства, в ТЗ на их проектирование должен быть введен раздел Требования к видам обеспечения», содержащий требования к математическому, информационному, лингвистическому, программному и другим видам обеспечения.
Например, ГОСТ 34.602—89 устанавливает необходимость введения в ТЗ следующих разделов.
67
• Для математического обеспечения системы приводят требования к составу, области применения (ограничения) и способам использования в системе математических методов и моделей, типовых алгоритмов и алгоритмов, подлежащих разработке.
• Для информационного обеспечения системы приводят требования:
к составу, структуре и способам организации данных в системе;
информационному обмену между компонентами системы;
информационной совместимости со смежными системами;
использованию унифицированных документов и классификаторов, действующих на данном предприятии;
применению систем управления базами данных;
структуре процесса сбора, обработки, передачи данных в системе и представлению данных;
защите данных от разрушений при авариях и сбоях в электропитании системы;
контролю, хранению, обновлению и восстановлению данных.
• Для лингвистического обеспечения системы приводят требования к применению языков программирования высокого уровня, языков взаимодействия пользователей и технических средств системы, а также требования к кодированию и декодированию данных, языкам ввода-вывода данных, языкам манипулирования данными, средствам описания предметной области (объекта автоматизации) и способам организации диалога.
• Для программного обеспечения системы приводят перечень покупных программных средств, а также требования:
к независимости программных средств от используемых средств вычислительной техники и операционной среды;
качеству программных средств и способам его обеспечения и контроля;
необходимости согласования вновь разрабатываемых программных средств с фондом алгоритмов и программ.
• Для технического обеспечения системы приводят требования:
к видам технических средств, в том числе к видам комплексов технических средств (КТС), программно-технических комплексов и других комплектующих изделий, допустимых к использованию в системе;
функциональным, конструктивным и эксплуатационным характеристикам средств технического обеспечения системы.
• Для метрологического обеспечения системы приводят:
предварительный перечень измерительных каналов;
требования к точности измерения параметров и (или) метрологическим характеристикам измерительных каналов;
требования к метрологической совместимости технических средств системы;
перечень управляющих и вычислительных каналов системы, для которых необходимо оценивать точностные характеристики;
требования к метрологическому обеспечению технических и программных средств, входящих в состав измерительных каналов системы, средств встроенного контроля, метрологической пригодности измерительных каналов и средств измерений, используемых при наладке и испытаниях системы;
вид метрологической аттестации (государственная или ведомственная) с указанием порядка ее выполнения и организаций, проводящих аттестацию.
68
Технические условия, являясь неотъемлемой частью комплекта технической документации, должны содержать все требования к продукции, ее изготовлению, контролю, приемке и поставке, которые нецелесообразно указывать в проектно-конструкторской документации. В ТУ входит совокупность всех показателей, норм, правил и положений, установленных для данного типа продукции. Построение ТУ следующее: вводная часть, технические требования, правила приемки, методы контроля (испытаний, анализа, измерений), транспортирование и хранение, указания по эксплуатации (применению), гарантии поставщика.
В соответствии с особенностями объекта допускается дополнять ТУ какими-либо другими разделами или не включать в них отдельные указанные разделы.
2.3. Технико-экономическое обоснование проектных решений
2.3.1. Общие сведения
С самого начала постановки и разработки методологии проектирования в учебном процессе раздел технико-экономического обоснования (ТЭО) являлся непременной составной частью дипломного проектирования.
В первом курсе по электрической передаче и распределению механической энергии, поставленном в Петербургском электротехническом институте в 1923 г., при обосновании эффективности перевода конки на электрическую тягу приводилось всестороннее технико-экономическое исследование целесообразности замены данного типа привода с многофакторным учетом эффекта и затрат. Курьезным является факт учета экономического эффекта от использования навоза лошадей, обеспечивающих тягу.
В дальнейшем экономическая часть проектов стала включать в себя оценку затрат на проектирование, изготовление нового оборудования и срока его окупаемости, а также расчет себестоимости продукции.
На современном этапе, учитывая переход России к рыночным отношениям и использование инвестиционных способов финансирования, технико-экономическое обоснование должно содержать кроме приведенных ранее вопросы эффективности инвестиционной политики в соответствии с финансовой государственной и межкорпоративной обстановкой.
Конечно, в полной мере вопросы технико-экономического обоснования яри проектировании могут быть рассмотрены только в специальной методологической литературе, однако в данном пособии, на наш взгляд, целесообразно отразить основные его содержательные и методологические аспекты.
2.3.2. Жизненный цикл промышленной продукции
Жизненный цикл промышленной продукции независимо от ее типа и назначения вписывается в довольно четкую последовательность стадий и эта
69
пов, приведенную в табл. 2.2. На каждом из указанных в таблице этапов на промышленную продукцию относят затраты на необходимые ресурсы.
Таблица 2.2
Стадии жизненного цикла Этапы жизненного цикла (подразделения, обеспечивающие их выполнение)
Исследование и проектирование продукции 1. Исследование и отработка замысла (научно-исследовательские подразделения и подразделения перспективного планирования)
2. Разработка проектной и рабочей конструкторской документации опытного образца (конструкторские подразделения)
3. Изготовление и испытание опытного образца (опытное и экспериментальное производство, испытательные подразделения, конструкторские подразделения)
4. Разработка рабочей конструкторской документации для изготовления продукции (проектно-конструкторские подразделения)
5. Изучение опыта потребления или эксплуатации (научно-исследовательские и конструкторские подразделения)
Изготовление продукции 1. Технологическая подготовка производства (специализированные производства, технологические и конструкторские подразделения)
2. Изготовление установочной и головной контрольной серии (основное, обеспечивающее и обслуживающее производства)
3. Установившееся производство (основное, обеспечивающее и обслуживающее производства)
4. Подготовка продукции к транспортированию и хранению
Обращение продукции 1. Сбыт (сбытовые организации и подразделения)
2. Хранение (базы и склады)
3. Транспортирование (транспортные и сбытовые подразделения)
Потребление или эксплуатация и утилизация продукции 1. Целевое использование, потребление (центры технического обслуживания, подразделения эксплуатации)
2. Обслуживание и профилактический ремонт (центры технического обслуживания, подразделения эксплуатации)
3. Ремонт, восстановление (ремонтные предприятия и подразделения)
70
На первой стадии исследования и проектирования продукции предопределяется 60...80% ее себестоимости, хотя сами затраты при этом составляют чаще всего меньше одной десятой процента общих затрат, т. е. здесь наблюдается наибольшее несоответствие между уровнем собственных затрат и тем влиянием, которое оказывает данная стадия на суммарные затраты последующих стадий жизненного цикла продукции.
На стадиях изготовления и обращения продукции уровень затрат зависит от прогрессивности и сложности разрабатываемых технологических процессов, а также от масштабов, стабильности и серийности выпуска спроектированной продукции. С точки зрения влияния на затраты за весь жизненный цикл продукции этап технологического освоения ее производства занимает одно из ведущих мест. Например, в индивидуальном крупном машиностроительном производстве расходы на техническую подготовку и освоение в 2—4 раза превышают себестоимость изготовления продукции.
В структуре отчетных калькуляций себестоимости установившегося производства продукции, выпускаемой предприятиями электротехнической промышленности (например, объединением УРАЛЭЛЕКТРОТЯЖМАШ), наибольший удельный вес имеют затраты на сырье, покупные изделия и полуфабрикаты (60...80 %), а затраты на топливо и энергию (в том числе и электроэнергию) составляют примерно 2 %.
Следовательно, для электротехнической промышленности освоение новой продукции всегда связано с значительными экономическими трудностями для предприятия, даже при том условии, что прямые расходы по освоению продукции оплачиваются за счет специальных источников финансирования.
Заключительная стадия потребления или эксплуатации и утилизации продукции имеет наибольшую длительность из всех стадий жизненного цикла. Именно на этой стадии изделие начинает давать экономический эффект в результате целевого его использования потребителем. Но следует помнить, что как только происходит износ изделия и появляются неисправности, оно снова становится потребителем ресурсов. Когда затраты, связанные с эксплуатацией изделия, превышают полезную отдачу, наступает момент его утилизации.
Такое представление жизненного цикла полностью соответствует принятому в России стандарту ИСО 9001 — 96, который представляет собой аутентичный текст международного стандарта ИСО 9001 — 94 «Системы качества. Модель обеспечения качества при проектировании, разработке, производстве, монтаже и обслуживании». Стандарт ИСО 9002 — 96 уточняет модели обеспечения качества.
Затраты на стадии потребления или эксплуатации и утилизации продукции зависят от расходования ресурсов, потребляемых при эксплуатации и обслуживании техники, поддержания ее в рабочем состоянии и эффективности системы ремонтов, проводимых за время эксплуатации, а также от ремонтопригодности, ремонтной и эксплуатационной технологий самого изделия. По статьям расходов на заключительной стадии жизненного цикла продукции все ресурсы в процентном отношении к итогу распределяются приблизительно следующим образом: амортизация — 27,4 %; эксплуатация и ремонт — 47,2 %; внутризаводские перемещения — 7,0%; износ малоценных и быстроизнаши-вающихся инструментов и приспособлений — 10,1 %; прочие расходы — 8,3 %.
71
Из этого распределения видно, что на самой длительной стадии жизненного цикла продукции наибольшие затраты связаны с эксплуатацией и обслуживанием оборудования. Применительно к видам наиболее массовой продукции машиностроения примерно 70 % всех затрат за ее жизненный цикл приходится на эксплуатацию.
Среди всех видов ресурсов особое место занимают энергетические. При этом потребление электроэнергии растет более быстрыми темпами, чем суммарное потребление всех других топливно-энергетических ресурсов (ТЭР), что наблюдается чуть ли не с самого начала использования электроэнергии в промышленных масштабах. Причем темпы роста потребления электроэнергии должны и в дальнейшем опережать рост общего энергопотребления. Это обусловлено рядом технических причин, основные из которых заключаются в следующем: электроэнергию можно вырабатывать на базе самых различных ТЭР; широкие возможности регулирования электроэнергии обеспечивают эффективность ее использования; использование электроэнергии практически не причиняет ущерба окружающей среде.
Из результатов анализа структуры потребления электроэнергии по отраслям промышленности установлено, что основная доля приходится на электроприводы (например, в химической промышленности — 68 %, черной металлургии — 64,5%, машиностроении и металлообработке — 50,4 %). Среди машиностроительных предприятий наибольшее потребление электроэнергии характерно для автомобиле- и приборостроения (соответственно 54,8 % и 52,8%).
Высокое электропотребление, значительные потери электроэнергии в промышленности и неудовлетворительный характер энергоснабжения вызвали необходимость принятия федерального закона об энергосбережении.
2.3.3. Инвестиционные проекты.
Оценка эффективности проектных решений
С помощью инвестиционного проекта решается важная задача по выяснению и обоснованию технической возможности и экономической целесообразности создания объекта. Во времени инвестиционный проект охватывает период от момента зарождения идеи о создании объекта и до завершения его жизненного цикла. Этот период включает в себя три фазы: предынвестиционную, инвестиционную и эксплуатационную.
Подготовка инвестиционного проекта на прединвестиционной фазе проводится чаще всего в два этапа, т. е. на первом этапе разрабатывается предварительное ТЭО проекта, а на втором — окончательное. (В дипломных проектах, как правило, реализуется первый этап.)
По концептуальному содержанию выполняемые на первом и втором этапах ТЭО близки. Отличие заключается в глубине проработки проекта, последующем уточнении исходной технико-экономической информации и информации о возможных объемах реализации, стоимости кредита и подобных сведений, которые, в конечном счете, сказываются на показателях эффективности проекта. Однако особенность второго этапа состоит в том, что затраты здесь
72
носят необратимый характер, так как пока проект не завершен, он не приносит доходов. На данном этапе решаются вопросы, связанные с привлечением инвестиций.
Специфика инвестиционной фазы в отличие от предынвестционной состоит в том, что установленные здесь временные рамки создания объекта предпринимательской деятельности и размер затрат, предусмотренный сметой, должны неуклонно выполняться. Превышение этих параметров чревато весьма серьезными последствиями, а возможно и банкротством. Немаловажное значение имеет мониторинг всех факторов и обстоятельств, влияющих на продолжительность создания объекта и затраты, позволяющий своевременно принимать меры по преодолению возникающих негативных явлений.
Последняя фаза инвестиционного проекта — эксплуатационная. Общая продолжительность этой фазы оказывает заметное влияние на показатели экономической эффективности проекта, т.е. чем больше эксплутационный период объекта, тем больше размер чистого дохода. Этот период не может устанавливаться произвольно, ибо существуют экономически целесообразные границы использования элементов основного капитала, которые диктуются главным образом их моральным старением.
Определение приемлемого для инвестора уровня экономической эффективности инвестиций является наиболее сложной областью экономических расчетов, связанной с разработкой ТЭО, так как здесь надо свести воедино все множество интересов потенциальных инвесторов, учесть трудно предсказуемые изменения внешней среды по отношению к проекту, а также системы налогообложения в условиях нестабильной экономики. Все это многократно усложняется тем, что оценка эффективности должна базироваться на соответствующей информации за весьма длительный расчетный период.
Проблема оценки экономической эффективности проекта заключается в определении уровня его доходности в абсолютном и относительном (т.е. в расчете на единицу инвестиционных затрат) выражении, что обычно характеризуется как норма дохода.
Оценку эффективности рекомендуется проводить по системе следующих взаимосвязанных показателей [35]: чистый доход — ЧД; чистый дисконтированный доход — ЧДД, или интегральный эффект (довольно широко используемое за рубежом название данного показателя — чистая приведенная, или текущая, стоимость, net present value — NPV)\ индекс доходности — ИД, или индекс прибыльности profitability — РР, срок окупаемости, или срок возврата единовременных затрат — РВ'. внутренняя норма дохода — ВНД, или внутренняя норма прибыли, рентабельности, internal rate of return — IRR.
Коммерческая эффективность проекта характеризует экономические последствия его осуществления для инициатора, исходя из весьма условного предположения, что он производит все необходимые для реализации этого проекта затраты и пользуется всеми его результатами. Коммерческую эффективность иногда трактуют как эффективность проекта в целом. Считается, что коммерческая эффективность характеризует с экономической точки зрения технические, технологические и организационные проектные решения.
Оценка предстоящих затрат и результатов при определении эффективности инвестиционного проекта осуществляется в пределах расчетного периода (горизонта расчета), измеряемого количеством шагов расчета. Причем шагом рас
73
чета может быть месяц, квартал или год. Для стоимостной оценки затрат и результатов могут использоваться базисные, мировые, прогнозные и расчетные цены.
Под базисными понимаются цены, сложившиеся на рынке на определенный момент времени ?б. Базисная цена на любую продукцию или ресурсы считается неизменной в течение всего расчетного периода. Оценка экономической эффективности проекта в базисных ценах производится на стадии технико-экономических исследований инвестиционных возможностей.
На стадии ТЭО инвестиционного проекта обязательным является расчет экономической эффективности в прогнозных и расчетных ценах. Однако одновременно рекомендуется осуществлять расчеты в базисных и мировых ценах.
Прогнозная цена продукции или ресурса в конце /-го шага расчета
Ц, = Цб/(г, /н),
где Цб — базисная цена продукции или ресурса; J(t, tH) — коэффициент (индекс) изменения цен продукции или ресурса соответствующей группы в конце /-го шага расчета по отношению к его начальному моменту /н (т.е. когда известна цена).
Расчетные цены используются для вычисления интегральных показателей эффективности, если текущие значения затрат и результатов выражаются в прогнозных ценах. Это необходимо, чтобы обеспечить сопоставимость результатов, полученных при разных уровнях инфляции. Расчетные цены получаются путем введения дефилирующего множителя, соответствующего индексу общей инфляции.
При разработке и сравнительной оценке нескольких вариантов инвестиционного проекта необходимо учитывать влияние изменения объемов продаж на рыночную цену продукции и цены потребляемых ресурсов.
При оценке эффективности инвестиционного проекта соизмерение разновременных показателей осуществляется путем дисконтирования (приведения) их к ценности в начальном периоде. Для приведения разновременных затрат, результатов и эффектов используется норма дисконта Е, равная приемлемой для инвестора норме дохода на капитал.
Технически приведение к базисному моменту времени затрат, результатов и эффектов, имеющих место на /-м шаге расчета реализации проекта, удобно производить путем их умножения на коэффициент дисконтирования, определяемый для постоянной нормы дисконта как ос, = 1/(1 + £)', где t = 0, 1, 2, ..., Т — номер шага расчета (Т— горизонт расчета).
Если же норма дисконта меняется во времени и на /-м шаге расчета она равна Е„ то коэффициент дисконтирования ос0 = 1, а при t > О
1
а, = --------.
П(! + ^) к=\
Для расчета эффективности необходимо подготовить информацию о внешней среде. Показатели внешней среды характеризуют следующие макроэкономические параметры функционирования проекта: оптовые цены на оборудо
74
вание, запчасти, материалы; банковские процентные ставки; общую динамику инфляции на финансовом рынке; темпы инфляции по отдельным элементам доходов и затрат проекта; учетную ставку Центрального банка России; периоды начисления процентов по кредитам; курсы обмена валют.
Рассмотрим некоторые из них.
Оптовые цены — это цены на все виды материальных ресурсов, используемых в процессе создания и реализации проекта.
Банковские процентные ставки характеризуют цену заемных источников финансирования проекта и могут быть номинальными и реальными. Номинальные процентные ставки применяются при расчете экономической эффективности проекта в текущих ценах и содержат в себе инфляционную составляющую.
Номинальная ставка рассчитывается по формуле N= R+1, где R — реальная процентная ставка; I — темп инфляции на финансовом рынке. Данная формула применима для расчета номинальных ставок в условиях низкой инфляции (3... 5 % в год). При более высокой инфляции эта зависимость становится нелинейной, т. е. формула принимает вид N = R + I + RI.
Реальная процентная ставка — это очищенная от инфляции номинальная ставка. При невысоких темпах инфляции реальная ставка рассчитывается по формуле R = N-1. В современных экономических условиях, характеризуемых высокой инфляцией, формула для расчета реальной ставки имеет вид R = (7V--/)/(1 + /).
При этом следует учитывать несопоставимость методов расчета процентных ставок и темпов инфляции. Банковские процентные ставки обычно рассчитываются по правилу простых процентов, тогда как темп инфляции — по правилу сложных процентов. Следовательно, для обеспечения корректности расчетов величины N, R, / должны быть приведены в сопоставимый вид, т.е. следует определить значения банковских ставок и инфляции в расчете на один месяц.
Для банковских ставок такой расчет производится по формулам 7VMec = 7УГ0Д/12 и 7?чес = Лгод/12.
Для расчета ежемесячных темпов инфляции используется формула Д,ес = |2з!/(Дод -1)- Тогда формулу для расчета годовой реальной процентной ставки можно представить следующим образом: Агод = 12(7VMec - /мес)/(1 + 4ес)-
Общая динамика инфляции на финансовом рынке определяется исходя из официально публикуемых показателей инфляции в целом по России.
Учетная ставка Центрального банка России используется для определения нормативной процентной ставки за кредит, при которой процентные платежи могут включаться в себестоимость продукции. Согласно действующему законодательству этот норматив определяется по формуле П, = УСЦБ + 0,003, где ПЛ — нормативная ставка процентов за кредит, включаемых в себестоимость; УСЦБ — учетная ставка Центрального банка.
Период начисления процентов за банковские кредиты используется для расчета выплаты процентов за кредиты в составе нормируемых текущих пассивов. Стандартное значение периода начисления процентов за банковские кредиты — 30 дней.
Темпы инфляции по отдельным элементам, формирующим затраты и доходы от инвестирования, необходимы для корректировки входных данных в
75
процессе проведения финансово-экономического анализа проекта в текущих ценах. Инфляция по-разному воздействует на отдельные элементы, формирующие затраты и доходы, поэтому динамику инфляции прогнозируют по элементам инвестиционных затрат (на оборудование и пр.), текущих затрат (на материалы, заработную плату) и динамике цен на продукцию.
Курс обмена валют необходим для пересчета финансовых потоков инвестиционных проектов, в которых исходные показатели представлены более, чем в одной валюте. Для целей инвестиционного планирования необходимо построить прогноз динамики курса обмена валюты на дату начала проекта и весь расчетный период. При этом динамика обменного курса может не совпадать с темпами инфляции.
2.3.4. Методические рекомендации по оценке, анализу и интерпретации показателей экономической эффективности инвестиционного проекта
Анализируя доходность инвестиционного проекта, целесообразно сравнить две будущие альтернативные ситуации: предприятие осуществляет свой проект и предприятие не осуществляет свой проект. В модифицированном виде этот прием можно представить формулой Ринв = Др - Спр, где Рмт — доходность инвестиционного проекта; Рпр — изменения в выгодах (доходах) благодаря проекту; Спр — изменение затрат вследствие внедрения проекта.
На практике бывают случаи, когда выгоды заранее заданы, но их трудно оценить в денежном выражении. Тогда используют метод (прием) наименьших затрат. Решение инженерной задачи может быть достигнуто различными путями, при которых результат будет одинаков, а затраты различны и соизмеримы в денежном отношении. В этом случае также используют метод наименьших затрат, т.е. находят наиболее дешевый или наиболее эффективный способ достижения поставленной цели с использованием дисконтирования. Дисконтирование состоит в сопоставлении затрат и доходов (выгоды), возникающих в разное время.
Рассмотрим основные показатели экономической эффективности инвестиционного проекта.
Чистый доход. Если принять, что притоки — это достигнутые результаты реализации проекта (Л), а оттоки — затраты (3). то разность этих величин будет представлять собой экономический эффект или чистый доход. Таким образом, изначально экономический эффект можно выразить формулой ЯД, = Rt- 3Z, где I указывает на принадлежность потоков денежных средств к конкретному Z-му шагу расчета. Составляющие этой формулы можно представить в виде Rt = 2, + Л, и 3, = С, + К, + Д + Н, где Q, — объем продаж; Л, — поступления от продаж активов; С, — операционные издержки; К, — затраты на приобретение активов; Д — проценты по кредитам; Н — налоги.
Чистый дисконтированный доход определяется как сумма текущих экономических эффектов за весь расчетный период, приведенная к начальному шагу расчета, или как превышение интегральных результатов над интегральными затратами.
76
Если в течение расчетного периода не происходит инфляционного изменения цен или расчет производится в базовых ценах, то значение ЧДД для постоянной нормы дисконта вычисляется по формуле т 1
эИнт = У(к, -з,)—-—,
(1 + Е)1’
где Эинт — интегральный показатель эффективности; Rt — результаты, достигнутые на /-м шаге расчета; 3, — затраты, произведенные на t-м шаге расчета; Т — горизонт расчета (равный номеру шага расчета, на котором производится ликвидация объекта); Rt - 3; = Эг — эффективность, достигаемая на f-м шаге расчета.
Если ЧДД положителен, инвестиционный проект является эффективным (при данной норме дисконта) и может рассматриваться вопрос о его принятии. Чем больше ЧДД, тем эффективнее проект.
На практике часто используют модифицированную формулу для определения ЧДД. Для этого из состава формулы для 3, исключают капитальные вложения и вводят следующие обозначения: К; — капиталовложения на t-м шаге;
г ]
J — сумма дисконтированных капиталовложений, J = ^\Jt---; 3,+ — за-
/=0 (1 + Е){
траты на z-м шаге при условии, что в них не входят капиталовложения. Тогда формула
/О U +
выражает разницу между суммой приведенных эффективностей и приведенными к тому же моменту времени капитальными вложениями К.
Индекс доходности представляет собой отношение суммы приведенных эффективностей к капиталовложениям:
н-идДЬ^-з;)--1—.
J г=о (1 + Е)
Индекс доходности тесно связан с ЧДД. Он состоит из тех же элементов, и его значение связано с значением ЧДД, т. е. если ЧДД положителен, то ИД > 1, и наоборот. При этом если ИД > 1, проект эффективен, если же ИД < 1 — проект не эффективен.
Внутренняя норма дохода представляет собой ту норму дисконта Евн, при которой значение приведенных эффективностей равно приведенным капиталовложениям, т.е. ЧДД = 0. Иными словами, £вн является решением уравнения
у Et - 3/ _ у, К, Г^(1 + £ВНУ ~о(1 + £вн)''
Экономическую природу этого показателя можно пояснить с помощью графика зависимости ЧДД от изменения нормы дохода (рис. 2.1), из которого видно, что с ростом требований к эффективности инвестиций ЧДД уменьшается и достигает нулевого значения при пересечении кривой с осью абсцисс в точке А.
77
Рис. 2.1. Зависимость ЧДД проекта от изменений нормы дохода
Внутренняя форма дохода характеризует нижний гарантированный уровень доходности инвестиций, генерируемый конкретным проектом, при условии полного покрытия всех расходов по проекту за счет доходов. Если расчет ЧДД инвестиционного проекта дает ответ на вопрос, является он эффективным или нет при некоторой заданной норме дисконта £, то ВНД проекта определяется в процессе расчета и затем сравнивается с требуемой инвестором нормой дохода на вкладываемый капитал.
В случае когда ВНД равна или больше требуемой инвестором нормы дохода на капитал, инвестиции в данный инвестиционный проект оправданы, и может рассматриваться вопрос о его принятии. Если сравнение альтернативных инвестиционных проектов по ЧДД и ВНД приводит к противоположным результатам, предпочтение следует отдавать значению ЧДД.
Срок окупаемости — минимальный временной интервал (от начала осуществления проекта), за пределами которого интегральный эффект становится и в дальнейшем остается неотрицательным. Иными словами, это период (измеряемый в месяцах, кварталах, годах), начиная с которого первоначальные вложения и другие затраты, связанные с инвестиционным проектом, покрываются суммарными результатами его осуществления, что показывает график жизненного цикла инвестиций, приведенный на рис. 2.2. Результаты и затраты, связанные с осуществлением проекта, можно вычислять с дисконтированием или без него, чему соответствуют два различных срока окупаемости. Рекомендуется определять срок окупаемости с использованием дисконтирования.
Интегральный эффект
О
I этап I II этап j III этап
Коммуникативный доход
Годы
Рис. 2.2. Жизненный цикл инвестиций:
I этап — инвестирование производственных затрат; II этап — возврат вложенного капитала; III этап — получение доходов
78
Наряду с перечисленными возможно использование и других показателей, например, интегральной эффективности затрат, точки безубыточности, простой нормы прибыли, капиталоотдачи, для применения каждого из которых необходимо ясное представление о том, какой вопрос экономической оценки проекта решается с его использованием и как осуществляется выбор решения. При этом ни один из приведенных показателей сам по себе не является достаточным для принятия проекта. Решение об инвестировании средств должно приниматься с учетом значений всех перечисленных показателей и интересов всех участников инвестиционного проекта. При этом важны структура и распределение во времени капитала, привлекаемого для осуществления проекта, а также факторы, некоторые из которых поддаются только содержательному, а не формальному учету.
В настоящее время наблюдается устойчивая тенденция применения в различных отраслях промышленности частотно-регулируемых ЭП с стандартным короткозамкнутым асинхронным электродвигателем (АД). Наиболее значимые результаты их использования предполагаются в сфере создания технологических систем водо-, воздухе- и теплоснабжения. Экономический эффект обусловливается энергосбережением в самом ЭП и ресурсосбережением в технологических системах, где устанавливается такой ЭП. Ресурсосбережение определяется как стоимостная оценка дополнительных преимуществ: уменьшения износа основного технологического оборудования (например, заслонок, задвижек и т.д.); снижения потерь (уменьшения отходов) в процессе технологической обработки (передачи) получаемого продукта (например, снижения давления и, следовательно, сокращения потерь воды) и др. [П. 27].
Приведем значения некоторых показателей эффективности инвестиционного проекта внедрения энергосберегающего электропривода для насосной станции водозабора технической воды [28].
В рассматриваемом варианте приводов насосов используются АД с короткозамкнутым ротором и следующими паспортными данными: /*ном = 630 кВт; С'ноч = 6 кВ; п0 = 1500 мин1.
Исходя из того что 1 кВт - ч стоит 1 р., рассчитанная суммарная экономия от внедрения регулируемого электропривода насоса составит 1 994428,7 р. в год.
Для реализации проекта требуются дополнительные капитальные вложения на приобретение и установку преобразователя частоты, которые оцениваются в 2,5 млн р. Тогда срок окупаемости дополнительных капитальных вложений Ток2 = 2 500000/1994428 = 1,25 г.
Необходимым условием технической реализации проекта является экономическая оценка требуемых инвестиций. Эту оценку выполним в соответствии с методическими рекомендациями, приведенными в подразд. 2.3.3, и следующими имеющимися данными: окупаемые инвестиции /ок = 2 500 000 р.; годовые сбережения Эх = 1 994428 р.; годовые затраты на поддержание насосов Эп = 25000 р.; годовые чистые сбережения В = 1969428 р.; экономический срок службы п = 10 лет; номинальная процентная ставка N-100 % = 22 %; темп инфляции /= 15 %.
Реальная процентная ставка R = (N - /)/(1 + 7) = (22 - 15)/(1 + 0,15) = = 6,1 %.
Срок окупаемости РВ= /Ок/В = 2 500000/1 969428 = 1,27 г.
79
Здесь следует отметить, что показатель РВ имеет слабые стороны: не учитывает эффект за рамками срока окупаемости и не учитывает изменение стоимости денег во времени.
Коэффициент аннуитета/= 1 969428/2 500000 = 0,78, а из таблицы аннуитета [28] период выплат (РО) составляет 2 г.
Чистый существующий (дисконтированный) доход NPV= В(\ - (1 + R) n)/R~ _ /ок = 1 969 428(1 - (1 + 0,06)-*0)/0,06 - 2 500 000 = 11876 824 р.
Так как NPV> 0, инвестиции прибыльны.
Коэффициент чистого дисконтированного дохода
NPVQ = NPV/IOK = 11 876 824/2 500000 = 4,75.
Так как NPVQ > 0, мероприятия по сохранению электроэнергии прибыльны.
Разница между сроком окупаемости (РВ = 1,27) и периодом выплат (РО = = 2) составляет 0,73 г. (срок окупаемости на 36 % меньше периода выплат), т.е. чистая прибыль начинает поступать до окончания срока выплат.
Необходимым условием любых конкретных технико-экономических расчетов является их проверка на чувствительность к возможным изменениям исходной информации, например стоимости необходимого электрооборудования или его монтажа и стоимости электроэнергии [28].
2.4. Использование параметрических рядов номинальных параметров при выборе электрооборудования
Рассмотрим принципы построения и параметрические ряды номинальных параметров силового электрооборудования электропривода. Это поможет проектанту ориентироваться и выбирать по каталожно-справочным материалам силовое оборудование, соответствующее требованиям ТЗ по номинальным параметрам и исполнению.
При проектировании требуется не только выполнить расчеты и выбрать виды электрических машин и оборудования, но также определить типы этих машин и аппаратуры и выбрать их из номенклатуры, выпускаемой промышленностью.
Первая часть проектирования обычно сосредоточена в пояснительной записке, а вторая — заключается в составлении перечней оборудования и спецификаций, на основе которых будут производиться заказы. Наконец, главной частью проекта являются схемы, на основе которых выполняется установка электрооборудования, производятся внешние соединения, осуществляется наладка и т.п.
При работе с каталогами и справочниками проектант встречается с множеством типов машин, аппаратов и большим числом типоразмеров, т.е. с большим числом однотипных машин или аппаратов, отличающихся по мощности, скорости, напряжению. Имеются группы аппаратов, например реле, с катушкой на разные токи или напряжения, разными уставками защит и различным числом контактов.
Существенным является выбор соответствующих монтажных размеров, например двигателей, агрегатируемых с различными механизмами, а также выбор исполнений, отвечающих климатическим условиям и характеру помещений для установки электрооборудования.
80
В каталогах, издаваемых Информэлектро, приводятся примеры формулирования заказов, однако руководствоваться ими можно только на основе достаточных представлений о стандартизации и нормализации оборудования.
При обращении к каталожно-справочным материалам для выбора электрооборудования следует четко представлять, как построены ряды номинальных напряжений, токов, мощностей электрических машин и аппаратов, а также номинальных скоростей электродвигателей. Необходимо также знать, как строятся стандартные ряды монтажных размеров, какие конструктивные особенности (способы монтажа, защиты от воздействия окружающей среды) предусмотрены в стандартах и как это учитывается при выборе конкретного изделия.
Условно разделим возможные варианты исполнений по численным изменениям того или иного параметра (мощности, тока, геометрических размеров) и по изменениям конструкции или других качеств, которые не сводятся к простому изменению какой-то величины. В первом случае значения изменяемых параметров должны составлять некоторую последовательность, ряд чисел. Знание принципов построения численных параметрических рядов необходимо для компетентного выбора типоразмеров оборудования. Во втором случае различные исполнения приходится обозначать (маркировать) дополнительными буквами (или буквами и цифрами).
Система предпочтительных чисел и параметрические ряды. В системе стандартизации существенное значение имеют нормативы, регламентирующие численные значения параметров изделий, так называемые параметрические ряды. Такие стандарты определяют номенклатуру изделий одного и того же назначения, например ряд номинальных мощностей данного типа двигателей или ряд размеров шкафов для размещения электрооборудования.
Согласно рекомендациям ИСО построение параметрических рядов выполняется на основе геометрических прогрессий. Такие ряды, получившие название рядов Ренара, строятся с знаменателями геометрической прогрессии:
Я5 = Ш = 1,6; 7?10 = хУТо = 1,25;
/?20 = <Г0 = 1.12; 7?40 = Щ) = 1,06; R80 = Ш = 1,03.
Первые четыре ряда являются основными, а ряд 7?8О — дополнительным. Номиналы рядов следующие: R5 — 1,0; 1,6; 2,5; 4,0; 6,3; /?10 — 1.0; 1,25; 1,6; 2,0; 2,5; 3,15; 4,0; 5,0; 6,3; 8,0. Аналогично строятся ряды /?20, /?40 и /?80.
В ряде случаев могут применяться ряды предпочтительных чисел, построенные на базе геометрических прогрессий, но отличающиеся от рядов Ренара. Таковы ряды номинальных сопротивлений резисторов. Эти ряды обозначаются EN, где А — число номинальных величин в каждом десятичном интервале, и представляют собой геометрические прогрессии с знаменателем qN = VlO.
Согласно рекомендациям МЭК и действующим отечественным стандартам значения сопротивлений резисторов с допуском ±5 % и более соответствуют рядам ЕЗ, Е6, Е12 и Е24, а с допуском менее ±5 % — рядам Е48, Е96 и Е192.
Номинальные напряжения трехфазного переменного тока в области низких значений представляют собой ряд с знаменателем х/З, учитывающий соотношение значений линейных и фазных напряжений при включении по схеме звездой или треугольником.
81
Ряды номинальных параметров величин, используемых в электротехнике. Номинальные мощности электрических машин соответствуют ряду 7?10. В стандарте на номинальные мощности предусматривается возможность округления, поэтому в диапазоне 1... 10000 кВт ряд номинальных мощностей следующий: 1,1; 1,5; 2,2; 3,0; 4,0; 5,5; 7,5; 11; 15; 18,5; 22; 30; 37; (45); 55; 75; 90; 110; 132; 160; 200; 250; 315; 400; 500; 630; 800; 1000; 1250; 1600; 2000; 2500; 3200; 4000; 5000; 6300; 8000.
Номинальные мощности трансформаторов соответствуют ряду R5.
Номинальные напряжения до 1000 В для приемников постоянного тока — 27; ПО; 220; 440 В, а для приемников переменного тока — 40; 220; 380; 660; 1140 В. Для источников энергии (генераторов, трансформаторов) номинальное напряжение выше на 5 % (115: 230; 460 В постоянного тока и 230; 400; 690 В переменного тока).
Номинальные токи соответствуют ряду R10, но предпочтительным является ряд R5. Например, для реле тока РЭВ-830 номинальные токи катушки — 0,6; 1,0; 1,6; 2,5; 4,0; 6,0; 10; 16; 25; 63; 100; 160; 250; 320; 400; 630 А.
Специфическому стандарту подчиняются вторичные напряжения трансформаторов, предназначенных для питания полупроводниковых преобразователей. Это значения, позволяющие получить стандартные значения выпрямленного напряжения.
Номинальные значения скоростей вращения машин трехфазного тока определяются известным соотношением, связывающим частоту питающей сети и число пар полюсов с синхронной скоростью: п0 = f£f/p. Поэтому параметрический ряд синхронных скоростей вращения при питании от сети с частотой 50 Гц имеет следующий вид: (100); (125); (150); (166,6); (187,5); 200; 250; 300; 375; 500; 600; 750; 1000; 1500; 3000 об/мин. При этом значения, заключенные в скобки, не рекомендуются к применению.
При частоте питания 400 Гц параметрический ряд содержит следующие значения: (1500); (3000); 4000; 6000; 12000; 24000 об/мин.
Для электрических машин постоянного тока параметрический ряд номинальных скоростей близок к ряду синхронных скоростей. Это объясняется широкой практикой создания преобразовательных агрегатов, в состав которых входят машины постоянного и переменного тока, а также необходимостью унификации механического оборудования (редукторов) по скорости вращения первичного двигателя. Для машин постоянного тока параметрический ряд значительно расширяется в сторону малых скоростей. Для двигателей постоянного тока мощностью более 630 кВт, предназначенных для приводов механизмов металлургического производства и шахтных подъемных машин, параметрический ряд номинальных скоростей вращения лежит в переделах от 20 до 1000 об/мин и соответствует ряду ДЮ.
Стандартизация основных размеров и способов монтажа электрических машин. Основным размером, характеризующим электрическую машину, является высота h оси вращения относительно основания (рис. 2.3). Номинальные значения высот оси вращения должны соответствовать следующему ряду: 25; 28; 32; 36; 40; 50; 56; 63; 71; 80; 90; 112; (125); 132; (140); 160; 180; 200; 225; (236); 250; 280; 315; 355; 400; 450; 500; 560; (600): 630; 710; 800 мм. Нетрудно убедиться, что за исключением подчеркнутых приведенные значения соответствуют ряду ДЮ. Значения, заключенные в скобки, применяются толь-82
ко в технически обоснованных случаях. Регламентирующий высоту оси вращения ГОСТ 13267—67 распространяется и на неэлектрические вращающиеся машины, предназначенные для непосредственного соединения с электрическими машинами и установками на общем основании.
Длина машины может варьироваться в зависимости от высоты вращения. Различ
а б
Рис. 2.3. Высоты осей вращения электрических машин двух (а, б) конструктивных исполнений цапф двига-
ные длины имеют стандартные условные теля обозначения: 5 (короткие), М (средние)
и L (длинные). В соответствии с основным размером машины по рекомендации МЭК стандартизованы установочные и присоединительные размеры.
Кроме нормализации размеров унифицированы исполнения двигателей по способу их монтажа. Формы исполнения принимаются на основе рекомендаций МЭК и имеют стандартные условные обозначения следующего вида (ГОСТ 7479-79):
IM-XXXX
III
Общая часть буквенного обозначения (International Mounting) Цифровое обозначение групп конструктивного исполнения (от 1 до 9) Цифровое обозначение способа монтажа (две цифры)
Цифровое обозначение конца вала (от 0 до 8)
Согласно стандарту МЭК 34-7 от 1972 г. для обозначения ряда исполнений могут применяться коды с буквой В — для машин с горизонтальным расположением вала и с буквой V — для исполнений с вертикальным расположением вала относительно плоскости крепления. Приведем некоторые примеры обозначения исполнений (рис. 2.4):
1М 1001 (код IM ВЗ) — двигатель с подшипниковыми щитами на лапах, горизонтальным расположением вала и цилиндрическим концом вала (см. рис. 2.4, а);
IM 1031 (код IM В6) — то же, с концом вала, направленным вверх (см. рис. 2.4, б);
Рис. 2.4. Примеры (а...з) конструктивных исполнений электрических машин
83
IM 1071 (код IM B8) — то же, для крепления к потолку (см. рис. 2.4, в);
IM 2011 (код IM VI5) — двигатель с подшипниковыми щитами, большим фланцем на подшипниковом щите и цилиндрическим концом вала, направленным вниз (см. рис. 2.4, г);
IM 2111 — то же, с малым фланцем (см. рис. 2.4, д);
IM 3031 (код IM V3) — двигатель без лап, с большим фланцем и цилиндрическим концом вала, направленным вверх (см. рис. 2.4, е);
IM 3631 — то же, с малым фланцем (см. рис. 2.4, ж);
IM 6000 — машина с подшипниковым щитом, стояковым подшипником и горизонтальным расположением вала без конца (см. рис. 2.4, з).
Приведенные примеры показывают многообразие исполнений, но не исчерпывают их. Комбинации свойств не могут быть произвольными; машины со стояковыми подшипниками выполняются только для горизонтального расположения вала.
Возможные конструктивные исполнения для различных типов машин приводятся в каталогах и справочниках.
2.5. Выбор электрооборудования в соответствии с требованиями по исполнению и условиям эксплуатации
Широкое применение электрического оборудования вызвало потребность обеспечения его климатостойкости, т.е. способности выдерживать без заметных нарушений нормальных эксплуатационных характеристик климата той местности, для которой оно предназначено. Сюда относится защита от коррозии и прочие меры, обеспечивающие установленный срок службы и надежную работу оборудования в том или ином климатическом районе.
В соответствии с особенностями климата (предельным уровнем температуры, влажностью и др.) вводится понятие климатических зон и выполняется климатическое районирование, т.е. определение принадлежности района к той или иной климатической зоне. При этом имеются в виду макроклиматические зоны, т.е. большие территории с определенными особенностями климата, в отличие от микроклимата отдельных районов.
Для электрооборудования, эксплуатируемого в условиях суши, рек и озер (в отличие от морских условий), определены климатические исполнения, приведенные в табл. 2.3.
В типовом обозначении электротехнического оборудования климатическое исполнение указывает категорию помещения, в котором допускается его эксплуатация:
1 — эксплуатация на открытом воздухе; 2 — закрытое помещение, температура и влажность в которых несущественно отличаются от состояния окружающего воздуха; 3 — помещение с естественной вентиляцией без искусственного климата; 4 — помещения отапливаемые или охлаждаемые и вентилируемые; 5 — помещения с повышенной влажностью, где возможно длительное наличие воды или частая конденсация влаги на стенах и потолке.
Климатические исполнения и категории помещений имеют подробные количественные характеристики [50]. Так, оборудование с обозначениями
84
Таблица 2.3
Обозначение исполнения Макроклимат Основные характеристики макроклиматических районов
Рус. Лат. Средняя из абсолютных температура воздуха, °C Сочетание температур более 20 °C и влажности более 80 % 12ч или более в сутки непрерывно, мес
макси- мальная минимальная
У N Умеренный 40 или ниже -45 или выше Нет
хл F Холодный — Ниже -45 —
УХЛ NF Умеренный и холодный 40 или ниже То же —
ТВ TH Влажный тропический Выше 40 — От 2 до 12
тс ТА Сухой тропический То же — Нет
т Т Сухой и влажный тропический — — От 2 до 12
о — Все, кроме очень холодного — -45 или ниже То же
УХЛ1, УХЛ2 допускается к работе при температуре окружающего воздуха от +40 до -60°С, а с обозначением УХЛ4 — от +35 до +1 °C и т.п.
Приведем примеры типовых обозначений по условиям применения: АВП400-1000У5 — асинхронный двигатель мощностью 400 кВт с синхронной скоростью 1000 об/мин, исполнение для умеренной климатической зоны, категория помещения 5; 4А225М4УЗ — асинхронный двигатель серии 4А с высотой оси вращения 225 мм, средней габаритной длины, имеет 4 полюса, исполнение для умеренной климатической зоны, категория помещения 3; ТМ-4000/10-У1 — трансформатор с естественным масляным охлаждением мощностью 4000 кВ А, исполнение для умеренной климатической зоны, предназначен для установки на открытом воздухе.
Классификация оболочек по степени защиты электрооборудования от попадания посторонних предметов и воды. Исполнение оболочек электрооборудования по степени защиты персонала от соприкосновения с токоведушими или движущимися частями, находящимися внутри них, регламентируется рекомендациями МЭК, государственным стандартом и ПУЭ (см. подразд. 1.2.2).
Для оболочек определены семь степеней зашиты персонала от соприкосновения с токоведущими или движущимися частями электрооборудования п попадания в него посторонних тел: 0 — зашита отсутствует; 1 — защита от сл +
чайного соприкосновения человеческого тела с токоведущими или движущимися частями, находящимися внутри оболочки, и попадания твердых предметов диаметром не менее 52,5 мм (зашита от преднамеренного доступа к этим частям отсутствует); 2 — защита от возможности соприкосновения пальцев человека с токоведущими частями, находящимися внутри оболочки, и попадания внутрь посторонних предметов диаметром не менее 12,5 мм; 3 — защита от соприкосновения с токоведушими частями инструмента, проволоки или других предметов, толщина которых превышает 2,5 мм; 4 — то же, но с ограничением размеров до 1 мм; 5 — полная зашита персонала от соприкосновения с токоведущими и движущимися частями и защита оборудования от вредных отложений пыли; 6 — полная защита персонала от соприкосновения с токоведущими и движущимися частями и полная зашита оборудования от попадания пыли.
Зашита электрооборудования оболочками от попадания влаги характеризуется следующими степенями: 0 — защита отсутствует; 1 — защита от капель конденсата воды, вертикально падающих на оболочку; 2 — защита от капель воды, падающих на оболочку, наклоненную под углом не более 15° к вертикали; 3 — зашита от дождя, падающего на оболочку, наклоненную под углом не более 60° к вертикали; 4 — защита от брызг любого направления, попадающих на оболочку; 5 — защита от водяных струй, т.е. воды, поступающей через наконечник на оболочку в любом направлении, при условиях, указанных в ТУ; 6 — зашита от воздействий, возможных на палубе корабля, т.е. от периодического захлестывания оборудования морской волной; 7 — защита от воздействий, возникающих при погружении в воду, при давлении и в течение времени, указанных в ТУ; 8 — защита от воздействий при неограниченно длительном погружении в воду и давлении, указанном в ТУ.
Примеры условных обозначений степеней защиты: IP00, IP23, IP43. Здесь IP — от англ. International Protection, первая цифра указывает степень защиты оборудования от случайного прикосновения и попадания посторонних твердых тел, а вторая — степень защиты от попадания воды.
Классификация степеней зашиты не распространяется на электрическое оборудование напряжением свыше 1000 В, а также взрывонепроницаемое оборудование, провода и кабели.
Прочность и стойкость изделий при механических воздействиях. В процессе эксплуатации и транспортирования аппаратура может подвергаться механическим воздействиям при ударах, падениях, тряске и вибрации. В результате возможны разрушение отдельных элементов устройств и некачественных паек, нарушение контактов реле и переключателей, замыкание проводов с поврежденной изоляцией, самоотвинчивание винтов и гаек, появление сколов и трещин в хрупких материалах и т.д. Аппаратура, эксплуатируемая в нормальных условиях, подвергается механическим перегрузкам главным образом при транспортировании. Аппаратура, установленная на подвижных объектах, испытывает воздействие вибраций, ударов и линейных ускорений, которые возникают из-за наличия неуравновешенных масс. При этом на каждый элемент конструкции действует сила, которая вызывает деформации отдельных ее элементов, в результате чего возможно изменение параметров устройства и даже его разрушение. Наиболее опасным является механический резонанс, который, как правило, ведет к разрушению конструкции.
86
Таблица 2.4
Воздействующий фактор Диапазон частот, Гц Максимальное ускорение, м/с2 Длительность удара, мс
Вибрационные нагрузки 1 ...5000 100 ....5000 4,91...392,4 или (0,5 ...40)g 392,4, или (40g) —
Ударные Многократные — 147...1471, или (15... 150)g 2...15
нагрузки Одиночные — 39,2...29400, или (4...3000)g 0,2...60
Линейные (центробежные) нагрузки — 98,1 ...4905, или (10...500)g —
Отношение силы механического воздействия F к силе тяжести устройства Р называют перегрузкой и обозначают G. Если на устройство действует вибрация, изменяющаяся по синусоидальному закону, то перегрузка определяется по формуле G = Af2/200, где А — амплитуда вибрации, мм; f — частота вибрации, Гц.
ГОСТ 16962—84 устанавливает виды механических факторов и их значения з обобщенной форме, отражающие условия эксплуатации изделия (табл. 2.4). 'Ускорение свободного падения g= 9,81 м/с2.)
Изделия без амортизаторов не должны иметь резонансных частот в диапазонах от 5 до 100 Гц. Изделия, предназначенные для работы в условиях воздействия акустического шума, должны быть работоспособными в диапазоне частот от 50 до 10000 Гц с максимальным уровнем звукового давления от 130 до 170 дБ.
Выводы, включая места их присоединения к изделию, должны выдерживать без механических повреждений определенные воздействия растягивающей силы, направленной вдоль оси:
Сечение вывода, мм2 Растягивающая сила, Н
От 0,1 до 0,2............................................... 4,9
Свыше 0,2 до 0,5 ......................................... 9,806
Свыше 0,5 до 2,0............................................ 19,61
Резьбовые выводы должны выдерживать без механических повреждений определенные воздействия крутящего момента:
Аиаметр резьбы, мм
До М2 .........
М2,5 .........
М3 ...........
М4............
М5 ...........
Мб............
Свыше Мб......
Крутящий момент, Н м
................ 0,14
................ 0,44
................ 0,49
................ 1,17
................ 1,76
................ 2,45
.......... Требования
не предъявляются
Аппаратура, которая нормально работает при воздействии вибраций, называется виброустойчивой. Аппаратура, выдерживающая длительные вибрации
87
и ускорения, а также воздействия ударов без изменения параметров, называется вибропрочной и ударопрочной. Чтобы предохранить аппаратуру от разрушающего действия механических перегрузок, применяют амортизаторы.
Характеристики помещений. Особый подход необходим при выполнении проектных работ по созданию специального электрооборудования электропривода и систем автоматизации для объектов, работающих в пожаро- и взрывоопасных условиях [56].
Перед проектированием электропривода выясняют характер окружающей среды, степень пожаро- и взрывоопасности помещения, опасность поражения людей электрическим током. Классификация помещений в зависимости от характера окружающей среды дана в ПУЭ [46].
2.6. Обеспечение электромагнитной совместимости электрооборудования
2.6.1. Общие сведения
Проблема электромагнитной совместимости электрооборудования особенно актуальна вследствие резкого увеличения суммарной мощности электроприводов с регулированием частоты вращения посредством силовых полупроводниковых преобразователей (СПП). В системах электропривода рассматривается аспект совместимости СПП с двигателем исполнительного механизма, обусловленный наличием пульсаций электромагнитного момента двигателя, который в данном учебном пособии определяется как электромеханическая совместимость. Проблемы и особенности работы электроприводов с СПП при питании от сетей соизмеримой мощности достаточно полно освещены в [4, 63], а вопросы электромеханической совместимости рассмотрены в [14].
Нормы и условия в области электромагнитной совместимости определяют международные стандарты (МЭК (IEC) 60034-1, 60034-17, 60050-161, 61000, 61800) и российские (ГОСТ Р 13109-97, ГОСТ Р 50034-92, ГОСТ Р 51.317). Работы по стандартизации в этой области выполняет технический комитет 77 «Электромагнитная совместимость» в структуре МЭК и ТК110 в структуре СЕНЭЛЕК, обеспечивающий гармонизацию стандартов стран, входящих в ЕС. Стандарты МЭК имеют общий номер публикации 1ЕС 61000. Российский стандарт ГОСТ Р 51.317 гармонизирован с международными стандартами.
Наряду с основополагающими стандартами IEC 61 000 существуют разделы по электромагнитной совместимости в международных стандартах по электрическим машинам (МЭК (IEC) 60034-1, 60034-17) и системам силовых электроприводов с регулируемой скоростью (МЭК (IEC) 61800).
Системы электропривода и автоматизации с СПП и микропроцессорными средствами управления являются объектами, в которых в наибольшей степени проявляется проблема помехозащищенности в условиях мощных импульсных электромагнитных воздействий. Для изучения вопросов электромагнитной совместимости, электромагнитно-помеховой совместимости, стойкости к внешним электромагнитным воздействиям следует использовать специаль-88
ную литературу, например [30]. Обеспечение электромагнитной совместимо-ети цифровых и аналоговых узлов систем управления электроприводов и СПП, а также выполнение помехозащищенных информационных линий рассматривается в [63]. Далее при изучении основных вопросов обеспечения электромагнитной и электромеханической совместимости будем использовать [14].
2.6.2. Высшие гармоники в кривых токов и напряжений и их влияние на электрооборудование
Электромагнитная совместимость (ЭМС) полупроводниковых преобразователей и других видов электрооборудования промышленной системы электроснабжения или электроэнергетической системы автономного объекта — это способность их одновременного функционирования без нарушения заданных режимов работы с сохранением технических и эксплуатационных нежимое электрооборудования. Естественно, что такое функционирование должно обеспечиваться в любом эксплуатационном режиме в течение всего трока службы.
Схема электрической сети (рис. 2.5) состоит из СПП, получающих питание от распределительного щита (РЩ), объекта регулирования (ОР) и конденсаторных батарей (КБ). Питание на распределительный щит поступает от силового трансформатора Т или синхронного генератора либо от нескольких трансформаторов или генераторов, соединенных параллельно. Потребители электроэнергии в представленной схеме условно разделены на две группы: группа П1 — потребители, нечувствительные к искажениям по напряжению, группа П2 — чувствительные. Здесь же условно показана окружающая среда । ОС). Кроме того, на схеме стрелками показано воздействие СПП на электрооборудование и потребители сети, объект регулирования или питания, окружающую среду. Также показаны воздействия, которым подвергается СПП со стороны электрооборудования и потребителей сети, объекта регулирования или питания, окружающей среды.
Воздействие СПП на сеть проявляется в виде генерирования в нее гармоник напряжения и токов различной физической природы и потребления из нее реактивной мощности. Воздействие СПП на объект регулирования проявляется в искажении формы напряжения на входных зажимах объекта, т. е. в появлении в спектре напряжения высших гармонических составляющих.
Воздействие СПП на окружающую среду заключается в следующем. Амплитудно-частотные спектры напряжений и токов на входе и выходе СПП отличаются достаточно широким диапазоном частот — от нескольких герц до нескольких десятков и даже сотен мегагерц. При некоторых определенных частотах токопроводящие части СПП начинают излучать электромагнитную энергию в
Рис. 2.5. Схема электрической
сети
89
окружающую среду. Иными словами, статический преобразователь является генератором излучения помех. В свою очередь, окружающая среда также создает наводки и помехи в системах управления преобразователем.
Исходя из многообразия перечисленных воздействий для обеспечения электромагнитной совместимости СПИ с потребителями промышленных сетей целесообразно использовать следующие технические меры: экранирование статического преобразователя как источника электромагнитных помех; защиту статического преобразователя от воздействия внешних помех; индивидуальную защиту ответственных потребителей; минимизацию гармонических составляющих напряжения и тока, генерируемых в сеть.
Важнейшим фактором в проблеме ЭМС является генерирование преобразователями высших гармоник тока и напряжения и влияние их на качество электроэнергии. Стандарт устанавливает ряд следующих показателей, влияющих на качество электроэнергии в установившихся режимах [32]:
установившееся отклонение напряжения Д[/уст — разность между действительным U и заданным (номинальным) Сном значениями напряжений, выраженная в процентах от номинального значения, АЦСТ = [(С- Сном)/(/ном] • 100;
установившееся отклонение частоты АДСТ — разность между действительным f и заданным (номинальным) /НОХ1 значениями частоты, выраженная в процентах от номинального значения, ДДСТ = [(/-/Ном)//ном] • Ю0;
коэффициент небаланса напряжений трехфазной системы К„е6 — величина, равная разности наибольшего Стах и наименьшего </min значений линейных напряжений в трехфазных системах, выраженная в процентах от номинального значения, К„е5 = [(Cmax- Cmin)/t/H] • 100;
коэффициент амплитудной модуляции напряжения Кыоа[/ — величина, равная отношению полуразности наибольшей Um тахи наименьшей амплитуд линейного напряжения (при наличии его модуляции) к амплитудному номинальному значению напряжения, выраженная в процентах, KMOaU - [(t/mmax-- Cmmin)/(2CmH0M)] • 100;
коэффициент искажения синусоидальности кривой напряжения, или коэффициент несинусоидальности, или коэффициент нелинейных искажений Ки — величина, равная отношению корня квадратного из суммы квадратов амплитудных значений высших гармонических составляющих данной периодической кривой напряжения С„!Н0Х) к амплитудному значению основной (первой) гармоники, выраженная в процентах,
Д^ном к» =^~--------100.
U ml
(Допустимый коэффициент искажения синусоидальности напряжения определяет ГОСТ 13109—97, табл. 1, 2);
коэффициент пульсации, характеризующий качество напряжения в сетях постоянного тока. Кпули — отношение максимального мгновенного значения переменной составляющей Стах к номинальному значению постоянной составляющей Сном, выраженное в процентах, Апулг7 = • 100.
Гармонический состав тока, потребляемого преобразователями из сети. Основу СПП составляют полупроводниковые приборы, по своей сущности яв-
90
ляюшиеся нелинейными элементами. Работа преобразователей основана на переключении (коммутации) групп тиристоров, транзисторов или диодов, и во всех схемах этот процесс вызывает потребление из сети несинусоидального тока, вследствие чего происходит искажение синусоидальности формы кривой напряжения сети.
Ток, потребляемый выпрямителем из сети, можно представить в виде гармонического ряда, содержащего основную гармонику п = 1, частота которой равна частоте напряжения сети, и некий спектр высших гармоник. Гармонический состав потребляемого из сети тока зависит от схемы выпрямления, а точнее от числа тактов т = fjfe, где /п — частота пульсаций выпрямленного напряжения; уё — частота напряжения сети переменного тока. При этом кривая первичного тока выпрямителя кроме основной гармоники содержит высшие гармонические составляющие, порядок которых определяется выражением п = кт ± 1, где к = 1, 2, 3 ...
Относительные значения амплитуд высших гармоник при идеально сглаженном выпрямленном токе /*„тах = 1птях / 1\тах, где /, тах— амплитуда первой гармоники потребляемого тока.
Искажения напряжения сети, вносимые СПП, для разных их схем характеризуются различным составом высших гармоник. Поскольку искажения кривой напряжения возникают из-за падения напряжения от токов высших гармонических составляющих на импедансах элементов электросети (источника, кабельной линии, трансформаторов, реакторов и т.д.), то спектр частот гармоник напряжения сети совпадает со спектром частот гармоник тока, потребляемого преобразователем из сети. Так, порядок высших гармоник напряжения, вносимых трехфазными двухполупериодными схемами выпрямления в сеть, определяется выражением п - 6к ± 1. где к = 1, 2, 3, ... Такие гармоники называются каноническими. Для трехфазного двухполупериодного выпрямителя канонические гармоники сетевого напряжения имеют порядок 5, 7, 11, 13, 17, 19 и т.д. Для двенадцатифазных схем выпрямления канонические гармоники имеют порядок И, 13, 23, 25 и т.д.
Падение напряжения на индуктивностях сети от протекания л-й гармоники тока U„ = 1„Хп, где 1„ — ток л-й гармоники; Х„ — эквивалентное сопротивление элементов сети для л-й гармоники. Соответственно определяющими для искажений напряжения будут факторы, влияющие на каждый из сомножителей этой формулы. При прочих одинаковых условиях (схема преобразователя, режим работы и др.) амплитуды гармоники тока увеличиваются с ростом мощности преобразователя. На гармоники тока преобразователя влияют также глубина регулирования выходного напряжения и индуктивное сопротивление входного трансформатора (или реактора) преобразователя. При постоянстве тока нагрузки преобразователя с ростом глубины регулирования выходного напряжения амплитуды гармоник его первичного тока увеличиваются, а следовательно, увеличиваются и вносимые искажения. С увеличением индуктивного сопротивления входного трансформатора (реактора) амплитуды гармоник тока уменьшаются.
В настоящее время в связи с широким использованием полностью управляемых коммутирующих полупроводниковых элементов получают распространение преобразователи частоты с активными выпрямителями (АВ). При использовании специальных систем управления АВ могут служить статическим
91
компенсирующими устройствами и обеспечивать повышение коэффициента мощности и снижение коэффициента нелинейных искажений.
Высшие гармоники в выпрямленном напряжении и напряжении автономного инвертора. Кривые выпрямленного напряжения на выходе полупроводниковых выпрямителей представляют собой периодические функции и могут быть разложены в ряд Фурье:
Ud(at) = Udi;p + Yunn^x sin (w/wcor + <р„),
Л=1
где Udcp = f(UdQ, cosa) — среднее значение выпрямленного напряжения; UM — среднее значение выпрямленного напряжения при угле регулирования а - 0; Ситах — амплитудное значение п-й гармоники напряжения; <р„ — угол сдвига.
Относительная амплитуда п-й гармоники
,г = Unmm = 2cosa71 + (^tga)2 "max Ud0 (тпУ-1
откуда следует, что амплитуды высших гармоник (при прочих равных условиях) увеличиваются с увеличением угла а.
Напряжение на выходе преобразователей частоты с автономными инверторами напряжения и синусоидальной широтно-импульсной модуляцией также представляет собой совокупность основной и набора высших гармоник напряжения. Порядок высших гармонических составляющих для трехфазного мостового автономного инвертора также определяется выражением п-6к± 1. Амплитудные значения гармоник напряжения определяются не только напряжением на входе инвертора и номером гармоники, но и числом импульсов модуляции в периоде основной гармоники. Аналитический вывод этих зависимостей достаточно сложен и приводится в специальной литературе.
Ущерб, наносимый электрооборудованию высшими гармоническими составляющими напряжения. Наличие высших гармоник в кривой сетевого напряжения снижает надежность и качество работы электрооборудования технологических установок. В общем случае технико-экономический ущерб, наносимый высшими гармониками напряжения, можно представить в виде нескольких составляющих: У = Уа+ Уи+ Ук + Ус, где Уэ — ущерб, обусловленный дополнительными потерями электроэнергии в сети; Уи — ущерб, обусловленный ускоренным старением изоляции электрических машин и кабельных линий; Ук — ущерб, обусловленный воздействием высших гармоник на конденсаторные установки; Ус — ущерб, обусловленный ложным срабатыванием устройств защит и средств автоматики. Дадим количественные оценки перечисленных составляющих технико-экономического ущерба.
Дополнительные потери энергии в электрооборудовании при коэффициенте несинусоидальности Kv ~ 5 % составляют 1,5...3,0 %. При увеличении КК эти потери возрастают. Таким образом, зная мощность электрооборудования, входящего в состав электросети предприятия, и тарифы на электроэнергию, действующие в энергосистеме, к которой относится предприятие, можно довольно точно количественно оценить Уэ.
Составляющую технико-экономического ущерба Уи можно оценить лишь приблизительно. Увеличение отчислений на капитальный ремонт электро
92
двигателей, трансформаторов и кабельных линий, эксплуатируемых при коэффициентах несинусоидальности напряжения К,, > 5 %, должно составлять ориентировочно 5... 10 %. Практика показывает, что при несинусоидальном напряжении сети возрастает также стоимость текущих ремонтов электрических машин и силовых кабелей. Так, при К,, = 5... 10% суммарные амортизационные отчисления по кабельному хозяйству возрастают на 5... 10 %, если же Ка = 10... 15 %, то суммарные амортизационные отчисления возрастают до 15%.
В электрических сетях современных промышленных предприятий широко используются конденсаторные установки различного назначения, например, компенсаторы реактивной мощности, электрические фильтры и др. При наличии высших гармоник в кривой напряжения на обкладках конденсатора процесс старения диэлектрика протекает также значительно интенсивней. Это явление объясняется тем, что физико-химические процессы в диэлектриках, обусловливающие их старение, значительно ускоряются при высоких частотах электрического поля.
При несинусоидальном напряжении сети питания возрастают погрешности систем защиты, индукционных счетчиков, систем импульсно-фазового >правления, ухудшается работа телемеханических устройств и т.д. Применение дополнительных технических средств для зашиты этих систем, таких как Ъильтры и автономные источники питания, увеличивает их стоимость. Высшие гармоники затрудняют также использование силовых кабелей в качестве каналов связи для телемеханических систем. Это приводит к дополнительным затратам на организацию специальных каналов связи, а в отдельных случаях вынуждает использовать более дорогие устройства телемеханики.
2.6.3. Способы и устройства обеспечения электромагнитной совместимости
Обеспечение электромагнитной совместимости возможно посредством минимизации высших гармоник напряжения и тока, генерируемых СПП в электрическую сеть, подавления высокочастотных колебаний напряжения в сети, компенсации реактивной мощности, подавления помех в каналах управления преобразователями и т.д. Методы и средства обеспечения электромагнитной совместимости подразделяются на два основных вида: структурные и системные.
Структурные методы, предусматривающие воздействие непосредственно на СПП, заключаются в выборе, построении и оптимизации схемы преобразования и системы управления для снижения влияния преобразователя на сеть и подразделяются на три группы: схемные решения по силовой части, обеспечивающие минимизацию гармонических составляющих напряжения и тока; выбор рационального способа регулирования; воздействие на систему управления путем введения дополнительного сигнала. К методам первой группы можно отнести повышение фазности схемы выпрямления и создание условного режима повышения фазности на стороне переменного тока. Методы второй группы заключаются в выборе способа преобразования переменного напряжения в постоянное и введении специальных законов управления.
93
т
рщ
СПП
Рис. 2.6. Схема электроснабжения объектов, поясняющая способ минимини-зации высших гармоник в сети
Воздействие на систему управления в целях минимизации генерируемых неканонических гармоник (при несимметрии каналов управления), реализованное с помощью введения обратных связей, относится к методам третьей группы.
К системным решениям обеспечения электромагнитной совместимости относятся коррекция структуры электросети и включение фильтрокомпенсирующих устройств, а в автономных системах электропитания — применение в системах возбуждения синхронных генераторов корректоров напряжения, позволя
ющих стабилизировать основную гармонику напряжения.
На практике в системах электроснабжения объектов с мощными СПП наиболее широкое применение нашли способы обеспечения электромагнитной совместимости, основанные на увеличении фазности преобразователей и применении сетевых фильтров.
Использование сетевых фильтров представляется в настоящее время весьма перспективным способом минимизации высших гармонических составляющих напряжения в электрических сетях. Для того чтобы какая-либо гармоническая составляющая не поступила от преобразователя в сеть, необходимо на сетевых зажимах установить фильтр, который для этой составляющей имел бы сопротивление, близкое к нулю. Электрическая схема, поясняющая такой способ минимизации высших гармоник в сети, представлена на рис. 2.6.
В системах электроснабжения объектов в настоящее время применяются исключительно простые режекторные фильтры, состоящие из последовательно соединенных конденсаторов и индуктивностей. Регулирование параметров индуктивностей и конденсаторов используется крайне редко. Более сложные фильтры, а также комбинированные фильтры, предназначенные для устранения большого числа гармоник, — полосовые — используются редко. Сетевые фильтры, рассчитанные, как правило, на гармоники 5, 7, 11, 13, серийно выпускаются рядом зарубежных фирм, такими как Siemens, WESTINGHOUSE и др. В отечественной промышленности сложилась практика, в соответствии с которой сетевые фильтры проектирует и изготавливает предприятие — поставщик электропривода, в состав которого они и входят. Для комплектования фильтров применяются конденсаторы с большой единичной мощностью 75... 100 кВ А и напряжением, соответствующим номинальному напряжению сети. Реакторы, применяемые при комплектовании сетевых фильтров, — это обычно нерегулируемая индуктивность, представляющая собой ферромагнитный сердечник с рабочей обмоткой. Известны единичные случаи изготовления реакторов, имеющих отпайки на рабочей обмотке, однако они используются крайне редко по причине сложности и дороговизны устройства переключения числа витков. Современным эффективным способом повышения коэффициента мощности и уменьшения коэффициента нелинейных искажений является использование активных выпрямителей.
94
2.6.4. Электромеханическая совместимость электродвигателей с силовыми полупроводниковыми преобразователями
Пульсации электромагнитного момента, вызванные воздействием высших гармоник напряжения на электродвигатели, приводят к ухудшению виброа-кустических характеристик двигателей, т. е. увеличению акустического шума и появлению вибраций, а также сопровождаются резонансными явлениями и ухудшением прочностных характеристик. Иными словами, высшие гармонические составляющие напряжения являются причиной появления еще одной проблемы — необходимости электромеханической совместимости преобразователей и электрических машин, входящих в состав регулируемых электроприводов.
Под воздействием несинусоидального напряжения в статорной обмотке двигателя будет протекать ток, который кроме основной гармоники будет содержать и высшие гармонические составляющие. Следовательно, в воздушном зазоре электродвигателя будут присутствовать движущиеся магнитные поля, скорость и направление вращения которых определяются номером гармоники. В результате этого в роторе возникают магнитные поля, также вращающиеся с соответствующими угловыми скоростями, а в асинхронном двигателе — электромагнитные моменты двух видов — постоянные и колебательные.
Постоянные электромагнитные моменты возникают при взаимодействии магнитных полей статора и ротора одного порядка, например 1-й гармоники статора с 1-й гармоникой ротора или 5-й гармоники статора с 5-й гармоникой ротора.
Колебательные электромагнитные моменты возникают в результате взаимодействия магнитных полей статора и ротора, имеющих разный порядковый номер. Кроме того, колебательные электромагнитные моменты возникают при взаимодействии магнитного поля основной гармоники с магнитными полями высших гармоник. Вращающий электромагнитный момент возникает при наличии разности фаз между вращающимися магнитными полями статора и ротора. В общем виде электромагнитный момент асинхронного двигателя можно выразить следующим образом: М = /5y,.sin <р„., где Is — составляющая магнитодвижущей силы, обусловленная током статорной обмотки; у,. — магнитный поток, создаваемый током ротора; — угол сдвига между двумя этими векторами. При взаимодействии магнитодвижущей силы и магнитного потока с одним порядковым номером угол сдвига между ними остается постоянным, поскольку эти векторы вращаются с одинаковой угловой скоростью. Следовательно, и электромагнитные моменты, создаваемые гармониками одного порядка, будут постоянными.
Совершенно другая картина наблюдается в случае взаимодействия гармонических составляющих с разными порядковыми номерами. Если вектор магнитодвижущей силы основной гармоники Is вращается с угловой частотой оу, а вектор, например, 5-й гармоники магнитного потока ротора вращается с угловой частотой 5соь но в другую сторону, то, естественно, угол <pslr5 между этими векторами будет изменяться по синусоидальному закону. Причем за один оборот (период) вектора Is[ угол сдвига изменится шесть раз. Следовательно, электромагнитный момент, создаваемый основной гармоникой ста-
95
тора Is и 5-й гармоникой ротора будет изменяться по синусоидальному закону, т.е. колебаться, причем частота этих колебаний будет равна бсо,.
Рассмотрим электромагнитный момент, создаваемый основной гармоникой статора и 7-й гармоникой ротора. В этом случае векторы /5, и у,.7 вращаются с разными скоростями ю, и 7а>|, но в одну сторону. Угол сдвига между этими векторами <р,|,- в процессе вращения также будет периодически изменяться по синусоидальному закону. Поскольку рассматриваемые векторы вращаются в одну сторону, то период изменения или колебания электромагнитного момента МЛгЪ как и в предыдущем случае, будет равен бго,. Можно показать, что электромагнитные моменты, создаваемые при взаимодействии 1 и 11-й, 1 и 13-й гармоник, тоже носят синусоидальный характер, причем частота пульсаций этих электромагнитных моментов равна 2 x6а)].
В регулируемых электроприводах постоянного тока, в которых двигатели получают питание от преобразователей, напряжение, подводимое к якорным зажимам, представляет собой сумму некоторой постоянной и гармонических составляющих. Если в регулируемом электроприводе в качестве статического преобразователя используется широтно-импульсный преобразователь, то /=/шип, а если двигатель получает питание от выпрямителя, то/= те/. В электродвигателях постоянного тока также будут возникать колебания электромагнитного момента.
Механические колебания вращающихся частей двигателя, возникающие из-за наличия колебательных электромагнитных моментов, в силу их малости в обычных условиях не существенны. Исключение составляют случаи, когда двигатель используется при частотах вращения, составляющих несколько оборотов в минуту и ниже, а также случаи, когда необходимо очень точное регулирование.
Однако если частота колебательного вращающего момента становится равной собственной частоте крутильных колебаний системы двигатель—механизм, наступает явление резонанса, сопровождающееся сильным шумом и вибрациями, а в ряде случаев и механическими повреждениями. В этом случае говорят уже об электромеханической совместимости преобразователя и электродвигателя, учет и обеспечение которой необходимо осуществлять на всех стадиях проектирования и разработки регулируемых электроприводов.
Способы и устройства обеспечения электромеханической совместимости. Способы минимизации вредного влияния высших гармонических составляющих напряжения на характеристики электродвигателей можно условно разделить на следующие группы: применение фильтрующих устройств; использование схемотехнических решений при разработке преобразователей, включая специальные законы их управления; принятие специальных конструкторских решений при проектировании электрических машин.
В зависимости от типа электропривода, т.е. от рода тока, перечисленные способы обеспечения электромеханической совместимости реализуются по-разному. Поэтому эти способы следует рассмотреть отдельно для электроприводов постоянного и переменного токов.
В современных автоматизированных электроприводах постоянного тока в качестве устройств управления широко применяют управляемые выпрямители и широтно-импульсные преобразователи. Для этих типов преобразователей характерна периодическая пульсирующая кривая напряжения на выходе. Ос-96
новные требования к фильтрам для уменьшения пульсаций можно сформулировать следующим образом: фильтр не должен существенно изменять режим работы преобразователя; фильтр должен обеспечивать заданную по условиям электромеханической совместимости степень сглаживания напряжения на нагрузке во всех оговоренных режимах работы электропривода.
Выполнение первого требования достигается в основном соответствующим выбором схемы фильтра. Так, например, емкостный фильтр или фильтры с емкостным входным звеном в мощных электроприводах использовать не рекомендуется, так как они ухудшают форму токов, протекающих через вентили и трансформатор в управляемых выпрямителях, в результате чего возрастают потери мощности. Установка таких фильтров на выходе широтно-импульсных преобразователей изменяет расчетные условия коммутации, что может привести к аварийным ситуациям.
Второе требование, предъявляемое к фильтрующим устройствам, является определяющим при расчете параметров элементов схемы фильтра. Обычно это требование задается в виде коэффициента пульсаций напряжения на нагрузке. Отношение пульсаций напряжения на выходе преобразователя к коэффициенту пульсаций напряжения на нагрузке определяет снижение пульсаций напряжения, достигаемое в результате применения фильтра. Это отношение называется коэффициентом сглаживания. Для увеличения эффективности фильтрующих устройств и увеличения коэффициента сглаживания 5 на практике используют многозвенные фильтры. Коэффициент сглаживания таких фильтров равен произведению коэффициентов отдельных звеньев.
Для обеспечения электромеханической совместимости преобразователя и двигателя без применения фильтрующих устройств или с применением фильтров, обладающих незначительными массогабаритными показателями, следует использовать преобразователи с повышенными значениями частот первой тгрмоники выходного напряжения. Так, при использовании в электроприводе в качестве преобразователя управляемого выпрямителя и необходимости обеспечения электромеханической совместимости целесообразно применять мно-тотактные схемы выпрямления. Если в качестве преобразователя используется широтно-импульсный модулятор, то в целях увеличения частоты пульсаций выходного напряжения, необходимо повышать частоту коммутации его силового ключа. Важнейшим преимуществом широтно-импульсных преобразователей является возможность плавного регулирования частоты коммутации, что позволяет устранять явления резонанса.
Для обеспечения электромеханической совместимости электрооборудования, входящего в состав электропривода переменного тока на основе автономного инвертора с широтно-импульсной модуляцией, следует устанавливать как можно более высокую частоту модуляции. В этом случае частоты всех высших гармоник будут достаточно высокими и не будут оказывать существенного влияния на появление пульсирующих электромагнитных моментов. Дополнительные потери мощности от высших гармоник в двигателе с увеличением их частоты уменьшаются. В преобразователях же при увеличении частоты модуляции увеличиваются потери на коммутацию в ключах, а также потери в звеньях коммутации. Следовательно, при проектировании регулируемых электроприводов с преобразователями на основе инверторов с широтно-импульсной модуляцией большое значение имеет выбор оптимального
97
значения частоты модуляции, для которого суммарные потери в электроприводе будут минимальными.
Задачу обеспечения электромеханической совместимости двигателей с преобразователями нельзя решать в отрыве от решения задачи обеспечения высокого коэффициента полезного действия привода. Для современных преобразователей частоту модуляции выбирают в диапазоне 4...20 кГц.
2.7. Обеспечение надежности электроприводов и систем автоматизации
2.7.1. Основные понятия и задачи обеспечения надежности
Вопросы обеспечения надежной работы оборудования являются основополагающими при его проектировании и создании. В полной мере это относится к электроприводам и системам автоматизации. По общей теории надежности имеется множество учебников и учебных пособий. Особенностью таких объектов, как электроприводы и системы автоматизации является требование обеспечения их определенного ресурса и возможности (и необходимости) проведения регламентных и ремонтных работ, т.е. это оборудование, как правило, относится к восстанавливаемому. Вопросы теории и методов обеспечения надежности невосстанавливаемого или восстанавливаемого радиоэлектронного оборудования рассматриваются в [16], а специфические вопросы по надежности теристорных преобразователей электроэнергетических систем — в [37, 52, 56].
Согласно ГОСТ 27.002—83 надежность — комплексное свойство, которое включает в себя безотказность, долговечность, ремонтопригодность и сохраняемость. В электроэнергетике и электромеханике к этим свойствам добавляют еще готовность, живучесть и безопасность.
Безотказность — свойство объекта непрерывно сохранять работоспособное состояние в течение некоторого времени или некоторой наработки. Работоспособное состояние (работоспособность) — состояние объекта, при котором значения всех параметров, характеризующих способность выполнять заданные функции, соответствуют требованиям нормативов. Наработка — продолжительность или объем работы объекта.
Долговечность — свойство объекта сохранять работоспособность до наступления предельного состояния при установленной системе технического обслуживания и ремонта. Предельным называется состояние, при котором дальнейшее применение объекта по назначению недопустимо или нецелесообразно либо восстановление его невозможно или невыгодно.
Ремонтопригодность — свойство объекта, связанное с приспособленностью к предупреждению и обнаружению причин появления отказов и повреждений, поддержанию и восстановлению работоспособности путем технического обслуживания и ремонтов.
Переход объекта с одного уровня работоспособности на другой, более низкий, называется отказом. Отказ, произошедший во время выполнения заданных функций, называется отказом в работе (отказом функционирования). Отказы бывают полные и частичные.
98
Сохраняемость — свойство объекта сохранять значения показателей безотказности, долговечности и ремонтопригодности в течение и после хранения и (или) транспортировки.
Готовность — свойство объекта приступать к выполнению некоторых функций в любой момент времени по требованию, изменяя режим работы без нежелательных переходных процессов. В это понятие включается и управляемость, и устойчивость, и относительная длительность (вероятность) нахождения в работоспособном состоянии.
Живучесть — свойство объекта противостоять внешним и внутренним возмущениям (нарушениям, воздействиям, отказам), не допуская их цепочечного развития и сокращения функционирования ниже жизненно необходимого уровня. В это понятие включается и неуязвимость объекта (в отношении утраты некоторых элементов), и стойкость объекта (в отношении к общим для всех элементов воздействиям).
Безопасность — свойство объекта не создавать опасности для людей и окружающей среды во всех возможных режимах работы и аварийных ситуациях. Учитывая безусловную важность этой составляющей, часто ее выделяют из понятия надежности, говоря о надежности и безопасности объектов.
Вероятностные показатели надежности следующие: вероятность отказа 0(zp) и вероятность безотказной работы Р(гр) за заданное время /р; вероятность восстановления Р(/3) за заданное время /3; вероятность нахождения объекта в любой момент времени определенного периода в состоянии работоспособности (характеризуется коэффициентом готовности КТ) или состоянии неработоспособности (характеризуется коэффициентом простоя qab); условная вероятность Q(s//) отказа объекта 5 при возникновении события i (например, отказа устройства защиты при повреждении оборудования). Вероятностные показатели надежности могут быть определены экспериментально-статистическим путем или аналитически на основе вероятностных моделей и других методов расчета. С помощью статистических и расчетных оценок вероятностных показателей надежности формируются критерии для приемки или браковки, критерии выбора наиболее надежных вариантов и критерии оптимальности решений так же, как для рассмотренных ранее показателей свойств объекта во времени. Например, Р(/р) < Р(Гр)Н0М — условие браковки, а 7’(Гр) -» max — условие выбора.
Надежность как свойство конкретного объекта выполнять заданные функции можно охарактеризовать последовательностью наработок на отказ Усредняя оценку наработки на отказ по множеству реализаций и получив оценку среднего значения и рассеяния этой величины, можно уверенно говорить о выполнении заданных функций данным объектом в ближайшем будущем. Мерой уверенности может служить вероятность безотказной работы или отказа в предстоящем интервале времени. Однако вероятности эти будут условными мерами уверенности, так как предполагается, что существенно не изменятся ни условия функционирования, ни само состояние объекта [18]. Условность мер надежности является причиной неопределенности оценок показателей элементов электротехнических установок и систем. Интервал, в который попадают возможные значения частот отказов, составляет от одного до двух-трех порядков.
Рассматривая надежность такого класса объектов, как система, можно говорить об условиях ее функционирования при отказах отдельных элементов и
99
изменении внешних воздействий и требований, т.е. о логической мере уверенности в выполнении или невыполнении всех или части ее функций. Переход от логической меры к вероятностной или частотной возможен при условии выполнения оценки показателей надежности элементов. Но эти показатели условны, следовательно, условна и оценка показателей надежности системы.
Можно выделить электротехнические объекты высокой, средней и низкой надежности. Объекты высокой надежности за счет хорошо развитого резервирования обеспечивают высокий уровень безотказности. Вероятность их отказа за весь срок службы меньше 10-6. Подтвердить этот уровень с большой степенью уверенности не удается ни расчетом, ни экспериментально.
Объекты средней надежности имеют невысокую кратность резервирования, поэтому не исключены их отказы в процессе работы. В течение расчетного периода эксплуатации отказы могут возникать, но могут и не возникать. Безотказность и восстанавливаемость их обеспечивается средствами защиты, управления и автоматики, а также профилактикой и ремонтами. Оценки показателей надежности таких объектов получаются довольно точными. Причем точность оценок тем выше, чем больше число элементов, учитываемых в модели.
Объекты низкой надежности не имеют избыточных элементов. Их отказы — массовые явления, вероятность возникновения которых в течение года близка к единице. Неопределенность наблюдается только в отношении числа отказов и момента их наступления.
Показатели надежности элементов установок оцениваются средними значениями и среднеквадратическими погрешностями. Погрешности оценок показателей надежности установок, включая ущерб, вычисляются по формулам теории точности при известных погрешностях исходных данных. Следует отметить, что относительная погрешность полученных при этом результатов, как правило, не превышает относительной погрешности исходных данных.
Задача обеспечения надежности любого оборудования решается на стадиях разработки проекта, производства, доставки к месту установки, хранения, монтажа, испытания и эксплуатации (использования, технического обслуживания и ремонта). Практически обеспечение безотказной и долговечной работы любого электротехнического устройства (оборудования и установок) основывается на обязательном соблюдении требований ПУЭ, ПТЭ, ПТБ и инструкций по его применению, а также проверке технического состояния оборудования, находящегося на складе, в резерве, на техническом обслуживании (включающем в себя осмотр, измерения, диагностирование, отбраковку).
Контроль функционирования устройств должен осуществляться непрерывно или периодически с помощью информационно-измерительной системы и средств технической диагностики, а также путем непосредственного наблюдения и осмотра. Прогнозирование изменения технического состояния объекта и нагрузок на основе знания процессов деградации и текущей информации о контролируемых параметрах позволяет избежать возникновения отказов по причине его старения и износа.
Избыточность структурная, временная, запаса прочности и ресурса обеспечивает существенную отсрочку момента отказа объекта и дает возможность его предотвращения. Предупреждение отказов возможно при своевременном 100
проведении технического обслуживания (проверки, контроля, испытаний, замены, ремонта) и полноценного восстановления работоспособности оборудования, которые также позволяют продлить срок службы оборудования до запланированного или необходимого уровня.
Все время работы электротехнических установок можно разделить на три периода. В первом периоде выходят из строя (вскоре после начала эксплуатации) всегда имеющиеся изделия с скрытыми дефектами. По этой причине первый период называют периодом приработки, или «выжигания», дефектных изделий. Второй период, когда отказы изделия довольно редки и вызываются чисто случайными обстоятельствами, называют периодом нормальной работы. Третий период — это период старения, когда необратимые физико-химические явления приводят к ухудшению качества материалов и деталей объекта и износ становится неустранимым. В этот период интенсивность отказов возрастает и удержать ее на заданном низком уровне путем профилактических ремонтов уже не удается.
Управление эксплуатацией электрооборудованием связано с оцениванием его текущего состояния, прогнозированием надежности и обоснованием управляющих решений. Для выполнения этой работы создаются экспертные компьютерные системы и разрабатываются математические модели, учитывающие условия практической работы персонала и его профессиональный опыт.
2.7.2. Оценочный расчет надежности элементов электрооборудования
Расчет надежности заключается в определении показателей надежности устройства по известным характеристикам надежности составляющих функциональных узлов, аппаратов, элементов и условиям эксплуатации [50]. Для расчета надежности составляют логическую модель безотказной работы устройства. Система считается работоспособной, если все элементы исправны, отказы случайны, независимы и несовместимы. При таких условиях выход из строя одного из элементов означает отказ всей системы, т.е. логическая модель надежности устройства состоит из последовательно включенных элементов N, каждый из которых имеет вероятность безотказной работы P(t).
Цель проведения оценочного расчета надежности электрооборудования — определение элементов, аппаратов, функционально законченных узлов, подверженных отказам или имеющих наибольшие значения интенсивности отказов, и разработка предложений по повышению надежности устройства известными методами и способами.
Приведем последовательность оценки уровня надежности устройства.
1. Определить интенсивности отказов элементов с учетом условий эксплуатации устройства: Х, = ^кук^к^^Т, кн) где Хо/ — номинальная интенсивность отказов элементов; Л, и к2 — поправочные коэффициенты, зависящие от воздействия механических факторов; к3 — поправочный коэффициент, зависящий от воздействия влажности и температуры; к4 — поправочный коэффициент, зависящий от давления воздуха; а,(Т, кн) — поправочные коэффициенты, зависящие от температуры поверхности элементов (Т) и коэффициента нагрузки (Лн).
101
Коэффициенты для различных типов элементов приведены в [16, 50, 57].
2. Разбить все элементы устройства на группы с примерно одинаковыми значениями интенсивности отказов.
3. Найти произведение числа элементов А,- каждой группы на интенсивность отказов X,.
п
4. Рассчитать интенсивность отказов устройства по формуле Л = ^NД;, /=1
где п — число групп.
5. Определить среднее время наработки устройства до первого отказа Тср = = 1/Л.
6. Рассчитать вероятность безотказной работы в течение заданной наработки по формуле Р(1р) = ехр(-£АД,Гр).
/=1
Требования надежности считаются выполненными, если среднее время наработки устройства на отказ соответствует заданному в ТЗ. В противном случае предлагаются меры повышения надежности устройства, например замена элементов с большими значениями наработки на отказ, изменение коэффициентов нагрузки, изменение условий эксплуатации, введение резервирования и т.д.
В рассмотренном методе расчета надежности, являющемся универсальным и упрощенным, использован экспоненциальный закон распределения отказов элементов. Для типовых случаев, которые часто встречаются в инженерной практике [16], расчет надежности выполняется для следующих изделий: без резервирования и восстановления работоспособности элементов; без резервирования, с восстановлением работоспособности элементов; с восстановлением и постоянным нагруженным резервированием основного элемента; с учетом глубины контроля, а также планирования и расчета запасных изделий.
К этому классу можно отнести большую часть промышленных систем ЭП и СА. Основным показателем надежности для них является коэффициент готовности, а основным методом обеспечения надежности — снижение времени восстановления за счет новых конструктивных решений и развитой диагностики.
2.7.3. Расчет надежности изделий с учетом надежности программных средств
Основная направленность и последовательность расчетов надежности изделий с учетом влияния программных средств [16] должна сохраняться такой же, как и при расчете аппаратурной надежности. На этапе разработки и отладки программного обеспечения производится проверка соответствия программ заданным требованиям. По результатам этой проверки выдается характеристика надежности и степени отработанности программы. Характеристика должна отражать интенсивность отказов программы обнаруженную и прогнозируемую, вероятность безотказной работы программы обнаруженную и прогнозируемую, а также среднее время восстановления работоспособности программно-управляемого изделия (прогнозируемое).
102
Обнаруженные при проверке программы показатели надежности используются для оценки степени ее отработанности. Прогнозируемые показатели надежности используются при расчете надежности программно-управляемого изделия. Возможны два варианта такого расчета.
Первый вариант является грубо ориентировочным. В схему расчета надежности изделия включается фиктивный блок — «программное изделие» с характеристиками надежности, полученными либо из его паспортных характеристик, либо из результатов проверки и испытаний. Грубо ориентировочным этот расчет является потому, что обнаруженные при проверках и испытаниях ошибки программы, как правило, устраняются, а прогнозировать ожидаемые отказы можно лишь весьма ориентировочно. Однако даже грубо ориентировочный расчет полезен, так как позволяет определить сравнительную характеристику влияния аппаратуры и программ на надежность изделия и получить представление об ожидаемой надежности программного обеспечения на различных этапах создания программно-управляемого изделия.
Есть основания предполагать, что программные ошибки подчиняются экспоненциальному распределению. Вероятность того, что эти ошибки не про-
явятся в интервале времени 0...Z, определяется по формуле P(t) = е° , где
ДО — интенсивность отказов изделия, вызванных дефектами программы.
Для ориентировочных расчетов надежности программно-управляемых изделий, аналогичных промышленным компьютерам средней производительности, рекомендуется использовать ориентировочные данные о показателях надежности программ, приведенные в табл. 2.5.
Второй вариант — это расчет надежности изделия с учетом влияния отказа программ, выявленного на этапе совместных испытаний аппаратуры и программ. Такой расчет проводится также по обычным правилам, т. е. с использованием либо логических функций работоспособности, либо структурных схем,
Таблица 2.5
Период отработки программы Интенсивность программных ошибок z, ч Среднее время работы изделия на программную ошибку То, ч Среднее время устранения отказа изделия, вызванного программной ошибкой, мин
Начальный период комплексной отладки 0,07 14 12
Завершение комплексной отладки 0,02 50 8
Начальный период опытной эксплуатации 8 10-3 125 6
Завершение опытной эксплуатации 0,5 • 10-3 2000 6
103
либо графа состояний. В качестве показателей надежности частей сложного изделия (объекта, системы) используются программно-аппаратурные показатели надежности, т.е. показатели надежности частей этого изделия, управляемых реальной программой.
Естественно, что при этом получают различные результаты, т.е. различные показатели надежности изделия для различных функций, выполняемых этим изделием. Такой расчет приобретает характер расчета функциональной надежности, так как показатели в этом случае определяются для каждой из выполняемых функций.
2.8. Выполнение, оформление и комплектование проектов
Всю техническую документацию, которую используют и составляют при разработке, изготовлении и эксплуатации изделий, можно разделить на три основные группы: нормативно-техническую, конструкторскую и технологическую. Нормативно-техническая и технологическая документация была рассмотрена в гл. 1. Остановимся на конструкторской документации.
К конструкторским относятся графические (чертежи и схемы) и текстовые (пояснительные записки, спецификации, расчеты и т.п.) документы, которые в отдельности или в совокупности определяют состав и устройство изделия и содержат необходимые данные для его разработки или изготовления, контроля, приемки, эксплуатации и ремонта. При этом вся документация должна соответствовать стандартам ЕСКД.
Документы, разработанные на этапах технического предложения, эскизного и технического проектов, называют проектными, а документы, созданные на этапе выпуска рабочей документации, — рабочими.
На этапе технического предложения конструкторской документации присваивается литера П, на этапе эскизного проектирования — Э, а на этапе технического проекта — Т. Корректировка конструкторских документов на стадии рабочего проекта по результатам изготовления и испытания опытного образца (партии) производится с присвоением документации литеры О. При последующих (повторных) изготовлениях и испытаниях опытного образца и соответствующей корректировке конструкторских документов им присваивают соответственно литеры 01, 02 и т.д. При корректировке конструкторских документов по результатам изготовления, испытания и оснащения технологического процесса основных сборочных единиц изделия установочной серии конструкторским документам присваивается литера А. При подготовке серийного или массового производства по результатам изготовления и испытания головной серии изделий конструкторским документам присваивается литера Б. Конструкторским документам для индивидуального производства (разового изготовления одного или нескольких изделий) присваивается литера И.
При разработке электроизделий конструкторская документация выполняется, как правило, в две стадии: эскизный или технический проект и рабочая конструкторская документация. При наличии предварительной проработки и модернизации электроизделий разрабатывают только рабочую документацию.
104
В зависимости от способа выполнения и характера использования конструкторские документы подразделяются следующим образом: оригиналы — документы, выполняемые на любом материале и предназначенные для изготовления по ним подлинников; подлинники — документы, оформленные подлинными установленными подписями и выполненные на любом материале, допускающем многократное воспроизведение с них копий; дубликаты — копии подлинников, обеспечивающие идентичность воспроизведения подлинников, выполненные на любом материале, допускающем снятие с них копий; копии — документы, выполненные способом, обеспечивающим их идентичность с подлинником (дубликатом), и предназначенные для непосредственного использования при разработке, изготовлении, эксплуатации и ремонте изделий.
При определении комплектности документов на изделия различают основной документ изделия, основной комплект документов, полный комплект документов. Основной конструкторский документ (для деталей — чертеж детали, для сборочных единиц, комплексов и комплектов — спецификация) полностью и однозначно определяет данное изделие и его состав. Основной комплект конструкторских документов объединяет все документы, относящиеся ко всему изделию (сборочный чертеж, схемы, технические условия, эксплуатационные документы и т.д.). Полный комплект конструкторских документов состоит из основного комплекта документов на данное изделие и основных комплектов документов на все его составные части. Обозначение основного конструкторского документа является одновременно обозначением изделия.
Структура обозначения изделия и основного конструкторского документа включает в себя четырехзначный код организации-разработчика, шестизначный код классификационной характеристики и трехзначный порядковый регистрационный номер:
XXX ХХХХХХ XXX
I Порядковый регистрационный номер
Код классификационной характеристики
Буквенный код организации-разработчика
Буквенный код организации-разработчика назначается по кодификатору этой организации или организации, ведающей централизованным присвоением обозначений.
Числовой код классификационной характеристики присваивают изделию и конструкторскому документу по классификатору изделий и конструкторских документов машиностроения и приборостроения (по классификатору ЕСКД). Структура кода классификационной характеристики имеет следующий вид:
105
Например, код 482164 соответствует изделию класса 48 — оборудование подъемно-транспортное и погрузочно-разгрузочное; подкласса 2 — машины транспортирующие непрерывного действия; группы 1 — конвейеры с тяговым элементом ленточные и пластинчатые, эскалаторы; подгруппы 6 — эскалаторы и конвейеры пассажирские; вида 4 — конвейеры ленточные. Понятию «класс» соответствует вид продукции, например станки, экскаваторы, конвейеры и т. и.
Наряду с приведенными правилами обозначения изделия и основного конструкторского документа могут применяться другие правила, составленные, например на основании стандартов предприятия (см. примеры схем и чертежей, приведенные в гл. 5).
При обозначении неосновных конструкторских документов к обозначению изделия добавляют шифр документа (например, СБ, ТУ, ПЗ и т.д.). На изделия (детали, сборочные единицы, комплексы и комплекты), обладающие общими конструктивными признаками и имеющие некоторые различия, создают групповые конструкторские документы.
Правила выполнения чертежей определяются стандартами третьей классификационной группы ЕСКД. Для быстрого нахождения на чертеже составной части изделия рекомендуется разбивать поле чертежа на зоны с помощью отметок, наносимых по горизонтали арабскими цифрами слева направо и по вертикали — прописными буквами латинского алфавита сверху вниз. Зоны обозначаются сочетанием букв и цифр, например: Al, А2, Bl, В2 и т.д.
Рабочие чертежи должны разрабатываться и выполняться с соблюдением ряда общих требований: оптимального применения стандартных и покупных изделий и изделий, освоенных производством и соответствующих современному уровню техники; рационального ограничения номенклатуры конструктивных элементов, их размеров, условий монтажа и т.д.; рационального ограничения номенклатуры марок и сортаментов материалов, применения наиболее дешевых и наименее дефицитных материалов; взаимозаменяемости, наиболее выгодных способов изготовления, ремонта изделий и максимального удобства их обслуживания при эксплуатации.
Количество чертежей на изделие должно быть минимальным, но достаточным для рациональной организации его изготовления. Чертежи необходимо выполнять с соблюдением всех условных изображений и упрощений, предусмотренных стандартами ЕСКД.
Наименование изделия, указываемое в основной надписи чертежа, должно быть кратким и соответствовать принятой терминологии. Наименование записывается в именительном падеже и единственном числе, причем на первое место в многословном наименовании помещают имя существительное.
Виды схем обозначают прописными буквами русского алфавита: электрическая — Э; гидравлическая — Г; пневматическая — П; кинематическая — К; оптическая — О; комбинированная — С. При разработке ЭП и СА выпускают электрические схемы.
Тип схем обозначается арабскими цифрами: 1 — структурная; 2 — функциональная; 3 — принципиальная; 4 — соединений; 5 — подключения; 6 — общая; 7 — расположения; 0 — объединенная. В зависимости от вида и типа схемы ей присваивают буквенно-цифровое обозначение. Например, ЭЗ — схема электрическая принципиальная.
106
Назначение, содержание и оформление схем применительно к системам электроприводов и систем автоматизации см. в гл. 5.
Текстовые конструкторские документы подразделяются на документы, состоящие из сплошного текста (технические условия, пояснительная записка и т.д.), и документы, содержащие текст, разбитый на графы (спецификации, ведомости покупных изделий и т.д.).
Построение текстовых документов определяется их содержанием и объемом. Наивысшая степень деления — часть. Всем частям присваиваются обозначения документа с добавлением порядкового номера начиная с второй части к шифру документа, например: ТО — первая часть технического описания; ТО1 — вторая часть и т.д. После части следуют разделы, подразделы, пункты и подпункты. В начале документов большого объема рекомендуется помещать содержание, а в конце — список используемых документов или литературы. Иллюстрации, таблицы или вспомогательный материал можно давать либо в тексте, либо в виде приложений, которые при большом объеме могут быть оформлены в виде самостоятельного документа.
Ряд стандартов ЕСКД устанавливает требования к содержанию различных текстовых документов. В этих стандартах приводятся рекомендуемые перечни разделов; в зависимости от особенностей изделия текстовые документы допускается дополнять другими разделами или не включать в них отдельные разделы из числа рекомендованных.
Изложение документа должно быть кратким, четким, исключающим возможность субъективного толкования. Терминология, определения, сокращения и условные обозначения должны быть едиными и соответствовать стандартам или общепринятым в научно-технической литературе. Специфические термины должны иметь соответствующие разъяснения.
Документы, содержащие графы, обычно имеют разделение на строки. Наименования разделов и подразделов в таких документах подчеркивают; ниже заголовка оставляют одну свободную строку, выше — не менее одной свободной строки. Все записи производят в один ряд в нижней части строки, не допуская сливания текста с линиями, разграничивающими строки и графы.
Цифровой материал обычно оформляют в виде таблиц. Над правым верхним углом таблицы помещают надпись «Таблица...» с указанием ее порядкового номера. Если таблица имеет самостоятельное значение, ниже дают ее тематический заголовок. При ссылках слово «таблица» пишут сокращенно (например, табл. 1).
Сокращенно пишут слово «рисунок» при нумерации иллюстративного материала, например рис. 5 или рис. Е20. Иллюстрации должны иметь тематические наименования и при необходимости — подрисуночный текст.
Номер однострочной формулы в круглых скобках помещают в конце строки, а многострочной — в конце последней ее строки. После формул ставят знак препинания, необходимый при построении фразы.
Формулы, иллюстрации и таблицы нумеруются арабскими цифрами.
Эксплуатационная и ремонтная конструкторская документация составляется на изделия, использование, обслуживание и ремонт которых можно выполнить только при наличии специальных сведений. Эксплуатационные и ремонтные документы должны разрабатываться с учетом подготовки специалистов по эксплуатации данного изделия.
107
В состав эксплуатационной документации входят следующие документы: техническое описание (ТО), содержащее описание устройства и принципа действия изделия; инструкция по эксплуатации (ИЭ), в которой излагается минимум сведений по правилам эксплуатации, транспортированию, хранению и обслуживанию изделия; инструкция по техническому обслуживанию (ИО), содержащая порядок проведения обслуживания (регламентных работ) изделия; инструкция по монтажу, пуску, регулировке и обкатке (ИМ), включающая в себя сведения о проводимых операциях на объекте эксплуатации; формуляр (ФО), паспорт (ПС), этикетка (ЭТ), определяющие основные параметры изделия и гарантии на него; ведомость запасных частей, инструмента и принадлежностей (ЗИ), устанавливающая номенклатуру, назначение и количество запасных частей, инструментов и материалов (ЗИП).
Контрольные вопросы
1. Какие основные конструкторские документы разрабатываются на разных стадиях проектирования?
2. Из каких разделов состоит техническое задание? Поясните примерное содержание этих разделов на примере проектирования ЭТУ.
3. Из каких подразделов состоят технические требования? Поясните примерное содержание этих подразделов на примере проектирования ЭТУ.
4. Каков жизненный цикл промышленной продукции?
5. По каким показателям выполняется оценка экономической эффективности инвестиционного проекта?
6. Как выполняется оценка ресурсосбережения при внедрении регулируемого электропривода?
7. Каковы основные ряды номинальных значений параметров в электрооборудовании?
8. Как выбирается электрооборудование в соответствии с требованиями по исполнению и условиям эксплуатации?
9. Как влияет на работу электрооборудования наличие высших гармоник в кривых токов и напряжений?
10. Каковы основные способы и устройства, обеспечивающие электромагнитную и электромеханическую совместимость электрооборудования?
11. Из каких составляющих складывается надежность электрооборудования и что они характеризуют?
12. Какова последовательность оценки уровня надежности элементов электрооборудования?
13. Как выполняется оценка надежности элементов электрооборудования с учетом надежности программных средств?
14. Каковы основные правила оформления и комплектования проектов электроизделий?
ГЛАВА 3
РАСЧЕТ И ВЫБОР ТЕХНИЧЕСКИХ
И ПРОГРАММНЫХ СРЕДСТВ СИСТЕМ
ЭЛЕКТРОПРИВОДОВ И АВТОМАТИЗАЦИИ
3.1. Технические средства систем
автоматизированных электроприводов
3.1.1. Управляемые преобразователи для низковольтных систем электроприводов переменного тока и их компоненты
В процессе выбора технических и программных средств систем электроприводов и автоматизации разработчик может использовать информацию из источников, указанных в приложении.
Преобразователи переменного тока выпускаются современной электротехнической промышленностью в двух основных конструктивных исполнениях: в виде преобразователей частоты, питающихся от сети переменного трехфазного напряжения, и в виде автономных инверторов напряжения, питающихся от сети постоянного напряжения. Преобразователи частоты включают в себя блок силового выпрямителя, звено постоянного тока и автономный инвертор напряжения. Как правило, преобразователи частоты применяются в системах однодвигательного привода. На базе автономных инверторов напряжения, питающихся от общего блока выпрямления (выпрямления/рекуперации) реализуются экономически эффективные системы многодвигательного привода.
Преобразователи частоты и автономные инверторы напряжения могут использоваться для управления как стандартными асинхронными двигателями, так и синхронными двигателями. Область применения регулируемых электроприводов переменного тока очень широка. Для удобства рассмотрения их функциональных и конструктивных особенностей целесообразно выделить характерные виды приводов (табл. 3.1).
В зависимости от области применения приводов переменного тока фирмы-производители преобразовательной техники предлагают их специализированные серии. Для решения задач автоматизации простых производственных механизмов, типовых объектов городского, жилищно-коммунального хозяйства применяют приводы общего назначения — стандартные. В связи с острой конкуренцией в секторе стандартных приводов на рынке сегодня в основном представлена продукция крупных электротехнических корпораций, которые смогли снизить стоимость своей продукции за счет больших объемов производства и организованного международного рынка сбыта. Такими производителями являются ABB, Siemens, Vacon, Danfoss, SEW Eurodrive, Yaskawa, Mitsubishi, Fuji, Rockwell, Schneider-Toshiba, Omron, Lenze.
В качестве примера стандартных электроприводов переменного тока можно привести следующие серии: Micromaster и Sinamics G110 фирмы Siemens; Altivar 1 1, 28, 38, 58 фирмы Schneider Electric; FR-S 500 и FR-E 500 фирмы Mitsubishi Electric; CIMR-77AZ, CIMR-E7Z фирмы Yaskawa-Omron.
109
Т а блица 3.1
Характеристики Приводы общего назначения Высокодинамичные приводы Высокодинамичные взаимосвязанные приводы Сервоприводы
Тип управления U/f- управление Векторные Векторные Серво
Точность Низкая Средняя Высокая Высокая
Динамика Низкая Средняя Средняя Высокая
Двигатель Стандартный асинхронный Стандартный асинхронный Стандартный асинхронный Синхронный и асинхронный
Технологические функции Предварительно заданная конфигурация (ПИД-ре -гулятор) Предварительно заданная конфигурация (ПИД-регулятор) Программируемые функции управления механическими переменными (синхронизация скоростей, распределение нагрузки, управление натяжением) Программируемые функции управления перемещением (синхронизация положений, угловых перемещений)
Способ обмена данными Аналоговые и дискретные сигналы Аналоговые и дискретные сигналы, промышленные сети Промышленные сети Промышленные сети, операционные системы реального времени
Способ управления и квалификация оператора Местное управление приводом, низкоквалифицированный персонал Местное управление приводом, компьютерные средства НМ1, высококвалифицированный персонал Компьютерные средства НМ1, высококвалифицированный персонал Компьютерные средства НМ1, высококвалифицированный персонал
Область применения Насосы, вентиляторы, компрессоры и другие простые механизмы с переменным моментом нагрузки Центрифуги, подъемнотранспортные механизмы, экструдеры, мешалки и другие механизмы с постоянным и переменным моментом нагрузки Многодвигательные приводы бумага- и картоно-делательных производств, прокатных станов, фольгопрокатных машин, производств полимерных пленок, синтетического волокна, приводы портовых кранов и др. Станочные приводы, в том числе с ЧПУ, системы позиционирования в упаковочных и печатных агрегатах, системы перемещения, ткацкие станки и др.
Таблица 3.2
Характеристики Omron-Yaskawa F7Z Mitsubishi FR-V 520/540 Schneider Altivar 58 Siemens Micromaster 440
Диапазон мощностей 0,55... 110 кВт при 230 В ЗАС 0,55...300 кВт при 400 В ЗАС 1,5...55 кВт при 230 В ЗАС 1,5...55 кВт при 400 В ЗАС 0,37...5,5 кВт при 230 В ЗАС 1,5 ...7,5 кВт при 230 В ЗАС 0,75...55 кВт при 400 В ЗАС 0,12...3 кВт при 230 В1АС 0,12...45 кВт при 230 В ЗАС 0,37...200 кВт при 400 В ЗАС 0,75 ...75 кВт при 600 ВЗАС
Диапазон напряжений 170...264 В 323...528 В 170...242 В 323...528 В (200...240 В) ±10% (380...500 В) ±10% (200... 240 В) ±10% (380...480 В) ±10% (500...600 В) +10%
Входная частота 47,5...63,0 Гц 47,5...62,5 Гц 47,5...62,5 Гц 47,0...63,0 Гц
Рабочая температура -10...+40 °C -10...+50 °C Для 0,37...5,5 кВт -10...+50 °C Для 7,5...55кВт -10...+40 °C Для 0,12...75 кВт -10...+50 °C Для 90... 200 кВт О...+4О°С
Температура хранения -2О...+6О°С -20...+65 °C -25...+60 °C -4О...+7О°С
Допустимая влажность воздуха 95 % (без образования конденсата) 90 % (без образования конденсата) 93 % (без образования конденсата) 95 % (без образования конденсата)
Степень защиты NEMA1( <18,5 кВт) IP00 (>22 кВт) IP20/NEMA1 (<15кВт) IP00 (15...55 кВт) IP21 IP20/NEMA 1
Выходная частота 0...400 Гц 0...400 Гц 0...500 Гц Для 0.12...75 кВт 0...650 Гц Для 90...200 кВт 0... 267 Гц В режиме векторного управления 0...200 Гц
Разрешение выходной частоты 0,01 Гц 0,001 Гц 0,01 Гц 0,01 Гц
Продолжение табл. 3.2
Характеристики Omron-Yaskawa F7Z Mitsubishi FR-V 520/540 Schneider Altivar 58 Siemens Micromaster 440
Диапазон регулирования скорости Без датчика 1:100 С импульсным датчиком 1:1000 С импульсным датчиком 1:1000 Без датчика 1:100 С импульсным датчиком 1:1000 Без датчика 1:50 С импульсным датчиком 1:1000
Перегрузочная способность 200 % от /ноч в течение 1 с 150 % от /ном в течение 60 с 136 % от /ном в течение 60 с Для 0,12...75 кВт 200% от /ном в течение 3 с и 150 % от /ноы в течение 60 с (каждые 300 с) Для 90... 200 кВт 160% от /ном в течение 3 с и 136 % от /пом в течение 57 с (каждые 300 с)
Способ регулирования Вол ьт- ч астотн ы й: линейный (U/f), произвольная настройка Векторный: с/без датчика скорости, управление моментом Вольт-частотный: линейный (U/f), квадратичный (t///2), произвольная настройка, режим «мягкой» ШИМ Векторный: с/без датчика скорости, управление моментом Вольт-частотный: линейный (U/f), квадратичный (l///2), режим энергосбережения Векторный: с/без датчика скорости Вольт-частотный: линейный (U/f), квадратичный (U/f1), прямое управление потоком FCC, произвольная настройка Векторный: с/без датчика скорости, управление моментом
Дискретные входы 4 программируемых + 3 фиксированных 4 программируемых 6 программируемых
Аналоговый вход 1 -10...+ 10 В 0...10 В 0... 10 В 0...10 В 0...20 мА -10...+ 10 в Разрешение 10 бит
Аналоговый вход 2 4...20 мА -10 В/+10 В -10... + 10 В 0...20 мА Разрешение 10 бит 0...10 В 0...20 мА
Аналоговый вход 3 Отсутствует -10...+ 10 в Отсутствует Отсутствует
Аналоговый выход 1 0...10 В; Разрешение 12 бит 0...10 В; Разрешение 12 бит 0/4...20 мА Максимальная нагрузка 5000 Разрешение 9 бит 0/4...20 мА Максимальная нагрузка 5000 Разрешение 10 бит
Аналоговый выход 2 0...+ 10 В Разрешение 12 бит -10...+ 10 В Разрешение 12 бит Отсутствует 0/4...20 мА Максимальная нагрузка 5000 Разрешение 10 бит
Дискретный выход 1 30 В PC 1 А 250 В АС 1 А (реле неисправности) 30 В DC 0,3 А 250 В АС0,3 А (реле неисправности) 30 В РС5А 250 В АС 5 А (реле неисправности) 30 В РС5А 250 ВАС2 А Параметрируемый
Дискретный выход 2 Релейный параметрируемый Транзисторный параметрируемый 30 В PC 5 А 250 В/4С5А Пара метри руе м ы й 30 В PC 5 А 250 ВАС2 А Параметрируемый
Дискретный выход 3 То же То же Отсугствует То же
Дискретный выход 4 » » » Отсутствует
Подключение энкодера Опция На базовой влаге управления Опция Опция
RS485 интерфейс Протокол MEMOBUS Индивидуальный протокол Протокол Modbus Протокол USS
Торможение На выбеге, с заданным темпом, быстрое, постоянным током, динамическое (на резистор)
Функции защит От пониженного напряжения, перенапряжения, обрыва питающей и выходной фаз, перегрузки, замыкания на землю, междуфазного короткого замыкания, блокировки двигателя, перегрева двигателя, перегрева преобразователя и др.
Технологический регулятор Встроенный ПИД-регулятор. Встроенный источник питания 24 В для датчика ПИД-регу-лятора Встроенный ПИ-регуля-тор Встроенный источник питания 24 В для датчика ПИ-регулятора Встроенный ПИД-регулятор Встроенный источник питания 24 В для датчика ПИД-регулятора
Окончание табл. 3.2
Характеристики Omron-Yaskawa F7Z Mitsubishi FR-V 520/540 Schneider Altivar 58 Siemens Micromaster 440
Карты расширения Карта цифрового задания скорости 16 бит Карта аналогового задания скорости 14 бит Карта аналогового монитора 11 бит Карта цифровых выходов (6 транзисторных, 2 релейных) Карта подключения датчиков положения (операционный уси-л итсл ь/о ткрыты й коллектор) Сетевые карты: Profibus-DP, Device-Net, CFN-open, LONWORKS, PLC-options with Device-Net Карта входов [6 DI, AO (16 бит), PTC] Карта транзисторных выходов (3 DO) Карта выходов (7 DO, 1АО) Карта релейных выходов (3DO) Карта позиционирования С импульсным ВХОДОМ Карты цифрового задания частоты 16 и 12 бит Сетевые карты: SSCNET, Ethernet, Profibus-DP, Device- Net, CC-Link Карта связи с ПК Модуль подключения импульсного датчика скорости/тахогенератора Карта управления насосами (до 5 насосов) Карта переключения двигателей Карта переключения параметров Карта простого позиционирования Сетевые карты: Fi pio, Modbus Plus, Uni-Telway, Modbus ASCII, Modbus RTU/Jbus, Interbus-S, AS-i, Profi-bus-DP, Ethernet, CANopen, Device Net, METASYS Модуль связи с ПК Модуль подключения импульсного датчика скорости Сетевые карты: ProfibusDP, DeviceNet, CANopen Модуль связи с ПК
Приводы, относящиеся к классу высокодинамичных могут использоваться для решения достаточно сложных задач автоматизации производственных механизмов и технологических комплексов. Как правило, такие приводы характеризуются гибко программируемой системой управления, могут оснащаться датчиками обратной связи по скорости двигателя, имеют в стандартной комплектации широкий набор дискретных и аналоговых входов/выходов и позволяют расширять функции за счет дополнительных плат (карт).
Сравнительные характеристики приводов отдельных производителей представлены в табл. 3.2.
Основными поставщиками высокодинамичных и взаимосвязанных электроприводов являются компании ABB, Siemens, Vacon, Yaskawa, SEW Eurodrive, KEB, Alstom, Rockwell, Lenze. Значительную долю рынка в данном сегменте на сегодня занимает фирма Siemens. Продукция Siemens представлена семейством преобразователей частоты (ПЧ) Simovert Master Drives Vector Control (Simovert VC). Техническое описание электроприводов см. на Internet-сайтах, указанных в приложении.
3.1.2. Сервоприводы
Областью применения сервоприводов является в основном станкостроение, где они используются в качестве приводов подач. Однако часто сервоприводы используются и в других областях промышленности для выполнения точных перемещений.
Сервоприводы для станкостроительной отрасли сегодня представлены продукцией компаний Fanuc, Siemens, Indramat, Fagor, Yaskawa, Heidenhine и др. Сервоприводы для широкого круга применений представлены продукцией компаний Indramat, Omron, Rockwell, Lenze, ВашпьПег, Siemens, Yaskawa, Mitsubishi Electric, Schneider Electric, Elau и др. В качестве примера можно рассмотреть подробно сервоприводы серии W, выпускаемые компанией Omron. Информацию см. в источниках, указанных в приложении.
Система управления сервоприводом содержит три контура регулирования: контур тока/момента, контур скорости и контур положения (рис. 3.1).
В зависимости от решаемой задачи сигнал управления может быть подан в требуемый контур от внешней системы управления (числового программного устройства — ЧПУ, программируемого контроллера и т.п.). Управление сервоприводами от внешней системы может осуществляться как через управляющие входы (дискретные, аналоговые, импульсные) сервопреобразователя так и по сети. Управление по сети осуществляется через интерфейсные модули, дополнительно подключаемые к сервопреобразователю (предлагаются модули сетей DeviceNet, ProfiBus-DP и др.). Имеются модули для организации распределенных систем с использованием последовательного канала обмена информацией RS-422/RS-485 и/или дискретных входов/выходов.
3.1.3. Высоковольтные электроприводы
Области применения высоковольтных приводов весьма разнообразны: насосные станции, системы теплоснабжения и канализационные сооружения
115
Рис. 3.1. Обобщенная структура системы управления сервоприводом
(насосы для подачи и распределения питьевой воды, циркуляции теплоносителя, а также шламовые); нефтяная и газовая промышленность (насосы и компрессоры); машиностроение (вентиляторы, насосы, приводы с постоянным моментом нагрузки); пищевая промышленность (приводы центрифуг, например, при производстве сахара, насосы, тестомесильные машины, миксеры, мельницы, экструдеры, червячные прессы); судостроение (приводы главных, вспомогательных гребных винтов и подруливающих устройств); цементная промышленность (ленточные транспортеры, воздуходувки и дробилки); карьерные выработки (ленточные транспортеры, вибраторы, экскаваторы, дробилки); производство проволоки и тонкое вальцевание (приводы проволочноволочильных станов); силовые установки предприятий энергоснабжения (насосы, вентиляторы, угледробилки); бумажная промышленность (дисковые мельницы, насосы); подземные горные выработки (транспортерные машины, рудничные вентиляторы).
В отечественной промышленности наибольшее распространение получили асинхронные и синхронные электродвигатели с номинальным напряжением питания 6 и 10 кВ. Программа поставок зарубежных производителей высоковольтных электродвигателей стандартизирована на следующие напряжения: 2,4; 3,3; 4,16; 4,8; 6,0; 6,6; 7,2 кВ.
На рынке регулируемых высоковольтных электроприводов представлены несколько типовых схем реализации системы ПЧ—АД (6,0 кВ). Фирма Siemens предлагает высоковольтные преобразователи частоты Simovert MV, выполненные по схеме 12-пульсный выпрямитель—промежуточное звено постоянного тока — трехточечный инвертор напряжения. Выходной инвертор напряжения реализован на базе высоковольтных /бДГ-транзисторов. Система включает в себя следующие компоненты: силовой выключатель среднего напряжения, управляемый от преобразователя частоты; входной согласующий трехобмоточный трансформатор с вторичными обмотками, сдвинутыми друг относительно друга на угол 30 эл. град.; 12-пульсный неуправляемый выпрямитель, состоящий из двух диодных 6-пульсных мостов; звено постоянного напряжения с сглаживающими конденсаторами и измерительным преобразователем постоянного напряжения; трехточечный инвертор с измерительными преобразователями выходного тока и напряжения инвертора; высоковольтный асинхронный двигатель. В моделях с выходным напряжением до 4,16 кВ возможно непосредственное подключение выходного инвертора к двигателю.
Для управления частотой вращения двигателей на 6,0 и 6,6 кВ с квадратичным моментом нагрузки на валу дополнительно используется повышающий выходной синусоидальный фильтр. Преобразователи Simovert MV выпускаются в диапазоне мощностей от 660 до 7200 кВ-А. Возможны их комплектация 24-пульсным блоком входного выпрямителя и исполнение с воздушным или водяным охлаждением. Цифровая система управления преобразователя включает в себя алгоритм векторного управления, позволяющий достичь устойчивого регулирования выходной частоты в диапазоне 1:10. В стандартном исполнении максимальная выходная частота преобразователя составляет 100 Гц.
Широкое распространение получили высоковольтные преобразователи частоты с инверторами напряжения на базе запираемых тиристоров (GTO, IGCT) фирм ABB, Mitsubishi Electric, Allen-Bradley, Alstom.
117
Корпорация Mitsubishi Electric предлагает схему построения высоковольтного преобразователя частоты, которая в настоящее время является наиболее современной. Схема состоит из входного трансформатора, многоуровневого инвертора и системы управления. Входной трансформатор служит для преобразования входного напряжения 3 фазы, 6 кВ в выходное напряжение 18 фаз, 578 В, которое после выпрямления питает ячейки инвертирования.
Основной особенностью данного трансформатора является то, что его вторичные обмотки разделены на три группы по шесть обмоток в каждой. Фазовый сдвиг между соседними обмотками в группе составляет 10°, а между первой и шестой обмотками группы — 50°. Каждая выходная обмотка трансформатора нагружена на выпрямитель своей ячейки инвертирования.
По аналогичной схеме построены преобразователи частоты, выпускаемые компаниями General Electric и Robicon.
Существенным недостатком рассмотренных высоковольтных электроприводов является их большая стоимость. Снижение стоимости достигается применением двухтрансформаторной схемы, в которой двойная трансформация напряжения осуществляется с помощью понижающего Т1 и повышающего Т2 высоковольтных трансформаторов, что позволяет использовать для регулирования частоты относительно дешевый низковольтный преобразователь. Такие двухтрансформаторные преобразователи отличают относительная дешевизна и простота практической реализации, поэтому они часто применяются для управления высоковольтными электродвигателями в диапазоне мощностей до 1,5 МВт. При большей мощности электропривода трансформатор Т2 вносит существенные искажения в процесс управления электродвигателем. Для улучшения формы выходного напряжения низковольные преобразователи комплектуются выходными синусоидальными фильтрами.
Основными недостатками двухтрансформаторных преобразователей являются высокие массогабаритные характеристики, а также меньшие по сравнению с другими схемами КПД (93...96 %) и надежность. Преобразователи, выполненные по такой схеме, имеют ограниченный диапазон регулирования частоты вращения двигателя как сверху, так и снизу от номинального значения. При снижении частоты на выходе преобразователя увеличивается насыщение сердечника и нарушается расчетный режим работы выходного трансформатора Т2, поэтому, как показывает практика, диапазон регулирования ограничен пределами яноч > п > 0,5/?ном.
3.1.4. Электродвигатели и мотор-редукторы
Электродвигатели. Наибольшее распространение в электроприводах переменного тока получили низковольтные асинхронные двигатели с короткозамкнутым ротором. Их массовое применение обусловлено высокой надежностью, простотой эксплуатации, сравнительно низкой стоимостью и хорошими регулировочными свойствами при работе от преобразователя частоты. Соединение вала двигателя с рабочим органом машины или механизма может выполняться напрямую — безредукторным способом либо через понижающий (а в некоторых случаях через повышающий) редуктор. Способ механического соединения зависит от конструкции, требуемой скорости вра
118
щения и момента приводного механизма, однако предпочтительным является использование безредукторных приводов [54]. При невозможности безре-дукторного исполнения привода в современном машиностроении широко применяются мотор-редукторы — электродвигатель и понижающий редуктор, образующие единую конструкцию. Область применения мотор-редукторов, как правило, ограничена мощностью 200 кВт. Более мощные редукторы изготавливаются на заказ. Производство асинхронных электродвигателей широко развито в России и за рубежом. Отечественные электромашиностроительные предприятия выпускают; асинхронные двигатели общепромышленного назначения различного конструктивного исполнения (серий 4А, 5А, 6А, АИР и др.) и их модификации специального назначения; взрывозащищенные двигатели (серий BA, ВРА, 2В, АИМ и др.); крановые и лифтовые двигатели (серий MTF, МТН, MTKF, МТКН, 4МТМ, 4МТКМ, 5АН, АНП и др.); высоковольтные асинхронные двигатели (серий А4, ДА304 и др.).
Среди зарубежных производителей наиболее широкую производственную программу низковольтных асинхронных двигателей предлагает компания Siemens (см. приложение).
Электродвигатели с механическими тормозами. Во многих приводных системах, используемых для позиционирования рабочего органа, двигатель должен быть оснащен дополнительным механическим тормозным устройством. Двигатели с тормозом применяются и в тех случаях, когда необходима высокая степень безопасности. Например, в подъемных устройствах, когда двигатель электрическим способом останавливается при определенном положении привода, для его надежной фиксации налагается стояночный тормоз. Подобные требования к безопасности действительны и для систем, чувствительных к отказу электросети. В этом случае механический тормоз двигателя является гарантом экстренной остановки. При подаче напряжения на катушку тормоза он освобождается (отпускается) электромагнитным способом, при снятии напряжения тормоз автоматически налагается усилием пружин. Тормозной момент дисковых тормозов регулируется посредством установки различных комплектов пружин, т.е. в заказе необходимо указывать требуемый тормозной момент двигателя, выбранный по каталогу в соответствии с условиями эксплуатации. Например, для подъемных устройств из соображений безопасности следует выбирать тормозной момент приблизительно вдвое больше необходимого номинального момента двигателя.
Защита двигателей от перегрева. Условием стабильности вращающего момента двигателя является сохранение эффективности его охлаждения даже в нижнем диапазоне частоты вращения. Для двигателей с самоохлаждением это невозможно, поскольку при снижении частоты вращения уменьшается и эффективность вентиляции. Если вентилятор принудительного охлаждения не используется, вращающий момент необходимо снизить. Работать с постоянным вращающим моментом и без принудительного охлаждения может только двигатель большего, чем требуется, типоразмера. В этом случае при той же полезной мощности, но большей площади поверхности двигателя, тепловые потери будут эффективно отводиться даже на низкой частоте вращения. При выборе максимальной частоты вращения следует учитывать условия работы редуктора. При высокой окружной скорости входной ступени увеличиваются
119
потери от перемешивания масла, возрастает трение в подшипниках и манжетах, повышается уровень шума. Эти факторы ограничивают максимально допустимую частоту вращения двигателя. Нижняя граница диапазона частоты определяется параметрами самой приводной системы.
Для защиты обмоток двигателя от перегрева используются устройства, действующие в зависимости от значений тока и температуры двигателя. Токозависимыми защитными устройствами являются, например, автоматические выключатели, а термочувствительными — термисторы и биметаллические выключатели (термостаты). Термисторы и биметаллические выключатели срабатывают при достижении максимально допустимой температуры обмотки, причем измерение производится непосредственно в месте ее повышения. Предохранители не защищают двигатель от перегрузок. Они используются исключительно для защиты подводящих кабелей от короткого замыкания. Защитные автоматические выключатели обеспечивают достаточную защиту двигателя от перегрузки при работе в нормальном режиме с малым числом включений, недолгими запусками и умеренным пусковым током. Однако их не следует использовать при работе в режиме с большим числом включений (более 60 в час) и тяжелом запуске.
Мотор-редукторы. Состоят из электродвигателя и понижающего редуктора, образующих единую конструкцию. Тип редуктора выбирается с учетом монтажного пространства, способа крепления и соединения с приводимым механизмом. Мотор-редукторы производятся российскими и зарубежными компаниями, наиболее крупными из которых являются SEW-Eurodrive, Flender, Sumitomo, Varvel, Motovario и др. Типы выпускаемых мотор-редукторов, принципы их расчета и выбора наиболее обстоятельно даны в каталогах компании SEW-Eurodrive.
3.1.5. Коммутационная и защитная аппаратура, дроссели и фильтры
Коммутационная и защитная аппаратура, дроссели и фильтры предназначены: для устранения нежелательного влияния преобразователя частоты на двигатель и питающую сеть, зашиты преобразователя частоты и питающих кабелей, аварийного отключения преобразователя и двигателя от силового питания. Схема подключения коммутационной и защитной аппаратуры, дросселей и фильтров показана на рис. 3.2.
Выбор аппаратов защиты для преобразователей частоты определяется их номинальным входным током, указанным в каталоге. Причем нет необходимости использовать быстродействующие автоматические выключатели и полупроводниковые предохранители, рекомендуется применять стандартные автоматические выключатели для защиты двигателей. Как правило, рекомендуемые аппараты защиты указаны в каталогах по выбору преобразователей. При отсутствии таких данных выбор автоматического выключателя определяется максимально возможной перегрузкой преобразователя, которая в общем случае составляет около 150 % его номинального входного тока в течение 60 с.
Сетевой контактор КМ1 на рис. 3.2 обеспечивает функцию аварийного останова электропривода, а также может использоваться для безопасного его
120
Ul/Ll
V1/L2
W1/L3
PE
Рис. 3.2. Схема подключения защитной и коммутационной аппаратуры преобразователя частоты
121
отключения. Выбор сетевого контактора следует производить по номинальному входному току преобразователя. Не рекомендуется использовать контактор для управления пуском/остановкой привода под нагрузкой. Это приведет к нежелательному износу контактора, а также увеличит время запуска привода за счет процедуры его инициализации при подаче силового питания. Для управления пуском/остановкой следует использовать сигнальные цепи преобразователя.
Сетевой коммутационный дроссель L1 снижает гармоники тока, которые вырабатывает в преобразователе блок выпрямления или блок выпрямления/ рекуперации. Эффект применения дросселя зависит от отношения мощности короткого замыкания (КЗ) питающей сети к мощности привода; рекомендуемое значение этого отношения более 33:1. Используется 2%-ный дроссель для блоков выпрямления и 4%-ный дроссель для блоков выпрямления/рекупе-рации. Сетевой коммутационный дроссель также снижает выбросы тока, вызванные скачками напряжения в сети (например, при работе компенсирующих устройств или замыкании на землю) или переключениями на подстанции.
Согласующий автотрансформатор, предназначенный для повышения напряжения обратного моста блока выпрямления/рекуперации относительно напряжения питания на 20 % во время рекуперации энергии, имеет два типа исполнения: для работы в режиме рекуперации 25 % времени цикла (ПВ 25 %) и 100 % времени цикла (ПВ 100 %).
Помехоподавляющие фильтры (входные) Z1 совместно с коммутационными сетевыми дросселями уменьшают напряжение помех преобразователя, блока выпрямления и блока выпрямления/рекуперации. Существуют помехоподав-ляющие фильтры с номинальными током до 2500 А и напряжением до 690 В для разных типов промышленных сетей.
Звено постоянного тока, снабжающее инвертор постоянным напряжением, питается от блока выпрямления или блока выпрямления/рекуперации, предохранители на входе которых также защищают его от КЗ и перегрузок. Возможны три способа подключения инвертора и блоков:
1. Непосредственное подключение инвертора через встроенные предохранители в звене постоянного тока.
2. Электромеханическое подключение инвертора и блоков торможения к звену постоянного тока через разъединитель QS (двухполюсное подключение) с двумя предохранителями (защищающими инвертор). При таком подключении или отключении на звене постоянного тока не должно быть напряжения.
3. Электрическое подключение инвертора к звену постоянного тока через разъединитель QS (двухполюсное подключение) с двумя предохранителями, двумя сопротивлениями предварительного заряда R и соединительным контактором КМ1 (рис. 3.3).
В базовой версии соединительным контактором можно управлять с помощью электроники инвертора, следовательно, можно включить или выключить инвертор, когда звено постоянного тока находится под напряжением. При включении и выключении импульсы инвертора заблокированы, т.е. переключение происходит не под током. При настройке необходимо предусмотреть, чтобы контактор не замыкался при работе, например при аварии питания катушки управления контактором.
122
Шина постоянного тока
Инверторы
Рис. 3.3. Схема электрического подключения модуля инвертора к шине постоянного тока
Блоки торможения и тормозные сопротивления используются в тех случаях, когда процессы торможения привода с выделением энергии на звене постоянного тока происходят редко и имеют кратковременный характер, например при аварийном торможении механизма. Блоки торможения в диапазоне мощностей от 5 до 20 кВт состоят из полупроводникового ключа и встроенного нагрузочного резистора (рис. 3.4). Для увеличения мощности торможения подключают внешний нагрузочный резистор. При этом встроенный нагрузочный резистор должен быть отключен. Блоки торможения в диапазоне мощностей от 50 до 200 кВт требуют подключения внешнего нагрузочного сопротивления. Блоки торможения соседнего габарита или одинакового габарита, например, 100 и 170
кВт или 5 и 10 кВт, можно подключать параллельно для увеличения мощности торможения. Однако для каждого блока торможения требуется свое нагрузочное сопротивление. Для инверторов, подключенных к общей шине постоянного тока с блоком торможения, рекомендуется использовать обратные диоды.
Выходные дроссели L2 (см. рис. 3.2) компенсируют емкостные токи в длинных кабелях. Максимальная длина кабеля питания двигателя, подключаемого к стандартному преобразователю без выходного дросселя, и при использовании выходного дросселя указана в каталогах. Если к преобразователю частоты подключено несколько двигателей, емкостные токи их кабелей складываются, и рекомендуется использование выходного дросселя. Общая длина кабеля включает в себя длины кабелей отдельных двигателей.
АС 230 В
UZ
Simovert
VC/MC
nC/L+ С/Lb —--------G
BV
Рис. 3.4. Схема подключения тормозного блока и тормозного сопротивления к преобразователю частоты
123
Для приводов с асинхронными двигателями с номинальной частотой до 87 Гц и максимальной частотой 200 Гц, а также для приводов с синхронными двигателями с максимальной частотой 120 Гц рекомендуется использование дросселей с стальными сердечниками. Для приводов с асинхронными двигателями с номинальной частотой до 200 Гц и максимальной частотой 300 Гц, а также для приводов с вентильными двигателями с максимальной частотой 600 Гц рекомендуется использование дросселей с ферритовыми сердечниками. Ферритовые дроссели допускается использовать при максимальной частоте ШИМ-преобразователя. Увеличение потерь в дросселе при увеличении частоты ШИМ компенсируется снижением мощности преобразователя. Работа преобразователя с частотой ШИМ свыше 6 кГц приводит к смещению резонансной частоты, и, следовательно, изменению максимальной длины кабеля. Допустимая длина кабеля при частоте /шим > 6 кГц рассчитывается по формуле /доп < /Табл(6//шим), гДе 4абл — данные из таблиц.
Выходной дроссель совместно с емкостью кабеля ограничивает производную напряжения на обмотке двигателя. Длины кабелей питания двигателей при работе от ПЧ с выходным дросселем, позволяющие ограничивать максимум du/d/на уровне 500 В/мкс, приведены в табл. 3.3.
Выходной dw/dz-фильтр (ограничения напряжения) используется при наличии сомнений в прочности изоляции двигательных обмоток. Для стандартных двигателей серий Siemens 1LA5, 1LA6 и 1LA8 эти фильтры применяются только при напряжении питания Un более 500 В + 10 %. Данные фильтры ограничивают производную напряжения на уровне < 500 В/мкс и пиковые перенапряжения на уровне менее 1000 В при t/c < 575 В и менее 1150 В при 660 В < < Uc < 690 В и длине кабеля питания двигателя < 150 м. Если дроссель и фильтр соединены последовательно, предельную длину кабеля можно определить из таблиц.
Начиная с значения тока 120 А, двигатель может питаться с помощью параллельных кабелей (вплоть до максимальной длины кабеля). Фильтр ограничения напряжения может быть использован до частоты 300 Гц и может работать только при подключенном к преобразователю двигателе.
Синусоидальный фильтр позволяет обеспечить практически синусоидальную форму напряжения и тока двигателя. При использовании синусоидального фильтра высшие гармоники в выходном напряжении по отношению к напряжению с частотой 50 Гц составляют всего 5 %, а также ограничивается уровень пиковых напряжений на обмотках двигателя. При проектировании привода необходимо иметь в виду, что максимальное выходное напряжение преобразователя или инвертора с синусоидальным фильтром составляет приблизительно 85 % от питающего напряжения, равного 380...480 В, и прибли-
Табл и ца 3.3
Мощность преобразователя, кВт Длина неэкранированного кабеля, м Длина экранированного кабеля, м
< 37 > 30 > 20
> 37 > 150 > 100
124
зительно 90 % от напряжения 500...690 В. Синусоидальные фильтры для блоков на 380...480 В, рассчитаны на частоту ШИМ 6 кГц. При этом максимальная выходная частота преобразователя составляет 400 Гц для компактного исполнения (типоразмеров A...D) и 200 Гц для встраиваемого исполнения (типоразмеров Е... G). Синусоидальный фильтр для блоков на 500...690 В рассчитан на частоту ШИМ 3 кГц. При этом максимальная выходная частота преобразователя составляет 200 Гц для компактного исполнения (типоразмеров B...D) и 100 Гц для встраиваемого исполнения (типоразмеров Е... G).
3.1.6. Устройства плавного пуска и торможения асинхронных двигателей
Устройство плавного пуска и торможения (УПП) представляет собой тиристорный регулятор напряжения, обеспечивающий плавный пуск и остановку трехфазных асинхронных двигателей с короткозамкнутым ротором. Данные устройства являются современной альтернативой традиционным способам пуска посредством воздействия на напряжение статора асинхронного двигателя, таким как переключение звезда/треугольник, автотрансформаторный пуск, введение добавочных сопротивлений в статорную цепь. В отличие от традиционных способов УПП за счет плавного тиристорного регулирования напряжения на статорных обмотках обеспечивает бесступенчатый пуск и останов двигателя, защиту механизмов и двигателей, а также связь с системами автоматизации. Применение УПП является экономичным решением, позволяющим уменьшить стоимость эксплуатации механизмов путем снижения механических воздействий и улучшения эксплуатационной готовности оборудования, а также уменьшить влияние пуска двигателей на электрическую сеть за счет ограничения бросков тока и провалов напряжения в сети. Наиболее часто УПП применяются для центробежных механизмов, насосов, вентиляторов, компрессоров и конвейеров [И]. Выпуск УПП осуществляется большинством компаний — производителей электроприводов и систем автоматизации.
Основные функции УПП обстоятельно рассмотрены в документации на продукцию компании Schneider Electric (см. приложение).
3.1.7. Средства модернизации существующих электроприводов постоянного тока
Многие действующие электроприводы постоянного тока находятся в эксплуатации более 15 лет и оснащены аналоговыми системами управления. При модернизации механическую систему и силовую часть электропривода сохраняют, а секцию управления с замкнутыми контурами регулирования тока якоря и скорости двигателя заменяют микропроцессорным модулем. Фирма Siemens предлагает готовое решение по модернизации систем управления приводов постоянного тока в действующих промышленных установках — модуль SIMOREG СМ. Это экономичный способ получения современного электропривода постоянного тока, обладающего всей полнотой функций тиристор-
125
Binary select inputs WEB
210
211
212
213
214
215
216
&
-&
0-
-@-
0^
P24_S1)
нм
X161
Rx-/Tx-
T/R Rx+/Tx+
R/T 1 Ч=Р»<1ВА RX-/TX-
Rx+/Tx+
Clk. O«<1BA Rx-ZTx-
Rx+/Tx+
f Rx-/Tx-
Х165
X166
Tx+i
+ Rx+/Tx+
RS485
|61
£204 I 1205
Motor temperature
KTY84 / PTC ’
8
9
I I 10
1 1 11
&
<&
&
Binary select inputs < WEB
44
45
40
41
42
43
-0-
X164
dM
dM
P24_S
Tx-
&-
-&
0 0
62
63
64
&-
ф-
-0-
65
Rx-/Tx-M
MH
X162 Г”) 18 ,-x
19 lj0
rvi i 4tr 20 | I
21 I 10
M i— X164 •x
MF
X163 -LM
CUD2 (optional)
Main setpoint
KTY84/PTC
Switch-on/ shutdown Enable signal
Supply
Connection for pulse (2) encoder
35
36
37
Or 42г *& to
*&
-0
-0
-0
dM
CUD1 X110/X111
P10 + 1%/10mA
N10 ±1%/10mA
5
6
7
22
23
24
34
Open- and closed-loop control for armature and field
P24T
C98043-A7006
MH
X163
Tx-
Tx-
RS485 BA
Rx+/T x+
Rx-/Tx-
MH
X172
I act__
MF
MF
38
39
26
-&
-0-
&
&
0
X171
P24_S
Ml—
X175
MF
MF
_L м Selection 5/15V
27
.|M 200mA max.
28
сомр-_ X > Y “
Track 1 >
29,
30
Track 2
31
32
Zero mark>
33
О X107
-0
-0
0
-0
-0-
-0-
-0-
42г
&
&
&
-0-
56 r1)
58 I l
59 | |
60 I I
13 । '0
14;;
15-40
161
17 1 10
P24
Analog tacho
RS232/RS485 to X300
Armature current
X171 i
X109
C98043-A7001
ТВ and CB boards
Рис. 3.5. Принципиальная схема подключения силовых цепей и цепей управления
126
Parallel switch interface (2x)
Power Interface
1) P24_S total max. 200mA
BA = electronically switchable bus termination
to OP1S
модуля SIMOREG CM (см. также c. 128 и 129)
127
From the backplane zr wiring =
3AC 50-60Hz, 400V {
3AC 50-60Hz Г
20-1000V I
1АС 50-60HZ, 230V {
Q
A-\
' X101
'IK
or
---fv W !~'Гф~У Ф 1V V V l~
XT T T ~ ' T
j]- 7 wr
Analog tachometer
E stop
Power ON__________
Electronics supply
Fan ON
Fuse OK
E stop
Supply voltage armature
Armature voitage______
ES/ P24
XR 1 ।
109
110 K1
Firing pulses armature
Armature current
Loads
Temperature monitoring
Fan OK
External error
Supply voltage field
Firing pulses field
Field current actual value
C98043-A7042 Power interface
Рис. 3.5. Окончание
85V
XS1_4
120
XS20
XS21
XS20_1
, Fuse
J OK
XS12_4
i Armature voltage
1 Supply voltage 1 armature yj
1 XS21
□sslsO
C98043-A7043 i
XIMP 1. .3 ‘
X21A1
X22Aj
X21A
X31 к
хз.з
X3 2 у
XL 2
X22A
(X21PAR
ximp 4...6 ।
r®
X22PAR
X7
122
<&
123
124
* External
125 t monitoring
X102 1
128
-{(НН)]------|1 и ну- -
XS12_3 XS12_2 XS12_1
250V 575V 1000V
XS1_3 XS1_2 XS1_1
C98043-A7044 Fuse monitoring ;
85V 250V 575V 1000V
C98043-A7044 Voltage measurement !
©
i Supply voltage
XU2
XV2
XW2
XC2
XD2
XU4
XV4
XW4
XC4
XD4
XU3
XV 3
XW3 XC3 XD3
External power section
monitoring
1D1)
XF W •
Analog tachometer
3C
e
XT (103, 104)
Shunt
> 3D
e
<2> Conversion to field extra-low voltage
C98043-A7043
' XIMP11. .16 X16_1 (V)>
V X15_1(1C1)>
0-
XU1
XV1
XW1
XC1 1C1 >
XD1 -*-lD1 >
TXIMP21...26 X25J(1D1)>
<1 > Voltage measurement from module C98043-A7043 (firing pulse transformer) or directly from the power section
! C98043-A7044 Field supply
। xf и:
ЩС1)
Й Pulse encoder Terminals --------*12/ X173 (26. .33)
129
ного преобразователя с микропроцессорной системой управления. Адаптация модуля SIMOREG СМ к существующим компонентам электропривода производится путем параметрирования. Помимо секции управления такой модуль содержит силовую секцию с тиристорным мостом для питания обмотки возбуждения двигателя с номинальным током не более 40 А. Все функции разомкнутого и замкнутого управления электроприводом, а также функции обмена данными по сетевым протоколам осуществляются с помощью двух микропроцессоров. Функции управления реализованы в программном обеспечении SIMOREG СМ в виде программных блоков, которые связывают между собой с помощью параметров. Секция управления модуля может комплектоваться дополнительными платами расширения входов/выходов и сетевыми картами.
Платы модуля SIMOREG СМ, обеспечивающие управление тиристорным мостом преобразователя, измерение напряжения на выходе моста и контроль целости предохранителей, можно размещать отдельно от секции управления непосредственно у силовой части преобразователя. Связь двух секций модуля осуществляется с помощью набора специальных кабелей.
Принципиальная схема подключения силовых цепей и цепей управления модуля представлена на рис. 3.5.
3.1.8. Кабели и провода
При выборе, разводке и подключении кабельно-проводниковой продукции для систем регулируемых электроприводов постоянного и переменного тока необходимо руководствоваться действующими нормативными документами по использованию кабелей и проводов в электрических сетях (ПУЭ), а также рекомендациями производителей подключаемого электрооборудования. Особое внимание при разводке и подключении силовых и слаботочных цепей к регулируемым электроприводам требуется обращать на соблюдение требований электромагнитной совместимости (ЭМС) (см. подразд. 2.6). Преобразователи частоты рассчитаны для работы в промышленных условиях, где ожидается высокий уровень электромагнитных помех. Общие требования обеспечения ЭМС:
все устройства в шкафу электрооборудования должны быть заземлены короткими заземляющими проводами с большим сечением, причем провода должны быть соединены с общей точкой или сборной шиной РЕ',
сам преобразователь и все подключенные к нему устройства управления (например, программируемые контроллеры) присоединяются к шине заземления, или общей точке, короткими проводами с большим поперечным сечением;
зажим для заземления в клеммной коробке электродвигателя, управляемого преобразователем, присоединяется непосредственно к зажиму заземления {РЕ) этого преобразователя;
предпочтительны плоские проводники, которые при высоких частотах имеют меньшие сопротивления и потери;
необходимо разделять управляющие и силовые проводники, используя для этого разделенные кабельные каналы, пересекающиеся под углом 90°;
130
для подключения цепей управления к преобразователю необходимо использовать экранированные провода;
катушки управления контакторов системы электропривода должны быть защищены от помех ЛС-цепями при управлении переменным током и обратными диодами при управлении постоянным током;
для подключения электродвигателя рекомендуется использовать армированный или экранированный кабель, причем экран должен быть заземлен на обоих концах.
Общая схема подключения силовых и слаботочных проводников в системе электропривода приведена на рис. 3.6.
Условия подключения следующие:
соединение шин РЕ и ТЕ выполняется проводником минимальной длины;
расстояние между местом соединения арматуры с петлей цехового заземления и другим ближайшим заземлением производственного оборудования должно быть не менее 3 м;
кабели связи прокладываются в заземленной с обоих концов трубе;
шина РЕ должна быть соединена с арматурой, корпус трансформатора должен быть заземлен;
трубы и кабели заземляются с обеих сторон;
корпус каждого двигателя постоянного тока должен быть заземлен недалеко от двигателя, возможно также заземление корпуса на шину РЕ в шкафу электропривода;
каждый двигатель переменного тока должен быть заземлен на расстоянии не более 6 м от двигателя, обязательно заземление корпуса на шину РЕ в шкафу электропривода;
корпусы оборудования системы управления должны быть соединены с петлей цехового заземления на расстоянии не более 6 м;
для получения наименьшего сопротивления рекомендуется прокладывать одну шину ТЕ в нескольких соединенных щитах;
кабель между датчиком скорости и преобразователем прокладывается в заземленной с обеих сторон трубе, экран кабеля подключается к шине ТЕ только со стороны преобразователя;
в случае большого числа щитов рекомендуется соединять все шины РЕ.
Классификация проводок, используемых в схемах силовых цепей и цепей управления комплектных электроприводов, приведена в табл. 3.4.
Общие требования:
стальные трубы, входящие в шкаф, должны быть надежно изолированы для предотвращения попадания в него воздуха и воды;
для алюминиевых труб применимы те же рекомендации по укладке, что и для стальных;
экраны кабелей класса 2, идущих от шкафа управления к внешним устройствам, соединяются только со стороны этих устройств, а экраны кабелей, идущих из одного шкафа в другой, соединяются с обеих сторон. Кабельные разъемы должны иметь хороший электрический контакт с экраном кабеля по всей его длине;
подключение силового питания асинхронного двигателя от преобразователя частоты рекомендуется выполнять экранированным кабелем. Рекоменду-
131
Рис. 3.6. Общая схема подключения силовых и слаботочных проводников в системе
132
Вводные шины шкаф силового переменного тока
Линия связи в Секция электропривода электрооборудования (проводка класса 4)
4 4
электропривода
133
Таблица 3.4
Вид кабеля Класс проводов Подгруппа проводов Вид цепи Пример использования Тип кабеля Минимальное расстояние между стальными монтажными конструкциями для проводок разных классов, мм Примечания
45 4 3 35 2 25 1
Силовой 4 5 Переменного тока (> 600 В) 2,3 кВ. Трехфазные сети АС Согласно ПУЭ, ГОСТ См.примечание 7 1, 2, 5
— Переменного тока (< 600 В) 400 В. Трехфаз-ныс сети АС 0 1 6 9
Постоянного тока Питание якоря двигателя постоянного тока
Питание возбуждения двигателя постоянного тока
Контрольные 3 — Логическая 220 В АС/DC Реле развязки для модулей ПЛ К См. примечание 7 1 0 9 9
Питания 220 В АС Источники питания, датчики
5 Логическая 24 В АС/DC Реле развязки для модулей ПЛ К
Сигнальный 2 — Аналоговые сигналы Сигналы обратной связи (5...24 В DC) Экранированный Belden 8735, 8737, 8404 См. примечание 7 6 9 0 25 2, 3, 4, 5, 6
Цифровая (с низкоскоростной передачей) Сигналы уровня TTL
5 Цифровая (с высокоскоростной передачей) Импульсные датчики, тахометры Экранированный Belden 9730
Кабели связи 1 Последовательный интерфейс RS232, RS422 Экранированный. RS232 -Belden 8735, 8737 RS422- Belden 9729, 9730 См. примечание 7 9 9 25 0
5 Последовательный интерфейс 20 Кбод Модули удаленного ввода/ вывода ПЛ К Дуаксиаль-ный Belden 9463, A-В 1770 CD
С ПЛ К. Последовательный интерфейс > 5 мВ Control Net Коаксиальный A-В 1786 RG-6, Belden 3092A
D Параллельный интерфейс DeviceNet A-B1485-C- Pl-C
Е Ethernet Зависит от ПЛ К
а\
Окончание табл. 3.4
Вид кабеля Класс проводов Подгруппа проводов Вид цепи Пример использования Тип кабеля Минимальное расстояние между стальными монтажными конструкциями для проводок разных классов, мм Примечания
4.S’ 4 3 3S 2 2S 1
Кабели связи 1 F ПЛК. Последовательный интерфейс > 5 мВ Control Net Оптический кабель См. примечание 7 — — — — —
Примечания: I. Входной и выходной силовые кабели должны укладываться в одну трубу.
2. Рекомендации по укладке:
провода разных классов должны укладываться отдельно;
не допустима укладка проводов различных классов в одной трубе.
3. Все провода классов 1 и 2 должны иметь экран согласно ГОСТу.
4. Для разделения проводов различных классов в кабельном канале необходимо использовать стальные разделители.
5. Используемая для прокладки кабелей труба должна быть сплошной и металлической.
6. Полная информация об укладке проводов класса 1 дана в инструкции по монтажу конкретного контроллера.
7. Провода класса 45' рекомендуется укладывать в раздельных каналах или каналах с разделительными барьерами.
емая металлическая оплетка — рифленый алюминий (наилучший вариант), сплетенный алюминий или сплетенная сталь.
3.1.9. Управляющие и сетевые средства электроприводов
Алгоритмы управления электромагнитными и механическими переменными в системах комплектных электроприводов реализуются на базе как встроенных в электропривод, так и внешних модулей и блоков управления — программируемых контроллеров, средств приема и передачи информации.
Модули контроля и управления в составе комплектных электроприводов представлены базовыми платами управления электроприводов с встроенным программным обеспечением, позволяющим конфигурировать различные структуры управления электромагнитными и механическими переменными в зависимости от прикладных задач, решаемых комплектным электроприводом. Платы управления электроприводов содержат определенный набор дискретных и аналоговых входов/выходов, интерфейсов для связи с другими приводами, датчиками и системами автоматизации верхнего уровня. Базовые функции плат управления могут быть расширены за счет установки дополнительных прикладных карт связи и управления, а также использования внешних программируемых контроллеров. Функциональность базового программного обеспечения и производительность микропроцессорной системы управления электропривода зависят от сферы его применения, которая определяется фирмой-производителем при выпуске определенной серии преобразователей. Например, преобразователи частоты Simovert VC используются при требовании высоких точности и динамики регулирования. Базовая плата управления преобразователя CUVC содержит разъем для подключения импульсного датчика скорости, четыре двунаправленных цифровых входа/ выхода, три цифровых входа, два аналоговых входа и два аналоговых выхода (рис. 3.7).
Предусмотрена установка в преобразователе до шести дополнительных карт расширения, в том числе технологических плат Т100, ТЗОО, Т400 с модулями программного обеспечения, адаптированного для решения конкретных задач. В базовом программном обеспечении платы управления предусмотрены блоки, которые могут быть запрограммированы пользователем с помощью системы BlCO-параметрирования (Binector/Connector). Таким образом увеличивается адаптивность преобразователя к требованиям пользователя. Информация между функциональными блоками системы управления передается с помощью коннекторов, которые представляют собой 16 и 32-битные сигналы, или бинекторов, по сути являющихся теми же коннекторами, но для передачи логических сигналов. Возможно написание программ обработки данных сигналов с помощью библиотеки из 240 свободных функциональных блоков, доступных в базовом программном обеспечении. В качестве свободных блоков доступны следующие:
блоки общего назначения (фиксированные задания, блоки индикации, преобразовательные и диагностические блоки);
арифметические и управляющие блоки (сумматоры, умножители, делители, генераторы абсолютного значения, фильтры, инверторы знака, ограни-
137
оо
Внешнее питание 150 мА
Х101
Плата
Р24 В управления
Microcontroller
Двунаправленные цифровые входы/выходы /вых ^20 мА
о-
М24
Вых/вх
Выходы
Цифровые входы Л,=3,4 кОм
Входы
Последовательный интерфейс 2 USS (RS485)
&
UARI
Вход
Выход Вход
Выход Вход
Слот А
Слот С Слот D Слот Слот Слот
Е F G
PMU
Х300
Опорный потенциал для RS485
4 двунаправленных входа/выхода
RS485P
RS485N
Выход Вход
Выход Вход
Вход
Вход
бход
и и и и и и и и
BOOT
О
Z
Q
ai.
о о
Bi
О о о о
о о о о о
О
Q
ой
at.
ai
Опорные потенциалы
-10... +10 В
/<5 мА
Аналоговый вход 1 (не дифференциальный)
11 бит + знак
U ' Лшутр = 60 кОм
I: ЛВНутр = 250 кОм (S3 закрыто)
Аналоговый вход 2 (не дифференциальный)
Аналоговый выход 1
Аналоговый выход 2
10 бит + знак (/:/<5мА <
I .R< 500 Вт
Вход для тахометра: термистор 35 мА при 15 В
/max ^<00 КГЦ
Рис. 3.7. Функциональная схема базовой платы управления преобразователя CUVC
чители, сигнализаторы предельных значений, выбор минимума и максимума, таймеры, элементы памяти, произвольные характеристики);
логические блоки (элементы И, ИЛИ, исключающее ИЛИ, НЕ, И —НЕ, 7?5-триггеры, D-триггеры, таймеры, генераторы импульсов);
сложные блоки (задатчик интенсивности, программный счетчик, ПИД-регулятор, генератор колебаний, управление тормозом и др.).
Интерфейсные и сетевые средства электроприводов. Передача данных на нижних и средних уровнях автоматизации между программируемыми контроллерами, приводами, датчиками, средствами визуализации и управления технологическим процессом осуществляется по стандартизованным сетевым протоколам.
Описания наиболее известных промышленных сетей можно найти на Internet-сайтах, указанных в приложении.
3.1.10. Датчики в системах электропривода
Датчики скорости широко применяются в системах комплектных электроприводов постоянного и переменного тока. Применявшиеся ранее аналоговые тахогенераторы заменяют сегодня более точные, надежные и помехоустойчивые цифровые датчики — абсолютные и инкрементальные энкодеры, а также оптоэлектрические пристраиваемые датчики для регистрации отрезков пути, углов поворота или числа оборотов — резольверы. Эти датчики производят как российская (СКВ ИС), так и зарубежные компании (Heidenhine, Leine&Linde, Siemens, Hubner, Omron, Schneider Electric, Avtron и др.). Применяют их вместе с системами числового программного управления (ЧПУ), приводами и устройствами определения положения. При использовании инкрементальных датчиков после каждого отключения сети необходимо проводить процедуру реферирования (вывода в ноль) промышленного механизма, так как после отключения питания его движения не регистрируются. Абсолютные датчики, напротив, регистрируют эти движения механически, и после включения питания показывают действительное значение, т.е. процедура реферирования здесь не нужна. Датчики выпускаются на напряжение питание 5 В DC или на выбор на напряжение от 10 до 30 В DC. Большинство систем управления передают напряжение питания датчика через сигнальный кабель. Датчики на 10... 30 В DC позволяют использовать длинные кабели. Инкрементальные датчики работают по принципу оптоэлектронной развертки делительных дисков в проходящем луче. Источником света при этом является светодиод. Модуляция светотени, возникающая при вращающемся вале датчика, регистрируется фотоэлементами. Через подходящее распределение штрихового образца на связанном с валом делительном диске и неподвижной диафрагме фотоэлементы выдают два путевых сигнала — А и В, смещенных относительно друг друга на угол 90°, а также нулевой сигнал R. Электроника датчика усиливает эти сигналы и преобразовывает их в выходные сигналы требуемого вида:
дифференциальные сигналы (TTL) и интерфейс передачи RS422; аналоговые сигналы sin/cos;
сигналы HTL (High Voltage Transistor Logic).
140
Таблица 3.5
Технические характеристики датчика Датчик с TTL (RS422) Датчик с sin/cos Датчик с HTL Двухимпульсный датчик с TTL (RS422)
Напряжение питания Предельная частота: -ЗдБ -6 дБ 5BDC±10% или 10...30 В DC 5В DC±10% > 180 кГц > 450 кГц 10...30 В DC 5 В DC +5 %
Максимальная частота считывания 300 кГц — 300 кГц Импульс 1:160 кГц Импульс 2:1 МГц
Уровень сигнала TTL (RS422) Синусоидальный HTL UH>21 В при 1н = 20 мА и 24 В UL > 21 В при IL = 20 мА и 24 В TTL (RS422)
Время переключения (10...90%) Время подъе-ма/спада t+/t_ < 50 нс — Время подъе-ма/спада tjt_ < 200 нс Время подъема/ спада Z+/L < 100 нс
Фазовое положение сигнала А относительно сигнала В 90 эл. град. (90± 10) эл. град. 90 эл. град. 90 эл. град.
Максимальная длина кабеля, идущего к следящей электронике 100 м 150 м 100 м 100 м (до 500 кГц) 50 м (до 1 МГц)
Максимальное разрешение 5000 имп/об 2500 имп/об 2500 имп/об Импульс 1 — 1024 имп/об Импульс 2 — 9000 имп/об
Точность, утл. с ±18°х3600/число импульсов Импульс 1—±63 Импульс 2—+12
Максимальное число оборотов механических 12 000 мин-'
Момент трения при 20 °C Момент трогания при 20 °C < 0,01 Н • м <0,01 Нм
141
Окончание табл. 3.5
Технические характеристики датчика Датчик с TTL (RS422) Датчик с sin/cos Датчик с HTL Двухимпульсный датчик с TTL (RS422)
Максимальное ускорение > 105 рад/с2
Момент инерции ротора 1,45 х 10’6 кг м2 20х I0 6 кг м2
Степень защиты по DIN EN 60529 (IEC 60529) IP67 на корпусе IP64 на входе вала
EMV Проверено на электромагнитную совместимость (89/3 36/EWG)
Масса = 0,25 кг = 0,7 кг
В датчиках с интерфейсом RS422 (TTL) за счет обработки передних и задних фронтов сигналов можно увеличить разрешение в четыре раза. Для достижения более высокого разрешения в вышестоящую систему управления интерполируют сигналы синусных датчиков. Датчики с интерфейсом HTL хорошо подходят для использования с модулями счетчиков программируемых контроллеров.
Датчики абсолютного значения (угловые кодирующие устройства) основаны на принципе считывания, как и инкрементальные датчики, но обладают большим числом дорожек. Например, при 13 импульсных дорожках в однооборотных датчиках, кодируются 213 = 8192 шагов. Используемый одношаговый код (код Грея) позволяет обеспечить отсутствие ошибок считывания. После включения промышленного механизма значение позиции сразу же переносится в систему управления. Процедура реферирования не производится. Передача данных от датчика в систему управления происходит либо через синхронный последовательный интерфейс SSI, EnDat или же через Profibus-DP.
Сравнительные технические характеристики инкрементальных и абсолютных датчиков с различными интерфейсами передачи данных приведены в табл. 3.5, 3.6. Для примера рассмотрены датчики Simodrive Sensors производства компании Siemens. Однооборотные датчики имеют определенное разрешение, например 8192. Каждой позиции датчика приписано определенное кодовое слово. После 360° значения позиций снова повторяются. Многооборотные датчики в дополнение к значению абсолютного положения в течение одного оборота регистрируют определенное значение импульсов. Это обеспечивается за счет считывания с других кодирующих дисков, связанных с валом датчика через шестерни передачи. При обработке 12 следующих импульсных дорожек дополнительно могут кодироваться 212 = 4096 оборотов.
Инкрементальные и абсолютные датчики могут иметь различное конструктивное исполнение. Различают датчики с цельным и полым валом. Датчики с цельным валом сопрягаются с валом вращения двигателя/механизма с помощью специальных пружинных, сильфонных или пластинчатых муфт. Датчики с полым валом насаживаются непосредственно на вал двигателя/механизма.
142
Таблица 3.6
Технические характеристики датчика Датчик абсолютных значений с синхронным последовательным интерфейсом SSI Датчик абсолютных значений с EnDat Датчик абсолютных значений с Profibus-DP (EN 50170)
Рабочее напряжение на датчике 10...30 В DC 5 В DC+ 10% 10...30 В DC
Потребление тока ~ 180 мА — многооборотный = 120 мА — однооборотный = 250- мА — многооборотный = 180 мА — однооборотный 300... 100 мА (3,5 Вт)
Тактовый вход Приемник разностных кабелей по стандарту Е1А RS485
Выход данных Ведущий элемент разностных кабелей по стандарту EIA RS485
Допустимое число оборотов электрических 1500 мин1 при точности ±1 бит
Максимальное число оборотов механических 12000 мин 1 — однооборотный 6000 мин — многооборотный 12000 мин"1 — однооборотный 10000 мин"1 —многооборотный 12000 мин"1 — однооборотный 6000 мин"1 — многооборотный
Максимальная длина кабеля, идущего к следящей электронике 50 м — до 1 МГц 100 м — до 300 кГц 400 м- 100 кГц 50 м — до 1 МГц 150 м - до 300 кГц 100 м —до 12 Мбит/с 200 м — до 1,5 Мбит/с 1200 м — до 93,75 Кбит/с
Максимальное число участников — — 99
Разрешение 12 бит — однооборотный (4096 шагов) 24 бит — многооборотный (4096 x 4096 шагов) 13 бит — однооборотный (8192 шагов) 25 бит — многооборотный (4096x8192 шагов) 12 бит — однооборотный (4096 шагов) 24 бит — многооборотный (4096x4096 шагов)
Длина телеграммы 13 бит — однооборотный, без четности 25 бит — многооборотный, без четности Соответственно спецификации EnDat —
Инкрементальный импульс — 512 имп/об —
Окончание табл. 3.6
Технические характеристики датчика Датчик абсолютных значений с синхронным последовательным интерфейсом SSI Датчик абсолютных значений с EnDat Датчик абсолютных значений с Profibus-DP (EN 50170)
Вид кода: считывания переноса Gray Gray Gray Двоичный Gray Двоичный
Нагрузка шины — — = 20 мкс на датчик при 12 Мбит/с
Время цикла — — 667 мкс
Точность ±1/2 LSB ±60" ±1/2 LSB
EMV Проверено на электромагнитную совместимость (DIN EN 50081 и EN 50082)
Максимальное угловое ускорение 105 рад/с2
Момент инерции: около синхронизирующего фланца около клеммного фланца 2x106 кг м2 3x106 кг - м2
Степеньзащиты по DIN EN 60529 (I ЕС 60259) с соединенным валом/без соединения IP67/IP64
Масса однооборотного/ многооборотного, около 0,2/0,3 кг 0,35/0,35 кг 0,5/0,7 кг
Для тяжелых условий эксплуатации применяются датчики с усиленными подшипниковыми узлами и повышенной до IP68 степенью зашиты. Для контроля состояния датчиков предлагаются специальные системы диагностики, например, система ADS (Advanced Diagnostic System), разработанная компанией Leine&Linde. Эта система позволяет отслеживать состояние всех ключевых узлов датчика и тем самым предупреждать возможную неисправность датчика задолго до ее проявления.
Выбирая датчик положения, прежде всего необходимо правильно определить приоритетные критерии: разрешение и точность; линейность; скорость измеряемого процесса; условия применения и класс защиты; надежность; габаритные размеры; стоимость. Необходимо также учесть, что датчики могут определять абсолютное или относительное положение контролируемого объекта. Абсолютный датчик вырабатывает сигнал, являющийся функцией положения одной из его частей, связанных с подвижным объектом, а изменения этого сигнала отражают перемещение. Это резистивные (потенциометрические) датчики, индуктивные датчики с подвижным сердечником, емкостные датчики с подвижными обкладками и цифровые кодовые датчики абсолютных значений. Относительный датчик генерирует единичный импульс на каждом элементарном перемещении, а положение датчика определяется суммой импульсов, зависящей от направления перемещения. Достоинством таких датчиков по сравнению с абсолютными являются простота и низкая стоимость, а недостатком — необходимость периодической калибровки и дальнейшей микропроцессорной обработки данных.
3.1.11. Низковольтные комплектные устройства
Низковольтные комплектные устройства (НКУ) предназначены для приема и распределения электроэнергии, а также для обеспечения управления, регулирования, измерений, сигнализации и зашиты оборудования, осуществляющего производство, передачу и использование электрической энергии. Требования к НКУ, номинальное напряжение которых не превышает 1000 В переменного тока частотой не более 1000 Гц или 1500 В постоянного тока, определяет ГОСТ Р 5132.1-2000 (МЭК 60439-1-92).
Согласно определению НКУ представляет собой комбинацию низковольтных коммутационных аппаратов и устройств управления, измерения, сигнализации, защиты, регулирования, полностью смонтированных изготовителем на единой конструктивной основе со всеми необходимыми внутренними электрическими и механическими соединениями и соответствующими конструктивными элементами.
Различают НКУ распределения и управления полностью прошедшие типовые испытания, т.е. соответствующие без значительных отклонений типовому НКУ, испытанному согласно ГОСТ Р 51321.1 — 2000, и прошедшие частичные типовые испытания, т.е. НКУ, включающие в себя узлы, прошедшие типовые испытания, и узлы, не подвергавшиеся типовым испытаниям с условием, что их технические характеристики являются производными (полученными, например, расчетом) от технических характеристик подобных узлов, прошедших типовые испытания.
145
НКУ классифицируются по следующим признакам: виду конструкции; месту установки; возможности перемещения; степени защиты; виду экранирования; способу установки составных частей (например, стационарные и съемные); мерам защиты обслуживающего персонала; виду внутреннего разделения ограждениями или перегородками; типам электрических соединений функциональных блоков. Виды конструкций НКУ приведены на Internet-сайтах, указанных в приложении.
3.2. Расчет режимов работы и выбор
автоматизированных электроприводов
3.2.1. Расчет и выбор комплектных электроприводов и их компонентов
Широкий спектр продукции, представленной на современном рынке регулируемых электроприводов, в сочетании с высокопроизводительными компьютерными средствами автоматизации обеспечивает возможность решения прикладных задач автоматизации любого уровня сложности. Актуальной задачей, возникающей сегодня перед проектировщиком систем автоматизации типовых производственных механизмов и технологических комплексов, является расчет и выбор компонентов комплектных электроприводов машин и комплексов по следующим критериям, определяющим технические и экономические показатели создаваемых систем:
обеспечение требуемых технических характеристик системы;
соответствие международным стандартам и положениям;
экономичность принимаемых технических решений;
надежность и универсальность;
устойчивость к внешним факторам, действующим со стороны нагрузки, питающей сети, окружающей среды;
оптимизация по критериям энерго- и ресурсосбережения;
простота в обслуживании и ремонтопригодность.
Тщательная проработка технических решений при первоначальном расчете и выборе комплектного электропривода, как правило, помогает предотвратить появление проблем при пуско-наладке и дальнейшей эксплуатации электропривода, а также снизить уровень затрат на внедрение системы.
Приведем общие положения, на которые необходимо обращать особое внимание при выборе электропривода переменного тока на базе асинхронного двигателя.
• Выбор номинальной мощности преобразователя частоты по номинальной мощности двигателя не является достаточным. При выборе стандартных приводов в общем случае необходимо осуществлять проверку соответствия номинального тока двигателя номинальному выходному току преобразователя, т.е. соблюдение условия /лв < 7пр. Выбор мощности привода, предназначенного для механизма с постоянным моментом нагрузки, требует предварительного анализа нагрузочной диаграммы этого механизма в целях проверки способности преобразователя выдерживать ожидаемые перегрузки.
146
• Учет требуемого рабочего диапазона регулирования скорости двигателя. Работа в области частот выше номинальной (50 Гц), как правило, возможна только при пониженном моменте двигателя, т.е. при Л-/,в < М.,в ноч = (9550Рцв ном)/лдв ном (где Мав ном — номинальный момент двигателя, Н м; Рдв.ном — номинальная мощность двигателя, кВт; плв.ноч — номинальная частота вращения ротора двигателя, об/мин). Необходимо также учитывать, что максимальная частота вращения ротора определяется параметрами механической части двигателя. При работе двигателя в области низких частот с моментом, близким к номинальному, необходимо учитывать параметры системы охлаждения двигателя. Во избежание перегрева, а следовательно, потерь мощности двигателя в этом режиме требуется использовать принудительную вентиляцию.
• Возможность работы привода в тормозном режиме с отдачей энергии торможения через модуль инвертора на звено постоянного тока. При проектировании приводов подъемно-транспортных машин, устройств размотки материала и прочих механизмов с большим моментом инерции, режим работы которых подразумевает быструю остановку или резкое снижение скорости, необходимо предусматривать тормозные модули (тормозные резисторы) либо модули рекуперации энергии торможения в питающую сеть.
• Учет длины силового кабеля для подключения двигателя. При превышении допустимой длины кабеля требуется предусматривать специализированный фильтр на выходе преобразователя частоты и учитывать дополнительные потери мощности в фильтре и питающем кабеле.
Для надежного функционирования электропривода необходимо обеспечить соответствие параметров питающей сети техническим характеристикам преобразователя.
Допустимые отклонения номинальных параметров питающей сети. Преобразователи частоты, серийно выпускаемые фирмами —производителями приводной техники, предназначены для эксплуатации в сетях с ограниченными значениями напряжения питания и частоты. Так, например, преобразователи частоты Simovert VC фирмы Siemens могут эксплуатироваться в сетях с следующими рабочими диапазонами трехфазного переменного напряжения: от 200 В -15 % до 230 В +15 %; от 380 В -15 % до 480 В +10 %; от 500 В -15 % до 600 В +10 %; от 660 В -15 % до 690 В +15 %.
Номинальная частота питающего напряжения для данных преобразователей должна лежать в пределах (50/60 Гц) ±6 %.
В некоторых случаях указанные пределы могут быть превышены. Например, питающее напряжение может резко возрасти на конечных участках длинных магистральных линий в вечерние часы и выходные дни, когда отключаются мощные потребители. При питании электроприемников от локальных источников электроэнергии (например, дизель-генераторов) возможно значительное снижение питающего напряжения. При проектировании электропривода необходимо проводить оценку возможных отклонений параметров питающей сети от номинальных.
Искажения в питающей сети. В большинстве случаев частота и напряжение питающей сети находятся в пределах нормы, однако периодически в сети возникают возмущения, которые могут привести к возникновению неисправностей или выходу из строя преобразователя. Для предотвращения таких ситуаций необходимо обращать внимание на следующие факторы: наличие обору
147
дования для коррекции коэффициента мощности сети (так как, например, переключение ступеней конденсаторной установки может вызвать большие броски напряжения, которые часто являются причиной выхода из строя преобразователей частоты); наличие мощного сварочного оборудования, особенно контактных и высокочастотных сварочных аппаратов; наличие других приводов, полупроводниковых преобразователей электротермических систем и т.д. Современные преобразователи частоты способны выдерживать довольно интенсивные возмущения в питающей сети, например броски напряжения до 4 кВ. Однако перечисленное оборудование может вызвать более мощные искажения. При невозможности устранения исходных причин искажений в питающей сети необходимо, как минимум, предусмотреть установку входных сетевых дросселей в цепи питания преобразователей, а также ограничителей перенапряжений на базе варисторов. Необходимо наличие защиты преобразователя от коротких замыканий в сети и устройства грозозащиты.
Сети с изолированной нейтралью. Некоторые промышленные установки предназначены для работы в условиях повышенных требований к электробезопасности. Как правило, питание таких установок осуществляется от сетей с изолированной нейтралью. Использование преобразователей частоты в таких сетях возможно только при отсутствии входных помехоподавляющих фильтров. При наличии в преобразователе встроенного фильтра подавления электромагнитных помех необходимо удалить конденсаторы фильтра, связанные с корпусом преобразователя. Для предотвращения нежелательных отключений преобразователя от замыкания выходной фазы на землю рекомендуется использовать устройство защитного отключения (УЗО).
Ограничения режимов со стороны двигателя. В стандартном исполнении асинхронный двигатель охлаждается с помощью крыльчатки, вращающейся со скоростью вращения его вала. Этот способ охлаждения эффективен при работе двигателя с номинальным моментом при номинальной скорости (зона I на рис. 3.8).
При работе в продолжительном режиме на пониженной скорости (зона 3) максимальный момент двигателя ограничен значением, равным 75 % номинального момента при нулевой частоте. Допустимый момент увеличивается до уровня номинального при увеличении частоты вращения до 50 % от номинального значения. При работе двигателя в данной зоне требуется применение вентилятора независимого обдува. Работа двигателя с увеличенным моментом (зона 2) обычно не продолжительна, так как ограничена перегрузочной спо-
собностью преобразователя (обычно 150 % номинального тока преобразователя в течение 60 с) и не приводит к перегреву двигателя.
Мд„, %
25 50 75 /, Гц
। 1
Рис. 3.8. Режимы работы системы ПЧ—АД под нагрузкой:
1 — зона работы с номинальным моментом при номинальной скорости; 2 - зона работы с увеличенным моментом двигателя; 3 — зона продолжительной работы на пониженной скорости
148
Рис. 3.9. Механические характеристики различных нагрузок:
1 — с постоянным моментом, не зависящим от частоты; 2 — с переменным моментом, зависящим от частоты; 3 — с нелинейной зависимостью момента от частоты
Работа стандартных асинхронных двигателей в диапазоне частоты выше номинальной,
как правило, ограничена двойной номиналь-
ной частотой вращения двухполюсного двигателя (6000 об/мин) вследствие
наличия ограничений со стороны подшипников. Однако в данном режиме про-
исходит снижение потока магнитного возбуждения (так как выходное напряжение преобразователя ограничено значением входного напряжения), что влечет за собой уменьшение максимального момента двигателя пропорционально повышению частоты вращения выше номинального значения. Если обмотки стандартного асинхронного двигателя с параметрами А/А 380/220 В соединить треугольником (номинальное напряжение двигателя UaK ном = 220 В) и питать его через преобразователь частоты с номинальным входным напряжением 400 В, номинальный момент можно обеспечить на частоте п, =
Тип нагрузки механизма. Выбор системы преобразователь частоты—двигатель определяется требованиями, предъявляемыми к диапазону регулирования скорости, и характеристикой нагрузки приводного механизма. Соотношение между частотой вращения п двигателя и моментом нагрузки М„ различно для разных классов машин и механизмов (рис. 3.9). Большинство из них могут
рассматриваться как нагрузки с постоянным, не зависящим от частоты вращения моментом (прямая 7). Типичным примером таких механизмов являются конвейеры, компрессоры и т.д.
Некоторые механизмы следует рассматривать как нагрузки с переменным моментом, зависящим от частоты вращения (кривая 2). Типичным примером таких нагрузок служат центробежные насосы и вентиляторы. Момент нагрузки этих механизмов пропорционален квадрату частоты вращения, а потребляемая мощность соответственно пропорциональна частоте вращения в третьей степени. Данный факт означает, что снижение частоты вращения двигателя приводит к значительному снижению мощности, потребляемой механизмом, и соответственно обеспечивает экономию электроэнергии, что является основной причиной применения регулируемых электроприводов вен
тиляторов и насосов.
Некоторые механизмы имеют нелинейные зависимости момента нагрузки от частоты вращения (кривая 5). Выбор двигателя для таких механизмов требует предварительного анализа их механических характеристик, так как необходимо обеспечить достаточный запас по моменту двигателя для реализации всех требуемых режимов работы механизма. Отдельного рассмотрения требует режим пуска привода, т.е. выбранный двигатель должен обеспечивать достаточный пусковой момент и момент, требуемый для ускорения механизма (см. подразд. 3.2.3).
149
3.2.2. Расчет гармоник тока и напряжения в электросети, питающей преобразователь частоты
Как было показано в гл. 2, неуправляемый диодный выпрямительный мост в составе преобразователя частоты, является источником высокочастотных гармоник тока и напряжения. В некоторых случаях необходимо оценивать уровень этих гармоник, так как превышение допустимого уровня их содержания в питающей сети вызывает дополнительные потери в питающем трансформаторе и другом силовом оборудовании. Для расчета уровня гармоник в конкретной питающей сети необходимо знать ее полное сопротивление, значение которого влияет на уровень тока короткого замыкания сети, номинальные параметры питающего трансформатора и установленное полное сопротивление питаемых электроприемников. Существуют прикладные программы для определения количественного состава гармоник тока и напряжения в питающей сети в зависимости от нагрузки, типа и числа подключенных преобразователей. Например, программное обеспечение Harmac4, созданное фирмой Siemens для анализа гармонического состава сети, питающей преобразователи частоты.
Состав гармоник, поступающих в питающую сеть, зависит от режима работы привода. Рассмотрим двигательный режим работы привода с использованием неуправляемого выпрямителя и генераторный режим с использованием модуля выпрямления/рекуперации, взяв за основу соответствующие эквивалентные схемы (рис. 3.10).
Рис. 3.10. Эквивалентная схема системы питающая сеть—ПЧ:
а — для двигательного режима работы с использованием неуправляемого выпрямителя; о — для генераторного режима работы с использованием модуля выпрямления/рекуперации
150
Предположим, что ток нагрузки /н остается постоянным и рассчитаем его соответственно для двигательного и генераторного режимов:
~ ^дв.ном/( ^вПдвПи), 4 ~ (^дв.номПдвПи)/^в>
где Рдв.ном — номинальная мощность двигателя; рДБ, т|и — соответственно КПД двигателя и инвертора; UB — выпрямленное напряжение на звене постоянного тока.
В двигательном режиме UB можно оценивать без учета падения напряжения в промежуточных цепях: UB = l,35t/c где Uc — напряжение питания сети на входе преобразователя. В генераторном режиме значение UB задается при настройке контура регулирования напряжения на звене постоянного тока.
Емкость конденсатора С определяется для конкретного преобразователя частоты или инвертора. Индуктивность сетевого фильтра £с рассчитывается исходя из мощности короткого замыкания .8КЗ на стороне высокого напряжения питающего трансформатора, его номинальной мощности 5ТН0М и напряжения короткого замыкания нКЗт( %), а также напряжения короткого замыкания входного сетевого дросселя нКЗд ( %) и номинальной активной или полной мощности инвертора .8/ ном. В режиме рекуперации энергии при наличии модуля выпрямления/рекуперации необходимо также учитывать напряжения короткого замыкания согласующего автотрансформатора нКЗАТ ( %). Суммарная индуктивность сети таким образом складывается из следующих компонентов:
Lc = СКЗв + ЕК31 + £кз, + (Екзат), где £'КЗв = //^/(Л’кэсо) — составляющая высоковольтной питающей сети; £КЗт = С2снКЗт/(5тН0мсо) — составляющая питающего трансформатора; £КЗд = ^сИкзд/С^и.ном®) — составляющая входного сетевого дросселя; £КЗАТ = = С2нКЗАТ/(5и.ном®) — составляющая согласующего автотрансформатора (при использовании модуля выпрямления/рекуперации); со = Inf.
Расчет гармоник, поступающих в питающую сеть, рассмотрим на примере привода мощностью 90 кВт при работе в двигательном и генераторном режимах.
Пример 3.1. Для работы в двигательном режиме используется преобразователь частоты мощностью 90 кВт с входным сетевым дросселем (ик3д = 2 %). В генераторном режиме используется инвертор с звеном постоянного тока мощностью 90 кВт, питающийся от модуля выпрямления/рекуперации мощностью 90 кВт с входным сетевым дросселем (иКЗд = 4 %)• Номинальный выходной ток преобразователя/инвертора 4.ном = 186 А. Инверторный мост модуля выпрямления/рекуперации подключается к питающей сети через согласующий автотрансформатор (икЗАТ = 2 %). Характеристики питающей сети, одинаковые для обоих режимов: используется трансформатор 2,2/0,4 кВ, .S’, ноч = 150 кВ А, иКЗт = 4 %, .8КЗ = 10 МВ А. КПД двигателя 94,9 %; КПД инвертора 98 %. Емкость конденсатора в звене постоянного тока преобразователя частоты и инвертора С = 12 мФ.
Компоненты для расчета индуктивности питающей сети £с:
т, 4002 r , 4002 0,04 ... _
£к3„ =----т----= 51мкГн; £кз„=---------т—— = 136 мкГн;
к3в 10 1 06 315 150-Ю3 314
Д<3л2 % -
4002 -0,02
>/3-400 186-314
= 79 мкГн;
151
~ —г-------7 — 158 мкГн; £«з at2% ~~ 79 мкГн.
V3-400 186-314 A
Таким образом, в двигательном режиме £с = £'КЗАТв + £кзт + £кзд2% = 266 мкГн, а в генераторном £с = L ^Зв + Т^зт + ^-кздгзг + £кзат2% ~ 424 мкГн.
Ток нагрузки в двигательном режиме при UR = 521 В
/н = ЛвнЛ^вПдвПи) = 90 103/(521 0,949 -0,98) = 186 А.
Ток нагрузки в генераторном режиме при UB - 521 В
Л = (Лв-ЛдвПиЖ = (90-103- 0,949 - 0,98)/521 = 161 А.
б
Рис. 3.11. Изменение тока (/) и напряжения (2) питающей сети в двигательном (а) и генераторном (б) режимах
152
Приведем количественные результаты анализа гармонического состава тока питающей сети в специализированном программном пакете Excel/VBA с графиками изменения формы тока и напряжения питающей сети в двигательном и генераторном режимах (рис. 3.11), тока и напряжения на звене постоянного тока ПЧ в двигательном и генераторном режимах (рис. 3.12), а также диаграммы, отражающие гармонический состав тока питающей сети (в % от основной гармоники) в двигательном и генераторном режимах (рис. 3.13).
Двигательный режим: = 145,5 А — амплитудное значение первой гармоники
тока питающей сети во вторичной обмотке трансформатора; cos <р(1) = 0,963 — коэффициент мощности первой гармоники; /сХ= 153,2 А — среднеквадратичное значение тока питающей сети во вторичной обмотке трансформатора; Лф2 = 7,2 — коэффициент искажения формы тока питающей сети во вторичной обмотке трансформатора; АГф| = 2 % — коэффициент искажения формы тока питающей сети в первичной обмотке трансформатора.
Генераторный режим:./с(1) = 152 А — амплитудное значение первой гармоники тока питающей сети во вторичной обмотке трансформатора; cos<р(|) = 0,796 — коэффициент
Рис. 3.12. Изменение тока (7) и напряжения (2) звена постоянного тока в двигательном («) и генераторном (б) режимах
153
Рис. 3.13. Гармоники тока питающей сети в процентах от основной гармоники в двигательном (а) и генераторном (б) режимах
тающей сети в вторичной обмотке трансформатора; АГф2 = 8,6 — коэффициент искажения формы тока питающей сети в вторичной обмотке трансформатора; Лф, = 2,4 % — коэффициент искажения формы тока питающей сети в первичной обмотке трансформатора; а.= 141,3° — угол открытия тиристоров модуля выпрямления/рекуперации.
Следует заметить, что ток нагрузки в звене постоянного тока в генераторном режиме ниже, чем в двигательном, вследствие влияния КПД двигателя и инвертора. Однако значение основной гармоники тока питающей сети в генераторном режиме больше, чем в двигательном, так как коэффициент мощности cos<p(|) в генераторном режиме меньше, чем в двигательном (угол открытия тиристоров модуля рекуперации Р*0). Данный факт обусловлен также применением повышающего автотрансформатора. Несмотря на большую индуктивность питающей сети Л в генераторном режиме наблюдаются более высокие гармоники тока из-за неблагоприятного влияния угла Р модуля выпрямления/рекуперации.
3.2.3. Расчет и выбор электроприводов непрерывного действия без рекуперации энергии торможения в электросеть
Режимы разгона и торможения. Если в режиме работы механизма с большим моментом инерции, требуется выполнение высокодинамичного разго-на/торможения, следует учитывать изменение момента, обусловленного инерционностью механизма, т.е. при разгоне необходимо обеспечивать дополнительный динамический момент. Согласно основному уравнению движения электропривода требуемый суммарный момент складывается из статического и динамического моментов. Режим разгона/торможения механизма определяется типом нагрузки. Если момент нагрузки (сопротивления) приводов насосов и вентиляторов определяется выражением Мс - Л/стах(и/итах)2, то при постоянном моменте двигателя (т.е. при разгоне с контролем ограничения тока при постоянном потокосцеплении двигателя) время его разгона от нулевой до максимальной скорости итах (об/мин) можно рассчитать по формуле
ТТЛ ,v'*max'
Zp бо7мдвл/стах
1П
max
Л/.,,, ^стах
154
Рис. 3.14. Изменение моментов двигателя Л/дв и нагрузки Мс при разгоне
Рис. 3.15. Пример разбиения на отрезки характеристик моментов двигателя Мзв и нагрузки Мс
где J — сумма момента инерции нагрузки и механических передач, приведенных к валу двигателя, и момента инерции ротора двигателя, кгм2.
Момент, требуемый для разгона механизма, определяется разностью моментов двигателя и нагрузки (рис. 3.14). По окончании разгона, т.е. при скорости итах, моменты двигателя и нагрузки сравниваются. Ускорение при разгоне тем выше, чем больше отношение М2В/М(.тах и чем ниже суммарный момент инерции системы.
Если зависимость момента нагрузки от частоты вращения отличается от квадратичной или момент двигателя не остается постоянным в период разгона, то время разгона
( йп
р “ 30 J Мт(п)-Мс(п)
Разбив данную функцию на т отрезков, можно получить следующую аппроксимацию (рис. 3.15):
t = ZlEy if 1 ! 1 Y _ п .
р 30 й 2 f Мдв/_, - + Л/дв,- - Mci р П‘-1)-
Для вычисления данного выражения необходимо иметь значения моментов двигателя Мш и нагрузки Мс, представленные в табличном виде. Для примера рассчитаем время разгона привода вентилятора.
Пример 3.2. Вентилятор, оснащенный редуктором с коэффициентом передачи i = 1/3, требуется разогнать до скорости ятах = 4450 мин-1. Мощность, потребляемая вентилятором на максимальной скорости, Ртлх = 67 кВт. Механическая характеристика вентилятора приведена на рис. 3.16, а его момент инерции JB = 25 кгм2.
Максимальный момент нагрузки
Мстах = Л™х9550/и = 67-9550/4450 = 143,8 Н м.
Таким образом характеристику момента нагрузки вентилятора можно записать в виде
Мс = 143,8(и/4450)2.
155
max
Рис. 3.16. Механическая характеристика вентилятора
По известному моменту инерции вентилятора выберем двигатель мощностью 75 кВт, имеющий следующие номинальные данные: МДВ|1ои = 484 Н м; ядвном = 1480 мин'1; /ав.пом — 1 34 A, ,/п. —1,4 КГ М-.
Суммарный момент инерции, приведенный к валу двигателя,
Г = ./в/г + JaB = З2 25 + 1,4 = 225 + 1,4 = 226,4 кг м2.
Характеристика момента нагрузки вентилятора, приведенного к двигателю, имеет следующий вид:
м:
тах f ^дв
/г)р 1/ 4450
Полагая КПД редуктора т]р = 1, получим
К
/ / \2
-3-143,8 =431.4
I 4450/3 ’I 1483 I
Для управления вентилятором требуется преобразователь частоты с следующими номинальными данными: РПчНом = 90 кВт; /Пчном = 186 А.
Ток двигателя во время разгона должен соответствовать номинальному длительному току преобразователя частоты. Таким образом, максимальный допустимый момент двигателя
м
: дв max
датах Да дв ) /( Л1В.НОМ
где /двтах = Лги ном = 186 А, а ток намагничивания двигателя /цдв = 0,35/ЛВ НОМ.
Следовательно,
-1^11; max’
.о. 8б2 - 0,352 1342
= 484. ----т-----—------- = 694
V1342 - 0,352 1342
Нм.
Время разгона вентилятора до ятах = 4450 мин'1
^дв max Т
60 ^Л/Дв max |дах
Расчет и выбор тормозных резисторов в системах без рекуперации энергии в электросеть. Для осуществления остановки или снижения скорости приводов
156
в генераторном режиме используются блоки рекуперации тормозной энергии в питающую сеть либо блоки торможения с встроенными или внешними тормозными резисторами. Использование модулей рекуперации энергии в сеть экономически оправдано для индивидуальных или многодвигательных приводов общей мощностью свыше 150...200 кВт, работающих в генераторном режиме с определенной цикличностью. При малых значениях времени цикла — общей мощностью свыше 200 кВт. В большинстве же случаев применяются блоки торможения с встроенными или внешними тормозными резисторами.
Тормозные резисторы предлагаются производителями преобразовательной техники в качестве дополнительной комплектации к преобразователям частоты и выбираются исходя из конкретных параметров режима торможения по каталожным данным. Основными параметрами, служащими для выбора тормозных резисторов, являются: номинальное сопротивление, продолжительность включения в процентах от общего времени рабочего цикла Т, пиковая мощность торможения Рттах в течение определенного времени, мощность торможения в продолжительном режиме PTill1T и температура окружающей среды. Некоторые производители указывают нагрузочную способность тормозного резистора в процентах от номинального момента конкретного привода при определенных параметрах рабочего цикла.
В общем случае пиковая мощность тормозного резистора рассчитывается по формуле PTmax= U2Bma/R, где С|тах — порог срабатывания тормозного прерывателя преобразователя частоты (либо прерывателя внешнего тормозного модуля); R — сопротивление резистора. Как правило, табличные данные пиковой, номинальной или продолжительной мощности тормозного резистора указываются производителями для конкретных преобразователей частоты с учетом порога срабатывания тормозного прерывателя, настроенного по умолчанию. Однако в некоторых случаях значение порога срабатывания может настраиваться пользователем. Соответственно снижение данного порога влечет за собой уменьшение допустимой пиковой мощности торможения.
Например, параметры тормозных резисторов для приводов серии Simovert VC указываются из расчета цикличности торможения 90 с (рис. 3.17). Величина Р20 характеризует допустимую (номинальную) мощность торможения в течение 20 с с цикличностью 90 с, Р3 — максимальную (пиковую) мощность
Рис. 3.17. Диаграммы изменения нагрузки при торможении привода с использованием внешнего тормозного резистора
157
торможения в течение 3 с с последующим ее линейным снижением в течение 20 с, а Ав — это максимально допустимая длительная мощность торможения. При этом Р20 = 4РДВ; Р3 = 6РДВ.
При выборе тормозного резистора необходимо учитывать цикличность и параметры режима торможения привода. Порядок действий при выборе тормозного резистора следующий.
1. Построить диаграмму изменения мощности торможения в течение рабочего цикла привода Рт =/(/).
2. Рассчитать среднее значение мощности торможения Рг ср в течение рабочего цикла.
3. Выбрать тормозное сопротивление из условия Ао > 4Рт.ср.
4. Определить максимальную (пиковую) мощность торможения Р, тах и проверить выполнение условия Рттах< 1,5 Ао- Если условие не выполняется, необходимо выбрать тормозной резистор большей мощности.
Если реальное время цикла не равно 90 с, процедура выбора тормозного резистора сводится к построению диаграммы изменения мощности торможения в течение рабочего цикла и выбору на ней отрезка времени Т = 90 с, где значение Ртср максимально. Дальнейшие действия в соответствии с пунктами 3 и 4 описанной методики.
Для определения максимальной мощности торможения при проверке условия Атах — 1,5 Р20 необходимо рассматривать всю область построенной диаграммы. Если торможение привода происходит нерегулярно и случается при остановке привода, методика выбора тормозного резистора аналогична методике, применяемой для времени цикла, отличного от 90 с.
Для определения мощности торможения при остановке необходимо рассчитать:
момент торможения привода, Н м,
ЛА- (Л«т)/(9,55гт),
где J2 — суммарный момент инерции вала двигателя и нагрузки, приведенной к валу двигателя, кг- м2; «т — скорость двигателя в начальный момент торможения, мин1; /т — время торможения привода до полной остановки, с;
максимальную мощность торможения, кВт,
Атах = (Л/т«тПдв)/9550,
где г|дв — КПД двигателя;
среднее значение мощности торможения, кВт,
р = р П,
Мощность тормозного резистора можно определить на основе полученных значений средней и максимальной мощностей торможения.
Для примера рассмотрим расчет режима торможения привода вентилятора.
Пример 3.3. Привод вентилятора должен тормозиться с максимальной частоты вращения итах = 1500 мин до полной остановки с помощью существующего тормозного резистора. Предполагается, что нагрузка имеет квадратичную зависимость момента от частоты вращения.
Данные системы электропривода следующие: номинальная мощность четырехполюсного двигателя Ав.ном = 250 кВт; номинальный ток двигателя /дв ,юм = 430 А; номинальный момент двигателя Л/дв ноч= 1600 Н м; максимальная частота вращения венти-158
лятора лтах = 1500 мин '; потребляемая нагрузкой при лтах мощность Ртах = 198 кВт; момент инерции вентилятора JB = 223 кг м2; момент инерции вала двигателя JaB = = 3,6 кг м2; КПД двигателя г]ав = 0,962; номинальная мощность преобразователя частоты Рпчном = 250 кВт; номинальная мощность внешнего тормозного резистора Р20 = 100 кВт; пиковая мощность торможения Рттах = 1,5Р2о = 150 кВт; длительная мощность торможения РТХИ1Т = 25 кВт.
Для оптимального использования тормозного резистора целесообразно осуществлять торможение с постоянным темпом замедления, так как в случае торможения с постоянным тормозным моментом в течение одного и того же времени будет генерироваться большая пиковая мощность торможения. При оптимизации использования тормозного резистора необходимо учитывать пиковую мощность и энергию торможения, т.е. их значения должны оставаться в пределах допустимых.
1. Расчет режима торможения с постоянным темпом замедления. Найдем пиковую мощность торможения для тормозного резистора. Момент двигателя при торможении
М 11 н max
Таким образом,
^„ах60 _ 198 000 60 126р 5 н dto _ 2лятах
2лятах 2л 1500 ’ ' dt 60?Т
/2литах
60т
Соответственно
мощность двигателя в тормозном режиме
г 2пп 2л двт ‘60’ 60
/ 2 литах 60гт
Максимальная мощность двигателя
в тормозном режиме достигается при
и определяется выражением
дв.т max
^2лявшх 1
3-60Т/нтах 7т
/Л Л!г,а\ j 7л/7т,г., 1
4050 1/10ЛТнтах '
Минимально возможное время торможения определяется заданной пиковой мощностью торможения Рттах с учетом Рдв.ттах = Лтах/Лдв, т. е. минимальное время торможения
6 min
Ул/?тах
Л2Я2 П2 "тахчдв
10 40502Л/ Р2
iw ni.'.ju н тах-*т max
ппкк л215002 0,9622
226,6л 1500 л--------------------------
V 10 40502 1260,5 1500002
= 17,52 с.
2. Расчет энергии, выделяемой при торможении. Целью расчета является проверка на соответствие выделяемой тормозной энергии допустимому уровню. В режиме оста-
159
новки с постоянным замедлением скорость двигателя п = итах[1 - (г/гт)]. Соответственно мощность двигателя при торможении
р
1 дв.
2л
60
п
н mav'max
/2ли^ах ( ।__£
60/. L
Общий вид зависимости мощности двигателя от времени в режиме торможения нагрузки с квадратичной зависимостью момента от частоты вращения приведен на рис. 3.18. Отрицательная область характеристики соответствует режиму выделения тормозной энергии. Энергия, выделяемая при торможении на внешнем резисторе,
... I . п1В2лЛ
1Р = Пдв [ = ~^7----
1 «До I До. I
max^max
4
t0
2 60rT I /т
Время /0 можно определить из условия Рдв = 0:
/
1-
/2лЛтах 60Л/двтахГт
/,
I 226,6 2л 1500 11 у 52 — 4 у2 \60 • 1260,5 • 17,52 J ’ ” ’
с.
Отрицательное значение Го показывает, что даже в самом начале торможения тормозной момент превышает момент нагрузки. В этом случае значение /0 в выражении для расчета энергии торможения необходимо приравнять к нулю. Тогда
... 0,962 2л • 17,52 (1260,5 1500 226,6 - 2л 1500М „
Ид =-------тд------ -----------------7---------- = -1855 кВт • с.
60 [ 4 2-60-17,52 J
Допустимая энергия торможения, рассеиваемая на данном тормозном резисторе за 90 с (время рабочего цикла для тормозного резистора),
И^.доп = Л.длиг90 = 25 90 = 2250 кВт • с,
т.е. рассчитанное значение энергии находится в пределах допустимого.
Можно определить, что торможение привода должно осуществляться с минимальной цикличностью 7( И/Г/И/Гдоп)90 = 74,2 с.
Диаграммы изменения мощности и момента двигателя при торможении привода до полной остановки за 17,52 с приведены на рис. 3.19).
Проверка правильности выбора преобразователя частоты. Максимальный момент, развиваемый двигателем в режиме торможения в момент перехода через нулевую скорость (и = 0),
/2литах _ 226,6 2л 1500 _ , 60/, ” 60 -17,52 “
Максимальный ток двигателя, соответствующий моменту Л/дв.тих.
, ,2
= I ^лептах 1 / г 2 г 2 \ , г 2
лвтах J I Vjb.hom 2 ц ном / 2 ц ном •
\Ц -‘^дв.ном I
Рис. 3.18. Зависимость мощности двигателя от времени в режиме торможения нагрузки с квадратичной зависимостью момента от частоты вращения
160
Рис. 3.19. Диаграммы изменения за период торможения мощности (а) и момента (б) двигателя
Положим номинальный ток намагничивания двигателя /цноч = 0,31/1в ном. Тогда
Двтах = J (4302 - 0.31-’ -4302) + 0,312 • 4302 = 536 А.
лвтах A^1600 j
Параметры выбранного преобразователя частоты:
Л1Чном = 250 кВт; /пчном = 510 А; /рчтах = 694 А.
Таким образом, преобразователь частоты выбран правильно.
4. Расчет режима торможения с постоянным тормозным моментом. Максимальная мощность торможения в этом режиме достигается при п = птлх. Момент торможения определяется на основе пиковой мощности тормозного резистора:
МдВ.т = -(Рттах60)/(2тслтахт|Лв) =-(150 000 60)/(2л 1500- 0,962) = -993 Н • м.
Минимальное время торможения
t\ min
1")ТГИ ГК/f
_____° ^-'u/fmax__arctg 11 max
60^Л/нтахЛ/лв, у 4/двт
226,6 2тг 1500
бОд/1260,5 993
arctg
11260,5
993
= 26,9 с,
т.е. при той же пиковой мощности время торможения с постоянным тормозным моментом больше. Мощность двигателя при торможении в этом случае
Рдо.т = Мдвт2ли/60,
где
П _ Лтах tg arctg \4/Нтах/Л/дВТ \
6 0 тахЛ/лвт
Т 71ГИ
</ ^д.мтах
161
Таблица 3.7
/ t Лв
0 0 -155,93 0
1 2,69 -131,64 -371,91
2 5,38 -110,98 -685,69
3 8,07 -92,94 -949,42
4 10,76 -76,85 -1169,02
5 13,44 -62,21 -1348,87
6 16,13 -48,63 -1492,21
7 18,82 -35,85 -1601,47
8 21,51 -23,61 -1678,37
9 24,20 -11,72 -1724,06
10 26,89 0 -1739,22
Рис. 3.20. Диаграммы изменения за период торможения мощности (а) и частоты вращения (б) двигателя
Энергия торможения здесь может быть рассчитана только численными методами. Например, при разделении участка торможения на т сегментов можно получить следующую аппроксимацию:
1=т р , р
/=1
При разбиении участка торможения на 10 сегментов энергия торможения
И4 =-1739 кВт с.
Результаты численного расчета энергии торможения приведены в табл. 3.7.
Диаграммы изменения мощности и частоты вращения двигателя при торможении привода с постоянным моментом за 26,9 с приведены на рис. 3.20.
5. Расчет торможения с постоянным замедлением и последующим ограничением тормозного момента. При торможении с фиксированным темпом замедления момент двигателя возрастает при переходе частоты его вращения через нуль. В некоторых случаях необходимо ограничивать момент торможения, например до значения номинального момента двигателя. Однако при этом увеличивается продолжительность торможения. Для оптимизации использования тормозного резистора момент торможения ограничивают только при достижении максимальной мощности торможения, которая достигается на частоте вращения
п= Лм3т уз-60-
226,6 2л 15003
3-60 1260,5 17,52
= 1099,5 мин
162
Для расчета режима торможения с фиксированным темпом замедления без ограничения момента следует использовать ранее вычисленное время торможения rTmin = = 17,52 с. Момент торможения двигателя при достижении максимальной мощности
М - М { П -
1У1 дв.т УГ1нтах
60ZT
,^n^1099,5f 226,6 - 2тт • 1500 1ЭСаатт
= 1260,5 ----—-------------------- -1354,4 Н м.
1500 J 60-17,52
Момент торможения двигателя при переходе через нулевую скорость
/2литах 226,6 2л 1500 „
Л/ |В. тах =-тах =----------------= -2032 Н • м.
дв'тт 60rT 60-17,52
Таким образом, ограничивать тормозной момент можно в диапазоне от -1354,4 до -2032 Н-м. В данном примере момент торможения ограничивается номинальным моментом двигателя (-1600 Н-м), что иллюстрирует диаграмма на рис. 3.21.
Сначала рассчитаем частоту пх и момент времени t, перехода в режим ограничения момента торможения:
1 ( J 2лИтах
max 60/т
-1500 / 1 f 226,6 2л • 1500
1260,5 60-17,52
- 1600 = 877,8 мин
?! = Л] 1=17 52^-^2^=7,27 с. «max t 1500 1
Затем рассчитаем увеличенное время торможения
К = 6 +
_____^2л/7тах_____ 60^4/н max Мдв.ном
arctg
М шн may
^дв.пом
«1 «тах
226,6 2л • 1500 f 1260,5 877,8 ^ 1П ---, arctg ,—--— =19,28 60Т1Ж5 1600-----------------------1600 1500 j
В диапазоне времени от 0 до t} энергия торможения
[|/ _ Пдв 2яГт т1 60
М п ‘г‘ н тах'*тах
4
2 2 ляд,,, 2 • 60гТ
Рис. 3.21. Диаграмма изменения момента двигателя за период торможения
163
0,962 2л 17,52 1260,5-1500k к 7,27?'
60 4 ” 17,52
L V v } )
226,6 2л 15002 2-60-17,52
7,25 У'
17,52 J
= -1032 кВт • c.
Для расчета энергии торможения Wx2 в данном диапазоне необходимо определить мощность торможения:
Дзв.т — ном2лИ/60,
где
60^Л/н max-^дв.ном , ,
------7Z-------------V _ <11
В этом случае энергия торможения может быть рассчитана только численными методами. При разбиении участка торможения на 10 сегментов энергия торможения 1^-2 = -815 кВт-с. Таким образом, суммарная энергия торможения
= Ц/т1 + lkl2 =-1032 - 815 = -1847 кВт-с.
Результаты численного расчета энергии торможения приведены в табл. 3.8.
Диаграммы изменения мощности и частоты вращения двигателя при торможении привода с постоянным моментом за 19,28 с приведены на рис. 3.22).
Таблица 3.8
i t ^1дв J
0 7,27 -147,05 0
1 8,47 -130,23 -160,11
2 9,67 -114,14 -301,22
3 10,87 -98,66 -424,10
4 12,07 -83,69 -529,40
5 13,27 -69,14 -617,65
6 14,47 -54,92 -689,28
7 15,67 -40,97 -744,66
8 16,87 -27,21 -784,02
9 18,07 -13,57 -807,57
10 19,27 0 -815,41
Рис. 3.22. Диаграммы изменения за период торможения мощности (а) и момента (б) двигателя
164
3.2.4. Расчет и выбор электропривода циклического действия с рекуперацией энергии торможения в электросеть
Пример 3.4. Для примера рассмотрим расчет электропривода центрифуги. Центрифуга оснащена асинхронным шестиполюсным двигателем с системой принудительного охлаждения. Данные системы электропривода следующие: момент инерции пустого барабана JL = 565 кгм2; момент инерции заполненного барабана Jv= 1165 кг-м2; момент инерции заполненного барабана после удаления воды JF = 945 кгм2; частота вращения при загрузке nF= 180 мин-1; частота вращения при отжиме ns = 1240 мин-1; частота вращения при выгрузке nR = 70 мин-1; время загрузки tF = 34 с; время отжима rs = 35 с; время выгрузки tR = 31,83 с; время разгона от nF до ns tbs = 45 с; время торможения от ns до nR tv = 39 с; момент при выгрузке MR = 500 Н -м; момент трения 1/тр = 120 Н м; номинальная мощность двигателя Рлвноч = 250 кВт; номинальный ток двигателя /ввноч = 430 А; номинальный момент двигателя Л/1ВНОМ = 2410 Н м; номинальная частота вращения двигателя н1ВН„м = 989 мин-1; КПД двигателя г|дв = 0,96; момент инерции двигателя /1В = 7,3 кгм2.
На рис. 3.23 приведена диаграмма изменения частоты вращения центрифуги в течение рабочего цикла.
На диаграмме можно выделить следующие участ ки: 1 — разгон с частоты вращения выгрузки до частоты вращения загрузки. ЛЦ = tbF, 2 — загрузка с частотой вращения nF, At2 = tF; 3 — разгон с частоты вращения загрузки до частоты вращения отжима, ДГ3 = tbs; 4 — отжим с частотой вращения п5. Дц = ts; 5 — торможение с частоты вращения отжима до частоты вращения выгрузки, Дг5 = tF, 6 — выгрузка с частотой вращения nR, At6 = tR.
Времена tF, tbs, ts, tF и tR указаны в исходных данных. Разгон с частоты вращения выгрузки nR до частоты вращения загрузки nF должен осуществляться с тем же ускорением, что и разгон до частоты вращения ns. Таким образом
thF= tbs(nF- nR)/(ns- nF) = 45(180 - 70)/(1240 - 180) = 4,67 c.
Суммарное время цикла T- tbF+ tF+ tbS+ ts+ tv+ tR= 189,5 c.
Диаграмма изменения момента инерции центрифуги в течение цикла представлена на рис. 3.24. Предполагается, что момент инерции центрифуги линейно увеличивается в течение загрузки (участок 2) и уменьшается при разгоне до скорости отжима (участок 5) и выгрузке (участок 6). В общем случае для момента привода при изменении частоты вращения и момента инерции справедливо следующее выражение:
Рис. 3.23. Диаграмма изменения частоты вращения центрифуги в течение рабочего цикла, разбитого на 6 участков
Рис. 3.24. Диаграмма изменения момента инерции центрифуги в течение рабочего цикла, разбитого на 6 участков
165
.. , 2тг dn пп dJ
M = J —+ ---------,
60 dr 60 dr
где M — в H • m; J — в кг м2; n — в мин-1.
С учетом линейности характеристик я(г) и /(f) можно использовать следующие отношения:
dn _ Ал dJ _ А/
dt At ’ dt At
1. Расчет момента двигателя на участках цикла. Момент двигателя необходимо рассчитывать в начальной и конечной точках каждого участка (рис. 3.25). Момент в начальной точке участка будем обозначать индексом 0, в конечной точке — 1. Между этими точками момент изменяется линейно.
На участке I при разгоне с частоты вращения выгрузки до частоты вращения загрузки
Л/двю = МдВ11 = (Jl + + Мтр =
ои
= (565- 7,3)j^ 180 ~ 70 + 120 = 1532 Н м.
60 4,67
На участке 2 при загрузке с частотой вращения nF (Ап = 0; AJ* 0)
,, nnFJv-JL тс-180 1165-565 Л1
ЛЛвго = Мт2( ------ + Мтр = ---------+ 120 = 286 Н • м.
60 tF 60 34
На участке 3 при разгоне с частоты вращения загрузки до частоты вращения отжима (Ап * 0; A.J ф 0)
.. ! I т ns - nF TtnF J F - Jv ,r
= (Jv + -7^- -—-1- + Л^тр =
60 tbs 60 tbs
_ ..2ТГ 1240- 180 тс-180 945- 1165 „
(ll65 + 7-3)60-^5—+ -60---------— + ™ =
Рис. 3.25. Диаграмма изменения момента двигателя центрифуги в течение рабочего цикла, разбитого на 6 участков
166
i Z /г г \ 2 71 ГК ~ Пр TUK jF ~~ jV i t
MnB3i = (JE + Jw) — 5 + -А -5—+ Л/,р =
60 tbs 60 tbs
1пле РЧ2тг 1240-180 я 1240 945-1165 ...
= (945 + 7,3)-----------+------------------+ 120 = 2152 Н м.
V 60 45 60 45
На участке 4 при отжиме с частотой вращения п$ (Дп = 0; ДУ= 0)
Мш40 = Mw41 = Л/тр = 120 Н • м.
На участке 5 при торможении с частоты вращения отжима до частоты вращения выгрузки (Ди Ф 0; АУ = 0)
Л/дв50 = Л/дв51 = (JE + J^ + Чр =
OU ty
= (945 - 7,3) — 70 ~ 1240 + 120 = -2872 H • м.
60 39
На участке 6 при выгрузке с частотой вращения nR (Дп = 0; АУ^ 0)
»г > г тси е Jе 4' е 1 г Д’ 70 565 945 .... у т <
Л/1в6п = Л/1в61 = —— —--- + Л/т„ =--------------+ 120 + 500 = 576 Н м.
дв60 jb61 60 tR тр 60 31(583
2. Проверка теплового режима работы двигателя. На определенных участках цикла двигатель работает с частотой вращения больше номинальной, таким образом попадая в диапазон ослабления потокосцепления. В этом диапазоне для обеспечения требуемого момента двигателя необходим больший ток, чем в диапазоне с постоянным потокосцеплением, поэтому для проверки теплового режима двигателя целесообразно использовать метод среднеквадратичного тока.
Ток двигателя в диапазоне работы с постоянным потокосцеплением при п < пю ном
Ток двигателя в диапазоне работы с ослабленным потокосцеплением и > идв ном
дв
Ток двигателя рассчитывается в начальной (с индексом 0) и конечной (с индексом 1) точках каждого участка. На участках 3 и 5 дополнительно рассматривается точка входа в диапазон работы с ослабленным потокосцеплением (с индексом FW). Для упрощения расчетов предположим, что ток двигателя на этих участках изменяется линейно. Диаграмма изменения частоты вращения центрифуги в течение рабочего цикла с выделением диапазона работы с ослабленным потокосцеплением приведена на рис. 3.26:
д? = / Дд° ном = 45 1240 989 = 10 66 с;
'* bs ns-nF 1240-180
м -t ns~ «дв-ном 3q 1240 - 989 _
4/5/it - ty----------------- .59 ———— — 8,3/ c.
ns - nR 1240 - 70
На участке 1 при разгоне с частоты вращения выгрузки до частоты вращения загрузки
Чвю = = 1532 Н м;
167
Рис. 3.26. Диаграмма изменения частоты вращения центрифуги в течение рабочего цикла, разбитого на 6 участков
Л»10 = /двН^^^ (4302 - 133,32) + 133,32 = 292 А.
На участке 2 при загрузке с частотой вращения nf
Mib20 = Мцв21 = 286 Н м;
/дв20 = ^в21 j (4302 - 133,З2) +133,З2 = 142 А.
На участке 3 при разгоне с частоты вращения загрузки до частоты вращения отжима
Л^двзо = 2966 Н м;
/двзо = (43°2 - ЩЗ2) + 133Д2 = 520 А;
Мдв3Fw =М- ^дв-21 2Мдв3° дw =2152 21з2~2966 10,66 = 2344,8 Н м;
hs 45
j (4302 - 133,3’)TirvV =419,5 А;
Млв11 = 2152 Н-м;
Г 91 З2 <194Г)32 ( QRQ \2
Лв31 =, зП2- (4302 - 133,32) — + 133,32 —— = 469,9 А.
д \^2410j 1^ 989 J |J240 J
На участке 4 при отжиме с частотой вращения п$
^дв40 — ^Иав41 120 Н-М,
Л.« - Л.« ^J<430’-133,3=)^pl33,^ 3 А.
168
На участке 5 при торможении с частоты вращения отжима до частоты вращения выгрузки
-^дв50 — ^ib5FW — -^/ав51 — “2872 Н • М,
, 1(2872^мт2 ,„.,01240? ,„,2 ( 989 f .
/лв5п = J --- (4302 - 133,3-) ---- + 133,32 ----- = 620 A;
д 0 ^2410 J 989 J 1240 J
Лв5^ = Лв50 = (4302 — 133,32) + 133,32 = 505 A.
На участке 6 при выгрузке с частотой вращения пк
^двво = М1вб1 = 576 Н м;
ЛвбО = /двбЦ <43°2 - 133’ З2) + 133’ 32 = 1653 А-
Используя диаграмму, приведенную на рис. 3.27, рассчитаем среднеквадратичное значение тока двигателя центрифуги. Для участков 5 и 5, где ток двигателя изменяется, можно записать следующее соотношение:
'J /2dr = 1 (/,2 +/Д+1)А/,.
Тогда для всего рабочего цикла
Д?в.Д - + llo1 F + 3 (Д) + 73FtV + Л/ И ' М'Л “ ^6ли) +
— (-Orw + Л21 +AfW^31)^3W + ЦоЦ + 2 U50 + Hf»' + ЛоЛлИ Мб ЛИ +
+ /зли(^и — ^5Fw)+ = 2922 • 4,67 +1422 34 +
Рис. 3.27. Диаграмма изменения тока двигателя центрифуги в течение рабочего цикла, разбитого на 6 участков
169
+ |(5202 +419,52 +520 419,5)(45-10,66) +
+1 (419,52 + 469,92 + 419,5 • 469,9)10,66 +109,32 • 35 +
+ |(6202+5052 +620-505)8,37 + 5052(39-8,37) +165,32• 31,83 = 22 557 472 А2с;
дв.к
122 557 472 __
У 189,5
Рассчитанное среднеквадратичное значение тока двигателя находится в допустимых пределах, так как номинальный ток двигателя /двном = 430 А.
3. Расчет мощности торможения. Торможение двигателя имеет место при переходе из режима отжима в режим выгрузки на участке 5 (рис. 3.28). Тормозной момент двигателя при этом составляет 2872 Н м.
Максимальная мощность торможения на звене постоянного тока при частоте вращения
A max = ~|р ад™ = -^-р240 0,96 - 0,98 = 350,8 кВт.
Минимальная мощность торможения на звене постоянного тока при частоте вращения /гй
A min = ад™ = -^q7-Q 0,96 0,98 = 19,8 кВт.
Энергия торможения центрифуги в течение рабочего цикла (см. рис. 3.28) определяется следующим образом:
И2 = А+Ц+± Amin = 350, 8 + 19, 8 = ?
Среднее значение мощности торможения за рабочий цикл
А.ср = WT/T= 7226,7/189,5 = 38 кВт.
Вследствие большой мощности торможения целесообразно применение преобразователя частоты с модулем рекуперации энергии торможения в питающую сеть.
4. Выбор преобразователя частоты. Максимальный ток двигателя 620 А (в режиме торможения), а среднеквадратичный ток 345 А. Выбранный преобразователь частоты с рекуперацией энергии в сеть имеет следующие номинальные параметры: РПчном = = 250 кВт; /пчном = 510 А; /пч ,пах = 694 А; номинальный ток в звене постоянного тока А.ном — 605 А.
170
Проверим преобразователь на допустимый максимальный ток в звене постоянного тока в режиме рекуперации:
/в.рп1ах = Лтах/(1,35£/С) = 350,8-107(1,35-400) = 650 А.
Допустимый ток в звене постоянного тока преобразователя в режиме рекуперации составляет 92 % от значения тока, допустимого для двигательного режима:
4ртах = Л.н», 1.36 0,92 = 605 1,36 0.92 = 757 А,
где 1,36 — значение коэффициента, учитывающего перегрузочную способность ПЧ.
Таким образом, блок выпрямления/рекуперации преобразователя выбран правильно.
5. Выбор автотрансформатора для согласования модуля рекуперации с питающей сетью. При выборе согласующего автотрансформатора в первую очередь необходимо рассчитать среднеквадратичное значение тока в звене постоянного тока для режима рекуперации:
1 -± врк U ~ U с/ В в
| (350.82 + 19,82 + 350,8 19,8) 39/189,5 = 175 А.
Допустимое среднеквадратичное значение тока для согласующего автотрансформатора с продолжительностью включения 25 % определяется следующим образом:
/в.с.к = Л.НОМ • 0,92^ = 7,НЮ1 0,46 = 605 0,46 = 278,3 А.
При работе нескольких центрифуг возможен выбор системы многодвигательного привода, состоящего из модуля выпрямлении/рекуперации, шины звена постоянного тока и автономных инверторов для каждой центрифуги. При правильном согласовании циклов работы центрифуг энергия, передаваемая на звено постоянного тока при торможении одними центрифугами, может использоваться другими центрифугами в двигательном режиме. Таким образом возможен выбор модуля выпрямления/рекуперации меньшей мощности.
Tmax-^Tmin) Ф/Ф
max
3.2.5. Выбор электроприводов с учетом влияния условий эксплуатации и окружающей среды
Преобразователи частоты предназначены для эксплуатации в условиях промышленного производства. Однако существуют определенные ограничения по их использованию, которые необходимо учитывать при проектировании:
• для обеспечения свободной вентиляции необходимо выдерживать требуемые производителем зазоры между плоскостями блока преобразователя и соседним оборудованием;
• температура среды эксплуатации преобразователя в общем случае не должна превышать 40 °C. При превышении данного предела необходимо вводить поправку на снижение выходного тока привода. Следует также учитывать снижение выходного тока привода при установке преобразователя на высоте выше 1000 м над уровнем моря. Для учета данных факторов при выборе привода следует использовать поправочный коэффициент Кт (рис. 3.29). Учет снижения номинального выходного тока преобразователя при работе блока на высоте от 1000 до 4000 м над уровнем моря осуществляется с помощью
171
Рис. 3.29. Диаграмма изменения поправочного коэффициент Кт на высоте установки преобразователя выше 1000 м над уровнем моря в зависимости от температуры окружающей среды
Рис. 3.30. Диаграмма изменения поправочного коэффициента А) в зависимости от высоты установки преобразователя над уровнем моря
поправочного коэффициента Л7(рис. 3.30). При понижении температуры окружающей среды это снижение тока, если необходимо, может быть скомпенсировано поправочным коэффициентом К'/ (рис. 3.31). При высоте установки более 2000 м в соответствии с IEC 60664-1 кроме ограничения тока необходимо снижать напряжение. Снижение напряжения производится с помощью поправочного коэффициента К^для отдельных преобразователей (рис. 3.32);
• большинство современных преобразователей имеет степень защиты корпуса 1Р20, IP21 или IP56. При этом устройства со степенью защиты IP20 и IP21 требуют дополнительной защиты от попадания внутрь корпуса пыли, грязи и воды, как правило, они устанавливаются в щитах, имеющих требуемую степень зашиты корпуса, устройства вентиляции и кондиционирования;
Рис. 3.31. Диаграмма изменения поправочного коэффициента Кт привода в зависимости от температуры внешней среды
Рис. 3.32. Диаграмма изменения поправочного коэффициента Kv в зависимости от высоты установки преобразователя над уровнем моря
172
• промышленные преобразователи частоты предназначены для фиксированной установки и не обеспечивают устойчивость к повышенным ударным нагрузкам и вибрации. Допустимые нагрузки указываются в эксплуатационной документации;
• преобразователи частоты неустойчивы к воздействию коррозионно-активных сред.
3.3. Программные средства автоматизированных электроприводов
3.3.1. Библиотека программ стандартных функций управления
Функции систем разомкнутого и замкнутого управления частотой вращения и моментом двигателя и функции обмена данными по сетевым интерфейсам, диагностики и оперативного управления электроприводом реализуются в программном обеспечении преобразователей частоты с помощью функциональных блоков. Эти блоки могут параметрироваться и соединяться друг с другом в различных комбинациях посредством связующих цифровых сигналов — битов, 16- или 32-разрядных слов. Назначение функциональных блоков определяют исполняемые ими функции. Блоки содержат в своей структуре входы, выходы и параметры. Микропроцессорная система управления привода производит расчет функциональных блоков в заданной последовательности за определенные временные интервалы. Параметры обеспечивают адаптацию блоков к прикладным задачам, служат для построения связей между ними с помощью цифровых сигналов и визуализации внутренних сигналов системы управления привода.
В общем случае параметры бывают изменяемыми (настроечными) и неизменяемыми (индикационными). Каждый параметр имеет индивидуальный цифровой или буквенный идентификационный код. Некоторые параметры могут содержать индексы для хранения нескольких вариантов настроек. Обязательными атрибутами параметра являются также значение настройки по умолчанию (заводская установка) и диапазон настройки/индикации. Примерами настроечных параметров функционального блока являются нормирование входного сигнала, темп разгона/торможения в блоке генератора темпа изменения задания частоты (задатчика интенсивности), коэффициенты пропорциональной и интегральной составляющих ПИ-регулятора частоты и т.д.
Пользовательское меню преобразователя частоты для удобства настройки и диагностики разбивается на функциональные группы — подпункты, в которые входят параметры, относящиеся к взаимосвязанным функциональным блокам. В качестве примера можно назвать группы настройки преобразователя, двигателя, дискретных и аналоговых входов/выходов, технологических функций, формирования задания, диагностики неисправностей, обмена данными по встроенным сетевым протоколам и т.д.
Производители поставляют преобразователи с исходными (заводскими) установками параметров, содержащими некоторые базовые настройки. Изменения, внесенные в настройки параметров, всегда можно отменить, вернувшись к заводским установкам.
173
Для быстрого ввода в эксплуатацию преобразователя можно выполнить его упрощенную параметризацию, что допустимо для простых применений, когда условия работы привода четко определены и не требуется проведения его тестирования под нагрузкой с детальной настройкой параметров. Процедура быстрой параметризации включает в себя установку параметров, определяющих номинальные данные двигателя (его тип, частоту и напряжение питания, ток, мощность, cosip, КПД, частоту вращения вала, ток намагничивания, тип охлаждения), тип нагрузки на валу (с постоянным или переменным моментом), допустимую перегрузочную способность, источники подачи сигналов задания и команд управления, ограничения выходной частоты преобразователя (минимальное и максимальное значения), темпы разгона и торможения, выбор алгоритма управления частотой или моментом (скалярное, векторное с датчиком скорости или без датчика).
Если условия работы преобразователя заранее не определены и его настройка осуществляется непосредственно при пуске приводного механизма, требуется выполнение детальной параметризации. Назовем основные ее шаги.
1. Настройка силовой части — запись в определенный параметр системы управления привода кода, соответствующего конкретному заказному номеру силовой части преобразователя, что необходимо в случае замены платы управления или перестановки ее на другой силовой блок.
2. Настройка дополнительных плат и опций — осуществление конфигурации и настройки дополнительных плат расширения и обмена данными по стандартным сетевым протоколам.
3. Настройка преобразователя — указание реального значения напряжения на входе преобразователя, номинальных данных двигателя и датчика скорости (при его наличии), алгоритма управления частотой или моментом, частоты коммутации ШИМ инвертора, нормирующих значений для сигналов тока, напряжения, частоты, частоты вращения и момента. Для режима одновременной работы преобразователя на группу двигателей в параметре, определяющем номинальный ток двигателя, указывается сумма номинальных токов всех двигателей. Номинальный ток намагничивания двигателя, как правило, неизвестен, и его значение рассчитывается автоматически при введении номинальных данных двигателя. Для точного определения параметров двигателя необходимо выполнить процедуру его идентификации, т.е. определить параметры эквивалентной схемы замещения асинхронного двигателя (активные составляющие сопротивлений статора и ротора, индуктивности рассеяния статора и ротора, взаимную индуктивность), активную составляющую сопротивления кабеля двигателя, падение напряжения на IGBT-модулях и время запаздывания при подаче открывающих импульсов на IGBT-модули. Например, точное определение активного сопротивления обмотки статора существенно влияет на устойчивость системы векторного управления с датчиком обратной связи по скорости; также оно необходимо в режиме скалярного управления с увеличением выходного напряжения инвертора в области низких частот. Настраиваемые параметры показаны на эквивалентной схеме замещения системы ПЧ—АД (рис. 3.33).
Помимо параметров эквивалентной схемы замещения при идентификации можно определить характеристику намагничивания двигателя, что позволит улучшить динамику привода. Характеристика должна сниматься при работе
174
Инвертор
Падение напряжения на ключах (0...20 В)
Запаздывание ключей (0...3,5 мкс)
UZ
Кабель
2(ЯК+Л|)
Сопротивление кабеля (0...120 Ом)
А
А
R.
Двигатель
Сопротивление обмотки статора (10"3...2000 Ом)
—Л-------ч Индуктивность Индуктивность ----------------------- рассеяния
рассеяния
рассеяния рассеяния Гпппптмопаыыа
обмотки статора обмотки ротора ХРК™“а
/1П 3 1Л-Э .,Г.Л /10 3 10^ иГ.Л /О 100
Ri
Взаимная индуктивность (0...3000 мГн)
(10 ... 10 мГн)
L1
(0...300 Ом)
R2
(10 3...10J мГн)
А
А
Рис. 3.33. Настроечные параметры эквивалентной схемы замещения системы ПЧ —АД
системы ПЧ—АД в области ослабления поля (с выходной частотой более 50 Гц), особенно в режиме векторного управления.
Дальнейшая настройка привода подразумевает адаптацию параметров преобразователя к типу нагрузки на валу двигателя. Для настройки высокоточных приводов, как правило, предусмотрены функциональные параметры (макроконфигурации), определяющие в зависимости от типа нагрузки на валу двигателя базовые настройки набора параметров, отвечающих за динамические свойства привода.
Например, при настройке приводов серии Simovert VC можно выбрать базовые макроконфигурации для следующих стандартных применений:
• стандартные приводы (насосы, вентиляторы);
• механизмы с упругими связями, редукторами и большим моментом инерции (например, бумагоделательные машины);
• механизмы, работающие в режиме резких ускорений/замедлений с постоянным моментом инерции (например, летучие ножницы);
• механизмы, режим работы которых характеризуется резкими набросами нагрузки (для диапазона регулирования частоты не более 1:5);
• механизмы с мягкой рабочей характеристикой в области низких частот (при регулировании скорости с импульсным датчиком с большим числом импульсов на оборот);
• механизмы с высоким пусковым моментом (тяжелым пуском);
• механизмы с высокой динамикой в области ослабления поля (например, приводы испытательных стендов).
Приведенные макроконфигурации определяют настройки ряда параметров, существенно влияющих на динамические характеристики привода:
коэффициента Рр регулятора скорости, зависящего от суммарного момента инерции привода;
постоянной времени интегрирования тр регулятора скорости, определяющей точность поддержания заданной скорости и перерегулирование переходного процесса по скорости;
фильтрации сигнала измеренной скорости, используемой только в замкнутых системах регулирования скорости или момента привода при наличии импульсных помех в сигнале скорости;
175
оптимизации поддержания момента, компенсирующей влияние дискретности цифровой замкнутой системы регулирования скорости и повышающей точность поддержания момента при разгоне. При этом сигнал измеренной скорости подвергается дифференцированию. Для использования этой функции в сигнале датчика скорости не должно быть помех, обусловливающих возникновение колебаний в замкнутой системе;
темпа нарастания сигнала задания активной составляющей тока статора г)₽, снижение значения которого приводит к повышению динамики контура регулирования тока статора в области ослабления потокосцепления (при работе на частотах выше 50 Гц), а увеличение — снижает перерегулирование активной составляющей тока статора при резких бросках момента;
динамического момента — настройкой этого параметра обеспечивается дополнительный динамический момент в области низких частот при работе без датчика обратной связи, который задействуется в режимах ускорения/замед-ления;
фильтрации сигнала измеренного напряжения звена постоянного тока, снижение значения которого приводит к повышению динамики контура регулирования напряжения на звене постоянного тока;
задания потокосцепления двигателя относительно номинального значения в диапазоне частот от 0 до 50 Гц;
оптимизации работы при неполной нагрузке привода, позволяющей снизить потери в стали статора двигателя за счет задания снижения потокосцепления пропорционально снижению нагрузки на валу;
фильтрации сигнала задания потокосцепления двигателя, обеспечивающей устойчивость контура регулирования потокосцепления в режиме оптимизации при частичной загрузке и в области частот выше номинальной;
компенсации запаздывания срабатывания ключей инвертора, позволяющей компенсировать колебания момента в диапазоне частот выше 10 Гц.
Оптимизация настроек привода проводится вручную с использованием дальнейшей подстройки этих и ряда других параметров в соответствии с индивидуальными требованиями в каждом конкретном случае.
Современные автоматизированные электроприводы на базе преобразователей частоты обладают дополнительными функциями, расширяющими возможности настройки системы. Назовем наиболее распространенные из них.
Автоматический перезапуск — используется для автоматического сброса возникшей неисправности (пропадания питания) и перезапуска преобразователя.
Кинетическое буферирование — позволяет осуществлять управление двигателем при кратковременном пропадании питания за счет кинетической энергии вращения высокоинерционной нагрузки. При активации этой функции выходная частота преобразователя снижается до определенного уровня, т.е. привод работает в генераторном режиме, принимая энергию от нагрузки. При возобновлении питания преобразователь выводит двигатель на прежнюю частоту вращения.
Работа при пониженном напряжении — обеспечивает работу привода при просадках напряжения до 50 % от номинального значения. При этом соответственно ограничивается максимальный выходной ток преобразователя.
176
Поддержание максимального напряжения звена постоянного тока (7втах — обеспечивает безостановочную работу привода при возникновении генераторных режимов в течение определенного времени. При этом регулирование выходной частоты преобразователя не позволяет двигателю перейти на надсинхронную частоту вращения.
Динамическое торможение — позволяет останавливать двигатель с нагрузкой за минимально возможное время, т.е. подаваемый в статорные обмотки вращающегося двигателя постоянный ток создает тормозной момент. Однако при этом энергия торможения выделяется в обмотках двигателя, что создает опасность их перегрева при длительном процессе торможения.
Подхват на ходу — позволяет подключать к выходу преобразователя вращающийся двигатель, с которого до этого было снято силовое питание. При этом преобразователь осуществляет поиск текущей частоты вращения двигателя и обеспечивает его плавный вывод на заданную частоту.
Температурная адаптация — служит для компенсации ошибки регулирования частоты вращения или момента двигателя в замкнутой системе управления, возникающей при температурных изменениях сопротивлений обмоток статора и ротора. При отсутствии встроенного датчика температуры обмоток статора расчет сопротивлений осуществляется по заложенным в преобразователь тепловой и электрической моделям двигателя.
3.3.2. Программное обеспечение параметрирования, мониторинга и наладки электроприводов
Для параметрирования, мониторинга и наладки современных приводов переменного тока производители оборудования предлагают специальное программное обеспечение, позволяющее упростить и ускорить эти процедуры. В качестве примера можно привести программные продукты компании Schneider Electric.
Для всей гаммы приводной техники, выпускаемой данной компанией, — преобразователей частоты, устройств плавного пуска и интеллектуальных пускателей — предлагаются постоянно совершенствуемые диалоговые программные средства PowerSuite. Их использование в стандартных промышленных компьютерах или миникомпьютерах позволяет осуществлять подготовку файлов данных, которые можно загружать в ПЧ или устройства плавного пуска. Программное обеспечение PowerSuite создает файлы данных, обеспечивая необходимое взаимодействие между функциями конфигурации и настройки изделия. Программное обеспечение содержит все функции встроенного или выносного терминала управления (конфигурирование или настройку приводных устройств, управление, сигнализацию и т.д.) с пользовательским интерфейсом в среде Windows (рис. 3.34). Связь между ПЧ и компьютером осуществляется по последовательному интерфейсу.
Программное обеспечение PowerSuite может использоваться:
• автономно для подготовки и сохранения исходных файлов конфигурации и настройки на дискетах, CD или жестком диске;
• подключенным к ПЧ или пусковому устройству для конфигурирования, настройки и управления ими;
177
Acceleration Auto DC Inj Auto Tuning Control mode de I at rest DC ln| Time deadb./pedst Deceleration DecRampAdapt Enc pulse No Encoder chk
High Speed Int I Lim IR Compens Jump Freq 2 Jump Freq 3 Jump Freq. Low Speed LSP Time Machine Coel Max Freq Mot Cos Phi Motor flux Noise Reduct Norn. Mot. Curr Nom Mot.Freq Nom Mot.Volt
ACC ADC TUN CTR SDC TDC BSP DEC BRA PG I
ENC FLG HSP CLI UFR JF2 JF3 J PF LSP TLS use TFR COS
FLU NRD NCR FAS UNS
fAcceletation |DeceleiaHot; iLcw Speed
S s Hz
Г' 100 -7-*
ATvbSPUl 81 J-l
Рис. 3.34. Диалоговое окно программного обеспечения PowerSuite для настройки параметров преобразователя частоты
• для пересылки файлов конфигурирования и файлов настройки от ПК к устройству, и наоборот.
PowerSuite предоставляет возможность оперативного управления приводом и осциллографирования переходных процессов при наладке. Диалоговое окно PowerSuite для управления приводом с компьютера и осциллографирования переходных процессов показано на рис. 3.35.
3.4. Технические средства систем автоматизации
3.4.1. Программируемые логические контроллеры и промышленные компьютеры
Программируемые логические контроллеры (ПЛК) являются базовыми компонентами для построения систем автоматического управления различной степени сложности. Широкий спектр центральных процессорных устройств (ЦПУ), сигнальных, функциональных, коммуникационных и интерфейсных модулей позволяет получать оптимальные решения каждой конкретной задачи. Основные характеристики ПЛ К можно в полном объеме рассмотреть на примере программируемых контроллеров, выпускаемых компанией Omron. Предлагае-
178
га2.
: ATV31
L.J7 Scope
! T,.^ Display
j ; 1 Г" FRefSeforeRmp
; - p OiJtpirt Fi eq i p Line voltage ; . p MotorCi.irterrt i. I Di vThermStat L |“ Mot TheimStat r- Г MachSpeedLo'n-
Г” Phys Value 411
' Г Phys Value 412
, (“ Phys ValueAfF
i Int Scale AO1
SettiiMi paiameteis
। Г Acceleration
Deceleration
(“ Low S»eed
I I Г Hiah Sneed P I Mot Thermal
• Г Accelerations Г' Decelerations
• •Г LSP Timeout Г" Skip Freq
- I- Skip Freq 2 Г* Slip Comp
Г voltage Boost ” Fr Loop Stab FreqLoopC-am
Г' Mot Freq.Thr Г" MotThrmTlirhld
- I” Motor I Det
I- DisplayScaieF
j I r— ।—
рТГ Active
J inactive
Command
Рис. 3.35. Диалоговое окно программного обеспечения PowerSuite для управления приводом и осциллографирования переходных процессов
мые этой компанией ПЛ К предназначены для построения систем автоматизации различного уровня сложности — от компактного ПЛК серии СРМ до высокопроизводительного модульного контроллера СИ и ПЛК серии CS1 на основе базовой панели (см. рис. 1.5). Для программирования контроллеров применяется пакет автоматизации СХ-Programme г, содержащий средства настройки, программирования, запуска, наблюдения и обслуживания для всех контроллеров Omron. При необходимости набор программных средств можно расширить посредством добавления дополнительных программных компонентов.
Описание серий ПЛК Omron дано на Internet-сайтах, указанных в приложении.
Промышленные компьютеры могут круглосуточно работать в условиях повышенной влажности, пыли, агрессивных сред, вибрации и тряски. Промышленные компьютеры в различных исполнениях можно рассмотреть на примере оборудования SIMATIC PC компании Siemens.
Промышленные компьютеры SIMATIC PC имеют следующие особенности: материнскую плату собственной разработки и изготовления; современную архитектуру, базирующуюся на использовании микропроцессоров Intel; промышленное исполнение, соответствующее современным PC стандартам; мощную встроенную систему диагностики и мониторинга.
Благодаря перечисленным особенностям промышленные компьютеры SIMATIC PC способны работать в тяжелых температурных режимах, под управлением различных операционных систем и с различной дополнительной аппаратурой.
179
3.4.2. Информационные сети и их компоненты
Информационные сети служат для передачи данных на всех уровнях автоматизации производства, включая сети полевого и заводского уровней, комплекс сетевых компонентов, программные и аппаратные средства для построения, конфигурации и эксплуатации. Некоторые крупные компании предлагают готовые интегрированные системы, охватывающие все уровни автоматизации производства. В качестве примера рассмотрим информационные сети, входящие в систему автоматизации SIMATIC PCS 7 компании Siemens.
Значительная часть сетевых решений во всем мире создается на основе Ethernet. Применение Ethernet предоставляет пользователю целый ряд преимуществ: быстрый ввод в эксплуатацию, удобные технологии соединений; гибкие возможности расширения существующих сетей; неограниченные коммуникационные возможности, использование технологии коммутируемых сетей; организацию обмена данными между различными иерархическими уровнями управления; интеграцию в глобальные сети, использование функциональных возможностей Internet; надежное вложение инвестиций, возможность поэтапного развития сети. При небольшом числе логических соединений (до восьми) операторские станции подключаются к сети Industrial Ethernet через интерфейс ВРС (Basic Process Communication). Для более сложных систем рекомендуется применение станций с коммуникационным процессором СР 1613. Industrial Ethernet обеспечивает получение всех преимуществ высокоэффективной системы промышленной связи: скорость передачи данных 100 Мбит/с, использование технологии коммутируемых сетей, возможность применения резервированных структур на основе дублированных колец.
Системы связи полевого уровня характеризуются интенсивным обменом данными между системами автоматизации и станциями распределенного ввода-вывода и другим оборудованием данного уровня. Опрос входных сигналов и выдача управляющих воздействий производятся циклически. Передача сигналов тревоги, параметров настройки аппаратуры, диагностических данных происходит асинхронно. На работу системы связи полевого уровня накладываются жесткие требования работы в реальном масштабе времени.
Характеристика и описание информационных сетей, входящих в систему автоматизации SIMATIC PCS 7 компании Siemens, даны на Internet-сайтах, указанных в приложении.
3.4.3. Пульты и терминалы
Приборы оперативного управления и мониторинга включают в свой состав широкую гамму аппаратуры оперативного управления и контроля, масштабируемую по производительности и стоимости, степени защиты и возможности расширения. Достаточно широкий выбор устройств оперативного управления и контроля предлагает компания Omron. Программируемые терминалы серии NT Omron используются в качестве панелей оператора для контроля и управления технологическим оборудованием в режиме реального времени. Эти устройства позволяют отображать информацию как в графическом, так и сим
180
вольном виде, а также вводить требуемые данные. Терминалы, предназначенные для панельного монтажа или монтажа в стойку, имеют степень защиты лицевой панели IP65. Исполнение их дисплеев может быть основано на одной из трех технологий: EL, STN LCD, TFT LCD. Электролюминесцентная технология (EL) обеспечивает наилучший угол обзора, яркость и контрастность, а жидкокристаллическая (LCD) — отсутствие мерцания, точную геометрию, полное отсутствие рентгеновского излучения, продолжительный срок эксплуатации. На Internet-сайтах, указанных в приложении, даны технические характеристики терминалов компании Omron.
3.5. Выбор средств автоматизации
Выбор программируемых контроллеров. Роль и место ПЛ К в автоматизированных системах управления промышленными механизмами и технологическими комплексами подробно рассмотрены в [8]. Однако наличие различных ПЛК ставит вопрос об их выборе для решения поставленных задач. Большинству потребителей требуется не превосходство одной какой-то характеристики, а некая интегральная оценка, позволяющая сравнить различные ПЛК по совокупности характеристик и свойств.
Программно реализуемые функции системы управления во многом определяют технические характеристики технологического контроллера, а точнее, технические характеристики микропроцессорных устройств — однокристальных микроконтроллеров (ОМК) или микропроцессоров (ОМП), на основе которых он реализуется. Основными характеристиками, по которым ведут выбор технологических контроллеров, являются: разрядность процессора, быстродействие, объем адресуемой памяти (ОЗУ и ПЗУ), особенности системы команд.
Важную роль при выборе технологических контроллеров играют номенклатура встроенных или внешних периферийных устройств (таймеров, последовательных интерфейсов, параллельных портов ввода-вывода, АЦП, модулей ШИМ, модулей обработки прерываний и др.), возможность использования режимов пониженного электропотребления, характеристики питающего напряжения. В некоторых случаях промышленного применения контроллеров важны такие параметры, как диапазон рабочих температур и потребляемая мощность.
Один из самых важных параметров ПЛК — быстродействие — в каталогах фирм указывается в совершенно разных вариантах: время выполнения бинарных команд, время опроса 1К дискретных входов, время выполнения смешанных команд и т.д.
При выборе технологического контроллера важна также его цена, которую одни фирмы приводят в американских долларах, а другие — в евро, при этом курсы иностранных валют очень разные и всегда завышенные. А с учетом многочисленных систем скидок задача выбора еще усложняется.
При выборе контроллера важным является наличие развитого инструментального обеспечения по его программированию: кросс-компиляторов с языков высокого уровня, программ отладчиков, операционных систем реального времени, инструментальных сред разработки программного обеспечения с использованием CASE-средств.
181
Спектр ПЛК, предлагаемых сегодня, чрезвычайно широк. В подразд. 3.4 приведены некоторые сведения о ПЛК наиболее распространенных в России фирм. Кроме параметров CPU указывают параметры для интеллектуальных модулей. Все контроллеры строятся по магистрально-модульному принципу, монтируются на панель или DIN-рейку, работают от напряжения +24 В, поддерживают протоколы обмена Fieldbus и имеют широкий набор модулей: дискретных входов/выходов, коммуникационные, аналогового ввода/вывода, терморегуляторов, позиционирования, ПИД-регулятора, контроля движения.
Из обзора контроллеров видно, что все они имеют равные функциональные возможности, близкие технические и эксплуатационные характеристики и даже почти одинаковые габаритные размеры и массу. В такой ситуации необходимо определить критерии оценки и выбора ПЛК, удовлетворяющего конкретной поставленной задаче.
Учитывая специфику данных устройств, критерии оценки можно разделить на три группы: технические характеристики, эксплуатационные характеристики, потребительские свойства. При этом критерием выбора следует считать потребительские свойства, т.е. соотношение затрат, производительности и надежности, а технические и эксплуатационные характеристики — ограничениями для процедуры выбора.
Выбор ПЛК производится в четыре этапа.
1. Определение соответствия технических характеристик предъявленным требованиям.
2. Определение соответствия эксплуатационных характеристик предъявленным требованиям.
3. Оценка потребительских свойств выбираемой аппаратуры.
4. Ранжирование изделий.
На первом этапе каждая техническая характеристика анализируемого ПЛК сравнивается с предъявленными к проектируемой системе требованиями, и если данная характеристика не удовлетворяет этим требованиям, ПЛК снимается с рассмотрения.
На втором этапе проводят анализ эксплуатационных характеристик. И только если технические и эксплуатационные характеристики соответствуют поставленной задаче и предъявленным требованиям, оценивают потребительские свойства ПЛК, используя различные методы, например аддитивный (ГОСТ 15467-79).
Определение весовых коэффициентов характеристик ПЛК является ответственной задачей, так как от их правильного расчета зависит достоверность результатов анализа. Для этого составляют таблицу эксперт-коэффициентов, в которой проставляют полученные от каждого эксперта оценки коэффициентов по определенной шкале (например, от 0 до 10).
Ранжирование изделий, т.е. расположение их в порядке возрастания (или убывания) соотношения показателей производительность/надежность/затра-ты, целесообразно проводить по формуле Р = П + Н + 3, где П — производительность; Н — надежность; 3 — затраты.
Отдельными фирмами (например, EMERSON Process Management) разработан опросный лист для выбора технологического контроллера, в котором необходимо ответить на следующие вопросы:
наименование системы (объекта управления);
182
назначение контроллера (только сбор данных, дискретное управление, непрерывное управление и т.д.);
число сигналов ввода/вывода (аналоговый вход, аналоговый выход, вход «сухой контакт», дискретный вход 24 В, дискретный выход 24 В, дискретный выход релейный, импульсный вход и т.п.);
число и тип коммуникационных портов (RS232 до 15 м, RS485 до 1500 м и др.);
поддерживаемые коммуникационные протоколы (Profibus, Modbus, Hart и др.);
условия размещения контроллера (в отапливаемом помещении, в неотапливаемом помещении, вне помещения и др.);
защитный кожух (не требуется, требуется (IP66), для монтажа на открытой площадке, для монтажа на стене/трубе и т.д.);
внешний жидкокристаллический дисплей (не требуется, требуется);
температура окружающей среды;
напряжение питания на объекте (220 В переменного тока, 24 В постоянного тока, 12 В постоянного тока, отсутствует);
комплект программного обеспечения (для сбора и отображения данных — SCADA, ОРС-сервер, DDE-сервер и др.).
Выбор датчиков. При выборе датчиков учитываются следующие показатели: линейность и однозначность статической характеристики; высокие чувствительность (крутизна) и разрешающая способность; стабильность характеристик во времени; отсутствие влияния нагрузки на статические характеристики; минимальная инерционность; минимальное влияние внешних факторов (температуры, вибраций и т.д.); устойчивость к химическим воздействиям контролируемой и окружающей среды; простота и технологичность конструкции; взаимозаменяемость (повторяемость характеристик); удобство монтажа и обслуживания. Выбор типа датчика определяется требованиями по точности системы, ее назначением и условиями эксплуатации (см. подразд. 3.1.10).
3.6. Программные средства систем автоматизации
3.6.1. Программные средства промышленных компьютеров, контроллеров, терминалов и интеллектуальных модулей
Программное обеспечение средств автоматизации. Все фирмы — производители средств автоматизации разрабатывают и программное обеспечение этих средств. Программное обеспечение имеет общие признаки построения интерфейса проектировщика, системы команд и функций. Рассмотрим программное обеспечение для настройки и программирования различных средств автоматизации фирмы Omron.
Программные продукты фирмы объединены в серию СХ, основанную на коммуникационной платформе CX-Server (CX-Programmer, CX-Simulator, СХ-Supervisor, CX-Motion, CX-Positbion, CX-Protocol), которая включает в себя драйверы сетевой связи для всех программных протоколов Омгоп, сетей Ethernet, Controller Link и последовательной связи.
183
Широкий набор программных средств серии СХ обеспечивает одновременный доступ к различным программируемым логическим устройствам и сетям через CX-Server. Это повышает удобство и простоту обращения с оборудованием фирмы Омгоп.
Данные программные средства выполняют функции драйвера Windows для обмена данными между системами ПЛК Омгоп и Microsoft Office, а также функции VBA: программирование для всех типов ПЛК, тестирование пользовательских программ SCADA, настройку параметров модулей динамического управления CS1W-MC*** и С200Н-МС221, настройку параметров модулей позиционирования CS1W-NC и CJ1W-NC и программирования коммуникационных модулей поддерживающих макропротокол.
Среда CX-Programmer обеспечивает единую платформу программного обеспечения для ПЛК Omron всех типов: от микроконтроллеров до двухпроцессорных систем. Программатор упрощает преобразование и повторное использование управляющих программ, созданных с помощью программного обеспечения для ПЛК предыдущих поколений.
Усовершенствованная функция «сравнение проектов» позволяет детально сравнить программу ПЛК и персонального компьютера. За счет интеграции CX-Programmer с другими программными средствами и совместного использования комментариев повышается скорость разработки и упрощается эксплуатация ПЛК.
Главной особенностью среды CX-Programmer является наличие в ней (по аналогии со средствами для разработки программ для персональных компьютеров) функции компиляции программы. Фактически эту функцию выполняет мощный анализатор текста программы, который производит проверку исходного текста и сигнализирует о фактических ошибках и фрагментах кода, выполнение которых может происходить неверно (например, использование одного и того же выхода в более чем одной цепочке). Благодаря функции компиляции удается резко сократить количество ошибок, оставшихся на момент отладки программы, а также сократить время ее написания. Сэкономленное время можно использовать для более тонкой настройки характеристик оборудования, а также сокращения длительности и оптимизации рабочего цикла программы.
В состав функциональных устройств ПЛК, как правило, входят различные устройства ввода и отображения информации, позволяющие осуществлять контроль за ходом технологического процесса, — средства человекомашинного интерфейса ММ1 (Man Machine Interface).
С помощью программной среды разработки экранов терминалов (панелей оператора) NT-Shell решаются следующие задачи (для всех без исключения NT-терминалов фирмы Omron):
создание и редактирование экранов, таблиц данных, строковых и цифровых таблиц;
управление обменом данных между ПЛК и NT;
ведение хронологии аварийных сообщений и вызовов экранов NT.
СХ-Supervisor—SCADA — это пакет фирмы Omron, с помощью которого можно создавать приложения верхнего уровня управления. Простые приложения быстро создаются с помощью большого числа готовых функций и библиотек. За счет ясной структуры программы сокращается время на озна
184
комление с ней. С помощью ОРС возможна установка связи с ОРС-серверами второй версии. Поддержка баз данных SQL, ODBC, MS Access, dBase, CSV и MS Excel, а также импорт компонентов ActiveX позволяет создавать гибкие приложения с широкими функциональными возможностями.
Программирование промышленных компьютеров и программируемых контроллеров. Простые компьютерные средства автоматизации работают по жестким программам, заложенным в них при изготовлении. Их программирование для конкретных приложений заключается в записи необходимой для управления информации: кодов режима, управляющих слов, бит разрешения или запрета, коэффициентов, пределов изменения данных и т.д. Таким способом программируются многие устройства низкого уровня: модули вво-да/вывода, модули связи, специализированные контроллеры (локальные регуляторы), датчики и исполнительные устройства с микропроцессорным управлением.
Для устройства управления более высокого уровня (программируемых логических контроллеров, систем числового программного управления, промышленных компьютеров, некоторых интеллектуальных регулирующих модулей) требуется написание программ управления оборудованием. Следовательно, для их программирования необходимы специальные программные инструментальные средства, которые могут находиться в самом устройстве управления (и тогда для программирования достаточно небольшой консоли) либо на специальном программаторе или промышленном компьютере (тогда создаваемая с их помощью программа загружается в управляющее устройство по каналу связи).
Особенности программ для устройств этого уровня следующие: наличие развитого математического аппарата обработки битовой информации (преимущественно целочисленной арифметики); большое разнообразие функций и функциональных блоков по анализу информации с датчиков; реализация законов управления и обмена по каналам связи. Данные программы реализуют основные алгоритмы автоматического управления и должны обладать хорошим быстродействием и высокой надежностью.
Для систематизации разрабатываемых инструментальных пакетов программирования логических контроллеров разработан стандарт МЭК 1ЕС—1131, который включает в себя пять языков [8].
В качестве примеров инструментальных средств программирования можно назвать пакеты SYSMATE-PMD (MS DOC) и SYSWIN (Windows) для контроллеров фирмы Omron и пакет Step? — для контроллеров фирмы Siemens.
Программирование терминалов. Для удобства обслуживающего персонала при работе с компьютерными системами управления в производственных условиях используются средства человеко-машинного интерфейса MMI. включающие в себя промышленные терминалы, информационные панели, консоли данных. Эти устройства также имеют средства программирования, которые используют те же типы данных, что и программируемые контроллеры, но предназначены для удобного ввода и наглядного представления оперативной информации о процессе управления. Входной язык для написания программ промышленных терминалов представляет собой набор графических образов элементов индикации, текстовых сообщений, цифровых и стрелочных дисплеев, диаграмм, экранов для графических зависимостей (трендов), кнопок,
185
переключателей и других элементов управления. Все это поддерживается системой связи с данными программируемых контроллеров и системой организации экранного диалога. Примером может служить пакет NTWin, предназначенный для программирования промышленных NT-терминалов фирмы Omron.
Общий контроль и управление технологическим процессом, сбор и архивирование данных, их статистическая обработка и документирование выполняются на верхнем уровне, где используются промышленные или персональные компьютеры. Эти устройства используют известные операционные системы и работают под управлением специальных программных приложений, разработанных в среде инструментальных средств систем дистанционного контроля, управления и диспетчеризации SCADA. Примером такой системы может служить пакет программ SCS, предназначенный для использования в автоматизированных системах управления, построенных на базе контроллеров фирмы Omron. Эти программные приложения могут дополняться или создаваться полностью на языках программирования общего назначения, например в среде Delphi или среде Visual С либо в пакетах систем управления базами данных.
Программирование интеллектуальных модулей. Под интеллектуальными модулями программируемого контроллера понимаются модули, которые обрабатывают данные по некоторому алгоритму независимо от центрального процессора, выполняющего основную программу управления. Фактически интеллектуальные модули являются сопроцессорами, их можно разделить на четыре группы, которые обеспечивают:
ввод информации, выполняя ее предварительную обработку (например, модули высокоскоростного счета);
вывод информации с представлением ее в требуемом виде (например, ASCII-модули, предназначенные для масштабирования информации с учетом системы физических единиц и вывода ее на печать в удобном виде с текстовыми комментариями);
ввод информации, обработку ее по определенным алгоритмам и выдачу управляющих сигналов (например, модули ПИД-регулирования и модули числового программного управления);
получение информации из памяти контроллера, обработку ее по определенным алгоритмам и возвращение снова в память контроллера (например, модуль нечеткой (fuzzy) логики Omron С200Н FZ001, реализующий законы управления, основанные на методах нечеткой логики).
Применение интеллектуальных модулей значительно расширяет функциональные возможности программируемых контроллеров, снижает объем работы по составлению основной управляющей программы, разгружает центральный процессор от ряда стандартных вычислений.
Некоторые из этих интеллектуальных модулей имеют свое программное обеспечение. Например, для ввода базы знаний в модуль нечеткой (fuzzy) логики Omron С200Н FZ001 используется инструментальный программный пакет FSS, который устанавливается на промышленном компьютере и связывается с модулем по интерфейсному порту RS232C. Этот пакет включает в себя средства для формирования функций принадлежности входов и выходов, ввода правил, выбора метода дефазификации, а также для обмена дан
186
ными с модулем, наблюдения за процессом принятия решений и отладки базы знаний.
Другие модули программируются с помощью данных, вводимых в модуль или память контроллера. Например, программирование интеллектуальных модулей контроллеров фирмы Omron осуществляется записью значений управляющих бит и слов в область памяти DM в режиме программирования. Оперативное управление и передача данных в них выполняются через область IR. Эти модули являются специальными [51], поэтому адреса ячеек памяти, используемых ими, задаются переключателем на передней панели модуля.
3.6.2. Программирование контроллеров для реализации алгоритмов управления оборудованием
Управление по времени. Автоматическое управление в функции времени наиболее распространенно в дискретной автоматике. Алгоритм такого управления можно представить в виде двух частей: алгоритма формирования последовательности интервалов времени и алгоритма управления исполнительными устройствами в соответствии с интервалами времени.
Формирование последовательности интервалов времени выполняется с использованием устройств создания выдержек времени (реле времени или таймеров) или счетчика последовательности импульсов заданной длительности. В программируемых контроллерах предпочтительнее первое, так как они допускают введение большого числа программных таймеров, и такой подход удобнее при отладке системы управления и коррекции значений интервалов времени.
Последовательность интервалов времени формируется последовательностью таймеров, составляющих генератор интервалов времени (ГИВ). Программную реализацию ГИВ на языке релейно-контактных схем и пример программы управления по времени смесителем см. в [8].
Управление по состоянию объекта. Для этого способа управления необходимо иметь информацию о состоянии объекта, поэтому при разработке таких систем требуется выбрать датчики. Число датчиков и объем поставляемых ими данных должны быть достаточными для получения полной информации об объекте, необходимой для решения конкретных задач управления.
Можно выделить два способа управления по состоянию объекта:
последовательность действий (состояний объекта) жестко определена и информация с датчиков позволяет контролировать окончание действия или переход объекта в новое состояние, при этом каждое новое действие начинается после окончания предыдущего;
выбор нового действия (состояния объекта) определяется текущими значениями параметров, при этом каждое новое действие начинается по выполнении необходимых для этого условий.
Первый способ называют также программным, а последовательность действий объекта, которая реализуется при таком управлении, — программой. Общее управление может включать в себя оба способа, например, в программе учитывается состояние параметров, в зависимости от которого потребуется та или иная последовательность действий.
187
Алгоритм жесткого последовательного управления по состоянию объекта. Способ автоматического управления в функции состояния объекта при жесткой последовательности операций также распространен в дискретной автоматике. При этом последовательность операций может выполняться однократно по одной команде или повторяться многократно в повторяющихся циклах. Алгоритм такого управления можно представить в виде двух частей: алгоритм формирования последовательности действий или шагов управления (отдельных операций, выполняемых в объекте управления) и алгоритм управления исполнительными устройствами в соответствии с шагом управления.
Последовательность шагов формируется с использованием датчиков состояния объекта, которые информируют систему управления об окончании текущей операции. Факт окончания предыдущей операции является необходимым условием начала следующей операции.
Различные шаги управления могут использовать одни и те же датчики или исполнительные устройства, поэтому шаги необходимо фиксировать. В этом случае работа датчиков на последующих шагах не будет влиять на предыдущие шаги, а следовательно, на управляемые ими исполнительные механизмы. Для этого в программе каждый шаг управления связывается с битовой переменной (признаком шага), которая в момент активизации шага устанавливается в единичное состояние ON.
Таким образом, последовательность действий в объекте управления формируется программой, которая генерирует ряд шагов, последовательно устанавливая связанные с ними биты. По окончании последнего шага все признаки шагов сбрасываются.
Если цикл необходимо повторить, то последний шаг должен снова запустить программу последовательности шагов.
Управление исполнительными механизмами определяется текущим шагом. Действие указывается для того механизма, который на этом шаге включается или выключается, исходя из чего формируется функция управления исполнительными устройствами, т.е. для каждого устройства определяется, на каком шаге оно включается, а на каком выключается.
Пример управления позиционным манипулятором по алгоритму жесткого последовательного управления схвата см. в [8].
Алгоритм гибкого управления по состоянию объекта. Для систем дискретного автоматического управления объектами с конечным числом состояний, алгоритм перехода которых из одного состояния в другое определяется значениями параметров объекта и не имеет жесткой последовательности, могут быть использованы известные алгоритмы цифровых автоматов, например автомата Мура. Такой алгоритм подробно раскрыт в [51].
3.6.3. Программирование контроллеров для решения задач повышения надежности систем управления
Производители компьютерных средств автоматизации уделяют вопросам надежности большое внимание: проводят жесткий отбор аппаратных средств, вводят дополнительные элементы (например, сторожевой таймер), дополнительные программы тестирования в процессе управления, контроль сохран
188
ности программы управления и данных, а также резервирование аппаратных средств и линий связи.
Результаты внутреннего тестирования и проверок компьютерных средств автоматизации фиксируются в служебной и архивной памяти. Эта информация берется из управляющей программы, поэтому при разработке программ необходимо учитывать влияние возможных отказов на качество управления. При создании системы управления необходимо учитывать ее устойчивость к отказам как при выборе технических средств, так и при проектировании схемы подключения и разработке управляющей программы. Отказ всегда возможен, поэтому необходимо строить систему таким образом, чтобы можно было этот отказ своевременно обнаружить и минимизировать ущерб от его появления. Рассмотрим некоторые мероприятия по повышению надежности компьютерных систем управления.
1. Обрыв электрических цепей входных сигналов или замыкание их на корпус — одна из наиболее часто встречающихся неисправностей. Входом модуля ввода это состояние будет восприниматься как сигнал нулевого напряжения или тока. Одним из способов определения такой неисправности является выведение нулевого сигнала из информационного диапазона. Например, для аналоговых сигналов используют напряжение от 1 до 5 В или ток от 4 до 20 мА. Если входной сигнал меньше 1 В или 4 мА, это означает, что входная цепь оборвана либо в ней имеется плохой контакт или замыкание на корпус.
Для дискретных сигналов, где нулевой сигнал является информационным, управляющую программу необходимо строить таким образом, чтобы появление аварийного нулевого сигнала не привело к опасным последствиям. Например, цепи, предназначенные для подачи сигнала останова, должны в исходном состоянии подавать сигнал высокого уровня, а сигнал останова должен иметь низкий уровень, т.е. он подается инверсным. В этом случае при обрыве цепи будет сниматься сигнал высокого уровня, что равнозначно останову и в большинстве случаев — это более благоприятное последствие аварии, чем невозможность останова.
2. Контроль состояния позволяет косвенно определить неисправность датчика, например если его состояние не изменяется при изменении измеряемого параметра. В некоторых случаях такую неисправность можно определить по возникновению противоречивого, недопустимого в нормальных условиях эксплуатации состояния нескольких датчиков.
Например, при противоречивом состоянии датчиков уровней осушительной насосной станции датчик минимального уровня BL 1 будет показывать уровень ниже минимального, а датчики верхних уровней BL1 и BL2 — что уровень воды выше. В этом случае должны выдаваться предупреждающий сигнал обслуживающему персоналу о неисправности датчиков.
Фрагмент программы такого предупреждения на языке релейно-контактных схем приведен на рис. 3.36.
3. Явление «дребезга» дискретного датчика возникает из-за влияния различных шумов на его работу (например, волнения поверхности воды на датчики уровня, пульсации давления или потока вследствие работы насосов на датчики давления и потока,
, Отказ датчика BL2 BLI уровня
НН-41--------°
BL3
НН
Рис. 3.36. Фрагмент программы предупреждения о неисправности на языке релейно-контактных схем
189
Рис. 3.37. Пример программы установки временных задержек на переключение сигнала на языке релейно-контактных схем: X — входной сигнал с датчика; X” — сигнал с фильтрацией от дребезга; TIM — таймер; Г, — интервал времени
дребезга датчиков приближения на пороге чувствительности и т.д.). Для борьбы с этим явлением устанавливают два датчика, чтобы обеспечить гистерезис переклю-
чения, или один датчик, обладающий гистерезисом пе-
реключения. Это снижает точность определения значения параметра, но
исключает возможные колебания и неоправданно частые переключения со-
стояний.
Способом борьбы с явлением дребезга является также установка временных задержек на переключение сигнала. На входе механизма устанавливается устройство, при котором входной сигнал X при вводе в механизм обрабатывается программой таким образом, чтобы сигнал X*, направленный в алгоритм принятия решения, был бы равен входному, если тот находился в одном из допустимых состояний более заданного интервала времени, иначе сигнал X* сохраняет свое значение. Пример такой программы на языке релейно-контактных схем приведен на рис. 3.37.
4. Защита от затянувшегося пуска и контроль продолжительности включения целесообразны для периодически работающих механизмов. Например, насосная станция гидравлики металлорежущего станка, включающая в себя насос и гидроаккумулятор, работает в основном при большом расходе гидравлики во время действия вспомогательных механизмов (зажимов заготовки и инструмента, манипуляторов и т.д.), а в процессе обработки заготовки лишь поддерживает давление в системе гидравлики. Насос такой гидростанции при неработающих гидравлических механизмах должен поднимать давление в си
стеме гидравлики за определенное время, превышение которого свидетельствует о неисправности (обрыве муфты насоса, течи в трубопроводах, неисправности в золотниках или гидроцилиндрах исполнительных устройств). Контроль этого времени целесообразен как при включении станка, так и в ходе выполнения технологического процесса. Пример программной реализации такого контроля приведен на рис. 3.38.
5. Защита от частых пусков целесообразна для периодически работающих механизмов. Например, слишком частые пуски насоса системы гидравлики
-И—II—1—°
Wml RstW
ННЧН
Рис. 3.38. Пример программы защиты от затянувшегося пуска и контроля продолжительности включения на языке релейно-контактных схем:
SP — гистерезистое реле давления, которое включается при значении давления ниже минимального и выключается при значении выше максимального; N — насос; FH1 — флаг режима вспомогательных технологических операций, т.е. режима работы гидравлических механизмов; Wml - флаг предупредительного сообщения о возможной неисправности в системе гидравлики; Т\ — время работы насоса до полного подъема давления; IT./W- бит сброса предупредительных сообщений
190
Рис. 3.39. Пример программы контроля частоты пуска насоса на языке релейно-контактных схем:
Т2 — период времени, на котором контролируется частота включений; М - число допустимых включений за период Г;; Wrn2 — предупредительное сообщение о повышенной частоте включений
являются свидетельством ее неисправности (утечки гидравлики и др.) и ведут к быстрому износу оборудования.
Пример программы контроля частоты пуска насоса приведен на рис. 3.39. В этой программе таймер TIM2 через период Т2 перезапускает себя и сбрасывает показания счетчика CNT3. который считает число запусков насоса. Если за период между сбросами число запусков превысит Л'з, установится флаг счетчика, и будет выдано сообще
ние о частых пусках.
6. Предупредительный и аварийный контроль значений технологических переменных является важным фактором повышения надежности. В автоматизированных системах управления на все регулируемые и измеряемые переменные в диапазоне их изменения устанавливают предупредительные и аварийные (т.е. максимальные и минимальные) пределы. При выходе значения переменной за предупредительные пределы выдается сообщение оператору. При выходе значения переменной за аварийные пределы запускаются программы, которые переводят технологический процесс в режим, исключающий развитие аварийной ситуации.
Приведенные примеры предупреждения аварий и отказов не охватывают всего многообразия задач надежности, возникающих при создании систем управления. В каждом конкретном случае необходимо рассматривать различные варианты поведения системы и предусматривать соответствующие действия.
Контрольные вопросы
1. Какие технические средства систем автоматизированных электроприводов применяются при создании новых и модернизации действующих производственных механизмов и машин?
2. Какие классы электроприводов производятся электропромышленностью, каковы их особенности и область применения?
3. Каковы условия выбора технических средств автоматизированных электроприводов?
4. Какие основные положения необходимо учитывать при расчете и выборе электроприводов переменного тока?
5. Как выполняется расчет и выбор тормозных резисторов в электроприводах, не имеющих рекуперации энергии в электросеть?
6. Как выполняется расчет и выбор электроприводов циклического действия с рекуперацией энергии в электросеть?
7. Как влияют на выбор электроприводов условия эксплуатации и окружающая среда?
8. Что включает в себя библиотека программ стандартных функций управления электроприводами?
9. Что представляет собой программное обеспечение параметрирования и наладки электроприводов?
191
10. Какие технические средства систем автоматизации применяются при модернизации и создании новых производственных машин и технологических комплексов?
11. Каковы особенности и условия применения основных средств автоматизации?
12. Каковы условия оценки и выбора средств автоматизации?
13. Какие программные средства используются в промышленных компьютерах, котроллерах, терминалах и интеллектуальных модулях?
14. Как выполняется программирование контроллеров для реализации алгоритмов управления оборудованием?
15. Какие возможности программирования контроллеров можно использовать для повышения надежности компьютерных систем управления?
ГЛАВА 4
КОМПЬЮТЕРНЫЕ ТЕХНОЛОГИИ ПРОЕКТИРОВАНИЯ ЭЛЕКТРОПРИВОДОВ И СИСТЕМ АВТОМАТИЗАЦИИ
4.1. Инструментальные средства проектирования
4.1.1. Системы проектирования
Весь спектр проблем, связанных с проектной деятельностью (графических, аналитических, экономических, эргономических, эстетических и др.), решается в настоящее время с использованием эффективных компьютерных технологий и систем автоматизированного проектирования (САПР).
Использование САПР позволяет в значительной мере сократить продолжительность проектирования, обеспечивая [1]:
быстрое выполнение чертежей;
высокую точность и качество выполнения чертежей, т.е. на чертеже, построенном с помощью программных средств, любая точка определена точно, а для более детального просмотра элементов чертежа можно увеличить любую его часть. Кроме того, в САПР имеются различные специальные средства выполнения чертежей, например программные средства любой САПР позволяют быстро стереть лишние линии без каких-либо последствий для конечного чертежа;
возможность многократного использования чертежа, т.е. построение всего чертежа или его части можно сохранить и использовать для последующего проектирования;
ускорение расчетов и анализа, требуемых при проектировании. Существующее разнообразное программное обеспечение позволяет выполнять практически все проектные расчеты;
сокращение затрат на исследование и усовершенствование прототипов объектов. Средства имитации и анализа, включенные в САПР, позволяют резко снизить затраты времени и средств на эти дорогостоящие этапы процесса проектирования;
интеграцию проектирования с другими видами деятельности. Интегрированная вычислительная сеть с высококачественными средствами коммуникации обеспечивает САП Р более тесное взаимодействие с другими инженерными подразделениями.
Конструктор должен досконально знать правила оформления чертежнографической документации (ЕСКД), свободно владеть программными средствами, необходимыми для работы, и иметь представление о составе и возможностях своего автоматизированного рабочего места (АРМ).
Различают системы проектирования трех уровней: высокого, среднего и низкого.
193
Системы высокого и среднего уровней, в значительной мере схожие между собой, называют трехмерными. Проектирование в них происходит на уровне твердотельных моделей с привлечением мощных конструкторско-технологических библиотек и использованием современного математического аппарата для проведения необходимых расчетов. Кроме того, эти системы позволяют с помощью средств анимации имитировать перемещение в пространстве рабочих органов изделия (например, манипуляторов робота), а также отслеживают траекторию движения инструмента при разработке и контроле технологического процесса изготовления спроектированного изделия. Все это делает трехмерное моделирование неотъемлемой частью совместной работы САПР/ АСТПП. К системам высокого уровня относятся Pro/ENGINEER (США), EUCLID QUANUM (Франция), T-FLEX CAD, СПРУТ (Россия); к системам среднего уровня Mechanical Desktop (фирмы AutoDESK), SolidWorks 96 (фирмы SolidWorks) и др.
Системы низкого уровня — это графические редакторы, предназначенные для автоматизации инженерно-графических работ. Совместно с компьютером и монитором они представляют собой «электронный кульман», т.е. хороший инструмент для выполнения конструкторской документации. Системы низкого уровня называют двухмерными. К ним относятся AutoCAD, MiniCAD, Microsoft Visio (США), КОМПАС (фирмы АСКОН, Россия), ElectriCS (ООО РОЗМЫСЕЛ, Россия), EPLAN (Германия).
Системы двухмерного проектирования распознают геометрические формы, определяемые точками, прямыми или кривыми линиями, только на плоскости. Каждый вид некоторого объекта (главный, сверху и т.д.) такая система может выполнить лишь как отдельную фигуру, рассматриваемую вне связи с любыми другими видами.
Двухмерные (проекционные) системы более примитивны, чем трехмерные, однако они довольно широко распространены, и их сравнительно небольшая стоимость является существенным фактором при выборе системы проектирования. С помощью двухмерных систем создается большинство конструкторских документов. Все команды любой двухмерной системы (или графического редактора) подразделяются на три вида: команды черчения; команды редактирования; команды нанесения размеров, условных обозначений и текста (оформления чертежа).
4.1.2. Основные методы выполнения инженерно-графических работ
Процесс проектирования можно разделить на ряд этапов или видов деятельности, причем порядок их описания не имеет значения, поскольку на практике постоянно происходит переход от одного вида деятельности к другому без очевидных приоритетов. В основном можно выделить следующие виды деятельности:
создание — выполнение проекционных чертежей новых изделий, которые пока не существуют;
редактирование — внесение изменений в разрабатываемые чертежи изделия по мере их возникновения;
194
расчеты — выполняемые на уровне типовых для модулей и блоков изделий; выбор — принятие решения о пути разработки проекта на основе технических данных (например, чертежей прототипов изделий, расчетов и т.п.);
поиск — работа с архивами (знакомство с уже существующими решениями, историей видоизменения изделия и т.д.), круг которых, как правило, ограничивается прототипами изделий конкретной отрасли.
Перечисленные виды деятельности поддаются автоматизации благодаря современным программным продуктам, разрабатываемым различными фирмами.
Системы Microsoft Visio 2002, AutoCAD, ElectriCS предназначены для создания и редактирования электрических схем и текстовой документации с соблюдением требований стандартов. В их состав, как правило, входят графический редактор схем, модуль логической обработки, система управления базой электрических устройств, базы данных, библиотеки расчетов, генератор отчетов и система управления проектом. Системы проектирования позволяют вводить и редактировать принципиальные электрические схемы, создавать, редактировать и использовать базу электрических устройств, осуществлять трассировку проводов, определять внешние трассы, подбирать клеммные блоки, создавать схемы подключений и соединений, настраивать и создавать формы отчетов и выполнять по ним конструкторскую документацию. С помощью любого из перечисленных программных средств автоматизации чертеж строится на основе базовых графических элементов (графических примитивов): точек, отрезков, окружностей и кривых. Метод построения каждого отдельного чертежа в большинстве случаев зависит от требуемой точности.
4.1.3. Анализ программного обеспечения
Проведем анализ программного обеспечения систем Microsoft Visio, AutoCAD, ElectriCS и покажем их основные достоинства и недостатки.
Требования к вычислительной среде. Для нормального функционирования рабочие места, на которых устанавливаются Microsoft Visio и AutoCAD, должны удовлетворять следующим требованиям:
наличие операционной системы Windows 98, 2000, NT, ХР;
соблюдение необходимых минимальных требований конфигурации компьютера (процессор Pentium 2 с частотой 166 МГц, оперативная память 64 Мбайт, жесткий диск 1 Гбайт).
Для установки ElectriCS требуется наличие графического пакета AutoCAD. Желательно также иметь редактор MS Word для подготовки отчетов. Требования к рабочему месту соответствуют требованиям AutoCAD.
При использовании систем AutoCAD 2002 и ElectriCS перечисленные характеристики компьютера должны быть увеличены примерно в два раза.
Установка систем. Установка систем Microsoft Visio и AutoCAD выполняется специальной программой — мастером. По умолчанию предлагается устанавливать систему в папку c:\Program Files\ Microsoft Visio или AutoCAD.
При установке системы ElectriCS копируются файлы программы в указанный каталог; устанавливаются BDE, программа просмотра документации Acrobat Reader и драйвер электронного ключа HASP HINSTALL.EXE; созда
195
ется или дополняется существующий файл ACADDOC.LSP в каталоге AutoCAD. По умолчанию предлагается устанавливать систему в папку c:\Program Files\ ElectriCS.
После установки этих систем на рабочем столе появляются ярлыки, хорошая настройка которых обеспечивает дополнительные возможности.
Возможности конструирования. Программы Microsoft Visio, AutoCAD, ElectriCS предоставляют удобную объектную технологию, позволяющую быстро и легко создавать технические рисунки и диаграммы, а следовательно, широко используются. Каждые несколько лет появляются их новые версии. Описания программного обеспечения Microsoft Visio и AutoCAD приводятся для английских версий, однако пользователи, имеющие русифицированные версии, легко смогут в них разобраться.
Русификация программ Microsoft Visio и AutoCAD касается только команд меню, поэтому русификация версии обеспечивает очень незначительные преимущества.
Microsoft Visio позволяет создавать схематические чертежи, используемые при разработке технологических процессов в электротехнике и машиностроении. Элементы схем соответствуют ГОСТам и DIN.
Каждая очередная модифицированная версия совершеннее предшествующей версии. При этом от версии к версии сохраняется возможность запуска команд из диалоговой строки. Программа Microsoft Visio 2002 способна открывать файлы, созданные в более ранних ее версиях, и сохраняет файл в формате, который совместим с любыми приложениями.
Усовершенствованная версия Microsoft Visio 2002 автоматизации проектирования обладает следующими возможностями:
импорт и экспорт .dwg и .dgn-файлов, вставка и конвертация их с использованием специального дизайн-конвертера;
чтение и запись .dwg-файлов Autodesk AutoCAD и .dgn-файлов из Bentley Systems’ MicroStation;
легкое и быстрое размещение форм, так как они фиксируются в основной DWG -геометрии;
быстрое изменение размера окна вокруг рисунка в формате .dwg или .dgn;
управление видимостью, цветом, толщиной линий изображений объектов и конвертация уровней в формы.
В подразд. 4.2 приведены только самые необходимые и часто используемые команды для Professional.
В Microsoft Visio возможно создание многостраничных документов. Если схема создается в формате А1, а принтер печатает только А4, то Microsoft Visio сама разобьет изображение на требуемые части, которые следует распечатать и склеить.
Также к плюсам данного редактора можно отнести большое число форматов, в которых можно сохранять изображения, — от bmp до Adobe Illustrator.
Система AutoCAD свои документы сохраняет в файлах формата DWG, который различен для разных ее версий, но каждая последующая версия совместима по формату с предыдущими. Файл формата AutoCAD 2000 Drawing не может напрямую читаться более ранними версиями системы (R14, R13 и т.д.), поэтому для передачи в другую версию данной системы следует использовать команду Saveas (Сохранить как).
196
AutoCAD может экспортировать рисунки или отдельные элементы в другие dwg-файлы и импортировать dwg-файлы. Для этого используются команды Wblock (Пблок) и Insert (Вставить). Возможен также экспорт восьми форматов: Metafile (*.wmf), ACIS (*.sat), Lithography (*.stl), Encapsulated PS (*.eps), DXX Extract (*.dxx), Bitmap (*.bmp), 3D Studio (*.3ds), Block (*.dwg) — и импорт трех форматов: Metafile (*.wmf), ACIS (*.sat), 3D Studio (*.3ds).
В AutoCAD можно создавать схемы в форматах от А4 до А1. При этом предусмотрена возможность распечатывать чертежи как на принтере, так и на плоттере.
Так как система ElectriCS устанавливается на базе AutoCAD ее возможности идентичны рассмотренным.
Во всех описанных программных средствах имеется готовая библиотека электротехнических элементов.
Так как Microsoft Visio и AutoCAD — универсальные инструменты для проектирования, набор электротехнических элементов в них ограничен, однако пользователи легко могут пополнить библиотеку недостающими элементами и сохранить их как шаблоны для дальнейшего использования.
Так как ElectriCS предназначена для автоматизированного проектирования электротехнических схем, набор электротехнических элементов в пакете ее программ максимальный. При этом не рекомендуется использовать папку библиотеки условно-графических обозначений (УГО), созданной по умолчанию при установке программы, так как разрабатываемые файлы УГО могут быть утеряны. Необходимо создать свою папку для библиотеки и скопировать в нее библиотеку УГО.
4.1.4. Базы данных для проектирования электроприводов и систем автоматизации
База данных для проектирования представляет собой набор взаимосвязанных документов, специальных файлов и таблиц данных. Она, как правило, размещается в отдельной папке и содержит:
технические средства электроприводов и систем автоматизации;
описания электрических устройств и связей между ними;
отчеты в формате документов Word или любом другом текстовом формате;
файлы черновиков, т.е. файлы рисунков, создаваемых для черновых проработок;
файлы структурных схем;
файлы функциональных схем;
файлы принципиальных схем;
файлы схем соединений;
файлы схем подключений;
файлы общих схем;
файлы схем расположения.
Все файлы схем выполняются в одном из видов программных средств автоматизации. Документы, размешенные в базе данных для проектирования, легко редактируются, сохраняются, удаляются.
В ElectriCS предусматривается автоматическое создание проекта в виде отдельного каталога.
197
4.2. Графические и буквенно-цифровые обозначения на схемах. Форматы
и основные надписи
4.2.1. Условные графические обозначения элементов схем и цепей
Графические обозначения общего применения для электрических, гидравлических, пневматических и кинематических схем и специальные обозначения для каждого вида схем, в том числе электрических, стандартизированы. Рассмотрим наиболее употребляемые УГО с учетом изменений, внесенных в стандарт в последние годы.
Обозначения общего применения, изображаемые в соответствии с ГОСТ 2.721—74, приведены на рис. 4.1...4.7.
При наличии текста к линии электрической связи, кабелю, шине или линии групповой связи текст помещают над линией, в разрыве линии, в начале или конце линии (см. рис. 4.4, а). Изображения групп линий электрической
т ~ f 3 ~ 50 Гц г
б в
т ~ fU 3 - 50 Гц 220 В 3N ~ 50 Гц 220/380 В
Рис. 4.1. УГО рода тока и напряжения, числа фаз, частоты и напряжения:
а — основное постоянного тока и при невозможности использования основного обозначения; б — постоянного тока с положительной (+) или отрицательной (-) полярностью; в — основное переменного тока: г — переменного тока с числом фаз т, частотой f и пример обозначения переменного трехфазного тока частотой 50 Гц; д - переменного тока с числом фаз т, частотой f напряжением U и примеры обозначения трехфазного переменного тока частотой 50 Гц, напряжением 220 В и трехфазного переменного тока, четырехпроводной линии (три провода и нейтраль) частотой 50 Гц, напряжением 220/380 В
---------Рис. 4.2. УГО обмоток:
а — однофазной с двумя выводами; б — трехфазной, соединенной в треугольник, звезду и зигзаг
| или (
Рис. 4.3. УГО электрических линий связи:
а — просто линий; б — линии с одним разветвлением; в — графического разветвления (слияния) линий групповой связи; г — пересечения линий и линий групповой связи электрически не соединенных проводов, кабелей, шин; д -- линий с одним и двумя ответвлениями; е — линий с допустимыми ответвлениями с углами, кратными 45°
198
связи, имеющих общее функциональное назначение, однолинейное и многолинейное показаны на рис. 4.4, б. При многолинейном изображении для облегчения поиска допускается разделять группу линий на подгруппы интервалами, при этом в каждой группе должно быть одинаковое число линий, а крайняя подгруппа может содержать меньшее число линий (см. рис. 4.4, в).
ABCDEF
-ABCDEF-
ABCDEF--
--ABCDEF
а
или ////
или //-
или ///
Рис. 4.4. УГО групп линий электрической связи:
а — размещение текста; о — изображение групп, имеющих общее функциональное назначение; в — изображение многолинейных групп, разделенных на подгруппы; г — однолинейное изображение группы, состоящей из 2...4 линий
Рис. 4.5. УГО экранированных электрической линии связи, провода и кабеля (а), отдельных участков линии (5), линии с ответвлением (в), соединения экрана с землей (г, д)
Рис. 4.6. УГО потока электромагнитной энергии или электрического сигнала (а), в двух направлениях (б), прямолинейного движения в одном направлении (в), в двух направлениях возвратного (г), прерывного с выстоем одностороннего (д) и возвратного (е), одностороннего с ограничением (ж) и возвратно-поступательного (з)
Рис. 4.7. УГО движения:
а — вращательного; б — возвратного; в — прерывного с выстоем; г — одностороннего с ограничением; д — качательного
199
Однолинейное изображение группы, состоящей из 2...4 линий электрической связи, показано на рис. 4.4, г.
Элементы привода и управляющих устройств изображаются в соответствии с ГОСТ 2.721—74. Условные обозначения привода показаны на рис. 4.8.
Обозначение приводов, приводимых в движение различными устройствами, показаны на рис. 4.9.
Условные обозначения муфт приведены на рис. 4.10.
На рис. 4.11 даны условные обозначения механизма с защелкой.
При изображении электрических машин используют упрощенный и развернутый способы построения условных графических обозначений (ГОСТ 2.722-68).
При упрощенном способе обмотки статора и ротора машин переменного тока изображаются в виде окружностей (рис. 4.12), внутри которых можно
Рис. 4.8. УГО приводов различного типа:
а — общее обозначение; б — электромашинного; в — электромагнитного; г - пневматического и гидравлического; д — теплового
Рис. 4.9. УГО приводов, приводимых в движение различными устройствами:
а — общее обозначение ручного; б — приводимого ключом; в — несъемной рукояткой; г — съемной рукояткой; д — маховичком; е — нажатием кнопки; ж — нажатием кнопки с ограниченным доступом; з — рычагом; и — ножного
Рис. 4.10. УТО муфт:
а — общее; б — выключенной; в — включенной
200
или
б
Рис. 4.11. Общее УГО тормоза (а), в опущенном состоянии (б), в состоянии торможения (в), общее обозначение механизмов с защелкой (г) и препятствующих передвижению вправо и влево в фиксированном (д) и нефиксированном (е) положениях и в обе стороны (ж)
е
или
ж
указывать схему соединения обмотки, например, статора — в звезду, а ротора — в треугольник (см. рис. 4.12, г).
Выводы обмоток можно изображать однолинейно и многолинейно. Однолинейное изображение выводов выполняют в соответствии с ГОСТ 2.721—74 (см. рис. 4.4). Примеры обозначения трехфазных машин с короткозамкнутым и фазным ротором показаны соответственно на рис. 4.12, а, б. При многолинейном изображении обмоток выводы показывают в соответствии с числом фаз. Пример такого изображения трехфазных обмоток показан на рис. 4.12, в, г. Причем выводы можно располагать с любой стороны изображения.
При развернутом способе построения УГО обмотки статора и фазного ротора изображаются в виде цепочек полуокружностей и располагаются с учетом геометрического сдвига осей фазных обмоток (см. рис. 4.12, д) или без его учета (см. рис. 4.12, ж).
Допускается использовать смешанное обозначение, например, обмотки статора изображать развернутым способом (см. рис. 4.12, д), а обмотки ротора — упрошенным (см. рис. 4.12, е), и наоборот (см. рис. 4.12, ж).
В обозначениях синхронных машин обмотки изображаются также упрощенным (однолинейным, многолинейным) или развернутым способом, но с ука
Рис. 4.12. УГО электрических машин:
а...г — выполненные упрощенным способом; д...ж — выполненные смешанным (упрощенным и развернутым) способом
201
занием конструкции ротора. На рис. 4.13, а...г приведены примеры обозначений синхронной трехфазной машины с обмоткой возбуждения на явнополюсном и неявнополюсном роторе и обмоткой статора, соединенной в звезду и треугольник. При наличии на роторе короткозамкнутой пусковой обмотки (демпферной клетки) она изображается, как у асинхронных машин (рис. 4.13, д, е).
В машинах постоянного тока (рис. 4.14) обмотка якоря изображается в виде окружности со щетками, а обмотка возбуждения — в виде цепочек полуокружностей, число которых определяет вид обмотки. Двумя полуокружностями изображают обмотку добавочных полюсов (см. рис. 4.14, о), тремя — обмотку последовательного возбуждения (см. рис. 4.14, б, в) и четырьмя — обмотку параллельного (см. рис. 4.14, г) и независимого (см. рис. 4.14, д, е) возбуждения. Располагают обмотки якоря и возбуждения с учетом (см. рис. 4.14, в, е) и без учета (см. рис. 4.14, б, г, д) направления магнитного поля, создаваемого обмоткой.
При изображении трансформаторов и автотрансформаторов в соответствии с ГОСТ 2.723—68 также используются упрощенные однолинейный, многолинейный и развернутый способы (рис. 4.15).
При упрощенных способах обмотки трансформаторов напряжения (см. рис. 4.15, а, б) и автотрансформаторов (см. рис. 4.15, е) изображаются в виде окружностей, а выводы при однолинейном способе — одной линией с указанием их числа, например трех (рис. 4.15, а), а при многолинейном — всеми линиями, определяющими число фаз, например тремя (см. рис. 4.15, б, е). При этом внутри окружностей может указываться схема соединения обмоток, например звезда—треугольник (см. рис. 4.15, б).
Рис. 4.13. УГО обмоток в синхронных машинах:
а, б — трехфазная с обмоткой возбуждения на явнополюсном роторе и обмоткой статора, соединенной в звезду; в. г — трехфазная с обмоткой возбуждения на неявнополюсном роторе и обмоткой статора, соединенной в треугольник; д, е — изображение короткозамкнутой пусковой обмотки на роторе
Рис. 4.14. УГО обмоток машин постоянного тока:
а — добавочных полюсов; б, в — последовательного возбуждения; г — параллельного возбуждения; д, е — независимого возбуждения
202
а б в г
Рис. 4.15. УГО трансформаторов:
а. б — напряжения; в — однофазного: г, д — трехфазных: е — автотрансформатора; ж, з — соответственно однофазного и трехфазного автотрансформаторов с ферромагнитным магнитопроводом; и.к тока
При развернутом способе обмотки изображаются в виде цепочек полуокружностей, число которых для автотрансформаторов ГОСТ не устанавливает, а для трансформаторов — три полуокружности на одну обмотку. Примеры таких обозначений приведены на рис. 4.15, в...д, ж, з.
В трансформаторах тока первичная обмотка изображается в виде утолщенной линии, выделенной точками, а вторичная — упрощенным способом — в виде окружности (см. рис. 4.15, и) или развернутым способом — двумя полуокружностями (см. рис. 4.15, к).
Катушки индуктивности и реакторы в соответствии с ГОСТ 2.723—68 также изображаются упрощенным и развернутым способом, однако наиболее распространен развернутый способ, т.е. изображение обмоток в виде цепочек полуокружностей. Примеры такого изображения катушек индуктивности и реактора приведены на рис. 4.16, а...д.
Коммутационные устройства и контактные соединения (куда входят контакты выключателей, контакторов и реле) в соответствии с ГОСТ 2.755 — 87 имеют общее обозначение контактов (рис. 4.17).
Для пояснения принципа работы коммутационных устройств при необходимости на их контакт-деталях изображают квалифицирующие символы (рис. 4.18).
Рис. 4.16. УГО катушек индуктивности без магнитопровода (а), с магнитопроводом без зазора (б) и с воздушным зазором (в), с магнитоэлектрическим сердечником (г) и выводами (д)
Рис. 4.17. УГО замыкающего контакта (а), размыкающего (б), переключающего (в) и переключающего с нейтральным центральным положением (г)
203
Cl х — тт □ 'Я <1 о
а б в г д е ж з и
Рис. 4.18. УГО квалифицирующих символов, изображаемых на контакт-деталях: а — функция контактора; б — функция выключателя; в - функция разъединителя; г — функция выключателя разъединителя; д — автоматическое срабатывание: е — функция путевого или концевого выключателя; ж — самовозврат; з — отсутствие самовозврата; и — дугогашение
Обозначения контактов контактора однополюсного, выключателя, разъединителя и выключателя разъединителя приведены на рис. 4.19.
Обозначения контактов замыкающих и размыкающих с замедлением даны на рис. 4.20.
На рис. 4.21 приведены обозначения контактов трехполюсных замыкающего нажимного кнопочного выключателя без самовозврата с размыканием и возвратом элемента управления различными способами, разъединителя трехполюсного, выключателя-разъединителя и выключателя ручного.
Обозначения контактов контактных соединений выполняются в соответствии с ГОСТ 2.755—87 (рис. 4.22).
Общее изображение воспринимающей части электромеханических устройств (катушек электромагнитов) и электротепловых реле согласно ГОСТ 2.756—76 имеет вид прямоугольника (рис. 4.23).
Обозначения плавких предохранителей по ГОСТ 2.727—68 и резисторов и конденсаторов по ГОСТ 2.728—74 приведены на рис. 4.24.
Обозначения полупроводниковых приборов по ГОСТ 2.730—73 приведены на рис. 4.25.
Рис. 4.19. УГО контактов однополюсных контакторов замыкающего (а), размыкающего (б), замыкающего дугогасительного (в), размыкающего дугогасительного (г), замыкающего с автоматическим срабатыванием (<9), выключателя (е), разъединителя (ж) и выключателя разъединителя (з)
Рис. 4.20. УГО контактов замыкающих (а... в) и размыкающих (г...е), действующих соответственно при срабатывании, возврате и при срабатывании и возврате
204
и и
а бег
ч <"Ч
д е ж з и
Рис. 4.21. УГО трехполюсных контактов однолинейного и многолинейного (а), замыкателя выключателя с автоматическим срабатыванием максимального тока (б), замыкающего нажимного кнопочного выключателя без самовозврата с размыканием и возвратом элемента управления автоматически (в), посредством второго нажатия кнопки (г), посредством втягивания кнопки (ф, посредством отдельного привода (е) и УГО разъеденителя трехполюсного (ж), выключателя-разъединителя (?) и выключателя ручного (и)
Рис. 4.22. УГО контактов контактных соединений:
1 2 3 4
разъемного соединения штырь (а) и гнездо (б), разборного (в) и неразборного (г) соединений, скользящего по линейной (д) и нескольким линейным (е). по кольцевой (ж) и нескольким кольцевым (з) токопроводяшим поверхностям, соединения контактного разъемного (и) и колодки зажимов (к)
Для упрощения на схемах допускается:
выполнять обозначения транзисторов в зеркальном изображении;
не изображать корпус, если смысл обозначения не меняется и корпус не используется для электрического подключения;
проводить линию электрической связи от эмиттера или коллектора в одном из двух направлений: перпендикулярно или параллельно линии вывода базы.
Обозначения полупроводниковых приборов с фотоэлектрическим эффектом даны на рис. 4.26.
205
Рис. 4.23. УГО воспринимающей части электромеханических устройств:
а - однофазных обмоток; о — трехфазных обмоток; в, г — с указанием вида обмотки; д, е — с указанием вида устройства, например реле времени, работающего с замедлением соответственно при срабатывании и отпускании; ж — воспринимающего устройства электротеплового реле; з — электромагнитной муфты
Рис. 4.24. УГО плавкого предохранителя (а), постоянных резисторов без отводов (5) и с отводами (в), шунтов (г), переменных резисторов (д, е), конденсаторов с постоянной (ж) и переменной (з) емкостями, полярных электролитических (и) и неполярных (к)
Рис. 4.25. УГО полупроводниковых приборов:
а — диод; б — стабилитрон; в — транзистор с переходами р—п—р; г — транзистор с переходами п—р—п; д — тиристор с управлением по катоду; е, ж — соответственно однофазная мостовая выпрямительная схема с диодами в развернутом и упрощенном видах
Рис. 4.26. УГО полупроводниковых приборов с фотоэлектрическим эффектом:
а — фоторезистор; б — фотодиод; в — диодный фототиристор; г — фототранзистор типа р—п—р; д — диодная оптопара; е — тиристорная оптопара; ж — резисторная оптопара
Источники света в виде осветительных и сигнальных ламп накаливания в схемах изображаются по ГОСТ 2.732—68 (рис. 4.27, а, б). При изображении сигнальных ламп секторы допускается зачернять. Для сигнализации используются также акустические приборы, изображаемые по ГОСТ 2.741—68 (рис. 4.27, в...е).
Элементы цифровой техники изображаются по ГОСТ 2.743—91 и имеют форму прямоугольника, от которого отходят линии выводов. УГО элемента
206
Рис. 4.27. УГО ламп накаливания (д, о), электрозвонка (в), электросирены (г), электрогудка (д) и полупроводникового светоизлучающего диода (е)
может содержать три поля: основное и два дополнительных, расположенных слева и справа от основного (рис. 4.28). В первой строке основного поля УГО помещают обозначение функции, выполняемой элементом. В последующих строках основного поля располагают информацию по ГОСТ 2.708—81.
УГО элемента цифровой техники может также состоять только из одного основного поля (рис. 4.29, а), основного и одного дополнительного, расположенного слева или справа от него (рис. 4.29, б), основного и двух дополнительных полей, разделенных на зоны, число которых не ограничено (рис. 4.29, в).
Обозначения выводов элементов цифровой техники показаны на рис. 4.30.
Обозначение функции элемента
Линия вывода
Указатели
Метка
Дополнительные поля
Указатели
Основное поле
иния вывода
Рис. 4.28. Структура УГО элементов цифровой техники
б
в
а
Рис. 4.29. Различные виды (а...в) УГО элементов цифровой техники
или
—[> или —
Рис. 4.30. Обозначения выводов элементов цифровой техники:
а — прямой статический вход или выход; б — инверсный статический вход или выход; в — прямой динамический вход; г — инверсный динамический вход; д — статический вход или выход с указанием полярности
207
KJ о о©
Таблица 4.1
Элемент гост МЭК (1ЕС) DIN ANSI/CSA
Резистор —1 1— -W- или -1 1- —1 1— RES или -1 1-
Резистор с отводами — — RES -А/^- или -1 И
Переменный резистор —гТп— —гТп— —Г7^1— —Г~И— ИЛИ
Потенциометр _р-1-j _р-1-j —Г/д—
Обмотка, индуктивность ГГГЪ или —— —— или X
Катушка индуктивности с выводами
Конденсатор —II— или НН или
Индикатор Q) Q) Q) О
Лампа 0 0 0 D или О или
Привод ручной, приводимый в действие ключом fi О —
Катушка электромагнитная ф- ф- ф-
Катушка электромагнитная с обмоткой тока III * 1 или II ' 1 Il ‘ 1
bJ о 40
Воспринимающее устройство электро-теплового реле Г^~1 или 1-4—1 Г^~1 L-Ц—1 ИЛИ *1 ИЛИ ч
Контакт контактора замыкающий 1 1 \ или О ± Д ИЛИ -|-
Контакт контактора размыкающий ИЛИ
Контакт замыкающий с замедлением, действующим при срабатывании I J. 'г Р | или 1 о о или
Контакт размыкающий с замедлением, действующим при срабатывании — V о или о
Контакт замыкающий нажимного кнопочного выключателя без самовозврата с размыканием и возвратом элемента управления автоматически 1 РВ о о
Контакт замыкающий нажимного кнопочного выключателя без самовозврата с размыканием и возвратом элемента управления посредством вторичного нажатия кнопки ч ,1, ,рв4- и I и Од о L--TC''
Разъединитель трехполюсный Гг5 00 ТУТ
Окончание табл. 4.1
Элемент ГОСТ МЭК (IEC) DIN ANS1/CSA
Трехполюсный выключатель с тепловым и электромагнитным расцепителем максимального тока III 1> А А А в г4- 1- 1 4- I-1 -+п 1" 1
Предохранитель —1=1— —1=1— —1=1— [ 1 ?
Однофазный трансформатор 1 1 ХФХ ИЛИ —СЮ— lj cS или XXX или <^^ИЛИ ШТОГ)
Автотра нсфор м атор КРили ф 1—1 или Ч-/' рр или
Трансформатор тока £ или f $
Генератор (общее обозначение) CD CD CD CD или CD
Машина электрическая (общее обозначение) CD CD CD или@
Двигатель постоянного тока (общее обозначение) ® ® ®
Асинхронный двигатель трехфазный (общее обозначение) (J) С^)
Асинхронный двигатель трехфазный с короткозамкнутым ротором (^) (£> 0
Асинхронный двигатель трехфазный с фазным ротором \\з//
Диод (А) (»Г) (К)
Светодиод -в*н
Тиристор
Транзистор с переходами рп--р ИЛИ
Транзистор с переходами п-р—п ИЛИ
В верху основного поля изображения логического элемента указывают выполняемую им функцию: & — И; 1 — ИЛИ; ।—। — задержка; > — усилитель; 1 — пороговый элемент; Т — триггер и др.
Размеры условных графических обозначений определяет ГОСТ 2.747—68. Однако они могут быть увеличены, если необходимо выделить (подчеркнуть) особое или важное значение соответствующего элемента (устройства), либо для размещения внутри изображения квалифицирующих символов или дополнительной информации, а также уменьшены в целях повышения компактности схемы. Размеры элементов, как и форматы чертежа, выбирают в зависимости от объема и сложности этого чертежа, особенностей и возможностей его выполнения (репродуцирования или микрофильмирования) и необходимости использования средств электронной вычислительной техники.
В связи с тем, что в проектной документации используются чертежи и схемы зарубежных фирм — производителей технических средств электроприводов и автоматизации, приведем некоторые иностранные УГО в сравнении с российскими (табл. 4.1).
4.2.2. Буквенно-цифровые обозначения элементов и устройств
Каждому устройству, их элементам и функциональным частям на схемах присваивается позиционное обозначение, состоящее из букв и порядкового номера одинаковой высоты.
Для единообразия в построении обозначений, ориентированных на применение компьютерных способов обработки информации, применяются буквенно-цифровые обозначения, регламентированные ГОСТ 2.710—81 и публикациями МЭК № 113-2 и 204-1. В рекомендуемых одно- и двухбуквенных обозначениях, приведенных в табл. 4.2, первая буква означает род элемента, а вторая — его функциональное назначение. При отсутствии необходимых рекомендуемых двухбуквенных обозначений к однобуквенному коду прибавляют букву латинского алфавита, формируя новое обозначение, смысл которого поясняют на поле схемы, либо используют однобуквенный код, что предпочтительнее.
Таблица 4.2
Однобуквенный код (обязательн ый) Двухбуквенный код Вид элемента (устройства)
А — Устройства (усилители и др.)
В — Преобразователи неэлектрических величин в электрические (кроме генераторов и источников питания), и наоборот
вв Датчик магнитострикционный
вк Тепловой датчик
212
Продолжение табл. 4.2
Однобуквенный код (обязательный) Двухбуквенный код Вид элемента (устройства)
BL Фотоэлемент
ВР Датчик давления
BR Датчик частоты вращения (тахогенератор)
BV Датчик скорости
С — Конденсаторы
D — Интегральные схемы
DA Аналоговая микросхема
DD Цифровая микросхема, логический элемент
DS Устройство хранения цифровой информации
DT Устройство задержки
Е — Элементы различные, для которых не установлено специальное буквенное обозначение
ЕН Нагревательный элемент
EL Осветительная лампа
F — Разрядники, предохранители, защитные устройства
FA Дискретный элемент защиты по току мгновенного действия
FP То же, инерционного действия
FS Элемент мгновенного и инерционного действия
FU Плавкий предохранитель
FV Дискретный элемент защиты по напряжению, разрядник
G — Генераторы, источники питания
GB Батарея
Н — Устройства индикаторные и сигнальные
НА Прибор звуковой сигнализации
HL Прибор световой сигнализации
К — Реле, контакторы, пускатели
213
Продолжение табл. 4.2
Однобуквенный код (обязательный) Двухбуквенный код Вид элемента (устройства)
КА Реле токовое
КН Реле указательное
КК Реле электротепловое
КМ Контактор, магнитный пускатель
КР Реле поляризованное
КТ Реле времени
KV Реле напряжения
L — Индуктивности (катушки индуктивности, реакторы, дроссели)
М — Двигатели
Р — Приборы и устройства измерительные и испытательные, указывающие, регистрирующие и дифференцирующие
РА Амперметр
PC Счетчик импульсов
PF Частотомер
PJ Счетчик активной энергии
РК Счетчик реактивной энергии
PS Регистрирующий прибор
PV Вольтметр
PW Ваттметр
Q — Выключатели и разъединители в силовых цепях
QF Автоматический выключатель
QK Короткозам ы кател ь
QS Разъединитель
R — Резисторы
RK Терморезистор
RP Потенциометр
214
Продолжение табл. 4.2
Однобуквенный код (обязательный) Двухбуквенный код Вид элемента (устройства)
RS Шунт измерительный
RU Варистор
5 — Устройства коммутационные для цепей управления, сигнализации и измерительных
SA Выключатель или переключатель
SB Выключатель кнопочный
SL Выключатель, срабатывающий от уровня
SP Выключатель, срабатывающий от давления
SQ Выключатель, срабатывающий от положения (путевой)
SR Выключатель, срабатывающий от частоты вращения
ST Выключатель, срабатывающий от температуры
Т — Трансформаторы
ТА Трансформатор тока
TS Стабилизатор электромагнитный
TV Трансформатор напряжения
и — Преобразователи электрических величин в электрические
UR Модулятор, демодулятор
UJ Дискриминатор
uz Преобразователь частоты, выпрямитель, инвертор
V — Приборы полупроводниковые
VD Диод, стабилитрон
VT Транзистор
VS Тиристор
X — Контактные соединения
XA Скользящий контакт, токосъемник
XP Штырь
215
Окончание табл. 4.2
Однобуквенный код (обязательный) Двухбуквенный код Вид элемента (устройства)
XS Гнездо
XT Разборное соединение
Y — Устройства механические с электрическими приводами
YA Электромагнит
YB Тормоз с электромагнитным приводом
YC Муфта с электромагнитным приводом
YH Электромагнитная плита и патрон
YV Электромагнитный золотник
4.2.3. Форматы и основные надписи
Основные форматы листов чертежей устанавливает ГОСТ 2.301—68 (табл. 4.3).
Дополнительные форматы создаются увеличением короткой стороны основного формата на значение, кратное этому размеру. Обозначение дополнительного формата составляется из обозначения основного формата и его кратности.
Форматы листов определяются размерами их внешней рамки. На рис. 4.31 показаны форматы с различным расположением основной надписи / и дополнительных граф 2...4. Дополнительные графы 2 и 3 служат для записи инвентарных номеров подлинников и дубликата, подписей и даты приемки, а дополнительная графа 4, являющаяся обязательной для чертежей и схем, для обозначения документа. Обозначения документов выполняют в соответствии с ГОСТ 2.501—68, 2.502—68, 2.503 — 74. Оформление любого конструкторского документа начинается с основной надписи. ГОСТ 2.104—68 предусматривает форму, размеры и порядок заполнения основных надписей. На рис. 4.32 представлены размеры и формы основных надписей. Содержание граф следующее: / — наименование изделия в соответствии с ГОСТ 2.109—73 и документа в именительном падеже единственного числа; 2 — обозначение документа (индекс предприятия, разработавшего документ, характеристика
Таблица 4.3
Обозначения основных форматов А4 АЗ А2 А1 АО
Размеры форматов, мм 210x297 297x420 420x594 594x841 841x1189
216
Рис. 4.31. Форматы листов с различным расположением основной надписи 1 и дополнительных (2... 4) граф
а
в
Рис. 4.32. Размеры и формы основных надписей:
а — для .теталси. сборочных единиц и схем; б — для первого листа текстовых конструкторских документов; в — для последующих листов текстовых документов
217
по классификатору, порядковый регистрационный номер документа в пределах данной характеристики (три последние цифры), по необходимости шифр документа (например, ЭЗ — схема электрическая принципиальная) по ГОСТ 2.201—80); 5 — обозначение материала детали (заполняется только на чертежах деталей); 4 — слева направо литера документа в зависимости от стадии разработки конструкторской документации (П, Э, Т — проектная стадия; О, О], А — рабочая стадия) по ГОСТ 2.103—68; 5 — масса изделия по ГОСТ 2.109—73; 6 — масштаб в соответствии с ГОСТ 2.302—68 и 2.109—73; 7 — порядковый номер листа (на документах, состоящих из одного листа, не заполняется); 8 — число листов документа; 9 — наименование или различительный индекс предприятия, выпускающего документ (не заполняется, если различительный индекс содержится в обозначении документа); 10... 12 — характер работы, фамилии и подписи лиц, разрабатывавших документ; 13 — даты подписания документа; 14... 18— отметки об изменениях, вносимых после выпуска документа в соответствии с ГОСТ 2.503—74.
4.3. Проектирование с использованием
Microsoft Visio
4.3.1. Вход в Microsoft Visio и выход из него с сохранением выполненной работы
Запуск Microsoft Visio 2002 осуществляется командой Пуск Программы —> El MicrosoftVisio. После загрузки на экране появится диалоговое окно, изображенное на рис. 4.33.
Открытие нового файла чертежа, не базирующегося на готовых трафаретах, осуществляется нажатием кнопки Blank drawing из раздела New. В результате получают не масштабируемую (1:1) страницу чертежа, в которой не используются шаблоны и трафареты.
Прежде чем создавать чертеж необходимо выбрать тип чертежа через опцию Choose Drawing Туре. Нажав на левую кнопку мыши и передвигая ее, сначала выбирают категорию чертежа (Category), а затем из палитры трафаретов шаблоны или мастер-образы, в результате чего открывается диалоговое окно, приведенное на рис. 4.34.
Каждый Visio-документ содержит:
по крайней мере одну страницу рисунка;
трафарет документа, который содержит копии любых шаблонов, используемых на странице рисунка (или в случае vss-файла — трафарет, который просто изображает шаблоны);
список рабочего пространства, который определяет все окна и файлы, которые открываются с текущим файлом;
список стилей, определенных в документе, включающий в себя по крайней мере четыре назначенных Visio-стиля (No Style, None, Normals Text Only)', 24-битную палитру цветов (которую возможно модифицировать) и 232 дополнительных цвета;
218
Д М icrosoft Visio
File Edit View Insert Format Tools $мре Window Help т:'ре з question to> belts »
I □ ’ 2? M "i л 4: ft « - A - " . z - ф • iEc%...........z ”
Choose Drawing Type
Category Template
Ф ♦ New Drawing ▼ X
Open a drawing
Choose drawing...
New
И Blanh drawing
New from existing drawing
iCj Choose drawing,,.
New from template
E j Circuits and Logic
E] Industrial Control Systems More templates,,,
; Hide template previews
F?| Microsoft Visio Help
V Show at startup
Рис. 4.33. Ярлык открытия
проект Microsoft Visual Basic for Applications (VBA) с модулем классов This Document;
«чистый» документ, в котором могут содержаться данные, определенные самим пользователем, т.е. документ может содержать образы рисунка со стилями и цветами, взятыми из данных, которые содержатся в документах.
Документ может также включать в себя дополнительные VBA-проекты с модулями, модулями классов и пользовательскими формами.
Открытие уже имеющегося чертежа осуществляется нажатием кнопки Choose drawing из раздела Open a drawing (см. рис. 4.33). В Visio можно открыть сразу несколько чертежей, выделив с помощью нажатой клавиши Ctrl соответствующие файлы и нажав кнопку Open.
Если необходимо открыть существующий чертеж таким образом, чтобы его основной файл остался без изменений, в диалоговом окне Open следует активизировать кнопку Сору. Если активизировать кнопку Read only, то изменения, произведенные в открытом чертеже, не сохранятся в существующем файле.
Для открытия файла, созданного в предыдущих приложениях Visio, необходимо выбрать команду File —> Open или дважды щелкнуть мышью по этому файлу.
Все Visio-файлы имеют один и тот же формат. Однако расширение файла документа определяется тем, каким образом он был открыт и как сохранялись в нем произведенные изменения.
219
Рис. 4.34. Папки трафаретов
Visio-документ может быть рисунком (.vsd), трафаретом (.vss), эскизом (.vst), рабочим пространством (.vsw).
Программа Visio использует файловое расширение для определения того, что следует отобразить на экране при открытии документа. Для сохранения чертежа в виде файла с расширением .vsd, который впоследствии можно загрузить в Visio в качестве эскиза.
При выборе команды File —> Open «движок» Visio использует расширение файла, чтобы определить, какое из окон будет активизировано, т.е. при открытии файла-трафарета, соответствующее окно чертежа останется закрытым (отобразится только трафарет документа).
При открытии файла чертежа, соответствующее окно трафарета будет закрыто, а на экране появится только страница с чертежом.
Можно выводить на экран закрытые окна с помощью настроек Visio-файла, а чтобы создать новый самостоятельный трафарет для часто употребляемых образов, необходимо сохранить документ в виде файла с расширением .VSS.
При одновременном открытии нескольких файлов чертежа (.vsd), можно сохранить расположение всех открытых окон в файле рабочего поля (.vsw). После открытия файла рабочего поля на экране появятся все окна чертежей, причем в тех позициях, в которых их оставили при последнем сохранении чертежа (опция Checking Workspace диалогового окна Save As сохраняет только описания открытых окон в файле списка).
220
Для сохранения документа в виде файла рабочего поля необходимо нажать комбинацию клавиш Alt + F12, ввести имя файла, выбрать папку для сохранения, а затем нажать кнопку Save. Следует помнить, что перед сохранением файлов в рабочем поле необходимо сохранить чертежи в файле с расширением .vsd.
Для сохранения файла трафарета и эскиза, которые впоследствии будут «работать вместе», необходимо убедиться, что соответствующие настройки для страницы рисунка, стилей и цветов совместимы друг с другом.
Для работы над документом, который пользователь будет просматривать, а не редактировать, следует сохранить файл как читаемый (read-only), отметив в диалоговом окне Save As команду Read Only. В этом случае пользователь сможет открывать и редактировать копию читаемого файла, но сам оригинал останется защищенным от его вмешательства. Файл, пригодный только для чтения, можно сделать снова редактируемым, воспользовавшись командой Save As и сохранив его под другим именем.
4.3.2. Содержание инструментальных средств
Microsoft Visio 2002 содержит 14 папок различных категорий, в каждой из которых содержится по несколько шаблонов.
1. Папка Block Diagram содержит три папки шаблонов, используемых:
для различных типов основных диаграмм Basic Diagram, которые могут быть включены менеджерами отделов продаж и маркетолагами в отчеты, предложения и служебные записки;
блоковых диаграмм Block Diagram, с помощью которых можно создавать схемы алгоритмов, осуществлять визуализацию идей и сложных концепций;
блоковых диаграмм с перспективой Block Diagram with Perspective, с помощью которых можно представить задачи организаторов в единой и понятной форме.
2. Папка Building Plan содержит 12 папок шаблонов, которые можно использовать для размещения в офисе мебели, перегородок, дверей и окон и визуализации интерьера. Интересна папка с шаблонами Electric and Telecom Plan, ее трафареты могут использоваться при размещении в шкафах электротехнического оборудования. Конструкторы могут использовать диаграммы планов для размещения оборудования в цехах.
3. Папка с диаграммами Database содержит пять папок шаблонов, с помощью которых можно визуализировать схему той или иной базы данных. Хранящиеся в этой папке шаблоны и трафареты можно использовать для создания диаграмм той или иной модели базы данных.
4. Папка Electrical Engineering содержит четыре папки шаблонов, с помощью которых можно чертить любые электрические схемы, а также использовать их для создания кольцевых и логических систем, промышленных систем управления и систем в целом.
5. Папка Flowchart содержит 10 папок шаблонов, которые можно использовать для создания различных профессиональных блок-схем. SDL Diagram содержит графические элементы языка SDL (языка спецификаций и описаний), предназначенные для создания профессиональных блок-схем, в част
221
ности блок-схем программ. TQM (Total Quality Management) Diagram предназначена для создания блок-схем управления и автоматизации процесса. Work Flow Diagram (распределения рабочего потока) предназначена для создания блок-схем процессов управления, учета и изменения человеческих ресурсов. Также эти блок-схемы можно использовать для создания структурных схем.
6. Папка Forms and Charts содержит три папки шаблонов, которые можно использовать для создания различных диаграмм маркетинга и форм проектирования, а также для создания презентаций.
7. Папка Мар содержит две папки шаблонов, которые можно использовать для создания двухмерных или трехмерных карт. С помощью трафаретов этой папки можно осуществлять привязку к местности различных объектов.
8. Папка Mechanical Engineering содержит две папки шаблонов, которые можно использовать для создания чертежей механизмов, гидравлических и монтажных чертежей.
9. Папка Network содержит шесть папок шаблонов. Трафареты шаблона Logical Network Diagram можно использовать для создания логических диаграмм сети, a Basic Network — для создания различных типов физических диаграмм сети. Эти шаблоны также можно использовать для создания электрических схем подключения.
10. Папка Organization Chart содержит две папки шаблонов, которые можно использовать для создания диаграмм и организационных структур фирм.
11. .. 14. Папки Process Engineering, Project Schedule, Software, Web Diagram содержат папки шаблонов, которые можно использовать соответственно для создания: диаграмм конвейерной обработки и конвейерной пересылки; календарей Gantt-диаграмм (проектный менеджмент, записная книжка, расписание и т.д.) и PERT-диаграмм (проект и задание менеджмента, структура работы, жизненный цикл проекта и т.д.); диаграмм приложений различного типа; концепций Web-серверов и карт Web-узлов.
4.3.3. Создание электрических схем
Главной особенностью Visio является обширная подборка библиотек готовых образов условных обозначений радиодеталей, всевозможных вентилей, заглушек, логических блоков и многого другого. Коллекцию библиотек можно пополнять, создавая новые элементы или редактируя имеющиеся.
С помощью привычных средств и интерфейса Office можно быстро создавать красивые визуальные эффекты. Для создания диаграммы достаточно перенести на страницу необходимые фигуры Microsoft Smart ShapesT. Фигуры Visio ведут себя подобно реальным объектам, которые они представляют. Надписи связаны соответствующими фигурами. При перемещении элементов изменяются длина и наклон соединительных линий, которые затем можно масштабировать, деформировать, перемешать, размножать. Особенно удобно работать с ломаными или ступенчатыми стрелками и линиями связи: они имеют несколько узловых точек, вследствие чего их можно ломать мышкой и растягивать самым причудливым образом. Для создания красивых структурных схем имеется много объемных элементов с тенью.
222
Рис. 4.35. Окно выравнивания образов
В интерфейсе Visio поддерживаются улучшения пользовательского интерфейса Office ХР, т.е. имеются настраиваемые меню и панели инструментов, области задач, а также привычные средства Office: автозамена, проверка орфографии в фоновом режиме и сочетания клавиш.
Образы можно выравнивать по отношению друг к другу, т.е. располагать по левому/право-му краю, верхней/нижней границе. Для этого с помощью клавиши Shift и инструмента Стрелка надо выбрать несколько образов, посредством команды Shape —> Align Shapes открыть диалоговое окно Align Shapes и, выбрав в нем способ выравнивания (рис. 4.35), нажать кнопку ОК.
Можно создать направляющие и привязать к ним выровненные образы (если образы привязаны (Glue) к направляющей, они двигаются только по этой направляющей), для чего в меню Tools следует выбрать команду Snap & Glue и в открывшемся диалоговом окне (рис. 4.36) в разделе Currently active убедиться в том, что флажок привязки Glue активизирован, а в разделе Glue to выбрать флажок Guides.
Если образ одномерный, можно перенести одну из его точек привязки в то место направляющей, к которому этот образ надо привязать. Когда образ будет привязан, точки привязки окрасятся в красный цвет.
Двухмерный образ можно просто перенести к тому месту направляющей, к которому его необходимо привязать. При этом привязанная часть станет красного цвета.
Для того чтобы задать для двухмерного образа размер, ориентацию на чертеже и центр поворота, необходимо выделить его и посредством команды View Size & Position Window обратиться к панели Size & Position (рис. 4.37).
Рис. 4.36. Окно привязки образов
223
X 66.5 mm Л1 £= о W CT. <3 3
IY 231 mm
Width 5 mm
Height 2 mm
Angle 0 deg 3
। Pin Pos Cenfer-Cenh
Рис. 4.37. Окно задания размера
Рис. 4.38. Окно инструмент Соединитель
С помощью полей данных Xu Yможно перемешать образ по осям координат: для изменения ширины ввести значение в поле Width; для изменения высоты ввести значение в поле Height; для поворота задать требуемый угол в поле Angle; для расположения центра вращения образа по осям координат выбрать соответствующий параметр из списка Pin Pos.
Созданные на чертеже и привязанные к направляющим образы можно связать между собой таким образом, чтобы и при перемещении они оставались соединенными. Для этого необходимо убедиться в том, что Мастер-соединитель (Connector Master) не выбран на открытом шаблоне (выделенные иконки мастера окрашены в синий цвет) и из основной палитры инструментов (Standard Toolbar) выбрать инструмент Соединитель (Connector Tool) (рис. 4.38).
Чтобы связать образы Visio между собой с помощью метода статического связывания (Static Glue), точку привязки просто перетаскивают к одной из точек соединяемого образа.
Чтобы связать образы с помощью метода динамического связывания (Dynamic Glue) точка привязки первого образа перетаскивается к середине второго образа до тех пор, пока вокруг него не появится красная рамка.
В случае если надо соединить двухмерные образы, выбирают инструмент Соединитель и перемещают указатель возле первого образа до тех пор, пока вокруг него не появится контур. После этого указатель плавно переносят на второй образ до тех пор, пока вокруг него также не образуется контур. После чего отпускают левую клавишу мыши, тем самым «сомкнув» образы. Для заканчивания операции выбирают инструмент Стрелка.
4.3.4. Выборка образов
Для. того чтобы выбрать тот или иной образ, нужно щелкнуть по нему левой кнопкой мыши в тот момент, когда черная стрелка станет белой. Если необходимо выбрать несколько образов одновременно, необходимо просто «окружить» выделяемые образы и отпустить левую кнопку мыши. Выборка всех образов чертежа осуществляется командой Edit Select АН (рис. 4.39).
Используя технологию Visio Smart Shapes, можно разрабатывать образы, которые будут похожи на изображаемые ими объекты реального мира. Это означает, что образы могут моделировать характеристики, которые считаются важными и значимыми для создаваемых чертежей и диаграмм. Это можно делать с помощью формул, настройка которых подчиняет образы установленным правилам, нормам или принципам, применимым для отображаемых объектов. Каждый Visio-образ имеет свое окно Shape Sheet, которое определяет его
224
уникальные свойства и поведение. В этом окне каждое свойство устанавливается числом или формулой. При работе с образом эти формулы динамически пересчитываются, их также можно просмотреть или отредактировать. Многие свойства, которые требовали внешнего программирования, в данной версии можно контролировать с помощью окна Shape Sheet. Например, добавление в меню образа нескольких пунктов выполняется настройкой формул для образа в этом окне. Формулы могут контролировать и другие атрибуты образа:
геометрию (раскачивание, вращение, видимые и невидимые траектории);
цвет, заполнение и качество линий;
Рис 4.39. Окно Выборка образов
текст, включая шрифты, форматирование и ориентацию параграфа;
контрольные регулировки, которые помогают пользователю настраивать образ;
точки соединения, к которым «подклеиваются» другие образы; настройки, которые могут содержать информацию о пользователе.
Интерфейс диалогового окна, показанного на рис. 4.40, облегчает использование единичных ссылок для связи одного свойства образа с другим. Следовательно, свойства образа могут влиять друг на друга. Так, в механическом
Рис. 4.40. Окно Связка цвета с размером образа
225
Insert Format Tools Shape Window Help (2| New Page...
- &
“ |_3 comment,,, Ц _______________
| Ф ♦ New Drawing
Picture
Clip Art,.,
CAD Drawing...
From File.,.
t » Control,,,
1
J Object...
||^ Hyperlinks...
From Scanner or Camera...
Chart
Ctrl+K
Data Map,,,
Equation,,,
Рис. 4.41. Окно вставки или импорта рисунка
чертеже можно связать цвет образа с его размерами и тем самым указать, какая часть детали имеет допустимые габаритные размеры.
Простые образы работают в схемах или чертежах Visio быстрее и лучше.
Получать образы помимо рисования можно, импортируя графику из других программ, конвертируя материалы в образы, сканируя картинки и используя их в виде образов, адаптируя существующие образы для личного пользования.
В Microsoft Visio 2002 образ может быть одномерным (1-D) или двухмерным (2-D). Одномерный образ представляет собой линию и имеет конечные точки привязки, которые можно подтягивать инструментом Указатель (Pointer tool), меняя при этом размеры образа. Двухмерный образ представляет собой прямоугольник и имеет регулировки выбора, которые можно подтягивать инструментом Указатель, меняя при этом размеры образа [31].
Простейшим способом «установки» графических образов на чертеж Visio является их вставка или импорт. Для импортирования графического образа следует выполнить команду Insert Picture (рис. 4.41).
Импортируется образ в виде нового графического объекта в формате метафайла (если графика оригинала основана на векторах) или в формате растрового изображения (если графика оригинала была в файле BMP или DIB).
Также можно открывать графические файлы, используя команду File Open и выбрав соответствующий формат в окне открытия типа графических файлов Files of type (рис. 4.42).
Для большинства импортированных файлов в диалоговом окне Open находятся установки импорта Import settings, с помощью которых можно определить, в каком именно виде этим файлам необходимо появляться на чертеже. Так, импортируя файл в формате РСТ, можно указать надо ли образу сохранять градиенты и фон и как преобразовывать цвета.
Files of type:
All Visio Files
Ш Visio. Files.
Drawing
Stencil
Template Workspace AEG Flowcharter
Рис. 4.42. Окно открытия типа графических файлов
226
Рис. 4.43. Окно с растровым изображением
[] [W
FU1
3U1 3W1
Рис. 4.44. Построенный с помощью приведенных приемов фрагмент электрической схемы
Для того чтобы узнать является импортируемый графический объект метафайлом или растровым изображением, указывают объект, а затем выбирают Format Special. Открывшееся диалоговое окно покажет соответственно Тип'. Метафайл или Тит. Растровое изображение (рис. 4.43).
Фрагмент принципиальной электрической схемы, построенный с помощью описанных приемов, показан на рис. 4.44.
4.4. Проектирование с использованием AutoCAD
4.4.1. Запуск AutoCAD
Запуск AutoCAD осуществляется быстрым двойным нажатием пиктограммы .
В зависимости от текущей настройки системы при запуске AutoCAD либо сразу открывается новый пустой рисунок, либо на экран выводится диалоговое окно Загрузка (рис. 4.45), в котором необходимо щелкнуть мышью по одной из четырех больших кнопок с нужным вариантом начала работы: Open a Drawing (Открытие рисунка). New (Новый), Use a Template (По шаблону) и Use а IVica rd (Вызов мастера). При создании нового рисунка в режиме New (Новый), следует сначала установить нужный тип единиц измерения: Metric (Метрические) или English (feet and inches) (Английские (футы и дюймы)).
AutoCAD открывает основное окно системы и его элементы без всяких предварительных нестандартных установок (рис. 4.46).
Строка меню 1 содержит имена падающих меню из групп меню, загруженных в системе в текущий момент. В конце строки меню располагаются кнопки [□|х|, предназначенные для управления окном активного документа.
227
ИЕЗ
Л Загрузка
Начать с начала
~ Параметры по умолчанию------
С Английские [футы и дюймы]
; (* ^Метрические
г- Подсказка----------------------------------------—
Использовать метрические единицы измерения.
Р7 П оказывать диалог при запуске
ОК | Отмена |
Рис. 4.45. Окно Загрузка
Число панелей инструментов 2 определяется начальной установкой программы. Полный набор включает в себя более двадцати видов таких панелей. На рабочем столе можно разместить любые панели в любом количестве, но не следует устанавливать их все, так как это усложняет работу, ограничившись набором из нескольких активно используемых видов. Загрузка и удаление панелей осуществляются с помощью контекстного меню (рис. 4.47), которое открывается щелчком правой кнопки мыши при расположении курсора устройства указания на одной (любой) из панелей.
При необходимости вызвать или убрать несколько панелей следует из контекстного меню выбрать Вид (View) Панели инструментов (Toolbars) ОК. После чего откроется соответствующая вкладка (рис. 4.48) с флажками слева от имен тех панелей, которые в данный момент находятся на экране. Щелчок мышью по квадрату слева от имени сбрасывает или устанавливает этот флажок.
Зона командных строк 6 (см. рис. 4.46) является самостоятельным окном, интегрированным в систему окон AutoCAD. Обычно эта зона содержит три текстовых строки, но можно изменить ее размер мышью, передвигая границу вверх или вниз. Последняя (нижняя) строка в данной зоне называется командной строкой (или текущей командной строкой). В нее система выводит свои сообщения и запросы, а пользователь вводит с клавиатуры команды и ответы на запросы.
Зона командных строк включает в себя последние строки текстового окна активного документа, поэтому при активизации другого рисунка содержимое зоны автоматически меняется.
Даже при использовании меню и пиктограмм панели инструментов для ввода команд необходимо просмотреть командную строку, чтобы увидеть реакцию системы на введенную команду. Многие команды имеют опции, выбор которых проще выполнять введением символа с клавиатуры в командную строку. Кроме того, в командной строке отображается все, что вводится с клавиатуры. При нажатии клавиши F2 распахнется все окно командной строки и можно увидеть все команды, которые были выполнены. Если вновь нажать клавишу F2, текстовое окно закроется.
228
Рис. 4.46. Основное диалоговое окно системы AutoCAD:
1 — строка меню; 2 — панели инструментов; 3 — пиктограмма осей координат; 4— вкладки; 5 — строка состояния; 6 — зона командных строк; 7 — курсор устройства указания; 8 — графическая
зона
Если расположить указатель мыши в зоне командных строк и щелкнуть ее правой кнопкой, появится контекстное меню (рис. 4.49), содержание которого не совпадает с содержанием других контекстных меню.
Подменю Последние команды (Recent Commands) позволяет пользователю повторять последние команды, выбирая их мышью. Пункты со второго по пятый соответствуют традиционным операциям с буфером обмена, причем пункт Копировать протокол (Copy History) позволяет скопировать в буфер весь протокол работы, который хранится в текстовом окне текущего рисунка.
Строка состояния 5 (см. рис. 4.46) ограничивает окно системы AutoCAD. В ее левой части находится некоторый текст (обычно это координаты текущего положения устройства указания), а в средней — кнопки режимов: ШАГ, СЕТКА, ОРТО, ПОЛЯР, ВЫРВ, СЛЕД, ВЕСЛИН, МОДЕЛ.
Кнопка СЕТКА позволяет включать или выключать сетку из точек с настраиваемым шагом (рис. 4.50).
229
3D Орбита Вид Вставить Изменение Масштаба
м* Изменить Изменить И Интернет ПСК пеки Поверхности Правка Ссылок Привязка Объекта Размеры
Редактиров®«4е Тведаых Тел Редаеринг Рисование
*/ Свойства Объекта Справки Ссылки
* Стандартные Инструменты Твердые Тела Тень Точки Вида Форматы
Настроить...
Рис. 4.47. Контекстное меню
Панет инструментов:
□ 3D Орбита
□ Вид
П Вставить
I | Изменение Масштаба
[X] Изменить
□ Изменить II
О Интернет
Грута Менке
Г~ Большие Кнопки р Павсказки
Рис. 4.48. Вкладка Панели инструментов
Последние команды ►
f । 1-f-j - н ld’| '
Котировать протокол
t'f С: г J '!-.r ?
Параметры...
Рис. 4.50. Сетка из точек с настраиваемым шагом
Рис. 4.49. Окно подменю Последние команды
Кнопка ОРТО включает или выключает режим ортогональности. Если этот режим включен, AutoCAD начинает корректировать прямолинейные сегменты строящихся отрезков и полилиний до вертикального или горизонтального положения.
Кнопка ПОЛЯР включает или выключает режим полярного отслеживания, являясь расширением режима ОРТО на углы с некоторым настраиваемым шагом, т.е. позволяет задать отслеживание углов с определенным шагом. Можно задать в этом поле и свой угол, для чего следует подвести курсор к кнопке ПОЛЯР и нажать на правую кнопку мыши, при этом откроется окно (рис. 4.51), в котором можно выставить необходимое приращение угла.
Кнопка СЛЕД позволяет использовать полярное отслеживание объектов от промежуточной точки, указываемой с применением объектной привязки.
Кнопка ВЕСЛИН включает или отключает режим отображения веса объектов чертежа. Вес линии — это толщина, с которой она будет выводиться на внешнее устройство. На рис. 4.52 показан один и тот же прямоугольник при
230
Чертежные Настройки
ВЕЗ
Привязка и Сетка j Полярная Трассировка^ Привязка Объекта | Р Полярная Трассировка (F10) г* Параметры Полярного Угла i Приращение Угла | |й з I Г Дополнительные углы
р П араметры I рассировки— : (* Только Ортогонально
। С* Используя параметры всех I полярных углов
Создать | : _
, | ! * Мера Полярного Угла------
<♦ Абсолютная
С Относит, последнего сегменте
Опции...
| ОК || Отмена | Справка |
Рис. 4.51. Окно Чертежные Настройки
разных положениях кнопки веса: слева — при выключенном, справа — при включенном.
Кнопка МОДЕЛ позволяет переключаться между пространствами модели и листа. В режиме модели доступны только объекты пространства модели, а в режиме листа — только объекты, созданные в пространстве листа.
Окно каждого документа имеет строку вкладок, среди которых первой всегда имеется вкладка Model, которая является единственной вкладкой пространства модели, имя которой изменить нельзя. На вкладке Model обычно строится графическая модель объекта (трехмерная или двухмерная), а вкладки пространства листа соответствуют листам чертежей, которые выпускаются по построенной модели. Кнопки |м.;. < ► . ►< , расположенные в начале строки
вкладок, позволяют перемещаться соответственно на самую первую вкладку, на одну вкладку влево от текущей, на одну вкладку вправо от текущей, на
самую последнюю вкладку.
Устройство указания с курсором /обеспечивает взаимодействие пользователя с элементами интерфейса системы.
Графическая зона 8— это большая пустая зона внутри экрана, именно в
ней будет осуществляться нанесение элементов чертежа (ее можно сопоставить с чистым листом бумаги). Эта зона может иметь произвольные размеры.
Пиктограмма осей координат 3 — это графический символ из двух стрелок, направление которых совпадает с положительным направлением линий осей пользовательской системы координат.
Рис. 4.52. Образцы изображений прямоугольников при использовании кнопки ВЕСЛИН
231
4.4.2. Сохранение чертежа
Хип Файла: |AutoCAD 2000 Drawing (’.dwg]
Сохранение чертежа производится, как в приложениях Windows.
Команды сохранения могут сохранять рисунок в любом из форматов, которые можно указать, щелкнув мышью в раскрывшемся списке Тип файла (Files of type) (рис. 4.53).
Форматы DWG разных версий отличаются тем, что при сохранении в них более старой версии система заменяет новые объекты их аналогами, использовавшимися в ранних версиях. Тот же принцип применяется в форматах DXF разных версий.
Формат DWT используется для получения файлов-шаблонов, которые затем могут применяться при создании новых рисунков в режиме По шаблону (Use a Template).
В стандартном варианте настройки AutoCAD при сохранении рисунка со-
здает резервную копию его предыдущего состояния (с тем же именем, но с расширением .bak). При необходимости ВАК-файл можно переименовать в файл с расширением .dwg и редактировать его в системе AutoCAD. Создание резервной копии можно отменить, убрав флажок в окошке Создавать резерв-
AutoCAD 2.000 Djawing C.dwql
AufoCAD R14/LT98/LT97 Drawing C.dwg) AutoCAD R13/LT95 Drawing (* dwg!
.1' AutoCAD Drawing Template File 14 dwt) AutoCAD 2000 DXF (x dxf'l AutoCAD FH4/LT98/LT97 DXFF.dxtj AutoCAD R13/LT95 DXF F.dxf'l AutoCAD R12/LT2 DXF^.dxf)
Рис. 4.53. Окно Тип файла
У Параметры
Текущие «Профиль без имени» Текущий чертёж- Drawing2 dwg
Файлы | Экран Открыть и Сохранить | Вывод | Система) Настройки Пользователя) Черновой) Выбор) L
-Сохранение файлов--------
Сохранять как:
[AutoCAD 2000 Чертеж dwgl
50 Процент пошагового сохранения
-j Внешние Ссылки [Ссылки)----------—- ——- -
j Загрузка ссылок:
) j [разрешена т[
i | ЕЗ Р Сохранять изменения в слоях Ссылок
j i Щ Р Разрешить другим пользователям
\ ; Редактор ссылок для текущего чертежа
- Меры предосторожности-------------------
F/ Автоматическое сохранение
|20 Минут между сохранениями
t P Создавать резервную копию при сохранении Г Постоянная проверка корректности CRС Г Поддержка файла протокола
|ас$ Расширениедля временных Файлов
- Приложения ObjeotARX----—-----------------
। Требование загрузки приложений ARX-объектов:
1 [сбнаруж^иё'о&ъекта' ивызов команды
Заместители для пользовательских объектов: j Показывать графику
j R Отображать диалог свойств для
> Объектов-заместителей
| OK
1 ДРименить I Справка
Рис. 4.54. Окно Параметры
232
ную копию при сохранении диалогового окна Параметры (рис. 4.54). Для открытия этого окна выставляют курсор мыши на свободное место графического поля и щелкают правой кнопкой мыши, при этом откроется контекстное меню, из которого необходимо выбрать Опции.
В открывшемся окне также можно выставить автоматическое сохранение, задав время между сохранениями.
4.4.3. Открытие и частичное открытие чертежа
Открытие уже существующего чертежа также производится, как в приложениях Windows. Открывшееся окно, приведенное на рис. 4.55, позволяет с помощью кнопок, расположенных справа внизу, осуществить:
полное открытие рисунка (обычный режим);
открытие рисунка без возможности сохранения изменений;
частичное открытие рисунка с возможностью загрузки других частей файла;
Рис. 4.55. Окно Выбор файла
Рис. 4.56. Окно Создать новый чертеж
233
частичное открытие рисунка без возможности сохранения изменений.
Если при открытии документа выбирается готовый шаблон, в окне Создать новый чертеж (рис. 4.56) откроется список шаблонов Acad-named plot styles.dwt, а сам шаблон будет являться системным по умолчанию.
Пользователь может изменять готовый шаблон или создавать свой шаблон, используя готовый в качестве прототипа.
Для создания своего шаблона можно либо открыть список Acad-namedplot styles.dwt и выставить свои параметры, либо открыть свой уже существующий чертеж с нужными параметрами. Когда сохраняется вновь созданный шаблон, в окне Тип файла (см. рис. 4.53) нужно выбрать AutoCAD Drawing Template File (*.dwt). В открывшееся диалоговое окно Описание шаблона (см. рис. 4.56) ввести необходимый текст, после чего нажать кнопку ОК.
4.4.4. Основные приемы черчения
Единицы измерения. Рисунок AutoCAD строится в условных линейных единицах, интерпретация которых зависит от пользователя, т.е. при создании нового рисунка пользователь сначала должен выбрать тип единиц измерения (см. рис. 4.45).
При выборе команды Units открывается диалоговое окно, показанное на рис. 4.57. Раздел Length (Линейные), расположенный в левом верхнем углу окна, указывает тип линейных единиц измерения. В списке Туре (Тип) можно выбрать следующие значения: Architectural (Архитектурные), Dicimal (Десятичные), Engineering (Инженерные), Fractional (Научные), Scientific (Дробные). Обычный для работы тип единиц — Dicimal (Десятичные).
В поле Precision (Точность) можно задать нужное число знаков, выводимых после десятичной точки.
Раздел Angle (Угловые), расположенный в верхней правой части диалогового окна, управляет типом и форматом угловых единиц измерения. В списке
Рис. 4.57. Окно выбора линейных единиц измерения
234
Туре (Тип) можно выбрать следующие значения: Decimal Degrees (Десятичные градусы), Deg/Min/ Sec (Градусы/минуты/секунды), Grads (Грады), Radians (Радианы), Surveyors Units (Топографические единицы).
В поле, расположенном ниже на рисунке, представлен перечень из 21 единицы измерения: дюймы, футы, мили, миллиметры, сантиметры, метры, километры, ярды, ангстремы, астрономические единицы и др.
При нажатии кнопки Direction (Направление), расположенной в нижней части данного окна, открывается диалоговое окно Direction Control (Выбор направления), показанное на рис. 4.58. Если первые четыре указанных в разделе Base
Angle варианта направления нулевого угла не устраивают, то включив Other (Другое), можно задать требуемое направление либо численно, либо мышью,
Рис. 4.58. Окно выбора направления
используя кнопку
Начало черчения. Любой чертеж, построенный в AutoCAD, состоит из примитивов. Примитивами называют простые графические элементы, такие как точка, отрезок, луч, прямая, окружность, дуга, область, размер и др.
Построение примитивов осуществляется следующим образом.
Отрезок. Выбираем пиктограмму отрезок у на панели инструментов, щелкнув на ней левой кнопкой мыши (далее будем называть ее кнопкой выбора). В командной строке при этом появится приглашение на ввод команды:
Command: line Specify first point:
(Команда: Отрезок Определить первую точку:)
Вводим с клавиатуры через запятую без пробела координаты X и У сначала первой точки отрезка, а затем — второй.
Command: line Specify first point: 50,50 Enter
(Команда: Отрезок Определить первую точку: 50,50 Enter)
Specify next point or [Undo]: 200,230 Enter
(Определить следующую точку или [Отменить]: 200,230 Enter
Specify next point or [Undo]: Enter
(Определить следующую точку или [Отменить]: Enter
Нажатие клавиши Enter в последней строке команды обеспечивает выполнение и завершение команды.
Дуга. Щелкнем мышью на пиктограмме дуга у* панели инструментов рисования. В командной строке загорится следующее приглашение:
Command: arc Specify Start Point of Arc or [c Enter]
(Команда: Дуга Задание начальной точки)
Для задания начальной точки можно передвинуть курсор устройства указания в любую нужную точку графической зоны и щелкнуть кнопкой мыши (тем самым будут заданы начальные координаты дуги, что называется указанием точки построения) либо в командной строке ввести через запятую без пробела координаты X и У.
235
При этом в командной строке отобразится следующее приглашение:
Command: Second Point of Arc or [C Enter/End]
(Команда: Вторая точка дуги или [Enter/Конец]
Для задания второй точки можно щелкнуть правой кнопкой мыши и, выбрав в загоревшемся контекстном меню End, указать любую точку на экране либо в командной строке ввести через запятую без пробела ее координаты X и Y.
В командной строке загорится следующее приглашение:
Command: Specify center point of arc or [Angle/Direction/Radius]
(Команда: Задание точки центра дуги или [Угла/Направление/Радиус]
В ответ на приглашение в командной строке напечатать R, тем самым выбрав опцию Радиус, а затем ввести числовое значение.
AutoCAD сформирует дугу, и выполнение команды завершится.
Окружность. Окружность можно вычерчивать следующими способами:
по центру окружности и ее радиусу — опции Center, Radius (Центр, радиус);
по центру окружности и ее диаметру — опции Center, Dimeter (Центр, диаметр);
по двум точкам диаметра окружности — опции 2 Points (По двум точкам);
по трем точкам диаметра — опции 3 Points (По трем точкам);
по двум касательным (двум отрезкам, отрезку и окружности и т.д.) и радиусу — опции Tan, Tan, Radius (Касательная, касательная, радиус);
по трем касательным — опции Tan, Tan, Тап (Касательная, касательная, касательная).
Поясним построение окружности первым способом.
Щелкнем мышью по пиктограмме круг О панели инструментов.
В командной строке появится следующее приглашение:
Command: Circle Specify Center Point for Circle or [3P/2P/Ttr (tan tan radius)] (Команда: Окружность Определить точку центра окружности)
В ответ на приглашение необходимо указать точку, которая будет центром окружности, установив курсор устройства указания в любую нужную точку графической зоны, и щелкнуть левой кнопкой мыши, после чего в командной строке отобразится новое приглашение:
Command: Specify radius of circle or [Diameter]
(Команда: Задание радиуса окружности или [диаметра]
Выполнить данную команду можно, либо передвигая курсор устройства указания до нужных размеров, после чего щелкнуть левой кнопкой мыши, либо введением числового значения в командную строку и нажатием кнопки Enter, после чего AutoCAD вычертит на экране окружность.
Используя показанные приемы и следуя указаниям в командной строке, можно вычертить и другие примитивы.
Размеры. Для выставления размеров на чертеже активизируем панель инструментов Размеры (рис. 4.59).
Размеры ЕЗ
м Ч i 'С 5; tX ljiso-25 |
Рис. 4.59. Панель инструментов Размеры
236
Рис. 4.60. Примеры простановки размеров различных графических элементов (а...е)
Установка линейных размеров осуществляется с помощью кнопки |*-*| двумя способами: курсором устройства указания, либо выполняя приглашения командной строки. Пример работы команды приведен на рис. 4.60, а.
Простановка радиуса осуществляется кнопкой . Примеры работы команды приведены на рис. 4.60, б.
Простановка диаметра осуществляется кнопкой % . Примеры работы команды приведены на рис. 4.60, в.
Простановка углового размера осуществляется кнопкой . Примеры работы команды приведены на рис. 4.60, г.
Простановка базового размера осуществляется кнопкой . Пример работы команды приведен на рис. 4.60. д.
Простановка размерной цепи осуществляется кнопкой (НН. Пример работы команды приведен на рис. 4.60, е.
Простановка всех видов размеров может также осуществляться с помощью других команд.
По желанию можно изменять стиль надписи на чертеже. Для этого в меню следует выбрать Размер (Dimensions) Стиль (Style) и в открывшемся диалоговом окне активировать кнопку Изменить, после чего откроется диалоговое окно, показанное на рис. 4.61. Выбирая вкладки в этом диалоговом окне, можно изменять различные параметры, расположение и значения надписей и указателей.
Для использования несколько раз одной и той же команды в командной строке необходимо напечатать multiple, а затем ответ на приглашение — команду, которую надо повторять. Тогда по завершении команды будет автоматически запускаться ее повторение и это будет продолжаться до тех пор, пока не будет нажата кнопка Esc.
Нажатием кнопки Esc можно отказаться от любой команды.
237
^Изменить Стиль Измерения: IS0-25
ВЕЗ
Линии и Стрелки | Текст] Подгонка] Основные Единицы') Альтернативные Единицы | ДоА| *
Толщина линии: |— ByBlock
Промежуток до метки:
Базовое расстояние:
j Скрыты Г Линия 1 Г* Линия 2
- Граничите Линии----------------
Haan |в ByBlock
Т олщина Л инис |— ByBlock
Д!
3 I
Промежуток до линии:
-Смещение от начала:
р Маркер Ц ентра для Окружности----------
! Тит: jМаркер Л Размер: [?5
Скрыть: Г~ Граница 1
Г Грепица2
Отмена I Справка
Рис. 4.61. Диалоговое окно Изменить Стиль Измерения
Штриховки. Выбор типа штриховки осуществляется кнопкой Ш на панели инструментов, после нажатия которой открывается диалоговое окно, показанное на рис. 4.62. Левая часть этого окна задает параметры штриховки, а
Рис. 4.62. Диалоговое окно Граница штриховки
238
правая — заполняет штриховкой область. Раскрывающийся список Тип (Туре) позволяет выбрать один из трех образцов штриховки: Встроенный, Пользовательский, Настраиваемый.
Точки и координаты. Ввод координат точек нужен для построения графических объектов: концов отрезка, центра окружности, вершины прямоугольника и т.д. Координаты точек вводятся в той системе единиц измерения, которая была выбрана для построения чертежа. При этом возможны несколько способов ввода точек.
Визуальные координаты — самый простой способ ввода точки, выполняемый щелчком левой кнопкой мыши в указанном месте графического поля. Этот способ в основном эскизный.
Абсолютные декартовы координаты — самый распространенный способ ввода точек с клавиатуры.
Относительные декартовы координаты — ввод точек осуществляется с клавиатуры. Обычно конструктор редко знает абсолютные значения координат, но практически всегда известны размеры объекта, который необходимо вычертить. Как правило, вычерчивание детали начинается с некоторой точки, а затем, отталкиваясь от нее, строят дальнейшее изображение с соблюдением заданных размеров конструкции, т.е. в такой ситуации известны только длины отрезков, из которых состоит чертеж детали. Для выполнения чертежа в AutoCAD введены относительные системы координат. Для задания относительной системы координат при вводе их с клавиатуры используется символ @. Так, например, @20.30 означает, что новая точка задается со сдвигом по оси Xна 20 мм (т.е. вправо на 20 мм) и сдвигом по оси У на 30 мм (т.е. вверх на 30 мм). Вводимые числа могут быть целыми и вещественными, положительными, нулевыми и отрицательными. Относительные координаты удобны для построения фрагментов чертежа, которые состоят из горизонтальных и вертикальных линий, которые называют также ортогональными.
Относительные полярные координаты — ввод точек осуществляется с клавиатуры. Полярные координаты могут быть абсолютными или относительными. Чаше используются относительные полярные координаты. Задаются полярные координаты в формате @144.7 < 54, разделителем между компонентами служит знак <, который интерпретируется как знак угла. Эта запись читается следующим образом: расстояние между точками 144,7 мм, а вектор, проходящий из предыдущей точки в новую точку, образует угол 54° с положительным направлением оси абсцисс. При этом расстояние обязательно должно быть положительным, а угол может быть любым. Задаваемая пара значений в относительной полярной системе координат должна начинаться с символа @ так же, как и при задании относительных прямоугольных координат.
4.4.5. Привязка к объектам
Привязка — это комплекс команд, объединенных одним свойством, позволяющим при выполнении очередного элемента чертежа точно совместить его с ранее нарисованным объектом. При этом базовая точка выполняемого элемента автоматически совмещается с выбранной точкой привязки.
239
|Д" I t.. ’ \ Ч X X i j © 0 -Q i -4 Л Й? ° • X k° | cf
Рис. 4.63. Панель инструментов Привязка
Рис. 4.64. Фрагмент принципиальной электрической схемы, выполненный в AutoCAD
Команду либо применяют индивидуально к каждой точке привязки, либо удерживая нажатой кнопку . панели инструментов Привязка (рис. 4.63).
Совместив указатель мыши с нужной кнопкой, необходимо отпустить ее левую кнопку, после чего на стандартную панель инструментов переместится выбранная кнопка и сразу же будет включена
для одноразового выполнения команда, соответствующая данной кнопке. При этом кнопки из раскрывающегося меню перемещаются вверх и остаются на стандартной панели инструментов.
Порядок работы с использованием привязки:
щелчком мышью по кнопке на панели инструментов вызвать требуемую команду рисования, а затем щелкнуть мышью по кнопке из набора Привязка (Osnap);
подвести указатель мыши к намеченной на чертеже точке (в момент захвата на ней появится соответствующий символ) и щелкнуть ее левой кнопкой для
выполнения команды рисования.
Для выполнения привязки к следующей точке все операции повторяют.
На рис. 4.64 приведен фрагмент принципиальной электрической схемы, построенный с помощью рассмотренных приемов.
Контрольные вопросы
1. Что должен знать и уметь конструктор?
2. Как подразделяются системы проектирования?
3. Что включает в себя база данных для проектирования электроприводов и систем автоматизации?
4. Какие УГО используются в проектной документации?
5. Какова основная особенность Microsoft Visio?
6. Можно ли импортировать и экспортировать файлы в Microsoft Visio?
7. Существует ли готовая библиотека УГО в Microsoft Visio?
8. Что содержит основное диалоговое окно AutoCAD?
9. Какие единицы измерения используются в AutoCAD?
10. Можно ли пополнять библиотеку УГО в AutoCAD?
ГЛАВА 5
РАЗРАБОТКА КОНСТРУКТОРСКОЙ И ПРОГРАММНОЙ ДОКУМЕНТАЦИИ
5.1. Общие правила выполнения электрических чертежей и схем
5.1.1. Правила выполнения чертежей
Чертежи выполняются при проектировании шкафов электрооборудования, пультов операторов, мотор-редукторов, кинематических частей электроприводов, жгутов, кабелей, проводов и других изделий.
Наиболее употребительными являются чертеж общего вида, сборочный чертеж и чертеж детали.
Чертеж общего вида (ВО) содержит изображения сборочной единицы и другие данные, необходимые для понимания принципа работы и взаимодействия ее составных частей. Чертеж общего вида является основанием для разработки чертежей деталей и спецификации.
Чертеж общего вида относится к проектным документам и разрабатывается на стадиях технического предложения, эскизного и технического проектов. Требования к выполнению чертежа общего вида регламентируют ГОСТ 2.118 —73, 2.119-73, 2.120-73.
Изделие, изображаемое на чертеже общего вида, чаще всего представляет собой сборочную единицу, составные части которой соединяются различными способами. Изображение и обозначение соединений в сборочной единице являются важной информацией и осуществляются по правилам, устанавливаемым соответствующими стандартами ЕСКД.
Сборочный чертеж (СБ) содержит упрощенное изображение сборочной единицы и другие данные, необходимые для ее изготовления (сборки). На сборочном чертеже составные части сборочной единицы снабжаются полками-выносками, на которых проставляются номера позиций этих составных частей в соответствии с их порядковыми номерами в спецификации.
Чертеж детали — это конструкторский документ, содержащий изображение детали и другие данные, необходимые для ее изготовления и контроля.
Чертежи деталей относятся к рабочей конструкторской документации. Разработка чертежей деталей изделия осуществляется после разработки чертежа общего вида. Кроме графического изображения детали на чертеже приводят все размеры, определяющие ее геометрическую форму, предельные отклонения размеров, допуски формы и расположения поверхностей, шероховатости поверхностей, сведения о материале, технические требования и др.
Чертежи жгутов, кабелей и проводов. Жгутом называется изделие, состоящее из двух и более изолированных проводников (проводов, кабелей), скрепляемых в пучок плетением, связыванием или каким-либо другим способом, и
241
других составных частей (соединительных устройств, наконечников и т.п.). Кабель (провод) также включает в себя другие составные части (например, соединительные устройства). Таким образом, чертежи жгута и кабеля следует рассматривать как сборочные и выполнять их по соответствующим правилам, учитывая требования ГОСТ 2.414—75. Чертеж жгута (кабеля) должен содержать: изображение изделия, дающее представление о расположении и связи его составных частей (проводов, разъемов, наконечников, бирок и т.п.); таблицы или схемы, поясняющие соединения составных частей (при необходимости); размеры и предельные отклонения длин всех участков жгута; номера позиций составных частей, входящих в жгут (кабель); технические требования к изготовлению и контролю жгута (кабеля). Основным конструкторским документом чертежа жгута является спецификация, выполняемая на отдельных листах формата А4 по правилам, установленным ГОСТ 2.108 — 68.
Направления ответвлений, расположение самого жгута и его элементов на поле чертежа относительно основной надписи должны соответствовать фактическому их положению в готовом жгуте. При выполнении чертежа жгута изображают: проводники и их соединения, запасные проводники, переходные контакты, соединительные устройства (штепсельные разъемы, наконечники), маркировочные бирки кабелей, жгутов, отдельных ветвей с нанесенными на них размерами длин всех участков жгута с указанием допустимых отклонений (размеры радиусов изгиба допускается не указывать) и сведений о присоединении проводников.
Чертежи печатных плат. В электронных блоках систем электроприводов и автоматизации применяют платы с печатным монтажом. Конструкторская документация на печатные платы и блоки оформляется в соответствии с требованиями ГОСТ 2.109—73, 2.417 — 68 и действующими нормативно-техническими документами. Чертеж печатной платы односторонней или двухсторонней классифицируется как чертеж детали. Чертеж печатной платы должен содержать все сведения, необходимые для ее изготовления и контроля: изображение платы со стороны печатного монтажа; размеры, предельные отклонения и шероховатости поверхностей самой платы и всех ее элементов (отверстий, проводников), а также размеры расстояний между ними; необходимые технические требования; сведения о материале.
Чертежи с применением электромонтажа. В состав чертежа с применением электромонтажа, как правило, входят элементы электрической принципиальной схемы или схемы соединений: трансформаторы, реакторы, преобразователи частоты, коммутационно-защитная аппаратура.
В зависимости от объема, сложности и характера производства различают два варианта выполнения чертежей изделий с применением электромонтажа.
Вариант 1. Электромонтаж изделия производят по электромонтажному чертежу (МЭ). При этом разрабатывают следующие конструкторские документы: сборочный чертеж со спецификацией для механической сборки и электромонтажный чертеж по ГОСТ 2.413 — 72. Составные части, устанавливаемые по электромонтажному чертежу, вносят в спецификацию сборочного чертежа в дополнительные разделы.
Вариант 2. Электромонтаж изделия производят не по электромонтажному чертежу, а по другим документам. При этом разрабатывается два конструкторских документа: сборочный чертеж и спецификация для механической сбор
242
ки. В технических требованиях сборочного чертежа указывают документ, по которому производят электромонтаж, схему электрическую принципиальную, схему электрическую соединений или таблицу соединений в зависимости от характера производства. Составные части, устанавливаемые при электромонтаже, записывают в спецификацию сборочного чертежа в дополнительных разделах.
5.1.2. Правила выполнения схем
Стандарты ЕСКД устанавливают комплектность, требования и правила разработки и оформления схемной документации на изделия всех отраслей промышленности.
Схема — конструкторский документ, на котором показаны в виде условных изображений или обозначений составные части изделия и связи между ними.
Элемент схемы — составная часть схемы, которая выполняет определенную функцию в изделии и не может быть разделена на части, имеющие самостоятельное назначение.
Устройство — совокупность элементов, представляющих собой единую конструкцию (блок, плату, шкаф, панель и т.п.). Устройство может не иметь в изделии определенного функционального назначения.
Функциональная группа — совокупность элементов, выполняющих в изделии определенную функцию и не объединенных в единую конструкцию.
Функциональная часть — элемент, функциональная группа, а также устройство, выполняющее определенную функцию.
Функциональная цепь — линия, канал, магистраль определенного назначения.
Схемная документация входит неотъемлемой частью в комплект конструкторских документов и предназначена для производства, эксплуатации и ремонта изделий. Комплект (номенклатура) схем на изделие устанавливается в зависимости от состава, сложности и особенности изделия. Между схемами в одном комплекте должна быть установлена однозначная связь, позволяющая определить одни и те же элементы, связи или соединения на всех схемах этого комплекта.
Виды и типы схем и их коды устанавливает ГОСТ 2.701 —84 (ЕСКД. Схемы. Виды и типы. Общие требования к выполнению).
Схемы структурные и функциональные предназначены для общего ознакомления с изделием и изучения общих принципов его работы. Эти схемы, разрабатываемые на этапах эскизного и технического проектирования, определяются сложностью изделия и необходимостью обеспечения исходными данными последующего этапа проектирования.
Схема принципиальная предназначена для определения полного состава изделия, изучения принципов его работы и расчета. Эта схема, служащая основанием для разработки конструкции и последующих схем, используется при наладке, регулировке, контроле, эксплуатации и ремонте изделия.
Схемы соединений, подключения и общая предназначены для представления сведений о соединениях составных частей изделий и изделия в целом. Эти схемы служат для разработки других конструкторских документов и в первую
243
очередь чертежей, определяющих прокладку и способы крепления проводов, жгутов и кабелей в изделии, а также для осуществления присоединений при наладке, контроле, эксплуатации и ремонте изделия.
Схема расположения определяет относительное расположение составных частей изделия и при необходимости их соединений. Эта схема используется при разработке других документов, а также при изготовлении и эксплуатации изделий.
Перечисленные схемы разрабатывают на этапе рабочего проектирования, и их номенклатура определяется необходимостью обеспечения изготовления, контроля и эксплуатации изделия. Схемы выполняют на одном и более листах бумаги основного формата. При выполнении на нескольких листах каждый лист оформляется как продолжение предыдущего или как самостоятельный документ в целях получения совокупности схем одного и того же вида и типа. В последнем случае допускается указывать в наименовании схемы название функциональной цепи или группы. Каждой такой схеме присваивают обозначения в соответствии с ГОСТ 2.201—80 как самостоятельному конструкторскому документу (КД), а начиная со второй схемы к коду добавляют через точку порядковые номера (например, АБВГ.Х... ХЭЗ; АБВГ.Х...ХЭ3.1; АБВГ.Х...ХЭ3.2).
К схемной документации относят также таблицы и перечни элементов, если они выпускаются самостоятельными конструкторскими документами. Эти документы имеют наименование и обозначение той схемы, к которой они относятся, с отличительными буквенными кодами Т, если это таблица, и П, если это перечень элементов. Например, Таблица соединений к электрической схеме соединений — АБВГ.ХХХХХХ.ХХХТЭ4 и Перечень элементов к электрической принципиальной схеме — АБВГ.ХХХХХХ.ХХХПЭЗ.
Стандарт устанавливает общие требования к выполнению всех видов и типов схем, т.е. требования к комплектности (номенклатуре) схем на изделие, форматам, построению схемы, графическим обозначениям (в том числе условным графическим обозначениям элементов и устройств), линиям связи, перечню элементов, текстовой информации.
5.1.3. Текстовая информация на чертежах и схемах
Текстовая информация на чертежах включает в себя технические требования и технические характеристики. Располагается текстовая часть над основной надписью. Между текстовой частью и основной надписью не должно быть изображений, таблиц и т.д. При изложении технических требований на чертеже группируют однородные и близкие по характеру сведения по возможности в следующем порядке:
требования к материалу, заготовке, технической обработке и свойствам материала готовой детали (электрические, магнитные, диэлектрические, твердость и т.д.);
размеры, предельные отклонения размеров, формы и взаимного расположения поверхностей, массы и т.п., не указанные на графическом изображении;
требования к качеству поверхностей, указания об их отделке, покрытии; зазоры, расположение отдельных элементов конструкции;
244
требования к настройке и регулированию изделия;
требования к качеству изделий: бесшумность, виброустойчивость и т.д.;
условия и методы испытаний;
правила транспортирования и хранения;
особые условия эксплуатации;
ссылки на другие документы.
Пункты технических требований должны иметь сквозную нумерацию. Каждый пункт записывают с новой строки.
Заголовок «Технические требования» пишут только в том случае, если на чертеже также приведены технические характеристики изделия. Заголовок не подчеркивают.
Технические характеристики размешают отдельно от технических требований на свободном поле чертежа под заголовком «Технические характеристики». Заголовок не подчеркивается.
При выполнении чертежа на двух и более листах текстовую часть помещают только на первом листе независимо от того, на каких листах находятся изображения, к которым относятся технические требования или технические характеристики.
Надписи, относящиеся непосредственно к изображению (наименования составных частей изделия), могут содержать в себе не более двух строк, располагаемых на полке линии-выноски или под ней.
Текстовая информация на схемах может быть представлена в виде сплошного текста (технические требования, пояснения) или таблиц (перечень элементов, обозначения входных и выходных цепей, таблицы соединений и др.).
На схеме могут быть указаны различные данные в виде текста и символов. Эти данные в зависимости от содержания и назначения располагают:
рядом с графическими изображением (буквенно-цифровые обозначения, обозначения сигналов, формы импульсов, технические параметры и др.);
внутри графических изображений (наименования устройств, функциональных групп, обозначения мощности резисторов и др.);
рядом с линиями (обозначения линий связи, адреса, квалифицирующие символы);
на свободном поле схемы.
Текстовые данные, относящиеся к линиям, располагают параллельно горизонтальным участкам этих линий. При большой плотности схемы допускается вертикальное расположение данных.
Буквенно-цифровые обозначения элементов и функциональных групп должны обеспечивать взаимосвязь документов в комплекте документации на объект и быть одинаковыми на всех документах комплекта.
Позиционные обозначения образуются с применением прописных букв латинского алфавита, арабских цифр и знаков (квалифицирующих символов) в соответствии с ГОСТ 2.710—81. Буквенно-цифровое обозначение состоит из обязательной и дополнительных частей. Обязательная часть включает в себя буквенный код и номер элемента. Буквенный код устанавливает ГОСТ 2.710— 81, а номер элемента определяется местонахождением этого элемента на схеме и присваивается по порядку в направлении сверху вниз и слева направо. Дополнительная часть обозначения — это квалифицирующие символы, приведенные в табл. 5.1.
245
Таблица 5.1
Устройство =
Функциональная группа Ф или #
Конструктивное обозначение +
Обозначение элемента -
Обозначение электрического контакта •
Адресное обозначение ()
Условное буквенно-цифровое обозначение записывается в виде последовательности букв, цифр и знаков в одну строку без пробелов, и их число в обозначении не устанавливается.
Порядок записи составного обозначения определяется порядком вхождения частей в изделие, например запись Т1 = А2— R5 означает, что резистор R5 входит в состав устройства А2, которое в свою очередь входит в функциональную группу Т1. Перед обозначением основной части допускается не указывать квалифицирующий символ, если это не приведет к неправильному пониманию этого обозначения (например, К1:2 — второй контакт реле К1). Обозначение на схеме наносят над графическим изображением устройства или элемента либо справа от него.
Данные об элементах должны быть записаны в перечень элементов, который оформляют в виде таблицы и помещают на первом листе схемы или выполняют в виде самостоятельного документа. Если перечень элементов помещают на первом листе схемы, то его располагают над основной надписью на расстоянии не менее 12 мм. Продолжение перечня помешают слева от основной надписи, повторяя головку таблицы.
Правила оформления перечня элементов см. в подразд. 5.7.4.
5.2. Чертежи электроизделий
5.2.1. Чертеж общего вида
Рассмотрим разработку чертежа общего вида на примере щитов и пультов.
По назначению различают шиты и пульты оперативные, с которых ведутся управление и контроль за технологическим процессом, неоперативные, предназначенные для установки аппаратов, приборов и устройств, не используемых непосредственно для управления и наблюдения за технологическим процессом, и диспетчерские, с которых диспетчер, получающий информацию о состоянии оборудования и параметрах, ведет наблюдение и при необходимости производит оперативные переключения или передает распоряжения.
По исполнению различают шкафные одиночные шиты двух- и трехсекционные с задними дверями, шкафные щиты с передней и задней дверью, па
246
нельные щиты с каркасом, штативы в качестве конструкции для установки вспомогательной аппаратуры, пульты в качестве устройств для размещения аппаратуры управления и сигнализации.
Заводы-изготовители имеют полный комплект конструкторской и технологической документации на все типоразмеры щитов и пультов, установленные стандартами и инструкциями. Следовательно, проектирование щитов и пультов сводится к выбору требуемого типоразмера, размещению аппаратуры и приборов на щите, выбору мест прокладки жгутов проводов, соединений, подключения проводов к аппаратуре, коммутационным зажимам и приборам. Разрабатываются чертежи общего вида и перечень аппаратуры, установленной на щите, в соответствии с ГОСТ 21.101—79.
Если в проекте предусматриваются шиты без пультов, то на фронтальных панелях компонуются измерительные и регулирующие приборы, светосигнальная аппаратура, переключатели к приборам и аппаратура управления оперативного назначения.
Построение таблиц на чертежах общего вида и таблиц соединений и подключения электрических проводок должно соответствовать ГОСТ 2.105 — 95.
На чертежах общего вида приборы, средства автоматизации, аппараты, элементы их крепления и другие детали изображают упрощенно (в виде внешних очертаний сплошными основными линиями). В качестве примера на рис. 5.1 дан чертеж общего вида автоматизированного рабочего места оператора.
Шкафам, панелям, панелям с каркасом, корпусам пультов, вспомогательным элементам, а также приборам и средствам автоматизации, аппаратам, монтажным изделиям, элементам крепления внутрищитовой аппаратуры присваивают номера позиций в порядке записи их в перечне составных частей.
Размеры проставляют в соответствии с ГОСТ 2.307 — 68.
5.2.2. Сборочный чертеж
На рис. 5.2 показан пример оформления сборочного чертежа шкафа управления. На чертеже обозначены: основные размеры шкафа; основные модули системы управления (контроллер, элементы управления, блок питания и др.); монтажная панель (вид спереди); основные разрезы шкафа (А—А, Б—Б). Для удобства монтажа на сборочном чертеже приведены установочные размеры элементов автоматизации, а также способ их крепления (например, короб).
5.3. Схемы структурные и функциональные
5.3.1. Схемы электрические структурные
На структурной схеме все основные функциональные части изделия изображаются в виде прямоугольников. Допускается изображать элементы, устройства, функциональные части изделия в виде УГО, установленных для функциональных и принципиальных схем. Основные составные части изделия
247
Инв, № подл. | Поди, и дата | Взам Ине. №]Инв. № дубл. | Подл. и дата
Вид спереди.
Дверь условно не показана
100*100’
Рис. 5.1. Пример чертежа общего вида автоматизированного рабочего места оператора
248
249
Ине. №подл. | Подп. и дата | Взам. Ине. № | Ине. №дубп. [ Подп. и дата
Рис. 5.2. Пример оформления сборочного чертежа шкафа
250
50
Б—Б
74
12
75
12
Изм. Лист № докум. Подп. Дата
Разраб. Иванов
Пров. Сидоров
Т. контр.
Н.контр.
Утв. Петров
Монтажная панель (вид спереди)
PLC (8-slot)
0
60
280
Короб 60460
OPS 1PS 2PS 3PS
18
19~Т
121
20
21
12 ।
410
530
fl
630
740
850
950
1070
Короб 40460
1180
HSA1
Короб 60460
Короб 60460
BSY04
Короб 40460
10
11
12
250 ;
1 450
Р03.2005.100.СБ
Шкаф управления.
Сборочный чертеж
1340
1505
1610
1740
1825
Лит. Масса Масштаб
Лист 1 I Листов
ООО “НПФ “Ракурс” г. Санкт-Петербург
251
Инв. Ns подл, j Подп. и дата | Взам. Инв. № | Инв. № дубл. | Подп. и дата
К координатору насосного отделения
Рис. 5.3. Структурная схема системы управления насосными агрегатами
252
Задание Н, Q
Состояние оборудования
Программное управление и регулирование режимов работы главного насоса
В схеме использованы следующие обозначения:
BZ - датчик заполнения
BL - датчик уровня
BSOS - датчик состояния электропривода
ВОС - датчик обратного клапана
BOV - датчик охлаждающей воды
ВТР - датчик технологического параметра
В/О - включено/отключено
/-ток
U - напряжение
/-температура
п - частота вращения
W- мощность
В - вибрации
Я(л) - частота
Н- напор
Q - расход
I, U, t, п, W, В
В/О, Я(п)
H, Q
BSOS ИМ ВТР
Главный насос
Изм. Лист № докум. Подп. Дата
Разраб. Таранинцев 22 04 04
Пров. Иванов
Т. контр. Петров
Н. контр.
Уте. Сидоров
Р36.2004.540.Э1
Система управления насосными агрегатами.
Схема электрическая структурная
Лит. Масса Масштаб
Лист 1 | Листов 1
ООО “НПФ “Ракурс" г. Санкт-Петербург
253
изображаются, как правило, без учета их действительного расположения, однако графическое построение схемы должно наглядно показывать взаимодействие его функциональных частей.
На схеме должны быть показаны электрические и при необходимости механические взаимосвязи, существующие между функциональными частями. На линиях взаимосвязи можно стрелками показывать направления хода процессов, происходящих в изделии.
Для каждой функциональной части изделия должно быть указано наименование, но можно также указать тип части или обозначение документа, на основании которого этот элемент применен. Все эти сведения, как правило, вписывают внутрь прямоугольников. При большом числе функциональных частей указанные сведения допускается помещать в таблицах, при этом функциональные части следует нумеровать.
На схемах допускается помещать информацию о конструктивном расположении функциональных частей, устройств, элементов изделия, а также указывать, например, значения мощностей, токов, математические зависимости и др. Эти пояснения не должны перегружать схему.
Под структурой управления понимается совокупность частей автоматической системы, на которые она может быть разделена по определенному признаку, и пути передачи воздействий между ними. Хотя исходные данные для выбора структуры управления и ее иерархии с той или иной степенью детализации оговариваются заказчиком при выдаче задания на проектирование, полная структура управления должна разрабатываться инжиниринговой фирмой. Выбор структуры управления объектом автоматизации определяет эффективность работы этого объекта, относительную стоимость системы управления, ее надежность и ремонтопригодность.
В структурную схему входят объект, электроприводы, система автоматизации, информационные и управляющие средства.
Стрелками показывают основные потоки передачи информации от объекта и управляющие воздействия от системы управления.
В качестве примера на рис. 5.3 показана структурная схема системы управления насосными агрегатами, в которой выделены три уровня управления. На нижнем уровне решаются функциональные задачи — регулирование отдельных переменных процесса (частоты вращения двигателя главного насоса) и программное управление исполнительными устройствами выделенных частей агрегата (главного насоса, вакуумного и дренажного насосов, а также задвижек и клапанов). На втором уровне решается задача управления основными переменными в выходном трубопроводе — напором и давлением, а также задача координации управления для нижнего уровня управления. На третьем — верхнем уровне управления — обеспечивается координация управления несколькими насосными агрегатами: пуск, останов, коррекция параметров режима в зависимости от главной цели управления насосным отделением, например по критерию минимизации энергопотребления.
На структурных схемах также показывают: технологические подразделения (отделения, участки цеха); машинные залы, в которых размещается электрооборудование; пункты контроля и управления (щиты, операторские пункты и т.д.); технические средства, обеспечивающие связь всех устройств контроля и управления.
254
5.3.2. Схемы электрические функциональные
Функциональные схемы предназначены для разъяснения процессов, происходящих в изделии в целом, а также в отдельных его функциональных частях. Следовательно, для одного изделия может быть выпущено несколько функциональных схем.
На функциональных схемах должны быть изображены все функциональные части, функциональные группы, устройства, элементы, необходимые для разъяснения происходящих в изделии процессов, и показаны связи между ними. Функциональные части, устройства, элементы изображают в виде УГО, установленных стандартами ЕСКД, или прямоугольников.
Функциональные части и связи изображают независимо от их действительного расположения в изделии. Функциональный процесс, как правило, представляют слева направо и (или) сверху вниз. Допускается на этих схемах изображать пункты измерения и (или) контроля, приводить необходимые пояснения, диаграммы, таблицы и параметры физических величин в характерных точках. В стандарте установлены правила присвоения обозначений функциональным группам, устройствам, элементам.
Функциональные схемы электроприводов и систем автоматизации определяют функционально-блочную структуру отдельных узлов исполнительных механизмов, силовой части приводов, управления и регулирования, автоматического контроля, сигнализации, а также оснащение объекта управления приборами и средствами автоматизации.
При разработке схем решают следующие задачи: получение информации о работе электроприводов и технологического оборудования, непосредственное воздействие на технологический процесс в целях управления им, регулирование и стабилизация технологических переменных, контроль и регистрация технологических переменных процесса и состояния оборудования.
Результатом разработки функциональных схем систем автоматизации является:
выбор приводов исполнительных механизмов рабочих машин, управляемых непосредственно или дистанционно;
выбор основных технических средств автоматизации (ТСА);
выбор методов измерения технологических переменных;
размещение ТСА на щитах, пультах, технологическом оборудовании.
При разработке необходимо учитывать следующие требования:
сохранение возможности наращивания функций управления (соблюдение принципа открытости системы);
построение системы на базе типовых унифицированных средств, обеспечивающее значительные преимущества при ее монтаже, наладке, эксплуатации и ремонте;
выбор ТСА исходя из условий производства (пожаро- и взрывобезопас-ность, запыленность, агрессивность и токсичность среды), значений и диапазона измеряемых переменных, допустимых расстояний от датчиков и исполнительных механизмов до регулирующих устройств, требуемых точности и быстродействия системы.
Изображение средств измерения и автоматизации на функциональных схемах производится в соответствии с ГОСТ 21.404—85 условными буквенными
255
Станция управления
Задатчик 1
Задатчик 2
ЭДС электродвигателя M-i
Поток возбуждения M-i
Ток двигателя M-i
Инв. Nb подл. I Подп. и дата | Взам. Инв. № ] Инв. № дубл. | Подп. и дата
Датчик угла поворота
Tcs_CS
Рис. 5.4. Функциональная схема системы управления электроприводом поворота
256
Sfc dr
Sfb dr
Регулятор скорости
Vc dr
Регулятор момента
Регулятор момента
Vc Mi
Регулятор тока
Q_Mi
Vc_dr
eTo
Регулятор момента
Vc
Mi
Регулятор тока
Sfb Mi
Математическая модель привода поворота конвертера
zTq
Vc
Vc
Mi
Регулятор тока
ь-
sTq_i
Изм. Лист № докум. Подп. Дата
Разраб. Иванов
Пров. Сидоров
Т. контр. Петров
Н.контр.
Уте.
Регулятор момента
&Tq VcJ. —г—
Vc
Mi
Регулятор тока
P03.2005.100.Э2
Система регулирования приводом поворота.
Схема функциональная
Лит. Масса Масштаб
Лист 1 | Листов
ООО “НПФ “Ракурс” г. Санкт-Петербург
257
обозначениями, содержащими до пяти позиций: 1 — измеряемая величина; 2 — величина, уточняющая измеряемую величину; 3...5 — характеризующие функциональное назначение прибора.
Обозначения измеряемых величин: Т — температура; р — давление, разрежение; L — уровень; Е —расход; 5 — скорость, частота; Н — ручное воздействие; G — размер, положение, перемещение; К — время, временная программа; Е — любая электрическая величина; М — влажность; Q — состав, качество; R — радиоактивность; V — вязкость; D — плотность.
Обозначение величин, уточняющих измеряемую величину (дополнительные обозначения): D — разность давлений, перепад; F — соотношение, доля; J — автоматическое переключение; Q— интегрирование, суммирование; Е— чувствительный элемент; Т — дистанционная система передач; К — станция управления; Y — вычислительные функций.
Обозначения функционального назначения прибора: А — сигнализация; С — регулирование, управление; I — показание; R — регистрация; S — включение, отключение, переключение.
Дополнительные обозначения, отражающие функциональные признаки преобразования сигналов: Е — электрический сигнал; Р — пневматический сигнал; G — гидравлический сигнал; А — аналоговый сигнал; D — дискретный сигнал.
Знаками математических операций обозначается выполнение соответствующих функций: X; х; 1g; dx/dz; 5; max; min и др.
Функциональные схемы электропривода разъясняют процессы, протекающие в отдельных функциональных частях или электроприводе в целом. Они используются для изучения принципов работы элементов и систем, а также при их наладке, регулировке, контроле и ремонте. На функциональной схеме изображаются функциональные части (элементы) электропривода (или отдельные устройства и функциональные группы), участвующие в процессе, иллюстрируемом схемой, связи между этими частями или конкретные электрические, магнитные и механические соединения (провода, обмотки, валы).
В качестве примеров на рис. 5.4 приведена функциональная схема системы управления электроприводом поворота.
Внутри прямоугольников, обозначающих регуляторы, задатчик интенсивности и другие элементы, приведены временные характеристики, реализуемых ими процессов управления, временные функции, логические операции, временные задержки и другие функции.
5.4. Схемы электрические принципиальные
5.4.1. Особенности выполнения принципиальных схем
Принципиальная схема определяет полный состав элементов и устройств в изделии, а также все связи, необходимые для осуществления электрических процессов и их контроля, и дает детальное представление о принципах работы изделия. На принципиальной схеме изображают разъемы, клеммники и другие элементы, которыми заканчиваются входные и выходные цепи, а так
258
же показывают соединительные и монтажные элементы, устанавливаемые по конструктивным соображениям. Элементы, устройства, цепи размещают, как правило, на параллельных горизонтальных и вертикальных прямых линиях без учета их действительного расположения, обычно сверху вниз и слева направо.
На принципиальной схеме могут быть изображены в виде УГО или упрощенных очертаний отдельные элементы кинематики, гидравлики и другие, функционально связанные в изделии с электрическими элементами. Разрешается также изображать отдельные элементы, не входящие в изделие, на которое составляется схема, но необходимые для разъяснения принципов его работы. Размещение УГО элементов и устройств должно определяться удобством чтения схемы, а также необходимостью изображения электрических связей линиями минимальной длины с минимальным числом пересечений.
На принципиальных схемах допускается выделять штрихпунктирной линией группы элементов, совместно выполняющих в изделии определенную функцию, группы элементов, конструктивно объединенные и устройства, устанавливаемые на объекте. При повторении одинаковых элементов и устройств разрешается один раз изобразить их полностью, а остальные — упрощенно в виде прямоугольников.
Элементы, устройства можно изображать совмещенным и разнесенным способами. Например, разнесенными (в разных местах схемы) могут быть изображены модули программируемых контроллеров.
Если в схеме несколько элементов подключены к цепям одинаковой полярности с равным потенциалом, допускается линии электрической связи не проводить, а подключение элементов показывать простановкой полярности.
Все изображенные на схеме элементы должны иметь буквенно-цифровое позиционное обозначение, буквы и цифры которого должны выполняться шрифтом одного размера. Позиционное обозначение элемента наносят над УГО или справа от него. Рядом с УГО элемента допускается указывать номинальные значения его основных параметров или сокращенное наименование. Допускается помещать поясняющие надписи и указывать в характерных точках значения токов, напряжений, уровни сигналов, а также характеристики входных и выходных цепей изделия (частоту, напряжение, ток и др.) и параметры, подлежащие измерению в контрольных точках схемы. При невозможности указания характеристик или параметров следует давать наименования цепей или контролируемых величин.
Характеристики входных и выходных цепей, а также адреса их внешних подключений рекомендуется давать в виде таблиц, помещая вместо УГО входных и выходных элементов.
При проектировании сложных устройств, состоящих из нескольких конструктивно обособленных функциональных частей, рекомендуется для каждой из этих частей выполнять отдельную принципиальную электрическую схему.
При выполнении схемы на изделие, в состав которого входят устройства, имеющие собственные принципиальные схемы, эти устройства рассматривают как элементы схемы изделия.
Устройства на принципиальной схеме изображают следующим образом: в виде прямоугольника, внутри которого помещают таблицы с характеристиками или наименованиями входных и выходных цепей, соединителей,
259
клеммных плат, или с приведенными около них характеристиками цепей. При изображении в виде прямоугольников типовых унифицированных устройств допускается указывать в них только обозначения контактов;
в виде УГО, внутри которых полностью, частично или упрощенно изображены их принципиальные или функциональные электрические схемы. Элементы этих устройств в перечень элементов не записывают. Внутри или над УГО в этом случае рекомендуется проставлять полное или сокращенное наименование устройства.
Принципиальные электрические схемы сложных ЭП и СА допускается выполнять в виде несколько схем, выделяя в отдельные схемы силовые блоки, блоки управления, контроля и сигнализации. При этом необходимо учитывать следующее:
отдельные элементы могут повторяться на нескольких схемах;
присвоение позиционных обозначений должно быть сквозным по всему изделию;
каждая схема должна содержать перечень элементов, в который вписывают элементы, имеющие позиционные обозначения, присвоенные на данной схеме и сохраняемые при повторе этих элементов на других схемах;
около повторяемых УГО элементов в дополнение к позиционным обозначениям или вместо них допускается указывать сокращенное наименование элемента или значения его параметров.
В стандарте подробно рассмотрены присвоение и построение позиционных обозначений элементов, устройств, функциональных групп, а также способы указания характеристик входных и выходных цепей изделия.
На схемах источники питания могут быть представлены линиями, квалифицирующими символами (+ —) либо комбинацией обоих способов.
Изображения проводников линий электропитания трехфазной системы предпочтительно показывать в условной последовательности фаз (А, В, С или LI, L2, L3) начиная с верхней или левой части схемы. Нейтральные проводники (N) и проводники заземления (РЕ) следует показывать ниже или справа от фазовых проводников.
Одинаковые элементы в цепях, изображенные вертикально или горизонтально, следует выравнивать соответственно в горизонтальном или вертикальном направлениях. Соединения между функционально связанными элементами должны быть короткими, т.е. эта связь должна быть очевидной. Параллельные участки одинаковой важности рекомендуется располагать симметрично по отношению к главному участку цепи.
Принципиальные электрические схемы определяют полный состав технических средств ЭП и СА, действие которых обеспечивает решение задач управления, регулирования, защиты, измерения, сигнализации и визуализации, и служат основанием для разработки других документов проекта: схем соединений и подключения, монтажных таблиц щитов, пультов и др. Эти схемы служат для изучения принципа действия системы, они необходимы при производстве наладочных работ и в процессе эксплуатации оборудования. Принципиальная схема представляет собой сочетание элементарных электрических цепей, выполняющих в заданной последовательности ряд стандартных операций.
Приведем последовательность действий при разработке принципиальных схем.
260
1. На основании функциональной схемы составляются технические требования, предъявляемые к принципиальной схеме.
2. В соответствии с техническими требованиями устанавливаются условия и последовательность действий принципиальной схемы.
3. Каждое из заданных условий действия принципиальной схемы изображается в виде элементарной схемы.
4. Элементарные схемы объединяются в общую схему.
5. Производятся расчет параметров и выбор технических средств ЭП и СА.
6. Принципиальная схема корректируется в соответствии с возможностями выбранных средств.
7. Принципиальная схема проверяется на возможность выполнения всех требований ТЗ.
На принципиальной схеме электропривода изображают все элементы его устройств и их функциональных частей, необходимые для осуществления и контроля заданных динамических и статических процессов, и все электрические, электромагнитные и некоторые механические связи между ними, а также элементы, которыми заканчиваются входные и выходные цепи (выводы, зажимы, соединители).
Как правило, линии связи показывают полностью. Однако в отдельных случаях линии, пересекающие значительную часть изображений, допускается прерывать и заканчивать стрелками. При этом их обозначают соответствующими метками и при необходимости в скобках указывают место нахождения продолжения (наименование элемента или устройства).
На принципиальных схемах допускается прямоугольником или фигурой неправильной формы, выполняемыми контурной (штрихпунктирной) линией, выделять устройства, функциональные группы и другие части схемы.
Для удобства чтения принципиальных схем и создания по ним схем соединений и подключений участки цепей принципиальной схемы нумеруются (маркируются) согласно ГОСТ 2.709 — 89.
Участки цепи, разделенные контактами аппаратов, контакторов, машин, управляемых преобразователей и другими элементами должны иметь разную маркировку. Участки цепи, проходящие через разъемные разборные и неразборные контактные соединения, как правило, имеют одинаковую маркировку, хотя в этом случае разрешается ее делать разной. Цепи в схемах маркируют независимо от нумерации входных и выходных элементов (зажимов) машин, аппаратов, приборов. Маркировку выполняют арабскими цифрами и буквами одного размера.
Силовые цепи переменного тока маркируют соответственно буквами фазы и нуля и последовательными цифрами после них. Участки силовых цепей постоянного тока положительной полярности маркируют нечетными цифрами, а отрицательной — четными.
Цепи управления, защиты и сигнализации маркируют последовательными цифрами. Допускается цепи управления постоянного тока и однофазного переменного тока маркировать либо четными, либо нечетными цифрами.
Рекомендуется все цепи постоянного тока маркировать четными и нечетными числами, начиная с 1, 100, 200, 300 и т.д., в целях выделения их функционального назначения, например силовые, управления, защиты, сигнализации.
261
eeooe-93’6sz
Рис. 5.5. Схема автоматизированного однодвигательного электропривода (см. также
262
12АВЗ I
УУЛ Исходное положение
Конечное положение
170BQ1
вк
ви
170BQ2
вк
Схема 729.26.200ЭЗ
15
16
шкафа контроллера 12AD
729.26.300ЭЗ
Щит 12АВЗ. Управление электроприводом 170UZ устройства для установки листа (УУЛ). Схема электрическая принципиальная Лит. Масса Масштаб
Изм. Лист № докум. Подп. Дата
Разраб. Дюбарева
Пров. Зементов
Т. контр. Лист 1 | Листов 2
ОАО “КО ВНИИМЕТМАШ”
H. контр. Алексеенко
Уте. Зементов
с. 264 и 265)
263
£e00£’9Z’6ZZ
Ине. № подл. | Подп. и дата | Взам. Инв. № \ Инв.№дубл. | Подп. и дата
пульта управления 12АР1
Модуль А05 Модуль А04
Рис. 5.5. Окончание
264
Таблица электрооборудования
Поз. обозначение Наименование Кол. Примечание
1 2 3 4
На механизме
17 ОМ Электродвигатель асинхронный с КЗ ротором МТКН 3111-6, 11 кВт, 910 об/мин, 380 В, 50 Гц 2
170BQ1, 170BQ2 Датчик индуктивный BES M30MIPSC10B-BV03, 24 В пост, тока 8 BALLUFF
170BR Датчик импульсный FGHJ4S-1024G-90G-NG/20P, 24 В пост, тока 1 HUBNER
Шит управления 12АВЗ
170UZ Преобразователь частоты 6SE7023-4EC61 15 кВт 1 Siemens
QS1 Размыкатель 3NP5065-1HF13 1 Siemens
Предохранитель 3NA 3830 1
1QF1 Автоматический выключатель 3RV1031-4FA10, 40 А 1 Siemens
Блок-контакт 3RV1901-1E с 1 “з" и 1 “р” конт. 1
1КМ1 Контактор 3RT1035-1ВВ44, 24 В пост, тока, с 2 “з” и 2 “р" конт. 1 Siemens
QF230 Автоматический выключатель 5SX2110-6. 10 А, хар-ка В 1 Siemens
Блок-контакт 5SX9100C 1 “з” и 1 “р" конт. 1
G1 Блок питания SITOP POWER 6ЕР1334-2АА00, 10А, 24 В пост, тока 1 Siemens
729.26.300ЭЗ Лист 2
Изм. Лист № докум. Подп. Дата
265
Последовательность маркировки принимают от ввода источника питания к потребителю, а разветвляющиеся участки цепи нумеруют сверху вниз и слева направо. На схеме маркировку проставляют около концов или в середине участка цепи: при горизонтальном расположении цепей — над изображением цепи, при вертикальном — слева от изображения цепи. В технически обоснованных случаях допускается проставлять маркировку под изображением цепи. (Обычно справа от цепи и под ней проставляется заводская маркировка выводов устройств или изделий.)
5.4.2. Схемы автоматизированных однодвигательных электроприводов механизмов
Устройства управления сложными объектами, содержащими группу однодвигательных электроприводов, обычно компонуются в шкафы, шиты, пульты и другие комплектные устройства, в каждом из которых предусматривается аппаратура управления для нескольких однодвигательных электроприводов.
Электрические принципиальные схемы могут быть выполнены в двух вариантах:
с изображением на общей схеме всех электроприводов для каждого комплектного устройства управления и с указанием связей между ними и внешними устройствами (электродвигателями, датчиками и т.д.);
с изображением на одной схеме всех силовых цепей, цепей управления, электродвигателя, датчиков и других элементов, относящихся к одному электроприводу, и с указанием расположения элементов схемы в комплектных устройствах управления (это изображение по приводам).
В качестве примера изображения схем по второму варианту на рис. 5.5 приведена электрическая принципиальная схема управления электроприводом устройства установки листа (УУЛ) перед ножницами для резки листового проката с перечнем элементов.
Силовая часть электропривода размешена в щите управления 12АВЗ, органы управления (ключ выбора режимов 170SA1 и четырехкоординатный переключатель-джойстик 170SA) — на пульте управления 12АР1 с модулями удаленного ввода-вывода контроллера 12AD. В шкафу контроллера используются модули ввода сигналов датчиков 170BR, 170BQ1, 170BQ2.
5.4.3. Схемы автоматизированных многодвигательных электроприводов механизмов
Системы многодвигательных электроприводов, имеющих электрические связи по силовым цепям питания от общего преобразователя или по цепям управления, принято изображать на одной схеме. При этом электродвигатели могут иметь механическую связь в соответствии с кинематическими особенностями технологического объекта или через обрабатываемый материал.
На рис. 5.6 в качестве примера из двух листов формата АЗ приведен лист 1 принципиальной схемы двухдвигательного электропривода переменного тока для механизма резания ножниц листового проката, выполненного на базе ком
266
плектных частотно-регулируемых электроприводов с рекуперацией энергии Simovert VC (щиты управления 12АВ1, 12АВ2). Электродвигатели, управляемые от индивидуальных преобразователей, имеют общее задание скорости и выравнивание нагрузок при механической связи через суммирующий редуктор. С помощью коммуникационной системы связи Simolink осуществляется обмен данными между электроприводами с микропроцессорным управлением по схеме ведущий—ведомый (master—slave).
5.4.4. Схемы систем автоматизации
В качестве примера схемы систем автоматизации на рис. 5.7 представлены листы 1 и 6 схемы электрической принципиальной шкафа управления воздухонагревателем, выполняемой на семи листах формата А2. На схеме показаны элементы автоматизации (датчики, коммутационно-защитная аппаратура, элементы сигнализации, информационная сеть Controller Link, связь контроллера воздухонагревателя с NT-терминалом), а также основные функции, которые они выполняют (сведены в таблицы).
5.5. Схемы соединений и подключения
5.5.1. Схемы электрические соединений. Таблицы соединений
Схема соединений показывает соединения составных частей изделия между собой и определяет провода, жгуты, кабели, которыми они осуществляются, а также места их присоединения и ввода (зажимы, соединители). На схеме соединений должны быть изображены все устройства и элементы, входящие в состав изделия, их входные и выходные элементы (разъемы, платы, зажимы и т.п.), а также соединения между устройствами и элементами.
Элементы и устройства на схеме соединений изображают в виде их внешних очертаний, прямоугольников или условных графических обозначений, а входные и выходные элементы — в виде условных графических обозначений или таблиц. Вводные элементы, через которые проходят провода, жгуты и кабели, изображают в виде условных графических обозначений, установленных стандартами ЕСКД.
Расположение графических обозначений устройств и элементов на схеме соединений должно примерно соответствовать их действительному размещению в изделии, а расположение входных и выходных элементов внутри устройства — действительному размещению их в устройстве. При этом около графических обозначений устройств указывают позиционные обозначения, присвоенные им на принципиальной схеме. Допускается также указывать наименование, тип, основные параметры элементов и устройств.
На схеме соединений следует указывать обозначения выводов (контактов) элементов и устройств, нанесенные на изделие или установленные в документации на них. При изображении разъемов допускается применять условные графические обозначения, не показывающие отдельные контакты, при
267
Рис. 5.6. Схема автоматизированного многодвигательного электропривода
269
ХТЗ 11-
Ине. № подл. Г Подп. и дата | Взам. Ине. № | Ине. № дубл. | Подп. и дата
ХТЗ 12
Рис. 5.7. Схема системы автоматизации (см. также с. 272 и 273)
270
Гпо шп~Г
FLH
PS1
Ш1 3LU2 1 ' 'L21 гп
1 2 I l|
1N 31N 1 31N N21 I ХТ1.5| N21 S82K-05024
I ХТ1 6
Питание терминала NT1
PS10
+24 В Питание внешних входов =24 В
-24 В
Питание=220 В
Питание базовой панели контроллера
Работа контроллера
Разрешение управления клапаном 101
+24 В Внутреннее питание=24 В выходов
-24 В Внутреннее питание=24 В
-24 В
Контроль питания -220 В на входе ИБП
Контроль питания -220 В входов
Контроль питания =24 В PS1
Контроль питания =24 В PS2
Работа от резервной схемы
Работа от новой схемы
Питание дискретных входов -220 В 50 Гц
Вентиляция шкафа
Освещение шкафа
РОЗ.2001.300.ЭЗ
ШУВН. Схема электрическая принципиальная Лит. Масса Масштаб
Изм. Лист № докум. Подп. Дата
Разраб. Иванов
Пров. Сидоров
Т. контр. Петров Лист 1 | Листов 7
ШКАФ УПРАВЛЕНИЯ ВОЗДУХОНАГРЕВАТЕЛЯМИ ООО “НПФ “Ракурс” г. Санкт-Петербург
Н.контр.
Уте.
271
';_ШУВЗ_3 [
Unit 1 Node 02 . TerSW-On
21A08
CS1W CLK21
BD L BD H SHLD
BD L BD H SHLD
Unit 1
Node 01 TerSW=Off _______A08
CS1W
CLK21
BDL BD H SHLD
1_ШУ_НЗ I
Node 3
| TerSW=Off | __________PCI 3G8F5 CLK21-E
CLK2
CLK2
UnitO Node 01 TerSW=Off
BDL BD H SHLD
BDL
SHLD-^O.
BP L
Инв. № подл. Подп. и дата ГВзам. Инв. № I Инв. № дубл. | Подп. и дата
UnitO
Node 02 TerSW-Off
A09
CS1W
CLK21
UnitO Node 04 TerSW=On 22A09
CS1W
CLK21
21A09
CS1W CLK21
BD L BDH SHLD
BDL
BD H
SHLD
BD L BD Н SHLD
BP L
CLK1
SHLD
Рис. 5.7. Окончание
BDL BD Н SHLD
CLK1
BDL
SHLD
CLK1
272
Сеть Controller Link
Сервер_СКУ ।
Node 3
| TerSW-Off~~] Сервер
BDL BD H SHLD
Unit 0
Node 03 TerSW=On _______A09
CS1W
CLK21
BD L BD H SHLD
Переключатель Положение Комментарий
A08
Unit No. 1 Номер модуля
Node No. 3 Номер узла
TerSW On Терминатор включен
SW1:1 Off Скорость передачи
SW1:2 Off
SW1:3 Off Не используются
SW1:4 Off
A09
Unit No. 0 Номер модуля
Node No. 3 Номер узла
TerSW On Терминатор включен
SW1:1 Off Скорость передачи
SW1:2 Off
SW1:3 Off Не используются
SW1:4 Off
Р03.2001.300.ЭЗ Лист 6
Изм. Лист № докум. Подп. Дата
273
Рис. 5.8. Схема соединений силового щита
Инв. № подл. Подп. и дата I Взам. Инв. № I Инв. № дубл. I Подп. и дата
3-37-L 1:W1(nucm 3)
274
Х36814
ХТ2:15(лист 3)
31Р24
--------► ХТ2:19(лист 3)
2
Монтаж цепей L31, L32, L33 выполнить проводом МГШВ сечением 6 мм
2
Монтаж силовых цепей выполнить проводом МГШВ сечением 1,5 мм
2
Монтаж цепей управления выполнить проводом МГШВ сечением 0,5 мм
Р36.1999.440.Э4
Силовой щит №4 управления разгрузочным транспортером. Схема электрическая соединений Лит. Масса Масштаб
Изм. Лист № докум. Подл. Дата
Разраб. Розанов
Пров. Петров
Т. контр. Иванов Лист 1 | Листов 3
ООО “НПФ “Ракурс” г. Санкт-Петербург
Н.контр.
Уте. Сидоров
275
этом сведения о подключении контактов приводят в таблице, размещаемой около разъема или на свободном поле схемы.
При использовании многоконтактных элементов допускается указывать сведения о присоединении проводов и жил кабеля к контактам одним из следующих способов:
многоконтактное изделие изображают в виде прямоугольника, внутри которого условно показывают контакты и провода или жилы кабеля, при этом концы линий направляют в сторону соответствующего жгута или кабеля и обозначают;
около изображения многоконтактного устройства помещают таблицу с указанием подключения контактов.
Провода, группы проводов, жгуты и кабели показывают на схеме соединений отдельными линиями. Для упрощения допускается сливать отдельные провода, идущие на схеме в одном направлении, в общую линию, однако при подходе к контактам каждый провод должен быть выделен отдельной линией. Провода, жгуты и кабели обозначают порядковыми номерами в пределах изделия отдельно для каждого вида проводников.
В качестве примера на рис. 5.8 дан лист 1 схемы соединений силового щита, выполняемой на трех листах.
Если на принципиальной схеме электрическим цепям были присвоены обозначения, то на схеме соединений всем проводам и жилам кабелей должны быть присвоены те же обозначения, при этом для удобства чтения схемы рекомендуется нумеровать по порядку отдельные участки в пределах цепи, отделяя их от номера самой цепи дефисом.
Допускается линии, изображающие провода, группы проводов, жгуты и кабели, не проводить или обрывать около мест присоединения, при этом около обрыва линии связи и места присоединения следует указывать адреса присоединений (рис. 5.9).
На схеме соединений должны быть указаны: для проводов — марка, площадь сечения, при необходимости расцветка; для кабелей — марка, число и площадь сечения жил, а также число занятых жил, которое размещают в прямоугольнике справа от данных кабеля. Если данные о проводах и кабелях указывают около изображающих их линий, допускается обозначения этим проводам и кабелям не присваивать. Одинаковые данные (марки, сечения) для всех или большинства проводов рекомендуется указывать на поле схемы.
АЗ
Блок 5
Цепь Конт. Адрес
Корпус 1 =А1-Х4:2
+150 В 2 =А1-Х7:5
-27 В 3 =А1-Х4:3
-12 В 4 =А1-Х3:2
Конт. Номер провода Адрес присоединения
1 3 =А1-Х1:2
2 1 -К1:3
3 4 - К2:1
К
Рис. 5.9. Варианты указания адресов присоединений
276
Сведения о проводах и присоединениях указывают в таблице, размещаемой на поле первого листа схемы, как правило, над основной надписью на расстоянии не менее 12 мм от нее. Продолжение этой таблицы при необходимости помещают слева от основной надписи, повторяя головку таблицы. Такая таблица может выполняться в виде самостоятельного документа на формате А4 с основной надписью по ГОСТ 2.104—68 (формы 2 и 2а), при этом ей присваивают наименование «Таблица соединений». Варианты форм таблицы соединений представлены на рис. 5.10.
В таблице соединений указывают:
в графе Обозначение провода — обозначение провода, жилы кабеля;
в графах Откуда идет, Куда поступает — условные буквенно-цифровые обозначения соединяемых элементов или устройств;
в графе Соединения — условные буквенно-цифровые обозначения соединяемых элементов или устройств, разделяя их запятой;
в графе Данные провода для провода — марку, сечение и при необходимости расцветку, а для кабеля — марку, сечение и число жил;
в графе Примечание — дополнительные данные.
При выполнении соединений жгутами проводов или жилами кабелей перед записью проводов и жил в таблицу соединений дают заголовок, например
20 50 50 30
L0 Обозначение провода Откуда идет Куда поступает Данные провода Примечание
8 min
185 .
а
20 100 30
L0 Обозначение провода Соединения Данные провода Примечание
8 min
185
б
Рис. 5.10. Две формы таблицы соединений
277
Цепь внешняя Клемма Цепь внутренняя Номер Наименование Состояние Куда идет Примечание
2X003 ХТ9:5 2X003 3099 Лебедка конусов Заказ БК 2KV003-1
21Р24 ХТ9:6 21Р24
ХТ9:7 21Р24 Питание +24 В
ХТ9:8 21Р24 Питание +24 В
1KV505 ХТ9:9 1KV505 3098 Скиповая лебедка главного подъема Скип левый внизу 2KV202/1
1KV506 ХТ9:10 1KV506 Скип правый внизу 2KV203/1
ХТ10-1
3098-Р1 ХТ10_1:1 22Р24 3098 Скиповая лебедка главного подъема Питание +24 В Датчик положения 1 Энкодер Е6С2 CWZ6C 1000P/R
3098-А1 ХТ10_1:2 21Х2102А сигнал А
3098-В1 ХТ10_1:3 21Х2102В сигнал В
ХТ10_1:4 21X2102Z сигнал Z
3098-N1 ХТ10_1:5 22G24 Питание -24 В
РЕ ХТ10_1:6 РЕ земля
3099-Р1 ХТ10_1:7 22Р24 3099 Лебедка конусов Питание +24 В Датчик положения 1 Энкодер Е6С2 CWZ6C 500P/R
3099-А1 ХТ10_1:8 21Х2102А сигнал А
3099-В1 ХТ10_1:9 21X2102В сигнал В
ХТ10_1:10 21X2102Z сигнал Z
3099-N1 ХТ10_1:11 22G24 Питание -24 В
РЕ ХТ10_1:12 РЕ земля
Рис. 5.11. Таблица клеммников
Жгут 1 или Жгут АВГД.ХХХХХХ.085. и размещают их в порядке возрастания присвоенных номеров.
При выполнении соединений отдельными проводами, жгутами проводов и кабелями в таблицу соединений записывают сначала отдельные провода (без заголовка), а затем с соответствующими заголовками жгуты проводов и кабели. При разработке схем соединений на отдельных листах выполняют таблицы клеммников (рис. 5.11).
На поле схемы соединений над основной надписью допускается помещать необходимые технические требования, например о недопустимости совместной прокладки некоторых проводов, жгутов, кабелей и значения минимально допустимых расстояний между ними, сведения о специфике прокладки и др.
5.5.2. Схемы электрические подключения.
Таблицы подключения
Схема подключения показывает внешние подключения изделия. На этой схеме должны быть изображены изделие, его входные и выходные элементы (разъемы, зажимы и т.п.) и подводимые к ним концы проводов и кабелей внешнего монтажа, а также указаны данные о подключении изделия (характеристики внешних цепей, адреса).
Изделие изображают в виде прямоугольника или его внешних очертаний, а входные и выходные элементы — в виде условных графических обозначений или внешних очертаний. Размещение изображений входных и выходных элементов относительно изделия на схеме должно примерно соответствовать их действительному размещению в изделии. Всем этим элементам присваивают буквенно-цифровые позиционные обозначения согласно принципиальной схеме или схеме соединений. Допускается также указывать наименование и тип разъемов, к которым присоединяется внешний монтаж.
На всех элементах, изображенных на схеме подключения, должна быть дана маркировка, предусмотренная в конструкции этих элементов. Пример изображения и обозначения проводов внешнего монтажа показан на рис. 5.12.
Сведения о внешнем подключении могут быть указаны в таблице подключения, расположенной на поле схемы над основной надписью. Форма таблицы произвольная, однако в ней должны быть указаны характеристики внешних цепей и адреса.
5.6. Схемы электрические — общая, расположения, объединенная
Схема электрическая общая определяет составные части комплекса и соединение их между собой, используется при монтаже и наладке, а также при проектировании. На общей схеме изображают устройства и элементы, входящие в комплекс (прямоугольниками, условными графическими обозначениями или внешними очертаниями), и соединяющие их провода, жгуты и кабели. Входные, выходные и вводные элементы изображают в виде УГО
279
Оборудование ЭП-1. Отм. +9.000 Шкаф 1 ШТ ЭП-1. Отм. +9.000 Шкаф 1ШТ
Примечание Контроль 1ШТ=24 В Контроль 1ШТ=24 В
Оборудование
Примечание
ЭП-1. Отм. +16.800 Шкаф 1ШУ
Контроль 1ШТ=24 В
ЭП-1. Отм. +16.800 Шкаф 1ШУ
Контроль 1ШТ=24 В
Рис. 5.12. Схема электрическая подключений
280
281
ZCOOO'OO'688
Пост управления 12ПУ
Рис. 5.13. Схема расположения технических средств управления
282
Электротехническое помещение 12 ПСУ
Шкаф гидро-, пневмоприводов
ШУ1
ШУ2
Шкаф СНА
ШУ4
Шкаф Ж-9, Г-9
Электрические кабели
АР2
120UZ
107UZ
105UZ
Регулировка
Упор передвиж- бокового ной зазора
Тележка смены ножей
АВ6
Шкаф управления отбойником уборки обрези (у сталкивателя обрези)
Рабочее место
с переносным пультом смены ножей
АРЗ Рабочее место в маслоподвале №4
Р02 Мнемосхема
114UZ
116UZ
172UZ1
172UZ2
119UZ
173UZ
Транспортер Рольганг уборки приемный обрези
Рольганг качающийся
Рольганг заНПР
АВ9
АВ7
Комплектные электроприводы
АВ8
839.00.000Э7
Участок ножниц поперечной резки. Схема расположения технических средств управления Лит. Масса Масштаб
Изм. Лист № докум. Подп. Дата
Разраб. Галинская
Пров. Зементов
Т. контр. Лист | Листов 1
Н.контр. Алексеенко
Уте. Зементов
283
или таблиц. Расположение графических обозначений устройств и элементов на схеме должно примерно соответствовать действительному их размещению. Для каждого устройства и элемента, жгута и кабеля должны быть указаны наименование, тип, документ, на основании которого они применены. Данные об устройствах и элементах записывают в перечень элементов, а данные о жгутах, кабелях и проводах — в таблицу перечня проводов, жгутов и кабелей.
Связь перечня элементов со схемой осуществляется через позиционные обозначения, как правило, цифровые.
Перечень элементов заполняют по правилам, изложенным ранее. Форма таблицы перечня проводов, жгутов и кабелей заполняется следующим образом:
в графе Обозначение — обозначение основного конструкторского документа провода, кабеля, жгута, изготовленных по чертежам;
в графе Данные провода, жгута, кабеля — тип и технические данные проводов, на которые не разрабатывают чертежи.
Связь перечня проводов с общей схемой осуществляется через обозначения проводов, жгутов и кабелей, присвоенные по правилам, установленным для схем соединений. Характеристики цепей на общей схеме допускается обозначать на поле около изображения разъема.
Схемы расположения определяют относительное расположение электрических составных частей однодвигательного и многодвигательного электроприводов, средств автоматизации на технологической установке и вне ее, а при необходимости проводов, жгутов, кабелей, шино- и трубопроводов, соединяющих их. Эти схемы используют при разработке других конструкторских документов, а также при изготовлении и эксплуатации электроприводов и различных управляющих устройств.
Схемы расположения электроприводов выполняются в контуре внешнего очертания технологической установки без соблюдения масштаба. При этом действительное пространственное расположение составных частей электропривода учитывается приближенно либо не учитывается совсем. На этих схемах изображают электрические машины, управляемые преобразователи и трансформаторы, отдельно расположенные реакторы, панели, шкафы и пульты управления, датчики скорости, положения, технологических переменных и другие электротехнические элементы и устройства, входящие в технологическое оборудование или находящееся вне его, а также показывают расположение проводов, жгутов и кабелей, которыми соединены составные части электропривода. При необходимости на схеме расположения указывают конструкцию, место и помещение, где будут расположены составные части электропривода. При этом составные части изображают в виде их внешних очертаний или условных графических обозначений, а провода, жгуты и кабели — в виде отдельных линий или внешних очертаний.
В качестве примера на рис. 5.13 показана схема расположения технических средств управления участком ножниц поперечной резки листового проката.
Схемы объединенные — это когда на схеме одного типа приводят сведения, характерные для схем другого типа, например на схеме электрических соединений какого-либо устройства показывают его внешние подключения. При выполнении таких схем требуется соблюдать правила, соответствующие объединяемым типам схем.
284
В схемах производственных машин и комплексов встречаются различного вида электрические, гидравлические, пневматические и кинематические элементы, приводящие в движение исполнительный орган или несколько исполнительных органов рабочей машины. Эти элементы и их связи допускается изображать на одной объединенной схеме. Устройства, элементы и их связи изображают на схеме по правилам, установленным для соответствующих видов схем.
5.7. Текстовые документы в составе конструкторских документов
5.7.1. Виды текстовых документов
Текстовые документы содержат информацию в основном в виде текста, но в них также могут входить иллюстрации, т.е. чертежи, схемы, графики и т.д. Часть информации может быть представлена в виде формул, уравнений, алгоритмов, программ и др. Цифровой материал, как правило, оформляют в виде таблиц.
Информация в текстовом конструкторском документе может быть представлена в виде сплошного текста — это технические условия (ТУ), пояснительные записки (ПЗ), рабочие расчеты (РР), программы и методики проведения испытаний (ПМ), инструкции (И) и т.д., а также в виде текста, разбитого на графы, — спецификации, перечни, ведомости, таблицы и т.д.
Правила построения и изложения технических условий см. в гл. 2. Построение, выполнение и оформление пояснительной записки, расчетов, программы и методики испытаний устанавливает ГОСТ 2.106—68.
Схемы, таблицы и чертежи допускается выполнять на листах любого формата по ГОСТ 2.301—68 с применением основной надписи и дополнительных граф к ней по ГОСТ 2.104—68. Пример заполнения основной надписи для пояснительной записки приведен на рис. 5.14 [2].
Общие требования к текстовым документам определяет ГОСТ 2.105—95.
АБВГ.521721.003 ПЗ
Изм. Лист № докум. Подп. Дата
Разраб. Ильин 4.02.89 Двигатель асинхронный. Пояснительная записка Лит. Лист Листов
Пров. Карпов 4.02.89 °i|A| 1 34
Зав. сект. Зверев 5.02.89 ИГ ЭАПТ
Н. контр. Лисицин 5.02.89
Утв. Волков 5.02.89
а
АБВГ.521721.003 ПЗ Лист
6
Изм. Лист № докум. Подп. Дата
б
Рис. 5.14. Примеры (а, б) заполнения основной надписи для пояснительной записки
285
5.7.2. Пояснительная записка и отчет о научно-исследовательской работе
Пояснительная записка должна включать в себя следующие разделы: введение; назначение и область применения проектируемого изделия; технические характеристики; описание и обоснование выбранной конструкции; расчеты, подтверждающие работоспособность и надежность конструкции; описание организации работ с применением разрабатываемого изделия; ожидаемые технико-экономические показатели; уровень нормализационной оценки или уровень унификации. Допускается объединять, исключать, а также вводить в ПЗ новые разделы.
Порядок изложения расчетов определяется характером рассчитываемых величин. В общем случае расчеты должны содержать эскиз или схему рассчитываемого изделия, задачу расчета, исходные данные для расчета, условия расчета, сам расчет и заключение.
Программа и методика испытаний должны предусматривать следующие проверки: соответствия изделия чертежам, техническим требованиям, паспортным данным и нормам точности; показателей качества и надежности изделия; обеспечения стабильности работы изделия; удобства обслуживания и проведения ремонта изделия; комплектности изделия; соответствия изделия требованиям техники безопасности.
Описание методов испытаний изделий по отдельным показателям рекомендуется располагать в той же последовательности, в которой эти показатели расположены в технических требованиях. В методике испытаний необходимо также предусмотреть продолжительность и режим испытаний, а также необходимые замеры величин, схемы и средства контроля, значения предельных отклонений.
К текстовым документам относится также отчет о научно-исследовательской работе, являющийся научно-техническим документом. Общие требования, структуру и правила оформления такого отчета устанавливает ГОСТ 7.32—81.
К отчету предъявляются следующие требования: четкость и логическая последовательность изложения материала, убедительность аргументации, краткость и точность формулировок, исключающая возможность неоднозначного толкования, конкретность изложения результатов работы, обоснованность рекомендаций и предложений.
Отчет должен включать в себя титульный лист, список исполнителей, реферат, содержание, перечень условных обозначений, символов, единиц и терминов, введение, основную часть, заключение, список использованных источников, приложения.
Требования, установленные ГОСТ 7.32—81, распространяются на отчеты о фундаментальных, поисковых и прикладных научно-исследовательских работах.
Первым листом текстового документа является титульный лист, который используется для размещения утверждающих и согласующих подписей. На титульном листе приводятся наименование организации, разработавшей документ, гриф согласования и утверждения, наименования изделия и документа, обозначение документа, подписи разработчиков, год издания документа.
286
Текст документа при необходимости может быть разделен на разделы и подразделы. При большом объеме допускается разбивать документ на части (книги), каждую из которых комплектуют отдельно. Разделы должны иметь порядковые номера в пределах всего документа или его части.
Подразделы должны быть пронумерованы в пределах каждого раздела. Номер подраздела включает в себя номер раздела, отделяемый точкой. В конце номера подраздела также ставят точку.
Разделы и подразделы могут состоять из одного или нескольких пунктов, которые при необходимости разбивают на подпункты с порядковой нумерацией в пределах каждого пункта. Наименования разделов записывают в виде заголовков (по центру текста) прописными буквами, наименования подразделов — в виде заголовков с прописной буквы.
Стандарт в деталях определяет требования к оформлению текста, формул, таблиц и иллюстраций, входящих в документ.
5.7.3. Спецификация
Спецификация является основным конструкторским документом для сборочной единицы, комплекса и комплекта (ГОСТ 2.102—68). Она представляет собой перечень составных частей и конструкторских документов для конкретного изделия. Необходимость спецификации как самостоятельного конструкторского документа обусловлена потребностями изготовления, комплектования конструкторских документов, планирования запуска изделий в производство.
Спецификацию выполняют на листах формата А4. Форму и порядок заполнения спецификации устанавливает ГОСТ 2.108—68.
В спецификацию вносят составные части, входящие в изделие, а также конструкторские документы, относящиеся к изделию в целом и его составным частям.
В общем случае спецификация состоит из разделов, располагаемых в следующем порядке: документация, комплексы, сборочные единицы, детали, стандартные изделия, прочие изделия, материалы, комплекты. В зависимости от состава изделия некоторые разделы в спецификации могут отсутствовать.
В рабочей документации систем автоматизации и АСУ ТП выполняют спецификацию оборудования (СО1) и спецификацию щитов и пультов (СО2). Форма, разделы и основная надпись спецификации установлены ГОСТ 21.110-82.
5.7.4. Перечни и ведомости
Перечень элементов в виде самостоятельного документа выполняют на листах формата А4. Основную надпись и дополнительные графы к перечню устанавливает ГОСТ 2.104—68. Если перечень элементов выполняется в виде самостоятельного документа, ему присваивают код Пив основной надписи указывают наименования изделия и конструкторского документа.
287
Перечень элементов может быть выполнен также на электрической принципиальной схеме (см. рис. 5.5).
В графах перечня элементов помешают следующие данные:
в графе Поз. обозначение — позиционное буквенно-цифровое обозначение элемента, устройства или функциональной группы;
в графе Наименование — наименование элемента или устройства, их тип и обозначение, сведения о документе, на основании которого этот элемент или устройство применяются;
в графе Примечание — технические данные, не содержащиеся в обозначении элемента, производитель.
Связь перечня элементов с графическими обозначениями на схеме осуществляется через позиционные обозначения. Элементы в перечень записывают по буквенным позиционным обозначениям группами. В пределах каждой группы с одинаковыми буквенными позиционными обозначениями элементы располагают по возрастанию порядковых номеров. Допускается оставлять несколько незаполненных строк между группами элементов. Элементы одного типа с одинаковыми электрическими параметрами записывают в перечень в одну строку, при этом в графе Кол. указывают общее количество одинаковых элементов.
Ведомости подразделяются на два вида: ведомости проектов и ведомости потребности в материалах. Содержание и оформление ведомостей проекта см. в гл. 2. Форму таблицы ведомостей проекта устанавливает ГОСТ 2.106—68.
Ведомость потребности в материалах (ВМ) предназначена для определения номенклатуры и количества материалов, необходимых для производства работ по монтажу технических средств автоматизации, предусмотренных в рабочей документации систем автоматизации и АСУ ТП.
Форма ВМ установлена ГОСТ 21.109—80. В нее включают все материалы, необходимые для монтажа электрических и трубных проводок, щитов и пультов, приборов и средств автоматизации, а также материалы, необходимые для изготовления изделий.
ВМ включает в себя следующие разделы и подразделы: трубы (трубы защитные для электропроводок и трубы для трубных проводок); прокат черных металлов (металлоконструкции для крепления проводок, установки щитов и пультов, установки приборов и средств автоматизации).
5.8. Программная документация
5.8.1. Виды и содержание программных документов
Взаимоувязанные правила разработки, оформления и обращения программ и программной документации изложены в комплексе государственных стандартов ГОСТ 19 (см. подразд. 1.5.2).
Программные документы содержат сведения, необходимые для разработки, изготовления, сопровождения и эксплуатации программ.
К программным документам относятся (ГОСТ 19.101—87):
спецификация, содержащая сведения о составе программы и документации на нее;
288
ведомость держателей подлинников (05)’, содержащая перечень предприятий, на которых хранят подлинники программных документов;
текст программы (12) с необходимыми комментариями;
описание программы (13), содержащее сведения о ее логической структуре и функционировании;
программа и методика испытаний (51), содержащая сведения о требованиях, подлежащих проверке при испытании программы, а также о порядке и методе их контроля;
техническое задание, определяющее назначение и область применения программы, технические, технико-экономические и специальные требования, предъявляемые к ней, а также необходимые стадии, сроки разработки и виды испытаний;
пояснительная записка (81), включающая в себя схему алгоритма, общее описание алгоритма и (или) функционирования программы, а также обоснование принятых технических и технико-экономических решений:
эксплуатационные документы, содержащие сведения для обеспечения функционирования и эксплуатации программы.
К эксплуатационным документам относятся (ГОСТ 19.101—87):
ведомость эксплуатационных документов (20), включающая в себя перечень эксплуатационных документов на программу;
формуляр (30), содержащий основные характеристики программы, комплектность и сведения об ее эксплуатации;
описание применения (31), содержащее сведения о назначении программы, области применения, применяемых методах, классе решаемых задач, ограничениях для применения, минимальной конфигурации технических средств;
руководство системного программиста (32), содержащее сведения для проверки, обеспечения функционирования и настройки программы на условия конкретного применения;
руководство программиста (33), содержащее сведения для эксплуатации программы;
руководство оператора (34), содержащее сведения для обеспечения процедуры общения оператора с вычислительной системой в процессе выполнения программы;
описание языка (35), включающее в себя описание его синтаксиса и семантики;
руководство по техническому обслуживанию (46), содержащее сведения для применения тестовых и диагностических программ при обслуживании технических средств.
В зависимости от способа выполнения и характера применения программные документы подразделяются на подлинник, дубликат и копию (ГОСТ 2.102— 68), предназначенные для разработки, сопровождения и эксплуатации программы.
Допускается объединять отдельные виды эксплуатационных документов (за исключением ведомости эксплуатационных документов и формуляра). Необходимость такого объединения указывается в техническом задании. При этом объ-
Здесь и далее в скобках указан код вида документа по ГОСТ 19.101—87.
289
единенному документу присваивают наименование и обозначение одного из объединяемых документов. В объединенных документах должны быть приведены сведения, которые необходимо включать в каждый объединяемый документ.
На этапе разработки и утверждения технического задания определяют необходимость составления технических условий, содержащих требования к изготовлению, контролю и приемке программы. Технические условия разрабатывают на стадии рабочего проекта.
Необходимость составления технического задания на компоненты, не предназначенные для самостоятельного применения, и комплексы, входящие в другие комплексы, определяется по согласованию с заказчиком.
Обозначения программ и документов состоят из групп знаков, разделенных точкой (после кода страны и кода организации-разработчика), пробелом (после номера редакции документа и кода вида документа), дефисом (после регистрационного номера и номера документа данного вида) (ГОСТ 19.103—78).
Структура обозначения программы и ее программного документа — спецификации — имеет следующий вид:
Общая часть обозначения программы и программных документов на нее
Код страны____________________
Код организации-разработчика Регистрационный номер_________
Номер издания (для программы) Номер редакции (для документа)
А.В.ХХХХХ-ХХ
Структура обозначения других программных документов имеет следующий вид:
Общая часть обозначения программы и программных документов на нее Номер редакции документа__________
Код вида документа________________
Номер документа данного вида______
Номер части документа
А.В.ХХХХХ-ХХ XX ХХ-Х ----1----1--1--1-г
I । 1 1 1
. 1 1 ।
_____I____II, _____। । ।
Код страны-разработчика и код организации (предприятия)-разработчи-ка присваивают в установленном порядке, номер издания программы или номер редакции документа — в порядке возрастания от 01 до 99, код вида документа — в соответствии с требованиями ГОСТ 19.101—87.
5.8.2. Выполнение программных документов
ГОСТ 19.106—78 устанавливает правила выполнения программных документов для промышленных компьютеров, комплексов и систем независимо от их назначения и области применения.
Программные документы оформляют на листах формата А4. Кроме того, допустимо оформление документов на листах формата АЗ, а при изготовлении документа типографским способом возможно использование листов типографических форматов.
При необходимости допускается делить программный документ на части. Деление на части осуществляется на уровне не ниже раздела. Каждую часть
290
комплектуют отдельно, при этом в конце содержания первой части следует перечислить названия остальных частей.
Допускается включение в документ частей текста программы, оформленных в соответствии с правилами языка, на котором написан текст программы.
ГОСТ 19.701—90 (ИСО 5807—85) «Схемы алгоритмов, программ данных и систем» определяет условные обозначения и правила выполнения схем.
При графическом представлении алгоритм изображается в виде последовательности связанных между собой функциональных блоков, каждый из которых соответствует выполнению одного или нескольких действий. Такое графическое представление называется схемой алгоритма или блок-схемой.
В блок-схеме каждому типу действий (вводу исходных данных, вычислению значений выражений, проверке условий, управлению повторением действий, окончанию обработки и т.п.) соответствует геометрическая фигура, представленная в виде блочного символа. Блочные символы соединяются линиями переходов, определяющими очередность выполнения действий. Для на-
Табл и ца 5.2
Название символа Обозначение Пояснение
Процесс ь Вычислительное действие или последовательность вычислительных действий
Решение ТНет Проверка условий
Модификация р<^1,20,^>-| 1 Начало цикла
Предопределенный процесс Вычисления стандартной подпрограммы
Документ 1 Печать £7, c_J Вывод, печать результатов на бумаге
Ввод-вывод 1 / Ввод / / а, Ь, с / Ввод-вывод данных в общем виде
Соединитель А 9 или Т Разрыв линий потока
Пуск, останов а Начало, конец, останов, вход и выход в подпрограммах
Комментарий -- Текст комментария Пояснения, содержание подпрограмм, формулы
291
чертания этих схем используется набор символов, определяемых ГОСТ 19.701 — 90. Наиболее часто употребляемые символы приведены в табл. 5.2.
Для облегчения вычерчивания и нахождения на схеме символов рекомендуется поле листа разбивать на зоны. Размеры зон устанавливают с учетом минимальных размеров символов, изображенных на данном листе. Допускается один символ размещать в двух и более зонах, если его размер превышает размер зоны.
Координаты зоны по горизонтали проставляют арабскими цифрами слева направо в верхней части листа, а по вертикали — прописными буквами латинского алфавита сверху вниз в левой части листа.
Координаты зон в виде сочетаний букв и цифр присваивают символам, вписанным в поля этих зон (например, Al, А2, АЗ, Bl, В2, ВЗ и т.д.).
Расположение символов на схеме должно соответствовать требованиям ГОСТ 19.701—90. Исключение составляют обязательные символы Линия потока, Канал связи, Комментарий и рекомендуемые символы Межстраничный соединитель, Транспортирование носителей, Материальный поток.
Линии потока должны быть параллельны линиям внешней рамки схемы. Направления линий потока сверху вниз и слева направо принимают за основные и, если линии потока не имеют изломов, стрелками их можно не обозначать. В остальных случаях направления линий потока обозначаются стрелками обязательно. Расстояния между параллельными линиями потоков должно быть не менее 3 мм, между остальными символами схемы — не менее 5 мм.
Записи внутри символа должны быть представлены таким образом, чтобы их можно было читать слева направо и сверху вниз, независимо от направления потока. В схеме символу может быть присвоен идентификатор, который должен помещаться слева над символом (например, для ссылки в другие части документации). В схемах допускается краткая информация о символе (описание, уточнение или другие перекрестные ссылки для более полного понимания функции данной части системы). Описание символа помещаться справа над ним.
Контрольные вопросы
1. Что включают в себя правила выполнения электрических чертежей и схем?
2. Как представляется текстовая информация на чертежах и схемах?
3. Каковы особенности выполнения чертежей общего вида и сборочного?
4. Каковы особенности выполнения электрических схем: структурной, функциональной, принципиальной, соединений, подключения, общей, расположения, объединенной?
5. Как выполняются таблицы соединений, подключения?
6. Какие виды текстовых документов разрабатываются при проектировании?
7. Каковы правила выполнения пояснительной записки, спецификации, перечней и ведомостей?
8. Каковы особенности выполнения схем алгоритмов, программ управления и работы системы?
9. Какие виды программных документов вы знаете и каково их содержание?
10. Каковы правила выполнения программных документов?
ГЛАВА 6
КОМПЬЮТЕРНЫЕ ТЕХНОЛОГИИ ИССЛЕДОВАНИЯ И ОПТИМИЗАЦИИ СИСТЕМ АВТОМАТИЗИРОВАННЫХ ЭЛЕКТРОПРИВОДОВ ПРОИЗВОДСТВЕННЫХ МАШИН
6.1. Компьютерные средства для решения задач исследования и оптимизации
6.1.1. Анализ компьютерных средств
В инженерной практике при проектировании электромеханических комплексов (ЭК), а также при автоматизированном выборе наилучших проектных решений, широко применяются компьютерные методы исследования и синтеза. Эти методы позволяют повысить эффективность решений и сократить сроки и затраты на ввод ЭК в промышленную эксплуатацию.
Компьютерные исследования электромеханического комплекса выполняются по его модели, под которой понимается формализованное описание объекта, системы объектов, процесса или явления, выполненное посредством математических соотношений, набора чисел и (или) текстов, графиков, таблиц, словесных формул и т. п. В зависимости от поставленной задачи, способа создания и предметной области различают модели математические, физические и информационные. Однако часто встречаются и специальные типы моделей: эвристическая, логическая, концептуальная и т.д.
Сложность математического описания любого ЭК зависит: от необходимости одновременного рассмотрения всей совокупности факторов, отражающих свойства объекта управления; описания информационных систем и возмущений; точности движения электроприводов сепаратных систем; количества взаимосвязей.
В процессе математического моделирования модель может уточняться, усложняться или упрощаться.
В основе существующих в настоящее время функционально-ориентированных методов, направленных на совершенствование методологии программирования, лежит процесс целенаправленного разделения реализуемых моделей на составные, более простые части, т.е. декомпозиция модели, которая может быть функциональной или проводиться по структуре данных.
Программа математического моделирования строится по модульно-структурному принципу с четкой унификацией правил оформления подпрограмм и их взаимного сопряжения (интерфейса) по управлению и информации.
Структурный подход к программированию позволяет произвести декомпозицию разрабатываемой программы на ряд более простых составных частей (модулей), которые могут проектироваться автономно.
При разработке программных модулей следует стремиться к тому, чтобы наличие предварительных знаний об их внутренней структуре не являлось обязательным для сборки больших программ.
293
Желательно обеспечить максимальную независимость программных модулей, что достигается отказом от использования общих переменных, а также правильным расположением операций ввода-вывода.
Современные электромеханические системы характеризуются большим числом взаимосвязанных входных и выходных параметров. В математическом описании динамика электромеханических систем представляется системой дифференциальных и алгебраических уравнений.
С появлением вычислительной техники новых поколений и совершенствованием методов ее использования наметился новый системный подход к организации процесса проектирования на ПК, заключающийся в создании крупных программных комплексов, построенных по модульному принципу, с универсальными информационными и управляющими связями между модулями. При решении задач данного класса используются единые информационные массивы, организованные в банки данных.
Для решения задач исследования и оптимизации используются различные программные продукты: специализированные пакеты, библиотеки программ, математические системы программирования. Хорошо разработаны методики и алгоритмы, позволяющие исследовать режимы работы сложных электромеханических комплексов, анализировать их качество, рассчитывать частотные характеристики и импульсные переходные функции, исследовать динамику сложных систем, содержащих элементы с нелинейными характеристиками, рассчитывать оптимальные процессы при наличии ограничений, исследовать динамику стохастических систем и т.д.
При выборе того или иного программного продукта необходимо учитывать: вид математического описания исследуемой электромеханической системы; особенности представления данных модели;
порядок дифференциальных уравнений, порядок и вид матрицы (симметричная, избыточная, вырожденная и т.д.) и количество структурных элементов графа, используемых для математического описания электромеханической системы;
вид представления результатов расчета;
число и вид нелинейных характеристик, описывающих управляющие и возмущающие воздействия;
возможность гибкого изменения математической модели.
На этапе проектирования электромеханической системы возможные решения обычно оцениваются на основании интуиции и предыдущего опыта. Однако в настоящее время, как правило, требуется инструментарий, позволяющий стандартизировать процесс принятия решений.
Таким образом, последовательное применение известных пакетов программ, решающих отдельные задачи, позволяет получить требуемый результат. Однако такой подход не всегда удобен, так как увеличивается время исследования и требуется согласование формата и вида представления данных.
Для решения задач исследования и синтеза систем автоматизированных электроприводов применяют следующие программные средства: MATLAB (MathWorks, Inc); GPSS (компания Minuteman Software — CHIA); SCILAB, MATHCAD (Mathsoft, Inc); DERIVE (Soft Warehouse); SCADA (Supervisory Control And Data Acquisition — диспетчерское управление и сбор данных) или DCS (Distributed Control Systems — распределенная система управления) —
294
системы, реализующие в том числе и функции схематичного отображения технологических процессов; Case-средства (Computer-Aided Software/System Engineering) и др. Указанные средства отличаются друг от друга формой представления данных, характером решаемых задач, графическими возможностями, способностью взаимодействия.
В настоящее время для задач исследования и синтеза ЭП и СА чаше всего применяют MATLAB и GPSS.
MATLAB предназначается для проектирования систем управления, анализа данных, обработки изображений, цифровой обработки сигналов, визуализации полученных результатов и разработки собственных приложений.
В MATLAB помимо обычных языковых конструкций, позволяющих выполнять процедурное, объектно-ориентированное и визуальное программирование, содержится большое количество встроенных алгоритмов для математических расчетов и для анализа и графической визуализации данных, численных и символьных вычислений, создания инженерной и научной графики, имитационного моделирования, программирования, разработки приложений и графического интерфейса пользователя (GUI).
Программы MATLAB являются платформно-независимыми, поэтому пользовательские программы при необходимости могут быть перенесены на любую платформу без изменения.
Открытая архитектура облегчает применение MATLAB для изучения языковых конструкций, принципов программирования и создания пользовательских приложений.
MATLAB содержит специализированные графики, помогающие понять работу сложных систем, а также представить результаты их исследования. С помощью MATLAB можно создавать высококачественную графику для визуализации динамических процессов в исследуемых ЭК и презентации.
Набор специализированных приложений (Toolbox) позволяет обрабатывать сигналы и изображения, разрабатывать системы управления, проводить исследования с использованием нейронных сетей и др. Имеются тулбоксы,
Таблица 6.1
Наименование Toolbox Назначение
NAG Foundation Библиотека математических функций The Numerical Algorithms Group Ltd
Spline Сплайн-аппроксимация
Statistics Статистический анализ данных и моделирование методом Монте-Карло
Optimization Нахождение экстремумов линейных и нелинейных функционалов при наличии связей и ограничений
Partial Differential Equations Решение уравнений в частных производных
Symbolic Math Символьная математика
Extended Symbolic Math Расширенная символьная математика (включает в себя систему Maple)
295
расширяющие функциональные возможности программы в сборе данных, создании отчетов и написании программ, включающих в себя процедуры на языках C/C++ или Fortran, функционирующих в среде MATLAB или в виде независимых приложений.
MATLAB также содержит интерфейс для вызова Java-процедур, коммуникационный интерфейс (последовательный порт) для связи с внешним оборудованием и современные инструменты проектирования графического пользовательского интерфейса, а также поддерживает популярные форматы файлов — CDF (Common Data Format), FITS (Flexible Image Transport System), HDF и HDF-EOS.
В MATLAB входят специализированные пакеты прикладных программ (Toolbox) для решения математических задач (табл. 6.1).
6.1.2. MATLAB Simulink и его приложения
Для моделирования, имитации и анализа динамических систем применяется интерактивный инструмент MATLAB Simulink, который позволяет при помощи графических блок-диаграмм моделировать динамические системы и исследовать их работоспособность. Simulink, полностью интегрированный с MATLAB, обеспечивает немедленный доступ к широкому спектру инструментов анализа и проектирования. Simulink также интегрируется с приложением MATLAB Stateflow для моделирования поведения, управляемого событиями. Эти преимущества делают Simulink наиболее популярным инструментом для проектирования систем управления и коммуникации, цифровой обработки и других приложений.
Simulink Performance Tools содержит четыре инструмента для пользователей Simulink, проектирующих крупномасштабные, сложные модели: Simulink Accelerator, ускоряющий выполнение кода при имитации моделей от двух до десяти раз; Model Differencing, графически подчеркивающий отличия между двумя моделями; Model Profiler, собирающий данные функционирования и генерирующий HTML-отчет; Model Coverage, выдающий отчет о возможных путях имитации модели.
Для мониторинга сигналов и параметров в Simulink-моделях применяется приложение Dials & Gauges Blockset.
При создании и настраивании отчетов из MATLAB Simulink и Stateflow моделей и данных в различных выходных форматах, включая HTML, RTF, XML и SGML, применяются приложения MATLAB Report Generator и Simulink Report Generator, что обеспечивает возможность автоматического документирования создаваемых систем и включения в них любых данных из рабочей среды MATLAB.
MATLAB Compiler включает в себя MATLAB C/C++ Math and Graphics Libraries и позволяет компилировать /и-файлы в коды на С и C++, обеспечивая возможность создания независимых программных продуктов. Компилятор содержит алгоритмы оптимизации, существенно увеличивающие скорость выполнения программы. Модуль для Visual Studio позволяет использовать MATLAB-компилятор из Microsoft Visual Studio.
В MATLAB включены специализированные Toolbox, предназначенные для автоматизации проектирования систем управления (табл. 6.2).
296
Таблица 6.2
Наименование пакета прикладных программ Назначение
Control System Моделирование, анализ и проектирование как непрерывных, так и дискретных во времени линейных автоматических систем управления
Nonlinefr Control Design (NCD) Blockset Проектирование нелинейных систем
Fuzzy Logic Проектирование, моделирование и анализ систем с нечеткой логикой. Имеет средства для преобразования входных данных в выходные данные системы правил и связей произвольной сложности, выраженные обычным языком. Системы могут быть имитированы в MATLAB или включены в блочные диаграммы Simulink с возможностью генерации кода для независимого выполнения
LMI Control Синтез систем управления на основе линейных матричных неравенств. Содержит функции для проектирования и анализа таких характеристик систем управления, как помехоустойчивость, производительность и др.
Model Predictive Control Управление с эталонной моделью. Полезен для управления системами с большим числом входных и выходных переменных, имеющих много связей
ц-Analysis and Synthesis (i-анализ и синтез. Содержит набор функций для использования в анализе и проектировании устойчивых линейных систем с многими переменными
Robust Control Робастное управление. Содержит специализированный набор инструментов для анализа и синтеза систем управления, устойчивых по отношению к случайным возмущениям
Quantitative Feedback Theory (QFT) Control Design Проектирование робастных систем с обратной связью
Neural Network Нейронные сети. Применяется в областях, где формальный анализ чрезвычайно труден или невозможен, например при распознавании образов, идентификации и управлении нелинейными системами
System Identification Идентификация параметров в системах управления
Frequency Domain System Identification Идентификация в частотной области
xPC Target Моделирование и тестирование взаимосвязанного оборудования, управляющих систем и систем цифровой обработки сигналов
Communications Разработка современных коммуникационных систем, включая моделирование в реальном масштабе времени
297
В MATLAB также включены специализированные приложения, предназначенные для автоматизации проектирования в реальном времени (табл. 6.3).
Таблица 6.3
Наименование приложения Назначение
Real-Time Workshop Дополняет Simulink. позволяя автоматически генерировать С-код прямо из блочных диаграмм пакета Simulink
Real-Time Workshop Embedded Coder Расширяет возможности приложения Real-Time Workshop, позволяя осуществлять генерацию высококачественного встраиваемого кода для Simulink-моделей, и осуществляет генерацию кода из Stateflow
Real-Time Windows Target Обеспечивает простую в использовании среду макетирования в реальном времени, полностью контролируемую через пользовательский интерфейс Simulink
DSP Blockset Обеспечивает моделирование и симуляцию, позволяющие проектировать системы обработки сигналов в режиме реального времени и осуществлять проверку этих систем. DSP Blockset позволяет использовать инструменты Simulink для обработки потоковых данных и выполнения многоступенчатых операций
Таблица 6.4
Наименование библиотеки Назначение
Power Systems Моделирование энергетических систем, включая устройства электротехники и промышленной электроники
SimMechanics Моделирование механических систем, составленных из отдельных элементов, таких как механические блоки, соединения, узлы крепления, исполнительные элементы и датчики. С помощью этих элементов формируется описание сложной механической системы с присоединенными к ней другими динамическими моделями и контроллером
Aerospace Моделирование, интегрирование и имитация авиационных, космических, реактивных и турбореактивных систем и подсистем в приложении Simulink
Filter Design Проектирование, моделирование и анализ цифровых фильтров
Image Processing Набор средств для анализа и обработки цифровых изображений
298
Для моделирования и исследования электромеханических систем будут полезны библиотеки MATLAB, приведенные в табл. 6.4.
Применение библиотеки Power Systems для расчета и исследования электрических цепей и электрических машин постоянного и переменного тока подробно изложено в [15, 42].
Далее рассмотрим применение Simulink MATLAB для решения различных задач исследования и синтеза ЭК.
6.2. Синтез, исследование и оптимизация параметров систем регулирования
и управления
6.2.1. Автономные системы управления
К автономным системам относятся однодвигательные системы автоматического управления, например управляемые электроприводы насосов, компрессоров, напольного электротранспорта и др.
Рассмотрим системы управления (СУ), построенные по принципу подчиненного регулирования. В этом случае синтез систем сводится к расчету регуляторов различных видов (П-, ПИ-, ПИД-, И-регуляторов и др.), контуров тока, скорости, положения и др. Для синтеза регуляторов в зависимости от требуемых динамических характеристик применяются стандартные настройки: оптимум по модулю (ОМ) и симметричный оптимум (СО), а в методах модального управления — стандартные распределения корней характеристических полиномов. Такие настройки соответствуют стабилизирующим и следящим (контурным) режимам работы систем, а также режимам параболических, треугольных и трапециидальных движений, характерных для больших изменений переменных и соответствующих пусковым, тормозным, циклическим, программно-логическим режимам работы систем электроприводов. Последнее реализуется формированием соответствующих программных заданий на входы систем управления с использованием или без использования ограничений переменных регуляторов. Подробная методика стандартных настроек и их применения изложена в [7].
После проведения синтеза регуляторов переходят к исследованию различных режимов работы автономных систем, формируя различные управляющие и возмущающие воздействия. Для этого используют матричное описание СУ или ее описание в виде передаточных функций и соответственно Control System Toolbox либо систему визуального моделирования Simulink с описанием СУ в виде соответствующих 5-моделей.
В составе Control System Toolbox можно выделить следующие основные процедуры, приведенные в табл. 6.5.
В качестве примера рассмотрим построение переходных процессов для модели СУ второго порядка (рис. 6.1).
Применение Simulink для исследования СУ будет рассмотрено в подразд. 6.2.2.
299
Таблица 6.5
Процедура Назначение
Формирование LTI-объектов
SS Создание модели пространства состояния
zpk Создание модели нули —полюсы —коэффициенты (НПК)
tf Создание модели передаточной функции
Извлечение данных
ssdata Извлечение матриц пространства состояния
zpkdata Извлечение данных о нулях, полюсах, коэффициенте передачи
tfdata Извлечение числителя (числителей) и знаменателя (знаменателей) передаточной функции
Характеристики модели
class Получение данных о типе модели ('ss', 'zpk' или 'tf)
iset Проверка, является ли модель непрерывной
isdt Проверка, является ли модель дискретной
issiso Проверка, имеет ли модель один вход и один выход
isa Проверка, является ли LTl-объект моделью заданного типа
Преобразование вида модели
c2d Переход из непрерывного времени в дискретное
d2c Переход из дискретного времени в непрерывное
d2d Изменение периода дискретности, задание запаздываний по входам
Анализ динамических свойств систем
pole Определение полюсов системы
eig Определение собственных значений и собственных векторов
tzero Определение нулей системы
pzmap Расположение полюсов и нулей систем
degain Нахождение коэффициента передачи при нулевой (низкой) частоте
damp Определение частоты собственных колебаний и демпфирования по полюсам системы
300
Продолжение табл. 6.5
Процедура Назначение
Модели пространства состояния
rss, drss canon ctrb, obsv minreal mod red Генерирование случайных моделей пространства состояния Получение канонической формы пространства состояния Получение матрицы управляемости и наблюдаемости Минимальная реализация и сокращение нулей и полюсов Редукция состояния модели
Временные характеристики
step impulse initial Isim Получение переходной функции системы на единичный скачок Получение переходной функции системы на единичный импульс Реакция на начальные условия для моделей в уравнениях состояния Моделирование системы при произвольном входном воздействии
Частотные характеристики
bode nyquist freqresp margin Построение диаграммы Боде частотного отклика (АЧХ и ФЧХ) Построение диаграммы Найквиста Получение частотных характеристик системы Определение запасов устойчивости по фазе и амплитуде
Классические методы синтеза систем управления
rlocus rlocfind place estim destim reg Получение корневого годографа Определение коэффициентов усиления по заданным корням характеристического многочлена Вычисление матрицы обратной связи по заданным полюсам Вычисление коэффициента передачи наблюдателя Построение дискретного фильтра Кальмана Формирование регулятора в виде обратной связи по состоянию и наблюдателя
Для оптимизации параметров регуляторов СУ можно использовать два подхода: блоки пакета Nonliner Control Design (NCD) и возможности пакета Optimization [22].
Пакет NCD содержит три блока: CRMS, DRMS, NCD Output. Блок NCD Output является основным блоком и позволяет в интерактивном режиме выполнять следующие операции: задавать требуемые ограничения во временной
301
Рис. 6.1. Пример построения переходных процессов модели системы управления второго порядка
области на любой сигнал оптимизируемой системы; задавать параметры, подлежащие оптимизации; задавать неопределенные параметры; проводить параметрическую оптимизацию системы с учетом заданных ограничений.
Рассмотрим оптимизацию параметров ПИД-регулятора, используя файл ncddemol с демонстрационным примером, входящий в состав пакета MATLAB.
Задача оптимизации следующая: при заданной структуре объекта управления и известных неопределенностях его параметров найти значения коэффициентов кп, к,, и кд регулятора, при которых в представленной замкнутой структуре переходный процесс будет иметь требуемые параметры.
б
Рис. 6.2. Моделирование ПИД-регулятора:
а — модель объекта управления, ПИД-регулятора и NCD-блока; б — содержимое блока Plant & Actuator
302
При оптимизации параметров ПИД-ре-гулятора рассматриваются следующие параметры переходного процесса: длительность, время нарастания, максимальное перерегулирование, максимальное «недорегулирова-ние», начальное и конечное время моделирования, начальное и желаемое конечное значения выходного сигнала.
Объект управления представляется следующим звеном [22]: W(p) = 1,5/(50/Р + а^р2 + + а}р+ 1), где коэффициент а2 может принимать значения в диапазоне 40...50 (номинальное значение а2 = 43), а коэффициент а, — в диапазоне 0,5... 3,0 (номинальное значение = 1,5).
жиме оптимизации параметров ПИД -регулятора
Модель СУ представлена на рис. 6.2, а результаты оптимизации на рис. 6.3.
В результате получены следующие оптимальные коэффициенты ПИД-регу-лятора: кп = 1,34, к„ = 0,15 и кР = 8,33.
6.2.2. Взаимосвязанные системы управления
К взаимосвязанным относятся многодвигательные системы управления, связанные упругим обрабатываемым материалом (например, стан холодной прокатки, бумагоделательная машина, кордная линия и др.).
В теории и практике управления взаимосвязанными электромеханическими системами сложилось направление, в котором формальные процедуры оптимального синтеза одномерных или многомерных регуляторов по тем или иным критериям используются редко. Чаше стремятся получать нормированные динамические процессы на основе типовых алгоритмов управления при малых и больших изменениях переменных с учетом совокупности всех физических особенностей технических средств, на базе которых реализуется электромеханическая система. Для этого посредством декомпозиции [8] взаимосвязанная система управления разделяется на сепаратные системы, которые при определенных условиях можно рассматривать как квазиав-тономные. Тогда для расчета регуляторов можно использовать изложенный ранее подход.
Исследование взаимосвязанной системы управления рассмотрим на примере моделирования секции бумагоделательной машины [8].
Исходные данные для предварительных расчетов и исследования следующие.
Параметры секций и бумажного полотна (БП): Zi2 = 4,2 м — расстояние между первой и второй секциями бумагоделательной машины (БД); С12 = = 2,2- 104 Н/м — коэффициент жесткости БП при растяжении между первой и второй секциями БД; г, = 0,82 м и /2 = 0,64, м — радиусы валов; ipl - 4,4 м и /р2 = 5,4 м — передаточные числа редукторов; </, = 680 кг м2 и J2 - 540 кг м2 — приведенные моменты инерции агрегатов; В]2 = 8ОО Н/(м/с) — коэффициент внутреннего демпфирования БП.
303
Параметры электроприводов и датчиков систем управления секциями бумагоделательной машины: Ки] = 40 и Кп2 = 40 — коэффициенты передачи преобразователя; /?яц1 = 0,43 Ом и /?яц2 = 0,47 Ом — сопротивления якорных цепей электродвигателей; Гя ц| = 0,016 с и Тяц2 = 0,02 с — малые постоянные времени якорных цепей электродвигателей; сл1 = 4,1 Н м/А и c,l2 = 4,3 Н м/А — конструктивные постоянные электродвигателей; К.лт) = 0,03 В/A и Клт2 = = 0,032 В/А — коэффициенты передачи датчиков тока; /(1С, =0,14 В/рад/с и Клс2 = = 0,17 В/рад/с — коэффициенты передачи датчиков скорости; Ксс2 = 0,03 — коэффициент синхронизации скорости секций БД; Tn} - Tn2 - i 10 ’’ с — малые постоянные времени преобразователей; тр, — постоянная времени регулятора тока; Гр/ — малая постоянная времени контура тока; Рр т1, Рр |2 — коэффициенты усиления ПИ-регулятора тока; трс — постоянная времени регулятора скорости; Ppxi, ррс2 — коэффициенты усиления ПИ-регулятора скорости.
Контуры тока настроены на оптимум по модулю (тр, = Тя ц, Гр, = 7/):
^р.т(Р) = Рр.т
ТрлР + 1 . Тр.тР
т
1 Я. И
2Т К"К р К и 1Г
В результате расчетов получим следующие значения: ррт1 = 2,87; Рр |2= 3,672.
Контуры скорости настроены на симметричный оптимум (Гр, = 7/ = Тп = = 1 10-3 с; трс = 4Гр/= 8 10-3 с):
тп..р +
^р.с(Р) = Рр.с
Тр.сР
В результате расчетов получим следующие значения: Ррс, = 458,94; Ррс2 = = 202,67.
На рис. 6.4 представлена S-модель секции бумагоделательной машины, а на рис. 6.5 — соответственно переходные процессы по скорости и натяжению.
В достаточно общем виде математическую задачу оптимизации можно сформулировать следующим образом: минимизировать (максимизировать) целевую функцию с учетом ограничений на управляемые переменные.
Математические задачи оптимизации в общем виде можно записать следующим образом:
Q(a) -> min(max),
ае U
где Q(a) — целевая функция; U — допустимое множество, заданное ограничениями на управляемые переменные.
Часто для большей эффективности работы алгоритмов оптимизации в целевую функцию (критерий качества) вводят штрафную или барьерную функцию. Штрафная функция равна 0, если а е U, и быстро возрастает при удалении точки ай t/от допустимого множества.
Разработку алгоритмов управления электромеханических систем выполняют, как правило, с учетом двух важнейших параметров качества:
быстродействия (с учетом ограничений на потребляемую мощность) и связанной с ним производительности;
интегральной квадратичной ошибки управления и связанного с ней качества технологического процесса.
304
Рис. 6.4. Модель секции бумагоделательной машины
Методы формального синтеза алгоритмов управления взаимосвязанными системами и возникающие при этом сложности достаточно хорошо освещены в литературе по теории управления. Синтез оптимальных алгоритмов управления локальными и взаимосвязанными системами может производиться в соответствии с оптимизирующими функционалами [7].
а б
Рис. 6.5. Переходные процессы по скорости (а) и натяжению (5)
305
Особенностями задачи оптимизации параметров взаимосвязанных ЭП являются:
представление исходных моделей СУ в виде сложных структурных схем с значительным числом блоков, операторы которых принадлежат разным классам;
гибкое формирование различных функционалов качества при оптимизации по различным параметрам (быстродействию, энергопотреблению, точности и др.);
в ряде случаев специфический, нетиповой вид оптимизируемых переходных процессов, автоматическая оценка которых общепринятыми показателями качества (временем регулирования, перерегулированием и т.д.) представляет собой некоторую проблему при оптимизации по прямым показателям качества;
предполагаемая в результате использования типовых регуляторов относительно невысокая размерность пространства оптимизируемых параметров в пределах одной подсистемы ЭК.
Для оптимизации требуется применение таких программных средств, которые обеспечивают достижение необходимого результата за минимальное время. Существует множество работ, в которых подробно описаны различные методы оптимизации, поэтому не имеет смысла излагать их здесь (см., например, [60]).
Выбор алгоритма оптимизации зависит от таких факторов, как точность поиска экстремума, быстродействие, условия функционирования системы, и определяется решением конкретной задачи. К группе методов для решения таких задач можно отнести методы безусловной минимизации функций многих переменных и многомерной минимизации при наличии ограничений (нелинейное программирование).
Для решения поставленной задачи применяются два Toolbox: Simulink и Optimization из пакета MATLAB.
В Optimization Toolbox используются три метода для решения нелинейных задач без наличия ограничений: квази-ньютоновский, Нелдера —Мида и доверительных областей.
Задачи нелинейной оптимизации — это комбинация неких нелинейных целевых функций, которые могут иметь линейные или нелинейные ограничения. В Optimization Toolbox используется два основных метода для решения подобных задач: доверительных областей и последовательного применения активного набора задач квадратичного программирования.
Многокритериальная оптимизация предназначена в основном для минимизации многоцелевых функций с учетом некоего набора ограничений. В Optimization Toolbox реализованы два типа задач многокритериальной оптимизации: задача достижения цели и задача минимакса.
Optimization Toolbox может решать нелинейные задачи методом наименьших квадратов, т.е. с использованием трех методов: доверительных областей, Левенберга — Марквардта; Ньютона — Гаусса.
В задачах линейного программирования целевая функция представляет собой некое линейное выражение, на которое могут быть наложены ограничения в виде линейных равенств или неравенств. Для решения данного типа задач используются методы симплексный и внутренней точки.
Основные типы задач оптимизации, решаемых системой MATLAB Optimization Toolbox, представлены в табл. 6.6.
306
В табл. 6.6 приняты следующие обозначения: а — скалярный аргумент; х, у — в общем случае векторные аргументы;/(а),/(х) — скалярные функции; Г(х), с(х), ceq(x), K(x,w) — векторные функции; A, Aeq, С, Н — матрицы; b, beq, d, f, w, goal — векторы; xL, xc — соответственно нижняя и верхняя границы области изменения аргумента.
Таблица 6.6
Тип задачи Математическая запись Используемая функция MATLAB
Скалярная (одномерная) минимизация min f(a) при условии (7,< а < а2 fminbnd
Безусловная минимизация (без ограничений) min f(x) X fminunc, fminsearch
Линейное программирование min fTx при условиях: X А х< b; Aeq x= beq; XL<X< X, linprog
Квадратичное программирование minO, 5хтНх + fTx при X условиях: А -х < Ь; Aeq х = beq; xL<x< xb quad prog
Минимизация при наличии ограничений min/(x) при условиях: c(x) = 0; ceq(x) = 0; A x < b; Aeq x = beq; xL<x< XL; fmincon
Достижение цели min у при условиях: F(x) - wy = goal; c(x) < 0; ceqlx) = 0, A x < b; Aeq x = beq; XL<X< XL: fgoalattain
Минимакс mm max{/;(x)} при ус- ловиях: c(x) < 0; ceq(x) = 0, A x < b;- Aeq x = beq; xL <x < хи fminimax
Полубесконечная минимизация min/(x) при условиях: K(x, w) < 0 (для всех w); с(х) < 0; ceq(x) = 0, А х < b; Aeq x = beq; xL<x< xL. fseminf
307
a
308
Рис. 6.6. Экранные копии интерфейса программы оптимизации: а — переходный процесс по скорости до оптимизации; б — переходный процесс по скорости после оптимизации; в — процесс поиска оптимального параметра регулятора
Этапу поиска экстремума функционала качества, как правило, предшествует подготовительная работа, связанная с созданием удобного пользовательского интерфейса. Это необходимо, так как напрямую методы оптимизации, приведенные в табл. 6.6, использовать сложно. Примеры такого подхода к оптимизации см. в [22].
В качестве примера рассмотрим оптимизацию коэффициентов ПИ-регуля-торов скорости секции бумагоделательной машины [8] с помощью программы OptSys, разработанной в СПбГЭТУ «ЛЭТИ».
Оптимизация производилась по функционалу качества, имеющему вид
I = Oq/q + й\ /| + От
где а0, щ, а2 — весовые коэффициенты; /() = \e2(t)dt\ Ц = j(de(t)/dt)2dt; 12 = = \(d2e(t)/dt2)2dt\ e(t) — ошибка по скорости.
Исходные данные для расчета и оптимизации см. в начале данного подраздела.
Результаты проведенной оптимизации представлены на рис. 6.6.
6.2.3. Исследование и эквивалентирование моделей, описывающих упругие механические связи электроприводов
Механизмы ЭК (бумагоделательных машин, станов непрерывной прокатки металла, линий по производству полимерных материалов и др.) представляют собой многосвязные многомассовые механические подсистемы (ММП), управление которыми осуществляется многодвигательными системами электроприводов.
Чтобы с достаточной точностью отразить динамические свойства системы в заданных полосах частот сепаратных подсистем, необходимо провести ана
309
лиз и синтез ММП уже на этапе проектирования ЭК, поскольку внесение изменений в готовую конструкцию нерационально.
Методы математического описания и исследования характеристик ММП в общем виде рассматриваются в теории колебаний. Сложность кинематических схем основных функциональных узлов ММП ЭК затрудняет исследование их динамических характеристик. В большинстве случаев можно предположить, что взаимосвязь механической и электромагнитной систем слабая (что объясняется влиянием обратных связей по ЭДС двигателей на динамику СУ). Таким образом, ММП могут рассматриваться независимо от электромагнитных контуров управления. В этом случае входными воздействиями для ММП будут электромагнитные моменты приводных двигателей (если рассматриваются угловые перемещения) или силы (если рассматриваются линейные перемещения), а выходными переменными — координаты движения (скорости, угловые и линейные перемещения) и упругие моменты (силы). В любой ММП существуют также моменты или силы сопротивлений, которые могут быть отнесены к возмущающим воздействиям.
ММП, как и любая механическая система, может быть представлена бесконечным числом материальных точек, упруго связанных между собой. Очевидно, что число степеней свободы такой системы бесконечно велико и точное решение задач о колебаниях подобных механических систем удается получить в замкнутой форме лишь в относительно простых случаях. В общем виде эту задачу решить невозможно, что вызывает необходимость упрощения расчетной модели ММП.
В этом случае относительно малоинерционные части ММП полагают вовсе лишенными массы и представляют в виде безынерционных элементов (жестких или деформируемых). Примерами таких частей ММП могут служить перемещаемые бумажное полотно или полоса прокатываемого металла. Наиболее жесткие части конструкции (например, направляющие, нажимные валы и др.) принимаются за абсолютно жесткие тела. В этом случае число обобщенных координат ММП будет равно числу ее степеней свободы. Как правило, исследование динамических свойств ММП производится в режиме свободного движения. Для чего сначала к ММП прикладывается импульс силы, а затем при отсутствии внешних возмущений исследуется движение ее к положению равновесия, соответствующему минимуму потенциальной энергии.
Свободное движение для устойчивой ММП всегда является затухающим под влиянием демпфирующих (диссипативных) сил. Однако учет этих сил сильно усложняет исследование динамики ММП, поэтому исследование динамических свойств их моделей проводится для консервативного случая, т.е. при отсутствии рассеянья запасенной в ММП энергии. Учет влияния демпфирующих сил возможен лишь в простых случаях или после эквивалентирования исходной модели ММП. Механическая модель ММП может быть представлена в виде отдельных инерционных звеньев, соединенных упругими связями. Система дифференциальных уравнений, характеризующая свободные колебания консервативной ММП с конечным числом степеней свободы и соответствующая механической модели, является математической моделью ММП.
Подробно методика составления дифференциальных уравнений и матричного описания, характеризующих свободные колебания взаимосвязанной механической подсистемы, изложена в [8].
310
М ЦР КР ЦР в
с4.5
Рис. 6.7. Математическая модель механической подсистемы электроприводов прокатного стана:
М — электродвигатель; ЦР — цилиндрический редуктор; КР — конический редуктор; В - валы клети
Рассмотрим определение собственных частот колебаний механической подсистемы на примере электропривода клети прокатного стана 250 (см. рис. 1.4). Математические модели механической подсистемы электроприводов для 1, 3, 5, 7 клетей его черновой группы одинаковые (рис. 6.7).
Исходные данные для расчета клети 1: J, = 105000 кг - м2; Л = 110000 кгм2; ,/з = 90 кг - м2; J4 = 20 кг- м2; J5 = 100 кг - м2; Jb - 100 кг - м2; С, 2 = 2,8 10" Н м/рад; С23 = 5,7-107 Н-м/рад; С34 = 8-Ю7 Н-м/рад; С45 = 6,4 107 Н-м/рад; С46 = = 6,4-107 Н-м/рад.
Механическая подсистема электропривода клети описывается следующей системой уравнений:
•ЛФ1 =С|2((р| -ф2);
J 2Ф2 = — Ф'|2(ф| — фг) + С23 (Ф2 — Фз);
/Зфз =-С23(ф2 -ф3) + С34(ф3 -ф4);
/4ф4 =-С34(ф3 -ф4) + С45(ф4 - ф5) + С46(ф4 -ф6);
Лф5 =-С45(ф4 -ф5);
4Фб =-с46(ф4 -ф6).
Расчеты собственных частот, частот упругих колебаний и собственных векторов производим с помощью математического пакета MATLAB.
Из приведенной системы уравнений, используя методику, изложенную в
[8], получим матрицу G1 для расчета собственных частот:
( С12 -С12
0 0 0 0
л И
-С12 С12 + С23 -С23 0 0 о
J2 J2 J2
0 -С23 С23 + С34 -С34 о о
Gl:= J3 J3 J3
л 0 -С34 С34 + С46 + С45 -С45 -С46
J4 J4 J4 J4
-С45 С45
0 0 0 0
J5 J5
-С46 С46
0 0 0 0
У J6 J6 j
311
' 266,7 -266,7 0 0 0 0
-254,5 772,7 -518,2 0 0 0
Gl:= 0 -6,3 х 10 s 1,5 х 106 -8,9 х 10 s 0 0
0 0 -4х106 1 х 107 -3,2xl06 -3,2xl06
0 0 0 -6,4xl05 6,4xl05 0
1 0 0 0 -6,4xl05 0 6,4xl05
В MATLAB для решения задачи нахождения собственных значений матрицы применяется функция eig. Существует несколько способов обращения к этой функции: Lam = eig(A) — столбец Lam заполняется собственными числами матрицы A; [V,D] = eig(A) — диагональная матрица D содержит собственные числа; столбцы матрицы V содержат нормированные собственные векторы для каждого собственного числа. При этом векторы нормированы таким образом, что норма каждого из них равна единице.
Приведем результаты расчета собственных значений и частот колебаний:
>> format short е
>> Gl=[266.7 -266.7 0 0 0 0; ...
-254.5 772.7 -518.2 0 0 0; ...
0 -6.Зе + 5 1.5е + 6 -8.9е + 5 0 0; ...
0 0 -4е + 6 1е + 7 -3.2е + б -3.2е + б;
0 0 0 -6.4е + 5 6.4е + 5 0; ...
000 -6.4е +50 6.4е + 5]
G1 =
2.6670е + 002 -2.6670е +0С2 0 0 0 0
-2.5450е+002 7 . 7270е + 002 -5.1820е + 002 000
0-6.3000е-0С5 1.500 Се-0 0 6-8.900 Ое-005 0 0
0 0-4.ОСООе + ООб 1 . 0000е + 007-3.2000е + 006 -3.2000е + 006
О С 0-6.40ООе^ООЗ 6.4000е+005 0
0 0 0-6.4000е+005 0 6.4000е+005
>> lam = eig(Gl)
lam =
1.0787е+007
1.0787е+007
4.6829е+002
6.8304е+001
8.6593е+004
6.4000е+005
>> w = sgrt(1am)
w =
3.2844е + 003 3.2844е+003 2 . 164 0е-0 01 8 . 2 64 бе-С0 0 2 . 9427е + 002 8 .00 00е + 002
При параметрическом синтезе сепаратных систем управления взаимосвязанных ЭП, как правило, подлежат учету лишь те частоты свободных колебаний ММП, которые деформируют частотные характеристики этих систем в зоне существенных частот. При инженерных расчетах достаточно учесть две-три частоты колебаний ММП, наиболее существенно влияющих на динамику работы систем управления. Для упрощения ММП производится ее эквивален-тирование двух- или трехмассовой механической системой [23, 53].
312
Методика эквивалентирования, позволяющая сохранить как суммарный момент инерции (массу) ММП. так и точные значения интересующих частот свободных колебаний исходной ММП, основана на разделении главных координат исходной подсистемы на «медленные» и «быстрые» и исключении последних.
Для решения задачи эквивалентирования можно использовать алгоритм или функцию fsolve(fun, хО, options, Pl, Р2, ...), входящую в ToolBox Optimization MATLAB.
6.3. Моделирование и исследование пусковых, остановочных, циклических и других режимов работы машин и комплексов в технологическом процессе
К типовым режимам управления электроприводами машин и комплексов относятся |8|: стабилизация, слежение, позиционирование, программное управление, синхронизация скоростей и положений, управление нагрузкой.
Разнообразие режимов работы электроприводов обусловлено различными режимами работы промышленных установок в технологическом процессе. Наиболее характерным является режим длительной работы электроприводов в установках с непрерывным технологическим процессом, т.е. непрерывных прокатных станах, бумагоделательных машинах, установках для производства полимерных материалов, кордных тканей и др. Как правило, такие промышленные установки являются многодвигательными и содержат от нескольких единиц до нескольких десятков электроприводов.
Режимы работы машин и комплексов могут быть кратковременными с программным управлением скоростью в широких пределах. Стабилизация скорости в таких случаях является частным режимом на небольших временных интервалах, что характерно для электроприводов ряда металлообрабатывающих станков и реверсивных прокатных станов.
При длительных непрерывных режимах работы машин и комплексов особых требований к режиму пуска электроприводов не предъявляется. Режим пуска здесь является вспомогательным, так как машины и комплексы проектируются исходя в основном из условий обеспечения заданной точности стабилизации скорости в установившемся режиме.
В современных системах управления электроприводами в качестве регуляторов используются модули КП.
При программной реализации регуляторов предусматривается анализ уровней заданных сигналов и ошибок систем, границ допустимых значений переменных, коррекция ограничений и другие дополнительные функции, обеспечивающие заданные или предельно достижимые динамические свойства систем.
Позиционные режимы с прямоугольными временными диаграммами ускорений, обеспечивающие наибольшее быстродействие, неоптимальны по электропотреблению [7] и, самое главное, являются возбудителями полигар-монических колебаний механизмов и источником дополнительных погрешностей движения исполнительных органов. Поэтому при обработке заданных перемещений используют алгоритмы формирования треугольных, трапеции-
313
дальних или гармонических временных диаграмм ускорений. При этом некоторая потеря быстродействия систем принципиального значения не имеет.
Применительно к линейным перемещениям на рис. 6.8, а, б показаны прямоугольные временные диаграммы ускорений а(г), а также диаграммы скоростей y(z) и перемещений s(t) для режимов малых и больших позиционирований механизмов, а на рис. 6.8, в, г — треугольные (при усилии сопротивления, равном 0).
Доминирующее применение частотно-регулируемых электроприводов с асинхронным короткозамкнутым двигателем при разработке технологического оборудования позволяет реализовывать их различные режимы работы. Преобразователь частоты совместно с модулями управления представляет собой интеллектуальный блок управления приводом, свойства которого довольно разнообразны.
Во многих преобразователях (Altivar ATV-66, FR-A500 и др.) предусмотрена возможность реализации законов управления с различными типами ускорения и торможения, например линейного (см. рис. 6.8, а, б) и S-образного (рис. 6.9, а).
Например, S-образная характеристика Л (рис. 6.9, а) применяется при раз-гоне/торможении двигателей шпинделей станков, работающих обычно на номинальной скорости вращения (50 Гц и выше). В этом случае номинальная частота является конечной точкой кривой разгона. Приведенная S-образная характеристика В обеспечивает требуемый момент трогания и предотвращение
Рис. 6.8. Временные диаграммы ускорений o(Z), скоростей v(t) и перемещения s(t): а, б — прямоугольные соответственно для режимов малых и больших позиционирований механизмов; в, г — треугольные соответственно для режимов малых и больших позиционирований механизмов при усилии сопротивления, равном нулю
314
S-образная характеристика (А)
S-образная характеристика (В)
Компенсация люфта
Нагрузка с постоянным моментом (конвейеры, станки)
Нагрузка с переменным моментом (насосы, вентиляторы)
Подъемник (стартовое напряжение: прямое вращение, реверсное)
Подъемник (стартовое напряжение: прямое вращение, реверсное)
Рис. 6.9. Законы управления с различными типами ускорения и торможения:
а — S-образный; б — вида (///; в — функция, позволяющая вырезать из рабочего диапазона резонансные частоты; г — в зависимости от типа нагрузки
315
повреждения грузов на конвейере, т.е. S-образное изменение частоты при переходе от текущего значения f к заданному/2 определяет максимальную плавность хода.
Преобразователи частоты могут также реализовывать функцию компенсации люфта (см. рис. 6.9, а). Данная характеристика обеспечивает временную остановку изменения скорости при разгоне/торможении, что смягчает удар, возникающий при выборе люфта.
В приводах существует возможность формирования характеристики вида U/f с требуемыми стартовым и номинальным напряжениями (рис. 6.9, б) и в зависимости от типа нагрузки (рис. 6.9, г).
В некоторых случаях при управлении двигателем на отдельных частотах могут возникать резонансные колебания механической системы исполнительного механизма. Для избежания этих явлений в преобразователе существует функция позволяющая вырезать из рабочего диапазона резонансные частоты /р), /р2, /р3 (рис. 6.9, в).
Таким образом, формирование различных законов управления (требуемых входных воздействий) позволяет реализовывать различные режимы работы ЭП. При компьютерном моделировании с использованием MATLAB Simulink для этого можно применять как стандартные S-функции из разделов Sources (источники), Functions & Tables, Nonlinear, так и S-функции, разработанные пользователем. Стандартные S-функции из раздела Sources предназначены для описания рабочей нагрузки моделируемой системы, а также для формирования сигналов, обеспечивающих управление работой S-модели в целом или отдельных ее частей. Все блоки — источники сигналов имеют по одному выходу и не имеют входов (рис. 6.10).
В качестве источников сигналов (входных величин) могут использоваться следующие блоки:
Band-Limited White Noise (белый шум с ограниченной полосой) — генератор белого шума с ограниченной полосой;
Chirp Signal (гармонический сигнал) — источник гармонических колебаний переменной частоты;
Clock (часы) — генератор непрерывного временного сигнала;
Constant (константа) — источник постоянной величины (скаляра, вектора или матрицы);
Digital clock (цифровые часы) — источник дискретного временного сигнала;
Discrete Pulse Generator (дискретный импульсный генератор) —- генератор дискретных импульсных сигналов;
Pulse Generator (импульсный генератор) — генератор импульсных сигналов;
Ramp (возбудитель) — генератор линейно возрастающего (убывающего) сигнала;
Random Number (случайное число) — источник дискретного сигнала, амплитуда которого является случайной величиной, распределенной по нормальному закону;
Repeating Sequence (периодический сигнал) — генератор периодического дискретного сигнала произвольной формы;
Signal Generator (генератор сигнала) — генератор непрерывного сигнала произвольной формы;
316
Рис. 6.10. Раздел Sources MATLAB Simulink
Step (такт) — источник единичного дискретного сигнала с заданными параметрами;
Sine Wave (генератор гармонических колебаний);
Uniform Random Number (равномерное случайное число) — источник дискретного сигнала, амплитуда которого является равномерно распределенной случайной величиной.
Два блока из раздела Sources отличаются от перечисленных блоков тем, что обеспечивают использование в модели различных числовых данных, полученных ранее как с помощью Simulink, так и другими средствами MATLAB:
блок From File (ввод из файла) обеспечивает ввод в S-модель данных, хранящихся в МАТ-файле;
блок From Workspace (ввод из рабочей области) обеспечивает ввод в модель данных непосредственно из рабочей области MATLAB.
Структура данных в МАТ-файле представляет собой многомерный массив с переменным числом строк, которое определяется числом регистрируемых переменных. Элементы первой строки содержат последовательные значения модельного времени, элементы других строк — соответствующие значения переменных. Например, с помощью блока Signal Generator формируется сигнал, представленный на рис. 6.11.
В состав Functions & Tables входят три мощных и универсальных блока (рис. 6.12): Fen (функция), MATLAB Fen (функция MATLAB) и S-function (S-функция).
317
Рис. 6.11. Блок Signal Generator MATLAB Simulink:
a — сформированная диаграмма изменения скорости привода; б — модель изменения скорости привода
318
Рис. 6.12. Состав S-Functions MATLAB Simulink
В качестве параметра настройки блока Fen можно ввести любое вычисляемое выражение, аргументом которого является значение входного сигнала. В качестве операндов вычисляемого выражения блока Fen могут также использоваться переменные, находящиеся в рабочей области MATLAB.
Блок MATLAB Fen позволяет применить к входному сигналу любую процедуру обработки, реализованную в виде М-файла. Это может быть как библиотечная функция пакета MATLAB, так и подпрограмма, созданная разработчиком S-модели.
Блок S-function обеспечивает использование в блок-диаграмме так называемых S-функций. Такая функция является самостоятельной программой, написанной на языке MATLAB или C/C++, которая имеет определенную структуру и хранится в М-файле или в МЕХ-файле.
Стандартными аргументами S-функции являются:
Т — вектор значений модельного времени;
X — множество состояний моделируемой системы (непрерывное или дискретное);
U — вектор входных воздействий;
FLAG — признак, определяющий формат представления результата [61].
S-функция может также иметь произвольное число дополнительных аргументов, назначение которых определяется разработчиком. Примеры S-функций, реализованных в виде М-файлов и хранящихся в папке matlab\toolbox\ simulink\blocks, могут быть использованы в качестве шаблонов для создания собственных S-функций.
В качестве примера рассмотрим S-функцию, реализующую график движения кабины лифта [8]. Исходными данными для рассчета являются: цуст — установившееся скорость движения лифта; а — ускорение; р — рывок.
S-функция lift:
function (sys, хО,str,ts] = lift (t,x,u,flag, vust, a, ro)
%
% Шаблон для создания S-функции — файл sfuntmpl.m
319
switch flag, % В зависимости от значения переменной flag происходит % обращение к той или иной процедуры ответного вызова:
%
% Инициализация
case О
[sys, хО, str, ts] = mdlInitial!zeSizes(vust, a, ro) ; o-
* Вычисление вектора выходных сигналов
%
case 3
sys = mdlOutputs(t,x, u, vust, a, ro) ;
% Неиспользуемые значения переменной flag
% В примере не используется процедура завершения S-функции, нет
% непрерывных и дискретных переменных состояния, поэтому значения
% переменной flag = 1, 2, 4, 9 не задействованы.
% Результатом работы S-функции в этих случаях является пустой массив.
case { 1, 2, 4, 9 } sys = [ ];
%
% Неизвестное значение-переменной flag
otherwise
error ([' Unhandled flag = ', num2str(flag)]);
end
%
% Конец функции lift
о\° о\° о\° о\° о\С)
mdllnitializeSizes
mdlInitializeSizes
Функция инициализации
Расчет начальных условий, тактов дискретности, размеров векторов
сигналов,
% массива тактов и задержек
function [sys,хО,str,ts] = mdllnitializeSizes(vust, a, ro)
%
sizes = simsizes;
sizes.NumContStates = 10; % Число непрерывных переменных состояния sizes.NumDiscStates =0; 1 Число дискретных переменных состояния sizes.NumOutputs = 7; 1 Число выходных переменных
ь Задается динамически.
sizes.Numinputs = 3; 1 Число входных переменных
1 Задается динамически.
sizes.DirFeedthrough = 1; % Прямая передача входного сигнала на выход.
sizes.NumSampleTimes = 1; г Размер вектора тактов квантования.
sys = simsizes(sizes);
320
str = [ ]; » Параметр зарезервирован для будущего
xO = [ ] ; % использования. t Задание вектора начальных значений
ts = [0 0] ; 1 переменных состояния. 1 Такт квантования и задержка.
sizes = simsizes; c % Такт наследуется от предшествующего блока .
% Конец процедуры mdllnitializeSizes
% mdlOutputs
% Функция вычисления вектора выходных сигнален
function sys = mdlOutputs(t, х, u, vust, a, ro) %
x(1) = a*a/(2*ro);
x (2) = vust — a*a/ (ro) ;
x ( 3) = a*a/(2*ro) ;
x(4) = vust;
x(5) = — a*a/(2*ro);
x(6) = — vust + a*a/(ro);
x(7) = — a*a/(2*ro) ;
sys = x;
end
% Конец процедуры mdlOutputs
Для моделирования ограничений на выходные сигналы регуляторов и технологические параметры можно применить раздел MATLAB Simulink Nonlinear (рис. 6.13).
Сочетания приведенных ранее разделов MATLAB Simulink позволяют реализовывать различные режимы работы ЭП.
П Simulink Library Browser
File Edit View Help
Discontinuities
дД- Discrete
Logic and Bit Operations
Lookup Tables
Math Operations is-' Model Verification
Model-Wide Utilities
Ports & Subsystems
jb-1 Signal Attributes
Signal Routing
Sinks
Sources
User-Defined Functions >
Backlash
Coulomb & Viscous Friction Dead Zone
j уН I Dead Zone Dynamic
Hit Crossing
Quantizer
Rate Limiter
Rate Limiter Dynamic R elay
Saturation
| =4= | Saturation Dynamic
I fl I Wrap To Zero
Рис. 6.13. Раздел MATLAB Simulink Nonlinear, библиотека Discontinuities
321
В качестве примера рассмотрим компьютерное исследование системы управления ножницами с катящимся резом. Описание автоматизированных электроприводов и системы управления см. в [8].
Выбором параметров кинематической схемы ножниц и профиля ножа обеспечиваются требуемые условия реза листа при качении ножа относительно проката при минимальном угле реза. Исключение скольжения ножа относительно металла обеспечивает минимизацию затрат энергии при резе. Система управления в соответствии с заданием реализует циклические движения ножниц при резе в прямом и обратном направлениях. Временные диаграммы изменений скорости со, угла а и момента М кривошипа при прямом и обратном резе показаны на рис. 6.14. На участках О...?ь i4...t5, t6...t7, изменение угла происходит по параболе.
Для обеспечения плавности разгона и торможения целесообразно использовать S-образную характеристику изменения скорости (рис. 6.15), входящую в меню параметрических настроек приводов Simovert. График изменения
в
Рис. 6.14. Временные диаграммы изменений скорости (а), угла (б) и момента (в) кривошипа
322
Рис. 6.15. Временная диаграмма изменения скорости с S-образными характеристиками разгона и торможения
ускорения в режимах разгона и торможения в этом случае имеет вид треугольника (в отличие от прямоугольного графика изменение линейной скорости).
Математическая модель системы управления движением однокривошипных ножниц показана на рис. 6.16. Модель отражает динамические процессы в системе управления с учетом упругих деформаций в механической части электропривода и выравнивания нагрузки электродвигателей. Так как кроме исследования динамических характеристик системы необходимо выполнить оценку энергозатрат на цикле реза, структурная схема дополнена элементами оценки энергии А в интервале времени цикла Тн. Все параметры и переменные системы управления приведены к валу кривошипа.
На схеме обозначены:
И'д/, W"M, (Ирс — передаточные функции соответственно замкнутых контуров регулирования моментов М2 и регулятора скорости;
Кв — коэффициент выравнивания нагрузки двигателей (при Кп = 1 двигатели имеют по половине номинальной нагрузки кривошипа);
Кос — коэффициент обратной связи по скорости (Кос = Kxip (где Кх — коэффициент датчика скорости, /р — передаточное число редуктора);
/зад(‘) — функция задания управляющего воздействия свмд;
/5(.), fsX') ~ Функции, определяющие электрические потери в приводе;
Л/,з, ^23 — сигналы задания моментов электродвигателей;
Л/С|, Л/'.], Л/с2, Мс3 — моменты сопротивлений в элементах привода, обусловленные силами трения;
Рэо Р?2> Л:н Лд, Л: ~ мгновенные мощности соответственно механические, электрические и суммарные;
А — энергия на цикле реза.
Регулятор скорости и замкнутые контуры регулирования моментов являются частью комплектных электроприводов Simovert VC. Следует параметри-ровать регулятор скорости как ПИ-регулятор.
Для моделирования используется ПИ-регулятор скорости с следующими параметрами передаточной функции:
323
Рис. 6.16. Математическая модель системы управления движением однокривошипных ножниц
в =_____________• Т = —
Ррс ^(1/Т,Иос’ рс 0)ср'
где соср — частота среза, определяемая в соответствии с минимальной частотой упругих колебаний привода; Км — передаточный коэффициент замкнутого контура регулирования момента.
Для двигателя, имеющего Рнт1 -400 кВт, ином = 1000 об/мин, Л/Н0Х| = 3826 Н м. Дпах = 8800 Н м, и редуктора с /р = 117,2 получим: Км = 1,03x10’ Нм/В; = = 313- 103 кг м2; Aqc = В/рад/с; oymin = 160 1/с; юср = 20 1/с; трс = 0,1 с; Рр.с = 5,19.
Компьютерная модель системы управления, реализованная в Simulink MATLAB в соответствии с математическим описанием, приведенным на рис. 6.16, показана на рис. 6.17.
Функциональные зависимости f(-) .../5(-) вводились отдельными программами, написанными в среде MATLAB. Модель может быть расширена, если
в SUIkr
[ТыТНЕГН
11 |ijde223
Рис. 6.17. Компьютерная модель системы управления, реализованная в MATLAB Simulink в соответствии с математической моделью, показанной на рис. 6.16
325
необходимо выполнить исследование динамических нагрузок (упругих момен тов) любых выбранных элементов механической части электропривода. С ис пользованием разработанной модели можно исследовать:
Рис. 6.18. Переходный процесс по скорости:
1 — заданная скорость кривошипного вала; 2 — результат отработки задания по скорости
Рис. 6.19. Переходный процесс по углу резания
Рис. 6.20. Переходный процесс по моменту
326
Рис. 6.21. Переходный процесс энергии, затрачиваемой на резание
заданные диаграммы движений ножниц;
динамические нагрузки, возникающие в суммирующей шестерне редуктора при отличии друг от друга динамических характеристиках замкнутых контуров регулирования моментов двух приводов;
динамические процессы в системе и ножницах при воспроизводстве заданных движений;
энергетические характеристики привода в виде изменений отдельных составляющих мощности, суммарной мощности и энергии в процессе реза листового проката разного сортамента;
кинематику, динамику и энергию ножниц, задав произвольного вида функциональные зависимости /ф) •• •./♦(•)•
Результаты исследования динамических характеристик представлены на рис.
6.18...6.20, а энергетических — на рис. 6.21.
6.4. Моделирование и исследование аварийных ситуаций
Аварийные ситуации в технологическом процессе могут возникать на трех уровнях:
при включении (запуске) оборудования в технологическую цепочку. На этом уровне производится самотестирование систем оборудования (в основном это проверка цепей питания и соответствующих напряжений и токов, а в ряде случаев — выявление неисправных ячеек памяти);
при пусковых режимах. На этом уровне кроме проверки соответствующих напряжений и токов контролируются и технологические параметры (например, заправочная скорость бумаги или другого материала и т.д.);
при рабочем функционировании технологического оборудования. На этом уровне кроме проверки соответствующих напряжений и токов контролиру
327
ются и технологические параметры обрабатываемого материала (толщина, натяжение, размер петли, прогиба и т.д.), а также ситуации, связанные с нарушением технологического процесса (например, заклиниванием механизмов нажимного устройства прокатного стана, возникающим при нарушении синхронизации движений нажимных винтов, или остановкой вращения вала двигателя, возникающей при завале камнями бункера дробильного агрегата и т. п.).
При моделировании аварийных ситуаций первого уровня в компьютерные модели вводят специальный логический блок, который при отклонении какого-либо параметра (или параметров) от условий нормальной эксплуатации, выдает сообщение либо о наступлении аварийной ситуации, либо о соответствующих отклонениях параметров. В этом случае возможны прекращение исследования и продолжение исследования, но с новыми параметрами (в реальных системах управления срабатывают требуемые защиты и блокировки). Формирование соответствующих сообщений выполняется с использованием алгоритмов логического управления. Реализация любого из этих алгоритмов основана на использовании операций сравнения (>, >=, <, <= и др.), типовых логических операций (AND, OR, NOT, XOR, NXOR) и других логических преобразований. Для этих целей можно применить раздел Logical Operator Math MATLAB (рис. 6.22).
Кроме того, для выявления отклонений параметров технического объекта на входе исследуемой модели формируются тестовые (испытательные) сигналы [8]. Обычно в качестве детерминированных моделей сигналов используются следующие математические представления: 8 — импульс; функция включения (скачок) о(г) = 1(г); треугольный импульс; последовательность прямоугольных импульсов; гармонические функции sin cot и cos cor; экспоненциальная функция ехр(сх/) и др. Для этих целей возможно применение стандартных S-функций раздела Sources Matlab (см. рис. 6.10).
В основе моделирования аварийных ситуаций второго и третьего уровней лежит формирование определенных управляющих воздействий:
ступенчатых у3(г) = у30 при t < 0 и у3(г) =у30 при t > 0;
Logical Operator
Logical operators For a single input, operators are applied across the input vector. For multiple inputs, operators are applied across the inputs.
- W Simulink
Commonly Used Continuous
Discontinuities j3-| Discrete ЙН Logic and Bit Ст» j3-| Lookup Tables b-| Math Operation: -b-j Model VerificatioR= is-| Model-Wide Utilities zb-j Ports &. Subsystems
Signal Attributes Signal Routing
Main j Signal data types |
Operator: | AND
Number ol input ports' [_
Sample time (-1 for inherited).
OK I
Cancel |
Logical
Operator
~fhiervai i est""1
Interval Test Dynamic
"*-• Logical Operator
Relational Operator
’ | Shift Arithmetic
100%
Рис. 6.22. Раздел Logical Operator Math MATLAB
328
линейных y3(t) = узо + y30t при t = 0... t0, y3(r) = у30 при t > г0;
гармонических у(?) = у30 + у30 sin со/, y3(t) = у3() + Узо cos <»/;
траекторных y3(t), которые задаются в виде таблицы переменных с использованием линейной интерполяции, а также следующих возмущающих воздействий:
ступенчатых f(t) =fn при t < 0 и f(t) =f'o при t > 0;
гармонических /(г) =fn +f0 sin со/, f(t) =f0 +f0 cos co/;
волновых /(/) = c0 + у (ck.sin a>kt + c'k cos coA t);
Л-1
случайных.
Здесь частоты coA — преимущественный спектральный состав возмущений, а изменяющиеся случайным образом коэффициенты с0, ск, с'к отражают меру неопределенности в описании этих возмущений.
При этом задают граничные значения управляющих или возмущающих воздействий или значения, превышающие граничные. Например, для осуществления процесса непрерывной прокатки без натяжения необходимо чтобы длина петли удовлетворяла допустимым значениям: /,mjn < /,(/) < linKa.
Таким образом, формируя, например, на входе компьютерной модели прокатного стана различные входные воздействия, по соотношению скоростей клетей можно определить возможный диапазон изменения скоростного режима прокатки, а также соотношения скоростей, при которых может произойти разрыв металла или возникновение разнотолщинности по длине проката.
Аналогичные результаты можно получить и в бумаго- или картонодела-тельных машинах, кордных линиях и т.д.
Исходя из сказанного можно отметить, что возникновение аварийных режимов, связанных с отклонением от технологии производства продукции, в основном обусловлено отклонениями скоростных режимов или возникновением перегрузок электродвигателя, т.е. уменьшением (увеличением) момента на его валу.
Других отличий методики моделирования и проведения исследований на компьютерных моделях от рабочего функционирования нет.
Для моделирования аварийных режимов можно также применить пакет событийного моделирования Stateflow, являющегося специальным расширением Simulink MATLAB. При этом функционирование системы представляется на основе последовательности правил, которые определяют соответствие событий и действий, выполняемых в ответ на эти события. Данный пакет можно использовать для проектирования и моделирования детерминированных систем управления, диспетчерской службы городского транспорта и др.
Пакет Stateflow имеет свой графический интерфейс пользователя, позволяющий создавать модели в виде SF-диаграмм динамического типа. В процессе моделирования на SF-диаграмме отражаются все изменения модели. При этом динамическое изменение параметров модели представляется в виде изменения цвета модулей математической модели в зависимости от их состояния, построения диаграмм переходов и др.
Подробное описание основных объектов SF-диаграмм приводится в [22].
В качестве примера моделирования аварийного режима рассмотрим исследование обрыва полотна бумаги в секции бумагоделательной машины [8].
329
Рис. 6.23. SF-модель и SF-диаграмма для исследования работы секции бумагоделательной машины
Исходные данные для предварительных расчетов и исследования аварийного режима см. в подразд. 6.2.2.
На рис. 6.23 представлены SF-модель и SF-диаграмма исследования работы секции бумагоделательной машины.
Рис. 6.24. Переходные процессы в электроприводах до и после обрыва бумажного полотна
Рис. 6.25. Характеристика натяжения бумажного полотна при обрыве
330
На рис. 6.24 представлены переходные процессы, происходящие до и после обрыва бумажного полотна (/обр = 0,1 с). Обрыв бумажного полотна произошел при увеличении скорости второго электропривода по отношению к первому на 5%, что автоматически вызвало увеличение силы натяжения бумажного полотна до критического значения. Характеристика натяжения бумажного полотна при обрыве показана на рис. 6.25. В этом случае до остановки секции бумагоделательной машины электроприводы работают в режиме холостого хода.
6.5. Компьютерные методы исследования с визуализацией движений механизмов и процессов обработки вещества (материала)
Чаще всего для отображения результатов исследования ЭК используются различные графические зависимости (частотные характеристики, корневые показатели, переходные характеристики и т.д.), которые не отражают наглядно суть процесса, происходящего в объекте, а позволяют судить о работоспособности системы только по косвенным признакам, таким как устойчивость, колебательность, чувствительность, время переходного процесса и т. п.
Эффективность проектирования повышается, если при исследовании применяется визуализация динамических процессов в ЭК.
Независимо от разбиения конкретной автоматизированной системы управления на подсистемы для каждой из них выполняется внешнее и внутреннее проектирование (макро- и микропроектирование). На стадии макропроектирования разрабатывается обобщенная модель процесса функционирования, позволяющая разработчику получить ответы на вопросы об эффективности различных алгоритмов управления объектом при его взаимодействии с внешней средой.
Для работы на этапе макропроектирования программная система должна иметь библиотеку модулей, отражающих конфигурацию и свойства типовых элементов электромеханических комплексов и эмулятор программируемого контроллера (ЭПК), функциональным назначением которого является непосредственно реализация алгоритма управления.
Развивая блочно-модульную идеологию построения средств и систем управления до уровня механизмов, агрегатов и комплексов, можно выделить группы оборудования [8], для которых характерны общие функциональные задачи управления в технологическом процессе (функциональные модули). Соответственно можно подготовить программные модели модулей и программные блоки, решающие задачу управления этими модулями. Из таких модулей можно формировать блоки-комплексы, а следовательно, обеспечивать экономичную технологию проектирования компьютерных систем управления любыми ЭК.
В результате использования блочно-модульного подхода к проектированию определяется объектно-ориентированная модель программного обеспечения и все основные объекты (включая данные и основные операции), требуемые для выполнения системных функций, а также следующие компоненты модели: диаграммы классов, содержащие ключевые классы предметной области;
331
спецификации классов, описывающие семантику классов, их отношения, атрибуты и ключевые операции;
диаграммы, изображающие взаимодействие объектов при выполнении системных функций;
схемы организации функционирования электромеханических комплексов, классификации/детализации и схемы потоков данных с использованием связей родитель—потомок с различными основаниями классификации;
словарь данных, в котором перечислены все основные сущности, относящиеся к предметной области, включая классы, отношения и атрибуты.
Организационная структура отображает сложившуюся модель функционирования комплекса. При декомпозиции выделяются функциональные подсистемы, определяемые типовыми решаемыми задачами.
Существующие математические пакеты в полной мере не решают поставленную задачу.
В основе предлагаемой методики визуализации динамических процессов, происходящих в ЭК, лежит одновременное решение дифференциальных уравнений, а следовательно, динамическое изменение в пространстве или плоскости положения графических примитивов (точек, линий, окружностей, прямоугольников и др.), отображающих движения механизмов оборудования, входящего в состав ЭК (табл. 6.7). Визуализация более сложных технологических объектов производится с использованием совокупности простейших графических примитивов.
Основная проблема, которая возникает при визуализации, — это время решения и объем информации о перемещении. Время решения зависит от порядка дифференциальных уравнений, которыми описывается СУ технологическим объектом. Однако если учесть, что СУ на первой стадии проектирования отлажена, т.е. настроены все ее контуры (рассчитаны регуляторы), то описание системы можно свести к описанию звеньев первого, второго порядков — передаточным функциям замкнутых внешних контуров — и математическому описанию свойств обрабатываемого материала. Это позволит повысить быстродействие в получении выходной координаты, характеризующей исполнительный орган, а следовательно, уменьшить объем информации о перемещении. Но упрощение математического описания потеряет всякий смысл, если частоты процессора компьютера приближаются к значению, при котором все расчеты будут выполняться в реальном времени. Поэтому основной задачей в этом случае является формирование графических примитивов и их динамическое отображение в зависимости от результатов математического моделирования.
Для решения поставленных задач применим математический пакет MATLAB, дописав недостающие функции (программные единицы).
Существует несколько способов взаимодействия системы MATLAB с внешними программами:
• запись расширения MATLAB на обычных языках программирования, таких как C/C++, Fortran и т.п.;
• вызов вычислительного ядра MATLAB из своей программы и получение результата вычислений из среды MATLAB в свою программу. В этом случае MATLAB выступает как своего рода вычислительный сервер для внешней программы;
332
Таблица 6.7
Графические примитивы Вид визуализации Характеристи ка исполнится ьных механизмов и приводов Рабочий орган или обрабатываемое вещество Группы оборудования |8|
Точка на плоскости Один механизм и привод Пресс, штамп, молот, кабина лифта, нож 3, 8
Точка в пространстве Три и более механизмов и приводов Схват, ковш, крюк, нож 7, 8, 10
Линия на плоскости _ Один механизм и привод Транспортерная и конвейерная ленты, рольганг 6, 8
Окружность на плоскости с постоянным радиусом То же Валок, пила, вал, барабанные ножницы 4, 6
Окружность на плоскости с изменяющимся радиусом ((с » Валок, вал 6
Прямоугольник на плоскости или утолщенная линия — — Заготовка металлическая, картон, пластмассе! 3, 4, 6, 8
• управление средой MATLAB при помощи команд DDE (Dynamic Data Exchange) или ActiveX (OLE) Automation;
• простой обмен данными co средой MATLAB через МАТ-файлы, структура которых описана в документации к системе.
Для того чтобы написать модуль, расширяющий набор функций MATLAB, нужно создать обычную динамическую библиотеку (DLL) для Microsoft Windows со специальным набором функций (интерфейсом). Для этого используют систему программирования Borland C++ Builder версия 6.0, которая является одной из систем программирования для разработок, ориентированных на концепцию визуально-событийного программирования. Эта система позволяет разрабатывать 32-разрядные приложения для операционных систем Windows, а также корректировать производные классы, функцию WinMain и т.п., что при профессиональном подходе уменьшает вероятность ошибок в программе. Сама программа при этом имеет меньший код по сравнению с другими системами программирования вследствие специфики языка С.
В документации к системе MATLAB для подобных расширений употребляется термин МЕХ-файл (Matlab Extension). Специально назначать МЕХ в качестве расширения имени файла необязательно, MATLAB может прекрасно работать и с стандартным расширением подобных динамических библиотек — DLL.
Е1апка \matlab\extern на диске, где установлена система, содержит все необходимые файлы-заголовки для программ на языке С (каталог \matlab\ extern\include), а также несколько примеров модулей (\matlab\extern\examples), реализующих некоторые расширения системы, приведенные целиком в виде исходных текстов программ на языке С.
Кроме того, имеется папка \matlab\extern\src, в которой приведен исходный текст некоторых вспомогательных функций, весьма облегчающий отладку модулей расширения MATLAB.
В МЕХ-файлах для обмена параметрами всех типов с вычислительной средой MATLAB используется одна структура — mxArray (Matlab Extension Array).
Программный интерфейс создаваемой динамической библиотеки достаточно прост. В нем экспортируется единственная функция с двумя параметрами — входным и выходным массивами структур mxArray.
Прототип интерфейсной функции объявлен в заголовочном файле \matlab\extern\include\mex.h.
Приведем порядок создания dll-файла в Borland C++ Builder версия 6.0, вызываемого из MATLAB.
1. File -> New
Откроется диалог New вкладка Projects'.
а) выбираем тип создаваемого проекта: Win32 Dynamic-Link Library
б) заполняем Project Name: {progl}
Location: {указываем путь к нужной директории}
2. File -> New
Откроется диалог New вкладка Files'.
а) выбираем тип создаваемого файла: C++ source file
б) заполняем File Name: {progl}
3. Скопировать в директорию проекта файл matlab.lib (прилагается)
4. Добавить скопированный файл к проекту:
334
Project -> Add ToProject -> Files -> matlab.lib
5. Работа с С++-ым файлом, входящим в проект: обязательно включить следующие хедера: #include <windows>
#include <mex.h>
#include <matrix.h>
(Далее идет текст нужной программы (функции))
6. Добавить к проекту файл {progl.def}:
a) File -> New: откроется диалог New вкладка Files'.
б) выбираем тип создаваемого файла: text files
с) заполняем File Name: {progl.def}
7. Открыть {progl.def} и заполнить его:
LIBRARY «{progl}»
EXPORTS
mexFunction
8. Tool -> Options -> Вкладка «Directories» включить путь:
C:\MATLAB\extern\include
9. Project -> Settings: Output file name: {progl .dll}
10. F7 (Build) -> создастся файл {progl.dll}
11. Открываем MATLAB
12. File -> Set Path: указываем путь к созданному dll-файлу
13. С командной строчки MATLAB:
»{progl} а выполнится нужный С++-ный код.
Если для исследования ЭК применяется подсистема моделирования динамических процессов MATLAB Simulink, то для создания нужного блока целесообразно применять технологию S-функций (Simulink-функции). С помощью языков программирования (С, C++, Ada или Fortran) пользователь может создавать описание сколь угодно сложных блоков (например, блоков, обеспечивающих взаимодействие системы Simulink с аппаратными средствами; блоков на основе математических уравнений; блоков, реализующих анимационные возможности) и включать их в Simulink-модель, при этом блоки ничем не будут отличаться от стандартных библиотечных блоков системы Simulink. Создаваемые таким образом блоки могут реализовывать непрерывные, дискретные или гибридные (дискретно-непрерывные) модели.
Рис. 6.26. Модель заправки металла в ножницы с катящимся резом
335
Рис. 6.27. Динамические картинки, полученные при исследовании динамики процесса резания металла:
а — поступление листа на рольганг перед ножницами: б — остановка листа для выравнивания у борта рольганга, выравнивание листа, установка листа для реза переднего конца; в — окончание реза переднего конца; г — установка листа на мерный рез при перемещении по рольгангам; д — окончание реза листа с включением рольгангов качающегося и за ножницами; е — включение рольганга перед ножницами для транспортирования второй части листа для реза заднею конца, остановка второй части листа для отрезания заднего конца, окончание процесса; г- — скорость листа; грол — скорость рольганга
336
Созданные на языках С, C++, Ada или Fortran S-функции компилируются в исполняемые файлы с расширением *.dll. Подробно методика создания S-функ-ций изложена в [19, 61].
В качестве примера рассмотрим компьютерное исследование системы управления ножницами с катящимся резом, математическая модель которой показана на рис. 6.16.
Система автоматизации участка ножниц поперечного резания реализует управление последовательным линейным технологическим процессом в рамках комплексной автоматизированной системы управления листовым прокатным станом в соответствии с графиком перемещения листа металла [8].
Компьютерные исследования системы управления ножницами с катящимся резом проводятся в два этапа.
На первом этапе исследования разработанные программное обеспечение и математическая модель обеспечивают построение переходных процессов при различных управляющих воздействиях, что позволяет отстроить систему управления оптимальным образом.
На втором этапе компьютерных исследований отрабатываются различные алгоритмы управления с визуализацией динамических процессов. При этом переходят к упрощенным структурной схеме и ее математическому описанию, что возможно, так как на первом этапе компьютерных исследований была произведена настройка системы управления. Порядок системы дифференциальных уравнений, описывающих упрощенную структурную схему, будет ниже.
При визуализации лист металла представляется в виде параллепипеда с соответствующими размерами (класс Metal), ножницы — в виде сектора круга (класса CecNoj) (рис. 6.26).
Обеспечив программу возможностью управления координатами в соответствии с моделью, приведенной на рис. 6.16, и графиком перемещения листа [8], а также ограничителями движения листа и другими элементами, на экране дисплея при исследовании можно получить динамические картинки, изображенные на рис. 6.27.
Таким образом, используя предложенную методику исследования технологических комплексов, можно отрабатывать различные режимы их работы в реальном времени.
Контрольные вопросы
1. Что понимается под компьютерной моделью электроприводов производственных машин?
2. В чем заключается сложность моделирования электроприводов производственных машин?
3. Какие вы знаете виды моделей?
4. В чем заключается структурный принцип моделирования КЭ?
5. Что необходимо учитывать при выборе программного продукта, предназначенного для компьютерного исследования и оптимизации систем автоматизированных электроприводов производственных машин и технологических комплексов?
6. Назовите известные программные продукты, применяемые для задач исследования и синтеза систем автоматизированных электроприводов.
7. Дайте характеристику математическому пакету Matlab и его основным приложениям.
337
8. Какие Toolbox применяются для синтеза, исследования и оптимизации параметров автономной и взаимосвязанной систем управления?
9. Каков основной подход к расчету частот упругих колебаний механических многомассовых подсистем?
10. Как осуществляются моделирование и исследование пусковых, остановочных, циклических и других режимов работы электроприводов машин и комплексов?
11. Как разрабатываются S-функции?
12. Какими средствами моделируются и исследуются аварийные ситуации, возникающие в технологических комплексах?
13. В чем заключается методика исследования с визуализацией движений механизмов и процессов обработки вещества (материала)?
14. Какие программные средства применяются при оптимизации?
ГЛАВА 7
МОНТАЖ, НАЛАДКА И ЭКСПЛУАТАЦИЯ ЭЛЕКТРОПРИВОДОВ И СИСТЕМ АВТОМАТИЗАЦИИ
7.1. Нормативно-техническое обеспечение электромонтажных работ, наладки и эксплуатации электротехнических установок
Производство электромонтажных работ, наладка и эксплуатация электроустановок регламентируются правилами и нормами. Эти правила и нормы обязательны для всех видов электромонтажных работ, включая электроснабжение и электрооборудование со средствами автоматизации. К электроснабжению и силовому электрооборудованию относятся воздушные линии электропередач, внешние кабельные сети цеха, подстанции и распределительные устройства.
К электрооборудованию и средствам автоматизации относятся электроприводы производственных механизмов и машин, осветительное электрооборудование, контрольно-измерительные приборы, системы и средства автоматизации, внутренние кабельные разводки цеха к электроприемникам, включая программируемые контроллеры и промышленные сети коммуникаций.
Основными документами нормативно-технического обеспечения всех видов электротехнических работ являются ПУЭ, ПТЭ, ПТБ, СНиП (см. подразд. 1.2.2).
Правила выполнения электромонтажных работ содержат общие требования к строительно-монтажным работам, определяющие безопасность работающих (раздел 12 СНиП Ш-4 — 80) и требуют соблюдения ГОСТ 12.3.032—84.
В перечень требований стандарта входят условия снятия и включения напряжения в зоне монтажных работ, выполнения защитных заземлений, временных ограждений, порядок производства работ с силовым электрооборудованием, а также определение мест нахождения и условий безопасного пребывания работающих.
Системы электроснабжения в зависимости от способа заземления электроустановок разделяются на питающие распределительные сети с заземленной нейтралью и сети с изолированной нейтралью. При этом различают сетевое (рабочее) заземление токоведуших проводников и защитное заземление открытых проводящих частей электроустановок.
Стандарт МЭК-364 предусматривает следующие типы систем электроснабжения:
система TN — с сетевым рабочим заземлением, использованием у потребителя совмещенного рабочего и защитного проводника PEN и обеспечением возможности его разделения на нулевой рабочий N и защитный заземленный РЕ проводники;
339
система IT — с изолированной нейтралью, допускаемым соединением с землей через проводник или сопротивление, защитным заземлением РЕ проводящих частей установки потребителя;
система ТТ — с сетевым рабочим заземлением, использованием у потребителя нулевого рабочего проводника N, наличием отдельного заземления РЕ открытых проводящих частей;
система TI — в отличие от системы ТТ не имеет соединения проводящих частей с землей и сетевым заземлением.
Системы TN, IT, ТТ, приведенные соответственно на рис. 7.1 ...7.3, показаны применительно к трехфазной распределительной сети переменного тока, причем в системе TN предусматривается использование источника однофазного тока с заземленным выводом.
Электроустановки переменного тока напряжением до 1 кВ могут выполняться с заземленной или изолированной нейтралью (системы TN и IT), причем использование системы IT обычно ограничивается взрывоопасными и другими опасными производствами. Электроустановки в трехпроводных сетях постоянного тока могут выполняться с заземленной или изолированной средней точкой (системы TN и IT), а электроустановки с однофазными источниками тока — с одним заземленным (системы TN) или обоими изолированными проводниками (система IT), причем в этих установках не допускается заземление открытых проводящих частей без их зануления (система ТТ).
В соответствии с ГОСТ 12.1.030—81 защитное заземление и зануление электроустановок постоянного и переменного тока частотой до 400 Гц должно обеспечить защиту обслуживающего персонала при прикосновении к их токоведущим частям, которые могут оказаться под напряжением в результате повреждения изоляции. Защитное заземление выполняется электрическим соединением корпусов электроустановок непосредственно с заземлителем РЕ (заземляющей магистралью). Зануление выполняется электрическим соединением с заземленной точкой N источника питания (система с глухозаземленной нейтралью TN).
Защитное заземление или зануление электроустановок должно выполняться при номинальном напряжении 380 В и выше переменного тока и 400 В и выше постоянного тока, а также при работах в условиях повышенной опасности (ГОСТ 12.1.013 — 78) с напряжением выше 42 В переменного тока и выше 110 В постоянного тока.
А >
Во-
Со
РЕ
PEN —
РЕ
Электроустановка № 1
6
Электроустановка №2
Рис. 7.1. Схема системы электроснабжения типа TN
340
Рис. 7.2. Схема системы электроснбжения типа IT
Для стационарных электроустановок с изолированной нейтралью (система IT) защитное заземление выполняется в сочетании с контролем сопротивления изоляции.
Пожарная-безопасность на объекте обеспечивается в соответствии с требованиями Правил пожарной безопасности при производстве строительно-монтажных работ (ППБ-05 —86).
Снижение пожарной опасности электротехнических изделий достигается: исключением использования легковоспламеняющихся материалов и ограничением массы горючих материалов;
использованием средств и элементов электротехнической защиты, снижающих вероятность возникновения пожара и уменьшением переходных сопротивлений в силовых контактных соединениях;
применением элементов и выбором режимов работы электротехнических изделий с меньшими значениями перегрузки и перегрева частей изделия.
При проведении работ по монтажу, модернизации, ремонту или техническому обслуживанию оборудования электроустановок у потребителя также используются нормативные документы, принятые в данной отрасли или у данного потребителя: отраслевые стандарты, ведомственные руководящие документы (ВРД), стандарты предприятия, технические условия на изделие.
Проектная организация в соответствии с ЕСКД (ГОСТ 2.601—95) разрабатывает комплект эксплуатационных документов, который содержит:
Рис. 7.3. Схема системы электроснабжения типа ТТ
341
руководство по эксплуатации (РЭ);
инструкцию по монтажу, пуску, регулированию и обкатке изделия (ИМ); паспорт (ПС), удостоверяющий гарантии и технические характеристики;
ведомость комплекта запасных частей, инструмента и принадлежностей (ЗИП);
нормы расхода запасных частей и материалов, а также другие документы, содержащие сведения об изделии и комплекте документации.
Основной комплект рабочих чертежей, предназначенный для производства электромонтажных работ (марки ЭМ по ГОСТ 21.613—88 системы проектной документации для строительства), включает в себя:
общие данные по чертежам силового электрооборудования;
схемы электрические принципиальные комплектных трансформаторных подстанций, питающей и распределительной сетей, управления электроприводами силовых установок;
схемы или таблицы подключения;
планы расположения электрооборудования и прокладки электрических сетей;
кабельный журнал;
ведомости трубозаготовительную и заполнения труб кабелями и проводами.
В состав рабочей документации силового электрооборудования входят также габаритно-установочные чертежи комплектных устройств управления и чертежи электромонтажных конструкций.
Правила пользования электрической энергией устанавливают технические условия на присоединение электроустановок потребителей (см. подразд. 1.2.2).
Проектные решения в комплекте рабочей документации должны соответствовать общим требованиям безопасности в части применения электротехнических изделий с учетом их конструктивных особенностей.
При выполнении электромонтажных работ следует учитывать классы электротехнических изделий по способу защиты человека от поражения электрическим током. ГОСТ 12.2.007.0—75 устанавливает пять классов защиты электротехнических изделий:
0 — рабочая изоляция без элементов заземления (если изделия не отнесены к классам II и III);
01 — рабочая изоляция, элемент для заземления и провод без заземляющей жилы для присоединения к источнику питания;
I — рабочая изоляция и элемент заземления (при наличии провода для подключения к источнику питания необходимо иметь заземляющую жилу и вилку с заземляющим контактом);
II — двойная или усиленная изоляция без элементов для заземления;
III — использование безопасного сверхнизкого напряжения (при отсутствии изделий электрических цепей, работающих при другом напряжении).
Безопасным сверхнизким напряжением считается номинальное напряжение 42 В (без нагрузки не более 50 В), причем при особо неблагоприятных условиях (например, при работе с незаземленным инструментом и возможности соприкосновения с заземленными металлическими поверхностями) это напряжение снижается до 12 В. Защитное заземление допускается не выполнять для установок, части которых не могут находиться под переменным напряжением выше 42 В или под постоянным напряжением выше НО В.
342
Для присоединения заземляющего проводника применяют сварные или специальные резьбовые соединения; использование крепежных соединений для этой цели не допускается. Каждая заземляемая часть оборудования должна иметь независимый заземляющий проводник для соединения с заземляющей магистралью.
Общие требования безопасности определяют также специальные требования к органам управления в части снабжения их надписями, указывающими управляемый объект, обеспечения взаимными блокировками при возможности выполнения одной и той же операции с нескольких рабочих мест (кроме кнопок аварийного отключения) и выполнения элементов управления в определенной цветовой гамме.
Кнопки аварийного отключения имеют толкающий элемент увеличенного размера красного цвета. Кнопки пуска (включения) должны иметь ахроматическую расцветку (черную, серую или белую, но в некоторых случаях допускается зеленый цвет) и фронтальное кольцо, если выполнены не в утопленном исполнении, или свободный ход не менее 4 мм. Органы включения (переключения) технологических операций и режимов должны быть ахроматического или синего цвета. Желтым цветом должны отмечаться органы управления, осуществляющие воздействие, необходимое для предотвращения аварии.
В определенной цветовой гамме выполняются также органы световой сигнализации:
красный цвет используется для аварийных и запрещающих сигналов;
желтый — для предупредительных сигналов (достижение предельных значений, переключение на автоматическую работу);
зеленый — для сигнализации готовности, нормального режима работы;
белый — для оперативных сигналов включенного состояния;
синий — в специальных случаях, когда уже использованы отмеченные ранее цвета.
Специальные требования предъявляются к маркировке разъемных соединений и различительной окраске и маркировке проводников. Маркировка должна выполняться на обеих частях разъемных соединений и на обоих концах каждого проводника в соответствии с проектной документацией.
Чтобы различить проводники по функциональному назначению цепей используют следующие цвета изоляции: черный — для силовых цепей; красный — для цепей управления, измерения и сигнализации переменного тока; синий — для цепей управления, измерения и сигнализации постоянного тока; зелено-желтый — для цепей заземления; голубой — для проводников, соединенных с нулевым проводом (7V) и не предназначенных для заземления.
7.2. Проектно-сметная документация для производства монтажных работ
Производство монтажных работ выполняется по рабочим строительно-монтажным чертежам со сводным сметным расчетом стоимости. Сметная стоимость электромонтажных работ включает в себя прямые затраты и накладные расхо
343
ды, составляющие определенный процент от прямых затрат или заработной платы рабочих (зависит от вида работ). Прямые затраты состоят из основной заработной платы рабочих, определяемой по расценкам, приведенным в ценнике Госстроя на монтаж определенного вида оборудования, стоимости расходных материалов и при необходимости затрат, связанных с эксплуатацией специальной техники.
Кроме того, при монтаже используется документация заводов — поставщиков комплектующего оборудования: паспорта, технические описания, инструкции по эксплуатации. Техническое описание и (или) инструкция по эксплуатации изготовителя электротехнического оборудования (прибора) должны содержать следующую информацию:
назначение и технические данные оборудования;
общие описание устройства и принцип работы с указанием необходимых мер безопасности;
порядок установки и подготовки к работе;
порядок работы;
техническое обслуживание;
возможные неисправности и методы их устранения;
правила хранения и транспортирования;
комплект поставки;
гарантийные обязательства изготовителя.
Паспорт на конкретное изделие (при наличии технического описания и инструкции по эксплуатации) содержит технические данные по результатам испытания этого изделия, сведения о комплектности поставки, свидетельство о сертификации и приемке изделия со штампом отдела технического контроля (ОТК).
Документация поставщиков изделия может включать в себя формуляр, содержащий сведения, указанные для паспорта, и предназначенный также для внесения различных данных в период эксплуатации (длительность и условия работы, сведения о техническом обслуживании, ремонте и т.д.).
Проект производства электромонтажных работ (ППР) разрабатывается на основании рабочих чертежей и смет по видам выполняемых работ с разбивкой на монтажные зоны и этапы. ППР включает в себя определение фонда заработной платы в соответствии с трудоемкостью работ, сведения о количестве и квалификации необходимых рабочих, потребности в складировании материалов, условия транспортирования оборудования, получаемого по ведомости заказов, а также мероприятия, требуемые по технике безопасности. Основными в проекте являются графики производства работ, устанавливающие взаимосвязь и последовательность всех монтажных операций.
Электромонтажные и пусконаладочные работы являются частью комплекса операций по созданию нового объекта, поэтому они включаются в локальный график, согласованный с комплексным графиком работ по вводу объекта в эксплуатацию.
На рис. 7.4 приведен примерный вид локального графика электротехнических работ, включая электроприводы и локальные автоматизированные системы управления (АСУ) объекта, имеющего технологическую линию обработки материала с последовательным расположением машин (например, участка прокатного стана). На таких объектах можно производить наладку ЭП
344
№ п/п Время выполнения Наименование этапов работ Недели 1-го месяца Недели 2-го месяца Недели 3-го месяца
1 2 3 4 1 2 3 4 1 2 3 4
1 Монтаж ЭП
2 Наладка ЭП
3 Монтаж АСУ ТП
4 Автономная наладка АСУ ТП
5 Комплексная наладка ЭП и АСУ
6 Опробование режимов работы, устранение замечаний и сдача в эксплуатацию
Рис. 7.4. Примерный вид локального графика электротехнических работ
Рис. 7.5. Примерный вид сетевого графика на девять событий
отдельных машин до окончания монтажа ЭП всей линии, также возможен монтаж элементов АСУ и совмещение этих работ на последующих этапах вплоть до сдачи объекта в эксплуатацию.
Комплексный график монтажа и наладки оборудования объекта определяет конечный срок ввода всего объекта в эксплуатацию с учетом выполнения требуемой последовательности работ. На уровне инженерной подготовки производства строительно-монтажных работ объекта разрабатывается сетевой график, примерный вид которого на девять событий приведен на рис. 7.5.
Основные составляющие сетевого графика — события и работы (этапы). События на рисунке изображены кружками с указанием в них порядковых номеров этапов работ. Работа показана стрелками, указывающими порядок и продолжительность ее выполнения (например, в днях). Существует понятие критического пути от начального до конечного события с наибольшим суммарным временем длительности выполняемых работ. Критический путь, выделенный на рисунке утолщенными стрелками, определяет максимальную длительность работ — 33 дня. Очевидно, что выполнение в заданные сроки работ на критическом пути сетевого графика требует особого внимания и рассматривается в первую очередь при минимизации времени ввода объекта в эксплуатацию.
345
7.3. Организация электромонтажных и пусконаладочных работ
Электромонтажные работы выполняются специализированными организациями с разделением электромонтажных бригад по видам выполняемых работ. Пусконаладочные работы также выполняются специализированными организациями или специализированными бригадами пусконаладки предприятия с участием специалистов по контрольно-измерительным приборам (КИП), про-граммно-техническим средствам автоматики централизованных служб предприятия, а также специалистов — поставщиков нестандартного электрооборудования, приборов технологического контроля и средств автоматики с программируемыми устройствами, требующими отладки непосредственно на объекте.
При производстве электромонтажных и наладочных работ должны выполняться технические и организационные мероприятия, обеспечивающие безопасность работающих.
Технические мероприятия предусматривают:
применение и проверку электротехнических изделий с изоляцией токоведущих частей и установку защитных оболочек, кожухов для исключения возможности случайного прикосновения к ним;
правильное выполнение и проверку защитных заземлений;
принятие мер от ошибочного включения, установку и проверку запрещающих блокировок включения;
проверку электрических сигнализирующих устройств, предупредительных знаков и надписей;
использование инструмента с безопасным напряжением, соответствующего требованиям эргономики.
Работники, обслуживающие электроустановки (кроме их устройства и правил работы), должны знать Правила техники безопасности при обслуживании электроустановок в пределах занимаемой должности и иметь квалификационную группу по электробезопасности, подтверждаемую выданным удостоверением установленной формы.
Для получения квалификационной группы I достаточно пройти инструктаж по электробезопасности для данной электроустановки с оформлением в журнале инструктажа без выдачи удостоверения. Группы электробезопасности II...V присваиваются после проверки знаний персонала, обслуживающего электроустановки, в зависимости от опыта работы на обслуживаемых или аналогичных установках.
Административно-технические, дежурные и оперативно-ремонтные работники при получении группы II должны иметь стаж работы не менее 1 мес, а при получении группы III — не менее 2 мес работы с группой II. Для получения группы IV требуется стаж работы не менее 3 мес. Для получения группы V работники с общим средним образованием должны иметь стаж работы 12 мес, а с высшим техническим и специальным средним образованием — 6 мес.
Неэлектротехнический персонал, привлеченный к работе в зоне электроустановок, и практиканты учебных заведений с учетом стажа работы могут получить квалификационную группу не выше III.
346
Лицевая сторона наряда Для работ в электроустановках Предприятие Подразделение НАРЯД-ДОПУСК № Руководителю работ допускающему производителю работ наблюдающему с членами бригады поручается Работу начать: дата время Работу закончить: дата время
Меры по подготовке рабочих мест
Наименования электроустановок, в которых нужно провести отключения и установить заземления Что должно быть отключено и где заземлено
1 2
Отдельные указания
Наряд выдал: дата время подпись фамилия Наряд продлил по: дата время Подпись фамилия дата время
Разрешение на подготовку рабочих мест и на допуск
Разрешение на подготовку рабочих мест и на допуск выдал (должность, фамилия или подпись) Дата, время Подпись работника, получившего разрешение на подготовку рабочих мест и на допуск
1 2 3
a
Рис. 7.6. Форма наряда для работ в электроустановках (см. также с. 348): а — лицевая сторона; б — оборотная сторона
347
Оборотная сторона наряда Рабочие места подготовлены. Под напряжением остались:
Допускающий Руководитель (производитель (подпись) работ или наблюдающий) (подпись)
Ежедневный допуск к работе и ее окончание
Бригада проинструктирована и допущена на подготовленное рабочее место Работа закончена, бригада удалена
Наименование рабочего места Дата, время Подписи Дата, время Подпись производителя работ (наблюдающего)
допускающего производителя работ (наблюдающего)
1 2 3 4 5 6
Изменение в составе бригады
Введен в бригаду (фамилия, инициалы, группа) Выведен из бригады (фамилия, инициалы, группа) Дата, время Разрешил (подпись)
1 2 3 4
Работа полностью закончена, бригад ленные бригадой, сняты, сообщено а удалена, заземления, установ-кому) (должность) время (подпись) (подпись)
(фамилия) Дата Производитель работ (наблюдающий) Руководитель работ
б
Рис. 7.6. Окончание
Группы электробезопасности присваиваются отделами техники безопасности предприятий, причем при аттестации кроме специальных знаний требуется также знание приемов оказания первой помощи пострадавшим при несчастных случаях, а для работников, имеющих группы IV и V, — также знание организации безопасного проведения электротехнических работ.
Организационные мероприятия включают в себя выдачу распоряжения на производство работ оперативному электротехническому персоналу с необходимой квалификационной группой, выделение для монтажной организации
348
зоны производства работ, принятие мер по предотвращению ошибочной подачи в нее напряжения и при необходимости организации ограждения от действующей части объекта с указанием мест прохода персонала. Для работы в установках с напряжением до 1 кВ оперативный персонал должен иметь квалификационную группу не ниже III, а в условиях напряжения выше 1 кВ — не ниже IV.
Распоряжение на производство конкретного вида работ — наряд — определяет состав рабочей бригады, место, время начала и окончания работ, условия безопасности с назначением ответственного лица, а также материалы и инструменты, необходимые для выполнения работ.
Для производства строительно-монтажных работ на территории действующего предприятия в соответствии с СНиП 111-4—80 составляется акт-допуск, по которому представители заказчика и генерального подрядчика согласуют их объем и сроки. На производство работ повышенной опасности (строительно-монтажные работы на сооружениях, находящихся в аварийном состоянии, или в зонах с постоянно действующими опасными производственными факторами) составляется наряд-допуск.
Наряд-допуск содержит раздел «Наряд», в котором указываются приведенные ранее данные, и раздел «Допуск», в котором удостоверяется прохождение инструктажа о мерах безопасности на рабочем месте и отмечается время начала и окончания работ.
Форма наряда для работ в электроустановках, приведенная на рис. 7.6, заполняется в соответствии с Правилами техники безопасности при эксплуатации электроустановок.
7.4. Методы настройки параметров электротехнического оборудования, параметрирование комплектных электроприводов
В процессе наладки электротехнического оборудования сложных технологических объектов предусматривается участие специалистов различных профилей: по электроснабжению (силовым распределительным устройствам), электроприводам, программируемым контроллерам, контрольно-измерительным приборам и т.д. В качестве примера на рис. 5.13 приведена схема технических средств управления участком ножниц поперечной резки листового прокатного стана, расположенных в электротехническом помещении 12ПСУ, маслоподвале, на посту управления 12ПУ оборудованием технологической линии и в цехе — переносной пульт АР2 для механизмов настройки и смены рабочего инструмента (ножей) ножниц.
В 12ПСУ расположены комплектные частотно-регулируемые электроприводы UZ, скомпонованные в щиты управления АВ. Шкаф контроллера AS1 является объектно-ориентированным изделием, включающим в себя собственно программируемый контроллер с проектной компоновкой модулей ввода-вывода дискретных, аналоговых и импульсных информационных сигналов датчиков и сигналов управления нерегулируемыми приводами, электромагнитами гидроприводов, а также блоки питания, вспомогательную коммутационную
349
аппаратуру и т.д. Выдача сигналов управления и обмен информацией для частотно-регулируемых приводов предусматривается по сети PROFIBUS DP (интерфейс RS485).
На посту управления 12ПУ установлены пульт API с органами оперативного управления и модулями удаленного ввода-вывода для связи с контроллером по сети, графическая панель оператора POI с изображением объекта, точек контроля и возможностью выдачи технологических сообщений, задания технологических параметров и уставок управления.
В маслоподвале размещается оборудование насосно-аккумуляторной станции для управления гидроприводами, системы циркуляции жидкого смазочного материала с электроприводами насосов и электромагнитами клапанов гидросистем, датчики и регуляторы давления, температуры, уровня. Аппаратура управления, диагностики и сигнализации, размещенная в шкафу управления ШУ2, выдает сводные сигналы предупредительной (о достижении предельных значений технологических уставок) и аварийной сигнализации на пост управления оператору.
Настройка датчиков, контрольно-измерительной аппаратуры и других средств автоматизации, установленных на механизмах или сопряженных с технологическим оборудованием, обычно выполняется после завершения монтажных работ.
Датчики технологических параметров (температуры, уровня, давления жидкости в гидросистемах и др.) настраиваются в соответствии с требуемыми диапазонами измерения и контроля. Электроконтактные манометры, используемые, например, для контроля верхнего и нижнего допустимых значений давления жидкости (масла) в аккумуляторах для гидроприводов, настраиваются на требуемые параметры для выдачи сигналов предупредительной сигнализации. Настройка на верхнее и нижнее аварийные значения давления используется для обеспечения отключения работающего оборудования с выдачей сигналов аварийной сигнализации.
Интеллектуальные средства автоматизации технологических процессов — датчики и регуляторы с встроенными микропроцессорными устройствами для измерения и регулирования температуры, давления, расхода, уровня жидкости и газообразных сред — требуют для наладки специальных знаний и подготовленного квалифицированного персонала.
Сервисное преимущество интеллектуальных датчиков технологических параметров — это непрерывная самодиагностика, которая обеспечивает контроль их работы и формирует сообщения о неисправности.
Параметрирование комплектных регулируемых электроприводов постоянного тока и частотно-регулируемых электроприводов переменного тока позволяет выбрать вариант (конфигурацию) системы регулирования и ввести параметры встроенного объектно-ориентированного программного обеспечения.
Параметрирование может быть выполнено с помощью промышленного портативного компьютера (ноутбука) или клавишной панели диалогового терминала комплектного устройства, позволяющего:
представлять на экране параметры и характеристики преобразователя, режимы работы и неисправности;
изменять параметры и конфигурацию преобразователя по сравнению с заводскими настройками;
350
сохранять варианты настроек и конфигурации в энергозависимой памяти терминала;
управлять электроприводом в локальном (ручном) режиме.
Меню диалогового терминала включает в себя разные уровни доступа и может быть заблокировано кодом (паролем) доступа.
Серия комплектных частотно-регулируемых электроприводов SIMOVERT VC фирмы Siemens позволяет выполнять параметрирование тремя способами:
• с помощью встроенного терминала PMU, имеющего четырехзначный жидкокристаллический (LCD) дисплей и шесть операционных клавиш: | ,
• с помощью дополнительного подключаемого по интерфейсу RS485 пульта оператора, имеющего четырехстрочный дисплей и цифровую клавиатуру в дополнение к операционным клавишам;
• с помощью компьютера с сервисной программой SIMOVIS для Windows 95 и Windows NT, выполняющей параметрирование, диагностику и управление преобразователями.
Параметры, используемые при параметрировании, различаются по назначению (имени) и номеру. Номер параметра состоит из буквы и трехзначного числа. Буквами Р, U, Н, L обозначаются изменяемые параметры, буквами г, n, d, с — неизменяемые параметры визуализации. Параметр имеет числовое значение. Некоторые параметры имеют индексы, т.е. можно иметь несколько значений для параметра с одним номером. При использовании терминала PMU
Р производится выбор номера,
последовательным переключением клавиши
индекса, значения параметра; клавишами /\ и
можно увеличить или
уменьшить значение параметра. Комбинации клавиш
или
производят переключение режимов индикации: номеров параметров, оперативного дисплея и т.д.
При выполнении процедуры параметризации могут быть выбраны следующие варианты:
«заводская» настройка параметров;
«быстрая» параметризация, если известны и могут быть точно заданы параметры (структура и числовое значение) системы регулирования;
детальная параметризация, если известны не все параметры и уточнение параметров модели двигателя предусматривается в режиме самонастройки при пуске (процедура выполнения отдельных операций приводится в руководстве по эксплуатации).
При сохранении общего принципа параметрирования электроприводов другими ведущими электротехническими фирмами, например Schneider Electric, предлагается более простая методика параметрирования.
Для параметров указывается код, даются описание, возможный диапазон настройки, заводская установка значений.
На рис. 7.7 в качестве примера показана структура доступа к меню преобразователя частоты Altivar 58 фирмы Schneider Electric.
351
Первое Последующие включение включения
Рис. 7.7. Структура меню при параметрировании Altivar 58
Принцип параметрировании при использовании четырех клавиш диалогового терминала ENT, ESC, весьма прост:
• с помощью клавиш — больше — и — меньше — можно «листать» номенклатуру меню;
• с помощью клавиш ENT — выбор — и ESC — возврат — можно «перебирать» параметры в меню, а используя клавиши и менять их значения, подтверждая или отменяя выбор клавишами ENT и ESC соответственно.
В меню LnG (язык) можно выбрать текст сообщений на пяти основных европейских языках.
В меню CFG (макроконфигурация) осуществляется автоматический выбор номенклатуры входов-выходов и параметров, предоставленный для дополнительных вариантов по сравнению с заводской настройкой.
В меню rEF (идентификация) индицируются мощность и напряжение преобразователя и выполняется его конфигурация с нормальным или увеличенным моментом.
Меню контроля SUP производит выбор параметров контроля, ускорения, замедления, ограничения тока, вида торможения, а также задание частоты, отображение параметров и состояния работающего двигателя.
Настроечное меню SEt позволяет задавать числовые значения параметров двигателя, включая контур регулирования, с учетом выбранной макроконфигурации и наличия карты расширения входов-выходов.
352
Меню привода drC позволяет производить оптимизацию привода с введением данных конкретного двигателя (в том числе специального исполнения по напряжению, ротору и т.д.), задание формы кривых разгона и торможения, выбор частоты широтно-импульсной модуляции преобразователя, функций адаптации тока ограничения в зависимости от выходной частоты, времени торможения при увеличенном моменте инерции механизма и т.д.
Меню управления CtL предназначено для конфигурирования типа управления с изменением назначения его дискретных входов, ограничением максимальных и минимальных сигналов задания, а также для активизации управления преобразователем с помощью встроенного терминала.
Меню входов-выходов 1-0 предлагает выбор по назначению аналоговых и дискретных входов и выходов управления с учетом предварительного выбора, сделанного в меню CtL, и установленной в преобразователе карты расширения входов-выходов.
Меню неисправностей FLt позволяет выбрать режимы автоматического перезапуска после сброса или исчезновения неисправностей, режимы косвенной тепловой защиты с учетом уменьшения допустимой мощности в функции скорости для двигателя с естественной вентиляцией, тип остановки при появлении неисправности и т.д.
Меню файлов FLS позволяет сохранить четыре файла конфигурации преобразователя или вернуться к заводским настройкам.
Ведущие фирмы—производители комплектных регулируемых электроприводов включают в объем поставки сервисные программы, позволяющие не только выполнить параметрирование электроприводов, но обеспечить также оценку качества регулирования и состояния оборудования, оперативную диагностику отказов, оптимизацию параметров настройки.
Для оптимизации параметров комплекса технологического оборудования используются также программно-аппаратные информационные комплексы обработки данных, например DPM64 фирмы IBA (Ingenieurbiiro Anhaus GmbH, Германия).
Комплекс DPM64 представляет собой пассивную станцию в сети Profibus DP для обработки данных объемом до 12 Мбод с дискретными и аналоговыми входами и выходами, интегрируемую в конфигурацию системы программируемого контроллера с стандартным DP-мастером. В объем заказа могут быть включены интерфейсные карты для персонального компьютера и ноутбука, программное обеспечение обработки данных для 64 аналоговых и 64 дискретных сигналов с возможностью расширения до 512 каждого вида сигналов.
Архивирование данных позволяет индицировать и регистрировать процессы для анализа в будущем.
На рис. 7.8 приведен пример записи архивированных данных процесса прокатки в клети кварто толстолистового стана 5000 (с помощью программного пакета iba Analyzer, позволяющего выбрать номенклатуру регистрируемых данных, масштаб, размерность, вид надписи и т.д.).
На рисунке приведены:
время прокатки в автоматическом режиме (AutoRolling);
счетчик пропусков в клети (PassCounter);
353
ibaAnalyzer E:\IBA Messung\050111\SEVJBN32244.dat IBA
i ।
-r Mis AutoRolling
251
23; — PassCounter_L2
21-
19-
17-
15--
, -r MdrActCurr" gp (A)
•- MdrActCurrlfoi (A)
10000-
50001
0
-50001
-10000-
Sec
03:13:50
03:14.30
03’14:50
—пята . 03:14:10
-—-тИЯЙЕВг.......г
03:15:10 03:15:30
Рис. 7.8. Процесс прокатки в клети кварто толстолистового стана 5000
температура (TempFurn) листов перед клетью (нечетные пропуски при реверсивной прокатке);
усилие прокатки (FrActSTAC);
скорости прокатки для верхнего и нижнего валков (MD Speed Up, MD Speed Down) и задание скорости (speedUpperRef);
токи главных приводов постоянного тока (верхний двигатель MdrActCurrTop, нижний двигатель MdrActCurrBot).
354
7.5. Приемосдаточные испытания оборудования
Приемосдаточные испытания нового оборудования по индивидуальному проекту могут проходить в два этапа:
1 — испытание машины или ее наиболее ответственных рабочих узлов после контрольной сборки отдельных машин у заказчика под нагрузкой;
2 — испытания после монтажа и наладки комплекса оборудования на объекте для сдачи объекта в опытную или промышленную эксплуатацию.
Для выполнения работ первого этапа при отсутствии штатного электрооборудования производится монтаж и наладка электрооборудования испытательного стенда, разрабатываемого по отдельной документации.
Организация приемосдаточных испытаний на объекте (на втором этапе) включает в себя подготовку следующих документов: план-график работ, программу и методику испытаний, приказ о проведении работ, приказ о составе приемочной комиссии.
В соответствии с СНиП 111-4-80 (раздел 14) перед испытанием смонтированного оборудования необходимо провести ряд технических и организационных мероприятий, обеспечивающих безопасность работ.
На вновь смонтированную установку рабочее напряжение подается эксплуатационным персоналом только после введения эксплуатационного режима и при наличии письменной заявки руководителя работ. Допускается временная подача напряжения ниже 1000 В для проведения наладочных работ по постоянной схеме на щиты, станции управления и силовые сборки без введения эксплуатационного режима, но тогда выполнение мероприятий, обеспечивающих безопасные условия труда, возлагается на руководителя наладочных работ.
Объем и нормы испытаний силового электрооборудования (электродвигателей, генераторов, трансформаторов, выключателей, разъединителей, разрядников, конденсаторных установок, аккумуляторных батарей, силовых кабельных линий высоковольтных, а также распределительных устройств, вторичных цепей и электропроводки до 1000 В и др.) приведены в документе Р.Д34.45-51.300—97 (Объем и нормы испытаний электрооборудования), предназначенном для персонала, занимающегося наладкой и эксплуатацией электрооборудования электрических станций и сетей.
В ходе работ ведется протокол испытаний, составляются протоколы согласования отступления от проектных решений и оценки результатов испытаний, а также устранения замеченных недостатков.
ГОСТ 34.603—92 устанавливает общие требования и следующие виды испытаний для автоматизированных систем (АС): предварительные, опытная эксплуатация, приемочные.
Предварительные испытания, которые могут быть автономными (т.е. могут охватывать части АС) и комплексными (для взаимосвязанных частей АС или АС в целом), проводятся в целях подготовки АС к опытной эксплуатации. Предварительные испытания выполняются после отладки и тестирования программных и технических средств системы.
Опытную эксплуатацию проводят в соответствии с программой и указывают порядок устранения выявленных недостатков. Продолжительность опытной эксплуатации должна быть достаточной для проверки функционирования АС и готовности обслуживающего оперативного персонала.
355
Приемочные испытания проводят в соответствии с заданными программой и методикой при предъявлении технического задания на создание АС, рабочих журналов, актов приемки и завершения работ по опытной эксплуатации. В процессе этих испытаний проводят проверку функционирования АС в условиях, указанных в ТЗ, автономно и в составе комплекса, а также проверку средств восстановления работоспособности АС после отказов и возможность практического выполнения всех рекомендованных процедур. Протоколы испытаний по программе обобщают в едином протоколе, на основании которого делают заключение о соответствии системы требованиям ТЗ и возможности оформления акта приемки АС в постоянную эксплуатацию.
При составлении акта приемки объекта в эксплуатацию также могут быть указаны сроки устранения отдельных замечаний.
Окончание приемосдаточных испытаний с устранением замечаний оформляется актом о завершении работ.
7.6. Гарантийное и сервисное обслуживание
Новое оборудование, как правило, имеет гарантию на бесплатное устранение дефектов и замену комплектующих. Стандартная заводская гарантия обычно не превышает 18 мес и производится службами гарантийного ремонта. Послегарантийный ремонт обычно производится службами эксплуатации или с привлечением специализированных организаций.
Традиционная система обслуживания оборудования строилась по подрядному принципу с составлением дефектных ведомостей и привлечением подрядных организаций, не заинтересованных в объективной диагностике состояния оборудования.
Перевод на сервисное обслуживание предполагает оценку качества работ по тем же критериям, по которым работают эксплуатационные службы: повышение ремонтопригодности, совершенствование технологии ремонтов, оперативности в сборе информации о состоянии оборудования на основе систематической диагностики и т.д. Ведущие электротехнические фирмы (производители оборудования, научно-технические инжиниринговые центры) предлагают сервисные услуги для поставляемого оборудования, создают сети сервисных партнеров с расширением гарантийных обязательств и созданием складов для поставки запчастей.
В объем комплексного сервисного обслуживания на основе договорных обязательств могут быть включены: техническая поддержка в вопросах обслуживания и настройки оборудования на объекте заказчика, постгарантийный ремонт с продлением гарантии, диагностика и обследование с плановой заменой запчастей и т.д.
Инжиниринговые службы сервисных организаций учитывают риск, связанный с выполнением постгарантийных обязательств, разрабатывают технологии перехода на сервис, учитывающие состояние оборудования, объем передаваемых на сервис функций, регламент выполняемых работ, документацию по технике безопасности и охране труда, бюджет и систему расчетов по плановым и внеплановым работам.
356
Внедрение сервисного обслуживания обеспечивает повышение надежности работы оборудования, снижение сроков и исключение внеплановых ремонтов за счет систематической диагностики и устранения неисправностей в процессе технического обслуживания.
7.7. Экологические аспекты внедрения и модернизации технологических объектов
Вопросы экологии при развитии и перевооружении крупных технологических объектов, расположенных, как правило, в плотно населенных районах, требуют решения комплекса технических проблем, связанных с техногенной нагрузкой на среду обитания. Улучшение конкретных технологических показателей, связанных с уменьшением загрязнения атмосферы, почвы, накапливания не утилизируемых производственных отходов, происходит в первую очередь с внедрением прогрессивных технологий и оборудования, оснащенных контрольно-измерительными приборами и системами оптимизации технологических режимов, контроля аварийных ситуаций.
В связи с отсутствием методических материалов по решению экологических задач в рамках системного подхода при оценке экологичности конкретного производства многие проблемы возникают на стадии наладки, ввода в эксплуатацию, но нередко и в процессе эксплуатации объекта.
Первый Всероссийский съезд по охране природы принял концепцию перехода Российской Федерации на модель устойчивого развития, основанную на тесной взаимосвязи экологии и экономики.
Разработка современных машин и других технологических объектов с высокими экологическими характеристиками, применение энергосберегающих технологий, способствующих улучшению экологических показателей, также тесно связаны с работами в области совершенствования электроприводов и систем автоматизации.
В данной области основными направлениями работ, решающих задачи экономики и экологии, являются:
совершенствование комплектных электроприводов и средств автоматизации с использованием материалов, не выделяющих газы, пыль, вредные продукты окисления, снабжение их эффективными системами зашиты и очистки, включая замкнутые оборотные циклы водоохлаждения;
расширение номенклатуры и совершенствование характеристик контрольноизмерительных приборов;
использование систем автоматического управления с повышенными требованиями к надежности функционирования;
разработка новых технических и программных средств контроля технологических процессов, связанных с опасностью загрязнения окружающей среды;
внедрение на экологически опасных производствах мощных информационных систем.
В России в рамках Федеральной системы обязательной экологической сертификации поставлена задача разработки систем управления окружающей средой на предприятиях и производствах металлургического комплекса, ли
357
тейных и прокатных производствах, предприятиях металлообработки и оборонной промышленности и т.д.
На базе Московского института стали и сплавов создан Центр сертификации в металлургии ЭКОСЕРТ, предлагающий услуги по экологической сертификации, аудиту, консалтингу и обучению специалистов по курсам «Системы управления окружающей средой» и «Федеральная система обязательной экологической сертификации».
Контрольные вопросы
1. Что включает в себя нормативно-техническое обеспечение электромонтажных работ, наладки и эксплуатации электротехнических установок?
2. Что представляют собой проект производства электромонтажных работ, локальный и сетевой графики выполнения работ?
3. Какие технологические и организационные мероприятия выполняются при производстве электромонтажных и пусконаладочных работ?
4. Какие методы применяются для настройки параметров электротехнического оборудования и параметрирования комплектных электроприводов?
5. Как выполняются приемосдаточные испытания электрооборудования?
6. Как организуются гарантийное и сервисное обслуживание электрооборудования?
7. Как решаются задачи экологии при разработке электроприводов и систем автоматизации?
ПРИЛОЖЕНИЕ
INTERNET-ИНФОРМАЦИЯ: СРЕДСТВА СИСТЕМ ЭЛЕКТРОПРИВОДОВ И АВТОМАТИЗАЦИИ И МЕТОДИКИ РАСЧЕТА И ПРОЕКТИРОВАНИЯ РЕГУЛИРУЕМЫХ ЭЛЕКТРОПРИВОДОВ
Средства систем электроприводов и автоматизации. В соответствии с порядком изложения материала в подразд. 3.1 и 3.4 дадим номера Internet-сайтов, по которым можно получить требуемую подробную информацию. Далее расшифруем эти номера.
Управляемые преобразователи и их компоненты для систем электроприводов переменного тока [1—4, 8—15, 18, 19, 21, 30, 31].
Сервоприводы [1, 3, 4, 6—12, 15, 16, 18, 21, 30. 31].
Промышленные компьютеры и контроллеры [1—3, 5—7, 9, 10, 16, 21, 29, 30, 31].
Информационные сети и их компоненты [1—3, 5—7, 9, 10. 16, 21, 30, 31].
Пульты, терминалы и станции оператора [1—3, 5—7, 9, 10, 21. 29, 30, 31].
Высоковольтные электроприводы [1, 9, 10, 15, 21. 30, 31].
Электродвигатели и мотор-редукторы [1, 3—5, 7—9, 11, 12, 14, 17—23, 30, 31].
Коммутационно-зашитная аппаратура [1—5, 7, 9, 10, 21, 30, 31].
Устройства плавного пуска [1, 2, 4, 8, 9, II, 14, 15, 21, 30, 31].
Средства модернизации существующих электроприводов постоянного тока [1].
Кабели и провода [1, 9, 15, 21, 30, 31].
Датчики [1-5, 7-9, 16, 18, 21, 23-29].
Низковольтные комплектные устройства [I, 2, 4, 8, 9, 12—15, 17, 21].
Internet — сайты:
1. http://www.automation-drives.ru
2. http://www.schneider-electric.ru
3. http: //www. omron.com
4. http://www.bosclirexroth.com
5. http://www.heidenhain.corn
6. http://www.gefanuc-europe.com
7. http://www.fagorautomation.com
8. http://www.yaskawa.com
9. http://www.ab.com
10. http://www.mitsubishi-automation.com
11. http://www.keb.de
12. http://www.lenze.de
13. http://www.vacon.com
14. http://www.danfoss.com
15. http://www.alstom.com
16. http://www.elau.de
17. http://www.baumueller.com
18. http://www.sew-eurodrive.ru
359
19. http://www.flender.com
20. http://www.reduktor.ru
21. http://www.abb.com
22. http://www.eldin.ru
23. http://www.vemz.ru
24. http: //www.bourns.com
25. http://www.skbis.ru
26. http://www.leinelinde.se
27. http://www.hubner.ru
28. http://www.avtron.com
29. http://www.pgcontrols.com
30. http://www.rakurs.com
31. http://www.bcc.ru
32. http://aep.mpei.ac.ru/old/eldrive
33. http://elmech.mpei.ac.ru/EM
Методики расчета и проектирования регулируемых электроприводов.
Методики расчета [1—4, 9, 10, 18, 21].
Методики проектирования [1—4, 9, 10, 18, 21, 32, 33].
СПИСОК ЛИТЕРАТУРЫ
1. Автоматизация инженерно-графических работ / Г. А. Красильникова, В. В. Самсонов, С. М.Тарелкин. — СПб. : Питер, 2000. — 256 с.
2. Александров К. К. Электротехнические чертежи и схемы / К. К. Александров, Е.Г. Кузьмина. — М. : Энергоатомиздат, 1990. — 288 с.
3. Алексеева Г.А. Метрология, стандартизация и сертификация / Г.А.Алексеева, Э.И. Медякова. - СПб. : СЗТУ, 2004. - 109 с.
4. Анисимов Я. Ф. Электромагнитная совместимость полупроводниковых преобразователей и судовых электроустановок / Я .Ф. Анисимов, Е. П. Васильев. — Л. : Судостроение, 1990. — 264 с.
5. Антонов В.Н. Адаптивное управление в технических системах : учеб, пособие / В.Н. Антонов, В.А.Терехов, И.Ю.Тюкин. — СПб. : Изд-во С.-Петербургского университета, 2001. — 244 с.
6. Апексунин В. А. Маркетинг. Краткий курс : учеб, пособие / В. А. Апексунин. — 2-е изд. — М. : Изд. дом «Дашков и К°», 2001. — 191 с.
7. Башарин А. В. Управление электроприводами : учеб, пособие / А.В.Башарин, В.А.Новиков, Г.Г.Соколовский. — Л. : Энергоиздат. Ленингр. отд-ние, 1982. — 392 с.
8. Белов М. П. Автоматизированный электропривод типовых производственных механизмов и технологических комплексов : учебник / М.П.Белов, В.А.Новиков, Л.Н.Рассудов. — М. : Изд. центр «Академия», 2004. — 576 с.
9. Белов М. П. Типовые алгоритмы управления взаимосвязанными электроприводами / М.П.Белов, В.А.Новиков, Л.Н.Рассудов // Электротехника. — 1998. — № 6. — С. 7—15.
10. Борохович Л. Ваша интеллектуальная собственность / Л.Борохович, А. Монастырская, М.Трохова. — СПб. : Питер, 2001. — 416 с.
11. Браславский И. Я. Энергосберегающий асинхронный электропривод / И.Я.Браславский, З.Ш.Ишматов, В.В.Поляков ; под ред. И.Я. Браславского. — М. : Изд. центр. «Академия», 2004. — 256 с.
12. Буч Г. Объектно-ориентированный анализ и проектирование с примерами приложений на C++ /Г. Буч ; пер. с англ. — 2-е изд. — М. : Бином ; СПб. : Невский диалект, 1998.- 560 с.
13. Вершинин В. И. Выбор электроприводов типовых производственных машин и механизмов : учеб, пособие / В.И.Вершинин. А.Е.Козярук, А.С.Соловьев. — СПб. : СПГГИ(ТУ), 2000. - 36 с.
14. Вершинин В.И. Электромагнитная и электромеханическая совместимость в электротехнических системах с полупроводниковыми преобразователями / В.И.Вершинин, Э.А.Загривный, А.Е.Козярук. — СПб. : Изд. СПГГИ (ТУ), 2000. — 69 с.
15. Герман-Галкин С.Г. Электрические машины: Лабораторные работы на ПК / С.Г.Герман-Галкин, Г.А.Кардонов. — СПб. : КОРОНА принт, 2003. — 256 с.
16. Голинкевич Т.А. Прикладная теория надежности : учебник / Т.А.Голинкевич. — М. : Высш, шк., 1985. — 168 с.
17. Грибалев Н.П. Бизнес-план. Практическое руководство по составлению / Н.П.Гри-балев, И.Г.Игнатьева. — СПб. : Белл, 1994. — 160 с.
18. Гук Ю.Б. Теория надежности в электроэнергетике / Ю.Б.Гук, В.В.Карпов. — СПб. : Изд. СПбГПУ, 1999. - 82 с.
361
19. Гультяев А. Визуальное моделирование в среде MATLAB : учебный курс /А. Гуль-тяев. — СПб. : Питер, 2000. — 432 с.
20. Дипломное проектирование : учеб, пособие / подред. В. И. Лачина. — Ростов н/Д. : Феникс, 2003. — 352 с.
21. Джозеф А. Ковелло Бизнес-планы. Полное справочное руководство /Ковелло А. Джозеф, Хейзеягрен Дж. Бриан ; пер. с англ. — М. : БИНОМ, 1998. — 352 с.
22. Дьяконов В. П. MATLAB 6/6.1/6.5 + Simulink 4/5 в математике и моделировании. Полное руководство пользователя / В.П.Дьяконов. — М. : СОЛОН-Пресс, 2003. — 576 с.
23. Егоров В. И. Динамика систем электропривода / В.Н.Егоров, В.М.Шестаков. — Л.: Энергоатомиздат, 1983. — 438 с.
24. Единая система конструкторской документации : справ, пособие / [С.С. Бору-шек, А. А. Волков, М.М. Ефимова и др.]. — М. : Изд-во стандартов, 1989. — 352 с.
25. Измеряемые параметры физически опасных и вредных производственных факторов. — М. : Изд-во стандартов, 1988. — 240 с.
26. Ильинский И. Ф. Общий курс электропривода / Н.Ф.Ильинский, В.Д.Казаченко. — М. : Энергоатомиздат, 1992. — 238 с.
27. Ильинский И. Ф. Энергосбережение в электроприводе / Н.Ф.Ильинский, Ю.В.Ро-жанковский, А.О.Горнов. — М. : Энергоатомиздат, 1989. — 316 с.
28. Инновационные ресурсосберегающие решения и их экономические оценки : учеб, пособие / под ред. О.В. Федорова. — М. : ИНФРА— М, 2003. — 198 с.
29. Казаченко В. Ф. Микроконтроллеры: Руководство по применению 16-разрядных микроконтроллеров Intel MCS-196/296 во встроенных системах управления / В.Ф.Казаченко. — М.: Эком, 1997. — 685 с.
30. Карвовский Г. А. Электрооборудование и окружающая среда / Г.А.Карвовский. — М. : Энергоатомиздат, 1984. — 248 с.
31. Карпов Б. Microsoft Visio 2000 : краткий курс / Б. Карпов, Н. Мирошниченко. — СПб. : Питер, 2001. — 256 с.
32. Карташев И. И. Качество электроэнергии в системах электроснабжения. Способы его контроля и обеспечения / И.И.Карташев. — М. : Изд. МЭИ, 2000. — 120 с.
33. Кетков Ю.Л. MATLAB 6.Х. : программирование численных методов / Ю.Л.Кет-ков, А.Ю.Кетков, М.М.Шульц. — СПб. : БХВ — Петербург, 2004. — 672 с.
34. Ктев А. С. Проектирование систем автоматизации / А.С.Клюев, В.Д.Таланов, А.М.Демин ; под ред. А. С. Клюева. — М. : Фирма «Испо-Сервис», 2002. — 148 с.
35. Ктчев В. И. Теория электропривода : учеб, пособие / В.И.Ключев. — 2-е изд. — М. : Энергоатомиздат, 1998. — 396 с.
36. Ковчин С.А. Теория электропривода : учебник / С.А.Ковчин, Ю.А.Сабинин. — СПб. : Энергоатомиздат, 1994. — 496 с.
37. КозярукА. Е. Вопросы надежности тиристорных преобразователей / А.Е.Козярук. — Л. :ЛДНТП,— 1968.- 30 с.
38. Конюхова Е.А. Электроснабжение объектов / Е.А.Конюхова. — М. : Мастерство, 2001.- 284 с.
39. Котлер Ф. Маркетинг. Менеджмент / Ф. Котлер ; пер. с англ. ; подред. О. А.Третьяк, Л. А. Волковой, Ю.Н.Каптуревского. — 9-е изд. — СПб. : Питер, 2000. — 896 с.
40. Котлер Ф. Основы маркетинга / Ф. Котлер. — М. : Прогресс, 1992. — 736 с.
41. Леоненков А. В. Нечеткое моделирование в среде MATLAB и fuzzyTECH / А.В.Ле-оненков. — СПб. : БХВ —Петербург, 2003. — 736 с.
42. Новгородцев А. Б. Расчет электрических цепей в MATLAB : учебный курс / А.Б.Новгородцев. — СПб. : Питер, 2004. — 250 с.
43. ОАО «Электропривод» 60 лет. Страницы истории / под ред. В.Д. Кочеткова. М.Г. Юнькова, О. В.Слежановского, Б. И. Моцохейна. — М. : Знак, 2002. — 203 с.
44. Пивоваров К. В. Бизнес-планирование / К.В.Пивоваров. — 2-е изд. — М. : Маркетинг, 2002. — 164 с.
45. Полещук И. И. AutoCAD 2002 / Н.Н.Полещук. — СПб. : БХВ— Петербург, 2003. — 1200 с.
362
46. Правила устройства электроустановок. — М. : Энергоатомиздат, 1998. — 630 с.
47. Правила эксплуатации электроустановок потребителей. — М. : Энергоатомиздат, 1994. -450 с.
48. Прикладные нечеткие системы : пер. с япон. / [К. Асаи. Д. Ватада. С. Иван и др.] ; под ред. Т.Тэрано, К. Асаи, М.Сугэно. — М. : Мир, 1993. — 368 с.
49. Проектирование систем автоматизации технологических процессов : справ, пособие / [А. С. Клюев, Б. В. Глазов, А.Х.Дубровский, А. А. Клюев] ; под ред. А. С. Клюева. — М. : Энергоатомиздат, 1990. — 464 с.
50. Проектирование электротехнических устройств : учеб, пособие / [В. А. Анисимов, А. О. Горнов, В. В. Москаленко и др.]. — М. : Изд. МЭИ. 2001. — 130 с.
51. Прокопов А. А. Компьютерные технологии автоматизации : учеб, пособие / А.А.Про-копов, Н.И.Татаринцев, Л.А.Цирлин. — СПб. : ЛЭТИ, 2001. — 80 с.
52. Расчет и конструирование элементов электропривода / |В.С. Янковенко и др.]. — М. : Энергоатомиздат, 1987. — 320 с.
53. Ривин Е.И. Динамика привода станков / Е.И.Ривин. — М. : Машиностроение, 1996. - 324 с.
54. Свечарник Д. В. Электрические машины непосредственного привода: Безредук-торный электропривод / Д.В.Свечарник. — М. : Энергоатомиздат, 1988. — 256 с.
55. Современные энергосберегающие электротехнологии : учеб, пособие / [Ю. И. Блинов, А. С. Васильев, А. Н. Никоноров и др.]. — СПб. : ЛЭТИ, 2000. — 564 с.
56. Соколов Н. Г. Основы конструирования электроприводов / Н.Г.Соколов. — М. : Энергия, 1971 — 256 с.
57. Справочник по автоматизированному электроприводу / под. ред. В. А. Елисеева и А. В. Шинянского. — М. : Энергоатомиздат, 1983. — 616 с.
58. Теория механизмов и машин : учеб, пособие / [К.В. Фролов, С.А. Попов, А.К. Мусатов и др.] ; под ред. К.В. Фролова. — М. : Высш, шк., 2003. — 495 с.
59. Тун А. Я. Наладка электрических машин электроприводов / А.Я.Тун. — М. : Энергия, 1970. — 192 с.
60. Химмелъблау Д. Прикладное нелинейное программирование / Д.Химмельблау. — М. : Мир, 1975. - 576 с.
61. Черных И.В. SIMULINK: среда создания инженерных приложений / И.В.Черных ; под ред. В.Г.Потемкина. — М. : ДИАЛОГ-МИФИ, 2003. — 496 с.
62. Шенфельд Р. Автоматизированные электроприводы : пер. с нем. / Р. Шенфельд, Э.Хабигер ; под ред. Ю. А. Борцова. — Л. : Энергоатомиздат, 1985. — 464 с.
63. Электротехническая совместимость оборудования ЛА / [В.П.Булеков, С.Б.Резников, В.Г.Болдырев и др.]. — М. : Изд. МАИ, 1992. — 216 с.
ОГЛАВЛЕНИЕ
Предисловие редакторов.................................................. 3
Введение ............................................................... 6
Глава 1. Содержание инжиниринга..........................................9
1.1. Системный инжиниринг............................................... 9
1.1.1. Объекты и характеристика системного инжиниринга...............9
1.1.2. Унификация, агрегатирование и типизация в системном инжиниринге............................................ 10
1.2. Электротехнический инжиниринг..................................... 13
1.2.1. Объекты и характеристика электротехнического инжиниринга.... 13
1.2.2. Нормативно-технические документы, используемые в электротехническом инжиниринге .................................. 14
1.3. Инжиниринг электроприводов и систем автоматизации................. 18
1.3.1. Создание автоматизированных электроприводов механизмов, машин и комплексов на базе типовых средств............................... 18
1.3.2. Анализ и выбор альтернатив оптимального варианта системы ... 28
1.3.3. Создание средств электроприводов и автоматизации.................................................... 29
1.3.4. Создание распределенных систем автоматизации................ 31
1.4. Бизнес-планы создания нового и модернизации действующего электрооборудования.................................................... 34
1.4.1. Бизнес-план инвестиционного проекта......................... 34
1.4.2. Маркетинговые исследования.................................. 35
1.5. Международные и российские системы стандартов..................... 36
1.5.1. Международные системы стандартов............................ 36
1.5.2. Техническое регулирование и системы стандартов в РФ......... 37
1.6. Сертификация и лицензирование .................................... 46
1.6.1. Сертификация соответствия требованиям технических регламентов, положениям стандартов и условиям договоров......................... 46
1.6.2. Лицензирование отдельных видов деятельности................. 49
1.7. Организационные структуры фирм, занимающихся инжинирингом электроприводов и систем автоматизации. Взаимодействие фирм при реализации крупных проектов....................................................... 50
1.8. Оформление правовых отношений сторон, участвующих в создании новой техники................................................................ 54
1.8.1. Договора и контракты........................................ 54
1.8.2. Охрана интеллектуальной собственности в условиях конкуренции............................................. 55
1.8.3. Правовые отношения на рынке интеллектуальной собственности . 59
Глава 2. Общие положения о проектировании электроприводов и систем автоматизации.......................................................... 61
2.1. Стадии проектирования и состав проектов........................... 61
2.2. Технические задания, требования и условия......................... 63
364
2.3. Технико-экономическое обоснование проектных решений............... 69
2.3.1. Общие сведения.............................................. 69
2.3.2. Жизненный цикл промышленной продукции....................... 69
2.3.3. Инвестиционные проекты. Оценка эффективности проектных решений ............................................................ 72
2.3.4. Методические рекомендации по оценке, анализу и интерпретации показателей экономической эффективности инвестиционного проекта ............................................................ 76
2.4. Использование параметрических рядов номинальных параметров при выборе электрооборудования.................................................... 80
2.5. Выбор электрооборудования в соответствии с требованиями по исполнению и условиям эксплуатации ............................................... 84
2.6. Обеспечение электромагнитной совместимости электрооборудования.... 88
2.6.1. Общие сведения.............................................. 88
2.6.2. Высшие гармоники в кривых токов и напряжений и их влияние на электрооборудование.............................................. 89
2.6.3. Способы и устройства обеспечения электромагнитной совместимости .... 93
2.6.4. Электромеханическая совместимость электродвигателей с силовыми полупроводниковыми преобразователями................................ 95
2.7. Обеспечение надежности электроприводов и систем автоматизации..... 98
2.7.1. Основные понятия и задачи обеспечения надежности.............. 98
2.7.2. Оценочный расчет надежности элементов электрооборудования ..101
2.7.3. Расчет надежности изделий с учетом надежности программных средств.............................................................102
2.8. Выполнение, оформление и комплектование проектов..................104
Глава 3. Расчет и выбор технических и программных средств систем электроприводов и автоматизации........................................109
3.1. Технические средства систем автоматизированных электроприводов ...109
3.1.1. Управляемые преобразователи для низковольтных систем электроприводов переменного тока и их компоненты...........................109
3.1.2. Сервоприводы................................................115
3.1.3. Высоковольтные электроприводы ................................115
3.1.4. Электродвигатели и мотор-редукторы............................118
3.1.5. Коммутационная и защитная аппаратура, дроссели и фильтры ...120
3.1.6. Устройства плавного пуска и торможения асинхронных двигателей.125
3.1.7. Средства модернизации существующих электроприводов постоянного тока................................................................125
3.1.8. Кабели и провода..............................................130
3.1.9. Управляющие и сетевые средства электроприводов..............137
3.1.10. Датчики в системах электропривода..........................140
3.1.11. Низковольтные комплектные устройства.......................145
3.2. Расчет режимов работы и выбор автоматизированных электроприводов....146
3.2.1. Расчет и выбор комплектных электроприводов и их компонентов...146
3.2.2. Расчет гармоник тока и напряжения в электросети, питающей преобразователь частоты.............................................150
3.2.3. Расчет и выбор электроприводов непрерывного действия без рекуперации энергии торможения в электросеть........................154
3.2.4. Расчет и выбор электропривода циклического действия с рекуперацией энергии торможения в электросеть.....................165
3.2.5. Выбор электроприводов с учетом влияния условий эксплуатации и окружающей среды..................................................171
3.3. Программные средства автоматизированных электроприводов...........173
3.3.1. Библиотека программ стандартных функций управления..........173
365
3.3.2. Программное обеспечение параметрирования, мониторинга и наладки электроприводов ........................................177
3.4. Технические средства систем автоматизации........................178
3.4.1. Программируемые логические контроллеры и промышленные компьютеры .......................................................178
3.4.2. Информационные сети и их компоненты .......................180
3.4.3. Пульты и терминалы.........................................180
3.5. Выбор средств автоматизации......................................181
3.6. Программные средства систем автоматизации .......................183
3.6.1. Программные средства промышленных компьютеров, контроллеров, терминалов и интеллектуальных модулей ............................183
3.6.2. Программирование контроллеров для реализации алгоритмов управления оборудованием...........................................187
3.6.3. Программирование контроллеров для решения задач повышения надежности систем управления......................................188
Глава 4. Компьютерные технологии проектирования электроприводов и систем автоматизации.........................................................193
4.1. Инструментальные средства проектирования.........................193
4.1.1. Системы проектирования.....................................193
4.1.2. Основные методы выполнения инженерно-графических работ.....194
4.1.3. Анализ программного обеспечения............................195
4.1.4. Базы данных для проектирования электроприводов и систем автоматизации ....................................................197
4.2. Графические и буквенно-цифровые обозначения на схемах. Форматы и основные надписи...................................................198
4.2.1. Условные графические обозначения элементов схем и цепей....198
4.2.2. Буквенно-цифровые обозначения элементов и устройств .......212
4.2.3. Форматы и основные надписи.................................216
4.3. Проектирование с использованием Microsoft Visio..................218
4.3.1. Вход в Microsoft Visio и выход из него с сохранением выполненной работы............................................................218
4.3.2. Содержание инструментальных средств........................221
4.3.3. Создание электрических схем ...............................222
4.3.4. Выборка образов............................................224
4.4. Проектирование с использованием AutoCAD..........................227
4.4.1. Запуск AutoCAD ............................................227
4.4.2. Сохранение чертежа.........................................232
4.4.3. Открытие и частичное открытие чертежа......................233
4.4.4. Основные приемы черчения ..................................234
4.4.5. Привязка к объектам........................................239
Глава 5. Разработка конструкторской и программной документации........241
5.1. Общие правила выполнения электрических чертежей и схем ..........241
5.1.1. Правила выполнения чертежей................................241
5.1.2. Правила выполнения схем ...................................243
5.1.3. Текстовая информация на чертежах и схемах..................244
5.2. Чертежи электроизделий ..........................................246
5.2.1. Чертеж общего вида.........................................246
5.2.2. Сборочный чертеж...........................................247
5.3. Схемы структурные и функциональные...............................247
5.3.1. Схемы электрические структурные ...........................247
5.3.2. Схемы электрические функциональные.........................255
5.4. Схемы электрические принципиальные...............................258
5.4.1. Особенности выполнения принципиальных схем.................258
366
5.4.2. Схемы автоматизированных однодвигательных электроприводов механизмов.........................................................266
5.4.3. Схемы автоматизированных многодвигательных электроприводов механизмов.........................................................266
5.4.4. Схемы систем автоматизации .................................267
5.5. Схемы соединений и подключения....................................267
5.5.1. Схемы электрические соединений. Таблицы соединений..........267
5.5.2. Схемы электрические подключения. Таблицы подключения........279
5.6. Схемы электрические — общая, расположения, объединенная...........279
5.7. Текстовые документы в составе конструкторских документов..........285
5.7.1. Виды текстовых документов...................................285
5.7.2. Пояснительная записка и отчет о научно-исследовательской работе.286
5.7.3. Спецификация................................................287
5.7.4. Перечни и ведомости.........................................287
5.8. Программная документация..........................................288
5.8.1. Виды и содержание программных документов ...................288
5.8.2. Выполнение программных документов...........................290
Глава 6. Компьютерные технологии исследования и оптимизации систем автоматизированных электроприводов производственных машин..............293
6.1. Компьютерные средства для решения задач исследования и оптимизации....293
6.1.1. Анализ компьютерных средств.....................................293
6.1.2. MATLAB Simulink и его приложения ...........................296
6.2. Синтез, исследование и оптимизация параметров систем регулирования и управления...........................................................299
6.2.1. Автономные системы управления...............................299
6.2.2. Взаимосвязанные системы управления..........................303
6.2.3. Исследование и эквивалентирование моделей, описывающих упругие механические связи электроприводов.................................309
6.3. Моделирование и исследование пусковых, остановочных, циклических и других режимов работы машин и комплексов в технологическом процессе...............................................................313
6.4. Моделирование и исследование аварийных ситуаций ..................327
6.5. Компьютерные методы исследования с визуализацией движений механизмов и процессов обработки вещества (материала).............................331
Глава 7. Монтаж, наладка и эксплуатация электроприводов и систем автоматизации..........................................................339
7.1. Нормативно-техническое обеспечение электромонтажных работ, наладки и эксплуатации электротехнических установок............................339
7.2. Проектно-сметная документация для производства монтажных работ....343
7.3. Организация электромонтажных и пусконаладочных работ..............346
7.4. Методы настройки параметров электротехнического оборудования, параметрирование комплектных электроприводов...........................349
7.5. Приемосдаточные испытания оборудования............................355
7.6. Гарантийное и сервисное обслуживание..............................356
7.7. Экологические аспекты внедрения и модернизации технологических объектов...............................................................357
Приложение. Internet-информация: средства систем электроприводов и автоматизации и методики расчета и проектирования регулируемых электроприводов.....................................................359
Список литературы..........................................................361
Учебное издание
Белов Михаил Петрович, Зементов Олег Иванович, Козярук Анатолий Евтихиевич, Козлова Людмила Петровна, Новиков Владислав Александрович, Савва Сергей Владимирович, Чернигов Леонид Михайлович, Горохов Сергей Георгиевич, Татаринцев Николай Иванович
Инжиниринг электроприводов и систем автоматизации
Учебное пособие
Под редакцией В. А. Новикова, Л. М. Чернигова
Редактор В. Н. Махова
Технический редактор Н. И. Горбачева Компьютерная верстка: Г. Ю. Никитина Корректоры Т. В. Кузьмина, И. Н. Волкова
Изд. № 101109869. Подписано в печать 28.03.2006. Формат 70x100/16.
Гарнитура «Таймс». Печать офсетная. Бумага тип. № 2. Ус л. печ. л. 29,9.
Тираж 3000 экз. Заказ № 5625.
Издательский центр «Академия», www.academia-moscow.ru
Санитарно-эпидемиологическое заключение № 77.99.02.953.Д.004796.07.04 от 20.07.2004.
117342, Москва, ул. Бутлерова. 17-Б. к. 360. Тел. факс: (495)330-1092, 334-8337.
Отпечатано с электронных носителей lu.iaie. п>ства.
ОАО "Тверской полиграфический комбпиа Г. 170024. г. Тверь, пр-т Лепина. 5.
Телефон:(4822) 44-52-03. 44-50-34. Телефон факс: (4822) 44-42-15.
Home page - www.tverpk.ru. Электронная почia (E-mail) - sales<PH\erpk.ru
Ж