













































































































































































































































































































































































































































Похожие



Текст
Ю.А. СМИРНОВ
РАДИОТЕХНИЧЕСКАЯ
РАЗВЕДКА
МОСКВА
ВОЕННОЕ ИЗДАТЕЛЬСТВО
200 1
Смирнов Ю.А.
Радиотехническая разведка. — М.: Воениздат, 2001. —
456 с., ил.
В учебнике изложены теоретические основы организации и ведения ра-
диотехнической разведки.
Автор выражает глубокую благодарность за оказанную помощь в консуль-
тации и написании рукописи кандидату технических наук, старшему научно-
му сотруднику Г.П. ГАДЖУНУ и кандидату технических наук А.В. ГУРИНУ.
ПРЕДИСЛОВИЕ
Радиоэлектронная разведка, являясь составной частью
военной разведки, в последнее время превратилась в важ-
нейший элемент единой автоматизированной системы раз-
ведки и предупреждения об агрессии, обеспечивающий бое-
вые действия войск и контроль за выполнением договоров и
соглашений по сокращению вооруженных сил и вооруже-
ний.
Только радиоэлектронная разведка, обладающая высо-
ким пространственным и информационным доступом, с
достаточной полнотой и достоверностью способна обеспе-
чить необходимыми данными о военно-политической об-
становке, группировках войск, их действиях и намерениях,
тенденциях развития вооружения и военной техники. Одной
из важнейших составных частей системы радиоэлектрон-
ной разведки является радиотехническая разведка.
В учебнике сформулированы основные пути рациональ-
ного построения средств радиотехнической разведки в усло-
виях неопределенности исходных данных о разведываемой
стороне. Учитывая то, что в современных условиях пробле-
ма энергетической доступности источников радиотехниче-
ской разведки является ключевой, значительное место в
учебнике уделено построению устройств оптимальной обра-
ботки сигналов.
Ранее разработанные средства радиотехнической развед-
ки ориентированы прежде всего на простые сигналы с по-
стоянными параметрами, *гогда как в настоящее время бо-
лее 90 % радиолокационных станций излучают сигналы с
переменными параметрами и сложной структурой. Поэтому
в учебнике достаточно подробно рассматриваются вопро-
сы анализа таких сигналов, их распознавания и идентифи-
кации при асинхронном методе пеленгования.
Значительное место уделено методам идентификации
сигналов с изменяющейся структурой, в том числе от импу-
льса к импульсу.
3
Широкое освещение нашли вопросы пеленгования,
определения местоположения источников радиоизлучений
угломерными методами, принципы построения разно-
стно-дальномерных комплексов и устройств скрытого пере-
носа изображений с экранов разведываемых РЛС на экран
станции радиотехнической разведки.
Большое внимание в учебнике уделено принципам по-
строения конкретных элементов и систем станций и ком-
плексов радиотехнической разведки, что позволяет увя-
зать методику применения общетеоретических положений с
разработкой разведывательной аппаратуры.
I. ЗАДАЧИ И МЕТОДЫ ВЕДЕНИЯ
РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ
1.1. ЗАДАЧИ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ.
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Радиотехническая разведка является составной частью радио-
электронной разведки и выполняет задачи по вскрытию состава
группировок войск разведываемых государств, характера их дейст-
вий и намерений, осуществляя перехват и анализ излучений ра-
диотехнических средств и систем, применяемых для обеспечения
боевых действий и управления оружием.
В мирное время радиотехническая разведка способна осущест-
влять постоянное наблюдение за группировками вооруженных
сил разведываемых государств, определять их учебно-боевую дея-
тельность, вскрывать признаки состояния объектов разведки.
В угрожаемый период основные усилия радиотехнической раз-
ведки сосредоточиваются на вскрытии мероприятий по переводу
вооруженных сил разведываемых государств с мирного на военное
положение, определении возможного замысла их действий, сро-
ков и способов развязывания войны, мероприятий командования
по приведению средств доставки ядерных боеприпасов в готов-
ность к нанесению ударов. В этот период ее основные задачи за-
ключаются в установлении сроков и степени наращивания дежур-
ных ядерных сил, вскрытии рассредоточения тактической авиа-
ции на запасных аэродромах, определении мест расположения
складов ядерного оружия и степени готовности системы противо-
воздушной обороны.
С появлением на вооружении разведывательных ударных ком-
плексов радиотехническая разведка будет участвовать в решении
задач огневого подавления систем управления войсками и оружи-
ем. Радиотехническая разведка из подсистемы, обеспечивающей
боевые действия, может превратиться *в подсистему, непосредст-
венно участвующую в них.
С началом и в ходе боевых действий состояние подсистемы ра-
диотехнической разведки, искусство ее ведения являются важней-
шими факторами, определяющими боевую готовность войск.
Перечисленные выше задачи решаются на основе получения
сведений о состоянии конкретных объектов вооруженных сил раз-
ведываемых государств.
Объектами радиотехнической разведки являются:
5
соединения, части и подразделения ядерного оружия и органы
их управления;
стратегическая, тактическая и военно-транспортная авиация,
ее органы управления и аэродромы базирования;
соединения, части и подразделения, органы управления и опо-
вещения систем ПРО и ПВО;
соединения, части и подразделения полевой артиллерии сухо-
путных войск и их органы управления;
части и подразделения радиоэлектронной борьбы и их органы
управления;
корабли военно-морских сил и военно-морские базы;
ракетно-космические испытательные полигоны;
радионавигационные системы.
Объекты радиотехнической разведки обнаруживают (проявля-
ют) себя через работу радиоэлектронных средств, обеспечиваю-
щих их функционирование. Эти радиоэлектронные средства на-
зывают источниками разведывательных сведений.
Источниками получения разведывательных сведений для ра-
диотехнической разведки являются излучающие радиоэлектрон-
ные средства различного назначения, установленные непосредст-
венно на военной технике, развернутые на пунктах управления су-
хопутных войск, военно-воздушных, военно-морских сил, на
авиационных базах и посадочных площадках, стартовых и огневых
позициях ракет и артиллерии, зенитных ракетных частей и по-
дразделений, в боевых порядках войск.
Основными источниками разведывательных сведений являют-
ся:
бортовые РЛС всех классов;
РЛС, развернутые на аэродромах, в центрах, пунктах и на по-
стах управления;
радиолокационные запросчики и ответчики системы опознава-
ния;
РЛС в районах стартовых позиций ракетно-ядерного оружия
для обеспечения данными о метеорологической обстановке в пе-
риод непосредственной подготовки пуска ракет;
РЛС на позициях дивизионов и батарей зенитных ракетных
комплексов и зенитной артиллерии;
РЛС центров и постов управления и оповещения, радиолока-
ционных постов системы ПВО;
РЛС на специальных самолетах дальнего радиолокационного
обнаружения;
радионавигационные системы;
системы управления огнем и оружием;
корабельные радиолокационные станции и системы;
средства радио-, радиорелейной, тропосферной и спутниковой
связи.
Под разведывательными сведениями понимают результаты на-
блюдения за работой источников разведывательной информации.
6
Обработанные разведывательные сведения с оперативно-так-
тическими выводами являются разведывательными данными.
Разведывательные сведения и разведывательные данные со-
ставляют разведывательную информацию.
Разведывательная информация от источников разведыватель-
ных сведений может быть получена только через физические поля
или электромагнитное, тепловое или световое излучение.
Радиотехническая разведка использует только один переносчик
разведывательной информации— электромагнитное поле, поэто-
му единственным носителем информации здесь является сигнал.
Задачи по добыванию информации решаются комплексом
средств с использованием различных методов ее обобщения и об-
работки. Средствами радиотехнической разведки решаются зада-
чи по приему, анализу сигналов, опознаванию типа радиолокаци-
онных станций, пеленгованию и определению их местоположе-
ния.
1.2. МЕТОДЫ ВЕДЕНИЯ РАДИОТЕХНИЧЕСКОЙ
РАЗВЕДКИ
Методы ведения радиотехнической разведки определяются си-
лами и средствами, выделенными для добывания разведыватель-
ных данных.
Для одного средства или небольшой группы средств радиотех-
нической разведки основными методами являются радиотехниче-
ские поиск и наблюдение.
Для формирований из нескольких групп средств радиотехниче-
ской разведки основными методами являются структурно-инфор-
мационный и структурно-системный.
Радиотехнический поиск ведется одним средством или неболь-
шой группой средств в целях выявления источников разведыва-
тельных сведений, определения характеристик их сигналов, опе-
ративной ценности, назначения и принадлежности.
Радиотехническое наблюдение ведется в целях получения уточ-
ненной разведывательной информации об источниках разведыва-
тельных сведений, главным образом об изменении режимов их ра-
боты. Радиотехническое наблюдение может быть непрерывным,
периодическим и контрольным.
Структурно-информационный метод заключается в использова-
нии группы средств для добывания сведений о пространствен-
но-временных характеристиках сигналов, режимах работы радио-
электронных средств в целях определения типов, назначения,
принадлежности к объектам разведки, состава и местоположения
разведываемых объектов.
Структурно-системный метод заключается в комплексном
применении сил и средств радиотехнической разведки различного
назначения в целях получения данных о составе, состоянии и дея-
тельности объектов радиотехнической разведки в масштабе време-
ни, близком к реальному.
7
Процесс ведения радиотехнической разведки слагается из до-
бывания разведывательных сведений, их обработки, получения
разведывательных данных и доведения их до заинтересованных
инстанций.
1.3. ОБЩИЕ СВЕДЕНИЯ О ДОБЫВАНИИ И ОБРАБОТКЕ
РАЗВЕДЫВАТЕЛЬНОЙ ИНФОРМАЦИИ
Основными способами добывания разведывательной инфор-
мации в радиотехнической разведке являются прием радиоизлуче-
ний и определение местоположения радиоэлектронных средств
вооруженных сил разведываемых государств.
Перехват радиоизлучений представляет собой следующий ком-
плекс мероприятий:
обнаружение излучающих радиоэлектронных средств в частот-
ном диапазоне и в пространстве;
прием обнаруженных радиоизлучений;
анализ сигналов;
передачу добытых разведывательных сведений для последую-
щей обработки.
Обнаружение излучающих радиоэлектронных средств заключает-
ся в установлении факта их работы в данный момент времени. По-
скольку частоты излучений и местоположение радиоэлектронных
средств заранее не известны, то процесс обнаружения слагается из
поиска и обнаружения сигналов в частотном диапазоне, поиска и
обнаружения сигналов в пространстве.
Прием обнаруженных радиоизлучений имеет целями выделение
сигналов из помех и их усиление до уровня, необходимого для
срабатывания анализирующей и регистрирующей аппаратуры и
проведения анализа сигналов.
Под анализом сигналов понимают совокупность операций над
сигналом, в результате которого определяют тип, назначение, ре-
жим работы радиоэлектронного средства, устанавливают его при-
надлежность к конкретным объектам разведки. Регистрация при-
нимаемых радиоизлучений заключается в консервации основных
характеристик и параметров радиоизлучений в целях их детально-
го анализа и документального подтверждения. Регистрация сигна-
лов осуществляется с помощью электронно-лучевых индикаторов,
запоминающих цифровых устройств, ферромагнитной ленты, ки-
ноленты, термопластической записи, магнитооптики, электрохи-
мической бумаги и т.п.
Добытые разведывательные сведения передаются по инстанции
для последующей обработки. Определение местоположения ис-
точников радиоизлучений в существующих системах радиотехни-
ческой разведки осуществляется: путем радиотехнического пелен-
гования с нескольких разнесенных в пространстве точек; измере-
нием времени задержки импульсов сигналов, пришедших в
различные пункты приема (разностно-дальномерный способ); ме-
тодом комплексного синхронного анализа прямых, отраженных и
8
переизлученных сигналов РЛС с переносом изображения с экрана
РЛС противника на экран средства радиотехнической разведки.
Для повышения точности и надежности определения местопо-
ложения источников радиоизлучений результаты пеленгования
можно статистически обрабатывать. Важной проблемой радиотех-
нической разведки является обобщение результатов пеленгования
и анализа сигналов. Обработка разведывательных сведений имеет
целями извлечение из них разведывательных данных о составе и
состоянии группировки войск разведываемых государств, о состо-
янии и уровне технического развития их радиоэлектронных сис-
тем и оружия. Процесс обработки разведывательных сведений
включает:
измерение параметров и характеристик сигналов;
определение местоположения источников радиоизлучений;
определение назначения радиоэлектронных средств;
определение типов радиоэлектронных средств;
выявление индивидуальных особенностей в параметрах и
структуре сигналов;
идентификацию и индивидуальное опознавание конкретных
образцов радиоэлектронных средств;
определение состава радиоэлектронных средств на объектах
разведки;
вскрытие режимов работы радиоэлектронных средств;
определение боевых возможностей оружия и обеспечивающих
его радиоэлектронных средств;
выявление разведывательных признаков ситуаций;
накопление и обобщение разведывательных сведений в целях
эталонного описания объектов;
систематизацию и обобщение выявленных разведывательных
данных об объектах разведки, классификацию их по степени важ-
ности и достоверности, сопоставление их с данными других видов
разведки;
разработку отчетных документов по результатам разведки.
Степень обработки разведывательных сведений на каждом
уровне определяется видом и характером аппаратуры разведки,
средств обработки и систем передачи данных.
Для распознавания типов и конкретных экземпляров радио-
электронных средств, определения их назначения, места установ-
ки, способа перемещения в пространстве, принципа действия и
для вскрытия режимов работы «используются соответствующие
разведывательные признаки.
Разведывательные признаки подразделяются на режимные,
опознавательные, ситуационные и оперативно-тактические.
К режимным разведывательным признакам относятся, как пра-
вило, различия в параметрах и структуре сигналов радиоэлектрон-
ных средств, связанные с изменением режимов их работы, а также
изменением формы, структуры и потока сигналов.
К опознавательным признакам относятся совокупности пара-
метров и характеристик сигналов, позволяющих определить тип,
9
конкретный экземпляр, государственную принадлежность и на-
значение радиоэлектронного средства.
К ситуационным разведывательным признакам относятся при-
знаки изменения ситуации в полосе разведки: изменение степени
боевой готовности, перевод войск с мирного на военное положе-
ние и т.д.
Оперативно-тактическими признаками считаются такие харак-
теристики радиоэлектронных средств, которые раскрывают прин-
ципы их боевого применения и позволяют получать данные о ха-
рактере разведываемых объектов и систем. К оперативно-тактиче-
ским признакам относятся назначение, тип, состав,
местоположение, режим работы, роль и место радиоэлектронных
средств в боевых порядках войск.
Учет и накопление разведывательных данных (сведений) и раз-
ведывательных признаков, поступающих от групп средств радио-
технической разведки, осуществляются централизованно в выше-
стоящих инстанциях.
1.4. ПУТИ РАЦИОНАЛЬНОГО ПОСТРОЕНИЯ СРЕДСТВ
РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ
Станции и комплексы радиотехнической разведки должны раз-
рабатываться на основе всестороннего изучения форм и методов
ведения вооруженной борьбы, глубокого анализа ожидаемой ра-
диоэлектронной обстановки в полосе разведки и радиоэлектрон-
ного обеспечения боевых действий войск противника.
Если произвести такой анализ для средств радиотехнической
разведки оперативного звена, то можно отметить, что уже в насто-
ящее время радиоэлектронная обстановка будет создаваться более
чем 30 тыс. радиоэлектронных средств противника, насчитываю-
щих более чем 900 типов. Причем число типов радиоэлектронных
средств и насыщение ими войск будут непрерывно наращиваться.
Следует учитывать, что не все радиоэлектронные средства про-
тивника имеют одинаковое значение для обеспечения боевой дея-
тельности разведуемой группировки и не все несут одинаковое ко-
личество нужной нам информации, поэтому не обязательно все
они должны подлежать радиотехнической разведке (обнаруже-
нию, анализу, пеленгованию). В противном случае в систему воо-
ружения разведки пришлось бы включать такое количество техни-
ки, на производство которой потребовались бы десятки лет, а на
ее изготовление и боевое применение— огромные людские и ма-
териальные ресурсы. Поэтому одним из путей рационального по-
строения системы вооружения является ограничение и конкрети-
зация задач, решаемых средствами радиотехнической разведки,
путем выбора в качестве источников только тех радиоэлектронных
средств, разведка которых может дать ощутимый оперативный и
тактический эффект.
Нельзя при этом не учитывать, что разработку средств разведки
чриходится проводить в условиях большой неопределенности ис-
10
ходных данных о противнике. К началу разработки средств раз-
ведки оказывается известной только часть, как правило, устарев-
ших образцов радиоэлектронных средств противника. Если
учесть, что станции радиотехнической разведки разрабатываются
в течение нескольких лет, после которых длительное время дол-
жны находиться на вооружении и быть эффективными не только
на момент начала разработки, а и на период боевого применения в
войсках, то можно сказать, что неопределенность исходных дан-
ных является важным фактором при разработке перспективных
систем вооружения. Поэтому одним из путей рационального по-
строения средств радиотехнической разведки в условиях объек-
тивно существующей и принципиально неустранимой неопреде-
ленности данных является универсализация методов приема и
анализа сигналов и унификация устройств.
Под универсализацией понимается разработка таких методов,
которые позволяют максимально ослабить зависимость эффек-
тивности разрабатываемых систем от видов принимаемых радио-
сигналов, изменения их структуры, мер повышения скрытности,
условий боевого применения радиоэлектронных средств против-
ника, дезинформации и т.д.
Унификация устройств предполагает создание однотипных уз-
лов, блоков, станций, удовлетворяющих условиям размещения,
эксплуатации, модернизации, наращивания возможностей по
диапазону, скорости обработки, энергетическому потенциалу,
объему памяти и другим характеристикам в целях быстрейшей
адаптации к ведению разведки новых, неизвестных ранее источ-
ников радиоизлучения.
Для повышения эффективности перспективного образца воо-
ружения при его разработке должна быть заложена возможность
комплексного ведения радиотехнической разведки, при которой
предусматривается одновременный прием, анализ и обработка
сигналов всех радиоэлектронных средств, находящихся на объек-
те: средств радиолокации, радионавигации, управления и связи.
К числу путей рационального построения следует отнести и со-
кращение до минимума времени на разработку, производство и
освоение в войсках новых и модернизацию существующих средств
радиотехнической разведки, что снижает влияние фактора неоп-
ределенности исходных данных о противнике. Для этого должны
быть учтены соответствующие предпосылки:
непрерывно возрастающий»уровень научных исследований во-
просов, связанных с разработкой образца вооружения, методов
приема и анализа сигналов, идентификации источников радиоиз-
лучений, основанных на новых физических принципах;
создание аппаратуры блочного типа из расчета использования
однотипных блоков в средствах радиотехнической разведки раз-
личного назначения;
возможность быстрого перепрограммирования задач, решае-
мых станцией (комплексом);
н
изменение характера, принципов обработки и анализа сигна-
лов с помощью программируемых средств.
Состав комплексов разведки в процессе их разработки должен
непрерывно уточняться с учетом результатов оценки их боевой
эффективности, а их реализуемость должна быть согласована с
уровнем ассигнований и отведенных для этих целей материальных
ресурсов.
К рациональным путям построения следует отнести системный
подход к разработке средств радиотехнической разведки, который
предусматривает многообразие связей в самой станции (комплек-
се) и между ними путем сведения этих связей в единую систему с
учетом основ системного анализа.
Процесс системного анализа включает: постановку задачи на
исследование, сбор, обобщение и прогнозирование исходных дан-
ных, построение моделей, отображающих взаимосвязь между эле-
ментами системы радиотехнической разведки; расчет, моделиро-
вание и сравнение различных вариантов структур станций и комп-
лексов; экспериментальную проверку и получение заключений.
При рациональной разработке средств радиотехнической раз-
ведки следует учитывать принципы необходимого и возможного в
области системы вооружения.
Необходимое определяется военной политикой, характером
военной доктрины, задачами, возлагаемыми на систему, а также
тактико-техническими требованиями к средствам разведки.
Возможное определяется уровнем знаний в соответствующих
областях науки и техники, уровнем развития экспериментальной,
испытательной, технологической базы и экономическими воз-
можностями государства. При этом следует различать абстракт-
ную и реальную возможности.
Область формальной возможности характеризуется располагае-
мыми возможностями использования познания законов природы
в интересах решения задач разведки. Расширение этой области до-
стигается проведением фундаментальных научных исследований.
Область абстрактной возможности представлена знаниями, ко-
торые могут быть использованы для решения задач с учетом конк-
ретных ограничений и условий.
Результаты реализации выполняемых опытно-конструкторских
работ образуют область реальной возможности. При разработке
средств радиотехнической разведки следует использовать концеп-
цию запланированной модернизации, которая заключается в бы-
строй разработке новых систем на базе проверенных технических
решений с одновременным планированием их последующих усо-
вершенствований в соответствии с имеющимися требованиями
или появившимися возможностями. Реализация этой концепции
опирается на блочно-модульный принцип компоновки аппарату-
ры и развитие микропроцессорной техники, которые позволяют
при стандартизации форм обмена информацией и способов со-
пряжения несколько раз заменять отдельные блоки более совер-
шенными.
12
Для определения тактико-технических характеристик перспек-
тивных средств надо использовать методы нормативного прогно-
зирования, статистические и экспертные методы, а также методы
восполнения недостающих информационных данных на основе
построения математических и информационных моделей функци-
онирования программируемых объектов.
Учет перечисленных выше путей рационального построения
эффективных средств радиотехнической разведки требует от спе-
циалистов в этой области глубоких и разносторонних знаний по
таким дисциплинам, как математика, физика, кибернетика, ра-
диоэлектроника, тактика, основы построения станций и комплек-
сов радиотехнической разведки.
2. ОБНАРУЖЕНИЕ РАБОТАЮЩИХ
РАДИОЭЛЕКТРОННЫХ СРЕДСТВ ПРОТИВНИКА
2.1. ОБНАРУЖЕНИЕ (ПОИСК) РАБОТАЮЩИХ
РАДИОЭЛЕКТРОННЫХ СРЕДСТВ В ПРОСТРАНСТВЕ
Для оценки возможностей и эффективности добывания разве-
дывательных сведений средствами радиотехнической разведки не-
обходимо учитывать следующее:
радиоэлектронные средства противника развернуты в полосе
разведки в соответствии с боевым порядком (оперативным по-
строением) войск неравномерно: на отдельных направлениях
плотность их распределения больше, на других — меньше, а на не-
которых направлениях они могут вообще отсутствовать;
радиоэлектронные средства имеют различный энергетический
потенциал, а их удаление от линии фронта (линии соприкоснове-
ния войск, государственной границы) определяется также боевы-
ми порядками (оперативным построением) войск;
современные радиоэлектронные средства, подлежащие радио-
технической разведке, работают в очень широком диапазоне час-
тот (от единиц килогерц до десятков тысяч мегагерц);
в большинстве радиоэлектронных средств противника исполь-
зуются вращающиеся антенны с направленными диаграммами из-
лучения, поэтому прием излучения при произвольном положении
антенны РЛС в заданный момент времени носит вероятностный
характер;
по характеру использования многие радиоэлектронные средст-
ва противника включаются на излучения кратковременно, что
ограничивает время приема и обработки их сигналов;
современные радиоэлектронные средства противника имеют
разнообразную, сложную и изменяющуюся структуру излучений.
Из перечисленного выше следует, что с помощью средств ра-
диотехнической разведки можно обнаружить работающие радио-
электронные средства противника только на определенной даль-
ности, в конкретном направлении, на данной частоте и только в
определенный момент времени, имея специальную аппаратуру
для приема простых и сложных сигналов с неизвестной структу-
рой.
Таким образом, обнаружение работы радиоэлектронных
средств противника является сложным событием, слагающимся из
ряда условий, к которым можно отнести следующие:
14
в зоне разведки должна быть обеспечена электромагнитная до-
ступность, т.е. уровень сигнала радиоэлектронного средства про-
тивника на входе приемного устройства станции радиотехниче-
ской разведки должен превышать его реальную чувствительность:
Р > Р ;
вх р ’
диаграммы направленности антенн разведываемого радиоэлек-
тронного средства и станции радиотехнической разведки должны
встретиться;
в момент встречи диаграмм приемное устройство станции ра-
диотехнической разведки должно быть настроено на частоту излу-
чаемого сигнала;
за время встречи диаграмм направленности антенн радиоэлект-
ронного средства и станции радиотехнической разведки должен
быть принят сигнал с длительностью, достаточной для его обра-
ботки и регистрации.
Для обнаружения работающих радиоэлектронных средств про-
тивника с помощью станции радиотехнической разведки необхо-
димо выполнить все выше перечисленные условия. —
Для удовлетворения первого условия приемные устройства
должны иметь высокую эквивалентную чувствительность во всем
диапазоне разведываемых частот:
где Рр— реальная чувствительность приемника;
Gp — коэффициент направленного действия антенны.
Это возможно только при высокой чувствительности приемно-
го устройства и наличии антенны с большим коэффициентом на-
правленного действия.
Для удовлетворения второго условия необходимо вести поиск
по направлению, т.е. вращать диаграмму направленности антенны
станции радиотехнической разведки в заданном секторе или вкру-
говую. При этом полагают, что диаграмма направленности в вер-
тикальной плоскости достаточно широкая и нет необходимости
вести поиск по углу места. Для большинства станций радиотехни-
ческой разведки это условие, как правило, выполняется.
Для удовлетворения третьего условия нужно вести поиск в час-
тотном диапазоне,д.е. перестраивать избирательную часть прием-
ника по частоте или использовать широкополосное приемное
устройство, способное принимать сигналы во всем диапазоне час-
тот без перестройки (осуществлять беспоисковый прием сигна-
лов).
Для удовлетворения четвертого условия необходимо иметь ан-
тенную систему станции радиотехнической разведки с широкой
диаграммой направленности при заданной высокой скорости вра-
щения или с узкой диаграммой при медленной скорости враще-
ния.
Поскольку чувствительность приемного устройства, скорость
вращения антенны и ширина диаграммы направленности заданы
15
при разработке станции радиотехнической разведки, то перехват
сигналов работающих радиоэлектронных средств будет слагаться в
основном из обнаружения по направлению и по частоте.
В современных средствах радиотехнической разведки исполь-
зуются варианты совмещения поисковых и беспоисковых методов
обнаружения:
комплексы “Тамара”, “Рамона-Планшет”— беспоисковые по
направлению, поисковые по частоте;
станции “Пост-ЗМ”, “РПС-6" ,’’Кольчуга”- беспоисковые по
частоте и поисковые по направлению;
комплексы “Сахалин”, СДР-2А — комбинированные по часто-
те и поисковые по направлению.
Для обнаружения работы радиоэлектронного средства по на-
правлению используются как поисковые, так и беспоисковые ме-
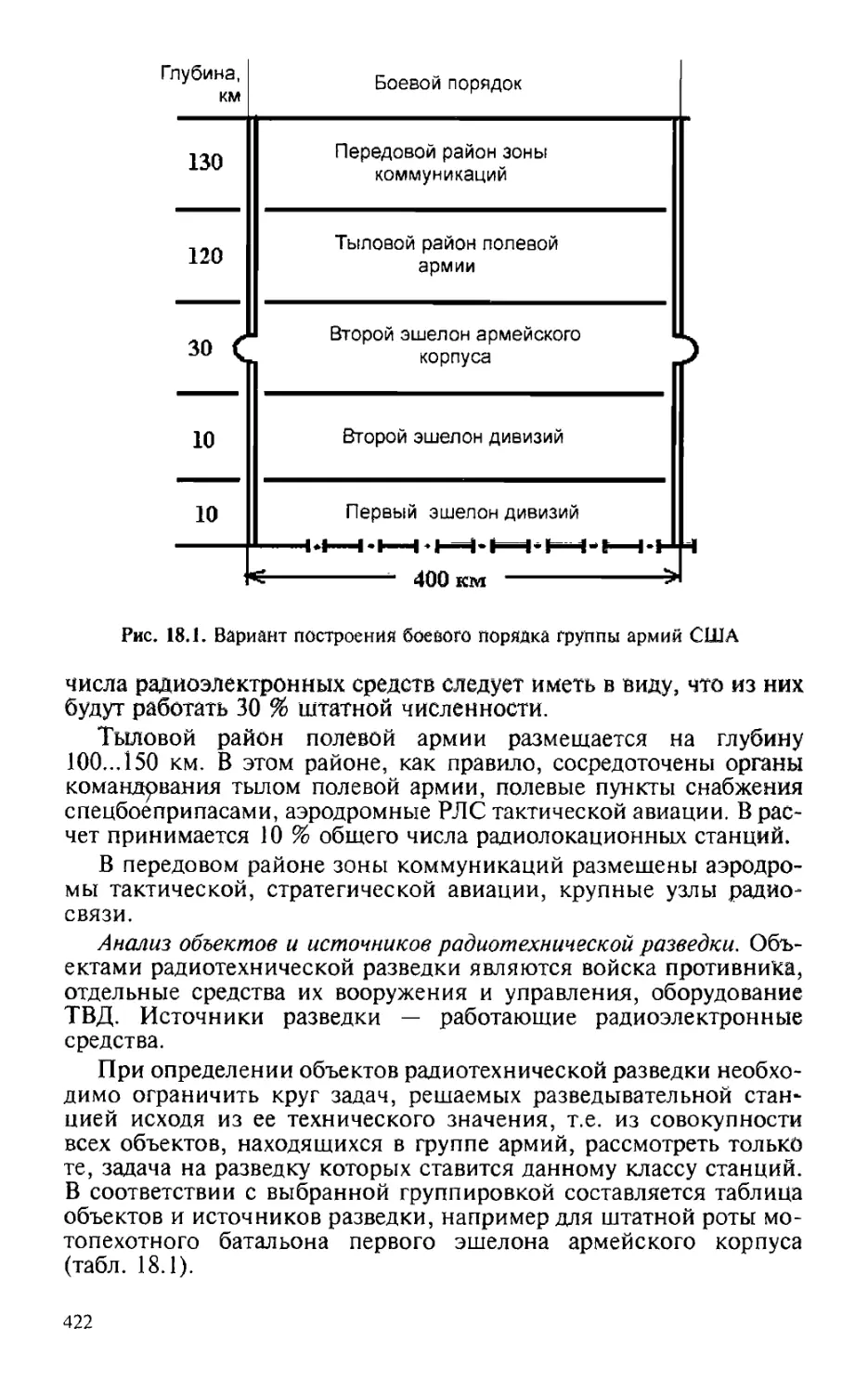
тоды (рис. 2.1).
Рис. 2.1. Методы обнаружения РЭС по направлению
В целях реализации поисковых методов обнаружения радио-
электронных средств по направлению используются вращающие-
ся или сканирующие антенные системы.
Под поиском по направлению понимают процесс обнаружения
работающих радиоэлектронных средств путем последовательного
или ведущегося по определенному закону просмотра пространства
диаграммой направленности антенны станции радиотехнической
разведки. Поиск можно вести в секторе или вкруговую. При рас-
смотрении поиска в пространстве следует учитывать два возмож-
ных случая:
поиск радиоэлектронных средств, имеющих направленное из-
лучение с вращением диаграммы направленности в горизонталь-
ной плоскости;
поиск радиоэлектронных средств, имеющих ненаправленное
излучение.
16
Наиболее общим является первый случай. При ведении поиска
по направлению могут быть пропуски сигналов за счет кратковре-
менности работы радиоэлектронного средства, а также за счет
того, что в момент облучения станции радиотехнической разведки
ее антенна не направлена на разведываемое радиоэлектронное
средство. По наличию или отсутствию пропусков приема сигналов
поисковые методы обнаружения разделяют на гарантированные и
вероятностные. Если за один период вращения антенны радио-
электронного средства Та обеспечивается достоверный прием сиг-
налов, то поиск называется гарантированным. В противном слу-
чае поиск имеет вероятностный характер.
Гарантированный поиск может быть медленным и быстрым. В
ряде случаев используют беспоисковый метод обнаружения по на-
правлению или частоте. Для сравнительной оценки методов обна-
ружения применяются следующие критерии:
вероятность обнаружения работающего радиоэлектронного
средства;
время обнаружения с заданной вероятностью;
средняя частота повторений приема сигналов.
Вероятность обнаружения работающего радиоэлектронного
средства по направлению при предварительной настройке прием-
ника станции разведки на частоту сигнала и достаточном превы-
шении сигнала над шумом определяется вероятностью встречи
диаграмм направленности. При этом следует иметь в виду, что
время приема сигналов (длительность реализации) тс должно быть
не меньше времени, необходимого для их обработки и отображе-
ния. Поэтому вероятность обнаружения по направлению можно
представить выражением
Л ^о),
где Рв — вероятность встречи диаграмм направленности ан-
тенн радиоэлектронного средства и станции радио-
технической разведки;
Р(тс >т0) — условная вероятность приема сигналов длительно-
стью не менее заданной (т0) при условии, что встре-
ча диаграмм направленности состоялась.
Временем встречи называют продолжительность встречи диа-
грамм направленности антенн радиоэлектронного средства и
станции радиотехнической разведки, в течение которой принимаются
сигналы разведывательной станцией. Важной характеристикой является
время обнаружения по направлению /„.'Временем обнаружения по направ-
лению называется время, в течение которого работающие радиоэлектрон-
ные средства обнаруживаются с заданной вероятностью.
Определим вероятность встречи диаграмм направленности ан-
тенн радиоэлектронного средства и станции радиотехнической
разведки.
В практике ведения радиотехнической разведки наиболее часто
возникает задача поиска новых источников радиоизлучения, мес-
тоположение которых, а следовательно, и направление на них с
17
позиции станции разведки неизвестны. Значит, нужно осуществ-
лять поиск в пространстве, перемещая (вращая) диаграмму на-
правленности вкруговую или в априорно заданном секторе с пери-
одом Гр.
Поскольку антенна радиоэлектронного средства вращается с
периодом Га, то встреча диаграмм направленности будет происхо-
дить не за каждый оборот, а за п оборотов. Число оборотов антен-
ны п зависит от соотношения периодов 7р и 7а.
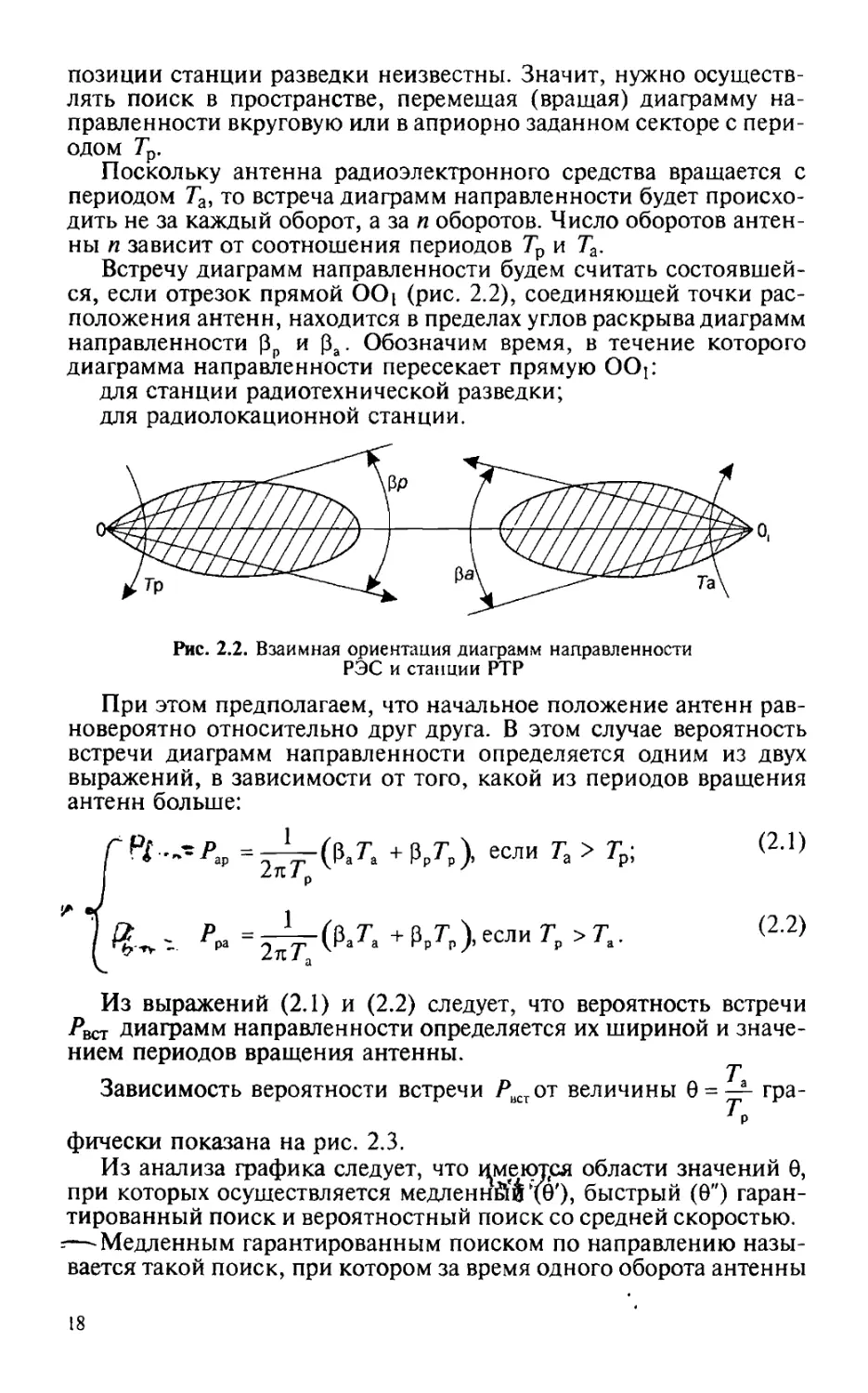
Встречу диаграмм направленности будем считать состоявшей-
ся, если отрезок прямой OOi (рис. 2.2), соединяющей точки рас-
положения антенн, находится в пределах углов раскрыва диаграмм
направленности 0р и ра. Обозначим время, в течение которого
диаграмма направленности пересекает прямую ОО^
для станции радиотехнической разведки;
для радиолокационной станции.
Рис. 2.2. Взаимная ориентация диаграмм направленности
РЭС и станции РТР
При этом предполагаем, что начальное положение антенн рав-
новероятно относительно друг друга. В этом случае вероятность
встречи диаграмм направленности определяется одним из двух
выражений, в зависимости от того, какой из периодов вращения
антенн больше:
r?l ---Pv = т4=г(₽.7’, +РЛ) если > Гр!
I
] Р> ' Ла =---------(РаЛ + РпЛ Y еСЛИ Г_ > Л-
| „ pa Qtt'T' Vra а “Р Р/’ Р а
к. а
Из выражений (2.1) и (2.2) следует, что вероятность встречи
Рвет диаграмм направленности определяется их шириной и значе-
нием периодов вращения антенны.
Т
Зависимость вероятности встречи Рнстот величины 0 = — гра-
Л
фически показана на рис. 2.3.
Из анализа графика следует, что имеются области значений 0,
при которых осуществляется медленнй’^30'), быстрый (0") гаран-
тированный поиск и вероятностный поиск со средней скоростью.
—-Медленным гарантированным поиском по направлению назы-
вается такой поиск, при котором за время одного оборота антенны
18
Рис. 2.3. Зависимость вероятности встречи диаграмм направленности
от периодов вращения антенн: 7 - с медленной скоростью;
2 — со средней скоростью; 3 — с быстрой скоростью
радиоэлектронного средства антенна станции радиотехнической
разведки поворачивается не более чем на ширину своей диаграм-
мы направленности. При этом факт обнаружения состоится за
время не большее, чем период вращения антенны станции развед-
ки Ом -трУ
Время встречи при медленном поиске будет практически равно
времени облучения. Соотношение скоростей вращения антенны
станции радиотехнической разведки и антенны радиоэлектронно-
го средства равно отношению угла обзора радиоэлектронного
средства (при круговом вращении Д|За = 2л) к углу раскрыва диаграммы
направленности станции разведки.
На основании изложенного можно сделать следующие выводы
об особенностях медленного поиска:
1. Скорость вращения антенны станции радиотехнической раз-
ведки мала, следовательно, требуется большое время для обнару-
жения сигнала. Для обнаружения кратковременно работающих
радиоэлектронных станций медленный поиск неприемлем.
2. При медленном поиске обеспечивается время приема сигна-
лов, вполне достаточное для срабатывания анализирующей и ре-
гистрирующей аппаратуры.
Существует несколько способов уменьшения времени поиска,
основными из которых являются:
использование многоканальных по направлению антенн, со-
здающих парциальные диаграммы направленности;
повышение чувствительности приемных устройств станций ра-
диотехнической разведки йля приема по боковым лепесткам диа-
граммы направленности радиоэлектронного средства;
использование секторного поиска.
Режим, при котором за период вращения антенны радиоэлект-
ронного средства факт приема сигнала длительностью не менее
заданной является достоверным, называется быстрым поиском.
При быстром поиске за время поворота антенны радиоэлектрон -
19
ного средства на ширину диаграммы направленности антенна
станции разведки делает полный оборот. Скорость вращения ан-
тенны станции разведки в 2л/ра раз больше скорости вращения
антенны радиоэлектронного средства противника, т.е. достаточ-
но большая, что является существенным недостатком быстрого
поиска. При этом трудно обеспечить время приема не менее за-
данного.
Если условия существования гарантированного медленного
или быстрого поиска не выполняются, может быть применен ве-
роятностный поиск (поиск со средней скоростью). Скорость вра-
щения антенны занимает промежуточное положение между ско-
ростью при медленном и быстром поиске.
Если вероятность встречи за один оборот антенн станции раз-
ведки Рра, то за к оборотов она составит
Рис. 2.4. Зависимость вероятности встречи диаграмм
направленности от числа оборотов антенны
станций РТР
На рис. 2.4 приведены графики зависимости вероятности
встречи диаграмм направленности для различных значений Рра от
числа оборотов к антенны станций радиотехнической разведки.
Зная число оборотов антенны станции разведки, требуемое для
обнаружения радиоэлектронного средства с заданной вероятно-
стью, необходимое время поиска /н =кТр.
2.2. ОБНАРУЖЕНИЕ РАБОТАЮЩИХ
РАДИОЭЛЕКТРОННЫХ СРЕДСТВ
В ЧАСТОТНОМ ДИАПАЗОНЕ
Для обнаружения работающих радиоэлектронных средств в ча-
стотном диапазоне используются поисковые, беспойсковые и
комбинированные методы (рис. 2.5).
Под обнаружением сигнала в частотном диапазоне понимают
процесс поиска работающих радиоэлектронных средств путем по-
следовательной перестройки приемного устройства разведывате-
20
явной станции, имеющего полосу пропускания Д/ в диапазоне
разведки Д/р. Поэтому для реализации поисковых методов обна-
ружения радиоэлектронных средств по частоте используются пе-
рестраиваемые приемные устройства.
Рис. 2.5. Методы обнаружения по частоте
При рассмотрении поиска по частоте следует учитывать четыре
возможных случая:
L) непрсрияпоиск радиоэлектронных средств,
имеющих направленное импульсное излучение с вращением диа-
граммы направленности в горизонтальной плоскости;
2) поиск радиоэлектронных средств, имеющих направленное
непрерывное излучение с вращением диаграммы направленности
в горизонтальной плоскости;
3) поиск радиоэлектронных средств, имеющих ненаправленное
импульсное излучение;
4) поиск радиоэлектронных средств, имеющих ненаправленное
непрерывное излучение.
Наиболее общим является первый случай, нашедший широкое
применение в системах радиотехнической разведки.
При поиске по частоте возможны следующие виды перестрой-
ки приемника станции радиотехнической разведки:
односторонняя с быстрым нерабочим обратным ходом;
односторонняя с быстрым обратным ходом и остановкой для
анализа;
двухсторонняя с одинаковой скоростью перестройки в обе сто-
роны;
двухсторонняя с одинаковой скоростью перестройки в обе сто-
роны и остановкой для анализа.
При поиске по частоте, как и при поиске по направлению, мо-
гут происходить пропуски приема сигнала за счет кратковремен-
ной работы радиоэлектронного средства и за счет того, что в мо-
21
мент встречи диаграмм направленности приемное устройство раз-
ведывательной станции не настроено на частоту сигнала.
По отсутствию или наличию пропусков приема поисковые ме-
тоды обнаружения делятся на гарантированные и вероятностные.
При гарантированном обнаружении обеспечивается обязательный
прием сигналов за время, равное наибольшему из периодов Т1( или
Тс. При вероятностном обнаружении прием сигналов за тот же
промежуток времени осуществляется с некоторой вероятностью.
К гарантированным методам поиска относятся медленный и бы-
стрый, а к вероятностному— поиск со средней скоростью.
Разновидностями медленного поиска по частоте являются по-
иск по простому закону, поиск по сложному закону и поисковый
метод последовательного уточнения частоты.
Для разведки радиоэлектронного средства с быстрой пере-
стройкой от импульса к импульсу или кратковременно работаю-
щих радиоэлектронных средств применяются беспоисковые по
частоте методы обнаружения: метод полосовых фильтров, метод
частотного разделения, интерференционный и автокорреляцион-
ный методы.
В некоторых станциях радиотехнической разведки применяют-
ся комбинированные методы обнаружения, которые представля-
ют собой сочетания поисковых и беспоисковых методов обнару-
жения. Сравнительную оценку методов обнаружения по частоте,
как и для случая поиска по направлению, производят по следую-
щим критериям:
вероятность обнаружения работающего радиоэлектронного
средства;
время обнаружения с заданной вероятностью;
точность определения несущей частоты;
диапазон разведу ем ых частот;
реализуемость.
Вероятность Рч обнаружения работающего радиоэлектронного
средства по частоте определяется по формуле
Л — Рсч'Р(^с — То)>
где Рсч — вероятность совпадения интервала времени на-
стройки приемного устройства на частоту работа-
ющего радиоэлектронного средства с интервалом
времени прихода сигнала;
Р(тс >т0) —условная вероятность приема сигнала длитель-
ностью не менее заданной при условии, что совпа-
дение состоялось (предполагается, что по направ-
лению сигнал обнаружен, а его уровень превышает
реальную чувствительность приемного устройст-
ва).
При тс > т0 вероятность обнаружения практически равна веро-
ятности совпадения.
Вероятность совпадения будет тем больше, чем шире полоса
пропускания приемного устройства разведывательной станции, а
22
также чем больше длительность сигнала, больше различие между
периодом перестройки приемного устройства Тп и периодом по-
вторения сигнала Тс.
Временем обнаружения по частоте /ч называется время, в тече-
ние которого работающее радиоэлектронное средство обнаружи-
вается с заданной вероятностью Рч = Р§.
Для поисковых систем это время называется временем поиска
по частоте Гпч.
Требуемый диапазон разведываемых частот определяется рас-
пределением радиоэлектронных средств, подлежащих разведке по
частоте. Вероятность совпадения интервала времени настройки
приемного устройства на частоту работающего радиоэлектронного
средства Рпс с интервалом времени прихода сигнала тс за время
перестройки приемника во всем диапазоне частот ) определя-
ется выражением
р _ hfP + тс (2.3)
* пг _
Этот случай характеризуется тем, что Тп > Тс. Если же Тн < Тс,
вероятность совпадения за время, равное периоду прихода сигна-
лов, определяется выражением
р _ ^fp + тс (2.4)
* гп __ •
Обозначив скорость перестройки у = Д//Тр, время перестройки
приемного устройства на ширину его полосы пропускания
, (2-5)
“ Y " Д/
С учетом выражения (2.5) формулы (2.3, 2.4) определения веро-
ятности совпадения можно переписать в виде:
гдет = Тс/Гп;
Qc =тс/Тс— скважность сигнала.
Результаты расчета по формулам (2.5) и (2.6) представлены на
рис. 2.6.
Из графика следует, что имеются два режима гарантированного
поиска: медленный и быстрый.
Медленным гарантированным поиском по частоте называется
такой поиск, при котором за время перестройки
л т„
23
Рис. 2.6. Зависимость вероятности обнаружения сигнала от соотношения периода
следования импульсов и периода перестройки РПУ: 7 - медленная перестройка;
2 - средняя скорость; 3 - быстрая скорость по частоте
Вероятность обнаружения сигнала за один период перестройки
приемного устройства при приеме по боковым лепесткам вкруго-
вую определяется из выражения
п _ р + Тс
ПС Г»-.
При разведке по главному лепестку диаграммы направленности
/ДЛ + тс
р _ J р с
ГПС 1-р
а
Вероятность обнаружения сигнала за к периодов
Л = 1-(1-Ло)‘- (2.7)
Преобразуем выражение (2.7) к следующему виду:
Учитывая, что за один период перестройки вероятность обна-
ружения сигнала Рпс, как правило, невелика— lim (1 - Р]1С)-----=е,
-^пс
вероятность обнаружения за к периодов Рк = 1 - е’*пс, так как
t £-Д.с
к = —, то Рк = 1 - е Тс
Вероятность обнаружения сигнала за время t4 > Тс может быть
определена из выражения
24
А/р? II
Р=1 -е’^7
Время обнаружения сигнала с заданной вероятностью Р^ опре-
деляется по формуле
Л,с
2.3. СОВМЕСТНЫЙ ПОИСК РАДИОСИГНАЛОВ
ПО НАПРАВЛЕНИЮ И ЧАСТОТЕ
На практике радиотехническая разведка ведется панорамным
приемным устройством с одновременным поиском по направле-
нию и частоте. Поэтому актуальной задачей является опенка эф-
фективности поиска станцией радиотехнической разведки такого
типа в пространстве и частотном диапазоне.
Антенны радиолокационной станции и станции радиотехниче-
ской разведки в азимутальной плоскости вращаются с угловыми
скоростями £1, иО2. Их диаграммы направленности в прямоуголь-
ной системе координат можно аппроксимировать прямоугольни-
ками с углами растворов соответственно ра и Рр. Сигнал излучает-
ся радиолокационной станцией с частотой следования Fc =- — и
длительностью тс. Поисковый радиоприемник, обладая прямоуго-
льной частотной характеристикой, с полосой пропускания Д/р в
диапазоне (/tnax - /т1Л) перестраивается с постоянной скоростью
у = ——^2- и с периодом Тп. В этом случае необходимо опреде-
ли
лить частоту приема сигнала разведываемой радиолокационной
станции. Станция радиотехнической разведки будет облучаться
потоком серий импульсов длительностью т, = 0a/Q,, следующих с
частотой =£1(/2тг. При этом сигналы радиолокационной стан-
ции принимаются дискретно и только тогда, когда ее антенна пе-
ресекает линию визирования на разведываемую радиолокацион-
ную станцию. Дискретность определяется вращением диаграммы
направленности и ее избирательной способностью в пространстве.
Возможную деятельность и «частоту приема сигналов обозна-
чим соответственно т2 = ра /Q2 иц2 = £22 /2 л.
Продолжительность и частоту наблюдения сигналов поисковой
станцией на фиксированной частоте можно рассматривать как по-
ток сигналов с длительностью т3 =(л/'р / Д/)Г„ и частотой следо-
вания F3 =1 /Та. Длительность и частоту следования импульсов
радиолокационной станции обозначим т4 =тс и F4 = ц=1/Гс.
Следовательно, частота повторения приема сигналов определяет-
ся характеристиками четырех потоков импульсов совпадения.
25
Сигналы будут приняты только при совпадении всех четырех
импульсов суммарного потока. Средняя частота приема сигналов
определяется выражением
~ V 1 I I (2.8)
М4.4 =L — ЦН,Т,
f=l /=1
В соответствии с принятыми обозначениями раскроем форму-
лу
Ц44 =р1Ц2Ц3Ц4(т2Т3Т4 + TjT2T3 + Т,Т2Т4 + Т)Т3Т4). (2.9)
Эта формула является общей, и из нее можно получить форму-
лы для ряда частных случаев поиска. Например, если сигнал не-
прерывный, то ц4т4 = 1, и правая часть выражения (2.9) приводит-
ся к виду
ц33 =£—Пил = PiM 2Нз(т2гз +тЛз +TiT2)-
5 = 1
Если в дополнение к этому отсутствует поиск по направлению
(антенна станции радиотехнической разведки всенаправленная)
или положение радиолокационной станции известно, тоц2т2 = 1.
В этом случае
М" 2 2 = Н(Цз(Т1 + ^з)-
Если для приема сигналов требуется принять реализацию дли-
тельностью не менее т0, то основная формула (2.8) будет иметь вид
-о- (210)
5=1 т5 “ Т0 '=1
По формулам (2.8) и (2.10) можно найти среднюю частоту при-
ема сигналов при поиске по направлению, при поиске по частоте
и направлению. Зная среднюю частоту приема сигналов, нетрудно
определить среднее время, затраченное на прием сигналов:
^пр ~ VH/.i •
Для оценки вероятности обнаружения сигналов по направле-
нию и частоте на практике можно воспользоваться формулярами
расчета вероятностных характеристик.
В этом случае исходными данными для расчета будут:
длительность и частота повторения импульсов разведываемой
радиолокационной станции тс, Fc = 1/Тс;
скорость вращения антенны разведываемой радиолокационной
станции ла;
ширина диаграммы направленности антенны радиолокацион-
ной станции Ра;
скорость вращения антенны поисковой станции ир;
26
ширина диаграммы направленности антенны поисковой стан-
ции рр;
частотный диапазон поиска Д/;
период перестройки в полосе Д/ - Т„;
полоса пропускания приемного устройства Д/р.
При поиске по, направлению рассчитываются следующие ха-
рактеристики:
вероятность встречи диаграмм направленности:
если Тл >Тр, то
Рар = Г Ра -^а Рр^р
ар rrt \ । а а ’ Р Р J,
если Тй <ТР, то
/’pa =5Лг(ЗаТ + Зр/’р);
вероятность встречи диаграмм направленности за к оборотов:
/>» =1 -[(1 - Лр ра)]\
необходимое время поиска с заданной вероятностью обнаруже-
ния:
" “ig(i -Лр,р.) '
Расчет основных характеристик поиска по частоте можно про-
извести в такой последовательности.
1. Определяется соотношение между периодом повторения им-
пульсов Тс и периодом перестройки Тп.
Если Тс > Тп, рассчитывается вероятность настройки приемно-
го устройства на частоту сигнала за один цикл перестройки:
Р -4U
ЛАе’
Если Тп > Тс, рассчитывается вероятность настройки приемно-
го устройства на частоту сигнала за период повторения импульсов:
D Р
РСП ~ + TCQC ,
А/
। де Qc— скважность сигнала.
2. Рассчитывается вероятность настройки приемного устройст-
ва разведуемой станции на частоту сигнала за к циклов перестрой-
ки или за к периодов повторения сигнала:
Л =1-(1-/’,к.«„)‘
27
3. Определяется необходимое число циклов перестройки к и
время для обнаружения сигналов в частотном диапазоне Д/ с за-
данной вероятностью Р^.
к 1ё(1-Л)
lg(l -Ле) '
Если осуществляется совместный поиск по частоте и направле-
нию, то может применяться следующий порядок расчета. Рассчи-
тываются:
1. Длительность серии облучения
2. Частота повторения серий облучения
щ = ла/60.
3. Длительность серии приема сигналов
т =—7
4. Частота повторения серий приема
м2 =«р/60.
5. Длительность и частота наблюдения сигналов поисковой
станцией радиотехнической разведки на фиксированной частоте:
6. Длительность и частота следования импульсов радиолокаци-
онной станции:
Т4 =тс> =—=Р4-
* с
7. Средняя частота приема сигналов при совместном поиске по
частоте и направлению
Ш.4 =Р1Р2РзР4(Т1Т2Т3 +TJ2T4 +V3T4 +^2T3T4>
8. Периодичность приема сигналов (время, затрачиваемое на
прием сигналов)
Л.4 =1/Ц4.4 •
3. ДАЛЬНОСТЬ ОБНАРУЖЕНИЯ (РАЗВЕДКИ)
3.1. ФАКТОРЫ, ВЛИЯЮЩИЕ НА ДАЛЬНОСТЬ
ОБНАРУЖЕНИЯ
Дальностью обнаружения называется максимальное расстоя-
ние до источника излучения, на котором обнаруживается его ра-
бота с вероятностью не менее заданной. ____
На дальность действия разведывательной станции влияют раз-
личные факторы, а именно:
параметры источника излучения (излучаемая мощность, коэф-
фициент усиления передающей антенны в направлении на разве-
дывательную станцию);
параметры разведывательной станции (чувствительность разве-
дывательного приемного устройства, коэффициент усиления и
поляризационная характеристика приемной антенны, качество
согласования антенно-фидерного устройства со входом приемно-
го устройства);
условия распространения радиоволн, которые проявляются
по-разному в зависимости от диапазона и взаимного расположе-
ния радиоэлектронного средства противника и разведывательной
станции. -
Известно, что на распространение радиоволн оказывают влия-
ние как Земля, так и атмосфера. Влияние Земли в основном сво-
дится к следующему:
1. При распространении радиоволн может иметь место отраже-
ние их от поверхности Земли. В этом случае поле в какой-либо
точке А над поверхностью Земли будет представлять собой сумму
полей двух волн— прямой и отраженной. В результате интерфе-
ренции волн поле в одних точках пространства будет увеличивать-
ся, а в других— уменьшаться, а следовательно, будет различной и
дальность обнаружения.
2. На характер распространения радиоволн над поверхностью
Земли большое влияние оказывает сферичность Земли. Электро-
магнитное поле в области тени определяется способностью радио-
волн преодолевать выпуклость Земли или, иначе, способностью
радиоволн дифрагировать. Эта способность зависит от длины вол-
пы. Чем длиннее волна, тем больше напряженность дифракцион-
ного поля в месте расположения разведывательной станции.
3. На распространение радиоволн значительное влияние ока-
зывает и рельеф земной поверхности. Чем короче длина волны,
тем это влияние больше. Очень часто принимаемый сигнал из-за
29
естественного препятствия (горы, скалы, крутого склона), отделя-
ющего разведывательную станцию от радиоэлектронного средства
противника, сильно ослаблен или отсутствует вообще.
При рассмотрении влияния атмосферы на распространение ра-
диоволн ее обычно принято делить на три слоя: тропосферу, стра-
тосферу и ионосферу. Тропосфера в среднем простирается в высо-
ту до 10... 12 км, стратосфера— от 10... 12 до 60 км, ионосфера—
выше 60 км.
Тропосфера представляет собой неоднородную в электриче-
ском отношении среду. Это определяется в основном неравномер-
ностью плотности, температуры и влажности воздуха. Неоднород-
ность тропосферы приводит к тому, что скорость распространения
радиоволн в верхних слоях больше, а в нижних— меньше. В резу-
льтате этого фронт волны постепенно наклоняется вперед по на-
правлению к земной поверхности, иначе говоря, имеет место яв-
ление рефракции. Оно приводит к тому, что источник излучения,
находящийся в области тени, может быть обнаружен.
Следует отметить, что в тропосфере благодаря турбулентному
движению воздуха всегда существуют электрические неоднород-
ности, рассеивающие радиоволны. Это может оказаться причиной
распространения достаточно коротких радиоволн далеко за преде-
лы прямой видимости. Такое явление называют дальним тропос-
ферным распространением радиоволн.
Дальнее тропосферное распространение радиоволн особенно
характерно для санти- и дециметрового диапазонов, а также для
коротковолновой части метрового диапазона волн.
В тропосфере кроме указанных явлений происходит ослабле-
ние радиоволн из-за поглощения их как газами атмосферы, так и
атмосферными образованиями: туманами, облаками, дождем и
т.п. Ослабление увеличивается с уменьшением длины волны и
особо ощутимо на волнах сантиметрового и более коротких по
длине волн диапазонов.
В стратосфере особенности распространения радиоволн те же,
что и в тропосфере, но они выражены слабее.
Ионосфера представляет собой ионизированный слой воздуха.
Ионизация обусловлена главным образом действием ультрафио-
летовых лучей Солнца. Ионосфера существенно влияет на распро-
странение радиоволн, причем степень этого влияния зависит от
длины волны. Так, волны длиннее 6...8 м отражаются от ионосфе-
ры, при этом благодаря многократным последовательным отраже-
ниям от ионосферы и поверхности Земли они распространяются
на очень большие расстояния.
Более короткие волны, как правило, от ионосферы не отража-
ются. Ионосфера для таких волн прозрачна, как и для световых
волн.
В радио- и радиотехнической разведке ставится задача обеспе-
чения максимальных дальностей обнаружения, т.е. дальностей
прямой видимости, дальностей в области тени, а также сверхдаль-
них расстояний.
30
Анализируя диапазон волн, в котором работают радиоэлект-
ронные средства вероятного противника, можно сделать вывод,
что он охватывает в основном волны начиная с сверхдлинных и
кончая сантиметровыми: 10 кГц...40 000 МГц (33 333 м...1,25 мм).
3.2. ДАЛЬНОСТЬ ОБНАРУЖЕНИЯ
В СВОБОДНОМ ПРОСТРАНСТВЕ
Дальность обнаружения в свободном пространстве в основном
определяют параметрами источника радиоизлучения и разведыва-
тельной станции.
Пусть в точках Oj и О размещены соответственно разведывате-
льная станция и разведываемое радиоэлектронное средство про-
тивника (рис. 3.1).
Рис. 3.1. Пространственная ориентация диаграмм направленности РЛС
и станции РТР
На рисунке обозначено:
Dp — расстояние межу разведывательной стан-
цией и радиоэлектронным средством
противника;
6’ц0 и Ga = Ga0 Fa (Де) — коэффициент усиления антенны радио-
электронного средства соответственно в
направлении максимума диаграммы на-
правленности, который характеризуется
углами р и 8, отсчитанными от направле-
ния максимального излучения в гори-
зонтальной и вертикальной плоскостях;
Gp— коэффициент усиления антенны разве-
дывательной станции.
Для надежного срабатывания индикаторной и регистрирующей
аппаратуры необходимо, чтобы мощность принимаемого сигнала
/р в п раз превышала уровень чувствительности приемного
устройства разведывательной станции Pmjn. В этом случае даль-
ность обнаружения определяют из условия
31
(3.1)
Обычно принимают/: = 3...10.
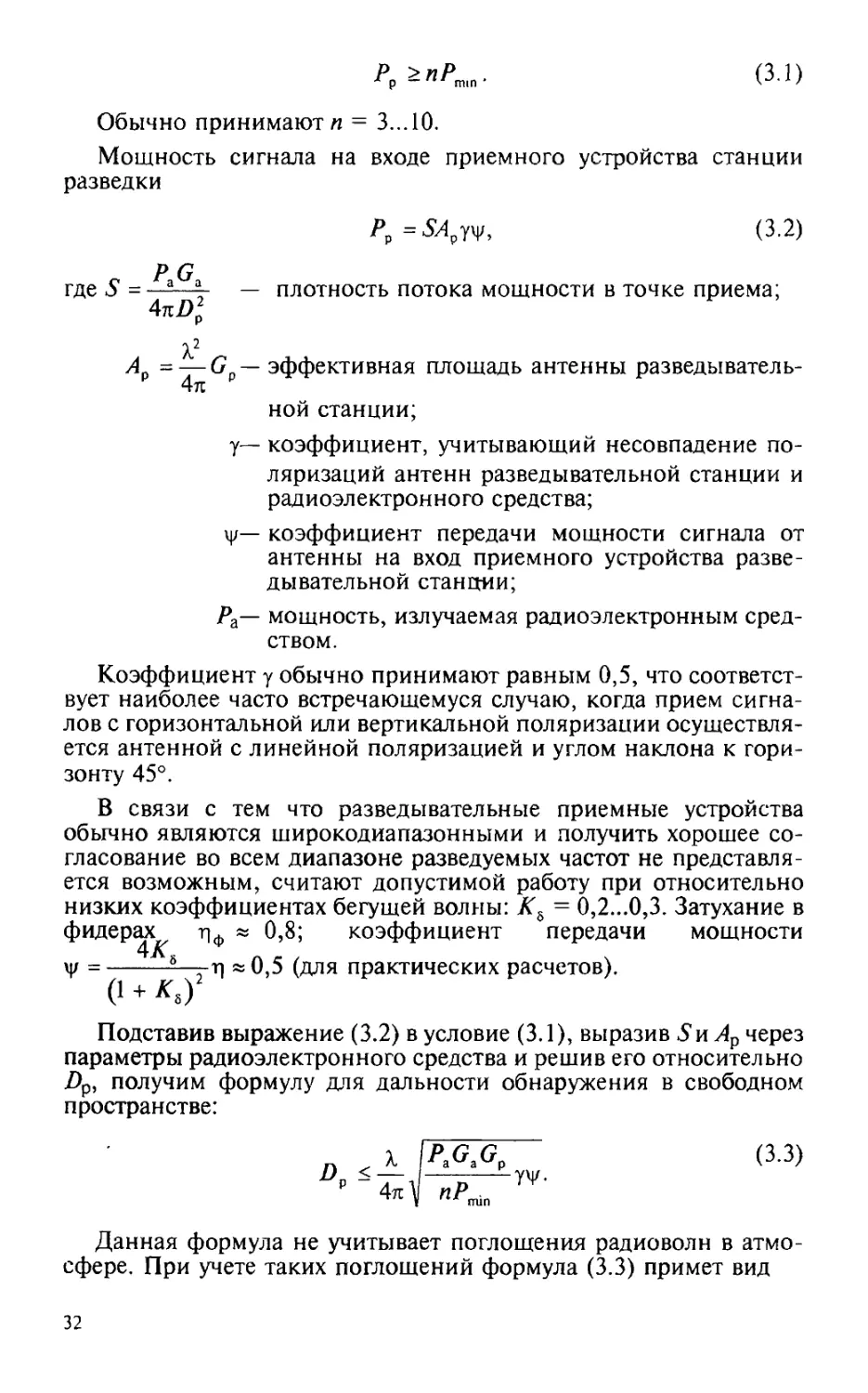
Мощность сигнала на входе приемного устройства станции
разведки
Рр =5Лру\|/,
(3.2)
где £ = - л- ~
4тгРр2
плотность потока мощности в точке приема;
Z2
Ао = — G — эффективная площадь антенны разведыватель-
4л ₽
ной станции;
у— коэффициент, учитывающий несовпадение по-
ляризаций антенн разведывательной станции и
радиоэлектронного средства;
V— коэффициент передачи мощности сигнала от
антенны на вход приемного устройства разве-
дывательной станции;
Ра— мощность, излучаемая радиоэлектронным сред-
ством.
Коэффициент у обычно принимают равным 0,5, что соответст-
вует наиболее часто встречающемуся случаю, когда прием сигна-
лов с горизонтальной или вертикальной поляризации осуществля-
ется антенной с линейной поляризацией и углом наклона к гори-
зонту 45°.
В связи с тем что разведывательные приемные устройства
обычно являются широкодиапазонными и получить хорошее со-
гласование во всем диапазоне разведуемых частот не представля-
ется возможным, считают допустимой работу при относительно
низких коэффициентах бегущей волны: = 0,2...0,3. Затухание в
фидерах ть, # 0,8; коэффициент передачи мощности
АК.
V =-----—» 0,5 (для практических расчетов).
(1 + V
Подставив выражение (3.2) в условие (3.1), выразив 5*и Ар через
параметры радиоэлектронного средства и решив его относительно
Dp, получим формулу для дальности обнаружения в свободном
пространстве:
<А
р 4л
РЖ
V пР
1 г * пип
у\|Л
(3.3)
Данная формула не учитывает поглощения радиоволн в атмо-
сфере. При учете таких поглощений формула (3.3) примет вид
32
x I^GaGp
n —J--------yw • LO 20 ,
P 4лV nP •
(3-4)
где a — коэффициент поглощения электромагнитной энергии в
атмосфере, дБ/км.
Зависимость коэффициента поглощения в атмосфере от длины
волны показана на рис. 3.2.
Рис. 3.2. Зависимость коэффициента поглощения от длины
волны: / - вода; 2 - пар; 3 - туман;
4 кислород
Уравнение (3.4) является трансцендентным, и его решают гра-
фическим способом. Реализация рассчитанных значений Рр воз-
можна, если разведывательная и радиолокационная станции нахо-
дя гея в области свободного пространства. Проверка осуществля-
ется путем сравнения дальности обнаружения с дальностью
прямой видимости.
33
Рис. 3.3. Зависимость дальности обнаружения от величины
коэффициента затухания
На рис. 3.3 приведены расчетные зависимости дальности обна-
ружения для различных значений коэффициентов затухания от
дальности обнаружения, определяемой для условия (3.1) свобод-
ного пространства. Графики (рис. 3.3) позволяют оперативно про-
извести расчет дальности обнаружения в пределах прямой види-
мости.
3.3. ДАЛЬНОСТЬ ОБНАРУЖЕНИЯ В УКВ-ДИАПАЗОНЕ
Основным для УКВ-диапазона является распространение ра-
диоволн в тропосфере. В этом случае отражения от земной повер-
хности не учитываются, так как поверхностная волна либо огибает
поверхность Земли, либо касается ее в определенной точке. В по-
следнем случае дальность обнаружения ограничивается дально-
стью прямой видимости.
Дальность прямой видимости (в км) с учетом нормальной ат-
мосферной рефракции определяют известным соотношением
Д„, =4,12(< + л/л7),
где hy и А2 ~ высота станции над уроВнем«моря и высота антенны, м.
При значительных мощностях источника излучения и большой
чувствительности приемника разведывательной станции возмож-
но обнаружение источника и за пределами прямой видимости, т.е.
за горизонтом. Это объясняется наличием дифракционного поля
или дальним тропосферным распространением радиоволн.
34
На дальностях, превышающих дифракционный горизонт, ра-
диотехническая разведка радиоэлектронных средств противника
может осуществляться за счет использования явления дальнего
тропосферного распространения (ДТР). В условиях ДТР даль-
ность обнаружения может быть определена по формуле
X IP G G '
Р ---D---10 >
М «Лип
(3.5)
|дс В(Др)— коэффициент, учитывающий ослабление сигнала в
зоне ДТР по отношению к его уровню на том же рас-
стоянии в свободном пространстве, дБ.
Под дифракционным горизонтом Dp понимают расстояние, с
которого начинается зона ДТР, где значение напряженности поля,
вычисленное по дифракционным формулам, становится меньше,
чем измеренное. Для диапазона волн X = 3...150 см, высот ан-
тенн 5...10 м можно считать условный дифракционный горизонт
/)р = 60... 100 км.
Коэффициент B(Dp) является функцией ослабления средней
напряженности поля в зависимости от расстояния длины волны,
рельефа местности, метеорологических условий. Кроме того, он
позволяет ориентировочно оценить значение специфического для
ДТР явления потерь усиления остронаправленных антенн и на-
блюдаемые быстрые и медленные замирания сигнала, определяю-
щие степень устойчивости работы радиолинии. Таким образом,
для какой-либо трассы
B(Dp) = Вс + Д^м + Д/?р + Д(7 + ЬВ , (3.6)
где Вс— коэффициент ослабления поля, определяемый дально-
стью разведки D и длиной волны X при некоторых стан-
дартных условиях;
АВМ — поправка на метеоусловия;
Л/?р — поправка на рельеф местности;
Д(7 — поправка на потери усиления антенн;
Д/? — дополнительное ослабление за счет медленных и быст-
рых замираний.
Основной является зависимость ослабления поля от дальности
и длины волны, остальные имеют характер поправок.
Под стандартными подразумевают такие условия, при которых
радиоволны распространяются над гладкой сферической поверх-
ностью Земли (углы закрытия приемной и передающей антенн
раины нулю); передача и прием осуществляются слабонаправлен-
ными антеннами (Ga +Gp <60 дБ); приведенный коэффициент
преломления у поверхности Земли N = 310 (близок к зимним
условиям); средний уровень поля выражен в медианных значени-
ях. Медианным принято считать такой уровень, который превы-
шается сигналом в течение 50 % времени приема.
35
Принцип расчета дальности обнаружения в зоне ДТР по фор-
муле (3.5) аналогичен расчету дальности обнаружения в свобод-
ном пространстве, но предварительно вычисляют коэффициент
B(Dq) из выражения (3.6).
На практике расчет коэффициента потерь B(Dp) является до-
статочно громоздкой и сложной процедурой, так как поправки на
метеоусловия описываются сложными аналитическими выраже-
ниями, зависящими от многих факторов, таких, как состояние по-
годы, характеристики местности, состояние тропосферы и т.д.
Поэтому для удобства расчетов дальности разведки в условиях
ДТР были рассчитаны графические зависимости медианного зна-
чения суммарных потерь для зимы и лета (рис. 3.4).
Рис. 3.4. Зависимость суммарных потерь от дальности
В этом случае методика расчета достаточно проста и сводится к
вычислению энергетического потенциала радиоэлектронного
средства противника Эп(Ра,(?а)[дБ]и приемного потенциала стан-
ции разведки.
Можно считать, что сигнал радиоэлектронного средства будет
принят на такой дальности, для которой выполняется условие
[Лоа]-
' реал
а<7„^[дБ}
36
Сущность явления потерь усиления антенн состоит в том, что
juim остронаправленных антенн усиление при ДТР не реализуется
полностью и оказывается меньшим, чем при распространении ра-
диоволн в свободном пространстве.
Уменьшение ширины диаграммы направленности антенн сна-
чала не сказывается на рассеивающем объеме, а значение приня-
юго сигнала изменяется пропорционально произведению обеих
антенн так же, как и в свободном пространстве. Дальнейшее суже-
ние диаграмм направленности приводит к уменьшению рассеива-
ющего объема, который теперь уже определяется областью пере-
сечения пространственных диаграмм направленности антенн.
Принятый сигнал растет медленнее, чем произведение усилений
обеих антенн. Этот эффект рассматривают как потерю усиления.
В настоящее время теория и эксперимент не позволяют с доста-
ючной надежностью установить значение коэффициента потерь
AG в зависимости от значения усиления антенн передающей Ga и
приемной <7р, а также от дальности обнаружения и длины волны.
В первом приближении можно считать, что коэффициент по-
терь &G линейно возрастает с ростом усиления системы антенн.
Для антенн с усилением G = 25...30 дБ потеря усиления не наблю-
дается. По экспериментальным данным на расстояниях до 800 км
коэффициент потерь Д(7 системы из двух направленных антенн
(приемной и передающей) с общим усилением до 90 дБ не превы-
шает 10 дБ. Это позволяет лишь ориентировочно оценить потери
усиления системы двух остронаправленных антенн.
Значения потерь усиления антенн приведены в табл. 3.1.
Таблица 3.1
+ <ja, дБ 60 70 80 90
Аб,дБ 0 -4 -7 -10
Тропосферное распространение УКВ сопровождается непре-
рывными и глубокими изменениями уровня сигналов, известны-
ми под общим названием замирания. Поле сигнала меняется из
месяца в месяц, изо дня в день и в течение дня. Причем на эти
медленные как регулярные, так и нерегулярные колебания накла-
дываются более быстрые колебания (с длительностью, составляю-
щей минуты, секунды и даже доли секунд). Особенностью замира-
ний тропосферных волн является именно наличие быстрых коле-
бппий, которые накладываются на более медленные. Причина
колебаний уровня поля — это регулярные (суточные и сезонные),
и также случайные изменения метеорологических условий.
Установлено, что медленные колебания уровня поля подчиня-
ются логарифмически нормальному закону распределения, а бы-
стрые замирания— закону распределения Релея. Ослабление за
счет замираний АД выраженное в децибелах, можно определить
как сумму ослаблений, вызванных колебаниями быстрыми Д^ и
медленными Д/?2 *
Д2? = Д2? + ДУ?2.
37
3.4. ДАЛЬНОСТЬ ОБНАРУЖЕНИЯ В КВ ДИАПАЗОНЕ
Напряженность поля “поверхностной волны” в КВ-диапазоне
очень быстро убывает с расстоянием из-за значительного его по-
глощения почвой вследствие кривизны Земли. Часто на расстоя-
нии в несколько десятков километров это поле ослаблено настоль-
ко, что прием оказывается невозможным.
На пространственной же волне прием коротких волн возможен
на очень больших дальностях, что обусловлено особенностями
влияния ионосферы на распространение коротких волн.
Обнаружение радиоэлектронного средства KB-диапазона осу-
ществляется за счет приема отраженной электромагнитной энер-
гии от ионосферы, т.е. энергии пространственной волны. Сущест-
венная особенность распространения коротких волн пространст-
венной волной определяется тем обстоятельством, что в каждый
данный момент времени не любая волна KB-диапазона может от-
ражаться от ионосферы.
Наибольшая частота, при которой радиоволны отражаются от
данного слоя при вертикальном падении на ионосферу, называет-
ся критической. Значение критической частоты зависит от кон-
центрации электронов в слое ионосферы и определяется следую-
щим выражением:
Ар = -ЖН >
где N3— максимальное число электронов в кубическом метре.
Для каждого угла возвышения 0 при данной концентрации
электронов существует максимальная частота /пах-Волны с часто-
тами выше/„ах не возвращаются, а волны с частотами ниже кри-
тической/пах возвращаются к Земле. Максимальная частота связа-
на с критической следующим соотношением:
Утах
(3.7)
где Zmax — высота слоя с максимальной концентрацией электро-
нов;
а — радиус Земли.
Максимальные частоты для слоя F} будут максимальными для
всей ионосферы. Наибольшую из максимальных частот можно
получить, подставив в формулу (3.7) значение угла возвышения,
равное нулю. Если принять, например, что высота расположения
максимума слоя составляет 400 км, то при а = 6370 км 77тах=
= 48 МГц (X = 6 м).
Таким образом, можно полагать, что волны короче 6 м от ионо-
сферы не отражаются. Волны от 6 до 19 м также могут пройти че-
38
рез ионосферу не отражаясь, но при соответственно больших уг-
лах возвышения. Волны длиннее 19 м отражаются от ионосферы
при любом угле возвышения.
Следующей характерной особенностью распространения ко-
ротких волн является возникновение так называемых зон молча-
ния. Они возникают вследствие того, что на некотором расстоя-
нии от источника излучения энергия, распространяемая вдоль по-
верхности Земли, затухает, а первая отраженная от ионосферы
волна возвращается на сравнительно большом удалении от источ-
ника излучения.
Каждой частоте соответствует свой радиус зоны молчания: чем
больше частота, тем больше этот радиус. Максимальный радиус
юны молчания получается при 0 = 0, т.е. когда волна распростра-
няется вдоль линии горизонта. В этом случае он равен 4000 км.
Обычно исходными данными для расчета радиолиний являются
координаты корреспондирующих пунктов и необходимая напря-
женность поля в месте приема. Задача расчета состоит в том, чтобы
определить оптимальные рабочие частоты, при которых напряжен-
ность поля в месте приема имеет значение не ниже необходимого
при заданной эквивалентной мощности (PaGa) передатчика.
Оптимальная рабочая частота лежит между двумя предельными
частотами— максимальной применимой и наименьшей примени-
мой. Наибольшая частота, при которой отражающий луч падает на
удалении передатчика, равном расстоянию между корреспондиру-
ющими пунктами, называется максимальной применимой часто-
юй (МПЧ).
При частотах /> Лшч отраженный луч может упасть дальше от
передатчика, чем это нужно, или может вовсе не отразиться от
ионосферы.
Если же выбрать частоту слишком низкой, то проводимость
ионосферы может оказаться настолько большой, а поглощение
радиоволн настолько сильным, что при заданной мощности пе-
редатчика не будет обеспечена требуемая напряженность поля в
месте приема. Поэтому искомая частота при заданной мощности
передатчика не может быть меньше некоторой минимальной час-
тоты. Эта минимальная частота называется наименьшей приме-
нимой частотой (НПЧ).
Из приведенного выше видно, что максимальная применимая
частота и наименьшая применимая частота являются функциями
ионизации слоя и его высоты, которые в свою очередь зависят от
времени суток (ночью слой D исчезает, потери в слое Е уменьша-
ются, ионизация слоя F уменьшается), сезона и фазы одиннадца-
1плетнего периода солнечной активности (с повышением солнеч-
ной активности повышается и концентрация электронов в ионо-
сфере).
Следовательно, при одних и тех же параметрах источника излу-
чения разведывательной станции для конкретных случаев будет
различная дальность разведки.
39
При ведении разведки в KB-диапазоне конкретные условия
распространения волн учитывают на основании радиопрогнозов.
3.5. ДАЛЬНОСТЬ ОБНАРУЖЕНИЯ НА СРЕДНИХ ВОЛНАХ
Средние волны могут распространяться поверхностной волной
на большие расстояния, чем короткие волны, как вследствие ме-
ньшего поглощения почвой, так и вследствие дифракции. Однако
при этом дальность распространения не превышает нескольких
сотен километров. Пространственной волной радиоволны этого
диапазона в ночное время могут распространяться на значительно
большие расстояния, чем в KB-диапазоне. Средние волны прони-
кают через слой D и отражаются от слоя Е. Поэтому испытывае-
мое ими поглощение в дневное время столь велико, что поле про-
странственной волны практически пренебрежимо мало. В ночное
время вследствие исчезновения слоя D поглощение резко падает.
Поскольку при распределении пространственной волны в ноч-
ное время и отражении ее от слоя Е поглощение незначительно, то
при расчете напряженности поля вовсе пренебрегают этим погло-
щением и считают, что распространение по треугольному пути
происходит как в свободном пространстве.
Дальность обнаружения на длинных волнах. Длинные волны
вследствие большой проводимости Земли и большого дифракци-
онного поля распространяются поверхностной волной на сравни-
тельно большие расстояния. Однако уже на расстояниях
1000...2000 км поле пространственной волны значительно превос-
ходит поле поверхностной волны. Поэтому в радиолиниях боль-
шой протяженности (тысячи километров) используется простран-
ственная волна.
Дальность обнаружения на сверхдлинных волнах. В силу того что
длина волны диапазона сверхдлинных волн сравнима с расстояни-
ем от нижней границы ионосферы до поверхности Земли, понятия
о поверхностной и пространственной волнах теряют смысл. Со
значительно большим основанием, чем в случае длинных волн,
здесь можно говорить о волноводном распространении по сфери-
ческому волноводу. Поэтому сверхдлинные волны распространя-
ются вокруг Земли с весьма незначительным ослаблением. Это об-
стоятельство послужило одной из основных причин использова-
ния сверхдлинных волн в новейшей навигационной аппаратуре.
4. ПРИНЦИПЫ ПОСТРОЕНИЯ УСТРОЙСТВ
СЕЛЕКЦИИ СИГНАЛОВ
Важную роль в процессе обработки и анализа сигналов играет
их селекция. Это объясняется тем, что на входе станции радиотех-
нической разведки присутствует хотя и ограниченное, но доста-
точно большое количество сигналов, структура которых различна
и заранее не известна. Причем структура входных сигналов может
изменяться от импульса к импульсу по случайному или детерми-
нированному закону. Наличие большого количества таких сигна-
лов на входе станции радиотехнической разведки не позволяет
произвести анализ, распознавание и идентификацию источника
радиоизлучения. Поэтому прежде чем произвести анализ сигналов
и определение координат источника разведывательных сведений,
необходимо осуществить достаточно жесткую их селекцию.
Селекция— это разделение входного потока сигналов на подпо-
гоки и выделение из всей совокупности сигналов сигнала с задан-
ными характеристиками. Селекция сигналов основана на их фи-
зическом отличии по направлению приема, поляризации, виду
модуляции, частоте, времени прихода, фазе, амплитуде или их со-
вокупности.
В зависимости от того, по какому параметру сигнала осуществ-
ляется его выделение из общего потока, различают следующие
виды селекции: пространственную, поляризационную, по виду мо-
дуляции, частотную, фазовую, временную, амплитудную, а также
комбинированные способы селекции, основанные на их сочета-
нии: пространственно-временную, временно-частотную, ампли-
тудно-частотную, по форме сигнала, по его тонкой структуре и т.д.
Все названные виды селекции, кроме амплитудной, являются
линейными, поэтому результаты селекции не изменяются от оче-
редности их применения. Вариант реализации последовательной
селекции приведен на рис. 4.1.
Для разделения (селекции) сигналов необходимо, чтобы они
обладали определенными различиями по одному или нескольким
параметрам, а также были линейно независимы.
Рис. 4.1. Последовательность решения задач селекции сигналов
41
Пространственная селекция производится с помощью антенн,
которые используют различия в положении фронтов волн, прихо-
дящих от различных источников радиоизлучения. Антенна работает
как пространственный фильтр, т.е. селектирует сигналы, приходя-
щие с определенных направлений. Известно, что ширина диаграм-
мы направленности антенны связана с длиной волны X и раскры-
вом антенны / в заданной плоскости следующим выражением:
Р-Кр
где К - коэффициент, определяемый типом антенны (для зерка-
льных антенн К = 50 ... 60).
Степень селекции тем выше, чем уже диаграмма направленно-
сти антенны, т.е. чем больше отношение 1/Х.
Для более четкого уяснения принципа пространственной се-
лекции можно рассмотреть аналогию между сигналом и диаграм-
мой направленности антенны. Аналогом спектральной характери-
стики сигнала является величина Цх)е^х\ определяющая закон
изменения амплитуды и фазы поля в раскрыве антенны. Аналогом
частоты является величина х — расстояние от центра до данной
точки раскрыва антенны.
Аналогия между сигналом и спектральной характеристикой, с
одной стороны, и диаграммой направленности антенны и распре-
делением поля, с другой стороны, полезна в том отношении, что
при синтезе антенн можно воспользоваться результатами синтеза
сигналов, а методы частотной селекции использовать для про-
странственной селекции.
Поляризационная селекция. Принимаемые радиоволны бывают
полностью поляризованными, частично поляризованными и не-
поляризованными. Поляризационная селекция основана на раз-
личии в поляризации волн, приходящих от различных источников
радиоизлучений.
Поляризация — это свойство волны, заключающееся в неодина-
ковости амплитуд колебаний векторов электрического и магнит-
ных полей в различных направлениях, и определяется направле-
нием вектора напряженности электрического поля хЕ. Поляриза-
ция бывает линейная, круговая, эллиптическая.
При линейной поляризации проекция конца электрического
вектора на плоскость, перпендикулярная направлению распростра-
нения радиоволн, описывает прямую линию. При линейной поля-
ризации вектор хЕ, периодически изменяясь в процессе распро-
странения, остается параллельным самому себе. В зависимости от
ориентации относительно поверхности Земли линейную поляриза-
цию называют вертикальной, горизонтальной и наклонной.
При круговой поляризации электрический вектор вращается с
частотой радиоволн и при их распространении описывает концом
винтовую линию в виде растянутой пружины (рис. 4.2). При рас-
пространении радиоволн на расстояние длины волны X вектор по-
ворачивается на 360°.
42
Рис. 4.2. Характер изменения ориентации вектора электрического
поля при круговой поляризации
Радиоволны с эллиптической поляризацией отличаются от
волн с круговой поляризацией тем, что амплитуда вектора Е при
его вращении изменяется.
Мгновенное значение горизонтальной составляющей можно
представить в виде ex=Exsinco/, а вертикальной — в виде
ег = Еу sin(cor - р),
где Ех, Еу — амплитуды горизонтальной и вертикальной составля-
ющих в рассматриваемой точке пространства;
р — сдвиг фаз между составляющими.
Полагая р=^,ех = х, = У> уравнения составляющих полей
можно записать как х = Ех sin со/1; у = Еу cos <о/.
Тогда каноническое уравнение эллипса будет иметь вид
Соотношение между амплитудой горизонтальной и вертикаль-
ной составляющих определяет вид поляризации— круговая или
эллиптическая. Поляризационный эллипс определяется размера-
ми осей Аэ, Вэ, углом а и направлением обхода (направлением вра-
щения поляризации). %
Эффективность селекции мешающих сигналов зависит от по-
ляризационных характеристик антенны и сигнала. Амплитуда сиг-
нала на выходе антенны определяется из выражения
</„„(г) = С1±
4* Л а (1-^Х1-^2)
(1 + К1Х1 + *1) (1 + К X1 + К )
cosy
i/ic (' - постоянный коэффициент;
43
в /
Кс = уд — коэффициент эллиптичности поля принимаемого
сигнала;
Ка — коэффициент эллиптичности антенны;
у — угол между большими осями эллипсов поляризации
антенны и сигнала.
Знак (+) выбирают в случае, когда принимаемая волна и поле
принимаемой антенны в режиме передачи имеют одинаковые на-
правления поляризации. Знак (-) выбирают при несовпадающих
поляризациях.
При линейной поляризации (Ка = Кс = 0)
^..„G) = ^Cc°sv- <4-')
Следует обратить внимание на то, что коэффициент передачи
селектора по поляризации, выражение (4.1), совпадает с выраже-
нием для коэффициента передачи по фазе, полученным ниже.
Это объясняется тем, что гармоническое колебание
^ВЫЛ.., (у) = V2 С cos у с произвольной фазой можно получить как
путем интерференции двух колебаний U[ sin со/ и t/2 sin (“* +ф), так
и в результате интерференции двух ортогональных полей одинако-
вой частоты Ех= sin со/ и £y=sin (со/ - р).
Основной недостаток поляризационной селекции заключается
в том, что один канал селекции ослабляет только один мешающий
сигнал из совокупности входных. Это является причиной, ограни-
чивающей применение поляризационных селекторов в системах
радиотехнической разведки.
Частотная селекция — это такая селекция, когда используются
различия частотных составляющих сигналов, и ее результаты не
зависят от начальных фаз этих составляющих.
При частотной селекции используются полосовые фильтры с
полосой ДГсел, настроенные на различные частоты. Так как после
селектора сигнал должен подвергаться временному и спектраль-
ному анализу, то основным требованием к фильтрам является
обеспечение неискаженного пропускания селектируемого сигна-
ла. А это значит, что избирательная часть частотного селектора
должна иметь коэффициент передачи, постоянный на всех часто-
тах спектра сигнала, а его фазовая характеристика должна быть
линейной.
Фазовая селекция использует различие в начальных фазах сиг-
налов. В радиотехнической разведке применяется фазоимпуль-
сная селекция, которая не относится к фазовой селекции в обще-
принятом смысле. Это по сути временная селекция. При фазовой
селекции используются различия в фазах высокочастотных со-
ставляющих. Предположим, что на входе фазового селектора име-
ется несколько сигналов с различными начальными фазами:
w(t) = cos(co0/ + ЛДср).
*=0
44
Т
(co0Z + ф)С/0 sin(cooz + ip + Дф)<# = U{UQ — cos Дф.
Чтобы ответить на вопрос, какое число сигналов этой суммы
можно разделить, необходимо знать, сколько сигналов будут ли-
нейно независимыми.
Доказано, что по фазе можно разделить только два непрерыв-
ных синусоидальных сигнала, и не более.
В качестве схем селекции по фазе применяются схемы селек-
ции с демодуляцией сигнала и с ортогонализацией сигнала.
Пусть сигнал имеет начальную фазу равную ср. т.е.
= sin(cor + (р), а мешающий сигнал — фазу, отличную от
начальной на тс/2, т.е. #„(/) = Un sin(co/ + л/2 +ср) = Un cos(<o/ + ф).
Чтобы разделить эти сигналы, опорное напряжение в схемах ак-
тивного селектирующего по фазе фильтра должно составлять
^<.и(0 = ^о sin(coj + ф).
Оценим чувствительность схемы к изменению фазы на сдвиг Дф
между опорным и селектируемым сигналом.
При сдвиге фаз Аф селектируемого и опорного сигналов после
интегратора выделяется напряжение
- = р, sin
27 -ТА
Понимая под коэффициентом передачи отношение напряже-
ния на выходе и входе селектора, можно записать
Л?Аф) = С cos Дф,
U Т
inc С = —— , здесь Т- длительность сигнала.
2
Селекция по фазе получается неоднозначной, а в пределах од-
ного периода селектируемая функция описывается функцией ко-
синуса Дф. В качестве наиболее распространенной схемы фазового
селектора применяется фазовый детектор.
Селекция по времени использует различия в моментах поступле-
ния и различия по времени существования сигнала. В радиотехни-
ческой разведке селекция по времени используется для разреже-
ния потока сигналов, отличающихся периодом следования или
длительностью импульсов, для уменьшения влияния импульсных
помех, возникающих в приемном устройстве, или помех внешнего
хпрактера. В качестве основного метода селекции импульсных
сигналов используется метод задержанных совпадений, сущность
которого поясним с помощью рис. 4.3.
Пусть на вход схемы селекции поступают импульсы различной
д/писльности: трт2 и т3. Требуется на схему анализа пропустить
импульс длительностью т2. Для этого входные сигналы дифферен-
цируются, в результате чего из каждого из них формируются два
коротких импульса, временное положение которых соответствует
переднему и заднему фронтам.
Импульс, соответствующий нарастанию (началу) импульса, по-
ci упаст на линию задержки с отводами, а импульс, соответствую-
щий концу импульса, поступает непосредственно на схему совпа-
45
Рис. 4.3. Структурная схема устройства временного селектора
дения. Устанавливая переключатель селекции в нужное положе-
ние, мы задаем необходимую для селектирования импульса
длительность линии задержки. Схема пропускает только те импу-
льсы, которые вызовут срабатывание схемы совпадения. Анало-
гично можно осуществить и селекцию по периоду следования им-
пульсов. Процесс селекции можно автоматизировать при цифро-
вом методе измерения временных интервалов.
Достоинства временного селектора, основанного на использо-
вании метода задержанных совпадений:
— высокая точность и надежность селекции сигналов;
— простота технической реализации;
— селекция сопровождается одновременным измерением се-
лектируемого параметра.
Амплитудная селекция. При амплитудной селекции для разделе-
ния сигналов используются различия их амплитуд. Амплитудная
селекция возможна только при несовмещенных сигналах, т.е. когда
их импульсы не совмещены во времени. Так как принятые сигналы
оказываются промодулированными по амплитуде вращающимися
диаграммами направленности антенны радиолокационной станции
и станции радиотехнической разведки, то использовать непосред-
ственно различия амплитуд практически невозможно. Поэтому ре-
комендуется использовать не сами амплитуды сигналов, а их разно-
сти, которые указывают не только на наличие перекрытых серий,
но и на существенные различия в значении производной измене-
ния амплитуды от импульса к импульсу и в знаке производной.
. Селекция по виду модуляции использует различия в спектрах
простых, частотно-модулированных и фазоманипулированных
сигналов, в частности в ширине спектров, преобразованных вход-
ных сигналов путем удвоения их частоты, автокорреляционной
свертки или кепстральным преобразованием. Подробно методы
селекции сигналов по виду модуляции будут рассмотрены в под-
разд. 7.1.
5. ПРИНЦИПЫ ПОСТРОЕНИЯ УСТРОЙСТВ
АНАЛИЗА ЧАСТОТНЫХ ПАРАМЕТРОВ СИГНАЛОВ
5.1. ОБЩИЕ ПРИНЦИПЫ ПОСТРОЕНИЯ
ЧАСТОТНОГО АНАЛИЗА
Обнаружение радиосигналов в частотном диапазоне осуществ-
ляется специальными разведывательными приемными устройст-
вами, обладающими частотной избирательностью. Принцип по-
ci роения приемных устройств зависит от выбранного способа по-
иска радиосигналов по несущей частоте и заданной вероятности
обнаружения.
Поисковый способ определения частоты реализуется, как пра-
вило, с помощью панорамного разведывательного приемного
устройства (рис. 5.1). Панорамное приемное устройство в про-
стейшем виде представляет собой супергетеродин, перестраивае-
мый автоматически (электронным способом) или вручную. При-
мерами устройств с электронной перестройкой по частоте являют-
ся приемники комплексов “Тамара”, “Рамона”, а с ручной
перестройкой — “Днепр-!К”, “Аргон” и др.
В связи с появлением избирательных высокочастотных гиро-
магнитных фильтров панорамные разведывательные приемные
устройства могут строиться по принципу приемника прямого уси-
ления с перестройкой высокочастотного фильтра в широком диа-
Рис. 5.1. Структурная схема супергетеродинного приемника
47
Рис. 5.2. Структурная схема панорамного приемника прямого усиления
пазоне частот (рис. 5.2). Преимуществом такого приемника перед
супергетеродином является отсутствие комбинационных частот,
недостатком — более низкая чувствительность.
В процессе поиска радиосигналов по частоте перестройка при-
емника осуществляется по определенному закону: непрерывно
или дискретно. Время перестройки определяется выбранным спо-
собом поиска.
В основе беспоисковых методов лежит использование широко-
полосных неперестраиваемых приемных устройств, обеспечиваю-
щих прием сигналов во всем заданном диапазоне частот.
Если поиск по направлению не требуется, то беспоисковые ме-
тоды по частоте обеспечивают обнаружение сигнала практически
мгновенно — в течение длительности сигнала. Это обстоятельство
позволяет широко сочетать в станциях радиотехнической развед-
ки беспоисковые методы обнаружения по частоте с поиском по
направлению.
К беспоисковым методам обнаружения по частоте относятся:
метод полосовых фильтров; метод частотного различения несущей
частоты; интерференционные методы.
Метод полосовых фильтров основан на применении фильтров,
каждый из которых пропускает сигналы только в пределах опреде-
ленной полосы. Несущая частота сигнала равна средней частоте
фильтра. В этом случае максимальная ошибка отсчета частоты не
будет превосходить половины полосы пропускания фильтров.
Приемные устройства с использованием полосовых фильтров
строятся по принципу многоканальных. В зависимости от способа
обработки сигнала в многоканальных приемниках последние по-
дразделяются на приемники с независимыми каналами, матрич-
ные и двоичнокодовые.
В многоканальных приемниках с независимыми каналами ме-
тод полосовых фильтров реализуется следующим образом. Весь
48
диапазон разведываемых частот А/ разбивается на несколько под-
диапазонов (каналов), каждый из которых перекрывается своим
фильтром с полосой д/\ (рис. 5.3). Структурная схема приемника
показана на рис. 5.4.
Рис. 5.3. Разбиение частот диапазона разведки на каналы
(поддиапазоны)
Рис. 5.4. Структурная схема многоканального приемного
устройства
Антенная система может быть общей для всех или нескольких
Хинклов или отдельной для каждого канала.
11аряду с приемниками прямого усиления в станциях радиотех-
нической разведки используются супергетеродинные приемники с
рн щслснием диапазона разведываемых частот на независимые ка-
Нилы по промежуточной частоте. Этим существенно повышается
чуистнительность приемного устройства.
Необходимое число каналов для перекрытия заданного диапа-
101 in частот определяют по формуле
49
Отсюда следует, что при высокой точности измерения частоты
(малых ошибках 5/) число каналов будет недопустимо большим.
Поэтому в станциях радиотехнической разведки применяют ком-
бинированные методы обнаружения (двух- и трехступенчатые).
Сначала производят беспоисковое обнаружение сигнала при низ-
кой точности измерения частоты (фильтры имеют широкую поло-
су прозрачности). По номеру фильтра определяют частоту с точ-
ностью до половины полосы пропускания фильтра
^5/тах < Затем обнаружение сигнала осуществляют в пре-
делах полосы широкополосного фильтра набором узкополосных
фильтров и значение частоты уточняют до половины полосы про-
пускания узкополосного фильтра. Количество узкополосных фи-
льтров определяют по формуле
У ф ДА ‘
J фу
Для уточнения частоты во всем диапазоне разведываемых час-
тот узкополосные фильтры должны перестраиваться и перекры-
вать полосу широкополосного фильтра, по которому прошел сиг-
нал, или преобразовать по частоте сигнал таким образом, чтобы
он попал в гребенку узкополосных фильтров.
Рассмотрим некоторые аспекты построения многоканального
разведывательного приемника.
5.2. ПРИНЦИП ПОСТРОЕНИЯ МНОГОКАНАЛЬНОГО
БЕСПОИСКОВОГО РАЗВЕДЫВАТЕЛЬНОГО ПРИЕМНИКА
Многоканальный беспоисковый разведывательный приемник
строится по следующему принципу (рис. 5.5). Диапазон разведы-
ваемых частот, как правило, не может быть перекрыт одним уси-
лителем высокой частоты, поэтому в зависимости от заданного
диапазона разведки их может быть 3 — 6. Каждый усилитель высо-
кой частоты через разветвитель нагружается на ряд полосовых фи-
льтров, перекрывающих диапазон частот соответствующего уси-
лителя. Каждый фильтр имеет полосу прозрачности Д/ и настроен
на определенную среднюю частоту / , а в совокупности все они
перекрывают заданную полосу частот Д/.
Сигнал, отфильтрованный соответствующим фильтром, детек-
тируется и усиливается по видеочастоте. После видеоусилителей в
таком приемнике стоят емкостные накопители, которые служат
для того, чтобы запоминать сигнал на время, необходимое для ин-
дикации или съема информации о частоте. В системах радиотех-
нической разведки старых образцов индикация осуществляется на
электронном табло, а в новых системах — на дисплеях или элект-
ронно-лучевых трубках.
С помощью электронного коммутатора производится опрос на-
копителей, напряжение с которых подается на вертикально откло-
50
Рис. 5.5. Структурная схема многоканального беспоискового приемника
пяющие пластины электронно-лучевой трубки. На горизонтально
отклоняющие пластины синхронно с опросом ячеек накопления
подается пилообразное напряжение, которое перемещает луч по
жрану. С помощью яркостной отметки подсвечивается номер
опрощенного канала.
Если по z-му каналу прошел сигнал, то в его ячейке накопления
будет напряжение, которое отклонит луч электронно-лучевой
I рубки.
Время опроса всех каналов должно быть меньше периода сле-
дования импульсов, в этом случае задержка в выдаче информации
о частоте будет несущественна и не скажется на эффективности
беспоискового метода.
Недостатком приемного устройства, построенного по многока-
нальному принципу, является то, что для обеспечения высокой
ючпости измерения несущей частоты число каналов может быть
недопустимо большим. Например, если разведка ведется в полосе
V ” 4000 МГц, а точность измерения должна быть не хуже 5 МГц,
Го число каналов N /(2S/) = 400.
Приемное устройство с таким числом каналов будет достаточно
громоздким, дорогостоящим. При большом уровне сигнала будет
наблюдаться срабатывание смежных каналов. Кроме того, отобра-
жать и оценивать результаты поиска с таким числом каналов срав-
нительно сложно. Поэтому в станциях радиотехнической разведки
применяют двухступенчатый метод обнаружения сигнала. На пер-
вой ступени сигнал обнаруживается с помощью набора широко-
полосных фильтров, определяется номер канала, по которому
пришел сигнал. Затем с помощью набора узкополосных фильтров,
Перекрывающих полосу пропускания широкополосного фильтра,
уточняется значение несущей частоты.
Гак как узкополосные фильтры имеют фиксированную на-
трий ку, то сигналы, прошедшие первую ступень обнаружения,
сводятся к одной промежуточной частоте. Индикация прохожде-
51
ния сигналов через фильтры первой и второй ступени обнаруже-
ния осуществляется на двухлучевом индикаторе. На верхней стро-
ке отображаются результаты поиска первой ступени обнаружения,
на нижней строке — результаты второй ступени обнаружения. Су-
щественным ограничением рассмотренного принципа построения
многоканального беспоискового разведывательного приемника
является затрата на подключение фильтров второй ступени к од-
ному из фильтров первой ступени. Если эту операцию осущест-
вить автоматически, то время, затраченное на переключение кана-
лов, будет незначительным. Примером реализации такого двухсту-
пенчатого обнаружителя может служить приемное устройство
станции СДР-2А или приемное устройство комплекса “Сахалин”.
Матричные и двоичнокодовые приемники не нашли практиче-
ского применения в станциях радиотехнической разведки, поэто-
му принцип их построения здесь не рассматривается.
Целесообразность использования поискового и беспоискового
методов обнаружения должна быть аргументирована с точки зре-
ния системного метода разведки, т.е. с точки зрения решения кон-
кретных задач системой и комплексом разведки в целом. Напри-
мер, если ставится задача вскрыть радиоэлектронную обстановку
в полосе разведки, насыщенной большим количеством радиоэлек-
тронных средств, за время tp , то эффективность беспоисковой си-
стемы обнаружения будет незначительно превосходить поисковую
систему обнаружения с электронной перестройкой. Это объясня-
ется тем, что в поисковых и беспоисковых системах обнаружения
система анализа является одноканальной, т.е. она может быть рас-
смотрена как система массового обслуживания с отказами. Прио-
ритетность обработки до проведения анализа сигналов установить
нельзя, поэтому анализ сигналов в беспоисковой системе будет
проводиться выборочно, с частыми повторениями. Все это приве-
дет к тому, что пропускная способность беспоисковой системы бу-
дет соответствовать пропускной способности одноканальной сис-
темы анализа. Расчеты показывают, что при большой насыщенно-
сти радиоэлектронных средств за время, отводимое для вскрытия
радиоэлектронной обстановки при подготовке армейской опера-
ции, число вскрытых источников разведывательных сведений для
поисковых и беспоисковых систем примерно одно и то же.
Однако поисковая система имеет ряд преимуществ перед бес-
поисковой по технической реализации, чувствительности, избира-
тельности, точности отсчета частоты. Особенно перспективными
являются поисковые системы на гиромагнитных фильтрах и фи-
льтрах, использующих эффект поверхностных акустических волн.
5.3. МЕТОДЫ ПАНОРАМНОГО ЧАСТОТНОГО АНАЛИЗА
Частотный анализ осуществляется в целях выявления несущих
частот и составляющих спектра сигналов. В радиотехнической
разведке частотный анализ сигналов производится в широкой по-
лосе частот, поэтому устройства частотного анализа называются
52
панорамными разведывательными приемниками или панорамны-
ми спектроанализаторами. По принципу построения оба типа
устройств аналогичны. Отличия заключаются лишь в соотноше-
нии полосы пропускания линейной части приемника и ширины
спектра исследуемого сигнала. Если ширина спектра сигнала
меньше полосы пропускания линейной части приемника
(Л/.„ < то такие устройства называются панорамными при-
емниками, и, наоборот, если Д/Сн » Д/11р, то такие устройства на-
нимаются анализаторами спектра. Остановимся на задачах, кото-
рые решаются с помощью этих устройств.
Панорамные разведывательные приемники обеспечивают:
разведку радиоэлектронной обстановки в полосе или секторе
рп шедки;
наблюдение за работой радиоэлектронных средств в заданной
полосе частот;
определение загруженности частотного диапазона;
измерение несущей частоты сигналов;
вскрытие режимов работы радиоэлектронных средств.
(' помощью анализаторов спектра можно решать следующие
ылачи:
определять вид модуляции сигнала;
определять ширину и структуру спектра сигнала;
определять составляющие многочастотного сигнала;
вскрывать характер изменения режимов работы многофункци-
оппльпых радиолокационных станций;
выявлять индивидуальные разведывательные признаки при-
1ни1лсжпости сигналов к конкретным образцам радиоэлектронных
средств.
Для решения перечисленных выше задач панорамные устрой-
епш частотного анализа должны удовлетворять определенным
[рсбованиям и обладать заданными характеристиками, к числу
коюрых в первую очередь можно отнести диапазон разведывае-
мых частот (полосы обзора), разрешающую способность по часто-
(0, скорость обзора частотного диапазона или отдельных его уча-
стии. динамический диапазон, чувствительность.
В устройствах частотного анализа в качестве избирательных по
чпеlore элементов могут быть использованы:
избирательные фильтры на резонансных или полосовых усили-
1слих;
I иромагнитные ЖИГ-фильтры;
ini версионные линии задержки;
пкусгооптические модуляторы света;
‘шстотно-зависимые линии задержки.
1’пссмотрим последовательно особенности частотного анализа
с использованием перечисленных избирательных элементов.
( |руктурная схема панорамного частотного анализатора с из-
Ьирн тельными элементами на резонансных контурах приведена на
рис 5.6. В основе действия таких устройств лежит явление резо-
нанса. Следовательно, разрешающая способность их определяется
53
параметрами резонансной системы и методами частотного анали-
за, скоростью обзора частотного диапазона. Обобщенной характе-
ристикой, учитывающей все перечисленные факторы, является
динамическая характеристика резонансной системы. Чем шире
динамическая характеристика, тем ниже разрешающая способ-
ность. Полоса пропускания динамической характеристики зави-
сит от ширины и формы статической характеристики и скорости
анализа. На рис. 5.7 изображено семейство динамических частот-
ных характеристик одиночного колебательного контура.
Рис. 5.6. Структурная схема панорамного частотного анализатора
Параметрами семейства является коэффициент е =
А/up >
где у = — — скорость изменения частоты воздействующего на-
дг
пряжения (скорость перестройки);
Д/пр — ширина статической характеристики колебательно-
го контура.
Анализируя приведенные частотные характеристики, видно,
что с ростом скорости перестройки происходят следующие явле-
ния: максимум характеристики сдвигается в сторону изменения
частоты, а значение выходного напряжения уменьшается; расши-
54
ряется полоса пропускания; появляются дополнительные макси-
мумы; ухудшается соотношение сигнал/шум.
Устройства панорамного частотного анализа на гиромагнитных
фильтрах (ЖИГ-фильтрах) могут быть прямого усиления и супер-
гетеродинного типа.
Один из вариантов функциональной схемы панорамного час-
тотного анализатора прямого усиления изображен на рис. 5.8.
Рис. 5.8. Структурная схема частотного анализатора прямого усиления
Рис. 5.9. Конструкция коак-
сиального ЖИГ-фильтра
Анализатор содержит полосовые избирательные ЖИГ-фильтры,
фанзисторные усилители высокой частоты, квадратичный детектор,
видеоусилитель, индикатор и устройство регистрации.^Частотно-из-
бирательная система приемника прямого усиления, основой кото-
рой являются гиромагнитные ЖИГ-фильтры, определяет такие ка-
чественные показатели, как избирательность, чувствительность, раз-
решающую способность по частоте, а также динамический
диапазон. Принцип действия гиромагнитного фильтра основан на
резонансных явлениях в ферритовом образце. Намагниченный до
насыщения феррит при воздействии гармонического колебания в
динамическом отношении подобен колебательному контуру.
Если гиромагнитное вещество возмущается периодическим
электромагнитным полем с частотой fo, то при выполнении усло-
вия /0 =ц0Я.угол прецессии намагни-
ченности становится максимальным.
Это и будет проявлением гиромагнитно-
го резонанса. Здесь Ht — напряженность
внутреннего магнитного поля в образце.
; В зависимости от целей применения
и рабочего диапазона гиромагнитные
фильтры делятся на резонансные, вол-
новодные, коаксиальные и полосковые.
Коаксиальные фильтры (рис. 5.9)
применяются для работы в низкочастот-
ной области сверхвысокочастотного диа-
пазона (ниже 2 ГГц). Высокочастотная
шергия передается с помощью -сферы
через полную петлю связи.
55
На средних частотах СВЧ-диапазона (от 2 до 12 ГГц) применя-
ются гиромагнитные фильтры полосковой конструкции. В них
связь между входом и выходом осуществляется посредством полу-
петель. Сфера находится на пересечении полупетель связи. Маг-
нитное поле направлено вдоль линии пересечения полупетель.
Полосковый фильтр (рис. 5.10) выполнен на двух сферах диамет-
ром 1,12 мм. На частотах выше 12 ГГц используются гиромагнит-
ные фильтры волноводного типа (рис. 5.11).
Рис. 5.10. Конструкция полоскового ЖИГ-фильтра
Рис. 5.11. Конструкция волноводного ЖИГ-фильтра
Гиромагнитные фильтры имеют следующие характеристики:
потери — от 3 до 5 дБ;
полоса пропускания — от 2 до 50 МГц в зависимости от диапа-
зона;
уровень боковых паразитных резонансов — порядка 25 ... 30 дБ;
динамический диапазон — 50 ... 60 дБ.
Большим их достоинством являются широкий диапазон пере-
стройки, простота управления частотной перестройкой, высокая
избирательность и стабильность характеристик.
56
Существенным преимуществом приемников прямого усиления
перед супергетеродинными является отсутствие комбинационных
частот, вызванных преобразованием частоты, и отсутствие приема
по зеркальному каналул
В качестве индикаторов панорамных приемников на ЖИГ-фи-
льтрах используются аналого-цифровые дисплеи с цифровым съе-
мом информации о частоте. Это позволяет определять значение
частоты в процессе перестройки (на проходе).
Устройства регистрации предназначены для отображения час-
тотной обстановки на магнитной ленте или электрохимической
бумаге в целях обобщения результатов анализа за длительный ин-
тервал времени. Наиболее подходящим устройством регистрации
результатов анализа в условиях радиотехнической разведки явля-
ется фототелеграфный аппарат, скорость которого синхронизиро-
вана со скоростью перестройки ЖИГ-фильтра. Поэтому положе-
ние сигнала на строке электрохимической бумаги соответствует
конкретному значению несущей частоты. На рис. 5.12 показан об-
разец записи частотной обстановки в диапазоне 1...10 ГГц. Запись
сделана с помощью устройства частотного анализа (рис. 5.13).
1,С JL
70 -
60 -
50 - | =
40 -
30 - н _
20 - = = ~
10 - = =
___I__I___I__I___I I____I___I___I__I____0»
1 2 3 4 5 6 7 8 9 10/,ГГц
Рис. 5.12. Регистрация частотной обстановки
Рис. 5.13. Структурная схема устройства анализа и
регистрации частотной обстановки
57
Рис. 5.14. Структурная схема устройства управления перестройкой
частоты
Управление перестройкой избирательных элементов происхо-
дит с помощью цифровых устройств (рис. 5.14). Команды управ-
ления в виде десятичного кода поступают на входной преобразо-
ватель код — напряжение, выдающий ступенчатое напряжение,
пропорциональное заданной частоте настройки:
U=k(fT -fH)>
где к = —— коэффициент пропорциональности;
f\kt -')
/т — текущая частота настройки;
/н — нижняя частота диапазона;
kf — коэффициент перекрытия по частоте.
Особенностью рассмотренного метода является использование
одних и тех же ступенчатых напряжений как для создания разверт-
ки луча на электронно-лучевой трубке, так и для перестройки изби-
рательного фильтра. При изменении частоты опорного генератора
изменяются одновременно скорость развертки и скорость пере-
стройки. Этим устраняются ошибки, вызванные нестабильностями
управляющих напряжений. Оригинальным устройством съема ин-
формации является устройство, состоящее из счетчика и панорам-
ного индикатора (рис. 5.15). Запуск счетчика осуществляется син-
хронно и одновременно с началом развертки на панорамном инди-
каторе, а остановка — импульсом, пришедшим с фотодатчика.
Фотодатчик для удобства пользования помещен в специальный ка-
рандаш. В точку появления сигнала на частотно-временной развер-
тке панорамного индикатора подводится карандаш с фотодатчиком
на конце. Световой импульс преобразуется в фотодатчике в элект-
рический, который производит остановку счетчика. Устройство
управления позволяет сбрасывать показания счетчика и перевести
его в готовность к следующему измерению.
58
ЯА1ЮРЖНЫЙ ИЩИХАТОР
Рис. 5.15. Структурная схема устройства съема индикации
Таким образом, при условии линейности напряжения пере-
стройки значение интервала от импульса запуска до импульса фо-
тодатчика не зависит от скорости развертки индикатора. Это по-
зволяет избавляться от составляющей ошибки, обусловленной не-
стабильностью работы осциллографического индикатора.
Кроме повышения точности отсчета частоты имеют место и
другие преимущества:
возможность полуавтоматического съема информации при ав-
томатической перестройке приемного устройства;
возможность полуавтоматической настройки приемников ана-
лиза на частоту выбранного сигнала;
наглядное отображение частоты в цифровой форме;
большая оперативность съема информации.
Особенно удобен рассмотренный метод в панорамных прием-
никах на гиромагнитных ЖИГ-фильтрах, где диапазоны разведки
достигают нескольких гигагерц при высокой скорости обзора.
5.4. ПРИНЦИПЫ ПОСТРОЕНИЯ АКУСТООПТИЧЕСКИХ
ПРИЕМНЫХ УСТРОЙСТВ
t
Акустооптический метод частотного анализа сигналов
При измерении частоты радиосигналов оптическими методами
в настоящее время используются различного рода дифракции ко-
герентного светового потока на периодических структурах. Разли-
чают дифракцию света на тонких дифракционных решетках (диф-
ракция Римана — Ната) и на объемных решетках (дифракция
Брегга).
59
Дифракция Римана — Hama. Пусть плоская световая волна с ам-
плитудой Ао распространяется в направлении положительной по-
луоси у.
На пути распространения волны находится дифракционная ре-
шетка с амплитудным коэффициентом пропускания, например
транспарант в виде стеклянной пластины с толщиной, изменяю-
щейся по закону
t = /0 + /( СО8 2тгГ|У,
где /0,/, — вещественные постоянные;
г| — пространственная частота решетки.
За дифракционной решеткой амплитуда выходной волны
а(у, л) = aj0 + a/(cos27rny = а (г n + - а|/1 ехр(2л^у) +
2 (5.1)
+ |a1z1 ехр(-2тут|у).
Физический смысл выражения заключается в том, что исход-
ный пучок света расщепляется на три.
Первая часть выражения описывает плоскую волну, распро-
страняющуюся вдоль оси Z, — недифрагированную волну.
Вторая часть выражения описывает плоскую волну, распро-
страняющуюся под отрицательным углом 02 к оси Z, причем
sin02 = лть гДе — Длина волны света (дифрагированная волна
+ 1-го порядка).
Третья часть выражения (5.1) описывает плоскую волну, рас-
пространяющуюся под положительным углом (дифрагированная
волна -1-го порядка).
Таким образом, легко видеть, что если сохранить л неизменной,
то угол отклонения дифрагированных пучков однозначно зависит
от пространственной частоты дифракционной решетки.
Дифракция Брегга. Физические процессы, проходящие при
этом виде модуляции, в целом близки к процессам при дифракции
Римана — Ната. Образуются две волны: недифрагированная и от-
клоненная. Угол отклонения определяется выражением
sine = ^l, (5.2)
из которого следует, что в случае брегговской дифракции имеется
однозначная связь частоты объемной дифракционной решетки и
угла отклонения светового пучка.
Преобразование радиосигнала в его пространственный аналог,
т.е. в дифракционную решетку, проще всего реализуется с помо-
щью акустооптических модуляторов (АОМ).
Радиосигнал поступает на пьезопреобразователь, возбуждаю-
щий в звукопроводе бегущую акустическую волну. Акустическая
волна, проходящая через ячейку, заполненную оптико-акустиче-
ским материалом, вызывает синусоидальное изменение показате-
ля преломления материала вдоль звукопровода. Поскольку ско-
рость акустической волны мала по сравнению со скоростью света,
60
то образуется медленно движущаяся диэлектрическая дифракци-
онная решетка. Изменение коэффициента преломления вызывает
изменение фазы проходящего света. В зависимости от соотноше-
ния геометрических размеров пьезопреобразователя и длины зву-
ковой волны в акустической ячейке может обеспечиваться либо
режим Римана — Ната, либо режим Брегга.
Ячейка Брегга освещается параллельным когерентным лазер-
ным лучом, падающим под углом Брегга к направлению распро-
странения акустической волны. В результате акустооптического
взаимодействия в ячейке лазерный луч отклоняется, причем угол
отклонения прямо пропорционален частоте анализируемого ра-
диосигнала. Отклоненные лазерные лучи фокусируются на линей-
ной матрице фотодетекторов, выполненной на приборах с зарядо-
вой связью, где световая энергия преобразуется в электрические
заряды и накапливается в элементах матрицы. Электронное
устройство считывания преобразует энергию зарядов в напряже-
ние выходного видеосигнала, которое обрабатывается для даль-
нейшего анализа принятых сигналов и их индикации.
Созданные к настоящему времени ячейки Брегга с шириной
полосы частот, равной примерно октаве, обеспечивают формиро-
вание до 2 тыс. отклоненных на разные углы лазерных лучей, т.е.
позволяют определить одновременно до 2 тыс. различных частот.
Разрешающая способность по частоте приемника на ячейке Брег-
га обратно пропорциональна длительности акустического сигнала
в апертуре ячейки Брегга. Интенсивность каждого отклонения ла-
зерного луча определяется мощностью входного радиосигнала.
Основу ячейки Брегга составляет акустооптический модулятор
света. Из акустооптических материалов наиболее часто использу-
ют воду, плавленый кварц, парателлурит (ТеО2) и др. В случае
применения акустооптического дефлектора (т.е. устройства, от-
клоняющего пучок света)
где та — время отклонения пучка;
D — ширина оптического пучка;
у — скорость звука в акустооптической среде.
Из формулы (5.3) видно, что при фиксированной ширине оп-
тического пучка быстродействие акустооптического модулятора
тем выше, чем больше скорость звука у. Скорость звука в наиболее
распространенных модуляторах «изменяется от 700 м/с (альфаиод-
ная кислота) до 3,5 км/с (плавленый кварц).
Простейшее устройство для измерения частоты радиосигналов
показано на рис. 5.16. Принцип действия устройства заключается
в следующем. Пучок света от лазера дифрагирует на АОМ и рас-
щепляется. Оптический клин имеет переменную подлине оптиче-
скую плотность.
Изменение частоты сигнала на входе акустооптического моду-
лятора вызывает перемещение луча 1-го дифракционного порядка
по оптическому клину. Это, в свою очередь, приводит к измене-
61
АКУСТО олтичкский
МОДУЛЯТОР СВЯТА
Рис. 5.16. Структурная схема акустооптического устройства
частотного анализа
нию интенсивности светового потока на входе фотоприемника.
Таким образом, появляется однозначная связь выходного сигнала
фотоприемника и частоты входного сигнала.
Дальнейшим развитием описанного устройства является акус-
тооптический панорамный приемник, который отличается тем,
что в нем используется энергия + 1-го дифракционного порядка за
счет введения второго канала приема. Предположим, что частота
сигнала возросла. Тогда в соответствии с выражением (5.2) дифра-
гированные пучки разойдутся. Поскольку оптические клинья ори-
ентированы в пространстве одинаково, то сигнал от верхнего фо-
топриемника станет, скажем, больше, а от нижнего — меньше.
Схема вычитания вычислит их разницу. Легко заметить, что в та-
ком устройстве выходная характеристика имеет знакопеременный
характер. Это делает перспективным ее применение в автоматиче-
ских системах измерения частоты радиосигналов.
Недостатком приемников, использующих акустооптический
модулятор света, является узкий динамический диапазон
(20...30 дБ), что в ряде случаев ограничивает их применение в сис-
темах радиотехнической разведки.
Важнейшей из технических характеристик акустооптического
модулятора является диапазон рабочих частот. Этот диапазон
определяется как типом используемой дифракции, так и материа-
лом звукопровода.
Дифракция Римана — На та позволяет обрабатывать сигналы с
несущей частотой до нескольких десятков мегагерц. Дифракция
Брегга обеспечивает работоспособность модуляторов до единиц
гигагерц. Зависимость интенсивности дифракционного пучка све-
та от частоты для различных видов дифракций показана на
рис. 5.17.
62
Рис. 5.17. Зависимость интенсивности пучка света
от частоты сигнала
Разрешающая способность по частоте акустооптического при-
емника ограничена также расходимостью дифрагированного пуч-
ка света в дальней зоне. Эта расходимость является следствием
дифракции, связанной с ограниченным поперечным сечением па-
дающей плоской световой волны.
Для световых пучков с круглым поперечным сечением угловая
расходимость в дальней зоне определяется хорошо известным со-
отношением
р = aX/D,
где а — коэффициент, характеризующий угловую расходимость
луча между выбранными уровнями относительного спада
интенсивности;
D — диаметр пятна.
Минимальный интервал частот, который может быть разрешен
в режиме непрерывной бегущей ультразвуковой волны, определя-
ется как интервал, для которого угол отклонения луча Д0 равен его
угловой расходимости.
Быстродействие акустооптического приемного устройства
При работе ультразвуковой ячейки в режиме бегущей волны за-
держка в возникновении сигнала на выходе фотодиода по отноше-
нию к моменту прихода высокочастотного сигнала складывается
63
из времени прохождения ультразвукового импульса от преобразо-
вателя до светового луча и времени, необходимого для заполнения
поперечного сечения светового луча ультразвуковым сигналом.
Первое слагаемое может быть уменьшено до нуля, если луч будет
проходить вплотную с преобразователем. Второе слагаемое опре-
деляет время заполнения от 10 до 90 % поперечного сечения све-
тового луча.
Требования к уровню мощности возбуждения
Мощность, необходимая для возбуждения в ультразвуковой
ячейке акустических колебаний, зависит от вносимых преобразо-
вателем потерь, полосы частот высокочастотного сигнала, общего
числа каналов, оптических и акустических свойств среды взаимо-
действия, чувствительности фотодиодов, полосы видеотракта, ин-
тенсивности света и режима работы. Доказано, что при равных аб-
солютных полосах частот и одинаковом числе каналов при диф-
ракции Брегга для возбуждения ультразвуковых колебаний
требуется мощность вдвое меньше, чем при дифракции Римана —
Ната. В качестве фотоприемников желательно использовать фото-
диоды с низким уровнем дробового шума и большим быстродей-
ствием. В реальных разведывательных приемниках используются
ячейки на приборах с зарядовой связью.
Оптические требования
Падающий луч света должен быть когерентным как во време-
ни, так и в пространстве, иначе в выходной плоскости будет на-
блюдаться множество дифракционных картин, каждая из которых
была бы связана с определенным углом падения одного из множе-
ства непараллельных пучков, составляющих луч пространственно-
го некогерентного света.
Требования к временной когерентности можно записать в виде
ду =
/к
Wm,n
. /о .
ДА
Л
где к — допустимое увеличение ширины луча дифрагированного
света.
Если к = 0,1, =0,01, то — =0,001.
Л ’
э ДА
Значение для гелии-неоновых лазеров составляет пример-
Л
но 10’6 , следовательно, соответствует требованиям к временной
когерентности.
Требования к пространственной когерентности вытекают из
тех же условий:
64
А/min
~тг.
Полагая к = 0,1; Л. = 6,3- 10“5 см;/0 = 3,75 108 Гц;АД/Д = 10’6,
получим |д<р| = 2,36 • 10’5 рад. Это число указывает на нежелатель-
ность использования лазеров с синфазным волновым фронтом.
Частотно-модулированные колебания
Частотная модуляция импульса приводит к изменению длины
волны акустических колебаний, а значит, к изменению шага пока-
зателя преломления п вдоль пластины. Для световых колебаний
образуется перемещающаяся во времени дифракционная решетка
с переменным шагом. Падающие на различные элементы решетки
лучи света отклоняются при переменном ее шаге неодинаково и
могут сфокусироваться в различных дифракционных максимумах.
Углы отклонения определяются из условия компенсации раз-
ности хода 0,5 лт|-г,; 0,5 X,max, где Xmin и A.max — длины оптической
волны.
Акустооптические приемные устройства комплексов
радиотехнической разведки
В настоящее время созданы ячейки Брегга с центральной час-
тотой в диапазоне от 50 МГц до 2 ГГц и шириной мгновенной по-
лосы частот до октавы. Работа на более высоких частотах (до
18 ГГц и выше) обеспечивается путем соответствующего преобра-
зования частоты входных сигналов.
В составе приемника имеются входное устройство, блок опти-
ческой обработки сигналов, блок предварительной цифровой об-
работки и вычислительное устройство (рис. 5.18).
Рис. 5.18. Структурная схема акустооптического приемного устройства
65
Входное устройство содержит преобразователь частоты входных
сигналов и малошумящий усилитель.
Оно работает в диапазоне частот от 2,6 до 3,1 ГГц с шириной
мгновенной полосы пропускания 500 МГц. Диапазон частот мо-
жет быть расширен до 18 ГГц при шаге 500 МГц. Динамический
диапазон входного устройства превышает 50 дБ. При автоматиче-
ской регулировке усиления с помощью вычислительного устрой-
ства динамический диапазон входного устройства может быть уве-
личен до 120 дБ.
Блок оптической обработки сигналов (см. рис. 5.16) содержит ла-
зер, оптическую систему коллимации лазерного луча, ячейку Брег-
га, фокусирующую линзу и линейную матрицу фотодетекторов с
электронным устройством считывания. Мощность излучения лазе-
ра составляет 10 МВт, диаметр луча 1 мм. Система коллимации
формирует из лазерного луча параллельный пучок с эллиптической
формой поперечного сечения, размеры которого соответствуют
размерам акустического луча в ячейке Брегга. В фокальной плоско-
сти фокусирующей линзы расположена матрица фотодетекторов,
содержащая более 1 тыс. фотодиодов и обеспечивающая измерение
частоты сигналов в полосе 500 МГц с разрешением 1 МГц. Для
ускорения процесса считывания сигналов с матрицы фотодетекто-
ров используется несколько параллельных видеоканалов.
Время считывания информации с матрицы фотодетекторов
определяет как временную разрешающую способность всего раз-
ведывательного приемника, так и предельную скорость считыва-
ния, которая может достигать нескольких миллионов аналоговых
сигналов в секунду.
Динамический диапазон блока оптической обработки состав-
ляет 30 дБ и определяется в основной матрице фотодетекторов.
Можно увеличить его до 60 дБ за счет расщепления лазерного луча
и образования двух отдельных каналов обработки для сильных и
слабых сигналов.
Блок предварительной цифровой обработки предназначен для
быстрого преобразования аналоговых сигналов в цифровые и сжа-
тия (уменьшения избыточности) потока данных. В перспективе
предполагается обеспечить обработку в реальном времени радио-
сигналов одновременно в тысяче параллельных каналов.
Вычислительное устройство используется для анализа сигналов,
управления приемником и индикации обнаружения сигналов. Це-
лью анализа являются определение типа сигнала и измерение его
амплитуды и времени появления. Полученная информация ото-
бражается на цифровом индикаторе “Время — частота”.
Характеристика акустооптического приемного
устройства станции радиотехнической
разведки СРТР-У “Кольчуга”
Для более глубокого понимания принципов построения акус-
тооптического приемника рассмотрим наиболее важные его ха-
рактеристики, такие, как чувствительность, отношение сиг-
66
нал/шум на выходе приемника, влияние длительности сигнала и
времени накопления на основные показатели.
Схема измерения параметров показана на рис. 5.19. Принцип
работы сводится к следующему. Сигнал промежуточной частоты с
выхода высокочастотного блока поступает на устройство усиления
сигнала промежуточной частоты, где усиливается по мощности до
уровня 0,01...1,0 Вт и подается на акустический преобразова-
тель-измеритель, где несущая частота сигнала преобразовывается
в задержку выходного сигнала (ВС) фотоприемника относительно
начала считывания (НС), а значение ширины спектра — в длите-
льность выходного сигнала. Сигнал с акустооптического преобра-
зователя-измерителя, управляемого устройством управления фо-
топриемником, поступает на устройство предварительной обра-
ботки, в котором видеосигнал очищается от служебных сигналов.
Рис. 5.19. Структурная схема акустооптического приемного устройства
станции “Кольчуга”
Вычислитель текущих значений параметров по сигналам “На-
чало считывания” и “Выходной сигнал”, тактирующему импульсу
и информации о номере частотного канала определяет значения
несущей частоты /н. и ширины спектра Д/н/. анализируемого сиг-
нала, формирует код частоты и ширины спектра для устройства
индикации. Принципиальным для любого приемного устройства
является отношение сигнал/шум на его входе и выходе.
Для акустооптического приемника это соотношение определя-
ется из следующего выражения:
4вь,х =8/Гн(^вх)\
где 8/— разрешающая способность приемника по частоте;
Гн — время накопления сигнала на ячейках фотоприемника.
Если разрешающая способность приемника соответствует ши-
рине спектра сигнала д/с, а время накопления 7Н равно длитель-
67
ности сигнала ти, то для энергетически скрытых сигналов радио-
локационной станции при входном отношении сигнал/шум qex =
=10 дБ выходное отношение сигнал/шум будет составлять
4...25 дБ. Важной характеристикой приемного устройства является-
связь чувствительности с длительностью импульсов, временем на-
копления и временной апертурой ТА.
Рис. 5.20. Зависимость чувствительности приемника от длительности
принимаемых сигналов
Рис. 5.21. Зависимость чувствительности приемника от времени
накопления длительности ти и апертуры Гд
68
На рис. 5.20 представлены расчетные семейства кривых, харак-
теризующих зависимость чувствительности приемника от длите-
льности принимаемых сигналов при фиксированных отношениях
сигнал/шум и различных значениях времени прохождения сигна-
лом а кустооптического модулятора 7д (временной апертуре).
Как следует из графика (см. рис. 5.20), приемное устройство на
основе ячеек Брегга с пространственным интегрированием может
обеспечить чувствительность 139... 149 дБ/Вт по скрытым сигна-
лам с длительностью 5... 100 мкс.
Зависимость чувствительности акустооптического приемника
от времени накопления для различных длительностей ты и времен-
ной апертуры 7д показана на рис. 5.21. Из графиков следует, что
наиболее высокая чувствительность обеспечивается при равных
значениях 7д и ти.
Оптимальным в понимании достижения максимальной чувст-
вительности приемного устройства является выбор временной
апертуры акустооптического модулятора, равной длительности
принимаемого сигнала. Однако ввиду большого диапазона дли-
тельностей входных сигналов это условие при ведении радиотех-
нической разведки выполняться не будет. Следовательно, чувст-
вительность акустооптических разведывательных приемников бу-
дет в пределах 95... 140 дБ.
Задачи, решаемые с помощью акустооптических приемных
устройств
С помощью разведывательных приемников на ячейках Брегга
можно осуществлять:
перехват в широком диапазоне частот и анализ различных ра-
диоизлучений — сигналов радиолокационных станций, систем
опознавания “свой — чужой”, систем управления воздушным дви-
жением, навигационных систем и средств связи противника;
определение координат источников излучения триангуляцион-
ным методом (использование разведывательного приемника в ка-
честве дополнительного пассивного датчика, уменьшающего
ошибки измерения координат за счет специфических характери-
стик спектров помеховых сигналов);
пеленгование и идентификацию самолетов по их радиолокаци-
онным сигналам;
пеленгование постановщиков цомех;
контроль излучения собственных радиолокационных станций
и систем связи.
Использование приемников на ячейках Брегга совместно с уз-
кополосными сканирующими супергетеродинными приемника-
ми, демодуляторами (устройствами определения модулирующих
функций сигнала) и пеленгаторами открывает новые перспективы
для расширения функциональных возможностей систем радиотех-
нической разведки.
69
Дальнейшие работы по совершенствованию разведывательных
приемников на ячейках Брегга направлены на расширение их ди-
намического диапазона и улучшение временной разрешающей
способности, разработку устройств сжатия потока выходных дан-
ных и создание алгоритмов обработки сигналов. Ожидается, что
будут разработаны аппаратура и программное обеспечение
устройств предварительной обработки сигнала для сжатия потока
данных в 100 - 10 000 раз.
При создании полностью автоматического приемника предпо-
лагается применять для обработки сигналов многошинные микро-
процессорные системы или матричные процессоры. Для умень-
шения времени обработки данных и расширения возможностей
устройств анализа должна быть создана специальная архитектура
матричных процессоров в совокупности с соответствующими ал-
горитмами обработки сигналов.
В целях расширения мгновенной полосы частот можно исполь-
зовать несколько параллельно работающих разведывательных
приемников. Создание таких многоканальных систем будет упро-
щено за счет модульного построения приемных устройств.
Перспективным считается также применение многоканальных
приемников на ячейках Брегга в широкополосных пеленгаторах,
где приемники по определенной программе подключаются к не-
скольким (например, четырем) антеннам для последовательного
формирования круговой диаграммы направленности и измерения
азимута источника излучения. Одновременно производится изме-
рение и других параметров сигналов: xu,Tt,bf.
Основные параметры акустооптических приемников, предназ-
наченных для радио- и радиотехнической разведки, по данным за-
рубежных источников, приведены в табл. 5.1.
Таблица 5.1
Параметр Для радиотехнической разведки Для радиоразведки
Диапазон частот, ГГц 0.7 ,18 0,3...4
Ширина мгновенной полосы пропускания, МГц 500 1000
Разрешающая способность по частоте, МГц 1 1
Чувствител ьн ость*: мкВ дБ/Вт 90 80
Динамический диапазон, дБ 30 45
Длительность импульса, мс - 0,02...16
Напряжение питания, В 220 —
’ Чувствительность приведена для непрерывных сигналов и одиночных импуль-
сов длительностью не менее 25 мкс при отношении сигнал/шум более 13 дБ.
70
5.5. ПРИНЦИП ПОСТРОЕНИЯ ПАНОРАМНЫХ
РАЗВЕДЫВАТЕЛЬНЫХ ПРИЕМНИКОВ СО СЖАТИЕМ
ИМПУЛЬСОВ
Общие положения о приемнике со сжатием импульсов
Широко распространенным разведывательным приемником
является супергетеродинный приемник, в котором реализован
принцип аналоговой обработки сигналов (см. рис. 5.1). Такой
приемник обычно состоит из преселектора, широкополосного
смесителя, детектора, видеоусилителя и индикатора. Как было от-
мечено, приемник имеет высокую чувствительность, хорошую из-
бирательность при использовании преселектора (например, на
ЖИГ-резонаторах) и низкую вероятность ложных тревог. Недо-
статками приемника являются низкая вероятность обнаружения
одиночных импульсов, не очень высокая точность измерения час-
тоты (погрешность ±0,5 %), невозможность индикации сигналов с
межимпульсной и внутриимпульсной модуляцией.
Вероятность обнаружения сигнала может быть повышена за
счет увеличения скорости перестройки частоты гетеродина, а так-
же перестройки гетеродина по заданной программе, учитывающей
распределение вероятностей появления сигналов в частотном диа-
пазоне. Однако увеличение скорости перестройки приводит к
ряду нежелаемых явлений в приемнике, таких, как возникновение
динамических искажений спектра сигнала за счет быстрого изме-
нения частоты гетеродина. Немодулированный радиоимпульс
превращается в частотномодулированный. Ширина спектра тако-
го сигнала определяется уже не длительностью входного импуль-
са, а девиацией частоты гетеродина за время импульса и может
превышать ширину спектра исходного сигнала в сотни раз.
Это, в свою очередь, приводит к потере чувствительности и
точности измерения частоты. Если для входного радиоимпульса
полоса УПЧ приемника согласована с ним, то при быстрой пере-
стройке она окажется сильно рассогласованной.
Чем быстрее осуществляется перестройка приемника, тем
выше коэффициент рассогласования.
Для того чтобы исключить потери чувствительности, необходи-
мо согласовать тракт УПЧ не с сигналом на входе приемника, а с
сигналом на входе УПЧ (на выходе смесителя). Вспомним условия
согласованной фильтрации. Их два: одно — в частотной области,
другое — во временной. Для осуществления согласованной филь-
трации достаточно выполнения одного из них, другое выполняет-
ся автоматически.
Условие во временной области гласит: фильтр считывается со-
гласованным с сигналом, если его импульсная характеристика g(t)
с точностью до постоянного коэффициента С является зеркаль-
ным отображением сигнала на его входе:
«(О = С5(<(, -0-
71
Условие в частотной области вытекает из преобразования Фу-
рье от импульсной характеристики фильтра.
Комплексный коэффициент передачи согласованного фильтра
А'(со) =С15'’(а))е’у/()<0, где to — задержка выходного сигнала, должен
с точностью до постоянного коэффициента Q соответствовать со-
пряженному спектру входного сигнала У’(со).
Амплитудно-частотная характеристика фильтра (АЧХ) описы-
вается, как А'(со) = с, 5(со), а фазочастотная (ФЧХ) будет иметь вид
Ф*(со) = <р,.(со) - со0/. Знак ( - ) в правой части указывает на комп-
лексную сопряженность фазочастотной характеристики <р5(со) и
комплексную сопряженность спектра сигнала. Сказанное можно
наглядно пояснить с помощью рис. 5.22.
Таким образом, на выходе смесителя необходимо поставить не
обычный УПЧ, а фильтр, согласованный с сигналом. Из теории
согласованной фильтрации известно, что применять согласован-
ный фильтр можно только тогда, когда параметры сигнала извест-
ны, т.е. известны его длительность, частота, закон модуляции.
При радиотехнической разведке на вход приемника поступают
различные сигналы с различной структурой и осуществить согла-
сованную фильтрацию в этих условиях нельзя. Но в данном случае
фильтр согласуется не с входным сигналом, а с сигналом на входе
смесителя. Параметры этого сигнала определяются законом моду-
ляции гетеродина, а поэтому известны заранее, так как мы сами
определяем закон изменения частоты. Поясним это с помощью
рис. 5.23, на котором показаны динамика изменения структуры
сигнала на выходе смесителя, а также характеристики, которыми
должен обладать согласованный фильтр.
72
Рис. 5.23. Динамика изменения структуры сигнала
на выходе смесителя
Входной непрерывный сигнал, так же как и импульсный, с
длительностью, равной или большей времени сканирования, бу-
дет преобразовываться при каждом сканировании в короткий
импульс на выходе приемника. Импульс, длительность которого
меньше времени сканирования, также будет создавать сжатый вы-
ходной сигнал, но с меньшей амплитудой и сдвинутый по частоте.
Время поступления сигнала на фильгр квантовано на интерва-
лы, равные времени сканирования. Если время сканирования со-
ставляет 1 мкс, то время поступления сигнала на вход приемника
не может быть измерено с погрешностью, меньше 1 мкс.
Поскольку полоса пропускания приемника определяется дли-
тельностью сжатого импульса и примерно равна —, то за счет
т
и сж
большой ширины полосы пропускания промежуточных частот
обеспечивается высокая вероятность перехвата сигналов без сни-
жения чувствительности или получения при обработке совпадаю-
щих по времени сигналов. Отклик согласованного фильтра на ли-
нейно-частотно-модулированный сигнал имеет высокий уровень
боковых лепестков, которые всего на 13 дБ ниже максимума, что
существенно снижает возможности приемника по частотному раз-
решению, особенно если амплитудно-частотная характеристика
фильтра будет прямоугольной. Поэтому на практике используют
сжимающие фильтры с амплитудно-частотной характеристикой,
описываемой усеченной гауссовой кривой. Кроме того, в ряде
случаев используется специальная дополнительная весовая обра-
73
Рис. 5124? Сжатие КМлульса на выходе
фильтра
ботка сжимаемого сигнала, преобразующая выколкой сигнал в
импульс гауссового типа, что позволяет ослабить уровень ближних
боковых лепестков сигнала на выходе приемника на 20 дЬ и более.
Однако при весовой обработке увеличивается ширина главного
лепестка импульса, что ухудшает разрешающую способность.
Приемник со сжатием сигнала обеспечивает почти одинаковую
вероятность перехвата входного сигнала во всем частотном диапа-
зоне, которая обычно присуща широкополосным приемникам
прямого усиления, но сохраняет способность высокого частотного
разрешения, которая присуща приемнику с узкой полосой пропу-
скания линейного тракта. Линейная зависимость времени задерж-
ки в фильтре от частоты приводит к тому, что задержка низкочас-
тотных составляющих спектра больше задержки высокочастотных
составляющих. Пропорциональные задержки имеют и промежу-
точные спектральные составляющие. Результатом этого является
сжатие импульса на выходе фильтра (рис. 5.24). Из-за ограничен-
ной полосы пропускания фильтра Д/выходной импульс отличает-
ся от идеального (8-функции), имеет конечную длительность и
представляет собой Фурье-преобразование спектра сигнала про-
межуточной частоты. С рос-
том ширины полосы проме-
жуточных частот дЛ дли-
тельность выходного импу-
льса уменьшается, а разре-
шение по частоте данного
приемника увеличивается.
Практически ограниче-
ния по частотному разреше-
нию в приемниках со сжа-
тием импульса зависят от
ограничения скорости ска-
нирования и линейности
гетеродина, а также от ли-
нейности частотно-времен-
ной ^"исйерсйоИнс'й) ха-
рактеристики сжимающего
фильтра. Произведение
диапазона задержки т3 фи-
льтра на ширину его полосы
пропускания Д/ характери-
зует добротность приемни-
ка (коэффициент сжатия) —
базу фильтра:
В = ДЛз-
Структурная схема пано-
рамного приемника (спек-
троанализатора) изображе-
на на рис. 5.25.
74
Так как на входе фильтра присутствует линейно-частотно-моду-
лиро’ванный сигнал, то для согласованной фильтрации использует-
ся дисперсионная линия задержки на поверхностных акустических
волнах (ПдВ\ На влйэде линии необходимо поставить усилитель
мощности для эффективнее преобразования электрических коле-
баний в ультразвуковые и фильтрации помех вне полосы дисперси-
онной характеристики линии. тЕа выходе смесителя необходимо
установить усилитель для компенсации большого затухания сигна-
лов дисперсионной линии задержки, которое может составлять до
80 дБ. Так как ослабляется не только полезный сигнал, но и шум,
то, компенсируя затухание, получаем необходимый эффект: высо-
кую вероятность обнаружения сигнала и высокую разрешающую
способность сигналов по частоте и точности ее измерения.
Рассматривая общий принцип построения панорамного при-
емника со сжатием импульса, мы не объясняли, как определяется
частота сигнала. Поэтому для лучшего понимания этого принципа
рассмотрим работу дисперсионной линии задержки на поверхно-
стных акустических волнах й Некоторые теоретические основы
спектрального анализа на дисперсионных линиях задержки.
работы дйсперсйонной дишии задержки
на поверхностных акустических волнах
Наибольшее применение в фидьтрах сжатия нашли приборы на
поверхностных акустических волнах, рашгростран^ю'ц^’жея вт-оль
поверхности уЗфуШх твердых тел в звукоГГроводе в относительно
тонком приповерхностном слое.
Если на поверхности звукопровода нанесен тонкий слой веще-
ства е<э скоростью распространения менЦПей, чем в основном зву-
коп^оводе, то в приповерхностном слое возникают поперечные
колебания — волны Лява, обладающие частотнойтщсперсией ско-
рости распространения и позволяющие вследствие этого создавать
дисперсионные линии задержки.
75
Малая скорость распространения акустических колебаний в
среде va = 0,33 ... 10 км/с дает возможность получить задержку сиг-
нала т3 = 1 ...30 мкс на сантиметр длины звукопровода. Длина акус-
тической волны Л.а = у- примерно в 10 раз меньше длины электро-
магнитной волны в свободном пространстве при одной и той же
частоте колебаний.
Размеры приборов на ПАВ пропорциональны длине волны, по-
этому предел их рабочей частоты (примерно 2 МГц) обусловлен
неприемлемо большими габаритами устройств. Верхняя граница
рабочей частоты 1...3 ГГц определяется трудностями изготовления
элементов (сверхвысокочастотных) с размерами, меньшими еди-
ниц (десятков долей) микрометра, а также возрастающими с рос-
том частоты потерями.
Принцип действия линии задержки на ПАВ основан на испо-
льзовании малой скорости распространения волн вдоль звукопро-
вода.
Главная особенность приборов на ПАВ состоит в линейной за-
висимости скорости распространения волн от частоты (дисперси-
онной характеристики).
Закон изменения скоростей от частоты, следовательно, и за-
держки частотных составляющих задается структурой встреч-
но-штыревых преобразователей.
Линия задержки (рис. 5.26) состоит из кристалла пьезоэлектри-
ка и двух преобразователей, нанесенных на кристалл и удаленных
друг от друга на расстояние, обеспечивающее требуемое время за-
держки т3 = —, где / - длина звукопровода.
^а
Наиболее эффективное преобразование радиосигнала в ПАВ и
обратно осуществляется встречно-штыревыми преобразователя-
Ветре ч на-штыревые
76
ми — двумя рядами электродов, вложенными друг в друга, период
структуры которых должен быть равен Ха. Во входном встреч-
но-штыревом преобразователе возбуждаемые радиосигналом в
пьезоэлектрике акустические волны от каждой пары электродов
складываются в фазе и распространяются к выходному, где проис-
ходит обратное преобразование. В широкополосных встреч-
но-штыревых преобразователях шаг штырей делается переменным.
Суммарные потери в устройствах на ПАВ состоят из потерь в
преобразователях и потерь при распространении. Общее затуха-
ние в устройствах на ПАВ пропорционально длине линии, т.е.
времени задержки, и в зависимости от их конструкции и рабочей
частоты может составлять от десятых долей до десятков децибел.
Теоретические основы спектрального анализа
с использованием дисперсионных линий задержки
В системах радиотехнической разведки спектральный анализ
является основной операцией при обработке сигналов. Анализ
может осуществляться либо последовательно во времени, либо од-
новременно. При последовательном анализе частотные составля-
ющие сигнала (спектра) выявляются поочередно. Такой анализ
дает удовлетворительные результаты только при наличии на входе
периодических и стационарных сигналов. Однако применение
противником РЛС с изменяющимися параметрами сигналов, а
также различных форм сигналов в многофункциональных РЛС
обусловливает необходимость одновременного анализа спектра
импульса в течение его длительности с одновременной поимпуль-
сной регистрацией.
Одновременный или параллельный анализ позволяет получить
более детальную и наглядную информацию о свойствах сигналов,
особенно сложных и с переменными параметрами с перестройкой
частоты от импульса к импульсу. Существует несколько методов
создания одновременных анализаторов спектра. Рассмотрим наи-
более перспективный метод — дисперсионно-временной, осно-
ванный на использовании особенностей распространения радио-
сигналов в замедляющих средствах с дисперсией скорости (дис-
персионных линиях задержки).
В отличие от многоканальных параллельных спектроанализа-
торов дисперсионно-временные устройства относятся к группе
одновременных анализаторов, которые дают картину спектра сиг-
нала практически в реальном масштабе времени. Их основные
преимущества:
универсальность и простота реализации; функционально они
значительно проще многоканальных (многофильтровых);
высокое быстродействие, позволяющее анализировать сигналы
в реальном масштабе времени, в том числе и широкополосные;
возможность получения с одинаковой степенью сложности как
амплитудных, так и фазовых спектров сигналов, т.е. полную ин-
формацию о спектральных характеристиках сигнала.
77
Рис. 5.27. Дисперсионно-временной анализ спектра
Рабочая полоса частот в таком анализаторе зависит от эквива-
лентного числа каналов анализатора.
Разработанные в настоящее время дисперсионные устройства
анализируют сигналы от единиц килогерц до сотен мегагерц.
Принцип дисперсионно-временного анализа спектра основан
на свойстве тела неопределенности линейно-частотно-модулиро-
ванного сигнала (рис. 5.27).
Рассмотрим прямоугольный радиоимпульс с линейной модуля-
цией частоты колебаний, когда комплексная амплитуда имеет вид
= И при $<t <хи,
[ 0 при t >xu,t < 0.
Мгновенная частота такого импульса
Л') = “(2*/? + 7'2) (5.4)
Ziidt v 7
тт
линейно изменяется от /0 до /0 + —- за время длительности им-
л
пульса. Коэффициент у в формуле (5.4) выражается через частот-
ную девиацию Д/и длительность импульса т„;
лД/
у =---.
Тело неопределенности такого линейно-частотно-модулиро-
ванного сигнала описывается выражением
78
p(\ Г)
(5.5)
Кривые зависимостей р(т, А) для F = const, рассчитанные по
формуле (5.5), приведены на рис. 5.28.
При нулевой расстройке F — 0 и при условии »1 ширина
сжатого импульса по первым нулям равна —. Из рис. 5.28 видно,
Л/
что возможное смещение сжатых импульсов во времени при рас-
стройке по частоте F относительно центральной части фильтра
пропорционально расстройке:
Рассмотренные свойства тела неопределенности линейно-час-
тотно-модулированных импульсов могут быть использованы при
спектральном анализе сигналов произвольной формы со спектра-
льной плотностью комплексной амплитуды G(fy.
U(t) = E(t)ei2°fy.
Полагаем, что спектр анализируемого сигнала ограничен и на-
ходится в полосе (/0 - Fmax,/0 + Fmax).
79
Рис. 5.29. Действия дисперсионного спектроанализатора
Рассмотрим принцип действия дисперсионного спектроанали-
затора (рис. 5.29).
Пусть на вход смесителя поступают два сигнала с постоянными
частотами /() + F' и /0 + F" и длительностью ти. В качестве гетеро-
дина используется линейно-частотно-модулированный гетеро-
дин, создающий импульсное частотно-модулированное колебание
длительностью тг = т/( вида
£/2(r) = exp|j2nf/ar + </ <h_.
( 2т„ J 2 2
Из гладкого (узкополосного) импульс преобразуется в частот-
но-модулированный (широкополосный), т.е. каждая гармоника
спектра переходит в колебание с линейно изменяющейся часто-
той, а сам сигнал на выходе смесителя может быть найден из вы-
ражения
'mtn
где f2 = fOr + /0; G (F) — спектральная функция сигнала.
Пропустим колебание (7) через дисперсионную линию задер-
жки, характеристики которой согласованы с напряжением гетеро-
дина. Обозначим через tQ время задержки в ДЛЗ составляющей
спектра с центральной частотой. На выходе фильтра получим сжа-
тый импульс. Пик сжатого импульса сдвинут на время |т| =
относительно 1$.
Комплексная амплитуда напряжения U i(t) на выходе фильтра
описывается выражением
ко
</г('
о
где С - константа,
которое определяет выходное напряжение спектроанализатора в
произвольный момент времени iQ + т.
Нетрудно заметить в подынтегральном выражении функцию
sinx , Н
вида ----, принимающую максимальное значение 1 - — при
*
F - -&fr — и быстро спадающую.
Таким образом, амплитуда выходного напряжения ДЛЗ в функ-
ции времени определяется модулем спектральной плотности
<7| К исследуемого колебания в функции частоты, умножен-
пой на искажающий сомножитель 1 - —
Чтобы исключить его
влияние и получить зависимость только от модуля спектральной
плотности, достаточно расширить в два раза согласованную по
скорости импульсную характеристику ДЛЗ. При анализе непре-
рывных или длинноимпульсных сигналов за счет гетеродинирова-
ния получается серия частотно-модулированных импульсов дли-
тельностью тсер (рис. 5.30).
Для дисперсионно-временного анализатора процесс анализа
сводится к воспроизведению спектров импульсов, следующих
один за другим со скважностью, близкой к единице. Основное
требование заключается в том, чтобы выходные отклики ДЛЗ не
перекрывались во времени. На время обратного хода цикла пере-
стройки гетеродин необходимо выключить. Условие неперекрыва-
пия откликов во времени, определяющих спектры соседних выбо-
рок сигнала, позволяет найти необходимое значение девиации ча-
стоты гетеродина утг и требуемую рабочую полосу частот линии
шлержки 8со при заданной полосе анализа Дсо:
|утг| > Асе;
8со~ Дсо + |ут| > 2 Дсо
Изменение задержки в рабочей полосе частот линии 8г =2ти.
Таким образом, максимальная полоса обзора анализатора и час-
ки пый диапазон линии задержки связаны соотношением
Л<У2 = лД/тах.
81
Рис. 5.30. Анализ непрерывных или длинноимпульсных сигналов
Два элементарных отклика одинаковой амплитуды раздел я ют-
4itd
ся, если интервал времени между их максимумами не менее------
т«
(d — дисперсия линии), а интервал частот между соответствующи-
ми гармоническими составляющими сигнала U(t) не менее Лео = —
тг
ИЛИ Л/с = — .
Интервал частот между составляющими спектра Лео определяет
разрешающую способность анализатора для гармонических сиг-
налов одинакового уровня. Чтобы оценить качество анализирую-
г- кт Дед г
щего устройства, удобно ввести величину N =----, обратную от-
Лсо0
82
носительному разрешению, эквивалентную числу каналов анали-
за. Эта величина определяет число параллельных фильтров
многоканального анализатора одновременного анализа с шири-
ной обзора Дсо и разрешающей способностью Acoq. Если N выра-
зить через коэффициент сжатия Асж, получим N = у]тсКсж .
Основным достоинством такого спектроанализатора является
простота его реализации. Спектр анализируется практически в ре-
альном масштабе времени. Недостатком является то, что при
сложном групповом спектре выборки по спектру могут отличаться
друг от друга, следовательно, структуру сигналов анализировать
нельзя. Кроме того, за счет согласованной фильтрации происхо-
дит сжатие сигнала по времени. Поэтому произвести цифровую
обработку выходного отклика в целях выявления индивидуальных
разведывательных признаков значительно сложнее, чем при пря-
мом анализе спектров.
Основным элементом приемного устройства (дисперсионного
анализатора спектра) является дисперсионный фильтр. Он опре-
деляет полосу перестройки и время анализа. В настоящее время
отечественная промышленность выпускает дисперсионные филь-
тры с максимальной полосой д/= 300 МГц и длительностью задер-
жки т3 = 0,5 мкс, работающие на средней частоте 560 МГц. Прини-
маемые радиолокационные сигналы на несущих частотах в диапа-
зоне А/р = 200...40 000 МГц нельзя непосредственно подавать на
фильтр, так как они не попадают в полосу фильтра. Необходимо
предварительно преобразовать сигнал таким образом, чтобы его
промежуточная частота соответствовала частоте фильтра. Преоб-
разование осуществляется дважды (рис. 5.31): ступенчато — по 100
МГц в каждой ступени и непрерывно — в диапазоне 100 МГц. Для
этой цели вырабатываются два управляющих напряжения — сту-
пенчатое и пилообразное.
Рис. 5.31. Схема преобразования радиолокационных сигналов
83
Ступенчатое напряжение перестраивает первый гетеродин, вы-
полненный, как правило, на лампе обратной волны (ЛОВ), каждая
ступень смещает частоту на 100 МГц относительно предыдущей.
Пилообразное напряжение управляет линейно-частотно-моду-
лированным гетеродином и осуществляет перестройку в диапазо-
не Д/п = 100 МГц за 1 мкс. В качестве такого гетеродина использу-
ются пассивные гетеродины линейно-частотно-модулированных
колебаний на основе дисперсионных линий задержки, которые
имеют высокую стабильность, отличаются надежностью, незначи-
тельным энергопотреблением, при формировании коротких сиг-
налов им свойственны малые габаритные размеры и масса. В то же
время использование в качестве источника сигнала дисперсион-
ной линии задержки на ПАВ с характерными для нее большими
потерями на преобразование электрических сигналов в акустиче-
ские (-30...-50 дБ) при ограничениях амплитуды возбуждающих
сигналов приводит к появлению ложных сигналов с уровнем
-30...-40 дБ, что снижает погрешность преобразования до 1...3 %.
Поэтому в ряде случаев для формирования линейно-частотно-мо-
дулированных сигналов целесообразно использовать электронные
устройства.
Таким образом, независимо от структуры сигнала на входе
спектроанализатора на дисперсионный фильтр подаются линей-
но-частотно-модулированные колебания длительностью 1 мкс и
девиацией частоты А/ = 100 МГц. Крутизна изменения частоты
сигнала определяется скоростью изменения частоты гетеродина и
должна соответствовать крутизне дисперсионной характеристики.
Ступенчатое напряжение подается на горизонтально отклоняю-
щие пластины индикатора, а пилообразное — на вертикально от-
клоняющие пластины. Сигнал с выхода фильтра детектируется и
попадает на управляющий электрод. На экране индикатора ото-
бражается частотная панорама. Частота сигнала определяется по
грубой (горизонтальной) и точной (вертикальной) шкалам. Ши-
рина метки на экране определяется шириной спектра анализируе-
мого сигнала.
Если длительность каждой ступени тст = 10 мкс, а число ступе-
ней п = 10, то в диапазоне 1000 МГц осуществляется перестройка
за 100 мкс.
Последовательный панорамный спектроанализатор осуществ-
ляет анализ в широком диапазоне частот с высокой разрешающей
способностью. В данном примере разрешающая способность со-
ответствует фильтру с полосой АД, = 1 МГц, что эквивалентно
многоканальному приемнику с числом каналов N = 1000. Необхо-
димость перехвата коротких импульсных сигналов в широком
диапазоне частот требует компромисса между разрешением по ча-
стоте и минимальной длительностью анализируемого импульса, а
также между сложностью реализации системы и шириной полосы
канала.
Приемник со сжатием импульса имеет широкую мгновенную
полосу частот и поэтому может обрабатывать сигналы с внутриим-
84
пульсной модуляцией частоты или с переменной частотой запол-
нения импульсов. Кроме того, он способен обрабатывать совпада-
ющие во времени импульсные сигналы, которые на выходе при-
емника будут представлены последовательностью импульсов с
промежутками времени между ними, соответствующими разности
частот данных сигналов.
Однако при наличии сигнала большой мощности боковые ле-
пестки сжатого импульса имеют высокий уровень и протяжен-
ность, тем самым уменьшая динамический диапазон и увеличивая
интенсивность потока ложных тревог. При анализе частотно-мо-
дулированных сигналов возникают определенные трудности, так
как сигнал на выходе смесителя не будет повторять закон измене-
ния частоты гетеродина. Закон изменения частоты сигнала на вы-
ходе смесителя будет определяться разностью законов изменения
частоты сигнала и гетеродина. А так как частота сигнала тоже из-
меняется, то результирующий закон изменения частоты не будет
согласован с дисперсионной характеристикой фильтра. Эти рас-
согласования приводят к тому, что уменьшается амплитуда выход-
ного отклика фильтра, увеличивается его длительность, ухудшает-
ся разрешающая способность. При определенных соотношениях
скоростей перестройки на входе фильтра может образоваться не-
модулированный радиоимпульс.
Для уменьшения влияния рассогласования скорость изменения
частоты гетеродина выбирается намного больше скорости измене-
ния частоты сигнала (уч » ус). Диаграмма обработки ЛЧМ сигна-
лов приемником со сжатием импульса приведена на рис. 5.32.
При частотном анализе частотно-модулированных сигналов
требуются очень высокие скорости перестройки ЛЧМ гетеродина.
Так как фильтр на ПАВ должен быть по существу согласован с
сигналом гетеродина, то в качестве формирователя сигнала гете-
родина используется точно такая же линия на ПАВ путем подачи
на ее вход короткого импульса в виде 8-функции. Тогда реакцией
линии задержки на ПАВ будет ее импульсная характеристика (ли-
нейно-частотно-модулированный сигнал). Комплексная сопря-
женность с характеристикой фильтра достигается за счет преобра-
зования частоты в смесителе приемника.
Реализуемая скорость перестройки частоты гетеродина состав-
ляет в настоящее время 500 МГц/мкс. Приемник имеет разрешение
по частоте 1 МГц, динамический диапазон — более 60 дБ, а его чув-
ствительность аналогична чувствительности супергетеродинного
приемника с полосой, равной полосе разрешения (1 МГц).
Приемник со сжатием импульсов обеспечивает возможность
сохранить амплитудную и фазовую информацию анализируемого
сигнала. Это позволяет с помощью многоканального антенного
устройства определить направление прихода сигнала р. Каналы
устройства для определения разности фаз конструктивно выпол-
нены в одном модуле, что обеспечивает минимальную фазовую
ошибку, вызываемую температурным разбалансом. Неидентич-
ность каналов не превышает 0,8 дБ по амплитуде и 13,2° по фазе.
85
Одним из основных недостатков приемников со сжатием импу-
льсов является низкая точность измерения времени прихода им-
пульса (около 1 мкс), что затрудняет идентификацию сигналов в
условиях сложной радиоэлектронной обстановки. В этом случае
можно использовать приемник со сжатием импульсов в сочетании
с обычным перестраиваемым супергетеродином.
Анализ спектра сиггналов без гетеродинирования
Выше была рассмотрена возможность анализа спектра с пред-
варительным преобразованием входного колебания в линейно-ча-
стотно-модулированный радиоимпульс. Если внимательно изу-
чить дисперсионную характеристику линии задержки (рис. 5.32),
то можно заметить, что каждая частотная составляющая спектра
сигнала задерживается на разное время.
Рис. 5.32. Диаграмма обработки ЛЧМ сигналов приемником
86
Рис. 5.33. Структурная схема устройства спектроанализатора
Наиболее простым спектроанализатором является устройство,
структурная схема которого приведена на рис. 5.33. Для решения
возможности анализа спектра с помощью такого устройства надо
определить, насколько точно огибающая отклика дисперсионной
линии задержки описывает форму спектра входного сигнала. Для
простоты решения задачи пренебрегаем нелинейностями диспер-
сионной характеристики и считаем, что зависимость времени за-
держки отклика от частоты линейна, а модуль коэффициента пе-
редачи линии постоянен в интервале рабочих частот. Кроме того,
условимся, что полоса (рабочая часть) линии больше эффектив-
ной полосы спектра сигнала.
Сигнал на выходе дисперсионной линии задержки можно за-
писать с помощью интеграла Фурье:
g(0 = - Rej F[a)K(($ ехр[усоГ -
где co — текущая частота, рад;
АГ(со) — модуль комплексного коэффициента передачи линии
задержки;
р(со) — фазовая постоянная распространения волн в линии.
Комплексная спектральная функция радиоимпульса U(t), по-
ступающего на вход линии, определяется выражением
£(со) = /'(со) ехр[/у(со)],
где Дсо) — модуль спектральной функции;
\р(со) — фазочастотная функция сигнала.
Функцию U(f) представим в следующем виде:
6/0 = j(/)cos[coor + (р(/)].
Сигнал g(t) на выходе дисперсионной линии задержки можно
вычислить из выражения
87
МО
Дпа
g(t) = Ле j Ko F(Q) exp
где 2a — дисперсия линии задержки;
а — задержка на частоте Q = ц + (/ - а()2а;
_ со( — минимальная рабочая частота в полосе линии;
F(Q) — спектральная функция, аргументом которой является те-
кущая частота Q, линейно связанная со временем.
Таким образом, за счет прохождения сигнала через дисперси-
онную линию задержки осуществляется его спектральное разло-
жение во времени. Параметры спектра частотной оси переносятся
на временную ось. В частности, зависимость от времени огибаю-
щей выходного отклика
g,(t)=
определяет зависимость модуля спектра сигнала от частоты. Связь
между осью времени и осью частот можно выразить соотношени-
ем
Q = со, + (7 - а,)/(2а).
Число каналов, которые заменяет один анализатор, У =
Д<о0|
Это число N можно выразить через коэффициент сжатия линии
8со
задержки, который равен произведению полосы частот — на ве-
2л
личину диапазона времени задержки в этой полосе 8/:
То обстоятельство, что в дисперсионно-временном анализато-
ре определяется спектр по одному импульсу, значительно расши-
ряет его возможности по анализу сигналов с переменными пара-
метрами, особенно сигналов многофункциональных радиолока-
ционных станций, структура которых может изменяться от
импульса к импульсу.
Возможность определения спектра каждого импульса с до-
статочно высокой точностью позволяет использовать такие
спектроанализаторы для анализа тонкой структуры сигналов и
выявления их индивидуальных признаков. Кроме того, диспер-
сионно-временной анализатор спектра можно применять в ка-
честве частотного дискриминатора для выявления законов из-
менения частоты от импульса к импульсу и анализа частотных
нестабильностей в полосе дисперсионной характеристики ли-
нии.
88
t
Рис. 5.34. Анализ ЛЧМ радиоимпульсов
Такой анализатор прост и удобен в эксплуатации, обладает вы-
сокой серийностью и идентичностью характеристик от образца к
образцу. Основной недостаток дисперсионно-временных анализа-
торов спектра заключается в том, что нельзя производить анализ
частотно-модулированных сигналов. Это объясняется тем, что
при анализе простых сигналов все частотные составляющие спек-
гра импульса возникают одновременно, а на выходе их появление
определяется положением частотных составляющих в спектре. То
есть существует линейная зависимость между частотой и време-
нем задержки.
При анализе линейно-частотно-модулированных радиоимпу-
льсов частотные составляющие импульса возникают последова-
тельно (не одновременно) и на длительность задержки оказывает
влияние не только дисперсия скоростей частотных составляю-
щих, но и время генерации этих составляющих. Поясним это яв-
ление с помощью рис. 5.34.
Представим линейно-частотнб-модулированный сигнал рядом
немодулированных радиоимпульсов с различной частотой. Ши-
рина спектра каждого дискрета определяется его длительностью
( Д/д =—), а их смещение по частоте и время появления на входе
фильтра влияют на время задержки и форму выходного отклика,
который не повторяет форму спектра анализируемого сигнала.
Это нужно учитывать в практической работе с такими спектроана-
лизаторами.
89
5.6. ШИРОКОПОЛОСНЫЕ РАЗВЕДЫВАТЕЛЬНЫЕ
ПРИЕМНИКИ НА МАГНИТОСТАТИЧЕСКИХ
ВОЛНАХ
В настоящее время в системах радиотехнической разведки ши-
роко внедряются цифровые устройства обработки сигналов. Это
обусловлено возможностью их программирования, высокой точ-
ностью анализа сигналов и длительным хранением информации о
сигнале. Однако в средствах разведки требуется вести обработку
сигналов в реальном масштабе времени и широкой полосе частот,
измеряемой в гигагерцах, чего нельзя достичь цифровыми метода-
ми. Наиболее перспективными являются устройства на магнито-
статических волнах.
Магнитостатические волны (МСВ), распространяющиеся в
эпитаксиальных пленках железоитриевого граната на сверхвысо-
ких частотах, имеют сравнительно малые потери, примерно
20дБ/мкс на частоте 10 ГГц.
Положение центральной частоты настройки устройства на
МСВ регулируется полем подмагничивания с помощью электро-
магнита. Полоса одновременной обработки сигнала может достичь
1 ГГц. Устройства на МСВ обладают исключительно уникальными
дисперсионными свойствами, хорошей способностью к пере-
стройке по частоте, простотой возбуждения. Эти свойства опреде-
ляют перспективу их применения в разведывательных приемниках
со сжатием импульсов. На рис. 5.35 приведена упрощенная схема
разведывательного приемника, основу которого составляют
устройства на МСВ. Измеритель частоты может быть приемником
прямого усиления с видеоусилителем, мгновенного измерения ча-
стоты, со сжатием импульсов или акустооптическим. Основными
узлами приемника со сжатием импульсов являются дисперсион-
ные линии задержки на МСВ.
Дисперсионные МСВ устройства выполняют на основе ступен-
чатых заземленных плоскостей. Поперечное сечение линий пока-
зано на рис. 5.36. Такая линия задержки обеспечивает полосу раз-
Рис. 5.35. Упрощенная схема разведывательного приемника
90
*0
ЖИГ-ПЛЕНКА
ЗОЛОТО
—I СТУПЕНЧА-'—
ТАЯ ПЛОСКОСТЬ
J___t
шжъ|
АЛЮ-
МИ-
НИЯ
СТЕКЛЯННОЕ ОСНОВАНИЕ
t
Рис. 5.36. Дисперсионное МСВ устройство
ведки частотного диапазона порядка 1 ГГц на частотах до 20 ГГц.
Обработку сигналов на линиях МСВ можно осуществлять непо-
средственно на высокой частоте. Применение устройств на МСВ в
разведывательных станциях имеет большую перспективу при раз-
работке не только приемников, но и фазированных антенных ре-
шеток, устройств запоминания сигналов.
91
Поскольку групповая скорость магнитостатических волн vrp =
С •> с
=З...ЗОО км/с, то коэффициент замедления — = 10 ...10 . Во сто-
vrp
лько же раз длина волны магнитостатических колебаний меньше,
чем длина волны в свободном пространстве при одинаковой час-
[А. I
------= 1О3...1О5 .
^-мсв-)
Зависимость затухания магнитостатических волн L (дБ/мкс) от
частоты f (ГГц) для многих материалов хорошо аппроксимируется
выражением L = 16,4 + 1,15/ Отсюда следует, что погонное зату-
хание магнитостатических волн на микросекунду задержки сигна-
ла частотой 3 ГГц составляет примерно 20 дБ/мкс, частотой
10 ГГц — примерно 30 дБ/мкс. Потери на преобразование элект-
ронных волн в магнитостатические и обратно составляют от еди-
ниц до десятков децибел. Они тем меньше, чем более сходны по
структуре магнитостатические волны и возбуждающее их электро-
магнитное поле, т.е. чем лучше согласование преобразователя с
подводящей микрополосковой линией и ферритовой средой.
Приборы на МСВ реализуются как по схеме на проход, так и по
схеме на отражение. Примером конструктивного исполнения
устройств на МСВ может служить линия задержки (рис. 5.37). Она
включает в себя диэлектрическую магнитную подложку из галий-
гадолинового граната, на которую нанесена монокристаллическая
пленка ЖИГ толщиной 0,5...227 мкм с малыми потерями и узкой
кривой ферромагнитного резонанса (7/0 = 1 Ы/Л7). Преобразова-
ние входного электромагнитного сигнала в магнитостатические
волны и обратно осуществляется короткозамкнутыми или разо-
мкнутыми полосковыми преобразователями. В качестве преобра-
зователей можно использовать встречно-штыревые преобразова-
тели, создающие магнитную составляющую сверхвысокочастот-
ного поля, сходную по структуре с полем, возбуждаемым
магнитостатической волной. Изменяя значение и распределение
Делитель
мощности
Ветре ч но-шт ыревой
преобразователь Р*10, Конструкта в-
ное устройство на МСВ
92
магнитного поля, можно регулировать время задержки, что позво-
ляет производить обработку сверхвысокочастотного сигнала раз-
личной длительности в реальном масштабе времени.
К основным преимуществам устройств на МСВ можно отнести
следующие:
1. Обеспечение мгновенной ширины полосы частот порядка
1 ГГц в диапазоне 9,5...26,5 ГГц, что позволяет вести обработку
сигналов на несущей частоте без их переноса на более низкие час-
тоты. В результате можно упростить конструкции устройств прие-
ма и частотного анализа, а также исключить потери в отношении
сигнал/шум и снизить линейные искажения, вносимые сверхвы-
сокочастотными смесителями, гетеродинами и т.д.
2. Планарность конструкции и возможность их изготовления
по хорошо отработанным интегральной и эпитаксиальной техно-
логиям.
3. Малые потери на распространение (менее 30 дБ/мкс в диапа-
зоне частот от 3 до 10 ГГц). Для сравнения: потери на распростра-
нение поверхностно-активных волн в ниобате лития достигают
100 дБ/мкс на частоте 9 ГГц.
4. Возможность перестройки в широких пределах параметров
устройств путем изменения напряженности магнитного поля сме-
щения, которое используется для намагничивания пленки на ЖИГ.
5.7. ПРИНЦИПЫ ПОСТРОЕНИЯ РАЗВЕДЫВАТЕЛЬНЫХ
ПРИЕМНИКОВ МГНОВЕННОГО ИЗМЕРЕНИЯ ЧАСТОТЫ
Частотный анализ сигналов с использованием
частотно-зависимой линии задержки
В радиотехнической разведке давно известен метод, основанный
на взаимодействии волн, прошедших пути разной длины 1[ и ?2-
Рис. 5.38. Простейшее устройство приемника мгновенного
изменения частоты
93
Первые устройства были изготовлены из двух отрезков волно-
вода, по которым распространялись электромагнитные колебания
(рис. 5.38). Эти колебания взаимодействовали друг с другом (вы-
зывали интерференцию). В зависимости от частоты сдвиг фаз в
точке А был различен. Следовательно, напряжение на детекторе
изменялось в соответствии со сдвигом фаз. Несмотря на простоту
реализации этого метода, он не нашел широкого практического
применения из-за низкой чувствительности, невозможности из-
мерять частоту сигнала при перекрытии импульсов, низкой точно-
сти измерения частоты. Отсутствие в то время аналого-цифровых
преобразователей не позволило достаточно точно и быстро изме-
рить напряжение на выходе измерителя, в котором заложена ин-
формация о сдвиге фаз, а следовательно, о частоте.
Дальнейшее развитие этот метод получил при переносе измере-
ния фазы на промежуточную частоту, что позволило устранить ряд
перечисленных выше недостатков и создать разведывательные
приемники с очень хорошими характеристиками.
Метод частотного анализа с использованием
частотно-зависимых линий задержки позволяет
определять значение несущей частоты в широ-
ком диапазоне частот по данному импульсу. Та-
ким образом, можно считать, что с помощью ча-
12 стотно-зависимой линии задержки можно реа-
— лизовать беспоисковый метод обнаружения по
частоте.
--- Частотно-зависимой линией задержки назы-
вается устройство, в котором электромагнитные
1F^j' ▼ Ь2 колебания проходят различные пути/] и Л, в ре-
зультате чего на выходе линии колебания будут
Рис. 5.39. Принцип иметь сдвиг фаз, пропорциональный частоте.
работы частотно-
зависимой
линии задержки
Поясним принцип работы частотно-зависи-
мой линии задержки (рис. 5.39).
Напряжение сигнала U(t) = t/() cos(wz + ip0)
подводится к точке а коаксиального кабеля, который разветвляет-
ся на два плеча 1[ и Ь так, что одно плечо оказывается длиннее
другого на А/ =/2 -/,. Рассмотрим соотношение напряжений на
выходе отрезков линий 1\ и 1р.
где р = —/.
Разность фаз в точках Ь\ и соответственно равна
av=^(/2 -/,) = ъ(')-Ш
У гК
94
Так как скорость распространения колебаний в кабеле Уф и
длина отрезка А/ постоянны, можно записать
= (5.6)
Из выражения (5.6) следует, что несущая частота сигнала про-
порциональна сдвигу фаз на отрезке А/. Таким образом, если ка-
ким-то способом измерить однозначно сдвиг фаз в точках Ь\ и Ьг,
то каждому сдвигу фаз можно поставить в соответствие опреде-
ленное значение частоты. Наиболее распространенным измерите-
лем сдвига фаз является фазовый детектор. Напряжение на выходе
фазового детектора будет зависеть от косинуса фаз Между колеба-
ниями U \(t) и U2(г) и от амплитуды Uq. Чтобы отсчет частоты не
зависел от амплитуды входного сигнала, на входе фазового детек-
тора всегда устанавливается усилитель-ограничитель.
Таким образом, чтобы определить частоту входного сигнала,
достаточно измерить амплитуду колебаний на выходе фазового де-
тектора. Это можно сделать, применяя как аналоговый, так и циф-
ровой метод. Но следует помнить, что однозначное измерение
сдвига фаз можно произвести только от 0 до 2л. Поэтому найдем
максимальную длину линии задержки, которая обеспечивает од-
нозначное измерение частоты в диапазоне частотД.../). Для этого
определим сдвиг фаз на минимальной и максимальной частотах
диапазона Д и /2 соответственно.
2 и f
На частоте f сдвиг фаз Ду, =—— Д/.
2
На частоте/2 сдвиг фаз Ду2 =-----&1.
Разность сдвига фаз Ду = Ду; - Ду, приравняем 2л и определим
максимально допустимую длину отрезка:
К примеру, диапазон частот разведки составляет 2000 МГц (/j =
= 1000 МГц,/2 = 3000 МГц). Длины волн соответственно Х| = 30 см,
Х2 = 10 см. 1
т л/ 30 10 1С
Тогда Д/т.х =-----=15 см.
тах 30-10
Сдвиг фаз несложно измерить фазовым детектором или другим
фазометром. Однако следует помнить, что эти измерения надо
произвести за время длительности импульса и в широком диапа-
зоне частот. В настоящее время подобные устройства не разрабо-
таны, поэтому рассмотрим измерение сдвига фаз методом стоячей
волны в линии.
95
Из теории длинных линий известно, что стоячая волна образу-
ется при условии взаимодействия двух когерентных волн и
U 2(t), направленных навстречу друг другу. Рассмотрим линию за-
держки с отводами, согласованную с обоих концов. На входы этой
линии подадим напряжение U^t) и U2(t^ с выхода частотно-зави-
симой линии задержки. В линии установится стоячая волна, поло-
жение минимума которой определится сдвигом фаз Ду между ко-
лебаниями (?) и U2(?), а следовательно, несущей частотой сигна-
ла. Если частота сигнала будет изменяться, минимум стоячей
волны будет перемещаться по линии в соответствии с изменением
частоты. Точность отсчета частоты зависит от числа отводов, поэ-
тому измерение сдвига фаз желательно произвести на промежу-
точной частоте.
Техническая реализация измерителя частоты
с помощью фазового моста
Принцип действия измерителя частоты основан на использова-
нии частотно-зависимой линии задержки, но вместо фазового де-
тектора применяется фазовый мост (рис. 5.40). Анализируемый
сигнал с выхода УПЧ приемника подается на вход разветвителя
Р-1. Дальше сигнал разветвляется по двум направлениям: через
линию задержки ЛЗ-1 поступает на второй разветвитель Р-2 и не-
Рис. 5.40. Структурная схема устройства фазового моста
96
посредственно на разветвитель Р-3. Сигнал на линии задержки
ЛЗ-1 приобретает сдвиг фаз tpj.
На суммарно-разностный мост СР-1 поступают колебания:
= KXU, cos(co/ + <р();
C/2(r) = K2U\ cos(coz).
Сигнал с разветвителя Р-2 через линию задержки ЛЗ-2, где
приобретает еще сдвиг фаз <р2> поступает на суммарно-разностный
мост СР-2, на второй вход которого поступает колебание U 4(t) че-
рез разветвитель Р-3:
t/3(7) = K-jU( cos(co/ + Ф| + ф2);
U4(/) = K4U{ coscor.
Если а и в — суммирующие входы, б и г — разностные входы
суммарно-разностных устройств, то их выходные напряжения
описываются следующими выражениями:
U а = ^f/Jcosr + cos(cor + ф,)];
U6 = A’gi/Jcos/- cos(cor + ф[)];
U g = A^f/Jcos/ + cos(cor + Ф( + ф2)];
Uг = [cos t - cos(<or + ф1 + ф2)]-
Так как детекторы Д1 — Д4 работают на квадратичных участках
амплитудных характеристик, а усилители постоянного тока
УПТ-1, УПТ-2 дифференциального типа работают в режиме по-
давления синфазного сигнала, то на индикатор подаются напря-
жения:
U аб ~ Кa6U\ СО8ф,
U„ = +ф2).
В качестве индикатора используется электронно-лучевая труб-
ка, на отклоняющие пластины которой подаются напряжения
и UBr. Луч на экране индикатора под действием этих напряжений
получит радиальное отклонение, причем угол наклона к одной из
осей трубки t
---т г-
СО5(ф, + ф2)
Зависимость ^=/(ф1) будет линейной, если ф2=л/2, т.е.
со5(ф, + ф2) = -sin ф(. Тогда X = л/2 + ф(.
На экране электронно-лучевой трубки радиус-вектор в поляр-
ных координатах соответствует квадрату напряжения анализируе-
мого сигнала, а полярный угол пропорционален частоте.
97
Чл
имеем
Однако на всех частотах рабочего диапазона невозможно вы-
полнить условие ф2 = я/2, поэтому шкала для угла X будет нели-
нейной. При определении длины линии задержки Д/2 нужно исхо-
дить из условия, что на крайних частотах диапазона фазовый
сдвиг должен отличаться от л/2 одинаково в обе стороны, т.е. дол-
жно выполняться условие ф, - <р, = ф, - ф, .
J 2 ZKOp т zcp 2 ср
Учитывая, что ф, = — Д/,, а ф2 = —Д/2 и Хкор
\ - 2^4
ср Р + Г
где Р — коэффициент перекрытия диапазона.
На средней волне диапазона Хср фазовый сдвиг ф2 должен быть
равен л/2, поэтому длина линии задержки Д/2 = ср— = Дя1
2л 2(Р + 1)
Расчет длины ЛЗ-1 произведен исходя из условия
(ф1коР “ Фдл)) 2л, что соответствует повороту луча на экране элек-
тронно-лучевой трубки на 360°.
При перекрытии заданного диапазона
(2тухкор)д/1 - (2л/Ххи1 )д/, =2л, откуда находим
Д/j = ХкорХ /(X -Хкор), т.е. получаем уже известный результат -
формула (5.6): Учитывая, что Хкор = ^Ш1/Р, зависимость длины линии
от коэффициента перекрытия по диапазону можно записать в виде
д/, =Дг_.
Расчеты показывают, что частотная шкала при малых коэффи-
циентах перекрытия по частоте близка к линейной.
При больших коэффициентах перекрытия из-за увеличиваю-
щейся асимметрии кривой погрешность определения девиации
частотно-модулированного сигнала значительна, и практически
строить фазовые мосты с коэффициентом перекрытия > 1,5
frrun
нет смысла.
Остановимся кратко на разветвителях и сумматорах как основ-
ных элементах рассмотренной схемы.
В качестве разветвителей и сумматоров обычно используют
гибридные кольца. Гибридное кольцо представляет собой замкну-
тую на себя линию передачи (рис. 5.41), длина которой выбирает-
ся равной X.
При подаче высокочастотных колебаний на кольцевую линию в
точке 7 волна делится на две, которые распространяются по кольцу
двумя путями навстречу друг другу, причем в точки 5 и 5 эти коле-
бания поступают в противофазе, а в точки 2, 4, 6 — в фазе.
Если в эти точки поместить согласованные нагрузки, то в точку
3 (или 5) энергия поступать не будет, а в нагрузки, помещенные в
точки 2 (или 6) и 4, поступят одинаковые мощности.
98
Рис. 5.41. Гибридное
кольцо разветвителей
и сумматоров
Таким образом, гибридное кольцо может служить трехдецибе-
льным разветвителем, при этом тракты отвода энергии будут до-
статочно развязаны. При подаче в точки 7 и 3 гибридного кольца
двух колебаний с одной частотой в нагрузку, включенную в точку
2, будет поступать сумма напряжений, а в нагрузку, подключен-
ную в точку 4, разность этих напряжений. Коэффициент согласо-
ванности т > 0,8, что соответствует коэффициенту потерь Р = 1,35.
В качестве разветвителей применяются стандартные трехдецибель-
ные разветвители.
Рассмотренная схема используется как измеритель частоты и
определитель вида модуляции в комплексе радиотехнической раз-
ведки “Сахалин”.
Цифровой приемник мгновенного измерения частоты
Принцип построения цифрового приемника также основан на
использовании частотно-зависимой линии задержки, но вместо
одной применяется несколько таких линий, длина которых под-
бирается в соответствии с двоичным кодом:
/,,/2 =2/„/3 = 4/,,...,/л =/12л"1.
Это позволяет автоматически, в течение длительности импульса,
измерить его частоту в цифровом виде в двоичном коде (рис. 5.42).
На входы фазового детектора поступают напряжения непосред-
ственно с выхода усилителя высокой частоты через соответствую-
щие усилители. На выходе фазовых детекторов амплитуда импуль-
сов пропорциональна косинусу сдвига фаз между входными коле-
баниями фазовых детекторов:
99
Рис. 5.42. Схема частотно-зависимой линии задержки
а, = cos2n/xT0;
а2 = cos2n/x2T0;
а„ = со8 2тг/'х2л’1т0,
г Д/
где fx — измеряемая частота сигнала; т0 = —.
%
Зависимость напряжений al,aJ,aifa4 (рис. 5.43) позволяет по-
нять принцип отсчета частоты. Например, если на всех четырех
фазовых детекторах напряжение положительно, то код частоты
будет 0000, если на первых трех фазовых детекторах напряжение
положительно (aj > 0, а2 > 0, а2 > 0), а на четвертом — отрицатель-
но (д4 < 0), то код частоты будет 0001.
100
Чем выше должна быть точность измерения частоты, тем боль-
ше нужно двоичных разрядов, т.е. требуется больше фазовых де-
текторов.
Структурная схема широкополосного приемника радиотехни-
ческой разведки показана на рис. 5.44.
Рис. 5.44. Структурная схема широкополосного приемника
Гетеродин и смесители преобразуют входные сигналы несколь-
ких диапазонов к одному диапазону, в котором производится со-
ответствующее измерение. Блок измерителей и формирователей
выходных сигналов с помощью мультиплексора подключается к
одному из выходов УПЧ и производит измерение.
Тактико-технические характеристики такого приемника при-
ведены в табл. 5.2.
Таблица 5.2
Параметр приемника Рабочий диапазон, ГГц
I...2 2...4 4...8 8...12 12...18
Мгновенная полоса час- тот, МГц 1060 2120 4240 4240 6300
Чувствительность, дБ/Вт -95 * -95 -95 -95 -90
Динамический диапазон, дБ 70 70 70 70 65
Разрешающая способ- ность, МГц 0,52 1,04 2,08 2,08 3,12
Погрешность измерения частоты, МГц 1,6 1,7 1,9 1,9 2,0
Минимальная длитель- ность импульса, нс 95 60 45 45 40
101
Анализ тактико-технических характеристик показывает, что по
своим возможностям этот приемник является наиболее предпоч-
тительным. Основные недостатки приемника: невозможность из-
мерения частоты двух и более одновременно приходящих импуль-
сов и недостаточно высокая чувствительность вследствие широко-
полосности приемного устройства. Присутствие одновременно
приходящих сигналов может быть легко обнаружено, если уровни
этих сигналов различаются более чем на 10 дБ, а частоты — более
чем на 50 МГц.
Широкая мгновенная полоса обзора частот и высокое разреше-
ние по частоте делают эти приемники практически незаменимы-
ми при анализе сигналов с “прыгающими частотами”.
При приеме фазоманипулированного сигнала его несущая час-
тота не всегда индицируется правильно, кроме того, приемник не
может определить вид модуляции сигнала. При приеме частот-
но-модулированного сигнала фаза его изменяется непрерывно, в
течение импульса, и могут возникнуть существенные сбои при из-
мерении частоты. Цифровые приемники с мгновенным измерени-
ем частоты могут обеспечить высокую точность измерения, широ-
кую мгновенную полосу пропускания и способны работать при
очень плотных потоках импульсов (более 20 млн импульсов в се-
кунду).
6. ПРИНЦИПЫ ПОСТРОЕНИЯ УСТРОЙСТВ
АНАЛИЗА ВРЕМЕННЫХ ПАРАМЕТРОВ
СИГНАЛОВ
6. Г ИЗМЕРЕНИЕ ВРЕМЕННЫХ ПАРАМЕТРОВ
С ПОМОЩЬЮ ЭЛЕКТРОННО-ЛУЧЕВЫХ ИНДИКАТОРОВ
Одна из основных операций анализа сигналов в радиотехниче-
ской разведке сводится к измерению временного положения им-
пульсов. В том случае, когда фазу несущей частоты сигнала по тем
или иным причинам нельзя использовать для уточнения его поло-
жения на временной оси, указанная операция сводится к измере-
нию временного положения огибающей радиоимпульса.
В радиотехнической разведке распространение получило изме-
рение следующих временных параметров: длительности и периода
повторения импульсов, длительности задержки переизлученных
сигналов боковыми постами относительно центрального поста
при разностнодальномерном методе измерения координат, дли-
тельности задержки отраженного сигнала относительно прямого
при комплексном анализе, длительности задержки ответного сиг-
нала бортового ответчика относительно запросного, длительности
элементарных дискретов при анализе кодированных сигналов и т.д.
Принципы определения этих параметров сводятся к измере-
нию положения импульса на временной оси. Поэтому, не сосре-
доточивая внимания на измерении каждого параметра, рассмот-
рим с общих позиций измерение временного положения импуль-
сов как составной части операции анализа сигналов. Наибольший
практический интерес представляет случай высокой точности из-
мерения, при котором ошибка измерения меньше длительности
сигнального импульса.
Измерение временного положения импульсов в станциях ра-
диотехнической разведки производится с помощью электрон-
но-лучевых индикаторов с калиброванными ждущими развертка-
ми или специальными автоматическими устройствами с предва-
рительным выделением измеряемого интервала или фиксацией
его на проходе.
Для измерения временных параметров сигналов широко при-
меняются электронно-лучевые индикаторы с калиброванными
ждущими развертками. В связи с очень большими пределами зна-
чений измеряемых величин весь диапазон измерений делится на
ряд участков.
103
При использовании однолучевых индикаторов для повышения
точности измерения производится автоматическое или ручное пе-
реключение ждущих разверток, с тем чтобы длительность разверт-
ки перекрывала длительность исследуемого интервала не более
чем в 2—3 раза. В целях ускорения измерений в анализаторах им-
пульсов применяют многолучевые индикаторы (рис. 6.1).
Рис. 6.1. Структурная схема многоканального измерителя
временных интервалов
Трубка индикатора имеет пять отдельных электронных пушек с
отклоняющими системами, каждая из которых обеспечивает со-
здание отдельной линии развертки на экране трубки. Развертыва-
ющие напряжения вырабатываются пятью самостоятельными ге-
нераторами разверток длительностью 5, 50, 500, 5000 и 50 000 мкс.
Шкала индикатора с масштабными метками приведена на рис. 6.2.
Достоинством многолучевых индикаторов является одновремен-
ный панорамный анализ всех временных параметров.
Для измерения кратковременных и редко повторяющихся сиг-
налов применяется режим ждущего растра, использующий метод
телевизионной развертки. Структурная схема — принцип созда-
ния растра и общий вид экрана электронно-лучевой трубки при
работе в режиме ждущего растра показаны на рис. 6.3 и 6.4.
104
12 3 4
5 МКС
10 20 30 40 50 МКС
—I----
200 МС
Рис. 6.2. Диаграмма сигналов на экране многолучевого
индикатора
Рис. 6.3. Принцип формирования ждущего растра
105
U2f t
ЛЛЛЛЛ .
t
Рис. 6.4. Эпюры напряжений в схеме устройства формирования
ждущего растра
Ошибки измерения временных интервалов с помощью калиб-
рованных ждущих разверток определяются периодом калибровки
и воздействия шумов на форму анализируемого сигнала.
При калиброванных развертках значение абсолютной ошибки
измерения определяют выражением
где Тк — период калибровки.
При измерении временных интервалов иногда используют ме-
тод преобразования длительности временного интервала в ампли-
туду, которая в дальнейшем измеряется с помощью стрелочного
прибора или электронно-лучевого индикатора. Принцип работы
такого устройства (рис. 6.5) поясним с помощью эпюр напряже-
ний (рис. 6.6).
Нормирователь амплитуд необходим для того, чтобы напряже-
ние на зарядном элементе не зависело от амплитуды входного сиг-
нала. После нормирования сигнал подается на зарядно-разрядный
каскад с большой постоянной времени заряда. Срезом импульса
сигнала запускается спусковая схема, вырабатывающая импульс
порядка 10 мкс, которая закрывает разрядный каскад. В течение
этого времени напряжение на зарядном каскаде остается постоян-
ным. Этот же импульс подается на подсвет электронно-лучевой
трубки. В связи с тем что импульс задержан на значение длитель-
ности сигнала, подсвечена будет только вершина импульса. С
окончанием этого импульса разрядный каскад открывается, кон-
денсатор быстро разряжается, и схема готова к новому измерению.
106
НА ОТКЛОНЯЮЩИЕ
ПЛАСТИНЫ
ПОДСВЕТ
ТРУБКИ
Рис. 6.5. Схема устройства преобразования длительности временного
интервала в амплитуду
Рис. 6.6. Эпюры напряжений в преобразователе
временной интервал — амплитуда
Напряжение с зарядного конденсатора подается на вертикаль-
но отклоняющие пластины трубки, вызывая отклонение пятна на
экране, пропорциональное напряжению на зарядном конденсато-
ре, а следовательно, и длительности временного интервала.
Метод нашел широкое применение при создании двухмерных
индикаторов, с помощью которых одновременно измеряется дли-
тельность и период повторения импульсов. Для этих целей на го-
ризонтально отклоняющие пластины трубки, как в обычных
осциллографах, подается напряжение развертки. По горизонталь-
ной оси отсчитывается период повторения импульсов, а по верти-
кальной — длительность импульса (рис. 6.7).
107
Рис. 6.7. Изображение на экране
индикатора в координатах
Достоинства осциллографических
методов анализа: возможность анали-
за формы импульсных сигналов; воз-
можность фоторегистрации с после-
дующей статистической обработкой;
возможность использования для ана-
лиза промышленных приборов
(осциллографов и измерителей ин-
тервалов времени).
Недостатки: низкая точность из-
мерений; большое время анализа; не-
возможность анализа кратковремен-
ных излучений.
Наличие этих недостатков привело
«длительность—период» к тому, что в настоящее время наряду
с визуальным анализом в станциях радиотехнической разведки
широко применяют автоматический анализ.
6.2. АВТОМАТИЧЕСКОЕ ИЗМЕРЕНИЕ
ВРЕМЕННЫХ ИНТЕРВАЛОВ
В литературе описано большое число методов автоматического
измерения временных интервалов, однако практически их можно
свести к генератор-пересчетной схеме (методу заполнения) и ме-
тоду задержанных совпадений.
В большинстве схем дискретного измерения временных интер-
валов применяется метод генератор-пересчетной схемы. Суть его
сводится к заполнению измеряемого интервала импульсами эта-
лонной частоты с последующим их подсчетом пересчетной схемой
(рис. 6.8).
Схема выделения временного интервала фиксирует начало и
конец отсчета. На выходе схемы формируется импульс, по длите-
льности равный измеряемому интервалу. На схему совпадения не-
прерывно поступают эталонные импульсы с периодом Тк. В мо-
Рис. 6.8. Генератор-пересчетная схема
108
мент прихода импульса со схемы выделения временного интервала
открывается схема совпадения и пропускает эталонные импульсы
на пересчетную схему. В момент окончания временного интервала
подача импульсов эталонного генератора на пересчетную схему
прекращается. Пересчетная схема подсчитывает число прошедших
импульсов за время измеряемого временного интервала и результат
выдает на световое табло.
Временной интервал измеряется дискретно с погрешностью до
периода повторения импульсов эталонного генератора. Результат
измерения
'н =(«-1)Л.
где п — число импульсов эталонного генератора, прошедших схе-
му совпадения.
Однако вследствие случайных фазовых соотношений между
импульсами эталонного генератора и измеряемым временным ин-
тервалом неизбежна ошибка измерения. Допустим, фазовые соот-
ношения между указанными импульсами произвольны. Тогда из-
меряемый временной интервал
'и — Т’нач + — + Тост ’
где хнач — ошибка начала отсчета;
т0СТ— ошибка конца отсчета.
Погрешность измерения в этом случае
3/ = тнач + + (п - 1)дТк,
где дТк — нестабильность периода эталонного генератора.
Ошибку начала отсчета можно устранить, если генератор эта-
лонных импульсов синхронизировать импульсами со схемы выде-
ления временного интервала. В качестве эталонного применяют
генератор с контуром ударного возбуждения.
Наибольшая ошибка конца отсчета может достигать значения,
примерно равного периоду следования импульсов эталонного ге-
нератора.
Рассмотрим ошибку, возникающую вследствие нестабильности
частоты повторения импульсов эталонного генератора. Эта неста-
бильность приводит к изменению цены деления временной шкалы.
При этом результирующая ошибка будет тем больше, чем про-
должительнее временной интервал, т.е. ошибка является накапли-
ваемой. Поэтому при анализе следует исходить из максимально
возможного значения временного интервала /тах.
Число периодов повторения за время /тах
Предположим, что за счет нестабильности эталонного генера-
тора период его колебаний увеличится на дТк и будет равен
Тк + Д7\, тогда число периодов за время zmax
109
_ 2 max
" тк + at; ‘
A T
Ввиду незначительной относительной нестабильности —- «1
Т.
выражение для /V' можно записать так:
уу г _____^тах______ ~ ^тах | | |
'гк +(i + at;/7;)~ тк ; тл J
Обычно считают, что из-за нестабильности эталонного генера-
тора за время zmax уход частоты не должен превышать Т*. В этом
случае получим N = /V' + 1.
t тахДТк Г;
Тогда - к =1, откуда АТ =—
Т2 t
Относительная нестабильность будет определяться соотноше-
нием
АТК 1
Л = N
Кроме этих нестабильностей существенное значение на точ-
ность измерения оказывают ошибки в выделении или фиксации
временного интервала, возникающие в результате различного
рода помех. Поскольку действие этих помех различно при измере-
нии длительности и периода повторения импульсов, они будут в
дальнейшем рассмотрены для каждого параметра отдельно.
Вторым распространенным методом автоматического измере-
ния временных интервалов является метод задержанных совпаде-
ний. Сущность метода сводится к фиксации начала и конца изме-
ряемого интервала и к задержке начального (стартового) импульса
относительно конечного (стопового) на значение этого интервала.
Импульс, соответствующий началу измеряемого интервала, посту-
пает на линию задержки с отводами. Длина линии задержки дол-
жна быть больше или равна значению максимального измеряемо-
го интервала, а число отводов R, сделанных через одинаковые
промежутки А/, определяется требуемой точностью измере-
ния временного интервала:
_ Спах
А/
Этот импульс, проходя по линии задержки, последовательно
поступает на схемы совпадения Hj, И2,...,ИК. На вторые входы
схем совпадения поступает столовый импульс. На одной из схем
совпадения произойдет совпадение задержанного стартового им-
пульса со стоповым. Очевиден тот факт, что схема И подключена
к отводу линии с задержкой, равной длительности измеряемого
110
интервала. Импульс, прошедший схему совпадения, поступает на
световое табло и указывает длительность временного интервала.
Точность метода определяется дискретностью задержки, а также
длительностью стартового и стопового импульсов. На практике
выбирают длительность этих импульсов из условия
Для уменьшения числа отводов линии при измерении больших
временных интервалов дискретизацию производят по методу дво-
ичного кодирования.
Преимуществом метода задержанных совпадений перед мето-
дом генератор-пересчетной схемы являются возможность одно-
временного измерения сигналов нескольких радиолокационных
станций, а также высокая стабильность задержки.
Недостаток — относительная сложность реализации измерения
больших временных интервалов.
6.3. МЕТОДЫ ПОВЫШЕНИЯ ТОЧНОСТИ ОТСЧЕТА
Нониусный метод нашел широкое применение в технике изме-
рения интервалов времени для повышения точности отсчета. На
рис. 6.9 приведена структурная схема измерителя интервалов вре-
мени, в котором используется нониусный метод уменьшения по-
грешности.
Рис. 6.9. Структурная схема измерителя интервалов нониусным методом
Схема работает следующим образом. Формирующее устройство
формирует импульс, по длительности равный измеряемому вре-
менному интервалу. Этот импульс фронтом запускает генератор
счетных импульсов с периодом Тк, а срезом — генератор нониус-
пых импульсов с периодом Тн = (п - где п — целое число.
Счетчик грубого отсчета подсчитывает число целых периодов Тк,
уложившихся в измеряемом временном интервале, а счетчик точ-
ного отсчета — число нониусных импульсов до момента совпаде-
ния с импульсами генератора счетных импульсов.
ill
Измеряемый интервал можно выразить формулой
= NTK +
где А — показания счетчика грубого отсчета;
Ун — показания счетчика точного отсчета;
Дтн — шаг нониуса, равный Тк /и.
Таким образом, нониусный метод позволяет свести абсолют-
ную погрешность измерений к величине Тк /п. При этом число п
может достигать больших значений (нескольких десятков и даже
сотен). Использование нониусного метода предъявляет к узлам
схемы ряд требований, из которых наиболее существенными явля-
ются высокая стабильность параметров импульсов счетной и но-
ниусной последовательностей и высокая разрешающая способ-
ность схем совпадения.
Абсолютная погрешность измерения при использовании нони-
усного метода может быть сведена до 1 нс.
Метод преобразования масштаба времени состоит в том, что зна-
чение измеряемого интервала преобразуется в импульс длительно-
стью Х/и, а затем измеряется с помощью преобразователя последо-
вательного счета.
L-'\Г----------------WV ;
Рис. 6.10. Эпюры напряжений в схеме преобразования
масштаба времени
112
Преобразование масштаба времени осуществляется в два этапа.
Первый этап заключается в преобразовании вида время — ампли-
туда, второй — в преобразовании вида амплитуда — время.
На рис. 6.10 приведены эпюры напряжений, поясняющие
принцип работы схемы преобразования. Импульс, соответствую-
щий измеряемому интервалу, подается на зарядно-разрядную
цепь, имеющую очень большую длительность разряда при высо-
кой линейности. Из пилообразного импульса формируется пря-
моугольный импульс, длительность которого измеряется.
Для измеряемого интервала можно записать
Л, = N[TJk],
где N— число импульсов, зарегистрированных счетчиком;
к — масштаб преобразования.
Таким образом, рассматриваемый метод позволяет измерить
малые интервалы времени, не прибегая к быстродействующим пе-
ресчетным схемам. Погрешность метода преобразования масшта-
ба времени определяется в основном значением и постоянством
коэффициента преобразования к\
_ 7\ЛТ
ЗтДк) = -------г,
' * к(кп - Лк}
где кц — номинальное значение коэффициента преобразования;
Лк — отклонение коэффициента от номинального значения.
6.4. ОШИБКИ ИЗМЕРЕНИЯ ВРЕМЕННЫХ ИНТЕРВАЛОВ
Наличие активных элементов в тракте приема приводит к появ-
лению ошибки измерения, вызванной шумами приемника. Кри-
терием качества проведенного измерения является ошибка в опре-
делении значения измеряемого параметра. При измерении длите-
льности и периода повторения импульсов потенциальная ошибка
определяется флуктуациями фронтов импульсного сигнала.
Как было показано ранее, при автоматическом анализе на вхо-
де анализатора расположено устройство выделения временного
интервала, формирующее импульс по длительности, равный изме-
ряемому интервалу, но стандартной формы и с крутыми фронта-
ми. Формирующее устройство срабатывает каждый раз, как толь-
ко напряжение Uo + 6/ш превысит пороговый уровень £0.
Рассмотрим потенциальную ошибку на примере измерения
длительности импульса. Эта ошибка определяется флуктуациями
фронтов импульсного сигнала и уровнем измерения.
Пусть на вход формирующего устройства поступает смесь сиг-
нала и шума:
у(г) = С/(г) + ф).
из
При отсутствии флуктуационных помех формирующее устрой-
ство срабатывает в моменты времени /0 и tl0 (рис. 6.11), определяе-
мые уровнем измерения:
£/(/„) = t/(r,„) = £0.
Рис. 6.11. Ошибки измерения временных интервалов
При наличии флуктуаций импульса (j(7) срабатывание форми-
рующего устройства произойдет в моменты:
=г0 -Дили^2 = /0 + Д;
/н =/10 - ДИЛИГ|2 =/|0 + Д,
где Д — смещение фронта импульса под воздействием шумов при-
емника.
Тогда
u(t„ ± д) + ?(/„ + д) = £„.
Рассмотрим смещение переднего фронта импульса:
- д) + <;(г„ - д) = £„ = £/(/„). (6.1)
Для станций радиотехнической разведки, как правило, выполня-
ется условие С//8Ш »1. В этом случае смещение будет небольшим и
выражение (6.1) можно разложить в ряд Тейлора по степеням Д в
окрестности точки /о- Ограничиваясь линейным приближением от-
носительно Д, получим t/(z0) + ^(r0) - + ^(/0)]д = Z7(z0),
откуда
d/Ape„)+?(<„)] 5фр/1„+соо)’
где 5фр/70 =^*Со) — крутизна фронта импульса в точке /д-
В линейном приближении это выражение можно представить
так:
114
В реальных радиотехнических системах «5фр и выраже-
ние для Д можно представить следующим образом:
д = Ш
^о)
Обозначив среднюю крутизну фронта S = ——, переходя к сред-
тФр|
ним квадратическим погрешностям, получим среднее значение
флуктуаций переднего фронта импульса:
— _ аш _ ТФр
°фр ~ ,
v/Тфр у/аш
Ошибки при измерении ти складываются из флуктуаций фрон-
та и среза импульса. Дисперсия флуктуаций длительности импуль-
сов при этом
О 2 = О]2 + 02 + 2рО',СУ2,
где О;Ио2-~ дисперсии флуктуаций фронта и среза импульса;
р — коэффициент корреляции между флуктуациями
фронта и среза импульса.
Поскольку в станциях радиотехнической разведки применяют-
ся широкополосные приемные устройства, у которых ткор <ти,
можно считать, что флуктуации фронта и среза происходят неза-
висимо. В этом случае р = 0. Тогда
СУТ + СТ2-
Импульсные сигналы, поступающие на вход устройства авто-
матического измерения параметров, не имеют строго определен-
ной формы. Поэтому из-за неправильного выбора порога, на ко-
тором проводится измерение временных интервалов, возникают
ошибки, обусловленные уровнем1 измерения.
Различия в форме импульсов на входе измерительного устрой-
ства обусловлены следующими факторами:
— наличием большого числа разнотипных радиолокационных
станций в полосе разведки, каждая из которых излучает сигналы
индивидуальной формы и длительности;
— большим динамическим диапазоном входных сигналов;
— наличием помех в канале и приемном устройстве;
— несогласованностью приемного устройства и сигнала.
Различия в форме сигналов приведут к дополнительным ошиб-
кам измерения параметров при фиксированных уровнях а = —
Ус
Найдем оптимальный уровень измерения прямоугольного им-
пульса с бесконечно крутыми фронтами. Под оптимальным пони-
мают такой уровень, при котором длительность импульса на выхо-
де измерителя равна длительности сигнала на входе приемника.
При подаче прямоугольного импульса длительностью ти и амп-
литудой Uq на вход л-каскадного резонансного усилителя с резо-
нансной частотой, равной несущей частоте импульса, огибающая
сигнала на выходе усилителя описывается уравнениями:
If 77
If
е7')=^т7у[7’^р')“7’^’₽' ' >т":
где T(/7,pz) — неполная гамма-функция;
р — постоянная времени одного из идентичных кас-
кадов.
При п > 4 р выражается через энергетическую полосу пропуска-
ния следующим образом:
Р = -1).
В станциях радиотехнической разведки УПЧ представляет со-
бой многокаскадный усилитель. Тогда для п > 4 неполную гам-
ма-функцию можно хорошо аппроксимировать интегралом веро-
ятностей (функцией Крампа):
Т (п, х)/(л -1) ~ Ф [(х - л)/л/Й] ,
где х = р t.
В этом случае огибающую сигнала на выходе усилителя можно
аппроксимировать следующими выражениями:
е,(/) (6.2)
z. ^(pj-л) Гр(*--п 1
е2(0 = 7 - Ф ——------- >.
Ул yjn
Таким образом, фронты прямоугольного импульса, прошед-
шего резонансный тракт УПЧ, описываются интегралом вероят-
ностей. Максимальная крутизна фронта, а следовательно, и мини-
мальная флуктуационная ошибка согласно выражению (6.2) соот-
ветствуют половинному уровню измерения.
Н6
Ошибки измерения дли-
тельности импульсов при
измерении уровня входного
сигнала возникают вследст-
вие того, что импульсы од-
нотипных радиолокацион-
ных станций, расположен-
ных на разных дальностях,
имеют на входе измеритель-
ного устройства разную ам-
плитуду, но одинаковую
длительность на одном и
том же относительном Л
Рис. 6.12. Импульсы прямоугольной формы
уровне.
Для примера рассмотрим случай треугольного импульса
(рис. 6.12). Разность в измерениях максимального и минимально-
го импульсов на уровне £7ИЗМ записывают в виде равенства
2тДД-1)
т — т ____
max v гшп д ’
т V
где тфр = -А;Д = -™*-; т0 =хи по основанию,
^min
Максимальная ошибка 8ттаЛ может составлять половину разно-
сти ттал - Tmjn, если сравнение измеренных длительностей прово-
дить на относительном уровне, равном \/ка от амплитуды,
ЧЛ — -- — — Г".
(Д + 1)
Максимальная ошибка определяется на условиях
-тном =1/2(гтах " тт.Д а значение коэффициента к из отно-
шения
При этом длительность импульса амплитуды t/H0M измеряется с
нулевой ошибкой. Таким образом, максимальную ошибку измере-
ния, обусловленную различием входных амплитуд, можно пред-
ставить в виде
=[(д-1)/ад]тфр.
Для больших значений отношения амплитуд ошибка определя-
ется лишь выбором уровня измерения UMM. Для треугольных им-
пульсов чем ниже уровень измерения (чем больше коэффициент
к), тем меньше ошибка.
Рассмотрим ошибки измерения периода повторения импульсов
при небольшом отношении сигнала к шуму. Особенность измере-
ния периода повторения импульсов заключается в том, что в ис-
следуемом интервале могут появиться несколько выбросов шума,
среди которых надо распознать импульсы сигнала. Процесс шумо-
вых выбросов случайный, поэтому распознать сигнальный им-
пульс можно только с некоторой вероятностью.
117
Если в интервале между импульсами сигнала появится выброс
шума, от которого срабатывает пороговое устройство, или сигна-
льный импульс исказится так, что будет пропущен пороговым
устройством, то это приведет к выделению ложного периода, а
следовательно, и к ложному измерению. Это событие характеризу-
ется вероятностью ошибки
Р < Р + Р ,
ОШ — Л В Пр. с ’
где Л, в — вероятность появления ложного выброса на интерва-
ле Т;
Р — вероятность пропуска сигнала.
Для определения вероятности появления ложного выброса рас-
смотрим реализацию случайного процесса (ft). Среднее число шу-
мовых выбросов над фиксированным уровнем Eq в единицу вре-
мени определяют из выражения
л2
М>о)=|"4=Й*ое 2аш>
)
где 5<о — средняя ширина полосы флуктуаций;
^0 " с:
х0 =—относительный уровень наблюдения;
— среднее квадратическое значение шума.
Значение 5со зависит от вида частотной характеристики УПЧ.
Для УПЧ с прямоугольной частотной характеристикой средняя
ширина полосы флуктуаций
5со^ 2тгД/)1р/д/3.
Рис. 6.13. Распределение шумовых выбросов
118
Е0 > /л ( Eq \ [ -Eq |
~ Ыг М" Кр еХР Г
) V 6 J I 2(5ш J
Среднее число однополярных шумовых выбросов в единицу
времени
Основную ошибку при выделении периода следования импуль-
сов вносят шумовые выбросы, превысившие порог.
В качестве меры борьбы с ними в современных станциях ра-
диотехнической разведки применяют селекторы шумовых выбро-
сов по длительности. Принцип их работы основан на различии
статистических характеристик сигналов и шумовых выбросов.
На рис. 6.13 показано распределение шумовых выбросов по
длительности И^т) для различных уровней измерения £0/суш.
Анализ распределения показывает, что при Е„/с>ш = 4,5 90 %
шумовых выбросов имеют длительность меньше 0,2 мкс, а анализ
излучения радиолокационных станций армий стран—участниц
НАТО показывает, что 99 % из них работают с импульсами длите-
льностью более 0,2 мкс. Следовательно, если установить селектор,
не пропускающий импульсы короче 0,2 мкс, то число шумовых
выбросов на входе анализатора резко сократится.
6.5. ПРИНЦИП ПОСТРОЕНИЯ ЦИФРОВЫХ ИЗМЕРИТЕЛЕЙ
ВРЕМЕННЫХ ИНТЕРВАЛОВ С ИСПОЛЬЗОВАНИЕМ
МИКРОПРОЦЕССОРНОЙ ТЕХНИКИ
Методы измерения временных интервалов, описанные выше,
основаны на том, что путем фиксации положения импульсов на
временной оси выделяется интервал, заполняемый счетными им-
пульсами, число которых определяет длительность временного
интервала (параметра). Недостатком рассмотренных измерителей
является то, что временные интервалы измеряются выборочно (не
подряд), иногда случайным образом. Статистическая обработка
результатов измерения ограничена из-за объема выборки и слу-
чайности выборок временных интервалов. Применение микро-
процессорной техники позволяет измерять большое число всех
подряд импульсов, производить над результатами измерения лю-
бые математические операции, селектировать импульсные после-
довательности, статистически обрабатывать результаты измере-
ния, селектировать ложные периоды.
В качестве примера рассмотрим принцип построения измери-
теля временных интервалов с использованием микро-ЭВМ, струк-
турная схема которого приведена на рис. 6.14. Измеритель состоит
из собственного измерителя, запоминающего устройства, узла
управления и схемы сопряжения с ЭВМ.
Измеритель в зависимости от режима производит измерения
или периода повторения импульсов Т], или длительности импуль-
сов ти, или паузы между ними. Структурная схема измерителя
представлена на рис. 6.15. В основу его работы положен метод ге-
нератор-пересчетной схемы.
119
Рис. 6.14. Микропроцессорный измеритель временных интервалов
Рис. 6.15. Структурная схема измерителя временного интервала
16 РАЗРЯДОВ
120
Рис. 6.16. Эпюры напряжений в схеме измерителя
Рассмотрим принцип работы измерителя (рис. 6.16). Входная
последовательность (эпюра а) поступает на вход схемы выделения
фронта и спада импульса. Схема формирует короткие (т » 50 нс)
импульсы, соответствующие переднему и заднему фронтам
(Uo,Uti). Эти импульсы поступают на схему формирования изме-
ряемого интервала и управления памятью и защитного интервала
Шг). Выделенный для измерение временной интервал поступает
на первый вход схемы совпадения, на второй вход которого непре-
рывно поступают счетные импульсы эталонного генератора.
Электронный счетчик подсчитывает число прошедших через
схему совпадения импульсов. За время защитного интервала осу-
ществляется перезапись информации из счетчика в оперативное
запоминающее устройство и очищение счетчика. Импульсы за-
щитного интервала осуществляют также работу счетчика адреса
запоминающего устройства (инкремент счетчика).
121
Таким образом, работа измерителя осуществляется по следую-
щему алгоритму.
1. Измеряется временной интервал —13.
2. Измерение прекращается и происходит запись информации
в память (интервал _*з)-
3. Производится обнуление счетчика (интервал ?з -/4) и инкре-
мент счетчика адреса запоминающего устройства (интервал /3 —/5).
4. Измеряется новый временной интервал r4 -/5. Как видно из
рис. 6.16, при измерении возникает систематическая ошибка
/2 “которая учитывается при оценке длительности временного
интервала. Эталонный генератор имеет два временных масштаба:
0,1 и 1 мкс — в зависимости от заданного режима работы и часто-
ты эталонного генератора.
Запоминающее устройство представляет собой оперативное за-
поминающее устройство с последовательным доступом к инфор-
мации, дополненное устройством сигнализации достижения гра-
ниц памяти. Для данного измерителя запоминающее устройст-
во — это матрица запоминающих элементов размерностью 1К х 16
(1024 16-разрядных слов). Запись в ячейке производится последо-
вательно, начиная с нулевой, по 1023-ю.
Для микро-ЭВМ запоминающее устройство представляет со-
бой матрицу элементов размерностью 2К х 8, так как информация
об одном измерении записана в двух соседних ячейках.
Запоминающее устройство (см. рис. 6.14) включает в себя мат-
рицу ОЗУ, счетчик адреса (СТА) и узел блокировки.
Узел управления и схема сопряжения с микро-ЭВМ обеспечива-
ют взаимодействие микро-ЭВМ и ИВИ. Узел включает в себя:
селектор адреса, который предназначен для выбора одного из
внешних устройств — портов ввода-вывода, РУС, ОЗУ измерите-
ля;
регистр управляющего слова, в который записывается слово с
указанием режима работы и режима измерения, тактовой частоты
и т. д.;
схему начального пуска, обеспечивающую запись в нулевую
ячейку памяти периода следования импульсов;
схему готовности, обеспечивающую передачу в микро-ЭВМ
сигнала «Останов, по заполнении».
Рассмотренный измеритель временных интервалов позволяет
измерять поочередно 1024 временных интервала, производить ста-
тистическую обработку, выдавать графически или таблично закон
изменения временного интервала во времени, осуществлять се-
лекцию перекрытых импульсных последовательностей.
7. ПРИНЦИПЫ ПОСТРОЕНИЯ УСТРОЙСТВ
АНАЛИЗА СЛОЖНЫХ СИГНАЛОВ
7.1. ОПРЕДЕЛЕНИЕ ВИДА МОДУЛЯЦИИ СЛОЖНЫХ
СИГНАЛОВ
Сигналы, излучаемые радиоэлектронными средствами против-
ника, можно разделить по виду модуляции на три больших класса:
простые, частотно-модулированные и фазоманипулированные.
Разделить эти сигналы по видам модуляции можно, если исполь-
зовать временное и частотное (спектральное) представление сиг-
налов одновременно. Но практически задача усложняется тем, что
сигнал на входе станции радиотехнической разведки присутствует
кратковременно и оператор не в состоянии за это время сопоста-
вить временные и спектральные признаки и определить вид моду-
ляции. Кроме того, осциллографические методы в большинстве
случаев оказываются нечувствительны к изменению модуляции
сигналов. Поэтому возникает задача быстрого и уверенного распо-
знавания вида модуляции. Принцип распознавания или различе-
ния основан на преобразовании малоинформированных входных
признаков в более информативные с помощью специальных опе-
раторов, например оператора удвоения частоты входного сигнала
или оператора автокорреляции.
Найдем различия амплитудных спектров простых, линейно-ча-
стотно-модулированных и фазомодулированных сигналов на
основной и удвоенной частотах. В качестве параметров амплитуд-
ных спектров используем их ширину на основной и удвоенной ча-
стотах.
Рассмотрим прямоугольный радиоимпульс на основной частоте
5,(г) = Л, cos (ц/ + ф0), 0 <t < ти.
Ширина его спектра определяется длительностью импульса. На
удвоенной частоте сигнал запишем в следующем виде:
S2(z) =А2 cos (2а>0/ + 2<р0),
Так как его длительность не изменилась, то ширина спектра
осталась той же, а сам спектр перенесен в область частот 2соо- Из
приведенных соотношений следует, что удвоение частоты не из-
меняет ширину спектра сигнала, т.е. Д/сп1 = Д/сп2.
Линейно-частотно-модулированный сигнал на основной час-
тоте запишем в виде
123
51лчм(0=Д cos^co0Z + ^-j, 0< / <ти. (7.1)
Ширина спектра определяется девиацией частоты
А/сп = Ги>
где у — скорость изменения частоты в импульсе.
Линейно-частотно-модулированный сигнал на удвоенной час-
тоте представим в виде
‘У2лЧм(/)=А cos[2co0z + у/2], 0< / <ти. (7.2)
Сравнивая выражения (7.1) и (7.2), видим, что скорость изме-
нения удвоенной частоты в два раза выше, чем основной. Это
привело к тому, что девиация частоты, а следовательно, и ширина
спектра на удвоенной частоте стали в два раза выше, чем на основ-
ной, т.е./ел, = 1/2д/а|2.
Рассмотрим фазоманипулированный сигнал, который на
основной частоте запишем как
VX0 = АЕ(' -C)c°s[4(/ - с) + 6J
п-1
•z к [1 при 0 < t < т ;
гдеЯ(/) = <! F
1^0 при других значениях/;
rg — длительность одного дискрета кода;
0„ — фаза дискрета, принимающая значение 0, и;
п — число дискретов кода.
Амплитудный спектр комплексной огибающей сигнала запи-
шем в виде
1с(“)1фн =ВД-1Ш
где LSYco) — амплитудный спектр импульса дискрета кода;
|//(со) — амплитудный спектр кодовой последовательности.
|А(со)| = ’ где ап = cos0„ = ±1-
п=1
Ширина спектра фазоманипулированного сигнала оценивается
величиной /сп1 = l/zg.
Сигнал на удвоенной частоте имеет вид
^2Фм(0 = А ЕС "' J cos [2(°оС " Q + 204 0 <' - тн •
л-1
Так как 0 = л, 0, то на удвоенной частоте 20 = 2л или 0, т. е. фазо-
вая модуляция снимается и импульс из фазоманипулированного
становится немодулированным. Следовательно, ширина спектра
теперь определяется не длительностью дискрета, а длительностью
импульса. А так как длительность импульса в Араз больше длите-
льности дискрета, то можно констатировать, что при удвоении ча-
стоты ширина спектра сигнала уменьшилась в А раз, т. е.
Д/сп! = WCI>2-
124
Таким образом, проведенный анализ показывает, что имеются
существенные различия спектра сложных сигналов на основной и
удвоенной частотах. Эти различия определяются следующими со-
отношениями:
простой сигнал - д/сп| s Д/сл2;
линейно-частотно - модулированный сигнал — д/сп) s д/сп2;
фазоманипулированный сигнал — A/cnl s Лд/.^.
(7.3)
На рис. 7.1 изображены огибающие спектров трех классов сиг-
налов на основной и удвоенной частотах, показывающие степень
их различая.
Рис. 7.1. Спектры сигналов на входе и выходе устройства
умножения частоты
Соотношения (7.3) определяют алгоритм данного метода раз-
личения сигналов по модуляции. Измерение ширины спектра
производится с помощью дисперсионного спектроанализатора
(рис. 7.2), длительность импульсц. на выходе которого пропорцио-
нальна ширине спектра. Длительности импульсов сравнивают
между собой и в зависимости от их соотношения принимают ре-
шение о виде модуляции сигналов.
Автокорреляционный метод определения вида внутриимпуль-
сной модуляции сигналов основан на сравнении их спектров на
выходе автокорреляционной схемы. Найдем аналитические выра-
жения откликов автокоррелятора при воздействии линейно-час-
тотно-модулированных, фазоманипулированных и простых сиг-
125
Рис. 7.2. Структурная схема устройства различения сигналов
налов, а также проведем исследования их различий во временной
и спектральной областях.
Будем полагать, что коэффициент передачи автокоррелятора
равен единице, а его фильтр без искажения пропускает низкочас-
тотные составляющие спектра сигнала на выходе перемножителя.
Аналитическое выражение для входного сигнала в общем виде
запишем так:
S(f) = Uo cos [со01 + <р(г)], 0 < t < ти.
Сигнал на выходе перемножителя автокоррелятора имеет вид
U2
cos [<°отз + ф(0 - <р(' - тз)] +
и2
+ -y-cos [2со0Г + <р(0 + <р(/ -т3) -<о0т3].
Сигнал на выходе фильтра перемножителя определяется выра-
жением
г/2
\.11р(0 '= 2~СО5 [ыотз + ф(0"ф(г "тз)]- С7-4)
Подставляя в формулу (7.4) функции модуляции простого, ли-
нейНо-частотно-модулированного и фазоманипулированного сиг-
налов вида
у/2
фПр(0 = <₽о; Флмм(0=^-; ффм(0 = кЧ0’
где k(f) — функция, принимающая в момент изменения фаз значе-
ния 0, 1,
получим аналитические выражения откликов автокоррелятора:
126
для простого сигнала:
U2
\гЛО=у"с08(<°охз)> тз
для линейно-частотно-модулированного сигнала:
U2
\ лчм(0 = -у cos [соб/ + <рк ], Т3 < t < Ти,
где соб = 2тгут3 — частота биения сигнала или разностная частота
между входным и задержанным колебанием на
выходе перемножителя;
<рк = <о0т37гут3 —начальная фаза сигнала биения;
для фазоманипулированного сигнала:
г/2
\фм(0 = ^Р(/)Р(/ -b)cos(co0T3), (7.5)
где 0(/) — модулирующая функция фазоманипулированного сиг-
нала.
Из аналитических выражений для откликов автокоррелятора
следует, что отклик автокоррелятора на простой сигнал представ-
ляет собой видеоимпульс длительностью тв = хи - т3. На практике
длительность задержки меньше длительности импульса, поэтому
можно считать тв = хи. Поэтому ширина спектра огибающей вы-
ходного сигнала определяется шириной спектра видеоимпульса
входного сигнала.
Откликом автокоррелятора на линейно-частотно-модулиро-
ванный сигнал является смодулированный радиоимпульс на час-
тоте биения, ширина спектра которого
Следовательно, на выходе автокоррелятора произошло сжатие
спектра сигнала в &fgxu раз.
Отклик автокоррелятора на фазоманипулированный сигнал
(7.5) соответствует произведению двух модулирующих функций
|1(г), сдвинутых на величину задержки тз (рис. 7.3).
При т3 « xg длительность выходных импульсов равна времени
задержки и не зависит от длительн'бсти дискретов кода, а их число
равно числу изменений фазы в коде фазоманипулированного сиг-
нала. Ширина спектра отклика на фазоманипулированный сигнал
при т3 < xg определяется величиной 2/т3. На рис. 7.4 показаны
спектры выходных импульсов, иллюстрирующих возможность
распознавания видов модуляции по ширине спектров и их поло-
жению на частотной оси.
Реализация устройства распознавания основана на фильтрации
этих спектров.
127
Рис. 7.3. Сигналы на входе и выходе автокоррелятора
G(M
Рис. 7.4. Спектры импульсов на выходе автокоррелятора
Рассмотренные методы на практике показали высокую эффек-
тивность распознавания видов модуляции не только сигналов пе-
речисленных классов, но и дискретных частотно-составных сиг-
налов.
128
7.2. МЕТОДЫ ИЗМЕРЕНИЯ ПАРАМЕТРОВ
ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ
Частотно-модулированный сигнал можно представить в общем
виде:
£7(7) = Z7(r) cos [о<0 + Ф0],
где U(t\ — закон изменения огибающей сигнала во времени;
сф/j — функция изменения частоты;
Фо — начальная фаза.
Основная информация о структуре частотно-модулированного
колебания заключена в аргументе косинуса:
законе изменения частоты во времени со (/) = d(t)/dt\
девиации частоты за время длительности импульса Д/с =
длительности частотно-модулированного импульсного сигнала
Тс> а/
/ \ Д/г
скорости изменения частоты ус(у) = —
Наиболее широкое распространение получили частотно-моду-
лированные сигналы с линейным законом изменения частоты.
Мгновенное значение частоты такого импульса
f(t) = — — (2V0/ + et2^ меняется по линейному закону от /0 до
/0 + (в/л)тс, где коэффициент в выражается через частотную деви-
ацию.
Основная задача приемника при разведке частотно-модулиро-
ванных сигналов заключается в измерении параметров закона из-
менения частоты р(?) и девиации частоты Д/с.
Для этой цели могут быть использованы все методы разведки
частоты, рассмотренные ранее. Однако здесь мы рассмотрим толь-
ко методы, которые нашли наиболее широкое применение в ра-
диотехнической разведке при анализе частотно-модулированных
сигналов, дадим им оценку с точки зрения точности анализа час-
тотных параметров. Разведка частотно-модулированных сигналов
с помощью приемников непосредственного преобразования час-
тоты в код практически не отличается от разведки многоканаль-
ным приемником, и здесь этот вопрос не рассматривается.
Разберем метод использования узкополосных приемников или
волномеров для определения характеристик частотно-модулиро-
ванных сигналов. Если настроить узкополосный приемник на час-
тоту и подать на него частотно-модулированное колебание, то
на выходе появится импульс напряжения или тока в тот момент
времени, когда мгновенная частота приобретает значение со0. Пе-
рестраивая приемник и фиксируя каждый раз положение импуль-
са на временной оси, можно установить закон изменения частоты
исследуемого сигнала.
Каждое измерение состоит из двух независимых операций: на-
стройки резонатора на выбранную частоту и измерения положе -
129
ния импульса во времени. Нетрудно заметить, что требования вы-
сокой точности для этих операций противоречивы. Чтобы умень-
шить частотные ошибки, нужно сузить полосу пропускания
приемника, увеличить добротность резонансной системы. Но чем
уже полоса, тем длиннее импульс на выходе приемника.
Ошибки во времени зависят от длительности выходного импу-
льса при прочих равных условиях, и тем больше, чем меньше
ошибки градуировки приемника.
Теперь рассмотрим способ измерения времени. Интервал из-
мерения длительности импульса на выходе приемника состоит из
двух частей: времени пребывания частоты в полосе приемника и
времени установления колебаний, которые зависят от характери-
стик приемника.
Если du »Д/р2, то выходной отклик приемника на час-
тотно-модулированное колебание представляет собой импуль-
сную реакцию приемника:
^вых(0=А(/ "zo)>
где t0 — подлежащий измерению момент резонанса.
Импульсная реакция представляет собой отклик приемника на
S-функцию и связана с частотной характеристической преобразо-
ванием Фурье:
Л(/) = ±Г ОДе^са
2 л: Д,
Таким образом, при градуировке приемника аппаратной харак-
теристикой является частотная характеристика АГ(со), а при изме-
рениях времени — импульсная реакция Л(/). Поскольку эти функ-
ции есть результат взаимного преобразования Фурье, то при изме-
рении частоты имеет место соотношение неопределенности:
1
=ц - 2’
где су/ и су, — средние квадратические ошибки измерения соответ-
ственно частоты и времени.
На рис. 7.5 показаны два случая измерения мгновенной часто-
ты частотно-модулированного колебания, удовлетворяющие соот-
ношению неопределенности. В первом случае ошибки измерения
времени велики, а ошибки измерения частоты малы; во втором —
наоборот: ошибки по времени малы, а по частоте — велики. За-
штрихованный прямоугольник изображает область неопределен-
ности измерения закона частотного модулирования.
При заданном коэффициенте сжатия соотношение неопреде-
ленности ограничено условием
где Хсж — коэффициент сжатия.
130
Рис. 7.5. Области неопределенности измерения закона модуляции
Существенные изменения ошибок по частоте и времени не
приводят к уменьшению результирующей погрешности, если зна-
чение ц остается неизменным. Чтобы снизить ошибки, надо уме-
ньшить значение р. При достаточно большой энергии сигнала не
существует принципиальных ограничений точности измерений.
Однако сказанное не всегда имеет место при радиотехнической
разведке. Это объясняется, во-первых, невысокими средними
мощностями излучения радиотехнических станций, использую-
щих линейно-частотно-модулированные сигналы, во-вторых, вы-
сокими направленностями излучения в пространстве, что вынуж-
дает вести радиотехническую разведку по боковым лепесткам диа-
грамм направленности разведываемых радиотехнических станций.
Приведенные рассуждения справедливы для случая использо-
вания многоканального «матричного» и двоично-кодового прием-
ников.
В отличие от рассмотренного случая закон частотной модуля-
ции и его параметры можно определить с помощью набора узко-
полосных каналов (фильтров).
По мере изменения частоты сигнала на выходе каждого канала
появляются импульсы, которые подаются либо на осциллограф,
либо на устройство автоматического измерения временных пара-
метров. t
Девиацию частоты находят как произведение числа импульсов
п на интервал частот между каналами:
Д/с = («- О-
Закон частотной модуляции определяют путем измерения и
сравнения периодов следования импульсов на выходе канала. По-
тенциальные ошибки измерения закона модуляции находят из со-
отношения неопределенности суу а, =ц, аналогичного для пере-
страиваемого приемника.
131
Метод с использованием сетки равноотстоящих частот по свое-
му принципу измерения параметров частотно-модулированных
сигналов аналогичен многоканальному. Однако многоканаль-
ность здесь создается не набором фильтров, а набором частот гете-
родина. В качестве напряжения гетеродина используется широкий
набор гармоник, равноотстоящих друг от друга.
Если напряжение разведываемого частотно-модулированного
сигнала и равноотстоящих частот гетеродина будет воздействовать
на смеситель, то в момент равенства /с - /с = /нр о на выходе УПЧ
приемника появляются импульсы, количество которых определя-
ется значением девиации частоты сигнала и интервалом дискрети-
зации частот гетеродина, образующих сетку. Таким образом, мно-
готонный участок модулирующей функции частотно-модулиро-
ванных сигналов получается в виде последовательности
импульсов, т. е. в дискретном виде. За счет приема по зеркальному
каналу число импульсов удваивается, что повышает точность из-
мерения.
Удвоенная девиация частоты 2д/с представляет собой произве-
дение числа импульсов меток п на интервал частот между метками:
2Д/С =Д/н(«-1).
Закон изменения частоты определяют путем измерения и срав-
нения периодов следования всех импульсов меток в соответствии
со структурной схемой (рис. 7.6).
Рис. 7.6. Структурная схема устройства измерения закона модуляции
с использованием сетки равноотстоящих частот
Если в качестве промежуточной частоты использовать стандар-
тные частоты 30 и 60 МГц, это будет соответствовать высоким но-
мерам гармоник сетки, которые имеют малый уровень мощности.
В этом случае эффект преобразования незначителен. Кроме того,
на высоких частотах трудно обеспечить узкую полосу пропускания
132
УПЧ, которая определяет необходимый разнос гармоник по час-
тоте. Поэтому в схеме (см. рис. 7.6) спектр сигнала переносится в
область низких частот. Схема переноса спектра сигнала представ-
ляет собой обычную схему преобразования частоты. Указанный
метод позволяет измерить параметры импульсных частотно-моду-
лированных сигналов, если длительность последних удовлетворя-
ет условию
t„ >2д/с/[(1,2 -1,5)Д/р].
Ошибка отсчета девиации частоты, как и у многоканального
приемника, не превосходит интервала частот между метками.
7.3. ЦИФРОВЫЕ МЕТОДЫ АНАЛИЗА СЛОЖНЫХ
СИГНАЛОВ
При решении практических вопросов анализа сложных сигна-
лов цифровые методы более удобны по сравнению с традицион-
ными аналоговыми.
Перечислим преимущества цифровых методов:
наглядность представления результатов измерения;
оперативность;
высокая точность измерения параметров и независимость от
измеряемого интервала;
возможность сопряжения с ЭВМ;
минимум регулировки.
Существующая в настоящее время отечественная цифровая
элементная база позволяет производить обработку сигналов на ча-
стотах до 150 МГц, т. е. непосредственно на промежуточных час-
тотах приемных устройств. Цифровые измерители временных ин-
тервалов (длительностей импульсов, периода повторения импуль-
сов и т. д.) в станциях радиотехнической разведки используются
широко. Однако анализ частотных характеристик сигналов, осо-
бенно сложных, до настоящего времени не проводился.
Рассмотрим возможность измерения параметров частотно-мо-
дулированных сигналов. Наиболее информативными параметра-
ми этих сигналов являются: девиация частоты, длительность им-
пульсов и связанная с ними характеристика — скорость измене-
ния частоты. Один из возможных методов их измерения — счет
числа пересечений сигналов нулевого уровня на отрезке длиной rg
(рис. 7.7). Можно также считать положительные и отрицательные
гюлупериоды. Но теория оптимального измерения параметров по-
казывает, что наибольшая точность измерения обеспечивается,
если считать переходы колебаний через нуль.
Интервал времени тс, равный длительности сигнала, разбиваем
на N отрезков длиной и подсчитываем число пересечений нуле-
вой линии в каждом интервале N2,..., А^. Сравниваем интерва-
лы N[, N2, A3 с А/4 и т.д. Если разность N\ — А^ = 0, то сигнал про-
стой или с фазовой модуляцией. Если А^ > А/) > 0, то сигнал час-
133
Рис. 7.7. Измерение девиации частоты сигнала цифровым методом
тотно-модулированный с нарастающей функцией модуляции;
если < 0, то сигнал частотно-модулированный с убываю-
щей функцией модуляции. Так как измерение осуществляется на
промежуточной частоте, то сказанное справедливо, если преобра-
зование по частоте верхнее. Если преобразование нижнее, то на-
блюдается обратное. В станциях радиотехнической разведки жела-
тельно осуществлять верхнее преобразование, чтобы закон моду-
ляции на входе и выходе радиотракта станции РТР совпадал.
Выразим закон изменения частоты в импульсе в дискретном виде:
+/о,О<г<гс;
7(0=0, ?>хс,/<0,
где д/с — девиация частоты;
/) — начальная частота сигнала;
к = 1 при простом сигнале; к = 2 при линейной частотной мо-
дуляции; к = 3 при квадратичной частотной модуляции.
Число нулей на интервале {0, г} определяется из выражения
134
О k Tc
Разность числа пересечений нулевой линии на смежных интер-
валах длительностью т9:
Лп = 1^1(2к-1 -1).
К* V >
Таким образом, измерение девиации сигналов с монотонным
изменением частоты состоит в определении приращения числа
нулей сигнала в двух равных смежных интервалах:
Определим требования к значению временного интервала. По-
лагая известной длительность сигнала, определим максимум фун-
кции (7.6). Это соответствует Tqopl = тс/2.
Цифровые измерители сигналов линейной частотной модуля-
ции, в которых = тс/2, в дальнейшем назовем квазиоптималь-
ными, поскольку в классе рассматриваемых цифровых измерите-
лей они имеют минимальную относительную среднюю квадратич-
ную погрешность измерения девиации частоты:
8.v =(n«/A/)min.
Для такого квазиоптимального измерителя (рис. 7.8) девиация
частоты определяется из выражения
Рис. 7.8. Квазиоптимальный цифровой измеритель девиации частоты
135
К характерным особенностям ошибок измерения цифровых
измерителей следует отнести ошибки целочисленного счета о„,
значения которых существенно больше ошибок, вызванных шу-
мами при отношениях сигнал/шум больше 12 дБ.
Поскольку в задачах радиотехнической разведки длительность
сигнала, как правило, априорно неизвестна, то измерение девиа-
ции частоты можно реализовать с помощью многоканального
устройства, каждый канал которого соответствует своему диапазо-
ну длительностей т. + 5, а длительность временного интервала рав-
на т./2. Задаваясь допустимым увеличением ошибки, можно опре-
делить необходимое число каналов измерителя т из условия
т
"^гпах ^ппп —
где и Tmin — верхняя и нижняя границы диапазона длительно-
стей принимаемых сигналов.
Сокращение числа каналов можно достичь, прибегая к нерав-
ноинтервальным измерениям. Определение длительности при-
нимаемого сигнала в рассматриваемом устройстве производится
традиционными цифровыми методами по нормированной огиба-
ющей сигнала на выходе амплитудного детектора. Чтобы умень-
шить влияние ошибок измерения длительности импульсов на
ошибки измерения девиации частоты, необходимо обеспечить
условие
5Т <0,1тс.
Учитывая, что сложные сигналы имеют, как правило, достаточ-
но высокую длительность (единицы—десятки микросекунд), то
это условие обеспечить сравнительно просто.
Рис. 7.9. Неоптимальное измерение девиации частоты
136
Реально используются неоптимальные методы. Принимаемый
сигнал разбивается на интервалы длительностью (рис. 7.9). Из-
меритель, учитывающий количество нулевых переходов во всех
измерительных интервалах, образует приращение по правилу
Р/2 13
дЛ = Е«, - ЕЛ>’
/=| ;=(p/2)u
где \п1 — сумма нулей в первых измерительных интервалах;
— сумма нулей второй части сигнала;
Р — общее число измерительных интервалов.
Девиация частоты определяется из выражения
7.4. АНАЛИЗ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ
Фазоманипулированный сигнал представляет собой последова-
тельность импульсов одинаковой формы. Каждый импульс харак-
теризуется амплитудой, фазой и частотой заполнения.
В зависимости от того, какие значения имеют амплитуда и фаза
импульсов, фазоманипулированные сигналы можно классифици-
ровать следующим образом:
равномерные, если амплитуды импульсов одинаковы;
неравномерные, если амплитуды импульсов различные;
бинарные или двухфазные, если фазы импульсов принимают
только два значения, как правило 0 и тс;
многофазные, если фазы сигналов могут принимать п значений
(где п >2).
В радиолокационных системах наиболее широкое распростра-
нение получили равномерные бинарные сигналы. Они представ-
ляют собой прямоугольный импульс длительностью гс, который
делится на N дискретов длительностью т0 = tc/N. Высокочастот-
ные колебания в пределах каждого интервала имеют фазу 0 или л
относительно начальной фазы отсчета. Значению фазы 0 или л
ставится в соответствие 0 или 1 определенного двоичного кода
(модулирующей последовательности).
Таким образом, информация^ структуре фазоманипулирован-
ных сигналов заключена в следующих характеристиках:
длительность импульса тс;
период повторения импульсов 7};
длительность дискретов г0;
несущая частота
закон чередования фаз или код сигнала.
Методы анализа первых четырех параметров практически не
отличаются от методов анализа простых сигналов радиолокацион-
ной станции и здесь рассматриваться не будут.
137
Определение закона чередования фаз (выделение модулирую-
щей функции) представляет практический интерес для радиотех-
нической разведки, поскольку здесь заложена основная информа-
ция о типе разведуемой РЛС, режимах работы, методах обработки
сигналов. Поэтому в данном подразделе основное внимание уде-
лено вопросам выделения модулирующей функции или расшиф-
ровки кода.
Для выделения модулирующей функции необходимо произве-
сти преобразование фазового кода в амплитудный, т. е. осущест-
вить фазовое детектирование. Особенность этого преобразования
состоит в том, что его необходимо осуществить в широкой полосе
частот приемного устройства станции радиотехнической разведки
при высоких частотах манипуляции сигнала.
Важное значение приобретают вопросы помехоустойчивости.
Действительно, если в радиолокационной станции отношение
сигнал/шум на выходе согласованного фильтра
9р“ =^2%f0’
то отношение сигнал/шум на выходе разведывательного приемни-
ка не может быть выше, чем
a
Ыод/р’
где (f/,2„oTo)/2 — энергия одной дискреты фазоманипулирован-
ного сигнала;
Д/р — полоса пропускания разведывательного при-
емника.
При записи кода аппаратура анализа должна иметь объем па-
мяти больше, чем аппаратура анализа простых импульсных сигна-
лов. Для выделения кода фазоманипулированного сигнала можно
использовать синхронное детектирование (рис. 7.10).
Рис. 7.10. Синхронный детектор
Если на входе такого детектора действует полезный сигнал на-
пряжением S{(t) с амплитудой Slm и фазой <р
5,(0=5i.cos(2^ + q>i) (7-7)
и опорное напряжение
138
^o„(0 =5onn, cos(2V0r + (p0I1), (7.8)
то на выходе детектора получается напряжение
S2(r) = /Г2 cos(<p, - фоп),
где К2 =(K{Soum)/2; — постоянный коэффициент, определяе-
мый параметрами схемы умножения и
коэффициентом передачи фильтра.
Если 50IIW — const и Slm~ const, то сигнал на выходе детектора
определяется лишь разностью фаз полезного сигнала и опорного
колебания:
V =<Р| - Фо,.-
Это дает нам право такой детектор назвать фазовым.
Сигнал с выхода фазового детектора может быть подан на эле-
менты обработки, а затем на элементы принятия решения. Когда
фаза сигнала меняется скачком на л, схема обработки и принятия
решения может строиться, как показано на рис. 7.11.
ФД
Рис. 7.11. Устройство демодуляции ФМ-сигналов
Так как элементы обработки представляют собой линейный
фильтр, то в отсутствие шумов получим: при передаче дискрета с
фазой 0 результат обработки > 0, при передаче дискрета с фазой
л результат обработки S2 < 0. Таким образом, для расшифровки
кода достаточно определить полярность сигнала S2 и решения мо-
гут приниматься по правилу: если S2 > 0 — передан символ 0, если
S2 < 0 — передан символ 1.
Следовательно, осуществляя синхронное детектирование, мож-
но выделить закон модуляции фазЬк Однако при радиотехниче-
ской разведке неизвестна частота принимаемого сигнала и создать
опорное напряжение в виде, представленном формулой (7.8), не-
возможно. Поэтому оно должно быть сформировано из самого
сигнала. Трудность преобразования сигналов, действующих на
входе детектора, в опорное колебание состоит в том, что полезный
сигнал на входе [см. формулу (7.7)] образуется последовательно-
стью символов с различными фазами, а опорное напряжение дол-
жно иметь неизменную фазу, совпадающую с фазой одного из
139
символов. Кроме того, на входе детектора неизбежно присутству-
ют шумы, что обусловливает появление шумов в опорном канале
и приводит к ошибкам в выделении кода. Известно несколько
схем формирования опорных колебаний, позволяющих устранять
влияние манипуляции и уменьшать мощность помех в опорном
канале, и несколько методов приема фазоманипулированных сиг-
налов. Дадим краткую характеристику методов фазоманипулиро-
ванных сигналов.
Поскольку основная информация о структуре сигнала заклю-
чена в законе чередования фаз, то для выделения модулирующей
функции фазоманипулированного сигнала необходимо оценить
фазы двух следующих друг за другом посылок:
= я sin (со/ + [(« -1)т <1 <«т]
и
Sn(t) = я sin (со/ + <p„), [лт <1 <(п + 1)т],
т.е. необходимо определить разность фаз
V =<Р„ -Фл.1-
На вход приемника станции РТР поступают искаженные поме-
хой сигналы:
л (0=s.(0 + ^(0-
Для составления математических алгоритмов работы приемни-
ка удобно представить дискреты сигнала и Sn(t) в векторной
форме Sn_t и Sn функционального пространства сигналов, а иска-
женные помехой дискреты сигнала и у„(/) в виде векторов
функционального пространства сигналов и помех. Аппарат век-
торной алгебры целесообразно применять по той причине, что по-
нятия разности фаз двух дискрет сигнала и утла между векторами
функционального пространства сигналов тождественны, т.е.
о
РМн/рК')1*
V о
V о
140
При отсутствии помех косинус выделенной разности фаз
(cos \|/с) равен косинусу истинной разности фаз (cos у):
т
J. \ jasin(co/‘+ (prt_[)asin(co/+
cos V с = = у. °- .......••= =
Н,"|11|Г”1 Jja2 sin2(<D?+ (рл_,)Л • [a2 sin2(<D? + (pn)dt
Vo Vo
a2772[cos(<p„ -(₽„_,)]
=------ ------ ------± = cos(<p„ - (p„_,) = COS \|7.
(X/772)
Таким образом, фаза у может быть определена как отношение
скалярного произведения векторов двух соседних дискретов. Од-
нако при наличии помех вычисленное по формуле значение cos
не соответствует точному значению cos у, поэтому возможны
ошибки первого и второго рода. Задача состоит в том, чтобы отыс-
кать такие способы обработки сигналов, при которых полная ве-
роятность ошибок первого и второго рода была бы минимальной.
Для фазоманипулированного сигнала, где происходит измене-
ние фазы скачком на л, необходимо только определить знак cos уе.
Математически эту операцию записывают в виде
sign/ = sign (cos ус).
Здесь sign следует понимать как «знак принятого информаци-
онного символа», a sign (cos ус) — «знак косинуса пси».
Имея в виду, что произведение норм векторов — величина поло-
жительная и на знак cosi^ влияния не оказывает, можно считать
sign/ = sign(yj„_,) (7.9)
и что для выделения модулирующей функции необходимо опреде-
лить знак скалярного произведения уп и Выражение (7.9) яв-
ляется основным, с его помощью можно получить алгоритм обра-
ботки фазоманипулированных сигналов и классифицировать из-
вестные методы.
Автокорреляционный метод приема состоит в непосредственной
реализации выражения
sign/ = signj* уп (г)ул_, (/) dt. (7.10)
о
Сигнал с выхода УПЧ разведывательного приемника разветв-
ляется на два канала (рис. 7.12). По одному из них сигнал непо-
средственно подается на фазовый детектор, по другому — через
линию задержки. Значение задержки выбирается таким образом,
чтобы при постоянной промежуточной частоте произведение со0т3
удовлетворяло условию а>от3 = 2тш, где п = 1, 2, 3,... .
В этом случае на выходе фазового детектора будут скачки на-
пряжения в момент изменения фазы сигнала. При всей простоте
метода применение его в целях декодирования сигналов РЛС
141
Рис. 7.12. Автокорреляционный приемник ФМ-сигналов
встречает принципиальные затруднения, так как требует точного
знания несущей частоты.
Введение регулируемой задержки (рис. 7.13) позволяет полу-
чать эффект выделения модулирующей функции, близкий к по-
тенциальному, однако при этом возрастает время разведки.
Рис. 7.13. Автокорреляционный приемник ФМ-сигналов с регулируемой
линией задержки
Кроме описанной схемы можно применять схему вскрытия
кода фазоманипулированного колебания, основанную на двухкас-
кадном способе приема (рис. 7.14). Здесь принятый и усиленный
сигнал разветвляется на два канала. По одному каналу он непо-
средственно поступает на вход смесителя 1, по другому — задер-
живается на время ц, а затем преобразуется смесителем 2.
Гетеродин имеет фиксированную настройку. Разностная часто-
та с выхода смесителя 1 выделяется фильтром и поступает на вто-
рой вход смесителя 2. После преобразования сигнал разностной
частоты усиливается. В дальнейшем работа схемы не отличается
от случая, описанного выше.
142
Корреляционный метод приема рассмотрим на следующем при-
мере.
Представим сигнал 5(/) = a cos(co/ - <р) = a cos со/ cos ср +
+ a sin ср sin со/ в виде проекции вектора на координатные оси. В
этом случае алгоритм корреляционного приема имеет вид
Гт т
sign/ = sign J уп (/) sin со/ Л j уя_, (?) sin со/ dt +
.0 о
т т
+ j y„(/)cosco/^f }>„_](/) cos (atdt
о о
(7.П)
Термин корреляционный прием здесь можно применить по при-
чине формальной аналогии между взаимной корреляционной
функцией и интегралами в формуле (7.11). Различие состоит в
том, что результатами вычислений являются не функции, а числа,
соответствующие взаимно корреляционной функции, рассматри-
ваемой во времени.
Координатные функции /, = sinco/;/2 = cos со/ создаются с по-
мощью местного гетеродина и фазовращателя на л/2 (рис. 7.15).
Схема корреляционного приемника более сложна, чем авто-
корреляционного, однако в ней отсутствует запоминающее
устройство в виде линии задержки.
Рассмотрим когерентный метод приема. Любой из принятых
сигналов при когерентном приеме может быть записан в виде
S(t) = a sin (со/ + ср0).
Скалярное произведение векторов (п -1)-й и и-й дискреты сиг-
нала в этом случае может быть вычислено через проекции на ко-
ординатную ось: /0 = sin (со/ + ср0).
С учетом воздействия помех это скалярное произведение мож-
но записать в виде
143
Рис. 7.15. Корреляционный приемник ФМ-сигналов
Подставляя выражение для проекции на координатную ось в
общий алгоритм приема (7.10), получаем алгоритм когерентного
приема
sign/ = sign^y,,.^) sign (y„70)
или, заменив скалярное произведение их интегральными пред-
ставлениями, окончательно имеем
т т
sign/ = signjyn_l(r)sin(cor + (р0) dt х signjуп(/)sin(coz + (pn) dt.
о 0
Основной трудностью при реализации когерентного приема
(рис. 7.16) является формирование колебаний когерентных сигна-
лов (т.е. с точностью до л), совпадающих по фазе с вариантами
сигнала.
Рис. 7.16. Когерентный прием ФМ-сигналов
144
Рис. 7.17. Принцип формирования когерентного опорного напряжения
Когерентные приемники сигналов с фазовой манипуляцией
отличаются разнообразием применяемых схемных решений. Наи-
более простую реализацию нашла схема формирования опорного
напряжения методом удвоения частоты (рис. 7.17).
На вход схемы действует сигнал S,(z) =51Я1 cos(2k/0z + (р.), ко-
торый может принимать два значения: 0 или л. Этот сигнал пода-
ется на фазовый детектор и удвоитель частоты.
Сигнал на выходе удвоителя будет иметь вид
5УДВ(О = КудЛы cos(4r/0z + 2ф,).
При манипуляции фазы на 0 и л на выходе удвоителя частоты
фазы будут равны 0 или 2л, что не изменит значения аргумента ко-
синуса.
Таким образом, на выходе удвоителя получаем гармоническое
колебание удвоенной частоты, которое пропускается через узкопо-
лосный фильтр для уменьшения уровня помех в опорном канале.
Уменьшение уровня шумов в опорном канале пропорциональ-
но сужению полосы пропускания опорного канала относительно
УПЧ. Колебание удвоенной частоты после умножения подается на
схему деления на два, вырабатывающую опорное напряжение с
частотой сигнала и нулевой фазой. На выходе делителя частоты на
два могут сформироваться такие сирналы:
=S011 cos2k/0/ или 5"n = С08(2л/Ог + л).
Эти колебания отличаются наличием фазового сдвига, равно-
го л. Причиной является случайный процесс, связанный с нача-
лом деления и воздействием шумов на делитель частоты.
В результате анализа методов фазоманипулированных сигналов
рассмотрены три алгоритма, положенные в основу трех различных
методов приема сигналов с фазовой манипуляцией:
145
автокорреляционный метод приема, при котором скалярное
произведение векторов вычисляется непосредственно (7.10);
корреляционный метод приема, при котором то же скалярное
произведение вычисляется через проекции посылок сигнала на
две создаваемые в приемнике ортогональные координатные функ-
ции;
когерентный метод приема, при котором скалярное произведе-
ние вычисляется через проекции посылок сигнала на одну коор-
динатную функцию (7.10).
Перечисленные методы практически исчерпывают все извест-
ные методы приема сигналов с фазовой манипуляцией. Корреля-
ционный и автокорреляционный методы являются некогерентны-
ми. Из них корреляционный прием обладает наибольшей помехо-
защищенностью.
7.5. АНАЛИЗ ПОМЕХОУСТОЙЧИВОСТИ МЕТОДОВ
ФОРМИРОВАНИЯ ОПОРНОГО НАПРЯЖЕНИЯ,
ОСНОВАННЫХ НА АВТОКОРРЕЛЯЦИОННОМ
МЕТОДЕ ПРИЕМА
На рис. 7.12 была представлена структурная схема устройства
фазового детектора, основанная на простой автокорреляционной
схеме. При всей простоте схемы применение его для целей декоди-
рования зондирующих сигналов РЛС встречает принципиальное
затруднение, так как требует точного знания несущей частоты сиг-
нала что невозможно в условиях радиотехнической разведки.
Оценим допустимое отклонение несущей частоты сигнала fc от
fo. Если считать допустимым уменьшение уровня сигнала на входе
пороговых устройств, следующих за фазовым детектором, на 30 %
за счет рассогласования фаз основного и опорного напряжения,
что соответствует Д(р = -, а значение задержки т = 0,3 мкс, то допу-
6
тс10
стимое отклонение частоты от/п составит д/о =---------0,28 МГц.
g 62л0,3
Ширина полосы частот (ДЛ) разведывательных устройств прие-
ма с учетом реальных длительностей принимаемых сигналов со-
ставляет примерно 6... 10 МГц, причем разведываемый сигнал с
равной вероятностью может быть принят в любой точке полосы
широкополосного тракта приемника разведки.
Из вышеизложенного следует, что схема (см. рис. 7.12) не
обеспечивает нужную работу в требуемой полосе частот.
Оценим помехоустойчивость методов фазового детектирова-
ния, основанных на автокорреляционном методе приема.
При наличии флуктуационной помехи N(t) напряжения на вхо-
дах фазового детектора схемы (см. рис. 7.12):
Х[(7) = £/с cos
x2(t) = Uc cos co(z + tQ)+ N(t + t0),
146
где ?о ~ время запаздывания сигнала на втором входе по отноше-
нию к первому.
Напряжение на выходе фазового детектора, усредненное за до-
z— rri 2
статочно большое время 1 » —:
со0
1 т 1
=7.|\(0*2(0^ =у^с COSOVO + (7’12>
1 о
[де хй(/0) — корреляционная функция флуктуационной составля-
ющей.
Корреляционная функция выходного напряжения фазового де-
тектора:
Ч'иых.флОл) = tfc2x(t)cosov + х2(т) + х(70 + т)х„(/0 - т) +
+ 2 [*„(т -zo)cos“o(T + 'о) + *0 + 'o)COS«o(T -'о)]’
При отсутствии на выходе фазового детектора интегрирующего
фильтра из выражения (7.12), положив в нем т = О, получим дис-
персию флуктуационной составляющей выходного напряжения:
%,хФД^0) = :/са-- + ^с^и(^)сО8(О0Г0 +ХП2(7О) + С^
Дисперсия флуктуаций при наличии фильтра определяется
формулой
ФЯ= (б = 7 J (1 - 7V •“> ™ )*’ <7-13)
1 0 \ 1 '
где Т = —
&F
время наблюдения;
А/7 — полоса пропускания фильтра низкой частоты.
Если функцию корреляции Увых.фд (ТДО) аппроксимировать
прямоугольной функцией
вых.ФД
.„хфл(°)при0^т£Дт;
При т > Ат,
(7.14)
где Ат =--------интервал корреляции;
2лД
2a/v,— полоса пропускания усилителя,
то, подставив выражение (7.13) в (7.14), получим
/'7’4 2 Лт ,(0) = —а ,(0).
вых.ФД - X ' l\.fy вых.ФД’ X z
^вых.ФД2
(7.15)
Соотношение (7.15) показывает, что интенсивность флуктуа-
ций на выходе фазового детектора уменьшается с увеличением
времени наблюдения 7q. Однако повысить помехоустойчивость за
счет увеличения времени наблюдения 7g нельзя, поскольку, как
следует из рис. 7.12, необходимо на выходе фазового детектора
то
воспроизводить элементы сигнала длительностью т < —, что тре-
147
бует расширения полосы пропускания низкочастотного фильтра
до полосы первого усилителя.
Связь между отношением сигнал/шум на выходе и на входе
схемы определяется выражением
г/2 h1
h = с -------------=----. (7.16)
+2^, +2
Зависимость (7.16) показывает, что помехоустойчивость авто-
корреляционной схемы примерно равна помехоустойчивости при-
емника с амплитудным детектором.
При больших значениях Авх
h — — h
"вых J 2 *ВХ ’
При малых значениях /гвх
h к—h1
1ВЬСХ 1 ^2 "вх '
Улучшить помехоустойчивость фазового детектирования сиг-
налов фазоманипулированного типа можно, если от автокорреля-
ционного способа приема перейти к когерентному. При когерент-
ном приеме отношение сигнал/шум на входе схемы равно отно-
шению сигнал/шум на выходе, т. е. hax = АВШ.
Высокая помехоустойчивость может быть достигнута, если
опорное напряжение полностью очищено от помех, а его фаза
совпадает (или отличается на тс) с фазой дискретов входного фазо-
манипулированного сигнала.
Поскольку опорное напряжение может быть сформировано то-
лько из принятого колебания х((0, то оно отличается от чистого
гармонического из-за наличия помех, что приводит к понижению
помехоустойчивости приема сигналов с фазовой манипуляцией. В
отличие от когерентного способа приема, когда опорное напряже-
ние не поражено помехой, прием называется квази когерентным
или квазислучайным.
7.6. ПРИНЦИПЫ ПОСТРОЕНИЯ УСТРОЙСТВА
КЕПСТРАЛЬНОГО АНАЛИЗА СИГНАЛОВ
СЛОЖНОЙ СТРУКТУРЫ
При анализе сигналов сложной структуры в ряде случаев удоб-
нее осуществить кепстральное преобразование сигналов. Такое
преобразование направлено на то, чтобы выходной эффект наибо-
лее четко подчеркивал основные характеристики сигнала: вид мо-
дуляции, параметры внутриимпульсной структуры, временные и
частотные свойства. Рассмотрим сущность кепстрального преоб-
разования радиолокационных сигналов, которые лежат в основе
кепстрального анализа.
148
Известно, что преобразование Фурье устанавливает однознач-
ное соответствие между самим сигналом и его спектром. Следова-
тельно, любое преобразование сигнала вызывает соответствующее
изменение его спектра и наоборот. Это позволяет обрабатывать
заданные колебания с использованием операций прямого преоб-
разования Фурье, определенной трансформации спектра сигнала
и обратного преобразования Фурье для перехода из частотной
вновь во временную область.
Одним из подобных способов анализа тонкой структуры сигна-
лов является метод кепстрального преобразования.
По определению, кепстр — есть преобразование Фурье от лога-
рифма спектра заданного сигнала. Термин «кепстр» образован от
слова «спектр» путем перестановки букв. Существуют энергетиче-
ские, амплитудные, комплексные и фазовые кепстры. Характер-
ной способностью кепстрального преобразования является воз-
можность выполнения операции, обратной свертке двух сигналов.
Эта возможность основана на представлении спектра свертки двух
функций в виде произведений их спектров. Логарифмирование,
входящее в алгоритм кепстрального преобразования, преобразует
произведение в сумму, а в результате последующего преобразова-
ния Фурье формируются отклики, соответствующие каждому сла-
гаемому.
Благодаря современным достижениям в области акустоэлект-
роники созданы устройства на поверхностных акустических вол-
нах, выполняющих преобразование Фурье в реальном масштабе
времени, т. е. позволяющие получать спектр каждого отдельного
импульса. Это дает возможность применить кепстральное преоб-
разование для анализа импульсных радиолокационных сигналов.
Такие а кустоэлектронные устройства называются Фурье-процес-
сорами на поверхностных акустических волновых или ПАВ-Фу-
рье-процессорами.
Одним из алгоритмов работы ПАВ-Фурье-процессора является
схема «умножение—свертка—умножение». При выполнении пре-
образования Фурье импульсного радиосигнала последний умно-
жается на линейно-частотно-модулированный сигнал, поступает
на фильтр, в котором происходит свертка с импульсной характе-
ристикой фильтра, согласованной с этим сигналом. Сигнал на вы-
ходе фильтра вновь умножается на линейно-частотно-модулиро-
ванный сигнал.
Линейно-частотно-модулированцые сигналы после умножения
в Фурье-процессоре генерируются путем пассивного возбуждения
дисперсионных ультразвуковых линий задержки (ДУЛЗ) на ПАВ
коротким импульсом. Фильтр свертки строится также на основе
ДУЛЗ и согласуется по наклону дисперсионной характеристики с
линейно-частотно-модулированным сигналом предумножения.
Длительность сигналов пред- и послеумножения в оптимальном
случае одинакова и равна половине длительности импульсной ха-
рактеристики ДУЛЗ-фильтра свертки. При анализе амплитудного
спектра послеумножение на линейно-частотно-модулированный
149
сигнал может быть заменено линейным амплитудным детектиро-
ванием.
На основе ПАВ-Фурье-процессоров могут быть построены
устройства, осуществляющие в реальном масштабе времени кеп-
стральный анализ импульсных радиосигналов.
Как указывалось, одним из видов кепстра является амплитуд-
ный.
Рис. 7.18. Схема устройства кепстрального анализа сигналов
На рис. 7.18 представлена структурная схема анализатора од-
ностороннего амплитудного кепстра. Устройство содержит два
Фурье-процессора, включенный между ними логарифмический
усилитель и синхронизатор. Входной сигнал поступает на первый
Фурье-процессор и синхронизатор. Амплитудный детектор про-
цессора формирует модуль спектра входного сигнала, который по-
сле логарифмирования поступает на квадратурный второй Фу-
рье-процессор.
Выходной сигнал детектора второго процессора является моду-
лем однополосного спектра отклика логарифмического усилителя
или односторонним амплитудным кепстром входного сигнала.
В синхронизаторе с помощью детектирования выделяется оги-
бающая входного сигнала, из которой амплитудный компаратор и
ждущие мультивибраторы выбирают синхроимпульсы, управляю-
щие генераторами линейно-частотно-модулированных сигналов.
Амплитудные кепстры наиболее распространенных среди ра-
диолокационных простого, бинарного фазоманипулированного и
ЛЧМ-сигналов аналитически можно представить в следующем
виде:
^пР(0=А coster, 0<г <Т0; (7.17)
/V
5фм(О = АХ^оО-^)cos((°0/ + (7.18)
п=1
150
Sp4M(0=Acos^0r+ 0<t<TQ, (7.19)
где Ao, w0, To — амплитуда, несущая частота и длительность сиг-
нала;
тп, N, 0,( — длительность, число и фаза дискрета фазомани-
пулированного сигнала;
у — скорость перестройки частоты (крутизна) ли-
нейно-частотно-модулированного сигнала;
с, =(«-i)^o; ^(0 = ч
Поскольку рассматривается амплитудный кепстр, то началь-
ную фазу сигнала (7.17) - (7.19) и линейно-частотно-модулиро-
ванных сигналов Фурье-процессоров без потери общности рас-
суждений полагают равными нулю.
Рассмотрим процедуру получения одностороннего амплитуд-
ного кепстра на примере простого сигнала (7.17). Прежде всего от-
метим, что для обеспечения синхронизации Фурье-процессоров
анализатора кепстра огибающей входного сигнала последний за-
держивается с помощью радиочастотной линии задержки (на схе-
ме не показана) на время, необходимое для формирования линей-
но-частотно-модулированных сигналов предумножителей.
После этого входное воздействие поступает на предумножитель
первого Фурье-процессора, где умножается на линейно-частот-
но-модулированный сигнал вида
5,(Г) = Bi Costco,, - |/| < TJ2. (7.20)
где 7\ - длительность ЛЧМ-сигнала.
Для упрощения полагаем В\ = 1. Перемножая колебания (7.17)
и (7.20), получаем
= у cos
(2со/ + <о0)/
+ cos (2coj
2
|г|<7^0/2. (7.21)
Фильтр сверки, построенный на основе ДУЗЛ, является узко-
полосным устройством с центральной частотой ц, поэтому первое
слагаемое выражения (7.21), содержащее под знаком аргумента
суммарную частоту, отфильтровывается, а второе — подвергается
сверке с импульсной характеристикой фильтра:
У2(г) = В2 cos Г со/ + |/| < Т{.
Сигнал на выходе фильтра сверки будет иметь вид
151
5фс(/) = • sine----—cos^<D|Z + (7.22)
где |?| < Tv a = TQ/Т.; sin ex =
x
Огибающая этого сигнала (7.22) соответствует спектру просто-
го радиоимпульса. Из выражения (7.22) следует, что амплитуда
спектра тем выше, чем больше длительность входного сигнала и
база Фурье-процессора. Ширина главного лепестка функции
(7.22) обратно пропорциональна длительности входного сигнала.
На выходе линейного амплитудного детектора с коэффициен-
том передачи, равным -72, формируется колебание, адекватное ам-
плитудному спектру немодулированного радиоимпульса. В соот-
ветствии с алгоритмом кепстрального преобразования колебание
далее поступает на логарифмический видеоусилитель с амплитуд-
ной характеристикой
/(х) =s(gwxln(l + Р|х|),
где р — коэффициент усиления.
После логарифмического усилителя сигнал поступает на вход
второго Фурье-процессора, на выходе которого и образуется
спектр этого сигнала или кепстр входного (исследуемого) сигнала.
На рис. 7.19 показаны формы кепстров для сигналов с различны-
ми видами модуляции и осциллограммы в различных точках схе-
мы.
$лчм(0
Рис. 7.19. Кепстры сигналов: а - для простого радиоимпу-
льса; б — фазоманипулированного и линейно-частотно-
модулированного сигналов
152
Анализ кепстров простого и фазоманипулированного сигналов
показывает, что боковой отклик в первом из них расположен от
начала координат на расстоянии, равном длительности огибаю-
щей, а во втором — на расстоянии, равном длительности элемен-
тарного сегмента. Длительности главных лепестков откликов со-
ставляют Т{ 1т на уровне 4 дБ от вершины; эта величина определя-
ет разрешающую способность анализатора кепстра по
длительности. Кепстр линейно-частотно-модулированного сигна-
ла состоит из единственного импульса с максимумом в точке
t -TJ2m\ длительность его на уровне 4 дБ от вершины равна
Т./т0.
Таким образом, структура и параметры односторонних ампли-
тудных кепстров радиолокационных сигналов однозначно связа-
ны с функцией внутриимпульсной модуляции и позволяют разли-
чать простой и фазоманипулированный сигналы по координатам
боковых откликов кепстров. Линейно-частотно-модулированный
сигнал опознается по наличию только одного импульса в составе
кепстра. Анализ кепстра фазоманипулированного сигнала дает
возможность измерить длительность его элементарного сегмента
(дискрета). Различия в кепстрах сигналов позволяют разделить их
по виду внутриимпульсной модуляции. Характеристики анализа-
тора кепстра, построенного на базе ПАВ-Фурье-процессоров, за-
висят от параметров применяемых ДУЛЗ. Так, для анализа сигна-
ла длительностью до 25 мкс в полосе частот 50 МГц требуются ли-
нии задержки с дисперсией 50 мкс и полосой пропускания
100 МГц; разрешающая способность этих устройств по длительно-
сти составляет 20 нс, ПАВ-Фурье-процессор, реализованный на
основе таких ДУЛЗ, имеет в полосе частот 50 МГц разрешающую
способность 40 кГц.
8.ИСПОЛБЗОВАНИЕ ПРИНЦИПОВ
ОПТИМАЛЬНОЙ ФИЛЬТРАЦИИ ИМПУЛЬСНЫХ
СИГНАЛОВ ПРИ ПОСТРОЕНИИ
ПЕРСПЕКТИВНЫХ СРЕДСТВ
РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ
8.1. ОБЩИЕ СВЕДЕНИЯ О СОГЛАСОВАННЫХ
ЛИНЕЙНЫХ ФИЛЬТРАХ
Принятие оборонительной доктрины и события, происшедшие
в Восточной Европе, резко снизили разведывательный потенциал
системы радиотехнической разведки. Это объясняется тем, что
информативные источники разведки, находящиеся на объектах
стран НАТО, стали энергетически недоступны для наземных и
воздушных средств радиотехнической разведки. Сигналы удален-
ных от станций радиотехнической разведки источников радиоиз-
лучения могут быть обнаружены, но вследствие низкого отноше-
ния сигнал/шум трудно измерить их координаты с заданной точ-
ностью.
Проблема разведки новых источников осложняется тем, что
большинство радиолокационных станций излучают сигналы
сложной структуры с изменением параметров от импульса к импу-
льсу. Такие сигналы обладают повышенной энергетической и
структурной скрытностью, что затрудняет обеспечение требуемой
дальности разведки и достоверности полученных разведыватель-
ных сведений. Поэтому в перспективных средствах радиотехниче-
ской разведки необходимо реализовать потенциальные возможно-
сти как по обнаружению и измерению координат, так и по анализу
их сигналов и распознаванию типов и экземпляров радиоэлект-
ронных средств.
Эта задача может быть решена, если будут использованы прин-
ципы оптимальной обработки сигналов независимо от их структу-
ры, изменения параметров и характеристик в процессе ведения
разведки.
Прежде чем рассматривать принципы построения оптималь-
ных фильтров для радиотехнической разведки, напомним общие
сведения о согласованной фильтрации, необходимые для дальней-
шего изучения и понимания вопроса.
Согласованный фильтр является оптимальным по ряду причин.
Во-первых, он оптимизирует отношения сигнал/шум в каждый
момент времени.
154
Во-вторых, при обнаружении излучения согласованный
фильтр формирует весьма удобный для этой цели статистический
параметр, называемый отношением правдоподобия.
В-третьих, с точки зрения теории оценок параметров, согласно
которой проблема приема радиосигналов трактуется как оценка
параметров излучений известной формы в присутствии белого
шума, согласованный фильтр дает на выходе оптимальные оценки
в соответствии с принципом максимального правдоподобия. Этот
фактор весьма важен при оценке времени задержки сигналов в
разностно-дальномерных разведывательных комплексах, так как
огибающая сигнала на выходе согласованного фильтра достигает
максимума в момент времени, равный времени задержки, удов-
летворяющему принципу максимального правдоподобия.
В-четвертых, распознавание структурно подобных сигналов по
тонкой структуре импульсов наиболее эффективно, если исполь-
зовать различия сигналов на выходе согласованного и квазисогла-
сованного фильтров.
В-пятых, согласованная фильтрация позволяет перейти от мед-
ленного поиска в частотном диапазоне к быстрому поиску, обес-
печивая 100%-ное обнаружение сигнала без потери чувствитель-
ности, а также произвести анализ спектра сигнала по одному им-
пульсу.
Согласованные линейные фильтры предназначены для выделе-
ния сигнала из шумов (помех), спектр которых перекрывает
спектр принимаемого сигнала. В них используется комплексная
селекция по частоте, амплитуде и фазе. Согласованные фильтры
дают наибольшее отношение пикового значения сигнала к сред-
нему квадратичному значению шума. Понятие согласованный от-
ражает то обстоятельство, что передаточная функция фильтра со-
гласована со спектральной характеристикой сигнала. Кроме обес-
печения максимального соотношения сигнал/шум важным
свойством согласованного фильтра является сжатие сложного сиг-
нала во временной или спектральной области.
Из теории радиолокации известно, что согласованный фильтр
выделяет сигнал только одной определенной формы, на которую
он рассчитан. При изменении формы сигнала фильтр оказывает-
ся рассогласованным. Поэтому в радиолокации применяется на-
бор фильтров на все ожидаемые формы сигналов, структура кото-
рых заранее известна.
В системах радиотехнической разведки этот метод неприемлем,
поскольку структура сигналов в общем случае неизвестна, набор
сигналов разведываемых радиолокационных станций настолько
велик, что постановка на каждом из них согласованного с ним фи-
льтра практически нереализуема. Поэтому желательно иметь та-
кой согласованный фильтр, который бы менял свои характеристи-
ки под воздействием сигнала, как бы самонастраиваясь, самооп-
тимизируясь под принимаемую или ожидаемую форму сигнала.
Такие фильтры можно реализовать с помощью акустооптических
Фурье-процессоров, магнитооптических Фурье-процессоров, ди-
155
одних конвольверов, спиновых и домен-акустических процессо-
ров. Наибольший интерес для радиотехнической разведки пред-
ставляют последние три. Для реализации согласованных фильтров
необходимо выполнить одно из двух условий в частотной или вре-
менной области. Выполнение одного из них автоматически при-
водит к выполнению другого. Напомним эти условия.
В частотной области: чтобы обеспечить максимальное отноше-
ние пикового значения сигнала к среднему квадратичному значе-
нию шума, коэффициент передачи фильтра и спектральная харак-
теристика сигнала должны быть комплексно-сопряженными с
точностью до множителя се'7<0/°, где с и Iq — постоянные вещест-
венные числа, т. е.
ед = KS\^q-jw'° .
Из этого следует, что амплитудно-частотная характеристика
согласованного фильтра с точностью до постоянного множителя
должна совпадать с амплитудно-частотным спектром принимае-
мого сигнала.
Условие согласованной фильтрации во временной области сво-
дится к тому, что импульсная характеристика согласованного фи-
льтра g(t) с точностью до постоянного множителя является зер-
кальным отражением относительно оси ординат комплексно-со-
пряженного сигнала (входного сигнала), задержанного на время 1$,
т. е.
g(f) = CU(j0 -/).
Сигнал на выходе согласованного фильтра, импульсная харак-
теристика которого g(t) ~CU(tQ -t), записывается в виде
Uc(t) = cjc/(r)f/(zo - г + т)А.
Таким образом, для осуществления операции согласованной
фильтрации надо иметь возможность задерживать сигнал, инвер-
тировать его, т. е. формировать импульсную характеристику с зер-
кальным отображением, перемножать прямой и инвертированные
сигналы между собой и интегрировать результат перемножения.
Для оптимальной фильтрации сигналов необходимо иметь
устройство, импульсная характеристика которого представляет со-
бой зеркальное отображение сигнала. В фильтре на дисперсион-
ной линии задержки импульсная характеристика создается с по-
мощью встреч но-штыревых преобразователей, которые наносятся
на полированную поверхность кристалла литографическим спосо-
бом. Эта импульсная характеристика соответствует единственно-
му сигналу. Если бы удалось каким-то образом создать динамиче-
скую импульсную характеристику с помощью входного сигнала
или сигнала, создаваемого специальным генератором, и которая
существовала бы в течение времени, необходимого для обработки
156
сигнала, то эту импульсную характеристику можно было бы под-
строить под любую форму сигнала. В этом случае можно было бы
оптимальным образом обрабатывать последовательно большое ко-
личество сигналов. Такую импульсную характеристику можно со-
здать только путем обращения сигнала во времени.
Метод обращения сигнала во времени используется в диодных
конвольверах, акустических процессорах, спиновых и домен-акус-
тических процессорах. Путем взаимодействия различных по физи-
ческой природе полей можно осуществить сжатие сложных вход-
ных сигналов по времени или по спектру. В акустооптических
устройствах (ячейка Брегга) используется взаимодействие свето-
вой волны с ультразвуковой волной в оптически прозрачном кри-
сталле.
В спиновых эхопроцессорах используется взаимодействие
электромагнитных колебаний с магнитными моментами количе-
ства движения элементарных частиц или ядер атомов, помещен-
ных в поле постоянного магнита.
В домен-акустических процессорах используется взаимодейст-
вие акустической (ультразвуковой) волны, распространяемой в
специальном магнитострикционном звукопроводе, с внешним
магнитным полем, создаваемым сигналом.
В диодных конвольверах используется взаимодействие элект-
рического поля с ультразвуковой волной, распространяющейся в
звукопроводе, вызванной принимаемым сигналом.
Один и тот же эффект — сжатие сигналов и получение макси-
мального отношения сигнал/шум — достигается взаимодействием
различных по природе полей. Рассмотрим последовательно работу
таких фильтров.
8.2. ПРИНЦИПЫ ПОСТРОЕНИЯ АКУСТООПТИЧЕСКИХ
ФИЛЬТРОВ СЖАТИЯ СИГНАЛОВ
С принципами акустооптической обработки сигналов мы уже
встречались при изучении разведывательных приемников на ячей-
ках Брегга.
Новым и очень перспективным направлением в радиотехниче-
ской разведке является применение акустооптических устройств
для фильтрации и обработки широкополосных СВЧ-сигналов в
реальном масштабе времени. В этих устройствах используются оп-
тические методы обработки светового потока, промодулированного
ультразвуковым сигналом, возникающим в результате линейного
электроакустического преобразования исходного СВЧ-сигнала.
В основе такого фильтра лежит взаимодействие светового поля
(световой волны) с ультразвуковой волной, создаваемой приня-
тым сигналом в модуляторе света. Преимущество акустооптиче-
ских фильтров сжатия заключается в том, что условие физической
осуществимости, ограничивающее реализуемость радиотехниче-
ских фильтров, на оптические системы не распространяется. Кро-
ме того, для проектирования оптически согласованных фильтров
157
не требуется знать аналитическое выражение передаточной функ-
ции или импульсной характеристики, так как она формируется са-
мим сигналом. <
Опишем один из наиболее исследованных типов акустооптиче-
ских устройств. Сжатый выходной сигнал возникает на фотодиоде
в момент времени, когда обрабатываемый импульс, преобразован-
ный в эквивалентный ультразвуковой сигнал, целиком заполнит
освещаемую область звукопровода. Фотодиод должен быть распо-
ложен так, чтобы на его входной щели сфокусировались все свето-
вые лучи, дифрагированные на разные углы при прохождении све-
та через звукопровод, который эквивалентен фазовой дифракци-
онной решетке с переменным периодом, вследствие изменения
свойств звукопровода под воздействием распространяющихся
ультразвуковых волн.
Рассмотренное устройство является одним из простейших. В
настоящее время исследованы другие, более сложные акустоопти-
ческие фильтры для согласованной обработки когерентных и не-
когерентных сверхвысокочастотных широкополосных сигналов с
использованием ультразвуковых волн.
8.3. СУЩНОСТЬ ЯВЛЕНИЯ ЯДЕРНОГО СПИНОВОГО ЭХА
Спином называется собственный магнитный момент количест-
ва движения элементарных частиц или ядер атомов, не связанных
с их перемещением. Если поместить частицу с заданным магнит-
ным моментом М в постоянное магнитное поле напряженностью
Hq, она начнет прецессировать (вращаться) с частотой со0 = у0//0
вокруг силовых линий. Здесь у — коэффициент гиромагнитного
отношения.
Явление ядерного магнитного резонанса (ЯМР) используется
для получения эффекта спинового эха. Поясним суть явления.
В парамагнитном материале имеются собственные локальные
магнитные поля силой в несколько тысяч эрстед, и для получения
в них эффекта ЯМР внешние магнитные поля не нужны. Так как
магнитные материалы не однородны, то элементарные магнитные
моменты ядер атомов будут находиться в локальных магнитных
полях различной силы, а следовательно, у них будут различные
скорости прецессии. Если бы удалось разделить образец на эле-
ментарные однородные области, то магнитный момент атомов в
каждой такой области будет иметь свою скорость прецессии
<як =уНОК, свою гармонику, называемую изохроматой (рис. 8.1).
Рассмотрим процессы в системе координат вращающейся с час-
тотой too центральной изохроматы. Пусть в начальный момент все
изохроматы находятся в равновесном состоянии, т. е. направлены
вдоль оси Z, совпадая с напряженностью магнитного поля //ок.
Если приложить в плоскости XYвнешнее магнитное поле Н ,
вращающееся с частотой со(| в направлении вращения спинов, все
изохроматы будут относительно его неподвижны и начнут враша-
158
Рис. 8.1. Прецессия магнитных моментов
ться (поворачиваться) вокруг его силовых линий с одинаковой ча-
стотой О = уЯ0.
Выберем импульс длительностью ти « 1/ , т. е. очень корот-
/ ^сп
кий, а его интенсивность подберем так, чтобы за время, равное
т(), обеспечить разворот изохромат на 90° (в физике получил на-
звание 90-градусный импульс). При этом условии изохромы в
плоскости XY за время действия импульса Ны развернутся, но не
успеют разбежаться (рис. 8.2).
Рис. 8.2. Поворот изохромат
После разворота каждая изохромата начнет прецессировать во-
круг оси Zc частотой Ны . Причем центральная изохромата будет
вращаться вокруг оси Z с частотой*со(), а = <оЛ - со0. Сразу же
после подачи импульса Н ш , когда еще все изохроматы совпадают
но времени, они создадут максимальный результирующий поток
индукции, который можно обнаружить и зарегистрировать. Одна-
ко после т=-----, когда все изохроматы расфокусируются и рас-
положатся равномерно в плоскости XY, поток индукции исчезнет.
Спустя время т|2 =----приложим второй условный импульс та-
159
кой интенсивности, чтобы он развернул все изохроматы на 180°.
Тогда все «отстающие» и опережающие изохроматы с одинаковы-
ми значениями Лсо4 поменяются местами относительно централь-
ной частоты. Так как при этом они будут продолжать вращаться
вокруг оси Zc той же скоростью и в ту же сторону, что и до разво-
рота, «веер» начнет снижаться, поток индукции будет фокусирова-
ться и к моменту 2т|2 достигнет максимума, который будет зареги-
стрирован индикатором.
Благодаря инверсии изохромат форма индукции будет зеркаль-
на по отношению к исходной, в связи с чем это явление названо
спиновым эхом.
Все особенности спинового эха позволяют использовать его
для обработки сигналов, в частности для их задержки и сжатия во
времени.
Так, если на спиновый прибор подать короткий импульс
ти « —i— произвольной формы и интенсивностью, достаточной,
ДЧп
чтобы он развернул изохроматы на угол ^<90°, а спустя время
т12 > /д подать 180-градусный 8-импульс, то через время 2т|2 на
выходе прибора воспроизведется зеркальное отображение первого
импульса (рис. 8.3).
Рис. 8.3. Принцип формирования зеркального отображения
импульса
Для получения задержанного прямого отображения импульса
применяется трехимпульсная методика.
Сначала на спиновую систему подают стартовый 90-градусный
8-импульс, спустя время т)2 — задержанный информационный
импульс, а спустя время т13 — считывающий 90-градусный им-
пульс. Тогда через время, равное х|2 + т13, на выходе возникает за-
держанный неинвертируемый информационный импульс.
Время задержки регулируется путем изменения интервала т)3
между.З-импульсами. Минимальное время задержки определяется
длительностью информационного импульса, а максимальное —
временем релаксации и составляет несколько десятков миллисе-
кунд. Спиновая система является простой, позволяющей задержи-
вать (консервировать) высокочастотный импульс на сравнительно
большое время. Полоса сигналов составляет десятки мегагерц и
160
охватывает практически все сигналы разведываемых радиолока-
ционных станций.
Рассмотрим возможность сжатия сигналов с помощью спино-
вых систем. Для этого необходимо через время т12 после его воз-
действия подать вспомогательный импульс с тем же размахом и
законом частотной модуляции, но вдвое меньшей длительностью.
Через время т12 на выходе системы воспроизводится сжатый им-
пульс (рис. 8.4).
Рис. 8.4. Принцип сжатия импульса в спиновом процессоре
Таким образом, в основе работы спинового процессора лежит
явление спинового эха, суть которого заключается в том, что если
на образец, содержащий ядра, обладающие магнитным моментом,
и помещенный в постоянное внешнее магнитное поле Hq, пода-
ются последовательно два радиоимпульса с одинаковой частотой
заполнения со0 — y#o, гДе У — ядерное гиромагнитное отношение,
о)0 — частота ядерного магнитного резонанса со сдвигом друг от-
носительно друга на т|2, то спустя время 2 т12 возникает резко вы-
раженный отклик — сигнал спинового эха. Этот сигнал называет-
ся двухимпулъсным эхом.
При воздействии на образец последовательно тремя радиоим-
пульсами кроме двухимпульсных эхо-сигналов возникает трехим-
пульсное (стимулированное) эхо (рис. 8.5). Его временное поло-
жение определяется суммой задержек второго т12 и третьего т|3
импульсов относительно первого.
161
Эхо, образованное по двухимпульсному методу, представляет
собой взаимокорреляционную функцию (ВКФ) предыдущего сиг-
нала с автосверткой последующего, а для трех им пульс но го мето-
да — ВКФ первого со сверткой второго и третьего сигналов.
Спектр двух им пульс но го эха описывается формулой
5э2(ю) =^(ш)5;(со)5;(со)е’>м2г':!,
а трехимпульсного
где S'(co) и 5* (со) — спектр и комплексно-сопряженный спектр
входных сигналов соответственно;
к— коэффициент пропорциональности;
g(co) — частотная линия ядерного магнитного резо-
нанса вещества.
Во временной форме выражения для двухимпульсного и трех-
импульсного эхо соответственно имеют вид:
где Ut (7) — комплексные амплитуды переменного магнитного
поля радиочастотных импульсов;
F(f) — функция, описывающая обратное преобразование
Фурье от формы линии поглощения.
Эти уравнения лежат в основе принципов построения эхо-про-
цессоров, так как устанавливают однозначное соответствие между
временным положением, формой спинового эха, спектрами и вре-
менной расстановкой входных сигналов.
8.4. ФУНКЦИОНАЛЬНЫЕ ВОЗМОЖНОСТИ СИГНАЛОВ
В СПИНОВОМ ПРОЦЕССОРЕ
Спиновой процессор — это универсальный прибор, принцип
действия которого основан на явлении ядерного магнитного резо-
нанса. Устройство можно помимо операции приема сигналов ис-
пользовать в различных типовых вариантах при обработке сигна-
лов, таких, как реализация регулируемой задержки, перемноже-
ния и инверсирование сигналов во времени, спектральный анализ
и пр., что составляет основу анализа сигналов при радиотехниче-
ской разведке.
Наиболее перспективно использование спинового процессора
в приемном тракте станций разведки в качестве адаптивного к
типу сигнала оптимального фильтра, обеспечивающего наилучшее
отношение сигнал/шум. Причем выбор режима работы спинового
процессора и соответственно синтез его импульсной характери-
162
стики достаточно просты и осуществляются подачей на него 8-им-
пульса и ожидаемого сигнала.
Существенным недостатком спиновых процессоров является
то, что обработку сигналов они ведут за сравнительно короткий
промежуток времени (единицы — десятки миллисекунд), называе-
мый временем активной памяти процессора, что иногда не удов-
летворяет условию разведки.
В радиолокационных станциях этот недостаток решается срав-
нительно просто: система процессоров (для перекрытия требуемо-
го временного интервала) запускается зондирующим импульсом
передатчика. В системах, в которых отсутствует зондирующий им-
пульс и неизвестно время приема, могут быть использованы сиг-
налы единого времени и два работающих последовательно на об-
щую нагрузку процессора.
К основным техническим параметрам спиновых процессоров,
которые, как правило, определяются составом и размерами рабо-
чего вещества, относятся:
рабочая частота;
ширина полосы пропускания;
максимальное время памяти системы;
длительность обрабатывающих сигналов;
амплитудные соотношения (требуемые уровни возбуждения и
переходного затухания);
динамический диапазон;
энерговесовые и конструктивные характеристики.
Рабочая частота спинового процессора, как правило, совпадает
с центральной частотой линии ядерного магнитного резонанса ра-
бочего вещества.
Для ферромагнитиков (ЯМР на ядрах Fe57, Со59, Ni61 в раз-
личных соединениях) диапазон рабочих частот от 30 до 300 МГц.
Ширина полосы пропускания определяется неоднородностью
поля на ядрах и для ферромагнитных пленок с помощью техно-
логических приемов может быть получена любой в диапазоне
0,5 ... 20 МГц.
Максимальное время памяти ограничено временем попереч-
ной релаксации Т2 и для ферромагнитных пленок может колеба-
ться в пределах от 100 мкс до нескольких миллисекунд. Минима-
льный период повторения цикла обработки информации спино-
вых процессоров определяется в основном временем Т\, которое
для пленок принимает значения от’нескольких сотен микросекунд
до 10 мс.
Длительность обрабатываемых сигналов ограничена, как пра-
вило, значением 7V2.
Необходимые уровни возбуждения резонансного контура, в ко-
торый помещается рабочее вещество, составляют единицы
вольт для сложных сигналов и десятки вольт — для управляющих
8-импульсов. Переходное затухание спинового процессора для
разных материалов колеблется от 40 до 70 дБ.
163
Динамический диапазон определяется логарифмом максималь-
ной амплитуды эха к напряжению шумов. Амплитуда эха зависит
от многих причин, в частности, она пропорциональна количеству
ядер, значению магнитного момента ядра, коэффициенту г усиле-
ния радиочастотного поля и обратно пропорциональна температу-
ре образца. Для современных пленок динамический диапазон на-
ходится в пределах 40 ... 70 дБ.
Рис. 8.6. Структурная схема спинового процессора
Структурная схема спинового процессора представлена на
рис. 8.6, где обозначено: 1 — входной ключ; 2 — сумматор; 3 — ге-
нератор управляющих сигналов; 4 — усилитель сигналов возбуж-
дения; 5 — программатор; 6 — резонатор с рабочим веществом;
7— усилитель эхо-сигналов; 8 — выходной ключ.
Входной ключ ограничивает длительность поступающих на
вход процессора обрабатываемых сигналов. Выходной ключ устра-
няет прямое прохождение сигналов возбуждения. Усилители обес-
печивают соответственно необходимый уровень сигнала возбуж-
дения и усиления эхо-сигнала. Генератор формирует требуемые
для заданного режима обработки последовательности управляю-
щих сигналов. Управление спиновым процессором обеспечивает-
ся с помощью программатора, который синхронизируется внеш-
ним сигналом.
Если спиновой эхо-процессор используется в составе разведы-
вательного приемника, то в нем реализуются следующие положи-
тельные результаты.
164
I. При заданной вероятности правильного обнаружения и лож-
ной тревоги (критерий Неймана—Пирсона) увеличивается даль-
ность обнаружения сложных сигналов.
2. При заданной дальности обнаружения и вероятности ложной
тревоги увеличивается вероятность обнаружения сигнала вполне
определенного типа. При этом, обнаружив сигнал, сразу же без
какого-либо измерения его параметров с высокой вероятностью
можно определить экземпляр РТС, что упрощает систему анализа
и позволяет осуществить автоматическую сортировку потока сиг-
налов на входе системы анализа. Указанное обстоятельство связа-
но с максимизацией отношения сигнал/шум и настройкой (согла-
сованием) спинового процессора только с принимаемым сигна-
лом.
3. При прочих равных условиях повышается точность опреде-
ления координат радиотехнических средств, излучающих сложные
сигналы, что также связано с повышением отношения сиг-
нал/шум.
4. Возможность повышения пропускной способности станций
радиотехнической разведки за счет автоматизации процесса сор-
тировки потока сигналов при помощи эхо-процессорного прием-
ника.
5. Эхо-процессорный приемник полностью адаптивен к любо-
му типу сигналов. Поэтому при появлении РТС с новыми типами
сигналов, например уолшевскими, приемный тракт должен сохра-
нить свои рабочие характеристики.
Рассмотренный вариант эхо-процессорной обработки наибо-
лее пригоден для использования в специальных комплексах аппа-
ратуры экспресс-анализа, на постах разведки разведыватель-
но-ударных комплексов, в лабораториях исследования радиоизлу-
чений.
8.5. ПРИНЦИПЫ ПОСТРОЕНИЯ
ДОМЕН-АКУСТИЧЕСКОГО ПРОЦЕССОРА
Рассмотрим физические явления, лежащие в основе до-
мен-акустического процессора.
Пусть в момент t = 0 в образце ферромагнетика, находящегося
в размагниченном состоянии, возбуждена акустическая волна с
частотой со. Эта волна будет распространяться в образце, претер-
певая рассеяние и тепловые затухания. Уравнение акустической
волны, описывающее смещение частиц тела от положения равно-
весия, можно записать в виде
где р — плотность материала образца;
U- компонента векторного смещения частиц в волне;
t — время;
Т — компонента тензора механических напряжений;
165
Xj— пространственная координата.
Для одномерного случая, выбрав направление распростране-
ния акустической волны вдоль оси X, решение уравнения (8.1) в
комплексной форме можно записать так:
Ux(x,t) = U^~ikx +U'()lQ-'^kx,
где U*Ql — комплексная амплитуда смещения;
со— частота звуковой волны;
к — волновой вектор.
Теперь в момент времени t = тс подадим на образец импульс
магнитного поля с такой же частотой:
Я,(/ + г) = Я01е'"('-'> +
где Я0| и Яо’( — действительная и мнимая части компоненты на-
пряженности магнитного поля.
В результате нелинейного взаимодействия за счет магнитост-
рикции происходит перемножение распространяющихся вдоль
оси X акустической волны U(x, г) и магнитного поля H(t + т).
Под действием поля изменяются доменные границы ферромаг-
нетика. При этом происходит изменение внутреннего состояния
образца, т.е. запись взаимодействующих импульсов. Эти измене-
ния обусловлены переходом системы из равновесного состояния в
метастабильное.
После окончания процесса движения доменных границ в об-
разце возникает структура неоднородного распределения намаг-
ниченности, которая несет информацию о частоте возбуждающих
импульсов со, временном промежутке между ними т. За счет магни-
тоупругой связи образца эта структура также создает соответству-
ющее ей поле механических напряжений.
При таком распределении намагниченности доменные грани-
цы образуют внутри образца дифракционную решетку, которая в
принципе является акустической голограммой возбуждающих им-
пульсов. Время жизни этой голограммы определяется устойчиво-
стью метастабильного состояния, в которое перешла доменная
структура образца, и зависит от коэрцитивности, температуры,
амплитуды и частоты импульсов.
Если в момент времени t= Тв образце вновь возбудить акусти-
ческую волну U2(x, Т) той же частоты св, распространяющуюся в
направлении оси X,
U2(x,T) = U02^T-kx +U‘02e-M,
то произойдет взаимодействие этой волны со стационарной струк-
турой магнитных неоднородностей, образованных на этапе запи-
си. В момент t = Т + т появится сигнал трехимпульсного стимули-
рованного эха.
Существует и другая возможность получения сигналов до-
мен-акустического эха. Если вновь в момент t = Т в образце возбу-
дить импульс магнитного поля частоты со:
166
Н2(Т) = НЮ^Т +н^-'“т,
а не акустическую волну, то за счет магнитоупругой связи ферро-
магнетика произойдет взаимодействие этого поля со стационар-
ной структурой амагниченности, сформированной на этапе запи-
си. При этом возникнут две акустические волны. Волна
Ut\x,T + ^распространяется в том же направлении, что и исход-
ная акустическая волна, имеет ту же частоту со и регистрируется
как сигнал стимулированного домен-акустического эха.
Волна из(-х,Т - т) распространяется навстречу исходной вол-
не и тоже является сигналом домен-акустического эха (обращен-
ная волна). Взаимодействуя со стационарной волной, путем пере-
множения на нелинейностях получим на одном выходе корреля-
ционную функцию, на другом — отклик согласованного фильтра
(сверку сигнала).
На рис. 8.7 изображен процесс генерации домен-акустического
эха в виде двух акустических волн Щ(-х, Т + т) и U3{x, Т + т), рас-
пространяющихся в противоположных направлениях. Возбужде-
ние структуры магнитных неоднородностей в этом случае произ-
водится импульсом поля Н2(Т).
Рис. 8.7. Принцип формирования домен-акустического эха
Перестройка доменной структуры происходит за время, мень-
шее длительности возбуждающих импульсов, и зависит от скоро-
сти движения доменных границ у и от смещения Ах отдельной гра-
ницы. Движение доменной границы происходит со скоростью
звука в твердом теле (несколько тысяч метров в секунду). Макси-
мальное значение смещения доменной границы Дх, необходимое
для формирования эха, не превышает половины периода акусти-
ческих волн, возбуждаемых в образце ферромагнетика первым им-
пульсом, и поэтому время Iq перестройки всей структуры акусти-
ческой голограммы оказывается достаточно малым:
t0 = — = — = 102 с,
2у0 2/
<де
X — длина акустической волны;
v — скорость волны;
/— частота сигнала.
167
Перестройка доменной структуры происходит уже при воздей-
ствии на образец переднего фронта второго импульса, остальная
часть этого импульса порождает сигналы двухимпульсного эха.
Для стирания акустической голограммы на катушку индуктивно-
сти нужно подать импульс спадающей амплитуды с низкочастот-
ным заполнением. Магнитное поле катушки разрушает метаста-
бильную доменную структуру.
Эффект домен-акустического эха позволяет создать многофунк-
циональное устройство — домен-акустический процессор (ДАП). В
зависимости от назначения домен-акустического процессора мож-
но осуществлять следующие преобразования сигналов:
длительное запоминание сигналов с сохранением фазовой
структуры;
многократное неразрушающее считывание сигналов;
временную инверсию сигналов;
вычисление функции корреляции и свертки сигналов;
анализ спектра в реальном масштабе времени.
Рис. 8.8. Схема процесса записи и считывания информации на основе
домен-акустического процессора
Общая структурная схема процесса записи и считывания ин-
формации с рабочим телом домен-акустического процессора
представлена на рис. 8.8. Она включает в себя твердотельный маг-
нитострикционный носитель информации; один или два возбуди-
теля упругих акустических волн; катушку записи, считывания и
стирания информации. Магнитострикционный носитель инфор-
мации 2 изготовляется из пол и кристаллических магнитострикци-
онных ферритов со структурой шпинели и граната длиной до
НО мм и сечением 3x3 или 6x6 мм в зависимости от длины. Эле-
мент возбуждения акустических волн 7 представляет собой пьезо-
168
электрический преобразователь объемных волн. Он изготовляется
из монокристаллов L1NBO3 (центральные частоты 15 ... 40 МГц) и
закрепляется на торцах с помощью эпоксидных клеев.
Элемент записи выполнен в виде катушки из проводящей лен-
ты, охватывающей магнитострикционный носитель. Основным
показателем домен-акустического процессора является информа-
ционная емкость (база фильтра). В настоящее время информаци-
онная емкость достигает 500 единиц. Это достаточно хорошая
база. Максимальная длительность сигнала, записываемого на
ДАП, определяется из выражения
L
т = — .
«шах ’
V
к зв
где L — длина звукопровода;
v3B — скорость звука в феррите.
Для современных устройств тятах =150 мкс, что охватывает
практически весь диапазон длительностей импульсов радиолока-
ционных станций США и стран НАТО.
Максимальная полоса рабочих частот Д/тах домен-акустиче-
ского процессора определяется средней частотой fo и полосой
пропускания преобразователя акустических волн и составляет
(0,1 ... 0,5) /q. Время записи радиоимпульсов происходит в реаль-
ном масштабе времени и не превышает единиц микросекунд. Ди-
намический диапазон порядка 50 дБ.
8.6. УСТРОЙСТВА КОРРЕЛЯЦИОННОЙ ОБРАБОТКИ
СЛОЖНЫХ СИГНАЛОВ НА АКУСТИЧЕСКИХ ВОЛНАХ
При рассмотрении приемных устройств было показано, что то-
лько использование приборов, основанных на современных физи-
ческих явлениях, позволяет достичь принципиально новых каче-
ственных показателей аппаратуры радиотехнической разведки. К
их числу в первую очередь следует отнести приборы на поверхно-
стных акустических и магнитостатических волнах. Применение
этих приборов для анализа частотных параметров сигналов позво-
лило создать приемные устройства, отвечающие современным
требованиям к аппаратуре радиотехнической разведки. Эффект
оптимальной фильтрации частотно-модулированных сигналов не
должен ограничиваться только областью спектрального анализа.
Широкие перспективы открываются при создании устройств
на основе нелинейных свойств материалов, позволяющих осуще-
ствлять большое число операций над сигналом — параметриче-
ское усиление, преобразование частоты, детектирование и т. д.
Наибольший интерес для анализа сигналов представляет при-
менение нелинейного взаимодействия распространяющихся ульт-
развуковых волн для построения устройств корреляционной обра-
ботки сигналов, инвариантных к внутриимпульсной структуре
сигналов (конвольверов).
169
Рассмотрим нелинейные взаимодействия акустических волн в
твердых телах.
Распространение акустических волн в твердых телах описы-
вается уравнением движения
где j? — плотность среды;
U, — вектор смещения частиц в волне;
t— текущая координата времени;
Ту— тензор механического напряжения;
х— пространственная координата.
Параметры волны существенно зависят от свойств среды рас-
пространения и определяются такими физическими величинами,
как механическое перемещение, деформация тела, электрическое
поле, электрическая индукция.
Выражение механического напряжения и электрической ин-
дукции через деформацию тела х и электрическое поле Ет имеет
линейную и нелинейную зависимости. Нелинейность свойств
кристаллов приводит к тому, что для распространения в нем акус-
тических волн не выполняется принцип суперпозиции; происхо-
дит взаимодействие волн и электрических полей.
В устройствах для корреляционной обработки сигналов могут
использоваться два основных типа взаимодействия:
взаимодействие акустических волн друг с другом;
взаимодействие акустических волн с внешним электрическим
полем.
Взаимодействие акустических волн друг с другом можно рас-
смотреть на примере распространения по кристаллу двух акусти-
ческих волн, смещения частиц в которых могут быть записаны в
виде:
U{ = V? ехр|;(со,г -к^ + кс} ;
U2 = V2 exp£/(<o2f - к2r2^ + кс} ,
где со, и со2 — частоты двух волн;
к; — волновой вектор;
г — направление распространения.
Вследствие пьезоэффекта эти волны сопровождаются электри-
ческими полями:
£, = Е° ехрр(со,г ;
Е2 = Е° ехр|у(со2Г -к^Л + кс\ .
170
Деформация в каждой волне имеет вид S = djdr, а электриче-
ское поле, сопровождающее волну, Е = (-e,jgy(duldr). Тогда нели-
нейная часть индукции, возникающей при взаимодействии волн,
может быть представлена выражением
=k(dU/di)\
где к — нелинейный коэффициент, зависящий от нелинейного
пьезоэффекта, диэлектрической проницаемости и электрострик-
ции.
Частота нелинейной индукции и ее волновой вектор связаны с
частотами и волновыми векторами взаимодействующих волн сле-
дующими соотношениями:
= со, + со2;
к3 =к} + к2.
Если частоты акустических волн равны, а распространяются
они навстречу друг другу, то к3 =0, со3 = 2<а
Рассмотрим взаимодействие акустической волны с внешним
электрическим полем. Как было показано, взаимодействие акус-
тических волн приводит к образованию нелинейной электриче-
ской индукции. Возможен и обратный процесс. Пусть на крис-
талл, по которому распространяется акустическая волна с часто-
той со, и волновым вектором kit подействовали электрическим
полем с частотой со2 =2со, и вектором к3 = -kt (поле однородно в
пространстве). В результате взаимодействия акустической волны с
электрическим полем образуется новая акустическая волна с час-
тотой со, = со, и вектором к3 =-к{ (волна той же частоты, что пер-
воначальная, но распространяющаяся в противоположном на-
правлении), т.е. возникает обращенная волна, что чрезвычайно
важно при оптимальной обработке сигналов.
Если акустические волны в твердом теле возбуждаются радио-
частотными сигналами, то с помощью нелинейных взаимодейст-
вий можно осуществить интегральные преобразования входных
сигналов.
Пусть один из сигналов имеет вид F = F(/)exp{y(co,r - &,?)},
другой — G = G(0exp{y(co2r -&2z)}. В каждой точке кристалла, в
которой существуют акустические волны, вызванные обоими сиг-
налами, происходит перемножение сигналов. Если проигнориро-
вать результат перемножения по всей области взаимодействия, то выход-
ной сигнал можно определить из выражения
где L — длина области взаимодействия;
v — скорость акустических волн.
171
Если длительность сигналов не превышает длины области
взаимодействия, то выходной сигнал представляет собой акусти-
ческую свертку сигналов
C(t)* $F(r)G(2t-r)dr.
Если сигнал F подается на кристалл в виде электрического
поля, а сигнал G возбуждает в нем акустическую волну, то выход-
ной сигнал принимает вид функции акустической корреляции:
С(/)« J F(r)G(2t -r)dt. (8.2)
Следует отметить, что в этих выражениях в отличие от приня-
тых в математике определений свертки и корреляции двух функ-
ций есть множитель 2 при аргументе подынтегральных функций.
Если в выражении (8.2) сигнал С является 8-функцией, на вы-
ходе получим сигнал С(Г), сжатый во времени в два раза:
С(Г) « J Г(г) 8(2/ - t)dr = Ft/2, (8.3)
а если сигнал F(r) имеет вид 8-функции, то происходит обращение
сигнала во времени:
C(t) = J 8(r)G(2r - tjdr = C(-t). (8.4)
Простейшее вырожденное акустическое устройство (рис. 8.9)
может быть реализовано как на объемных волнах, так и на поверх-
ностных акустических волнах. Наиболее широкое распростране-
ние получили устройства на ПАВ, так как за счет локализации
энергии нелинейный эффект взаимодействия волн проявляется
при меньших уровнях мощности входных сигналов. Но возбудить
ПАВ пока удалось на частотах только до 1000 МГц.
Входные сигналы Fu G подаются на преобразователи 2 и воз-
буждают в звукопроводе 1 встречные акустические волны v( и V2-
Взаимодействие этих волн приводит к образованию нелинейной
составляющей электрической индукции Вт, которая генерирует в
поверхностном слое кристалла толщиной d волну длиной, близ-
кой к длине ПАВ, а остальная часть кристалла играет роль конден-
сатора емкостью Скр. Вследствие изменения нелинейной индук-
ции во времени в звукопроводе возникает электрический ток, ко-
торый снимается с параметрического электрода 3, играющего роль
интегратора в виде напряжения свертки.
Сигнал акустической корреляции можно снимать как с помо-
щью того же преобразователя, который выдал входную волну, так
и с помощью специального преобразователя, расположенного ря-
дом с входом.
Устройство свертки на ПАВ характеризуется следующими
основными параметрами: информационной емкостью (произведе-
ние ширины полосы пропускания устройства на время интегриро-
172
Рис. 8.9. Акустическое устройство обработки сигналов
вания д/Тинг), динамическим диапазоном и коэффициентом пре-
образования.
Информационная емкость акустических устройств свертки по-
тенциально очень высока, так как их полоса пропускания опреде-
ляется значением полосы пропускания встречно-штыревых пре-
образователей, используемых для возбуждения акустической вол-
ны, а время интегрирования зависит от размеров звукопровода.
Динамический диапазон устройств 40 ... 50 дБ и выше.
Сверткой прямоугольных импульсов является треугольный
(рис. 8.10) с пиковой амплитудой, пропорциональной £вх, и с
длительностью, равной длительности Гвх. Это справедливо при
Рис. 8.10. Свертка прямоугольных импульсов
173
Твк < То, где TQ = £/И — время прохождения волны под параметри-
ческим электродом. Для Тт > Го выходной сигнал имеет форму;
трапеции.
Кроме устройств, использующих нелинейность пьезоэлектрика
и акустоэлектронную нелинейность полупроводника, могут при-
меняться акустооптические устройства корреляционной обработ-
ки сигналов, основанные на нелинейности вольт-амперной харак-
теристики диодов (диодные конвольверы).
Диодное усгройство свертки состоит из многоотводной линии
задержки, к каждому преобразователю которой присоединен полу-
проводниковый диод. Диоды имеют постоянное смещение, кото-
рое определяет выбор рабочей точки и регулируется для получения
нелинейного коэффициента преобразования устройств. Известны
две основные схемы диодных свертывателей: последовательная и
параллельная.
Устройство свертки можно разделить на две части: линейную
акустическую и нелинейную электрическую. Поверхностные аку-
стические волны, генерируемые входными преобразователями,
распространяясь по звукопроводу и достигая встречно-штыревых
преобразователей диодно-связанной структуры, индуктируют в
них электрическое поле, которое вызывает ток через диоды. Если
на преобразователях диодно-связанной структуры существуют
электрические сигналы от двух акустических волн, то вследствие
нелинейности вольт-амперной характеристики на диодах появля-
ется сигнал, пропорциональный произведению входных сигналов
на суммарной и разностной частотах.
Диодное устройство свертки в отличие от рассмотренных ранее
устройств осуществляет операцию суммирования выборок, а не
интегрирования непрерывного произведения:
МОМ2('(8.5)
Р=1
где р — номер отвода линии задержки;
N — число отводов;
tp — время отбора выборок произведений волн, пересека-
ющих р-ый отвод;
t3 — время задержки между электродами и центром обла-
сти взаимодействия.
При уменьшении расстояний между диодно-связанными отво-
дами выражение (8.5) приближается к интегралу акустической
свертки. На практике, как правило, используется более эффектив-
ная параллельная схема.
В акустических устройствах свертки на основе пьезоэлектриче-
ской и полупроводниковой нелинейности полоса пропускания
определяется величиной пропускания входных встреч но-штыре-
вых преобразователей. В диодном устройстве она зависит от рас-
стояния между встречно-штыревыми преобразователями в диод-
но-связанной структуре и определяется как
А/ = vl&L,
174
где v — скорость волны;
ДА — расстояние между отводами линии задержки.
Для получения широкой полосы пропускания диодного конво-
львера следует создать конструкции с небольшим расстоянием
между отводами линии задержки. Например, для д/= 30 МГц не-
обходимо 150 отводов с расстоянием 0,12 мм между ними. Для
уменьшения уровня боковых лепестков за счет вторых гармоник
используют двухканальные конструкции. Это позволяет на ниоба-
те лития получить уровень ложных сигналов менее 60 дБ.
Для обработки сигналов большой длительности может быть ис-
пользована схема, состоящая из акустического устройства и линии
задержки на ПАВ с обратной связью. На входы устройства пода-
ются прямой и обращенные сложные сигналы в виде отрезков
кода или частотно-модулированных сигналов.
Сигнал свертки на удвоенной частоте поступает на линию за-
держки с положительной обратной связью, время задержки кото-
рой приблизительно равно времени интегрирования устройств
свертки. Вследствие когерентности накопления входных сигналов
отдельных отрезков происходит увеличение отношения сиг-
нал/шум всего сигнала.
Согласованную фильтрацию можно осуществить также с помо-
щью акустического устройства свертки, работающего в асинхрон-
ном режиме. Асинхронный режим достигается путем периодиче-
ского повторения опорного сигнала и стробированного сигнала на
выходе. Если время интегрирования устройства свертки удовлет-
воряет соотношению О0Лнт = Лх> то с выхода устройства сни-
мается функция акустической свертки при любой задержке между
опорными и обрабатываемым сигналами.
Момент появления выходной функции свертки практически не
зависит от времени прихода сигнала.
Из интегральных преобразований (8.3) и (8.4), выполняемых с
помощью акустических устройств свертки, ни одно не подходит в
чистом виде для решения задач корреляционной обработки сигна-
лов.
Получение корреляционных функций сигналов возможно,
если использовать соединение двух устройств свертки (рис. 8.11).
Схема работает следующим образом. Один из входных сигналов
на частоте со подается на входной встречно-штыревой преобра-
Рис. 8.11. Принцип получения свертки
двух сигналов
175
зователь первого устройства свертки. На другой вход второго
устройства свертки подается второй сигнал на частоте 2со. При
этом с параметрического электрода второго устройства свертки
снимается сигнал, пропорциональный функции корреляции вход-
ных сигналов на частоте 2coq-
Существуют конвольверы с акустоэлектрической памятью, в
которых запись одного из сигналов производится потоком элект-
ронов. Интенсивный электронный поток бомбардирует поверх-
ность пьезоэлектрода при прохождении по нему поверхностных
акустических волн и вызывает эмиссию вторичных электронов с
низкой энергией, которые мигрируют к положительным полюсам
полей, сопровождающих ПАВ, и закрепляются на поверхностных
ловушках пьезоэлектрода. Этого количества электронов достаточ-
но для нейтрализации поляризационного заряда. Полученный по-
тенциальный рельеф сохраняется несколько часов и используется
для получения свертки и сигнала в обычном устройстве свертки с
акустической нелинейностью. Такие устройства могут обеспечи-
вать полосу более 100 МГц, длительность обрабатываемых сигна-
лов более 10 мкс при динамическом диапазоне до 60 дБ.
Зачастую в радиотехнической разведке возникает необходи-
мость обращения во времени линейно-частотно-модулированных
сигналов. Согласованные или квазисогласованные фильтры в сис-
темах радиотехнической разведки могут быть использованы, если
имеется достаточно высокая априорная информация о параметрах
ожидаемых сигналов, главным образом о девиации частоты и дли-
тельности импульсов. Но в реальных системах, особенно при раз-
ведке новых или многофункциональных радиолокационных стан-
ций, такой информации нет, а наибольший интерес для радиотех-
нической разведки будут представлять именно эти станции.
Поэтому одной из важных проблем является оптимальная обра-
ботка сигналов с неизвестной внутриимпульсной структурой. Фи-
льтры, о которых идет речь, получили название инвариантных к
внутриимпульсной структуре. Наиболее подходящими для этой
цели являются конвольверы (свертыватели), которые были рас-
смотрены раньше. Принцип работы конвольвера основан на ис-
пользовании режима встречно направленных волн и перемноже-
нии их на нелинейностях: объемных (неоднородностях материала)
либо дискретных (диодах, подключенных к преобразователю вол-
на-сигнал).
Известно, что оптимальной процедурой приема является на-
хождение корреляционного интеграла от произведения двух функ-
ций, одна из которых — сигнал, а другая — обращенная во време-
ни копия сигнала:
В условиях радиотехнической разведки желательно получить
обращенную во времени копию из самого сигнала, не прибегая к
J76
Рис. 8.12. Принцип формирования обращенной копии
сигнала
генерированию опорного напряжения. Рассмотрим принцип об-
ращения на примере сигнала с линейно-частотной модуляцией,
при которой эта процедура осуществляется достаточно просто
(рис.8.12). Исследуемый сигнал подается на смеситель, на входе
которого получаем верхнее и нижнее преобразования частот:
/„ = Л + Л = Л - ft- Эти частоты могут быть отселектирова-
ны соответствующими фильтрами. Результирующий или сжатый
сигнал получим на суммарной частоте: Л = Л + Л = 2/с вх, т. е. на
удвоенной частоте входного сигнала. Проведем анализ отношения
сигнал/шум в фильтре на конвольверах.
Процессы на входах конвольвера (см. рис. 8.11) обозначим е, (?)
и е2(/). Согласно формуле (8.3) процесс на выходе фильтра опре-
деляется из выражения
Л)/
/2
е0(т)= |е,(г)е2(2т(8.6)
-У ’
।дс То — время интегрирования конвольвера.
Процессы е2(?) представляют собой аддитивные смеси
импульсных детерминированных сигналов и стационарных шумов
с нулевыми математическими ожиданиями, т. е.
е1(?) = 5|(?) + «,(?);
е2(/)=52(0 + л2(Г).
Подставляя эти равенства в выражение (8.6), получим
177
ТА ТА
е0(т)= J5,(/)S2(2t -t)dt + J*Sj(Z)/22(2т -t)dt +
-TA -7
7 7
+ j S2(2t - t)nr(f)dt + |и1(/)л2(2т - t)dt, (8.7)
-7 -7
где T — длительность сигналов.
В выражении (8.7) имеем сумму четырех независимых слагае-
мых. Поэтому мощность процесса е0(Т) равна сумме мощности
слагаемых:
Л = + + СТ5|/11 + ал|й2 •
Соотношение сигнал/шум на выходе фильтра
Для вычисления мощности Ps s входные сигналы представим в
следующем виде:
^(0 = cos[co0z + <pt(/)];
S2(0 = f/2 c°s[oV + Фг(0]- (8.9)
Подставляя выражение (8.9) в первое слагаемое формулы (8.7)
и рассматривая случай, когда S^f) - S2(t), получаем (Р1Р2/2)Т, где
Pi и Р} — мощности входных сигналов 5t(7) и S2(r).
Для вычисления второго слагаемого формулы (8.7) примем
шум «,(/“) =0. Тогда отношение сигнал/шум Ps s g2s п будет такое
же, как на выходе согласованного фильтра:
р0 =-^-=2ТД/-^, (8.10)
Сто г СТ-
«j । О 2
где Д/— полоса рабочих частот;
а2 — дисперсия шума.
Аналогичная формула может быть получена для соотношения
Р'о =-^-=2ТД/-^. (8.11)
Дисперсия четвертого слагаемого формулы (8.7) определяется
так:
Т-А ТА
<«. = / pjr, -г2)Л,А2> (8.12)
-Г‘А-ТА
где Вп(хх) и ^л(т2) — корреляционные функции шумов.
Полагаем, что шумы и n2(t) имеют корреляционные функ-
ции вида
178
Я„(т) = о2
sin(Acor/2)
Д(вт/2
COS (O0 T.
Подставляя это выражение в формулу (8.12) и производя вы-
числения двойного интеграла, получаем
2 2 'р
2Д/ ’
(8.13)
cy„ „
"i";
где ст2 — дисперсия шума п( (/).
Тогда с учетом выражений (8.10), (8.13) формула (8.8) принима-
ет вид
Рф = 2Тд/ у + у + у - (8.14)
И5’ 781
где g[ и g2 — соотношения сигнал/шум (по мощности) на входах
конвольвера;
а = Т/т — отношение длительности входного сигнала к по-
/1 о
стоянной времени интегрирования конвольвера.
Выражение (8.14) представляет собой зависимость отношения
сигнал/шум на входе фильтра на конвольверах. При g, =g2 = gBX
формула (8.14) упрощается и принимает вид
Рис. 8.13. Отношение сигнал/шум на входе конвольверного
фильтра
179
Графически выражение (8.15) иллюстрируется на рис. 8.13.
Найдем превышение и значения сигнал/шум на выходе согла-
сованного фильтра по сравнению с фильтром на конвольверах.
Подставив формулы (8.11), (8.13) в выражение (8.15), после преоб-
разования получим
Y. =101g
9 1 1
2 1 +------ .
I а#вх )
(8.16)
На рис. 8.14 приведена зависимость yj от отношения сиг-
нал/шум gex при фиксированных значениях а. Из рисунка следует,
что при а = Т/т потери возрастают с уменьшением входного отно-
/1 о
шения сигнал/шум. Например, при а = 1 и gux > 1 потери состав-
ляют от 3 до 6 дБ.
Рис. 8.14. Потери в конвоя веерном фильтре
Полученные аналитические выражения для сравнительной
оценки отношения сигнал/шум фильтра на конвольверах и согла-
сованного фильтра справедливы для независимых шумов на выхо-
дах конвольвера 2 (этот случай характеризует работу7 фильтра для
сигналов с четной функцией фазовой модуляции, так как верхнее
и нижнее преобразования частоты входного процесса не приводят
к преобразованию во времени шумов).
В схеме фильтра (см. рис. 8.11) на входы конвольвера поступа-
ют взаимообразные во времени сигналы и шумы. При этом вы-
полняется свертка сигналов и шумов.
Используя результаты проведенного анализа, можно показать,
что для случая совпадения моментов времени сжатия сигналов и
шумов потери в отношении сигнал/шум значительны и пропорци-
ональны коэффициенту сжатия шумов. Такой режим работы фи-
льтра не является эффективным.
Вследствие того что момент поступления сигнала на вход филь-
тра является случайным, для выполнения операции обращения
180
сигнала во времени 5-функция попадает на конвольвер 1 с опре-
деленной частотой следования. При этом моменты сжатия шумов
являются известными, а моменты сжатия сигнала — случайными.
В общем случае моменты сжатия сигнала и шумов не совпада-
ют, и при их сдвиге на величину Дт > у^ в момент сжатия сигна-
ла шумы являются независимыми. При этом для оценки отноше-
ния сигнал/шум справедлива формула (8.15).
Проведенный анализ соотношения сигнал/шум показывает,
что при входном отношении сигнал/шум gBX > I потери в фильтрах
составляют от 3 до 6 дБ. Поэтому такие фильтры являются квази-
оптимальными для обработки сигналов с неизвестной внутриим-
пульсной структурой. Таким образом, применяя квазиоптималь-
ный фильтр на конвольверах, не только выигрываем в отношении
сигнал/шум, но и получаем возможность осуществить селекцию
входных сигналов по их структуре, обеспечивая уверенное измере-
ние первичных координат. При этом конвольвер необходимо по-
ставить как в канале синхронизации, так и в канале отраженного
сигнала. За счет квазиоптимальной обработки сигналов повыша-
ется точность измерения времени задержки в раз, а следовате-
льно, повышается и точность измерения координат.
9. ПОТЕНЦИАЛЬНАЯ ТОЧНОСТЬ ИЗМЕРЕНИЯ
ПАРАМЕТРОВ СИГНАЛОВ ПРИ
РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКЕ
9.1. ПАРАМЕТРЫ СИГНАЛОВ, ИЗМЕРЯЕМЫЕ ПРИ РТР
В реальных системах радиотехнической разведки нельзя доби-
ться потенциальной (теоретически достижимой) точности измере-
ния параметров. Это объясняется неопределенностью данных о
структуре сигнала в момент разведки, их количестве, принадлеж-
ности к одному или нескольким типам радиоэлектронных средств.
Однако для оценки эффективности разработанных методов и
устройств необходимо их сравнение по точности с оптимальными,
точность измерения которых для данных условий наивысшая. Раз-
ница между реальной и потенциальной точностью будет свидете-
льствовать об эффективности (рациональности) построения
устройства измерения того или иного параметра. При радиотехни-
ческой разведке обычно производится измерение следующих
основных параметров сигналов:
амплитуды и фазы сигналов (А и <р) при измерении пеленгов
амплитудными и фазовыми методами;
частоты сигнала/) и ухода частоты/(7>;
длительности импульсов тц;
периода повторения импульсов Ти;
длительности дискретов тя;
временных задержек сигналов в разностно-дальномерных ком-
плексах радиотехнической разведки г ;
пеленга на источник радиоизлучения [3.
Временные параметры сигналов Ти, т„, тд, т3 имеют единую при-
роду — временной интервал, который по существу представляет
собой время задержки относительно выбранного начала отсчета.
Так, для импульсных сигналов время задержки между нарастани-
ем и спадом импульса на выбранном уровне будет характеризовать
его длительность, время задержки между смежными фронтами
двух импульсов последовательности определяет их период повто-
рения.
Поэтому в дальнейшем при изучении вопроса потенциальной
точности измерения временных параметров не будем рассматри-
вать отдельно каждый параметр, а рассмотрим только точность из-
мерения временного интервала, отображающего время задержки.
182
9.2. ТОЧНОСТЬ ИЗМЕРЕНИЯ АМПЛИТУДЫ ИМПУЛЬСОВ
Запишем выражение для простого радиоимпульса, принимае-
мого на фоне шума:
U(t) = Asin(2iif t + (р) + n(f),
где А — амплитуда сигнала, которую надо измерить и которая в
течение импульса не изменяется;
n(t) — напряжение шума.
Для упрощения рассмотрения физических процессов выделим
один период синусоиды. Под действием шума амплитуда синусои-
ды изменяется на величину п.
Тогда средняя квадратическая погрешность измерения ампли-
туды
где п — среднее по времени значение квадрата шума, а относи-
тельная погрешность
Если шум белый, а сигнал представляет собой радиоимпульс с
прямоугольной огибающей, относительную ошибку оценки амп-
литуды можно определить из соотношения
где
энергия сигнала;
спектральная плотность мощности шума;
отношение сигнал/шум по энергии.
9.3. ТОЧНОСТЬ ИЗМЕРЕНИЯ ФАЗЫ ИМПУЛЬСОВ
Влияние шумов приводит к изменению момента перехода си-
нусоиды через нулевую линию, а это аналогично смещению по
фазе.
Ошибка в определении времени для конкретного перехода ко-
лебания через нуль
183
где S = 2nfA — крутизна синусоидальной волны при переходе
через нуль.
Средняя квадратическая погрешность
/-2
Г - 2 пХ л
а- = (д0 =Мг- (9Л)
|_v 7 J 2tijA
Сдвиг по фазе связан с временем задержки t3 выражением
ср = —А/ = 2л^А/ =2тг/— =2л//3.
А, с с
Ошибка измерения фазы
= 2я/6?
2nfA
а для случая оценки измерения начальной фазы прямоугольного
радиоимпульса, принимаемого на фоне белого шума,
. _[Ао.
’ (2£,
где Nq — спектральная плотность шума;
Es~ энергия сигнала.
9.4. ОШИБКИ ИЗМЕРЕНИЯ ЧАСТОТЫ ИМПУЛЬСОВ
Период колебания Т% — это время между двумя последователь-
ными переходами синусоиды через нуль при одинаковой крутиз-
не. Так как измерения независимы, то средняя квадратическая по-
грешность измерения периода
2 • C>f ,
(9.2)
где су, и а, — средние квадратические ошибки измерения вре-
2 мени, вычисляемые по формуле (9.1).
Используя соотношения (9.1) и (9.2), можно получить формулу
для средней квадратической ошибки оценки частоты.
В общем виде оценка произвольного (временного или частот-
ного) параметра у определяется по формуле
jy2|5(y)|2^
-----=--/7;.... S Мэкв = -----------Мо> (93)
а 9^(2рэкп) | |5(у)|2 dy
184
где |1ЭКВ— второй центральный момент, характеризующий остро-
ту пика выходного сигнала оптимального приемника;
ц0— первый начальный момент спектра огибающей |5(у)|‘.
Если энергетический спектр симметричен относительно нуле-
вой частоты, то ц0 =0.
Заменяя произвольный параметр у конкретными параметрами
найдем дисперсию точности их измерения:
Для равномерного спектра:
0;|N>y-;
ДЦ _ Д/
2Л 2Л ’
Для параболического спектра:
Дц
5(ц) =
Д/
2VtO 2VI0'
Для Гауссова импульса:
5(ц) = ехр(-тщ2 /Дц2); цэкв = -^=-7=.
2л/л 2л/л:
Тогда ошибки измерения частоты для прямоугольного импуль-
nrq
То же можно записать и для различной формы импульсов:
для треугольного импульса
VIQ
Kiq
для Гауссова импульса
1,18
Аналогично рассуждая, можно получить формулу для оценки
потенциальной точности измерения угловых координат.
185
Для антенны с прямоугольным распределением поля в разрыве
ошибки измерения угла 0 определяется по формуле
0,6280
°е q
9.5. ПОТЕНЦИАЛЬНАЯ ТОЧНОСТЬ ИЗМЕРЕНИЯ
СОВОКУПНОСТИ НЕИЗВЕСТНЫХ ПАРАМЕТРОВ
СИГНАЛОВ
Как и в случае измерений единственного параметра, для опре-
деления потенциальной точности оценки А:-го параметра при со-
вместном измерении с другими неизвестными параметрами мож-
но воспользоваться формулой (9.3), только вместо 1/ необходимо
подставить d~K'K — диагональный элемент обратной корреляцион-
ной матрицы Я-1. Тогда формула для расчета потенциальной точ-
ности измерения одного из двух параметров при совместном из-
мерении с другими параметрами будет иметь вид
2 _ __________1_________
Y| (2Е 2 2 ’
^bw„)i 2(i-P,O2
гдер|2— коэффициент временной корреляции параметров у, иу2.
Сравнение приведенной формулы с формулой для одного пара-
метра показывает, что они отличаются только множителем 1 -р?2,
учитывающим взаимосвязь измеряемых параметров. При р|2 = 0
точность наивысшая и равна точности измерения одного параметра.
Для оценки влияния коэффициента корреляции рассмотрим
совместное измерение частоты и времени задержки линейно-час-
( yt2 ''l
тотно-модулированного сигнала U(t) = Uo\ cosco0r + L
Коэффициент времячастотной корреляции ptF такого сигнала
определяется из выражения
(9.4)
i + ~jT
сж
где Ксж = ут* = В — коэффициент сжатия или база сигнала.
Из выражения (9.4) следует, что с ростом базы сигнала коэф-
фициент времячастотной корреляции стремится к единице и рез-
ко снижает точность совместного измерения времени и частоты, а
для РЛС—дальности и скорости цели.
Поэтому для одновременного повышения точности измерения
по дальности и скорости целей используют в радиолокационных
станциях либо четную модуляцию частоты, например симметрич-
но нарастающую и спадающую модуляцию (V-образную), либо
фазоманипулированные сигналы, у которых коэффициент время-
частотной корреляции близок к нулю.
186
10. ПРИНЦИПЫ ПОСТРОЕНИЯ УСТРОЙСТВ
ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ
10.1. ПРИНЦИП ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ
Цифровая обработка сигналов основана на преобразовании ана-
логов сигналов (непрерывных или импульсных) в цифровую форму
(числа) и осуществлении математических операций над числами в
целях получения выходного эффекта. Цифровая обработка сигнала
осуществляется с помощью специальных устройств. Классифика-
ция задач цифровой обработки сигналов представлена на рис. 10.1.
Рис. 10.1. Классификация задач цифровой обработки сигналов
Устройства цифровой обработки можно объединить в четыре
больших класса: обнаружители, измерители, фильтры и устройст-
ва распознавания. >
Цифровая обработка сигналов в станциях радиотехнической
разведки имеет ряд особенностей:
обрабатывается сложный поток сигналов, создаваемый боль-
шим числом радиоэлектронных средств, находящихся в зоне раз-
ведки;
измеряется большое число параметров и характеристик сигна-
лов, разнообразных по своей структуре, как внутриимпульсной,
так и межимпульсной.
187
По результатам измерений должны обобщаться группы харак-
теристик и параметров в целях проведения индивидуального и
группового распознавания. Структура сигналов и их число заранее
неизвестны. Неизвестны число радиоэлектронных средств, их
местоположение и принадлежность.
Параметры и характеристики сигналов, необходимые для ре-
шения задач, как правило, скрыты. Выделение скрытых парамет-
ров связано со статической обработкой сигналов: построением за-
конов распределения и нахождения их статических характеристик.
Обработка сигналов должна осуществляться в реальном масш-
табе времени.
Для индивидуального распознавания используется тонкая
структура сигналов.
Для выделения параметров тонкой структуры сигналов необхо-
дима высокая точность преобразования аналогового сигнала в
цифровой.
Поясним кратко принципы цифровой обработки сигналов в
системах радиотехнической разведки с помощью рис. 10.2.
Рис. 10.2. Принцип цифрового измерения временных параметров
серий импульсов
Для наглядности рассмотрим две серии импульсов. Из рисунка
следует, что при превышении сигналов порогового уровня обнару-
жения выделяется временной интервал, соответствующий длите-
льности серии импульсов тсер, длительности периода вращения
антенны и углу прихода сигнала (пеленгу).
Для измерения этих параметров выделенные временные интер-
валы квантуются с частотой дискретизации Fg. Для каждого вре-
менного интервала подсчитывается число импульсов и результат
выдается в цифровом виде. Если из серии импульсов выделить два
смежных импульса, то можно измерить период повторения импу-
льсов. В связи с высокими требованиями к точности измерения
параметров частота дискретизации должна быть достаточно высо-
кой и одинаковой для всех параметров. В этом случае абсолютная
ошибка измерения будет одинакова для всех параметров.
188
Принцип цифровой обработки сигналов для измерения пара-
метров тонкой структуры сигналов рассмотрим на примере огиба-
ющей импульса A(t).
Для этого необходимо с помощью дискретных устройств пред-
варительно преобразовывать непрерывное по времени и амплиту-
де напряжение A(t) на выходе детектора приемного устройства ра-
диоразведывательной станции в дискретную форму.
Первым этапом дискретизации сигналов, являющихся случай-
ными функциями времени, есть дискретизация по аргументу, т.е.
по времени. При этом непрерывный на ограниченном интервале
наблюдения (0, тм) сигнал преобразуется в последовательность ко-
ротких импульсов с амплитудами А[, А2,..., А„. Их амплитуды соот-
ветствуют значению напряжения в момент времени /2, •••, tn-
Вторым этапом дискретизации является преобразование выбо-
рочных значений амплитуд в некоторое число градаций, т. е. пред-
ставление выборочных амплитуд Ai, А2,..., Ап некоторым числом в
двоичной или десятичной форме. При этом интервал (период)
квантования не должен превышать интервал корреляции:
т, = ткв < ткор. При такой форме представления амплитуд сигналов
требуется сравнительно большое время или высокая частота за-
полнения интервала Такое преобразование аналогового сигнала
в цифру носит название последовательного. Практически желате-
льно преобразование дискреты сигнала осуществить за время его
длительности. Такое преобразование носит название параллельно-
го. В связи с этим и аналого-цифровые преобразователи называют
параллельными.
Третьим этапом является обработка цифровых значений в со-
ответствии с выбранным алгоритмом. Например, фильтрация, се-
лекция построения законов распределения, нахождение функций
корреляции между сигналами, вычисление спектральных характе-
ристик и т. д.
На рис. 10.3 изображена функциональная схема дискретизации
непрерывных сигналов с последующим их восстановлением в со-
ответствии с формулой
к=0
где [/(кТ'')— выборки амплитуд сигнала с интервалом т, < ткор;
N — число выборок сигнала на интервале его длитель-
ности;
f(t - Ат,) — множество ортогональных неслучайных функций
времени, отличающихся только смешением на
интервал, кратный тг
В качестве критерия оптимального воспроизведения сигнала
по дискретным данным обычно выбирается квадратичная функ-
ция потерь вида
/•(л,Л-)=[Л’(/)-4П]г.
189
Рис. 10.3. Схема дискретизации и восстановления
непрерывных сигналов
10.2. ПРИНЦИП АМПЛИТУДНОЙ ДИСКРЕТИЗАЦИИ
Для того чтобы вести обработку принятых сигналов, кроме рас-
смотренной выше временной дискретизации надо выполнить ди-
скретизацию по амплитуде. Дискретизация по амплитуде называ-
ется квантованием. В процессе квантования непрерывная случай-
ная величина U = U(kx) преобразуется в дискретную случайную
величину Uk. Случайность обусловлена действиями шумов и усло-
виями распространения радиоволн.
Устройство для квантования амплитуд сигналов (квантователь)
представляет собой нелинейный элемент с амплитудной характе-
ристикой, изображенной на рис. 10.4.
190
Интервал h, изменения амплитуды входного сигнала между по-
рогами 1Г и Сл+| называется интервалом или шагом амплитудного
квантования. В общем случае шаг амплитудного квантования не
является постоянной величиной, а определяется характером ре-
шаемой задачи.
10.3. ДОСТОИНСТВА ЦИФРОВЫХ МЕТОДОВ
ОБРАБОТКИ СИГНАЛОВ
При цифровой обработке радиолокационных сигналов выбор-
ки сигнала, подлежащего обработке, преобразуются в цифровую
форму — в числа, представленные в виде определенного кода.
Чаще всего для этих целей используется двоичный код, т.е. числа
представляют собой последовательность единиц и нулей.
После преобразования аналог-код дальнейшая обработка сигна-
лов (фильтрация и измерение координат) производится путем вы-
полнения операций над числом с помощью цифровых устройств
подобно тому, как это осуществляется в цифровой ЭВМ.
Система цифровой обработки по существу представляет собой
комбинацию аналого-цифрового преобразователя (АЦП) и специ-
ализированной цифровой ЭВМ, выполняющей операции в реаль-
ном масштабе времени.
Устройства цифровой обработки, реализованные на базе совре-
менной дискретной микроэлектроники, имеют ряд преимуществ
перед аналоговыми, а именно:
большой динамический диапазон;
возможность гибкой и оперативной перестройки параметров
фильтров, обеспечивающей более высокую адаптивность системы
анализа;
высокую стабильность характеристик фильтров;
возможность длительного накопления слабых сигналов;
большую точность выполнения арифметических операций;
высокую надежность, малые массу и габаритные размеры;
возможность сопряжения систем обработки с цифровыми
устройствами управления.
В цифровых устройствах сигнал записывается в дискретном
виде запоминающего устройства (ЗУ) и извлекается из него по
мере надобности в более поздний момент времени. Таким обра-
зом, он хранится или задерживается в течение длительных, но точ-
но управляемых интервалов времени, в то время как обычные ана-
логовые линии задержки в общем случае уже недостаточно стаби-
льны для задержки импульсов. В цифровых устройствах можно
реализовать необходимые передаточные функции с задержкой
сигналов на время, соответствующее большому числу периодов
повторения.
Одним из наиболее существенных преимуществ цифровой об-
работки сигналов является то, что цифровая аппаратура в процес-
се эксплуатации не требует настройки, так как все весовые функ-
ции, используемые при вычислениях, и все задержки сохраняют
191
заранее выбранное значение в течение любого сколь угодно боль-
шого времени. Вместе с тем цифровое преобразование сигналов
неизбежно приводит к потере информации, что делает цифровые
алгоритмы обработки квазиоптимальными.
10.4. ПРЕОБРАЗОВАНИЕ УГЛОВЫХ КООРДИНАТ
В ДВОИЧНЫЙ КОД
Рассмотрим преобразование угловой координаты в двоичный
код. Так как угловая координата отсчитывается по углу поворота
антенны от начального направления <р0 до направления на цель
Фи, то при равномерной скорости вращения антенны этот угол по-
ворота можно представить временным интервалом
z Фц - Фо
«г
Поэтому преобразователи угловых координат могут быть по-
строены по принципу счета импульсов эталонной частоты (эталон-
ных импульсов), интервал между которыми соответствует опреде-
ленному углу поворота. Сосчитанное количество импульсов пред-
ставляется затем в двоичной системе счисления и передается в ЦВМ.
Устройство преобразователя угловых координат показано на
рис. 10.5. На прозрачный диск, ось которого жестко связана с при-
водом антенны, наносится в виде чередующихся прозрачных и не-
прозрачных участков циклический код Грея. Темные места соот-
ветствуют нулю, прозрачные — единице. Как известно, этот код
позволяет уменьшить ошибку, возникающую при считывании в
момент перехода от одного сектора диска к другому. По одну сто-
рону диска располагается шелевой импульсный источник света,
по другую — фотодетекторы в количестве, равном числу разрядов
счетчика. Считывание кода происходит при подаче на источник
света импульса цели.
Рис. 10.5. Преобразователь “вал-код”
192
10.5. КРАТКИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ ДИСКРЕТНЫХ
ЛИНЕЙНЫХ СИСТЕМ
Теория дискретных линейных систем связана с описанием и
обработкой временных и частотных последовательностей. Рас-
смотрим непрерывный сигнал u(t) (рис. 10.6). Произведем дискре-
тизацию этого сигнала, т. е. сделаем выборки в определенные мо-
менты времени через интервал Д/.
Рис. 10.6. Непрерывный сигнал и его дискретная форма
В результате получим последовательность чисел или
h(nT), <п <7V2(pHC. 10.7, б). В первом случае интервалы диск-
ретизации неодинаковые, во втором — одинаковы и равны Т. На
практике удобнее пользоваться равномерным интервалом, т.е. от-
счеты производить через одинаковые промежутки времени. Тогда
h(nT) = h(f) / t = пТ, -<х><п<<х>.
Для пояснения основных процессов обработки информации
рассмотрим некоторые важные последовательности, наиболее ча-
сто используемые при цифровой обработке сигналов. На рис.
10.7, а показан единичный импульс или единичный отсчет U$(n),
который определяется следующим образом:
1, п = 0;
0, п * 0.
193
При цифровой обработке этот импульс играет такую же роль,
как в аналоговых системах 3-функция.
На рис. 10.7, б показан импульс не в начале координат, а задер-
жанный на wq отсчетов: !
На рис. 10.7, в представлен единичный скачок U.^y, задавав^
мый следующим образом:
1, п <пг ;
0, л < 0.
Рис. 10.7. Типовые виды дискретных, сигналов
194
Единичный скачок связан с единичным импульсом соотноше-
нием
= Z^o(e).
е=-<с
На рис. изображены убывающая экспонента g(ri) (10.7, г) и си-
нусоида h(n) (рис. 10.7, д'), определяемые соотношениями:
g(n) =
f еол, п >0, а <0;
[О, п < 0;
h(ri) = si
я всех п> 0; гц— период.
В радиотехнических системах важную роль играет комплексная
экспоненциальная функция еу“', которая может быть представле-
на в дискретном виде:
е7“" =cos(co„) + jsin(coJ,
Поскольку эта последовательность является комплексной фун-
кцией, для ее изображения строят раздельные графики веществен-
ной и мнимой частей.
10.6. ЛИНЕЙНЫЕ СИСТЕМЫ С ПОСТОЯННЫМИ
ПАРАМЕТРАМИ
На вход дискретной системы поступает некоторая последовате-
льность сигналов Х(п) (рис. 10.8), которая оператором R(n) преоб-
разуется в последовательность Y(n), т.е. выходная последователь-
ность может быть найдена через входную с помощью оператора
преобразования R(n)\
Y(ri) = /ВДи)].
Вид оператора R(n) зависит от свойств системы, ее назначения
и принципа функционирования.
Рассмотрим только линейные системы.
Если на вход системы поступают две последовательности —
х\(п) и xi(n), а на выходе получаются последовательности у[(л) и
Рис. 10.8. Модель дискретной системы
195
У1(п), то нельзя утверждать, что эта система будет линейной. Сие-;
тему можно считать линейной, если при подаче на ее вход суммар<
ной последовательности fljq(n) + вх^п) на выходе образуется сум-
марная последовательность ау^(п) + ву^п). Здесь а и в — произво-
льные постоянные.
Система с постоянными параметрами характеризуется тем, что
если входной последовательности Х(п) соответствует выходная по-
следовательность Y(n), то входной последовательности с{п - по)
соответствует последовательность у(п - по).
Характерным является то, что в линейной системе с постоян-
ными параметрами входная и выходная последовательности свя-
заны соотношением свертки. Обозначим h(n) — отклик системы
на единичный импульс. По аналогии с непрерывными системами
это импульсная дискретная характеристика системы.
Известно, что последовательность можно легко выразить через
единичный импульс, используя задержку и маштабирование. На-
пример, числовая последовательность а(1), я(2), а(3), ..., а(п) опи-
сывается равенством
К}= " т>-
По аналогии с этим можно записать
Х(п)= ^x(m)U0(и - т).
/И = -оо
Поскольку h(n) является откликом системы на последователь-
ность Uo(n), параметры системы постоянны, то h(n - т) будет от-
кликом на последовательность Uo(n - т). Из свойств линейности
следует, что отклик на последовательность Х(т) Uo(n - т) должен
быть последовательностью Х(п). Поэтому отклик на Х(п) будет по-
следовательностью
У (л) = h(m)h(n - т).
Z?| = —ОС
Простой заменой переменных это равенство может быть преоб-
разовано к виду
Г(л) = ^h(m)X(n - т). (10.1)
С помощью рис. 10.9 покажем, как практически вычисляется
свертка.
Линейную систему называют устойчивой, если при любой
ограниченной входной последовательности выходная последова-
тельность также ограничена. Необходимое и достаточное условие
устойчивости дискретной системы запишем, используя импуль-
сную характеристику:
£м<о°-
196
a
h(n)
Рис. 10.9. Процесс вычисления свертки сигнала и импульсной
характеристики
n
197
Частотная характеристика системы. Говоря о последователь-i
ности Х(п), мы не делали никаких ограничений и допущений, т.е/
последовательность может быть любой. Пусть входная последова-;
тельность имеет вид <
Если такая последовательность поступает на вход линейной си-'
стемы с импульсной характеристикой й(л), то на выходе в соответ-
ствии с равенством (10.1) появится последовательность
Г(и) = Х/7(/и)е>(л-'") =е'шл J h(m)&-Jam =Х(п)Н(&^.
Множитель 7/(еу“) получил название частотной характеристи-
ки фильтра.
Таким образом, для выбранного класса входных последовате-
льностей отклик совпадает с входной последовательностью с точ-
ностью до комплексного множителя
Я(е'“)= £аде-^. (10.2)
Л=-оо
Дискретный ряд Фурье. Выражение Н (е7") = ^Л(л)е-7Ш" мож-
/7 =
но рассматривать как разложение функции в ряд Фурье с
коэффициентами разложения h(n).
Согласно теории рядов Фурье коэффициенты h(n) могут быть
выражены через j следующим образом:
А(л) = — f (10.3)
2тс'я v 7
Таким образом, эти выражения представляют собой не что
иное, как пару преобразований Фурье. Поскольку эта пара преоб-
разований справедлива для любой последовательности с конечной
суммой, то любую входную последовательность можно предста-
вить в виде:
%(л) = — [х(е'“)е^со;
2лJ v 7
-к
х(е^) = Jx(«)e’^.
/7=—X
Вспомним, что отклик на входную последовательность еу<ол
имеет вид Я(е7“'’) e7“", тогда отклик на входную последователь-
ность Х(п) можно выразить следующим образом:
Г(л) = 1_ | х(е7“) Я(е'“)
198
Видно, что для дискретных систем свертка во временной облас-
ти соответствует умножению в частотной области. Если возникает
необходимость выразить спектральный состав последовательно-
сти h(nT) в единицах частоты, связанных с интервалом дискрети-
зации Т, то надо равенства (10.2) и (10.3) преобразовать к виду:
Я(е7“7) = УЛ(яТ)е^7;
гг п/Т
h(nT) = — \
2 71-п/т
Функция изменяется по частоте с периодом, равным
2л / Т, а частота со выражается в радианах в секунду.
Соотношение между непрерывными и дискретными системами.
Известно, что путем квантования (дискретизации) непрерывного
колебания x(t) можно получить дискретную последовательность
х(пТ). В этом случае весьма важно определить, как связан спектр
последовательности x(eJ“7) с преобразованием Фурье x„(jQ) не-
прерывного колебания:
x(e7o7) = Jx(/iT)e’7<e’7; x„(/Q) = \x(t}e^'dt;
Л = -=ОО -OQ
1 л/Г . оо
х(лТ) =— jx(e;“7) е705"7^ x(t) = — |х„(уП)е'п'г£1.
2 тт / т- 2 тс _
Поскольку х(пТ) = x(f) при t = nt, то связать хл(ун) и x(eX7)
можно, если вычислить интеграл х(0 для t- nt, причем интеграл с
бесконечными пределами следует заменять бесконечной суммой
интегралов на интервалах длиной 2л / Т.
Таким образом,
. ю (2m+l)ir/T
х(пГ) = ^-Х Jx,(/n)e*“-Tdn. (10.4)
2 71 m = -vo(2m-l)rt/T
Изменив порядок действий и заменив Q на од, получим
Приравнивая подынтегральные выражения (10.4) и (10.5), по-
лучаем искомое решение:
199
Из формулы видно, что периодическая спектральная функция,1
последовательности состоит из суммы бесконечного числа спект-
ральных компонентов непрерывного колебания. Таким образом',
имея спектр квантованной последовательности, можно получить
спектр исходного колебания.
Применение цифровой обработки при оптимальной фильтрации
сигналов. В основу оптимальной обработки сигналов положена
функция неопределенности, которая для аналоговых сигналов
имеет вид
<г,/) = р(Г + г).Г(/)е72п/'Л.
Сигнал на выходе цифрового согласованного фильтра, называ-
емый цифровой функцией неопределенности, является функцией
взаимной корреляции сигнала и импульсной характеристики со-
гласованного фильтра:
Л(г,/) = t^S(nTc + z)S\nT^12'n"T‘''\
Л=-0С
где Tg — период дискретизации.
Рассмотрим функцию неопределенности линейно-частот-
но-модулированных сигналов.
Так как на практике сигналы имеют конечную длительность, а
импульсная характеристика также ограничена во времени, то
можно ввести ограничения на пределы суммирования в выраже-
нии для Л(тр/), которые в явном виде учитывали бы степень пе-
рекрытия между сопряженными сигналами S(nTg + т) и S*(nTg).
Причем длительность сигнала равна тTg, где т — число отсчетов в
импульсной характеристике согласованного фильтра. При
~Tg < х <0 сигналы полностью перекрываются импульсной харак-
теристикой фильтра, при 0 < т < Tg они взаимно смещены на один
дискрет. Пусть /(т) — округленное до большего числа значение от-
ношения т и Tg.
/(т) = 1 при 0 < х < Tg -
Z(x)=2 при Tg <x<2Tg.
Из рис. 10.10 видно, что при отрицательных х равенство прини-
мает вид
a/-i ,
A(.lt)=XS(nTe^)S-(nTg)e'2’f-T’,
п=1,
а при положительных т
М-\-!г
л(г,0= +r)r(WT,)e'w«.
п=0
Квантование сигналов с запоминанием фазы. Для того чтобы со-
хранить информацию о структуре сигнала, необходимо знать не
200
т - О
•--*—•—•-•--•—•-•
Рис. 10.10. Цифровая функция неопределенности
только амплитудные, но и фазовые соотношения внутри импуль-
са. Но поскольку сигнал неизвестен, то получить эти соотношения
достаточно трудно. Однако если использовать разложение сигнала
и квантование обеих составляющих, то в амплитудах этих состав-
ляющих будет заложена информация и о фазе.
201
Рассмотрим простейшее колебание U(t) - UQ cos(co0 - <р).
Разложим его на синусную и косинусную (квадратурные) со-
ставляющие с помощью фазовращателя на л / 2 в одном из кана-
лов:
U(t) = Un coscd0/ cosip + t/0 sin со0/ sin ср = U { cosco0/ + U2 sinco0r
Затем приведем квантование в каждом канале самостоятельно,
но в одних и тех же дискретных моментах времени. Информация о
фазе будет заключена в соотношении амплитуд дискретных значе-
ний напряжения в канале.
11. ПРИНЦИПЫ ПОСТРОЕНИЯ УСТРОЙСТВ
АНАЛИЗА СИГНАЛОВ С ПЕРЕМЕННЫМИ
ПАРАМЕТРАМИ
11.1. ПРИНЦИПЫ ПОСТРОЕНИЯ УСТРОЙСТВ
ИЗМЕРЕНИЯ НЕСУЩЕЙ ЧАСТОТЫ СИГНАЛА
Анализ радиолокационных средств США и других стран НАТО
показывает, что более 70 % из них изменяют структуру сигналов в
процессе боевой работы, в том числе и от импульса к импульсу.
Целями изменения параметров сигналов радиолокационных
станций являются:
обеспечение заданного режима работы;
повышение скрытности от радиотехнической разведки;
повышение помехозащищенности;
повышение живучести при применении по радиолокационным
станциям противорадиолокационных ракет.
В зависимости от типа радиолокационной станции, решения
конкретной задачи характер и пределы изменения параметров бу-
дут различны. Характер изменения параметров РЛС существенно
влияет на эффективность средств радиотехнической разведки, и в
первую очередь на вероятность опознавания типа, конкретного
экземпляра радиолокационной станции, а главным образом на на-
дежность идентификации источников радиоизлучения при опре-
делении их местоположения угломерным методом.
Проблемными при этом являются вопросы регистрации и из-
мерения параметров при их изменении. Рассмотрим последовате-
льно решение задач обработки сигналов с переменными парамет-
рами.
Несущая частота сигналов современных радиолокационных
станций изменяется в широких пределах (10 ... 15 % от средней ча-
стоты) по детерминированному или случайному закону. Особенно
широкое распространение изменение несущей частоты получило
в самолетных многофункциональных, корабельных, загоризонт-
ных радиолокационных станциях KB-диапазона. Изменение несу-
щей частоты резко снижает вероятность опознавания типа радио-
локационной станции и вероятность ее индивидуального распо-
знавания по измеряемому параметру,так как отношение среднего
квадратического значения девиации параметра к разбросу средних
значений параметров смежных станций много больше единицы
203
| — »ll Основную информацию разведываемой радиолокаци-’
) '
онной станции несет закон изменения несущей частоты во време-
ни. Поэтому для выделения информативных признаков надо оце-
нить (измерить) частоту каждого импульса, запомнить результаты
измерения (или регистрации), восстановить функцию изменения
частоты во времени и статистически обработать результаты изме-
рения (найти диапазон изменения параметров, построить закон
распределения вероятности, оценить характеристики закона рас-
пределения). Структурная схема устройства приема и обработки
сигналов с изменяющейся частотой показана на рис. 11.1.
Рис. 11.1. Структурная схема устройства приема сигналов
с изменяющейся частотой
Так как измеряется частота каждого импульса, то метод обна-
ружения сигналов в заданном частотном диапазоне должен быть
беспоисковым, а обнаружение — гарантированным. Для этого
можно использовать многоканальные приемники с быстрым
опросом каналов, мгновенного измерения частоты, акустооптиче-
ские и со сжатием импульсов. Принципы построения таких при-
емников подробно описаны в разд. 5 учебника.
Так как основную информацию о сигналах несет закон измене-
ния частоты во времени, то для их обработки достаточно с помо-
щью беспоискового приемного устройства преобразовать частот-
ные характеристики во временные и проводить с ними все опера-
ции как с числами, представленными во времени.
204
11.2. ПРИНЦИПЫ ПОСТРОЕНИЯ УСТРОЙСТВ АНАЛИЗА
СИГНАЛОВ С ПЕРЕМЕННЫМ ПЕРИОДОМ
ПОВТОРЕНИЯ ИМПУЛЬСОВ
Исследование реальных сигналов показало, что широкий класс
радиолокационных станций использует изменение периода повто-
рения импульсов по детерминированному или случайному закону.
)то изменение вызвано защитой РЛС от пассивных помех, от от-
ветных импульсных помех, сменой режимов работы. Наибольшее
применение это изменение нашло в многофункциональных само-
летных РЛС США, установленных на самолетах F-15, F-16, F-18 и
других, а также в системе “Усовершенствованный ХОК” и в ряде
корабельных РЛС. Наиболее часто наблюдается изменение перио-
да повторения импульсов по гармоническому закону (рис. 11.2),
согласно которому функция изменения описывается выражением
Г, = Т0 + AT„sinQ/.
Здесь Тц — среднее значение переменного периода повторе-
ния импульсов;
ДГ„,— амплитуда отклонения от среднего значения;
Q — частота модуляции.
Г,,мкс А
1550
1470-4-
1530 Ч~
1510 ।
1490
1450 --
0 2 4 6 8 10 12 14 16- 18 20 22 24 26 28 30 Г, мкс .10’
Рис. 11.2. Гармоническое изменение периода повторения импульсов
У некоторых самолетных и наземных радиолокационных стан-
ций наблюдается изменение периода по пилообразному закону
(рис. 11.3):
Т =Т +уТ-
1 I 1 I nun I у ’
где у — скорость изменения периода повторения импульсов.
205
L—I-------1-1--1--1--1--1--1--1---1-----I--i--1--1--1---;-1--:---1-1--I--1---1--1--►
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 28 t
Рис. 11.4. Случайное изменение периода следования импульсов
При изменении 7} по случайному закону (рис. 11.4) анализируе-
мая последовательность S(t) является функцией случайного аргу-
мента:
Т’ =TQ + t,T.
Наиболее неблагоприятным для целей идентификации источ-
ников радиоизлучений является случай равновероятного распре-
деления величины в интервале 2лТт. Анализ известных в этой
области работ показывает, что информативность переменного пе-
риода повторения импульсов низкая. При преднамеренном изме-
нении периода повторения нет необходимости в его точном изме-
рении, так как пределы изменения велики. Нужно найти такой па-
раметр, который характеризуется достаточной устойчивостью во
времени. Отыскивание устойчивых, наиболее информативных
признаков является одной из основных задач при разработке ап-
паратуры радиотехнической разведки.
206
11.3. ПРИНЦИПЫ ПОСТРОЕНИЯ УСТРОЙСТВ
РЕГИСТРАЦИИ И ИЗМЕРЕНИЯ ПАРАМЕТРОВ
Для измерения одного конкретного значения параметра можно
использовать методы и устройства измерения временных интерва-
лов (см. разд. 6).
Однако для решения перечисленных выше задач разведки не-
обходимо последовательно произвести поимпульсное измерение и
зафиксировать с помощью устройства памяти все результаты. За-
поминание можно осуществить с помощью осциллографа с памя-
тью, кинопленки, цифровой памяти.
Классическим методом анализа для радиотехнической разведки
является осциллографический, когда функция изменения парамет-
ра представляется на экране индикатора, фотографируется, и по
калибровочным меткам производится отсчет каждого измерения.
Для регистрации большого числа периодов повторения осуществ-
ляется растровая развертка или непрерывная протяжка кинопленки
в направлении, перпендикулярном движению развертки, на кото-
рой зафиксирован временной интервал. Для регистрации без про-
пусков желательно использовать двухлучевой осциллограф, раз-
вертки которого поочередно запускаются четными и нечетными
входными импульсами. Для увеличения точности отсчета началь-
ная, неизмеряемая частг временного интервала задерживается на
время т3, а на экран выводится только изменяемая часть времен-
ного интервала т||ер. Структурная схема устройства записи показа-
на на рис 11 5.
Недостатком, ограничивающим применение метода, являются
низкая точность отсчета и трудность визуального съема информа-
ции о большом числе временных интервалов.
Рис. 11.5. Структурная схема устройства регистрации импульсных сигналов
207
11.4. ИЗМЕРИТЕЛЬ ПЕРЕМЕННОГО ПЕРИОДА
ПОВТОРЕНИЯ ИМПУЛЬСОВ (ПЕРЕМЕННЫХ
ВРЕМЕННЫХ ИНТЕРВАЛОВ)
Основные требования к анализатору переменных временных
интервалов сводятся к следующему:
диапазон измерения должен включать все значения временных
интервалов, причем девиация временного интервала может оказа-
ться больше нижней границы диапазона;
точность измерения должна быть достаточно высокой и не дол-
жна зависеть от диапазона измерений параметра;
анализатор должен фиксировать достаточно большое число из-
мерений в целях определения закона изменения 7](Г) и вычисле-
ния междупериодной функции корреляции
анализатор должен обеспечить удобную и наглядную форму
представления результатов измерений.
Чтобы эти требования удовлетворялись, устройство измерения
вобулирующих временных интервалов может быть построено на
основе двоичного цифрового счетчика с осциллографической ин-
дикацией и двухмасштабным отображением результатов измере-
ния (рис. 11.6). Принцип работы такого устройства можно пояс-
нить с помощью рис. 11.7.
Рис. 11.6. Структурная схема устройства анализа вобулирующих
последовательностей
208
Рис. 11.7. Напряжения на элементах схемы рис. 11.6
209
Схема синхронизации 5 (рис. 11.6) вырабатывает два следую-
щих друг за другом импульса длительностью 1 мкс. Первый совпа-
дает с входным импульсом измеряемой серии и является импуль-
сом подсвета. Второй импульс устанавливает счетчик в нулевое
состояние. Дешифратор подсвета 4 вырабатывает импульсы при
установке первых четырех разрядов счетчика в нулевое состояние.
Генератор опорных импульсов Сформирует импульсы с периодом
Топ, поступающие на вход счетчика /.
Таким образом, двоичный счетчик при поступлении на вход
схемы синхронизации серии импульсов последовательно измеряет
каждый временной интервал с дискретностью Гоп. Преобразова-
тель код-аналог 3 выполнен по схеме резисторного сумматора / с
коэффициентом суммирования
=^о2е-1,
где kq — коэффициент суммирования напряжения первого счет-
чика для первых четырех разрядов (/ = 1, 2, 3, 4) и
ке = к02е-5 для четырех последующих разрядов (/= 5, 6,
7, 8).
Такой сумматор позволяет получать ступенчатое напряжение
сложной формы, являющееся суммой двух пилообразных напря-
жений из 16 ступенек каждого (при полном заполнении счетчика).
Вид формируемого напряжения представлен на графике (см.
рис. 11.7). Дешифратор подсвета вырабатывает импульсы длитель-
ностью Гоп в момент а; схема синхронизации формирует дополни-
тельный импульс подсвета в момент б.
Луч осциллографа, управляемый по вертикали напряжением и
двигающийся по горизонтали, проходит все возможности состоя-
ния счетчика, подсвечиваясь в точках а (точках грубого отсчета) и
в точках б (точках точного отсчета).
Значение измеренного интервала, как следует из рисунка,
определяется выражением
T.t = 16Ton(m -1) + Топл, (11.1)
где т — число точек грубого отсчета;
п — число градаций точного отсчета — меток от последней
точки а до точки б.
Из выражения (11.1) для 7} и из рисунка видно, что при данном
методе формируется двухмасштабный точечный растр, позволяю-
щий измерять значения каждого интервала и визуально фиксиро-
вать незначительные изменения. Точность измерения всех значе-
ний и отклонений определяется величиной Гоп.
Изображение функции изменения интервалов между импуль-
сами может быть зафиксировано фотоаппаратом и в дальнейшем
обработано или подсчитано двухканальным счетчиком точного и
грубого отсчета. Рассмотренный метод анализа и регистрации из-
меняющихся временных интервалов от импульса к импульсу по-
зволяет осуществлять равноточное измерение малых и больших
отклонений независимо от периода измерения любых парамет-
210
ров, в том числе фазовых и частотных, если последние предвари-
тельно преобразовать во временной интервал. Особенно полезен
этот метод при анализе и регистрации сигналов многофункциона-
льных РЛС с фазированными антенными решетками, когда на-
блюдаются изменения временных интервалов от долей микросе-
кунд до единиц миллисекунд.
11.5. ОЦЕНКА ИНФОРМАТИВНОСТИ ПАРАМЕТРОВ
ТОНКОЙ СТРУКТУРЫ ПРИ РАЗВЕДКЕ
РАДИОЛОКАЦИОННЫХ СТАНЦИИ
С ИЗМЕНЯЮЩИМИСЯ ПАРАМЕТРАМИ СИГНАЛОВ
Изменение параметров сигналов привело к резкому повыше-
нию скрытности радиолокационной системы противника от ра-
диотехнической разведки. При решении таких задач, как индиви-
дуальное опознавание, селекция и идентификация сигналов в ре-
жиме синхронного и асинхронного пеленгования, традиционные
методы анализа оказались малоэффективными, поскольку они
рассчитаны на анализ стабильных параметров в течение длитель-
ного времени. Поэтому совершенно необходимо изыскание но-
вой, устойчивой, высокоинформативной системы признаков, за-
ключающихся прежде всего в тонкой структуре сигналов. К такой
системе могут относиться следующие признаки:
функция изменения (модуляции) параметров FmW);
период модулирующей функции при детерминированном из-
менении параметров Тт,
междупериодная функция модуляции R(Tj);
закон изменения частоты внутри импульса S(f);
огибающая отклика на выходе дисперсионного спектроанали-
затора 5(0;
огибающая радиоимпульса Л(/).
Т а б л и ц а 11. 1
Характер изменения параметров Вероятность индивидуального опознавания по параметрам тонкой структуры
Уход частоты в импульсе f(t) Отклик на выходе ДЛЗ S(t) Среднее значение периода функции изменения параметра т, Междупе- риодная функция модуляции R(Ti) Огибающая радио- импульса /1(7)
Изменение несущей частоты по случайному закону 0,76...0,84 0,82 Л — 0,76...0,8 0,42
Изменение периода следования импульсов по случайному закону 0,42...0,86 0,45...0,84 — 0,66...0,72 0,45...0,52
Изменение периода следования импульсов по детерминированно- му закону 0,9...0,94 0,48...0,92 0,8...0,84 0,7...0,86 0,41...0,46
Изменение формы огибающей радиоимпу- льса по случайному за- кону— 0,44...0,56 0,48...0,92 0,8...0,84 0,7...0,86 0,41...0,46
211
Методика оценки информативности этих признаков сводится к
вычислению корреляционных функций и сравнению их максиму-
мов с некоторым порогом. В качестве исходных данных должны
быть использованы реализации образцов реальных сигналов. Ре-
зультаты для реальных функций изменения параметров несколь-
ких классов РЛС приведены в табл. 11.1.
Анализируя данные табл. 11.1, можно заметить, что при любых
изменениях параметров сигналов тонкая структура является
устойчивым и информативным разведывательным признаком.
Следовательно, анализатор тонкой структуры является неотъемле-
мой частью станции радиотехнической разведки, так как только
тонкая структура сигналов менее всего подвержена внешним из-
менениям и воздействиям со стороны оператора.
11.6. МЕТОД ВЫДЕЛЕНИЯ СКРЫТЫХ ПЕРИОДИЧНОСТЕЙ
ВРЕМЕННЫХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ
На практике встречаются случаи, когда на выходе устройств се-
лекции или анализа сигналов будут существовать последователь-
ности импульсов следующего характера:
с постоянными параметрами;
с переменными параметрами;
смешанные последовательности (комбинации частных после-
довательностей), но число их конечно и не очень велико.
Какими бы эти последовательности ни были по структуре и
природе параметров, они всегда будут содержать структуру перио-
дичности, о чем свидетельствует анализ их корреляционных функ-
ций, полученных в реальных условиях. Поэтому оптимальной об-
работкой сигналов в целях идентификации будет такая, которая
включает на каждом пеленгаторном посту вычисление взаимной
корреляционной функции входной последовательности с некото-
рой опорной последовательностью, общей для обоих постов, вы-
деляет пики выбросов взаимокорреляционных функций, подчер-
кивающих наличие скрытых периодичностей, а идентификация
источников разведывательных сведений осуществляется по точно-
му положению этих пиков на частотной оси. Структурная схема,
поясняющая принцип обработки сигналов, представлена на
рис. 11.8.
Обоснуем теоретически возможность реализации этого метода
для целей идентификации.
Известно, что оптимальным устройством выделения структур-
но-подробных сигналов на фоне смешанного потока является
устройство, осуществляющее операцию свертки вида
g(a) = —- j S(t, a)h(t)dt,
-тс
где ±ГС — пределы интегрирования, определяемые длительно-
стью исследуемой реализации:
212
x(t) = S(t, а) + лш(Г);
h(t) — специально подобранная селективная функция, которая
должна обладать селективными свойствами или селектив-
ными действиями к компоненту с определенной частотой в
спектре сигнала (для удобства записи обозначим ее 5о(/)).
Так как поток входных сигналов содержит в себе скрытые пе-
риодичности, то будем считать, что период их заключен в пара-
метре а, который неизвестен. Поэтому система должна быть мно-
гоканальной или перестраиваемой в априорно ожидаемом интер-
вале распределения параметров (amil...amax).
Рис. 11.8. Структурная схема устройства выделения скрытых периодичностей
Различают два равноценных по конечному эффекту (а не по
технической реализации) метода формирования функции h(t)'.
корреляционный и оптимальной фильтрации. Синтез пассивных
оптимальных фильтров для широкого диапазона значений пара-
метров потока сигналов можно реализовать на базе электромеха-
нических фильтров или на базе цифровых фильтров, но при этом
время анализа будет недопустимо большим и идентификацию ис-
точников разведывательных сведений в квазиреальном масштабе
времени осуществить не удастся.
Коррелятор как оптимальный фильтр воспроизводит значение
выходной функции g(a) на интервале распределения параметра a
путем умножения входной последовательности на опорный сиг-
нал h (t, а). Причем входную последовательность следует предва-
рительно подвергать некоторым преобразованиям с целью под-
черкнуть требуемые гармонические составляющие, сохраняя при
213
этом закон изменения параметра. При математическом анализе
опорную селективную функцию будем считать гармонической,
частота которой может меняться в диапазоне значений параметра
а. Схема такого коррелятора может быть как одноканальной, так и
многоканальной. Комплексная сигнальная функция на выходе
этой схемы имеет следующий вид:
Qs = > ч) = & (5 ф, > ч) + (Ч ф, ч > w0).
Она определяет, по существу, функцию взаимной корреляции
исследуемого и опорного сигналов. В свою очередь,
U U Тс
= lim—-—- | cos со0Г cos[cox(/ + т) - ф] dt,
-гс
(Н.2)
где Тс = /2 - А — длительность реализации сигнала.
Преобразуя выражение (11.2), получим
^(ьФ>^х,(о0) =
- (Охт + ф] + cos[(<o0 - (Ох)г
4ГС
Используя результат фильтрации высокочастотных составляю-
щих на выходе фильтра премножителя, запишем
Гс
| COs((DxT- ф)сО$ [(<о0 - <Ox)z] dt +
-Гс
~ 4ГС
л
J siп(охт-ф) siп[(о>0-сох)?]<// .
Обозначив сохт - ф = Ф и произведя интегрирование, получим
Z ч sinfojz, - (йЛ
gs (Ф, О)х, (Do) = К cos Ф —±-}- Тс,
(й0 - (0х
где К = —у—- — амплитудный множитель.
2ТС
Произведя аналогичные вычисления для g’, найдем
. z х sinfcoo - со Л
gs (Ф, сох, со0) = К sin Ф—Тс.
со0 - сох
Тогда
= Qs (Дсо) [cos Ф + /вшФ],
где Асо = со0 - сох;
0ДД<|>) = л------модуль комплексной сигнальной функции
Дсо
на выходе коррелятора при расстройке.
214
Q
Рис. 11.9. График огибающей сигнальной функции
На рис. 11.9 показан график аргумента, который достигнет
максимума в точке Дсо = 0. Ширина главного лепестка функции
2Дсо = —.
Тс
Если изменять со0, то последовательно будут появляться все
скрытые частотные составляющие. Выражение для выходного от-
клика коррелятора можно представить в следующем виде:
Q/Дсо) = Щсо),
где С(со) — огибающая функции спектральной плотности сигна-
ла в интервале частот.
Отыскание точки экстремума 0.(Дщ) адекватно оптимальному
с(4
Если система многоканальная или перестройка осуществляется
дискретно на частоте со01, со02,..., со0 , а частота последовательно-
сти сох постоянна, то каждому значению <о0 соответствует свой от-
клик
Qs (Дсо) = со, (Дц.) [cos Ф + j sin Ф],
где Дсо = сох - со0/.
Определение максимального значения отклика соответствует
оценке скрытой частоты по методу максимального правдоподобия.
На рис. 11.10 приведена структурная схема одно канального
коррелятора для выделения скрытых периодичностей по корреля-
ционно-фильтровому принципу.
С выхода приемника случайные импульсные последовательно-
сти через специальный фильтр-расширитель поступают на
схему перемножителя коррелятора, на второй вход которого пода-
ется опорный сигнал S(t, а). Частота сигнала измеряется плавно в
215
Рис. 11.10. Структурная схема одноканального коррелятора
диапазоне изменения частоты повторения исследуемой радиоло-
кационной станции AF = F^ - Fmn. Произведение напряжений
исследуемого и опорного сигналов после интегрирования подает-
ся на вход осциллографа. Время интегрирования выбирается в со-
ответствии с длительностью реализации последующего сигнала.
На экране индикатора наблюдается развернутое во времени
значение функции gt (со) = g5( , со0), форма которой определя-
ется структурой изменения параметра последовательности.
При перестройке опорного генератора происходит биение час-
тоты генератора и скрытой частоты сигнала. При со0 * функция
gs осциллирует с разностной частотой Асо = «0 -сол/. Этот эффект
хорошо известен при воздействии синусоидальной помехи на им-
пульсный сигнал. При со0 = со наблюдается колоколообразный
выброс — отклик сигнальной функции, амплитуда которого про-
порциональна экстремальному значению g5(0, Ф,/).
В момент совпадения частот «0 = соЛ(. производится отсчет час-
тоты опорного генератора с помощью частотомера, значение от-
счета записывается в память ЭВМ как разведывательный признак
принадлежности излучения к конкретной радиолокационной
станции и в дальнейшем используется для ее идентификации.
При регулярной последовательности эта задача решается доста-
точно просто. Но доля энергии, например, первой гармоники бу-
дет невелика по сравнению с общей энергией последовательности
импульсов. Поэтому при выделении последовательностей в шумах
наблюдаются значительные трудности, а достоверность результа-
тов анализа невысока.
Выход из этого положения можно найти путем преобразования
входной последовательности импульсов. Преобразование должно
заключаться в изменении формы импульсов таким образом, чтобы
216
выделяемая гармоника (например, первая) была подчеркнута наи-
лучшим образом.
Предложим следующий вид преобразования. Входная последо-
вательность подается на триггер с двумя устойчивыми состояния-
ми, в результате чего получается выходное колебание типа “ме-
андр”. Затем это колебание подается на сглаживающий фильтр, на
выходе которого в идеальном случае будет синусоида длительно-
стью Тс и периодом Тк = 27}. Основная энергия сосредоточена в
Рис. 11.11. Напряжения на элементах схемы коррелятора
217
Так как входные колебания подвержены взаимодействию шу-
мов или помех, то, естественно, форма выходного спектрального
отклика будет размыта и появятся побочные составляющие в
спектре, который даже при малом отношении сигнал/шум не пре-
взойдет анализируемую гармонику.
Предложенный метод применим при выделении скрытой пери-
одичности последовательности импульсов с переменной частотой
следования импульсов.
Для простоты объяснения обратимся к рис. 11.11, из которого
следует, что на выходе сглаживающего фильтра появляется реали-
зация частотно-модулированного колебания с малым индексом
модуляции, закон изменения частоты нового сигнала соответству-
ет закону изменения частоты повторения входных импульсов.
Спектр частотно-модулированного колебания при т << 1 диск-
ретный (линейчатый), поэтому на выходе коррелятора последова-
тельно будут выделяться все гармонические составляющие. Выде-
ляя скрытую частоту повторения и измеряя ее значение, мы, по
существу, находим новый индивидуальный разведывательный
признак принадлежности сигналов к конкретным РЛС. Этот при-
знак можно успешно использовать для индивидуального распо-
знавания и идентификации источников радиоизлучения при
асинхронном пеленговании.
12. ИНФОРМАЦИОННОЕ ОБЕСПЕЧЕНИЕ
РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ
12.1. ЗАДАЧИ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ РТР
Под информационным обеспечением радиотехнической раз-
ведки понимают обеспечение данными о характере группировки,
действиях и намерениях противника, состоянии уровня техниче-
ского развития его радиоэлектронных средств, определения меро-
приятий противника по приведению средств доставки ядерного
оружия в состояние повышенной и полной боевой готовности и
подготовке этих средств к нанесению ракетно-ядерного удара.
С точки зрения радиотехнической разведки эти данные прояв-
ляются через работу радиоэлектронных средств разведуемой сис-
темы. Рассмотрим модель разведуемой системы противника в об-
щем виде (рис. 12.1).
Любая разведузмая система проявляется через качественные,
количественные, пространственные и косвенные признаки или
характеристики системы.
Под качественной характеристикой радиолокационной систе-
мы понимают типы или классы РЛС, создающих это поле. Тип
или класс РЛС проявляется через основные параметры сигналов,
такие, как несущая частота сигнала /0, длительность тл, частота
повторения импульсов Ft и скорость сканирования антенной сис-
темы
Эта характеристика радиолокационного поля может быть оце-
нена через вероятность опознавания типа РЛС.
Количественные характеристики определяют число станций
каждого типа в зоне разведки, которое может быть вскрыто в резу-
льтате анализа полученных сигналов, особенно тонкой структуры.
Число радиолокационных станций отражает число объектов раз-
ведки и в определенной степени состояние группировки войск
противника.
Пространственная характеристика позволяет оценить располо-
жение объектов и источников радиоизлучений на местности, ха-
рактеризуют их динамику и компактность. Они вскрываются тра-
диционными методами определения местоположения источников
радиоизлучения (пеленгационными) и методом комплексного
анализа прямых и отраженных сигналов.
Косвенные признаки характеризуют функционирование систе-
мы и проявляются через режим работы многофункциональных ра-
диолокационных станций и изменения потока сигналов.
219
Рис. 12.1, Модель разведуемой системы
Данные характеристики выбраны потому, что они количест-
венно отражают информативность радиотехнической разведки и
состояние разведуемой системы.
12.2. ПРОБЛЕМА ОБЕСПЕЧЕНИЯ ИНФОРМАТИВНОСТИ
РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ
Проблему обеспечения информативности радиотехнической
разведки рассмотрим с точки зрения удовлетворения двум крите-
риям: заданной вероятности опознавания типа РЛС и заданной
вероятности правильного индивидуального опознавания.
220
Информативность разведки зависит от насыщенности театра
военных действий, степени неопределенности исходных данных о
противнике, количества и качества средств разведки.
Постановка задачи оценки информативности в условиях пол-
ной неопределенности является некорректной, так как априорная
информация имеется уже после того, как возникла проблема раз-
ведки конкретной системы (в условиях полной неопределенности
не может возникнуть сама проблема). Нельзя говорить об инфор-
мативности вообще, какие бы алгоритмы ее оценки ни использо-
вали.
Во-первых, необходимо конкретизировать класс задач, для ре-
шения которых служит система разведки, и произвести анализ
сигналов. Во-вторых, необходимо конкретизировать источник
разведывательной информации и шумовой фон, т. е. поток меша-
ющих сигналов, в условиях которого производится анализ. В-тре-
тьих, следует учитывать степень априорной неопределенности ре-
шения задач радиотехнической разведки и конкретизировать ин-
формативные параметры.
Для решения различных задач одни и те же параметры будут
иметь различную информационную способность.
12.3. ОЦЕНКА ИНФОРМАТИВНОСТИ
РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ ПО КРИТЕРИЮ
ВЕРОЯТНОСТИ ОПОЗНАВАНИЯ ТИПА РЛС
В основу оценки положим байессовский критерий, сущность
которого при опознавании типов радиолокационных станций
сводится к следующему.
В результате измерения N параметров сигналов на вход системы
распознавания поступает N— мерный вектор xN = {x\,x2,...,xN}.
Под проекциями вектора х понимают конкретное значение /-го
параметра, например несущей частоты или длительности импу-
льсов. Из результатов предварительной разведки считаем извест-
ными условные плотности вероятности для всех N типов РЛС.
Пренебрегая слабой корреляционной связью между признака-
ми, можно записать
N
w =(**/*> ПФ*/О»
*=1
где со(х^//) — условная плотность распределения вероятностей
£-го параметра /-й РЛС.
С учетом априорных вероятностей появления на входе станции
разведки сигналов РЛС /-го типа P(i) пространство решений раз-
бивают таким образом, чтобы обеспечить минимум полной веро-
ятности ошибок, стоимость которых должна зависеть от важности
разведуемых РЛС. В этом случае средние ожидаемые потери при
принятии решения можно выразить соотношением
221
R=±P(i)-
1=1
/=1
j«l
где P(i) — априорная вероятность появления сигнала z-й РЛС;
С(у/0 ~ стоимость ошибочных решений;
Р(У/л — вероятность принятия ошибочного решения;
5(0,/х) — правило выбора решений. 5(0,./х) = 1 при j=k и О
при j * к.
Апостериорная вероятность того, что измеренные параметры
принадлежат РЛС /го типа:
лп0 =
P(/)co(xJ/)
£Р(*>(х*А)
*=i
Таким образом, для расчета вероятности опознавания каждого
типа радиолокационных станций необходимо знать априорные
вероятности появления сигналов Р(/), которые можно оценить на
1 снове анализа группировки войск противника в полосе разведки
как отношение числа станции z-го типа к общему числу радиоло-
кационных станций:
р(0 =
Nt
N'
Условные плотности вероятности co(xA/z) находят на основе
анализа данных предварительной радиотехнической разведки.
Статистическая обработка реальных сигналов большого числа
однотипных радиолокационных станций США и стран НАТО по-
казала, что их условные распределения представляют собой сово-
купность нормальных распределений, сдвинутых по оси парамет-
ра на разнос между средними значениями параметров конкретных
РЛС:
со(^/0=-Ел5=ехр
п 72т1о,,
fa ~^)2
где п — число РЛС данного типа;
хк — условное обозначение А:-го параметра;
т,к — среднее значение к-го параметра Z-й РЛС;
aik — среднее квадратическое значение разброса к-го па-
раметра /-й РЛС.
Для радиолокационных станций с фиксированными парамет-
рами сигналов функции распределения со(?), со(Т), со(т) аппрокси-
мируются гауссовыми кривыми.
Для перестраиваемых станций по параметру хк в диапазоне Дхл
аппроксимирующая функция распределения имеет вид
222
Лехр< -
\2
к ~тк) тк ~Лхк
, ; ПрИ - —к-~ к- < Xt
А Дл\ Дл\
---при------- <xt <—
Лхк 2 к 2
~^к .
2
где А — определяется как плотность равномерного распределения
в интервале перестройки.
Рис. 12.2. Вероятности распознавания типа РЛС по параметрам сигналов
223
Если данных о характеристиках радиолокационных станций
недостаточно, а есть только предельные значения параметров, то
распределение «(х*//) можно принять равновероятным в диапа-
зоне xkm3Xl...xkmini, т. е.
где хЛтах/ и хЛгпЫ — максимальное и минимальное значения &-го
параметра /-й РЛС, полученные из справоч-
ных данных.
Практика ведения радиотехнической разведки показывает, что
при распознавании типов РЛС классы в признаковом пространст-
ве удалены друг от друга достаточно далеко. Это позволяет приме-
нить в системах распознавания станций РТР простые алгоритмы
принятия решений, например, на основе функций расстояния и
им подобным, при сохранении высокой вероятности распознава-
ния (рис. 12.2).
12.4. ОЦЕНКА ИНФОРМАТИВНОСТИ
РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ ПО КРИТЕРИЮ
ВЕРОЯТНОСТИ ПРАВИЛЬНОГО ИНДИВИДУАЛЬНОГО
РАСПОЗНАВАНИЯ РЛС
Для оценки информативности РТР по критерию индивидуаль-
ного распознавания необходимо иметь статистические характери-
стики сигналов РЛС, а именно:
групповые и индивидуальные законы распределения парамет-
ров;
расстояние между средними значениями одноименных пара-
метров смежных РЛС;
числовые характеристики законов распределения т и о.
Рис. 12.3. Гистограммы распределения частоты сигналов РЛС
224
На рис. 12.3 приведены гистограммы распределений парамет-
ров трех смежных РЛС. Очевидно, что для массовых РЛС эти рас-
пределения достаточно близко примыкают друг к другу, в боль-
шинстве случаев значительно перекрываясь, создавая области не-
однозначного принятия решений.
Рассмотрим принципиальную возможность разделения сигна-
лов однотипных РЛС по произвольному параметру X. Безусловное
распределение параметра X описывается выражением
: _ t
где Q. — априорная вероятность появления сигналов /-й РЛС;
Р (X) — индивидуальное распределение вероятности для /-й
РЛС.
Так как опознавание осуществляется среди однотипных РЛС,
можно положить Q. = Qj и записать
PW = 7-U= ехР
[X - т - (2Х + 1)Д/п]2
2?
+ ехр
2 а2
где к = 1, 2, 3, ...;
Дт — усреднение по всем экземплярам, расстояния между матема-
тическими ожиданиями смежных законов распределения.
Необходимым условием разделения сигналов по одному пара-
метру является многомодальность суммарного закона.
Обозначим (X - т) = у и найдем экстремум функции Р(у) из
условия
dPM _0
dy
(12.1)
Значение у = 0 соответствует экстремуму функции и является
корнем при любых Д/и и о. Отбрасывая тривиальные решения
V/ =±оо, запишем выражение (12.1J в виде
у е °2
которому эквивалентно уравнение
225
Так как гиперболический косинус не равен нулю ни при каки
значениях аргумента у, запишем выражение (12.2) в следующе]
виде:
7----=
(2к + 1)Д/и
(2к + 1)Д/иу
о2
(12.3)
Корнями трансцендентного уравнения является абсцисса точек
пересечения левой и правой частей, причем для у = 0 корни суще-
ствуют всегда.
Исследование решений уравнения (12.3) позволяет получить
условие минимума многомодального распределения параметров:
но ch(0) = 1. Запишем условие многомодальности
[(2& + 1)Д/и]2 > а2; (2к + 1)Д/и > о. (12.4)
При к = 0 условие разделения смежных радиолокационных
станций по параметру можно записать в виде
Д/и > о. (12.5)
Условия (12.4) и (12.5) определяют принципиальную возмож-
ность разделения сигналов однотипных РЛС по параметру к. Реа-
льно в процессе ведения РТР нельзя получить объем выборки, не-
обходимый для построения закона распределения, и определить
точки экстремума суммарного закона, поэтому алгоритм индиви-
дуального распознавания должен учитывать ограниченность вре-
мени анализа и объема выборки. Наиболее приемлемым в этом
смысле является пороговый алгоритм, сущность которого сводит-
ся к тому, что измеряется среднее значение параметра к, вокруг
которого создается строб размером ±ДА/2, и РЛС присваивается
условный номер.
Все результаты, попавшие в этот строб, относятся к радиолока-
ционной станции с этим условным номером, не попавшие в
строб — к сигналам другой РЛС с другим условным номером. При
этом возможны два рода ошибок (рис. 12.4).
Вероятность правильного индивидуального распознавания
РЛС. по параметру к определяется вероятностью попадания резу-
льтатов измерения параметров сигналов /-й РЛС в область, огра-
ниченную вероятностью непопадания в строб сигналов смежных
РЛС:
Лр. =44][>-(?Е4)]’
226
где Р[Д. ] = J co, (A.) JЛ;
л>, -Д%
Р^Д — суммарная вероятность попадания в строб мешаю-
щих сигналов.
Рис. 12.4. Вероятности ошибок принятия решений
В зависимости от размеров строба происходит перераспределе-
ние ошибок 1-го и 2-го рода, а следовательно, и вероятности пра-
вильного опознавания. Существует оптимальное значение Alopt,
при котором вероятность правильного индивидуального опозна-
вания максимальна. Для определения оптимальных размеров
строба ДА.ор1 построим графики зависимости вероятности правиль-
ного опознавания Рпр от безразмерного параметра — при различ-
ен
ных расстояниях между средними значениями параметров смеж-
ных РЛС (рис. 12.5). Этими графиками можно воспользоваться
только тогда, когда известны конкретные значения о и ДА., кото-
рые могут быть получены либо экспериментально на основе обра-
ботки данных предварительной разведки, либо расчетным путем.
правильного распознавания от
размера строба Д/т^ < Д/эт2 < Д/и3 < Д/эт4
Рис. 12.6. Пример расчета
вероятности правильного
распознавания
227
Значение рассчитывается путем нахождения суммарной дис-
персии, определяемой нестабильностью параметров а^т, влияни-!
ем шумов aj, ошибками измерительных устройств :
=7анС1 + + о4м •
В качестве примера на рис. 12.6 приведены значения вероятно-
стей индивидуального распознавания радиолокационных стан-
ций, рассчитанные по рассмотренной методике. Из графиков
можно сделать вывод, что вероятность индивидуального распозна-
вания РЛС даже при оптимальных размерах строба невелика и со-
ставляет 0,10 ... 0,45.
Методика вычисления вероятности правильного распознава-
ния Рпр сводится к следующему:
определяют оптимальное отношение ДА/ст;
вычисляют отношение Дт/ст;
из точки (ДА/ст)ор[ восстанавливают перпендикуляр до пересече-
ния с кривой Дш/ст и определяют Рпр.
Хотя данная методика не является оптимальной, она часто
применяется в условиях ведения радиотехнической разведки на
насыщенных ТВД.
12.5. ОЦЕНКА ЭФФЕКТИВНОСТИ СИСТЕМЫ
РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ
Эффективность системы радиотехнической разведки Э являет-
ся мерой ее целесообразности, связанной с назначением. Эффек-
тивность всегда подразумевает получение полезного эффекта, ко-
торое называется выигрышем G.
Если плата С и выигрыш G выражены в одних единицах изме-
рения, то рассчитать или оценить эффективность очень легко:
Э = G - С.
Но в военных системах нельзя оценить эффективность таким
путем, так как выигрыш и плата в большинстве случаев бывают
выражены в различных единицах и даже несоизмеримы друг с дру-
гом. В этом случае в качестве меры эффективности следует при-
нять выигрыш при фиксированной плате:
3 = G/C <С‘.
Эта формула позволяет только сравнить одну систему с другой,
но не отвечает на вопрос, эффективна она или нет.
Система РТР, под которой мы в дальнейшем будем понимать
радиотехническую бригаду ОСНАЗ или подразделение ОСНАЗ,
исключительно сложна как по решаемым задачам, так и по прин-
ципам функционирования и управления. Ее эффективность сле-
дует оценивать через эффективность системы, которую она обслу-
живает, т. е. фронт или военный округ. Иными словами, эффек-
228
гивность системы радиотехнической разведки определяет тот
вклад, который она вносит в общую эффективность войск фронта
как вышестоящей системы.
Система радиотехнической разведки принадлежит к классу ин-
формационных систем, которые осуществляют отображение объ-
ектов противника в определенном пространстве.
Под отображением понимают получение информации об объ-
ектах противника и преобразование ее к такому виду, который ну-
жен потребителю (командующему фронтом, ГРУ ГШ).
Отображение должно быть связано с решением задач, постав-
ленных перед системой разведки, например:
вскрытие мероприятий по переводу вооруженных сил против-
ника с мирного на военное положение, возможности замысла,
сроков и способов развязывания военных действий;
определение мероприятий командования противника по при-
ведению средств доставки в состояние повышенной и полной бое-
вой готовности и подготовке этих средств к нанесению ракет-
но-ядерных ударов;
установление сроков и степени наращивания дежурных ядер-
ных сил, рассредоточение тактической авиации на запасные аэро-
дромы;
определение мест расположения складов ядерного оружия и
степени их готовности к выдаче ядерных боеприпасов;
своевременное вскрытие выхода войск из мест постоянной
дислокации, районов сосредоточения и рубежей развертывания;
определение состояния и степени боевой готовности системы
ПВО: аэродромов базирования истребительной авиации, типов и
числа перехватчиков и истребителей-бомбардировщиков, рубежей
перехвата; районов развертывания дивизионов и батарей ЗУРС,
степени их боевой готовности и возможностей по применению
ими головных частей с ядерными зарядами, сильных и слабых
сторон системы управления.
Оценить эффективность системы радиотехнической разведки
по решению этих задач количественной мерой в настоящее время
не представляется возможным. Во-первых, трудно формализовать
совокупность разведывательных признаков, обеспечивающих ре-
шение этих задач, во-вторых, не всегда удается их вскрыть. Поэто-
му эффективность радиотехнической разведки удобнее выразить
посредством отображения.
Введем понятие коэффициента полноты отображения объектов
разведки х- Полнота отображения есть относительное число разве-
данных и отображенных объектов к общему числу объектов в по-
лосе разведки:
. _ м
м0’
где М — число разведанных объектов за время г;
Mq — общее число объектов в зоне разведки.
229
Разведанным считается объект или источник разведыватель-
ных сведений, если определены его назначение, государственная:
принадлежность, тип, местоположение, режимы функциониро-
вания.
Число разведанных объектов зависит от их количества в зоне
разведки, расположения на местности, тактико-технических ха-
рактеристик средств РТР, чувствительности и быстродействия ап-
паратуры.
Рассмотрим вариант положения объектов противника в опера-
ции, начинающейся без применения ядерного оружия, и оценим
возможности ведения РТР по глубине.
Из табл. 12.1 следует, что, например, в зоне прикрытия, удален-
ной от переднего края до 50 км, развертывается 280 РЛС, или 13 %
всех РЛС. В зоне небоевых действий глубиной 200 км, удаленной
от переднего края на 15 ... 200 км и более, развертывается до 76 %
всех РЛС на ТВД с общим числом 1560 радиолокационных стан-
ций. Причем на передовом оборонительном рубеже развертывает-
ся более 50 % всех РЛС.
Таким образом, только в тактической зоне, удаленной от пе-
реднего края до 70 ... 100 км, находится до 65 % всех РЛС. В зоне
коммуникаций — до 250 РЛС, или 11 % всех РЛС. Естественно, не
все они могут быть разведаны и отображены. Часть РЛС не будет
обнаружена по энергетическим критериям, часть — по времен-
ным, часть — по информационным и т. д.
Таблица 12.1
Наименования объектов Число объектов Удаление от переднего края, км
Всего из них
ССГА Ц Г А
Батареи НУРС 26 20 6 12 . . 15
Батареи УРС 41 4 37 40 . . 60
Аэродромы тактической авиации 90-110 40 - 50 50-60 300 . . 400
Батальоны (дивизионы) 240 - 250 НО - 115 130- 135 15 . . 60
Батареи атомной артил- лерии 80 - 85 11 - 12 69 - 73 15 . . 60
Батареи ЗУРС 80 - 90 30 - 35 50 - 55 15 .. 100
Эскадрильи армейской авиации 16 - 20 3-4 13 - 16 30 . . 60
Пункты управления (СВ, ВВС, ВМС. ПВО) 235 - 245 115 - 120 120 - 125 15 .. 250
Базы снабжения 30 - 40 10 - 15 20 - 25 100 . .. 350
Склады ядерных боепри- пасов 30-40 10 - 15 20 - 25 20 . .. 90
ВМБ, порты 130 130 — 200 . .. 450
Энергетические центры 15 - 25 5-10 10 - 15 150 . .. 400
Другие военные объекты 20 - 30 10 - 15 10 - 15 70 .. 300
Итог о... 1033 - 1132 498 - 545 535 - 587
230
Для расчета полноты отображения х в первую очередь введем
понятие коэффициента энергетической доступности Кэ д, который
представляет собой отношение энергетически доступных РЛС /-го
типа к общему числу РЛС /-го типа:
Энергетически доступными для радиотехнической разведки
считаются такие РЛС, которые обеспечивают уровень сигналов на
входе приемника разведки, превышающий реальную чувствитель-
ность приемника, т. е. должно выполняться условие Рс вх > Рреал,
гае Рс„ = (12.6)
(4^р)
Здесь Рп — энергетический потенциал разведываемого РЭС;
Gn — коэффициент усиления антенны РЭС;
Л — длина волны, м;
у и у — коэффициенты потерь в антенно-фидерном тракте;
Ср — коэффициент усиления антенны станции РТР;
а — коэффициент затухания в атмосфере;
/)р — коэффициент, учитывающий ослабление поля за ра-
диогоризонтом по отношению к уровню поля в сво-
бодном пространстве;
Д, — дальность разведки.
Коэффициент различимости сигнала, учитывающий требуемое
отношение сигнал/шум:
Обо всех элементах, входящих в выражение (12.6), известно из
разд. 3. Реальная чувствительность приемника разведки вычисля-
ется по формуле
Рреал = m/up(/Vlip +/а - 1)тр,
где к~ постоянная Больцмана (к - 1,38 • 10-23 Дж/К);
Т — эффективная шумовая температура антенны, 290 К;
Д/Пр — полоса пропускания линейной части приемника (до
детектора);
/Vnp — коэффициент шума приемника;
/а — относительная шумовая температура антенны.
Для того чтобы определить коэффициент энергетической до-
ступности РЛС, необходимо иметь график зависимости Рс =J(Dp).
На этом графике (рис. 12.7) строим график зависимости Рр
Проекция точки пересечения для каждого типа радиолокаци-
онных станций дает предельную дальность, на которой станция
будет обнаружена. На нижней части графика, исходя из опера-
231
тивного построения типовой группировки войск противника,
построена зависимость относительного числа РЛС каждого типа
от дальности разведки. Проекция точки О' на кривую и ось У по-
кажет коэффициент энергетической доступности Кэл. Усредняя
коэффициенты энергетической доступности по всем типам, на-
ходим среднее значение:
где п — общее число типов радиолокационных станций.
Рис. 12.7. Графики расчета коэффициента энергетической доступности
232
Число энергетически доступных РЛС определяется по формуле
/Гэд=^мс.
Обнаруженные РЛС должны быть опознаны, т. е. должны быть
установлены типы и тактическое назначение станций. Этот крите-
рий характеризуется вероятностью опознавания типа радиолока-
ционной станции.
Кроме обнаружения и опознавания типа РЛС необходимо
определить местоположение ее на местности. В существующих си-
стемах радиотехнической разведки определение местоположения
РЛС осуществляется пеленгаторными группами и пеленгаторны-
ми радиосетями. Следует отметить, что не все источники разведы-
вательной информации будут запеленгованы, поскольку времени
на пеленгование и определение местоположения затрачивается
гораздо больше, чем на анализ сигналов. Так, например, нормати-
вы на станцию СДР-2А равны:
за 1 ч одна пеленгаторная группа способна определить 9—10
источников, следовательно, за сутки — приблизительно 216 — 240
источников;
вероятность выполнения команд на пеленгования К\ = 0,6...0,8;
вероятность использования пеленгов = 0,7...0,9.
Под вероятностью выполнения команд на пеленгования пони-
мают отношение запеленгованных источников ведомой станции
к числу команд, поданных с ведущей станции радиотехнической
разведки:
где К[ всегда меньше единицы.
Это объясняется тем, что значительная часть радиолокацион-
ных станций работает кратковременно и в период между команда-
ми ведомая станция не может их запеленговать.
Вероятность использования пеленгов характеризует отношение
числа целей (РЛС), местоположение которых определено с доста-
точной точностью, к общему числу засечек. Коэффициент испо-
льзованных команд A3 = 0,4...0,6.
Учитывая то, что требуется четырехкратное подтверждение ра-
боты источников информации в течение суток, вводят коэффици-
ент повторяемости К4 = 0,25.
С учетом сказанного, одна пеленгаторная группа дальней ра-
диотехнической разведки за сутки способна вскрыть
*в.ист = (216-240) = (15-17) 0,8 = 12-14.
Если вероятность привязки источников к объекту К$ = 0,4...0,6,
то число вскрытых объектов за сутки
Ао = Ув.ист *5 = (12-14) (0,4-0,6) = 5-6.
233
Аналогично можно оценить возможности неавтоматизирован-
ной сети на базе пеленгатора Р = 359. За 1 ч в пеленгаторной сети
на пеленгование подается 30 команд. Следовательно, за сутки
30-24 = 720 команд.
Вероятность выполнения команд (получение засечки) К\ =
= 0,6...0,8.
Вероятность использования засечек (пеленгов) “ 0,7...0,8.
Учет подачи нескольких команд на одну радиостанцию Kj —
= 0,4...0,6.
Учет четырехкратного подтверждения источников в течение
суток К = 0,25. Следовательно, одна пеленгаторная сеть за сутки
способна вскрыть 72ОХ4А2А3Х4 = 47 источников.
Учтем вероятность опознавания объекта Л'з = 0,6...0,8 и вероят-
ность опознавания нескольких источников на объекте =
= 0,3...0,5. Получим N = 47= 8—18 объектов. Зная число пе-
ленгаторных сетей, можно определить возможности системы ра-
диотехнической разведки.
Сопоставление возможностей пеленгаторной группы по вскры-
тию объектов радиотехнической разведки и числа объектов в зоне
разведки позволяет сделать вывод, что вскрывается только незна-
чительная их часть. Поэтому нельзя по выбранному критерию
оценить оперативно-тактическую эффективность средств развед-
ки, а можно оценить только техническую сторону эффективности.
Это объясняется тем, что неизвестно пороговое значение числа
источников, необходимое для оперативных выводов вышестоя-
щей системы. Целесообразно выбирать только ключевые источни-
ки объекта, снабдив их предварительно весовыми коэффициента-
ми или коэффициентами важности.
Более строгий научный подход к оценке эффективности систем
радиотехнической разведки состоит в следующем.
Сформулируем и четко разграничим задачи радиотехнической
разведки, например перечисленные ранее, которые должны ре-
шаться на основании данных разведки. Обозначим их i = 1,2, ...,
Lq. Естественно, что каждая задача характеризуется важностью у,.
Полную вероятность решения каждой /-й задачи обозначим Р,.
Тогда выигрыш, полученный при решении всех задач системной
радиотехнической разведки, составит
1=1
Для решения задач необходимо создать посты радиотехниче-
ской разведки, пеленгаторные группы и сети, т. е., выражаясь язы-
ком системотехники, необходимо выделить ресурс для решения
всех задач Lq'.
1=1
где Zj — средства, выделенные для решения /-й задачи.
234
Условная вероятность решения z-й задачи при выделении до-
статочного ресурса зависит от электромагнитной доступности ра-
диоэлектронных средств, точности измерения координат источ-
ников и объектов, вероятности их опознавания, точности анализа
и быстродействия.
Будем считать, что для решения z-й задачи нет необходимости
иметь информацию о всех М источниках. Может оказаться, что
для ее решения достаточно информации об одном источнике или,
наоборот, о всех. Опыт ведения разведки показывает, что инфор-
мация об одних и тех же источниках разведывательных сведений
может использоваться в ряде задач.
Полная вероятность Q, правильного решения z-й задачи зави-
сит от условной вероятности Р, и от выделенных средств Zz:
если отображение точное и полное (% = I), а важность всех це-
лей или объектов одинакова, то максимальный выигрыш
< Л/2 >
GmM > L0M6 exp --f-
X Zo )
где Lq — число решаемых задач;
если отображение неполное, то вводят коэффициент %:
( М2}
G>£0AfoXexp --f-
х zo )
С учетом коэффициента важности
(Sn. Г л/2
G>M 2Z exp f-
X'=‘ ) X z0 J
Интересно заметить, что если ресурс неограниченный
(Mq/Zq»\), т. е. число средств радиотехнической разведки пре-
восходит число источников, то получаем максимальный выиг-
рыш
Отсюда вытекает, что на малонасыщенных радиоэлектронны-
ми средствами ТВД выигрыш, а следовательно, и эффективность
системы РТР выше. Это объясняется тем, что на таких ТВД, как
Западный, поступающая информация не используется полно-
стью, т. е. наблюдается кажущаяся избыточность информации,
которую не успевает обработать система разведки, а точнее, на
Западном ТВД более низкий коэффициент информационного
доступа.
В практических задачах всегда приходится анализировать сис-
тему высшего порядка и находить конкретные выражения для
функционала эффективности.
235
12.6. ПРИНЦИПЫ ПОСТРОЕНИЯ УСТРОЙСТВ
РАСПОЗНАВАНИЯ
Станция радиотехнической разведки работает с радиолокаци-
онным полем противника, которое создается совокупностью ра-
диолокационных станций. Общие свойства, характеристики, па-
раметры позволяют разделить радиолокационные станции на
классы по тактическому назначению, государственной принад-
лежности, типу РЛС, конкретному экземпляру.
Задача станции радиотехнической разведки — по принятым
сигналам в момент разведки отнести излучаемую РЛС к одному из
классов, т. е. установить ее тактичное назначение, тип, государст-
венную принадлежность и по возможности конкретный экземп-
ляр.
Процесс отнесения источников разведывательных сведений к
конкретному классу называется распознаванием.
Распознавание и определение принадлежности обнаруженного
источника к объекту разведки или к определенному классу или
типу осуществляются по параметрам излучения, измеренным в
момент разведки.
Распознавание источников и объектов разведки составляет
основную задачу информационного обеспечения радиотехниче-
ской разведки.
Существует несколько уровней распознавания.
1. Распознавание сигналов на фоне помех, т.е. обнаружение
сигналов.
2. Распознавание типа радиоэлектронных средств, конкретного
экземпляра РЛС (индивидуальное распознавание), его тактиче-
ского назначения и государственной принадлежности.
3. Распознавание объекта по типам и числу радиоэлектронных
средств, развернутых на объекте разведки.
4. Распознавание ситуации, состава группировки, ее целей и
намерений.
Распознавание как основа информационного обеспечения
имеет целями обеспечение вышестоящей системы данными о со-
ставе группировки, характере выполняемых ею задач (учебно-бое-
вой деятельности), о моменте перехода с мирного на военное по-
ложение или изменении степени боевой готовности. Все эти цели
достигаются в основном и в первую очередь путем распознавания
типа и конкретного экземпляра РЛС.
Поскольку распознавание осуществляется в условиях большого
количества излучений различных радиоэлектронных средств, то
эта задача является вероятностной.
Эффективность процесса распознавания зависит от следующих
факторов:
числа источников радиоизлучения, среди которых производит-
ся распознавание;
степени неопределенности исходных данных о радиоэлектрон-
ной обстановке в полосе разведки;
236
точности измерения параметров;
пределов измерения параметров;
алгоритма распознавания и выбора критерия принятия реше-
ния о принадлежности излучения к определенному типу или эк-
земпляру РЛС.
При организации распознавания источников радиоизлучений
имеется ряд особенностей, присущих радиотехнической разведке:
1. Неизвестно заранее число классов, среди которых произво-
дится распознавание.
2. Существует неопределенность в параметрах сигналов, испо-
льзуемых как признаки распознавания. Параметры сигналов мо-
гут изменяться в процессе разведки в широких пределах.
3. Законы распределения параметров могут быть различны
даже при распознавании среди двух классов.
4. Практически нельзя задать функцию стоимости ошибок.
5. Время предъявления признаков неизвестно и в большинстве
случаев является случайным.
6. Распознавание необходимо осуществлять в квазиреальном
масштабе времени.
Прежде чем рассматривать алгоритмы распознавания, необхо-
димо определить критерии, по которым в условиях случайных из-
менений признаков распознавания следует отнести сигнал, при-
нятый станцией радиотехнической разведки, к определенному
классу РЛС.
12.7. ВЫБОР КРИТЕРИЕВ ПРИ РАСПОЗНАВАНИИ ТИПОВ
И ЭКЗЕМПЛЯРОВ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ
Как было отмечено, у РЛС и других источников имеются об-
щие свойства, по которым их можно разбить на классы, т. е.
сгруппировать по определенному признаку.
Каждый класс характеризуется определенным набором пара-
метров сигналов, которые являются разведывательными призна-
ками принадлежности к этому классу.
Эти признаки изменяются под воздействием многих факторов:
обеспечение помехозащищенности, скрытности, случайные воз-
действия, условия распространения, влияние помех, технологиче-
ские разбросы при изготовлении и настройке радиоэлектронных
средств и т. д. Поэтому многие признаки имеют вероятностные
распределения, которые описываются соответствующими функ-
циями распределения — одномерными или многомерными — в за-
висимости оттого, один параметр или несколько используется для
распознавания.
С математической точки зрения процесс распознавания сво-
дится к разбиению диапазона значения параметров на классы.
Границы областей устанавливаются исходя из выбранного крите-
рия принятия решения о принадлежности перехваченного излуче-
ния с конкретными значениями параметров к тому или иному
классу. Поскольку задача статическая, рассмотрим возможность
237
применения статических критериев для распознавания источни-
ков радиоизлучения.
В статистике широко применяются следующие критерии: Бай-
еса, Неймана — Пирсона, максимума апостериорной вероятно-
сти, максимального правдоподобия, идеального наблюдения.
Оценим их не с точки зрения эффективности, а по возможности
применения для распознавания радиоэлектронных средств. Как
было отмечено, в условиях радиотехнической разведки задача рас-
познавания является многоальтернативной и многопараметриче-
ской. Не нарушая общности решения задачи распознавания, рас-
смотрим двухальтернативную задачу, когда для распознавания
предъявляются два класса сигналов: и S}. Априорные вероятно-
сти появления сигналов и (двух классов) соответственно рав-
ны P(Si) и P(Si). Условные плотности вероятности того, что при
работе РЛС /-го типа вектор значений параметров
h = {х,, x2,...,xN},
записываются в виде
х2,...,хл.).
Критерий Байеса для решающего правила в этом случае соот-
ветствует следующему выражению:
L = Ж(х„ x2,x2,...,x,,/S>) >п PQ) 7)
х2, х3,..., xN /S2) < P(S2)
где П — матрица потерь.
Как видно из выражения (12.7), при использовании критерия
Байеса необходимо знать априорные вероятности и матрицу по-
терь.
Если положить П~ 1, т. е. потери системы распознания при пе-
репутывании РЛС одинаковы, то приходим к критерию максиму-
ма апостериорной вероятности:
L _ P(S2)W(xx, x2,x3,...,x^/52)>i
х2,х3,...,XN/SX) < r
Если L > 1, то принимается решение в пользу сигнала S^, при-
надлежащего к классу или типу второй РЛС. Если критерий мак-
симума меньше единицы, решение принимается в пользу первой
РЛС.
Априорные вероятности P(S\) и P(Si) определяются ожидае-
мым числом радиолокационных станций каждого типа в зоне раз-
ведки, частотой и продолжительностью их включения на излуче-
ние. Такие данные в большинстве случаев отсутствуют. Тогда сле-
дует принять P(5j) = P[Si), и критерий максимума апостериорной
вероятности переходит в критерий максимального правдоподо-
бия:
238
L =
РИ(х,, x2, x3,..., xN /S2) >
Ж(х„ x2,xy,...,xN ISV} <
Если L > 1, решение принимается в пользу второй РЛС; если
L < 1, решение принимается в пользу первой РЛС. Этот критерий
часто применяется в системах РТР для распознавания источников
разведывательных сведений. Если пороговое отношение устано-
вить равным не единице, а потребовать определенную степень
уверенности, т. е. выбрать порог С * 1, то получим критерий Ней-
мана —Пирсона:
£ = ^Х|’ (]2 8)
W(xv х2,х}...x„/S,) <
Решение принимают в пользу той или иной РЛС в зависимости
от знака неравенства в формуле (12.8).
Следовательно, процесс распознавания сводится к разделению
пространства признаков (диапазонов значений параметров) на об-
ласти (подпространства). Границы областей устанавливают исходя
из выбранного критерия принятия решения, при этом допускают-
ся ошибки первого и второго рода.
Естественно, надо разделить области так, чтобы полная вероят-
ность ошибок по всем классам (типам РЛС) была минимальной,
т. е.
Рош = Р(1)Р(*1)+ Л2)Л*2)+...+ЛдЛ*0=>тт .
Здесь P(i) — априорная вероятность приема сигнала /-й РЛС;
Р(*0 — условная вероятность того, что при наличии на
входе системы распознавания /-й РЛС принима-
ется решение в пользуj-й РЛС.
Критерий, который обеспечивает минимум полной вероятно-
сти ошибок, называется критерием идеального наблюдения или кри-
терием Котельникова.
Так как параметры сигналов Xi,X2, измеряются отдель-
ными анализаторами и практически независимы, то многомерную
условную плотность распределения вероятностей 1У(х[,Х2,хз,...,
x^/Sd можно представить в виде произведения одномерных плот-
ностей вероятностей:
fV(xh х2, .... xN/S,) = 1И/(х1)И^’(х2),..., W(xN)/S^.
Тогда
L _ Ж(х„х2„..,х,/52) _ [W^W^y...,W{xH)IS2] >.
ГГ(х„ х2,...,хА,/5,) [FK(x;)»r(x;)j...,H/(x;)/5,]<‘'
239
Здесь Xi* и Х2* конкретные, измеренные значения параметров,
а ИХ xi*/5i) и W(x\ /Si) ~ условные плотности вероятности при-
знаков для первой и второй РЛС.
На практике часто возникают задачи, когда недостаточно взять
отношение плотностей вероятностей в точках распределений, рав-
ных измеренным значениям параметров, и принять наиболее
правдоподобное решение, а важно знать, насколько вероятность
принятия решения в пользу одной РЛС больше, чем в пользу дру-
гих.
Чтобы определить, с какой вероятностью перепутываются рас-
познаваемые РЛС по данному параметру или группе параметров,
необходимо воспользоваться формулой Байеса. Апостериорная
вероятность распознавания РЛС z-го типа
p(/w(x7A
Л,(0= - 5 - (12.9)
7=1
где P(i) P(j) — априорные вероятности появления сигналов РЛС
/-го,у-го типов на входе станции РТР;
М — число типов РЛС, среди которых производится
распознавание.
12.8. АСПЕКТЫ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ
РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ
Среди множества аспектов общей проблемы повышения ин-
формационного обеспечения радиотехнической разведки в пер-
вую очередь необходимо выделить три: информационный, опера-
ционный и организационный.
Информационный аспект проблемы включает изучение физи-
ческой природы признаков, их выделение, отбор по информаци-
онности, ранжировку, создание базы данных, а в последующем —
и базы знаний.
Операционный аспект включает синтез алгоритмов распознава-
ния по основным и косвенным признакам, по тонкой структуре
импульсов и функциям изменения параметров, по статическим
характеристикам изменяющихся параметров от импульса к импу-
льсу.
Организационный аспект включает все виды селекции: по про-
странственным характеристикам, по параметрам сигналов, орга-
низацию поиска сигналов в пространстве и частотном диапазоне,
измерение параметров и анализ сигналов, организацию радиотех-
нической пеленгации и определение местоположения источников
радиосигналов. Улучшение каждой составляющей любого аспекта
проблемы должно быть направлено на повышение эффективности
радиотехнической разведки.
Основой информационного аспекта является выделение при-
знаков. Задача выделения признаков заключается в уменьшении
240
размерности вектора входных параметров при одновременном на-
хождении такой системы координат, в которой типы или экземп-
ляры РЛС разделяются наилучшим образом. Уменьшение размер-
ности имеет большое значение при распознавании сигналов в
сложном радиолокационном поле по следующим причинам:
во-первых, уменьшается объем вычислений, тем самым увеличи-
вается пропускная способность станции РТР; во-вторых, сокра-
щается аппаратура анализа сигналов; в-третьих, увеличение числа
признаков не всегда приводит к увеличению достоверности распо-
знавания. Исследования, проведенные автором, показали, что су-
ществует оптимальное число признаков, при котором вероятность
распознавания является наилучшей.
Снижение вероятности распознавания при увеличении числа
признаков объясняется суммарным возрастанием ошибок 1-го и
2-го рода.
13. ПРИНЦИПЫ ПОСТРОЕНИЯ УСТРОЙСТВ
РАСПОЗНАВАНИЯ РАДИОТЕХНИЧЕСКИХ
СРЕДСТВ ПО ТОНКОЙ СТРУКТУРЕ СИГНАЛОВ
13.1. ОСНОВНЫЕ ПРЕДПОСЫЛКИ НАЛИЧИЯ
ИНДИВИДУАЛЬНЫХ РАЗВЕДЫВАТЕЛЬНЫХ ПРИЗНАКОВ,
ЗАКЛЮЧЕННЫХ В ТОНКОЙ СТРУКТУРЕ СИГНАЛОВ
Основные параметры сигналов не обеспечивают заданной ве-
роятности индивидуального опознавания и идентификации ис-
точников радиоизлучений. Следовательно, не могут быть вскрыты
количественные и пространственные признаки разведуемой сис-
темы. Кроме того, необходимо учитывать, что в процессе совер-
шенствования технологии изготовления радиоэлектронной аппа-
ратуры, а также вследствие принятия противником специальных
мер повышения скрытности работы РЛС эти параметры как разве-
дывательные признаки могут потерять информационную способ-
ность. Поэтому необходимо изыскание новой системы индивиду-
альных признаков на основе детального анализа тонкой структуры
характеристик отклонений параметров, присущих определенному
классу или типу сигналов. Структуру сигналов, которая выявляет-
ся только в результате детального анализа, будем называть тонкой
структурой.
Применительно к сигналам без внутриимпульсной модуляции
к параметрам тонкой структуры могут быть отнесены:
форма импульса Л (г);
форма диаграммы направленности и структура ее боковых ле-
пестков Г(р,£);
закон изменения частоты в импульсеУ(т) и от импульса к импу-
льсу Г(г+7});
огибающая амплитудно-частотного спектра сигнала Дсо) и дру-
гие параметры.
Среди параметров тонкой структуры сигналов для анализа дол-
жны быть отобраны такие, которые присущи широкому классу
РЛС с различными принципами построения передающих
устройств и обладают устойчивостью во времени и в пространстве.
Для обоснования системы индивидуальных признаков необхо-
димо:
определить основные предпосылки наличия индивидуальных
разведывательных признаков в сигналах РЛС;
242
разработать оптимальные или близкие к оптимальным алгорит-
мы разделения структурноподобных сигналов;
исследовать наличие индивидуальных разведывательных при-
знаков в сигналах реальных РЛС и оценить их устойчивость;
исследовать информативность каждого параметра, сформули-
ровать и обосновать систему разведывательных признаков;
рассмотреть возможность технической реализации методов ин-
дивидуальных распознаваний.
В общем случае импульсный сигнал РЛС в разведывательном
устройстве (без учета влияния помех) можно представить в виде
U(t, 7]) = A(t + Т,)sin со0/ + со(/)Л + Фо ,
где Tj — период повторения импульсов РЛС;
A(t) — огибающая высокочастотного импульса;
«о — круговая несущая частота;
ти— длительность импульса РЛС;
со(^ — закон изменения частоты за время импульса;
Фо ~ начальная фаза сигнала.
Тонкую структуру сигналов характеризуют параметры A(t), а
также огибающая серии импульсов на входе станции РТР 2?(/), ко-
торая представляет тонкую структуру диаграмм направленности
F(p,e), и огибающая спектра высокочастотного сигнала, которая,
по существу, является обобщенной частотной характеристикой
A(t) и <o(t). Кратко рассмотрим физическую природу параметров
тонкой структуры. Форма огибающей высокочастотного импульса
Я(/) для каждого класса РЛС выбирается из условия обеспечения
заданной разрешающей способности по дальности, вида угловой
модуляции, требований спектрального состава зондирующего сиг-
нала. Размещение РЛС на различных позициях, носителях, инди-
видуальные особенности работы станций придают специфиче-
скую окраску форме излучаемого импульса. Параметр со(/) харак-
теризует форму ухода частоты сигнала за время импульса. В случае
работы радиолокационной станции без частотной и фазовой мо-
дуляции сигнала девиация сс(О вызвана паразитными явлениями,
происходящими в генераторах СВЧ. Огибающая серии импульсов
на входе аппаратуры анализа B(t) характеризует тонкую структуру
диаграмм направленности антенны РЛС и определяется методом
сканирования, позицией РЛС, структурой высокочастотных эле-
ментов диаграмм направленности и рядом других факторов.
Тонкая структура диаграмм направленности антенн двух РЛС
одного и того же класса, одного и того же диапазона, помещенных
в одинаковые условия, будет различной. У каждой из диаграмм
направленности отмечаются характерные особенности, которые в
результате анализа могут с высокой вероятностью определять при-
надлежность каждого сигнала к своей радиолокационной стан-
ции.
243
Закон изменения частоты в импульсе со(г) определяется видом
модуляции сигнала, требованиями к стабильности частоты РЛС,
характером элементной базы систем селекции движения целей.
Например, для радиолокационных станций, использующих коге-
рентно-импульсный метод селекции движущихся целей с черезпе-<
риодной компенсацией, максимально допустимый уход частоты
А/-за период следования импульсов не должен превышать некото-
рую величину:
15 10'°
2я9* 1 - ехр —
е
где 0“ — постоянная времени модулирующего импульса;
кп — коэффициент подавления сигналов от неподвижных
объектов.
Теоретические и экспериментальные исследования, проведенные
на базе отечественных и зарубежных РЛС, показывают, что уход
несущей частоты станции за время импульса А/а= 25 ... 125 кГц и
от импульса к импульсу д£= 20 ... 40 кГц.
Внешние дестабилизирующие факторы, действующие в тече-
ние времени, соизмеримы с периодом повторения зондирующих
импульсов РЛС, могут быть сведены к минимуму путем стабили-
зации источников питания, выбора системы охлаждения. Однако,
как показывают экспериментальные исследования, технические
возможности ограничены пределами 50 ... 60 кГц.
Уходы несущей частоты радиолокационной станции связаны с
внутренними процессами, происходящими в самом генераторе
СВЧ, и поэтому трудно поддаются стабилизации. Влияние различ-
ных факторов на дестабилизирующие явления в передатчиках
СВЧ подробно исследованы в ряде работ, которые свидетельству-
ют о наличии индивидуальных разведывательных признаков, за-
ключенных в форме закона изменения частоты в импульсе.
Спектральные характеристики сигнала также могут быть испо-
льзованы в качестве параметров индивидуального опознавания.
При синтезе оптимальных измерителей и оптимальных фильтров
предполагают, что спектр сигнала достаточно строго описывается
детерминированной функцией 5(со). На практике в силу ряда при-
чин спектр сигнала может существенно отличаться от описывае-
мой его гипотетической функции. Причем несовершенство фор-
мирования спектров сигнала может служить не только предпосыл-
кой, но и убедительным основанием для использования тонкой
структуры огибающей спектров в качестве индивидуальных разве-
дывательных признаков.
Таким образом, сигналы каждой РЛС имеют характерный от-
печаток, индивидуальный разведывательный признак. Анализ
тонкой структуры сигналов позволяет не только повысить досто-
верность результатов анализа, но и решить ряд принципиально
новых практических задач радиотехнической разведки, таких, как:
244
определение количественного состава РЛС в зоне радиотехни-
ческой разведки;
выявление перемещения источников разведки на ТВД;
определение и выявление характерных режимов РЛС и объек-
тов радиотехнической разведки;
селекция сигналов однотипных РЛС на фоне потока мешаю-
щих излучений;
индивидуальное опознавание РЛС при преднамеренном изме-
нении параметров в широких пределах.
13.2. СИНТЕЗ ОПТИМАЛЬНЫХ АЛГОРИТМОВ СЕЛЕКЦИИ
И РАСПОЗНАВАНИЯ СИГНАЛОВ ПО ТОНКОЙ СТРУКТУРЕ
В общем случае при ведении радиотехнической разведки число
сигналов в момент разведки неизвестно. Решение задачи много-
сигнального анализа в общем виде вызывает непреодолимые труд-
ности, а в практическом приложении — еще сложнее. Поэтому це-
лесообразно сначала рассмотреть попарное разделение сигналов.
В этом случае в качестве математического аппарата разделения
может быть использована теория статических решений.
Таким образом, при синтезе оптимальных алгоритмов разделе-
ния и опознавания РЛС по тонкой структуре сигналов ограничим-
ся двухальтернативной гипотезой. Разделение нескольких сигна-
лов не вносит принципиальной разницы в оптимизацию обработ-
ки. Вследствие измерения параметров тонкой структуры импульса
получим /V-мерный вектор признаков. При воздействии помех
значения признаков случайны и распределяются по некоторому
статическому закону.
Примем для класса А вектор признаков х с плотностью fA (х), а
для класса В — вектор признаков хс плотностью /й(х). Известно,
что все оптимальные алгоритмы в качестве необходимой операции
над принятым сигналом включают формирование коэффициента
правдоподобия
л = Ж
Л(*)
Рассмотрим случай классификации процесса x(t), который яв-
ляется суммой случайного процесса n(t) и одного из сигналов 5^(0
или Srfj). Реализация процесса x(t) наблюдается на непрерывном
интервале 0 ... Г, в конце которого принимается решение о харак-
тере сигнала.
Разложим принятый сигнал по системе собственных функций
уравнения
где R(t.) — корреляционная функция шума.
Тогда коэффициенты разложения входного сигнала
245
xk = forXOw*(O^ |
являются некоррелированными величинами. Используя ограни-'
ценное число членов разложения, коэффициент правдоподобия^
можно представить в виде
^SAK ~^Вк}Хк ~^АК + ВК ‘
20к
Л(х) = ехр
а разделяющую функцию можно записать следующим образом:
2(*^ЛК S ВК SAK + SBI(
F(x)=£
к=1
20к
Если п устремить к бесконечности, то
ф(0] =£г«('М0Л^А‘)5лш -/ог«„(О$в(0Л
причем функции g(t), gA(t) и g^t) определены соответствующими
интегральными представлениями;
5л(0-тХтХт-
От входной реализации процесса x(t) зависит первый интеграл,
поэтому разделяющую поверхность можно представить в более
простом виде:
4X0] = £’ *(0X0 <* + # = о-
Реализацию этого алгоритма можно осуществить двумя спосо-
бами. Первый заключается в следующем: с помощью специально-
го генератора формы генерируется сигнал g(f), который перемно-
жается с принимаемой реализацией x(f), интегрируется и сравни-
вается с порогом. Второй способ — фильтровая обработка. На
практике в системах радиотехнической разведки выполняется
условие АД, > —.
^кор
Следовательно, можно считать, что шумы в момент приема им-
пульсов от разных РЛС будут некоррелированными, а дисперсия
шумов — постоянна. В этом случае коэффициент правдоподобия
определяется мерой близости между входной реализацией процес-
са x(t) и каждым из эталонных сигналов:
246
еТ
глв = /о [Х(^ ~ $АВ (0]
Решающее правило будет состоять в следующем:
. т ,т 2
/о МО - (')] dt - £ МО - 5« (0] 40е А-
.т 2 .г 2
L МО - (0] dt > Jo [х(0 - ss (/)] Л, x(t) <= В.
Однако формы сигналов при ведении радиотехнической раз-
ведки систем противника могут быть известны только в исключи-
тельных случаях. Следовательно, эталонный сигнал должен фор-
мироваться непосредственно в процессе разведки, т. е. должна
осуществляться взаимная корреляция между приходящими сигна-
лами.
При решении задачи многосигнального анализа входная смесь
x(f) содержит п импульсных сигналов, в общем случае принадле-
жащих различным источникам разведывательных сведений:
*(0 = Е ’U ('» ) ехР(М 0] + 44
1=1
где 0/ — случайные коэффициенты, вектор которых можно охарак-
теризовать корреляционной матрицей, зависящей от па-
раметров сигналов:
-В®'-6')-
Детерминированная модуляция £/(/, X) для всех сигналов оди-
накова, если исключить различия в тонкой структуре, которую
обозначим А.(/), т. е. предполагается, что производится анализ сиг-
налов однотипных РЛС.
Как и в случае с двумя сигналами, в качестве критерия оптима-
льности многосигнального разделения можно принять коэффици-
ент (отношение) правдоподобия.
Анализ многосигнального коэффициента правдоподобия явля-
ется сложной математической задачей. Однако независимо от ха-
рактера связей между параметрами тонкой структуры сигналов, их
природы и степени корреляции между флуктуациями отдельных
сигналов, особенностей функции неопределенности сигналов ц/(Л.),
соотношения уровней отдельных сигналов на фоне «белого» шума
элементарной операцией, на которой основан оператор коэффици-
ента .правдоподобия структурноподобных сигналов, является на-
хождение корреляционных интегралов, сформированных для всех
ожидаемых форм излучений. Таким образом, нахождение корреля-
ционных интегралов — это оптимальная процедура не только при
247
обнаружении сигналов, но и в случае многосигнального анализа
тонкой структуры сигналов при радиотехнической разведке.
Итак, процедура оптимального индивидуального распознава-
ния сводится к нахождению коэффициентов взаимной корреля-
ции или функций корреляции между приходящим сигналом и эта-
лонами, заложенными в память устройства. Несмотря на оптима-
льность процедуры, в ряде случаев она может оказаться
малоэффективной. Покажем это на следующем примере. За счет
несовершенного формирования ЛЧМ-радиоимпульса у РЛС даль-
него обнаружения США образовался устойчивый выброс (нели-
нейное изменение частоты) в центре сигнала. В излучении другой
РЛС такого выброса нет. Как в этом случае производит распозна-
вание умелый оператор? Он основное внимание сосредоточивает
на этом выбросе, т. е. как бы придает ему определенный вес —
производит весовую обработку. Надежность распознавания при
этом близка к единице.
При нахождении взаимно корреляционных функций по всей
реализации за счет усреднения по выборке результат сгладится и
данные сигналы будут распознаваться менее уверенно. Поэтому
при разработке устройств оптимального распознавания следует
учитывать возможность весовой обработки.
Информация об индивидуальных различиях может быть заклю-
чена в переднем фронте импульса, или в заднем фронте, или толь-
ко в его вершине; следовательно, нужно сравнивать только эти ча-
сти импульса. В настоящее время эту задачу можно решить лишь с
помощью оператора. Машинного алгоритма выбора информатив-
ного участка пока нет — не разработана достаточно обоснованная
теория решения этого вопроса.
Рассмотрим некоторые пути решения задач индивидуального
распознавания. В большинстве случаев при радиотехнической
разведке форма импульса или форма уходов частоты априорно не-
известна. Следовательно, необходимо создать взаимно корреляци-
онные вычислители на все ожидаемые формы сигналов. Очевид-
но, что при таком методе селекции, тем более в случае индивидуа-
льного опознавания РЛС, число фильтров, поставленных в
соответствие условному номеру РЛС, будет зависеть от соотноше-
ния сигнал/шум и свойств принимаемых сигналов. Поскольку
формы огибающих радиоимпульсов являются случайными функ-
циями и зависят от многих параметров передатчика и режимов ра-
боты РЛС, учет всех возможных вариантов функции Х(г) приведет
к недопустимо большому объему вычислений. Их число может
быть сокращено, если вместо функции А. (Г) использовать их оцен-
ки Л.(Г), получаемые в процессе радиотехнической разведки. В этом
случае в канал вычисления необходимо добавить устройство запо-
минания и логическое устройство управления памятью (рис. 13.1).
Рассмотрим работу такого устройства при поступлении на его
вход последовательно сигналов U^t), ..., UK(t), принадлежа-
щих различным РЛС и имеющих законы изменения огибающих
Х.,(/), А.2(г),...,ХДг). Этапное описание первой РЛС с помощью
248
устройства управления памятью заносится в память свободного
канала (например, первого). Аналогичные операции производятся
с сигналами других РЛС. В результате в памяти каналов форми-
руются эталонные описания \ (z = 1,2,...,&) всех РЛС. При поступ-
лении на вход устройства сигнала неизвестной РЛС он подается
одновременно на вычислители всех к каналов. Решение о номере
(экземпляре) РЛС принимается путем выбора канала, где значе-
ние коэффициента взаимной корреляции максимально.
Рис. 13.1. Алгоритм обработки сигналов при распознавании
по форме огибающей
249
Схему (рис. 13.1) можно упростить, если на ее вход подавать,
сигналы равных энергий. В этом случае достаточно на выходе,,
каждого канала установить фиксированный порог, определяемый
статистическими свойствами сигналов и помех. Влияние шумов
делает необходимым установку резервных каналов для выяснения
спорных ситуаций.
Один канал устройства разделения сигналов А. (г) представляет
собой самонастраивающийся фильтр, импульсная характеристика
которого изменяется в соответствии с приходящим сигналом. Для
сравнения сигналов с различными энергиями, а также для исклю-
чения постоянной составляющей импульсы, поступающие на са-
монастраивающиеся фильтры, необходимо подвергнуть преобра-
зованиям — центрированию и нормированию по энергии. В этом
случае на выходе самонастраивающегося фильтра получаем от-
клик в следующем виде:
^1.2 = |0 (0^2 0 ~ Т)^’
; 4(0+ «.(0
^о'[х-(О + ««(О] dl
где к =1 или 2 — нормированный по энергии сигнал.
Подчеркнем, что рассмотренный алгоритм обработки будет оп-
тимален только в случае нормированных по энергии сигналов.
Если такого нормирования нет, то алгоритм неоптимален и ошиб-
ки в распознавании и селекции превысят допустимые пределы.
Решение о принадлежности сигналов к k-й РЛС принимается
или по максимуму функции корреляции между опорными колеба-
ниями k(f) и входным колебанием х(г), или по результатам сравне-
ния максимума функции корреляции с порогом Н. Рассмотрим
необходимость нормирования сигналов на примере распознава-
ния РЛС по форме импульса. Функции взаимной корреляции
между огибающими импульсных сигналов описываются выраже-
ниями:
лп(т) = {0€°А(^1(/ -т)^ =Л2гн(т);
•Кк(т) - ty* =ABKriK(r).
Сдвиг максимумов функций 7?//(т) и Т?7к(т) не учитывался, по-
скольку при селекции и распознавании этот параметр не имеет су-
щественного значения. Здесь важно выполнение условия
Яи(т) / гл
V ДЛЯ ЛК)б°Г0 номера сигнала к. Отношение
R Гт) /
/\<1 во всех случаях, если Л/Хт) и Я/^т) описываютто-
/Я1ДТ)
лько форму сигналов и не связаны с их энергией. Если сигнал не
нормирован по энергии, то это условие может не выполняться.
250
Пусть сигнал прямоугольной формы отнормирован только по ам-
плитуде:
(О
К(')
(1 при 0 </ < тс1;
1 О при 0 > t > тс1;
Г1 при 0 < Г < т •
(О при 0 > t > тск.
Если тск>тс1, XK(t)=Ii(t)+AX(t),
дл(/) =
Дпри тс1
(О при тс1
— — ^ск >
> I > ^ск ’
то
Пк(х)=ги + -т)
Но интеграл в правой части для максимума rllc не отрицатель-
ный, следовательно,
Г11(Т)тах < ।
Амплитуда мешающего сигнала тоже может оказаться больше
амплитуды полезного сигнала. В этом случае решение о принад-
лежности сигналов к конкретному экземпляру может быть оши-
бочным. Иными словами, если селектируемые сигналы будут от-
личаться по амплитуде или по длительности, то максимум функ-
ции взаимной корреляции может превысить максимум функции
автокорреляции анализируемого сигнала и решение о принадлеж-
ности сигналов к тому или иному классу РЛС будет ошибочным.
Для того чтобы использовать форму сигнала как разведыватель-
ный признак, необходимо или предварительно произвести норми-
ровку по энергии, или использовать многопороговую схему срав-
нения. Сказанное относительно нормировки сигнала по энергии
справедливо и в случае распознавания по другим индивидуальным
разведывательным признакам: со (г), 5(со), B(t) и т. д.
Выше было показано, что параметрами тонкой структуры явля-
ются: форма импульса, уход частоты в импульсе, тонкая структура
огибающей спектра сигнала, тонкая структура боковых лепестков
диаграммы направленности. Рассмотрим последовательно воз-
можность их использования в системах радиотехнической развед-
ки в качестве индивидуальных разведывательных признаков при-
надлежности сигналов к конкретным РЛС.
13.3. ХАРАКТЕРИСТИКИ ОСНОВНЫХ ПАРАМЕТРОВ
ТОНКОЙ СТРУКТУРЫ СИГНАЛОВ
Сигналы, распространяющиеся в реальной среде от РЛС до си-
стемы анализа, претерпевают некоторые искажения, вызванные
различными условиями распространения радиоволн. Чтобы выра-
ботать единый подход к оценке информативности параметров
251
тонкой структуры сигнала, воспользуемся энергетическим крите-
рием, который показывает общее изменение формы принятого
сигнала от формы переданного по значению среднего квадратиче-
ского отклонения. Под формой сигнала можно понимать не толь-
ко огибающую импульса, но и со(/) — закон изменения частоты и
др. Поскольку при ведении радиотехнической разведки форма пе-
редаваемого сигнала неизвестна, то в качестве эталона использу-
ется сигнал, принятый в условиях прямой видимости при больших
отношениях сигнал/шум.
Обозначим форму сигнала, принятого в условиях прямой види-
мости, в виде Ф^Г), и пусть искаженная форма этого сигнала, при-
нятого при дальностях, превышающих дальность прямой видимо-
сти £р>Дггв > будет Ф2((). Для уменьшения влияния амплитуды
сигнала форма импульса представляется в нормированном виде
по энергии:
А (0^(0
^П[А(') + yv(0]!</z
где Л0(г) — неслучайная составляющая импульсного сигнала,
обусловленная индивидуальными свойствами моду-
ляторов РЛС;
— случайная составляющая помехи.
Сложение помехи и сигнала происходит аддитивно. Согласно
выбранному критерию средняя квадратическая погрешность од-
ной формы импульсов относительно другой может быть найдена
из выражения
2
“U =ЦФ'(')-фг(')] dl-
Определение этой величины сводится к нахождению функций
взаимной корреляции между двумя импульсами с формой Ф,(Г) и
Ф2(0:
а12 = 2 1 -]’“Ф,(/)Ф2(/ -x)dt .
Для нахождения количественной меры искажений импульсов
были статически обработаны записи фотоосциллограмм сигналов
радиолокационных станций США, принятых на морских и при-
земных трассах радиотехнической разведки с различных дально-
стей, а также с фиксированных дальностей при различных отно-
шениях сигнал/шум. Экспериментальные исследования показали,
что при ведении разведки в условиях прямой видимости огибаю-
щая импульсов сохраняется в течение всего практического време-
ни. Под практическим временем разведки понимают время, отводи-
мое на фронтовую или армейскую операцию, или время, отводи-
мое конкретным заданием на разведку. Форма импульса при
ведении дальней радиотехнической разведки может существенно
искажаться за счет дальнего тропосферного распространения ра-
252
диоволн. Следовательно, ее можно считать устойчивой во времени
и пространстве только в пределах дальности прямой видимости. В
случае дальней тропосферной разведки форма импульса предва-
рительно должна подвергаться статической обработке (накопле-
нию и усреднению).
Устойчивость формы сигналов во времени и пространстве по-
зволяет сделать вывод о целесообразности ее использования как
разведывательного признака при опознавании и селекции сигна-
лов однотипных РЛС. Эффективность разделения сигналов зави-
сит как от наличия индивидуальных различий в форме огибающей
импульса РЛС, так и от оптимальности выбора порога сравнения
при различном отношении сигнал/шум.
Для выбора оптимального порога сравнения целесообразно ис-
ходить из критерия минимума полной вероятности ошибки разде-
ления сигналов:
А.,* = Р(1)Р(* 1)+...+/>(;)/>(* о,
где Р(Г) — априорная вероятность появления сигналов РЛС с
формой Ф1 (г);
Р(* /) — условная вероятность того, что при наличии на входе
станции РТР сигнала с формой ФД/) принимается
решение о наличии сигнала с формой Ф/t).
На рис. 13.2 приведена экспериментальная зависимость полной
вероятности ошибки разделения сигналов по огибающей импуль-
сов от значения порога сравнения Н для наземных, самолетных и
корабельных РЛС. Огибающая импульсов является статическим
устойчивым параметром на приземных трассах и приморских на-
правлениях только в пределах прямой видимости.
Рис. 13.2. Зависимость полной вероятности ошибки
от величины порога
253
При приеме сигналов за счет дальнего тропосферного распрей
странения (ДТР) радиоволн форма импульса может существен^
изменяться и данный признак оказывается неустойчивым. Болы
шинство РЛС по форме импульса отличаются друг от друга и мо-
гут быть разделены с вероятностью, близкой к единице, но толькс
при большом отношении сигнал/шум и при обеспечении прямой
видимости.
Форма импульса является наиболее общим параметром, в кото-
ром заложены индивидуальные признаки принадлежности сигна-
лов к конкретному образцу РЛС. Поэтому устройство, осуществ-
ляющее распознавание по форме импульса, использует различия
автокорреляционных и взаимно корреляционных функций. Сле-
довательно, является оптимальным и обладает наибольшей поме-
хоустойчивостью. Любое другое устройство, распознающее сигна-
лы только по временным параметрам (7), ти), обладает более низ-
кой способностью определять конкретные образцы РЛС. Однако
при построении устройств анализа по тонкой структуре формы
импульса следует учитывать жесткие требования к неискаженному
приему в условиях обеспечения динамического диапазона
60...70 дБ, что не всегда выполнимо на практике.
Особую актуальность приобретает борьба с искажениями сигна-
лов при ведении радиотехнической разведки с больших разведыва-
тельных кораблей. Палубные надстройки переотражают мощные
сигналы РЛС, которые складываются с прямыми сигналами, вызы-
вая искажения. В качестве мер борьбы с искажениями желательно
применять высоконаправленные антенны, поднятые над палубны-
ми надстройками корабля или вынесенные за его пределы. Кроме
того, если станция РТР работает в режиме целеуказания ракетным
средствам для уничтожения объектов разведки, т. е. используется в
составе разведывательных ударных комплексов, вероятность инди-
видуального опознавания по одному параметру является недоста-
точной. Поэтому имеет смысл использовать совокупность парамет-
ров, обеспечивающих суммарную вероятность не ниже заданной.
Уход частоты в импульсе обладает исключительной неповтори-
мостью и может быть использован в качестве индивидуального
признака принадлежности сигналов к конкретным РЛС. Наличие
существенных различий в законах изменения частоты наблюдается
практически у всех РЛС постов ПВО, корабельных и самолетных
РЛС. В качестве примера в табл. 13.1 приведены эксперименталь-
ные результаты средней вероятности индивидуального распознава-
ния различных типов РЛС по уходу частоты за время импульса.
Как было показано, уход частоты передатчика за время импуль-
са составляет десятки килогерц при ширине спектра сигнала, рав-
ной единицам мегагерц. Для выделения закона изменения часто-
ты частотный дискриминатор должен быть узкополосным с боль-
шой крутизной характеристики, а для сохранения свойств сигнала
весь тракт должен быть широкополосным. Это противоречие
ограничивает практическое применение метода. Кроме того, вы-
деление ухода частоты в импульсе требует очень точной настройки
254
частоты сигнала на частоту дискриминатора. Эта задача решается
ja счет применения многоступенчатых частотных детекторов.
Сначала сигнал во всей полосе УПЧ обнаруживается и анализиру-
ется с помощью широкополосных дискриминаторов, уточняется
его положение на частотной оси, а затем подстройкой приемника
сигнал вводится в полосу узкополосного частотного детектора.
Таблица 13.1
Тип РЛС Число РЛС в эксперименте Средняя вероятность распознавания
AN/MPQ - 35 46 0,86
AN/MPQ - 120 24 0,91
AN/FPS - 20 12 0,95
AN/FPS - 100 8 0,92
AN/FPS - 10 62 0,94
AN/FPS - 36 4 0,88
GS/I - 17449 4 0,92
AN/SPS - 37 8 0,90
Особенно важным для радиотехнической разведки является
устойчивость данного разведывательного признака при измене-
нии углового положения передающей антенны. Это условие необ-
ходимо при идентификации сигналов, принятых с нескольких то-
чек (при синхронном и асинхронном пеленговании). В пределах
сектора РТР (рр= 150°) закон изменения частоты нарушается не-
значительно: например, коэффициент взаимной корреляции меж-
ду сигналами, принятыми на краях сектора разведки, не уменьша-
ется ниже 0,85, что позволяет считать данный разведывательный
признак достаточно устойчивым в пространстве.
В принятых сериях импульсов заложена информация не только
о методах обзора пространства и режимах работы РЛС, но и о тон-
кой структуре диаграмм направленности. Эта информация сообща-
ет об индивидуальных особенностях каждой РЛС, поэтому она
может быть использована для индивидуального опознавания стан-
ций, привязки их к конкретным позициям, наблюдения за пере-
мещающимися объектами разведки. До настоящего времени рас-
познавание РЛС по диаграммам направленности осуществляется
путем регистрации серии импульсов и визуального анализа. Реги-
страция серии импульсов, отражающих тонкую структуру диа-
грамм направленности, должна удовлетворять определенным тре-
бованиям, а именно:
должны отсутствовать искажения формы серии импульсов в
широком динамическом диапазоне входных сигналов;
форма и структура серии импульсов не должны зависеть от ре-
жима работы РЛС и изменения параметров сигнала;
255
при визуальном распознавании РЛС должна обеспечиваться
наглядность представления серий импульсов; (
для удобства обработки и сравнения серий импульсов они дол-
жны быть отнормированы как по амплитуде, так и по времени.
Используемый в радиотехнической разведке метод регистра-
ции с помощью шлейфового осциллографа не удовлетворяет пере-
численным требованиям по наглядности представления и норми-
рования. Поэтому рассмотрим метод регистрации структуры диа-
граммы направленности, основанный на синхронном вращении
развертки индикатора станции радиотехнической разведки с ан-
тенной разведываемой РЛС.
Сущность метода заключается в следующем. Антенна станции
РТР неподвижна и направлена на разведуемую РЛС. Отклоняю-
щая система индикатора кругового обзора (ИКО) станции РТР
вращается синхронно и синфазно с антенной РЛС противника. На
отклоняющие катушки индикатора подается сигнал с амплитудно-
го детектора, вызывая отклонение луча от центра к периферии.
Отклонение луча пропорционально амплитуде сигнала. Уровень
сигнала на входе приемного устройства станции радиотехниче-
ской разведки зависит от углового положения антенн РЛС про-
тивника. Так как отклоняющая система вращается синхронно с
антенной РЛС противника, то на индикаторе кругового обзора бу-
дет автоматически выписываться форма диаграмм направленно-
сти в полярной системе координат, чем обеспечивается нагляд-
ность ее представления. Существенные различия заключаются в
ширине боковых лепестков и расстановке их относительно глав-
ного. Поэтому нет необходимости обрабатывать всю диаграмму
направленности, достаточно определить /у и др, для двух-трех бли-
жайших боковых лепестков (рис. 13.3).
Рис. 13.3. Форма диаграммы направленности в координатах уровень - время
Распределение эмпирических коэффициентов корреляции и
автокорреляции отражает степень различия тонкой структуры
диаграммы направленности.
Однако степень различия признаков не является достаточным
основанием для эффективного индивидуального опознавания.
Для этого нужно дополнительное условие устойчивости призна-
ков во времени и в пространстве.
256
Устойчивость структуры диаграммы направленности наиболее
распространенных классов наземных, самолетных и корабельных
РЛС показана в табл. 13.2.
Таблица 13.2
1 Тип РЛС Средний коэффициент корреляции
в момент приема через I ч через i сут через 30 сут при при О>60°
1 AN/FPS-100 0,94 0,91 0,91 0,90 0,84 0,92
i AN/FPS-20 0,97 0,92 0,92 0,86 0,91 0,95
AN/MPQ-35 0,95 0,95 0,94 0,94 0,92 0,86
AMES-80 0,93 0,94 0,93 0,92 0,90 0,93
I N-35 0,97 0,97 0,95 0,93 0,81 0,92
; AN/S PS-40 0,94 0,34 0,76 — — —
AN/SPS-52 0,99 0,32 0,42 — — —
AN/MPQ-120 0,91 0,42 0,90 0,36 — —
AN/SPS-10 0,92 0,51 0,24 0,44 — —
AN/S PS-30 0,98 0,95 0,94 0,94 0,92 0,86
AN/FPS-16 0,94 0,92 0,91 0,91 0,76 0,89
N/MPDR 0,92 0,92 0,92 0,91 0,89 0,74
GC-17440 0,98 0,98 0,96 0,96 0,94 0,95
AN/FPS-8 0,88 0,92 0,80 0,84 0,85 0,78
ALTAIR 0,96 0,96 0,94 0,92 0,94 0,90
TPADEX 0,98 0,96 0,96 0,95 0,91 0,84
MSR 0,34 0,27 0,18 0,21 0,30 —
Из таблицы видно, что наземные радиолокационные станции
постов ПВО на ТВД, РЛС целеуказания зенитным ракетным ком-
плексам, а также РЛС обеспечения ракетно-космических полиго-
нов, использующие нефазированные антенные системы, имеют
достаточно устойчивую структуру диаграмм направленности в те-
чение длительного времени. Однако диаграммы направленности
РЛС с фазированной антенной решеткой и с программным управ-
лением имеют более низкую информационную способность. Даже
с помощью методов статистической обработки трудно, а порой и
невозможно выяснить скрытую периодичность обзора.
Структура боковых лепестков диаграмм направленности кора-
бельных РЛС вследствие качки корабля, влияния палубных над-
строек, различным образом ориентированных относительно стан-
ции РТР, влияния береговой черты при нахождении кораблей в
портах, на рейдах и в узкостях может оказаться неустойчивой даже
от обзора к обзору. Поэтому при разведке корабельных РЛС нуж-
ны специальные меры по стабильности приема сигналов и специ-
альные методы обработки.
257
По диаграммам направленности корабельных РЛС имеется
возможность определить класс РЛС даже при установке на них одя
нотипных станций. Например, диаграммы направленности анЦ|
тенн РЛС, установленных на авианосцах, имеют более равномер-
ный уровень боковых лепестков, чем на фрегатах управляемого
ракетного оружия, эсминцах, спасательных кораблях.
Структура диаграммы направленности самолетных и корабель-г
ных РЛС зависит от ракурса полета самолета или курса корабля. В
направлении фюзеляжа самолета (палубы) наблюдается более вы-
сокий уровень боковых лепестков, что позволяет определять курс
полета самолета (курс корабля) относительно станции радиотех-
нической разведки (рис. 13.4).
Рис. 13.4. Структура диаграммы направленности в зависимости от ракурса
полета самолета
Таким образом, по тонкой структуре диаграмм направленности
можно получать сведения об индивидуальных разведывательных
признаках принадлежности излучений к конкретным РЛС и к
конкретным объектам разведки.
Спектр сигнала является одним из важнейших его параметров.
Однако, несмотря на это, в системах РТР анализ спектральных
характеристик не нашел достаточно широкого применения. Это
объясняется тем, что последовательные спектроанализаторы вслед-
ствие кратковременности излучения и изменения параметров сиг-
налов от импульса к импульсу имеют низкую точность измерения
частотных характеристик и большие потери информации.
В связи с разработкой теоретических основ дисперсионно-вре-
менного анализа, позволяющего определить характеристики спек-
тра в реальном масштабе времени по одному импульсу, появилась
возможность его использования в системах РТР. Целесообраз-
258
ность использования того или иного вида анализа определяется
прежде всего информативностью анализируемого признака и его
устойчивостью при различных условиях ведения разведки. Для
получения информации о тонкой структуре спектра может быть
использован широкополосный дисперсионно-временной анали-
затор, в котором в целях сохранения тонкой структуры импульсов
отсутствует частотная модуляция сигнала. Импульсы с выхода
УПЧ приемника подаются непосредственно на линию задержки,
г. е. осуществляется прямой анализ спектра. Дисперсионная ли-
ния задержки преобразует спектр сигнала во временную область
таким образом, что огибающая выходного отклика ДУЛЗ соответ-
ствует огибающей спектра входного сигнала.
Как было показано в разд. 5, положение выходного импульса
на временной оси соответствует положению входного импульса на
оси частот. Это свойство можно использовать для частотной се-
лекции входных сигналов путем селекции по времени задержки,
например, стробированием выходных импульсов. Это позволяет
осуществлять индивидуальное распознавание, когда в пределах
УПЧ приемника наблюдается одновременно несколько сигналов
от различных радиолокационных станций.
Таблица 13.3
Класс РЛС Вероятность опознавания типа РЛС Средняя вероятность индивидуального опознавания по параметру
f tu f(t) •Sfa) F(b) A(t)
РЛС постов ПВО на Центра- льно-Европей- ском ТВД 0,96 0,26 0,22 0,09 0,92 0,94 0,95 0,43
РЛС целеука- зания ЗРК 0,98 0,68 0,16 0,21 0,96 0,92 0,97 0,52
РЛС обнару- жения воздуш- ных и надвод- ных целей 0,92 0,31 0,39 0,41 0,76 0,41 0,24 0,47
РЛС обеспе- чения ракетно- космических по- лигонов 1 0,16 0,29 0,41 0,84 0,94 — 0,51
Бортовые многофункцио- нальные РЛС 0,91 0,36 0,28 0,11 0,92 0,76 0,9 0,26
Область использования индивидуальных разведывательных
признаков в оперативно-тактическом смысле недостаточно иссле-
дована и изучена. Практика ведения радиотехнической разведки
показывает, что по индивидуальным признакам отдельных РЛС
удается вскрыть перемещение частей и соединений. Высокие тре-
бования результатов анализа определяются важностью сведений о
группировке войск противника, получаемых в результате анализа
тонкой структуры сигналов. К тому же, несмотря на высокую ин-
формативность некоторых параметров тонкой структуры, в инте-
ресах индивидуального распознавания целесообразно использо-
259
вать их совокупность. На основе статистических данных, получен-
ных в результате экспериментальных исследований, рассчитана
вероятность индивидуального опознавания по каждому параметру
в отдельности (табл. 13.3), что позволило определить суммарную
вероятность индивидуального опознавания по совокупности пара-
метров /?(р), Яг), 5(со)м. Для этого воспользуемся формулой
А I =£ р(А)-£ 1)+-+(->Г' л., Па л 13.D
\К=1 ) К = 1 К = 1 J=K+1
где Р(ЛГ) — вероятность опознавания по каждому параметру.
Результаты расчетов по формуле (13.1) сведены в табл. 13.4.
Таблица 13.4
Класс РЛС Вероятность опознавания по совокупности параметров
Tu,f, ъ F(t), S(e>) F(t), SM, F(b)
РЛС постов ПВО на Центрально-Ев- ропейском ТВД 0,521 0,96 0,86 1
РЛС целеуказа- ния ЗРК 0,955 0,98 1 1
РЛС обнаруже- ния воздушных и надводных целей 0,658 0,87 0,86 0,98
РЛС обеспече- ния ракетно-кос- мических полиго- нов 0,651 0,94 0,99 1
Бортовые много- функциональные РЛС 0,570 0,94 0,98 1
По данным расчетов можно сделать заключение, что для инди-
видуального опознавания РЛС с вероятностью Р = 0,95 необходи-
мо использовать два-три параметра. Их конкретный выбор опре-
деляется решаемой задачей и сложностью технической реализа-
ции. Анализ всех признаков следует производить одновременно,
убедившись в том, что они принадлежат сигналам одной РЛС. По-
этому в дальнейшем рассмотрим методы и устройства комплекс-
ного анализа сигналов.
13.4. АНАЛИЗ ТОНКОЙ СТРУКТУРЫ
СЛОЖНЫХ СИГНАЛОВ
Определим основные предпосылки наличия индивидуальных
признаков, заключенных в тонкой структуре ЛЧМ-импульсов.
При рассмотрении сложных ЛЧМ-сигналов, особенно при их ма-
тематическом описании, форма спектра принимается, как прави-
ло, строго прямоугольной. Реально при разведке радиолокацион-
ных станций армии США наблюдаются существенные отклонения
формы спектра от теоретической. Например, в спектрах сигналов
РЛС «Традекс» и MSR отчетливо выражены локальные выбросы и
впадины, т.е. плоская часть спектра имеет некоторые неровности,
260
которые в свою очередь существенно отличаются не только в раз-
личных РЛС, но даже в разных передатчиках одной станции.
Математическое описание спектров с учетом этих неровностей
и в силу их случайности сопряжено со значительными трудностя-
ми, поэтому, как в случае анализа тонкой структуры простых сиг-
налов, следует использовать статическую обработку результатов
эксперимента. Кроме того, индивидуальным признаком может
служить характер предыскажений закона изменения частоты сиг-
нала, например, за счет предыскажений закона фазовой или час-
тотной модуляции сигнала. Принимаемый сигнал на входе стан-
ции РТР имеет вид
Я/)=5о cos (о0/ + 1£_ + ер(/) ,
где 0р(/) — фазовая предыскажающая функция.
Искаженный спектр определяется как суперпозиция трех спек-
тров: основного и двух предыскажений S2 чл S3:
5(со) =|51(со)|ехр[/|/,(со)] + |52(о)|ехр[/у 2(со)] +
+|53 (со)| exp[7v3 (<>)]>
где S.(cd) = ^^|{[С(Х>) + с(л)] + [Я>1) + 5(х2)]}г, j = 1,2,3.
В скобках в правой части равенства С(х) и S(x) — интегралы
Френеля.
Можно предполагать, что предыскажения каждого сигнала
РЛС носят индивидуальный характер. Таким образом, основные
предпосылки возникновения индивидуальных различий в сигна-
лах сложной формы объясняются наличием искажений при фор-
мировании сигналов (как случайного, так и преднамеренного ха-
рактера), которые, по существу, являются принципиально неу-
странимыми.
Следует отметить, что формирование ЛЧМ-сигналов с техни-
ческой точки зрения более сложно, чем формирование простого
импульсного сигнала, следовательно, в формируемый ЛЧМ-сиг-
нал может быть внесено больше индивидуальности. При этом сле-
дует учитывать наличие тонкой структуры как в частотной, так и
во временной области.
Индивидуальные различия в частотной области обусловлены
искажениями, вызванными несовершенством тракта передачи.
Даже при идеальном модулирующем импульсе частотные характе-
ристики усилителей мощности не являются линейными, поэтому
вносят дополнительные искажения в форму огибающей частот-
но-модулированных сигналов. Кроме того, сам модулирующий
импульс имеет скос и осцилляции на вершине. Поэтому ампли-
тудно-временным искажениям из-за электронного смещения
фазы соответствуют фазовременные искажения.
261
Искажению ЛЧМ-импульсов способствуют дисперсионные
свойства волноводного тракта. Фазочастотная характеристик!
волновода является нелинейной и может быть разложена в рял
Тейлора. При этом линейный член приводит к постоянной задер4
жке, а квадратический — к изменению наклона характеристики чал
стотной модуляции в импульсе. Несогласованные неоднородности?
в волноводном тракте за счет переотражений накладывают отпеча-)
ток на форму зондирующего импульса. Кроме того, могут наблюдав
ться отклонения от линейности изменения частоты в импульсе.
Существенный вклад в характерные различия тонкой структу-
ры ЛЧМ-сигналов вносят модулирующие искажения, возникаю-
щие из-за меняющегося во времени коэффициента усиления и за-
держки в цепи передатчика большой мощности. Обычно модули-
рованные искажения возникают вследствие наклона плоской
части импульса и наличия в нем пульсации от разряда накопите-
льных емкостей источников питания. Таким образом, на тонкую
структуру ЛЧМ-сигналов оказывает влияние метод их формирова-
ния. В настоящее время известно два метода формирования сиг-
налов: активный и пассивный.
Наибольшее применение нашел пассивный метод формирова-
ния сигналов. Возбуждающий импульс при этом методе выбирает-
ся достаточно коротким и аппроксимируется 5-функцией.
Дисперсионная характеристика формирующего фильтра суще-
ственно нелинейна, поэтому для формирования ЛЧМ-сигнала на
выходе фильтра устанавливают полосовой фильтр с полосой Д/ф.
Сигнал на выходе фильтра формирования может быть описан
выражением
Uг (/) = j Я(со)\ (со) ехр(jwtyfa),
где S/co) — спектр возбуждающего импульса.
Используя квадратичное представление фазовой характеристи-
z . ((О-СО0)
ки Р(со) = --—, получим
2у
+ у/ с/со.
(13.2)
Пределы интегрирования заданы в предположении прямоуго-
льности спектра. Выполнив преобразования, запишем
U r (г) = a(t) exp
2
+ ег(')]
262
,Ле ^|[C(%l) + C(X2)P +[5(X1) + 5(X2)]?
оги-
бающая, которую путем ограничения пытаются сделать линейной,
т-е. х,.2
02(/) — остаточный фазовый член:
О2 = -arctg
5(х,) + ^(х2)
C(x,) + C(x2)
Выражение (13.2) показывает, что огибающая формируемого
пассивным фильтром ЛЧМ-импульсов имеет френелевскую пуль-
сирующую компоненту. Это является существенной предпосыл-
кой возникновения тонкой структуры в каждом сигнале, так как
ограничения в мощных каскадах радиолокационных передатчиков
приводят к тому, что пульсирующая структура временных функ-
ций превращается в пульсирующую структуру частотного спектра,
которую должна выявлять система анализа.
Рассмотрим методику обработки сложных сигналов в интересах
индивидуального опознавания конкретных образцов радиолока-
ционных станций. Схема обработки сигналов при априорно неиз-
вестных формах может быть сведена к выделению модулирующей
функции и дальнейшей ее обработке с помощью самонастраиваю-
щегося фильтра (рис. 13.5).
Рис. 13.5. Структура устройства обработки сложных сигналов
Сложность реализации такого фильтра обусловлена увеличени-
ем числа каналов в устройстве, а также реализацией задержки сиг-
налов большой длительности даже по видеочастоте с сохранением
индивидуальных форм законов изменения частоты сигнала и бо-
льшим затуханием в линии задержки. Компенсация затуханий с
263
помощью промежуточных усилителей вносит дополнительные и
кажения, которые могут замаскировать (исказить) полезную то)
кую структуру сигнала. Поэтому целесообразно рассмотреть ус
ченную обработку сигнала, т.е. обработку по частям.
Общая теория обработки сложного сигнала в целях его обнар;
жения или выделения из смеси одинаковых по структуре сигнале
сводится к корреляции поступающей реализации с опорным коле
банием, имеющим определенную форму. Так как время прихо/
сигнала неизвестно, для нахождения корреляционного интеграл
применяется согласованный фильтр с одним из ожидаемых сигна
лов. Отклики фильтра зависят прежде всего от степени согласо
ванности сигнала и фильтра. Сигналы, имеющие различия в тон
кой высокочастотной структуре, получают различные отклики н
выходе фильтра, по которым можно судить о принадлежносп
сигналов к различным экземплярам РЛС. Построение многокана
льных анализаторов станций РТР по ожидаемому числу сигнало!
нецелесообразно только из-за сложности технической реализа
ции. В конкретных задачах РТР, например при длительном на
блюдении за ракетно-космическим полигоном, при накоплен™
априорных данных, можно подобрать и установить оптимальный
фильтр на каждую ожидаемую форму сигнала в целях выявления!
изменения режима работы и ввода в действие новых передатчи-1
ков. I
Для ЛЧМ-сигнала теория и практика построения таких филь-j
тров достаточно хорошо отработаны. Их реализация не вызывает
затруднений. Например, можно использовать в качестве элемента*
задержки дисперсионную ультразвуковую линию или осуществить
свертку сигнала методом гетеродинирования.
Степень несовершенства формирования ЛЧМ-сигналов в стан-
ции AN/SPS-37 армии США приведена в табл. 13.5.
Таблица 13.5
№ экз. Девиация частоты, МГц Длительность входного импульса, мкс Длительность сжатого импульса, мкс Коэффициент сжатия
1 0,4373 190 2,28 83,12
2 0,4375 210 2,88 91,86
3 0,3750 200 2,66 75,00
4 0,3890 196 2,53 77,24
5 0,4250 212 2,35 90,10
Анализ данных, приведенных в таблице, позволяет сделать
важный практический вывод: для индивидуального опознавания
РЛС по длинноимпульсным сигналам с линейной частотной мо-
дуляцией наиболее информативными параметрами являются ко-
эффициент сжатия, длительность выходного и входного импуль-
сов. Наименьшая дисперсия наблюдается в девиации частоты
ЛЧМ-сигнала, следовательно, в ней заложено наименьшее коли-
чество информации о принадлежности сигналов к конкретным
264
’ЛС. С точки зрения технической реализации наиболее просто
вмерить временные параметры — длительность входного и сжа-
ого импульсов. Однако с учетом влияния шумов на точность из-
мерения временных параметров наиболее достоверными будут ре-
Ьультаты измерения сжатого импульса.
। Обработка сложных сигналов для выделения индивидуальных
признаков заключается в их квазисогласованной фильтрации.
Определим влияние несовершенства формирования сложных сиг-
налов на эффективность их селекции и распознавания. Рассмот-
рим оптимальный фильтр, настроенный на ожидаемый сигнал,
юлько по основным параметрам: по девиации частоты, по длите-
1ьности импульса и средней скорости изменения частоты в импу-
ibce. Считаем, что дисперсионная характеристика фильтра линей-
на, а его параметры могут изменяться в некоторых пределах.
Поскольку сигналы имеют искажения по различным парамет-
рам, на выходе этого фильтра отклики будут отличаться за счет не-
согласованности фильтра тонкой структуры разведуемых сигна-
лов. Проведем краткий анализ воздействия различного рода иска-
жений на отклик согласованного фильтра и, исследуя реальные
искажения сигналов РЛС вероятного противника, оценим их вли-
яние на эффективность селекции и распознавания при радиотех-
нической разведке.
Искажения сигналов в передатчике РЛС будем считать модуля-
ционными. В этом случае для решения поставленной задачи мож-
но применить метод парных эхо.
Если существует только амплитудная модуляция по синусоида-
льному закону, то в спектре принимаемого сигнала находятся бо-
ковые полосы, центры которых относительно центральной часто-
ты спектра сдвинуты на величину частоты модуляции ±сом. Нали-
чие этих боковых полос модуляции в согласованном фильтре
вызовет выходные сигналы, сдвинутые по времени на J — Го,
< Дсо J
где Доз — девиация изменения частоты в импульсе. Учитывая, что
сом<<Д(о, смещение выходного сигнала будет незначительным.
В мощных передатчиках РЛС обеспечения противоракетной и
противокосмической обороны при ограничении амплитуды ее мо-
дуляционные искажения преобразуются в модуляционные иска-
жения фазы.
На практике модулирующие функции более сложные. Поэтому
для оценки влияния искажений (влияния тонкой структуры) на
выходной сигнал квазисогласованного фильтра модулирующую
функцию можно разложить в ряд Фурье. В этом случае функция
модуляции представляется рядом, состоящим из п компонентов.
Каждая частота дает паразитный отклик, который характеризу-
ется временным ±(coz./Да>)7 и частотным ±<^/1 сдвигами.
Иногда имеют место одновременно и амплитудные и фазовые
модуляции, которые усиливают различия в тонкой структуре, од-
нако математический анализ в этих случаях существенно услож-
няется.
265
Разность
может быть
линейных задержек для рассогласованного сигнала
определена из выражения
Д? = 2 л А/
Yi
Y2J Y3kb
где /У — полоса фильтра;
Yj — наклон функции задержки согласованного сигнала;
у2— наклон функции задержки рассогласованного сигнала;
= (т.тЭ
I ЭКВ / \ •
(у 2 - Y1)
Анализ ЛЧМ-сигналов на выходе согласованного фильтра по-
казывает, что информационными признаками, характеризующи-
ми принадлежность излучений к конкретным РЛС, являются:
временные интервалы между паразитными откликами на выхо-
де фильтра, обусловленные модуляционными искажениями;
временные интервалы между центральными откликами филь-
тров;
амплитуда и время задержки на выходе фильтра.
Наличие мешающих радиолокационных станций с ЛЧМ-сиг-
налами можно рассматривать как влияние рассогласования этих
сигналов на выходной отклик фильтра.
При разделении сигналов по индивидуальным признакам не-
обходимо отселектировать конкретный ЛЧМ-сигнал на фоне по-
тока структурно подобных сигналов, незначительно отличающих-
ся по параметрам модуляции, например по длительности импуль-
са, несущей частоте, скорости изменения частоты в импульсе.
Непосредственно использовать эти параметры на практике не все-
гда удается вследствие их относительно малых значений.
Поэтому, как было сказано, имеет смысл пропустить селекти-
руемый сигнал через согласованный с ним фильтр, тогда мешаю-
щие сигналы на выходе фильтра будут ослаблены или получат до-
полнительную «окраску», по которой можно отличить один сиг-
нал от другого.
Пусть селектируемый ЛЧМ-сигнал имеет вид
Л ( М
5(7) = л cos 41 + ~y при ' - т«’
О при I * ти,
где
амплитуда сигнала;
скорость изменения частоты в импульсе.
Здесь сок1 и <оя1 — конечная и начальная ча-
стота сигнала;
длительность ЛЧМ-сигнала.
266
Выходной отклик фильтра на селектируемый согласованный
сигнал имеет вид
При этом амплитуда выходного отклика
Um =АС/К^.
Максимум отклика появляется в момент времени t =ти, а его
. _ 4п
ширина, измеряемая по первым нулям, Д^ =-----------.
^Чдев
Если на этот же фильтр будет воздействовать сигнал другой
РЛС, согласованный по скорости изменения частоты, но рассог-
ласованный по длительности и средней частоте вида
j при Z = (0, т2);
при t ф (0, т2),
л Г
А. СОЯ СО 2 4- -—
Z I НI
О
где сон2 — начальная частота второго сигнала;
т2 — длительность сигнала мешающей РЛС, то отклик филь-
тра на этот сигнал можно определить выражением
sin] -(в-л) -tJ - Дсо]
xcosi зЬЧ
2-т„
]_
2
ти)-Дсо](в-а) + сон2, - сонт,
т„)-Д<о
(13.3)
I
2
где Дсон = <оН2 - со — расстройка сигналов по частоте;
а = 0, в = t 'при t = (0, т2);
a=t-r2, e = t при t = (т2,т„);
a = t-x2, в = хи при t =(т„,т2,ти).
Из выражения (13.3) следует, что максимум отклика появляет-
ся в момент времени, сдвинутый относительно максимума согла-
е. Д(О А
сованного сигнала на величину 8/ = —. Амплитуда отклика при
Y
этом определяется по формуле
267
При » j ширина сечения пика отклика фильтра
дР=^,
т. е. происходит расширение выходного сигнала пропорционально
ти
отношению —, уменьшается амплитуда и изменяется время его
т2
появления.
На рис. 13.6 представлены графики зависимости относительно-
го расширения выходного сигнала от расстройки по частоте для
различных коэффициентов сжатия.
Рис. 13.6. Графики зависимости относительного расширения
длительности сигнала от расстройки по частоте
Некоторые РЛС (AN/SPS-37, AN/SPS-33) имеют незначитель-
ные девиации частот: порядка сотен килогерц. В этом случае мо-
жет оказаться, что расстройка по частоте Дсо = со , - соя1 будет боль-
ше девиации частоты и сигнал мешающей РЛСS2(f)вообще не бу-
дет восприниматься согласованным фильтром.
Рассогласование по скорости изменения мгновенной частоты
приводит к еще большим различиям выходного сигнала, особенно
268
при значительных параметрах частотной модуляции. Например,
при kzui\f < 2 выходной импульс расширяется незначительно, при
2 <kxubf <6 — растягивается в 5 раз, при kxu!sf =10 — в 10 раз.
Здесь к — коэффициент рассогласования по скорости:
Yi
(2лД/() (2лД/2)
где у, =^---у2 --------<.
Следовательно, эффективность селекции по отклику оптималь-
ного фильтра значительно выше, чем по выходным параметрам,
таким, как девиация частоты и длительность импульсов.
13.5. ВЫДЕЛЕНИЕ ПАРАМЕТРОВ ТОНКОЙ СТРУКТУРЫ
СЛОЖНЫХ СИГНАЛОВ НА ОСНОВЕ ФАЗОВОЙ
АВТОПОДСТРОЙКИ ЧАСТОТЫ
Устройства выделения параметров тонкой структуры сигналов
должны быть универсальны, т. е. должны обладать способностью
анализировать сигналы широкого класса модуляции (AM, ИМ,
ФМ). Кроме того, устройства анализа должны быть адаптивными
по сигналу, т. е. изменять свои характеристики под воздействием
сигналов. Поскольку при анализе тонкой структуры сложных сиг-
налов основная информация заложена в частотно-фазовых харак-
теристиках, то очевиден тот факт, что в адаптивном анализаторе
следует использовать принципы фазовой автоподстройки частоты.
Для анализа сигналов можно, например, использовать две раз-
новидности автоматической подстройки частоты: частотную и фа-
зовую. С точки зрения универсальности анализа предпочтительной
является система фазовой автоматической подстройки частоты
(ФАПЧ), способная демодулировать как частотно-модулирован-
ные, так и фазоманипулированные сигналы. По существу, она мо-
жет служить универсальным устройством выделения индивидуаль-
ных разведывательных признаков, заключенных в тонкой структуре
сигналов.
Структурная схема ФАПЧ содержит четыре функциональных
узла (рис. 13.7).
Усиленный и отфильтрованный сигнал подается на вход 1.
Вход 2 целесообразно использовать для точного измерения часто-
ты. На фазовом детекторе сигналы перемножаются. Сигнал ошиб-
ки через усилитель постоянного тока и фильтр управления часто-
той генератора, управляемого напряжением, сводит ошибки по
фазе и частоте к нулю. Так как частота или фаза сигнала изменя-
ются в течение импульса, то по такому же закону изменяется и
сигнал ошибки, а следовательно, на выходе УПТ будет не что
иное, как модулирующая функция входного сигнала. Особенно-
стью работы системы ФАПЧ в системах радиотехнической развед-
269
Рис. 13.7. Структурная схема ФАПЧ
ки является широкая полоса частот (десятки, а иногда и сотни ме-
гагерц), определяемая полосой сигналов.
Поэтому к устройствам анализа на основе ФАПЧ предъявляет-
ся ряд специфических требований, которые порой противоречи-
вы, например обеспечение широкой полосы захвата и максималь-
ной помехоустойчивости, широкого диапазона частот и малого
времени входа в синхронизм.
Сущность работы анализатора с ФАПЧ заключается в следую-
щем. Частотно-измерительная система грубого анализа определя-
ет частоту сигнала с погрешностью до половины полосы захвата
устройства ФАПЧ и выводит его в полосу захвата. На фазовом де-
текторе сравнивается фаза входного сигнала с фазой управляемого
по частоте генератора и вырабатывается напряжение сигнала
ошибки, пропорциональное разности фаз этих сигналов.
Выходное напряжение фазового детектора фильтруется, усили-
вается и используется для управления частотой опорного генера-
тора. Когда частота генератора, управляемого напряжением, ста-
нет близкой к частоте входного сигнала, система ФАПЧ синхро-
низирует по фазе управляемый генератор с принимаемым
сигналом в пределах полосы удержания. Таким образом, она в
дальнейшем работает как следящий фильтр. Важно то, что как
для частотно-модулированных, так и для фазоманипулированных
сигналов напряжение ошибки на выходе цепи регулирования яв-
ляется демодулированным входным сигналом, который в даль-
нейшем подвергается дополнительному анализу в целях определе-
ния принадлежности сигналов к конкретным РЛС. Положитель-
ным можно назвать то, что система ФАПЧ, по существу, является
устройством частотной селекции. Следует иметь в виду, что на
входе станции радиотехнической разведки в пределах полосы за-
хвата может одновременно присутствовать несколько сигналов
различных РЛС. В этом случае система фазовой автоподстройки
270
частоты настраивается на сигнал, ближайший по частоте к частоте
генератора, управляемого напряжением.
Однако может оказаться, что в интересах решения разведывате-
льной задачи необходимо производить анализ не ближайшего по
частоте, а вполне определенного сигнала. В этом случае следует
предусмотреть принудительный перевод системы ФАПЧ в полосу
анализируемого сигнала.
Для анализа широкополосных сигналов система ФАПЧ должна
иметь фильтр с широкой полосой. Наиболее приемлемым являет-
ся пропорционально-интегрирующий фильтр. Для повышения
точности анализа система ФАПЧ должна быть высокого порядка,
во всяком случае не ниже второго.
13.6. КОМПЛЕКСНЫЙ АНАЛИЗ ПАРАМЕТРОВ
ТОНКОЙ СТРУКТУРЫ СИГНАЛОВ
Под комплексным анализом будем понимать одновременное
получение данных о всех характеристиках сигналов, используе-
мых для индивидуального распознавания РЛС. Недостатком су-
ществующей системы анализа является то, что каждый параметр
и каждая характеристика сигнала анализируются отдельным ана-
лизатором. При этом результаты анализа трудно сопоставить по
времени, отнести к конкретному источнику разведывательных
сведений. Нередки случаи, когда уход частоты в импульсе опре-
делен для одной РЛС, а спектр сигнала — для другой. Как извест-
но, для индивидуального распознавания наряду с параметрами
тонкой структуры следует использовать и основные параметры.
Поэтому первое требование к комплексному анализатору —
производить анализ следующих параметров: /о, ти, Т}, A(t), со(0,
^(®).
Второе требование заключается в том, что все эти параметры с
большой вероятностью должны относиться к данному источнику
излучения, а параметры тонкой структуры — даже к одному импу-
льсу.
Третье требование — анализ ухода частоты в импульсе должен
производиться при точной настройке приемника на частоту сиг-
нала. Точность настройки определяется по равенству частот:
/сигн =/упч-
При неточной настройке форма индивидуальных признаков,
заключенная в огибающей радиоимпульса и законе изменения ча-
стоты в импульсе, будет существенно искажаться.
Для решения этой задачи необходимо предварительно осущест-
вить жесткую селекцию по несущей частоте. Выполнить это с
помощью узкополосного УПЧ не всегда возможно, так как для неис-
каженного приема сигналов должно соблюдаться условие
10)Д/;ИГН. При такой полосе УПЧ разведприемника в течение вре-
мени анализа на входе анализатора могут присутствовать сигналы
нескольких РЛС, что усложнит выполнение второго требования.
Поэтому в качестве устройства частотной селекции используют
271
Рис. 13.8. Законы изменения частоты
дисперсионный анализатор
спектра со скрещенными^
дисперсионными характе-
ристиками линий задержки
(рис. 13.8).
Сущность частотной се-
лекции заключается в сле-
дующем. При изменении
частоты гетеродина (пере-
стройке приемника) изме-
няется промежуточная час-
тота fnp с. На выходе 1 -го и
2-го каналов анализатора
один и тот же сигнал появ-
ляется неодновременно. И
напряжения на входах каналов ТОЛЬКО когда промежуточ-
анализатора ная частота сигнала будет
равна/пр 0, что соответствует точной настройке приемника на час-
тоту сигнала, импульсы на обоих выходах появятся одновременно.
При неточной настройке приемника вследствие неодновременно-
го появления импульсов в 1-м и 2-м каналах на выходе перемно-
жителя сигнал будет отсутствовать. При точной настройке прием-
ника на выходе перемножителя появится сигнал, который будет
хронирующим для работы анализатора, т. е. этот импульс разре-
шает произвести анализ остальных характеристик и параметров
сигналов.
Сигналы других радиолокационных станций, попавшие в поло-
су УПЧ, будут отличаться по частоте от анализируемого сигнала,
поэтому хронирующий импульс на выходе перемножителя будет
отсутствовать. Следовательно, эти сигналы анализироваться не
будут.
При последовательной перестройке приемного устройства
(вручную или автоматически) каждый сигнал поочередно получа-
ет значение /пр с = /пр о и подвергается анализу.
В качестве перемножителя целесообразно использовать фазо-
вый детектор, что обеспечивает высокую эффективность частот-
ной селекции сигналов.
Отображение параметров и характеристик сигналов при распо-
знавании оператором целесообразно осуществлять на осциллогра-
фе. При этом вследствие задержки отклика сигнала на выходе ДЛЗ
на одной развертке можно отображать огибающую импульса и
спектр сигнала или уход частоты в импульсе со(г) и спектр сигнала.
Значения несущей частоты и периода повторения импульсов луч-
ше представлять в цифровом виде.
Наиболее наглядную картину отображения сигналов можно по-
лучить на экране пятилучевого индикатора—анализатора сигналов
РЛС (рис. 13.9).
Комплексный анализ параметров тонкой структуры сигналов
включает:
272
выделение информативного
признака принимаемого сигна-
ла, его обработку и измерение
параметров;
сравнение информационных
признаков с эталонами и распо-
знавание сигналов, определе-
ние их принадлежности к изве-
стным уже образцам РЛС или
отнесение к новым.
Если вопросы выделения
информативных признаков раз-
работаны достаточно глубоко,
то методы технической реализа-
ции процесса распознавания не
решены.
До сих пор распознавание
сигналов производится опера-
тором визуально, по фотоос-
циллограммам или по осцил-
лограммам с экрана осциллог-
рафа. В связи с большой насыпи
Рис. 13.9. Изображения сигналов
на экране пятилучевого индикатора
однотипных РЛС в зоне
разведки визуальное распознавание малоэффективно. Поэтому
особую важность приобретает автоматизация этого процесса. Для
этого в первую очередь необходимо обеспечить нормирование
сигналов, так как амплитуда даже одной радиолокационной стан-
ции изменяется в широких пределах за счет модуляции последова-
тельности импульсов диаграммой направленности РЛС. Кроме
нормирования сигналов для автоматизированных устройств рас-
познавания надо обеспечить достаточно высокие отношения сиг-
нал/шум: Рс/Рш> 10...15 дБ. Снизить требование к отношению
сигнал/шум можно, если производить усреднение значений при-
знаков по всем импульсам пачки.
Для обеспечения требуемой точности вычисления коэффици-
ентов корреляции между спектрами сигналов различных РЛС ин-
тервал дискретизации не должен превышать 0,2 мкс, при разряд-
ности аналого-цифрового преобразователя (АЦП) — не менее
7 мкс. Если динамический диапазон сигналов на входе анализато-
ра тонкой структуры составляет хотя бы 20 дБ (за счет модуляции
сигнала диаграммой направленности с учетом АРУ), то разряд-
ность аналого-цифрового преобразователя должна быть повыше-
на до 15 — 16. Эти характеристики совпадают с предельными ха-
рактеристиками современных АЦП.
Предельное количество информации в преобразованном таким
образом сигнале составляет примерно 100 Кбит. Обработка таких
больших объектов информации требует огромных затрат машин-
ного времени, приводит к значительным задержкам в выдаче резу-
льтата и принятии решения и практически не позволяет решать
273
задачу селекции, идентификации и индивидуального распознава-
ния во времени, близком к реальному.
Поэтому при разработке спецвычислителей для индивидуаль-
ного распознавания необходимо индивидуальный разведыватель-
ный признак преобразовать так, чтобы потеря информации была
незначительной, а вычислительная процедура существенно упрос-
тилась.
0001: оооо :111
оо : 11; ооо
Рис. 13.10. Процесс клиппирования сигнала
Рассмотрим, например, серию импульсов, характеризующих
тонкую структуру диаграммы направленности (рис. 13.10). На
определенном уровне Ug произведем клиппирование сигнала. В
результате получим последовательность нулей и единиц, которые
будут характеризовать длительность и расстановку боковых лепе-
стков относительно главного.
Задача коррелятора — определить степень совпадения поляр-
ности входных сигналов (осуществить полярную корреляцию).
Таким образом, если обычный автокоррелятор вычисляет функ-
цию
ОД= ЙгН’Х'М'+ т)л’
то при полярной корреляции коррелятор вычисляет функцию
КОД = fT sign [лг(/ )]sign [x(z + r)]<*.
274
Вычисление второй функции значительно проще, а следовате-
льно, более простой будет реализация технического устройства.
При этом интегрирование можно заменить суммированием, осу-
ществив квантование последовательностей по времени. Точность
вычисления корреляционных функций Rn(x) будет зависеть от час-
тоты заполнения (квантования).
Спектральные признаки, как и огибающие диаграмм направ-
ленности, являются функциями времени. Информация о принад-
лежности сигналов к конкретному РЛС заложена в структуре бо-
ковых лепестков спектров и их расстановке.
Можно, как и в случае обработки серий импульсов, осуществлять
преобразование спектра сигнала в последовательность импульсов.
Однако при этом будет большая потеря информации, так как от-
клик, характеризующий спектр, имеет длительность несколько мик-
росекунд и небольшое число боковых лепестков. В то же время фор-
му спектра и его характерные точки отражают производные различ-
ных порядков. Поэтому, взяв первую или вторую производную
спектра, можно получить знакопеременные последовательности им-
пульсов, которые будут не только отражать структуру спектра, но и
подчеркивать его наиболее характерные особенности. Очевиден тот
факт, что с увеличением порядка производной скорость изменения
функций, а следовательно, и частота смены знака увеличиваются.
Практика показывает, что использовать производную порядка
выше второго нецелесообразно, так как информативность призна-
ка при любом преобразовании сигнала не может увеличиваться
принципиально, а может только уменьшаться. В то же время уве-
личение порядка производных требует увеличения быстродейст-
вия устройств клиппирования и коррелирования, что усложнит их
техническую реализацию.
Рассмотрим работу комплексного анализатора. С выхода УВЧ
панорамного разведывательного приемника сигнал поступает на
смеситель (рис. 13.11). Перестраивая гетеродин в полосе разведки,
Рис. 13.11. Структурная схема анализатора тонкой структуры
275
изменяем частоту сигнала настройки приемника. При точной на«|
стройке приемника на частоту сигнала его промежуточная частот®
становится равной центральной частоте УПЧ и центральной часа
тоте дисперсионных линий задержки (/пр. с =/Одлз)- В этот момент?
на выходе фазового детектора появляется хронирующий импульсу
который останавливает перестройку гетеродина и дает команду на
съем информационных характеристик. С выхода амплитудного де-
тектора снимается огибающая радиоимпульса Л(г), с выхода час-
тотного детектора — закон изменения частоты в импульсе со(/), а с
выходов дисперсионных линий задержки — спектр сигнала 5(со).
Так как сигнал на выходе фазового детектора появляется только
при точной настройке на частоту сигнала, то этот сигнал исполь-
зуется для измерения периода повторения импульсов. Мешающие
сигналы, попавшие в полосу УПЧ, на выход поступать не будут.
Этим обеспечивается высокая помехозащищенность измерителя
несущей частоты, точное значение которой считывается элект-
ронно-счетными частотомерами.
Огибающая спектра анализируемого сигнала поступает на
устройство двукратного дифференцирования, после него — на
устройство клиппирования, затем — на стробирующую схему совпа-
дения. В качестве памяти для хранения эталона использованы стан-
дартные цифровые устройства, например ПЗУ типа 556 РТ4. Каждая
микросхема позволяет хранить по 256 отчетов четырех эталонов.
Коррелирование эталонов и клиппирование признака осуществ-
ляются перемножением их на схеме совпадения и суммированием
на двоичном счетчике для каждого эталона. Суммирование может
осуществляться как по одному, так и по пачке импульсов. Число
накапливаемых импульсов определяется схемой управления.
Результат корреляционного сравнения используется в решаю-
щем устройстве для выбора номера эталона, наиболее близкого к
анализируемому сигналу. Схема управления определяет режимы
работы и исходное состояние элементов устройства.
Для выделения структуры кодов фазоманипулированных сиг-
налов необходимо на фазовый детектор подать опорные колеба-
ния на частоте сигнала. В данном анализаторе приемник настраи-
вается с точностью до фазы, поэтому считают, что в момент ана-
лиза частота сигнала известна точно. Подавая на фазовый
детектор опорное колебание от специального генератора на часто-
те /г=7пр. о, можно производить анализ кода.
Анализ ЛЧМ дискретно-частотно-модулированных сигналов осу-
ществляется с помощью широкополосного частотного детектора.
Поскольку съем всех характеристик и параметров сигнала стро-
го синхронизирован, то обеспечиваются первое и второе требова-
ния к комплексному' анализу.
14. МЕТОДЫ ПЕЛЕНГОВАНИЯ ИСТОЧНИКОВ
РАДИОИЗЛУЧЕНИЯ
14.1. КЛАССИФИКАЦИЯ МЕТОДОВ ПЕЛЕНГОВАНИЯ
Под пеленгованием источника радиоизлучения при ведении ра-
диотехнической разведки понимают определение направления
распространения радиоволн. Пеленгование осуществляют в целях
последующего определения местоположения разведуемого радио-
технического средства. Пеленгом источника 0 называется угол
между основным направлением и направлением на источник. В
качестве основного направления в горизонтальной плоскости
чаще всего используется направление на север, а в вертикаль-
ной — в нормаль к плоскости горизонта.
Пеленгование основано на свойстве радиоволн распространя-
ться в однородной среде прямолинейно.
Для пеленгования могут быть использованы как специальные
устройства, называемые радиопеленгаторами, так и радиоразве-
дывательные станции, решающие кроме задачи пеленгования ряд
других задач. Радиопеленгатор или система пеленга радиоразведы-
вательной станции включает антенну (антенную систему), прием-
ник для обработки принятых радиосигналов и измерительное
устройство.
Одной из основных характеристик радиопеленгатора является
пеленгационная характеристика, представляющая собой функцию
выходного напряжения приемника от направления прихода ра-
диоволн 6вых(Р)- В зависимости от того, какой параметр сигнала —
амплитуда, частота или фаза — оказывает основное влияние на
формирование пеленгационной характеристики, методы пеленго-
вания можно разделить на амплитудные, амплитудно-фазовые и
фазовые.
В радиотехнической разведке находят практическое примене-
ние амплитудные, фазовые и амплитудно-фазовые методы, кото-
рые будут рассмотрены далее. Классификация методов пеленгова-
ния приведена на рис. 14.1.
Амплитудные методы основаны на использовании направлен-
ных свойств антенн. В зависимости от вида пеленгационной ха-
рактеристики и способа реализации амплитудные методы можно
разделить на методы максимума, минимума и сравнения.
Фазовые методы пеленгования основаны на использовании фа-
зовых соотношений сигналов на выходе двух разнесенных антенн.
277
Рис. 14.1. Методы пеленгования
Амплитудно-фазовые методы используют как амплитудные, так
и фазовые соотношения сигналов на выходе двух разнесенных ан-
тенн.
Реализация одних методов требует неподвижной антенной сис-
темы пеленгатора, а реализация других — вращающейся.
Для сравнительной оценки методов пеленгования могут быть
использованы следующие характеристики:
ошибка измерения пеленга;
время пеленгования;
практическая реализуемость.
Ошибка измерения пеленга вызывается многими причинами, к
которым в первую очередь относятся влияние различных условий
распространения радиоволн и недостаточная чувствительность
пеленгатора.
В состав ошибки измерения пеленга входят как случайные, так
и систематические ошибки. Систематические ошибки пеленгато-
ров изучают и исключают из результатов измерений. Ошибки, но-
сящие случайный характер, обычно характеризуются средней
квадратической ошибкой, которую определяют опытным путем,
для чего обрабатывают результаты пеленгования многих извест-
ных источников радиоизлучений, расположенных на различных
дальностях и направлениях, в пределах всего диапазона частот пе-
ленгатора.
Полученная таким образом средняя квадратическая погреш-
ность пеленга характеризует так называемую реальную (эксплуа-
тационную) точность пеленгатора. В отличие от нее инструмента-
льная (предельная) точность определяется без учета таких не зави-
сящих от пеленгатора факторов, как уровень внешних помех и
условий распространения радиоволн. Предельная точность харак-
теризует возможность пеленгатора при работе в стандартных (кон-
кретно заданных) условиях, а эксплуатационная — в реальных.
Определение предельной точности сопряжено с рядом трудностей
278
и возможно не для всех типов пеленгаторов, но получаемые при
этом данные представляют практический интерес в целях улучше-
ния характеристик существующих и проектирования новых пе-
ленгаторов.
Ранее отмечалось, что пеленгование основано на свойстве ра-
диоволн распространяться в однородной среде прямолинейно. Ре-
альная среда, как известно, не является однородной, вследствие
чего траектория распространения радиоволн не будет строго пря-
молинейной. Так, изменения влажности и плотности атмосферы с
увеличением высоты вызывают вертикальную рефракцию. При
некоторых состояниях погоды возможны изменения влажности и
плотности атмосферы и в горизонтальной плоскости, что вызыва-
ет горизонтальную рефракцию. Наличие неоднородностей земной
поверхности и неровностей рельефа приводит к искривлению тра-
ектории распространения радиоволн. Различные местные предме-
ты, например промышленные и жилые сооружения, деревья и
другие объекты, расположенные вблизи радиопеленгатора, вызы-
вают местное изменение направления радиоволн.
Основной причиной, вызывающей ошибку пеленгования, яв-
ляется недостаточная угловая чувствительность пеленгатора. Под
угловой чувствительностью пеленгатора понимают его способ-
ность отмечать малые отклонения напряжения на выходе прием-
ника пеленгатора при изменении линии пеленга.
Угловая чувствительность пеленгатора (пеленгационная чувст-
вительность) зависит от метода пеленгования, крутизны пеленга-
ционной характеристики, способа индикации, уровня внутренних
шумов, а также от внешних помех и субъективных данных опера-
тора. Все эти факторы определяют так называемую реальную (экс-
плуатационную) пеленгационную чувствительность в отличие от
инструментальной (предельной) чувствительности, определяемой
без учета не зависящих от пеленгатора факторов (уровня внешних
помех и субъективных данных оператора). Пеленгационную чув-
ствительность определяют опытным путем.
Угол относительно линии пеленга, в пределах которого пелен-
гатор не отмечает изменения выходного напряжения приемника,
называют углом нечувствительности 0Н.
Пеленг источника радиоизлучения лежит в пределах угла не-
чувствительности. Ошибки отсчета в пределах угла нечувствитель-
ности распределены по равновероятному закону. При отсчете пе-
ленга по биссектрисе угла нечувствительности вследствие неточ-
ного определения границ угла и его биссектрисы получается
ошибка отсчета ор, которая, по опытным данным, лежит в следу-
ющих пределах: ор= (0,1...0,25) рн.
Ошибка отсчета входит в состав общей ошибки пеленгования.
В дальнейшем мы не будем оценивать составляющие пеленгова-
ния, вызванные влиянием различных условий распространения
радиоволн, недостатками схемы и конструкции пеленгатора. Поэ-
тому под ошибкой пеленгования будем понимать ошибку отсчета,
являющуюся функцией угла нечувствительности. Очевидно, что
279
чем меньше угол нечувствительности, тем меньше ошибка пелен-
гования.
Время пеленгования зависит от метода пеленгования и способа
индикации. Для методов пеленгования, использующих неподвиж-
ную антенную систему, это время минимально. При использова-
нии вращающихся антенных систем пеленгование требует боль-
шего времени.
14.2. ИЗМЕРЕНИЕ УГЛОВЫХ КООРДИНАТ
Под угловыми координатами целей или источников разведыва-
тельных сведений обычно понимают их азимут и угол места.
Азимутом цели, или пеленгом, называется угол в горизонтальной
плоскости между прямой, соединяющей станцию с проекцией
цели на эту плоскость, и некоторым начальным направлением
(обычно направлением на север).
Углом места цели называют угол в вертикальной плоскости
между прямой, соединяющей станцию и цель, и проекцией этой
прямой на горизонтальную плоскость.
В тех случаях, когда рассуждения в равной мере справедливы
как для азимута, так и для угла места, условимся обозначать угло-
вую координату буквой 0.
Известные в теории и практике методы пеленгования преду-
сматривают использование ненаправленных и направленных ан-
тенных систем. По характеру использования направленных ан-
тенн различают одноканальные и многоканальные методы пелен-
гования. Соответственно системы измерения угловых координат
станций РТР называют одноканальными и многоканальными.
Принцип определения пеленга одноканальной системой изме-
рения угловых координат заключается в следующем. Антенная си-
стема направленного действия производит обзор пространства. В
течение времени, когда диаграмма направленности антенны пере-
секает направление на цель, излучаемые целью сигналы поступа-
ют в приемник и усиливаются в нем. Закон изменения огибающей
амплитуд сигналов связан с пеленгом цели. Он определяется пара-
метрами обзора и зависит от диаграмм направленности передаю-
щей антенны цели и приемной антенны пеленгатора.
Пусть Fi(0), /2(6) — характеристики направленности (по полю)
антенны РЛС и антенны станции РТР соответственно. Результи-
рующая характеристика направленности (по полю) Fp(0) представ-
ляет собой произведение этих характеристик: Fp(0) = Fi(0) /2(0).
Пример построения результирующей характеристики направ-
ленности Гр(0) по заданным характеристикам Fj(0) и приве-
ден на рис. 14.2, где /^(©q) — максимальное значение результиру-
ющей характеристики направленности, соответствующее оси диа-
граммы направленности.
Пусть РЛС цели формирует ненаправленное излучение. На
рис. 14.3 изображены четыре пространственных положения диа-
граммы направленности антенны пеленгатора 7^(0,), формируе-
280
Рис. 14.2. Пример построения результирующей диаграммы направленности
Рис. 14.3. К пояснению зависимости формы огибающей сигналов
от формы диаграммы направленности
мне в моменты t^, МЦв процессе сканирования зоны обзора
(условно обозначены цифрами 1—4). Максимум диаграммы на-
правленности (ось ДН) во времени занимает положения 0, , 0, , 0,
и 0, . Угловая координата цели — 0Ц.
(toгда координата оси диаграммы равна 0, , амплитуда приня-
того сигнала пропорциональна отрезку Fn(Q2u -0, ); при угловой
координате оси диаграммы 0, амплитуда сигнала пропорциональ-
на Ftl (0Ц -0, ) и т.д. Если угловая скорость обзора Qa постоянна,
то форма огибающей сигналов в данном случае является зеркаль-
ным отображением формы диаграммы направленности. На прак-
тике диаграммы направленности антенн в большинстве случаев
можно считать симметричными, а форму огибающей сигналов —
совпадающей с формой диаграммы направленности.
Зная положение оси диаграммы направленности 0, в каждый
момент времени t, по закону изменения амплитуды сигнала мож-
но определить направление на цель. Например, для случая, изоб-
раженного на рис. 14.3, угловая координата цели 0Ц численно рав-
на координате оси диаграммы направленности антенны в момент
/ц, соответствующий максимуму огибающей. Представленные со-
отношения справедливы как для непрерывного, так и для
импульсионного режима излучения цели. В последнем случае за
время нахождения цели в пределах диаграммы направленности
будет принята пачка импульсов, максимум огибающей которой
соответствует пеленгу цели.
281
Если увеличить скорость обзора, то число принятых импульсов
уменьшится. При некоторой скорости обзора от цели может быть
принят только импульс. В этом случае угловая координата цели
будет определена с большой ошибкой, значение которой равно
половине ширины диаграммы направленности по нулевому уров-
ню. Поэтому пеленгование с использованием одноканальных сис-
тем при высоких скоростях обзора и жестких требованиях к точ-
ности измерений существенно ограничено.
Рассмотрим принципы определения направления на источник
излучения многоканальными системами на примере двухканаль-
ной фазовой системы. Принцип работы ее заключается в следую-
щем. Антенная система двухканальной фазовой системы состоит
из двух антенн. Обе антенны направленного действия с одинако-
выми диаграммами направленности. Обзор пространства произ-
водится путем поворота всей антенной системы в целом. Сигналы,
принятые антеннами, усиливаются отдельными приемниками, а
затем поступают на фазометр (рис. 14.4). Если цель находится на
оси антенной системы, то фазы сигналов, принятые обеими ан-
теннами, одинаковы. Поэтому направление оси антенной систе-
мы в момент, когда измеренная фазометром разность фаз равна
нулю, определяет сразу же угловую координату цели. Если цель
отклонена от оси антенной системы на угол 0ОТН, то разность фаз
сигналов отличается от нуля. По измеренной фазометром разно-
сти фаз можно рассчитать угол 0ОТН. Следовательно, фазометр
можно отградуировать непосредственно в углах отклонения цели
относительно оси антенной системы 0ОТН. Тогда угловую коорди-
нату цели 0Ц можно определить по формуле
еи = + еотн>
где 0, — угловая координата оси антенной системы в момент при-
ема сигнала.
Двухканальная фазовая система позволяет так же точно изме-
рять угловую координату цели при остановленной антенной сис-
теме. Для этого необходимо, чтобы цель находилась в пределах
Рис. 14.4. Двухканальная фазовая система измерения угловых координат
282
диаграммы направленности антенн и сигнал надежно выделялся в
приемниках на основе шумов. Одноканальные системы измере-
ния угловых координат такой возможностью не обладают.
Наконец, фазовая система при большом отношении сиг-
нал/шум практически нечувствительна к флуктуациям амплитуды
принятого сигнала. Действительно, для точного определения уг-
ловой координаты цели достаточно одного импульса. За время
действия импульса диаграмма направленности практически не ме-
няется. Изменение амплитуды от импульса к импульсу приведет
лишь к тому, что некоторые измерения будут более точными (ког-
да отношение сигнал/шум велико), другие — менее точными, а
среднее значение оценки пеленга не изменится.
Кроме фазовых систем нашли применение двухканальные амп-
литудные системы. В таких системах антенное устройство состоит
из двух антенн с отклоненными от оси на угол ±Vq » но перекрыва-
ющимися диаграммами направленности (рис. 14.5). В данном слу-
чае отклоненному на угол 0ОТН относительно оси антенной системы
угловому положению цели соответствует определенное отношение
амплитуд, принятых по каждой из диаграмм направленности сиг-
налов. Это отношение измеряется специальным устройством —
измерителем отношения амплитуд, которое может быть отградуи-
ровано непосредственно в единицах измерения угла 0ОТН.
Рис. 14.5. Двухканальная амплитудная система измерения угловых координат
Наряду с амплитудными и фазовыми могут применяться ком-
бинированные (амплитудно-фазовые) двухканальные и многока-
нальные системы.
Достоинства многоканальных систем по сравнению с однока-
нальными заключаются в следующем:
возможно точное измерение угловых координат при моноим-
пульсной работе;
возможно точное измерение угловых координат при неподвиж-
ной диаграмме направленности антенной системы;
флуктуации амплитуды сигнала на точность измерений угло-
вых координат влияют в значительно меньшей степени.
283
Недостатками многоканальных систем являются громоздкость
аппаратуры и жесткие требования к приемным устройствам. При-
емники таких систем не должны искажать разность фаз или отно-
шение амплитуд сигналов, принятых антеннами. В противном
случае точность измерений может значительно снизиться. Чтобы
поставленное требование удовлетворялось, приходится применять
специальные меры устранения неоднородности амплитудных и
фазовых характеристик приемных каналов, что еще более услож-
няет аппаратуру.
14.3. ОДНОКАНАЛЬНЫЕ СИСТЕМЫ ИЗМЕРЕНИЯ
УГЛОВЫХ КООРДИНАТ. ОПТИМАЛЬНАЯ ОБРАБОТКА
ПАЧКИ ИМПУЛЬСОВ
Упрощенная функциональная схема одноканальной системы
измерения угловых координат (рис. 14.6) состоит из антенны,
приемника и индикатора пеленга. Антенное устройство произво-
дит обзор по угловой координате 0 с постоянной угловой скоро-
стью Qa. Излучаемые РЛС-сигналы, искаженные шумом, посту-
пают на вход приемного устройства, усиливаются в нем и подают-
ся на устройство обработки пачки. Выходным сигналом этого
устройства является оценка угловой координаты цели 0и или ка-
кая-либо величина, однозначно связанная с ней.
Индикатор
пеленга
Рис. 14.6. Одноканальная система измерения угловых координат
Установим характер оптимальной обработки принятого коле-
бания (сигнал + шум) в приемном устройстве и устройстве обра-
ботки пачки.
Чтобы измерить угловую координату цели 0Ц, необходимо оце-
нить запаздывание пачки относительно момента времени при
t =0. За начало отсчета времени можно принять момент, когда ось
результирующей диаграммы направленности (ДН) совпадает с на-
чальным направлением (например, при измерении азимута — с
направлением на север). Оценка угловой координаты цели опре-
деляется выражением
9н = ^Q,
где Qa — угловая скорость сканирования ДН;
— оценка времени запаздывания пачки.
За оценку времени запаздывания пачки импульсов в соответст-
вии со статистической теорией измерения параметров можно при-
нять наиболее вероятное время запаздывания. Практически удоб-
нее работать с отношением правдоподобия или функцией, линей-
284
но с ним связанной. Если априорная плотность вероятности
распределения параметра z0 постоянна в некотором интервале, то
наивероятнейшая оценка совпадает с оценкой максимального
правдоподобия.
Условие для определения оценки /0 имеет вид
Uk(jk) -> max, tk = iQ, (14.1)
т.е. сводится к нахождению временного положения некоторого к-го
импульса, имеющего максимальную амплитуду. В качестве вариан-
та оптимальной обработки, эквивалентной нахождению временно-
го положения к-го импульса с максимальной амплитудой, рассмат-
ривается метод симметричных весовых коэффициентов.
Оптимальная обработка пачки импульсов при его применении
заключается в следующем. Принятая пачка радиоимпульсов уси-
ливается линейной частью приемника, оптимальной для одиноч-
Рис. 14.7. К пояснению метода симметричных весовых коэффициентов
285
ного радиоимпульса. После усиления сигналы поступают на ли-
нейный детектор. Напряжение на выходе приемника имеет вид,
показанный на рис. 14.7, а. Форма огибающей амплитуд импуль-
сов определяется результирующей характеристикой направленно-
сти Fp(Qa,/).
Дальнейшая обработка пачки сводится к образованию взве-
шенных сумм для различных значений предполагаемого запазды-
вания и нахождению того значения tQ, при котором взвешенная
сумма максимальна:
£Fp[Qa(^ -Zo)]£/, = max, (14.2)
где Fp[Qa(r(t -Q]- весовые коэффициенты для текущего значе-
ния времени запаздывания пачки г0 из облас-
ти допустимых значений.
Сумма произведений коэффициентовQa на Fp[Uk(tk -г0)]на-
зывается взвешенной суммой.
Выбор весовых коэффициентов Fp\Qa(Jk -/0)]для одного из
значений t0 иллюстрируется на рис. 147, б.
Описанный метод нахождения оценки в литературе часто назы-
вается методом симметричных весовых коэффициентов, так как
функция веса Fp(ty, или Fp(£late), — четная.
Условие (14.2) отыскания оценки можно изменить, если учесть,
что производная любой функции в точке ее максимума равна
нулю.
Получим
[«.('* -^4 =0 <14-3)
О * t0=t0
или
n.£F;[na(rt -zs)]f/,| =0.
к I'o ='»
Штрихом здесь обозначена производная функции.
После сокращения обеих частей равенства (14.3) на ^оконча-
тельно получим следующее условие отыскания оптимальной
оценки:
ZF;[n,(zt -Го)]<7*| =0. (14.4)
к 1'0 ='е
Оптимальная обработка и в этом случае сводится к образова-
нию взвешенной суммы. В отличие от предыдущей функция веса
здесь нечетная, а оценка находится из условия равенства нулю
взвешенной суммы. В литературе метод отыскания оценки по пра-
вилу (14.4) называется методом антисимметричных весовых коэф-
фициентов.
286
При слабом сигнале импульсы с выхода оптимальной линей-
ной части приемника должны подаваться на квадратичный детек-
тор, а функция веса представляет собой квадрат результирующей
характеристики направленности. В остальном характер обработки
пачки остается таким же, как при обработке сильного сигнала.
14.4. ПРЕДЕЛЬНАЯ ТОЧНОСТЬ ИЗМЕРЕНИЯ УГЛОВОЙ
КООРДИНАТЫ ОДНОКАНАЛЬНЫМИ СИСТЕМАМИ
Рассмотрим ошибки измерения угловых координат однокана-
льными системами. Наиболее значительными факторами, влияю-
щими на значение ошибки в определении угловых координат, яв-
ляются:
внутренние шумы приемного устройства;
флуктуации сигнала при приеме за счет неоднородностей сре-
ды распространения радиоволн;
субъективные качества оператора при неавтоматизированной
работе или погрешности работы счетно-решающего устройства
при автоматизированном определении координат;
нестабильность параметров радиолокационной станции;
атмосферная рефракция;
влияние земной поверхности.
Атмосферная рефракция связана с неоднородностью земной
атмосферы и оказывает наиболее существенное влияние при из-
мерении угла места цели. Подробно влияние рефракции рассмат-
ривается в курсе, изучающем распространение радиоволн.
Влияние земной поверхности особенно сильно проявляется
при малых углах места и связано с отражениями от ее неровностей
и наличием в диаграмме направленности боковых лепестков, со-
здающих возможности дополнительного приема сигналов, отра-
женных от земли. Интенсивность последних зависит от рельефа
местности на разных азимутах.
Влияние нестабильности параметров радиолокационной стан-
ции в большинстве случаев может быть учтено некоторым эквива-
лентным увеличением шумов приемного устройства.
В данном параграфе описаны ошибки, обусловленные внут-
ренними шумами приемного устройства и флуктуациями ампли-
туды сигнала. Подчеркнем, что рассматриваются ошибки одно-
кратных измерений (ошибки при измерении угловой координаты
по одной пачке).
Выведем общие формулы для оценки точности измерения угло-
вых координат методом весовых коэффициентов, учитывая влияние
внутренних шумов приемного устройства и флуктуаций амплитуды
сигналов. Эти формулы в дальнейшем применим для оценки преде-
льной точности. Можно также использовать их для оценки погреш-
ности некоторых неоптимальных методов обработки сигналов.
При выводе общих соотношений будем полагать, что число им-
пульсов в пачке большое, ошибка по значению мала. Ограничим-
ся рассмотрением только метода антисимметричных весовых ко-
287
эффициентов. Ошибки при использовании метода симметричных
весовых коэффициентов будут точно такими же, так как условия
отыскания оценки, по существу, одинаковы для обоих методов.
При определении угловой координаты методом антисиммет-
ричных весовых коэффициентов специальное устройство выраба-
тывает взвешенную сумму:
/>('„) = Z^,[na(r,
к
или й(/0) = [Па (tk - Q] Uk , если сигнал слабый.
Здесь штрихи, как обычно, обозначают производную функции.
В качестве весовой функции может использоваться некоторая
специально подобранная функция W(tk -z0). Если взвешенная
сумма совпадает с оптимальной, дисперсия ошибки будет мини-
мально возможной, если не совпадает, то дисперсия ошибки воз-
растает. Дисперсия оценки угловой координаты цели определяет-
ся по формуле
< = (14.5)
где 23q/Nq — отношение сигнал/шум по энергии, определенное
как отношение энергии одиночного сигнала 3q к
спектральной плотности белого шума N$/2, на фоне
которого производится измерение.
Поясним смысл этого выражения. Дисперсия ошибки измере-
ния угловой координаты ст? , обусловленная внутренними шума-
ми, зависит от соотношения*1 сигнал/шум, угловой скорости обзора
Па, периода повторения импульсов Тп, формы результирующей
диаграммы направленности FP(Q) антенных систем РЛС и станции
РТР. С увеличением отношения 23$/Nq дисперсия ошибки умень-
шается. Увеличение угловой скорости обзора Qa и периода повто-
рения импульсов 7П ведет к возрастанию дисперсии ошибки, так
как при этом уменьшается число импульсов в пачке. Увеличение
крутизны диаграммы направленности ведет к снижению диспер-
сии ошибки.
Если задаться конкретной формой характеристики направлен-
ности антенны, то формулу (14.5) можно упростить.
Характеристика направленности чаще всего может быть ап-
проксимирована функцией вида sin х/х, изображенной на
рис. 14.8. Для практических расчетов эту характеристику часто ап-
проксимируют следующим аналитическим выражением:
= sin(7rJa / X)sin е
(лт7а / A.) sin 9
где da — размер полотна антенны (вертикальный — если речь идет
о характеристике в вертикальной плоскости, горизонта-
льный — если речь идет о характеристике в горизонталь-
ной плоскости).
288
Рис. 14.8. Функция sin х/х
косинусоидальной функцией
Такая аппроксимация является совершенно точной для антенн
типа синфазного полотна:
F _ / Л,)sine]
0 (7icfa / Л.) sinG
где /i(x) — функция Бесселя первого рода первого порядка;
— радиус раскрыва антенны.
Такая аппроксимация также является точной для антенн типа
параболоида вращения при равномерном распределении поля в
его раскрыве.
Так как интерес представляет только первый лепесток диаграм-
мы направленности, то можно ограничиться более простой ап-
проксимацией:
F(9) = cos "(Ав),
где к — коэффициент масштаба.
Рассмотрим простейший случай, когда можно предположить,
что п =1. Значение масштабного коэффициента выбирается из за-
данной ширины диаграммы направленности 0а антенны по поло-
винной мощности.
При данной аппроксимации для угла 0а/2 (рис. 14.9) имеем
F(f>, / 2) = cos(*0a / 2) = 1/V2 , (14.6)
так как уменьшению мощности в два раза соответствует ослабле-
ние напряженности поля в -72 раз.
Из выражения (14.6) получим
cos(A0a / 2) = cos (л / 4),
что определяет
к =ъ / 20а.
289
Воспользуемся аппроксимацией характеристики направленно-
сти вида
F(0) = cos(fcO).
Предполагая, что характеристики направленности антенн цели
F[(Q) и станции РТР /2(6) одинаковы, получим выражение для ре-
зультирующей диаграммы направленности:
FP(Q) = cos2Dul (14.7)
k2Ba )
Это выражение справедливо при значениях 0, лежащих в преде-
лах от -0а до +0а. Если же 0 > 0а, то Fp(0) = 0.
Вычислим интеграл, входящий в формулу (14.5):
Подставив полученное выражение в формулу (14.5), получим
4 N
о го (14.8)
0Ц тс2 2Э а а
Удобное выражение для дисперсии ошибки измерения получа-
ется, если вместо энергии одиночного импульса Эд ввести суммар-
ную энергию всей пачки импульсов . По определению
=£Эк. L
Энергия А;-го импульса
э, =f,2[n.(^ -/в)]Э0,
поэтому
Эу =30Zfp![Qa(z, -Г,)].
Изменив начало отсчета времени, получим
Эу =Эо£/7(ПЛ)-
к
Заменив приближенно сумму интегралом, запишем
э, = Э04-£Г2(Я,г,)дг =эо—!— iF2An,t,)dt.
-* и а "* п
Воспользуемся очевидным соотношением
£,(пл) = ^(е>-
290
Подставив выражение Fp(&) из формулы (14.7) и проинтегриро-
вав, получим
Эу =Э0 —
1 п.т,
о.
-0;
41 ТС 30а
cos -----0 f/0 =----—
^20а ) AF1J,
Отсюда
Л
зеа
Подставив это выражение в формулу (14.8), найдем дисперсию
ошибки измерения угловой координаты:
2 _ 3 ^0 п2
*ц Я2 2Э£ а‘
Минимально возможная средняя квадратическая ошибка изме-
рения угловой координаты:
5 = — ЦЬ-0а.
Ои тс а|2Эе а
(14.9)
Значение этой ошибки пропорционально ширине диаграммы
направленности 0О и обратно пропорционально квадратному кор-
ню из отношения суммарной энергии сигнала к спектральной
плотности шума Nq.
Полученные соотношения справедливы как для нефлуктуиру-
ющего сигнала, так и для случая дружных флуктуаций. В послед-
нем случае в формулу надо подставить значение энергии для дан-
ной конкретной пачки. Для разных пачек ошибки будут различ-
ными. Чтобы вычислить среднее значение ошибки, надо задаться
законом распределения энергии по различным пачкам и произве-
сти усреднение ошибки по всевозможным пачкам.
В заключение отметим, что формула (14.9) справедлива не то-
лько для импульсного, но и для непрерывного излучения.
Заметим, изменение аппроксимирующей функции не приводит
к существенному изменению дисперсии оценки пеленга. Предпо-
ложим, что радиолокационная станция излучает непрерывный
модулированный сигнал. Результирующую характеристику на-
правленности аппроксимируем колоколообразным импульсом:
/ Ч 2 '
F,(0) = exp -п А •
Здесь 0Q — параметр, определяющий ширину диаграммы на-
правленности.
291
Ширина диаграммы направленности может быть найдена из
условия
= 0,5,
(14.10)
отсюда
= 1п2
(М.11)
или
-О,946о.
Согласно формуле (14.10) выражение для нормированной оги-
бающей сигнала имеет вид
U (t) = exp
/ \ 2
-Tif—
l0o J
(14.12)
При этом средняя квадратическая ошибка измерения времени
запаздывания пачки выражается соотношением
=-^=, (14.13)
q^Jlt
2Э0
где q = —— параметр обнаружения.
V No
Заметим, что параметр f является временем нахождения цели в
пределах диаграммы направленности (временем наблюдения
цели).
Сопоставив формулы (14.11) и (14.12), отметим, что формула
(14.13) для вычисления ошибки справедлива для сигнала (14.10),
если
тогда
ео
О/
Эр
О/
1 f0 у
f =
Средняя квадратическая ошибка измерения угловой координа-
ты:
292
е>
- = 1 / No 9о
или, учитывая выражение (14.11),
= 0,6 —Па.
°* у2Э0 а
(14.14)
Можно показать, что формула (14.14) будет справедлива и для
случая измерения угловой координаты по пачке импульсов, если
число импульсов в пачке достаточно большое. Тогда вместо Эо не-
обходимо рассматривать суммарную энергию пачки импульсов:
j n
= 0,6 --
ГЭЕ
(14.15)
Выражение (14.15) отличается от формулы (14.9) только число-
вым множителем (— *0,55 вместо 0,6) .
71
14.5. НЕОПТИМАЛЬНЫЕ СПОСОБЫ ОБРАБОТКИ
ПАЧКИ ИМПУЛЬСОВ
На практике часто вместо оптимальной весовой функции испо-
льзуют неоптимальную. Форма неоптимальной весовой функции
выбирается такой, чтобы обработка реализовалась проще и в то же
время чтобы погрешности измерения угловой координаты незна-
чительно возрастали в сравнении с погрешностями при оптималь-
ной обработке.
Существует еще одна причина, из-за которой на практике отка-
зываются от оптимальных функций веса. Оптимальные функции
веса, рассмотренные выше, были получены для некоторых вполне
определенных статистических характеристик принимаемого сиг-
нала. Форма оптимальных весовых функций различна для флукту-
ирующего и нефлуктуирующего, слабого и сильного сигналов.
Статистические характеристики сигнала могут изменяться с тече-
нием времени, могут быть неизвестными. Это означает, что в ряде
случаев схема обработки, оптимальная для сигнала с вполне опре-
деленными характеристиками, является неоптимальной для дру-
гого сигнала. Поэтому нет особого смысла всегда работать с опти-
мальными функциями веса. Оптимальные весовые функции
обычно используются только в особо точных системах радиотех-
нической разведки, работающих по целям с известными статисти-
ческими характеристиками. Ниже будут рассмотрены различные
неоптимальные способы обработки пачки импульсов в целях
определения одной угловой координаты, например азимута.
293
Наиболее простой неоптимальной симметричной функцией
веса ^(z -t0 является прямоугольная (рис. 14.10). Она близка к
оптимальной весовой функции, соответствующей независимым
флуктуациям амплитуд импульсов и большому отношению сиг-
нал/шум.
и/Гг-О।
te t»+r/2
Рис. 14.10. Прямоугольная функция веса
Сущность обработки сигнала при прямоугольной функции веса
заключается в следующем. Оператор (счетно-решающее устройст-
во) для каждого предполагаемого времени запаздывания вычисля-
ет площадь, ограниченную огибающей на участке
Го - Тд/2, г0 + Тр/2 (см. рис. 14.10), где — ширина весовой функ-
ции. В качестве оценки времени запаздывания z0 принимается та-
кое значение при котором площадь под огибающей
наибольшая.
Симметричной функции веса ЙИ(/ - /0) прямоугольной формы
эквивалентна антисимметричная функция веса пред-
ставляющая собой совокупность двух 5-функций с разными зна-
ками:
l¥'(t - ts) = 8р - (z0 -Тр/2)]-8р-(/, + Тр/2)]. (14.16)
Обработка огибающей сигнала Y(t) заключается в данном слу-
чае в образовании взвешенного интеграла, а не взвешенной сум-
мы, так как У(/) — непрерывная функция:
Х'«)=m'-'oXo-*.
Подставив в эту формулу выражение для функции веса (14.16),
получим
А('о) = И - -т- - У 'е + — I
\ и / ° Э ° Э I
Оценка времени запаздывания определяется из условия
Л(г0) = О.
Иначе:
294
Таким образом, оценка времени запаздывания представляет
собой среднее арифметическое двух значений времени (tQ - тр/2)
и (70 + тр /2), при которых огибающая Y(t) принимает одинаковые
значения (рис. 14.11). Этот метод определения оценки называют
методом "вилки". При использовании метода "вилки", по существу,
максимизируется пло-
щадь под огибающей
сигнала У(г), так как
обработка сигнала с
помощью симметрич-
ной функции веса эк-
вивалентна обработке
с помощью соответст-
вующей антисиммет-
ричной функции веса.
Подчеркнем, что
при рассмотренном
выше методе "вилки"
ширина весовой функ-
ции Тр фиксированна,
поэтому при измене-
нии уровня сигнала или расстояния до цели уровень отсчета изме-
няется.
Примером обработки сигнала методом "вилки" является визуа-
льное определение середины пачки импульсов по индикатору кру-
гового обзора (ИКО) или по индикатору азимут-частота. Отметка
на ИКО представляет собой светящуюся дужку, образованную се-
рией импульсов.
Начало отсчета оператор выбирает на уровне шумов. Положение
центра дужки отсчитывается с помощью азимутальной шкалы.
Определение азимута по индикатору азимут-частота сущест-
венно не отличается от измерения азимута по ИКО.
При работе с индикатором с амплитудной отметкой оператор
фиксирует положение антенны, при котором сигнал исчезает в
шумах. В качестве угловой координаты цели принимается среднее
арифметическое двух отсчетов.
Метод "вилки" можно применить и в автоматизированных сис-
темах съема данных. При этом специальная схема выделяет огиба-
ющую амплитуд импульсов от выбранной цели. Затем проводится
отсчет интервалов запаздывания, при которых сигналы одинако-
вы. Среднее арифметическое этих отсчетов принимается за оцен-
ку времени запаздывания.
Если в качестве симметричной весовой функции использовать
8-функцию (такая функция весьма далека от оптимальной), полу-
чим метод максимума. Покажем это на примере.
Если весовая функция выражается формулой
- re) = 8(r - z0>
295
Рис. 14.12. Огибающая выходных сигналов
по методу максимума
то взвешенный интервал
%) =^(' -'Ж =Н' -'.УМ' = ш /
Оценка времени запаздывания определяется из условия
й(70) = max или У(70) =лтах.
В качестве оценки /0 принимается такое значение г9, при кото-
ром огибающая достигает максимума (рис. 14.12).
В настоящее время ме-
тод максимума не приме-
няется в станциях радио-
технической разведки, так
как обладает низкой точ-
ностью. Причина заключа-
ется в том, что в окрестно-
сти максимума диаграммы
направленности амплитуда
сигнала меняется медлен-
но и воспринимается опе-
ратором как неизменная.
Сильно сказывается и вли-
яние шумов: даже при сла-
бом шуме момент макси-
мума огибающей может
значительно сместиться
относительно истинного времени запаздывания.
Иногда диаграмма направленности антенны имеет резко выра-
женный минимум. В этих случаях возможна пеленгация методом
минимума. Оператор за оценку времени запаздывания принимает
момент, когда огибающая имеет минимальное значение (рис.
14.13).
Методу минимума соответствует функция веса
РИ(г-/0)=-8(г-/о).
Действительно, h(t^ = -te)Y(/)dt =-У(/). Следовательно,
оценка должна определяться из условия -У(г0) = тах или
У(/о) = min.
Рис. 14.13. Огибающая выходных сигналов по методу минимума
296
Метод минимума может оказаться значительно точнее метода
максимума, если минимум диаграммы направленности острый.
Недостатком метода минимума является низкий уровень сигнала в
рабочей точке (т. е. в точке минимума огибающей). В радиотехни-
ческой разведке метод минимума в чистом виде используется
крайне редко. Обычно положение минимума определяют методом
"вилки’'. При этом оператор замечает два направления 0! и 02, для
которых сигнал начинает выделяться на фоне шумов, а направле-
ние на цель определяется как среднее арифметическое.
14.6. ОШИБКИ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ
НЕОПТИМАЛЬНЫМИ МЕТОДАМИ
В настоящем параграфе рассмотрены ошибки, обусловленные
субъективными качествами оператора (погрешностями работы
счетно-решающего устройства), внутренними шумами и флуктуа-
циями сигнала. Угловые координаты цели за время измерения бу-
дем считать практически неизменными.
Проанализируем ошибки, обусловленные субъективными ка-
чествами оператора или погрешностями работы счетно-решающе-
го устройства.
В большинстве неоптимальных методов пеленгации угловая
координата цели определяется путем сравнения двух значений
сигналов. Так, например, при использовании метода "вилки” срав-
нивают амплитуды сигналов на краях огибающей пачки импуль-
сов.
В силу субъективных особенностей оператор при необходимо-
сти быстрого отсчета будет считать одинаковыми сигналы, отли-
чающиеся по амплитуде на некоторую величину ДУС (рис. 14.14).
Практически установлено, что оператор средней натренированно-
сти не замечает разницы в амплитуде сигналов при условии
|дУе/У0|<5..15%,
(14.17)
где Уд — максимальная амплитуда сигнала при отсутствии ошибки
297
При сравнении амплитуд сигналов в счетно-решающем
устройстве тоже будет иметь место “область нечувствительности”^
Эта область, как правило, уже, чем область, определяемая нера-
венством (14.17). Ее параметры зависят от качества работы счет-
но-решающего устройства.
Рассчитаем ошибки измерения угловых координат методом
“вилки” при фиксированной ширине весовой функции, полагая,
что имеем предварительное выделение огибающей амплитуд им-
пульсов. Поскольку нас интересуют только ошибки, связанные с
“областью нечувствительности”, то шумами можно пренебречь,
считая, что огибающая по форме совпадает с результирующей ха-
рактеристикой направленности антенны:
Г(1)=йЩЯД
где а — коэффициент пропорциональности.
На рис. 14.14 буквами Р отмечены точки отсчетов в идеальном
случае, а буквами С — при наличии ошибки измерения времени
Д^. Связь между ошибкой дг9 и различием в амплитудах ДУС мож-
но установить из заштрихованного треугольника:
где Yp — производная У(/) по времени в точке Р (точки Р называют
часто рабочими точками).
Следовательно,
|Л'»1 »
ДУ
гу;
М
2«q0|a;(q0?)|’
а ошибки измерения угловой координаты
|ДГС|
деи = о0дг6 = 1
(14.18)
где F'p(p.at) — производная характеристики направленности по
углу в рабочей точке.
Уровень сигнала в рабочей точке:
у,=г(9,)=й/-,(е,).
Найдем отсюда коэффициент а и подставим в соотношение
(14.18):
£ ДГС
2 Y
(14.19)
298
Таким образом, каждому значению ДУ/ Yсоответствует вполне
определенное значение ошибки измерения угловой координаты.
Коэффициент ) часто называют коэффициен-
том пеленгационной чувствительности метода “вилки”. Чем боль-
ше этот коэффициент, тем меньше ошибка измерения угловой ко-
ординаты, связанная с наличием “области нечувствительности”.
Заметим, что формула (14.19) справедлива при больших значе-
ниях отношения сигнал/шум и достаточно большом уровне отсче-
та Yp. При несоблюдении этих условий значения дУр и Д/о связаны
нелинейной зависимостью, что значительно усложняет расчеты.
Ранее были выведены формулы для расчета ошибки измерения
угловых координат методом весовых коэффициентов. К сожале-
нию, для метода “вилки”, использующего прямоугольную функ-
цию веса Иф), эти формулы непригодны, так как производных
прямоугольной функции веса не существует.
Рис. 14.15. Крайние импульсы пачки при наличии шумов
Оценим приближенно значение ошибки измерения угловых
координат методом “вилки” за счет внутренних шумов. На
рис. 14.15 заштрихованы приращения полезного сигнала, обу-
словленные шумом. В соответствии с методом “вилки” за оценку
времени запаздывания должно быть принято среднее арифметиче-
ское моментов прихода крайних импульсов: 1-го и /и-го. На самом
же деле угловая координата цели такова, что сигнальные части
крайних импульсов соответственно равны Yc и YCm. Ошибка изме-
рения координаты будет точно такой же, как если бы при отсутст-
вии шумов оператор не замечал разницы в амплитудах
(ЛГШ =ЛУС( -ЛГе_).
Следовательно, для расчета можно воспользоваться получен-
ной выше формулой (14.19), в которой ДУ надо заменить на ДУШ.
Расчетная формула имеет вид
299
1
2 У,
Ш)
(14.20)
Сравним погрешности, обусловленные шумами, оптимального
метода измерения и метода “вилки”. Будем считать сигнал неф-
луктуирующим и, заменив отношение ДУш/Ур в формуле (14.20)
равным ему выражением (AtZi — AUm)/Up, вычислим дисперсию
ошибки:
(де„)2 = Дд1Д2 -д(/2)Л ^4М-
Учитывая независимость отклонений амплитуд, обусловлен-
ных шумом, на краях пачки, получим
(ли, -ли„У =(ли,У +(ли„У =2(ли,У =2(N,/23,yjl,
где черта означает усреднение по времени.
Следовательно,
7T77V 1 А. Л?(е)
<• “> 2 2Э0 z} f;2(e,)'
Далее
UI Л2(9) 1
и2, ^2(9,) ^2(9,)’
так как характеристика направленности антенны нормирована,
поэтому
/до \2 _ L Л 1
~2 2Э0 >/(ер)‘
Аппроксимируем результирующую характеристику направлен-
ности выражением
^(6)
2| 710
- COS -----
20„
Тогда
(д9«)2
2 (Ур в;
я2 2Э„ sin(^0p/e„)'
300
Наименьшая дисперсия при 0р = 9а/2 будет:
(ДО )2. =-.-^°-.О^
V ^пъп к 2Э0 а
Сравним полученное значение с минимально возможной
ошибкой. Отношение дисперсии
е,/(2П.Г„) = М/2,
где М — число импульсов, приходящихся на ширину диаграммы
направленности.
Результат ясен; метод “вилки” предусматривает использование
только крайних импульсов пачки, а оптимальная обработка — все
импульсы пачки.
14.7. АВТОМАТИЧЕСКОЕ СОПРОВОЖДЕНИЕ
ПО УГЛОВЫМ КООРДИНАТАМ ПРИ ИСПОЛЬЗОВАНИИ
ОДНОКАНАЛЬНЫХ СИСТЕМ
В современных станциях радиотехнической разведки высокой
точности, работающих по скоростным целям (при разведке кос-
мических объектов), как правило, используется автоматическое
сопровождение цели по угловым координатам. При автосопро-
вождении по направлению отсутствуют субъективные ошибки,
вносимые человеком при ручном управлении, что делает сопро-
вождение цели более плавным и надежным.
Автоматическое сопровождение может осуществляться либо
только по одной угловой координате, либо по двум координатам,
но раздельно по каждой, либо по двум угловым координатам со-
вместно. Для сопровождения по одной угловой координате может
быть использован метод равносигнальной зоны или метод линейного
развертывания. Для совместного сопровождения цели по обеим
угловым координатам чаще всего применяется метод конического
развертывания.
14.8. МНОГОКАНАЛЬНЫЕ СИСТЕМЫ ИЗМЕРЕНИЯ
УГЛОВЫХ КООРДИНАТ
Из многоканальных методов измерения угловых координат
наиболее часто применяют фазовый метод и метод сравнения ам-
плитуд.
Характер оптимальной обработки сигналов в многоканальных
системах измерения угловых координат может быть установлен с
помощью изучения выражения для отношения правдоподобия.
Соответственно выкладки весьма громоздки и поэтому в учебнике
не приводятся.
Рассмотрим фазовый метод измерения угловых координат.
301
Рис. 14.16. Фазовый метод измерения угловых координат
В простейшем случае антенная система фазового пеленгатора
состоит из двух отдельных антенн 1 и 2, разнесенных в простран-
стве на некоторое расстояние (базу) d (рис. 14.16). Если направле-
ние на цель отклонено от оси антенной системы на угол 90ТН, то
разность хода сигналов, принятых антеннами, составит d sin(0OTH).
Соответственно разность фаз принятых сигналов:
<Pi -Ф2 = v</sin(e^>
Л
где X — длина волны передатчика.
После усиления сигналы поступают на фазометр. По измерен-
ной разности фаз <pi—<р2 и известным d и X можно определить на-
правление на цель относительно оси антенной системы
0ОТН =arcsinp—
; \ 2 Д
X
d
(14.21)
Следует заметить, что угол 0ОТН зависит от длины волны, т. е. от
частоты принимаемого сигнала. Но частота сигнала измеряется в
момент разведки. Поэтому оценку направления на источник излу-
чения можно сделать только после измерения частоты. Этот факт
ограничивает применение фазовых пеленгаторов в станциях ра-
диотехнической разведки.
Определение угловой координаты цели 0ОТН с помощью фазо-
вых пеленгаторов можно производить различными способами.
Наиболее простой способ заключается в том, что антенная систе-
302
ма поворачивается как одно целое, а оператор, следя за показани-
ями фазометра, отмечает угловую координату Gt оси антенной сис-
темы, при которой разность фаз срг— <р2, а значит, и угол 0ОТН обра-
щаются в нуль. Значение 0t принимается за угловую координату
цели Эц. Следует заметить, что при рассмотренном способе необя-
зательно иметь два раздельных приемных канала. Можно обой-
тись одним приемным каналом, если предварительно сигналы с
выходов антенн вычесть (сложить). Тогда в момент совпадения
оси антенной системы с направлением на цель амплитуда разно-
стного сигнала обратится в нуль, а при суммировании сигналов
она окажется наибольшей. Учитывая это, оператор может опреде-
лить угловую координату цели. Вариант с одним приемным кана-
лом представляет собой обычный одноканальный метод пеленго-
вания по минимуму (по максимуму) сигнала. Поэтому в дальней-
шем подобные варианты рассматриваться не будут.
Способ определения угловой координаты цели с помощью
двухканального фазового пеленгатора представляет наибольший
интерес. Антенная система производит обзор пространства, дан-
ные об угловом положении оси антенной системы 0t в каждый мо-
мент времени поступают на счетно-решающее устройство (рис.
14.17). Радиоимпульс принимается антеннами А! и А2, после чего
с выхода фазометра снимается напряжение, пропорциональное
разности фаз Дф=ф!-ф2 и подается на счетно-решающее устройст-
во. Последнее обрабатывает разность фаз в соответствии с форму-
лой (14.21) и полученный результат 0ОТН суммирует с угловой коор-
динатой 0t в момент приема импульса. С выхода счетно-решающе-
го устройства снимается угловая координата цели 0Ц. Таким
образом, двухканальная фазовая система позволяет определить уг-
ловое положение цели с высокой точностью по одному принятому
импульсу. Моноимпульсный радиопеленгатор, как увидим далее,
может быть осуществлен не только на основе фазового метода, но
и на основе любого многоканального метода пеленгации.
///-г-///
РЛС 1
Рис. 14.17. Двухканальный фазовый пеленгатор
303
Радиопеленгатор, структурная схема которого изображена на риоЛ
14.17, позволяет определить направление на цель и при остановлен*
ной антенне. Принцип работы при этом остается неизменным.
При конструировании антенной системы фазового пеленгатора
следует иметь в виду, что разность фаз cpi—<р2 определяется фазо*
метром с точностью до слагаемого, кратного 2тг. Показания фазо-
метра будут одинаковыми при значениях разности фаз Дер, Дф+2л,
Дф+4л и т.д. Это может привести к неоднозначному отсчету угла
0ОТН. Так, например, если показания фазометра соответствуют раз-
ности фаз Дф4-2тгл, где п — целое число, то угол 0ОТН может быть
равен 0' или 0" и т. д.
Существуют различные способы устранения неоднозначности
отсчета угловой координаты. Можно, например, использовать
остронаправленные антенны и ширину диаграммы направленно-
сти выбрать такой, чтобы принимать сигналы РЛС только из узко-
го сектора углов. Угловой интервал 0ОТН должен соответствовать
интервалу разности фаз cpi—(р2 протяженностью я.
Вместо применения остронаправленных антенн можно умень-
шить базу d. Если она равна половине длины волны, то отсчет уг-
ловой координаты будет однозначным во всем интервале углов от
-я/2 до +тс/2. Недостатком этого способа является существенное
снижение точности измерения угла 0ОТН. Действительно, ошибка
измерения разности фаз Д(<р]-<р2)> обусловленная шумами и по-
грешностями работы аппаратуры, одна и та же для большой d[ и
для малой d-2 базы (рис. 14.18). Но при малой базе этой ошибке со-
ответствует большая по значению ошибка определения угла 0ОТН,
так как крутизна зависимости разности фаз Дер от 0ОТН невелика.
Рис. 14.18. Пеленгационные характеристики фазового пеленгатора
304
Рис. 14.19. Трехканальный фазовый пеленгатор
Устранить неоднозначность отсчета можно также путем приме-
нения третьей антенны и третьего приемника канала (рис. 14.19).
По разности фаз <Pi —Ф2 сигналов, принятых антеннами 1 и 2, угло-
вая координата цели определяется с высокой точностью, но неод-
нозначно. Измерив разность фаз сигналов, принятых антеннами 2
и 3, можно устранить эту неоднозначность подобно тому, как в ча-
сах с помощью часовой стрелки устраняется неоднозначность от-
счета времени по минутной стрелке.
Рассмотрим амплитудный метод измерения координат, осно-
ванный на сравнении амплитуд.
Излучаемые целью сигналы принимаются двумя антеннами,
диаграммы направленности которых смещены относительно друг
друга на некоторый угол 0СМ. Если направление на цель совпадает
с угловой координатой оси антенной системы 0Л т. е. угол 0ОТН ра-
вен нулю, то амплитуда сигналов на выходах антенн А] и Аг одина-
кова. Если же направление на цель отклоняется от оси антенной
системы, то отношение амплитуд U\llh не будет равно единице.
Зная формы характеристик направленности, значение угла 0СМ,
измерив отношение амплитуды И\]11г с помощью специального
устройства, можно определить угол 0ОТН. Эта операция произво-
дится в счетно-решающем устройстве, в которое вводится также
угловая координата антенной системы 0,. Направление на цель
рассчитывается по формуле
6ц ~ 6/+0Отн.
Метод сравнивания амплитуд, как и фазовый метод, позволяет
точно определить угловую координату цели по одному принятому
импульсу. Пеленгация цели возможна не только при обзоре, но и
при остановленной антенной системе.
14.9. СПОСОБЫ ИЗМЕРЕНИЯ И ИНДИКАЦИИ РАЗНОСТИ
ФАЗ И ОТНОШЕНИЯ АМПЛИТУД СИГНАЛОВ
Существует множество различных способов измерения разности
фаз и отношения амплитуд сигналов. Рассмотрим некоторые из
них, которые удобно использовать в моноимпульсных станциях.
305
Сначала рассмотрим способы измерения и индикации отноше-
ния амплитуд, так как принцип действия фазометра сводится в
конечном счете к измерению отношения амплитуд.
Предположим, что радиоимпульсы, снимаемые с выходов при-
емных трактов, имеют одинаковые фазы. Это возможно, если
электрические (фазовые) центры антенн, используемых при мето-
де сравнения амплитуд, принадлежат одному фронту ЭВМ. Тогда
отношение амплитуд радиоимпульсов можно измерить осциллог-
рафическим методом. Сущность этого метода поясняется просто.
Напряжения с выходов приемных трактов и U2 подаются соот-
ветственно на горизонтальные и вертикальные отклоняющие пла-
стины осциллографа. Изображение на экране осциллографа будет
иметь вид отрезка прямой линии, расстояния концов которого от
центра по горизонтали и вертикали пропорциональны соответст-
венно амплитудам U{ и U2. Угол наклона этого отрезка к верти-
кали связан с отношением амплитуд U\IU2 следующим образом:
tgM/= U{/U2.
Измерив угол, можно рассчитать отношение амплитуд. На
краю экрана осциллографа размещают кольцевую шкалу, програ-
дуированную соответственно значениям угла отклонения направ-
ленности на цель от оси антенной системы.
При изменении отношения амплитуд от 0 до оо угол ср изменя-
ется от 0 до 90°. Поэтому используются только первый и третий
квадранты экрана осциллографа. В дальнейшем будет описан слу-
чай, когда напряжения U\ и U2 находятся в противофазе. Тогда
tgvp = ~U\/U2 и изображение на экране осциллографа будет нахо-
диться во втором и четвертом квадрантах.
Рассмотрим способ измерения отношения амплитуд импульсов
с использованием усилителей с логарифмической характеристи-
кой и схемы вычитания. Сущность способа заключается в следу-
ющем. Видеоимпульсы с выходов детекторов приемных каналов
поступают на усилители с логарифмической амплитудной харак-
теристикой. Выходные напряжения усилителей будут пропорци-
ональны соответственно lgt/j и lg U2. Далее эти напряжения пода-
ются на схему вычитания. Поскольку lg— \gU2 = \g(U{/U2), то
амплитуда импульса на выходе схемы вычитания определяется то-
лько отношением амплитуд импульсов.
Одним из устройств, позволяющих измерять разность фаз двух
сигналов, является фазометр суммарно-разностного типа. Сигна-
лы и U2(t) одинаковой амплитуды с начальными фазами срj и
Ф2 подаются на специальное устройство, образующее сумму и раз-
ность входных сигналов:
Ui(t) + U2(t) = U cos(co/ + <рт) + U С05(аЦ + <р2) =
= 2 U cosf — — ^COsf (£>t + +
I 2 J I 2
306
£72(О - U\t) = IV sin sin rar +
Фазы суммарного и разностного сигналов отличаются на п/2, а
амплитуды определяются выражениями:
U+ = 2£7|cos[((p! - <р2) / 2]|;
U_ = 2t/|sin[(<pl -<р2) / 2]|.
Отношение амплитуд разностного и суммарного сигналов за-
висит только от разности фаз исходных сигналов срj-ср2:
jf- = |tg[(<Pt - Ф2)/2] I-
Рис. 14.20. Зависимость отношения амплитуд от разности фаз сигналов
Поэтому, измерив отношение амплитуд UJU+, можно рассчи-
тать разность фаз <pi-(p2. Графически зависимость отношения амп-
литуд U./U+ от разности фаз исходных сигналов срj-ср2 показана на
рис. 14.20. Интервал однозначного измерения разности фаз опи-
санным способом, как следует из графика, равен только ±л ради-
ан. Этот недостаток может быть устранен за счет некоторого изме-
нения схемы.
14.10. ПРЕДЕЛЬНАЯ ТОЧНОСТЬ ИЗМЕРЕНИЯ УГЛОВЫХ
КООРДИНАТ ДВУХКАНАЛЬНЫМИ СИСТЕМАМИ
Рассчитаем значение “шумовой” ошибки измерения утла двух-
канальной фазовой системой. Представим шум в виде последова-
тельности шумовых импульсов, длительность которых в среднем
равна 1/А/пр, где Д/Пр — полоса пропускания приемного тракта.
Если частотная характеристика приемных трактов близка к опти-
307
мальной, то длительность шумового импульса в среднем равна
длительности полезного импульса. Для оценки предельной точно-
сти измерения координат сделанные допущения оправданы. Резу-
льтирующее колебание (сигнал + шум) в каждом приемном кана-
ле можно представить в виде суммы двух векторов — сигнального
Uс и шумового иш. Амплитуды и начальные фазы шумовых век-
торов £?ш1и Uш2 за время импульса можно считать неизменными в
течение импульса, но меняющимися от одного измерения к друго-
му по случайному закону. Наличие шумов приводит к тому, что
разность фаз результирующих векторов и U2 отличается от раз-
ности фаз ф! и ср2 полезных сигналов. Связь между ошибкой изме-
рения разности фаз Д(ф1-ф2) и ошибкой измерения угловой коор-
динаты 0ОТН можно установить с помощью формулы (14.21). Если
считать, что угол Д0ОТН невелик, то
Д0ОТН =[V(2kJ)]a((Pi -ч>2)'
Поскольку шумы в разных приемных каналах независимы, то
дисперсия ошибки измерения разности фаз равна сумме диспер-
сий фазовых ошибок в каждом приемном канале:
[д(ф, -<р2)]2 =(ДФ()2 +(Д<Р2)2.
Будем считать, что приемные каналы идентичны. Следователь-
но, (Дер,)2 =(Дф2)2. Тогда дисперсия ошибки измерения угла 0ОТН
М™)2 = 2[V(2Ktf)]’ (М7. (14.22)
Рассчитаем (Дф])2, полагая, что отношение сигнал/шум доста-
точно велико. Проще всего это можно сделать, разложив вектор
шума t7ml на две ортогональные составляющие U ш । и Uш1. Одна
из них, Uш р совпадает по направлению с вектором полезного сиг-
нала Uс}, а другая, Uперпендикулярна к нему. Эти составляю-
щие независимы между собой. Каждая из них распределена по
нормальному закону с дисперсией, равной дисперсии шума. Дей-
ствительно, шум £/ш(/) можно записать в виде
(0 = и к |(?) cos(cor) + sin(coZ),
отсюда
[f/mW]2 = <72 5cos2(arf) + <7^1sin2(a>l) = j72|| =с72±.
На значение ошибки по фазе в первом приближении влияет то-
лько составляющая 17шх, причем ошибка по фазе мала вследствие
незначительного шума. _____________
Дисперсия фазовой ошибки (Дф])2 ~С/2 /
308
Если обработка сигнала в приемнике близка к оптимальной, то
/VI -230/N0,
где Эо — энергия одиночного импульса;
Nq — спектральная плотность мощности белого шума.
Подставляя полученные соотношения в формулу (14.22), най-
дем выражение для дисперсии угла:
(Л6„™)2 = 2[Х(2я</)]2У(| /(2Э0).
Это выражение справедливо для случая определения угловой
координаты по одному принятому импульсу. Если же принимает-
ся Л/ импульсов примерно одинакового значения, то дисперсия
ошибки измерения может быть уменьшена в М раз. Для этого не-
обходимо в качестве оценки угловой координаты взять среднее
арифметическое результатов М отдельных измерений. Операцию
усреднения оператор производит путем “сглаживания” флуктуа-
ций изображения на экране индикатора. В счетно-решающем
устройстве должна быть предусмотрена специальная усредняющая
(интегрирующая) схема.
Итак, при приеме М импульсов дисперсия ошибки измерения:
(ле„,и)2 = 2[х / (2nd)]2.
Учитывая, что Э0Л/=Э^> , где — полная энергия принято-
го сигнала, полученную формулу можно переписать в виде
------ , N
(де.,,)2 =2[Х / (2itd)] ——-°-. (14.23)
2Э1
Проведенный расчет приближенный, однако окончательный
результат совпадает с точной формулой, полученной с примене-
нием весьма тонкого статистического анализа.
Из соотношения (14.23) легко получить выражение для средней
квадратической погрешности измерения угла:
(14'24)
2тш у2£
Сравним двухканальные методы измерения угловых координат
и одноканальный метод весовых коэффициентов. Если общие га-
баритные размеры антенных систем при двухканальном и однока-
нальном методах одинаковы и число импульсов М в пачке доста-
точно велико, то шумовые ошибки будут одного порядка для срав-
ниваемых методов. Действительно, если размер антенны
одноканальной системы равен 2d, то ширина ее диаграммы на-
правленности 90 будет приближенно равна А/(2б/).
309
Подставив это значение в выражение (14.9), получим для одно-
канальной системы формулу
° I No
(14.25)
которая незначительно отличается от формулы (14.24).
Следует заметить, что при уменьшении числа импульсов в пач-
ке выражение (14.25) перестает быть справедливым. Если принять
всего лишь один импульс, то ошибка измерения угловой коорди-
наты одноканальной системы будет соответствовать половине ши-
рины диаграммы направленности 0а/2а независимо от энергии
сигнала.
Важным достоинством двухканальных систем, как отмечалось,
является отсутствие влияния флуктуаций сигнала на точность из-
мерения угловых координат. Недостатком двухканальных систем в
сравнении с одноканальными является большая сложность аппа-
ратуры (два приемных канала вместо одного, специальные устрой-
ства для измерения разности фаз или отношения амплитуд сигна-
лов и т. д.).
Рассмотрим некоторые особенности технического выполнения
двухканальных систем, связанных с необходимостью уменьшения
аппаратурных ошибок измерения угловых координат. Для того
чтобы разность фаз или отношение амплитуд принятых сигналов
не подвергались резкому искажению в приемных каналах, исполь-
зуют общие гетеродины.
Колебания от общего гетеродина поступают на смеситель при-
емных каналов. После усиления в усилителях промежуточной час-
тоты сигналы поступают на анализирующее устройство (фазометр
или измеритель отношения амплитуд). В такой схеме случайные
изменения фазы или амплитуды усиливаемого сигнала наблюда-
ются в обоих приемных каналах и, следовательно, не влияют на
разность фаз или отношение амплитуд на выходе усилителей про-
межуточной частоты.
В ряде случаев наличие общего гетеродина недостаточно для
хорошей работы схемы. Дело в том, что в силу ряда причин фазо-
вые задержки и коэффициенты усиления приемных каналов могут
меняться в довольно широких пределах. Если эти изменения раз-
ные в различных каналах, то они могут привести к существенным
ошибкам измерения угловой координаты. Поэтому второй осо-
бенностью технического выполнения двухканальных приемных
устройств является обеспечение идентичности схемы при монтаже
приемных каналов.
В особо точных станциях кроме указанных мер приходится
применять еще автоматическое выравнивание фазовых задержек и
коэффициентов усиления отдельных приемных каналов. Это вы-
равнивание производится по специальному контрольному сигна-
лу, подаваемому на входы приемников.
310
14.11. ПРИНЦИПЫ ПОСТРОЕНИЯ МОНОИМПУЛЬСНЫХ
РАДИОПЕЛЕНГАТОРОВ. МОНОИМПУЛЬСНАЯ
ПЕЛЕНГАЦИЯ
В моноимпульсных радиопеленгаторах каждый принятый сиг-
нал несет информацию о положении цели в пространстве. Выде-
ление информации о направлении на источник радиоизлучений
достигается одновременным сравнением амплитуд и фаз сигна-
лов, которые принимаются несколькими антенными устройства-
ми. Различные типы моноимпульсных пеленгаторов отличаются
используемыми параметрами сигналов и способом обработки из-
лучений, принимаемых различными антеннами. По принципу об-
работки сигналов моноимпульсные радиопеленгаторы делятся на
четыре типа:
амплитудно-разностные;
фазоразностные;
амплитудные суммарно-разностные;
фазовые суммарно-разностные.
Рис. 14.21. Амплитудно-разностный пеленгатор
311
Амплитудно-разностный пеленгатор — это радиопеленгатор,
принцип действия которого основан на сравнении амплитуд при-
нимаемых сигналов в двух пеленгационных каналах (рис. 14.21).
Диаграммы направленности двух антенных систем развернуты
относительно равносигнального направления на углы ±у0. При-
нимаемые сигналы усиливаются отдельными приемными канала-
ми, детектируются и подаются на вычитающее устройство.
Найдем сигнал на выходе вычитающего устройства. Для этого
сигнал, принятый антенной и поступивший на вход приемника
первого канала, запишем в виде
t/cl(/) + у) cos (со/+ ср),
где к — коэффициент пропорциональности;
/г(к|/0 + у)~ характеристика направленности антенны;
ср0 — угол отклонения антенны от равносигнального на-
правления;
у— угол отклонения источника радиоизлучений от рав-
носигнального направления;
со и ср— частота и начальная фаза сигнала соответственно.
Сигнал на выходе второго приемного канала имеет вид
Uc2(f) ~ “ у) COS (со/ + ср).
Принятые сигналы преобразуются, усиливаются, детектируют-
ся и поступают на вход 7 и 2 вычитающего устройства в виде
U{(t) = kklF(y0 + у);
U2(t) =U2F(y0 - у).
где к[ и к2 — коэффициенты усиления в каналах 7 и 2. На выходе
схемы вычитания имеем
= -U2 = k[k{F{yQ + y)-k2F(y0 -у)].
Разложим функции F(\p0 + у) и F(\p0 - у) в ряд Тейлора в окре-
стности точки ср0. Ограничиваясь линейным приближением, за-
пишем
U
ВЫХ
= k{(kt -k2)}F(V<>) + (kt+k2^^
•у-
4»=V0
Следует заметить, что к таким пеленгаторам предъявляются
высокие требования по идентичности каналов, иначе сравнение
амплитуд на их выходе теряет смысл. В этом случае можно считать
к\ = к2 = к$. Тогда формула для выходного напряжения примет вид
=2кка^^
ВЫХ (J j
<7\р
• У-
Ч' = Ч'О
312
Анализ выражения показывает, что выходное напряжение
устройства вычитания при малых углах отклонения прямо про-
порционально углу у. Основной недостаток такой системы заклю-
чается в высоких требованиях к стабильности и равенству друг
другу коэффициентов передачи сигналов в каналах. Если коэффи-
циент усиления каналов неидентичен, то это вызывает смещение
пеленгационной характеристики по углу, что приведет к ошибке
определения пеленга на источник радиоизлучения.
Фазоразностный пеленгатор — это пеленгатор, в котором испо-
льзуется сравнение фаз принятых сигналов двумя антеннами.
Применяется в системах точного определения угловых координат
излучающих целей. В отличие от амплитудно-разностного пелен-
гатора антенны фазоразностного пеленгатора не развернуты отно-
сительно равносигнального направления. Поясним принцип ра-
боты фазоразностного пеленгатора с помощью простейшей схемы
(рис. 14.22).
ИРС (цепь)
Рис. 14.22. Фазоразностный пеленгатор
31
Антенные системы А\ и А2 разнесены в пространстве на рассто-
яние d, называемое базой. Если источник радиоизлучения распо-
ложен под углом у относительно направления, перпендикулярного
к базе, то его сигналы будут приняты антенными А[ и А^ не одно-
временно, а с задержкой, что вызовет определенный фазовый
сдвиг:
Так как напряжение гетеродина на смеситель первого канала
подается через фазовращатель, то сигнал на выходе УПЧ-1 будет:
(0 = *ЛусI (г) cos(conpr - ффв - ф,) ,
где фф0 — фазовый сдвиг сигнала из-за наличия фазовращателя;
Ф,— фазовый сдвиг сигнала в УПЧ-1;
кус1 — коэффициент усиления УПЧ-1.
На выходе УПЧ-2 сигнал представим в виде
U2(0 = k2kyz2 F2 (у)cos(conpz - ф2),
где куС2 — коэффициент усиления УПЧ-2;
Ф2— фазовый сдвиг сигнала в УПЧ-2.
Фазовый детектор является перемножителем входных сигна-
лов, на выходе которого стоит узкополосный фильтр. Сигнал на
выходе фазового детектора с учетом фильтрации составляющей
удвоенной частоты имеет вид
^вых =^фд^Л2^уСЛус2^(У)/?2(У)СО8[(ффв - ф) + (ф( -ф2)].
Для обеспечения равенства нулю выходного сигнала при нуле-
вом отклонении от оси антенной системы (у =0) необходимо, что-
бы фазовращатель сдвинул фазу на л/2. Тогда выходное напряже-
ние фазового детектора
^вьгх
= Zc,1F1(y)T2(y)cos
+ (<Pi -<р2)
где кп к^дк\к2куо,\куС2-
Заменяя сдвиг фаз ф его значением, получим
2 ТС
= ^IIF1(y)/’2(y)sin — Jsiny + (ф, -ф2) .
Л
(14.26)
Анализируя это выражение, можно сделать следующие выводы:
амплитудные характеристики принимаемых трактов не влияют на
h тожение нулевого значения пеленгационной характеристики;
неидентичность фазовых характеристик каналов приводит к до-
полнительным ошибкам определения угловых координат.
314
Существенным недостатком, присущим фазовым системам, яв-
ляется неоднозначность измерения фазы, а следовательно, и пе-
ленга. В качестве мер борьбы с этим можно использовать узкие
диаграммы направленности или постановку дополнительных при-
емных каналов, что создает многошкальное измерение фазы —
грубое и точное.
Из формулы (14.26) видно, что чем больше база d, тем больше
крутизна пеленгационной характеристики. И чем больше база,
тем больше ложных направлений в пределах пеленгационной ха-
рактеристики. Если дополнительный канал приема выбрать с та-
кой малой базой, что ложные нулевые направления не имеют мес-
та, то можно, совмещая выходные сигналы основной и дополни-
тельной систем, сохранить высокую крутизну характеристики. Это
позволяет обеспечить высокую точность измерения пеленгов при
однозначном определении истинного направления.
Амплитудный суммарно-разностный пеленгатор. Рассмотренные
выше пеленгаторы имеют существенные недостатки, связанные с
Равносигнальное
Рис. 14.23. Амплитудный суммарно-разностный
пеленгатор
315
зависимостью пеленгационного направления от стабильности ха-
рактеристик каналов. Этот недостаток можно устранить, если ис-
пользовать суммарно-разностные системы. Рассмотрим принцип
действия такой системы с помощью рис. 14.23. Антенны каналов
устанавливаются так, чтобы диаграммы направленности были
смещены на угол ф0 вправо и влево от равносигнального направ-
ления. С выхода антенны принятые сигналы подаются на сумми-
рующее и вычитающее устройство, которое представляет собой
гибридный четырехплечевой кольцевой мост в волноводном или
микрополосковом исполнении.
Основным достоинством суммарно-разностных пеленгаторов
является формирование пеленгационной характеристики непо-
средственно в антенно-фидерном тракте, что исключает влияние
на положение нулевой точки пеленгационной характеристики как
нестабильностей элементов приемного тракта, так и амплитудных
флуктуаций входных сигналов.
Сигналы с выхода суммарных и разностных каналов поступают
на каскады преобразования и усиления, а с них — на входы фазо-
вого детектора.
Для оценки характеристик пеленгатора найдем зависимость
сигнала ошибки на выходе фазового детектора от угла рассогласо-
вания у, параметров антенны и приемного тракта.
Сигналы на выходе первой и второй антенн запишем так:
U с[ = kF(\yQ + y)cos(cof);
t/c2 = -y)cos(coO-
Сигнал на выходе суммирующего устройства будет иметь вид
Uc = £[Г(у0 + у) + F(y0 - y)]cos(cor),
а на выходе устройства вычитания
Up = k[F(y0 +y)-F(y0 -y)]cos(co/).
После преобразования и усиления сигналы на выходе УПЧ
можно представить следующим образом:
Uz. = [F(Vo + У) + Л'Ио -Y)]cos(conpr + ф();
U&- = к2 [^(Vo + У) " F(Vo - У)]СО$(<М + Фг)»
где к\ и ^2 — коэффициенты передачи каналов по амплитуде с уче-
том коэффициента к.
В фазовом детекторе сигналы перемножаются:
^фд=ЧА-^- (14.27)
Подставив значения £/ги U в выражение (14.27), получим
^Фд =2^фд^Л2[/?2(ч>0 +y)-^2(Vo - y)]cos(<Pj -ф2).
316
Здесь сигнал суммарной частоты 2со„р отфильтрован фильтром
фазового детектора.
Если разложить функции F(y0 + у) и F(y0 - у) в ряд Тейлора и
использовать линейное приближение, получим
i/ф. =24.Мф.Лч-о>^^ ycos(<p,-<р2). (14.28)
d\if
т v=4<0
Анализируя выражение (14.28), отметим следующие достоинст-
ва рассмотренного пеленгатора:
нулевое пеленгационное направление не зависит от амплитуд-
ных и фазовых характеристик тракта (UbbOl =0 при у = 0);
амплитудные флуктуации сигналов не влияют на устойчивость
пеленгационного направления.
Рис. 14.24. Фазовый суммарно-разностный пеленгатор
317
Фазовый суммарно-разностный пеленгатор. Недостатки просто-
го фазоразностного пеленгатора устраняются в фазовом суммар*
но-разностном пеленгаторе, принцип работы которого аналоги-
чен во многом принципу действия амплитудного суммарно-разно-»
стного пеленгатора. Отличие в том, что используется полезная
информация об угловом положении цели, содержащаяся в фазе
сигналов. Для выделения этой информации применяются также
фазовые детекторы. Кроме того, в один из каналов вводится сдвиг
по фазе на 90°. Для сдвига сигналов по фазе в канале разностного
сигнала имеется фазовращатель (рис. 14.24).
Пеленгационное направление в таком пеленгаторе не зависит
от стабильности и точности установки амплитудных и фазовых па-
раметров тракта усиления в отличие от рассмотренной выше про-
стой фазоразностной системы. Однако неоднозначность нулевых
пеленгационных направлений сохраняется. Ограниченное приме-
нение фазовых систем в радиотехнической разведке объясняется
тем, что сдвиг фаз ср, определяющий угловое положение цели, за-
висит от частоты принимаемого сигнала, которая неизвестна. При
неизвестной частоте сигнала фазовые методы пеленгации теряют
практическое значение.
Поэтому в таких системах необходимо при оценке пеленга ис-
пользовать результаты измерения несущей частоты принимаемого
сигнала, что, естественно, усложняет систему пеленга станций ра-
диотехнической разведки.
15. ПРИНЦИПЫ ОПРЕДЕЛЕНИЯ КООРДИНАТ
ИЗЛУЧАЮЩИХ ЦЕЛЕЙ
15.1. КООРДИНАТНЫЕ ПОВЕРХНОСТИ
Положение объекта в пространстве можно указать, если ввести
систему координат £,,т), ср. Местонахождение точечной цели в этом
случае полностью определяется тремя числами %0 , ср0. Фикси-
рованным значениям одного из этих чисел в пространстве соот-
ветствуют некоторые поверхности, которые в математике принято
называть координатными.
Комплексы радиотехнической разведки имеют в своем составе,
как правило, два или более приемных пунктов (пеленгаторных
центров). Излучаемые целью колебания принимаются ими и под-
вергаются специальной обработке. Задачей обработки является
количественная оценка одного или нескольких параметров при-
нятого колебания или разности фаз между колебаниями, приня-
тыми в двух пунктах, и др. Каждому параметру может быть постав-
лена в соответствие определенная координатная поверхность (не-
сколько поверхностей). Так, в большинстве станций РТР
измерение азимута часто производят по максимуму мощности
сигнала, принятого вращающейся направленной антенной (пе-
ленгация по методу максимума). Соответственно координатной
поверхностью в этом случае является полуплоскость, которая вы-
ходит из вертикальной прямой, проходящей через точку стояния
приемного пункта.
При измерении угла места координатной поверхностью служит
конус с вершиной в пункте приема колебаний.
Принципиально задачу определения местоположения цели
можно считать решенной после того, как определены ее три коор-
динатные поверхности или соответствующие им три независимые
координаты ^,т], ф.
Обычно система координат ^,т), <р связана с точками стояния
приемных пунктов, сама система при этом, как правило, криво-
линейна и неортогональна. Определять положение цели в этой си-
стеме неудобно, поэтому для практического использования вводят
более общую систему координат. В качестве такой часто применя-
ют прямоугольную декартовую систему X, У, Z либо географиче-
скую систему координат. Под последней понимают сферическую
систему, начало которой находится в центре Земли, а координат-
ными поверхностями являются плоскость географического мери-
319
диана, конус, проходящий через параллель, и сфера, определяемая
высотой цели над уровнем Мирового океана. $
Чтобы различать координатные системы, назовем систему
£,т|,ф первичной (например, гиперболической), а систему %, Л
Z— пространственной. Таким образом, в результате обработки)
принимаемых колебаний для каждой цели^ могут быть найденЩ
оценки двух или трех первичных координат с,г), ф. Истинным пер-
вичным координатам соответствуют числа ,т|°, <р°. Если высоте
цели не определяется, то достаточно двух чисел и 13°. •
Положение цели в пространстве будет определяться тройкой
чисел л°, у0, z°. Их оценки, полученные после соответствующих
измерений, обозначим х, у, z-
При определении пространственных координат необходима
производить вычисления (пересчет координат), для чего должны
быть известны функциональные зависимости, связывающие про-
странственные координаты с первичными:
* = Л($,п,ф);
у = Л(^'п,ф);
z = Л(^,п,ф)-
Условимся, что положение цели однозначно определяется в
обеих системах координат ^,т|, ф и х, у, z- В этом случае существу-
ют обратные функции:
^ = Ф^(х,у,г);
n = <₽nUzz); (15.1)
^ = Фф(х,у, г).
Выражения (15.1) при фиксированных значениях левых частей
равенства описывают одинаковые координатные поверхности.
Координатные поверхности в радионавигации называют повер-
хностями положения объекта. В самом деле, после того как произ-
ведено измерение какого-либо параметра, например можно
утверждать, что цель находится на поверхности, уравнением кото-
рой является первое выражение (15.1).
В дальнейшем оба термина — “координатная поверхность” и
“поверхность положения” — будем использовать в одном и том же
смысле.
15.2. ОПРЕДЕЛЕНИЕ КООРДИНАТ ИСТОЧНИКОВ
ИЗЛУЧЕНИЯ В КОМПЛЕКСАХ РАДИОТЕХНИЧЕСКОЙ
РАЗВЕДКИ
При известном расположении приемных пунктов (геометрии
комплекса) положение цели в пространстве определяется сово-
купностью трех чисел — первичных координат цели. Первичные
координаты позволяют вычислять пространственные координаты
цели.
320
В зависимости от вида используемых первичных коорди!
различают следующие методы координатометрии.
Угломерные методы основаны на использовании угловых изм<
рений. В простейших случаях достаточно лишь двух пунктов, в ко»
торых необходимо измерить два азимута и один угол места либо
два угла места и один азимут (первичные координаты). Первый
случай предпочтителен, если цели находятся под малыми углами
места. Если же комплекс предназначен для измерения положения
объектов, находящихся в зените, то целесообразно измерять два
угла места и один азимут.
Среди угломерных выделяется так называемый триангуляцион-
ный метод. С помощью этого метода плоскостные координаты
цели хи у могут быть вычислены, если измерены два азимута (пе-
ленга).
Для определения координат цели нужно решить треугольник
по известной стороне (базе) и двум прилежащим к ней углам. Ана-
логичная задача встречается в геодезии, откуда и взят термин три-
ангуляция.
Принципа определения плоскостных координат разностно-да-
льномерным методом рассмотрим на примере станции РТР “Рамо-
на” (рис. 15.1). Импульсные сигналы, излучаемые радиоэлектрон-
ными средствами, поступают на центральный пост станции ра-
диотехнической разведки тремя путями:
непосредственно на центральный пост (Л5);
путем приема левым боковым постом и переизлучения его с
помощью радиорелейной станции на центральный пост (R, + Д);
путем приема сигнала правым боковым постом и переизлуче-
321
Пренебрегая незначительными запаздываниями сигналов fl
приемных цепях, можно записать выражения для времени запав
дывания сигналов левого и правого постов: |
г,=(^)(Я,+Д-Л,); 1
где с — скорость распространения электромаг-t
нитных волн в свободном пространстве^
Rf, L,,Rn, Z„, Rs — расстояния на местности. ‘
Если Т/С =(/?,+ L, -Rs) итрс=(Яп + Ln - К5) — константы, ТС|
уравнения (15.2) определяют две системы гипербол, фокусы котСн
рых находятся для левой системы в точках стояния левого и цент*
рального постов (L, S), а для правой системы — в точках стояния
правого и центрального постов (Р, S).
Зная время запаздывания сигналов т, и тп и расстояния между
постами L/и Ln, можно определить гиперболические (первичные)
координаты РЭС.
Йз геометрических построений очевидно, что всегда выполня-
ются условия R, + Lt >RS и Rn + Ln > Rs, т. е. запаздывание все-
гда положительно или, в крайнем случае, равно нулю.
Как видно из рис. 15.1, максимального значения г, и тГ| дости-
гают в случае, когда радиоэлектронное средство (цель) находится
непосредственно на центральном посту:
Т/ тах (Ус) '
т
р max
Так как станция РТР измеряет плоскостные координаты х, у,
то, пренебрегая высотой полета цели, запишем выражения, связы-
(153)
где х, у — текущие координаты цели в прямоугольной сис-
теме X, К;
х/, У/, *п, Уп — координаты постов станции РТР в системе X, У.
Система уравнений (15.3) по измеренным значениям т,,т„, из-
вестным координатам х/, у^ хп уп позволяет вычислить координа-
ты цели х и у. В станции РТР “Рамона” эти координаты вычисляет
ЭВМ.
На рис. 15.2 изображена сеть декартовых координат т/,тпдля
конкретных значений хи у при фиксированных значениях баз £/и
Тп и углов (pt и tp2, поясняющая принцип измерения координат
целей на гиперболическом (обзорном) индикаторе.
322
Рис. 15.2. Принцип измерения координат на гиперболическом
индикаторе
Ввиду большей насыщенности РЭС в зоне разведки даже в по-
лосе узкого, участка диапазона частот могут появляться импульсы
от нескольких целей. Это означает, что время задержки т,и тп мо-
жет быть измерено для разных целей, что приведет к значитель-
ным ошибкам измерения координат. Поэтому первой задачей из-
мерительного устройства является выделение трехимпульсных
сигналов (“чистых троек”), принадлежащих каждой отдельной
РЛС, и измерение времени запаздывания.
Это выполняется следующим образом. Первым импульсом, при-
нятым центральным постом, формируется измерительный интер-
вал tm, длительность которого определяется максимальным време-
нем задержки т/тахи тптах. Если в течение времени tm от боковых
постов поступит по одному импульсу, то измеряются гиперболиче-
ские координаты объекта. Допускается случай, когда на централь-
ном посту приняты два импульса, при этом один из них запаздыва-
ет по отношению к другому на большее значение, чем tm (рис. 15.3).
Если в течение времени tm с боковых постов поступит больше
одного импульса, выбор тройки импульсов считается неправиль-
ным и ожидается прием очередного импульса центральным постом.
Существенным недостатком гиперболического метода является
принципиальная невозможность измерения координат целей, из-
лучающих импульсы с высокой частотой следования. Если период
повторения импульсов разведываемой РЛС меньше максимально-
323
Рис. 15.3. Принцип выделения “чистых троек”
го времени задержки (7} < возникает неоднозначность в изме-
рении координат, устранить которую практически невозможно.
При использовании угломерно-гиперболического метода мес-
тоположение радиоэлектронного средства находится в точке пере-
сечения прямой и гиперболы.
Система состоит из двух станций радиотехнической разведки
(РРС1 и РРС2), связанных между собой линией связи. РРС1 изме-
ряет пеленг на РЭС и временную задержку между сигналами: не-
посредственно от РЭС и сигналом, ретранслированным РРС2.
Вторая разведывательная станция предназначена для приема сиг-
налов от РЭС и ретрансляции их на первую станцию.
По измеренной временной задержке АГ, равной + В- R\)/ct
определяют разность расстояний:
R2 - 7?, = сД/ - В,
где В - измерительная база (расстояние между РРС1 и РРС2).
Вычислив разность расстояний А/?, местоположение радио-
электронного средства находят расчетным или графическим спо-
собом. *
При расчетном способе местоположение РЭС определяют по
измеренному пеленгу с РРС1 и расстоянию до РЭС, вычисленно-
му по формуле
А ^2~^2
1 2(В cos а + АЛ) ’
где а — пеленг на РЭС.
324
При графическом способе местоположением P3q
точка пересечения линии пеленга, проведенной из точ^и
жения РРС1, с гиперболой, построенной по известно^
расстояний ДА.
является
располо-
разности
Местопо-
I пря-
опре-
на РЭС
до двух
Целесообразно, как и при гиперболическом методе9 На
карту-планшет относительно двух РРС семейство на
ских линий положения и использовать их при определеН1В?оличе'
положения радиоэлектронного средства. место-
При угломерно-эллиптическом методе определения
ложения разведываемая РЭС находится в точке пересененес1
мой и эллипса (рис. 15.4). Угломерно-эллиптический Метс> Я
деления местоположения основан на измерении пеле^га д
станцией РТР и определении суммы расстояний от
определенных точек на местности (фокусов эллипса).
КОоРдинат
Рис. 15.4. Угломерно-эллиптический метод определения
РЭС1 облучает объект разведки РЭС2. Станция Ртр /ррр\
принимает излучение непосредственно от РЭС1 и ретран
ванные или отраженные сигналы от РЭС2^ р слиро-
На станции РТР измеряют временную задержку mcxq.v
и ретранслированным (отраженным) сигналами и од^оа Рямым
определяют пеленг на РЭС2. По измеренной временно^ ременно
при известном местоположении РЭС1 вычисляют сумх™ Держке
ний от станции РТР до РЭС2 и от РЭС2 до РЭС1. По пелССТ°Я~
данной сумме расстояний определяют местоположенце рс^рНГу И
четным или графическим способом. Этот метод приме^Им с рас~
ности, для определения координат самолетов путем пр^е ’ в част“
лов бортовых ответчиков и наземных запросчиков сисТем сигна"
знавания. Измеренная временная задержка сигналов одВет Ь1 опо~
отношению к сигналам запросчика определяется выра^ени^а П°
А. + R. - В М
А/ =—!---г-----+ /3,
с
где /3 — задержка срабатывания ответчика.
Отсюда сумма расстояний от наземных станций до рцдИо
ческой системы: техни-
/?i + R2 — с At + В — ct3.
(15.4)
325
По данной сумме расстояний определяют местоположение
станции расчетным или графическим способом. Расчетным спо*
собом координаты радиотехнической системы вычисляют по из-
меренному пеленгу и расстоянию до нее от станции разведки:
X (R]+R2r-B2
2(Rt + R2) - В cos а
Графическим способом местоположение РТР определяют как
точку пересечения линии пеленга, проведенной из точки С, с эл-
липсом, построенным по известной сумме расстояний (R[ + Т?2)>
или с помощью специальных линеек. При расстоянии В, во много
раз меньшем расстояний R\ и R}, эллипс преобразуется в окруж-
ность. В этом случае с некоторым приближением данный метод
можно считать угломерно-дальномерным, т. е. можно определять
местоположение РЭС по дальности до нее (R где Д/ — из-
меренная на станции РТР временная задержка сигналов) и пе-
ленгу.
Местоположение РЭС в пространстве определяют как точку
пересечения линии положения с поверхностью положения или
как точку пересечения трех линий положения (например, дально-
сти, азимута и угла места).
15.3. ОШИБКИ ЛИНИЙ ПОЛОЖЕНИЙ
Во время измерения геометрической величины, характеризую-
щей местоположение радиоэлектронного средства, возникают си-
стематические и случайные ошибки. Значения этих ошибок зави-
сят от правильности учета реальных условий распространения ра-
диоволн, отношения сигнал/шум, наконец, инструментальных
ошибок пеленгаторов. Систематические ошибки могут быть
устранены или учтены, случайные — нет. Поэтому геометрическая
величина будет в общем случае отличаться от истинной, вследст-
вие чего найденная линия положения не совпадает с истинной.
Расстояние между истинной и найденной линиями положения
называется ошибкой линии положения. «
Для определения зависимости ошибки линии положения от
ошибки геометрической величины воспользуемся теорией скаляр-
ного поля. Семейство линий положения можно рассматривать как
линии уровня плоского скалярного поля геометрической величи-
ны U.
Из теории известно, что |grad U\ = dU / dh.
Заменяя дифференциалы конечными приращениями, получа-
ем ошибку линии положения:
ДЛ = Д# /|gradt/|, (15.5)
где Д[/ — ошибка геометрической величины.
326
Из выражения (15.5) следует, что ошибка линии положения
прямо пропорциональна ошибке геометрической величины. За-
кон распределения ошибок линий положения будет таким же, как
и закон ошибок геометрической величины. В подавляющем боль-
шинстве случаев закон распространения ошибок геометрической
величины достаточно точно описывается нормальным законом
распределения, который характеризуется средней квадратической
ошибкой.
Следовательно, точность определения линии положения также
характеризуется средней квадратической ошибкой линии положе-
ния. Коэффициент пропорциональности между средней квадра-
тической ошибкой линии положения и средней квадратической
ошибкой геометрический величины зависит от вида линии поло-
жения и взаимного расположения РЭС и радиопеленгаторов.
Линия положения постоянного пеленга в декартовой системе
координат описывается уравнением
[3 = arctg - .
У
i
Модуль градиента в той же системе координат:
fz \~2 / \ 2 С \2 / х 2
ierad[/i=C%} (,5-6)
Тогда в рассматриваемом случае
|grad|3| = l^,
где R — расстояние между РЭС и РРС.
Согласно формуле (15.5) ошибка линии положения постоянно-
го пеленга:
ДЛ„ = R Др,
где Др — ошибка пеленга.
Заменяя Др средней квадратической ошибкой пеленга, находим
среднюю квадратическую ошибку линии положения постоянного
пеленга:
ст., = /?стг
(15.7)
Гиперболическая линия положения описывается уравнением
Я, = Я( -R2 = /^)2 +У2 -^(X-J%)2 +У2 >
где В — база разностно-дальномерной системы.
Можно показать, что в этом случае модуль градиента разности
расстояний имеет вид
327
I AD I £7i %2 + У1 ~(B2/4)
|gradX,|= Ы1---------’.
i
I
Из треугольника ABC (рис. 15.5) следует, что
2 + R2 - В2 _х2 + у2 -(#2/4)
2Л,А2 R^R
(15.8)
тогда
|grad7?p | = д/2(1 - cos ср) = 2 sin .
Ошибка гиперболической линии положения:
где Д7? — ошибка разности расстояний;
ср — угол между фокальными радиусами-векторами.
Заменяя ДЯ средней квадратической ошибкой разности рассто-
яний оЛ, находим среднюю квадратическую ошибку гиперболиче-
ской линии положения:
328
СТг =
(15.9)
Если расстояние от середины базы до РЭС значительно больше
5, то
где а — угол между базой и ради усом-вектором R.
Тогда ।
ДЛГ = — R &R
В sin а
и
R
ог =---------СУ
В sin а
(15.10)
Эллиптическая линия положения (см. рис. 15.5) описывается
уравнением
Rc = Я, + R2 = ^(х + %)2 + у2 + ^-%)2 +У2 ,
поэтому
|gradAJ
Из треугольника АВС следует, что
cos ср =
х1 +Уг -(*%)
тогда
|gradAc | = 2 cos у.
Ошибка эллиптической линии положения:
Д/?3 = ДЯ(. /(2 cos ф / 2), ~ (15.11)
где ДЯС — ошибка суммы расстояний;
ср— угол между фокальными радиусами-векторами.
329
Заменяя &RC средней х-^адратичеекой оымбкой суммы расстоя-
ний ос, получаем среднюю квадратическую ошибку эллиптиче-
ской линии положения:
оэ = cos ср/2. (15.12)
Анализ полученных формул позволяет сделать следующие вы-
воды:
ошибка линии положения, как видно из выражения (15.5), при
неизменной ошибке пеленга увеличивается с увеличением рассто-
яния до РЭС;
при измерении разности расстояний ошибки линии положе-
ния, как следует из выражения (15.8), уменьшаются с увеличением
базы пеленгаторов В. Следовательно, для повышения точности
определения линии положения расстояние между пеленгаторами
необходимо увеличить;
при измерении суммы расстояний, наоборот, целесообразно
уменьшать расстояние между пеленгаторами, так как минималь-
ное значение ошибки линии положения, как это следует из выра-
жения (15.11), соответствует ср = 0, т. е. В = 0.
Существенно отметить, что коэффициент пропорциональности
между ошибкой линии положения и ошибкой измерения геомет-
рической величины для пеленгационной системы (см. формулу
15.6) не зависит от направления, поэтому пеленгационные систе-
мы являются всенаправленными.
Для гиперболических и эллиптических систем этот коэффици-
ент, как следует из выражений (15.8) и (15.11 ), зависит от направ-
ления. Следовательно, гиперболические и эллиптические системы
не являются всенаправленными.
15.4. ТОЧНОСТЬ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ
РАДИОЭЛЕКТРОННЫХ СРЕДСТВ
Рассмотрим случай определения местоположения РЭС на
плоскости. *
Пусть, например, местоположение РЭС определяется пеленга-
ционным методом. Если при измерении пеленгов на РЭС, находя-
щейся в точке М, возникли ошибки Apj и др2, то найденное место-
положение Мо будет отличаться от истинного на величину М, Мо.
Расстояние между истинным местоположением и найденным
значением называется ошибкой места. Очевидно, что при извест-
ных значениях ошибок др( и др2 определение ошибки места М,
Мо не вызывает затруднений. Однако значение случайных ошибок
неизвестно, следовательно, точность местоопределения может
быть оценена только статистически.
Пусть линии положения пересекаются под углом ср, а их слу-
чайные ошибки U и Vподчиняются нормальным законам распре-
деления.
330
Из теории вероятности известно, что двумерная плотность рас-
пределения вероятностей ошибок Un Ив этом случае описывается
соотношением
W(U, И) =-----1 , — ехр
-Р2
G«CTv а2 )
,(15.13)
где ov — средние квадратические значения ошибок линий по-
ложения; >
р — коэффициент корреляции ошибок.
Приравнивая показатель степени экспоненты (выражение
15.13) к некоторой постоянной величине X, получим уравнение
кривой равной плотности распределения вероятностей:
1 <U2 2pUV । И2
2(1 -р2)(стр + °' J
Кривая равной плотности распределения представляет собой
эллипс (рис. 15.6).
сигналов
Различным значениям параметра о соответствует семейство со-
фокусных эллипсов, которые принято называть эллипсами оши-
бок.
Вероятность нахождения искомого местоположения в пределах
эллипса с параметром X:
Р(Х) = 1 -е~\
откуда
Х = 7-1п[1 -Р(Х)].
(15.14)
Если случайные ошибки Un Vнезависимы, то р = 0 и размеры
полуосей эллипса ошибок найдем по формулам:
Угол у, определяющий положение эллипса ошибок, находим из
соотношения
1 ((У7и - Пу )
у = - arctg ----- tg ср .
2 W + с; )
Анализ возможных положений эллипса ошибок при различных
значениях ov, ср позволяет сделать следующие выводы:
большая ось эллипса всегда лежит в остром углу пересечения
линии положения и ближе к той из них, точность определения ко-
торой выше. Иными словами, болылая ось эллипса ошибок всегда
лежит между биссектрисой острого угла пересечения линий поло-
жения и той из линий положения, точность определения которой
выше;
при одинаковой точности определения линий положения боль-
шая ось эллипса совпадает с биссектрисой острого угла пересече-
ния линий положения.
В случае когда угол у = 0, ось эллипса ошибок совпадает с ли-
нией положения. Если при этом то эллипсы ошибок пре-
вращаются в окружности.
Таким образом, точность определения местоположения радио-
электронного средства на плоскости наиболее полно характеризу-
ется эллипсом ошибок.
Совокупность эллипсов ошибок заданной вероятности пред-
ставляет собой так называемое поле ошибок, дающее наиболее
полное представление о зависимости точности местоопределения
от взаимного расположения РЭС и элементов, например пеленга-
торных пунктов системы РТР.
332
Приведенные выше формулы позволяют построить поле оши-
бок. Необходимыми условиями для построения служат опытные
данные о зависимости средних квадратических ошибок геометри-
ческих величин от взаимного расположения РЭС и радиопеленга-
торов. Если по каким-либо причинам эти зависимости неизвест-
ны, то в первом приближении для ориентировочного суждения о
поле ошибок можно принять средние квадратические ошибки гео-
метрических величин постоянными.
В случае если положение объекта задается в пространстве, точ-
ность его местоположения характеризуется эллипсоидом ошибок,
для сечений которой координатными плоскостями справедливы
приведенные выше функциональные зависимости.
В ряде практических задач описания точности местоопределе-
ния вместо эллипсоида или эллипса ошибок целесообразно опре-
делять область пространства, в пределах которой ошибка места не
будет превосходить значения наперед заданной величины. Для от-
вета на поставленный вопрос необходимо найти функцию распре-
деления вероятностей ошибки места, под которой понимают веро-
ятность того, что ошибка места не будет превосходить значения на-
перед заданной величины. Рассмотрим физическую величину,
характеризующую точность местоопределения при данном подходе.
Для вероятностей Р > 0,6 в первом приближении можно счи-
тать, что ошибки места подчиняются нормальному закону распре-
деления и достаточно полно характеризуются средним квадрати-
ческим значением.
Найдем среднюю квадратическую ошибку места при пеленга-
ционном методе. Линейная ошибка местоопределения расстояния
г между истинным положением и оценкой с использованием ли-
нейных ошибок /[ и Г2 Для каждого пеленгатора определяется вы-
ражением
г2 = Г[2 + г22 - 2г(г2 cos (л - <р).
Учитывая, что п = tZ/sin ф, = J^/sin ср, где ср — угол пересече-
ния пеленгов, имеем
2 U7 + И2 +2tZKcosq>
г =-------—------------•
Sin ф
Из теории вероятностей известно, что среднее значение суммы
случайных величин равно сумме средних значений слагаемых, по-
этому
(U7 + V7 +2tfFcosp)
Г ; - .
Sin ф
_ Так _как при нормальном законе распределения
t/2 =о„2, V7 = о2, UV = рст„сту , то
333
. (о„2 + -2poucv coscp)
<зг = -----------------------— .
sin2 cp
Отсюда средняя квадратическая ошибка места:
7о2 + О2 + 2pouov cosip
Gr =------------------------- •
sin q>
(15.15)
При независимых измерениях р = 0 и, следовательно,
<зг
sin2 ф
(15.16)
Итак, точность местоопределения можно характеризовать либо
эллипсом ошибок заданной вероятности, либо средней квадрати-
ческой ошибкой места.
15.5. РАБОЧИЕ ЗОНЫ
Наглядной характеристикой точности местоопределения явля-
ется ошибка места заданной вероятности. При этом район дейст-
вия радиопеленгаторной системы можно обозначить контурами
заданной точности местоопределения.
Пространство, ограниченное контурами постоянной точности
местоопределения, принято называть рабочей зоной.
Контуры постоянной точности местоопределения находятся из
условия <зг = const. Для нахождения контуров постоянной точно-
сти необходимо в выражение (15.15) или (15.16) подставить значе-
ния <5и и в соответствии с выражениями (15.7), (15.9) или
(15.10). При этом должны быть известны средние квадратические
ошибки радиопеленгаторов.
Рассмотрим рабочие зоны для некоторых методов определения
местоположения радиотехнических станций.
При пеленгационном методе определения местоположения
РЭС коэффициент корреляции между ошибками двух пеленгато-
ров практически равен нулю. Тогда выражение (15.16) с учетом
(15.14) примет вид
аг = (0,0175/sin (р)^/?2^ + 7?2ст22 > С (15.17)
где коэффициент 0,0175 является переводом радиан в градусы;
R[ и Т?2 — расстояния от каждого пеленгатора до РЭС;
°pi и ар2 “ средние квадратические ошибки пеленгаторов в гра-
дусах.
В частном случае, когда используются однотипные пеленгато-
ры и ор1 = ар2 = ор, тогда
=52125 J/?2 + А2 . (15.18)
sin ф
334
Для удобства построения рабочих зон перейдем к полярным
координатам (А, а). Из рис. 15.7 следует, что
У?,2 =Я2 + (Я/2)?+ЯЯ cos а ; Я2 = Я2+(Я/2)2-ЯД cos а2,(15.19)
отсюда после суммирования левых и правых частей имеем
Я2 + Я2 = 2[я2 + (Я/2)2].
Рис. 15.7. Крищце_равной плотности-вероятности
Площадь д АВС:
_ RXR7 sin ср _ ЯД sin a
О —--------- — —
2
2
отсюда
sin ср =
RB sin a
“мГ
RB sin a
^[Я2 + (Я/2)2 + RB cos a] [Я2 + (Я/2)2 - RB cos a]
Подставляя полученное выражение, а также (15.19) в (15.17),
получим
0,0175Яор
sin a
-+—Y
В + 4Я )
2
- cos a
2
Это уравнение решают графически, для чего строят семейство
стг /Д')
кривых —— =f \ — , соответствующих различным значениям a
Op В \,В )
(рис. 15.8).
335
Для построения рабочей зоны на карту (кальку) наносят пози-
ции пеленгаторов и определяют базу В. Зная и задаваясь необхо-
димой точностью определения местоположения ог, определяют
отношение / ор/? и по графикам для каждого значения В нахо-
дят два значения отношения R/B. Но так как В известно, то мож-
но определить два значения R в нужном направлении, т. е. постро-
ить по точкам внешнюю и внутреннюю границы контура заданной
точности.
Рис. 15.8. Пеленгационный метод определения координат
Минимальная ошибка места будет в точке, находящейся на
перпендикуляре, восстановленном в середине базы на расстоянии
0,35 В от нее. В этой точке о = 0,016opZ?.
Район, в пределах которого местоположение источника излуче-
ния определяется с допустимой ошибкой, называют зоной пелен-
гации. Для наземных РЭС допустимыми считают ошибки, не пре-
вышающие пятикратно минимального значения.
База радиотехнической системы пеленгации выбирается из
следующих соображений. С одной стороны, с увеличением базы
увеличиваются глубина и зона пеленгации. С другой — увеличе-
ние базы пеленгации приводит к возрастанию минимальной
ошибки , а также к увеличению ошибок в определении место-
положения ”РТС, находящихся на незначительных расстояниях от
базовой линии. Поэтому длину базы надо выбирать исходя из кон-
кретного задания на разведку.
Если требуется определить с максимально возможной точно-
стью местоположение РЭС, находящихся в определенном районе
территории противника, нужно выбрать базу пеленгации и сори-
ентировать ее на местности таким образом, чтобы контур посто-
336
янной точности местоопределения, соответствующий о , прохо-
дил через данный район.
Если требуется обеспечить наиболее оптимальные условия для
пеленгации РЭС на всю глубину разведки L, то базу пеленгации
следует выбирать примерно равной Z/2.
Длина базовой линии часто ограничивается дальностью обна-
ружения РЭС. Если дальность обнаружения двух станций РТР
одинакова и равна 2)р, то базовая линия не должна превышать
0,7 Z)p. Это необходимо для того, чтобы обеспечить взаимное пе-
рекрытие областей, где возможно обнаружение работающих ра-
диоэлектронных средств двумя разведывательными станциями.
Точность определения местоположения РЭС повышается, если
пеленгация осуществляется с помощью трех-четырех радиоразве-
дывательных станций, разнесенных на местности. В этом случае
ог3 = 0,76аг2 и ог4 =0,64ог2, где ог2 — ошибка при пеленгации дву-
мя радиоразведывательными станциями, а <зг3 и ог4— ошибки при
пеленгации тремя или четырьмя станциями соответственно.
Для гиперболического метода, когда разностно-дальномерная
система имеет три наземные станции и средние квадратические
ошибки определения разности расстояний для каждой пары неза-
висимы и одинаковы, выражение (15.16) с учетом (15.10) примет
вид
Г — ------- ---------- + ----------’
2 sinp J . 2 <Р1 • 2 <₽2
1 sin — sin —
V 2 2
где <зг — средняя квадратическая ошибка определения разно-
сти расстояний;
Ф— угол между фокальными радиусами-векторами.
При больших расстояниях между РЛС и станциями РТР можно
приближенно считать ср ~ ф, ± ф2, где знак “+” или выбирается
соответственно для зон, образованных линиями баз или их про-
должением (см. рис. 15.1). Тогда
С5Г
1—+ —.
2 sin— 1 1 sin2 — sin2 —
2 ¥ 2 2
(15.20)
Из выражения (15.20) следует, что контуры постоянной сред-
ней квадратичной ошибки места при <уг— const зависят от углов ср,
и ф2.
Задаваясь отношением аг/ор = с, т.е. ошибкой определения ме-
ста, выбирая ряд конкретных значений для угла ф1 от 0 до 180°,
можно определить угол <р2из выражения
_ ст, _ 1 1 1
ар 2 sin (р‘ ~ 1 sin2 sin2 —
2 V 2 2
337
Построенные таким образом семейства линий представляю!
собой геометрические места точек равной точности для различны^
углов ф, и (р2.
Построение искомых контуров равной точности для реальной}
системы, местоположение наземных пеленгаторов которой изве*
стно, производят в такой последовательности.
На карту или кальку наносят точки расположения пеленгато-
ров; задаваясь значением ошибки места, находят отношение
<зг/<\ =с; задаваясь рядом значений ф( и ф2, по выбранной кривой
с определяют соответствующий ряд значений для (pt (<р2). Для каж-
дой базы находят линию, для которой в любой точке ф, или <р2 —
величина постоянная. Такими линиями будут окружности, опира-
ющиеся на базы. Радиусы окружностей определяют по следую-
щим выражениям:
7?! = /(2 sin epi); R2 = Z?2/(2 sin ср2).
Точка пересечения двух окружностей даст искомую точку кон-
тура равной точности. Таким образом, точка за точкой, воспроиз-
водится весь контур.
При угломерно-гиперболическом методе выражение для сред-
ней квадратической ошибки места может быть получено из выра-
жения (15.14) с учетом формул (15.7) и (15.10):
°г =
sin ср
(15.21)
где ср — угол между фокальными радиусами-векторами;
R— расстояние от станции, измеряющей пеленг, до
РЭС;
ор,стс— средние квадратические ошибки измерения угла и
суммы расстояний;
Ф,— угол пересечения линий положения (прямой и ги-
перболы).
При угломерно-эллиптическом методе выражение для средней
квадратической ошибки места может быть получено из формулы
(15.16) с учетом (15.12) и (15.7):
ог =----
8Шф
(15.22)
где сте— средняя квадратическая ошибка измерения суммы
расстояний.
Для построения рабочих зон угломерно-гиперболических и уг-
ломерно-эллиптических систем выражения (15.21) и (15.22) дол-
жны быть приведены к более удобному виду.
338
Нанесенные на карту рабочие зоны позволяют быстро произве-
сти оценку точности определения местоположения обнаруженно-
го РЭС.
Принципы определения координат, рассмотренные выше, по-
казывают, что практически во всех случаях (за исключением раз-
ностно-дальномерного) используется измерение угловых коорди-
нат (пеленгов на источники излучения).
15.6. ПРИНЦИПЫ ИДЕНТИФИКАЦИИ ИСТОЧНИКОВ
РАЗВЕДЫВАТЕЛЬНЫХ СВЕДЕНИЙ В СИСТЕМАХ
РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ ПРИ
ПРЕДНАМЕРЕННОМ ИЗМЕРЕНИИ ПАРАМЕТРОВ
Устройство и принцип идентификации ИРС при угломерном
методе местоопределения поясним с помощью рис. 15.9 и 15.10.
Координаты
типа РЭС
Рис. 15.9. Семейство кривых (У г /(Ур6
339
Рис. 15.10. Принцип идентификации источников при угломерном методе
местоопределения
Обозначим X А и X в векторы, элементами которых являются
параметры сигналов, измеренные в момент пеленгования источ-
ников радиоимпульсов и увязанные с пеленгами и . Если век-
тор параметров сигналов XAR /-го ИРС, пЪлученный на пеленгаторе
Пл, сопоставим по определенному критерию близости с вектором
X В} /-го ИРС, полученным на пеленгаторе Пг, и это сопоставление
удовлетворяет выбранному критерию близости, то пеленги и
являются линиями положения и определяют местоположение
источника. Это классический угломерно-параметрический метод,
применяемый при синхронном и асинхронном методах пеленго-
вания. Он обладает рядом достоинств:
не требует одновременного приема сигналов на разнесенных
приемных позициях;
для передачи информации о параметрах сигналов в цифровой
форме пригодны узкополосные каналы связи;
упрощена процедура организации канала связи;
упрощена процедура сопоставления векторов ХАК и Xвк.
Наряду с достоинствами следует отметить существенные недо-
статки:
низкая точность определения местоположения целей как за
счет значительной ширины диаграммы направленности антенн
340
пеленгаторов, так и за счет перемещения воздушных целей в про-
странстве;
упрощенная процедура идентификации приводит к неодно-
значности расчета пеленгов, а следовательно, к ложному опреде-
лению местоположения.
Если параметры сигналов меняются, а пеленгаторные посты
облучаются неодновременно, то измеренные параметры в момен-
ты облучения постов и будут иметь различные значения,
поэтому векторы значений параметров X А и Xв будут зависеть от
времени:
где —
XA2(t), XtM-
законы изменения несущей частоты на
постах ПЛ1 и ПЛ2;
законы изменения периода следования
импульсов;
законы изменения л-го параметра.
XAn(t), XBn(t) ~
В этом случае идентификацию векторов А\(/) и X в (t) осущест-
вить сложно, а в ряде случаев — невозможно. Сказанное проиллю-
стрируем с помощью рис. 15.10 при изменении одного параметра.
Из рисунка видно, что выборки ХА и Xв будут значительно от-
личаться друг от друга. Сопоставить по выбранному критерию
близости для^данного случая не представляется возможным. Век-
торы XА1 и Xв2 существенно разнятся. Поэтому проблемы, кото-
рые возникают в этой ситуации при разработке средств РТР, со-
стоят в необходимости:
определить систему устойчивых признаков идентификации, не
зависящих от времени;
разработать алгоритм получения этих признаков (выборочных
значений);
разработать алгоритм сравнения векторов параметров и опре-
делить критерии их близости.
Рассмотрим один из подходов к определению устойчивых при-
знаков. Изменение параметров сигналов происходит по времени
от импульса к импульсу. Поэтому независимо от природы сигнала
f(t =пТ^, T(t = пТ^х(г =nTj) на выходе измерительных устройств
измеренные значения числовых величин изменяются во времени.
Это позволяет сделать вывод о том, что способ обработки сигнала
должен быть общим для всех параметров. Такой подход упрощает
алгоритм обработки.
Как было показано на сигналах реальных РЛС, закон измене-
ния параметров во времени может быть детерминированным или
случайным. Учитывая стационарность процессов изменения пара-
метров и неизменность их статических характеристик во времени,
последнее можно использовать в качестве устойчивых признаков
идентификации. К их числу следует отнести: оценку математиче-
341
ского ожидания m* и дисперсии о2’, оценку коэффициентов асим4
метрии и эксцесса законов распределения тп3' и т4, функции и ко4
эффициенты корреляции (символ * означает, что представленные
оценки формируются по результатам конкретных измерений). Тб
есть идентификацию сигналов источников радиоизлучений надо
осуществлять не по параметрам сигналов, а по оценкам их стати-
ческих характеристик.
Исследования показали, что статические характеристики пара-
метров не только устойчивы во времени и в пространстве, но и до-
статочно информативны. Однако для получения надежной иден-
тификации по ним необходимо использовать сравнительно боль-
шое число импульсов — от 400 до 700. Как было отмечено ранее,
это значительно превышает число импульсов за одну серию облу-
чения и является некоторым сдерживающим фактором в приме-
нении этого метода. Если осуществлять идентификацию по одной
серии, то она будет сопровождаться значительными ошибками.
Поэтому для идентификации источников радиоизлучений с пере-
менными параметрами предлагается изменить режим обзора про-
странства пеленгатором и от линейного сканирования антенной
системы перейти к дискретному обзору пространства.
При этом, как показывают расчеты, число вскрытых источни-
ков за время Zp в зоне разведки при дискретном сканировании не
уменьшается, а точность пеленгования даже увеличивается.
Необходимым для идентификации сигналов с переменными
параметрами является условие, чтобы на входе измерительных
устройств присутствовала только последовательность сигналов од-
ной РЛС. Иначе любые алгоритмы будут бессмысленны, так как
наложение последовательностей сигналов от двух и более РЛС
приводит к изменению статических характеристик параметров
каждого из ИРС и, следовательно, вызывает ложную идентифика-
цию пеленгов.
Число последовательностей сигналов на входе станции РТР,
время облучения, их длительность не зависят от нашего желания.
Поэтому для реализации условия облучения сигналами только од-
ной РЛС необходимо осуществить жесткую селекцию по про-
странству, несущей частоте, поляризации, виду модуляции, вре-
мени прихода.
Цель селекции — отсеять мешающие излучения, не подлежа-
щие пеленгации в данный момент. Пространственная селекция
осуществляется за счет избирательных свойств антенны (направ-
ленного приема) и избирательного устройства по поляризации,
частотная селекция — за счет избирательности линейного тракта
приемника по частоте, параметрическая — по параметрам модуля-
ции сигнала, и в первую очередь по ее виду.
Результаты измерения всех параметров фиксируются в ОЗУ с
привязкой по времени. МикроЭВМ (микропроцессорная система)
производит сортировку сигнала. Отдельно формируется матрица
сигнала с постоянными параметрами, отдельно — матрица с час-
342
гично переменными параметрами и отдельно — с полностью пере-
менными параметрами.
Для каждого случая определяют оценку математического ожи-
дания /л*, среднего квадратического отклонения су*, коэффициен-
та эксцесса и асимметрии. Для измеренных параметров вычисля-
ют функцию корреляции и ее характеристики.
В результате этой процедуры на каждом пеленгаторном посту
формируется следующий вектор признаков:
^А ~ fy^Al »СТЛ1 ,^3 > тА4 >Grm j" >
% В ~ 5 >тВЗ ’тВ4 ^В (Т)>Рг Двпп}’
где символ А указывает на принадлежность к первому посту, В —
ко второму.
При определении местоположения источника радиоизлучений
с переменной структурой сигналов методы синхронного пеленго-
вания непригодны из-за чрезвычайно большого времени поиска
“синхронного источника”. Поэтому лучше использовать метод
асинхронного пеленгования. Для его реализации фиксируются за
время /о значения векторов параметров XAl и XBi, которые зано-
сятся в память ОЗУ устройства идентификации (/ — условный но-
мер источника):
...={Х„.
А2 /}; X в, =
Далее в соответствии с выбранным критерием близости произ-
водят попарное сравнение векторов ХА[ и Xвх. При удовлетворе-
нии условия близости вычисляют координаты источника радиоиз-
лучения по пеленгам рл1 и рВ1.
15.7. СУЩНОСТЬ ИДЕНТИФИКАЦИИ ПО ЕЕ ОТЛИЧИЮ
ОТ ИНДИВИДУАЛЬНОГО РАСПОЗНАВАНИЯ
Индивидуальное распознавание — это способ определения при-
надлежности сигналов к конкретному образцу РЛС. С этой целью
в радиотехнической разведке осуществляется предварительное
изучение характерных индивидуальных особенностей в структуре
принятых сигналов, определяется степень их устойчивости во вре-
мени и пространстве (что очень важно) и формируется эталонный
сигнал. Время хранения эталона должно быть достаточно боль-
шим, во всяком случае пока РЛС не сменят сигнал или не изме-
нят его структуру в связи со сменой генератора передатчика или
его перестройкой. Распознавание осуществляется путем сравне-
ния принятого сигнала с эталонным в соответствии с разработан-
ным алгоритмом.
343
Идентификация выполняется по тем же алгоритмам, что и инЧ
дивидуальное распознавание, но вместо эталонного сигнала испсн
льзуется сигнал, принятый в другой точке пространства, без пред-,
варительного его изучения. i
При идентификации не требуется длительной устойчивости!-
сигнала во времени, так как сравнение сигналов осуществляется ж
короткие промежутки времени, т. е. в данный момент или отрезок
времени. Например, определение местоположения воздушной
цели пеленгационным методом.
Задачей идентификации является устранение ложных пелен-
гов. Причем за время пеленгации цель не должна переместиться
на расстояние больше радиуса ошибки Rq. Эталонный сигнал,
сформированный на одной из станций радиотехнической развед-
ки, хранится только на время обработки результатов пеленгова-
ния, затем стирается из ОЗУ.
При индивидуальном опознавании эталоны хранятся сколь
угодно долго и сравнение сигнала, принятого в момент разведки,
осуществляется со всеми эталонными сигналами, имеющимися в
памяти ЭВМ. Каждый эталон соответствует конкретному экземп-
ляру РЛС. При идентификации важно установить принадлеж-
ность вектора измеренных значений параметров к одной цели.
15.8. АЛГОРИТМЫ ИДЕНТИФИКАЦИИ СИГНАЛОВ
С ПЕРЕМЕННЫМИ ПАРАМЕТРАМИ
ПО ХАРАКТЕРИСТИКАМ СИГНАЛОВ
Кроме рассмотренных в подразд. 15.6 параметров для иденти-
фикации источников радиоимпульсов могут*использоваться и:
другие характеристики. К их числу относятся:
эмпирическая функция изменения параметров;
эмпирическая функция распределения параметров;
эмпирическая функция спектральной плотности параметров;
эмпирическая межпериодная функция корреляции.
Некоторые функции изменения параметров связаны между со-
бой строгой функциональной зависимостью. Поскольку можно
получить одну функцию из другой путем строгих математических
преобразований, то нет необходимости осуществлять при иденти-
фикации сравнение их всех, так как известно, что никакое преоб-
разование не может увеличить количество информации относите-
льно исходной. Поэтому рациональный выбор функции для иден-
тификации будет основываться только на объеме вычислений и
экономичности машинного времени. Алгоритм сравнения и при-
нятия решения может быть один, так как все рассматриваемые
функции — функции времени.
Рассмотрим задачу синтеза алгоритма идентификации ИРС по
характеристикам ИХ сигналов. Пусть на вход устройства иденти-
фикации поступают два сигнала. Известно, что эти сигналы струк-
турно подобны и могут принадлежать как одному ИР€, так и раз-
ным,
344
Необходимо оптимальным образом ндента фицировать эти сиг-
налы.
Считаем, что 5Д0 и 5з(0 — полностью детерминированные
сигналы, на которые наложена случайная составляющая.
По принятым реализациям Y(t) нужно решизь; сиг «алы SjQr> и.
S2(/), принятые на пеленгаторах Пг и П2, принадлежат одному
И PC или разным? Ответ на этот вопрос дает теория различения
сигналов. Для реализаций Y^t) и У2(0, включающих сдан из сиг-
налов S\(t) и 52(0» запишем апостериорные распредел1ения:
»У(5,) = ^Ж)ехр{-А + 2- V(OS,(Od/|;
Иу(52) = + 2-|У(0520)л|.
I Ло Ло о J
где ~ априорные распределения сигналов;
£[ = \Sy(t)dt и Е2 = \S2(f)dt — энергия сигналов,
о о
Воспользуемся критерием идеального наблюдателя. Для этого
запишем отношение апостериорных плотностей вероятностей (от-
ношение правдоподобия Л) и сравним его с порогом принятия ре-
шения I =1:
(|5-2з)
И рЛ^з) [ Ло ЛГ0 о J
pjz г 5 )
Если Л ^1, то считаем, что на входе устройства иден-
тификации присутствует сигнал одного источника радиоизлуче-
ний, т. е. идентификация осуществилась.
Если Л <1, то сравниваются сигналы разных ИРИ, т.е. сигналы
уе одетп'пфишруюгся.
Прологарифмировав выражение (15.23\, получим
Сделав некоторые преобразования, имеем
«=2-Jw,W-52(o]^<in^? + ^A=A!
где g — достаточная статистика; h — порог принятия решения.
Так как осуществляется идентификация сигналов однотипных
РЯС по неэнергет1ц'4$скйм параметрам, то можно доложить
M>(S() = Wpr (•$?) и Е\ = Е2 > то-ГЖ
345
g = ^Y(O[SW-S2(t)]dt<h
Ло о
или
о > о
Таким образом, по данному правилу принимаются решения об
идентификации сигналов того источника, для которого достаточ-
ная статистика максимальна.
Процедура сравнения, как и в случае анализа тонкой структуры
сигналов, сводится к нахождению взаимной корреляционной
функции между реализациями сигналов, принятых на пеленгатор-
ных постах Щ и П^. Полная вероятность ошибки определяется из
выражения
> = ф
ОШ
Е
No
где Ф() — интеграл вероятностей;
Rs — коэффициент взаимной корреляции сигналов S, и Sj.
Для большого ансамбля сигналов коэффициент может изменя-
ться от -1 при Sx(t) = -S2(t) до +1 при 51(0 = 5г(0.
Вероятность правильной идентификации сигналов ПРИ рас-
считывают по формуле *
С Ге
?"р=1-ф •
Так как за время поворота антенны ИРИ на угол у (угол визиро-
вания базы с источником радиоизлучения) структура сигналов из-
меняется, вероятность идентификации зависит от длительности
реализации.
15.9. ПРОСТРАНСТВЕННАЯ СЕЛЕКЦИЯ СИГНАЛОВ
С ПЕРЕМЕННЫМИ ПАРАМЕТРАМИ
Пространственная селекция в интересах идентификации сиг-
налов ИРИ осуществляется за счет избирательности антенной си-
стемы, т. е. направленного приема. При приеме по главному лепе-
стку диаграммы направленности коэффициент селекции к равен
отношению ширины диаграммы направленности дра к сектору
обзора Дрр. Для большинства станций РТР к ~ дра/2х
В настоящее время известны алгоритмы обработки сигналов,
позволяющие разрешать И PC внутри главного лепестка диаграм-
мы направленности. Например, используя амплитудные разли-
чия, можно отселектировать импульсные последовательности.
346
Как было отмечено выше, для обеспечения однозначного измере-
ния угловых координат желательно, чтобы на входе устройства из-
мерения и оценки пеленга присутствовали сигналы только одной
РЛС. Поэтому должна быть жесткая пространственная селекция.
Так как информация об угловом положении цели заключена в
амплитудах и фазах принимаемых сигналов, то последние должны
быть использованы для пространственной селекции.
Речь в данном случае идет о том, чтобы разделить последовате-
льности импульсов в пределах главного луча диаграммы направ-
ленности. При дискретном сканировании антенна радиоразведы-
вательной станции принимает ряд фиксированных положений
относительно направления на ИРС, которое не совпадает с равно-
сигнальным направлением. Для объяснения этого рассмотрим то-
лько два положения антенны, в каждом из которых направление
максимума приема находится под углами [3, и р2. Углы отсчитывают
от произвольного начального направления, а разность др = р, - р2
называется углом дискретного сканирования. В станциях РТР для
определения направления на источник радиоизлучений использу-
ют метод равносигнальной зоны, поэтому рассматривать простран-
ственную задачу будем применительно к нему. Так как дискретное
сканирование не предусматривает поиска и уточнения равносигна-
льного направления, то в момент приема сигналов антенная систе-
ма радиоразведывательной станции, как правило, не будет находи-
ться в этом положении. Поэтому отсчет пеленгов осуществляется
по соотношению амплитуд в каналах пеленгаторов UaJUа2. Если
угловые положения ИРС, находящихся в главном луче диаграммы
направленности, будут отличаться друг от друга, то соотношение
амплитуд будет различно и последовательности импульсов на выхо-
де схемы отношений будут отличаться по амплитуде. Это позволяет
осуществить разделение этих последовательностей с сохранением
информации о направленности на источник радиоизлучений. Ка-
чество разделения будет зависеть от пеленгационной характеристи-
ки антенной схемы радиоразведывательной станции, от соотноше-
ния сигнал/шум для всех сигналов, которые необходимо разделить,
и от угла Др, т. е. углового различия в положении ИРС относитель-
но пеленгатора. Произведя усреднение амплитуд на выходе ампли-
тудного селектора, можно уточнить оценку пеленга р*. Таким обра-
зом, используя различие в пространственном положении, можно
даже в пределах диаграммы направленности осуществить разделе-
ние импульсных последовательностей в целях измерения их вре-
менных параметров и других характеристик.
Так как сигналы на выходе схемы отношений будут флуктуиро-
вать по случайному закону в зависимости от соотношения сиг-
нал/шум на входе приемного устройства, то задача выбора опти-
мальных порогов сводится к многоальтернативному разделению
сигналов. Для этого необходимо произвести оценку амплитуд всех
сигналов. Йз теории оптимального измерения параметров извест-
но, что дисперсия оценки амплитуды прямоугольного импульса
347
прямо пропорциональна спектральной плоскости шума и обратно
пропорциональна длительности сигнала:
Если радиоимпульс имеет гауссовую форму, т. е. описывается
выражением
t1
U(t) = exp -2,8 Ц-
L М
где хи — длительность импульса на уровне 0,5 максимального
значения, то
Вероятность правильной селекции сигналов можно определить
по формуле
А2 Л2
где РС1 = \Wx(A)dA' Рош, = \W\A}dA . *
Для нормального шума и релеевского распределения амплитуд
на выходе амплитудного детектора существуют зависимости
п / ЛА |
Pip =/ — L которые позволяют при известных характеристиках
антенн и пространственном распределении целей определить ве-
роятность пространственной селекции.
16. КОМПЛЕКСНЫЙ АНАЛИЗ ПРЯМЫХ,
ОТРАЖЕННЫХ И ПЕРЕИЗЛУЧЕННЫХ
СИГНАЛОВ РЛС
16.1. ПРИНЦИП ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ
И ПЛОСКОСТНЫХ КООРДИНАТ ЦЕЛЕЙ
Основными источниками информации при радиотехнической
разведке являются радиолокационные станции. По принятым сиг-
налам делают вывод о их типе и тактическом назначении, опреде-
ляют местоположение, а также устанавливают объект, который
они обеспечивают, вскрывают некоторые характеристики его
функционирования. При этом не используется информация, за-
ключенная в отраженных или переизлученных сигналах этих РЛС,
тогда как сами станции получают информацию именно через от-
раженные сигналы. Так, РЛС постов ПВО центров управления по-
лучение информации о действиях авиации в зоне обнаружения, ее
сопровождении и наведении осуществляют путем приема и обра-
ботки отраженных от целей сигналов. В системах радиотехниче-
ской разведки традиционно принимаются только сигналы, излу-
ченные бортовыми РЛС, — прямые сигналы, но при действии
авиации в зоне разведки не все сигналы бортовых РЛС будут по-
ступать в систему разведки. Значительное количество целей будет
пропущено. В то же время РЛС постов ПВО противника непре-
рывно наблюдают за этими целями. Если система радиотехниче-
ской разведки сможет использовать сигналы РЛС противника, от-
раженные от неизлучающих целей, она будет иметь необходимые
данные о РЛС. Следовательно, эффективность разведки сущест-
венно возрастет.
Аналогичную картину наблюдают при разведке деятельности
кораблей военно-морского флота, испытательных ракетно-косми-
ческих полигонов противника и любых других систем, в которых
используются радиолокационные станции. Принципиальным от-
личием обработки сигналов в системах РТР от системы РЛС явля-
ется то, что РЛС используют собственный сигнал. Поэтому изве-
стна его структура, и главным образом начало отсчета, т. е. начало
излучения. В системах РТР такой информации нет, но ее можно
получить косвенно, используя прием и анализ прямых сигналов.
Таким образом, принимая и обрабатывая только в совокупности
прямые и отраженные от целей сигналы, можно получить полную
информацию о воздушных, надводных или других целях, облучае-
мых РЛС. Отличием здесь является не только то, что для олреде-
349
ления координат воздушных целей используются отраженные сиг-
налы, но и то, что источником разведывательных сведений явля-*
ется РЛС, значительно удаленная от самого объекта разведки. \
Принципиальным является вопрос, как получить и обработать
в комплексе информацию, заключенную в прямых и отраженны^
сигналах, в целях определения координат воздушных целей. j
Рис. 16.1. Определение координат путем обработки прямых
и переотраженных сигналов
Принцип определения пространственных координат поясним с
помощью рис. 16.1, из которого видно, что сигнал, излучаемый
передатчиком РЛС, находящимся в точке А, попадает в приемник
станции РТР, находящейся в точке В, двумя путями: прямым от А
к В и путем переотражения от А-»С->В.
Длина первого пути АВ = соответствует базе, т.е. расстоя-
нию от станции РТР до наземной РЛС. Длина второго пути
а=Г1 +г2 =rz.
Расположение наземных РЛС считаем известным из данных
предварительной разведки. В этом случае считаем также извест-
ным и длину первого пути г^.
Составим следующую систему уравнений:
рг = + A2 -Ir^cosy; (16 р
|/+''2='е-
350
Неизвестное значение можно определить, если измерить
время задержки прихода отраженного сигнала относительно
прямого.
Из рисунка г, + r2 - Rb =ст3 или
г, + г2 =гъ + ст3. (16.2)
Если база известна, то, измеряя т3, нетрудно определить rz.
Так как известна и величина постоянная, то при фиксиро-
ванной задержке второе уравнение системы (16.1) есть уравнение
эллипса. Следовательно, расстояние rz определяет положение цели
на поверхности эллипсоида вращения, фокусы которого находят-
ся в точках расположения РЛС и станции радиотехнической раз-
ведки.
Пересечение прямой, характеризующей направление прихода
отраженного сигнала, с поверхностью эллипсоида вращения опре-
деляет положение цели в пространстве. Угол у, находят по извест-
ным значениям:
у, = arccos (cos е cos р).
Решение системы уравнений (16.1) дает следующие выражения
для определения расстояний г\ и г2-
. _ rl -'I . /1 + ''s -2yEcosy
^2 -»/ \ ‘ (1о.э)
2(г£ - гБ cos у) 2(rz - гБ cos у)
Если измеряется угол АВС, то в выражениях (16.3) надо поме-
нять соответственно индексы в Г[ и и угол у, (т. е. угол АВС за-
менить на угол ВАС)-.
r +ГБ ~2/хгб cos ВАС , 4 - rl
2 2(rz - гБ cos ВАС} ’ 1 2(г£ - гБ cos ВАС}
Так как высота целей, как правило, намного меньше наклон-
ной дальности, то необходимость в измерении углов АВС и ВАС
отпадает. Цели заменяются значениями измеренных азимутов р, и
решается задача на плоскости.
Таким образом, измеряя время задержки отраженного сигнала
относительно прямого и один из углов у, или у2 при известной
базе, нетрудно определить плоскостные координаты целей. Если
база неизвестна, местоположение РЛС можно определить по сиг-
налам, отраженным от местных предметов, координаты которых
известны (рис. 16.2).
Измеренными следует считать время задержки т3 и один из уг-
лов а, или а2. Запишем выражение для времени задержки:
Т3 =(Г1 +Г2 -Гб)/С‘ О6’4)
351
Рис. 16.2. Взаимное расположение станции РТР, РЛС
и местного предмета МП
Так как известно расстояние от станции РТР до местного пред-
мета, то уравнение (16.4) можно представить в виде
стз -h = f\ -гБ.
Если ст3 — величина постоянная и не изменяется во время из-
мерения координат РЛС, то - гъ = const. Это есть уравнение ги-
перболы, фокусы которой расположены в местах стояния станции
РТР и местного предмета. Измеряя один из углов, например ли-
нию пеленга со станции РТР на цель, по пересечению гиперболы
и линии пеленга легко определить координаты РЛС, а следовате-
льно, и ее удаленность от станции разведки, т. е. гБ. Так как в зоне
обнаружения всегда находятся местные предметы, от которых
можно принять отраженные сигналы, то определение координат
РЛС не представляется сложной задачей.
Из треугольника АВС (рис. 16.3):
а =Г] cos а,;
гБ - а = r2 cos а 2.
Решая эту систему, получим
гБ = r( cos а! + r2 cos а2.
Согласно теореме синусов можно записать равенство соотно-
шений
r]/sina2 =r2/sinar
352
Рис. 16.3. Определение координат РЛС по сигналам,
отраженным от местных предметов
Теперь составим следующую систему уравнений:
+г2 -г6;
< гк = r. cos а, -г, cos а, ;
D I \ 2. I 1
sina2 since.
где Дг = ст3.
Из этой системы получим соотношение, позволяющее на осно-
ве измерения двух углов а,, а2 и времени задержки т3 определить
значение
.------7------- .
sina. + sina,
—;—5--------- ~ 1
sin(a( + a2)
Если известны координаты местного предмета, то для опреде-
ления базы гБ достаточно измерить время задержки т3 и один из
углов а! или а2. Зная гБ, можно приступить к измерению коорди-
нат воздушных целей.
На командных пунктах подразделений радиотехнической раз-
ведки чаще всего используется прямоугольная система координат
X У. Поэтому можно перевести угломерно-эллиптическую систе-
му координат в прямоугольную, используя следующие формулы:
гБ sin(a.] + a3)
2 sin(a3 - a,)
_ гБ sinat sina3
sin(a3 - a()
Рассмотрим подробнее процесс определения времени задержки
т3 и углов а, и а,.
353
Предположим, что имеется двухканальная система пеленгации
диаграммы направленности антенн в которой могут изменять свов
положение в пространстве независимо друг от друга. Направим
одну антенну на РЛС, а вторую — на цель. Первой антенной прич
мем прямой сигнал, второй — отраженный. Измерим время задеру
жки между этими сигналами. Угол раствора между антеннами Aj И
А2 и будет углом а2. Для определения угла а2 надо в каждый мо-
мент знать положение диаграммы направленности РЛС противни-
ка. Получить эту информацию не сложно. На основании рассмот-
ренного выше структурная схема поста радиотехнической развед-
ки примет вид, показанный на рис. 16.4.
Рис. 16.4. Структурная схема устройства приема прямого
и отраженного сигналов
Так как прямой и отраженный сигналы имеют одну и ту же час-
тоту (отличие может быть только на частоту Доплера), то с помо-
щью общего гетеродина автоматически оба приемных канала на-
страиваются на одну и ту же частоту, чем обеспечивается высокая
степень идентификации целей. Наиболее сложным является по-
иск отраженного сигнала в пространстве, поскольку неизвестно не
только местоположение воздушных целей, но и факт их нахожде-
ния в зоне разведки. Определить наиболее вероятное положение
воздушных (надводных) целей в зоне разведки позволяет метод
скрытого переноса изображения с экрана РЛС противника на эк-
ран станции РТР, так называемый метод синхронного обзора.
16.2. МЕТОД СИНХРОННОГО ОБЗОРА
Метод синхронного обзора заключается в следующем. Станция
имеет два самостоятельных приемных канала: канал приема пря-
мого сигнала и канал приема отраженного сигнала (см. рис. 16.4).
354
Антенна канала приема прямых сигналов имеет узкую диаграмму
направленности, ориентированную на РЛС. Назовем ее опорной
или базовой.
Обладая высокой чувствительностью, этот канал способен при-
нимать зондирующие сигналы по боковому излучению на больших
дальностях, в том числе и за счет дальней тропосферной разведки.
Диаграмма направленности антенны приема отраженного сиг-
нала имеет лепестковую структуру, чтобы обеспечивался одновре-
менный просмотр всей зоны обнаружения РЛС или основной ее
части. При этом приемник имеет высокую эквивалентную чувст-
вительность в целях обеспечения заданной глубины разведки.
Синхронно и синфазно с антенной РЛС вращается развертка
индикатора кругового обзора станции РТР. Запуск развертки осу-
ществляется импульсами, принятыми каналом приема прямого
сигнала.
В момент облучения цели
станция РТР производит прием
отраженного сигнала. Так как
развертка индикатора кругового
обзора станции РТР вращается
синхронно с антенной радиоло-
кационной станции, то угол
а2 =Qf на станции разведки и
на РЛС противника будет одним
и тем же (рис. 16.5). Это позво-
ляет измерить угол аг Положе-
ние отметки от цели относите-
льно центра экрана будет ха-
рактеризовать время задержки
отраженного сигнала относите-
льно прямого. Таким образом,
на индикаторе разведыватель-
ной станции можно одновре-
менно измерить угол а( и время
задержки, однозначно опреде-
лить координаты цели в систе-
ме угломерно-эллиптических
координат. Если в зоне обзора
будет находиться несколько це-
лей, все они будут отражены на
экране станции разведки. Сле-
довательно, метод синхронного
обзора позволяет переносить
изображение всей обстановки с экрана РЛС противника на экран
станции РТР.
Синхронизация вращения развертки осуществляется в момент
пересечения антенной радиолокационной станции противника
линии визирования РЛС — станция РТР. При равенстве угловых
скоростей вращения антенных систем РЛС и развертки источника
355
кругового обзора линия визирования будет засвечиваться в одно1^
и том же месте. При нарушении синхронности отметка линии врм
зирования будет смещаться на экране, набегать или отставать в за<
висимости от знака разности угловых скоростей.
Отметка линии визирования формируется путем ограничениа|
верхней части серии импульсов главного лепестка диаграммы на*
правленности РЛС противника.
Развертка индикатора кругового обзора станции РТР должна
запускаться каждым импульсом, излученным радиолокационной
станцией. Это возможно, если осуществлять уверенный прием по
боковым и заднему лепесткам диаграммы направленности. Если
опорная РЛС удалена от станции радиотехнической разведки на
достаточно большое расстояние, это условие не выполняется. По-
этому наблюдаются пропуски в запуске развертки и, следователь-
но, непросматриваемые секторы.1 Чтобы это исключить, можно
использовать генератор прогнозируемых импульсов, который
синхронизируется сигналами, принятыми по главному лепестку
диаграммы направленности, и в дальнейшем генерирует импульсы
запуска с периодом следования, равным периоду повторения им-
пульсов РЛС. Для того чтобы ошибка ухода частоты генератора не
накапливалась от оборота к обороту, синхронизация осуществля-
ется на каждом обороте антенны в течение времени облучения
главным лепестком диаграммы направленности антенны РЛС
противника. Создание парциальной диаграммы направленности
для приема отраженного сигнала значительно усложняет устрой-
ство, реализующее метод синхронного обзора. Учитывая, что на
станции РТР в каждый момент времени известно положение диа-
граммы направленности РЛС противника, можно уменьшить
время поиска остронаправленной антенной.
Несмотря на сокращение сектора поиска, может наблюдаться
пропуск целей. На рис. 16.6 изображена диаграмма направленно-
сти антенны РЛС, облучающей две цели. Одна цель обнаружена,
вторая — пропущена. Чтобы исключить пропуск целей, скорость
поиска приемной антенны должна быть подобрана таким обра-
зом, чтобы ее диаграмма направленности “просматривала” сектор
обзора за время перемещения передающей антенны РЛС на угол,
равный ширине ее диаграммы направленности.
Величина и конфигурация зоны обзора зависят от уровня сиг-
налов на входе приемного устройства, принятых по обоим кана-
лам приема. Однако энергия отраженного сигнала значительно
ниже, чем энергия прямого сигнала, даже если прямой сигнал
принимается за счет дальней тропосферной разведки. Причина за-
ключается в том, что энергия прямого сигнала изменяется обратно
пропорционально квадрату расстояний, а отраженного — расстоя-
нию в четвертой степени.
Энергию отраженного от цели сигнала на вход станции РТР
рассчитывают по формуле
356
Сектор поиска
Ui
РЛС
Станция РТР
Рис. 16.6. Пропуск цели при синхронном обзоре
р____________________________,
(4n;)3rt2r22 £]£2£3
(16.5)
где Рл — мощность передатчика РЛС, Вт;
Gj, — коэффициент усиления по мощности передающей
антенны РЛС в направлении на цель;
X— длина волны, м;
ои — эффективная отражающая поверхность цели, м2;
Г1 — расстояние от РЛС до'цели, м;
Г2 — расстояние от цели до станции РТР, м;
L[— потери на участке передатчик РЛС—цель;
£2— потери на участке цель—станция РТР;
£3— потери в приемной системе станции РТР.
Это уравнение можно сопоставить с соответствующим уравне-
нием в радиолокации, положив, что (72 = Gn,Gp; =r„;
£2 = £,£2 . Предположим, что все члены в правой части выраже-
ния (1о.5) постоянны, за исключением г\ и г^, получим
357
* MV n-------
(4л)3 L{L2L2
Приняв эти допущения, получим уравнение овалов Кассини, ко-
торое характеризует геометрическое место точек равной мощно-
сти принимаемого сигнала в любой плоскости, содержащей базис-
ную линию между передатчиком и приемником. Цель с заданны-
ми параметрами может быть обнаружена только внутри овала, а
вне его цель — энергетически недоступна.
Уравнение овалов запишем в виде
(х2 + у2)-2с2(х2 -у2) = а4 -с4, (16.6)
где с = гБ /2.
Поясним геометрический смысл уравнения овалов Кассини.
Точка М плоскости лежит на кривой, если произведение ее рас-
стояний до фиксированных точек F[ и F2 постоянно:
(Л//7]) х (MF2) = а2. Здесь MF[ = Г|, MF2 = Точки F\ и F2 — фо-
кусы овала, имеющие координаты Ji(c,0), F2(-c,0). Форма кривой
зависит от отношения а/с (рис. 16.7):
а) а >сЛ вершины A,B,C,D имеют координаты:
A^Ja2 + с2,о); С^->]а2 + с2,о); 4а2 с2)D^Q,-y/a2 -с2).
Положение вершин характеризует наиболее удаленные точки
зон. Так, максимальная глубина разведки вдоль базисной линии:
ПтаА = с + >1а2 + с2;
б) с<а<су/2 — овал с талией. Имеется шесть вершин:
A,C,G,K,E,I. Их координаты:
х£ = -хс = -хк =xf = у]4с2 -а2 / (2с);
Уе =Ув = ~Ук =~У( =“2 / (2с);
A^Ja2 + с2,о); C^la2 + с2,о);
в) а = с — лемниската (частный случай овала Кассини). Урав-
нение (16.6) преобразуется к виду
(х2 + у2^-2а(х2 -у2) = 0, д>0.
Пересечения кривой с осью X:
л(л>/2,0); С(-Ол/2,0).
358
Рис. 16.7. Вады овалов Кассини
Координаты точек Е, G, I, К:
х£ = х{ = -xG = -хк =ayl3/2;yE = у0 =-yf =-ук = ^.
Площадь каждой петли 5= а2;
359
г) а < с. Зона имеет два овала. Пересечения с осью X:
A^xla2 + с2,0^; С^-л/а2 + с2,0^;
р(х/с2 -а2,0); Q^-x/с2 -а2,0^.
Координаты точек Е, Gy I, К:
хЕ =Х/ = -хс =-хк = -х14сА -а4 / (2с);
Уе ~Ус =~У/ =~Ук =а" /2с-
Координаты вершин позволяют найти энергетическую зону
разведки. Но координаты целей можно определить не во всей
зоне. На базисной линии между станцией РТР и радиолокацион-
ной станцией противника не будет задержки отраженного сигнала
относительно прямого, так как сумма расстояний равна базе
г, - г2 = гБ, а время задержки определяется по формуле
Ъ = rJc + Ъ/с ~гь!с= rdc -Гб/с-
При г£ = гБ получим т3= 0. Это очевидно, так как путь прямого
сигнала до цели и от цели до РЛС один и тот же. Во всех других
точках зоны цели могут быть обнаружены и их координаты изме-
рены. Однако следует заметить, что при малых отклонениях ан-
тенны РЛС от базисной линии F\F} поперечное отклонение цели
соизмеримо с высотой цели и измерение координат будет неодно-
значным. Поэтому фактическая глубина зоны разведки будет
иметь вид кардиоиды.
Важной характеристикой является глубина зоны разведки, по-
скольку конфигурацию ее можно скорректировать за счет геомет-
рии постов радиотехнической разведки.
Пример. Рассчитать максимальную дальность обнаружения
самолета с эффективной отражающей поверхностью оц = 1 м2 при
базе /‘б = 200 км.
Параметры станции РТР и радиолокационной станции против-
ника:
Рл =106Вт; Gn =104;(7р -103; Х=0,1 м; Рр =1012Вт.
Для удобства расчетов примем =г2. Воспользовавшись фор-
мулой (16.5), вычислим г2г2 = а4 =1О20, откуда а = 105 м. При базе
200 км с = 100 км.
Форма зоны обнаружения будет иметь вид овала Кассини (см.
рис. 16.7). Результат расчета максимальной дальности:
Z) х = Г'б /2 + дМ2 +(Гб/2)2 *241 км.
max bi \j \ d I /
360
16.3. ПОВЫШЕНИЕ ДАЛЬНОСТИ ОБНАРУЖЕНИЯ
ЗА СЧЕТ ИСПОЛЬЗОВАНИЯ СИГНАЛОВ
БОРТОВЫХ ОТВЕТЧИКОВ
Глубину зоны разведки можно существенно увеличить, если
для обнаружения воздушных целей использовать ответные сигна-
лы системы опознавания. Известно, что запросные сигналы сис-
темы опознавания следуют синхронно с зондирующими сигнала-
ми РЛС. Поэтому синхронизацию разверток индикатора кругово-
го обзора станции РТР можно осуществлять сигналами РЛС, а
вместо отраженных сигналов принимать ответные сигналы борто-
вого ответчика. Так как мощность ответного сигнала значительно
превосходит мощность отраженного сигнала, то, естественно, и
дальность обнаружения целей будет существенно повышена. Глу-
бину зоны разведки по сигналам бортового ответчика можно рас-
считать по формуле
={Л.О<?6О<?Р^ / [(4я)2РрА2Л3]}/,
где У’б.о ~ импульсная мощность бортового ответчика;
бь.о — коэффициент усиления антенны бортового ответчи-
ка в направлении на станцию РТР;
(7р — коэффициент усиления антенны станции РТР;
X — длина волны сигнала бортового ответчика;
Рр — реальная чувствительность приемного устройства
станции РТР;
L2L3 — коэффициент потерь на распространение сигнала от
цели до станции РТР.
Для системы MK-10SIF максимальная дальность разведки со-
ставляет 740 км, что значительно превышает дальность прямой
видимости воздушных целей на любых достижимых в настоящее
время высотах полета авиации (Н — 30 км). Поэтому максималь-
ная глубина зоны разведки ограничивается не уровнем сигнала, а
дальностью прямой видимости (см. формулу 2)пв на с. 49).
По сравнению с обнаружением целей по отраженному сигналу
глубина зоны разведки возросла в три раза. На небольших высотах
полета самолетов выигрыш в дальности воздушных целей будет
менее значительным, однако надежность обнаружения будет
выше. Некоторые сложности возникают при использовании от-
ветных сигналов системы MK-12SIF. В отличие от системы
MK-10SIF система MK-12SIF имеет криптографический много-
позиционный запросный сигнал, меняющийся от запроса к за-
просу. Ответный сигнал излучается в виде одного импульса с за-
держкой на время т3, кратное 4 мкс. Изменение временного поло-
жения импульсов ответного сигнала приводит к тому, что по
задержке ответного сигнала относительно запросного нельзя
определить местоположение цели в пространстве. Поэтому в резу-
льтате предварительной разведки надо установить, какому запрос-
361
ному коду соответствует задержка. Это можно сделать, если при*
нимать прямой, отраженный и переизлученный сигнал РЛС. 1
Метод определения координат при синхронном обзоре являет-
ся угломерно-эллиптическим, так как фактически измеряется
сумма расстояний + г2 =гБ + стэ и угол aL (пеленг РЛС на цель).
Ошибка измерения базы зависит от точности измерения коорди-
нат станции РТР и ошибок измерения координат РЛС. Если пози-
ция разведывательной станции привязана к местности достаточно
точно, то ошибкой определения места положения станции РТР
можно пренебречь. Как было показано выше, координаты радио?
локационной станции определяются в результате предваритель-
ной радиотехнической разведки либо триангуляционным, либо
разностно-дальномерным (угломерным) методом. Путем много-
кратного пеленгования или многократного измерения координат
РЛС другими способами ее местоположение может быть опреде-
лено сколь угодно точно. Поэтому в ряде случаев этой ошибкой
тоже можно пренебречь. Если условия радиотехнической разведки
таковы, то координаты РЛС определяются непосредственно в мо-
мент разведки, а для вычисления ошибки измерения координат
РЛС можно воспользоваться формулой (15.18) при триангуляци-
онном методе или формулой (15.20) при разностно-дальномер-
ном. Ошибку определения положения цели относительно станции
РТР и радиолокационной станции находим по формуле
|[4cos2/<₽ / 2] sin ср, (16.7)
где оа — ошибка измерения угла;
ср — угол видимости базы при угломерно-эллиптическом
методе.
Следует заметить, что в формулу (16.7) расчета ошибки измере-
ния координат угломерно-эллиптическим методом входит угол ар
точность измерения которого определяется шириной диаграммы
направленности антенны РЛС противника. Поскольку большин-
ство радиолокационных станций имеют узкие диаграммы направ-
ленности (менее 1°), точность измерения угла будет достаточно
высокой. Ошибка измерения зависит и от геометрии системы ра-
диотехнической разведки, определяемой углом у. При у = 90°
ошибка измерения координат наименьшая. При у = 0 измерение
координат не имеет смысла, так как ошибка измерения координат
стремится к бесконечности. Это ограничение было рассмотрено
при оценке зон обнаружения.
При малых углах ошибка измерения координат достаточно ве-
лика. Она велика также при углах, близких к 180°, т.е. когда эл-
липс сильно вытянут (цель находится вблизи базисной линии).
Следовательно, опорную (базовую) РЛС надо выбирать таким
образом, чтобы зона интенсивных полетов находилась в стороне
от линии визирования цель — РЛС.
362
16.4. ПРАКТИЧЕСКАЯ РЕАЛИЗАЦИЯ МЕТОДА
СИНХРОННОГО ОБЗОРА
Устройство синхронного обзора (рис. 16.8) состоит из двух ан-
тенных систем, создающих диаграммы направленности игольча-
того и веерного типов; двух приемных каналов для приема прямых
и отраженных сигналов; устройства отображения в виде индикато-
ра кругового обзора. Круговое вращение развертки осуществляет-
ся асинхронным гистерезисным двигателем, который питается от
трехфазного генератора со стабильной частотной генерацией.
Подстройкой частоты генератора добиваются синхронизации ско-
рости кругового вращения развертки индикатора кругового обзора
со скоростью вращения антенного устройства РЛС противника.
Направление от разведываемой РЛС на приемную позицию фик-
сируется на экране электронно-лучевой трубки яркостной линией
Рис. 16.8. Структурная схема устройства синхронного обзора
363
пеленга в момент облучения главным лепестком диаграммы на-
правленности разведываемой РЛС приемной позиции. Селекция
главного лепестка осуществляется аттенюатором.
Для измерения времени задержки в схеме предусмотрен ярко-
стный подвижный круг, создаваемый специальной схемой, вклю-
чающей в себя компаратор уровня и генератор импульса строба.
На компаратор уровня подается пилообразное напряжение с
генератора развертки. Уровень срабатывания компаратора, а сле-
довательно, и время задержки можно плавно регулировать. В мо-
мент достижения пилообразным напряжением выбранного уровня
компаратор вырабатывает импульс запуска генератора строба.
Импульс строба создает круговую отметку. Начало счета импуль-
сов измерения интервала задержки определяется импульсом запу-
ска генератора развертки, конец измерения — импульсом строба.
Вместо индикатора кругового обзора можно использовать ин-
дикатор азимут-дальность. На горизонтально отклоняющие плас-
тины этого индикатора подается пилообразное напряжение с дли-
тельностью, равной периоду вращения антенны, а на вертикально
отклоняющие пластины — пилообразное напряжение длительно-
стью несколько меньшей периода повторения импульсов РЛС.
Синхронизация горизонтальной развертки осуществляется импу-
льсом, вырабатываемым при облучении станции разведки глав-
ным лучом диаграммы направленности РЛС. Синхронизация вер-
тикальной развертки осуществляется импульсами, принятыми ка-
налом приема прямого сигнала. Отраженные сигналы поступают
на устройство подсветки целей, куда подаются азимутальные мет-
ки и метки времени, по которым измеряется задержка. Индикатор
азимут-дальность значительно проще в эксплуатации, так как об-
ладает большим диапазоном измерения скоростей азимутальной
развертки, позволяет осуществлять синхронизацию в условиях из-
менения частоты вращения антенны РЛС, а также в случае работы
ее в секторном режиме, однако наглядность отображения обста-
новки на индикаторе кругового обзора значительно ниже.
16.5. ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ РЛС
ПРОТИВНИКА ЗА РАДИОГОРИЗОНТОМ
Для определения местоположения РЛС противника за радиого-
ризонтом используется самолет-разведчик, который совершает
полеты вдоль линии соприкосновения войск. Путем пеленгации
источника радиоимпульсов в нескольких точках маршрута (рис.
16.9) определяется местоположение РЛС. Точность измерения ко-
ординат зависит от длины искусственной базы, создаваемой поле-
том самолета за время AZ, точности измерения собственных коор-
динат самолета, точности пеленгования.
Обеспечить большую базу на практике не всегда удается, так
как радиолокационные станции могут работать кратковременно.
Поэтому в момент Z[ сигнал будет принят, а в момент (2 — нет.
Кроме того, условия приема могут быть для точек А[ и А2 различ-
364
ними, и обеспечить прием в обеих точках не всегда удается. Суще-
ственным недостатком является низкая надежность идентифика-
ции. В условиях большой насыщенности зоны разведки радиоло-
кационными станциями трудно идентифицировать сигналы,
принятые в точках А[ и Аг. Даже для наземных условий радиотех -
нической разведки вопрос идентификации чрезвычайно сложен.
Современные методы навигации позволяют измерять собст-
венные координаты самолета достаточно точно, следовательно,
можно считать, что эта ошибка не будет определяющей.
Точность пеленгования с борта самолета невысока, так как ма-
лые габаритные размеры антенны не позволяют создавать узкие
диаграммы направленности. Поэтому общая ошибка измерения
координат наземных РЛС может быть достаточно большой.
Одним из существенных недостатков определения местополо-
жения источника радиоизлучений с борта самолета является боль-
шое время запаздывания данных, которые, как правило, получают
после обработки результатов полета самолета-разведчика на КП
разведывательной части.
Перечисленные недостатки вынуждают изыскивать новые спо-
собы определения координат наземных объектов. Одним из спо-
собов является переизлучение принятой информации бортовой
станцией РТР на наземный приемный пункт и измерение пеленга
на РЛС. Так как координаты самолета-разведчика известны, то
пеленг на самолет определять не нужно. В этом случае координа-
ты измеряют угломерно-гиперболическим методом, где в качестве
базового расстояния выступает расстояние от самолета-разведчи-
ка до станции РТР. Если угол а, определить трудно или радиоло-
кационная станция с земли не обнаруживается, то производится
измерение координат в двух точках полета самолета (рис. 16.10). В
365
W РЛС
Рис. 16.10. Гиперболический метод определения
местоположения РЛС за радиогоризонтом
этом случае метод измерения координат — гиперболический в
чистом виде. Но здесь, как и при триангуляционном методе, воз-
никает проблема идентификации и проблема обнаружения сигна-
ла в различные моменты времени и ?2- Однако преимуществом
является высокая точность измерения координат и меньшее время
запаздывания в их измерении и выдаче. Это время может быть со-
кращено, если использовать два поста разведки (рис. 16.11). Сиг-
налы РЛС, ретранслируемые с борта самолета, принимаются в
точках РТР1 и РТР2. Тогда образуются две базы гб! и гб2- Значит,
как и в предыдущем случае, здесь будет применен гиперболиче-
ский метод. Достоинством этого метода является измерение коор-
Рис. 16.11. Применение двух наземных постов РТР при приеме
сигналов от бортовых станций РТР
366
динат РЛС с достаточно высокой точностью по одному принятому
импульсу. Ограничением при использовании рассмотренного ме-
тода является необходимость установки на борту самолета широ-
кополосного канала связи для ретрансляции сигнала РЛС, приня-
того бортовой станцией радиотехнической разведки.
16.6. ИСПОЛЬЗОВАНИЕ ОТРАЖЕННЫХ
ОТ САМОЛЕТА-РАЗВЕДЧИКА СИГНАЛОВ
ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ НАЗЕМНЫХ
РАДИОЛОКАЦИОННЫХ СТАНЦИЙ
Рассмотрим следующую ситуацию. Пусть координаты наземной
РЛС неизвестны, но установлен пеленг на эту станцию. Определим
период вращения антенн РЛС противника и осуществим синхро-
низацию вращения развертки индикатора станции РТР с антенной
РЛС противника. Если самолет-разведчик находится в зоне обна-
ружения радиолокационной станции, отраженный от него сигнал
может быть принят. На индикаторе кругового обзора станции раз-
ведки будем наблюдать отметку самолета-разведчика, координаты
которого, а следовательно, и расстояние до него известны.
Зная <Х] и расстояние до цели, нетрудно определить дальность
от станции РТР до РЛС, т.е. (рис. 16.12). В отличие от рассмот-
ренного выше метода синхронного обзора координаты радиолока-
ционной станции определяются в угломерно-гиперболической
системе координат (используется угломерно-разностно-дально-
мерный метод определения координат) и нет необходимости осу-
ществлять поиск в пространстве, так как местоположение самоле-
та на станции РТР известно.
Рис. 16.12. Определение координат наземных РЛС
с использованием сигналов, отраженных
от самолета-разведчика
367
Рассмотренный метод позволяет уточнять местоположение ра-
нее разведанных РЛС, а также определять координаты неразве-
данных РЛС. Особенно высока эффективность этого метода при
радиотехнической разведке постов ПВО, ЦУО и ПУО.
16.7. КОМПЛЕКСНЫЙ АНАЛИЗ ОТРАЖЕННЫХ И
ПЕРЕИЗЛУЧЕННЫХ СИГНАЛОВ РЛС СИСТЕМЫ AWACS
ДЛЯ ПОВЫШЕНИЯ ИНФОРМАТИВНОСТИ
РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ
В настоящее время на континентальной части США и в евро-
пейской зоне активно используются следующие комплексы: даль-
него радиолокационного обнаружения AWACS, который может ре-
шать задачи дальнего радиолокационного обнаружения; опознава-
ния государственной принадлежности воздушных целей в зоне
обзора; автоматического сопровождения целей на больших, сред-
них, малых и предельно малых высотах; автоматической передачи
данных о всех сопровождаемых целях в ЦУО и ПУО; наведения
истребителей на воздушные цели; взаимодействия с зенитными ра-
кетными комплексами и выдачи им целеуказания; обеспечения
взаимодействия тактической авиации с частями и соединениями
наземных войск, с авианосцами и другими объектами морского ба-
зирования; управления боевыми действиями тактической авиации
на театре военных действий; ведения радио- и радиотехнической
разведки.
Для решения этих задач самолет Е-ЗА имеет специальное ра-
диоэлектронное оборудование, основу которого составляет обзор-
ная РЛС типа AN/APY-2, которая может работать в разных режи-
мах. Из них следует отметить основные режимы:
импульсно-доплеровский с высокой частотой повторения им-
пульсов без угломерного сканирования;
импульсно-доплеровский с высокой частотой повторения им-
пульсов со сканированием в угломерной плоскости;
импульсный режим с большой длительностью импульсов и
низкой частотой повторения;
импульсный режим с малой длительностью сигнала.
Перечисленные режимы могут быть использованы отдельно, в
различных сочетаниях и комплексно. Все это существенно услож-
няет вопросы разведки самой системы AWACS, а также получение
информации о воздушной обстановке.
Метод скрытого переноса изображений с экрана РЛС против-
ника на экран станции радиотехнической разведки путем комп-
лексного синхронного анализа может дать наиболее ощутимый
информационный эффект, если в качестве синхронирующей ис-
пользовать станцию системы AWACS. Повышение информатив-
ности радиотехнической разведки в этом случае достигается при
выполнении следующих условий:
самолеты системы AWACS максимально приближены к госу-
дарственной границе (линии соприкосновения войск), при этом
368
удаление самой системы в целях безопасности от линии соприкос-
новения войск составляет 150 км; следовательно, по этой системе
можно осуществлять уверенную и надежную синхронизацию пе-
реноса изображений;
в целях обеспечения собственной безопасности система
AWACS поддерживает непрерывный контакт с системой опозна-
вания ЗУРС типа “Усовершенствованный хок” или “Патриот”,
что позволяет вести комплексную разведку самолетов тактической
авиации на Центрально-Европейском ТВД;
система опознавания на борту самолета Е-ЗА построена по еди-
ному принципу с наземной системой MK-10SIF или MK-12SIF,
что позволяет использовать одну и ту же аппаратуру радиотехни-
ческой разведки;
вследствие подъема системы AWACS на большую высоту (8 ...
10 км) энергетические условия приема прямых и отраженных сиг-
налов улучшаются.
С помощью 1-го приемного (базового) канала станции РТР
осуществляются сопровождение системы AWACS по угловым ко-
ординатам, синхронизация запуска и вращения разверток индика-
тора кругового обзора станции РТР (см.рис.16.8).
С помощью 2-го приемного канала осуществляется прием от-
раженных от воздушных целей сигналов. На экране разведывате-
льной станции отображается воздушная обстановка относительно
системы AWACS, координаты которой неизвестны и непрерывно
меняются. Эти координаты могут быть определены путем перено-
са изображения с экрана наземной РЛС с известными координа-
тами на второй индикатор станции радиотехнической разведки.
Таким образом, метод синхронного обзора позволяет не только
вести разведку системы AWACS, но и использовать ее в качестве
переносчика информации о воздушных целях, находящихся в зоне
разведки. Так как РЛС AN/APY-2 излучает сложные сигналы, то
для повышения дальности разведки, точности измерения коорди-
нат и разрешающей способности по дальности целесообразно ис-
пользовать принципы оптимальной фильтрации сигналов, в част-
ности конвольверную обработку.
Так как отображение воздушной обстановки методом комплек-
сного синхронного анализа желательно получить от системы
AWACS, то в качестве опорной РЛС целесообразно использовать
бортовой локатор в обзорном режиме.
16.8. ПУТИ ПОВЫШЕНИЯ ТОЧНОСТИ ИЗМЕРЕНИЯ
КООРДИНАТ
Первая составляющая ошибки определения координат связана
с ошибкой измерения времени задержки переизлученного сигнала
относительно прямого. Здесь возможны два пути. Первый заклю-
чается в том, чтобы при определении координат воздушных целей
по отраженным сигналам улучшить отношение сигнал/шум за
счет статистической, оптимальной или квазиоптимальной обра-
369
ботки сигнала или статистической обработки результатов измере-;
ния. Второй путь: при определении местоположения целей пф
бортовым ответчикам использовать полный ансамбль ответного
сигнала, т.е. измерять время задержки между импульсом кода
производить статистическое усреднение результатов измерения:
Наряду с повышением точности измерения координат предло-
женный метод позволяет одновременно осуществить идентифика-
цию кодов. Средняя квадратическая ошибка измерения времени
задержки при этом уменьшится на величину, равную квадратному
корню из числа импульсов в коде. Можно достичь максимального
(в 4 раза) уменьшения ошибки для кода наземной системы
MK-10SIF.
При приеме сигналов РЛС или РНС ТАКАН точность измере-
ния координат может быть повышена, если время задержки изме-
рять не по переднему фронту импульсов, а по центру импульса,
т.е., измеряя задержку между передними фронтами и спадами им-
пульсов, усреднять результат. Этот метод достаточно эффективен
в случае приема колоколообразных радиоимпульсов. Из теории
оптимального приема известно, что дисперсия ошибки измерения
временного положения колоколообразного радиоимпульса по пе-
реднему фронту cj ~2,7oJonT, т.е. дисперсия ошибки измерения
почти в 3 раза превосходит оптимальную.
Если оценку задержки производить по центру импульса, отра-
женного от цели, то дисперсия составит oj = 1,2 <у?01|Т, т.е. диспер-
сия оценки задержки только в 1,2 раза больше, чем дисперсия оп-
тимальной оценки.
Таким образом, простейшая с точки зрения оптимального при-
ема методика измерения времени задержки позволяет в 2...4 раза
снизить составляющую ошибки.
Второй важной составляющей ошибки измерения координат
является ошибка измерения угла. Улучшить точность измерения
этого параметра практически невозможно, так как она определя-
ется параметрами антенны РЛС противника. Однако можно пред-
ложить использование избыточной информации о координатах в
целях уменьшения результирующей ошибки.
Ранее, в подразд. 16.2, было показано, что для обеспечения вы-
сокого уровня электромагнитной доступности диаграмма направ-
ленности антенны канала приема отраженного сигнала должна
быть достаточно узкой. Следовательно, имеется возможность из-
мерения еще одной первичной координаты — угла а2.
Поэтому в таком варианте метод скрытого переноса изображе-
ний совмещает в себе два принципа измерения: угломерный (из-
вестны а, р, Гб) и угломерно-эллиптический (известны a, rg, ст3).
Совмещение принципов позволяет улучшить точность измерения
пространственных координат X и Y.
370
Кроме того, желательно для уточнения координат использовать
две базовые РЛС противника. В этом случае объединяют угломер-
но-эллиптический и угломерный принципы либо используют две
пары разнесенных пунктов приема (каждая из пар определяет ги-
перболические координаты). Пересечение гипербол покажет по-
ложение цели в пространстве с достаточной точностью. В отличие
от обычной гиперболической системы дополнительно использует-
ся один пункт приема, однако при этом не требуется одновремен-
ное облучение РЛС всех постов станции РТР. Сверх того, имеется
возможность измерять координаты целей с высокой частотой по-
вторения.
Для упрощения расчетов и методов обработки первичных коор-
динат с достаточной степенью корректности можно использовать
не гиперболы, а их асимптоты, поскольку базовые расстояния
между РЛС и станциями разведки невелики. Уравнения гипербо-
лы и асимптоты в полярных координатах р и ф соответственно
имеют следующий вид:
cos2 ф sin2 <р 1
('Ъ/2)2 (гб/2)2[(ст3/2)2 -1] “ р2 ’
(гб/2)2 -(ст3/2)2
t8l₽“=------^/2-------’
где (pfl— угол, образованный базой и асимптотой, проведенной
из центра базы.
Запишем расхождение между асимптотой и гиперболой при из-
вестной базе и заданной дальности:
2 sin2<рд
16tg((pfl -<р)
Наибольшее расхождение наблюдается при фа = 45°, тогда
г2
р2 ______'Б____
16tg(pfl -ф)
Исследования показывают, что на дальностях Dp = Згб асимп-
тоты практически сливаются с гиперболами. Поэтому, измеряя
время задержки на каждой паре станций и определяя асимптоты
гипербол, можно триангуляционным методом вычислить коорди-
наты целей. При этом вместо линии пеленга используют асимпто-
ты гипербол.
Существенным преимуществом рассмотренного метода перед
триангуляционным являются более высокие точность и пропуск-
ная способность системы измерения координат, так как для опре-
деления местоположения целей нет необходимости вращать ан-
тенную систему.
17. ПРИНЦИПЫ ПОСТРОЕНИЯ УСТРОЙСТВ
РЕГИСТРАЦИИ СИГНАЛОВ В СТАНЦИЯХ И
КОМПЛЕКСАХ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ
17.1. ТРЕБОВАНИЯ К РЕГИСТРИРУЮЩЕЙ АППАРАТУРЕ
Регистрация сигналов при радиотехнической разведке играет
важную роль для документального подтверждения приема новых
видов излучений и углубленного их анализа.Регистрация позволя-
ет запомнить (зафиксировать) принимаемые излучения и вести их
обработку не в реальном масштабе времени, а с произвольной за-
держкой, определять различные характеристики сигналов, что в
реальном масштабе времени выполнить невозможно.
Регистрирующая аппаратура, применяемая в системах радио-
технической разведки, должна отвечать определенным требовани-
ям, к числу которых в первую очередь можно отнести следующие:
неискаженная запись и воспроизведение сигнала;
возможность обеспечения измерения регистрируемых парамет-
ров с точностью, достаточной для определения характеристик
разведываемых радиолокационных средств;
обеспечение требуемой длительности (большого объема ин-
формации) регистрации при широком диапазоне регистрируемых
параметров;
обеспечение широкого диапазона скоростей записи и воспро-
изведения сигналов;
многоканальность записи и воспроизведения сигналов;
регистрация большого числа параметров сигналов;
пропускная способность устройства регистрации должна соот-
ветствовать регистрируемому входному потоку сигналов;
возможность многоканального обращения к зарегистрирован-
ным сигналам;
возможность документирования фрагментов сигнала.
Записанная реализация должна сопровождаться временными,
амплитудными и другими метками.
В радиотехнической разведке применяются различные методы
регистрации, определяемые при их классификации типом носите-
ля, на который нанесена информация. В системах радиотехниче-
ской разведки наибольшее распространение получили следующие
виды регистрации сигналов:
на магнитный носитель;
на бумажный носитель;
на кино- и фотопленку;
на термопластический носитель.
372
Наиболее распространен метод регистрации сигналов на маг-
нитный носитель (магнитная запись), который рассмотрим по-
дробнее.
Существуют три способа записи: продольная (горизонтальная),
поперечная и перпендикулярная (вертикальная) (рис. 17.1).
Рис. 17.1. Способы записи
Продольная запись широко известна как аудио- или видео-
запись.
При поперечной записи носитель намагничивания располо-
жен в плоскости своей поверхности, но перпендикулярно направ-
лению относительного перемещения головки и носителя (поперек
магнитной ленты).
При вертикальной записи основная ориентация вектора на-
магничивания перпендикулярна плоскости поверхности носителя.
17.2. ФИЗИЧЕСКИЕ ОСНОВЫ МАГНИТНОЙ ЗАПИСИ
И ВОСПРОИЗВЕДЕНИЯ ИНФОРМАЦИИ
В процессе магнитной записи на движущийся магнитный но-
ситель действует переменное магнитное поле (рис. 17.2).Это поле
является источником записываемой информации. При воздейст-
вии тока сигнала в обмотке магнитной головки записи происходят
изменения напряженности переменного магнитного поля. Меха-
низм, протягивающий носитель в процессе записи, обеспечивает
равномерное движение носителя относительно неподвижной го-
ловки записи и контакт этих элементов.
373
Магнитная лента
Рис. 17.2. Принцип магнитной записи
В процессе воспроизведения сигнала обеспечивается хороший
контакт носителя записи и магнитной головки воспроизведения
(контактное воспроизведение).
В большинстве случаев в магнитофонах один и тот же ленто-
протяжный механизм служит для магнитной записи и воспроизве-
дения сигнала.При движении ленточного носителя записи с изме-
няющимся вокруг него внешним магнитным полем относительно
головки воспроизведения изменяется магнитный поток, входя-
щий в сердечник и пересекающий обмотку данной головки. Ин-
дуктируемая в обмотке головки ЭДС представляет собой воспро-
изведенный в электрической форме записанный сигнал.
Особенностью передачи информации с магнитной записью и
воспроизведением является то, что она не нуждается в обработке
и сигнал может быть воспроизведен практически сразу же после
записи. Кроме того, один и тот же носитель может быть много-
кратно использован для записи, так как произведенная магнитная
запись легко стирается путем размагничивания магнитного мате-
риала носителя, и он становится пригодным для новой записи.
Для размагничивания носителя перед записью звука использу-
ется специальная магнитная головка стирания.
Процесс магнитной записи. В современной головке записи ка-
тушка, создающая переменное магнитное поле, — это намотка на
сердечник из магнитомягкого материала с зазором. С помощью
сердечника магнитное поле катушки концентрируется в области
зазора. Зазор обычно невелик — от 0,5 до 5 мкм, и это позволяет
концентрировать магнитное поле в очень малой области.
В качестве носителя записи используется магнитная лента,
представляющая собой пластмассовую основу, чаще всего лавса-
новую, на которую нанесен ферромагнитный рабочий слой, со-
стоящий из магнитного порошка окиси железа и связующего ве-
щества.Основа и связующее вещество обычно бесцветны, а харак-
терный бурый цвет ленте придает порошок. Размеры частичек
магнитного порошка в рабочем слое ленты составляют десятые
доли микрометра.
374
Если при движении ленты в головке записи ток изменился со-
ответственно одному полному периоду, то на ленте возникнут два
противоположно намагниченных участка, соприкасающихся од-
ноименными магнитными полюсами (рис. 17.3).Изменение намаг-
ниченности на этих участках в идеальном случае повторит измене-
ние тока записи.
ТО ♦
Магнитная лента
Рис. 17.3. Намагниченность ленты
Ток в головке в течение первого полупериода имеет одно на-
правление, но постепенно возрастает, достигая максимума, и
уменьшается до нуля.В течение второго полупериода то же проис-
ходит в обратном направлении. Соответственно этому намагни-
ченность ленты изменяется волнообразно.
Длина волны записи на ленте зависит от скорости ее движения
относительно головки и частоты изменения тока в головке:
где Z— длина волны записи, м;
f — частота тока записи, Гц;
V — относительная скорость головки и ленты, м/с.
Процесс воспроизведения записи.При воспроизведении записан-
ная лента передвигается, скользя по головке воспроизведения,
устройство которой такое же, как и головки записи. Если против
зазора головки оказывается намагниченный участок ленты, маг-
нитный поток пойдет по пути наименьшего сопротивления и зам-
кнется через сердечник головки.Цель зазора — направить магнит-
ный поток через сердечник головки, т.е.через обмотку.Чем мень-
ше ширина зазора, тем с более коротких участков осуществляется
375
выборка потока, а именно тем выше разрешающая способность
головки. >
При изменении потока, сцепляющегося с обмоткой головки, Й’
ней индицируется ЭДС, пропорциональная скорости изменений
потока.Так как эта скорость при постоянной скорости ленты зави-
сит лишь от частоты записанного сигнала, то ЭДС индукции, илй
ЭДС воспроизводимого сигнала, пропорциональна его частоте.
С увеличением частоты длина волны сигнала на ленте умень-
шается и приближается по размеру к ширине зазора головки. В
этот момент к краям зазора прикладываются одноименные маг-
нитные полюса, и поток через сердечник не проходит. Наблюда-
ется резкое уменьшение ЭДСголовки, происходящее из-за влия-
ния ширины зазора.
Таким образом, частотная характеристика воспроизведения
очень неравномерна: она имеет спад в сторону низких и высоких
частот.
Ухудшение качества воспроизведения происходит и в результа-
те неплотного прилегания головки к ленте. Причиной неплотного
контакта является технологическая микрошероховатость поверх-
ности ленты и головки, а также загрязнение рабочей поверхности
головки и ее неправильная установка.
Процесс стирания магнитной ленты. Важнейшим достоинством
магнитной записи является возможность многократного исполь-
зования одной и той же ленты. Для этого стирают старую запись
путем размагничивания ленты.
При воздействии на каждую частичку рабочего слоя ленты пе-
ременным магнитным полем, амплитуда которого изменяется от
максимального значения, соответствующего насыщению ленты,
до нуля, происходит размагничивание.
Если в головку записи попадает ток сигнала с таким расчетом,
чтобы каждая частичка ленты, проходя мимо зазора головки,
успевала намагнититься, но не перемагнититься, то в головку сти-
рания попадает такой ток, чтобы каждая частичка ленты успевала
бы много раз перемагнититься за время прохода участка мимо за-
зора головки. По этой причине в головку стирания подается ток
высокой частоты, например, в аппарате магнитной записи “Вол-
чок” — 480 кГц.Кроме того, рабочий зазор головки делается ши-
роким, например 100 мкм, а именно шире, чем у головки записи.
При большом зазоре легче создать сильное поле не только по
длине ленты, но и по ее толщине, т.е.легче стирать запись в глу-
бинных слоях носителя.
Искажения при магнитной записи. Намагниченность ферромаг-
нитных материалов нелинейно зависит от намагничивающего тока.
Если ток в головке имел строго синусоидальную форму, то рас-
пределение намагниченности по длине носителя отличается от си-
нусоидального, т.е. волна записи на ленте имеет форму искажен-
ной синусоиды. Вследствие нелинейности кривой намагничива-
ния очень слабые колебания не будут записаны, а колебания тока
с большой амплитудой записываются с искажением.
376
Эти искажения характеризуются возникновением в записан-
ном сигнале нечетных гармоник, прежде всего третьей гармони-
ки, и зависят от длины волны записи. С уменьшением длины про-
исходит линеаризация характеристики намагничивания и искаже-
ния уменьшаются.
Частотная характеристика воспроизведения магнитной записи
имеет завал в сторону низких и высоких частот. Это уменьшает
влияние искажений, так как третьи гармоники значительной час-
ти записываемых сигналов не пропускаются системой магнитной
записи. Например, если система пропускает полосу частот
0,5... 11 кГц, то третья гармоника основной частоты сигнала 4 кГц
уже не пропускается системой, так как она равна 12 кГц.
В магнитной записи существуют способы исключения искаже-
ний.Так, если вместе с током записываемого сигнала в головку за-
писи подавать ток высокой частоты, которая в несколько раз
выше, чем самая высокая из частот записываемого сигнала, то ис-
кажения в этом сигнале почти прекращаются. В этом случае ток в
головке и соответственно магнитное поле в области зазора будут
представлять собой сумму тока записываемого сигнала и дополни-
тельного тока высокой частоты. При записи звука частота тока
подмагничивания составляет 100...480 кГц.Сигнал, соответствую-
щий этому току, на ленте не записывается.Происходит наложение
звукового сигнала на высокочастотный. И пока звуковой сигнал
совершает колебания со своей низкой частотой, высокочастотный
подмагничивающий сигнал изменится много раз.
В результате намагничивание ленты низкочастотной составля-
ющей оказывается пропорциональным напряженности магнитно-
го поля. Поэтому почти полностью исключается влияние нели-
нейности процесса намагничивания.
17.3. ТЕХНИКА МАГНИТНОЙ ЗАПИСИ
Процессы магнитной записи, воспроизведения и стирания
осуществляются с помощью электромагнитных устройств, назы-
ваемых магнитными головками. Основной частью любой магнит-
ной головки является сердечник из магнитного материала, на ко-
тором размещается обмотка.В сердечнике имеется рабочий зазор.
Головка взаимодействует с магнитной лентой в основном через
рабочий зазор сердечника, обеспечивающий переход магнитного
поля головки на ленту при записи или стирании и поступление
внешнего магнитного потока ленты в сердечник при воспроизве-
дении.
В сердечнике записывающих головок для уменьшения уровня
искажений зазор делается из изоляционного диамагнитного мате-
риала.Он увеличивает магнитное сопротивление сердечника, пре-
дохраняет его от остаточного намагничивания. Магнитное насы-
щение сердечника головки может возникнуть из-за большой на-
пряженности магнитного поля, от “бросков” тока при включении
и выключении магнитофона.
377
При записи переменный ток, протекающий в обмотке записы-
вающей головки, создает магнитный поток в сердечнике, намаг-
ничивающем ленту при ее движении перед рабочим зазором го-
ловки. После удаления от рабочего зазора магнитная индукция в
ленте уменьшается до значения остаточной индукции. Для полу-
чения неискаженной записи работа должна происходить на ли-
нейном участке кривой остаточного намагничивания ленты.Для
этого, как уже было отмечено, в обмотку записывающей головки
вместе с током звуковой частоты подают постоянное или высоко-
частотное подмагничивание. В современных магнитофонах испо-
льзуется запись с высокочастотным подмагничиванием.
При воспроизведении внешний магнитный поток замыкается
через сердечник головки, имеющей малое магнитное сопротивле-
ние. В обмотке головки возникает электродвижущая сила.
При стирании производится магнитная обработка сигнало-
грамм, в результате которой с ленты удаляются следы имеющейся
записи. В современных магнитофонах обычно применяется высо-
кочастотный способ стирания путем размагничивания ленты: сиг-
налограмма, проходя через переменное магнитное поле над рабо-
чим зазором стирающей головки, многократно перемагничивает-
ся, — вначале намагничиваясь почти до насыщения, а потом
размагничиваясь до нуля.
С типами магнитных ленточных носителей записи тесно связа-
ны конструкции записывающей, воспроизводящей и стирающей
магнитных головок. Использование для магнитной звукозаписи
ленточных носителей сделало целесообразным применение маг-
нитных головок кольцевого типа.
Основные конструктивные отличия магнитных головок заклю-
чаются в наличии дополнительного зазора, различной ширине ра-
бочих зазоров и числе витков обмотки в этих головках. Наиболее
высокие требования предъявляются к головке воспроизведения.
Поверхность магнитных полюсов головки, имеющая закруг-
ленную форму, тщательно полируется для лучшего контакта с
ленточным носителем записи, огибающим рабочую поверхность
головки вблизи рабочего зазора с некоторым углом обхвата.
Сердечник с обмоткой устанавливается в металлическом кор-
пусе, там, где находится рабочий зазор, делается отверстие для
обеспечения контакта головки и ленточного носителя записи.
Особенно важно экранирование головки воспроизведения вви-
ду небольшой напряженности внешнего поля, создаваемого лен-
точным носителем записи, и соответственно малого значения
электродвижущей силы, индуктируемой в обмотке головки.
Всегда следует стремиться к тому, чтобы при данной ширине
ленточного носителя магнитная головка имела по возможности
меньшие размеры.Часть ее сердечника, непосредственно примы-
кающая к носителю записи, для улучшения частотной характери-
стики воспроизведения записи в области очень низких частот дол-
жна иметь закругленную форму.
378
17.4. УСТРОЙСТВО И ХАРАКТЕРИСТИКА МАГНИТОФОНОВ
Устройство аппарата магнитной записи рассмотрим на приме-
ре кассетного магнитофона простейшего типа.
Основным узлом кассетного магнитофона является компакт-
ная кассета, в которой имеются два направляющих пластмассовых
ролика и две неподвижные направляющие пластмассовые стойки.
Направляющие ролики вращаются в подшипниках, а стойки
обеспечивают равномерное натяжение магнитной ленты.
В кассетах используют магнитные ленты на полиэфирной осно-
ве. Наибольший диаметр рулона, размещаемого в корпусе кассе-
ты, 46 мм.Толщина магнитной ленты 9...25 мкм.
Устройства записи и воспроизведения кассетных и катушеч-
ных магнитофонов отличаются конструкцией и габаритными
размерами.
Составные части головок смонтированы на общей металличе-
ской пластине.
В отличие от катушечных магнитофонов для включения кас-
сетного магнитофона в режим записи и воспроизведения узел го-
ловки перемещают вперед примерно на 10 мм с помощью специа-
льного переключателя рода работ. При этом осуществляется плот-
ный контакт между лентой и головками, ведущим валом и
направляющим роликом.
Рассмотрим узлы кассетного магнитофона.
Лентопротяжный механизм обеспечивает движение ленты, на-
ходящейся в кассете, с возможно малыми колебаниями скорости
в режимах записи и воспроизведения, а также ускоренную пере-
мотку вперед и назад.
Лентопротяжный механизм в режимах записи и воспроизведе-
ния работает следующим образом: магнитная лента, перемещаю-
щаяся перед стирающей и универсальной головками, протягива-
ется между ведущим валом и прижимающимся к нему прижим-
ным роликом. Вал подающего узла свободно вращается. Намотка
магнитной ленты осуществляется приемным узлом, которому рав-
номерно передается момент вращения от фрикционного диска.
Как маховик, так и фрикционный диск получают момент враще-
ния от цапфы электродвигателя через резиновый ремень (пассик).
Электродвигатель приводит в движение лентопротяжный меха-
низм и влияет на качество и характеристики сигналов.Так как пе-
реносные магнитофоны должны питаться от батарей, то в них ис-
пользуются малогабаритные двигатели постоянного тока.Для ста-
билизации скорости вращения применяют два способа:
механический и электронный.
При механическом способе центробежные регуляторы — вы-
ключатели — срабатывают при незапланированном увеличении
скорости вращения ротора двигателя. Электронная стабилизирую-
щая цепь предназначена для той же цели; при изменении скорости
вращения двигателя соответствующая цепь регулирования срабаты-
вает ч обеспечивает восстановление необходимой скорости.
379
Усилитель записи и вое произведения.От дельных усилителей запи-
си и усилителей воспроизведения в кассетных магнитофонах не
применяют; в них имеется только один усилитель, переключае-
мый с помощью коммутационной системы в режим записи или в
режим воспроизведения.
Функции усилителя записи — создание определенного тока в
головке и соответствующее усиление сигнала.
В более простых кассетных магнитофонах не используют отде-
льный предварительный усилитель записи и сигнал источника че-
рез делитель подают непосредственно на выход универсального
усилителя.
Корректирующий каскад.При записи и воспроизведении умень-
шается уровень сигнала на некоторых участках полосы звуковых
частот из-за потерь, особенно на высоких частотах.Для их компен-
сации включают элементы предыскажений и коррекции в усили-
телях записи и воспроизведения.
Частотная коррекция при воспроизведении обычно создается
частотно-зависимой отрицательной обратной связью. При записи
включают RC-цепочку, с помощью которой создают равномер-
ную амплитудно-частотную характеристику.
Генератор стирания и подмагничивания.В кассетных магнитофо-
нах, как и в катушечных, токи стирания и подмагничивания вы-
рабатываются одним генератором. Частота генератора стирания и
подмагничивания кассетных магнитофонов находится в пределах
30... 100 кГц, в специальных магнитофонах военного назначения
480...500 кГц.
Простейшие генераторы работают в однотактном режиме.
Основным их недостатком является нестабильность частоты.
В высококачественных магнитофонах используют двухтактные
генераторы, работающие с малыми искажениями и высокой ста-
бильностью частоты.
Усилители мощности. Некоторые кассетные магнитофоны вы-
пускают со встроенным усилителем.Достоинством их является то,
что они без дополнительного усилителя всегда обеспечивают вос-
произведение программы на громкоговоритель.
Как правило, усилитель мощности выполнен по двухтактной
схеме с фазорасщепительным и выходным трансформаторами.Та-
кие усилители развивают на выходе мощность 2...4 Вт с малыми
искажениями.
Индикатор уровня.^ кассетных магнитофонах в качестве инди-
катора уровня применяют малогабаритные магнитоэлектрические
приборы. Для контроля уровня записи индикатором необходимо
выпрямить напряжение поступающего звукового сигнала. Цепь
простого индикатора уровня состоит из одного диода, с помощью
которого выпрямляется напряжение сигнала.
В кассетных магнитофонах используют цепь автоматической ре-
гулировки уровня записи, промежуточное усиление и т.д.Хотя бо-
льшинство магнитофонов рассчитано на работу от батарей, в них
можно применять и сетевой стабилизированный блок питания.
380
Расположение дорожек на фонограммах компактных кассет. В
компактных кассетах предусмотрена однодорожечная запись в двух
направлениях.В режимах записи и воспроизведения магнитная лен-
та перемещается слева направо, а записываемая дорожка находится
внизу. После записи до конца ленты кассету нужно перевернуть, и
тогда возможно намагничивание второй, незаписанной дорожки.
Особенностью аппаратов магнитной записи, применяемых для
регистрации сигналов в радиоразведывательной станции, являет-
ся необходимость регистрации телеграфных сигналов, которые
могут иметь длительность посылки очень большую, вплоть до по-
стоянного тока. Поэтому в таких аппаратах запись телеграфных
сигналов производится с преобразованием их в частотно-модули-
рованные колебания.
В качестве несущей используется сигнал генератора стирания и
подмагничивания.В зависимости от напряжения входного сигнала
и скорости магнитной ленты несущая частота изменяется при по-
мощи делителя частоты.
Положительному напряжению входного сигнала соответствует
верхняя частота манипуляции, нулевому или отрицательному на-
пряжению входного сигнала соответствует нижняя частота мани-
пуляции.Отношения частот манипуляции для аппарата М-71 при-
ведены в табл. 17.1.
Таблица 17.1
Частота манипуляции, Гц Скорость, см/с
76,20 38,10 10,05 9,53 4,76
Верхняя 40 000 30 000 15 000 7500 3750
Нижняя 30 000 15 000 7500 3750 1875
Сигнал усиливается и поступает на магнитную головку записи.
Запись производится с насыщением без высокочастотного под-
магничивания.
Записанный частотно-манипулированный сигнал воспроизво-
дится головкой воспроизведения, усиливается, фильтруется и пре-
образуется в исходный телеграфный сигнал. В отличие от бытовых
магнитофонов в аппаратуре магнитной регистрации сигналов испо-
льзуется маркерный сигнал (эталон времени), который создается
кварцевым генератором частоты порядка 100 кГц.Сигнал кварцево-
го генератора в зависимости от скорости записи и от положения
сетки частот (временного масштаба) делится при помощи тригге-
ров и подается на магнитную головку записи.Запись производится
с насыщением без высокочастотного подмагничивания.
17.5. ЦИФРОВАЯ МАГНИТНАЯ ЗАПИСЬ
Наиболее распространена в радиотехнической разведке анало-
говая регистрация сигналов. Даже если сигнал импульсный, он
записывается без каких-либо дополнительных преобразований.На
участке времени, равном длительности сигнала, импульсный сиг-
381
нал можно считать непрерывным. Но сложность заключается в
том, что можно записать только тот сигнал, ширина спектра кото+
рого меньше полосы пропускания всего тракта записи и воспроиз-
ведения. Если это условие не выполняется, сигнал будет сильно
искажен и важная информация о структуре и параметрах будет!
безвозвратно утеряна. Поэтому желательно еще до записи пара-
метра сигнала закодировать его в цифровом виде и зарегистриро-
вать на магнитном носителе.
Рассмотрим основы цифровой магнитной записи. Поскольку
предварительно аналоговый сигнал преобразуется в цифровую
форму, то мы имеем дело с записью и чтением сигналов импуль-
сного типа, которые соответствуют дискретным состояниям ин-
формации.
Для записи цифровых данных используется двоичная система.
Каждая двоичная цифра в общем случае носит название “бит”. В
цифровой магнитной записи каждый записанный бит должен
быть индивидуально выделен. Если информация запоминается в
двоичном коде, то используются два противоположных состояния
насыщения магнитного носителя.
Основными рабочими характеристиками цифровой магнитной
записи являются продольная плотность размещения информации
по дорожке и поперечная плотность расположения дорожек.Раз-
мерность первой — бит/мм, размерность второй — дор/мм.
Продольная плотность является основной характеристикой и
практически позволяет определить требуемую скорость протяжки
пленки (ленты) при заданной частоте следования импульсов.Раз-
решающая способность записи также связана с продольной плот-
ностью записи.
Система магнитной записи может рассматриваться как канал
связи, если пренебречь временной задержкой между записью и
воспроизведением.Как было сказано выше, информация магнит-
ной записи кодируется в двоичной системе, т.е.записывается по-
следовательность (комбинация) нулей и единиц.Для этого доста-
точно двух значений намагниченности.
Магнитные материалы, из которых делаются пленки, вос-
приимчивы к аддитивным шумам и имеют нелинейные характери-
стики даже при оптимальных параметрах записывающего устройства.
В лучшем случае достигается отношение сигнал/шум, равное 70 дБ,
при этом применяются специальные дополнительные шумоподав-
ляющие устройства. На высоких частотах динамический диапазон
еще меньше.Шум, создаваемый на пленке в процессе записи, не
является стационарным, а модулируется сигналом, т.е. образует
сложную модуляционную помеху. При воспроизведении синусои-
дального сигнала, как правило, у синусоиды появляются боковые
полосы, содержащие шумовой сигнал.Этот вид помехи очень за-
метен, когда частота сигнала близка к 1 кГц, где отношение сиг-
нал/шум опускается ниже 40 дБ. Недостаточно хорошее качество
пленки и загрязнения на ней создают быстрые флуктуации ампли-
тудной и фазовой характеристик, особенно заметные в области
382
высоких частот. Эти флуктуации приводят к низкому качеству за-
писи и снижают качество анализа параметров тонкой структуры
сигналов.
Любые эксцентриситеты во вращающихся частях лентопротяж-
ного механизма, таких, как ведущий вал с маховиком или инер-
ционные обводные ролики, приводят к непостоянству скорости
движения ленты при записи и воспроизведении.Это создает час-
тотную модуляцию сигналов. Поддержание постоянной скорости
протяжки связано с большими трудностями.Из-за нелинейной за-
висимости коэффициента трения между пленкой и головками при
движении могут иметь место микроскопические рывки.Механиче-
ские резонансы при движении слабо натянутой ленты могут уси-
ливать рывки. Подобную неравномерность, связанную с трением,
можно уменьшить за счет правильного расположения обводных
роликов.
Из-за перечисленных трудностей, а также в силу неизбежной
нестабильности и ненадежности аналоговых устройств в системах
радиотехнической разведки находят применение магнитофоны с
цифровой записью.
Принцип действия цифровых магнитофонов несложен
(рис. 17.4).Сигнал в каждом из входных каналов подвергается низ-
кочастотной фильтрации, дискретизируется, и его отсчеты превра-
щаются в числа. Потоки двоичных чисел уплотняются в один об-
щий канал, причем вводятся дополнительные разряды для синхро-
низации, исправления ошибок, проверки на четность и
поблочного кодирования. Образованная сложная последователь-
ность двоичных цифр в модуляторе преобразуется в соответствую-
щую последовательность аналоговых импульсов.При воспроизведе-
нии все процессы происходят в обратном порядке. Считанный с
ленты сигнал декодируется, из него выделяются служебные раз-
ряды, исправляются ошибки и производится распределение по
Рис. 17.4. Структурная схема цифрового магнитофона
383
Рис. 17.5. Кольцевой накопитель
каналам. Если полагать, что ошибок после исправления не остает-
ся, то качество восстановленного сигнала определяется только ха-
рактеристиками аналого-цифрового и цифроаналогового преоб-
разователей.
Хотя из-за неидеальности механизма протяжки скорость плен-
ки будет оставаться непостоянной, интервалы между воспроизве-
денными числами можно уравнять с помощью выходного накопи-
j с.тя. Кольцевой накопитель (рис. 17.5) заполняется с переменной
частотой, пропорциональной скорости пленки, а считывание
происходит с постоянной частотой, задаваемой кварцевым гене-
ратором.Очевидно, что если между частотами имеется постоянная
разница, то в некоторый момент накопитель опорожнится или пе-
реполнится. Чтобы этого не произошло, вырабатывается вспомо-
гательный сигнал, описывающий степень заполнения накопителя
и управляющий скоростью вращения сервопривода тонвала. Раз-
ность между входным и выходным адресами емкости накопителя,
взятая по модулю 2, вводится в простой цифроаналоговый преоб-
разователь. Различие между этой величиной и напряжением, рав-
ным половине емкости накопителя, является сигналом ошибки,
по которому управляется основной сервопривод тонвала. Таким
образом, если накопитель начинает опорожняться, сигнал ошиб-
ки приводит к увеличению скорости протяжки, и наоборот, если
накопитель заполняется слишком быстро, сигнал ошибки снижа-
ет скорость протяжки. Необходимая емкость накопителя пропор-
циональна постоянной времени сервопривода тонвала.В практике
достаточно иметь накопитель емкостью 100 слов.
Более трудоемкими являются выбор плотности записи и обес-
печение заданной вероятности ошибок, так как они зависят от
процесса записи на пленку. Низкая плотность записи увеличивает
помехоустойчивость при воспроизведении, но приводит к боль-
шему расходу пленки при записи.Наоборот, при высокой плотно-
сти записи пленка расходуется экономнее, зато повышается веро-
ятность ошибок. Поскольку цифровые магнитофоны предназнача-
384
ются для высококачественных систем анализа сигналов, все
ошибки устранятся с помощью некоторого алгоритма обнаруже-
ния ошибок. При высокой плотности записи этот алгоритм дол-
жен быть весьма эффективным.
Применяемые в системах радиотехнической разведки цифро-
вые магнитофоны должны обеспечивать высокое качество записи
и воспроизведения.Для этого необходимо в каждом канале обес-
печить скорость обработки информации, по крайней мере равную
0,3 Мбит/с (если только не будут созданы более эффективные спо-
собы сокращения избыточности).Тогда в 4-канальной системе по-
требуется скорость 1,2 Мбит/с, но скорее предпочтение будет отда-
но 8-канальным системам, и уже сейчас разрабатываются 16-кана-
льные системы записи. Указанные скорости записи информации
очень высоки для обычного магнитофона со скоростью протяжки
38,1 или 76,2 см/с.
Вопрос о схемах модуляторов достаточно сложен и подробно
рассматриваться здесь не будет. Схемы модуляторов разделяются
на два/различных класса: самосинхронизирующиеся и с внешней
синхронизацией. Во втором случае для установления местополо-
жения каждого разряда необходим вспомогательный синхросиг-
нал. В первом случае вся информация о расположении разрядов
создается в модуляторе.Очевидно, что в таких схемах предпочтите-
льно применять самосинхронизирующиеся коды, поскольку за-
пись опорных импульсов приводит к дополнительному расшире-
нию спектра сигнала. Если предположить, что в состав цифрового
магнитофона включена какая-то система обнаружения и исправ-
ления ошибок, то выбор кода должен осуществляться только на
основе критерия максимума скорости записи информации. Пре-
дел скорости определяется пропускной способностью канала, в
данном случае — магнитной пленки.Анализ этой величины связан
с детальным исследованием ширины полосы пропускания и отно-
шения сигнал/шум в канале, но такие сведения трудно получить и
их нельзя применить в стандартной линейной модели, поскольку
свойства пленки далеки от идеальных. Характеристики пленки
имеют сильную нелинейность и гистерезис, которые изменяются в
зависимости от типа пленки и даже рулона, свойств магнитофонных
головок и т.п. При этом также меняется отношение сигнал/шум.
При заданной ширине пленки увеличение числа дорожек при-
водит к уменьшению ширины каждой из них.Это уменьшает от-
ношение сигнал/шум, но плотность записи, измеряемая числом
импульсов на квадратный миллиметр, увеличивается, поскольку
отношение сигнал/шум часто остается больше необходимого ми-
нимума.
Опыт разработки стандартных цифровых магнитофонов для вы-
числительных машин малопригоден для выяснения предельных
возможностей цифровой записи.Запоминающие устройства на маг-
нитных лентах для ЭВМ проектируются на основе повышенных
технических требований и должны обеспечивать минимальную ве-
роятность ошибок. Как правило, в них применяются несамосинхро-
385
низирующие коды и имеется отдельная синхродорожка. Плотность!
записи на каждой дорожке составляет всего 32 имп./мм. 1
Метод записи и метод воспроизведения с исправлением оши-
бок могут оказаться полезными с точки зрения снижения требова-
ний к плотности записи, поскольку в этом случае плотность раз-
мещения информации на пленке часто можно существенно повы-
сить, не опасаясь потерь информации.Простой метод исправления
ошибок в цифровой магнитной записи заключается во введении
дополнительного разряда, служащего для проверки на четность
пяти старших разрядов отсчета.
Поскольку потенциальные возможности цифровой записи го-
раздо выше, чем аналоговой, то можно ожидать, что в системах
радиотехнической разведки в конечном итоге перейдут на цифро-
вую технику.К числу ее достоинств относятся следующие:
возможность получения больших значений отношения сиг-
нал/шум, ограниченных только характеристиками АЦП и плотно-
стью записи;
полное отсутствие ошибок за счет неравномерного движения
пленки, так как равномерность появления отсчетов обеспечивает-
ся кварцевой стабилизацией;
отсутствие гармонических искажений вблизи верхнего края
диапазона;
отсутствие перекрестных искажений при многоканальной за-
писи;
небольшие колебания намагниченности пленки не вызывают
флуктуаций амплитуды сигнала;
ширина диапазона может доходить до частоты Найквиста;
отсутствие сложных боковых полос вблизи частоты сигнала,
связанных с мультипликативным характером помех.
Все это совершенно недостижимо в аналоговых устройствах и
является крайне желательным даже с учетом дополнительных рас-
ходов при необходимости обеспечения качественной регистрации
сигналов.
17.6. СТРУКТУРНАЯ СХЕМА АППАРАТА
МАГНИТНОЙ ЗАПИСИ
Несмотря на большое количество технических решений и раз-
нообразие конструкций аппаратов магнитной записи, во всех ап-
паратах имеется ряд характерных блоков, что позволяет предста-
вить обобщенную структурную схему (рис.17.6).В системах анализа
устройства магнитной записи служат для регистрации нескольких
независимых сигналов, которые в общем случае представляют со-
бой процессы с независимыми или зависимыми характеристика-
ми.Например, надо зарегистрировать сигналы шести каналов РЛС
типа MSR-Для этой цели можно использовать шестиканальный
магнитофон М-71. Для согласования параметров регистрируемого
сигнала, тракта записи, воспроизведения и обеспечения необхо-
димой точности регистрируемые сигналы могут подаваться на
386
Рис. 17.6. Структурная схема аппарата магнитной записи
входные преобразователи. Это позволяет иногда на одну дорожку
писать несколько сигналов, если осуществить их предварительную
модуляцию. С помощью преобразователей сигнал разделяется по
каналам, восстанавливая свою первоначальную форму.
Аппараты, созданные специально для регистрации сигналов,
позволяют осуществлять несколько видов преобразований сигна-
лов и несколько способов магнитной записи. Важной характери-
стикой аппаратов, применяемых в станциях радиотехнической
разведки, является точность передачи сигналов через канал запи-
си-воспроизведения.Требования точности определяются требова-
ниями к сохранению информации о параметрах сигнала, поэтому
важнейшей характеристикой является полоса всего тракта “за-
пись-воспроизведение” ДД,. Важнейшим правилом является то,
что зарегистрировать без существенных искажений можно только
тот процесс, ширина спектра которого меньше или равна полосе
тракта: Д/сп <Д/тр.Для этого надо иметь линейную амплитудную
характеристику и равномерную амплитудно-частотную характери-
стику в заданной полосе частот.
Пример. Необходимо зарегистрировать сигнал, излучаемый
PJICAN/MPQ, принятый приемником “Днепр-1к”. Информаци-
онные характеристики сигнала: несущая частота Jq = 1200 МГц,
частота повторения импульсов Д =600...800 Гц, длительность им-
пульсов ти = 2,5 мкс, форма импульса A(t), форма спектра на вы-
ходе S(f), структура диаграммы направленности /Д), период вра-
щения антенны Та, длительность серии импульсов т Вкачестве
устройства магнитной записи используется аппарат М-71.Макси-
мальная полоса тракта Д, < 80 кГц.Следовательно, высокочастот-
ные колебания зарегистрировать нельзя, так как А > дД. Макси-
мальная частота повторения импульсов F, — 800 Гц. Она меньше
полосы тракта записи, поэтому этот параметр регистрируется
успешно. Ширина спектра видеоимпульса
А/сп.вых =—=400 кГц,
т
с вых
так как Д/сп >ДД,, сохранить длительность импульса, а значит, и
форму его при записи нельзя.
При анализе тонкой структуры импульсов для индивидуально-
го распознавания РЛС используются дисперсионно-временные
анализаторы, на выходе которых имеется импульс S(f), соответст-
вующий по форме спектру сигнала 5(/).Если длительность отклика
такова, что ширина его спектра много уже, чем полоса тракта, то
зарегистрировать длительность импульса, а следовательно, и фор-
му спектра на выходе можно.Для этого надо иметь линию задерж-
ки с большой длительностью. В настоящее время существуют ли-
нии с полосой ДД = 3 МГц и задержкой т3 =60 мкс.Если полоса
спектра сигнала по промежуточной частоте Д/С|| = 1 МГц = 1/ЗдД,
то длительность отклика на выходе линии т[;ы, = 1/Зт3 = 20 мкс. Ши-
рина спектра видеоимпульса
388
&fcll вых = — =50 кГц .
т
v вых
Следовательно, выполнив частотно-времен ное преобразование
спектра сигнала, можно осуществить регистрацию параметров
тонкой структуры сигнала.
Структура диаграммы направленности и связанные с ней пара-
метры тсер и 7а представляют собой достаточно медленный про-
цесс даже по сравнению с частотой повторения импульсов, поэ-
тому их регистрация не вызывает технических трудностей.Однако
надо обеспечить высокий динамический диапазон как аппарата
магнитной записи, так и всего предшествующего тракта приема
сигналов.
17.7. ПРИМЕНЕНИЕ МАГНИТНОЙ ЗАПИСИ
В НАКОПИТЕЛЯХ НА МАГНИТНОЙ ЛЕНТЕ
ИЛИ МАГНИТНЫХ ДИСКАХ ЭВМ
Для регистрации сигналов и их цифровой обработки часто ис-
пользую^ ЭВМ и накопители на магнитных лентах или дисках.
Накопителями информационных массивов в ЭВМ являются
устройства памяти на магнитных лентах, дисках, дискетах, картах
и барабанах.
Накопитель на магнитной ленте (НМЛ) имеет несколько бло-
ков головок (до трех — в зависимости от способа и модели нако-
пителя).
Головка стирания имеется только в тех моделях НМЛ, в кото-
рых производится размагничивание ленты перед записью.
Вслед за головкой стирания устанавливается блок головок запи-
си и блок головок воспроизведения (головка на каждую дорожку).
Принципы записи и воспроизведения информации в НМЛ
аналогичны изложенным выше. Однако основное назначение
НМЛ — регистрация и хранение больших массивов информации —
создает специфику в конструировании, технологии и технических
характеристиках устройств.В накопителях на магнитной ленте, как
и в обычных магнитофонах, имеются две катушки — приемная и
подающая.Лента, намотанная на катушку, образует так называе-
мый том. Диаметр тома может достигать 27 см.Разгон ленты, на-
мотанной на катушку такого размера, до заданной скорости и
поддержания этой скорости создают определенные трудности.
В конструкциях описываемых накопителей имеются вакуумные
колонки, в которых располагаются свободновисящие петли ленты.
Эти колонки играют роль механического буфера. Благодаря им
быстрый разгон ленты не приводит к ее обрыву или вытягиванию.
Верхняя часть колонок открыта: здесь под давлением воздуха
магнитная лента опускается и входит в колонку. В нижней части
колонки вакуумным насосом создается разрежение воздуха, бла-
годаря чему лента располагается в колонке в виде аккуратной пет-
ли.В колонках имеются датчики положения петли, которые, реа-
389
Рис. 17.7. Тракт протяжки магнитной ленты
гируя на выход петли ленты из верхнего и нижнего уровней, вклю-
чают привод соответствующей катушки, перемещающий ленту до
нормального уровня (рис. 17.7).
Информация, записанная на магнитной ленте, не должна раз-
рушаться при воспроизведении, поэтому головки стирания и за-
писи отключены. В результате разгона лента достигает заданной
скорости и проходит над головками воспроизведения. Магнитное
поле, действующее в окрестностях каждой из дорожек, проникает
в соответствующую этой дорожке головку. Изменения напряжен-
ности магнитного поля приводят к возникновению напряжения в
обмотке. Появление напряжения в обмотке означает, что воспро-
изведена единица, а его отсутствие — что воспроизведен нуль.
Восемь дорожек ленты являются информационными, а девя-
тая — контрольная по четности.
390
К общим характеристикам накопителей единой системы ЭВМ
относятся следующие: стандартная магнитная лента (шириной
12,7 мм, длиной 750 м и толщиной 48 мкм) размещается на стан-
дартной кассете — 267 мм; запись информации производится на
девяти дорожках с плотностями 32 бит/мм (рабочая) и 8 бит/мм
(обмен); считывание информации осуществляется при прямом и
обратном движении магнитной ленты.
Накопитель на магнитных дисках (НМД).Том, на котором хра-
нится информация в НМД, называется пакетом дисков.Пакет со-
стоит из шести дисков и ряма конструктивных деталей, объединя-
ющих их в один блок (рис. 17.8).
Основные достоинства пакета дисков заключаются в возмож-
ности снятия его с накопителя, хранения в архиве и замены дру-
гим пакетом диско ;.
Для надежности и сохранности информации во время хранения
каждый пакет заключается в герметический контейнер. Конструк-
тивно накопительна магнитных дисках состоит из механических и
электронных узлов. Основные узлы устройства со сменными дис-
ками скомпонованы на жестком основании.
391
В состав основных узлов накопителя входят: двигатель, на ва/1
которого устанавливается пакет дисков; блок каретки с магнитндон
ми головками, перемещаемый на выбранный диск; основание с
приводом (с его помощью блок каретки перемещается вдольраДи-
уса дисков).
Блок каретки движется к центру пакета или от него.В блоке го-
ловок имеются по две головки на дорожку.Универсальная головка
выполняет либо воспроизведение, либо запись. При записи обра-
зуется магнитное поле, полностью удаляющее старую информа-
цию, имеющуюся на дорожке.
Функция головки стирания состоит в том, чтобы стирать края
только что записанной информации, уменьшая ширину дорожки.
Основные технические параметры, которыми характеризуются
накопители на магнитных дисках, — это частота вращения диска и
время выборки информации.
Стандартный сменный пакет магнитных дисков имеет следую-
щие параметры: емкость пакета — 7,25 Мбайт, число дисков — 6,
рабочих поверхностей — 10, дорожек на каждой поверхности —
200 + 3 запасные.
Средняя плотность записи для накопителей всех модифика-
ций — 32 бит/мм; частота вращения дисков — 2400 об./мин;
среднее время доступа к информации — 50. .90 мс.
17.8. ШИРОКОПОЛОСНАЯ МАГНИТНАЯ ЗАПИСЬ.
КРАТКИЕ СВЕДЕНИЯ О МАГНИТНОЙ ЗАПИСИ
СИГНАЛОВ НА ВИДЕОМАГНИТОФОН
Магнитная запись отметила второе рождение в 40—50-х годах,
когда на магнитную ленту впервые было записано телевизионное
изображение. В 1956 году был выпушен промышленный аппарат
магнитной записи движущихся изображений — видеомагнитофон.
Сначала видеомагнитофоны применялись для телевизионного ве-
щания в стационарных условиях.В настоящее время видеомагни-
тофоны и видеомагнитная запись используются не только для те-
левизионного вещания, но и в научных исследованиях, учебном
процессе, искусстве, технике и т.д. Широкое применение они на-
шли и в комплексах РТР “Рамона”, “Тамара”.
На магнитной ленте сигнал записывается мгновенно, задержка
между записью и воспроизведением определяется только конст-
рукцией видеомагнитофона и не зависит от свойств ленты. Маг-
нитная лента, как и в обычных магнитофонах, до и после записи
не требует химической или какой-нибудь другой обработки. Одна
и та же лента используется сотни раз.Это определяет преимущест-
ва магнитной записи изображений перед записью на кинопленку.
Отличительной особенностью магнитной записи видеоизобра-
жений по сравнению с записью звука является необходимость за-
писи чрезвычайно широкой полосы частот. Для магнитной записи
звука достаточна полоса частот 40 Гц... 12 кГц, тогда как для запи-
си телевизионных изображений необходима полоса 50Гц...6,5МГц.
392
В первом случае это соответствует диапазону частот 8 октав, во
втором — 17 октав. Следовательно, при магнитной записи телеви-
зионных сигналов основная проблема заключается в передаче ко-
лебаний более высоких частот. Любому мгновенному значению
частоты сигнала f соответствует определенная длина волны X, за-
писанная на магнитной ленте. Очевидно, что при постоянной час-
тоте длина волны будет зависеть от скорости записи V. Частота ви-
деосигнала /, длина волны записи X и скорость записи Vсвязаны
следующей зависимостью:
/ = и/х
Понижения скорости движения ленты можно достигнуть за
счет уменьшения минимальной записываемой длины волны X.
Значение А уменьшают за счет уменьшения рабочего зазора маг-
нитной головки. Обычно выбирают условие a/Xmin =0,5, где а —
геометрический размер рабочего зазора головки.
Подставив в выражение для расчета частоты видеосигнала вме-
сто X значение Х^, получим /тах = И/2д, т.е. наивысшая частота
записи зависит от скорости движения пленки и геометрических
размеров щели.Увеличение допустимой максимальной частоты за-
писи может происходить за счет увеличения скорости движения
ленты, так как уменьшение ширины щели ведет к резкому пони-
жению эффективности магнитной головки. Уменьшение ширины
щели также имеет технологический предел и ухудшает эксплуата-
ционную надежность головки.
Особенности записи телевизионных изображений на магнит-
ную ленту определяются необходимостью записи и воспроизведе-
ния широкого спектра частот (около 17 октав). Кроме технологи-
ческих трудностей, связанных с записью и воспроизведением вы-
сокочастотных составляющих спектра телевизионного сигнала,
характерную трудность для магнитной записи представляет запись
и воспроизведение низкочастотных составляющих сигнала.Совре-
менные аппараты магнитной записи способны записывать сигнал
в диапазоне не более 8... 10 октав, а головка для записи видеосиг-
налов — всего 3...4 октавы.Поэтому широкий диапазон частот те-
левизионного сигнала преобразуется в спектр, укладывающийся в
3...4 октавы.
Такое уменьшение диапазона частот телевизионного сигнала
возможно, если передвинуть этот спектр по частоте на 0,5 МГц
выше. В этом случае спектр телевизионного сигнала будет иметь
всего 3,5 октавы и запись низких частот не вызовет трудностей
(рис. 17.9).
Простейшим способом переноса спектра является модуляция.
При записи телевизионных сигналов на магнитную ленту приме-
няется частотная модуляция. В хороших видеомагнитофонах, рас-
считанных на высококачественные запись и воспроизведение те-
левизионных изображений, в результате частотной модуляции на
ленту записывается сигнал с диапазоном частот 0,5...11 МГц.
393
Рис. 17.9. Сдвиг спектра сигнала по частоте
Рис. 17.10. Структура каналов записи и воспроизведения
Применяется способ так называемой поперечно-строчной ви-
деозаписи, при котором запись на ленту происходит не вдоль лен-
ты, а поперек, в виде узких строчек шириной 0,25 мм.
Запись и воспроизведение частотно-модулированного сигнала
схематически показаны на рис. 17.10.На частотный модулятор по-
ступает полный видеосигнал. На выходе модулятора возникает
сигнал с различной частотой, но постоянной амплитудой. Этот
сигнал усиливается усилителем записи и записывается головкой
на ленту.
При воспроизведении сигнал проходит через усилитель и огра-
ничитель-демодулятор. Чтобы получить на ленте наибольший
394
остаточный магнитный поток, запись происходит с насыщением
ленты. Одно из достоинств способа записи с частотной модуля-
цией заключается в том, что паразитные колебания амплитуды
почти не сказываются на качестве изображения.
В процессе воспроизведения частотно-модулированный сигнал
проходит через ограничитель, в котором срезаются все неравно-
мерности амплитуды. Полезная информация зависит только от
мгновенной частоты или мгновенной длины волны.Так как полез-
ная информация определяется изменениями частоты сигнала, то
возникающие дополнительные паразитные изменения частоты бу-
дут существенно влиять на нее. Поэтому в системах видеозаписи с
частотной модуляцией выдвигаются очень жесткие требования к
равномерности скорости головок и ленты. Если при записи звука
допустима степень неравномерности скорости до 0,1 %, то при ви-
деозаписи она не должна превышать 0,01 %.
Магнитные головки для видеозаписи. В видеомагнитофонах при-
меняются обычно универсальные головки, выполняющие функции
записи и воспроизведения.Это обусловлено тем, что, во-первых, в
устройствах с вращающимися магнитными головками применение
головок с раздельными функциями затруднительно по конструк-
тивным соображениям и, во-вторых, параметры головок для запи-
си и воспроизведения видеочастот практически одинаковы.
При конструировании и изготовлении головок для видеозапи-
си на первое место выдвигаются задачи уменьшения в них частот-
ных потерь, определяющих в данном случае основные электриче-
ские параметры головки, а также задачи повышения срока службы.
Это связано с условиями применения, которые характеризуются
высокой граничной частотой записываемого и воспроизводимого
сигналов, высокой относительной скоростью между головкой и
лентой, а также большим контактным давлением, оказываемым
лентой на рабочую поверхность головки.
Головки, полностью изготовленные из металла, имеют особен-
но большие потери из-за вихревых токов.Они практически непри-
годны для видеозаписи.За пределами часто-
ты 3...4 МГц воспроизводимый сигнал у та-
ких головок падает до уровня шумов
системы, т.е. высокочастотные сигналы не
воспроизводятся.
В видеоголовках, распространенных в
видеомагнитофонах, сердечник изготовлен
из феррита, а полюсные наконечники — из
металла (рис. 17.11). Феррит представляет
собой керамический материал с низкой
электропроводностью. В нем возникают
значительно меньшие вихревые токи, чем в
металлах. Недостаток феррита в том, что он
имеет пористую хрупкую структуру, вслед-
ствие чего ИЗ него Трудно получить правиль- Рис. 17.11. Внешний вид
ную форму ребер на границе рабочего зазора. магнитной головки
395
Поэтому полюсные наконечники головки, образующие рабочий
зазор, изготовлены из металла. В рабочем зазоре устанавливается
немагнитная прокладка из тончайшей (толщиной около 1 мкм)
бронзы или серебряной фольги. Прокладку можно также получить
путем нанесения тонкого слоя немагнитного материала или стекла
на образующие зазор внутренние поверхности полюсных нако-
нечников.
Рабочий зазор современных видеоголовок имеет ширину 0,5...3
мкм и высоту 0,1...0,25 мкм.Высота рабочего зазора равна ширине
дорожки видеозаписи на ленте.
Видеоголовки с металлическими полюсными наконечниками,
обладая малыми потерями на вихревые токи, имеют ряд недостат-
ков. Полюсные наконечники представляют собой участки с высо-
кой электропроводностью, и потому в них возникают некоторые
потери.Кроме того, в местах стыковки полюсных наконечников с
сердечником образуется дополнительное магнитное сопротивле-
ние. Поэтому специально для видеоголовок были разработаны
ферриты с плотной и прочной структурой, не подверженные вы-
крошиванию при обработке или при трении о ленту и обеспечива-
ющие правильную форму ребер на границах рабочего зазора.В на-
стоящее время в видеомагнитофонах применяются головки с по-
люсами из феррита и металла.
В ферритовых головках в рабочем зазоре вместо металлической
прокладки применяют стеклянные. При сборке ферритовые сер-
дечники нагревают до температуры плавления стекла и в виде
очень тонкой стеклянной пластины или пленки помещают между
торцевыми поверхностями сердечника. Стекло образует с ферри-
том однородную и очень прочную структуру.Таким образом удает-
ся значительно укрепить ребра, образующие рабочий зазор в фер-
ритовом сердечнике, и создать монолитную структуру всего сер-
дечника головки.
Магнитная видеолента.Рабочиъ свойства магнитной ленты (ча-
стотная характеристика, отношение сигнал/шум для видеозапи-
си) должны отвечать требованиям, которые предъявляются к лен-
там для записи сигналов с небольшой длиной волны.Так как на
ленте сигналы изображения и звука записываются одновременно,
ее рабочие свойства должны отвечать, кроме того, условиям запи-
си звукового сопровождения.Лента должна обладать небольшими
нелинейными искажениями, а также иметь минимальное количе-
ство потерь сигнала при воспроизведении. Полное пропадание
сигнала на короткий промежуток времени или резкое уменьшение
его уровня вызывает на воспроизводимом изображении помехи,
ухудшает его восприятие. Существенное отличие магнитных лент
для видеозаписи заключается в их физико-механических свойствах.
В видеомагнитофонах из-за высокой относительной скорости
между лентой и головкой, а также из-за большого контактного
давления условия эксплуатации ленты очень тяжелые. Поэтому
она должна быть достаточно прочной, а ее рабочий слой должен
обладать износо- и термостойкостью. Для изготовления ленты ис-
396
пользуется полиэфирная основа, имеющая высокую прочность на
разрыв и практически не изменяющая своих физико-механиче-
ских свойств под влиянием окружающих условий (температуры,
влажности). Ленту изготавливают на тонкой основе толщиной
около 24 мкм, обладающей эластичностью, необходимой для обес-
печения хорошего контакта с поверхностью головок. Для взаимно-
го обмена записанными программами международными организа-
циями приняты рекомендации, устанавливающие размеры ленты.
В видеомагнитофонах с четырьмя вращающимися головками испо-
льзуется лента шириной 50,8 мм. Для наклонно-строчной записи
применяют ленты шириной 25,4 мм; 12,7 мм; 6,35 мм.
Для изготовления рабочего слоя ленты используется магнит-
ный порошок с игольчатой формой частиц. В целях повышения
чувствительности ленты эти частицы в рабочем слое ориентирова-
ны по магнитному полю.
Тепло, выделяемое при трении между головкой и лентой, на-
гревает поверхность рабочего слоя. Экспериментально доказано,
что температура поверхности рабочего слоя ленты в видеомагни-
тофонах с четырьмя вращающимися головками может достигать
700 °C. Нагревание рабочего слоя до высокой температуры влечет
за собой ухудшение его магнитных и механических свойств.В раз-
мягченном виде он прилипнет к рабочей поверхности головок,
создавая на ней твердый нагар, затрудняющий возможность запи-
си или воспроизведения сигналов. Для уменьшения выделения
тепла стремятся понизить коэффициент трения рабочего слоя лен-
ты. Поверхность этого слоя выполняется зеркально гладкой, что
улучшает рабочие свойства ленты, а в некоторых типах в рабочий
слой добавляют смазывающие вещества.
Для изготовления рабочего слоя используются термостойкие
связующие материалы, способные выдержать без разрушения вы-
сокую температуру.В результате трения ленты накапливается зна-
чительный заряд статического электричества. Электрический по-
тенциал ленты при выходе ее из блока вращающихся головок мо-
жет достигать 2...3 кВ. При электризации ленты возникает ряд
других нежелательных явлений. Для уменьшения этого явления
повышают ее электропроводность, вводя в состав рабочего слоя
сажу или графит.
Срок службы ленты для видеозаписи определяется износом ра-
бочего слоя, из-за которого резко возрастает количество потерь
сигнала, вызываемых дефектами изготовления ленты, а также
возникающих в процессе ее эксплуатации. Количество потерь за-
висит от контакта между головкой и лентой.Увеличение степени
прижима головок к ленте способствует уменьшению числа помех,
вызываемых потерями сигнала.Число потерь до известного преде-
ла уменьшается с увеличением прогонов ленты. Поэтому новую
ленту иногда предварительно шлифуют. К концу срока службы
видеоленты число потерь снова возрастает. Это свидетельствует о
том, что ленту надо заменять.
397
Рассмотрим устройство видеомагнитофонов.Существует неско-
лько принципов построения видеомагнитофонов, в основе кото-
рых заложена скорость движения видеоленты относительно голо-
вок. При видеозаписи на ленте за одну секунду требуется записать
до 6 млн колебаний, а при записи звука — только 16 тыс.Так как в
обоих случаях плотность записи на ленте примерно одинакова, то
задачу фиксации большого числа колебаний в течение 1 с можно
решить только путем увеличения относительной скорости движе-
ния ленты.
Видеомагнитофоны с поперечно-строчной записью.Первой систе-
мой видеозаписи, получившей широкое распространение, была
поперечно-строчная система.В ней видеозапись на ленту происхо-
дит в виде строчек, или дорожек, расположенных почти поперек
ленты.
Для поперечно-строчной записи применяется видеолента ши-
риной 50,8 + 0,1 мм. Головки во вращающемся диске расположе-
ны с таким расчетом, что, когда одна из головок заканчивает до-
рожку, другая начинает следующую.Врезультате запись получается
“разрывной”.Однако при воспроизведении сигналы от каждой ви-
деоголовки коммутируются специальным электронным коммута-
тором в непрерывный видеосигнал, такой же, какой поступал на
вход видеомагнитофона.
Видеолента транспортируется сравнительно медленно (со ско-
ростью 39,7 см/с), а диск с видеоголовками вращается очень бы-
стро (с частотой 25 об./с).3а счет того что лента движется, дорож-
ки записи располагаются не строго поперек ленты, а с небольшим
наклоном к ее осевой линии.
Рис. 17.12. Структурная схема видеомагнитофона
с поперечно-строчной записью
398
На рис. 17.12 показана упрощенная электрическая структурная
схема видеомагнитофона с поперечно-строчной видеозаписью.
Система записи и воспроизведения видеосигнала состоит из час-
тотного модулятора, усилителей записи и воспроизведения,
коммутатора, частотного демодулятора и формирователя. Она
функционально связана с устройствами автоматического регули-
рования, в частности для подачи опорного сигнала (кадровых
импульсов), выделенного из видеосигнала при записи, когда на
него подается полный видеосигнал. Этот сигнал модулирует по
частоте некоторую несущую частоту, усиливается и записывается
на ленту.Воспроизведенный с ленты сигнал усиливается, комму-
тируется, демодулируется и формируется в полный видеосигнал,
такой же, какой был использован при записи.
Видеомагнитофоны с наклонно-строчной записью. В видеомагни-
тофонах с одной и двумя вращающимися видеоголовками запись
на ленту происходит в виде строчек, но в отличие от попереч-
но-строчной записи строчки, или дорожки, видеозаписи распола-
гаются не поперек ленты, а с большим наклоном к ее оси.Видео-
запись, осуществляемая в видеомагнитофонах с одной и двумя
вращающимися головками, называется наклонно-строчной. Ее
называют также записью со спиральной, или геликальной, раз-
верткой.
В системах с наклонно-строчной видеозаписью видеоголовки
вращаются в видеобарабане, слегка выступая над его поверхно-
стью. Лента охватывает барабан по спирали, в результате чего го-
ловка записывает на ней наклонную дорожку от одного края до
другого.
За счет большого наклона на каждой дорожке записывается
один полукадр телевизионного изображения, т.е. 312,5 телеви-
зионных строк для стандарта 625 строк/кадр. Кадры следуют с час-
тотой 25, а полукадры — 50 Гц.Например, для одноголовочного ви-
деомагнитофона частота вращения видеоголовки составляет 50 Гц,
т.е. 3000 об./мин. В двухголовочном видеомагнитофоне за один
оборот записываются две дорожки (один полный кадр), поэтому
частота вращения головок в нем в два раза ниже и составляет
1500 об./мин. Видеолента транспортируется с небольшой скоро-
стью. В зависимости от конструкции видеомагнитофонов скорость
ленты может быть от 20 до 40 см/с.Относительная скорость ленты
и головки — от 8 до 12 м/с.
В связи с тем что на одной дорожке записывается полукадр, т.е.
все четные или нечетные строки изображения, упрощается элект-
рическая схема и наладка видеомагнитофона.
Лентопротяжный механизм двухголовочного видеомагнитофо-
на типа “180" показан на рис. 17.13.Лента охватывает барабан по
окружности в пределах 190°. В барабане со сдвигом на 180° уста-
новлены две вращающиеся видеоголовки, поочередно включаю-
щиеся на запись (воспроизведение) на время контакта с лентой.
Барабан представляет собой неподвижную направляющую ленты
и состоит из нижней и верхней половин.Подающая и принимаю-
399
Рис. 17.13. Тракт протяжки ленты в двухголовочном
ви дс о м а гн итофо не
щая катушки расположены на различной высоте относительно ба-
рабана, за счет чего лента охватывает его по наклонной траекто-
рии и при горизонтальном вращении головок на ней запись про-
изводится на наклонной дорожке.
В одноголовочном лентопротяжном механизме типа “360°-а”
(рис. 17.14) лента охватывает барабан в форме греческой буквы а и
перекрещивается в точке схода или захода на него. Единственная
видеоголовка постоянно находится в контакте с лентой в пределах
угла около 360°. Так как лента охватывает барабан по спирали и
участок ее захода на барабан расположен ниже схода, то в резуль-
тате вращения головки на ленте записывается наклонная дорожка.
Одноголовочный лентопротяжный механизм “360°-О” отлича-
ется от предыдущего только формой охвата барабана лентой. В
этом случае лента охватывает барабан в виде буквы О без перекре-
щивания. В этой и предыдущей конструкциях механизма сущест-
вует некоторый “холостой” угол движения видеоголовки при пе-
реходе ее с одной дорожки на другую. Для охвата типа “Q” этот
угол может быть несколько меньше, чем у типа “а”.
400
Рис. 17.14. Лентопротяжный механизм типа “ЗбО°-а”
В современных станциях радиотехнической разведки целесооб-
разно использовать кассетные видеомагнитофоны, основное пре-
имущество которых заключается в том, что зарядка ленты в лен-
топротяжный тракт происходит автоматически. Внешне видеокас-
сета напоминает увеличенную в несколько раз обыкновенную
магнитофонную кассету.Основное отличие состоит в том, что ка-
тушки видеокассеты расположены ступенчато в соответствии с
требованием наклонно-строчной видеозаписи.Ширина видеолен-
ты, применяемой в кассетах, 12,7 и 6,24 мм.
17.9. МАГНИТООПТИЧЕСКИЕ МЕТОДЫ РЕГИСТРАЦИИ
И ОБРАБОТКИ СИГНАЛОВ
Магнитооптические методы регистрации и обработки сигналов
основаны на записи сигналов на магнитный носитель и их оптиче-
ской обработке. Это позволяет одновременно визуализировать и
анализировать практически неограниченное число каналов в ши-
рокой полосе частот, так как оптическая система обладает свойст-
401
вом многоканальное™. Ограничение по полосе возникает только
в тракте записи. Задача многоканальной регистрации и одноврвЯ
менной визуализации является исключительно актуальной при?
разведке каналов телеметрии, спутниковых систем связи, много*
канальных и многофункциональных радиолокационных станций,*
Магнитооптический анализ состоит из двух частей: визуализа-1
ции записи магнитных сигналограмм и оптической обработки сиг-
налов.
Преимуществом магнитооптической обработки сигналов явля-
ется возможность их анализа на низкой частоте. При этом регист-
рация и обработка производятся одновременно, т.е. низкочастот-
ный сигнал автоматически переводится в оптический диапазон
волн.Магнитооптический способ визуализации магнитных сигна-
лограмм основан на воздействии поля рассеяния сигналограммы,
записанной на магнитный носитель — специальный магнитоопти-
ческий материал, обладающий чрезвычайно малыми значениями
поля перемагничивания и одним из оптических эффектов Керра и
Фарадея.Таким эффектом обладают ортоферриты и висмутсодер-
жащие ферро гранаты.
В основу оптического метода обработки сигналограмм положе-
но явление дифракции световой поляризованной волны на домен-
ной структуре феррогранатовой пленки.
Рассмотрим принципы магнитооптического анализа и регист-
рации сигналов применительно к задачам радиотехнической раз-
ведки.
Запишем интересующий нас сигнал на магнитофон, который
может быть многоканальным. Сигнал, записанный на магнитный
носитель, называется сигналограммой. Чтобы проанализировать
или хотя бы визуально просмотреть записанную информацию (сиг-
налограмму), надо выход магнитофона подключить к осциллографу
или другому анализатору. При этом особая сложность возникает с
многоканальными записями, которые должны быть проанализиро-
ваны или просмотрены одновременно, так как записанные сигна-
лы тесно связаны во времени и последовательный их просмотр или
анализ не даст нужного результата. В радиотехнической разведке
для многоканальной регистрации используются шлейфовые осцил-
лографы. Однако они узкополосны, имеют большую задержку в
выдаче визуальной информации, не обладают свойством повтора
записи, сильно ограничены по времени записи и искажают сигнал.
Магнитооптические методы обработки свободны от указанных не-
достатков и позволяют одновременно визуализировать и анализи-
ровать практически неограниченное число каналов.
Рассмотрим кристалл, оптически прозрачный, который обла-
дает лабиринтной структурой магнитных доменов (рис. 17.15).
Пусть световая волна с линейной поляризацией падает на поверх-
ность этого прозрачного кристалла. Поместим рассматриваемый
кристалл в магнитное поле, вектор напряженности которого Н
параллелен направлению распространения света. Под влиянием
магнитного поля среда (кристалл) становится оптически анизо-
402
Лабиринтная структура магнитных доменов
Рис. 17.15. Структура магнитных доменов
тропной, т.е. свойства ее зависят от направления X, Y, Z. Это про-
является в неравенстве скоростей распространения волн в среде с
противоположными направлениями круговой поляризации. Для
таких волн показатель преломления п можно записать
п± = nQ ± Ди,
403
где п+ — показатель преломления с правым вращением вектор
ра поляризации; ’
п. — показатель преломления с левым вращением вектора
поляризации;
Д«— добавка, зависящая от поля Н;
ио — начальный показатель преломления.
Фазовая задержка соответственно:
где / — путь света в кристалле;
Хсв — длина волны света.
Различие фазовых задержек приводит к повороту плоскости по-
ляризации прошедшего сквозь среду света на угол
<Р = ^-(5+ -8_).
Если на пути прошедшей световой волны поместить анализатор
поляризации (поляроид), то изменение поляризации преобразует-
ся в изменение интенсивности света, т.е.магнитооптический кри-
сталл можно рассматривать как дифракционную решетку с боль-
шим числом щелей.
Из курса физики известно, что с помощью дифракционной ре-
шетки можно производить анализ спектра.А если свет промодули-
ровать радиосигналом, то можно производить и анализ радиосиг-
налов. Итак, запомним, что в соответствии с внешним магнит-
ным полем домены внутри кристалла ориентируются в двух
взаимно противоположных направлениях вдоль оси намагничива-
ния. При прохождении света через такой кристалл состояние по-
ляризации световой волны будет повторять пространственное рас-
пределение областей намагниченности.
При воздействии на кристалл внешнего магнитного поля про-
исходит расширение областей с совпадающим с этим полем со-
стоянием намагниченности и сужение областей с противополож-
ным этому полю состоянием намагниченности.Если сигнал запи-
сать на магнитную ленту, то она сама становится источником
магнитного поля.Теперьесли к ней приложить кристалл, обладаю-
щий перечисленными выше свойствами, то за счет намагничен-
ности ленты произойдет, как отмечалось, расширение областей с
противоположным полю состоянием намагниченности. То есть
информация, записанная на магнитную ленту (сигнал), будет пе-
редана кристаллу, который обладает свойством прозрачности.При
прохождении световой волны состояние ее поляризации повторит
пространственное распределение намагниченности в кристалле, а
следовательно, будет соответствовать информации, записанной
на ленту. На рис. 17.16 представлена функциональная схема
устройства оптической визуализации. Здесь магнитная феррогра-
натовая пластинка (кристалл) находится на расстоянии 1... 1,5 мкм
404
Рис. 17.16. Функциональная схема устройства оптической
визуализации
от поверхности магнитной ленты/Процесс визуализации происхо-
дит без дополнительных магнитных полей.
Разрешающая способность магнитооптических элементов
определяется размерами доменов и может составлять 5... 10 мкм,
что позволяет записать 100 имп./мм.Установлено, что чем больше
толщина пленки (кристалла), тем больше домены.С уменьшением
толщины пленки размеры доменов уменьшаются.Но уменьшение
доменов за счет толщины пленки приводит к уменьшению степе-
405
ни поляризации, а следовательно, и к ухудшению контраста изоб-
ражения. Несмотря на очень высокую разрешающую способность
самого кристалла, общая разрешающая способность устройства
будет ниже, главным образом за счет качества объектива передаю-
щей телевизионной установки, и составит по горизонтали около
120 импульсов на строку.
Магнитооптический анализатор наряду с визуализацией позво-
ляет с очень высоким разрешением анализировать спектр сигнала
и вычислять его корреляционную функцию в реальном масштабе
времени по мере записи. Для примера рассмотрим работу много-
канального магнитооптического коррелятора.
Рис. 17.17, Магнитооптический коррелятор
Магнитооптический коррелятор (рис. 17.17)включает в себя: ла-
зер 1, коллиматор 2, входную плоскость, в которой размещен
магнитооптический кристалл 3 и магнитный носитель 4 с много-
канальной записью входных сигналов, поляризатор 5, объектив 6,
эталонную плоскость с размещенным в ней вторым магнитоопти-
ческим кристаллом 7и магнитным носителем 8 с записью эталон-
ных сигналов, поляризатор 9, объектив 10 ъ виде астигматической
пары линз, фотоприемник 11. Коррелятор работает следующим
образом.
Набор сигналов записывается на магнитной ленте 4 вдоль про-
странственной координаты X. Различные каналы упорядочены по
координате У. Под действием полей рассеяния магнитной ленты
магнитооптический кристалл 3 локально перемагничивается и
структура его магнитных доменов повторяет структуру намагни-
ченности магнитной ленты.При освещении кристаллов 3 линейно
406
поляризованным когерентным пучком света вследствие эффекта
Фарадея локальный разворот плоскости поляризации света на
входной плоскости будет повторять пространственный сигнал, за-
писанный на магнитной ленте. Для увеличения светосилы на зад-
нюю грань кристалла, контактирующую с магнитной лентой, на-
носится тонкое зеркальное покрытие. Поляризатор 5 преобразует
пространственное распределение угла поворота плоскости по-
ляризации в распределение амплитуды световой волны м(х, у) =
= cos ф [х,у], где ф — угол поворота плоскости поляризации в
пространственных точках х, у входной плоскости. Так как зависи-
мость угла поворота плоскости поляризации (р от напряженности
поля рассеяния магнитной ленты имеет ярко выраженный поро-
говый характер, то для обработки в корреляторе аналоговых сиг-
налов последние должны представляться на магнитной ленте на
несущей частоте в режиме фазовой или частотной модуляции. Это
позволяет сохранить амплитудную информацию при прохожде-
нии сигнала через нелинейное звено.
Таким образом, в плоскости кристалла формируется поле ком-
плексной амплитуды света, которое (с учетом действия поляриза-
тора) соответствует функции
/V 4-1
и (х, у) = £ f(x) rect -,
4 7 м л v 7 Я
где d — расстояние между дорожками магнитной записи на
ленте;
Д — расстояние между каналами;
N — число каналов записи;
rect — =
d
1,
ч
q>d.
Если теперь в плоскость кристалла 7 ввести сигнал, записан-
ный аналоговым образом на магнитной ленте 8, то по аналогии с
предыдущим случаем пропускание магнитооптического кристалла
7 (с учетом действия поляризатора 9) можно записать как
<х,у)= £
4 7 . w+i v ' d
Так как оптическая система 6 осуществляет отображение плос-
кости 5 в плоскость 7 с единичным увеличением, то поле комп-
лексной амплитуды света в плоскости 7 (с учетом поляризатора 9)
будет иметь вид
н(х',у') = «,(%', у') т(х', у').
407
Если магнитные ленты в плоскостях 3 и 7 будут перемещаться
во встречных направлениях со скоростью v, то поле комплексной
амплитуды света будет зависеть и от временной координаты:
« ft, У, о = £ +1 Z- ft' + (х' - V/) rectУ +-Л 1 ,
а поле комплексной амплитуды света в выходной плоскости, по-
лучаемое после Фурье-преобразования и(х) по координате X:
и(алх,у’,
со р -1_ Л . /
I Zft' + v/)gzft' - w)e~;c,u dx' rect--------------------------------------------------
Если информацию считывать вдоль пространственной оси
у'(сох =0), то последнее выражение соответствует многоканальной
корреляционной функции, заданной по временной координате
«(0, у', t) =L f f, ft)g, ft - 2/)^ rect—,
где введена новая переменная интегрирования ^ = х' + t.
Если информация считывается со всей плоскости х, у, то на
выходе коррелятора осуществляется многоканальное отображение
функции неопределенности сигнала.
Формирование эталонного сигнала осуществляется за счет вво-
да в эталонную плоскость 7в виде записи на магнитной ленте, ко-
торая может осуществляться в реальном масштабе времени с вы-
ходного устройства ЦВМ или приемного устройства.
Увеличение эффективности коррелятора по световому потоку
за счет использования магнитооптических кристаллов позволяет
использовать лазеры малой мощности, что в целом приводит к
удешевлению системы обработки. Кроме того, наблюдается улуч-
шение соотношения сигнал/шум на выходе коррелятора. Опера-
тивный ввод требуемой эталонной функции позволяет расширить
возможности коррелятора, а именно обеспечить вычисление вза-
имных корреляционных функций по двум реализациям сигнала.
17.10. РЕГИСТРАЦИЯ СИГНАЛОВ
НА ЭЛЕКТРОХИМИЧЕСКУЮ БУМАГУ
Принцип открытой записи, используемый в аппарате записи,
основан на свойстве электрохимической бумаги (ЭХБ) окрашива-
ться при прохождении через нее электрического тока. Бумага по-
мещается между электродами, к которым подано постоянное на-
пряжение. Электрический ток, проходящий через электрохимиче-
скую бумагу, вызывает в растворе, которым пропитана бумага,
химическую реакцию, вследствие чего происходит окрашивание
408
бумаги с одной стороны. Степень окрашивания зависит от силы
тока, протекающего через бумагу, и от скорости записи.
Таким образом, при изменении приложенного напряжения бу-
дет изменяться степень окраски бумаги.
В случае отсутствия электрохимической бумаги запись может
осуществляться на обычную рулонную (телетайпную) бумагу с
применением копировальной бумаги. Для этого в комплекте аппа-
рата предусмотрено рекодерное устройство.Запись рекодером яв-
ляется резервной и не дает тех показателей, которые могут быть
получены при записи на электрохимическую бумагу.
Рис. 17.18. Структурная схема устройства регистрации сигналов на ЭХБ
В аппарат записи (рис. 17.18) входят элементы, участвующие в
выделении и формировании значения и формы напряжения, не-
обходимого для воздействия на электрохимическую бумагу (сиг-
нальный тракт), система автоматической синхронизации скоро-
сти вращения развертывающего устройства и др.
В схему записи входит также индикаторное устройство, служа-
щее для повышения эксплуатационных возможностей аппарата
записи, в частности для облегчения и ускорения настройки аппа-
рата при работе с выхода НЧ приемника и наблюдений за формой
сигнала в канале.
Часть аппарата записи, которая формирует импульсы, воздей-
ствующие на электрохимическую бумагу, включает:
фильтр низкой частоты;
преобразователь с усилителем;
полосовой фильтр;
ограничитель;
дискриминатор;
усилители с тональными выпрямителями;
усилитель постоянного тока.
В аппарате записи предусмотрена возможность приема ампли-
тудно-модулированных передач, для чего выход усилителя после
фильтра с помощью переключателя рода работ соединяется со
входом одного из усилителей после дискриминатора. Одновре-
409
менно с этим включается система автоматического регулирований
преобладаний (АРП). В усилителе постоянного тока (УПТ) пре-»'
дусмотрено регулирование тока записи, контрастности записи и
регулирование уровня “белого”. Сигнал с усилителя поступает
на развертывающее устройство, прикладывается к двум элект-
родам — ножу барабана и записывающей линейке, между которы-
ми протягивается электрохимическая бумага. Сопротивление этой
бумаги является нагрузкой усилителя постоянного тока. Преду-
смотрена возможность изменения полярности включения элект-
рохимической бумаги. Это требуется при использовании различ-
ного типа бумаги (ЭХБ-1 или ЭХБ-3).
При работе с буквопечатающего выхода одного из аппаратов с
силой тока 40...60 мА и напряжением 0...15 В сигнал через пере-
ключатель рода работ поступает на дополнительный усилитель
УВУ, а затем на тот же усилитель постоянного тока.
В систему автоматической синхронизации скорости вращения
развертывающего устройства входят следующие элементы:
развертывающее устройство;
задающий генератор;
делитель частоты;
схема расщепления фазы;
усилитель мощности (трехфазный);
синхронный двигатель (трехфазный).
Развертывающее устройство представляет собой механизм син-
хронной развертки и записи сигнала. Развертка по строкам осуще-
ствляется вращающимся барабаном, на котором по винтовой ли-
нии расположен нож.Два сменных барабана обеспечивают одно-
канальную и двухканальную запись. Частота вращения барабана
регулируется в диапазоне получения 45... 190 строк/мин.
Развертка по вертикали осуществляется механизмом протяжки
бумаги. Шаг подачи плавно регулируется 0...2 мм.
Развертывающее устройство и механизм протяжки бумаги при-
водятся в движение электродвигателем типа Г-32 через редуктор с
передачей 1:50. Гистерезисный двигатель, питаемый трехфазным
напряжением, позволяет получить необходимые стабильность
фазы и широкий диапазон скоростей. Первоисточником питания
двигателя является задающий генератор.
Напряжение, генерируемое задающим генератором, через кас-
кад формирования импульсов поступает на вход делителей часто-
ты.Выходы делителей частоты через переключательдиапазонов за-
ведены на вход расщепления фазы. С выхода схемы расщепления
фазы три напряжения, сдвинутые относительно друг друга на
120°, усиливаются по мощности и питают трехфазный синхро-
нный двигатель гистерезисного типа.Одновременно переключают-
ся нагрузочные сопротивления в последней лампе усилителя по-
стоянного тока, чем достигается необходимое напряжение тока
записи, соответствующее данной скорости оборотов.
410
17.11. РЕГИСТРАЦИЯ СИГНАЛОВ НА ОСНОВЕ
ТЕРМОПЛАСТИЧЕСКОЙ ЗАПИСИ
Регистрация информации термопластическим способом отли-
чается от других видов записи физическими свойствами носителя.
Входной сигнал при термопластической записи регистрируется в
виде изменения поверхности носителя. При этом поверхностный
рельеф не изменяет интенсивности освещающего потока, а при-
водит к изменению его фазы, т.е. времени задержки при прохож-
дении носителя.Термопластическая запись является разновидно-
стью фазовой рельефографической записи.
Особенность фазовой записи в том, что ни один из известных
фотоприемников, в том числе и человеческий глаз, не обнаружи-
вает фазовых изменений светового излучения. Поэтому для вос-
произведения фазовой записи требуется специальная проекцион-
ная аппаратура, преобразующая фазовую модуляцию в амплитуд-
ную. Термопластик осуществляет запись информации, как
правило, на светочувствительном материале, вследствие чего его
объединяют с фотопроводниковой пленкой в единую структуру,
реагирующую на освещение.Такую структуру называют фототер-
мопластическим носителем. Наибольшее распространение получи-
ли многослойные структуры, когда термопластик нанесен на по-
верхность фотопроводника.
Термопластический слой выполняется на основе натуральной
древесной смолы (канифоли).Толщина слоя около 1 мкм. В каче-
стве основы чаще всего используют полимерное соединение — по-
ливинилкабзол, к которому для повышения чувствительности
(сенсибилизации) примешивают различные донорные добавки. В
качестве проводящего слоя применяется, как правило, окись оло-
ва, нанесенная слоем толщиной несколько десятков ангстрем
(° \
1А =0,1НМ = 1О'10 м L В качестве подложки могут использоваться
такие материалы, как стекло, лавсан и пр.
Первым (подготовительным) этапом является заряд — созда-
ние однородного потенциала на поверхности термопластика по
отношению к проводящему слою, осуществляемый обычно ко-
ронным разрядом высокого напряжения порядка 10 кВ.На втором
этапе экспонируется заряженная поверхность. При этом происхо-
дит разряд фотопроводника в соответствии с пространственным
распределением интенсивности экспонирующего изображения.
На третьем этапе изображение проявляется. Для этого на слой тер-
мопластика кратковременно воздействуют теплом, нагревая его
до температуры размягчения (примерно 80 °C) пропусканием
тока через прозрачный проводящий слой. При нагреве термоплас-
тик деформируется под действием пондеромоторных сил локаль-
ных электрических полей, причем его толщина уменьшается в не-
экспонированных участках и увеличивается в экспонированных.
При быстром охлаждении до температуры окружающей среды де-
формации “замораживаются” и изображение, таким образом, ре-
41 1
гистрируется в виде пространственного распределения толщины
слоя термопластика. Полученная запись стабильна в диапазоне
рабочих температур аппаратуры регистрации. Для стирания изоб-
ражения носитель вновь нагревают до температуры размягчения,
но на более длительное время, чем при проявлении. При этом
силы поверхностного натяжения слоя термопластика сглаживают
рельеф и стирают записанное изображение. После этапа стирания
носитель вновь готов к записи. Такое свойство неоднократного,
восстановления носителей называется реверсивностью.
Как уже говорилось, проекция фазовых изображений осущест-
вляется с помощью специальной аппаратуры.
Проектор работает следующим образом. Свет, фокусируемый
объективом на нож Фуко, по пути проходит сквозь пластину с фа-
зовой записью.Лучи света дифрагируют на деформациях поверх-
ности. При этом часть дифрагированных лучей отклоняется от
ножа Фуко и объективом фокусируется на экране. В настоящее
время достигнуты следующие характеристики фототермопласти-
ческих носителей:
разрешающая способность до 1500 лин/мм;
время проявления — единицы и даже доли миллисекунд;
время стирания — доли секунд;
реверсивность — 1О2...1О4.
Достоинствами фототермопластической записи (ФТПЗ) явля-
ются: низкая стоимость носителей, высокие скорость обработки и
разрешающая способность. Это позволяет записывать информа-
цию с высокой плотностью и использовать ФТПЗ при регистра-
ции голограмм.
К недостаткам можно отнести необходимость некоторого
усложнения съемочной аппаратуры, габаритные размеры которой
должны быть достаточно малыми. Так, например, аппарат ФТПЗ
можно разместить в корпусе фотоаппарата, не нарушая его основ-
ных функций.
17.12. РЕГИСТРАЦИЯ СИГНАЛОВ НА КИНОПЛЕНКУ
Запись сигналов на кинопленку или фотопленку осуществляется
с экрана электронного осциллографа кино- или фотоаппаратом.С
помощью фотоаппарата регистрируются сигналы только устойчи-
вых детерминированных процессов. В случае изменяющихся пара-
метров сигналов, особенно при анализе сигналов многофункцио-
нальных РЛС, на экране индикатора, или осциллографа, будет на-
блюдаться интегральная (суммарная) картина, так как произойдет
наложение изображений, по которым трудно восстановить истин-
ную динамику процесса. Поэтому чтобы иметь полное представле-
ние об изучаемом процессе, например о режимах работы много-
функциональных РЛС, надо осуществить поимпульсную регистра-
цию сигналов с помощью киноаппарата.Для этой цели протяжка
пленки должна осуществляться непрерывно, для чего в аппаратах
покадровой съемки снимается обтюратор, и объектив остается по-
412
стоянно открытым. При этом следует учитывать весьма важный мо-
мент. Так как осуществляется поимпульсная регистрация, то каж-
дый импульс записывается на новом участке пленки. Это часто
приводит к тому, что яркость изображения на пленке может оказа-
ться недостаточной. Поэтому прежде чем осуществлять поимпуль-
сную регистрацию сигналов, надо выбрать осциллограф с ярко-го-
лубым или фиолетовым свечением экрана без послесвечения. При
поимпульсной регистрации сигналов в зависимости от направле-
ния движения пленки могут быть следующие виды записи: верти-
кальная (поперечная), горизонтальная (продольная).
Для обеспечения горизонтальной протяжки пленки киноаппа-
рат закрепляется в горизонтальном положении, и протяжка плен-
ки осуществляется вдоль оси Д'. Более удобна при продольной за-
писи подача сигналов на горизонтально отклоняющие пластины,
а не на вертикально отклоняющие, как принято в осциллографах.
Это достигается переключением каналов отклонения осциллогра-
фа. Генератор разверток при горизонтальной форме записи вы-
ключается.Для регистрации сигналов целесообразно использовать
двухлучевой осциллограф, на один луч которого подается калиб-
рованное напряжение или второй регистрируемый параметр (на-
пример, форма импульса и форма отклика ДУЛЗ или выход амп-
литудного детектора и частотного детектора на второй исследуе-
мый сигнал). При этом лучи выводятся на одну горизонтальную
линию и смещаются по оси Xна размер изображения.Это позволя-
ет синхронно регистрировать различные процессы или различные
параметры.Для регистрации амплитудных параметров, например
формы диаграммы направленности, наиболее удобна точечная за-
пись.Для этого на управляющий электрод трубки подаются корот-
кие подсвечивающие импульсы большой амплитуды, формируе-
мые из сигнала, а сам сигнал подается на отклоняющие пласти-
ны — вертикальные или горизонтальные — в зависимости от вида
протяжки пленки.Очень важно при регистрации сигналов прави-
льно выбрать размеры изображения на экране осциллографа.Же-
лательно, чтобы изображение занимало основную площадь экрана.
Для размещения всего изображения в кадре пленки объектив надо
отодвинуть от экрана осциллографа на большое расстояние.Это, в
свою очередь, снизит яркость.Следует также учитывать, что при
высокой частоте повторения импульсов их изображения могут на-
кладываться друг на друга, что нежелательно, так как сильно за-
труднит анализ осциллограмм. Во избежание наложения необхо-
димо увеличить скорость протяжки пленки.При решении этих во-
просов полезной будет следующая формула:
где а = -— (здесь v — скорость протяжки пленки);
2Л
/ — расстояние до объектива;
/— фокусное расстояние.
18. ОБОСНОВАНИЕ ТАКТИКО-ТЕХНИЧЕСКИХ
ТРЕБОВАНИЙ К КОМПЛЕКСАМ И СТАНЦИЯМ
РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ
18.1. ОБЩИЕ СВЕДЕНИЯ
Для эффективного выполнения сложных и многообразных за-
дач радиоразведывательная станция должна отвечать определен-
ным требованиям, учитывающим особенности ее боевого исполь-
зования как при существующем уровне развития средств нападе-
ния и обороны, так и с учетом перспектив их совершенствования.
Требования к радиоразведывательной станции.следует предъ-
являть исходя из оценки эффективности разведывательной систе-
мы в целом и того вклада, который вносит в нее разведывательная
станция.
В свою очередь, эффективность системы радиотехнической
разведки в зависимости от обслуживаемых ею потребителей может
оцениваться по различным критериям и даже выражаться в раз-
личных единицах (нанесенный или предотвращенный ущерб, ве-
роятность успешного выполнения боевой задачи, потеря техники
или личного состава и т.п.). Различают требования тактические и
тактико-технические.
Под тактическими требованиями понимают количественные
значения характеристик радиоразведывательной станции с учетом
состояния и перспектив развития средств вооруженного нападе-
ния вероятного противника и средств борьбы с ними.
На основе анализа тактических требований определяют перс-
пективы развития средств радиотехнической разведки, планируют
исследования в этой области.
Реализация тактических требований может быть ограничена
возможностями производства, достигнутым уровнем развития на-
уки и техники. Поэтому при разработке новых средств радиотех-
нической разведки к ним предъявляются тактико-технические
требования.
Под тактико-техническими характеристиками понимают ко-
личественные значения основных характеристик радиоразведыва-
тельной станции с учетом тактических требований и состояния
науки и техники на период разработки станции. Средства развед-
ки, состоящие на вооружении, характеризуются тактико-техниче-
скими данными.
Тактико-технические данные представляют собой количествен-
ные значения основных характеристик конкретного образца ра-
414
диоразведывательного средства для средних условий его боевого
использования и эксплуатации.
Тактико-технические данные определяются тщательной экспе-
риментальной проверкой образца при испытаниях: заводских, по-
лигонных, войсковых, государственных. Количественно они могут
совпадать или незначительно отличаться от тактико-технических
требований, которые определяют боевые возможности радиоразве-
дывательной станции и заносятся в формуляр. Задача личного со-
става, эксплуатирующего радиоразведывательную станцию, — под-
держивать технические параметры станции на уровне, обеспечива-
ющем реализацию тактико-технических данных.
Систему показателей, используемых для оценки боевых воз-
можностей радиоразведывательной станции и проведения такти-
ческих расчетов, принято называть тактическими характеристи-
ками станции. Основными из них являются:
состав разведывательной информации;
зона обзора (форма и ее параметры);
достоверность выдаваемой информации;
точность измерения координат;
разрешающая способность по координатам;
информационная способность;
эксплуатационная надежность;
электромагнитная совместимость;
маневренность.
Кроме этих характеристик в состав системы показателей вклю-
чают: пределы и точность измерения параметров сигналов, веро-
ятность опознавания типа и конкретного экземпляра РЭС, пропу-
скную способность и др.
Составом разведывательной информации называют совокуп-
ность сведений об объектах радиотехнической разведки, получае-
мых в результате приема и анализа радиоизлучений. Эти сведения
могут касаться наличия или отсутствия источников и объектов
разведки в данном районе, их координат, режимов работы, состо-
яния боевой готовности, учебно-боевой деятельности, появления
новых радиоэлектронных средств. Поступающая на радиоразве-
дывательную станцию информация закодирована во временной и
пространственной структуре принимаемых электромагнитных
волн, в несущей частоте, длительности импульсов и периоде их
повторения, частоте облучения, изменении параметров сигналов,
углах прихода электромагнитных волн. Задачей обработки инфор-
мации разведывательной станцией, или комплексом радиотехни-
ческой разведки, является демодуляция и декодирование про-
странственно-временных сигналов на фоне потока мешающих из-
лучений, измерение параметров и опознавание принадлежности
излучений к конкретным типам или экземплярам радиоэлектрон-
ных средств, их государственной принадлежности, обобщение по-
лучаемых сведений и представление их в наиболее удобном для
использования виде.
<’5
Состав информации определяется главным образом требовани-
ями потребителя информации и решаемыми задачами в выбран-
ной системе координат. К современным средствам радиотехниче-
ской разведки предъявляются требования выдачи координат объ-
ектов разведки с точностью, достаточной для целеуказания
активным средствам поражения. Поэтому наиболее удобной сис-
темой координат для представления информации о местоположе-
нии воздушных и наземных (надводных) целей является прямо-
угольная (X Y, Z). В ней проще производить преобразование ко-
ординат в единую систему для всей группировки сил и средств,
осуществлять отождествление и объединение информации, полу-
чаемой от нескольких источников.
Однако устройства определения местоположения источников
радиоизлучений измеряют первичные координаты (линии поло-
жения): одни — пеленг, другие — гиперболы, которые не являются
прямоугольными координатами. Поэтому в системе обработки
информации должен быть предусмотрен пересчет координат из
непрямоугольной (криволинейной) в прямоугольную (декартову)
систему координат.
Зоной обзора (форма и ее параметры) радиоразведывателъной
станции называется область пространства, в пределах которой
станция обеспечивает получение разведывательной информации о
РЭС с заданным энергетическим потенциалом и качеством не
ниже требуемого. Под качеством разведывательной информации в
данном случае понимают следующие показатели:
вероятность правильного обнаружения РЭС и ложной тревоги
(качество обнаружения);
точность измерения параметров сигналов;
точность измерения координат источника радиоизлучений или
линий положения;
вероятность правильного опознавания типа источника радио-
излучений и государственной принадлежности.
Форму зоны обзора радиоразведывательной станции принято
обозначать графически или таблицей зависимости:
R = <p(z>p,fty),
где Z)p — дальность до границы зоны обзора;
ft у — угловые границы зоны в азимутальной и вертикаль-
ной плоскостях соответственно.
Наиболее сложной является зона обзора при разведке воздуш-
ных и космических объектов.
Параметры зоны выбираются с учетом тактических требований
и технических возможностей их реализации. Так, значение мини-
мального угла места утш радиоразведывательной станции санти-
метрового диапазона ограничивается условием распространения
сантиметровых волн в приземном слое. С одной стороны, необхо-
димо выбрать угол места как можно более близким к нулю, а с
другой — необходимо приподнять диаграмму направленности от
земли, так как она будет сильно изрезанной на малых углах места
416
вследствие интерференции прямого и отраженного от неровно-
стей поверхности Земли лучей. Причем из-за колебательных дви-
жений под действием ветра покрывающих земную поверхность
кустарников и другой растительности непрерывно изменяется ам-
плитуда и фаза принимаемого сигнала. При разведке бортовых
РЛС обзора земной поверхности и РЛС перехвата и прицеливания
их мощность излучения равна десяткам киловатт в импульсе
(можно обеспечить требуемую максимальную дальность обнару-
жения без существенных затруднений). Однако при разведке ра-
диолокационных станций бокового обзора РУК типа ПЕИВ
МУВЕР, мощность излучения которых составляет доли ватт, об-
наружение их на предельной дальности представляет собой нераз-
решимую задачу. При разведке низколетящих целей наземными
РЛС дальность прямой видимости составляет десятки километров,
поэтому максимальную дальность обнаружения Dmax следует опре-
делять с учетом тропосферного распространения радиоволн.
В метровом диапазоне и верхней части дециметрового диапа-
зона волн зона обзора формируется с учетом рельефа, и значение
угла ymin для равнинного участка практически однозначно опре-
деляется отношением длины антенны к высоте подъема ее фазо-
вого центра hA :
Y *2,3—.
I mtn ’ i
Максимальный угол места зоны утах для исключения “мерт-
вой” воронки желательно было бы выбирать равным 90° или близ-
ким к нему. Однако это привело бы к значительному усложнению
конструкции антенной системы. В настоящее время считается це-
лесообразным выбор значений угла места порядка 35...45° в санти-
метровом и 20...30° в метровом диапазонах волн. При этом радиус
“мертвой” воронки 7?мв =^uctgymax (здесь Ни — высота полета
цели) соответственно составляет (1...1,5) Яии (2...4,5) Н1Х. Верхняя
граница зоны Ятах должна быть не меньше потолка полета суще-
ствующей и перспективной авиации противника. Для современ-
ных радиоразведывательных станций Ятах > 40...60 км.
Максимальную дальность обнаружения Dmax целей, летящих на
максимальной высоте Нтах, желательно получить равной дально-
сти-прямой видимости, примерно 600...800 км.
'Достоверность выдаваемой информации характеризует степень
соответствия информации о противнике, полученной в результате
ведения радиотехнической разведки за определенный период, с
реальным состоянием объектов разведки. Достоверность инфор-
мации зависит от точности и полноты измеряемых параметров, от
точности измерения координат, от оптимальности алгоритмов об-
работки сигналов, от сложности радиотехнического поля в зоне
разведки, от времени разведки и от времени запаздывания инфор-
мации относительно начала ее получения.
417
Точность измерения координат, или линий положений, является
важнейшим показателем комплексов и станций радиотехнической
разведки. Она характеризуется ошибкой измерения, представляю-
щей собой разность между истинным и измеренным значением
координаты. В зависимости от точности измерения координат в
пространстве строятся рабочие зоны угломерных и разностно-да-
льномерных комплексов. Рабочие зоны входят в состав зон обна-
ружения, которые, как правило, значительно превышают первые.
Это объясняется тем, что обнаружить сигнал с заданной вероятно-
стью (например, Р = 0,9) всегда значительно легче, чем измерить
координаты с требуемой точностью. При этом надо помнить, что
зона обнаружения имеет смысл и для одной станции радиотехни-
ческой разведки, а рабочая зона — только для комплекса разведки
или пеленгаторной группы.
Под разрешающей способностью по координатам радиоразведы-
вательной станции понимают такое минимальное различие в дан-
ной координате источников радиоимпульсов при совпадении у
них других координат, при котором они наблюдаются раздельно.
Разрешение осуществляется по выходным сигналам системы
обработки принимаемых сигналов РРС, несущих информацию о
координатах. Различия двух источников радиоимпульсов по даль-
ности и угловым координатам проявляются соответственно в раз-
ном времени запаздывания принимаемых от них сигналов разно-
стно-дальномерным комплексом и в различном направлении при-
хода этих сигналов в угломерном комплексе радиотехнической
разведки. Разрешение ИРИ может быть основано на разделении
сигналов по любому из указанных параметров.
Разрешающая способность существенно влияет на возможно-
сти радиоразведывательной станции по определению состава об-
наруженной группы целей. Таким образом, окончательный выбор
требований к разрешающей способности радиоразведывательной
станции должен осуществляться при комплексном подходе к ре-
шению этой задачи.
Информационной способностью радиоразведывательной станции
называют максимальное число РЭС, по которым станция может
выдавать информацию заданного качества при установленной ди-
скретности (периоде обновления).
Например, для оценки воздушной обстановки и принятия обо-
снованного решения необходима информация о всех целях, кото-
рые находятся в границах данной зоны разведки. В определении
ожидаемого числа таких целей, приходящихся в среднем на одну
радиоразведывательную станцию, и состоит методика расчета не-
обходимой информационной способности.
Потенциальные возможности радиоразведывательной станции
по информационной способности определяются числом раздель-
но наблюдаемых целей, источников разведывательных сведений,
объектов разведки.
418
Однако возможности реализации потенциальной информаци-
онной способности ограничиваются устройствами поиска сигна-
лов, анализа и съема информации.
Под эксплуатационной надежностью понимают свойство ра-
диоразведывательной станции выполнять задачи, сохраняя свои
тактико-технические данные в заданных пределах в течение требу-
емого промежутка времени.
Надежность радиоразведывательной станции характеризуется
ее способностью к безотказной работе и быстрому восстановле-
нию после отказов в определенных условиях эксплуатации. Коли-
чественно она оценивается средним временем наработки на отказ
и коэффициентом готовности:
Т
Kt ,
Т’о+Т/
где 7Ь — среднее время наработки на отказ;
7в — среднее время восстановления РЛС (среднее время
отыскания и устранения неисправности).
Обеспечение требуемого коэффициента готовности достигает-
ся увеличением надежности применяемых деталей и элементов,
использованием различного рода избыточности, повышением ре-
монтопригодности аппаратуры, применением автоконтроля рабо-
тоспособности аппаратуры и выучкой личного состава, эксплуати-
рующего радиоразведывательную станцию.
Электромагнитной совместимостью радиоэлектронных средств
называют их свойство функционировать без ухудшения качест-
венных показателей в заданной электромагнитной обстановке.
Радиоразведывательная станция не должна создавать помехи
другим радиоэлектронным средствам (станциям разведки, систе-
мам связи и управления и т.д.), должна противостоять их воздей-
ствию.
В условиях большой насыщенности войск радиоэлектронными
средствами требования электромагнитной совместимости для ра-
диоэлектронной станции являются весьма важными. Невыполне-
ние этих требований может привести к срыву выполнения стан-
цией боевых задач разведки даже при отсутствии организованных
помех со стороны противника.
К маневренным характеристикам разведывательной станции
относятся:
время развертывания (свертывания) станции;
время подъема и опускания антенно-мачтового устройства;
время включения РРС при питании от штатных агрегатов и
промышленной сети;
возможность транспортирования различными видами транс-
порта;
средние скорости транспортирования.
Маневренные характеристики радиоразведывательной станции
в значительной степени определяют ее живучесть, мобильность и
оперативность выполнения ею боевых задач.
419
18.2. ПОСЛЕДОВАТЕЛЬНОСТЬ ОБОСНОВАНИЯ
ТАКТИКО-ТЕХНИЧЕСКИХ ТРЕБОВАНИЙ
Обоснование тактико-технических требований к станциям ра-
диотехнической разведки производится в такой последовательно-
сти.
1. Уточнение исходных данных. На этом этапе уточняется назна-
чение станции радиотехнической разведки, определяемое опера-
тивно-тактическим звеном, где станция будет использоваться (ди-
визия, армия, фронт), которое и определяет глубину (дальность)
разведки. Кроме того, уточняется место установки станции РТР
(наземная, самолетная, космическая), что определяет требования
конструкторско-технологического характера: массу, габаритные
размеры, вибростойкость, надежность и др.
Основными исходными данными являются средства, выделен-
ные на разработку и изготовление станции радиотехнической раз-
ведки. В большинстве случаев финансирование определяет основ-
ные характеристики станции (точность анализа, степень автома-
тизации и т.д.).
Не менее важным требованием при разработке станции радио-
технической разведки являются сроки проектирования и изготов-
ления опытного образца, поэтому уточнение исходных данных —
один из основных этапов. В процессе проектирования эти данные
уточняются и согласовываются между заказчиком и исполнителем.
2. Анализ радиотехнической обстановки на участке фронта. Этот
этап имеет целью выявить основные характеристики разведывае-
мого радиотехнического поля, определить плотность потока сиг-
налов, основные объекты и источники разведки.
3. Распределение радиоэлектронных средств по задачам. В период
подготовки и ведения боевых действий радиотехническую развед-
ку ведут в интересах дивизий первых эшелонов (тактическая РТР),
общевойсковых и танковых армий (оперативно-тактическая РТР),
фронтов, военных округов (оперативная РТР). Каждое звено име-
ет свои средства РТР. Поэтому, прежде чем перейти к обоснова-
нию тактико-технических требований к станции РТР, все объекты
и источники разведки должны быть распределены по задачам. Это
позволит создать станцию разведки более гибкой и целенаправ-
ленной.
4. Анализ тактико-технических характеристик (параметров)
радиоэлектронных средств в полосе разведки. Он включает сбор
необходимых данных о параметрах, составление таблиц, графи-
ков, диаграмм. На основе этого анализа осуществляются:
определение параметров, подлежащих анализу;
определение предельных значений параметров и выбор частот-
ного диапазона;
обоснование необходимой точности анализа параметров;
обоснование требований к точности местоопределения;
обоснование требований к точности пеленгования;
выбор ширины диаграммы направленности;
420
определение дальности радиотехнической разведки;
обоснование требований к чувствительности;
выбор методов обзора по азимуту и углу места;
определение динамического диапазона приемников;
определение основных технических характеристик приемни-
ка;
обоснование требований к быстродействию;
формулировка общих требований;
предварительная оценка эффективности.
18.3. АНАЛИЗ РАДИОТЕХНИЧЕСКОЙ ОБСТАНОВКИ
В ПОЛОСЕ РАЗВЕДКИ
Методика анализа радиотехнической обстановки в полосе раз-
ведки практически сводится к решению следующих вопросов:
анализ возможной структуры группировки войск противника в
полосе разведки;
анализ объектов и источников радиотехнической разведки;
привязка объектов и источников к местности.
Анализ возможной структуры группировки войск противника в
полосе разведки производится на основе изучения характера совре-
менного общевойскового боя (операции). Современный бой (опе-
рация) немыслим без применения ракетно-ядерного оружия и
других средств массового уничтожения. Все это накладывает опре-
деленный отпечаток как на тактику общевойскового боя, так и на
оперативно-тактические нормативы войск. Американское коман-
дование основным видом боевых действий считает наступатель-
ные операции, поэтому при определении группировки войск ве-
роятного противника целесообразно рассматривать оперативное
построение группы армий в наступательной операции начального
периода. Это соответствует принятой доктрине России конца
20-го столетия.
По опыту учений армейский корпус США, как правило, перехо-
дит в наступление, имея две дивизии в первом эшелоне и одну — во
втором. Танковые дивизии армейского корпуса обычно находятся
в первом эшелоне боевого построения на главном направлении.
Вариант построения боевого порядка группы армий США при-
веден на рис. 18.1. Анализ типовой группировки противника в по-
лосе разведки ОРТП ОН показывает, что радиотехнической раз-
ведке подлежат около 24 дивизий и 21 авиакрыло (примерно 1400
самолетов).
Как видно из рисунка, войска первого эшелона дивизий зани-
мают полосу глубиной 10 км и шириной 400 км, т.е. площадь S] =
= 4000 км2. Войска второго эшелона дивизий первого эшелона ар-
мейских корпусов занимают полосу глубиной 10 км и шириной
400 км (S2 = 4000 км2).
Второй эшелон армейских корпусов занимает полосу глубиной
30 км при ширине 400 км (S3 = 12 000 км2). При расчете общего
421
Рис. 18.1. Вариант построения боевого порядка группы армий США
числа радиоэлектронных средств следует иметь в виду, что из них
будут работать 30 % штатной численности.
Тыловой район полевой армии размещается на глубину
100... 150 км. В этом районе, как правило, сосредоточены органы
командования тылом полевой армии, полевые пункты снабжения
спецбоеприпасами, аэродромные РЛС тактической авиации. В рас-
чет принимается 10 % общего числа радиолокационных станций.
В передовом районе зоны коммуникаций размешены аэродро-
мы тактической, стратегической авиации, крупные узлы радио-
связи.
Анализ объектов и источников радиотехнической разведки. Объ-
ектами радиотехнической разведки являются войска противника,
отдельные средства их вооружения и управления, оборудование
ТВД. Источники разведки — работающие радиоэлектронные
средства.
При определении объектов радиотехнической разведки необхо-
димо ограничить круг задач, решаемых разведывательной стан-
цией исходя из ее технического значения, т.е. из совокупности
всех объектов, находящихся в группе армий, рассмотреть только
те, задача на разведку которых ставится данному классу станций.
В соответствии с выбранной группировкой составляется таблица
объектов и источников разведки, например для штатной роты мо-
топехотного батальона первого эшелона армейского корпуса
(табл. 18.1).
422
Таблица 18.1
Объект разведки
Параметр излучения
Штабная
рота мо-1
топехот-
ного ба-
тальона
Первый
эшелон
армей-
ского
корпуса
| Источник разведки
-------!------!----
2 *
82
0,4 ; 5000
6,2
8900
Гц | Ьл ’
РРС-4
МГц
6,2
е!
е г
0,5 I
3
£
4
По этим данным определяется плотность распределения источ-
ников радиоимпульсов на местности по полосам оперативного по-
строения, 1/км2:
Рц
S, ’
где Ny — число источникову-го типа в /-й полосе оперативно-
го построения;
— площадь ьй полосы.
Также определяется плотность распределения источников ра-
диоимпульсов в угловых координатах, 1/...°:
ACV
р — 3
3 сект
г^е Nj— общее число РЛС у-го типа в полосе разведки;
рсект— сектор разведки.
18.4. ОПРЕДЕЛЕНИЕ ЧИСЛА НЕОБХОДИМЫХ
ПАРАМЕТРОВ ДЛЯ АНАЛИЗА СИГНАЛОВ
В общем случае сигнал на входе станции радиотехнической
разведки может быть представлен выражением
t/(r) = /l(7)cos[cor + q>(/)] ,
где Л(/) — огибающая сигнала, которая содержит в себе информа-
цию о мощности сигнала, длительности и форме импульса, перио-
де повторения импульсов и периоде вращения антенны.
Основные обобщенные сведения и характеристики радиоэлек-
тронных объектов в полосе фронта по периодам представлены в
табл. 18.2. Считается, что общее число источников оперативной
радиотехнической разведки к 2005 году возрастет до 2500...3000.
Из них до 70 % будет развернуто на удалении до 250 км от линии
фронта и до 90 %— до 400 км.
423
Таблица 18.2
Сведения о радиоэлектронных объектах в полосе разведки радиотехнической бригады Численность объектов на период
1986 - 1990 гг. 1991 - 1995 гг. 1996 - 2005 гг.
Общее число объектов (источников) РТР 1800 - 2500 2000 - 2500 2500 - 3000
По глубине оперативного построения распределение объектов (источни- ков) для РТР, %: до 100 км 30...40 40...50 40...50
до 250 км 50...60 60...70 60...70
до 400 км 80...90 80...90 85...90
Численность сложных объектов, % 10...15 10...30 30...40
По диапазону частот распределение объектов (источников) для РТР, %: 0,07... 1,0 ГГц 3...5 3...5 3...5
1,0 ...6,0 ГГц 65...70 55...60 40...45
6,0 ...12,0 ГГц 15...20 25...30 35...40
12,0...18,0 ГГц 5...10 5...10 10...15
Распределение объектов (источников) для РТР (%) с усложненной час- тотно-временной структурой сиг- налов: ЧМ (ЛЧМ, НЧМ) 3...5 5...7 5...10
шумоподобные — 1...2 3...5
ФКМ 5...10 10...15 15...20
с перестройкой несущей частоты 30...40 40...50 60...70
с перестройкой периода следова- ния импульсов 30...40 50...60 60...70
В векторной форме огибающая А может быть записана так:
Л = A Т, (/), тДг), Ф(г> <л(г) То (г)},
где U, Ti, ти, ср, <цТа соответственно амплитуда, период следования,
длительность, фаза, частота импульсов и период пачек импульсов.
Все эти параметры являются функциями времени.
Такой качественный анализ показывает, что в общем случае
сигнал содержит большое число параметров, несущих определен-
ную разведывательную информацию. Возникает вопрос: все ли
параметры сигналов необходимо измерять, а если не все, то какие?
На первый взгляд кажется, что, если каждый параметр несет ин-
формацию, надо измерять все, но такой вывод не всегда является
верным.
Во-первых, измерение всех параметров значительно усложнит
аппаратуру анализа, обработки и передачи данных. Во-вторых,
может снизиться пропускная способность станции, так как изме-
рение некоторых параметров требует длительного времени. На-
пример, измерение периода вращения антенны Та занимает время
от миллисекунд до нескольких десятков секунд. Поэтому при вы-
боре параметров надо исходить из конкретно решаемых задач
станцией радиотехнической разведки и учитывать вклад каждого
параметра в их решение.
424
Чаше всего анализ сигналов производится в целях опознавания
типа РЛС, идентификации пеленгов при синхронном и асинхрон-
ном пеленговании. В качестве критерия, по которому осуществля-
ется отбор параметров для анализа, может быть принята средняя
вероятность опознавания типа радиолокационных станций или
средняя вероятность индивидуального опознавания:
Р = — ZP ,
°" NiT\ ош
где /V — число типов РЛС;
Роп/ — вероятность опознавания /-го типа, характеризую-
щая отношение числа случаев правильного опозна-
вания к полному числу испытаний.
При автоматическом опознавании измерение Х-го параметра
производится с точностью, определяемой дискретным интервалом
В процессе работы Х-й параметр может принять любое из
f X, -X, • ]
। _ a max-A_min_ । значений. Здесь X*. , X. min — максимальное и ми-
I J
нимальное значения Х-го параметра. Обозначим через т тип ра-
диотехнической станции, полученный устройством автоматиче-
ского опознавания при конкретном значении параметров.
Введем функцию 8(/и-/), равную единице при m = i и нулю
при всех остальных значениях аргумента, т.е.
, ч 11 при т = г.
[О при т * I.
Тогда вероятность опознавания РЭС z-го типа при измерении
одного к-го параметра можно определить из выражения
Y 8(т - >)
оп/
~^к max min
ДХА
Если известна вероятность опознавания по каждому параметру,
то вероятность опознавания по совокупности параметров опреде-
ляется согласно формуле сложения вероятностей
л ( 11 \ Н л , ч Л-1 п л / \
р ЕЛ =1Р(А)-£ Е^(ЛЛ) +
J fc-l A=l j=kA х 7
+”Z I t P(AiAJAi)-...+(-l)"-'p(flAt'}. (18.1)
Л=1 j^k-л /=у+1 x 7 \k=\ J
Для определения числа измеряемых параметров необходимо
найти среднюю вероятность опознавания по каждому параметру
Р(Х,), затем, расположив вероятности в порядке их убывания, вы-
425
числить по формуле 18.1 вероятность опознавания по двум, трем
параметрам и т.д. Процесс привлечения новых параметров про-
должать до тех пор, пока полученная вероятность не будет выше
заданной.
Пример. Пусть известны вероятности опознавания типа РЛС
по трем параметрам:
Р(\ =7) =0,5; Р(Х2 = /)=0,4; Р(Х3 = т4) = 0,3.
Вероятность опознавания типа РЭС по совокупности парамет-
ров должна быть не ниже 0,9. Вычисляем
£a 1=/>(>-,) + р(ъ) + рМ - р(Ъ)р(Ъ) -
\Л=1 /
~/>(Х2) Р(Х,) - Р(\) Р(Х,) + Р(К,) »0,79.
Следовательно, для опознавания необходимо привлечь допол-
нительные параметры, например период вращения антенны.
Неясным остался вопрос нахождения средней вероятности
опознавания по каждому параметру. Методика ее определения
приведена ниже. Она позволяет дать оценку информативности па-
раметров через ортогональность функций <р( распределения пара-
метров, определяющих степень неоднозначности опознавания.
Введем коэффициент неортогональности распределений пара-
метров z-й и у-й радиолокационных станций:
где Sj — область определения параметров z-й и у-й РЛС.
При У типах РЛС коэффициент неортогональности имеет вид
Йу =^7-7 Z /ф,(*)<Р,(Х)Л + —Ц-У J<p,(X>,(7)<A +
/V — 1 ' = ! /V — 2 1=2
+ т/ > V f Ф* (X)<P1 (X)dX+.. .+f <p,v (х)<р„ (X) dk.
Jy — К I=k
Таким образом, информативность признаков (параметров)
можно сравнить по значению суммарного коэффициента неорто-
гональности. Чем меньше этот коэффициент, тем меньше пере-
крываются параметры и тем выше их информативность. Метод
оценки информативности признаков является оптимальным, по-
скольку в нем учитывается наиболее полная характеристика —
функция распределения параметров.
18.5. ОБОСНОВАНИЕ ПРЕДЕЛЬНЫХ ЗНАЧЕНИЙ
ПАРАМЕТРОВ
Обоснование предельных значений параметров проводится на
основе статистического анализа параметров радиоэлектронных
средств, находящихся в зоне разведки. Ввиду того что в полосе
426
разведки могут находиться радиоэлектронные средства, парамет-
ры которых сильно отличаются друг от друга и их дисперсия очень
велика, необходимо ограничивать диапазон предельных значений
параметров. Считается допустимым 95%-ный уровень значимо-
сти. Это означает, что диапазон частот, а также других параметров
должен быть выбран так, чтобы в него попадало 95% всех РЛС в
зоне разведки. При этом необходимо учитывать важность разве-
дываемых средств. Нельзя допускать, чтобы важные с точки зре-
ния радиотехнической разведки радиоэлектронные средства оста-
вались за пределами диапазона. Чтобы учесть эти факторы, произ-
ведем статистическую обработку параметров. Методику обработки
покажем на примере несущей частоты.
На основании данных табл. 18.1 строим диаграмму параметров.
По диаграмме строим гистограмму распределения числа типов
Рис. 18.2. Гистограмма распределения РЛС
по диапазону частот
На диаграмме записываем для каждого типа станций их число
и важность. Важность определяется коэффициентом от 1 до 4. По-
сле этого строим суммарную гистограмму распределения радио-
электронных средств по параметру с учетом важности и числа эк-
земпляров РЛС в типе (рис. 18.3).
По суммарной гистограмме определяем 95%-ный уровень зна-
чимости параметров, который соответствует частотному диапазо-
ну станции радиотехнической разведки. Аналогично производим
статистическую обработку других параметров. Полученные гис-
тограммы распределения позволяют определить вероятность опо-
знавания по каждому параметру. Для этого предварительно нахо-
дим вероятность работы радиолокационной станции на каждой
частоте 7^.
Среднюю вероятность опознавания вычисляем по формуле
р, л^р„,
п /Л
где п — число слагаемых, равное числу дискретов, на кото-
рое разбит диапазон /mil) - /тах.
427
W(7)
68,1? -
66,15
62,13-
44,11
36,9-
123
Рис. 18.3. Суммарная гистограмма распределения РЭС
по параметру Ти
Число дискретов определяется диапазоном возможных значе-
ний параметров, точностью измерения, наглядностью отображе-
ния. На практике при статистической обработке параметров по
выбору их предельных значений принимают следующие значения
дискретов: Д/ = 50... 100 МГц; Дт„ = 0,1 мкс; ДГН = 100 мкс.
18.6. ОБОСНОВАНИЕ ТРЕБОВАНИЙ К ТОЧНОСТИ
АНАЛИЗИРУЮЩЕЙ АППАРАТУРЫ
ПРИ ИЗМЕРЕНИИ ПАРАМЕТРОВ
Точность измерения параметров является важнейшей характе-
ристикой приемно-анализируюшей аппаратуры станции радио-
технической разведки. Ее чрезмерное завышение приводит к значи-
тельному усложнению разведывательной аппаратуры. На рис. 18.4
показана зависимость коэффициента сложности анализатора дли-
тельности импульсов от точности ее измерения Дт. Из графика,
например, следует, что уменьшение ошибки измерения с 0,1 до
0,025 мкс усложняет аппаратуру в десять раз.
Рис. 18.4. Зависимость сложности аппаратуры измерения
длительности импульса от точности измерения
428
В свою очередь, занижение точности анализа приводит к сни-
жению эффективности аппаратуры радиотехнической разведки.
При ее разработке необходимо найти компромиссное решение,
которое позволило бы при заданном критерии эффективности по-
лучить минимальную сложность аппаратуры. В качестве такого
критерия наиболее удобно принять:
снижение вероятности опознавания типа РЛС в допустимых
пределах при уменьшении точности измерения;
снижение вероятности индивидуального опознавания РЛС в
допустимых пределах при снижении точности анализа.
В первом случае, задаваясь вероятностью опознавания типа
РЛС Роп = const и используя зависимость Роп = /(ДХ(), можно
определить необходимую точность измерения параметра
Считается допустимым снижение вероятности опознавания Роп
на абсолютную величину 0,05 по сравнению с вероятностью
опознавания, когда ошибка измерения отсутствует. Во втором
случае задача значительно усложняется, поскольку нет соответ-
ствующих зависимостей критерия эффективности от точности
измерения.
Рассмотрим одну из методик,
позволяющих оценить необходи-
мую точность измерения параметра
А,, при индивидуальном опознава-
нии. Пусть имеется к сигналов РЛС
одного типа. По параметру \ созда-
ется строб селекции ДА, (рис. 18.5).
Рис. 18.5. Формирование строба
селекции
Задача состоит в том, чтобы в стробы по возможности попадали
сигналы только от одной радиолокационной станции. Вероят-
ность попадания в строб селекции из £-1 оставшихся сигналов
равно т сигналов (т = 2, 3, ..., к-l) определяют следующим обра-
зом:
— \ к — 1 -<
1 _ р 1
1 7
где Р^ — средняя вероятность попадания сигнала в строб се-
лекции шириной ±ДА...
На практике можно считать, что параметры РЛС распределены
по нормальному закону со средней квадратической погрешностью
<j;. В этом случае вероятность попадания в строб шириной ±ДА.у
определяют по формуле
где ДАу — ширина строба;
сг — дисперсия параметра у-й РЛС.
429
При значениях------~ = 5, <0,3 средняя вероятность попадания
_ г? '
Идентификация РЛС имеет место в том случае, если вероят-
ность непопадания в строб других сигналов равна единице:
л,*.. *’•
При условии 5у < 0,3 для одномерного строба имеем
«1 -Ц8(* -1)8,
или
1 - р
0,8(£ -1) ’
Учитывая, что 5у =---J—> получаем ДХ. = л/2-оу5у. Размеры
a,V2
строба селекции, выраженные через вероятность непопадания
сигналов мешающих РЛС, находим по формуле
Задаваясь значением PQ = 0,9, получим
Пример. Средний квадратический разброс частоты сигна-
лов РЛС AN/APQ-120, установленный на самолете “Fantom”, ра-
вен 120 МГц. Экспериментальные данные получены при измере-
нии параметров пятидесяти пяти РЛС, т.е. к = 55. Определив зна-
чение строба селекции, получим, что если ставится задача
индивидуального разрешения по частоте самолетных РЛС
AN/APQ-120, то погрешность измерения должна быть не более
170 кГц.
Из рассмотренной методики следует, что для обоснования не-
обходимой точности измерения параметров в интересах поэкземп-
лярной идентификации необходимо знать средний квадратиче-
ский разброс параметров РЛС оу и число сигналов РЛС одного
типа на входе станции радиотехнической разведки.
430
18.7. МЕТОДИКА РАЗБИВАНИЯ ЧАСТОТНОГО
ДИАПАЗОНА НА ПОДДИАПАЗОНЫ
До сих пор разбивание частотного диапазона на поддиапазоны
между станциями РТР и внутри диапазона одной станции произ-
водилось условно, без учета интенсивности работы РЛС в различ-
ных участках диапазона. В настоящее время в качестве критерия
выбора границ частотного диапазона принят критерий равномер-
ной загруженности. Для удовлетворения этого критерия необхо-
димо выполнить следующие операции.
1. По данным приведенных в диаграммах и гистограммах рас-
пределений РЛС по диапазону (см.рис.18.2) и характеристикам
работы радиоэлектронных средств найти математическое ожида-
ние числа одновременно работающих РЭС z-ro типа:
=КЛТС1,
где Nj — суммарное число РЭС z-ro типа, состоящих на зада-
нии разведывательной станции того или иного зве-
на;
X. — средняя частота включения РЭС z-ro типа, 1/ч;
Tci — средняя продолжительность сеанса РЭС z-ro типа.
Пример. Станция GS-17449 работает сеансами Тс/ = 10 мин =
= 1/6 ч и в сутки выходит на излучение 12 раз. Следовательно, Х =
= 12/24 ч = 0,5 (1/ч). В зоне разведки находится 18 комплексов,
тогда Af0(. = А, X. Tei «11
2. Зная диапазон рабочих частот всех типов РЭС, состоящих на
задании, произвести построение графиков плотности математиче-
ского ожидания числа одновременно работающих РЭС с учетом
перекрывающихся участков в диапазоне /min - /тах, т.е. построить
зависимости:
у(/) = —2*—для неперекрывающихся участков диапазона;
i
Mr ft
— для перекрывающихся участков,
где А/, — диапазон частот работы РЭС z-ro типа;
mf— число типов РЭС, состоящих на задании и работаю-
щих в диапазоне А/..
3. Разбить диапазон /т1П - /тах на поддиапазоны из условия
равномерной их загруженности работающими средствами:
Л, /-
где f - fj+\ — границы частотных диапазонов.
Но данное выражение не позволяет определить значение гра-
ниц, так кактаких равенств может быть бесчисленное множество.
Надо найти дополнительные условия, которые бы позволили од-
нозначно определить значения f, ft+\. Такими условиями могут
431
быть время, выделяемое на проведение разведки, а также время на
разведку одного радиоэлектронного средства. Тогда в качестве
критерия максимизации интервала/ -/+) можно принять отноше-
ние
'с min
где Гр — время разведки, отводимое на операцию. Для станции опе-
ративной разведки оно равно 8 ч, для станции оперативно-тактиче-
ской разведки — 6 ч, для станции тактической разведки — 1,5 ч, поэ-
£ N-T .
__ л I вр/
тому Тс = (30...40) Твр (здесь Т = -----),
где Твр, — период вращения антенны РЭС /-го типа;
m — число типов РЭС, состоящих на задании;
Ny — суммарное число РЭС всех типов, состоящих на за-
дании.
Таким образом, рассмотренная методика позволяет объектив-
но, с учетом равномерной загрузки станций радиотехнической
разведки определять границы частотных диапазонов на этапе раз-
работки. г
18.8. ОПРЕДЕЛЕНИЕ ПОТОКА СИГНАЛОВ НА ВХОДЕ
СТАНЦИИ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ
Поток сигналов на входе станции радиотехнической разведки
определяет требуемое быстродействие и необходимую пропуск-
ную способность. Этот поток создается излучениями радиоэлект-
ронных средств, находящихся в полосе разведки, уровень сигнала
которых на входе приемного устройства станции РТР будет доста-
точным для срабатывания анализирующей и регистрирующей ап-
паратуры.
В общем случае число сигналов /-го типа на входе станции РТР
определяется выражением
К21
yN.
где К,. =---— коэффициент, характеризующий отношение
числа радиоэлектронных средств /-го типа,
мощность сигналов которых на входе станции
РТР превышает реальную чувствительность
приемника, к числу всех средств /-го типа;
^2/ — коэффициент пространственной селекции за
счет избирательных средств диаграммы на-
правленности.
432
При прямоугольной аппроксимации диаграммы направленно-
сти
. A,W
сект
ширина диаграммы направленности по уровню 0,5Л,
ширина сектора разведки.
где ДР,;0.5
Рсект
Рассмотрим методику определения коэффициента Кц.
Из оперативного построения войск противника определяем ко-
личественное размещение радиоэлектронных средств по полосам
обороны. Делая допущения о равномерности распределения ра-
диоэлектронных средств в каждой полосе обороны, строим зави-
симость процентного отношения энергетически доступных РЭС
каждого /-то типа от дальности разведки.
Энергетически доступными считаются такие радиоэлектрон-
ные средства, уровень сигналов которых превышает реальную чув-
ствительность приемников, т.е. для которых выполняется условие
(12.6).
Остановимся на выборе коэффициента различимости тр. В
станциях радиотехнической разведки требуемое отношение сиг-
нал/шум определяется необходимой точностью измерения времен-
ных параметров (длительности и периода повторения импульсов).
Средняя квадратическая погрешность флуктуаций определяет-
ся из выражения
тф.'|
фр
(18.2)
где тфр — длительность фронта импульса (для РЛС сантиметрово-
го диапазона тфр= 0,05...0,1 мкс).
Из выражения (18.2) находим
U
фр
тфл
Если известна требуемая точность измерения параметров А/ из
заданной вероятности опознавания, то можно определить допус-
тимую погрешность сттфл. Для случая равномерного распределения
ошибок в интервале Д/ имеем
М
Приравнивая требуемую точность измерения параметра <j. к
флуктуационной ошибке о1ф/1, получаем
433
тогда
ис _2Убтфр
т = 12^
I Аг )
(18.3)
Для проверки условия Рс вч > Рреал строим график зависимости
Рс = Л^р)- На этом же графике (рис. 18.6) проводим горизонталь-
ную прямую, соответствующую реальной чувствительности при-
емника, которая оценивается по известной формуле:
Л = *?¥.,₽ (^пр +'а -1)>«р >
где к— постоянная Больцмана, к = 1,38 • 10‘23 Дж/К;
Т — эффективная шумовая температура антенны, Т =
= 290К;
Д/||р — полоса пропускания линейной части приемника —
Д/нр (здесь Tmin — минимальная длительность
^min
импульса);
Afnp — коэффициент шума приемника;
га — относительная шумовая температура антенны.
Рис. 18.6. Номограммы для определения количества
энергетически доступных РЭС
434
Точка пересечения прямой, соответствующей реальной чувст-
вительности приемника Рр, и функции Рс/ = /(Z)p) показывает до-
стижимую дальность разведки /-го средства. Проектируя эту точку
на кривую коэффициента электромагнитной доступности К\, по-
лучаем значение коэффициента Aq/для РЭС /-го типа. Аналогич-
но, построив зависимость Рс = /[Ьр) и Кц = flj)p) для всех типов
РЭС, подлежащих разведке, определим число энергетически до-
ступных радиоэлектронных средств всех типов.
Рассмотрим порядок определения коэффициента пространст-
венной селекции. Диаграмма направленности антенны станции
радиотехнической разведки имеет пространственную избиратель-
ность, поэтому из общего числа сигналов РЭС на вход станции бу-
дет поступать только часть сигналов. Коэффициент А^/ можно
определить из графика (рис. 18.7). На графике в первом квадранте
по оси абсцисс отложено значение эквивалентной чувствительно-
сти Эр, а по оси ординат — значение коэффициента усиления ан-
тенны Ср. Во втором квадранте в логарифмическом масштабе по-
строена зависимость коэффициента усиления антенны от ширины
диаграммы направленности, в третьем квадранте — коэффициент
пространственной селекции А^/. Методика нахождения коэффи-
циента пространственной селекции сводится к следующему. Ис-
ходя из требуемого значения эквивалентной чувствительности
(точка А), проводим вертикальную линию до пересечения с ли-
нией реальной чувствительности приемника. Затем точку пересе-
чения проектируем на ось Y и находим требуемое значение Gp.
Рис. L8.7. Номограммы для определения динамического диапазона
приемного тракта станции РТР
435
Перенося значение Gp на кривую б'р - ф(₽0) и проектируя точку
пересечения на ось X, получаем требуемую ширину диаграммы на-
правленности (точка В), а также коэффициент X2i (точка Q.
Перейдем к определению динамического диапазона приемных
устройств станций радиотехнической разведки. Динамический
диапазон — это отношение максимального к минимальному сиг-
налу на входе приемника:
1 с mln их
Максимальный уровень сигнала определяется по самой ниж-
ней из полученных кривых Рс. = /(^р) (см. рис. 18.6), минималь-
ный уровень — реальной чувствительностью приемника. Динами-
ческий диапазон определяется переносом соответствующих точек
графиков на ось Рс.
18.9. ОБОСНОВАНИЕ ТРЕБОВАНИЙ К БЫСТРОДЕЙСТВИЮ
АППАРАТУРЫ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ
Источниками разведывательных сведений при ведении радио-
технической разведки является совокупность радиотехнических
средств, расположенных на местности. Из всех технических пара-
метров, характеризующих отдельные типы радиолокационных
станций, в данном случае представляют интерес только те, что
определяют уровень сигнала на входе приемника станции РТР и
время обслуживания. Этими параметрами являются:
Рл — мощность РЛС;
Од — коэффициент усиления антенны РЛС;
X— длина волны;
Ро — ширина диаграммы направленности РЛС по уровню 0,5;
(о— скорость вращения антенны.
Максимальная дальность разведки по главному лучу без учета
потерь в атмосфере определяется выражением
где Gp — коэффициент усиления антенны станции РТР;
у — суммарный коэффициент потерь сигнала;
Pmm — чувствительность разведывательного приемника.
Введем следующие обозначения: у =~ylP.iG,}; е =—— .
' Л™
Передающий потенциал у целиком определяется параметрами
РЛС, а приемный потенциал е — параметрами станции радиотех-
нической разведки.
436
Радиолокационные станции облучают станцию РТР в течение
времени г0 = 7\ —. Так как они расположены на различных даль-
2л
ностях от разведывательной станции, то время облучения /обл
представляет собой функцию дальности:
0,0620
. Ро
при 0 < — < 1;
Ро
при 1 < — < —
где — коэффициент усиления антенны РЛС при отклоне-
нии ее на угол 0;
GjiO — коэффициент усиления антенны в главном направ-
лении.
Если время облучения выразить через характеристики антенны
и максимальную дальность разведки Z)max, то аппроксимирующая
функция для гОбл будет иметь вид
1,7г0 In при 1 < < 4;
°]| ДР Др
Q5ro^L при £ш^>4,
где Z)p — удаление РЛС от станции разведки.
Сигнал, принятый приемником, может быть обработан, если
выполняется неравенство
4>бл > 4>бр> (18.4)
где гОбр — время обработки сигнала.
Таким образом, заключение о том, будет ли сигнал РЛС дан-
ного типа, расположенной на дальности D от станции разведки,
принят, можно сделать на основании проверки неравенства
(18.4).
Одной из важнейших характеристик эффективности станции
РТР, оценивающей возможности разведки всей совокупности ра-
диолокационных станций, составляющих радиолокационное
поле, является процент обнаруженных станций в заданной зоне
разведки £>з. Эта величина может быть найдена путем проверки
выполнения неравенства (18.4) для каждой РЛС в зоне разведки.
Расчеты вручную представляют большой объем операций, поэто-
му на рис. 18.8 представлены графики, полученные с помощью
цифровой ЭВМ.
Рис. 18.8. Зависимость доли обнаруженных РЛС
от приемного потенциала станции РТР
г. =-----------
Обо
Параметром зависимостей служит время обработки, измеряе-
мое в секундах. Эти зависимости хорошо аппроксимируются вы-
ражением
1-е , (18.5)
)
где е — приемный потенциал станции, 1/Вт;
D3 — глубина зоны разведки, км;
^обр — время обработки сигналов, мс.
Выражение (18.5) позволяет определить при заданной эффек-
тивности (в качестве критерия эффективности принят процент об-
наруженных станций) необходимое быстродействие аппаратуры ра-
диотехнической разведки. Или наоборот, если известно быстродей-
ствие разведывательной аппаратуры, то можно определить общее
число обработанных сигналов РЭС, находящихся в зоне разведки:
где Кэ д у ~ средний коэффициент энергетической до-
ступности;
т| — процент обнаруженных станций;
N— общее число РЛС всех типов.
438
18.10. ОБОСНОВАНИЕ ТРЕБОВАНИЙ К СТАНЦИИ РТР
ПО ТОЧНОСТИ ПЕЛЕНГОВАНИЯ ИСТОЧНИКОВ
РАДИОИЗЛУЧЕНИЙ
Обоснование требований к станции РТР по точности пеленго-
вания производится в такой последовательности:
определяют требуемую точность измерения координат объек-
тов радиотехнической разведки;
по требуемой точности измерения координат находят требуе-
мую точность пеленгования.
Место расположения источника радиоимпульсов определяют
при радиотехнической разведке путем нахождения точек пересе-
чения линий положения, главным образом пеленгов. Ввиду того
что цели пеленгуются с ошибками, отметка от цели может стоять
далеко от истинного ее положения. При наличии нескольких це-
лей в зоне разведки отметки одной цели могут быть отнесены к
другой, и наоборот. Задача состоит в том, чтобы правильно сгруп-
пировать отметки пеленга. Качество группирования в значитель-
ной степени зависит от расстояния между объектами (ПРИ) на
местности и от алгоритма группирования. Таким образом, задача
группирования сводится к привязке отметок целей радиотехниче-
ской разведки к истинному положению объекта. Рассмотрим про-
стейший метод группирования.
Допустим, точки А и В — “истинные” точки положения разве-
дываемых РЛС. Проведем вокруг точки окружность радиусом Rq и
будем считать, что первая отметка правильно идентифицирована с
объектом А, если она лежит внутри круга, а вторая отметка мешаю-
щего объекта лежит вне круга. Вероятность события правильного
группирования отметок объекта соответствует событию, происхо-
дящему по следующей логической схеме: если 7?л1 < Tfy и Я42 > Яо,
то группирование правильное, в противном случае — ложное.
При круговом рассеивании ошибок аппаратуры радиотехниче-
ской разведки <тк = <уи = о0ш вероятность попадания первой отмет-
ки в круг радиусом Rq:
<Я0)=1-е
Вероятность попадания “чужой” точки от соседнего мешающе-
го объекта может быть найдена путем двойного интегрирования:
^Я02-(х-Я)2 Я+Яо
P(Ra2<Rq)=2 f f W(x,y)dxdy, (18.6)
о я-я0
где R — расстояние между объектами А и В;
у = ^Rq -(х - 7?)2 — уравнение окружности.
После подстановки выражения
439
И/(х,у) =
1 2<r
_________g 4 и 011)
2ттсг;ш
в равенство (18.6) и интегрирования получим
Р(ЯЛ2 <r„)-——=
®ош №
R+R(,
I
й-/?0
2ooiu
е
2х
где Ф(х) =-f е 2 dt — табулированная функция,
я о
Тогда вероятность правильного группирования можно опреде-
лить из выражения
Рис. 18.9. Зависимость вероятности правильного
группирования от радиуса пороговой окружности
На рис. 18.9 приведена зависимость вероятности правильного
группирования от радиуса пороговой окружности Rq и расстояния
между соседними объектами, выраженных в относительных еди-
ницах. При расчете вероятности правильного группирования в
выражение (18.6) входит значение R — расстояние между объекта-
ми. Но R не является постоянной величиной и зависит от насы-
щенности зоны разведки радиоэлектронными средствами.
440
Чтобы определить расстояние
между объектами, необходимо ре-
шить статистическую задачу, т.е. най-
ти сначала распределение расстояний
между соседними объектами или ра-
диолокационными станциями на
местности.
Распределение РЛС на местности
неравномерно. Примерная зависи-
мость плотности объектов на местно-
сти р0 от удаления их от линии фрон-
та D показана на рис. 18.10.
Несмотря на общую неравномер-
ность распределения РЛС, на круп-
ных участках местности всегда можно
выделить менее крупные районы, где Рис. 18.10. Плотность распреде-
станции расположены приблизитель- ления РЛС на местности
но равномерно. К участкам, где плот-
ность распределения РЛС на местности является постоянной ве-
личиной, можно применить закон Пуассона, согласно которому
вероятность того, что на площади 5 расположено ровно к радио-
локационных станций:
к\
Найдем распределение расстояний между соседними РЛС при
условии их равномерного распределения на плоскости. Обозна-
чим событием А появление хотя бы одной точки в круге радиуса г с
центром, совпадающим с точкой расположения любой РЛС поля,
а случайной величиной Z — расстояние между центром круга и
ближайшей соседней точкой. Тогда вероятность того, что событие
А произойдет в интервале значений Zot 0 до г :
P(J) = P(Z<r) = l -е"р<
Таким образом, плотность распределения расстояний между
ближайшими соседними точками (нулевой и первой соседней):
Представляет также интерес плотность распределения расстоя-
ния между нулевой и второй соседней точками. Обозначив через
событие появление в интервале значений Zot 0 до г хотя бы двух
точек, получим
Р(5)=1 -е"а(1 +а),
где а = тсрг2, откуда
^(х) = 2к2р2г\-прг\
441
Применяя метод математической индукции, находим распре-
деление расстояний между нулевой точкой и /-й соседней:
И/.('-) = 2(,1р)(ГГ^ —<=1,2... (18.7)
Это выражение — распределение Эрланга. Найдем модуль и
первые моменты распределения.
Продифференцировав выражение (18.7), получим
</ИК(г) 2(тгг¥ , ,z ,ч
---r2'~2(2i-l-2прг2),
откуда
Математическое ожидание
Дисперсия определяется выражением
тер
Найдем усредненную вероятность группирования отметок объ-
ектов типового радиолокационного поля.
Выше были получены зависимости вероятностей правильного
группирования отметок радиотехнической разведки от расстояния
между двумя соседними объектами, причем один из этих объектов
рассматривался как мешающий.
В реальном радиолокационном поле вероятность правильного
группирования отметок от РЛС вокруг какого-либо объекта ока-
зывает влияние на все станции поля. Если оценить мешающие
РЛС к-го порядка, то можно считать, что расстояния между сосед-
ними объектами распределены по закону Релея:
R2
W(R) = 2а’,
° R
0,56
где .
ур
Средняя вероятность группирования для любого объекта ра-
диолокационного поля
442
Р„ =] Pm(P)^(P)dR,
о
где
О при
р.Ар) =
-fo.4—-0.3 [
— <0,25;
^ош
при > 0,25.
^ош
1 - е 1 °ош
На рис. 18.11 приведена усредненная зависимость вероятности
правильного группирования от отношения —
СТОШ
Пользуясь графиком для заданной вероятности правильного
группирования, получают значение отношения
^- = К.
°ош
Рис. 18.11. Зависимость вероятности правильного группирования
от отношения оЛ/оош
443
Допустимая средняя квадратическая ошибка местоопределения
источника радиоимпульсов с заданной вероятностью
°оШ
0,56
Точность пеленгования связана с ошибкой местоопределения
следующим соотношением:
о
ош
0,0175ona f Я2 1
------2— + i
sin а Ш d2 2
R d V 2
— + — - cos а
d 4R )
(18.8)
где Ср— средняя квадратическая ошибка пеленгования;
а — угол между центром базы и направлением на цель;
R — дальность (глубина) разведки;
d— база пеленгования.
Если глубина разведки известна из тактических условий, то
выбираем базу, как d ~ R/2. Угол а определяется выражением а =
= arccos d/R.
Из выражения (18.8) находим среднюю квадратическую ошиб-
ку пеленгования:
_ _ sinao0lu
°Р П---------Гг=---------:--------:
none 1э^ 1 Н } 2
0,0125a 2-ТГ- + - — + — -cos a
Ш d2 21 U 4R)
0,56 v
где о0Ш tf.
VP
Зная среднюю квадратическую ошибку ap и исходя из нормаль-
ного закона распределения ошибок, выбираем ширину диаграммы
направленности:
ДР “6сУр.
Графическое определение необходимой точности пеленгова-
ния можно произвести в следующем порядке:
1. Определяем среднее квадратическое расстояние между РЛС
на местности:
0,56
= ~г,
VP
7УрЛС
где р = —-------плотность распределения РЛС, не различаю-
щихся по параметрам.
2. Задаваясь вероятностью правильного группирования отме-
ток цели, находим по графику (см. рис. 18.11) отношение
^- = К,
" СТоШ
444
отсюда
°ш к-
3. Зная о0Ш, определяем
4. Зная Gp, находим ширину диаграммы направленности по
уровню 0,5Р:
Дра
18.11. ОБОСНОВАНИЕ ТРЕБОВАНИЙ К ТОЧНОСТИ
ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПРИ ИНДИВИДУАЛЬНОМ
ОПОЗНАВАНИИ
Описанная ранее методика предполагает нормальное распреде-
ление в пределах измерения параметров одного типа РЛС. Реально
получить такое распределение не всегда удается. Кроме того, в ней
не учитываются разброс параметров внутри образца и вероятность
пропуска сигнала. Рассмотрим методику обоснования требований
к точности анализа сигналов с учетом этих дополнительных воз-
можностей, основываясь на реальных данных.
Индивидуальное опознавание производится по характерным
признакам принадлежности сигналов к конкретному экземпляру
РЛС. К таким признакам при радиотехнической разведке в первую
очередь относят средние значения несущих частот, периода повто-
рения и длительности импульсов. Эффективность опознавания за-
висит от степени разброса этих параметров от образца к образцу, от
числа радиолокационных станций одного типа в зоне разведки.
На рис. 18.12 представлены экспериментальные значения рас-
пределения однотипных РЛС по несущей частоте. Как следует из
рисунка, распределение не является равномерным. Однако для
небольших участков диапазона равномерное распределение мож-
но считать допустимым. В этом случае применим закон Пуассона,
Рис. 18.12. Экспериментальные значения распределения
однотипных РЛС по частоте
445
согласно которому вероятность того, что на участок длиной г по-
падут сигналы к РЛС, определяется формулой
(рг)
Рк =^-2е-рг,
к к\
С
где р — плотность потока сигналов.
Найдем распределение расстояния между средними значения-
ми параметров соседних радиолокационных станций.
Применяя метод математической индукции, получаем распре-
деление расстояний между нулевой и j-й соседними точками:
Это распределение есть не что иное, как распределение Эрлан-
га. Найдем его параметры:
_ 7 p'r‘~'e~pr , i
г = f г—,-----—аг = -:
1 О -1)! р’
2 7 2 р'>/_,е рг г WZ VI2 *
“ОТ ЛМ')] =^-
На рис. 18.13 представлены гистограммы распределения между
нулевой и Z-й точками. Их числовые характеристики сведены в
табл. 18.3.
Таблица 18.3
i I 2 3 4 5 6 7 8
2,05 4,1 6,15 8,2 10,25 12,3 14,35 16,4
2,05 2,9 3,52 4,1 4,6 5,05 4,45 5,8
mrT 0,59 1,18 1,77 2,36 2,96 3,52 4,15 4,7
<5rT 0,59 0,83 1,02 1,18 1,32 1,44 1,55 1,66
2Ь
О
0 2 4 6 8 1012141618Д f, (Мгц)
Рис. 18.13. Гистограммы распределения
расстояния между средними значениями
признаков распознавания
Рис. 18.14. Пороговый алгоритм
распознавания
446
Рассмотрим применение порогового алгоритма для индивидуа-
льного распознавания РЛС.
В системе координат f и Т (рис. 18.14) изобразим прямоуголь-
ник размером 2а*2Ь (2а = ДХ(,2Ь = ДХ2 — значения строба). Точка-
ми обозначим отметки сигналов первой РЛС, а крестиками — вто-
рой. Будем считать, что точка 1 правильно идентифицирована с
первой РЛС, если она лежит внутри прямоугольника, а отметка
мешающей РЛС — вне его. Это событие характеризуется вероят-
ностью правильного индивидуального опознавания Рпр.
При идентификации по двум параметрам вследствие их неста-
бильностей и ошибок измерения двумерный закон распределения
параметров каждой РЛС имеет вид
I /2 2kT,f Т2 1
W(T„ /) =-------\ е ,
2лауОгд/1 -к2
где az и сГ1 — средние квадратические ошибки разброса пара-
метров вокруг среднего значения параметров/и
Т соответственно;
к — коэффициент корреляции между параметрами.
Как показали экспериментальные исследования, статистиче-
ская связь между параметрами f и 7} отсутствует, и можно поло-
жить, что к = 0, тогда
= ---е
f2 , т2
и] ' 2<т|
Вероятность попадания отметок первой РЛС в строб селекции,
ограниченный прямоугольником 2а*2Ь, определяется выражением
(18.9)
J Ег ,
где Ф— приведенная функция Лапласа;
/, и Г, — средние значения параметров первой РЛС;
Ех = 0,62ах.
Вероятность попадания отметок второй РЛС в строб селекции
характеризует вероятность ошибочной идентификации:
> л
°Ш2 4
где /2 и Т7 — средние значения параметров второй РЛС.
Аналогично определяется вероятность ошибки за счет попада-
ния в строб селекции сигналов других соседних радиолокацион-
ных станций. Хотя в основном на значение ошибки влияют сигна-
447
лы второй РЛС, иногда необходимо учитывать влияние третьей и
четвертой.
Вероятность непопадания отметок второй РЛС в строб селек-
ции определяется как
р -1 _ р
а вероятность правильной идентификации
Лр =Р(1-РОШ).
(18.11)
Согласно выражению (18.11) с учетом формул (18.9) и (18.10)
построены графики зависимости вероятности правильного инди-
видуального распознавания РЛС от разности Дх между средними
значениями параметров/ и 7^ выраженной в относительных еди-
ницах, и от размеров строба — (рис. 18.15). Графики позволяют
о
выбрать оптимальные размеры стробов идентификации. Из них
следует, что оптимальные значения размеров строба при Рпр > 0,9
соответствуют — = — >2. Таким образом, чтобы правильно выбрать
о о
размер строба, необходимо теоретически или экспериментально
определить средний квадратический разброс параметров каждой
РЛС, найти среднее расстояние между параметрами и для задан-
Дх а о
ного значения —, выбрать оптимальное значение — и —.
а о а
Под средней квадратической погрешностью о понимают не то-
лько нестабильность параметров, но и погрешность измерения па-
раметров оизм, обусловленную влиянием шумов, ограниченностью
Рис. 18.15. Зависимость вероятности правильного индивидуа-
льного распознавания РЛС от размеров строба
448
времени анализа и методом измерения. Погрешность за счет изме-
рения при проведении экспериментальных исследований можно
уменьшить путем многократного измерения:
где п — число измерений.
18.12. МЕТОДИКА ОБОСНОВАНИЯ ТРЕБОВАНИЙ
К ТОЧНОСТИ ИЗМЕРЕНИЯ ПАРАМЕТРОВ
ДЛЯ ИНДИВИДУАЛЬНОГО РАСПОЗНАВАНИЯ РЛС
Для индивидуального распознавания радиолокационных стан-
ций могут использоваться как основные параметры сигналов
f, ти, Tt, так и тонкая структура сигналов. Тонкая структура сигна-
лов определяется характеристиками отклонения параметров сиг-
налов РЛС при их излучении. Чтобы разработать эффективную
аппаратуру анализа тонкой структуры сигналов, необходимо обес-
печить точность измерения параметров хотя бы на порядок выше
самих нестабильностей. Поэтому в первую очередь нужно знать,
какова стабильность параметров сигналов реальных РЛС против-
ника. Ответ на этот вопрос можно получить двумя путями: экспе-
риментально исследовать нестабильность параметров широкого
класса сигналов РЛС или теоретически оценить предельные зна-
чения нестабильностей, исходя из требований по помехозащи-
щенности. Первый путь, безусловно, важен, но требует больших
материальных затрат на создание аппаратуры и проведение экспе-
римента. Поэтому в настоящем учебнике рассмотрена методика
оценки нестабильностей расчетным путем через частотные и вре-
менные нестабильности радиолокационных станций.
Анализ частотных нестабильностей произведем для радиолока-
ционных станций, в которых имеется аппаратура череспериодного
вычитания для защиты от пассивных помех.
При изменении частоты передатчика от импульса к импульсу
(непреднамеренном) усредненный за длительность импульса ко-
эффициент корреляции сигналов на входе схемы вычитания
устройства череспериодной компенсации
sinTtA/rT„
^frxu
где &fr — разность несущих частот смежных импульсов после-
довательности;
хи — длительность зондирующего импульса.
Предельно достижимый коэффициент подавления
к - °’5 - 1
"" ! sin тсА/у тц
449
Так как на практике яД/гта « 1, то это выражение можно
упростить:
к - 3
""
Поскольку нестабильность носит случайный характер, то, за-
меняя Д/г на Од-, получим
Требуемая стабильность передатчика при его разработке опре-
деляется из выражения
V3
- Н=-
и пп
Коэффициент подавления помех задается как отношение мощ-
ности сигналов подавляющих помех на входе системы СДЦ к пи-
ковой мощности некомпенсированных остатков. В этом случае
к~
отсюда
& fперед
1
Для современных РЛС требуемый коэффициент подавления
помех кнп = 40 дБ.
В качестве примера оценим требуемую стабильность передат-
чика РЛС с рабочей частотой 3000 МГц и длительностью импульса
2 мкс:
7 <----------------=295 Гц,
f 2-3,14-2-Ю-6100
что соответствует относительной стабильности порядка 2,6 10-7.
Требования к аппаратуре радиотехнической разведки, предназ-
наченной для анализа тонкой структуры сигналов, должны быть
примерно на порядок выше и составлять для рассматриваемого
примера около 80 Гц. Такая точность очень высока и может быть
реализована только при большом отношении сигнал/шум, что не
всегда возможно. Поэтому использовать нестабильность передат-
чика от импульса к импульсу в качестве разведывательного призна-
ка принадлежности сигналов к конкретным РЛС нецелесообразно.
Требования к стабильности фазового сдвига в усилителе мощ-
ности РЛС предъявляются исходя из следующего выражения:
450
1
1-57°
<—= = 1Э/ =0,3°.
* ИЫ00
Измерить фазовые сдвиги в принятом сигнале также техниче-
ски сложно, поэтому в качестве разведывательных признаков при
анализе тонкой структуры сигналов используются характеристи-
ки, отражающие суммарные отклонения, связанные с изменением
амплитуды, частоты, фазы сигнала. Такой комплексной характе-
ристикой является огибающая спектра одиночного радиоимпуль-
са, полученная на выходе дисперсионного спектроанализатора.
Требования к стабильности периода повторения импульсов
РЛС предъявляются в соответствии с выражением
Т,
Для выявления индивидуального отклонения периода повторе-
ния импульсов РЛС ошибка измерения системы анализа станции
радиотехнической разведки должна соответствовать условию
540-4
ЮМ
Реализовать на практике такую точность можно только при бо-
льшом соотношении сигнал/шум и статистическом усреднении
большого числа импульсов.
Высокая стабильность несущей частоты, периода повторения
импульсов свидетельствует об устойчивости этих признаков во
времени. Так как разброс параметра 7} от образца к образцу РЛС
значительно превышает его нестабильность, то эти РЛС с успехом
можно разделить по основным параметрам f и 7} при условии, что
станции не изменяют свои параметры преднамеренно. Требова-
ния к точности измерения параметров в этом случае определяются
разбросом РЛС по измеряемому параметру: олтр <0,1oaAw.
Требования к стабильности длительности импульсов при раз-
работке РЛС определяются выражением
где о, — среднее квадратическое отклонение длительности
импульсов от номинального значения.
По существу, требования к стабильности длительности и пери-
ода повторения импульсов одинаковы, но разброс периода от об-
разца к образцу значительно ниже. Поэтому эффективность инди-
видуального распознавания по длительности импульсов хуже, и
этот параметр не следует рассматривать в качестве индивидуаль-
ного разведывательного признака принадлежности сигналов к
конкретным радиолокационным станциям.
СПИСОК ЛИТЕРАТУРЫ
1. Вакин С.А., Шустов Л.Н. Основы радиопротиводействия и ра-
диотехнической разведки. М.: Сов.радио, 1968. 448 с.
2. Демин В.П., Куприянов А.И., Сахаров А.В. Радиоэлектрон-
ная разведка и радиомаскировка. М.: Изд-во. МАИ, 1997. 156 с.
3. Палий А.И. Радиоэлектронная борьба. М.: Воениздат, 1989. 350с.
4. Вартасарян В.А. Радиоэлектронная разведка. М.: Воениздат,
1991. 225 с.
5. Фалькович С.Е. Оценка параметров сигналов. М.: Сов.радио,
1970. 336 с.
6. Горелик А.Л., Скрипкин В.А. Методы распознавания / Учеб,
пособие для вузов. М.: Высшая школа, 1984. 208 с.
7. Тихонов В.И. Статистическая радиотехника. 2-е изд., перераб. и
доп. М.: Радио и связь, 1982. 624 с.
8. Теория электромагнитного поля и распространение радиоволн.
Часть 2. Распространение радиоволн. Л.: ВАС, 1973. 255 с.
9. Ш ирман Я.Д. Теоретические основы радиоволн. М.: ВИРТА, 1984.
410 с.
10. Тверской В.И. Дисперсионно-временные методы измерений
спектров радиосигналов. М.: Сов. радио, 1974. 240 с.
452
ОГЛАВЛЕНИЕ
Предисловие...........................................................3
1. Задачи и методы ведения радиотехнической разведки..................5
1.1. Задачи радиотехнической разведки. Основные понятия и определения . -
1.2. Методы ведения радиотехнической разведки......................7
1.3. Общие сведения о добывании и обработке разведывательной информации 8
1.4. Пути рационального построения средств радиотехнической разведки. . 10
2. Обнаружение работающих радиоэлектронных средств противника........14
2.1. Обнаружение (поиск) работающих радиоэлектронных средств в
пространстве ..................................................... —
2.2. Обнаружение работающих радиоэлектронных средств в частотном
диапазоне.........................................................20
2.3. Совместный поиск радиосигналов по направлению и частоте......25
3. Дальность обнаружения (разведки)..................................29
3.1. Факторы, влияющие на дальность обнаружения....................-
3.2. Дальность обнаружения в свободном пространстве...............31
3.3. Дальность обнаружения в УКВ-диапазоне........................34
3.4. Дальность обнаружения в КВ-диапазоне.........................38
3.5. Дальность обнаружения на средних волнах......................40
4. Принципы построения устройств селекции сигналов..................41
5. Принципы построения устройств анализа частотных параметров сигналов . 47
5.1. Общие принципы построения частотного анализа..................-
5.2. Принцип построения многоканального беспоискового разведыватель-
ного приемника....................................................50
5.3. Методы панорамного частотного анализа........................52
5.4. Принципы построения акустооптических приемных устройств......59
Акустооптический метод частотного анализа сигналов..............-
Быстродействие акустооптического приемного устройства..........63
Требования к уровню мощности возбуждения.......................64
Оптические требования...........................................—
Частотно-модулированные колебания..............................65
Акустооптические приемные устройства комплексов радиотехни-
ческой разведки.................................................-
Характеристика акустооптического приемного устройства станции
радиотехнической разведки СРТР-У “Кольчуга”....................66
Задачи, решаемые с помощью акустооптических приемных устройств. . 69
5.5. Принцип построения панорамных разведывательных приемников со
сжатием импульсов.................................................71
Общие положения о приемнике со сжатием импульсов...............-
Принцип работы дисперсионной линии задержки на поверхностных
акустических волнах............................................75
Теоретические основы спектрального анализа с использованием
дисперсионных линий задержки...................................77
Анализ спектра сигналов без гетеродинирования..................86
5.6. Широкополосные разведывательные приемники на магнито-
статических волнах................................................90
5.7. Принципы построения разведывательных приемников мгновенного
измерения частоты.................................................93
Частотный анализ сигналов с использованием частотно-зависимой
линии задержки.................................................93
, Техническая реализация измерителя частоты с помощью фазового моста 96
Цифровой приемник мгновенного измерения частоты................99
6. Принципы построения устройств анализа временных параметров сигналов 103
453
6.1. Измерение временных параметров с помощью электронно-лучевых
индикаторов.....................................................103
6.2. Автоматическое измерение временных интервалов..............108
6.3. Методы повышения точности отсчета..........................Ill
6.4. Ошибки измерения временных интервалов......................113
6.5. Принцип построения цифровых измерителей временных интервалов
с использованием микропроцессорной техники......................119
7 . Принципы построения устройств анализа сложных сигналов.........123
7.1. Определение вида модуляции сложных сигналов...................—
7.2. Методы измерения параметров частотно-модулированных сигналов . 129
7.3. Цифровые методы анализа сложных сигналов...................133
7.4. Анализ фазоманипулированных сигналов.......................137
7.5. Анализ помехоустойчивости методов формирования опорного
напряжения, основанных на автокорреляционном методе приема......146
7.6. Принципы построения устройства кепстрального анализа сигналов
сложной структуры...............................................148
8 .Использование принципов оптимальной фильтрации импульсных сигналов
при построении перспективных средств радиотехнической разведки.....154
8.1. Общие сведения о согласованных линейных фильтрах............ -
8.2. Принципы построения акустооптических фильтров сжатия сигналов . 157
8.3. Сущность явления ядерного спинового эха....................158
8.4. Функциональные возможности сигналов в спиновом процессоре . . . 162
8.5. Принципы построения домен-акустического процессора.........165
8.6. Устройства корреляционной обработки сложных сигншюв на акусти-
ческих волнах...................................................169
9. Потенциальная точность измерения параметров сигналов при радиотех-
нической разведке..................................................182
9.1. Параметры сигналов, измеряемые при РТР...................... —
9.2. Точность измерения амплитуды импульсов.....................183
9.3. Точность измерения фазы импульсов........................... —
9.4. Ошибки измерения частоты импульсов.........................184
9.5. Потенциальная точность измерения совокупности неизвестных пара-
метров сигналов.................................................186
10. Принципы построения устройств цифровой обработки сигналов......187
10.1. Принцип цифровой обработки сигналов........................ —
10.2. Принцип амплитудной дискретизации.........................190
10.3. Достоинства цифровых методов обработки сигналов...........191
10.4. Преобразование угловых координат в двоичный код...........192
10.5. Краткие сведения из теории дискретных линейных систем.....193
10.6. Линейные системы с постоянными параметрами................195
11. Принципы построения устройств анализа сигналов с переменными
параметрами........................................................203
11.1. Принципы построения устройств измерения несущей частоты сигнала —
11.2. Принципы построения устройств анализа сигналов с переменным
периодом повторения импульсов...................................205
11.3. Принципы построения устройств регистрации и измерения
параметров......................................................207
11.4. Измеритель переменного периода повторения импульсов
(переменных временных интервалов)...............................208
11.5. Оценка информативности параметров тонкой структуры при разведке
радиолокационных станций с изменяющимися параметрами сигналов . . 211
11.6. Метод выделения скрытых периодичностей временных
последовательностей.................................................212
12. Информационное обеспечение радиотехнической разведки............219
12.1. Задачи информационного обеспечения РТР...................... -
12.2. Проблема обеспечения информативности радиотехнической разведки 220
12.3. Оценка информативности радиотехнической разведки по критерию
вероятности опознавания типа РЛС.................................221
12.4. Оценка информативности радиотехнической разведки по критерию
вероятности правильного индивидуального распознавания РЛС........224
12.5. Оценка эффективности системы радиотехнической разведки.....228
12.6. Принципы построения устройств распознавания................236
12.7. Выбор критериев при распознавании типов и экземпляров радио-
локационных станций..............................................237
12.8. Аспекты информационного обеспечения радиотехнической разведки. 240
454
13. Принципы построения устройств распознавания радиотехнических средств
по тонкой структуре сигналов.......................................242
13.1. Основные предпосылки наличия индивидуальных разведывательных
признаков, заключенных в тонкой структуре сигналов............... —
13.2. Синтез оптимальных алгоритмов селекции и распознавания сигналов
по тонкой структуре.............................................245
13.3. Характеристики основных параметров тонкой структуры сигналов . . 251
13.4. Анализ тонкой структуры сложных сигналов..................260
13.5. Выделение параметров тонкой структуры сложных сигналов на основе
фазовой автоподстройки частоты..................................269
13.6. Комплексный анализ параметров тонкой структуры сигналов .... 271
14. Методы пеленгования источников радиоизлучения..................277
14.1. Классификация методов пеленгования......................... -
14.2. Измерение угловых координат...............................280
14.3. Одноканальные системы измерения угловых координат. Оптимальная
обработка пачки импульсов.......................................284
14.4. Предельная точность измерения угловой координаты одноканаль-
ными системами .................................................287
14.5. Неоптимальные способы обработки пачки импульсов...........293
14.6. Ошибки измерения угловых координат неоптимальными методами . 297
14.7. Автоматическое сопровождение по угловым координатам при исполь-
зовании одноканальных систем ...................................301
14.8. Многоканальные системы измерения угловых координат......... -
14.9. Способы измерения и индикации разности фаз и отношения
амплитуд сигналов...............................................305
14.10. Предельная точность измерения угловых координат двухканаль-
ными системами .................................................307
14.11 . Принципы построения моноимпульсных радиопеленгаторов.
Моноимпульсная пеленгация........................................311
15. Принципы определения координат излучающих целей.................319
15.1. Координатные поверхности ................................... -
15.2. Определение координат источников излучения в комплексах радио-
технической разведки..............................................320
15.3. Ошибки линий положений.....................................326
15.4. Точность определения местоположения радиоэлектронных средств . 330
15.5. Рабочие зоны...............................................334
15.6. Принципы идентификации источников разведывательных сведений
в системах радиотехнической разведки при преднамеренном измерении
параметров........................................................339
15.7. Сущность идентификации по ее отличию от индивидуального
распознавания....................................................343
15.8. Алгоритмы идентификации сигналов с переменными параметрами
по характеристикам сигналов.......................................344
15.9. Пространственная селекция сигналов с переменными параметрами . 346
16. Комплексный анализ прямых, отраженных и переизлученных сигналов
РЛС................................................................ 349
16.1 . Принцип определения пространственных и плоскостных координат
целей............................................................. —
16.2 . Метод синхронного обзора..................................354
16.3 . Повышение дальности обнаружения за счет использования сигналов
бортовых ответчиков..............................................361
16.4 . Практическая реализация метода синхронного обзора.........363
16.5 . Определение местоположения РЛС противника за радиогоризонтом 364
16.6 . Использование отраженных от самолета-разведчика сигналов для
определения координат наземных радиолокационных станций..........367
16.7 . Комплексный анализ отраженных и переизлученных сигналов РЛС
системы AWACS для повышения информативности радиотехнической
разведки.........................................................368
16.8 . Пути повышения точности измерения координат...............369
17. Принципы построения устройств регистрации сигналов в станциях и
комплексах радиотехнической разведки ...............................372
17.L Требования к регистрирующей аппаратуре....................... ~
17.? Физические основы магнитной записи и воспроизведения
информации.......................................................373
17.3. Техника магнитной записи...................................377
455
17.4. Устройство и характеристика магнитофонов..................379
17.5. Цифровая магнитная запись.................................381
17.6. Структурная схема аппарата магнитной записи...............386
17.7. Применение магнитной записи в накопителях на магнитной ленте
или магнитных дисках ЭВМ...................................... 389
17.8. Широкополосная магнитная запись. Краткие сведения о магнитной
записи сигналов на видеомагнитофон..............................392
17.9. Магнитооптические методы регистрации и обработки сигналов ... 401
17.10. Регистрация сигналов на электрохимическую бумагу.........408
17.11. Регистрация сигналов на основе термопластической записи..411
17.12. Регистрация сигналов на кинопленку.......................412
18. Обоснование тактико-технических требований к комплексам и станциям
радиотехнической разведки .........................................414
18.1. Общие сведения............................................. -
18.2. Последовательность обоснования тактико-технических требований . 420
18.3. Анализ радиотехнической обстановки в полосе разведки......421
18.4. Определение числа необходимых параметров для анализа сигналов 423
18.5. Обоснование предельных значений параметров................426
18.6. Обоснование требований к точности анализирующей аппаратуры
при измерении параметров....................................... 428
18.7. Методика разбивания частотного диапазона на поддиапазоны .... 431
18.8. Определение потока сигналов на входе станции радиотехнической
разведки........................................................432
18.9. Обоснование требований к быстродействию аппаратуры радио-
технической разведки............................................436
18.10. Обоснование требований к станции РТР по точности пеленгования
источников радиоизлучений.........................*.............439
18.11. Обоснование требований к точности измерения параметров при
индивидуальном опознавании......................................445
18.12. Методика обоснования требований к точности измерения
параметров для индивидуального распознавания РЛС................449
СПИСОК ЛИТЕРАТУРЫ..................................................452
Ю.А. Смирнов
РАДИОТЕХНИЧЕСКАЯ РАЗВЕДКА
Редактор В.А. Михайлов
Технический редактор Н.Я. Богданова
Корректоры В.Л. Соловьева, Т.А. Ярославцева
Компьютерная верстка Н.В. Зизина
Сдано в набор 01.08.2000. Подписано в печать 29.05.2001. Формат 60><90/16.
Печ. л. 28Х- Усл. печ. л. 28,5. Уч.-изд. л. 28,08. Бесплатно.
Изд. № 5/00/38. Зак. 5009.
Воениздат, 103160, Москва, К-160