





































































































































































































































Текст
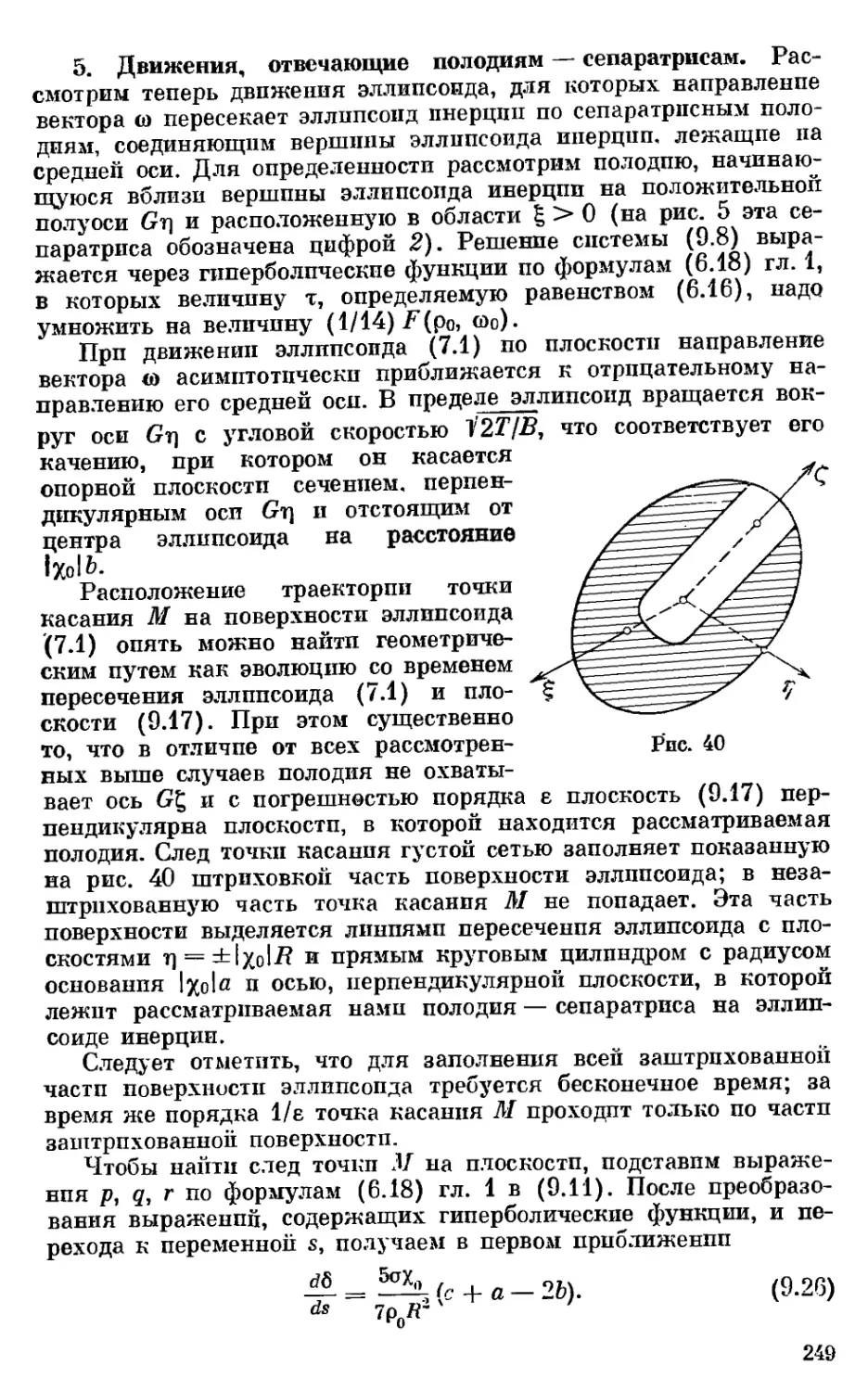
ДИНАМИКА
ТЕЛА,
ссприкосоющегося
с твердой
повеохностью
А.П.Маркеев
А. П. Маркеев
ДИНАМИКА
ТЕЛА,
СОПРИКАСАЮЩЕГОСЯ
С ТВЕРДОЙ
ПОВЕРХНОСТЬЮ
МОСКВА «ПАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
1992
ББК 22.213
М26
УДК 513.31
Маркеев А. П. Динамика тела, соприкасающегося с твердой
поверхностью. — М.: Наука. Гл. ред. физ. мат. лит., 1992. — 336 с. —
ISBN 5-02-014285-9.
Систематически изложены основные задачи, методы и результаты
динамики тел, соприкасающихся с твердой поверхностью. Подробно
рассмотрена динамика твердого тела на абсолютно шероховатой поверхности, а
также на абсолютно гладкой горизонтальной плоскости с сухим или вязким
трением скольжения. В основу книги положены как классические
исследования рассматриваемой проблемы, так и публикации последних десятилетий.
Для специалистов в области гироскопии, динамики твердого тела и
аналитической механики, а также студентов старших курсов и аспирантов
университетов и втузов.
Табл. 1. Ил. 45. Библиогр. 302 назв.
Рецензент доктор физико-математических наук А. В. Карапетяк
Научное издание
МАРКЕЕВ Анатолий Павлович
ДИНАМИКА ТЕЛА, СОПРИКАСАЮЩЕГОСЯ
С ТВЕРДОЙ ПОВЕРХНОСТЬЮ
Заведующий редакцизй Л. А. Русаков
Редактор В. И. Леваптовский
Художественный редактор Г. М. Коровина
Технический редактор С. Я. Шкляр
Корректор М. Н. Дропова
ИБ № 41008
Сдано в набор 04.12.90. Подписано к печати 24.12.91. Формат 60X90/1G. Бумага
тип. № 2. Гарнитура обыкновенная. Печать высокая. Усл. печ. л. 21 Усл. кр.-отт. 2L
Уч,-изд. л. 23,49. Тираж 1100 экз. Заказ № 539. Цена 5 р. 80 к.
Издательско-производственное и книготорговое объединение «Наука»
Главная редакция физико-математической литературы
117071 Москва В-71, Ленинский проспект, 15
Четвертая типография издательства «Наука»
630077 Новосибирск, 77, Станиславского, 25
_._ 1603030000—013 m
М 053(02)-99 51-91 \© «Наука». Физматлпт, 1992
ISBN 5-02-014285-9
ПРЕДИСЛОВИЕ
Изучение задач динамики тел, соприкасающихся во время
движения с неподвижной или движущейся твердой
поверхностью, имеет довольно длительную историю. Одной из первых
таких задач, возникшей, по-видимому, из потребностей техники,
была задача о движении тяжелого однородного цилиндра
(катка) по наклонной плоскости.
Развитие динамики тела, соприкасающегося с заданной
поверхностью, тесно связано с процессом становления и развития
целого раздела аналитической механики — динамики неголоном-
ных систем. Можно сказать, что для развития неголономной
механики задача о движении тнердого тела по поверхности другого
тела имеет такое же (или аналогичное) значение, какое имела
п имеет задача трех тел для развития методов небесной
механики.
Прикладное же значение исследований по динамике твердого
тела и, в частности, по динамике тела, соприкасающегося с
твердой поверхностью, хорошо сформулировано в начале нашего
века Дж. Перри: «Если бы обстоятельному изучению
вращающегося волчка было уделено больше внимания, то успехи
(человечества) в области прикладной механики и во многих отраслях
промышленности были бы более значительными».
Развитие теорни качения твердых тел позволило дать
глубокий анализ приложения этой теории в технике. Сюда относится,
прежде всего, рассмотрение вопросов динамики
железнодорожного состава, автомобиля, мотоцикла, велосипеда, исследования
счетно-решающих устройств и электрических машин.
Теория движения тела, соприкасающегося с поверхностью
другого тела, и сегодня не потеряла своего значения для
приложений в машиностроении, приборостроении, транспорте. Она
также по-прежнему стимулирует развитие методов
аналитической механики, теории устойчивости движения,
дифференциальной геометрии.
За последние примерно двести лет в задаче о движении тела
по твердой поверхности получено довольно много результатов,
и интерес к этой задаче не ослабевает, а, по-видимому,
усиливается. Эти обстоятельства и важность проблемы для теории и ее
1* 3
приложений побудили автора к написанию монографии, в
которой он ставит перед собой цель — дать систематическое
изложение основных задач, методов и результатов динамики тел,
соприкасающихся с твердой поверхностью.
Краткое содержание кпиги таково. Введение представляет
собой исторический очерк развития рассматриваемой проблемы.
В первой главе, имеющей вспомогательный характер, изложены
необходимые сведения из теоретической механики. Во второй
главе исследуется движение твердого тела на абсолютно гладкой
горизонтальной плоскости в однородном поле тяжести («тяжелое»
твердое тело). В третьей, наибольшей по объему главе
рассматривается динамика твердого тела на абсолютно шероховатой
поверхности (т. е. движение тела по поверхности происходит без
скольжения). В четвертой главе изучается движение твердого
тела по горизонтальной плоскости при наличии сухого или
вязкого трения скольжения. Более детальное представление о
содержании книги можно получить из ее оглавления.
Как правило, предполагается, что поверхность тела является'
выпуклой, без заострений и ребер; иногда тело имеет острый
край в форме плоской кривой. При этом считается, что
функции, задающие уравнение поверхности тела (или его острого
края), аналитические или достаточное число раз
дифференцируемые. Всюду предполагается, что касание тела и опорной
поверхности происходит в одной точке. Всегда (за исключением п. 2
§ 1 гл. 4) пренебрегается трением качения и верчения.
В основу книги положены как классические исследования
рассматриваемой проблемы, так и работы, результаты которых
опубликованы совсем недавно. При этом было стремление к
единому стилю изложения. К сожалению, ограниченный объем
книги пе позволил изложить результаты исследований движения
тела с полостью, наполненной жидкостью, на горизонтальной
плоскости, а также ряда задач динамики твердого тела прп
наличии его соударений с горизонтальной плоскостью,
неподвижной или совершающей вертикальные вибрации.
Автор надеется, что написанная книга будет способствовать
дальнейшему теоретическому развитию рассмотренных в ней
вопросов, а также их приложениям в технике.
ВВЕДЕНИЕ
Задача о движении тела, соприкасающегося с твердой
поверхностью, привлекает внимание ученых уже около двух с
половиной столетий.
Уже в 1734 г. Л. Эйлер изучал малые колебания твердого
тела, движущегося без скольжения по неподвижной горизонталь-
нон плоскости в однородном поле тяжести [236]. Тело
считалось выпуклым и рассматривались его плоские движения.
Исследование этой задачи было продолжено Ж. Даламбером в его
трактате но динамике [40], где плоские движения тела
изучались с учетом его проскальзывания на гладкой или шероховатой
плоскости. В [40] при изучении колебаний тела Ж. Даламбер
рассмотрел некоторые вопросы устойчивости; установлено, что
если радиус кривизны поверхности тела (плоской фигуры)
в точке его касания с абсолютно гладкой плоскостью превосхо*
дит расстояние от центра тяжести тела до этой плоскости, то
движение тела вблизи его положения равновесия будет
представлять собой малые колебания, в противном случае тело
«опрокидывается», если его слегка вывести из положения
равновесия.
В 1758 г. И. Л. Эйлер (сын Леонарда Эйлера) исследовал
динамику однородного шара на неподвижной горизонтальной
плоскости с учетом сухого трения скольжения [235]; он показал,
что центр тяжести скользящего шара движется по параболе,
которая лежит в горизонтальной плоскости и ось которой
параллельна направлению скольжения. Задача о движении
однородного шара по неподвижной плоскости получила дальнейшее
развитие в XIX и начале XX века в трудах Г. Кориолиса [87],
Л. Резаля [281—283], Э. Рауса [156], П. Пэнлеве [155],
П. Анпеля [216].
Общая постановка задачи о движении тяжелого твердого
тела, касающегося одной точкой своей поверхности неподвижной
горизонтальной плоскости, принадлежит С. Пуассону [278]. Для
случая гладкой плоскости при помощи теоремы об изменении
количества движения С. Пуассон получил три
дифференциальных уравнения, определяющих движение центра тяжести тела;
Для описания движения тела относительно центра тяжести он
5
использовал динамические и кинематические уравнения Эйлера.
Затем С. Пуассон показал, как, используя аналитическое
задание формы поверхности тела, можно из дифференциальных
уравнений движения исключить реакцию плоскости, и нашел
два их первых интеграла: один отражает постоянство проекции
вектора кинетического момента относительно центра тяжести на
вертикаль, а другой — постоянство полной механической энергии
движущегося тела.
В [278] исследовано движение однородного симметричного
волчка, который опирается на плоскость своим острым концом и
ось которого близка к вертикали, причем опорная плоскость
может совершать поступательное движение вверх или вниз с
постоянным ускорением. Рассмотрено также поступательное
движение твердого тела по наклонной плоскости при наличии
сухого трения скольжения. В частности, выписано условие, при
выполнении которого возможно движение со скольжением при
заданных величинах коэффициента трения и угла наклона
плоскости к горизонту. Выписаны также три дифференциальных
уравнения плоского движения тела на шероховатой горизонтальной
плоскости; эти уравнения применены для исследования
движения однородного шара.
Исследования С. Пуассона были продолжены в трех статьях
А. Курно [228—230], опубликованных в 1829—1831 гг. Как и
С. Пуассон, А. Курно применяет две декартовы системы
координат — одну неподвижную, а другую жестко связанную с
твердым телом. Воспользовавшись основными теоремами динамики,
он получил уравнения движения тела в той же форме, что и
С. Пуассон. А. Курно рассмотрел задачу о движении тела в
предположении, что оно может касаться плоскости не одной,
а несколькими точками, целой кривой или даже конечной
площадкой. Для движения по абсолютно гладкой наклонной
плоскости указаны интегралы энергии и кппетического момента;
в качестве примеров рассмотрены тела в форме цилиндра или
конуса. При изучении движения тела по шероховатой плоскости
Л. Курно пользовался моделью сухого трения и выписал
условия наличия скольжения и его отсутствия; в качестве примера
рассмотрено движение однородного шара. А. Курно рассмотрел
также некоторые вопросы определения реакций и динамики тела
на шероховатой плоскости, предполагая, что тело имеет форму
прямоугольного параллелепипеда и касается плоскости одной
своей гранью.
В середине XIX в. обширные исследования движения
выпуклого тела на абсолютно гладкой горизонтальной плоскости
проведены В. Июизё [279, 280]. В. Пюпзё исследовал в линейной
постановке задачу об устойчивости вращения тела любой
выпуклой формы вокруг вертикали, а также малые колебания тела
вблизи его положения равновесия на плоскости [280]. В. Пюизё,
в частности, показал [279], что если тяжелое твердое тело
вращения достаточно быстро закручено вокруг осп симметрии, то
€
угол между этой осью и вертикалью всегда остается сколь
угодно близким к его пачальному значению.
В 1861 г. Г. Слессер [286] составил уравнения движения
тяжелого тела вращения на неподвижной абсолютно
шероховатой горизонтальной плоскости. При этом он использовал
основные теоремы динамики, записанные в системе координат,
движущейся относительно тела.
В 1872 г. Н. Феррерс [238] исследовал задачу о движении
тяжелого однородного кругового диска по неподвижной
горизонтальной плоскости в отсутствие скольжения. Исследование
Н. Феррерса опирается не иа основные теоремы динамики, как
это было в трудах его предшественников при изучении
движения твердого тела по плоскости, а на новые, полученные самим
Н. Феррерсом уравнения движения (уравнения движения него-
лономных систем без неопределенных множителей Лагранжа).
Задаче о движении твердого тела по заданной поверхности
много внимания уделил Э. Раус в своем трактате [156],
вышедшем в последней четверти прошлого века. Как и Г. Слессер,
Э. Раус использовал основные теоремы динамики и широко
применял систему координат, подвижную относительно тела. Э.
Раус составил уравнения движения однородного шара по
произвольной абсолютно шероховатой поверхности под действием
заданных сил; подробно исследовал движение шара по
неподвижным поверхностям, имеющим форму цилиндра, конуса,
параболоида, произвольной поверхности вращения, а также движение
шара на вращающейся сфере; рассмотрел задачу об
устойчивости и малых колебаниях тяжелого шара вблизи вершины
абсолютно шероховатой поверхности произвольной формы.
Э. Раус изучил движение со скольжением тяжелого шара на
наклонной плоскости, нашел стационарные движения твердого
тела вращения на абсолютно шероховатой горизонтальной
плоскости и исследовал малые колебания тела вблизи этих
движений.
В трактате [156] Э. Раус сформулировал также общую
процедуру, позволяющую при помощи основных теорем динамики
получить дифференциальные уравнения движения твердого тела
на горизонтальной плоскости при различном характере
взаимодействия тела и плоскости в точке их касания: рассмотрено
движение на абсолютно гладкой или абсолютно шероховатой
плоскости, а также движение при наличии сухого трения
скольжения.
В конце XIX — начале XX века исследование движения тела,
касающегося твердой поверхности, велось очень интенсивно и в
различных направлениях. В 1892 г. Д. К. Бобылев [12]
сформулировал и разрешил в эллиптических функциях времени задачу
о движении без скольжеипя по неподвижной горизонтальной
плоскости шара с гироскопом внутри и с центром тяжести
системы в геометрическом центре шара. В несколько упрощенной
постановке эту же задачу в 1893 г. псследовал Н. Е. Жуковский
7
[52]. Решение более общей задачи о движении без скольжения
по неподвижной плоскости тела с гироскопом содержится в
статье С. А. Чаплыгина [202], в которой поверхность
катящегося тела не обязательно является сферой, а представляет собой
произвольную поверхность вращения.
В двух своих работах [203, 204] С. А. Чаплыгин,
воспользовавшись основными теоремами динамики и некоторыми их
обобщениями, решил очень сложные задачи о движении шаров.
В первой из этих работ исследована система, состоящая из
полого шара, внутри которого находится выпуклое тело с гладкой
поверхностью, а сам шар движется со скольжением или без
скольжения по неподвижной плоскости, составляющей
произвольный угол с горизонтальной плоскостью; внутреннее тело
также может иметь полость, в которой движется еще одно тело,
и т. д. Во второй работе С. Л. Чаплыгин решил задачу о
движении по неподвижной абсолютно шероховатой горизонтальной
плоскости неоднородного шара, центр тяжести которого
совпадает с его геометрическим центром.
Движение со скольжением или без скольжепия тяжелого
однородного шара по неподвижпой сферической поверхности
исследовалось А. Фиркандтом в его работе [294], опубликованной в
1892 г. В этой же работе рассмотрена задача о движении диска
по неподвижной горизонтальной плоскости.
В исследовании М. Джеббиа [244], посвященном задаче о
движении одной твердой поверхности по другой, указапьт
случаи, когда кинематическое условие отсутствия скольжения
представляет собой интегрируемую связь.
В статье [290] Е. Штюблер прп помощи теорем об
изменении количества движения и кинетического момента дал
подробный анализ движения без скольжения однородного шара в поле
тяжести по цилиндрической поверхности, образующая которой
наклонена к горизонтальной плоскости под произвольным углом.
Изучено движение центра шара и вектора его мгновенной
угловой скорости, найден след точки касания па поверхности шара,
вычислена реакция цилиндра в точке касания.
В работе Ф. Нётер [272] дан общий анализ уравнений
движения без скольжения тяжелого шара по неподвижной
поверхности: рассмотрены условия существования их решений, число и
Характер особых точек, положение точек ветвления в
зависимости от формы поверхности и т. д. Уравнения движения шара по
параболоиду вращения проинтегрированы, дан подробный анализ
получающихся при этом квадратур. Рассмотрено влияние трення
качения и тренпя верчения на найденные движения шара.
В конце XIX — начале XX века в работах [225, 243, 295,
296] продолжалось начатое еще в середине XIX столетия [287,
239] исследование движения волчка по горизонтальной
плоскости. В частности, в работе [296] были сделаны первые попытки
получения теоретического объяснения обнаруженной в
экспериментах зависимости устойчивости стационарных вращении во-
8
круг вертикали несимметричного волчка, ограниченного
поверхностью двойной кривизны, от направления вращения (задача об
устойчивости движения «кельтского камня»).
Динамике тела вращения на абсолютно шероховатой
плоскости посвящены работы Ж. Адамара [246—248].
Н. Е. Жуковским [53] была рассмотрена задача о равновесии
твердого тела, опирающегося на неподвижную плоскость
некоторой площадкой при наличии сухого трения. В исследованиях
П. Пэнлеве [155] и Е. А. Болотова [15], посвященных общей
теории движения механических систем с трением, содержатся
некоторые конкретные примеры движения твердого тела по
шероховатой поверхности.
В последней четверти XIX — начале XX века появились
трактаты [245, 254, 261, 288], содержащие изложение основных
достижений в динамике твердого тела и, в частности, в
динамике тела на неподвижной плоскости. Небольшая монография
[214] специально посвящена движению тела по абсолютно
шероховатой поверхности. Кинематика движения тела по
поверхности изучена в классических трактатах [188, 284, 293] и статьях
[И, 187, 232, 233].
Исследования динамики тела, катящегося по твердой
поверхности, во многом определили развитие аналитической
динамики неголоиомных систем (т. е. систем с дифференциальными
пепнтегрпруемымп связями) в конце XIX — начале XX века.
Термин «неголономные системы» был введеп в механику Г.
Герцем в 1894 г. в его сочинении [35]. Задачи о качении тела по
твердой поверхности обычно приводят к необходимости изучения
неголоиомных систем. Простейшим примером неголономной
системы является шар, движущийся без скольжения по плоскости
[154]. Начало неголономной мехапики связано еще с трудами
Ж. Лагранжа [90] и М. В. Остроградского [145]. Однако
качественное различие между голономными и неголономными
системами было четко установлено только на рубеже XIX и XX
веков, когда выяснилось, что движение неголономной системы в
отличие от голономпой не может быть описано уравнениями
Лагранжа второго рода. Игнорирование этой специфики
неголоиомных систем привело к известным в истории механики
ошибкам, например в работах [265, 271], допущенным при изучении
дннампкп катящегося тела. Исправление этих ошибок привело
к созданию дифференциальны?.- уравнений динамики
неголоиомных систем.
В 1895 г. С. А. Чаплыгин впервые получил
дифференциальные уравнения движения неголономной системы в обобщенных
координатах при наличии линейных по обобщенным скоростям
неиитегрируемых связей [202]. При этом предполагалось, что
кипетическая и потенциальная энергии системы, а также
уравнения связей не содержат некоторых из обобщенных координат.
Системы, обладающие такими свойствами, стали впоследствии
называть системами Чаплыгина.
9
В 1901 г. П. В. Воронец получил более общие уравнения
движения неголономных систем, применимые и к системам, не
являющимся системами Чаплыгина [28, 29].
В 1899 г. П. Аппель вывел новую форму уравнений
динамики, показав, что для написания дифференциальных уравнений
движения достаточно знать выражение для силовой функции
системы и еще одной функции, называемой энергией ускорений и
представляющей собой полусумму произведений масс точек
системы на их ускорения [213].
В диссертации П. В. Воронца [31] приведены основные
результаты но неголономным системам, полученные к 1903 г., с
критической оценкой примененных различными авторами методов.
Помимо общих вопросов иеголономной механики на рубеже
XIX и XX веков были изучены и некоторые задачи о движении
тела по неподвижной поверхности в предположении, что тело
касается поверхности одной точкой, а скольжение отсутствует:
задача о движении тела вращения, в частности диска, по
горизонтальной плоскости [30, 31, 33, 202, 215, 262, 263]; задача о
движении по инерции эллипсоида вращения, мало
отличающегося от шара, а также тела, поверхность которого подобна его
центральному эллипсоиду инерции; задача о качении
однородного трехосного эллипсоида, когда точка касания описывает одно
из его главных сечений [31, 33]; задача о движении
материальной плоскости по шару [33, 301]; задача о качении твердого
тела, ограниченного поверхностью эллипсоида, по поверхности
эллипсоида с теми же осями [33]; задача о качении диска по
произвольной поверхности под действием заданных сил [211,
299] и некоторые другие задачи, ранее рассмотренные при
помощи основных теорем динамики.
Важнейший вклад в динамику катящегося твердого тела
внесли работы П. В. Воронца [30—33, 299—301], в которых
получены общне дифференциальные уравнения движения без
скольжения тела по заданной выпуклой поверхности под действием
заданных сил и рассмотрены некоторые частные случаи
движения.
В 1932 г. X. М. Муштари [137| продолжил исследование
уравнений движения без скольжения тяжелого тела вращения
по неподвижной плоскости, полученных С. Л. Чаплыгиным
[202], и указал несколько новых частных случаев, допускающих
полпое исследование движения.
Для теории неголономных систем и ее приложений большой
интерес представляет рассмотренная С. Л. Чаплыгиным задача о
движении по инерции тела параллельно неподвижной
горизонтальной плоскости [205]. Тэло опирается на плоскость тремя
точками, две из которых свободно скользят по плоскости,
а третья является точкой касания тонкого колесика, ось
которого жестко скреплена с телом, п плоскости. Движение колесика
рассматривается как чистое качение по плоскости. С. А.
Чаплыгин показал, что решение рассматриваемой задачи может быть
10
сведено к квадратурам. Другое решение задачи С. А. Чаплыгина
дано В. В. Вагнером [24]. В [144] рассмотрено обобщение
задачи С. А. Чаплыгина на случай движения тела по произвольной
поверхности и учтено влияние силы тяжести при движении по
сфере. К. Каратеодори [223] исследовал задачу о плоском
движении тела, опирающегося о плоскость двумя точками, одна из
которых скользит без трения по плоскости, а другая ограничена
в своем движении, подобно точкам острого полоза саней:
проекция ее скорости на нормаль к полозу равна нулю.
В 40—50-х годах текущего столетия было опубликовано
много работ, в которых с разных позиций была подробно
исследована динамика так называемого волчка «тип-топ», который
представляет собой динамически симметричное тело, ограниченное
сферической поверхностью [218—220, 222, 240—242, 250—253,
255, 273—276, 292]. Основное внимание в этих работах
уделялось качественному объяснению поворота оси симметрии быстро
закрученного волчка, поставленного на шероховатую плоскость.
В 1958 г. Е. И. Харламова [198] продолжила исследования
С. А. Чаплыгина [204] о качении по горизонтальной плоскости
неоднородного шара с трехосным центральным эллипсоидом
инерции, центр тяжести которого совпадает с его
геометрическим центром. Рассматривая движение не на горизонтальной,
а на наклонной плоскости, Е. И. Харламова показала, что при
некоторых ограничениях, налагаемых на начальные условия,
уравнения движения шара по наклонной плоскости могут быть
приведены к уравнениям, по форме совпадающим с
уравнениями, исследованными С. А. Чаплыгиным.
Исследование конкретных задач о движении тела,
соприкасающегося с твердой поверхностью, некоторое время развивалось
значительно медленнее, нежели шло изучение общих вопросов
динамики неголономных систем, на развитие которых на рубеже
XIX и XX веков так решительно повлияли частные задачи дн-
намики твердого тела на абсолютно шероховатой плоскости.
В последние десятилетия полученные результаты в области
математики и механики позволили по-новому взглянуть на
динамику твердого тела и значительно расширить арсенал методов,
применяемых для решения конкретных механических задач. Такие
математические средства анализа, как метод малого параметра
Пуанкаре, теория устойчивости движения, асимптотические
методы, теория возмущений гамильтоповых систем, метод
топологического апализа натуральных систем с симметрией, методы
численного анализа, позволили в последние десятилетия
значительно продвинуть вперед проблему о движении тела,
соприкасающегося с твердой поверхностью. Перечислим основные
результаты исследования этой задачи за последние 20—30 лет.
В работах Ю. П. Бычкова [20—22] методом П. В. Воронца
[31. 300, 301] найдены новые случаи интегрируемости задачи о
качении тела вращения по неподвижной абсолютно шероховатой
поверхности вращения: подробно исследован частный случай —
И
качение динамически симметричного шара по поверхности
сферы. В статье [23] при помощи уравнений Эйлера — Лагранжа
получены дифференциальные уравнения в псевдокоординатах,
описывающие движение произвольного выпуклого твердого тела
по произвольной абсолютно шероховатой выпуклой поверхности.
Прп помощи второго метода Ляпунова в теории устойчивости
движения решена задача об устойчивости вращения вокруг
вертикали однородного твердого тела, ограниченного произвольной
поверхностью вращения, на абсолютно шероховатой
горизонтальной плоскости [44, 60, 423, 125]; исследована устойчивость
произвольного стационарного движения катящегося по плоскости
тела вращения, в частности диска, тора и неоднородного шара
[46, 63, 69, 71, 123, 125, 138, 142, 143, 153], а также
устойчивость качения тела вращения, на оси симметрии которого
установлен вращающийся гироскоп [41, 45, 122, 123, 168].
Устойчивость и малые колебания оси симметрии волчка вблизи ее
равновесного вертикального положения на плоскости при наличии
сухого или вязкого трения скольжения исследованы в работах
[1, 74, 75, 86, 99, 124]. Задача об устойчивости вращения вокруг
вертикали несимметричного тела на горизонтальной плоскости
при наличии вязкого трения изучалась в статьях [65, 269, 270].
В. В. Румянцев [159, 161, 162] исследовал задачу об
устойчивости стационарного вращения и, в частности, равновесия
тяжелого гиростата на горизонтальной плоскости. Предполагалось,
что гиростат имеет произвольный центральный эллипсоид
инерции и произвольную выпуклую поверхность, а гиростатический
момент постоянен. В. В. Румянцев получил условия,
необходимые и достаточные для устойчивости равновесия или вращения
гиростата вокруг вертикали, проходящей через центр тяжести и
точку касания гиростата и плоскости, а также рассмотрел задачу
о движении по гладкой горизонтальной плоскости тяжелого
симметричного гиростата с переменным гиростатпческим моментом.
В статьях [7, 64, 161] решена задача об устойчивости
вращения вокруг вертикали движущегося по абсолютно
шероховатой горизонтальной плоскости несимметричного тяже л ого
твердого тела, ограниченного выпуклой поверхностью двойной
кривизны, и, таким образом, отмеченное еще в конце прошлого века
явление зависимости устойчивости вращения кельтского камня
вокруг вертикали от направления вращения [295, 296] получило
теоретическое обоснование. В статьях [109, 147] содержится
обоснование еще одного интересного эффекта в динамике
кельтского камня, состоящего в изменении направления его вращения
вокруг вертикали без активного внешнего воздействия и в
возникновении вращения вокруг вертикали в том или ином
направлении за счет колебаний тела вокруг горизонтальной оси.
Результаты численного анализа динамики кельтского камня
опубликованы в статьях [258, 264].
В вышедших в 1967 г. монографии [138] и в 1970 г.
учебнике [43] по неголономной механике содержится значительное
12
число конкретпых примеров качения тел по неподвижной
поверхности.
Общая задача о существовании и устойчивости перманентных
вращений тяжелого твердого тела на горизонтальной плоскости
подробно изучена в работах А. В. Карапетяна [65—67, 70, 77].
В этих работах рассматривается движение тела, распределение
масс которого, вообще говоря, произвольно, а поверхность тела
также произвольна: требуется только, чтобы она была
выпуклой и не имела ребер. В упомянутых работах [65—67, 70, 77]
найдены все перманентные вращения и условия их
существования и устойчивости, а также исследовано влияние характера
взаимодействия тела с плоскостью на устойчивость
перманентных вращений (плоскость может быть абсолютно гладкой,
абсолютно шероховатой или в точке касания тела и плоскости может
возникать сила вязкого трения скольжения). В работах [68, 70,
77] также в общей постановке рассмотрена задача о
существовании и устойчивости регулярных прецессий динамически и гео-
метричекп симметричного тяжелого твердого тела на
горизонтальной плоскости для трех упомянутых случаев его
взаимодействия с плоскостью.
Существование и устойчивость стационарных движений тела
с острым краем на абсолютно гладкой плоскости исследованы в
работах [108, 120, 200, 209].
В статье [118] решены задачи об устойчивости двух типов
движения однородного трехосного эллипсоида на абсолютно
гладкой плоскости: вращения вокруг одной из осей эллипсоида,
направленной вертикально, и такого движения, при котором
одна из осей горизонтальна, а точка касания описывает на
поверхности эллипсоида одно из его главпых сечений. В статье [9]
исследована устойчивость вращения гиростата вокруг вертикали
на абсолютно гладкой плоскости в тех случаях, когда этот
вопрос не решается при помощи соответствующих достаточных
условий устойчивости, полученных в работе [161].
Н. К. Мощук в работах [131, 134] исследовал фазовую
топологию движения твердого тела на абсолютно гладкой плоскости,
определил топологический тип интегральных многообразий и
изучил его изменение при прохождении некоторого
бифуркационного множества. Результаты работ [131, 134] применены в
[210] для анализа областей возможности движения' тел с
острым краем.
В статьях [105, 117] методами современной теории
возмущений гамильтоновых систем проведено качественное исследование
движения мало отличающего от шара однородного эллипсоида и
близкого к динамически п геометрически симметричному
твердого тела на абсолютно гладкой плоскости. Некоторые вопросы
полной интегрируемости задачи о движении тяжелого
эллипсоида на абсолютно гладкой плоскости изучены в работах [19, 165].
В [186] для задачи о движении тела по горизонтальной гладкой
плоскости найдено общее аналитическое выражение поверхно-
13
сти, ограничивающей тело, для которого уравнения движения
допускают совокупность четырех линейных и однородных по
скоростям инвариантных соотношений; подробно рассмотрен случай
поверхности вращения.
В работе [167J проведено качественное исследование
движения на конечном интервале времени тела вращения на
шероховатой плоскости прп наличии скольжения в предположении, что
сила трения мала. Изучен характер квазистационарных
движений, представляющих собой прецессии с медленно
изменяющимся углом наклона оси симметрии тела к вертикали.
Асимптотическому исследованию движения тора и волчка, мало
отличающегося от симметричного на плоскости с трением, посвящены
работы [48—51, 132]. Движение со скольжением однородного
тяжелого шара в вертикальном цилиндре рассмотрено в [84].
В статье [111] при помощи метода усреднения и второго
метода Ляпунова на бесконечном интервале времени исследована
эволюция движения динамически симметричного волчка со
сферической поверхностью на плоскости с малым вязким трением.
В работах [107, 133, 134] методом усреднения исследовано*
движение однородного трехосного эллипсоида, мало
отличающегося от шара и неоднородного шара, центр тяжести которого
лежит в его геометрическом центре, на плоскости с малым
сухим или вязким трением. Указаны интегралы усредненных
уравнений, и дан качественный анализ эволюции движения. В
частности, выявлена тенденция эллипсоида к такому
движению, когда его наибольшая ось занимает вертикальное
положение; финальное движение шара в случае вязкого трения
таково, что его центр тяжести движется прямолинейно и
равномерно, а сам шар вращается с постоянной угловой скоростью
вокруг оси наименьшего из центральных моментов инерции.
В статьях [104—106] исследовано движение без скольжения
однородного эллипсоида по горизонтальной плоскости
(эллипсоид принят близким к шару). Найдены периодические движения
эллипсоида, рождающиеся из стационарных движений шара,
исследована их устойчивость, определены следы точки касания на
эллипсоиде и на плоскости, вычислена реакция плоскости.
Показано, что в первом приближении метода усреднения самое общее
движение эллипсоида относительно центра тяжести будет
движением Эйлера — Пуансо с измененным масштабом времени,
зависящим от начальных условий движения. Аналогичное
исследование для неоднородного шара проведено в диссертации [134].
Эволюция движения произвольного тяжелого твердого тела
на плоскости с вязким трением исследована в работах [131,
134]. Найдено предельное множество траектории движения; оно
включает в себя положения равновесия, перманентные
вращения, регулярные прецессии и равномерные качения вдоль
неподвижной прямой.
Некоторые задачи о движении твердого тела с полостью,
содержащей жидкость, при наличии соприкосновения тела с гори-
14
зонтальной плоскостью изучались в статьях [59, 113—115].
Б [115] показана интегрируемость задачи о качении шара с
л1ЫОгосвязной полостью, заполненной идеальной жидкостью,
совершающей безвихревое движение. В [113] получены условия
устойчивости вращения вокруг вертикали динамически и
геометрически симметричного тела с эллипсоидальной полостью,
заполненной идеальной жидкостью, совершающей однородное
вихревое движение, на абсолютно гладкой или абсолютно шероховатой
плоскости; в случае произвольного тела с выпуклой
поверхностью в [114] исследованы нелинейные колебания на
абсолютно шероховатой плоскости. В [59] рассмотрено движение шара,
полностью заполненного вязкой жидкостью, по абсолютно
шероховатой горизонтальной плоскости; установлено существование
перманентных вращений шара около вертикальной оси.
Некоторые вопросы динамики шара и тела вращения на
горизонтальной плоскости, вращающейся вокруг вертикали с
постоянной угловой скоростью, рассмотрены в работах [146, 193,
195, 298]. Движение шара по сфере, вращающейся вокруг
вертикального диаметра, исследовано в [194]. В [47] выписаны
уравнения движения гироскопического шара Жуковского на
вращающейся плоскости.
В статьях [56, 57, 110, 112, 119] рассматривались задачи об
устойчивости периодических движений тела при наличии его
соударений с абсолютно гладкой горизонтальной плоскостью,
неподвижной или совершающей синусоидальные колебания вдоль
вертикали. Для неподвижной плоскости в предположении об
абсолютно упругих соударениях установлена своеобразная «кван-
тованность» областей устойчивости по высоте подскока тела пад
плоскостью. В [58] исследована устойчивость перманентных
вращений симметричного тела при наличии его соударений с
абсолютно шероховатой плоскостью.
В статьях [196, 197] рассмотрены некоторые вопросы
кинематического истолкования движения гироскопического шара
Жуковского.
В работах [61, 86, 166, 170, 256] исследован ряд задач о
движении тела по плоскости в предположении, что касание тела и
плоскости происходит не одной, а несколькими точками или
даже площадкой, имеющей конечные раямеры.
Вопросы о существовании линейных относительно скоростей
интегралов неголономных систем рассмотрены в [183]. Статья
[80] посвящена проблемам теории интегрирования уравнений
неголономноп механики. Некоторые задачи качественного анализа
динамики тяжелого твердого тела на абсолютно шерохозатой
поверхности изучены в [136, 191].
В приведенном обзоре упомянуты не все работы по динамике
тела, соприкасающегося с твердой поверхностью. Некоторая
дополнительная библиография будет дана в соответствующих
главах книги, а также может быть почерпнута из книг [2, 36—38,
77, 94, 100, 138, 156, 163, 164, 261] и статей [31, 137, 272, 294].
ГЛАВА 1
ПРЕДВАРИТЕЛЬНЫЕ СВЕДЕНИЯ ИЗ МЕХАНИКИ
§ 1. Некоторые понятия и формулы кинематики твердого тела
Под твердым телом мы будем обычно понимать систему
материальных точек, сплошным образом заполняющую некоторый
объем пространства и такую, что расстояние между двумя
любыми ее точками всегда остается неизменным.
1. Задание движения твердого тела. Пусть O^xyz — некоторая
неподвижная декартова прямоугольная система координат.
Движение твердого тела считается заданным, если известен способ
определения положения каждой его точки в любой момент
времени. Если на перемещения твердого тела не наложено никаких
ограничений, то оно называется свободным. Свободное твердое
тело обладает шестью степенями свободы. Положение тела в
пространстве может быть задано, например, следующим образом.
Пусть О — некоторая фиксированная точка тела. Назовем ее
полюсом. Координаты полюса в неподвижной спстеме координат
O^xyz обозначим через х0, у о, %о. Пусть, далее, Oxyz —
декартова прямоугольная система координат с началом в выбранном
полюсе О и осями, параллельными соответствующим осям
системы 0^.xyz, а декартова прямоугольная система координат 0£т)£
жестко связана с телом. Взаимная ориентация систем координат
Oxyz и Ogi^ определяется при помощи матрицы А
направляющих косинусов, задаваемых таблицей
(и)
Отметим свойства матрицы направляющих косинусов: сумма
квадратов элементов каждой строки (столбца) равна единице;
сумма попарных произведений соответствующих элементов двух
строк (столбцов) равна нулю; каждый элемент матрицы равен
своему алгебраическому дополнению.
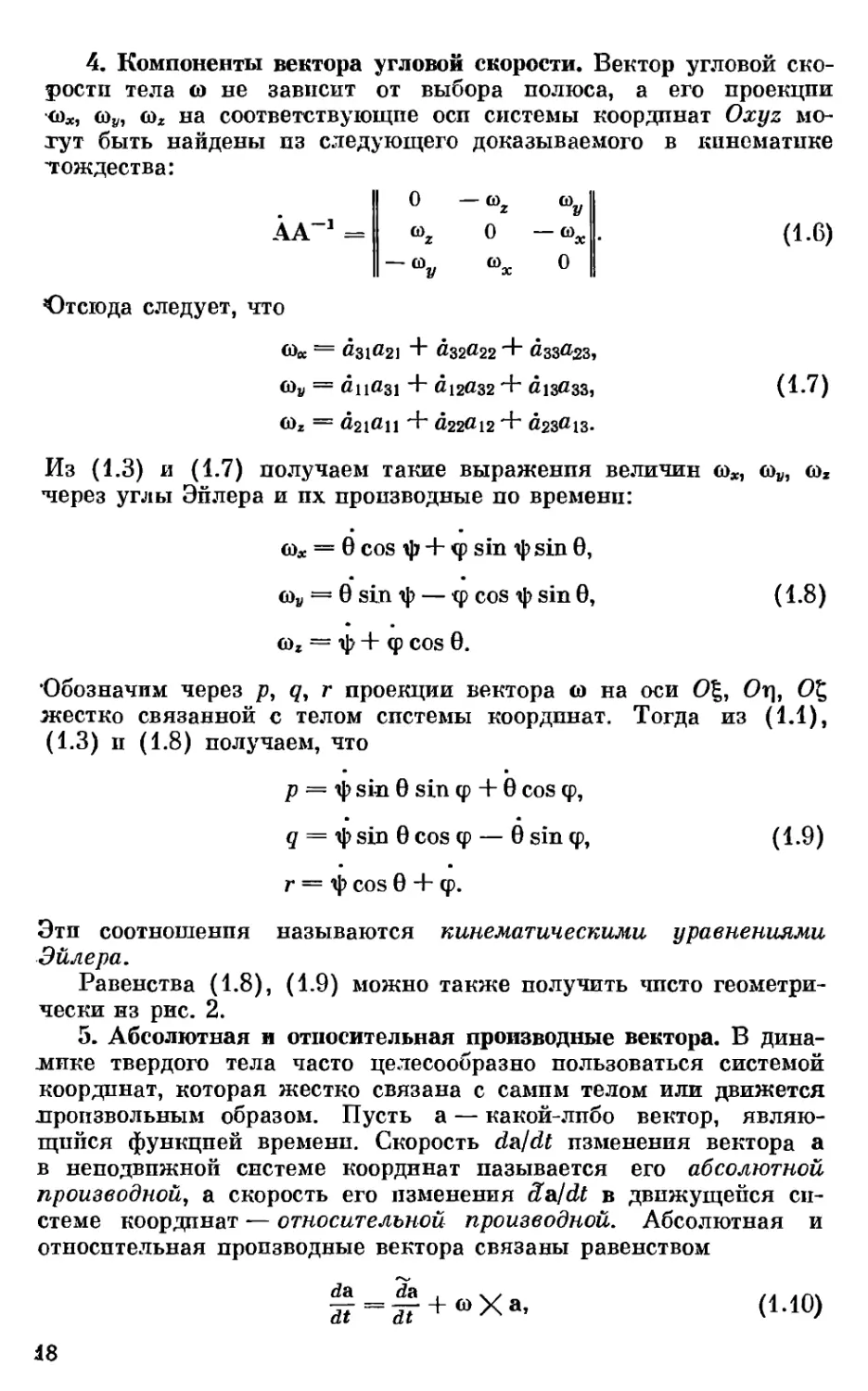
Пусть Р — произвольная точка тела, задаваемая в системе
координат Ogrjt; радиусом-вектором г, имеющим компоненты
£, т), £. Тогда (рис. 1) радиус-вектор R точки Р в неподвижной
спстеме координат определяется равенством
R-Ro+Ar. (1.2)
X
У
Z
S
ап
%i
в31
1
в12
«22
ЛЪ2
1
в13
в23
взз
16
Замечая, что среди девяти величин а,ц независимыми
являются только три, получим, что ориентация тела может быть
задана при помощи трех параметров. Из (1.2) следует, что эти
параметры и координаты х0, у о, z0 полюса и будут теми шестью
параметрами, которыми однозначно определяется положение тела
в пространстве.
Рпс. 1 Рис. 2
2. Углы Эйлера В качестве трех независимых параметров,,
задающих ориентацию тела в пространстве, примем углы
Эйлера я[\ 0, ф (рис. 2). Величины ai5 выражаются через углы Эйлера
по формулам
а\ [ = соз *ф cos ф — sin if sin ф cos 6,
al2 = —cos ф sin Ц) — 8щ <ф cos ф cos Q?
^13 = sin if sin 0,
^21 = sin if cos ф + cos if sin <p cos 6,
^22 = —sin if sin ф + cos if cos ф cos G, (1.3)
023 = —cos if sin 6,
аз1 = sin ф sin 0,
^32 = cos ф sin 6,
033 = COS 6.
3. Скорости п ускорения точек тела. Из кинематики известно,
что произвольное движение твердого тела можно рассматривать
как сложное, состоящее из двух движений — поступательного со
скоростью произвольного полюса и вращательного вокруг этого
полюса.
Скорость произвольной точки Р тела вычисляется по формуле
V = Vo + G>Xr, (1.4)
где v0 — скорость полюса, ао — угловая скорость тела.
Ускорение точки Р определяется формулой
w = w0 + 8Xr + ©X(©Xr)f (1.5)
где wo — ускорение полюса, а £ — угловое ускорение тела.
2 А. П. Маркеев 17
4. Компоненты вектора угловой скорости. Вектор угловой
скорости тела со не зависит от выбора полюса, а его проекции
<*>*, <оу, coz на соответствующие осп системы координат Oxyz мо-
тут быть найдены пз следующего доказываемого в кинематике
тождества:
АЛ"1 =
0
*>х
— U„
-со2
0
<*г
°>v
-<*х
0
(1.6)
Отсюда следует, что
СО* = «31«21 + Й32«22 + «33%3,
ыу = аца31 + Й12Я32 + а^азз, (1-7)
C0Z = а2\а\\ + 022^12 + Й23«13-
Из (1.3) и (1.7) получаем такие выражения величин ож, щ, о2
через углы Эйлера и их производные по времени:
(Ох = 6 cos ф + <р sin tysin 6,
&у = 6 sin г|) — <р cos г|) sin 6, (1.8)
ог = t]> + ф cos 6.
'Обозначим через р, #, г проекции вектора со на оси 0£, Ог\, 0£
жестко связанной с телом системы координат. Тогда из (1.1),
(1.3) и (1.8) получаем, что
р = г|) sin 6 sin ф + 6 cos ф,
q = г|> sin 6 cos ф — 6 sin ф, (1.9)
г = г|) cos 6 + ф.
Этп соотношения называются кинематическими уравнениями
Эйлера.
Равенства (1.8), (1.9) можно также получить чисто
геометрически из рис. 2.
5. Абсолютная и относительная производные вектора, В дина-
.мике твердого тела часто целесообразно пользоваться системой
коордпнат, которая жестко связана с самим телом или движется
лроизвольным образом. Пусть а — какой-либо вектор,
являющийся функцией времени. Скорость da/dt изменения вектора а
в неподвижной системе координат называется его абсолютной
производной, а скорость его изменения fia/dt в движущейся
системе коордпнат — относительной производной. Абсолютная и
относительная производные вектора связаны равенством
§=| + <*Ха, (1.10)
18
где со — угловая скорость вращения подвижной системы
координат. В частности, если со = О, т. е. движение подвижной системы
координат поступательное (или мгновенно поступательное), то»
абсолютная и относительная производные вектора
геометрически равны.
6. Уравнения Пуассона. Соотношение (1.10) позволяет
выразить производные по времени от элементов а^ матрицы
направляющих косинусов (1.1) через сами эти элементы и проекции
угловой скорости тела на оси подвижной системы
координат ОЪцъ.
Пусть i, j, k — единичные векторы осей 0%х, О^у, 0%z
неподвижной системы координат 0^.xyz. Эти векторы в системе*
0^,xyz постоянны, поэтому, согласно (1.10), должны
выполняться соотношения
|-1Х«. I-JX». £-ЬХ«. (1.11>
В связанной с телом системе координат Ol^rfe векторы i, j и к
имеют компопенты, задаваемые соответственно первой, второй и
третьей строками матрицы направляющих косинусов (1.1). Если
движение тела не является поступательным, то векторы i, j, k
в системе координат 0£tj£ изменяются со временем. Проектируя
векторпые равенства (1.11) на осп 0£, От), 0£, получаем
йц = а\2Г—а\зд, аХ2 = апР — ацг, а\ъ=^ацд — аХ2р,
021 = а%яг — агз<7, «22 — ЯгзР — «21^, йгз = «2i(7 — ЯггР, (1.12)
аз1 = аюг — а3з<7, язг = «ззР — Яз1*\ азз = a$\q — аз2Р-
Эти соотношения называются уравнениями Пуассона.
§ 2. Движение тела по поверхности. Трение
Пусть тело, ограниченное поверхностью S, во все время
движения находится в соприкосновении с неподвижной твердой
поверхностью Su причем касание происходит в одной точке. Пусть
М — точка тела, в которой в данный момент времени происходит
соприкосновение тела с поверхностью S\. Скорость v этой точки
лежит в общей касательной плоскости поверхностей S n S\. Она
называется скоростью скольжения тела по поверхности S\.
В данный момент времени разложим движение тела на
поступательное со скоростью v и на вращательное вокруг полюса
М с некоторой угловой скоростью со. Вектор со представил! в
виде суммы двух векторов со„ и сот (рис. 3). Составляющая соп
направлена по нормали к общей касательной плоскости и
называется скоростью верчения. Составляющая сот лежит в
касательной плоскости и называется скоростью чистого качения.
В общем случае тело скользит, катится и вертится на
поверхности Si. Если v = 0, то говорят, что тело движется без
скольжения или что тело катится по поверхности S\\ если при
2* 19
Рис. 3
этом соп = 0, а сот^0, то говорят, что имеет место чистое
качение тела; если же соп Ф О, а сот = 0, то тело совершает чистое
верчение на поверхности S\.
В действительности ни тело, ни поверхность, по которой оно
движется, не являются абсолютно твердыми и соприкосновение
происходит по некоторой площадке пз-за возникающей
деформации тела и поверхности. В
каждой точке этой площадки на тело
действует реакция со стороны
поверхности S\. Из статики
твердого тела известно, что
произвольная система сил, приложенных к
телу, эквивалентна одной силе,
приложенной в произвольно
выбранной точке и к паре. Так как
площадка, по которой
происходит соприкосновение, обычно
весьма мала, то с геометрической
точки зрения можно считать, что
касание тела и поверхности S\
происходит в одной точке М. Тогда действие поверхности S\ на
тело можно свести к следующим составляющим:
1) к силе N, направленной по внешней нормали поверхности
Si в точке М\ эта сила называется нормальной реакцией',
2) к силе F, приложенной в точке М и лежащей в общей
касательной плоскости; эта сила называется трением скольжения;
3) к паре, вектор момента которой нормалей к общей
касательной плоскости; эта пара называется парой трения верчения,
противодействующей верчению тела;
4) к паре, вектор момента которой лежит в общей
касательной плоскости и направлен вдоль той же прямой, что и вектор
сот скорости чистого качения тела; эта пара называется парой
трения качения, она препятствует чистому качению тела.
Как правило, влияние пар трения верчения и качения на
тело мало по сравнению с влиянием нормальной реакции и силы
трения.
Движение тела по поверхности при наличии трения
существенно зависит от закона трения, который устанавливается
эмпирически. Наиболее употребительны две модели: сухого (кулопо-
ва) и вязкого трения.
В модели вязкого трения считается, что сила трения
пропорциональна скорости скольжения и направлена противоположно
вектору скорости скольжения и определяется равенством
F = ~ av, (2.1)
где положительный коэффициент а зависит от свойств
соприкасающихся поверхностей.
Законы сухого трения более сложны. Сформулируем два
из них.
20
1. Если при соприкосновении двух твердых тел в одной
точке скорость скольжения равна нулю, то сила треныя F может
иметь произвольное направление в общей касательпой плоскости
поверхностей, ограничивающих тела. При этом величины силы
трения и нормальной реакции удовлетворяют условию
F<f0N, (2.2)
где /о — коэффициент трепия покоя, зависящий только от
природы тел.
2. При наличии скольжения сила трения направлена
противоположно вектору скорости скольжения, а ее величина
пропорциональна величине нормальной реакции:
F = fN, (2.3)
где величина /, называемая коэффициентом трения скольжения,
зависит только от физических свойств соприкасающихся
поверхностей. Величина коэффициента /, согласно опыту, меньше /о.
Особо отметим, что нормальная реакция не может быть
направлена по внутренней нормали поверхности S\ в точке М.
Отсюда и из условия (2.2) получаем физические условия
осуществимости качения тела по поверхности:
F ^ foN, N^O. (2.4)
Если поверхность S\ является абсолютно гладкой, то сила
трения равна нулю. В этом случае физическое условие
осуществимости движения тела при наличии его соприкосновения с
поверхностью сводится к неравенству
W;>0. (2.5)
§ 3. Основные динамические величины твердого тела
1. Геометрия масс. Рассмотрим твердое тело в некоторой
декартовой прямоугольпой системе координат, подвижной плп
неподвижной. Мысленно разобьем тело на бесконечно малые
элементы с массой dm = о dxdy dz, где о = о(х, у, z)—плотность
данного элемента с координатами х, у, z. Масса всего тела m
может быть вычислена при помощи тройного интеграла
m= [ \ [adxdydz. (3.1)
Пусть G — центр масс (центр инерции) тела. Его координаты
«Zg, Ус, zg определяются выражениями
зс = — J J J axdxdydz. yG = - \ \ \ oydxdydz,
zG =1 \ \ \ gz dx dy dz. (3.2)
В (3.1) u (3.2) интегрирование производится по всему объему
тела.
21
Пусть задана некоторая ось и. Через р обозначим расстояние-
от бесконечно малого элемента с массой dm до этой оси.
Моментом инерции тела относительно осп и называется величина /«„
определяемая интегралом.
Ju = j J \ op2 dx dy dz.
В соответствии с этим определением можно составить следующие*
выражения для моментов инерции тела относительно осей:
Ox, Оу, Oz:
Jx= \ j J о (у2 + z2) dx dy dz, J у = J J J о (x2 + z2) dx dy dz,
Ш(З.З).
o(a* + y*)dxdydz.
Если известен момент инерции JG относительно некоторой
осп, проходящей через центр масс тела, то момент инерции /
относительно любой параллельной ей оси может быть получен по»
формуле
J = JG + md\ (3.4)
где m — масса тела, ad — расстояние между осями.
Из формулы (3.4) следует соотношение между моментами.
инерции вокруг двух любых параллельных осей:
/2 = /1 + m(4-d?)> (3.5)
где d\ и йг — расстояния от центра масс до этих осей.
Величины Jxy, /Ж2, Jyz, вычисляемые по формулам
Jxy = J J J ахУ &x dy dz, Jxz = j J j oxz dx dy dz,
Jyz = j \ J oyz dx dy dz, (3.6)
называются центробежными моментами инерции.
Рассмотрим симметрическую матрицу
/==
J*
~~Jxy
XZ
Jxy
Jy
~Jyz
~JXz
~Jyz
*z
(3.7)
Девять элементов этой матрицы образуют симметрический
тензор второго ранга. Этот тензор называется тензором инерции
тела для точки О.
Пусть система координат Oxyz получена из системы Oxyz
при помощи поворота вокруг точки О, задаваемого матрицей
направляющих косинусов
X
У
Z
х-
«U
«21
«31
V
«12
«22
«32
Z'
«13
«23'
«33
22
Согласно правилу преобразования компонент тензора при
переходе от одной системы координат к другой [88], выражения для
осевых п центробежных моментов инерции, подсчитанных для
системы координат Ox'y'z', будут такими:
Jx' === J а:а11 + ^ уа21 + $ 2%1 — ^*> xy&ll^l ^ xz&U&si — &* j/2a21a3l»
Jyf = Jх^\2 "Ь «^ j/a22 "Ь ** 2°&32 — ^ xy^\2^22 "«' ДЯ#12а32 ^** J/2°&22a32»
/2/ = */#a13 + JyCL23 + «* 2^-33 — ^3fJ/al3a23 ^*zal3a33 ^*^|/2a22a33'
Jx'yr = «'эса11а12 *^|/a2ia22 *^za3ia32 "Ь ^ЛЭ/(а11а22 "Ь а21а1г) ~Ь
+ ^2(^11^2 + 0С31а12) + ^yz(^2ia32 + а31а22)'
(3.8)
J x'z* = * х&П&ла — «/J/0&21.0&23 — **2а31а33 "I" *^»|/(alla23 + а21а1з) +
+ «^эс2 (а11^33 + а31а1з) + ^yz(a2ia33 + а31а2з)»
J y'z' = «'5cOCl2ai3 *^ 1/^22^23 ^2а32а33 Н" •* ху (а12а23 •" а22а1з) ~Ь
+ «^я:2(а12а33 "Ь С'з2а1з) + *^2/2 (а22а33 "Ь а32а2з)#
Пусть ось u проходит через точку О и образует с осями
Ох, Оу и Oz углы, косинусы которых равпы о, р п «у
соответственно. Момент инерции относительно оси и выражается через
компоненты тензора инерции и величины а, р, «у согласно
•формуле
/и - Jxa2 + /#•+ Jzf - 2/^сф - 21хгщ - 2/^. (3.9)
При изменении направления оси и величина Ju изменяется.
Это изменение наглядно иллюстрируется следующим
геометрическим способом. Отложим от начала координат вдоль оси и
отрезок ОР длиной 1/T/W. Если исключить тела, имеющие форму
бесконечно топкого стержня, то при изменении направления оси
и точка Р опишет замкнутую поверхность. Уравнение этой
поверхности имеет вид
Jxx2 + Jyy2 + Jzz2 — 2Jxyxy — 2Jxzxz — 2Jyzyz = 1. (3.10)
Поверхность (ЗЛО) является эллипсоидом и называется
эллипсоидом инерции тела для точки О. Если эллипсоид инерции тела
для точки О известен, то очень просто найти величину момента
инерции тела относительно любой оси и, проходящей через
точку О. Действительно, если обозначить через Р одну из двух
точек, в которых ось и пересекает эллипсоид, то Ju = 1/ОР2.
Плоскости п осп симметрии эллипсоида инерции тела для
точки О называются главными плоскостями и главными осями
инерции тела для этой точки. В системе координат Ox'y'z', осп
которой направлены вдоль главных осей, тензор инерции будет
диагональным п матрица (3.7) принимает вид
\Л О О II
/ =
о в о\. (3.11)
о о с!
23
Величины А, В, С называются главными моментами инерции.
тела для точки О. В системе координат Ox yzr уравнение
эллипсоида инерции (ЗЛО) принимает вид
Ах'2 + Ву'2 +Cz'2=l. (3.12>
Эллипсоид инерции для центра масс тела называется
центральным эллипсоидом инерции, а соответствующие главные
моменты инерции — главными центральными моментами инерции
тела.
2. Кинетическая энергия. Пусть 0%xyz — неподвижная сис-г
тема координат, а 0%х\Х> — система координат, жестко связанная
с твердым телом. Обозначим через v0\< v0^ v0z и р, q. r проекции
па оси 0%, Ог\, ОС; скорости v0 полюса относительно
неподвижной системы координат и вектора мгновенной угловой скорости
со тела. Пусть v — вектор скорости бесконечно малого элемента
тела dm относительно системы O^xyz, a £, tj, g — проекции
радиуса-вектора ОР этого элемента на оси 0|, Ог\, 0£. Согласно
формуле (1.4)
v = Vo + о х ОР. (3.13)
Воспользовавшись этим равенством и произведя интегрирование
по всему объему тела, выражение для кинетической энергии
тела
можно записать в виде следующей формулы:
Т = 1 m (v20l + иЪъ + vl-) +
+ 4 (^* + Jrf? + JV'2 - 2/6nP9 - 2/K/>r - 2/чйт) +
+ ™> {(b'orf — vo&) Ig + {voiP — votf) TjG + {voiq — v0i\P) tcIi (3. J4)
где m — масса тела, /g, /ч, /с и /£ч, /Etj /чС — осевые и центробеж-
пые моменты инерции тела для точки О, a |G, Цс, £g —
координаты центра масс тела в системе 0|г}£;.
Рассмотрим частные случаи.
1. Если полюс О совпадает с центром масс G, то |о = 'Пе==
= £G = 0, \0=Vg и формула (3.14) принимает вид
Т = 4 mi£ +i (/|Р2 + /rtf2 + ^ - 2/6чр« - 2/ерг - 2/^дг).
(3.15)
Движением тела относительно центра масс называют его
движение относительно поступательно движущейся системы координат
с началом в центре масс (такая система координат называется
кёниговой). Равенство (3.15) выражает теорему Кёнига для
кинетической энергии твердого тела: кинетическая энергия тела
24
равна сумме той кинетической энергии, которую имел бы центр
масс, если бы в нем была сосредоточена вся масса тела, и
кинетической энергии тела в его движении относительно центра масс.
2. Если полюс совпадает с центром масс, а за оси.О£, Оц, 0£
жестко связанной с телом системы координат приняты главные
центральные осп инерции, то /^ = /« — Кь = О, 1г =■ А, /ч = В7
Jz = С, где А, В, С — главные центральные моменты инерции
тела. В этом случае
Т = 1 ™>о + }(¥ + Bq* + О*). (3.16)
3. Пусть прп движении твердого тела одна из его точек
остается неподвижной. Если эту точку принять за полюс О, то v0\ =*
= i^on = Vot = 0 и выражение (3.14) для кинетической энергии
тела запишется в виде
Т = j (JlP2 + Jjf + Jti* - 2J^pq - 2/крг - 2J^qr). (3.17)
Если к тому же осп 0g, Or), ОС; направлены вдоль главных осей
инерции для неподвижной точки О и Л, В, С — величины
главных моментов инерции для этой точки, то кинетическая энергия
тела определяется равенством
Т = 1 (Ар2 + В(? + О2). (3.18)
3. Количество движения. Количеством движения тела
называется вектор Q, определяемый равенством
тде v — вектор скорости бесконечно малого элемента dm тела.
Воспользовавшись формулой (3.13) и произведя интегрирование,
лолучпм такие выражения для проекции вектора количества
движения на осп жестко связанной с телом системы
координат 0|г}£:
Qi =• m(vot + tcq — r\Gr), Qr> = m (v0l] + £cr — tGp),
Qi = m(Vot + r\cP - lor). (3.19)
Если полюс О совпадает с центром масс G, то
Qi =■ mvGl, Qr, = mvGl]J Qt = mvGl.
Отсюда следует, что
Q = mvc, (3.20)
т. е. количество движения тела равно тому количеству
движения, которое бы имел центр масс, если бы в нем была
сосредоточена вся масса тела.
Из формул (3.14) и (3.19) следует, что проекции вектора
количества движения на оси 0£, Оц, Ot, равны частным
производным от кинетической энергии тела по соответствующим проек-
25
циям скорости точки О на эти оси:
fc~sy ^-*S|' ft-**- <3-21>
4. Момент количества движения. Моментом количества
движения (кинетическим моментом) тела относительно точки О
называется вектор К, определяемый равенством
К-JJJaOPXvdgdTidE.
где ОР — радиус-вектор, a v — вектор скорости бесконечно
малого элемента dm тела.
Интегрирование дает следующие выражения для проекций,
момента количеств движения на оси системы координат 0£,ц&
Кг => hp — J^q — hxT + m(r\GVot — UVoJ,
Kn = —J&P + Jr>q — Л*г + m (tcVoi — IcVot), (3.22 >
Kt = —Jup — J^q + Jtr+m (IcVon — 4gV0z) -
Отсюда и из (3.14) следуют равенства
т. е. проекции вектора кинетического момента тела на оси.
О6, Orj, 0£ равны частным производным кинетической энергии
тела по соответствующим проекциям вектора угловой скорости.
на эти оси.
Если точка О неподвижна {v0i =' v0r) = v0t = 0) или совпадает*
с центром масс тела (|с = Цо = £с — 0), то формулы (3.22)
станут такими:
К\ =■ JiP — J^pq — hipr, Кч = — Jlrj) + Л,д — Л,£г,
Kt = -JuP-J*q-Jtr. (3.24>
Последние формулы можно записать более компактно, используя*:
матрицу J тензора инерции тела для точки 0:
K = Jco. (3.25)
Если оси Og, Or], Ot, — главные оси инерции тела для точки О*.
то формулы (3.24) упрощаются:
К*=Ар, Krt^Bq, Kt = Cr. (3.26>
Отметим без доказательства, что если К и К' — векторы
кинетических моментов тела относительно двух точек О и О',.
a Q — вектор количества движения тела, то связь между К и К'
задается равенством
K, = K + 07OXQ. (3.27)
Пусть \ и v(r) — скорости бесконечно малого элемента тела:
по отношению к неподвижной системе координат и в его
движении относительно центра масс, а К и К(г) — векторы моментов.
26
.количеств движения тела относительно центра масс,
подсчитанные для абсолютного движения (т. е. для скоростей v) и для
движеппя относительно центра масс (т. е. для скоростей v(r)).
Вычисления показывают, что К = К(г), т. е. абсолютный момент
количеств движения тела относительно центра масс совпадает с
аналогичным относительным моментом количеств движения по
«отношению к самому центру масс. Это утверждение справедливо
не только для твердого тела, но и для произвольной
материальной системы.
5. Энергия ускорепий. Пусть w — вектор ускорения
бесконечно малого элемента dm тела. Энергия ускорений S вводится по
аналогии с кинетической энергией
Имеет место теорема, аналогичная теореме Кёнига: энергия
ускорений тела равна сумме энергии ускорений, которую имел бы
центр масс, если бы в нем была сосредоточена вся масса тела, и
энергии ускорений тела в его движении относительно центра
масс:
5=1 roa'S + | J j j ™(r)2 dl dt[ d£,
где wG — ускорение центра масс тела, а w(r) — вектор ускорения
бесконечно малого элемента dm тела в его движении
относительно центра масс.
Воспользовавшись формулой (1.5) для ускорении точек
твердого тела и произведя интегрирование, получим следующее
выражение для энергии ускорений тела [96]:
JS = 1 mwb + ~ (Ар* + Bq2 + Сг2) + (С - B)qrp +
+ (Л- С) rpq + (B-A)pqr+ ... (3.28)
Здесь р, </, г п р, <7, г — проекции векторов угловой скорости «о
и углового ускорения со на главные центральные оси инерции
-тела, а величины А, В, С — соответствующие главные
центральные моменты пнерцпи тела. Многоточием в формуле (3.28)
обозначены слагаемые, не зависящие от р, q, r.
§ 4. Основные теоремы динамики
Рассмотрим движение некоторой системы материальных
томен относительно неподвижной системы координат Oxyz. Когда
система несвободна, то ее можно рассматривать как свободную,
если отбросить наложенные на систему связи и заменить их
действие соответствующими реакциями.
Разобьем все силы, приложенные к системе, на внешние и
внутренние; в те и другие могут входить реакции отброшенных
27
связей. Через F и МА обозначим главный вектор и главный
момент внешних сил относительно точки А.
1. Теорема об изменении количества движения. Если Q —
количество движения системы, то (см. [188])
g-F. (4.1>
т. е. справедлива теорема: производная по времени от
количества движения системы равняется главному вектору всех
внешних сил.
Заменяя вектор Q через его выражение mvG, где m — масса-
системы, a vG — скорость центра масс, уравнению (4.1) можно>
придать другую форму:
m-J! = F. (4.2>
Это равенство означает, что центр масс системы движется, пакт
материальная точка* масса которой равна массе системы и к
которой приложена сила, геометрически равная главному вектору
всех внешних сил системы. Последнее утверждение называют
теоремой о движении центра масс (центра инерции) системы.
Если F = 0, то из (4.1) следует, что вектор количества
движения Q постоянен по величине и направлению. Проектируя его>
на оси координат, получим три скалярных первых интеграла,
дифференциальных уравнений движепия системы:
Qx =• cXl Qv = су, Qz = cz, (cX7 cy, cz — const).
Эти интегралы носят название интегралов количества движения.
При F = 0 скорость центра масс постоянна, т. е. он движется
равномерно и прямолинейно.
Если проекция главного вектора внешних сил на какую-либо
одну ось, например на ось Ох, равна нулю, то имеем один
первый интеграл Qx = const, пли vGx = const; если же равны нулю»
две проекции главного вектора, то существует два интеграла
количества движения.
2. Теорема об изменении кинетического момента. Пусть А —
некоторая произвольная точка пространства (движущаяся или
неподвижная), которая не обязательно совпадает с какой-либо
определенной материальной точкой системы во все время
движения. Ее скорость в неподвижной системе координат Oxyz
обозначим через \л- Теорема об изменении кинетического момента
КА материальной системы относительно точки А имеет вид [188]
%- = mvc X vA + МЛ. (4.3>-
Если точка А неподвижна, то vA = 0 и равенство (4.3)
принимает более простой вид:
dK,
dt
= МЛ. (4.4>
28
Это равенство выражает теорему об пзмепенпи
кинетического момента системы относительно
неподвижной точки: производная по времени от
кинетического момента системы, вычисленного относительно некоторой
неподвижной точки, равняется главному моменту всех внешних
сил относительно этой точки.
Если МА = 0, то согласно (4.4) вектор кинетического
момента постоянен по величине и направлению. Проектируя его на
оси координат, получим три скалярных первых интеграла
дифференциальных уравнений двпжеипя системы:
Кх = схч Ку = су, Кг = сг (сх, Су, c'z — const).
Эти интегралы посят название интегралов кинетического
момента или интегралов площадей.
Если точка А совпадает с центром масс G системы, то
у а = vG. Тогда первое слагаемое в правой части равенства (4.3)
обращается в нуль и теорема об изменении кинетического
момента имеет ту же форму записи (4.4), что и в случае
неподвижной точки А. Отметим (см. п. 4 § 3), что в
рассматриваемом случае абсолютный кинетический момент Ка системы в
левой части равенства (4.4) может быть заменен па равный ему
кинетический момент системы в ее движении относительно
центра масс.
Пусть и — некоторая неизменная ось пли ось неизменного
направления, проходящая через центр масс системы, а Ки — ки-
петическпп момент системы относительно этой оси. Из (4.4)
следует, что
^ = М„, (4.5)
где Ми — момент внешних сил относительно оси и. Если во все
время движения Ми = 0, то имеем первый интеграл
Ки = const. (4.6)
В работах С. А. Чаплыгина [203, 204] получено несколько
обобщений теоремы об изменении кинетического момента,
которые применены затем при решении ряда задач о качении шаров.
Дальнейшие обобщения теоремы об изменении кинетпческога
момента и их приложения в задачах динамики твердого тела
содержатся в работах [13, 14, 81, 138, 182—185]. Основные
результаты этих работ связаны с теоремой об изменении
кинетического момента относительно подвижной осп и, постоянно
проходящей через некоторую движущуюся точку А. Пусть е —
единичный вектор, направленный вдоль этой осп. Умножив скаляр-
но на е обе части равенства (4.3) и добавив к его обеим частям
слагаемое КА • е, получим
dKA-e
—£— = m(vGX v^)-e + КАе + МАе. (4.7)
29
При выполнении кинематического условия [81]
m(vcXvA)-e + KA е = 0 (4.8)
из (4.7) следует уравнение (4.5). И если во все время
движения Ми = 0 и выполняется условие (4.8), то существует первый
интеграл (4.6).
Если связи системы идеальны и допускают в числе
виртуальных перемещений вращения системы как твердого тела вокруг
«оси и, то главный момент реакций относительно оси и равен
нулю [188], и тогда величина Ми в правой части уравнения (4.5)
представляет собой главный момент всех внешних активных сил
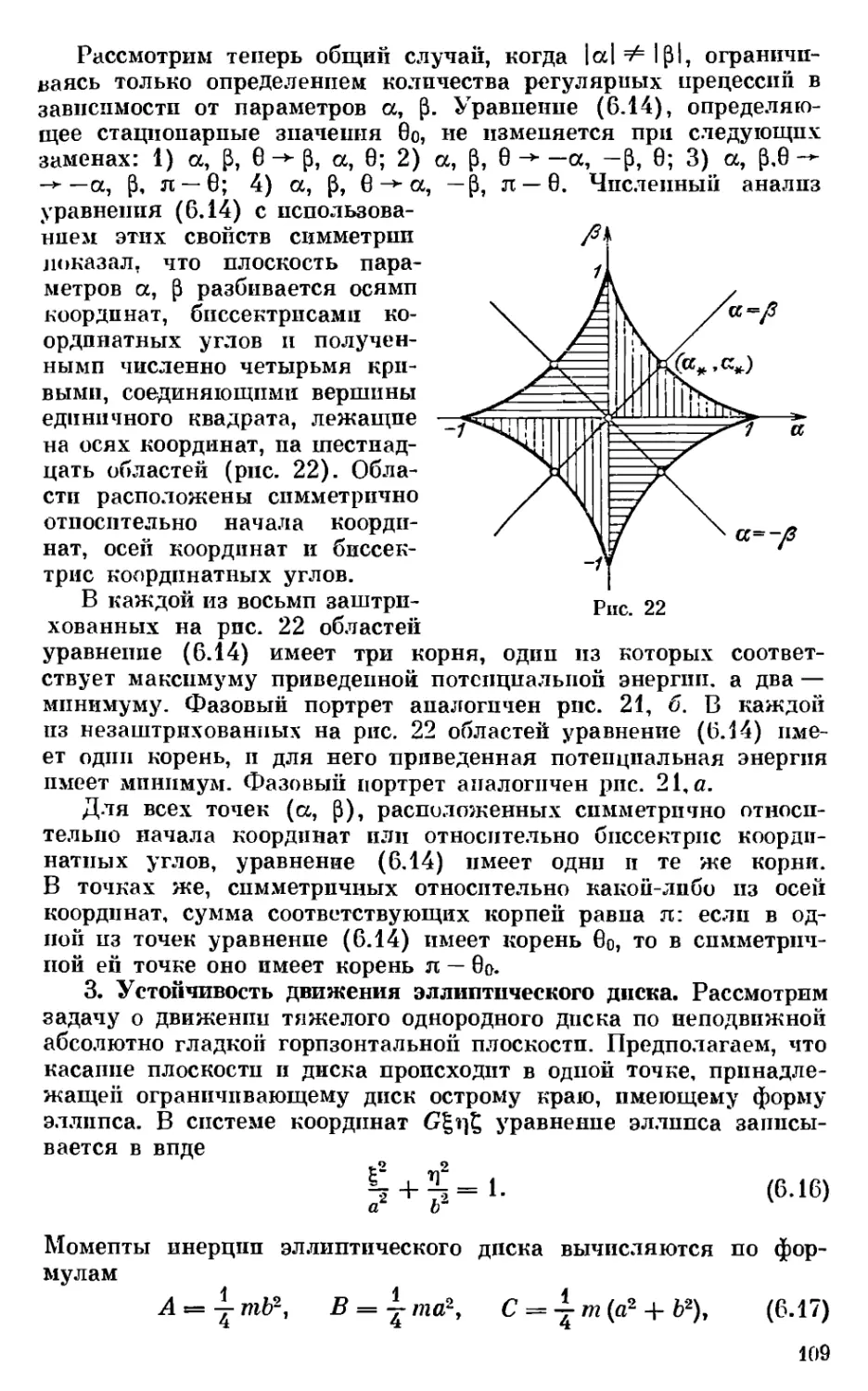
относительно оси и. Равенство нулю этого момента и
выполнимость соотношения (4.8) будут в рассматриваемом случае
достаточными условиями для существования интеграла (4.6).
Если направление оси и неизменно (е = 0), то условие (4.8)
.запишется в виде [138]
Ы X vA) • е = 0. (4.9)
"Это равенство означает, что проекции скорости центра масс и
скорости точки А оси и на плоскость, перпендикулярную этой
осп, являются параллельными. В работе С. А. Чаплыгина [203]
вместо (4.9) требуется выполнение менее общего условия
\А = X\G, где К — произвольная постоянная величина.
Заметим, что условие (4.8) не зависит от выбора точки на
осп и. Действительно [185], пусть Р — произвольная точка на
«оси и. Тогда
АР = ае, \Р = \А + ссе + ае, КР —■ КА + mavG X e
ж, следовательно,
m(\G X vP) • е + КР - е = m(v0 X vA) ■ е + КА -е.
В заключение отметим геометрическую интерпретацию Реза-
ля уравнений (4.1) и (4.4): векторы абсолютных скоростей
концов векторов Q и КА равны соогвегственно главному вектору и
главному моменту всех внешних сил относительно точки А,
3. Теорема об изменении кинетической энергии. Между
изменением кинетической энергии системы и работой сил,
приложенных к точкам системы, существует связь, устанавливаемая
теоремой об изменении кинетической
энергии: дифференциал dT кинетической энергии системы равен
сумме элементарных работ всех внутренних (d'AU)) и внешних
(d'A{e)) сил системы, совершенных на соответствующих
действительных перемещениях точек системы, т. е.
dT = d'A{i) + d'A{e\ (4.10)
Если все силы системы потенциальны п потенциал П не
зависит от времени, то элементарная работа сил системы будет
50
полным дифференциалом: d'A{i) +d'A{e) = — dU. В этом случае-
полная механическая энергия системы Е = Т + П постояпна,.
т. е. имеет место первый интеграл дифференциальных уравнений
движения
Г + П = й = const. (4.11)
Следует иметь в виду, что для существования интеграла-
(4.11) требование о том, чтобы все силы были потенциальными,
не является необходимым: достаточно потребовать, чтобы
потенциальными были силы, работа которых па действительных мере-
мещепиях системы отлична от нуля. Например, если свя<зп
системы идеальные и стационарные, то работа реакций связей на
действительных перемещениях равна нулю; если активные силы
имеют не зависящий от времени потенциал, то сущесткует
интеграл энергии (4.11).
Для твердого тела работа внутренних сил равна нулю и
равенство (4.10) (принимает вид
dT = d'A{'K (4.12)
Работа внешних сил d'A{e\ приложенных к твердому телу,
вычисляется по фор1муле
d'A(e) = F • vo dt + Mo • <о dt, (4.13)
где F — главный вектор, а М0—главный момент внешних сил
относительно полюса О, v0 — скорость полюса, со — угловая
скорость тела, a dt — бесконечно малый промежуток времени,
отвечающий тем бесконечно малым перемещениям точек системы,,
па которых вычисляется работа.
§ 5. Уравнения движения твердого тела
Рассмотрим движение свободного твердого тела. Если бы на
него были наложены связи, то задачу о его движении можно-
было бы свести к задаче о движении свободного тела путем
отбрасывания связей и введения соответствующих реа/кцпй.
Уравнения движения твердого тела могут быть получены из теоремы
о движении центра инерции и теоремы об изменении
кинетического момента.
Движение твердого тела можно рассматривать как
совокупность поступательного движения, определяемого движением
произвольной точки тела (полюса) и вращения тела вокруг этой
точки. Ив основных теорем динамики следует, что за гаолюс
удобно принять центр масс тела. Действительно, согласно теореме о
движении центра инерции, последний движется как
материальная точка, -к которой приложены все силы системы, а теорема об
изменении кинетического момента для движения относительно
центра масс формулируется так же, как и для неподвижного
полюса.
31
i. Уравнения, отнесенные к неподвижным осям* Пусть v —
скорость центра масс тела в неподвижной системе координат
OffXijz, Kg— кинетический момент тела относительно центра
~масс, F — главный вектор внешних сил, a MG — главный момент
внешних сил относительно центра масс. Из теоремы о движении
центра масс и теоремы об изменении кинетического момента,
лолучаем два векторных уравнения:
Тхаждое из этих векторпых уравнений может быть заменено тре-
мя скалярными:
тх = Fx, ту = FVJ mz = FZl (5-2)
Rgx = MGxi K-Cy ==s MGV9 KGz = Мог, (°*3)
где x, у, z — координаты центра масс, а индексами хл z/, z
отмечены проекции векторов на соответствующие осп.
2. Уравнения движения, отнесенные к осям, жестко
связанным с телом. Обозначим через G£tj£ жестко связапную с телом
систему координат, оси которой направлены вдоль главных
центральных осей инерции тела. Пусть «о — угловая скорость тела.
Использовав связь (1.10) абсолютной и относительной
производных вектора, уравнения (5.1) можно записать в виде
т
(f + oXv)=F. ^+*ХКс-Мо. (5.4)
Проектируя обе части этих уравнений на оси G£, Gr\j Gt> и
пользуясь равенствами (3.26), получаем шесть скалярных
дифференциальных уравнений движения твердого тела, записанных
в проекциях на осп жестко связанной с телом системы координат
Glvfc
т(щ + qvt — rvj = Fb т(г\ + гиг — pvz) = F^
A%- + (C-B)qr = Ml9 B% + (A-C)rp-Mv
C* + {B-A)pq = Mi.
(5.5)
(5.6)
Индексами £, tj, £ здесь обозначены проекции векторов па оси
G£, Gtj, G£. Уравнения (5.6) называются динамическими
уравнениями Эйлера. Вообще говоря, система уравнений (5.5), (5.6)
должна рассматриваться совместно с кинематическими
уравнениями Эйлера (1.9).
3. Уравнения движения твердого тела по отношению к осям,
имеющим произвольно заданное движение. Получим
дифференциальные уравнения движения твердого тела относительно
системы координат, совершающей произвольное движение. Имея в
52
*1
"i
zi
I
cn
C21
Si
K\
CI2
C22
C32
I
C13
C23
C33
виду дальнейшее применение этих уравнении в задаче о
движении твердого тела по поверхности, мы будем следовать
работам [33, 301]. Пусть O^xyz — неподвижная система координат,
а система координат 0\х\1> жестко связана с телом. Обозначим
через voi, vori, v0t и рч q, г проекции скорости полюса О и
мгновенной угловой скорости со твердого тела на осп 0%, Ог\, 0£.
Согласпо формуле (3.14), кинетическая энергия тела Т =
= T(voz, Vor), Vou p, q, г) будет квадратичной формой величин
Voi, ^от), vou p, q, r с постоянными коэффициентами.
* Рассмотрим еще систему координат 0\X\y\Z\. Предполагаем,
что координаты |, т], £ ее начала 0\ в системе 0%г\^ и девять
направляющих косинусов, задающих взаимную ориентацию
систем 0\xxy\z\ и 0\vfe>,
(5.7)
заданы либо как функции времени t, либо как функции
параметров, определяющих положение твердого тела.
Проекции о, т, п па оси 0\Х\, 0\у\, 0\Z\ мгновенной угловой
скорости со тела и проекции a, ji, f на те же оси скорости той
точки тела, которая в данпый момент времени совпадает с
началом системы координат OiX\y\z\, согласно (1.4) и (5.7), будут
такими:
о = рсп + qc\2 + rc13, T = pc2i + qc22 + rc23, п = /?с31 + tf с32 + гсы,
a = (vos + qt — rr\)cn+(Vo4+rl — pt))cl2+(Vot + pr\--ql)cls,
(5.8)
$=Ы + qt — ГХ\)С2Х +(v0r)+ rl — pt>)C22 + (Vot+P4 — <^)c23j
Tf ^(voi + qt — nr|)c3i +(v0n + r% — pt)cs2 + (Voz +рц — rtjcse.
Разрешив уравнения (5.8) относительно p, q, r, v0^, v0^ vot,
получим
P = OCU + XC2\ + ПС3и q = OCi2+TC22 + nCs2, Г = OC\z + TC23 + ??C33,
vol = acu + |3c21 +y c31 + 0(r|Ci3 — £cl2) + т(т]С23 — £c22) +
+ w(tjcss — £c32),
(5.9)
Уоп = ac12+ |k22 + ifc32 + often — £cl3) + т(£с21 — gc23) +
+ rc(£c3] — g<?33),
*ot = 0CC13 + £c23 + 1fC33 + G(ICX2 — f|Cn) + %{lC22 — ЦС2х) +
+ П(\СЪ2 — TjCsi).
Обозначим через Г* кинетическую энергию тела Т, выраженную
3 а. П. Марнеев 33
через переменные а, Р, ч, °i т> п- в соответствии с (5.9) пмееос
дт* дТ дТ , дТ п
^ = ^Сп + ^'12+<Ы l3'
ж=^' + ^Г22 + ^Г23' (5Л0)
дТ* _ дТ дТ дТ .
-^— = Л,Си + Аг2С12 + КзС13.
^ = A-Al + V22 + А3С23> (5Л1>
-^- = А^^з! + л2с32 + «r3c33r
где введены обозначения
ь _дТ дТ дТ £
^-гр + ж^ч-^б-
Из (3.21), (5.7) и (5.10) следует, что частные производные
от функции Г* по а, [}, f суть 'проеащ-пп вектора количества
движения Q тела на оси 0\Х\, 0\у\ и 0\Z\ соответственно:
<Ч-£. ^,=ж- «4-?- '512>
Воспользовавшись далее формулой (3.27), получим, что
величины к\9 Агг и Агз равны проекциям кинетического момента
**ох тела относительно точки 0\ на осп 0£, Or\ и 0£
соответственно. Поэтому из (5.7) и (5.11) вытекает, что частные
производные от функции Т* по о, т и п равны проекциям вектора
K0l на оси 0\Х\, 0\у\ и 0\Z\\
Пусть Q—угловая скорость спсте*мы координат 0\X\y\Z\r
vOj — скорость ее начала относительно неподвижной системы
координат, a F и M0j — главный вектор и главный момент
внешних сил. Опираясь на равенства (1.10) и (4.3), векторные
дифференциальные уравнения движения твердого тела можно
записать в виде
^ + fiXQ = F, i^p + QxK0i = QXv0l + M0i. (5.14>
Твердое тело вращается относительно системы 0\X\yiZ\ с
угловой скоростью coi, проекции которой 0\, п, щ на осп Oix\9
34
0\У\, 0\zx, согласно (1.7) и (5.7), вычисляются по формулам
01 = С31С21 + C32^22 + ГЗЗС23,
Tl = СЦС31 + С12С32 + С13СЗЗ, (5.15)
П\ = С2\С\\ + С22^12 + ^23^13-
Так как й = со — coi, то проекциями ft на оси 0\х\, 0\у\, 0\Z\
будут соответственно величины о — Оь т —ti и п — щ.
Для нахождения проекций вектора "Vo1 абсолютной скорости
точки 0\ на оси 0\хи 0\уи 0\Z\ заметим, что v0j = vox + vOj>
где \*о — скорость геометрической точки 0\ относительно твер-
1 (О
дого тела, а \*о — скорость той точки тела, которая в данный
момент совпадает с точкой 0\. В системе координат 0£г}£ вектор
\то} имеет компоненты |, г), £; его компоненты £', -n', £' в
системе координат 0\X\y\Z\, согласно (5.7), будут такими:
Т]' = ic2\ + Т1С22 + £С23, (5.16)
^/ = |С31+Г|С32+ЬСЗЗ.
Вспоминая, что вектор vj в системе 0\x\y\z\ имеет компоненты
а. p. "Y, получаем, что проекциями абсолютной скорости v0.
точки 0\ на осп 0\хи Оху\, 0\Z\ будут величины £' + а, tj' + P,
5' + Т-
Проектируя теперь обе части векторных уравнепий (5.14)
на оси 0\Хи 0\у\, 0\Z\, получаем уравнения движения твердого
тела по отношению ik произвольно движущейся системе
координат 0\X\yxz\ в такой форме:
d дТ* . /^ чдТ* / ч №* п
57 -^ + <т - Ti) -57 - (n - ni) "5p = F*t>
d дТ* . дТ* дТ*
л if + (0 ~ 0l)"5p - <т- т1)ж = *v
d ЯГ* . , v 571* . дТ* . ВТ* ЯТ*
= М0Л. (5.17)
d дТ* , , % 57* , дТ* ЯТ* ЯТ*
Ч
35
= If оА.
§ 6. Движение Эйлера — Пуансо
1. Уравнения движения и их интегралы. Рассмотрим
движение твердого тела вокруг неподвижной точки О, налагая, что
момент внешппх сил относительно этой точки равен нулю.
Будем считать, что осп жестко связанной с телом системы координат
OgrjJ; направлены вдоль главных осей инерции тела для точки О.
Дифференциальными уравнениями движения тела будут
динамические уравнения Эйлера:
A§ + (C-B)gr = 0, B%t + (A-C)rp = 0,
Cft + (B-A)pq=0. (6.1)
Здесь А, В и С — {моменты инерции тела относительно осей 0%7
Оц и 0£, а р, q и г — проекции вектора мгновенной угловой
скорости тела на эти осп.
Уравнения (6.1) должны быть дополнены кинематическими
уравнениями Эйлера:
р = я|) sin 6 sin <p + в cos ф, q = г|) sin 6 cos ф — 6 sin <p,
r = ^cos6 + <p. (6.2)
Задача о движении твердого тела вокруг неподвижной точки по
инерции получила аналитическое решение в трудах Л. Эйлера
[237], в честь которого такого рода движение твердого тела
носит название движения в случае Эйлера. В этом параграфе
излагаются необходимые в дальнейшем сведения об этом случае
движения твердого тела [2, 25, 37, 54, 99].
Так как момент внешних сил относительно точки О равен
нулю, то, согласно теореме об изменении кинетического момента,
кинетический момент тела К относительно этой точки постоянен
в неподвижной системе координат Oxyz. Следовательно, длипа
вектора К постоянна, т. е. уравнения (6.1) имеют первый
интеграл:
А2р2 + B2q2 + С2г2 = К2 = const. (6.3)
Принимая неподвижную точку О тела за полюс, из (4.13)
получаем, что работа внешних сил в случае Эйлера равна нулю.
Поэтому из теоремы об изменении кинетической энергии
следует, что постоянна и кинетическая энергия тела, т. е. существует
еще один первый интеграл уравнений (6.1):
-*- (Ар2 + Bq2 + Сг2) = T = const. (6.4)
2. Перманентные вращения. Уравнения (6.1) допускают
частные решения, отвечающие вращениям твердого тела с
постоянной угловой скоростью вокруг осп, проходящей через
неподвижную точку О. Такие оси называют перманентными осями ера-
36
тения, а сами движения — перманентными вращениями.
Перманентными осями вращения являются главные оси эллипсоида
инерции тела для неподвижной точки.
Если величины А, В и С различны, то существует три лер-
мапептных вращения, которые отвечают вращениям тела вокруг
осей 0£, Ох\ и 0£ и описываются формулами:
1) р=ро = const, q = 0, r = 0;
2) р = 0, q = go = const, r = 0; (6.5)
3) p = 0, g = 0? r = r0 = const.
Прп этом перманентное вращение устойчиво, если оно
происходит вокруг наибольшей или наименьшей оси эллипсоида инерции
тела для точки О:
Al2 + Brf + Ct?=L (G.6)
Перманентное вращение, происходящее всхкруг средней оси
эллипсоида инерции, неустойчиво.
Если две из величин А. В л С равны одна другой, т. е.
тело динамически симметрично, то существует бесчисленное
множество перманентных осей вращения. Если, например, А = В, то
такими осями будут, во-первых, ось 0£ и, во-вторых, любая ось,
лежащая в экваториальной плоскости 0|г) эллипсоида инерции
и проходящая через точку О. Вращение вокруг осп 0£
устойчиво, а вращения вокруг осей, лежащих в плоскости 0£,ц,
неустойчивы.
Если А=В = С, то перманентной осью вращения будет любая
ось неизменного направления, проходящая через -неподвижную
точку О. Соответствующие перманентные вращения устойчивы.
3. Геометрическая интерпретация Пуансо. Л. Пуансо [277]
дал следующее [27] геометрическое толкование движения
твердого тела в случае Эйлера:
Эллипсоид инерции для неподвижной точки во время
движения катится без скольжения по одной из своих касательных
плоскостей. Эта плоскость перпендикулярна вектору
кинетического момента тела и остается
неподвижной в пространстве.
Мгновенная угловая скорость по величине
пропорциональна радиусу-вектору
точки касания, а по направлению
с ним совпадает.
Эта знаменитая теорема носпт
название (первой) геометрической
интерпретации Пуансо, а часто и
само движение твердого тела
называют движением Эйлера — Пуансо.
На рис. 4 показан эллипсоид пнерцпи твердого тела,
катящийся по плоскости я, упоминаемой в интерпретации Пуансо.
«эта плоскость касается эллипсоида в точке Р, она
перпендикулярна неизменному вектору кинетического момента К и отстоит
37"
от центра эллипсоида па постоянном расстоянии OQ, равном
У2Т/К. При движении точ(ка Р описывает на эллипсоиде
инерции кривые, называемые полодиями; соответствующие кривые
на плоскости Пуансо я называются герполодиями. Характер
полодий и герполодий существенно зависит от величин моментов
инерции А, В, С и постоянных К и Т интегралов (6.3) и (6.4).
Мгновенная ось вращения может с течением времени
изменять свое положение и в пространстве, и в движущемся теле.
Она описывает в пространстве
коническую поверхность с вершиной в
неподвижной точке О; эта
поверхность называется подвижным аксои-
дом, или конусом герполодий.
Аналогичная поверхность в
движущемся теле называется подвижным ак-
соидом, или конусом полодии.
4. Аналитическое представление
решения динамических уравнений
Эйлера. Пусть величины А, В и С
различны. Для определенности будем считать, что выполняются
неравенства
А>В>С. (6.7)
Тогда при любых К и Т имеем неравенства 2ТА >К2> 2ТС.
Качественная картина расположения полодий представлена па
рис. 5. Эта картина симметрична относительно главных
плоскостей эллипсоида инерции. Возможны три различных случая.
1) 2ТВ > К2 > 2ТС. В этом случае полодии охватывают
наибольшую ось эллипсоида инерции. В областях /и 77 решение
уравпений (6.1) выражаются через эллиптические функции Яко-
би [55] соответственно в виде
Рис. 5
„ — 1 /V - 2ТС , . Г К1 - 2747
sn т,
2ТА — /Г
С (А —С)
dn т (6.8)
=т1/
ГК2— 2ТС
А (А — С)
СП т, q
-*Vm
2ТС
В {В-С)
sn т,
/Г2ТА
К*
С (А —С)
с1пт. (6.9)
В формулах (6.8) или (6.9) одновременно берутся либо только
верхние, либо только нижние знаки и введено обозначение
-/
(В - С) (2ТА — К2)
ABC
('-*о).
(6.10)
38
где to — произвольная постоянная. Модуль к\ (0^fci<l)
эллиптических функций в формулах (6.8) и (6.9) определяется
формулой
к* (А-В){К*-2ТС) 6И)
1 (В—С)(2ТА — К2)
Направление движения точки Р по полодиям показано на рис. 5
стрелками. Если К2 = 2ТС, то полодии в областях / и //
вырождаются в точки, являющиеся вершинами эллипсоида
инерции, лежащими на оси 0£. Эти точки отвечают перманентным
вращениям тела, для которых р = О, q = 0, г = const.
2) 2ТА > К2 > 2ТВ. В этом случае полодии охватывают
наименьшую ось эллипсоида инерции и лежат в областях /// и IV
на рис. 5. Если 2ТА = К2, то полодии вырождаются в точки,
являющиеся вершинами эллипсоида инерции, лежащими на оси
0% и соответствующими перманентпым вращениям тела, для
которых р = const, q = 0, г = 0.
Введем обозначения для модуля эллиптических фупкций и
переменной т:
*-S:ggl-.£ '-•"-"is-"'»-* <«2>
Тогда в областях III и IV решения уравнений (6.1) будут
соответственно такими:
т Гкъ - 2ТС л , , Г ITА - К2
Р-У А(А-С)АПХ> «=±1/ ЩА=В)тГ>
И
1 Г*? — 2747 , , -, [\
2ТА — К2
В (А —В)
sn т,
=±/йЫс^- (б-14)
В формулах (6.13) пли (6.14) одновременно берутся либо
только верхние, либо только пижние знаки.
3) 2ТВ = К2. В этом случае полодии лежат в плоскостях
проходящих через среднюю по величине ось эллипсоида инерции
и разбивающих поверхность эллипсоида на области I—IV с
различным характером поведения полодпй. Совокупность полодий,
отвечающих рассматриваемому случаю, образована двумя
точками, совпадающими с вершинами эллипсоида инерции, лежащими
на его средней оси и соответствующими неустойчивым перма-
39
нентным вращениям тела р — 07 д = const, г = 0, и четырьмя се-
паратрисными кривыми, соединяющими эти точки. Последние
кривые обозначены на рис. 5 цифрами i, 2, 5, 4.
Решения уравнений Эйлера (6.1), соответствующие
полодиям-сепаратрисам, выражаются через гиперболические функции.
Введем обозначение
x^y2TiB-CHA-B){t_to) (616)
Тогда на кривой 1
Л,Г2Т(В — С) 1 l/27\i л/гТ{А — В) 1 .
(6.17)
на кривой 2
,/~2Т(В-С) 1 /IF.. _ |/2ГИ-В) 1 .
(6.18)
на кривой 3
l/2T(B-C) 1 1/2Г41 i/2T(A — B) l
на кривой 4
1 /2Г (Л — С) 1 ,/2Гм
(Л-С) 'chr- *— К В1111' ' ~~ Г С(4-С) chx'
(6.19)
ClA-O-Wx (6-20)
5. Герполодпи. Если моменты инерции А, В, С различны, то
герполодпи представляют собой плоские симметричные кривые,
завивающиеся вокруг центра Q, представляющего собой точку
пересечения вектора кинетического момента К с неизменной
плоскостью я (рис. 4). Хотя эти кривые состоят из
конгруэнтных частей, они не обязательно замкпуты. Герполодпи не имеют
ни точек перегиба, ни точек возврата. Вся герполодия заключена
между двумя граничными концентрическими окружностями,
которых она попеременно касается; моменты касания
соответствуют переходу вектора со через главные плоскости эллипсоида
инерции. Радиусы граничных окружностей £>Pmm н QPma*
представлены в табл. 1. В случае перманентпых вращении герполодия
вырождается в точку Q. Отметим, что для движений тела,
отвечающих полодиям-сепаратрисам (случай 3), герполодия будет
спиралью, завивающейся вокруг точки Q, так как в этом случае
QPmm = 0. Эта спираль бесконечное число раз обходит точку (),
но ее общая длина конечна, так как она равна длине
соответствующей дуги полодии.
40
6. Вычисление углов Эйлера как функций времени. Если
динамические уравнения Эйлера проинтегрированы, то зависимость
утлов Эйлера i|), 6, <р от нре.мени может быть найдена путам
интегрирования уравнений (6.2). Однако вычисления можно
значительно упростить, если воспользоваться постоянством вектора
Таблица 1
Случай
1) 2ТВ > К2 > 2ТС
2) 2ТА^К2>2ТВ
3) 2ТВ = К2
Q*>mm
(2ТВ — К2) {К2 — 2ТС)
2ТК2ВС
(2ТА — К2) (К2 — 2ТВ)
2ТК2АВ
0
фРщах
(2Т А — К2) (К2 — 2ТС)
гтк2Ас
(А-В)(В-С)
ABC
кинетического момента К и выбрать неподвижную систему
координат Oxyz (рис. 2) так, чтобы направление оси Oz совпадало
с неизменным направлением вектора К. Тогда
Ар = К sin 6 sin ф, Bq = K sin 6 cos <p, Cr = К cos 6.
Отсюда сразу определяются два угла Эйлера:
о Сг
cos 6 = -=т,
*ф-$
(6.21)
(6.22)
Из (6.2), (6.21) и (6.22) следует, что
\р = К
г 2Т — СГ
К*
С2г2'
(6.23)
Если динамические уравнения Эйлера уже проинтегрированы, то
правые части равенств (6.22) и (6.23) будут известными
функциями времени, и вопрос об определении углов Эйлера можно
считать в принципе решенным.
Движения тела, отличные от перманентных вращений pi
движений, отвечающих сепаратрисам 1—4 на рис. о, будут двух-
частотиыми. Одна частота является частотой (Oi периодических
колебашш углов 6 и ср, определяемых из (6.22), (6.8), (6.9) пли
из (6.22), (6.13), (6.14). Вторая частота ог есть среднее по
времени значение правой части уравнения (6.23).
Если частоты ©i и юг соизмеримы, т. е. отношение (Oi/юг
будет рациональным числом, то говорят, что имеет место
резонансный случай; в этом случае движение тела в пространстве
буцет периодическим. Если же частоты roi и сог несоизмеримы
(нерезонансный случай), то движение тела в пространстве будет
Условнотпериодическим.
41
7. Случай динамической симметрии, регулярная прецессия.
Пусть два из момептов инерции тела равпы, например А=ВФ
ФС. Тогда решение системы уравнений (6.1) будет таким:
p=p0cosXt + q0s'mht, g= — p0sinXt + q0cosXt, r=r0, (6.24)
где К = —2— ro» a индексом нуль обозначены начальные
значения соответствующих величип.
Если неподвижную систему координат Oxyz выбрать, как в
предыдущем пункте, направив ось Oz по неизменному вектору
К, то получим, что угол 6, угловая скорость прецессии я|) и
угловая скорость собственного вращения тела ф постоянны.
Такое движепие тела называется регулярной прецессией. Оно
описывается формулами
cos0 = cos60=-^, u = -j, ф = Я. (6.25)
В случае регулярной прецессии иолодни и гер-полодии будут
окружностями. Для перманентных вращений эти окружности
вырождаются в точки.
§ 7. Некоторые дифференциальные уравнения
аналитической динамики
В этом параграфе приведены те из дифференциальных
уравнений аналитической динамики, которые потребуются в
последующих главах.
1. Уравнения Лагранжа второго рода. Рассмотрим движение
голономтюй системы с п степенями свободы. Обобщенные
координаты обозначим через </i, <7й* ■ • -i Qn. Пусть элементарная
работа сил системы на ее виртуальном перемещении, задаваемом
величинами 6gi, бдг, §Цп* может быть записана в впде
6.i = Sa(q.q.')6<7i- (7-1)
2 = 1
Величина Qi называется обобщенной силой, соответствующей
обобщенной координате q{ (i = 1. 2 /г). Пусть Т = T(q, q, t) —
кинетическая энергия системы. Уравнения двнжепия
материальной системы могут быть записаны [34] в форме п
дифференциальных уравнений второго порядка
Щ-Wr^ («-1.2.....П). (7.2)
Эти уравнения называются уравнениями Лагранжа второго рода.
Предположим, что силы системы потенциальпы, т. е.
существует функция П = П(д, t) (называемая потенциалом или по-
42
тенциалъной энергией) такая, что
Q^-Щ: (*= 1,2, ...,»). (7.3)
Если ввести функцию L {функцию Лагранжа) по формуле
L = r —П, (7.4)
то уравнения (7.2) примут вид
*£*_*£ = О (i =1,2, ...,л). (7.5)
2. Уравнения Гамильтона. Уравнениям (7.5) можно придать
изящную симметричную форму, полученную Гамильтоном.
Введем величины pi (обобщенные импульсы) по формулам
Pi = d± (i = l,2 и) (7.6)
и составим функцию
H^^Pigi-L{q/q.t). (7.7)
Так как гессиан функции L по обобщенным скоростям
отличен от нуля, то уравнения (7.6) разрешимы относительно q\
(i=l, 2, ..., и). Разрешив уравнения (7.6) и подставив
полученные при этом функции <jfi = <jfrf(q, p, t) в правую часть
выражения (7.7), получим функцию ff = #(q, p, t). Эта функция
называется функцией Гамильтона. Если вместо переменных qiy
ф, £ в качестве переменных, отбывающих состояние системы,
принять величины д», /?,, £ (i=l. 2, ..., гс), то
дифференциальные уравнения движения примут вид [34]
dQi дН dPi дН
!и=Щ> И = -^ (* = 1.2, ...,*). (7.8)
3. Уравнения Рауса для системы с циклическими
координатами. Пусть изучаемая система голономна, а функция Лагранжа
L не зависит от некоторых из обобщенных координат qa (сс =
= s+l, ..., п), т. е. qa — циклические координаты. Тогда [34]
для уравнений (7.5) существует п — s первых интегралов
or
Ра = -т- = са = const (а = s + 1, ..., п). (7.9)
Пусть гессиан функции Лагранжа L по переменным qa отличен
от нуля. Тогда уравнения (7.9) разрешимы относительно qa.
Составим функцию
i? = L- 2 cJia. (7.10)
a=e+i
Исключив из пее переменные qa при помощи (7.9), получим
43
функцию R=R(qi, qu c«, t) (i=l, 2, ..., s; a = s+l, ..., n),
которая называется функцией Рауса.
При помощи функции Рауса система дифференциальных
уравнений, описывающая изменение нециклических переменных
(позиционных координат) со временем, может быть записана
в виде [34]
Щ-wr0 е-1-2'--* <7Л1>
Система (7.11) на-зывается приведенной системой. Ее порядок
на 2 (п — s) единиц меньше порядка ргсходной системы (7.5).
Можно сказать, что исследование движения в системе с п
степенями свободы привелось к исследованию движения в системе
с s степенями свободы.
4. Уравнения Чаплыгина. Пусть положение системы
определяется п + k обобщенными координатами </i, g2, • --, qn, qn+\, ...
..., qn+h и па нее наложены пеинтегрируемые связи вида
71
?«+v = 2 bviffi (v = 1, 2, .... к), (7.12)
1=1
где bvi — функции обобщенных координат. Пусть Т —
кинетическая энергия, а П — потепциал сил системы. Если Г, П и все
коэффициенты bVt в уравпетъиях связей (7.12) не зависят от
обобщенных координат qn+\, ..., qn+h, то рассматриваемую него-
лономную систе-тму называют системой Чаплыгина. Дргфферен-
циальные уравнения движения таких систем получепы
С. А. Чаплыгиным в работе [202]. Они имеют вид
d дТ* дТ* ОТ v дТ Г v (дЪ* dbvj\ ' I (7 лоч
(*— 1, 2, ..., п).
Через Г* здесь обозначена фупкция, получающаяся из Т в
результате исключения обобщенных скоростей qn+\, ..., qn+h с
помощью уравнений связей (7.12).
Уравнения (7.13) носят название уравнений Чаплыгина.
Если в них в выражениях для импульсов dT/dq„+v исключить с
помощью уравнений связей (7.12) величины qn+i, . .., ф,+ь, то
получим систему п уравнений относительно п функций qx, ..., qn.
Следовательно, уравнения Чаплыгнпа, число которых равно
числу степеней свободы системы, позволяют независимо от
уравнении связей (7.12) найти q{(t) (j=l. 2. ..., п). Если функции
qt(t) (&=1, 2, ..., п) уже найдены, то остальные функции
qn+v(t) (v = 1, 2, ..., к) найдутся из уравнений связей (7.12)
при помощи квадратур.
Если для всех v, i, } выполняются равенства
(7.14)
дЬ„.
VI
~Щ
дЬ„.
*1 = 0
То кинематические связи (7.12) будут интегрируемы, и
уравнения Чаплыгина (7.13) принимают вид уравнений Лаграшка
второго рода.
5. Уравнения Воронца. В своих работах [28, 29, 31, 300]
П. В. Воронец получил дифференциальные уравнения движения
яеголономных систем с более широким классом связей, нежели
системы Чаплыгина.
Обозначим через ди 02, • • -, 2«, Яп+и • • •> 4W* обобщенные
координаты системы и предположим, что уравнения иеинтегрдруемых
кинематических связей имеют вид
п
gn+v = 2 VviQi + <*v (v = 1, 2, ..., к), (7.15)
где величипы о^ь av являются, вообще говоря, функциями всех
обобщенных координат д\, ..., дп+к и времени t. Определим
величины P?j, pVi по формулам
В?.-fe*+ Va - ^ ) fei , V к - *** ) (7Ш
*"l^ + ^^H^+,£a*w (7Л7)
Так как связи (7.15) неинтегрируемы. то величипы |3%, |3? не
могут быть все одновременно тождественно равными пулю.
Пусть в и 6V суть кинетическая энергия системы и
обобщенные импульсы dT/dgn+v (v = 1, 2, ..., к), выраженные при
помощи (7.15) только через первые п обобщенных скоростей qt
(i = 1, 2, ..., п), та»к что
Т = в {дх qn+h, gv ... qnj t),
W fl ( ' ' ,ч (7Л8)
a Qj — обобщенная сила, соответствующая обобщенной коорсщпа-
т® ch (/ = 1, 2, ..., п + &). Если обобщенные силы зависели от
обобщенных скоростей qni_ь ..., ^эт+л? то последние считаются
исключенными из Q5 при помощи уравнений связей (7.15).
Дифференциальные уравнения движения системы запишутся
в виде
5?i Чг v=i v"+v v=i S'=l /
(7.19
(1=1, 2, ..., »).
45
Эти уравнения называются уравнениями Воронца. Вместе с
уравнениями связей (7.15) они составляют систему п + к уравнений
относительно п + к неизвестных функций qi{t), ..., дп+л(0-
В частном случае, когда обобщенные силы потенциальны,
связи (7.15) стационарны, а обобщенные координаты дп+и •••
..., gn+h, соответствующие исключенным обобщенным скоростям
дп+и ■••» <?п+а, не входят в выражения для кинетической
энергии, потенциала и коэффициентов axt связен, уравнения (7.19)
переходят в уравнения Чаплыгина.
6, Уравнения Эйлера — Лагранжа. В этом и следующем
пунктах, следуя [34, 96, 138], мы рассмотрим дифференциальные
уравнения движения, которые применимы как к голономным,
так и к неголономньш системам-
Пусть qu ..., qn, Яп+i, ..., qn+h— обобщенные координаты
рассматриваемой системы. Предположим, что на систему
наложено к кинематических связей, задаваемых уравнениями
n+fe
2 «n+v,s<7s = 0 (v = 1, 2, ..., к). (7.20)
s=i
Коэффициенты an+xs — функции обобщенных координат q\, ...
• • -1 qn+h-
Для определения скоростей точек системы очень часто
удобнее использовать не сами обобщенные скорости gi, ..., qn+h>
а некоторые их линейные формы с коэффициентами, зависящими
от обобщенных координат. Обозначим эти формы через ns (s =
= 1, 2, ..., п + к) и введем их по формулам
w+ft
Щ = 2 aisQs (i = 1, 2, ..., п), (7.21)
e=i
n+ft
Jtn+v = 2 «n+v,e<7s (v = 1, 2, ..., к). (7.22)
Правые части равенств (7.22) совпадают с левыми частями
соответствующих уравнений связей (7.20), а коэффиценты ais
в равенствах (7.21) выбираются так, чтобы соотношения (7.21),
(7.22) были однозначно разрешимы относительно дь ..., qn+h.
Если это условие выполнено, то из (7.21) и (7.22) имеем
n+ft
qs = 2 bsrkr (s = 1, 2, ..., n + Л), (7.23)
r=i
где bsr — функции qu ..., qn+h.
Величины nr (r=l, 2. ..., п + к) называют
псевдоскоростями, а символы пг — псевдокоординатами. Если / — .какая-либо
функция от qu ..., qn+h, то символу означает по определению
46
следующую операцию:
£-Ъ.4; <7-24>
1 S=l S
Обозначпм через Г* функцию, полученную из кинетической
энергии Т системы заменой обобщенных скоростей q8 на их
выражения (7.23) через псевдоскорости nr (s, г=1, 2, ..., п + к).
Пусть Qa — обобщенная сила, соответствующая qs (s=l,
2, . •., п + к). Дифференциальные уравнения движения
рассматриваемой системы запишутся в виде
г--Ж+2*2Л^^-П, (1-1.2,...,»). (7.25)
Здесь
n+k
П* = 2 *>*& (* = 1- 2, • •., »), (7.26)
П+kn+k ох
(г = 1, 2, ..., гс + Л; *, у = 1, 2, ..., п).
Величина П,- называется обобщенной силой, соответствующей
лсевдокоординате я», а величины yij — трехиндексными
символами Болъцмана. Значения трехпндексных символов зависят лишь
от принятого определения (7.21), (7.22) псевдоскоростей через
обобщенные скорости; они не зависят ни от структуры
изучаемой системы, ни от ее движения.
Уравнения (7.25) получены Г. Гамелем [249], который на-
звал их уравнениями Эйлера — Лагранжа. Этп уравнения вместе
с уравнениями связей (7.20) и соотношениями (7.21)
представляют 2п + к уравнений движения системы в псевдокоординатах.
Если начальные условия заданы, то интегрирование этих
уравнений позволяет пайти 2п + к неизвестных функций времени
ль ..., л„, 7ь • - -. Чп+к-
При использовании уравнений (7.25) следует иметь в виду,
что в них кипетическая энергия Т* является, вообще говоря,
функцией всех п + к псевдоскоростей тсг. И так как в (7.25)
содержатся производные от Т* по всем псевдоскоростям, в том
числе и по псевдоокоростям n„+v, обращающимся согласно (7.20)
в нуль, то связи (7.20) нужно учитывать только после
составления уравнений (7.25), когда дифференцирование по
псевдоскоростям уже произведено.
7. Уравнения Аппеля. Пусть qu q2, ..., g„, qn+\, ..., qn+h —
обобщенные координаты системы, на которую наложено к кине-
47
матических связен, задаваемых уравнениями
2 *vtfj + «v = О (v = 1, 2, ..., А:), (7.28)
где коэффициенты aVJ- при дй и свободные члены «v являются
функциями от д\, ..., qn+h и £. Через Qj {] = 1^ 2, ..., и + А)
обозначим обобщенпые силы, соответствующие обобщенным
координатам qj.
Введем псевдоскорости зт* по формулам
n+k
Щ= 2 о«щ (£ = 1, 2, ...,«), (7.29)
где ау — функции от ди -.., (7*+* и *• Эти функции должны быть
выбраны так, чтобы соотношения (7.28), (7.29),
рассматриваемые как уравнения относительно q\, ..., qn+h, были однозначно
разрешимы.
Разрешив систему линейных уравнений (7.28), (7.29),
получим
д3 = 2 Pii^i + р,- (7 = 1,2,..., п + к), (7.30)
г=1
где рЛ ^ — функции от ди ..., gn+* и *.
Пусть £/=£/(q, q, q, £)— энергия ускорений системы,
выраженная через обобщенные координаты, скорости и ускорения.
Используя (7.30), можно исключить из выражения для U
обобщенные скорости и ускорения. Получающуюся в результате
функцию обозначим через S. Таким образом, получим энергию
ускорений, выраженную через псевдоскорости я* и
псевдоускорения Ui (i=l, 2, ..., п): S = S(q\, ..., qn+h; яь ..., яп; яь ...
. . ., Jin, Т) .
Величины П|, вычисляемые согласно равенствам
n+ft
Пг = 2 Pj-ift (*" = 1, 2, ..., и), (7.31)
j=i
суть обобщенные силы, соответствующие псевдокоординатам я,-.
Если величины ф не зависят от обобщенных скоростей, то
обобщенные силы будут функциями от (7i qn+h и t. В общем
же случае П< — функции ди ..., <2W, Щ, ..., я„ и J.
Дифференциальные уравпения движения рассматриваемой
системы могут быть записаны в виде
4^ = П| (i=lf2f ..., п). (7.32)
Уравнения движения в этой форме впервые получены в [213] и
называются уравнениями Аппеля. Вместе с уравнениями связей
48
(7.28) и соотношениями (7.29) они образуют систему из 2п + к
уравнений относительно такого же числа неизвестных функций
Уравнения Эйлера — Лагранжа и уравнения Аппеля
применимы как к неголономпым, так и к голономным системам. Их
применепие не предполагает обязательного использования
псевдокоординат в качестве переменных задачи: уравнения могут быть
записаны и в обобщенных координатах. Выбор тех или иных
уравнений, а также переменных, задающих движение системы,
в каждой конкретной задаче диктуется прежде всего вычисли-
тельными удобствами.
ГЛАВА 2
ИССЛЕДОВАНИЕ ДВИЖЕНИЯ ТЯЖЕЛОГО
ТВЕРДОГО ТЕЛА
НА АБСОЛЮТНО ГЛАДКОЙ ГОРИЗОНТАЛЬНОЙ
ЛЛОСКОСТИ
§ 1. Уравнения движения
Пусть твердое тело движется по горизонтальной плоскости в
юднородном поле тяжести. Поверхность, ограничивающая твердое
тело, предполагается выпуклой, так что имеется только одна
точка соприкосновения твердого тела и плоскости и в этой точке
.поверхность, ограничивающая твердое тело, имеет вполне
определенную единственную касательную плоскость. Тем самым
исключаются тела, поверхности которых имеют заострепия, ребра и т. п.
Задача о движении твердого тела по плоскости состоит в том,
чтобы по заданному начальному кинематическому состоянию
тела найти в зависимости от времени его положение в
пространстве и реакцию плоскости. Для полного уяснения геометрической
гкартины движения целесообразно та/кже найти след точки
касания на плоскости и на поверхности тела.
1. Получение уравнений движения из теорем об изменении
количества движения и кинетического момента. Движепие тела
будем рассматривать но
отношению к неподвижной системе
координат Oxyz с началом О
в некоторой точке
горизонтальной плоскости Оху, по которой
движется тело. Ось Oz
направим вертикально вверх,
единичный вектор этой оси
обозначим через п. Если М —
точка касания тела с плоскостью,
то п — единичный вектор
внутренней пормали к
поверхности тела, построенной в точке
М (рис. 6).
С твердым телом жестко свяжем систему координат G%v^ с
началом в его центре тяжестп G и осями, направленными вдоль
главных центральных осей инерции тела. На рис. 6 показана
также система координат Gxyz, осп которой во все время дви-
жеппя параллельны соответствующим осям неподвижной
системы кооординат Oxyz, а начало совпадает с центром тяжестп
тела. Ориентация тела относительно неподвижной системы
координат задается углами Эйлера -ф. G. cf пгтн птш помощи
матрицы направляющих косинусов а^ (см. равенства (1.3) гл. 1).
50
Уравнение поверхности тела в системе координат запишем
в виде
Fit, ч, %) = 0, (1.1)
выбирая знак функции F так, чтобы пмело место равенство
sra<IF-fe1 + -^e! + |:es, \fmiF\-
^Ш+Ш+№- «-з>
где еь eg и ез — единвгапые векторы осей G|, Gt] и Gt;
соответственно. Отсюда и из равенств (1.3) гл. I получаем
а31 = sinesincp^- |gradF|^ "S2 = sin9cOS(f = ~ |grad/4^
(1.4>
— А — 1 dF
а33 - cos и - — |gradF| ^ •
Пусть плоскость, по которой движется тело, является
абсолютно гладкой. Тогда ее реакция R направлена вертикально
вверх,
R = Nn {N>0). (1.5)
Следуя [94, 156], введем десять неизестных функций
времени t: три координаты х, у, z центра тяжести тела в неподвижной
системе координат Oxyz, три угла Эйлера, три компоненты |г
т], £ радиуса-вектора р точки касания М тела и плоскости
относительно центра тяжести и величину N нормальной реакции
плоскости.
Для определения перечисленных неизвестных фупкций
составим следующие десять уравнений:
1) три уравнения (5.2) гл. 1, выражающих теорему об
изменении количества движения; с учетом того, что внешними
силами являются реакция плоскости (1.5) и сила тяжести, этиг
уравнения запишутся в виде
тх = 0, ту = 0, mz = —mg + N, (1.6)
где т — масса тела, g — ускорение свободного падения;
2) три уравнения (5.6) гл. 1 выражающих теорему об
изменении кинетического момента:
Л W + (С - В) Ф = N (^зз - Се»).
B§ + (A-C)rp = N(£«3i- |а33), (1.7)
C^ + (B-A)pq^N (£язг - щ31)
** 51
(здесь р9 q, r—проекции вектора со угловой скорости тела на
оси G|, Gt], G£, а Л, В, С — моменты инерции тела
относительно этих осей);
3) два уравнения, к которым в силу очевидного тождества
п2 = 1 сводятся три уравнения Пуассона
«31 = «32^ — язз(7» «32 = ажр — а^г, озз = «зь7 — «зг/?, (1-8)
доказывающих, что вектор п определяет пеизмепное
.направление в неподвижной системе координат Oxyz;
4) уравнение (1.1) поверхности тела;
5) уравнение связи
z = ~р . п = — (a3i| + а32т] + «зз£) - (1.9)
Условие (1.9) означает, что твердое тело движется, все время
соприкасаясь с плоскостью.
Перечисленные уравпепия с учетом соотношении (1.4) и
кинематических уравнений Эйлера (см. формулы (1.9) гл. 1)
представляют собой полную систему уравнений движения тяжелого
твердого тела по неподвижной горизонтальной абсолютно
гладкой плоскости. Рассмотрим эти уравнения подробнее.
Согласно первым двум уравнениям из (1.6) центр тяжести
тела движется так, что его проекция на опорную горизонтальную
плоскость движется равномерно и прямолинейно:
x = xot + x0, y^yot + yo, (1.10)
где индексом 0 обозначены начальные значения соответствующих
величин.
Третье уравнение из (1ЛЗ) с учетом равенства (1.9)
позволяет найти выражение для нормальной реакции плоскости." В
самом деле, обозначая точкой над вектором его производную в
системе координат G£t]£, для абсолютной производпой dp/dt
получаем выражение (см. равенство (1.10) гл. 1)
i£ = p + <oXp. (1.11)
Так как вектор п постоянен в абсолютном пространстве, а
вектор р. очевидно, ортогонален п, то из (1.9) и (1.11) следует,
что проекция г скорости центра тяжести тела на вертикаль
определяется равенством
2 = —п-(оХр). (1.12)
Дифференцируя обе части этого равенства по времени п
учитывая (1.11), получаем выражение для проекцип ускорения центра
тяжести тела на вертикаль:
z = —п • [со X р + со X (со X р) + со X р].
Отсюда и из (1.6) имеем
N=mg — mn-[coXp + coX(coXp) + coXp]. (1.13)
52
Уравнения (1.7), (1.8) с учетом (1.1), (1.4) и (1.13)
образуют замкнутую систему уравнений относительно величин р, д,
г * п, £. Если эти величины найдены как функции времени, то
известны след точки касапия М тела и плоскости на
поверхности тела и вектор угловой скорости <о(£); углы Эйлера 6(f)
и ф(£) могут быть получены из (1.4), а угол \p(t) найдется затем
путем интегрирования одного из кинематических уравнений
Эйлера:
. « » • • •
/; = 1Из1 + 6cos<p, g = i|}«32 — 8sin<p, г = -фа3з + ф. (1-14)
При известных вектор-функциях <о(£), p(t) реакция плоскости
вычисляется по формулам (1.5), (1.13), а координата z=z(t)
центра тяжести найдется из (1.9). Координаты хм, ум точки
касания на плоскости Оху могут быть определены при помощи
рис. 6 из простых геометрических соображений: если R и Им
^>адиусы-ве»кторы центра тяжести и точки М относительно
начала системы координат Oxyz, то RM = R+Ap, где А — матрица
направляющих косинусов а#; отсюда следует, что
хм = х + апЪ + «i2i] + albt, yM = y + a2\l + a22i} + а2&- (1.15)
Если указанным выше путем величины х, у, g, tj, £ и углы
Эйлера найдены как функции времени, то формулы (1.15)
задают в параметрической форме уравнение кривой — следа,
описываемого точкой касания М на опорной горизонтальной
плоскости.
Из теоремы об измепении кинетической энергии следует, что
имеет место интеграл энергии
r + n = const, (1.16)
где
Т = 4" m & + У* + *2) + Т (АР* + ВЯ* + Ст% (1.17)
П = mgz = —mg (a3\l + сад + агз1). (1Л8)
Так как внешние силы, действующие на тело, направлены
вертикально, то их момент относительно любой вертикальной
оси, в частности относительно вертикали, проходящей через центр
тяжести тела, равен нулю. Поэтому из теоремы об изменении
кинетического момента следует еще один интеграл:
Аразх + ВдаЪ2 + Сга3з = const, (1.19)
выражающей постоянство проекции на вертикаль кинетического
момента тела относительно центра тяжести.
2. Уравнения Лагранжа. Положение твердого тела на
горизонтальной плоскости однозначно определяется пятью
обобщенными координатами: х, у, of>, 0, <р. Координата z центра тяжести
при заданной поверхности тела будет фупкцией углов В и <р.
Это следует из равенства (1.9) (которое имеет место при
любом характере взаимодействия тела и плоскости в точке их кон-
53
та?кта М) и соотношений (1.1), (1.4), позволяющих представить
координаты точки М как функции углов 6 и <р: | = |(0, <р), г) =
= ^(6, Ф), £ = £(0, ф).
Потенциальная энергия тела представляет собой функцию
углов 0 и ф и в соответствии с формулами (1.18) и (1.4)
может быть представлена в виде
n = mg/(6, Ф), (1.20>
где
/(6, <p)=z =—(gsin ф+т]С08ф)8т6 — £cos6. (1.21>
Подсчитаем кинетическую энергию тела. Из (1.12) имеем
£ = со -{пХр) = р(аю£> — «ззт1)+д(«зз| — «з1^) +
+ г(а31Т]-аз2|). (1.22>
Воспользовавшись кинематическими уравнениями Эйлера (1.14)
и заменив величины «зь «32, «зз на их выражения (1.4) через-
углы Эйлера 6 и ф, получим равенство (1.22) в виде
*' = /её + /фф, (1.23)
где
^=w = -foicose-£sine), /^g-^^^sine, (1.24>
Xi = I sin ф + r\ cos ф, %2 = | cos ф — ц sin ф. (1-25)
Из (1.14), (1.17) и (1.23) получаем выражение кипетической
энергии тела через обобщенные координаты и скорости:
Т = \ то (я8 + у2) + \ (Лсоз2ф + В81п2ф + rnfl) ё2 +
+ ~-(С + т/|)ф2 + ±[(Asm2<p-]- В cos2 ф) sin2 6 + С cos2 6] ф2 +-
+ га/е/ф6ф+ И — #) sin 0 sin ф cos ф 0я|) + С cos 0 фя|э. (1.26)
Тяжелое твердое тело на гладкой горизонтальной плоскости
представляет собой голономную систему с пятью степенями
свободы. Уравнения движения тела можно записать в виде
уравнений Лагранжа второго рода:
-ЖТ"—i = ° C-1.-.5) (1-27)
dqi *i
(gi = 6, д2 = ф, js^t g4 = ^, Чь = у)-
В функции Лаграпжа
L = T — П (1.28)
кинетическая и потенциальная энергии определяются
выражениями (1.26) и (1.20).
Функцию Лагранжа можно записать в более удобном для
дальнейшего виде, если ввести величины 7# (£, j = 1, 2, 3) —
осевые (i = j) и центробежпые (i^j) моменты инерцип тела по
54
.отношению к осям системы координат G|i*r)i£i, начало которой
совпадает с центром тяжести тела (ось G%\ направлена
вертикально вверх, ось Gt]i—по линии узлов в сторону, откуда
поворот оси Gt>\ на угол 6 до совмещения с осью G£ происходит
против часовой стрелки, и ось G\\ — перпендикулярно плоскости
/Gt]i£i так, чтобы образовывать правую систему координат).
Элементы ац матрицы направляющих косинусов
Е «11 «12 «IS
4 «21 «22 «23
С «31 «32 «33
вычисляются по формулам
an = —cos 6 sin ф, ai2 = cos <p, ai3 = sin G sin ф,
a&i = — cos 6 cos ф, а22=— sincp, агз = sin 6 cos <p, (1-29)
asi = sin 6, a32 = 0, азз = cos 6.
В соответствии с формулами (3.8) гл. 1 имеем
in =*(А sin2 ф + В cos2 ф) cos2 0 + С sin2 6, /22 = A cos2 ф + В sin2 ф,
/зз = {A sin2 ф + В cos2 ф) sin2 6 + С cos2 6,
1\2 = {А — В) cos 6 sin ф cos ф, (1.30)
/i3 = (A sin2 ф + В cos2 ф — С) sin 6 cos 6,
/23 •= — (^4 —-В^твзтфсовф.
Используя величины (1.30), функцию Лагранжа (1.28)
можно представить в виде [70]
L = \ т (х* + z/2) + ± (/22 + тЦ) G2 +
+ i- (/и sin2 0 + /33 cos2 6 - 2113 sin 6 cos 6+ mfl) ф2 + 1- /23я]>2 +
+ тгг/е/фбф — hs^ + (7зз cos 6 — /J3sin 6) фя|> — mgf (G, ф). (1.31)
3. Уравнения Рауса. Очевидно, что обобщенные коордипаты
х, у и *ф — циклические. Им отвечают первые интегралы
рх = — == ™# = const, ру = -г = ту = const, (1.32)
дх ду
р$ = —г = ^зз'Ф — ^23^ + (^зз cos 6 — Лз sul 6) Ф = const, (1-33)
которые означают, что проекция центра тяжести на опорную
горизонтальную плоскость движется равномерно и прямолинейно
(интегралы (1.32)) и что проекция на вертикаль кинетического
момента тела относительно центра тяжести остается постоянной
во лее время движения (интеграл (1.33)). Эти выводы были
получены выше, в п. 1, из теоремы об изменении количества
.движения и теоремы об изменении кинетического момента.
55
Наличие трех циклических координат позволяет понизить
порядок системы дифференциальных уравнений движения (1.27)
на шесть единиц. Чтобы сделать это, [воспользуемся
уравнениями Рауса. Введем функцию Рауса посредством равенства
R = L — pxx — pyy — р+у
в правой части которого величины х, z/, if> исключены с помощью»
(1.32), (1.33). Тогпда получим [66]
R=R2 + Ri — W, (1.34)
Я2 =4(7** ~ 7^ + теЯ) ё* + 4 [(7и-7^) sill2e + ™/ф* +
+ [-(/12 + ^8]8те + т/е/ф|ёф, (1.35)
Д1_ -^р# + ^со8е-/1з8ше^ (i 36)
33 33
W = rog/ (6, Ф) + ± J& + ± (pi + pi). (i.37>
Система дифферепциальных уравнений Рауса
имеет четвертый порядок и описывает движение приведенной
системы, имеющей приведенный (эффективный) потенциал W,
задаваемый равенством (1.37). Потенциал W включает в себя
потенциальную энергию тела, энергию его вращения вокруг
вертикали и кинетическую энергию горизонтального движения
центра тяжести.
4. Уравнения Гамильтона. Получим уравнения движения
твердого тела на абсолютно гладкой плоскости в форме
уравнений Гамильтона. Так как величины х, у постоянны, то при
описании движения тела относительно центра масс без
ограничения общности можно принять, что х = у = 0.
При помощи функции Лаграшка (1.28) обычным образом
введем обобщенные импульсы, соответствующие углам Эйлера:
р* = e2ty + е48 + С cos 6<р, рв = е^ + е$ + га/в/<рф,
(1.39>
Pv = C cos 0я|> + mfefjd + в\ц>,
где
ех = С + m/ф, е2 = (A sin2 ф + В cos2 ф) sin2 6 + С cos2 6,
(1.40)
е2 =: A cos2 ф + В sin2 ф + mfl, е4 = (А — В) sin 0 sin ф cos ф.
Для функции Гамильтона получаем такое выражение:
М = 2Д Рь + 2Д~ Р* + 2Д ^* +
Сум 9-«,.»/„/ еЛ-Стуфсо86
Ч д—■ РвРч> д "w}*
CV„cos6— те ff.ff. .
з д *е* р^ру + mgf (0, ф). (1.41)
Ддесь введено обозначение
Л = еге£8 - ехе\ - С2е3 cos2 6 + 2™/е/фСе4 cos 6 - m?flffc2. (1.42)
Согласно (1.33) /?Ф = const, и в функции Гамильтона (1.41)
ее можно считать параметром. Измепение переменных В, ф со
времепем определяется дифференциальными уравнениями
dB^_0H dtp ^OH^dPQ^^dH <%^_W ,л /оч
dt ~~ дре' dt дру dt c/G' at dtp9 I ' }
Эти уравнения допускают интеграл энергии Н = h = const.
§ 2. Движение динамически и геометрически
симметричного тела
1. Функции Рауса и Гамильтона. Рассмотрим тяжелое
динамически и геометрически симметричное тело на абсолютно
гладкой горизонтальной плоскости. Под динамически и
геометрически симметричным телом подразумевается тело, ограниченное
выпуклой поверхностью вращения, причем ось симметрии
поверхности тела совпадает с осью его дппа'мпчеокой симметрии, на
которой расположен центр тяжести тела.
Получим некоторые нужные в дальнейшем геометрические
соотношения. Ось G£ связанной системы координат G|r)£
направлена по оси симметрии тела. На рис. 7 М — точка касания тела
и плоскости. GQ = / — расстояние от цептра тяжести до
плоскости. Уравнение (1.1) поверхности тела запишем в виде
F(%, б)=0 (б = П2 + г12). (2.1)
Равенства (1.4) запишутся в виде
cos 6 = — -—V^t - %. (2.2)
Первые два равенства из (2.2) дают тождество | cos ф = tj sin ф.
Ортогональные оси G\ и Gx\ ввиду динамической симметрии
тела можно выбирать с точностью до их одновременного поворота
на произвольный угол в экваториальной плоскости центрального
Эллипсоида инерцип. Выберем их так, чтобы при ф = я/2
координата ^ точкп касания М равнялась —б. На рис. 8 показано
меридианное сечение поверхности тела, отвечающее значению угла
57
Ф, равному я/2. На этом рисунке отрезок MS перпендикулярен
оси G£* и равен б.
Из (2.1) и тождества |cos ф = ц вшф следует, что
| = —б sin ф, т] = —б cos ф. (2.3)
Отсюда и из второго и третьего из соотношений (2.2) получаем
равенство
6F и , 8F . ь л
-^- COS G + -тггг sin 8 = О,
до ОС,
которое с учетом (2.1) показывает, что величины £, б суть
функции угла 9. Используя (2.3), получаем далее, что
%i = % БШф + т] cos ф = —б. (2.4)
Таким образом, координаты точки М касания тела и плоскости:
можно представить в виде
| = Х1(6)8тф, т] = Х1(6)со8ф, £ = Е(в). (2.5>
Если Z(8) обозначает расстояние от точки М до К — точки
пересечения оси симметрии тела с вертикалью, проходящей через М9
М Q
Рис. 7
1 КА
\§/
/в
М Q
Pj
яс.
8
то (см. рис. 8) Xi = —Z(6)sin6. Из (1.21) и (2.5) следует, что
расстояние от центра тяжести тела до горизонтальной
плоскости — функция угла 8: GQ = /(6), где
/(6) = -xi №)sin е -1 (8)cos е. (2.6)
Уравнения £ = Xi(6), £ = £(6) в параметрической форме
задают меридианное сечение поверхности тела, изображенное
на рис. 8. Так как вектор MQ лежит на касательной к этому
сечению, то он коллинеарен вектору, имеющему в системе
координат G£| компоненты £' п %г, где штрих означает производную
по 6; вектор GQ коллинеарен вектору с компонентами cos 6 и
sin 8. Ввиду ортогональности векторов MQ и GQ отсюда
следует тождество
X;sine + £'cos6 = 0. (2.7>
58
Дифференцируя обе части равенства (2.6) по 0 и используя
тождество (2.7), получаем
f (9) = —xi cos 9 + £ sin 9. (2.8)
Из (2.6) и (2.8) получаем параметрические уравнения мери-
jjnanHoro сечения в такой форме:
£ = _-/(e)cose + /'(e)sin6, xi = — /(6)sme — /'(9)cose.
(2JB)
Найдем радиус кривизны r=r(6) меридианного сечения
в точке М. Он может быть вычислен по формуле [157]
(Г2 + *'2)3/2
г (В) = , . У , ■ (2-10)
Дифференцируя (2.9), получаем
I' = (/ + Л sin e, xi = - (/ + Л cos e (2.H)
Г =(/' + f)sme+(/+r)cose,
X; = - (/' + Г) cos 8 + (/ + Л sin 9. (2.12)
Из (2.10) —(2.12) получаем
г(в) = /(в)+Г(в) (2.13)
и, кроме того,
£' = г (0) sin 6, %[ = — г (6) cos 6. (2.14)
Необходимое и достаточное условие выпуклости тела
запишется в виде г(8)>0. Отметим еще, что из формулы (2.8)
следует равенство MQ= 1/'(8) I (см. рис. 8).
Функция Лагранжа (1.28) в случае симметричного тела
примет вид
L = ±т(х* + у*) + ±(Л + т/1) В* + -|-Л sin* В^ +
+ \ С (ip cos 6 + ф)2 - mgf (6). (2.15)
Координаты х, у, ф, *ф циклические. Им отвечают первые
интегралы
dL dL dL dL t
—Г = Рх, — = Руч — = Рч» —7 = Р$ \Рх< Ру, Api Pty—
дх ду дц. <9iJ?
— const). (2.16)
Величины рх и ру суть проекции количества движения тела на
оси Ох и Оу неподвижной системы координат, а /?„ и рц, —
проекции вектора кинетического момента тела относительно
центра тяжести G соответственно на ось симметрии G£ и вертикаль.
,59
Из (2.15) и (2.16) получаем
Рх
х = —,
т
У =
т
(2Л7>
и
: p4D~^cose • (i ls , *<p-^cose /0yfQ4
t- * . 2fl » Ф-Ь'-^Г^фН- Ф . . 2fi - (2.18>
Л sin 6 ^ c ism 8
Исключив циклические координаты, введем функцию Рауса
(2.19}>
Приведенная система имеет одну степень свободы, и ее
движение описывается дифференциальным уравнением
J-g-f = °- <2-2°>
Получим еще уравнения движения симметричного твердого?
тела иа абсолютно гладкой плоскости в гамильтоновой форме.
В дополнение к обобщенным импульсам (2.16) введем импульс
ре, отвечающий координате 8: pG = дЬ/дв. Тогда
В« *в » (2.21)
A+mfl
Функция Гамильтона имеет вид
(2.22)
Уравнения движения приведенной системы с одной степенью
свободы в гамильтоновой форме будут такими:
dt дре> dt — 6Q* V"**r
Таким образом, паклон 8 оси тела к вертикали меняется са
временем так же, как в консервативной системе с кинетической
энергией Т* п потенциальной энергией П^, определяемыми
равенствами
Уравнения движения допускают первый интеграл (интеграл
энергии)
Е = Г* + П* = h = const. (2.25)
60
2. Стационарные движения и их устойчивость. Уравнепня
движения (2.20) (или (2.23)) допускают частные решения, для
которых
9 = 9о, 9 = 0, (р = сро, Ф = ,фо, х = х0, у = уо. (2.26)
В движении, отвечающем этим решениям, тело вращается
вокруг своей оси симметрии с постоянной угловой скоростью (Oi =
= фо и вокруг вертикали, проходящей через центр тяжести тела,
с постоянной угловой скоростью (02 = 'фо; при этом центр тяже-
« 1/ * 2 , * 2
сти тела движется с постоянной скоростью, равной У х0 + у е
вдоль неподвижной прямой, параллельной опорной плоскости,
и, следовательно, остается на постоянном от нее расстоянии
2о =/(Во). Не ограничивая общпости, можно принять, что центр
тяжести тела неподвижен (хо = уо = 0, z = zo). Тогда
рассматриваемые движения будут регулярными прецессиями.
Регулярные прецессии тяжелого твердого тела выпуклой формы на
абсолютно гладкой плоскости изучались в работах [2, 34, 37, 66,
70, 77, 91, 94, 117, 134, 161, 261]. Наше изложение следует в
основном работам [66, 70, 77, 117].
В случае регулярной прецессии точка М касания тела с
опорной плоскостью Оху описывает на последней окружность с
центром в точке Q, являющейся проекцией центра тяжести на
эту плоскость, и радиусом (Ш" = 1/'(Во) I. На поверхности тела
точка М также описывает окружность с центром на оси
симметрии тела в точке с координатой £ = £;(8о) и радиусом б —
= IXi(6o)l. При этом, если (Oi Ф 0 и (а^Ф d^QM, то скорость
точки поверхности тела, которой оно касается опорной
плоскости, отлична от нуля и происходит движение со скольжением.
В случае, когда coi = 0, тело касается плоскости одной
фиксированной точкой своей поверхности и имеет место чистое
скольжение тела.
При фиксированных значениях константы h интеграла
энергии (2.25) регулярная прецессия возможна только тогда,
когда 9о будет кратным корнем уравнения h. — П* (6) =0, т. е. если
6 = Go удовлетворяет системе
Пф(8) = й, ^М = 0. (2.27)
При любой функции /(9) можно получить регулярную
прецессию с произвольным заданным значением угла нутации 80,
если соответствующим образом выбрать постоянные р^ рт h*
Действительно, второе из уравнений (2.27)
mgfW+ ^-^cose)^-^cose)=0 (2.28)
A sin* 8
61
дает следующие выражения для величины р^:
2рф = apq ± У (а2 — 4) /4 + 4bf a = 4-±£2LJLf
fc = Aitg/' (В) sin3 6 ,9 9Qv
cos 8 * ^"" '
Так как lal>2, то соответствующим выбором р^ подкоренное
.выражение в (2.29) можно сделать положительным и тем
самым удовлетворить второму из уравнений (2.27). Первое же
дз уравнений (2.27) естественным образом удовлетворяется,
«если положить h = II* (G0).
При помощи соотношений (2.18) уравнение (2.28),
определяющее многообразие регулярных прецессии тяжелого
твердого тела на абсолютной гладкой горизонтальной плоскости, мо-
.жет быть записано в виде
лцг/'(6) + [Ccdi +{C — Л)©2 cos 9] (о2sin 9 = 0. (2.30)
Последнее равенство представляет собой хорошо известное [95]
условие существования регулярной прецессии под действием
момента mgf'(&), который является моментом нормальной
реакции N опорной плоскости относительно центра тяжести G (так
как центр тяжести неподвижен, то N = mg).
Ввиду того что величины р„, р$ произвольны, величины (Oi
и (02- также можно выбирать произвольными; угол 8 = 6о будет
тогда определяться из (2.30). Если соотношение (2.30)
рассмотреть как квадратное уравнение относительно (02, то из
условия вещественности -корпен этого уравнения получим
условие существования регулярных прецессий в виде неравенства
C2to* sin 6 + Amg (А — С) /' (8) cos 8 > 0. (2.31)
Для исследования устойчивости регулярных прецессий
воспользуемся теоремами Рауса — Ляпунова и Кельвина — Четае-
ва. Приведем формулировку этих теорем [77, 160]. Пусть го-
лономпая система движется под действием потенциальных сил,
а ее связи стационарны. Предположим, что число степеней
свободы системы равно п, а обобщенные координаты qs+i, (7«+2, • •.
..., qn — циклические. Тогда ра = са (а = s + 1, s + 2, ..., п) —
лервые интегралы, отвечающие циклическим координатам. Пусть
R — функция Рауса, получаемая путем игнорирования
циклических координат. Ее можно записать в виде суммы R = R2 +
+ Вг — П*, где /?2 и /?i представляют собой совокупность
членов второй и первой степени соответственно относительно
обобщенных скоростей, отвечающих позиционным координатам tfi,
£2, ..., Qs, а функция П* не зависит от обобщенных скоростей.
Функция П* зависит от позиционных координат и констант
.ся+1, св+2, ..., сп; она называется приведенным потенциалом или
приведенной потенциальной энергией. Вопрос об устойчивости
♦стационарных движений исходной системы часто может быть
решен при помощи следующих двух теорем.
62
Теорема Рауса — Ляпунова. Если приведенный
потенциал системы имеет минимум как при данных величинах ра —
-=Ca(a = s+l, ..., и), отвечающих рассматриваемому
стационарному движению, так и при всяких достаточно близких к
данным значениям ри = си + еа (ос = s + 1, .,., п), причем
значения переменных q{ (i = l. 2. ..., s), обращающих ее в
минимум, суть непрерывные функции величин /?а(ос = $+1, ..., п)г
то стационарное движение устойчиво по отношению к
переменным Qu Qi (l = 1, 2, •.., s).
Теорема Кельвина — Четаева. Пусть приведенный
потенциал является аналитической функцией и не имеет
минимума на стационарном движении, причем среди собственных
значений квадратной матрицы с элементами cih определяемыми
равенствами
левая часть которых вычисляется на стационарном движении,,
имеется нечетное число отрицательных и нет нулевых, то
стационарное движение неустойчиво.
В изучаемой задаче о движении симметричного тела на
гладкой плоскости имеется только одна позиционная координата —
угол 8. Поэтому из теорем Рауса — Ляпунова и Кельвина —
Четаева очевидно следует, что регулярная прецессия будет
устойчива относительно 6, 8, ср, ip, х, у, если при 8 = 8о
^>0, (2.32>
и неустойчива при строгом нарушении этого неравенства.
Продифференцировав левую часть равенства (2.28) по 6t
получим условие (2.32) в виде неравенства (считаем, что 6 ¥=
^=0, я)
mgf(Q) +
+[рФ(рФ—р^со8е)+(Рф—^^
Л sin4 6
>о
которое с учетом формул (2.28), (2.8), (2.13) и равенства Xi =
= —Ism 8 можно представить в виде (неравенства
mg(r —l) +
, (Ру-РусоЩ2-2соЩРу-Ръс08ЩРу-РустВ)+ п
(2.33)
где г = г(8) — радиус кривизны меридианного сечения
поверхности тела в точке М его касания с опорной плоскостью; I =
= /(6) — расстояние от этой точки до точки пересечения ocir
63
симметрии тела с вертикалью, проходящей через М; левая часть
в (2.33) должна вычисляться при 8 = 9о.
Неравенство (2.33) с учетом (2.18) можно записать в виде
Amg (г (в0) — I (80)) + [Сщ + (С —2 А) со2 cos 6J2 + А*ы\ sm290 > 0.
(2.34)
Отсюда следует [77], что регулярная прецессия тела вращения
на абсолютно гладкой горизонтальной плоскости всегда
устойчива, если радиус кривизны меридианного сечения
поверхности тела в точке его касания с опорной плоскостью не меньше
расстояния от этой точки до точки пересечения оси симметрии
тела с вертикалью, проходящей через первую точку (r^Z);
в противном случае (г<1) устойчивость имеет место, если
выполняется условие (2.34), которое налагает ограничение на
величины (Oi И (Dg.
Рассмотрим еще один тип стационарных движений
симметричного твердого тела на гладкой плоскости. Пусть в решении
(2.26) т£о = 0)2 = 0. Тогда в стационарном движении
9 = 00, 6 = 0, ф = фо, ^ = 0, ф = <р0 = (01, х = х0ч у = Уо,
(2.35)
тде \£0, coi, xq, т/о — произвольные постоянные величины, а угол
во, как и в случае регулярных прецессий, определяется из
уравнения (2.30), которое при (02 = 0 переходит в уравнение /'(9о) =
= 0 (0о^О, я).
Вспоминая, что MQ = \f(9)1 (рис. 8), приходим к выводу,
что в стационарном движении, отвечающем решению (2.35),
центр тяжести тела находится на вертикали, проходящей через
точку касания тела с опорной плоскостью. Тело движется так,
что его ось симметрии перемещается прямолинейно и равиомер-
по. Происходит равномерное качение со скольжением вдоль
фиксированной прямой ф = -фо; если 'Xi'(Go) coi cos if0 = й) п
XiK^o) coi sin "фо = J7o, то происходит чистое качение. Условие
устойчивости такого движения тела получается из неравенства
(2.34), если в нем положить (Ог = 0:
C^l + Amg (г (00) - I (%)) > 0. (2.36)
При roi = 0, л*о + #о=^0 рассматриваемое движение тела
представляет собой чистое скольжение, а если coi = 0 и к тому же
хо + У о = 0' то тело находится в равновесии. При чистом
скольжении и равновесии условие устойчивости запишется в виде
леравенства
г(8о)>г(в0). (2.37)
Из неравенств (2.36) и (2.37) следует [77], что если центр
тяжести тела находится не выше центра кривизны
меридианного сечения поверхности тела в точке его касания с опорной
64
плоскостью (r>Z), то качение со скольжением (или чистое
качение) тела вдоль неподвижной прямой с произвольной
постоянной скоростью устойчиво; в противном случае (r<Z) для
устойчивости необходимо и достаточно, чтобы величина (Oi была
больше некоторого критического значения, определяемого
неравенством (2.36); чистое скольжение и равновесие при г>/
устойчивы, а при г < / неустойчивы.
Следует отметить [134], что рассматриваемый тип
стационарных движений возможен не для всех тел вращения, а
только для тех тел, для которых существует значение угла 9о
такое, что 0<9о<л и /'(6о)|==0.
Например, для динамически симметричного
шара радиуса R с центром тяжести,
отстоящим от геометрического центра па /рас-
стояппе \d\ (рис. 9, где d>0), имеем
f(Q) = R — d cos 9, и этот тип движений
не реализуется. Как замечено в [134],
рассматриваемый тип стационарных
движений тяжелого твердого тела на глад-
коп плоскости существует не только для
симметричных тел. Для его
существования достаточно, чтобы в одпом из сечений
поверхности тела, перпендикулярном
главпой центральной оси иперции,
лежала окружность, а радиус-вектор любой точки этой окружности
отпосптельно центра тяжести тела был ортогонален поверхности
тела в точке ее касаиия с опорной плоскостью.
Во всех рассмотренных выше стационарных движениях
тела предполагалось, что 90 Ф О, я. Теперь рассмотрим еще один
тип стационарных движений геометрически и динамически
симметричного тела на гладкой плоскости, в которых Во = 0 или
Во — к, т. е. когда в стационарных движениях ось симметрии
тела занимает вертикальное положение. Стационарные
движения симметричного тела, представляющие собой вращения с
постоянной угловой скоростью вокруг расположенной
вертикально оси симметрии, изучены в работах [91, 117, 134, 156, 159,
161, 260, 279, 280].
Очевидно, что для симметричного тела, обладающего
выпуклой поверхностью вращения, не имеющей заострений, имеют
место равенства /' (0) = /' (зх) = 0, т. е. в точках пересечения оси
симметрии тела с его поверхностью ось симметрии ортогональна
поверхности тела.,
Пусть при движении твердого тела его ось симметрии может
проходить через вертикальное положение, отвечающее значению
угла В, равному нулю. Для этого, очевидно, необходимо должно
выполняться равенство р^ = рф. Раскрывая неопределенность
в левой части уравнения (2.28), получаем уравнение
mir/4e) + fftg 4 (i + tgs 4) = о.
\> А. П. Mapi-:eei?
(2.38)
65
Так как /' (0) = 0, то это уравнение имеет корень 9 = 0. Это
означает, что существует стационарное вращение тела вокруг
вертикально расположенной оси симметрии с произвольной
постоянной угловой скоростью (о. При этом х = х0, у=уо, где
^о, i/o — произвольные постоянные, т. е. центр тяжести тела
движется равномерно вдоль прямой, параллельной опорной
плоскости. Анализируя характер экстремума функции П* в точке
в = 0 и учитывая, что р„ =С(о, получаем, что необходимым и
достаточным условием устойчивости такого движения по
отношению к возмущениям величин 9, 9, ф + яр, х, у будет
выполнение неравенства
C2(*2 + Mmgf" (0)>0,
которое при помощи соотношения (2.13) может записано в виде
С2(о2 + Ы mg (г — h) > 0, (2.39)
где г—радиус кривизны поверхности тела в точке ее касания с
плоскостью, a h — расстояние от центра тяжести тела до
плоскости в невозмущенном движении.
При (о = 0 неравенство (2.39) дает условие устойчивости
равновесия твердого тела, отвечающего вертикальному
положению его оси симметрии (при 9 = 0). Из (2.39) следует, что
если расстояние от центра тяжести тела до опорной плоскости
в невозмущеином движении не больше радиуса кривизны
поверхности тела в точке его касания с плоскостью (r#*h), то
стационарное вращение тела вокруг вертикали будет
устойчивым при произвольной угловой скорости тела (со^О); в
противном случае (г < h) для устойчивости величина (о должна
превосходить некоторое критическое значение, определяемое
неравенством (2.39). Равновесие тела при r>h устойчиво, а при
г < h неустойчиво.
Условие устойчивости стационарного вращения тела вокруг
вертикально расположенной оси симметрии в случае 9 = я
будет также записываться в виде неравенства (2.39), в котором
г и h должны быть вычислены для положения тела,
отвечающего значению в, равному я.
3. Пример: стационарные движения динамически
симметричного шара [34, 66]. В случае динамически симметричпого телат
ограниченного сферической поверхностью радиуса R+ имеем
(рис. 9)
f(Q) = R — dcosQt
где через d обозначена координата центра шара на осп G±,
Так как r=l = R, то неравенство (2.34) выполнено, и,
следовательно, регулярная прецессия динамически симметричного
шара на абсолютпо гладкой плоскости устойчива.
Условие (2.39) устойчивости стационарного вращения шара
вокруг направленной вертикально вверх оси симметрии G£
запишется в виде
С2со2 + 4Лт^>0.
66
Если в стационарном вращении центр тяжести шара расположен
апгже геометрического центра (d>0), то стационарное вращение
устойчиво при любом значении со, включая и значение со = О,
отвечающее равновесию шара. Если же центр тяжести расноло-
зкеи выше геометрического центра шара (d<0), то
устойчивость стационарного вращения имеет место, если 1)
03>to, = 2^«ii-;
равновесие же шара при d < О неустойчиво.
Еще один тип стационарных движений тела, а именно тот,
для которого центр тяжести расположен над точкой касания
тела и опорной плоскости, как отмечалось выше, в случае шара
не реализуется.
Подробное рассмотрение математических аспектов теории
движения динамически симметричного шара на абсолютно
гладкой плоскости проведено Ф. Клейном [259].
/i. Движение симметричного тела в общем случае.
Рассмотрим движение симметричного тела на абсолютно гладкой
плоскости более подробно. Не ограничивая общности, будем
считать, что постоянные рх и ру в (2.16) равны нулю, т. е.
проекция Q центра тяжести на опорную плоскость неподвижна, и,
следовательно, центр тяжести тела во все время движения
остается на фиксированной вертикали. Изменение угла 0 со
временем находится при помощи интеграла (2.25). Обозначая
через 8о начальное значение угла 9, получаем
е Г 7Г
i / Л Л-тй
±.fV
Когда из (2.40) будет найдена функция 9 = 0(£), то
координата z центра тяжести определится по формуле z = /(9(£)), а
изменение углов гр и ф со временем находится из (2.18)
квадратурой. Если •фо и сро — начальные значения углов ty и ср, то
J Л sin2 6(0
о
t
Щ~И
dt. (2.41)
Рассмотрим сначала такие движения тела, при которых его
ось симметрии не проходит через вертикальное положение, т. е.
Угол 6 во все время движения не может стать равным 0 или л.
Для этого, очевидно, достаточно потребовать, чтобы />ф Ф ±р^.
}) Рассматривая разложепне функции П* в ряд в окрестности 8 = 0
с точностью до членов четвертого порядка включительно, можно показать,
Что устойчивость имеет место и при критическом значении со — ft)*.
5* 67
Заметим, что всегда h —11^(6)^0, а при р^ = ±р9
величина h — Ujj. (9) при 8 -*■ 0 или я становится отрицательной.
Отсюда следует, что в реальном движении угол 8 заключен между
двумя вещественными корнями уравнения h — II^ (6) = 0,
лежащими между 0 и я. Если 6ь 9г — два различных (02 > 9i)
простых корня этого уравнения и в промежутке между этими
корнями h > 11^.(6), то угол 9 колеблется между 8i и 8г в
соответствии с (2.40). Период этих колебаний т вычисляется но^
формуле
Г2 /2(A + mfl)
"J V А-П. (в) ^
(2.42)
На фазовой плоскости 6, 6 приведенной системы этим
колебаниям соответствует замкнутая кривая. Если во все время
движения 8 = 80, то тело совершает какое-то из стационарных
движений, исследованных выше. Стационарным движениям на
фазовой плоскости 6, 6 отвечают изолированные (особые) точки,
лежащие на оси 8 = 0.
На рис. 10 для. случая р$ Ф ±p<v в качестве примеров
представлено поведение траекторий системы, когда функция П* (6),
имеет один локальный минимум (рис. 10, а) и когда П* (6) имеет
Рис. 10
два локальных минимума и один локальный максимум (рис. 10, б).
Рис. 10, а соответствует случаю, когда существует одно
стационарное движение, являющееся устойчивым, а 10, б — случаю,
когда осуществляются три стационарных движения, из которых два
устойчивы, а одно неустойчиво.
Пусть теперь ось симметрии тела во время движения может
пройти через вертикальное положение. Если возможно
прохождение положения 6 = 0, то необходимо должно выполняться
равенство р^, = pv. Если же ось симметрии может пройти через
положение, при котором 6 = я (т. е. возможен переворот тела), то рФ =
= —pv. Если р* = р9 = 0, то при движении тела его ось симмет-
рпи может проходить оба особых положения: 6 = 0 и В = л. При
/^ — Л — О из (2.41) следует, что if = <фо = const, ф = фо = const,
т. е. тело движется так, что его ось симметрии все время
находится в фиксированной вертикальной плоскости. Зависимость
угла нутации от времени получается из (2.40), где следует
положить n* = mgf(Q).
Если исключить положения равновесия 8 = 6о приведенной
системы, отвечающие стационарным движениям тела, а также
движения, соответствующие сепаратрисам на фазовой плоскости 9,
9 приведенной системы (см., например, 10,6) то
9(£)—периодическая функция времени. Из (2.41) тогда следует, что функции
-if (/■) и ф(£) представимы в виде
г|: (t) = V + Ь (t) Ф (0 = V + Ф1 (01 (2.43)
где постоянные Лф и >.„ зависят от констант />ф, />ф, h, а функции
i])i(£) и q>i(t) — периодические с периодом т, равным периоду
функции 9(f).
Рассмотрим характер следов точки касания М на плоскости и
поверхности тела для движений, не являющихся стационарными
в случае рф^±/?ф. Если угол 9 колеблется между 9i и 9г с
периодом т, то if и <р за время т получают приращения Ая|> = Хфт
и Лф = к^г. След точки касания иа иоверхпости тела заключен
а 5 в г
Рис. 12
между двумя параллелями, а на опорной плоскости — между
двумя концентрическими окружностями, что иллюстрируется
Рис. 11 и 12.
На рис. И, а представлен случай, когда ф не изменяет
своего знака, на рис. И, б ф обращается в нуль при 9 = 8i; рис. И, в
11 2 соответствуют таким движениям тела, когда за период т
69
одного его колебапия по углу 9 величина ф меляет свой знак
соответственно один и два раза; рис. 11,9 соответствует
сепаратрисе в плоскости 9, 6.
На рис. 12, и—в величина я|) за время т не изменяет знак,
меняет знак один раз и обращается в иуль при 9 = 9i; рис. 12, г
соответствует сепаратрисе.
Интеграл энергии (2.25) позволяет выделить в пространстве
Рф, /v h множество W таких значений постоянных /?ф, р<р, h,
которые отвечают реальным движениям тела. Так как Т%^0, то
это множество, очевидно, представляет собой совокупность
величин р$, ръ, h, определяемых неравенством
/i^ min И* (0; Рф, рф). (2-44)
Уравнение
А= min Пф (0; р-ф, рф) (2.45)
задает поверхность, ограничивающую W.
§ 3. Качественный анализ движения тела, близкого
к симметричному
Пусть твердое тело не является геометрически и
динамически симметричным. Наличие трех циклических координат х, у,
$ (применяем обозначения, принятые в § 1 и 2) позволяет
свести задачу о движении твердого тела по абсолютно гладкой
плоскости к исследованию системы с двумя степенями свободы.
Не ограничивая общности, будем считать, что х = у = 0, т. е.
что центр тяжести тела движется по фиксированной вертикали.
Движение тела относительно центра масс будет описываться
уравнениями Гамильтона (1.43) с гамильтонианом (1.41).
Величина рм в гамильтониане (1.41) рассматривается как параметр.
Пусть поверхность твердого тела будет выпуклой без
заострений л ребер и мало отличается от поверхности вращения с осью
врашепия G£ и тело близко к динамически симметричному.
Тогда можно принять, что аппликата z центра тяжести тела
задается формулой
* = /(e)+e/i(8,q>)
п В = А (1 + е), где е — малый параметр (0 ^ е < 1); функцию
/i(G, (f) считаем аналитической. Гамильтониан (1.41)
приведенной системы с двумя степенями свободы запишется в виде
11 = Яо(0, ре, Рр, Р*)+ e#i(6, ср, ре, Рч, Ph e). (3.1)
Невозмущеиное движение (при е = 0) представляет собой
движение динамически и геометрически симметричного тела,
подробно изученное в § 2. Согласно (2.22), имеем следующее вы-
70
раженне для функции Гамильтопа По певозмущепного движения:
н« 'ЧТГ1ГЛ + "tfW + ^чУ + 4- <32>
1. Переменные действие — угол, Изоэнергетическая
невырожденность невозмущенной системы [117, 134]. В дальнейшем
будем для определенности считать, что р^¥^±р€р, т. е. что
исключается возможность существования таких движепнй тела, когда
в невозмущенном движении его ось симметрии могла бы прой-
тп через особые положения 8 = 0, я. Случаи р^^ ± р^
аналогичны и в техническом отношении даже более просты для
исследования. Изоэнергетические кривые Но = const невозмущен-
иой задачи в плоскости 8, рв принципиально не отличаются от
соответствующих кривых Т% + U% = h в плоскости 8, 8.
Исключив из рассмотрения стационарные движения, для которых
б = 8о = const, и движения, асимптотические к стационарным,
получим, что изоэнергетические кривые в плоскости 8, ре будут
замкнутыми и на них 0 < 8i ^ 6 ^ 82 < я.
Для исследования возмущенного движения при малых, но
отличных от нуля значениях е удобно вместо переменных 8. q),
pQ, pv ввести канонически сопряженные переменпые wu w%, Iu
/2, являющиеся в невозмущенном движении переменными
действие— угол [4, 5, 16]. Переменные действие /i, /2 задаются
при помощи равенств
Л (',.#„)--я $>Ре<!е-
h = /V (3.3)
Интегрирование производится по замкнутым кривым Но = const.
Из (3.3) следует, что
е2
J г (/а. Н0) = JL [ 1Л(4 + т/3)1Я0-1Ме)] dB. (3.4)
'ei
Здесь 11^(8)— это функция из (2.24), в которой надо
положить рх = ру = 0, a 9i и 02 — простые действительные корни
Уравнения П* (0) — Нп = 0, причем в промежутке 0i < 8 < 82
выполняется неравенство П*(6)<//0.
Дифференцируя обе части равенства (3.4) по #о п учитывая
выражение (2.42) для периода движения т по замкнутой
кривой на фазовой плоскости, имеем
" е, "
71
1/2
dB,
При получении этого равенства учтено, что Gi и 02 — корнр-
уравнения 11* (Э) — Н0 = 0, и, следовательно, подынтегральное
выражение в (3.4) обращается в нуль при 9 = 8i, 82.
Так как dlJdHo^O, то первое из равенств (3.3) разрешимо
относительно #о. В неременных действие /i, h — угол wu w2
функция Гамильтона #о невозмущенного движения зависит
только от /i, /2, а функция Гамильтона (3.1) возмущенного
движения в переменных действие — угол имеет вид
Я = Яо(/ь h)+eHl(Iu /2, wu иь, е). (3.6)
Функция Н\ имеет период 2я по угловым переменным wu ш2.
Зависимость от параметров задачи, в том числе и от р^ в (3.6)
не указана.
Область возможных значений /i, h есть область
/) = {/, /2: J^O}.
Функция //о (Л, 1ъ) непрерывна в D и аналитична всюду, за
исключением прямой /i = 0 и кривых 1\ (/г, hc), соответствующих
сенаратрисным значениям //о = hc. Область аналитичности До
обозначим через Z>a:
DA = D/({h = 0} U Иг = /i(72, hc))).
Частоты невозмущенного движения
г г Шп
©i = ©i(/l. 72)=^?
(* = 1,2)
в области £>а будут аналитическими функциями своих
аргументов.
Рассмотрим изоэнергетический уровень #о = & = const. На
нем /i = /1 (/2, й), и, следовательно, частоты Oi — функции
переменной /г. Если отношение частот (02/coi будет зависеть от/g
(т. е. не сводится к постоянной), то изучаемая система изоэнер-
гетнчески невырожденна.
Проверим условие невырожденности. Для этого рассмотрим
тождество Ho(Ii(h, h), /2) = ^. Продифференцировав его по /г,
получим тождество
Откуда
(3.7)
Дифференцируя интеграл из (3.3) по параметру /г, получаем
Pq cos 6 — 72
^--5-(6.
Vil + m/g
\il С l
'. + "
л sinz e
71 _(*» —72cose)2 _
С 4 sin2 6
dB.
2mg/ (6)
72
Преобразуем это равенство, учитывая (2.18), (2.21) и (3.2).
Получим
—& м
где Аф — угол, на который повернется тело вокруг оси
симметрии за время, равное периоду колебаний угла 9 в
рассматриваемом невозмущенном движении (см. рис. 11). Согласно (2.40)
п (2.41)
^ - (— Tj7* + J л sin2 0 V *-Д,(6) ^ <3'9)
Таким образом, отношение (3.7) частот невозмущенного
движения может быть вычислено по формуле
^ = |5 (3.10)
где Аср определяется равенством (3.9).
Покажем, что угол Аф зависит от 1% (т. е. не сводится к
постоянной) . Для этого исследуем поведение Аф при h -*- °°, т. е.
в случае, когда в начальный момент тело быстро закручено
вокруг оси симметрии.
Пусть -ф = 9 = 0, /><р = h< 8 = Bi при t = 0. Для таких
начальных данных /?ф = /г cos Bi, h = mgf(Q1) + l\/(2C). Уравнение
h — Л* (0) = U запишется в виде
- (cos 8, ~ cos 8\2
It , ] . 2fl ' + т*/(8) = те/(6,). (3.11)
2А sin 8
Угол 8 во время движения тела изменяется между 8{ и 8г, где
8г — ближаищии к 6i корень уравнения (3.11). При больших
значениях \h\ его можно представить в виде ряда по
отрицательным степеням /г. Проведя некоторые выкладки, получим
Через pi и pi здесь обозначены значения функции /е(0) и ее
производной /ее (6) при 8 = 8i. Формула (3.12) уточняет
соответствующую оценку величины 8г, приведенную в [2]. Из нее
видно, что при достаточно большой угловой скорости вращения
тела вокруг оси симметрии угол нутации будет сколь угодно
близок к начальному зпачению. Этот факт был отмечен еще
В. Пюпзё [279].
Из (2.42) ц (3.12) можно теперь получить разложение
периода т колебаний угла 6 в ряд по отрицательным степеням
величины |/г1. Опуская все промежуточные весьма громоздкие
73
выкладки, приведем окончательный результат:
+<Ш (3-18)
Отсюда видно, что с ростом угловой скорости вращения тела
вокруг оси сиимметрии период колебании угла 9 уменьшается,
причем т -^ 0, если I^I-*- °°.
Используя (3.12) ц (3.13), после довольно громоздких
вычислений получим следующее выражение для величины Дф,
определенной равенством (3.9):
Ар\ (.4 -f- Згор*)
CPl (Л + тр\)
\ + о
При любых значениях А и С и для любой формы
поверхности, ограничивающей тело, выбором произвольного угла 0i
всегда можно добиться того, чтобы выражение в квадратных скобках
в (3.14) не было равно нулю. Исключение составляет случай
/в (А + m/2) sins-sc/A e = const, (3.15)
когда выражение в квадратных скобках в (3.14) тождественно
равно нулю. Остановимся на этом случае подробнее [134]. Так
как /е(0)=0, то постоянная в правой части равенства (3.15)
должна быть равной пулю, т. е. рассматриваемый
исключительный случай характеризуется условием
U (А + mil) sin»-*7/* 6 = 0, (3.16)
которое выпотппмо только в том случае, когда /е — 0, т. е. в
случае динамически симметричного шара, центр тяжести которого
совпадает с его геометрическим центром. Но задача о движении
такого -тара относительно центра тяжести на абсолютно
гладкой плоскости (как, впрочем, и любого неоднородного шара,
центр тяжести которого лежит в его геометрическом центре)
представляет собой интегрируемую задачу Эйлера — Нуансо.
Невырожденность этой задачи показана в [3, 79].
Таким образом, Аф не сводится к постоянной. Согласно (3.10),
отсюда следует, что отношение частот (Ог/coi на уровне
H^(I\,h)=h зависит от /г, т. е. невозмущенная задача,
описываемая гамильтонпапом (3.6) при е = 0, является изоэнергети-
чески невырожденной.
2. Свойства возмущенного движения. Пусть теперь величина
е отлична от нуля, но достаточно мала, т. е. тело близко к гео-
74
метрически и динамически симметричному. Движение
описывается каноническими дифференциальными уравнениями
at - di^1 If- ei\ {l~ l' ZJ
с функцией Гамильтона (3.6). В невозмущенной системе
'*(0 = /i(0), !*(*)= <D,(/i(0), /2(0))*+ 117,(0).
Если отношение частот (0i/(02 — иррациональное число, то
невозмущенное движение будет условно-периодическим с частотами (Oi,
(02*, в фазовом пространстве траектории всюду плотно заполняют
инвариантные многообразия, представляющие собой двумерные
торы.,
Так как невозмущенная система изоэнергетическп невырож-
деына, то, согласно теореме Колмогорова о сохранении условтго-
пернодических движений при малом изменении функции
Гамильтона [3, 85]. при малых е в системе с аналитическим
гамильтонианом (3.6) большинство инвариантных торов невозму-
щениой системы не исчезает, а лишь немного деформируется.
Двумерные инвариантные торы делят трехмерный уровень
энергии И = const, и из сохранения большей части торов
следует, что для всех начальных данных значения переменных
/, (i=1, 2) во время движения всегда будут близки к своим
начальным значениям, т. е. при малых возмущениях функции
Гамильтона Но движение будет устойчивым относительно
переменных U (£= 1, 2).
Более точно последнее утверждение означает следующее.
Для любого и. > 0 найдется е* > 0 такое, что при всех 8 из
интервала 0 < 8 < 8* для возмущенного движения при любых t
выполняются неравенства
|/,(0-/<(0)1<ц (* = 1, 2). (3.17)
Отсюда следует, что проекция кинетического момента тела
на ось G£ при всех t будет близка ее начальному значению при
t = 0. При 0 < 8 < 1 фазовый портрет в плоскости 9, 8 будет
мало отличаться от соответствующего фазового портрета
невозмущенной задачи в том смысле, что для большинства
начальных условий мало изменятся фазовые траектории и, в
частности, диапазон изменения угла нутации. Мало изменяется также
характер и место расположения следов точки касания на опор-
нон плоскости и поверхности тела.
Для теоремы Колмогорова о сохранении
условно-периодических движений в работе [141] получены пеулучшаемые оценки
для меры множества разрушающихся торов п деформации
сохраняющихся торов. Для возмущения порядка е зта оценка
имеет порядок Уе. Таким образом, в неравенствах (3.17) величина
|li имеет порядок У е.
75
§ 4. Перманентные вращения твердого тела
на гладкой плоскости
1- Существование стационарных движений. Пусть тяжелое
твердое тело с произвольной выпуклой поверхностью без
заострений и ребер движется по абсолютно гладкой горизонтальной
плоскости. Центральный эллипсоид инерции тела произволен.
Обобщенные координаты ф, х, у — циклические. Изменение
позиционных обобщенных координат 8, ф со временем
описывается дифференциальными уравнениями Рауса (1.38). Функция
Рауса R определена равенствами (1.34) — (1.37).
Твердое тело может совершать стационарные движения ви-
Да [66]
В = во, Ф = фо, "ф = *фо = со, х = х0, у = уо, (4.1)
где xq, */о — произвольные постоянные, а постоянные Во, фо, <о
удовлетворяют уравнениям
Щ = 0, «Е-в. (4.2,
К этим уравнениям надо присоединить соотношение
р* = /ззсо, (4.3)
получаемое из (1.33) при 6 = 60, Ф = фо-
В стационарном движении (4.1) тело касается опорной
плоскости одной и той же точкой М своей поверхности и вращается
с постоянной угловой скоростью со вокруг вертикали,
проходящей через центр тяжести тела G. При этом сам центр тяжести
движется с постоянной скоростью v = у Xq + Уо ВД°ЛЬ
неподвижной прямой, параллельной опорной плоскости. Не
ограничивая общности, можно считать, что центр тяжести тела в
стационарном движении неподвижен. Тогда движение (4.1) будет
представлять собой перманентное вращение вокруг неподвижной
вертикали, проходящей через центр тяжести тела. При этом
точка касания М тела с опорной плоскостью описывает на
последней окружность, центр которой расположен в точке,
являющейся проекцией центра тяжести G на опорную плоскость.
Радиус р этой окружности может быть найден по формуле р =
= У (GM)2 — z2, где велпчипы GM и z должны быть
вычислены для значений 8 и ф, равных пх значениям Во, фо в движении
(4.1). Использовав равенства (1-21), (1.25), получим
Р = K[(XiCose-Ssine)2 + X2]o. (4.4)
Индекс 0 здесь и в дальнейшем указывает на то, что
соответствующая величина вычислена при 6 = Во, ф = Фо.
76
Из (1.30) вытекают следующие тождества, которые полезно
заметь в виду при проведении выкладок в данном параграфе:
££i = /„-/„, ^=2/J3sme = /12sm0-/23coSe, (4.5)
^f = - /„, ^| = (/„ - /32) sin е + /13 cos е.
Из (1.37) и (4.3) следует, что система уравнений (4.2), (4.3)
может быть записана в виде
IS 2mg дд -U' ду 2mg дц> ~ U' *>* - 'л10' ^'Ь>
В силу произвольности константы р$ величина о> также может
принимать произвольные значения. При заданной величине (о
постоянные Во, фо будут определяться из первых двух
уравнений системы (4.6), которые с учетом равенств (1-24)^ (1.25) и
(4.5) могут быть представлены в виде уравнений
(£ sin ф + tj cos ф) cos 0 — £ sin 9 = :—»
£ COS ф — Т] Sin ф = -=*—.
Исключив отсюда величипу (о2, прпдем к соотношению
(В - С) |а32азз + (С - А) ца^а^ +(А-В) Ъаъхаъ2 = 0. (4.8)
Здесь язь «32, «зз — направляющие косинусы вертикали в
системе координат G£rj£, жестко связанной с телом; отш
выражаются через 8 и ф по формулам (1.3) гл. 1. Соотношение
(4.8) является условном, которому должны удовлетворять
направляющие косинусы возможных осей перманентных
вращений тяжелого твердого тела на абсолютно гладкой
горизонтальном плоскости.
Если взять какие-либо значения 9 = 90, ф = фо,
удовлетворяющие равенству (4.8), то значение величины |(о| определится
однпм из уравнений (4.7). При этом для данных 6о, фо значение
1о)| уже будет, вообще говоря, единственным.
Из (4.7) следует, что не каждая проходящая через центр
тяжести вертикаль, направляющие косинусы которой
удовлетворяют условию (4.8), является осью перманентного вращения:
значения 9о, ф0 должны быть такими, чтобы из (4.7)
следовало неравенство о2 > 0. Последпее условие с учетом равенств
(1.30) может быть записано в внде
(А — В) (<na3i — £а32)яз1аз2 > 0. (4.9)
77
Отметим еще, что соотношения (1.25) и уравнения (4.7)
позволяют записать выражение (4.4) для радиуса окружности —
следа точки касания на опорной плоскости — в виде
p-S^Ui + /1«).
(1.10)
2. Устойчивость перманентных вращений [66, 70J.
Согласно теоремам Гауса — Ляпунова и Кельвина — Четаева [66, 70],
для получения достаточных условий устойчивости
стационарного движения (4.1) надо исследовать характер критической точки
G = 8о, <р = фо приведенного потенциала W. При этом
потребуются производные координат | = |(0, ф),
ri = T](8, ф), £ = £(6, ф) точки касания М
тела с опорной плоскостью по
переменным 9 и ф. Для вычисления этих
производных воспользуемся следующими
соображениями [70]. Пусть |*, tj*, £* —
значения координат точки касания,
отвечающие каким-либо произвольным
значениям 6 = 6*, <р = ф*. Представим
уравнение поверхности тела в окрестности ее
точки |*, т]*, £* с точностью до членов
второй степени относительно \ — !*>
т] — т)*, t, — £*. Тогда из системы (1.1),
(1.4) можно будет получить выражения
Рис. 13
величии | — 1*, т] — rj*, £ — %* через
разности 6 — 6*, ф — ф* с точностью до
членов первой степени. Соответствующие
коэффициенты при 6 — 9* и ф — ф* будут искомыми
производными функций |, т), £ по 6 и ф.
Приводимая ниже процедура вычислений лишь
незначительными деталями отличается от соответствующих вычислении
работы [70]. Помимо введенной в § 1 системы координат GIih^i
введем еще две вспомогательные системы координат М^^^ и
Л?1з11з£з с началом в точке касания М тела и плоскости (рис. 13)-
Оси системы координат МЪ^Ц^ьъ параллельны соответствующим
осям системы координат G£itji£i. Направления осей М£з и Мт\$
системы координат Л/|зТ]з$з совпадают с направлениями линий
кривизны поверхности тела в точке М, причем радиус
кривизны п отвечает оси М%$, а гг — оси Мг\з', ось Л/£з направлена
вертикально вверх и, следовательно, совпадает с осью Д/£г. Угол
между осями М%% и М\ъ, отсчитываемый от оси 1/£г к осп Мх\2,
обозначим через а. Ясно, что величины п, гг, а зависят, вообще
говоря, только от 6 и ф, так как поворот тела вокруг вертикали
на любой угол не изменяет их значений.
Выпишем формулы перехода между введенными системами
координат. Используя выражения (1.29) для элементов матрицы
перехода от системы координат Gtrfc к системе GliTjiti, получаем
такие значения координат £i, rji, £i точки касания М тела п
78
плоскости в системе Ggit]iti:
£i = — (£ sin ф + rj cos ф) cos 8 + £ sin 0, rji = £ cos ф — rj sin ф,
(4.11)
£i = (£ sin ф + rj cos ф) sin 8 +1; cos 8.
Далее, ввиду параллельности соответствующих осей систем
координат GgiT]iti и Л/^т^г, справедливы равенства
£2 = Ь — £?. 4i = *Ь — т£' £2 = Ь — Й» (4-12)
* * *
где ^l^ ih, £i суть величины £i, rji, £i из (4.11), вычислен-
яые при 6 = 9*, ф = ф*.
И наконец, при помощи рис. 13 получаем следующие
соотношения:
h = Ъ cos a + tj2 sin a, tjs = —£2 sin a + ч\2 cos ос, £з = Ь-
(4,43)
Уравнение поверхности тела в окрестности точки касания с
плоскостью до величин второго порядка малости включительно
относительно величин £з, *1з имеет вид
ь- 4- (#+|)- <*■«>
Используя формулы перехода (4.11) — (4.13), его можно
записать в системе координат G^tfe (оси которой направлены по
главным центральным осям инерции тела). Проделав несложные
вычисления, получим уравнение поверхности тела с точностью до
вторых степеней величин £ — £*, г\ — rj*, £ — £* в виде
F (Ь Л. 0=- К - С*) - KS - £*) sin ф* + (ч - п*) cos ф*] tg 8* +
+ д (I - £*)2 -?- Ь (£ -1*) (г) - У]*) +С(т)-ц*)« = ^ (415)
где введены обозначения
2ггг2 cos3 G*
а = Zi sin2 ф* — Z cos 6* sin 2ф* + /г cos2 6* cos2 ф*,
Ъ = U sin 2ф* — 21 cos 8* cos 2ф* — h cos2 0* sin 2ф*,
с = ly cos2 ф* + I cos 6* sin 2ф* + h cos2 9* sin2 ф*,
li = 7*1 sin2 a + Г2 cos2 a, h = r{ cos2 a + r2 sin2 a,
I =(?2 — r\) sin a cos a. (4.17)
(416)
Из (1-4) имеем уравнения
OF ,
^r gin 8 sin ф = -tst cos 8, -T5- sin 8 cos w = — cos 8. (4.18)
Разлагая входящие сюда тригонометрические функции углов 6 и
Ф в ряды с точностью до первых степеней 8 — 8* и ф — ф* вклю-
79
чнтельно и пользуясь выражением (4.15) для функции F,
приходим к уравнениям
2а(6-Е»)+Ь(ч-т|*) =
= —2nr2 cos8* [sin <р* ■ (G - G*) + sin G* cos G* cos ф* • (cp - ф*) ],
(4.19)
Ь(6-5*)+2с(т1-ч»)|=
= —2г\Гч cos 0* [cos ф*•(8 — 6*) — sin 9* cos 9* sin ф* • (ф — ф*) ].
Разрешив эти уравнения относительно £ — £* и ц — г)*, получим
I — I* = — [(h cos6* sin ф* + I cos ф*) (9 — G*) +
+ {h соБф* + ZcosB* sin ф*)зт 8* -(ф — Ф*)],
(4.20)
Yj — г]* = — [ (h cos 8* cos ф* — I sin ф*) (9 — G*) —
— (Zi sin ф* — I cos 9* cos ф*)эт 6* ■ (ф — ф*) ].
Используя (4.20), из (4.15) получаем величину Е; — £* с
точностью до первых степеней величин 8 — 8*, ф — ф* в таком виде:
I _ £* = [/2 . (9 — 8*) + / sin 8* • (ф — ф*) ] sin 9*. (4.21)
Из (4.20) и (4.21) следуют искомые выражения для производных
величин £, т), £ по переменным 8, ф [70]:
-_^- = — (Z2 COS 8 Sin ф + /СОЭф), 4р = — (/т С08ф+/С08б8тф)8т6,
~ = Zsin ф— /2со8бсоБф, ~~- = (U sin ф — ZcosGcos ф) sin 9,
^■= i, sine, -^ = Zsiu2G. (4.22)
Отсюда, в частности, вытекают два соотношения вида
(£' sin ф + V cos ф) sin 8 + £' cos 8 = 0, (4.23)
где штрих обозначает дифференцирование по 6 или по ф.
Введем возмущения х\, Х2, положив 6 = Go + х\9 ф = фо + ^2.
Использовав соотношения (1.21), (1.24), (1.25), (1.30), (4.5),
(4.7) и (4.22), можно получить квадратичную часть
приведенного потенциала W в виде
W = 4 foi*? + 2с,г^Л + с2А (4-24)
где
Си = [mg (7, - h) + о2 (/33 - /ц + ^Д ) j
sin 90, (4.25)
L22
= [mg (Zx - Л) + о2 (/33 - /„ + ^) ]o sin2 90,
80
Через h обозначена высота центра тяжести тела над опорной
плоскостью в невозмущенном движении.
Согласно теореме Рауса — Ляпунова невозмущенное
движение устойчиво по Ляпунову относительно 9, G, ф, ф, Ц\ х, у,
если выполняются условпя
сц + с22>0, (426)
'iA2- 4* >°- (4-27)
Если неравенство (4.27) выполняется с обратным знаком, то,
согласно теореме Кельвина — Четаева, имеет место
неустойчивость.
При выполнении неравенства (4.27) и строгом нарушении
неравенства (4.26) оба собственных числа квадратной матрицы,
образованной элементами су (£, / = 1, 2), будут отрицательными
и теоремы Рауса — Ляпунова и Кельвина — Четаева не дают
возможность получить достаточные условия устойчивости пли
неустойчивости. В этом случае ограничимся получением
необходимых условий устойчивости на основе исследования
характеристического уравнения линеаризованных уравнений
возмущенного движения. Опираясь на соотношения (1.21), (1.24), (1.23),
(1.30), (4.5), (4.7), (4.22) и используя равенство р$ = ^зз^»
получим линеаризованные уравнения (1.38) в виде
d\\X\ + d\2X2 + JX2 + С\\Х\ + Ci2#2 = 0,
d\2X\ + Й22#2 — № + c12^1 + <?22#2 = 0,
где си, Ci2, C22 определены равенствами (4.25), а
*и-(/--£+5-ш1)'
\ узз т$ /о
du = - (л, + ^а+^) sineot
4=Ц+^2^ Sin^e0,
V ':з т% о
/ J* -1-/2 \
7 — 1/ 4-7 —Г ° 13 281
\ *зз /о
Если выполняется условие
f + Г1А2 + Сийн - 2cV2d12 - 2\f(cnc22 - r*a) (dnd22 — rfb) < 0,
(4.29)
то характеристическое уравнение системы (4.28) имеет корень
с положительной вещественной частью п согласно теореме
Ляпунова об устойчивости по первому приближению [101]
невозмущенное движение неустойчиво. Если же неравенство (4.29)
выполняется с обратным знаком, то характеристическое уравнение
6 А. П. Маркеев 81
(4.28)
to sin 60.
•имеет две пары чисто мнимых корней. В этом последнем случае
необходимо дальнейшее исследование, опирающееся па теорию
устойчивости движения в системах Гамильтона [4, 103, 127,
176—179]. В следующем параграфе эта теория будет применена
для исследования устойчивости движения однородного
эллипсоида.
Отметим два важных частных случая. В первом из них "фо =
= о = 0. Этот случай отвечает положению равновесия тела.
Из (4.10) следует, что в положении равновесия центр тяжести
и точка касания поверхности тела и опорной плоскости лежат
па одной вертикали.
Для исследования устойчивости положения равновесия тела
воспользуемся теоремой Лагранжа об устойчивости положения
равновесия консервативной системы и результатами Ляпунова,
лолучениымн в его работе [98], посвященной проблеме
обращения теоремы Лагранжа.
Квадратичная часть Пг разложения потенциальной энергии
П = mgf{Q, ф) в ряд в окрестности положения G = 6о, <р = фо
имеет вид
Па = 4"mg ^'2 — Л> а'* + 21хл + & ~~ h) **]■
Если сделать замену переменных
х\ = —cos ш/i + sin ау2У х2 — sin ау\ + cos ау2,
то Пг примет вид
П2 = "2" mg К1"* "" h) у* + (Г2 — ft) y*lm
Отсюда впдпо, что если r\ > h и г2 > h, то потенциальная
энергия П в положении равновесия имеет строгий локальный
минимум и по теореме Лагранжа это положение равновесия
устойчиво. Если же хотя бы одно из последних неравенств
выполняется с обратным знаком, то функция П в положении равновесия
не имеет минимума, и это узнается уже по членам второго
порядка Пг ее разложения в ряд; согласно [98] в этом случае
имеет место неустойчивость.
Таким образом, установлено, что положение равновесия
тяжелого твердого тела на абсолютно гладкой горизонтальной
плоскости устойчиво, если центр тяжестп тела лежит ниже обоих
главных центров кривизны поверхности тела в точке его
касания с плоскостью, п неустойчиво, если центр тяжести лежит
выше хотя бы одного из главных центров кривизны.
Второй важный частный случай отвечает такой ситуации,
когда одна из главных центральных осей пнерцпп тела,
например ось Gt\4 в одном из двух противоположных направлений
(или в обоих) пересекает поверхность тела но нормали к ней.
Тогда для значений углов 6 и <р, отвечающих точке пересечения
S2
(например, 6 = л/2, <р = 0), имеют место равенства
-щ - т - и, J12 - i13 - i23 - и,
и уравнения (4.6) (или, что то же самое, уравнения (4.7))
удовлетворяются при любых значениях о. Следовательно, в этом
случае тело может совершать перманентное вращение с
произвольной по величине угловой скоростью вокруг вертикально
расположенной главной оси инерции (в нашем случае вокруг
осп Gn). Из (1.30), (4.25) —(4.27) следуют такие достаточные
условия устойчивости этого перманентного вращения:
mg(rx + r2 - 2h)0 + со2(25 - А - С)> 0,
(mg)2[(rl—h)(r2 — h)]0 +
+ mg&2[{B — C)(lx — k) + (B — A){l2 — h)U +
+ co4(S — С) (В — А)>0.
Эти условия получены в статье [161] при исследовании
устойчивости стационарного движения гиростата.
§ 5. Некоторые задачи динамики эллипсоида
на гладкой плоскости
1. Исследование устойчивости перманентного вращения
эллипсоида [118, 134]. Рассмотрим движение однородного
тяжелого тела, ограниченного эллипсоидальной поверхностью, по
абсолютно гладкой горизонтальной плоскости. Будем
придерживаться обозначений, принятых в § 1. Пусть а, Ъ, с — полуоси
поверхности тела. Тогда в связанной системе коордпнат
поверхность тела задается уравнением
*4&ч. 0 = 4 + 4 + 4-1 = 0- (51>
а о с
Из (1.1) и (1.4) с учетом конкретного вида (5.1) фупкцип
/'(£, 1], £) находим выражения для координат £, rj, £ точки
касания эллипсоида с опорной плоскостью:
* а2 Ь2 «. с2 /г 0ч
d = ] а2аз1 + 62я22 + ^зз- (5-3)
Отсюда и из (1.21) получаем выражение для расстояния от
центра тяжести тела до опорной плоскости:
/ (0, <>) = d =1 ГаЧ\х + Ъ2а\, + с2а23. (5.4)
Для производных /е и /ф из (5.4) получаем такие выражения:
г _ (a2 sin2 ф + b2 cos2 ф — с) sin 9 cos 0 , __ (а2 — ft2) sin2 8 sin ф cos ф
Jb j ■ * /<p — j ■ .
(5.5)
6* 83
Без ограничения общности можно считать, что проекция
^центра тяжестп на опорную плоскость неподвижна, т. е. рх =
— ру = 0. Тогда, принимая во внимание выражения для
моментов инерции эллипсоида относительно его главных осей
А = -Lт(Ь2 + с% В = -~ т(с2 + a2), C = {m(c2 + b2), (5.G)
лз (1.30), (1.37) и (5.4) получаем следующее выражение для
приведенного потенциала:
W~mgf+ ,**£_ г ,2ч • (5-7)
2т (а -\- Ь + с — f )
Так как очевидно, что dW/df>0, то в соответствии с (4.2)
.значения 6 = 80, ф = фо, отвечающие перманентным вращениям
эллипсоида, будут критическими точками функции /(6, ф),
которые, в свою очередь, соответствуют точкам пересечения осей
эллипсоида с его поверхностью. Учитывая, что оси эллипсоида
ортогональны его поверхности, получаем, что перманентные
вращения однородного эллипсоида существуют и -отвечают его
вращению с произвольной постоянной угловой скоростью (о вокруг
любой его вертикально располоя^енной оси. Исследуем
устойчивость этих вращений. Для определенности рассмотрим
перманентное вращение вокруг оси Gg эллипсоида. Соответствующее
решение системы дифференциальных уравнений (1.43) с
функцией Гамильтона (1.41) будет таким:
6 = ф = —-, рв = /?ф = 0, -ф = at + ipot Pty = А^ (5-8)
где о — произвольная постоянная.
Пусть 6 = я/2 + <7ь ф = я/2 + д2. Отбросив несущественную
постоянную, получим, что с точностью до вторых степеней #ь
#2 разложение приведенного потенциала (5.7) в окрестности
перманентного вращения будет таким:
W = -^лш? (5fc + 1) [(г2 - a2) q\ + (b2 - а2) д22], (5.9)
где через к обозначена безразмерная величина g/(o2a).
Из (5.9) и теоремы Рауса — Ляпунова следует, что еслп
вращение эллипсоида происходит вокруг его наименьшей осп
(а < Ь, а<с), то перманентное вращение (5.8) устойчиво
относительно возмущений величин 6, ф, /?е, А>, /Ч, рх> рУ. При этом
величина о может быть любой, в том числе и равной нулю, что
соответствует положению равновесия эллппсопда, когда он
опирается о плоскость одной из своих вершин, лежащих на его
наименьшей оси.
Если а будет средней осью эллипсоида (Ь <а<.с или Ъ >
> а> с), то из (5.9) и теоремы Кельвина — Четаева следует
неустойчивость перманентного вращения (5.8) (при любом со).
Если же а будет наибольшей осью эллипсоида, то функция
двух переменных (5.9) будет определенно-отрицательной, и пер-
84
знанентпое вращение (5.8) может быть устойчивым или
неустойчивым в зависимости от величины о, по это нельзя установить
прн помощи теорем Рауса — Ляпунова или Кельвина — Четае-
ва. Для строгого решения вопросу об устойчивости в этом
случае воспользуемся результатами работ [4, 103, 127]. Сделаем
замену переменных
е = -— + ?!, ф = | + й* ло = A®Pii р<р = А®Р2
н перейдем к безразмерному времени Ы. Разлагая затем
функцию Гамильтона (1.41) в ряд по степеням qh рй (у = 1, 2) и
отбрасывая несущественную постоянную, получаем
# = #2 + #з + #4+..., (5.10)
где Hk — форма степени к относительно q\, Q2, Р\, /?2.
Вычисления показывают, что
61 + 62 б, + б2 6i + s2~5k(i~62)
Н*~ 2(l + 62)Pl^ 2(1 + Й1)р« + 2^ + fiJ ^
(1-бг)[б1+б2 + 5А(1+62)1 . 1-6,
Я3 - 0, (5.12)
8(61 + 62) + 5fe(l-62)(l+362) 5 ,
М* = 24 (6, + б2) 9i + Т 9l/,« +
(1 - fij [4 (6, + б2) + 5fc (1 + б2) (1 + 36,] 2(1-6,) __
"*" 24 (* + «,) («! + ««) 3 (1+в,)
_ (1 - б,) 12 (6, + 62) (1 + й,) + 40 (1 - б,) 6* - 5fc (1 + б2)3] г2
4(в1 + в8)(1+6,)« ««»
(1-б1)[(1 + б1) + 5(1-62)(б]+б2)]
"" (i + fi,)(i + 62) Qi'hPiP* —
5(б1+б2)(1-б2)2 ±
2(i + e2)2 ?ift + 2 9l/?2
(l-6l)f2062(l-62)4-(l + 63)] 2
2(1 +fig)* 5l№ ~~
(1-6,) [(1+6,)+ 10 (1-6^] »„ , *-в1 2 2
(1 + 6.) (1 + 6^ ft/»P« + 2(l + 62)^i
2M +6 ч2 ?2/V (o-13)
Здесь приняты обозначения 8i = b2/a2, 62 = c2/a2 (0<6js£l).
Характеристическое уравнение линеаризованной системы с
гамильтонианом Яг будет иметь вид
(14-6,) (1 + 62)Я4 + 2[2 + (5ft +1) (6,fe- 1)]Л2 +
+ (5/с + 1)2(1-61)(1-62) = 0. (5.14)
85
Для устойчивости необходимо, чтобы это уравнение не имело
корней с отличной от нуля вещественной частью.
Следовательно, должна выполняться система неравенств
(5/с + 1) (6 Д - 1) + 2 > 0, (1 - 6t) (1 - 62) > О,
\(5к + 1)(6А- 1) + 2|2- (5* + If (1 - ЬХ) (1 - 622) >0. (5.15)
Решив эту систему, придем к следующему необходимому (с
точностью до знака равенства) условию устойчивости
перманентного вращения эллипсоида (5.8):
*</i(fii, 62), (3.16>
где
(6, + 62)2
5([/l-^+|/^l-622j2'
Условие (5.16) можно также записать в такой форме:
fi»
-ь4 +
Ъ2+с2
(5.17>
Неравенство (5.17) впервые получено Пюизё [280]. Если
эллипсоид симметричен (Ь = с), то
неравенство (5.17) переходит
в такое:
<о>
V4
bi Va* - с*
(5.18)
которое согласно (2.39)
необходимо и достаточно для
устойчивости перманентного
вращения симметричного эллипсоида.
На рис. 14 в пространстве»
параметров 6i, 62, к
представлена область (5.16), в которой
выполняются условия,
необходимые для устойчивости. Она
лежит внутри бесконечного
параллелепипеда (0 < 6j ^ 1 (/ —
= 1, 2), 0<&<°°) и
расположена под поверхностью к =
= /i(6i, 62). Эта область
симметрична относптельно плоскости 61 = 62, прп fc^O она
сужается к началу координат, а при к ->■ °° сужается и асимптотически
приближается к ребру параллелепипеда 61 = 62 = 1. Поверхности
fc = /r(6i, 62) пересекает все боковые грапп параллелепипеда;
боковые ребра {6i = 1, 62 = 0} и (6i = 0, 62 = 1} она пересекает
прп к = 0,2.
Для полного нелинейного анализа устойчивости в области
(5.16), следуя алгоритму из [103], сделаем сначала линейную
каноническую замену переменных <fr, Pj ->■ Qj, Pj, приводящую Н2
к нормальной форме
я2=4"Wi (^2+р'*) ~~ т™* (?*2 + /;22)' <5Л9>
тде o)j (/ — 1, 2) — положительные корни (wi > ш2) уравнения
(5.14), в котором принято Л. = ico (z2 = —1). Линейная
нормализующая замена переменных будет такой:
Qi = «Л + ОДг* <72 = — ttibiPi + аАР2,
Pi = ^jC,Pi — a2c2p2l p2 = aAft + tf2d272-
Здесь введены обозначения
(5.20)
e'- 2\ Ki-eox^K
(6i + 62)";
^ + 4) + 4(6, + б2) -20А(1 - 62) |
j
(l + 6i)xj + 2(6] + 62)-10A-(l-62) 1+6,
2a>j(61 + 62) ' в'-2(в1+в,)^
xj = (1 + б2) (©J - 1) + 5fr (1 - б2) (/ = 1, 2).
Дальнейшая нелинейная нормализация^, Pj-^qj, Рз
проводится при помощи преобразования Биркгофа [10]. Если
выполняется резонансное соотношение coi = Зо)г, то нормализованная до
членов четвертого порядка включительно функция Гамильтона
(5.10) примет вид
Я = ЩГг — 0)2Г2 + C20r\ + Сг11\Г2 + С02Г22 + уГ2 У~Г^Г2 COS (фх + Зф2) +
+ 0((r1 + r2)*/*) (5.21)
(щ = Vr2r3 sin Til p] = V2rjCos(fj),
где Cij, y — функции параметров 6i, 62, к. Соотношение Wi = За>2
выполняется на резонансной поверхностп
U = 9 [2 + (5fc + 1) (6Д - I)]2 - 25 (5/с + I)2 (1 - Ы) (1 - 622) = 0.
(5.22)
Эта поверхность пересекает плоскость к = 0 по кривой,
изображенной на рис. 14 штриховой линией. Точки {6i = 0,8; 62 = ()}
и {6i = 0; 62 = 0,8} являются граничными точками этой кривой.
Вся резонансная поверхность лежит ниже поверхности к —
= /i (61, 62), выделяющей из параллелепипеда {0 < б,- < 1, 0 < к <
< °°} область, где выполняются условия устойчивости в первом
приближении; при к ^ 0,2 она пересекает грани 6i = 1 и бг = 1
параллелепипеда по тем же кривым, что и поверхность к -=
= /i(6i, 62).
87
Если при резонансе coi = 3co2 выполняется неравенство
|cto + 3cn + 9co2l >3V3IyI, (5.23)
то имеет место устойчивость, при обратном знаке неравенства в.
(5.23)—неустойчивость [103]. Численная проверка при помощи
ЭВМ показала, что неравенство (5.23) выполняется на всей
резонансной поверхности (5.22), за исключением двух ее узких
областей, исходящих из точки {к = 0,014; 6i = 52 = 0,547} п
симметричных относительно плоскости 61 = 62. На рис. 14 эти
области заштрихованы. При приближении к граням параллелепипеда
6i =» 0 и 6г = 0 они стягиваются в точки {6j =0; 62 = 0,957; к =
= 0,070} и {6i = 0,957; 62 = 0; к = 0,070} соответственно.
Если 0)1^3(02, то в нормальной форме (5.21) f — 0, и при
выполнении неравенства
/з = С20<°2 + СПЩ(02 + C020)i ф 0 (5.24>
движение устойчиво [4, 127]. Численные расчеты показали, что
поверхность /з^О существует и лежит ниже поверхности
k=»fi(6\, 62), но выше резонансной поверхности /2 = 0. Она
пересекает боковые грани параллелепипеда (0 < 6,- < 1, 0 < к <
<°°} по тем же кривым, что и поверхность А: = /i (61, 62).
Таким образом, внутри области устойчивости в первом
приближении стационарное вращение (5.8) эллипсоида вокруг его
наибольшей вертикально расположенной оси устойчиво всюду,
кроме, быть может, поверхности /з =■ 0, которая требует более
детального исследования, учитывающего члены выше четвертого
порядка в разложении функции Гамильтона (5.10), а также
двух узких заштрихованных на рис. 14 областей, лежащих на
резонансной поверхности o)i = Зо)2, на которых имеет место
неустойчивость.
В статье [75] рассмотрено движение тяжелого твердого тела
с эллипсоидальной поверхностью но абсолютно гладкой
горизонтальной плоскости. Тело пеоднородно, но главные оси его
поверхности совпадают с главными осями центрального
эллипсоида инерции. Найдены однопараметрические семейства
перманентных вращений тела, условия их существования, ветвления
и устойчивости; отмечено, что в одном вырожденном случае
семейство перманентных вращений становится двухпараметри-
ческим. Указаны некоторые особенности рассматриваемой
задачи; в частности, найдено, что возможны потеря устойчивости
быстрого вращения тела с наинизшим расположением центра
масс и стабилизация такого вращения в случае наивысшего
расположения центра масс.
2. Движение, при котором эллипсоид касается плоскости
одним из его главных сечений. Рассмотрим движения
эллипсоида, при которых одна из его осей, например G£, горизонтальна,.
а точка касания описывает на поверхности эллипсоида одно из
его главных сечений (£ =» 0). При этом вектор угловой скорости
эллипсоида направлен по оси Gt;, и, следовательно, эллипсоид
88
яе вращается вокруг вертикали. Этому движению соответствуют
нулевое значение постоянной р^, угол 6 = п/2, рв = 0, а
изменение угла ф определяется дифференциальными уравнениями с
функцией Гамильтона
Л = 2Г Рф + meU (5.25)
где е\ и / вычисляются при 6 = л/2.
Будем считать, что сечение эллипсоида £ = 0 близко к
кругу, и положим а2=>Ь2(1 + е), считая, что 0^е<1. Введем так-
.же безразмерное время
т-^*1
и, оставляя старые обозначения, введем безразмерные
импульсы при помощи масштабного коэффициента 1/mgbC. Тогда
функция Гамильтона (5.25) запишется в виде (несущественную
постоянную отбрасываем)
h = \ v% + \ г sin2 ф + О (е2). (5.26)
При малых значениях е приведем гамильтониан (5.26) к
переменным действие — угол J, W при помощи производящее фувк-
дщи
5 = /(f + E^ + 0(e«). (5.27)
Замена переменных р<р, ф -*■ J, W задается равенствами
л-|« w = % (5-28>
из которых следует, что
т . cos 2W , /i / оч ш , sin 2W ^ . пч /г 0п\
РФ = / + е^^Т" + °И» Ф = И^ + £ —^- + О(еь). (5.29)
Отбросив несущественную постоянную, получим гамильтониан
(5.26) в новых переменных в виде
/z--|-/- + <9(e*). (5.30)
Отсюда следует, что в первом ириблпжешш но 8 имеем / = /о,
И/ = /0т+И/о, где /о, И7о — произвольные постоянные (/о^О).
Из (5.29) видно, что исследуемое движение представляет собой
вращение с угловой скоростью ~l!mgb/CIo вокруг горизонтальной
оси G£, на которое накладываются малые колебания с амплпту-
дой порядка е.
Невозмущенное движение 6 = л/2, ре = 0, 1 = /о, W = hr Ь
+ И^о, очевидно, неустойчиво по Ляпунову, так как малое
изменение начального значения / приводит к болышш отклонениям
W от ее значения в невозмущенном движении в тот же момент
89
времени. Исследуем задачу об орбитальной устойчивости,
которая в нашем случае означает устойчивость по отношению к
возмущениям величин /, 6, ре. Положим / = /о+п, 8 = л/2 + дг,
Ре=Р2 и разложим фушщию Гамильтона (1.41) (в которой
^ = 0 и введены безразмерные импульсы и время т) в ряд по*
степеням гь #2, Р2- При этом #2, Р2 — величины первого порядка
(малости, а величина п, по самому ее смыслу, имеет второй
порядок малости. Получим разложение (5.10), в котором
слагаемые #ft могут быть представлепы в виде Hk = Н^ + Н^\ где-
через Ни обозначена совокупность членов не ниже первого-
порядка по е, причем функции II h содержат переменную W в
виде синусов и косинусов углов, кратных 2W. Вычисления
показывают, что
^0) = /<А +
Н"» = ±г1 +
2/„
1<&
х2 + 2/2-1
2 (х + 1)
Яз-0,
i2
qt +
i
х + 1
pt
(5.31>
(5.32).
5(x-lf 2 2 (3x + l)(x2-l) + 16/g 4
Q2P2 •>/./„_!_ 1\ ^2-
х + 1'™2 (И+!)»*"-» 24(x + l)
(5.33>
Здесь через к обозначена безразмерная величина (с/Ъ)2.
Рассмотрим устойчивость в линеаризованной задаче,
описываемой функцией Гамильтона Яг. Здесь переменные #2, Рг и
переменные п, W разделяются. По переменной п, очевидно,
будет устойчивость. Рассмот-
lok рим устойчивость по от-
*2у ! ношению к переменным
#2, Р2. Соответствующие
этим переменным
дифференциальные уравнения
задаются функцией
Гамильтона И 2 — Iqt\.
Пусть сначала е = 0-
Тогда #2 " hr\ = ^а0) —
—/nr,,H из (5.31)
следует, что прп выполнении
неравенства
к2 + 2/?-1>0 (5.34)
Рис. 15 пмеет место устойчивость
в липейном приближении.
При обратном знаке в неравенстве (5.34) будет неустойчивость.
На рис. 15 область неустойчивости заштрихована. Прп 8 = 0
эллипсоид будет телом вращения, и исключение циклической
координаты ф приводит к системе с одной степенью свободы
с обобщенной координатой 8. Разложение гамильтониана
возмущенного движения будет начинаться с квадратичной формы
90
/г/j
Л20) — A>'V k условие (5.34) будет достаточным условием
устойчивости.
При 8^0 угол ф не будет циклической координатой, и при
выполнении неравенства (5.34) из-за параметрического
резонанса возможна неустойчивость уже в линейном приближении
[103]. Найдем параметры /о, х, из которых при малых е
рождаются соответствующие области неустойчивости. Переходя в
уравнениях возмущенного движения к новой независимой
переменной W и учтя, что в линейном приближении W = /0,
получаем, что параметрический резонанс возникает в окрестности
кривых, задаваемых равенствами
" = N (N - целое). (5.35)
о
Здесь через о обозначена частота колебапий в системе с
гамильтонианом #20) — A)ri' описывающим изменение переменпых
ff2, P2'.
1/2(^ + 2/^-1)
*> = -—5гй ■ <5-36>
Следовательно, при е ^ 0 параметрический резонанс возникает
вблизи таких параметров /о, к, при которых частота колебаний
угла нутации кратна угловой скорости вращения эллипсоида
вокруг его оси симметрии.
Пз (5.35) и (5.36) получаем явное выражение /о через у,
на резонансных кривых:
Верхний знак здесь соответствует положительным N, а
нижний — отрицательным. Для .V = ±1 резонансные кривые будут
двух типов: либо /о — любое, а к = 1 (эллипсоид вырождается
в шар), либо /о= ±У2(х+ 1)/(х + 2ук Последние кривые
начинаются па оси /о в точках h = гЫ72/3 п при к -*- «> монотонно
приближаются к своим асимптотам /о = ±1/2. При |ЛТ|>2 резо-
напсиые кривые расположены в области х ^ 1. Все они
проходят через точку {и = 1, /о = 0) и при х-* °о имеют асимптоты
Io = Tf2/Na На рис. 15 резонапсные кривые (5.37) для N =
= ±1. ±2, ±3 показаны штриховыми линиями. Отметим, что
при i/ol^V2 параметрический резонанс отсутствует.
Пусть параметры /о, у» лежат вне достаточно малых
окрестностей кривых параметрического резонанса (5.37). Тогда при
малых £ исследуемое движение эллипсоида будет орбитально
устойчивым в первом (линейном) приближении. Рассмотрим
теперь устойчивость в строгой нелинейной постановке задачи.
Согласно [102, 103] для этого необходимо провести нелинейную
нормализацию п, ТУ, (?2, Р2 -+~ Pi, 0i, ?а> P* функции Гамильтона
91
возмущенного движения. В переменных п, W, #2, Р2 процедура
нелинейной нормализации в окрестности исследуемого
периодического движения эллипсоида формально выглядит точно так же,,
как и при нормализации в окрестности положения равновесия,,
хотя при е Ф 0 для нахождения канонического нормализующего
преобразования необходимо решать некоторые системы
дифференциальных уравнений [102]. Нормальная форма будет
различной в завис им остп от того, есть или нет резонанс четвертого
порядка
_ = п (п — целое). (5.38)
7о
Здесь п следует считать нечетным числом, так как при п = 2ДГ
приходим к рассмотренному резонансу второго порядка (5.35),.
проявляющемуся уже в линейной задаче.
Из кривых (5.38) исходят резонансные поверхности. При
е Ф 0 на этих поверхностях нормальная форма функции
Гамильтона возмущенного движения будет иметь вид
Н = Я^ + Я2р2 + а20р? + апр,ра + а02ра + Vnp2Cos(462 — 2пВг) +
+ 0((Pl + P2)5/2). (5.39)
Здесь q\ = J^2p^sm92, p% = j/^2p 2 cos 82. Коэффициенты
нормальной формы непрерывны по е и, как показывают
вычисления, при 8 = 0 определяются формулами
Хх = /о, l2 = со, fn = °>
^ол — ТГ> ^11 —
#П9
2f 1,_ш(и + 1)2'
5(х-1)2 (x2^-l)(3x+l) + 16/g
" (х + 1)а 4со2 (х + I)3
Если параметры и, /о» е не лежат на поверхностях резонансом
четвертого порядка, то в нормальной форме (5.39) следует
положить Yn s0.
Бсли при резонансе четвертого порядка выполняется
неравенство
2uaii + 4awl>4lTfnlf (5.40)
то согласно [103] движение устойчиво. А если резонанса
четвертого порядка нет, то достаточным условием устойчивости
будет выполнимость неравенства [4, 127]
D = б?20Я1 - апКг12 + а021\ ф 0. (5.41)
Следовательно, если при е = 0 неравенство (5.41) выполнено, то
при достаточно малых е будет устойчивость как при наличии
резонансов четвертого порядка, так и при их отсутствии. Кривая
D =■ 0 изображена на рис. 15.
Таким образом, если параметры Jo, и не лежат вблизи
кривой D = 0 пли в малой окрестности кривых параметрического
92
резонанса (5.35), то движение эллипсоида, при котором он
касается опорной плоскости одним из своих главных сечений, будет
орбптально устойчивым, если указанное сечепие будет
достаточно близким к кругу. Вблпзи же кривых (5.35) возможна
неустойчивость при сколь угодно малом отличии главного сечэния
эллипсоида от круга.
3. О несуществовании дополнительного интеграла в задаче о
движении тела, ограниченного эллипсоидальной поверхностью.
Как мы видели выше, задача о движении тяжелого твердого
тела по абсолютно гладкой горизонтальной плоскости сводится
к рассмотрению движений системы с двумя степенями свободы,
описываемой гампльтоновыми дифференциальными уравнениями
(1.43). Так как функция Гамильтона (1.41) не зависит явно от
времени, то существует интеграл энергии // = const. Согласно
теории множителя Якоби [188], для сведения интегрирования
системы (1.43) к квадратурам в общем случае не достает одного
дополнительного интеграла.
Выше отмечались два случая, когда задача о движении
тяжелого твердого тела на абсолютно гладкой горизонтальной
плоскости сводится к квадратурам: 1) случай, когда поверхность
тела является сферой, а центр масс тела лежит в ее
геометрическом центре (случай Эйлера — Пуансо); 2) случай
геометрически и динамически симметричного тела (аналог случая Лаг-
ранжа в динамике тяжелого твердого тела, имеющего одну
неподвижную точку). Возникает вопрос о существовании других
случаев интегрируемости. Это очень интересный и мало
изученный вопрос в динамике твердого тела на плоскости. Следуя
работе [19], рассмотрим задачу о существовании дополнительного
аналитического в фазовом простраистве интеграла для случая
тела, поверхность которого представляет собой эллипсоид,
близкий к сфере, причем тело не обязательно является однородным
и его главные центральные моменты инерции А, В, С различны.
Пусть Ох\Х2Хъ — система координат, оси которой направлены
вдоль главных осей эллипсоидальной поверхности тела. Если рг
(&=*1, 2, 3) — полуоси эллипсоида поверхности тела, то
уравнение последней имеет вид
•Л
— + — + —
Р? Pi P:
т + 5 + т1 = 1- <5-42>
Пусть —a* (i^l, 2, 3) — координаты центра эллипсоида (5.42)
в системе координат G£r]£, оси которой направлены вдоль
главных центральных осей пнерции тела, a ciu — косинусы углов
между соответствующими осями системы координат Ох&ъХъ vl
&1Ф
(5.43)
93
Tl
Г2
*9
•a
cn
C21
csi
•n
C12
C2*
C32
С
cis
Sz
C33
Для удобства записи для величин а3,- из формул (1.3) гл. 1
введем обозначения ^ (£ = 1, 2, 3), т. е.
Yi = sin9sin(p, Y2 = sin 9 cos ф, Y3 = cos9. (5.44)
Величины Yb Y2 и Тз суть проекции единичного вектора
вертикали на оси G£, Gv[ и G£. Пусть £, <п, £ —координаты точки
касания поверхности тела и опорной плоскости в системе
координат GgrjE;. Из (1.4), (5.42) —(5.44) получаем, что
Величины г] и £ равны значениям правой части равенства (5.45),
если в ней величины «ь сц заменить соответственно на аг, с&
и аз, Саз.
Используя найденные выражения для |, rj, £, получаем из
{1.20), (1.21) такое выражение для потенциальной энергии тела:
[з Г з / з
2 щъ + 1/ 2 р? (23 счъ
3=1 У 2=1 *j=l
(5.46)
Будем считать, что поверхность тела мало отличается от
сферы радиуса г, а центр тяжести тела близок к геометрическому
центру этой сферы. Полагая
outsat, рг = г+гг> (0^е<1; z = l, 2, 3), (5.47)
разложпм функцию Гамильтона задачи по степеням е. Еслп
отбросить несущественную аддитивную постоянную, то
Здесь Но есть функция Гамильтона задачи Эйлера — Пуапсо. а
Г 3^ 3 .3 \2l
#1 = tng 23 азЪ + 21 п 21 ^iiY; J • (5-48)
I j=l i=l V j = l / I
Рассмотрим сначала случай, когда все величины п равны
нулю, а среди величии а, хотя бы одна отлична от нуля. Это
означает, что поверхность тела является сферой, а центр
тяжести тела не лежит в се геометрическом центре. В этом случае
функция (5.48) имеет штд, аналогичный виду Hi в случае
движения тяжелого твердого тела вокруг неподвижной точки. В [79]
для этой классической задачп показано, что если главные
центральные моменты иперцпп тела различны (что мы и
предполагаем), то прп достаточно малых 8^=0 уравнения движения не
имеют дополнительного аналитического интеграла.
Пусть теперь все величины щ равпы нулю, а хотя бы одна
из величин rt отлична от нуля, т. е. поверхность тела является
эллипсоидом, центр которого совпадает с центром тяжестп тела.
Тогда Hi будет квадратичной формой относительно переменных
*fi> Y2» Тз, ы рассматриваемая задача сводится к вопросу о суще-
S4
ствовапии дополнительного интеграла в задаче о движении
твердого тела в силовом поле, имеющем квадратичный потенциал.
Последняя задача изучена в работе [82]. Согласно [82], в слу-
xjae когда моменты инерции тела А% В, С различны,
необходимые условия существования дополнительного интеграла
совпадают с условиями Клебша интегрируемостп уравнений
Кирхгофа движения твердого тела по инерции в безграничном ооъеме
идеальной жидкости [226]. Чтобы выполнялись условия
Клебша, надо удовлетворить двум требованиям: 1) потенциальная-
энергия должна быть суммой квадратов величин ^:
2) должно выполняться равенство
A (c2-cs) + B(c^-cl) + C(ci - с2) - 0.
Для данной задачи эти требования имеют вид
8 3 3
S ГгСцСг2 =0, 2 П^гЗ = °> 2 ЪС^Сц = 0, (5.49>
i=l i=l i=l
С11С12
С12С13
1 С12СП
C2LC22
С С
22 23
С23С21
с с I
31 32
с с
32 33
гззсз11
А 2 П (г?2 - г?3) + В 2 п (с% - &) + С S Г| (4 - 4) = 0.
i = l i=l г=1
(5.50)
Соотношения (5.49) можно рассматривать как систему
линейных однородных уравнений относительно г и Гг, гз. Эта
система имеет нетривиальные решения, так как определитель ее
матрицы
|| C11C12 C2LC22 C31C32 Ц
(5.51)
равен нулю, в чем легко убедиться, прибавив, например, к
первому ее столбцу второй и третий столбцы и воспользовавшись
одним из свойств матрицы направляющих косинусов с,-,-:
з
2 Cijdk = 0 (у, к = 1, 2, 3; / =j= к).
i=l
Покажем, что при выполнении условия (5.50) ранг матрицы
(5.51) равеп нулю. Это будет означать, что главные оси
эллипсоида поверхности и эллипсоида инерции тела совпадают: при
этом условие (5.49) будет удовлетворяться тождественно, а
условие (5.50) может быть записано в виде
'4(р2-рз) + Я(рз-р1) + С(Р1-р2) = 0. (5.52)
Покажем сначала, что рапг матрицы (5.51) не может быть
равным двум. Действительно, непосредственный перебор
всевозможных значений clj7 отвечающих случаям, когда хотя бы одна
из осей эллппсопда поверхности совпадает с какой-либо из осей
95
эллипсоида инерции тела, показывает, что в этих случаях ранг
матрицы (5.51) меньше двух. Но, с другой стороны, если ранг
матрицы (5.51) равен двум, то общее решение системы
уравнений (5.49) зависит от одной произвольной постоянной р и имеет
вид Г! = г2 = гз = р. Это означает, что эллипсоид поверхности
тела является сферой. Но для сферы любые три ортогональные
оси, проходящие через ее центр, являются главными. Отсюда
следует, что рапг матрицы (5.51) не может быть равен двум.
Покажем теперь, что ранг матрицы (5.51) не может быть
равен единице. Для этого заметим, что так как третий столбец
матрицы (5.51) равеп взятой с обратным знаком сумме первых
двух столбцов, то ее ранг совпадает с рангом матрицы
С11С,2 С21С22 0
С12С13 V23 °
(5.53)
Так как ранг матрицы (5.51) меньше двух, то отсюда следует,
что нее мипоры второго порядка матрицы (5.53) равны нулю.
"Это означает, что
С11С12С23С21 — С13СЦС21С22 = О,
СцС12С22С23 — ^12^13^21^22 = 0, (5.54)
С12С13С23С21 — ci^ci 1C22C23 = 0.
Воспользовавшись свойствами матрицы направляющих
косинусов Су, получим, что равенства (5.54) эквивалентны равенствам
c\\C2iC3i = 0, С12С22С32 = 0. С13С23С33 = 0. (5.55)
Рассмотрев все возможные случаи выполнения этой системы
равенств, можно показать, что если раиг матрицы (5.51) равен
единице, то элементы сц с точностью до обозначений и выбора
направлений осей имеют вид
си = 1 с12 = 0 с13 = 0,
с21 = 0 с22 = cos а с23 = — sin а [0 < а <С -g- )» (5-5.6)
с31 = 0 сЪ2 = sin a c33 = cos a.
При этом эллипсоид поверхности и эллипсоид инерции тела
имеют одну общую ось; в случае (5.56) ось Gx\ совпадает с
осью G\. Тогда общее решение системы (5.49) зависит от двух
произвольных постоянных р, q и имеет вид
ri=»pf Г2 = гз=<7. (5.57)
Условие (5.50) с учетом (5.56) и (5.57) принимает вид
(В~С)(д-р) = 0.
Так как ВФС, то отсюда следует, что q=p, т. е. эллипсоид
поверхности тела является сферой. Но это противоречит
усложню 0 < об < л/2, так как для сферы а = 0.
Таким образом, показапо, что ранг матрицы (5.51) равен
нулю. Из сказанного выше следует вывод о том, что для
существования дополнительного интеграла в задаче о движении тяжелого
твердого тела, имеющего эллипсоидальную поверхность, центр
которой совпадает с центром тяжести тела, необходимо, чтобы
главные оси эллипсоида поверхности и эллипсоида инерции тела
совпадали и чтобы выполнялось условие (5.52).
В качестве нрпмера рассмотрим вопрос о существовании
дополнительного интеграла в задаче о движении тяжелого
однородного эллипсоида на абсолютно гладкой горизонтальной
плоскости. Пусть полуоси эллипсоида я, Ъ, с различны. С учетом
выражений (5.6) для моментов инерции эллипсоида условие
(5.52) можно записать в впде равенства
(а-Ъ)(Ъ-с)(с-а) = 0.
Так как а, Ь, с различны, то это равенство пе выполняется.
Следовательно, в задаче о движении близкого к шару тяжелого
однородного эллипсоида, имеющего различные полуоси,
дополнительный аналитический интеграл не существует.
Некоторые вопросы интегрируемости задачи о движении
тела, близкого к геометрически и динамически симметричному,
рассмотрены в диссертации [165]. В частности, показано, что в
общем случае уравнения возмущеипого движения тяжелого
эллипсоида вращения по абсолютно гладкой горизонтальной
плоскости не имеют дополнительного аналитического первого
интеграла, независимого с интегралом энергии.
В статье [18] получены достаточные условия существования
частного интеграла специального вида в задаче о движении
тяжелого твердого тела по абсолютно гладкой горизонтальной
плоскости. В качестве примера рассмотрено тело, обладающее
эллипсоидальной поверхностью.
4. Качественное исследование движения эллипсоида, близкого
к шару* Пусть однородный эллипсоид движется по абсолютно
гладкой плоскости. Будем считать, что эллипсоид мало
отличается от шара радиуса R. В системе координат СЁт]£, осп
которой направлены по главным осям эллипсоида, уравнепие его
поверхности имеет вид (5.1). Положим
и исследуем общпе свойства движения эллипсоида при малых
значениях е.
Без ограничения общности будем счптать, что проекция
центра тяжести эллипсоида на опорную горизонтальную плоскость
неподвижна, т. е. центр тяжести тела движется по заданной
вертикали. Для исследования движения эллипсоида будем
применять методы теории возмущении гамильтоиовых систем. В
качестве канонически сопряженных переменных примем
переменные, которые применял М. Андуайе при исследовании задач пе-
7 а. П. маркеев 97
бесной механики [212]. На рис. 16 Gxyz— система координат с
началом в центре тяжести эллипсоида и осями, параллельными
соответствующим осям неподвижпой системы координат Oxyz
(рис. 6); К —вектор кинетического момента эллипсоида
относительно центра тяжести, GSN — плоскость, перпендикулярная К;
она пересекает плоскость Gxy
по прямой GS, а плоскость
G|t] — по прямой GN.
Канонически сопряженными
переменными будут величины L, /г, h>
I, фг, фз. Смысл угловых
переменных I, фг, Фз ясен из рис. 16,
а соответствующие им
импульсы, как нетрудно видеть,
таковы:
L = K cos 62, h = К,
/3 = #cos6i. (5.Г>8)
рис is Импульс h — это длина
вектора кинетического момента, a L
и h — его проекции на ось Gt> эллипсоида и на вертикаль
соответственно; величина h, как не раз отмечалось выше, будет
постоянной во все время движения.
Кинематические уравнения Эйлера (уравнения (1.9) гл. 1)
в рассматриваемых канонически сопряженных переменных
запишутся в виде [6]
p = i.|/7|_ L2sinZ, q = ±\/"l* — L2cosl, r = ^. (5.59)
Выразим функцию Гамильтона задачи
Н = ± (А? + В? + О2) + 1 тр + mgU (5.00)
где / — вычисляемое по формуле (5.4) расстояние от центра
тяжести эллипсоида до плоскости, через канонические
переменные L, 1%, /з, /, Фг. Фз. Кинетическая энергия вращения
эллипсоида вокруг центра тяжести (функция Гамильтона задачи
Эйлера — Пуансо) представится равенством
±(Ар* + Вд* + Сг-) =
П
Г2/ • 2 7
ь (SHI I
cos2^ L~
+ ~В~) + 2С'
(5.01)
Выражение / через канонические переменные довольно
громоздко; его явная запись далее не потребуется. Нужные в
дальнейшем величины аз1, «32, «зз запишутся [6] в виде следующих
выражений:
«3i — cos 61 sin 62 sin / + sin 61 cos 62 sin / cos Ф2 + sin 61 cos I sin фг,
«32 = cos 61 sin 62 cos I + sin 61 cos 62 cos I cos фг — sin 6| sin / sin ф2,
Язз = cos 6[ cos 62 — sin 61 sin 62 cos фг,
(5.62)
98
где cos 6X = £, ccs 62 = т. (5.63)
С учетом (5.6) выражеппе (5.61) можно представить в впде
| (Л,. + ^ + СИ) = Й + ± [^ + ^ЗД - *)со* |] + ...,
(5.64)
где многоточие обозначает совокупность членов выше первого
порядка малости относительно е.
Учитывая тождество aiji + аз2 + ^зз = 1 и отбрасывая
несущественную аддитивпую постоянную, получаем с учетом (5.4)
следующее выражение для потенциальпой энергии П = rngf:
П = mg [(b — а) «32 + {с — а) а;3] + ... (5.65)
а а а
Далее заметим, что / =» /е6 + /^ф, где величины /е, /«
вычисляются по формулам (5.5). Отсюда следует, что /2 будет
величиной второго порядка малости относительно е, и с погрешностью
порядка е2 функция Гамильтона (5.60) запишется в впде
+ mg [(b — а) я32 + (с — а) 4,] > (5Лtft)
где а?2, язз задаются соотношениями (5.62).
При 8 = 0 движепие эллипсоида относительно центра
тяжести описывается функцией Гамильтона Н0 = 1\/(2А) н
представляет собой равномерпое вращение вокруг неизменного по
величине и паправлеиию вектора кинетического момента К с
угловой скоростью ф2 = /гМ- Принимая это движение за иевозму-
щешюе, исследуем возмущенное (при е ¥= 0) движение
эллипсоида методом усреднения [126, 128].
В системе канонических дифферепцпальпых уравнений с
гамильтонианом (5.66) переменные L, /2, I медленные, а
переменная ф2 быстрая. Для получения решения в первом приближении
надо усреднить функцию Гамильтона (5.66) по переменной $2
и отбросить члепы второго и более высоких порядков малости
относительно е. Проведя необходимые вычисления, получим, что
в нервом приближении движение описывается системой
дифференциальных уравнений с функцией Гамильтона
г = й + т (ь +с - 2й>si»2 6i + й [Чг1* + Чг(7* - "Wi],
где ^ (5.67)
x=l + ^l(2-3sm261).
2i\R v "
а величина б] определяется из (5.63).
7* 99
Из (5.64) и (5.67) видпо, что переменные L. h, l в первом
приближении измепяются со временем так же, как в движении
Эйлера — Пуансо, если в последнем роль времени играет
величина т = xt.
В первом приближении вектор кинетического момента
постоянен по величине и медленно прецессирует вокруг вертикали
с постоянной угловой скоростью dt/dh, оставаясь от нее на
постоянном угловом расстоянии 61 = arccos (/3/^2). Проекция
вектора кипетического момента на ось GE; эллипсоида медленно
(со скоростью L = —dTfdl) изменяется со временем, что
приводит к медленному изменению угла б? между осью G£
эллипсоида и вектором кинетического момента; эллипсоид быстро
вращается вокруг вектора кинетического момента с медленно
меняющейся угловой скоростью фг = дГ/д/г, а вокруг своей оси G£ —
с малой, тоже изменяющейся со временем угловой скоростью
1 = дГ/дЬ.
На интервале времени порядка е"1 медленные переменные
L, /г, I определяются первым приближением с ошибкой
порядка е, а быстрая переменная фг — с ошибкой порядка единицы.
При частном выборе начальных данпых, для которых
величина у, обращается в нуль, помимо 7г, постоянны в первом
приближении также и величины L и I. Согласно (5.59) отсюда
следует, что тогда вектор мгновенной угловой скорости постоянен
относительно движущегося эллипсоида (а следовательно, и
относительно абсолютного пространства).
Более содержательные результаты можно получить, если в
качестве невозмущенпого движепия принять не движеппе
однородного шара, а более сложное движение, описываемое
функцией Гамильтона (5.66), усредпенпой по быстрой и медленной
переменным фг и I. Произведя это двойное усреднение, можно
функцию Гамильтона (5.66) представить в виде
H = HQ(h) + Hx{L, I2)+H2{L, /2, /, q>2)+..., (5.68)
где
Но + #1 = Й + f (Ь + с - 2а)шПг + й[2£?^+ ¥ W-*)]-
(5.69)
Функция Яг в (5.68) имеет первый порядок малости по е, а ее
среднее значение по фг и / равно нулю; многоточием обозначены
члены выше первого порядка малости.
За невозмущенное движение эллипсоида прпмем его
движение, описываемое функцией Гамильтона Нъ~\г Ну. В ыевозмущси-
ном движении
. - - дНл I0 Oil
L = О, /2 = О, I = —^ = со2, v 8 = -? + _i = со2.
Величины L и h в невозмущенном движении постоянны.
Учитывая еще неизменность величины /з, получаем из (5.63), что
в невозмущепном движении углы б[ и бг также постоянны.
100
Гакпм образом, в певозмущенном движении с гамильтониан
ном Но + #i постоянный по длине вектор кинетического
момента К эллипсоида прецессирует с постояпиой угловой скоростью
i03 = dH\/dh вокруг вертикали, находясь от пее иа постоянном
угловом расстоянии 61 = arccos (/3Д2). Сам же эллипсоид
совершает (при к Ф 0) регулярную прецессию вокруг вектора К; он
вращается с постоянноп угловой скоростью coi вокруг своей
оси G£, которая находится на постояппом угловом расстоянии
б2 — arccos(L//2) от вектора кинетического момента и
вращается ВОКРУГ НеГО С ПОСТОЯННОЙ УГЛОВОЙ СКОРОСТЬЮ 0)2.
Следуя работе [217], покажем устойчивость описанного
невозмущенного движения эллипсоида по отношению к
переменным L, h при малых возмущениях функции Гамильтона (5.(59).
Для этого, согласно [217], надо убедиться в изоэиергетической
невырожденности задачи, т. е. надо показать, что определитель
третьего порядка
Л»-
0L1
дЬдТ
0L
OL
dln
0
отличен от нуля. Вычисления показывают, что с погрешностью
9
порядка б
Х/
D* = -L{a + b-2c).
2ASR
Так как для невозмущенного движения (движения,
описываемого функцией Гамильтона
Н0 + Hi) величины к, 1^
приняты отличными от нуля, то
определитель Z>3 отличен от нуля,
если длина полуосей
эллипсоида удовлетворяют неравенству
а+ЪФ2с. (5.70)
Тем самым, согласно [217],
Для достаточно малого отличия
эллипсоида от шара при
выполнении условия (5.70)
доказано, что величины L и /г сколь
Угодно мало изменяются на
бесконечном интервале
времени. Это значит, что длина век-
т°ра кинетического момента К и угол 6i, который он составляет
с вертикалью, при всех t остаются вблизи их начальных
значений. Всегда остается вблизи своего начального значения п угол бг
Рис. 17
101
между вектором кинетического момента и осью G£ эллипсоида
(рис. 17).
Частоты со» (i = 1, 2, 3) тоже будут вечно близки к их
начальным значениям. Соответствующие же им углы /(£), фг(0»
Фз(0 не будут, вообще говоря, близки их зпачениям в невозму-
гцеином движении, вычисленным для одних и тех же моментов
времени.
Следует подчеркнуть, что исследование в дайной работе
проведено в предположении, что эллипсоид все время находится в
соприкосновении с плоскостью, по которой он движется. Для
заданной начальной угловой скорости ц при достаточно малом
отличии эллипсопда от шара это предположение выполняется,
так как из уравнений (1.6) и того, что величина z=/ сколь
угодно мала при достаточно малых б, следует, что нормальная
реакция плоскости всегда положительна (и близка к весу
эллипсоида). Последнее означает, что эллипсоид во все время
движения не подскакивает над плоскостью, а движется, касаясь ее.
§ 6. Движение тела с острым краем
До сих пор мы рассматривали движение твердого тела,
имеющего выпуклую поверхность. Для такого тела в точке его
касания с опорной горизонтальной плоскостью можно провести
единственную касательную плоскость (совпадающую с опорной
плоскостью). В этом параграфе рассмотрим тело, поверхность
которого имеет острый край. Будем
предполагать, что: 1) острый
край тела представляет собой
выпуклую плоскую кривую;
2) центр тяжести тела G и две
его главные центральные оси
инерции G% u Gx\ лежат в
плоскости этой кривой; 3) при
движении тело касается опорной
плоскости одной точкой М,
лежащей на остром крае.
1. Существование стационарных
движений. Пусть Gsn£ —
система координат, жестко
связанная с твердым телом; ее оси
направлены по главным центральным осям инерции тела.
Ориентацию тела относительно неподвижной системы координат Oxyz,
имеющей начало в точке О, принадлежащей опорной
горизонтальной плоскости, и вертикальную ось Oz, будем задавать при
помощи углов Эйлера if, 6» <f (рис. 18). Обозначим через d
расстояние от центра тяжестп тела до касательной к его острому
краю в точке М соприкосновения тела и опорной плоскости.
Если форма кривой — острого края — задапа, то d — известная
функция угла <f.
Рис. 18
102
Расстояние от центра тяжести тела до опорной плоскости
вычисляется по формуле
f{Q,q)) = d(<f)siiie. (6.1)
Очевидно, что, как и в случае тела, ограниченного выпуклой
поверхностью без заострений и ребер, в рассматриваемой задаче
о движении тела с острым краем координаты х, у центра
тяжести и угол прецессии if будут циклическими координатами.
Игнорируя циклические координаты, приходим к приведенной
системе с двумя степенями свободы, описывающей изменение
позиционных координат — углов б, ф. Приведенный потенциал может
быть вычислен по формуле (1.37) с учетом (6.1):
W = mgd ((f) sin G + А + ^L (р« + pl). (0.2)
Здесь рх, ру, р$ — постоянные, а /зз — момент инерции тела
относительно вертикали, проходящей через центр тяжести; ои
вычисляется по одной из формул (1.30):
/зз = (-4 sin2 ф + В cos2 ф) sin2 6 + С cos2 б.
Изменение переменных в, ф со временем описывается
дифференциальными уравнениями (1.38), в которых функция Рауса те-
и».фь вычисляется по формулам (1.34) — (1.36) и (6.2).
Твердое тело может совершать стационарные движения
6 = 60, Ф = Фо, яр = со, х = х0, У = Уо, (0.3)
где #о, Уо — произвольные постоянные, а 8о, фо, со
удовлетворяют уравнениям
Для движения (6.3) тело вращается с угловой скоростью со
вокруг вертикали, проходящей через центр тяжести тела, который
движется с постоянной скоростью v = v а0 4- уо вдоль
неподвижной прямой, параллельной опорной плоскости Оху. Если центр
тяжести покоится, то точка М касания тела с опорной
плоскостью описывает на ней окружпость, центром которой является
проекция центра тяжести тела па эту плоскость, а радиус р
может быть вычислен по формуле
р = V^2 cos2 в + сГ2)0. (П.5)
Здесь штрих означает дифферепцировапие по ф, а индекс 0
указывает на то, что соответствующая величина должна быть
вычислена при б = 8о, Ф = фо. Если же скорость цептра тяжести
v ^ 0, то точка касания Л/ описывает на опорной плоскости тро-
ХипДУ, которая при |colp<^, \ы\р=*и и |<о1р>г; будет
соответственно укороченной циклоидой, циклоидой и удлиненной
циклоидой; при р = 0 трохоида вырождается в прямую.
103
При заданной величине /?Ф стационарные значения углов 8,
Ф определяются из первых двух уравнении системы (6.4). При
известных 6о, фо угловая скорость равна со = р$ /зз-
Исключив из рассмотрения особые зпаченпя угла нутации
G =» 0 п 6 = л (для них тело должно «упасть» на опорную
плоскость п опираться на нее более чем одной точкой), получаем,
что система из двух первых уравнении (6.4) распадается на две
независимые системы
cos e0 = о,
, (A-B)sin%cos% (6.6)
(Asm y0 + Bcos ф0)2
__ (Asin2% + Bcos*%~C)smd0
mga° ~ [(A sin* Фо + В cos2 Фо) sin2 G0 + С cos2 6,]* Р*'
,' (A — В) sin ф0 cos ф0 sin 60 2
^^-[(^sm^e + ^cos^pJsi^G^Ccos^J2^
(6.7)
Возможны стационарные движения двух типов. Движение
первого типа удовлетворяют системе (6.6). Для них плоскость
острого края тела перпендикулярна опорной плоскости (6э =
= л/2). Положение точки касания М иа остром крае (ф^Фо)
зависит от величины р$ и инерционных параметров тела и
определяется из второго уравнения системы (6.6). Значение фо
может быть любым, если форма кривой — острого края — такова,
что
d М = d <°> + 2 Яи~^Я « 1 * (6-8)
2mgB (A sin ф + В cos ф)
Стационарные движения второго типа удовлетворяют системе
(6.7). Так как do>0 и 0<6о<н, то из первого уравнения
системы (6.7) следует, что эти движеппя не существуют, если тело
представляет собой пластинку (А + В = С). Если же твердое
тело пе будет пластинкой, то АЛ- В> С, и система (6.7) может
быть совместной. Поделив второе ее уравнение на первое,
получим, что она может иметь решения, если угол фо удовлетворяет
уравнению
A sin" ф0 + В cos" фо — С
Если значение фо найдено, то бо можно затем определить из
любого уравнения системы (6.7). Отметим, что угол фо может быть
произвольным, если
d (<f ) = d (0) |/^sin4 + gcoslcp-C (6 Ш)
104
Устойчивость обоих тппов стационарных движений может быть
исследована аналогично п. 2 § 4, где рассматривались
стационарные движения тела, поверхность которого не имеет ребер и
заострений. Некоторые частные случаи стационарных движений
тела с острым краем подробно исследованы в статье [200].
2. Регулярные прецессии динамически симметричного тела с
острым краем в форме окружности» Пусть d(<p)s=# = const.
В этом случае выпуклая кривая, являющаяся острым краем
тела, должна быть окружностью радиуса /?, центр которой
совпадает с цептром тяжести тела. Предположим, что тело обладает
динамической симметрией (.4 = В). Этим условиям
удовлетворяет, в частности, однородная круговая пластина (круговой
диск); для нее А = В = С12 = mR2/L
В принятых предположениях обобщенная координата cf будет
циклической, поэтому проекция рф кинетического момента тела
относительно центра тяжести на ось G£ будет постоянной во все
время движения. Игнорируя циклические координаты .г, у, ф, ф,
придем к приведенной системе с одной степенью свободы с
обобщенной координатой 8. Если ввести обозначения
p<t = yAmgRa, p9=lAmgR^ (6.11)
где аи^ — безразмерные постоянные величины, и перейти к
безразмерному временит = J/ —j-t, то выражения для
кинетической к потенциальной энергий приведенной системы
запишутся в виде (штрихом обозначено дифференцирование по т)
гр 1 Л , mR'' о/Ил/2 о - о , (а —Р cos б)2 ... 4ПЧ
r* = -s-llH j-cos-0.8 , n]k=sin6 + - ^-s——. (b.12)
* 2 \ A ) * ^2 sin2 G v '
Дифференциальные уравнения движения приведенной системы
имеют интеграл Т# + П^ = const, и их интегрирование
сводится к квадратуре. Когда зависимость б = 8(т) найдепа,
изменение \f и ф со временем найдется из соотношений (2.18), (6.11):
(0.13)
В дальнейшем без ограничения общности будем считать, что
проекция центра тяжести на опорную плоскость неподвижна,
т. е. центр тяжести тела движется по задаппой вертикали.
Проведем качественное исследование движения. Осповное внимание
будем уделять существованию и устойчивости движений, для
которых б =» во = const. Эти движения соответствуют регулярным
прецессиям тела. Угловые скорости прецессии и собственного
вращения определяются по формулам (6.13), в которых б = бо.
Значения 8 = бо являются стационарными точками
потенциальной энергии приведенной системы и удовлетворяют уравнению
*п± s cos e + («-Рсовенр-сЕсоае) = а ((J 14)
°V sin 0
105
15 случае регулярной прецессии центр тяжести неподвижен,
а нормальная реакция опорной плоскости равна весу тела.
Рассмотрим сначала такие движения, когда тело может
пройти через особые положения, соответствующие углам
нутации 6=0 или 8 = к. Эти движения физически осуществимы,
например, для однородного кругового диска. Тело может пройти
через положепне 8 = 0, если а = (3. Пусть это условие
выполнено. Раскрывая иеопределенпость в выражении для
потенциальной энергии приведенной системы, получаем
П„ = sin 6 + у tg2 6. (G.15)
Анализ показывает, что при
a?>al= (3/3-5) |/| = U,158
функцпя (6.15) на рассматриваемом промежутке 0<6<л не
имеет ни одного экстремума, а при 0 <С сг < а\ имеет два
экстремума 8i и 82 (я/2<81<82<к),
причем 8i — точка максимума
П^, а 8? — точка минимума. На
рис. 19, я, б показан фазовый
портрет приведенной системы для
случаев, когда у П^ нет ни
одного экстремума и когда их
два соответственно. Значение
8 = 8j соответствует
неустойчивой но отношению к
возмущениям 8, 8 регулярной прецессии
тела, а значение 8 = 62 —
устойчивой. Из рис. 19 видно, что (при
а = [1 ¥= 0) тело не может пере-
вк I
Рис. 20
вернуться, т. е. на одном и том же движении тела угол 8 не
может пройти как через значение 8=0, так и через значение
8 = к. Движение таково, что либо угол 8 периодически
изменяется в окрестности значения 82, либо тело надает так, что угол 8
106
стаповптся равным нулю (это возможно для диска; если же
тело не является диском, то при стремлении 6 к нулю оно
коснется опорной плоскости более чем одной точкой, лежащей на
его остром крае), либо, наконец, угол б асимптотически
стремится к значению 6 = 6i. Отметим, что ие обязательно каждой
фазовой траектории, представленной на рис. 19, отвечает
реальное движение тела. Имеют смысл только те фазовые траектории
(или их участки), которые соответствуют неотрицательной
нормальной реакции опорной плоскости. Этому условию заведомо
удовлетворяют, например, фазовые траектории, расположенные
вблизи стационарных значений угла 6. Требование
неотрицательности нормальной реакции исключает возможность отрыва
тела от опорной плоскости.
Особое положение 6 = к тело может пройти, если а = — р.
Анализ этого случая аналогичен рассмотренному случаю, когда
а = р. Фазовый портрет получится из рис. 19, если па нем б
заменить на л — 8.
Чтобы тело могло пройти оба особых положепия, 0 = 0 и 9 =
= л, необходимо выполнение равенства а =■ [1 = 0. В этом
случае П* = sin б. Фазовый портрет приведенной системы
представлен па рис. 20. Существует стационарное значение угла
путации бо = л/2. При этом ф = q, = 0, плоскость острого края
тела занимает вертикальное положение, а само тело покоится.
Это положение равновесия неустойчиво. Другне возможные
движения таковы, что либо тело «падает», приходя в особое
положение б^О или 8 = л (причем возможен «переворот» тела,
когда б изменяется от 0 до я или от к до 0), либо
асимптотически стремится к неустойчивому положению равновесия, для
которого 6 =» я/2.
Пусть lal^lpl. Для таких значений а и р тело, например
диск, не может «упасть» на опорную плоскость, так как при
lal^lpl угол нутации ие может стать равным 0 или л.
Рассмотрим сначала частные случаи. Пусть a = 0. Из (fi-14)
следует, что тогда при Ij3l ^ 1 существует одно стационарное
значение угла нутации €0 = л/2, а при |[1|<1—три: 8о = л/2, 8о =
= б* =» arcsin [12/3, бо = л — 8*. Анализ характера экстремума
потенциальной энергии приведенной системы показывает, что
движение тела (регулярная прецессия), соответствующее 0 = 8о =
= л/2, устойчиво по отношению к возмущениям б, б при [I2 ^ 1
и неустойчиво при [12<1. Движения же, соответствующие 8о =
= 8* и 8о = л — 8*, устойчивы, если они существуют, т. е. при
?2<1. На рис. 21, а, б показаны фазовые портреты при [12>1
п [I2 < 1 соответственно. Если 6 ¥= 60, то он при любом движении
тела изменяется между своими минимальным 8i и
максимальным 8г значениями (0 < 8i < 8 < 62 < л).
Угол в = 8о = л/2 соответствует такому движению тела, когда
плоскость его острого края расположена в фиксированной
вертикальной плоскости, а само тело вращается с постоянной угло-
107
вой скоростью вокруг проходящей через его центр тяжести
горизонтальной оси. Это движение устойчиво, если IcpI > 1/AmgRjC,
и неустойчиво, если это неравенство не выполняется. Для
кругового однородного диска условие устойчивости запишется в
виде неравенства |ф1 ^ 1/gfR.
Для регулярпых прецессий, совершающихся при б = бо = б*
и б = бо = л — 9*, угловые скорости вращения тела вокруг осп
симметрии и вокруг вертикали будут соответственно такими:
_y^(£ + ctgMgPi i__y\
sin2 в
rP-
Точка М касания тела и опорпой плоскости описывает на
последней окружность радиуса p = /?lcos6ol. Центром этой
окружности будет проекция центра тяжести тела па опорную
плоскость. Если р > 0, то вокруг оси симметрии тело вращается
Рис. 21
против часовой стрелки, а точка касания движется по
окружности-следу против часовой стрелки, если бо = л; — 6*, и по
часовой стрелке, если бо = 6*. При [1 < О картина обратная.
Рассмотрим еще частный случай [1 = 0, а ¥=■ 0. Аналогично
предыдущему случаю получим, что существует движение, для
которого 6 = бо = к/2 и которое устойчиво, если а2^1, и
неустойчиво, если а2 < 1. Для 8о = л/2 тело движется так, что
плоскость его острого края вращается вокруг вертикали с
произвольной постоянной угловой скоростью ф, а угловая скорость ф
собственного вращения равна нулю. Это движение устойчиво,
если lifl ^ llmgRjA, и неустойчиво, если последнее неравенство
не выполняется. Для круглого однородного диска условием
устойчивости будет выполнение неравенства I if I ^2 }'gfR.
Если а2 < 1, то при [1 = 0 помимо движений, для которых
© = бо = л/2, существуют еще два движения — регулярные
прецессии, для которых 60 = 80 = arcsin а2 3 и 60 = л — б'. Эти
движения устойчивы. Для них
1 — I/ :
ф:
■У
A sin2 G.
ос,
*-/=
igR
sin2 6„
108
Рассмотрим теперь общий случаи, когда |а|=?Н[1|,
ограничиваясь только определением количества регулярных прецессий в
зависимости от параметров а, [1. Уравнение (6.14),
определяющее стационарные значения бо, не изменяется при следующих
заменах: 1) а, р, 6 -+ [}, а, 6; 2) а, |J, 6 -* -а, -[}, 6; 3) а, [},б —
-+■ — а, р, я —8; 4) а, (J, 6 -+ а, — [1, к —6. Численный анализ
уравнения (6.14) с
использованием этих свойств симметрии
показал, что плоскость
параметров а, р разбивается осями
координат, биссектрисами
координатных углов и
полученными численно четырьмя
кривыми, соединяющими вершины
единичного квадрата, лежащие
на осях координат, па
шестнадцать областей (рис. 22).
Области расположены симметрично
относительно начала
координат, осей координат и
биссектрис координатных углов.
В каждой из восьмп
заштрихованных на рис. 22 областей
уравнение (6.14) имеет три корня, один из которых
соответствует максимуму приведенной потенциальной энергии, а два —
минимуму. Фазовый портрет аналогичен рис. 21, б. В каждой
из незаштрихованпых на рис. 22 областей уравнение (6.14) нме-
ет один корень, и для него приведенная потенциальная энергия
имеет минимум. Фазовый портрет аналогичен рис. 21, а.
Для всех точек (а, [1), расположенных симметрично
относительно начала координат или относительно биссектрис
координатных углов, уравнение (6.14) имеет одни и те же корни.
В точках же, симметричных относительно какой-либо из осей
координат, сумма соответствующих корпей равна я: если в
одной из точек уравнение (6.14) имеет корень бо, то в
симметричной ей точке оно имеет корень п — бо.
3. Устойчивость движения эллиптического диска. Рассмотрим
задачу о движении тяжелого однородного диска по неподвижной
абсолютно гладкой горизонтальной плоскостп. Предполагаем, что
касание плоскости и диска происходит в одной точке,
принадлежащей ограничивающему диск острому краю, имеющему форму
эллипса. В системе координат G£i]£ уравнение эллипса
записывается в впде
£ + ^=i. (еле)
а Ъ
Момепты инерции эллиптического диска вычисляются по
формулам
А = -г mfc2,
В =
~ та\ С = ± т (а2 + Ь2), (6.17)
109
а расстояние d(<p) от центра тяжести диска до касательпой к
ограничивающему его эллипсу в точке М соприкосновения диска
и опорной плоскости задается выражением
й(ф) = Уа2 sin2 <р + Ь2 cos2 q>. (6.18)
Функция Гамильтона, описывающая движение диска
относительно центра тяжести, определяется соотношениями (1.41), (1.42),
(6.1), (6.17) и (6.18). Если перейти к безразмерному времени
т = 2}!g/a -1 и обезразмерить импульсы введением масштабного
множителя yl2ina\!ag, то выражение для функции Гамильтона
будет таким (сохраняем старые обозначения для импульсов):
cic„ — с£ о С,С0 — С2 а С С СЧСЛ С Сл — С<Ст
Я — ' 3 5 П2 _1_ г 2 4 п2 _L 45 1 6 n n _1_ 5 6 3 4 о „ I
— 26 ^е ~* 26 Pw ~* 6 PeI<i) ~* 6 ' Рь +
+ с4св-с2сорр^ + f2V_^6p2 + /Sin*v + aacosa9sin8. (6.19)
Здесь
Cj = j [(cos2 ф + а2 sin2 ф) sin2 0 + (а2 + 1) cos2 0],
с2 = -г (sin2 ф + а2 cos2 ф) (4 cos2 6+1),
=![«'
, , (а2 — l)2 sin2 2<p sin2 6
sm* <р + or cos ф
(fi.20)
r4 = -о--(а2 — 1) sin 6 sin 2ф,
1 1
с5 = -т (а2 + 1) cos 8, с6 = — -т- (а2 — 1) sin 26 sin 2cp,
6 = 4 faty^ — c^e — с2с? — cscl + 2t4cbc6).
Через а в (6.19) и (6.20) обозначен безразмерный параметр,
равный отношению полуосей диска: а = bfa, а через р —
безразмерная постоянная интеграла р$ = const.
Рассмотрим частный случай движения диска, когда он
катится и скользит так, что его плоскость остается в заданной
вертикальной плоскости. Такое движение существует, если [1 = 0. При
этом б = л/2, ре = 0, а изменение переменных ф, /?ф со
временем описывается дифференциальными уравнениями с
гамильтонианом
2
h = Щр1 Р% + /sin*q, + a«cosa<pf (G.21)
где коэффициенты Ci должны быть вычислены при 6 = л/2.
Будем считать, что длины полуосей дпска близки, п положим Ь- =»
= а2(1 + е) (0^е<1). С точностью до членов первого порядка
относительно б гамильтониан (6.21) запишется в виде
h = {р% - г4 (р1 ~ 4 C0s2 <r)- (6-22)
110
Упростим функцию Гамильтона (6.22), введя новые
канонически сопряженные переменные /, W (переменные действие —
угол) при помощи канонического преобразования, задаваемого
формулами
W-Tr *-%• ^-23)
Производящую функцию S(I, ф) подберем так, чтобы в
преобразованной функции Гамильтона отсутствовала угловая
переменная W. Несложно показать, что в первом приближении по б
5в/ф_е^. (6.24)
С той же точностью из (6.23), (6.24) находим явный вид замены
перемепных /?„, ф -*-1, W:
ф = » — е —£р~* Рч = 1 — е —ft—- (Ь^э)
Если отбросить несущественную аддитивную постоянную, то в
переменных /. W в первом приближении но б функция
Гамильтона (6.22) будет такой:
/г = |(2-е)/г. (G.2G)
В новых переменных в первом приближении но б
рассматриваемое движение диска задается формулами
6 = |, Ре = 0, / = /0, W = ih + W0, (6.27)
где /о, Wo — произвольные постоянные, a Q = 1/4(2 — e)/o.
Пусть 1оФ0. Из (6.25) и (6.27) следует, что в первом
приближении по е
<F(t)-<f(0) + Qt-85^. (6-28)
47 о
т. е. диск вращается вокруг горизонтальной осп G£ со средней
угловой скоростью Q (при выбранной единице времени). На это
вращение при б Ф О накладываются колебания с амплитудой
v(^o) (тем меньшей, чем больше Q) и частотой 2Q.
Исследуем устойчивость движения диска по отношению к
возмущениям q\ = б — я/2, /?i—/?e, выводящим его плоскость из
фиксированной вертикальной плоскости, и по отношению к #• =
= / — /о, т. е. по отношению к возмущению его средней угловой
скорости. При получении функции Гамильтона Н возмущенного
движения qu Р\ — величины первого порядка, г — величина
второго порядка. Фупкцпю Н можно записать в виде ряда
я=#2+//3+я4+..., (й-29)
где Нк — совокупность члепов А*-го порядка, Hk = Я^0) + /Гл ,
111
Hk имеет порядок е и содержит W в виде сипусов и косинусов
углов, кратных 2TF, #&0) от W не зависит.
Вычисления показывают, что #з = 0, а
И? = - ~ {[(1 + 211) + (5 - 211) cos 2W\ q\ +
+ Ш0 sin 2JF -qlPl + 2 (1 — cos 2W) p\\. (6.30)
Hf = ± r> + W + g (1 + 8/?) flj - 29ip».
Из п. 2 следует, что если е = 0, то при 1\ < 1 рассматриваемое
движение диска неустойчиво. Неустойчивость при ll<Zl,
очевидно, остается и при ненулевых, но достаточно малых
значениях е. Пусть теперь 1$ > 1. Рассмотрим сначала устойчивость
в первом (липейпом) приближении, описываемом функцией
Гамильтона #2. По переменной г, очевидно, будет устойчивость.
Рассмотрим устойчивость но переменным qu p\. Если перейти к
новой независимой переменной — углу W, то квадратичная часть
функции Гамильтона возмущенного движения Гг = #2 — Q/\
отвечающая за изменение переменных #i, р\ в первом (линейном)
приближении, запишется с учетом членов ие выше первого
порядка по б в виде
г2 = г<0) + г™.
2
г2
(0) * О L „2 . 1 2
(«-31)
1 2 ~ г У1 "Г Y Р1
О 0
Г^ = - | Hi + ly^Scos 2ИЧ9*+ 12sin2W^9lPl-|-cos2fF.pjj.
Из двух дифференциальных уравнений, определяемых
гамильтонианом (6.31), получим одно дифференциальное уравнение
второго порядка для #i, которое при помощи замены переменных
#i =(1 + lf4Ecos2W)u приведем в первом приближении по б к
уравнению Матье
—т + (6 + И cos v) u = 0,
П-i з . jn-
(6.32)
2^. 6 = ^- e-^, ti = e
/2 ~4/27 Г- ^ 4/2
Для нахождения областей неустойчивости используем
исследование уравнения Матье, изложенное в [181]. Области
неустойчивости могут возникнуть вблизи тех значений параметров /о, е,
для которых б = л2/4 (л = 0, 1, 2, ...). Так как при достаточно
малых б величина б пе превосходит единицу, то в нашей задаче
112
число п может принимать только два значения: 0 или 1.
Соответствующие области неустойчивости, как показывают
вычисления, обнаруживаются уже в первом приближепии по б и
задаются неравенствами
|/0|<1 + |-8, ф(1 + 11бе)<|/0|<^(1 + ^£)г (с.33)
'*-'*!*
На рис. 23 в верхней полуплоскости параметров б, /о области
неустойчивости отмечены штриховкой; области неустойчивости
в нижней полуплоскости расположены
симметрично относительно оси б.
Пусть параметры б, /о лежат в
областях устойчивости линейной задачи.
Рассмотрим теперь задачу об устойчп- 2^*
вости в нелинейной постановке. Со- з
гласно [103, 127] для этого надо
вычислить коэффициенты нормальной
формы функции Гамильтона
возмущённого движения (6.29). Как
правило, для суждения об устойчивости и
неустойчивости достаточно провести
нормализацию до членов четвертого
порядка включительно.
Найдем сначала нормальную форму функции Гамильтона
(6.29) при б = 0. Для этого сделаем каноническую замену
неременных
0|
Рис. 23
(7л = 1/ ,/•——sine^ pj = К2р!VI\— lcosBj, г = р2,
w = e2. (6.34)
Тогда Нг примет нормальную форму, а так как #з —0, то при
б = 0 нахождение нормальной формы членов Я4 сводится к их
усреднению по 6i и бг. В результате получаем
Н = co2pj + со2р2 + сп& + c„pip2 + c02pl + О ((pt + | р21 )5/2),
со,
\ /о — 1' ы2 = -^ /0, с20 =
17-
■87»
16(IJ-1)'
слл =
Vn-i
(6.35)
г02 — 4 *
При Б=^0 коэффициенты нормальной формы (6.35) изменяются
на постоянные величины порядка б, а прп резопансе 2coi = А*о)2
{к — целое нечетное число) в нормальную форму добавятся еще
и слагаемые е аАр, cos (Авг — 2к02) (ah = const). В нашей
задаче реализуются только случаи /с= 1 и к = 3. Согласно [103, 127]
при достаточно малых б как при наличии резонанса, так и в его
8 А. п. Маркеев 113
отсутствие будет устойчивость, если величина /) = 6*20cd2 —
— ChOjOj.2 + £02G)i отлична от нуля. Вычисления показывают, что
1С+17/2-24/^!
7) =
64 (/»-!)
и D обращается в пуль при /о = =Ь1,115. Если исключить эти
значения /о, то всюду в области устойчивости в первом
(линейном) приближении рассматриваемое движение эллиптического
диска, достаточно мало отличающегося от круга, будут
действительно устойчивым.
Остановимся еще на исследовании устойчивости
перманентного вращения эллиптического диска вокруг вертикали. Система
дифференциальных уравнений движения с функцией
Гамильтона (6.19) допускает частпое решение
6 = ^-, ср = 0. Ре-0, рф = 0. (6.36)
Это решение соответствует перманентному вращению диска
вокруг его вертикально расположенной оси Gh. Угловая скорость
вращения произвольна и определяется значением постоянной Р
(if = 2Vg/aP). Устойчивость этого движения диска по отношению
к возмущениям величин 6, ф, ре, р* рассмотрена в статье [120].
Кратко изложим полученные та*м результаты.
Характеристическое уравнение линеаризованной системы уравнений
возмущенного движения имеет вид
>4 + 2«У-1)Я* + (»'-rtfapa + if _ о. №.37)
а- + 1 а2(сс2 + 1) *
Необходимые условия устойчивости определяются следующей
системой неравенств:
а2-1^0, <*р2-1^0,
а2р4 + 2а (1 - 2а4) f + 1 > 0. {1}тЖ}
В плоскости параметров а, р2 неравенства (6.38) выделяют
область F, в которой корни уравнения (6.37) чисто мнимые и
различные. Эта область показана на рис. 24. В заштрихованной
на рис. 24 части плоскости а, р2 .перманентное вращение диска
неустойчиво, так как характеристическое уравнение имеет там
корень с положительной вещественной частью. Отметим, что при
а < 1, т. е. когда перманентное вращение эллиптического диска
происходит вокруг -меньшей его осп, имеет место неустойчивость
при любых значениях угловой скорости. Для вращения вокруг
большей осп (а>1) необходимые условия устойчивости будут
выполнены, если только величина угловой скорости |\f>| будет не
меньше некоторой зависящей от а величины.
Для строгого решения вопроса об устойчивости перманентного
вращения диска в случае, когда параметры а, р2 принадлежат
114
области F устойчивости в первом приближении, в статье [120]
использовались расчеты на ЭВМ, опирающиеся на результаты
теории устойчивости гамдльтоновых систем, содержащиеся в [4,
103, 127, 176]. Расчеты проведены для (}2 < 400. Оказалось, что
для значений а, [I2, лежащих й*Ь//
внутри области F или иа крпволи- *//■
нейной ее правой границе,
задаваемой уравнением
Р*«
2сс4 + 2а2 l/V — 1 — 1
исследуемое перманентное
вращение диска устойчиво.
Отметим еще, что па левой
границе области F, где а=1,
р2 ^ 1, имеет меюто устойчивость,
что следует ив п. 2 данного па- рпс 24
раграфа, так как при а = 1
получаем рассмотренную в п. 2 задачу об устойчивости вращения
однородного кругового диска вокруг его вертикально
расположенного диаметра.
§ 7. О бифуркационном множестве в задаче
о движении твердого тела по плоскости
В статье С. Смеила [171] разработан метод топологического
анализа систем с симметрией. Предложенная в [171] техника
исследования упрощена в статье [190]. В этом параграфе,
следуя работе [134], мы используем метод Смейла для анализа
качественных свойств движения тяжелого твердого тела на
абсолютно гладкой горизонтальной плоскости. Основное внимание
будет уделено установлению топологического типа областей
возможности движения на сфере Пуассона S2 = {у2, у2, у3, Yi + ?! +
+ Тз — 111 где f* — направляющие косинусы вертикали в системе
координат G£rj£, оси которой направлены по главным
центральным осям инерции тела:
7i = sin ©sin ф, ^2 = sin 8 cos ф, f3 = cos8. (y.l)
Без ограничения общности будем считать, что проекция
центра тяжести на опорную горизоптальную плоскость неподвижна.
Как отмечалось выше, высота z центра тяжести над плоскостью
зависит от формы поверхности тела и его ориентации
относительно неподвижной системы координат, причем z зависит не ото
всех углов Эйлера ф, б, ф, а только от угла нутации 6 и угла
собственного вращения ф, т. е. z=f{Q, ф). Так же, как и в
классической задаче о движении тяжелого твердого тела вокруг
неподвижной точки [5], конфигурационное пространство системы
есть ортогональпая группа вращений трехмерного пространства
S* 11S
5*0(3), а фазовое пространство будет касательным расслоением
Г50(3), являющимся прямым произведением Л3 X50(3).
Пусть К, V и E = K+V суть кинетическая, потенциальная
и полная энергия, а / — проекция кинетического момента тела
относительно центра тяжести на вертикаль. Группа 51 вращений
вокруг вертикали действует на 50(3), не меняя значений К и V.
Таким образом, тяжелое твердое тело на абсолютно гладкой
горизонтальной плоскости является механической системой с
симметрией [171].
Полная энергия Е: F50(3)-^i? и момент количества
движения тела вокруг проходящей через центр тяжести вертикали
/: Г50(3)-** R являются первыми интегралами. Отображение
I = EXJ: F50(3)->RXR=R2 называется интегральным
отображением. Множества htP=I~l(h, р), т. е. совместные
многообразия уровней первых интегралов
E = h, / = /?, (7.2)
являются инвариантными многообразиями фазового потока. Это
означает, что всякая траектория системы дифференциальных
уравнений движения твердого тела, пересекающая множество
h,v, содержится в нем целиком.
Строение инвариантных многообразий (7.2) важно для
качественной характеристики задачи, так как оно позволяет
получить важную информацию о структуре фазового пространства.
Если точка (ho, po)^R2 является точкой общего положения,
то существует окрестность этой точки, над которой интегральное
отображение I = EXJ является расслаивающим. Точки из i?2,
для которых это свойство не выполняется, т. е. над которыми
отображение I пе является локально расслаивающим, образуют
бпфуркацпоЕшое множество 2. Бифуркационное множество — это
такое минимальное подмножество из R2, что над каждой
компонентой R2 — 2 топологический тип инвариантных многообразий
h,P фазового потока не меняется; это означает, что при (hQ, ро)^
<=R2 — 2 множества /л<р и Д0,рп диффеоморфны, если точки
(h, p) и (ho. po) достаточно близки. Нахождение
бифуркационного множества 2 является основной задачей при исследовании
топологии интегрального отображения /. Критические точки
отображения / — это в точности относительные равновесия [Л]
(если р = 0, то это — обычное равновесие в неподвижной системе
координат).
Пусть MhtP есть проекция множества Ihp на 50(3).
Множество Mhv называют областью возможности движения ;оно состоит
из тех точек 50(3), для которых Vv<h, где Vv — эффективный
(приведенный) потенциал задачи. В случае движения тяжелого
твердого тела по абсолютно гладкой горизонтальной плоскости
эффективный потенциал определяется по формуле (см. § 1)
116
Симметрия задачи позволяет понизить размерность
исключением вращения вокруг вертикали. Профакторизованное по
действию группы S1 конфигурационное пространство есть сфера
Пуассона S2. Формула (7.3) определяет фактор-функцию Vv на
S~. Эффективный потенциал включает в себя потенциальную
энергию тела и кинетическую энергию его вращения вокруг
вертикали. Относительные равновесия — это перманентные вращения
тела вокруг вертикали. Профакторизованные по действию группы
51 множества возможности движения Mh.P обозначим через Mh,P,
т. е.
Mh,v = AI h,p.'Sl = hi + vl + 7з = 1 • Vv < h}.
В приложениях удобно искать множества MhiP на S2, ajie
множества МПщР на 50(3). Изменение топологического типа Mh.v
на сфере 52 происходит при (/г, /?)^2. В силу компактности
50(3) бифуркациоииоэ множество S совпадает с множеством
критических точек интегрального отображения /, т. е. с
множеством критических значений h приведенного потенциала Гр,
и описывается уравнениями
»_*,<** *£« _*£•>-о, т
которые, конечно, совпадают с условиями существования
перманентных вращении, рассмотренных в § 4.
Изображение бифуркационного множества в R2
(бифуркационная диаграмма) разбивает R2 на связные области, в каждой
из которых топологический тип области возможного движения
Mh,v сохраняется. После того как это разбиение осуществлено,
возникает задача установить этот тип в каждой из областей.
Это можно сделать с помощью теории Морса [121].
Рассмотрим конкретные примеры. В качестве первого
примера рассмотрим движение твердого тела, имеющего сферическую
поверхность, причем центр тяжести тела не совпадает с центром
его поверхности — сферы. Формула (7.3) для эффективного
потенциала в этом случае такая же, как и в случае движения
тяжелого твердого тела с пеетодвижной точкой. Последний случаи
подробно изучен в статьях [78, 89, 189, 190]. Таким образом,
если игнорировать возможность отрыва шара от опорной
плоскости, то бифуркационное множество в задаче о движении
неоднородного шара но абсолютно гладкой горизонтальной плоскости
совпадает с бифуркационным множеством задачи о движении
твердого тела вокруг неподвижной точки.
В качестве второго примера рассмотрим движение трехосного
однородного эллипсоида. Пусть а, Ь, с — длины его полуосей.
а <Ь<с. В системе координат Ggr]£ поверхность эллипсоида
задается уравнением (5.1). В соответствии с (5.7) имеем
у'-^+^+^-/" (7-5)
117
где / = у а2у\ + b2y\ + c2yl — расстояние от центра тяжести до
опорной плоскости. Как показапо в § 5, критическими точками
функции (7.5) являются точки, отвечающие перманентному
вращению эллипсоида вокруг любой его вертикально расположенной
оси. Там же исследована устойчивость этих вращений.
Таким образом, получаем, что бифуркационное множество 2
состоит из трех непересекающихся парабол, расположенных одна
над другой (рис. 25):
h = rnga + s- оР 2> h = mgb + ^- .,p „, h = mgc + ^ _?p „
Нижняя парабола соответствует устойчивому перманентному
вращению вокруг меньшей оси (/ = а). На сфере Пуассона этому
вращению отвечают две невырож-
f=b f=a денные точки фушкцпп Гр: fi =
= ±1, ,у2=='Уз = 0; индексы Я этих
критических точек равны еулю.
Средняя парабола на
бифуркационной диаграмме соответствует
неустойчивому вращению
эллипсоида вокруг средней оси (/=fc).
Две невырожденные критические
точки *yi = 7з — 0, -у2 = =Ы
функции Гр, соответствующие этому
Р вращению, пмеют индекс X, рав-
Рис. 25 ный единице. И наконец, верх-
пяя парабола на рис. 25 отвечает
вращению вокруг наибольшей оси (/ = с). Этому вращению на
сфере Пуассоиа S2 соответствуют точки 'Yi=='Y2 = 0, <y3 = ±l с
индексом %= 1.
Изменение топологического типа множества возможности
движения MKv на S2 происходит при прохождении точки (h, p)
через одну из парабол на рис. 25. Топологический тип сверху вниз
Рис. 26
на рис. 25 меняется в последовательности: S2 (вся сфера), D1 X
Х51 (.кольцо), D2UD2 (два диска), 0 (пустое множество). Здесь
Dn и Sn суть /г-мерные шар п сфера. Множество Mh,v можно
трактовать как множество, которое пересекает вертикальная ось
на поверхности тела при его движении. Это множество гомео-
морфно множествам, заштрихованным на сферах рис. 26 и
приведенным в указанной выше последовательности.
ГЛАВА 3
ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА ПО НЕПОДВИЖНОЙ
АБСОЛЮТНО ШЕРОХОВАТОЙ ПОВЕРХНОСТИ
§ 1. Уравнения движения
В этой главе рассмотрена задача о движении твердого тела
ио неподвижной поверхности в предположении об отсутствии
скольжения. Поверхность тела предполагается выпуклой. В
большинстве рассмотренных задач считается, что в точке
соприкосновения тела и опорной поверхности существует единственная
касательная плоскость. Рассматривается также движение тела,
имеющего острый крап (ребро), одной из точек которого тело
при движении касается неподвижной опорной поверхности.
Как и в случае абсолютно гладкой опорной плоскости,
задача о движении твердого тела по абсолютно шероховатой
поверхности состоит в определении положения тела в пространстве и
реакции опорной поверхности в зависимости от времени.
Целесообразно также нахождение следа точки касания на теле и иа
опорной поверхности.
1. Общая схема решения задачи о движении без скольжения
тяжелого твердого тела по неподвижной горизонтальной
плоскости. Отнесем движение тела к неподвижной системе координат
Oxyz с началом в некоторой точке О опорной плоскости; ось Oz
этой системы координат направим вертикально вверх. Пусть п —
единичный вектор нормали к поверхности тела, построенной в
то11ке М касания тела и плоскости (рис. 6). Оси жестко
связанной с телом системы координат G|r]J; направим по главпым
центральным осям инерции тела. Пусть А, В, С — моменты
инерции тела относительно осей G£, Gr\, G£, a m — масса тела.
Ориентацию тела относительно неподвижной системы координат
зададим при помощи углов Эйлера. Пусть уравнение поверхности,
ограничивающей тело, записано в виде F(^ т], £) = 0 и
— йнтг <••«>
Следуя [94, 156], введем двенадцать неизвестных функций
времени t: три компоненты вектора скорости центра тяжести G
тела в подвижной системе координат G^rfe; три угла Эйлера
(или вообще какие-либо другие т/рн параметра, определяющие
ориентацию тела относительно неподвижной системы координат
Oxyz); три компоненты £, ц, £ радиуса-вектора GM точки со-
119
прикосновения тела и плоскости; трп компоненты реакции
плоскости R.
Пусть со — мгновенная угловая скорость тола, v — скорость
его центра тяжестп, К — кинетический момент тела
относительно центра тяжести, g — ускорение свободного падения.
Составим следующие двенадцать ура/внений: шесть
(скалярных) уравнений, выражающих теоремы об изменении количества
движения и кинетического момента:
m(v + coXv)=— mgn + R, (1.2)
K + coXK = MG, (1.3)
где MG = GM X R — момент реакции плоскости относительно
цептра тяжестп; три (скалярных) уравнения — условие
отсутствия скольжения
v + coXGM=0; (1.4)
уравнение поверхности, ограничивающей тело:
F&, т), £) = 0; (1.5)
два скалярных уравнения относительно £, г], £, к .которым в
силу очевидного геометрического тождества п2 = 1 сводится
векторное уравнение Пуассона
п + соХп = 0, (1.6)
показывающее, что вектор п определяет неизменное направление
в неподвижной системе координат Oxyz.
Если решение системы уравнений (1.2) — (1.0) найдено, то
для завершения решения задачи о движении твердого теча по
плоскости остается только найти углы Эйлера и уравнение следа
точки касания на плоскости. Это можно сделать, опираясь на
кинематические уравнения Эйлера и соотиошепия (1.4), (1.15)
гл. 2.
Из (1.2) и (1.4) найдем выражение для реакцпп плоскости
R = — т [—gn + со X GM + со X GM + со X (со X GM) J. (1.7)
Подставив выражение (1.7) для R в формулу для момента
MG, получим замкнутую систему уравнений (1.3), (1.6), пе
содержащую реакцию плоскости. В скалярной форме уравнения
(1.3) и (1.6) представляют собой систему шести
дифференциальных уравнений относительно проекций /?, q, г вектора со на осп
Gg, Gr|, G£ и координат g, т], t, точки касания тела и плоскости,
через которые из (1.1) п (1.5) выражаются компоненты вектора
п. входящего в уравнения (1.6). В силу (1.5) из шести
упомянутых уравнений независимыми будут только пять. Исспедоваиие
системы (1.3). (1.6) — основпая и наиболее трудная часть
решения задачи о движении без скольжения тяжелого твердого
тела по неподвижной горизонтальной плоскости. Соотношение
(1.7) может служить для определения реакции плоскости. Прп
этом следует помнпть, что из получаемых решений смысл имеют
120
только те, для которых выполняются условия (2.4) гл. 1
физической осуществимости качения тела по поверхности.
Отметим, что уравнения (1.2) —(1.6) имеют интеграл Г +
+ П= const, где Т — кинетическая, а П — потенциальная энергия
тела.
2. Вывод уравнений движения твердого тела, движущегося
без скольжения по произвольной неподвижной поверхности.
Выведем дифференциальные уравнения движения тела, катящегося
по заданной неподвижной поверхности [33, 301]. Относительно
поверхности тела будем предполагать, что на ней можно
выделить не/которую область S так, чтобы во всех точках этой
области поверхность имела единственную касательную плоскость.
Аналогичные предположения делаются и относительно
неподвижной поверхности: иа ней можно выделить область Si, во всех
точках которой эта поверхность имеет касательную плоскость и
прптом только одну.
Мы будем рассматривать только такие движения, когда одна
из точек поверхности тела из области S приходит в
соприкосновение с одной из точек неподвижной поверхности из области S\.
Для получения дифференциальных уравнений движения тела
воспользуемся уравнениями (5.17) гл. 1, которые описывают
движения твердого тела по отношению к произвольной системе
координат, совершающей заданное движение. В качестве
полюса О возьмем центр тяжести G, а оси жестко связанной с телом
системы координат G£ri£ направим вдоль главных центральных
осей инерции тела. В качестве неподвижной системы координат
примем систему координат Gj£irii£i с началом в заданной точке
G\ неподвижной поверхности, по которой катится тело.
Пусть Л/ — точка соприкосновения поверхности тела и
неподвижной поверхности. Через и, v и щ, v\ обозначим гауссовы
координаты на участке S поверхности тела и на участке Si
неподвижной поверхности соответственно, а через г п Г| обозпачпм
радиусы-векторы точки М относительно G и G\. Тогда г=(|,
л- £), *1=(1ь щ, СО и
£ = !(", v), г) = т\(щ v), Б = Б(ы, v),
b=lv{uu v^, r]1=r]i(wi, vY)4 £i = £i(iii, i;i).
В качестве системы координат OiX{y\Zi § 5 гл. 1 примем
систему .коордпиат Mqiq2qs с началом в точке касания тела и
неподвижной поверхности. Ось Mqx направим по координатной оси
и (v = const), а ось Mq3 — по направлению нормали к S в
точке М; ось Mq2 дополняет оси Mqx и Mqz до правой
прямоугольной декартовой системы координат. Если линии м = const, y==
= const будут линиями кривизны, то ось Mq2 будет направлена
по координатной осп v (гг = const).
В обозначениях § 5 гл. 1 условия отсутствия скольжения
записываются ,в виде равенств
Щ + ЧЪ — гп = 0, v4 + r| — pC —0f Vc + РП —?S = 0, (1.8)
121
где Vi, уч, Vi—(проекции скорости центра тяжести на
соответствующие оси системы координат G£t]£. В уравнениях (5.17)
гл. 1 надо положить
а = 0, р-0, 4 = 0. (1.9)
Для кинетической энергии Т тела имеем выражение
Т = i m (r| + v\ + i£) + 4 (A? + Bq* + Cr-). (1.10)
При вычислении входящих в уравнения (5.17) гл. 1
производных от Г* по с, т, п мы. согласно (1.9), (1.10) с учетом
равенств (5.9) гл. 1, можем пользоваться следующим выражением
для Г*:
Т* =\гп [р2 (а2 + т2 + ri1) - (9lo + q2T + 9sw)s] +
+ -g- [Л (аси + тс21 + псп)2 + Б (ас12 + тс22 + /ic32)2 +
+ С (ос13 + тс23 + пс33)2], (1.11)
где а, тип — проекции угловой скорости тела на координатные
оси Mq\, Mq% и Mqs соответственно, q\7 f/2, qs— компоненты
вектора г в системе коордипат Mqiq^qsy
q\ = \>С\ 1 + ЦСХ2 + £С13, ?2 = %С2\ + Г]С22 + £^23,
(1 12)
^3 = £C3I + T1C32 + £^33,
а р2 = г2 = |2 + г]2 + £2 — жвадрат расстояния от центра тяжести
тела до точки его касания с опорной поверхностью.
Далее, воспользовавшись свойствами матрицы направляющих
косинусов, из (1.10) и равенств (5.9), (5.10) гл. 1 имеем
следующее выражение для производной Г* ло a, [J, *у:
дТ* дТ* ОТ*
— = m(q2n — q3T), -щ =m(q3o— qxii), — = m(qtT—q2o). (1.13)
Три последних уравнения системы (5.17) гл. 1 теперь
можно записать в виде
d /дТ*\ . /^ \дТ* / \ №* ,
+ ™ hi Wit* + q& + g^) — <* (ад! + g272 + q/h)\ = ЛЛ>
d /<?Г*\ , / 4 07** , JJ* ,
+ ™ [?2(?г? + № + ?i«) — T(qftgi + q2q'2 + ftfc)] = -l/8. (!-14>
+ те [<7з (?r3 + № + q*n) — n (qiq[ + q2q2 + r/3r/3) J = M~
122
Здесь 0i, Ti и щ — проекции угловой скорости тела
относительно системы координат Mq^qs на ее оси Mqu Mq2 и Mq3
соответственно; Ми Мъ, Л/з — проекции главного момента активных
внешних сит на эти оси; ч§рез (ft, ?2« Ъ обозначены следующие
выражения:
02 = £С21 + ЧС22 + £С23'
(1.15)
В качестве обобщенных координат в задаче о качении
твердого тела, следуя [33, 301], используем (примененные впервые
Нейманом) следующие
пять величин: две гауссовы
координаты и, v,
определяющие положение тючки
касапия М тела п опорной
поверхности па участке
поверхности тела S; две
гауссовы координаты и и
Vu определяющие
положение точки М на участке
опорной поверхности Si;
угол 8 между литиями
и 1 = const и v = const
(рис. 27).
Выразим через и, v, hi,
v\, 8 и их производные
по времени
коэффициенты, входящие в выражение (1.11) для Т* и в уравнения (1.14).
Для этого введем коэффициенты £", F, G и L, М, N первой и
второй квадратичных форм поверхности S [157]:
Е = г2 - Ш2 + (дЛ\- . l^LУ8 F-(v v\~dl д^ -и д^дх\ . *ь К
(1.16)
J/ = (гмг-е3) =
Рис 27
«
+
Л|
+
П
■с.»
ди Ov 31 ^ дн </ь- 32 "*" ди дг 33,
-Л =(гст-е3) = г|Сз1 + -^сзв + -2С8з-
dr (?r dr
Здесь через ез обозначен единичный вектор осп Mq$:
г„ X г г.. X г„
еч =
К ХМ Veg-f?
(1.17)
123
Квадрат длины ds дуги на поверхности S определяется
выражением
(ds)2 = E{du)2 + 2Fdudv + G{dv)2. (1.18)
Косинус угла б между координатными линиями и и и
вычисляется по формуле
ruTv F
COS б
Уес
(119)
Угол б (0^б<2л) отсчитывается (рис. 27) от оси Mq\ (v =
= const) против часовой стрелки,
Чг\ если смотреть из конца
вектора е3.
Соответствующие величины Eij
Fu Gu Lu Mu Nu (dsx)\ cos6i
для поверхности S\ вычисляются
по формулам, аналогичным
Рис. 28
*/=** 9, (1.16) — (1.19).
Найдем матрицу
направляющих косинусов Си, определяющую
взаимную ориентацию систем координат G£rj£ и Mq\qiq^ Пусть
1, j, k — единичные векторы осей G£, Gr\, G£, a e{ —- единичный
вектор оси Mq\. Тогда
\ди |
Отсюда следует, что
I 01
1 дц
Cll~y'E8"' Cl2~~VEdu* "К-уЁди
(1.21)
Далее, .для единичного вектора ег, направленного по касательной
к линии и (и = const), имеем выражение
or
дг\ dv
ди\
_L/*i+^H+^k} (1^2)
Пусть ег — единичный вектор оси Л/^2. Из рпс. 28 получаем
равенство
е* = iln~6(е* — cos б е^ (1 *23>
Отсюда и из (1.20), (1.22) следует, что
J / 1 dl созбам
21 sin 6 [усди уЁ buy
— 1 / 1 £П _ COS б С^Л
С22~ sin 6 [уд dv уЁ ди)'
= 1 / 1 a; cos6c?£\
~ sin 6 (у'ё aw уЁ ди)
(1.24)
124
И наконец, из (1.17) получаем
1 /дц di dt дг)\ = 1 /ас di оъ oz\
c3i — у _ а ^ аи с/у Он dv)i °32 у EG _ ^ [ Он Ov ди dv)'
(1.25)
Сая —
1 №^_<*}Щ
VEG—F'z\dudu dudvy
При движении тела координаты и, v изменяются;
направляющие косинусы Сц будут сложными функциями времени, с,-у(м(£),
i;(0)- После некоторых преобразований, иополызующих свойства
матрицы направляющих косинусов, из выражений (1.21), (1.24),
(1.25) и формул (5.15) гл. 1 получим следующие выражения для
проекций d, Ti, щ угловой скорости тела относительно системы
координат Mqiq2qs на ее оси:
/ . л /. 1 М \du , / 4 - А/ 1 TV \ А;
i fdEdu OGtJv 0 d/47iA ^^ d / 1 \
Щ " 2 sin 6 У £G^ Л ^ df + ^ di; dl j + V Ь C°S °" dt (sin 6 у с )
djctgb)
dt '
Для вычисления проекций а, т, /г абсолютной угловой
скорости тела со на оси системы координат Mqiqzqs будем
рассматривать со как сумму трех векторов угловых скоростей:
СО = COi + С02 + С03,
где coi — угловая скорость тела относительно системы координат
Mqxq2qz (ее проекции на оси Mqu Mq2, Mq3 вычисляется по
формулам (1.26); С02 — угловая скорость системы координат Mq^qs
относительно системы координат Mqf q^qi * которая образуется
аналогично системе координат Mq^qz (ее ось Mq^ направлена
по координатной осп щ (v\== const), а ось Mq^—по
направлению нормали к участку Si опорной поверхности в точке М; см.
рис. 27); со3 —угловая скорость системы координат Mg/Ve 7з
относительно неподвижной системы координат Gi£iT)i£i.
Вектор со2 в системе координат Mq\q%q^ имеет следующие
компоненты:
с2 = 0, т2 = 0, «2=f- (1.27)
Компоненты аз, тз, т вектора со3 на осп системы координат
MQx Чъ <7з можно найти аналогично тому, как выше были
найдены величины Ci, xi, щ — проекции вектора со на оси системы
координат Mq\q2qz\ надо только изменить знак «каждой из
правых частей равенств (1.26) на обратный п входящим в них ве-
125
личинам приписать индекс 1, указывающий на то, что величины
Еи F\, Gu L\, Mu Nu 61, щ, *>i относятся к S\. Получим
I Мх 1 Л'х \ dv1
пз = —
2 sin
1 tdExdux dGxdvy QgyPl\
— yG1 cos 61 — 7= 4— ,. .
1 ' M\ sin61/G1 / dt
Используя рис. 27, теперь можно выписать компоненты вектора
со в системе координат Mqxq^qz'-
о = о± + cr3 cos (6t — 6) + т3 sin (6j — 6),
т = Tj + а3 sin (бх — 6) — T3 cos (6t — 6), ^j 2g)
, <®
r 1 1
Теперь осталось еще найти величины qv g2, qs, Qi, q%, q%,
входящие в (1.11), (1.14) и определяемые равенствами (1.12) и
(1.15). Из (1.12), (1.21) и (1.24) получаем
где через е обозначено взятое со знаком расстояние от центра
тяжести тела до касательной плоскости к поверхности S в
точке М:
£ = lesi + г]с32 + £сзз. (1-31)
Из (1.15), (1.21), (1.24), (1.25) после проведения некоторых
выкладок имеем
cA = VE% + VGcoSb%. ft-sine/B* gi-0. (1.32)
Надо еще получить условие отсутствия скольжения. Это
условие выпишем, исходя из того, что отсутствие скольжения
означает, что вектор скорости геометрической точки М при ее
перемещении по 5 равен вектору скорости точки М [при ее
перемещении по S\. Пусть а и b — проекции па осп v= const и и ==
= const скорости геометрической точки М при ее перемещении
ло S, a fli и Ь\ — проекции на оси v\= const и iii= const ее
скорости при перемещении по Si. Учитывая равенство (1.18) и
120
аналогичное ему равенство для поверхности Si, имеем
«-/*£, b = VG% «Ч-/^. Ь-/^ (1.33)
Используя рпс. 27, получаем условие отсутствия скольжения
в виде двух равенств:
a + fccos6 =aicos(6i — 8)+&iCos0,
b sin б — ax sin (61 — B) — bi sin 6.
Разрешив эти равенства относительно ai, b\ и воспользовавигась
соотношениями (1.33), получим условие отсутствия скольжэнпя
в виде
V^£-;^[v'^sin(6l-e>+V^><6.-8-<>)]
Восемь дифференциальных уравнений (1.14), (1.29) и (1.34)
первого порядка (рассматриваемые с учетом выражении (1.11),
(1.21), (1.24) —(1.26), (1.28), (1.30) —(1.32)) определяют
обобщенные координаты и, у, щ, vu 8 и величины с, т, п как
функции времени.
Если активные внешние силы имеют потенциал, то
уравнения движения допускают интеграл энергии Т* + П = const.
Когда линии и п v на S и линии щ и v\ на Si суть линии
кривизны этих поверхностей, дифференциальные уравнения
движения зпачптельно упрощаются. В этом случае
F = 0, М = 0. б =-5; Fx = 0, A/! = 0, 6t =-J
и
- _ А[_ А; т L. cl!L п _ j /^ d" ^ <7г\ . п
n = 1 /0Я *" _ £G rffA , 1 (дЕ± £^i _ £^i А>Д dG
2yjG\^dt 0u dt) + 2 yKfi^^x ut ~"0iTl~dtJ + IV
1 dp I dp
д* = уЦРТи< 9*"ygP^ ^ = e,
127
Выражение (1.11) принимает вид
f-l-[w + * + *>-№'Pi+rt7a + m)'] +
+ \[А (осп + тс21 + пс31)2 + В (ос2 + тс22 + пс32)2 +
+ С (ос1з + тс23 + пс33)% (1.37)
а уравнения (1.14) и условия отсутствия скольжения (1.34)
становятся такими:
!(£)+<*-'■>£-*—-JS +
(1 38^
(с)р т dp о \ ifrdu пт
d (дТ*\ , , ч ОТ* , ч дТ* . (i/T^du , ifrdv \
f dpdu , dp dv\ , r
-/5ftsine. (1.39)
В качестве важного примера применения полученных
уравнений выпишем дифференциальные уравнения движения без
скольжения твердого тела по неподвижной горизонтальной
плоскости под действием заданных активных сил. В этом случае
Ь=ии тц = 171. ti=0, £i = l, Gi —lf iVi =0, Li = 0,
и уравнения (1.36), (1.38), (1.39), описывающие движепие тела,
принимают такую форму:
N_dv L-^!L — 1 ldF~du dGdv\ dQ
° " YG dt4 T ™ Уе d? U ~ 2 У EG \dv dt du dt) + dV
d [OT*\ dT*dQ , /dp т dp a \-,/^f7r ,r
d /^H , dr*^G / dp т dp a \ ,/TTf?» nr ,, /m
^(17] + ^-^-"г(р^у1-Р^!у5)^Тг = Л/2, (1.40)
d [дТ*\ , (if-udu , -.A^ffr \ / dp tf« , dp f?r\ , r
428
Если главный момент внешних сил не зависит от координат
ыь v\, то первые шесть уравнений системы (1.40) могут
интегрироваться независимо от последних двух уравнений, задающих
условие движения без скольжения.
3. Уравнения Воронца движения тяжелого твердого тела,
катящегося без скольжения по горизонтальной плоскости. Пусть
твердое тело дпжется в однородном поле тяжести по
неподвижной горизонтальной плоскости так, что скольжение отсутствует.
Точка М касания тела и плоскости в системе координат G§n.£,
опразованиой главными центральными осями инерции тела,
имеет координаты £, г), £. Величины £, г), £ будут функциями
координат ич v точки М на поверхности тела. Координаты сзи Сз2<
сзз единичного вектора ез, направленного по нормали к
плоскости, вычисляются по формулам (1.25). Так как вертикаль имеет
неизменное направление в пространстве, то справедливы
равенства
- + <7сзз ~ r<*32 = °> "IT + rc3i — /*33 = 0.
^С31 гл dC'
dc™
-ft- + PCS2 — ^31 = 0.
(1.41)
Условия отсутствия скольжения записывается в виде
соотношений (1.8).
Так как величины сы (£=1, 2, 3) — функции величин м, v,
то их производные по времени в (1.41) можно заменить на
правые части равенств:
at ди dv v '
Обозначим через п проекцию угловой скорости тела па
вертикаль. Тогда
п = pczi + qc32 + гсзз. (1-43)
Из (1.41) -(143) находпм
Я = >Щ2 + (5*с31 -a-£c„)L + (^fc31 -б-£с») v. (1.41)
-*- + (^.-^)i + (^»-^«)-
Из (1.8) и (1.44) с учетом обозначения (1.31) и очевидных
равенств
£L /. j_ £П /. _|_ ^ _ п 5£ • Л1 _. д- _ п
д« ~31 + du С32 + ^7^зз — и, ^с31 + —с32 + ^,с33 — U
9 А. П. Марьеев 129
имеем
8-^7 -са-дй) и + l8^7 -cnTv) v*
^(^-^зз)^ (1.45)
vi = <&* - црм) п + (в ^f - с33 У к + (г ^f - с331) v.
Формулы (1.44) и (1.45) дают величины р, q, r, vu ym v- как
линейные однородные функции величин и, v, /г, коэффициентами
при которых являются известные функции величин г/, v. Следуя
[30], найдем дифференциальные уравнения, которые
определяют величины и, v, n как функции времени.
Кипетическая энергия тела вычисляется по формуле (1.10).
Проекции вектора количества движения Q и кипетического
момента Кс на оси G|, Gr], G£ определяются соответственно
выражениями
п дТ
и
к дТ
Из уравнений (5.1) гл. 1
О -?L
имеем
К™
ъ Or
d (дТ \ дТ ОТ , о
d 1дТ\ dT dT , т> ,л /еч
d (дТ\ ОТ „дТ t о «.о
d (дТ\ дТ дТ , «.» с. о /, /7Ч
^) = ^--?^ + №- ^ (L'i7)
d /дТ\ дТ ОТ , tJr> о
Здесь mg — вес тела, a i?i, i?m R$ — проекции реакции плоскости
на соответствующие оси.
Пусть 0 обозначает кинетическую энергию Т из (1.10),
выраженную через величины г/, у, и, г), /г при помощи равенств
(1.44) и (1.45). Товда на основании (1.44) и (1.45) имеем
№ _Wty Wty Mdr_ дТ dvl дТ д1>ъ дТ д\ _
On dp дп dq dn дг дп di\ dn dv On dv~ dn
dT dT dT .dTi * \ , ^ tr t \ ^l
Я^" C31 + "X7 C32 + яГ C33 + ThZ W33 ±C32) + ~^T lbC31 ~~ ЬСЗЗУ +
dp 31 ■ e/g "32 ' 0r » * c/^v 'ras ^32/ 1 dl;
+ Jr (^32 - Vsi)"
*t
130
Следовательно,
л (дв\ дТ ■ , d (дТ\ . дТ ■ , d IдТ\ . дТ ;
+ й (?) Сзз + ^й <*« " *-> + | (^) (^зз - Ш +
+ ^ I <&* - *»> + Тг (£;) tea - W + J£ Ж <*» - *-> +
+ я (£J <*«-**>■
d /0П d /07* \
Заменив здесь величины ^ 1^Ь •••> ЗПа^) па
соответствующие правые части уравнений (1.46), (1.47), воспользовавшись
равенствами (1.41) и приведя подобные члены, получим
уравнение _
It (Й) в £ [^ (г]Сз3 — ^ + q (*Сз2 ~~ Vei) — г (&»1 — ^зз)] +
+ лГ Ь» ^и ~~ ^ + г (тКз3 — ^~ р ^Рм "~1F8l)] +
+ £ \li №см — 1lcai) + Р (£%l — £сзз) — Я 0f33 — &■«)]• (1 -48)
Вычислим теперь производную от G по й. Используя (1.44)
и (1.45). получаем
дВ_»Т(*>* *». \.?L(^Sc -6-^с W
Л; — "р \ "лГ с»з— ^гc»v + а9 V л*Cgl о*с«у +
^ сУг ^ дм Сз« 0в 3V ft'| V ft< 31 ви/ ^ ft^V ft* 32 ft*^
+ ftvl ди с^ди)'
Продпффренцпровав обе части этого равенства по времени и
воспользовавшись уравнениями (1.46), (1.47), получим после
приведения подобпых членов такое уравнение:
± (д&\ дП
^ ftp [ dt' ои С™ Ои CMJ + q{ ди С'2 ди C3i; ' [ ди Сз1 ои Css)\
т °Ч [dt \ о„ °al ди Cs3J +,[ди Сз3 ди сы) р\ ди "S2 ~ди~Сз1)\
drIrftV ди сзг а„ c3iy -+• Р[ ди с-л ди CasJ Я\-0-и-сзз— ■д-и-сзг)\
+
+
+
+
°* 131
,9T\a_( f^i ее) (_*«_с *)_гЛ£з_с Ml.
+ Щ[И[8"diT Сз1д^) +q[s ди с'-яди) Ч ди Ся*ви/| +
(1.49)
Здесь через П обозначена потенциальная энергия тела:
П = Tmge,
где верхний или нижпий знак отвечает соответственно случаю,
когда вектор ез направлен вертикально веерх пли вертикально
вниз.
Совершенно аналогично можно получить уравнение
= /. (1.50)
Правая часть / этого уравнения получается из правой части
уравнения (1.49), если в последней частные производные от
функций П, сц по и заменить па частные производные по v.
Упростим уравнения (1.48) —(1.50). Из (1.16) и (1.25)
получаем
дспп дсП1
ди Css ди С=»2 - YeG — F3" \ 8v ди1
Veg~f2\ dv ди1
ди ~2 ди °31 - YeG - F% \ dv ди!
£^lc _f!ac 4 /Va| vdM
dv C3S dv °32 ~ YEG - F2 \ 8v~ duJ
dv °sl dv C«3 - YeG-F* I dv 8ul
dv S2 dv Csl — YeG — F2 \ dv 0U)'
dC™r -^c -
Mi п.. сяя —
#c.,, #c0
(1.51)
Из (1.51) и тождеств
ди Сз1 + eta 32 + di* 33_ U' Л; Сз1 + cto Сз2 + dv Сз;
132
получаем, что
Ои
***
5 - itb* [ш ~ щ * + {FL - EM) 21'
£=шЬ> [(™ -LG) й+{FL - ЕМ)%\
£ - zsrb? И - ш> д-ш+<** - fl) a-i\
i-uttV™-ES^+iEM-FLM-
- z^h? И - FjV) ^f + {FM ~ GL) W
du
(1.52)
(1.53)
<9i]
Если теперь в правых частях уравнений (1.48)— (1.50)
величины dT/dvi, ..., бГ/dr выразить через и, v, и, г;, п при
помощи формул (1.44), (1.45) и провести затем довольно
громоздкие преобразования, использующие равенства (1.51) —(1.53), то
уравнения (1.48) — (1.50) могут быть представлены в таком виде:
d [д<д\ (др • др -\
— лГ me > [(LF - ME) и? + (LG — NE) uv + (MG - XF) у2],
У EG — F2
d (ов\ дв дП , LN — M2 д& ' др о ,
(1.04)
+ лГ тг у \(LF - ME) и + (MF- NE) v] и,
У EG — F*
133
_d/£6\_£e Ш _ LN — M2 OS • _
dt \dv) dv " dv VEG^F2 dn U
dp о ,
+ mb \(LG - MF) и + (MG - NF) v] n.
V EG — F1
Это и будут искомые дифференциальные уравнения движения
твердого тела; они определяют величипы и, у, п. В работах
[29, 31] П. В. Воронец получил уравнения (1.54) также и
другим способом, опираясь на принцип Гамильтона —
Остроградского, обобщенный им на неголономные системы. В монографии
[96] уравнения (1.54) получены при помощи уравнений
Эйлера — Лагранжа.
Из теоремы об изменении кинетической энергии следует, что
существует интеграл энергии
в + П = h = const.
Дифференциальные уравнения (1.54) имеют второй порядок
относительно переменных и, v и первый порядок относительно /г.
Общее решение системы (1.54) зависит, следовательно, от пяти
произвольных постоянных с,-:
n = n(t, Си -.., с5), u=u(t, си ..., се), v = v(t, си ..., сь).
(1.55)
Если из двух последних соотношений исключить t, то получим
уравнение кривой Г — следа точки касания М на поверхности S
твердого тела.
Из формул (1.55) при помощи квадратур можно получить
уравнение кривой Ti — следа точки касания М на плоскости
качения 5Ь Пусть S\ будет плоскостью Оху неподвижной системы
коордтат Охугл ось Oz которой направлена вертикально вверх.
Обозначим через б угол, который образует касательная к кривой
Ti с осью Ох. Тогда [31]
£=»-**£■ (1-5в>
г,де к§ — геодезическая кривизна кривой Г в точке М. a ds/dt —
скорость перемещения точки М по Г. Из (1.56) пмэем
б = ^ndt—^kg ^dt + ce, (1.57)
где Сб — новая произвольная постоянная.
Кривые Г и Ti в точке М имеют общую касательную, и в
силу отсутствия скольжения геометрическая точка М за время dt
по оиопм кривым проходит одип и тот же путь ds.
Следовательно, если через хм, Ум обозначить декартовы координаты точки М
на плоскости Оху, то можно написать
dxM = ds cos б, dyM = ds sin 6.
134
Отсюда следует, что
хм = \ cos б ds + с7, ум = J sin б ds + с8. (1.58;
где с? и се —новые произвольные постоянные. Формулы (1.58)
задают кривую Гь
Соотношения (1.55), (1.57) и (1.58) содержат восемь
произвольных постоянных и дают общее решение задачи о движении
без скольжения твердого тела по неподвижной горизонтальной
плоскости. Действительно, положение тела, катящегося по
какой-либо поверхности и касающегося ее одной своей точкой,
вполне определяется пятью координатами; условие отсутствия
скольжения дает две неинтегрируемые связи; следовательно,
самое общее решение нашей задачи должно содержать как раз
восемь произвольных постоянных.
С помощью формул (1.55), (1.57) и (1.58) легко найти углы
Эйлера if), 8, ф и координаты ж, у, z центра тяжести G в
неподвижной системе координат Oxyz как функции времени t. Углы
8, ср сразу находятся из равенств
Сы — sin G sin ф, Сз2 = sin 9 cos <р, с3з = cos 8,
так как при из^естпых и и v величины сы (i=l, 2, 3),
определяемые по формулам (1.25), будут также известными
функциями t. Угол "ф можно найти интегрированием кинематических
уравнений Эйлера. Но можно воспользоваться отсутствием
скольжения и, следуя [31], избежать интегрирования. Угол б* между
касательной к следу Т\ точки М на плоскости Оху и осью Ох в
силу отсутствия скольжения равен углу между вектором
скорости v* перемещения точки М по ее следу Г на поверхности тела
и той же осью Ох. Единичные векторы линии узлов ON и
касательной к кривой Г задаются в системе координат Gi,r\t
компонентами cosq\ — sin ф, 0 и £/^*, r\/v*y tyv* соответственно. Л так
как угол между этими векторами равен ф — б*, то
cos ft, - 6*) = ^""Р-Явт^ (ЬИ)
Координата z центра тяжести, очевидно, равна +е (берется
верхний пли нижний знак в зависимости от того, направлен
вектор е3 вверх пли вниз), а координаты х, у при известных
углах Эйлера могут быть вычислены по формулам (1.15) гл. 2.
Проекции Щ, /?Ч1 Rt реакции .плоскости на оси G|, G»], G£
могут быть найдены из (1.44) — (1.46). Если эти величины
найдены, то величпна нормальной реакции плоскости N определится
по формуле
yV = ± (/?• сз! + i?4c32 + Яссзз).
Проекции же Fl4 Fn, Ft силы трения на осп Gg, Gn, G£
определяются, очевидно, соотношениями
Fl = Rl*Nesu /74 = /?n + iVc32, Ft = Rt + Nc33.
135
Уравнения движения (1.54) сильно упростятся, если за
координатные линии и ж v принять линии кривизны поверхности
тела S. В этом случае F = 0, M=0, и уравнения (1.54)
принимают вид
d /д&\ (до ' , до '\ те , г п Л-г\ " '
Ш[-0Гг)-Г^[£и + £и}П-уШ(ЬО-АЕ)111''
* h\™=™+™™v-mpd±n*- -=LNEvn. (1.60)
dt \dv j dv dv Л/Ж dn dv V^G
4. Уравнения Эйлера — Лагранжа движения без скольжения
твердого тела по произвольной неподвижной поверхности.
В статье [23] при помощи уравнений Эйлера — Лагранжа
получены дифференциальные уравнения движения без скольжения
твердого тела по произвольной неподвижной выпуклой
поверхности. Эти уравнения обобщают рассмотренные в предыдущем
пункте уравнения Воронца движения твердого тела по
неподвижной горизонтальной плоскости. Опуская для краткости процедуру
вывода уравнений, полученных в [23], приведем их
окончательный вид, применяя обозначения п. 2 этого параграфа.
Пусть линии к и у на поверхности тела S и линии и\ и V\
на неподвижной поверхности S\ будут линиями кривизны этих
поверхностей. Тогда условия отсутствия скольжения запишутся
в виде двух равенств (1.39). Обозначим через 0 кинетическую
энергию тела (1.37), вычисленную с учетом выражении (1.36)
для о. т, п и уравнений свя!зей (1.39). Функция 0 будет
квадратичной формой величин и, v, n с коэффициентами, являющимися
функциями от и, v, ии v\, 8.
Полученные в [23] уравнения записываются в виде
d (дв\ лГ~гг (LN ^ДГ1 \дв ' < \ лГ-F
ди и*л dV Vg V ga)-p»
' +г-4?+2"й(-эд-'-<1С,)
а (ав\ , , .,/-?, • дв ■ л'д», . ае • ~\/е[. л'дл
+ m{eX-qtn)VOv--rV±?E[i--E£)-^v1g—Pr
136
Здесь
р — — р — в — II
где П — потенциальная энергия твердого тела,
х 1 dlnE , sine dlngi cos0^ gj^gi
(1.62)
До =
2 "I/G *> 2 УЧ dyi 2VEi ди*
1 <>InG sinG <*\nGx cosg ^H§
(1.63)
2 2"|/E <*" 2/E, ^i 2/G1 to-
l
величины а, т, п вычисляются по формулам (1.36) с учетом
связей (1.39), т. е.
о Ai2V£u — A22HGV, T = &ntEu + A2il/Gv,
_. _. (1.64)
n^e + AiVEw —A2VG1;.
д ц = L + Ь. sin2 е + ^ cos2 е, д22 = ^ + ^ sin2 e + |w о,
(1.65)
д12 = д21 = (^■ — ^) sm e cos е, д - дпд22 — д;2
112-
Уравнения (1.61) вместе с кинематическим соотношением
(1.04) для величины п и уравнениями связей (1.39) образуют
замкнутую систему шести уравнений для определения величин
м, v, Mj, v\, /г, 6 как функций времени.
Отметим, что в работе [300] П. В. Воронец получил
уравнения движения, аналогичные уравнепиям (1.61), исходя из
принципа Гамильтона — Остроградского.
5. Уравнения Чаплыгина движения без скольжения твердого
тола по неподвижной горизонтальной плоскости. Пусть твердое
тело движется без скольжения по неподвижной горизонтальной
плоскости. Положенпе тела определяется пятью обобщенными
координатами: двумя декартовыми коардипатами х, у центра
тяжести и тремя углами Эйлера г{\ 6, ф (.в этом пункте мы
будем использовать те же обозначения, что и в § 1 гл. 2). Условие
отсутствия скольжения (равенство нулю абсолютной скорости
точки М тела, которой оно касается опорной плоскости) приво-
137
дит к трем скалярным равепствам:
± = аи(щ — ql) + al2(pl — r£) + a,3(gg — РЦ),
У = «2i (гт) — qt)+ aw(pt — rl) + a2b(ql — /И]),
г = asi (rr| — д£) + а32 (рБ — r\) + л3з(9£ — рц).
Последнее из этих равенств совпадает с равенством (1.22) гл. 2
и является следствием геометрической связи z —/(в, ср), где
/(6, ср)—расстояние от центра тяжести тела до опорной
плоскости. Первые же два равепства представляют собой неиптегрируе-
мые кинематические связи. Использовав соотношения (1.3) и
(1.9) гл. 1 их можно записать в виде
х =* а$ + а2ф + а3^, у = fte + (32ф + р3ф, (1-66)
где введены обозначения
ах = — (xi sin 8 + £ cos 8) sin if), a2 = yv2 cos 8 sin if) + ул cos if,
(1.07)
«з = */2sin * + (xicos e — Б sin °)cos Ф> Pi = — ^p- (' = l •2-3)-
Кинетическая и потепциальная энергии вычисляются по
формулам (1.26) и (1.20) гл. 2. Так как Т и П, а также
коэффициенты а,-, рг (£ = 1, 2, 3) иеинтестрируемых связей (1.66) не
зависят от координат х, у, то рассматриваемая механическая
система — твердое тело при отсутствии скольжения на неподвижной
горизонтальной плоскости — представляет собой пеголономную
систему Чаплыгина. Дифференциальные уравнения движения этой
системы могут быть записапы в форме уравнений Чаплыгина
(см. § 7 гл. 1). Кинетическую эпергию Teia (1.26),
изучающуюся после нсклточепия из нее величин х\ у при помощи
уравнений связей (1.66), обозначим через Т*. Вычисления
показывают, что
Г* = у /22ё* + 4 (Ju sin2 8 + J33 cos2 8 - 2/ls sin 0 cos 9) Ф2 +
\ • ....
+ ~ •^зз'Ф2 — (-'"и sin G + /?3 cos 8) Эф — /23В-ф +
+ (/gg cos 8 — /13 sin 8) q-ф, (l .68)
где величины JiS выражаются чорез Белпчины hu вычисляемые
по формулам (1.29) гл. 2, при помощи соотношений
Jn = Тп + m [у} + (х, sin В + I cos 6)s], J,2 = /22 + m (yjf + l2),
Jm = 7зз + m 17.1 + (Xi cos 8 — £ sin 8)2],
Jn = A2 — mX> (Xi cos 8 — I sin 8), (1.69)
J*3 = 7is — w (Xi cos 8 — £ sin 8) (xi sin 8 + £ cos 8),
J2<6 = 72з + m%2 (Xi sin 8 + £ cos 8).
138
Величины Jij представляют собой [70] осевые (г = у) и
центробежные (i^j) моменты инерции тела по отношению к осям
системы координат МЪ^ц^ъ (см. п. 2 § 4 гл. 2).
Положим q\ = 0, дг =Ф, qz = % q4 = x, <?5==*Л Уравнения
Чаплыгина (см. уравнения (7.13) гл. 1) можно представить в
виде
з
dor* вт* вп V^o;: (Г** э я- Л<*> пм\ а ю\
rflflgf ^i ^i j,fc=i
Вычисления, использующие соотношения (4.22) и обозначения
(4.17) гл. 2, показывают, что коэффициенты аД квадратичных
форм в правых частях уравнений (1.70) не зависят от угла ф
п определяются равенствами
а|? = 0 (г = 1,2,3),
йц — 6Ui2 ' а11 — ^а13 • ^ttia — а22 » а12 — а23 "13 »
9„<3) _ (1) (3) _ « (2) о„(3) _ (2)
-"13 — а33 * "22 ^"23 • ^"23 — — а33 »
«з? = m Ufa + к (Xicos e — £ sin 6)Ь
а{$ = m sin 6 [Jjjfc + / (Xi cos В — I sin 6)],
«Й = J m t2//2 C0S 6 T" ^Xl + *2 C0S Э (Xl COS В — ^ Sin 6)|, (f[ yj j
я 2? = -^ w sin В (Z,)r2 cos 0 + Zxi), ЯгУ = /?г cos А (Ъл cos ^ + ^2X1)'
a($ = — -9- ^ [^i sin 8 (ул sin 6 + £ cos Э) + ly2 cos G +
+ /2 cos 0 (ул cos 6 — ^ sin 0)1,
a[}? = — y mZ(xiSin6 + ^cos6), a^ = — -5- mZcosB^sinO + ^cosG).
6. Уравнения движения твердого тела с острым краем по
абсолютно шероховатой новерхности. Пусть твердое тело имеет
острый край в форме плоской кривой, лежащей в одной из
главных центральных плоскостей инерции тела. Выведем, следуя
[211, 299]. дифференциальные уравнения движения тела,
предполагая, что скольжение отсутствует. Будем считать, что на
кривой — остром крае тела — можпо выделить некоторую ее часть —
область if — так, чтобы во всех точках f кривая имела
касательную и притом только одпу. Аналогично относительно
неподвижной поверхности, по которой катится тело, предполагается, что
во всех точках некоторой ее части — области Г — .можно
провести к ней единственную касательную плоскость. Будем
рассматривать только такие движения тела, когда точки кривой из
области 7 прпходят в соприкосновение с точками поверхности из
областп Г.
139
Координаты |i, lib £1 точки неподвижной поверхности из
области Г в некоторой неподвижной системе координат Gi£ir)i£i
выразим через гауссовы координаты и и и:
li=li(w, v), -П, =11,(1*, v)> Si=£i(w, ^)»
причем коэффициенты первой и второй квадратичных форм
поверхности обозначим, как принято, через £", /\ G и L, Л/, 7V.
За линии и {v = const) и и (w = const) примем линии
кривизны поверхпости; следовательно, F = О, М = 0.
Пусть G|r)£ — жестко связанная с телом система координат,
оси которой направлены вдоль главных центральпых осей
инерции тела. Будем считать, что кривая — острый край тела —
лежит в плоскости £ = 0. Эту кривую зададим в полярных
координатах p. Z, поместив полюс полярной системы координат в центр
масс тела G и направив полярную ось по положительному
направлению оси G|; угол / будем отсчитывать от оси G£ против
часовой стрелки, если смотреть со стороны положительного
направления оси G£. Таким образом,
p = p(Z). (1.72)
Введем еще две подвижные системы координат с началом в
точке М соприкосновения тела и опорной поверхности: Mxyz,
оси Мх и My которой направим
вдоль положительных направлений
линий и и и, а ось Mz — по нормали
к опорной поверхности, и Mx\y\Zu
ось Му\ которой направлена по
прямой MG, а ось Мъ\ параллельна оси
G\ (рис. 29).
Масса тела равна т, моменты
инерции относительно осей Gg, Grj
и GE обозначаем, как обычно, через
А, В и С.
Положение твердого тела в
пространстве будет вполне определено,
Рпс. 29 если мы найдем координаты и. v
точки М и углы Эйлера \|\ В, ф,
определяющие ориентацию тела относительно системы
координат Mxyz.
Для получения уравнений связей, являющихся условиями
отсутствия скольжения, воспользуемся тем, что условие отсутствия
скольжения эквивалентно тому, что вектор скорости точки М при
ее перемещении по острому краю тела равен вектору скорости ее
перемещения по опорной поверхности. Из (1.18) следует, что
проекции последнего иа линии и и и будут соответственно й\Е
и г)УС Замечая далее, что длина ds дуги кривой — острого
края — вычисляется по формуле
ds= l/V + p,2rfZ,
140
где через р' обозначена производная р по I, получим при
помощи рис. 29 условие отсутствия скольжения в виде
и/! = J/У+ p/2icosl>, ^/G = ]/p2 + p'2Zsin^. (1.73)
Отметим, что задание I определяет один из углов Эйлера ф
п, наоборот, при известном ф величина I определена однозначно.
Действительно, пусть а есть угол между линией MN
пересечения плоскости G|r| с плоскостью Мху и осью Му\ (рис. 29).
Тогда
a^Z+ф — к. (1.74)
Далее, если d — расстояние от центра тяжести G до линии MN,
то
7 Р2 . d
а = г —, sm а = —. ({ 7Г))
/р*+р'2 р (
Из последних двух равенств а определяется как функция угла /,
а равенство (1.74) позволяет выразить I через ф пли ф через /.
Обозначим через о, т, п проекции вектора угловой скорости
со тела относительно неподвижной системы координат Gi|irji£i
на оси Mxi, My\, Mz\. Для пахождения величин о, т. п
представим вектор со в виде суммы
СО = COi + С02,
где coi — вектор угловой скорости тела относительно движущейся
системы координат Mxyz, а сог — вектор угловой скорости
системы координат Mxyz относительно неподвижного трехгранника
Проекции /?*, </*, г* вектора coi на оси Gg, Grj, G£
вычисляются при помощи кинематических уравнений Эйлера
р* — \р sin 6 sin ф + 6 cos ф, q* = \f) sin 8 cos ф — 6 sin ф,
Г* = if) COS 6 "Г ф.
Отсюда и из матрицы направляющих косинусов, задающей
ориентацию трехгранника G|t)^ относительно трехгранника Mx{y\Z\\
I ч Е
хг — sin I cos / 0
ух —cos/ —sin/ 0 (1-76)
*! О 0 1
получаем такие выражения для проекций со1х . со1у , со1г вектора
со! на оси Мхи My и Mzx\
(°i^ = Ф sin В cos (/ + ф) — В sin (I + ф),
^щ = — Ф sin В sin (Z + ф) — 9 cos (Z + ф), (1.77)
со1г = if cos 9 + ф,
141
Обозначим через о>2*, о>2У, o>2z и со2х1, Щу±, Щг± проекции
вектора (02 на соответствующие оси систем координат Mxyz и Mx\y\Z\
В соответствии с формулами (1.28) имеем
^уГ' ^^"Vl"' ^-£TW*"~*T (1'78)
Теперь из (1.76) и таблицы (1.1) гл. 1 получаем
®2хг =(— «иsin Z + a12cosZ)G>2x+(— a2lsm I + a22 cos Z) o>2|, +
+ (— %L S^n ^ + fl32 cos 0 ^гг*
^21/ = — (#n cos Z + a12 sin I) o23C — (a21 cos Z + a22 sin Z) <й2у—
— {a31 cos Z + «32 sin Z) co2z, (1-79)
<^2z1 = а,цр>гх + a2ff*2y + «зз^гг»
где а,ц выражаются через углы Эйлера \f, 8, ф по формулам
(1.3) гл. 1.
Величины о, т, п могут быть теперь найдены из (1.77) —
(1.79) при помощи соотношений
о = ©13Ci + co2v т = Ыщ + со2^, /г = co12i + (o22j. (1.80)
Для получения дифференциальных уравнении движения
твердого тела относительно центра масс воспользуемся уравнениями
(1.14) применительно к рассматриваемому случаю тела с острым
краем. В этих уравнениях Mi, M2, Л/з — проекции главного
момента активных внешних сил относительно точки М касания
тела и плоскости па оси Мх\, Му\, Mz\.
Вычислим еще величины 5Г*, Oi, xi, щ, qu (ii(i= 1. 2? 3),
содержащиеся в уравнениях (1.14).
Из (1.76) видно, что величины Сц таблицы направляющих
косинусов (5.7) гл. 1 таковы: с\\ = с22 ~ ~~ sm ^ см ==г~~c2i = cos I,
С33= 1; остальные величины Сц тождественно равны нулю.
Далее имеем
g = p(Z)cosZ7 7i = p(Z)sinZ, £ = 0,
s — (р'cos Z — р sin Z) Z, 71 = (p' sin Z + p cos 1)1, £ = 0
и из (1.12), (1.15) получаем
Qx = 0, q2 = — P, % = 0' 0i = P*» #2 = — P'*> q's = 0,
(1.81)
^g + </2т + д3/г = — рт, q[o + g2x + с/гп = (pa — p'x) /,
?i?i + ад2 + ял* = pp'f-
Выражение (1.11) для величины Т* прпнпмает вид
Г* = -*. игра (аз + и2) + ± [A (sin Z *a + cos Z • x)3 +
+ S(cosZ-a — sinZ.x)a + C/i2l- (l.*2)
142
11 наконец, из соотношений (5.15) гл. 1 получаем, что
Ol=0, т, =0, щ = -/. (1.83)
Уравнения (1.14) с учетом равенств (1.81) —(1.83) могут
быть теперь записаны в виде
(юр* + Asm11 + В cos2 /) -^ + (А — В) sin Z cos Z -J +
+ fwpp' + И — В) sin Z cos Z] la — (A sin2 Z + В cos2 /) Zt —
— {A — S) sin Z cos / •/ш + [wp2 + С — (A cos2 Z + fi sin21)] /it = Af1?
(A - B) sin Z cos Z ~ + (Лсов2 Z + /isiii2 Z) -g- +
+ (,4cos2Z + flsin4) Za —(Л —£)sinZcosZ.Zт —
—[C — (Л sia2 Z + В cos2 Z)] no + (A — B) sin Z cos Z-ht = Л/2, (1-84)
#np2 + С) -^ + wpp'Z/i + (Л — B) sin Z cos Z (a2 - т2) —
— [трг — (Л — В) cos 21] от = М3.
Уравнения (1.80), (1.84), (1.73) с учетом определяемой из
(1.72), (1.74), (1.75) зависимости угла Z от (р и будут искомыми
дифференциальными уравнениями движения тела с острым краем
по неподвижной поверхности. Интегрирование этих уравнений
дает величины м, и, \]г, 6, ф как функции времени.
§ 2. Движение тела сферической формы
по неподвижной поверхности
1. Тяжелый однородный шар на абсолютно шероховатой
горизонтальной плоскости. Пусть однородный шар движется без
скольжения по неподвижной горизонтальной плоскости.
Движение происходит в однородном поле тяжести. Массу шара
обозначим через т, радиус — через /?. Для исследования движения
шара возьмем неподвижную систему координат Oxyz с началом в
некоторой точке О опорной плоскости; ось Oz направим
вертикально вверх. Пусть М — точка касания шара и плоскости, а х,
у. z— координаты центра G шара. В системе координат Oxyz
скрость v центра шара и вектор GM задаются компонентами
х\ уч0 ц 0, 0, —R. Пусть со — вектор угловой скорости шара; его
компоненты в системе координат Oxyz обозначим через co.v, о)у, ш*.
Условие отсутствия скольжения (1.4) запишется в виде двух
скалярных равепств:
х = о)у/?, у = — ioxR. (2.1)
Для описания движения шара используем уравнения Аппе-
ля, приняв в качестве псевдоскоростей я* (i=l, 2, 3) величины
со*, (ои, coz:
Я1 = сох, Яг = o>i/, Дз== wz. (2-2)
143
Главные центральные моменты инерции шара А, В п С
одинаковы и равны 2/5mR2. Выражение (3.28) гл. 1 для энергии
ускорений S шара принимает вид
5=4" mwG + -g~ mi?2(°2 = 4"щ (^2 + #2) + -§" mi?2 fa* + (0* + со*)-
(2.3)
Продифференцировав обе части равенств (2.1) по времени и
воспользовавшись соотношениями (2.2), получим х = шу/? = Ягй,
y = — <s>xR = — niR- Выражение (2.3) для £ теперь можно
записать в виде
S = -L шД» [7 (я* + л|) + 2л|]. (2.4)
Единственная активная сила, приложенная к шару,— сила
тяжести — пе совершает работы при движении шара, поэтому все
обобщенные силы IL, соответствующие псевдокоординатам nt
(i = 1, 2, 3), равны нулю.
Уравнения Аппеля
^ = П, (i- 1,2,3)
дают я£ = 0, т. е., согласно (2.2), величины w*, oy, о>2
постоянны. Таким образом, вектор угловой скорости (о во все время
движения шара постоянен в неподвижной системе координат Oxyz
и, следовательно, в любой жестко связаниоп с шаром подвижной
системе координат.
Так как величины &х и ow постоянны, то из (2.1) следует,
что величина скорости и центра шара постоянна по величине.
Направление v также постоянно и
перпендикулярно вектору со. Если со* = щ =
= 0, (0*^0, то шар находится в режиме
чистого верчения вокруг вертикали с
постоянной угловой скоростью о2; центр
шара при этом неподвижен.
Ввиду того что вектор v постоянен в
абсолютном пространстве, левая часть
уравнения (1-2) равна нулю.
Приравнивая нулю правую часть этого уравнения,
получаем, что при движении шара
нормальная реакция плоскости равна
весу шара, а спла тренпя равна нулю.
Если со| + <&1 Ф 0, то след точки М касания на плоскости —
прямая линия, а на поверхности шара — окружность радиуса р,
плоскость которой перпендикулярна со п находится от центра
шара на постоянном расстоянии d (рис. 30); величины р и d
определяются начальными условиями. При со* + <&у = 0 оба
следа вырождаются в точки.
144
Кратко рассмотрим движение однородного шара по
абсолютно шероховатой плоскости, вращающейся вокруг заданной
вертикальной оси с постоянной угловой скоростью. Если последнюю
обозначить через Q, то условия отсутствия скольжения
запишутся в виде равенств
х = Wj,/? — Qyy у = — (s>xR + Их.
В качестве величин я* примем две проекции скорости центра
шара на оси Ох, Оу н проекцию абсолютной угловой скорости
шара на вертикаль:
Л1 = X, Яг = У, Яз = 0>z.
Если в выражении для энергии ускорений отбросить
величины, не зависящие от ям то получим
S = -j-j- т (я? + я|) + -g- m [2Q (щп2 — п^щ) + я|].
Все обобщенные силы П* (i = 1, 2, 3) равны нулю. Третье
из уравпенпй Аппеля dS/djii = 0 (i= 1, 2, 3) дает
о2 = const,
т. е., как и в случае неподвижной опорной плоскости, угловая
скорость вращения шара вокруг вертикали постоянна.
Первые два из уравнений Аппеля имеют вид
При Q Ф 0 общее решение этих уравнений имеет вид
х = а + f5cos(y Q(t + v)), у = 6 + psin {^Q(t + ?)),
где а, р, 'у, б — постоянные величины, определяемые по
начальным условиям.
Таким образом, при Q Ф 0 центр шара в неподвижной
системе координат движется по окружности радиуса (} с центром в
точке х = а, у = б (в частном случае, когда Р = 0, центр шара
покоится). Угловая скорость движения центра шара постоянна
и равна 2hQ\ она пе зависит от радиуса и массы шара, а
также от начальных условий движения и полностью определяется
величиной угловой скорости вращения опорной плоскости.
2. Шар Чаплыгина на горизонтальной плоскости. Рассмотрим
уравнения (1.40) движения без скольжения твердого тела по
неподвижной плоскости, предполагая, что проекции Л/i, Л/2, Л/з
главного момента активных внешних сил относительно точки
касания М тела п плоскости зависят только от гауссовых
координат и, v точки М. Именно этот случай имеет место при
движении тяжелого твердого тела по горизонтальной плоскости.
Получим выражение для величин Л/,- {1=1, 2, 3) в зтом случае.
Так как потенцпальная энергия тела равна П = Trnge, то для
10 а П. Марксев
145
элементарной работы 6Л силы тяжести за время dt имеем
такое выражение:
ЬА = —6П = — tldt == ±mgedt.
Считая, что линии и = const, v = const являются линиями
кривизны поверхности тела, из (1.31), (1.32), (1.40), (1.52)
получаем, что
i до 1 an
Ус dv Уе аи
Используя это равенство, получаем такое выражение для
элементарной работы силы тяжести:
Отсюда следует, что
Л/г=±/пде-^^=, M, = =Fi»*p|f:^, ^з = 0, (2.5)
где берется верхний или нижний знак в зависимости от того,
направлен ли вектор е3 вверх или вниз.
Согласно (1.37) функция Г* есть квадратичная форма от
о, т, п, коэффициенты которой являются функциями только от
и, v. Поэтому из первых шести уравнений системы (1.40)
можно исключить величину dQ/dt и получить систему пяти
дифференциальных уравнений первого порядка относительно о, т, л,
и, v. Если этп уравнения проинтегрированы, то остальные
величины В, iiu v\ найдутся из третьего, седьмого и восьмого
уравнений системы (1.40) при помощи квадратур.
Если активные виешипе силы имеют потенциал, то
упомянутые пять уравнении допускают интеграл энергии. Замечая
еще, что из этих уравнений может быть исключено время,
приходим к следующему выводу [33]: задача о движении без
скольжения твердого тела по плоскости под действием сил,
имеющих потенциал, зависящий лишь от координат ищ v точки
касания, решается интегрированием трех совместных
дифференциальных уравнений первого порядка н квадратурами.
В качестве примера рассмотрим движение тяжелого
неоднородного тара по горизонтальной плоскости. Предполагаем, что
центр тяжести шара лежит в его геометрическом центре.
Главные центральные моменты инерции шара считаем различными.
Задача о движении такого шара решена С. Л. Чаплыгиным
[204]. В дальнейшем шар с указанным распределением масс
будем называть шаром Чаплыгина.
Покажем интегрируемость задачи о движении без
скольжения шара Чаплыгина по горизонтальной плоскости, следуя
статье П. В. Воронца [33]. Пусть R — радиус шара. Тогда
| = R sin и cos v, ц = R sin и sin v, £ = R cos ы,
E = R\ G = R2 sin2 щ L = -iJ, N^-Rsitfu, (2.6);
146
и из (1.21), (1.24), (1.25) имеем
Си = COS U COS У, Ci2 = COS U Sin У, Ci3 = — Sill W,
C2l= — Sin У, C22 = COSy, C23 = 0, (2.7)
C31 = sin и cos у, С32 = sin м sin у, C33 = cos w.
Получаемые из (1.40), (2.5) —(2.7) дифференциальные
уравнения, определяющие величины о, т, п, и, v как функции
времени £, будут такими:
d (дТ*\ ОТ*, , . ч d /ЭТ*\ ОТ*, . . ч
причем функция Т* в соответствии с (2.6), (2.7) имеет вид
1.1 .-»
Т*= ~y тВг (а2 + т2) + -у [А(о cos и cos у — т sin у + /г sin гг cos у)"- +
+ 5 (о cos и sin у + т cos у + /г sin и sin у)2 + С (а sin м- — п cos и)2].
(2.9)
Уравнения (2.8) допускают интегралы
Т* = const, ^* = const, («£)* + (££)*_ const. (2.10)
Если из этих интегралов определить величины о, т, п как
функции от и и у, то траектория точки касания М на
поверхности шара может быть найдена путем интегрирования
уравнения
cdu + xsin udv = 0, (2.11)
являющегося следствием четвертого и пятого уравнении
системы (2.8), а время затем введется квадратурой
t = — 1 — + const.
Покажем, что наличия трех интегралов (2.10) достаточно
для того, чтобы уравнение (2.11) могло быть проинтегрировано
в квадратурах. Согласно сказанному выше это будет означать,
что интегрирование системы (2.8) может быть сведено к
квадратурам.
Для доказательства достаточно найти последний множитель
Якоби [188] системы (2.8). Для удобства вычислений введем
вместо о и п новые переменные о' и п по формулам
g = g' cos и — п' sin и, п =o'sin 11+ п' cosu. (2.12)
Из (2.9) и (2.12) получаем
Г* =4 (яц<7'2 + я22т2 + a3Sn'2 + 2я12с'т +■ 2a13aV), (2.13)
10* 147
где введены обозначения
а\ 1 = mR2 cos2 и + A cos2 и + В sin2 v,
G22 = mR2 + -4 sin2 г; + В cos2 г;,
«зз = mR2 sin2 гг + С, «i2 = — (Л — Б) sin г; cos г;, v ' ;
«13 = —mR2 sin u cos u.
На осыованпп (2.12) имеем
дТ* дТ* дТ* . дТ* 6Т* . ЗГ*
т—г = -т- cos и Н—— sin гг, -т-т- = г— sin и -f -т— cos гг,
до до On дп ао да
и в новых переменных уравнениях (2.8) становятся такими:
d (дТ*\ дТ* , . дТ* d (дТ*\ (дТ* дТ* . \ ,
(2.15)
d [дТ*\ дТ* дТ* , du dv , .
c/£ ^ c>/i'y do CT dt dt °
Разрешим эти уравпения относительно производных от
неизвестных функции. Для этого положим
дТ* _ дТ* __ дТ* _
Если обозначить через К кинетическую энергию Г*,
выраженную через м, v, ри /?2, ръ-
Т* = К(щ v, ри /?2, /?з),
то на основании свойств преобразования Лежапдра [34] имеем
равенства
дК дК , дК /0 ло.
с = -г—, т = г—, гс = т—, (2.16)
^ дР2 °РЪ V
так что уравпения (2.15) могут быть записаны в виде
следующей системы уравнений, разрешенных относительно
производных от неизвестных функций:
fL - 17. § = V, % = />, (i = 1, 2, 3), (2.17)
где
дК Т7 Ж ж М'
n ^ t дК п / i \дК
Последний множитель Якоби |я удовлетворяет уравнению
■£ (V") + -% (И + ^ (ИЛ) + ^ (№) + щ (№) = О'
148
где и, v, pi (i = l, 2, 3) суть правые части уравнений (2.17).
Уравнение для множителя можно представить в виде
~Г~ Л,. ~Г ,)„ I™ Ли "•" Ял "Т~ Ли
df ^ 0м cto с^ dp др.
з
Подставив сюда выражения для правых частей уравнений
(2.17), найдем, что
din и &*К , д2К , &К , г^2/Г .
-^г" — ■=;—; И . . ctgи — -г—т f р2
—^ctglicit ди др2 dv Ор± & dv dp3 1 * <?//2
— Pi 1—о- ctS И + Pi о о Pa -> ^— = 0. (2.18)
Но свойства преобразования Лежандра дают равенства
дК _ __дТ* дК___дТ*
ди ди ' dv dv
Отсюда и из (2.9), (2.12), (2.1С) следует, что
ок „ /дк . , дк \[ок ок . \
—- = mR- ( — sin и + -T—cosu | f^—cos и — -—sinw ,
ди [dPl дръ )[dPl dps )
дК дК дК , жл(дК . , дК \аК .
тг- = рл -г р2 о Ь га# —smii + — cos и -— sin ы,
dv lldp2 I2dpl \дрх ap3 J 0p2
и уравнение (2.18) для множителя и. можно представить в виде
d In u , дК . ™ / д2К . , д2К \ (дК
—— + -r—ctgu — mR- -—— sin и + -—г— cost/ f^—cosw —
dt др2 - \&Pldp2 ^ dp2 dPg j \dPl
дК . \ , m\(&K #K\ .
— t— sin и + mR* — sin и cos и +
*з / [Wl dpi)
+ -fi— (cos2 M - sin2 u) ] ^ = 0. (2.19)
Использовав представление функции Г* в виде (2.13),
получим следующее явное выражение для функции К:
К = 2д- [a22a33Pi + (апа33 — «D Рг + (яи°22 ~ ^г) Рз +
+ 2а12а13р2р3 — 2а22а13р3р^ — 2а33а12р1р21, (2.20)
где введено обозначение
А = аия22я33 — а22а\ъ — «33^12- (2.21)
Уравнение (2.19) на основании (2.14) и (2.20)
перепишется так:
d In Ц , дК mR* . D* , -ч . (дК дК . \
~~dT + If ctg и + ~Г ^12 ^д" + С>sin w (df cos w "" df sln wJ ""
д [^13 (с22йзз — ^3i«22 + ^12) + mR2a22al3 (cos2 и — sin2 w)] — =
0p2
-0.
149
Но из (2.14) и (2.21) получаем
-т- = 2а13 {а22азз — Яц^гг + ^12) + 2a22a13?nR2 (cos2 и — sin2 и),
|£ = 2al2mR2 (mR* + С) sin2 и.
Поэтому последнее уравнение можно записать в виде
d\n\i . дК , , 1 дА (дК . ж\ 1 адж Л
^ + ^ctg^+^^^ctg^^-J--^-- = 0,
или, используя уравнение (2.17), в виде
—^ ctg и-^- + 2д &, "5Г + 2\ ~д~и It '
Отсюда получаем
sin u
где jlio — произвольная постоянная, а Д дается формулой (2.21).
Таким образом, на основании теории последнего
множителя Якоби рассматриваемая задача о движении без скольжения
шара по плоскости должна сводиться к квадратурам.
Фактическое получение квадратур представляет собой очень
трудоемкую проблему. Она разрешена С. А. Чаплыгиным в его работе
[204]. В этой же работе Чаплыгин дал геометрическую
интерпретацию движения. Аналитическое представление решения
Чаплыгина весьма сложно. В работе [134] для анализа
движения в рассматриваемой задаче применяются асимптотические
методы; в предположении, что шар близок к однородному,
получено приближенное решепие задачи, допускающее наглядное
аналитическое и геометрическое представления движения.
Соответствующие результаты работы [134] изложены в п. 8 § 9
данной главы.
3. Уравнения движения шара по неподвижной поверхности
заданной формы. Будем считать, что центр тяжести шара
находится в его геометрическом центре, а центральный эллипсоид
пнерции есть сфера. Масса шара равняется т, радиус R.
радиус инерции шара относительно его диаметра обозначим через к.
За линии и и и на поверхности шара п линии iii и vi на
неподвижной поверхности принимаем соответствующие линии
кривизны. Координаты Гаусса и, v на поверхности шара
зададим по формулам (2.6).
Выражение (1.37) для кинетической энергии шара
принимает вид
Г* = ± т ц№ + А-2) (а2 + г1) + к*п% (2.22)
Из (1.35) и (2.6) имеем
oi = sin ш;, Ti = — й9 n\ = — cosuv. (2.23)
150
Поэтому согласно (1.36)
а = sin и-и Ч—т= sin Q-vx 7=cosd'Uv
т = — и + —jh= sinB-U! + -^=cosB-rx, (2.24)
у Ег уОг
1 1дЕл ' дСтг ' \ А
Ha основании (2.6), (2.22) и (2.23) уравнения (1.38)
будут такими:
m(R2 + к2)'с + ткЦх+и)п- m(R2+k2) (п + cos u-v)x = Mu
т {R2 + к2) т + т (R2 + к2) (п + cos и ■ и) с -
— тк2(с — sin и • v)n = Л/2, (2.25)
тк2 (п — ой — sin и ■ xv) = Л/3.
Добавляя к уравнениям (2.24), (2.25) условия (1.39)
отсутствия скольжения:
llEiux = R sin 6 • и 4- R sin и cos 0 • v4
— (2-26)
1 Gxv\ = R cos 8 ■ и — R sin и sin 9 ■ i\
получим замкнутую систему уравнений, описывающую движение
без скольжения шара, центр масс которого совпадает с его
геометрическим центром, а центральный эллипсоид инерции
является сферой, по заданной неподвижной поверхности.
4. Тяжелый шар на неподвижной сфере. Пусть поверхность,
по которой движется шар, будет сферой радиуса R\. Пусть
^lSi1!^»—система координат с началом в центре этой сферы и
ось G^i направлена вертикально вверх. Имеем
|i = /?i sin zii cos tfi, rji = R\ sin щ sin V\, £i = R\ cos uu
Ei = ^i» G, = R\ sin2 uv Lj = — Rl4 iV3 = — Rl sin2 uL.
Уравнения связей (2.26) будут выглядеть так:
Riui = i?(sin8 • н +sin w cos 8 ■ г;),
(2 27)
Risinit[Vi= R(cosQ • й — s'mus'mQ • v). v ' '
Задаваемые формулами (2.24) величины о, т и п проекций
угловой скорости шара на оси и, v и на направление нормали к
неподвижной сфере, проведенной через точку М ее
соприкосновения с движущимся шаром, будут такими:
а = —^— sin и-*, т = д—±и,
п = — cosu-v — созщ-Vi + Q. (2.28)
151
Разрешив равенства (2.27) относительно й, г), получим
Я. П.
и = -тт (sin 8-Hi + cos8 sin w, -у,), i> = -75—^—(cos А-и,—
7? * * ' Li/' д sin M \ 1
— sine sin u^Vi), (2.29)
и выражения для с и т из (2.28) могут быть записаны в виде
о = —^—- (cos 0 -Mj — sin 6 sin 1^ • иг),
т= ^-^(sinG-i^ -f cos 8 sin u^-v^). (2.30)
Используя выражение для потенциальной энергии шара
n = /rcg(7? + fli)cosu,, (2.31)
найдем входящие в уравнения движения (2.25) проекции М\, Мг
и М% момента внешних сил (в рассматриваемой задаче — силы
тяжести) на оси щ v п нормаль к сфере. Имеем такое
выражение для элементарной работы 8А силы тяжести за время dt\
6А = —6\T = mg(R + R{)smin -бщ = mg(R + 7?i)sin щ • uidt.
Преобразуем это выражение, опираясь на соотношения
(2.27), (2.28). Получим
6Л = mg(R + Ryj sin иг jr- (sin 8 -udt + sin u cos Q-vdt) =
= mgR sin ux [cos 0 (acft) — sin В (т dt)]*
Отсюда следует, что
Мх = mgR sin щ cos В, М2 = — mgR sin щ sin 6, Л/з^О. (2.32)
Из (2.28) и (2.30) следуют такие легко проверяемые равен-
R + R -
т sin 0 — о cos В = jz—- Mj,
т cos 8 -f a sin 6 = -—х sin м,_ - vlt (2 33)
т sin 9 — а cos В = ^— их 4-
i? + i?t
(2,34)
я 4-я, а
т cos 6 4- о sin 0 = д— -^- (sin wx-L,i) —
Л + ^t • ■ •
jz—- (И + COS И • У + COS Mj • Tj) Uj»
Сложим первое уравнение из (2.25), умноженное на cos 6, со
вторым уравнением, умноженным па —sin 6; затем сложим пер-
152
вое уравнение, умноженное иа sin 8, со вторым уравнением,
умноженным на cos В. Преобразовав полученные суммы при
помощи формул (2.33), (2.34) и присоединив к ним упрощенное
при помощи (2.28) третье уравнение из (2.25), получим
следующие три дифференциальные уравнения, эквивалентные
системе (2.25) и описывающие движение без скольжения шара
по неподвижной сфере:
d / - ' ч , * ' . Ж2 п
—-(sin ил -г,) + cos и, -ил? v -Ь j—z 5; mii = l'«
dt V 1 U T 1 1 1 -Г ^2 + A2) ^R + Rj
j2
.2
tf ", . * 2 Я*
if — SHI W^OSWt-1?! — —; 57 ft Sill Mi «l^ =
dt2 * (|?2 + Л2)(Д + Л1)
|?я2
dt
(Л2 + Л2)(1? + Л1)
sin Mj, (2.35)
Уравнения (2.35) допускают следующие первые интегралы:
Т7Х = и\ + sin2 i/x -i?f + a cos мх = а = const. (2.3Й)
F2 = sin2 И!-У! + Ъ cosi^ = р == const, (2.37)
У3 = sin2 щ + cos2 w2 = 1, (2.38)
У4 = п = п0 = const. (2.39)
Здесь введены обозначения
2gR~ т к2пВ an , 2
Л-(Ла + А-2)(Л + Д1)' = ~(/?2 + *2)(/? + Я1)~~2^7?
Смысл последних двух интегралов очевиден. Интеграл V\
есть интеграл энергии, a Vi выражает тот факт, что проекция
на вертикаль кинетического момента шара относительно точки
касания его поверхности с неподвижной сферой постоянна во
все время движения.
Наличие интегралов (2.36) — (2.39) дает возможность
произвести полное интегрирование системы уравнений (2.35). Для
интегрирования исключим из (2.36), (2.37) величину щ и
сделаем замену ar = coswi. Получим
[inj= <а -ах) (1 - *2) - (Р -bxf = f м- (2/l0)
Полином третьей степени f(x) принимает положительные
значения при #->-+оо? отрицательные при # = ±1 (если |р| ^
=^\b) u положительные при некоторых значениях х, лежащих
между —1 и +1, так как в реально существующем движении и\
имеет действительные значения. Отсюда следует, что полином
f(x) цмеет три вещественных корня ej, ег, £з, удовлетворяющих
условию —1 <ej < с2< 1 <с3<+оо. Для интегрирования урав-
153
нения (2.40) введем переменную z согласно равенству
x = el + (e2-el)z2. (2.41)
Подставив (2.41) в (2.40), после необходимых преобразований
получим дифференциальное уравнепие
*2 = а-^^- (1 - z2) (1 - xV), (2.42)
где для краткости записи введена величина х,
удовлетворяющая условиям
Уравиеппе (2.42) можно записать в виде
± —г = -гг- Vа (Со — еЛ dt.
Таким образом, задача о нахождении переменной х свелась
к обращению эллиптического интеграла. Если принять, что при
£ = 0 х = е\, то из последнего уравнения и из (2.41) получим
х = ех + (е2 - е,) sn2 ( ^"^Ч*
Это соотношение дает mj как функцию времени. Переменная Vi
может быть теперь найдена из интеграла (2.37) при помощи
квадратур. След, вычерчиваемый точкой касания на
неподвижной сфере, будет лежать между параллелями х = в\ и х = е2.
В частном случае, когда е\ = е%, он вырождается в параллель
х = е\.
Отметпм, что пптегралы (2.36) — (2.39) имеют тот же вид,
что и классические интегралы в задаче о движении тяжелого
твердого тела в случае Лагранжа [2]. Рассматриваемая задача
о движении без скольжения шара по неподвижной сфере
радиуса R\ вырождается в классическую задачу о «волчке
Лагранжа» прп R\ = 0. Подробное исследование движения шара по
сфере содержится в книгах [43, 100, 138, 156, 188].
Следуя [20], рассмотрим вопрос об устойчивости в случае
движения шара, аналогичного «спящему волчку Лагранжа»: шар
вращается с постоянной угловой скоростью гсо вокруг
вертикали, проходящей через его центр и наивысшую точку
неподвижной сферы. Этому движению отвечает частное решение
уравнений (2.35) вида
й 1 = 0, vi = 0, и = ло, sin iii =0. coswj = l.
Устойчивость будем рассматривать по отношению к переменным
Mi, sinu\V\9 щ sin^i, cosui.
154
Пусть в возмущенном движении
U{ = Х\, Sill UiVi =Х2, П = По~\- Хъ, Sill Щ = .Т4, COS III = 1 + Х$.
Для исследования воспользуемся теоремой Ляпунова об
устойчивости, построив функцию Ляпунова V по методу Четаева
в форме связки первых интегралов [208]. Пусть
где Яиц — вещественные постоянные. Если их можно выбрать
так, чтобы функция V была зиакоопределенной, то
рассматриваемое движение шара будет устойчивым. Отбросив в фупкции
аддитивную постоянную, получим
Рассматривая функцию V как сумму трех квадратичных
форм: первой относительно хи второй относительно хъ, х^ и
третьей относительно #з, х$, получаем условие ее
знакоопределенности в виде трех неравенств:
,2
х*--йгх+-г<0- м>0'
^(^-■)-ИЙГ>^- м
Первому из зтих неравенств можно удовлетворить выбором
вещественного X, если выполняется условие
»S>^r- (2^4)
ак
Если такой выбор к сделай, то второе и третье из неравенств
могут быть удовлетворены, если положительную величину \х
взять превосходящей критическое значение, определяемое
третьим из неравенств (2.43).
Таким образом, неравенство (2.44) является достаточным
условием устойчивости. Если через А обозначить момепт
инерции шара относительно его дпаметра. то условие (2.44)
запишется в виде неравенства
А2??1 - 4mg (А + тЩ (R + Rt) > 0, (2.4Д)
которое при /?i = 0 переходит в условие Мапевского. Если шар
однородный, то достаточным условием устойчивости будет
155
выполнение неравенства
35*(Я + Я,)
»о> -г •
5. Устойчивость вращения шара па вершине поверхности
двойной кривизны. Пусть шар, обладающий геометрией масс
предыдущего пункта, движется в однородном поле тяжести по
заданной неподвижной поверхности. Шар может совершать
такое движение, когда он касается верхней точки опорной
поверхности произвольной точкой своей поверхности и вращается с
произвольной постоянной угловой скоростью вокруг вертикали.
Исследуем устойчивость такого движения шара.
Пусть R — радиус шара, a R\ и Яг — радиусы кривизны
опорной поверхности в ее верхней точке. Величины R\ и Ri
произвольны. С шаром жестко свяжем систему координат G|ri£
с началом в его центре. Будем считать, что точка касания шара
и неподвижной поверхности в невозмущенном движении имеет
координаты О, О, —R. С опорной поверхностью свяжем
неподвижную систему координат Gili-rjiEi с началом в ее верхней
точке и направленной вертикально вверх осью G\%\.
Ограничиваясь исследованием устойчивости в первом
(линейном) приближении, можно пренебречь в уравнениях
поверхности шара и опорной неподвижной поверхности
величинами выше второго порядка малости относительно возмущений и
считать, что в гауссовых координатах и, v и ui, v\ эти
поверхности задаются соответственно уравнениями
и
1 /и? »?\
Ь = «и 4i = - «v Ь = —z ущ + тг2 у <2-47>
Из (1.16), (1.21), (1.23), (1.25) следует, что
линеаризованные относительно Щ i\ щ, V\ коэффициенты первой п второй
квадратичных форм рассматриваемых поверхностей будут такими:
£ = 1, ^ = 0, G = l, L = ±, Л/ = 0, ^ = 4"' (248)
£1=1, ^ = 0. G2 = l, Lx = ± Л/1 = 0. Nx = ±.
Л1 Л 2
(2.49)
За уравнения движения примем восемь уравнений (1.14),
(1.29) и (1.34). Линеаризуем их. Линеаризация уравнений
(1.34), задающих условие отсутствия скольжения, н
последующее их разрешение относительно и, v дают
й = й\ sin В + v\ cos В, v = й\ cos 6 — tfi sin 8. (2.50)
156
Опираясь на (1.26), (1.28) и (2.48) —(2.50), представим
линеаризованные разности с — Gi, т —Ti, п — щ и уравнения (1.29)
в виде
V. U
о — (Ji = -тг sin 6 — -тг cos "»
т — Tj = -^- cos В + -тг-sin В, /г — пх = —; (2.51)
° - - (тг + зУcos е"* + (i + f2) sin e^
T = (тг + ^)sin e"i + (i + ^)cos ^ n = 4r ■ (2-52>
Линеаризация соотношений (1.30), (1.32) дает
<7i = 0, g2 = 0, За = — В; q[ = и, q2 = v, q2 = 0. (2.53)
Сохраняя в выражении (1.11) для кинетической энергии члены
не выше второго порядка относительно возмущении, имеем
Г* = 4"m f(/?2 + **> <°2 + т2) + Л2/г2); (2'54>
здесь m и к — масса и радиус инерции шара относительно
диаметра.
Найдем еще линеаризованные выражения для моментов A/i,
М2, Мъ силы тяжести. Пусть М — точка касания шара и
неподвижной поверхности. Потенциальная энергия шара вычисляется
по формуле
n = mg(fe, + й2),
где fei и fe — проекции векторов G\M и MG соответственно на
ось 6ч£[. При этом
*i
Если уравнение (2.47) неподвижной поверхности записать
в виде F = 0, положив
'-'♦-И***)-
то величина Ъ,2 будет, очевидно, третьей компонентой вектора
I grarf * I
С точностью до членов второго порядка малости отсюда
получаем, что
1 /«? г? \
157
Отсюда
Если отбросить несущественную аддитивную постоянную, то
выражение для функции П с точностью до членов второго
порядка малости относительно щу vx будет таким:
Для элементарной работы силы тяжести ЬА получаем
выражение
8.4 = -6П = -й£А = mgl—^щи,dt + -jH^i &)•
Подставив сюда величины ui, i>\, выраженные через о, т из
соотношений (2.52), получим
bA = mgR — f-^- cos6 — -^-sin6]a<U + | ^-sin6 + ^cos6]гйЛ•
„ / и v. \
Л/, = — mgR^ cos6 — -s~ sin 6 j.
\Ri Д2 )
Mt = mgR ( ^- sin 8 + ^~ cos e), M 3 = 0. (2.56)
Теперь можно выписать линеаризованные уравнения (1.14):
m(R2 + к2) а + тк2п ( J-sin6 + J- cose) — m(R2 + k^x^- =
= — mgR (^- cos6 — -^ sin o\
m (R1 + к2) т + mk2n (-^ cos 6 — ^- sin 6 1 + m (Я2 + к2) о -^ =
= mg-Я /A sin 6 + -^±- cos ft Y (2.57)
Восемь уравнений (2.50), (2.52), (2.57) и будут
линеаризованными уравнениями движения шара вблизи вершины
неподвижной поверхности. В частностп, в линеаризованной задаче
угловая скорость п вращения шара постоянна.
Из уравненпй (2.57) можно исключить угол 6. Для этого
сначала заметим, что из (2.52) вытекают такие равенства:
R + Д - R + R. -
a sin 0 + tcosB = RR ги^ a cos 6 — xsiaB = RR ux\ (2.58)
R '-Д. - R + R9 -
о cos 6 — т sin 6 = ^— z/j 4—д ni\n
a sin Й + т cos 6 = д„ vx -\ къ—- и^. (2.59)
лл2 "^ дя,
158
Если теперь первое уравнение из (2.57) умножить на —cos О,
а второе на sin 6 п сложить, а затем первое уравнение (2.57)
умножить на sin Э и сложить его со вторым уравнением,
умноженным на cos 6. то после преобразования получившихся сумм,
использующих (2.58), (2.59), придем к такой системе уравнений
относительно щ, V\:
d\ ш^п dvi .?Д- и =0
at2 B^R + Bjirf + k1) dt (R + Rj(R* + li*) х
d\ RRjfn dut g^____v =0
(2.G0)
Характеристическое уравнение этой системы имеет вид
Л4 + аЛ2+Ь = 0, (2.61)
где
Л!
(/?-ЬЯ,)(л + Л2)(л2 + А'2
Необходимые условия устойчивости определяются неравенствами
а^О, Ь^О, а2-4Ь>0. (2.62)
Если величины R + R\ и R + R2 имеют противоположные
знаки, то величина Ъ будет отрицательной; в этом случае уравнение
(2.61) имеет корень с положительной вещественной частью и
движение шара неустойчиво.
Если же величины R + R\ и R + R2 имеют одинаковые знаки,
то условия (2.62) эквивалентны одному неравенству
k4n2^(R2 + k2)g(2R + Rl + R2 + 2l(R + Ri){R + R2)). (2.63)
Если величины R + i?i и R + R2 отрицательны (т. е. шар
движется по внутренней поверхности чашки, выпуклой вниз), то
последнее неравенство выполнено при произвольных пч т. е.
необходимые условия устойчивости удовлетворяются при любой
угловой скорости вращения шара вокруг вертикали.
Когда величины /? + /?i и R + R2 положительны, неравенство
(2.63) может быть представлено в виде
п2> ^j^ g ( //ГТЖ+ VBT%)2, (2.04)
А"
1. е. необходимые условия устойчивости выполняются, если
угловая скорость вращения шара будет не меньше некоторой
критической величины, определяемой правой частью неравенства
(2.64). Другим путем это условие получено Э. Дж. Раусом [136].
В частном случае, когда R\=R2> 0, т. е. когда шар
движется по внешней поверхности неподвижной сферы радиуса i?i, пра-
159
вые части неравенств (2.64) и (2.44) одинаковы, и в этом
случае необходимые н достаточные условия устойчивости совпадают
(с точностью до знака равенства).
6. О применении некоторых обобщений теоремы об
изменении кинетического момента в задаче о качении твердого тела по
неподвижной поверхности. В § 4 гл. 1 рассмотрены теорема об
изменении кинетического момента системы и некоторые ее
обобщения. Од по из обобщений состоит в следующем [138, 188,
203]. Пусть некоторая ось и имеет неизменное направление
в пространстве п постоянно проходит через движущуюся точку
А. Пусть связи, наложенные на систему, идеальны и в любой
момент времени допускают виртуальный поворот системы как
одного твердого тела вокруг оси и. Тогда если в каждый момент
времени выполняется условие (4.9) гл. 1
(vGXvA)-e = 0, (2.65)
где vG и vA — вектор скорости центра масс системы и точки Л,
а е — единичный вектор оси и, то производная по времени от
кинетического момента системы относительно оси и равна
сумме моментов всех активных сил, действующих на систему,
относительно этой оси:
5 = M<f>. (2.6G)
Из (2.66) следует, что если в любой момент времени Ми = 0,
то существует первый интеграл Ки = const.
Применим это обобщение теоремы об изменении
кинетического момента в задаче о движении без скольжения твердого
тела, ограниченного выпуклой поверхностью £, по неподвижной
поверхности Si. Считаем, что поверхности S и Si
соприкасаются не более чем в одной точке и допускают дважды непрерывно
дифференцируемую параметризацию. Связи, которые в данной
задаче являются условиями отсутствия скольжения, идеальны
и допускают виртуальный поворот тела вокруг произвольной
оси MN, проходящей через точку касания М тела с
опорной поверхностью. Следуя статье А. С. Сумбатова [182].
покажем, что в случае движения без скольжения твердого тела по
неподвижной поверхности теорема об изменении кинетического
момента тела относительно осп и в форме (2.66) имеет место
только тогда, когда тело представляет собой шар, центр масс
которого совпадает с его геометрическим центром, а
неподвижная поверхность либо сферическая (в частности, плоская),
либо произвольная цилиндрическая, причем в первом случае ось
и имеет произвольное заданное направление, а во втором
случае она параллельна образующей цилиндра.
Действительно, пусть Mxyz — прямоугольная декартова
система координат с пачалом в точке касания М тела и опорной
поверхности. Осп Мх и My направлены по касательным к
линиям кривизны опорной поверхности Si, a Mz — по внутренней
160
нормали к поверхности тела S в точке М. Через Ль Лг п кх ,
Л(21) обозначим главные кривизны поверхностей S и S\ в точке 71/,
а через kg п Л^ — геодезические кривизны линий L и Lx —
следов, вычерчиваемых точкой М соприкосновения тела и опорной
поверхности на S и S|, которые вычислены в точке М.
Компоненты абсолютной угловой скорости тела со в системе Mxyz
будут такими [138]:
соЛ = — k2v2 cos ф + kxv± sin ф — к2 v* '
соу = k2v2 sin ф + kjUL cos ф + к^}и(^\ coz = (kg — Л^ ) v,
где l'i, г;2 и i^1*, г2г—проекции вектора скорости v перемещения
точки М по кривой £ (или по Li, что одно п то же в силу
отсутствия скольжения) соответственно на касательные к лпнп-
ям кривизны на S и на оси Мх, My; v = у v\ + v\ =
ЛГ (,)2 77^2"
= У v\ + v2 • а ф — угол между первой линией кривизны на
S и осью Мх. Так как
ut = v(jp cos ф — и2г) sin ф, i;2 = v^ sin ф + v2x) cos ф,
то выражения для величин со*, со„ можно записать в виде
cojc = {kY — к2) v[1] sin ф cos ф — (к2 + к2) v(2l\
соу = {кг + Л*1*) v^ — (кг — к2) v2x) sin ф cos ср.
Здесь %ь ^2 — вычисленные в точке М кривизны нормальных
сечений поверхности тела S вдоль координатных осей Мх, My:
%\ = Л| cos2 ф + Лг sin2 ф, %2 = кх sin2 ф + Лг cos2 ф.
Из условия отсутствия скольжения vG = со X MG находим
компоненты vx, vyy vz вектора скорости центра масс \с:
vx = z [(&! + к[1)) г[г) — (kt — к2) l41} sin ф cos ф] — у (kg — Л(/}) и,
vy = x(kg— k(g}) v — z [(kL — Л2)i^1* sinфcos ф — (k2 + к(2г)) и(2г)],
Vz = y [(Лх — k2) г[1] sin ф cos ф — (fc2 + ft(21}) v(2l)] —
— x[{k, + k[v) v™ — (k± — k2)v(21}sinфcosц]
где х, у, z — координаты центра масс.
Если теперь компоненты единичного вектора е оси MN
обозначить через а, [}, *у, то условие (2.65) запишется в виде
равенства
(oiv2v - pi/») [у [{к, - fc2) v(? sin ф cos Ф - (Л2 + Л(21}) и^] -
— х [(Лх + к?) и[1} - (к, - Л2) и? sin ф cos ф] } +
+ У [(*, - W) * W + yv{?) + «4V (£2 + *!» - Л, - #>) -
— z (Лх — Л2) (vi1^ — v21)2j sin (f]cos Ф] = 0. (2.67)
11 А. П. Маркеев 161
Для справедливости равенства (2.66) последнее
соотношение должно выполняться для любых кинематически возможных
движений тела по опорной поверхности. Это означает, что
равенство (2.67) должно выполняться тождественно относительно
независимых величин ср, v^, v%\ kg— kg. Рассматривая левую
часть соотношения (2.67) как квадратичную форму
относительно pi1, Го1 , kg—kg\ получаем, что это возможно только в том
случае, когда на любых движениях тела
.r = 0, jr = 0, у(кг — к^ = 09 t(*(i1} —*21})в0- (~08)
Первые два равенства из (2.68) показывают, что все
нормали к поверхности тела пересекаются в его центре масс G.
Принимая G за начало системы координат Ggn£, запишем условие
коллинеарности нормали и радиуса-вектора r(|(i/. i>), т)(м. i;),
£(м, v)) поверхности S(w, v — гауссовы координаты поверхности):
" I " П ^ I '
Отсюда следует, что (r'2)u = (r2)„ = 0, т. е. длина вектора г
постоянна. Следовательно, S — сфера с центром в точке G, т. е.
тело представляет собой шар, центр масс которого совпадает с
его геометрическим центром.
Таким образом, А| = йъ и третье равенство из (2.68)
удовлетворяется. Четвертое же равенство из (2.68) позволяет теперь
выяснить, какую форму должна иметь опорная поверхность Su
чтобы имело место равенство (2.66). Возможны два случая.
В первом случае в точке М поверхности Si у Ф 0. Тогда к± =
= *?\ т. е. точка М поверхности S\ омбилическая. В силу
непрерывности у и постоянства направления оси MN на поверхности
Si пайдется некоторая окрестность точки Л, в каждой точке
которой ^ ^ 0. Следовательно, все точки этой окрестности
омбилические, а поэтому указанная окрестность является частью
сферической поверхности [39].
Во втором случае в точке М поверхности Si у = 0. Если это
равенство справедливо во всех точках некоторой окрестности
точки М на поверхности Si, то эта окрестность представляет
собой часть цилиндрической поверхности, образующая которой
параллельна оси MN. Если в любой достаточно малой
окрестности точки М на поверхности Si есть точки, в которых у =^ 0,
то по доказанному они омбилические. В силу непрерывности
коэффициентов первой и второй квадратичных форм
поверхности Si главные кривизны будут одинаковы и в точке М. На
поверхности найдется некоторая окрестность точки Л/, все точки
которой омбилические. Если бы это было не так, то по
сказанному выше, любая сколь угодно малая окрестность точки М на
поверхности Si содержала бы участок цилиндрической
поверхности. Но это противоречило бы знакоопределенности второй
162
квадратичной формы в омбилической точке М. Следовательно,
некоторая окрестность точки М па поверхности Si является
сферической.
В статье [185] А. С. Сумбатов исследовал восирос о
движении без скольжения однородного шара по неподвижной
поверхности с целью выяснить, когда в этой задаче теорема об
изменении кинетического момента относительно проходящей через
точку касания шара и опорной поверхности подвижной осп (не
обязательно имеющей постоянное направление) может быть
записана в виде равенства (2.66). Путем анализа
кинематического условия (4.8) гл. 1
т (vG X vA) ■ е + КА - е = О
в [18Г>] установлены виды опорных поверхностей и
соответствующие им подвижные оси и, для которых справедливо
равенство (2.66). В частности, в случае движения шара но
неподвижной сфере осью и может служить общая нормаль к
соприкасающимся сферическим поверхностям.
Сказанное позволяет пояснить причину существования
интегралов (2.37) и (2.39) в задаче о движении без скольжения
однородного шара по неподвижной сфере. Интеграл (2.37)
выражает постоянство кинетического момента шара относительно
поступательно движущейся оси вертикали, проходящей через
точку касания шара и опорной сферы, а интеграл (2.39) —
относительно общей нормали к соприкасающимся поверхностям.
Оба этих интеграла существуют, так как моменты единственной
активной силы — силы тяжести — относительно заданных
подвижных осей равны нулю.
Отметим еще, что в данном параграфе рассмотрены только
некоторые задачи о движении без скольжения тела сферической
формы по неподвижной поверхности. Другие многочисленные
задачи о движении без скольжения тела сферической формы по
неподвижной поверхности можно найти, например, в работах
[21. 22, 42, 43, 62, 100, 138, 156, 198, 202, 203, 221, 272, 290].
§ 3. Движение тела вращения по неподвижной поверхности
1. Уравнения Воронца движения тела вращения по
горизонтальной плоскости. Теорема Чаплыгина. Рассмотрим задачу
о движении без скольжения твердого тела, ограниченного
поверхностью вращения, по неподвижной горизонтальной
плоскости. Предполагаем, что центр тяжести тела G расположен на
оси симметрии G£, а моменты инерции А п В тела
относительно главпых центральпых осей инерции G\ и Gn.
перпендикулярных G£. равны между собой. Движение происходит в
однородном поле тяжести.
За уравнения движения тела примем уравнения Воронца,
рассмотренные в п. 3 § 1. Прпняв параллели и меридианы за
11* 163
линии и и v соответственно, имеем
% = и cos v, r) = usini;, £ = £(u). (3.1)
Из (1.16) следует, что
£"1 +ЙГ F = 0' С = гЛ (3-2>
Отсюда и из (1.21), (1.24), (1.25) находим
cos v sin v 1 d£ •
Cl1 = VF* Cl2 = л/w1 °13 ~~ л/Ъ"fa4 °21 ~~ sinv" °22 ~~cosVy
_ n _ 1 dt 1 ^ . _ I
^23 — U, C31 - — ^= -^ COS У, C32 _ — ^_ — Sill Г, C33 - ^_.
(3.3)
Из (3.3) и (1.16) получаем
L = -±=d\ М = 0У tf," * (3.4)
УЕди1 Уе ди v '
Так как координатные линии и и и являются линиями кри->
внзпы на поверхности тела, то уравнения Воронца имеют
форму (1.60). В рассматриваемой задаче о движении тела
вращения эти уравнения можно записать в более простом виде.
Применяя обозначения § 1, имеем
p2="2+s2' г=Ы1~и^\ (3-5)
Эти величины будут функциями одной координаты и. Из (3.4)
следует, что
Из (1.10), (1.44), (1.45), (1.51), (1.52) и (3.1)-(3.4)
получаем [31] такое выражение кинетической энергии тела в
переменных и, v, й, v, п:
0 = 4- (8ии2 + 2612ui> + 2613шг + G22i;2 + 2Qialn + еззга2), (3.7)
где
*~ Е
6ц = Ц- (™Р2 + -% 6x2 = 0, 613 = 0,
G22 = £[Е(тр* + А)-т(P^J + (С-А) (^)']. (3.8)
е23=:Д[тер"Й~(С~Л)"ЙС4
езз = т (р2 - е2) + А + (С-А) г323.
Легко видеть, что коэффициенты (3.8) кинетической энергии
аависят только от координаты и.
164
Потенциальная энергия тела П = Trnge будет также
зависеть только от и.
Так как функции р, 0 и П не зависят от и, то уравнения
(1.60) принимают более простой вид:
d /д0\ до ' те /ТП ЛГГЧ ф "
ж (ш) = щ'-£ип - уш{LG - л Е) uv'
dt \дн ) ди да ^ yzG д* ди У EG V '
d /дв\ LN д& ' . me тг *
dt[dvj 1/EG <>" У EG
Одно из этих уравнений, например второе, мы можем
заменить интегралом энергии
6 + II = fe. (3.10)
Замечая, что
— = e23i; + e33w, — = q22v + e23w,
0n dv
получаем, что уравнение (3.10) вместе с первым и третьим из
уравнений (3.9) образует систему трех совместных
дифференциальных уравнений первого порядка относительно неизвестных
функций времени и, г\ п.
Полученные уравнения допускают следующее частное
решение:
и = ио, v = vo, п = wo,
где щ, vq, «о — постоянные величины. Это решение отвечает
регулярной прецессии тела; при г^о = 0 регулярная прецессия
вырождается в чистое верчение тела вокруг своей вертикальной
оси симметрии с произвольной угловой скоростью гао. Указанные
стационарные движения тела будут более подробно
рассмотрены ниже, в п. 4.
В общем же случае будем рассматривать величины п и v в
первом и третьем из уравнений (3.9) как функции переменной
и. Разделив обе части этих уравнений на й, исключим время t
и придем к уравнениям
J_(dS\ _
du\dnj
"Р%»-7=№-л*)ъ
* /*е\ _ i* л ™LGUi (3,11)
du [dv ) У EG fa У EG
пли, в раскрытом впде,
dn . , dv , о ' dn , , dv , n ' /r) AC%\
fli Ж + 6l 1H = ttlR + P^' °2 ~dH + b* лГ = a*n + №' (ЗЛ2>
где коэффициенты aiy bh a», 0,- (i = lf 2) — функции только и.
165
Видим, что полученные дифференциальные уравнения (3.12)
линейны. Если они проинтегрированы, то мы имеем величины
п и v как функции и. Подставляя эти функции в интеграл
энергии (ЗЛО), определим посредством квадратур и как
функцию времени. Зная же и, затем найдем и v через время, причем
придется взять еще одну квадратуру. След Г точки касания М
на поверхности тела теперь определится равенствами (3.1).
След Г\ на плоскости, положение центра тяжести и ориентация
тела в пространстве найдутся затем способом, указанным в
п. 3 § 1.
Итак, задача о движении без скольжения тяжелого тела
вращения по неподвижной горизонтальной плоскости сводится к
интегрированию двух линейных уравнений первого порядка, или
что то же самое, одного уравнения второго порядка, и к
квадратурам.
Этот результат был впервые получен С. Л. Чаплыгиным
[202], поэтому сформулированное утверждение названо в [31]
теоремой Чаплыгина.
2. Метод Чаплыгина решения задачи о движении тяжелого
тела вращения на плоскости. Сформулированная выше теорема
была получена С. А. Чаплыгиным иначе, нежели это изложено
в п. 1. С. А. Чаплыгин в своем исследовании опирался на
дифференциальные уравнения движения, полученные им из
основных теорем динамики. Следуя работе С. А. Чаплыгина [202]
и статьям [123, 137], получим, эти уравнения и рассмотрим
указанный в [202] алгоритм
исследования движения без скольжения
тяжелого тела вращения на
неподвижной горизонтальной плоскости.
Пусть Oxyz — неподвижная
система координат с началом в
некоторой точке плоскости Оху, по
которой движется тело. Обозначим
через 6 угол между осью симметрии
тела и вертикалью. Расстояние GQ
от центра тяжести до плоскости
Рис. 31 Оху (рнс. 31) будет функцией
угла 6: GQ = f{Q) (см. §^2 гл. 2).
Пусть (} — угол между меридианом М% тела и какой-либо
фиксированной его мериднапной плоскостью, а у — угол между
горизонтальной касательной MQ меридиана MZ, и неподвижной
осью Ох. Положение тела будет вполне определено углами G,
а, $ и координатами х, у точки М.
Для описания движения тела введем еще систему координат
(?§)]£;, движущуюся и в пространстве, и в теле так, что ось G%
все время лежит в плоскости вертикального меридиана Л/£; Gx\
перпендикулярна этой плоскости. Пусть векторы скорости v
центра масс G. угловой скорости со тела, угловой скорости Q
трехгранника G\vfe п реакции плоскости R задаются в системе
166
координат G^nE; компонентами i;£l i;4, у£; p, g, г; й|? Q,„ Q* n
/?., Дп, Ri соответственно.
Пусть т — масса тела, А — его момент инерции
относительно осей G£ и Grj, а С — момент инерции относительно оси
симметрии.
Так как ось G£ неподвижна в теле, то
/? = Й|, 0 = 0* (3.13)
Величина же Q* может быть выражена через р\ действительно,
в силу того, что плоскость G\t\ все время остается
вертикальной, проекция угловой скорости трехгранника G£r)£ иа
прямую MQ равна нулю. Отсюда и из (3.13) следует, что
Й£ = Qi ctg 9 = р ctg 6. (3.14)
Из условия отсутствия скольжения и теорем об изменении
количества движения и кинетического момента получим три
векторных равенства:
v + <dXg1/ = 0, (3.15)
m(v + QXv)=mg + R, (3.16)
K + QXK = GMXK (3.17)
Здесь g — ускорение свободного падения, К — кинетический
момент тела относительно центра масс.
Пусть £, г), £ — координаты точки касания М тела и
плоскости в подвижной системе координат GgnE;. Тогда и = 0, а \ п
*! будут функциями угла 6, причем (см. § 2 гл. 2):
E = -/(e)sine-/'(e)cosef £ = -/(e)cose + /'(e)sme. (зле)
В скалярной форме уравнения (3.15) — (3.17) будут такими:
vi + qt> = 0, vn+rl-pt = О, Vl - ql = 0; (3.19)
*
1? +%'n - JVS = - ^cos6 + -J; (3.20)
A |f + ЛрЙ; - CVQg = £Л6 - $Д;, (3.21)
C-g. + ^Qg-^Q^i/?,.
Исключение величин i?s, Дч, i?t пз уравнений (3.20), (3.21)
и некоторые упрощения, опирающиеся на (3.13), (3.14), (3.18)
167
и (3.19), приводят к трем уравнениям
dq
dt
[А + т (£> + P)J -g- = mgf (в) + {Cr - Ap ctg G) p -
- mlpctg6 (ft - r\) - mlp{pi - rl) -mq^ + l^.j,
Л If + C\ W = (^ ct£ 6 ~ Cr) 9' <3-22>
Здесь £ и г) —функции угла 6, определяемые равенствами (3.18).
Добавив к (3.22) очевидное соотношение
д — §. (3-23)
получим замкнутую систему четырех дифференциальных
уравнений относительно неизвестных функций времени /;, г/, г, 6.
Полученная система уравнений допускает интеграл энергии
Е = Т + П = const. Воспользовавшись теоремой Кёнига и
условиями отсутствия скольжения (3.15), его можно записать в
таком виде:
±-Ар* + ±[A + m {? + ?)} ф + i-Cr2 +
+ 4 m 0£ - ГЭ2 + "iff/ (e) = const. (3-24)
Откладывая случай 6 = 6о = const для дальнейшего
подробного исследования в пп. 4, 5, будем здесь считать, что Й Ф
Ф const. Тогда, воспользовавшись равенством (3.23), перейдем
во втором и третьем из уравнении (3.22) к новой независимой
переменной — углу 6. Получим
с||-£^1-§--(Е<*ве + *+ &')* +г* (3-25)
Эти линейные уравнения первого порядка приводят к
одному линейному дифференциальному уравнению второго порядка.
Интегрирование этого уравнения или системы (3.25) дает
зависимость р и г от 6 с Двумя произвольными постоянными; затем
интегрирование задачи заканчивается в квадратурах.
В самом деле, если р и г найдены, то величина q может
быть определена пз интеграла энергии (3.24) также как
функция 6. Зависимость же угла 6 от времени получится из
уравнения
Я = — И. (3.26)
168
Углы $ и у определятся затем квадратурами из следующих
очевидных кинематических уравнений:
(3.27)
Координаты х, у точки касания М также найдутся при
помощи квадратур. Действительно, пусть dc\ и йог —
соответственно элементарные душ меридиана и параллели в точке 31,
отсчитываемые следующим образом: dc\ от М к Q, a dc2
перпендикулярно плоскости рис. 31 в направлении оси Gx\. Тогда
dCx = П'2+£'2^е, do2 = -Jdp. (3.28)
Так как скольжение отсутствует, то
dx = dc\ cos y + ЙС2 sin Y, dy = dci sin f — fe cos f- (3.29)
Из (3.28) и (3.29) следует, что
f-ZpTT'cMTf-erinTg:,
f = /r2 + rsinVf+ icosYf. (3.30)
Если 0, Y и Р уже определены как функции времени, то
величины х, у находятся отсюда квадратурам©.
Заметим еще [137], что подстановкой р = иг интегрирование
системы (3.25) может быть приведено к интегрированию
уравнения Риккати относительно функции и(0).
В работах [137, 202] рассмотрено несколько простейших
частных случаев, когда уравнения (3.25) интегрируются достаточно
просто. Много внимания уделено нахождению тел, имеющих
такую форму меридианного сечения, при которой были бы
возможны движения тела с постоянной угловой 'скоростью вращения
вокруг оси симметрии (г = го = const). В частности, в [137]
подробно рассмотрело движение тела, ограниченного
.поверхностью, образованной ©ращением дуга параболы вокруг осп,
проходящей через ее фокус, а та.шке изучена -задача о движении
параболоида вращения. В [202] исследовано движение тела,
ограниченного сферической поверхностью; основные результаты этого
исследования изложены в следующем пункте.
3. Движение тела вращения, ограниченного сферической
поверхностью. Пусть динамически симметричное тело имеет
сферическую поверхность радиуса /?, центр которой отстоит от цент-
а тяжести тела, лежащего на оси симметрии тела, на расстояние
d\. Тогда
/(6)=Я-£*созв, ! = -#sin0, £ = tf-i?cos9, (3.31)
и интегрирование першого из уравнений (3.25) сразу приводит к
первому интегралу
Ар sin 0 + С г (cos 9 — ~|-W Ла = const. (3-32)
i
Этот интеграл есть не что иное, как интеграл Желле [156,
254]: скалярное произведение кинетического 'Момента тела и
радпуса-вектора точки касания отпосит-елыно центра тяжести
постоянно во все время движения. Следует отметить, что для
существования интеграла Желле ее обязательно отсутствие
скольжения; для справедливости (3.32) достаточно, чтобы
динамически симметричное тело, движущееся ла неподвижной
горизонтальной плоскости, удовлетворяло двум требованиям: 1) центр
тяжести тела лежит та оси симметрии; 2) участок поверхности
тела, точки которого при движении тела приходят в
соприкосновение с плоскостью, является частью 1сферы, центр которой
лежит также на оси симметрии тела. Подробности см. ъ гл. 4
(п. 3 § 2).
Второе из уравнений (3.25) приводится при помощи первого
уравнения и равенств (3.31) к виду
Заменив «здесь величины £ и £ их значениями* из (3.31), получим
уравнение с разделяющимися переменными. Интегрирование
этого уравнения дает еще один первый интеграл [202]:
г |/-S + sin2 e + -§-(4" -cos e)2 =ъ =const- (3-33)
Обозначив постоянную интеграла энергии (3.24) через — с2>
перепишем его в ъиде
[A + m{¥ + t?)]cf =
= Гс2 - 2mgRU-~cos 6J] - [Лр2 + Cr2 + m (pi - r£)2].
Умножив это равенство па sin2 6 и учтя (3.23), получим
[А + т (£2 + I2)] и* = (1 - и2) |> - 2mgR (1 - -^ и)] ~ К> <3-34)
где введено обозначение и = cos 6, а функция К определена
равенством
К = (1 - и2) [Ар2 + Сг2 + т(рЪ>- rl)2]. (3.35)
Опираясь на соотношения (3.31) и интегралы (3.32), (3.33), ее
можно привести к виду
К = а2 \А + mR2 f-|- - uj] + mRW 1*1 - и2 + -^ (-L - uj\ +
+ 2abmR* [-± - u) |/ JL- + (1 - ir) + -»- (-|— ")*• (3-36)
Замечая еще, что I2 + £2 == R2 — 2Rdu + <P, приходим к выводу,
что нахождение зависимости и от времени дз диффер-енциальпо-
170
го уравнения (3.34) .приводится к обращению абелева интеграла.
В частшых случаях, когда хотя бы одна из произвольных постояп-
лых а или Ъ равна нулю ■или .коада распределение масс ;в теле
таково, что (выражение под знаком корня в (3.36) есть полный
квадрат, т. е. выполнено условие
вадача об отыскании функции u{t) приводит к эллиптическим
функциям.
Если а = Ъ = 0, то во все время движения р = г = 0. Движение
шара происходит так, что его ось симметрии Gt> находится в
фиксированной вертикальной плоскости. Изменение угла 6,
составляемого осью G£ с вертикалью, со временем определяется
уравнением (3.34). в котором надо положить К = 0:
[А + m(d2 + R2 - 2dRu)\u2 = (l-u2) [с2 -2mg(R- du)\.
Будем считать для определенности, что d > 0. Шар может
находиться в положениях равновесия, отвечающих значениям в = 0
или 6 = л, причем первое равновесие устойчиво, а второе
неустойчиво относительно возмущений величин 9, 9: при 9 = 0
центр тяжести занимает наинизшее, а при 6 = я — наивысшее
положение.
При с2 < 2mg(R — d) движение шара невозможно: при
2mg(R — d) < с2 < 2mg(R + d) ось симметрии совершает
колебательное движение в вертикальной плоскости с амплитудой, не
превосходящей я, при этом следом точки касания на плоскости
будет отрезок прямой. При с2 > 2mg(R + d) угол 9
неограниченно возрастает^ шар катится вдоль бесконечной прямой на
плоскости. Если с2 = 2rng(R + d), то шар либо занимает
неустойчивое положеии равновесия 6 = я, либо совершает
асимптотическое движение, при котором угол 9 стремится к я при
возрастании времени, т. е. шар стремится занять такое иоложени, при
котором его центр занимает наивысшее положение: следом
шара на плоскости будет опять отрезок прямой.
Б1ар может совершать стационарные движения, в которых
ось симметрии составляет постоянный угол 9о с вертикалью. Та-
>кие движения будут рассмотрены в п. 5 для произвольного тела
вращения.
Исследуем характер движении шара в общем случае. Для
этого заметим, что в действительном движении выполняются
неравенства — i^u^l и правая часть уравнения (3.34) должна
быть неотрицательной. Представим ее в виде
(1 - и2) [с2 - 2mg{R - du)]-K = f*{u)-K.
При — 1<и<1 функция Ку определенная равенством (3.35),
положительна. Поэтому в действительном движении /* (и) !> 0.
171
Рис. 32
Замечая еще, что при достаточно больших положительных
значениях и функция f*{u) отрицательна, & лри достаточпо
больших по модулю отрицательных и она положительна, получаем,
что возможны два типа графиков фупкции f = /*(*0,
представленных па рис. 32. График правой части уравнения (3.34)
получится из приведенных на рис. 32
графиков уменьшением ординаты
кривой в каждой точке и на
соответствующую величину К.
Деформированная кривая должна
по условию задачи иметь точки
над осью абсцисс и,
следовательно, будет пересекать отрезок АВ
не менее двух раз, причем
справа от точки В ее ординаты
отрицательны; в общем случае
абсциссы точек пересечения
лежат внутри интервала — 1 < и < 1, но одпа из них может
равняться +1 пли —1, если у функции К (и) есть такой корень; несложно
непосредственной подстановкой соответствующих величин и в
функцию (3.36) проверить, что функция К(и) имеет корень и =
= +1 или и = —1, если между произвольными постоянными а ц
Ъ выполняется соответственно соотношение
aVA + miR — df = Ь |/^{R — d) (3.37)
или
a VA+m(R + df = — Ъ |Л~ {R + d). (3.38)
Равенства (3.37) и (3.38) несовместимы одно с другим.
Рассматривая общий случай, будем считать, что правая часть
уравнения (3.34) имеет два простых корня щ, U2, .которые лежат
внутри интервала — 1 < и < 1. Тогда функция и будет
периодической функцией времени, колеблющейся (между значениями щ
и U2, при которых й = 0. Следовательно, и угол 6 будет
периодической функцией времени ic некоторым .периодом т; такими же
будут функции р, д, г, |, £, р, y, как это видно из (3.31)—(3.33)
и (3.23), (3.27); величины же $ и ^ получают некоторые
постоянные приращения за время, равное периоду т.
На поверхности шара точка касания М вычерчивает .кривую,
ваключенную между параллелями и = щ и и = ич\ эта кривая
поочередно прикасается к указанным параллелям и состоит из
периодически (повторяющихся «волн. На «неподвижной плоскости
точка М описывает кривую подобного же типа, расположенную в
общем случае между двумя концентрическими окружностями,
которых точка М поочередно касается при движении шара.
4. Устойчивость стационарного вращения тела вокруг
вертикали. Пусть /'(0) =0, т. е. ось симмметрип G£ при отрицательных
172
значениях £ пересекает поверхность тела по нормали к
.последней, В этом случае тело может двигаться так, что
/;==0, r=o)=iconst, g = 0, 0 = 0. (3.39)
В этом движении тело вращаемся вокруг своей неподвижной
вертикально стоящей оси симметрии с произвольной постоянной
угловой скоростью со. Рассмотрим устойчивость этого стационар-
лого движения тела.
Необходимые условия устойчивости движения (3.39)
получены еще Э. Дж. Раусом [91, 156, 245] ina основе анализа корней
характеристического уравнения линеаризованных уравнений
{возмущенного движения. В точной (Нелинейной постановке
устойчивость движения (3.39) «впервые была исследована в статье [159].
Исследования, ороведеппые в [159], были продолжены (в работах
[44, 45, 123]. В статьях [44, 45] при помощи первых интегралов
уравнений возмущенного движения по методу Четаева построена
функция Ляпунова и определены (необходимые и достаточные
условия устойчивости движения (3.39) для динамически
симметричного тела сферической формы. В работе [123] аналогичное
исследование проведено для произвольного тела вращения; в этой
работе достаточные условия устойчивости также .получаются при
помощи функции Ляпунова, получаемой из первых интегралов
по методу Четаева, /но в отличие от исследований в статьях
[44. 45, 159] явные выражения для интегралов неизвестны.
Полученные в [44, 45, 123] условия устойчивости
стационарного вращения вокруг вертикально направленной оси симметрии
для произвольного тела вращения и тела вращения со
сферическим основанием полностью совпадают. Связано это с тем, что в
указанных работах вопрос об устойчивости решался с помощью
исследования корней характеристического уравнения, а также с
помощью функции Ляпунова. При этом в функции Ляпунова
используются только члены низших степеней в ее разложении
в ряд по малым отклонениям от стационарного движения.
Поэтому можно ограничиться рассмотрением уравнения поверхности
тела в связанной системе .координат G|r)£ в окрестности точки
1 = \] = 0, £ = —/(0) чтишь с точностью до малых второго
порядка включительно. С указанной точностью поверхность
произвольного тела вращения в окрестности этой точки можно считать
сферической. Радиус этой сферы равен /(0)+ /" (0), а расстояние
от центра сферы до центра тяжести равно I/" (0)1. Сказанное
позволяет при исследовании движения (3.39) ограничиться
рассмотрением тел -вращения, имеющих сферическую поверхность.
Для того чтобы полученные результаты перенести на случай
произвольного тела вращения, надо только в них радиус сферы
и расстояние от центра тяжести заменить на выражения через
/(0) и /" (0). Пусть в возмущенном движении
р = хи г = со + #2, <7 = ^з, 0 = я4.
Первые интегралы (3.24), (3.32) и (3,33) в возмущенном дегоке-
173
нин могут быть записаны в виде
V1 = Ax\ + [А + т(Д — df]xt+2Ca)x2 + Cxl +
+ т [со/?.г4 — (R — d) хг]2 + mgdxl + ... ='const, (3.40)
У2 = С (R — d) х2 + ARx^ — -i- CtoRxl + ... = const, (3.41)
= тЛ*1АЛ-С{Л-*Я а.2 ^ congt. (3./l2>
3 2 2C U + го (Д — d)2] 4 V Л
Многоточием обозначены члены выше второго порядка относи-
телыно Xt (i = 1, 2, 3, 4).
Для 'нахождения достаточных условий устойчивости
рассмотрим функцию Ляпунова в виде суммы квадратов интегралов
ураганеннй возмущенного двшкеиия [151]: V = V\-\- V\ + V\.
Функция V будет знакоопределеннои тогда и только тогда*
когда V\ змакоопределешма ири тех значениях xt (i = 1, 2, 3, 4),
для которых Т72 = 0, Т7з = 0. Разрешив {последние равенства
относительно Х\, Х2у ИОЛуЧИ-М'
_ [С + mR (Я — d)] со
Xl~ 2[A + m(R^df] *4+ ■'■• (3.43)
mRto\AR — С (Л — d)]
2_
*2 2C[A + m{Ii-d)1] Х* ' '"
В выражении для х\ не (выписаны члены выше первого, а в Х2 —
выше второго порядка относительно х^.
Заменив в выражении (3.40) для функции V\ величины х\у
Х2 иа их выражения (3.43), получим
V1=[A^m{R^df]xt +
[С + mR {R — d)f со2 + bngd \А + т {Л — d)2] „2
4[A+m(R—df]
. 11:-h тп\п — а)\ со -j- 4mga [A -f- т [к — a) j „2 , (Ъ //\
Многоточие здесь означает «совокупность членов выше второго
порядка относительно х$, х±щ Функция (3.44) будет
зпакоопре.деленной, если выполняется неравенство
[С +mR{R — d)] 2со2 + Amgd [А + т {R — d)2] > 0, (3.45)
которое и будет достаточным условием устойчивости стадионар-
(ного движения (3.39) тела, имеющего сферическую поверхность.
Согласно сказанному выше, это условие для произвольного тела
вращения имеет вид
[С + mf0 (/„ + Q]2 ш2 + imgfo (A + m/02) > 0, (3.46)
где индексом 0 о6о(значеиы значения функции и ее второй
производной при 8 = 0.
Покажем теперь, что при обратном знаке неравенства (3.45)
движение (3.39) неустойчиво гао Ляпунову. Для установления
174
неустойчивости достаточно (показать ее хотя бы па некотором из
совместных уровней первых интегралов (3.40) — (3.42) уравне-
iHirii возмущенного движения. Рассмотрим движения,
удовлетворяющие условиям V\ = 0, V2 = 0. Тогда -возмущения #i, x2 будут
связалы с возмущением х± равенствами (3.43). Опираясь па эти
равенства, линеаризуем первое из уравнений системы (3.22).
С учетом (3.23) оно может быть записано в виде
4[A + m(R-&)]*—£ +
at"
+ {[С + mR (R — d)]2 со2 + Amgd [A +"m {R — d)2]} *4 = 0.
Отсюда на основавши теоремы Ляпунова об устойчивости по
первому приближению [101] следует, что при обратном знаке в
неравенстве (3.45) стационарное вращение (3.39) неустойчиво.
Таким образом, неравенство (3.40) является необходимым
(с точностью до знака равенства) и достаточным условием устой-
чнвости движения (3.39) произвольного тела вращения па
абсолютно шероховатой горизонтальной плоскости.
5. Регулярные прецессии. Из уравнений (3.22), (3.23) видно,
что тяжелое тело вращения может совершать стационарные
движения, при «которых угол 0, составляемый осью симметрии тела
с вертикалью, остается постоянным [69—71, 125, 156]: 8 = Во —
= const. Случай 0о = 0 изучен в предыдущем пункте, .поэтому в
дальнейшем считаем, что 0о ^ 0.
Уравнения (3.22), (3.23) допускают частное решение
0 = 00=^0, <? = 0, р = ро, г = г0, (3.47)
если постоянные 0q, ро, *о (удовлетворяют уравнению [125]
(^-^/o)ctge^- (c-^-foyoPo-mgf'o = 0. (3.48)
Рассматривая это уравнение как квадратное относительно ро
ш требуя вещественность его (Корней, получаем условие
существования решения (3.47) в виде неравенства [125]
[С ~ 1Щ /о)' г* + 4"*/о [А - ^k0 /о) ^ % > 0. (3.49)
Для решепия (3.47) угловая скорость собственного вращения
coi и угловая скорость прецессии тела сог постоянны и связаны с
постоянными 0о, Ро, го равенствами
ро = 0)2 sin 0о, г0 = coi + 0)2 cos 0о. (3.50)
Из (3.27) и (3.30) получаем, что в движении (3.47)
координаты х, у точки касания тела ai плоскости в неподвижной
системе координат Oxyz определяются дифференциальными
уравнениями
dx «. dy . dy
175
Отсюда следует, что
х = -2— cos у + сх, у = -^ sin y + су, у = щ1 + су,
2 2
где сх, су, ст — иостояпные. Эти соотношения показывают, что при
<02=^ 0 точка М касания тела и неподвижной плоскости
описывает та последпеи окружность радиуса l^oO)i/o)2l. Используя
рис. 31, теперь .несложно показать, что центр окружности лежит
па вертикали, проходящей через неподвижную в пространстве
точку S оси симметрии тела, координаты которой в подвижной
системе координат GgrjE; задаются равенствами [69—71]
U = Ув = 0, Is = ±- [щ10 + со2 (l0 cos 90 + £0)]. (3.51)
Здесь через ?о = ^ (6о) обозначено «расстояние от точки М до точки
пересечения оси симметрии тела с вертикалью, проходящей
через М.
Отметим, что точка S является точкой пересечения оси
симметрии тела с мгновенной осью шращения, проходящей в силу
отсутствия скольжения .через точку М [70, 156]. Например, для
тяжелого .'неоднородного динамически симметричного шара пз
(3.31) и (3.51) имеем
2
т. е. неподвижная в пространстве точка S оси симметрии
находится на расстоянии fllcoi/o^l от его геометрического центра
(при g>iG>2>0 в положительном, а при g>iG)2<0 в отрицательном
направлении осп G£).
Таким образом, при сог ^ 0 решению (3.47) отвечает
регулярная прецессия тела: одна .из точек его оои симметрии (точка S
с координатами (3.51)) неподвижна в пространстве, тело
вращается с постоянной угловой скоростью «г вокруг вертикали,
проходящей через S, и с постоянной угловой скоростью coi вокруг оси
симметрии. Центр масс тела описывает окружность с угловой
скоростью 0)2 в плоскости z = /о, параллельной опорной
(неподвижной горизонтальной плоскости Оху; центр этой окружности
лежит на вертикали, проходящей через точку £, а радиус равен
l£ssin6ol. Точка касания М тела и опорной плоскости
описывает на поверхности тела окружность с угловой скоростью gm в
плоскости, перпендикулярной оси симметрии, с центром на этой
оси в точке с координатой £о и радиусом 1|о1. При этом тело
движется без скольжения.
Введя в (3.48) вместо ро, г0 (их выражения через coi, 0)2 из
(3.50), получим, что уравнение, определяющее многообразие
регулярных прецессий тела вращения на абсолютно шероховатой
плоскости, принимает такую форму:
mgf'o + IC(°i + (с — А) <°2cos eJ °>2 sin S = mfo^ (toi£o — ^г/о)- (3.52)
176
Рассматривай это уравнение как квадратное относительно сог &*
выписывая «условие вещественности его 'корней, получаем
следующее неравенство, эквивалентное условию (3.49) существования
регулярных прецессий:
(С + 1л/0у2 sin Э0 - со? + 4wig/o [(А — С) cos 90 - ю/0 (£0 + Z0 cos 60)]>
> 0. (3.53)
Сравнение соотношении (3.52), (3.53) с соотношениями (2.30),
(2.31) гл. 2 показывает, что двумерные многообразия регулярных
прецессий тела гвращенпя на абсолютно (гладкой и абсолютно
шероховатой плоскостях те совпадают. Это сразу видно из того, что
соотношения (2.30) п (2.31) гл. 2 получаются из соотношений
(3.52) и (3.53) прп /о = 0, а величина /о при регулярной
прецессии есть высота центра тяжести /над опорной плоскостью и,
следовательно, положительна.
Рассмотрим устойчивость движения (3.47). Задача об
устойчивости регулярных прецессий тела вращения на абсолютно
шероховатой .плоскости изугчеиа в работах [69—71, 125]. В этих
работах получены необходимые м достаточные условия
устойчивости. При этом необходимые условия получены обычным
способом, основанным на выяснении условий отсутствия у
характеристического уравнения линеаризованной системы уравнений
возмущенного движения корней с положительной вещественной
частью. Для получения достаточных условий устойчивости гв
работе [125] построена функция Ляпунова гв виде суммы
квадратов первых интегралов уравнений возмущенного движения:
интеграла энергии и двух интегралов, линейных относительно ком-
лонент угловой скорости /?, г тела, причем выяснение условий
знакоопределенности функции Ляпунова не потребовало явного
(вычисления линейных интегралов. Такой подход к задачам
устойчивости был обобщен п развит в работах [69—71], где указан
способ применения теоремы Рауса — Ляпунова [77] к
исследованию устойчивости стационарных движений механических систем
некоторого вида, явные выражения первых интегралов которых,
кроме интегралов энергии, неизвестны. В качестве примера в
[69—71] получены достаточные условия устойчивости
регулярных прецессий (3.47).
Разрешая линейные уравнения (3.25) относительно
производных, получаем
-^ = агр + а2гщ % = btf> + Ъ2г. (3.54)
Здесь
аг = _ctge -4 С (Б +1% * -тг (£ + £2 + Е'С).
д = 4г + А%2 + съ2-
12 А. П. Маркеев
177
Пусть cpi(6), 4fi(0) n ф2(6), if2(6)—два частных решения
уравнений (3.54), удовлетворяющие условиям cpi (в0) = 1, я^1 (©о) = 0 я
Фг(6о) = 0, il)2(6o)=l. Тогда общее решение уравнений (3.54)
запишется в форме
Р = С!ф1 + С2ф2, q = Cilf 1 + С2^2.
Разрешив эти уравнения относительно постоянных С\ и Сг,
получим два интеграла:
1 1
-g- (Р^2 — ГФ2) = си -g- (/чр, — /%) = с2 (Я = ф1ф2 — гр!ф2). (3.55)
Кроме того, имеем еще интеграл энергии (3.24).
Пусть
Р :=Ро + %и г = Го + х2, q = #3, 6 = Во + х4.
На невозмущенном движении (3.47) с\ = ро, С2 = Пь а зпачение
ксшстанты интеграла (3.24) обозначим через Eq. Уравнения
возмущенного движения будут иметь первые интегралы Vi = Е — £о,
V2 = с\ — ро, Уз = С2 — *о, (где Ci, С2 — .соответствующие левые
части равенств (3.55). Следуя статье [125], при исследовании
устойчивости в качестве функции Ляпунова примем функцию
v-vl + vl + v*.
Функция V будет определенно положительной тогда п только
тогда, когда функция V\ определенно положительна при условии
V2 = 0, Т7з = 0. Если из последних равенств выразить величины
xci, X2 через ха п подставить эти величины в функцию V\, то в
результате получим функцию двух переменных \\ (х3, х±) =
= l7i(#!(#4), #2(24), #3, #4). Условие знакоопределенности
функции I7! и будет достаточным условием устойчивости
-движения (3.47).
При практическом «нахождении функции V\ злящие явного
вида игатегралов (3.55) не является обязательным, так как при
получении первых (линейных и квадратичных) членов
разложения V х в ряд по степеням Хз, ха потребуются величины dp/dQ,
dr/dQ, а они равны правым частям уравнений (3.54). Имеем
(3.5G)
В (3.56) производные вычисляются на невозмущевшом движении,
многоточием обозначены [члены выше второго порядка
относительно ХзУ #4-
Из (3.24) видно, что сва левозмущенном движении (3.47)
5 = °' Йге=°; ^-4 + "(Й + «)>0. (3.57)
178
Далее имеем в силу уравнеппй (3.54)
+ т (р£ - rt) d{pt~ri) + mgf = m (£' + «') g2 +
+ [Л + m (« + ;*)] 9-g-F, (3.58)
где через F обозначено следующее выражение:
Из (3.58) «с учетом равенства (3.48) следует, что на невозмущеп-
ном движении (3.47) производная dVJOQ равна нулю.
Производная же d2Vi/0Q2 яа певозмущеннам движении будет равна взятой
с обратпым .знаком производной dF/dQ, .вычислешюй в силу
уравнений (3.54). Учитывая (3.57), получаем из (3.56) условие
знакоопределенности функции Vx в впде неравенства ^-> 0.
Произведя указанное выше дифференцирование, получим это
неравенство в развернутом виде:
mgf" + (Схг0 — 2AlPo ctg 60) (alPo + а2г0) — А[ ctg 0оР1 +
+ Л —£- + С[гоРо + ClPo (blPo+ b2r0) > 0. (3.59)
sin 60
Через AY и Сх обозначены производные функции А\ и С\ по 0.
Все входящие в левую часть неравенства (3.59) функции 8
вычисляются при 8 = 8о. Напомним, что величины /?0, г0, Во св!язаны
равенством (3.48).
Неравенство (3.59) является достаточным условием
устойчивости регулярной прецессии (3.47) тяжелого тела вращении на
абсолютно шероховатой плоскости. Аналогично тому, как это
сделано в п. 4 при исследовании устойчивости стационарного
вращения вокруг вертикали, можно показать [125], что с точностью-
до знака равенства условие (3.59) будет и необходимым для
устойчивости движения (3.47).
В работах [69—71] достаточное условие устойчивости
получено в другой форме:
{А'1 [Сщ + (С - 2А) со2 cos 80]2 + Аы\ sin2 80 + mg (г* -01 +
+ m(l0 sin2 0O— £0 cos 80)2 <02 + т (l0 sin2 G0 — £0 cos 60) X
X (V°i + k cos eo<°2 + ьо<°2) -4"1 [Co)i + (c — Щ <°2 cos eol +
+ m {10щ + l0 cos 80co2 + l0co2) £0co2 — [A (C + mllsin2 60) +
+ Cmtl]-1Cmt0{l(A-C)-m(l0cose0+ Q(Z0sin2 80-^cos60)]o)2—
— [C + ml0 (l0 sin2 80 — £0 cos Qq)]^} [г* (<о2 + ох cos 60) +
+ A"1^ (co2 cos 60 + ©J — l0 sin2 60o)2] > 0. (3.60)
12* 179
Через г0 здесь обозначена величина радиуса кривизны г*(6о)
меридианного сечения поверхности тела в точке его касания
с опорной плоскостью; смысл остальных величин в (3.60)
разъяснен выше. Если неравенство (3.60) шьшолнено с обратным
-знаком, то имеет место неустойчивость [69—71].
Отметим, что условие (3.60) устойчивости регулярных
прецессий тела вращения на абсолютно шероховатой плоскости
(переходит в условие (2.34) гл. 2 устойчивости регулярных прецессий
на абсолютно гладкой плоскости, если в (3.60) отбросить все
члены, кроме тех, которые «заключены в первые фигурные скобки.
Рассмотрим иодробпее случай, когда угловая скорость
прецессии юг равна нулю. Из (3.52), (3.53) следует, что при сог = О
регулярные прецессии ina абсолютно шероховатой плоскости
существуют, если только /' (9о) = 0, т. е. когда центр тяжести тела
•находится на вертикали, проходящей через точку М касания гела
с опорной плоскостью, причем угловая скорость -собственного
.вращения 0)i может быть произвольной. В этом случае частное
решение уравнений (3.22), (3.23)
е = е0^о, «г = о, /? = о, r=©i (3.ci)
определяет равномерное качение тела вдоль 'неподвижной
прямой; если же еще п coi = 0, то решение (3.61) отвечает
равновесию тела.
Для решения (3.61) условие устойчивости (3.59)
принимает вид
Wo + (Cifl2)0(Oi>0.
Из (3.18) получаем, что на невозмущенном движении (3.61)
£о = — /о sin ео- Со— —/о cos ео' £о = — (/о + /о) cos 60
Учитывая еще равенство /0 + /о = 7'о> получаем, что на
невозмущенном движении
Г Г Л. mi* a C[C+mA,(roCOS4 + /osi°4)]
/0 2 AC + mfl(A sin2 60 + С cos2 60)
Поэтому достаточное (н необходимое с точностью до знака
равенства) условие устойчивости движения (3.61) записывается в
виде неравенства [69—71, 123, 125]
с(С + <)[С + те/о(;о%о^е0 + /о^е(,)] ^
АС + mf20 (A sin2 60 + С cos" 60)
(3.62)
Если /0^/*о' т. е. "когда центр тяжести тела лежит ие выше
центра кривизны меридианного сеченпя поверхности тела,
проведенного через точку его касания с опорной плоскостью,
качение тела вдоль неподвижной прямой устойчиво при любой (не
180
равной пулю) угловой скорости coi; в случае равновесия, когда
oji=0, условие устойчивости (3.62) переходит в неравенство
/о<го- Если же /0>/'от то равновесие неустойчиво, а качение
будет устойчивым, когда coi превосходит (некоторую критическую
величину, определяемую неравенством (3.62).
Отметим, что условие (3.62) прямолинейного качения тела
вращения по абсолютно шероховатой плоскости качественно
совпадает с соответствующим условием устойчивости (2.36) гл. 2.
Но количественно эти условия различны; наличие неголономных
связей оказывает, как правило, стабилизирующее влияние:
необходимая для устойчивости угловая скорость тела coi,
определяемая из условия (3.62), обычно меньше величины coi,
определяемой из неравенства (2.36) гл. 2 [70, 77], хотя возможны и
исключения [70].
6. Об уравнениях задачи о движении без скольжения тела
вращения по поверхности вращения. Пусть тело динамически
сшмметричпо (А = В) и ограничено поверхностью вращения S с
осью симметрии G£:
| = и cos и9 г) = и sin v, £ = £ (и). (3.63)
Неподвижная поверхность Si, по которой движется тело,
абсолютно шероховатая н также является поверхностью вращения.
Движение происходит в однородном поле тяжести. В
неподвижной системе координат Gig]T]i^i, ось Gi£i которой направим
вертикально вниз, поверхность S\ задается равенствами
£i = uiCosui, Tji = ui sin i7i, £i = £i(wi)- (3.64)
В (3.63), (3.64) п далее в этом пункте применяются
обозначения из § I.
Так как линии и и v ina S и лишш щ и vx на S\ суть линии
кривизны зтпх поверхностей, то за уравнения движения можно
принять уравнения (1.38), (1.39) с учетом соотношений
(1.35)-(1.37).
Из равенств (3.2) — (3.6) следует, что при А=В
кинетическая энергия тела Г*, тычисляемая по формуле (1.37), будет
•квадратичной формой относительно величин а, т, /г,
коэффициенты которой суть функции только гауссовой координаты и.
Разрешив уравпения связей (1.39) относительно производных
по времени от .гауссовых координат v и v\, получим
М Ус cos 6 V dt. v г dt У
dt Ygx cos e V dt 1 dt J
Подставим отсюда величины v, v\ в равенства (1.35), (1.36).
Получим, что Oi, Ti, щч о, т будут линейными однородными
функциями от й, йи коэффициенты которых зависят только от и, и\,
6; величина п будет аналогичной функцией от щ щ, В. Разрешив
181
полученные равенства относительно и, и\у 0, придем к
соотношениям
u = a\G-)rb\X, ui=a2$+b2T, В = а$о + Ь$т + п, (3.GC)
где а*, Ы (i = 1, 2, 3)— функции от и, ии 0.
Найдем выражение для ■проекций М% (г = I. 2, 3) момента
силы тяжести относительно точки касаашя тела и опорной
«плоскости -на линии и, v ш общую (нормаль к поверхностям S и S\. Для
.потенциальной эпергии тела имеем выражение
Il = -mg(hi + h), (3,67)
где J^i = ^i (гг1), a h — проекция вектора MG, проведенного из:
точки касания М тела и опорной поверхности в центр тяжести G
тела, па ось G\t>\ ненодвижиой системы координат Gib'Hiti-
h = - (с[№ + с№ + «>)• (3.68)
Здесь С|д} (г = 1. 2, 3) — направляющие косинусы вертикали G&i
в системе координат Mq^q^q^ (см. рис. 27, где надо положить
6i = 8 = n/2). Величины с\$ вычисляются по формулам,
аналогичным (3.3):
0x2 ^yt^i С2® =0, Сз3 ^ уТ' *3,69*
Через q% (i = 1, 2. 3) в (3.68) обозначены компоненты вектора
GM в системе координат Mq^q^g^; из рис. 27 следует, что
они выражаются через компоненты gi, q^ дъ того же вектора в
системе координат Мдщ^дз при помощи равенств
д[г) = gj sin 0 + q2 cos 6, £Р = qx cos 6 — g2 sin 0, g(31) = — g3~
(3.70)
Величины q{ (i=l, 2. 3) вычисляются по формулам (1.12)r
(3.1)-(3.3):
*-^(u+*■£)■ *2=a q*=Ml~-u^}(3J1)
Из (3.68) — (3.71) солучаем следующее выражение:
h=vkHu+t^s'm6~u^+l} (3J2>
Таким образом, потенциальная энергия тела (3.67) будет
функцией только от переменных щ щ, 0; от величин у, V\ она не
зависит.
За время dt сила тяжести совершает работу 6-4 = —6П =
= — Hdt. Или, если воспользоваться соотношениями (3.66),
ЪА = — ^и& — ^щЛ — ЩвЯ — Mt (с dt) + i\I2(xdt) + M3{ndt)7
182
где
M* = ~w (3-73>
Из изложенного следует, что в случае двшкепия бее
скольжения тяжелого тела вращения ло гаеподвижпой поверхности
вращения с вертикальной осью симметрии диффереощнальпые
уравнения (1.38) могут быть приведены к замкнутой системе трех
уравнении второго порядка, определяющих координаты и, щ, В
как функции времени. Если эти уравнения азроинтегрированы, то
координаты у, Vi найдутся и,з «уравнении связей (3.65) при
помощи квадратур.
В некоторых частных случаях движения, например когда
точка касания М описывает на поверхности тела S и на опорной
поверхности S\ параллели и = const, щ = const, задача может быть
проинтегрирована полностью [32, 300].
7. Тяжелое тело вращения с плоским участком поверхности
на сфере. Пусть поверхность тела не является выпуклой, а
имеет плоский участок S, ортогональный осп симметрии Gt,.
Рассмотрим такие движения тела, при которых его соприкосновение
с неподвижной поверхностью Si происходит в одной из точек 5.
Уравнения участка поверхности тела S в системе координат
С^ц^ запишем в виде
s = и cos и, n = u sin v, £ = —h (h > 0, и > 0). (3.74)
Тогда
Е = l,F = 0, G = и2,
Сц = cos v, c\2 = sin у, Ci3 = 0, C2! = —sin v, C22 = cos y,
C23 = 0, C3i = 0, сз2 = 0, сзз = 1, L = 0, M = 0, N = 0,
p2 = u2 + A2, e = -h. (3.75)
Выражение (1.37) для кинетической энергии тела Г* будет
таким:
Г* =-i {А + той2)о* + -у (Л + mfe2 + тгг2) т2 +
+ -о- (С + mvr) n2 + mhuon. (3.76)
В соответствии с (1.35) и (3.75) имеем
Ci = 0, Ti = 0, щ = —v.
Дифференциальные уравнения (1.38) принимают вид
d (дТ*\ . дТ* , , \дТ* , 9* лт
1 (?г) + (* + »> Г - ° тяг ~ ™« - л/- <3-77>
d /йГ*\ , дТ* дТ* т /" . " ч " 7,г
"dF (1£Г ) + 0"37 — Т^о* ~~ ^1Ш + WL?T) — muun = Л^з-
183
Уравнения (3.77) справедливы для движения без скольжения
тела вращения, соприкасающегося плоским участком своей
поверхности с произвольной неподвижной выпуклой опорной
поверхностью. Пусть опорная поверхность будет сферой радиуса /?.
В неподвижной 'системе координат Gi£irji£i (Gi — центр сферы,
ось G£i направлена вертикально вгверх) ее уравнения зададим
в виде
£i = jR sin щ sin vu Ц\ = R sin щ cos v\, £1 = R cos m. (3.78)
Тогда
£, =Д2, G{ = R2sm2uu L{=R, N{=Rsm2m. (3.79)
Уравнения связей (1.39) и кинематические уравнения (1.36)
принимают вид
Ru\ = sin В • и + и cos 6 • v, R sin щ • v\ = cos В • й — и sin 6 • v;
(3.80)
о = — cos 0 ■ й\ + sin щ sin 6 • vu т = sin В • й\ + sin u\ cos 9 • #i,
(3.81)
п = 6 — у — cos z*i • У1.
Потенциальная энергия тела вычисляется по формуле
П = rng [ (R + h) cos щ + и sin ui sin 6]. (3.82)
Аналогично тому, как это сделано в предыдущем пункте,
находим выражения для величин Д/г (i = 1, 2, 3) проекций момента
силы тяжести относительно точки касания на линии и, v и
нормаль к поверхности тела:
Мх = —mgh sin щ cos 6, Мг = mgh sin щ sin 6 — mgu cos uu
(3.83)
Д/3 = — mgu sin wi cos 6.
Восемь уравнений (3.77), (3.80), (3.81) с учетом равенств
(3.83) образуют замкнутую систему дифференциальных
уравнений, описывающих движение без скольжения тела вращения,
обладающего плоским участком поверхности, но неподвижной
сфере в однородном поле тяжести. Эти уравнения допускают
первый интеграл
Г* + П = const.
Укажем два простейших частных решения полученных
уравнении движепии. Первое из них описывается равенствами
и = 0, iii = 0, v = 0, Vi = 0, 6 = п = const (3.84)
и соответствует такому движению тела, ,коща оно вращается с
произвольной постоянной угловой скоростью п вокруг
неподвижной вертикали, проходящей через ось симметрии тела и центр
неподвижной опорной сферы.
184
Во втором частном решении
u = Rul9 i; = 0, t'x = 0, в ■=-£-, (3.85)
а функция u\{t) удовлетворяет дифференциальному уравнению
(Л + mh- + mRhi\) иг + mE?uju\ + mg (Ящ cos щ — h sin щ) = 0.
(3.86)
Это решение отвечает такому движению тела, когда его ось
симметрии перемещается в заданной вертикальпой тлоскости,
проходящей через вершину опорной сферы: точка касания описывает
ша сфере часть меридиана, а «а плоском участке шоверхпости
тела отрезок прямой. Уравнепию (3.86) удовлетворяет функция
Mi =0; для этого решения тело находится в положении
равновесия, когда его ось симметрии расположена ша вертикали,
проходящей через вершину сферы.
Уравнение (3.86) имеет интеграл (интеграл энергии)
-2~(Л + rnh2 + mRhi\)u\ + mg[(R + fycosi^ + Ru^^inu^ = const.
(3.87)
Анализ линеаризованного уравнения (3.86) п условия
знакоопределенности шггеграла (3.87) показывает, что движение щ = О
устойчиво, если R> h, и неустойчиво, если это неравенство
выполняется с обратным знаком.
В заключение отметим, что в работах [20, 33] рассмотрена
задача о движении без скольжения тела вращения по
неподвижной сфере в предположении, что силовое ноле обладает
потенциалом, зависящим только от координаты и\ эта задача в [20, 33]
прошггегрироваша в квадратурах.
§ 4. Тело с острым краем на неподвижной поверхности
1. Стационарные движения диска на абсолютно шероховатой
плоскости и их устойчивость. Рассмотрим динамически
симметричное тело, имеющее острый край в форме окружности, центр
которой совпадает с центром тяжести G тела; ось симметрии
тела G£ (перпендикулярна -плоскости острого края. Такое твердое
тело будем называть диском. В частности, диск может быть
однородной круглой пластинкой. Рассмотрим движение диска в
однородном поле тяжести, предполагая, что он опирается ,на
абсолютно шероховатую горизонтальную (плоскость одной точкой своего
острого края. Эта задача исследована весьма подробно [2, 31, 41,
46? 94, 122, 153, 202, 211, 215, 262, 263, 299]. Изложим адесь
основные результаты.
Пусть т — масса диска, а — его радиус, А и С — моменты
пнерции диска относительно главных центральных осей инерции
G£. Gn, лежащих в плоскости острого края, и осп симметрии G£
соответственно. За (дифференциальные уравнения, описывающие
движение диска, примем уравнения (1.73), (1.84).
185
За неподвижную систему координат примем систему
координат Gili^i^ с началом в некоторой точке опорной плоскости; ось
Gi£i направим вверх. Уравнения опорной плоскости имеют вид
li = и, T)i = v9£i = 0.
Система координат Mxyz имеет начало в точке М касания диска
и плоскости, а ее оси Мх, My, Mz параллельны соответствующпл!
осям неподвижной системы координат Gi^iiliEi. Ориентация
диска в пространстве задается при -помощи углов Эйлера г|\ В, ср
(рис. 29). Еще одна подвижная система координат Mx\y\Z\ имеет
начало в точке М, ее ось Мх\ направлена по касательной тс
острому краю диска, Му\ направлена вдоль диаметра диска, а ось Mz\
имеет то же направление, что и ось G£. Так как для диска р =
= а = const, то угол а между «линией узлов Л/.V и осью My у
равен я/2, п поэтому из (1.74) имеем
з
1 = —п — ф. (4.1)
Условия отсутствия скольжения (1*73) 'запишутся в виде
|i = — а<р cos if, T)i = —fl(psin\|\ (4.2)
Из соотношений (1.77) — (1.80) в случае диска на плоскости
следуют такие ^кинематические уравнения:
о = 6, T = \fsin6, rc = ifcos6 + (p, (4.3)
задающие выражения проекций .вектора абсолютной угловой
скорости тола на соответствующие оси системы координат Mx\y\Z\
через углы Эйлера и их производные.
Потенциальная энергия тела задается равенством
П = mga sin 6, (4.4)
а проекции М\, Л#2, Ms момента силы тяжести относительно осей
Мх\, Муи Mz\ вычисляются по формулам
Мх = -mga cos 6, М2 = 0, Мъ = 0. (4.5)
Учитывая (4.1), (4.3), (4.5), получаем, что уравнения (1.84) в
случае диска принимают вид
(А + та2) -п- + (С + та2) т — Лт2 ctg В = — mga cos В,
A il + Лат ctg 6 — Сап = 0, (С + та2) -^ - та2сх = 0. (4'6>
Восемь уравнений (4.2), (4.3), (4.6) представляют собой
замкнутую систему днфференциальпых уравнении, описывающую
движение диска; интегрирование этой системы дает величины if, В,
<Р, Su ^i к^к функции времени, полпостью определяющие
положение диска в пространстве.
186
Получеппая система уравнений имеет гштеграл энергии
Е = 4- (А + та2) о2 + 4" ^т2 + 4~ (С + та2) n2 + mga sin 6 =
= h — const. (4.7)
Уравнения движения допускают частное решение вида
6 = 0о, 0 = 0, т = то, п = щ (4.8)
где постоянные во, то, т?о связаны соотношением
A ctg 60То — (С + та2) п0т0 — mga cos 60 = 0. (4.9)
Решение (4.8) отвечает стационарному движению, при котором
угол В между плоскостью острого <края диска и горизонтальной
плоскостью постоянен. При этом угловая скорость собственного
вращения диска и угловая скорость его прецессии также
постоянны п определяются равенствами.
т
<р = тг0 — т0 ctg80 = oyt = const, ф> = . °й = оэ2 = const. (4.10)
sm«0
Если Во = я/2, то уравнение (4.9) имеет два решения: п$ =
=(р =0, то = ф = 0)2 п по = <р = о>1, То = ф = 0. Для обоих
решетин плоскость диска вертикальна. В движении, отвечающем
первому решению, диск вращается с произвольной угловой
скоростью 0)2 .вокруг своего неподвижного вертикального диаметра;
второе решение соответствует качению диска вдоль прямой, при этом
угловая скорость вращения диска o)i вокруг его оси симметрии
С£ произвольна.
Если 6о т^ я/2, то равенство (4.9) задает двумерпое
многообразие стационарных движений диска, в которых 0)2 ^ 0. Траекторию,
вычерчиваемую точкой касания М \на опорной плоскости, найдем
из (4.2), (4.10). Имеем
£i = — ao)i cos if. r\i = —«o)i sin ф, ф = 0)2 = const.
Отсюда получаем-
li = а — — sin ф, 4l = р + — cos ф,
2 2
где се, [} — произвольные постоянные. Последние равенства
показывают, что точка касания М описывает на опорной плоскости
окружность, радиус которой равен lo)i/o)2la; центр окружиостп
находится в точке (а, [}). При этом центр тяжести диска
движется та»кже по окружности. Эта окружшость имеет радиус
и лежит в горизонтальной плоскости на высоте a sin 0o над
опорной плоскостью с центром на вертикали, проходящей через центр
187
ш2 cos ео
<*>„
а =
(а, Р) окружности, описываемой точкой касания М на -опорной
плоскости. Бели /го = 0, то центр тяжести дпска покоится.
Задача об устойчивости рассматриваемых стационарных
движений диска решена в «статьях [41, 46, 122]. Введем возмущения
Хг (i = 1, ..., 4), положив
6 = Во + #i, о = х2, т = то + #з, п = по + #4.
Из (4.3) и (4.6) получаем линеаризованные уравнения
возмущенного движения
йхл dx
<Ч_ dx*_ (4.11)
dt — Рз&2' "5F "~ P&xv
где введены обозначения
1 ( АА \
Р21 = — 2" wgflsin 60 71±- I
А + та \ sin 0Q /
Р23 = — 2 12Лто<^ё 60 — (С+ та2) щ],
А -\- та
С + та2 С р тд2
Л + та л С + /па
Характеристическое уравнение 'системы (4.11) записывается
в виде
Я2(Л2 - Р21 - 7>23/>32 ~ /?24/?42) = 0. (4.12)
Необходимое условие устойчивости, состоящее в требовании
отсутствия у уравнения (4.12) корней с положительной
вещественной частью, записывается в виде «неравенства
/?21 + Р2ЪРЪ2 + Р24/?42 < 0,
или, в развернутой форме,
--г {С + та2) nl — (ЗС + та2) ctg 60т0и0 +
+ {А + та2 + ЗА ctg2 60) т2, — mga sin 60 > 0. (4.13)
При невыполпенпп этого условия стационарное двпженпе дпска
неустойчиво.
Для получения достаточных условий устойчивости, восполь-
эуемея тем же приемом (из статьи [125]) построения функции
Ляпунова пз интегралов уравнений возмущенного «движения, что
и в задаче об устойчивости регулярных прецессий тела вращения
в § 3.
Перейдя при помощи первого из уравнений (4.3) к новой
независимой переменной — углу 0, получим из второго и третьего
уравнений системы (4.6) два линейных уравнения относительно
188
функций т(В), п (6):
d% п С dn та" // л/\
"т« = — ctg Вт + -7И, -ж =—; 5-т- (ь14)
сЮ & A dd С+таГ
Пусть Ti(6), п\(в) и тг(6), /Z2(6)—два решения этих
уравнений, удовлетворяющие условиям: ti(6o)=1» rci(6o)=0 и
Т2(60) = 0, 722 (Во) =1. Общее решение системы (4.14)
записывается в виде
1 = С\1\ (В) + С2Т2 (6) , П = С\П\ (В) + С2П2 (6) ,
где ci, C2 — произвольные постоянные. Разрешив последние
равенства относительно С\, с2, получим два первых интеграла
уравнений (4.14):
1 1
-р (т/22 — пт2) = с17 -^ (птг — т/Zi) = с2 (Z) = тх/г2 — пхт2). (4.15)
На невозмутценном движении с\ = то, с2 = по; зпачение
константы h интеграла энергии (4.7) на (невозмущенном движении
обозначим через Eq.
Уравнения возмущенного движения 'имеют интегралы V\ =
= Е — Е0, V2 = С\ — то, Vs = с2 — /г0, где Ci, сг — соответствующие
левые части равенств (4.15). Пусть функция Ляпунова равна
V = Vl + Vl + V\. Найдя из уравнений V2 = 0, Уз = 0
выражения шеличин #з и #4 через #i и подставив их в функцию
Vt(x\, х2, #з, ха)у получим Fi(#i, х2, xz(xi), ха{х\)). Обозначим
эту функцию через Vx (хг. х2). Функция Ляпунова V будет
определенно положительной относительно х\, х2, хг, х* тогда и только
тогда, когда функция Vt будет зпакоопределенной
относительно Х\, Х2.
Имеем
*_^х е\\ 1 d2vx 2 д2Уг j_<rvi 2
Vl = "Ж Ж1 + *^о" *2 + T'ie5"Хх + "^^ ^ + "2" 1? *2 + "" *
(4.16)
Здесь производные вычисляются па невозмущенном движешш;
многоточием обозначены члены выше второго порядка
относительно Х\, Х2.
Из (4.7) следует, что на невовмущенном -движении (4.8)
дУл д2Ул д2Ул
^Г = 0' 1Ш=°> -^-(Л+ ««*)><). (4.17)
Вычислим теперь производные 8V\/dQ и d2V\/0Q2. Пользуясь
уравнениями (4.14), имеем па невозмущенном движении
^i л dx . .а . о. dn , «
~06 = ~de + (С + mar)n~dd + mga C0S 0 =
= Ai I — /1 — ctg 0т) + (С + ига2) /г ———- т + mga cos В =
\ А / С + та"
= — A ctg Э -х2 + (С + та2) их + mga cos В, (4.18)
189
f-J = -£ (С + 7/ш2)/?2 — (ЗС + ma2)ctg6-™ +
+ (А + та2 + ЗА ctg2 В) т2 — mga sin 6. (4.19)
Из (4.18) и (4.19) видно, что на невозмущениом движении
производная dVi/дв равна пулю. Поэтому в соответствии с (4.16) —
(4.18) имеем
v*=4*5^+4-^ + т°2У>х* + ■ ■ ■ (4-2°)
Замечая, что на шевозмущенном движении правая часть
равенства (4.19) в точиостн совпадает с левой частью перавенства
(4.13), получаем, что достаточным условием устойчивости
стационарных движений диска будет выполнимость соотношения
(4.13) со строгим знаком неравенства.
Рассмотрим условия устойчивости в частных случаях
стационарных движений диска, .когда его плоскость .вертикальна
(Во = л/2). В случае верчения диска вокруг своего неподвижного
вертикального диаметра с угловой скоростью о)2 необходимое
(с точностью до знака равенства) и достаточное условие
устойчивости записывается в виде неравенства
(Л + та2) of >mga, (4.21
а в случае качения вдоль прямой с угловой скоростью o)i —
в виде
С {С + та2) OJ > mgaA. (4.22)
Отметим, что при рассмотрении стационарных двпжепий диска
мы предполагали, что скольжение отсутствует. Некоторые
аспекты задачи об устойчивости стационарных двпжепий диска с
учетом возможности возникновения скольжения рассмотрены в
статье [153].
2. Общий случай движения диска по абсолютно шероховатой
плоскости. Рассмотрим процедуру решения задачи о движенпп
без скольжения диска по плоскости в общем случае, :когда В Ф 0.
Дифференцируя второе уравнение из (4.14) но В и исключая из
получающегося результата величины т и dr/d6 при помощи
равенств (4.14), получаем для проекции п угловой скорости
дифференциальное уравнение второто порядка
О О
d~n . i n dn ma'C n
; + Ctg6-7PT —7 =77- П — "•
Введя в это уравнение вместо угла 6 новую 'независимую
переменную #, определяемую равенством [31, 215, 262]
cos В = 1 - 2я,
190
окончательно получим
««'--♦ё+<«-*>£-гай"-0- <423>
Мы пришли к липешюму дифференциальному уравнению
второго порядка, представляющему собой гплергеометрическое
уравнение Гаусса [180]. Таким образом, рассматриваемая задача о
движении диска интегрируется при помощи гппергеом-етрическпх
функции. Это пока единственный случай интегрируемости
задачи о движении без скольжения тяжелого тела с острым краем,,
хотя бы и весьма частного вида (круга), п по одной вполне опре-
делешгой поверхности (горизонтальной плоскости),
интегрируемость задачи о двшкепни диска в гииергео'метрпческих функциях
установлена независпмо С. А. Чаплыгиным [202], П. Аппелем
л Д. Кортеветом [2, 215, 262].
Если обозначить через
F(a, р, Г, х)
гииергеомегрпчесшш ряд Гаусса
л , ^Р г , «(« + 1)р(Р + 1) у2 ,
а (а
1-2 ...(A + i)-Y-(Y-rl)....(Y + *) * + ■•■' И-V
то уравнение
,rf2» . , / . П . JY 1 Л*
допускает [172] следующие частные решения:
F{*, р, -у; х), f(a, pt a+p-if+1; !-«)■
Для уравнения (4.23)
о
1 . п 4 о та"С
у = 1, a + р = 1, ар =
(С + ma J A
и, следовательно, его общее решение запишется так:
rc = CiF(a(, р, 1; x)+c2F(a, р, 1; 1-я),
где ci, C2 — произвольные постоянные, а а и Р — корни
квадратного уравнепия
s~ — s + 7 = 0.
(С + та~)А
Для бесконечно тонкого однородного диска С = 2А = х12ша2 и
величины а и р будут комплексно сопряженными числами.
Ряд (4.24) сходится равномерно «а любам отрезке числовой
оси, лежащем внутри пптервала — 1 < х < 1.
191
Возвращаясь от # к старой независимой переменной 6,
получаем функцию п (6) в виде
и = cxF (а, р, 1; sin2 -|-j + c2F (a. p, 1; cos2 -|Л (4.25)
Учитывая, что
-^f(a.p.v;ar) = ^F(a+l. р + 1. Т + 1? *).
находим функцию т(6) пз (4.25) п второго уравнения
системы (4.14):
т = 1L sin 6 LWa + 1, р + 1, 2; sin2 -jj-\ _
- c2F (a + 1. p + 1, 2; cos2 -|-U (4.26)
Используя кинематические уравнения (4.3), полупгаем теперь
величины <ф л <р как функции угла в:
* = Та[c*F (« + !• Р + 1, 2; sin2±) - c2F(о + 1,p + 1.2; cos2f )]
(4.27)
4 =c,f/'(a, p. 1; sin^j-^-eoseWa + 1, p + 1, 2; sin2-§")] +
+ c2 \F(a, p. 1: cos2-|-j + fA coseWa + 1. p + 1. 2: cos2 -|-Y|
(4.28)
Имея выражения (4.25) и (4.26) для функций гс(0), т(6),
можию определить время t при помощи квадратур. Для этой цели
еаметпм, что из первого кинематического уравпения (4.3) и
интеграла энергии (4.7) можно на основании выражений (4.25) и
(4.26) получить величину 0 как функцию утла 6:
6-/(8), (4.29)
где
х /q\ -■ / 2 (Л — mga sin 8) — Ах1 — (С + юя2) и2
7(4= \/ — 9 •
у А-\- та
Так как мы ограничиваемся рассмотрением одной фазы
движения, в которой величина 6 не обращается в нуль, то в последнем
выражении перед корнем вэят вполне определенный /знак.
Выбран знак плюс, что отвечает фазе движения, в которой угол 6
возрастает.
Из (4.29) получаем
в
где tо и Во — начальные значения (ц 6.
192
Равенство (4.30) определяет неявную зависимость угла В от
времени. При известной фупкцпи 6 = 6(f) зависимости углов ф
и ф от времени определяются из (4.27) и (4.28) посредством
квадратур.
Для завершения задачи осталось найти траекторию,
вычерчиваемую па опорной плоскости точкой касания М тела и
плоскости, а также определить закон движения точки М но этой
траектории. При известных функциях ф и яр это можно сделать на
основании условий отсутствия скольжения (4.2) при помощи
квадратур.
Качественный анализ характера следа точки касания на
опорной плоскости проведен в статьях [83, 192]. В частности,
покапано, что при почта всех тачальных условиях след лежит в
ограничений части плоскости, а диск никогда не упадет на
плоскость.
В статьях [211. 299] рассмотрено 'несколько задач о движении
без скольжения тела с острым краем по произвольной выпуклой
поверхности, -но прп весьма специфических .предположениях о
силовом иоле, в котором происходит движение. В статье [299]
рассмотрена «задача о движении диска по произвольной поверхности
под действием заданных сил. В частности, рассмотрена задача о
движении диска по сфере иод действием сил, приводящихся к
равнодействующей, проходящей через центры диска и опорной сферы
и зависящей только от расстояния между этими центрами:
показано, что в этом случае задача сводится к интегрированию
дифференциального уравнения второго порядка и квадратурам; когда
радиус опорной сферы стремится к бесконечности, эта задача в
пределе переходит в рассмотренную выше задачу о движении
диска до горизонтальной плоскости в однородном иоле тяжести.
В [299] указаны также (некоторые частные решения задачи о
движении без скольжения диска но произвольной поверхности
(и, в частности, по поверхности трехосного эллипсоида) под
действием силы, приложенной в центре диска и во все время
движения лежащей в плоскости диска. Дальнейшее развитие эта
часть работы [299] получила в статье [211], где движущееся тело
не обязательно является .диском, а может быть произвольным
телом с острым краем; в «качестве примера ш [211] рассмотрено
движение тела с острым краем в форме логарифмической
спирали по (поверхности вращения.
В статье [209] рассмотрено движение произвольного тяжелого
твердого тела с острым краем (не обязательно являющегося
диском) на неподвижной абсолютно шероховатой горизонтальной
плоскости; яайдепо семейство перманентных вращений тела
вокруг вертикали п получено необходимое и достаточное условие их
устойчивости.
3. Дифференциальные уравнения задачи о движении диска
по гладкому горизонтальному льду. Пусть тяжелый диск массы
та и радиуса а движется по горизонтальной поверхности гладко-
13 А. П. Маркеев
193
Рис. 33
го льда, касаясь ее одной ив точек своего острого края. Для
описания движения введем неподвижную систему координат 0|ini£i.
с началом в некоторой точке О опорпой плоскости и
вертикально направленной осью 0£i (рис. 33) и систему координат Gxyz
с началом в центре тяжестп диска; ось Gx горизонтальна, ось Gz
перпендикулярна плоскости острого края, а ось Gy проходит
через точку М диска, которой он
касается льда. Моменты
инерции диска относительно осей
Gx, Gy и Gz обозначим через Л
и С. Пусть S — какая-либо
фиксированная точка на
окружности диска. В силу
динамической симметрии диска, ось GSy
как и оси Gx, Gy, будет
главной центральной осью инерции.
Ориентацию диска
относительно неподвижного пространства
зададим при помощи углов
Эйлера я|?, В, ср. На рис. 33 линия
узлов MN является касательной
к окружности края диска и, следовательно, параллельна
оси Gx, угол собственного вращения ф есть угол между прямой,
проходящей через GS и линией узлов; через Q на рис. 33
обозначена проекция центра тяжести диска на плоскость льда.
Обозначим через vXy vy, vz и с, т, п проекции векторов
скорости центра тяжести диска \G и его угловой скорости о на
соответствующие оси системы коордипат Gxyz. При движении по
гладкому льду па диск наложена кинематическая связь: вектор
скорости \м точки М диска, ^которой он касается льда, должен быть
параллелей горизонтальному диаметру окружности диска.
Проектируя обе части векторного равенства
v.v = vg + cdXGM (4.31)
на оси Gy и Gz, .получаем уравнения связи в виде
vy = 0, vz-oa = 0. (4.32)
Пусть М' — геометрическая точка, которая принадлежит
следу, шычерчпваемому точкой касания М диска со льдом; азри своем
движении диск соприкасается точками М, лежащими «на его
окружности, с соответствующими точками М' следа. Скорость
точки М' в неподвижной системе координат ОЪ>\\\\£>\ обозначим через
М'
По теореме о сложении скоростей
v*u = v# + v(M}#f
(4.33)
где Уд?/—скорость точки М' относительно диска, а \м* —
переносная скорость точки Л/', т. е. скорость v3/ той точки М диска
относительно неподвижной системы координат, с которой ,в
данный момент совпадает точка М' следа. Если i, \, k — едипичпые
194
векторы осей Gx, Gy, Gz, то очевидно, что
\м> = — qai, (4.34)
а для удг = \м из (4.31), (4.32) получаем
\{M> = (vx + na)\. (4.35)
Согласпо (4.33) — (4.35), имеем
vm' = I^x + (п — Ф) a] i,
т. е. абсолютная скорость точки М' направлена по линии узлов.
Опираясь та кинематические уравнения (4.3)
о = 0, т = if sin 6, п = if cos 6 + ф, (4.36)
последнее равенство можно записать в виде
vM' = (vx + ax ctg В) I. (4*37)
Пусть £ь ци 0 — координаты точки М' в неподвижной
системе .координат OgniiSi. Из (4.37) и рис. 33 тогда получаем, что
след точки касания на льду определяется дифференциальными
уравнениями
-ft = {vx + ат ctg 6) cos «ф, —х = (i;x + ах ctg B) sin ф. (4.38)
Для получения динамических уравнений, описывающих
движение диска, воспользуемся теоремами об изменении количества
движения и кинетического момента. При применении теоремы
об изменении кинетического момента за полюс примем точку Л/'.
Обозначая символом d/dt операцию дифференцирования по
времени во вращающейся с угловой скоростью Q системе координат
Gxyz, получаем
т [^ + Q X vGJ « mg + R, (4.39)
—$- + fi X KM/ = mvG X vM' + Л/G X mg. (4.40)
Здесь R — реакция льда, g — вектор ускорения свободного
падения, Км' — кинетический момент диска относительно полюса М\
Реакция R ортогональна линии узлов MN, так как связи,
наложенные на диск при его движении но гладкому льду,
исключают возможность «подрезания» льда, не препятствуя вращению
диска вокруг оси симметрии. Вычисления показывают, что
векторы Км' и 12 в системе координат Gxyz имеют такие
компоненты:
(Л + и?я2)а, Ах, Сп — таих по, т, п — ф.
Проектирование уравнения (4.39) на ось Gx и уравнения (4.40)
13* 195
на осп Gx, Gy и Gz дает с учетом равенств (4.32) следующие
четыре скалярные уравнения:
(А + та2) — + (Сп — mavx) т — Лт2 ctg 0 + mga cos 6 = 0,
A -g- + A ctg Эта — Спо = 0, -g- = 0, ^ = — «та. (4.41)
Если к этим уравнениям добавить первое из кинематических
равенств (4.36) о = В, то получим замкнутую систему пяти
дифференциальных уравнений первого порядка относительно
пяти неизвестных функций времени о, т, пч vx, 0. Если эти
функции найдены, то углы Эйлера яр и ф найдутся из второго и
третьего равенств (4.36) посредством двух квадратур. Затем —
опять же при помощи двух квадратур — пз уравнений (4.38)
можно найти траекторию следа точки касания на поверхности
льда п закон движения точки М' по пей. Реакция льда
определится из двух равенств, получающихся проектированием
векторного уравнения (4.39) на осп Gy и Gz.
При движении полная механическая энергия диска остается
постоянной, т. е. пмеет место интеграл
-L {А + та2) а2 + -i- At* + \ Сп* +±mvl +
+ mga sin В = h = const. (4.42)
Из третьего уравнения системы (4.41) сразу следует, что
проекция угловой скорости диска на его ось симметрии также
постоянна во все время движения:
п = щ = const. (4-43)
Можно непосредственной проверкой убедиться в том, что
уравнения (4.41) имеют еще один интеграл
Ат sin 6 + Сп cos 6 = С\ =■ const, (4.44)
который означает, что проекция кинетического момента диска
относительно его центра тяжести на вертикаль постоянна.
Используя равенство о = 6, перейдем в четвертом из
уравнений (4.41) к новой независимой переменной 6 и заменим в
нем величину т на ее значение, получаемое из (4.44). В
результате придем к дифференциальному уравнению
dvx aci , Спа . а
интегрируя которое, получаем
vx + —■ In tg -r -^ In sin 6 = с2 = const. (4.45)
Существование пнтегралов (4.43) — (4.45) установлено в
статье [81]. В этой же статье дан качественный анализ двпже-
196
пия диска при произвольных начальных условиях; этот анализ
приведен в и. 5.
4. Стационарные движения диска на льду и их устойчивость
[116]. Уравнения движения диска па льду допускают частное
решение
0 = 60, а = 0, т = т0, п = л0, vx = V*, (4.46)
где постоянные В0, т0, л0, гх связаны соотношением
Лтд ctg 60 — (Сп0 — mavx) т0 — mga cos B0 = 0, (4.47)
а в остальном, вообще, произвольны. Решение (4.46)
соответствует стационарным движепиям диска, при которых угол
нутации 6, т- е. угол наклона плоскости острого края диска к
плоскости льда, постоянен. При этом движении диска угловые
скорости его собственного вращения и прецессии o>i и о>2
постоянны, они определяются равенствами (4.10); вектор скорости
центра тяжести диска горизонтален и имеет постоянную длину | vx |»
если при этом vx + ст0 Ф 0, то движение диска происходит со
скольжением, в противном случае — без скольжения.
Уравпения (4.38), определяющие траекторию точки касания
на льду, в случае стационарного движения диска становятся
такими:
-jr = (Рх + я<°2 cos E*o) cos Ф» ~jt = (у° + яю2 cos %) s*n *Ф» (4-48)
где it = i|j(f)= о>2* + ^(0), со2 = Wsin 6о. Отсюда видно, что если
на стационарном движении величина то отлична от нуля, то
следом точки касания на льду будет окружность радиуса
I y$ + aco2cos60 I
Траекторией цептра тяжести будет также окружность; эта
окружность лежит в плоскости, параллельной плоскости льда на
расстоянии a sin 6o от последней, а ее центр расположен в точке
вертикали, проходящей через центр окружности — следа точки
касания. Радиус окружности, описываемой центром тяжести,
равен |у£/о)2|; если у? = 0, то окружность вырождается в точку,
т. е. центр тяжести диска на стационарном движении (4.46)
будет в этом случае неподвижен.
Если же на стационарном движении (4.46) величина то
равна нулю (что, согласно (4.47), возможно, лишь когда 6о = л/2),
то при vx Ф 0 траекторией точки касания на льду будет прямая;
при Vx = 0 эта прямая вырождается в точку. Плоскость диска
прп этом вертикальна. Если в рассматриваемом случае и0 = О,
то диск совершает иоступательпое движение вдоль указанной
прямой или (при Vx = О) покоится; если же по Ф 0, то диск прп
движении вдоль прямой вращается вокруг своей осп симметрии,
197
занимающей горизонтальное положение, с постоянной угловой
скоростью Ъ)1 = по\ при Ух = 0 ось симметрии диска неподвижна
и диск «буксует» на месте, вращаясь вокруг оси симметрии с
УГЛОВОЙ СКОРОСТЬЮ COi ='ГСо.
В общем случае соотношение (4.47) определяет трехпара-
метрическое семейство стационарных движений диска. В
частных случаях это семейство может быть описано более просто
при помощи меньшего числа параметров. Если, например, 80 =
= л/2, то равенство (4.47) определяет два семейства двухпара-
метрических стационарных движений диска, в которых плоскость
диска вертикальна. Для одного из них
00 = -~-\ mavx = Сп0 (т0 — произвольная величина), (4.49)
а для другого
80 = -х-; т0 = 0 (vx, п0 — произвольные величины). (4.50)
Механический смысл движений (4.50) (а также п движений
(4.49) при то—0) описан выше. Остановимся на движениях
(4.49) при то^О. В этих движениях плоскость диска остается
вертикальной, а центр тяжести диска и точка касания движутся
по окружностям одинаковых радиусов, равных | у£/т0 |; сам диск
движется так, как если бы он был основанием прямого
кругового конуса, имеющего неподвижную, расположенную на
высоте а над плоскостью льда вершину и движущегося,
соприкасаясь со льдом одной из точек окружности своего основания;
движение конуса происходит со скольжением пли без скольжения
в зависимости от того, выполняется неравенство v% 4- ап0 Ф 0
пли нет. Отметим, что второе из равенств в (4.49) есть условие
осуществимости такого движения (регулярной прецессии)
упомянутого конуса, если считать, что вся масса конуса
сосредоточена в его основании. Если в движении (4.49) v% = 0, то она
отвечает вращению диска вокруг его неподвижного вертикального
диаметра с произвольной угловой скоростью сог = то.
Исследуем устойчивость стационарных движений диска
(4.46) на льду. Положим
6 = 60 + ^, о = х2, т = 10 + х3. гс = и0 + :r4, vx = v$+xb.
Линеаризованные относительно возмущении xt (i — l, 2, ...
..., 5) уравнения движения будут такими:
dx dx
lit = *2' It = Р*Л + Л*Л + ЛЛ + РяЛ-
dx3 _ fl4 _ - ^5 _ (4-51)
198
где приняты обозначения
1 ( К \
Рп = — J mgasm% гт— ),
А -+- та \ sin 6 I
Р23 = — 2 (2flT0ctg 00 + mav%—С/г0),
Л + та
_ Сто __ тато
Р'2Л — 7~i 2 ' ^25 — , . 2 '
Л + ™а А ■{- та
Рз2 = -д "о — ^о ctg 00, р52 = — ат0.
Характеристическое уравнение системы (4.31) имеет вид
Я3 (Я2 — р2\ - РпгРю — Р2$Р$2) = 0.
Это уравнение не имеет корней с положительной вещественной
частью, если выполняется следующее неравенство:
Р21 + /fe3/>32 + P2SPb2 ^ 0,
которое в развернутой форме может быть представлено в виде
■J 4 - ЗС/г0т0 ctg G0 + (/1 + та2 + ЗА ctg2 80) tJ +
+ mavi (To ctg eo — -J- wo) — m^« sin G0 > 0. (4.52)
Неравенство (4.32) необходимо для устойчивости: при его
невыполнении стационарное движение диска неустойчиво. Для
получения достаточных условий воспользуемся теоремой
Ляпунова об устойчивости движения [97].
Интегралы (4.42) — (4.45) в возмущенном движении могут
быть записаны в вике
Vx = 2mga cos 80xl + 2At0xs + 2Сщх± + 2mv%xb — mga sin QQx\ +
+ (A + mar)x\ + Ax\ + Cxi + nla:? + .. . = const,
V2==x± = const,
V3 = 2 (Лт0 cos G0 — Си0 sin 60) xx -f 2^4 sin 00#3 + 2C cos 00#4 —
— (At0 sin G0 + C/?0 cos G0) jt-f + 2A cos Оо^^д — 2C sin Q^x^ + ...
... = const,
V4 = 2x5 + 2ат0х, + a (^ n0 — xu ctg B0j a:J —
— ^ lnsinG0-F2+ — In lg-^--F3 + ... = const.
В выражениях для F|, F3 и F4 многоточием обозначены члены
выше второго порядка относительно возмущений.
199
Возьмем функцию Ляпунова в виде суммы квадратов
интегралов уравнении возмущенного движения:
v = v\ + v\ + v% + v*.
Функция V будет знакоопределенной в том и только в том
случае, когда знакоопределенной будет функция V\ при значениях
возмущений Xi (i = l, 2, ..., 5), удовлетворяющих уравнениям
172 = 0, Уз = 0, ^4 = 0. Из этих уравнений получаем
Хг = [^ п0 - т0clg 80) хх + ^_[т0 (1 + 2 ctg* 00) -
-^-/?0ctgG0]^+ . .., (4.53)
х4 = 0, (4.34)
Ч = — «Vi — "Г ("X "о — то ctg B0j .r? + ..., (4.55)
где многоточием обозначены члепы третьего и более высоких
порядков относительно х\.
Величина V\ при условиях (4.53) — (4.55) будет функцией
переменных х\ и Х2, причем ее часть, линейная относительно
хи обратится в нуль в силу равенства (4.47). Имеем
Vx = ах\ + {А + та2) х\ + . .. (4.50)
Здесь опять многоточие обозначает совокупность членов выше
второго порядка относительно Х\, а выражение для
коэффициента а, как показывают вычисления, совпадает с левой частью
неравенства (4.52).
Таким образом, условие (4.52) является необходимым и (с
точностью до знака равенства) достаточным условием
устойчивости стационарного движения диска (4.46).
Если vx + ап0 = 0, т. е. в невозмущенном движении (4.46)
скольжение диска на льду отсутствует, то условия (4.47) п
(4.52) существования п устойчивости стационарных движений
диска на гладком льду переходят в соответствующие условия
(4.9) и (4.13) существования и устойчивости стационарных
движений диска на абсолютно шероховатой плоскости.
Рассмотрим условие устойчивости (4.52) в частных случаях
стационарных движении диска, когда его плоскость вертикальна.
1Три 80 = л/2 неравенство (4.52) принимает вид
С2т?о + А(А + та2) т" — maCv*n0 — mgaA > 0. (4.57)
Отсюда следует, что движение (4.49) устойчиво (независимо от
значений величин vx ц щ). если угловая скорость прецессии
диска 0)2 = То достаточно велика:
(А + та2) g>2 > mga.
200
Отметим, что это условие совпадает с условием (4.21)
устойчивости стационарного вращения диска вокруг его неподвижного
вертикального диаметра в случае абсолютно шероховатой
плоскости.
При То —0 из (4.37) получаем, что движение (4.50)
устойчиво, если угловая скорость (ui = /zo собственного вращения
диска вокруг его горизонтальной оси симметрии удовлетворяет
неравенству
С2со?—maCvl^ — mgaA > 0. (4.58)
Отсюда при Vx = 0 следует, что «буксующий» на месте диск
устойчив, если выполняется условие
Chv^mgaA. (4.59)
Это условие совпадает с условием устойчивости «буксующего»
диска на абсолютно гладкой плоскости (см. § 6 гл. 2). Отмэтим,
однако, что на гладкой плоскости для устойчивости не
требовалось равенства нулю величины v%: там «буксование» могло
сопровождаться поступательным движением диска вдоль прямой
с произвольной скоростью. В случае же движения диска по
гладкому льду условия устойчивости при v%фi) не будут совпадать
с условием (4.59).
При ^2^=0 стационарное движение диска (4.50) будет
устойчивым, если (при ь\?>и) выполняется одно из неравенств:
(4.60)
При Vx<i0 знаки в неравенствах (4.60) надо изменить на
противоположные.
5. Качественная картина движения диска по льду в общем
случае. Следуя работе [81], рассмотрим некоторые свойства
движений диска, отличных от изученных в п. 4 стационарных
движений.
Используя интегралы (4.43) — (4.45), интеграл энергии (4.42)
можно записать в виде
(А + та1) 1^)= 2Л — 2mgasin G — mvl (G) —АхЩ— Cnl (iM)
Отсюда угол 6 = 0(/) находится квадратурой. Будем считать,
что Сп^Фси Тогда, согласно (4.45), правая часть равенства
(4.61) стремится к —°°, когда 6 стремится к 0 или п.
Следовательно, в этом случае 0<6(£)<jt и 0(0— периодическая
функция с некоторым периодом Т. Величины о, т, vx, v2 будут также
периодическими функциями времени с тем же периодом Т.
201
Из второго и третьего кинематических условий (4.3)
вытекает, что \|\ ф — периодические функции времени с периодом Т
и, следовательно,
4> = M + /i(0, ф = М + /г(0» (4-62)
где Яь Хг — постоянные величины, зависящие от пачальных
условий, a /i, /2 — периодические функции времени с периодом Г.
Осталось рассмотреть характер движения точки касания
диска и льда, определяемого уравнениями (4.38). Обозначим через
g\(t) величину i^ + atclgO, являющуюся Г-периодической
функцией времени. Если ввести комплексную величину £ = £| +
+ Щ] и учесть первые из равенств (4.62), то два уравнения
(4.38) можно записать в виде следующего одного уравнения:
-§- = *! (О ехР I* (М + /, (*))]• (4.63)
Разложим ^-периодическую функцию gi{t)exp[if\(t)] в
сходящийся ряд Фурье
2 flfcexp^-p-fj.
fc=—00
Тогда из (4.63) получим
E-c + dfOexp^iO,
где с — произвольная комплексная постоянная, а
Gi О = J^ Ч2лА-/°Г + Ях) еХР (* ¥ ')'
Если 2пк + Тк\=£0 при целых /с, то G\{t)—аналитическая
периодическая функция с периодом Т. В неподвижной плоскости
0\\Ц\ введем подвижную систему координат, вращающуюся с
угловой скоростью —A,i вокруг точки с. В этой системе
координат точка £(£) будет двигаться периодически по замкнутой
аналитической кривой £ = Gi(f). В неподвижной плоскости 0\\Ц\
точка касания будет совершать сложное движение: она
движется периодически по кривой £ = Gi(£), которая вращается как
твердое тело с постоянной угловой скоростью —к\ вокруг
неподвижной точки £ = с.
§ 5. Перманентные вращения тяжелого твердого тела
на абсолютно шероховатой горизонтальной плоскости
1. Существование стационарных движений. Рассмотрим
движение без скольжения твердого тела, ограниченного выпуклой
поверхностью, по неподвижной горизонтальной плоскости в
однородном поле тяжести. Положение твердого тела в
неподвижной системе координат Oxyz, имеющей начало в некоторой точке
202
опорной плоскости и направленную вертикально вверх ось Oz,
зададим координатами х. у его центра тяжести и углами Эйлера
i|\ G, ф. Уравнения связей, выражающие условия отсутствия
скольжения, запишутся в виде соотношении (1.66).
Тяжелое твердое тело, движущееся без скольжения по
горизонтальной плоскости, представляет собой неголономную
систему Чаплыгина. Дифференциальные уравнения движения тела
имеют вид уравнений (1.70). Следуя работам [67, 70],
рассмотрим вопрос о существовании и устойчивости перманентных
вращений тела.
Опираясь па равепства (1.68), (1.09) данной главы н на
соотношения (1.25), (1.30), (4.3), (4.22) гл. 2, нетрудно
убедиться, что дифференциальные уравнения (1.70) допускают частные
решения вида
0 = 60, 6 = 0, ф = фо, Ф = 0, if = ifo = G), (5.1)
где 6о, фо, fc) ~ постоянные величины, удовлетворяющие
уравнениям
mg(%i cos Оо - I sin Go) = -/|з<*)2, mg%2 = /23o)2. (5.2)
Решение (5.1) соответствует такому стационарному
движению тела, когда оно опирается о горизонтальную плоскость
одной и той же точкой своей поверхности и вращается вокруг
вертикали, проходящей через эту точку, с угловой скоростью
\fo = со. Центр тяжести тела описывает при этом окружность,
лежащую в плоскости, параллельной опорной горизонтальной
плоскости, с центром на оси вращения тела. Чтобы найти
радиус pG этой окружности, рассмотрим уравнения связей (1.66) на
решении (5.1). Имеем
£ = [х2 sin if + (xi cos 60 — £ sin 00) cos if] to,
У = - [X2 cos \f - (xi cos Oo - I sin 0o)sin if] o. *°"
Здесь Х2, Хь £—постоянные, зависящие от 6о, фо, a if = (u£+\fo.
Из (5.3) при со Ф 0 получаем
х — а — [хг cos if — (xi cos G0 — £ sin G0)sin \f],
У = P - [X2 sin Ф + (Xi cos 0o - I sin Go) cos if],
где a, P — произвольные постоянные (координаты точки
касания тела и опорной плоскости). Отсюда получаем
(х - а)2 + (у - р)2 = рЬ = Х2 + (Xi cos G0 - £ sin G0)2.
Но так как для решения (5.1) справедливы равенства (5.2),
то выражение для радиуса окружности, описываемой центром
тяжести тела, можно записать в виде
Pg = — V J и + Jlz'
203
Здесь величины /i3, /23, определяемые равенствами (1.69),
должны быть вычислены при 6 = 00, ф = фо-
Если о) = 0, то решение (5.1) отвечает равновесию тела;
в положении равновесия центр тяжести тела находится на
вертикали, проходящей через точку касания тела с опорпой
плоскостью.
Исключив пз уравнений (5.2) величину со. получим
соотношение
(В - С) £а32язз + (С - Л) Tjflsaflsi + (А - В) £д31Яад = 0, (5.4)
где ази «32, язз—направляющие косинусы оси Oz в системе
координат G\vfc, образованной главными центральными осями
инерции тела; они выражаются через 6 и ф по формулам (1.3)
гл. 1. Соотношение (5.4) является условием, которому должны
удовлетворять направляющие косинусы осей перманентных
вращений тяжелого твердого тела на абсолютно шероховатой
горизонтальной плоскости. Отметим, что (5.4) в точности совпадает
с аналогичным условием (4.8) гл. 2.
Не каждая удовлетворяющая условию (5.4) вертикальная
ось, проходящая через точку касания тела и плоскости, является
осью перманентного вращения тела. Чтобы ось была таковой,
она должна удовлетворять динамическому условию: величина (о2,
определенная из (5.2), должна быть неотрицательной. Это
условие может быть записано в впде неравенства /23X2 ^ 0,
которое можно преобразовать к такой форме:
(А-В) (т]а31 - £а32)а31аз2 > m(r\aS\ - £«з2)2/(0, ф), (5.5)
где /(0. ф)= — Xi sinO — £cos6 — расстояние от центра тяжести
тела до опорной плоскости.
Каждой оси перманентного вращения тела, направляющие
косинусы которой удовлетворяют условиям (5.4) и (5.5),
отвечает уже, вообще говоря, не произвольное, а единственное
значение величины Itol, которая определяется одним из равенств
(5.2).
Отметим [67], что динамическое условие (5.5) переходит в
соответствующее условие (4.9) гл. 2, если правую часть в (5.5)
заменить на нуль. Но так как правая часть неравенства (5.5)
неотрицательна, то отсюда следует, что, хотя уравнения,
которым должны удовлетворять направляющие косинусы осей
перманентных вращений в задачах о движении тяжелого твердого
тела на абсолютно гладкой и абсолютно шероховатой
плоскостях, совпадают, область динамически допустимых осей в случае
абсолютно гладкой плоскости шире, нежели в случае абсолютно
шероховатой плоскости.
Отметим также [67] некоторое различие задач о
перманентных вращениях тяжелого твердого тела на абсолютно гладкой и
абсолютно шероховатой плоскостях. В первом случае вращение
тела происходит вокруг вертикали, проходящей через центр
тяжести тела, сам центр тяжести неподвижен, а точка касания
204
тела с опорной плоскостью описывает на последней окружность;
при этом тело скользит по опорной плоскости. Во втором случае
вращение тела происходит вокруг вертикали, проходящей через
точку касания тела с опорной плоскостью; эта точка тела
неподвижна, а центр тяжести тела описывает окружность,
лежащую в плоскости, параллельной опорной плоскости.
2. Устойчивость перманентных вращений. Рассмотрим теперь,
следуя |67, 70], вопрос об устойчивости найденных
стационарных движений тела — перманентных вращений вокруг
вертикали. Нам потребуется теорема Ляпунова — Малкина об
устойчивости движения в особенном случае критического случая
нескольких нулевых корней. Приведем ее формулировку [101].
Пусть дифференциальные уравнения возмущенного движения
имеют вид
2Г= Yi(Vv ..чУьг! *п-1) (/ = 1,2 Д'),
d*j (5.G)
-^jT = PhZl + - - - + PjnZn + Zj (yl4 . . ., yh* Z2, . . ., Zn, t)
(/=1.2 л),
где Yu Zj — ограниченные функции t при всех t &* 0,
разлагающиеся в сходящиеся в некоторой не зависящей от t окрестности
начала координат ряды, начинающиеся с членов не ниже
второго порядка относительно yu Zj. При этом
Yt(yu ...,0*0, ..., 0, t) = Zj(yu ..., Ук90, .... 0.0 = 0.
т. е. функции У,, Zj обращаются в нуль при равенстве нулю
одних лишь переменных Z; (у = 1, 2, ..., /г).
Коэффициенты pjs в (5.6) постоянны и таковы, что
характеристическое уравнение линеаризованной системы (5.6)
где Р„(Я)—характеристический многочлен матрицы,
образованной элементами pjs (/, s = l, 2, ..., п), имеет п корней с
отрицательными вещественными частями.
Уравнения (5.6) допускают частное решение
У\ = си ..., yh = ch, zi = ... = zn = 0, (5.7)
определяющее семейство движений, зависящее от к
произвольных постоянных Сг и содержащее исследуемое невозмущенное
движение.
Теорема Ляпунова— Малки на. Если уравнения
возмущенного движения имеют вид (5.6), то невозмущенное
движение устойчиво. При этом всякое возмущенное движение,
достаточно близкое к не возмущенному, стремится с
неограниченным возрастанием времени к одному из движений семейства
(5.7). Теми же свойствами обладают все движения семейства
205
(5.7), если только численные значения параметров с,
достаточно малы.
Переходя к исследованию устойчивости перманентных
вращений (5.1) твердого тела на абсолютно шероховатой плоскости,
рассмотрим характеристическое уравнение линеаризованной
системы уравнений возмущенного движения [07, 70]:
К(а^ + а1кг + а2К2+азК + а4) = 0, (5.8)
где
а0 = {A*UA22 — К\2 — А'зз1 (АПА§3 + К22К\3 + 2К1гКаК^}° =
^АВС(К£)0>0,
Gl = о {— mh (г2 — г,) ( А12 + К^К13К23) +
+ Kjtfg-* [A']3A'23(A'11rl - А22г2) + А12 (А^ - А23г2)]}°
а2 = mg [(К22 - К33гК%) (г2 - Л) + (Кп - К£К*и) (r, - h)]° +
+ о2 {m-hb-fr + mh [(К33 — An) r2 + (К33 — К22) т\ +
+ АТз1 (А23(r, + 2r2) + А*3(2/j + г2))1 + (А33 - Кп) (К33 - А'22) +
+ #UA22 - 2А?2 + 3 {К% + К*,) + Kg [Ки (К$3 - 4Kb) +
+ К2г (А|3 - 4А23) - 10A12AlsA-23]}° +
+ (АТз1)0*)^-! |(А23 + А22з)тйгу, + (A33 + А22 - Ки)К\3г2 +
+ (А'зз — А"22 + Кп) Kiarj — 2К12К13К23 (гг + г2)) ,
«з = ю3 (— mh (r2 — ri) (ки + SAg^A^Ajs) +
+ A-^Vg-i [А1зА23 {Кигх- К22г2) + К12 (КV, - К*,г2) +
+ А-13ЛГ23 (А33 - Ки - А22) (г2 - г,)]}0 = gi(o2 +
^ + о3 [К^К^К^ ЦК„ - Ки - К22) coV"1 - 2mh\}° (г, - г,)»,
Й4 = mY- [(п - h) (r2 - h))° + mgtf {^33 ('i + '2 - 2/0 -
— * 11 (г2 — Л) — А22 (г2 — й) + mfe [2r,r2 — /1 (г, + rt)J +
+ 4АГ31 [ А23 (г, - ft) + К\\ (г, - ft)])° + ю» {j»aftV« +
+ m/г [(А'зз - Кп) Ъ + {К33 - К22) rj + 2mhK331 [K\3 (2r2 - гх) +
+ А|з(2Г1 - г2)] + 2тГ1г2К£ {К\3 + A'fj) +
+ (А33 — Аи) (Адз — А*22) — А12 — 8А33 KJ2K13K23 +
+ 4АГ31 [А22з (А'зз - Аи) + А23 (А'зз - А22)])° +
+ 2 {K£Y<*g-i [mhrir2 (А?з + А22з) + (А33 - Ап) А'23г2 +
+ (А,, - А22) кЪгг - К^К^К^ (гг + г2)}°. (5.9)
206
Здесь Кц — осевые (i = j) и центробежные (i=£j) моменты
инерции тела по отношению к осям системы координат Л/£з*1з£з с
началом в точке касания тела с опорной плоскостью, направления
осей координат М\% и Жт|з которой совпадают с направлениями
линий кривизны поверхности тела в точке М, причем оси М|з
отвечает радиус кривизны n=ri(6, ф), а оси М\\з — радиус
кривизны г2 = гг(6, ф) (рис. 13); в соответствии с формулами (3.8)
гл. 1 имеем
Ki\=Jii cos2a + /22 sin2 a — 2/12 sin a cos a,
K12 = (/11 — /22) sin a cos a + /12 (cos2 a — sin2 a),
K13 — /13 cos a + /23 sin a, (5.10)
K22 = /1 1 sin2 a + /22 cos2 a + 2/12 sin a cos a,
#23 = —/is sin a + /23 cos a, K33 = /33,
где a = a(6, ф)—угол между осями М\ъ и Л/|з, отсчитываемый
от оси Л/^2 к оси Ж|3; в (5.9) h = h(Q, ф)—высота центра
тяжести над опорной плоскостью; верхний нулевой индекс
указывает, что соответствующая функция переменных 6 и ф
вычисляется при 0 = Go, Ф = Фо-
Систему уравнений возмущенного движения можно [70]
привести к пяти уравнениям первого порядка, имеющим структуру
уравнений (5.6), к которым применима теорема Ляпунова —
Малкина.
Уравпение (5.8) всегда имеет один нулевой корень. Если при
этом хотя бы один его корень имеет положительную
вещественную часть, то имеет место неустойчивость движения (5.1). Если
же все корни уравнения
a0lA + alXs + a2l2 + aJ, + a4 = 0 (5.11)
имеют отрицательные вещественпые частп, то движение (5.1)
устойчиво, прпчем асимптотически, относительно переменных 6,
ф, и, v, где и и v характеризуют отклонения G, ф п *ф от пх
значений на многообразии (5.2) перманентпых вращений.
Все корни уравнения (5.11) имеют отрицательные
вещественные части тогда и только тогда, когда выполнены условия [101]
«i>0, a3>0, a4>0, а±а2а3 — а\а± — aoa|>0.
(5.12)
Если хотя бы одно из этих неравенств выполняется с обратным
знаком, то уравнение (5.11) имеет корень с положительной
вещественной частью.
Таким образом, условия (5.12) являются необходимыми
(с точностью до знака равенства) и достаточными для
устойчивости перманентных вращений тяжелого твердого тела на
абсолютно шероховатой горизонтальной плоскости.
Из (5.2) и (5.9) видно, что коэффициенты а0* ^2 п а^
уравнения (5.11)—четные, а а\ и «з— нечетные функции со. Поэто-
207
му последние два условия в (5.12) налагают ограничения
только на геометрию масс п поверхности тела и на величину его
угловой скорости, а первые два в общем случае — и на знак
угловой скорости. Отсюда следует, что при прочих равных
условиях устойчивость перманентных вращений тяжелого твердого
тела на абсолютно шероховатой горизонтальной плоскости,
вообще, зависит от направления вращения: устойчивое вращение
тела в одном направлении становится неустойчивым при
изменении направления вращения на противоположное.
Эта зависимость, а также возможность существования
асимптотической устойчивости по части переменных при отсутствии
активных внешних днссипативных сил существенно отличает
задачу об устойчивости перманентных вращений тела на
абсолютно шероховатой плоскости от аналогичной задачи в случае
абсолютно гладкой плоскости, рассмотренной в гл. 2. В последнем
случае условия устойчивости пе зависят от направления
вращения тела, а при отсутствии активных внешних
днссипативных сил асимптотическая устойчивость невозможна.
Если о) = 0, то, как уже отмечалось в п. 1, решение (5.1)
отвечает положению равновесия тела. Для исследования его
устойчивости воспользуемся [161] теоремой Ляпунова об
устойчивости, приняв в качестве функции Ляпунова V полную
механическую энергию тела Г* + И- В силу того что Г* —
определенно-положительная функция от 8, ф, *ф, то, согласно теореме
Ляпунова, достаточным условием устойчивости равновесия тела по
отношению к возмущениям величин G, ф, G, ф, ф будет условие
положительной определенности потенциальной энергии П(0, ф)
в окрестности положения 6 = 6о, Ф = фо- Как показано в § 4
гл. 2, это условие записывается в виде неравенств
П > /г, г2 > К (5.13)
т. е. положение равновесия тела на абсолютно шероховатой
плоскости устойчиво, если центр тяжести тела находится ниже
обоих главных центров кривизны поверхности тела в точке его
касания с опорной плоскостью. Если хотя бы одно из неравенств
(5.13) выполняется с обратным знаком, то рассматриваемое
положение равновесия тела неустойчиво согласно теореме
Ляпунова об обращении теоремы Лагранжа [98].
Таким образом, условия устойчивости положения равновесия
тела на абсолютно гладкой и абсолютно шероховатой
плоскостях одинаковы: они задаются неравенствами (5.13). Л условия
устойчивости перманентных вращений, как мы видели выше и
увидим еще в следующем параграфе, отличаются п качественног
я количественно.
3. О перманентных вращениях неоднородного шара [70].
Пусть твердое тело представляет собой неоднородный шар
радиуса р, геометрический центр которого в системе G£r]J; имеет
координаты go, т]о, £о. Тогда координаты £, г], £ точки касания
208
поверхности шара с опорной плоскостью определяются по
формулам.
Е = Ео-раз1, Л = По - рязг, £ = ьо-ра33. (5.14)
Уравнение (5.4) и условие (5.5) принимают соответственно вид
(В - С) Ъоаюаы + (С - А) т]о«ззйз1 + {А - В) £0^31^32 = 0, (5.15)
(А — В) (Т]0а31 — Ео«32) 031^82 >
> т (r\0aSi — Ъоаы)2 [р — (bflsi + Ло«зг + £оЯзз) ] - (5.11))
Уравнение (5.15) определяет конус второго порядка.
Из (5.9) прп п —Г2 = р следует, что
аг = [К*1 [К13К23 (Кг1 - К22) + К1Ш (К\3 - А1з)11° Р©3*"1 Ф О*
а3 = to^j.
и, следовательно, условия (5.12) устойчивости перманентных
вращений записываются в виде системы неравенств
ai>0, а4>0, {а2 — а0ы2) со2 — я4 > 0. (5.17)
Так как «j — нечетная функция со, то устойчивость зависит
от направления вращения шара. Отметим, что устойчивость
перманентных вращений шара в отличие от произвольного тела
зависит от знака со только в том случае, когда ось вращения
не является главной осью инерции шара для точки М его
касания с плоскостью. В самом деле, в противном случае К\$ =
= А'2з = 0. Следовательно, ai = az = 0 и уравнение (5.11)
содержит только четные степени Я, коэффициенты прп которых —
четные функции со.
§ 6. Динамика кельтского камня
1. Постановка задачи. Пусть одна из главных центральных
осей инерции тела, например ось Gr\, в одном из своих
противоположных направлений или в обоих пересекает поверхность
тела по нормали к последней. Предположим, что в точке М
пересечения оси Gy\ с поверхностью тела радиусы кривизны
поверхности г\ и Г2 различны по величине, а направления главных
осей инерции тела для точки М не совпадают с направлениями
линии кривизны поверхности в этой точке. Кроме того, будем
считать, что моменты инерции А и С тела относительно
главных центральных осей G\ и G£ различны (тогда будут различны
и моменты пнерции относительно параллельных G£ и G£
главных осей инерции тела для точки М). Тела, поверхности и
распределения масс которых обладают указанными свойствами,
иногда называют кельтскими камнями. Данный параграф
посвящен некоторым вопросам дпнампкп таких тел. Первое научное
сообщение о замечательных динамических свойствах кельтского
камня на неподвижной горизонтальной плоскости появилось в
14 А. П. Маркеев
209
конце прошлого века в небольшой заметке [293]. В этой
заметке сообщалось о некоторых наблюдениях в эксперименте
«курьезных» динамических свойствах кельтского камня. Если его
поместить иа горизонтальную плоскость и закрутить в
определенном направлении вокруг вертикальной осп, то он может
устойчиво продолжать это вращение. Если же направление
начального вращения изменить на противоположное, то он может
скоро перестать вращаться, пачиет колебаться вокруг
горизонтальной оси, а затем без активного внешнего воздействия начнет
вращаться в обратном направлении. В некоторых случаях эффект
изменения направления вращения наблюдается при любом
направлении начального вращения и даже может повторяться
многократно. Кельтский камень обладает еще и таким «странным»
свойством: если покоящийся на плоскости камень привести к
колебаниям вокруг горизонтальной оси, то эти колебания с
течением времени вызовут его вращение вокруг вертикальной осп,
причем направление вращения зависит от ориентации
относительно тела той оси, вокруг которой вначале камень колебался.
Многочисленные эксперименты, проведенные с целью
исследования динамики кельтских камней, подробно описаны в
популярной статье [297].
Первое математическое исследование движения твердых тел
типа «кельтских камней» было проведено в статье [29G]
автором первого сообщения [295] о динамических свойствах
«кельтского камня». Задачу естественно рассматривать с двух сторон,
различая вопрос об исследовании устойчивости стационарного
вращения тела вокруг вертикали и вопросы исследования
нелинейных колебаний тела иа плоскости. В статье [29G] в
предположении об отсутствии скольжения тела по плоскости путем
анализа линеаризованных уравнений движения показало
существование зависимости устойчивости вращения тела вокруг
вертикали от направления этого вращения. Кроме того, в [296] при
некоторых ограничениях на геометрию масс тела и на
начальные условия движения сделан вывод о возможности
возникновения вращения тела вокруг вертикали за счет его колебаний
вокруг горизонтальной оси. Достаточно подробное изложение
исследования [296] содержится в монографии [245] .
Задача об устойчивости стационарного вращения тела вокруг
вертикали в строгой нелинейной постановке вопроса решена в
работах [7, 04, 67, 161]. В статьях [Со, 162, 270] при
исследовании движения со скольжением тела по плоскости показано,
в частности, что и при наличии вязкого трения в некоторых
случаях есть зависимость устойчивости от направления вращения
тела вокруг вертикали. Таким образом, первая сторона задачи
о движении кельтского камня получила строгое решение.
С целью исследования второй стороны задачи, связанной с
анализом характера нелинейных колебаний кельтского камня,
в статье [224] построена математическая модель, обладающая
свойствами кельтского камня, фпзпческое соответствие которой
210
реальным твердым телам на плоскости не проанализировано.
В работах [258, 264] многие экспериментальные выводы о
движении кельтского камня [297] подтверждены при помощи
численного интегрирования нелинейных дифференциальных
уравнений движения. В работе [147] исследование движения
кельтского камня проведено асимптотическим методом усреднения.
В статье [109] для исследования нелинейных колебании
кельтского камня использован метод нормальных форм Пуанкаре [17].
Основные результаты работ [109, 147] дают теоретическое
обоснование наблюдаемого в опытах эффекта, связанного с
изменением направления вращения кельтского камня вокруг
вертикали без активного внешнего воздействия и возникновения
вращения в том пли ином направлении за счет колебаний вокруг
горизонтальной осп. Это обоснование получено в предположении
о малости отличия постоянной интеграла энергии от ее
значения в положешш устойчивого равновесия кельтского камня.
В данном параграфе на основе упомянутых в приведенном
здесь кратком обзоре работ будут рассмотрены задачи
устойчивости и колебаний тяжелых твердых тел типа кельтских
камней на неподвижной абсолютно шероховатой горизонтальной
плоскости.
2. Устойчивость перманентных вращений тела вокруг
главной оси инерции. Пусть главная центральная ось инерции Сц
ортогональна поверхности тела в точке их пересечения при
отрицательных значениях г|. Тогда если 00 = л/2, а фо = 0. то
правые и левые части уравнений системы (3.2) обращаются в нуль
одновременно при произвольном значении со. Следовательно,
уравнения движения (1.70) имеют частное решение
л *
0 = -^-, ф = 0, я|) = оз = const, (6.1)
отвечающее вращению тела с произвольной постоянной угловой
скоростью со вокруг покоящейся оси Gr), занимающей
вертикальное положение.
Введем возмущения xt (i= 1, 2, 3), положив
0 = -^ + х1ч <р = х2, яр = оз + xv (6.2)
Уравнения возмущенного движения будут такими:
(A + mh2)x\ = mlhu>x\ — [(А + С — В) + 2mh2 — mhl\] ®X2 +
+ [{C-B)G>2 + m(h-l2)(g + to2h)]xl-ml(g + <*2h)x2 + Xlr
(С + mh2)x2 = [ (А + С — В) + 2mh2— mhl2] toil — mlhu>x2 —
- ml(g + to2h)xx + [(A -В)<д2 + m{h~-1{) (g + (d2h)]x2 + X2, (6.3)
Bx3 = X3.
Здесь Xt (i= 1, 2, 3)— функции переменных x\, х2ч х\, x2 и хъУ
разложения которых в ряды по степеням этих переменных на-
14* 211
чинаются с членов не ниже второго порядка, причем Xi(0, 0f
О,0,а:з)-0 (1 = 1,2,3).
Пренебрегая членами выше второго порядка относительно
х\ч х2, xi, £2, #з, имеем следующие выражения для функций X*
(*=1,2,3):
Xi = {mlhxx - [ (А + С - В) + 2mh2 - тЫл ] х2 +
+ 2о) [ (С - В) + mh (h - Z2) ] х{ - 2^rnlhx2)xz + Fu
X2 = {[ (A + С - В) + 2mh2 - mlhl2] xx - mlhx2 - 2a>mlhxl +
+ 2to [ (A - B) + m/г(h - lt) ] x2b3 + ^2, (0.4)
X3 = x1{mlhx1 — [(Л — B) + mh (h — Z2)] x2} -f
+ #2{[C + w>h(h — Z2)] a*! — mlhx2} +
+ (В + С — A) xxx2 + /гго)/ (ЗА — j\ — r2) (хгх2 -f xxx2) —
— to {2 (C — B) + m [2Л2 — 3feZ2 + (r\ cos2 a + r\sin2 a)]} 24 ix —
— со {2(4 — B) + m [2h2 — ЗЛ/j + (r{sm2a + iicos-a)]} x2x2.
В последнем выражении для Хз величины х\, х2— линейные
функции xti Xt (i = l, 2), получаемые из первых двух
уравнений системы (6.3), если в них положить Xi = 0 (i = l, 2).
В (6.4) h — расстояние от центра тяжести тела до опорной
плоскости; величины Zi, Z2, I определяются соотношениями (4.17)
гл. 2; г\ и г2 — главные радиусы кривизны поверхности тела в
точке его касания с плоскостью; a — угол между осью G£ и
линией кривизны, соответствующей п в невозмущенном движении
(угол а отсчитывается от оси Gt> против часовой стрелки, если
смотреть навстречу оси Сц* занимающей вертикальное
положение в движении (6.1)). Через F\, F2 в (6.4) обозначены
квадратичные формы относительно я», ±t (i=l, 2); их явный вид
в дальнейшем не потребуется.
Характеристическое уравнение линеаризованной системы
уравнений возмущенного движения (6.3) пмеет вид
Я (РЯ4 + (>аЛ3 + RK2 + Qrfl + 5) = 0, (6.5)
где
Р = (А + mh2) (С + mh2), Q = mlh{А-С),
R = {[(A+C-B)+2mh2]2-[(A + C-B)+2mh2]mh(ri + r2) +
+ m2h2rlr2}o>2-(A + mh2)[(A-B)(u2 + m(h-ll)(g+(*2h)]-
-(С + mh2) [(С-В)(*2 + m(h-l2) (g + v2h)],
S = (A-B){C-B)<u* + m(g + b>2h)<d2[A(h-l2) + C(h-ll)-
-В(2/г-г1-г2)] + т2(^ + оз2/г)2(/г-г,)(й-г2).
К системе (6.3) применима теорема Ляпунова — Малкина об
устойчивости движений в особенном случае критического случая
212
одного нулевого корпя (см. п. 2 § 5). Из этой теоремы и
критерия Рауса—Гурвица получаем [64], что при выполнепии
условий
(R - Ро)2) со2 - S > О, S > 0, (6.6)
со (Л —С) (r2 — ri)sinacosa>0 (6.7)'
стационарное вращение (6.1) устойчиво, причем асимптотически
по отношепию к возмущениям величин 6, 0, ф, ф. При строгом
нарушении хотя бы одного из неравенств (6.6), (6.7)
движение (6.1) неустойчиво.
Неравенства (6.6) задают ограничения на распределение
масс, геометрию поверхности тела и величину угловой скорости,
а неравенство (6.7) налагает ограничения и на знак угловой
скорости (направление вращения тела); при устойчивом
вращении меньшая горизонтальная ось центрального эллипсоида
инерции идет впереди линии наибольшей кривизны поверхности
тела в точке его касания с плоскостью в невозмущенном
движении.
При выполнении условий (6.6), (6.7) всякое возмущенное
движение, достаточно близкое к невозмущенному,
асимптотически стремится к перманентному вращению с возмущенной
угловой скоростью вокруг главной оси Gr\4 положение которой
асимптотически стремится к вертикальному. Зависимость
условий устойчивости от знака со и наличие асимптотической
устойчивости по всем, кроме ф, переменным существенно отличает
условия устойчивости перманентных вращений твердого тела вокруг
главной центральной оси инерции на абсолютно шероховатой и
абсолютно гладкой плоскостях. В последнем случае условия
устойчивости (см. неравенства (4.30) гл. 2) не зависят от
знака оз и, кроме того, невозможна асимптотическая устойчивость
по части переменных.
Если (?=^0, то при достаточно малых Icol стационарное
вращение (6.1) неустойчиво независимо от знака со, так как при
малых I со I неравенства (6.6) несовместны. Отсюда вытекает еще
одно отличие задачи об устойчивости перманентных вращений
тела вокруг главной центральной оси инерции на абсолютно
шероховатой и абсолютно гладкой плоскостях: устойчивые как на
гладкой, так и на шероховатой плоскости равновесия тела (со =
= 0, fe<n, /&<гг) переходят при малых |(о| в медленные
перманентные вращения вокруг главной центральной оси инерции;
эти вращения устойчивы на абсолютно гладкой плоскости (см.
условия (4.30) гл. 2) и неустойчивы на абсолютно шероховатой.
При увеличении Icol перманентное вращение тела на
абсолютно шероховатой плоскости может стать устойчивым.
Явление потери устойчивости при критическом значении Icol
исследовано в [72]. Показано, что это явление сопровождается
возникновением периодических движений тела при околокритиче-
скпх значениях его полной механической энергии.
213
Отметим еще, что если перманентное вращение тела
происходит вокруг главной центральной оси инерции, отвечающей
наибольшему из моментов инерции (В>А% В>С), то, как это
видно из условии (4.30) гл. 2, на абсолютно гладкой плоскости
это вращепие может быть устойчивым при сколь угодно
высоком положении центра тяжести тела, если угловая скорость
вращения тела достаточно велика. На абсолютно шероховатой
плоскости это не так: как показывает анализ условий (6.6),
(6.7), перманентное вращение па абсолютно шероховатой
плоскости всегда неустойчиво, если центр тяжести тела находится
выше некоторого (зависящего от Itol) критического положения,
заключенного между панменышш и наибольшим радиусами
кривизны поверхности тела в точке его касания с опорной
плоскостью в невозмущенном движении [70].
Если хотя бы одна из величин со, А — С, Г2 — г\* sin 2а равна
нулю, то ^ = 0 и неравенство (0.7) не выполняется.
Характеристическое уравнение (6.5) по-прежнему имеет один нулевой
корень, а остальные четыре корня удовлетворяют биквадратному
уравнению. Пусть биквадратное уравнение имеет две пары
чисто мнимых корней ±koi, ±ш2 (o)i > 0)2 > 0). Тогда движение
(6.1) устойчиво в линейном приближении. Рассмотрим корни
уравнения (6.5) при малых Q(o. Вычисления показывают, что
в первом приближении относительно Q(o у корней ±ш3 (/ =
= 1, 2) помимо поправок к их мнимым частям появляются еще
и вещественные части:
Qko (со2 — со2) Qio (со* — со2)
1 ~~ 2 (А + mh2)(C + тЛ2)(со2-(о2)' 2 ~~ 2{A + mh1)(C + mh1){^\~ си2)*
(6.8)
Пусть Qo> > 0, т. е. неравенство (6.7) удовлетворяется. Из (6.8)
тогда следует, что если с*)2<; со2 < со2, то y-j<0 (/=1, 2) и
малые колебания тела, близкие его стационарному вращению
(6.1), будут экспоненциально затухать; если 0 < со2 < со2, то
xi<0, ^2>0 и экспоненциально затухают высокочастотные
колебания (с частотой toi), а низкочастотные (с частотой сог)
экспоненциально возрастают; если же <о22>(о^, то, наоборот,
затухают низкочастотные колебания, а высокочастотные растут. При
Q(n < 0 характер развития малых колебаний будет
противоположным.
3. Нормальные координаты для колебании вблизи положения
равновесия. Пусть в движении (6.1) а)=0, т. е. тело покоится
на плоскости, опираясь на нее одной своей точкой, лежащей
на оси Gy\, занимающей вертикальное положение. Необходимым
(с точностью до знака равенства) и достаточным условием
устойчивости этого положения равновесия будет, согласно п. 2
§ 5, выполнение неравенств г\ > /г, Гг > h. Пусть это условие
выполняется. Рассмотрим движение тела вблизи положения
равновесия. Уравнения возмущенного движения с учетом членов до
214
второго порядка включительно имеют вид
(А + mh2)x\ = mg(h — l2)x{ — mglx2 + Хи
(С + mh2)x2 = —mglxx + mg(h — l{)x2 + X2, (6.9)
Bxs = X3.
Здесь Xj (J = 1, 2, 3)—соответствующие функции из (6.4),
вычисленные при о) = 0. В линеаризованной системе (6.9) первые
два уравнения, описывающие изменение со временем углов
нутации и собственного вращения, отделяются от третьего
уравнения, описывающего вращение тела вокруг вертикали.
Замечая, что формально эти два уравнения можно рассматривать как
уравнения малых колебаний консервативной системы, сделаем
в уравнениях (6.9) замену переменных х\, х2, хз~*Уи Уъ J/з,
приводящую линеаризованные первые два уравнения системы
(6.9) к виду, соответствующему нормальным колебаниям [34].
Частоты fii, Q2 (Qi>Q2>0) нормальных колебаний
удовлетворяют уравнению
(А + mh2) (С + mh2) Q4 - mg [ (A + mh2) (h - h) +
+ {C+mh2)(l2-h)]Q2 + (nig)2(rl-h)(r2-h)=0. (6.10)
Приведение к нормальным координатам уи у2 осуществляется
при помощп замены переменных
#1 = "ll»l + W12#2' *2 = "2l2/l + "222/2' *3 = У 2"
и15 = kjmgl, u2j = кj [{А + mh2) Qj + mg (h — 12)]ч (6.11)
A-; ={(A + mlr) (mgVf + (С + mh2)[(A + m/*2)Qf + mg(h - /2)]2Г1/2
В линейном приближении по хи х2 уравнение следа,
описываемого точкой касания М на поверхности тела, будет таким:
Ht) = —lxX(t)—liX2(t), l(t)=l2Xl{t)+lx2{t).
Отсюда и из (6.11) получаем, что для /-го нормального
колебания (с частотой Qj) касательная к следу в точке М
составляет с осью G£ угол р?, вычисляемый по формуле
(/=1.2).
Отсюда видно, как должны быть выбраны возмущения х\, Х2,
чтобы тело совершало высокочастотные (с частотой Q\) пли
низкочастотные (с частотой Q2) малые колебания.
4. Нормальная форма нелинейных уравнений возмущенного
движения. В переменных у\, у2, уз уравнения (6.9) примут впд
Ух + &i2/j = («1У1 + «22/2)2/3 + Gn
шуг + Q\y2 = (Ъ,уг + Ъ2у2) y3 + G2, (6.12)
Byz=Yt.
215
Здесь
а} = (cji/22 + с2щ2)и1} + (^22 + d2u12)u2j,
bj = — (схи21 + с2ип) uv — (djw21 + d2un) и 2} (J =1,2),
__ mlh (A + C-B)+2n,h2-mh!0
(A + C-B)+2mlC-mhlx mhl
1 _ (A + той2) A ' 2 "~ (C + mh1) A
Д « (Л + mh1) (Q'l — Ql) kfijngU
Ys = — ("uS&i + Ui2Q\y2){mhl {uny1 + щ,у2) —
- [{A -B) + mh (h - lx)) (ипУ1 + u12y2)) - (6.14)
— ("2i^i2/i + "2^2) {Iе + m/* (л — z2)l ("ii»i + u\&d —
— mkliunj/i + u22y2)} + (В + С— Л) (u^ 4- Щ2У2){и2\У1 + "222/2)*
Как и в (6.9), в системе (6.12) отброшены члены выше
второго порядка относительно возмущений. Через G\, G2 в (6.12)
обозначены квадратичные формы переменных г/;, ijj (7 = 1, 2).
Для исследования нелинейной системы (6.12) приведем ее
к нормальной форме [17]. Нормализующая замена переменных
позволяет оставить в уравнениях движения только те из нелп-
пейных членов, которые определяют качественный характер
движения, и исключить несущественные члены. При получении
нормальной формы системы (6.12) удобно сначала сделать
замену переменных, вводящую две пары комплексно-сопряженных
переменных z\, z$ п 22, z^.
(6.15)
В переменных zh (Л=1, 2, ..., 5) линейная часть системы
(6.12) имеет диагональную форму и получение нормальной
формы сводится просто к выделению резонансных членов из нелп-
нейиостей в правых частях преобразованной системы (6.12).
При Qi^=2Q2 структура нормальной формы не зависит от
квадратичных форм Gj (7 = 1, 2) в уравнениях (6.12), или, что
то же самое, от квадратичных форм Fj в (6.4). Считая, что
Qi Ф 2^2, получаем следующую нормальную форму системы
(6.12), записанную в комплексных переменных:
21 = iQ\Z\ + CioO0I^lZ5, 22 = ^222 + ^01001^2-5,
23 = — &1\%Ъ + C00101S3S5, U = —^2^4 + С(Ю01 ДОб, (6.16)
2*5 = ^10100^1^3 + £01010*2*45
_ _ «1 _ __ ^2
^10001 — cooioi — *2"» coiooi — соооп 2 '
216
»i = —§Г' у* = ^~* У
unii2l cos 2a], (6.17)
w12i/22cos 2a].
Введя вещественные полярные координаты согласно формулам
z\ = pi(cosoi +/sinoi), z% = p2(coso2 + /sino2),
*3 = 2i, Z4 = 22, Zb = рз
и проведя затем некоторые выкладки, использующие равенства
((5.11), (0.13) и уравнение частот (6.10), получим
нормализованную систему уравнений возмущенного движения, которая
распадается на две независимые подсистемы:
Pl = - aQjPlft|f p2 = aQ*p2p3, Bp^aiQlpl-Qlpl), (0.18)
oi^Qi, o2 = Q2, (6.19)
где
(A — C) mh (r2 — rx) sin a cos a
~~ 2 (Л + ™fc2) (^ + mh1) (Qj — Q*) '
В (0.18) отброшены члены выше второго, а в (6.19) выше
первого порядка относительно ph (fc = l, 2, 3).
5. Нелинейные колебания. В е-окрестпостп положения
равновесия правые части уравнений (6.18) и (6.19) отличаются от
отвечающих им правых частей точных уравнений
возмущенного движения на величины порядка е3 и е2 соответственно.
Решения точных уравнений аппроксимируются решениями
системы (6.18), (6.19) с погрешностью порядка е2 для pft и
порядка £ для Gj на интервале времени порядка 1/е. Ограничиваясь
этой точностью, будем вместо полных уравнений возмущенного
движения рассматривать приближенную систему (6.18), (6.19).
Уравнения (6.19) сразу интегрируются. Получаем Gj(t) =
= Qjt + Gj(0) (/ = 1, 2). Система (0.18) описывает эволюцию
«амплитуд» р! и р2 высокочастотных и низкочастотных
колебаний и угловой скорости рз вращения тела вокруг вертикали.
Непосредственной проверкой убеждаемся, что она имеет
интегралы
SiPI + &lol + Bpl = В\? (u > 0). (0.20)
где и. и v — постоянные, определяемые начальными условиями.
Траектории системы (6.18) представлены на рис. 34 в
пространстве pi, р2, рз- Они расположены в области pi^O, рг >0
и представляют собой кривые, являющиеся пересечением эллип-
217
mh(r —r )Qj r/ .
*шоо = ~Щ^ Kl/2i — "и J sin a cos a
2В
'^2
1 оюю — 2В
mh(r —r)Qt г/ ч .
rri,nin = %д — К»22 — "12) sin а cos а
соида (6.20) и цилиндрической поверхности (6.21). На рис. 34
принято обозначение Aj=l/ByiQj (/=1, 2). При заданном
значении постоянной \.1 величина v должна удовлетворять
неравенствам
0< г<г>* = x'M^iVIa + *)Й1]}{1+*)/2.
При v 2> v,,. движение невозможно. Штриховкой на рис. 34
показана плоскость pjQj = p2Q2' на которой обращается в нуль
правая часть третьего уравнения
системы (6.18). Траектории на рис. 34
симметричны относительно
плоскости рз = 0. Направление движения
по траекториям показано стрелками.
На рис. 34 представлен случай а > 0;
при а < 0 направление движения
изменится на обратное.
Остановимся подробно на
свойствах решений системы (6.18) и их
связи с характером движения
твердого тела но плоскости. Точками
Pi(0, о, ц), р2(о, о, -|i),/>3(pi.pS-
0) на рис. 34 отмечены положения
равновесия системы (6.18). Точкам
Pi и Pi отвечают стационарные
вращения тела вокруг вертикали
соответственно против часовой стрелки
с угловой скоростью и и по
часовой стрелке с угловой скоростью
—jLi. Оба эти вращения
неустойчивы, что следует из линеаризованных уравнений (6.18), которые
выпишем для Pi (для Pi надо только изменить знак и, на
обратный) :
Pi = — flQftipi, р2 = <&lWv Рз = 0,
и иллюстрируется рис. 34. Это находится в соответствии с п. 2,
где отмечалось, что при достаточно малых угловых скоростях
стационарное вращение (6.1) неустойчиво независимо от
направления вращения (при а¥*0).
Положению равновесия Рз отвечают условно-периодические
пли даже периодические, если fii/йг — рациональное число (не
равное двум, так как случай Qi = 2Q2 исключен из
рассмотрения) колебания тела. При этом
Рис. 34
A-kV-i
Г By.
В
о0 - JL \Г
Р2~~ Q * к(1 + к)9
v = \\
Для таких колебаний не наблюдаются эффекты, характерные
для «кельтских камней» [295—297]: колебания относительно
горизонтальных осей не вызывают вращения тела вокруг вер-
218
тикали (р3 = 0). При исследовании устойчивости колебаний
воспользуемся теоремой Ляпунова об устойчивости, построив
функцию V в виде связки первых интегралов (6.2U), (6.21) в
возмущенном движении. Положив Pi=Pi + /?r р2=р2+ ^2> Рз=^з»
перепишем их в виде
К, - R, + Я. + X J« + ± * + ф: Щ - const,
1',-л, + й,+5|=^л! + |д,л2 + 2Ь-1й|+ ...-сопя.
Многоточием в функции V% обозначены члены выше второго по-
рядка относительно возмущений /?i, R2. Пусть V=V\—V2-\-—-F2.
Имеем разложение
Так как эта функция определенно положительна, то [97]
рассматриваемые колебания устойчивы относительно возмущений
Рь Р2, Рз. Этот вывод иллюстрируется рис. 34, где точка Ръ
окружена сколь угодно близко к ней расположенными
замкнутыми траекториями, лежащими на эллипсоиде (6.20).
Система уравнений (6.18) имеет следующие два частные
решения, в которых pi или р2 тождественно равны нулю:
Pi = 0, р2 (I) = ^^ sell [8L(I + ej], рз(0 = [i th [Ьг (t + ej]
(6.22)
^--nHOl^i-^Arth^);
Pi (0 = ^^ sell [82 (I + ej), p2 = 0, p3 (I) = u th [82 (t + e2)] (6.23)
I 82 = a^iQi, e2 = g- Arth -^-j—
Эти решения на рис. 34 представлены асимптотическими
траекториями, соединяющими неустойчивые положения равновесия
Ри Р2-
Решение (6.22) отвечает таким движениям тела, когда оно,
вращаясь вокруг вертикали, совершает низкочастотные
колебания с частотой Q2- Если рз(0)=^0, т. е. в начальный момент
тело либо совсем не закручено вокруг вертикали, либо
закручено по часовой стрелке, то с течением времени «амплитуда»
колебаний р2 монотонно убывает (при а > 0, как на рис. 34) от
ее начального значения рг(0) до нуля, а угловая скорость
возрастает по модулю. В пределе тело совершает чистое вращение
219
вокруг вертикали по часовой стрелке с угловой скоростью — и..
Если же рз(0)>0, т. е. в начальный момент тело закручено
против часовой стрелки, то предельное движение тела будет
таким же, как и прп рз(0)^0, но эволюция движения
существенно иная. Прп 0<£<*# = —ех «амплитуда» колебаний р2
монотонно возрастает, а тело вращается вокруг вертикали против
часовой стрелки с уменьшающейся угловой скоростью. В
момент I = t# угловая скорость обращается в нуль, а «амплитуда»
колебаний рд достигает своего максимального значения Аъ При
>*# тело уже вращается по часовой стрелке с возрастающей
по модулю угловой скоростью, а амплитуда колебаний
монотонно убывает. Такпм образом, при рз(0)>0 за время эволюции
движения один раз происходит смена направления вращения
тела вокруг вертикали.
Решение (0.23) описывает движения, в которых тело,
вращаясь вокруг вертикали, совершает высокочастотные колебания.
Анализ эволюции движепия аналогичен предыдущему случаю.
Предельным движением здесь будет чистое верчение вокруг
вертикали протпв часовой стрелки с угловой скоростью \\. Если в
начальный момент времени тело закручено вокруг вертикали по
часовой стрелке, то при t = — е% происходит смена направления
вращения. В этот момент «амплитуда» колебаний pi достигает
своего максимального значения Л\.
Рассмотрим теперь решения системы (6.18), отличные от
решений (6.22), (6.23) и от положений равновесия Р* (i=l, 2,
3). Из интегралов (6.20) и (6.21) имеем
Pa = vpr*, Рз=±/Ы> («.24)
где
/(pl)= ущ
Подставив рз пз (С.24) в первое уравнение системы (6.18) и
разделив переменные, получим
^1 _ -г- ^2
Pi/ (Pi)
= + aQidt. (6.25)
Если отсюда найдена функция pi(/), то рг(0 u Рз(0 находятся
из соотношений (6.24).
Найти явную аналитическую зависимость pi(/) в общем
случае невозможно. Но качественный характер движения можно
получить непосредственно из системы уравнении (6.18). Пусть,
например, в начальный момент времени правая часть третьего
уравнения системы (6.18) и величина рз положительны. Картина
движения будет такой (см. рис. 34). При t > 0 тело все быстрее
вращается вокруг вертикали против часовой стрелки (рз растет);
прп этом «амплитуда» pi высокочастотных колебаний
уменьшается, а амплитуда р2 низкочастотных колебаний увеличивается.
220
Это приведет в конце концов к тому, что правая часть третьего
уравнения системы (6.18) обратится в нуль; на рис. 34 это
соответствует моменту, когда траектория пересекает плоскость
PjQi = p2Q2- В этот момент угловая скорость рз вращения тела
вокруг вертикали достигает максимального значения и вслед за
этим моментом начнет убывать, оставаясь положительной (тело
продолжает вращение вокруг вертикали против часовой
стрелки); при этом pi по-прежнему уменьшается, а рг растет. Это
продолжается до тех пор, пока угловая скорость не обратится
в нуль. В этот момент pi и рг достигают своих минимального
и максимального значений соответственно, и далее pi начинает
возрастать, а рг — убывать, а тело вращается уже в обратном
направлении по часовой стрелке (рз < 0) со все возрастающей
по модулю угловой скоростью. Убывание рг п возрастание pi
приведут к тому, что правая часть третьего уравнения системы
(6.18) снова обратится в пуль (на рис. 34 траектория снова
пересечет плоскость р^? = р2£^ но уже в области
отрицательных значений рз). В этот момент достигается наибольшая по
модулю угловая скорость вращения тела по часовой стрелке,
н вслед за этим начнется замедление вращения тела; при этом
pi продолжает возрастать, а рг — убывать. Так продолжается
до тех пор, пока рз не обратится в нуль, когда pi и рг
достигают своих максимального и минимального значений
соответственно, а тело изменяет вращение с направления по часовой
стрелке на обратное. В дальнейшем картина движения будет
периодически повторяться. Описанному циклу движения на
рис. 34 соответствует замкнутая траектория. Период колебаний
может быть найден из уравнения (6.2о).
В статье [201] рассмотрено движение тяжелого твердого те-
ла типа «кельтского камня» на неподвижной абсолютно
шероховатой сфере. Исследованы нелинейные колебания тела в
окрестности положения равновесия, при котором оно касается
наивысшей точки сферы. Получено, что качественный характер
колебаний тела на сфере аналогичен рассмотренному в данном
пункте характеру колебаний тела на плоскости.
Отметим еще, что исследованные выше замечательные
эффекты в движении «кельтского камня» рассматривались также
в статьях [148, 266].
§ 7. Простейшие случаи движения однородного эллипсоида
по абсолютно шероховатой плоскости
1. Перманентные вращения. Пусть твердое тело
представляет собой однородный эллипсоид, поверхность которого в
системе координат G§n£, образованной главными центральны ми
осями инерции, задается уравнением
t + t + t = 1. p.,,
221
Рассмотрим вопрос о существовании и устойчивости
перманентных вращений эллипсоида на неподвижной горизонтальной
абсолютно шероховатой плоскости в однородном поле тяжести.
Координаты точки касания М эллипсоида и плоскости в
системе координат С£т)£ выписаны в п. 1 § 5 гл. 2. Имеем
2 ,2 -2
Ев—7*31- Ч = — у «32- ^ = — уЯзЗ' (''2)
хде озь «32, язз — направляющие косинусы вертикали в системе
G^t,, выражающиеся через углы Эйлера по формулам
аз1 = sin G sin ф, G32 = sin G cos ф, G33 = cos8. (7.3)
Через / в (7.2) обозначено расстояние от центра тяжести
эллипсоида до опорной плоскости:
/(В, Ф) = Va24i + Ь2<4 + с2<4- (7.4)
Из (7.2) и формул (1.25) гл. 2 имеем такпе выражения для
величин хь %2'.
7l в _ «р (fl2 sin, ф + ft2 cog2 4)f ^ = _ sin 6 sin <р cos ф (fl2 _ ^
(7.5)
Отсюда следует, что
ул cos G — £ sin G
Xi sin в + £cos6
Моменты инерции эллипсоида относительно осей G|, Grj, G$
определяются равенствами (5.6) гл. 2:
Л = |т(Ь2 + с2), Я = -| m(с2 + а2). С = -g-m(ft2 + 6*). (7.7)
На основании (7.2), (7.7) легко проверить, что в случае
однородного эллипсоида условие (5.4), которому должны удов-
летворять направляющие косинусы осей перманентных вращений,
выполняется при любых значениях язь язг, «зз, а условие (5.5)
приводится к неравенству
(а2-Ь2)2а?!<4<0.
Рассматривая это неравенство совместно с первым из уравнении
(5.2) и используя соотношения (7.6), (7.7) и (1.69), можно
получить, что осями перманентных вращении однородного
эллипсоида на абсолютно шероховатой горизонтальной плоскости могут
-быть только его главные центральные оси инерции; при этом
угловая скорость вращения со может быть произвольной.
Рассмотрим перманентное вращение вокруг осп Gn. Этому
вращению отвечает следующее решение уравнении движения эллнп-
= -/■
Sin G COS G , 9 • о . г.9 „о о\
~ (a1 sin- ф + о2 cos- ф — cJ),
/ (7.6)
222
сонда, записанных в форме уравнений Чаплыгина (1.70):
G = -£> Ф = 0, «ф = со = const. (7.8)
Пусть ось Gy\ не является осью симметрии аллписонда; не
ограничивая общности, будем считать, что а > с. Тогда наибольший
и наименьший радиусы кривизны гг и г\ поверхности эллипсоида
в точке М (0. —Ь, 0), которой он касается плоскости в
невозмущенном движении (7.8), будут равны а2/Ь и с2/Ь соответственно,
а угол а между осью G£ и линией кривизны, отвечающей п,
равен нулю. Характеристическое уравнение линеаризованных в
окрестности (7.8) уравнений возмущенного движения
записывается в виде (6.5), где
Q = 0, Р = (а2 + 6Ь2) (с2 + 6Ь2),
R = [(а2 + 6Ь2) (с2 + ОЬ2) + 36 (Ь2 — а2) (Ь2 — с2}] со2 —
- Ц [{а2 + 6Ь2) (Ь2 - с2) + (с2 + 6Ь2) (Ь2 - с58)], (7.9)
Так как Q = 0, то ненулевые корни характеристического
уравнения удовлетворяют биквадратному уравнению, и в
линеаризованной задаче об устойчивости перманентных вращений
однородного эллипсоида не обнаруживается явлений, характерных дтя
«кельтских камней»: нет зависимости устойчивости от знака о и
отсутствует асимптотическая устойчивость по части перемепных.
Для устойчивости движения (7.8) необходимо потребовать,
чтобы выполнялись неравенства
/?>0, S>0, /?2-4Р£^0. (7.10)
Если Ъ — средняя полуось эллипсоида, то 5 < 0 при любом со;
в этом случае характеристическое уравнение имеет корень с
положительной вещественной частью, п. следовательно, на
основании теоремы Ляпунова об устойчивости по первому приближению
перманентное вращение эллипсоида вокруг средней оси
неустойчиво при любой угловой скорости вращения (в том числе и при
нулевом значении со, отвечающем равновесию эллипсоида).
Пусть Ъ — наименьшая полуось эллипсоида. Тогда R > 0, S >
>0 и система неравенств (7.10) сводится к одному неравенству
R ^ 21/PS, которое на основании (7.9) приводится к такому
эквивалентному ему неравенству:
[ /(а2 + (5Ь2)(с2 + 6Ь2) — 6 /(а2 —Ь*)(с* —Ь2)]2©2 +
+ Ц [ /(д2 + СЬг)(с2-Ь2) - /(с2 + 6Ь2)(я2-Ь2)]2>0.
Последнее неравенство выполняется. Таким образом, для
перманентного вращения эллипсоида вокруг наименьшей оси иеобхо-
22S
дцмые условия устойчивости выполняются при любом значении со.
Отметим, что положение равновесия (со = 0) в рассматриваемом
случае, когда 6 — наименьшая полуось эллипсоида, устойчиво в
строгом нелинейном смысле, а не только в первом приближении,
так как (см. условие (5.13)) в этом случае в положении
равновесия центр тяжести эллипсоида лежит ниже обоих центров
кривизны поверхности эллипсоида (а2/6, г2/6>6).
Пусть теперь со Ф 0 и 6 — наибольшая полуось эллипсоида.
Тогда необходимые условия устойчивости (7.10) запишутся в
виде неравенства R "> 2VPS или
[ VV + 06*) (с2+ ($6*) — б/(62 — а2)(62 —с2)]2со2>
> Ц [ l/V + GfeW-c2) + /(с2 + (56Ч(6^-<)]2.
Отсюда следует, что для перманентного вращения эллипсоида
вокруг наибольшей полуоси необходимые условия устойчивости
выполняются, если величина I со 1 будет не меньше своего
критического значения | со^. |:
1НЖ1 - )/S ^^)y-fl + /(^tf)y-Q (7Л1)
Если |со| <| co^J, то перманентное вращение неустойчиво.
Таким образом, мы получили (см. также [146]), что если 6 —
наименьшая из полуосей я, 6, с эллипсоида, то для перманентного
вращения (7.8) необходимые условия устойчивости выполняются
при любом значении со; если 6 — средняя полуось, то движение
всегда неустойчиво; если же 6 — наибольшая из полуосей, то
необходимые условия устойчивости выполняются, если модуль
угловой скорости будет не меньше критического значения | со^ |,
определяемого соотношением (7.11).
Если а = с, т. е. ось вращения Gx\ является осью
динамической симметрии эллипсоида, то неравенство (7.11) принимает впд
i i-^i i 2 -« / 5 (a1 -j- 6{г) (b~ — а") /п . пч
мж1 = ^2 у ь—*• <7Л2)
которое, согласно п. 4 § 3, является не только необходимым, но и
(с точностью до знака равенства) достаточным условием
устойчивости перманентного вращения эллипсоида вокруг его
вертикальной оси симметрии.
2. Случай, когда точка касания описывает одно из главных
сечений эллипсоида. Уравнения Чаплыгина (1.70) имеют
частное решение, в котором
G=|, -ф = 0, (7.13)
а изменение угла ф со временем описывается дифференциальным
224
уравнением второго порядка
а2Ь2 {а2 — Ь2) sin 2ф
[1 / о , L2\ , л4sin2 ф + Ь4сов2 ф] "
0 a sin ф + 6 cos ф J
+ 2/?
2 (a2 sin2 ф + б2 cos2 ф):
(л2 — Ь3) sin 2ф
+
2 sin2 ф + b2 cos2 ф
*~С. (7.14)
Это частное решение отвечает такому движению эллипсоида,
когда точка касанпя описывает на его поверхности одно из главных
сечений, именно сечение, расположенное в плоскости G^r\.
Уравнение (7.14) имеет первый интеграл
1 Г/ ? , L2\ . ca4sin2 ф + Ь4соз2 ф] "о
^т (а- + Ъ2) + 5 2 . 2Т^ ^ ф2
1U [ a sin ф + ггсов^ф]
+
+ mg Vaz sin2 ф + Ь2 cos2 ф = h = const. (7.15)
Пусть для определенности а ^ Ь. Тогда при /г < mgft движение
невозможно. Если h = ragb, то эллипсоид находится в положении
устойчивого (при а > Ь) равновесия (ф = 0 или Ф = я), при
котором он опирается о плоскость «концом» своей меньшей полуоси.
Если mga > h > mgb, то эллипсоид совершает колебания в
окрестности устойчивого положения равновесия; при этих
колебаниях отклонение угла ф от его равновесного значения не
превосходит я/2. Следом точки касания на опорной плоскости будет
отрезок прямой. Зависимость угла ф от времени может быть
найдена из (7.15) при помощи одной квадратуры. Если колебания
малые, то их период Т определяется по формуле
Если h = mga, то эллипсоид либо находится в положении
неустойчивого (при а > Ъ) равновесия (<р = я/2 пли ф = —л/2),
при котором он опирается о плоскость «концом» своей большей
оси, либо совершает асимптотическое к этим положениям
движение, когда угол ф при t ->■ °о стремится к я/2 илп к —л/2.
И наконец, при h > mga эллипсоид катится вдоль
фиксированной прямой с непостоянной периодической по времени
угловой скоростью ф(0» определяемой пз (7.15).
Качественная картина расположения интегральных кривых
уравнения (7.14) на плоскости ф, ф аналогична соответствующей
картине для уравнения математического маятника.
Из (7,14) видно, что если эллппсопд динамически
симметричен (а = Ь), то ф = о)£ + ф0, где со и ф0 — постоянные величины.
Если со = 0, то эллипсоид покоится, если же со Ф О, то эллипсоид
катится вдоль прямой, касаясь ее точками своего
экваториального сечения (круга); при этом ось симметрии Gt, горизонтальна и
движется поступательно, а эллипсоид вращается вокруг нее с
постоянной угловой скоростью со.
15 а. П. Маркеев 225
Пусть главное сечение эллипсоида плоскостью G£rj мало
отличается от круга, т. е. эллипсоид близок к симметричному.
Положим Ъ2 = а2(1~ е), где е — малый положительный параметр.
Если пренебречь членами выше первого порядка по е, то одно
из решений уравнения (7.14) можно получить в виде
(f = cot + е 4 (1 + ~4-) sin 2(*t (со =
= 0).
(7.17)
Это решение описывает качение эллипсоида вдоль прямой, мало
отличающееся от его равномерного качения с угловой
скоростью со.
Исследуем устойчивость движения (7.13), (7.17) по
отношению к возмущениям угла нутации и угловой скорости прецессии.
Введем возмущения и и w, положив
6п
= Y + и*
\р = w.
(7.18)
Вычисления показывают, что линеаризованные уравнения
возмущенного движения в первом приближении по е будут пметь вид
и =
5 (а2 — с2) g
(б«2 + с")а
7а" со
6«2 + с
-2 w + efv
w ■
й" + С
j сои + е/2, (7.19)
где /ь U — линейные однородные функции от и, й, w,
коэффициенты которых — периодические функции времени с периодом,
равным лУ|со1.
При е = 0 характеристическое уравнение системы (7.19)
имеет вид
>.* +
14со2«5 - 5g (я4 - с4)
а (6а2 + с2) (а2 + с2)
Если выполнено неравенство
= 0.
оУ->
5(а4-с*)е
14аэ
(7.20)
(7.21)
то уравнение (7.20) имеет один нулевой и два чисто мнпмых
корня:
Я, =0, А2 = й2, Я3 = — IQ;
где
lWV-5s(a4-c4)
О- =
а (бй2 + с2) (а2 + с2)
>0.
(7.22)
Если же неравенство (7.21) выполнено с обратным знаком, то
уравнение (7.20) имеет положительный корепь. Таким образом,
условие (7.21) в случае симметричного эллипсоида является
необходимым (с точностью до знака равенства) условием
устойчивости движения (7.13), (7.17). Согласно п. 5 § 3 (см.
неравенство (3.62)), условие (7.21) в случае симметричного эллипсоида
226
будет и достаточным для устойчивости. Отметил!, что условие
(7.21) заведомо выполнено, если а^с.
Можно показать, что если число й/(2(о) не будет целым, то
прп выполнении условия (7.21) и достаточно малых е среди
характеристических показателей системы (7.19) не будет
характеристического показателя с положительной вещественной частью,
и, следовательно, при условии (7.21) для малых е качение почти
симметричного эллипсоида, описываемое формулами (7.13),
(7.17), устойчиво в первом приближении. Если же fi/(2co)
—целое число, то пмеет место параметрический резонанс, и в области
(7.21) при е ¥= 0 возможно появление неустойчивости.
§ 8. Периодические движения эллипсоида, близкого к шару
1- Уравнения движения. Пусть однородный эллипсоид,
поверхность которого задается уравнениями (7.1), движется без
скольжения по неподвижной горизонтальной плоскости в однородном
поле тяжести. Получим уравнения движения эллипсоида,
опираясь на равенства (1.1) — (1.7).
В системе координат G|r]£, образованной главными
центральными осями пнерции эллипсоида, вектор мгновенной угловой
скорости эллипсоида ш задается компонентами р, д, г, а
радиус-вектор точки М касания эллипсоида с опорной плоскостью
относительно центра тяжести имеет компоненты |, rj, £. Из (7.2), (7.4)
следует, что направляющие косинусы вертикали в системе G$t)£
выражаются через величины §, г), £ по формулам
A2,.2 ^2^2 Л2А2
о с «. с а а о -. /0 *v
аЪ\= д-£> «32= д-Л» ft33 = д-Ct (8.1)
А = Vb4c4s2 + с Vtj2 + а*ь%2. (8.2)
Подставив выражение (1.7) для реакции плоскости в правую
часть уравнения (1.3), получим следующие три
дифференциальные уравнения:
[А + т{г? + £2)]р — т1щ — m&r = (B — C)qr +
+ иг(6-ту +Cg)(<o-GM) - m(GM.GM)p + mg£Ji^£l^9
— iragfip + [В + ш(« + |2)] q— тф- = (С — А)гр +
• /О 0\
+ п»(ч — СР + 1'-)(<»-5М) - '" (GM-GM)q + rog *'(а*д"~ *** g,
— т&р — wilSg + (С + m (£2 + т]2)] г = (Л — В) pq +
+ *»(£ — I? + 4P)(<o-GM) — m(GAf .GM)r + mg°2^~a^lr\.
Здесь m — масса эллипсоида, # — ускорение свободного падения,
15* 227
А, В и С — главные центральные моменты эллипсоида,
вычисляемые по формулам (7.7).
Система уравнений (8.3) замыкается при помощи
кинематического уравнения Пуассона (1.6). Опираясь на равенства (8.1),
(8.2), его можно записать в виде следующих трех скалярных
дифференциальных уравнений:
I = W~ 14 + ^^(Р-а8) С? + ^£(£2-«2)г]Г + с-=£- Шр,
ас Ъ а с Ъ
ц = ip - |r + ^rf-Oi2 - ь2) &■ + ^=£ (п2 - ь2) Ер + ^f №.
о а с Ъ ас
(8.4)
с = ig- tip + ^^(р-^чр + ^£-(е-<*)& + ь^4-ыг-
со ас о а"
Эти уравнения зависимы в силу тождества (7.1). Система
уравнении (8.3). (8.4) допускает интеграл энергии
-i mir + - (Ар2 + Bq1 + Cr2) + mgf = h = const.
где v — скорость центра тяжести, / — вычисляемое по формуле
(7.4) расстояние от центра тяжести до опорной плоскости. Учтя
условие отсутствия скольжения (1.4), интеграл энергии можно
записать в виде
у т {gPGM* — (ш • GAf )2] + i- (Ар2 + Bcf + О2) + mgf = h. (8.5)
Можно проверить, что при каждой из следующих трех
подстановок
/, /?, q. г, х, у, z —- -t, -/?, g, r, -x, у, z;
t, /?, q. г, 2:, i/r z—^-J, p, -q. r, a:, -i/, z; (8.6)
*, P, ?, '\ x, y, z-^-t, p, </. -r, a:, i/, -z
уравнения (8.3), (8.4) остаются неизменными. Эти свойства
симметрии будут далее использованы при исследовании вопроса о
существовании периодических движений эллипсоида и для
построения их методом, разработанным Л. Чезарп [206] и Дж. Хей-
лом [199].
2. Преобразование уравнений движения. Пусть эллипсоид
мало отличается от шара радиуса R. Положим
и исследуем движение эллипсоида при малых значениях е.
Сделав в уравнениях (7.1), (8.3) и (8.4) замену переменных
t-a£i, Ч = Ь»11, C-cCi, (8-7)
228
получим следующую систему уравнении:
g+i£ + S = l, (8.8)
4> + y/i = 0, tfg + |/2 = 0. Сг + А/3 = 0, (8.9)
Ii = гтц - qlx + gu tji = p£i - r|i + яга, 6 = ЧЬ ~ РШ + ёъ, (8.10)
где введены обозначения
U = (C-JB)Ug+2p2r,1?1+2p(p|1+?rh + rc1)t141?1+ ^4iCi+-|^] +
+ {А-0 [rpll4l + 2qpU1 + 2q (p|t + giji + /£,) (g - l) C,] +
+ (Я _ 4) [pqUi + Irp&b + 2r (pg, + 9m + rO (g - 1) П1] + ...,
(8.11)
Л-^=йЬ%ЬР + ^(2Й-1)^ + ^(2Й-1)Л1Г+...
(8.12)
Здесь многоточием обозначены члены порядка е2 и выше.
Выражения для /г, /з и g2, £з получаются соответственно из
выражений для /i и #! путем циклической перестановки величин 1. 2, 3;
Л, В, С; а, Ь, с; />, д, г; £ь т]ь Si-
При е = 0 уравнения (8.8) — (8.10) описывают движение без
скольжения однородного шара по плоскости. Это движение
рассмотрено в п. 1 § 2: в общем случае движения, отличном от
чистого верчения вокруг вертикали, вектор мгновенной угловой
скорости шара to постоянен по величине и направлению, а центр
шара движется равномерно и прямолинейно в направлении,
перпендикулярном to; след точки касания на плоскости — прямая
линия, а на поверхности сферы, ограничивающей шар,—
окружность неизменного радиуса р, расположенная в плоскости,
перпендикулярной to и отстоящей от центра шара на неизменное
расстояние d (рис. 30); нормальная реакция плоскости равна
весу шара, сила трения равна нулю.
Для исследования движения эллипсоида при малых
значениях е введем вместо переменных |i, тц, £i новые переменные
X, р, ^ ПРП помощи следующих двух замен переменных.
Во-первых, введем переменные %ь хг, х п0 формулам
|i = sin pxi + cos a cos Px2 + sin a, cos P/v,
rji = —cos £xi + cos a> sin {5yv2 + siu a sin fty» (8.13)
£i = — sin ayw2 + cos ax»
/7+7
sin a =
-, cosa=—, sin(3 = У t, cosf>=:
W + <T VV + 99
(8.14)
Эта замена переменных соответствует переходу от системы коор-
229
дпнат G^itii^i к системе координат Gytf^y. у которой ось Gx
параллельна вектору со, ось Сул перпендикулярна плоскости GtiXi
а ось Gx2 составляет тупой угол с осью G£i. Угол а — это угол
между вектором ш и осью G£i, a р— угол между проекцией
ш на плоскость G\\t\\ и осью G|i (на рис. 35 вектор мгновенной
угловой скорости to изображен
проходящим через центр тяжести G; на
самом деле он проходит через точку М
касания эллипсоида п опорной
плоскости).
Do-вторых, вместо переменных Хь
Х2 введем переменные р, «у по
формулам
Xi = psin7» X2 = pcos'Y (8.15)
Введенные переменные имеют
следующий смысл: в невозмущенном
движении (при е = 0) величины X» Р п 7
постоянны, р — радиус окружности —
следа точки касания на поверхности
шара, 1x1—расстояние от плоскости
этой окружности до центра шара, 7 —
угол между радиусом-вектором точки
касания относительно центра окружности — следа и
фиксированным в ее плоскости направлением, причем f — угловая скорость
движения точки касания М по ее следу на поверхности шара.
Уравнение (8.8) и уравнения для х п 7 имеют
следующий вид:
У2 + Р2 = 1,
% = [(с — b)rqli +(a — c)prr\i + (b — a)qp£i\h\ +
+ l(c-b)pi\&l+(a-c)qZill+{b-a)rllrii]h*+.
F2 cos у + F2 sin у
Рис. 35
(8.16)
Y = со -
Здесь введены обозначения
14 — 15%q
top
+
(8.17)
(8.18)
A,-
7toi?
Л*=й(2-5*2-й> (8Л9)
F\ = p(ctg «X2 + X)sin p - q(ctg ay2 + x)cos p -
-co sin p^i + о cos p^2,
F2 = p (ctg a sin Pxi — cos a cos Px) — q (ctg a cos Pyvi + cos a sin Px) +
+ r sin ay + со cos a cos Pgi + со cos a sin f}g2 — <*> sin ag3.
(8.20)
В (8.11), (8.12) и (8.17)-(8.20) величины |,, и,, С, Xi, to, а, р
должны быть выражены через р, q, r, у, р, f в соответствии с
230
формулами (8.13) —(8.15). Многоточием в (8.17), (8.18)
обозначены члены порядка е2 и выше.
Для описания движения эллипсоида в новых переменных
надо в системе уравнений (8.9), (8.10) уравнения (8.10) заменить
на уравнения (8.17), (8.18), а равенство (8.8) —на (8.16).
3. Существование периодических движений и их построение.
Опираясь на соотношения (8.7), (8.13) —(8.15), можно из
интеграла энергии (8.5) и геометрического интеграла (8.16) найти
X и р в виде функций от переменных р, д, г, к и параметра h.
Подставив тогда |ь Ци £ь выраженные через %, р, 7> в функции
/,- (i = 1, 2, 3) и разрешив уравнения (8.9) относительно р, q, г,
получим систему трех уравнений, у которой правые части будуг
функциями р, q, r, f и параметра h; по угловой переменной у
правые части будут 2л-периодическими.
Для получения геометрической картины двпжения перейдем
еще, используя уравнение (8.18), к новой независимой
переменной 7- Тогда, учтя еще равенства (7.7), получим такое уравнение:
% - ш {<с- fe) (^Й + 2^4ib+2p®zEi4iSi + % nib +f gr) +
+ (*-c) [гр^щ + ZvpUi + 2«®x (e5 - i) Si] +
+ (b - a) [pqUi + 2rp£l4l + 2r<oZ (£» - l) 4lJJ + ... (8.21)
К этому уравнению следует добавить еще два аналогичные
уравнения, получающиеся из (8.21) при помощи циклической
перестановки величин р, q, r; а, Ь, с: |i, rji, £i. Многоточием в (8.21)
обозначены члены порядка е2 и выше.
Для нахождения 2я-перподпческих по f решений системы
(8.21) используем свойства симметрии (8.6). Рассмотрим только
второе свойство симметрии, так как два других сводятся к нему
путем циклического переобозначения осей спстелгы координат
Glut
Уравнения (8.21) обладают свойством Е по отношению к
матрице Q = diag (1, —1, 1). Это означает [199], что система (8.21)
не изменяется при подстановке «у, /?, д, г -*- —«у, /?, —д, г.
Периодические решения системы (8.21) получим согласно следующему
алгоритму [199].
Рассмотрим систему уравнений
z = eZ(*, z, e), (8.22)'
где е — малый параметр, функция Z аналптттчна по z и е, a no t
она 2я-перподнчна и непрерывна. При е = 0 решения системы
(8.22) постоянны. Все периодические решения системы (8.22),
рождающиеся при е ¥= 0 из ее постоянных решений, могут быть
получены следующим образом. Положим
z(0> = a*,
2<*+i> = а* + в J [Z (*, z<fe> (I), в) - (Z (*, z<ft) (I), e)>] A, (823)
231
где угловые скобки обозначают усреднение по переменной L
Последовательные приближения (8.23) определяют приближенное
значение периодической функции z(J, а*, е) с точностью до
членов порядка eft+1 включительно. Это значение будет функцией
произвольного постоянного вектора а*.
Составим систему бифуракцпонных уравнений
<Z(*f z<*>(*, a*, e), е)> = 0, (8.24)
которая служит для определения порождающего решения —
постоянного вектора а* как функции е. Если система (8.24)
допускает решение, для которого якобиан отличен от нуля, то,
подставив это решение в z(ft+1), получим 2л-периодпческое решение
системы (8.22) с точностью до efe+1 включительно.
При к = О имеем
z(1) = а* + е J [Z (t, a*, 0) — <Z (t, a*, 0)>] dt, (8.25)
где а* удовлетворяет системе уравнений
<Z(f, а*, 0)> = 0. (8.26)
Часто — и это наиболее интересный случаи для
приложений — якобиан для решений системы (8.24) обращается в нуль.
Тогда наличие свойства Е у системы (8.22) дает возможность
получать достаточные условия существования периодических
решений, соответствующих некоторому частному выбору вектора а*.
Именно [199], если j-й элемент диагональной матрицы Q равен
+ 1, то /-му уравнению бифуркационной системы (8.24)
удовлетворяет (во всех приближениях по е) всякий вектор а*, для
которого Qa* = a*. Поэтому ряд уравнений в (8.24) исчезает, что
позволяет получать условия существования периодических
решений, когда якобиан для решений системы (8.24) равен нулю.
Вычисления показывают, что для уравнений (8.21)
упомянутый якобиан бифуркационной системы (8.24) тождественно
равен нулю. Но система (8.21) обладает свойством Е по
отношению к матрице Q = diag(l, —l, 1). Поэтому положим
а* =(/>*, 0, г*). (8.27)
Первое и третье уравнения бифуркационной системы (8.24) при
таком выборе а* удовлетворяются тождественно, и поэтому
требует изучения только второе уравнение прп произвольных р*, г*.
Ограничиваясь построением решений в первом приближении
по е, рассмотрим второе уравнение из (8.26), которое получается
в результате усреднения по f правой части второго уравнения
системы (8.21) прп /? = /?*, q = 0, г = г*. При построении р, д, г в
первом приближении величины х и Р, входящие в выражения для
1ь т)1, £ь можно считать постоянными %* и р*. Эти постоянные
удовлетворяют соотношениям '/*2+ р*2= 1, р* > 0, а в остальном
они произвольны. Произведя усреднение, получим бифуркацпон-
232
ное уравнение
^*r*F(p*f to*) = 0,
F (р*, со*) = Юр*4 - 5 (6а* + 5) р*2 + 4 (5а* + 6), (8.28)
а* = -£-, со* = t^p*2 + г*2.
Для анализа уравнения (8.28) рассмотрим предварительно
уравнение F(p*, co*)= 0. Из него следует, что
~2_ I0(3p*2-2)g g29
(l0p*4-25p*2-f 24)я'
где р* изменяется в промежутке от нуля до единицы. Функция
F(p*, со*) может обратиться в нуль только при одновременном
выполнении неравенств р* > у -j и со* < -g- |/ -^-. Производная
dF = 20g (Зр*2 — 2)
дса* ш*зл
не обращается в нуль при F(p*, co*) = 0. Следовательно, если
корни уравнения F(p*, со*)=0 существуют, то они будут
простыми.
Бифуркационное уравнение (8.28) имеет три типа решений,
для которых якобиан отличен от нуля. Для решений первого типа
г* = 0, р* — произвольная величина, но такая, что F(p*, &*)¥= 0;
для решений второго типа р* — О, г* — произвольно, но
F(p*, &*)¥* 0; для решении третьего типа f(p*, to*)=0, р*¥=0,
г* Ф 0. Из этих решений при е ¥= 0 рождаются 2л-периодические
по "у решения системы уравнений (8.21).
Совершенно аналогично для доказательства существования
периодических решений уравнений (8.21) можно использовать
свойство Е по отношению к матрицам diag(—1, 1,1) и
diag(l, 1, —1). В последнем случае переменную f следует
предварительно заменить на л/2 — f.
Итак, существуют два различных семейства периодических
движений эллипсоида. Во-первых, существуют периодические
движения, переходящие при е = 0 в такие движения, для которых
вектор to параллелен одной из осей эллипсоида. Для
периодических движении этого семейства при е = 0 катящийся и
вертящийся эллипсоид (шар) касается горизонтальной плоскости
сечением, параллельным его главному сечению. Как следует из
проведенного выше анализа уравнения F(p*, to*) = 0, периодические
движения первого семейства существуют, еслпсо*;>-^1/ -сг i^p*—
любое из промежутка от нуля до единицы, или если со* <-д-р -Лщ
а р* и со* не связаны соотношением (8.29).
Во-вторых, существуют периодические движения, для которых
прп е = 0 проекция вектора со на одну из осей эллипсоида равна
нулю, а на две другие оси отлична от нуля. Для этих периодиче-
233
скпх движений при е = 0 эллипсоид (шар) касается плоскости
сечением, параллельным одной из его осей и пересекающим две
другие его оси. Периодические движения второго семейства су-
* Jl i/lO* *_ i/2
ществуют, если со * < -^ у -^ и р* > у -^ и если при этом
выполняется еще соотношение типа равенства — условие (8.29),
связывающее порождающие значения величин со и р. Периодические
движения второго семейства в дальнейшем не рассматриваются,
так как они могут реализоваться в исключительных случаях.
Построим периодические решения первого семейства,
переходящие прп е = 0 в порождающее решение:
р=р*, ? = 0, г» 0, p«p*f x = X*. (8.30)
Величину р* для определенности считаем положительной. Для
получения решения в первом приближении надо в правые части
системы (8.21) вместо величин /?, <?, г, |i, rji, %\ подставить их
значения, соответствующие порождающему решению (8.30),
отбросить члены выше первого порядка по е и произвести
интегрирование. В результате получим
р = р* - Щ^(с - Ъ) (2 - р*2 + о*) cos 2y,
9 = — ^*ffi*{l2(fl—ф» sin Y+(c—Ь)[3(р*2—4) sin 7—р*явтЗу]},
(8.31)
г ^Щ^. {l2(b-a)a*cos7 + (c-b)[3(p*2^4)cos7 + p*2cos3Y]}.
Если эллипсоид будет эллипсоидом вращения (Ъ = с), то в
первом приближении проекция р вектора мгновенной угловой
скорости to на ось симметрии постоянна, а конец вектора to лежит
в плоскости, перпендикулярной оси симметрии, и движется во-
10 I a — с\ to*p*v*a*
круг нее по окружности радиуса ■ „R с угловой
скоростью у.
Найдем координаты |, т], £ точки М касания эллипсоида и
плоскости в зависимости от у. Для этого сначала из (8.17)
определим функцию % в первом приближении по е:
X = X* - С~щ- Х*Р*2 (5р*2 - 5о* - 3) cos 2Y. (8.32)
Функция р вычисляется затем из (8.16).
Из (8.32) и (8.16) следует, что величины % и р в первом
приближении постоянны, когда эллипсоид будет эллипсоидом
вращения (с = Ь), либо когда его качение происходит так, что оп
касается плоскости своим главным сечением Gr\t, (%* = 0), либо,
наконец, когда между р* и со* существует зависимость 5р*2 —
— 5о* — 3 = 0, которая возможна только при одновременном
выполнении неравенств со* > у ^ и Р* > } -тр
234
Теперь пз (8.13) —(8.16), (8.31) и (8.32) находим величины
|ь Ци £i с точностью до членов первого порядка по е:
^ =х* + *!£!: [30 (Ь + с — 2а) о* + {с - Ъ) (5р*2— 15а*—5l)cos2v)>
г\! = — р* sin у — ^£- {120 (а — с) а* sin 7 +
+ {с—Ъ) [3(5р*2 + 5а* — 37)sinу + (5p*2 — 15а* — 9)sinЗу]},
(8,33)
£1= — p*cos7+ ^7Г 112°(ь — a)a*cosY +
+ (с — Ь) [3 (ор*2 + 5а*— 37)cos 7 — (5р*2 — 15а* — 9) cos3 у]}.
Для получения %, т], £ осталось только воспользоваться
формулами (8.7).
На рис. 36 схематически показан вид следа точки М на
поверхности эллипсоида. Он
заключен между двумя плоскостями,
параллельными плоскости Grj£,
расстояние между которыми
Л *2 1(с-Ь)Х*(5р*2-15о*--51)1
а*-Р 217? '
След касается указанных
плоскостей при sin 2^ = 0. Направление
движения точки касания М по ее
следу на эллипсоиде показано на
рис. 36 стрелкой.
Период Т* по времени постро- Рис. 36
енных периодических движений
эллипсоида находится из (8.18). Он будет таким:
1*-5[l-S$rC» + «-*)+...].
Из (8.18) находим также угол ^ как функцию времени
Y = 7* + |£* + W [5р*4~ 15(°* + 2)Р*2 +
+ 2(5а* + 3)]сов|?+.,
(8.34)
(8.35)
где ^ — произвольная постоянная.
4. Кривая, описываемая точкой касания на плоскости. Пусть
#, у — координаты точки М на опорной плоскости, а б — угол
между касательной к ее следу на плоскости и осью Ох
неподвижной системы координат (пли, что то же самое в силу отсутствия
скольжения, б — угол между касательной к следу на эллипсоиде
в точке М и осью Ох). Тогда
dx л dy . с
—- = cos о, ~ = sin б,
ds ds '
(8.36)
235
где ds — элемент длины дуги следа на плоскости (или на
эллипсоиде).
Пусть v и w — векторы скорости и ускорения точки М при ее
перемещении вдоль следа на эллипсоиде, MP — вектор,
проведенный из точки М в центр кривизны следа, к — кривизна следа в
точке Л/. Тогда
v=Vt2 + iia + ta, w = V't2 + rf + I2
MP = /,(vXw) X v, к - 4sin(vTW).
(v X w) v
(8.37)
Для нахождения угла б заметим [31], что
6 = шв - kgv, (8.38)
где сов — угловая скорость верчения эллипсоида,
сов = со • n, (8.39J
a kg — геодезическая кривизна следа в точке М. Согласно [157J,
kg = к sin{MP, n). Здесь и в (8.39) п — единичный вектор
направленной вертикально вверх оси Oz неподвижной системы
координат Oxyz.
Поскольку для изучаемых периодических движений получены
уравнения движения точки М по поверхности эллипсоида
(формулы (8.33), (8.7)) и вычислены компоненты вектора <о
(формулы (8.31)), то правая часть уравнения (8.38) может быть
представлена как функция угла if- Если принять «у за независимую
переменную, то уравнение (8.38), как показывают выкладки,
запишется в виде
IJ = ДО** + 2ц2 cos 2у + ..., (8>40)
* = 5 ЬХ*~1?а 7>*' И2 = W ** (5а* + 24).
Замечая, что dsfdy отличается от p*i? на величины первого
порядка малости, и полагая начальное значение б равным нулю,
найдем из (8.40)
б = № + \х2 sin tt \ + ... (8.41)
Оставляя в правых частях уравнений (8.36) члены не выше
первого порядка малости, получаем уравнения, решение которых
с точностью до членов первого порядка малостп включительно
будет таким:
х — я* = — sin j^s + -g- Ц2Р*Я s*n № cos ]J*7r
У — У* = — -jj- cos fXjS — "2~ \х^*В cos fixs cos ^f <8-42)
236
где х*, #* — произвольные постоянные. Равенства (8.42) задают
в параметрической форме след точки касания М на опорной
плоскости. Рассмотрим простейшие частные случаи.
Если |и2 = 0 (эллипсоид вращения, с = Ь), то следом будет
дуга окружности радиуса 1/1 щ\ с центром в точке я*, у* (при
%* = 0, т. е. когда эллипсоид катится, касаясь плоскости своим
главным сечением, следом точки касания на плоскости будет
прямая). В случае шара (Ь = с = а), как и следовало ожидать,
окружность вырождается в прямую. Направление движения
точки М по окружности определяется знаком величины %*(Ь — а).
Например, если у* < 0 (как на рис. 36), то прп а > Ъ (вытянутый
эллипсоид) движение точки касания по окружности ее следа на
плоскости происходит против часовой стрелки, а при а < Ь
(сплюснутый эллипсоид) — по часовой стрелке.
Пусть \Х\ = 0. Это возможно либо когда полуоси эллипсоида
связаны соотношением Ь + с = 2а, либо когда а* = 0, т. е. когда
эллипсоид невесом. Последний случай не является
математической абстракцией, так как к нему, например, приводится в рас-
сматриваемом прпближенпи случай, когда о* будет величиной
не ниже первого порядка малости. Последнее означает, что
потенциальная энергия эллипсоида много меньше кинетической
энергии его вращения относительно центра масс. Прп \1г = 0
получим
* 1 * г> 2 (ж — х*)
У = У* — ~2Г Н*Р Л cos р»д »
т. е. следом точки касания на плоскости будет синусоида. Для
невесомого эллипсоида вращения, близкого к шару, этот
результат получен в [31].
В общем случае, когда щ Ф 0, и2 Ф 0, следом на плоскости
будет дуга «испорченной» окружности радиуса l/l|iil. На
окружность наложены колебания с малой, медленно меняющейся
амплитудой У2М.2Р*/? sin \i]S. В искаженном масштабе след точки
касания на плоскости показан на рис. 37.
Рис. 37
5. Вычисление углов Эйлера. Определим для найденных
периодических движений ориентацию эллипсоида относительно
неподвижной системы коордпнат Oxyz. Углы нутации 8 и
собственного вращения <р вычисляются из (7.3), (8.1), (8.7) и (8.33).
237
Проведя необходимые вычисления, получим
_ * (Ь + с-2а)х*р*2(10а* + 7)
«si — — г 14л
-»(^)*>^-^-Щс0,2Т+..м (8.43)
«32 = Р* siny + 2& {— 5 (с — fc)p*4 —
— [40(а — с)а* + (с — Ь)(5а* — 49) — 28(Ь — а)] р*2 +
+ 40 (а — с) а* — 28(Ь — а) + (с— Ь)(5а* — 37)} sin у —
- (C~MR9* I5p*4~ 5(За* + 7)p*2 + 3<5a* + 3)1 sin3y + ..., (8.44)
«33 = P* cos Y + 2gff 15 (с — Ь) Р*4 +
+ [40 (b — a) a* + (<* — b) (5a* — 49) — 28 (a — c)] p*2 —
— 40(6 —a)o*+ 28(a — r) — (c —b) (5a* —37)}cosv —
_ (c~4^p* [5p*4 — 5 (3a* + 7) p*2 + 3 (5a* + 3)] cos 3y + . -. (8.45)
Соотношения (8.43) — (8.45) определяют в зависимости от f
ориентацию неизменного направления вертикали относительно
эллипсоида. В частности, из (8.43) видно, что угол между
вертикалью и осью G% изменяется в окрестности своего постоянного
значения с частотой, близкой к удвоенной угловой скорости
невозмущенного (при е = 0) движения. Амплитуда колебаний
косинуса этого угла равна
^*2|(c-fe)X*(p*2-3a*-6)|
°Р 42Л "
Для эллипсоида вращения (с = Ъ) колебания отсутствуют.
Отсутствуют они также и в том очевидном случае, когда
эллипсоид катится, касаясь плоскости своим главным сечением (%* = 0).
Угол прецессии if можно найти интегрированием
кинематических уравнении Эйлера. Но, следуя [31], можно избежать
интегрирования. Соотношение (1.59) в принятых в данном параграфе
обозначениях записывается в виде
/t с\ ЁсОЭф — TIsinCD to /o\
cos (яр — о) = -2 Э- 1 i~. (8.46)
При вычислении угла яр с погрешностью порядка е следует
положить б = jLiip*i?if' а правую часть в (8.46) вычислить при е =
= 0. Выполнив необходимые выкладки, найдем
cos (if — щр*Я?) = f г щ — cos y-
Vl — p*"cos" у
Отсюда угол if определяется с ошибкой порядка е на интервале
238
изменения у порядка 1/е. Углы 8 и <р определяются из (7.3) и
(8.43) —(8.45) с ошибкой порядка е2 для любых у.
6. Реакция плоскости. Рассмотрим нормальную реакцию N и
силу трения F, возникающие в точке касания эллипсоида и
плоскости. Нахождение этпх величин — необходимая составная часть
решения задачи о движении твердого тела по неподвижной или
подвижной поверхности. Условие того, что в каждый момент
времени движущееся тело и поверхность имеют одну общую точку,
является неудерживающей связью, п в моменты времени, когда
значение нормальной реакции поверхности проходит через нуль,
тело может освободиться от этой связи. В изучаемой нами задаче
эллипсоид может подскочить над плоскостью, и полученные в
предположении касания эллипсоида и плоскости движения
теряют смысл.
Далее, силу трения надо вычислять потому, что, полученная
в предположении отсутствия скольжения, она может оказаться
настолько большой, что не может быть развита в точке касания
тела и поверхности при заданном коэффициенте трения. Это
означает, что будет проскальзывание, и результаты, полученные в
предположении его отсутствия, теряют реальное механическое
содержание.
Реакцию плоскости найдем при помощи теоремы об
изменении количества движения:
mw0 = -mgn + N + F, (8.47)
где wG — ускорение центра тяжести эллипсоида. Умножив обе
части уравнения (8.47) скалярно на п, получим
N = mg + mwG ■ п.
Опираясь на (1.4), (8.31), (8.43) —(8.45), найдем отсюда, что
N = mg + -L т(с — Ъ) со*2р*2 [5 (а* — 1) р*2— (5а* + 9)] cos 2?+...
(8.48)
Затем из (8.47) уже можно вычислить силу трения. Она будет
величиной первого порядка малости относительно е.
Из (8.48) видно, что для заданного со* прп достаточно малой
величине \с—Ъ\ нормальная реакция N мало отличается от веса
эллипсоида, так что подскакивания эллипсоида над плоскостью не
будет. Необходимая же для удержания эллипсоида от
проскальзывания сила трения может быть достигнута и при малых
коэффициентах трения.
При заданных величинах полуосей эллипсоида величина со*
угловой скоростп эллипсоида не должна быть большой, так как
согласно (8.48) при значительных величинах со* (порядка
Tlgl(eR)) нормальная реакция iV может обратиться в пуль.
239
Отметим еще, что для найденных периодических движений
эллипсоида скорость его центра тяжести равна
(8.49)
В первом приближении по е проекция р угловой скорости о
на ось G£, угол между этой осью и вертикалью, скорость центра
тяжести, нормальная реакция N плоскости достигают своих
экстремальных значений одновременно (при sin 2^ = 0). В эти же
моменты времени траектория точки касания М на эллипсоиде и
плоскости проходит через экстремальные значения.
7. Устойчивость периодических движений. Исследуем
устойчивость найденных периодических движений эллипсоида.
Величина у в силу ее монотонного возрастания с ростом t может быть
принята за независимую переменную. Устойчивость исследуем по
отношению к возмущениям переменных р, q, r и %. Наличие
устойчивости означает, что при малых начальных отклонениях
величин р, q, г и % от пх значений в невозмущенном движении,
задаваемом формулами (8.31) и (8.32), мало изменяются след
точки касания на поверхности эллипсоида, величина вектора
мгновенной угловой скорости и его ориентация относительно
эллипсоида (и, следовательно, относительно абсолютного
пространства) .
Устойчивость исследуем в первом приближении. Обозначая
через х\, Х2, хз и #4 возмущения величин р, q, r и %
соответственно п линеаризуя уравнения (8.17) п (8.21), получаем
-^ = Аг (у) х + ... (х= (xv x2i x3, я4)), (8.50)
где элементы матрицы Aj имеют первый порядок малости по е,
являются 2л-пернодпческими по у и содержат величины р*, со*
как параметры.
Представим фундаментальную матрицу Х(у), нормированную
условием Х(0)=Е, где Е — единичная матрица, в виде ряда
Х(Т)=Е + Х1(т)+...| (8.51)
где Х,(0) = 0. Из (8.50) и (8.51) получаем
v
Хй(7) = JAjP)*, X (2я) = Е + 2д <Aj> + ...
о
При е = 0 характеристические показатели, очевидно, равны
нулю. Поэтому для системы (8.50) характеристические
показатели могут быть вычислены как собственные значения матрицы
■1 1пХ(2я) = ^1п(Е + 2л <АХ> +...) = <А,> + ...
Следовательно, задача об устойчивости в первом приближении
240
приведена к исследованию устойчивости системы (8.50) с
усредненной по ^ матрицей Ai(y). Вычисления показывают, что
усредненная система (8.50) будет такой:
(8.52)
где отброшены члены выше первого порядка относительно е.
Функция F(p*, со*) не обращается в нуль согласно условию
существования исследуемого семейства периодических движений.
Характеристическое уравнение системы (8.52) таково:
Я2 h 2 _ (а-с){Ъ--а) ^ * ф 1 = ^
[ 196Л2 ^ J
При (а — с) (Ъ — а)> 0 у этого уравнения есть корень с
положительной вещественной частью, а при (а — с) (Ъ — а) < 0 оно имеет
пару чисто мнимых и пару нулевых корней, которым, очевидно,
соответствуют простые элементарные делители.
Следовательно, при достаточно малом отличии эллипсоида от
шара справедливо следующее утверждение: если в порождающем
движении вращение эллипсоида происходит вокруг оси,
параллельной его средней по величине полуоси, то исследуемое
периодическое движение неустойчиво; если же вращение происходит
вокруг оси, параллельной наибольшей пли наименьшей полуоси
эллипсоида, то (при пренебрежении в (8.50) членами второго
и более высокого порядков относительно е) имеет место
устойчивость в первом приближении.
§ 9. Асимптотическое решение задачи о движении
однородного эллипсоида по абсолютно шероховатой плоскости
В § 8 для движущегося без скольжения по горизонтальной
плоскости однородного эллипсоида, близкого к шару, рассмотрена
задача о периодических движениях, рождающихся из
стационарных движений шара. Там получены первые члены рядов,
представляющих периодические движения и являющихся строгими
решениями уравнении движения; эти решения справедливы на
бесконечном интервале времени. В данном параграфе мы будем
иметь дело не с точными, но частными решениями уравнений
движения, а с приближенным, но зато общим их решением. Мы
получим решение, аппроксимирующее точное решение на
достаточно большом, но конечном интервале времепи. При построении
решения воспользуемся методом усреднения [126, 128].
1. Усредненная система уравнений движения. Пусть Кх, KVf
Kz — проекции вектора кинетического момента К эллипсоида
относительно центра тяжести на соответствующие осп неподвиж-
16 А. П. Маркеев
241
ной системы координат Oxyz. Имеем
Кх = Араи + Bqaiz + СгаУз,
Ку = Ара,2[ + Еда*® + Сгачъ, (9.1)
Кг = Арам + Вдаз2 + Сга3з,
где ац — элементы матрицы направляющих косинусов (1.1) из
гл. 1, задающей ориентацию жестко связанной с эллипсоидом
системы координат G£r]£ относительно неподвижной системы
координат Oxyz.
Продифференцировав квадрат модуля кинетического момента
К2 = АУ + B2qz + C2r> (9.2)
по времени и воспользовавшись уравнениями (8.9), получим
дифференциальное уравнение, описывающее изменение со
временем модуля вектора кинетического момента эллипсоида:
§ = -Щг W* + V* + г'"з) + • • • (°-3)
Аналогично, дифференцируя третье из равенств (9.1) и
пользуясь уравнениями (8.9) и кинематическими уравнениями
Пуассона (1.12) из гл. 1, получаем дифференциальное уравнение для
проекции кинетического момента Кг на вертикаль:
dKT
_* = (В - С) qrl, ±(С- Л) rp^ + (А - В) Mi +
Получим еще дифференциальное уравнение для угла >. между
проекцией вектора К на плоскость Оху и осью Ох. Имеем
Кх = Кху cos Я, Ку = Кху sin Я,
где Кху — величина проекции вектора К на плоскость Оху. Из
этих равенств следует, что
dt ~ А'2 ' ( '
ху
Преобразовав правую часть этого равенства, опираясь на
соотношения (9.1), (8.9) и на свойства элементов а^ матрицы
направляющих косинусов, получим уравнение
%. = ' , \\{С - В) qr - ± П1 (tf, - г%) +
dt Aw sin [i [l ' J
+ [(A-C)rp L /2] (rb - pb) +
+ [{B-A)pq |-/8](pTb-ffb)}+ ••• (9-6)
Здесь через jx обозначен угол между вектором кинетического
момента и вертикалью.
242
Уравнения (9.3), (9.4), (8.6) описывают движение вектора К
в абсолютном пространстве. Многоточием в них обозначены
члены порядка е2 и выше.
Уравнение (8.38) для угла б между касательной к следу
точки М на поверхности эллипсоида в точке его касания с опорной
плоскостью и осью Ох можно при помощи соотношений (7.2),
(8.7), (8.10), (8.13), (8.14) и (8.37) преобразовать к
следующему виду:
If - -^5}Г К* - с) гръ + {Ъ-а) pfa + (с-Ъ) grgj +
+ -4г [(в - с) (id + Ш q + (Ь - а) (%£, + т^) г +
top-ft
+ (с — Ь) (£l4l + £i%) p] + -4~2 {(Р — <»x€i) ft + <9 — юХЛ0 ft +
ш р
Ос
+ (г - юзсЬ) £3 + ^21/i (lb'" - Ьв) + ШъгР - Eir) +
+ /8(b«-4iP)J}+--. (9-7>
Функции /,-, g,- (i = l. 2, 3), входящие в уравнения (9.3), (9.4),
(9.6) и (9.7), определены равенствами (8.11), (8.12).
Уравнения (8.9), (8.17), (8.18), (9.3), (9.4), (9.6) и (9.7)
представляют собой систему дифференциальных уравнений
движения, записанную в форме, удобной для применения метода
усреднения. В этих уравнениях переменные р, д, г, %, К, Кг, >„,
б — медленно меняющиеся функции времени. Если со —
величина порядка единицы, то угловая переменная f будет
единственной быстрой переменной. Правые части дифференциальных
уравнений, разрешенных относительно медленных переменных,—
функции величин р, q, г, %, р, ?, причем по углу -у они 2л;-перио-
дичны. Напомним еще, что % и р связаны равенством (8.16).
Усредняя по у правые части уравпенпп для медленных
переменных, получаем такую систему уравнений первого
приближения:
в^ + Та f^ £°Нл ~ 9 гр = °« <9-8>
(9.9)
Gfe.p,ff,0. (9Л°)
(9.11)
(9.12)
dK
dt ~~
0,
§_0, Х» + р»_1,
dy
-5г = <в-
1С*
243
Здесь введено обозначение
G== Ш [(Ь + с ~~ ^^ + <с + а-Щя2 + (в + Ь-2с)г21, (9.13)
а функция F определена в равенствах (8.28):
F = Юр4 - 5(6о + 5)р2 + 4(5с + 6)
(а-^, <*»-/>» +а»+ г«). <914>
Решение системы уравнений первого приближения (9.8) —
(9.12) аппроксимирует точное решение на интервале времени
порядка 1/е с погрешностью порядка е для медленных
переменных р, q, г, %, Р> К, Кг, Я, б и с погрешностью порядка единицы
для у. Отметим, что р при этом считается величиной порядка
единицы. Случай малых р будет особо рассмотрен в п. 7.
2. Геометрические свойства усредненного движения. Согласно
(9.9) величины % и р в первом приближении постоянны. Далее
из (9.8) следует, что производная со равна нулю с погрешностью
порядка е2. Поэтому, замечая еще, что в (9.8) функция F(p, ro)
умножается на разности моментов инерции, которые сами
являются величинами первого порядка малости, можно, не
увеличивая погрешности аппроксимации точных решений
приближенными, в функции F(p, со) положить величину со равной соо. Здесь
и ниже ипдексом 0 обозначаются начальные значения
соответствующих переменных.
Функция /г(ро, соо) обращается в нуль, если между соо и о0
существует соотношение вида (8.29)
10(3p*-2)g
loo = ~t ; ; ^—у (У. 1о)
^ 1Г 2 ^ 1 1 /lOg
что возможно, если одновременно pv, > \ -g- и со0 < -^ у -^-.
При выполнении равепства (9.15) вектор со будет в первом
приближении постоянен относительно движущегося эллипсоида (и
относительно абсолютного пространства).
Пусть F(po, coo)^0. Используя интерпретацию Пуансо
движения твердого тела в случае Эйлера, можно дать следующее
геометрическое представление движения, описываемого
усредненной системой уравнений. Пусть векторы «о и К отложены от
центра тяжести эллипсоида. При движении по плоскости
эллипсоид совершает относительно вектора К движение Эйлера — Пуаи-
со, в котором «временем» является величина irrP (Pc ^оН-
Далее из (9.9) — (9.11) следует, что величины К, Кг (а
следовательно, и угол и. между вектором К и вертикалью) постоянны
в первом приближении и что существует интеграл усредненных
уравнений движения
2
К V- б - const* (9.16)
sin2 [i v
244
Следовательно, вектор К имеет постоянную длпну и медленно
прецессирует вокруг вертикали, оставаясь от нее на неизменном
угловом расстоянии jw, определяемом начальными условиями.
Угловая скорость прецессии Я определяется третьим из
уравнений (9.10). Углы Я и б связаны соотношением (9.16); в
частности, когда 5 ^ 0, т. е. когда след точки касания на опорной
плоскости — прямая линия, вектор кинетического момента К
движется поступательно со скоростью центра тяжести эллипсоида.
Вместе с вектором К движется воображаемая плоскость л
(плоскость Пуансо), перпендикулярная К и находящаяся от
центра тяжести на постоянном расстоянии У2Т/К (Т —
кинетическая энергия движения эллипсоида относительно центра
тяжести) . Воображаемая поверхность Л£2 + Brf + С£2 = 1
(эллипсоид инерции) катится по этой плоскости без скольжения.
Направление <о описывает на эллипсоиде инерции полодпи, а на
плоскости Пуансо — герполодии.
Заметим, что из (8.7), (8.13) и (8.14) следует, что точка М
соприкосновения рассматриваемого реального эллипсоида и
опорной горизонтальной плоскости в каждый момент времени
находится в плоскости, задаваемой уравнением
-^-E-f-*-T| +—£-y0. (9.17)
Если пренебречь в (9.17) величинами порядка 8, то можно
утверждать, что эта плоскость находится па постоянном расстоянии
\%о \R от центра тяжести эллипсоида и с течением времени
медленно эволюционирует, оставаясь перпендикулярной вектору <ю и
тем самым отслеживая движение со по конусу полодии.
3. Анализ приближенного решения. Остановимся подробнее
на анализе движения, описываемого усредненной системой
уравнений (9.8) — (9.12). Пусть а<Ь<с. Тогда А>В>С и
выполняются неравенства 2ТВ ** К2 ^ 2ТС. Картина расположения
полодий на эллипсоиде инерции представлена на рис. 5.
Принято, что F(po, coo)> 0; если F(po, coo)< 0, то направление движения
вектора <о, показанное на рис. 5 стрелками, изменится на
обратное.
Рассмотрим движение для случая, соответствующего
расположению полодпй в области 1 (движение для остальных областей
рассматривается аналогично). Решение уравнений (9.8)
выражается через эллиптические функции Якоби в виде равенств (6.8)
гл. 1, в которых только величину т, определяемую равенством
(6.10) гл. 1, надо умножить на постоянный коэффициент
-feF (p0, со0). зависящий от начальных условий.
Уравнения движения точки касания М по поверхности
эллипсоида (7.1) определяются по формулам (8.7), (8.13), (8.14),
в которые надо вместо /?, q, г подставить их выражения через
эллиптические функции Якоби. Геометрический характер следа
245
точки М на поверхности эллипсоида удобнее, однако, получить
геометрическим же способом, основанном на замечании в
конце п. 2.
Находя след и место его расположения на поверхности
эллипсоида с погрешностью порядка е, можно принять эллипсоид (7.1)
эа шар радиуса R. На рис. 38 изображено сечение шара
плоскостью, проходящей через отложенный от его центра вектор w
Рис. 38 Рпс. 39
и ось G£. Угол а в соответствии с (8.14) п равенствами (6.8)
гл. 1 удовлетворяет соотношению
sincc=l/ 1- ~/ (1-A-?sh2t), (9.18)
где к{ — модуль эллиптических функций, определяемый
равенством (6.11) гл. 1.
При перемещении вектора «о по конусу полодии угол а
медленно изменяется между своими минимальным и максимальным
значениями ai и а2, которые достигаются при прохождении «о
в плоскостях G|E; и Grfe соответственно (рис. 5), причем
согласно (9.18)
/~ 2ТА — К2 . , ГА 2ТА — К1 (А 7Т\
1 - , sina2 = l/ 1 - (1 — frf).
На рис. 38 показано также сечение шара радиуса \y$\R с
центром в точке G. Во время движеппя эллипсоида плоскость
(9.17) касается этого шара. На рис. 38 отрезок PN есть
проекция линии пересечения эллипсоида и плоскости (9.17). При
движении эллипсоида точка М быстро перемещается по следу на
его поверхности, а проекция точки М быстро движется по
отрезку PN (на рпс. 38 от Р к N). Сам же отрезок PN медленно пре-
цессирует вокруг оси G£, так как, перемещаясь по конусу
полодии, вектор <о медленпо вращается вокруг G£. Одновременно
отрезок PN из-за изменения угла а медленно колеблется
относительно прецессирующей вместе с PN оси, перпендикулярной
плоскости рис. 38 и проходящей через точку G.
246
Из сказанного следует, что точка касания М будет
находиться в полосе поверхности эллипсоида, заключенной между двумя
граничными кривыми, показанными на рис. 39. Минимальная и
максимальная ширина полосы, в которой расположен след точки
касания М эллипсоида и плоскости, достигается в плоскостях
G|£ и Grj£ и равна соответственно 2po#sinai и 2p0fisina2.
Точки нижней (при меньших значениях £ на рис. 39) границы
полосы, отвечающие ее минимальной п максимальной шпрпне,
отстоят от главного сечения эллипсоида С|т] на расстояния
(роsin ai + Ixol cos<x{)R и (po sin 0:2 + Ixol cos аг)R соответственно.
При движении эллипсоида точка М быстро перемещается в
заштрихованной на рис. 39 полосе, попеременно касаясь то одной,
то другой граничной кривой. За время порядка 1/е указанная
полоса будет заполнена густой сетью, описанной следом точки М
на поверхности эллипсоида.
Найдем теперь след, вычерчиваемый точкой М на опорной
горизонтальной плоскости. Для этого переидем сначала в
уравнении (9.11) к новой независимой переменной — длине дуги s
следа точки М. Тогда учитывая, что скорость s точки М по ее следу
с погрешностью порядка е равна pocooi?, подставляя р, д, г из
формул (6.8) гл. 1 в уравнение (911) и производя
преобразование выражений, содержащих эллиптические функции,
получаем в первом приближении
ds 7Р0сооЛ
*!= Хо[(Ъ + с- 2а) fa + i^|qj) + (а + Ь - 2с) fa +^)].
(9.20)
Из (9.19) видно, что если х = 0, то следом точки касания на
плоскости будет ( в первом приближении) прямая линия.
Согласно (9.20), это возможно, когда Хо^О (например, когда
эллипсоид движется по плоскости, касаясь ее своим главным
сечением), а также когда между длинами полуосей эллипсоида и
начальными значениями /?о, ?сь Jo существует соотношение,
обращающее в нуль выражение, стоящее в квадратных скобках в (9.20).
Пусть х Ф 0. Без ограничения общности можно считать, что
начальное значение угла б равно нулю; тогда из (9.19) получаем
5axs л л
б=-^^- <9-21>
Подставив затем величину б из (9.21) в уравнения (8.36),
определяющие координаты х, у точки касания М на опорной
плоскости Оху. и произведя интегрирование этих уравнений и
исключение параметра s, получим, что след точки М лежит на
окружности
247
При положительном % движение точкп М по окружности (9.22)
происходит против часовой стрелки, а при отрицательном — по
часовой.
Рассмотрим частный случай — перманентное вращение вокруг
оси G£:
р = 0, з — О, г = г0 = о0. (9.23)
Согласно (9.17) в этом случае следом точки касания на
поверхности эллипсоида будет эллипс, лежащий в сечении эллипсоида
(7.1) плоскостью £ = е*Хо- Далее из (9.23) и (9.19) —(9.22) по-
лучаем^ что если %о(а + Ъ — 2с) = 0, то следом точки касания на
опорной плоскости будет прямая линия, а еслп Хо [а + Ъ — 2с) Ф
7 о co2jR^
Ф 0,— окружность радиуса 5q ■ ^ь_2с)[. Движение
точки касания по этой окружности происходит против часовой
стрелки при положительной величине %о{а + Ь — 2с) и по часовой при
отрицательной.
4. Случай эллипсоида вращения. Пусть эллипсоид (7.1) будет
эллипсоидом вращения с осью симметрии GZ>(a = Ь). Тогда в
первом приближении его движение относительно центра тяжести
будет регулярной прецессией. Угол а между вектором «о н осью
G£ постоянен:
г
а = <х0 = arccos —-. (9.24)
°о
Полодии представляют собой окружности, лежащие в
плоскостях, перпендикулярных осп G£; любая ось, лежащая в
плоскости £ — 0, является осью перманентных вращений.
Аналогично п. 3 можно провести анализ следа точки касания
М эллипсоида (7.1) и горизонтальной плоскости Оху, по которой
он катится. На эллипсоиде след будет заключен в полосе,
которая в отличие от общего случая несимметричного эллипсоида
будет иметь постоянную ширину, равную (с погрешностью
порядка е) 2p0/?siBao-
Из (9.20), (9.21) получаем прп а^Ь
5ахл (с — Ь) (3 sin2 a — 2)
б = —^ ^-Ц; 2 L 8. (9.25)
7р0Л2
Отсюда вытекает, что след точкп касания на опорной
плоскости будет прямой линией ие^ только при %о = 0 пли с = Ь, но и
в случае, когда sin ao = У 2/3, который полностью определяется
начальной ориентацией вектора «о относительно эллипсоида. Во
всех остальных случаях следом точкп касания на плоскости
будет окружность радиуса
V2
5a|x0(c-ft)(3sin2a0-2)|'
Направление движения точки касания по этой окружности ясно
из (9.25).
248
5. Движения, отвечающие полодиям — сепаратрисам.
Рассмотрим теперь движения эллипсоида, для которых направление
вектора о пересекает эллипсоид инерции по сепаратрнсньш
полодиям, соединяющим вершины эллипсоида инерции, лежащие на
средней оси. Для определенности рассмотрим полодию, начинаю-
щуюся вблизи вершины эллипсоида инерции на положительной
полуоси Gr\ и расположенную в области | > 0 (на рис. 5 эта
сепаратриса обозначена цифрой 2). Решение системы (9.8)
выражается через гиперболические функции по формулам (6.18) гл. 1,
в которых величину т, определяемую равенством (6.16), надо
умножить на величину (1/14) F(po, coo).
При движении эллипсоида (7.1) по плоскости направление
вектора <о асимптотически приближается к отрицательному
направлению его средней оси. В пределе эллипсоид вращается
вокруг оси G-г) с угловой скоростью Т2Г/2?, что соответствует его
качению, при котором он касается
опорной плоскости сечением,
перпендикулярным оси Gr] и отстоящим от
центра эллипсоида на расстояние
ixolb-
Расположение траектории точки
касания М на поверхности эллипсоида
(7.1) опять можно найти
геометрическим путем как эволюцию со временем
пересечения эллипсоида (7.1) и
плоскости (9.17). При этом существенно
то, что в отличие от всех рассмотрен- Рис. 40
ных выше случаев полодия не
охватывает ось G£ и с погрешностью порядка е плоскость (9.17)
перпендикулярна плоскости, в которой находится рассматриваемая
полодия. След точки касания густой сетью заполняет показанную
на рис. 40 штриховкой часть поверхности эллипсоида; в неза-
штрихованную часть точка касания М не попадает. Эта часть
поверхности выделяется линиями пересечения эллипсоида с
плоскостями ri = ±lxoli? и прямым круговым цилиндром с радиусом
основания Ixola п осью, перпендикулярной плоскости, в которой
лежит рассматриваемая нами полодия — сепаратриса на
эллипсоиде инерции.
Следует отметить, что для заполнения всей заштрихованной
части поверхности эллипсоида требуется бесконечное время; за
время же порядка 1/е точка касания М проходит только по части
заштрихованной поверхности.
Чтобы найти след точки М на плоскости, подставим
выражения р, g, r по формулам (6.18) гл. 1 в (9.11). После
преобразования выражений, содержащих гиперболические функции, и
перехода к переменной s, получаем в первом приближении
as <р0я
249
Если %о(с-\-а — 2Ь) = 0, то след на плоскости — прямая
линия, если же %о(с + а — 2Ъ)Ф0, то этот след — окружность ра-
7р0Д2
диуса 5а. /с ■ д _ 9м | • Направление движения точки касания
по окружности — следу определяется знаком выражения %о{с +
+ а — 2Ъ).
6. Один особый случай движения. Все предыдущее
исследование проводилось в предположении, что F(po, coo)=^0. Если же
^(ро, соо) = 0, то, как отмечалось в п. 2, вектор «о мгновенной
угловой скорости эллипсоида постоянен. Следом точки касания на
эллипсоиде будет эллипс, являющийся пересечением
поверхности эллипсоида и плоскости (9.17), в уравнении которой р—ро^
q = qv, г = го- Таким образом, при F(p0, соо) = 0, как и в случае
шара, эллипсоид катится по плоскости, касаясь ее сечением,
ориентация которого относительно эллипсоида произвольна. Но
след точки касания на плоскости не обязательно будет прямой
линией. След будет прямой линией или окружностью в
зависимости от того, обращается или не обращается в нуль правая
часть уравнения (9.11), если в ней положить р = />о, 5 = 5о, г =
= го. Еще одно существенное отличие состоит в том. что для
эллипсоида величины ро и соо не являются независимыми: они
должны удовлетворять соотношению (9.15).
Отметим, что ориентация эллипсоида относительно
абсолютного пространства определяется по движению Эйлера — Пуансо
известным способом (см. п. 6 § 6 гл. 1); поэтому на этом вопро*
се здесь не останавливаемся.
Реакция плоскости вычисляется по формуле (1.7).
Вычисления показывают, что нормальная реакция с погрешностью
порядка е равна весу эллипсоида, а сила трения имеет величину
порядка е. Для заданной величины соо и достаточно малого
отличия эллипсоида от шара подскока эллипсоида над плоскостью не
будет и не требуется больших коэффициентов трения для
обеспечения его качения по плоскости.
7. Случай движения с малой скоростью центра тяжести.
Рассмотрим еще ранее исключенный из рассмотрения случай малых
значений переменной р [104]. Пусть в начальный момент
времени направление вектора мгновенной угловой скорости
эллипсоида близко к направлению радиуса-вектора GM точки касания
относительно центра тяжести эллипсоида. Точнее, будем считать,
что величина р имеет порядок е. Опираясь на соотношения
(8.13) —(8.15), преобразуем уравнения (8.9) п (8.17). Если
отбросить величины порядка е2, то получим
В^+-т(5о + 6)(А-С)гр = 0, (9.27)
СЖ + -f-(5a + 6Kfi- A)pq = 0;
250
Согласно (9.27) величина со с погрешностью порядка е2
равна нулю. Поэтому если ограничиться нахождением /?, q, r с
погрешностью порядка е на интервале времени порядка 1/е, то в
выражении для а можно положить со = соо.
Движение эллипсоида относительно его цептра тяжести на
интервале времени порядка 1/е будет с указанной погрешностью
движением Эйлера — Пуансо, в котором роль времени играет
величина 2/7 (5а+ 6)^. С той же погрешностью скорость центра
тяжести будет равна нулю, горизонтальная опорная плоскость
будет параллельна плоскости Пуансо (т. е. угол между этими
плоскостями равен нулю), траектория точки касания на
эллипсоиде гомотетична полодии, нормальная реакция опорной
плоскости равна весу эллипсоида, а сила трения равна нулю.
8. Об асимптотике движения шара Чаплыгина. В работе [204]
С. А. Чаплыгин дал решение задачи о движении без
скольжения по плоскости шара, центр масс которого лежит в его
геометрическом центре. Однако это решение имеет весьма сложное
аналитическое выражение, а данная С. А. Чаплыгиным
геометрическая интерпретация позволяет представить движение лишь в
самых общих чертах.
В работе [134] при помощи использованной в данном
параграфе процедуры построения асимптотического решения задачи о
движении эллипсоида была рассмотрена задача о движении шара
Чаплыгина радиуса R по абсолютно шероховатой
горизонтальной плоскости. Предполагалось, что шар близок к однородному.
За малый параметр е была принята величина,
характеризующая близость главных центральных моментов инерции шара.
Установлено, что в первом приближении величины X и Р
постоянны (применяем обозначения данного параграфа); движение
шара относительно вектора кинетического момента К будет
движением Эйлера — Пуансо, в котором роль времени играет
величина (4 + 5р2//?2)*/14; сам же вектор К в первом приближении
медленно прецесспрует вокруг вертикали, оставаясь на
неизменном угловом расстоянии от нее.
§ 10. К геометрической интерпретации Пуансо
движения твердого тела в случае Эйлера
Полученная Л. Пуансо [277] геометрическая интерпретация
движения твердого тела в случае Эйлера стимулировала целый
ряд исследований, посвященных детальному выяснению
различных сторон геометрического характера движения.
Последовательный и систематический анализ содержится в обзоре П. В. Ворон-
да [27].
Много интересных выводов об интерпретации Пуансо
содержится в работе Дж. Сильвестра [291]. Вот самый простой из
251
них: «Однородный материальный эллипсоид того же размера и
той же формы, что и эллипсоид инерции данного тела, имеющий
неподвижный центр и катящийся по плоскости, расположенной
так же, как и неподвижная плоскость Пуансо, может быть
приведен в движение таким образом, что в дальнейшем он будет
двигаться совершенно одинаково с данным вращающимся телом.
Иными словами, положение главных осей инерции и угловые
скорости вокруг этих осей будут всегда одинаковыми в обоих
случаях». Сформулированное утверждение является одной из
нескольких теорем динамики твердого тела, называемых
теоремами Сильвестра [54, 91, 146].
В связи с интерпретацией Пуансо п теоремой Сильвестра
рассмотрим следующую задачу [104]. Пусть твердое тело,
ограниченное эллипсоидальной поверхностью, движется без
скольжения по горизонтальной плоскости в однородном поле тяжести.
Центр поверхности тела совпадает с его центром масс, а главные
осп поверхности направлены по главным центральным осям
инерции твердого тела, не являющегося, вообще, однородным.
Требуется найти условия, которым должны удовлетворять
геометрия масс тела и полуоси его эллипсоидальной поверхности и
при выполнении которых тело может двигаться так, что его цеитр
тяжести G остается неподвижным.
Из условия отсутствия скольжения следует, что центр
тяжести тела будет неподвижен, если вектор «о его мгновенной
угловой скорости коллинеарен радиусу-вектору GM точки касания
поверхности тела и горизонтальной опорной плоскости:
<0 = 5С5/. (10.1)
Величину б будем считать постоянной.
Уравнения движения тела имеют вид (8.3), (8.4). Условия
совместности уравнений (10.1), (7.1), (8.3) и (8.4) будут
условиями существования движений, для которых центр тяжести
тела неподвижен. Если при помощи условия (10.1) исключить
из уравнений (8.3) и (8.4) переменные |, г), £, то получим, что
величины р, q, r должны удовлетворить двум системам
дифференциальных уравнений-
Ap + [(C-B) + ba?(b2-c*)]qr=0,
Bq + [{A-C) + Xb2(c2-a2)]rp = 0,
Cf + [(B-A)+lc*{a2-b*)]pq = 0;
c2b2p + a2{b2 — c2)qr = 0,
a2c2q + b2{c2-a2)rp=<0,
b2a2f + c2{a? — b2)pq = 0,
где введено обозначение
(10.2)
(10.3)
(10.4)
252
а величина А определена равенством (8.2). При помощи
уравнений (8.4) можно непосредственной проверкой показать, что
величина А при условии (10.1) не изменяется во время
движения; поэтому Я — постоянная величина.
Системы (10.2) и (10.3), очевидно, не противоречат одна
другой в частном случае движения твердого тела, когда оно
совершает чистое верчение вокруг одной из своих вертикально
расположенных главных центральных осей инерции. Чтобы они
не были противоречивы в общем случае движения, надо
потребовать выполнения следующих равенств:
С-В , , а2(Ь2-с2) <г{Ъ2-с2)
~А- + К А e ftV '
А^С Ъ2(с2-а2) Ь2{с2-а2)
ту ~Г ** ту -1 о 1
** в с" а
В-А , ^с2{а2-Ъ2) с2(а2-Ъ2)
—(Г + к с ^2—
Если ввести обозначения
Аа? = хи ВЪ2 = х2, Сс2 = x3j
то равенства (10.5) запишутся в виде следующей неоднородной
системы трех линейных уравнений относительно величин хи
{Ь2 — с2)хх + с2х2 - Ъ2хъ « ЫЬ2с2(Ъ2 — с2),
-c2xv + (с2 - а2)х2 + а2х3 = Ка2Ъ2с2{с2 - а2), (10.7)
Ъ2хх - а2х2 + (а2 - Ь2)х3 = Ка2Ъ2с2 {а2 - Ъ2).
Вычисления показывают, что определитель основной
матрицы системы (10.7) тождественно равен нулю, а необходимое и
достаточное условие совместности этой системы записывается в
виде равенства
ца* _ ъ2) {Ъ2- с2) (с2 - а2)= 0. (10.8)
Это условие выполняется в трех случаях: 1) когда тело
ограничено сферической поверхностью, т. е. при а = Ъ = с; 2)
когда поверхность, ограничивающая твердое тело, будет
эллипсоидом вращения, например при а = Ъ; 3) при л = 0, т. е. когда
движение происходит в отсутствие поля тяжести.
В первом случае из (10.5) следует, что А = В = С, т. е.
центр тяжести для твердого тела будет его шаровой точкой.
Центр тяжести неподвижен, если тело находится в режиме
чистого верчения; при этом тело касается опорной плоскости
произвольной точкой своей сферической поверхности.
Во втором случае из (10.5) следует, что А = В, т. е. тело
обладает геометрической и динамической симметрией с осью
симметрии GE;. Движения, при которых центр тяжести тела
неподвижен, будут частными случаями регулярных прецессий
тела, изученных в § 3.
(10.5)
(10.6)
253
В третьем случае, когда Я = 0, решение системы (10.7)
зависит от одного произвольного параметра к, и его можно записать
в виде х\ = #2 — хз = ку откуда в соответствии с равенствами
(10.6) получаем, что к > 0 и
Аа* = ВЪ2 = С с2 = ft. (10.9)
Равенства (10.9) означают, что поверхность тела (7.1) подобна
центральному эллипсоиду инерции твердого тела, которое она
ограничивает.
При Я = 0 и при выполнении условий (10.9) системы
уравнений (10.2) и (10.3) одинаковы и представляют собой
классические динамические уравнения Эйлера движения твердого
тела по инерции. Из (10.1), (7.1) и (10.9) следует, что 6 =
= У2ГД, где Т — кинетическая энергия тела. Траектории точки
касания М на поверхности тела (7.1) и на опорной
горизонтальной плоскости получаются соответственно из полодии и герполо-
дий при помощи гомотетии с коэффициентом 1/Vft и центром,
совпадающим с центром масс тела.
Таким образом, в отсутствие поля тяжести твердое тело,
ограниченное эллипсоидальной поверхностью, только тогда может
совершать движение Эйлера — Пуансо, когда его эллипсоид
инерции для центра масс и ограничивающая тело поверхность
геометрически подобны. Это утверждение дополняет
сформулированную выше теорему Сильвестра и является ее обращением
для случая движения тела вне поля тяжести.
ГЛАВА 4
ТВЕРДОЕ ТЕЛО НА НЕПОДВИЖНОЙ ГОРИЗОНТАЛЬНОЙ
ПЛОСКОСТИ ПРИ НАЛИЧИИ ТРЕНИЯ СКОЛЬЖЕНИЯ
§ 1. Тяжелый шар на плоскости при наличии трения
Рассмотрим шар, движущийся в однородном поле тяжести
по неподвижной горизонтальной плоскости. Пусть
геометрический центр и центр тяжести шара G совпадают, а центральный
эллипсоид инерции является сферой. Радиус шара обозначим
через а, а массу — через т. Для рассматриваемого шара все оси,
проходящие через центр тяжести, будут главными осями;
момент инерции шара относительно его диаметра обозначим через
/. Кинетический момент шара К относительно центра тяжести
коллинеарен вектору угловой скорости шара «о, причем К =
= /<о.
Движение отнесем к неподвижной системе координат Oxyz
с началом в некоторой точке О неподвижной плоскости, по
которой движется шар; ось Oz направим вертикально вверх.
Угловую скорость шара представим в виде со = 12 + со2к, где 12 и
cozk — горизонтальная и вертикальная составляющие угловой
скорости; Q = co*i + coj (i, j, k — единичные векторы осей Охг
Оу, Oz). Пусть v = vxi + Vy} + vzk — вектор скорости центра
шара, а и = их\ + щ\ + uzh — скорость точки М шара, которой он
касается неподвижной опорной плоскости при своем движении.
Так как vz = 0, а
u = v + <oXGM«v + akxn. (1.1)
то
ux-=vx — (£>ya, ny = vy + (oxa, иг = 0. (1.2)
Движение рассматриваемого шара по плоскости изучено в
работах [2, 87, 155, 156, 216, 235, 281—283]. Движение
существенно зависит от характера взаимодействия шара с опорной
плоскостью. Случай, когда отсутствует тренпе качения и
верчения, а плоскость абсолютно шероховатая (скорость и точки
касания во все время движения равна нулю), рассмотрен в § 2
гл. 3. В данном параграфе сначала на основании упомянутых
работ будет рассмотрено движение шара с учетом сухого трения
скольжения, тренпя верчения и трения качения, а затем будет
кратко исследовано движение шара при наличии вязкого трения.
1. Движение шара под действием сухого тренпя скольжения.
Пусть скорость и точки касания отлична от нуля. Пренебрегая,
255
как обычно, трением качения и верчения, будем считать, что
действие опорной плоскости на движущийся шар сводится
только к реакции плоскости R = i?zk + F, где /?2к— нормальная
реакция, a F = Fxi + Fyj — сила сухого трения. Обозначая через /
коэффициент трения скольжения, имеем
Fx = -fRz^, Fv = -fR2^. (1.3)
Теоремы об изменении количества движения и
кинетического момента дают два векторных уравнения:
m-^ = /ng + R, (1.4)
/■£«-ЛХП- (1.5)
Здесь g = —gk — вектор ускорения свободного падения.
Приравняв вертикальные составляющие в левой и правой частях
уравнений (1.4), (1.5), получим
Вг = mgj сог = coz = const. (1.6)
Таким образом, проекция угловой скорости шара на вертикаль
постоянна во все время движения, а нормальная реакция
плоскости равна весу шара. Горизонтальные составляющие
векторов v и о удовлетворяют уравнениям
/§-/!=кх». (1.8)
Продифференцировав выражение для и из (1.1) по времени и
воспользовавшись уравнениями (1.7), (1.8), получим
dn
dt
Отсюда следует, что направление скорости скольжения и во
все время скольжения остается постоянным, а модуль этой
скорости уменьшается со временем по закону
u = u0-fg[i + ^f)t, (1.10)
где wo — начальное значение скорости скольжения.
Из уравнения (1.7) теперь следует, что центр шара
движется с постоянным ускорением, имеющим модуль fg и
направление, противоположное начальному вектору скорости скольжения
и0. Представим радиус-вектор центра шара г в виде г = як + р,
где як и р — вертикальная и горизонтальная составляющие г.
Тогда из (1.7) получаем
P = Po + v0<-*f-2-^. (1.11)
256
Отсюда видно, что если вектор начальной скорости центра
шара vo не коллинеарен вектору начальной скорости скольжения
uo, то в течение всего времени, пока происходит скольжепие,
центр шара движется по параболе, ось которой направлена
противоположно вектору но.
Из уравнения (1.8) с учетом того, что вектор и/и постоянен
во все время скольжения, находим зависимость горизонтальной
составляющей угловой скорости от времени:
Q = Q0 + /^tkXu0. (1.12)
Таким образом, при скольжении угловое ускорение шара
d(dt/dt имеет постоянный модуль, равный fmga/J, и постоянное
направление, ортогональное вектору ио-
Скольжение шара будет длиться до момента времени,
равного /i, когда скорость скольжения и обращается в нуль. Из (1.10)
получаем
*i= г^ * (113)
Соответствующие этому моменту времени векторы vi и Qi
ортогональны и согласно (1.1) (1.12), (1.13) определяются
равенствами
vi = 7Т^2 «о~ ак X Co. fii = 7Т^кХ«о + fio- (1-14)
J -f- та J -J- та
Покажем, что при t > tx скорость скольжения и всегда
остается равной нулю. В самом деле [155], пусть в момент U + dt
скорость и не равна нулю. Будем уменьшать t, начиная с
момента ti + dt. Тогда из уравнения (1.9), имеющего силу при
и Ф 0, следует, что с уменьшением t скорость и увеличивается;
таким образом, при t = tx мы получили бы значение и, отличноо
от нуля. С другой стороны, если скольжение отсутствует (и = 0),
то согласно § 2 гл. 3 движение шара происходит так, что сила
трения равна пулю, т. е. меньше fmg. Следовательно, условия
(2.4) гл. 1 допустимости качения тела по поверхности
выполнены.
Таким образом, движение центра шара по параболе длится
до тех пор, пока скорость v центра шара не принимает
направления, перпендикулярного £1\; начиная с этого момента, шар
катится без скольжения; центр шара движется прямолинейно
со скоростью vr, угловая скорость шара coi постоянна, ортого-
пальна vi и равна Q\ + cozok.
Из (1.1) и (1.12) следует такое выражение для
производной величины со2 = Q2 + со^ио времени:
dt
о
^[(«o-v0-u*) + ^\V].
Отсюда видно, что во время скольжения шара его угловая
скорость или всегда убывает, или всегда возрастает, или убывает
17 а. П. Маркеев
257
до минимального значения, а затем возрастает; угловая скорость
не может только возрастать до какого-то максимального
значения, а затем убывать.
Остановимся еще на частном случае движения шара, когда
\7о и uo коллинеарны, или, что то же самое, когда vo и йо
ортогональны. Согласно (1.11) в этом частном случае вектор v
скорости центра шара всегда коллинеарен вектору и0; центр шара
движется по прямой, a v увеличивается или уменьшается и
вектор v может даже, пройдя через значение, равное пулю,
изменить свое направление на противоположное. При 13> t\
происходит чистое качение шара вдоль прямой в направлении
вектора uo или в противоположном направлении со скоростью vi,
определяемой из (1.14):
v, = i> « i;1 = °- . ', (1.15)
«■
О
/ + та"
где верхний и нпжиий знаки отвечают соответственно случаям,,
когда кратчайший поворот (на угол л/2) вектора йэ к вектору
uo происходит по часовой и против часовой стрелки. При t > t\
шар катится в направлении вектора uo либо в противоположном
направлении в зависимости от того, будет ли значение v\,
определяемое формулой (1.15), положительным пли отрицательным.
Исследование более сложной задачи о движешш шара по
наклонной плоскости при наличии сухого трения скольжения
изложено в [100, 155, 156].
2. Учет трения качения и верчения. Рассмотрим движение
шара в общем случае его взаимодействия с опорной плоскостью,
когда действие плоскости на шар приводит к силе R,
приложенной в точке касания, паре сил с моментом трения качения
Мк и паре сил с моментом трения верчения Мв [216]. Как и в
п. 1, положим, что R = i?2k + F, где Rzk — нормальная реакция
плоскости, a F — сила сухого трения скольжепия. Момент
трения качения направлен противоположно горизонтальной
составляющей й, а момент трения верчения — противоположно
вертикальной составляющей tozk вектора угловой скорости шара:
Мй = - б/?2^, Мв = - eflzrign ovk. (1.16)
Здесь 6 и е — коэффициенты трения качения и верчения
соответственно.
Векторные уравнения движения будут иметь вид (1.4),
(1.5). только в правую часть уравнения (1.5) надо добавить
величины Мк и Мв. Приравняв вертикальные составляющие в
левой и правой частях этих уравнений, получим, что Rz = rng,
a tDz удовлетворяет уравнению
J-jf= — em/? sign со2. (1.17)
Пусть, папример, <uZq > 0- Тогда
zmg
0)z = CO,o Tt.
258
Через промежуток времени, равпый
/со
'.-srf« <1Л8>
вертикальная составляющая (oz вектора угловой скорости
становится равной нулю; горизонтальная составляющая вектора
угловой скорости шара вследствие тренпя верчения не изменяется.
Пусть аир — углы, которые образуют горизонтальпая
составляющая Й вектора угловой скорости и вектор скоростп v
центра шара с осью Ох соответственно. Тогда
и* = u cos a, uy = usina, ых = Q cos p, toy = fisinp (1.19)
и из векторных уравнений движения с учетом равенства (1.1)
вытекают следующие четыре скалярные уравнения,
определяющие величины щ Q, а, р как функции времени:
йи , (л . та2] , bmga . /0 ч
— = - /# I 1 -Ь -у- + -/- sin ф - а),
dt \ J ) J (1 20)
da bmga to v
UJF = f-cf»(p-a),
ft =^sin(P-a)-^, Q| = ^-flcos(P-a). (1.21)
Если функции u(t), Q(t), <x(t), §(t) найдены, то из (1.19)
определятся величины их, иу, со*, соу, а затем из (1.1) найдутся
величины vx и vy как функции t\ траектория центра шара затем
определится при помощи квадратур.
Уравнения движения (1.20), (1.21) справедливы, если есть
одновременно и скольжение (и¥=0), и качение шара (S3^=0).
Если хотя бы одна из величин и или Q равна нулю, то уравнения
(1.20), (1.21) должны быть изменены в соответствии с законами
трения скольжения и качения [2].
Если 6 = 0, то мы приходим к рассмотренному в п. 1 случаю
движения шара под действием сухого трения скольжения. В
реальных ситуациях величина 6 отлична от нуля, но является
малой; будем считать, что выполняется неравенство
6</а. (1.22)
Покажем, что скольжение шара без качения невозможно.
Действительно, пусть в некоторый момепт времени, который всегда
можно рассматривать как начальный момепт t = 0, величина £2о
равна нулю и остается таковой при t > 0. Тогда момент трения
каченпя, подчиняясь законам трения качения при покое [2],
будет горизонтальным вектором, образующим с осью Ох
неизвестный зарапее угол р и имеющим модуль, равный 6img, где 6i ^ б.
При t ^ 0 уравнения движения будут пметь вид уравнений (1.20),
(1.21), в которых Q = 0, а 6=6,. Уравнения (1.21) в этом
случае дают р — a = л/2, б, = fa. Но так как 5i < б, то последнее
равенство в силу (1.22) невозможно. Таким образом, пока есть
скольжепие, происходит п качение.
17* 259
Если же в начальный момент времени t = 0 скорость
скольжения щ равна нулю, то она остается нулевой и при t > 0. В
самом деле, если скольжение отсутствует, то, согласно законам су-
хого тренпя, сила трения имеет неизвестное заранее горизонта-
льное направление, образующее с осью Ох некоторый угол а,
а модуль силы трения равен f\mg, где /i ^ /. Уравнения
движения шара будут иметь вид уравнений (1.20), (1.21), в которых
надо положить и = 0, / = /i. Из уравнений (1.20) тогда получаем,
Р — а = л/2, а
/1==1 *_. (1.23)
а l + //(m<r) v '
В силу (1.22) это значение /i меньше /. Таким образом, при £>
> 0 имеем движение, в котором и = 0, р — а = л/2, а величина
/i сохраняет свою постоянную величину (1.23), меньшую /. Из
уравнений (1.21) следует тогда, что
dQ bmg dfi ~
М ~~ / + та ' dt ~~ ''
Поэтому Q уменьшается пролорциопально времени, а угол (J
остается постоянным:
0 = Ц,-7?^«' P = IV- (1-24)
/ + та
Выбором направления оси Ох неподвижной системы координат
можно добиться, чтобы угол ро равнялся л/2; тогда а = 0 и из
(1.2), (1.19) следует, что
(о* = 0; g)j, = Q; h* = 0, ^==0; vx = Qa, vy=^0. (1.25)
Следовательно, центр шара движется прямолинейпо и равноза-
медленно; ускорение центра шара
bx~-J™g. (1.26)
/ + та
Вектор скорости центра шара v ортогонален вектору £2, а
скольжение отсутствует. В момепт времени, равный
*»=Ч^^ (*-27>
величина Q обращается в пуль и центр шара останавливается.
Рассмотрим теперь общий случай движения, когда т ^ 0,
Qo^=0. Уравнения (1.21), (1.22) остаются справедливыми до
того момента, когда одна из двух величин и или Q не станет
равной нулю. Если Q обращается в нуль раньше, чем и, то
согласно сказанному выше Q сразу же перестает быть нулевой.
Если, наоборот, в нуль обращается величина и, то она п в
дальнейшем остается равной нулю.
Из уравнений движения следует, что скорость скольжения
и все время уменьшается и в конце концов в некоторый момент
260
времени обращается в нуль. В самом деле, так как sin(p — a):
^ 1. то первое из уравнений (1.20) дает неравенство
du ^ Л + таг^ _j_ bmga
i,<-/*i + —] + j
из которого с учетом принятого условия (1.22) следует, что
du . ,
Следовательно,
и < и0 — /g*f
и скорость скольжения обращается в нуль по прошествии
времени, меньшего Uo/fg. Начиная с этого момента, происходит
описанное выше движение шара без скольжения.
Уравнения движения допускают первый интеграл, который
получается путем исключения величины sin(p — а) из первого и
третьего уравнений системы (1.20), (1.21). Имеем
/f-»£--ft(i + =£) + «5*.
В силу (1.22) правая часть этого равенства отрицательна. В
течение рассматриваемого промежутка времени, когда и Ф 0 и
Q Ф 0, величина fu — 6Q уменьшается пропорционально времени:
/u-6Q = /Mo_6Q0-[f(l + ^-2) + ^]^.
Рассмотрим теперь вопрос об интегрировании системы урав-
непий движения шара (1.20), (1.21). Введем для краткости
обозначения
Тогда уравнепия (1.20), (1.21) запишутся в виде
d£ 1 . т • п * da , п
■^ = — к\ + fr2sm е, ^— = — fc2cos e,
§ = к2 sin 6 - А,, п|£ = Л8 cos 6, р_сс= 6. (1.28)
Из этпх уравнений следует, что
S-5-**-*» <1-2°)
Из (1.30) п первого и третьего уравнений системы (1.28)
получаем два дифференциальных уравнепия:
§-1г-Д'-"9-*^ё)' S-&(*e-i£n)- с-3»
261
определяющих величины g, r\ как функции угла Э. Если
функции £(0), т)(6) найдены, то соотношение между 8 и t
определится следующим равенством, вытекающим из (1.29):
^1 — g = Ло — go + (*i - h)t. (1.32)
После этого второе и пятое уравнения системы (1.28) дадут
зависимость углов а, р от времени при помощи одной квадратуры.
Таким образом, вопрос об интегрировании уравнений движения
приводится к рассмотрению системы двух уравнений (1.31). Эта
система может быть приведена к одному уравнению первого
порядка известного типа [216]. Для этого произведем сначала в
(1.31) замену независимой переменной в соответствии с
равенством
Уравнения (1.31) примут форму
Е'-|Т? ^' = 1?^ С-34)
где К может рассматриваться как функция от новой независимой
переменной ф, а штрих означает дифференцирование по ф. Из
(1.34) имеем равепства
Исключив из этих равенств величину ч, придем к уравнению
ъч"=%'*+ч'а-1')2- (1-35)
Введем еще вместо функции §(ф) новую неизвестную функцию
Е(фЬ связанную с £(ф) равенством
6 = eJ . (1.36)
Из (1.35), (1.36) получим окончательно следующее
дифференциальное уравнение относительно функции £(ф):
t' = t8-t2 + *.E(i-t)2- (1-37)
Такой тип уравнений пзучен Лиувпллем.
3. О движении шара под действием вязкого трения
скольжения. Предположим, что действие опорной плоскости на шар
сводится к одной силе R, приложенной в точке касания. Будем
считать R = Дгк + F, где F — горизонтальная составляющая
реакции плоскости, имеющая характер силы вязкого трения, i?zk —
пормальная реакция плоскости. Сплу трения запишем в виде
F = _mxu (x>0), (1.38)
где и — вектор скорости скольжения шара, вычисляемый по
формуле (1.1). Из уравнений движения (1.4), (1.5), как и в слу-
262
чае сухого трения, следуют равенства (1.6). Горизонтальные
составляющие угловой скорости шара и скорости его центра
определяются дифференциальными уравнениями
£=-*«. (1.39)
/^ = maxkXu. (1.40)
Продифференцировав и из (1.1) по времени и учтя уравнения
(1.39), (1.40), получим дифференциальное уравнение,
определяющее зависимость скорости скольжештя от времени:
§--*(1 + ^Ь <!•*>
Отсюда следует, что
u = ц^-*^™»1//)^ (1.42)
Таким образом, скорость скольжения имеет постоянное
направление, совпадающее с направлением вектора uo начального
скольжения; модуль скорости скольжения, никогда не обращаясь
в нуль, экспоненциально убывает со временем в соответствии
с (1.42).
Из (1.39), (1.42) получаем ускорение центра шара
^=^-xu0^(l+Tna2/j)f. (1.43)
Ускорение центра шара имеет неизменное направлепие,
противоположное направлению вектора Но: с течением времени
модуль ускорения экспоненциально убывает.
Интегрирование равенства (1.43) дает зависимость скорости
центра шара от времени:
v = v„ + -^Ч [e**+~*Mt - l]. (1.44)
/ -\- та L J
При t -»- °° вектор скорости центра шара стремится к
постоянной величине Voo, определяемой равенством
Voo = v0 — — з «о- (1-45)
/ -f- nia
Иптегрпрованпе равенства (1.44) дает такое выражение для
горизонтальной составляющей р радиуса-вектора центра шара:
Р = Р„ + к - -S «о) ' + n~{j^fV - e-^™^}. (1-46)
\ / + та J K\J-\-ma ] '- J
Если вектор vo не коллинеарен вектору uo (или, что то же
самое, еслп вектор Qq не ортогонален вектору vo), то траекторией
центра шара будет кривая, имеющая своей асимптотой при
t -+ оо прямую, задаваемую уравнением
Р = Ро+5(7-^-2|2 + К-7тЦт«о)^ (1-47)
и \J - та J \ J + та J
263
Если же векторы vo и и0 коллинеарны, то траекторией
центра шара будет прямая, задаваемая уравнением (1.46).
В статье [193] исследовано движение тяжелого шара по
горизонтальной плоскости, вращающейся с постоянной угловой
скоростью вокруг заданной вертикали. Рассмотрены случаи
движения без скольжения и движения с учетом сил вязкого
трения и трения качения. Показано, что под действием сил
вязкого трения об окружающую среду центр однородного шара
движется по скручивающейся спирали к состоянию покоя в
неподвижной системе координат; положение точки покоя
определяется величиной и направлением пачальной скорости центра шара.
Под действием сил сопротивления качению движение центра
шара в неподвижной системе координат представляет собой
движение по крпвой, приближающейся к раскручивающейся спирали с
центром в начале координат.
§ 2. Стационарные движения тела вращения
1. Вводные замечания. При движении твердого тела по
шероховатой плоскости при наличии скольжения происходит
диссипация его энергии. Если и — вектор скорости точки касапня,
a R — реакция плоскости, то для производной по времени от
полной энергии тела Е = Т + П имеем выражение
f=R.u. (2.1)
Горизонтальная составляющая F реакции плоскости (сила
трепня) направлена противоположно скорости скольжения,
поэтому правая часть в равенстве (2.1) неположительна. Движение
происходит так, что тело стремится избежать трения
скольжения [2]; скорость рассеяния энергии, т. е. абсолютная величина
правой части равенства (2.1), с течением времени убывает.
В случае сухого трения равенство (2Л) имеет вид
f = -/*«- (2-2)
где / — коэффициент трения скольжения, а N — нормальная
реакция плоскости. При движении в отсутствие отрыва
твердого тела от плоскости проекция ускорения его центра тяжести на
вертикаль не превосходит некоторой величины ag, где g — уско-
реппе свободного падения, а а — положительный коэффициент,
меньший единицы. Если га — масса тела, то из теоремы о дви-
жешш центра инерции следует тогда, что N^(1 — a)mg, т. е.
нормальная реакция плоскости ограничена снпзу
положительной постоянной. А так как правая часть в равенстве (2.2) с
возрастанием времени стремится к пулю, то это означает, что
скорость скольжения и с ростом времепи уменьшается [2].
В некоторых частных случаях показано [2, 152, 155], что при
наличии сухого трения скорость скольжения может исчезнуть
за конечное время. Но так ли этд в общем случае — неизвестно.
264
Как и в случаях абсолютно шероховатой и абсолютно глад-
коп плоскостей, в случае горизонтальной плоскости при наличии
трения скольжения известны [73, 74, 68, 86, 99, 124, 134, 159,
162, 273] следующие три типа стационарных движений тела
вращения в однородном поле тяжести: 1) вращение вокруг
вертикально направленной оси симметрии; 2) регулярные
прецессии; 3) качение тела одним из своих сечений так, что ось
симметрии перемещается равномерпо и прямолинейно, а центр
тяжести находится над точкой касания. В этих стационарных
движениях скорость точки касания равна нулю. Как уже
отмечалось в § 2 гл. 2, движения третьего типа возможны не для всех
тел вращения.
Устойчивость стационарного движения первого тпиа в случае
плоскости с сухим трением исследована в статье [124]. В этой
статье получено достаточное условие устойчивости, которое
имеет вид неравенства (3.46) гл. 3. Для получения этого условия
в [124] использовалась функция Ляпунова, построенная при
помощи интегралов неголономной задачи. Как заметил Н. К. Мо-
щук в диссертации [134], из неустойчивости движения в
неголономной задаче следует неустойчивость этого движения на
плоскости с сухим трением, так как в случае плоскости с сухим
трением устойчивость стационарного движения означает
устойчивость как по отношению к произвольным возмущениям, так
и по отношению к возмущениям, оставляющим скорость
скольжения нулевой. Но, как показано в гл. 3, условие (3.46) этой
главы является необходимым (с точностью до знака равенства)
п достаточным для устойчивости стациопарного движения
первого типа в неголономной задаче. На основании замечания
Н. К. Мощука отсюда следует [134], что полученное в [124]
условие является не только достаточным, но и необходимым
(с точностью до знака равенства) условием устойчивости
стационарного движения первого типа на плоскости с сухим
трением. В диссертации [134] отмечено также, что условия
устойчивости второго и третьего типов стационарных движений тела
вращения на плоскости с сухим трением такие же, как и в
неголономной задаче.
В данном параграфе будет подробно рассмотрен вопрос о
существовании и устойчивости стационарных движений тела
вращения только для случая плоскости с вязким трением. Как
показали П. Коптенсу [86] и Т. Эрисман [234], при движении
тела, сопровождающемся его верчением и скольжением на
плоскости с сухим трением, фактическая сила трения оказывается
пропорциональной скорости скольжепия, т. е. имеет место
вязкое трение.
2. Теория Коптепсу связи между трением скольжения и
трением верчения. Пусть тело движется по неподвижной
горизонтальной плоскости с сухим трением. Так как плоскость и тело
никогда не являются абсолютно твердыми, то они будут
соприкасаться не в точке, а по некоторой, хотя и малой, но конечной
265
площадке. Для получения закона распределения нормального
давления рг по площади соприкосновения будем использовать
теорию статических контактных задач Герца [92], пренебрегая
динамическими эффектами.
Предположим, что поверхность тела, по крайней мере
локально, в окрестности точек его касания с опорной плоскостью,
является сферической. Согласно
теории Герца, соприкосновение тела и
плоскости будет происходить по
круговой площадке; радиус о этой
площадки зависит от модулей
упругости материалов плоскости и тела,
результирующей нормального
давления N тела на плоскость и радиуса
кривизны поверхности тела.
Величина нормального давления pz в
точке Р круга контакта задается
формулой
Рис. 41
Pz =
2л0"
i/i-<
(2.3)
где р — расстояние от центра круга контакта до точки Р (рис. 41).
Будем считать, что законы Кулона сухого трения скольжения
применимы к каждому элементу площади контакта. Пусть в
данный момент времени тело вращается с угловой скоростью со
вокруг вертикали и движется поступательно со скоростью и
бдоль оси Ох. Проекции скорости точки Р на оси Ох и Оу
будут такими:
vx = u — cop sin 9, vv = cop cos 9.
Пусть / — коэффициент сухого трения скольжения.
Тангенциальное напряжение в точке Р противоположно вектору
скорости этой точки и имеет величину fpz. Проекции тангенциального
напряжения на оси Ох и Оу вычисляются по формулам
Рх = — fpz
и — о){> sin В
V и1 — 2сори sin 0 + о>2р
■> Py=—fPz
сор cos В
Уи1-Ъ
2соры sin 0 + оГр""-
Приняв центр круга контакта за центр приведения сил,
приложенных к телу со стороны плоскости, получим, что реакция
плоскости приводится к силе F и паре с моментом М, имеющим
вертикальное направление. Модуль момента пары
вычисляется по формуле
О г „ 2Л -1
м-Щ Up? ]/ 1 - q Г , "p-"siD0 dQ .
2лоГ J, 1- * ° о * "~—2wp"cos e"~w2f>2 -I
(2.4)
Проекция силы F на ось Оу равна нулю, а проекция на ось
266
Юх определяется равенством
° Г г "2Л Л
Рх = Щ\<1р Р)/1-е:Г—^^1пе~ц дI (2.5)
2ло2 J Н |/ К 0 о /и2-2о)Ри sin 6 + юV J
Интегралы (2.4), (2.5) нельзя выразить в элемептарных
функциях. Вычислим их асимптотику при больших и малых
угловых скоростях тела. Точнее, введем безразмерный параметр
X = u/(wo), который характеризует соотношение между
скольжением и верчением, и вычислим приближенные значения
интегралов (2.4) и (2.5) в случае 0 ^ X < 1 п А, > 1.
При малых значениях % интеграл (2.4) будет таким:
M = %NfG + G(X), (2.(0
а при больших К имеем
«-lA^ + 0(i). (2.7,
Ввиду малости величины о радиуса круга контакта момент
трения верчения мал, и в дальнейшем его рассматривать не будем.
Для величины Fx из (2.5) при малых и больших значениях
Я получаем соответственно такие приближенные выражения:
*.--TJV'SF + 0<*'> <2-8)
'■—у'(1-д?) + 0(?)- м
В работе [86] приведены результаты численного анализа
интегралов из (2.5). И числепные расчеты, и асимптотики (2.8),
(2.9) показывают, что при движении тела по плоскости в
режиме скольжения и достаточно быстрого верчения сила трепня
приблизительно пропорциональна скорости скольжения, т. е.
имеет место вязкое трение; в режиме чистого скольжения и при
малых угловых скоростях верчения следует рассматривать
сухое трение.
3, Интеграл Желле. Пусть динамически симметричпое тело
движется в однородном поле тяжести по неподвижной
горизонта тьной плоскости. Центр тяжести тела G лежит на оси
симметрии. Характер взаимодействия тела и опорной плоскости не
конкретизируем; предполагаем только, что воздействие плоскости
на тело сводится к одной силе — реакции R, приложенной в
точке М касания тела и плоскости. Пусть участок поверхности
тела, точками которого тело при своем движении касается
плоскости, является сферическим с радиусом, равным р, шшчем
центр этой сферы лежит на оси симметрии. Пусть
C|i]^ — система коордипат, образованная главными
центральными осями инерции тела; ось G£ паправлепа по оси симмет-
2G7
рии. Координатами центра сферического участка
поверхности будут величины 0, 0, —а; направление оси G£ выберем таку
чтобы величина а была положительной.
Пусть та — масса тела, А и С — моменты инерции тела
относительно осей Gg, Gr\ и G£, a to*, vi9 ^ (i = 1, 2,
3)—компоненты соответственно векторов угловой скорости тела, скоростп его
центра тяжести и направленного вверх единичного вектора
вертикали в системе координат Ggr]£. Координаты §, т), £ точки
касания М задаются равенствами
£ = — РТь Л = —РТ2, 5 = — (Р7з + а). (2.10)
Из теорем об изменении количества и момента количеств
движения и пз кинематических уравнений Пуассона следуют такие*
дифференциальные уравнения:
vx + а,ия — ы3и2 = — £Yi + -^ Rv
m
v2 + tOgi'i — co^g = — gy2 + - R2r (2.11>
v3 + (0^ — to^ = — gy3 + ~ R3;
Аы\ + (С — A) ©2CO3 == (р7з + a) R2 — р'Угйз,
Л(о2 ~(C - ^1)0)3(0! « pTii?3 - (рТз + «)Ль (2.12>
Сыз = PY2R1 — pti^2;
Ti + «273 — CO3Y2 *=■(), Y2 + Ы3Т1 — to 1Y3 = 0, 73 + to 1Y2 — «2Y1 = 0.
(2.13)
Непосредственная проверка показывает, что в силу (2.10), (2.12),
(2.13) производная по времени скалярного произведения
кинетического момента и радиуса-вектора GM точки касания
относительно центра тяжести тождествепно равна нулю. Это
означает, что в рассматриваемой задаче существует интеграл
Awil + А о)2г] + С«з£ = const. (2.14)
Этот интеграл получен впервые в [254] и называется
интегралом Желле. Используя (2.10), его можпо записать в виде
A (otfx + со2у2) + Ссол (у3 + j\ = A\ (2-15>
где к — произвольная постоянная.
4. Стационарные движения неоднородного шара на
плоскости с вязким трением* Исследование задачи о существовании и
устойчивости стационарных движений тела вращения на
неподвижной горизонтальной плоскости прп наличии трения скольже-
нпя содержится в работах [68, 70, 73—76, 86, 99, 159, 162, 273].
В статье [273] получено необходимое условие устойчивости вра-
268
яценпя тела со сферическим основанием вокруг вертикально
направленной оси симметрии; это условие было затем получено
еще раз в работе [86], где оно подробно обсуждается в связи
с рассмотрением вопроса о стремлении оси симметрии волчка на
плоскости с треппем скольжения занять вертикальное
положение. Результаты этого обсуждения в краткой форме изложены
в монографии [99]. В строгой нелипейной постановке задача об
устойчивости вращения симметричного тела вокруг вертикали на
плоскости с вязким трением рассмотрена сначала в [159], а
зачтем в [162], где показано, что полученное в [273] необходимое
условие устойчивости является и достаточным. Кроме того,
.в статьях [159, 162] обсуждаются достаточные условия
устойчивости при любом законе трения, приводящем к диссипации
полной энергии тела. Как замечено в [134] (см. п. 4 § 3 гл. 3),
никакой разницы в условиях устойчивости вращения вокруг
вертикально направленной оси симметрии для произвольного тела
вращения и тела вращения со сферическим основанием нет.
Исследованию второго и третьего типов (см. п. 1)
стационарных движений произвольного тела вращения на плоскости с
вязким трением посвящена работа [68]; этот же вопрос
подробно рассмотрен в диссертации [70].
Стационарные движения динамически симметричного тела
:вращения, обладающего сферической поверхностью, на
плоскости с трением скольжения рассмотрены в недавних статьях
А. В. Караиетяна и В. Н. Рубановского [73—76]; закон трения
.в этих статьях не конкретизируется. Исследованию
стационарного вращения тяжелого твердого шара вокруг вертикали при
наличии трения скольжения, являющегося весьма произвольной
-функцией скорости скольжения, посвящена также работа [268].
В данном пункте мы изложим некоторые результаты работ
[73—76], полагая для определенности, что трение является
вязким 1).
В работе [73] предложен эффективный метод анализа
задачи о существовании и устойчивости стационарных движений
неконсервативных механических систем. Он состоит в
следующем. Пусть склерономная механическая система допускает не
зависящие от времени первые интегралы
U\(xu .-., хп) = си .-., Uh(xu ..., xn)=ch,
а также не зависящую от времени функцию Uo(xi, ..., хп),
не возрастающую вдоль движений системы. Функции Ui(xu ...
1) Следует, одпако. подчеркнуть, что результаты работ [73—761
справедливы (и в этом их значимость) в гораздо более общих случаях. Напри-
мер, сила треппя скольжения F = (FXt Fv) может зависеть от скорости
♦скольжения v = (vx, vy) следующим образом: Fx = — & arctg-р/^, F=
3 (dFx\ /dFy\
= — k arctg у vy (&> 0), при этом [ ^- J = I ^~ ) =—ооИ никакие пзве-
x о У о
стные способы исследования, кроме приведенных в [73—761. не годятся.
269
..., хп) предполагаются непрерывно дифференцируемыми по
входящим в них переменным х\, . . ., хп. Сущпость предложенного
в [73] метода исследования заключена в следующих трех
теоремах, являющихся дальнейшим развитием классической
теоремы Рауса [77, 15(5, 285].
Теорема 1. Если не возрастающая вдоль движений
системы функция Uo(xu ..., хп) имеет строгий локальный минимум
при постоянных значениях интегралов Ui(x\, ..., xn)=d (i=-
= 1, 2, .. ., к) этой системы, то значения переменных,
доставляющие этой функции минимум, отвечают устойчивому
действительному (стационарному) движению системы.
Теорема 2. Если стационарное движение доставляет
функции Uq(xi, ..., Хп) строгий локальный минимум и изолирована
при постоянных значениях интегралов Ui(x\, ..., хп)= d (i =
= 1, 2, ..., к) от движений, вдоль которых функция Uo(x\, ...
. .., Хп) сохраняет постоянное значение, то всякое возмущенное
движение, достаточно близкое к не возмущенному,
асимптотически при £ ->- оо стремится к одному из стационарных движений
системы, отвечающему строгому локальному минимуму функции
Uo(xu ..., хп) при возмущенных значениях интегралов Ui(x\, ...
..., xn)=Ci (i=l, 2, ..., к); в частности, невозмущенное
движение асимптотически устойчиво при невозмущенных значениях
постоянных используемых интегралов.
Теорема 3. Если стационарное движение не доставляет
функции Uo(x\, ..., хп) даже нестрогого минимума и
изолировано при постоянных значениях интегралов Ui(x\, ..., #„)=ct-
(i = l, 2, ..., А*) от движенийщ вдоль которых функция Uo(%u •••
..., хп) сохраняет постоянное значение, то невозмущенное
движение неустойчиво.
Следует отметить, что в теоремах 1 и 2 содержатся
утверждения об устойчивости, вообще говоря, по отношению не ко в€емг
а к части переменных х\, . .., хп [158]: именно по отношению
к тем из них, изменение которых увеличивает значение функции
Uq(x\, ..., хп) при постоянных значениях интегралов Ui(z\. ...
..., %п) = Ci (i = 1, 2, ..., к). Заметим также, что утверждение
теоремы 2 в известной мере аналогично утверждению теоремы Ля-
пупова — Малкина об устойчивости в особенном случае
критического случая нескольких нулевых корней (см. п. 2 § 5 гл. 3).
Однако ее применение в отличие от теоремы Ляпунова —
Малкина не требует анализа характеристического уравнения.
Для динамики симметричного шара справедливы
дифференциальные уравнения (2.11) — (2.13). Помимо интеграла Uu
определяемого равенством (2.15), эти уравнения имеют
очевидный геометрический иптеграл
C/2 = Y? + Vl + Vl-1 (2-16)
и не возрастающую в случае трения скольжения функцию
(удвоенную полную энергию) С/о вида
U0 = m (vl + v\ + vl) + A (w? + col) + Ceo* + 2mgay3. (2.17)
270
Стационарным движениям шара соответствуют критические
точки функции (2.17) при фиксированных значениях интегралов
(2.15), (2.16) [77, 156, 285]. В соответствии с процедурой
нахождения условного экстремума рассмотрим функцию
V =• ио-2К(их - к)+ \i(U2- 1),
где Яиц — неопределенные мпожптелп Лагранжа. Функция V
принимает стационарные значения, если перемепные сог-, vu у*
(г=1, 2, 3) п множители к и jn удовлетворяют системе
уравнений (2.15), (2.16) и
i;l8= О, 172 = 0, ^з = 0, (2.18)
щ = Я/уи ы2 = ку2, со3 = % (у3 + ~ \ (2.19)
(|1 _ л>;2) Tl = 0, (yi - АЩ у2 = 0, (fi- Ск2)ys -CV± + mga = 0.
(2.20)
Эта система уравнений имеет следующие три группы решений:
Vi = i'2 = va = 0; <oL = со2 = 0, <о3 = Я, (1 + -^ j; Yi = Y2 = 0,
Va-1, (2.21)
v1 = vz = v3 = 0; со, = сй2 = 0, w3 = >, f—1+-^>; уг = y2 = 0,
V3 = -l, (2.22)
ui = v2 = *ъ = о; (ot = ?vTi. «г = A/ySI cu3 = я,(ys + 4);
t! + y5 = i-vJ- (2-23)
Для решении (2.21) — (2.23) множитель р, выражается через к
соответственно по формулам
и. = сг? [\ + -^ - шдо, м = с^ (i - f) + '»#*• и = Ак\
э постоянная А: интеграла (2.15)—по формулам
+ (л,*д)' 8> (2.24)
Для решений (2.21) п (2.22) шар совершает вращение с
произвольной по времени постоянной угловой скоростью соз вокруг
своей оси симметрии, которая неподвижна и занимает верти-
271
сальное положение; для решения (2.21) центр тяжести шара
расположен выше, а для решения (2.22)—ппже его
геометрического центра. Если Л = 0, то соз = 0 и решения (2.21), (2.22)
отвечают положению равновесия шара.
Группе решений (2.23) отвечают регулярные прецессии: шар
вращается с угловой скоростью ha/p вокруг оси симметрии,
которая прецессирует с угловой скоростью X вокруг вертикали,
проходящей через центр тяжести шара; ось симметрии
составляет с вертикалью постоянный угол, косинус которого ^з
вычисляется согласно последнему из равенств (2.23).
Регулярпые прецессии существуют не при всех угловых
скоростях вращепия шара, а только при тех, когда модуль
величины уз, определяемой из (2.23), не превосходит единицы.
Компоненты вектора скорости точки касания М шара и
опорной плоскости в системе координат G£N£ определяются из
равенств
Щ = V\ + р^20)з — (РКЗ + Ci) 0)2,
u2 = v2 + (руз + а) о)! — pYit03, (2.25)
us = 1>з + Р (Ti©2 - T2©i).
На стационарпых движениях шара (2.21) — (2.23) скорость
точки касания равна нулю, т. е. шар движется без скольжения.
Отметим, что из равенств (2.24) с учетом (2.21) — (2.23)
следует, что при каждом значении к интеграла (2.15) существует
не более четырех стационарных движений шара: два вращения
вокруг вертикали (2.21), (2.22) и не более двух регулярных
прецессий (2.23) (из последнего равенства в (2.24) видно, что
одному зпачению к могут отвечать не более двух различных
вещественных значений X).
При фиксированном значении к все (в общем случае четыре)
стационарные движения шара изолированы одно от другого,
если выполняются неравенства
)*фк*, 1*фк1 12фХ1 (2.26)
Здесь %\j K2 и Хъ — вещественные корни уравнений 7з —1|
73 ~— 1 и dk/dX = 0 соответственно, где ^з и к определяются
соотношениями (2.23) и (2.24):
п rnga -2 rnga „4 3 (mgaf
Al-C(l+a/9)-A' '*-А-С(1-а!рУ A* ~ A [c (j __a*/pa) _A]U
Покажем, что функция С/о сохраняет постоянное значение
только на стационарных движениях вида (2.21) — (2.23).
Функция С/о, очевидпо, сохраняет постоянное значение только на
таких движениях, когда скольжение отсутствует, т. е. когда на
движениях шара выполняются соотношения
vi = (рКз + а) о)2 — PY2W3, v2 = pi( ito3 — (рт(з + а) ом,
^3 = p(T2toi~Yito2). (2.27)
272
При отсутствии скольжения сила вязкого трения обращается в
нуль и реакция плоскости будет направлена по вертикали.
Обозначая величину этой нормальной реакции через iV, получаем из
(2.11) —(2.13) уравнения, которым должны удовлетворять
движения шара с постоянпым значением С/о:
их + d)2v3
v3 + ыги2
Aw{ +(C — Л)со2юз = Л^2,
Лю2-(С-4)©зЮ1 = -ЛИ1, (2.29)
Со)3 = 0;
Yi + согтз ~ о>зТг = 0, Y2 + ®3Yi — <*ф = 0, y3 + W1Y2 — ©2Yi = 0.
(2.30)
На рассматриваемых движениях выполняются соотношения
(2.15), (2.16) и, кроме того,
та?у\ + A (tof + cog) + 2mgay3 = const, (2.31)
{v\ + v% + v%) — (vxyt + v2y2 + v3y3)2 = const. (2.32)
Продифференцировав первые два равенства (2.27) по времени
с учетом (2.29), (2.30) и подставив полученные выражения для
Vi (£ = 1, 2) и выражения для Vt (£ —1, 2, 3) из (2.27) в
первые два уравнения (2.28), получим следующие два соотношения:
V
j^[A + ma (руд + a)] yi = Agyx + [С (ру3 + а) — Ару3] ы3щ
(/=1,2). (2.33)
Если 7i = Tf2 — 0, то из (2.27) — (2.30) сразу следует, что
движение тела без скольжения — это только стационарные вращения
вокруг вертикали (2.21) и (2.22). Пусть yi и ^2 не равны нулю
одновременно. Тогда, умножая первое из равенств (2.33) на уг,
а второе на — 7i и складывая результаты, получаем
[С(р7з + а) -Ар*(ъ] соз(toiY2 - 0)2^1) = 0.
Отсюда следует, что либо о)з = 0, либо
0)172-0)271=0 (2.34)
(если С(рчъ + а) — Лр^з^О, то уз = const и из (2.30) опять
следует (2.34)).
18 а П. Марнеев 273
-«W,-(£-*)y*. (2-28)
Если соз = 0, то из (2.33) и (2.29) получаем
' mga * mga /t) Q_
0)1 ~ ii + m<i(pY, + a) Y2' <°2~ ^ + ^«(PY3-r«) Tr (Zm60)
Продифференцировав выражение ь>1 + ы1 по времени с учетом
равенств (2.35) и третьего из уравнений (2.30), получим
соотношение
!(«* + «*)— A + ljy3 + a) Ъ> (2-30)
пз которого следует, что величина со2 + ы\ на движениях без
екольжения есть функция только одной переменной уз-
Далее, при со3 = 0 равенство (2.32) с учетом (2.27) и (2.30)
может быть записано в виде
(Р2 — а2) Тз + (РТз + а)2 (со2 + to2) = const. (2.37)
Исключив из равенств (2.31) и (2.37) величину у%, получим
соотношение, связывающее переменную ^3, параметры га, g, а, р,
А, константы из правых частей равенств (2.31), (2.37) и коп-
станту, получающуюся при интегрировании уравнения (2.36) с
целью нахождения зависимости суммы coj + со?, от ^з- Это
соотношение может быть удовлетворено только при постоянном
значении угла ^з- Таким образом, уз = 0. Отсюда на оспова-
нии третьего из уравнений (2.30) получаем, что движения
шара без скольжения возможны только при выполнении условия
(2.34).
Из (2.34), (2.27), (2.29) и (2.30) вытекает, что при этом
должны выполняться соотношения
0)1=^1, 0)2 = ^1(2, С0з = Const, 73 = COnSt,
(2.38)
v\ = I (рТз + а)1~ рсо3] 1(2, V2 = - [ (рТз + а)Ь — рсо3] уь »ъ = 0.
Из (2.15) следует, что содержащаяся здесь величина X
постоянна.
Подставив (2.38) в уравнения (2.28), получим с учетом (2.30)
N~J?* У1 = f(РТз + а) Ь — Рыз1 ^YaYi (* = U 2),
^^ Уз = - [(РТз + а)Х- ро3] Л (1 - Y2)-
Умножив этп равенства соответственно на Tfii 42, ^з п сложив
результаты, получим N = rag. Следовательно,
[(РТз + а)к — рсо3] к(1 — 7з) = 0.
Отсюда и из (2.38), (2.28) —(2.30) следует, что движение шара
без скольжения возможно только на стационарных движениях
(2.21) —(2.23). Полученный вывод является частным случаем об-
274
+
щих результатов работы [135], посвященной задаче исследования
предельных движений тяжелого твердого тела на плоскости с
вязким трением скольжения. Эта задача будет рассмотрена в § 3.
Для исследования устойчивости стационарных движений при
помощи теорем 1—3 исследуем характер экстремума функции С/о
на решениях (2.21) — (2.23) при фиксированных значениях
интегралов (2.15), (2.16). Рассмотрим решение (2.21). Положим
vx = #!, v2 = х2ч v3 = х3] wx = я4, ы2 = хъ, со3 = ?Л 1 + — J + х6;
Подставим эти выражения для vt, со,, у* (i = 1, 2, 3) в функцию
С/0 и интегралы (2.15), (2.16). Затем при помощи этих
интегралов исключим из функции Uo переменные xG, x9. В результате
получим, что часть функции С/о, линейная по остальным
переменным xh равна нулю, а квадратичная часть имеет вид
U™ = т (*1 + х\ + 4) + А(х1 + х\) +
\СХ2 (1 + -^\ — mga\ {xl + xi) — 2Ак (хАх7 + хьхъ)<
Отсюда при помощи критерия Сильвестра получим, что при
выполнении условия
Л2>^ (2.39)
стационарное движение (2.21) доставляет функции С/о строгий
минимум при постоянных значениях интегралов (2.15), (2.16) п,
следовательно, согласно теореме 1 устойчиво по отношению к
переменным v^ to*, у,- (i = l, 2, 3); если же
K2<ll (2.40)
то стационарное движение (2.21) не доставляет функции С/о даже
нестрогого минимума.
Совершенно аналогично можно получить, что при выполнении
условия
%2 < II (2.41)
стационарное движение (2.22) доставляет функции С/0 строгий
минимум и, следовательно, устойчиво, а при условии
Я2>*| (2.42)
не доставляет функции С/о даже нестрогого минимума.
Для решения (2.23) положим
v\ =* у и v2 = у2, vb = уъ;
„ Тз = V* + У7,
где у3— значение величины ^з в движении (2.23). При постоян-
18* 273
ных значениях интегралов (2.15), (2.16) можно исключить из
С/о члены, линейные относительно возмущений, а квадратичная
часть С/о будет иметь вид
и? = т {у\ + у% + У%) + W™ (у„ уь, у7),
где
Ww = u-uyl + 2и\ьулуъ + 2ir47j/4y7 + и'&ъу1 + 2№„y.j/7 + и-„г/|,
_ л [л i Ayi 1 _ А\У»
U"~ [ *« + «*»)* J' W«-C(y*3 + a/Py'
2АХуг Г _ ЛУз ]
"'55 = ^
[ c(y*+«/p)J
н'77 = (Л — С) к2 + 4а.2
Главные миноры первого и второго порядков матрицы
квадратичной формы W<2! всегда положительны, а знак главного минора
третьего порядка (определителя матрицы), как показывают
вычисления, совпадает на движении (2.23) со знаком выражения
(А — С) dk/сГл, где к — функция К, определенная третьим из
равенств (2.24).
Учитывая структуру функции U^ и пользуясь критерием
Сильвестра, получаем отсюда, что при условии
(А-С)^->0 (2.43)
стационарное движение (2.23) доставляет функции С/о строгий
минимум при постоянных значениях интегралов (2.15), (2.16) и,
следовательно, устойчиво согласно теореме 1 по отношению к
переменным Vi (i=l, 2, 3), coj- — >^Yj (/=1, 2), соз, -уз, а при
условии
(A-C)§<0 (2.44)
не доставляет функции С/о даже нестрогого минимума.
Поскольку выше показано, что функция С/о постоянна только
на стационарных движениях (2.21) — (2.23), а сами стационарные
движения изолированы одно от другого прп выполнении условий
(2.39)— (2.44) (ср. с условиями (2.26)), то согласно теоремам 2
и 3 получаем, что стационарные вращения шара вокруг вертикали
(2.21) и (2.22) устойчивы, причем асимптотически по отношению
к переменным vu 7. (i=l, 2, 3) и cdj (/=1, 2) прп
выполнении условий (2.39) и (2.41) соответственно, и неустойчивы при
выполнении условии (2.40) и (2.42) соответственно. Регулярные
27G
3+i£l
прецессии (2.23) устойчивы, причем асимптотически ио
отношению к переменным v{ (i = 1, 2, 3), ю, — Х^ (/=1, 2) и mga —
— С*Шз + АХ2ч$ при выполнении условия (2.43), и неустойчивы
при выполнении условия (2.44).
Для геометрической и механической интерпретации
полученных результатов рассмотрим, следуя [74, 75], плоскость
параметров е=а/р>0 и 6 = А/О
>0 (рис. 42). Выделим на
этой плоскости следующие
области: область D+
(ограничена лучами е = 0, б > 1
и е>(3 + Г2)/7, 6 = 1/2 и
кривой Г+), в которой при
любом фиксированном
значении к интеграла Желле
(2.15) существует не более
одной регулярной прецессии
и эта прецессия всегда
устойчива; область D-
(ограничена отрезком прямой е =
= 0, 3/4 < б < 1 п кривой
Г_), в которой при любом
фиксированном значении к
существует также не более
одной регулярной прецессии,
но эта прецессия всегда неустойчива; область D±
(ограничена отрезками прямых е = 0, 1/2<б<3/4 и 0< е <(3+ V2)/7,
6 = 1/2 и кривыми Г+ и Г-), в которой могут существовать две
регулярные прецессии, одна из которых («медленная») устойчива
(К2<А|), другая («быстрая») неустойчива (X1 >X)д. Кривые Г+
п Г_ задаются соответственно уравнениями
462-6(1-е)(7 + е)+3(1-е)2 = 0
и
4б2-6(1 + е)(7-е) + 3(1 + е)2 = 0.
Разобьем еще области Z)+, D- и D± на подобласти D± (8;>
>! + £),£>; (1 + е>6>1), D'l (6<1); £>1(6>1-е), £>1(6<
< 1 - е); D'± (6> 1 - е). D"± (6< 1 - г).
Стационарные вращения шара вокруг вертикальной оси
симметрии, для которых центр тяжести шара лежит выше его
геометрического центра, устойчивы, если параметры шара лежат вне
области + и его угловая скорость достаточно велика
(выполняется неравенство (2.39)), а в протпвных случаях неустойчивы.
Учитывая (2.21), неравенство (2.39) можно записать в впде
ограничения на угловую скорость вращения шара:
3> * " [С(р + й)-До]р- (2'45)
277
Стационарные вращения шара вокруг вертикальной оси
симметрии, для которых центр тяжести лежит ниже его
геометрического центра, устойчивы, если параметры шара лежат в областях
D+ и Z)_ или его угловая скорость достаточно мала
(выполняется неравенство (2.41)). Учитывая (2.22), неравенство (2.41)
можно записать в виде ограничения на угловую скорость
вращения шара:
,,2^. 2 тца (р — а)2 .
"з < со** = [Лр-С(Р-«)]р- <2'46)
Если параметры шара лежат вне областей D± и 2)1, а
неравенство (2.46) выполняется с обратным знаком, то имеет место
неустойчивость.
В литературе широко обсуждались [173—175, 218—220, 222,
240-242, 250—253, 255, 273—276, 292] динамические свойства
волчка сферической формы, или волчка
«тип-топ» (иначе, «китайского волчка»,
или волчка Томсона), на плоскости с
трением скольжения. Конструктивно
такой волчок состоит из срезанного шарика
с ножкой, расположенной в центре среза;
ось симметрии ножки проходит через
центры тяжести волчка и части его
сферической поверхности (рис. 43). Если
волчок расположен ножкой вверх, то его
центр тяжести лежит ниже центра
кривизны поверхности, так как в устойчивом
состоянии покоя волчок опирается на
плоскость точкой своей сферической поверх-
Рис. 43 ности. За ножку волчок может быть
приведен в быстрое вращение; начав
вращаться, волчок теряет устойчивость, его ось симметрии отклоняется от
ее первоначального вертикального положения; в конце концов
волчок переворачивается и продолжает устойчиво вращаться,
опираясь на плоскость своей ножкой.
Проведенный выше анализ поясняет странное на первый
взгляд поведение волчка «тип-топ». Если параметры волчка ле-
жат в ооластях/}+« D+* D±. /}_, то имеет место эффект потери
устойчивости вращения волчка с наинизшим расположением
центра тяжестп при увеличении его угловой скорости,
сопровождающийся стабилизацией вращения волчка с наивысшим
расположением центра тяжести. Конечно, проведенный анализ описывает
только начальную и конечную стадии переворота волчка. Анализ
динамики волчка на всех стадиях его переворота будет проведен
ниже, в § 4.
Как уже отмечалось, результаты исследования устойчивости
стационарного вращения шара вокруг вертикали переносятся на
случай произвольного тела вращения. Пусть /(8) — расстояние от
центра тяжестп т<зла до опорной плоскости (8 — угол нутацпи).
278
Необходимое (с точностью до знака равенства) и достаточное
условие устойчивости тела вращения вокруг его вертикальной оси
симметрии запишется в виде [162]
(С - А) - A If- j (l + A j о* + mgfl > о. (2.47)
Индексом 0 здесь обозначены значения функции /(8) и ее второй
производной при 8 = 0.
Если со = 0, т. е. тело находится в равновесии, то неравенство
(2.47) дает /0>0. Это означает, что для устойчивости равновесия
тела необходимо (с точностью до знака равенства) и достаточно,
чтобы его центр тяжести лежал ниже центра кривизны
поверхности в точке касания тела с опорной плоскостью.
5. Регулярные прецессии произвольного тела вращения [68,
70J. Тяжелое твердое теле» на горизонтальной плоскости с вязким
трением представляет собой голономную механическую систему
с пятью степенями свободы, находящуюся под действием
потенциальных и диссипативных сил. Положение тела будем задавать
двумя координатами х, у его центра тяжести в неподвижной
системе координат Oxyz с направленной вертикально вверх осью Oz
и началом в произвольной точке О опорной плоскости н тремя
углами Эйлера *ф, 6, ф, которые вводятся обычным образом и
задают ориентацию жестко связанной с твердым телом системы
координат G|rj£, образованной главными центральными осями
инерции, относительно системы координат Oxyz. Считаем, что
центр тяжести тела лежит на оси его динамической симметрии
G£, которая является также н осью симметрии поверхности тела.
Функция Лагранжа задается равенством (2.15) гл. 2:
L = -±- т(х* + у*) +±(А + mf 2)62 + -L A sin26^ +
+ ±C(qcosQ + y)2-mgj(Q), (2.48)
где g — ускорение свободного падения, т — масса тела, А и С —
его моменты инерции относительно осей Gg, Grj и G£
соответственно, /(8)— расстояние от центра тяжести тела до опорной
плоскости, являющееся при заданной форме поверхности тела
функцией только угла 6; через /' обозначена производная
функции /(8) по 8.
Координаты £, г), £ точки касания М тела и плоскости в
системе координат G^r]^ задаются формулами (2.5) гл. 2:
$ = Xi(8)sin«p, n = x.(e)cos<P, £ = £(8), (2-49)
причем
Zl(8)=-/(8)sin8, (2.50)
где Z(8)—расстояние от точки М до точки пересечения оси
симметрии тела с вертикалью, проходящей через М. Величины xi и £
279
выражаются через / и /' по формулам (2.9) гл. 2:
Xi = -/(6)sine-/7(9)cosG, £ = -/(6)cos 6 +/'(6)sinG. (2.51)
Имеет место также такое тождество:
xi (6) sin G + £' cos 8 = 0. (2.52)
Диссипативные силы зададим при помощи функции Рэлея
Ф = -^-тки2, (2.53)
где к > 0 — коэффициент трения, и — вектор скорости точки
касания. При помощи формул (1.66), (1.67) гл. 3 и соотношений
(2.49), (2.51) получаем такое выражение для функции Рэлея:
ф = ± тк [(х - аА - а2ф - a3if)2 + (у - №'- (32ф - рз^)2Ь
(2.54)
где
ai = /(6)sin if, а2 = Xi (б) cos if, а3 = —/' (6) cos if,
Р^=-$ С-1.2,3).
Уравнения движения тела имеют вид уравнений Лагранжа
второго рода
d dL 6L дФ /■ ii о о / с\
^^~^ = ~7Г (* = !• 2-3'4< 5>
(qi = е, g2 = ф, q3 = ф, ff4 = х, g$ = у).
Функция Ф явно зависит от if. С целью исследования
регулярных прецессий удобнее ввести псевдокоординаты я», положив
[68, 70]
(2.55)
я4 = р = х sin if — у cos if, Л5 = о = # cos if + # sin if.
Величины аир представляют собой соответственно проекции
скорости центра тяжести на линию узлов и на перпендикулярную
ей горизонтальную ось. Уравнения движения тела в
псевдокоординатах запишем в форме уравнений Эйлера — Лагранжа (см.
п. 6 § 7 гл. 1). Функции L и Ф после исключения из них
величин х, у при помощи соотношений (2.55) обозначим через L* и
Ф*. Они будут зависеть от 8, 8, ф, if, p, с. Функция L*
получается из (2.48) заменой суммы х2 + у2 на сумму р2 + о2, а
функция Ф* имеет вид
Ф* = 4-тк Кр - /б)2 + (*" - хл + /'Ф)2Ь
280
Вычисления показывают, что для трехиндексных символов
Больцмана y\j имеем выражения: *уз5 = 743 = — 1* Уъз = Тз4 = 1»
а остальные символы равны нулю. Уравнения Эйлера — Лагран-
жа имеют вид
d dL* dL* дф* d dL* дФ* d dL* дФ*
dt d дд об' dt ^ ei9 dt ^ <*'
(2.56)
d dL* dL* ; дФ* d dL* dL* \ дФ*
ai dp do dp ai da dp do
Уравнения (2.56) имеют частные решения вида
8 = Go, Ф = Фо, г|) = %, р = Ро, о = оо, (2.57)
где постоянные 8о, фо, фсь Ро, Go удовлетворяют системе уравнении
С sin 6 • <рф + (С - А)sin 6 cos 6 ■ г|)2 + mgf (6)- m/(G) фо = 0,
Xi(6)*p = 0f /'(6)^ = 0, (2.58)
ifa-fcp-0, 4fp + А: (a — xi (0) Ф + /' (в)^) = 0.
Рассмотрим сначала два частных случая. В первом из них
Xi (во) — 0. Тогда (см. (2.49), (2.58)) при фо^О имеет место
вращение тела вокруг его неподвижной вертикальной оси симметрии;
при ifo = 0 тело покоится. Это движение исследовано в
предыдущем пункте. Во втором частном случае Xi(6o)^0, //(8o)=0. Трг-
да центр тяжести тела лежит на вертикали, проходящей через
точку его касания с опорной плоскостью; при этом согласно
уравнениям (2.58):
ifo = Ро = 0, Go = Xi (6о) Фо,
т. е. у системы уравнений (2.56) существует однопараметриче-
ское семейство решений вида
6 = Go, Ф = Й, ^ = р = 0, о = xi (во) О, (2-59)
где Q — произвольная постоянная. Это семейство определяет
качение тела вдоль неподвижной прямой с постоянной скоростью;
при Q = 0 тело находится в равновесии.
Рассмотрим теперь общий случай, когда выполняются
неравенства
Xi(6o)^0, /'(6о)^0. (2.60)
Тогда из системы (2.58) следует, что ро = Оо = 0, а три
постоянные бо, Фо = «ь я^о = «2 удовлетворяют двум уравнениям:
mgf'(В0) + [Сол +(С - А) иг cos 60] w2sm 60 = 0, (2.61)
-cD,Xi(e0) + (D2/'(eo)=0. (2.62)
281
Соответствующее однопараметрпческое семейство решений
уравнений движения (2.56)
в = в0, ф = со1, яр = со2, р = а = 0 (2.63)
определяет регулярную прецессию тела вращения на плоскости
с вязким трением. При этом центр тяжести тела неподвижен,
а тело вращается с постоянной угловой скоростью coi вокруг своей
оси симметрии, которая в свою очередь вращается с постоянной
угловой скоростью 0)2 вокруг вертикали, проходящей через центр
тяжести; точка касания с угловой скоростью сог описывает на
опорной горизонтальной плоскости окружность радиуса 1/'(во)1,
центром которой является проекция центра тяжести па плоскость;
на поверхности тела точка касания описывает с угловой
скоростью (Oi окружность, лежащую в плоскости, перпендикулярной
оси симметрии тела, с центром в точке оси симметрии с
координатой £(0о) и радиусом lxi(6o)l. В силу (2.62) при регулярной
прецессии скольжение тела по плоскости отсутствует.
Из (2.61) и (2.62) с учетом равенств (2.51) имеем
соотношения
„ - £Ш о о2 - "***■ (е„) Пео)
1_ '/.(бо) 2' (02-l^x1(e0)coSe(1-ct(e0)Sineo]SmG0' <-b4)
позволяющие по заданному углу 0о однозначно определить
угловые скорости прецессии и собственного вращения. Кроме того,
требование положительности правой части второго из равенств
(2.64) с учетом равенств (2.50), (2.51) приводит к следующему
условию существования регулярной прецессии тела вращения на
горизонтальной плоскости с вязким трением, ось симметрии
которого составляет угол Во с вертикалью:
[А1 (Во) cos Во + С С (во) ] [I (во) cos в0 + £ (во) ] > 0. (2.65)
В § 2 гл. 2 и § 3 гл. 3 установлено, что на абсолютно гладкой
и абсолютно шероховатой плоскости регулярные прецесснп
образуют двумерные многообразия. В случае же плоскости с вязким
трением многообразие регулярных прецессий, как мы видим,
является одномерным. Имеет место следующее замечательное
свойство семейств регулярных прецессий, установленное А. В. Кара-
петяном [68, 70]: одномерное многообразие регулярных
прецессий тяжелого тела вращения на горизонтальной плоскости с
вязким трением лежит на пересечении (не пустом при выполнении
условия (2.65)) соответствующих двумерных многообразий для
случаев абсолютно гладкой и абсолютно шероховатой плоскостей.
В самом деле, па гладкой плоскости три постоянные во, o>i, с>2
удовлетворяют одному уравнению (2.30) гл. 2, которое совпадает
с уравнением (2.61); в случае регулярных прецессий и на
гладкой плоскости, и на плоскости с вязким трением центр тяжести
неподвижен, но в случае гладкой плоскости тело, совершая
регулярную прецессию, может скользить по опорной плоскости. В слу-
282
чае абсолютно шероховатой плоскости постоянные 8о, ©i, 0)2
удовлетворяют одному уравнению (3.52) гл. 3, которое отличается
от уравнения (2.61) тем, что его правая часть не нуль, а
выражение m/(eo)o)2[coi|(8o)~ со2/'(Йо)], которое с учетом первого из
равенств (2.49) (напомним, что при вычислении £(8о) нужно угол
Ф положить равным л/2) запишется в виде
~mf (во) № [©«/' (во) - ©iXi (Во) ]. (2.66)
На абсолютно шероховатой плоскости тело движется без
скольжения, но на регулярной прецессии неподвижен не центр
тяжести, как в случае абсолютно гладкой плоскости и плоскости с
вязким трением, а точка оси симметрии с координатой £s,
определяемой из формул (3.51) гл. 3. Опираясь на равенства (2.49) —
(2.51), выражение для £s можно представить в виде
ts - Д^:^. (2.67)
co2sin00 * '
Сопоставляя (2.62), (2.66) и (2.67) и замечая, что величина
/(0О) по своему смыслу всегда отлична от нуля, получаем, что
многообразие регулярных прецессий на плоскости с вязким
трением лежит на пересечении соответствующих многообразии для
случаев абсолютно гладкой и абсолютно шероховатой плоскостей
[68, 70].
В [68, 70] получены необходимые и достаточные условия
устойчивости рассматриваемых регулярных прецессий по отношению
к возмущениям переменных в, в, ф, \f, p и с.
Характеристическое уравнение линеаризованной системы уравнений
возмущенного движения имеет [70] вид XF(k) = 0. Здесь
F (К) = аокъ + а№ + Ы3 + а3А2 + а4Я + as, (2.68)
где
а0 = АС[А + w(Zcos6 + £)2sin2в]> 0,
«i =
= fr{[4 + w(Zcose + £)2sin2e] [А (С + тР sin2 в)+ С(А + ггЛ?)\ +
+ [АСт (I sin2 в - £ cos в)2] > > 0,
а2 = АС [А + т (Z2 sin2 в + £2)] ft* +
+ \АСт (I sin* В — Ссозв)3Ц^г]со2Л+ЛПЛ + т(/совв+Е)2.8т8в](^ +
+ С [A2sin2 в-ю! + \(2А — С)©2cosG — CcoJ2 — Amg(l — г)}»
а3 = ft (2 [ А (А + т (Z cos в + £)2 sin2 в) со2. + Л2а>1 sin2 в +
+ ((2А — С) (02 cos в — Ссо,)2 — Amg (Z — г)] С + (Ami2 sin2 в +
+ Ст^)[А(о1 sin2 в — mg(l — г)] + [(2А—C)©2cose—C©1l2i?iFsinae +
+ [(2А ^ С) (о2 cos вв— CcoJ Cml [(r + I sin2 в + £ cos в) со2 +
+ г cos всо^ — ACmZ, cos в [(г + I sin2 в — £ cos в) со2 + г cos в - щ\ со2 +
+ [А + т (Z cos в + £)2 sin2 в] [— 2АС + Ami2 sin2 в + Cm£2] co2},
283-
а4 = С [А2ы\ sin2 G + [(2А — С) со2 cos G — Сщ]2 — Arng (I — г) +
+ Am (I sin2 6 — I cos б)2 со2, — (Al cos 6 + Ct) CmZ, [А (С +wZ2sin28) +
+ Cml2]-* Г1 [Аг (со2 + сох cos 6) + С£ (щ + со2 cos 6) —
— Al sin2 9 -co2] co2j k2 + i[Al (I sin2 6 — t cos 8)—
— (Al cos 6 + CO U (I sin2 9 — £ cos 9) Ц4 Cmcojfc +
+ С (Л2со^ sin2 6 + [(2Л — С) ©о cos 6 — CcoJ2 — Arng (I — r) j со2.,
a5 = imd^ {(4Z2sin2 6 + C£2) [(Л — C) co| sin2 6 — mg (I — r)] +
+ 4 {(Al cos G + Clf sin2 6] col}.
Здесь r=r(8)— радиус кривизны меридианного сечепия
поверхности тела в точке его касания с опорной плоскостью;
правые части выражений для коэффициентов at (г = 0, 1, ..., 5)
вычисляются при 8 = Go.
Если выполняются неравенства
аз > О, as > 0, а\а% — «о«з > О,
(а{а2 — аоЯ3) («з«4 — а2аъ) — (а0а5 — а\аА)2 > 0, '
то все корни многочлена (2.68) имеют отрицательные
вещественные части и регулярная прецессия тела вращения на плоскости
с вязким трением устойчива, причем (в отличие от случаев глад-
кой и абсолютно шероховатой плоскости) асимптотически по
части переменных, характеризующих отклонение возмущенного
движения от многообразия регулярных прецессий. Это означает,
что при выполнении условий (2.69) скорость центра тяжести
асимптотически стремится к нулю, а значения угла 8 и величин
ф, if асимптотически стремятся к значениям, удовлетворяющим
системе уравнений (2.61), (2.62) (а не к невозмущенным). При
строгом нарушении хотя бы одного из неравенств (2.69) имеет
место неустойчивость [68, 70].
6. О перманентных вращениях несимметричного тела и их
устойчивости. Задача о существовании и устойчивости
перманентных вращений произвольного тяжелого твердого тела с
выпуклой поверхностью на неподвижной горизонтальной плоскости
с вязким трением изучена в работах [65, 70, 77, 162, 269, 270].
Полное изложение зтих исследований было бы весьма
громоздким, поэтому, следуя работам [65, 70, 77], приведем только
основные результаты.
Для описания движения в [65, 70, 77] приняты
дифференциальные уравнения в квазикоординатах, отвечающих (2.55).
Уравнения движения имеют форму уравнении (2.56), в которых
функции L* и Ф* вычисляются теперь, исходя не из
соотношений (2.48)—(2.54), как это было в случае тела вращения, а из
284
равенств (1.31) гл. 2 и (1.66), (1.67) гл. 3, справедливых для
произвольного тела.
Анализ уравнений движения показал [70]. что частные
решения вида (2.57) существуют только в двух случаях: 1) в
случае равновесия тела, когда центр тяжести находится на
вертикали, проходящей через точку касания тела с опорной
плоскостью; 2) в случае перманентных вращений тела с
произвольной угловой скоростью вокруг неподвижной оси инерции тела,
занимающей вертикальное положение; последний случай
возможен только тогда, когда какая-либо из главных центральных
осей инерции тела хотя бы в одном из своих направлений
ортогональна поверхности тела; перманентные вращения
совершаются вокруг этой оси.
В [70] показано, что положение равновесия устойчиво, если
центр тяжести тела находится ниже обоих центров кривизны
поверхности тела в точке его касания с опорной плоскостью в
невозмущенном движении, и неустойчиво, если центр тяжести
лежит выше наинизшего центра кривизны.
В [65, 70, 77, 162] получены необходимые и достаточные
условия устойчивости упомянутых перманентных вращений тела
вокруг вертикальной главной центральной оси инерции. Эти
условия задаются пятью неравенствами вида
/«(*, т, А, В, С, со, п, Г2, а, /г)>0 (i = l, ..., 5), (2.70)
где к — коэффициент трения, т и А, В, С — масса и главные
центральные моменты инерции тела, со = \f — угловая скорость
вращения тела в невозмущенном движении, п, г2 — радиусы
кривизны поверхности тела в точке его касания с опорной
плоскостью, h — высота центра тяжести над плоскостью в
невозмущенном движении, а — угол между одной из главных
центральных осей инерции, расположенной в горизонтальной
плоскости в невозмущенном движении, и одной из линий кривизны
поверхности тела в точке касания. Функции /* в (2.70)
являются многочленами относительно величины со, содержащими как
четные, так и нечетные ее степени.
Условия (2.70) весьма громоздки, и для их анализа
целесообразно привлекать численные расчеты, что сделано в статье
[270] для некоторых частных значении параметров, от которых
зависят функции (2.70). В работах [65, 70, 77, 162] проведено
аналитическое исследование условии устойчивости в предельных
случаях больших и малых коэффициентов трения. Показано, что
при А'>1со| условия устойчивости (2.70) эквивалентны
соответствующим условиям (6.6) и (6.7) гл. 3 устойчивости
перманентных вращений тяжелого твердого тела вокруг вертикальной
главной центральной осп инерции на абсолютно шероховатой
плоскости, и устойчивость вращения в общем случае зависит
от направления вращения. Если же /c<lcol, то условия
устойчивости (2.70) близки, но не эквивалентны достаточным
условиям устойчивости перманентного вращения тела на абсолютно
285
гладкой плоскости (неравенства (4.30) гл. 2), и устойчивость
перманентных вращении, вообще говоря, не зависит от
направления вращения; но, однако, и при малых к в пространстве
параметров можно указать [65, 70] область, для которой
устойчивость вращения тела существенно зависит от направления
вращения, причем характер этой зависимости аналогичен характеру
такой зависимости в случае абсолютно шероховатой плоскости
(см. п. 2 § 6 гл. 3).
§ 3. Финальные движения твердого тела
на плоскости с вязким трением
Тяжелое твердое тело, движущееся по плоскости с трением
скольжения, представляет собой пеконсервативную
механическую систему с пятью степенями свободы, для которой в общем
случае пеизвестеи ни один первый интеграл. При наличии
скольжения полная энергия тела Е = Т + П убывает со
временем. Если в точке касания тела и плоскости действует сила
вязкого трения F = —тки, где и — скорость точкп касания, то
согласно (2.1) полная энергия Е удовлетворяет уравнению
Ё = ~тки2. (3.1)
Скорость точки касания с течением времени стремится к пулю,
т. е. тело стремится избежать трения [2].
Движение тела отнесем к неподвижной системе координат
Oxyz с началом в некоторой точке О опорной плоскости, ось
Oz направлена вертикально вверх. За обобщенные координаты
примем координаты ху у центра тяжести тела в системе Oxyz
и три угла Эйлера 1|э, 8, ф, задающих ориентацию системы
координат. G|n£, образованной главными центральными осями
инерции тела, относительно неподвижного пространства. Расстояние
z от центра тяжести до опороной плоскости будет (см. гл. 2)
известной функцией углов 8, ф, т. е. z = /(8, ф)>0. Из (3.1)
следует, что с возрастанием времени полная энергия тела стремится
к некоторому пределу Е*:
UmE(t) = £*>v, v = mg min / (8, ф). (3.2)
Если функция /(6, ф) аналитпчна, то и правые части
дифференциальных уравнений, описывающих движение тела на
плоскости с вязким тренпем, аналитически зависят от фазовых
координат. Поэтому и решение аналитически зависит от начальных
значений и времени. Следовательно [131, 134, 135], скольжение
никогда не исчезнет навсегда, так как в противном случае
скорость точки касания u(t) была бы не аналитической функцией L
Будем считать далее, что функция /(6, ф) является
аналитической, и, следуя работам [131, 134, 135], рассмотрим задачу о
нахождении предельного при t -> °o (финального) множества
траекторий движения тела на плоскости с вязким трением.
286
1. Классификация финальных движений. Если в
дифференциальных уравнениях движения тела положить и = О, то члены,
зависящие от коэффициента трения (эти члены прямо
пропорциональны к), обратятся в нуль, и мы придем к уравнениям
движения тела по абсолютно гладкой плоскости. Далее,
поскольку Е > 0, а Ё < 0, то предельным множеством Q решений
уравнений движения тела по плоскости с вязким трением будет [93]
максимальное инвариантное множество, содержащееся в
ограниченной области Е ^ /г фазового пространства, в точках которого
Ё = 0. Но Ё = 0 тогда и только тогда, когда скорость
скольжения и равна нулю. Таким образом, максимальное инвариантное
множество из области Е ^ h, в точках которого Ё = 0,— это
множество движений без скольжения рассматриваемого тела на
абсолютно гладкой плоскости.
Множество У асимптотически устойчиво для любых
возмущений, возможных при движении тела по плоскости с вязким
трением, и инвариантно относительно фазового потока,
задаваемого уравнениями движения тела.
Чтобы найти множество Q финальных движений тела по
плоскости с вязким трением, надо среди всех движений этого тела
на абсолютно гладкой плоскости выделить те, для которых
скорость и точки касания тела и плоскости равна нулю. Опираясь
на соотношения (1.21), (1.24) гл. 2, условия отсутствия
скольжения, задаваемые равенствами (1.66), (1.67) гл. 3, можно
записать в виде
х = Их cos -ф — //2 sin if, у = Н\ sin -ф + Иг cos ф, (3.3)
где
#i'= - /е № + Ф cos 6) - f sin - ф, Ht = — /в + ^ (ф + ф cos6).
(3.4)
Положив
р = X я2 + #-, sin а = —, cos a = -g-,
условия (3.3) можно записать в виде
#i = Psin(a + lOf #2 = pcos(a + ^). (3.5)
Из (3.4), (3.5) и равенства (1.23) гл. 2 получаем, что
// = - Р [/е cos (a + ф) + Jjfc sin (a + ф)]- (3.6)
Кроме того, из (3.5) вытекает равенство
Н\ + Н1 = р. (3.7)
Для движения тела но абсолютно гладкой плоскости
величины х, у (а следовательно, и Р) постоянны, а угол я]) является
циклической координатой; задача сводится к исследованию
системы с двумя степенями свободы, а уравнения движения могуг
287
быть записаны в форме уравнений Рауса (1.38) гл. 2.
Соотношения (3.5) и (3.6) могут быть удовлетворены только для
таких движений тела на абсолютно гладкой плоскости, в которых
или \f = const, или Р = 0. Другие финальные движения сводятся
к ним при помощи соответствующего выбора связанной системы
координат. Дальнейшая классификация финальных движений
проводится при помощи условий (3.5) — (3.7), уравнений
движения тела на гладкой плоскости и их первых интегралов. В [131,
134, 135] установлено, что возможны только следующие типы
финальных движений:
а) многообразие Qi положений равновесия тела;
б) если одна из главных центральных осей инерции тела
хотя бы в одном из своих направлений ортогональна его
поверхности, то существует многообразие йг перманентных
вращений тела вокруг этой оси, направленной вертикально;
в) если в сечении поверхности тела, перпендикулярном одной
из главных центральных осей инерции, например G£, лежит
окружность, а радиус-вектор точки этой окружности относительно
центра тяжести G ортогонален поверхности тела, то существует
многообразие Qs качений тела этим сечением вдоль
неподвижной прямой с постоянной скоростью; цептр тяжести при этом
находится над точкой касания, и для таких качений
е = 80^0, jt, -ф = if о, Ф = (о, /ф(Эо, ф) = /е(е0, ф) = 0;
г) если одна из главных центральных осей инерции тела,
например G£, является осью динамической симметрии тела, а в
сеченни поверхности тела, перпендикулярном этой оси, лежит
окружность и радиус-вектор точки этой окружности
относительно центра тяжести G не ортогонален поверхности тела, то
существует многообразие Q4 регулярных прецессий; для нпх
А = В, 9 = Go, U (Во, Ф) = 0, /е (6о, ф) Ф 0.
Заметим, что для всего множества Q = Qi U Й2 U ^з U Q4
финальных движений высота / центра тяжести тела над опорной
плоскостью постоянна. Отметим также, что в общем случае фи-
пальными движениями тела могут быть только положения
равновесия.
Основной результат данного пункта можно сформулировать
в виде следующего утверждения [131, 134]: предельным
множеством Q траекторий движения произвольного тела по
горизонтальной плоскости с вязким трением является множество
движений этого тела на абсолютно гладкой плоскости без
скольжения; в зависимости от геометрических и динамических
характеристик тела Q включает в себя положения равновесия,
перманентные вращения вокруг вертикали, регулярные прецессии п
равномерные качения вдоль неподвижной прямой.
Для каждого конкретного тела, учитывая его геометрические
и динамические характеристики, можно определить структуру
288
множества Q финальных движений, т. е. представить Q как
объединение попарно непересекающихся многообразий Qi, ..., Qrt.
Каждое многообразие будет характеризоваться некоторым
числом параметров. Однако зарапее не ясно, к какому конкретному
Q, стремится траектория движения и каковы параметры
финального движения.
Определение множества Qi, соответствующего конкретным
начальным данным, представляет собой весьма сложную
теоретическую задачу. Ее можно решать, например, при помощи
численного интегрирования дифференциальных уравнении движения
(в данной задаче расчет на достаточно большом промежутке
времени позволяет определить, в окрестность какого
инвариантного множества Q* вышла траектория) или асимптотическими
методами.
Согласно (3.2) величина полной энергии тела имеет
предельное значение. Поэтому если Q,- представляет собой однопарамет-
рическое многообразие движений, то из того, что траектория
стремится к Qi, будет следовать, что она стремится к
определенной траектории пз Q,. Например, для однородного эллипсоида
с различными по величине осями финальным движением может
быть только перманентное вращение с определенной угловой
скоростью (в частности, равновесие) вокруг одной из своих осей,
направленной вертикально (так как только в этом случае / =
= const). Если же многообразие Qi двухпараметрическое, то
условие (3.2) позволяет определить, какой из параметров имеет
предельное значение, а по какому возможно «блуждание».
Например, для тела вращения, у которого /е на интервале (0, п)
обращается хотя бы один раз в нуль, существует
двухпараметрическое многообразие Q3 качений тела вдоль неподвижной
прямой (см. выше случаи в)). Параметрами многообразия Q3
являются угол \|?о и угловая скорость ф = со. Из (3.2) следует, что
величина угловой скорости тела стремится к о при t ->- 00, а по
1|э возможно блуждание, но скорость блуждания стремится
к нулю.
Сформулированное выше утверждение полезно иметь в виду
при исследовании устойчивости стационарных движений
твердого тела на плоскости с вязким трением. Из нее следует, что
если рассматриваемое движение из Qi устойчиво, то оно
асимптотически устойчиво по части переменных, характеризующих
отклонение от Q,.
2. О финальных движениях тела вращения. Финальными
движениями тела вращения будут движения а)—г), описанные в
предыдущем пункте. Для того чтобы убедиться в этом, следует
приравнять выражения для 82, получаемые из (3.7) (где [} =
= const) и интеграла энергии (2.25) гл. 2. В результате полу-
чпм соотношение, связывающее постоянные первых интегралов
и угол 8. В общем случае из этого соотношения следует, что
8 =■ const. Движения с 6^0 возможны лишь для таких тел, по-
19 а. П. Марь-еев 289
верхность которых имеет сферический участок с центром в
точке G, т. е. /е = 0 в некотором диапазоне изменения угла 6. Для
этих тел будут существовать также качения, при которых тело
равномерно вращается вокруг оси G£ пли Gx\ (см., например,
§ (5, где исследовано движение шара Чаплыгина по плоскости с
вязким трением).
Пусть трение мало, т. е.0<Ь / -^< 1. Уравнения
движения тела вращения с осью симметрии G£ запишем в
переменных х, у, Е, /?ф, р$, 8, -ф (/?ф и /?ф — проекции кинетического
момента тела относительно центра тяжести на ось симметрии тела
и на вертикаль соответственно). Исходя из уравнений Лагранжа
второго рода с функцией Лагранжа (2.15) гл. 2 и диссипатив-
иой функцией Рэлея (2.53), можно показать, что уравнения
движения будут иметь вид
х = — ких, у = — kity, Е *= — тки2j
рч = — тк (/ sin 8 -f f'b cos в) (их cos ty + uv sin ф),
Ръ = — гоА/е (Цх cos ф + uv sin ф), (3.8)
- (рФ-^со8е)(Р(рсо8е-^) .- * + /Jeea
<4U + m/e2)Sin30 Л + m/;,2
kv sin ф — к„ cos ib
+ ™*/- Ti 1
• Рф-Рфсове
V Л siir 6
Здесь i/зс и щ — проекции скорости и точки касания тела и
плоскости на оси Ох и Оу неподвижной системы координат:
их = х — Н\ cos if + /?2 sin ф, wy =>y — Hi sin tp — Я2 cos ф. (3.9)
При /с = О имеем задачу о движении тела вращения на
абсолютно гладкой плоскости, которая подробно изучена в гл. 2.
Если исключить положение равновесия, перманентные
вращения, регулярные прецессии и асимптотические к ним движения,
то в невозмущенном движении (при к — О) функция 8(f) —
периодическая, -ф(£) допускает представление ф(0 = ?ч* + ^i (0»
где постоянная Я* зависит от Е, /?ф, р^ а функция ipi(0 имеет
период г, равный периоду функции 6(£), причем среднее
значение \|?i (t) по времени равно нулю.
При к малом, но отличном от нуля исследование движения
можно провести асиптотическпм методом усреднения [126,
128]. В возмущенном движении х, у, Е, /v р* — медленные, а 8,
*ф — быстрые переменные. В нерезонансном случае, когда
2л
Хф^ — п (и = 0, 1, ...)» усреднение по времени можно заме-
290
нить усреднением сначала по я[\ а затем по 6. Из (3.9) видно,
что <ихУ=х, <иу> = у (угловые скобки означают усреднение).
Усреднение правых частей уравнений для медленных
переменных из (3.8) дает
х = — кх, у = —ку, Е = — тк (х2 + у2 + (Н\ + #;)),
рф = тк ((/ sin 6 + U cos 6) Н^ р^ = тк </e#i). (3.10)
Здесь угловые скобки означают усреднение по 6 как функции
времени, т. е. в (3.10) в надо рассматривать как функцию £,
Первые два уравнения пз (3.10) легко интегрируются, а ос-
тавшиеся три образуют замкнутую систему. Получаем, что
скорость центра тяжести с течением времени стремится к нулю,
т. е. для достаточно малых коэффициентов трения в
нерезонансном случае финальные движения тела вращения на плоскости
с вязким трением — это движения из Q с нулевой (или близкой
к нулю) скоростью центра тяжести. Следовательно, чтобы
финальным движением было движение из £2з, необходимо, чтобы
между Хф и 2я/т выполнялось резонансное соотношение
Аф = ^^ п (п = 0, 1, ...).
§ 4. Эволюция движения волчка сферической формы
на плоскости с вязким трением
Задаче об исследовании эволюции движения тяжелого тела
вращения на плоскости с трением скольжения посвящено
довольно много работ аналитического, численного и
экспериментального характера [37, 86, 99, 129—134, 156, 167, 174, 175,
218-220, 222, 227, 240-243, 245, 250-255, 257, 258, 261, 267,
273—276, 286—289, 292, 302]. В большинстве из этих работ дай
анализ одного из основных динамических явлений в движении
волчка по плоскости с трением скольжения — подъем его оси
симметрии к вертикали. Первой из работ, где дано правильное
физическое объяснение этого явления, была работа [287].
Анализ подъема оси симметрии волчка содержится теперь во
многих учебниках по механике [26, 169] и в научно-популярной
литературе [149, 173, 231].
Особенно много публикаций связано с исследованием волчка
«тип-топ» сферической формы [129, 130, 167, 174, 175, 218—
220, 222, 227, 242, 250-253, 255, 273, 274, 276, 292, 302].
Результаты этих публикаций иногда имеют дискуссионный
характер. Одпако выявлены главные закономерностп в поведении
волчка и их происхождение. Основными факторами,
определяющими движение, являются наличие трения скольжения,
положение центра тяжести на оси симметрии и форма центрального
эллипсоида иперции волчка.
19*
291
Ниже на основе статьи [111] исследована эволюция на
бесконечном интервале времени движения тяжелого динамически
симметричного твердого тела сферической формы на
горизонтальной плоскости с малым вязким трением. Центр тяжести тела
лежит на оси симметрии тела вблизи геометрического центра
его поверхности. Основное внимание уделено исследованию
характера асимптотического при t -*- °о стремления осп симметрии
к ее совпадению с вертикалью.
1. Уравнения движения в переменных Андуайе. Пусть
тяжелое твердое тело движется по неподвижной горизонтальной
плоскости, опираясь на нее одной точкой своей сферической
поверхности радиуса R. Неподвижная система координат Oxyz имеет
начало в некоторой точке О опорной плоскости z = 0; ось Oz
направлена вертикально вверх. Начало кёниговой системы
координат Gx\yxz\ находится в центре тяжести тела, а ее оси
параллельны соответствующим осям системы координат Oxyz. Оси
жестко связанной с телом системы координат G£ii£ направлены
по главным центральным осям инерции тела. В дальнейшем
т — масса тела, g —ускорение свободного падения, А, В ш С —
моменты инерции тела относительно осей G|, Gn и G£
соответственно.
Пусть и — вектор скорости точки тела, которой оно касается
опорной плоскости, а их, щ — его проекции на оси Ох, Оу.
Будем предполагать, что, кроме пормальпои реакции, на тело в
точке касания действует сила вязкого трения; реакция
плоскости в системе координат Oxyz имеет компоненты —хтих, —у.тии,
TV, где % — постоянный положительный коэффициент трения.
Если через х, у, z обозначить координаты центра тяжести
тела в неподвижной системе координат, то
х = — им*, # = — кщ, z = —g + —• (4-1)
292
Ei
li
Si
I
an
°21
азх
Ц
°12
a
22
a32
I
"iS
«23
азз
*1
»1
Zl
El
611
hi
631
*>,
*12
*22
bS2
t.
",3
»«
633
Ж!
*l
Г1
i
cii
C2!
C31
Ц
C12
C22
C32
С
C13
C23
C33
Для описания движения тела относительно центра тяжести
будем использовать одну из модификаций перемекпых Лндуайе
[212], введенную в [8, 207]. Пусть GliT|iEi—система
координат, связанная с вектором кинетического момента К тела
относительно центра тяжести (рис. 44, а). Ось G£i направлена по
вектору К; переход от кёииговой системы координат Gxxy\Z\
к системе координат G|iT|i£i осуществляется двумя
последовательными поворотами: на угол о вокруг оси Gyx (при этом
ось Gx\ переходит в ось Grii) и на угол р вокруг оси Gr\lm
Ориентация твердого тела относительно системы координат Gi;iT|iEi
определяется углами Эйлера (рис. 44, б).
Взаимные ориентации введенных систем координат задаются
при помощи соответствующих матриц направляющих косинусов:
(4.2)
Величины a2j выражаются через углы Эйлера по формулам
(1.3) гл. 1; для bij, сц получаем такие выражения:
Ьп = cos p sin a, Ъ\2 — cos a, Ь^ = sin p sin a,
&21 = —Sin p, Ь22 = 0, &23 = COS p, (4.3)
Ьз\ = cos p cos з, Ьз2 = —sin a, Ьзз = sin p cos a;
Сц = cos p sin a (cos if cos ф — sin if sin ф cos 8) +
+ cos a (sin if cos ф + cos if sin ф cos 8) + sin p sin a sin 8 sin ф,
C\2 = cos p sin a (—cos if sin ф — sin if cos ф cos 6) +
+ cosa(—sin if sin ф +cos if cos ф cos 8) + sin p sin a sin 6 cos ф,
Ci3 = cos p sin a sin б sin if — cos a sin 6 cos if + sin p sin a cos 6,
C21 = —sin p (cos ф cos ф — sin if sin ф cos 8) + cos p sin 6 sin ф,
£22 — —sin p (—cos if sin ф — sin if- cos ф cos 6) +■ cos p sin 8 cos ф, (4.4)
С2з = — sin p sin G sin if +■ cos p cos 6,
C31 = cos p cos a (cos if cos ф — sin if sin ф cos 6) —
— sin a (sin if cos ф + cos if sin ф cos 8) + sin p cos a sin 8 sin ф,
Сз2 =* cos p cos a (—cos if sin ф — sin if» cos ф cos 6) —
— sin a (—sin if sin ф + cos if cos ф cos 6) + sin p cos о sin 6 cos ф,
Сзз = cos p cos a sin 6 sin if + sin a sin 8 cos if + sin p cos 0 cos 6.
В кёнпговой системе координат вектор мгновенной угловой
скорости тела со задается такими компонентами:
xoXi = p cos с + if sin p sin a + 0 (cos p sin a cos if + cos a sin if) +
+ ф (cos p sin a sin 8 sin if — cos a sin 6 cos if + sin p sin a cos 6),
293
^У1= с? + if cos p — 8 sin p cos ф +
+ ф (—sin p sin 8 sin ф + cos p cos 6), (4.5)"
coZl= —p sina+ if sin p cos a + 6 (cos p cos a cos if — sin о sin if) +
+ <jp (cos p cos о sin 8 sin if + sin a sin G cos if + sin p cos a cos 8).
Уравнения, описывающие двнжеппе тела относительно
центра тяжести, имеют вид [207]
^.-м- iP-^Ь dG A/"i (4.6)
dt V dt К * dt — К sin p' K '
<Ю „ . _ . /1 1 \ , M cos ^-M^ sin it
— =ATsm8Sm4>cos(p(^r--g-J + -^ ^—i ,
d<V r„»e/l «П2ф COS^ , Mg COS 1])+Л/ Sin If
jT-JCl-TJ:+~iri; * K—1 ctg8-^ctgp.
Здесь Mg , Л/ч » Af^—проекции момента М реакции плоскости
на соответствующие оси системы координат Glirji£i. Они
вычисляются по формулам
Mi = Мх cos p sin a — Mv sin p + Mz cos p cos a,
M^ = A/* cos a — MZl sin a, (4.8)
Mi = Л/зс sin p sin a + Afy cos p + Mz sin p cos a;
A/Xl = fol^O + C224o + C23^o) ^V + *™l/y (C3lSo + ^32% + С3з£0 — %
Л/у, = — fcn£o + ^12^0 + с\£>ъ) N — ктих (с31£0 + с32г|0 + c^ — Д),
(4.9)
Mh = — xmuv(cnl0 + с12ц0 + cl3l0) + ктих(с2110+ c22n0 + c23£0);
мж = # + co^ (c3IE0 + c32r\0 + c^ — i?) — coZi (c21£0 + c22rjo + с2з£о)>
(4.10)
uv= У + w2i (сп£0 + c12n0 + c13£0) — «*4 fei£o + сзгЛо + сзз£о — R)'
В (4.9), (4.10) £o, Ло, So — координаты центра сферической
поверхности тела в системе координат G|t|£.
В дальнейшем в этом параграфе рассматривается
динамически симметричное тело (А=В), центр тяжести которого лежит
на оси симметрии, проходящей через центр поверхности тела
(£0 = tjq^O). В этпх предположениях уравнения движения
(4.1), (4.6), (4.7) имеют первый интеграл (интеграл Желле)
К (£о cos 6 — R sin p cos a) = const. (4.11)
294
2. Разделение медленных и быстрых движений. Пусть центр
тяжести тела расположен вблизи геометрического центра его
поверхности, а трение мало, причем величины \£,o\IR и кУЛ/д
имеют одинаковый (первый) порядок малости е (0<е<1).
Можно, например, считать, что
где безразмерные величины £0 и и' имеют порядок единицы.
При е = О вектор кинетического момента К неизменен по
величине и направлению (К, р, а постоянны), а тело совершает
регулярную прецессию вокруг вектора К. При этом угол нутации
6 = const, угловая скорость собственного вращения ф = о)х =
= К cos 8/ — -т- J, угловая скорость прецессии ф = сог = К/А,
а центр тяжести тела движется равномерно и прямолинейно.
Координата z центра тяжести в неиодвижпой системе
координат Oxyz равна R — £с£зз. Если е мало, но отлично от нуля,
то из (4.4) и уравнений движения следует, что нормальная
реакция N с погрешностью порядка е равна весу тела. Далеэ,
пз формул п. 1 получаем
Mi = т (gZoc23 — nRuy) cos p sin a + т (g£0c13 — KRux)$in p + О (е2),
MT)i = m (gr0c23 — KRuy) cos а + О (е2), (4.12)
М^ = т (^ос2з — kRuv) sin p sin a — m{gt,0c13 — kRux) cos p + О (е2);
ux = x — jRco^ + О (e), uy = y + Лсо^ + О (e); (4.13)
<% = -j- ^i3 + К cos 61 -£ -j-J c13 + О (е),
К / 1 1 \
°4 = T Ь'23 + A C°S 6 (~C X J **" + 0 W« t4-14)
co2i = — fe33 + A'cosBf — — -j-U33 + О (е).
При б Ф О величины a;, z/, /f, p, a, G будут медленными, а ф
и ф -— быстрыми переменными (если 6 лежит вблизи л/2, то
медленной будет также и переменная ф). Правые части
дифференциальных уравнений в первом приближении по е содержат
синусы и косинусы величии ф, ф, ф ± ф, ф ± 2ф. При малых е
преобразуем уравнения движения, следуя одной из основных:
пдей метода усреднения [126, 128]. Сделаем близкую к
тождественной замену переменных:
i = #! + euu у = х2 + ги2, К = хз + ещу р = а;4+еи4,
(4.15)
с = хъ + е^5, 8 = х6 + eM6i Ф ~ #7 + в"7, ф = #8 + eug,
295
которая позволяет привести уравнения движения к такой
форме, что в первом приближении по е уравнения для медленных
переменных отделены от уравнений для быстрых переменных.
Все Ui (г = 1, 2, ..., 8) в (4.15) — функции аргументов хи х2* ...
..., #8, ограниченные при стремлении величин xi и х% к
бесконечности.
При построении замены переменных (4.15) существепно
наличие или отсутствие резонансов па рассматриваемом
промежутке времени. Так как 0)2 > 0, то в первом приближении по е
резонанс может возникнуть только при таких значениях медленпых
переменных, когда одна из величии coi, coi ± сог, coi±2o)2 будет
близкой или равной нулю. Используя выражения для coi п сог,
получаем, что резонапс coi « 0 возможен при 8 ~ л/2, т. е. когда
ось динамической симметрии тела почти ортогональна вектору
кинетического момента; резонансы coi ± о>2 ~ 0 возникают при
cos8»± £_ (П<-^<Г—]
С-А \и^ А ^ 2 Г
а резонансы coi ± 2о>2 « 0 при
cose^i^^ (o<4-<4-)-
Вычисления показывают, что в отсутствие резопанса
уравнения для новых медленных переменных х% (i=l, 2, ..., 6) будут
такими:
Хг = — У.Х± + KZiX2 COS ХА I j-5 -\ р~ I + А ,|
х.2 = — кх2 — Kiix3 sin х± sin хь I —j—- -\ -^ I + л2,
х3 = wijR (sin #4 sin хъ -х2 — cos x^*xt) -f- ^з» (4.16)
sin хъ cos #6 + mi? (cos #4 sin #5 • х2 + sin а;4 ■ хг)]
{ткХ0 cos я4 cos хь cos #6 + mi? cos хъ -х2) + Х5,
а:4 = — [ mg£0 sin #5 cos #6 + mR (cos #4 sin хь • х2 + sin a:4 ■ я^)] + Х4,
хз
X.. S111JC.
о 4
* 1 / 1 1 \
хв = -5" иго/?2 [ -£ j- j sin a:6 cos are"(l + sin2 xA cos2 a:5) + X6,
где Xt — функции порядка е2 при любых значениях быстрых
переменных #7, X8.
При резонансе coi ~ 0 медленной будет также переменная ф„
Для Х7 получается такое уравнение:
х7 = (-^- — -И хя cos х6 — — mgfSo sin *4 cos я5 + Х7, (4.17)
а уравнения для xt (i = l, 2, ..., 6) в первом приблпжепип по 8
пе изменятся. Функции Xt (* = 1, 2, ..., 7) в (4.16) и (4.17)
имеют порядок е2 при всех значениях быстрой переменной х&*
296
При резонаисах coi±o>2^0 пли (Oi ±2g)2 ~ О, согласно
процедуре метода усреднения [126, 128], вводится медленная
переменная ф ± ф или ф ± 2\f соответственно. Преобразованные
уравнения для медленных переменных не выписываем, так как они
не понадобятся в дальнейшем. Существенно то, что и при этих
резонансах в первом приближении по е уравнения для xt (i =
= 1, 2, ..., 6) будут такими же, как и в иерезонаиспом случае,
а функции Xt (i = 1, 2, ..., 6) имеют порядок е при любых
значениях быстрой переменной х%.
3. Эволюция движения волчка на основе приближенной
системы уравнений движения. Для исследования движения сперва
пренебрежем в системе (4.16) функциями Хи Приближенная
система дифференциальных уравнений имеет несколько
решений, которые можно выписать как явные функции времени;
часть из них будут просто положениями равновесия.
Рассмотрение этих решений дает обширную информацию о движении
волчка на конечном интервале времени. Не анализируя всех
этих решений, остановимся на рассмотрении только двух
вопросов об эволюции движения волчка, но не на конечном, а на
бесконечном интервале времени. Один из них связан с эволюцией
угла нутации 6 при произвольном движении волчка, а другой —
с имеющейся в некоторых случаях тенденцией осп симметрии
волчка запять вертикальное положение. Рассмотрение этих
вопросов начнем с анализа соответствующих решений
приближенной системы.
Из последнего уравнения системы (4.16) при Х6 = О видно,
что для любых движений волчка величина xe(t) при А >С
стремится при f->oo к значению, равному л/2, независимо от
начального значения #с(0), а при А<С x§{t) стремится к нулю
или л в зависимости от того, будет ли #б(0) меньше или
больше л/2. Таким образом, при АФ С движение, описываемое
приближенной системой уравнений движения, таково, что в
предельном (при £-^°°) движении ось наибольшего момента
инерции волчка направлена вдоль вектора кинетического момента К.
Приближенная система уравнений движения допускает
частные решения, отвечающие квазистационарным движениям тела:
хх = О, х2 = 0, х3 = х3 (0), хА = -у, ^5=^5 (0)= 0. л,
tg^e(0-tgye(0)exp[xiw/P(-l--4-) *]• (4-18)
Для решений (4.18) проекция центра тяжести на
горизонтальную плоскость неподвижна, а его перемещение по вертикали
описывается уравнением
z = R — £о cos x$ (0) cos xq (t). (4.19)
Вектор кинетического момента К постоянен и направлен вдоль
вертикали (вверх при хь = 0 и вниз при х$ = л). Движение
297
волчка относительно вектора К будет регулярной прецессией,
в которой угол нутации медленно эволюционирует в
соответствии с (4.18). Ось симметрии волчка стремится расположиться
вертикально, если А < С, и горизонтально, если А > С При этом
волчок вращается вокруг вертикали с угловой скоростью \f = 0)2,
а вокруг оси симметрии с угловой скоростью ф = о)г, если xQ ~
~л/2 (т. е. имеет место резонанс o)i~0), то, как следует из
(4.17), o)i = 0 с погрешностью порядка е. Угол нутации пе
может пройти резонансного значения л/2: он либо стремится в
резонанс (при А>С), либо (при А<С) выходит из
резонансной зоны. Резонапсные зоны, соответствующие соотношершям
coi =fc о)2 ~ 0 и o)i ± 2о)2 ~ 0, существующим при А > 1С и А > ЗС,
проходятся при движении без нарушения характера эволюции
угла нутации, описываемой формулой (4.18).
Из (4.18) и (4.19) следует, что за время эволюции центр
тяжести волчка поднимется или опустится в зависимости от того,
будет ли величина (А — С) £о cos x$ (0) cos xQ (0) положительной
или отрицательной.
Для решения (4.18) координаты хм, ум точки касания волчка
и плоскости в неподвижной системе координат Oxyz будут
такими:
Хм = х — £g cos Хь (0) sin xQ (t) cos \f,
Ум = У — £o sin xe (t) sin if,
а координаты £, rj, £ точки касапня в связанной системе
координат G£n£ для решения (4.18) вычисляются по формулам
£ = — R cos хъ (0)sin xG (t)sin <p,
ц = — R cos #5 (0) sin xq (t) cos cp,
£ = £0 — i? cos :r5 (0) cos :r6 (J).
Траекторией точки касания на плоскости будет спираль,
получающаяся из эволюционирующей окружности радиуса
l£ol sinjC6(£) с центром в проекции центра тяжести волчка иа
плоскость. Эта спираль будет раскручивающейся прп А > С (ось
симметрии стремится занять горизонтальное положение) и
скручивающейся при А<С (ось симметрии стремится к вертикали).
На поверхности волчка след точки касания также будет
спиралью, которая при А > С, раскручиваясь, асимптотически
приближается к окружности радиуса R, лежащей в сечении волчка
плоскостью £ = £о. При А < С след на поверхности волчка будет
скручивающейся спиралью, стремящейся к точке поверхности
сферы, лежащей на оси симметрии волчка.
Из (4.13), (4.14), (4.3) и (4.4) для решения (4.18) с
погрешностью порядка 8 получаем
и (Q = и (0) (1 + tr *е (0)) ± + tg, ^ (Q) exp [2KmR, {1/с _ Ш) ц *
298
Отсюда следует, что, как и следовало ожидать (см. § 3),
скорость и точки, которой волчок касается плоскости,
асимптотически стремится к нулю, ни при каком конечном t не обращаясь
в нуль, т. е. волчок все время движется со скольжепием.
Общий характер эволюции движения волчка можно было
предвидеть на основании результатов § 2 и 3. Действительно,
согласно § 2, для рассматриваемого волчка существует
регулярная прецессия (2.23), для которой величина уз имеет порядок е
(в обозначениях данного параграфа 0 = л/2 + О (е)). Согласно
(2.43) и (2.44), эта прецессия при достаточно малых е
устойчива, если А > С, и неустойчива, если А < С.
С другой стороны, согласно п. 2 § 3, финальным движением
рассматриваемого волчка может быть либо стациопарное
вращение вокруг вертикальпой оси симметрии (в частности, равпове-
сне), либо регулярная прецессия. И если последняя неустойчива
(А < С), то положение оси симметрии в финальном движении
волчка может быть только вертикальным.
4. Об устойчивости эволюции движения волчка в силу
точных уравнений движения. Для исследования устойчивости
движения (4.18) сделаем в уравнениях (4.16) замену переменных
*i = /tyi, х2 = Ry2, х3 = х3 (0) + j/3, #4 = -тг + Vv
Получим
ь2 — А1г/2? *^з — ^з \
хь = хь (0) + 1/5, xQ = хе (t) + yQ.
</l = — J/1" «J/4 + ^1 + ^1'
У2 = —J/2— a C0S 4 (0) J/5 + У2 + F2>
Vz = Y3 + F3J (4.20)
У* = — ЬУ1 — аЪУ1 + Clh + Г4 + ^4'
j/5= — fccos.r5(0)#2 —c#4 — «fy/5 + Г5 +F5,
J/6 = ^6 + Ye + Fe-
Здесь штрихом обозначено дифференцирование по безразмерной
переменной т = v,t и введены обозначения
= ^ГЩ mg%»cos х~» ^ cos *« Wf
d = iniP /1. _ JL\ cos 2ar6 (*).
Через Yt обозначены функции, разложения которых в ряды
начинаются с членов не ниже второго порядка относительно
У и J/2, . • ■, Уе- Для дальнейшего существенно, что 17« = 0, если
только равны нулю перемепные уи J/2, J/4, J/5, 1/6, т. е. ряды для
Г sin2:
1~
« = ^з(0) з + 7? b = 71i- (4-21)
1
299
Yi не содержат членов, зависящих только от 2/з. Через Ft в
(4.20) обозначены фупкции не ниже первого порядка малости
относительно е. Они представляют собой некоторые линейные
комбипации входящих в (4.16) функций Xh выраженных через
новые переменные уи 2/2, ..., 2/6, и не обязательно равны пулю
при у\ = 2/2 = ... = J/6 = 0. Поэтому решение задачи об
устойчивости движения (4.18) в силу уравнений движения (4.16)
требует рассмотрения устойчивости при постоянно действующих
возмущениях [101].
Положим в (4.20) Yi = 0, Ft = 0, рассмотрим сначала
устойчивость линеаризованной системы. Третье уравнение из (4.20)
дает нулевой корень характеристического уравнения. Остальные
пять уравнений не содержат i/з и имеют переменные
коэффициенты, которые при т -*- оо стремятся к некоторым конечным
пределам. Этим уравнениям соответствует характеристическое
уравнение
(Л- d) [tf(K + ab + 1)2 + с2{К + I)2] = 0. (4.22)
Отмечая звездочкой предельные зпачения величин (4.21) при
т ->■ оо и применяя критерий Рауса — Гурвица, получаем, что
вещественные части всех корпей уравнения (4.22) при т -> оо
будут отрицательными тогда и только тогда, когда а%Ь>0
с* ф- 0. Первое из этих неравенств выполняется всегда, а
второе — когда одновременно £о Ф 0 и предельное значение Xq
отлично от л/2. Оставляя открытым вопрос об устойчивости дви-
жепия (4.18) в случае Л>С, соответствующем а*6 = л/2,
рассмотрим устойчивость при А < С, когда предельное (при т -* °°)
положение осп симметрии волчка является вертикальным
(** = 0 или #8 = я).
Если £о Ф 0 и А < С, то для всех достаточно больших т при
некотором положительном а выполняются неравенства ReXt<
<—а<0, где К{ (г=1, 2, ..., 5) —корни уравнения (4.22).
Поэтому, согласно [150], существует определенно-положительная
квадратичная форма V переменных уи 2/2, у\, 2/5» 2/6, производная
которой V в силу линеаризованных уравнений (4.20) будет
определенно-отрицательной функцией тех же переменных.
Следовательно, линеаризованная система асимптотически устойчива
относительно уи у% у^ 2/5, 2/6.
Так как разложения функций У, не содержат членов,
зависящих только от уз, то V будет также определенно-отрицательной
и в силу нелинейной системы (4.20) (при Fi = 0). Таким
образом, если пренебречь постоянно действующими возмущениями Fiy
то движение (4.18) асимптотически устойчиво относительно
2/ь 2/2, 2/4i 2/5, 2/6i т. е. относительно возмущений скорости центра
тяжести волчка, ориентации его вектора кинетического
момента К и угла между осью симметрии волчка и вектором К.
Покажем теперь, что при достаточно малых е движение
(4.18) устойчиво относительно всех переменных yt (i — 1» *i •••
..., 6). Чтобы показать устойчивость относительно 2/ь 2/2, 2/4, У*>
300
Уб> достаточно заметить, что производные дУ/ду, ограничены и,
следовательно, применима теорема Малкипа об устойчивости при
постоянно действующих возмущениях [101]. Устойчивость
относительно #з, т. е. относительно возмущений модуля вектора
кинетического момента, следует теперь из интеграла (4.11).
Совершенно аналогично можно доказать устойчивость
рассмотренной в п. 3 эволюции угла нутации (выражающейся в
стремлении оси наибольшего из моментов иперции совпасть с
направлением вектора кинетического момента) при
произвольном движении волчка, а не только в случае движения (4.18).
§ 5. Асимптотический анализ динамики эллипсоида
на плоскости с трением скольжения
1. Уравнения движения в случае сухого трения* В данном
параграфе исследуется движение со скольжением тяжелого
однородного эллипсоида по неподвижной горизонтальной плоскости
при наличии сухого или вязкого трения [107]. Коэффициент
трения считается постоянным. Эллипсоид близок к шару, трение
мало. Исследование проводится методом усреднения.
Выпишем сначала уравпеиия, необходимые для решения
задачи о движении со скольжением произвольного выпуклого
тяжелого твердого тела по неиодвижпой шероховатой
горизонтальной плоскости с сухим трепием. Пусть Oxyz — неподвижиая
система координат с началом в некоторой точке опорной
плоскости и вертикально направленной осью Oz. Единичный вектор
вертикали обозначим через п (тогда —п — это единичный вектор
внешней нормали к поверхности тела, построенный в точке М
касания тела и плоскости). С твердым телом свяжем систему
координат С|т]£ с началом в его центре тяжести G и осями,
направленными по главным центральным осям инерции тела.
Ориентация тела относительно неподвижной системы координат
определяется при помощи матрицы А направляющих косинусов
I n С
(5.1)
X
У
X
ап
«21
«31
«12
«22
«32
«13
«23
«33
В системе координат С|г]£ вектор GM имеет компопенты |. т|, £.
Уравнение поверхности, ограничивающей тело, зададим в виде
Ф(1, Ч, 5)~0. (3.2)
Тогда (см. § 1 гл. 2)
П==~ |grad^| ' *' = ^i- *w «»)• (5-3)
Штрихом обозначена операция транспонирования.
301
Пусть и и v —векторы скоростей точек М и G тела, а их, uyj
uz и х, у, z — их компоненты в неподвижной системе координат.
Тогда
u = v + A»XGAf, (5.4)
где со — вектор мшовепнои угловой скорости тела, задаваемый
в системе координат G^rfe компонентами р7 q, г. Пусть Rx, Ry,
N — компоненты реакции R плоскости в системе координат Oxyz.
Тогда в случае сухого трения
Rx = — /TV cos 0, Ду = — /TV sin 0, i/* = u cos 0, i^ = usin0, (5.5)
где / — коэффициент трения, a G — угол между вектором и
скорости точки касания и осью Ох неподвижной системы
координат. Предполагается, что и Ф 0, т. е. движение происходит со
скольжением.
Из уравнения связи z + (GM -п) = 0, означающего, что тело
опирается на плоскость точкой М своей поверхности, вытекает
кинематическое соотношение
z +Ъ31 (ql - гц) + a32(rl - рЪ) + «зз(РЦ - qt) = 0. (5.6)
Пусть т — масса тела, А, В и С — его моменты инерции
относительно осей G£, Gt] и G£ соответственно, a g — ускорение
свободного падения. Из теорем об изменении количества движеппя
и кинетического момента получаем уравнения
тх = — fN cos 0, ту =■ — fN sin 0, mz = N — rag, (5.7)
Ар+(С-В)дг = Мг {pqr, ЪчЪ ABC), (5.8);
J/£ = [(a33r] - fl32£) + /(a22^ - a23r])sin 6 + f(a\2^ - a13n)cos 0]TV
(5.9)'
{£i]£, anuitfiK (i = l, 2, 3)1.
В (5.8) и (5.9) не выписаны еще по два равенства, которые
получаются соответственно из (5.8) и (5.9) одновременной
круговой перестановкой символов, указанпых в фигурных скобках.
Выпишем еще кинетические уравнения Пуассона
йп = ai2r — a^q, rii2 = а*Р — апг, г
di3 = вид ~ Ъ2Р (& = 1, 2, 3).
Уравнения (5.2) —(5.10) образуют замкнутую систему
уравнений, описывающую задачу о движении со скольжением
произвольного выпуклого тяжелого твердого тела по неподвижной
горизонтальной плоскости при наличии сухого трения.
2. Уравнения движения эллипсоида в форме, удобной для
применения метода усреднения. Пусть движущееся тело
представляет собой однородный эллипсоид, поверхность которого в
спстеме G|t]£ задается уравнением
302
При а = Ь = с получаем хорошо изученную задачу о движении
с трением однородного шара по горизонтальной плоскости
(см. § 1).
Пусть эллипсоид мало отличается от шара радиуса Z, а
коэффициент трения / мал. Примем величину
max
(\а-Ь\ \Ь-с\ \с~а\ \
{ I ' I ' I ' ']
за малый параметр е. При в = 0 приходим к задаче о движении
однородного гаара по абсолютно гладкой горизонтальной
плоскости; центр шара движется равномерно и прямолинейно, причем
шар равномерно вращается вокруг неизменного в неподвижной
системе координат направления. Принимая это движение за
порождающее, движение эллипсоида при 0 < в «с 1 исследуем
асимптотическими методами. Для этого преобразуем уравнения
п. 1 к форме, удобной для применения метода усреднения.
Из (5.11), (5.3) и (5.6) следует, что г — величина первого
порядка малости относительно в, поэтому, согласно третьему
уравнению из (5.7), нормальная реакция плоскости N с
погрешностью порядка в равна весу эллипсоида. Если пренебречь
членами порядка в2, то первые два уравнешш из (5.7) запишутся
в виде
£ = -/gcos6, £ = -/gsin6. (5-12)
Делая, как и в § 8 гл. 3, замену переменных
t = ati, Л = ЬЧ1> C^c£i (5.13)
ц учитывая, что для однородного эллипсоида
А= ^т(Ь2 + с% Я=^-т(с2 + а2), С = ^т(а2 + fe2), (5.14)
получаем из (5.11), (5.3), (5.9), что для записи уравнений
(5.8) с точностью до членов порядка в включительно достаточно
положить в их правых частях
Mi = Ц- (В — С) г],^ + fmgl (a21 cos 0 - ап sin 6) (5Л5)
(6чС, Ei4r£i, ABC, anfliafli3 (i=l,2)>.
Уравнение поверхности эллипсоида (5.11) в переменных \и Чи
£i будет уравнением сферы
Й + ч! + й = 1- (*-1С)
Из (5.10) (при £ = 3) получаем при помощп (5.3) п (5.13), что
уравнешш для переменных |[, г\\, £i в первом приближении по е
будут иметь вид уравпеппй (8.10) гл. 3:
h = Tjir- £i? + gu цх = £{р - lir + g2> £i = hq - rjiP + ft,
^ = ^-^^^ + <Lpf (2g_ ^^ + Ъ-а (2g _ 1)%г (5.17)
lgig2gb abc, iirjiSb pqr).
Эти уравнения зависимы в сплу (5.16).
303
Из соотношений их = и cos 6, иу = и sin 6 имеем
6 =
m,(cos fi — M^sinB
и = иу sin 6 + ux cos 0.
Подставив сюда производные нх, щ, получаемые путем
дифференцирования кинематического соотношения (5.4), использовав
уравнения (5Л0), (5.12), (5ЛЗ), (5.17) и тождества, которым
всегда удовлетворяют направляющие косинусы aih получим
такие дифференциальные уравпения для 0 и и в первом
приближении по в:
6 = ^ , и = —j /# + (Ф sin 0 — 4я cos 0), (5.18)
Ф — ф1 + ф2 + (f 3, W = \fi + \f2 + фз,
(Р! = (а — с) [а12 (pr + ^bb) — 2$£tq (aup + «12? + Gi3r) +
+ 2a22g (liP — ^r) — 2g2 (a21lx — вадЬ)]»
*!=(« — C) [«22 (РГ + T bCl) + 2£l£l2 («2lP + «227 + «23Г) ~
— 2«12g (Up — dr) + 2<?2 (aub — a13^),
{Ф1Ф2Ф3, Мгфз, а&с, pgr, EiniSu a»i«i2al3 (i=l, 2)}.
Аналогично § 8 гл. 3 вместо перемепных Ei, т|ь £i введем
переменные х, р, "у по формулам
к
sin P cos a cos P sin а cos РIIIIР sin у II
— cos p cos а sin p sin а sin P P cos у IL
О — sin а cos а ||
(5.19)
sin а =
Ур2+ч>
со
, cosa = —, sin в = -.
X II
cos (5 =
vV+
Переменные pujf связаны соотношением
р2 + Х2 = 1.
(5.20)
При 8 = 0 имеем ч = со, а величины % и р постоянны, причем
р — расстояние от центра эллипсоида (шара) до прямой,
проходящей через точку касания параллельно вектору со, величпиа
1x1—расстояние от центра эллипсоида (шара) до плоскости,
перпендикулярпой w и проходящей через точку касания.
В уравнениях (5.10) также сделаем замену переменных по
формуле (5.19), заменив только в ней Ei, i]i, t\ па an, ai2j а*з
(i=l, 2, 3) соответственно, а р, х, f на ри X'» Т«- Величины Хь
Х2, Хз суть косинусы углов между вектором со и осями Ох, Оу,
Oz неподвижной системы коордтшат. Имеют место тождества
р? + х! = 1-
(5.21)
304
В первом приближении по е переменные х* х» (* — !> 2, 3)
удовлетворяют таким дифференциальным уравпениям:
• бдР + ti^ + E^ p'p+qg^rr , Pgx + qe2 + rgs
*= !ЙП ? + ш ' (5-22)
х*= ^ л—• \b-Z6>
со
со"
Входящие сюда величины Д g, r должны быть получены из
уравнений (5.8) с правыми частями (5.15). Пренебрегая
членами порядка в и выше, имеем также такие уравнения:
^, = ч = со. (5.24)
Вместо Xi» X2 введем переменные cci, с*2 по формулам
C6i = xi cos 6 + Х2 sin G, сс2 = — Xi sin 6 + Х2 cos 8. (5.25)
Величина cci — это косинус угла между векторами со и и, а «2 —
косинус угла между « и вектором, перпендикулярным и и
лежащим в горизонтальной плоскости, причем кратчайший
поворот от и к этому вектору происходит против часовой стрелки.
Для cci, c*2 из (5.25) и (5.23) получаем такие
дифференциальные уравнения:
• _ (a2lP + g22g + aJ) Sln 6 + (flU*+ «12* + W) C0S 6
-" + «+"«,+&»., {526)
©
(°21P + "«* + °23r) C0S 6 ~ ("llP + gl2° + °l3r) S'D 6
• • •
pp + qq + ™
«»
CO
a2 — 8ale
В уравнениях (5.22), (5.23), (5.26) p, g, г —функции,
определенные из (5.8); |i, rji, £i, я»* предполагаются выраженными
через х» Р> If» 5С*> Р*» Y*> Р> 2» г по формулам замены переменных
(5.19); величина 6 в (5.26) представляет собой правую ча^ть
первого уравнения из (5.18).
Уравнения (5.8) (с правыми частями (5.15)), (5.12), (5.18),
(5.22) — (5.24) и (5.26) представляют собой систему,
записанную в форме, удобной для применения метода усреднения.
В полученной системе уравнений переменные х, у, р, д, г, х»
X», 6, I/, «1, сс2 — медленные, а переменные Yi If* — быстрые.
3. Усредненные л равнения в их первые интегралы. Усредним
правые части уравнений для медленных переменных по
быстрым переменным. Учитывая при этом (5.20), (5.21), а также
£й А. П. Маркеев 305
соотношения ppiCos(f - f.) + ХХ<= 0 (* = ii 2), справедливые для
невозмущенного (при 8=0) движения, получаем следующую
усредненную систему уравнений:
х = —fg cos Э, у = -/g sin Э, (5.27)
^Р + [1+^(Зг-1)](С-Б)Г = /^а2р {4fiC,pgr}; (5.28)
6 = -^ а2. (5.30)
Х=-1Ь«' (*-32
Ь = -ЭЧ- (5-33)
Усредненные уравнения для xi и %2 ие выписаны, так как они
не понадобятся в дальнейшем. Для величины со из (3.28)
следует такое вспомогательное уравнение:
ы~Ща2. (5.34)
В (5.29) —(5.31) введено обозначение
F =>(а- с) (p2~r2) + {b-a) (д*-p-) + (c~b) (r2- q*). (5.35)
Решения усредненной системы аппроксимируют медленные
переменные с погрешностью порядка г на интервале времени
порядка 1/в.
Усредненная система имеет следующие интегралы:
%(о = const, Хз« = const. (5.36)
Второй из этих интегралов, в частности, означает, что проекция
вектора мгновенной угловой скорости на вертикаль в первом
приближении метода усреднения постоянна.
Нахождение общего решения усредненпоп системы вряд ли
возможно, поэтому в дальнейшем ограничимся рассмотрением
частных ее решений и установлением некоторых общих свойств
движения эллипсоида.
4. Геометрическая интерпретация усредненного движения.
Сделаем в уравнениях (5.28) замену переменных по формулам
р = was, д, = coccn, r = юа£, (5.37)
где ah an, а; — косинусы углов между вектором со и осями зл-
306
липсоида G£, G\\, G£ соответственно. Из (5.28) и (5.34) получим
Акг + со [l + J5|_ (3X2 - 1)] (С - В) эд = О {ЛЯС, ^}. (5.38)
Таким образом, в первом приближении величины с^т ссп, ссс,
определяющие ориентацию вектора ю относительно эллипсоида,
могут быть вичислены по тем же формулам, что и величины р,
д, г в движении Эйлера — Пуансо, в котором роль времени
играет величина
t
*-И1+&™-1)]*- (5-39)
Пусть в неподвижной системе координат вектор
кинетического момента тела относительно центра тяжести К имеет
компоненты Кх, Ку, Кг. Из теоремы об изменении кинетического
момента имеем уравнения
Rx = auMi + aX2MJi + a\^Ml {xyz, аща^ы '(iel, 2, 3)}. (5.40)
Все компоненты Я*, Ку, Кг — медленные переменные.
Использовав (5.40), получим дифференциальное уравнение для величины
К, усреднение правой части которого дает следующее уравнение
первого приближения:
R = fmgla2. (5.41)
Усреднение правой части выражения для производной от
кинетической энергии движения относительно центра тяжести дает
такое уравнение первого приближения:
Т = /mgZwa2. (5.42)
Если с нашим реальным эллипсоидом мысленно связать его
эллипсоид инерции для центра тяжести, провести через центр
тяжести прямую, параллельную вектору ю, и через точку
пересечения этой прямой с эллипсоидом инерции провести касательную
к нему плоскость, то, как и в случае Эйлера — Пуансо, эта
плоскость будет перпендикулярна вектору К и будет отстоять от
центра эллипсоида на расстоянии d = У2Т/К. В случае Эйлера —
Пуансо Т и К постоянны п поэтому постоянна и величина d.
В рассматриваемом же случае Т и К изменяются со временем.
Однако вычисления, использующие уравнения (5.41), (5.42) и
близость моментов инерции (5.14), показывают, что й = 0 с
точностью до членов порядка е включительно. Поэтому, как и в
случае Эйлера — Пуансо, в рассматриваемом случае эллипсоид
инерции катится (и вертится) без скольженпя по построенной
касательной плоскости, остающейся на неизменном в первом
приближении расстоянии от центра эллипсоида. Однако в
рассматриваемом случае центр эллипсоида движется согласно
уравнениям (5.27) и меняется ориентация вектора К
относительно неподвижной системы координат Oxyz.
20* 307
Получим уравнения, определяющие ориентацию вектора К.
Вычисление правой части третьего уравнения из (5.40) с
использованием (5.3), (5.11) (5.13) и (5.15) показывает, что
она с точностью до членов порядка в включительно равна нулю.
Таким образом, в первом приближении проекция Кг вектора
кинетического момента К на вертикаль постоянна.
Пусть а — угол между осью Ох и проекцией вектора К на
горизонтальную плоскость. Легко видеть, что тогда (см.
формулу (9.5) гл. 3)
^_^КхКу—КуКх
А'2-А'* "
Заменив здесь Кх и Ку на правые части соответствующих
уравнений пз (5.40) и произведя усреднение, получим следующее
уравнение первого приближения:
*- М«-%) '"^-*('-Г)Л. С-«>)
5. О стремлении эллипсоида вращаться вокруг наибольшей
оси. В [149] описан опыт, который проводил Томсон с
эллипсоидальным камнем. Движение быстро закрученного на
шероховатой плоскости камня эволюционировало так, что последний
имел тенденцию вращаться вокруг наибольшей своей осп,
которая стремилась занять вертикальное положение, если только
вращение камня было достаточно быстрым.
Рассмотрим вопрос о стремлении эллипсоида вращаться
вокруг его наибольшей, вертикально расположенной оси.
Сначала при помощи интегралов (5.36) усредненных уравнений
движения получим некоторые качественные выводы об эволюции
движения эллипсоида, не обязательно быстро закрученного,
а для самого общего случая его движения. Если угловая
скорость со уменьшается, то в силу неизменности величины
проекции вектора со на вертикаль он стремится занять вертикальное
положение. Далее из первого из интегралов (5.36) следует, что
прп уменьшении со величина 1x1 должна увеличиваться.
Учитывая геметричеекпй смысл переменной %, приходим к выводу
о том. что при умепьшешш ш эллипсоид стремится подняться на
его наибольшую, вертикально расположенную ось. При
увеличении со имеет место обратное: вектор со и наибольшая ось
эллипсоида имеют тенденцию к возрастанию их отклонений от
вертикали.
Для получения количественных выводов об эволюции
движения эллипсоида недостаточно анализа следствий, вытекающих
из интегралов (5.36). Следует использовать сами усредненные
уравнения движения. Пусть при t = 0 I v I < I w X GM\. Тогда
в начальный момент времени величина а2 отрицательна, а ве-
личппа ai мала. Будем считать, что Iccil не ниже первого по-
308
рядка по е. Тогда из (5.29) имеем в первом приближении
уравнение
*-Й-(*-«». <5-44>
которое вместе с уравнением (5.34) образует замкнутую
систему уравнений. Обозначая индексом 0 начальные значения
переменных, получаем общее решение этой системы:
о = /«г+го^т + т», а2 = "20УТ (х = Щ t). (3.45)
С ростом t величина w уменьшается, а величина а2 растет,
изменяясь от своего отрицательного значения сего. Она остается
отрицательной до момента времени
Из геометрических соображений следует, что с погрешностью
порядка е аго = — ро, щ = рооМ- Поэтому приближенно
При малых C6i из (5.31) получаем, что в первом
приближении, как и в случае шара на плоскости с сухим трением
(см. § 1), скорость точки касания равна
и-Ио-T/e*- (5-46>
В момент времени t2 = 2uol(7fg) скорость и обращается в нуль
и начинается движение без скольжения. Так как tx > t2, то
отсюда следует, что на всем интервале времени 0 < t < fe
угловая скорость (о уменьшается и подъем эллипсоида на его
наибольшую ось происходит вплоть до начала движения без
скольжения.
Оценим величину At времени, необходимого для переворота
эллипсоида с наименьшей полуоси а на его наибольшую
полуось с. Это значит, что 1x1 за время At должен измениться на
величину (с — а)/1. Из (5.36) имеем х (*) =Xocoo/ta (t). Если здесь
положить Хо —я/'i x(A*) = c/J» T0 получим, пренебрегая
членами порядка в2 и выше,
со
(Д«) = ч[1-^]-
Подставив это значение со в левую часть первого из равенств
(5.45), найдем
Отброшенные в правой части этого равенства слагаемые по
крапнеп мере на один порядок г меньше оставленных. Чтобы
309
переворот мог произойти до начала движения без скольжения,
необходимо потребовать выполнения неравенства At < t2j откуда
с учетом приближенных соотношений аго = — Ро, Щ = PoWoJ
следует, что должно выполняться неравенство
Ро>
|/П£^. (5.48)
Таким образом, для осуществления переворота эллипсоида с
наименьшей полуоси на наибольшую необходимо потребовать,
чтобы в начальный момент времени угол между наименьшей
полуосью и вектором ю не был слишком острым; в противном
случае время At, необходимое для переворота эллипсоида,
будет больше значения времени £2, при котором начинается
движение без скольжения. Качественно этот вывод можно
усмотреть непосредственно из (5.34) и (5.36): чем меньше ро, тем
меньше 1а2о1 и, согласно (5.34), тем медленнее уменьшается со
и, следовательно, согласно (5.36), тем медленнее рост 1x1.
6. Частные решения усредненных уравнений движения.
Укажем некоторые простейшие частные решения усредненной
системы (5.27) — (5.34). Рассмотрим сначала решение, в
котором х = 0- Оно соответствует такому движению эллипсоида,
когда с погрешностью порядка е можно считать, что его центр
тяжести лежит в плоскости, перпендикулярной со и проходящей
через точку касания эллипсоида и плоскости.
При х = 0 уравнение (5.32) тождественно удовлетворяется,
а из (5.27), (5.30), (5.31) следует, что, как и в случае
движения со скольжением шара по плоскости с сухим трением,
8 = 60 = const, и = и0 — у fgt
и проекция центра тяжести на плоскость движется по прямой
или параболе в зависимости от начальных условии. Уравнения
(5.28), (5.29) при % — 0 запишутся так:
A'p+[i--^Yc-B)^-f:^Lp {Авс>р<1>-}' (5-49>
^ = -йИа*- <5-50)
i-gf (!-«»■ (5-51)
Из (5.34), (5.50) и (5.51) получаем, что изменение величин ш
и а2 со временем описывается равенствами (5.45), a ai =
= аюсоо/со.
Ориентация вектора мгновенной угловой скорости в
неподвижной системе координат Oxyz определяется равенствами
X ф
Ул = «1 cos 0О — а2 sin 0О, ул = аг sin %+(% cos 0О, Хз= ~^J!- (5-52)
Величины р, q, г (при известной зависимости (o(t)) найдутся
310
из равенств (5.37) и уравнений (5.38), которые при % = 0
введением независимой переменной
t
приводятся к интегрируемой в эллиптических функциях
системе уравнений в задаче Эйлера — Пуансо.
Нетрудно проверить, что усредненная система уравнений
допускает решение, для которого /? = 0, q = 0, а величины х,
I/, C6i, с&2, в, и, уи уз, (о = 1Н удовлетворяют системе уравнений
(5.27), (5.29) — (5.34), в которой величину F/co2 надо заменить
на константу 2с — а — Ь. Это частное решение соответствует
такому движению, при котором вектор w во все время двияхенпя
остается параллельным одной из осей эллипсоида. Если
полуоси эллипсоида связаны соотношением а + Ь = 2с, то 0 = 0о =
= const, проекция центра тяжести на плоскость движется по
прямой или параболе, а величины аи аг, и, со изменяются со
временем так же, как и в предыдущем частном случае, ког-
да х = 0.
Укажем еще на одно интересное частное решение усредпеи-
ной системы, которое соответствует движению эллипсоида с
постоянным вектором угловой скорости (о. Получим это частное
решение, а также условия его существования.
Из (5.28) — (5.34) получаем, что упомянутое решение имеет
следующее аналитическое выражение:
6 = ео' X = Xoi u = u0 — fgt.
Проекция центра тяжести на плоскость движется по прямой
или параболе. Постоянные /о, wo в (5.53) связаны
соотношением, обращающим в нуль выражение в квадратных скобках в
(5.28):
Требуя положительности правой части (5.54) и учитывая, что
lail^l, получаем ограничения сверху на величину угловой
скорости соо и коэффициент трения /:
Шо<]и1р /<■
(в + й + С-8?« + ^ + ^
•8
. (5.55)
Неравенства (5.55) и будут условиями существования
движения с постоянным вектором о. Отметим, что в случае шара при
/=И=0 движения со скольжением при постоянном со не
существует.
311
7. О движении эллипсоида по плоскости с вязким трением.
Пусть эллипсоид по-прежнему близок к шару, трение мало, но
оно не сухое, а вязкое. Реакция плоскости будет теперь в
системе координат Oxyz задаваться компонентами —хлшсовб,
—xmusinB, N, где х > 0 — постоянный малый (порядка в)
коэффициент трения. Усредненные уравнения движения
получаются из уравнений (5.27) — (5.34), если в их правых частях
слагаемые, содержащие множитель fg, заменить па те же
слагаемые, но уже с мпожителем ум.
Геометрические характеристики движения, рассмотренные в
п. 47 имеют место и в случае вязкого трения. Только в правых
частях уравнений (5.41) — (5.43) величина fg должна быть за-
мепена на ум.
Для усредненных уравнений, как и в случае сухого трения,
справедливы интегралы (5.36), и по-прежнему имеет место
тенденция эллипсоида вращаться вокруг его наибольшей,
вертикально расположенной оси. Только в случае вязкого трения
в (5.45) величина т должна быть определена равенством
T=^(1_e-^j, (5.56)
а формула (5.46), описывающая при малых Ictil уменьшение
скорости точки касания, становится такой:
и = и0е 2 . (5.57)
Так как и не обращается в пуль ни при каких t, то движения
без скольженпя не будет. Оцепка «времени» Дт, необходимого
для переворота эллипсоида с наименьшей оси на наибольшую,
в случае вязкого трения будет такой:
(с — а) со
Ат = ( / ". (5.58)
Эта величина не должна превосходить наибольшего возможного
значения т, равного 5и0/(7/). Отсюда, как п при сухом трении,
следует условие (5.48).
Усредненные уравнения допускают рассмотренное в п. 6
частное решение, в котором % = 0. В этом решении переменные
«1, «2, со определены теми же формулами, что и при сухом тре-
нип, только т должна быть задана равенством (5.56). Скорость
точки касания дается формулой (5.57), угол G = 0o = const,
а траектория проекции центра тяжести на плоскость задается
уравнениями
*We43feM°cose^1 — * 2 ' + Г°" у wo cos 0О) * + *V
у W = Ши»sinе°I1 "" е * / + (и> ~ Тwosin6o) * + Иг
(5.59)
312
Существует также частное решение усредненных уравнений,
для которого вектор со параллелен одной из осей эллипсоида.
Рассмотренного же в п. 6 решения, отвечающего движению
эллипсоида с постоянным вектором (о, в случае вязкого трения нет.
§ 6. Шар Чаплыгина на плоскости с трением скольжения
Пусть тяжелое твердое тело сферической формы движется
со скольжением по неподвижной шероховатой горизонтальной
плоскости. Будем считать, что тело является шаром Чаплыгина,
т. е. его геометрический центр совпадает с центром тяжести,
а главные центральные моменты инерции различны. Движение
шара отнесем к неподвижной системе координат Oxyz с началом
в точке О опорной плоскости и направленной вертикальпо
вверх осью Oz. С шаром жестко свяжем систему координат
&\цХ>, образованную главными центральными осями инерции.
Через т обозначим массу, а через Ау 5, С (А >В>С) —
моменты инерции шара относительно осей G|, Grj, G£; радиус шара
равен Z. Считаем, что касание шара и плоскости происходит в
одной точке М, в которой к шару со стороны плоскости помимо
нормальной реакции N приложена еще сила трения
скольжения, которое может быть либо вязким, либо сухим. Динамика
шара Чаплыгина для этих двух моделей трения скольжения
исследована в [131, 133—135]. Ниже рассматривается только
вязкое трение.
1. Уравнения движения в случае вязкого трения и их
первые интегралы. Пусть зс, у, z = l — координаты центра тяжести
шара в неподвижной системе координат Oxyz. Из теоремы об
изменении количества движения следует, что в случае вязкого
трения величины х, у удовлетворяют уравнениям
х = —хиХу у = ~хиУ, (6.1)
где у, > 0 — коэффициент вязкого трения, их и иу — проекции
скорости точки Ж, которой шар касается плоскости, на оси Ох
и Оу соответственно:
их = х — coyZ, иу = у + со*/, (6.2)
(Ox, (£>y> coz — проекции вектора угловой скорости со тела на оси
Ох, Оу, Oz.
Пусть Кх, Kyj Kz — компоненты вектора К кинетического
момента шара относительно его центра тяжести на
соответствующие оси неподвижной системы координат, а К\, Къ, Яз—
проекции на эти оси кинетического момента шара относительно
точки его касания М с опорной плоскостью. Теорема об
изменении кинетического момента дает уравнения
Ёх = —'хт1щу £y=xmlux, Йг = 0. (6.3)
313
Из (6.1), (6.3) видно, что существуют три первых интеграла
Кх — mly =К{= const, Kv + mix = К2 = const, Kz = Я3 = const,
(6.4);
которые, впрочем, являются следствием сохранения вектора
кинетического момента шара относительно точки касания.
Выпишем еще выражение для производной по времени от
кинетической энергии Т движения шара относительно его центра
тяжести:
Т = ктп1 (щих — (охиу). (6.5)'
Из (6.4) найдем величины х, у и подставим их в (6.5) и
первые два уравнения (6.3). Если затем еще ввести вместо Т новую
переменную о:
а=§, (6.6)
где G2 — квадрат модуля вектора кинетического момента шара
относительно центра тяжести:
G2 = К% + К* + К*. (6.7)
то первые два уравнения из (6.3) и уравнение (6.5) примут вид
следующих трех уравнений, которые и будут положены в основу
дальнейшего анализа движения шара по плоскости с вязким
трением:
Кх = - х (Кх - Кх + wZ2^),
Ку = — х (Kv — К2 + тпРыу),
+ ml2 [о (К^х + KyiOy) — w| — со*]}.
Обозначим через а, Ь, с величины, обратные А, В, С (а<Ь<
<с). Ясно, что а^о<с. Эти неравенства определяют в
пространстве переменных Кх, Ку, о область £/, которая представляет
собой часть пространства, заключенную между двумя
параллельными плоскостями, соответствующими вращениям шара вокруг
осей наибольшего и наименьшего моментов инерции (рис. 45).
2. Эволюция движения шара на плоскости с вязким трением.
Рассмотрим эволюцию движения тяжелого шара Чаплыгина на
плоскости с вязким трением. Для этого воспользуемся
результатами § 3.
Согласно теореме § 3 предельным множеством Q траекторий
тела на плоскости с вязким трением является множество
движений без скольжения этого тела по абсолютно гладкой плоскости.
Движение шара Чаплыгина на абсолютно гладкой
горизонтальной плоскости складывается из прямолинейного и равномерного
движения центра тяжести шара и движения Эйлера — Пуансо
314
<*+
СЬ
Я.
\
Рис. 45
относительно центра тяжести. Среди всех движений шара
выделим такие, для которых скорость точки шара, которой он
касается плоскости, равна нулю: их^щ = 0. Из (6.2) в силу
постоянства величин #, у следует, ято этими движениями могут быть
только движения с постоянным вектором угловой скорости со.
Отсюда на основании
геометрической интерпретации
Пуансо и теоремы § 3 получаем, что
предельное множество Q есть
множество вращений вокруг
главных центральных осей
инерции тела (это также сразу
следует из классификации
возможных типов финальных
движений, приведенной в § 3).
Шар будет асимптотически
стремиться к этому движению,
не достигая его.
Если направить ось G£
вдоль оси вращения шара в его
финальном движении, а
соответствующий ей момент инерции обозначить через / (1 = А, В,
С), то для параметров финального движения х0у Уо, tfo, во, фо — о>
(Ф> в* <р—углы Эйлера) из условий отсутствия скольжения и
первых интегралов (6.4) получим систему пяти уравнений:
х0 + coZ sin 6o cos i£0 =0, у0 + co/sin в0 sin ф0 = 0,
/<о sin Во sin <ф0 — mlyo = Ки (6.9)
—Jco sin 0O cos % + т1х0 *= К2, /со cos 6о = Къ.
Отсюда параметры финального движения z0, y0, tpo, 60, Фо
можно однозначно выразить через значения констант первых
интегралов Kt (i—1, 2, 3). Исключение составляет только
случай К\ = Яг = Кг = 0, отвечающий положению равновесия шара
(#о = £о = 0, со = 0, fo и 6о — любые).
Таким образом, в пространстве переменных kXj &у, о
предельное множество О состоит из трех точек Qi, Q2, Оз (рпс. 45),
определяемых по значениям констант первых интегралов К{ (1 =
= 1, 2, 3). Теорема § 3 не указывает только, к какой из трех
возможных величин а, 6, с стремится о, т. е. вокруг какой из
осей будет происходить предельное вращение шара.
Пусть трение мало, т. е. х —малый параметр. Тогда в
невозмущенной ^ задаче (х = 0) центр шара движется равномерно
и прямолинейно, вектор кинетического момента К постоянен,
о = const, а шар совершает движение Эйлера — Пуансо вокруг
К. Согласно геометрической интерпретации Пуансо (см. § 6
гл. 1), величина а равна квадрату расстояния от центра шара
до плоскости (Пуансо), касательной к центральному эллипсои-
315
ду инерции п перпендикулярной К. Вращениям шара вокруг
большей, меньшей и средней осей эллипсоида инерции отвечают
значения о = с, а = а, о = Ь.
Возмущенное движение (при малых отличных от нуля тс)
будем исследовать методом усреднения. Рассмотрим сначала
нерезонансный случай, когда частоты движения Эйлера — Пуансо
несоизмеримы; ниже мы покажем, что это предположение в
рассматриваемой задаче об эволюции движения шара
несущественно. Усредняя правые части уравнений (6.8) по
условно-периодическому невозмущенному движению Эйлера — Пуансо [134,
207], получаем такую усредненную систему уравнений первого
приближения для медленных переменных KXj КУч о [133, 134]:
^=-(l+crmZ2)#*+ #„
d-b = -(l + omP)Ky + K2, (6Л0)
*-mp(l + §)Ma).
йт
Здесь т = nt — новая безразмерная независимая переменная,
функция К (о) определяется равенствами
X (а) _ (с - а) (а - с) - Л (а) Klk^lk\ (6.11)
где
h (а) = \ /г, \ / \ ^ г, & =
v ' \(b — a)(o — c), а>&;
с — bo — a ^ ,
b — ac —a
l с — &o — a
, a>fe.
Здесь Я (А) и £*(£)— полные эллиптические интегралы первого
и второго рода, к — их модуль.
Кратко перечислим [134] свойства функции Я (о),
необходимые для качественного исследования уравнений (6.10).
Функция Я (о) определена на отрезке [а, с], если ее доопределить
в точках a, fe, с по непрерывности; Х(а)<0 всюду, за
исключением точек а, Ь, с, где она обращается в нуль. Разложения
функции к (о) вблизи точек а, с, Ъ имеют соответственно такой вид:
а(о) = -^-g (a — a) + o(a —a),
k(o) = c~~* ~~ (<? — a) + о (с — a),
Из этих разложений видно, что интегралы (е>0— малая
316
величина)
do
Да)
а+е с
J M°)' J M
а с—e
расходятся, а интеграл
do
J К (о)
b
сходится.
На основании перечисленных свойств функции Я (о) и с
учетом того, что
о-
из последнего уравнения системы (6.10) можно сделать
следующий вывод: если в начальный момент времени оое(я, Ь), то
с течением времени а уменьшается и асимптотически стремится
к а; если же ooG(&, с), то о будет уменьшаться и достигнет Ъ
за конечное время. Таким образом, решения усредненной
системы выходят на сепаратрису невозмущенного движения и
переходят через нее. Но вблизи сепаратрисы метод усреднения в
обычной форме неприменим.
Проблеме прохождения через сепаратрису посвящены работы
[139, 140], в которых показано, что движение описывается
усредненными уравнениями вплоть до выхода на сепаратрису.
О дальнейшем поведении динамической системы можно говорить
только с определенной вероятностью. Мера множества начальных
данных, для которых движение после пересечения сепаратрисы
нельзя описать при помощи усредненной системы уравнепий,
мала вместе с возмущением.
Таким образом, в рассматриваемой задаче эволюция движения
для большинства начальных данных описывается решениями
усредненной системы, «склеенными» из решений в разных
областях, т. е. из решений в области а<о<Ь и в области Ь<о<с.
Все решения усредненной системы, получаемые «склеиванием»,
стремятся при т-* «> к равновесию на плоскости о = а (рис. 45),
т. е. шар стремится к вращению вокруг оси наибольшего из
главных центральных моментов инерции.
К зтому движению и стремится большинство траекторий
точной (а не усредненной) системы при t-+°°. Исключение
составят только те траектории, начинающиеся в области Ь<о<с,
которые имеют своим предельным множеством вращение вокруг
оси среднего по величине момента инерции (т. е. точку £Ь
на рис. 45).
Так как о -*■ а прп т ->• °°, то из первых двух уравнений
системы (6.10) следует, что при т -*■ °°
Кх-+—^-2-, Ку-+—*Ь—. (6.12)
1+aml2 v 1 + aml2 V '
317
Из интегралов (6.4) получаем теперь, что при t -> °°
кл • кл
х-> л 2 ?, #->- ^. (6.13)
A + ml* * A+ml* x '
Далее, так как финальное движение шара — это вращение вокруг
оси наибольшего момента инерции А9 то при £->°о имеем
К
<а->-^р т. е. согласно (6.12) и (6.4)
"*-*т&г ^inb' ю*-^- (614)
Таким образом, финальное движение шара для любых
начальных данных из области а<о<Ь и для большинства
начальных данных из области Ь<о<с таково, что его центр тяжести
движется равномерно и прямолинейно, а сам шар вращается с
постоянной угловой скоростью вокруг оси наибольшего момента
инерции, при этом скорость скольжения стремится к нулю.
Кроме того, получаем такое следствие (см. п. 1 § 3):
качение шара Чаплыгина, при котором он вращается вокруг оси
наибольшего момента инерции, на плоскости с малым вязким
•
тренпем устойчиво по отношению к переменным 0, 6, if, г|), ср,
х, у, о, причем асимптотически по переменной о,
характеризующей отклонение от многообразия вращения шара вокруг оси
наибольшего момента инерции; вращение же вокруг оси
наименьшего и среднего по величине момента инерции неустойчиво.
Если частоты невозмущенного движения Эйлера — Пуансо
соизмеримы, т. е. имеет место резонанс, то предыдущий анализ
эволюции должен быть, вообще говоря, иным. Дело в том, что
область U (рис. 45), задаваемая неравенствами а^о^с,
содержит счетное множество резонансных поверхностей.
Траектории движения в процессе эволюции достигают резонансных
поверхностей; в принципе возможно застревание на резонансе.
Однако в рассматриваемой задаче такого застревания не будет
[134]. Это следует из результатов § 3: предельным множеством
в области U могут быть только три точки: £2i, Q2, ^з, и
финальные движения шара суть только его вращения вокруг главных
центральных осей инерции.
СПИСОК ЛИТЕРАТУРЫ
1. Акуленко Л. Д., Лещенко Д. Д. О вращении тяжелого твердого
тела, имеющего опору на горизонтальной плоскости с трением / Me-
хан. тв. тела.—1984.— Вып. 16.— С. 64—68.
2. Ann ель П. Теоретическая механика. Т. 2.—М.: Физматгиз, I960.—
487 с.
3. Арнольд В. И. Доказательство теоремы А. Н. Колмогорова о
сохранении условно-периодических движений при малом изменении
функции Гамильтона // Успехи мат. наук.— 1963.— Т. 18, вып. 5.— С. 13—40.
4. Арнольд В. И. Малые знаменатели и проблемы устойчивости
движения в классической и небесной механике // Успехи мат. наук.—
J963.—Т. 18, вып. 6.—С. 91—192.
5. Арнольд В. И. Математические методы классической механики.—
М.: Наука J989.—472 с.
6. Архангельский Ю. А. Аналитическая динамика твердого тела.—
М.: Наука, 1977.— 328 с.
7. А с т а и о в И. С. Об устойчивости вращения кельтского камня /
Вестн. МГУ. Сер. 1. Мат.. механ.— 1980.— № 2,— С. 97—100.
8. Белецкпй В. В. Движение искусственного спутника Земли
относительного центра масс // Искусственные спутники Земли: Сб.
статей.— М.: Изд-во АН СССР, 1938 - Вып. 1.— С. 25—43.
9. Б е л и к о в С. А. Устойчивость равномерных вращений гиростата
вокруг вертикальной главной оси на абсолютно гладкой горизонтальной
плоскости И Прикл. мат. и механ.— 1986.— Т. 50, № 1— С. 73—82.
10. Б и р к г о ф Дж. Д. Динамические системы.— М.; Л.: Гостехиздат,
1941.—320 с.
11. Бобылев Д. К. О движении поверхности, прикасающейся к другой
поверхности, неподвижной // Записки Императорской Академии
Наук.— 1887.— Т. 55.— С. 1—25.
12. Бобылев Д. К. О шаре с гироскопом внутри, катящемся по
горизонтальной плоскости без скольжения // Мат. сб.—1892.— Т. 16,
вып. 3.—С. 544—581.
13. Богоявленский А. А. Об одном виде обобщенного интеграла
площадей II Прпкл. мат. и механ.—1957.—т. 21, вып. 3.—С. 422—423.
14. Богоявленский А. А. Теоремы взаимодействия частей
механической системы II Прикл. мат. и механ.—1966.— Т. 30, вып. 1.—
С. 203—208.
15. Б о л о т о в Е. А. О движении материальной плоской фигуры,
стесненной связями с трением / Мат. сб.— 1904.— Т. 25.— С. 562—708.
16. Б о р н М. Лекции по атомной механике. Т. 1.— Харьков: ОНТИ, 1934.—
312 с.
17. Брюно А. Д. Локальный метод нелинейного анализа
дифференциальных уравнений.— М.: Наука, 1970.— 256 с.
18. Буров А. А. О частных интегралах уравнений движения твердого
тела по гладкой горизонтальной плоскости / Задачи исследования
устойчивости и стабилизации движения.— М.: ВЦ АН СССР, 1985.—
С. 118-121.
319
19. Б у р о в А. А., К а р а п е т я н А. В. О несуществовании
дополнительного интеграла в задаче о движении тяжелого твердого эллипсоида по
гладкой плоскости / Прикл. мат. и механ.—1985.— Т. 49, № 3.—
С. 501—503.
20. Б ы ч к о в Ю. П. О катании твердого тела по неподвижной
поверхности И Прикл. мат. и механ.—1965.—Т. 29, вып. 3,—С. 573—583.
21. Бычков Ю. П. К задаче о катании твердого тела по неподвижной
поверхности / Инж. журн.—1965.—Т. 5, вып. 5.—С. 803—811.
22. Бычков Ю. П. О движении тела вращения, ограниченного сферой,
на сферическом основании / Прикл. мат. и механ.—1966.— Т. 30,
вып. 5.— С. 934—935.
23. Б ы ч к о в Ю. П. Об уравнениях движения одной механической
задачи / Прикл. мех.— 1967,— Т. 3, вып. 6.— С. 135—137.
24. В а г н е р В. В. Геометрическая интерпретация движения неголоном-
пых динамических систем Ц Тр. Семинара по векторному и
тензорному анализу.— 1941.— Вып. 5.—С. 301—327.
25. В а л л е Пуссен Ш. Ж. Лекции по теоретической механике. Т. 2.—
М.: Изд-во иностр. лит., 1949.— 328 с.
26. Вебстер А. Г. Механика материальных точек, твердых, упругих и
жидких тел.— Л.; М.: ГТТИ, 1933.— 634 с.
27. Воронец П. В. Геометрическое исследование эйлерова случая
вращения твердого тела около неподвижной точки / Киевские
университетские известия.— 1898.— Т. 38, № 4.— С. 1—52; № 5.— С. 53—
ИЗ.
28. В о р о н е ц П. В. Об одном преобразовании уравнений динамики.—
Киев: Тип. Университета Св. Владимира, 1901.—14 с.
29. В о р о н е ц П. В. Об уравнениях движения для неголономных систем Ц
Мат. сб.— 1001.—Т. 22, вып. 4.—С. 639—686.
30. Воронец П. В. Вывод уравнений движения тяжелого твердого тела,
катящегося без скольжения по горизонтальной плоскости.— Киев: Тип.
Университета Св. Владимира, 1901.— 17 с.
31. Воронец П. В. Уравнения движения твердого тела, катящегося без
скольжения по пеподвижной плоскости.— Киев: Тип. Университета
Св. Владимира, 1903.— 152 с.
32. В о р о п е ц П. В. К задаче о движении твердого тела, катящегося без
скольжения по данной поверхности под действием данных сил.— Киев:
Тип. Университета Св. Владимира, 1909.—11 с.
33. В о р о н е ц П. В. Дифференциальные уравнения движения твердого
тела по отношению к среде, имеющей произвольно заданное
движение /I Сб. статей, посвященных профессору Г. К. Суслову.— Киев,
1911.—С. 75—114.
34. Г а н т м а х е р Ф. Р. Лекции по аналитической механике.— М.:
Наука, J 966.— 300 с.
35. Г е р ц Г. Принципы механики, изложенные в новой связи.— М.: Изд-
во АН СССР, 1959.— 386 с.
36. Г о р р Г. В., К у д р я ш о в а Л. В., Степанова Л. А.
Классические задачи динамики твердого тела.— Киев: Наукова думка, 1978.—
295 с.
37. Г р а м м ель Р. Гироскоп, его теория и применение. Т. I.— M.: Изд-во
иностр. лит.. 1952.— 351 с.
38. Г р п го рьян А. Т., Фра длин Б. Н. История механики твердого
тела.— М.: Наука, 1982.— 296 с
39. Гурса Э. Kvpc математического анализа. Т. I, ч. 2.—М.; Л.: Гостех-
пздат, 1933.— 235 с.
40. Даламбер /К. Динамика.—М.; Л.: Гостехиздат, 1950.—343 с.
41. Джаемоаев Р. Т. Устойчивость стационарных движении диска,
несущего гироскоп, катящегося без проскальзывания по горизонтальной
плоскости I/ Расчет и конструирование машин и механизмов.— Алма-
Ата, 1979.—С. 136-141.
42. Д и а м а н д и е в В а с и л. Частнп случаи на интегриране при дви-
жението на нехолюгенно кълбо върху неподвижни сфери.— Год. Со-
320
фийск. ун-т. Фак. мат. и мех. Мех.—1981 (1985).—Т. 75, № 2.— С. 243—
256.
43. Добронравов В. В. Основы механики неголономпых систем.— М.:
Высшая школа, 1970,— 271 с.
44. Д у в а к и н А. П. Об устойчивости движения волчка по абсолютно
шероховатой горизонтальной плоскости / Инж. журн.—1962.— Т. 2t
вып. 2.— С. 222—230.
45. Д у в а к и н А. П. Об устойчивости движения волчка с гироскопом по
абсолютно шероховатой горизонтальной плоскости / Инж. журп.—
1963.—Т. 3, вып. L— С. 131—134.
46. Дувакин А. П. Об устойчивости движений диска / Инж. журн.—
1965.—Т. 5, вып. 1.—С. 3—9.
47. Елизаров Е. Я.. Харламов А. П. Гирошар Жуковского па
вращающейся массивной плоскости // Механ. тв. тела.— Киев, 1986.—
№ 18.— С. 10—14.
48. Е л ь к и н а М. Е. К вопросу о движении волчка по плоскости с
трением /I Вестн. МГУ. Мат., мехап.— 1983.— № 1.— С. 85—89.
49. Е л ь к и н а М. Е. К задаче о движении вращающегося тела по
плоскости с трением // Молодые ученые и специалисты — одиннадцатой
пятилетке.— Пермь, 1983.— С. 53—54.
50. Елькина М. Е. К задаче о движении вращающегося тела по
плоскости с трением.— Дис. ... канд. физ.-мат. наук.— М., 1983.— ИЗ с.
51. Е л ь к и н а М. Е., Самсонов В. А. Колебания оси динамически
несимметричного волчка // Отчет Ин-та мех. МГУ.— 1982.— № 2727.—
42 с.
52. Ж у к о в с к п п Н. Е. О гироскопическом шаре Д. К. Бобылева /
Труды отделения физических наук Общества любителей естествознания,
антрополоши и этнографии.—1893.— Т. 6, вып. I.— С. 11—17.
53. Жуковский Н. Е. Условие равновесия твердого тела, опирающего*
ся на неподвижную плоскость некоторой площадкой и могущего
перемещаться вдоль этой плоскости с трением / Собр. соч. Т. 1.— М.; Л.:
Гостехиздат, 1948.— С 339—354.
54. Жуковский Н. Е. Динамика твердого тела // Собр. соч. Т. 1.—
М.; Л.: Гостехиздат, 1948.—С. 441—540.
55. Ж у р а в с к и й А. М. Справочник по эллиптическим функциям.— М.;
Л.: Изд-во АН СССР, 1941.— 235 с.
56. И в а н о в А. П. Об устойчивости в системах с неудерживаюипшн
связями J/ Прикл. мат. и механ.— 1984,— Т. 48, вып. 5.— С. 725—732.
57. И в а н о в А. П. О периодических дрижениях тяжелого симметричного
твердого тела с ударами о горизонтальную плоскость / Изв. АН СССР.
Механ. тв. тела.— 1985.— № 2.— С. 30—35.
58. Иванов А. П. Об уравнениях движения неголономной системы с
неуде рживающей связью // Прикл. мат. и механ.— 1985.— Т. 49, № 5.—
С 717—723.
59. II л и е в Ил., 3 л а с т е в Ст. Движение на твърдо тяло съдържашо
течност, подчинено на липейни отнпсо обобщените скорости нехолоно-
ми връзки / Научн. тр. Мат./Пловдив. ун-т.— 1981.— Т. 19, № 1,—
С. 485—498.
60. II с а е в а Л. С. О достаточных условиях устойчивости вращения волчка
«тип-топ», находящегося на абсолютно шероховатой горизонтальной
плоскостп II Прикл. мат. и механ.— 1959.— Т. 23, Д1 2.— С. 403—406.
61. II ш л ин с кий А. Ю., Соколов Б. Н., Черноусько Ф. Л.
О движении плоских тел при наличии сухого трения // Изв. АН СССР.
Механ. тв. тела.— 1981.— № 4.—С. 17—2*8.
62. К а з а к о в а А. В., Цветков 10. В. О взаимодействии быстро
вращающегося шара с жесткой сферической оболочкой // Прикл. задачи
динам, систем.— Горький, 1985.— С. 147—155.— Деп. в ВИНИТИ 24.10.85,
№ 7418-Б.
63. К а р а п е т я н А. В. Об устойчивости стационарных движений него-
лономных систем Чаплыгина // Прикл. мат. и механ. 1978.— Т. 42,
вып. 5.— С. 801—807.
21 а П. Маркеев
321
64. Карапетян А. В. К вопросу об устойчивости стационарных
движений неголономных систем / Прикл. мат. и механ.—1980,—Т. 44
вып. 3.- С. 418-426.
65. К а р а п е т я н А. В. О реализации пеголономпых связей силами
вязкого трения и устойчивость кельтских камней / Прикл. мат. и механ.—
1981.— Т. 45, вып. 1.— С. 42—51.
66. К а р а п е т я н А. В. Об устойчивости стационарных движений
тяжелого твердого тела па абсолютно гладкой горизонтальной плоскости /
Прикл. мат. и механ.— 1981.— Т. 45, вып. 3.— С. 504—511.
67. Карапетян А. В. О перманентных вращениях тяжелого твердого
тела на абсолютно шероховатой горизонтальной плоскости / Прикл.
мат. и механ.— 1981.— Т. 45, вып. 5.— С. 808—814.
68. К а р а п е т я н А. В. О регулярной прецессии тела вращения на
горизонтальной плоскости с трением / Прикл. мат. и механ.—1982.—*
Т. 46, вып. 4 — С. 568—572.
69. К а р а п е т я н А. В. К вопросу об устойчивости стационарных
движений /J Задачи исследования устойчивости и стабилизации движения.—"
М.: ВЦ АН СССР, 19S2.— С. 87—102.
70. К а р а п е т я н А. В. Некоторые задачи динамики неголономных
систем.— Дис. ... докт. физ.-мат. паук,— М., 1982.— 259 с.
71. К а р а п е т я н А. В. Об устойчивости стационарных движений систем
некоторого вида / Изв. АН СССР. Механ. тв. тела.— 1983.— № 2.—
С. 45-52.
72. К а р а п е т я н А. В. Бифуркация Хопфа в задаче о движении
тяжелого твердого тела по шероховатой плоскости / Изв. АН СССР.
Механ. тв. тела.— 1985.—№ 2.—С. 19—24.
73. К а р а п е т я н А. В., Р у б а н о в с к и й В. II. Об устойчивости
стационарных движений неконсервативпых механических систем / Прикл.
мат. и механ.— 1986.— Т. 50, вып. 1.— С. 43—49.
74. К а р а п е т я н А. В., Р у б а н о в с к и и В. Н. О бифуркации и
устойчивости стационарных движений волчка на горизонтальной плоскости
с трением // Задачи исследования устойчивости и стабилизации
движения.— М.: ВЦ АН СССР, 1986.- С. 11—18.
75. Карапетян А. В., Рубаповский В. Н. О бифуркации и
устойчивости перманентных вращений тяжелого трехосного эллипсоида
на гладкой плоскости II Прикл. мат. и механ.—1987.—Т. 51, № 2.—
С. 260—267.
76. Карапетян А. В., РубановскийВ. Н. О модификации
теоремы Рауса об устойчивости стационарных движений систем с
известными первыми интегралами // Сб. науч.-метод. статей по теор. механ.—
1986.—Вып. 17.—С. 91—99.
77. К а р а п е т я н А. В., Румянцев В. В. Устойчивость
консервативных и дисеппативных систем // Итоги науки и техники. Общая
механика. Т. 6.— М.: ВИНИТИ, 1983.— 132 с.
78. К а т о к СВ. Бифуркационные множества и интегральные
многообразия в задаче о движении тяжелого твердого тела / Успехи мат.
наук, 1972.— Т. 27, вып. 2.- С. 126-133.
79. К о з л о в В. В. Методы качественного анализа в динамике твердого
тела.— М.: Изд-во Моск. ун-та, 1980.— 230 с.
80. К о з л о в В. В. К теории интегрирования уравнений неголономной
механики II Успехи механ,— 1985.—Т. 8, № 3 —С. 85—107.
81. К о з л о в В. В., К о л е с и и к о в И. Н. О теоремах динамики / Прикл.
мат. и механ.— 1978.— Т. 42, вып. 1.— С. 28—33.
82. Козлов В. В., Онищенко Д. А. Неинтегрируемость уравнений
Кирхгофа / Докл. АН СССР.— 1982.— Т. 266, № 6.— С. 1298-1300.
83. К о л е с н и к о в С. Н. О качении диска по горизонтальной плоскости Ц
Вест. МГУ. Мат., механ.— 1985.— № 2.— С. 55—60.
84. Колесников С. Н. Задача о качении однородного тяжелого шара
в вертикальном цилиндре с учетом проскальзывания / Сб. науч.-метод.
статей по теор. механ.— 1986.— Вып. 17,— С. 118—121.
85. К о л м о г о р о в А. Н. О сохранении условно-периодических
движений при малом изменении функции Гамильтона / Докл. АН СССР.—
1954—Т. 98, № 4.—С. 527—530.
86. Коетенсу П. Связь между трением скольжения и трением
верчения и ее учет в теории волчка // Проблемы гироскопии.— М.: Мир,
1967.— С. 60—77.
87. К о р и о л и с Г. Математическая теория явлений бильярдной игры.—
М.: Гостехиздат, 1956.— 235 с.
88. К о ч и н Н. Е. Векторное исчисление и начала тензорного
исчисления.— М.: Изд-во АН СССР, 1951 — 426 с.
89. Кузьмина Р. П. О бифуркационном множестве в задаче о
движении тяжелого твердого тела с неподвижной точкой / Изв. АН СССР.
Механ. тв. тела.— 1982.— № 1.— С. 3—10.
90. Лагранж Ж. Аналитическая механика. Т. I.—M.; Л.: Гостехиздат,
1950.— 596 с.
91. Л а м б Г. Теоретическая механика. Т. 3 — М.; Л.: ОНТИ НКТП, 1936.—
291 с.
92. Ландау Л. Д., Лифшиц Е. М. Теория упругости.—М.: Наука,
1965.— 203 с.
93. Ла-Салль Ж., Лефшец С. Исследование устойчивости прямым
методом Ляпунова.— М.: Мир, 1964.— 168 с.
94. Л е в и -Ч и в и т а Т., А м а л ь д и У. Курс теоретической механики.
Т. 2, ч. 2.— М.: Изд-во иностр. лит., 1951.— 555 с.
95. Л о й ц я н с к и й Л. Г., Л у р ь е А. И. Курс теоретической механики.
Т. 2.— М.: Наука, 1983.— 640 "с.
96. Лурье А. И. Аналитическая механика.—М.: Физматгиз, 1961.—824 с,
97. Ляпунов А. М. Общая задача об устойчивости движения / Собр.
соч. т. 2.— М.; Л.: Изд-во АН СССР, 1956.—С. 7—263.
98. Ляпунов А. М. О неустойчивости равновесия в некоторых
случаях, когда функция сил не есть максимум // Собр. соч. Т. 2.— М.; Л.:
Изд-во АН СССР, 1956.—С. 391-400.
99. Магнус К. Гироскоп: теория и применение.— М.: Мир, 1974.— 526 с.
100. Мак-Миллан В. Д. Динамика твердого тела.— М.: Изд-во иностр.
лит., 1951.—467 с.
101. М а л к и н И. Г. Теория устойчивости движения.— М.: Наука, 1966.—
530 с.
102. Маркеев А. П. Устойчивость плоских колебаний и вращений
спутника на круговой орбите // Космич. исслед.— 1975.— Т. 13, № 3.—
С. 322—336.
103. Маркеев А. П. Точки либрации в небесной механике и космодипа-
мике.— М.: Наука. 1978,— 312 с.
104. Маркеев А. П. К геометрической интерпретации Пуансо движения
твердого тела в случае Эйлера / Проблемы механики управляемого
движения.— Пермь, Изд-во ПГУ, 1982.— С. 123—131.
105. Маркеев А. П. О движении тяжелого однородного эллипсоида на
неподвижной горизонтальной плоскости / Прикл. мат. и механ.—
1982.—Т. 46, вып. 4.—С. 553—567.
106. Маркеев А. П. О качении эллипсоида по горизонтальной
плоскости / Изв. АН СССР. Механ. тв. тела, 1983,— № 2.— С. 53—62.
107. Маркеев А. П. О движении эллипсоида на шероховатой плоскости
при наличии скольжения // Прикл. мат. и механ.—1983.— Т. 47,
выи. 2.—С. 310—320.
108. Маркеев А. П. О движении тела с острым краем по гладкой
горизонтальной плоскости II Изв. АН СССР. Механ. тв. тела.—1983.—
№ 5.- С. 8-16.
109. Маркеев А. П. О динамике твердого тела на аисолютно
шероховатой плоскости / Прикл. мат. и механ.— 1983.— Т. 47, вып. 4.— С. 575—
582.
110. Маркеев А. П. Об устойчивости вращения твердого тела вокруг
вертикали при наличии соударений с горизонтальной плоскостью Ц
Прикл. мат. и механ.— 1984.—Т. 48, вып. 36.—С. 363—369.
21*
323
111. Маркеев А. П. К динамике волчка / Изв. АН СССР. Механ. тв.
тела.—1984.—№ 3.—С. 30—38.
112. М а р к е е в А. П. О движении твердого тела с идеальной неудержи-
вающей связью / Прикл. мат. и механ.—1985.— Т. 49, вып. 5.—
С. 707-716.
113. М а р к е е в А. П. Об устойчивости вращения волчка с полостью,
наполненной жидкостью / Изв. АН СССР. Механ. тв. тела.—1985.—
№ 3.- С. 19-26.
114. М а р к е е в А. П. О колебаниях твердого тела с полостью,
содержащей жидкость, на абсолютно шероховатой плоскости // Некоторые
задачи и методы исследования динамики механических систем.— М.: Изд.
МАИ, 1985.— С. 19—25.
115. Маркеев А. П. Об интегрируемости задачи о качении шара с
многосвязной полостью, заполненной идеальной жидкостью // Изв. АН
СССР. Механ. тв. тела.— 1936.—№ 1.—С. 64—65.
116. Маркеев А. П. О стационарных движениях диска на гладком
горизонтальном льду / Изв. АН СССР. Механ. тв. тела,— 1986.— № 4.—
С. 16-20.
117. Маркеев А. П., Мощу к Н. К. Качественный анализ движения
тяжелого твердого тела на гладкой горизонтальной плоскости // Прикл.
мат. и механ. 1983.— Т. 47, вып. 1.— С. 37—42.
118. Маркеев А. П., М о щ у к Н. К. Об устойчивости движения
эллипсоида на абсолютно гладкой горизонтальной плоскости / Механ. тв.
тела,— Киев, 1984.— Вып. 16.— С. 56—64.
119. Маркеев А. П., X о л о с т о в а О. В. Об устойчивости движения
твердого тела при наличии соударений с вибрирующей плоскостью /
Некоторые задачи и методы исследования динамики механических
систем,— М., 1985.— С. 34—40.
120. Маркеев А. П., Шапошников В. П. Об устойчивости
стационарного вращения эллиптического диска на гладкой плоскости //
Исследование периодических движений и устойчивости механических
систем.—М., 1983.—С. 13—19.
121. Милнор Дж. Теория Морса.— М.: Мир, 1965.— 184 с.
122. М и н д л и н И. М. Об устойчивости диска, несущего гироскоп.— Инж.
журн.— 1964.— Т. 4, вып. 1.— С. 101—104.
123. М и н д л и н И. М. Об устойчивости движения тяжелого тела
вращения на горизонтальной плоскости / Инж. журн.— 1964.— Т. 4, вып. 2.—
С. 225—230.
124. Мин длин И. М. Об устойчивости движения волчка на
горизонтальной плоскости при действии сухого трения скольжения // Инж. журн.—
1965.—Т. 5, вып. 2.—С. 211—216.
125. Миндлин И. М., Пожарицкий Г. К. Об устойчивости
стационарных движений тяжелого тела вращения на абсолютно шероховатой
горизонтальной плоскости / Прикл. мат. и механ.—1965.— Т. 29,
вып. 4.— С. 742—745.
126. М и т р о п о л ь с к и й Ю. А. Метод усреднения в нелинейной
механике.— Киев: Наукова думка, 1971.— 440 с.
127. Мозер Ю. Лекции о гамильтоновых системах.— М.: Мир, 1973.—
167 с.
128. Моисеев Н. Н. Асимптотические методы в нелинейной механике.—
М.: Наука, 1981.— 400 с.
129. Морозов В. М. Об одном случае устойчивости неустановившегося
движения волчка на плоскости / Вестн. МГУ. Сер. 1, Мат., механ.—
1964.— № 3.—С. 70—74.
130. Морозов В. М. К задаче об устойчивости вертикального вращения
волчка на плоскости с учетом вязкого сопротивления / Вест. МГУ.
Сер. 1, Мат., механ.—1965.—№ 3.—Стр. 59—64.
131. Мощу к Н. К. Исследование движений твердого тела на абсолютно
гладкой плоскости и плоскости с вязким трением.— М., 1983.— 24 с.—
Деп. в ВИНИТИ 06.07.1983, № 3716-83.
324
132. Mo щук Н. К. Качественный анализ движения тора по
горизонтальной плоскости с малым трением Ц Исследование периодических
движений и устойчивости механических систем.— М.: Изд-во МАИ, 1983.—
С. 26—29.
133. М о щ у к Н. К. О движении шара Чаплыгина на горизонтальной
плоскости / Прикл. мат. и механ.— 1983,— Т. 47, вып. 6.— С. 916—921.
134. Мощу к Н. К. Исследование движения тяжелого твердого тела на
неподвижной горизонтальной плоскости.— Дис. ... канд. физ.-мат.
наук,—М., МАИ, 1983.— 117 с.
135. Мощу к Н. К. О движении тяжелого твердого тела на горизонталь-
нон плоскости с вязкпм трением // Прикл. мат. и механ.— 1985.— Т. 49,
вып. 1.—С. 66—71.
136. М о щ у к Н. К. Качественный анализ движения тяжелого тела
вращения на абсолютно шероховатой плоскости / Прикл. мат. и механ.—
1988.— Т. 52, № 2.— С. 203—210.
137. М у ш т а р и X. М. О катании тяжелого твердого тела вращения по
неподвижной горизонтальной плоскости // Мат. сб.—1932,— Т. 39,
№ 1—2.—С. 105—126.
138. Неймарк Ю. И., Ф у ф а е в Н. И. Динамика неголономных
систем.— М.: Наука, 1967.— 519 с.
139. Нейштадт А. И. Прохождение через сепаратрису в резонансной
задаче с медленно меняющимся параметром // Прикл. мат. и механ.—
1975.—Т. 39, вып. 4.—С. С21—632.
140. Н е й ш т а д т А. И. Об эволюции вращения твердого тела под
действием суммы постоянного и диссипативного возмущающего моментов //
Изв. АН СССР. Механ. тв. тела.— 1980.— № 6,— С. 30—36.
141. Нейштадт А. И. Оценки в теории Колмогорова о сохранении услов-
по-периодических движений // Прикл. мат. и механ., 1981.— Т. 45,
вып. 6.— С. 1016—1025.
142. Н и к о л е н к о И. В., Подолян Д. С. Исследование областей
устойчивых движений тела, катящегося по шероховатой плоскости // Динам.
мех. систем.—Киев, 1985.—С. 2—13.—Деп. в УкрНИИНИТИ 2.12.85,
N° 2640-УК.
143. Николенко И. В., Терещенко Н. В., Крушельниц-
кая Е. А. Области устойчивости стационарных движений тора,
катящегося без скольжения по горизонтальной плоскости // Колебания
механических систем.—Киев, 1983.—С. 40—56.—Деп. в УкрНИИНИТИ
30.06.1983, № 652УК-Д83.
144. Орешкина Л. Н. Некоторые обобщения задачи о санях
Чаплыгина / Мех. тв. тела.— Киев, 1986.— № 18.— С. 34—39.
145. Остроградский М. В. Мемуар о мгновенных перемещениях
систем, подчиненных переменным условиям / Полн. собр. трудов. Т. 2.—*
Киев: Изд-во АН УССР, 1961.—С. 32—59.
146. Парс Л. А. Аналитическая динамика.— М.: Наука, 1971— 635 с.
147. Паскаль М. Асимптотическое решение уравнений движения
кельтского камня II Прикл. мат. и механ.— 1983.— Т. 46, вып. 2.— С. 321—
329.
148. Паскаль М. Применение метода осреднения к исследованию
нелинейных колебаний кельтского камня // Прикл. мат. и механ.—1986,—
Т. 50, вып. 4.— С. 679—681.
149. Перри Дж. Вращающийся волчок.— М.; Л.: Гл. ред. науч.-популяр-
ной и юношеской лит., 1935.— 92 с.
150. Персидский К. П. О характеристичных числах
дифференциальных уравнений / Изв. АН КазССР. Мат. и механ.—1947.— № 42,
вып. 1.— С. 5—47.
151. Пожарицкип Г. К. О построении функций Ляпунова из интегралов
уравнений возмущенного движения / Прикл. мат. и механ.—1958.—
Т. 22, вып. 2.-С. 145-154.
152. Пожарицкий Г. К. Исчезающие скольжения механических систем
с трением // Прикл. мат. и механ.—1965.— Т. 29, вып. 3.— С. 558—
563.
325
153. П о й д а В. К. Об устойчивости в целом катящегося диска II Вест
ЛГУ.- 1981.- «Ys 19.- С. 82-87.
154. Пуанкаре А. Идеи Герца в механике //Т. Герц. Принципы
механики, изложенные в новой связи,—М.: Изд-во АН СССР, 1959 —
С. 310-333.
155. Пэнлеве П. Лекции о трении.—М.: Гостехиздат, 1954—316 с.
156. Раус Э. Дж. Динамика системы твердых тел. Т. 2.— М.: Наука, 1983.—
544 с.
157. Рашевский П. К. Курс дифференциальной геометрии.— М.:
Гостехиздат, 1956.— 420 с.
158. Румянцев В. В. Об устойчивости движения по части
переменных / Вестн. МГУ. Мат., механ.— 1957, As 4.— С. 9—16.
159. Румянцев В. В. Об устойчивости движевия гиростатов
некоторого вида / Прикл. мат. и механ. 1961.—Т. 25, вып. 4.—С. 778—784.
160. Румянцев В. В. Об устойчивости стационарных движений
спутников.— М.: ВЦ АН СССР, 1967.— 141 с.
161. Р у м я н ц е в В. В. Об устойчивости вращения тяжелого гиростата на
горизонтальной плоскости / Изв. АН СССР, Мех. тв. тела.—1980.—
№ 4.—С. 11—21.
162. Румянцев В. В. К задаче об устойчивости вращения тяжелого
гиростата на горизонтальной плоскости с трением // Современные
проблемы механики и авиации.— М.: Машиностроение, 1982.— С. 263—272.
163. Румянцев В. В., Карапетян А В. Устойчивость движений не-
голономных систем Ц Итоги науки и техники. Общая механика. Т. 3.—
М.: ВИНИТИ, 1976.—С. 5—42.
164. Савин Г. Н., Путята Т. В., Фра длин Б. Н. Очерки развития
некоторых фундаментальных проблем механики.— Киев: Наукова
думка, 1964.— 376 с.
165. Сальникова Т. В. О существовании дополнительных
аналитических интегралов в динамике твердого тела.— Дис. ... канд. физ.-мат.
наук.—М., 1985.—101 с.
166. Самсонов В. А. О трении при скольжении и верчении тела / Вестн.
МГУ. Мат., мех.— 1981.—№ 2.—С. 76—78.
167. Самсонов В. А. Качественный анализ задачи о движении волчка
по плоскости с трением / Изв. АН СССР. Механ. тв. тела.—1981.—
№ 5.- С. 29—35.
168. С е м е н о в а Л. Н. О теореме Рауса для неголономных систем /
Прикл. мат. и механ.— 1965.—Т. 29, вып. 1.—С. 156—157.
169. Сивухин Д. В. Общий курс физики. Т. 1. Механика.— М.: Наука,
1989.— 576 с.
170. Синицын В. А. О движении твердого тела с плоским основанием
по шероховатой плоскости // Проблемы аналитической механики и
управления движением.— М.: ВЦ АН СССР, 1985.— С. 87—93.
171. С ы е й л С. Топология и механика / Успехи мат. наук.— 1972.— Т. 27,
вып. 2.— С. 77—133.
172. Смирнов В. И. Курс высшей математики, Т. 3, ч. 2.— М.:
Гостехиздат, 1957.— 674 с.
173. С м о р о д и н с к и й Я. Волчок-акробат / Наука и жизнь.—1969.—
№ 7.- С. 76—78.
174. Соколов В. С. О проявлении гироскопического эффекта при
движении некоторых волчков.—Курск, 1980.—26 с—Деп. в ВИНИТИ
30.06.1980, № 2691-80.
175. Соколов В. С. Об устойчивости волчка Томсона.—Курск, 1981.—
29 с- Деп. в ВИНИТИ 17.12.1981, № 5741-81.
176. С о к о л ь с к и и А. Г. Об устойчивости автономной гамильтоновой
системы с двумя степенями свободы в случае равных частот / Прикл.
мат. и механ.— 1974.— Т. 38, вып. 5.— С. 791-799.
177. Сокольский А. Г. Об устойчивости автономной гамильтоновой сяк
стемы с двумя степенями свободы при резонансе первого порядка //
Прикл. мат. и механ.— 1977.— Т. 41, вып. 1.— С. 24-33.
326
178. Сокольский А. Г. Доказательство устойчивости лагранжевых
решений при критическом соотношении масс // Письма в
Астрономический журнал.— 1078.—Т. 4, № 3,—С. 148—152.
179. С о к о л ь с к и й А. Г. Об устойчивости автономной гамильтоновой
системы с двумя степенями свободы в случае нулевых частот / Прикл.
мат. и механ.— 1981.— Т. 45, вып. 3.— С. 441—449.
180. Степанов В. В. Курс дифференциальных уравнений.— М.: Гостех-
издат, 1952.— 468 с.
181. Стокер Дж. Нелинейные колебания в механических и
электрических системах.— М.: Изд-во иностр. лит., 1953.— 256 с.
182. Сумбатов А. С. О применении некоторых обобщений теоремы
площадей в системах с качением твердых тел / Прикл. мат. и механ.—
1976.— Т. 40, вып. 4.— С. 599—605.
183. Сумбатов А. С. Интегралы, линейные относительно скоростей.
Обобщения теоремы Якоби // Итоги науки и техники. Общая механика.
Т. 4.— М.: ВИНИТИ, 1979.— С. 3—57.
184. Сумбатов А. С. К теореме площадей // Задачи исследования
устойчивости и стабилизации движения.— М.: ВЦ АН СССР, 1982.—
С. 80-86.
185. Сумбатов А. С. О законе изменения кинетического момента шара,
катающегося по неподвижной поверхности // Прикл. мат. и механ.
1983.—Т. 47, вып. 5.—С. 867-869.
186. Сумбатов А. С. Некоторое инвариантные соотношения в задаче о
движении тела по горизонтальной гладкой плоскости / Прикл. мат. и
механ.— 1988.— Т. 52. № 4.— С. 34—41.
187. Суслов Г. К. К вопросу о катании поверхности по поверхности //
Киевские университетские известия.— 1892.—№ 6.—С. 1—41.
188. Суслов Г. К. Теоретическая механика.— М.; Л.: Гостехиздат, 1946.—
655 с.
189. Татаринов Я. В. Портреты классических интегралов задачи о
вращении тяжелого твердого тела вокруг неподвижной точки // Вест.
МГУ. Мат. механ — 1974.— № 6.—С 99—105.
190. Татаринов Я. В. К исследованию фазовой топологии компактных
конфигураций с симметрией // Вест. МГУ. Мат., механ.— 1973.— № 5.—
С. 70—77.
191. Татаринов Я. В. Слабо неголономное представление задачи о
качении твердого тела и возможности усреднения по фазовым торам I/
Изв. АН СССР. Механ. тв. тела.—1988.-№ 1.—С. 25—33.
192. Федоров Ю. Н. О качении диска по абсолютно шероховатой
плоскости / Изв. АН СССР. Механ. тв. тела.— 1987.— № 4.— С. 67—75.
193. Ф у ф а е в Н. А. Катание шара по горизонтальной вращающейся
плоскости / Прикл. мат. и механ.—1983.—Т. 47, вып. !.—С. 43—47.
194. Ф у ф а е в Н. А. Катание тяжелого однородного шара по шероховатой
сфере, вращающейся вокруг вертикальной оси I/ Прикл. механ.— 1987.—
Т. 23, № 1.— С. 98—101.
195. X а р л а м о в А. П. Обобщение задачи Чаплыгина о качении тяжелого
тела вращения на горизонтальной плоскости II Механ. тв. тела.—
1984.— Вып. 16.— С. 50-56.
196. Харламов А. П. Гирошар Жуковского II Механ. тв. тела.— Киев,
1985.—Вып. 17.—С. 9-15.
197. Харламов А. П. Гирошар Жуковского (специальные случаи) /
Механ. тв. тела.— Киев, 1986.— № 18.— С. 22—34.
198. Харламова Е. И. Качение шара по наклонной плоскости / Прикл.
мат.и механ.— 1958.— Т. 22, вып. 4.— С. 504-509.
199. Хейл Дж. Колебания в нелинейных системах.— М.: Мир, 1966.—
230 с.
200. Холостова О. В. О стационарных движениях твердого тела с
острым краем по абсолютно гладкой горизонтальной плоскости //
Проблемы механики управляемого движения. Нелинейные динамические
системы.—Пермь: Изд-во ПГУ, 1986,—С. 160—164.
327
201. Холостова О. В. О некоторых динамических эффектах твердого
тела на абсолютно шероховатой сферической поверхности II Изв. АН
СССР. Механ. тв. тела.— 1986.—№ 6.— С. 51—56.
202. Чаи л ы г и н С. А. О движении тяжелого тела вращения на
горизонтальной плоскости / Труды отделения физических наук Общества
любителей естествознания, антропологии и этнографии.—1897.— Т. 9
вып. 1.— С. 10—16.
203. Чаплыгин С. А. О некотором возможном обобщении теоремы
площадей с применением к задаче о катании шаров / Мат. сб.— 1897.—
Т. 20, вып. 1.— С. 1—32.
204. Чаплыгин С. А. О катании шара по горизонтальной плоскости II
Мат. сб.—1903.—Т. 24, вып. 1.—С. 139—168.
205. Чаплыгин С. А. К теории движения неголономных систем.
Теорема о приводящем множителе / Мат. сб.— 1911.—Т. 28, был. 2.—С. SOS-
SI^
206. Ч е з а р и Л. Асимптотическое поведение и устойчивость решений
обыкновенных дифференциальных уравнений.— М.: Мир, 1964.— 477 с.
207. Черноусько Ф. Л. О движении спутника относительно центра
масс под действием гравитационных моментов // Прикл. мат. и
механ.— 1963.— Т. 27, вып. 3.— С. 474-483.
208. Ч е т а е в Н. Г. Устойчивость движения.— М.: Наука. 1989.— 176 с.
209. Шапошников В. П. О стационарных движениях твердого тела
на абсолютно шероховатой плоскости // Проблемы механики
управляемого движения. Нелинейные динамические системы.— Пермь: Изд-во
ПГУ, 1985.— С. 149—157.
210. Ш апо шников В. П. Области возможного движения тел с острым
краем на абсолютно гладкой плоскости.— М.: Моск. авпац. ин-т, 1985.—
Рукопись деп. в ВИНИТИ 28.11.85, № 8224-В.
211. Штаерман Э. Дифференциальные уравнения движения пластинки,
катящейся без скольжения по неподвижной поверхности.— Изв. Киев,
ун-та, 1915.— Т. 55, № 1.— С. 29—47.
212. Andoyer M. H. Cours de mecaniquee celeste.— Paris: Gaulhier-Villars,
1923.—T. 1—440 p.; 1926.—T. 2.-454 p.
213. A pp ell P. Sur une forme generate des equation de la dynamique //
Comptes Rendus hebdomadaires des Seances de FAcademie des
Sciences.— 1899.— T. 129.— P. 423—427.
214. Appell P. Les mouvements de roulement en dinamique.—Paris: Gau-
thier-Villars, 1899.-70 p.
215. Appell P. Sur Integration des equations du mouvement d'un corps pe-
sant de revolution roulant par une arete circulaire sur un plan horizontal;
cas parficulier du cerceau // Rendiconti del circolo matematico di
Palermo.— 1900.— T. 14.— P. 1—6.
216. Appell P. Sur le mouvement d'une bille de billard avec frottement de
roulement // J. des mathematiques pures et appliquees.— 1911.— Ser. 6,
t. 7.— P. 85—96.
217. Barrar R. A proof of convergence of the Poincare —von Zeipel
procedure in celestial mechanics // Amer. J. Math.—1966.—V. 88, No. 1.—
P. 206—220.
218. В r a a m s CM. On the influence of friction on the motion of a top //
Physica.- 1952.- V. 18, No. 8-9.- P. 503-514.
219. Bra am s CM. The symmetrical spherical top / Nature.— 19o2.—V. 17U,
No. 4314.— P. 31. 00 „ 0
220. Braams CM. The tippe-top / Amer. J. Fhys.— 1954.— V. 22, No. 8.—
221 Br о с k J. E. Sphere on imperfectly rough plane / Trans. ASME. J. Appl.
Mech.— 1979.— V. 46, No. 3.— P. 713—714.
222 Del Campo A. R. Tippe top (topsy-turnee top) / Amer. J. Piiys.—
" 1955.-V. 23, No. 8.-P. 544-545.
223 Car a the odor у С Der Schlilten // Zeitschnft fur angewandte Matne-
matik und Mechanik— 1933.—Bd 13.—S. 71—76.
328
224. С a ugh е у Т. К. A mathematical model of the «rattleback» ff Int. J.
of Non-Linear Mechanics.—1980.—V. 15, No. 4—5.— P. 293—302.
225. Chapman H. W. The Problem of Columbus / Philosophical Journal.—
1903.— V. 5, ser. 6.— P. 458—47S.
226. С I e b s с h A. Ober die Bewegung eines Korpers in einer Flussigkeit ff
Math. Ann.— 1871.—Bd 3.—S. 238—262.
227. Cohen R. J. The tippe top revisited / Amer. J. Phys — 1977.— V. 43,
No. 1.—P. 12—17.
228. Cournot A. A. Mfrnoire sur le mouvement d'un corps rigide, soulenu
par un plan fixe ff J. fur die reine und angewandte Mathematik.— 1829.—
Bd 5, H, 2.— S. 133—162.
229. Cournot A. A. Du mouvement d'un corps sur un plan fixe, quand on
a egard a la resistance du frottement, et qu'on ne suppose qu'un seul
point de contact ff J. fur die reine und angewandte Mathematik.—1830.—
Bd 5, H, 3.— S. 223—249.
230. Cournot A. A. Du mouvement d'un corps sur un plan fixe, quand on a
egard a la resistance du frottement ff J. fur die reine und angewandte
Mathematik.— 1831.— Bd 8, И. 1.— S. 1—12.
231. Crabtree H. An elementary treatment of the theory of spinning tops
and gyroscopic motion / Chelsea Publishing Company.—1967.—193 p.
232. Distely M. Ober Rollcurven und RoIIflachen ff Zeitschrifl fur Mathe-
matik und Physik.— 1898.—Bd 43, H. 1— S. 1—35.
233. D i s t e 1 v M. Ober Rollcurven und RoIIflachen ff Zeitschrift fur
Mathematik und Physik.— 1901,— Bd 46.— S. 134—181.
234. Erismann T. Theorie und Anwendungen des echten Kugelgetriebes /
Zeitschrift fur Angewandte Mathematik und Physik.—1954.— V. 5,
Fasc. 5.— P. 355—388.
235. Euler J. A. Recherches plus exactes sur l'effet des moulins a vent /
Mem. Acad. Roy. Sci. Berlin.— 1758.— Bd 12.— S. 165—234.
236. Euler L. De minimis oscillationibus corporum tarn rigidorum quam
flexililium, methodus nova et facilis / Commentarii Academiae scien-
tiarum imperiales Petropoiitanae. 1734—1735.—1740.— T. 7,— P. 99—
122.
237. Euler L. Du mouvement de rotation des corps solides autour d'un axe
variable / Histoire de Г Academic Royale des Sciences.— Berlin.— 1758—
1765.— V. 14.— P. 154-193.
238. Ferrers N. M. Extension of Lagrange's equations ff Quart. J. of pure
and applied Mathematics.— 1872.—V. 12, No. 45.—P. 1—5.
239. Finck B. Note sur la toupie ff Nouvelles Annales des Mathematiques.—
1850.— T. 9.— P. 310—316.
240. Fokker A. D. The rissing top, experimental evidence and theory /
Physica.— 1941.— V. 8, No. 6.— P. 591—596.
241. Fokker A. D. The tracks of tops pegs on the floor / Physica.— 1952.—
V. 18, No. 8—9.— P. 497—502.
242. Freeman I. M. The tippe top again / Amer. J. Phys.— 1956.— V. 24,
No. 3.— P. 178.
243. Gallop E. G. On the rise of a Spinning Top / Proc. Cambr. Phylos.
Soc— 1904 — V. 19, pt. 3.— P. 356—373.
244. Gebbia M. Sulla integrabilita delle condizioni di rotolamento di un
corpo solido sorpa un altro, e su qualche questione geometrica che vi e
connessa / Rendiconti del Chcolo Matematico di Palermo.—1905.—
T. 20.— P. 265—303.
245. Gray A. A Treatise on gyrostatics and rotational motion / London: Ma-
cmillan, 1918.— 530 p.
246. Hadamard J. Sur les mouvements de roulement / Comptes Rendus
hebdomadaires des Seances de TAcademie des Sciences.— 1894.— T. 118.—
P. 911—912.
247. Hadamard J. Sur les mouvements de roulement ff Appe 11 P. Les
mouvements de roulement en dinamique.— Paris: Gauthier-Villars, 1899.—
P. 47-68.
329
248. Hadamard J. Sur certains systems d'equations aux differentielles
totales I/ Appell P. Les mouvements de roulement en dinammue —
Paris: Gauthier-Viliars, 1899.— P. 69—70.
249. Hamel G. Die Lagrange — Eulerschen Gleichungen der Mechanik //
Zeitschrift fur Mathematik und Physik— 1904.— Bd 50.— S. 1—57.
250. H а г i n g x J. A. Miraculous top Й Ingenieur.— 1952.— V. 64, No. 4 —
P. 013-017.
251. Hart J. B. Angular momentum and tippe top / Amer. J. Phvs.— 1959 —
V. 27, No. 3 - P. 189.
252. Hugenholtz N. M. On tops rising by friction / Fhysica.— 1952 —
V. 18, No. 8—9.— P. 515—527.
253. Jacobs LA. Note on the behavior of a certain symmetrical lop //
Amer. J. Phys.—V. 20, No. 8.—P. 517—518.
254. J e 11 e 11 J. H. A treatise on the Theory of Friction.— Dublin; London:
Macmillan, 1872.—230 p.
255. Johnson F. F. The tippy top / Amer. J. Phys.— I960.— V. 28, No 4 —
P. 406-407.
256. Johnston G. W. The dynamics of a curling stone // Canadian
Aeronautics and Space J.— 1981 —V. 27, No. 2.— P. 144—160.
257. Kane T. R., Levinson D. A. A realistic solution of the symmetric
top problem / Trans. ASME J. AppL Mech. Ser. E.— 1978 — V. 45, No. 4.—
P. 903—909.
258. Kane T. R., Levinson D. A. Realistic mathematical modeling of
the rattleback / International Journal Non-Linear Mechanics.—1982.—
V. 17, No. 3.— P. 175—186.
259. Klein F. The mathematical theory of the top / Klein F. Gesammel-
te mathematische Abhandlungcn. Bd 2.— Berlin: Springer, 1922.— S. C18—
654.
260. Klein F. On the stability of a sleeping top // Klein F. Gesammelte
mathematische Abhandlungen. Bd 2.— Berlin: Springer. 1922.— S. 655—
658.
261. Klein F.T Sommerfeld Л. t)ber die theorie des Kreisels.—H. i—
4.—Leipzig: B. Teubner, 1897—1910.—966 S.
262. Korteweg D. Ueber eine ziemlich verbreitete unrichtige Behandlungs-
weise eines Problemes der rollenden Bewegung und insbesondere uber
kleine rollende Schwingungen um eine Gleichgewichtslage / Nieuw Ar-
chiefvoor Wiskunde,— 1899 — Bd 4.— S. 130—155.
263. Korteweg D. Extrait d'une lettre a M. Appell / Rendiconti del cir-
colo matematico di Palermo.— 1900.— V. 14.— P. 7—8.
264. Lindberg R. E., Longman R. W. On the dymanic behavior of
the wobblestone // Acta mechanica.— 1983.— V. 49, No. 1—2.— P. 81—94.
265. Lindelof E. Sur le mouvewent d'un corps de revolution roulant sur
un plan horizontal / Acta Societatis Scientiarum Fennicae.— 1985.— T. 20f
No. 10.— P. 1—18.
266. Liu Yanzhu. On the motion of an asymmetrical rigid body rolling
on a horisontal plane / Zeitschrift fur Angewandte Mathematik und
Mechanik.— 1985.— Bd 65, No. 3.— S. 180—183.
267. Liu Yanzhu, Zhang Wen. The global motion of a top rotating on
a rough plane // Proc. Int. Conf. Nonlinear Mech. Beijing, 1985.— P. 1257—
1261.
268. Luis Novaes F. F. Estabilidade das rotagoes de unia esfera sob dife-
rentes condicoes de contacto com um piano / COBEM83: An. 7 Congr.
bras. eng. mec, Uberlandia, 13—16 dez., 1983. V. B. Uberlandia, s. a.—
P. 413—422.
269. Magnus K. Die Stabilitat der Drehbewegungen eines Unsymmetn-
schen Korpers auf horizontaler Unterlage / Aus Theorie und Praxis^ der
Ingenieurwissenschaften.— Berlin; Munich; Dusseldorf, 1974.—
p ig 23
270. M a gnu's K. Zur Theorie der Keltischen Wackelsteine / Zeitschrift
fur Angewandte Mathematik und Mechanik.—1974.—Bd 54, H. 4.—
S. 54—55.
330
271. Neumann C. Ober die rollende Bewegung einer Korpers auf einer ge-
gebenen Horizontalebene unter dem Einfluss der Schwere // Mathemati-
sche Annalen.— 1886.— Bd 27.— S. 478—505.
272. N о e t h e r F. t)ber rollende Bewegung einer Kugel auf Rotationsfla-
chen.— Leipzig: B. Teubner, 1909.— 56 S.
273. O'Brien S., Synge J. L. The instability of the lippe-top explained
by sliding friction II Proc. Roy. Irish Acad. Sec. A.— 1954.— V. 56, No. 3.—
P. 23-35.
274. Parkyn D. G. The inverting top / Math. Gazette.—1956.—V. 40,
No. 334.— P. 260—265.
275. Parkyn D. G. The rising of tops with rounded pegs / Physica.—
1958.— V. 24, No. 5.—P. 313—330.
276. PIiskin \V. A. The lippe-top (topsy-turvy lop) / Amer. J. Phys.—
V. 22, No. 1.— P. 28—32.
277. P о i n s о t L. Theorie nouvelle de la rotation des corps.— Paris, 1834.
278. Poisson S. D. Traite de mecanique. T. 2.—Paris: Bachelier, 1833.—
782 p.
279. P u i s e u x V. Du mouvemcnt d'un solide de revolution pose sur un plan
horizontal // J. des Mathematiques pures et appliquees.— 1848.— T. 13.—
P. 249—256.
280. Puiseux V. Solution de quelques question relatives au mouvement d'un
corps solide pesant pose sur un plan horizontale // J. des mathematiques
pures et appliquees.— 1852.— T. 17.— P. 1—30.
281. R e s a 1 H. Sur un point de la theorie mathematique des effets du jeu
de billard / Comptes Rendus hebdomadaires des Seances de TAcademie
des Sciences.— 1882.— T. 94.— P. 1548—1551.
282. R e s a I H. Du choc de deux billes posees sur un tapis de billard /
Comptes Rendus Hebdomadaires des Seances de TAcademie des Sciences.—
1882.—T. 95.—P. 655—659.
283. Re sal H. Commentaire a la theorie mathemaque du jeu de billard /
J. des mathematiques pures et appliquees.— 1883.— T. 9.— P. 65—98.
284. R e s a 1 H. Traite de mecanique generale.— T. 7.— Paris: Gauthier-Vil-
lars, 1889.— 389 p.
285. Routh E. J. A treatise on the stability of a given state of motion.—
London: Macmillan and Co., 1877.
286. S1 e s s e r G. M. Notes on rigid dynamics / Quart. J. of mathematics.—
1861.— V. 4.— P. 65—77.
287. Smith A. Note on the theory of a spinning top // Cambr. Math. J.—
1846.— V. 1.- P. 47—48.
288. Stackel P. Elemenlare Dynaniik der Punktsysteme imd starren Kor-
per / Enzvclopadie der Malhematischen Wissenschaften.—Bd 4(1),
H. 4.— Leipzig: B. Teubner, 1908.— S. 435—691.
289. Stefanini L. Behavior of a real top / Amer. J. Phys.—1979.—
V. 47, No. 4.— P. 346—350.
290. S t ii b 1 e r E. Rollbewegung einer homogenen sclnveren Kugel auf einer
Zylinderflache / Zeitschrift fur Mathematik und Physik.—1909.—
Bd 57.— S. 260—271.
291. Sylvester J. J. On the motion of a rigid body acted on by no
external forces / Phylosophical Transactions of the Royal Society of London.—
1866.— V. 156.— P. 757-780.
292. Synge J. L. On a case of instability produced by rotation / Phylos.
Mag.— 1952.—V. 43, No. 342.—P. 724—728.
293. Thomson \V., Та it P. Trealise of natural Philosophy. V.
1—London: Macmillan and Co., 1867.— 727 p.
294. Vierkandt A. t)ber gleitende und rollende Bewegung // Monatshef-
te fur Mathematik und Physik.—1892.—Jahrgang 3.—S. 31—54, 97—
134.
295. Walker G. T. On a curious dynamical property of celts // Proc.
Cambridge Phil. Soc— 1895.— V. 8, pi. 5.— P. 305—306.
296. Walker G. T. On a dynamical lop // Quart. J. pure and appl. math.—
1896 — V. 28.— P. 175—184.
331
297. Walker J. The mysterious «rattleback»: a stone spins in one direction
and then reverses / Scientific American.—1979. No. 10.—P. 144—149.
298. Weltner K. Stable circular orbits of freely moving balls on rotating
discs / Amer. J. Phys.— 1979.— V. 47, No. 11.— P. 984—986.
299. Woronetz P. t)ber die rollende Bewegung einer Rreisscheibe auf einer
beliebigen Flache unter der Wirkung von gegebenen Kraften / Mathema-
tische Annalen.— 1909.— Bd 67.— S. 268—280.
300. Wornetz P. t)ber die Bewegung eines starren Korpers, der ohne
Gleitung auf einer beliebigen Flache rollt / Mathematische Annalen.—
1911 — Bd 70.— S. 410—453.
301. Woronetz P. t)ber die Bewegangsgleichungen eines starren Korpers If
Mathematische Annalen.— 1912.— Bd 71 — S. 392-403.
302. Yamamoto T. Piotation of an ellipsoid and reversible top / Sci. Repts
Hirosaka Univ.— 1980.— V. 27, No. 1.— P. 9—16.
ОГЛАВЛЕНИЕ
Предисловие 3
Введение 5
Глава 1. Предварительные сведения из механики 16
§ 1. Некоторые понятия и формулы кинематики твердого тела 16
1. Задание движения твердого тела (16). 2. Углы Эйлера (17). 3. Скорости
и ускорения точек тела (17). 4. Компоненты вектора угловой скорости
(18). 5. Абсолютная и относительная производные вектора (18). 6.
Уравнения Пуассона (19).
§ 2. Движение тела по поверхности. Трение 19
§ 3. Основные динамические величины твердого тела .... 21
1. Геометрия масс (21). 2. Кинетическая энергия (24). 3. Количество
движения (25). 4. Момент количества движения (26). 5. Энергия
ускорений (27).
§ 4. Основные теоремы динамики 27
1. Теорема об изменении количества движения (28). 2. Теорема об
изменении кинетического момента (28). 3. Теорема об изменении
кинетической энергии (30).
§ 5. Уравнения движения твердого тела 31
1. Уравнения, отнесенные к неподвижным осям (32). 2. Уравнения
движения, отнесенные к осям, жестко связанным с телом (32). 3. Уравнения
движения твердого тела по отношению к осям, имеющим произвольно
заданное движение (32).
§ 6. Движение Эйлера — Пуансо 36
1. Уравнения движения и их интегралы (36). 2. Перманентные вращения
(36). 3. Геометрическая интерпретация Пуансо (37). 4. Аналитическое
представление решения динамических ураввений Эйлера (38). 5. Герпо-
лодии (40)., 6. Вычисление углов Эйлера как функций времени (41).
7. Случай динамической симметрии, регулярная прецессия (42).
§ 7. Некоторые дифференциальные уравнения аналитической
динамики 42
1. Уравнения Лагранжа второго рода (42). 2. Уравнения Гамильтона (43).
3. Уравнения Рауса для системы с циклическими координатами (43).
4. Уравнения Чаплыгина (44). 5. Уравнения Воронца (45). 6. Уравнения
Эйлера — Лагранжа (46). 7. Уравнения Аппеля (47).
Глава 2. Исследование движения тяжелого твердого тела на
абсолютно гладкой горизонтальной плоскости 50
§ 1. Уравнения движения 50
1. Получение уравнений движения из теорем об изменении количества
движения и кинетического момента (50). 2. Уравнения Лагранжа (53).
3. Уравнения Рауса (55). 4. Уравнения Гамильтона (56).
§ 2. Двпженпе динамически и геометрически симметричного тела 57
1. Функции Рауса и Гамильтона (57). 2. Стационарные движения и их
устойчивость (61). 3. Пример: стационарные движения динамнчески
симметричного шара (66). 4. Движение симметричного тела в общем
случае (67).
333
§ 3. Качественный анализ движения тела, близкого к
симметричному 7D
1. Переменные действие — угол. Изоэнергетическая невырожденность
невозмущенной системы (71). 2. Свойства возмущенного движения (74).
§ 4. Перманентные вращения твердого тела на гладкой плоскости 76
1. Существование стационарных движений (76). 2. Устойчивость
перманентных вращений (78).
§ 5. Некоторые иадачи динамики эллипсоида на гладкой плоскости 83
1. Исследование устойчивости перманентного вращения эллипсоида (83).
2. Движение, при котором аллипсоид касается плоскости одним из его
главных сечений (88). 3. О несуществовании дополнительного интеграла
в задаче о движении тела, ограниченного эллипсоидальной поверхностью
(93). 4. Качественное исследование движения эллипсоида, близкого
к шару (97).
§ 6. Движение тела с острым краем 102
1. Существование стационарных движений (102). 2. Регулярные прецессии
динамически симметричного тела с острым краем в форме окружности
(105). 3. Устойчивость движения эллиптического диска (109).
§ 7. О бифуркационном множестве в задаче о движении твердого
тела по плоскости 115
Глава 3. Движение твердого тела по неподвижной абсолютно
шероховатой поверхности 119
§ 1. Уравнения движения 119
1. Общая схема решения задачи о движении без скольжения тяжелого
твердого тела по неподвижной горизонтальной плоскости (119). 2. Вывод
уравнений движения твердого тела, движущегося без скольжения по
произвольной неподвижной поверхности (121). 3. Уравнения Воронца
движения тяжелого твердого тела, катящегося без скольжения по
горизонтальной плоскости (129). 4. Уравнения Эйлера — Лагранжа движения
без скольжения твердого тела по произвольной неподвижной
поверхности (136). 5. Уравнения Чаплыгина движения без скольжения твердого
тела по неподвижной горизонтальной плоскости (137). 6. Уравнения
движения твердого тела с острым краем по абсолютно шероховатой
поверхности (139).
§ 2. Движение тела сферической формы по неподвижной
поверхности 143
1. Тяжелый однородный шар на абсолютно шероховатой горизонтальной
плоскости (143). 2. Шар Чаплыгина на горизонтальной плоскости (145).
3. Уравнения движения шара по неподвижной поверхности заданной
формы (150). 4. Тяжелый шар на неподвижной сфере (151). 5.
Устойчивость вращения шара на вершине поверхности двойной кривизны (156).
6. О применении некоторых обобщений теоремы об изменении
кинетического момента в задаче о качении твердого тела по неподвижной
поверхности (160).
§ 3. Движение тела вращения по неподвижной поверхности . . 163
1. Уравнения Воронца движения тела вращения по горизонтальной
плоскости. Теорема Чаплыгина (163). 2. Метод Чаплыгина решения задачи
о движении тяжелого тела вращения на плоскости (166). 3. Движение
тела вращения, ограниченного сферической поверхностью (169). 4.
Устойчивость стационарного вращения тела вокруг вертикали (172). 5.
Регулярные прецессии (175). 6. Об уравнениях задачи о движении без
скольжения тела вращения по поверхности вращения (181). 7. Тяжелое тело
вращения с плоским участком поверхности на сфере (183).
§ 4. Тело с острым краем на неподвижной поверхности . . . 185
1, Стационарные движения диска на абсолютно шероховатой плоскости
и их устойчивость (185). 2. Общий случай движения диска по абсолютно
шероховатой плоскости (190). 3. Дифференциальные уравнения задачи
о движении диска по гладкому горизонтальному льду (193). 4.
Стационарные движения диска на льду и их устойчивость (197). 5.
Качественная картина движения диска по льду в общем случае (201).
§ 5. Перманентные вращения тяжелого твердого тела на
абсолютно шероховатой горизонтальной плоскости .... 202
1. Существование стационарных движений (202). 2. Устойчивость
перманентных вращений (205). S. О перманентных вращениях неоднородного
шара (208).
§ 6. Динамика кельтского камня 209
1. Постановка задачи (209). 2. Устойчивость перманентных вращений
тела вокруг главной оси инерции (211). 3. Нормальные координаты для
334
колебаний вблизи положения равновесия (214). 4. Нормальная форма
нелинейных уравнений возмущенного движения (215). 5. Нелинейные
колебания (217).
§ 7. Простейшие случаи движения однородного эллипсоида по
абсолютно шероховатой плоскости 221
1. Перманентные вращения (221). 2 Случай, когда точка касания
описывает одно из главных сечений эллипсоида (224).
§ 8. Периодические движения эллипсоида, близкого к шару . . 227
1. Уравнения движения (227). 2. Преобразование уравнений движения
(228). 3. Существование периодических движений и их построение (231).
4. Кривая, описываемая точкой касании на плоскости (235). 5.
Вычисление углов Эйлера (237). 6. Реакция плоскости (239). 7. Устойчивость
периодических движений (240).
§ 9. Асимптотическое решение задачи о движении однородного
эллипсоида по абсолютно шероховатой плоскости .... 241
1. Усредненная система уравнений движения (241). 2. Геометрические
свойства усредненного движения (244). 3. Анализ приближенного
решения (245). 4. Случай эллипсоида вращения (248). 5. Движения,
отвечающие полодиям — сепаратрисам (249). 6. Один особый случай
движения (250). 7. Случай движения с малой скоростью центра тяжести
(250). 8. Об асимптотике движения шара Чаплыгина (251).
§ 10. К геометрической интерпретации Пуансо движения твердого
тела в случае Эйлера 251
Глава 4. Твердое тело на неподвижной горизонтальной плоскости
при наличии трения скольжения 255
§ 1. Тяжелый шар на плоскости при наличии трения .... 255
1. Движение шара под действием сухого трения скольжения (255).
2. Учет трения качения и верчения (258). 3. О движении шара под
действием вязкого трения скольжения (262).
§ 2. Стационарные движения тела вращения 264
1. Вводные замечания (264). 2. Теория Контенсу связи между трением
скольжения и трением верчения (265) 3. Интеграл Желле (267). 4.
Стационарные движения неоднородного шара на плоскости с вязким трением
(268) 5. Регулярные прецессии произвольного тела вращения (279).
6. О перманентных вращениях несимметричного тела и их устойчивости
(284).
§ 3. Финальные движения твердого тела на плоскости с вязким
трением 286
1. Классификация финальных движений (287). 2. О финальных
движениях тела вращения (289).
§ 4. Эволюция движения волчка сферической формы на плоскости
с вязким трением .... 291
1. Уравнения движения в переменных Андуайе (292) 2. Разделение
медленных и быстрых движений (295). 3. Эволюция движения волчка на
основе приближенной системы уравнений движения (297). 4. Об
устойчивости эволюции движения волчка в силу точных уравнений
движения (299).
§ 5. Асимптотический анализ динамики эллипсоида на плоскости
с трением скольжения 301
1. Уравнения движения в случае сухого трения (301). 2. Уравнения
движения эллипсоида в форме, удобной для применения метода
усреднения (302). 3. Усредненные уравнения и их первые интегралы (305). 4.
Геометрическая интерпретация усредненного движения (306). 5. О
стремлении эллипсоида вращаться вокруг наибольшей оси (308). 6 Частные
решения усредненных уравнений движения (310). 7. О движении
эллипсоида по плоскости с вязким треиием (312).
§ 6. Шар Чаплыгина па плоскости с трением скольжения . . . 313
1. Уравнения движения в случае вязкого трения и их первые
интегралы (313). 2. Эволюция движения шара на плоскости с вязким трением
(314).
Список литературы 319
DYNAMICS OF A BODY BEING CONTIGUOUS
TO A RIGID SURFACE
BY ANATOLY MARKEEV
Moscow, Nauka, Main Editorial Board for Literature on Physics and
Mathematics, 1991
Readership: Specialists in gyroscopy, dynamics of a rigid body,
analytical mechanics, undergraduate and postgraduate students majoring in
indicated fields.
Summary: Systematical account of main problems, methods and results
in dynamics of bodies being contiguous to a rigid surface is given. Dynamics
of a rigid body on a rough surface, on a smooth horizontal plane and on a
plane with a dry or viscous sliding friction is considered in detail. The book
is based as on a classical investigation of the problem as on publications of
last decades.
Contents: Chapter 1. Preliminary inforfation from mechanics: Kynema-
tics of a rigid body; Motion of a body on a surface. Friction; Main
dynamical characteristics of a rigid body; Principal theorems of dynamics;
Equations of a motion of a rigid body; Euler-Poinsot's mation; Some differential
equations of an analytical mechanics. Chapter 2. Motion investigation of a
heavy rigid body on a smoolh horizontal plane: Motion equations; Motion of
dynamically and geometrically symmetrical body; Qualitative analysis of a
motion of a body close to symmetrical; Permanent rotations of a rigid body
on a smooth plane; Some problems of dynamics of an ellipsoid on a smooth
plane; Motion of a body with an acute edge; Bifurcations in a problem of a
rigid body motion on a plane. Chapter 3* Motion of a rigid body on an
immovable rough surface: Motion equations; Motion of a body of a spherical
shape on an immovable surface; Motion of a body of rotation on an immovable
surface; Body with an acute edge on an immovable surface; Permanent
rotations of a heavy rigid body on an rough horizontal plane; Dynamics of a
rattleback; Elementary cases of a motion of a homogeneous ellipsoid on a
rough plane; Periodical motins of an ellipsoid close to a sphere; Asymtoti-
cal solution in the problem of a motion of a homogeneous ellipsoid on a rough
plane. Chapter 4. A rigid body on an immovable horizontal plane with sliding
friction: Heavy sphere on a plane with friction; Stationary motions of a
body of rotation; Final motions of a rigid body on a plane with viscous friction;
Motion evolution of a top of a spherical shape on a plane with viscous
friction; Asymptotical analysis of dynamics of an ellipsoid on a plane with
sliding friction; Chaplygin's sphere on a plane with sliding friction.
The author: Anatoly Markeev, Dr. Sc. (Phys. & Math.), leading researcher
at the Institute of Problems in Mechanics of the USSR Academy of Sciences,
Professor of the chair of Theoretical Mechanics at the Moscow Aviation
College.