










































































































































































































































































































































































































































































































































































Текст
THE JOUKOVSKY
CENTRAL INSTITUTE FOR AEROHYDRODYNAMICS
COMMISSION FOR PUBLICATION OF THE WORKS OF Prof. N. E. JOUKOVSKY
Prof. N. E. JOUKOVSKY
COLLECTED PAPERS
VOLUME I
GENERAL MECHANICS
Edited by Prof. A. P. KOTELNIKOV
With a Bibliographical Survey Compiled by Prof. V. V. GOLOUBEV
PEOPLE’S COMMISSARIAT OF HEAVY INDUSTRY OF THE USSR
ONTI
(UNITED SCIENTIFIC TECHNICAL PUBLISHING HOUSE)
EDITORIAL OFFICE FOR AVIATION LITERATURE
MOSCOW
19 3 7
LENINGRAD
Э9-/Ч66
центральный аэрогидродинамический институт
им. проф. Н. Е. ЖУКОВСКОГО
КОМИССИЯ ПО ИЗДАНИЮ ТРУДОВ проф. Н. Е. ЖУКОВСКОГО
Проф. Н. Е. ЖУКОВСКИЙ
ПОЛНОЕ
СОБРАНИЕ СОЧИНЕНИЙ
ТОМ I
ОБЩАЯ МЕХАНИКА
Под редакцией проф. А. П. КОТЕЛЬНИКОВА
С биографическим очерком, составленным проф. В. В. ГОЛУБЕВЫМ
ОНТИ НКТП СССР
ГЛАВНАЯ РЕДАКЦИЯ АВИАЦИОННОЙ ЛИТЕРАТУРЫ
И О С К В А 1937 ЛЕНИНГРАД
пр. 598 П. Ih
ПОСТАНОВЛЕНИЕ
СОВЕТА НАРОДНЫХ КОМИССАРОВ.
В ознаменование пятидесятилетия научной ^деятельности профессора
И. Г.ГУКОВСКОГО и огромных заслуг его, как "отца русской рвиацил"
Совет Народных Комиссаров Постановил:
I.Освободить профессора Н.Е.ЖУКОВСКОГО от обязательного чтения
лекций, предоставляя ему прево об*являть курсы более важного научно-
го содержания.
2 .Назначить ему ежемесячный оклад Оодерквния в размере ста тысяч
/100.000/ рублей с распространением на ©тот оклад всех последующих
повышений тарифных ставок.
3 .Установить годичную премию R.E.Чуковского за наилучшие труды
по математике и механике с учреаденим жюри в составе профессора Н.Е.
Ваковского,а также представителей, по одному: от Государственного уче-
ного Совета, от российской Академии Наук, от Физико-математического
факультета Московского Государственного университета и от. Московского
Математического Общества.
4 .Издать труды Н-Е-ЧУ^овского.
Москва, Кремль
3-го декабря Председатель Совета Народных
1920 г. Комиссаров:
Управляющий Д<
С е к р е
нами Совета Народных, ,
Комиссаров: ж.
т а р ь: —~ Гг------------------
ПРЕДИСЛОВИЕ
Весьма важные в теоретическом и практическом отноше-
нии работы проф. Н. Е. Жуковского по механике печатались
в различных периодических изданиях, достать которые иногда
было очень трудно, особенно в провинции. Поэтому еще при
жизни Н. Е. Жуковского, в связи с празднованием в 1910 г.
его сорокалетнего научного юбилея, назрела необходимость
переиздать его работы. В то время была образована редакци-
онная комиссия в составе профессоров: Б. К. Млодзеевского,
С. А. Чаплыгина и Е. А. Болотова, которая пользовалась при
подготовке к изданию указаниями самого автора. Работы
предполагалось расположить в хронологическом порядке. За
1911—1912 гг. был подготовлен и вышел из печати первый
том, содержащий работы за период с 1876 по 1884 г. Начав-
шаяся империалистическая война 1914—1918 гг. задержала
издание, и только после Великой Октябрьской социали-
стической революции явилась возможность его возобно-
вить.
Постановлением Совета Народных Комиссаров РСФСР от
3 декабря 1920 г. было признано необходимым издать собра-
ние сочинений Н. Е. Жуковского Ч Сам Н. Е., оправлявшийся
в то время от тяжелой болезни, не мог принять участие в изда-
нии своих трудов, и фактически работа по изданию началась
только после смерти великого ученого, скончавшегося 17 марта
1921 г. Постановлением ВСНХ был образован Комитет по
увековечению памяти проф. Н. Е. Жуковского, который
совместно с ЦАГИ образовал комиссию для издания тру-
дов Н. Е. под председательством профессора (ныне акаде-
мика) С. А. Чаплыгина.
1 Полный текст постановления (факсимиле) см. стр. 5.
8
ПРЕДИСЛОВИЕ
Комиссии пришлось заняться разысканием работ Н. Е. Жу-
ковского, рассеянных в различных журналах, сборниках и
других изданиях; собиранием отдельных их оттисков, перепи-
ской некоторых материалов; приведением в порядок оставшихся
после Н. Е. Жуковского рукописей; составлением их описи
и разработкой нового плана издания. Так как первый том
сочинений Н. Е. Жуковского, изданный при его жизни в 1911 г.,
еще не был распродан, то комиссией было постановлено в новое
издание включить лишь работы, не вошедшие в первый том.
В первую очередь было решено издать сочинения, которые
имели наиболее актуальное значение для ЦАГИ и для связан-
ных с ним технических кругов, а именно — сочинения по
вопросам гидро- и аэромеханики, авиации и технической
механики вообще. Таким образом из общего числа работ
было выделено 82 работы; они были распределены на
4 тома.
В том второй (первым считается том, изданный в 1911 г.)
вошли сочинения по общим вопросам гидродинамики; в том
третий были включены работы, посвященные вопросам аэро-
динамики и авиации; в том четвертый — общие вопросы меха-
ники и в том пятый — некоторые из неопубликованных или
незаконченных работ (подробный план издания помещен в пер-
вом выпуске второго тома, Труды ЦАГИ, вып. 92).
Дальнейшая подготовка к новому изданию уже ранее на-
печатанных работ Н. Е. Жуковского заключалась в матема-
тической корректуре их, поверке всех вычислений, исправлении
опечаток и недосмотров в [формулах и в тексте, в изгото-
влении новых чертежей, в составлении примечаний, необхо-
димых добавлений и резюме на английском языке. В резуль-
тате этой работы в период 1929—1932 гг. вышли из печати
том II (570 стр.) и том V (175 стр).
Кроме того, комиссией были подготовлены и напечатаны
следующие работы, не опубликованные при жизни Н. Е. Жу-
ковского: „Заметка по вариационному исчислению"; „О движении
воды в открытом канале и о движении газов в трубах"; ..О про-
сачивании воды через плотины4*; „О снежных заносах" (статья
вторая); Лекции по прикладной механике. Были подготов-
лены и прокорректированы французские издания: „Вихревая
ПРЕДИСЛОВИЕ
9
теория винтов" (снабженная новыми рисунками и дополнени-
ями) и „Ветряная мельница типа Н. Е. Ж.“.
Несколько раз была переиздана его „Теоретическая меха-
ника". Несколько раз были изданы „Аналитическая механика" и
„Теоретические основы воздухоплавания" (часть первая).
Дальнейшее печатание отчасти уже подготовленного мате-
риала замедлилось, а затем и все издание по ранее соста-
вленному плану прекратилось, ввиду того что в 1933 г. Коми-
тетом по увековечению памяти Н. Е. Жуковского совместно
с ЦАГИ было постановлено предпринять издание полного
собрания сочинений Н. Е. Жуковского, в которое должны
были войти все его научные работы и лекции, читанные им
в Университете, в Московском высшем техническом училище
и в других учебных заведениях. Комитет заключил с Госу-
дарственным объединенным научно-техническим издательством
(ОНТИ) соответствующий договор. Для этого нового издания
Редакционной коллегией был составлен новый план (прила-
гается в конце настоящего тома). Все работы были разделены
на десять томов с группировкой их по отдельным томам
не в хронологическом, а в систематическом порядке так,
чтобы каждый том занимал в среднем около 20 печ. листов.
Этой комиссией были подготовлены к печати томы I, II, III,
IV и отчасти V, из которых вышли из печати к июню 1936 г.
томы II и III.
17 марта 1936 г. в связи с 15-летием со дня смерти
проф. Н. Е. Жуковского, огромные заслуги которого, как
„отца русской авиации", были отмечены постановлением СНК
РСФСР от 3 декабря 1920 г., подписанным В. И. Лениным,
Совнарком Союза ССР принял постановление об увеко-
вечении памяти ученого.
Постановление было опубликовано за подписью Предсе-
дателя СНК СССР тов. В. М. Молотова.
Совнарком Союза ССР постановил организовать в Воен-
ной Воздушной академии РККА постоянную выставку, посвя-
щенную научной деятельности проф. Жуковского.
Московскому Совету поручено переименовать Мыльников
переулок в Москве, где жил прэф. Жуковский, в улицу Н. Е. Жу-
ковского; произвести капитальный ремонт дома, где жил и
10
ПРЕДИСЛОВИЕ
умер проф. Жуковский и в котором проживает в настоящее
время его семья, и установить на доме мемориаль^ю доску,
посвященную его памяти. - %
Совнарком СССР установил 5 стипендий имени _проф. Жу-
ковского: 3— в Московском авиационном институте и 2—
в Московском государственном университете по механико-мате-
матическому факультету, а также ежегодную премию имени
проф. Жуковского в размере 20000 рублей за лучшую работу
по аэродинамике.
Внучке проф. Н. Е. Жуковского М. И. Домбровской увели-
чена пенсия до 250 рублей в месяц до окончания ею обра-
зования.
Наркомату обороны и Наркомтяжпрому СССР вменено
в обязанность в течение 1936—37 г. издать все научные
труды проф. Н. Е. Жуковского; в первую очередь издать
научные труды, наиболее необходимые для дальнейшего раз-
вития советской авиации.
Для издания трудов проф. Н. Е. Жуковского была обра-
зована редакционная комиссия в составе начальника Военной
Воздушной академии РККА (председатель) и ответственных
работников ЦАГИ и Военной Воздушной академии РККА.
Эта комиссия и приняла на себя завершение издания полного
собрания сочинений проф. Н. Е. Жуковского.
Редакционная Комиссия по
изданию трудов
проф. Н. Е. Жуковского.
ОТ РЕДАКЦИИ
В первом томе помещена краткая биография проф. Н. Е. Жу-
ковского, характеристика его научных работ и обществен-
ной деятельности. Биография написана проф. В. В. Голубевым.1
Настоящий том содержит статьи по теоретической меха-
нике точки, твердого тела и системы, относящиеся ко всем
отделам механики: статике, кинематике и динамике.
Среди работ по общей механике находится обширная док-
торская диссертация: „О прочности движения" (8), работы,
посвященные вариационным принципам (5, 10. 12, 15), неко-
торым задачам динамики точки, связи задачи о движении
точки с задачей о равновесии нити (1, 4, 7, 14, 18).
Очень много статей посвящено ^динамике твердого тела.
Среди них преобладают статьи, в которых рассматривается
задача вращения твердого тела около неподвижной точки
(16, 23,24, 25, 27,29,30,32, 34)и*связь этой задачи с задачей о ра-
вновесии упругой линии: геометрическая интерпретация случая
С. В. Ковалевской, случай Гесса, теория движения полюсов
земли, теория гироскопов и т. п. К этим же работам примы-
кает и работа (33) о движении материальной фигуры по по-
верхности псевдосферы.
Несколько статей относятся к теории удара (2, 3, 13), дви-
жению маятника (9, 26) и еще несколько статей носят различ-
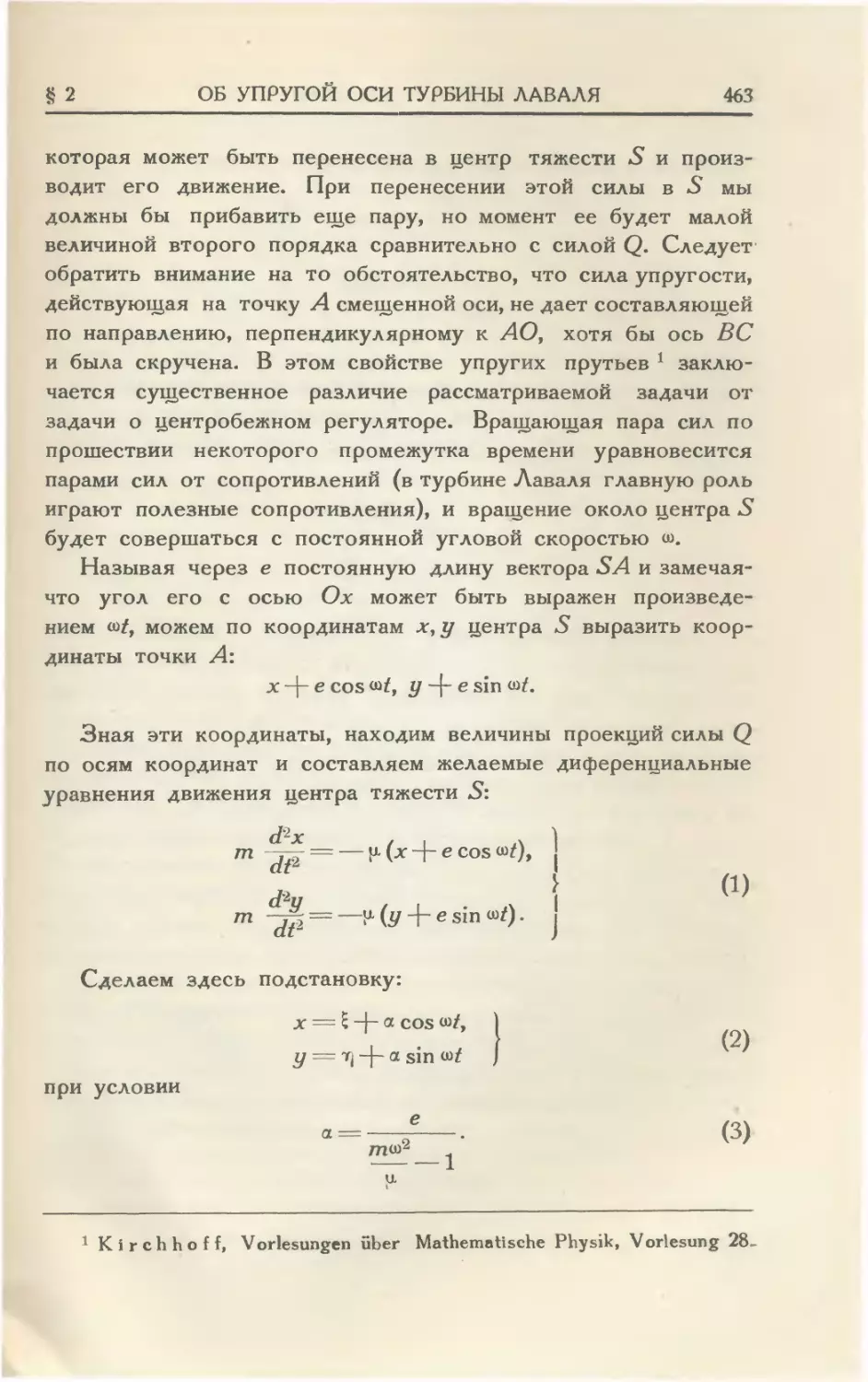
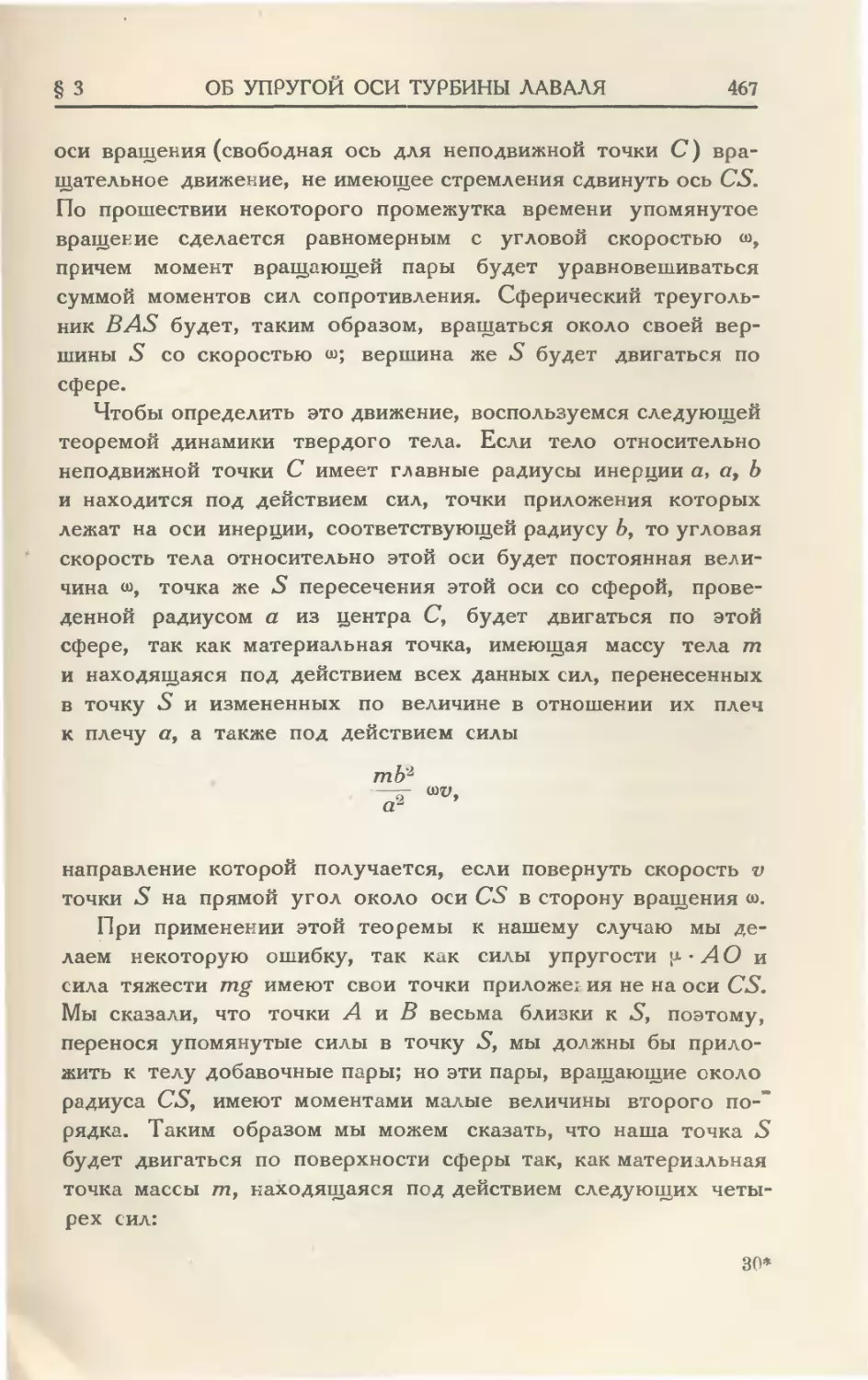
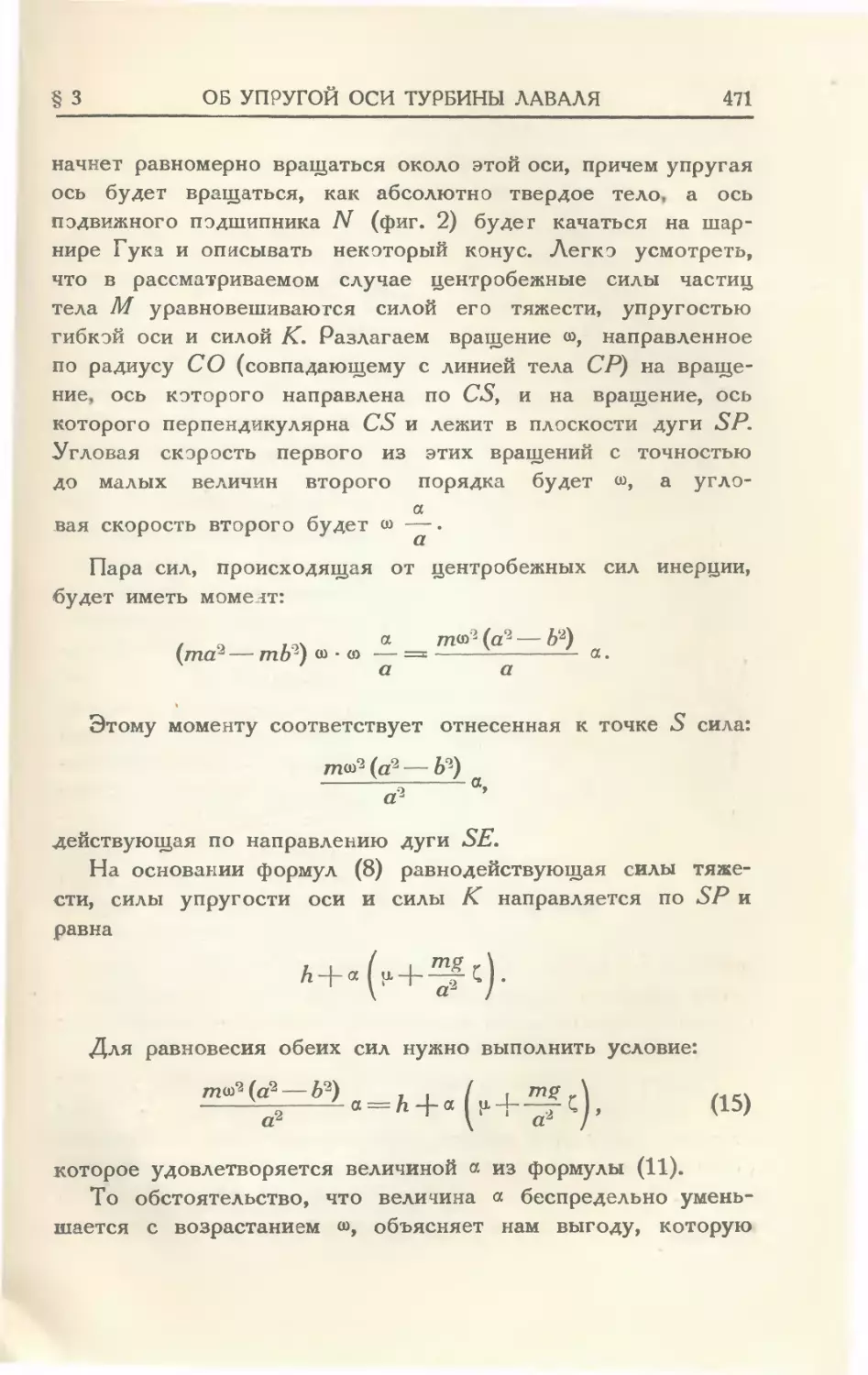
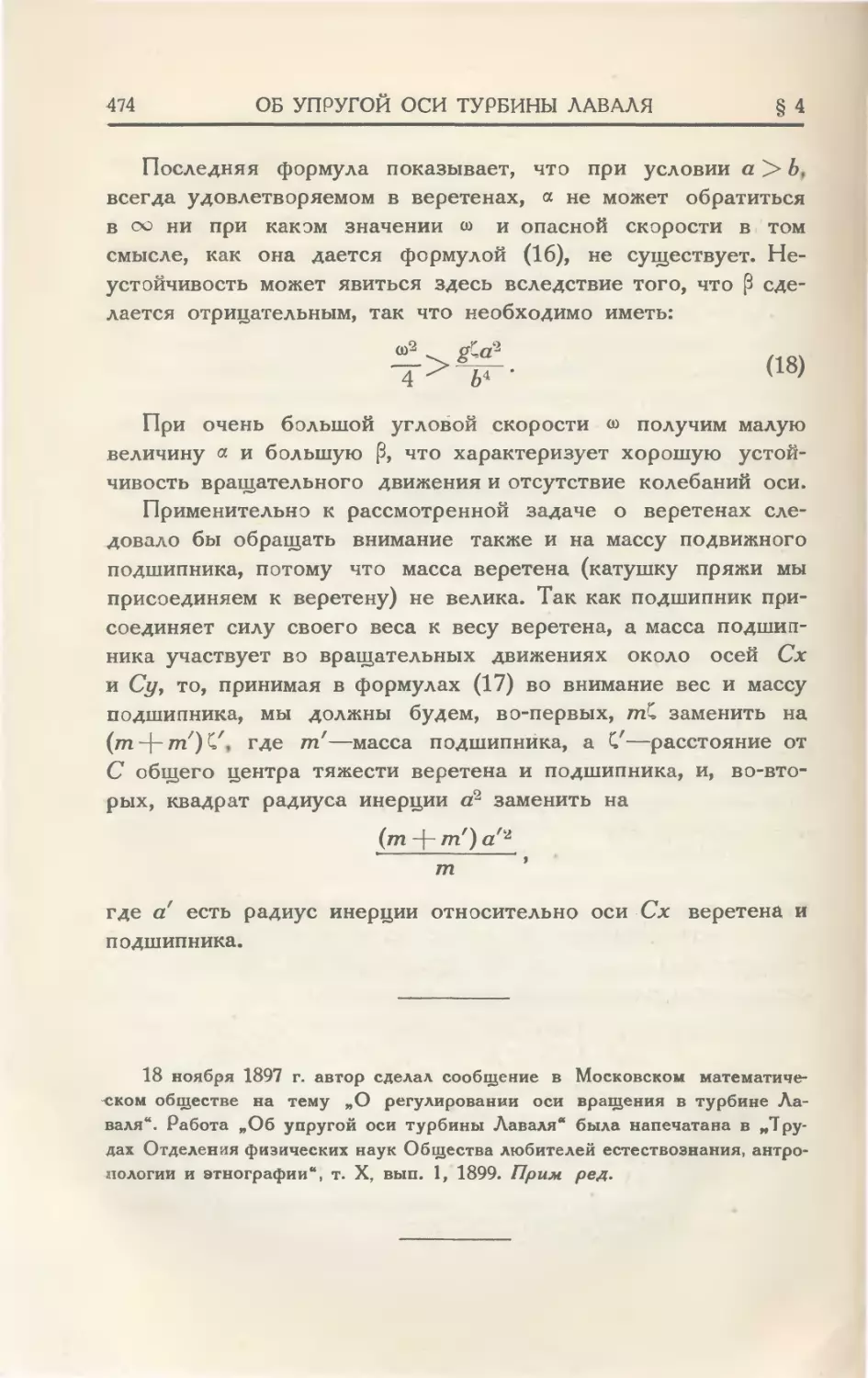
ный характер: одна касается теории движения турбины Лаваля
с упругою осью (31), другая — полета снаряда Шапеля (17),
третья дает описание прибора для определения моментов инер-
ции (19) и четвертая посвящена статике твердого тела: в ней
изучаются условия равновесия твердого тела, опирающегося
на неподвижную плоскость некоторой площадкой (28)
1 По материалам проф. В. П. Ветчинкина.
12
ОТ РЕДАКЦИИ
Кроме этих статей, относящихся к механике твердого тела,
в первом томе помещено несколько работ по теории шарнир-
ных механизмов; пять из них (6, 11, 21, 22, 36) относятся
к кинематике и шестая (35) „Сведение динамических задач
о кинематической цепи к задачам о рычаге" имеет весьма важ-
ное значение в прикладной механике.
Статья математического характера „Условия конечности
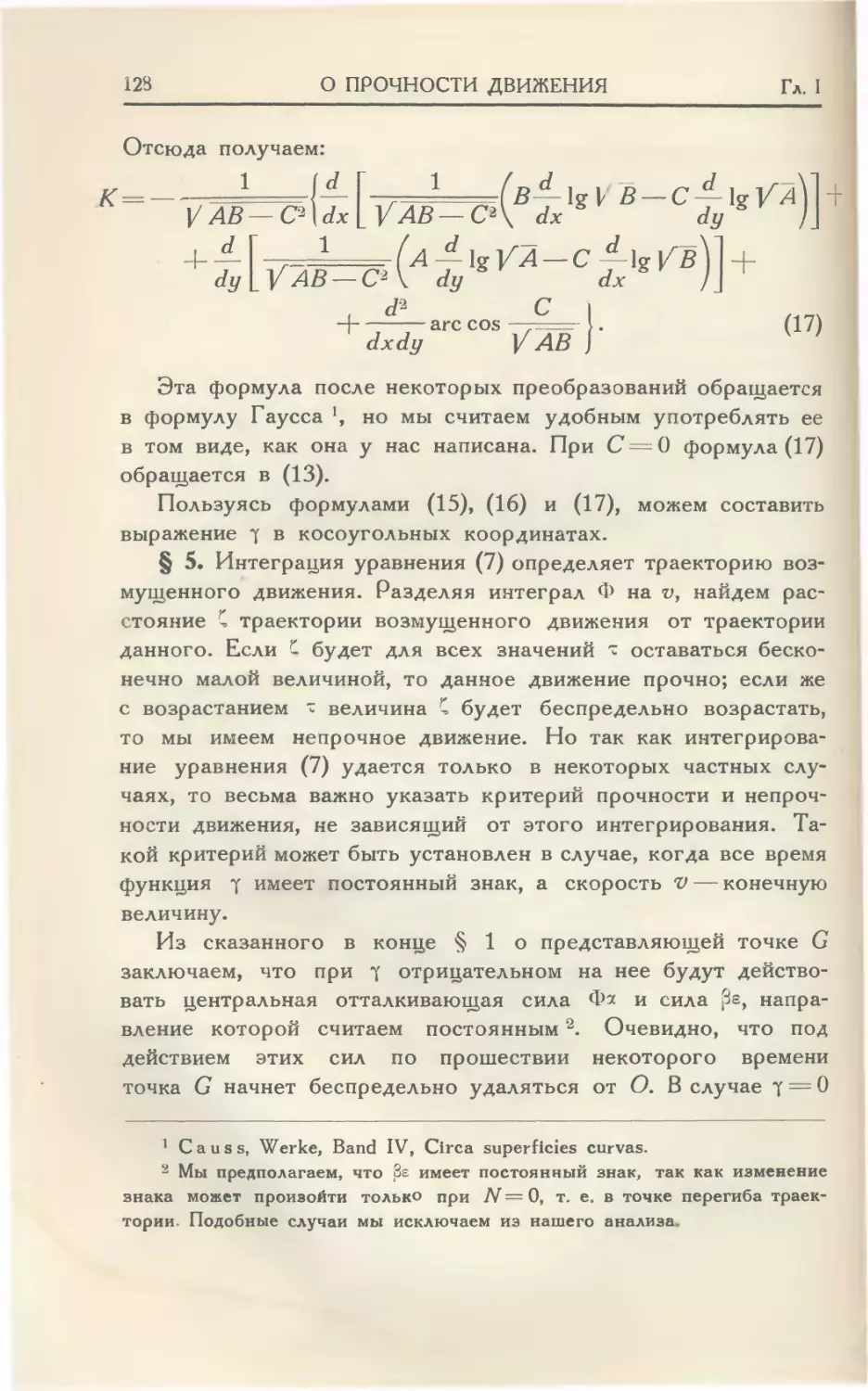
интегралов уравнения
dx2
py — Q“ (20) помещена в этом
томе по той причине, что в ней рассматривается вопрос о ко-
нечности интегралов уравнения, играющего роль в работе
„О прочности движения", помещенной в этом томе.
Статьи 1. 2, 15, 19, 29, которые Н. Е. Жуковским были
опубликованы в печати на французском и немецком языках,
для настоящего издания переведены на русский проф. А. П.
Котельниковым. Русский перевод дается вслед за иностран-
ным текстом.
После выхода из печати двух томов настоящего полного
собрания сочинений Н. Е. Жуковского (т. II —1935 г. и
т. III —1936 г.) редакцией была изменена форма титульного
листа, поэтому в ранее вышедших томах II и III титульный
лист имеет иное оформление, чем во всех остальных томах.
Во всех томах, кроме III, вышедшего раньше, на титуль-
ном листе и в резюме на английском языке принята транскрип-
ция фамилии Жуковского — Joukovsky, ближе передающая
ее произношение, а в III томе сохранилась прежде употре-
блявшаяся транскрипция Joukowsky, которая применялась
самим Н. Е. для его статей на немецком языке и впослед-
ствии перешла в иностранную литературу вообще
Все работы Н. Е. Жуковского распределены в настоящем
издании по отдельным томам в систематическом порядке по
тематическому признаку, а в пределах каждого тома располо-
жены в хронологической последовательности в соответствии
с желанием Н. Е. Жуковского, выраженным им при печатании
изданного в 1912 г. первого тома собрания его сочинений.
В последнем, десятом, томе будет дан указатель предметный
и имен по всем десяти томам полного собрания сочинений
Н. Е. Жуковского.
НИКОЛАИ ЕГОРОВИЧ
ЖУКОВСКИЙ
1847—1921
(19111.)
НИКОЛАЙ ЕГОРОВИЧ ЖУКОВСКИЙ
(Биографический очерк)
I
Н. Е. Жуковский родился 17 (по ст. ст. 5) января 1847 г.
в небольшом имении Орехово, бывшей Владимирской губ. Его
отец Егор Иванович Жуковский, по профессии инженер-пу-
теец, работал одно время на постройке Нижегородской ж. д.,
затем вышел в отставку и занимался сельским хозяйством
в своем имении Орехово.
На скудные средства, которые давало хозяйство, Е. И. Жу-
ковскому и его жене Анне Николаевне (урожденной Стеч-
киной) приходилось содержать большую семью, состоявшую
из шести человек — четырех сыновей и двух дочерей. Нико-
лай Егорович был третьим в семье. Несмотря на то, что ро-
дители Н. Е. еле-еле сводили концы с концами, они дали своим
детям хорошее образование. В качестве домашнего воспита-
теля был приглашен Альберт Христианович Репман, человек
исключительно разносторонний, весьма образованный и увле-
кательный рассказчик; впоследствии он был директором Мо-
сковского политехнического музея. Мальчики после домашней
подготовки поступили в четвертую московскую гимназию, ко-
торая помещалась на Покровке.
Так как семья жила безвыездно в Орехове, то Н. Е. по-
ступил в пансион при гимназии, где он и находился до окон-
чания гимназии (в 1864 г.), приезжая летом в Орехово.
В первых классах гимназии Н. Е. учился плохо. Не вы-
казывал он больших успехов и в арифметике, которую пре-
подавал Малинин, автор широко известных в свое время
учебников и задачников. Но с четвертого класса Н. Е. стал
заметно выделяться среди своих товарищей успехами по
математике.
16
НИКОЛАЙ ЕГОРОВИЧ ЖУКОВСКИЙ
Гимназию Н. Е. окончил с серебряной медалью в 1864 г.
и поступил на математическое отделение Физико-математи-
ческого факультета Московского университета. В это время
он уже с увлечением занимался математикой и с восторгом
слушал известных в то время профессоров и выдающихся
ученых А. Ю. Давидова, В. Я. Цингера и Ф. А. Слудского.
В студенческие годы Н. Е. с особым интересом занимался
механикой, которую читали сначала В. Я. Цингер, затем
Ф. А. Слудский. Несомненно, что влияние их сказалось на всей
дальнейшей научной деятельности Николая Егоровича. Проф.
В. Я. Цингер был геометр по специальности. Как прекрасный
преподаватель, талантливый ученый, строгий и требователь-
ный профессор, он пользовался совершенно исключительным
авторитетом среди студенчества. Прекрасные лекции Цингера,
его геометрический талант, вероятно, в значительной мере
определили характер научного мышления Н. Е.: в его науч-
ных исследованиях геометрические методы играли всегда со-
вершенно исключительную роль.
Совершенно иного рода было влияние Ф. А. Слудского.
Большой знаток механики, Слудский видел идеал, к которому
должна стремиться механика, в том методе изложения, кото-
рый ей придал гениальный Лагранж в своей „Аналитической
механике". Все преподавание механики у Ф. А. Слудского
строилось на общих принципах, из которых затем получались,
как частные случаи, различные изучаемые до конца типы
движения. Известно, что в „Аналитической механике" Ла-
гранжа все изложение ведется чисто аналитическим путем; та-
кой же характер носило и изложение Ф. А. Слудского. Гео-
метрическому элементу при таком изложении не придавалось
никакого значения, геометрические иллюстрации считались
излишними, если были найдены формулы, определяющие для
любого момента положение движущегося тела. Контраст меж-
ду живыми, геометрически наглядными и блестящими по форме
лекциями В. Я. Цингера и точным строго аналитическим и
абстрактным изложением Ф. А. Слудского был очень велик.
И, повидимому, уже тогда Н. Е. сделал выбор между этими на-
правлениями, и этот выбор был не в пользу метода Ф. А. Слуд-
ского. Впоследствии Н. Е. любил вспоминать, как студенты,
БИОГРАФИЧЕСКИМ ОЧЕРК
17
ЗУУ'/б'б
рассуждавшие хорошо об общих принципах механики, не умели
решать простейших механических задач; этот пример, веро-
ятно, вполне убедил Н. Е. в преимуществе конкретного, гео-
метрически ясного и наглядного изложения, которому он и
следовал в дальнейшем в своей долгой и блестящей научной
и педагогической деятельности.
В 1868 г. Н. Е. окончил университет. В начале он не по-
шел по научному пути. Увлеченный своим товарищем Щу-
киным, впоследствии крупным специалистом по паровозострое-
нию, Н. Е. решил посвятить себя в дальнейшем деятельности
в области прикладной техники и поступил в Институт инже-
неров путей сообщения в Петербурге. Но здесь он пробыл
недолго. Общая постановка преподавания его не удовлетво-
ряла; трудно давалось ему также черчение; кроме того, не-
привычный петербургский климат неблагоприятно повлиял на
его здоровье.
Н. Е. оставил Институт, вернулся в Москву и стал усердно
готовиться к сдаче магистерского экзамена. Первый год по
возвращении из Петербурга он прожил в Орехове, а затем
в 1870 г. со своей матерью, Анной Николаевной, и сестрами
переселился в Москву, где занял место преподавателя физики
во второй женской гимназии.
В 1872 г. Н. Е. был назначен преподавателем Московского
технического училища. Первое время он преподавал матема-
тику, а затем осенью 1874 г. был утвержден доцентом по ка-
федре аналитической механики в том же Техническом училище,
где и преподавал механику в течение 47 лет.
В 1876 г. в VIII томе „Математического сборника" напе-
чатана первая научная работа Н. Е., его магистерская дис-
сертация „Кинематика жидкого тела". Этой работой, которая
сразу выдвинула молодого ученого, начинается длинный ряд
работ Н. Е. по гидро- и аэромеханике, работ, которые дали
их творцу мировое имя. В этой первой работе Н. Е. совер-
шенно ясно сказываются уже те тенденции, которыми была
проникнута его дальнейшая исследовательская работа.
Глубокие исследования по деформациям элемента жидкости
во время ее движения, начало которым восходит к работам
Лагранжа и Коши, носили исключительно аналитический ха-
Зак. 2365. — Н. Е. Жуковский. Т. I. 2
1 11С11ИI W <i I ь ।
18
НИКОЛАЙ ЕГОРОВИЧ ЖУКОВСКИЙ
рактер, а потому были лишены той наглядности, которую
вносят геометрические методы исследования. Выражаясь со-
временным языком, все эти исследования носили количествен-
ный характер, качественного исследования характера движе-
ния произведено не было. Н. Е. переводит все исследование
совершенно в иную плоскость.
Основная идея этой выдающейся работы точно и ясно
формулирована Н. Е. во введении к ней.
„Та высокая степень ясности, которая была внесена в об-
ласть динамики твердого тела геометрическими исследованиями
неизменяемой системы, заставляет ожидать значительного
успеха гидродинамики от сближения ее с кинематикой изме-
няемой системы. К сожалению, геометрическая теория движе-
ния изменяемой системы находится только на первых ступенях
своего развития. Все работы по этому предмету ограни-
чиваются небольшим числом исследований движения простей-
ших изменяемых систем и общими соображениями о движении
непрерывно изменяющегося тела“... „Предлагаемое нами сочи-
нение имеет в виду дать краткий, но, по возможности, нагляд-
ный очерк теории скоростей и ускорений непрерывно изменяе-
мого тела и может быть рассматриваемо как вступление
в гидродинамику. При составлении его мы старались поста-
вить общие теоремы о движении жидкости в уровень с тем
развитием, которое получили исследования изменяемых систем
частного вида“.
В этом введении к своей первой крупной научной работе
Н. Е. дает тот лейтмотив, который будет звучать во всех после-
дующих его научных работах.
Много лет спустя, в речи на собрании, посвященном
25-летнему юбилею Московского математического общества,
Н. Е. возвращается более подробно к вопросу о роли
геометрии:
„Механика при своем первоначальном развитии опиралась-
исключительно на геометрический метод. Механические ис-
следования Архимеда, Галилея и Гюйгенса—геометрического
характера. Весь строй изложения в „Принципах натуральной
философии" Ньютона — чисто геометрический. В том же
направлении шли работы последующих авторов: Бернулли,
БИОГРАФИЧЕСКИЙ ОЧЕРК
19
Айвори, Маклорена и др. Но после того как Декарт дал спо-
соб выражать движение в пространстве по трем движениям
на осях координат, и анализ бесконечно-малых, открытый
Ньютоном и Лейбницем, вошел во всеобщее употребление,
в исследованиях по теоретической механике стал все более
и более преобладать аналитический метод, который в творе-
ниях Лагранжа и его последователей достиг своей высшей
точки. Геометрическая постановка задачи заменилась соста-
влением возможной работы, реакции связей—неопределенными
множителями, изыскание движения отождествилось с задачей
об интегрировании диференциальных уравнений.
Поощренные успехом, выразившимся рядом блестящих
теорий в общей теории интегрирования уравнений динамики,
представители аналитического метода стремились возможно
шире ставить рассматриваемые вопросы, почти совершенно
игнорируя их геометрическую и механическую сторону. Вслед-
ствие этого возникали аналитические трудности, иногда ни-
сколько не вызываемые сущностью дела. Данная механическая
задача запутывалась и усложнялась вследствие отнесения ее
к произвольной системе координат и упущения из виду той,
которая всего ближе к ней подходит"... „Так, задача о дви-
жении твердого тела по инерции, хотя и разрешенная анали-
тически Эйлером, представлялась трудной и запутанной,
а задачи гидродинамики, хотя и сведенные Эйлером и Лагран-
жем к уравнениям с частными производными, оставались без
решения, так как последнее неразрывно связывалось с оты-
сканием общих интегралов этих уравнений. Здесь на помощь
анализу снова явилось забытое на время геометрическое
толкование. В своем изящном мемуаре „Theorie nouvelle de
la rotation des corps" Пуансо поставил себе задачей „изучить
вещи сами в себе" и, следуя этому девизу, довел геометри-
ческую интерпретацию рассматриваемого движения до той сте-
пени наглядности, при которой оно со всеми подробностями
рисуется перед глазами читателя". . - „Подобным же образом
геометрическое толкование сослужило важную роль в исследова-
ниях по гидродинамике. В своем замечательном сочинении
„Uber Integrate der hydrodynamischen Gleichungen" Гельмгольц
дает геометрическую интерпретацию интегралов гидродинамики,
2*
20
НИКОЛАЙ ЕГОРОВИЧ ЖУКОВСКИЙ
которые 20 лет раньше были найдены Коши и оставались без
применения"... „Таким образом конец нашего столетия озна-
меновался возвращением к геометрическому толкованию и
соединением аналитического метода исследования с геометри-
ческим. Механика сознательно пошла по тому пути, которого
при своем возникновении держалась по необходимости".
„Отстаивая достоинства геометрического метода исследо-
вания, я далек от мысли об его исключительности. Механика
должна равноправно опираться на анализ и геометрию, заимст-
вуя от них то, что наиболее подходит к существу задачи.
Своими новыми методами: исследованием интегралов по дифе-
ренциальным уравнениям, изысканием признаков, при которых
существуют алгебраические интегралы, и т. д. анализ дает нам
могущественное орудие для разрешения задач динамики. Но
последняя обработка решений задачи всегда будет принадле-
жать геометрии".
„Геометр всегда будет являться художником, создающим
окончательный образ построенного здания".
Таково было научное кредо Н. Е., и мы видели, что уже
в первом своем крупном исследовании он твердо наметил
путь, по которому и шел всю свою долгую и плодотворную
научную жизнь. Так пышно проросли семена, которые были
посеяны университетским преподаванием, лекциями Цингера
и, как контрастом к ним, лекциями Ф. А. Слудского.
В 1877 г. Н. Е. защитил магистерскую диссертацию и
вскоре был командирован за границу — в Берлин и Париж.
В Берлине он слушал лекции Гельмгольца, Кирхгоффа, Кум-
мера, а в Париже главным образом занимался у Дарбу и
Резаля. За границей он завязал научные знакомства, главным
образом, среди тогдашней научной молодежи; в частности,
в Париже он познакомился с тогда еще совсем юным Анри
Пуанкарэ.
В Париже Н. Е. близко сошелся с Резалем, который по-
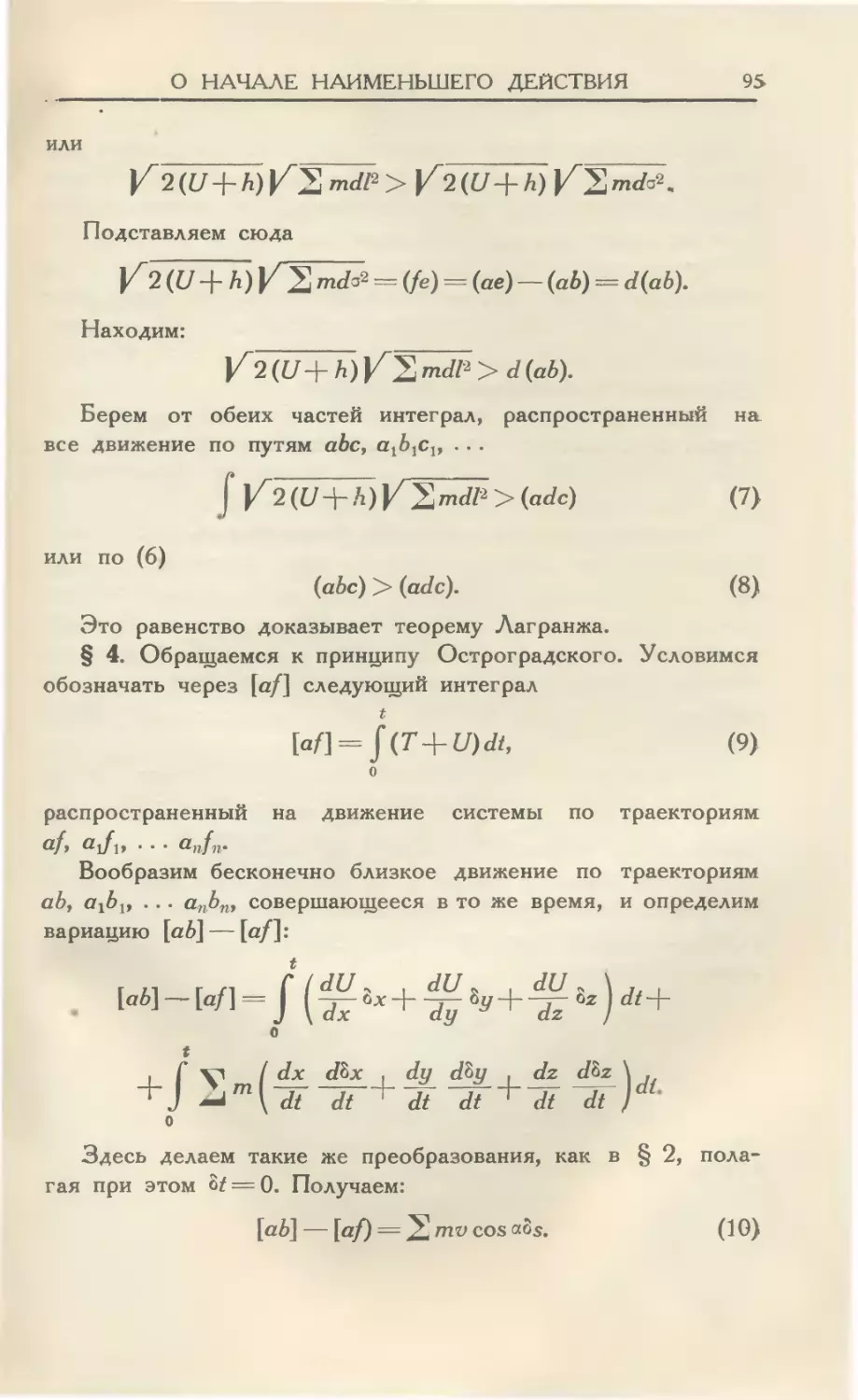
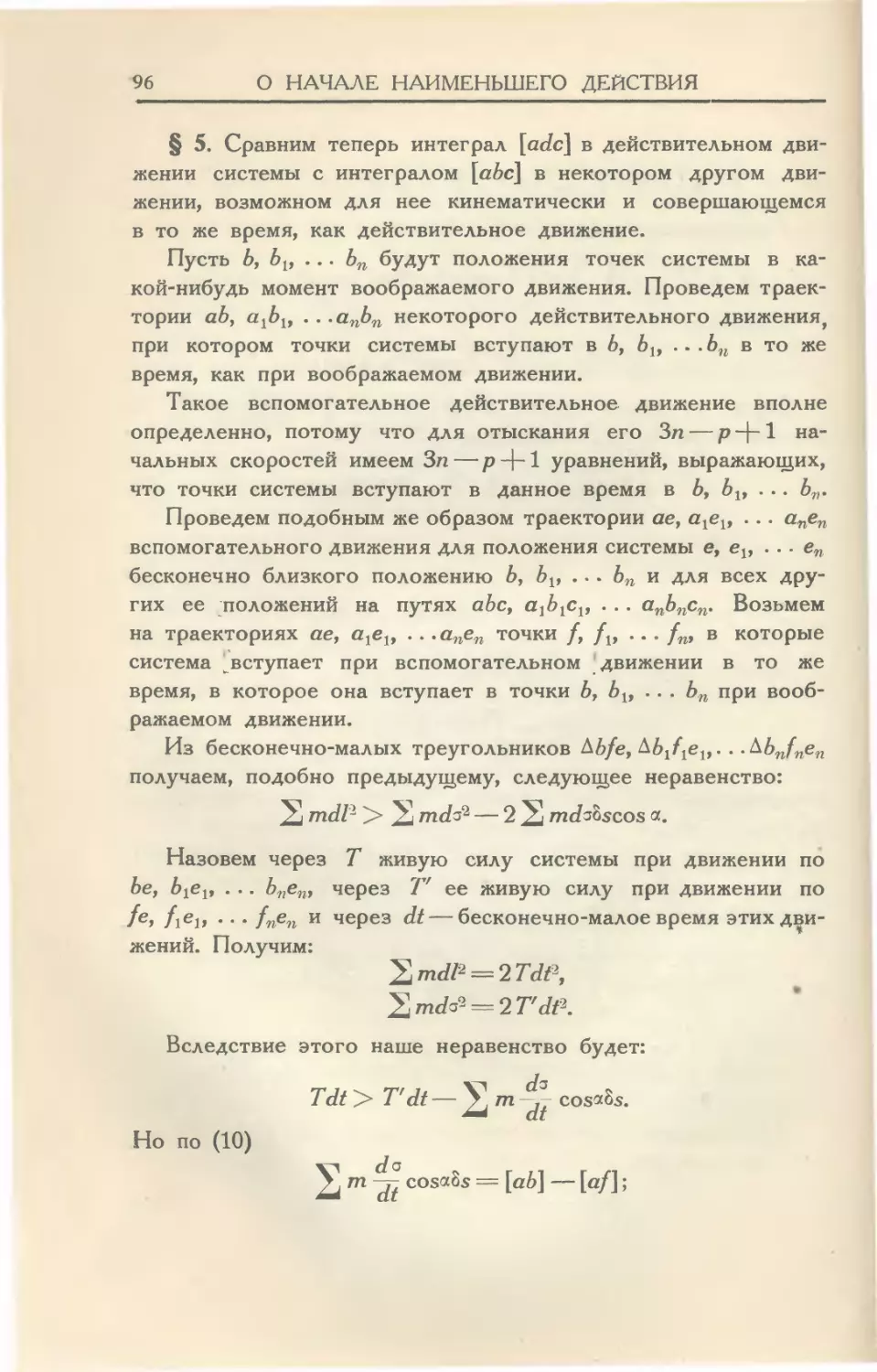
местил две работы Н. Е. „Об ударе" и „О начале наимень-
шего действия" в „Журнале Лиувилля" (1878 г.) Статья Н. Е.
„Об ударе" была особенно отмечена Дарбу; эта работа Н. Ек
вместе с сочинением на ту же тему Дарбу послужила осно-
ванием чисто геометрического исследования явления удара,
БИОГРАФИЧЕСКИЙ ОЧЕРК
21
которому в дальнейшем были посвящены работы Делоне,
Занчевского, Бельтрами и др.
По возвращении из-за границы в 1879 г. Н. Е. получает
назначение сверхштатным профессором механики в Техни-
ческом училище вместо ушедшего в отставку профессора
А. В. Летникова.
В 1882 г. появляется в печати вторая крупная работа Н. Е.,
его докторская диссертация „О прочности движения". В этой
работе, представляющей развитие первых работ по этому во-
просу Томсона и Тэта, сам Н. Е. считал наиболее ценным
определение величины, которая им названа мерой прочности.
Для случая системы с двумя степенями свободы мера прочно-
сти играет роль, аналогичную Гауссовой мере кривизны по-
верхности. Устойчивость движения зависит от знака меры
прочности. Работа Н. Е. в свое время была крупным успехом
в этой сложной области механики.
Эта работа Н. Е. была посвящена актуальнейшему вопросу
механики; достаточно сказать, что одновременно с диссерта-
цией Н. Е. появилось обширное исследование на ту же тему
одного из крупнейших английских механиков Рауса (Routh),
который разработал иной метод оценки устойчивости движе-
ния. Впоследствии этим вопросом занимался один из крупней-
ших русских ученых А. М. Ляпунов, который в 1892 г. за-
щитил в Московском университете диссертацию „Общая зада-
ча об устойчивости движения", причем Н. Е. был оппо-
нентом. Ляпунов значительно продвинул этот сложный
вопрос и исправил некоторые неточности, которые были в
работе Н. Е.
В 1882 г. Н. Е. защитил диссертацию и получил степень
доктора прикладной математики.
С 1885 г. Н. Е. начал свое преподавание в Московском
университете и в 1886 г. был назначен экстраординарным
профессором механики (после выхода в отставку проф. Ф. А.
Слудского). В связи с работой в университете Н. Е. в 1885 г.
оставил должность преподавателя физики во 2-й женской гим-
назии. Характерно, однако, что он не порывал совсем связи
со средней школой. Еще в 1873 г. он поступил преподавате-
лем в Московскую практическую академию коммерческих наук
22
НИКОЛАЙ ЕГОРОВИЧ ЖУКОВСКИЙ
и продолжал там преподавание непрерывно до 1920 г. Несом-
ненно, эта связь со средней школой сыграла значительную
роль в педагогической и научной деятельности Н. Е. Высшая
школа не учит и не может научить своих работников методам
преподавания; можно было бы назвать большое число круп-
нейших ученых, которые в то же время являлись очень сла-
быми преподавателями. Как остроумно заметил известный
русский педагог К. Д. Ушинский, вся методика чтения лекций
в университете может быть выражена в двух словах: „знай
хорошо свой предмет и излагай его ясно". Однако это вто-
рое требование, ясность изложения, — большое и сложное ис-
кусство, которое постигается далеко не сразу. И вот, работа
в средней школе и дает возможность овладеть этим немало-
важным для профессора искусством. Вероятно, длительная
работа в средней школе и выработала из Н. Е. прекрасного
преподавателя. Эта же педагогическая работа развила у Н. Е.
вкус к популяризации и наглядности изложения. В цитирован-
ной выше речи Н. Е. так резюмирует свое отношение к на-
глядности преподавания:
„Можно говорить, что математическая истина только тогда
должна считаться вполне обработанной, когда она может быть
объяснена каждому из публики, желающему ее усвоить. Я ду-
маю, что, если возможно приближение к этому идеалу, то
только со стороны геометрического толкования или модели-
рования".
Отсюда интерес Н. Е. к собиранию и постройке моделей
Механический кабинет Московского университета, созданный
главным образом проф. Орловым и Н. Е. Жуковским, обязан
им своими прекрасными коллекциями моделей. Следующий
естественный шаг — это превращение кабинета механических
моделей в механическую лабораторию.
Г оды преподавания физики в средней школе привели
к тому, что в руках Н. Е. механика была не теоретической
абстрактной наукой, целиком замыкающейся в математические
методы исследования, а естественной наукой, изучающей ши-
рокий, разнообразный и живой мир механических явлений
природы.
БИОГРАФИЧЕСКИЙ ОЧЕРК
23
II
Защита докторской диссертации в 1882 г. и связанное
с этим упрочение положения Н. Е. составляют важную дату
в его жизни. Перед Н. Е. теперь открывалась широкая воз-
можность разносторонней научной работы как в Техническом
училище, так и в Университете, где позднее, в 1891 г., он
сделался ординарным профессором. Первые крупные работы
Н. Е. создали ему солидный авторитет, а общение с выдаю-
щимися представителями научной и технической мысли того
времени (среди которых назовем крупнейших ученых, профес-
соров Бредихина, Столетова, тогда начинающего талантливого
геометра, живого и энергичного преподавателя Б. К. Млод-
зеевского и бывших учителей, а теперь товарищей Н. Е. по
работе в Московском университете — Ф. А. Слудского, Н. В.
Бугаева и других, а также профессоров-инженеров, товарищей
Н. Е. по работе в Московском высшем техническом училище)
позволило Н. Е. быть в курсе широких научных и техничес-
ких интересов. Все это создавало для Н. Е. исключительно
благоприятные условия для расцвета его выдающихся науч-
ных творческих способностей. После защиты диссертации
в ближайшие же годы Н. Е. развивает исключительно разно-
стороннюю и продуктивную научную работу. В 1883 и 1884 гг.
появляется ряд интересных исследований Н. Е.; некоторые из
них в дальнейшем послужили исходными для разработки слож-
ных научных и технических задач. К этому же времени отно-
сится начало ряда работ Н. Е. по астрономическим вопросам,
по теории вычисления планетных орбит и по теории кометных
хвостов; здесь сказывается влияние знаменитого творца теории
кометных хвостов профессора Московского университета
Ф. А. Бредихина, с которым Н. Е. в эти годы был особенно
близок.
Наряду с большим числом сравнительно мелких работ
отметим появление в 1885 г. крупного исследования Н. Е.
„О движении твердого тела, имеющего полости, наполненные
однородной капельной жидкостью", удостоенного Московским
университетом в 1886 г. премии имени проф. Брашмана. По
поводу этой работы ее рецензент проф. Ф. А. Слудский
24 НИКОЛАЙ ЕГОРОВИЧ ЖУКОВСКИЙ
сказал: „если бы сочинение Н. Е. Жуковского состояло лишь
из шести последних страниц, то и тогда оно было бы вполне
достойно премии покойного проф. Брашмана**. В этих послед-
них страницах, о которых говорит проф. Ф. А. Слудский,
дано доказательство того, что трение жидкости в полости тела
влияет на асимптотическое приближение его оси вращения
к оси инерции рассматриваемых движущихся масс. Н. Е. за-
канчивает свое сочинение вопросом: „не этой ли теоремой
следует объяснить то обстоятельство, что, несмотря на всякие
случайные начальные скорости, планеты вращаются около
своих осей инерции?4*
Впоследствии Ф. А. Слудский сделал приложение этой тео-
ремы к некоторым вопросам астрономии.
В 1890 г. был напечатан выдающийся труд Н. Е. „Видо-
изменение метода Кирхгоффа для определения движения жид-
кости в двух измерениях при постоянной скорости, данной
на неизвестной линии тока**. Работа эта, которую особенно
ценил сам Н. Е., представляет собой чрезвычайно остроумное
видоизменение метода Кирхгоффа в теории струй, позволяющее
находить течения несжимаемой жидкости с любым числом кри-
тических точек и с любым числом струй. Интересен употре-
бляемый Н. Е. в этой работе геометрический метод, основан-
ный на применении двух сетей линий. Хотя эта работа и не
дает расширения метода Кирхгоффа, так как можно показать,
что всякая задача, решаемая методом Н. Е., разрешима и ме-
тодом Кирхгоффа, но геометрическая наглядность метода и ог-
ромное число частных случаев, разобранных Н. Е. этим
методом, сообщает этой работе исключительный интерес. Одно-
временно появившаяся работа Митчеля, который применяет
метод, близкий к методу Н. Е., далеко уступает работе Н. Е.*
так как в ней нет ни геометрического приема, ни таких раз-
нообразных и интересных приложений, как в работе Н. Е.
Об интенсивности работы Н. Е. в этот период достаточно
ярко говорит тот факт, что за восемь лет им написано и опу-
бликовано в печати 36 работ. Если мы всмотримся в тематику
работ как появившихся за эти годы, так и опубликованных
в последующие годы, то нетрудно заметить, как постепенно
расширяется круг тех вопросов, которыми занимается Н. Е.
БИОГРАФИЧЕСКИЙ ОЧЕРК
25
К исследованиям по гидромеханике и механике твердого тела
постепенно присоединяются работы астрономического содер-
жания и по вопросам гидравлического характера (например,
работы Н. Е. по теории влияния реакций втекающей и вытека-
ющей жидкости, по гидродинамической теории смазки), по тео-
рии упругости, по теории подпочвенных вод, о форме судов,
об артиллерийских снарядах Шапеля и т. д. В этом разнообра-
зии тем исследования все более и более начинает проявляться
одна черта, чрезвычайно характерная для всей научной деятель-
ности Н. Е. , — это все большее тяготение научных интересов
Н. Е. к вопросам техники.
В этом сказывается одна общая тенденция, которая посте-
пенно проникает в чисто теоретические науки. Как известно,
первые успехи механики и ее твердое обоснование связаны с ре-
шением механических задач астрономии. Работы Ньютона,
главным образом, посвящены астрономическим вопросам. На
смену им в конце XVIII столетия пришли задачи, связанные
с общими проблемами теоретической физики. На работах по
теории тепла, по теории волн создавались и разрабатывались
математические методы механики. В это время задачи техники
почти совершенно не влияли на развитие механики. Можно,
пожалуй, указать только одну область технического, приклад-
ного характера, которая привлекла внимание теоретиков —
это теория корабля, которой Эйлер и Бугер посвятили пер-
вые трактаты, позволявшие подвести некоторую теоретиче-
скую базу под чисто технические задачи. В других областях
техника шла своим путем, заменяя точное научное исследование
вопроса полуэмпирическими, приближенными и временами не
достаточно научно-обоснованными методами. Но с дальнейшим
развитием техника все чаще и чаще обращается за помощью
к точной теоретической науке.
Это стремление разрешать технические, чисто прикладные
задачи методами точной теоретической механики все более
и более проявляется за последние десятилетия, и Н. Е. был
одним из первых крупных теоретиков-механиков, которые
вполне ясно осознали эту потребность техники и пошли ей
навстречу. Это тем более интересно, что годы, когда форми-
ровалось научное мировоззрение Н. Е., совпадают с эпохой,.
26 НИКОЛАЙ ЕГОРОВИЧ ЖУКОВСКИЙ
создавшей такие классические образцы чисто теоретических,
оторванных от всяких приложений исследований, как общие
методы интегрирования уравнений динамики, как задача о дви-
жении твердого тела, задача трех тел и т. п. Достаточно привести
два замечательных образца этого направления: классическая
книга Якоби „Лекции по динамике", по которой несомненно
учился Н. Е., и работы С. В. Ковалевской по теории враще-
ния твердого тела вокруг неподвижной точки, работы, которые
произвели глубокое впечатление на научные круги и создали
С. В. Ковалевской по справедливости мировое имя.
Этим направлениям Н. Е. также отдал дань. Вопросам об-
щей динамики посвящено несколько его мелких работ; к этому
же направлению можно отнести его докторскую диссертацию;
случаю движения твердого тела, открытому С. В. Ковалевской,
посвящена одна из статей Н. Е., в которой он по своему
обыкновению дает красивую геометрическую картину движе-
ния. Но все симпатии, все научные интересы Н. Е. все более
и более склоняются совершенно в иную область, в область
научного решения механических задач техники, а это в свою
очередь наложило совершенно своеобразный отпечаток на ме-
тоды его научной работы.
Технические задачи требуют немедленного решения. Если
можно утешаться тем, что со временем с развитием методов
исследования интегралов диференциальных уравнений задача
трех тел будет во всех подробностях изучена, то в области
технических наук нужно немедленное решение конкретных
задач, выдвигаемых практикой: пусть это решение будет не
очень точное, пусть оно годится только в частных случаях,
но его нужно найти и найти во-время, когда в нем нуждается
инженер, работающий на производстве. Отсюда развитие
приближенных методов при решении технических задач.
Но и сами приближенные методы могут быть различны.
Во-первых, можно записать изучаемое явление совершенно
точными уравнениями, например, диференциальными уравне-
ниями, и затем ввиду невозможности их точного решения
искать приближенные методы решения, разлагая, например,
интегралы в ряды, вводя малые параметры и т. п.; во-вторых,
можно с самого начала изучаемое явление заменить другим,
БИОГРАФИЧЕСКИЙ ОЧЕРК
27
более простым и допускающим полное исследование, но сохра-
няющим основные черты изучаемого явления,—иными словами,
стилизовать изучаемое явление, заменить его более простой
моделью.
Естественно, что можно воспользоваться и тем и другим
методом: в небесной механике, например, обычно применяют
первый метод; в технике, пожалуй, второй метод дал наиболее
интересные и важные результаты.
Н. Е. обладал исключительным уменьем упрощать изучаемое
явление, заменять его более простым и, опираясь на эту упро-
щенную схему, доводить исследование до конца. Н. Е. любил
говорить своим ученикам, что „механика есть искусство
выражать задачи о движении уравнениями, которые до конца
интегрируются", и этим искусством Н. Е. владел исключительно
виртуозно. Длительная работа в Техническом училище, среди
специалистов инженеров, а затем заседания инженерно-ме-
ханического отдела Политехнического общества, в котором
Н. Е. с 1872 г. был одним из самых активных участников
и докладчиков и мог постоянно поддерживать самую жи-
вую связь с инженерами, работавшими на производстве,
содействовали тому, что Н. Е. непрерывно и все более
и более глубоко втягивался в области чисто прикладных
вопросов.
Глубокий теоретический фундамент, разносторонняя под-
готовка Н. Е. и постоянное общение с научными силами
в университете, а затем и в Математическом обществе (Н. Е.
был одним из старейших и активнейших членов общества,
с 1903 г. его вице-президентом, а с 1907 г. — президентом) — все
это позволяло Н. Е. быть в курсе всех новинок не только
в области механики, но и в смежных областях математики,
астрономии, математической физики, всех отделов точного
естествознания, которое „мерою и числом" познает природу.
Неудивительно, что Н. Е., обладавший исключительным талантом
исследователя и живо интересовавшийся практическими вопро-
сами техники, быстро становится тем центром, около которого
группируются инженеры и к которому они обращаются за
советом при решении технических вопросов. Проф. П. К. Худя-
ков, который близко наблюдал деятельность Н. Е. в Техническом
28
НИКОЛАЙ ЕГОРОВИЧ ЖУКОВСКИЙ
училище и в Политехническом обществе, в своих воспомина-
ниях о Н. Е. говорит:
„Достойно внимания то обстоятельство, что не было никогда
ни одного случая, чтобы Н. Е., что называется, отмахивался
от предложенной ему темы. В каждый вопрос, за разъяснением
которого обращались к нему инженеры, его бывшие ученики,.
Н. Е. вдумывался самым серьезным, самым добросовестным
образом и отвечал на него или тут же непосредственно или
же путем длительной разработки, за которой следовали: или
специальный доклад на предложенную тему, или сооружение
научной модели, разъясняющей затронутый вопрос, или, — это
бывало нередко, — целое экспериментальное исследование по
его планам и указаниям".
Научные интересы Н. Е. постепенно и прочно вростали
в круг чисто технических задач, а сам он в сознании окру-
жающего его передового в научном отношении инженерства
перерастал в импозантную фигуру „сверх-инженера", к кото-
рому шли, чтобы получить совет, разъяснение, поддержку,
указание инженеры, его бывшие ученики по техническому
училищу, и другие технические работники, которым необхо-
димо было авторитетное мнение Н. Е. по тому или другому
вопросу.
Задача науки — решать общие широкие научные проблемы;
удел техники — заниматься конкретными частными вопросами,
но зато доводить их до полной ясности, до полного раз-
решения, до возможности рассчитать и претворить в кон-
струкцию язык формул и геометрических построений.
Практические вопросы техники, все более и более захва-
тывавшие Н. Е., естественно, влекли его в область решения
конкретных, частных задач. Поэтому в научном творчестве
Н. Е. подавляющее место занимает решение конкретных задач,
решение их частными, часто виртуозно подобранными и всегда
наглядными, целесообразными и простыми методами. Только
в первый период его деятельности, в годы, когда складывались
его научные интересы, он занимался общими теоретическими
вопросами. Его две диссертации и работы, указанные в первом
разделе нашего очерка, — результаты этих занятий. В после-
дующие годы он почти не занимался общими теоретическими
БИОГРАФИЧЕСКИЙ ОЧЕРК
29
проблемами, не разрабатывал общих теоретических методов
исследования. Это не значит, конечно, что он не получал
общих научных результатов, позволяющих ввести в науку
широкие, принципиально новые общие идеи. Но эти идеи
получались, как зрелый плод, в результате разрешения кон-
кретных задач. К общим истинам науки с одинаковым успехом
ведет и индукция — от частных результатов к теоретическим
широким обобщениям — и дедукция, позволяющая сразу
охватить широкую группу однородных явлений. Н. Е. рабо-
тал методами индукции. И эта особенность его творчества, на-
ряду с геометрическим складом его ума, давала исключитель-
ную законченность, ясность и конкретность его научным
результатам.
Из многочисленных и разнообразных работ Н. Е. за этот
период мы остановимся здесь только на одной группе тем —
это работы, связанные с гидродинамикой подземных вод и с
вопросами работы водопроводов. Эти работы необходимо от-
метить прежде всего потому, что ими Н. Е. приобрел себе
европейское имя крупнейшего специалиста по гидромеханике.
Около 1890 г. в связи с быстрым ростом населения Москвы
значительно увеличился расход воды московского водопровода.
Был поднят вопрос о расширении мытищинского водопровода.
В связи с этим появилась работа Н. Е. — „Теоретическое
исследование о движении подпочвенных вод“ и ряд после-
дующих статей и докладов на ту же тему. Н. Е. установил
связь между колебанием барометра и высотой стояния уровня
подпочвенных вод. По величине колебаний уровня подпочвен-
ных вод оказалось возможным определить емкость водовме-
стилища и предельный расход воды. В результате работ Н. Е.
мысль о расширении мытищинского водопровода была оста-
влена, и была построена новая Рублевская водопроводная
станция. Между прочим, эти работы обратили на себя внима-
ние гигиенистов на конгрессе врачей в Вене в связи с влия-
нием колебания уровня подпочвенных вод на развитие эпидемий.
В дальнейшем при постройке нового московского водопровода
возник вопрос о причинах частых разрывов водопроводных
труб. Приглашенный главным городским инженером Н. П. Зи-
миным принять участие в разъяснении этого вопроса, Н. Е.
30
НИКОЛАЙ ЕГОРОВИЧ ЖУКОВСКИЙ
организовал обширное экспериментальное исследование изме-
нения гидродинамического давления в трубах и распространения
этого изменения давления вдоль трубы при прекращении
течения воды путем быстрого закрытия задвижки в конце
трубы. Полученные интересные экспериментальные результаты
послужили Н. Е. материалом, на основе которого им была
разработана подробная теория гидравлического удара в водо-
проводных трубах, причем попутно оказалось возможным на
основании теории по ударной диаграмме отыскать место утечки
воды в водопроводной трубе. Замечательная, ставшая класси-
ческой, работа Н. Е. на эту тему „О гидравлическом ударе
в водопроводных трубах^ была переведена на английский
и французский языки и выдвинула Н. Е. на одно из первых
мест среди теоретиков, работающих в области гидродинамики.
К этой же области относятся работы Н. Е. о гидравлическом
таране, а по методу исследования близко подходит любопыт-
ная статья Н. Е., напечатанная много позднее (в 1914 г.)
„Определение скорости движения продуктов горения в завод-
ской трубе по фотографии выбрасываемого ею дыма“. К во-
просу о распространении волн в водопроводных трубах Н. Е.
неоднократно возвращался в последующих работах и до-
кладах.
Если темы исследования Н. Е. в период с 1882 по 1890 г.
поражают своим разнообразием, то еще более разнообразными
являются его работы в последующее десятилетие. Помимо
вопросов, связанных с гидродинамической теорией течения
жидкости в трубах, Н. Е. в этот период продолжает зани-
маться вопросами гидродинамики идеальной и вязкой жид-
кости, теорией вихрей.
Случайно заинтересовавшись задачей о вращении веретена
в кольцевых ватерах, Н. Е. находит новую и интересную
конструкцию веретена; установленный при этом Н. Е. прин-
цип движения немедленно (нашел применение в плоских рас-
севах сельскохозяйственных машин.
Исследования проф. Н. П. Петрова над трением под-
шипников вызвали со стороны Н. Е. ряд работ по гидроди-
намической теории смазки (последняя работа на эту тему
написана Н. Е. совместно с проф. С. А. Чаплыгиным).
БИОГРАФИЧЕСКИЙ ОЧЕРК
31
В эти же годы среди других тем начинают появляться
работы Н. Е. по механике полета в воздухе, области, которая
полностью захватила Н. Е. в последние два десятилетия его
жизни и нашла отражение в ряде исследований, поставивших
его имя в числе творцов современной теоретической и при-
кладной аэродинамики. В 1890 г. появилась первая статья Н. Е.
в этой области — „К теории летания“, через два года появ-
ляется вторая работа—„О парении птиц", затем идут статьи:
„О летательном аппарате Отто Лилиенталя", „О гибели Отто
Лилиенталя" (посвященная его памяти) и, наконец, статья
„О наивыгоднейшем угле наклона аэроплана". Вопросом
о летании на приборах тяжелее воздуха Н. Е. начал интере-
соваться, повидимому, еще очень давно. Он тщательно соби-
рал всевозможные летающие модели, воздушные змеи, завод-
ные летающие бабочки и т. п. С Отто Лилиенталем Н. Е. был
лично знаком и получил от него в подарок один экземпляр
построенных им крыльев, которые теперь находятся в Цен-
тральном аэро-химическом музее. Перечисленные статьи яв-
ляются попытками Н. Е. уяснить сложное явление полета,
и по ним можно проследить, с каким трудом вырабатывались
основные идеи, которые впоследствии дали возможность соз-
дать законченную и глубокую гидродинамическую теорию, нераз-
рывно связанную с именами Н. Е. Жуковского и С. А. Чаплыгина.
III
Начало текущего столетия ознаменовалось первыми удач-
ными попытками полета на самолетах. Братья Райт в Америке
и Фарман во Франции были пионерами летного искусства.
Техники ставили перед наукой труднейшую новую задачу —
дать теоретическое объяснение возникновению сил, поддер-
живающих в воздухе самолет, задачу, над которой в течение
тысячелетий, начиная от Аристотеля, Леонардо да-Винчи, и
кончая Кирхгоффом, Гельмгольцем, Рэлеем и другими, упорно
размышляли ученые.
Вся предыдущая научная деятельность Н. Е. как бы
специально готовила его к работе над разрешением этой
труднейшей задачи. Начиная с магистерской диссертации,
Н. Е. непрерывно занимался вопросами теоретической и при-
32
НИКОЛАЙ ЕГОРОВИЧ ЖУКОВСКИЙ
кладкой гидромеханики, а интерес к задачам воздухоплавания
держал его постоянно^ в курсе последних технических дости-
жений в этой области. Естественно, что известия о первых
удачных полетах братьев Райт, Фармана и других должны
были именно на Н. Е. произвести особенно сильное впечат-
ление. Здесь техника вызвала к жизни целый новый отдел
теоретической науки.
Возможно, что именно обширные и настойчивые занятия
гидромеханикой привели Н. Е. к тому, что он более чем
кто-либо другой из механиков-теоретиков, ощущал близость
механики к области опытных естественных наук и яснее соз-
навал необходимость в механике лабораторного научно по-
ставленного эксперимента. Конечно, вся механика представ-
ляет собой науку, выросшую из экспериментального материала,
но отдельные ее части так давно и так прочно заключены
в рамки аксиоматики, что участие опыта в них так же мало
чувствуется, как участие опыта в развитии геометрии. Так,
например, теория движения твердого тела еще Ньютоном
была приведена к столь совершенной и законченной форме,
что все задачи в этой области представляются в сущности
чисто математическими задачами на интегрирование диферен-
циальных уравнений; если опыт и привлекается здесь, то только
для иллюстрации тех результатов, к которым приводит мате-
матическая теория.
Совсем иную картину представляет собой область гидро-
механики. Несмотря на гениальные творения Ньютона, Эй-
лера, Лагранжа и длинного ряда выдающихся ученых, совре-
менная наука еще весьма далека от полного понимания того,
что происходит в движущейся массе жидкости; от аксиома-
тики, столь же совершенной как в динамике твердого тела,
наука в области гидро- и аэромеханики еще чрезв ычайно
далека. Достаточно вспомнить вопросы, связанные с явле-
ниями турбулентности, чтобы вполне оценить те трудности,
которые в этой области предстоит преодолеть.
При таких условиях роль опыта в гидромеханике высту-
пает на первый план, и эта роль Н. Е. была учтена совер-
шенно ясно. В первые же годы текущего столетия, когда
интерес к авиации как за границей, так и в России заметно
БИОГРАФИЧЕСКИМ ОЧЕРК
33
оживился, Н. Е. приступает к систематическим опытам над
движением крылообразных тел в воздухе. Это уже не слу-
чайные опыты, а систематическое исследование явления в тех
же масштабах и с теми же приемами, как при исследованиях
в физических лабораториях. В 1902 г. Н. Е. строит в меха-
нической лаборатории Московского университета первую аэро-
динамическую трубу в России и одну из первых в мире. Около
этого же времени по планам Н. Е. строится лаборатория
в Кучино на средства Д. П. Рябушинского и позднее в 1910 г.
строятся аэродинамические трубы в Московском техническом
училище и в университете. Во всех Зтих лабораториях ве-
дутся систематические исследования величины подъемной
силы и зависимости ее от формы обтекаемых тел. В частности,
в Кучинской лаборатории ведутся измерения подъемной силы
как на воздушных змеях, так и на моделях в аэродинамиче-
ской трубе, в Кучинской лаборатории. Повидимому, здесь же
•осенью 1904 г. у Н. Е. явилась гениальная мысль о влиянии
так называемой циркуляции на величину подъемной силы.
Нельзя сказать, что Н. Е. Жуковский первый высказал эту
идею. Еще значительно раньше она была вскользь затро-
нута Рэлеем, а в 1894 г. ее высказал в одном из докладов
англичанин Ланчестер, но в такой неопределенной и мало
убедительной форме, что эта идея в свое время прошла
совершенно незамеченной и о ней вспомнили только много
позднее, когда вся современная теория полета была в суще-
ственных чертах разработана. Впрочем, тут было еще одно
существенное обстоятельство, которое не дало идеям Лан-
честера широкого распространения. Дело в том, что меха-
ника есть точная наука, ее выводы должны быть выражены
в форме, которая допускает точный подсчет и сравнение теоре-
тических выводов с экспериментальными; между тем соображе-
ния Ланчестера были выражены в качественной форме, кото-
рая не поддавалась никакому количественному подсчету
и, следовательно, не могли быть подвергнуты эксперименталь-
ной проверке. Это с самого начала позволяло рассматривать
соображения Ланчестера только как остроумную, но неубе-
дительную и ничем не подтвержденную догадку.
Перед Н. Е. стояла сложная задача — придать своим со-
Зак. 2365. —Н. Е. Жукозский. Т. I. 3
34
НИКОЛАЙ ЕГОРОВИЧ ЖУКОВСКИЙ
ображениям количественную форму и дать им теоретическое
объяснение. Трудность этой работы, вероятно, и привела к тому,
что гениальная мысль, возникшая интуитивно в уме Н. Е.
и представшая ему вероятно сразу в полной ясности, полу-
чила четкое оформление только через два года в опублико-
ванном им классическом мемуаре „О присоединенных вихрях",,
который в области гидромеханики открывал совершенно но-
вую эру и поэтому может быть поставлен рядом с класси-
ческими работами Бернулли, Эйлера и Лагранжа. Этой рабо-
той в область механики жидкостей было введено представле-
ние о течениях жидкости, принципиально отличных от тех,
которые в ней рассматривались ранее.
Как известно, при настоящих условиях механика не обла-
дает ни методами интегрирования общих уравнений гидроме-
ханики, ни теоремами, позволяющими до конца судить об
условиях, единственным образом определяющих течение. При
таких условиях приходится ограничиваться изысканием ча-
стных типов решений диференциальных уравнений гидроме-
ханики. Простейшим типом таких решений является так
называемое потенциальное течение жидкости, на которое обра-
тил внимание еще Лагранж и которое было весьма подробно
изучено; простота этого типа движения объясняется прежде
всего тем, что все течение вполне определяется одной функ-
цией, которая к тому же в рассмотренных в механике слу-
чаях принадлежит к классу функций, хорошо изученных в ма-
тематике (так называемые гармонические функции). В середине
прошлого столетия Гельмгольц и Кирхгофф ввели в рассмотре-
ние другой возможный вид течения — течение с разрывом
скоростей, так называемое струйное течение. Введение этих
двух типов течения позволило дать объяснение ряду гидро-
динамических явлений, наблюдаемых в действительности, но
оно далеко не исчерпало всех возможных типов течения, удо-
влетворяющих гидродинамическим уравнениям и пограничным
условиям. Результат, вытекающий из содержания работы Н. Е.
„О присоединенных вихрях", состоит в том, что в гидро-
механику в случае, когда пространство, занятое текущей
жидкостью, неодносвязно, введен в рассмотрение еще новый
тип течения, потенциального во всей жидкости, но с неодно-
БИОГРАФИЧЕСКИМ ОЧЕРК
35
значным потенциалом, ввиду чего при обходе вокруг погру-
женных в жидкость тел циркуляция скорости может быть от-
лична от нуля; для этого типа течения, как показал Н. Е.,
характерно образование сил, действующих по направлению,
перпендикулярному к направлению первоначальной скорости.
Для этой силы — „силы Жуковского", как ее теперь называют,
Н. Е. дал очень простую формулу, позволяющую данную
силу рассчитать по величине циркуляции, скорости первона-
чального потока и плотности жидкости. Этот замечательный
результат в настоящее время вошел, как классическая основа,
во все учебники гидромеханики, наряду с самыми основными
результатами, как уравнения Эйлера, теорема Бернулли-Ла-
гранжа и т. п. Уже одно это показывает огромную ценность
полученного Н. Е. результата.
Тип течений, введенных в гидромеханику Н. Е. Жуковским,
как оказалось впоследствии, является как раз таким, который
объясняет все основные явления, происходящие в воздухе
в области летящего тела. Все попытки заменить течения, вве-
денные Н. Е. Жуковским, иными типами течений, — например
попытки Витошинского, — оказались неудачными и ненужными.
Естественно, что в действительности вследствие вязкости
воздуха и отчасти из-за его сжимаемости явление протекает
не вполне так, как это изображается Н. Е., но его теория
дает превосходную приближенную модель явления, его схему,
которая вполне охватывает его основные черты и нуждается
только в дополнениях и некоторых поправках, представляю-
щих последовательные приближения к тому явлению, которое
имеет место в действительности.
Вся гениальность полученного результата не сразу стала
ясна как самому Н. Е., так и другим ученым, работавшим
над вопросами гидромеханики и приложением их к во-
просам авиации и воздухоплавания. Нужно было время,
чтобы эта гениальная мысль дала свои плоды, и нужны
были соответствующие методы исследования, которые поз-
волили бы применить идеи Н. Е., сделать их так сказать
рабочим аппаратом исследования сложных вопросов гидроме-
ханики.
Чтобы вполне оценить всю глубину и важность тех идей,
3*
36
НИКОЛАЙ ЕГОРОВИЧ ЖУКОВСКИЙ
которые выросли из открытия Н. Е. Жуковского, следует об-
ратить внимание на учебники по гидромеханике, которые
выходят в настоящее время. Если в старых учебниках на пер-
вый план выдвигались такие вопросы, как теория волн, теория
форм равновесия жидкости под влиянием сил притяжения, то
в новых учебниках, вместо этого, все чаще и чаще входит теория
несущих поверхностей, Прандтлевская теория несущих поверх-
ностей и т. п. Достаточно просмотреть новые французские
курсы гидромеханики Вилла, Пере (Villat, I. Peres), чтобы убе-
диться в изменении направления научной мысли, которое нашло
отражение в новом содержании основной учебной литературы.
Как всякая новая и глубокая идея, открытие Н. Е. Жуков-
ского было, конечно, не случайно; к нему привело и разви-
тие науки и те задачи, которые к науке предъявляла техника.
Естественно, что к тем же идеям с разных сторон подходили
и другие исследователи. Одного из них, Ланчестера, мы выше
упоминали; необходимо здесь отметить и другого исследователя,
который на четыре года раньше Н. Е. для одного частного
случая крыла, имеющего в сечении форму дуги круга, дал
формулу подъемной силы, соответствующую теореме Н. Е.,—•
это был тогда начинающий германский ученый Кутта (Kutta).
В заграничной, главным образом, немецкой литературе основ-
ная формула для выражения подъемной силы обычно назы-
вается формулой Кутта-Жуковского. Не умаляя значения пре-
красной работы Кутта, написанной в 1902 г., необходимо,
однако, заметить, что Кутта рассматривает совершенно част-
ный случай и не делает в этой работе никакой попытки по-
казать, что найденный им совершенно частный результат
в действительности имеет гораздо более общее значение.
Форма, в которой дан результат Н. Е., представляет чрезвы-
чайно общую теорему; результат Кутта является совершенно
частным выводом, принципиальное и общее значение которого
остается совсем неясным. Этим замечанием достаточно ясно
определяется основное различие работы Н. Е. Жуковского
от работы Кутта.
Первый вопрос, который возникал при дальнейшем разви-
тии теории крыла, — это вопрос об определении величины цир-
куляции вокруг обтекаемого тела. Приблизительно одновре-
БИОГРАФИЧЕСКИЙ ОЧЕРК
37
менно Н. Е. Жуковский и С. А. Чаплыгин указали метод
определения величины циркуляции в случае контуров, имеющих
острую заднюю кромку. Соображение, на котором основыва-
лось определение циркуляции, состояло в том, что физически
невозможно рассматривать течение, в котором в некоторой
точке скорость равна бесконечности. Отсюда сейчас же выте-
кало, что острая кромка крыла должна быть точкой схода
струй, т. е. одной из критических точек течения, и это по-
зволяло определить величину циркуляции течения. В иностран-
ной литературе это положение обычно называется „основной
гипотезой Н. Е. Жуковского".
Все дальнейшие успехи теории крыла были связаны с за-
мечательными результатами, полученными С. А. Чаплыгиным.
Рассматривая крыло в условиях плоскопараллельного течения,
т. е. с физической точки зрения, не учитывая влияния концов
крыла и применяя метод теории функции комплексного пере-
менного, С. А. Чаплыгин вывел две замечательные формулы,
позволяющие определить величину, направление и точку при-
ложения результирующей силы, действующей на крыло; эти
формулы в настоящее время носят название „формулы
С. А. Чаплыгина". Необходимо, впрочем, заметить, что почти
в том же виде эти формулы, независимо от С. А. Чаплыгина,
были найдены германским ученым Блазиусом и в иностранной
литературе иногда носят название „формулы Блазиуса".
Таким образом были вполне выяснены и физические пред-
посылки теории, и был найден метод, позволяющий вести рас-
чет действующих на крыло сил. Механическая задача для
случая крыла в плоскопараллельном потоке была полностью
сведена к чисто математической задаче, задаче конформного
отображения. Оставалось пожать плоды.
В период с 1906 по 1913 г. Н. Е. выпускает ряд статей,
посвященных приложению этих обоих результатов к различ-
ным частным случаям. Первые примеры обтекания крылооб-
разных профилей были даны в замечательной работе
С. А. Чаплыгина в 1910 г.; в этой работе между прочим был
разобран случай профиля, представляющего собой инверсию
параболы. Одновременно с этим появляется работа Н. Е. Жу-
ковского, в которой рассматривается аналогичный профиль,
38
НИКОЛАЙ ЕГОРОВИЧ ЖУКОВСКИЙ
построенный на совершенно иных соображениях. Здесь Н. Е.
принадлежит геометрически совершенно ясная и весьма остро-
умная идея „округления" многоугольных контуров, „скелетов
крыла"; округление отрезка прямой дает так называемый „руль
Жуковского", округление дуги круга дает инверсию пара-
6ojg>i, ранее разобранную С. А. Чаплыгиным. Эти профили
в иностранной литературе обычно называются „профилями
Жуковского".
Далее Н. Е. рассматривает профили, представляющие окру-
гление луночки, ограниченной двумя дугами кругов; этим
профилям Н. Е. дал название профилей типа Антуанет; в ино-
странной литературе они называются профилями Трефтца-
Кармана, по имени ученых, которые много позднее разобрали
случай таких профилей. Необходимо вообще отметить тот
печальный для русской науки факт, что большинство работ
Н. Е. Жуковского и другого творца современной прикладной
аэродинамики С. А. Чаплыгина неизвестны за границей, и их
результаты, найденные позднее за границей, несправедливо
присваиваются заграничным ученым.
Работы Н. Е. в этой области далее были продолжены за-
мечательными исследованиями С. А. Чаплыгина по общей тео-
рии крыла. В сущности работы Н. Е. Жуковского и С. А. Ча-
плыгина до конца исчерпали теорию моноплана; дальнейшее
развитие в этой области дало только приближенную теорию
тонких крыльев, вызванную чисто математическими затрудне-
ниями, связанными с конформным отображением.
Естественно было в дальнейшем развивать эту теорию
в следующих направлениях: 1) развитие теории крыла конеч-
ного размаха; 2) изучение крыла, движущегося не поступательно,
а вращательно, т. е. развитие теории гребного винта. Из этих
задач, конечно, первая значительно проще второй; и в той,
и в другой приходится учитывать влияние на поток вихрей
сбегающих с конца крыла или с лопастей винта, так что ме-
тод исследования совершенно одинаков, но по степени труд-
ности подсчета эти задачи коренным образом отличаются;
учет влияния плоской вихревой полосы, а в простейшем слу-
чае теории подковообразного крыла даже учет влияния двух
сбегающих с его концов вихрей гораздо проще учета весьма
БИОГРАФИЧЕСКИЙ ОЧЕРК
39
сложных вихревых образований за лопастями вращающегося
пропеллера. Сейчас трудно понять, почему Н. Е. Жуковский
почти совершенно не занимался теорией крыла конечного
размаха и посвятил свои дальнейшие работы теории пропел-
леров. Может быть здесь сказалось то обстоятельство, что
теорией винта Н. Е. интересовался и ранее, и основные идеи
теории винтов, например, теория так называемого идеального
пропеллера, хорошо знакомая Н. Е., послужила для него
в дальнейшем руководящей схемой в его собственных изы-
сканиях; может быть здесь сказалось и то, что после разра-
ботки теории крыла в плоскопараллельном потоке Н. Е. считал
задачу кры R конечного размаха слишком простой и не за-
служивающей затраты сил, а теория винтов ему казалась бо-
лее практически важной; Н. Е. любил говорить, что „мотор
есть сердце самолета".
Теории крыла конечного размаха Н. Е. Жуковский касался
в некоторых докладах, которые им были сделаны в период
1911—1915 гг., а С. А. Чаплыгин вывел формулы подъемной
силы и индуктивного сопротивления в докладе, сделанном
в 1913 г. в Московском математическом обществе \ но эти
результаты не были опубликованы в печати и остались совер-
шенно неизвестными для широких кругов.
Как бы то ни было, но честь создания замечательной те-
ории крыла конечного размаха и индуктивного сопротивления
принадлежит полностью Прандтлю и его школе, хотя в работах
Н. Е. по теории гребных винтов вся вихревая схема этой
теории полностью использована в случае, значительно более
сложном и много ранее Прандтля.
Несомненно, что работы Н. Е. по вихревой теории греб-
ных винтов принадлежат к важнейшим результатам, найденным
им; созданная им теория далеко опередила работы в этой
области заграничных ученых, и четыре мемуара Н. Е., посвя-
щенные теории винтов, представляют классические работы,
которые будут служить основой всех дальнейших работ в этой
области.
Работы по теории крыла и по теории винтов являются
1 См. В. В. Голубев, Теория крыла конечного размаха, стр. 147,
Труды ЦАГИ вып. 108, 1931.
40
НИКОЛАЙ ЕГОРОВИЧ ЖУКОВСКИИ
главнейшими работами Н. Е. за последние два десятилетия
его жизни; они упрочили за Н. Е. мировую известность и по-
ставили его наряду с творцами механики жидкостей.
Но научные интересы Н. Е. не замыкались в области
этих двух основных задач, хотя они, естественно, требовали
от Н. Е. огромной затраты времени и труда, так как помимо
чисто теоретических исследований Н. Е. руководил огромной
экспериментальной работой в лабораториях Высшего техни-
ческого училища и Московского университета и в Лаборато-
рии Д. П. Рябушинского в Кучине; во всех этих лаборато-
риях велась интенсивная работа как по поверке ^оретических
выводов, так и по чисто практическим вопроса* связанным
с выработкой измерительной аппаратуры, техники измерений
и различных практических расчетов в применении к действи-
тельно существовавшим самолетам. Несмотря на огромную
работу в этом направлении, Н. Е. находил еще время и для
ряда других сложных и трудных вопросов. Диапазон научных
интересов Н. Е. был поистине огромный; он занимается и
вопросами, связанными с релятивистской механикой (которой
была посвящена речь Н. Е., подготовленная к университет-
скому акту 25 января 1918 г.), и задачами чисто математи-
ческими, посвященными геометрическому доказательству теорем
С. А. Чаплыгина по интегрированию уравнений и методам
вариационного исчисления, и исследованиями, связанными
с вихревой теорией лобового сопротивления, и чисто при-
кладными артиллерийскими и железнодорожными вопросами;
все эти разнообразные области привлекают внимание Н. Е., и
всюду он вносит методы точного научного исследования.
IV
Параллельно с огромной научной работой, которую вел
Н. Е., шла и его педагогическая работа. Н. Е. принадлежал
к тем ученым, для которых работа в аудитории, чтение лек-
ций, ведение постоянной работы со студенчеством, было
не обузой, мешающей научной работе, а необходимым живым
и интересным делом, без которого немыслима жизнь и науч-
ная работа. Этой живой связью с аудиторией была наполнена
вся долгая трудовая жизнь Н. Е. от первых его педагоги-
БИОГРАФИЧЕСКИЙ ОЧЕРК
41
ческих шагов буквально до последних минут его жизни.
Интерес к преподаванию, любовь к молодежи, к широкой
аудитории создавали исключительную популярность Н. Е.
Без всякого преувеличения можно сказать, что среди
профессоров Московского университета и Московского выс-
шего технического училища Н. Е. был одним из самых люби-
мых молодежью и самых популярных профессоров, хотя
никогда не заискивал перед молодежью, никогда не добивался
популярности.
Во время Октябрьской революции, когда в широких кру-
гах интеллигенции наблюдался распад и колебания, Н. Е.
один из первых твердо и решительно пошел с советской
властью, с теми, кто поставил себе задачей построение новых
форм свободной и счастливой жизни. Н. Е. было 70 лет,
когда началась революция, ки надо удивляться, что он, глу-
бокий старик, с такою юношеской энергией руководит моло-
дежью и вместе с ней создает два крупнейших центра, кото-
рые в дальнейшем сыграли исключительную роль и в научном
освоении труднейших задач, связанных с развитием авиации,
и в организации военной мощи Советского союза. Централь-
ный аэрогидродинамический институт и Военная воздушная
академия РККА носят имя Н. Е. Жуковского; в создание
их Н. Е. вложил остатки той неукротимой творческой энер-
гии, которой была насыщена его жизнь.
Плодотворная, неутомимая и разносторонняя научная и
педагогическая работа Н. Е. и результаты этой деятельности
говорят о том, что Н. Е. был замечательным учителем и
исключительным научным организатором. Однако Н. Е. совсем
не был блестящим лектором. Поглощенный творческой науч-
ной работой, Н. Е. был очень рассеян. Его ученики любовно
рассказывали самые невероятные истории о его рассеянности,
и хотя среди этих рассказов много анекдотического и пре-
увеличенного, но действительно бывали, например, такие слу-
чаи, что Н. Е. по рассеянности читал студентам II курса
лекции, предназначенные для Ш курса.
Та же рассеянность, а кроме того, и чрезвычайная доб-
рота Н. Е. иногда использовались студентами. Н. Е. был
очень добродушным и мягким экзаменатором, но не это соз-
42
НИКОЛАЙ ЕГОРОВИЧ ЖУКОВСКИЙ
давало ему популярность. Студенты весьма охотно исполь-
зуют излишнюю доброту своих учителей, но справедливость
требует сказать, что в глазах студентов это качество никогда
не служит к славе профессора.
Необычайная популярность и огромное влияние Н. Е. на его
учеников обусловливались прежде всего мощью его творче-
ского таланта, широтой его научной фантазии и его совер-
шенно исключительной любовью к постоянному, напряженному
научному творчеству, к научным вопросам, над которыми он
неустанно работал. Непрерывной творческой работой, напря-
женными научными исканиями объяснялись и его рассеян-
ность и дефекты, которые иногда бывали в его преподава-
нии. Его слушатели прежде всего видели в нем настоящего
ученого, для которого наука не отбывание служебной повин-
ности, а единственное, основное содержание всей его жизни.
Студенты знали, что если к Н. Е. обратиться с каким-нибудь
научным вопросом, то никогда не последует лаконический,
формальный, не затрагивающий существа дела ответ, показы-
вающий, что профессор желает только поскорее отделаться
от поставленного ему вопроса; наоборот, каждый серьезный
вопрос всегда находил у Н. Е. живой отклик и исчерпываю-
щее разъяснение.
Когда в 1872 г. Н. Е. начал чтение лекций по механике
в Московском высшем техническом училище, то там теоре-
тические предметы стояли не на очень высоком уровне; курс
теоретической механики ограничивался только самым необхо-
димым минимумом, непосредственно нужным при изучении
и применении техники. Н. Е. с самого начала сделал курс
механики более обширным и более углубленным теоретически,
так как совершенно ясно понимал, что развитие техники по-
требует от инженеров все большего повышения их чисто
научной подготовки.
В течение долгой преподавательской деятельности курсы
Н. Е., естественно, постепенно менялись сообразно тем тре-
бованиям, которые, с одной стороны, обусловливались разви-
тием науки, применением и усовершенствованием ее методов
и, с другой, — требованиями, предъявляемыми к механике
смежными техническими дисциплинами. Курсы лекций, которые
БИОГРАФИЧЕСКИЙ ОЧЕРК
43
читал Н. Е., всегда отличались большой продуманностью
в выборе материала и в его изложении. Курсы Н. Е., которые
из года в год издавались студентами в литографированном
виде, по своему построению и изложению чрезвычайно хара-
ктерны для педагогических взглядов Н. Е. В них, как и в его
научных работах, ярко сказывается геометрический характер
ума Н. Е., четко выраженная конкретность его мышления.
В речи на юбилее Математического общества Н. Е. сле-
дующим образом формулирует свои педагогические идеи:
„Если могут быть споры о самостоятельной роли геометрии
при решении недоступных до сих пор задач динамики, то ее высо-
кое значение в преподавании механики не подлежит сомнению".
„Ум изучающих весьма часто склонен к формальному по-
ниманию. Я из своего педагогического опыта знаю, как часто
запоминаются формулы без усвоения стоящих за ними обра-
зов... Если формулы и подстановки некоторыми из изучающих
легко запоминаются, то так же скоро они исчезают бесследно
из памяти; но раз усвоенные геометрические образы, рисующие
картину рассматриваемого явления, надолго западают в голову
и живут в воображении изучающего".
„Сравните, например, способы изложения теории притяже-
ния эллипсоидов, данные Шалем и Дирихле. Оба способа
одинаково прекрасны: один в области геометрии, другой
в области анализа. Который из них ближе ознакомит изу-
чающего с рассматриваемой задачей?"
„Из способа Дирихле он узнает остроумный искусствен-
ный прием брать многократные интегралы, ничего общего
с притяжением эллипсоидов не имеющий; способ же Шаля про-
ведет его через теоремы Айвори, Маклорена и Лапласа, вы-
ясняющие существенные свойства рассматриваемого явления".
„В этом отношении геометрическое толкование, предпочте-
ние геометрического доказательства аналитическому всегда
приносит пользу".
„Говоря о высоком значении геометрического толкования
в преподавании теоретической механики, не скрою, что неко-
торые авторы геометрией злоупотребляют. Нагромождение
кинематических теорем так же, как и нагромождение формул,
только запутывает дело преподавания".
44
НИКОЛАИ ЕГОРОВИЧ ЖУКОВСКИЙ
„Геометрическое толкование должно быть ясно и просто
и должно всегда близко прилегать к рассматриваемой задаче,
стремясь к изучению вещей самих в себе".
Эти педагогические идеи Н. Е. нашли свое полное выра-
жение в курсах, которые он читал. Необычайная простота
и конкретность, геометрическая наглядность и ясность изло-
жения делают его курсы лекций совершенно исключительными.
Можно только пожалеть, что среди постоянной научной, ис-
следовательской работы Н. Е. не нашел времени привести
в порядок, до конца обработать и издать в печатном виде
читавшиеся им курсы, и мы можем о них судить лишь по
воспоминаниям его учеников и по литографированным сту-
денческим запискам, естественно, спешно составлявшимся
и далеко не выражавшим педагогических намерений Н. Е. Тем
не менее даже изданные в таком несовершенном виде некото-
рые его курсы поражают замечательным совершенством формы
изложения; особенно следует отметить здесь его лекции по
аналитической механике, читанные в Техническом училище.
Два курса из числа прочитанных Н. Е. необходимо осо-
бенно выделить. Оба они посвящены вопросам гидро- и аэро-
механики, но один написан еще в первые годы, а другой
принадлежит к последним годам его продолжительной педа-
гогической деятельности: это — „Лекции по гидродинамике",
читанные в Московском университете в 1886 г., и „Теоретиче-
ские основы воздухоплавания" — курс, прочитанный Н. Е.
в Московском техническом училище в 1910 г.
Лекции по гидродинамике — единственный курс, который
был Н. Е. напечатан в обработанном виде. Чрезвычайно ха-
рактерна для Н. Е. вступительная лекция (введение), где
Н. Е., кратко охарактеризовав развитие механики, приходит
к выводу, что „XIX век можно приветствовать, как век бли-
стательного развития динамики непрерывного тела".
Охарактеризовав развитие теории идеальной жидкости,
Н. Е. далее указывает:
„Правильное употребление приемов вместе с внимательным
изучением могущих образоваться разрывов сплошности при-
водят нас к результатам, хорошо оправдываемым на опыте,
так что мы можем совершенно смело здесь повторить слова
БИОГРАФИЧЕСКИЙ ОЧЕРК
45
Гельмгольца о том, что „можно считать уравнения гидро-
динамики за истинные законы, управляющие движением фи-
зической жидкости".
„Если в старое время гидродинамика изгонялась из курсов
теоретической механики, как недостойная этого названия, то
теперь, разумеется, она должна занять видное место, являясь
одной из блестящих глав механики".
„Вот уже 15 лет. как я с интересом занимаюсь гидроди-
намикой, я много передумал и переработал разных вопросов
за это время. Я старался отбросить все, что не заключало
в себе успешных результатов, и изложить возможно простым
образом те выводы, которые к ним приводили".
„Оканчивая теперь мое вступление, позволю себе, мои бу-
дущие слушатели, выразить надежду, ^то вы получите интерес
и любовь к предмету, которым я сам занимался с таким увле-
чением. Я думаю, что в настоящее время великих открытий
в области аэронавигации и подводного плавания такая на-
дежда не должна быть тщетной. Может быть некоторым из
вас и самим придется заниматься гидродинамическими опыта-
ми, освещенными истинным пониманием теории, и внести
свою лепту в сокровищницу науки".
Это введение — целая программа научной деятельности
Н. Е., и мы знаем, каким блестящим образом были выпол-
нены скромные надежды Н. Е.: трудами его самого в пер-
вую очередь и трудами его ближайших учеников именно
в области гидромеханики, t непосредственно примыкающей
к чисто техническим дисциплинам, была внесена „не скром-
ная лепта", а фундаментальные вклады глубокого принци-
пиального значения.
Н. Е. в этом курсе собрал результаты своих 15-летних
размышлений и изысканий по вопросам гидродинамики; не-
сомненно, что и все его другие курсы включили резуль-
таты его продолжительной вдумчивой работы над самыми
разнообразными вопросами механики. И вот эта насыщенность
и глубина научной мысли Н. Е. заставляли его слушателей
видеть в его лекциях нечто чрезвычайно ценное, чего порой
нет в самых блестящих по форме, но лишенных глубокого
внутреннего содержания курсах и лекциях.
46
НИКОЛАЙ ЕГОРОВИЧ ЖУКОВСКИЙ
Как бы ответом на пожелания, выраженные в введении
к курсу Лекций по гидродинамике, является другой курс,
читанный Н. Е. в 1910—11 г., — „Теоретические основы
воздухоплавания", изданные в 1911 г. в литографирован-
ном виде его ближайшими учениками. Во введении Н. Е.
ставит задачей курса „связать богатый опытный материал,
накопленный аэродинамическими лабораториями, с теорети-
ческим исследованием рассматриваемых задач с помощью
основных уравнений гидродинамики и теории вязкости жидко-
стей". В этих лекциях впервые в мировой литературе в си-
стематически разработанном виде была дана теория подъем-
ной »силы крыла самолета, основанная на учете влияния
циркуляции скорости. Эти лекции являются замечатель-
ным памятником того, насколько работы Н. Е. Жуковского
стояли впереди работ подавляющего большинства загранич-
ных ученых.
В подтверждение этого можно привести такой факт. Зна-
чительно позднее, а именно в 1916 г., в своем курсе „Общей
аэронавтики" директор высшей аэронавтической школы в Ло-
занне и бывший профессор общей аэродинамики в Высшей
политехнической школе Льежа Рикардо Броцци (Riccardo
Brouzzi) утверждал: „Аэродинамика бесспорно есть наука
вполне эмпирическая. Все заслуживающие доверия законы
являются и должны быть указаниями действительного опыта.
Нет ничего более опасного, как применять математический
аппарат с целью достичь построения этих законов".
Понятно, с каким глубоким интересом лекции Н. Е. были
встречены всеми специалистами, работающими как в области
прикладной аэродинамики, так и теоретиками-механиками.
В 1916 г. „Теоретические основы воздухоплавания" были
переведены на французский язык и изданы в Париже Джевец-
ким; два французские издания этой книги (второе в 1931 г.)
достаточно характеризуют значение и популярность ее за
границей. Несомненно, что до самого последнего времени эта
книга являлась почти единственным систематическим изло-
жением современной теории сил, действующих на самолете.
В этих лекциях опять в полной мере проявляется черта
всех курсов Н. Е., — это исчерпывающее знание излагав-
БИОГРАФИЧЕСКИМ ОЧЕРК
47
мого материала во всех деталях и глубокая продуманность
содержания и формы изложения.
Теми же чертами, которыми отмечена педагогическая
деятельность Н. Е., характеризуется и его организационная
работа. Конечно, в руководстве Н. Е. лабораторной работой
нельзя искать элементарного организационного и администра-
тивного таланта. Хозяйство, внешние формы работы, ее ма-
териальную часть создавали и делали помощники Н. Е., об-
ладавшие административными и организаторскими способно-
стями. Но Н. Е. был душой всей работы, своим руководством
он оживлял и наполнял глубоким содержанием деятельность
всего коллектива, который имел счастье работать вместе
с ним. И здесь глубокое физическое понимание явлений
и исчерпывающее знание всех теоретических предпосылок
его позволяло Н. Е. в пестрой, часто неясной и противоречи-
вой картине экспериментальных данных находить простую
теоретическую сущность, которая позволяла затем распутать
весь сложный и запутанный клубок изучаемых явлений.
Аэродинамические лаборатории Московского технического
училища и Московского университета выдвинулись под руко-
водством Н. Е. на одно из первых мест в мире, а ближайшие
ученики и сотрудники Н. Е., работавшие с ним в этих лабо-
раториях, явились теми научными кадрами, опираясь на
которые можно было создать такую крупнейшую базу экспери-
ментальных и теоретических исследований по аэро- и гидро-
механике, как ЦАГИ, и такие мощные центры по подготовке
авиационных кадров, как Военная воздушная академия и Мо-
сковский авиационный институт.
V
В жизни Н. Е., как и в жизни большинства крупнейших
ученых, очень трудно отметить какие-нибудь внешние, заслу-
живающие особого внимания события. Обычно весь интерес
и все содержание жизни поглощается научными задачами, ухо-
дит на внутреннюю напряженную творческую работу.
С 1886 г., когда служебное положение Н. Е. после назна-
чения профессором Московского университета вполне опре-
делилось, в жизни Н. Е. почти не было внешних крупных
48
НИКОЛАЙ ЕГОРОВИЧ ЖУКОВСКИИ
перемен. Работа в университете, в Техническом училище и
в Промышленной академии шла из года в год по одному и
тому же раз установленному плану. Только в последние годы
к этому еще прибавилась работа сначала на Курсах для под-
готовки офицеров-летчиков, а затем в Институте инженеров
Красного воздушного флота, да интенсивная работа в аэро-
динамических лабораториях.
Н. Е. непрерывно живет в Москве со своей матерью Анной
Николаевной и сестрами Верой и Марией сначала на Немец-
кой улице (ныне ул. Баумана) в Денисовском переулке,
а затем с 1890 г., когда младшая сестра Вера Егоровна вышла
замуж за ученика Н. Е., инженера А. А. Микулина и уехала
из Москвы, а старшая сестра скончалась, Н. Е. переселяется
на другую квартиру в Гусятниковом переулке и вскоре затем
переезжает в Мыльников пер. В доме Соколовой в Мыльни-
ковом переулке (ныне улица Н. Е. Жуковского) Н. Е. и
прожил всю дальнейшую жизнь.
Все домашнее хозяйство вела его мать Анна Николаевна,
женщина властная, но вместе с тем гостеприимная хозяйка,
чрезвычайно радушная, прекрасная собеседница, всем живо
интересовавшаяся и входившая во все мелочи, касающиеся
деятельности ее любимого Николеньки.
Радушный, спокойный и уравновешенный характер Н. Е.,
его научный авторитет и широкие научные интересы создали
Н. Е. обширный круг знакомств среди профессоров универси-
тета и Технического училища, со многими из которых Н. Е.
был в близких, дружеских отношениях. Обаяние Н. Е. и ра-
душие Анны Николаевны привлекало в гостеприимный дом
Жуковских друзей Н. Е., а также многочисленных его учени-
ков, со многими из которых Н Е. поддерживал дружеские
отношения.
В дни семейных торжеств за гостеприимным столом
Жуковских собирались товарищи Н. Е. по работе — профес-
сора университета и Технического училища. Эти празднования
всегда носили сердечный, радостный характер и отличались
искренним весельем.
В 1900 г. Н. Е. был избран членом-корреспондентом
Академии Наук, а через год был выдвинут кандидатом в дей-
БИОГРАФИЧЕСКИЙ ОЧЕРК
49
ствительные члены Академии Наук. Н. Е. отказался от этой
кандидатуры, так как не желал расставаться с Москвой,
в которой имел разнообразные научные связи и вел интенсивную
научную и педагогическую работу.
Н. Е. часто бывал за границей на различных ученых съездах,
но каникулярное время проводил всегда в Орехове. Здесь он
отдыхал от напряженной зимней работы. Большой любитель
природы, птиц и домашних животных, садовод, страстный
охотник, искусный пловец и неутомимый ходок, Н. Е. здесь
в Орехове укреплял свое здоровье, черпал физическую бод-
рость, ясность и свежесть мысли.
Впрочем и здесь научная мысль не замирала: отдых соче-
тался с занятиями различными вопросами механики. То Н. Е.
сооружал большие крылья и с ними ездил на велосипеде, то
стрелял из самодельного арбалета стрелами с пропеллером
и следил за временем полета; наблюдал форму струи, выте-
кающей из большого резервуара и т. д.
Зимой жизнь Н. Е., помимо его служебных занятий
в университете и Техническом училище, была заполнена раз-
нообразной научно-общественной работой. Н. Е. с 1907 г.
был президентом Московского математического общества,
вице-президентом Общества любителей естествознания, антро-
пологии и этнографии, постоянным членом Бюро русских
водопроводных съездов, председателем Научно-технического
отдела Московского общества воздухоплавания, членом Совета
О-ва содействия успехам опытных наук и их практических
применений имени X. Л. Леденцова, членом О-ва испытателей
природы. Во всех этих организациях Н. Е. вел активную ра-
боту и часто выступал с научными докладами. В Политехни-
ческом о-ве, где Н. Е. состоял почетным членом, даже уста-
новился обычай начинать серию докладов каждого академиче-
ского года докладом Н. Е.
В 1911 г. научные и общественные круги торжественно от-
праздновали 40-летний юбилей профессорской деятельности Н. Е.
Московское математическое общество ознаменовало этот
юбилей изданием собрания сочинений Н. Е., первый том ко-
торого и вышел в 1912 г. Война 1914—1918 гг. не дала воз-
можности закончить это издание; вышел только первый том.
Зак. £365. — Н. Е. Жуковский. Т. I.
4
50
НИКОЛАИ ЕГОРОВИЧ ЖУКОВСКИЙ
Совет Политехнического общества вошел в Совет Москов-
ского высшего технического училища с ходатайством о при-
суждении Н. Е. звания инженера-механика honoris causa. Совет
Технического училища единогласно постановил удовлетворить
это ходатайство, и Политехническое Общество присвоило
Н. Е. почетное звание и поднесло ему большой нагрудный золо-
той инженерный знак. Во всех торжественных случаях Н. Е.
надевал этот почетный знак, необычный для профессоров
механики, как бы желая подчеркнуть свою постоянную связь
с работами , в технических прикладных областях.
Жена Н. Е., Надежда Сергеевна, рано умерла, оставив ему
двух детей: дочь Елену Николаевну и сына Сергея Нико-
лаевича Ч
Мать Н. Е. дожила до глубокой старости и умерла в воз-
расте 95 лет, 4 апреля 1912 г. После ее смерти место хозяйки
дома заняла дочь Н. Е. Елена Николаевна, окончившая в 1912 г.
гимназию и поступившая на математическое отделение Мос-
ковских высших женских курсов.
Дом Н. Е. все более наполняется молодежью. Подруги
его дочери и его ученики оживляют движением и молодыми
голосами старый дом в Мыльниковом переулке. Тихая, крот-
кая и ласковая Елена Николаевна была любима всеми, кто ее
знал. Но особенно большой популярностью пользовалась она
среди многочисленных студентов и изобретателей, приходив-
ших по делам к Н. Е.; все находили у Нее помощь и хода-
тайство перед Н. Е.
Дочь свою Н. Е. любил исключительно горячо; она сопро-
вождала его во всех заграничных поездках, присутствовала
с ним на ученых заседаниях, сопровождала его при посеще-
ниях лабораторий и аэродромов.
С началом в 1914 г. империалистической войны деятель-
ность Н. Е. Жуковского еще более расширилась. Аэродина-
мическая лаборатория Московского технического училища все
время вела различные исследования на военные нужды; при
ней под руководством Н. Е. образовалось Авиационное рас-
1 С. Н. Жуковский впоследствии был студентом ВВА; скончался от
туберкулеза в 1924 г.
БИОГРАФИЧЕСКИМ ОЧЕРК
51
четно-испытательное бюро, целью которого было производить
поверочные расчеты и испытания существующих самолетов,
выяснять их аэродинамические качества и необходимые тре-
бования со стороны прочности. Это Расчетно-испытательное
бюро затем было преобразовано в Экспериментально-аэроди-
намический отдел Института путей сообщения, а позднее
в Центральный аэрогидродинамический институт при Научно-
техническом отделе ВСНХ; Н. Е. при всех этих преобразо-
ваниях оставался неизменным председателем коллегий указан-
ных учреждений.
С организацией Московского военно-промышленного ко-
митета Н. Е. Жуковский вошел в Комиссию чугунных сна-
рядов; здесь он разработал формулы, определяющие устой-
чивость полета снарядов нового типа.
Одновременно с этим он вступил в должность председа-
теля вновь образовавшегося Отдела изобретений при Мос-
ковском военно-промышленном комитете, куда направлялись
все военные изобретения. Здесь Н. Е., кроме того, состоял
экспертом по изобретениям механическим, авиационным, гид-
равлическим и по всем вопросам, связанным с теорией ги-
роскопов.
Еще ранее, когда в 1912 г. в Москве была организована
Военная школа авиации, где занималось в то время всего 10
офицеров — будущих летчиков, Н.Е. начал читать им лекции по
элементарному курсу аэродинамики и динамике полета. Лекции
слушателям школы Н. Е. читал в университете и там же
в Аэродинамической лаборатории офицеры проходили лабо-
раторные занятия под руководством учеников и сотрудников
Н. Е.; такие же лабораторные занятия для них велись
и в аэродинамической лаборатории МВТУ. С началом войны
курсы были преобразованы в систематические четырехмесячные
теоретические курсы, на которых будущие летчики получали
уже более солидную подготовку по аэродинамике и по устой-
чивости аэроплан^.
Позднее, уже после Революции, в 1918 г. Курсы авиации
были преобразованы в Московский авиатехникум, а затем
в Институт инженеров Красного воздушного флота имени
Н. Е. Жуковского. Еще позднее, уже после смерти Н. Е.,
4:;
52
НИКОЛАЙ ЕГОРОВИЧ ЖУКОВСКИЙ
в 1922 г. Институт инженеров Красного воздушного флота
был преобразован в Военную воздушную академию имени
проф. Н. Е. Жуковского.
Самоотверженная напряженная работа, которую, несмотря
на свой возраст, вел Н. Е., и тяжелые условия жизни в Москве
зимой 1919 —1920 гг. в результате разрухи, вызванной империа-
листической и гражданской войнами, подорвали здоровье Н. Е.
В начале 1920 г. Н. Е. заболел воспалением легких; крепкий
организм Н. Е., несмотря на преклонный возраст, упорно бо-
ролся с болезнью. Весной Н. Е. был помещен в лучший под-
московный санаторий „Усово“ и начал поправляться. Но в мае
его постигла тяжелая утрата: после непродолжительной бо-
лезни скончалась его любимая дочь Елена Николаевна. Н. Е.
переживал смерть дочери очень тяжело. Тем не менее интен-
сивное лечение, питание, прекрасный уход несколько восста-
новили здоровье Н. Е. Явилась надежда на выздоровление.
29 августа 1920 г. исполнялось пятидесятилетие его на-
учно-педагогической деятельности. Московское высшее тех-
ническое училище и Политехническое общество готовились
торжественно отметить этот юбилей. Но отпраздновать этот
юбилей уже не пришлось. Н. Е. внезапно заболел тифом. Не
удалось даже передать ему заготовленные различными учреж-
дениями приветствия.
В связи с 50-летним юбилеем Н. Е. Жуковского 3 декабря
1920’г. Советом Народных Комиссаров за подписью В. И. Ле-
нина было издано постановление об освобождении Н. Е. от
обязательного чтения лекций, о назначении ему персональной
ставки, об установлении премии имени Н. Е. Жуковского за
лучшие труды по математике и механике и об издании его
трудов.
Н. Е. уже не мог оправиться от тяжелой болезни. Мед-
ленное угасание продолжалось еще несколько месяцев. Но
сила научного творчества Н. Е. еще не совсем иссякла: тя-
жело больной, лежа в постели, в санатории он продолжал еще
заниматься научной работой, украдкой от врачей слабеющей
рукой он писал на листках бумаги последние выкладки...
17 марта 1921 г., в 5 час. утра Н. Е. тихо скончался
в „Усове“.
БИОГРАФИЧЕСКИМ ОЧЕРК
53
Н. Е. Жуковский похоронен в Донском монастыре рядом
со своей дочерью. На могиле Н. Е. сооружен памятник с его
барельефом; в Военной воздушной Академии и в ЦАГИ
в память их основателя поставлены бюсты Н. Е. Жуковского
работы скульптора Н. А. Андреева.
VI
Полную картину той исключительной роли, которую сыг-
рал Н. Е. в развитии современной механики, дает изучение
его научных трудов. От Н. Е. осталось более 180 работ,
трактатов, составленных им курсов. Все эти работы войдут
в настоящее полное собрание его сочинений. Однако далеко
не все, сделанное Н. Е. для науки, можно в настоящее время
собрать. В течение своей долгой научной и общественной
деятельности Н. Е. сделал огромное количество докладов,
часто на общие принципиальные и весьма важные темы; со-
держание большей части докладов вошло в его научные пе-
чатные работы, но значительная часть этих ценных материалов
осталась неразработанной и ненапечатанной.
В последние годы Н. Е. во время своих докладов для
сокращения времени вместо выводов встречающихся формул
на доске обычно показывал их на экране при помощи про-
екционного фонаря, для чего предварительно выписывал их
на стеклышках. После смерти Н. Е. остались коллекции таких
стеклышек с формулами и чертежами, по которым иногда
можно восстановить основные черты сделанного им доклада.
Эта коллекция может служить некоторым дополнением к тому
печатному научному наследию, которое осталось от Н. Е.
Гораздо труднее воссоздать в возможной полноте его
образ, который оказывал такое исключительное влияние на
всех окружающих. Все его ученики, все встречавшие его ис-
пытывали на себе влияние его замечательной личности, но
охарактеризовать во всей полноте, проследить источники этого
воздействия — задача исключительной трудности.
В умах большинства его учеников, ныне работающих
в разных областях науки и техники, представление о личности
Н. Е. неразрывно связано с тем впечатлением, которое он
производил уже в преклонные годы.
54
НИКОЛАЙ ЕГОРОВИЧ ЖУКОВСКИЙ
В памяти всех встречавших Н. Е. Жуковского в эти годы
встает образ величавого патриарха науки. Мощная фигура,
исключительное спокойствие, задумчивый, сосредоточенный
взгляд, необычайная простота, естественность в обращении
с окружающими, поразительная скромность и вместе с тем
уверенность в себе и чувство собственного достоинства соз-
давали яркий образ ученого и мудреца. С философским
спокойствием взирал Н. Е. на окружающий мир; с живым.инте-
ресом вникал он во всякие суждения, избегая вступать в бес-
полезные споры и стараясь во всяком мнении найти нечто
ценное, заслуживающее внимания.
Исключительная широта его научных дарований, счастли-
вое сочетание геометрической интуиции, чувства живой дей-
ствительности и аналитического искусства соединялись со
столь же широким и разносторонним взглядом на людей и на
жизнь. Чуждый всякой односторонности и нетерпимости, Н. Е.
умел объединить для общего дела людей различных взглядов,
разнообразных темпераментов, разного таланта и способностей,
и каждый находил в работе, руководимой Н. Е., место для
приложения своих сил и дарований.
Н. Е. в течение многих лет был президентом Московского
математического общества; он умел объединить около Обще-
ства людей, интересовавшихся наукой и желавших научно
работать в области математики и механики; в нем все научные
работники находили постоянный живой интерес к их работе,
а молодые силы — поощрение и поддержку. За долгие годы
работы Н. Е. в Обществе менялись научные вкусы, исследо-
вательские идеалы, на смену одних научных перспектив при-
ходили другие, и в этой сложной обстановке 4Н. Е. с одина-
ковым интересом, пониманием и сочувствием следил за всяким
новым ценным направлением, за всяким проявлением
новой оригинальной и живой мысли. В~те годы, когда Н. Е.
стоял во главе Общества, там с одинаковым успехом прохо-
дили доклады на самые разнообразные темы, начиная от са-
мых общих и абстрактных отделов математики и кончая те-
мами, стоящими на границе с прикладными науками; доклады,
посвященные теории трансфинитных чисел, вопросам строения
бесконечных множеств, сменялись докладами по теории крыльев
БИОГРАФИЧЕСКИЙ ОЧЕРК
55
и винтов, а на смену им шли доклады по изгибанию поверх-
ностей, по теории особых точек аналитических функций.
Те же черты Н. Е. как талантливого организатора научной
работы проявлялись и во всех других случаях. Инженеров
он вовлекал в занятия чистой теорией, а отвлеченных, чистых
математиков умел заинтересовать работами совершенно при-
кладного характера.
С исключительной широтой научных взглядов, спокой-
ствием и мудростью истинного ученого гармонировал его
неизменный здоровый и бодрый оптимизм. Он был твердо
убежден в абсолютной ценности искания научной истины,
которая стояла всегда перед его научным взором; сохранив
до конца своих дней выдающийся талант исследователя,
Н. Е. всегда был чужд разочарований, сомнений и неуверен-
ности в своих силах. Он глубоко верил, что среди его уче-
ников есть и будут такие таланты, которые в силах разрешить
задачи, не решенные им, и искренно радовался, когда его
ученикам удавалось в некоторых областях пойти дальше
своего учителя. Никогда Н. Е. не пытался оказывать давление
на своих учеников своим авторитетом, никогда не обескура-
живал их резким, безапеляционным отзывом. Как истинный
мудрец, Н. Е. даже в ошибочных и неверных утверждениях
искал некоторую присущую им долю истины.
Эта вера в окружающих его учеников, убеждение в глу-
бокой ценности научного знания, беспредельная и бескорыст-
ная преданность науке — все эти черты ’слагаются в светлый
и трогательный облик замечательного человека, ученого и учи-
теля— облик, который всегда будет жить в памяти его уче-
ников.
Выдающийся ученый, один из творцов современной аэро-
механики, замечательный организатор научной работы, талант-
ливейший учитель, подготовивший первые научные кадры
в области авиации, Н. Е. Жуковский по справедливости наз-
ван в приведенном в этом томе постановлении СНК от 3 де-
кабря 1920 г. „отцом русской авиации".
SUR UN CAS PARTICULIER DU MOUVEMENT D’UN POINT
MATERIEL
(1878)
§ 1. Ne se dormant pas la peine de trouver les integrates
generates des equations du mouvement d’un point materiel, on
peut quelquefois donner des integrates particulieres de ces equa-
tions, en admettant que la vitesse initiate depend des coordon-
nees initiates.
Nous allons montrer, dans ce qui suit, une maniere bien fa-
cile de trouver de pareilles integrates pour le mouvement sur
un plan, quand les lignes de niveau seront des lignes isother-
miques.
§ 2. Soient
q = const (1)
I’equation de la famille des lignes de niveau, et
q{ = const (2)
I’equation de la famille des lignes perpendiculaires aux lignes de
niveau;
h et hx—les parametres differentiels des fonctions q et qf,
p— le rayon de courbure de la trajectoire;
g — la force rapportee a I’unite de la masse;
f (q) — la fonction potentielle des forces;
v— la vitesse;
6 — 1’angle entre la direction de la vitesse et la direction
de la force;
et «— les angles formes par ces directions et un axe donne.
SUR UN CAS PARTICUL1ER DU MOUVEMENT
57
En ayant egard a la fig. 1, dans laquelle ma est la traje-
ctoire du point materiel, mb — la ligne de niveau et me — la ligne
perpendiculaire aux lig-
nes de niveau, nous pou-
vons ecrire
— = Я sin о =
P
=f' (q)h sin в;
mais, si 1’angle ф est
considere comme une
fonction de qi9 on aura
7=A'3^s,n в;
Fig. 1
d’ou
A present, si les lignes de niveau sont isothermiques, on
pourra choisir les fonctions q et ql9 tellement que
A = Alf
et notre formule deviendra
AL=A^)
Nous pouvons eliminer v- de cette equation a 1’aide du theo-
reme des forces vives v2 = 2/(?) + c, (3)
et nous trouverons: dj _ f_ (?) z4)
§ 3. Admettons encore que la fonction f satisfasse a I’equa-
tion (?) —и. /чу 2/(?) + c b
ou p- est une quantite constante; apres avoir integre, nous
aurons
2/'(9) + C = 19e2w. (6)
58
SUR UN CAS PARTICULIER DU MOUVEMENT
En meme temps 1 equation (4) donnera
= (7)
«71
= (8)
$ et a etant des constantes arbitrages.
En remarquant que
6 = 180° —^ — 9,
nous trouverons, de la formule (8), Fequation differentielle de
la trajectoire
tg(Wi + ?—a) + ^ = 0. (9)
Enfin, des equations (3) et (6), nous deduirons la vitesse
pour chaque point de la trajectoire
= (10)
Ainsi sera determine le mouvement d’un point materiel
soumis a Faction de la force dont la fonction potentielle sa-
tisfait a Fequation (6); mais ce mouvement ne correspondra
qu’a un cas particulier, la vitesse initiate etant donnee par
Fequation (10).
§ 4. Considerons, par exemple, le cas pour lequel les lignes
(1) sont des cercles concentriques, et les lignes (2) les droites
qui passent par le centre de ces cercles; apres avoir designe
par r la distance du point considere de ce centre commun, et
remarque que cp, dans ce cas, sera Fangle de r avec un axe
donne, posons que
q = 9! = ?;
ce qui satisfait a la condition
Les equations (6) et (10) deviendront
2/(7)+ c = ^, (11)
= (12)
La derivee de la fonction par rapport a r, nous don-
nera la force g,
= (13)
SUR UN CAS PARTICULIER DU MOUVEMENT
59
elle sera attractive, si le coefficient est negatif, et repulsive,
s’il est positif; car on voit de (12) que p doit etre positif.
L’equation (9) prendra la forme suivante:
d 1g Г p ч----------; = 0, (14)
tglWH-l) —a]
et pourra etre integree
г'л и sin [(p +1) ? — a] = T, (15)
7 etant une constante.
L’equation (15) ne donne pas la trajectoire quand
h = —1;
mais, dans ce cas-la, I’equation (14) prend la forme
tga
d’ou nous trouvons l’equation de la spirale logarithmique
r=Te^.
Ainsi nous voyons qu’on peut trouver, de cette maniere, le
mouvement d’un point materiel dans le cas de la force cen-
trale proportionnelle a r*, quelque soit le nombre k\ seulement
la force doit ё!ге supposee attractive quand
^-<0,
et repulsive quand
Работа „Sur un cas particulier du mouvement d’un point materiel" была
сообщена автором 17 сентября 1877 г. в заседании Московского математик
ческого общества и напечатана в „Journal de Mathematiques pures et ap-
pliquees“, (3), IV, 1878, стр. 425—428, а реферат о ней в „Jahrbiiche ub. d.
Fortschr. d. Math.“, Bd. X, H. 3, S. 618. Вторично работа была напечатана
в Сочинениях Н. Е. Жуковского т. I, 1912, стр. 161—165. Прим, ред.
ОБ ОДНОМ ЧАСТНОМ СЛУЧАЕ ДВИЖЕНИЯ МАТЕРИ-
АЛЬНОЙ ТОЧКИ
{1878 г.)
§ 1. Не разыскивая общих интегралов уравнений движения
материальной точки, иногда можно дать частные интегралы
этих уравнений, предполагая, что начальная скорость зависит
от начальных координат.
Мы сейчас покажем весьма простой способ находить такие
интегралы для движения в плоскости, когда линии уровня
суть изотермические линии.
§ 2. Пусть
q — const (1)
уравнение семейства линий уровня и
— const (2)
уравнение семейства линий, перпендикулярных к линиям
уровня;
h и /ц— диференциальные параметры функций q и q$
Р — радиус кривизны траектории;
g— сила, отнесенная к единице массы;
/(7)— потенциальная функция сил;
v — скорость;
О—угол между направлением скорости и направлением
силы;
’Ь и © — углы, образованные этими направлениями с данной
осью.
Рассматривая фиг. 1, на которой та — траектория мате-
риальной точки, mb — линия уровня и тс — линия, перпенди-
кулярная к линиям уровня, мы можем написать:
^/2
— = g sin 6 = / (9) h sin 6;
ОБ ОДНОМ ЧАСТНОМ СЛУЧАЕ ДВИЖЕНИЯ
61
но если угол рассматривать как функцию д19 то будем
иметь:
1 т db . й
— = —sin
Р ^91
откуда
А_=А £А)
d<fi hx v2
Когда линии уровня
функции q и 94 выби-
рать так, чтобы
h = hx,
и тогда наша формула
будет:
f(<7)
dqr v2
Мы можем исклю-
чить V2 из этого урав-
суть изотермические линии, можно
нения при помощи теоремы живых сил
и получим:
^ = 2/(9) + с
Q = Пд)
d<h У(ч) + С'
(3)
(4)
§ 3. Предположим еще, что функция f удовлетворяет
уравнению
2/(9) + с
(5)
где у- — величина постоянная; интегрируя, мы будем иметь:
2/ (д) 4~ с =
(6)
и уравнение (4) дает:
AL
^91
= Р-,
+ а = у-9!,
(7)
(8)
где р и а — произвольные постоянные.
62
ОБ ОДНОМ ЧАСТНОМ СЛУЧАЕ ДВИЖЕНИЯ
Замечая, что
6 = 180° — ф —
из формулы (8) мы получим диференциальное уравнение
траектории:
tg<Wi + ?— °) + ~^ =0- (9)
Наконец, из уравнений (3) и (6) мы определим скорость
в каждой точке траектории:
^2=^7. (Ю)
Таким образом определится движение материальной точки
под действием силы, потенциальная функция которой удовле-
творяет уравнению (6); но это движение соответствует только
частному случаю, когда начальная скорость дается уравне-
нием (10).
§ 4. Рассмотрим, например, случай, когда линии (1) суть
концентрические окружности и линии (2) — прямые, прохо-
дящие через центр окружностей. Обозначив через г рассто-
яние рассматриваемой точки до общего центра и замечая,
что в этом случае 7 есть угол между г и данной осью, по-
ложим:
<7 = lg г, qi = ?,
что соответствует условию:
h =
Уравнения (6) и (10) будут:
2/(?)4-с = ^. (П)
г/2 = (12)
Производная от функции f(q) по г дает нам силу gz
g=$ ”1; (13)
она будет притягивающей, если коэфициент и отрицательный,
и отталкивающей, если он положителен, ибо из уравнения
ОБ ОДНОМ ЧАСТНОМ СЛУЧАЕ ДВИЖЕНИЯ
63
(12) видно, что ,3 — положительно. Уравнение (9) примет сле-
дующий вид:
rfl*’'+ir[T(c+i)-»]=-0 <14)
и может быть проинтегрировано:
1 sin [(р- +1) ? — а] = 7, (15)
где 7 — постоянная.
Уравнение (15) не дает траектории, когда
'Л — — 1;
но в этом случае уравнение (14) примет вид:
откуда мы получим:
уравнение логарифмической спирали.
Итак, мы видим, что таким способом можно определить
движение материальной точки в случае центральной силы,
пропорциональной г*, каково бы ни было число сила
должна быть притягивающей, когда
и отталкивающей, когда
1-±1>о.
Эта статья представляет собой перевод предыдущей статьи, выполнен-
ный для настоящего издания проф. А. П. Котельниковым. Прим. ред.
ON A PARTICULAR CASE OF MOTION OF A MATERIAL POINT
In this note Prof. Joukovsky shows how the particular inte-
grals of the equations of motion of a point in a plane can be
obtained in the case of the level lines of the force-function
forming with the orthogonal lines an isothermal set.
The solution is obtained by means of the integral of energy
(3) and of equation (4), obtained by a transformation of the na-
tural equation of motion of the point for the normal component
of the force. In the particular case (5) the differential equation
of the path takes the form (9). Applying this to the problem
of motion of a point acted on by a central force varying in
proportion to some power of the distance of the point from
the centre, we obtain the path’s equation (15).
SUR LA PERCUSSION DES CORPS
(1878)
§ 1. Poinsot, dans son Memoire sur la percussion des corps \
ddmontre que, dans les cas particuliers, on peut ramener la
question relative a la percussion d’un corps et d’un point
materiels denues d’elasticite a la percussion de deux points.
Les cas particuliers trait£s par 1’auteur sont celui ou la direction
de percussion se trouve dans le plan passant par deux axes
principaux d’inertie du corps, relatifs a son centre de gravite,
et celui ou la direction de percussion est perpendiculaire a
ce plan.
Ce qui va suivre montre que la question la plus generale
de percussion de deux corps libres, quel que soit leur degre
d’elasticite, peut etre ramenee a la percussion de deux points
massifs.
§ 2. Rappelons nous auparavant les formules relatives a la
percussion de deux billes.
Soient:
P—1’impulsion des actions mutuelles;
m et mi — les masses des billes;
v et — les projections des vitesses des centres des billes
sur la direction de P9 ou v < vf,
и et ut— les projections semblables apres le choc.
Nous aurons
P= m(u — vj — m} (v1 — uj,
(1)
mv2 -j- — mu2 — = e [zn (v — u)2 + mi (Vi — ui)2]> (2)
1 „Journal des Mathematiques pures et appliquees**, 1857, 1859.
Зак. 2365. — H. E. Жуковский. T. I.
5
66
SUR LA PERCUSSION DES CORPS
ou e est le coefficient du choc, qui est egal a zero pour les
billes parfaitement elastiques et a I’unite pour les billes dёnuёes
d’elastic^.
Вё1огтопз liquation (2) a I’aide de liquation (1):
и + т/4-е(и — v) = u1-r^14-e(u1 — ^). (3)
masses des billes restent
Liquation (3), reunie a
liquation (1), donne les quan-
tums cherchees
”4
— v m
ui = — 2 ----------:----,
1-f-S Hl-j-TH
mml
(4)
(5)
(6)
Les formules (4), (5) et (6)
ne dependent pas des rayons de
billes; admettant que ces rayons
diminuent a 1’infini et que les
constantes, nous aurons
le choc des
points massifs.
§ 3. Вё1егттоп8 maintenant les changements des vitesses
produites par le choc dans le mouvement d’un corps libre dont
la masse est M. Menons (fig. 1) par la direction de percussion P
et le centre de gravite О du corps un plan, que nous nommerons
plan de percussion. Abaissons du centre О une perpendiculaire
sur la direction de P. Le point C de rencontre de cette per-
pendiculaire avec la direction de P sera, comme dans le Мё-
moire de Poinsot, le centre de percussion.
Posons ОС = A.
Prenons les axes des coordonnees rectangulaires x, y, z, ayant
pour origine le point O, pour le plan xOy le plan de percus-
sion et pour Гахе Ox la droite ОС.
En transportant le point d’application de la force P au point O,
nous aurons une force P, dirigёe vers I’axe Oy, et un couple
SUR LA PERCUSSION DES CORPS
67
(P, —P) dans le plan xOy. La force P donnera au corps une
vitesse de translation p dirigee vers Гахе Oy.
?=£ <’>
Pour determiner les vitesses angulaires 62, autour des axes
Ox, Oy, Oz, produites par le couple (P, — P), representons par
f(x, y, z) = l (8
l’equation d’un ellipsoide d’inertie du corps par rapport au
point O.
Nous aurons, a 1’aide du theoreme des moments,
1 2 1 2 Cb cxJ cp CX> Qj to 1 ь- 1 z—s z-ч J2P JZP cp a? ф CP 05 05 II II о о W M (9
1 2 ^/(^ %)=ph.
Soient 6 la vitesse angulaire de rotation resultante, et E, t], C les
coordonnees du point d’intersection de 1’axe de cette rotation
avec la surface d’ellipsoide- Nous pouvons presenter les equations
(9) ainsi:
/С. 1, 0 = 0,
^/(^0=0,
| A/(e,„,q=.pa,
(10)
ou p = ]A24~7T24~£2-
Les deux premieres equations (10) mpntrent que 1’axe de
rotation 6 est le diametre conjugue du plan de percussion par
rapport a 1’ellipsoide (8). A 1’aide du theoreme bien connu des
fonctions homogenes
5*
68
SUR LA PERCUSSION DES CORPS
la troisieme equation (10) peut etre mise sous la forme
0 = W. (11)
En nommant 8 la projection de p sur le plan xOy, nous pouvons
decomposer la rotation 6 par les deux suivantes:
03 = W, (12)
(13)
compose avec
meme vitesse
Faxe Oz. Cet
la translation (3, et donne
angulaire autour d’un
axe coupe Ox dans un
dont la premiere a pour axe de rotation Oz, et la seconde la
projection de p sur le plan xOy.
La rotation se
une rotation avec la
axe Dz' parallele a
point D, pour lequel
OD = — — — 1 —
U 63 ‘
En posant
(14)
nous trouvons
hi — k\
(15)
Les points C et D sont reciproques.
Ainsi la percussion augmente le mouvement du corps de
deux rotations, dont Tune a pour vitesse angulaire Ph&Z et pour
axe 8, et 1’autre a pour vitesse angulaire Pht? et pour axe la
perpendiculaire au plan de percussion passant par le point D.
§ 4. Nous cherchons maintenant a determiner la grandeur
de percussion a Faide des vitesses des points s’entre-choquant
des deux corps.
, Soient v et и les projections des vitesses du point choque
sur la direction de la percussion P avant et apres le choc. Le
changement de v en и provient seulement de la rotation autour
de I’axe perpendiculaire au plan du choc; nous pouvons done
ecrire
p AS _L L2
u-v = P^(A + /)=-^A+^.
SUR LA PERCUSSION DES CORPS
69
Pour un autre corps Mi9 qui se choque avec M, nous trouvons
une formule semblable, en changeant P en —P:
oil hi9 ki9 vi9 щ ont pour le corps les memes significations
que h9 k9 v9 и pour le corps M9 et
> V.
Nous trouvons maintenant les equations
Ь2 1г 2
M(u — v) = (V1 - U1), (16)
qui se reduisent a (1) en posant
= d’)
Nous nommerons m et mx les masses des corps ramenees au
point du choc.
§ 5. Il nous reste a considerer le changement de force vive
des corps produit par le choc.
Soient
T et 7\ les forces vives des corps M et avant le choc;
F et Fr les forces vives des deux corps apres le choc;
ft et les forces vives des vitesses acquises ou perdues
par les corps M et pendant le choc.
Nous aurons une equation connue 1
dans laquelle e est le coefficient du choc. Cette equation peut
etre mise sous la forme
T+ еИ = _ (Fi _ + A). (18)
Determinons sa premiere partie.
Posons qu’avant le choc les projections de la vitesse du
centre О sur les axes x, y9 z seront
w19 w,29 w39
1 Traite de Mecanique generale, par R e s a 1, t. I, p. 417.
SUR LA PERCUSSION DES CORPS
et les vitesses angulaires autour de ces axes seront
“1, Ш2> ШВ-
Nous trouverons apres le choc, pour les memes quantites,
+ Ш2 + е2, шз + 68-
D’apres I’equation (8), on peut ecrire
2 T= M(w? 4- w22 + +/ (wp w2, w3),
2F = M [wx2 + (w2 4~ ₽)2 4" wb2] +/(°h+61» ш2“Н2, шз“М3),
2B =/ир+/(61> 6з)в
Remarquons que
М = /(61,62, ^=PW,
/ (01 4" “1> f,2 4~ т2» % + “з) ~
=/(бь о2) /(«г, е2, е3)+«2/(6lt е2, е3) +
1 2
+ ю3 °2> М+/(“!> “2> ^) = P-2h^ + 2^PhA-
+ /(“1, “-2, “3)-
Nous trouvons
г т_| ч-РГо/ I !Л I Р k* + h2 . Р £24-Ла]
F~ 7Ч-в6 — — ^2(гу.2 + <иаЛ)4-— 1~е М —£2—J’
ou, a cause de I’equation (16),
р— у* _j_ еЭ = v 4^ е (и —
Pour le corps М19 nous devons changer P en — P, ce qui donne
Fj— 714-8»!=— yK+vi-j-efai — «'t)b
En mettant les quantites trouvees dans l’equation (18) et la
divisant par
nous trouvons une equation toute semblable
a l’equation (3).
SUR LA PERCUSSION DES CORPS
71
§ 6. La question de la percussion de deux corps libres est
maintenant rdsolue. Il suffit seulement de concentrer dans les
points s’entrechoquant des corps les masses ramenees, et de
traiter le choc comme celui des points massifs, ayant le meme
coefficient du choc que les corps. En trouvant P par la for-
mule (6), il reste a augmenter les mouvements des corps des
rotations montrees dans le § 2.
Работа была напечатана в „Lionville Journ.*, т. IV (3) за 1878 г.,
стр. 417—424. Содержание ее реферировано в „Jahrbuch iib. d. Fortschritte
d. Math.*, Bd. X, H. 3, S. 634. Вторично статья была напечатана в юби-
лейном издании Сочинений Н. Е. Жуковского, т. I, 1912, стр. 154—160.
Прим. ред.
О СОУДАРЕНИИ ТЕЛ
(1878 г.)
§ 1. Пуансо в своем мемуаре о соударении тел показы-
вает, 1 что в частных случаях можно свести вопрос о неупру-
гом соударении материальной точки и тела к соударению двух
точек. Частные случаи, о которых говорит автор, — это случай,
когда направление удара лежит в плоскости двух главных
центральных осей инерции тела, и случай, — когда направление
удара перпендикулярно к этой плоскости.
Ниже мы покажем, что самая общая задача о соударении
двух свободных тел, какова бы ни была степень их упруго-
сти, может быть сведена к задаче о соударении двух массив-
ных точек.
§ 2. Напомним сначала формулы, относящиеся к удару
двух шаров.
Пусть
Р— импульс взаимодействия;
т и — массы шаров;
v и — проекции скоростей центров шаров на напра-
вление Р, причем v < vf,
и и щ — соответствующие проекции после удара.
Мы будем иметь:
т (и — v) = ml — nJ, (1)
mv2 4~ m^2 — mu2 — т^щ2 = e [тп (v — u)2 4- (vx — ur)2], (2)
где e — коэфициент удара, который равен нулю для шаров
абсолютно упругих и единице — для шаров неупругих.
Преобразуем уравнение (2) при помощи уравнения (1):
и + « + е(м — <») = ui + + е (“i — ui)- (3)
1 „Journal des Mathematiques pures et appliquees", 1857, 1859.
О СОУДАРЕНИИ ТЕЛ
73
Уравнение (3) вместе с уравнением (1) определяет искомые
величины:
и = «у 2
--V
т-\-т1 ’
о Vt — V т
Ui = v1 2 -т—i-------;---- ,
1-j-e т~}-тх
(4)
(5)
р = 2
14“s т-\-тщ ’
(6)
, производит удар, ирове-
Фиг. 1.
Формулы (4), (5) и (6) не зависят от радиуса шаров; пред-
полагая, что эти радиусы стремятся к нулю, причем массы
шаров остаются постоянными, мы будем иметь удар массив-
ных точек*
§ 3. Определим теперь, какие изменения в скоростях дви-
жущегося тела, масса которого
дем (фиг. 1) через направление
удара Р и центр тяжести О
тела плоскость, которую назо-
вем плоскостью удара. Опустим
из центра О перпендикуляр на
направление Р. Точка С встречи
этого перпендикуляра с направ-
лением Р, как и в мемуаре
Пуансо, будет центром удара.
Положим OC=h.
Возьмем прямоугольные оси
координат х, у, г, начало кото-
рых поместим в точке О, и
примем плоскость удара за
плоскость хОу и прямую ОС—за ось Ох.
Перенеся точку приложения силы Р в точку О, мы будем
иметь силу Р, направленную по оси Оу, и пару (Р, —Р)
в плоскости хОу. Сила Р сообщит телу поступательную ско-
рость Р, направленную по оси Оу.
(7)
74
О СОУДАРЕНИИ ТЕЛ
Чтобы определить угловые скорости 6.2, 63 вокруг осей Ох,
Оу, Oz, вызванные парой (Р, —Р), примем
f(x, y,z) = l (8)
за уравнение эллипсоида инерции тела для точки О.
Мы будем иметь на основании теоремы моментов:
08) = о, У = о, (9)
1 2 к /<’ 62,
1 2 6-2. %) = Ph.
Пусть 6 — угловая скорость вращения и т), С— координаты
точки пересечения оси вращения с поверхностью эллипсоида.
Мы можем представить уравнения (9) так:
^/(Е, 4,0 = 0, /С, 4, 0 = 0, (10)
|Л/(Е,4,0=А,
где p = /£2 + -»j2 4-C2.
Первые два уравнения (10) показывают, что ось враще-
ния о идет по диаметру, сопряженному по отношению к эллип-
соиду (8) с плоскостью удара. При помощи хорошо известной
теоремы об однородных функциях
I Q + /0. /G,nrj,Q = 2/(6, iq,C) = 2
третье уравнение (10) может быть представлено в виде:
0 = РАр!;. (11)
Обозначая через 8 проекцию р на плоскость хОу, мы можем
разложить вращение 0 на следующие два:
% = Р№, (12)
+ (13)
О СОУДАРЕНИИ ТЕЛ
75
из которых первое имеет осью 0z9 а второе — проекцию р
на плоскость хОу.
Вращение слагается с поступательным движением Р и
дает вращение с той же угловой скоростью вокруг оси Dz ,
параллельной оси Oz. Эта ось пересекает Ох в точке D, для
которой OD = — = —-
Полагая OD — i,
М2 ’ (14)
мы найдем: hi = k‘-. (15)
Точки С и D сопряжены.
Таким образом удар добавляет к движению тела два вра-
щения, из которых одно имеет угловую скорость Ph^Z и
осью 8, а другое — угловую скорость РК? и осью перпенди-
куляр к плоскости удара, проходящий через точку D.
§ 4. Займемся теперь определением величины удара при
помощи скоростей тех точек, в которых два тела касаются
в момент удара.
Пусть v и и суиъ проекции скоростей одной из этих точек
на направление удара Р до и после соударения. Изменение v
и и происходит только вследствие вращения вокруг оси,
перпендикулярной к плоскости удара; поэтому мы можем
написать:
г>, г2 ,7 । А Р А2 4~ А2
u —v = PA!;2(A + z) = -^ ——•
Для другого тела Mi9 соударяющегося с М9 мы имеем подоб-
ную же формулу, изменив Р на — Р:
^1 —Ui
Р A^ + V
Ах2
где At, k19 vi9 пх имеют для тела те же значения, какие
A, A, v9 и — для тела М9 и > v.
О СОУДАРЕНИИ ТЕЛ
Мы получаем теперь уравнения:
k2 k.2
М(и ~v)== Mi (Vi ~Ui)’ (16)
которые приводятся к (1), если положим:
k2 k.2
т = м ’ ml=Ml <17)
Назовем m и т1 массами тел, приведенными к точкам удара.
§ 5. Нам остается рассмотреть произведенное ударом
изменение живой силы тел.
Пусть
Т и Т\— живая сила тел М и Мх до удара;
F и Fx— живая сила тел М и Мх после удара,
О и — живая сила скоростей, потерянных или при-
обретенных телами М и Мх при ударе.
Мы имеем известное уравнение 1
7’+7’1-F-JF’1 = e(& + &1),
в котором е — коэфициент удара. Это уравнение может быть
представлено в виде
Г+е&= -(Л- Л + еПО. (18)
Определим его первую часть.
Предположим, что до удара проекции скорости центра О
на оси х, у9 z были
w29 W3
и угловые скорости вокруг этих осей:
<01, 0)2, (03.
Тогда мы получаем после удара для тех же величин:
«Ъ, W2+₽, W,,, <01 + 61, <02 + 02, <о8 + 68.
На основании уравнения (8) можно написать:
2Г = Л/(гУ12 + «>.22 + «;82)+/(«!, <02, Ш3),
4F = М [®12 + (w2 + ₽)2 + о>з2] + /(<fij+61, <02+62, <03 + 6а),
2» =^2+/(6i, 62, 68).
1 Traite de Mecanique generale, par R e s a 1, t. I, p. 417.
О СОУДАРЕНИИ ТЕЛ
77
Заметим, что
/ (б„ %) = I % f (б„ о2, М = /> w,
е2 + “2> 63-Нв) =
=/(0» 02, М+“1 НК 02, М+«2 аг/(01> 02. %)+
1 2
+ “з /(61’ °2’ 6з)+/(<й1> W2’ <»3)-^2 + 2^ +
°>2, “з)-
Найдем:
„ т ! А Р ' , ,ч . Р £2 + Л2 РР2 + Л2
F- Г+е» = - р (w2 + ®8А) + -у -----------he
или, по уравнению (16)
F— Z4-sfr = -^-[«4“v4“e(u — *>)]•
Для тела Мх мы должны изменить Р на —Р, что дает:
Fi — Тг + е&! = — у [wi+^j + е (uj — Vj)].
Подставляя найденные величины в уравнение (18) и деля
его на , мы получим уравнение, совершенно одинаковое
с уравнением (3).
§ 6. Вопрос о соударении свободных тел теперь решен*
Достаточно сосредоточить в точках касания тел приведенные
массы и рассматривать удар как удар массивных точек, имею-
щих тот же коэфициент удара, как и тела. Определив Р по
формуле (6), остается добавить к движению тел те вращения,
которые были рассмотрены в § 3.
Эта статья представляет собой перевод предыдущей статьи, выпол-
ненный для настоящего издания проф. А. П. Котельниковым. Прим. ред.
ON THE IMPACT OF RIGID BODIES
The problem of joint impact of two rigid bodies consists of
two problems, viz. I. to determine the normal impulsive pressure
at the point of contact at the moment of impact and 2. to
determine from the impulse P the velocities of translation and
of rotation of the bodies after the impact.
The chief interest of the paper consists in the fact that the
normal components of velocities of the point at which the two
bodies impinge: v and vr > v before the impact and and и
after the impact as well as the impulse P are determined in the
general case by the same equations (1) and (6) as in the case
of a central impact of spheres, provided the masses of the
spheres m and тп1 are determined according to the masses M
and of the impinging bodies by formulae (16). When the
impulse P it known the solution of the second problem is easily
obtained.
К ВОПРОСУ О НАИБОЛЬШЕМ УДАРЕ
(1878 г.)
§ 1. Положим, что на тело массы М действует ударом
пара, линейный момент которой есть g, и определим сообщаемое
ею вращение.
Пусть будут:
g}, S29 §з — проекции g на главные оси инерции Ох, Оу, Oz,
проходящие через центр тяжести тела О;
а, Ь,с— радиусы инерции тела относительно осей Ох, Оу, Oz\
®1» ®29 —проекции угловой скорости <0 искомого враще-
ния на оси Ох, Оу, Oz.
Мы получаем:
gi =
g2 = Мш2Ь2, (1)
g3 = Mwac2.
Отсюда
= fl (2)
«2 = J (з) W 1 Ь^сЧ W
Построим поверхность эллипсоида, имеющего уравнение:
*1 i £
а2'
= 1.*
Назовем через уи zx координаты точки пересечения
этой поверхности с линейным моментом g*, через г—радиус-
вектор точки (хр У1 zr)-, через р — длину перпендикуляра,
опущенного из центра О на плоскость, касательную к эллипсоиду
в точке (хр уи 24).
* Этот эллипсоид введен в теорию удара С. А. Марковым.
80
К ВОПРОСУ О НАИБОЛЬШЕМ УДАРЕ
Уравнениям (2) и (3) можно дать следующий вид:
е>1 : о).у
<°з =
£1 . £1 . £1.
а2 А2 с2 ’
(5)
Мгр
(6)
Пропорция (5) показывает, что вращение со будет совер-
шаться около перпендикуляра р; уравнение же (6) дает вели-
чину угловой скорости <».
Фиг. 1.
чало координат О, получим
вленную по оси Otj, и пару (Р9
оси ОС против солнца.
Прибавляя к’движению
тела найденное вращение,
получим скорости тела
после действия пары.
§ 2. Вообразим теперь,
что на наше тело дей-
ствует ударом сила Р.
Возьмем новые оси ко-
ординат OS, Otq, ОС, имею-
щие старое начало и рас-
положенные так, что ось
OS пересекает направление
силы Р в точке С под пря-
мым углом, а ось О?}
параллельна силе Р, но
направлена в сторону, про-
тивоположную этой силе.
Перенеся силу Р в на-
(фиг. 1) силу — Р9 напра-
Р)9 вращающую тело около
Линейный момент пары (Р, — Р) будет направлен по оси ОС
и будет равен — РА, где А = ОС.
Сила сообщит телу поступательное движение по оси О^
со скоростью
Р
К ВОПРОСУ О НАИБОЛЬШЕМ УДАРЕ
81
пара же сообщит ему вращение около перпендикуляра р,
соответствующего радиусу эллипсоида г, направленному по С.
Это вращение будет иметь угловую скорость
Ph
Мгр'
Проекция найденного вращения на ось С будет:
Ph ф р = Ph
Мгр г МР ’
Теперь, если точка С имела до удара по направлению оси
0г\ скорость г/, то после удара она будет в этом направлении
иметь скорость и:
Р Р№
u~~v М М^'
Отсюда
<7>
§ 3. Если предположить теперь, что движущееся тело со-
прикасается в данный момент своей поверхностью с плос-
костью в точке С, то, поместив в точке С неподвижную
точку, нанесем ей телом удар Р9 параллельный Ch], Величина
этого удара определится из формулы (7), полагая п = 0,
(8)
В отыскании точки С и направления iq, при которых вели-
чина Р будет наибольшая, заключается на мой взгляд задача
о наибольшем ударе.
§ 4. Рассмотрим сначала тот случай, когда тело получило
свое движение от действия одной пары, т. е. когда все дви-
жение тела состоит из вращения около некоторой оси, про-
ходящей через центр тяжести. Назовем через 6 угол, обра-
зуемый этою осью с осью ОС, и напишем:
= соА cos 0,
Р= М cos 0. (9)
№ -4- г2 '
Зак. 2365. — Н. Е. Жуковский. Т. I.
6
82
К ВОПРОСУ О НАИБОЛЬШЕМ УДАРЕ
Если будем поворачивать оси координат S, tq, С около оси О С
и таким образом передвигать точку С по кругу в плоскости £О^ ,
то увидим, что от этого Р изменяет только свое направление
но не изменяет величины.
Выберем теперь h так, чтобы сила Р была наибольшей:
h — г,
Ж» cos 6 • г
2
(Ю)
(И)
Нам остается выбрать направление оси ОС таким образом,
чтобы формула (11) дала наибольшую величину для Р. По-
нятно, что это будет тогда, когда г cos 6 получит наибольшую
величину, т. е. когда плоскость, прикасающаяся к эллипсоиду (4)
в конце радиуса г, будет перпендикулярна оси вращения
Называя перпендикуляр, соответствующий такой касательной
плоскости, через р, найдем искомую наибольшую величину
удара:
Р (12)
* шах <2
Если обозначим через g момент пары, от которой тело
пришло в движение, то найдем по формуле (6):
p^ = fr- (13)
Точки С, наносящие наибольший удар, будут при этом лежать
на круге, проведенном радиусом г из центра О по плоскости,
перпендикулярной g.
§ 5. Переходим к случаю, когда все движение тела полу-
чилось от удара, нанесенного некоторой силой Q.
Пусть ш будет попрежнему угловая скорость вращения
тела около оси, проходящей через центр тяжести, aw — ско-
рость центра тяжести*
Назовем через 0 угол между осью вращения и ОС; через
?— угол между w и ОС; через — угол между проекцией w
на плоскость и осью Oiq.
К ВОПРОСУ О НАИБОЛЬШЕМ УДАРЕ
83
Мы получаем:
= соА cos 6 4“ w sin ф cos ф,
Л/г2
Р = Д2Ц_ r2 COS + W s*n У cos
Сохраняя h постоянным, вращаем оси $, т}, С около оси ОС
и даем им такое положение, чтобы Р получила наибольшую
величину. Это положение будет соответствовать условию ф = 0.
Mr1
Р = — (со cos О • Л + w sin <р). (14)
Выбираем далее положительную величину h под условием»
чтобы сила Р в формуле (14) была бы наибольшей.
d / <^h cos 0 4“ w sin cp\_
dh\ л24-г2 / 0’
ю cos О (A2 4~ r2) — 2A (a A cos 6 4~ w sin cp) = 0, (15)
j.+a^’-^=4
ш COS и
>_ wsincp / ^2sin2cp t
Ф COS 6 у О)2 COS2 0
Мы берем перед корнем 4~» ибо А должен быть положи-
телен. Из формул (15) и (16) получаем:
о л/ о 01 cos О М О)2Г2 cos2 6
Р= МР —^7— =
zn 2 w sin г? w2 sjn2 (р r2^2 cos2 О
ИЛИ
Р= (j/w2 sin2 ср4- r2^2 cos2 6 4" w sin ср). (17)
А*
Теперь надо выбрать ось ОС так, чтобы величина Р в фор-
муле (17) стала наибольшей. Это будет тогда, когда г cos 6 и
sin ср получат возможно большие величины.
Наибольшая величина г cos 6, как было сказано в § 4, со-
ответствует перпендикуляру р, направленному по оси враще-
ния при этом ось ОС должна направиться по диаметру, со-
пряженному плоскости, перпендикулярной относительно
эллипсоида (4).
Но если вращение и скорость w произошли от удара,
нанесенного силой Q, то по § 2 скорость w должна быть
6^
84
К ВОПРОСУ О НАИБОЛЬШЕМ УДАРЕ
перпендикулярна к выбранной нами оси ОС; следовательно,
sin<p = l.
Таким образом при выбранных нами осях Е, tq, С мы полу-
чаем для Р возможно большую величину:
Назовем через 8 величину А, соответствующую силе Q, и
преобразуем формулы (18) и (19) на основании § 2:
1+?)• (20)
л=г(—г+|/ *+£) <21>
Точка С, наносящая наибольший удар, лежит на перпен-
дикуляре, опущенном из О на Q, на расстоянии h от О.
Статья „К вопросу о наибольшем ударе" была опубликована в „Отчетах
о деятельности Московского технического училища* за 1877—1878 гг. Вто-
рично статья была напечатана в Сочинениях Н. Е. Жуковского, т. I,
1912, стр. 179—184. Прим. ред.
ON THE PROBLEM OF MAXIMUM IMPACT
A rigid body possessing a given motion impinges on a plane
at some point of its surface the normal to which at the point C
has a direction iq. It is proposed to determine the position of
the point C and the direction of the normal for which the
magnitude of the impact in the direction is a maximum.
Prof. Joukovsky considers two particular cases of the pro-
blem. 1. The rotation of a body with an angular velocity about
an axis through its centre of gravity. The magnitude of Pmax for
this case is given by formula (13), in which g—moment of the
impulsive couple due to which the body was set in motion,
r—radius vector of the ellipsoid of gyration directed along the
axis of the moment g. The points producing the maximum impact
lie on a circle of radius r, drawn from the centre of gravity in
a plane perpendicular to g; the direction of tq is along the tan-
gent to the circle. 2. The motion of a body resulting from an
impact of the force Q. In this case Pmax is determined by for-
mula (20), in which r is the radius vector of the gyrational
ellipsoid (4) directed along the moment of the force Q as to
the centre of gravity, and 6 is the distance of the centre of
gravity from the line of action of the force Q. The point Clies
on the perpendicular drawn from the centre of gravity on the
line of action of the force Q, at a distance h (21) from the
centre of gravity.
СВЯЗЬ МЕЖДУ ВОПРОСАМИ О ДВИЖЕНИИ МАТЕРИАЛЬНОЙ
ТОЧКИ И О РАВНОВЕСИИ ГИБКОЙ НИТИ
(1878 г.)
Положим, что материальная точка движется по некоторой
поверхности под действием сил, имеющих силовую функцию U.
Назовем через v скорость точки, через ds— элемент дуги
траектории, через р — радиус ее геодезической кривизны отно-
сительно поверхности и через dn — элемент нормали траектории
по направлению р.
Диференциальные уравнения движения точки, если при-
нимать ее массу равной единице, могут быть написаны так:
dU dv )
ds ~V ds> |
au^. i (1>
dn P ' j
Положим теперь, что по рассматриваемой нами траектории
лежит на поверхности гибкая нить, плотность которой во
всех точках равна единице, и напишем диференциальные
уравнения равновесия этой нити под действием сил, имеющих
силовую функцию F.
Каждый элемент нити ds от действия натяжения Т будет
по направлению касательной подвержен силе
dT j
—т- dsf
ds
а по направлению р— силе
Т
Р
О ДВИЖЕНИИ ТОЧКИ И РАВНОВЕСИИ НИТИ
87
поэтому уравнения равновесия нити будут:
ds ds 9
_dF_=l^
dn p
(2)
Интегрируя первые уравнения групп (1) и (2), найдем
v и Т:
T = —F. I
Здесь постоянные величины отнесены к функциям U и F.
Теперь нетрудно, пользуясь уравнениями (3), привести
уравнения (1) к виду уравнений (2) и наоборот.
Мы получим из уравнений (1):
1 dU dv
/2(7 ds ds ’
1 dU=v
/2(7 dn p ’
или <//2(7 dv
ds ds ’
dV2U_ 77 (4)
dn ~ P ’
Из уравнений (2) получаем:
„dF T dT
„dF T*
или
d-F1
2 T dT_
ds ds ’
1 (5)
d^F* n.,
2 _ P
c?n p
88
О ДВИЖЕНИИ ТОЧКИ И РАВНОВЕСИИ НИТИ
Если теперь положим в уравнениях (4)
V2U= — F, v=T,
то получим уравнения (2); если же, наоборот, в уравнениях (5)
возьмем
yF2 = t/, T=v,
то получим уравнения (1).
Это показывает, что, изменяя надлежащим образом силовую
функцию, можно переходить от задачи о движении материаль-
ной точки к задаче о равновесии гибкой нити и, наоборот,
сохраняя для ^траектории и для нити одну и ту же кривую,
а для скорости и натяжения — одну и ту же величину.
Укажем примеры некоторых взаимных случаев движения
материальной точки и равновесия гибкой нити.
1) Материальная точка движется
по параболе, имеющей уравнение:
ч 2а
х1 = — у.
S
1) Гибкая
представляет
уравнение:
нить в равновесии
параболу, имеющую
Силовая функция и скорость вы-
ражаются формулой:
п I °2 ^2
и=^ + -2_=-2-'
2) Материальная точка движется
по эллипсу, имеющему уравнение:
9 2а
х-=1у-
Силовая функция и натяжение ни-
ти выражаются формулой:
F— — У 2gy-}-a2 = — Т.
2) Гибкая нить в равновесии
представляет эллипс, имеющий урав-
нение:
Силовая функция и скорость вы-
ражаются формулой:
и = % К°2 + *>'-) - +^)] =
3) Материальная точка движется
по коническому сечению, уравнение
которого в полярных координатах
есть:
г == Р
1 + е cos ср ’
Силовая функция и натяжение
нити выражаются формулой:
Г= — + & — х2 — #2) = — Т.
3) Гибкая нить в равновесии пред-
ставляет коническое сечение, урав-
нение которого в полярных коор-
динатах есть:
1 + е cos ср
О ДВИЖЕНИИ ТОЧКИ И РАВНОВЕСИИ НИТИ
89
Силовая функция и скорость вы-
ражаются формулой:
4) Материальная точка движется
по цепной линии, имеющей уравнение:
Силовая функция и натяжение
нити выражаются формулой:
х х
У = у (е ° + е °).
Силовая функция и скорость вы-
ражаются формулой:
7 7 S-У2 __
2 2
5) Материальная точка на поверх-
ности движется по геодезической
кривой. Силовая функция и скорость
постоянны
6) Материальная точка движется
по поверхности сферы радиуса Z;
уравнение ее траектории, выраженное
I п
через долготу Ф и широту -------ср,
4) Гибкая нить в равновесии
представляет цепную линию, имею-
щую уравнение:
ж ж
^=у(е^ + е »).
Силовая функция и натяжение
нити выражаются формулой:
F— — gy = — Т.
5) Гибкая нить на поверхности
натянута по геодезической кривой.
Силовая функция и натяжение нити
постоянны.
6) Гибкая нить покоится на сфере
радиуса Z; уравнение ее, выраженное
I л
через
имеет
долготу су и широту 2------ср,
вид:
имеет вид:
ф= f___________ «*Р-
J sin ср У*р cos ср sin2 ср — 1
Силовая функция и скорость вы-
ражаются формулами:
и = gl cos ср = —
6 = Г -------Z--
J sin ср у р cos ср sin2 ср — 1
Силовая функция и натяжение
нити выражаются формулами:
F = — У2gl cos ср = — Т
Статья „Связь между вопросами о движении материальной точки и
о равновесии гибкой нити" была доложена Московскому математическому
обществу 18 ноября 1878 г. и напечатана в IX томе „Математического
сборника". Вторично работа была напечатана в Сочинениях Н. Е. Жуков-
ского, т. I, 1912, стр. 166—170. Прим. ред.
CONNECTION BETWEEN THE PROBLEM OF MOTION OF A MATE-
RIAL POINT [AND THAT OF EQUILIBRIUM OF A FLEXIBLE CORD
The differential equations of motion of a material point (1),
in which U is the force-function, can be transformed into equa-
tions of equilibrium of a cord (2) acted upon by forces having
a force-function F, and vice versa, by putting V2U = —F, v= T.
Hence it is seen that by proper change of the force-function
the problem of motion of a material point may be reduced to
that of equilibrium of a flexible cord, and vice versa, retaining
the same curve for the path and the cord, and the same magni-
tude for the velocity and the tension.
The result is illustrated by several examples.
О НАЧАЛЕ НАИМЕНЬШЕГО ДЕЙСТВИЯ
(1879 г.)
§ 1. Серре в своем мемуаре о начале наименьшего дей-
ствия 1 пополнил теорему Лагранжа, доказав, что вторая ва-
риация от действия есть величина существенно положительная,
и, следовательно, действие имеет наименьшую величину при
действительном движении системы. Но,
умный анализ знаменитого ученого, его
исследование настолько сложно, что не
может быть изложено в курсах механики.
Я думаю, что поэтому не будет лишено
интереса простое геометрическое дока-
зательство, с помощью которого обнару-
живается, что действие имеет при дей-
ствительном движении системы наимень-
шую величину, тем более, что это до-
казательство распространяется и на прин-
цип Остроградского.
§ 2. Пусть дана система п 1 точек с р условиями в ее
первоначальном положении а, . ап, находящаяся под дей-
ствием сил, имеющих силовую функцию (Л
Рассмотрим два бесконечно близких движения этой си-
стемы, из которых одно совершается по путям: af, . -anfn»
а другое — по путям: afe, агЬ 19 .. . anbn (фиг. 1).
Назовем через Т живую силу системы и напишем интеграл
живых сил:
и— г+л=о,
(1)
где h — постоянное.
1 „Comptes rendus", t. LXXII. p. 696, 1871.
92
О НАЧАЛЕ НАИМЕНЬШЕГО ДЕЙСТВИЯ
Действие в движении по траекториям af9 аг ft.. -anfn усло-
вимся обозначать через (af)9 так что
t
(af) — ^2Tdt; (2)
О
t есть время, в которое система переходит из начального
положения в положение /,
Этот интеграл на основании формулы (1) может быть пред-
ставлен так:
t
(U+T±h)dt. (3)
О
Предположим, что постоянное h одинаково как для дви-
жения по траекториям af9 aj\- -anfn9 так и для движения
по траекториям ab, агЬ19 ... апЬП9 и определим вариацию
(аб)-(а/): f f
(ab)-(af) = | 2 + J V ( + dU + dU_ ) dt
0 0
t
। Г V I dx d&x .
+ J
0
dy dty dz dt>z \ ,
~dt ^dt +~dt ~dt ) dt
Интегрируем по частям:
Vi I dx d^x . dy dty . dz dbz \ ,
-im\~di -dT^li -dT^lFt ~dF)dt
0
- JSm(S fe+S8s+'Ss’)</'-
0
Ho
0
8x = 0,
t t t
dx
8x = 8 x— 8/,
at
+ 8 y' ^t~~i~S z' ==vcosa8s>
О НАЧАЛЕ НАИМЕНЬШЕГО ДЕЙСТВИЯ
93
о
где v — скорость точки /, a = / 6/e, 8s = bf; поэтому
t
dx d&x jdy day . dzdbz\ ,
~dt ~dr + ~dt~dt^ dt'dt]
t
— mv cos a8s — ;
t
dt* dt* /
о
Подставляем:
t
mv cos
dU d2x
dx m dt*
dU
W~m
dU d*z
dz m dt*
8z dt.
Здесь подинтегральная величина обращается в нуль на
основании главной теоремы динамики, и мы получаем:
(ab) — (af) = mv cos «8$; (4)
формула (4) показывает, что при
2^ mv cos a8s = 0 (5)
действия (af) и (ab) одинаковы.
Бесконечно малые линии/6, f\bv . . . fnbn9 удовлетворяю-
щие условию (5), вполне определены, так как они должны,
кроме того, соединять точки системы 6, Ьх. . .Ъп во втором
движении с некоторыми соответственными положениями этих
точек /, . fn в первом движении. Условимся называть та-
кие бесконечно малые линии линиями равного действия.
§ 3. Сравниваем теперь действие (adc) в действительном дви-
жении системы с действием (abc) в каком-нибудь другом ее
движении, кинематически возможном и удовлетворяющем урав-
нению (1); причем постоянное h в этом воображаемом движе-
нии то же, что и в действительном движении.
Пусть будет 6, &!,..• Ьп — ряд положений точек системы
в какой-нибудь момент второго движения. Проведем траекто-
рии ab, arbl9 ... апЪп некоторого действительного движения
системы, при котором она, имея то же постоянное А, перехо-
дит в некоторое время из а9 аг , ... ап в Ъ9 Ь19 .. . Ьп.
94
О НАЧАЛЕ НАИМЕНЬШЕГО ДЕЙСТВИЯ
Это вспомогательное движение будет вполне определен-
ное, потому что для определения его Зп— р + 1 начальных
скоростей мы получим Зп — р -уравнений, выражающих, что
точки системы вступают одновременно в b9 bi9 .. - ЬП9 да еще
уравнение (1).
Проведем траектории ае9 ахе19 ... апеп подобного же вспо-
могательного движения для точек е, е19 ►. . еп9 бесконечно
близких b9 bi9 ... bn9 и вообще проведем траектории таких
вспомогательных движений для всех положений точек системы
на путях abc9 . . апЬпсп.
Представим ^теперь действие (abc)9 исключая из него dt
помощью интеграла (1), как это делает Якоби.
(abc) = J ]/2(t7+ft) (6)
Здесь dl9 dl[9 ... dln суть элементарные пути, пройденные по
траекториям abc9
Пусть будет для некоторого элемента времени:
dl — Ье9 dlr= • • • dln == Ъпеп»
Проведем через точки b, hi9 ... bn линии равного действия
fb = 8s, ftbi = 651, ... fnbn = 8$й
и положим:
fe = do, fa = dox, ... fnen = don.
Из бесконечно малых треугольников &bfe9 ^Ь^еГ9 .. . ^bnfnen
получим:
dP — do2 + 8s2 — 2dabs cos a.
Умножаем это уравнение на массу т точки а и берем
сумму, распространенную на все точки системы:
2 mdP — 2 тd^2 + 2 ni8s2 — 2 2 md&s cos a.
Но по формуле (5)
2 wcbis cos a = dt 2 cos a = 0;
dt есть время, в которое система пробегает бесконечно ма-
лые пути: /е, .. . fnen.
Мы получаем:
2 mdP > 2 mdv2
О НАЧАЛЕ НАИМЕНЬШЕГО ДЕЙСТВИЯ
95
или
K2(Z7 + A)КХ™#2> KW+A) |/’S/nJa2.
Подставляем сюда
jZ^2(t/-|- А) И 2 m jo2 = (fe) = (ae) — (ab) = d(ab).
Находим:
J<2(t/+A) K2mJZ2 > d (ab).
Берем от обеих частей интеграл, распространенный на
все движение по путям abc, .
[^2 (U+h) У > (adc) (7)
или по (6)
(abc)>(adc). (8)
Это равенство доказывает теорему Лагранжа.
§ 4. Обращаемся к принципу Остроградского. Условимся
обозначать через [а/] следующий интеграл
t
\af} = $(T+U)dt, (9)
О
распространенный на движение системы по траекториям
af, aj\, ... anfn.
Вообразим бесконечно близкое движение по траекториям
ab9 агЬ19 ... апЬП9 совершающееся в то же время, и определим
вариацию [аб] — [а/].*
[ай]-[а/] = J (^8х+^8у + ^8г)л +
О
t
। f V / dx dbx I dy dty . dz d^z \ .
+J S’UT+ii+iT)*
0
Здесь делаем такие же преобразования, как в § 2, пола-
гая при этом о/ = 0. Получаем:
[аб] — [af) = 2 mv cos (10)
96
О НАЧАЛЕ НАИМЕНЬШЕГО ДЕЙСТВИЯ
§ 5. Сравним теперь интеграл [acfc] в действительном дви-
жении системы с интегралом [абс] в некотором другом дви-
жении, возможном для нее кинематически и совершающемся
в то же время, как действительное движение.
Пусть 6, bi9 ... bn будут положения точек системы в ка-
кой-нибудь момент воображаемого движения. Проведем траек-
тории ab9 ахЬ19 .. -апЬп некоторого действительного движения,
при котором точки системы вступают в 6, Ьь ... Ьп в то же
время, как при воображаемом движении.
Такое вспомогательное действительное движение вполне
определенно, потому что для отыскания его Зп— на-
чальных скоростей имеем Зп—р + 1 уравнений, выражающих,
что точки системы вступают в данное время в 6, Ьu ... bn.
Проведем подобным же образом траектории ае, аге19 ... апеп
вспомогательного движения для положения системы е, ех, ... еп
бесконечно близкого положению 6, bi9 ... bn и для всех дру-
гих ее положений на путях abc9 а^Ь^с^ . .. апЬпсп. Возьмем
на траекториях ае9 аге19 ... апеп точки /, fi9 ... fn9 в которые
система вступает при вспомогательном движении в то же
время, в которое она вступает в точки 6, bl9 ... bn при вооб-
ражаемом движении.
Из бесконечно-малых треугольников Ab^e^. . -&bnfnen
получаем, подобно предыдущему, следующее неравенство:
2 mdP > 2 — 22 md&scos а.
Назовем через Т живую силу системы при движении по
Ъе9 Ьхе19 . .. Ьпеп9 через Т' ее живую силу при движении по
/е, ... fnen и через dt—бесконечно-малое время этих дви-
жений. Получим:
2тЛ2 = 2ГЛ2,
2™^ = 2 ГЛ2.
Вследствие этого наше неравенство будет:
Tdt > T'dt— 2 cos«8s.
~ dt
Ho no (10)
m cosaSs = [aZ>] — [a/];
О НАЧАЛЕ НАИМЕНЬШЕГО ДЕЙСТВИЯ
97
следовательно, Tdt> T'dt+[af] — [ab\.
Прибавляем к обеим частям Udt-.
(T+U)dt>(T + U) dt + [af] — [аб].
Замечаем, что (T' + U)dt^\fe\, [«Л+Ие]=[ве], [ае] — [аб] = d [аб].
Получаем: (T+U)dt>[ab]. (11)
Берем от обеих частей интеграл, распространенный на все
движение: t J (ТU)dt > [adc] (12) Л
или и [абс] > [ас/с]. (12х)
Это неравенство дает принцип Остроградского.
§ 6. Заметим, что данное нами доказательство начала наи-
меньшего действия неприложимо в некоторых случаях, ука-
занных Якоби (Vorlesungen uber Dynamik, S. 46, 47); но это
суть именно те случаи, когда J* 2 Tdt под условием (1) не
имеет ни минимума, ни максимума. Подробное исследование
этого вопроса мы надеемся предложить читателю в пригото-
вляемом нами к печати сочинении „О прочности движения".
Статья „О начале наименьшего действия" была доложена Московскому
математическому обществу 17 февраля 1879 г. и в том же^году напечатана
в IX томе „Математического сборника". Вторично статья была напечатана
в Сочинениях Н. Е. Жуковского, т. I, 1912, стр. 171—178. Прим. ред.
Зак. §365. — Н. Е. Жуковский. Т. I.
7
ON THE PRINCIPLE OE LEAST ACTION
Prof. Joukovsky proves on the ground of simple geometrical
considerations that for real motion of the system the Lagran-
gian Action is a minimum. The proof given is extended to the
Principle of Hamilton-Ostrogradsky.
Let the motion along the paths abc9 aj^c^ ... be one of
the possible motions between points a9 aX9 ... and e, el9 . .. ,
that along the paths afe, axfxe19 . .. the actual motion between
points a9 ... and e, ei9 ... and that along the paths acbr
axcxbX9 ... the actual motion between points a9 aX9 ... and
b9 bX9 ...
The proof is based on a proper choice of the points f9 fX9--*
If these points are chosen in such a way that Lagrangian action
(a/) along the paths af9 axfX9 ... is equal to the action (ab)
along the paths ab9 axbX9 ... then the action (fe) along the
elements /e, fxeX9 ... is less than the action (be) along the paths
be9 bxeX9 . . . Thus
(ab)±(be)>(af) + (fe).
In the case of the principle of Hamilton-Ostrogradsky the
points /, fX9 ... are chosen so as to make the system arrive at
these points in actual motion along the paths afe9 aJxeX9 . . .
at the same time at which the points b9 bX9 ... are reached by
this system in the imaginary motion. Hence the difference
[6e] — [/e] between the action along the elements be9 bxe19 .. .
and along the elements fe9 fxeX9 - -. will be greater than the dif-
ference [afe] — \af\ between the actions along the paths ab*
axbX9 .. . and the paths af9 axfX9 ...
[ab]+[bc]>[af]+[fe].
ОПИСАНИЕ ИНСТРУМЕНТА КЕМПЕ ДЛЯ РЕШЕНИЯ
УРАВНЕНИЙ ВЫСШИХ СТЕПЕНЕЙ
(1879 г.)
1. Для отыскания с помощью инструмента Кемпе действи-
тельных корней уравнения
А=АххА^х2. -\-Апхп
заменяют неизвестное х новым неизвестным <?:
х = k cos %
где k — постоянная величина, которая больше всех действи-
тельных корней данного уравнения Ч
Подстановка дает:
А = Ахк cos ф + А^к2 cos2 ср 4“ • • • 4" Апкп cosn <р.
Здесь заменяют косинусы степеней косинусами кратных
дуг по формулам:
2Ш~1 cosw <р = cos + т cos (тп — 2) ф 4“
1 т(т —+
2
т(т— 1)
1-2
1 • 2 • —
2м'_ 1 cosm ® = cos nr? т cos (тп — 2) ® -|-
. т(т — 1) . .. .
-1-------- cos (т — 4) <э .
/ т— 1
“ Ч~~2~
1 • 2. • -т~1
2
1-2
т(т
cos %
1 Если Ар — наибольший отрицательный коэфициент в ряду А, Ар
А29 ... Ani a Aq — последний отрицательный коэфициент. то можно по-
ложить:
7*
100
ОПИСАНИЕ ИНСТРУМЕНТА КЕМПЕ
из которых первая употребляется для четных степеней тп,
а вторая — для нечетных.
После этой замены весь вопрос приводится к отысканию
действительных углов % удовлетворяющих уравнению:
С = Ct cos ? 4“ С2 cos 2? 4- ... 4" Сп cos п?.
Это отыскание и делается с помощью инструмента Кемпе.
2. Инструмент Кемпе представляет собой разомкнутую
кинематическую цепь (фиг. 1), состоящую из звеньев: уОх,
у АВ, ВС, CD, ; эти звенья
соединены между собой так, что
В при всех положениях цепи суще-
\ ствует равенство углов:
\ £ ОАВ = LABE= LBCF= ...
\ С
К Неподвижное звено хОу пред-
\ X. ставляет собой две линейки,
\ скрепленные под прямым углом.
0_________\ $ Число подвижных звеньев равно
F £ ” степени данного уравнения. По-
фиг. 1. ложим, например, что п = 3, и
возьмем три подвижных звена.
Сделаем:
ол=с, ав = сх, вс=с2, cd=c3.
Потом двигаем точку D до тех пор, пока она не прикос-
нется к линии Оу. Величина угла ВАО в момент прикосно-
вения и будет искомый корень Действительно, заметив,
что линия ОА сделается суммой проекций АВ, ВС и CD на
ось Ох и что
£CL4B = ?, £О£С=2% LOFD = 3?,
найдем:
С — С\ cos ? 4" ^2 cos 2<Р 4" Q cos 3?.
Когда угол будет определен, то для получения корня
уравнения
А — АрХ 4~ А2х2 4-
остается только взять х = к cos <р.
ОПИСАНИЕ ИНСТРУМЕНТА КЕМПЕ
101
Если это уравнение имеет три действительных корня, то
можно будет подвести точку D к линии Оу тремя способами.
3. Остается объяснить, как должны быть соединены звенья
уОх, АВ, ВС CD, . .., чтобы имело место вышеупомянутое
равенство углов.
Для этого пользуются механизмом Гарта (фиг. 2), кото-
рый состоит из четырех брусков: АВ, ВС, CD, DA, соеди-
ненных в точках А, В, С, D шарнирами, причем АВ— CD
и ВС = AD„ Если к механизму Гарта ABCD присоединим
Фиг. 2.
Фиг. 3.
другой подобный же механизм CEFG, стороны которого удо-
влетворяют пропорции
ЕС _ ВС
GC DC’
то получится подобие треугольников:
E^ECGco /\DCB,
из которого следует, что
/_CEG—/_CBD, Z_CGE= /_CDB.
Но по свойству механизма Гарта
/\DCB = /\DAB, /\ECG = AEFG.
Отсюда
Lcbd=ladb, /_cge=lgef.
Подставляя и вычитая, найдем:
/_CEG=£.ADB,
/FEG--/CDB,
LCEF= /_CDA.
102
ОПИСАНИЕ ИНСТРУМЕНТА КЕМПЕ
Таким образом мы получим три звена AD, DE, EF, удо-
влетворяющие желаемому условию. Понятно, что таким же
образом можно соединить сколько угодно звеньев.
На фиг. 3 изображен схематически инструмент Кемпе для
решения уравнения третьей степени.
Разумеется, что он должен быть устроен так, чтобы длины
ОА, АВ, ВС, CD могли бы быть установлены желаемым
образом.
Статья „Описание инструмента Кемпе для решения уравнений высшей
степени® была сообщена автором в заседании Политехнического общества
12 марта 1878 г. и опубликована в „Математическом сборнике" за
1879—1880 гг., в „Трудах Политехнического общества", вып. 1,1879, в „Бюл-
летенях Политехнического общества" за 1881 г., в Сочинениях Н. Е. Жу-
ковского, т. I, 1912, стр. 190—193. Прим, ред.
A DESCRIPTION OF KEMPE’S INSTRUMENT FOR THE SOLUTION
OF EQUATIONS OF HIGHER DEGREES
Making the substitution x = £cos% t£Abeing a constant, of
which the absolute value is greater than that of any of the real
roots of the equation, we reduce it to the form
C — C{ cos ? + C2 cos 2? + ... + Cn cos nr?.
If we now take a broken line composed of vectors AB — Ci9
BC = C2, • * • making in succession, with the x-axis the angles
?, 2?, . . . then the right-hand side of the equation will be
the projection of this line on the x-axis. This projection must
be made equal to C. The problem of making the segments
AB, BC, •. • form with the x-axis angles that are multiples
of is being solved mechanically by Kempe’s instrument, which
is shown in Fig. 3 and which consists of n mechanics of Harte.
Taking О A = C and bringing the end D to coincide with the
3/-axis we obtain and x = £cos<p.
К ВОПРОСУ О ДВИЖЕНИИ материальной точки под
ПРИТЯЖЕНИЕМ ОДНОГО И ДВУХ ЦЕНТРОВ
(1881 г.)
§ 1. В этой заметке я предлагаю весьма простой способ
исследования движения материальной точки под притяжением
одного и двух центров, основанный на выражении радиуса
кривизны конических сечений через радиусы-векторы.
Пусть т и п будут две бесконечно близкие точки эллипса.
Соединяем их с фокусами / и и проводим нормали то
и по, которые разделят углы между радиусами-векторами
пополам. Назовем через 6 бесконечно малый угол между
этими нормалями и через аир — бесконечно малые углы
между радиусами-векторами при вершинах f и Из чертежа
имеем:
orif -f- 6 = / omf а,
L omfi + 6 = L onfi +
Складываем и сокращаем:
26 = а + р.
Назовем радиус кривизны то через р, радиусы-векторы fm
и fvm — через г и г19 элемент дуги тп — через а и угол каса-
тельной с радиусами-векторами — через <р. Получим из чер-
тежа, обращая внимание на бесконечно малые треугольники
трп и mqn\
ь ° о sin ? п ° sin 9
Р г П
Подставляем и сокращаем на а:
(1)
К ВОПРОСУ О ДВИЖЕНИИ МАТЕРИАЛЬНОЙ ТОЧКИ 105
Это и есть искомое выражение радиуса кривизны эллипса
через радиусы-векторы. В случае параболы надо положить
7*1 = оо; в случае же гиперболы увидим, повторяя для нее
предыдущий вывод, что надо будет взять в формуле (1)
больший радиус-вектор с отрицательным знаком.
§ 2. Положим, что материальная точка движется под при-
тяжением центра f силой
где г — расстояние точки от центра, а и— коэфициент притяже-
ния. Принимая массу точки равной единице, определяем ее
скорость по теореме живых сил:
и2 = 2^ + л). (2)
Здесь постоянное h выражается через начальную ско-
рость v0 и начальное расстояние г0:
(3)
Z г0
Определив скорость по формуле (2), мы будем иметь для
определения траектории единственное условие, что центро-
бежная сила равна центростремительной. Посмотрим, не может
ли в нашем случае траектория быть коническим сечением,
имеющим фокус в точке /. Проекция силы Р на нормаль
будет:
Н .
—х sm ср,
г2
где ср есть угол между радиусом г и касательной к траекто-
рии, а центробежная сила на основании формул (2) и (1)
будет:
Сравниваем и сокращаем на sin ср:
(4)
106 К ВОПРОСУ О ДВИЖЕНИИ МАТЕРИАЛЬНОЙ ТОЧКИ
откуда
г ±г а
(5)
Здесь верхний знак имеет место для эллипсов, а нижний
для гипербол; а есть большая полуось эллипса или действи-
тельная полуось гиперболы. Формула (5) показывает, что при
h отрицательном мы удовлетворим уравнению (4), принимая
за траекторию эллипс и определяя его большую полуось из
формулы (5); в случае Л = 0 мы удовлетворим уравнению (4),
принимая за траекторию параболу, т. е. полагая г' = оо;
в случае же h положительного мы удовлетворим равенству
центробежной и центростремительной сил, приняв за траекто-
рию гиперболу и определив ее действительную полуось из
формулы (5). Всякий раз, как нам будут даны г0 и z/0, мы
определим по формуле (3) вид траектории; далее в случае
эллипса и гиперболы определим по формуле (5) полуось а.
По этим данным и по условию, что траектория должна про-
ходить через начальное положение точки и должна коснуться
начальной скорости, она вполне определяется.
Рассмотрим еще случай отталкивающей силы. Предпо-
ложим, что эта сила имеет центр в фокусе /х, и попробуем,
не может ли быть траекторией ветвь гиперболы, для которой
фокус есть внешний. Так как коэфициент в уравнении
живых сил надо будет взять со знаком минус, то формулы
(3) и (4) примут для нашего случая вид:
Из формулы (7) находим:
л = -Л-=А
г — г а
(6)
(7)
(8)
Так как по формуле (6) величина h всегда положительна,
то мы для всех начальных значений vQ и г0' можем из фор-
мулы (8) определить действительную полуось гиперболы а.
Далее останется только выбрать эту гиперболу так, чтобы
К ВОПРОСУ О ДВИЖЕНИИ МАТЕРИАЛЬНОЙ ТОЧКИ 107
она прошла через начальное положение точки и коснулась ее
начальной скорости. Таким образом в случае отталкиватель-
ной силы траектории всегда бывают гиперболами.
§ 3. Переходим к задаче о движении материальной точки
под притяжением двух центров. Предполагая, что эти центры
помещены в точках f и /х, расстояния которых от движу-
щейся точки суть г и г , выразим силы притяжения форму-
лами:
Р=^ Л =
Определяем скорость движения по теореме живых сил,
принимая массу точки за единицу:
„2 = 2 (-^ + 4+л). (9)
\ г г J
Постоянное h выражается по начальному положению
и начальной скорости:
Когда скорость движения удовлетворяет формуле (9), то
единственное условие, которому останется удовлетворить при
выборе траектории, состоит в равенстве центробежной и цен-
тростремительной сил. Посмотрим, не можем ли мы удовле-
творить этому условию, принимая за траекторию коническое
сечение с фокусами f и /х.
Составляя центробежную силу по формулам (9) и (1)
и приравнивая ее центростремительной силе, найдем:
где верхний знак имеет место для эллипсов, а нижний
гипербол.
Определяем Л:
h
Для
(12)
Формулы (10) и (12) дают нам условия, при которых
материальная точка, притягиваемая к центрам f и /х, может
108 К ВОПРОСУ О ДВИЖЕНИИ МАТЕРИАЛЬНОЙ ТОЧКИ
двигаться по эллипсам или гиперболам, имеющим в этих
центрах фокусы.
Проводим через начальное положение точки эллипс, имею-
щий фокусы в точках / и и определяем его полуось а.
Эта величина должна быть одинакова с той, которая полу-
чается из формул (10) и (12). Кроме того, построенный нами
эллипс должен касаться начальной скорости т/0. Если все
эти условия удовлетворены, то найденный эллипс будет
траекторией точки. Так же разрешаем вопрос и относительно
гиперболической траектории.
Статья „К вопросу о движении материальной точки под притяжением
одного и двух центров* была напечатана в „Bulletins de la Societe Impe-
rial des Naturalistes de Moscou" в 1881 г. Вторично статья была напеча-
тана в Сочинениях Н. Е. Жуковского, т. I, 1912, стр. 185 —189. Прим, ред^
ON THE PROBLEM OF MOTION OF A MATERIAL POINT UNDER
ATTRACTION OF ONE CENTRE AND OF TWO CENTRES
In this note N. E. Joukovsky gives a very simple method of
investigation of the motion of a material point under Newto-
nian attraction to one centre or to two centres, based on the
expression (1) for the radius of curvature p of a conic section
in terms of distances r and r from the foci / and f of a point
on the curve and of the angle between the tangent and the
radius vector of the point drawn from one of the foci.
If the point moves under the influence of a force P of attrac-
tion or repulsion (§ 2) of the centre /, the velocity is obtained
from the equation of energy (2) and the condition that the nor-
mal component of the force P should be equal to the centripe-
tal force is being satisfied on the assumption that the path be
a conic section, the semi-axes of which are given by equations
(5) and (3).
If the point moves under attraction of two centres f and f
(§ 3), the velocity is obtained from equation (9), and the con-
dition that the normal component of P should be equal to the
centripetal force is being satisfied on the assumption that the
path be a conic section with the foci f and f and the semi-
axis given by equations (10) and (12).
О ПРОЧНОСТИ ДВИЖЕНИЯ
(1882 г.)
Вопрос о прочности равновесия уже с давних пор служил
предметом исследования многих знаменитых геометров. Ра-
боты Лапласа, Лагранжа, Штурма, Коши, Дирикле, Сомова
и других, можно сказать, исчерпали этот вопрос во всех его
подробностях. Не такова была участь другого, более сложного
вопроса — о прочности движения. Все исследования в этой
области группировались первоначально около частных задач,
каковы задачи: о прочности вращения твердого тела около
оси инерции1, о прочности движения регулятора Уатта2,
о прочности вращательного движения жидкого эллипсоида3,
о прочности указанного Лапласом движения трех тел4 5, и т. д.
При этом в большинстве случаев исследование о прочности
движения стремились свести к вопросу о прочности равно-
весия, рассматривая движение как относительное равновесие.
Первая попытка установить общую теорию прочности движе-
ния была сделана Томсоном и Тетом в их „Натуральной
философии"б. Они ограничиваются движением системы под
действием сил, имеющих силовую функцию, и предполагают,
что такое движение претерпевает консервативное^возмущение,
т. е. такое, при котором полная энергия не изменяется.
Принимая за независимое переменное одну из координат
1 Р о i n s о t, Theorie nouvelle de la rotation des corps.
2 Airy, Memoirs of the Astronomical Society, Vol. XI, 1840; Siemens,
Phil. Trans., 1866; Routh, Dynamics of a System of Rigid Bodies, 1877;
Вышнеградский, „ИзвестияТехнологического института", 1877.
3 L i о u v i 11 е, „Journal de Mathematiques", T. XX; Riemann, Gesam-
melte mathematische Werke, S. 169.
4 Lionville, „Journal de Mathematiques", T. J, 1856.
5 Handbuch der theoretischen Physik, § 344 — 366.
О ПРОЧНОСТИ ДВИЖЕНИЯ
111
системы, они показывают, как составляются диференциальные
уравнения, служащие для определения других координат
в возмущенном движении, и исследуют таким образом проч-
ность движения системы относительно пространства. На
основании некоторых частных примеров и общих соображений
они пытаются сблизить вопрос о прочности движения с ис-
следованием интеграла, выражающего действие: „принцип
изменяемого действия, — говорят они, — дает во всяком движе-
нии математический критерий прочности и непрочности". Но,
показав, что действие будет наименьшим между всякими двумя
положениями системы в непрочном движении и не будет
обладать этим свойством при прочном движении, Томсон и
Тет не дают признака прочности движения. Можно вообще
сказать, что несколько страниц из „Натуральной философии",
посвященных исследованию прочности, представляют только
легкий набросок, в котором указываются пути для более
обстоятельного исследования. Ввиду интереса, возбужденного
знаменитыми английскими учеными к задаче о прочности
движения, эта задача была предложена в 1875 г. Кембриджским
университетом на соискание премии Адамса, которая и была
присуждена сочинению Раута, появившемуся в печати в 1877 г.1
Это сочинение представляет блестящее приложение к во-
просу о прочности движения методов исследования, анало-
гичных тем, какие употреблялись для исследования прочности
равновесия.
Определяя положение системы координатами х, */, z,. . .
в данном движении и координатами х $, у Ц- tq, z -|- С,. ..
в возмущенном движении, Раут рассматривает величины
S ri9 С,.. . как функции времени и называет движение проч-
ным, если эти функции всегда будут оставаться бесконечно
малыми, и — непрочным, если некоторые из них беспредельно
возрастают. Он останавливается главным образом на случае,
когда коэфициенты линейных диференциальных уравнений,
служащих для определения т], С,..., постоянны, и исследует
прочность таких движений (steady motion) во всех подроб-
ностях. Он показывает, каким образом при существовании
1 Routh, A Treatise on the Stability of a given State of Motion.
112
О ПРОЧНОСТИ ДВИЖЕНИЯ
некоторых условий уравнения возмущенного движения с пере-
менными коэфициентами могут быть с помощью линейных
подстановок обращены в уравнения с постоянными коэфи-
циентами. Что касается общего случая, то для него в конце
своей работы Раут устанавливает критерий прочности в пред-
положении, что для рассматриваемого движения известны
характеристическая или главная функции. В первых трех
главах Раут рассматривает движение под действием сил,
которые могут и не иметь силовой функции, а в последних
пяти он предполагает существование этой функции.
Сочинение Раута было неизвестно нам, когда мы начали
свои исследования о прочности движения; поэтому мы шли
в них по пути, указанному Томсоном и Тетом. Занимаясь
только движением при существовании силовой функции, мы
рассматриваем координаты системы как функции одной коор-
динаты и определяем уравнения возмущенного движения
с помощью начала наименьшего действия. Вследствие этого
у нас, как у Томсона и Тета, получается определение проч-
ности движения, отличное от того, которое дает Раут. Рас-
сматривая координаты как функции х, мы предполагаем,
что в возмущенном движении эти функции получают прира-
щения *1, i,. . . Если во все время движения^, С,... остаются
бесконечно малыми, то движение прочно; если же некоторые
из этих функций беспредельно возрастают, то движение
непрочно. Что касается времени /, то мы рассматриваем его
тоже как функцию х и определяем при переходе от данного
движения к возмущенному. Движение, будучи прочным с нашей
точки зрения, может давать для при одних возмущениях
бесконечно малую величину, а при других — беспредельно
возрастающую величину. Мы доказали, что консервативное
возмущение вызывает в прочном движении бесконечно малое
изменение времени; возмущение же неконсервативное дает,
вообще говоря, беспредельно возрастающее изменение времени.
Мы думаем, что наша точка зрения представляет неко-
торые преимущества перед точкой зрения Раута. С одной
стороны, рассматривая одну из координат как независимое
переменное, мы выражаем возмущенное движение числом
.диференциальных уравнений на единицу меньшим против
О ПРОЧНОСТИ ДВИЖЕНИЯ
из
того числа, которым должен пользоваться Раут. С другой
стороны, так как неконсервативное возмущение дает для c>t
обыкновенно беспредельно возрастающую величину, то устой-
чивых движений с точки зрения Раута почти не существует.
Да и сам Раут в приложениях обыкновенно не следует строго
своему определению и называет устойчивым движение, которое
по его условию неустойчиво, как например, в задаче о волчке Ч
Пользуясь иным методом, мы пришли ко многим резуль-
татам, не имеющимся в работе Раута, на которых и старались
по преимуществу остановить внимание читателя, оставляя
в стороне вопросы, обстоятельно исследованные Раутом
(таков, например, вопрос о равных корнях детерминантного
уравнения).
Наше сочинение разделяется на четыре главы. В пер-
вой главе рассматривается движение материальной точки
по поверхности и выясняется роль функции у, которую мы
называем мерой прочности. Эта функция аналогична кривизне
поверхности и равна сферическому избытку бесконечно малого
треугольника, образованного тремя траекториями, разделен-
ному на площадь треугольника. Движение точки будет прочно,
если мера прочности положительна, и — непрочно, если она
отрицательна или равна нулю. Величина функции у перво’
начально определена нами геометрическим путем 2, но в этом
сочинении для большего однообразия в изложении мы выводим
ее из начала наименьшего действия. Установив признаки
прочности и непрочности, мы прилагаем их к многочисленным
примерам.
Во второй главе мы рассматриваем прочность движения
системы с двумя свободными перемещениями и сводим эту
задачу к задаче о прочности движения точки, так что вся
вторая глава посвящена только примерам на движение си-
стемы.
В третьей главе исследуется прочность движения какой-ни-
будь системы, живую силу которой удалось выразить формулой:
Т = | (Лх'2 + By'2 + Cz'2 + ...),
1 A. Treat, on the Stab. Chapter IV, § 22.
- Протоколы VI Съезда русских естествэиспытателей, 1880.
Зак. 2365. — Н. Е. Жуковский. Т. I.
8
114
О ПРОЧНОСТИ ДВИЖЕНИЯ
где координаты у, z,.. . для рассматриваемого движения суть
нули. Найденная общая теория прилагается к движению сво-
бодной материальной точки, причем мы пользуемся особенной
ортогональной системой криволинейных координат, образован-
ных разверзающимися поверхностями.
Четвертая глава всего ближе подходит к исследованию
Раута. Оставаясь на нашей точке зрения и пользуясь началом
наименьшего действия, мы выводим в этой главе диференциаль-
ные уравнения возмущенного движения в предположении, что
коэфициенты этих уравнений постоянны. Установив по этим
уравнениям признаки прочности подобно тому, как это делает
Раут, мы переходим к приложению полученной общей теории
к задаче о движении волчка и к задаче о трех телах.
Из сказанного видно, что наш скромный труд может быть
рассматриваем как пополнение работы Раута. Смеем надеяться,
что он позволит подвинуться еще на один шаг вперед
в трудном вопросе о прочности движения.
ГЛАВА
§ 1. Предположим, что материальная точка единицы массы
движется под действием сил, имеющих силовую функцию /,
по некоторой поверхности. Возьмем на этой поверхности
семейство криволинейных прямоугольных координат х, у так,
чтобы уравнение у = 0 давало бы траекторию точки, и допу-
стим, что элемент дуги ds выражается в этих координатах
формулой:
ds2 = A dx2 + В dy2.
Пусть вследствие бесконечно малого изменения начального
положения и начальной скорости материальная точка стала
двигаться по некоторой иной траектории, бесконечно близкой
к первой. Определим диференциальное уравнение этой траек-
тории, пользуясь началом наименьшего действия.
По теореме живых сил первоначальное движение совер-
шается с кинетической энергией /-}- А, где h — постоянное ко-
личество. Вследствие возмущения это постоянное количество
получает некоторое бесконечно малое приращение е, так что
возмущенное движение совершается с кинетической энергией
Предполагая, что траектория возмущенного движе-
ния проходит через точки (х0> Уо) и (*i> Уi)> найдем по началу
наименьшего действия в форме Якоби h
Xi ___________________ ‘
2 [Л+ £(^)2] </+А + а) = 0. (1)
д?о
Разложим подинтегральную функцию в строку Тейлора
по бесконечно малым величинам
dy .
dx ’
1 Vorlesungen iiber Dynamik, S. 45, 1866.
8*
116
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл I
ограничиваясь при этом членами второго порядка:
/2['4+?(^1(/+Л+',=’/2‘4</+А)+»75Йг>_
_ 1 — -[_уА |/2Л(/+А) - у2 — / 2Л(7+Л) +
2[/2(/+Л)]8 dy 2 dy>
4-еу — —I2L + —(— Y - \/2(f^hj.
У dy V 2(f±h)T 2\dx) }AV
При подстановке в формулу (1) можно опустить первые
три члена, так как в них не входит варьируемых функций.
Четвертый член равен нулю, потому что формула (1) должна
быть удовлетворена в предположении, что траектория прохо-
дит через точки (х0, 0), (jq, 0), и что
У = = г = 0,
dx
а это требует
2Д (/-|-/г) = 0.
(2)
На основании этой формулы коэфициенты пятого и ше-
стого члена могут быть преобразованы так:
|^„2я(/+Л)=
=i«pj э$( ™u+h>),
d VA __ d ^2A(f±hl^
dy V2(f+h) dy 2(f-\-h) dy'
Вводим теперь новую неизвестную функцию Ф и новое
независимое переменное т:
X
ф = У }/2B(f+V, ^ = fdx }/2A(f+h). (3)
Гл. 1
О ПРОЧНОСТИ ДВИЖЕНИЯ
117
Мы получаем:
а?!
ха
,_____
^2A(f±h)dx =
2 . 2(/+Л)УЛВ
а?!
„ d Va ,
dy V2(f+h)
•J
ж0
еф
2-С=
dyV_B ,
[УГ(7+а)1б
Переходим к преобразованию последнего члена:
dy______1_____ с?Ф ф d ______1____
Jx ~ /25(/+Л) Л у 25(/+Л)’
/ dy \2 _ 1 /</Ф\2 ,
\dx) 2B(fA-h)\dx) +
( d 1 [о.,. </Ф 1 , л.о d 1 1
dx /2В(/+Л)Г dx ]/25(/4-Л) dx V2B(J-\-h)\
=А (АА । А 1 d ф2 =
В \d-J dx V2B(f+h) dx /2В(/+Л)
_ А /ЯФ\2 1 d . l/6fc.. , d Ф2
B\dz) /2В(/+Л) dx dx V2B(f+h)'
118
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. I
Подставляем и интегрируем по частям:
' 1 /*уd.. Г*!£[/£^2^
2 2(f+h)V АВ
о о
— - /1/- — 1g /25(/4-А) Ф2_
2 / г A dx s V2B(f+h)
Ха
Составляя формулу (1), мы увидим, что член с подста-
новкой в нее не войдет, потому что в пределах 6 Ф = 0. Мы
получим в окончательном результате следующую формулу:
1 ( <7Ф V
2 \ Л /
я + РеФ
dz — 0,
(4)
о
где коэфициенты аир суть симметричные выражения отно-
сительно х и у.
+ii/s£^2^+A>])’ <5>
з ______?________ (6)
1 [iZ2(/+A)l5 ‘ u
Называя подинтегральную функцию в формуле (4) через L,
найдем по правилам вариационного исчисления диференциаль-
ное уравнение возмущенной траектории по формуле:
Это дает нам:
d Г dL ]_ dL
dz , ( d<P\ d^ ’
\~d^
d*P
d^ ~
аФ
(7)
Гл. I
О ПРОЧНОСТИ ДВИЖЕНИЯ
119
Мы покажем в следующих параграфах геометрическое зна-
чение коэфициента а; что касается коэфициента Р, то, называя
скорость точки через v, а нормальную слагающую движущей
силы через N, найдем:
г N
3 = -2-^. (6)
Знак ( —) следует брать, когда сила W направлена в сто-
рону положительных у, а знак (-}-) в обратном случае.
Обращаясь к значению Ф и т, видим по формуле (3), что
Ф есть бесконечно малое расстояние возмущенной траектории
от невозмущенной, умноженное на скорость v, а т есть не что
иное, как действие при движении по невозмущенной траекто-
рии. Вообразив прямую линию и отложив на ней от некоторой
постоянной точки О длину О'-. = Ф вправо или влево, смотря
по знаку Ф, мы получим точку G, которую условимся назы-
вать представляющей точкой, так как положения ее харак-
теризуют возмущенное движение. Принимая в уравнении (7)
переменное т за время, можем рассматривать это уравнение,
как диференциальное уравнение движения точки G. Мы видим,
что эта точка находится под действием силы аФ, притяги-
вающей ее к О пропорционально расстоянию (если а отри-
цательно, то сила будет отталкивающая), и под действием
постоянной силы рг, зависящей от е. Когда движение претер-
пело консервативное возмущение, т. е. такое, при котором h
не изменилось, то сила ре = 0, и представляющая точка нахо-
дится под действием одной силы «Ф.
§ 2. Для того чтобы обнаружить геометрическое значение
коэфициента а, выведем основные формулы для составления
второго диференциального параметра и кривизны поверхности.
Пусть U будет функция точки, выраженная в криволиней-
ных координатах (х, у), начертанных на некоторой поверх-
ности. Вторым дифёренциальным параметром от функции U
называют величину
—т— as
an
d?
(8)
120
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. I
Здесь интеграл берется по элементарному четырехугольнику
abed (фиг. 1), образованному из четырех бесконечно близких
координатных линий; ds есть элемент дуги этого контура;
Фиг. 1.
dn — элемент внутренней нормали его,
a ds есть площадь элементарного четы-
рехугольника. Докажем, что не за-
висит от выбора криволинейных коорди-
нат. Для этого предположим, что коор-
динаты х, у прямоугольны, и, вообразив
произвольный замкнутый контур ABCDE,
разобьем его с помощью координатных
линий на бесконечное множество беско-
нечно малых прямоугольников. Умножим
формулу (8) на dz и возьмем от обеих
частей ее сумму, распространенную на все элементарные пря-
моугольники, вписанные в контур ABCDE. Мы получим:
где двукратный интеграл распространяется на площадь, а одно-
кратный— на периметр многоугольника ABCDE, dsi9 ds2, dnl9
dn2 имеют следующие геометрические значения:
Jsi = gh9 ds2 = hly dnx — Ihy dn2 = ht.
Назовем элемент дуги контура ABCDE через ds9 а элемент
его внутренней нормали через dn, т. е. положим
</$ = #/, dn — lty
и напишем
dU , dU , . dU ,
— an = — dn, H----— dn2.
dn dnj dn2
Делим на на чертеже: dn и вводим угол i, значение которого указано dU dU . , dU . . -7—= -7— cos 14- -.— sm 1. dn dnt dn2
Умножаем на ds: dU , dU , , dU , dn dn^ dn.2
Гл. 1
О ПРОЧНОСТИ ДВИЖЕНИЯ
121
Подставляя в вышенаписанную формулу, получим:
И
(9)
где интеграция распространяется на площадь и контур мно-
гоугольника ABCDE. Если возьмем теперь на поверхности
какую-нибудь новую систему прямоугольных или косоуголь-
ных координат и отнесем формулу (9) к конечному че-
тырехугольнику, образованному четырьмя координатными ли-
ниями этой системы, то, переходя в пределе к элементарному
четырехугольнику и разделяя равенство на cfa, найдем для
A2t/ формулу, совершенно одинаковую с формулой (8), в кото-
рой вторая часть отнесена к координатам В, Таким образом
не зависит от выбора криволинейных координат. Второй
диференциальный параметр составляется весьма просто по
формуле (8), как скоро дано выражение элемента дуги в какой-
нибудь системе координат. Если система координат х, у пря-
моугольна, то
ds- — A dx2 + В dy2.
Стороны элементарного четырехугольника abed будут:
ab = dxVA, ad = dyVB,
так что по формуле (8) найдем:
Д,С/ = —=-----Г — ( dy У B\dx +
Y АВ dxdy /
-j- (——т= dx VлД dy
dy\dy\ В J *]
или
= (10)
V AB dx \ r A dx J dy \ г В dy / J
§ 3. Кривизной поверхности называется величина
ds
р
dv
(И)
122
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. I
Здесь интеграл берется по контуру элементарного прямо-
угольника abed, образованного четырьмя бесконечно близкими
координатными линиями системы криволинейных прямоуголь-
ных координат х, у, начертанных на рассматриваемой поверх-
ности; ds и имеют значения, указанные в § 2, ар есть
радиус геодезической кривизны дуг ds и считается положи-
тельным, если направлен внутрь контура элементарного пря-
моугольника. Докажем, что К не зависит от выбора системы
прямоугольных координат х, у. Для этого воображаем на
поверхности произвольный замкнутый контур ABCDE и раз-
биваем его с помощью координатных линий на бесконечное
множество бесконечно малых прямоугольников. Умножаем
формулу (11) на d? и берем от обеих частей ее сумму, рас-
пространенную на все элементарные прямоугольники, вписан-
ные в контур ABCDE.
Мы получим:
где элементы дуг ds{ и ds2 имеют геометрические значения,
указанные в § 2, а рх и р.2 суть радиусы геодезической кри-
визны этих дуг, которые считаются положительными, если
ьаправлены внутрь многоугольника efghl. . .
Обращаемся к бесконечно малому прямоугольному тре-
угольнику ghl. Отбрасывая бесконечно малые величины выше
первого порядка, можем написать, что сумма внешних углов
этого треугольника плюс сумма углов геодезической смеж-
ности его сторон равна 2":
ds • । ds.> ds 1 л
v + z+A-t-О’—г +1—+ =
Г г-2 Z Pl
откуда
ds} . ds> f. I ds
4-----= di-\----.
Pl P-2 P
Назовем внешние углы контура ABCDE через Л, В, С, D, Е
и разобьем углы В и D линиями у — const на части Ви В2
и Du D.2. Мы получим для части периметра DEAB-.
J di = Dx — г. 4" Е 4- A -f- В19
Гл. I
О ПРОЧНОСТИ ДВИЖЕНИЯ
123
а для части периметра BCD'.
J Jz = B2 —^ + С + £>2;
тгк что для всего периметра будем иметь:
J Л’=ДЧ-В+С+Р+£—2«.
Произведя подстановки, найдем:
J J /CJ3 = 2k — А — В — С—D — Е— J (12)
где двукратный интеграл распространяется на площадь, а
однократный — на периметр контура ABCDE. Если теперь
возьмем новую систему криволинейных прямоугольных коор-
динат т, и приложим формулу (12) к конечному прямоуголь-
нику, образованному четырьмя координатными линиями этой
системы, то увидим, что 2~ сократится с суммой внешних
углов. Переходя в пределе к элементарному прямоугольнику
и разделив равенство на dz, найдем для К формулу, совер-
шенно одинаковую с формулой (11), в которой вторая часть
отнесена к координатам 5, iq. Таким образом величина К не
зависит от выбора системы прямоугольных координат. Всякий
раз, как дано выражение элемента дуги в какой-нибудь си-
стеме прямоугольных координдт
ds1 = Adxi + Bdy\
мы можем определить кривизну поверхности по формуле (11).
Обращаясь к элементарному прямоугольнику abed, найдем
по известной формуле:
J_ = 1_ d\$VA
?ab VВ dy J
J_ =____1
VA dx
Подстановка в формулу (11) дает нам искомое выражение
кривизны:
1г1Т
<13>
124
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. I
Укажем на связь, существующую между кривизной поверх-
ности и главными радиусами кривизны R и 7?'. Для этого
Фиг. 2.
предположим, что система прямоугольных коор-
динат соответствует линиям кривизны поверх-
ности, и построим на сфере радиуса единицы
сферическое изображение элементарного пря-
моугольника abed (фиг. 2). По свойству линий
кривизны это изображение будет тоже некоторый
бесконечно малый прямоугольник ар^8. При этом
углы геодезической смежности дуг ab, be, cd,
da будут равны углам геодезической смежности дуг ар, р^,
78, 8 а; так что
аЬ___ Ьс ___________ Ру
Pab ‘% ’ he ~ ’’ ' ’
Эти равенства показывают, что интеграл во второй части
формулы (11) будет одинаков, относим ли мы его к прямо-
угольнику abed, или к прямоугольнику ару8. Отсюда, называя
кривизну сферы радиуса единицы через К19 найдем:
. ар • а8 Кх
1 ab • ad RR'
Для определения пользуемся выражением элемента дуги
на сфере с помощью широты ф и долготы 6:
ds2 == eft?2 4“ sih2 ?
По формуле (13) получаем:
кг = 1,
откуда находим искомое соотношение между кривизной по-
верхности и главными радиусами нормальной кривизны:
K=Ri?- <14>
При этом выводе мы предполагали, что радиусы R и R'
направлены в одну сторону. Если же они направлены в раз-
личные стороны, то прямоугольники abed и аРу8 распола-
Гл. I
О ПРОЧНОСТИ ДВИЖЕНИЯ
125
гаются в обратном порядке, как показано на фиг. 3. Вслед-
ствие этого будем иметь:
ab _ ар Ьс_______ ру
^аЪ ^Ьс +
а потому найдем в окончательном результате:
к—Л,- (14)
§ 4. Сравнивая формулы (10) и (13) с (5), видим, что кээ-
фициент а не зависит от выбора прямоугольных координат
л, у, При этом величина у, определяемая по а уравнением
7 = зд2, имеет следующее простое геометрическое значение:
T = ^-A.2lg/2(/+A). (15)
Разумеется, что для со-
ставления величин
К и Д.2 1g У2(7+1)
нам нет никакой нужды брать
прямоугольные координаты х, у
так, чтобы уравнение у — 0 да-
вало траекторию точки. Мы мо-
жем даже выразить элемент
Фиг. 4.
дуги на поверхности с помощью косоугольных координат
в виде:
ds2 = A dx2 + В dy> + 2Cdx dy
и вывести формулы для второго диференциального параметра
и кривизны поверхности в этих координатах.
Для этого построим с помощью четырех бесконечно близ-
ких координатных линий элементарный четырехугольник abed
(фиг. 4) и заметим, что в нем
— — С
ab — dx VA, ad = dy\rВ, cos .
Проведем к координатным линиям два семейства ортого-
нальных линий и предположим, что ае, dh, af, bg будут две
пары линий этих семейств. Второй диференциальный параметр
126
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл 1
некоторой функции U получится, прилагая формулу (8) к эле-
ментарному четырехугольнику abed. Определим сначала сле-
дующие величины:
с?а = У АВ dxdy sin ? = У АВ— С'2 dxdy,
(dU\ 1 ( dU L dU L \ 1 dU 1
\dn)ad ae\dx^A dyYВ / У A dx sin?
1 dU + 1 (ndU „dU\
VB dy УвУАВ—С2\ dx dy!
tdU\ - 1 ( dU , dU ,A 1 dU 1
\dn!ab af\dy\fB dx\TA / У В dy sin?
1 dU f _ 1 l.dU dU\
У A dx ** УАУАВ-сЛ dy dx)'
Подставляя в формулу (8), найдем искомый
ный параметр:
1
диференциаль-
ъи= ______
VaB — C*
4- — [—____
dy [ VAB— C*
--(в—
—сЦ dx
dU rdU
Cz
dy dx
(16)
1
Переходим к кривизне поверхности. Для этого определим
прежде радиусы геодезической кривизны ортогональных линий
1 1 d^Adx sin?) _ Jig/Л dv
?(lb ]/Adx sin? VBdy dyV В ^‘dyV^
1 1 dty В dy sin's) dlg]/^B d-?
Pof | Bdysin'? ^Adx Jx]/A £‘dx]/A
С помощью этих радиусов легко определить радиусы кри-
визны координатных линий. Напишем, что в бесконечно ма-
лом треугольнике abk сумма внешних углов плюс сумма углов
геодезической смежности сторон равна 2^:
ак
?аЪ
kb . тс ab . ти
Pi?/1 2 2
Гл. I
О ПРОЧНОСТИ ДВИЖЕНИЯ
127
где d'? есть приращение угла ? при переходе от точки а
к точке к. Определим —:
Р<й>
111 1
— —------------ctg ?-----.
9аЪ Pae ? Ра/
Замечаем, что
d't_ 1 d<? al 1 d<? kl ____ 1 dy 1 1 dr$ cos 7
ab V A dx ab КВ dy ab V A dx sin^o Bdys\n-'i
Подставляем:
—=—-T=—Cg Va)——и -7- — (ig Vb) ctg ®—-2=—
Pab У В dy sin ® У A dx У A dx
или
— = . . -r1---~ ( — A 4- 1g УА + С — lg /fl) —
p06 УаУав-сА dy* ' dx * V '
1 d?
К A dx
Также найдем:
— = ——-1------( — fl—lg]/j?-|-C—Ig/H) —
[ad УВУАВ—СЛ dx* dy I
1 <z?
У в dy'
Прилагаем теперь формулу (13) к криволинейному четырех-
угольнику abed*.
KVAB — C^—-----h
dydx
+ - [..-- f—fl —lg/fl + C—ig/дА] 4-
dx L V ^B — сЛ dx dy* J J
4- — .1 f — Л — ig/^4-C^lg/fl')l — 2.
dyi^AB — СД dy dx^¥ /J dxdy
128
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. I
Отсюда получаем:
=-----I— —/-gL Г 1 /в— ig у 5—c—ig]/^14-
VAB— oUxL VAB — &\ dx dy* /]
-I- — [ ... (A — 1g VA — C — 1g /яЧ +
dy\_v AB — C*k dy dx* /]
. d1 2 * * C I
-—— arc cos . (17)
dxdy VAB J V 7
Эта формула после некоторых преобразований обращается
в формулу Гаусса \ но мы считаем удобным употреблять ее
в том виде, как она у нас написана. При С = 0 формула (17)
обращается в (13).
Пользуясь формулами (15), (16) и (17), можем составить
выражение у в косоугольных координатах.
§ 5. Интеграция уравнения (7) определяет траекторию воз-
мущенного движения. Разделяя интеграл Ф на v, найдем рас-
стояние Z траектории возмущенного движения от траектории
данного. Если С будет для всех значений т оставаться беско-
нечно малой величиной, то данное движение прочно; если же
с возрастанием т величина Z будет беспредельно возрастать,
то мы имеем непрочное движение. Но так как интегрирова-
ние уравнения (7) удается только в некоторых частных слу-
чаях, то весьма важно указать критерий прочности и непроч-
ности движения, не зависящий от этого интегрирования. Та-
кой критерий может быть установлен в случае, когда все время
функция у имеет постоянный знак, а скорость V — конечную
величину.
Из сказанного в конце § 1 о представляющей точке G
заключаем, что при 7 отрицательном на нее будут действо-
вать центральная отталкивающая сила Фя и сила ре, напра-
вление которой считаем постоянным2. Очевидно, что под
действием этих сил по прошествии некоторого времени
точка G начнет беспредельно удаляться от О. В случае у = О
1 Causs, Werke, Band IV, Circa superficies curvas.
2 Мы предполагаем, что Зе имеет постоянный знак, так как изменение
знака может произойти только при W=0, т. е. в точке перегиба траек-
тории. Подобные случаи мы исключаем из нашего анализа.
Гл. I
О ПРОЧНОСТИ ДВИЖЕНИЯ
129
точка G будет находиться под действием одной силы [Зе или
при консервативном возмущении будет двигаться по инерции.
В том и другом предположении Ф беспредельно возрастает.
Итак, если во все время дзижения точки по траектории
имеем 1^0, то такое движение непрочно. Обращаемся
к предположению, что во все время движения 7 > 0. Здесь
при консервативном возмущении на представляющую точку G
влияет притягательная сила аФ, под действием которой точка G
будет совершать колебания около центра О; но, будут ли эти
колебания всегда оставаться бесконечно малы или они станут
беспредельно возрастать со временем, судить a priori до-
вольно трудно. Еще труднее суждение о прочности при не-
консервативном возмущении; поэтому для случая у > 0 мы
обратимся к более обстоятельному анализу интеграла урав-
нения (7), пользуясь приемом Штурма Ч
Предполагаем возмущение консервативным и пишем урав-
нение (7) в виде:
<РФ
(18)
Начнем считать действие т от того момента, когда траек-
тория возмущенного движения пересекает данную траекторию,
так что при т = 0 будем иметь:
с1Ф
Ф = 0> Л? = Ф<”
где Фо —бесконечно малая величина. Назовем а2 и Ь2 наи-
большую и наименьшую величины коэфициента а и будем
вместе с функцией Ф рассматривать две другие функции 6
и ф, удовлетворяющие уравнениям:
ал*
и определяемые по начальным данным при х = 0:
f . n JO
6 = 4 = 0,
1 Sturm, Sur les equations differentielles lineaires du second ordre, „Jour-
nal de Liouville“, 1836.
Зак. 2365. — И. Е. Жуковский. Т. I.
9
130
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. [
Составляем разности: г d^ Ф dz* /72ф 6^ = Ф6 (a — а^, at-
. d2ty ф L — dt* </2Ф
или
d I , t/б г t/Ф \ I А /
Г Фз ° "Г- = ф6 (*— а2), dz \ dz dz /
*(фг-М= Ь)-
Ha основании этих уравнений заключаем, что до тех пор
пока ФО положительно, , двучлен I А ^Ф ф 0 dz dz
убывает с возрастанием т; а до тех пор, пока Фф положи-
тельно, двучлен . d^ , с?Ф
возрастает с возрастанием т. Так как при т = 0 оба эти дву-
члена равны нулю, то при zy большем нуля, </Ф фЦ 6 51. <о, dz dz r dty ф^-Ъ?>0-
Делим на Ф2: -И<0, d-\ф/ ’ dt \ ф ; •
Эти последние 6 неравенства показывают, что с возраста- - т-г
нием т дробь ф- убывает, а дробь возрастает. При т = 0
эти дроби получают неопределенный вид; но, взяв отношения
производных числителя и знаменателя, находим, что они обра-
щаются в единицы. При возрастании т первая дробь сделается
менее единицы, а вторая дробь более ее; поэтому получим:
о < ф < 4>.
Гл. I
О ПРОЧНОСТИ ДВИЖЕНИЯ
131
Первое неравенство справедливо до тех пор, пока 0 0, а
второе — до тех пор, пока Ф > 0.
Замечая, что
6 = sin а~,
а
& = —— sin 6т,
о
представим найденные неравенства в таком виде:
Фо' • _
---sm ат
а
Ф < —Я- sin 6т,
b
(19)
У
Фиг. 5.
Чтобы с большей ясностью
вывести заключения, вытекаю-
щие из этих неравенств, возь-
мем прямоугольные оси коор-
динат х, у и будем откладывать
на оси абсцисс действие т, а на
оси ординат — величины Ф, 6 и ty.
Мы получим (фиг. 5) три кривые: ОВ, ОА и ОС, из
которых две последние — синусоиды. На основании нера-
венств (19) эти кривые будут расположены так, как пред-
ставлено на фиг. 5. Называя приращение действия ОВ че-
рез Дт] и обращая внимание на неравенства
О А < ОВ < ОС,
находим:
6 ’
назовем Ф01 наибольшую величину Ф при измене-
0 до Дтр Эта величина заключена между наиболь-
Далее
нии т от
шими величинами функций 6 и ф, поэтому
— < Фп
а < ₽01
ф(/
6 ‘
При дальнейшем возрастании т от точки В функция Ф
сделается отрицательной и представится частью BF рассма-
триваемой кривой. Назовем через —Ф/ производную функ-
цию Ф в точке В. Определим новые функции 6 и которые,
9
132
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. I
удовлетворяя тем же диференциальным уравнениям, как и преж-
ние, определяются по новым начальным данным при т —
к , л dft dty т ,
е=ф=о, 5- = _;=-Ф/.
Эти функции изобразятся
Полагая BF — найдем по
тс . тс
— < ДТ-2<Т’
а о
на чертеже кривыми BE и BG.
предыдущему:
Ф/
< Ф
а
ф/
ь
где Ф12—наибольшая абсолютная величина функции Ф на
промежутке При дальнейшем возрастании т от точки F
функция Ф сделается опять положительной и обратится снова
в нуль после приращения т на Д?3, причем для промежутка
будут удовлетворены неравенства:
Ф/ Ф/
— < Ф-23 < "Г-
а о
и так далее.
Мы видим таким образом, что при непрерывном возра-
стании т функция Ф обращается бесконечное число раз в нуль,
У причем разности двух после-
довательных значений т, обра-
Z7V\ щающих Ф в нуль, заключены
azvs II \\ между постоянными пределами.
L ---Lx Что же касается пределов ве-
В личин Ф01, Ф12, Ф23,..., то они
фиг. 6. изменяются в зависимости
отФ0', Ф/, Ф2',. • • Если бы все
эти производные были бесконечно малы, то очевидно, что
функция Ф сама оставалась бы всегда бесконечно мала. Но
может возникнуть сомнение, что производные Фо', Ф/, Ф2',.. •
представляют ряд беспредельно возрастающих величин, так
что функция Ф представляется кривой О АВ (фиг. 6). Покажем,
что такое предположение невозможно, пользуясь доказатель-
ством от противного. Возьмем другую функцию % которая
тоже удовлетворяет уравнению (18), но обращается в нуль
не при т == 0, а при ~ = 14, причем производная ее в этой
Гл. I
О ПРОЧНОСТИ ДВИЖЕНИЯ
133
точке бесконечно мала. Величина всегда может быть вы-
брана так, что функция ср представляется, подобно функции Ф,
кривой вида CDE. Действительно, если бы существовали две
функции <р и удовлетворяющие уравнению (18) и остаю-
щиеся бесконечно малыми для всех значений т, то мы могли бы
положить
Ф = сер -р
и притти к заключению, что и функция Ф остается бесконечно
малой для всех значений т. Итак, предположим, что функ-
ция ср представляется кривой CDE, и допустим, что при т = О
d? ,
где ср0 и ср0' — бесконечно малые величины. Составляем на
основании уравнения (18) равенство:
с?2Ф с?2<р
гг;------ф----L — л
‘ d^
Интегрируем его и определяем произвольное постоянное:
с?Ф с?ср , ,
Подставляем в это уравнение т = О А в предположении,
что
в точке А функция Ф равна нулю,
</Ф
а ср и суть вели-
чины конечные.
Мы
получим невозможное равенство:
с/Ф . t
?-^Г = ?офо
по которому конечная величина равна бесконечно малой.
Итак, Фо', Ф/, Ф2', ... не могут представлять ряд беспре-
дельно возрастающих величин, и функция Ф будет всегда
оставаться величиной бесконечно малой.
Мы доказали, что при ? > 0 движение материальной точки
прочно относительно консервативных возмущений (исключе-
ние может представить случай 6 = 0, так как при этом по-
следний член неравенств (19) равен бесконечности); докажем,
что движение будет тем прочнее, чем более у. Назовем че-
рез и Cj значение функций у и С в точке траектории, для
которой а получает наименьшую величину, и примем, что эта
134
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. I
точка приходится на промежутке A~t. Разделяя второе нера-
венство (19) на скорость, находим:
< —-Р— sin b~.
/it
Мы видим, что Сх будет тем менее, чем более 7Р
Обращаемся теперь к случаю неконсервативного возмуще-
ния. Здесь суждение о прочности упрощается тем, что в боль-
шинстве задач, которые встречаются в различных практиче-
ских вопросах, кроме данного движения, соответствующего
постоянному Л, бывает еще известно одно бесконечно близ-
кое движение, соответствующее постоянному h + е, так что
мы знаем один частный интеграл уравнения (7):
Ф = Х,
где х остается всегда бесконечно малой величиной.
Называя через v и два частных интеграла уравнения (18),
которые при 7 > О остаются всегда бесконечно малыми, по-
лучаем общий интеграл уравнения (7) в виде:
Ф = х + С? + С1?1. (20)
Это показывает, что при у > 0 движение материальной
точки будет прочно и относительно неконсервативных/возму-
щений. Таким образом критерий прочности движения ма-
териальной точки заключается в положительности функ-
ции 7; при этом движение будет тем прочнее, чем более 7.
Функцию у поэтому можно назвать мерой прочности движения.
§ 6. До сих пор мы рассматривали вопрос о прочности
движения, не обращая внимания на изменение времени. По-
смотрим, какое изменение во времени происходит от возму-
щения движения. Для этого возьмем вариацию интеграла
С VAdx С V2A(fThjdx
Ч /2(/+ h) J 2(/+А) ’
Дур Дур
считая х0 и х неизменными:
*= Р mi
С VAdx
J [/2(/+Л)Г'
Гл I
О ПРОЧНОСТИ ДВИЖЕНИЯ
135
Первый интеграл по формуле (2) обращается в нуль,
два же других по формулам (3) и (6) преобразуются так:
8'= 2«
О о
Подставляем сюда Ф из формулы (20):
5Z = CJ J Р/Л-2е (21)
0 0 0 о
Докажем, что первые два интеграла, входящие в эту фор-
мулу, остаются бесконечно малыми при всевозможных изме-
нениях т. Для этого, написав интеграл уравнения (18) в виде:
Ф = с? + с1<?1,
перейдем от него к общему интегралу уравнения (7) по спо-
собу Лагранжа. Рассматриваем с и сг как функции т, удовле-
творяющие уравнениям:
de
Jo 1
Jr d^~dz
Р£-
Отсюда
de ере?! dc{ epep
d~ D ’ d' D 9
где
d='A
dy
d^
есть, как было показано в § 5, некоторая постоянная беско-
нечно малая величина второго порядка. Определим с и cf.
c —
136
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл I
Общий интеграл уравнения (7) будет:
Выбираем произвольные постоянные С и С\ так, чтобы
этот интеграл обратился в известный нам частный интеграл
и пишем:
? J — J Р?с?т==^(С<р + С1<?1 — х).
Берем от обеих частей производную по т:
[и=“(с4+с,*|
Л J 1 ‘1 (kJ s \ dT dx dx /
Определяем из этих двух уравнений искомые интегралы:
J 8 \ ал ал ]
Эти уравнения показывают, что рассматриваемые инте-
гралы будут оставаться бесконечно малыми при всех значе-
ниях т, если 7 > 0.
Останавливаясь на случае консервативного возмущения,
мы должны будем в формуле (21) положить
8 = X = 0,
и придем к заключению, что в этом случае остается бес-
конечно малой величиной для всех значений т. Если же воз-
мущение неконсервативно, то формула (21) дает нам, вообще
говоря, бесконечно возрастающее изменение Ы, исключая
случай, когда для полного оборота по траектории имеем:
(22)
о о
Мы приходим к следующему заключению: если мера проч-
ности положительна, то консервативное возмущение про-
изводит бесконечно малое изменение во времени движения,
возмущение же неконсервативное дает, вообще говоря, бес-
Гл. I
О ПРОЧНОСТИ ДВИЖЕНИЯ
137
конечно возрастающее изменение времени^ исключая тот
случай, когда для полного оборота удовлетворено уравне-
ние (22).
Последнее имеет, например, место при движении матери-
альной точки под действием центральной силы, прямо про-
порциональной расстоянию.
§ 7. Мы перейдем теперь к приложению изложенной об-
щей теории прочности движения к частным примерам. При
этом нам будет весьма часто встречаться преобразование
выражения А21g U, которое мы изложим в этом параграфе.
Допускаем, что криволинейные координаты х, у изотер-
мичны, т. е., что в выражении элемента дуги А = В. Полу-
чим по формуле (10):
л , ТГ 1 /rf2lgt7 . c/2lgt/\
1
~AU
/ cPU
I dx2
1
AU2
/wv, w\2'
\ dx / ' \ dy /
, <PU\
T" dy2 /
Пользуясь знаком А первого диференциального параметра^
представляем эту формулу так:
(23)
При этом следует помнить, что А(7 выражается при произ-
вольной прямоугольной системе координат формулой:
Полагаем в формуле (23) U= ]/2(/4“А):
Д21g /2(7+А) = 2(/+Л>[(/+ л)(Д/)2]’ (25>
что, на основании формулы (23), может быть представлено
еще так:
Mg Й2(/+А)= 2(^)2-W+/2A2lg/)- (26)
138
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. I
§ 8. Как первый пример рассмотрим прочность движения
материальной точки по плоскости под действием центральной
силы. Пусть силовая функция будет
г__ }ЬГпл 1
~ ЙЙ1’
где г — расстояние точки от центра силы, a ja— коэфициент
силы, который принимаем положительным, считая силу при-
тягательной. Берем полярные координаты:
По формуле (10) имеем:
Д>/=~ ^[г~т\==— |i(nf I)/-’1''.
г dr\ аг)
Подставляем в формулу (26) и замечаем, что по свойству
цилиндрического потенциала ^1^/= 0:
Д21g/2(7+А) = - 2^”-±1)Л г»-г.
Так как в нашем случае ЛГ=О, то по формуле (15) найдем
меру прочности:
2р-(п+1)А
‘ vi
(27)
Формула (27) показывает, что при п< — 1 движение будет
прочно или непрочно, смотря по тому, будет ли h менее или
более нуля. При п > — 1 из теоремы живых сил
Т = _ ZT+1 + h
заключаем, что h всегда положительно, так что в этом слу-
чае движение всегда прочно.
Для ньютонианского притяжения движение будет прочно
при h < 0 и непрочно при h > 0.
Называя через г0 и начальное расстояние и начальную
скорость точки, найдем:
2 г0
Гл. I
О ПРОЧНОСТИ ДВИЖЕНИЯ
139
Движение будет прочно при
^о1 2 <
2р-
го
и непрочно при
2и
П)’
Это понятно само собой, так как в первом случае траекто-
риями будут эллипсы, а во втором — гиперболы или пара-
болы Ч
Предполагаем теперь, что материальная точка движется
около центра силы по кругу 2, и определим h из формулы
центробежной силы:
г
J.
2
_ 1х(п~ЬЗ)
2(п+1)
1
Подставляем в формулу (27):
1 V*
(28)
Движение будет прочно при п > — 3 и непрочно при
п < — 3.
§ 9. Исследуем прочность движения материальной точки
под притяжением двух центров по закону Ньютона. Мы
имеем:
г и суть расстояния притягиваемой точки от центров
силы, которым соответствуют коэфициенты притяжения р-
и Р-р
Составляем второй диференциальный параметр:
, ’JL U, U а.
1 Laurent, Mecanique rationnelle, р. 264, 1870.
2 Этот пример разбирается несколько иначе у Томсона и Тета, Hand-
buch der theoretischen Physik, § 305.
140
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл I
Первый диференциальный параметр может быть получен
по формуле равнодействующей силы:
МА2 = _1_ Ех + cos?
' // r4 I ^4 I г2г/2 *
где — угол между радиусами-векторами. Называя через 2с
расстояние между центрами, находим:
cos © —
г2 гг2 — 4с2
277*!
откуда
• I2 I» 2
г Г1
г2 4“ Г]2 — 4с2
—А?—
Подставляем /, Л2/, (А/)2 в формулу (25), а найденную вели-
чину вместе с К=0— в формулу (15); найдем меру проч-
ности:
2 Г 4c2№i . , . Hi \
^4 \ Г3 ' Т^3/
Лагранж показал, что в рассматриваемой задаче материаль-
ная точка может двигаться по эллипсу, фокусы которого
помещены в притягивающих центрах; при этом квадрат ско-
рости точки равен сумме квадратов скоростей, которые она
бы имела под притяжением того и другого центра от-
дельно Ч Так как в эллиптическом движении под притяже-
нием одного центра имеем:
где а — большая полуось, то под притяжением двух
будем иметь:
центров
2а
Формула меры прочности получит вид:
__ Iх Ч~ Hi 1
<у4гЗГ13 а
(ру’ + ^г3)
8с2рь|х1'
1х .
1 См. примечание Бонне, Mecanique Analytique, Т. II, Note IV, 1853.
Гл. I
О ПРОЧНОСТИ ДВИЖЕНИЯ
141
из которого следует, что у будет положительно до тех пор,
пока удовлетворено неравенство:
(^,8 + (V3) >
Р-4-Н1 ’
Определяем значения г и г1г при которых первая часть не-
равенства получает наименьшую величину под условием
г 4“ rl = i2a. Находим:
Это есть достаточное условие устойчивости эллиптического
движения под притяжением двух центров.
§ 10. Исследуем прочность движения тяжелой материаль-
ной точки по поверхности конуса, ось которого образует
с вертикальной линией угол А, а с образующей — угол
(фиг. 7), причем
Назовем через g напряжение тяжести, через I — расстоя-
ние точки от вершины конуса, через © — угол между верти-
кальной плоскостью, проходящей через ось конуса, и плос-
костью, проходящей через ось конуса и материальную точку.
Принимаем за координаты I и
ds1 — dP 4“ Р sin2 ’Л cfcp2.
Допустим, что материальная точка начала свое движение
от вершины О, имеем:
/4“ h = gl cos ty,
где — угол между I и вертикальной линией;
cos = cos X cos 4“ s*n sin Iх cos
откуда
f~\~h—gl (cos X cos p- 4" s*n sin Iх cos ?)•
142
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл I
Составляем по формуле (10) и формуле (24):
(cos X cos у sin л sin cos <?)
sin X cos <?
sin
(A/)2 = g2 (cos X cos u sin X sin u cos ?)2 -f- g2 sin2 X sin2 .
Останавливаемся на двух случаях движения материальной
точки по нижней и по верхней образующей; для этого пола-
гаем <? = 0 или — тг:
f~\-h=gl cos (X zfz ^),
л/- £ Г /1 ч sinX ]
До/ — ~г cos (X u) z^z ,
I L sm у]
(Д/)2 — gi cos2 (X zp р.).
Подставляем в формулу (25):
Так как конус представляет разверзающуюся поверхность,
то для него К=0. Мы найдем по формуле (15)
, sin X
V = -----------------
2Z2 cos (X цз ji) sin ’
отсюда
sin X
ОС = ZJ -;-----7--------;--- е
4gl3 cos2 (X z$z u) sin
Выразим эту величину с помощью действия т;
с ~
т — ^2g cos (X zfz u) f V/ dl — l~ V2g cos (X ti),
0
p = —______________
8 g cos |(X zp p>) ’
Подставляя, получим:
2 sin X
9 cos (a z^z u) sin jx ‘
Здесь надо брать верхний знак при движении по нижней
образующей и нижний — при движении по верхней образующей.
Гл. I
О ПРОЧНОСТИ ДВИЖЕНИЯ
143
Формула Q0) показывает, что движение по верхней образую-
щей непрочно. Что касается движения по нижней образую-
щей, то хотя а и имеет все время движения положительный
знак, но мы не можем отсюда заключить, что движение по
нижней образующей прочно, так как в нашем случае 6 = 0.
Для решения вопроса о прочности движения обращаемся
к непосредственному интегрированию уравнения (7), которое
в нашем случае одинаково с уравнением (18), ибо р = 0. Мы
имеем:
подставляем сюда
Ф = с~п
и определяем п под условием, чтобы диференциальное урав-
нение было удовлетворено. Находим:
и2 — п ~4~ тп = 0,
Общий интеграл будет:
1 / V1—V1—4m \
F 21 2 I 2
ф = ~ )
Выражаем Ф через изменение угла которое обозначаем
через о?:
Ф = |/л2gl cos (X zjz u) sin u = j/2g cos (X и) I 8?.
Подставляем сюда величину l через т:
ф = А т8<р;
следовательно,
2
ОФ —— т
V1—4m
Эта формула показывает, что при движении по верхней обра-
зующей 8<р неопределенно возрастает со временем, при дви-
жении же по нижней оср стремится к нулю. При этом, если
144
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. I
4m < 1, то Sep, будучи в начале возмущения равно нулю, не
обращается более в нуль; если же 4m > 1, то Sep обращается
бесчисленное множество раз в нуль.
Следует заметить, что величина С = /Sep беспредельно воз-
растает, несмотря на то, что при движении по нижней обра-
зующей Sep стремится с возрастанием т к нулю.
§ 11 Если материальная точка движется по какой-нибудь
по инерции, то надо считать силовую функцию f
постоянной величиной. Мы получим:
4-2lgK2(/+A) = 0,
откуда по формуле (15)
Движение будет прочно при
К>0
и непрочно при
^<0.
^поверхности
х
Фиг. 8.
Этот результат представляет известное свойство двух
бесконечно близких геодезических кривых: если кривизна
поверхности отрицательна, то эти линии после пересечения
постоянно удаляются друг от друга; если же она положи-
тельна, то геодезические линии после пересечения расходятся,
потом снова сближаются до пересечения и т. д.
§ 12. Как последний пример рассмотрим прочность дви-
жения тяжелой материальной точки по поверхности вращения,
имеющей вертикальную ось (фиг. 8). Отнесем поверхность
к цилиндрическим координатам х, у, <?. Здесь х есть рас-
стояние точки от горизонтальной плоскости АВ, у есть рас-
стояние точки от оси вращения Ох, а ср обозначает угол,
который образует плоскость, проходящая через ось Ох и
данную точку, с некоторой постоянной плоскостью хОу.
Элемент дуги на поверхности в этих координатах будет:
ds2 =
dx2-\-y2d?2.
Для силовой функции найдем:
f=gx.
Гл. I
О ПРОЧНОСТИ ДВИЖЕНИЯ
145
По формулам (10) и (24) имеем:
cty сРу
° dx dx2
T(1ZY]2’,
^\dx ) .
(¥)2
Подставляем в формулу (25):
Определяем по формуле (13) кривизну поверхности:
d2y
Подставляем найденные величины в формулу (15):
Эта формула показывает, что при положительном у движе-
ние будет прочно, когда
<Ру
dx2
0,
dy
dx
0,
каково бы ни было h. Таково движение по внутренней по-
верхности параболоида вращения.
Зак. 2365. — Н. Е. Жуковский. Т. I.
10
146
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. I
Предположим, что материальная точка движется на поверх-
ности вращения по горизонтальному кругу, и определим
в этом предположении Мы имеем:
v 2 dx’
откуда
_gU
dx
меры прочности:
Подставляем эту величину
в формулу
Движение будет прочно при
„^<3
У dx ^
dy \2
dx )
Рассмотрим, какова должна быть поверхность вращения,
чтобы мера прочности при движении по всем горизонтальным
кругам ее равнялась нулю. Мы имеем для выполнения этого
условия диференциальное уравнение:
dx s dy
dx
Интегрируем его в первый раз:
уз = 4с— dx — 4с—*
У ^dx’ dX~ 4С 1/8’
интегрируем второй раз:
2с
_ = Л4-С1.
Произвольное постоянное сх определяем, полагая при х — О
17=00; найдем сх = 0; следовательно, искомое уравнение будет:
^2 = 2сх“1. (31)
Поверхность, получаемая от обращения этой кривой около
оси Ох, расстилается асимптотически по плоскости АВ и су-
Гл. I
О ПРОЧНОСТИ ДВИЖЕНИЯ
147
живается по мере удаления от этой плоскости в бесконечно
тонкую трубку около оси Ох. Движения по всем горизонталь-
ным кругам этой поверхности будут неустойчивы, так что
малейшее отклонение скорости от горизонтального направле-
ния заставит материальную точку подняться до плоскости АВ
или упасть бесконечно низко.
Любопытно заметить, что материальная точка, ниспадаю-
щая по найденной поверхности от плоскости АВ, будет иметь
во всякой точке поверхности такую скорость, при которой
она может, начиная с данного места, двигаться по горизон-
тальному кругу. Мы имеем:
Г ёУ .
^=1/ dy ’
F dx
но для нашей поверхности
d£L==_y_
dx 2х ’
следовательно,
v = ]/
§ 13. Оканчивая первую главу, сделаем некоторые заме-
чания, которые послужат разъяснением изложенной в гей
теории. Напишем формулу (2) в следующем виде:
V В dy
или
d^VA =d\gV2y±h)
VBdy VBdy
Здесь первая часть представляет единицу, разделенную на
радиус геодезической кривизны траектории, а ]/В dy есть
элемент нормали dn к траектории, так что
1 _Jlg]/2(7+A)
р dn
Построим на поверхности с помощью траекторий, которым
соответствует одно и то же постояннее Л, замкнутый много-
угольник ABCDE и приложим к нему формулу (12), в кото-
рой | заменим вышенайденной величиной:
10*
148
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. I
J Jk do = 2z — А — В — С— D — Е — ps-.
Интеграл во второй части преобразуем по формуле (9)
и перенесем в первую часть; получим:
Jpr-A2lg]/2(/+A)] Jo = 2к — А — В — С—D — Е
или по формуле (15)
J р</а = 2* — А — В — С—D — Е.
(32)
Формула (32) позволяет с/елать много весьма интересных
заключений. Прилагая ее к треугольнику, внутренние углы
которого суть А', В', С', находим:
J J1do = A' + B' + C' — к
или в случае бесконечно малого треугольника:
_Д/ + Д/ + С/ —
1 cfa
Отсюда видим, что мера прочности равна сферическому
избытку бесконечно малого треугольника, образованного тре-
мя траекториями, разделенному на площадь треугольника.
Если во всех точках поверхности у = 0, то сумма внутренних
углов всякого треугольника, образованного тремя траекто-
риями при постоянном h, равна двум прямым.
Приложим формулу (32) к четырехугольнику ABCD, для
которого внешние углы А, В и С суть прямые:
Мы видим, что угол D будет острый или тупой, смотря
по тому, будет ли мера прочности положительна или отрица-
тельна. Если мера прочности равна нулю, то угол D будет
прямой. Так же и наоборот: если на поверхности возможно
провести два семейства взаимно ортогональных траекторий
с постоянным Л, то во всякой точке поверхности у = 0. Таким
образом из того, что на поверхности вращения, образующая
которой представляется уравнением (31), возможно движение
Гл. I
О ПРОЧНОСТИ ДВИЖЕНИЯ
149
тяжелой материальной точки с одним и тем же постоянным h
по параллельным кругам и по меридианам, следует, что во
всех точках этой поверхности мера прочности равна нулю.
Предположим, что весь контур, на который распространена
формула (32), состоит только из
одной траектории, которая сама
себя пересекает в точке А. Най-
дем:
Фиг. 9.
А.
сама
Эта формула показывает, что
при траектория не может
может быть замкнута1.
Пусть О А будет траектория данного движения (фиг. 9), а
ОВ — траектория движения, происшедшего от консервативного
возмущения. Проведем ортогонально к О А семейство траекто-
рий с тем же постоянным h и приложим к четырехугольнику
abed формулу (32):
себя пересекать и не
= ?2 — <?!•
Мы видим, что при т > 0 угол более ерр т. е. угол
идет, возрастая, и может от острого угла i перейти в точке
пересечения траекторий к тупому углу г . Если 7 < 0, то
т* е* угол идет, убывая, и не может сделаться ту-
пым углом следовательно, в этом случае траектория ОВ
никогда не пересекает траекторию О А. Наконец при у = 0
имеем <р2 = Ф1, т. е. угол <р есть постоянная величина. Так
например, все траектории тяжелой точки на поверхности вра-
щения уравнения (31) при скорости V2gx пересекают мери-
дианы поверхности под постоянным углом. Теперь вполне
понятно, почему малейшее изменение в направлении скорости
точки, движущейся по горизонтальному кругу, удаляет ее бес-
предельно от этого круга.
1 Исключение представляют те случаи, при которых внутри контура
имеются критические точки, дающие У 2(/ +А) = оо.
ГЛАВА II
§ 14. В этой главе мы займемся прочностью движения си-
стемы, положение которой определяется двумя координатами
х, у и движение которой совершается под действием сил,
имеющих силовую функцию f (х, у).
Эта задача без всякого затруднения сводится к задаче
предыдущей главы. Пусть живая сила системы выражается
формулой:
2 Т = Ах'2 + By'2 + 2Сх 'у'.
Мы всегда можем отыскать поверхность, на которой эле-
мент дуги ds выражается в каких-нибудь криволинейных ко-
ординатах х, у подобной же формулой:
ds2 = Adx2-rBdy2 + 2Cdxdy.
Всякому положению системы в пространстве будет соот-
ветствовать точка на этой поверхности. Предположив, что
в этой точке сосредоточена единица массы и что она под-
вержена действию силы, имеющей силовую функцию /(х, у),
найдем как для движения системы в пространстве, так и для
движения точки по поверхности одни и те же диференциаль-
яые уравнения в лагранжевой форме
dt \dx'/ dx dx9
d / dT \ dT _df
dt \ dy') dy dy *
Таким образом вместо решения задачи о движении си-
стемы мы можем решать задачу о движении точки на по-
верхности; при этом найденная траектория точки будет слу-
жить, так сказать, годографом пути, пройденного системой.
Прочность движения системы будет вполне охарактеризована
прочностью движения точки. Если эта последняя будет иметь
Гл. II
О ПРОЧНОСТИ ДВИЖЕНИЯ
151
прочное движение, то и движение системы будет прочно,
и наоборот. На основании сказанного, мерой прочности движе-
ния системы является величина у, определяемая по формуле
(15), в которой К и Д2 Ig И2 (/+ Л) имеют для точки, пред-
ставляющей движение системы, значения, установленные в пре-
дыдущей главе. Точно так же в случае неконсервативного
возмущения, когда постоянное h получает при- о
ращение е, мы должны пользоваться вышеука- Л
занной величиной р. /
§ 15. Переходим к примерам. Дана система, /
состоящая из трех масс тп, тп, т' (фиг. 10). Она \/
л?'1'
стеснена следующими геометрическими услови-
ями: фигура атгп т всегда остается ромбом, сто-
рона которого равна /; точка а неподвижна; точка Фиг. 10.
т может только перемещаться по вертикальной
линии Ьа3 около которой система может вращаться. Требуется
исследовать прочность движения этой системы под действием
тяжести. За координату х принимаем угол образованный
плоскостью ромба с некоторой неподвижной плоскостью,
проходящей через ось ab; за координату у принимаем угол р.
Живая сила будет:
так что
Т — тР sin2 р </2 + (т 4- т' sin2 р) Рр'\
А ~ 2тР sin2 р,
В==2тР(1-[-— sin2И >
\ т /
АВ — 2тР sin р j/* l-j-^-sin2/?.
Силовая функция выразится так:
f — 2 gl (т т') cos р.
Составляем по формулам (10), (24), (25) и (13) первой
главы нужные нам величины:
152
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. П
A2lg /2(/+Л)--
2g2m 114-------) sin2 р
\ 772 /
2(/+А)2 .т' . о
14---sin“D
т
(/+ h)g^ 1 +~) (2"J~7^sin2j[’)
cos р
I ( 1 -|- — sin2p
\ т
1 d / 1 ЛЛ4\ = 1 А~*~ т
VABdp\VB dp )~ . ^isin2 \2
\ 772 /
и по формуле (15) находим меру прочности:
i I 2 / “f I I • о
14------ е*т 14--------------------I sin-p
772 | 5 \ т / г
. тf \ 2 * 7 уу»7
2тР ( 1 + sin2p] (/+ Л)2( 1 + ™ sin2P
(-« । 772 \ / 1 • о \
1 -г — 2 4-----sinp cos р
т J \ т г I
Так как эта величина положительна при то все
движения системы, удовлетворяющие этому условию, прочны.
Определим постоянное h для равномерного вращательного
движения. Написав, что сила тяжести уравновешивается центро-
бежной силой, получаем:
cos Р ~ 2 8^ (т 4" s*n Р^
mv2 = gl(m-\- m') ~~~
Гл. П
О ПРОЧНОСТИ ДВИЖЕНИЯ
153
Подставляем в формулу меры прочности:
1 4~ 3 cos2 р
2тР sin2 р I 1 --------sin2 р
\ т
(1)
Эта формула показывает, что прочность движения умень-
шается с возрастанием угла р.
Если бы мы желали определить время Д/ одного колеба-
ния системы в возмущенном движении, то следовало бы заме-
тить, что вследствие постоянства коэфициентов а и Р инте-
грал уравнения (7) первой главы
принимает вид:
т . I 1Г Л
Ф = с sm т у а + с, cos т I/ а -I-е
11 а
и показывает, что приращение дей-
ствия, соответствующее одному ко-
лебанию, есть
л 2^
Дт = ——.
Дт
Вспоминая, что
a==2(fThy
Д/“2(/+А)
§ 16. Рассмотрим (фиг. 11) систему, состоящую из двух
материальных точек т и т', движущуюся в плоскости ху.
Точка т соединена неизменяемой линией тО = а с началом
координат, а точка тп' в свою очередь соединена неизменяе-
мой линией тптп' = Ь с точкой т. Обозначаем через q угол
линии От с осью Ох и через р — угол, который образует
продолжение линии От с линией тт'. Координаты точек т и
т будут:
х = a cqs q, xr~ a cos q Ь cos (q -J~ р),
у — a sin 9, у1 = а sin q -|~ b sin (q -f- р).
154
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. II
Берем производные по времени:
х' = — aq' sin q, х/ = — aq' sin q — b (q' -f- p') sin (q -|- p),
y' = aq' cos q, yx' = aq' cos q + b (q' + p') cos (q + p).
Составляем живую силу:
2 T — [а2 (тп + тп') + №тп 2abm' cos р] q'2
+ 2 [Ь2т' аЪт' cosр] q'p 4~ Ъ2т'р'2.
Здесь за координаты, определяющие положение системы,
приняты углы q и р. Мы имеем:
А = а2 (т + т') + Ь2тп 2,аЬтп' cos р,
В = Ь~т',
С = Ь2тп' 4~ аЪт' cos р,
VAB— С2 = аЬтп л/~-^-]-sin р.
г ТП
Определяем К по формуле (17) первой главы:
к==1 d / 1 dA\
2VАВ —С2 dp \VAB — C2 dp J
m cos p
ab (тп + тп' sin2 p)2 *
Так как в нашей задаче /=0,‘ то вся мера прочности при-
водится к кривизне К:
________тп cosp
ab(m~\~ тп' sin2 р)2
(3)
Формула (3) показывает, что движение будет прочное, если
все время р < и непрочное, если р > Таким образом
равномерное вращение при р = 0 будет прочное, а равномер-
ное вращение при р = к — непрочное. Далее замечаем, что
при тп = 0 мера прочности равна нулю и движение становится
непрочно.
Останавливаясь на предположении р = 0, находим:
1
•у —— -- е
abm
Для определения времени одного колебания в этом случае
.получаем:
ос =
у,, Д/ =
zn
Дт
2h’
Гл. II
О ПРОЧНОСТИ ДВИЖЕНИЯ
155
откуда, ____
л'=2' / 1г- <4>
§ 17. Как последний пример исследуем прочность движения
трех материальных точек единицы массы, движущихся по трем
взаимно перпендикулярным осям координат, которых они не
могут покинуть под взаимным притяжением сил, пропорцио-
нальных расстоянию и стесненных тем условием, что сумма
расстояний точек от начала координат есть постоянная вели-
чина р. Пусть х, у, z будут эти расстояния; тогда
Силовая функция будет:
/=p.(x2 + y2 + z2).
Положение нашей системы вполне определяется двумя
координатами, за которые принимаем и и v:
и = (х — у),
Получаем:
dx — dy = du,
dx-\-dy = ——L dv,
dz = —dv,
Уз
откуда
dx2 dy2 4“ dz2 = (du2 dv2).
Так же найдем, отбрасывая постоянную величину,
f=^ (u2-\~v2).
Л/
Сделанная подстановка приводит нашу задачу о движении
системы к задаче о движении материальной точки по плоскости
под притяжением центральной силы, пропорциональной рас-
стоянию. На основании § 8 заключаем, что движение рас-
сматриваемой системы будет всегда прочно.
ГЛАВА III
§ 18. Переходим к исследованию прочности движения ка-
кой бы то ни было системы, живая сила которой выражена
в координатах х, у9 z9 и,.. . формулой:
2T=Ax^ + Byf^ + Czf2 + Du'2+ ... ,
причем координаты выбраны так, что для рассматриваемого
движения
у — z = и — ... =0.
Силовую функцию обозначим через f (х, у, z9 и,...). Пред-
положим, что вследствие бесконечно малого изменения началь-
ного положения и начальных скоростей система получила
новое движение, бесконечно близкое данному, и определим
в функции х бесконечно малые координаты у9 z9 и,... , поль-
зуясь началом наименьшего действия. По теореме живых сил
первоначальное движение системы совершается с кинетической
энергией Вследствие возмущения постоянное h получает
некоторое бесконечно малое приращение е, так что возму-
щенное движение совершается с кинетической энергией
/+ h -р е. Предположим, что система в возмущенном движении
проходит через положения (х0, yQ9 z09 и09 ...), (хр у19 z19 ul9 ...),
и напишем, что для возмущенного движения вариация дей-
ствия между этими двумя положениями есть нуль:
____________________________
г 2[Л + ВЙ) +С(£)+Р® + ...](/+Л + е) = О. (1)
Я?0
Разлагаем подинтегральную функцию в строку Тейлора по
- du dz du
бесконечно малым величинам е, и9 , z9 —г, и9 . , ... и
dx dx dx
ограничиваемся при этом членами второго порядка:
Гл. ш
О ПРОЧНОСТИ ДВИЖЕНИЯ
157
|/2 Р+* (й)3+с (е)’_+с (®)'+ • |(/+А+")=
= /2Л(/+Л) + « у===-~ [У5—-^4-
+у 1ЛМ (/+*) +z -i /24(7+7.) +
+ „^ /24(7+ Л)+ • +4 /24 (/+/.) +
+ 4 £ /W+4 + 4 i ^A(f+h)+ ...
-+^-£b VWf+V+vu /2Л(/+Л) +
J2 ________ Г j 1/л
ZU JV2A(f+h)+ ... +e b 4 77a= =
1 dz du Ly dy /2(/+A)
, d Va , d Va . 1.4.
dz V2(fA-h) du K2(/+A) J
< /2(/+A)
2 Va
При подстановке в формулу (1) члены первой строки могут
быть опущены, так как в них не входят варьируемые функции.
Все члены второй строки равны нулю, потому что формула (1)
должна быть удовлетворена в предположении, что движение
берется между положениями (х0> 0, 0,...), (xlf 0, 0,. ..)
и что во все время его имеем:
s = 0,i/ = ^ = 0, z=^ = 0...,
х dx dx
а это требует выполнения условий:
/2Л(/+А) = 0,
4 /2Л(/+Л) = 0,
az
V2A(f+h) = O,
аи
158
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. Ill
На основании этих формул мы можем преобразовать коэфи-
циенты членов третьего, четвертого и пятого рядов:
1 /72 _____
2Та^(/+Л) =
=1/1
rw+ч=rw+ч 18 V2A(f+h),
d VA = d /24(/+А) = _ /2Л(/+Л) df
dy /2(/+Л) dy 2(j+h) 2(f+hy dy'
Вводим новое независимое переменное т и новые неизвест-
ные функции Фп Ф2, Ф3,- • •
а?!
Т= J </х/2Д(/+А),
^=yV2B(f^h),
Ф.2 = 2-/2С(/+Л),
Ф8 = и/2Г»(/+А), ’
Мы получаем:
J’l
i>2 х/2 ------
^-^/2Л(/4-А) dx =
2 dy2
d
<Й,
-^V2A(f+k)Jx=^
О
е/ уд
Sy dy V2(~f+h)
2(/+A) V AB
lg V2Д(У+А)
2(/+Л)/5С
2-t
dy ] В
[/2(7+A)]6
еФ
л.
О
о
Гл. Ill
О ПРОЧНОСТИ ДВИЖЕНИЯ
159
Переходим к преобразованию членов последней строки:
dy= 1 ф d 1
dx dx 1 dx
( dy\2_ 1 ( V ।
\dx/ 2B(f-\-h) \ dx ) ‘f_
Г оф
d 1 1 d 1 _
' dx ]A2B(f~\-h) \_V2B(J+h) 1 dxV^B(f+h)_
__ 1 Z^iViA 1 d Фд2
~ 2B(f+ h) {dxK dx V2B(f+h) dx
1 /<7ФЛ8
2B(f-\-h) \ dx )
---< 1 — lg/2B(/4-A) — —- Ф1‘2.....
V2B(f+h) dx У J dx V2B(f±h)
Подставляем и интегрируем по частям:
Я?!
я?0
= П/<№1ул+ f
J2\d'j J 2 2(f±h)VAB
4/
д?о
При составлении формулы (1) члены с подстановками можно
отбросить, потому что в пределах 6ФХ = 6Ф2= ... = 0. Мы
получаем в окончательном результате следующую формулу:
f Г1 /<7ФЛ2 f 1 /с/Ф2\2 . 1 /б/ФзГ ।
J L2 \ +2 +2 +•••
о
(Ф 2 Фо2 Ф 2 \
а11 ^~2~ 4" а22 ~2 0633 ^2~ 4“ а12^1^2 4~ • • • j 4“
+ Ч?41+1%%+Рз4+---)1 ^ = о, (4)
160
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. III
где коэфициенты allf а12, Plf... имеют вид:
1 \d
чУАВЦ-уН) \dx
l/^T Г2В(/+А)] +
V A dx J
а
“12 2(f+h)VBC ’
dyV В
[/2(/4-А)Р‘
(5)
(6)
(7)
Диференциальные уравнения возмущенного движения най-
дутся по формуле:
где L есть подинтегральная функция в формуле (4).
Это дает нам ряд следующих диференциальных уравнений
возмущенного движения:
dW . D
d-z <№,+ fl ’
</*Ф2 ,s
dV <7Ф2+ 12 ’ |
, )
где W представляет функцию переменных Фр Ф2,...
ф 2 ф 2
ОСц а22 • • • +а12Ф1^2+ • • • (9)
§ 19. Обинтегрировав уравнение (8), найдем величины Фи
Ф2,.. . , определяющие при всяком х положение системы
в возмущенном движении. Если величины Ф1э Ф2,... будут
для всех значений т оставаться бесконечно малыми, то рас-
сматриваемое движение системы прочно; если же некоторые
из этих функций беспредельно возрастают с возрастанием т,
Гл. Ill
О ПРОЧНОСТИ ДВИЖЕНИЯ
161
то мы имеем непрочное движение (мы полагаем, что живая
сила системы в данном движении остается все время конечной
величиной). В случае, когда удается выбрать координаты х,
у, z, ... так, что коэфициенты а12, а13, . . . обращаются в нули,
а коэфициенты аи, «22, ... имеют постоянные знаки, суждение
о прочности движения может быть сделано, не прибегая
к интегрированию уравнений (8). В этом случае каждое из
уравнений (8) имеет вид уравнения (7) первой главы; поэтому на
основании сказанного в этой главе заключаем, что движение
системы будет прочно, если все коэфициенты ап, а.22, . ..
положительны, и непрочно, если некоторые из этих коэфи-
циентов отрицательны.
Определение изменения времени в этом случае может
тоже быть сделано, как показано в первой главе. Берем ва-
риацию от интеграла:
[ /2Л(/4-А)
J 2(/+Л) '
dx,
переходя от данного движения к возмущенному при постоян-
ных Хо И Хр
, _2f z-4-..Л —
J [V2(f+h)Y\dy dz )
-2г f -dx22 .
J [Vltf+h)]3
На основании формул (2), (3) и (7) будем иметь:
О о
Зак. 2365. — Н. Е. Жуковский. Т. I
И
162
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. III
Подставляем сюда
‘^2 ~ ОгРг 4~ ^2% ~Ь Х-2>
где С и D суть произвольные постоянные, ? и й — частные
интегралы уравнений (8) при е = 0, а у представляют частные
интегралы этих уравнений при г, не равном нулю, которые
принимаем заранее данными. Находим:
«« =2(С J+ J&<Л) + 2(/хМ-0-2з J (10)
о о о Л
возмущение консервативное
ф, х все время остаются беско-
нечно малыми, докажем, так же
как в первой главе, что инте-
гралы вида:
J J №
о о
будут тоже всегда оставаться
бесконечно малыми.
Формула (10) показывает,
что в рассматриваемом случае
дает бесконечно малое измене-
ние времени, возмущение же неконсервативное дает, вообще
говоря, беспредельно возрастающее изменение времени.
§ 20. Приложим нашу теорию к исследованию устойчивости
движения свободной материальной точки. Для этого отыщем
надлежащую систему координат.
Проведем (фиг. 12) к рассматриваемой траектории АВ
семейство нормальных плоскостей Р и предположим, что бес-
конечно близкие плоскости Р, Pi9 Р2,. . . этого семейства пере-
секают траекторию в бесконечно близких точках О, О', О",...
Построим на плоскости Р прямой угол COD, имеющий вер-
шину в О, и определим точки С и D, в которых стороны
этого угла пересекаются плоскостью Pt; соединим точки С и
D с О' и определим точки С' и D', в которых плоскость
Гл. Ill
О ПРОЧНОСТИ ДВИЖЕНИЯ
163
пересекает стороны угла CO'D*, соединяем точки С' и D' с О'
и определяем точки С" и D", в которых стороны угла C'O'D'
пересекаются плоскостью Р:;, и т. д. Стороны построенных
углов образуют две разверзающиеся линейчатые поверхности
Q и R, которые пересекаются во всех точках линии АВ под
прямым углом. Это последнее можно доказать следующим
образом. Пусть уравнения траектории АВ будут:
z=?(x).
Назовем через х, у, z координаты какой-нибудь точки О
траектории АВ, через Л, Y, Z — координаты соответствую-
щей точки С, через Xi9 Yь Z} — координаты точки D и через
X — угол COD. Получим:
(X-х) + (У-y)f (х) + (Z-2)(х) - О,
(X, - х) + ( У, - у) f (х) + (Z. - z) J (х) = О,
(%-х)(Л1-х) + (Г-у)(г1- ff)+(Z г)(Л-г)
КХ Ху=+(Г- ^+(z z)V[(*i -х)2 + (У!- Sy+(Zr zY}~-
Одиференцируем последнюю формулу в предположении, что
мы переходим от угла COD к углу CO'D. При этом X, Y,
Z, Xi9 Yj, Zj должны считаться постоянными, а координаты
у и z надо заменить функциями х из уравнений траектории.
На основании первых формул получаем:
d cos X = 0;
(11)
следовательно, если угол COD есть прямой, то и угол СО D
будет тоже прямой и т. д.
Проведем по разверзающейся поверхности Q линии, орто-
гональные образующим, которые будут ортогональны и к плос-
костям семейства* Р. Через эти линии проведем по выше-
указанному способу семейство разверзающихся поверхностей
R, ортогональных поверхности Q. Точно так же, построив
на поверхности R семейство линий, ортогональных ее образу-
ющим, проведем через них семейство разверзающихся поверх-
1F
164
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. III
ностей Q, ортогональных поверхности R. Понятно, что най-
денные семейства поверхностей пересекаются как между собой,
так и с плоскостями семейства Р во всех точках под прямыми
углами. Эти три семейства мы и примем за координатные по-
верхности нашей системы координат. Заметив, что каждые две
поверхности семейства Q отстоят друг от друга везде на
равных расстояниях и что то же имеет место относительно
двух поверхностей семейства R, условимся определять поло-
жение точки М относительно нашей системы следующими
тремя координатами: дугой АО = х, отсекаемой на линии АВ
плоскостью Р, проходящей через точку М, расстоянием у
точки М от поверхности R и расстоянием z этой точки от
поверхности Q.
Переходим к определению коэфициентов Д S, С в выра-
жении элемента дуги:
ds2 = A dx2 4- В dy2 + С dz2.
В случае, когда дуга ds лежит в плоскости Р, имеем:
б?х = 0,
ds^ = Bdy2 + Cdz\
Так как здесь у иг могут быть рассматриваемы как прямо-
угольные декартовы координаты на плоскости, то мы должны
иметь:
В = С=1.
Далее предполагаем, что элемент ds перпендикулярен
к плоскости Р9 тогда
dy = dz = О,
ds2 = A dx2.
Назовем через р и (/ радиусы геодезической кривизны
линии АВ в поверхностях Q и R и напишем из чертежа:
=Р —</
dx р
г р'
р ---у-----z
<ь_ р
d? f Р'
Гл. Ill
О ПРОЧНОСТИ ДВИЖЕНИЯ
165
Отсюда
= — У~ — 4),
\ р р /
следовательно,
(\ 2
. У z\
1 — ~----7 .
Р Р I
Здесь радиусы р и р' суть некоторые функции х.
Из найденной формулы для А имеем при y = z — G*
А = 1, = — , АУА = — 4- (12)
dx dy р dz р
Так как по формуле (2):
dVA __rflg/2(/+A)
dy dy ’
d / Л rflg/2~(/+A)
dz dz
TO
1 _Jlgy2(/+A)
P dy ’
1 _<71g/2(/+A) . <13>
p' dz
Живая сила материальной точки, имеющей массу, равную
единице, выражается по нашим координатам таким образом:
Обращаемся к составлению коэфициентов ап, я22, а12.
Полагая для сокращения письма
о =/2(ТТЛ), u = lgV2(7+ft),
по формулам (5), (6), (12) и (13) получаем:
. d-и / du \2
__ dx2 ~ dy2 \dy /
11 v2 9
d^u \d2u (du\2
dx2 * dz2 \dzl
ao0 =----------------.
22 v2
166
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. ш
d2u du du
= (15)
Далее по формулам (7) и (13) определяем коэфициенты
₽! = — ₽, = — -6^. (16)
Г1 И6 Р ’ ОБ р' V '
Найденные коэфициенты должны быть поставлены в уравне-
ния (8), которые для нашей задачи приведутся к двум диферен-
циальным уравнениям:
dW . , )
“ ЙФ1 + ^1’ I
_ dW । (17)
d^ ~ J
где
ф 2 ф 2
Вообразив на плоскости оси координат х, у, построим на ней
точку G, имеющую координаты (Фг, Ф2), и назовем ее пред-
ставляющей точкой, так как ее положение характеризует
положение возмущенной траектории. Стоит только разделить
координаты точки G на v, чтобы получить координаты х, у
точки М, в которой возмущенная траектория пересекает плос-
кость Р. Принимая переменное за время, мы можем рас-
сматривать уравнения (17) как диференциальные уравнения
движения точки G. Мы видим, что эта точка находится под
действием двух сил, из которых одна имеет силовую функ-
цию— W, другая же, не зависящая от Фг и Ф2> направлена
по центробежной силе невозмущенного движения и равна этой
2
силе, умноженной на Эта последняя сила не имеет места
при консервативном возмущении.
§ 21. Мы сказали, что суждение о прочности движения
значительно упрощается, когда возможен выбор координат,
при котором а12 — 0. Посмотрим, нельзя ли в рассматриваемом
Гл. ш
О ПРОЧНОСТИ ДВИЖЕНИЯ
167
случае распорядиться расположением поверхностей Q и R
таким образом, чтобы удовлетворить этому условию. Для раз-
решения вопроса подставим в формулу (15) и — 1g v.
1 d2v
v2 dy dz
2 dv dv
dy dz
1 d2
v dy dz
Рассматривая дробь — на плоскости Р как функцию коор-
динат у и z, разложим ее с помощью строки Маклорена в ряд
по переменным у и z и выпишем член второй степени этого
разложения, который назовем через п:
— 1 \ I
2 dy- \ v J dy dz
При постоянном п это уравнение выражает коническое сече-
ние, главные оси которого Otq и OZ удовлетворяют условию:
d2
j-F|-)=0.
dr\dZ \ v /
Угол наклонения к этих осей к оси у выражается формулой:
tgX =
(19)
Если этот угол будет независим от х, то на основании фор-
мулы (11) придем к заключению, что главные оси конического
сечения и ОС образуют при передвижении плоскости Р раз-
верзающиеся линейчатые поверхности. Принимая эти поверх-
ности за Q и /?, найдем для подобной системы координат
ai2 = 0. В этом случае движение будет прочно, если все время
его коэфициенты и <х22 будут положительны. Для выраже-
ния этого условия нам нет надобности выбирать поверхности
Q и R так, чтобы <х12 = 0, а достаточно взять какие-нибудь
поверхности Q и R и выразить, что относительно их функция
W имеет при всяких Фх и Ф2 положительный знак. Это уело-
168
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. III
вие, как известно, заключается в следующих двух неравен-
ствах:
аи а22 а21 > О,
а11 + а22 > °-
(20)
Отсюда приходим к заключению: если tg X есть постоянная
величина и удовлетворяются условия (20), то движение сво-
бодной точки будет прочно.
В случае, когда функция W будет величиной отрицатель-
ной, т. е. когда удовлетворены условия:
ап а22
а11 + «22<
(21)
рассматриваемое движение свободной точки будет непрочно
даже тогда, когда tg л не есть постоянная величина. Действи-
тельно, останавливаясь на консервативном возмущении, мы
увидим, что на представляющую точку G будет действовать
сила, имеющая силовую функцию — W. Эта сила будет напра-
влена по внешним нормалям семейства подобных эллипсов,
имеющих центр в начале координат, и всегда будет стремиться
удалить точку G от О. Таким образом при существовании
неравенств (21) движение свободной материальной точки
будет непрочно.
Функция W : и2 играет в рассматриваемом вопросе ту же
роль, как функция 7 при движении точки по поверхности.
§ 22. При приложении найденного признака прочности нам
очень часто нет надобности составлять tgX, потому что в дан-
ной задаче является очевидным существование поверхностей
Q и R, для которых <х12 = 0. Таков случай движения свобод-
ной точки по плоской траектории, плоскость которой пересе-
кает все поверхности уровня под прямым углом. Принимаем
плоскость траектории за поверхность Q, а прямой цилиндр,
имеющий основанием траекторию, — за поверхность R. Для
точек, лежащих на поверхности Q, имеем:
Гл. Ill
О ПРОЧНОСТИ ДВИЖЕНИЯ
169
(— ) =а12 =0.
\ v /
/
Фиг. 13.
откуда
1. d2
v dy dz
Прежде чем перейти к примерам, укажем некоторые геомет-
рические особенности возмущенных движений, имеющих место
при существовании поверхностей Q и /?, для которых а12 = 0.
Положим, что подобные поверхности существуют,
и напишем интегралы уравнения (17) в таком виде:
Ф1 = Q ?1Ч- D^i + Z1.
Ф2 = '-?2 + D2 ty.2 + /о,
где и суть частные интегралы первого урав-
нения (17) при £ = 0, у.2 и % — частные интегралы
второго уравнения (17) при том же предположении,
a Xj и */.2 суть частные интегралы первого и второго
уравнений при s, не равном нулю.
Предположим (фиг. 13), что частные интегралы выбраны
так, что они обращаются для точки f траектории fop в нули,
а % и % в этой точке не обращаются в нули. Остановимся
на случае консервативного возмущения, для которого надо
положить 7Л = у.2 = 0. Для всех возмущенных траекторий, прохо-
дящих. через точку /, будем иметь Dr = D> — 0; поэтому урав-
нения их примут вид:
= ^2 =
Изменяя здесь Сг и С2, получим уравнения целого пучка
траекторий, выходящих из точки f. При С2 = 0 получим траек-
тории, лежащие в поверхности Q, а при С\ = 0 — траектории,
лежащие в поверхности R. Таким образом наши взаимно орто-
гональные линейчатые поверхности Q и R являются одними
из поверхностей траекторий. Предполагая, что в некоторой
точке п функция ?.2 снова обращается в нуль, найдем, что
в этом месте все траектории рассматриваемого пучка пересекут
поверхность Q по некоторой линии тп, перпендикулярной
к траектории fop. Точно так же, если в некоторой точке д
функция обратится в нуль, то в этом месте все линии пучка
170
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. III
пересекутся с поверхностью R по линии pq, перпендикулярной
к траектории fop. Наконец если в одной и той же точке будем
иметь одновременно — 0, = 0, то в этом месте весь пучок
траекторий снова соединится в одну точку. Томсон и Тет
называют подобные точки фокусами; аналогично этому мы
можем назвать линии тп и pq фокальными линиями.
§ 23. Исследуем устойчивость движения материальной точки
по кругу АВ (фиг. 14) под притяжением двух центров С и
С', расположенных так, что линия СС' проходит через центр
круга АВ и перпендикулярна к плоскости этого круга. Силы
притяжения центров пусть выражаются формулами ргп. Так
как сила, действующая на каждую точку плоскости АВ, лежит
в этой плоскости, то мы можем принять плоскость АВ за
поверхность Q, а прямой круглый цилиндр,
имеющий основанием круг АВ, — за по-
верхность R.
Положим в формуле (14)
U = llg2(/+A), g = 0;
получаем:
(/+A)g
Составляем силовую функцию,
полагая СС — 2Ь, АВ — 2а:
з/#Г
2 \dy/ .
2 \dz).
{к*-*)'3 + <«-згп * +
+ [(6 + 2)2+(а-^]^}-
Определяем производные при у = z = 0:
^=2на(а24-62)~,
dy
0,
az
Га III
Э ПРОЧНОСТИ ДВИЖЕНИЯ
171
п 1 п
— = — (а2 + Ь2)~ — 2 (п — 1) р. (а2 + 62)“ а2,
J.jr п—1 п — З
4^ = —+ 2 —2(п —1)<х(а2+^)” 62.
az"
Постоянное h определяем из формулы центробежной силы:
2(^+Л) = 2-ю (а2 + 62)“.
а
Делаем подстановки:
_4Иа2(а2+ Ь^( .
а и — ———{па 4- За -[-4о ),
2ра2(а2+62)»-2, ,2 ,
а22 =----~в---(пЬ + а‘)
Эти формулы показывают, что движение будет прочно, когда
удовлетворены неравенства:
п>— 3 — 4~,
, ° (22)
а2
п > у>,
и будет непрочно, если эти неравенства не удовлетворены.
В случае 6 — 0 нижнее неравенство (22) удовлетворяется при
всяком п, а верхнее требует, чтобы п было более —3.
§ 24. Рассмотрим устойчивость свободной материальной
точки, движущейся по эллипсу под притяжением двух центров
по ньютонианскому закону, причем для большей простоты
предположим, что коэфициенты притяжения р. для обоих цент-
ров одинаковы. Принимаем за поверхность Q плоскость тра-
ектории, а за поверхность R — прямой цилиндр, имеющий
основанием траекторию. Найдем а12 = 0. Коэфициент ап мы
не будем определять, так как условие его положительности
уже исследовано в § 9 первой главы. Для случая = р/ фор-
мула (29) первой главы дает для эксцентриситета эллипса
неравенство:
1
е<У2’
характеризующее положительность коэфициента
172
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. III
Обращаемся к коэфициенту а.».’ Полагая в формуле (14)
df п
^ = U, получаем:
1
V4
dx2
dz2
1 ( df_\
/4“ h \ dx J
Составляем силовую функцию;
где радиусы-векторы эллипса г и г} суть функции его дуги х.
Чтобы отсюда определить производные по х, замечаем, что
по свойству эллипса
dr drx . у
~di~~"d^~~3in Т’
где у есть угол между радиусами-векторами. Этот угол может
быть определен из треугольника, образованного двумя радиу-
сами г и Fj и фокусным расстоянием 2с:
где а — большая, а Ь — малая полуось эллипса.
Теперь мы можем определить нужные нам частные про-
изводные:
Подставляем в вышенаписанную формулу для
Гл. Ill
О ПРОЧНОСТИ ДВИЖЕНИЯ
173
Так как наименьшая величина произведения гг{ есть 62, то
второй и третий члены формулы всегда положительны. Для
того чтобы а.22 было всегда положительно, достаточно удо-
влетворить неравенство
262
ГГ1
0.
Но наибольшая величина гг1 есть а1, поэтому достаточное
условие положительности а22 есть
2fr2 > а2. (23)
Это неравенство есть вместе с тем и необходимое условие
положительности коэфициента и^° ПРИ r== ri~a второй
и третий члены обращаются в нули, а первый принимает вид:
2р- / 262 \
Определяя из неравенства (23) эксцентриситет эллипса,
находим то же самое неравенство, которое достаточно для проч-
ности движения в плоскости траектории. Итак, если эксцен-
триситет эллипса менее 1: ]/~2, то движение по нему свободной
материальной точки, притягиваемой к фокусам по ньютониан-
скому закону с равными коэфициентами, будет прочно.
ГЛАВА IV
§ 25. В этой последней главе мы рассмотрим прочность
движений, которые Раут называет установившимися (steady
motion) и которые характеризуются тем, что уравнения воз-
мущенного движения имеют для них постоянные коэфициенты.
Предположим, что положение системы определяется коорди-
натами Ф, Ф1Э Ф2, ..., выбранными так, что в продолжение
рассматриваемого движения Ф1 = Ф2 = . .. =0, и напишем для
возмущенного движения формулы живой силы и силовой
функции, ограничиваясь при этом бесконечно малыми вели-
чинами второго порядка:
Г = 4.+А, Ф t+а2 ф2+...+В х -ud+в2 +...
/ ЛФ V
.. + А11Ч>г+2АХ2Ф1Ф2 + • • • (-j/) +
+ 2Я12
</ф1 сГФг
</Ф <7Ф *
пФ
+с21ф2^+..., (1)
2(/+A + e) = Z)0 + 2s + ^A + ^2+ • • •
...+ZW + 2Z)^M2+... (2)
Все коэфициенты, входящие в эти формулы, суть, вообще
говоря, некоторые функции от Ф, но мы рассмотрим здесь
только тот случай, когда все эти коэфициенты постоянны.
Уравнения возмущенного движения определим, так же как
предыдущих главах, по началу наименьшего действия
из формулы:
8f]/ ^2(/+Л+ Ю<№ = 0. (3)
Га. IV
О ПРОЧНОСТИ ДВИЖЕНИЯ
175
Если положим здесь г — 0 и допустим, что интеграл берется
между двумя положениями системы в невозмущенном движении^
то мы должны удовлетворить уравнение (3) самим невозму-
щенным движением, т. е. положением:
ф1==ф2=
с?Ф1 _ с?Ф2
~d&~ с?Ф
=-0.
Отбрасывая в этом предположении в формуле (3)
второго порядка и замечая, что члены, содержащие
члены
б/Ф >
г7Ф.2
исчезают при варьировании, так как предельные
значения Фр Ф2, ... по началу наименьшего действия не
варьируются, найдем следующие соотношения между коэфи-
циентами:
-4qC>i 4~ АЛ — О,
ЛА АЛ — 0,
ИЛИ
^4о Х2
Z)o А А
(4)
Пользуясь этой формулой, займемся преобразованием под-
интегральной функции в уравнении (3), которую для большего
удобства разделим на постоянное количество
~2 УЛА-
При этом преобразовании мы будем отбрасывать члены выше
второго порядка, члены, не содержащие варьируемых функций,
и члены, содержащие варьируемые функции в виде полных
диференциалов, каковы например:
с/Ф/2 <№гФ2
t/Ф ’ с?Ф ’ с/Ф ’
Называя через L всю подинтегральную функцию, разделим
ее на три части Li9 L29 L>9 из которых первая содержит одни
производные от неизвестных функций, вторая — произведение
176
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. IV
производных от неизвестных функций на самые неизвестные
функции, а третья — одни неизвестные функции. Получим:
!М>к
1 1г.
Ь>Л$+..
/ 1 ь с?Ф с/Ф 1
? I D ^Ф.2 | \
^ + сл^+...
+ ок(в'а-ф'^+°Аф’^-+-
Последнюю формулу на основании формулы (4) можно
написать так:
л0
1
Ь^-л-\в
1 Л1
и
4Л0«
i.= 3-(c
^0 \
(5)
</Ф.2
1 d<i>
. D . с?Ф.,
Л1/?2Ф1
'2~Иф
А 2
Сделаем здесь подстановки:
С12 ла
Ло /1о2
_Сд1__^4-2^1
Ло Ло2
(6)
в которых будем считать VLi2=lx2i> ш12 = — ••• Отобрав
члены при коэфициентах ’^12, найдем, что все они
могут быть отброшены, так как при а12, например, будем
иметь полный диференциал:
с/Ф '
Функция Л.? обратится после этого в
с/Ф2 . с1ФА
'гг-ф’<и.
(6)
где
1
“12- 2
Ло
•21
^2^1
Гл. IV
О ПРОЧНОСТИ ДВИЖЕНИЯ
177
Для составления L3 сделаем предварительно на основании
формулы (4) в силовой функции (2) следующую подстановку:
Р1Ф1 + РаФ24-... =-^(ДФ1 + А2Ф2+ • • •),
после чего найдем:
L3 = А (Азф12+2А2ФЛ2+ • • •) +
^0
+ ^(Р11ф12+2Р12ф1ф2+.-)-
—^~2 (Аф1 + Аф2 + • • • )2+-Jr?) (Аф14- А2Ф2 -f-...). (7)
Zlo ^омо
Формулу (7) на основании пропорций (4) можно написать
еще в таком виде:
ц - 4- (АЛ2+2Л12Ф1Ф.2 4-...)+
+ ^Р1зФ12+2О12Ф1Ф2 + • • •)-
- щ 0>Л+Р2Ф-2+ • • )2— т^Л + ДЛ+ • • •)• (Г)
Мы имеем L = Lx 4~ Ь2 4~ А3, поэтому диференциальные урав-
нения возмущенного движения найдутся из формул вида:
d [d(L,+L2y\
t/Ф Л dФi\
a I —I ’
\ йФ /
dL2 __
dФi ~ dФl ‘
(8)
§ 26. Докажем, что многочлен Lx буде» положителен,
. А с?Ф1
каковы бы ни были —-,т- ,
d<&
dФ2
dФ
... Для этого напишем жи-
вую силу системы для случая = Ф.2 = . . . = 0:
2Т = + ВХФ'Ф/ + Я2Ф'Ф2' + .. • + ВпФ/2 +
^“2B12Ф1/Ф2, + • • •
Сделаем подстановки:
ф' = х9 Ф/ = kxy9 Ф2 = k»y9 ... ;
27’ = Д0х2 + (ВЛ + ад+
-4-(Su*i2 + 2B12M2+ • • )У2-
Зак. 2365. — Н. Е. Жуковский. Т. I.
178
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. IV
Здесь вторая часть должна быть положительна при все-
возможных Ztj, ... и при всевозможных х и у\ следовательно,
для всевозможных значений к2, • • • должно быть удовлетво-
рено неравенство:
4 А (Впк^ + 2В^к2 +...)- (Bikl + в2к2 +... )2 > 0.
Первая часть этого неравенства при подстановке в нее
к1~ <№ ’ 2 </Ф ’
и по разделении на 4Л02 обращается в функцию Желаемое
таким образом доказано.
§ 27. Для сокращения представим функции L} и £3 так:
L1 2 \ <7Ф ) + 12 </Ф <7Ф + '“ ’ (9)
£3=-^Фг-«1Аф-2+ • • • +^^UA+Ai>2+--)> (Ю)
где коэфициенты а и сс имеют следующие величины:
_Еи = -5и_ вг ап _ /jAi I д.
2 Ло 4А02’ 2 ' * А + Do А2/’
В19 _ В1В* а12 ( ^12 1 D^_ 2 А-А
2 Ло W’ 2 1 А + Do А,? ^0
Подстановки формул (9), (10) и (6') в уравнение (8) дают нам:
। сРФ2 с?Ф2 с?Ф.3
11 dФ2 d&^ 12 иф 13 dФ
2s
= — ацФ, — а12Ф.2+ . .. + А1г
Л2Фг . <РФ2 . -<&>!- <7Ф3
0121 </Ф2 ~^а22 ЛФ2 ' 2“21 <7Ф 2“28 </Ф
2е
Чтобы избавиться от постоянных членов, делаем подстановки:
ф1 = ч + Л1, Ф2 = %+ А2>..
Гл. IV
О ПРОЧНОСТИ ДВИЖЕНИЯ
179
в которых Ар А2, . . . суть постоянные величины, определяемые
из уравнений:
а11^1 - - • = 2з 9
а21^1~Ьа22^2‘4"
_9^ -А
АА
(И)
и получаем:
п ^д_п ^k_L аф2 "Т” «12 аф2 । 0 d^ • • 2<“12 № 2<“13
• • • 4~с е1Л4-«12^4- • • • =о,
“21 d$2 ' а^2 d$2 О ^1 - • • • 2ш21 Нф — 2<°23 А </ф
•• • 4“ а21^1 4- «22^2 4" • .. =0,
(12)
Рассматривая частные интегралы этих уравнений
t — хф t — п ЛФ
Ч — 91е > ?2 — 42е >' * • ’
найдем для определения постоянной X и отношений между
постоянными <7р д2, ... уравнения:
(«иХ2 + «11) <71 + («12х 2 — 2“12Х + «12) <72 4-=0,
(«21х2 — 2(О21Х 4- «21) 71 4- («22Х2 4- «22) 92 4- • • = 0,
(13)
Исключая отсюда величины 9, найдем для определения X
детерминантное уравнение:
а11Х2-4“ац #i2^2 — 2<о12Х 4~ ai2 • • •
а21Х2 — 2<о21Х + а21 а22Х2 а22
= 0. (14)
Здесь а12 = а21, а12 = а21, ш12 =—Ш2Р поэтому с измене-
нием X на —X детерминант не изменяется, так как его ряды
делаются колоннами, и наоборот. Это приводит нас к заклю-
чению, что уравнение (14) содержит только четные степени X
12*
180
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. IV
и может быть рассматриваемо как уравнение относительно
неизвестного X1 2.
Для того чтобы движение системы было прочно, необхо-
димо и достаточно, чтобы все корни X были мнимые величины
без действительных частей, т. е. чтобы все решения уравне-
ния (14) по X’2 были действительные и отрицательные вели-
чины. Для отыскания условий, при которых это имеет место,
приложим к исследованию корней X2 уравнения (14) анализ,
подобный тому, которым пользуется Лоран 1 для исследования
условий прочности равновесия, так как при <ог2 = <о13 = ... — 0
уравнение (14) становится аналитически тождественным с урав-
нением, характеризующим прочность равновесия. Назовем
через А весь детерминант, составляющий первую часть урав-
нения (14), через Др Д.?, —детерминанты, которые
будут получаться при отбрасывании в нем первого ряда и
первой колонны, двух первых рядов и двух первых колонн
и т. д. Все эти детерминанты будут функциями от X2, причем
последний будет просто последний диагональный элемент
Ч~ &ППЛ
Напишем ряд функций:
Д, Др Д-2, • • •, Дп_1, Д^, (15)
где Дп обозначает единицу. Докажем, что если одна из этих
функций обращается для какого-нибудь отрицательного значе-
ния X2 в нуль, то две рядом стоящие функции будут иметь
обратные знаки. Для этого воспользуемся известной теоре-
мой о детерминантах 2
ДД'З — А22 А 12^21» (16)
в которой Д^- выражает субдетерминант, получаемый из детер-
минанта Д через отбрасывания ряда i и колонны /. Очевидно,
что су б детерминант Дп есть ДР Что же касается су б детерми-
нантов Д12 и Д21, то они вследствие <о12 =—<о.21, пере-
меняются величинами с изменением X на —X. Это показы-
вает, что Д12 и Д21 должны быть функциями X следующего
вида:
Д12 = ? Р) + Р), Д21 = ? Р) — Р).
1 Laurent, Mecanique rationelle, 1870, р. 217.
2 Ibid., р. 327.
Гл. IV
О ПРОЧНОСТИ ДВИЖЕНИЯ
181
Подставляя в формулу (16), находим:
Д Д2 = AtA22 - [? (X2)]2 + X2 ft (X2)]2.
Отсюда следует, что при отрицательном значении X2, обра-
щающем в нуль функцию произведение ДД.2 отрицательно.
Так же докажем подобные свойства произведений Д^з, Д3Д4, • • •
Что касается последнего произведения ДП_2ДМ, ^то для него
формула (16) выражает не что иное, как определение детер-
минанта таК как ^п=1*
Доказанное свойство функций ряда (15) показывает нам,
что при непрерывном изменении X’2 от значения — а2 до зна-
чения — 62 число перемен знаков может увеличиваться или
уменьшаться только при обращении Д в нуль (здесь является
различие с теоремой Штурма: в ней при возрастании пере-
менного число перемен знаков может только уменьшаться).
Отсюда следует, что разность в числе перемен, полученных
от подстановки в ряд (15) Х2 =— cP и Х2 =— 62, равняется
числу действительных корней X2, заключенных между этими
пределами, уменьшенному на четное число.
Положим в ряде (15) Х2 = — сю; находим:
(-оо)»А (-oo)2£>„_ „ 1, (15')
где Di9 D.29. • • получаются из детерминанта
«и «12 . • •
^21 а22 • • •
точно так же, как Дн Д.2, • • • получаются из детерминанта А.
Известно, что условие положительности
мулы (9) при всевозможных значениях
d$t
Ж’
функции фор-
, характе-
ризуется тем свойством, что для ее коэфициентов удовлетво-
ряются неравенства:
D > 0, £>i > О, D2 > 0, ...
Отсюда следует, что ряд (15') будет представлять нам п
перемен знаков. Подставляем в функции (15) X2 = 0. Получаем
ряд величин:
d9 d19 d.,9 . . . , dH_ j, 1,
(15")
182
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. IV
в котором d19 d29 .. . получаются из детерминанта:
а11 а12 * * ’
а21 а22 • * *
так же, как Д£, ... из детерминанта Д.
Напишем функцию
...
(17)
и допустим, что она будет положительна для всевозможных
значений В2,тогда все величины d9 dl9 d29.. • будут
положительны, и ряд (15'z) не представит нам ни одной пере-
мены. В этом случае на основании сказанного все корни X1 2
должны быть действительны и отрицательны.
Отсюда получаем теорему *: если функция W будет
положительная величина при всевозможных значениях
$.2,..., то движение системы прочно.
Когда функция W имеет для всех значений £29...
отрицательную величину, то ряд (15") так же, как ряд (15'), дает
нам одни перемены знаков, так что ни одной перемены
не исчезает. Если бы при этом п было нечетное число, то
мы не могли бы предположить, что все корни суть действи-
тельные и отрицательные величины. Движение системы было бы
непрочно. Если же п число четное, то, несмотря на отрица-
тельность функции W9 движение системы может быть прочно.
§ 28. Для более обстоятельного разъяснения роли, кото-
рую функция L2 играет в уравнениях возмущенного движе-
ния, рассмотрим систему, возмущенное движение которой опре-
деляется тремя координатами Заменим координаты
t29 тремя новыми х9 у9 z с помощью линейных подста-
новок:
Е-2 = а2х 4- Ъ.2у 4- C-2Z,
$3 = asx4-^4-c8z.
1 Эта теорема доказана Раутом ”A Treatise on the Stability of a given
State of Motion"; p. 78; только в его изложении рассматривается функция,
отличная от нашей функции Ж.
Гл, IV
О ПРОЧНОСТИ ДВИЖЕНИЯ
183
Коэфициенты а, 6, с выберем так, чтобы функция Lr полу-
чила вид:
г __ 1 Г / tZx \2 ( dy \2 / dz \2
Функция L3 представится при этом через
L:s = х2 4- -2- у*+4- z2 4- pyz 4- qzx 4- rxy.
£ £
Что же касается функции L2, то она будет:
т л / dz dy \ . ъ ( dx dz \ .
— _г—-х—^4-
I (t ( dy dx \
3\* </Ф У t/Ф/’
где 62, 63 определяются по ю23, а>31, »12 из формул:
J<o23 = а161 + 6Л + с^з,
cfo>31 = a.2^i ~f~ Ь$2 -р с263,
J(o12 = аз61 -|- 6362 с363;
d есть детерминант мулу (8), найдем движения: J2x из Ь19. .. Подставляя Lu диференциальные уравнения i ^^*3 О / А А \ ® фор— юзмущенного
dx 1 v2 </ф 3 </Ф J’
J2!/ Зф2 dL. ~ dy — 2 (е3 dx d4> ft dz \ M>)- (18)
d~z -А dz — 2 (61 dy </Ф h dx \ ‘лч-}-
Вообразив систему прямоугольных осей координат х, у, z,
будем определять место системы в возмущенном движении
с помощью представляющей точки Gy координаты которой
суть х, уу z. Принимая в формулах (18) Ф за время, можем
рассматривать эти формулы как диференциальные уравнения
движения представляющей точки, которая движется относи-
тельно осей Ху уу Zy вращающихся с постоянной угловой
скоростью
б = /о124-ь22+е82
184
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл IV
около оси, образующей с х, у, z постоянные углы:
.
COS л — COS рь = — COS v —
и и и
под действием сил, имеющих силовую функцию
1 62
f=L3 +1 + М2 —2 (*2 + <72 +
(19)
Члены, входящие во вторые части уравнений (18) и завися-
dx dy dz
щие от производных , суть, с нашей точки зре-
ния, проекции на оси координат сложной центробежной силы.
Эта сила, будучи направлена нормально к оси вращения и
к относительной скорости точки G, препятствует удалению
этой точки от начала координат и тем увеличивает прочность
движения системы.
Если бы положение системы в возмущенном движении
определялось только двумя координатами, то уравнения (18)
и (19) приняли бы вид:
^ = ^4-20^
<«>2 dX </Ф ’
<&У ^з or, dx.
d'V1 dy </Ф’
/=L3-y(x2 + ^).
(18')
Возьмем для примера
£3=^-(х2+</2),
так что функция W = — Л3 будет для всех значений пере-
менных величиной отрицательной. Найдем:
2__
/=^"4—1(x2+v2). (19х)
Гл. IV
О ПРОЧНОСТИ ДВИЖЕНИЯ
185
Это показывает, что представляющая точка находится под
действием центральной силы, направленной к началу коорди-
нат. В случае т2 < № эта сила притягательна, и точка G будет
описывать в абсолютном движении эллипс около начала
координат. Движение нашей системы будет прочно, несмотря
на то, что W есть отрицательная величина.
§ 29. Обращаемся к вопросу об изменении времени. Огра-
ничиваясь бесконечно малыми величинами первого порядка,
мы можем определить время в возмущенном движении с по-
мощью формулы:
ф
/э
t_ Г_____________Др + 4- 4- + • • •_____ , ь
1/ . , . к , . , , D
•/ F Ло+АФ1-гД2Ф2+---+В11фН-В2^-+...
о
* В этой формуле дробь под корнем написана неправильно: числитель
должен быть поставлен в знаменателе, знаменатель- в числителе, и фор-
мула должна иметь вид:
+ АФ1 + АФ2 + * - • + + в>
Do + + АФ1 + В2Ф2 + ...
<7Ф,
и потому после развертывания подинтегральной функции в строку и от-
брасывания в ней величин выше второго порядка получаем:
с/Ф +
£>0/2 2 ]Л4о£>о \ </Ф «И>
</Ф,
Прим, ред .
186
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. IV
Развертываем подинтегральную функцию в строку и от-
брасываем в ней величины выше первого порядка:
Первый интеграл выражает время в невозмущенном движе-
нии; во втором интеграле на основании диференциальных
уравнений возмущенного движения можно заменить Фр Ф2, ..
через первые и вторые производные этих функций по Ф.
Выполнив инеграцию, находим:
8f=• • •
|/ /10^0
. . лт с?Ф2 . I
. . . +^2 ‘ ’ + COnst,
(20)
где Ми М.>, • N%9 • • • —некоторые постоянные коэфи-
циенты, a const — очень малое постоянное.
Формула (20) приводит нас к следующему заключению:
Всякое консервативное возмущение производит в устой-
чивом установившемся движении бесконечно малое измене-
ние времени; всякое же неконсервативное возмущение произ-
водит в нем беспредельно возрастающее изменение времени.
§ 30. Как первый пример рассмотрим (фиг. 15) вопрос
об устойчивости движения волчка, опирающегося на горизон-
тальную плоскость ху острием О, так что эта точка может
быть рассматриваема, как неподвижная. Проведем через
точку О вертикальную линию Oz и примем оси х, у, z за не-
подвижные оси координат, относительно которых определяем
положение волчка. Возьмем, кроме этого, подвижные оси
т], С, которые направлены по главным осям инерции волчка
Гл. IV
О ПРОЧНОСТИ ДВИЖЕНИЯ
187
относительно точки О. Пусть А, В, С будут моменты инер-
ции волчка относительно этих
волчка; через I — расстояние
ОС от начала координат центра
тяжести волчка, который бе-
рем на оси (X; через <р, ф и 6
— три эйлеровых угла, опре-
деляющих положение подвиж-
ных осей относительно непо-
движных; через р, q и г —
проекции на оси £, т) и С мгно-
венной угловой скорости. Опре-
делим прочность вращения
волчка около вертикальной ли-
нии. Для этого выразим р, q, г
ных эйлеровых формул:
9 =
Фиг. 15.
по 0, 9, ф с помощью извест-
но
dt
НО
dt
dv
cos ф —sin ф sin О,
. , । И? । • л
sm ф ф — cos ф sin О,
dt
dv
dt
cos 6.
Заменяем v новым переменным Ф, полагая v — ф = Ф, и под-
ставим, ограничиваясь бесконечно малыми второго порядка, О2
в наши формулы sin 0 = 0, cos 0 = 1 > получим: с?6 , fi cty с/Ф р = cos Ч — о sin ф — Ь sm ф , db . , fi dty с/Ф q = sm ф+ 6cos 76 cos 7 » _ <7Ф / 62 \ 62 Г dt \1 2 / dt 2 *
13 водим еще две новые переменные величины Фг и Ф2:
Фх = 0 cos ф, Ф2 = 6 sin ф,
188
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. IV
которые при бесконечно малом 0 будут сами бесконечно малы.
С помощью новых переменных Ф, Фр Ф2 величины р, <7, г
выражаются так:
с/Фх т с7Ф
р=_._Фг__
<H’s I ... rf‘1*
м
dt
ф 2Д_ф 2
1 _ £1—
2
Составляем теперь живую силу волчка по формуле
Подставляя, найдем:
^ = С+(в-С)Ф,«+(Л-С)Ф,’+д(^)'-
+ в (Ж)’+<2В - с>ф- Зф + <с - м>ф> -X1
Далее определяем силовую функцию:
2 (/+ А) = 2Л 4- 2Р1 (1 — cos 6) = 2Л + Р1 (Ф* + Ф2*).
Для определения h полагаем в интеграле живых сил
Ф1 = Ф2=о, ^4/;
находим 2 А = С Ф'о2, так что
2 (/+ Л) = СФ'<? + Pl (^i2 + Ф22)-
Составляем по формулам (5), (6') и (7) функции L3:
Гл. IV
О ПРОЧНОСТИ ДВИЖЕНИЯ
189
Подставляя эти функции в формулу (8), составим диферен-
циальные уравнения возмущенного движения волчка:
По этим уравнениям найдем следующее детерминантное
уравнение для определения X:
— (А + В — С)Х
да(Л С+;£С)
Условие прочности движения волчка заключается в том,
чтобы все корни этого уравнения были действительны и отри-
цательны. Прежде нежели перейти к изысканию этих условий,
заметим, что по теореме § 27 достаточным условием устой-
чивости будет отрицательность функции L3, которая при
А > В характеризуется неравенством:
Р1
С>А+^- (22)
Теперь рассмотрим два частных случая, которые предста-
вляют наибольший практический интерес: задачу Пуансо
о вращении тела около центра тяжести и случай А —В.
В первом случае, полагая / = 0, найдем детерминантное
уравнение:
Р + 1)[Д^ + (С—Л)(С—Я)] = 0. (23)
Оно дает для X2 действительные и отрицательные корни,
когда момент инерции С или более А и В, или менее А и В;
если же момент инерции С заключен между моментами инер-
ции Л и В, то один из корней К2 будет положителен и дви-
жение тела неустойчиво. Это вполне совпадает с анализом
Пуансо \ по которому вращение тела устойчиво, если оно
совершается около наибольшей или наименьшей оси инерции.
1 Poinsot, Theorie nouvelle de la rotation des corps.
190
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл IV
Во втором случае наше детерминантное уравнение будет:
Г / Pl \ 1 1
А+ 2 А ( - А + С) + ± (2А - С? ] X2 +
/ Р1 V
+ \^h + A-C =°- <24>
| Если имеем
то условие действительности корней будет, очевидно, удовле-
творено. Кроме того, так как при этом известный член и
коэфициент при X2 положительны, то оба корня л2 отрица-
тельны, и движение прочно. Таким образом мы получаем под-
тверждение неравенства (22). Но, как было сказано, это
неравенство есть только достаточный признак прочности.
Допускаем, что оно не имеет места; тогда условие действи-
тельности корней уравнения (24) напишется так:
/ Pl \ 1 / pi \
А ( - А + с) +1- (2Л-С)2 > A + А - с).
Это дает:
Р1
Ф'о2 < 4А ‘
.(25)
Член известный в уравнении (24) всегда положителен;
покажем, что при существовании неравенства (25) коэфициент
при X2 будет тоже положителен. Мы уменьшим этот коэфи-
циент, если возьмем:
г / Г'2 \ I 11
2 [А (“ ^А - А+с) + 4(2Л ” С) J= Т(2Л ~ сг ’
а это есть величина положительная. Итак, при существовании
неравенства (25) движение волчка будет тоже прочно. Не-
трудно показать, что неравенство (25) удовлетворяется, если
удовлетворено неравенство (22). Это следует из того, что
0<(С— 2А)\
с___д < QL.
< 4Д •
Гл. IV
О ПРОЧНОСТИ ДВИЖЕНИЯ
191
Отсюда следует, что неравенство (25) есть необходимое и
достаточное условие прочности движения волчка.
Найденный нами признак прочности может быть также
получен из рассмотрения движения представляющей точки G.
Полагая А = В, напишем уравнение (21) в виде:
___Чл Г4ЛХ 2А — С <7Ф2
d<№ ~ А \ С Ф'о2 / Ф1+ А d<i> '
</*Ф2 _ 1 (л Г Ф 2Л~С
</Ф2 А \ ф'о2) 2 А с1Ф •
По формуле (19х) найдем, что представляющая точка бу-
дет находиться под влиянием центральной силы, которой со-
ответствует коэфициент
Если этот коэфициент отрицателен, то движение будет
прочно; если же он положителен или равен нулю, то движе-
ние непрочно.
Это приводит нас к условию (25) для прочного движения
и к условию:
Р1 С2
Ф'о2 4А
для непрочного движения. Приняв за оси координат для пред-
ставляющей точки G оси т], найдем для ее построения
на основании формул
Фх = 0 cos Ф2 = 6 sin
следующий простой способ: нужно проектировать на плос-
кость Юц конец линии, равной единице, отложенной на оси
Oz, а полученную проекцию повернуть на 90° против стрелки
часов около оси С.
§ 31. Рассмотрим прочность движения в задаче о трех
телах. Исследуя вращательное движение трех взаимно притя-
гивающихся масс ти, тщ, т2 около их центра тяжести, при
котором треугольник остается неизменяемым, Лаплас
показал, что подобное движение возможно только в двух
случаях: когда треугольник тт}т.> равносторонний и когда
192
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. IV
его стороны сливаются в одну прямую линию Ч Это весьма
просто обнаружить следующим образом. Назовем (фиг. 16)
Фиг. 16.
через г, г2 расстояния между
материальными точками, через р, рп
Р-2 — расстояния этих точек от их
центра тяжести О и составим сумму
силовых функций для сил взаимного
притяжения и для сил центробеж-
ных в предположении, что тре-
угольник тт{т.> вращается около центра О с постоянной
угловой скоростью Эта сумма будет:
U —-------q (mxm2rn^ + m.2mr1n+1 тти1г2п+1) -f-
n-f-l
+ (™P2 + ^iPi2 + пг2р22).
Мы предполагаем здесь, что силы притяжения пропорцио-
нальны n-м степеням расстояния и что коэфициент притяжения
есть q. Преобразуем второй член функции U, выражая его
через расстояния г, rt, г2. Для этого примем центр О за
начало прямоугольных осей координат В, tq и назовем коор-
динаты точек ти, тпи тп2 через (£, ^), (;1? ^t),.($2, *}2). Мы имеем
по свойству центра тяжести
m' + m1S1+zn2$9 = 0.
Возведем эту величину в квадрат и придадим ее к много-
члену
($1 — У2 + zn2m (;2 — 5)2 + mmx ($ —
получим:
7И17П2 ($! — У2 + 7П27И (;2 — ?)2 + ГПТП1 (? — $j)2 =
где
jjl = /л + тп2.
Подобную же формулу будем иметь для оси iq. Складывая
обе формулы, найдем:
znp2 4- ицр!2 + Л12р22 = -1 (ти^аГ2 + m2mr^ -f- mmlr2i), (26)
Г
Mecanique celeste, tome IV.
Гл IV
О ПРОЧНОСТИ ДВИЖЕНИЯ
193
откуда
(тхт2г,1'л
4~ 77l277l Ггп+1
+ mm1r2ra+1) +
U
Я
п+ 1
2^
(тхт2 г2 + пг2тп ri2 + mmi г22)-
Если треугольник ттхт2 вращается с постоянной угловой
скоростью ю около центра О, не изменяя своего вида, то
должно существовать равновесие между силами взаимного
притяжения и центробежными силами. Мы должны иметь:
8t/=0.
Отобрав коэфициенты при Sr, 8гь 8г2 и приравняв их нулю,
найдем условия, при которых предполагаемое движение имеет
место:
о2 = q рь гп~1 — д r^1 — q рь (27)
Эти равенства требуют, чтобы треугольник ттгт2 был рав-
носторонний.
Мы предположили, что вариации 8г, 8гг, 8г2 между собой
независимы, но если бы точка т совпадала с линией mxm2,
то, отбрасывая бесконечно малые величины второго порядка,
мы имели бы:
8 г = 8г2.
Исключая из вышенаписанной формулы с помощью этого
равенства 8г и приравнивая нулю коэфициенты при 8^ и 8г2,
находим:
0)2 = o,j. + = Ш1ГП2Лга 4-771)71^2”
7п1т2 г7п2ти rt ‘ т{т2 г 4“ тт1 г2
(28)
Отсюда получаем.
771 ---Г^) 4- 7П! (г2”Т- ГпГ2) 4~ 7712 (г^ — Г^г) = 0, (29)
_ JJ,77117712 —1 + 7712,71 Г1”+1+7717711 Га”+1. (28')
тtm2 г2 4“ т.2т rY2 + тт^ г22
Из формул (29) и (28') определяем отношение r2: ri и угло-
вую скорость, при которых рассматриваемое движение воз-
можно. Формулы (27), (29) и (28 ) показывают, что при п = 1
Зак. 2365. — Н. Е. Жуковский. Т. I. 13
194
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. IV
радиусы г, г2 не стеснены никакими условиями, а угловая
скорость о) должна быть равна V
§ 32. Прочность вращательного движения равностороннего
треугольника в случае ньютонианских сил была исследована
в тезах Гашо (Gascheau) 1 и распространена Раутом 2 * на слу-
чай сил, пропорциональных каким-нибудь степеням расстоя-
ния. Анализ Раута показался нам несколько сложным вслед-
ствие несимметричного выбора координат, характеризующих
возмущенное движение. Мы предложим здесь исследование
прочности вращательного движения равностороннего тре-
угольника, опираясь на нашу общую теорию и принимая за
координаты, характеризующие возмущенное движение, изме-
нения сторон треугольника.
Предположим, что оси ; и т( вращаются вместе с треуголь-
ником тт^ так, что ось £ остается постоянно параллельна
стороне г, и составим живую силу системы в предположении,
что стороны треугольника изменяются и что положение сто-
роны г определяется углом <?, который она образует с неко-
торой неподвижной линией в направлении стрелки часов:
2 Т= 2 т [0' + + 0/ — ?'5)2] =
=2 т G/2 ~h V2) Ч~ 2®' 2 т +?2 2 m G2 + 7i2)-
Здесь знак суммы распространяется на все три точки.
По формуле (26)
V т 02 = 2. (miZn2r2-j- ттгг^ + mjnr.fi.
Совершенно также докажем, что
2m 0'2 + V2) = у { тхт2 [0\ - _ ^2] _|_
+ т2т [0'2 — £')2 + 01'2 — •n')2] + mmj [0' — «'J2 -f- 0]' — iq'i)2] >.
Опускаем из точки т на сторону г перпендикуляр z и назы-
ваем через х и у отрезки стороны г, получившиеся с правой
1 J u 11 i е n, Problemes de Mecanique rationnelle, t. Il, p. 29.
2 Routh, An elementary treatise on the dynamics of a system of rigid
bodies, 1877, p. 380.
Гл. IV
О ПРОЧНОСТИ ДВИЖЕНИЯ
195
и левой сторон этого перпендикуляра. Пользуясь величинами
х, у, z, находим:
2 ™ (Г2 + 42) = у [тхт.2 (х' + у')2 + m2m (У2 + z'2) +
4" ттх (х'2 z'2)].
Для составления суммы, умноженной на 2?', замечаем, что
в нашем случае ^1 = ^2» Vi==V2:
2 пг — hf) = т ($' — fy') 4-
+ ^1 + ™2<'2) — Vi + тпЛ).
Но
4" ~т1^1 4~ т2^2 —-
поэтому
2 m (•»£' — b]') = mV (t\ — irh) — zm (»)' — t\'i) = m (;'z — ;z').
Подставляем сюда
»т2У — mix.
находим:
V т (т^' — $7]') = -L \ттх (xz — zx} -f- mm2 (zy’ — yz')].
Теперь мы можем составить следующую формулу для жи-
вой силы:
2Г 1
= — (т^г2 4-т2тиГ12 4- тгщг22) 4-
. г
4)1- (30)
d/i / J
+ 2т1Ш2 )
. 2 Г ( dz
4---mmA x -г"
HL \
Назовем через а длину сторон треугольника в невозмущен-
ном движении и предположим, что в возмущенном движении
г — а 4~ Ф, гг = а 4- г2 — а 4" *2*
13*
196
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. IV
Пользуясь чертежом, выразим х, у, z через Ф, Фх и Ф2 с точ-
ностью до бесконечно малых величин первого порядка:
X = -X- 4- 4" + Ф2 —
£ £
Подставляем величины г, г2> У> z в формулу (30), огра-
ничиваемся в ней бесконечно малыми величинами второго
порядка и для сокращения полагаем 4~ тп2т 4- тт1 — v:
9 7* <y2v 2d
— 4- — (пг1т2Ф 4- 4~ 4"
f \ I ZO - I x </ф1
[mm2 — mmj + (2mml -f- mm2)
. d^2 '
ds?
©'2
, 2а
+ и/з
— (2тт2 4- тгщ) 4" у (гщпцФ2 4~ пг2тФ12 -f- mm/V) 4-
i 1 J zq , < ч W I
Г/х/Ф \2 /х/Ф VI
+4(^4-^) [(^) +(rf»]-
—- 4 (mm14- тти2) 4~ 2 (mmi — 2mm,) 4~
t o <7Ф , o J , 2 („ x
4"2 ~d^ (тгП2 ~ 2m™i)j 4
X/ л ^Ф1 Л d(K 1 .
x[*24bL I‘w] + ,n"
4тт2|Ф,^
</Ф
Ф
Гл ^ф<>
d^i ])
<7Ф '
Составляем силовую функцию:
2(f 4 /i) = 2A--т2т г^1
*1 1 1
Гл. IV
О ПРОЧНОСТИ ДВИЖЕНИЯ
197
Подставляем сюда г, г2и совершаем разложение, ограни-
чиваясь бесконечно малыми величинами второго порядка:
2(/4~Л)=2Л—°П+1—2<? (т1т2Ф4“7П2тФ14~тт1Ф2) ап—
— дп 4" тпт^^) ап~\
Найденные формулы дают нам следующие величины коэфи-
циентов Ао и DQ:
Л 2L п — о д ап
Aq — cl U0 — 2h п_|_1 « •
Между этими коэфициентами на основании теоремы живых
сил и по формуле (27) получаем зависимость:
Do = Л0о)2 = драп-'Ав.
Теперь мы имеем все данные для составления функций Lv
L% по формулам (5), (6) и (7). Полагая для краткости
7П7П17и2 = ^, получим:
i. = [(3m,W+4M(-^)2+(3'"W+4«n) (4^)8+
//7фл\2 /7Ф /7ф
+(3mw+^) +24.г w'(3m-2[‘,+
+ 2™’- 4? «(Зт, — 2'.) -®-»(Зтг—2и)1,
a® d® d® J
4тгр,
'2”^W
($2
т. ^Ф2
ф_____£
</<р
J®
Ф^1
198
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. IV
£з = — 4 (тгт2Ф 4- тщттУ^ + тт^ —
(т^т^Ф2 + т.2тФ2 + ттщФ£).
Подставляя эти функции в формулу (8), получим диференци-
альные уравнения возмущенного движения, которые для
ЗаЪ п
упрощения умножаем на - . 11ервое из этих уравнении
будет:
(Зш2ту 4“ 4^р.) — + 3 (и — 1) m1m2v 4" 12;
L v 2 'dy^ Уз d<? 2
-f- (3m1 — 2;j) —-^7^ —
L 1 ''dy Уз d? *.
Составляем детерминантное уравнение для определения X:
(Зтх2т22 + 4^х)Х2 4 12m1W 4 3 (п — 1) Утупг, (Зт2 — 2р.) тск2 + 12 Уз 4" 127Г7П2 (Зтх —« 2р.) пК2 12тср. ~7Т 412^т1
(Зт2 — 2р) (3m22m2 4“ 4к|1) X2 (Зт — 2р) 7сХ2
12тср. —Л. /З 4 12m22m2 , 12яр. +VT
4 12”7П2 4 3 (п — 1) vm2m 4 12лт
(Зтщ — 2р.) кк2 (3m — 2р.) тсХ2 (Зт2тх2 4 4кр.) X2
. 12^'1 у 1 Уз ' 12кр. 4 12m2mi2
4- 12ii:mt 4 12тст 4 3 (п — l^mm!
Прибавляем к первому горизонтальному ряду сумму двух
нижних рядов и выносим в полученном таким образом верхнем
ряду общего множителя за скобки; получим:
Гл. IV
О ПРОЧНОСТИ ДВИЖЕНИЯ
199
ТП^ГП mmi
(Зт2 — 2рь) тсХ2 к УУ —127С7П2 (Зт22т24-4т:р,)Х2 4- 12m22m2 4~3 (п — 1) т>тч (3m - 2рь) т:Х2 + 12-^Х + 12кт
(SmjL — 2(л) лХ2 + 12лтх (3m — 2(л) тсХ2 12тс|х Гз- 4“ 12л7И (3m2mi2-f"4^x) X2 + 12т2т12 + 3 (п—1)тт£\
Делим колонны последовательно на т2т19 тт1 и в по-
лученном определителе вычитаем из второй и третьей ко-
лонны первую. Это обращает наш детерминант в детерми-
нант из четырех элементов:
2|х (2mt -р пг) X2 + ^X + 3(n-l)v 2р. (т - т2) X2 + ,^(^ + т)х г
2р. (т — mL) X2 2р< (2т2 4~ т) X2
— ^^Х+3(п —l)v /3
Раскрывая этот детерминант и сокращая полученное уравне-
ние на 12^2v, найдем окончательно:
3те2у(Х2 + п + 3) Гх4 + Х2(п + 3)+ 3 = 0. (31)
L г J
Для того чтобы X2, определяемое из первой скобки, было
отрицательно, необходимо иметь n-f-З > 0. При этом условии
во второй скобке коэфициент при X2 и член известный —
положительны, и, следовательно, для того чтобы X2, опреде-
ляемое из второй скобки, было действительно и отрицательно,
остается только выполнить условие действительности корней.
200
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. IV
Итак, для прочности движения необходимо и достаточно вы-
полнение условий:
п > — 3,
о <32)
о/П~1\2
V U + 3/ *
Второе неравенство, будучи представлено в виде:
+ > з /п—1\2
7И17П2+7П27П--|-7П7П1 \п4“3/ ’
тождественно с условием, данным Раутом. В частном случае,
когда п = — 2, мы получаем условие Гашо:
(m + mt + nig)2 >27
ТП 1т2 Ч~ т2т + тт 1
§ 33. Обращаемся ко второму случаю вращательного дви-
жения, когда три материальные точки составляют одну
прямую линию тхтт2. Прочность этого движения для нью-
тонианского притяжения была исследована Лиувилем S ко-
торый показал, что это движение всегда непрочно. В нашем
исследовании мы рассмотрим силы, пропорциональные каким-
нибудь степеням расстояния. Обращаясь к чертежу (фиг. 16),
замечаем, что в рассматриваемом случае при невозмущенном
движении 2 = 0, а г, 1\ и г2 имеют постоянные величины
а, ах и а2, причем а = а2. В возмущенном движении z
есть некоторая бесконечно малая величина, а 1\ и г2 имеют
величины а14-Ф1 и а2 + Ф2. Выражаем х, у и г через Фх, Ф2
и z с точностью до бесконечно малых величин второго по-
рядка:
Z2
Х = а2+Ф2_—,
22
^ = “• + "’^2^,
г=° + Ф‘ + Ф'-2^/’-
1 Lionville, Du probleme des trois corps, „Journal de Mathematiques
pures et appliquees*, 1856.
Гл. IV
О ПРОЧНОСТИ ДВИЖЕНИЯ
201
Вносим эти величины в формулу (30), полагая для сокра-
щения
тхт2а2 4~ т2та^ + ттга22 — k;
получаем:
27 k 2
-/2 = T + V + (mim^ + Фа] + .
T r r
, _2
£ '
dz
dv
+ (ni1m2 + тгщ) Ф22 4“ 2m1m2 Ф/>2 — ^im2-------z2 4“
«1^2 J
1
I п </ф. </ф2 , ,
+ 2ЗД + t
</Ф.?
( b dz
— mm2 — z
— z
-Ь— Гтш
н L
Полагаем:
mim2an+1 4“ m2matn+1 4~ mmta2n+1 — I
и составляем силовую функцию:
2 (/4~ Л) = 2Л-----[(т1т2аП 4“ пг2тиа1п) Ф! +
п 4~ 1
4- {т^тп^и 4" тпт^а^1} Ф2] — qn (т1т2ап~'1 т^а^1) Ф^ 4~
1 £;2
4~ Ф22-\-2т1т2ап'~1 ФгФ2—Ш1Ш2----------5
мы получаем для коэфициентов Ао и Do следующие вели-
чины:
Ао = ^, 1)0 = 2Л--^.
р- п ~г 1
Между этими коэфициентами на основании теоремы живых,
сил и формулы (28') имеет место зависимость:
Do — Ло<о2 = 9Р- А).
202
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл. IV
Определяем по формулам (5), (6) и (7) функции Lit L2, Ls:
L2
4- m.,m)
v
d<? /
,9m m
+ 2/71^2-^
«1
J^2_
</<s
2^a \ dz , -г т 4
~w L 3? ("1>2 “ a2$1)—2
L:i=~’s
/ с?Ф2\2
\ /
“2 ~d^
tn 1 + m2main~i) Ф^ + (mim2an^i
£jjn4- 1
-f- тпт^а^1) Ф22 + 2тпгт2ап“1 Ф1Ф2 — mi т-2------------
а\а2
(mtm2 + т2т) Ф^ -J- (^1^2 ”Ь тт1) Ф22 + 2тхт2 ФГФ2 —
а2 2
— тАт2----z^
1 2 0^2
—£2 Kmim2« 4~ $! 4-
+ (mjm^a + mmta^ Ф2]2.
Эти три функции выражаются проще, если введем в них
вместо Ф2 новое переменное положив
‘>2=14^+04,
а1 а1
Это переменное выражает бесконечно малое изменение
отношения г2: гг. Подставляем, пользуясь при составлении Л3
формулами (28) и (28'):
Lx —
2
\ “2 i I I
4- 4- mm^ 4-
(dz\2
d^J 9
Li~ k*
--Z
2uTraa12 I dz ,
—
Ls = — (n4-3)-^2 — 2(n4-3) ттП1а^<рф1 —
_W
(т^а”-1 + mmxa^~l) — 4 mm^ 4-
l^q
\ <D 2
47nlzn2
g3
kaxa<2
an-1 —
1
Гл. IV
О ПРОЧНОСТИ ДВИЖЕНИЯ
203
Составляем по формуле (8) диференциальные уравнения
возмущенного движения:
1 । 1 / । ч d2^
= — (п + 3) 3 {т.т^а + тт^) 4*,
и,^ К.
тщт а + тпгща^ . а£ ( _l_ mm \ _
k d'f k (mizn2+"i7n1) J(?2
к2
1 4
---^-(zn17n24-/n7n1) + p(zn1m2a4-/nzn1a2)2 а^,
d2z . ^at2 dty__ а
к dy2' к dy mirn2 r „
qnks\
Г
^an'r — 1) z.
«10-2 \ /
<72Ф
Исключаем из первого и второго уравнений и преоб-
разуем полученное уравнение с помощью формул (28) и (28'):
о d2^ dz /
al ^_a^=w(1
Здесь для сокращения положено
s = ma^1 а^1'1 -р тща*1"1 а2п~
Сделаем новое изменение переменных:
tya2 — v, za = w9
п-1а5
которое позволит нам представить формулы возмущенного
движения в следующем окончательном виде:
с/2Фх ( т^т^а^-тт^ d2v _
dy1 ** к dr^2
тт Ч— 3
— — (п + 3) <1Ч--— {т^т^а тт^) v9
d2w । dv___
dy2 • dy
d2v dw_______ / nk2s\
df^2 dy V \ p72 / ’
nkan~x
I “
(33)
k
Мы заменили здесь <o2 его величиной qpl: Л.
201
О ПРОЧНОСТИ ДВИЖЕНИЯ
Гл IV
Составляем детерминантное уравнение, полагая для со-
кращения письма
т1т2а^- ттха2
к
, nk2s j
- к (—11 = -Д_ [тл2 (о« - ' — о,”->) +
/подогу I J \daxa2
+ mja-j2 (а71-1 — а2’11)] = е;
(34)
получаем:
ХЗ + п + 3 сХ2 + (п + 3)с 0
0 12 — d — 1
0 X 12 — е
откуда
р + и + 3) р — (J+e — l)k2 + erf] = 0.
Для того чтобы все корни X2 этого уравнения были дей-
ствительны и отрицательны, нужно, во-первых, иметь
п > — 3;
далее произведение ed должно быть положительно, что может
иметь место, если d и е оба отрицательны, или оба положит
тельны. Если d и е отрицательны, то корни X2 уравнения,
получаемого из второй скобки, очевидно, действительны
и отрицательны; если же d и е положительны, то для дей-
ствительности и отрицательности корней X2 надо еще удовле-
творить двум неравенствам:
J + e —1<0,
l—d—e>2Ved,
из которых второе заключает в себе первое и может быть
представлено в виде:
/<Н-]/е<1.
(35)
Гл. IV
О ПРОЧНОСТИ ДВИЖЕНИЯ
205
Формулы (34) показывают, что для сил, степень которых
отрицательна, коэфициент d положителен, а коэфициент
е отрицателен; следовательно все такие силы дают не-
прочное движение нашей системы. В этом общем выводе за-
ключается результат, найденный Лиувилем о непрочности
движения в задаче Лапласа. Для п = 1 находим I = k, s = И,
поэтому d=e — 0. Движение в этом случае будет прочное,
как легко убедиться из уравнения (33) с помощью предста-
вляющей точки.
Работа „О прочности движения*, докторская диссертация автора, была
напечатана в „Ученых записках Московского университета*, вып. 4, 1882.
Некоторые результаты были сообщены впервые VI Съезду русских есте-
ствоиспытателей и врачей 27 декабря 1879 г. и напечатаны в протоколах
VI съезда. Вторично работа была напечатана в Сочинениях Н. Е. Жуков-
ского, т. I, 1912, стр. 194—296. Прим. ред.
ON THE STABILITY OF MOTION
The work „On the Stability of Motion", written by Prof.
Joukovsky independently of Routh’s "Treatise on the Stability
of a Given State of Motion", appeared nearly at the same time
with the latter. Both the point of view and the method of analysis
used by Prof. Joukovsky are different from those used by Routh.
Defining the position of the system in the given motion by
coordinates x, y, z9... and in the disturbed motion by coordi-
nates x-J-S, y + 'q, z + C,... Routh treats the quantities £, .
as functions of time, and calls the motion stable if these functions
remain infinitesimal, and unstable if some of them increase
infinitely. Prof. Joukovsky considers the coordinates y, z,— as
functions of x, and assumes that in the disturbed motion these
functions obtain increments iq, C,.. . If these increments while in
motion remain infinitesimal the motion will be stable, if some
of the functions increase infinitely, the motion will be unstable.
The time t is regarded by Prof. Joukovsky as a function of x,
St being determined for the transition from the given motion to
the disturbed one. According to the point of view of Prof.
Joukovsky the motion being stable, may give for either infini-
tesimal or infinitely increasing values, depending on the type of
disturbance. Prof. Joukovsky proves that a conservative disturbance
(i. e. a disturbance for which the constant in the integral of
energy does not change) produces in a stable motion an infini-
tesimal change in time, while a non-conservative disturbance
produces a change in time infinitely increasing.
The differential equation of disturbed motion is obtained by
Prof. Joukovsky by means of the Principle of Least Action in
the form of Jacobi.
In Chapter I is discussed the problem of stability of motion
of a point on a surface. In this case the differential equation of
SUMMARY
207
disturbed motion is reduced to the form (7), where Ф and т are
determined by formulae (3), Ф being the infinitesimal distance
of points of the disturbed path from those of the undisturbed
path, multiplied by the velocity v9 and " being the action for
the motion along the undisturbed path. The coefficients a, (3, e
in this equation have the following value
where TV is the force component normal to the path (in the
tangential plane), e is the variation of the constant in the
integral of energy for the disturbed motion, and is equal to zero
in the case of a conservative disturbance whilst a = 7: г»2, where
T = £-A2lg/2(7+7i),
k denoting the curvature of the surface.
Prof. Joukovsky proves the following theorem: If during all
the time of the motion of the point along the path 7^0, the
motion is unstable. If 7 > 0, then the motion is stable, and the
more so the greater is the value of 7. The function 7 is called
by Prof. Joukovsky the measure of stability.
At the end of the chapter are considered several examples
of stability of motion of a point in a plane: 1. motion under the
action of a central force; 2. motion under attraction of two
centres according to Newton’s law; 3. motion of a heavy point
on the surface of a cone with an inclined axis; 4. motion on
a surface of revolution with a vertical axis; 5. motion on an
arbitrary surface under no forces.
Chapter II deals with the stability of motion of a system
whose position is given by two coordinates, x and y, and which
is subject to the action of forces having a force-function / (x, y).
This problem is easily reduced to that of Chapter I, i. e. to
a problem of stability of motion of a point on a surface. The
measure of stability is the quantity 7 [formula (15)].
By way of examples three following problems are considered:
1. stability of motion of a centrifugal governor; 2. stability of
motion in a plane of two points m and rn connected with each
other by unvarying line mm' — b, the point m being also con-
nected with a fixed point О by an unvarying straight line mO = a;
208
SUMMARY
3. stability of motion of three points, mutually attracted by
forces proportional to the distance between the points, and
moving along the axes of coordinates so as x У *4“ z = const
In Chapter III is investigated the stability of motion of
systems with any number of degrees of freedom. In this case
also the differential equations of the disturbed motion are
reduced by means of the Principle of Least Action to the
form (8) and (9), Фр Ф2,... being determined by formulae (3)>
and т being the action in the undisturbed motion. The general
equations are applied to the motion of a free material point,
and are illustrated by two examples. In the first example is
investigated the stability of motion of a point along a circle,
under the attraction by forces proportional to the n’th power
of the distance to two centres situated on a line drawn through
the centre of the circle at right angle to its plane. The
second example deals with the stability of motion of a point
along an ellipse, under Newtonian attraction to two centres.
In the last chapter (Chapter IV) Prof. Joukovsky considers
the stability of a motion which is called by Routh steady
and which is characterized by the fact that the differential
equations of the disturbed motion have constant coefficients.
Prof. Joukovsky proves the following theorem:
If for any values of S2,... the function W (17) is
positive, the motion is stable.
If for all values of B2, • • • the function W is negative,
then, with an odd value of n (the number of degrees of freedom)
the motion is unstable and with an even value of n the motion
may be either stable or unstable.
The general theory is illustrated by two examples. In example 1.
is considered the stability of motion of a heavy top, spinning
on a plane on a pivot О (Fig. 15). In example 2. is investigated
the stability of motion in the problem of three bodies m, zn2
first, when the triangle m, zn2 remains equilateral and
rotates in its plane with a constant angular velocity o) and,
second, when the bodies тп, mx and m2 remain in a straight
line. The bodies are supposed to be attracted to one another
by forces proportional to the n-th power of their mutual
distance. __________
О ВЛИЯНИИ КОЛЕБАНИИ ШТАТИВА НА ВРЕМЯ КАЧАНИЯ
МАЯТНИКА
(1882 г.)
В этой заметке мы определим величину поправки длины
секундного маятника, которая должна быть введена для устра-
нения погрешности от непрочности
штатива.
Пусть (фиг. 1) АВ будет верти-
кальная линия, совпадающая с на
Правлением оборотного маятника при
его равновесии. Когда маятник будет
приведен в колебание, то точка его
опоры О не будет оставаться в Л,
а будет совершать колебания, укло-
няясь вправо и влево от точки А ио
горизонтальному направлению.
Назовем через 5 это чрезвычайно
малое отклонение АО. Вообразим оси
координат хОу, имеющие начало
А
точке опоры маятника и направленные: фиг ।
ось Ох по горизонтальной, а ось Оу
по вертикальной линии. Пусть 6 будет угол, который ось
маятника образует с осью Оу.
Координаты $ и б вполне определяют положение
маятника, поэтому мы можем относительно их написать
диференциальные уравнения движения в лагранжевой фор-
ме. Для этого надо предварительно определить живую
силу системы и силовую функцию всех сил, на нее действу-
ющих.
Зак. 2365. — Н. Е. Жуковский. Т. I.
14
210
О ВЛИЯНИИ КОЛЕБАНИЙ ШТАТИВА
Проекции абсолютных скоростей точек нашего маятника
на оси Ох и Оу выразятся следующими формулами1:
н = £'+#6'>
v — —
Поэтому живая сила Т нашей системы будет:
т=4 У тп (u2+V2)=± ма*+4 я>'2+мле'б',
где М—масса маятника, I—момент его инерции относительно
точки О, h — расстояние центра тяжести С от точки О,
Силовая функция U всех сил, действующих на нашу
систему, будет слагаться из работы силы тяжести и из работы
силы упругости, притягивающей точку О к А. Эта сила, как
показал опыт, прямо пропорциональна отклонению Е; поэтому
№
U=Mghcosb — ~.
Здесь g— напряжение тяжести, a к— коэфициент силы
упругости штатива, который представляет очень большую
величину.
Подставляем Т и U в лагранжевы уравнения движения:
d ( дТ\ дТ _dU
dt \ dE' / dl ~ dl ’
d (дТ\ dT = dU.
dt \ dW ) df) db 9
получим, заменяя по малости угла отклонения маятника sin 6
на О,
М" + ЛШ" = —|
МН" + /О" = — Mg№. J
Мы удовлетворяем этим уравнениям, полагая
Е = a [cos (Xz) -j- u sin (X/)], |
О — Р [cos (X/) а sin (X/)], J
1 Первые и вторые производные от £ и 0 по времени будем обозна-
чать через 6', 6".
О ВЛИЯНИИ КОЛЕБАНИЙ ШТАТИВА
211
где р- — произвольное постоянное, а X и отношение а: Р опре-
деляются из уравнений:
а (к — MX1 2) — $М№ = 0,
— а (Mgh—№) = 0.
Отсюда
а_ М№ _Mgh—I\2
$-к — М^~ Mhl2 ’ (3)
Делим в последней дроби числителя и знаменателя на Mh
и полагаем:
Получаем для определения X2 уравнение:
MW _g — LX2
к — М\2~ X2 ’
откуда
M(L — h) — (kL + Mg) W -\-kg = Q. (5)
Решаем относительно X2;
X2 = 2M(L~^h) [(kL + Mg) + Г(^+^)2-4Л/^(£-Л)].(6)
Здесь оба корня действительны, потому что подкоренная
величина может быть приведена к виду:
(kL — Mg)2^^Mgkh.
Кроме того оба корня, очевидно, положительны. Отсюда
следует, что общие интегралы уравнений (1) выразятся
с помощью одних тригонометрических функций. Эти инте-
гралы найдутся, если внесем в формулы (2) два положитель-
ных значения X из формулы (6) и возьмем сумму таких инте-
гралов Ч
Перейдем к упрощению формулы (6), происходящему от
весьма значительной величины коэфициента к, вследствие
1 Отрицательные значения X подставлять в формулу (2) не нужно, так
как через это не вводится новых произвольных постоянных.
14*
212
О ВЛИЯНИИ КОЛЕБАНИЙ ШТАТИВА
z- z- 1
чего можно пренебрегать степенями дроби выше первой.
Разлагаем радикал, входящий в формулу (6), по возра-
1
стающим степеням :
1
1 , W
k^ + IMg&h-L)^ г & j -
L, JL^ К
На основании этого разложения формула (6) дает нам
следующие две приблизительные величины К2:
Я Mg4i
_ kL । gh Mg2h
2 “ M(L — h) L(L — h) Dk ’
Этим двум величинам X соответствуют два простых перио-
дических движения, из которых слагается все движение
нашего маятника. Называя через tx и t2 полные периоды
2~ : kj и 2^ : Х2 этих простых колебательных движений, най-
дем-
(8)
Формулы (8) показывают, что период первого движения
очень мало отличается от времени полного колебания маят-
ника при неподвижном штативе, период же второго движения
весьма короток.
Можно всегда выбрать начальные данные так, чтобы все
движение маятника представлялось только первым из этих
двух периодических движений. Для этого стоит только откло-
нить маятник от вертикальной линии на угол % и удержи-
вать его в этом положении с помощью горизонтальной нити
O'D, направление которой проходит через центр качания О\
О ВЛИЯНИИ КОЛЕБАНИЙ ШТАТИВА
213
При таком положении равновесия маятника точка О переме-
стится из А вправо на пространство
t _ Mgh%
‘°- Lk ’
(9)
Если пережжем нить, то маятник придет в движение,
выражаемое найденными нами общими интегралами.
Произвольные постоянные этих интегралов должны быть
определены по следующим начальным данным: при / = 0 мы
должны иметь $' = О' = О, £ = £0, 6 = %.
Таким начальным данным мы удовлетворяем, давая инте-
гралам вид:
(10)
V = OgCOS^/.
Здесь отношение Ео : % должно удовлетворить формуле (З)3
что при отбрасывании высших степеней дроби дает:
£ __ft Mh 1 2
*0--°°~£“ Л1 •
Что это уравнение удовлетворяется, видно из того, что
по подстановке в него величины \ из формул (7) получаем
формулу (9).
Посмотрим теперь, какую погрешность делаем мы, опре-
деляя по способу Гюйгенса длину I маятника, соответствую-
щую времени колебания
Эта длина по формулам (8) будет:
Mgh
kL ’
(U)
По способу же Гюйгенса за эту длину мы принимаем
расстояние Л + Лх, где /ц есть расстояние от центра тяжести
С обратной точки привеса О', которая дает то же самое
время колебания маятника т. е. для которой
Mgh.
kL. '
(12)
214
О ВЛИЯНИИ КОЛЕБАНИЙ ШТАТИВА
Здесь L{ имеет для точки О' то же значение, какое L
для точки О.
Называя через /0 момент инерции нашего маятника отно-
сительно центра тяжести С, можем формулу (4) написать так:
£=ж+А-
Также найдем, что
т ___________________ । д
Подставляем эти значения в формулы (11) и (12) и пре-
образуем их:
4) I Mgh"j,
JsL — и __ ]>
В этих формулах L и могут быть с точностью до
1 порядка заменены через h 4~ ht. Сделав это, вычитаем
нижнюю формулу из верхней и делим результат на h — h{
Найдем:
Z-(A + M = ^. (13)
Это и есть величина поправки, которая должна быть при-
бавлена к наблюденной длине маятника h 4“ ht, чтобы полу-
чить его истинную длину I.
Принимая h-\~hl = Н за длину маятника, которому соот-
ветствует время колебания tt, мы определяем длину секунд-
ного маятника по формуле:
Истинная же длина секундного маятника будет:
О ВЛИЯНИИ КОЛЕБАНИЙ ШТАТИВА
215
откуда
07}
_ Mgr{
~ кН'
(14)
Это есть формула поправки длины секундного маятника,
определенной по способу Гюйгенса не на идеально прочном
штативе.
Что касается дроби
Mg
к ’
то она может быть определена по формуле (9) как сумма
отношений £0: 60 при обоих положениях точки опоры.
Работа „О влиянии колебаний штатива на время колебания маятника*
была сообщена автором 15 января 1882 г. в Физико-математической
комиссии Отделения физических наук Общества любителей естествознания,
антропологии и этнографии и 16 марта 1882 г. в Московском математиче-
ском обществе; работа была опубликована в издании Общества испытате-
лей природы в 1882 г. Вторично работа Ьыла напечатана в Сочинениях
Н. Е. Жуковского, т. I, 1912, стр. 297 — 303. Прим. ред.
ON THE EFFECT OF OSCILLATIONS OF THE SUPPORT ON THE
TIME OF OSCILLATION OF A PENDULUM
Assuming the point suspension, 0, of the pendulum to be
oscillating due to the action of an elastic force attracting О
toward a fixed point A (Fig. 1), Prof. Joukovsky deduces the
equation of oscillation in Lagrangian form and obtains two
periods of simple harmonic oscillations composing the whole
motion of the pendulum (Fig. 8) — one approaching the time of
oscillation for a fixed support, the other very small.
The length of the simple equivalent pendulum, Z, correspon-
ding to the first period, is given by formula (11), in which L
(formula 4) is the length of the simple pendulum for the case
of the fixed support. If two points of suspension, О and O',
giving the same period of oscillation, are determined, then,
with a fixed support we have: Z=&4~Zi1, where h and hx are
the distances of О and O' from the centre of gravity, and with
oscillations of the suspension point we have:
Z=A + A1+^. (13)
О ХАРАКТЕРИСТИЧЕСКИХ ФУНКЦИЯХ ЯКОБИ И
ГАМИЛЬТОНА
(1882 г.)
§ 1. В 1834 г. Гамильтон напечатал свое сочинение „Оп
a General Method in Dynamics"1, в котором предложил тео-
рему, дающую возможность определить интегралы диферен-
циальных уравнений движения с помощью так называемой
характеристической функции. Эта теорема была видоизменена
Якоби в его „Vorlesungen iiber Dynamik", причем он показал,
что нет нужды стеснять характеристическую функцию двумя
уравнениями, как это делал Гамильтон, а достаточно только,
чтобы она удовлетворяла одному из этих уравнений.
В предлагаемой заметке я имею в виду выяснить геомет-
рическое различие точек зрения обоих ученых и показать, что
теорема в форме Якоби может быть выведена по способу
доказательства Гамильтона.
Припомним сначала изложения того и другого автора, от-
нося их для простоты к одной материальной точке.
§ 2. Вообразим материальную точку массы тп, находящуюся
под действием силы, имеющей силовую функцию F(x, у, z),
и обозначим через h постоянное в интеграле2
^m(x'2-\-y'2-\-z'2) = F(x, у, z) + A. (1)
Характеристическая функция Якоби для движения этой
точки получается, отыскав полный интеграл уравнения с част-
ными производными
1 \(dVY^(dVV . (dV\2~] м
^LW+\w)+WJ (z,iz'2)+ (2)
1 Philosophical Transactions of the Royal Society of London, Part II,
1834.
2 Мы будем обозначать первые и вторые производные координат па
времени через х', у', z'; х", у", z,r.
218
О ХАРАКТЕРИСТИЧЕСКИХ ФУНКЦИЯХ
в форме
V=<?(x, у, z, а, Р) + С (3)
и отбросив в нем из трех постоянных а, 3 и С постоянное С.
Относительно этой функции <р (х, у, z, а, р) Якоби доказы-
вает следующую теорему:
Первые и вторые интегралы диференциальных уравнений
движения точки даются уравнениями:
Эф , — ТПХ , дх д& , ' Э7=/'’
ду г , ъ=тв- <4> (5)
д® , д®
/- = mz , dz
где X, jx, v — три новых произвольных постоянных; так что
всех постоянных величин вместе с Л, а и Р будет шесть.
Для доказательства этой теоремы Якоби обнаруживает
сначала, что скорости, определенные уравнениями (4), удо-
влетворяют диференциальным уравнениям движения. Действи-
тельно, взяв от первой из формул (4) производную по t9
имеем:
„ д2<? , . д2<? , д2<? г
тХ дх2 Х ~^~дхду^ dxdzZ
1 / de? д2ч> t Эф д2у . ду д2у \
~ т\дх дх2 ’ ду дхду ' dz dxdz) '
Подставив же в формулу (2) вместо V функцию ? и взяв
от обеих частей частную производную по х, получаем:
1 / ду д2у । ду д2у . ду д2у \ dF
т \дх дх2 ‘ ду дх ду dz дх dz) дх9
откуда
Далее обнаруживается, что при скоростях, определяемых
формулами (4), первые части формул (5) не изменяются при
движении точки.
О ХАРАКТЕРИСТИЧЕСКИХ ФУНКЦИЯХ
219
Взяв от формулы (2), в которую подставлено част-
ные производные по я, Р, h и преобразуя их по формулам (4),
находим:
d । d / d®\ / dv\ ,__ d (д<?\
dx \дя / ‘ dy \да dz \cta j dt\da) ’
d fd<?\ ' i (d<?\ f \ (d&\ ,__ d [d<?\___n
+ ~ di W/ °’
d (d'?\ ' i (d<?\ , . d (d<o\ ,
д^\ЪК]х ^dy\^h]y +dz\dk)z ~1
d I <?<x>
~dt \dh
— /=0.
§ 3. Обращаемся к изложению теоремы по способу Га-
мильтона. Берем от обеих частей формулы (1) вариацию
в предположении, что мы переходим от одного возможного
движения точки к другому, бесконечно близкому возможному
движению ее, и умножаем полученный результат на dt:
т (х'8х' 4- у'by' + z'§z') dt = dt 4~ 8A dt. (6)
Далее, на основании равенства
d (х'8х) = x"§x dt -j- х'8 (х'dt) = х"ох dt 4~ х'Ъх' dt -j- х'2 8 dt
пишем, что
т (х'Ъх' Ч- у'ьу' z^z) dt-\~m (х'2 4~ у'~ 4" z'2) &dt =
= md(х'ох4~y'ty4~z'^z) — т (х"^х 4~y"ty + z'bz) dt. (7)
Складываем формулы (6) и (7) и, замечая, что на основа-
нии диференциальных уравнений движения
&F— т (х"&х 4- у '^У 4“ zrbz) — О,
получаем:
8 [ли (х'2 4~ у'2 4“ z'2) dt\ = md (х'8х 4“ y'ty 4~ z'^z) 4~ dt.
Берем от обеих частей этой формулы интеграл между
пределами 0 и /, предполагая, что при / = 0 имеем:
х = а9 у — Ь9 z — с, х = аг9 у' = h'9 z' = с\
получаем:
t
8 j* m (х'2 4~ + zf2) dt = т(х'^х~}-у'^уz'^z) —
6
— т (а'^а 4~ 6'86 4~ с'8с) 4~ ^6.
(8)
220
О ХАРАКТЕРИСТИЧЕСКИХ ФУНКЦИЯХ
Интеграл
У = J т (х'2 + у'2 -|_ z'-2) dtf (9)
о
выражающий действие, Гамильтон рассматривает как функ-
цию от х, у, z9 а9 Ь9 с9 h на основании следующего соображения.
Пусть уравнения движения вполне проинтегрированы и мы
нашли, что
х — f (t9 а9 Ъ9 с9 а'9 6', с'),
y—fi(t9 а9 Ь9 с9 а9 У, с'),
z = А(4 а9 Ь9 с9 а' 9 Ь'9 с').
Прибавляем сюда уравнение, связывающее
а! 9 Ь' 9 с' и Л:
~ (a'b+b'*+c'*) = F(a, b, c) + h.
£
(10)
постоянные
(И)
Берем производные от формул (10) и, подставив их в фор-
мулу (9), производим интегрирование; из полученного резуль-
тата исключаем t9 а 9 bf, с' с помощью формул (10) и (11).
Полученная таким образом функция
И= <? (х, у9 z9 а9 Ь9 с9 h) (12)
и будет характеристическая функция Гамильтона.
Подставляя формулу (12) в формулу (8) и сравнивая коэ-
фициенты при одинаковых вариациях, найдем:
дУ дх = тх'9 дУ = da —та ,
дУ ду = гпу9 (13) дУ дЬ — mb', (14)
дУ dz — mz , dh дс — тс'. (15)
Подставляя же формулы (13) и (14) в формулы (1) и (11),
найдем:
(16)
О ХАРАКТЕРИСТИЧЕСКИХ ФУНКЦИЯХ
221
Отсюда получается теорема Гамильтона: если найдена
функция V, удовлетворяющая двум уравнениям (16), то инте-
гралы уравнений движения выразятся формулами (13), (14) и
(15). При этом одно из уравнений (14) может быть отброшено
так как оно является следствием двух других уравнений и вто-
рого уравнения (16).
§ 4. Разъясним геометрические свойства гамильтоновой
характеристической функции. Проведя семейство траекторий,
которые материальная точка описывает, выбегая из точки
(а, 6, с) в различных направлениях с одной и той же скоростью
6,С) + Я
т
построим поверхности, на которых лежат точки траекторий,
соответствующие равному действию. Эти поверхности, имею-
щие уравнение
V = const,
могут быть названы поверхностями равного действия. Так
как по формулам (13) функция
— V
т
является потенциалом скоростей рассматриваемых движений,
то гамильтоново семейство поверхностей равного действия
ортогонально семейству траекторий, выходящих из точки
(а, 6, с).
Скорость на траектории представляется производной
т dn 9
где dn — элемент нормали, заключенный между двумя беско-
нечно близкими поверхностями равного действия. Подставляя
эту величину скорости в формулу (1) и определяя из найден-
ного равенства dn, получим:
2т dn = -у===============^ .
VF(x, у, z) -\-h
222
О ХАРАКТЕРИСТИЧЕСКИХ ФУНКЦИЯХ
Эта формула дает возможность построить по одной поверх-
ности, для которой действие равно V, следующую бесконечно
близкую поверхность, для которой действие равно ИЦ-сГК;
по этой поверхности можно построить поверхность действия
V ~^2dV и т. д.
Таким образом одна поверхность равного действия и си-
ловая функция F(x,y, вполне определяют все семей-
ство поверхностей равного действия. Приближаясь к точке
(а, 6, с), гамильтоновы поверхности равного действия стано-
вятся все менее и менее и обращаются в пределе в беско-
нечно малую замкнутую поверхность, заключающую эту точку.
Эта бесконечно малая поверхность в изложении Гамиль-
тона принята, так сказать, за поверхность нулевого действия.
Посмотрим, как изменится теорема Гамильтона, если за
поверхность нулевого действия примем какую-нибудь поверх-
ность, проходящую через точку (а, 6, с).
Пусть уравнение такой поверхности будет:
6 (х, у9 z9 а, ,3) = О,
где а и Р — произвольные параметры. Так как эта поверх-
ность проходит через точку (а, 6, с) и нормальна к траекто-
рии, то
6 (а, 6, с, а, Р) = 0,
,. L, , cZO db . db
a C da* db de
(17)
(18)
Из этих трех уравнений вместе с уравнением (11) можем
определить а , Ь', с7 и подставить их в формулы (10). Най-
дем, что
x — ty (а, Ь, с, t, р, Л),
У = $1(а, Ь, с, t, а, р, Л),
2 = (а, 6, с, а, р, Л).
(19)
Берем производные по времени от этих трех формул и,
подставив их в формулы (9), совершаем интегрирование; из
полученного результата исключаем Z, а, 6, с с помощью фор-
мул (19) и (17). Найдем:
V=^(x> у, z, а, % А).
О ХАРАКТЕРИСТИЧЕСКИХ ФУНКЦИЯХ
223
Подставляя эту величину V в формулу (8), получим:
dV. , dV* , dV , dV , dV^ , dV„
- „ + — + -g- + I,. + 8? + — =
= m (x'^x -j- у'Ъу -|- z'8z) — m (a'Sa -f- b'^b -|- c'8c) t%h.
Преобразуем последний член второй части, введя в него
величины а', Ь', с'9 определенные из формул (18) и (11), т. е.
полагая
а=Д^’
,, л
Ъ ' = А ;п-,
дЬ ’
, лаб
С =Д^’
где
Д =
Найдем, что
т (а$а 4“ b'bb -|- с'8с)
дб
дЬ
Вариируем уравнение (17):
6)6 а । ।
Подставляем:
dV. , dV. , dv. ,
^8х + ^8<,+—62 +
8“ + %813 + zh = m (x'8x+^8-
+ 8a + fl’ +/8Л-
224
О ХАРАКТЕРИСТИЧЕСКИХ ФУНКЦИЯХ
Сравниваем коэфициенты при одинаковых вариациях.
dV , -т- — тх , дх dV Ad0 ] да m da'
dV -d^ = mS’ (20) dV ,db . d$ ~m^d^ (21)
dV -5— = mz . dz dh
Подставляя формулы (20) в уравнение (1), найдем для опре-
деления V уравнение с частными производными (2). Пусть
К= ф (х, г/, z, а, р, А) + с
будет один из полных интегралов этого уравнения. Так как
выбор поверхности нулевого действия зависит от нашего
произвола, то мы можем допустить, что
О (х, у, z, ос, р) = <р (х, у9 z9 а, р, А) -f- с.
Тогда уравнение (17) примет вид:
с (а, Ь9 с9 а, р, Л) + с = 0. (22)
Так как при данной поверхности нулевого действия и сило-
вой функции F(x9 у9 z)-]-h все семейство поверхностей равного
действия, а следовательно и функция V9 вполне определяются,
то в нашем предположении функция, выражающая действие,
должна быть именно та, которую мы нашли как один из пол-
ных интегралов уравнения (2), причем постоянное с опреде-
ляется по формуле (22).
Имеем:
V— v (х, у, z9 а, р, А) — ср (а, А, с, а, р, Л). (23)
Подставляя формулу (23) в формулы (20) и (21), найдем:
r d^~771X9 d<p 1 da 9
dv . dv
dr"*’
d<p r 3— = mz , dz 9 dv t
О ХАРАКТЕРИСТИЧЕСКИХ ФУНКЦИЯХ
225
где
X — (тпД -р 1) <р (а, 6, с, Л, а, р),
у. = (тД + 1) с, Л, а, р),
v = ~~г ? («, с> Л» а> Р)
dh х '
суть постоянные величины.
Таким образом мы получили теорему о характеристической
функции в форме Якоби. Читатель видит, что с геометриче-
ской стороны все различие в методах Гамильтона и Якоби
заключается в выборе поверхности нулевого действия.
Гамильтон заранее стесняет этот выбор, принимая за по-
верхность нулевого действия бесконечно малую замкнутую
поверхность, заключающую в себе начальное положение точки;
Якоби же, отыскав полный интеграл уравнения (2) в форме
V==(p (х, у, z, а, р, А) 4- с,
полагает, что поверхность нулевого действия имеет уравнение
? (*, У9 2, я, р, Л) 4~ с = 0.
Работа „О характеристических функциях Якоби и Гамильтона", доложен-
ная 16 марта 1882 г в Московском математическом обществе, была напе-
чатана впервые в 1883 г. в „Отчете о деятельности Московского техниче-
ского училища за 1879—1882 гг.м Вторично работа была напечатана в Со-
чинениях Н. Е. Жуковского, т. I, 1912, стр. 304—313. Прим. ред.
Зак 2365. — Н. Е. Жуковский. Т. I.
15
ON CHARACTERISTIC FUNCTIONS OF JACOBI AND OF HAMILTON
Jacobi has demonstrated in his proof of Hamilton’s theorem,
which gives the possibility to find the integrals of the diffe-
rential equations of motion by means of the characteristic
function, that there is no need to cumber this function with two
equations as Hamilton did, it being sufficient that it should
satisfy only one of the equations.
Prof. Joukovsky makes clear the geometrical difference of
the points of view of the two scientists, and shows that Ha-
milton’s theorem in the form of Jacobi can be deduced by the
method of proof used by Hamilton. For the sake of simplicity
the discussion is confined to the case of motion of a single
material point.
The surface, on which the integral V (9) representing the
action according to Hamilton has the same value for different
initial conditions, is termed by Prof. Joukovsky the surface of
equal action. It is shown moreover that from one surface, for
which the action is V, it is possible to construct another if
T7-}- h is known.
ПРИЛОЖЕНИЕ ТЕОРИИ ЦЕНТРОВ УСКОРЕНИИ ВЫСШИХ
ПОРЯДКОВ К НАПРАВЛЯЮЩЕМУ МЕХАНИЗМУ ЧЕБЫШЕВА
(1883 г.)
§ 1. Рассматривая направляющий механизм, состоящий из
треугольника, две вершины которого движутся по кругам,
П. Л. Чебышев дал правило построения центров этих кругов х,
при соблюдении которого третья вершина треугольника опи-
сывает кривую, имеющую с прямой соприкосновение пятого
порядка.
В этой заметке я показываю, каким образом результаты
найденные П. Л. Чебышевым, могут быть получены с по-
мощью теории центров
ускорений высших поряд-
ков, останавливаясь для
простоты только на том
случае, когда упомянутый
механизм в среднем по-
ложении симметричен от-
носительно оси.
§ 2. Пусть (фиг. 1)
С А = СХВ — г будут кри-
вошипы, вращающиеся
около центров С и С\,
а АВ = 21 — шатун, дви-
Фиг. 1.
жение которого вполне определяет движение соединенной
с ним плоскости АМВ. Назовем через 2d расстояние ССг
центров кривошипов, а через © и ©х величины углов "A'CD
и B'CJ), которые в среднем положении механизма^ равны
1 Приложение к XXXVI тому „Записок Академии наук'
15*
228
ПРИЛОЖЕНИЕ ТЕОРИИ ЦЕНТРОВ УСКОРЕНИЙ
между собой и равны углу С Ах. Допустим для простоты, что
при движении механизма шатун имеет постоянную угловую
скорость, равную единице, так что угол между линиями А'В'
и АВ можно положить равным времени /, и займемся отыска-
нием в плоскости шатуна AM В такой точки М, скорость
которой во время t = 0 имеет с траекторией соприкосновение
пятого порядка. С кинетической точки зрения это будет та
точка, в которой направление скорости совпадает с напра-
влением ускорений четырех первых порядков.
Направим ось Оу по оси симметрии механизма, а ось Ох
по направлению шатуна в его среднем положении АВ, и на-
зовем через аир координаты точки Аг относительно этих
осей. Для точки плоскости шатуна, определенной координа-
тами х, у, найдем по известной формуле скоростей:
?)~=х
Берем от этих формул последовательные производные по
времени и заменяем в них производные первого порядка их
величинами; найдем для проекции на оси координат ускорений
(2п4“1)"го и 2п-го порядка следующие формулы:
dinx — rf2”a
df2n * (x a)( 1)',
df-n c/2»p “ dt *» ‘ -(y-
d2"' 1х _ d2t^ 'a 1 I (1)
df2ni i dt2,l!1 (y ₽)( 1)”,
d2n+1y _d2n-l$
dt2nl 1 dt2n 1 +-(*—«)( —1)’'-
Приравнивая в этих формулах вторые части нулю и опре-
деляя х и у, найдем формулы координат центров ускорений
нечетных и четных порядков:
ПРИЛОЖЕНИЕ ТЕОРИИ ЦЕНТРОВ УСКОРЕНИЙ
229
хуп 1 —а dt~n
Учп - 1 = ₽- <Z2”p ( dt2n ' 1)",
х2п ® dfin+1 * - 1)".
Учп = ₽ 1 JfJn+l С -1)".
(2)
Если в последних двух формулах (2) положим п = 0, то
найдем координаты мгновенного центра вращения, который
может быть назван центром ускорения нулевого порядка.
Формула (1) показывает нам, что все ускорения нечетного
порядка направлены по радиусам, идущим из их центра уско-
рений, а все ускорения четного порядка перпендикулярны
радиусам, идущим из их центра ускорений.
Докажем теперь, что во время / = 0 все центры ускорений
плоскости шатуна лежат на оси Оу. Для этого, пользуясь
фиг. 1, напишем уравнения:
а — d — г cos ср,
р = г sin ср — 6,
cos ср 4- cos cpj — 2 — — 2— cos /,
(3)
sin ср — sin cpj = 2 “ sin /,
где b OD. Подставляя а и p из двух первых формул (3)
в формулы (2), найдем для времени t — 0:
x.in 1 ___ I . d2n cos ср .
\ + d№ 1
У27? 1 = _ d2n sin ср (
г dfin V
х2п I d2n + 1 sin ср
г г df2nA
у<>п___ __dln 1 cos ср .
г ~ ~ dfin-A '
(4)
230 ПРИЛОЖЕНИЕ ТЕОРИИ ЦЕНТРОВ УСКОРЕНИИ
От двух последних формул (3) берем последовательные
производные по t и полагаем в них Z==0:
d?n cos © । d'2n cos ©4 q I , 1V*
dt2n 1 dt2n 2 r ( 9
<Z2”+1 sin ® d-n'rl sin ъ I { 1
df*^1 ~2r( JJ »
d2n+icos ф d-n+1 COS ®! _
df2n+1 ' Jf2n + 1 U’
cPn sin ® d2n sin ®t
dfi" dt*"
Составляя первые части двух последних формул для по-
следовательных значений п и полагая в них © = ©lt найдем:
~1 > dt" '
откуда две первые формулы можно будет написать так:
rf^cos© =
Л2я
J2M+1sin©_ I , v
— г V И -
(5)
Подставляя формулы (5) в формулы (4), получаем:
х2п— 1 х2п
Так как все центры ускорений лежат на оси у, то иско-
мая точка М найдется в центре ускорений первого по-
рядка, если выбрать размеры механизма так, чтобы этот
центр совпадал с центром ускорения третьего порядка.
§ 3. Перейдем к определению четных производных от
.sine? и нечетных от cos©. Это можно сделать, беря последо-
вательные производные по времени от уравнения
sin2 © + cos2 © — 1 (6)
и подставляя в них величины производных sin© и cos© из
формул (5).
Таким образом, полагая для сокращения письма
г cos © ’
ПРИЛОЖЕНИЕ ТЕОРИИ ЦЕНТРОВ УСКОРЕНИЙ
231
найдем величины следующих четырех производных:
h sin cp,
A2
dcos ср
dt
d'2 sin ср
d3cos®
~~diT'
J4 sin ср , cos2 ср /
dt1 sm cp \
i ^»o3sin2cp — 1
+ 6A3-----г-б----
sm3 cd
sm cp sm cp
. ЗА2 . ЗА3
m cp -f- - .--;— ,
sm cp sm cp
1 I g2 sin2 cp — 1
sin cp sin3 cp
+ 3A«4sin8^~1.
sm3cp
(7)
(8)
(9)
(10)
Если теперь составим по формулам (4) yt и у:> и сравняем
их, то найдем:
<74 sin ?______J2 sin ср
Л4 “ ~dt2~ ‘
(И)
Подставляя в это уравнение (8) и (10) и производя со-
кращение, получим уравнение второй степени относительно А:
А2 (4 sin2 ср — 1) -к А (6 sin2 ср — 2) -j- 2 sin2 ср —1=0.
Это уравнение разлагается на множители
(А+ 1) [А (4 sin2 ср — l) + 2sin2? —1] = 0
и дает два корня:
А = —1, (12)
а = Г-2ЛЛ
4sm2cp — 1
Приняв первый корень, получим:
I = — г cos ср,
откуда следует, что угол ср тупой и <7 = 0, так что механизм
приводится к неизменяемому треугольнику, вращающемуся
около вершины. Место точки М может быть определено с по-
мощью угла хАМу который назовем через 6. Из фиг. 1 имеем
по формуле (8) и (4):
tg(l = 4l = -S5^±. (14)
I sm ср cos ср
232
ПРИЛОЖЕНИЕ ТЕОРИИ ЦЕНТРОВ УСКОРЕНИЙ
Полагая здесь Л = — 1, найдем:
tg О = tg
т. е. точка М лежит в общем центре кривошипов, что само
собой ясно, так как этот центр является центром ускорений
всех порядков.
Обращаясь ко второму корню, находим:
7 1—2 sin2?
I — "л ~~о--7 r COS ?.
4 sin2 ? — 1
Эта формула стесняет размеры механизма; положение же
точки М находится из формулы (14), которая по подстановке
в нее h из формулы (13) дает:
f 3 sin?—4 sin3?
tg 6 = — -------—-----— = tg 3?,
— 3 cos « 4 cos3 v
(15)
откуда
6 = 3?. (16)
Так как в нашем анализе I и г суть величины положи-
тельные, то из формулы (15) следует, что угол ? должен
быть заключен между следующими пределами:
45е > ? > 30 ,
120°>?> 90,
135" > ? > 120 ;
180е >> ? > 150 ;
при этом во втором и третьем случаях проекция кривошипа
на шатун более половины длины шатуна, т. е. кривошипы
пересекаются, а в четвертом случае эта проекция ме-
нее половины длины ша-
туна, и кривошипы не пе-
ресекаются. Эти четыре
случая представлены на
фиг. 1—4.
В
Фиг. 2.
Фиг. 3.
ПРИЛОЖЕНИЕ ТЕОРИИ ЦЕНТРОВ УСКОРЕНИЙ
233
Фиг.
4.
позволяет пойти
При ф = 120 полу-
чаем точку М на са-
мом шатуне; при этом
27:2t/: г = 1:3:4.
§ 4. Найденные на-
ми результаты вполне
согласны с теми, какие
даны П. Л. Чебыше-
вым; прибавим к этому, что наш анализ
несколько далее и решить, возможно ли между найденными
механизмами получить такой, в котором траектория точки М
имеет с прямой соприкосновение седьмого порядка. Для
этого нужно будет стеснить выбор угла ? тем условием, что
в точку М попадают не только центры ускорений первого
и третьего порядка, но и центр ускорений пятого порядка.
Берем от формулы (6) пятую и шестую производные по вре-
мени и преобразуем их с помощью формул (5), (7), (8), (9)и (11):
d&cos ф dt5 = h sin ф -Д5 hi sm? 45 лз- sin <P 30 h\ (17) sin Ф
dQ sin ? cos2 ? h2 । ( 15 \ 15Л» (,o 2 \
— — h 31 ry — 1 112 . о )
dt® sin ® sin ® sm2 < ® / sin <p \ Sin2<0 /
15A41 ( , 5 \ 180A5/ i 1 \ 90Л6
22 + -^r- ' + • 2 I — • 2 • (18)
sin ф ' sm2 ф ] sin? \ sm2?/ sm2 ?
Составляя по формуле (4) у- и ух и сравнивая их, найдем:
с/6 sin ?_______________d2 sin ф
dt2•
Подставляем сюда формулы (18) и (8) и делаем некоторые
сокращения:
6Л4 + 12/Г3 (sin2 ? +1) + h2 (22 sin2 ? + 5) +
+ А (12 sin2? — 2) + 2sin2?- 1=0.
Это уравнение, как и следовало ожидать, удовлетворяется
корнем h = — 1, значение которого было объяснено выше;
сокращая его на Л —|— 1, найдем:
6А3 -f- А2 (12 sin2 ? + 6) -f- h (10 sift2 ф — 1) + 2 sin2 ? — 1=0.
234 ПРИЛОЖЕНИЕ ТЕОРИИ ЦЕНТРОВ УСКОРЕНИЙ
Подставляем сюда h из формулы (13):
6 (1 — 2 sin2 у) sin2 ? ~
(4sin2<p — I)3
Это уравнение удовлетворяется только при ф = 0 и ф = 45°,
что дает невозможные механизмы. Таким образом соприкос-
новение пятого порядка есть высшее, которое может быть
достигнуто в рассматриваемом механизме.
Работа „Приложение центров ускорения высших порядков к напра-
вляющему механизму Чебышева* была напечатана в „Журнале Русского
•физико-химического общества*, т. XV, 1883. Прим. ред.
AN APPLICATION OF THE THEORY OF CENTRES OF ACCELERATION
OF HIGHER ORDERS TO THE FOUR-BAR CHAIN OF CHEBYSHEV
In this note is considered a symmetrical articulated quadr-
angle CABC^ Fig. 1, and is discussed the condition for the
case when the point M of the movable link AB describes a curve
having with a straight line a point of tangency of the fifth
order. It is shown that the formulae derived by Chebyshev
can be obtained by the theory of centres of acceleration of
higher orders.
On the assumption that the angular velocity of the connecting
rod AB is constant and equal to unity we obtain for the
coordinates of the centres of acceleration of different order
formulae (2), in which a and £ are the coordinates of the
point Ar. Taking into account formulae (3), in which I is the
length of the rod and r that of the crank, b — OD, and 2d — CClf
formulae (2) are transformed into (4) and give the possibility
to determine the coordinates xn, yn of the centres of accelera-
tion. All the centres lie on the i/-axis.
In order to make the point M to describe a curve having
with a straight line a point of tangency of the fifth order it is
necessary that the direction of its velocity should coincide with
that of accelerations of the first four orders. Since all centres
of acceleration lie on the */-axis, to fulfil the above condition
it is necessary that the point M should coincide with the centres
of acceleration of the first and of the third order, i. e. that
Ух — У& From this equation formula (15) connecting the quanti-
ties Z, r and 9 is obtained, and from the drawing we have
formula (14) giving the position of M and equation 6 = 3?.
At the end of the paper it is shown that among the mecha-
nisms obtained it is not possible to find such, in which the
path of M has with a straight line a point of tangency of the
seventh order.
SUR LE PRINCIPE DE LA M01NDRE ACTION
(1884)
1. Le theoreme de la moindre action a ete compete par
M. Serret1, qui a demontre que la variation du deuxieme ordre
de Faction est essentiellement positive. L’analyse du savant geo-
metre etant assez difficile, il m’a semble qu’une demonstration
plus elementaire du theoreme ne serait pas dёpourvue d’interet.
2. Soit donne un systeme de n points a p liaisons dans sa po-
sition initiale a, au ...,soumis a Faction des forces ayant une
fonction potentielle U. Examinons deux mouvements extremement
voisins de ce systeme: af, aj\, . . et ab, axbu .. . pour les-
quels la constante h, dans Fintegrale des forces vives
U—F-rh = Of (1)
est la meme, F etant la somme des forces vives.
En d6signant, avec M. Thomson, par (a, /) Faction dans le
premier mouvement et par t le temps de ce mouvement, ecri-
vons
t
(a,f) = ^2Fdt (2)
0
ou, a cause de la formule (1).
t
(a, f) — § (UF-r h) dt.
1 Comptes rendus des seances de I’Academie des Sciences, t. LXX1I,
P. 696, 1871.
SUR LE PRINCIPE DE LA MOINDRE ACTION
237
Determinons la variation (a, b) — (a, f),
t
(a, b) — (a,f)= ,2A^ +
o
+ I S + +
1 J \ dx 1 dy u dz /
c?8x । dy dty . dz dc>z \
~dt^~dt dt + dt ~dT)
Integrons par parties:
t
/yi / dx dbx . dy dty , dz dbz \ ,
-im\dt dt±~dt~dF~rlTt~dt)
t
0
Г V / d'2x J, | d2y „ , d2z . \ ,
-J }dt.
0
Mais on a
о
8 x = 0,
t t
8x — 8 x —
t
8 x
4-4-8 у
dt' y
t
dy
dt
t
8 z
dz
~dt
= v cos
formule dans laquelle v represente la vitesse du point /, 8s
I’element fb, et я un angle entre v et 8s. 11 vient ainsi
t
/ dx dbx . dy d&u . dz dbz \ .
>'(s -dt +iu £+-& dt ?'=
0
t
= mv cos <*8s — | 2/^8/ —
t
/кт / d2x . d*y , d2z \ ,
2jm( dt‘ w+
0
238
SUR LE PRINCIPE DE LA MOINDRE ACTION
et la variation devient
(a, b) — (a9 f) = mv cos -|-
0
dt.
L’integrale est nulle a cause de la formule generale de la
Dynamique, et nous trouvons
(a, b) — (a, f) = mv cos ao$. (3)
Ainsi, pour que
(a, &) = («,/),
il faut et il suffit que les elements fb, f^b^ ... satisfassent
Fequation
mv cos = 0. (4)
Nous nommerons les elements fb, f\bl9 • . . les lignes de Г egale
action.
3. Comparons Faction (a, e, d) dans un mouvement reel avec
Faction (a, b9 d) dans un mouvement quelconque, compatible
avec les liaisons et satisfaisant a Fequation (1), la constante h
etant la meme dans tous les deux mouvements.
Soient b, bi9 ... les positions simultanees des points du
systeme dans le second mouvement. Construisons les trajectoires
ab, afii. • • d’un mouvement reel auxiliaire ayant aussi des
points simultanes b, b19 ... et la meme constante Л. Ce mou-
vement auxiliaire sera entierement fixe, puisque nous aurons
pour la determination de 3n — p composantes arbitraires des
vitesses initiales 3n — p— 1 equations exprimant que les points
du systeme passent en meme temps en b, bl9 ... et une equa-
tion (1).
Construisons pareillement les trajectoires ac, ... du
mouvement auxiliaire pour les points simultanes c, . . et
pour tous les autres points simultanes du mouvement abd,
...
SUR LE PRINCIPE DE LA MOINDRE ACTION
239
Eliminons maintenant dt de Faction (a, b, d) a 1’aide de la
for^nule (1), comme le fait M. Jacobi,
(a, b,d)=f (t/+A) КXrf, (5)
ou dl, dl19 • • . sont les elements des trajectoires abd, .
parcourues dans le temps dt.
Soient
dl — be, dlt — bxcu
Menons par les points 6, . .. les elements
fb = 8s, fxbr = Ssn . . .
des lignes de I’egale action pour les mouvements auxiliaires,
les points /, ... etant places sur les trajectoires ac9 arcl9 ..
et posons
fc = rfo, /jCi = dslt ..
Nous avons
dP — do2 -J- 8s2 — 2t/o 8s cos a.
Multiplions par la masse m et prenons la somme £tendue sur
tous les points du systeme,
2 mdP = 2 mdo1 2 thos2 — 2 2 m do 8s cos a.
Par l’equation (4),
2 m do 8s cos я = dtt 2 mv cos a — 0,
dti etant I’element du temps dans lequel les points du systeme
parcourent les arcs infiniment eloignes /с, /гс19 .. . On aura
2 mdP > 2 mdo\
ou
m dP > У 2 (U + h) (6)
Mais nous avons
И2(С/+Л)К2т^2 = (У, c) = (°. °) =
= (a, c) — (a, ^) = --d (a, b),
240
SUR LE PRINCIPE DE LA MOINDRE ACTION
et la formule (6) devient
jA ({/+&) jASmdP > d(a, b).
Prenons de toutes les deux parties I’integrale etendue sur tous
les elements des lignes abd, агЬ^19 .. .
J K2(t/-FA) К > (a, e, d), (7)
ou par (5)
(a, b, d) > (a, e, d).
Статья „Sur le principe de la moindre action", представляющая собой
изложение первых трех параграфов статьи „О начале наименьшего дей-
ствия** (см. стр. 91 этого тома), была напечатана в „Journal des Mathema-
tiques pares et appliquees," t. X (3), 1884. Прим, ред.
ОБ УДАРЕ АБСОЛЮТНО ТВЕРДЫХ ТЕЛ
(Статья первая)
(1884 г.)
Изложению теории удара обыкновенно предпосылают уче-
ние о мгновенных силах, действие которых представляет пре-
дельный случай действия весьма большой силы за весьма
короткий промежуток времени. Мгновенные силы не произ-
водят конечного перемещения точек системы, но изменяют
конечным образом их скорости Ч Это изменение скоростей
вполне определяется величиной и направлением импульса
мгновенной силы
р=/га/,
О
причем направление импульса обыкновенно соответствует на-
правлению самой мгновенной силы которое принимают
постоянным в продолжение бесконечно малого времени т.
Переходя после этого к удару твердых тел, принимают,
что в точке их соприкосновения развиваются импульсы мгно-
венных сил, направленные по общей нормали; причину же
этих импульсов видят в силах Л, происходящих от взаимодей-
ствия частиц во время весьма малой деформации тел в месте
удара. Разумеется, в пределе можем считать эту деформацию
бесконечно малой или даже допускать, что тела совсем не
деформируются, но что силы F, как это предполагает Бур1 2,
начинают действовать несколько раньше, чем тела пришли
в соприкосновение, так что в момент этого соприкосновения
нормальные скорости будут равны.
1 Учение о мгновенных силах с особой ясностью изложено в сочине-
нии Дар бу „Etude Geometrique sur les percussions et lechoc des corps*,
Bulletin des Sciences mathematiques, 2-e serie, t. IV, 1880.
2 В о u r, Cours de Mecanique, III fascicule, p. 96.
Зак. 2365. — H. E. Жуковский. T. I.
16
242
ОБ УДАРЕ АБСОЛЮТНО ТВЕРДЫХ ТЕЛ
Во всех этих предположениях получатся, как необходимое
следствие закона действия, равного противодействию, равенство
и противоположность импульсов мгновенных сил, действующих
на соударяющиеся тела, но остается неопределенной сумма
работ этих сил.
Эта сумма, как известно, зависит от коэфициента восста-
новления е, который выражает отношение части импульса
мгновенной силь! после момента наступления равенства нор-
мальных скоростей к части импульса ее до этого момента.
При е — 1 сумма работ мгновенных сил равна нулю; при
е = 0 она отрицательна и выражается по теореме Карно; на-
конец, при 1 > е > 0 она представляет отрицательную вели-
чину, меньшую по абсолютному значению той, которая дается
теоремой Карно.
В недавнее время некоторые авторы сделали попытку
заменить такое обыкновенное изложение теории удара твер-
дых тел изложением теории удара неизменяемых систем,
в котором причина мгновенного изменения скоростей выте-
кает из тех геометрических условий, в которые системы ста-
новятся в момент удара.
Я говорю о новых воззрениях на удар „абсолютно твер-
дых тел", проведенных в сочинениях Ф. и Н. Мацон, проф.
Шиллера и французского автора П. Гаригу-Лагранж (Paul-
Garrigou-Lagrange). Из рассуждений Ф. и Н. Мацон и проф.
Шиллера следует, что при ударе таких тел необходимо должна
сохраниться живая сила, а Гаригу-Лагранж полагает, что это
свойство может иметь место только при центральном ударе
равных масс.
Эта заметка посвящена краткому разбору вышеупомяну-
тых воззрений.
В своем сочинении „Об ударе тел" Ф. и Н. Мацон 1 дают
два доказательства неизменяемости живой силы, из которых
первое, заключенное в § 30 и § 31, сводится к допущению
для прямого удара двух „совершенно неизменяемых" шаров
закона сохранения энергии.
1 „Киевские известия", 1883, № 1 и № 3.
СТАТЬЯ ПЕРВАЯ
243
Авторы пишут:
mv1 24" — ты2 ти^/2 2/?, (1)
где тп, тщ — массы шаров, v, vi9 w, — их скорости до и по-
сле удара, a R — их внутренняя работа за время удара. Эту
работу они принимают равной нулю и получают постоянство
живых сил. Не имея ничего возразить^против положения R = О
при тех условиях, которыми авторы характеризуют шары, мы
думаем, что само уравнение (1) в данном случае есть то, что
требует доказательства.
В своем втором доказательстве авторы рассматривают
работы 2 и 2Х ], которые производят мгновенные силы вза-
имного давления шаров, и пишут в § 37 для этих работ
формулы, изложенные у Томсона и Тета2:
2== _ — О =/Э(у —“>)
2 ’ 1 2 '2'
где Р—импульс мгновенной силы.
Далее они доказывают в § 43, что—2 = 2и рассуждая
таким образом: „С точки зрения рациональной механики дол-
жно сказать следующее. Так как 2t—работа импульса Р, при-
ложенного к шару Д, то— 2 — работа силы противодействия
этого шара. Но эта последняя сила не что иное, как то
мгновенное давление, которое шар А производит на шар Bt
следовательно, — 2 не что иное, как 2П т. е. — 2 = 2гм.
Как скоро это доказано, то из формул (2) получается
уравнение
которое вместе с условием постоянства количества движения
дает постоянство живой силы.
На основании вышеприведенного рассуждения авторов мы
полагаем, что явление удара представляется им таким обра-
зом: неизменяемые шары встречаются со скоростями v и
в момент соприкосновения они по неизменяемости получают
сразу общую скорость, которая по теореме о количестве дви-
1 Мы пишем здесь -- и вместо букв Qj и употребляемых авторами,
чтобы иметь обозначения, схожие с обозначениями формулы (1).
2 Natural Philosophy, art. 308.
16*
244
ОБ УДАРЕ АБСОЛЮТНО ТВЕРДЫХ ТЕЛ
жения будет равна скорости их общего центра тяжести; с этой
скоростью они движутся вместе в продолжение бесконечно
малого времени т, причем силы их взаимного давления произ-
водят работы О и 21? очевидно равные по абсолютной величине
и противоположные по знаку, так как пути, проходимые точками
приложения сил давления, равны, а сами эти силы равны и
противоположны; по прошествии времени т шары сразу полу-
чают скорости и которые определяются на основании
постоянства количества движения и живой силы.
Мы думаем, что с подобным воззрением трудно согласиться
вследствие разновременности в совершении работы и изменении
скорости.
В продолжение времени т, когда работа сил давления
происходит, скорости шаров не изменяются, а когда ни-
какой работы еще не происходило или когда эта работа
уже перестала совершаться, тогда-то шары и меняют свои
скорости.
Проф. Н. Н. Шиллер 1 в своем курсе „Основания физики"
поместил в § 51 статью об ударе свободных абсолютно твер-
дых тел, в которой приводит мысли, весьма схожие с воз-
зрениями Ф. и Н. Мацон.
Он рассматривает соударяющиеся тела „как одну систему
движущихся материальных точек" и прилагает к ним заклю-
чения, выведенные для движения одной системы. За одно из
таких заключений он принимает начало сохранения энергии
и, замечая, что „потенциальная энергия для твердых тел, не
действующих друг на друга во все время движения, равна
нулю", приходит к заключению о постоянстве кинетической
энергии, для вычисления которой „мы должны принимать во
внимание только скорости поступательных и вращательных
движений".
Из сказанного видно, что автор определяет абсолютно
твердое тело, как геометрическую систему, охарактеризирован-
ную условием неизменяемости2, а причину явления удара
1 Основания физики, часть I, Киев, 1884.
2 На стр. 345 автор говорит: „Если ударяющиеся материальные систе-
мы не обладают свойством абсолютно твердых тел, т. е. не представляются
неизменяемыми...
СТАТЬЯ ПЕРВАЯ
245
видит в мгновенном изменении возможных перемещений в тот
момент, когда тела приходят в соприкосновение.
Посмотрим, возможно ли для соударения таких систем
доказать теорему живых сил?
Обращаемся к обыкновенному доказательству ее \ осно-
ванному на замене в уравнении:
S* (й8х+й й4*)=8£Л (3)
в котором U — силовая функция, возможных перемещений Sx,
by, 8г,... действительными
at at at
и на интегрировании полученного уравнения
, Vi mv’
а '
dU .
~dt dt
G)
между пределами, соответствующими рассматриваемому про-
межутку времени.
Такая замена вполне законна для бесконечно малого вре-
мени т, в продолжение которого соударившиеся тела движутся
в соприкосновении, и, так как по предположению
то для всего времени т имеем:
y^mv2
const.
(5)
Но ведь скорости соударившихся тел, соответствующие
началу и концу их соприкосновения, при сделанной поста-
новке явления суть не те, которые тела имели до наступле-
ния соприкосновения и которые они получат после него; по-
этому формула (5) не выражает постоянства живой силы до и
после удара. Мы не можем, например, в случае прямого удара
двух неизменяемых шаров, рассматриваемого Ф. и Н. Мацон,
1 Jacobi, Vorlesungen uber Dynamik, S. 18.
246
ОБ УДАРЕ АБСОЛЮТНО ТВЕРДЫХ ТЕЛ
вообразить, что эти шары в момент наступления их сопри-
косновения имеют скорости v и v19 так как кинематически необ-
ходимо, чтобы они имели в этот момент равные скорости.
Мы думаем что все затруднение в исследовании явления
удара твердых тел, предложенного Ф. и Н. Мацон и проф.
Шиллером, состоит в том, что они не указывают возможности
перейти к этому явлению, как к предельному случаю некото-
рого непрерывно изменяющегося явления, между тем как такой
прием, на наш взгляд, есть единственный, с помощью кото-
рого вопрос об ударе может быть решен с полной ясностью.
Для случая удара геометрических систем такой путь был
указан Остроградским в его сочинении „Memoire sur la theorie
generale de la percussion"в котором мгновенное введение
новых условий, стесняющих точки движущейся системы, рас-
сматривается как предельный случай их постепенного введения.
Я изложу здесь в кратких словах вывод Остроградского
относительно живой силы, пользуясь ^обыкновенными пред-
ставлениями о возможных перемещениях.
Пусть в момент времени /0—т система стесняется новыми
условиями, которые зависят от времени таким образом, что
скорости точек системы в момент времени tQ — ~ им удовле"
творяют. Выражая х, у, z,... с помощью прежних и новых
условий системы через независимые координаты q9 qi9
найдем:
x=f(t, q, ?i>- • )
g = q, qt,. ..)
* = 'ИЛ <7i»- • •)
df й .df
ox = ~ oq 4-
v d41
я Я I
a-i d'[
bz = -4— ------
dq
(6)
(7)
1 Memoires de I’Academie Imp6riale des sciences de S.-Petersbourg, VI
serie, t. VIII, p. 269.
СТАТЬЯ ПЕРВАЯ
247
dx dt dt d±d_q> dq dt
dy
dt dt r dq dt 1
dz i \ dq ।
dt dt 1 dq dt
(8)
Формулы (6) и (7) показывают, что при данных 8<у, 8^,
8д2,. . . вариации 8х, by, 8z,.. . суть некоторые функции вре-
мени. Заметив это, умножаем формулу (3) на dt и интегри-
руем ее по частям между пределами t = /0 — 'с и t = t0. Найдем:
U \dt. (9)
Предположим теперь, что время т бесконечно мало, и допу
стим, что функции А ?, Ф,. •. обладают следующими свойства-
ми: в продолжение времени т их частные производные по
координатам <7, qu д29- • • изменяются бесконечно мало, а их
частные производные по времени* получают конечные прира-
щения. Разумеется, это последнее требует, чтобы вторые
производные
d2f
df2 ’
~dt2 9
д2ф
dt2 ’
получали при t = tQ беспредельно большие величины. Формулы
(7) показывают, что в сделанном предположении вариации 8х,
8z,... можно считать постоянными за время кроме того,
из формул (8) видно, что в выражение
* / V77™
Ч2Г2
не входят вторые производные по времени от функций /,
ф..., поэтому эта вариация в течение всего времени т будет
248
ОБ УДАРЕ АБСОЛЮТНО ТВЕРДЫХ ТЕЛ
менее некоторой величины A%q 4~ ^<71 • • • > где А> В, - • • —
постоянные конечные величины. Мы получим неравенство
to
tQ - т
yi mv2
^~2"
из которого видно, что вторую часть формулы (9) можно
отбросить. Отсюда следует, что
тп
(а — а) Ъх 4“ (6 — Ь) (с — с) 8z = 0, (10)
где а, А, с,. . . —скорости во время /0—т, а а, Ь', с ,. . . —ско-
рости во время /0; что касается 8%, Ъду 8z,. . ., то они могут
быть одинаково взяты как для времени так и для
времени /0-
Останавливаясь на последнем предположении относительно
возможных перемещений, заменяем в формулах (7) произволь-
ные вариации 8др од2>- . . на
&dt, ^dt, d-^dt,...
dt dt dt
и полагаем по формулам (8):
Ох — |
= 1
82 =
df d<? dty
dt9 dt 9 dt9'
берем для времени /0.
Подставляя в формулу (10), найдем:
тп / (аг — а) а 4~ (Ь' — b)b' (с7 — с) с' J —
= v m |(а' - а)^ + (6 - Ь) + (с - с) 1.
СТАТЬЯ ПЕРВАЯ
249
Подставляем сюда
, а1 . а'2 (а — а)2
т = 2 +т-----------2-----
и полагаем для сокращения:
Ф=^7и|(а— а)д^-\-(Ь — Ь’)д-^-}-(с — с') I. (11)
Получим формулу Остроградского для выражения поте-
рянной живой силы:
V а'2 Ч-62с2 а/24-6'‘24-с'2
т 2 т 2~
< + (12)
Если мы желаем произвести в движущейся системе мгновен-
ное введение новых условий, выраженных равенствами, неза-
висимыми от времени, то должны положить для времени f0:
df__d?____d&___ __п
di~ it “ dt -Oe
Вследствие этого получим Ф = 0, и формула (12) обра-
тится в теорему Карно, по которой потерянная живая сила
равна живой силе потерянных скоростей.
Если же производится мгновенное введение нового усло-
вия, выраженного неравенством и состоящего, например, в том,
что функция координат L не может быть менее с, то мы
сначала вводим условие L = 0(f), предполагая, что 0(f), умень-
шаясь, достигает в продолжение бесконечно малого времени т
своего наименьшего значения с. После этого можно сделать
два предположения: или система будет продолжать движение,
удовлетворяя .равенству L = c, или это условие устранится
тем же порядком, каким оно было введено, т. е. функция 6(f)
начнет возрастать, и по прошествии бесконечно малого вре-
мени т' система освободится от условия, причем ее координаты
будут удовлетворять неравенству L > с.
При таком устранении введенного условия произойдет
выигрыш живой силы, который, на основании вышеприведен-
ного анализа, будет равен живой силе приобретенных скоростей.
Но будет ли приобретенная живая сила равна потерянной?
Мы думаем, что для решения этого вопроса с точки зрения
250
ОБ УДАРЕ АБСОЛЮТНО ТВЕРДЫХ ТЕЛ
Остроградского недостаточно одного геометрического опре-
деления системы.
Кроме указанного пути, существует еще иной путь введения
новых условий, посредством которого получаем в пределе
мгновенное изменение скоростей точек системы, несмотря на
то, что во вводимые условия не входит время. Так как этот
путь iBcero ближе подходит к воззрениям Ф. и Н. Мацонов
и проф. - Шиллера, то мы скажем о нем несколько слов, не-
смотря на всю его оригинальность. Предполагаем, что в фор-
мулы (6), (7) и (8) не «входит t и что ^формулы (8) таковы,
что в момент введения новых условий, т. е. во время t0 — т,
они выражают скорости точек системы. Так как в пределе, по
прошествии бесконечно малого времени т, должны произойти
конечные изменения в скоростях точек системы, то производ-
df д? dty
ные . должны претерпевать за это;бесконечно
малое время конечные приращения. Вследствие этого мы уже
не можем считать при данных %q, ^qx,... возможные пере-
мещения постоянными за все бесконечно малое
время т и говорить о постоянстве направления мгновенной
силы давления.
Уравнение (10) в этом случае не имеет места, но зато
справедливость теоремы живых сил будет вне сомнения.
Разъясним это примером. Положим, что материальная
точка, движущаяся по инерции, встречает под ^прямым углом
к своей траектории неподвижную стену. Допускаем, что
в стене сделана полусферическая выемка и что материальная
точка попадает как раз на край этой выемки. Имея скорость,
направленную по касательной к поверхности сферической
выемки, материальная точка пробежит по окружности ее боль-
шого круга, плоскость которого перпендикулярна к плоскости
стены, и отразится от стены с той же скоростью, с какой
пришла, по пути, параллельному прежнему и отстоящему от него
на диаметр выемки. Переходя к предельному случаю, при кото-
ром диаметр выемки устремляется к нулю, будем иметь отра-
жение материальной точки от абсолютно твердой стены.
Расширяя эту мысль и воображая, так сказать, что поверх-
ности соударяющихся тел выражаются функциями, не имеющими
СТАТЬЯ ПЕРВАЯ
251
производных по координатам, мы могли бы, быть может,
получить геометрические неизменяемые системы, соударя-
ющиеся с соблюдением закона сохранения энергии. Но едва ли
такие тела представляют то отвлечение от действительных
тел природы, которое следует называть твердым телом. Для
нас это тело представляется предельным случаем консерва-
тивной динамической системы, подверженной действию взаимных
сил, оказывающих беспредельно большие сопротивления изме-
нению расстояний между точками системы. Короче, мы думаем
вместе с Бернулли х, что за твердое тело следует считать
предел упругого тела. Но об этом будет удобнее поговорить
после* разбора воззрений Гаригу-Лагранж.
Прочитанное нами сочинение Гаригу-Лагранж 1 2, служит
вступлением к его подробной работе и написано без матема-
тического развития; но помещенного в нем достаточно, чтобы
сделать суждение о странных воззрениях автора.
Основанием этих воззрений служит особое представление
о влиянии точки системы, которая должна бы иметь скорость
или ускорение, несогласные с условиями системы. Такие ско-
рость или ускорение автор называет „vitesse ou acceleration
acquise virtuelle“. Они представляют, собственно, не скорость
или ускорение, а стремление точки получить скорость или
ускорение. Если, например, имеем собрание бесконечного
множества бесконечно близких материальных точек, из которых
одна точка А имеет скорость, а все остальные покоятся,
и предположим, что все эти точки сразу соединены бесконечно
малыми неизменяемыми прямыми в неизменяемую систему, то
точка А будет иметь „vitesse acquise virtuelle“. По мнению
автора 3, образовавшаяся неизменяемая система будет оста-
ваться некоторое время в покое, точка же А будет взаимо-
действовать с ближайшими точками системы и сообщать им
„acceleration acquise virtuelie", вследствие которого эти точки
придут во взаимодействие с последующими точками, и так далее-
1 Jean Bernoulli, Discours sur les lois de la communication du mou-
vement. См. у Мацон, § 25.
2 Observations sur le mouvement et le choc des systemes invariables,
Paris 1883.
3 Idem, p. 17.
252
ОБ УДАРЕ АБСОЛЮТНО ТВЕРДЫХ ТЕЛ
По прошествии некоторого времени все точки системы получат
некоторые скорости, согласные с условием ее неизменяемости,
и тогда она придет в движение.
Обращаясь к удару двух неизменяемых тел М и М'. автор
замечает, что частицы тел, встретившиеся в точке соприкоснове-
ния будут иметь „vitesse acquise virtuelie"; вследствие этого они
будут действовать друг на друга и получать „acceleration
acquise virtuelle", которое, передаваясь от одной точки к другой,
может сообщиться твердым телам М и М' только по проше-
ствии времени t и когда все точки этих тел получат уско-
рения, согласные с условием их неизменяемости.
Называя время соприкосновения тел через Г, автор заключает
отсюда, что вся скорость, сообщенная ударом, передается
первому телу только по прошествии времени Т 4"1 от начала
удара, а второму телу — по прошествии времени Т 4-t'.
Переходя к вопросу о живой силе, автор указывает, что
по его теории сохранение ее требует выполнения некоторых
условий, между которыми он упоминает равенство масс и условие
центрального удара. Всем положенным им условиям удовле-
творяют шары равных масс и радиусов, которые, по его мнению,
соударяются всегда с сохранением живой силы.
При чтении сочинения Гаригу-Лагранж мы никак не могли
уразуметь, почему он относит свои рассуждения к неизме-
няемой системе? Ему приходится вводить читателя в фанта-
стическую область его „vitesse virtuelle" собственно потому, что
он толкует о неизменяемой системе, а хочет получить резуль-
таты, согласные с теми, какие мы замечаем в физических телах,
в которых передача всему телу количества движения, сообщен-
ного одной материальной точке, требует известного времени-
Нам кажется, что результаты, найденные Гаригу-Лагранж
для удара неизменяемых систем, представляют искажение
теории удара упругих тел, которая для призматических и цилин-
дрических тел была развита Коши 1 и Пуассоном 2 и закончена
в превосходных исследованиях Сен-Венана3.
1 Cauchy, Bulletin de seances de la Societe Philomathique, Decembre
1828, p. 180.
2 Poisson, Traite de Mecanique. 2-e edition, § 499 — 505.
3 Saint-Venant, „Journal de Mathematiques pures et appliquees“, 1867.
СТАТЬЯ ПЕРВАЯ
253
Мы думаем, что в распространении этой теории на случай
упругих тел произвольного вида для предельного случая, когда
модули упругости становятся бесконечно велики, заключается
истинный путь исследования удара твердых тел. Такое иссле-
дование, к сожалению, не сделано еще даже и для удара шаров.
Припомним, оканчивая нашу заметку, что по теории Сен-
Венана при одинаковом сечении и плотности призмы должны
иметь равные длины, чтобы они двигались после удара, как
твердые тела. Если же одна из призм длиннее, то часть ее
кинетической энергии будет заключена в колебательном дви-
жении, и это будет иметь место и при бесконечно большом
модуле упругости.
Таким образом нельзя утверждать заранее, что после удара
твердых тел так, как мы их понимаем, вся кинетическая энер-
гия будет заключена в движении тел по закону неизменяемых
систем.
Работа „Об ударе абсолютно твердых тел" (статья первая, 1884 г.)
была сообщена автором 20 апреля 1881 г. в заседании физико-математи-
ческой комиссии Отделения физических наук Общества любителей естество-
знания, антропологии и этнографии и напечатана в 1884 г в „Журнале
Русского физико-химического общества", т. XVI, вып. 7. Вторично статья
была напечатана в Сочинениях Н. Е. Жуковского, т. I, 1912, стр. 362—375.
Прим, ред.
ОБ УДАРЕ АБСОЛЮТНО ТВЕРДЫХ ТЕЛ
(Статья вторая)
(1885 г,)
В первом выпуске журнала Русского физико-химического
общества за 1885 г. проф. Н. Н. Шиллер приводит два под-
тверждения своего мнения о возможности доказательства со-
хранения кинетической энергии при соударении абсолютно
твердых тел, исходя только из геометрического условия их
неизменяемости. Первое опирается на допущение в мгновен-
ных условиях, вводимых по способу Остроградского, такой
зависимости от времени, при которой в конце удара полу-
чается прежняя живая сила; второе же заключается в прямом
доказательстве постоянства энергии при ударе геометрических
систем.
Соглашаясь с проф. Шиллером, что возможно в моих
уравнениях
*=7 (/, q, qi, . . .),
У ==?(*> <b <h> •)»
(1)
df dv df дъ'
дать производным , .. . , соответствую-
щим началу и концу удара \ такие значения, при которых
живая сила не изменяется, я не вижу, откуда следует необхо-
димость такого допущения. Рассматривая мгновенное введение
условий, выраженных равенствами, и написав формулу:
1 Я буду приписывать значок (7) величинам, соответствующим концу
удара, и писать без значка величины, соответствующие началу удара.
СТАТЬЯ ВТОРАЯ
255
у V m (а2 + &2 + с2) — V т (а'2_j_ £>'2 + с'2) =
=4 m [(а' “о)2+(6'_ 6)2+(с' ~с)2]+ф’
т V* Г/ ,\df' । /г , , / ,ч д'Ь''
ф:=2^т[(а — а )-^- + (6 — Ь) +(с — с)-^-
я полагаю в ней
df df df
dt — dt ~ dt ~ ” ~~ ’
(2)
потому что под конец удара х, у, z,... должны выразиться
через координаты q, qX9 . . . с помощью функций, не содер-
жащих время явно.
В формуле же проф. Шиллера
1 Vm(a'2 + 6^ + c'2)_^^ni{a2+62 + c2) =
(3)
относящейся к удару систем, освобождающихся под конец
удара от введенных условий, производные
V А
dt ’ dt*
.. стес-
нены только тем условием, что скорости, определяемые из
формул
dx d^L i.AL
dt dt 1 dg dt dqr dt
dy = d? । i_ d'-o All
dt dt ' dq dt "I r ^<71 dt
(4)
должны соответствовать действительным скоростям точек си-
стемы при начале и при конце удара.
Если мы стесним эти производные добавочным условием
(5)
256
ОВ УДАРЕ АБСОЛЮТНО ТВЕРДЫХ ТЕЛ
то получим сохранение живой силы. Но откуда следует обя-
зательность этого условия?
Проф. Шиллер принимает не условие (5), а полагает:
df df dv dv'
~dt ot dt dt
(6)
и думает даже, что при ударе абсолютно неизменяемых систем
надо все время считать частные производные по времени от
функций /, • • равными нулю. Нетрудно показать, что по-
добные допущения разрушают весь метод постепенного вве-
дения новых условий, который в том и состоит, что удар
о dv df
производится быстрым изменением функции . (при
этом можно всегда выбрать за переменные q9 ql9 ... величины,
производные которых весьма мало изменяются за время удара).
Действительно, если с помощью уравнений (4) составим
живую силу системы
то найдем, что она представится функцией второй степени от
dq d4\
производных
., которые для сокращения будем
обозначать через q, ql9 ... С помощью этой функции напи-
шем диференциальные уравнения движения нашей системы
в форме Лагранжа:
d fdT\ ОТ . ~ *
dt\dq) dq
±(дТ\==дТ__у_0
dt\dqj dqr
...............)
(7)
где Q, Qt, . . . суть коэфициенты при Qq9 bqi9 ... в выражении
элементарной работы действующих сил, которая произойдет,
если, не изменяя /, изменим q9 qi9 ... на • • •
Умножаем формулы (7) на dt и интегрируем их, распро-
страняя интеграцию на бесконечно малое время удара. Так
СТАТЬЯ ВТОРАЯ
257
d'2f d2s
как во вторые части этих формул не входят , && , • .,
то они в течение всего времени удара будут оставаться менее
некоторых конечных величин, поэтому интегралы, взятые от
них, будут бесконечно малы. Мы получим уравнения:
dq / dq '
дТ_\
dqj дЧ1 ’
(8)
Таких линейных уравнений между q'9 q\9 ... и <?, qX9 ...
будет столько, сколько независимых переменных 9, q19 . .
Если явные производные по времени от функций /,?,... удо-
влетворяют уравнениям (6), то коэфициенты при qf 9 q\, ...
в первых частях уравнений (8) будут бесконечно мало отли-
чаться от коэфициентов при q9 q19 . . во вторых частях,
т. е. сами величины q'9 q\9 . . и q9 ql9 . . . будут бесконечно
мало отличаться друг от друга. Обращаясь затем к форму-
лам (4), найдем по уравнениям (6), что скорости точек системы
получили бесконечно малое изменение за время удара, т. е.
никакого удара не произошло.
Перехожу к доказательству принципа сохранения энергии
при ударе геометрических систем, данному проф. Шиллером.
Оно основывается на равенстве
— S 771 — а) + (Ьг—Ь) Ъу + (с — с) +
+ АЛ D2f.2 + . .. = 0, (9)
в котором Sx, <>у9 Bz, ... — совершенно произвольные переме-
щения, а
Л<0, /2<.о,... (10)
суть линейные условия, стесняющие возможные перемещения
точек системы в момент удара. Замечая, что действительные
перемещения dx9 dy9 dz9 . . точек системы, отнесенные к мо-
Зак. 2355. — Н. Е. Жуковский. Т. I.
17
258
ОБ УДАРЕ АБСОЛЮТНО ТВЕРДЫХ ТЕЛ
менту удара, обращают условия (10) в равенства \ проф. Шил-
лер приписывает им значения
dx==^^L dt, dy = ±±^dt, dz = ^~-dt (11)
и заменяет в формуле (9) произвольные вариации 6х, Ъу, &г, . ..
на dx, dy, dz, • • • Это дает желаемое сохранение кинетиче-
ской энергии:
4-У пг(а'1 2-Ь6/2Н-с'2)—^-У тп(тп2 4-62 + с2) = 0.
А £
К сожалению, в этом весьма простом выводе недостает
доказательства формул (11).
Ссылка на Natural Philosophy, которую делает автор, не
может, по моему мнению, служить доказательством этих фор-
мул, так как в § 308 Томсон и Тет доказывают только, что
работа мгновенной силы Р не зависит от изменения этой
силы во время удара, и не делают подобного заключения
о пройденном пути. Привожу формулы этого параграфа:
(12)
Здесь i есть импульс силы от начала удара до времени т;
/—импульс силы за все время удара Т\ U, v, V—скорости
в начале удара, во время т и во время 7\ М—масса тела.
1 Если положим, что во время удара геометрические условия системы
бесконечно мало нарушаются и восстанавливаются в конце удара, то также
найдем, что действительные перемещения обратят условия (10) в равенства.
СТАТЬЯ ВТОРАЯ
259
Умножая скорость v на Pd~ и беря интеграл, распростра-
ненный на все время удара, Томсон и Тет определяют работу
w за время удара:
т 1
о о
=“+т5=4(и+,/)/-
(13)
Если бы мы желали определить подобным же образом
пройденный путь, то должны бы были умножить v на с/т и
взять интеграл от 0 до Т. Это дало бы нам:
Т т I
= = (14)
О 0 0
Так как интеграл во второй части не может быть взят
если неизвестна величина i в функции т или величина Р
в функции /, то вопрос об определении пройденного пути
остается неопределенным.
А между тем проф. Шиллер полагает, что формулы (11)
имеют место „для всякого закона изменения скоростей,
лишь бы это последнее совершалось в течение бесконечно
малого промежутка времени". На мой взгляд, формулы (11)
верны до бесконечно малых величин третьего порядка, пока
скорость изменяется непрерывно, и теряют значение, когда
в течение рассматриваемого бесконечно малого промежутка
скорость изменяется скачком. Действительно, положив x=F(t)
можем представить первую формулу (11) в виде
F(/+ dt) — F(t) = F (*+<&) + F'(f)
где F' — первая производная, и убедиться, разлагая по Тей-
лору, что формула верна до бесконечно малых членов треть-
его порядка. Но можно ли пользоваться этой формулой,, когда
F" (f), F'" (/), ... устремляются к бесконечности? Если в фор-
17-
260
ОБ УДАРЕ АБСОЛЮТНО ТВЕРДЫХ ТЕЛ
муле (14) будем считать мгновенную силу Р постоянной, то
найдем:
(15)
о
так что в этом предположении заключение проф. Шиллера
верно.
Вторая статья „Об ударе абсолютно твердых тел* была сообщена авто-
ром 8 февраля 1885 г. в заседании физико-математической комиссии Отде-
ления физических наук Общества любителей естествознания, антропологии
и этнографии и опубликована в 1885 г. в журнале Русского физико-химиче-
ского общества, т. XVII, вып. 3. Вторично статья была напечатана в Сочи*
нениях Н. Е. Жуковского, т. I, 1912, стр. 376—382. Прим. ред.
ON THE IMPACT OF PERFECTLY RIGID BODIES
Paper 1
This paper is devoted to a critical discussion of views
expressed by F. and N. Matzon, by Prof. N. N. Schiller, and
by Garrigou-Lagrange, with regard to the phenomenon of impact
of rigid bodies. According to the former two of the authors
named, at the impact of „perfectly rigid bodies" the kinetic
energy is not altered, while the latter author maintains the
opinion that such is the case only when the impact is central.
Prof. Joukovsky points out the difficulty encountered in dedu-
cing the proof of the conservation of the kinetic energy when,
according to F. and N- Matzon and N. N. Schiller, the rigid
body is considered as a geometrical system characterized by the
condition of invariability, and the impact is regarded as due
to an instanteneous change in possible displacements at the
moment of the first contact of the bodies. The difficulty is
due to the fact that both authors named fail to indicate the
possibility to proceed to the phenomenon of impact of rigid
bodies as to the limiting case of a continuously variable pheno-
menon. This last point of view, due to Ostrogradsky and deve-
loped in his memoir „Sur la theorie generale de la percussion
des corps", is the one adopted by Prof. Joukovsky. But from
the equation of the kinetic energy of the impact deduced by
Ostrogradsky it does not follow the necessity of the conserva-
tion of kinetic energy.
Paper 2
In this paper, as in the preceding one, Prof. Joukovsky
raises objection to the opinion set forth by N. N. Schiller as
to the possibility of proving the conservation of the kinetic
energy during the impact of perfectly rigid bodies, based only
262
SUMMARY
on the geometrical condition of their invariability. One of the
proofs of this proposition advanced by N. N. Schiller is based
on formulae (3), where /, ?,• • • are the coordinates of points
of the system, expressed by formulae (1). Prof. Joukovsky
shows that conditions (6), based on which equations (3) are led
to the theorem stated by N. N. Schiller, are in contradiction
with the very method of deducing equations (3).
The objection raised against another proof is that the
application of formulae (11) to equation (9) is not sufficiently
justified.
ЗАМЕЧАНИЕ ПО ПОВОДУ СТАТЬИ Б. К. МЛ0ДЗЕЕВСК0Г0 1
(1886 г.)
Теорема Б. К. Млодзеевского о том, что при действии
центральной силы по закону Ньютона огибающая траекторий,
пересекающихся в одной точке, в которой скорости одинако-
вые, есть коническое сечение, имеющее эту точку и центр
силы фокусами, может быть доказана геометрически. Для
этого обратим внимание на то, что все упомянутые траекто-
рии должны иметь одинаковую фокальную полуось а. Исклю-
чив sin2 И из формул (7) и (9), получим:
1— е2
2 —Л
Подставляя сюда
найдем по сокращении:
1 2 —Л
а и
где вторая часть постоянна для всех рассматриваемых траек-
торий.
Далее обращаемся к замечанию Якоби, что два бесконечно
близкие эллипса с равной фокальной полуосью и общим фо-
кусом имеют точки пересечения, лежащие на хорде, прохо-
дящей через второй фокус. Действительно, пусть (фиг. 1)
требуется построить эллипс по фокусу О, полуоси а и двум
его точкам А и В. Для этого надо из А и В провести дуги
радиусами 2а — О А, 2а — О В и найти точки F и Р их пере-
сечения, из которых каждая может быть принята за другой
1 См. примечание редакции на стр. 265. Прим. ред.
264 ЗАМЕЧАНИЕ ПО ПОВОДУ СТАТЬИ Б. К. МЛОДЗЕЕВСКОГО
фокус эллипса. Таким образом мы получим два эллипса, удо-
влетворяющие задаче; но оба они сделаются бесконечно
близки, когда точка В подойдет бесконечно близко к точке Т,
лежащей на хорде АТ, проходящей через F. Это доказывает
желаемое. Замечание Якоби, как легко видеть, распростра-
няется и на гиперболы. При этом или обе точки пересечения
бесконечно близких гипербол лежат на ветви, обращенной
выпуклостью к общему фокусу О, или одна лежит на этой
ветви, а другая — на ветви, обращенной к О вогнутостью.
Переходим к самому доказательству теоремы Б. К. Млодзеев-
ского. Пусть (фиг. 1) Т будет точка огибающей. Проведем
через нее касательную CD к огибающей, которая будет также
касательной к соответственным бесконечно близким между
собой траекториям. Точки пересечения этих траекторий будут
А и Т, поэтому их другой фокус F должен лежать на хорде
А Т. Так как в случае эллиптических траекторий
АОГС= ^FTD,
ЗАМЕЧАНИЕ ПО ПОВОДУ СТАТЬИ Б. К. МЛОДЗЕЕВСКОГО 265
а в случае гиперболических
LOTC= /_FTC,
то в первом случае огибающая будет эллипс, имеющий точки О
и А фокусами, а во втором — эллипс или гипербола с теми же
фокусами.
В случае притягательной силы гиперболические траектории
обращены к О вогнутостью, и так как на них должна нахо-
диться точка А, то на них не может находиться точка Т;
она будет лежать на вторых ветвях, которые обогнут эллипс,
потому что фокус F будет на продолжении АТ со стороны Т,
Если же сила отталкивающая, то траектории будут гипер-
болы, обращенные к О выпуклостью, и потому точка Т будет
лежать на них до тех пор, пока AF будет их пересекать;
когда же это перестанет иметь место, то Т перейдет на дру-
гие ветви гипербол. Фокус F будет сначала лежать между Т
и Л, а потом перейдет по линии ТА за Л; касательная же
СТ будет между ОТ и АТ, так что огибающей явится
гипербола.
Чертеж (фиг. 1), приложенный к этой заметке, взят из статьи
Б. К. Млодзеевского „Об огибающей орбит при ньютонианском притя-
жении" („Математический сборник", т. XIII, М. 1896), на которую ссылается
Н. Е. Жуковский.
На этом чертеже О обозначает центр притяжения, А —* точку плоскости,
из которой выходят по различным направлениям с определенной одной
и той же скоростью v материальные точки; линия ОА принята за поляр-
ную ось; ОА ~ и; г, — полярные координаты движущейся точки, е — экс-
центриситет ее траектории, р — параметр, а — фокальная полуось, а ее
полярный угол, & — угол между скоростью v и полярной осью. Из уравне-
ния траектории
’ г =------2------- (1)
1 — е cos (<р — а)
имеем:
р = и (1 — е cos а), (2)
о 1- ecosa
tg» =------------. (4)
е sin а
266 ЗАМЕЧАНИЕ ПО ПОВОДУ СТАТЬИ Б. К. МЛОДЗЕЕВСКОГО
Теория движения материальной точки под действием ньютонианской
силы дает нам уравнение
с = uv sin (5)
выражающее закон сохранения площадей, и выражение постоянной р нью-
тонианского притяжения через с и р:
Подставляя в последнее р и с из (2) и (5), имеем
uv- sin2 $
ч -------------
1 — е cos а
uv- ,
или, полагая -----= А,
Р-
1 — е cos а = h sin2 (а)
Затем из уравнения (4)
е sin а — h sin 0 cos 0. (b)
Из уравнений (а), (Ь), (2) находим:
е2 = 1 — (2 —Л) Л sin2 Я (7)
и
p — uh sin2 (9)
На эти уравнения (7) и (9), данные в статье Б. К. Млодзеевского, и
ссылается Н. Е. Жуковский. Прим. ред.
Статья „Замечание по поводу статьи Б. К. Млодзеевского" была доло-
жена автором 28 ноября 1886 г в заседании физико-математической ко-
миссии Отделения физических наук Общества любителей естествознания,
антропологии и этнографии и напечатана в „Математическом сборнике44,
тем XIII, 1886. Прим. ред.
SOME NOTES CONCERNING THE PAPER BY
B. R. MLODSIEVSKY
In this note N. E. Joukovsky gives a very simple geome-
trical proof of the Mlodsievsky theorem, which states that in
the case when the central force is acting according to Newton
law the envelope of the trajectories intersecting in a point
where the velocities are equal is a conical section having this
point and the force centre as its foci.
UBER DEN MITTELWERT DES KINETISCHEN POTENTIALS
(1888)
In seiner hochst interessanten Abhandlung „Uber die phy-
sikalische Bedeutung des Prinzips der kleinsten Wirkung“ 1
nennt Herr Professor Helmholtz das Zeitintegral
t
0
wo Z7 und L die potentieHe Energie des Systems und die le-
bendige Kraft desselben bezeichnen, „den Mittelwert des ki-
netischen Potentials" und stellt folgendes Prinzip auf: „Der fur
gleiche Zeitelemente berechnete Mittelwert des kinetischen Po-
tentials ist auf dem wirklichen Wege des Systems ein Minimum
in Vergleich mit alien anderen benachbarten Wegen, die in
gleicher Zeit aus der Anfangslage in die Endlage fuhren". Nach
meiner Ansicht ist der Mittelwert des kinetischen Potentials im
vorliegenden Faile nicht ein Minimum, sondern ein Maximum.
Das kann auf folgende Weise bewiesen werden. Wollen wir
uns, der Einfachheit halber, nur mit dem Fall eines materiel-
len Punktes beschaftigen (mit zwei oder drei Graden von Frei-
heit) und seine wirkliche Bewegung auf dem Wege abc (Fig. 1)
vergleichen mit der anderen, gedachten, kinematisch mogli-
chen Bewegung, die zu derselben Zeit auf dem Wege ahc vor
sich geht.
Nehmen wir auf dem Wege ahc einen Punkt e an und
suchen wir eine solche wirkliche Bewegung unseres materiel-
len Punktes, bei welcher er auf dem Wege ae von a nach e
gelangt zu derselben Zeit wie bei der gedachten Bewegung auf
dem Wege ahe. Wenn wir den Punkt e allmahlig von a nach c
1 „Journal fiir die reine und angewandte Mathematik“, B. 100, H. 2, 1886.
Ober den mittelwert des kinetischen potentials 269
verriicken, so wird der Weg ae sich vom unendlich kleinen
Wege bis zum Wege abc verandern. Nehmen wir an, dass der
materielle Punkt in der unendlich kleinen Zeit dt in der ge-
dachten Bewegung von e nach g und in der wirklichen
f nach g gelangt. Da
Bewegung auf dem Wege ag von
die wirklichen Bewegungen auf den
Wegen af und ae gleichzeitig sind, so
haben wir zu Folge des Hamilton’schen
Prinzips:
a e af
J (F—L)dt — j* (F—L)dt =
= — mv cos a dz,
wo тп die Masse des materiellen Punktes
ist, seine Geschwindigkeit im Punkte /,
dz die unendlich kleine Linie ef und a der
Fig. 1.
Winkel gfe.
Wenn wir fg — ds und eg = dl setzen, so folgt aus dem
unendlich kleinen Dreiecke efg, dass
dl2 = ds2 -j- dz2 — 2ds dz cos a.
Hieraus ergiebt sich die Ungleichung:
m
2
dt — m^y-dz cos a,
dt
welche, auf Grund der oben erwahnten Formel in
ae af
1 ( Л ? (£P'+ f f <F-L) Л
iibergeht.
Fiigen wir zu beiden Teilen dieser Ungleichung Fgdt hinzu,
wo Fg die potentielle Energie im Punkte g ist, und geben ihr
folgende Form:
af
J (F-L)J/ +
ml ds \
dt —
ae
270 OBER DEN MITTELWERT DES KINETISCHEN POTENTIALS
oder
ag ae
J (F-L)dt- f (F-L)di>^Fe—^^j2jdt.
Bilden wir die Summe solcher fiir alle Elemente dt der ge-
dachten Bewegung genommenen Ungleichungen:
abc ahc
J (F— L)dt> $ (F—L)dt.
Nachdem wir beide Teile dieser Ungleichung durch die
Zeit /, wahrend welcher die vorliegenden Bewegungen auf den
Wegen abc und ahc vor sich gehen, dividiert haben, erkennen
wir, dass der Mittelwert des kinetischen Potentials der wirk-
lichen Bewegung grosser ist als der Mittelwert des kinetischen
Potentials der gedachten Bewegung.
Dieser Beweis kann leicht auf jedes System materieller Punkte
ausgedehnt werden.
Die Richtigkeit meiner Behauptung kann auch durch Bei-
spiele bestatigt werden. Stellen wir uns einen materiellen Punkt
vor, welcher mit der Geschwindigkeit unter einem Winkel 9
zu der horizontalen Ebene geworfen wird und sich parabolisch
bewegt unter der Wirkung seiner Schwere, und vergleichen wir
seine Bewegung mit der gleichformigen Bewegung, die auf der
Geraden, welche die Schnittpunkte der Parabel und der hori-
zontalen Flache verbindet, zu derselben Zeit vor sich geht,
so ergiebt sich der Mittelwert des kinetischen Potentials fur
die geradlinige Bewegung
musin'2
Z7WO'2
2
welcher offenbar kleiner ist, als der Mittelwert des kineti-
schen Potentials
2 0*0
— mv(~ sm-
2
fiir die parabolische Bewegung.
Работа .Ober den Mittelwert des kinetischen Potentials0 напечатана
впервые в „Записках математического отделения Новороссийского обще-
ства естествоиспытателей0, т. VIII, 1888. Прим. ред.
1004
О СРЕДНЕМ ЗНАЧЕНИИ КИНЕТИЧЕСКОГО ПОТЕНЦИАЛА
(1888 г.)
В своей очень интересной статье: „О физическом значе-
нии принципа наименьшего действия" 1 проф. Гельмгольц
называет взятый по времени интеграл
t
у J
О
где F и L означают потенциальную энергию системы и ее
живую силу, „средним значением кинетического потенциала"
и устанавливает следующий принцип: „Сред-
нее значение кинетического потенциала на
действительном пути системы есть минимум
сравнительно со значениями его на других
близких путях, которые приводят систему
в то же время из того же начального в то
же конечное положение". По моему мнению,
среднее значение кинетического потенциала
в этом случае имеет не минимум, а максимум.
Это можно доказать следующим образом.
Займемся для простоты случаем одной толь-
ко материальной точки (с двумя или тремя степенями свободы)
и сравним ее действительное движение по пути аЬс (фиг. 1),
с другим воображаемым, кинематически возможным, которое
происходит по пути ahc за то же время.
Возьмем на пути ahc какую-нибудь точку е и определим
такое действительное движение нашей материальной точки,
при котором она по пути ае приходит из а в е в то же время,
как при воображаемом движении по пути ahe. Если точку е
1 „Journal fur die reine und angewandte Mathematik", B. 100, H. 2, 1886.
272 О СРЕДНЕМ ЗНАЧЕНИИ КИНЕТИЧЕСКОГО ПОТЕНЦИАЛА
мы будем постепенно перемещать от а к с, то путь ае будет
изменяться, начиная с бесконечно малого пути и кончая пу-
тем abc. Предположим, что материальная точка за бесконечно
малый промежуток времени dt переходит в воображаемом
движении из е в g, а в действительном движении по пути ag
из / в g. Так как действительные движения по путям af и
ае происходят за один и тот же промежуток времени, то на
основании принципа Гамильтона
ае af
(F— L)dt — J* (F— L)dt = — mv cos a cfa,
где m — масса материальной точки, v — ее скорость в точке f
dz—бесконечно малая линия ef и a — угол gfe.
Полагая fg~ds и eg — dl, из бесконечно малого треуголь-
ника efg имеем:
dP — ds1 && — ‘Zds dz cos a.
Отсюда получается неравенство
тп I dl\2 j mi ds V2 ds ,
2 Ы Z> 2 Ш
которое, на основании вышенаписанной формулы, переходит в
ае af
т ( dl\P . т (ds\2 . Г /г _. _ Г , Т ч ,
2\Л / d >2\dt) + J (f—Qdt-J (F—L)dt.
Прибавим к обеим частям этого неравенства Fgdt, где Fg
означает потенциальную энергию в точке g, и дадим ему та-
кой вид:
at
ае
- f (F-L)dl> A
или
ад ае
f {F-L)dl- [ (F-L)dl> ffib.
1 904
О СРЕДНЕМ ЗНАЧЕНИИ КИНЕТИЧЕСКОГО ПОТЕНЦИАЛА 273
Сложим такие неравенства для всех элементов dt вообра-
жаемого движения:
abc
ahc
Разделив обе части этого неравенства на время /, в тече-
ние которого происходит движение по путям abc и ahc, най-
дем, что среднее значение кинетического потенциала в дей-
ствительном движении будет больше среднего значения его
в воображаемом движении.
Это доказательство легко может быть распространено на
любую систему материальных точек.
Справедливость моего положения можно проверить и на
примерах. Е>ообразим материальную точку, брошенную со ско-
ростью vQ под углом © к горизонту и движущуюся по пара-
боле под действием силы тяжести, и сравним ее движение
с равномерным движением, которое происходит за то же время
по прямой линии, соединяющей точки пересечения параболы
с горизонтальной плоскостью; мы получим среднее значение
кинетического потенциала для прямолинейного движения;
1 Q . , mv02
rmtf sin- ®----£ -,
которое, очевидно, меньше, чем среднее значение кинети-
ческого потенциала
2 о о mvQ2
mv0- sm- ?----’
для параболического движения.
Эта статья представляет собой русский перевод предыдущей статьи
„Uber den Mittelwert des kinetischen Potentials", выполненный для насто-
ящего издания проф. А П. Котельниковым. Прим. ред.
Зак 2365. — Н. Е. Жуковский. Т. I.
18
ON THE MEAN VALUE OF KINETIC POTENTIAL
Prof. Joukovsky shows that the mean value of the kinetic
potential for a real motion is not a minimum as it was main-
tained by Helmholtz but a maximum. In giving a geometrical
proof of this proposition Prof. Joukovsky makes use of the
method applied in the article „On the Principle of Least Action".
ЭЛЕМЕНТАРНАЯ ТЕОРИЯ ГИРОСКОПОВ
(1888 ij
Z
§ 1. Все интересные движения, представляемые гироско-
пами различных систем, объясняются с помощью одной тео-
ремы, которая может быть выведена элементарно, опираясь
на сведения по механике, даваемые в кур-
сах реальных училищ.
Пусть (фиг. 1) плоскость вращается рав-
номерно с угловой скоростью <о около оси
ZZ и в этой плоскости движется некото-
рая материальная точка М под действием
силы Р, лежащей на плоскости А. Для того
чтобы плоскость могла вращаться равномер-
но, мы должны приложить к точке М силу
N , равную и противоположную нормаль-
ному давлению N, производимому на плос-
кость А движущейся по ней материальной
точкой М. Предположим, что такая сила N'
действительно приложена и постараемся оп-
ределить ее величину.
Относительное движение точки М в
плоскости А совершается так, как будто
бы эта материальная точка, кроме силы Р,
была подвержена еще центробежной силе Q,
вестно, направлена по продолжению перпендикуляра ВМ9
опущенного из М на ось ZZ', и выражается формулой
Q — т^у,
где т есть масса материальной точки, а у = ВМ. Предполо-
жим, что в бесконечно малое время т материальная точка про-
ходит элементарный путь ММ —= а, направление которого об-
18:!:
Фиг. 1.
которая, как из
276
ЭЛЕМЕНТАРНАЯ ТЕОРИЯ ГИРОСКОПОВ
§ 2
разует с осью ZZr угол а, и напишем теорему живых сил для
относительного движения ее:
раб.
о । о . nw'2
г ms^y? sm а = - ~
mv2
~2 ’
где v и v' суть скорости относительного движения в М и Мг.
Кроме этого, напишем теорему живых сил для абсолютного
движения нашей материальной точки, которое совершается
только под действием сил Р и N':
| v'2 -f- ш2 (у з sin а)2
L
раб. P+7VZ^ = —
Вычитая из этого равенства
предыдущее, разделяя на &у~
и отбрасывая бесконечно малый
член, получаем:
Nf—mw2 j sin а = тиоУ2-sin я,
т *
откуда следует, что
N' — 2mwu sin а. (1)
Если бы мы предположили,
что материальная точка дви-
гается от М' к М, то нашли бы
во второй части формулы (1)
знак (—). Это показывает,
что сила давления движущейся
материальной точки на плос-
кость А совершается в сторону,
противоположную вращению
этой плоскости, когда матери-
альная точка удаляется от оси
ZZ’\ и в сторону вращения плос-
кости Л, если материальная точка приближается к оси ZZ'.
§ 2. Вообразим (фиг. 2), что в плоскости YOZ лежит
бесконечно тонкий материальный диск, вращающийся с весьма
большой угловой скоростью 2 около оси XX, проходящей
через центр диска О и перпендикулярной его плоскости,
§ 2 ЭЛЕМЕНТАРНАЯ ТЕОРИЯ ГИРОСКОПОВ 277
и допустим, что эта ось в свою очередь приведена во вра-
щательное движение около перпендикулярной ей оси ZZ' с угло-
вой скоростью
Каждая частица диска будет при этом давить на плоскость
Y OZ силой 7V, определяемой по формуле (1). Проведем из
точки О ось YY\ перпендикулярную к осям XX' и ZZ\ и
возьмем относительно нее две симметричные частицы диска
М и М'. Называя через г расстояния этих частиц от центра О
и через а — угол MOY, найдем по формуле (1) для силы
оказываемого ими давления величину
N =‘2ms»Qr sin <х.
При этом давление частицы М будет направлено в сторону
вращения <о, а давление частицы 71/' — в обратную сторону. Эти
две силы давления образуют пару (7VP 7V), момент которой
будет:
2mг sin a ММ' — 4ma>2r2 sin2 а.
Пара эта стремится повернуть диск около оси YY' так,
чтобы ось вращения 2 приблизилась к оси вращения (оси
мы считаем направленными в ту сторону, глядя из которой,
вращение совершается по солнцу). Такие же пары будут полу-
чаться для симметричных точек, взятых на площади диска за
осью ZZ'. Если сложим найденную пару сил с парой сил дав-
лений, происходящих от влияния симметричных точек К и
К', радиусы ОК и ОК' которых тоже равны г, а по направ-
лению перпендикулярны радиусам ОМ и ОМ', то найдем рав-
нодействующую пару с моментом
4m<«2r2 sin2 a -|-4ma>2r2 cos2 а = 4т«)22г2.
Отсюда следует, что момент L равнодействующей пары,
происходящей от давлений всех частиц диска на плоскость
YOZ, будет:
L = 4<*)2 Утг,
где сумма распространяется на четверть диска, или
L = (2)
где сумма распространяется на весь диск.
278
ЭЛЕМЕНТАРНАЯ ТЕОРИЯ ГИРОСКОПОВ
§ 3
Если бы мы имели не бесконечно тонкий диск, а какое-
нибудь тело вращения относительно оси XX', то мы могли
бы его разбить на бесконечно тонкие диски и, определив
пару, соответствующую каждому из них, по формуле (2) сло-
жить моменты всех этих пар (причем то обстоятельство, что
ось ZZ', около которой совершается вращение <«, не будет
лежать в плоскостях диска, не окажет влияния на определение
давлений N). Вследствие этого замечания формула (2) при-
ложима к какому-нибудь телу вращения, причем входящую
в нее сумму надо распространять на все частицы тела. Такая
сумма называется моментом инерции тела относительно
оси XX'.
Наконец, если бы ось вращения ю образовала с осью вра-
щения 12 некоторый угол 3, то следовало бы разложить вра-
щение ш на вращение, совершающееся около оси, перпенди-
кулярной 12, и на вращение, совершающееся около этой оси.
При этом рассматриваемая пара будет зависеть только от
первого вращения, и так как угловая скорость этого вращения
есть sin ?, то момент пары будет:
L = sin
Из всего сказанного получается наша основная теорема.
Если какое-нибудь тело вращения вращается около своей
оси с угловой скоростью 12 и мы будем повертывать ось
этого тела около некоторой оси, образующей с осью тела
угол 3, с угловой скоростью <п, то явится пара с момен-
том, равным произведению sin на момент инерции тела,
стремящаяся повернуть ось тела к оси сообщаемого враще-
ния так, чтобы при совпадении осей вращения £2 и ш со-
вершались бы в одну сторону.
§ 3. Гироскопы Фуко (Foucault) и Плюкера (Plucker)«
Фуко устроил два гироскопа, из которых первый представлен
на фиг. 3. Он «состоит из тора Т, ось которого укреплена
в кольце А; это кольцо соединено с рычагом В, опираю-
щимся с помощью острия О на подставку С. Тор приводится
с помощью особого механизма (системы зубчатых колес)
в быстрое вращение О, которое мы будем воображать совер-
шающимся по солнцу для наблюдателя, глядящего от X к О.
§ 3
ЭЛЕМЕНТАРНАЯ ТЕОРИЯ ГИРОСКОПОВ
279
Потом рычаг опирают концом О на подставку и держат го-
ризонтально с помощью нити XD; при этом натяжение нити
будет таково, как если бы тор не вращался, потому что ука-
занная нами пара L может явиться только при поворачивании
оси тора. Если нить пережечь, то тор начинает падать, и ось
его вращается около оси OY по солнцу. Вследствие этого
является пара, которая, стремясь повернуть ось тора ОХ
к оси OY, сообщит гироскопу вращение около оси OZ тоже
Фиг. 3. Фиг. 4.
по солнцу; от этого вращения в свою очередь явится новая
пара, которая, стремясь повернуть ось ОХ к оси OZ, будет
уничтожать скорость падения гироскопа и уравновешивать его
вес. После нескольких колебаний (которые затухнут от трения
точки опоры и сопротивления воздуха) гироскоп начнет вра-
щаться около оси OZ с постоянной угловой скоростью
% удерживаясь на весу действием пары L, определяемой
по формуле (3). При этом вращение <о будет тем менее, чем
более скорость что прямо видно из формулы. Когда по
прошествии некоторого времени Q начнет уменьшаться,
то гироскоп начнет вращаться около оси OZ все скорее
и скорее. Если перед рычагом ВО поставить какое-нибудь
неподвижное тело, например держать карандаш, то, как только
рычаг подойдет к карандашу, гироскоп сейчас же опустится
вниз. Это происходит оттого, что при <о = 0 имеем в фор-
280
ЭЛЕМЕНТАРНАЯ ТЕОРИЯ ГИРОСКОПОВ
§4
муле (3) L = 0. Если хотим пустить гироскоп, удерживая его
сначала рукой за точку Л, то следует сразу отнимать руку,
потому что при нерешительном отнятии можно уронить ги-
роскоп.
Гироскоп Плюкера, представленный на фиг. 4, отличается
от вышеописанного присоединением противовеса Q. Здесь
рычаг BD, держащий кольцо Л, проходит в точке О через
муфту (которая может
Фиг. 5.
вращаться около горизонтальной
и вертикальной оси) и несет на сво-
ем продолжении OD подвижной
груз Q.
Поместив груз так, чтобы он пе-
ревешивал гироскоп, приведем тор
Т с помощью нитки в быстрое вра-
щение О по солнцу для наблюдателя,
глядящего от X к О; потом, удер-
живая гироскоп рукой за точку А,
поставим рычаг горизонтально и
быстро отнимем руку. Вследствие
падения груза Q тор Т будет под-
ниматься и вращаться около оси OY
по солнцу. Это образует пару, ко-
торая, стремясь приблизить ось ОХ
к оси ОК, сообщит гироскопу вра-
щение ю около вертикальной оси,
для наблюдателя, глядящего сверху — против солнца, а для
наблюдателя, глядящего снизу от Z в О, — по солнцу. От
этого последнего вращения явится пара L, стремящаяся
приблизить ось ОХ к оси OZ, которая будет уравновешивать
груз Q. Это равновесие установится после нескольких коле-
баний, и гироскоп, держась на весу, будет равномерно вра-
щаться около вертикальной оси против солнца для наблюда-
теля, глядящего сверху. Разумеется, что, передвинув или
сняв гирьку, мы можем гироскоп Плюкера заставить двигаться
так же, как гироскоп Фуко.
§ 4. Гироскоп Боненбергера (Bohnenberger). Боненбергер
устроил гироскоп (фиг. 5), в котором тор Т имеет так назы-
ваемый кардановский подвес, позволяющий ему свободно»
§ 5
ЭЛЕМЕНТАРНАЯ ТЕОРИЯ ГИРОСКОПОВ
281
вращаться около всякой оси, проходящей через центр тора О.
Приведем кольцо В в плоскость неподвижного кольца С
и скрепим их штифтом Е\ сообщим тору с помощью нитки
быстрое вращение и толкнем кольцо А. Мы увидим, что это
кольцо будет вращаться вместе с осью тора, как будто бы
тор не имел вращения около своей оси. Это произойдет от-
того, что из-за наличия штифта Е кольцо В не может вра-
щаться от действующей на него пары, а если нет вращения
кольца В, то нет и пары, стремящейся вращать тор около
оси OY кольца А. Совсем другое явление представляется,
когда мы вынимаем штифт Е. Тогда удар в кольцо А почти
не приводит его в движение, и чем мы сильнее ударяем, тем
более нам сопротивляется кольцо А, так что, пользуясь для
удара небольшим деревянным молотком D, мы чувствуем, как
будто ударяем по неподвижному телу. Это объясняется так:
сообщая ударом угловую скорость кольцу А около оси ОУ,
мы развиваем пару сил, которая вращает гироскоп около оси
OZ; от этого
же вращения в свою очередь развивается пара,
стремящаяся подвинуть ось ОХ
к оси OZ и уничтожающая вра-
щение кольца А, сообщаемое уда-
ром молотка. В подтверждение
сказанного мы будем при всяком
ударе молотка замечать поворот
кольца В на некоторый угол око-
ло оси 0Z.
§ 5. Гироскоп Харди (Hardy).
В этом гироскопе (фиг. 6) тор
тоже имеет кардановский подвес,
при этом ось кольца В в верхней
своей части опирается на острие
винта F, а в нижней части имеет
шкивок D, на который наматы-
вается укрепленная на нем одним фиг. 6.
концом резинка DE; другой же ко-
нец резинки укрепляется в точке Е к неподвижной подставке С.
Завертываем резинку так, чтобы она, развертываясь, вращала
гироскоп по солнцу около оси OZ, потом сообщаем тору Т
282
ЭЛЕМЕНТАРНАЯ ТЕОРИЯ ГИРОСКОПОВ
§ 5
быстрое вращение 2 по солнцу для наблюдателя, глядя-
щего из X в О, и отпускаем руку, которой мы удерживали
гироскоп за точку А. Произойдет следующее оригинальное
движение: ось ОХ начнет медленно вращаться по солнцу
около оси ОК, резинка же не будет развертываться до тех
пор, пока ось ОХ не приблизится к положению OD; в это
время резинка быстро развернется, потом опять завернется
в обратную сторону, и кольцо В быстро сделает несколько
оборотов около оси OZ по солнцу; потом кольцо В оста-
новится, и мы заметим, что ось тора ОХ, пройдя через по-
ложение OD, продолжает вращаться по солнцу около оси
OY, медленно приближаясь к прямой OF; во время совпа-
дения ОХ с этой прямой произойдет опять быстрое развер-
тывание и завертывание резинки, и кольцо В повернется не-
сколько раз против солнца около оси OZ; далее ось ОХ
пройдет через положение OF, кольцо В остановится, и явле-
ние начнет повторяться в указанном порядке до тех пор,
пока все уменьшающееся навертывание резинки не уничтожится.
Обращаемся к объяснению этого движения. Сначала
резинка сообщит кольцу некоторую скорость вращения около
оси OZ по солнцу, и этим разовьется пара, которая, стре-
мясь соединить оси ОХ и OZ, сообщит тору Т вместе с коль-
цом А угловую скорость О) по солнцу около оси OY; от
этого вращения произойдет пара L, стремящаяся подвинуть
ось ОХ к оси OY, которая уничтожит скорость вращения,
сообщенную около оси OZ, и будет уравновешивать на-
тяжение резинки. Определяя момент L этой пары по
формуле (3), мы должны будем за 3 считать угол XOZ. В то
время, когда ось ОХ примет положение OD, будем иметь
3 — 0 и, следовательно, L = 0. При этом ничто не будет сопро-
тивляться резинке, и она развернется, но потом опять завер-
нется в обратную сторону, так как кольцо В будет продолжать
некоторое время вращаться по инерции. Затем, когда ось ОХ,
продолжая вращаться по солнцу около оси OY, начнет уда-
ляться от OD, приближаясь к OF, явится снова пара L,
которая, стремясь приблизить ось ОХ к оси OY, будет
уравновешивать натяжение обратно навернутой резинки.
Когда ось ОХ примет положение OF, то L обратится опять
§ 6
ЭЛЕМЕНТАРНАЯ ТЕОРИЯ ГИРОСКОПОВ
283
в нуль; резинка снова развернется и завернется, причем
кольцо В повернется несколько раз около оси OZ против
солнца, и т. д.
§ 6. Гироскоп Сира (Sire). Этот гироскоп (фиг. 7) со-
стоит из тора Т, ось которого своим нижним концом опирается
острием на подставку В, а своим верхним концом может
быть или укреплена в центре горизонтальной фигурки А
(тогда ось будет стоять вертикаль-
но), или приложена к периметру этой
фигурки. Центр тяжести тора лежит
на его оси несколько ниже нижней
точки опоры. Сначала, приподняв
фигурку А с помощью верхней пу-
говки, укрепляют верхний конец
оси в центре фигурки и приводят
тор Т с помощью нитки в быстрое
вращение. Потом, несколько подняв
фигурку А, толкают ось тора в сто-
рону, так что она начинает описы-
вать некоторый конус (явление,
объясненное в § 3). Далее не-
Фиг. 7.
сколько опускают фигурку А и стараются прикоснуться ее
периметром к оси тора. Как только это случится, ось тора
как бы прилипнет к периметру фигурки и будет катиться по
нему, следуя за всеми его изгибами. Это явление объясняется
так: когда мы прикоснемся краем фигурки А к оси тора, то
вследствие небольшого давления между фигуркой и осью
последняя покатится по периметру фигурки, вследствие чего
образуется вращение около оси ОУ, а это обстоятельство
поведет к образованию пары сил, которая, стремясь повер-
нуть ось ОХ к оси ОУ, будет нажимать ось тора на пери-
метр фигурки А с довольно значительной силой, и эта ось,
катясь по периметру, будет следовать за всеми его изгибами.
§ 7. Второй гироскоп Фуко. Второй гироскоп был устроен
Фуко для обнаруживания вращательного движения земли. По
конструкции он схож с гироскопом Боненбергера и отличается
от него только приспособлением для уменьшения трения. Это
приспособление (фиг. 8) состоит в том, что концы оси кольца А
284
ЭЛЕМЕНТАРНАЯ ТЕОРИЯ ГИРОСКОПОВ
§ 1
заменены стальными призмами, опирающимися на агатовые
пластинки в кольце В (наподобие точки опоры весов); кольцо
же В верхним острием своей оси проходит через направляю-
щую С и подвешивается на нити СЕ, заключенной в футляре
F, а нижним острием D проходит через отверстие в подставке.
Прибор снабжен установочными винтами, с помощью которых
ось его устанавливается в вертикальном положении, и хорошо
Фиг. 8.
центрирован, так что тор остается
в равновесии во всяком положении.
Кроме того, мы можем сделать не-
подвижным кольцо В, опуская с по-
мощью винта Е нить ЕС и опирая
нижнее острие D в отверстие в под-
ставке, или можем связать в одно це-
лое кольца А и В (с помощью осо-
бого приспособления), причем плос-
кости их будут взаимно перпендику-
лярны.
Описываемый гироскоп позволяет
производить три рода наблюдений. Если,
сохраняя свободу обоих колец, сообщить
тору с помощью системы зубчатых колес
быстрое вращение (до 250 оборотов
в 1 секунду), то ось тора ОХ будет
сохранять свое положение в простран-
стве, и мы можем по прошествии некоторого времени наблюдать
ее относительное перемещение вследствие вращения земли.
Для второго наблюдения мы опускаем нить и устанавливаем
кольцо В в плоскости меридиана. Тогда замечаем, что ось тора
начинает двигаться и пос/ е нескольких колебаний около поло-
жения, параллельного оси земли, установится в этом положении
так, что наблюдатель, глядящий сверху (в северном полушарии),
будет видеть вращение тора против солнца. Это объясняется
так: все движение подставки гироскопа, происходящее от
движения земли, может быть разложено на некоторое посту-
пательное движение и на вращение по солнцу около оси OS,
параллельной оси земли, причем направлено на юг; от
этого вращения является пара сил, стремящаяся ось тора ОХ
§7
ЭЛЕМЕНТАРНАЯ ТЕОРИЯ ГИРОСКОПОВ
285
соединить с осью OS, и так как этому движению сопротив-
ляется только весьма малая сила трения призм, то после
нескольких колебаний ось ОХ займет положение OS. Чтобы
произвести третье наблюдение, скрепляем между собой кольца
А и В и поднимаем нить, причем кольцо А становится гори-
зонтально; тогда замечаем, что кольцо В по прошествии не-
которого времени становится перпендикулярно к плоскости
меридиана. Это объясняется так: вертикальная плоскость, про-
ходящая через прямую OS, и есть плоскость меридиана; если
ось тора ОХ не лежит в этой плоскости, то, стремясь при-
близиться к OS, она будет двигаться в своей горизонтальной
плоскости и после нескольких колебаний остановится в плос-
кости меридиана.
Автор выступал со следующими докладами о гироскопических явлениях:
13 ноября 1881 г- в Физико-математической комиссии Отделения физических
наук Общества любителей естествознания, антропологии и этнографии —
сообщение „О гироскопе Сира“; 29 марта 1885 г, там же — сообщение „Эле-
ментарная теория гироскопов"; 22 апреля 1885 г., там же — сообщение
„О гироскопах" (с опытами); 24 марта 1887 г. в Политехническом обще-
стве— сообщение „О гироскопических явлениях* (с демонстрированием
приборов Фуко, Сира, Харди и др.).
Работа „Элементарная теория гироскопов* была напечатана в „Вест-
нике опытной физики и элементарной математики", 1888. Прим. ред.
AN ELEMENTARY THEORY OF GYROSCOPES
In this note Prof. Joukovsky gives a simple deduction of the
expression of the gyroscopic moment (2) by means of Coriolis’s
theorem, which he obtains by comparing the equations of kinetic
energy for the absolute and for the relative motions of a mate-
rial point on a plane rotating about the Z-axis with angular
velocity <». Prof. Joukovsky gives a rule defining the effect pro-
duced by the gyroscopic moments and applies it to some gyro-
scopes.
ОБ АРТИЛЛЕРИЙСКИХ СНАРЯДАХ ШАПЕЛЯ
(1889 г.)
В № 319 „Московских ведомостей" за 1889 г. помещено
популярное описание дисковых снарядов французского артил-
лериста Шапеля. Несмотря на краткость этого описания,
можно составить себе представление о характере стрельбы
упомянутыми снарядами и подвергнуть полет их теоретиче-
скому исследованию.
Снаряд А (фиг. 1), имеющий форму диска, выбрасывается
из орудия, отверстие CD которого соответствует контуру В
поперечного сечения ди-
ска. При этом с одной
стороны D внутреннего
канала орудия имеется
желобок г, прорываясь
через который, порохо- фиг
вые газы прижимают сна-
ряд к стороне С и заставляют его катиться по этому краю ка-
нала орудия. При выстреле орудие ставится под углом к гори-
зонту так, чтобы линия CD была горизонтальна. Диск вылетает,
имея начальную скорость центра тяжести в своей плоскости, и
летит, сохраняя вследствие вращения направление своей пло-
скости. Если принять для решения задачи о движении диска
закон Ньютона о пропорциональности силы сопротивления
среды квадрату скорости и квадрату синуса угла, образуемого
скоростью v центра тяжести диска с его плоскостью, то реше-
ние это не представляет никакой трудности. Направим (фиг. 2)
ось Оу по начальной скорости снаряда ш, образующей с гори-
зонтом угол я, а ось Ох по перпендикуляру, восставленному из
центра диска к его плоскости в момент выхода его из орудия,
причем по сказанному выше плоскость ху будет вертикальна.
288
ОБ АРТИЛЛЕРИЙСКИХ СНАРЯДАХ ШАПЕЛЯ
Пусть ЕН будет сечение диска этой плоскостью. Вслед-
ствие сохранения плоскости диска эта прямая будет во все
формуле через vx и
время полета оставаться парал-
лельной оси Оу, а сила сопро-
тивления воздуха F, перпендику-
лярная плоскости диска, будет
все время оставаться параллель-
ной оси Ох. По принятому закону
эта сила будет:
F^K^R^sin2^,
где К — некоторый коэфициент,
Т — плотность воздуха, R — ра-
диус диска и <р— угол скорости
v с плоскостью диска.
Условившись обозначать через
vx и vy проекции скорости v на
оси Ох и Оу, заменим в этой
положим для сокращения письма
KyzRt
Р COS Я
где Pcosa— проекция веса диска на ось Ох. Тогда сила сопро-
тивления представится в виде:
F— Р cos
Замечая, что проекция веса диска на ось Оу будет
Psin а, напишем диференциальные уравнения движения центра
тяжести диска:
— = Р cos а — Рcos у-k-v
g dt х’
Р dvy р .
----Л =— rsma,
g dt
или
= g cos a (1 — £2v/),
dv,,
-^ = -gSma,
(1)
где g — напряжение тяжести.
ОБ АРТИЛЛЕРИЙСКИХ СНАРЯДАХ ШАПЕЛЯ
289
Эти уравнения показывают, что по оси Оу диск будет
двигаться как тело, брошенное снизу вверх в пустоте при
напряжении силы тяжести g sin а, а по оси Ох он будет падать,
как падают тела в сопротивляющейся среде без начальной ско-
рости при напряжении тяжести g cos а. Оба эти движения
хорошо известны.
Интегрируя последнее уравнение (1), получаем:
vy — —g sin at 4~ c.
Так как при t = 0, Vy = 09 то c = w и
dy , ।
vy = ~dt = —g sin at 4- w.
Интегрируя во второй раз, находим:
J g sin af- )
y = wt — ^—2----------------bCj
Так как при / = 0, у = 0, то Cj = 0 и
, g sin а
y = wt------------------2—л-
(2)
Разделяем в первом уравнении (1) переменные и предста-
вляем его в таком виде:
1. dvx 1
dvx [ dy^
1 4“ 1 — kvx
Интегрируем:
2kg cos at = 1g - + c2'
Так как при t = 09 vx = 09 то c2 = 0. Сделав это положе-
ние, определяем vx-
2kgt cos a - 21; gt cos a
v ___________—* 1 = J—e___________ (3)
x A;(e2^CO8C1+l) ^l-pr2^08’)' W
Если здесь положим t — co, то найдем:
1
х к
Зак. 2365. — Н. Е. Жукззский. Т. I.
19
290
ОБ АРТИЛЛЕРИЙСКИХ СНАРЯДАХ ШАПЕЛЯ
Это показывает нам, что движение по оси Ох стремится
к равномерному движению со скоростью
К
о dx
-заменяя vx на
dx
~dt
и представляя уравнение (3) в виде
1'gtc.os a- —kg tcosn
e — e
cos a । cos a>
умножаем его на k~g cos adt и интегрируем. Получаем:
то i / kqt ‘ os a . -kgt cos a\ ।
k2g cosax — lg(e y + e *
Так как при / = 0, х = 0, то с3 =— 1g 2. Подставляя это
значение с3 и определяя х, находим:
1/ kgt cos a । kgt cos a
i / ” I
------------ Jq. I --------------------------
k ~g cos a \ 2
(4)
Уравнения (2) и (4) вполне решают задачу о движении
дискового снаряда в сделанном предположении. Для соста-
вления уравнения траектории следовало бы из этих двух урав-
нений исключить t. Но, не делая этого, можно составить себе
представление о том виде кривой, в которую переходит тра-
ектория, удалившись значительно от точки О.
Движение по оси Оу все время есть равномерно-замед-
ленное движение же по оси Ох стремится, как было показано,
к равномерному. Следовательно, траектория на некотором рас-
стоянии от точки О получает вид, приближающийся к виду
параболы, имеющей ось, параллельную оси Оу.
Это показывает, как видно на фиг. 2, что при известном
угле бросания снаряда « траектория будет пересекать гори,
зонтальную плоскость под тупым углом (3. В этом и состоит
характеристическая особенность дисковых снарядов Шапеля.
Эта особенность может быть демонстрирована весьма про-
стым опытом. Мы вырезали из картона диск, вершков шесть
в диаметре, и бросили его под углом к горизонту (50° или
60°), держа за край так, чтобы он завертелся около центра;
ОБ АРТИЛЛЕРИЙСКИХ СНАРЯДАХ ШАПЕЛЯ
291
тогда диск описывал траекторию, которая резко поворачивала
назад своей нисходящей ветвью.
Напомним здесь, что опыты с дисковыми снарядами еще
в 1875 г. производились в русской артиллерии капитаном
Андреяновым, но, к сожалению, были оставлены без приме-
нения.
Статья „Об артиллерийских снарядах Шапеля* была сообщена автором
30 ноября 1889 г. в заседании Отделения физических наук Общества люби-
телей естествознания, антропологии и этнографии и напечатана в „Трудах
Отделения физических наук*, т. III, вып. 1, 1890. Прим. ред.
ON THE MOTION OF SCHAPEL’S PROJECTILE
In this article N. E. Joukovsky treats of the motion of the
centre of gravity of the projectile invented by Schapel. Assuming
that the flying disc maintains the direction of its plane unchan-
ged, due to rotation and that the resistance of the air is nor-
mal to the plane of the disc and follows Newtonian law of
proportionality of the resistance to the square of velocity and
to the square of the sine of the angle of the velocity of the
disc, with its plane, N. E. Joukovsky obtains two differential
equations of motion of the centre of gravity (1). The «/-axis is
taken in the direction of the initial velocity and the x-axis at
right angle to the «/-axis. The equations show that along the axis
Oy the disc moves as a body thrown upward in vacuo, the
intensity of the gravity being gsina and along the axis Ox it
falls as is the case with a body in a resistant medium without
initial velocity, the intensity of gravity being g coset. The
motion along the axis Ox tends to become uniform; the path
at a certain distance from the initial position approaches in
shape a parabola with axis parallel to Oy,
ОПРЕДЕЛЕНИЕ СИЛОВОИ ФУНКЦИИ ПО ДАННОМУ
СЕМЕЙСТВУ траекторий
(1890 г.)
§ 1. Недавно появилось в печати сочинение Г. К. Сус-
лова в котором, между прочим, решается с помощью теории
совокупных уравнений с частными производными следующая
задача: под действием сил, имеющих силовую функцию /7,
система с i степенями свободы может иметь всевозможные
движения, при которых i—1 данных функций ее координат
не изменяются со временем; определить U.
Мы имеем в виду в этой заметке показать, что в случае
движения одной материальной точки упомянутая задача мо-
жет быть разрешена с помощью формулы центростремитель-
ной силы.
§ 2. Для движения материальной точки по какой-нибудь
поверхности задача выражается так: на поверхности дано
семейство линий, каждая из которых может служить траекто-
рией точки при силах, имеющих силовую функцию; найти эту
функцию.
Решим сначала задачу при том ограничении, что все рас-
сматриваемые движения совершаются с одной и той же пол-
ной энергией. Вообразим на поверхности систему криволи-
нейных координат, образованную линиями данного семейства
и линиями, к нему ортогональными, и назовем через и р
Параметры этих семейств, причем рх — const будет уравнение
траекторий.
Примем для простоты массу точки за единицу и выразим
ее скорость v по теореме живых сил:
v^ = 2(U+H). (1)
1 Г. К. Суслов, О силовой функции, допускающей данные частные
интегралы, Киев 1890.
291
ОПРЕДЕЛЕНИЕ СИЛОВОЙ ФУНКЦИИ
Так как вследствие сделанного ограничения постоянное Н
для всех траекторий одинаково, то это постоянное Н может
быть включено в силовую функцию, и формула (1) может
быть написана так:
^ = 2t/. (2)
Когда движение будет совершаться по одной из линий
р{ = const со скоростью, выраженной формулой (2), то этим
будет удовлетворено равенство тангенциальной составляющей
движущей силы 1 тангенциальному ускорению, так что нам
останется только удовлетворить равенству нормальной соста-
вляющей движущей силы центростремительному ускорению.
Для этого мы должны удовлетворить уравнению:
в котором dsx есть элемент дуги линии, нормальной к траек-
тории, ар — радиус геодезической кривизны траектории. На-
зывая через ds элемент дуги траектории и через h и hr — пер-
вые диференциальные параметры функций р и р19 найдем по
известным формулам теории криволинейных координат 2:
h Л‘ ! (4)
1 d(^ds)=ht dh I
p ds{ h dpt * j
Преобразуем на основании этих формул и формулы (2)
уравнение (3):
dp, dP1 “ ™
Интегрируя это уравнение и называя через ^(р) некото-
рую положительную произвольную функцию от р, находим
искомое решение задачи:
U=h^(p). (6)
1 Мы говорим о силе, лежащей в касательной плоскости рассматри-
ваемой поверхности.
2 Lame, Lemons sur les coordonnees curvilignes, § 28, Paris 1859
ОПРЕДЕЛЕНИЕ СИЛОВОЙ ФУНКЦИИ
295
Таким образом при сделанном ограничении искомая сило-
вая функция равна квадрату первого диференциального пара-
метра семейства линий,
ортогональных к заданно-
му семейству траекторий,
умноженному на произ-
вольную функцию от па-
раметра семейства ортого-
нальных линий.
§ 3. Приложим форму-
лу (6) к одному простому
примеру. Пусть нам дано
семейство параболических
траекторий, получаемое
при бросании под дей-
ствием тяжести мате-
риальной точки по горизонтальному направлению (фиг. 1) из
различных точек А вертикали Оу со скоростями w, которые
соответствуют скоростям падения от О до А. Уравнение па-
рабол при прямоугольных осях координат, имеющих начало
в О и ось Оу, направленную по вертикали вниз, будут:
1 gx2
где р1 = ‘2АО, w — ^Pig.
Подставляя w, получаем:
х2 — 2pty + pi2 = 0. (7)
Легко усмотреть, что это семейство парабол с параметром
pt огибается двумя прямыми О В и ОЕ, наклоненными к оси
Оу под углом в 45°. Действительно, приравнивая нулю про-
изводную от уравнения (7) по р1? получаем:
Р1=У, (8)
а внося это в уравнение (7), находим:
х2 —у2 = 0.
Уравнение (8) показывает нам, что параметр pt предста-
вляет ординату точки прикосновения В, которая таким обра-
зом в два раза более, чем О А. Так как живая сила, приобре-
296
ОПРЕДЕЛЕНИЕ СИЛОВОЙ ФУНКЦИИ
тенная на путях О А и АВ, равна живой силе, которую точка
приобретает на пути ОВ, то найденные параболы после точки
их прикосновения с огибающей прямой соответствуют семей-
ству траекторий, описываемых материальной точкой, движу-
щейся от точки О в направлении ОВ по наклонным плоско-
стям различной длины и делающейся свободной при схожде-
нии с плоскостей.
Предложим теперь для разрешения такую задачу: отыскать
силовую функцию, характеризующую силы, под действием
которых материальная точка, выступая из О в направлении
ОВ со скоростью, квадрат которой равен двойному значе-
нию силовой функции в точке О, по наклонным плоскостям
разной длины и делаясь свободной, описывает параболы се-
мейства (7).
То обстоятельство, что в формулу (7) не входит g, пока-
зывает нам, что данные параболы будут описываться при
всяких постоянных силах, направленных по Од. Чтобы
разыскать всевозможные силы, соответствующие решению
задачи, мы должны составить уравнение семейства линий
р = const, ортогональных параболам (7). Решаем уравнение (7)
относительно
—W2 —X2, (9)
где перед корнем берется знак (—), потому что после при-
косновения к огибающей прямой парабола дает у >
Составляем частные производные:
dPi = *
Vу2—х~
fyl К?2 —x2 — #
дУ —X2
и подставляем их в уравнение:
Ох оу
Получаем однородное диференциальное уравнение:
О/ — Vу* — л2) dx -j- х dy = О,
ОПРЕДЕЛЕНИЕ СИЛОВОЙ ФУНКЦИИ
297
в котором делаем известную подстановку:
Это дает нам: dx , du n X 2и —/и2—1
Чтобы удобнее взять интеграл от второго члена, пола-
гаем: и2 — 1 — и — Z, _ z2 + l U 2z ’ du — - п dz. ZZ
Получаем: dx (z2 —l)<7z x ‘ (3z2l)z
или dx । 4z dz dz n X 1 3z2-f-l z ~
Интегрируем: -|(3z2+ir = P.
Легко видеть, что z = ^, X
поэтому 2 2 Г / \ 2 *1 3 ^зМ+i (10) Pi L \ x ) J
По дставляя в это уравнение величину рг из формулы (9),
найдем уравнение ортогональных линий в декартовых коор-
динатах. Что касается величины первого диференциального
параметра Л, то ее удобно составить по формуле (10), опре-
деляя приращение р при переходе по линии pv = const на
элемент длины ds — CD и написав по первой формуле (4)
h = d£. (11) as
298
ОПРЕДЕЛЕНИЕ СИЛОВОЙ ФУНКЦИИ
Пусть dx = cd будет проекция на ось абсцисс элемента
ds и 6 — его угол с этой осью. Так как по формуле (7)
tg 0 — JL cos 0 = - - _
Pi / Pi2-
Заметив это, диференцируем уравнение (10), считая pt
постоянным:
W±^)dx = dp;
рДз (^y+i]3
L \ х ]
потом вносим сюда найденную величину dx и определяем
h по формуле (11):
L 2 / Pi2 -f- X2
Vppi
Но по формуле (7) имеем:
= (12)
Pl
поэтому
Л2= —. (13)
Р
Если мы включим —- в состав произвольной функции то
получаем по формуле (6) следующее полное решение предло-
женной задачи:
и=У''Лр)- (14)
При (р), равном постоянному, мы получаем уже рассмот-
ренный раньше случай постоянной силы; если же положим,
что
Яр) = у, (15)
ОПРЕДЕЛЕНИЕ СИЛОВОЙ ФУНКЦИИ
29°
и заменим у его величиной из формулы (12), то найдем:
£7=и
з
•2
-13
(16)
Эта формула показывает, что линии равного уровня суть
прямые, проходящие через точку О, а силовые линии — дуги
кругов, проведенные из этой точки, как из центра.
При движении под действием сил, соответствующих сило-
вой функции (16), мы должны бросать точку из О со ско-
ростью:
причем с этой скоростью точка пробежит всю наклонную
плоскость и начнет изменять скорость только тогда, когда
вступит на параболу, и будет изменять ее до значения:
Voo=
Этим обстоятельством движение значительно отличается
от движения под действием постоянной силы, при котором
скорость в бесконечности есть оо.
§ 4. В общем случае, когда постоянное Н не есть одинако-
вая величина для всех траекторий, мы должны считать эту
величину функцией от Вследствие этого формула (5) за-
меняется формулой:
^£/=2(£7+Я) dh
дрг h dPi'
(17)
Представляем ее таким образом:
h^- — 4~U=2H^-
dPi dPi dPi
или, разделяя на Л3,
д
др1
(18)
300
ОПРЕДЕЛЕНИЕ СИЛОВОЙ ФУНКЦИИ
Интегрируем:
(/=/ф(р)-/^(^)
(19)
Здесь $(р) есть произвольная функция от р, а Н—про-
извольная функция от pf, диференциал же под знаком инте-
грала берется по переменному р{ или по какому-нибудь дру-
гому переменному при постоянном р.
Формула (19) может быть заменена еще такой:
U=h^(P) — J (20)
§ 5. Прежде, чем приложить формулы предыдущего пара-
графа к примерам, выведем из них две теоремы, найденные
Г. К. Сусловым иным путем.
Если бы, задав траектории, мы потребовали, чтобы сило-
вая функция U была функцией от некоторой функции f (р9 рх),
т. е. была бы постоянна на кривых, имеющих уравнение
/= const, то в формуле (17) мы должны были бы положить:
так что
U=F(f), Н=<?(Р1),
°U_ = F, df_
dPi dPl ’
где F'—производная от функции F(f) no f.
Внося формулы (21) и (22) в формулу (17),
ее в таком виде:
df
H/) + ?(Pi) = A
F (f) 2 Oh ’
dpi
(21)
(22)
представляем
(23)
Отсюда заключаем, что в том случае, когда вторая часть
формулы (23) имеет вид первой части, предложенная задача
допускает решение, причем
U—F(f), (24)
Предположим теперь, что нам дано на какой-нибудь по-
верхности два семейства ортогональных изотермических линий
ОПРЕДЕЛЕНИЕ СИЛОВОЙ ФУНКЦИИ
301
и требуется, чтобы оба семейства могли служить траекто-
риями при одной и той же силовой функции. Тогда, приняв
р и рх за изотермические параметры линий, будем иметь
А = А,. Формула (18), написанная для обоих семейств траек-
торий, дает:
ОрДнЧ’ I
др UJ ' др \ К‘Г )
где есть постоянная в интеграле живых сил для вторых
траекторий и представляет некоторую функцию р.
Взяв от первого уравнения производную по р, а от вто-
рого— по р{ и совершив вычитание, получаем:
(Н— = 0. (26)
v дрдрг \ h2 /
Это равенство удовлетворяется в двух предположениях.
1. Обе величины Н и Нх равны между собой, и так как
они должны быть функциями различных переменных, то они
должны быть для всех траекторий того и другого семейства
одной и той же постоянной величиной. При этом по фор-
муле (25)
U^Kh2 — H. (27)
2. Величина А удовлетворяет условию
(28)
При этом по формуле (19) для той или другой
траекторий будем иметь:
системы
1
/(p)+/,(Pi)
ЪЛрд- /ВДЧр)]- (29)
Для того чтобы оба выражения для U давали одну и
ту же функцию, припишем постоянным Н и Нг такие зна-
чения: г/ Ф1 (Р1) тт Ф (р) н- f,'(p,rH'~ f(py (30)
302
ОПРЕДЕЛЕНИЕ СИЛОВОЙ ФУНКЦИИ
При этом оба выражения, даваемые формулой (29), обра-
щаются в
п==
(31)
§ 6. Рассмотрим пример на формулу (20). Пусть дано
определить всевозможные силы, имеющие силовую функцию,
при которых материальная точка может двигаться по каж-
дому эллипсу, принадлежащему к семейству подобных кон-
центрических эллипсов.
Представим уравнение рассматриваемого семейства в ьиде:
Лу3-}-х2 = Р1, (32)
где к — постоянная величина, a — параметр семейства.
Составляем диференциальное уравнение ортогональных ли-
ний:
dx__dy
х~ку'
Интегрируем его:
(33)
Далее берем:
. 2 = (ЁЕ V । (ЁР V = ^к~2 **
\ дх / \ ду / у* ' у±
или по (33):
о4 / k-x-k \
''"^-(^1 'j 04)
Принимаем в формуле (20) за переменное под знаком ин-
теграла величину х, так что
/ кх~к \
(35)
Подставляя в формулу (20), получаем следующее решение
задачи:
U=h^(p)-'?(P1) + ^ f <?'(P1)x^dx, (36)
причем постоянному Н надо приписывать значение (35).
ОПРЕДЕЛЕНИЕ СИЛОВОЙ ФУНКЦИИ
303
Простейший случай представляется нам при
'Ир) = о, ф(Р1)=и£±1 Р1.
Тогда
к±1
2k
kx^
Р2
или по формуле (33):
U=—^(x*+y>). (37)
Это соответствует центральной притягательной силе, прямо
пропорциональной расстоянию. Что касается постоянного Н
то оно будет:
Н=!*^р(^ + х2),
так что скорость с которой мы должны бросать матери-
альную точку из различных точек оси Оу по направлению
оси Ох, для того чтобы описывались желаемые траектории,
должна согласно формуле (1) быть:
§ 7. Переходим к случаю движения свободной материаль-
ной точки, массу которой попрежнему берем равной единице.
Здесь рассматриваемая задача выражается таким образом:
дано в пространстве семейство линий
/1(х, у, z) = pp /2(х, у, z) = p.2, (38)
где р} и р2 — параметры семейства; определить силовую
функцию U так, чтобы под действием сил, ею характеризуе-
мых, материальная точка могла свободно двигаться по каж-
дой из этих линий.
В предположении существования силовой функции скорость
будет определяться по формуле (1), вследствие этого будет
удовлетворено равенство тангенциальной составляющей дви-
жущей силы тангенциальному ускорению. Остается удовле-
творить условию, чтобы проекция Рп движущей силы на
304
ОПРЕДЕЛЕНИЕ СИЛОВОЙ ФУНКЦИИ
нормальную плоскость траектории была геометрически равна
центростремительному ускорению, т. е., чтобы
> = 21
п Р
и направление Рп совпало с направлением радиуса кривизны р
траектории. Умножаем написанное равенство на cos а и на
cos Р, где а и Р суть углы радиуса р с поверхностями (38):
dU cos a dU о cos В
p ds2 p
Здесь ds{ и ds.2 суть элементы дуг линий, проведенных
по поверхностям (38) ортогонально к траекториям.
Называя через pj и р2 радиусы геодезической кривизны
Фиг. 2.
определяется по
траекторий в поверхностях pr = const и
= const, найдем известное соотношение:
cos « 1 cos Р 1
Р ~' Р1 Г Р “ Р-2 ’
вследствие чего наши формулы примут вид,
аналогичный с формулой (3):
Pi ’ ds.2 р2 ‘ '
Решим сначала задачу в предположении,
что пэ всем линиям данного семейства дви-
жение должно совершаться с постоянной
полной энергией, т. е. что v в формуле (39)
формуле (2). Вообразим две пары беско-
нечно близких поверхностей (38) с параметрами р19 pt-\-dpl9
р29 P'2^rdp2- Эти поверхности, пересекаясь между собой, обра-
зуют в пространстве (фиг. 2) бесконечно тонкую трубку АВА'В'.
Пусть а будет положение движущейся точки на траекто-
рии АВ. Проведем из этой точки пэ стенкам трубки беско-
нечно малую линию abcde9 ортогональную к траекториям.
Если к данному семейству траекторий можно провести семей-
ство ортогональных поверхностей, то эта линия будет полу-
чаться всегда замкнутой, и мы будем иметь ае = е = 0; если же
к данному семейству линий нельзя провести семейство орто-
гональных поверхностей, то линия abcde будет закручиваться
ОПРЕДЕЛЕНИЕ СИЛОВОМ ФУНКЦИИ
305
© не будет равно нулю Останавливаясь на этом общем
предположении, продолжаем ортогональную линию abode еще
на один завиток efghk. Называем через ds элемент дуги
траекторий, заключенный между двумя последовательными
завитками ортогональной линии, и представляем формулу (39)
на основании формул (2) и (4) в виде:
dig VV= _ dig V77_d (1g ds)
ds{ dsY 9 ds2 ds2
Если условимся теперь элемент дуги ортогональной линии,
на какой бы поверхности он ни находился, называть через сЬ
и считать в направлении контура abode, то обе вышенапи-
санные формулы можно заменить одной:
dlg/L/ d(lgJs)
dz dz
Умножаем это уравнение на dz и берем от обеих его
частей интеграл, распространенный на контур abode-.
(lg VU)e — (1g Уй)а = — [Ig(e^) — 1g (ae)],
где поставленные за скобками индексы е и а показывают,
что рассматриваемые величины надо взять в точках е и а.
Легко видеть, что полученное равенство может быть напи-
сано в виде:
d\gYU____ d lg е
ds ds
или
±(£yU) = 0. (40)
Уравнение (40) показывает, что всякий раз, как семейство
линий, по которым возможно движение с одинаковой полной
энергией, ортогонально к одной какой-нибудь поверхности,
то оно ортогонально к семейству поверхностей.
1 Н. Е. Жуковский, Лекции по гидродинамике, стр. 37, 1887; Труды
ЦАГИ, вып. 40, стр. 39; Полное собрание сочинений, т. II, М. 1935,
стр. 189.
Зак. 2365. — Н. Е. Жуковский. Т. I.
20
306
ОПРЕДЕЛЕНИЕ СИЛОВОИ ФУНКЦИИ
Предполагаем, что данное семейство траекторий имеет
семейство ортогональных поверхностей:
f(x, у, z) = p. (41)
Эти поверхности, пересекаясь с каждой из поверхностей
(38), начертят на них семейства линий pr = const и р2 = const,
ортогональных к траекториям. Будем называть через h пер-
вый диференциальный параметр функции р в пространстве и
через h} и h2—первые диференциальные параметры функции
рх на поверхности /2 = р2 и функции р2 на поверхности
f\ = P\- Так как каждая из формул (39) одинакова с форму-
лой (3), то решение предложенной задачи на поверхностях
/2 = р2 и А = Pi выразится формулой (6). Это решение будет
одинаково для обеих систем поверхностей и будет давать
искомую нами силовую функцию в пространстве
u=h^(p). (42)
§ 8. Обращаясь затем к движениям, совершающимся по
различным траекториям с различными полными энергиями, мы
будем тоже рассматривать только случай траекторий, к ко-
торым возможно провести семейство ортогональных поверх-
ностей.
Эти поверхности, как уже было сказано, начертят на
поверхностях /2 = р2 и ~ рг семейства ортогональных
линий.
Решив для тех и других поверхностей нашу задачу по
формуле (20), будем иметь:
U=h^(p)-H-t-h^ l^dPi =
= (P) - H-\- h* J -1 dP2. (43)
Для того чтобы оба решения были одинаковы, необхо-
димо положить:
1 дН , Г 1 ОН ,
Л1 2 t'Pi Pl J № др2 Р1'
ОПРЕДЕЛЕНИЕ СИЛОВОЙ ФУНКЦИИ
307
Возьмем от обеих частей этой формулы производную по
а потом по р.2; получим:
d / 1 \ / Ч
&Р1 \ ^ / ^Р'2 ^Р1 \ /
ИЛИ
/ 1 \ d (
дР\ ' дР2 дР1 \& J ' дРъ \ h2 J ' '
Так как первая часть этой формулы есть функция только
от pj и p2f то тем же свойством должна обладать и ее вто-
рая часть. Это показывает, что
~ = 77[р, / (Рп р2)], (45)
т. е. равно некоторой функции от р и аргумента х, завися-
щего только от Pi и р2. Предположив, что формула (45) имеет
место, находим, что оба выражения U в формуле (43) обра-
щаются в одно:
и = (р) — н+ А2 f F (Р, *) (46)
J и*
причем Н есть некоторая произвольная функция от х.
§ 9. Для примера решим такую задачу: дано в простран-
стве семейство всевозможных равносторонних гипербол, имею-
щих асимптотами ось Oz и некоторую прямую, проведенную
через начало координат по плоскости ху‘, отыскать всевоз-
можные силовые функции, при которых упомянутые гиперболы
могут быть траекториями точки.
Уравнения гипербол будут:
^ = Р1, xz = p.2. (47)
Составляем уравнение их ортогональных поверхностей.
Мы имеем из данных уравнений:
dx dy dz .
х У z
поэтому диференциальное уравнение ортогональных поверхно-
стей будет:
х dx у dy — zdz = 0.
20*
308
ОПРЕДЕЛЕНИЕ СИЛОВОЙ ФУНКЦИИ
Интегрируем его:
*2 + #2 —z2 = p.
(48)
Таким образом ортогональными поверхностями являются
однополые гиперболоиды вращения около оси Oz.
Составляем Л2:
Л2 = 2 (х2+V2 + = 2 (р + 2г2). (49)
Подставляем сюда величину z2, выраженную с помощью
формул (47) и (48) по р, р19 р2:
2р22(1+р?)
Z -- -------------------------•
— Р — V р2 + 4р.22(1 -Ьр(2)
Внося эту величину в формулу (49), находим:
4р22(1+р,2)
— Р— V Р2 + 4р32(1 -+-Р12)
(50)
Эта формула показывает нам, что условие (45) удовлетво-
ряется, причем
х = Рз2(1+Р12)-
Мы можем теперь составить по формуле (46) общее выра-
жение силовой функции U.
Для случая движения с постоянной полной энергией пола-
гаем в формуле (46) Н—С и пишем на основании формул
(48) и (49):
и = (х2 + + 22) 6 (х2 + Z/2 - Z2) - С (51)
В этой формуле заключается случай центральной отталки-
вающей силы, прямо пропорциональной расстоянию.
Работа „Определение силовой функции по данному семейству траек-
торий" была сообщена автором в заседании Московского математического
общества 20 ноября 1890 г. и напечатана в „Трудах Отделения физических
наук Общества любителей естествознания, антропологии и этнографии",
т. III, вып. 2, 1890. Прим. ред.
THE DETERMINATION OF THE FORCE-FUNCTION ACCORDING
TO A GIVEN SET OF PATH
The problem considered by Prof. Joukovsky is this: given a
family of lines, defined on a surface by the equation p1 = const
and in space by two equations (38), it is required, to determine
the force-function U so that a material point acted on by forces
characterized by this function will move freely along each of
these lines.
The problem is solved by means of the formula for the cen-
tripetal force (formula (3)] for the motion on a surface, and of
formula (39) for the motion in space. If the total energy is the
same for motions along each of the paths, i. e. the constant H
in the integral of energy is the same for all lines, so that equa-
tion (1) can be written in the form (2) or (42), then the poten-
tial function will be determined by equation (6) or by equation
(49), where p — const is the equation of the surfaces (or lines)
orthogonal to the paths given, and h is the differential para-
meter of the function p.
In his deduction of equation (42) Prof. Joukovsky proves
that when ever a family of paths for which the total energy of
motion is the same is orthogonal to one of any surfaces, this
family is orthogonal also to the family of the surfaces. On this
assumption the problem is being solved.
If the quantity H in the integral of energy is not the same
for all the paths of the family given, but is a function of pr
and (in space) and of p{ (on a surface) then in space the
parameter h of the functions must satisfy the condition (45), the
function U being determined by equation (19) or equation (21)
for the motion of the point on a surface and by equation (46)
for the case of motion in space. The application of the general
formulae (6), (20) and (46) is illustrated by examples.
SUR UN APPAREIL NOUVEAU POUR LA DETERMINATION
DES MOMENTS DE L’INERTIE DES CORPS
(1890)
L’appareil que j’ai 1’honneur de presenter a la societe est
construit pour la determination des moments de 1’inertie des
corps. II est forme (fig. 1 et 2) d’un disque A ayant dans son
centre un ecrou dans lequel passe la vis d’un cylindre vertical B.
Ce cylindre s’appuie par une pointe C sur un support immobile
et porte en haut une fleche F et une vis E, a laquelle doit
Фиг. 2.
Фиг. 1.
etre attache le corps observe D ayant son centre de gravite sur
I’axe CE. La theorie de cet appareil est bien simple. Supposons
le disque releve jusqu’a la plus grande hauteur et abandonne
sans vitesse initiale a Paction de la pesanteur. Soient К—le
moment de 1’inertie du corps D et du cylindre В et — leur
deplacement angulaire par rapport a 1’axe С7Г, et — le mo-
ment de 1’inertie et le deplacement angulaire du disque A par
rapport au meme axe.
SUR UN APPAREIL NOUVEAU
311
Les equations du mouvement seront:
js j is ____I
ou L est le moment de la force normale et du frottement exerce
par le disque A sur le cylindre B. Ces equations etant ajoutees,
nous avons:
, K d^~^K1 dt' -0,
d’ou, en integrant et en prenant en consideration les conditions
initiales, nous recevons:
+ (1)
A la fin du mouvement nous devons ajouter a cette equation
I’equation
?-<?! = ", (2)
exprimant la condition geometrique de 1’appareiL En eliminant
entre ces deux equations nous obtenons la formule:
К
(3)
par laquelle, nous pouvons determiner K, & etant observe par
la fleche F.
5 мая 1889 г. автор демонстрировал в заседании Отделения физических
наук Общества любителей естествознания» антропологии и этнографии
изобретенный им прибор для определения моментов инерции. 19 сентября
1889 г. автор сделал сообщение в заседании Московского математического
общества на тему: „Прибор для определения моментов инерции* и демон,
стрировал изобретенный им прибор.
Статья »Sur un appareil nouveau pour la determination des moments
d’inertie des corps* была напечатана в „Бюллетенях Общества испытателей
природы* за 1890 —1891 гг. Прим. ред.
О НОВОМ АППАРАТЕ ДЛЯ ОПРЕДЕЛЕНИЯ МОМЕНТОВ
ИНЕРЦИИ ТЕЛ
(1890 г.)
Аппарат для определения моментов инерции тел, который
я имею честь демонстрировать Обществу, состоит (фиг. 1, 2 и 3)
из диска А, имеющего в своем центре гайку, через которую
проходит винтовая резьба вертикального цилиндра В. Этот
цилиндр опирается точкой С на неподвижную подставку и имеет
наверху стрелку F и винт Е, на который должно одеваться
испытуемое тело D, имеющее свой центр тяжести на оси СЕ.
Фиг. 1.
Фиг. 2.
Теория этого аппарата очень проста. Положим, что диск
А поднят до наибольшей высоты и предоставлен без началь-
ной скорости действию силы тяжести.
Пусть будут: К— момент инерции тела D и цилиндра Вт
ср— их угловое перемещение около оси СЕ, а Кt и — момент
инерции и угловое перемещение диска А около той же оси.
Уравнения движения их будут:
К ^2? __т is ________ т
к ав ~~L' Кх а? —
О НОВОМ АППАРАТЕ
313
где L есть момент от нормальной силы реакции
трения, действующих на цилиндр В от диска А.
силы
Складывая эти уравнения, имеем:
сГ2?
"5F
/и
J/2
И
Интегрируя полученное уравнение и принимая во внимание
начальные условия, находим:
^+^=0. (1)
Для конца движения к этому уравнению прибавляется еще
уравнение:
? —?1 = п, (2)
где п зависит от геометрических условий аппарата.
Фиг. 3.
Исключая из этих двух уравнений угол мы
формулу:
получаем
(3)
из которой можно определить К, если угол найдем из
наблюдения при помощи стрелки F.
Эта статья представляет собой русский перевод предыдущей статьи
„Sur un appareil nouveau pour la determination des moments de 1’inertie des
corps", выполненный для настоящего издания . проф. А. П. Котельни-
ковым. Прим. ред.
A NEW APPARATUS FOR THE DETERMINATION OF MOMENTS
OF INERTIA
In this note Prof. Joukovsky gives a description of an ap-
paratus constructed by him for determining moments of inertia.
The apparatus is shown in Figs. 1 and 2. When the angle 9 of
the turn of the pointer F corresponding to the lowering of the
disc A is known, the moments of inertia of the body tested
can be calculated by formula (3). The letters Kx and n in this
formula denote the constants of the apparatus.
УСЛОВИЯ КОНЕЧНОСТИ ИНТЕГРАЛОВ УРАВНЕНИЯ
(1891 и)'
§ 1. В недавно напечатанном сочинении „Общая задача
об устойчивости движения" проф. А. М. Ляпунов рассматри-
вает вышеприведенное диференциальное уравнение в пред-
положении, что р есть периодическая функция х, и обнаружи-
вает на примерах, что при этом условие положительности и
конечности функции р не характеризует конечности инте-
гралов уравнения для всякого значения х1.
В этой заметке я разъясняю, почему доказательство ко-
нечности у при положительном р, которое было приведено
в моем сочинении „О прочности движения" 2, теряет силу
в случае, когда р — функция периодическая, и вывожу для
этого случая некоторые достаточные признаки конечности
интеграла.
§ 2. Предположив, что функция р для всех значений х
конечна и положительна, проведем (фиг. 1) через некоторую
точку А оси абсцисс кривую ABEF, удовлетворяющую урав-
нению:
Й+™ = ° (1)
и пересекающую в точке А ось ОХ под углом, тангенс ко-
торого равен т. Построим две синусоиды AD и ЛС, при-
1 А. М. Ляпунов, Общая задача об устойчивости движения, стр. 189,
Харьков 1892.
2 Н. Е. Жуковский, Поли. собр. сочин., т. I, М 1937, стр. 131.
Прим. ред.
316
УСЛОВИЯ КОНЕЧНОСТИ ИНТЕГРАЛОВ
касающиеся в точке А к на-
шей кривой и удовлетворя-
ющие уравнениям:
f „2„ —о
dx2
<^у>
dx2
^b2y, = 0,
(2)
в которых а2 и Ь2 суть наибольшее и наименьшее значения
функции р на отрезке оси абсцисс АВ.
Так как из уравнений (1) и (2) следует, что
d ( dii
dx Н1 dZ~
d / dy
^\УЧГХ~
у^-^=(Ь2~р)уу^
то первый из этих двучленов с возрастанием х возрастает,
а второй убывает. Но так как в точке А оба двучлена суть
нули, то на всем протяжении отрезка АВ
или
В точке А обе дроби обращаются в единицу, потому что
синусоиды прикасаются к рассматриваемой кривой, поэтому
во всех других точках отрезка АВ
У
У_>
1,
1,
т. е.
У2> У > У1-
УСЛОВИЯ КОНЕЧНОСТИ ИНТЕГРАЛОВ
317
Это показывает, что полуволна ЛВ рассматриваемой кривой
заключена между синусоидами AD и АС. Так как уравнения
этих синусоид суть:
т . , А
— — sin а (х — /),
= ыпЪ(х — Г}9
где I — ОА9 то расстояние = АВ заключено в пределах:
<3>
наибольшая же величина Y координаты АВ заключена в пре-
делах:
т
Т
Y>
т
а
(4)
Здесь т есть тангенс угла касательной с осью абсцисс для
точки А, но мы имеем право принять в неравенстве (4) вели-
чину т и за абсолютное значение тангенса угла наклонения
касательной в точке В9 так как мы могли бы провести сину-
соиды, прикасающиеся к нашей полуволне в точке В9 и рас-
сматривать не возрастающий, а убывающий х. Неравенства (3)
и (4) имеют место для всех полуволн рассматриваемой кривой.
Если бы все величины т были конечны, то рассматриваемая
кривая отстояла бы от оси ОХ всеми своими точками на
конечное расстояние. Если же величины т идут, последова-
тельно возрастая до бесконечности, т. е. угол пересече-
ния кривой с осью абсцисс стремится к прямому, то полу-
волны рассматриваемой кривой будут становиться беспре-
дельно высокими.
Легко усмотреть из неравенств (4), что всякий раз, как
функция р при беспредельном возрастании х стремится к опре-
деленному конечному пределу, рассматриваемая кривая всеми
своими точками отстоит от оси абсцисс на конечное расстоя-
ние. В сделанном предположении всегда найдется некоторое
конечное значение х9 начиная от которого функция р идет
возрастая или убывая.
318
УСЛОВИЯ КОНЕЧНОСТИ ИНТЕГРАЛОВ
Если р возрастает с возрастанием х, то из неравенства (4)
будем иметь для одной полуволны:
где тп и р берем для ее конца, а для следующей полуволны
найдем, что
Г'
т
V р’
где т и р возьмем для начала полуволны, т. е. припишем им
прежние значения. Отсюда видно, что
Y' < Y, (5)
т. е. высоты полуволн идут с возрастанием х убывая.
Если же р убывает с возрастанием х, то из того же не-
равенства (4) имеем для какой-нибудь полуволны:
jn у
V р
где р9 т берутся для начала полуволны, а / и т —для ее
конца. Из этих неравенств следует, что
т V p <^т Vp, (6)
т. е. величины т У р убывают с возрастанием х; а так как р
стремится к конечному пределу, то т всегда остается конеч-
ным, и кривая всеми точками отстоит от оси абсцисс на ко-
нечное расстояние.
§ 3. Желая получить теорему для всякого конечного и
положительного р, мы привели в вышеупомянутом сочинении
иное доказательство, которое опирается на предположение,
что, перемещая на фиг. 1 точку пересечения А исследуемой
кривой на конечное расстояние, мы вместе с этим передвинем
на конечное расстояние и весьма удаленные точки ее пере-
сечения с осью абсцисс.
Но это предположение именно и не оправдывается для
‘того случая, когда коэфициент р есть периодическая функция х.
УСЛОВИЯ КОНЕЧНОСТИ ИНТЕГРАЛОВ
319
Назовем период этой функции через <о и обратим внимание
на то, что общий интеграл уравнения (1) имеет вид:
У = A? (х) е'х -f В'Ь (х) е1Х, (7)
где ?(х) и ’Ь(х) суть периодические функции с периодом w,
А и В—произвольные постоянные, а X и Xt суть некоторые
действительные или мнимые сопряженные величины.
Легко усмотреть, что эти величины удовлетворяют условию:
= (8)
Так как
У = ? (х) ех, у! = 4 (х) е1Х (9>
представляют интегралы уравнения (1), то мы должны иметь:
х
/ dy, du \ ~
№ -*£)-°-
X
Подставляя сюда величины у, у, из (9), находим:
х + о
| е<Х + Ма,Г(х) = 0,
X
где F(x) есть периодическая функция с периодом а). Это
равенство требует, чтобы
-f- хх) и) _____ J
т. е. чтобы удовлетворялось уравнение (8).
Из формулы (8) видно, что X и Xt суть равные действи-
тельные или чисто мнимые величины с противоположными
знаками.
Если они действительны, то уравнение (1) имеет беспре-
дельно возрастающие интегралы; если же они мнимы, то инте-
гралы уравнения (1) конечны.
Так как всякие кривые, удовлетворяющие уравнению (1),
при положительном и конечном р должны по формуле (3)
через некоторые конечные промежутки пересекать ось абсцисс,
то при действительности X, X' функции 'з(х) и г^(х) необхо-
димо должны при некоторых значениях х обращаться в нуль;
при этом, получив одну точку пересечения с осью абсцисс
кривой, представленной тем или другим уравнением (9), мы
320
УСЛОВИЯ КОНЕЧНОСТИ ИНТЕГРАЛОВ
найдем на расстоянии <« от этой точки еще другую точку
пересечения и т. д. (между этими двумя точками пересечения,
вообще говоря, могут еще быть точки пересечения).
Легко увидеть теперь, что кривые с бесконечно возрастаю-
щими волнами, удовлетворяющие уравнению (1), на весьма
большом расстоянии от начала координат все проходят через
одни и те же точки на оси абсцисс.
Действительно, считая в формуле (7) X за положительную
действительную величину, найдем X' = — X и заключим, что
при весьма большом х второй член второй части формулы
обращается в нуль, так что точки пересечения для всех
кривых соответствуют корням уравнения 7 (х) = 0.
§ 4. Так как в случае периодичности коэфициента р его
положительность и конечность не характеризуют конечности
интегралов уравнения (1), то важно указать хотя бы доста-
точные признаки этой конечности (отрицательность р характе-
ризует бесконечно возрастающие интегралы, поэтому если при
положительном р интегралы конечны, то это необходимый и
достаточный признак).
Один из таких признаков выведен проф. А. М. Ляпуновым
из рассмотрения ряда, в который может быть развернут инте-
грал уравнения (1).
Мы дадим здесь весьма простой геометрический вывод
этого неравенства. Из сказанного в предыдущем параграфе
следует, что существование бесконечно возрастающих инте-
гралов в уравнении (1) характеризуется существованием кривых
представленных уравнением (9), с действительными X и X' = — X.
Каждой одной точке пересечения такой кривой с осью абсцисс
непременно соответствует другая точка пересечения, отстоящая
от первой на расстояние <и. Поэтому, если мы обнаружим, что
каждые две последовательные точки пересечения всякой кри-
вой, удовлетворяющей уравнению (1), отстоят друг от друга
на расстояние, большее <», то этим будет обнаружена невоз-
можность действительных кривых уравнения (9), т. е. будет
доказано отсутствие бесконечно возрастающих интегралов
уравнения (1).
Пусть (фиг. 2) AFB будет полуволна кривой, удовлетво-
ряющей уравнению (1). Проведем в ее начале и конце каса-
УСЛОВИЯ КОНЕЧНОСТИ ИНТЕГРАЛОВ
321
тельные AD и BD и опустим из точки D их пересечения на
ось абсцисс перпендикуляр DE — h. Назовем через т и т
величины тангенсов углов DAE
и DBE и положим, что О А = v,
АВ = р.
На основании уравнения (1)
будем иметь:
Ч-н-
J pydx = m-^-m'. (10)
v
Если бы имело место условие:
то мы увеличили
0)
ее на — и потом
условии (11)
бы первую часть равенства (10), умножая
заменяя у на h и р на Поэтому при
zn-J-zn'.
Подставляем сюда величину:
р- ттг
m-j- тп ’
определяемую по фиг. 2. Получаем:
Г Рлх> (т+Т')а,
J тт
или
со
Ji л । (т — т')2
р ах > 4 + --------.
тт
о
Отсюда и подавно
о
р dx > 4.
(12)
Зак. 2365. — Н. Е. Жуковский. Т. I.
21
322
УСЛОВИЯ КОНЕЧНОСТИ ИНТЕГРАЛОВ
Вот какое неравенство необходимо будет удовлетворено
при условии (11). Поэтому всякий раз, как
w J р dx 4,
о
(13)
мы будем иметь у- > <«, и придем к заключению, что все инте-
гралы уравнения (1) конечны. Неравенство (13) и есть при-
знак, найденный проф. А. М. Ляпуновым.
Признак, который мы ниже предлагаем, применяется и
в том случае, когда у- < <«, и кривая, удовлетворяющая урав-
нению (1), пересекает ось абсцисс на пространстве, равном <»,
несколько раз.
Начиная с какой-нибудь точки пересечения А (фиг. 1)
нашей волнообразной кривой, будем рассматривать последо-
вательные точки пересечения ее с осью абсцисс и писать по
формуле (3) величины, между которыми заключены расстояния
этих точек от точки А, в таком порядке:
к z 2~ 2i: пт: nit
а 9 Ъ ’ а 9 Ь 9 9 а 9 Ъ 9
здесь а2 и Ь2 представляют наибольшее и наименьшее значе-
ния р на протяжении всего периода <«.
Такие величины будем писать до тех пор, пока они в ука-
занном порядке идут возрастая.
Если w менее первого из этих чисел или попадает во
второй, четвертый или какой-нибудь четный промежуток между
ними, то этим обнаруживается, что ни одно из расстояний
между двумя точками пересечения кривых, удовлетворяющих
уравнению (1), не может быть равно <«, т. е. что уравнение (1)
не допускает бесконечно возрастающих интегралов.
Работа „Условия конечности интегралов уравнения ~~ 4" РУ ~ 0е была
-напечатана в „Математическом сборнике0, т. XVI, 1891. Прим. ред.
CONDITIONS OF FINITENESS OF INTEGRALS OF THE EQUA TION
In this note Prof, joukovsky makes several remarks con-
cerning the finiteness of integrals of the equation named,
on the assumption that the function p always remains positive
and finite.
A comparison of the curve ABEF (Fig. 1) satisfying the
given equation, cutting the x-axis at the point A at an angle,
of which the tangent is m, with half waves of two curves
d2y
satisfying the equations + and -j^ + 62^2 = 0, in
which a2 and b2 are the maximum and the minimum values of
the function p in the interval AB, leads to inequality (4) for
the maximum value Y of у in the interval AB. By means of
this inequality is proved the finiteness of the integrals у in the
case when, as x increases, the function p tends to a certain
finite and determinate limit.
In § 3 it is shown that if p is a periodic function, then for
very great values of x, the points of intersection with the
x-axis of all curves forming increasing waves and satisfying
the equation remain the same. But the proofs of the finiteness
of the integral у that was given by the author in his paper
„On the Stability of Motion" was based on the assumption that,
by displacing in Fig. 1 the point of intersection A of the curve
in question at a finite distance, there are at the same time
displaced at a finite distance also the remotely situated points
of its intersection with the x-axis. Hence this proof will not
avail if p is a periodic function with a period <o.
21
324
SUMMARY
In this latter case Prof. A. M. Liapounov advanced the fol-
lowing necessary condition of finiteness of the integral I:
<n
<0 J p dx ^4.
о
Prof. Joukovsky deduces this condition in § 4 from very
simple geometrical considerations.
ПЛАНИГРАФ ДАРБУ
(1892 г.)
Задача о направлении точки по прямой линии решается
посредством обыкновенных направляющих механизмов, не
употребляя для этого поступательной пары, а пользуясь
исключительно шарнирными ^соединениями стержней. В пла-
ниграфе Дарбу (Darboux) с по-
мощью тех же средств дости- ?________ £ О
гается направление точки по \
плоскости. / \
Прибор Дарбу состоит из / \
стержня АВС (фиг. 1), при- \
крепленного с помощью уни- с/ м \
версальных шарниров в точках /
А, В и С к рычагам АО, ВМ /
и CN. Эти рычаги в точках у
О, М и N прикреплены к не- / /
подвижной вертикальной стой*
ке OMN также с помощью Фиг. 1.
универсальных шарниров. При
таких связях стержень АВС представляет собой систему
с двумя степенями свободы, и каждая его точка может пере-
мещаться только по определенной поверхности.
Докажем, что на стержне АВС всегда существует одна
такая точка L, которая может перемещаться только по плос-
кости, перпендикулярной к оси стойки OMN. Для этого во-
образим систему ортогональных осей координат xyz, имеющую
начало в точке О, и направим ось Oz по линии OMN, а плоскость
xz так, чтобы она проходила через точку А, координаты
которой относительно построенных осей назовем через Е, О
и С.
326
ПЛАНИГРАФ ДАРБУ
Затем введем следующие обозначения:
СМ=р, ВМ=<7, NC^r,
ОМ=а, ON=b, АВ —а, АС = $.
Кроме того, назовем через 6 угол стержня АС с осью Oz
и через ср угол между проекцией стержня АС на плоскость
ху и осью Ох.
По формуле, выражающей расстояние между двумя точ-
ками, можем написать:
+ = (1)
(£ — a sin 6 cos с?)2 4~ а2 sin2 6 sin2 ср 4" (£ + а cos ® — a)2 — q2, (2)
(С — р sin 0 cos ср)2 4“ Р2 sin2 6 sin2 ср 4~ (С 4" Р cos ® — 6)2 = г2. (3)
Исключив из этих уравнений Е и мы установим зависи-
мость между С и 6. Для этого из (2) пишем:
k2 4~ а2 4“ 4~ °2 — 2а£ sin 6 cos ср — 2Са 4“
4“ 2Са cos 6 — 2ад cos 6 = g2. (4)
Подставляем сюда S2 из (1) и представляем полученную
формулу в таком виде:
р2 — <72 4~а'2 4~ я2 а а г t • ft г ft
~--------------------a cos 6----С= 5 sm 6 cos ср—С cos 6. (5)
Изменяя здесь а, а и q на 6, Р и г, найдем подобное же
соотношение из (3), и эта перестановка букв не изменит,
конечно, второй части равенства (5), а потому мы должны
иметь:
д2_|_а2_|_а2 а
------о---------a cos □---—
ос
р‘ — гЧ-р+62 , „ 4 . ,а
= “-----7'-------icosO-pL (6)
Положим для сокращения письма, что
Р2 — д2 + ^ + а2 = 2А, р2 —г2 + ₽2 + 62 = 2В;
и тогда, определив найдем следующее:
Aft— Ва . (Ь — а) «Р е
(?)
ПЛАНИГРАФ ДАРБУ
327
Эта формула и позволяет отыскать такую точку L, кото-
рая будет описывать плоскость, параллельную хО^. Пусть
искомая точка отстоит от А на расстоянии AL — 1. Тогда ее
координата z будет определяться так:
z — С — I cos 6
или
(b—a)ap
--g--7----/ COS Ь.
ар — 6а
Если будет существовать соотношение
(6 —а) аР
аР — 6а ’
Лр — Ва
Z ар —ba
(8)
(9)
то z будет иметь постоянную величину
Лр —Да
Z аР — 6а 9
(Ю)
т. е. точка L может тогда перемещаться только по плоскости,
параллельной плоскости хОу и отстоящей от нее на указан-
ном выражением (10) расстоянии. Таким образом мы видим,
что при всяких произвольно заданных величинах а, 6, а, р,
р, q и г возможно найти точку L, перемещающуюся по плос-
кости. Исключение представляет только такой случай, когда
оси стержней ОЛ, МВ и NC между собой параллельны, т. е.
когда существует следующая пропорция:
а : р = а : 6.
Соответственно этому I и z будут равны бесконечности,
и прибор тогда осуществлен быть не может.
Описанный прибор имеет пока только теоретический инте-
рес, но в будущем, может быть, и для него найдется какое-
нибудь практическое применение.
Работа „План и граф Дарбу* была сообщена автором 6 ноября 1892 г.
в заседании физико-математической комиссии Отделения физических наук
Общества любителей естествознания, антропологии и этнографии и 19 де-
кабря 1892 г. в заседании Политехнического общества; работа была впер-
вые напечатана в „Бюллетенях Политехнического общества при Москов-
ском техническом училище0, 1892—1893. Прим. ред.
THE DARBOUX PLANIGRAPH
In the instrument described, which is schematically shown
in the drawing, the rod ABC is attached by means of univer-
sal joints at points Л, В, C to levers Л0, BM, CN, which, in
their turn, are attached by means of universal joints at points
О, M, N to a fixed column OMN.
Taking the origin of coordinates at О and directing the Oz
axis along ON we obtain three equations (1), (2), (3), in which
0 = angle of the rod ABC with the z-axis and ф = angle of
the projection of AC on the xOy plane with the x-axis. By
eliminating $ and ? is obtained first equation (7), then equa-
tion (8) giving the coordinate z of the point L on the rod ABC
at a distance I from A. As it is seen from equation (8) the
point L will move in a plane perpendicular to the rod OMN,
if I is determined from formula (9).
РЫЧАЖНЫЙ ДУБЛИКАТОР ДЕЛОНЕ
(1892 г.)
На прилагаемом чертеже (фиг. 1) изображена схема устрой-
ства рычажного механизма, который позволяет от вала о
Фиг. 1.
gh = gc = са = се = hb = ab = bd = 9; en = dn = 16; oe = od — 12; oa = 4;
oD = 11,3; D — середина расстояния gh.
330
РЫЧАЖНЫЙ ДУБЛИКАТОР ДЕЛОНЕ
передавать непрерывное вращательное движение валу т
с удвоенным числом оборотов. Механизм состоит исключительно
из одних рычагов и шарниров и не имеет вовсе мертвых точек.
На чертеже обозначено: о и т — два вала, установлен-
ных на неизменном расстоянии; оа и тп— два кривошипа;
ас, cg9 ес9 ео и еп — рычаги левой стороны механизма; ab9
bh9 db9 do и dn — соответственные им рычаги правой сто-
роны механизма.
Звено gh остается неподвижным. Все части механизма
нанесены на чертеж толстыми линиями соответственно тому
положению его, когда кривошипы оа и тп находятся оба на
одной линии и оба в верхнем своем положении. При враще-
нии кривошипа оа по направлению стрелки I кривошип тп
вращается по направлению стрелки ZZ и делает вдвое боль-
шее число оборотов, чем оа. Пунктиром на чертеже нанесены
части механизма в тот момент, когда кривошип оа сделает
четверть оборота и придет в положение оаи а кривошип тп
опишет полоборота и займет положение тщ; соответствен-
ные этому положения всех шарниров механизма обозначены
одинаковыми буквами, но с прибавлением к ним индекса
а когда кривошип оаг опишет еще четверть оборота и придет
в положение оа.29 в это время все шарниры будут занимать
положения, отмеченные индексом 2; при этом видно, что
точки е и е.2, d и d29 п и п2 совпадут между собой, чем
и обусловливается свойство дублирования числа оборотов. На
чертеже выписаны соотношения между длинами рычагов дубли-
катора, найденные изобретателем прямо эмпирическим путем.
Механизм имеет чисто теоретический интерес, практиче-
ское же пользование им затруднительно вследствие сложности
его устройства, необходимости выполнения у него строго
точной длины всех парных рычагов и необходимости распо-
лагать рычаги в разных плоскостях, результатом чего неиз-
бежно будут существовать перекос, расшатывание и неравно-
мерное истирание всех шарнирных*болтов.
Работа „Рычажный дубликатор Делоне* была сообщена в заседании
Политехнического общества 19 декабря 1892 г. и напечатана в „Бюллете-
нях Политехнического общества" за 1892 —1893 гг. Прим. оед.
A DELONE LEVER DUPLICATOR
In this note N. E. Joukovsky shows on a drawing three
different positions of a Delone mechanism, called by the latter
“a duplicator".
As may be seen from the drawing to one turn of the crank
oa correspond two turns of the crank mn.
ЛОКСОДРОМИЧЕСКИЙ МАЯТНИК ГЕССА
(1892 I.)
§ 1. После интересного случая движения тяжелого твер-
дого тела, разобранного С. В. Ковалевской, эта задача
пополнилась исследованием еще другого нового случая, усмо-
тренного Гессом1. Случай Гесса был подвергнут дальнейшей*
математической обработке проф. П. А. Некрасовым, который
приведя его решение к линейному диференциальному уравне-
нию второго порядка с коэфициентами, выраженными эллипти-
ческими функциями, указал характер движения в теле верти-
кальной линии, проходящей через точку привеса2 3.
Как исследование Гесса, так и обработка вопроса
П. А. Некрасовым имеют аналитический характер. В нашей
статье мы даем геометрическое решение задачи и указываем,
что движение тела в случае Гесса управляется движением
сферического маятника и некоторым другим локсодромиче-
ским движением.
§ 2. Случай Гесса имеет место, когда центр тяжести тела
лежит на перпендикуляре, восставленном из точки опоры О
к плоскости кругового сечения гирационного эллипсоида
тела, построенного для этой точки, и когда в начале времени
главный момент количеств движения направлен по плоскости
этого кругового сечения. Предлагаемый нами геометрический
анализ этого случая опирается на четыре нижеследующие
теоремы.
1 Hess. Uber die Euler’shen Bewegungsgleichungen und liber eine neue
partikulare Losung des Problems der Bewegung eines starren Korpers um
einen festen Punkt, „Mathematiche Annalen", Bd. XXXVII, 1890.
3 П. А. Некрасов. К задаче о движении твердого тела около непо-
движной точки, „Математический сборник", том XVI; О движении твердого
тела около неподвижной точки, „Труды Отделения физических наук", том V,
вып. 2.
ЛОКСОДРОМИЧЕСКИЙ МАЯТНИК ГЕССА
333
Теорема I. Если при упомянутом расположении центра
тяжести тела главный момент количеств движения при
начале движения направлен по плоскости кругового сечения
гирационного эллипсоида, то он будет всегда направлен по
этой плоскости.
Пусть
(1)
представляет уравнение гирационного эллипсоида, отнесенное
к главным осям инерции Ox, Оу, Oz, причем а, Ь, с суть
радиусы инерции тела, опре-
деляющиеся по его массе М
и главным моментам инер-
ции А, В, С известными фор-
мулами:
а2
В
М'
с2— _Х_
с м'
Примем, что а > Ь > с и про-
ведем из неподвижной точки О,
как из центра, сферу радиусом
Ь (фиг. 1). Эта сфера пересе-
чет гирационный эллипсоид
по двум кругам. Предположим,
что LBG будет один из этих
Фиг. 1.
кругов, а центр тяжести тела
лежит на перпендикуляре ОН, восставленном из точки О
к плоскости этого круга, и отстоит от О на расстояние 8.
Заменим силу веса тела Mg, действующую на его центр
тяжести, эквивалентной относительно точки опоры силой
А
ЛГ
MgZ
Ь ’
(2)
приложенной в точке Н, лежащей на нашей сфере.
Допустим, что точка пересечения G главного момента
количеств движения со сферой лежит на круге LBG, и отме-
тим на сфере точки В, J, L, в которых ее пересекают: ось
гирационного эллипсоида 2Ь, мгновенная ось вращения
334
ЛОКСОДРОМИЧЕСКИЙ МАЯТНИК ГЕССА
и момент пары (Qf — Q), происходящей от перенесения силы
Q в точку О,
Точка L должна лежать на горизонтальном круге ЕЕ'
и на дуге кругового сечения, так как момент упомянутой
пары горизонтален и нормален к плечу ОН.
Что касается точки У, то она должна лежать на дуге BJ,
образующей с дугой BG кругового сечения постоянный
угол z, определяемый из формулы:
t . /(а2 — 62)(62 — с-)
tgz =----------_----------
(3)
Действительно, плоскость кругового сечения гирационного
эллипсоида, данного уравнением (1), имеет относительно тех
же осей координат уравнение:
Называя через р, q, г проекции на рассматриваемые оси
мгновенной угловой скорости вращения тела, найдем для
проекций на них главного момента G величины:
Ма2р, Mb2q, Мс2г,
которые с координатами (х, у9 z) точки G должны быть свя-
заны уравнениями:
G___Метр___ Mb2q___Мс2г
Ь х у z ' * '
Из формул (4) и (5) заключаем, что величины р, 9, г,
пропорциональные координатам точки У удовлетворяют урав-
нению:
— = — 1 Л g2~~62 fta
р с V & — с2
Составляя тангенс разности дуг, тангенсы которых даны
формулами (6) й (5), найдем формулу (3). Проведем теперь
дугу большого круга GJ и докажем, что она пройдет через
точку Н.
ЛОКСОДРОМИЧЕСКИЙ МАЯТНИК ГЕССА
335
Так как плоскость проведенной дуги проходит через глав-
ный момент количеств движения и мгновенную ось, то урав-
нение ее будет:
qr (b2 — с2) х + гр (с2 — a2) y~Ypq (а2 — Ь2) z = 0.
Эта плоскость пересекает плоскость xz по прямой, выра-
женной уравнением:
Z __ г Ь2 — с2
х р а2 — Ь2 ’
которое на основании формулы (6) обращается в
Ь2 — с2
а2 — Ь2
z
X
(7)
Сравнение формул (4) и (7) показывает, что найденная
прямая пересечения перпендикулярна к плоскости кругового
сечения, т. е. что она направлена по ОН.
Таким образом дуга GJ проходит через точку Н и пере-
секает дугу BG под прямым углом. Предположим теперь,
что в начальный момент времени точки G и J имеют распо-
ложение, представленное на фиг. 1, и посмотрим, что произой-
дет по истечении элемента времени dt.
Так как тело находится под действием пары с моментом £,
направленным по радиусу OL, то главный момент количеств
движения G получит по направлению прямой OL геометри-
ческое приращение Ldty и точка G на сфере передвинется
вдоль дуги GL на некоторую бесконечно малую дугу по
направлению к L. Таково будет ее перемещение в простран-
стве. Для того же, чтобы получить перемещение точки G
в теле, следует к ее перемещению в пространстве придать
перемещение точки G, происходящее от вращения тела около
оси OJ. Это перемещение будет вследствие перпендикуляр-
ности дуг JG и GL тоже направлено по дуге кругового сече-
ния GL от G к L.
Таким образом за промежуток времени dt точка G про-
двинется в теле по окружности кругового сечения на неко-
торую элементарную дугу по направлению от G к L. Так как
336
ЛОКСОДРОМИЧЕСКИЙ МАЯТНИК ГЕССА
сделанное рассуждение может быть повторено для следую-
щего элемента времени и для всякого дальнейшего, то тео-
рема доказана.
Теорема II. Траектория точки В пересекает семейство
кругов, представляющих последовательные положения круго-
вого сечения^ под постоянным углом
Эта теорема является прямым следствием того, что точка
В движется (фиг. 1) по сфере от вращения около мгновен-
ного полюса J и имеет скорость, направленную под прямым
Фиг. 2.
углом к дуге большого кру-
га BJ. Эта скорость образует
с BG постоянный угол -g”— z,
под которым траектория BD
точки В пересекает круги
упомянутого семейства. Легко
усмотреть, что путь ККГ, опи-
санный на сфере точкой G, оги-
бает семейство кругов, пред-
ставляющих последовательные
положения кругового сечения,
так как на основании сказан-
ного выше абсолютная и от-
носительная скорости точки G
направляются по дуге GL. Когда точка В, двигаясь по BD,
достигает до точки D, то в эту же точку вступают точки G
и /. Точка В в рассматриваемый момент времени останавли-
вается, точка же G, продолжая перемещаться в теле по кру-
говому сечению в направлении от G к L, переходит через
точку В, которая располагается (фиг. 2) на продолжении
дуги LG. Мгновенный полюс J расположится влево от точки В,
которая начнет двигаться вниз по траектории DF9 образуя
с дугами GB тот же угол -----i
только эти дуги BG будут
уже принадлежать ко вторым половинам кругов рассматривае-
мого семейства и часть траектории DF будет отличаться по
виду от PD. В точке D обе части траектории PD и FD
ЛОКСОДРОМИЧЕСКИЙ МАЯТНИК ГЕССА
337
наклонены к кривой КК' под одним и тем же углом
i,
2
поэтому в этом месте траектория образует точку возврата.
Сказанное о точке D одинаково относится и к точкам Р и F,
лежащим на кривой RR', симметричной кривой К К' относи-
тельно центра О.
На основании теоремы II можно составить диференциаль-
ное уравнение траектории точки В, если известна траектория
точки G. Назовем через S длину пути, пройденного точкой G
по траектории ККГ, считая от
какого-нибудь начального поло-
жения, и положим о = ztz GJ3, при-
чем верхний знак будем брать,
если дуга отсчитывается влево
от G, а нижний — наоборот. Из
рассмотрения фиг. 3 находим, что
Ja = — ds — b с/6 sin
(8)
Здесь есть элементарный
угол, заключенный между смеж-
ными дугами BG и В' G', который
Фиг. 3.
равен элементу дуги rfs,
разделенному на радиус R геоде-
зической кривизны траектории, описываемой точкой G. Поло-
жив, что
as 6 1
Ь ~~ Ь ~z; R ~ 7’
найдем из вышенаписанной формулы искомое уравнение:
dz> = —( 1 z sin <Д J/
\ P /
(9)
в котором при данной кривой КК' величина р есть известная
функция х-
Теорема III. В случае, рассмотренном Гессом, тело дви-
жется так, что вся его живая сила равна живой силе
точки Н, в которой сосредоточена вся масса тела.
Зак. 2365. — Н. Е. Жуковский. Т. I.
22
338
ЛОКСОДРОМИЧЕСКИЙ МАЯТНИК ГЕССА
Составим проекцию <» мгновенной угловой скорости тела
на направление OG главного момента количеств движения:
= М(а2р2W + ^8) .
G
Но живая сила Т нашего тела будет:
М
Т=уг (а2р2 + b2q2 -j- с2г2),
£
поэтому
2Г
<о =---
G
Если же мы представим формулу (5) в виде:
G = УМар = У Л/ Ъд
ЬУМ ± JL
а b
УМсг
Z
с
то найдем по уравнению (1)
Следовательно,
и по уравнению (10)
G
ьУм
Учт.
С = ЬУ2МТ,
У2Т
ьУм'
(И)
(12)
Вращение рассматриваемого тела, совершающееся около
мгновенной оси О/, может быть разложено на два вращения,
совершающиеся около взаимно перпендикулярных осей OG
и ОН. Первое из этих вращений дается формулой (12); вто-
рое же не имеет никакого влияния на движение точки Н.
Скорость этой точки будет (фиг. 1) перпендикулярна к дуге
GH и будет иметь величину:
= = 1 / .
у м
Отсюда получаем:
Mv2 =
2
что и требовалось доказать.
(13)
(14)
ЛОКСОДРОМИЧЕСКИЙ МАЯТНИК ГЕССА
339
Теорема IV. В случае, рассмотренном Гессом, тело дви-
жется так, что его главный момент количеств движения G
геометрически равен моменту количества движения точки Н,
в которой сосредоточена вся масса М.
Скорость точки Н будет (фиг. 1) перпендикулярна к дуге
GH, к той же дуге будет перпендикулярна и скорость точки G,
так как абсолютное перемещение этой точки, как было сказано,
будет совершаться по направлению дуги GL, а эта дуга пер-
7Г
пендикулярна к GH. Припоминая, что GH = - , приходим к
заключению, что конусы NON' и КОК', описываемые в про-
странстве радиусами ОН и ОG, будут взаимно ортогональны.
Таким образом главный момент количеств движения G
ортогонален к элементарному сектору, описанному радиусом
ОН, и, как видно на фиг. 1, расположен так, что наблюдатель,
глядящий по направлению от G к О, видит точку Н, пере-
мещающуюся по солнцу. Что касается величины G, то на
основании формул (11) и (13) мы можем представить ее так:
G = Afo6. (15)
Теорема таким образом доказана.
§ 3. Рассмотрим сначала простейший случай изучаемого
движения, при котором главный момент количеств 'движения
в начале времени равен нулю или горизонтален. Так как он
будет изменяться под действием вертикальной пары (Q, — Q),
то точка G должна (фиг. 1) все время оставаться на гори-
зонтальном круге ЕЕ'-, но так как по теореме I эта точка
должна еще находиться на круговом сечении BG, то она
должна лежать на пересечении обоих кругов, т. е. совпадать
с точкой L. Таким образом главный момент количеств дви-
жения будет все время направлен по моменту L вращающей
пары и потому, изменяясь по величине, будет сохранять в
пространстве неизменное горизонтальное положение, и со-
впавшие точки G и L на нашей сфере будут оставаться во
время движения тела неподвижными.
Всякое движение тела около неподвижной точки О вполне
определяется движением по сфере с центром О некоторой
дуги большого круга, соединенной неизменно с телом. За
такую дугу в нашем случае удобно принять дугу BG (фиг. 4).
22*
340
ЛОКСОДРОМИЧЕСКИЙ МАЯТНИК ГЕССА
Эта дуга должна на основании сказанного постоянно прохо-
дить через неподвижную точку G и на основании теоремы II
должна своим концом В описывать на сфере траекторию,
образующую постоянный угол —i с направлением BG.
Такая траектория представит нам локсодромическую ли-
нию, имеющую асимптотический полюс в G. Уравнение ее
может быть получено из формулы
(8), полагая
Что касается точки
Н,
tg i с№,
(16)
на дугу GH— Ь
и
ds — 0, -г =
о
Это дает нам диференциаль-
ное соотношение:
d's
sin <р
которое по интегрировании обра-
щается в
tg 2 =Се
где С— произвольное постоянное,
то она всегда будет отстоять от G
потому будет двигаться по окруж-
ности, плоскость которой перпендикулярна OG. Предполагая,
что на фиг. 4 прямая OG перпендикулярна к плоскости чертежа,
найдем, что точка //будет перемещаться по вертикальной окруж-
ности HF, по которой наша сфера пересекает плоскость чертежа.
Сосредотачивая в точке Н всю массу М, найдем по тео-
реме III и по теореме живых сил для всего тела, что точка Н
будет иметь такое движение, при котором ее живая сила равна
ее начальной живой силе, сложенной с работой, совершонной
силой Q при переходе точки Н от ее начального положения
к рассматриваемому. Но ведь под этим самым условием опре-
деляется движение математического маятника, состоящего из
материальной точки массы 71/, помещенной в Н9 и находя-
щегося под действием постоянной силы Q. Это приводит на
основании формулы (2) к следующему заключению.
ЛОКСОДРОМИЧЕСКИЙ МАЯТНИК ГЕССА
341
Точка тела Н будет двигаться, как математический
маятник длины Ь, в предположении, что напряжение тя-
8
жести изменено в отношении -г- •
о
Колеблясь по закону математического маятника, точка
тела Н будет вести за собой соединенную с телом дугу BG,
торая, опираясь точкой В на неподвижную локсодрому FBG
и постоянно проходя через неподвижную точку G, будет
иметь вполне определенное движение. Это движение охарак-
теризует все движение тела Ч
Если начальная скорость точки Н такова, что эта точка,
рассматриваемая как выше объясненный математический ма-
ятник, не может перейти верхнюю точку окружности HF, то
она будет колебаться по закону маятника, и тело через каждое
полное колебание будет возвращаться в свое прежнее поло-
жение. Если же начальная скорость точки Н такова, что она
должна перейти верхнюю точку окружности HF, то эта точка
будет по известному из теории маятника закону вращаться
по окружности HF. При этом вращении точка тела В, пере-
мещаясь по локсодроме, все ближе и ближе будет подходить
к полюсу G, и скольжение дуги BG через точку G будет все
более и более погасать.
В пределе при t — оо движение перейдет в простое вра-
щение тела около горизонтальной оси 0G по закону маятника.
Так как локсодромическая линия может быть продолжена на
часть сферы, лежащую за плоскостью чертежа, и дает в этой
части другую асимптотическую точку, симметричную относи-
тельно О, с точкой G, то можно сказать, что скольжение
дуги ВG, которое должно погаснуть при / = оо, было исче-
зающе мало и при t = — оо.
1 Полезно указать, что в случае о = 0 данная нами геометрическая
интерпретация представляет в новом виде случай движения Пуансо, при
котором перпендикуляр, опущенный из точки опоры на неподвижную пло-
скость, прикасающуюся к эллипсоиду инерции, равен 1: \В . При о = О
живая сила Т есть величина постоянная, и по формуле (12) со будет тоже
постоянно. Все движение тела выражается вращением дуги BG около точки G
с этой постоянной скоростью со и скольжением дуги BG через точку G
вследствие того, что точка В опирается на локсодрому.
342
ЛОКСОДРОМИЧЕСКИЙ МАЯТНИК ГЕССА
§ 4. Переходя к общему случаю, называем через I проек-
цию начального момента количеств движения на вертикальную
линию. Так как момент L вращающей пары горизонтален, то
эта проекция будет всегда сохранять величину /. Сосредо-
тачивая (фиг. 1) всю массу тела в точке Н, находим по тео-
реме IV, что проекция на вертикальную линию момента
количества движения точки Н равна проекции на эту линию
момента G, т. е. равна Z.
Кроме того, по теореме III и по теореме живых сил для
всего тела найдем, что живая сила точки Н равна ее началь-
ной живой силе, сложенной с работой силы Q при переходе
точки Н из начального положения в рассматриваемое.
По этим двум соотношениям, как известно, вполне опре-
деляется движение материальной точки Н на рассматриваемой
сфере, и мы приходим к следующему заключению:
В общем случае Гесса точка тела И движется, как
обыкновенный сферический маятник длины Ь, в предполо-
8
жении, что напряжение тяжести изменено в отношении
Траектория, описанная сферическим маятником, хорошо
исследована. Пусть (фиг. 1) она будет NHN'. Построив ко-
нус, дополнительный конусу, описываемому маятником ОН,
найдем в его пересечении со сферой траекторию КК' х, опи-
сываемую точкой G. На основании сказанного выше, пло-
скость кругового сечения будет постоянно прикасаться к ко-
нусу, описываемому радиусом OG, и следовательно дуга LBG
будет постоянно прикасаться к линии КК и к симметричной
ей относительно центра О линии RR'. Точка В на основании
теоремы II будет описывать траекторию, пересекающую се-
мейство кругов, представляющих последовательные положения
кругового сечения, под постоянным углом Эта траек-
тория представляет зигзагообразную линию, заключенную
между кривыми КК' и RR' и опирающуюся точками возврата
1 Эга кривая, вообще говоря, не смыкается, а циркулирует между двумя
параллельными кругами, отступая своими точками прикосновения к этим
кругам в сторону движения G.
ЛОКСОДРОМИЧЕСКИЙ МАЯТНИК ГЕССА
343
постоянно проходить
Фиг. 5.
на эти кривые. Но ниже будет показано, что траектория
точки В может в других случаях асимптотически прибли-
жаться к некоторым кривым, заключенным между К К' и RR'.
Двигаясь по закону сферического маятника, точка Н по-
ведет за собой точку G по траектории КК'*, движение этой
последней точки вполне охарактеризует движение дуги GB,
которая должна опираться точкой В на вычерченную нами
траекторию PBDF и должна
точку G. Движение же дуги BG
по поверхности сферы вполне
определяет движение всего те-
ла. Чтобы лучше познакомиться
с видом траектории точки В,
остановим наше внимание на
том простом случае, когда точ-
ка Н, в которой считаем со-
средоточенной массу М, имеет
горизонтальную скорость, даю-
щую центробежную силу, урав-
новешивающую силу Q. В этом
случае точка Н и точка G движутся
тальным кругам. Линии КК' и RR' представят два симмет-
ричных параллельных круга, и нам придется проводить траек-
торию точки В под равными углами к окружностям больших
кругов, прикасающихся к этим параллельным кругам.
Здесь представляются два случая: угол -----* будет или
через
горизон-
равномерно по
более угла ----X, образуемого окружностью кругового се-
чения KR' с экватором ЕЕ', или менее его. В первом случае
ни один из параллельных кругов, заключенных между КК
и RR', не будет пересекать окружности круговых сечений
под углом -----г, и траектория точки В будет представлять
вышеописанную зигзагообразную линию; во втором же между
КК' и RR' будут существовать (фиг. 5) два таких симметрич-
ных параллельных круга XX' и YY', а траектория точки В
будет своими концами асимптотически приближаться к этим
344
ЛОКСОДРОМИЧЕСКИМ МАЯТНИК ГЕССА
кругам. При этом если при положении точки В на экваторе ЕЕ'
точка G будет находиться в К, то траектория будет иметь
вид YPBDX'} если же при положении точки В на экваторе ЕЕ'
точка G лежит в К', то траектория будет иметь вид YBX'.
Этот результат, очевидный из данного нами геометрического
построения, может быть обнаружен также с помощью урав-
нения (9), которое в данном случае легко интегрируется. Так
как угол -g- — X измеряет дугу ЕКУ а р представляет выра-
женную в долях радиуса образующую конуса, прикасающегося
к сфере по кругу КК, то
p = tgX.
Уравнение (9) дает нам:
tgz .
-Ar sm ср
tgX
Делая в этом интеграле подстановку:
^1 = “’
мы приводим его к виду:
Если речь идет о первом случае и i < X, то этот интеграл
обращается в
(П)
I /-)==arcts
и мы получаем зигзагообразную кривую.
Если же i > X, то интеграл обращается в
tg2;
tg2x
1(.8 —х) =lg
о
tg2
tg; _, /tg2 i
tg X V tg2 x
tg^-r
ЛОКСОДРОМИЧЕСКИЙ МАЯТНИК ГЕССА
345
и мы получаем кривую, изображенную на фиг. 5. При
положительном вторая часть формулы (18) остается конечной,
что соответствует ветви траектории PD*, при отрицательном же
ф
tg получаем с приближением
этого тангенса к
tgi
tgX
;2Z-
tg2X 1
tgz
tgk
ф
и к
ф
1
1
величину x, устремляющуюся
к + ос или к — ос, что соот-
ветствует траектории YBX'
или же ветвям траектории DX'
и PY. На основании исследо-
вания П. А. Некрасова следует,
что и в общем случае движе- Фиг. 6.
ния точки И по закону сфери-
ческого маятника представляются два вида траектории точки В.
Может получиться или зигзагообразная траектория, рассмо-
тренная нами в начале этого параграфа, или же траектория
с асимптотическими ветвями.
§ 5. Я окончу эту статью описанием приборов, устроенных
мной для механического кабинета Московского университета,
чтобы демонстрировать изложенное движение тяжелого твер-
дого тела.
На фиг. 6 представлен прибор, который я называю локсо-
дромический маятник Гесса. Он состоит из диска АВ, опи-
рающегося на подпорку Е острием, находящимся на конце
оси СО, ввинченной в середину диска так, что конец острия О
лежит в нижней плоскости диска. Кроме того, в диск ввин-
чены четыре винта А, А', В, Bf, симметрично расположенные
на двух взаимно перпендикулярных диаметрах диска, а на
эти винты надеты тяжелые гайки Р, Р' и Q, Q', причем веса
346
ЛОКСОДРОМИЧЕСКИЙ МАЯТНИК ГЕССА
симметрично расположенных гаек одинаковы. Назовем эти веса
через Р и Q и предположим, что при гайках, подвинченных
к диску, центр тяжести прибора находится в точке О. Если
опустим гайку Р на некоторое расстояние I от диска, то и
центр тяжести опустится по оси прибора вниз, так что по-
ложение равновесия будет устойчивое.
Посмотрим, нельзя ли выбрать I так, чтобы плоскость
диска была плоскостью кругового сечения соответственного
гирационного эллипсоида. Называя через р, q, г проекции
угловой скорости вращения прибора на оси координат, на-
правленные по ОА, ОВ и ОС, напишем живую силу рассма-
триваемого тела:
Т = 1 (Ар2 + Bq2 4- Сг2 — 2Dqr — 2Егр — 2Fpq).
Здесь, как видно на фиг. 6, следует положить:
D = Hjnyz — О,
Е = S/nzx — —
Р=^тху — ®,
где р — расстояние винтов от оси прибора.
Формула живой силы принимает вид:
г = (Лр2 + Bq2 + Сг2 + 2Р/рлр).
(19)
(20)
Если плоскость ху есть плоскость кругового сечения, то
при перпендикулярности главного момента G к оси z должна
удовлетвориться формула (12).
Условие упомянутой перпендикулярности дает:
откуда следует, что
Р/Р
с р’
(21)
со2 — р2 I 1
ЛОКСОДРОМИЧЕСКИЙ МАЯТНИК ГЕССА
347
Преобразуя формулу (12) на основании формул (20) и (21),
получаем:
62Л/Гр2 (1 +^) + = Ia - p^ + Bq\ (22)
Вследствие равенств (19) заключаем, что ось координат Оу
есть одна из главных осей инерции. Принимаем ее за ось
среднего момента инерции и полагаем В = &М. После этого
для удовлетворения уравнения (22) нам надо будет только
положить, что
р2р2/2 (С + В) — С2 (А — В) = 0.
Легко увидеть на фиг. 6, что момент инерции С не изме-
няется от изменения длины Z, момент же инерции В слагается
из момента BQ при подвинченной гайке Р и из PZ2; что же
касается разности А — В, то она будет иметь величину:
A — 5 = 2p2(Q — Р).
На основании сказанного найдем для определения Р квад-
ратное уравнение:
С±в_о &(Q-P)
1 « р 1 рз v’
из которого получаем:
/2 = 1 /(С+^о)2 , С2(О^Р)_С±в,
I 4Р- "Г рз 2Р • W
Эта формула показывает, что необходимо сделать Q > Р.
Определив отсюда I и поместив на такое расстояние гайку Р,
мы получили прибор, который осуществляет движение в слу-
чае Гесса всякий раз, как он приводится в движение началь-
ным импульсом, приложенным к точке С и направленным
параллельно плоскости диска, так как при этом начальный
момент количеств движения будет лежать в плоскости диска-
Что касается начального положения прибора, то ось ОС мо-
жет быть наклонена под каким угодно углом к вертикали.
На этом приборе может быть проверена неподвижность точки G,
обнаруженная в § 3. Погнув ось ОС так, чтобы линия OG
пересечения диска с горизонтом направилась по стрелке ука-
348
ЛОКСОДРОМИЧЕСКИЙ МАЯТНИК ГЕССА
монстрирует движение
о
зателя F, пускаем прибор качаться без начальной скорости.
Тогда увидим, что край диска будет всегда прикасаться
к концу указателя, хотя место точки прикосновения G на
диске будет изменяться.
Другой прибор, устроенный мной, демонстрирует движение
вида Гесса подобно тому, как прибор Дарбу и Кенигса де-
вида Пуансо, т. е. подражает искус-
ственным образом движению, кото-
рое тело имело бы в случае, указан-
ном Гессом. Этот прибор представлен
на фиг. 7 и состоит из шара, укреплен-
ного на стойке D. На шаре вырезаны
два желобка: один имеет вид локсо-
дромы, представленной на фиг. 4;
другой же имеет вид зигзагообраз-
ной кривой, опирающейся точками
возврата на два параллельных круга,
как это было объяснено в § 4. По
локсодромическому желобку двига-
ется ролик В9 надетый на дугу
соединенную с маятником М9 а по
зигзагообразному — ролик В9 надетый на дугу большого
круга GG 9 соединенную посредством дуги G'C с ручкой N.
Если привести маятник М в колебание, то отрезок дуги BG9
отсчитываемый от точки В9 будет своим движением по сфере
интерпретировать движение маятника Гесса, рассмотренное
в § 3. Если же вращать равномерно ручку 7V, то движение
дуги BG9 отсчитываемой от точки В9 будет интерпретировать
один из случаев движения маятника Гесса, указанных в § 4. В на-
шем приборе ролик хорошо переходит через точки возврата.
Фиг. 7.
большого круга BG9
Работа „Локсодромический маятник Гесса" была сообщена автором
12 ноября 1892 г. в заседании физического Отделения Общества любителей
естествознания, антропологии и этнографии и напечатана в „Трудах Отде-
ления физических наук*, т. V, вып. 2, 1893. Прим. ред.
HESS' LOXODROMIC PENDULUM
Hess’ case of rotation of a heavy body about a fixed point
is obtained when the centre of gravity of the body lies on the
perpendicular from the point of support О to the plane of the
circular cross-section of the gyrational ellipsoid constructed for
the point 0, and when the principal moment of momentum
at the initial moment lies in the plane of that circular section.
In Fig. 1 is shown a sphere described from the fixed point
О by a ridius b equal to the mean of the three principal radii
of gyration (a > b > c). On the sphere is drawn the circular
section LBG of the gyrational ellipsoid, and are marked the
points: В — the point of intersection of the sphere with the
central axis of the gyrational ellipsoid, H—that of intersection
with the axis, on which is situated the centre of gravity and
which is perpendicular to the plane of the circular section,
J—that of intersection with the instantaneous axis of rotation,
G—that of intersection with the principal moment of momentum,
and L—with the moment of the gravitational force with respect
to the point O.
The geometrical interpretation of Hess’ case of motion
is based on the following four theorems, which Prof. Joukovsky
deduces by means of very simple considerations.
Theorem I. If at the initial moment of the motion the prin-
cipal moment of momentum was in the plane of the circular
cross-section of the gyrational ellipsoid, then it will always re-
main in that plane.
Theorem II. The family of circles representing the succesive
positions of the circular cross-section is intersected by the path
of the point В at a constant angle
2
350
SUMMARY
Theorem III. The motion of the body is such that its kinetic
energy equals that of the point H in which is concentrated
the mass of the body.
Theorem IV. The motion of the body is such that its prin-
cipal moment of momentum G is geometrically equal to the
moment of momentum of the point H in which is concentrated
the mass of the body.
From theorems III and IV it follows that the point H moves
as an ordinary spherical pendulum of length 6, it being assumed
that the intensity of the gravitational force is changed in the
g
ratio -7-, where 8 is the distance from the point О of the centre
0
of gravity of the body. The motion of H determines the motion
of the circular cross-section LBG and the envelope of its con-
secutive positions; the point G is always the point of contact
of the circular cross-section and its envelope. The path of В is
given by the differential equation (8) or (9), which is obtained
by means of Fig. 3. In this equation a denotes the arc GB, s is
the arc described by the point G along the envelope, and
is the geodesic curvature of the envelope.
Prof. Joukovsky considers in details the two following parti-
cular cases:
1. At the beginning of the motion the principal moment G
is horizontal. In this case the direction of the principal moment
will not change, the [motion of H in the vertical plane will be
that of a simple mathematical pendulum, and the point will be
shifting along a loxodrome of which the equation (16) is obtai-
ned by integrating the differential equation (8). The motion can
be reproduced by means of the apparatus shown in Fig. 7.
2. The point H performs an uniform motion along a small
horizontal circle, i. e. moves as a conical pendulum. In this case
the point G also moves along a small circle parallel too, and
symmetrical with, the former circle. The path of the point В
intersects at equal angles the circumferences of the large circles
tangent to the two small circles KK and RR'. Two cases can
SUMMARY
351
be set forth, when the angle -% — i is greater than that between
the circular cross-section KBR' and the equator EE' (Fig. 5),
and when it is less. In the first case the path of В is a zigzag
curve, of which the equation (17) is obtained by integrating
the equation (9). The motion of the body can be reproduced
by means of the apparatus shown in Fig. 7. In the second case
the path of В is as shown in Fig- 5. The path is seen to approach
the two parallel circles XX' and YY' asymptotically. Hess’ con-
ditions can be realized by means of the apparatus shown
in Fig. 6. The apparatus consists of a disc AA'BB' with nuts
P, P', Q, Q', the weights of symmetrically disposed nuts being
equal. By lowering the nut P at certain distance Z, the plane
of the disc can be made to become the plane of the circular
cross-section of the gyrational ellipsoid of the apparatus, and
the centre of gravity will be on the line perpendicular to the disc.
О ГИРОСКОПИЧЕСКОМ ШАРЕ Д. К. БОБЫЛЕВА
(1893 г.)
§ 1. В прошлом году проф. Д. К. Бобылев дал решение
интересной механической задачи: о движении без скольжения
по горизонтальной плоскости полого шара с гироскопом
внутри Ч При этом ему удалось выразить с помотцью эллип-
тических трансцендентных от времени все параметры, опре-
деляющие положение прибора, и исследовать вид кривых,
которые описывает точка опоры шара по плоскости. Эти кри-
вые Д. К. Бобылев воспроизводил опытно, заставляя устроен-
ный им (для механического кабинета Петербургского универ-
ситета) гироскопический шар катиться по плоскости, покрытой
порошком ликоподия.
Аналогичный прибор был еще раньше построен в Москве
А. X. Репманом (для Политехнического музея), который тоже
исследовал опытным путем движения, производимые им при
качении по горизонтальной и наклонной плоскости.
В обоих упомянутых приборах гироскоп В (фиг. 1) зани-
мает центральное положение внутри оболочки А, предста-
вляющей концентрический сферический слой, и на первый
взгляд кажется, что такой вид оболочки должен соответство-
вать простейшему случаю движения прибора. Но такое заклю-
чение несправедливо.
В этой статье мы имеем в виду показать, что анализ дви-
жения гироскопического шара значительно упрощается, когда
к его сферической оболочке А прибавлено изнутри некоторое
кольцо РР', экваториальная плоскость которого перпендику-
1 Д. К. Бобылев, О шаре с гироскопом внутри, катящемся по гори-
зонтальной плоскости без скольжения, „Математический сборник", т. XVI,
вып. 3, 1892.
О ГИРОСКОПИЧЕСКОМ ШАРЕ Д. К. БОБЫЛЕВА
353
лярна оси гироскопа и проходит через его центр, а размеры
подобраны так, что разность моментов инерции кольца отно-
сительно оси гироскопа и относительно перпендикулярной
оси, проходящей через центр прибора, равна моменту инер-
ции гироскопа относительно этой последней оси. Если пред-
положим, что кольцо РРГ есть цилиндрическое внешнего ра-
диуса с, внутреннего радиуса Ь и высоты 2е, то найдем для
определения размеров кольца соотношение:
1 9
~ гсре (с4 — 64) — у ’Фе3 (с2 — — тпВ2, (1)
где р — плотность кольца, т — масса гироскопа, а 6 — его ра-
диус инерции около оси, перпендикулярной к оси вращения.
Предполагая, что гироскоп сде-
лан из того же вещества, как коль-
цо, и представляет цилиндр высо-
ты 2е и радиуса основания немного
меньшего Ь, можем положить:
тиВ2 = ^р64е.
Подставляя эту величину в вы-
шенаписанную формулу, получаем:
По этой формуле мы можем определить толщину кольца
2е, задавшись остальными размерами его.
При прибавлении к сферической оболочке А всякого иного
диаметрального кольца РР' произвольных размеров, задача
о движении гироскопического шара остается той же степени
трудности, как задача Д. К. Бобылева \ так что простейший
ее случай соответствует не отсутствию кольца, а присоеди-
нению кольца указанных размеров.
1 Можно показать, что при этом в формулах Д. К. Бобылева изме-
няются только постоянные величины.
Зак. 2365. — Н. Е. Жуковский. Т. I.
23
354
О ГИРОСКОПИЧЕСКОМ ШАРЕ Д, К. БОБЫЛЕВА
Будем называть оболочкой систему, состоящую из сфери-
ческого слоя Л, кольца РР' и двух материальных точек Q
т
2
и Q', имеющих массы
и помещенных на оси гироскопа
на расстояниях 8 от его центра. Легко усмотреть, что при
кольце, сделанном указанным выше способом, эллипсоид инер-
ции оболочки относительно центра прибора есть шар.
Останавливаясь на этом случае, будем обозначать: массу
оболочки (т. е. массу всего прибора) через М, ее радиус
инерции относительно всякой центральной оси — через к, ра-
диус же инерции гироскопа относительно его оси вращения —
через к',
§ 2 Вообразим (фиг. 2) движущиеся поступательно прямо-
угольные оси координат х, г/, z, начало которых О постоянно
совпадает с точкой прикосновения гироскопического шара
с горизонтальной плоскостью, а ось Oz постоянно направлена
через центр прибора по вертикали вверх.
Так как гироскопический шар катится по плоскости без
скольжения, то угловая скорость его оболочки должна про-
ходить через точку О, Называя через р, </, г проекцию на
оси х, у, z, через ш' — проекцию угловой скорости гироскопа
О ГИРОСКОПИЧЕСКОМ ШАРЕ Д. К. БОБЫЛЕВА
355
на его ось и через а — наружный радиус гироскопического
шара, найдем, что двойная живая сила всего прибора будет:
М \кЪ* + (к? + а2) (р2 + 92)] + тк'Ы*.
Эта живая сила должна оставаться постоянной, потому что
высота центра тяжести прибора не изменяется, а сила трения
вследствие неподвижности во всякий момент времени ее точки
приложения работы не производит.
С другой стороны, так как никакая пара не вращает гиро-
скоп В около его оси, то о/ есть величина постоянная. Отсюда
следует, что живая сила оболочки во время движения гиро-
скопического шара не изменяется»
Называя двойную величину этой живой силы через Л,
имеем:
^ + (Л2+^)(^Ч-92) = 4- (3)
Пусть L будет вектор, отлагаемый на оси гироскопа и
имеющий постоянную величину mk'2®', а Л2, — проек-
ции этого вектора на оси координат.
Назовем через X и Y проекции на оси Ох и Оу силы
трения, развивающейся в точке опоры гироскопического шара,
и напишем известные уравнения динамики, относящиеся к дви-
жению центра тяжести и изменению момента количеств дви-
жения относительно центра тяжести:
-£(Мда) = Х,
-^(-Мра)=У,
^(Mktp + L^aY,
^(M&q + L,)==-aX,
23*
356
О ГИРОСКОПИЧЕСКОМ ШАРЕ Д. К. БОБЫЛЕВА
Исключая из этих формул X и Y, получаем уравнения:
^[Л/(^ + а2)р + £1] = 0, ^[W2+«2)<7+£J = o, -^[W2r+b8)]=o, (4)
которые показывают, что главный момент количеств движе-
ния относительно точки опоры всего гироскопического шара
не изменяется по величине и направлению во время его
движения.
Будем рассматривать вектор 0G, представляющий главный
момент количеств движения оболочки относительно точки О,
и назовем через х, у, z координаты его конца, так что
х — М (k2 4“ Qf2)
y = M(k2~\~a2)q,
z = Mk2r.
(5)
Определив отсюда р, q, г и подставив в уравнение (3),
получим:
х2 + у* . Z2 _
к2 + а2 к2
Mh.
(6)
Это уравнение показывает, что точка G во время движе-
ния гироскопического шара перемещается относительно осей
х, у, z по эллипсоиду вращения, подобному гирационному
эллипсоиду оболочки прибора, построенному для точки О.
Теперь легко отыскать конусы, по которым будут пере-
мещаться векторы OG и L относительно нашей подвижной
системы осей координат 1. Построив (фиг. 2) неизменный
вектор ON, представляющий главный момент количеств дви-
жения всего гироскопического шара, описываем из точки N,
как из центра, сферу радиусом NG = L и определяем кри-
1 Употребляемый здесь метод исследования аналогичен тому, который
был применен нами к решению задачи о движении твердого тела около
неподвижной точки с гироскопом внутри. „Журнал Русского физико-хими-
ческого общества", т. XVII, стр. 193, 1885.
О ГИРОСКОПИЧЕСКОМ ШАРЕ Д. К. БОБЫЛЕВА
357
вую ТТ', по которой эта сфера пересечет эллипсоид, данный
уравнением (6). На кривой ТТ\ как на направляющей, по-
строим два конуса ТОТ' и TNT', имеющие вершины в точ-
ках О и N По первому из этих конусов будет перемещаться
вектор OG. Если же перенесем второй конус поступательно,
так чтобы его вершина перешла в центр гироскопа, то полу-
чим место оси гироскопа относительно нашей подвижной си-
стемы осей координат.
§ 3. Определим уравнения проекций кривой ТТ' на пло-
скости xz и yz. Предположим для простоты, что неизменный
вектор CW лежит в плоскости zx, и назовем его длину через 7V,
а угол, который он образует с осью Ох, — через 6.
Уравнение построенной нами сферы будет:
У2 = L2 — — /V cos б)2 — (z — N sin О)2. (7)
Подставляя эту величину у2 в формулу (6), получаем:
х = а —7(z —р)2,
(8)
где
2/V cos О
р = —TVA sin О,
а2
а2
2№W
k2 \ 1
^-sin20j — L2 + Mh(k2 + a>) ,
(9)
Уравнение (8) показывает, что проекция кривой ТТ' на
плоскость xz есть парабола (фиг. 3), ось которой параллельна
оси Ох. Эта парабола имеет вершину Е в точке (а, р) и на-
правлена
при 6 < 2*
выпуклой стороной в положительную
сторону оси Ох. Внося величину х из формулы (8) в фор-
мулу (7), выразим у2 некоторым многочленом четвертой сте-
пени от z, старший член которого будет отрицательная вели-
чина — 72z4. Называя корни, обращающие этот многочлен в нуль,
через е19 е2, е3, е4, представляем уравнение проекции рассмат-
риваемой кривой на плоскость yz в виде:
t/2 = — Т2 (в! — z) (е2 — z) (е3 — z) (е4 — z). (10)
358
О ГИРОСКОПИЧЕСКОМ ШАРЕ Д. К. БОБЫЛЕВА
Легко усмотреть, что корни е19 е2, е3, е4 будут координаты
z точек пересечения параболы (8) с эллипсом, представляющим
меридиональное сечение гирационного эллипсоида, которое
мы будем для краткости называть гирационным эллипсом.
Если корни е{ > е4 будут действительны, а е2 и е3 будут мни-
мые сопряженные величины, то полученная кривая четвертого
порядка будет иметь вид овала, как это представлено на
фиг. 3, на которой плоскость yz совмещена с плоскостью xz.
При е2 = е3 = 0 овал переходит в восьмерку, а при еу > е2 >
> е3 > е4 действитель-
ных получаются два
замкнутых контура.
§ 4. Определим те-
х перь для всякого вре-
мени координаты х, у,
z точки G, причем на
основании формул (5)
найдутся также и вели-
чины р, д, г.
Так как ось гиро-
скопа, на которой мы откладываем вектор L, занимает в
оболочке неизменное место, то изменение компонента L3
мы можем определять так: переносим вектор L параллельно
самому себе из центра прибора в положение GN (фиг. 2)
и считаем его в этом положении неизменно соединенным
с оболочкой; потом сообщаем оболочке поворот на беско-
нечно малый угол со dt около мгновенной оси вращения
и составляем разность происшедших от этого поворота
бесконечно малых перемещений по направлению оси Oz то-
чек N и G.
Так как на основании формулы (5) вектор лежит в ме-
ридиональной плоскости гирационного эллипсоида, проходя-
щей через вектор OG, то точка G от упомянутого поворота
перемещается параллельно плоскости ху и не получает пере-
мещения по оси Oz', все же перемещение точки /V вдоль
оси Oz происходит от составляющей угловой скорости q.
Поэтому
JL3 — — N cos dt.
О ГИРОСКОПИЧЕСКОМ ШАРЕ Д. К. БОБЫЛЕВА
359
Подставляя сюда L3 = N sin 0 — z,
находим: dz ^=Neosbg, (11)
или dz N cos 0 dt М(к*+а2)У'
Внося в эту последнюю формулу величину у из уравне-
ния (10) и определяя 4 получаем:
t = ± 2№(*2 + «2) Г dz
a2 J V (et — z) (е2 — z) (е3 — z) (z — е4)
Таким образом выражается t по z; формулы же (8) и (10)
дают нам величины х и у по z.
§ 5. Переходим к определению координат G точки
опоры О относительно неподвижных осей 0% О'?], проведен-
ных по рассматриваемой горизонтальной плоскости из неко-
торого начала О' параллельно осям Ох и Оу.
Мы имеем:
На основании первой из этих формул и формулы (11) на-
ходим, что
__ a dz
dt /VcosG dt
Интегрируем:
5==/v^r+consL (14)
Таким образом расстояние точки О от оси О'зависит
линейно от высоты точки G над горизонтальной плоскостью.
Так как точка G перемещается по кривой ТТ (фиг. 2) и
периодически изменяет свою высоту от высоты точки Т' до
высоты точки Т, то траектория точки О должна быть заклю-
360
О ГИРОСКОПИЧЕСКОМ ШАРЕ Д. К. БОБЫЛЕВА
чена между двумя прямыми, параллельными оси О'г\ и отстоя-
щими друг от друга на расстояние, равное проекции хорды ТТ'
на ось Oz, умноженной на
а
N cos 6 *
Представляя вторую формулу (13) в виде:
dr\ _ a
dt~ M(a*+k?)X 1 '
и подставляя сюда величину х из формулы (8), выразим рас-
сматриваемую производную через z. Если же заменим dt вели-
чиной, взятой из формулы (12), и, разделив переменные,
совершим интеграцию, то выразим iq по z. Отсюда на осно-
вании уравнения (14) будем иметь связь между и 5, т. е.
составим уравнение траектории точки О.
О форме упомянутой траектории мы можем иметь пред-
ставление и не прибегая с составлению ее уравнения. Мы
сказали на основании уравнения (14), что эта траектория будет
заключена между двумя прямыми, параллельными оси О'г\.
На основании уравнения (15) заключаем, что между двумя
этими прямыми она будет итти, соприкасаясь поочередно то
с той, то с другой из них, и будет каждыми двумя точками
прикосновения к одной из прямых разбиваться на тождествен-
ные части. Для дальнейшего суждения о виде траектории
служит парабола (8). Траектория точки О будет принадлежать
к одному из трех типов, смотря по расположению отрезка ТТ'
упомянутой параболы (фиг. 3) в гирационном эллипсе. [Если
кривая четвертого порядка, данная уравнением (10), предста-
вляет два замкнутых контура, то мы считаем за ТТ' отрезок
параболы, соответствующий одному контуру.]
Первый тип будет иметь место, когда весь отрезок пара-
болы ТТ' заключен в правой половине гирационного эллипса.
В этом предположении х будет иметь только положительные
значения. Координата согласно формуле (15), будет по-
стоянно убывать. Траектория точки О изобразится волно-
образной кривой (фиг. 4), заключенной между параллелями
7 и 2. Такая же траектория будет иметь место в случае, когда
О ГИРОСКОПИЧЕСКОМ ШАРЕ Д. К. БОБЫЛЕВА
361
весь упомянутый отрезок параболы ТТ лежит в правой поло-
вине гирационного эллипса; но в этом случае движение
точки О по траектории будет совершаться в сторону, обрат-
ную той, которая указана на фигуре стрелкой.
Второй тип траекторий получается, если отрезок ТТГ лежит
в двух половинах гирационного эллипса так, что оба конца
его в левой половине, а середина в правой (как это изобра-
жено на фиг. 3). Идя в этом случае по отрезку параболы
от Т к мы будем иметь сначала отрицательные значения х,
потом положительные, потом опять отрицательные. Отсюда
Фиг. 5
по формуле (15) координата будет сначала увеличиваться,
потом убывать, а потом опять увеличиваться. Траектория
точки О будет иметь вид кривой, заключенной на фиг. 4 между
параллелями 2 и 3.
Третий тип траекторий получается, когда отрезок ТТ'
лежит одним своим концом Т в левой половине гирационного
эллипса, а другим Тг — в правой. Идя по рассматриваемому
отрезку параболы от Т к Т'\ мы будем иметь: сначала отри-
цательные значения х, а потом положительные. Координата Q
будет: сперва возрастать, а потом убывать. Траектория точки
О представит линию с последовательными петлями и будет
иметь вид кривой, заключенной на фиг. 4 между паралле-
лями 3 и 4.
На фиг. 4, перемещаясь по траекториям второго и третьего
типа, точка О по прошествии времени, соответствующего
362
О ГИРОСКОПИЧЕСКОМ ШАРЕ Д. К. БОБЫЛЕВА
полному периоду, перемещается в положительную сторону
оси О\. Но траектории этих типов могут быть и такие, что
точка О через каждый период времени перемещается в обрат-
ную сторону, как это представлено на фиг. 5.
В промежутке между кривыми, изображенными на фиг. 4
и 5, получается во втором типе замкнутая 8-образная кривая,
а в третьем типе — замкнутый овал.
§ 6. Дадим обстоятельное решение нашей задачи в том
случае, когда 6 = 0. Это будет иметь место, например, в том
случае, когда мы поставим ось вращающегося гироскопа гори-
зонтально и приведем шар в движение с помощью какого-
нибудь горизонтального импульса. Так как по формуле (9)
в сделанном предположении £ = 0, то вершина параболы (8)
будет лежать на оси Ох и корни е1э е.2, е3, е4 будут попарно
равны и противоположны по знаку:
в1= —е4, е2== — е3.
Если вершина параболы лежит внутри эллипса, то е2 и е;>
будут чисто мнимые сопряженные величины. Если же эта вер-
шина лежит вне эллипса, то е2 и е3 будут равные и противо-
положные по знаку действительные величины.
Останавливаясь на первом случае, положим:
е!= — е4 = е, е2 — — е3 = ® ]/— 1
и представим уравнение (12) в виде:
2№(£2 + а2) f ________dz
a2 J /(е2 — г2)^^/
Этот эллиптический интеграл приводится к нормальному
интегралу первого вида подстановкой
z — е cos ?. (16)
Мы получаем:
f ......... (17)
J Vl— X2sin2?
0
О ГИРОСКОПИЧЕСКОМ ШАРЕ Д. К. БОБЫЛЕВА
363
где
^-|/'е2_)_е2
2Ж2(£2 + а2)’
л э е2
& =-vn—Ъ •
e2 + s"
(18)
Введенный подстановкой (16) аргумент ср имеет следующее
геометрическое значение. Опишем около кривой (10) круг
радиусом е (фиг. 6) и построим для данного места точки g
(мы называем так проекцию на плоскость yz точки G)
ственную точку круга L, имеющую ту же координату
угол LOF будет представлять
угол ср. При изменении угла ср
от 0 до те точка g проходит
по своему пути от F до F',
а время возрастает на величину:
соответ-
z, тогда
cfcp
— X2 sin2 ’
(19)
о
соответствующую полупериоду.
На основании формул (14),
(15), (17) и (8) координаты $
и выражаются по углу ср урав-
нениями:
M(tz2 + fc2)
а
t г I ае
с = const -f- COS ср,
<р
(20)
Jcp_______
— X2 sin2 ср
1 =
о
9
X2 sin2 <р с?ср 14~ const,
о
где
В
X2v’
-н2(Дг
\ *fe2
(21)
364
О ГИРОСКОПИЧЕСКОМ ШАРЕ Д. К. БОБЫЛЕВА
Формулы (20) и (21) показывают, что в рассматриваемом
случае траектория принадлежит к первому типу, если а
отрицательно или если при положительном а имеет место
неравенство:
а > 7е2;
если же при положительном а имеет место обратное неравен-
ство, то траектория принадлежит ко второму типу. Определяя
корень е и обращая внимание на формулу (9), придем к за-
ключению, что^второй тип будет иметь место,
3 если L2 заключено между пределами:
N2 + Mh (k2 + а2) > L2 > N2 + Mhk2; (22)
Фиг. 7.
первый же тип будет иметь место, если L2
лежит вне этих пределов.
При
L2 = N2 + Mhk2 (23)
получается траектория с точками возврата на
обеих параллелях, представляющая переход-
ную кривую между первым и вторым типами.
Предполагая, что удовлетворено неравенство (22), мы можем
найти замкнутую 8-образную траекторию (фиг. 7) под условием:
TZ к
¥
В f i/i ' — sin2<?d'^ (24)
J VI — X2 sm2 ? J
о о
Если зададимся величиной X, то определим из формулы (24)
по таблицам полных эллиптических интегралов первого и
второго вида величину В. Зная же X и В по формулам (21)
и (18), найдем одну пару значений L и N, при которых данный
гироскопический шар описывает восьмерку.
Когда все четыре корня действительны и
в! = — е4 = е, е2 = — e3 = s,
тогда уравнение (12) получает вид:
_ 2Mk2(k2 + a^)
а2
dz
F(e2 —
О ГИРОСКОПИЧЕСКОМ ШАРЕ Д. К. БОБЫЛЕВА
365
Этот эллиптический интеграл приводится к нормальному
интегралу первого вида подстановкой:
z1 2 = e2—- (е2 — e2)sin2(?, (25)
которая дает нам уравнение (17) при
ест
2Л«:2(Р4-а2) ’
е2_е2
1
(26)
Геометрическое значение угла % введенного подстанов-
кой (25), объяснено на фиг. 8 Ч Кривая (10) изображается
в рассматриваемом случае двумя симметричными овалами. При-
няв точку О за центр, описываем из нее окружность радиу-
сом е и эллипс, большая ось которого направлена по оси Oz
и равна е, а малая направлена по Оу и равна ёк (фиг. 8).
Проводим из точки g параллель оси Оу до пересечения
с окружностью в точке L, потом проводим из точки L парал-
1 Фиг. 8 неправильна и построение эллипса здесь не нужно. Приняв
точку О (фиг. 8а) за центр, описываем из нее две концентрических окруж-
ности радиусами е и еХ. Проводим из точки g параллель оси Оу до пере-
сечения с первой окружностью в точке L, потом проводим из точки L
параллель оси Oz до пересечения со второй окружностью в точке п. Угол
nOF и будет представлять аргумент ср. Прим. ред.
366
О ГИРОСКОПИЧЕСКОМ ШАРЕ Д. К. БОБЫЛЕВА
лель оси Oz до пересечения с эллипсом в точке п. Угол nOF
и будет представлять аргумент ср. При возрастании ср от О
до точка g проходит от F к F'
и время возрастает на вели-
чину полупериода, который будет выражен формулой (19) без
множителя 2.
Определяя В и по углу <р, находим для
рассматриваемого случая:
Фиг. 9.
£ = const + — X2 sin2 ср, (27)
М(а* + &)
а
а Г cfcp
J /1 —X2 sin2 ?^
о
Если а > е2^, то траектория будет принадлежать к первому
типу; если же а < е2у, то к третьему. Случай а — e2’f приводит
к переходной траектории между двумя типами с точками воз-
врата на одной параллели. Выражая эти неравенства с помощью
начальных данных, видим, что третий тип характеризуется
вторым неравенством (22), первый тип — неравенством обрат-
ным, а промежуточная кривая — равенством (23).
Случай замкнутой овальной траектории (фиг. 9) в третьем
типе находится из уравнения:
а Г dv
е*Ч J Г1 — X2 sin2 v
о
J* /1 — К2 sin2 ср dv.
о
(28)
Между случаем мнимых и действительных корней лежит
случай е2 = е3 = 0, при котором парабола (8) прикасается к гира-
ционному эллипсу, а кривая (10) представляет восьмерку.
Анализ этого случая получается из формул предыдущих слу-
чаев, полагая в них:
п ' 1 еа?
S_o, Л-1, V— 2Ш2(а2 + ^2)*
О ГИРОСКОПИЧЕСКОМ ШАРЕ Д. К. БОБЫЛЕВА
367
Это дает нам:
V
vlgctg(|-J),
(29)
ае
£ = const -|- CQS
M(a2-^k2) =
а
Igctg^—у) +sin ® • (30)
Мы видим, что траектория точки О
(фиг. 10), идя от точки прикосновения на пра-
вой параллели, приближается асимптоти-
чески к левой параллели.
При этом, смотря по тому, будем ли мы
иметь а > или а < е2у, траектория будет
представлять одну волну или одну петлю.
Работа „О гироскопическом шаре Д. К. Бобылева* была доложена
автором 16 февраля 1893 г. в заседании Московского математического
общества и 19 февраля 1893 г. (с демонстрированием прибора) — в засе-
дании Отделения физических наук Общества любителей естествознания»
антропологии и этнографии. Работа была впервые напечатана в „Трудах
Отделения физических наук Общества любителей естествознания, антропо-
логии и этнографии", т. VI, вып. 1, 1893. Прим. ред.
ON BOBYLEV’S GYROSCOPIC SPHERE
Prof. Joukovsky shows that the analysis of motion of Bobylev’s
gyroscopic sphere (a sphere enclosing a gyroscope) on a hori-
zontal plane is considerably simplified by the provision of a
ring PP' (Fig. 1), of suitably chosen dimensions, inside the
spherical shell A.
Let тп be the mass of the gyroscope, and mS2 its moment
of inertia with respect to the transverse axis. The dimensions of
the ring are chosen so that the ellipsoid of intertia of the system
consisting of the spherical layer A, the ring PP' and two mate-
rial points Q and Q' (Fig. 1) having each a mass and situa-
ted on the axis of the gyroscope at a distance 3 from its centre,
should be a sphere. This system is termed by Prof. Joukovsky
the shell of the apparatus.
With the above construction of the apparatus the motion of
the sphere will have the following properties.
The principal moment of momentum N of the whole appara-
tus as to the point of contact О (Fig. 2) of the sphere with the
plane is composed of the moment of the shell, G, and of that
of the gyroscope, L = mk'2®': N — G L.
From the equations of motion of the sphere it follows that
vector N is invariable neither in magnitude nor in direction,
and vector Z, lying on the axis of the gyroscope, is constant in
magnitude. As to vector G, from the energy theorem it is seen
hat the end of this vector, the point G, when the motion of the
gyroscopic sphere takes place is shifting with respect to the
axes Oxyz (with the origin at the point of contact О of the
sphere with the plane and having a motion of translation) on an
ellipsoid of rotation (6) similar, to the gyrational ellipsoid of the
shell of the apparatus constructed for O. Consequently, G moves
SUMMARY
369
along the line of intersection of this ellipsoid with the sphere (7)
described from the end of the vector N with a radius equal to
the length of the vector L. The projection of this curve on the
xz-plane is the parabola (8), and on the г/z-plane the curve of
the fourth order (10), Fig. 3. From simple geometrical conside-
rations are obtained equations (11) and (12) determining the
coordinate z of G and the law of its motion.
The motion of the point О (£, of contact of the sphere
with the plane, with respect to the fixed axes Ob\ drawn in the
plane is determined by differential equations (13), of which the
first gives equation (14) and the second equation (15). From
these equations an idea as to the path of О may be obtained
directly, without performing the integration leading to elliptic
functions. According to the position of the segment of parabola
(8) within the ellipse, Fig. 3, the path may have the form repre-
sented in Figs. (4) and (5).
At the end of the article, in § 6, is considered in detail the
particular case when the principal moment N is horizontal.
Зак. 2365 — H. E. Жуковский. T. I.
24
GEOMETRISCHE INTERPRETATION DES HESS’SCHEN FALLES
DER BEWEGUNG EINES SCHWEREN STARREN KORPERS UM
EINEN FESTEN PUNKT
§ 1. Dieser Fall der Bewegung, analytisch bearbeitet und gelost
von Hrn. H. Hess1 und nachher von Hrn. P. ^Nekrasow2, tritt
ein wenn der Schwerpunkt
des Korpers auf einer Senk-
rechten liegt, welche errichtet
wird aus dem festen Punkte
zur Ebene des Kreisschnittes
des reziproken Tragheitsellip-
soids, d. h. eines solchen Ellip-
soids, dessen Gleichung, be-
zogen auf die Hauptachsen,
folgende Form hat:
Jk*2 11& Z^
(1)
in
wo a > Ь > c—die Haupttrag-
heitsradien in Bezug auf den
festen Punkt sind.
Ausserdem ist es notwen-
dig, dass der Korper durch eine
Bewegung gesetzt wird, deren
momentan wirkende Kraft
Moment mit der vorher erwahnten Kreisschnittebene zusammenfallt.
1 Hess, Ober die Euler’schen Bewegungsgleichungen und uber eine
neue partikulare Losung des Problems der Bewegung eines starren Korpers
um einen festen Punkt, „Mathematische Annalen“, Bd. XXXVII, 1890.
2 P. Nekrasow, Zum Problem der Bewegung eines starren Korpers
um einen festen Punkt, „Matematiceski sbornik* (Moskau. Math. Samml.) Bd.
XVI, 1892.
GEOMETR1SCHE INTERPRETATION DES HESS’SCHEN FALLES 371
sein
Fig. 2.
Ich habe nun hierzu folgendes Instrument (Fig. 1) konstruiert.
Es besteht aus einer Scheibe ABA'B' und der Achse ОС, die
mit der Spitze O,fwelche sich in der Mitte der unteren Ebene
der Scheibe befindet, auf einer Stiitze ruht.
An der Scheibe sind in den Punkten А, В, A', B', welche
auf zwei zu einander senkrechten. Durchmessern liegen, zylinder-
formige Lasten angebracht, deren Gewichte P, Q, P', Q'
mogen, - wobei P— P', Q=Q'
und Q > P ist.
Es ist klar, dass bei jeder
Lage dieser Lasten der Schwer-
punkt auf der Achse CO liegt.
Durch das Anbringen der
drei Lasten P\ Q, Qz an der £
Scheibe und das Verschieben der
vierten P in genugende Entfer-
nung von der Scheibe kann man
erreichen, dass die untere Ebene
der Scheibe die Ebene des vor-
erwahnten Kreisschnittes repra-
sentiert.
Wenn die Last P auf diese
Weise aufgehangt wird, so wird
welche man bei jeder ihrer Anfangslagen von der
angreifenden momentan wirkende Kraf erhalt, den Hess’schen
Bewegungsfall ereben.
Im speziellen Fall, wo das Anfangsmoment der momentan wir-
kenden Kraft Null oder horizontal ist, wird die Bewegung so
vor sich gehen, dass der Rand der Scheibe stets durch einen
festen Punkt G gehen wird.
Dies kann man zur Einstellung der Last P benutzen.
§ 2. Fur die geometrische Interpretation der zu betrachtenden
Bewegung ziehen wir (Fig. 2) um den festen Punkt О als Zen-
trum mit einem Radius b eine Kugel und bezeichnen auf ihr die
folgenden Schnittpunkte:
J mit der momentanen Achse der Rotation;
G mit dem Moment der momentan wirkenden Kraft;
В mit der Achse 2b des reziproken Ellipsoids;
der Scheibe.
im Punkte C
die Bewegung
24
372 GEOMETRISCHE INTERPRETATION DES HESS'SCHEN FALLES
H mit der Achse, auf welcher der Schwerpunkt liegt, und
welche senkrecht zum Kreisschnitt ist;
L mit dem Moment der Gewichtskraft des Korpers.
Beziiglich der Bewegung der Punkte G, В und H wollen wir
folgende vier Satze beweisen.
S a t z I. Der Punkt G bleibt immer auf dem Kreisschnitt des
reziproken Ellipsoids.
Da nach der Bedingung der Punkt G diese Eigenschaft im
Anfangsmoment erfiillt, so wird fur diesen Augenblick der Bogen
des grossen Kreises BG den Kreisschnitt des reziproken
Ellipsoids darstellen.
Wenn der Schwerpunkt des Korpers mit dem Stiitzpunkt 0
zusammenfiele, so wiirde der Punkt G unbeweglich im Raume
bleiben und, bei den angenommenen Anfangsbedingungen, im
Korper auf dem Bogen des Kreisschnittes sich fortschieben.
Da die Geschwindigkeit des Punktes G im Korper dabei
senkrecht zum Bogen JG war, so kann man daraus schliessen,
dass der Bogen JG senkrecht zum Bogen BG ist und deshalb
durch den Punkt H geht, wobei der Winkel GOH nach der Be-
dingung ein rechter ist.
Da indessen der Schwerpunkt des Korpers nicht in О liegt
sondern in irgend einem Punkte auf der Geraden OH, so wird
auf unseren Korper die Schwerkraft wirken, deren Moment in
der Richtung der Horizontalen OL senkrecht zum Radius OH
liegt. Diese Gerade schneidet die Kugel in dem Punkte L,
der im Schnittpunkte des Aquators EE' mit dem Bogen
GB liegt.
Um die^Verschiebung des Punktes G im Korper, entsprechend
dem unendlich kleinen Zeitraum, zu ermitteln, muss man zu
der schon betrachteten Verschiebung des Punktes auf dem Bogen
GB in Folge der Rotation des Korpers noch seine Verschiebung
in Folge der Schwerkraft hinzufugen, welche Verschiebung auch
auf dem Bogen BG stattfindet, da L auf BG liegt.
Dies zeigt, dass nach Ablauf eines unendlich kleinen Zeitrau-
mes der Punkt G auf dem Kreisschnitt bleiben wird.
Indem wir diese Betrachtung wiederholen, iiberzeugen wir
uns von der Richtigkeit des Satzes I.
Sat z IL Die Bahn des Punktes В schneidet die Kreise, welche
GEOMETRISCHE INTERPRETATION DES HESS’SCHEN FALLES 373
aufeinander folgende Lagen des Kreisschnittes darstellen, unter
einem konstanten Winkel.
Aus dem von Poinsot betrachteten Bewegungsfall ist uns be-
kannt, dass bei Verschiebung des Moments der momentan wir-
kenden Kraft auf der Ebene des Kreisschnittes des reziproken
Ellipsoids die momentane Rotationsachse sich auf einer anderen
Ebene verschiebt, welche die Ebene des Kreisschnittes in der
Richtung der Achse 26 unter dem Winkel i schneidet, wobei
, . /(a2 —62)(62-c2)'
tgl =---------------
(2)
Auf der Fig. 1 ist dieser Winkel durch GBJ angegeben.
Die Geschwindigkeit des Punktes В zu jeder Zeit der Bewe-
gung ist senkrecht zum Bogen В J, sie bildet also mit dem Bogen
BG einen konstanten Winkel 77
i, was zu beweisen war.
Satz III. Die lebendige Kraft des ganzen beweglichen Kor-
pers ist gleich der lebendigen Kraft des materiellen Punktes,
die wir erhalten, wenn wir uns die ganze Masse des Korpers
im Punkte H konzentriert denken.
Fiihren wir folgende Bezeichnungen ein:
M — die Masse des Korpers.
x, y, z— Koordinaten des Punktes G in Bezug auf die Achsen
des Ellipsoids (1),
p, 9» r — Projektionen der Winkelgeschwindigkeit in diese Achsen,
<0 — die Projektion der Winkelgeschwindigkeit in die Rich-
tung OG,
G — die Grosse des Momentes der momentan wirkenden
Kraft,
T—die lebendige Kraft des ganzen Korpers.
Da die Projektionen des Momentes G auf die Achsen des
Ellipsoids (1)
Mcrp, M&q, M&r sind,
so kann ergeben sich folgende Proportionen:
G Mcftp M&q M&r
b x у z 9
374 GEOMETRISCHE INTERPRETATION DES HESS’SCHEN F ALLES
oder
G I Map = V~Mbq VMcr _
b}M * 1 L
abc
M(a2p2 b2q2 c2r2)
x2 y2 . z2
^2 + ^2 c'r
Woraus wir auf Grund der Forme! (1) und des Ausdrucks:
T^(a^ + b^ + c^) (3)
fur die lebendige Kraft finden, dass
G = b^2MT. (4)
Bestimmen wir jetzt
___M(a2p2 b'2q2 4“
G
oder aus Gleichung (3)
Fur G seinen Wert aus Forme! (4) eingesetzt, finden wir:
_ /2Г
’ ьУм'
(6)
Aber ist die Geschwindigkeit des Punktes H, die wir mit v
bezeichnen. Dies setzt uns in den Stand, die Forme! (6) auf die
gewiinschte Form zu bringen:
T___Mv2
2 ’
(7)
S a t z IV. Zu jeder Zeit der Bewegung des Korpers ist das
Moment G geometrisch gleich dem Moment der momentan wir-
kenden Kraft des Punktes in welchem die Masse des Korpers
konzentriert ist.
Da die ganze Bewegung des Punktes H durch die Rotation
um die Achse OJ entsteht, so ist seine Geschwindigkeit senkrecht
zum Bogen JH9 und deshalb ist sowohl das Moment seiner momen-
tan wirkenden Kraft als auch das der momentan wirkenden
Kraft des ganzen Korpers nach OG gerichtet.
GEOMETRISCHE INTERPRETATION DES HESS’SCHEN FALLES 375
Indem wir den Wert
oder
was zu beweisen war.
2T aus (4) in (3) einsetzen, finden wir:
G^Mb^
G = Mvb, (8)
§ 3. Betrachten wir zuerst den einfachsten Fall, in welchem
das Anfangsmoment der momentan wirkenden Kraft Null oder
horizontal ist.
Da das Moment des Gewichtes des Korpers auch horizontal
ist, so muss der Punkt G wahrend der ganzen Zeit auf dem
horizontalen Kreise EE' (Fig. 2)
bleiben; da aber nach dem Satz I
derselbe Punkt auch stets auf
dem Kreisschnitt BG liegen muss,
so muss er sich in dem Schnitt-
punkte L dieser zwei Kreise
befinden. Auf diese Weise wird
das Moment G stets nach dem
Moment der Schwerkraft gerich-
tet sein und deshalb bei verander-
ter Grosse immer dieselbe Rich-
tung behalten.
Die Punkte L und G werden
zusammenfallen und unbeweg-
Fig. 3.
lich bleiben. Wir nehmen an (Fig. 3), dass der Radius OG senk-
recht zur Zeichenebene ist, und suchen die Bewegung des
Korpers zu interpretieren.
Die Lage des starren Korpers, der einen festen Punkt hat,
wird bestimmt durch die Lage des Bogens eines grossen Krei-
ses, der dem Korper angehort, und die Lage eines Punktes des
Korpers auf demselben.
Als solchen Kreisbogen nehmen wir GB an und fur den
Punkt des Korpers den Punkt B. Aber der Punkt В wird nach
dem Satz II eine Bahn beschreiben, die diesen Bogen GB unter
einem konstanten Winkel -%— i schneidet.
Diese Bahn ist also eine loxodromische Linie mit asympto-
tischen Polen im Punkte G und im diametral gegeniiber liegen-
den Punkte.
376 GEOMETRISCHE INTERPRETATION DES HESS’SCHEN FALLES
Um zu bestimmen, wie die Bewegung in Bezug auf die Zeit
vor sich gehen wird, betrachten wir den Punkt //, welcher sich
in unserem Faile nach dem vertikalen Kreis JH bewegen wird.
Diese Bewegung findet auf Grund der Satze III, IV so statt, als ob
im Punkte H die ganze Masse des Korpers konzentriert ware
und der Punkt sich bewegen wiirde, wie ein mathematisches
Pendel von der Lange b unter
*
der Wirkung, der im Verhaltnisse
veranderten Anziehungskraft der
£ Erde, wo 8 die Entfernung des
Schwerpunktes des Korpers von О
ist.
Der nach dem Gesetze des ma-
thematischen Pendels schwingende
M Punkt H des Korpers fiihrt den mit
ihm verbundenen Bogen BG mit
sich, der, mit einem Punkte В auf die
unbewegliche loxodromische Linie
FBG gestiitzt undimmer durch den
Punkt G gehend, eine vollstandig
bestimmte Bewegung haben wird. Diese Bewegung charakterisiert
die Bewegung des Korpers.
Ich erlautere die von mir ausgesprochene Theorie an einem
durch (Fig. 4) angegebenen Instrument. Auf der Stiitze D ruht
ein Globus, auf welchemeine loxodromische Linie mit asympto-
tischen Polen im Punkte G eingeschnitten ist. An diesem Punkte
ist ein Pendel M aufgehangt, an welchem unter einem rechten
Winkel der Bogen BG befestigt ist. Auf diesem Bogen gleitet
und rotiert die kleine Rolle B, welche sich mit ihrem Rande auf
der loxodromischen Linie bewegt. Wenn wir das Pendel schwin-
gen lasseri, so erhalten wir eine Bewegung des Bogens GB und
des Punktes В dieses Bogens, welche die Bewegung des Kor-
pers in dem zu betrachtenden Faile charakterisiert. Wenn dem
Pendel eine so grosse Geschwindigkeit gegeben wird, dass es sich
dreht, so wird sich der Punkt В dem asymptotischen Pole mehr
und mehr nahern und so unbeweglich zu werden streben.
Die Bewegung des Korpers nahert sich in diesem Faile mit
GEOMETRISCHE INTERPRETATION DES HESS’SCHEN FALLES 377
Zunahme der Zeit der einfachen Rotation nach dem Pendel-
gesetze um eine unbewegliche horizontale Achse.
§ 4. Jetzt gehen wir zu dem Faile uber, in welchem die mo-
mentan wirkende Kraft in irgend welcher Richtung und irgend
einer Anfangslage der Scheibe auf dem Punkt C wirkt (Fig. 1).
Auf Grund der Satze IV und III schliessen wir, dass auch in
diesem allgemeinen Faile der Punkt H sich als spharisches Pen-
del von der Lange b bewegen wird, in welchem die ganze Masse
g
M konzentriert ist, und auf welches die im Verhaltnis -r veran-
b
derte Anziehungskraft der Erde, wirkt.
Wenn wir auf unserer Kugel den Weg NN' (Fig. 2) des
Punktes H zeichnen, so werden wir sofort auch den Weg KK'
des Punktes G finden, weil die Kegel NON' und KOK' einan-
der erganzen. Es folgt dies daraus, dass sowohl die Geschwindig-
keit des Punktes H als auch die des Punktes G im Raume senk-
recht zum Bogen GH sind.
Da auch, wie friiher gesagt wurde, der Bogen HG senkrecht
zum Kreisschnitt ist, so folgt daraus, dass er die Kurve KK'
beriihrt, d. h. die aufeinander folgenden Lagen des Kreisschnit-
tes umhiillen auf der Kugel die Kurve KK'. Zu gleicher Zeit
werden diese Bogen auch die Kurve RR' umhiillen, welche mit
KK' symmetrisch ist beziiglich des Zentrums O.
Wenn wir auf der Kugel ein System von grossen Kreisen
zeichnen, welche die spharischen Kurven KK' und RR' beriihren,
so konnen wir die Bahn des Punktes В konstruieren, welche nach
dem Satz II alle diese Kreise unter einem konstanten Winkel
2----i schneiden wird.
Diese Bahn wird die Form PD haben. Im Punkte D auf der
spharischen Kurve KK bildet si§ eine Schnabelspitze. In diesem
Punkte bleibt der Punkt В stehen, damit er, nachher hinunter
laufend, unter demselben konstanten Winkel die zweiten Halb-
kreise des genannten Systems der Kreise schneidet.
Wir bekommen auf diese Weise eine zickzackformige Bahn
des Punktes B. Aber je nach dem Winkel i konnen auch solche
Bahnen erhalten werden, welche sich asymptotisch einigen zwi-
schen KK' und RR' eingeschlossenen Kurven nahern.
378 GEOMETRISCHE INTERPRETATION DES HESS’SCHEN FALLES
Wenn die Bahn des Punktes В gezeichnet ist, so ist die
ganze Bewegung des Korpers bekannt. Der Punkt Hf der sich
nach dem Gesetze des spharischen Pendels bewegt, fiihrt den
Punkt G auf dem Wege KK' mit sich; diese Bewegung charak-
terisiert vollstandig die Bewegung des Bogen GB und die des
Punktes В auf dem Wege PD.
Auf dem erwahnten Globus (Fig. 4) ist die zickzackformige
Bahn des Punktes В eingeschnitten, fiir den einfachen Fall, wo
der Punkt H als konisches Pendel einen horizontalen Kreis be-
schreibt, wobei die Kurven KK' und RR' sich in parallele Kreise
verwandeln L
An dem Griffe N ist ein Draht CG' befestigt, welcher in Form
des Bogens des Kreisschnittes GG’ gekriimmt ist.
Die kleine Rolle В gleitet auf dem Bogen GG' und stfltzt
sich mit ihrem Rande in den zickzackformigen Einschnitt. Wenn
wir den Griff gleichformig drehen, so erhalten wir die Bewe-
gung des Bogens GG' und die des Punktes В auf ihm; durch
diese Bewegung ist dann die oben erwahnte Bewegung des
starren Korpers vollstandig charakterisiert.
17 ноября 1892 г. автор сделал сообщение в Московском математиче-
ском обществе на тему .Геометрический анализ задачи Гесса". 15 декабря
1892 г. автор демонстрировал там же прибор, равъясняющий случай движе-
ния твердого тела, исследованный Гессом. Статья „Geometrische Interpreta-
tion des Hess’schen Failes der Bewegung eines schweren starren Korpers um
einen festen Punkt" была впервые опубликована в „Jahresbericht der deut-
schen Mathematiker-Vereinigung", 1893 —1894. Эта статья представляет
собой краткое извлечение из статьи Н. Е. Жуковского „Локсодромический
маятник Гесса". Имевшиеся в немецком тексте шероховатости и неточности
® настоящем издании исправлены. Прим. ред.
1 Die Bahn des Punktes В kann in diesem Faile auch mit asymptotischen
Zweigen verlaufen, wie ich seiner Zeit in meinem Aufsatz „Uber das Hess’sche
loxodromische Pendel" gezeigt hatte.
О ДВИЖЕНИИ МАЯТНИКА С ТРЕНИЕМ В ТОЧКЕ ПРИВЕСА
(1895 г.)
В обыкновенной задаче о колебании маятника, подвешен-
ного на ноже, трением в точке привеса пренебрегают сравни-
тельно с силой сопротивления воздуха, которая является глав-
ным фактором в явлении затуха-
ния колебаний. Но существуют
задачи практики, в которых точ-
кой привеса маятника является
шип, зажатый в подшипниках,
и трение в точке привеса раз-
вивается значительное. Таковы
задачи о колебании баланси-
ров, спускных аппаратов и т. д.
Любопытно указать, что в этих
задачах время колебания не за-
висит от трения в подшипни-
ках и остается равным време-
ни колебания маятника без
трения даже в тех случаях,
когда, пройдя малый путь, ма-
ятник останавливается, не до-
стигнув своего положения’равновесия^(равновесие без трения).
Анализ рассматриваемого вопроса чрезвычайно прост. Дви-
жущей силой может быть или вес маятника, или сила действия
пружины. Мы будем рассматривать первое предположение,
заметив, что для перехода ко второму следует только заме-
нить статический момент силы веса статическим моментом
силы действия пружины.
Пусть (фиг. 1) шип С физического маятника АС, имею-
щего массу М, зажат в подшипниках В так, что на окруж-
380
О ДВИЖЕНИИ МАЯТНИКА
ности шипа развивается сила трения F Отклоняем маятник
от вертикали на угол <f0, удовлетворяющий условию:
Mga sin ?0 > Fr,
(1)
где g— напряжение тяжести, а — расстояние от центра тяже-
сти до центра шипа и г — радиус шипа.
Предоставленный действию тяжести маятник начнет опус-
каться вниз, причем изменение угла ф, образуемого им с верти-
калью, выразится известным диференциальным уравнением:
cf2 /
---- I--------гп
dF \ 2--------?
= Mga sin — Fr,
где Л — момент инерции маятника относительно оси шипа.
Считая угол ф малым (так как момент действия пружины про-
порционален углу ее кручения, то при действии пружины
этого ограничения не нужно), напишем данное диференциаль-
ное уравнение в виде:
с?2ф , Mga Fr
аё+—^—к-а
и приведем его посредством подстановки:
<р = О
. Fr
^Mga
к уравнению без последней части. Это уравнение будет:
dF к
(2)
(3)
интегрируя его, найдем при данных начальных условиях, что
^), (4)
где
л __ Fr
Формулы (4) и (2) приводят нас к следующим уравнениям,
разрешающим предложенную задачу:
О ДВИЖЕНИИ МАЯТНИКА
381
Из уравнения (6) заключаем, что маятник будет оста-
навливаться через промежутки времени
(7)
равные временам колебания маятника без трения.
Из уравнения (5) видим, что первая остановка маятника
произойдет при амплитуде:
2Fr
Mga ’
По формуле (1) следует, что
Fr
?0 > Mga 5
если, кроме этого,
4Fr
?0 "" Mga ’
(8)
(9)
то будет положительно, и маятник не дойдет до вертикаль-
ного положения. Остановившись в положении маятник пре-
кратит свое движение, так как на основании формул (8) и (9)
Fr
Mga9
т. е. момент силы веса менее момента силы трения.
Если
?1 > Mga ’
то «j будет отрицательно, и маятник перейдет через вертикаль
влево. При этом, если
Mga ’
(Ю)
382
О ДВИЖЕНИИ МАЯТНИКА
то маятник, остановившись слева от вертикали, прекратит
свое движение, так
ства (10) дает:
как формула (8) на основании неравен-
(—?1)
Fr
Mga ’
Если же
?о
ЗЕг
Mga *
то маятник начнет двигаться вправо и т. д.
Из этого рассуждения видно, что число колебаний маят-
ника равно целому числу, наиболее близкому к дроби
. 2Fr
Mga'
При устройстве спускных аппаратов, в которых быстрым
поворотом рычага надо открыть или закрыть клапаны, эта
дробь должна быть менее единицы. Быстрота действия аппа-
рата увеличивается через увеличение статического момента
Mga движущей силы, а отнюдь не через уменьшение силы
трения, так как это уменьшение, не влияя на время колеба-
ния, вносит вредное дрожание спускного рычага.
Статья „О движении маятника с трением в точке привеса** была напе-
чатана в „Трудах Отделения физических наук Общества любителей естество-
знания. антропологии и этнографии'4, т. VII, вып. 2, 1895. Прим. ред.
ON THE MOTION OF A PENDULUM WITH FRICTION A T THE POINT
OF SUSPENSION
In his brief note Prof. Joukovsky proves that the time of
oscillation of a pendulum, of which the point of suspension is a
journal rotating with considerable friction in a bearing, is not
affected by friction and remains equal to the time of oscillation
of a pendulum without friction.
The truth of this statement is seen from the fact that the
differential equation of motion of a pendulum in the presence
of friction differs from the corresponding equation in the absence
Fr
of friction only by the constant term , where Fr is the frictio-
nal couple, and k is the moment of inertia. The number
oscillations performed by the pendulum will be equal to the
whole number nearest to the fraction
2Fr
, where % is the
Mga u
initial angle of deflection, and a — the distance of the centre of
gravity of the pendulum from the centre of the journal.
ГЕОМЕТРИЧЕСКАЯ ИНТЕРПРЕТАЦИЯ РАССМОТРЕННОГО
С. В. КОВАЛЕВСКОЙ СЛУЧАЯ ДВИЖЕНИЯ ТЯЖЕЛОГО
ТВЕРДОГО ТЕЛА ОКОЛО НЕПОДВИЖНОЙ ТОЧКИ
(1896 г.)
§ 1. После появления замечательного мемуара С. В. Кова-
левской 1 о движении тяжелого твердого тела, в котором
главные радиусы инерции а, 6, с относительно неподвижной
точки находятся в соотношении:
а = Ь = /2с (1)
и центр тяжести лежит на плоскости равных радиусов инер-
ции, было напечатано несколько статей, посвященных этой
интересной задаче.
Большая статья Коттера2 заключает в себе переработку
и пополнение анализа С. В. Ковалевской. Статьи Г. Г. Аппель-
рота 3, П. А. Некрасова4 5 и А. М. Ляпунова6 посвящены
исследованию (по отношению к полюсам) функций времени,
определяющих движение тела, когда время рассматривается
за комплексное переменное.
1 S. Kowalevski, Sur le probleme de la rotation d’un corps solide
autour d’un point fixe, Act. Math., XII; Sur une propriete du systeme
d’equations differentielles, qui definit la rotation d’un corps solide autour d’un
point fixe, Act. Math., XIV.
2 F. К о 11 e r, Sur le cas traite par M-me Kowalevski de la rotation
d’un corps solide autour d’un point fixe, Act. Math., XVII.
3 Г. Г. Аппельрот, По поводу первого параграфа мемуара С. В.Ко-
валевской, „Математический Сборник", XVI; Задача о движении тяжелого
твердого тела около неподвижной точки, Москва 1893.
4 П. А. Некрасов, К задаче о движении твердого тела около не-
подвижной точки, „Математический Сборник**, XVI.
5 А. М. Ляпунов, Об одном свойстве диференциальных уравнений
движения тяжелого твердого тела, Сообщения Харьк. Математического
Общ., IV. ,
ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ 385
Что касается геометрической интерпретации рассматривае-
мого движения, то она была дана в сочинении Н. Б. Делоне1
для частного случая, при котором постоянное к в интеграле
С. В. Ковалевской есть нуль. Этот случай подвергся более
детальной обработке в статьях Г. Г. Аппельрота 2 и Б. К. Млод-
зеевского 3.
Для общего случая указаны некоторые геометрические
свойства движения в небольшой статье Г. К. Суслова 4.
В предлагаемом сочинении я имею в виду установить
геометрическую интерпретацию общего случая движения рас-
сматриваемого тела и за основу этой интерпретации беру
разъяснение геометрического смысла двух гиперэллиптиче-
ских функций времени, через которые С. В. Ковалевская вы-
ражает все величины, определяющие положение движущегося
тела. Я показываю, что эти функции являются параметрами
некоторой системы криволинейных оотогональных координат
на плоскости равных радиусов инерции. Относительно этой
системы координат весьма просто получается движение
конца проекции угловой скорости на плоскость равных ра-
диусов инерции. По траектории этой точки строится конус,
представляющий в теле место вертикальной линии, который
я называю конусом вертикальной линии. Знание же этого
конуса дает нам картину движения тела.
§ 2. Рассмотрим на плоскости хОу равных радиусов инер-
ции (О лежит в неподвижной точке, а ось Ох проходит через
центр тяжести тела) мнимое переменное
С = х -|- yi'• = г (cos ? + i sin <?) (2)
1 Н. Б. Делоне, К вопросу о геометрическом истолковании инте-
гралов движения твердого тела около неподвижной точки, данных С. В. Ко-
валевской, .Математический Сборник*, XIV; Алгебраические интегралы
движения тяжелого твердого тела, С.-Петербург 1892.
2 Г. Г. Аппельрот, Некоторые дополнения к сочинению Н. Б. Де-
лоне, „Труды Отделения физических наук Общества любителей естество-
знания VI.
3 Б. К. Млодзеевский, Об одном случае движения тяжелого
твердого тела около неподвижной точки, „Математический Сборник", XVIII.
4 Г. К. Суслов, Вращение тяжелого твердого тела около неподвиж-
ного полюса (случай С. В. Ковалевской), „Труды Отделения физических
наук Общества любителей естествознания", VII.
Зак. 2365. — Н. Е. Жуковский. Т. I.
25
386 ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ
и его функцию
/(Q = а + =
= X + Yi = R (cos X i sin X), (3)
где i= у— 1, а а, а1? . . . суть некоторые действительные
коэфициенты, значения которых для данной механической
задачи будут указаны после.
Назовем через мнимую величину, сопряженную t, и на-
пишем эллиптические интегралы:
। . Г Л . Г Л.
Pi + Pi/ J у^у Pl р2г J <>
Семейства линий
Pi = const, р2 = const (5)
представляют нам некоторую систему криволинейных ортого-
нальных изотермических координат, для которой pt и р2 суть
изотермические параметры. Трансцендентные уравнения (5)
рассматриваемых координатных линий могут быть заменены
алгебраическими уравнениями. Для этого составляем дифе-
ренциальное уравнение кривых р2 = const. Принимаем в урав-
нении (4) параметр р2 за постоянную величину и берем от
обеих частей их производную по рр
<6>
Исключая отсюда dp^ найдем диференциальное уравнение
первого семейства кривых (5), выраженное в переменных t,
но нам удобнее сохранить уравнения (6) и отыскать интеграл
так, как это делает Лагранж Ч
Из формул, получаемых по уравнениям (3) и (4), имеем:
/ dt \2
(fr)2=а++ал2+алз+
й = 4 (“1 + + V + 4а4--3)’
1 Oeuvres de Lagrange, t. IX, p. 127.
ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ 387
= 4 <а1 + 2а& + 3*Л2 + 4«Л8).
На основании
находим, что
+ «2Х + | «з (*2 - У2) + 2«4(х8 - Зх^),
=+^ху + ? (3x2jz + 2“4 ху-
С помощью этих двух формул составляем диференциаль-
ное уравнение:
d2x dx dy _ л
yd^-7^ rfp;^-^3-4^3,
которое по умножении на
2 dx
У* с?Р1
и интегрировании дает:
/ dx \ 2
\"Y“) +2«8x + 4a4x2 = s2,
где постоянное интеграции $,2 есть функция одного р2.
Так же найдем для уравнений
= (Ч
интеграл:
/ dx \2
+2«3x + 4a4x2 = s1,
где постоянное есть функция одного рР Так как на осно-
вании формул (6), (7) и (3)
25*
388 ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ
то найденные функции $i и s2 могут быть представлены так:
«1 =-2^--|-2а3х4-4а4х1 2,
S2=^^+2“8x+4a^-
(9)
Здесь R есть абсолютная величина радиуса-вектора точки,
представляющей на плоскости хОу мнимую величину /(Q,
а X есть взятая с надлежащим знаком абсцисса этой точки.
Вследствие сказанного уравнения (5) заменяются следую-
щими алгебраическими уравнениями:
Si — const, $2 = const, (10)
причем Si и s.2 суть некоторые неизотермические параметры
рассматриваемой криволинейной системы координат.
Величины и и суть функции, с помощью которых
Т Тс
С. В. Ковалевская 1 выражает все элементы, определяющие
положение движущегося тела. Весь успех ее анализа, с гео-
метрической точки зрения, заключается в исследовании дви-
жения проекции конца угловой скорости на плоскость равных
радиусов инерции с помощью указанной системы криволи-
нейных координат.
§ 3. Формулы (8) позволяют нам вывести одно свойство
координатных линий (10), которое мы выразим в виде теоремы.
Теорема I. Касательные координатных линий = const
и s2 = const параллельны биссекторам углов, образованных
соответственным вектором R с осью абсцисс.
Обозначая вместе с Ламе первый диференциальный пара-
метр знаком Д и замечая, что pt и р2 суть изотермические
функции, напишем:
Р1 р2 1Л (—?+(—?*
|/ UpJ+Up2/
1 Величины и s2, употребляемые у Коттера, суть наши величины
1 1
2 si, 2 S2’
ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С В. КОВАЛЕВСКОЙ 389
откуда следует, что
ДР1=Др2=^-. (11)
Теперь мы можем составить выражения косинусов углов,
образованных осью Ох с проведенными в точке (х, у) каса-
тельными к рассматриваемым координатным линиям:
А dx X
Лр^й = с“Т
(12)
ДР2
. к
sin у,
^Р2
причем первый косинус соответствует касательной кривой
s2 = const, а второй соответствует касательной кривой
$! = const. Теорема таким образом доказана.
§ 4. Чтобы хорошенько познакомиться с введенными нами
криволинейными координатами, остановимся сначала на пред-
положении:
/(Q = (ei2-t;2)(822-^), (13)
где Sj и е2 суть некоторые действительные или чисто мнимые
величины (мы будем называть через и s2 корни, взятые
с положительным знаком).
Составляем функции Sj и s2 для точек, лежащих на осях
координат. Мы имеем на оси абсцисс:
# = 0, У = 0, X=f(x) = ±R. (14)
Если X положителен, то по формуле (9) s2 = со, а функ-
ция имеет конечную величину. Для определения последней
воображаем точку (х, у), бесконечно близкую оси абсцисс,
и пишем:
х I Г , /rVlf г2
2у2 “2^4 L^WJ т W
__________[ — (st2 + g22)2 sin 2? + л4 sin 4?]2_
4r2 sin2 ? [gi2g22 — (gi2 + е22) г2 cos 2? + г4 cos 4?] ’
[По сокращении на 4sin2?], полагая ? = 0, г = х, находим
— R + X^ х2[ —(ер + е22) + 2х2]2
2у2 s12s22 (Sl2 S22) X2 + X4 ’
390 ГЕОМЕТР ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ
Подставляя эту величину в первую формулу (9) и пола-
гая а3 = 0, а4 = 1, получаем:
х2 (ef2 — е22)2
Si то •
При отрицательном значении X находим, что $! = — сю,
а выражается той же формулой, которой прежде выража-
лось
На оси ординат имеем:
х = 0, У = 0, X=f(yi) = ±.R, (15)
так что при положительном X по формуле (9)
_ — О _ _ (е12 + #2)(е-224\72)
S1 — U, S2----------.
При отрицательном X имеем s2 = 0, a s, выражается той
же формулой, которой при положительном X выражалось s2.
Высказанное относительно значений функций slt на
осях координат можно сформулировать следующим образом.
На оси абсцисс
при этом, если вторая часть формулы положительна [см. фор-
мулу (14)], то она представляет s2, a st — — оо; если же вто-
рая часть формулы отрицательна, то она представляет
a S-2 = оо.
На оси ординат
(17)
при этом, если вторая часть формулы положительна [см. фор-
мулу (15)], то она представляет s2, a Sj = 0; если же вторая
часть формулы отрицательна, то она представляет а $2 = 0.
Рядом с формулами (16) и (17) нам будет важно еще обра-
тить внимание на некоторые формулы, непосредственно из
них получаемые.
ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ 391
Для оси абсцисс находим:
/е ц_8 \2_s — (£1 + Sa)2fcea — («, + »!> » /(л) fa"» 11 J S f(x) ds (et2 — e22)2 (ei2e22 — x<) d^)~ [/(x)P (18) (19)
Для оси ординат находим:
(.,+.ar-S: ds £i2s22 — d(y2)~ (20) (21)
Переходим к разъяснению вида координатных линий при
условии (13). Мы имеем три случая.
Корни Sj и е2 Действительны. Примем, что и от-
ложим на оси абсцисс (фиг. 1) отрезки
OFi = OF* = OF2 = OF3 = e2.
Рассмотрим изменения и s2 при изменении x2 от О
до оо. На отрезке F%F2 вторая часть формулы (16) отрица-
тельна и представляет функцию которая при переходе
от 0 до F2 или от 0 до F3 изменяется от 0 до — оо.
Функция же $2 на всем отрезке F3F2 имеет постоянную вели-
чину + оо, вследствие чего отрезок оси абсцисс F3F% при-
надлежит координатной линии s2 = oo. На отрезках F2FX и
^*3^4 вторая часть формулы (16) положительна и представляет
функцию $2, которая при переходе от F2 к Fx или от F> к F^
уменьшается от оо Д° наименьшей величины (et е2)2,
а потом опять возрастает до 4” оо. Наименьшая величина
получается при х2 = ^^2 (формулы (18), (19)). Функция на
отрезках F2Fr и FJF\ имеет постоянную величину —оо, так
что эти отрезки представляют координатную линию =— оо.
Наконец на бесконечных концах оси абсцисс, начинающихся
от точек Fr и Л4, имеем вторую часть формулы (16) опять
392 ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ
отрицательной; она представляет нам функцию изменяю-
щуюся от —оо до 0. Функция s2 на рассматриваемых бес-
конечных отрезках имеет постоянную величину + оо, так
что эти отрезки вместе с отрезком F2F% представляют коорди-
натную линию $2 = оо.
Для всех точек оси ординат вторая часть формулы (17)
положительна и представляет функцию rs2> которая умень-
шается при удалении от начала координат от 4~оо до наи-
меньшей величины (е1Н~е2)2 и потом возрастает до 4-00*
Наименьшая величина получается при = [формулы
(20), (21)]. Функция на всей оси ординат имеет значение
нуль, так что эта ось есть координатная линия s1 = 0.
Сказанное дает 1 нам расположение координатной сети,
представленное на фиг. 1. Любопытно заметить, что линия
s1 — (ei Ч" es)2 в этой сети есть круг \ проведенный из начала
координат радиусом У
1 См. мое сочинение „Видоизменение метода Кирхгоффа../, § 19.
„Математический Сборник**, т. XV. [См. Н. Е. Жуковский, Поли. собр.
сочин., т. III, М.-Л. 1936. стр. 195. Поим, ред.]
ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ 393
Корни ©j и s2 суть чисто мнимые величины. Примем
модуль ©i более модуля ©2, т. е.
^> X
i i
Отложим (фиг. 2) на оси ординат отрезки:
= of2=ofb = ^-
и будем рассматривать изменения функций Sj и s2 сначала на
оси абсцисс. Для всех точек этой оси вторая часть формулы.»
(16) отрицательна и представляет нам функцию которая
при удалении от начала координат убывает от нуля до наи-
меньшей величины (©! — ©2)2, а потом опять возрастает до
нуля. Наименьшая величина получается при х2 = — ©1©2 (фор-
мулы (18), (19)). Функция s2 на всей оси Ох равна + ос,
так что эта ось поинадлежит координатной линии s2=oo. На
394 ГЕОМЕТР ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ
оси ординат при передвижении от начала координат к или
Л’з вторая часть формулы (17) положительна и представляет
функцию s2, которая изменяется от оо до 0; функция же
на отрезке F.F> имеет постоянное значение нуль, вслед-
ствие чего весь этот отрезок принадлежит координатной
линии = 0.
На отрезках и вторая часть формулы (17) отри-
цательна и представляет функцию которая уменьшается
от нуля до наименьшей величины — s2)2, а потом возра-
стает до нуля. Наименьшая величина имеет место при
у* —— £j£2 (формулы (20), (21)). Функция s2 на отрезках F2FY
и FJF\ имеет постоянное значение нуль, так что эти отрезки
представляют координатную линию s2 = 0. На бесконечных
отрезках оси ординат, начинающихся от Fx и F±, вторая часть
формулы (17) положительна и представляет функцию s2, ко-
торая при возрастании у^ увеличивается от 0 до оо. Что
касается функции то она на рассматриваемых бесконечных
отрезках сохраняет постоянную величину нуль, так что эти
отрезки вместе с отрезком F2F.^ представляют координатную
линию = 0.
На основании всего сказанного получаем расположение
координатной сети, представленное на фиг. 2. Здесь, так же
как в предыдущей сети, одна из координатных линий, именно:
«1 = (81— е2>2»
представляет окружность (радиус окружности
Корень представляет действительную величину, а ко-
рень есть чисто мнимая величина. Отложим (фиг. 3) на
оси абсцисс
OF^OF^^,
и на оси ординат
ОГ8=ОГ4=^-.
На отрезке оси абсцисс F2Fr вторая часть формулы (16) поло-
жительна и представляет функцию s2, которая изменяется
при переходе от начала координат к точкам Ft и F2 от 0
до оо; функция же Sj на всем отрезке F2Ft имеет постоянную
ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ 395
величину —оо, так что этот отрезок представляет коорди-
натную линию = — оо. На бесконечных отрезках оси абсцисс,
начинающихся от точек Fr и F2, вторая часть формулы (16)
отрицательна и представляет функцию которая при беспре-
дельном возрастании х2 возрастает от —оо до 0. Функция
s,2 на рассматриваемых бесконечных отрезках имеет постоян-
ную величину оо, так
что эти отрезки при-
надлежат координатной
линии s2 = оо. На от-
резке FJ\ осп ординат
вторая часть формулы
(17) имеет отрицатель-
ную величину и пред-
ставляет ] функцию Sj,
которая при переходе
от начала координат к
точкам F3 и F^ изменя-
ется от — оо до 0;
функция же $2 на рас-
сматриваемом отрезке
имеет постоянную ве-
личину нуль, так что
этот отрезок представ- Фиг. 3.
ляет координатную ли-
нию s2 = 0. На бесконечных отрезках оси ординат, начи-
нающихся от точек F% и F4 вторая часть формулы (17) имеет
положительный знак и представляет функцию s2, которая при
беспредельном возрастании у2 увеличивается от 0 до оо.
Функция на этих отрезках имеет постоянную величину нуль,
так что эти отрезки дают нам координатную линию — 0.
На основании сказанного получаем расположение коорди-
натной сети, изображенное на фиг. 3.
§ 5. Обнаружим теперь, что всякая координатная сеть,
данная формулой (J0), получается путем преобразования
одной из трех сетей предыдущего параграфа с помощью
обратных радиусов-векторов из центра, лежащего на оси
абсцисс.
396 ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ
Предполагаем, что в равенстве
Г ЯС Г ЯС
J /7(9 J да
(22)
первый [эллиптический интеграл переходит во второй с по-
мощью следующей подстановки:
(C-Z)G'-m) = n3, (23)
[где Z, т, п — действительны].
Замечаем, что при этом корни двух уравнений четвертой
степени
/(Q = o, А(С) = О (24)
будут связаны между собой соотношением (23). Геометри-
у ческий смысл этого соотношения
можно усмотреть на фиг. 4.
/Точку Л/', представляющую
на осях х'О'у' мнимое перемен-
ное С = х' + у'i9 следует соеди-
нить с центром преобразования С,
~-------—-------——лежащим на оси О'х' на рассто-
янии О'С = т от начала, и заме-
нить на соответственную точку
М так, чтобы
У' СМ-СМ' = п\
Фиг. 4. Полученную точку М сле-
дует отнести к осям координат
хОу, в которых ось Ох направлена по О'х' 9 ось Оу напра-
влена в сторону, прямо противоположную О'у'у а начало О
отстоит от центра Сна расстоянии ОС = 1. Точка М относи-
тельно осей х Оу представит нам мнимое переменное С = х -|- yi,
соответственное переменному С'.
Докажем, что для всякого многочлена гчетвертой степени
(£') с действительными коэфициентами можно отыскать дей-
ствительные [’величины Z, т, п, при которых функция /(С)
представляется формулой (13). Если все четыре корня вто-
рого уравнения (24) действительны, то они (фиг. 5) пред-
ставляются точками f19 f;>9 fi9 расположенными на оси
ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ 397
абсцисс О'х'. Строим на отрезках и f%f29 как на диамет-
рах, окружности и проводим радикальную ось этих окружно-
стей BD. Из точки А пересечения радикальной оси с осью
абсцисс проводим к окружностям касательные, которые будут
по длине равны, и, приняв эти касательные за радиус, чер-
тим из центра А окружность. Точка пересечения С этой
окружности с осью абсцисс будет служить центром преобра-
зования с помощью обратных радиусов, а О'С=т. Так как
(AC— CfJ (АС+ CfJ = АС\
(AC-CfJ (АС-\- Cf2) = AC\
TO
1 _ 1 1 _ 1 1
ЛС C/4 Cf. Cf. Cf2>
откуда
1111
C/4 СА“СЛ С^-
Если назовем через Fi9 F2, F?>y Fx точки, соответственные
точкам flf f2, /4 относительно центра преобразования С
при произвольном действительном значении коэфициента п,
то, умножив полученное равенство на п2, найдем, что
CF.-CF^CF.-CF^
398 ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ
или
F^ = FJ\.
Теперь нам остается только взять середину отрезка F3F%
за начало О координат хОу, т. е. положить 1 = СО, чтобы
получить для /(С) выражение (13) при действительных кор-
нях ®2-
Когда все четыре корня второго уравнения (24) мнимы
[комплексны] и представляются (фиг. 6) точками Д, /4, /2, /3,
попарно симметричными отно-
сительно оси О' х', то следует
провести через эти четыре точ-
ки окружность. Точка пересе-
чения С этой окружности с осью
абсцисс будет центром пре-
образования с помощью обрат-
ных радиусов, так что О'С = тп.
При преобразовании на нашей
фигуре с коэфициентом п — СО
упомянутая окружность пре-
образуется в ось ординат Оу,
на которой симметрично от
начала О располагаются точки
F19 Fif F2, F}, соответственные
точкам /р /4, /2> /з и представ-
ляющие корни первого уравне-
Фиг. 6.
ния (24). Коэфициент I будет — СО. Функция /(С) примет вид
(13) (различие на постоянный множитель) при чисто мни-
мых значениях е2.
Наконец, если два корня второго уравнения (24) действи-
тельны, а два другие суть мнимые сопряженные величины,
то, представив их на фиг. 7 точками f2, /39 /4, соединяем
точку /з с А и /2 н отлагаем
Из точки Н, как из центра, проводим окружность радиу-
сом 7//3, причем эта окружность пройдет и через точку /4.
ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ 399
Точки /2 и Д будут относительно этой окружности взаимно
сопряженные, т. е. будут удовлетворять соотношению:
fiH-f<2H=HCi
(Cfi — CH) (Cf.2—СН) = СН2,
1.1 2
CD'
Приняв точку С за центр преобразования обратными радиу-
сами (О'С = т), при каком-нибудь действительном коэфи-
циенте п, преобразуем построенную окружность в ось Оу
новой системы осей координат (— ОС = I). На этой оси сим-
метрично относительно начала О расположатся точки F} и Fi9
преобразованные из точек /3 и Д, что же касается точек
F1 и F2, преобразованных из точек и /2, то они располо-
жатся по оси абсцисс тоже симметрично относительно О,
так как, умножая последнее наше равенство на и2, получим:
С^ + С^ = 2СО.
Функция f (С) принимает в рассматриваемом случае
вид, данный формулой (13) при действительном и чисто
мнимом е2.
Таким образом мы обнаружили, что всякая координатная
сеть рассматриваемого вида с помощью преобразования
обратными радиусами приводится к одному из видов, данных
400 ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ
на фиг. 1, 2 или 3. Так как преобразование обратными ра-
диусами взаимно, то, наоборот, всякая координатная сеть
рассматриваемого
простейших сетей
вида получается этим преобразованием из
одного из трех упомянутых типов.
На фиг. 8 представ-
лена сеть, получаемая
через преобразование сети
фиг. 1. Мы замечаем на
ней две окружности, соот-
ветствующие координат-
ным линиям — const и
= const, из которых
первая преобразовалась из
круга радиуса а
вторая из оси Оу и потому
проходит через центр С1.
На фиг. 9 представле-
на сеть, получаемая через
преобразование сети фиг. 2. Окружность, проходящая через точ-
ки А, /з> /4, соответствующие корням второго уравнения (24),
1 В самом деле, формулы преобразования будут:
» _ 2 _ 2 У ______________
Х П (xf— т)2 -4" у'2 ’ & П (х' — т)2 ~Ь УГ2
Отсюда видно, что линии х = 0 и х2 у2 — £4 е2 преобразуются в окруж-
ности. Прим. ред.
ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ 401
Фиг. 10.
обладает тем замечательным свойством *, что ее дуги
и /:>/4 представляют координатную линию s2 = const, а ее
дуги //4 и /2/з представляют
координатную линию =
= const. Другая окружность,
изображенная на фигуре, по-
лучается из круга радиуса 0
|/ —и соответствует ко-
ординатной линии st = const.
На фиг. 10 представлена
сеть, полученная через пре-
образование сети фиг. 3. Ось
ординат при этом преобра-
зуется в окружность, у ко-
торой дуга /3/4 есть коор-
динатная линия s.2 = const, а дуга /3С/4 есть координатная ли-
ния Si = const.
§ 5. Для нашей механической задачи следует еще дока-
зать одну теорему, имеющую место при а3 = 0 и а4 = 1.
Теорема II. Первые диференциалъные параметры функ-
ций Sj и $.2 выражаются формулами*.
(е, — s.,) (е2 — s2) (е3 — s2)
R
(25)
где постоянные еп е2, е3 выражаются по корням ev, е8, е4
уравнения /(С) = 0 таким образом:
ei — (ei + ез)2, е2 — (ei + ез)2, ез — (ei + е4)2-
При доказательстве теоремы I было обнаружено, что
1 Пользуясь этим свойством, можно разрешить задачу о распределении
тока в круглой пластинке, для которой электродами служат равные дуги
/1/2 и А/з.
Зак. 2365. — Н. Е. Жуковский. Т. I.
26
402 ГЕОМЕТР ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ
первый диференциальный параметр функций рт и р2 есть
1 : VR. Из этого следует, что
Так
л 1 dsA
VR dP1
л$.2
dsx
как есть функция
1 ds.2
VR dp 2
то мы будем знать
(26)
эту ве-
личину на всей плоскости,
если определим ее на
какой-
нибудь кривой s2 = const; точно так же мы будем знать
ds2
dp2
на
всей плоскости, если определим эту производную на какой-
нибудь кривой = const.
Предположим сначала, что функция / (С) имеет вид (13),
и заметим, что в этом случае ось абсцисс или состоит частью
ИЗ ЛИНИИ = const и частью из линий $2 = const (фиг. 1
и 3), или представляется линиею = const (фиг. 2), причем
в последнем случае некоторая часть оси ординат предста-
вляет линию = const. Отсюда следует, что дл я всякого
индекса будет удовлетворяться на той или другой оси одно
из равенств:
/ ds \ “ / ds \
(As)2 =54 , (As)2= 54 • <27>
\ах/ \dyj
Приравниваем теперь произведения первых и вторых ча-
стей уравнений (16) и (18), а также уравнений (17) и (20):
I(®is]
[(е1 + ег)2 — «] [(®1 — s-?)2
[/tor
д_/(у0(е12ез2—у1)2
У6
Полученные результаты на основании формул (19), (21),
(27), приводят к уравнениям:
(Д^=дл)[(^+®2)2-^] [&-е2)-s] (-s),
(М2=7^)[(£*+ £'г)2 “ d [($1 - s?)’2 ~s] ‘
(28)
Если мы желаем отнести эти формулы к sn то по сказан-
ному в § 4 должны в них считать f (х) положительным,
a f (yi) отрицательным и полагать (формулы (14), (15)), что
/(%) = /?, /(^)=-/?;
ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ 403
если же желаем относить их к $2, то должны в них на осно-
вании того же параграфа считать f(x) отрицательным, a f(yi)
положительным и полагать, что
Внося указанные значения /(х) и f(yi) в формулы (28)
и подставляя найденные результаты в формулы (26), при-
ходим к заключению, что
= 2—(-^1).
= 2 / - [(£1 + в2)2 - s2] [(г, - г2)2 - s,] ( - S,).
Так как в случае уравнения (13) имеем:
е8 = — s2, s4 = — su
то формулы (29) и (26) обнаруживают справедливость тео-
ремы для рассматриваемого частного случая.
Посмотрим, как преобразуются формулы (29), когда мы
перейдем от простейшего вида /(С) к какому-нибудь иному
виду удовлетворяющему условию я3'= 0, а/= 1, с по-
мощью подстановки (23).
Подстановка (23) может быть заменена тремя последова-
тельными подстановками:
;:=Z4-e, т,
причем подкоренные величины в формуле (4) последовательно
будем обозначать через /(С), /2 (С"), /3 (-„Э, Л(^). По этим
функциям на основании формул (9) вполне определяются
функции Sj и $2, которые соответственно будем называть
через: s.2, $/', s.2"f s/, s.2'. Посмотрим, в каком соот-
ношении будут эти функции для соответственных значений
С, Г, С", с.
При первой подстановке
:=z+r, /(С)-/(/+:")=ЛГ).
х" = х — I, у' = у, R" = R, Х" = Х. 1
1 См. стр. 390. Прим» ред.
26-
404 ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ
Вследствие этого
s" — s = 4а 4 ( — 2lx + Р) + 2 (а8 + 4a4Z) (х — Z) — 2asx,
или
s" — s = — 4а^ — 2asz. 1 (30)
При второй подстановке
(31)
Два последние уравнения приводят нас к заключению
о неизменности в формулах (9) частей
Я" _ R"'
2у"*~2у'"*'
Докажем, что остающиеся части тоже равны, т. е.
X" + 4а3''х V2 + 8а4 W2 _ + 4a3'VV'2 +
2уге* 2у'"*
Подставляем сюда х" = г" cos у' — г" sin и предста-
вляем на основании соотношений:
cos 3'/' + 4 cos sin2 dT = cos
cos 4<р" 8 cos2 <?" sin2 dr — 1,
первую дробь таким образом:
а" + V' cos ?" + а2"г"2 cos 2?" + «-"г"* cos?" + </z*
2/'2sin2?"
Подобное же выражение найдем для второй дроби, при-
чем придется только изменить значок (") на значок ("'). Так
как на основании формул (31)
2
ff _ п _ tr"' Z7 „ ГГГ _ о ГГ
г — -у,-,, ф — — ? 9 а = п , ott = п^(х3 ,
Ctg —— Gtg , Otg 72 Gt। --- 72 Gt
то обе дроби равны. Таким образом
(32)
Вместо третьей подстановки мы рассмотрим обратную ей
1 Так как для функции /> (£") коэфициенты и а/' будут:
«з" = «з + 4a4Z; а4" — а4. Прим. ред.
ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ 405
подстановку С' = + тп и на основании сказанного о первой
подстановке напишем:
s' — s'" = 4a4'm2 + 2a3z7n. (33)
Сложение первых и вторых частей равенств (30), (32), (33)
дает:
s' — s = 4а/т2 — 4а*Р 2а/т — 2«3Z.
Для интересующего нас вопроса надо положить а4 — а/ = 1,
а3 = а/ = 0, так что
s' — s = 4т2 — 4Z2. (34)
Представим эту формулу в ином виде. Если сразу по-
ложим
C==/+^L_
то найдем, что
< =ф = -^(е1-0 <•*—0 <«8—0 («4—0;
откуда, вследствие а/ = 1, имеем:
(«X - 0 (ч - 0 («3 - 0 (•« - 0=
Так же докажем, что
(г/ — т) — т) (г/ — т) (е/ — т) = п4,
где е/, е3', г/ — корни уравнения /х (С') = 0. Корни еи е2
и е/, е2' связываются соотношениями:
, /г2
ех — I — --------
ех —т
1 п2
е I----------
е2 —т
Складываем:
si + s2 —
Так же найдем, что
(ез ~Ь е«) 2Z
= n2 (г/ 4- S2Z — 2m)
(е/ —m)(s2' —m)’
(35)
^п2(ез' + е/—2т)
(е3' —m)(e/ —m)'
Полагая здесь на основании условий а3 = а/ — 0,
63 + е4 = — (61 + ег)> 8з' -Г е/ = — (6/ + О»
получаем:
n2(e/ + e2'+2т)
(ед' — т)(е/ — т)’
(36)
406 ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ
Перемножаем соответственно первые и вторые части
уравнений (35) и (36) и сравниваем их, обращая внимание на
выражение для п4; [мы получим:]
(£1 + е-з)2 — 4/2 = « + <)2 — (37)
Формула (34) на основании формулы (37) может быть
представлена в таком виде:
- s = « + О2 - (38)
Подставляя определенную отсюда и из аналогичных фор-
мул величину s в формулы (29), приводим их к виду:
= З/Квг+г-/)2-*/] [(е/ЧО2-*/] [(е/Ч-г?)2-*/] ,
(39)
'_____________________________~____________________
^=21 _[(e/+S./)2_S./] [(е/+£8')2_^] [(е/+г/)_^].
Опуская здесь значек ('), который мы употребляли для
того, чтобы рассмотреть переход от функции /(С), выраженной
уравнением (13), к некоторой иной функции четвертой сте-
пени, стесненной условием а4 = 1, = 0, подставляем фор-
мулы (39) в уравнения (26). Полученный при этом результат
доказывает нашу теорему.
§ 6. Четвертый алгебраический интеграл диференциальных
уравнений Эйлера, найденный С. В. Ковалевской для рас-
сматриваемого ею твердого тела, может быть получен с по-
мощью геометрических соображений и изложен в виде неко-
торой теоремы.
Мы формулируем эту теорему, введя термин вектор вто-
рой степени от данного вектора. Если данный вектор имеет
длину г и образует с осью Ох угол ?, то вектор второй
степени имеет длину г2 и образует с осью Ох угол 2с?«
Между скоростью конца данного вектора и скоростью конца
вектора второй степени имеет место соотношение, состоящее
в том, что обе скорости наклонены к своим векторам под
ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ 407
равными углами и вторая скорость равна первой, умноженной
на 2г1.
Угловые скорости и моменты количеств движения мы
будем графически представлять векторами, которые в еди-
ницах длины выражаются числами, представляющими рас-
сматриваемые механические величины в соответственных
единицах. Единицы длины и массы будем считать произволь-
ными, единицу же времени выберем так, чтобы
-^= = 1, (40)
где х — расстояние центра тяжести от точки опоры, a g — на-
пряжение тяжести.
Теорема III. Концы двух векторов, из которых первый
представляет проекцию на плоскость
равных радиусов
инерции единицы длины,
отложенной от точки опоры
вверх, а второй есть век-
тор второй степени от
проекции угловой скорости
на ту же плоскость, нахо-
дятся в течение всего вре-
мени движения друг от
друга на неизменном рас-
стоянии.
Возьмем (фиг. 11) начало
подвижных прямоугольных
осей координат в неподвиж-
ной точке О и направим ось
Oz по оси, которой соот-
ветствует радиус инерции с,
а ось Ох направим, как было
z
Фиг. 11.
сказано, через центр тяжести G
рассматриваемого тела массы М (OG = х). Проведем из центра О
1 В самом деле, tg угла скорости с вектором для первого вектора
dy о^(2У) <*?
dt dt dt
равен , а для второго ~• Прим, оед
dt dt dt
408 ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ
сферу АВС радиусом, равным единице, и отметим точки
ее пересечения Н, Е, F с вертикальной линией, с главным
моментом количеств движения Лис угловой скоростью Й.
Проекции векторов ОН, О, L на плоскость хОу пусть будут:
OQ = sin 6, ON — г, ОТ = МсРт,
причем 6 есть угол НОС. 1
Называя угол N0A чрез ф, построим вектор ON' = г2, обра-
зующий с осью Ох угол 2ф и являющийся вектором второй
степени относительно вектора ON. Соединим прямою точки
N' и Q и займемся исследованием движения хорды N'Q.
Для этого рассмотрим скорости точек N' и Q. Точка Н
остается неподвижной в пространстве и потому имеет отно-
сительно тела скорость, равную и противоположную скорости
соответственной точки тела. Составляющая этой скорости по
направлению плоскости хОу будет искомая скорость точки Q.
Она слагается геометрически из скоростей и п2, из
которых первая происходит от компонента ф угловой ско-
рости около оси Oz и направлена по перпендикуляру к OQ
в сторону Ох, а вторая происходит от компонента г угловой
скорости и направлена перпендикулярно к ON в сторону
оси Оу. Эти скорости имеют величины:
= со sin 6, и2 = г cos 6. (41)
Для определения скорости точки N' следует сначала рас-
смотреть скорость точки N. Если бы сила веса тела Mg не
действовала, то точка L была бы неподвижна в пространстве
и точка Т имела бы в плоскости хОу от компонентов,
угловой скорости ф и г следующую скорость:
М<ы (а2 — с2), 2
направленную по перпендикуляру к ОТ в сторону Ох. Но,
так как сила тяжести действует, то точка L получает от этой
1 Вследствие равенства а = Ъ проекции 2 и L на плоскости хОу лежат
вдоль одной прямой. Прим. ред.
2 В самом деле, координаты точки L будут
Mcfir cos ср, Ma2r sin ср, Afc2w;
компоненты угловой скорости по осям координат равны
г cos ср, г sin ср, о).
Отсюда по формулам Эйлера легко найти проекции скорости точки L на
оси Ох и Оу и затем всю скорость точки Т в плоскости хОу. Прим. ред.
ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ 409
причины скорость, геометрически равную моменту пары, по-
лучаемой при перенесении силы Mg в неподвижную точку О.
Скорость точки Т на подвижных осях хОу от этой причины
будет иметь величину:
Mgx cos 6
и будет направлена по оси Оу. Заметив, что
ON, \ -.Ма\
найдем для скорости точки N две составляющие:
а1 2 — с2 0Х
= -"-„2... га)> v2 = cos6, (42)
** оу
из которых первая направлена перпендикулярно к ON в сто-
к
рону Ох, а вторая — по оси Оу, т. е. под углом -%-------
к вектору ON.
Так как по соотношению (1) и условию (40)
а2 с2 _ 1 gX_______ j
а2 2’ ^2 — "2’
то найденные скорости получают следующий вид:
Vi = у гео, -у2 = ~ cos 6. (43)
Что касается скорости точки N', то на основании сказан-
ного о скорости вектора второй степени заключаем, что ско-
рость точки N' будет слагаться из двух скоростей:
= <»г2, w2 = г cos Ь,1 (44)
из которых первая перпендикулярна к вектору ON' и на-
правлена
к
оси Ох, а вторая образует с ON' угол
2
т. е. перпендикулярна к ON и направлена к Оу.
Сравнение формул (44) и (41) приводит нас к заключению,
что от скоростей щ и хорда N'Q вращается около точки
О с угловой скоростью о) в сторону, обратную вращению
тела около оси Oz, [так как ON' = г2, a OQ = sin 6 ]2, а вслед-
ствие скоростей и2 и ш2 эта хорда движется поступательно,
1 Так как скорость точки N' равна скорости точки N, умноженной
на 2 г. Прим. ред.
2 Это свойство указывается Г, К. Сусловым «Вращение тяжелого
твердого тела около неподвижного полюса", § 3.
410 ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ
направляясь по перпендикулярному направлению от вектора
ON со скоростью г cos 6. От обеих этих причин длина хорды
N'Q не изменяется, что и требовалось доказать. Постоянную
длину хорды N'Q мы будем называть через к и будем рас-
сматривать к, как вектор, направленный от N' к Q.
§ 7. Для определения движения точки N по плоскости
хОу нам надо вывести еще одну теорему, которая является
следствием интеграла живых сил и интеграла площадей. На-
пишем эти интегралы, пользуясь фиг. 11:
—2------h Ма2г2 4- ‘iMgx cos Р = Mgxh,
ш cos 6 Ma2r cos 7 = M ]/"2^xaZ,
£ A
(45)
где h и l суть постоянные отвлеченные величины, 3 есть
угол НО А, а 7 есть угол HON.
Называя через £ и проекции вектора k на оси Ох и Оу,
найдем, что
cos Р — г2 cos 29 4- £,
cos 7 = г2 cos 9 4~ (’ cos 9 + *1 s*n ?)•1
Подставляем эти величины в формулы (45) и из полу-
ченных уравнений определяем <о2 и 2<» cos 6, обращая внимание
на формулу (40):
= Л — 2r2 (1 + cos 2^) — 2£,
2<о cos 6 = I — 4г3 cos 9 — 4r (; cos 9 4“ sin 9).
К этим соотношениям присоединяем еще формулу:
sin2 0 = (г2 cos 29 4“ О2 4“ (г2 sin 2? 4~ )2,2
которую преобразуем так:
cos2 6 = 1 — к2 — г4 — 2r2 (; cos 29 4" *1 sin 29). (48)
Предполагаем теперь, что скорость движения точки N по
плоскости хОу выражается вектором V, и определяем про-
1 Так как:
"Ра? ОН = прж ON' 4- upxN'Q, прОрОН = upOpONf + npOpATQ.
OQ2 = sin 26 = (Прж OQ)2 + (ПР2/ OQ)2.
Прим, ред-
ГЕОМЕТР ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ 411
екции этого вектора на оси Ох и Оу на основании формул (43):
Ka. = -i-wrs:n®, = cos® 4-cos в); (49)
из этих формул следует, что
И2 = (w2r2 — 2<»r cos 6 cos ср 4~ cos2 6).
Исключая отсюда ю2, 2w cos 0 и cos2 6 с помощью формул
(47) и (48), находим:
V2 = -i- (1 — к2 — lr cos ср 4“ ^r2 — г4). (50)
Таким образом величина скорости точки N вполне опре-
деляется по координатам (г, ср) этой точки.
Чтобы удобнее определить направление скорости И, будем
рассматривать вектор V' = V2, являющийся вектором второй
степени от скорости V9 и напишем на основании формул (49)
его проекции по осям:
Vx — Vx2 — Vy2 — [ — o)2r2 cos 2? + 2wr cos 0 cos cp — cos2 6],
Vy = 2 Vx Vy = [ — <w2r2 sin 2cp + 2<»r cos 6 sin ср].1
Исключая отсюда o>2, 2w cos 6 и cos2 6 с помощью формул
(47) и (48), получаем:
Vx = ( — 1 -h k2 + lr cos cp — hr2 cos 2cp 4~ r4 cos 4cp) — Sr2 sin2 cp,
(51)
Vy — (lr sin cp — hr2 sin2cp 4" r* sin 4cp) — V2 sin2 cp.
Вообразим на плоскости хОу систему криволинейных ко-
ординат ($!, $2) при условии:
а = — 1 4~ к2, (^1 = 1, = — А, а3 = 0, а4 = 1
1 Эти формулы легко получить из соотношений:
Z=Vx + iVy-, Z'=Vx'±iVy'-, K=|Z|; V' = \Z'\.
Прим. ред.
ГЕОМЕТР ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ
и напишем проекции по осям Ох и Оу вектора /?, соответ-
ствующего точке N. Они будут:
X — —1 -f - Л2 -4- Ir cos <р — hr2 cos 2? -f“ r*cos 4?,
Y —lr sin <p — hr2 sin 2? 4~ P s*n 4?.
Это позволяет формулу (51) представить в виде:
1 (53)
где у есть ордината точки N.
Сказанное приводит нас к теореме IV.
R
Теорема IV. Вектор ~ есть геометрическая
сумма
вектора второй степени от скорости точки N и вектора ky2,
направленного по вектору k.
§ 8. Проведем через точку 7V координатные линии
— const и = const, которые на фиг. 12 обозначены через s2
и Sp и построим согласно теореме IV параллелограм ОИЛ/Р,
в котором сторона OV7 есть вектор второй степени от ско-
рости V точки N, диагональ ОМ направлена по вектору R
и равна , а сторона ОР направлена по вектору к и равна ky2.
Разделим углы У'Ох9 МОх и РОх пополам прямыми Ov 9
От и Ор и заметим, что прямая Ovf будет параллельна ско-
ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ 413
рости И точки N, прямая же От по теореме I будет парал-
лельна касательной к кривой = const в точке N. Если на-
зовем через 2»> и 2/ углы MOV' и МОР, то углы mOv и
тОр будут & и X- Эти углы могут быть определены по обыкно-
венным формулам тригонометрии из треугольника О VrМ.
Мы получим:
(54)
Вторые части этих формул легко выразить по и s2. Для
этого сложим величину X, данную формулами (52), с 4 И2
(формула (50)). Получим:
Х-р 4 V2 = h (1 — cos 2?) г2 — (1 — cos 4?) г4.
Вводим сюда декартовы координаты точки /V и опреде-
ляем V2:
V2 = 1 (_ Х+ 2hy* - 8xV). (55)
Вносим эту величину в формулы (54) и обращаем внима-
ние на уравнения (9), которые для нашего случая имеют вид:
51 2^
Получаем:
*2 2у2 +4х2>
(56)
где
tgz =
(s2 —£t) (з3 —Л2)
(si — К)
/fa —&i) fa —^2)
fa— ЛЭ (st — k.y
(57)
kt = h — 2k, k.2 = h + 2k.
(58)
414 ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ
Первая из формул (57) дает нам ясное геометрическое пред-
ставление о виде траектории точки N.
Эта траектория пересекает семейство координатных
линий s2 = const под углом 0, зависящим указанным обра-
зом от координатных параметров s.2. Вторая формула (57)
позволяет по направлению касательной, проведенной в точке N
к координатной линии = const, найти направление прямой Ор,
а следовательно и вектора к.
Вектор ОМ — при данной точке /V определяется по вели-
чине и по направлению, что же касается векторов О К' = ]/2
и ОР=ку2, то они определяются при данной точке ZVno вели-
чине (формула (50)). По этим данным мы можем построить
или параллелограм OV'MP, представленный на фиг. 12, или
другой параллелограм, который получается через поворот
нарисованного параллелограма, изображенного на фиг. 12,
на 180° около диагонали ОМ. Это показывает, что в каждой
точке N возможны два направления скорости И, которые
наклонены к касательной координатной кривой s2 = const под
равными углами. Задача о построении семейства траекторий
точки N при заданных значениях постоянных Л, Z, к есть
задача второй степени, и упомянутое семейство будет иметь
огибающие кривые.
Данному направлению скорости V соответствует опреде-
ленное направление вектора к, а следовательно (теорема III)
и определенное положение точки Q на фиг. 11. Вследствие
этого при рассматривании движения тела, зная место точки Q,
мы не будем иметь никакого сомнения, по которому из двух
указанных направлений движется точка 7V.
Первое уравнение (57) позволяет нам составить диферен-
циальное уравнение траектории точки N в принятых криво-
линейных координатах.
Мы имеем:
Ло . ds}
Х'К=,8: ’
Подставляя сюда соответственные величины из формул (25)
и (57), видим, что f!'s,
ТТ-0, (59)
ТО6 <
ГЕОМЕТР ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ 415
где
•51 = (et — sj) (e,2 — sj (e3 — sj (kx — sx) (k2 — $,),
S-2 = (*i — ^) (e2 — sa) (ез — 5г) G=i — s>) (k.2 — s2).
Что касается связи между положением точки W на плоско-
сти хОу и временем, то она найдется при рассмотрении проек-
ций скорости V на касательные кривых — const и s2 = const.
Мы имеем:
_L = у cos »,
Asj dt Д$.2 dt
Преобразуем эти формулы на основании уравнений (25) и
на основании формул:
COS&=2P
,2
/г
(61)
sin U =
/г
которые получаются рядом с формулами (57) из треуголь-
ника OV'M (фиг. 12).
Полученные при этом результаты можно написать так:
'2
Так как формулы (56) дают нам:
/г
*2 Sl~ У2’
(62)
(63)
то через умножение двух вышенаписанных выражений dt со-
ответственно на $i, $2 и вычитание их, находим:
у, _ s2^s2_slds1
~ vs2 vs;'
Формулы (59) и (63) позволяют выразить и $.2 гипер-
эллиптическими функциями времени и являются фундамен-
тальными уравнениями С. В. Ковалевской.
§ 9. Положение точки Q по данному положению точки N
находится с помощью теоремы III. Рассматривая фиг. 11, при-
ходим к следующему заключению:
416 ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ
Для построения траектории точки Q по данной траек-
тории точки N следует все векторы ON заменить векто-
рами второй степени ONr и через концы их N' провести
векторы N'Q = k. Место концов этих последних векторов
будет траектория точки Q.
Эта траектория представляет проекцию на плоскость хОу
пути, который описывает в теле точка Н. Если соединим все
точки этого сферического пути с неподвижной точкой О, то
получим конус, который я называю конусом вертикальной
линии.
Для полного знания положения тела в пространстве мы
определим еще угол ty, образованный плоскостью НОС с не-
которой неподвижной плоскостью, проходящей через верти-
кальную линию.
Производная найдется из рассмотрения на фиг. 11 со-
ставляющей скорости точки С по направлению перпенди-
куляра к плоскости НОС. Эта составляющая будет зависеть
только от проекции угловой скорости г на OQ и будет иметь
величину:
г cos (? 4“ v),
где v есть угол QON'. Разделив найденную скорость на sin О,
получим искомую производную:
cty_rcos(? + v)
Л-------she—-• <64>
На основании сказанного в этом и предыдущем параграфе
интерпретируем рассматриваемое движение теоремой V.
Теорема V. Движение твердого тела в случае С. В. Ко-
валевской совершается так, что соединенный с телом конус
вертикальной линии скользит через вертикаль ОН по за-
кону, характеризуемому движением точки N, а вертикаль-
ная плоскость, проходящая через точку С, вращается около
вертикали ОН с угловой скоростью, данной формулой (64).
§ 10. Рассмотрим некоторые частные случаи исследуемого
движения. Простейшим являются случай k = 0, указанный
ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ 417
Н. Б. Делоне Ч Этот случай имеет место, когда в начальный
момент времени (фиг. 11) радиус OQ направляется по ON',
а угловая скорость 2 такова, что точка Q совпадает с /V', т. е.
sin 0 = г1 2 = 22 sin2 (65)
где есть угол COF. Если бы мы желали выразить это усло-
вие при произвольных единицах времени, то должны бы были
на основании формулы (40) заменить 2 на
Q а
что дало бы нам:
(I2
sin 6 = —- 22 sin2 р-.
2gx
(65')
Если в начальный момент времени точки ЛГ и Q сливаются,
то по теореме III они будут совпадать всегда, и вектор OQ
будет все время движения представлять вектор второй степени
от проекции угловой скорости, так что sin 6 = г2 и v = 0.
По теореме IV [вектор квадрата] скорости V2 точки N будет
/? г TZ1
геометрически представляться вектором —, т. е. [скорость к]
R
4 ’
будет направлена по касательной к кривой s.2 = const.2 Это зна-
чит, что траектория точки 7V будет одна из координатных
линий = const. Какое именно значение имеет const, видно
из первой формулы (57), которая дает & = 0 при
So---------^2----А.
Заменив в координатной кривой s.2 = h все векторы [И]
векторами второй степени [Vf = V2], мы получим траекторию
точки Q, по которой построим конус вертикальной линии.
Но будет гораздо проще получить уравнение этого конуса
сразу, воспользовавшись теоремой VI.
1 Н. Б. Делоне в вышеупомянутом сочинении дает для случая k = 0
геометрическую интерпретацию аналогичную той, которая предложена Дарбу
для случая Лагранжа. По этой интерпретации тело, двигаясь вместе
с подвижным годографом угловой скорости, катится этою кривою без
скольжения по некоторой неподвижной поверхности вращения.
2 Так как в этом случае Ovr, От и Ор сливаются (фиг. 12).
Прим, ред
Зак. 2365. — Н. Е. Жуковский. Т. I. 27
418 ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ
Теорема VI. В случае к —О проекция главного момента
количеств движения на вертикальную плоскость, проходя-
щую через ось неравных радиусов инерции, образует с верти-
кальной линией постоянный угол.
Положим в первой формуле (47) £ = 0 и дадим ей сле-
дующий вид:
оо2 = h — 4r2 cos2 <э,
откуда следует, что
7И2а4 о । 09 4 о 9 п М2аЧг
—-— со2 -f- M2a^r2 cos2 —
Так как первая часть этого равенства1 представляет квадрат
проекции главного момента количеств движения L на указан-
Фиг. 13.
ную в теореме плоскость,
то заключаем, что эта проек-
ция имеет постоянную ве-
личину
Л7а2]/Л
2 ‘
Предположим, что упомя-
нутая проекция на фиг. 13 на-
правлена по ОР, и назовем
угол РОН, который она
образует с вертикалью ОН,
через L Так как проекция L
на ОН имеет постоянную
величину:
^MVZgxal,
4 s >
то
cos i
Vbgx I
a IVK'
или по формуле
(40)
I
COSl =---.
iV h
(66)
1 Так как / N'OQ в этом случае равен нулю (фиг. 11). Прим. ред.
ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ 419
Чтобы составить на основании доказанной теоремы уравне-
ние конуса вертикальной линии, обращаем внимание на прямо-
угольные сферические треугольники EPS и EDS. Так как
у обоих треугольников гипотенуза общая, то произведения
косинусов их катетов равны.
Но
h A/a2j/sin6 1
cos (ЕР) = —— , cos (ED) —-----------------
L
поэтому
или
рЛ ____
sin (0 — i) —— = Vsin 0 cos ?,
. р h sin (в — О
cos ? —------------------
Так как здесь 6 есть
полярный угол точки
Н, а 2? ее долгота, то
найденное уравнение
представляет нам сфе-
рическую кривую, по
которой конус верти-
кальной линии пересе-
кает сферу радиуса
единицы. Входящий в
формулу постоянный
угол i следует считать
положительным, если
дуга HP откладывается
от точки Н вверх, и
отрицательным в обрат-
ном случае.
Приписывая углу О
различные значения от О
до тг будем находить
по формуле (67) вели-
чины cos?, причем каждый косинус даст нам два положения
(67)
2 pGsinft
Фиг. 14
1 Так как для этого случая г2 = sin 6. Прим. ред.
27*
420 ГЕОМЕТР ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ
точки Н9 одно соответствует долготе 2?, а другое — долготе
4гс— 2? или, что одно и то же, 2гс— 2?. Из этого заключаем,
что наша сферическая кривая симметрична относительно
меридиана АС. Посмотрим, в каких точках пересекает она
этот меридиан. При 0 = £ для положительного значения i и
при 0 = гс -|- £ для отрицательного значения £ по формуле (67)
получаем cos ? = 0, следовательно 2? = 2гс — 2<р = к. Из этого
заключаем, что наша сферическая кривая пересекает рас-
сматриваемый меридиан в точке HQ (фиг. 14), лежащей
на продолжении дуги АС на расстоянии HQC=i (или
Н^С = гс —|— £). Остальные точки пересечения найдутся из пред-
положений cos2? = l, 2? = 0 или 2? = 2гс. Эти предположения
приводят нас к условию:
4
sin 6 — sin2 (6 — £) = 0. (68)
Делая здесь подстановку:
6 — £
tg—
находим для определения и уравнение четвертой степени:
^(w) — [2u cos £ + (1 — и2) sin £] (1 Ц- и2) — и2 — 0. (68 )
Отсюда заключаем, что рассматриваемая кривая пересечет
меридиан еще, вообще говоря, в четырех точках Ни Н29 Н>9 РЦ.
Относительно этих точек может быть дано геометрическое
толкование. Изложим его для положительного £.
Вообразим на фиг. 14 некоторые косоугольные оси коорди-
нат z Ох', в которых ось Ох' образует с нашею осью Oz
угол £, а ось Oz' направлена в сторону прямо противополож-
ную оси Oz. Какая-нибудь точка М меридиана, определяемая
углом 0, будет иметь относительно этих осей координаты:
, sin (6 — £) sin 0 1
z =----------, X =------- .
sin£ sin £
1 Эти формулы получены из рассмотрения треугольника OMS. Прим, ред
ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С В КОВАЛЕВСКОЙ 421
Определяя отсюда sin 6 и sin (6 — /) и подставляя в уравне-
ние (68), найдем:
4
—4-тх' — z'2 = 0.
h Sin I
(69)
Это уравнение показывает, что искомые точки Нъ Н2, Н& Н4
суть точки пересечения меридиана АС с параболой, ось
которой параллельна Ох и которая прикасается в точке О
к прямой zz'. Так [как со$2<?<1, то по (67) для всех точек
сферической кривой первая часть уравнения (68) должна быть
более нуля, а следовательно должна быть более нуля и пер-
вая часть уравнения (69). Это показывает, что концы дуг 6,
соответствующие точкам нашей сферической кривой, лежат
на отрезках меридиана СА, заключенных внутри начертан-
ной параболы, т. е. рассматриваемая сферическая кривая должна
состоять, вообще говоря, из двух ветвей, из которых одна
заключена между параллельными кругами, проходящими через
точки Ну и Н2, а другая заключена между параллельными
кругами, проходящими через точки Н% и Нх. На фиг. 14 пер-
вая ветвь имеет в Но кратную точку, а вторая ветвь пред-
ставляет некоторую замкнутую кривую.
Если i = 0, то точки и Нх сливаются с С, и кривая
получает здесь точку возврата. Уравнение (67) принимает
при этом упрощенный вид:
cos <р = Vsin 0. (70)
Вышеупомянутая парабола обращается при этом в две
параллельные прямые, из которых одна есть ось Oz. Так как
вторая часть уравнения (70) получает одинаковые значения
при 6 и при тс— то рассматриваемая сферическая кривая
состоит из двух ветвей, симметричных относительно плоско-
сти экватора хОу.
Заменяя в уравнении (70) sin 6 на г, найдем полярное
уравнение траектории точки /V:
2
Г = COS
Vh
422 ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ
которое представляет окружность, проходящую через точку О
и имеющую центр на оси Ох. Кривая, получаемая из этой
окружности через замену всех радиусов на векторы второй
степени, будет улитка Паскаля, которая представит проекцию
на плоскость хОу линии пересечения сферы с конусом верти-
кальной линии. Если точки Н2 и Н:> или и между
собой сливаются, то рассматриваемая сферическая кривая
состоит из одной ветви с двумя кратными точками или из ветви
с одной кратной точкой и из одной отдельной точки.
Условие равенства двух корней уравнения (68) (или 68')
может быть выражено тем, что искомая величина 0 удовлетво-
ряет одновременно уравнению (68) и уравнению:
9
-д-cosO — sin (6 — i) cos (6— z) = 0. (71)
Из этих уравнений находим, что
._____________________________tg6
gZ“ 2tg*6+l’ (72)
3 sin2 в — h sin 6 + 1=0.
Определяя из последнего уравнения (72) величину tg 6 и
подставляя в первое, найдем связь между tgz и Л, при кото-
рой происходит слияние точек Н> и Н3 или //3 и //4. Так как
первая часть уравнения (68) положительна для точек, лежа-
щих внутри вышеописанной параболы, и имеет отрицательное
значение для точек, лежащих вне этой параболы, то случай
слияния точек Н2 и 7/3 характеризуется условием минимума
первой части уравнения (68), а случай слияния точек Н> и
Нх—условием максимума этой части.
Это соответствует верхнему или нижнему Fзнаку нера-
венства:
— 2 sin 6 — h cos 2 (6 — z) 0.
На основании уравнения (68) это неравенство приводится
к виду:
6 sin 6 — h 0. (73)
Отсюда следует, что
ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ 423
при слиянии точек Н>
и Н3 и
sin 6
при слиянии точек Н3
Прибавим к этому,
и Н4.
что на основании первой формулы (72)
при
будем иметь 6
7й
> ~2'
А
6
Если движение тела началось так, что вертикальная линия
проходит через слившиеся точки А/.» и //4, то она в течение
всего времени движения будет сохранять в теле неизменное
место и следовательно явится перманентной осью вращения.
Это вращение будет устойчивым по отношению к весьма ма-
лому изменению постоянных i и А, так как всякое изменение
обращает рассматриваемую нами отдельную точку сфериче-
ской кривой в некоторый весьма малый замкнутый контур.
Что касается случая, в котором вертикальная линия проходит
в начальный момент через слившиеся точки Н.± и 77>, то он
соответствует тоже вращению около перманентной оси (что
будет выяснено ниже); только это вращение неустойчиво^ так
как малое изменение i и А заставляет сферическую кривую
разложиться на две конечные ветви, и вертикальная линия
начинает свое движение в теле по той или другой полости
конуса, соответствующего этим ветвям.
Вопрос об отыскании перманентных осей тяжелого твер-
дого тела, имеющего неподвижную точку, не представляет
особых затруднений и обстоятельно исследован в сочинениях
Стауде 1 и Б. К. Млодзеевского 2. При этом исследовании
обнаружилось, что местом перманентных осей вращения в теле
при заданном направлении прямой, соединяющей центр тяже-
сти с неподвижной точкой, является некоторый конус второго
порядка. Для случая С. В. Ковалевской упомянутый конус
распадается на две плоскости zx и ух, из которых только
первая соответствует конечным угловым скоростям.
1 Staude, Crelle, Bd. 113.
2 Б. К. Млодзеевский, „Труды Отделения физических наук Обще-
ства любителей естествознания", т. VII.
424 ГЕОМЕТР ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ
Предположим, что перманентная ось вращения совпадает
с вертикалью ОН. образующей с осью Oz угол 0, и устано-
вим связь между 6 и угловой скоростью Й из того условия,
что скорость, сообщаемая концу главного момента количеств
движения от вращения Й, геометрически равна моменту вра-
щающей пары от силы тяжести. Это требует, чтобы
Ма? —
McPQP sin 0 cos 6-S2 sin 0 cos 0 = Mgx cos О,
откуда получаем:
Сравнивая это уравнение с уравнением (65z), видим, что
второе при р. = 6 приводится к первому. Это показывает нам,
что все перманентные вращения в задаче С. В. Ковалевской
принадлежат к случаю Делоне. На основании формулы (40)
имеем:
й2 sin 0 = 1.
Если теперь приложим к случаю существования перманент-
ной оси первую формулу (47), то найдем из нее:
Й2 (cos2 0 4“ 4 sin2 0) = Л.
Исключение Й2 из двух вышенаписанных формул приводит
нас ко второй формуле (72). Таким образом перманентные
оси соответствуют (фиг. 14) случаю слияния точек Н2 и Н3
или Н3 и /74, причем решая первое уравнение (72), видим,
что один из его корней будет более , а другой менее,
т. е. один будет соответствовать слиянию точек Н2 и Н)У
а другой Н3 и НА.
Если неравенство (73) обращается в равенство
h — 6 sin 6,
то парабола (фиг. 14) будет иметь соприкосновение 2-го по-
рядка к кругу и три точки ее пересечения с кругом Н2, Н3> НА
сливаются между собой. Подставляя вышенаписанную
ГЕОМЕТР ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ 425
величину h во вторую формулу (72), получаем уравнение,
из которого находим, что
sin 0 = —.
/3
Линия пересечения конуса вертикальной линии со сферой
будет иметь кратную точку в Н{ и точку возврата в точке,
представляющей слияние точек Н2, Нл, Н±. Движение твердого
тела, при котором конус вертикальной линии имеет указанный
вид, было исследовано Б. К. Млодзеевским, который показал,
что в рассматриваемом случае все элементы, характеризую-
щие движение тела, выражаются алгебраическими рациональ-
ными функциями времени. Положение вертикали, проходящей
через точку возврата, соответствует перманентной оси вра-
щения. Вращение это относительно изменения постоянных i
и h будет, вообще говоря, неустойчиво. Анализ Млодзеевского
показывает, что при движении по рассматриваемому конусу
вертикальной линии вертикаль ОН приближается к положению
перманентной оси, но достигает этого положения только по
прошествии бесконечно большого времени. Такое же обстоя-
тельство имеет место для случая слияния точек Н2 и Н±.
§11. Для полного решения задачи о движении в случае
Делоне мы должны еще определить 0 и в функции времени.
Так как (фиг. 13) вся скорость точки С происходит только
от вращения г, то проекция этого компонента скорости на
горизонтальную прямую, перпендикулярную OS, будет выра-
жать скорость точки С по направлению дуги НС. Вследствие
этого
Подставляя сюда выражение sin % получаемое из фор-
мулы (67), находим:
= s*n --------sin2 —О, (74^
что с помощью подстановки (формула (68'))
х ° — i
426 ГЕОМЕТР ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ
приводит к эллиптическому интегралу:
J VF(u)
(74')
что же касается угла ф, то он найдется по формуле (64),
положив в ней v = 0, г — ]/"sin 0 и заменив в ней величину
cos? из формулы (67). Это дает нам:
dty ___V h sin (в — i)
dt 2 sin 0
(75)
Исключая время из формул (74) и (75), получим диференци-
альное уравнение конуса, представляющего место в про-
странстве оси ОС:
j. Vh sin (в — i)
пФ =----------------— -----------------------------
2 sin е /---------------------д------------у
1/ sin 0 — sin1 2 (6 — г)
(76)
Это уравнение с помощью переменного и выражается так:
J'l'
Vh Г .
COS I
1 — u2 sin i
<2u
du
W
(76')
2
Так как ось ОС в случае С. В. Ковалевской есть поляр-
ная ось эллипсоида инерции, то мы будем называть рассмо-
тренный конус конусом полярной оси. Все движение тела
происходит так, что конус вертикальной линии, соединенный
с телом, скользит через вертикальную линию, а ось неравных
моментов инерции скользит по конусу полярной оси.
Ввиду того, что задача об определении в функциях вре-
мени элементов, характеризующих положение тяжелого твер-
дого тела в пространстве в случае Делоне, разрешена в со-
чинении Г. Г. Аппельрота \ мы не станем здесь заниматься
разбором формул (74) и (75). Скажем только в заключение
несколько слов о случае i = 0 2, в котором конус вертикаль-
1 Задача о движении тяжелого твердого тела около неподвижной точки.
*Часть II, § 5.
2 Это соответствует в изложении Делоне случаю 3?i = 212.
ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ 427
ной линии имеет улиткообразный вид (уравнение (70)). Этот
случай получается, если направим ось ОС вертикально и
сообщим телу около нее некоторую начальную угловую ско-
рость. Формула (75) дает нам при i = 0 (начальное значение
берем за нуль):
(77)
откуда следует, что в случае i — О вертикальная плоскость,
проходящая через ось неравных моментов инерции, вра-
щается равномерно около вертикальной линии Ч
Если вообразим в этой вращающейся плоскости колеблю-
щийся около точки О физический маятник, для которого рас-
стояние центра тяжести от точки привеса есть х, а момент
инерции Л/а1 2, то, обозначая через b угол вертикальной пря-
мой, перпендикулярной к этому маятнику, найдем, что
Ма<4 db V . fi Ma* h . .
—о I —у- I = Mxg sm о--------sm2,j + const.
2 \ at ) 2 4
Берем const. = 0 в предположении, что в горизонтальном
положении маятник не имеет скорости в плоскости ОНС, и
пишем согласно формуле (40):
Д- = 1 /~sin 9 — A sin2 0. (78)
at | ч
Так как формула (78) совпадает с формулой (74) при z = 0,
то заключаем, что в рассматриваемом случае конус полярной
оси и конус, описанный вышеупомянутым маятником, будут
вертикальной плоскостью ОНС усекаться по взаимно перпен-
дикулярным образующим.
Статья „Геометрическая интерпретация рассмотренного С. В. Ковалев-
ской случая движения тяжелого твердого тела около неподвижной точки"
просмотрена для настоящего издания и снабжена подстрочными редакцион-
ными примечаниями проф. А. И. Некрасовым. Пояснительные вставки
в тексте, сделанные проф. А. И. Некрасовым, даны в квадратных скобках
Прим, ред
1 Это свойство впервые указано Г. Г. Аппельротом, Задача о движении
тяжелого твердого тела около неподвижной точки, стр. 112.
428 ГЕОМЕТР. ИНТЕРПРЕТАЦИЯ СЛУЧАЯ С. В. КОВАЛЕВСКОЙ
Автор сделал четыре сообщения на тему „Геометрическая интерпрета-
ция рассмотренного С. В. Ковалевской случая движения тяжелого твер-
дого тела около неподвижной точки": 18 февраля 1892 г. в Московском
математическом обществе (доклад был сделан за Н. Б. Делоне), 28 октября
1894 г. в физико-математической комиссии Отделения физических наук
Общества любителей естествознания, антропологии и этнографии, 19 сен-
тября 1895 г. в Московском математическом обществе и 30 сентября
1895 г. на Съезде немецких естествоиспытателей и врачей в Любеке.
Напечатана работа была впервые в „Математическом сборнике", т. XIX,
1896. Вторично работа была напечатана в „Трудах Отделения физических
наук Общества любителей естествознания, антропологии и этнографии,
т. XII, вып. 2, 1904. Прим, ред.
A GEOMETRICAL INTERPRETATION OF THE CASE TREATED BY
S. V. KOWALEVSKI OF MOTION OF A RIGID BODY ABOUT
A FIXED POINT
In this work Prof. Joukovsky gives a geometrical interpreta-
tion of the general case of motion of rigid body, of which the
principal radii of gyration as to a fixed point are in the ratio
a = b = ctf2 and whose centre of gravity is lying in the plane
of the equal radii of gyration.
The interpretation is based on an explanation of the geomet-
rical meaning of two hyperelliptical functions of time, by means
of which S. V. Kowalevski expresses all the quantities deter-
mining the position of the body. These functions are shown by
Prof. Joukovsky to be the parameters of an orthogonal system
of coordinates in the plane of equal radii of gyration. With
respect to this system of coordinates the motion of the end of
the projection of the angular velocity in the plane of equal ra-
dii of gyration is easily obtained. By means of the path of this
point is constructed a cone representing in the body the locus
of the verticals, which cone is termed by the author the cone
of verticals. When this cone is known we have the picture of
the motion of the body.
The work is divided in two parts.
In the first part (§§ 2 to 5) Prof. Joukovsky studies the pro-
perties of an orthogonal system Pi = const and p2 = const, gi-
ven by a function of a complex variable
p,+‘p! J Vfc)’
where f (C) is a polynomial of the fourth degree in Z with real co-
efficients and C = The curves of this system are determi-
ned by equation (9), in which R is the module, X is the real part
430
SUMMARY
and Y—the coefficient of the imaginary part of the function
/(Q, st is a function of only pj and s2 a function of only p2.
In order to investigate the general character of the system Prof.
Joukovsky at first assumes that /(Q = (£i2— £2)’(ез2— £2) and con-
siders three cases: 1. when £i<£2, both being real; 2. when Si
is real, and e2 is an imaginary number; 3. when both Sj and
e2 are imaginaries. Using a transformation by means of inverse
radii vectors these systems can be reduced to those represented
in Figs. 8, 9 and 10 for an arbitrary polynomial f (C) of the fourth
degree, with real coefficients. The first system (8) corresponds
to the case when the roots of /(C) are real, the second (9) — to
that of imaginary roots, and the third (10) — to that of two real
and two imaginary roots.
With regard to these systems Prof. Joukovsky deduces the
following theorem:
Theorem I. The tangents to the coordinate lines
Si = const (Pj = const) and s2 = const (p2 = const) are parallel
to the bisectors of angles made up by the corresponding vector /?
and the axis of abscissae.
In the second part is considered the rotation of a heavy
rigid body about a fixed point O. In Fig. 11 the axes x, y, z
are the principal axes of inertia of the body; to the axes x and у
correspond equal radii of gyration a — b and to the z-axis —
the
radius
. The x-axis is drawn through the centre of
gravity, G, x is the coordinate of the centre of gravity, OL is
the principal moment of momentum, 2 is the angular velocity.
From the point О is described a sphere of radius equal to
unity; //, E and F are corresponding points of intersection of
the sphere with the vertical, with the principal moment of mo-
mentum, and with the vector of angular velocity. The vectors OQ9
ON and OF are the projections of vectors OH, 2 and OL on the
xjy-plane, 6 = angle HOz, P — angle HO A, and 7 = angle HON,
The algebraical integral obtained by S. V. Kowalevski for
the rigid body under consideration is expressed by Prof. Joukov-
sky in the form of a theorem. To put this theorem in an ex-
plicit form Prof. Joukovsky assumes the units of length and of
mass to be chosen arbitrarily, expresses the unit of time so as
SUMMARY
431
to make —=. = 1, and introduces the term “vector of a second
2gx
degree". If the given vector in the xz/-plane is of length r and
makes with the x-axis an angle % then the vector of the second
degree has a length r2 and makes with the x-axis an angle 2<p.
Based on the principle of conservation of moment of momentum,
from simple geometrical considerations Prof. Joukovsky reveals
the following property of motion of a rigid body, expressing the
kinematical meaning of the integral of Kowalevski:
Theorem III. The distance between the ends of two vectors,
of which the first is the projection on the plane of equal radii
of gyration, of the unit of length laid off upwards from the point
of support, and the second is a vector of the second degree of
the projection on the same plane of the angular velocity, rema-
ins invariable during the motion. Thus the vector k = N'Q is
of constant length.
From the equation of energy and from equation (45) it fol-
lows that: 1. The velocity И of TV depends only on its coordi-
nates and on arbitrary constants k, I, h of the integrals of mo-
tion, i. e. on the position of TV in the xCty-plane and on the ini-
tial conditions. 2. If in the xCty-plane is constructed a system
of curves of the function
/(Q= —l+^ + /C —AC2 + C4,
then the vector of this system for the point TV is the geo-
metrical sum of the vector of second degree, V' 9 of velocity V
of TV and of the vector ky2 directed along the vector k (see
Fig. 12, in which OM=~, OP=ky2, OV' =V').
From the above properties of motion of TV and from theorem I
it follows that by the position of TV in the xOz/-plane the
velocity V of the point TV is determined not only in magnitude
but in direction as well. Making use of these properties of N
and writing the differential equations of its motion in curvilinear
coordinates and s2 are obtained equations (59) and (63), which
are the fundamental equations derived by S. V. Kowalevski.
432
SUMMARY
According to the given position of TV there can be obtained
by means of Theorem III the position of the point Q: to con-
struct the path of Q, according to the given path of N, it is
necessary to replace all vectors ON by vectors ON and through
the ends of N' draw the vectors N'Q = k. The locus of the
ends of these last will be the path of Q.
The path of Q is the projection on the xOy-plane of the
path described in the body by the point H fixed in space. By
connecting with О all points of this spherical path will be ob-
tained a cone termed by Prof. Joukovsky the cone of verticals.
The generating line of this cone coinciding with the vertical
OH will determine the position of the body, provided the angle
made by the plane HOC with any fixed plane through OH is
also known. The angular velocity of rotation of the plane HOC
about OH is given by formula (64), in which v = QCN'. Hence
we obtain the theorem:
Theorem V. The motion of a rigid body in the case con-
sidered by S. V. Kowalevski is such that the cone of vertical
joined to the body slides over the vertical OH according to the
law of motion of the point N, while the vertical plane through C
rotates about OH with an angular velocity determined by
formula (64).
At the end of the paper (§§ 10 and 11) is considered the
case when k = 0 and the point N coincides with Q, Fig. 13.
In this case the motion possesses the following property:
Theorem VI. In the case k = G the projection of the
principal moment of momentum on the vertical plane passing
through the axis of unequal radii of gyration makes with the
vertical a constant angle i.
By means of the above theorem is easily obtained equation
(67) of the cone of verticals and the properties of this cone
are easily investigated. The angles 6 and are expressed in
function of time by equations (74) and (75).
To the particular case k = 0 refer also cases of a perma-
nent rotation about an axis. The cone of permanent axes dege-
nerates into two planes zx and yx, of which the first corres-
ponds to finite angular velocities.
УСЛОВИЕ РАВНОВЕСИЯ ТВЕРДОГО ТЕЛА, ОПИРАЮ-
ЩЕГОСЯ НА НЕПОДВИЖНУЮ ПЛОСКОСТЬ НЕКОТОРОЙ
ПЛОЩАДКОЙ И МОГУЩЕГО ПЕРЕМЕЩАТЬСЯ ВДОЛЬ
ЭТОЙ ПЛОСКОСТИ С ТРЕНИЕМ.
(1896 г.)
§ 1. В своей статье „Заметка о равновесии твердого тела
при действии трения на некоторую плоскую часть его поверх-
ности" проф. Н. Н. Шиллер1 выводит в виде одного нера-
венства условие равновесия внешних сил, приложенных к телу.
Это неравенство получается таким образом: предположив
что тело стремится повернуться около некоторой оси, перпен-
дикулярной к опорной плоскости, автор исключает из трех
уравнений равновесия тела на этой плоскости две координаты
точки пересечения упомянутой оси с плоскостью; потом раз-
решает найденное уравнение относительно коэфициента трения
и ставит условие, чтобы полученная величина коэфициента
не превосходила коэфициента трения, соответствующего при-
роде трущихся тел.
Условие, найденное таким образом, кажется мне не вполне
доказанным. Автор задается требованием, чтобы сила трения,
вызванная вращением около некоторой оси, уравновешивала
внешние силы, приложенные к телу, и, найдя такую ось и
такую силу трения, заключает, что должно иметь место рав-
новесие тела. Но, может быть, тело при данных внешних
силах начнет вращаться около другой оси, причем внешние
силы, согласно началу Даламбера, будут уравновешиваться
силами трения вместе с силами инерции приходящего в дви-
жение тела.
1 „Труды Отделения физических наук Общества любителей естествозна-
ния*, т. V, вып. 1, 1892.
Зак. 2365. — Н. Е. Жуковский. Т. I.
28
434
УСЛОВИЕ РАВНОВЕСИЯ ТВЕРДОГО ТЕЛА
Чтобы разъяснить это сомнение, я нахожу полезным войти
в более подробный разбор поставленной задачи.
§ 2. Вопрос о нормальных давлениях р (к, с которыми
каждый элемент cfc опорной площадки о прижат к неподвиж-
ной плоскости, мы оставим в стороне и займемся решением
задачи при всяком предположении о давлениях р. Отнесем
(фиг. 1) площадку о к прямоугольным осям координат хОу*
проведенным в ее плоскости, и назовем через х, у координаты
центра С, около которого начинается вращение площадки,
у Если / есть коэфициент
---трения, то на каждый
/ А элемент сГа опорной пло-
/ I щадки будет действовать
I / сила трения /р к, перпен-
I V I дикулярная к радиусу г,
х. r^\^F соединяющему элемент cfc
С с центром С. Заменим все
х силы трения некоторой
„ силой F* проходящей че-
Фиг. 1. п
рез точку С, и некоторой
парой с моментом L; проекции силы F на оси координат на-
зовем через X, К. Если силу F сложить с парой, то полу-
чим одну равнодействующую сил трения F, которая будет
отстоять от С на некоторое расстояние Л, причем в частном
случае все силы трения могут привестись только к одной
паре (случай F= 0, h = оо).
Мы будем называть точку С, для которой все силы тре-
ния приводятся к одной паре, полюсом трения* а место точек
С, относительно которых сумма моментов всех сил трения
имеет постоянную величину, — линиями равного момента.
Уравнение линий равного момента будет:
L = const,
(О
где L рассматривается как функция х и у.
Теорема I. Сила трения параллельна касательной из
dL
точки С к линии равного момента и равна
УСЛОВИЕ РАВНОВЕСИЯ ТВЕРДОГО ТЕЛА
435
Мы обозначаем здесь через dn элемент внешней нормали
линий семейства (1). Для доказательства теоремы называем
через 5, V] координаты каждого элемента cfa опорной площадки а
и пишем формулы:
(2)
в которых двойное • интегрирование распространяется на всю
площадь а.
Формулы (2) приводят нас к уравнениям:
которые доказывают высказанную теорему.
Когда центр С удаляется в бесконечность и площадка о
получает поступательное движение, тогда равнодействующая
сил трения F проходит через центр g нормальных давлений
площадки и имеет следующую величину:
F^fjjpd. = Nf, (4)
где N— все нормальное давление тела на неподвижную плос-
кость. Очевидно, что это будет наибольшая величина силы
трения, так как во всех других случаях элементарные силы
трения слагаются под некоторыми углами. Соединяя центр дав-
ления площадки с весьма удаленными центрами вращения С,
усмотрим, что проведенные радиусы будут перпендикулярны
к F, и следовательно весьма удаленные линии равного момента
приближаются к окружностям, проведенным из центра нормаль-
ного давления площадки весьма большими радиусами.
Так как функция L, данная формулами (2), представляет
потенциал силы отталкивания площадкой о (с поверхностной
плотностью р) единицы массы, помещенной в точке С, когда
28*
436
УСЛОВИЕ РАВНОВЕСИЯ ТВЕРДОГО ТЕЛА
сила отталкивания f не зависит от расстояния, то нормали к ли-
ниям равного момента для всех точек С вне площадки о напра-
влены внутри угловх, образованных двумя крайними касатель-
ными, проведенными из этих точек к контуру площадки о. Идя по
направлению dn такой нормали от площадки о, мы будем иметь,
очевидно, возрастание функции £. Вследствие этого ни в одной
точке вне площадки мы не можем иметь:
Подобная точка может быть только внутри площадки. Если
принять такую точку С за центр вращения, то все силы тре-
ния дадут нам одну пару, так что эта точка будет полюсом
трения. Докажем теперь теорему.
Теорема II. Существует только один полюс трения.
Условие F— 0 на основании формул (3) приводит нас
к уравнениям:
^=0, f=0.
dx dy
(6)
которые показывают, что в полюсе трения функция L может
иметь максимум или минимум. Легко увидеть, что она всегда
будет иметь минимум.
Действительно, на основании формул (2) находим, что
d2L
dx2
(7)
« =-/f
dx dy 1J J r r3
Вследствие этого приращение L при переходе С от полюса
трения с координатами х, у к смежной точке с координатами
представится в следующем виде:
d2L^ &L . d2L. 2
8L = ^8x' + 2S^8x8y+^8y “
- /J J . (8)
1 Мы предполагаем, что все эти углы острые, как на фиг. 1.
УСЛОВИЕ РАВНОВЕСИЯ ТВЕРДОГО ТЕЛА
437
Это приращение всегда положительно, исключая случая
_£ — х_— х
*у~ч—у~^—у
(9)
при котором знак 8L зависит от малых величин выше второго
порядка. Этот случай, при котором все точки опорной пло-
щадки расположены по одной прямой, мы исключим из нашего
рассмотрения и перейдем к изучению непрерывного распреде-
ления линий равного момента в общем случае. Вообразив одну
из линий равного момента, охватывающую нашу площадку а,
увидим, что внутри ее при непрерывном распределении линий
равного момента должны получаться полюсы и узлы, причем
всегда будет пЦ-1 полюсов и п узлов. На фиг. 2 имеются
два узла А, Аг и один полюс В. Как
в полюсах, так и в узлах должны
быть удовлетворены уравнения (6).
При этом известно, что в полю-
сах рассматриваемая функция L
должна иметь максимум или мини-
мум, а в узлах не должно быть
ни максимума, ни минимума. Но мы
доказали, что при существовании
Фиг. 2.
уравнений (6) функция L имеет всегда минимум; следова-
тельно, узлов не может существовать и п = 0, т. е. существует
только один полюс, который и будет нашим единственным
полюсом трения.
В случае существования условия (9) могло бы быть бес-
конечное множество полюсов трения, расположенных на прямой,
проведенной через все точки опоры. Если, например, тело
опирается на плоскость по двум равным отрезкам одной и
той же прямой и р везде постоянно, то всякая точка этой
прямой между опорными отрезками будет полюсом трения.
Мы перейдем теперь к доказательству теоремы, которая
играет особенно важную роль в рассматриваемой задаче.
Теорема III. Если на неподвижной плоскости возьмем
некоторый центр моментов и определим относительно его
моменты сил трения нашей опорной площадки при повора-
чивании ее около различных центров вращения, то наиболъ-
438
УСЛОВИЕ РАВНОВЕСИЯ ТВЕРДОГО ТЕЛА
ший из таких моментов будет принадлежать силе трения,
получаемой при вращении площадки около взятого центра
моментов.
Для доказательства предположим (фиг. 1), что взятый центр
моментов лежит в начале координат хОу. Если повернем пло-
щадку около некоторого центра С и назовем через 71/ момент
соответственной силы трения F относительно начала координат,
то получим при вышеуказанных обозначениях следующую
величину этого момента:
М~ L-\-yX — xY,
которая на основании формул (2) может быть представлена
еще так:
r dL dL
M—L — х-^------у~л~- (10)
дх х ду ' '
Для отыскания максимума функции 71/ при различных поло-
жениях точки С составим частные производные этой функции
по х, у и приравняем их нулю:
дМ__ д2Л
дх дх2 Х дхдуЧ
дМ_____&L
ду дх дуХ ду2 &
Эти
ложением:
уравнения могут
быть удовлетворены только предпо-
х = у = 0.
(12)
Если бы х и у были отличны от нуля, то мы имели бы
равенства:
d2L d2L
х___дхду____ ду2
d'2L 9
дх2 дх ду
из которых следует, что
(д21Д (d2L\ / d2L \2
\дх2/ \ду2) \дхду)
УСЛОВИЕ РАВНОВЕСИЯ ТВЕРДОГО ТЕЛА
439
Но это невозможно *, так как на основании формул (7) мы
имеем неравенство:
[дЧД (d2L\ I d2L V
\дх2) \ду2/ \дхду)> <13>
Условия (12) показывают, что искомый максимум может
быть только в начале координат. Чтобы показать, что в этой
точке действительно будет максимум, составляем для нее вто-
рые производные функции М. Для этого берем производные
от обеих частей формул (11) и полагаем х = <7 = 0. Получаем:
dW d2L
дх2 дх2 ’
д2М= d2L
ду2 ду2 ’
д2М d2L
дх dy дх dy
На основании формул (7)
и формулы (13) будем иметь:
д2М
дх2
д2М
3
д2М д2М / dW V
дх2 ду2 \дхду)
(14)
Таким образом предложенная теорема доказана.
Пользуясь ею, можем утверждать, что по данной прямой,
проведенной по неподвижной плоскости, направляется только
одна сила трения F.
В самом деле, если бы по данной прямой направились две
силы трения F и Fv причем > F, то, взяв центр моментов
в центре вращения, соответствующем силе F, найдем, что
момент силы F1 относительно этого центра будет более
момента силы F что противоречит теореме III. Таким же
образом придем в противоречие с теоремой в случае FX = F.
Другой вывод, который мы сделаем из теоремы III, будет
заключаться в том, что сила трения F отстоит от соответ-
1 Исключая случай формулы (9).
440
УСЛОВИЕ РАВНОВЕСИЯ ТВЕРДОГО ТЕЛА
ственного центра вращения дальше, нежели центр сил нормаль-
ного давления. Напишем на основании принятых обозначений:
Л = (15)
Если h будет расстоякие точки С от центра сил нормаль-
ного давления, то, вспоминая, что через этот центр проходит
сила трения, выражаемая формулой (4), найдем по теореме III:
L > hNf.
С другой стороны,
F<Nf.
Разделяя эти неравенства, найдем:
т. е.
h>h.
Теперь мы имеем все необходимое для получения условия
равновесия рассматриваемого твердого тела под действием
внешних сил, лежащих в неподвижной плоскостих, которые
приведутся к некоторой силе Р, направленной по этой плос-
кости, или к некоторой лежащей в этой плоскости* паре
с моментом М.
Представим это условие равновесия в виде теоремы.
Теорема IV. Для равновесия твердого тела, опираю-
щегося о неподвижную плоскость некоторой площадкой,
необходимо и достаточно, чтобы сила, действующая на тело
по направлению прямой, лежащей в неподвижной плоскости,
была бы не более направляющейся по этой прямой силы
трения площадки. Если же на тело действует пара, лежа-
щая в неподвижной плоскости, то для равновесия необходимо
и достаточно, чтобы момент этой пары был бы не более
момента пары сил трения, получаемой при вращении пло-
щадки около полюса трения.
1 Составляющие сил, нормальных к неподвижной плоскости, будут
характеризовать нормальные давления р.
УСЛОВИЕ РАВНОВЕСИЯ ТВЕРДОГО ТЕЛА
441
Обнаружим сначала достаточность условия. Если сила Р
меньше или равна силе /4, направленной по той же прямой,
то нельзя допустить, что тело начнет движение, вращаясь
около какого-нибудь центра С, так как, сделай подобное до-
пущение, мы приходим к противоречию.
Если назовем через к момент инерции тела около оси,
перпендикулярной к неподвижной плоскости и проходящей
через какую-нибудь точку С, через 0 — угловое ускорение,
считаемое положительным в ту сторону, в которую начинается
вращение тела, и через h — расстояние центра С от силы Р9 то
можем написать следующее уравнение динамики:
Ph*=L + kb. (16)
Так как по теореме III
то
Ph^FJi + kb.
Это неравенство невозможно, так как к$ есть положитель-
ная величина, а по условию Р^Р\.
Точно так же нельзй допустить, что тело начнет вращаться
около какого-нибудь центра С под действием пары, момент
которой М меньше или равен моменту Lx пары, получаемой
от сил трения при вращении площадки около полюса вращения.
Мы имели бы в этом случае уравнение динамики:
M=L + kb. (17)
Но по сказанному при доказательстве теоремы II было
показано, что величина L для полюса вращения имеет наимень-
шее значение, т. е. Следовательно,
М^Ц + кЪ.
Это неравенство в силу условия также невозможно.
Таким образом при поставленном условии тело не может
начать своего движения, вращаясь около какого бы то ни было
центра С; следовательно, оно будет в равновесии.
Перейдем к доказательству необходимости поставленного
условия равновесия. Мы дадим это доказательство, приводя
к нелепости предположение, что тело находится в равновесии
при отсутствии поставленного условия.
442
УСЛОВИЕ РАВНОВЕСИЯ ТВЕРДОГО ТЕЛА
Пусть /4, а тело находится в равновесии. Это равно-
весие не должно бы нарушиться, когда сделаем в теле непо-
движной какую-нибудь ось, а между тем, сделав неподвижной
ось, проходящую через центр С, соответствующий силе Fu
мы получим вполне определенное вращение тела. Ускорение
этого вращения найдется из формулы (16), полагая в ней
Л = /71Л, и будет положительной величиной:
(Р-Л)А
k
(18)
Такое же рассуждение применимо в случае действия на
тело пары. Пусть М > L19 а тело находится в равновесии.
Делаем в нем неподвижной ось, проходящую через полюс тре-
ния; тогда получается совершенно определенное вращение,
ускорение которого найдется, относя уравнение (17) к полюсу
трения, т. е. полагая в нем L — L^. Мы найдем при этом по-
ложительную величину:
oJhA.
к
(19)
Предложенная теорема теперь вполне доказана.
Легко усмотреть, что найденное нами условие равновесия
совпадает с неравенством проф. Шиллера.
Мы нашли условия:
P^Fr или
в которые коэфициент f входит множителем только в /4 и Lr.
Разрешая наши неравенства относительно этого коэфи-
циента, найдем условие вида:
где 9 есть функция от действующих на тело внешних сил.
Это условие и есть неравенство проф. Шиллера.
§ 3. Поясним сказанное примером. Положим, что на го-
ризонтальной плоскости (фиг. 3) стоит скамейка веса N
с двумя симметричными ножками, и найдем наибольшую ве-
личину заданной по направлению ЕН силы, уравновешиваю-
щейся трением ножек скамейки о плоскость.
УСЛОВИЕ РАВНОВЕСИЯ ТВЕРДОГО ТЕЛА
443
Опорные площадки А и В ножек мы будем принимать
весьма малыми сравнительно с расстоянием АВ — 2Х между
ними, так что для всякого' центра вращения С, не подходя-
щего весьма близко к этим площадкам, ^можн о положить:
L = ^(r + n), (20)
где г и гг суть расстояния точки С от А и В.
Формула (20) показывает, что в нашем примере линии
равного момента будут эллипсы, имеющие фокусное расстоя-
У
Фиг. 3.
ние АВ. Уравнение таких эллипсов относительно их главных
осей будет:
х2 . у2
^2 ‘ а2 —Х2 —
(21
где большая полуось а определяется по L на основании фор-
мулы (20) таким образом:
L = Nfa. (22)
Сила трения Л*, соответствующая центру вращения С, бу-
дет параллельна касательной CD и пройдет через точку Е,
отстоящую от этой касательной на расстояние DE = h. На-
444
УСЛОВИЕ РАВНОВЕСИЯ ТВЕРДОГО ТЕЛА
зовем расстояние ОЕ этой силы от центра О эллипсов че-
рез Л2> а расстояние OD касательной CD от этого центра —
через На основании формул (22), (3) и (15) можем напи-
сать, что
'+^=7ЖУ
(23)
dn
Легко показать, что входящий сюда элемент нормали dn,
заключенный между двумя бесконечно близкими софокусными
эллипсами, для всех точек С одного и того же эллипса
обратно пропорционален Докажем это поверочно. Поло-
жим, что
dn —
8р.
(24)
где — бесконечно малая величина, одинаковая для всех
точек одного и того же эллипса.
Для перехода по dn от данного эллипса к смежному мы
должны продвинуть точку С из положения х, у в бесконечно
близкое положение ух, где
*1 = *+ 8Р> У1 = У +
ст а~ — №
Определяя отсюда х, у и подставляя их в уравнение (21),
получим уравнение эллипса, софокусного тому эллипсу, с ко-
торого мы сошли:
a24~2fyx a24~28[i — X2
Это уравнение показывает, что квадрат большой полуоси
возрос при переходе к новому эллипсу на 28}i, следовательно,
= a da.
Соединяя эту формулу с (24), найдем:
da__ hr
dn а
(25)
УСЛОВИЕ РАВНОВЕСИЯ ТВЕРДОГО ТЕЛА
445
Это позволяет нам преобразовать формулы (23):
I
Так как предложенная нам задача заключается в опреде-
лении F по заданной прямой ЕН, то постараемся определить
эту силу по перпендикуляру fc2 и углу % который этот пер-
пендикуляр образует с осью Ох.
Мы имеем формулы:
cos <р = hi ^2 , sm ср = hr
Определяя из них х, у и подставляя в уравнение (21),
находим:
& = + (27)
На основании этой формулы уравнения (26) приводятся
к следующему окончательному виду:
AxA2 = X2 sin2 )
/г— ]\jf__ 3sin?,....е । (28)
Л22k2 sin2 <? J
Последняя из написанных формул решает нашу задачу.
Сила Р, действующая на скамейку по направлению ЕН, не
должна быть более силы F, выраженной этой формулой.
Но если бы мы стали рассматривать всевозможные места
полюса С на плоскости (фиг. 3), то усмотрели бы, что соот-
ветствующие им силы F не направляются по всевозможным
прямым этой плоскости. Действительно, задавшись опреде-
ленным углом <р, будем продвигать касательную CD так, чтобы
она оставалась параллельна сама себе. Крайнее положение,
которое при этом займет касательная, будет прямая AS, при-
чем точка С подойдет к ножке A, a hr получит свою наи-
меньшую величину:
ft1 = kcoscp.
446
УСЛОВИЕ РАВНОВЕСИЯ ТВЕРДОГО ТЕЛА
Таким образом hr может изменяться от бесконечности до
указанного наименьшего значения, а Л2 [на основании первой
формулы (28)] может изменяться от нуля до следующей наи-
большей величины:
k sin2
д =--------.
cos
Принимая на фиг. 3 за эту наибольшую величину перпен-
дикуляр ОТ, найдем крайнюю прямую QT, по которой может
направляться сила
Построим огибающую всех таких крайних прямых. Уравне-
ние прямой QT будет:
х cos (~ + ср) У sin (^ + ?) =
или
х cos2 <р+у sin <р cos ? k sin2 © = 0.
Положим, что
tg ? = <7,
и напишем наше уравнение так:
х+де + ¥ = 0. (29)
Для получения уравнения огибающей следует исключить q
из уравнения (29) и уравнения:
У = — 2^9-
Совершив исключение, найдем: ”
#2 = 4Хх. (30)
Мы получили огибающую параболу, изображенную на
фиг. 3 кривой R. Такую же огибающую параболу jRj найдем
в случае, когда крайняя касательная к эллипсам проходит
через ножку В.
Мы видим теперь, что всевозможные направления сил
трения F, выражаемых в нашей задаче второй формулой (28),
идут по прямым, пересекающим обе параболы. Если же за-
данная прямая пересекает только одну параболу, то не суще-
ствует центра вращения вне опорных площадок А и В, кото-
рый бы дал силу трения, направленную по этой прямой. Это
будет соответствовать случаю, когда центр вращения нахо-
УСЛОВИЕ РАВНОВЕСИЯ ТВЕРДОГО ТЕЛА
447
дится на опорной площадке А или 5, причем самое малое
передвижение этого центра по площадке может изменять
силу F от величины, близкой к нулю, до величины, близкой
к Nf. Что касается момента L, то он при всяком положении
центра на опорной площадке мало отличается от Если бы
центр С лежал на опорной площадке А и вращение начина-
лось бы против стрелки часов, то компонент силы трения Y
был бы величиной положительной, так как компонент в на-
правлении оси Оу силы трения, развившейся в площадке В,
был бы более компонента силы трения, развившейся на пло-
щадке А. При этом величина Y была бы заключена между нулем
и Nf. Это показывает нам, что прямая, по которой напра-
вится Т7, пересечет ось абсцисс слева от точки А на рас-
L
стоянии -уг, которое заключено между бесконечностью и
7V/X_
л/ =
Таким образом, если прямая, пересекающая только одну
из огибающих [парабол, пересекает ось абсцисс влево от
точки О, то сила трения, направленная по этой прямой, бу-
дет происходить от вращения скамейки около площадки Аг
а если эта прямая пересекает ось абсцисс справа от О, то
сила трения по ней может только развиться от вращения
скамейки около площадки В.
Так как в случае вращения около ножек скамейки момент
сил трения имеет величину, весьма близкую к L = Nf\ то
наибольшее значение силы Р для прямых, не пересекающих
обе огибающие параболы, найдется по формуле:
(31)
где h — расстояние прямой от той опорной площадки, около
которой должно совершаться предполагаемое вращение.
Работа „Условие равновесия твердого тела, опирающегося на непо-
движную плоскость некоторой площадкой и могущего перемещаться вдоль
этой плоскости с трением4* была сообщена автором в заседании Москов-
ского математического общества в 1896 г. и напечатана в „Трудах Отделе-
ния физических наук Общества любителей естествознания, антропологии
и этнографии", т. IX, вып. 1, 1897. Прим. ред.
CONDITIONS OF EQUILIBRIUM OF A RIGID BODY RESTING BY A
CERTAIN AREA ON A FIXED PLANE AND ABLE TO MOVE WITH
FRICTION
Prof. Joukovsky first demonstrates several theorems relating
to friction forces developed by rotation of the body about a
centre C.
Let pdz be the normal pressure exerted by each element d<z
of the area of contact о on the fixed plane, r — the distance of the ele-
ment from the initial centre of rotation of the area, f —
coefficient of friction. Then the moment of force of friction, L,
as to C and the principal vector F (X, Y) will be given by for-
mulae (2), from which it follows that the friction F is parallel
to the tangent from C to the line L = const through C and is
equal to (Theorem I).
There exists only one point C (the pole of friction) for which
the friction forces are reduced to a couple; this point is within
the area of contact and for it L is a minimum (Theorem II).
For any other point C the friction forces have a resultant.
The moment of forces of friction with respect to any point О
for rotations about different centres C will be a maximum
when the points C and О coincide with each other (Theorem III).
It follows from the theorem that:
1. There is only one force of friction in the direction of a
given line.
2. The distance from the centre of rotation to the friction
force F is greater than the distance between the centres of ro-
tation and reaction.
Comparing the above theorems Prof. Joukovsky deduces the
following conditions of equilibrium:
The necessary and sufficient condition for the equilibrium of
a rigid body resting by a certain area on a fixed plane, is
SUMMARY
449
that the force acting on the body along a line drawn in a fixed
plane should not be greater than the force of friction of the
area along the same line. If there is a couple acting on the
body in the fixed plane the necessary and sufficient condition
for the equilibrium is that the moment of the couple should
not be greater than that of the couple of friction forces produ-
ced by the rotation of the area of contact about the pole of
friction.
To illustrate the application of the general theorems obtai-
ned, Prof. Joukovsky deduces the conditions of equilibrium of
a two-legged bench.
Зак. 2365. — H. E. Жуковский. T. I.
29
EIN NEUER GYROSKOPISCHER APPARAT
(1898)
Das von mir konstruierte neue Gyroskop ist auf demselben
Prinzip begriindet, wie das perimetrische Gyroskop von Sire.
Ein schwerer Kreisel A (Fig. 1) stiitzt sich mit seinem Rande
M an eine breite vertikale kupferne Rohre B, wobei an der
z»
Fig. 1- Fig. 2.
Peripherie des Kreisels in den Beriihrungspunkten ein Gummi-
band MN angebracht ist. Am unteren Teile des Kreisels be-
findet sich eine Rolle D, an welcher ein unendlicher Gummi- •
riemen sich befindet, der dem Kreisel gestattet, sich mit Hilfe
des Rades E zu drehen. In der Rolle D ist eine konische Ver-
tiefung angebracht, durch welche der Kreisel sich auf die un-
bewegliche Spitze О stiitzt.
Der Radius R (Fig. 2) der Rohre В kommt an Grosse dem
Radius r der Peripherie MN sehr nahe. Auf Fig. 2 ist dar-
EIN NEUER GYROSKOPISCHER APPARAT
451
gestellt ein durch den Punkt M gehender horizontaler Durchschnitt
des Apparates. Der Punkt C liegt hier auf der Achse der Rohre B,
dagegen der Punkt A auf der Achse des Kreisels.
Wenn der Kreisel sich in der Rohre В dreht, so beschreibt
der Punkt A um C einen kleinen Kreis mit dem Radius R— r.
Wenn wir mit <o die Winkelgeschwindigkeit bezeichnen,
welche durch den unendlichen Riemen dem Kreisel in der Rich-
tung des Uhrenzeigers mitgeteilt wird, so wird sich der Punkt
A in dem oben erwahnten Kreise mit der linearen Geschwindig-
keit <or in einer der Bewegung des Uhrenzeigers entgegenge-
setzten Richtung bewegen. Die Winkelgeschwindigkeit dieser
Drehbewegung ist: co = 5----.
- —r
Diese Winkelgeschwindigkeit ist sehr gross, da die Diffe-
renz R — r nach der Voraussetzung sehr gering ist. Mit dieser
Winkelgeschwindigkeit wird sich auch die obere Spitze F des
Kreisels (Fig. 1) um die Vertikallinie Oz drehen.
Auf der Achse Oz kann man einen Korper Q anhangen, der mit
Hilfe einer horizontalen Nadel L von F eine Drehbewegung mit
der Winkelgeschwindigkeit co' empfangt. So erhalt man einen
sehr einfachen Apparat, welcher eine schnelle Drehbewegung
verleiht. Die treibende Kraft dieser Bewegungsiibertragung wird
erhalten durch die Reibung im Punkte Л/, welche, dank der
zentrifugalen Kraft des Kreisels und dem gyroskopischen Effekte
desselben, sehr bedeutend ist.
Bezeichnen wir mit К das Tragheitsmoment des Kreisels um
eine Achse DF und mit K' das Tragheitsmoment des Kreisels
um die Achse DJ\ wo DJ [ DF, so wird das Moment der den
Kreisel an die Rohre В driickenden Kraft sein:
wo h — О A. h L R r J
Die Grosse der Reibungskraft aber, welche als die treibende
Kraft unseres Apparates erscheint. wird sein:
wo f der Koeffizient der Reibung ist. Diese Kraft wird, wenn co
gross und R — r klein ist, sehr bedeutend.
29*
новый гироскопический аппарат
(1898 г.)
Построенный мною новый гироскопический аппарат осно-
ван на том же принципе, как периметрический гироскоп Сира.
Тяжелый волчок (фиг. 1) опирается своим краем М о ши-
рокую вертикальную трубку J5, причем по окружности водчка
в месте соприкосновения надета резиновая лента MN, В ниж-
Фиг. 1. Фиг. 2.
ней части волчка имеется шкив Z), на который надет рези-
новый бесконечный ремень, который позволяет вращать вол-
чок с помощью колеса Е. В шкиве D сделано коническое
углубление, которым волчок опирается на неподвижное ост-
рие. Радиус R трубки В весьма близок^по величине к радиусу
г окружности MN. На фиг. 2 представлено сечение аппарата
горизонтальной плоскостью, проходящей через точку М. Точ-
ка С лежит здесь на оси трубки В, а точка А — на оси волчка.
НОВЫЙ ГИРОСКОПИЧЕСКИЙ АППАРАТ
453
Когда волчок катается по трубке В, то точка А описывает
около С маленькую окружность радиуса R — г.
Если назовем через <о угловую скорость, сообщаемую
волчку бесконечным ремнем по направлению стрелки часов,
то точка А будет двигаться по упомянутой окружности с ли-
нейной скоростью <ог в направлении, обратном стрелке часов.
Угловая скорость этого вращательного движения будет:
Эта угловая скорость очень велика, так как разность
R—г по предположению очень мала. С этой угловой скоро-
стью будет также вращаться и верхний конец F волчка
(фиг. 1) вокруг вертикальной оси Oz.
На оси Oz можно укрепить тело Q, которое посредством
горизонтальной шпильки L будет получать от F вращатель-
ное движение с угловой скоростью о/. Таким образом полу-
чается весьма простой прибор, дающий быстрое вращательное
движение. Ведущая сила этой передачи получается от трения
в точке Л/, которое благодаря центробежной силе волчка
и его гироскопическому эффекту будет весьма значительно.
Если обозначим через К момент инерции волчка около
оси DF и через К' момент инерции его около оси DJ\ причем
DJ 1 DF, то момент силы давления волчка на трубку В будет:
где h — О А.
Величина же силы трения, которая является ведущей си-
лой нашего аппарата, будет:
где f—коэфициент трения. Эта сила при большой со и малом
R — г будет весьма значительна.
Работа „Ein neuer gyroskopischer Apparat* была напечатана в „Verhand-
lungen des ersten Internation ale n*Mathematiker-Kongresses in Zurich vom 9 bis
11 August 1897“. Перевод этой статьи для настоящего издания выполнен
проф. А. П. Котельниковым. Прим, ред.
A NEW GYROSCOPIC APPARATUS
The gyroscopic apparatus represented in Fig. 1 makes it pos-
sible to obtain very high angular velocities. Denoting by w the
angular velocity of rotation of the top A about its axis, the
angular velocity of rotation of the end F and of the axis
about the z-axis will be о/ = ~. When the difference
R— r
R — r between the radius R of the cylinder containing the
top, and the radius r of the circumference MN is very small,
о/ will be very high. In order that the circumference MN
might roll without sliding upon the internal surface of the
cylinder В the top is provided with a rubber ring. The centri-
fugal couple presses the top against the cylinder with a force
----------------L/f ) f where f coefficient of friction.
nr \ R— r /
МОДЕЛЬ МАЯТНИКА ГЕССА
(1899 г.)
Случай Гесса представляет движение тяжелого твердого
тела, центр тяжести которого лежит на перпендикуляре
восставленном из точки опоры к круговому сечению гира-
ционного эллипсоида
твердого тела относи-
тельно точки опоры.
Укажем здесь один про-
стой способ построения
модели такого тела. Во-
образим (фиг. 1) две пря-
моугольные пластинки
Р и Q длины а, сложен-
ные основаниями 26 так,
что плоскости их обра-
зуют некоторый угол 2^
и вся модель имеет
форму крыши, высота Фиг- 1-
которой пусть будет А.
Примем начало О прямоугольных осей координат х, у, z
в центре тяжести модели и направим ось Ох по оси ее сим-
метрии, а ось Оу — параллельно основаниям 26. Очевидно,
что такие оси будут оси центрального эллипсоида инерции
нашего тела; легко показать, что моменты инерции его отно-
сительно этих осей будут соответственно:
(4а2-|-462—4А2), В= % (4а2—ЗА2), С== ~ (462+А2), (1)
X £ л £ X
где М—масса модели.
456
МОДЕЛЬ МАЯТНИКА ГЕССА
А > В > С,
Полагаем, что величины а, Ь, h выбраны под условием:
(2)
и ищем круговые сечения гирационного эллипсоида:
(3)
Эти сечения пройдут через ось Off и отклонятся от оси Ох
с двух сторон на угол 6, определяемый по формуле:
tgO =
/~С(Д-В)
V А(В — С)‘
(4)
Зададимся теперь условием, чтобы плоскости кругового
сечения были параллельны сторонам нашей крышеобразной
модели, т. е. чтобы
С (А — В) _ — № . .
А(В — С)~ № * W
Это дает нам соотношение между a, b, h следующего вида:
(4fr2 + Л2) (462 — Л2) = а2 — Л2
(4а2-j-462 — 4Л2) (4а2 — 4fr2 — 4Л2) — Л2 ‘
Возьмем один простой частный случай, при котором
соотношение удовлетворяется. Допустим, что
4
4а2 — 462 — 4Л2 = Л2, Л2 = -у(а2 —62).
(6)
ЭТО
(7)
При этом допущении формула (5) принимает вид:
4 . о ,ОЧ]
5 и>\-
- 4 . о ,п-
Г 4 1 Г 4 1
462+у(а2 —62) 462 —у(а2 —62) =
16 1 Г 4
= 4а2 + 462 — (а2— А2) а2 — (а2—fr2)
D О
или
4 (462 + а2) (6fr2 — а2) = (а2 + 9fr2) (а2 + 4fr2).
Чтобы удовлетворить этому условию, надо положить:
4(662 —а2) = а2 + 962,
(8)
откуда
(9)
МОДЕЛЬ МАЯТНИКА ГЕССА
457
Подставляя эту величину а в уравнение (7), находим:
Л = (10)
Так как все четыре скобки в формуле (8) при указанных
значениях а и h положительны, то эти значения удовлетворяют
неравенству (2).
Предположив, что наша крышеобразная модель построена
согласно формулам (9) и (10), опустим из ее центра тяжести О
перпендикуляр ОС на ее
сторону Р.
Расстояние DC = 3 по-
дошвы этого перпенди-
куляра от вершины крыши
найдется из пропорции:
& : h — h : а.
Это расстояние будет:
8 = ^ЪУ-З. (11)
В модели, построенной
мною для механического
кабинета Московского уни-
верситета из тонкого медного листа, взяты согласно форму-
лам (9), (10), (11) и (4) следующие размеры:
26 = 10 см
а — 8,66 „
6 = 6,32 „
S = 2,31 „
0,935
(12)
Точка С, в которой снизу стороны Р сделано маленькое
углубление, служит точкой опоры; ею модель опирается на
острие КЕ, укрепленное на подставке F, как это представлено
на фиг. 2. Очевидно, что в положении равновесия модели
458
МОДЕЛЬ МАЯТНИКА ГЕССА
плоскость Р будет горизонтальна; кроме того, легко усмо-
треть, что эта плоскость будет круговым сечением гирацион-
ного эллипсоида нашей модели, построенного для точки С.
Это обстоятельство вытекает из теоремы С. А. Чаплыгина \
по которой плоскости круговых сечений всех гирационных
эллипсоидов, центры которых лежат на перпендикуляре, восста-
вленном из центра тяжести к плоскости кругового сечения
центрального гирационного эллипсоида, параллельны этой
последней плоскости.
Приведем здесь доказательство упомянутой теоремы, не-
сколько отличное от доказательства автора.
Так как гирационный эллипсоид получается из эллипсоида
инерции через опущение из центра последнего перпендику-
ляров на его касательные плоскости и через откладывание
на этих перпендикулярах векторов, обратно пропорциональных
длинам перпендикуляров, то направление перпендикуляра
к круговому сечению гирационного эллипсоида совпадает
с направлением оси круглого цилиндра, описанного около
эллипсоида инерции. Повернем наши оси xyz (фиг. 1) около
оси Оу так, чтобы они заняли положение причем ось 0$
направляется по перпендикуляру ОС. Уравнение центрального
эллипсоида инерции относительно этих осей будет иметь вид:
‘ р & У. Q = № + By* + f-1 2 + 2ЕК — 1=0. (13)
Для точек прикосновения к этому эллипсоиду цилиндра,
образующие которого параллельны оси 0$, будем иметь:
1 dF
или £____Е г
а
Подставляя эту величину в уравнение (13), мы получаем
уравнение линии пересечения цилиндра с плоскостью у^:
/ Е2 \
+ —г)-2 = ь
1 С. А. Чаплыгин, По поводу локсодромического маятника Гесса.
„Труды Отделения физических наук Общества любителей естествознания**,
т. VII, вып. 1,
МОДЕЛЬ МАЯТНИКА ГЕССА
459
Так как по сказанному выше это уравнение должно при-
надлежать окружности, то
„ F/2
5 = т----(14)
Построив теперь эллипсоид инерции для какой-нибудь
точки С, лежащей на оси 0$, и отнеся его к осям t'y'C9
параллельным осям tyZ, мы выразим уравнение этого эллипсоида
в такой же форме, как уравнение (13):
аТ2 + В'у'2 + т'С'2 + 2ЕТ7 = 0, (15)
причем, если ОС — Z, то
a' —a, В'~В-{-МР, ч' = Ч-]-МР,
Мы видим, что через прибавление к обеим частям урав-
нения (14) величины МР мы обращаем это уравнение в
F/2
= (16)
которое показывает, что цилиндр, описанный около эллипсоида,
данного уравнением (15), параллельно оси О;, будет круглый,
т. е. плоскость y'Z' будет круговым сечением гирационного
эллипсоида для точки С. Таким образом мы видим, что по-
строенная модель удовлетворяет условию Гесса.
С этой моделью можно сделать одну простую демон-
страцию, характеризующую движение в случае Гесса. Отметив
(фиг. 2) на пластинке Р какую-нибудь прямую, проходящую
через С, повернем модель на острие ЕК так, чтобы эта прямая
расположилась под неподвижной стрелкой L; потом двинем
немного подставку F по столу в направлении, перпендикуляр-
ном к L; тогда увидим, что модель будет колебаться около
точки С, причем плоскость Р будет все время оставаться
параллельной стрелке L, а проведенная прямая будет укло-
няться от стрелки то направо, то налево.
Модель маятника Гесса была продемонстрирована автором 21 января
1899 г. в заседании Отделения физических наук Общества любителей
естествознания, антропологии и этнографии. Статья „Модель маятника
Гесса** была напечатана в „Трудах Отделения физических наук Общества
любителей естествознания, антропологии и этнографии*4, т. X, вып. 1, 1899.
Прим. ред.
A MODEL OF HESS' PENDULUM
The case of motion considered by Hess is that of motion
of a rigid body, whose the centre of gravity is on the perpen-
dicular set from the point of support to the circular cross-section
of the gyrational ellipsoid of the body with respect the point
of support. It is shown by Prof. Joukovsky that a model of the
body can be represented by a rectangular plate (2a X 26) bent
to the shape of a roof, Fig. 1., provided the dimensions of the
plate are determined from formulae (9) and (10), and as the
point of support is taken the point C—the foot of the perpen-
dicular drawn from the centre of gravity О of the roof to the
side P. For the point C the plane P will be the plane of the
circular cross-section, which plane will be horizontal when the
model is supported at the point C.
ОБ УПРУГОЙ ОСИ ТУРБИНЫ ЛАВАЛЯ И ОБ ОСЯХ
С КАЧАЮЩИМИСЯ ПОДШИПНИКАМИ
(1889 г.)
§ 1. В этой заметке я излагаю теорию упругой оси тур-
бины Лаваля по работам А. Феппль (A. Foppl) 1 и А. Стэвар
(A. Stevart)2 и распространяю эту теорию на случай осей,
имеющих качающийся
подшипник, как это де-
лается у центрофуг, ве-
ретен и т. д.
§ 2. Опытные иссле-
дования над эффектом
упругой оси, поддержи-
вающей вращающийся
диск, были произведены
в Мюнхенской физиче-
ской лаборатории инже-
нером Клейн (Klein). Он
Фиг. 1.
нашел, что для данной массы диска и силы упругости оси на
изгибание существует некоторая опасная угловая скорость,
при которой диск начинает бить на оси. Если угловая ско-
рость вращательного движения диска значительно превышает
опасную скорость, то вращение диска совершается почти без
всяких колебаний и тем спокойнее, чем угловая скорость
более. Опишем здесь опыты, которые производил Клейн.
Диск, помещенный на середине тонкой упругой оси ВС (фиг. 1),
опирающейся на два подшипника, приводился в быстрое вра-
1 A. F о р р 1, Das Problem der Laval’schen Turbinenwelle, Zivilingenieur,
1895, S. 334; Vereinfachte Darstellung meiner Theorie der Laval’schen Tur-
binenwelle; Zivilingenieur, 1896, S. 346.
2 A. Stevart, Revue universelie des Mines, 1896
462
ОБ УПРУГОЙ ОСИ ТУРБИНЫ ЛАВАЛЯ
§2
щение действием бесконечного ремня на шкив В. Во время
наступления опасной скорости ось диска удерживалась между
пальцами, чтобы ослабить ее колебания. Когда устанавлива-
лась весьма значительная угловая скорость, при которой не
было заметно колебания оси, тогда бесконечный ремень сни-
мался со шкива В и диск двигался с убывающей скоростью.
Величина угловой скорости диска определялась в тот момент,
когда начиналось колебание оси. Таким образом можно было
опытно находить величину опасной скорости.
Теоретическое ее определение, а равно и исследование
характера движения диска на упругой оси, может быть полу-
чено, как это показали Стэвар и Феппль (в своей второй
статье), с помощью весьма простого анализа.
Возьмем в плоскости диска неподвижные в пространстве
прямоугольные оси координат ху так, чтобы начало их О
совпало с точкой пересечения плоскости диска с осью под-
шипников СВ. Пусть А будет точка прикрепления упругой
оси к диску, a —центр тяжести диска; при этом точка А
при несогнутой оси ВС совпадает с точкой О, при изгибе же
оси — удаляется от О на некоторое малое расстояние АО.
Составим диференциальные уравнения движения центра тя-
жести S, воображая, что в нем сосредоточена вся масса
диска тп.
Если бы наш диск представлял колесо в турбине Лаваля,
то он приводился бы в движение действием пара, вытекаю-
щего из сопел, симметрично расположенных относительно
оси СВ; в аппарате Клейна вращение диска получается дей-
ствием крутящего момента оси СВ, на шкив которой дей-
ствует ремень. В том и другом случаях на диск действует пара
сил, которая не может сообщить движения центру тяжести S,
а сообщает только вращательное движение диску около его
центра. Если бы ось оставалась прямой, то этот центр оста-
вался бы неподвижным; но дело в том, что, вращаясь около S,
диск сгибает упругую ось и заставляет точку А смещаться
на некоторое пространство ОА, а это смещение вызывает
силу упругости
Q = уА О,
§ 2
ОБ УПРУГОЙ ОСИ ТУРБИНЫ ЛАВАЛЯ
463
которая может быть перенесена в центр тяжести 5 и произ-
водит его движение. При перенесении этой силы в мы
должны бы прибавить еще пару, но момент ее будет малой
величиной второго порядка сравнительно с силой Q. Следует
обратить внимание на то обстоятельство, что сила упругости,
действующая на точку А смещенной оси, не дает составляющей
по направлению, перпендикулярному к АО, хотя бы ось ВС
и была скручена. В этом свойстве упругих прутьев 1 заклю-
чается существенное различие рассматриваемой задачи от
задачи о центробежном регуляторе. Вращающая пара сил по
прошествии некоторого промежутка времени уравновесится
парами сил от сопротивлений (в турбине Лаваля главную роль
играют полезные сопротивления), и вращение около центра 5*
будет совершаться с постоянной угловой скоростью w.
Называя через е постоянную длину вектора SA и замечая-
что угол его с осью Ох может быть выражен произведе-
нием можем по координатам х, у центра S выразить коор-
динаты точки А:
х -J- е cos &t, у е sin
Зная эти координаты, находим величины проекций силы Q
по осям координат и составляем желаемые диференциальные
уравнения движения центра тяжести 5:
cf2x /I л 1
т. -^- = —^(x + ecosw/), ’
/I л I
т -~^ = (у + е j
Сделаем здесь подстановку:
при условии
х = £ + a cos
у = TQ -f- а sin
(2)
(3)
е
а =---------
и
1 Kirchhoff, Vorlesungen uber Mathematische Physik, Vorlesung 28-
464
ОБ УПРУГОЙ ОСИ ТУРБИНЫ ЛАВАЛЯ
§ 2
Эта подстановка приводит нас к уравнениям:
J4
т df2
d2^
(4)
которые показывают, что некоторая точка Р (фиг. 1), коор-
динаты которой суть 5, 1), движется под притяжением центра О
силой, прямо пропорциональной расстоянию. Траектория точ-
ки Р будет эллипс с центром О, а время полного оборота
этой точки будет:
(5)
Формулы (2) показывают, что движение точки S слагается
из движения точки Р и из вращения точки S около точки Р
по кругу радиуса а с постоянной угловой скоростью <«; при
этом, если а положительно, то точка Р лежит на продолжении
вектора AS, а если а отрицательно, то на продолжении ЗУЕ
На основании сказанного все движение диска будет слагаться
из движения его точки Р, которая описывает эллипс около
точки О, и из равномерного вращения диска около точки Р
с угловой скоростью со. Эллиптическое движение точки Р.
как вызывающее постоянное внутреннее движение вещества
упругой оси, по прошествии некоторого времени должно по-
тухнуть, и эллипс, описываемый точкой Р, все уменьшаясь,
обращается в точку О,
Диск будет равномерно вращаться около точки Р, совме-
щенной с неподвижной точкой О, причем центробежная сила,
действующая на центр тяжести S в направлении SA, будет
уравновешиваться силой упругости, действующей в направле-
нии AS. Это видно из того, что условие равновесия
т&2а = и(а Д- е) (6)
приводит нас к величине а, данной формулой (3).
ОБ УПРУГОЙ ОСИ ТУРБИНЫ ЛАВАЛЯ
465
Указанное устойчивое положение упругой оси перестает
существовать, когда угловая скорость приближается к ве-
личине:
(7)
которую мы будем называть опасной угловой скоростью, так
как при этом радиус а беспредельно возрастает.
Из формулы (5) следует, что опасная угловая скорость
дает время полного оборота, равное времени пробега точкой Р
своего эллипса. При весьма боль-
шой угловой скорости радиус а
по формуле (3) очень мал. Таким
образом вследствие эффекта упру-
гой оси центр тяжести диска, ко-
торый по несовершенству кон-
струкции отстоял от прямой ВС
на расстоянии е, во время бы-
строго вращения почти вступает
на прямую ВС.
§ 3. Переходим теперь к иссле-
дованию устойчивости вращения
осей при качающемся подшип-
нике, который удерживается в оп-
ределенном положении действием
некоторых сил. Возьмем для при-
Фиг. 2.
мера расположение при верхнем подвесе, представленное
на фиг. 2. Здесь качающийся около точки С подшипник N,
будучи подвешен на кардановском шарнире к неподвижному
подшипнику А, удерживается в равновесии действием упру-
гой оси. которая стремится занять вертикальное положение,
и действием тяжести, вследствие которой центр тяжести тела
М (мы пренебрегаем весом подшипника), отстоящий от С на
расстоянии С, стремится вступить на направление вертикаль-
ной оси подшипника L.
Предположив, что ось подвижного подшипника N немного
уклоняется от главной оси CS эллипсоида инерции рассма-
триваемого тела М (эллипсоида, построенного для центра С),
Зак. 2365. — Н. Е Жуковский. Т. I.
30
466
ОБ УПРУГОЙ ОСИ ТУРБИНЫ ЛАВАЛЯ
§3
будем иметь при вращении шкива отклонение подшипника 7V
от положения его равновесия. Назовем через Ь радиус инер-
ции тела относительно упомянутой главной оси эллипсоида
и через а радиусы инерции тела относительно двух других
осей, которые примем за равные (они очень близки к равен-
ству). Проведем (фиг. 3) из центра С сферу радиусом а и по-
ложим, что эта сфера пересекает продолжение оси подшип-
ника L в точке О, ось
подшипника N—в точ-
ке А, прямую, проходя-
щую через центр С
центр тяжести тела
Л/,— в точке В, ось CS—
в точке S.
Обратив внимание
на неизменный сфе-
рический треугольник
BAS очень малых раз-
меров, введем обозна-
чения:
AS=e,
BS = e, ^ASB = K
Эффект закрученной упругой оси будет состоять в следую-
щем. Во-первых, она передает телу М действие вращатель-
ной пары, момент которой направлен по радиусу С А*, во-вто-
рых, она сообщит точке А нашего тела силу р* • ОА, напра-
вленную от Л к О (здесь по закону упругих прутьев соста-
вляющая силы упругости в направлении, перпендикулярном
дуге О А, будет малая величина второго порядка). Разложим
упомянутую вращательную пару на пару, момент которой на-
правлен по радиусу CS, и на пару, момент которой перпен-
дикулярен к этому радиусу; при этом действие последней
пары заменим действием некоторой постоянной силы К на
точку *S по поверхности нашей сферы в направлении, перпен-
дикулярном к дуге Постоянная пара, момент которой
направлен по оси CS, сообщит телу около этой свободной
§ 3
ОБ УПРУГОЙ ОСИ ТУРБИНЫ ЛАВАЛЯ
467
оси вращения (свободная ось для неподвижной точки С) вра-
щательное движение, не имеющее стремления сдвинуть ось CS.
По прошествии некоторого промежутка времени упомянутое
вращение сделается равномерным с угловой скоростью <*>,
причем момент вращающей пары будет уравновешиваться
суммой моментов сил сопротивления. Сферический треуголь-
ник В AS будет, таким образом, вращаться около своей вер-
шины S со скоростью вершина же 5 будет двигаться по
сфере.
Чтобы определить это движение, воспользуемся следующей
теоремой динамики твердого тела. Если тело относительно
неподвижной точки С имеет главные радиусы инерции а, а9 b
и находится под действием сил, точки приложения которых
лежат на оси инерции, соответствующей радиусу 6, то угловая
скорость тела относительно этой оси будет постоянная вели-
чина <«, точка же *5 пересечения этой оси со сферой, прове-
денной радиусом а из центра С, будет двигаться по этой
сфере, так как материальная точка, имеющая массу тела т
и находящаяся под действием всех данных сил, перенесенных
в точку S и измененных по величине в отношении их плеч
к плечу а, а также под действием силы
направление которой получается, если повернуть скорость v
точки S на прямой угол около оси CS в сторону вращения <о.
При применении этой теоремы к нашему случаю мы де-
лаем некоторую ошибку, так как силы упругости р • АО и
сила тяжести mg имеют свои точки приложен ия не на оси CS.
Мы сказали, что точки А и В весьма близки к S, поэтому,
перенося упомянутые силы в точку S, мы должны бы прило-
жить к телу добавочные пары; но эти пары, вращающие около
радиуса CS, имеют моментами малые величины второго по-"
рядка. Таким образом мы можем сказать, что наша точка *$
будет двигаться по поверхности сферы так, как материальная
точка массы т, находящаяся под действием следующих четы-
рех сил:
30*
468
ОБ УПРУГОЙ ОСИ ТУРБИНЫ ЛАВАЛЯ
§3
1) силы, происходящей от действия упругой оси, которая
имеет величину • АО и направлена по дуге АО;
2) силы
ОВГ
С.
происходящей от тяжести и имеющей направление дуги ВО;
3) силы АГ, направленной по поверхности сферы перпен-
дикулярно к дуге
4) силы
mb2
——
а2
направленной по поверхности сферы, перпендикулярно к ско-
рости V,
Так как мы будем рассматривать движение точки на части
поверхности сферы, весьма близкой к О, то можем (фиг. 3)
провести к поверхности сферы в точке О касательную пло-
скость и спроектировать на нее точки В, 4 и 5, а равно и
рассматриваемые силы, причем все проекции сил и отрезков
дуг с точностью до малых величин второго порядка будут
равны проектируемым величинам.
Мы получим движение по плоскости ху точки S, анало-
гичное тому, какое в предыдущем параграфе имела точка 5.
Если назовем координаты точки S через х, у* то координаты
точки А будут:
х + е cos у е sin <«/,
а координаты точки В будут:
x + ecos(<oZ + X), у 4“ ® sin (wf +
где X — угол ASB,
Принимая во внимание все четыре вышеупомянутые силы,
действующие на точку S, будем иметь следующие диферен-
циалькые уравнения движения этой точки:
т = — cos £ [* 4“ е cos +^)] "Ь
. гл / , те \ mb2 dy
+ 2)—^“ Л’
§ 3 ОБ УПРУГОЙ ОСИ ТУРБИНЫ ЛАВАЛЯ 469
т = — р (у-|-е sin ®/) — -С [у + еsm(<of-j-X)]4-
, t \ I mb2 dx
+ ^sin(“z-2) + ^“j7-
Отбираем здесь в членах, не зависящих от х, у и их про-
изводных, множители при cos и sin (»/ и вводим подста-
новку:
mg У л >
це = —cos А = h cos v,
а2
(8)
ЛИ 0“ г . . , Гг , .
—~ Qe sm л Ч- К = п sm v.
а2
Тогда диференциальные уравнения движения точки S при-
мут более простой вид:
d2x / . mg Л mb2 dy . / , । \
ТпЩр==~ Р + “^гЧ Х~ a2<S>Tt~~ Acos(‘oZ + v)>
, (9)
d У ( । mg * \ , mb^ dx . . z t . ч
= s+-^ «а-Лз,п(«./ + »).
Для облегчения интеграции уравнений (9), также, как это
было сделано нами при интеграции уравнений (1), восполь-
зуемся подстановкой:
х = 5 + « cos (<of + v),
У == 'Ч + а sin + v), ^0)
где а определяется под условием:
о / I Л i о > 1
тиа)2а = I а Ч-------- £ I а Ч----+ п,
\ а2 / а2
k
а2 а2
(11)
Уравнения (9) получают при такой подстановке вид:
mdt2~
mb2 dr\
dt
а2
d2f]
m~dp—~
mg
a2
dk
® —Г-
dt
. mb2
470
ОБ УПРУГОЙ ОСИ ТУРБИНЫ ЛАВАЛЯ
§ 3
и могут быть еще представлены так:
т J = — Pe + zn24 — 22m
т X = — ₽"*] Н- m22-/] + 22тД|,
dt
где
O = <»
2а2 ’
P = !x + zn22 + ^f-C.
(12)
(13)
(14)
На уравнение (12) можно смотреть как на уравнение отно-
сительного движения некоторой материальной точки Р массы т
с координатами £, ?], которое наблюдается на осях х9 у, вра-
щающихся с угловой скоростью 2 против стрелки часов,
причем эта материальная точка находится под притяжением
центра О силой, пропорциональной расстоянию с коэфициен-
том притяжения р.
Это показывает нам, что точка Р на наших осях х9 у будет
описывать эллипс, вращающийся по часовой стрелке с угло-
вой скоростью 2.
Посмотрим теперь, как строится место точки Р. Коорди-
наты ее определяются по формулам (10), где a, v и h нахо-
дятся по формулам (8) и (11). Если построить на поверхности
нашей сферы (фиг. 3) угол ASE = v и, продолжив дугу ES,
отложить на ее продолжении длину SP=a9 то конец Р этой
дуги и будет точка Р. При а > b и весьма большом значе-
нии <о точка Р находится весьма близко от
На основании сказанного все движение сферической фи-
гуры В AS по поверхности сферы будет состоять во вращении
фигуры с угловой скоростью со около точки Р и в таком дви-
жении точки Р по поверхности сферы, что проекция Р на
касательную плоскость ху описывает некоторый эллипс, вра-
щающийся со скоростью 2 около точки О. Так как движение
точки Р вызывает внутренние деформации упругой оси, то
оно по прошествии некоторого времени потухает и точка Р
совпадает с О. Радиус СР направится по оси СО9 и тело
§ 3 ОБ УПРУГОЙ ОСИ ТУРБИНЫ ЛАВАЛЯ 471
начнет равномерно вращаться около этой оси, причем упругая
ось будет вращаться, как абсолютно твердое тело, а ось
подвижного подшипника N (фиг. 2) будет качаться на шар-
нире Гука и описывать некоторый конус. Легко усмотреть,
что в рассматриваемом случае центробежные силы частиц
тела М уравновешиваются силой его тяжести, упругостью
гибкой оси и силой К. Разлагаем вращение <о, направленное
по радиусу СО (совпадающему с линией тела СР) на враще-
ние, ось которого направлена по CS, и на вращение, ось
которого перпендикулярна CS и лежит в плоскости дуги SP.
Угловая скорость первого из этих вращений с точностью
до малых величин второго порядка будет <«, а угло-
а
вая скорость второго будет ю .
Пара сил, происходящая от центробежных сил инерции,
будет иметь момент:
/ о а mv>2(a2—Ь2)
(та2— mb ) <*> • со — =--------- а.
а а
Этому моменту соответствует отнесенная к точке S сила:
т^2(а2 — Ь2)
------о----
действующая по направлению дуги SE.
На основании формул (8) равнодействующая силы тяже-
сти, силы упругости оси и силы К направляется по SP и
равна
\ а2 )
Для равновесия обеих сил нужно выполнить условие:
т^2(а2— b-) 1 \ \ Д
----------- а = h + a bi -4-- (15)
а2 \ a2 J
которое удовлетворяется величиной а из формулы (11).
То обстоятельство, что величина а беспредельно умень-
шается с возрастанием со, объясняет нам выгоду, которую
472
ОБ УПРУГОЙ ОСИ ТУРБИНЫ ЛАВАЛЯ
§ 4
приносит устойчивости качающийся подшипник. Если умень-
шается и приближается к значению:
(16)
то а все более и более возрастает, а данное нами устойчивое
движение оси перестает иметь место. Мы получим опас-
Фиг. 4.
ную угловую скорость,
которая выражена форму-
лой (16).
§ 4. Изложенный ана-
лиз приложим к различ-
ным случаям качающихся
подшипников. Если бы
центр качания подшип-
ника лежал ниже центра
тяжести тела М (как это
делают в центрофугах), то
надо бы заменить в наших
формулах С на — С; если бы
упругая ось при устрой-
стве подшипника отсут-
ствовала, то надо бы по-
ложить в формулах р-==0.
Иногда роль упругой
оси заменяет каучуковая
подушка (в которую вделан качающийся подшипник) или уп-
ругая пружина, стремящаяся поставить этот подшипник в
определенное положение равновесия (обыкновенно в вертикаль-
ное положение).
Деталь с упругой пружиной употребляется при устрой-
стве качающихся веретен и представлена на фиг. 4. В на-
стоящее время для веретен употребляется еще иной, более
простой, тип качающихся подшипников, который изображен
на фиг. 4,6. Здесь качающийся подшипник имеет выступ
которым он опирается на край неподвижного стаканчика,
§4 ОБ УПРУГОЙ ОСИ ТУРБИНЫ ЛАВАЛЯ 473
прижимаясь к последнему силой натяжения ремня. При этом
подшипник получает возможность качаться около осей Fy
и Fx, из которых вторая направлена перпендикулярно к стенке
стаканчика; вращение же подшипника около оси Fz' каким-
нибудь механическим приспособлением задерживается.
Легко усмотреть, что для рассматриваемого случая качаю-
щегося веретена мы можем написать формулы предыдущего
параграфа, считая точку С как бы за неподвижную точку
(точка С лежит на пересечении Fx с осью веретена).
Действительно, обращая внимание на неподвижность точки
С, мы должны бы были при составлении уравнений моментов
около двух горизонтальных осей, проходящих через точку С,
принять во внимание силу реакции связей, развивающуюся
в точке F, и силы инерции от поступательного движения рас-
сматриваемого тела со скоростью, соответствующей точке С.
Но сила реакции прямо проходит через точку С, а все по-
ступательное движение совершается по направлению оси Cz.
Если принять, что центр тяжести тела близок к этой оси, то
силы инерции, соответствующие этому поступательному дви-
жению, дадут около осей, перпендикулярных Cz, моменты,
которые будут малыми величинами второго порядка.
Применительно к рассматриваемому случаю качающегося
веретена в наших формулах надо будет заменить С на —С
и положить 1^ = 0, е
К=-^Тг,
а2
где Т—разность натяжений концов бесконечного шнура,
приводящего веретено во вращение, а г—радиус горизон-
тального шкива веретена. Формулы (8), (14) и (11) вследствие
сделанных предположений дают нам:
A==l/ (^ec)2-2^^CeSinX + №>
__ mg& sin X — Ka2
cos X
ha2
m (a2 — b2) co2 -j- m8 *
474
ОБ УПРУГОЙ ОСИ ТУРБИНЫ ЛАВАЛЯ
(18)
малую
устой-
Последняя формула показывает, что при условии а > 6,
всегда удовлетворяемом в веретенах, а не может обратиться
в оо ни при каком значении со и опасной скорости в том
смысле, как она дается формулой (16), не существует. Не-
устойчивость может явиться здесь вследствие того, что р сде-
лается отрицательным, так что необходимо иметь:
со2 g-a2
При очень большой угловой скорости со получим
величину и большую р, что характеризует хорошую
чивость вращательного движения и отсутствие колебаний оси.
Применительно к рассмотренной задаче о веретенах сле-
довало бы обращать внимание также и на массу подвижного
подшипника, потому что масса веретена (катушку пряжи мы
присоединяем к веретену) не велика. Так как подшипник при-
соединяет силу своего веса к весу веретена, а масса подшип-
ника участвует во вращательных движениях около осей Сх
и Су, то, принимая в формулах (17) во внимание вес и массу
подшипника, мы должны будем, во-первых, тиС заменить на
(тп + тп7)^, где т'—масса подшипника, а С—расстояние от
С общего центра тяжести веретена и подшипника, и, во-вто-
рых, квадрат радиуса инерции а2 заменить на
(т -f- тп') а'2
* ,
т
где а есть радиус инерции относительно оси Сх веретена и
подшипника.
18 ноября 1897 г. автор сделал сообщение в Московском математиче-
ском обществе на тему „О регулировании оси вращения в турбине Ла-
валя*. Работа „Об упругой оси турбины Лаваля* была напечатана в „Тру-
дах Отделения физических наук Общества любителей естествознания, антро-
пологии и этнографии", т. X, вып. 1, 1899. Прим ред.
ON THE FLEXIBLE SHAFT OF DE LAVAL TURBINE AND ON
SHAFTS MOUNTED IN OSCILLATING BEARINGS
In this note Prof. Joukovsky discusses the theory of De
Laval turbine as developed by Foppl and Stewart, and extends
it to the case when the shaft is mounted in oscillating bearings.
A disc (Fig. 1) is subjected to a torque which imparts to it
only a rotation about the centre of gravity S. If the centre of
gravity were on the axis of rotation it would remain stationary.
When the centre of gravity is not on the axis of rotation, the
disc rotating about £ will cause a deflection of the shaft, hence
the displacement of the centre A of the disc will bring about
an elastic force Q — p-AO applied to the point A and acting in
the direction AO. In transferring this force to the point *5 we
must add a couple, which may be neglected however since’ its mo-
ment is of the second order of magnitude as compared with Q.
After the lapse of a certain time the torque will be balan-
ced by the resistance forces and the rotation about the centre
of gravity £ will be performed with constant angular velocity <«,
the centre of gravity moving under the action of the force Q.
Calling x, у the coordinates of the centre of gravity .S' with
respect to fixed axes and calling e the distance AS, we have
for the motion of the centre of gravity the differential equations
(1), which by substitution (2) are transformed into equations (4).
The form of these equations indicates that the motion
of the disc is the resultant of two motions, viz. that of the
point P(%, iq) describing an ellipse about O, and that of uniform
rotation of the disc about P with a uniform angular veloci-
ty the point .S' describing about P a circle of radius a
(formula 3).
Owing to internal friction in the flexible shaft, the motion
of P will die away and the ellipse described by P will diminish
476
SUMMARY
and finally be reduced to the point O. Then the disc will uni-
formly rotate about P (coinciding with O) and the centrifugal
force acting upon 5 in the direction SA will be balanced by
the elastic force Q acting in the direction AS.
When the velocity attains the critical value given by for-
mula (7), the radius a of the circle described by the centre of
gravity, about P becomes infinitely great.
In Fig. 3 is represented an oscillating bearing N suspended
by a universal joint (Carden’s suspension) from a fixed bearing A.
The flexible shaft carrying the body M passes through both
bearings L and N and tends to assume a vertical position. Let
us suppose the axis of the mobile bearing N to be somewhat
deflected from the principal axis CS of the ellipsoid of inertia
(for the point C) of the rotating body M. Denoting by b the ra-
dius of inertia of the body M with respect to this axis CS and
by a the radius of inertia with respect to axis perpendicular
to CS, we describe a sphere of radius a with its centre at C
and we assume that this sphere cuts the prolongation of the
axis of the bearing L in A9 the straight line drawn through C
and the centre of gravity of the .body M in B, and the CS-
axis in S. The effect of the twisted shaft consists first in trans-
mitting to the body M the torque, the moment of which is di-
rected along the radius CA and second in communicating to
the point A the force p-• О A directed along AO. The torque
can be resolved into two couples: one with the moment direc-
ted along the principal axis of inertia CS and the other with
the moment perpendicular to CS.
The first couple will impart to the body a rotation about
CS with a constant angular velocity and will be balanced by
the resistances. The second couple we shall replace by a con-
stant force К, applied at the point 5 and acting along the sur-
face of the sphere in the direction at right angle to SA. Thus
the spherical triangle BAS will uniformly rotate about its apex *S,
which will move on the sphere as a material point whose mass
is equal to that of the body M, acted upon by the four forces:
1) the force due to the action of the flexible shaft, of magni-
OB
tude y* • О A, 2) the force mg —C, where C is the distance of the
SUMMARY
477
centre of gravity from the point C, due to gravity and acting in the
direction of the arc BO; 3) the force К directed along the
surface of the sphere at right angle to the arc /4*5, 4) the force
mb2
----— CD V
a2
directed along the surface perpendicularly to the velocity
of the point S, and characterizing the gyroscopic effect.
Since the motion of S is being considered on a portion of
the surface of the sphere in the vicinity of the point O, hence
the points 5, Л, 5 and all the forces can be replaced by their
projections on the plane xOy tangent to the sphere at O. The
projections of the arcs of the triangle BAS and those of forces
will be equal to the projected quantities with an accuracy up
to the second order of magnitude. Thus there will be obtained
the differential equations of motion of the point »S(x, y) in
which e — SA, e = SB, \ = ASB. By means of the substitu-
tion (8) these equations are transformed into (9), and then by
substituting (10) and (11) into (12). In these equations the letter
a denotes the distance of the point P(^, vj) from S.
The form of these equations indicates that the motion of
the spherical figure will be made up of its rotation with angu-
lar velocity about P$, iq), and the motion of P along an
ellipse with the centre at O, rotating about О with angular ve-
locity 2. Owing to the internal friction in the shaft, the motion
of P will die away and after a certain interval of time it will
be coincident with O, the radius CP will be directed along CO
and the body will begin to rotate uniformly about CO with
angular velocity % while the axis of the movable bearing will
oscillate about the joint, describing a circular cone. The centri-
fugal forces will be balanced by the force of gravity, the elas-
tic force of the shaft, and the force K. The critical angular ve-
locity at which a is infinite, is given by formula (16).
At the end of the paper it is shown how the above formu-
lae are modified in the case of a bearing of a different design.
АНАЛОГИЯ ДВУХ ЗАДАЧ МЕХАНИКИ
(1900 г.)
Обыкновенно думают, что цель математического исследова-
ния явления природы заключается в вычислении всех величин,
характеризующих это явление, и когда достижение этой цели
превышает средства математического анализа, тогда исследова-
ние данного явления природы считается недоступной матема-
тической задачей. Но я полагаю, что такой взгляд на значе-
ние математического исследования явлений природы слишком
узок. Кроме возможности вычислять величины, характеризую-
щие явление, математический анализ устанавливает связь между
этими величинами, знакомит нас с ходом явления и его осо-
бенностями, а иногда позволяет усмотреть математическую
аналогию двух явлений, которые по своей физической природе
могут быть совершенно различны.
Установление математической аналогии между двумя явле-
ниями приносит нашему знакомству с ними пользу с двух
сторон.
Мы можем на основании найденной аналогии все раз-
решенные задачи в одной области физических явлений пре-
образовать в соответственные задачи в другой и получить
таким образом решение последних. С другой стороны, если
одно из двух математически аналогичных явлений сложно и
трудно наблюдаемо, а другое может быть осуществлено на
простом приборе, позволяющем измерять параметры, ха-
рактеризующие явление, то опытное изучение второго явле-
ния может расширить наше знакомство с первым, несмотря
на то, что оба явления могут представлять неразрешимую
математическую задачу.
АНАЛОГИЯ ДВУХ ЗАДАЧ МЕХАНИКИ
479
О такого рода двух математически аналогичных задачах
механики я буду иметь честь сделать сообщение в этом тор-
жественном заседании.
Одна задача является обобщением задачи о движении фи-
зического маятника. Она заключается в исследовании движе-
ния тяжелого твердого тела, радиусы инерции которого относи-
тельно точки опоры имеют какие-нибудь величины X, «л, v и
центр тяжести которого находится на оси, соответствующей ра-
диусу V. При центре тяжести в точке опоры это есть задача
Пуансо; при X = эта задача разрешена Лагранжем, а при-
рь = v = X]/2 она решена С. В. Ковалевской. В последнее
время появилось несколько частных решений этой задачи
в различных случаях, данных Бобылевым, Стекловым, Горя-
чевым и Чаплыгиным; таковы случаи v = X]/2 при произ-
вольном р- и pt = v = 2Х.
Другая задача есть задача теории упругости о равновесии
упругих прутьев, ущемленных с одного конца и подверженных
с другого конца действию силы и пары сил. Эта задача за-
нимала ученых с давних пор. Эйлер 1 и Лагранж 2 разо-
брали различные виды плоской эластической кривой. Ванцель 3
показал, что при действии пары сил на конец прута круго-
вого сечения последний принимает вид винтовой линии.
Коши и Пуассон, а затем Ляме пытались обосновать решение
задачи о равновесии упругих прутьев на общих формулах
теории упругости. Но эта цель была вполне достигнута только
Кирхгоффом 4, который в своем замечательном сочинении
„О равновесии и движении весьма тонкого упругого прута"
показал, какое место занимает задача о равновесии упругих
прутьев в общей теории упругости. Кирхгоффом была указана
интересующая нас аналогия. Но, к сожалению, анализ Кирх-
гоффа слишком сложен, и хотя он и был упрощен в сочинениях
1 Euler, Additamentum de curvis elasticis, Methodus inveniendi..., 1744.
2 Lagrange, Sur la force des ressorts plies, Academie de Berlin,
1769.
3 Wantzell, Comptes rendus, t. XVII, 1844.
4 Kirchhoff. Uber das Gleichgewicht und die Bewegung eines un-
endlich diinnen elastischen Stabes, 9Borchardt’s Journal", Bd. 56, 1858
480
АНАЛОГИЯ ДВУХ ЗАДАЧ МЕХАНИКИ
Клебша и Бусинеска но мне кажется, что причина вышеупо-
мянутой аналогии остается и до сих пор несколько закрытой
сложными формулами задачи, а между тем ее можно указать
с чрезвычайной простотой.
Вообразим (фиг. 1) упругий прут АВ, ущемленный в не-
подвижной стойке своим концом В и подверженный с другого
конца А действию некоторой силы Р и пары. Пусть а будет
перпендикулярное сечение прута, постоянное по всей его длине,
а X и пусть будут главные радиусы инерции площади этого
сечения относительно осей, проходящих по его плоскости
Фиг.
через центр его тяжести. Кроме этого,
будем еще рассматривать величину v, выра-
жающую согласно теории Сен-Венана мо-
мент сил кручения прута
около касательной к его
осевой линии с помощью
формулы jE’ov-r, где Е—•
модуль упругости, а г —
угол кручения на единицу
длины прута, и заметим,
что согласно указанию
проф. А. П. Соколова
(1)
Приняв начало коорди-
нат в центре О перпенди-
кулярного сечения деформированного прута, направим ось Oz по
касательной осевой линии в сторону точки В, а оси Ох и Оу
направим по осям, которым соответствуют радиусы инерции
X и р-. Тогда применение анализа Сен-Венана 1 2 о кручении
и сгибании призм к элементу прута, заключенному между
двумя смежными сечениями, приведет нас к следующим вы-
ражениям моментов сил упругости, развивающихся в сечении о,
которым оканчивается часть прута АО:
GX = E о К2/?, G2 = Е о G% = E ° v2r. (2)
1 Boussinesq, Etude nouvelle sur I’equilibre et le mouvement des corps
solides elastiques dont certaines dimensions sont tres-petites par rapport
a d’autres, „Journal des Mathematiques pures et appliquees", 1871.
2 Theorie de I’elasticite des corps solides de Clebsch, traduite par Barre
de Saint-Venant, Paris 1883, p. 422.
АНАЛОГИЯ ДВУХ ЗАДАЧ МЕХАНИКИ
481
Входящие сюда величины />, q и г по бесконечно малым
поворотам оЬ, oty, db осей координат xyz, при их переходе
от точки О в точку О' на элемент дуги ds осевой линии, вы-
ражаются формулами:
dty
P==ds' ^ds' r = ds-
(3)
Если теперь вообразим, что точка О перемещается по осе-
вой линии от В к А со скоростью, равной единице, то будем
иметь:
ds = dt (4)
и формулы (3) представят нам проекции на подвижные оси
координат жуя угловой скорости вращения этих осей.
Предположим, что наш упругий прут, кроме неравенства (1),
удовлетворяет еще условию:
Л2 —р2<у2, (5)
и вообразим рядом с ним твердое тело (фиг. 1) массы Еа,
опирающееся на неподвижную точку О и имеющее относи-
тельно ее главные радиусы инерции X, у,, v.
Если это тело движется так, что его оси, соответствую-
щие упомянутым радиусам инерции, постоянно остаются па-
раллельными вышеуказанным подвижным осям на упругом
пруте, то проекция на эти оси главного момента количеств
движения G выразится формулами (2).
Докажем, что такое движение рассматриваемого твердого
тела мотет быть получено от действия на него силы, рав-
ной и параллельной силе Р и приложенной на оси z на рас-
стоянии единицы длины от О.
Изменения проекций Gn G2, G3 на оси координат главного
момента количеств движения G рассматриваемого тела проис-
ходят от двух причин: во-первых, от изменения направления
осей вследствие вращений р, q, г и, во-вторых, вследствие
изменения в пространстве самого вектора G. Что касается
последнего изменения, то оно заключается в геометрическом
приращении вектора G на умноженный на dt линейный момент
силы Р относительно точки О. Какие же причины влияют на
изменение величин Gl9 G2, G3 в упругом пруте при пере-
движении сечения прута из точки О в бесконечно близкую
Зак. 2365. — Н. Е. Жуковский. Т. I. 31
482
АНАЛОГИЯ ДВУХ ЗАДАЧ МЕХАНИКИ
точку СУ на расстояние ds = dt по осевой линии? Упругие
силы, действующие в сечении о, проходящем через точку О,
уравновешиваются силой, приложенной в точке А, и парой;
вследствие этого геометрическая сумма момента этой силы
относительно точки О и момента пары дает вектор, равный
и противоположный вектору G (компоненты вектора G суть
G2, G3).
При указанном выше движении осей xyz, переносящих во
время dt — ds свое начало из точки О в О', проекции Gu Go,
G3 будут изменяться от двух причин: во-первых, оттого,
что оси координат получат повороты на углы dv, dty, dh,
и, во-вторых, оттого, что сам вектор G прирастет на момент
пары (Р,— Р) с плечом ds. Это последнее бесконечно малое
геометрическое приращение может быть представлено умно-
женным на ds линейным моментом силы Р, приложенной в точке
С на оси Oz на расстоянии единицы длины от О.
Так как изменение вектора G от обеих указанных причин
в обеих рассматриваемых задачах одинаково, то желаемое
доказано.
Мы получаем следующую теорему: если вообразить упру-
гий прут и твердое тело такими, что масса тела равна
°Е и величины X, у,, v для тела и для прута одинаковы, и до-
пустить, что в точке тела С, лежащей на оси Oz на
единице расстояния от опоры О, приложена сила, равная
и параллельная силе, приложенной к свободному концу прута,
другой конец которого ущемлен, если, кроме этого, дать
осям xyz в теле положение, параллельное осям xyz на конце
прута, и сообщить телу начальную скорость так, чтобы
главный момент количеств движения тела был равен, но
прямо противоположен моменту пары, действующей на конец
прута, то последующие положения осей инерции тела во
времЯ его движения от действия силы Р будут даны поло-
жениями осей xyz на пруте, начало которых отстоит от
свободного конца прута на расстояние s = t.
Сделаем теперь на основании установленной теоремы сра-
внение некоторых задач из области обоих рассматриваемых
явлений.
Начнем с задачи Эйлера о плоской эластической кривой.
АНАЛОГИЯ ДВУХ ЗАДАЧ МЕХАНИКИ
483
Этой задаче аналогична задача о колебании математического
маятника.
На фиг. 2 представлены три вида эластической кривой,
соответствующие колебанию маятника: при размахе, меньшем
при размахе, заключенном между к и 2~, и при непрерывном
вращении. Соответственные касательные прута и положения
маятника означены на нашей фигуре одинаковыми цифрами.
Задача о форме
прута,
торого
только
аналогична слу-
на конец по-
действует
одна пара 2
твердого тела
сил,
чаю Пуансо движе-
ния
по инерции. Проведя
из неподвижной точ-
ки О прямые, па-
раллельные последо-
вательным касатель-
ным прута, будем
иметь конус, описы-
ваемый в простран-
стве осью Oz твер-
дого тела. Для слу-
чая X = на основа-
нии задачи динамики
заключаем, что этот
конус должен быть
круглый, а отсюда приходим
что прут кругового сечения
пары форму винтовой линии.
Если на конец прута кругового сечения, кроме пары, дей-
Фиг. 2.
к оправданию
получает под
вывода Ванцеля,
действием одной
ствует еще сила, то задача о его равновесии аналогична за-
даче Лагранжа о движении гироскопов. Хорошо изученные
разнообразные движения гироскопов могут дать нам инте-
ресные разъяснения различных случаев равновесия упругих
прутьев кругового сечения. Четвертый интеграл в задаче
Лагранжа, выражающий постоянство проекции главного момента
31*
484
АНАЛОГИЯ ДВУХ ЗАДАЧ МЕХАНИКИ
количеств движения на ось гироскопа, выражает постоянство
момента сил упругости около осевой линии изогнутого
и скрученного прута. Это обстоятельство служит объяснением
передачи вращательной силы с помощью упругих изогнутых
осей, как это указано на особом виде сверла, представленного
на фиг. 3.
Припомним устройство гироскопа Плюкера (фиг. 4). Центры
гироскопического тора TQ опираются на края кольца РР',
Фиг. 3.
приделанного к рычагу Z, могущему поворачиваться около
горизонтальной и около вертикальной оси. Гирька М9 скользящая
по рычагу, дает возможность передвинуть центр тяжести си-
стемы направо или налево. В первом случае, приведя тор
в быстрое вращение против часовой стрелки (для наблюдателя,
глядящего от гироскопа к концу рычага) и предоставив систему
действию тяжести, мы получаем вращение рычага против
часовой стрелки для наблюдателя, глядящего сверху, и гиро-
скопический эффект, мешающий гироскопу падать вниз 1; во
втором случае при том же направлении вращения гироскопи-
1 При этом будет происходить мелкая и весьма быстрая нутацля при
периодически изменяющейся прецессии.
АНАЛОГИЯ ДВУХ ЗАДАЧ МЕХАНИКИ
485
ческого тора мы получаем вращение рычага по часовой
стрелке и гироскопический эффект, не пускающий гироскоп
подниматься вверх.
Аналогично гироскопу Плюкера я построил аппарат, отно-
сящийся к теории равновесия упругих прутьев (фиг. 5).
Конец упругого прута ущемлен в тисках так, что ущемленная
часть прута горизонтальна. На другом конце согнуто колено
под прямым углом к пруту, которое при разгрузке прута
располагается горизонтально. Конец колена обременен гру-
зом Р. а к углу колена прикрепляется вертикальная нить
(с помощью кольца, надетого на прут), перекинутая через
Фиг. 4.
блок и обремененная на своем конце другим грузом Q. Если
Q — Р. то прут находится только под действием пары сил,
плоскость которой перпендикулярна его оси, и сохраняет го-
ризонтальное положение. Если Р > Q, то конец прута нахо-
дится под действием силы Р— Q, направленной вниз,
и под действием пары (Р, — Р), вращающей по часовой стрелке
(пара же сил упругости действует против часовой стрелки);
при этом свободный конец прута опускается немного вниз,
и прут закручивается около вертикальной линии, проходящей
через тиски, по часовой стрелке. Если же взять Р< Q, то
конец прута будет находиться под действием той же пары
(Р, — Р), но сила Q — Р, на него действующая, будет направ-
лена вверх; при этом упомянутый конец поднимется вверх,
и прут закрутится около вертикали против часовой стрелки.
486
АНАЛОГИЯ ДВУХ ЗАДАЧ МЕХАНИКИ
Сообразуясь с установленной нами общей теоремой, заключаем
что все наблюденные положения равновесия прута вполне,
согласны с движением гироскопа Плюкера.
Укажем еще случай равновесия тонких упругих цилиндров,
аналогичный любопытному движению гироскопа Сира (фиг. 6).
Фиг. 5.
Этот гироскоп вследствие гироскопического эффекта прижи-
мается концом Р своей оси к пластинке S, обрезанной по про-
извольному контуру, и следует вполне точно за всеми при-
хотливыми извилинами контура. Аналогичным этому движению
Фиг 6.
гироскопа является случай равновесия упругого каучукового
прута, изображенный на фиг. 7, а. Обернув прут несколько
раз около вазы, укрепим один его конец при основании вазы,
а другой приделаем к ручке, могущей вращаться у верхней
стенки вазы. Прут сначала не будет охватывать плотно вазу,
но если начнем его закручивать с помощью вращения ручки,
то увидим, что он всеми своими частями прижмется к вазе.
АНАЛОГИЯ ДВУХ ЗАДАЧ МЕХАНИКИ
487
Во всех приводимых нами примерах разрешенные задачи
динамики твердого тела позволяли нам делать суждения
о формах равновесия упругих N
прутьев. Но когда речь идет о не-
разрешенной задаче динамики: о слу- /
чае, при котором л, и v суть не- / ЫР
которые произвольные величины, /
тогда форма равновесия прута, осу- J \ /
ществленная практически, может нам zjL\ 1
дать понятие о неизвестном виде VV 11
движения твердого тела. На фиг. (7, Ь) Фс 1
изображен прибор, позволяющий по
форме упругого прута при произ-
вольных л р и v судить о соответ-
Фиг. 7.
ственном движении тела.
Существует много математически аналогичных задач, отно-
сящихся к различным физическим явлениям. Эти задачи часто
исследуются различными методами без указания их взаимной
аналогии. Моим сообщением я хотел отметить пользу, которая
получается при совместном изучении таких задач.
Речь „Аналогия двух задач механики“ была произнесена Н. Е. Жуков-
ским 21 марта 1900 г. в заседании Московского математического общества
и напечатана в „Математическом сборнике*, т. XXI, 1900. Прим. ред.
AN ANALOGY BETWEEN TWO PROBLEMS OF MECHANICS
This short paper deals with an analogy between the problem
of rotation of a rigid body about a fixed point and that of
equilibrium of an elastic bar clamped at one end and exposed
to the action of a force and a couple at the other end (Fig. 1)«
This analogy was pointed out by Kirchhoff. Although Kirch-
hoff’s analysis was simplified by Clebsch and by Boussinesq,
it still remains too cumbersome and the reason for the analogy
is obscured by complicated formulae. The present paper was
written by Prof. Joukovsky with the object to make the analogy
evident by means of a simple geometrical construction.
Let <з be the constant area of cross-section of the bar,
X and the principal radii of gyration of the section, v — quan-
tity representing, in accordance with de Saint-Venant’s theory,
the moment of the twisting forces about the tangent to the
central line of the bar in the formula E^r, where E is the mo-
dulus of elasticity and r is the angle of torsion for a length
unit of the bar. Let the principal radii of gyration of the body
rotating about a fixed centre О be v and let the body be
acted upon by a force applied at a point on the v-axis. In the
case of the bar the origin of coordinates is taken at the cen-
tre of the cross-section and the Oz-axis is directed along the
tangent to the axial line, and the axes Ox and Oy are directed
along the axes to which correspond the radii X and In the
case of the rotating body the origin is taken at the fixed point O,
and the axes x, yy z are directed along the principal axes of
inertia, the z-axis corresponding to the radius v, Applying for-
mula (2) for the projections of the moment of the elastic forces
developing at the cross-section a, Prof. Joukovsky obtains a sim-
ple proof of the following theorem expressing the nature of the
analogy:
SUMMARY
489
If the elastic bar and the rigid body be supposed such that
the mass of the body is aE and that the quantities X, it, v are
the same for the body and for the bar, and if it be assumed
that at a point C of the body situated on the axis Oz at a unit
distance from О is applied a force equal and parallel to that
applied at the free end of the bar, which is clamped at its other
end, and if the axes x, y, z in the body be directed parallelly
to the axes x, y, z at the end of the bar and the body be given
an initial velocity so that make the principal moment of mo-
mentum of the body equal and opposite to the moment of the
couple at the end of the bar, then the positions that will be
assumed by the axes of inertia of the body during its motion
under the action of the force P will be given by the positions
of the axes x, yf z of the bar having the origin at a distance
s = t from the free end.
The paper ends by several examples illustrating the theorem-
О ДВИЖЕНИИ МАТЕРИАЛЬНОЙ псевдосферическои
ФИГУРЫ ПО ПОВЕРХНОСТИ ПСЕВДОСФЕРЫ
(1902 г.)
§ 1. В одном из своих сочинений Лобачевский высказы-
вает пожелание, чтобы в указанном им неэвклидовском про-
странстве были рассмотрены задачи механики. Это пожелание
в настоящее время выполнено во многих кинематических
и динамических исследованиях по воображаемой и многомер-
ной геометрии. Но между всеми подобными вопросами по
механике один имеет вполне реальное значение: это — задача
о движении неизменяемой материальной площадки по плос-
кости Лобачевского, так как эта задача в эвклидовском про-
странстве представляет движение материальной изгибающейся
псевдосферической площадки по поверхности неподвижной
псевдосферы. Решение этой задачи представляет предмет
нашей заметки.
Чтобы с большей наглядностью изложить это решение,
припомним, как исследуется аналогичная задача о движении
по инерции материальной сферической площадки по поверх-
ности неподвижной сферы. С динамической точки зрения
последняя задача есть известная задача Эйлера о движении
твердого тела около неподвижной точки. Построив три оси
эллипсоида инерции нашей сферической площадки относи-
тельно центра сферы и отметив точки Л, В, С, в которых
эти оси пересекают сферу, получим триортогональный сфе-
рический треугольник АВС (фиг. 1). Каждая из трех вершин
этого треугольника явится свободным полюсом вращения
нашей сферической площадки, т. е. около этих вершин пло-
щадка может по инерции иметь равномерное вращательное
.движение. Если нашей сферической площадке сообщено
начальное вращательное движение около какого-нибудь дру-
§ 1
О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ
491
гого полюса, то она уже не будет продолжать
около него
вращаться, а будет совершать по поверхности
сферы движе-
ние, которое удобно
интерпретировать с
помощью так назы-
ваемых дополнитель-
ных конусов.
Уравнения допол-
нительных конусов
по отношению к глав-
ным осям инерции
площадки относи-
тельно центра сферы
напишутся так:
х2 । у2 ।
С
Фиг. 1.
где а, Ь, с — квадраты полуосей эллипсоида инерции пло-
щадки относительно упомянутого центра, а К — параметр
семейства конусов. Если подставим в формулу (1) выражения:
х = г cos sin 6,
у— г sin sin 6,
z = г cos 6,
(2)
то получим уравнение, связывающее полярный угол 6 и дол-
готу ? точек, лежащих на дополнительном конусе и на дан-
ной сфере радиуса г. Это будет уравнение взаимноорто-
гональных софокусных сферических кривых, изображенных
на фиг. 1.
Определив по начальному вращению площадки плоскость
импульсивной пары (неизменяемая плоскость), отметим окруж-
ность MN большого круга, по которой эта плоскость пере-
секает сферу, и отыщем ту из сферических кривых, которая
прикасается к этой окружности. Все движение сферической
площадки по поверхности сферы сводится к тому, что най-
денная сферическая кривая, соединенная с площадкой, будет
катиться без скольжения по окружности MN, а эта последняя
492
О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ
§ 2
окружность вместе с площадкой и сферической кривой будет
равномерно вращаться около своего полюса.
Так как диференциальные уравнения движения нашей сфе-
рической площадки зависят только от выражения элемента
дуги на поверхности сферы, а это последнее не изменяется
со сгибаниями сферы, то указанная нами интерпретация дви-
жения по инерции материальной сферической площадки на
поверхности сферы сохраняется при одновременном сгибании
сферы и площадки.
Вообразив, например, что опорная сфера разрезана по
меридиану и вытянута в форму сигары, мы должны под-
вергнуть тому же изгибанию материальную площадку, сфе-
рическую кривую EDF и окружность MN. При этом окруж-
ность MN сделает несколько оборотов и может сомкнуться
своими концами, как это представлено на фиг. 2, на которой
сигарообразная форма обвертывается два раза полной поверх-
ностью сферы.
Движение по инерции изогнутой сферической площадки
по нашей сигарообразной поверхности будет слагаться из
катящего движения деформированной сферической кривой
DEF по геодезической линии MN и из движения, при кото-
ром все точки материальной площадки бегут по параллелям
к геодезической линии MN с постоянными скоростями.
§ 2. Представим элемент дуги на поверхности псевдо-
сферы в одном из трех видов:
г /ерц_е-т?\2
I eP — е-тЛI 2 ,
ds2 — f2 dp2-}- I----x---I dq2 >
Js2 = r2 (dp2 Ц- e2pdq2),
(3)
и предположим, что рассматриваемая псевдосфера есть поверх-
ность вращения с меридианами, направленными по геодези-
ческим линиям q — const. Это приведет нас к одному из трех
видов псевдосферы, представленных на фиг. 3, причем вид с
получается от вращения трактрисы (линия постоянной каса-
тельной) около ее асимптоты.
§2 О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОИ ФИГУРЫ 493
Вообразив на одной из этих поверхностей материальную
площадку К, будем вращать ее с некоторой постоянной угло-
вой скоростью около оси вращения поверхности,
на основании
двигаться по
скоростями:
формул (3) точки площадки будут
параллельным кругам р — const со
o==rch(p)s’
v = rsh(p)^,
dq
v — re~P
at
При
этом
(4)
С'
Фиг. 2.
Для псевдосферы вида а величина r~; есть
скорость на горловом круге MN\ для псевдо-
, dq
вида b величина представляет отношение к эле-
времени бесконечно малого угла между двумя беско-
сферы
менту
//
Фиг. 3.
нечно близкими меридианами, проходящими через точку О'»
Для псевдосферы же вида с величина г есть скорость на
произвольном параллельном круге на котором мы при-
нимаем р = 0.
494
О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ
§ 2
Заметив, что вследствие постоянства кривизны ------- j
каждая из псевдосфер может быть наложена сама на себя
или на другую псевдосферу, мы можем все три типа движе-
ния, данные формулами (4), рассматривать на одной псевдо-
сфере. Наложив, например, псевдосферу Ь на псевдосферу а
так, что точка О' займет какое-нибудь положение О и линии
q — const во второй формуле (3) представят нам геодезиче-
ские линии, проходящие через полюс О, мы выразим
с помощью второй формулы (4) движение площадки по
поверхности псевдосферы а около неподвижного полюса О
на этой поверхности, аналогичное вращательному движению.
На основании сказанного мы будем рассматривать три
вида движения псевдосферической фигуры по поверхности
псевдосферы.
1) Поступательное движение, при котором точки, лежа-
щие на данной геодезической линии/ называемой направляю-
щей поступательною движения, движутся с постоянной ско-
ростью rw, все же остальные точки перемещаются по парал-
лелям к этой геодезической линии (р — const) со скоростями
rw ch (р).
2) Вращательное движение, при котором одна точка
фигуры, называемая полюсом, остается неподвижной, все же
остальные точки движутся по псевдосферическим окружностям
(р — const) со скоростями го) sh (р), где о> = .
3) Вращательное движение около бесконечно удаленного
полюса или поступательное движение с бесконечно удален-
ной направляющей. Здесь все точки фигуры бегут по линиям,
ортогональным к семейству геодезических кривых (q — const),
пересекающихся в бесконечности, со скоростями шер, где
w есть скорость на линии р = 0.
Легко показать, что всякое весьма малое перемещение
псевдосферической фигуры по поверхности псевдосферы
непременно приводится к одному из указанных трех типов
движения. Положение псевдосферической фигуры на поверх-
ности псевдосферы вполне определяется местом двух точек
фигуры А и В (фиг. 4) или местом материальной линии, сое-
§2 О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ 495
диняющей эти две точки и представляющей при всех пере-
мещениях неизменную по длине геодезическую линию. Пусть
эта линия перешла из положения АВ в весьма близкое поло-
жение А'В'. Рассуждаем подобно тому, как это делается при
рассмотрении движения плоской или сферической фигуры.
Соединяем точки А и А' и В и В' геодезическими линиями;
делим эти линии в точках С и D пополам и восставляем
к ним геодезические ортогонали СО и DO. Если эти орто-
гонали пересекутся между собой, как это представлено на
чертеже а, то движение нашей псевдосферической фигуры
в рассматриваемый нами малый промежуток времени сведется
к вращению ее около полюса О,
что следует из равенства геоде-
зических треугольнико в:
А О АВ = А ОА'В'.
Фиг. 4.
Если же эти ортогонали дойдут до кратчайшего расстоя-
ния ОО' и потом начнут расходиться, как это изображено
на чертеже 6, то движение псевдосферической фигуры пред-
ставится ее поступательным движением с направляющей ОО\
Это можно доказать так. Продолжаем геодезическую линию
ОО' и опускаем на нее из точек Л, Л', В, В' геодезические
ортогонали АЕ, А' Е', BE, B'F'. Из формул псевдосфериче-
ской тригонометрии:
АЕ
sh
496
О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ фигуры
§ 2
заключаем, что АЕ = А'ЕГ, и так же доказываем, что BF=
= B'F'; далее, из формул:
заключаем, что EF~-E'F'. Если теперь сообщим псевдосфе-
рической фигуре EABF поступательное движение по напра-
вляющей линии О О1 такое, что в рассматриваемый элемент
времени отрезок EF займет место E'F', то вследствие пря-
мых углов при Е, Е', F, F' и вследствие равенства сторон
AE = AlE'9 BF—B'F' упомянутая псевдосферическая фигура
накроет фигуру Е'A'B'Ff и линия АВ займет положение А'В’.
Может еще быть третий случай, когда ортогонали СО
и DO пересекаются в бесконечно удаленной точке; он соот-
ветствует вращению фигуры около бесконечно удаленного
полюса или ее поступательному движению с бесконечно уда-
ленной направляющей.
Формулы (4), выражающие скорости точек фигуры в трех
рассматриваемых видах движения, могут быть легко получены
из фиг. 4. Из треугольника ОАС на чертеже а можем на-
писать :
sh ( ~ j = sh ( ~ ) sin (СОЛ),
отсюда, положив
лс=^, LCOA = ^,
находим вторую формулу (4):
v = rsh(p)
Далее из четырехугольника АСОЕ на чертеже Ь имеем
§ 2
О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ
497
dq
откуда, положив
vdt АЕ ЕО dq
АС=-^-9 — ==р, ---------=
2 г г 2
получим первую формулу (4):
v = г ch (р)
Наконец, если примем, что точка О на чертеже а уда-
ляется в бесконечность, и положим при весьма большем Р,
что
= Р— р9 lim [еР sin (СОЛ)] = dq,
то найдем третью формулу (4):
dq
V — ге •
dt
Скажем несколько слов о сложении и разложении движе-
ния псевдосферической фигуры.
Напишем формулы (4) поступательного и вращательного
движения в виде:
v=r ch (р) • w,
v=r sh (p) • <0
(4)
и назовем величины w и <*> параметрами поступательного
и вращательного движения. Сделаем подстановку р = рг а
v=r ch (р') • w ch (а) 4" sh (pz) • w sh (а), |
v=r sh (p') • <0 ch (a) 4“ Г ch (pz) • <0 sh (a). J
Эти формулы приводят нас к двум заключениям:
1) Опустив из какой-нибудь точки О' ортогональную гео-
дезическую линию О О' на направляющую поступательного
движения, мы можем это движение заменить поступательным
движением, направляющая которого проходит через точку О'
ПП 1 / °°Г \
ортогонально к UU с параметром w ch I—-—I, и враща-
dOO'\
тельным движением около полюса О с параметром w sh I -I.
2) Соединив какую-нибудь точку О' с полюсом О враща-
тельного движения, мы можем все это движение заменить
Зак. 2365.—Н. Е. Жуковский. Т. I.
32
498
О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ
§ 2
вращением около полюса О' с параметром ch —-—j
и поступательным движением с направляющей, проходящей
через точку О' ортогонально О О' с параметром sh j •
На основании этих замечаний мы можем составить пра-
вило для сложения двух поступательных движений, напра-
вляющие которых имеют кратчайшее расстояние О О', и двух
вращательных движений около полюсов О и О', а также
вращательного движения, совершающегося около полюса О,
с поступательным, имеющим направляющую, проходящую
через эту точку.
Два поступательных движения, совершающиеся в одну
сторону с параметрами w и w', заменяются одним поступа-
тельным движением, направляющая которого ортогональна
ОО' (ОО' = d) и проходит через точку С, лежащую на этой
геодезической линии между О и О' и определяемую фор-
мулой:
Положив здесь OC=d—х9 О'С=х, найдем:
th
w' -j- w ch
<6'>
причем вторая часть менее единицы.
Параметр W сложного поступательного движения выра-
жается так:
l^ = tpch
ОС
(7>
Если складывают два поступательных движения, совер-
шающихся в разные стороны, с параметрами w' > w, то
направляющую сложного поступательного движения можно
отыскивать со стороны направляющей поступательного дви-
§2 О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ 499
жения с параметром w', положив в формуле (6) ОС = x~\~d,
О'С = х. Это дает нам
непременно должен быть менее единицы
Так как th
и достигает этого значения только при х = оо, то для того,
чтобы сложное движение было поступательно, необходимо
условие:
w'
w
d
>er .
(9)
При существовании этого условия найдем по формуле (8)
место направляющей сложного поступательного движения (со
стороны направляющей движения с параметром ш'); что же
касается параметра этого сложного движения, то он будет:
ТУ/ 'dO'C\ d0C\ ЛПА
и/ = w ch I I — w ch I----|. (10)
\ г / \ г ]
Если
то сложное движение представит нам вращение около беско-
нечно удаленного полюса.
Если же
w'
W
(9")
то мы получаем сложное движение вращательное.
Место полюса этого вращательного движения найдется из
формулы (Ю), положив в ней W = 0, О'С = х, ОС = d-\~ х.
Это дает нам следующую формулу, определяющую х:
th
(11)
32*
500
О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОИ ФИГУРЫ
§ 2
Вторая часть этой формулы вследствие неравенства (9")
всегда менее единицы. Пока
w'. , ( d \
— > сп I — I,
W \ г /
мы будем иметь х положительным и полюс вращения С поме-
щенным со стороны направляющей с параметром w'. При
полюс вращения вступает в точку О' (х = 0); наконец при
г
W
W
ch
полюс вращения будет между точками О и О' и при w' = W
он займет середину отрезка ОО'. Что касается параметра
сложного вращения, то он будет выражаться формулой:
о г.(ОС'\ .[ОС\
Q = w sh I-I zjz w sh I-I, (12)
\ r J \ r /
где знак (—) берется для полюса, лежащего вне ОО'9 а знак
(+) берется для полюса, лежащего на отрезке ОО'. На
основании неравенств (9) и (9") легко усмотреть, что выра-
жения (10) и (12) положительны.
Переходим к сложению двух вращательных движений.
Предполагая, что псевдосферическая фигура вращается одно-
временно около полюсов О и О' в одну и ту же сторону
с параметрами <» и <*>', найдем, что сложное движение будет
вращение, совершающееся около полюса С, лежащего на
отрезке ОСУ и определенного уравнением:
к/ОС\ ,JO'C\ _
<*> sh - - I = <» sh I ~ J. (13)
\ г / \ г /
Положив в нем OC = d — х, О'С=х, найдем:
Jd\
( ш sh —
-)=—<13')
г 0)' 4“ ch ( — )
S2
О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ
501
Параметр же найденного вращательного движения будет:
2 = ад ch
(14)
Если вращения совершаются в различные стороны и <я' > <о,
то место С полюса сложного вращения найдем из форму-
лы (13), полагая в ней ОС — х, О'С = х. Это дает нам:
При
(15)
(16)
найденный th — j будет менее единицы, и мы найдем иско-
мый полюс на продолжении геодезической линии ОО' со сто-
роны О'. Величина угловой скорости 2 сложного вращения
будет: О ' d О'С\ J0C\ Г17Ч 2 = о) chi— -1—ch 1 -у-1. (17)
При Г d — =ег (16') О)
этот полюс удаляется в бесконечность.
Если же
а
О)'
ш
(16")
то сложное движение будет поступательное, причем напра-
вляющая поступательного движения найдется, полагая в фор-
муле (17) 2 = 0, OC = x + J, О'С=х.
Мы получаем:
(18)
502
О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ фигуры
§ 2
Вторая часть этой формулы вследствие неравенства (16т)
менее единицы. Пока
. / d\
— > ch I — ,
<0 \ г /
мы будем получать направляющую сложного поступательного
движения со стороны полюса О'; при
со
— =ch
со
эта направляющая пройдет через точку О'; когда же
со'
(О
< ch
эта направляющая пересечет под прямым углом отрезок ОО\
причем в случае ы' = w точка пересечения С будет лежать
на середине отрезка.
Что касается параметра сложного поступательного движе-
ния, то он будет выражаться формулой:
sh
Z^ZCO sh
(20)
где знак (—) соответствует сложному поступательному дви-
жению, направляющая которого лежит со стороны полюса О',
а знак (-{-) соответствует тому случаю, при котором напра-
/у вляющая сложного движения пересекает от-
Vj резок О О'. На основании неравенств (16) и
(16") вторые части формул (17) и (20) положи-
! тельны.
Случай сложения вращательного движе-
। ния, совершающегося около полюса О с па-
। С раметром <*>, и поступательного с параметром w,
Фиг 5 имеющего направляющей некоторую геоде-
зическую линию, проходящую через О, очень
прост. Переходя от точки О в некоторую точку С (фиг. 5),
лежащую на ортогонали ОС — х, к направляющей геодезиче-
§2
О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ фигуры
503
ской линии, ставим условие, чтобы поступательные движения
уничтожались:
(21)
Если w < <0, то из формул (21) определим полюс С слож-
ного вращательного движения, параметр которого будет:
2 = (UCh(y)— wsh (22)
Если w > <0, то сложное движение будет поступательное,
и точка С, через которую пройдет ось сложного поступатель-
ного движения, определяется из уравнения:
(23)
Что касается параметра сложного поступательного движе-
ния, то он будет такой:
U7=wch( — V (24)
\ г / \ г /
Случай w = <*> сводится к вращению около бесконечно
удаленного полюса. Так как всякое перемещение псевдосфе-
рической фигуры по поверхности псевдосферы может быть
выражено поступательным движением с направляющей, про-
ходящей через данную точку, и вращательным движением
около этой точки, а эти последние движения, слагаясь между
собой, приводят нас к одному из трех указанных видов дви-
жения, то в сказанном выше заключается новое доказатель-
ство того, что всякое движение псевдосферической фигуры
в весьма малое время может быть выражено одной из фор-
мул (4).
Нам остается еще рассмотреть сложение двух поступа-
тельных движений, направляющие которых пересекаются. Это
сложение приводит нас к правилу параллелограма. Проведя
504
О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ
§ 2
в точке пересечения направляющих линий касательные
к последним и отложив на этих касательных соответственные
величины параметров поступательных движений, складываем
полученные векторы по правилу параллелограма. Результи-
рующий вектор дает нам направление направляющей слож-
ного поступательного движения и его параметр.
Для доказательства этого правила обратимся к фиг. 6.
Пусть ОА и ОВ — направляющие сложных поступательных
движений с параметрами w' и w\ а ОС—направляющая
сложного поступательного движения с параметром UZ, кото-
рый получен по вышеупомя-
Фиг. 6.
нутому правилу параллело-
грама.
Мы имеем из чертежа:
wr sin (а) = w" sin (6), (25)
W = w' cos (a) -f - w" cos (6). (26)
Возьмем на ОС какую-
нибудь точку псевдосферической
фигуры М и докажем, что эта
точка движется вдоль геоде-
зической линии ОС со скоростью W. Для первого положе-
ния надо оправдать равенство:
w' ch (~) cos (а) = w" ch I — j cos (p),
которое по разделении на формулу (25) дает:
ch “ j cos (a) ch j cos (p)
sin (a) sin (b)
Ho по известной формуле псевдосферической тригономет-
рии имеем:
1
} (27)
cos а — ch I — I sin a,
\ r /
cos b — ch I — I sin P;
\ r )
поэтому наше равенство преобразуется так:
ctg a ctg a — ctg b ctg P,
§ 3 О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ 505
а это справедливо, так как оба произведения равны
Теперь остается оправдать равенство:
UZ= w' ch f —) sin ch ( — sin 3,
\ r / \ r ]
которое на основании формулы (27) прямо приводит нас
к уравнению (26).
§ з.к вышеизложенным кинематическим соображениям при-
бавим еще некоторые замечания по статике псевдосфериче-
ской фигуры. Мы будем рассматривать силы, приложенные
к точкам псевдосферической фигуры и направленные по каса-
тельной плоскости к псевдосфере. Геодезическую линию, про-
веденную через точку приложения силы и касающуюся силы,
мы будем называть направлением силы на псевдосфере. Легко
усмотреть, что точка приложения силы может быть перено-
сима по направлению силы. Это следует из того, что элемен-
тарная работа силы при всяком бесконечно малом перемеще-
нии псевдосферической фигуры не изменяется с упомянутым
перенесением точки приложения силы. Представляя переме-
щение псевдосферической фигуры вращением ее около неко-
торой точки О, лежащей на рассматриваемой геодезической
линии, и некоторым поступательным движением относительно
направляющей, проходящей через эту точку, увидим, что эле-
ментарная работа сил во вращательном движении есть нуль;
что же касается поступательного движения, то его можно
разложить на два: одно, направленное по рассматриваемой
геодезической линии, и другое, направляющая которого орто-
гональна к этой линии.
Работа силы во втором поступательном перемещении есть
нуль; работа же силы в первом поступательном перемещении
не изменяется при перенесении силы по направлению силы,
что доказывает сказанное выше.
Если же мы желаем перенести силу Р (фиг. 7) в некото-
рую точку О', не лежащую на направлении силы, то надо на
506 О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ § 3
направление силы из точки О' опустить геодезическую орто-
гональ О О' и перенести силу в точку О, потом к точке О'
надо приложить две равные и противоположные силы
I ОО'Х
Р' = Feb 1^-1, (28)
направленные по перпендикуляру к линии О' О. Мы получим
силу Р', приложенную к точке О', и комбинацию сил (Р, Р'),
р которую будем называть парой с цент-
0 г > ром О'. Пара с центром О' есть такая
комбинация сил, элементарная работа
которых при всяком поступательном дви-
pf pt жении псевдосферической площадки с на-
------------правляющей, проходящей через точку О',
О-----------есть нуль. Что взятая нами комбинация
сил (Р, Рг) этим свойством обладает, видно
из разложения всякого поступательного
движения с направляющей, проходящей
Фиг* через О', на два поступательные движения
с направляющими, идущими по направлению сил Р' и по ОО'.
Работа нашей пары силы при вращении около центра О'
на бесконечно малый угол S6 будет:
Prsh I ЭД.
\ r ]
Величину
M=Psh(—) (29)
\ r /
мы будем называть параметром пары. Очевидно, что пару
(Р, Р), не изменяя ее действия, можно поворачивать около
ее центра О', а также можно отдалять точку О от О', лишь
бы параметр пары М не изменялся. Сказанное можем форму-
лировать таким образом: при перенесении точки приложения
силы Р в какую-нибудь точку О', отстоящую от направления
силы на геодезическое расстояние </, надо к этой точке орто-
гонально d приложить силу Р ch и присоединить еще
пару с центром О' и с параметром Psh ( — I .
§ 3 О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ 507
Если бы вместо пары (Р9 Р) с центром О' мы желали бы
(фиг. 7) взять пару с центром О" с добавлением некоторой
силы Р'9 проходящей через этот центр, то следовало бы по-
вернуть пару около центра О так, чтобы плечо ее пошло по
геодезической линии ОО'9 силы пары Р и Р' перенести
по вышеуказанному правилу в центр О" и прибавить при
этом надлежащие пары с этим центром. Мы получили бы
силы:
или
Р' = М^\~^~\9 (30)
и пару с параметром:
или
AT = Psh
О'(Г
(31)
ЛГ = МсЬ
Таким образом если желаем изменить центр пары из
точки О' в точку Cf'9 отстоящую на О' О" — d9 то должны
изменить параметр пары М на Мс1л^—j и приложить к точке
О" силу, ортогональную О"О' и равную /И sh j .
Теперь легко установить правило сложения двух сил Р > Р,
направляющие которых имеют кратчайшее расстояние ОО'.
Если силы направлены в одну сторону, то точка приложе-
ния С найдется на отрезке О О' под условием уничтожения
пар
(32)
(32')
508 О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ § 3
При этом величина равнодействующей будет;
R — Pch
О'С
(33)
Если же силы направлены в различные стороны, то подобно
сказанному в предыдущем параграфе о сложении движений,
надо обращать внимание на то, которое из трех условий:
(34)
имеет место. В первом случае мы найдем равнодействующую
силу и точку ее приложения из формул:
(35)
Во втором случае мы будем иметь бесконечно малую силу,
приложенную к бесконечно удаленному центру. Что R будет
приближаться к нулю, следует из формул:
R = Р’ ch — />ch ( =
\ г) \ г /
Так
как по условию
Р — Pch
что с возрастанием х до бесконечности приближается к нулю.
§ 3 О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ 509
Наконец в третьем случае мы получим пару с центром С
и параметром L, определяемыми формулами:
При сложении двух пар мы можем, проведя через их центры
геодезическую линию О О', искать на ней центр С равнодей-
ствующей пары. Если пары вращают в одну сторону, то пара-
метр L и центр равнодействующей пары найдутся по форму-
лам:
Если пары с параметрами М' > М вращают в различные
стороны, то мы будем иметь опять три случая, смотря по
тому, которое из трех условий:
М' ±
м>е
удовлетворяется. При первом условии получается равнодей-
ствующая пара, определяемая формулами:
510
О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ
§ 3
при втором — получается пара с бесконечно малым параметром
и бесконечно удаленным центром; наконец при третьем—мы
получим равнодействующую силу, определяемую формулами:
/? = M'sh
М~М ch
(40)
I ,
\0
Q'
Q*---£
В частном случае при Mr = М эта сила проходит через
d
середину плеча О О' и равняется Ме~г.
Рассмотрим еще сложение силы Р,
действующей на точку О, с парой (Q, Q')
параметра М', имеющей эту точку цен-
тром. Проведя (фиг. 8) геодезическую
линию ОС, ортогональную силе Р, вы-
бираем точку С так, чтобы по переносе
в нее силы и пары мы получили бы
одну силу или одну пару.
Первое обстоятельство будет иметь
место при Р>М9 а второе — при P<ZM, при-
чем
х
Фиг. 8.
в случае одной силы имеем формулы:
tn “ = ,
\ г ) М
а в случае одной пары:
Р
М'
(41)
th
(42)
R
L = 4fch
Случай Р—М дает нам пару с бесконечно удаленным
центром.
В случае существования равнодействующей силы, при ее
замене одной силой и одной парой с центром в различных
точках псевдосферы, мы будем иметь силы, направленные по
линиям, ортогональным семейству геодезических кривых, про-
веденных под прямым углом к направлению равнодействую-
щей силы. При этом для всякой такой ортогональной линии
силы и параметры пар постоянны. В случае существования
§ 4
О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ
511
одной пары будем иметь для различных точек псевдосферы
пары и силы, направленные по геодезическим кругам, имею-
щим центром центр равнодействующей пары, причем на этих
кругах силы и параметры пар постоянны. Наконец в третьем
случае, когда центр пары лежит в бесконечности, для различ-
ных центров пары будем иметь силы, направленные по орто-
гоналям к семейству геодезических линий, пересекающихся
в бесконечности. Во всех точках этих ортогоналей сила и
параметр пары равны между собой и постоянны.
Если бы нам была дана какая-нибудь система сил, прило-
женных к материальной псевдосферической площадке, то, отме-
тив на площадке какую-нибудь точку О, мы могли бы пере-
нести в эту точку все силы, прибавляя при этом пары
с центром О. Потом следует сложить геометрически все силы
и алгебраически параметры всех пар (параметру пары будем
приписывать знак по тому же правилу, как моменту пары на
плоскости). Получим равнодействующую силу R и пару с пара-
метром L. Эти последние сила и пара заменяются, как было
сейчас указано, одной силой или одной парой.
§ 4. Мы будем называть центром инерции псевдосфери-
ческой площадки материальную точку, отличную от центра
ее тяжести и играющую при
движении псевдосферической
площадки по поверхности
псевдосферы ту же роль,
какую играет центр инерции
плоской материальной пло-
щадки при ее движении по
плоскости. Мы можем ска-
зать, что центр инерции при
движении плоской материаль-
ной площадки в ее плоскости
есть точка, обладающая тем
свойством, что при враще-
нии площадки около этой точки все импульсивные силы (ко-
личества движения) сводятся к паре.
Подобным образом мы будем называть центром инерции
псевдосферической площадки такую точку, при вращении около
512
О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ
§4
которой все импульсивные силы сводятся к паре, имеющей
рассматриваемую точку центром. Пусть О будет представлять
в указанном смысле центр инерции данной материальной пло-
щадки. Проведем через него (фиг. 9) две взаимно ортогональ-
ные геодезические линии ОХ и OY и выразим, что все им-
пульсивные силы, происходящие при вращении площадки около
этого центра, сводятся к паре с центром О. Для этого надо
написать, что сумма работ всех этих сил при бесконечно ма-
лых поступательных перемещениях вдоль осей ОХ и OY будет
нулем:
т sh (~ | ch ( ~ ) cos (и)=0,
\г/ \г)
V т sh ( —) ch ( “ ) cos (а)—О,
\Г ] \ г I
(43)
где сумма распространяется на массы т всех точек фигуры,
а значения букв В, iq, р, а, р указаны на фиг. 9. Подобно тому
как центр инерции плоской фигуры есть точка, относительно
которой момент инерции фигуры есть минимум, центр инер-
ции псевдосферической фигуры есть точка, для которой сумма
/=2msh2(^) (44)
есть минимум (при этом легко усмотреть, что параметр пары
импульсивных сил при вращении около центра О» определяе-
мом параметром есть: L = г&1).
Для доказательства этого, подвинув точку О на оси ОХ
на некоторое пространство 8%, выразим, что приращение
суммы I от этого передвижения есть нуль:
Но из чертежа видно, что
8р = — 8х cos (г),
§ 4
О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ
513
поэтому
V т sh
cos (а) — 0.
OY, докажем справедливость
псевдосферической площадки
которые будем называть глав-
Это есть второе уравнение (43). Подобным же образом,
перемещая точку О вдоль оси
первого уравнения (43).
Вместе с центром инерции
мы будем еще отыскивать оси,
ними осями инерции псевдосферической площадки» Такие оси
суть геодезические линии, обладающие тем свойством, что
для всякого поступательного движения, имеющего такую линию
своей направляющей, равнодействующая импульсивных сил
сводится к силе, направленной
по упомянутой оси.
Пусть (фиг. 10) ось ОХ есть
ось инерции площадки. Импуль-
сивные силы для каждой точки
будут: mw ch^~j . я ккОни должны Z7
давать, слагаясь между собой, О
равнодействующую, направленную
по оси ОХ, и потому сумма работ
этих сил при повороте около всякого центра О, лежащего
на оси ОХ, есть нуль. Напишем это условие:
ccs (Р) = 0.
м
Фиг. 10.
X*
X
V т ch
(45)
Так как это уравнение должно быть удовлетворено для
всякого центра, лежащего на оси ОХ, то мы можем прирав-
нять нулю диференциал его первой части, взятый в предпо-
ложении, что полюс О (фиг. 9) перемещается по оси ОХ на
некоторое пространство Мы получаем:
COS (3) =
т ch
cos (Р) ch
'П
Зак. 2365. — Н. Е. Жуковский Т. I.
33
514
О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ
или
sh I ~ j cos (z) = 0.
(46)
Этими двумя уравнениями (45) и (46) вполне охарактери-
зовано то обстоятельство, что импульсивные силы свелись в этом
случае к силе, направленной по геодезической линии ОХ.
Покажем, что ось инерции является такой геодезической
линией, для которой сумма
Д — т ch2 (yj — т sh2 j (47)
будет минимум (величина импульсивной силы при поступатель-
ном движении вдоль рассматриваемой направляющей со ско-
ростью w будет R — гшЦ).
Для этого предположим сначала (фиг. 9), что ось ОХ по-
вернулась около некоторой точки О на угол 3/, и приравняем
изменение Д, происшедшее от этого поворота, нулю:
но
sh ( — ) sin (z) — sh V
\r) \r J
поэтому
zn sh — j sh ~ j cos (z') = 0.
Это есть уравнение (46).
Далее составим изменение Ii9 происходящее от замены
геодезической линии ОХ геодезической линией О'Х', отстоя-
щей от ОХ на кратчайшее расстояние ОО' = Sqq',
5 V msh2( — ) =23nq'V т sh ( —ch ch (—) =0.
Jhd \ r J ** \ r) \r J \ r J
Ho
sin (z*) ch = cos p; sh^yj = sh j sin (z’),
поэтому
yj m sh j ch j cos(P) = 0.
Это есть условие (45).
§4
О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ
515
Таким образом задача об определении центра инерции
сводится к отысканию на псевдосферической площадке точки,
для которой сумма / имеет минимум, а
нии оси инерции сводится к отысканию
линии, для которой сумма имеет
минимум. Решение этих двух задач
можно вести аналогичным образом.
Отметив на псевдосферической фи-
гуре произвольную точку О (фиг. 11),
проведем через нее геодезическую ли-
нию ОХ. Пусть искомый центр инер-
ции занимает положение N или иско-
мая ось инерции имеет положение ND,
где угол OND прямой. Мы определим
тот или иной элемент геодезическим
расстоянием а и углом а. Каждую ма-
териальную точку М псевдосферической площадки мы будем
определять геодезическим расстоянием МО=Ь и углом р.
На основании известных формул псевдосферической три-
гонометрии можем определить расстояния MN = р и MD = т),
задача
на
об определе-
геодезической
ней
О
Фиг. 11.
входящие в наши формулы (44) и (47), таким образом:
ch (—) = ch( — ) ch ) —sh( — sh ( — cos(P— «),
\ r / \ r I \ r J \ r I \ r I
sh P ) = sh P j cos (MNO) =
(48)
(49)
(50)
33*
516 О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ § 4
Формулы (50) позволяют нам представить выражения (48)
и (49) так:
ch ) = zz" — хх"—уу", (48')
sh ( ^ ) = z'z" — х'х"—у'у". (49')
Отсюда определяем выражения, нужные для составления
сумм (44) и (47):
Sh2 ( = (zz" — ХХ" —уу")* — 1 =
= (zz — хх"—уу")* — (х2 + у* — z2) (х"2+у”2 — z"2) =
= х2 (z"2—у"2)+у* (z"2 — х"2) 4- Z* (х"2 + у"2) —
— 4yzy"z!' — 4zxz"x" + Чхух"у",
ch2 j = (z'z' — х'х" —у'у")2 4~ 1 =
== (z'z" — хх"-у'у")2 - (х'2+у'2 - Z'2) (х"2+у"2 - z"2) =
= х'2 (z"2 —у"2) + у'2 (z"2 — х"2) 4- z'2 (х"2 +• у"2) —
— Чу' z'у"z" — 4z'x'z"x" 4- Чх'у'х!'у".
Совершая подстановки в формулы (44) и (47), введем обо-
значения:
Л = 2т(/'2-Л
В=2тР-Л.
С=2»Р+Л
D^my"z",
E = ^mz"x",
F = ^mx!'y".
Мы увидим, что интересующие нас суммы I и Zj выра-
зятся одинаковыми формулами (первая—через х, zf а вто-
рая—через х', zf):
I — Ах2 4“ + Cz2 — "IDyz — 2Ezx + <lFxy —
-F(x,y,z),
I^Ax'2 + By'2-\-Cz'2 — 4Dy'z' — 4Ez'x' + 4Fx'y'= 1 }
= F'(x , y', z').
Теперь нам надо отыскать минимум выражений I и под
условиями:
z2 — X2— у2 —1=0, |
z'2 — х'2—у2 4-1 = 0. J
(53)
§ 4
О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ
517
Это приводит нас к уравнениям:
dF dF' , ,
^_—2kx = 0, зЧ— 2Хх=0;
дх дх
^ — 2^ = 0, —2Г/ = 0;
ду * ду’
dF dF' , ,
4- 4- <2\z = 0, -fr + 2 V zr = 0,
dz 1 dz 1
(54)
показывающим, что искомые величины х, у9 z или х , у' 9 zr
можно рассматривать как координаты точек прикосновения
поверхностей семейства эллипсоидов
F(x, у, z) = const
с гиперболоидами вращения (53) (вследствие положительно-
сти I и Д форма F положительна). Таких точек прикоснове-
ния будет шесть, по две симметричных относительно начала
координат. Одна пара точек прикосновения будет лежать на
двуполом гиперболоиде, данном первым уравнением (53), и
две пары—на однополом гиперболоиде, данном вторым урав-
нением (53). Точки прикосновения на двуполом гиперболоиде
определят нам значения х, у, z для центра инерции, а точки
прикосновения на однополом—значения х', yr, zr для двух
осей инерции.
Мы найдем на основании формулы (50) один вполне опре-
деленный центр инерции псевдосферической площадки и две
вполне определенные оси инерции ее.
Из трех действительных корней получаемого из формул (54)
кубического уравнения, определяющего X, один корень X будет
соответствовать центру инерции, а два других, X' и X",—
осям инерции.
Умножаем первую группу уравнений (54) соответственно
на х\ у'> zf и складываем, а вторую группу—на х, у, z и
тоже складываем; потом составляем разность найденных сумм.
По сокращении получим:
(К — {zz' — хх' — у у') = 0.
Так как X не равно X', то по необходимости
zzr — хх — уу' — 0.
518
О ДВИЖЕНИИ псевдосферической фигуры
§ 4
Величины (х, у, z) на основании формул (50) определяют
точку псевдосферы, соответствующую центру инерции, а ве-
личины (х', у', z') определяют подошву ортогонали, опущен-
ной из данной точки О на ось инерции. Примем на нашей
фиг. 11, что первая точка есть Му а вторая есть N. Тогда
в формуле (49') надо изменить х", у", z" на х, у, z (центру
инерции будут соответствовать теперь полярные координаты
Ь и Р), что дает нам:
(ТП \
у I = zz — х х —у'у — 0.
Отсюда = 0, и ось инерции ND должна проходить через
центр инерции М.
Сделанное рассуждение показывает нам, что обе оси инер-
ции псевдосферической площадки пересекаются в центре ее
инерции. Легко увидеть, что это пересечение происходит под
прямым углом. Написав вторую группу уравнений (54) для
х , у', z , характеризующих первую ось инерции, и для вели-
чин х", у\ z", характеризующих вторую ось инерции, соста-
вляем из них, подобно предыдущему, соотношение:
(г - V') (УZ - х'х"-у'у") = 0,
из которого усматриваем, что
zrz' — хх" —уг у’ — 0.
Пусть на фиг. 11 точки N и М суть подошвы перпенди-
куляров, опущенных из О на оси инерции, причем (х\ у', z')
определяются по формулам (50), а величины (х", у", z") суть
(50')
Предположив на фиг. 11, что угол OMD будет прямой,
а угол D какой-нибудь, определим этот последний угол по
формуле псевдосферической тригонометрии:
cos (D) — — sh I у I sh
\ Г / \ r J \ r )
cos (p — a),
§ 5
О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ
519
которая в силу указанных значений х, у', z'f х\ у", z может
быть написана еще так:
— cos (£>) = z'z" — х'х" —у'у" = 0.
Это показывает, что угол D есть прямой угол.
Таким образом для всякой псевдосферической площадки
существует центр инерции, через который проходят две
взаимно ортогональные оси инерции.
Если на фиг. 9 принять точку О за центр инерции и на-
править оси ОХ и OY по осям инерции площадки, то функ-
ция F(x, у, z) в формулах (52) будет:
F(x, у, z) = Ах* 4- By* + Cz\ (52')
так как только при этом условии уравнения (54) удовлетво-
ряются (первая группа—при условии х = р = 0, z = 1, а вто-
рая группа—при условиях z — у' = 0, х = 1 или zr = х = 0,
у’ = 1)-
Мы имеем при главных осях инерции соотношения:
L> = £ = F=0. (51')
§ 5. Посмотрим, какие перманентные движения может иметь
псевдосферическая фигура по инерции. Если материальная
точка массы тп движется по псевдосфере по направлению
линии "р = const с постоянной скоростью, выраженной одной из
формул (4) при постоянном значении , то проекция силы ее
инерции (центробежной силы) на касательную плоскость
к псевдосфере будет направлена по линиям <7 = const и выра-
зится с помощью живой силы Т известной формулой:
р'=-^(А+;г“;г(Т7 <55>
dt \др / др др\ 2 / '
При этом для трех упомянутых видов движения мы будем
иметь:
Т = %- r2ch2f-^)w2
2 \ г /
7’ = -^ r2sh2 f — ) <о2
2 \ г /
(56)
520 О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ § 6
Вторые части этих формул, поделенные на г, предста-
вляют нам потенциальные функции центробежной силы Р.
Ес/и речь идет о перманентном вращательном движении, то
для уравновешивания между собой всех центробежных сил,
приложенных к точкам материальной площадки, необходимо
выбрать центр вращательного движения так, чтобы сумма:
г2<°2 V но ( \ _ 7
2 т shj ( г ) ~ 2
распространенная на все точки площадки, имела минимум. На
основании предыдущего параграфа такой точкой является
только центр инерции площадки.
Подобным же образом отыскание направляющей поступа-
тельного движения, при котором все силы инерции уравнове-
шиваются, сводится к отысканию на поверхности площадки
такой геодезической линии, для которой сумма:
w2r2 1 о / \ f2w2 t
есть минимум. Мы видели, что существуют только две такие
линии, представляющие оси инерции пластинки.
Что касается третьего вида движения — вращения около
бесконечно удаленного полюса, то он не может представить
перманентное движение, потому что здесь, как легко усмо-
треть из формулы (55) и последней формулы (56), все цен-
тробежные силы будут иметь величину:
тге~2р (-377)
\ at /
и будут направлены по линиям q = const от бесконечно уда-
ленного полюса вращения, вследствие чего они не могут
уравновеситься.-
§ 6. Перейдем теперь к общему случаю движения псевдс-
сферической площадки по инерции. Мы могли бы для этой
цели воспользоваться уравнениями движения площадки в форме
Лагранжа, которым при надлежащем выборе параметров можно
бы дать вид, аналогичный виду уравнений Эйлера для дви-
жения твердого тела около неподвижной точки. Но более
простое и наглядное решение вопроса может быть получено
§ 6
О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ фигуры
521
из принципа сохранения импульсивной силы или импульсив-
ной пары. Пусть имеем систему материальных точек тп, тп ,. .
которые могут перемещаться, только
оставаясь на псевдосфере, и связаны
еще какими-нибудь условиями, допу-
скающими всякие поступательные и
вращательные перемещения нашей си-
стемы. Проведем (через точку О две
взаимно ортогональные геодезические
линии ОХ и 0Y (фиг. 12). Если по-
ложение точки тп будем определять
с помощью координат р и у согласно
первой формуле (3), приняв ось ОХ
за линию р = 0, то на основании на-
чала Даламбера можем написать для
мещения r^q по направляющей ОХ-.
ч'
о
Фиг. 12.
поступательного пере-
S<7
d
mdi
Отсюда, полагая
df
w и интегрируя, получаем:
V ‘ ио [ Ъ \ R
\ тп civ I — | w = —,
\ г / г
где R — постоянная величина; также получаем:
(57)
(57')
Если же примем точку О за начало полярных координат
в системе, выраженной второй формулой (3), то, записав
условие равенства нулю работ всех сил инерции при элемен-
тарном повороте около полюса О,^найдем:
У 7nsh2f-^U = A. (57")
—* \ г I г '
Постоянные во все время движения импульсивные силы /?,
направленные по ОХ и OY\ и импульсивная пара с параме-
тром L и центром О, слагаясь между собой, приведут нас,
вообще говоря, или к одной равнодействующей импульсивной
силе, или к одной равнодействующей импульсивной паре
522 О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ § 6
с определенным центром. Эта сила или эта пара остаются
неизменными во все время движения системы. Говоря о дви-
жении неизменной псевдосферической площадки, отметим на
псевдосфере геодезическую линию, пэ которой направлена
соответствующая начальному движению площадки импульсив-
ная сила, или точку, являющуюся центром импульсивной пары.
Эта сила или пара останутся неизменными во все время
движения.
Выполнение этого принципа для неизменной псевдосфери-
ческой площадки является достаточным условием правильно-
сти найденного движения. Так как в случае равномерного
вращения около центра инерции или равномерного поступа-
тельного движения вдоль одной из осей инерции импульсив-
ные пара и сила сохраняются, то упомянутые движения суть
перманентные. Это было иначе доказано в § 5. Составим
теперь живую силу псевдосферической площадки при каких-
нибудь поступательном и вращательном движениях, опреде-
ляемых параметрами w, w19 относительно осей ОХ и 0Y
(фиг. 12).
Разлагая скорости точки т от поступательных движений
(фиг. 11) на составляющие, направленные по р, и составляю-
щие, перпендикулярные этой линии, можно написать:
v*
w ch
cos (Р) — Wj ch
cos (a) <° sh
Ho по формулам псевдосферической тригонометрии имеем:
у j sin (?) = cos <р,
cos (a) = ch I — ) cos %
ch sin (a) — sin (<?),
cos (?) — cos h f — j sin (<?),
ch
ch
§ 6
О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ
523
поэтому
^2
_ — [w CQS sJn (<p)j2
Р
4- ы ch I —) sin (?) — zu{ ch ( — jcos (?) 4" °* sh
= w2 ch2
2 ch2
COS2 (?) 4"
sin2(?) 4~
sin2 (?) —
— 2w<& ch
4~ 2w ю ch
sin (?) —
— 2wwt sh2
sin (<p)cos(<p).
Умножая эту формулу на и беря сумму, распростра-
ненную на все материальные точки площадки, найдем, поль-
зуясь обозначениями (51):
7*2
Т == (Выл 4- + Со>2 — 2Еы4“ 2Z)wo) — 2FwW]). (58)
Допуская, что в рассматриваемый момент времени оси
инерции площадки (фиг. 12) совпадают с нашими неподвиж-
ными осями ОХ и OY, получим по (51х) упрощенное выра-
жение живой силы:
г2
Т = -у (Вы2 + А ы2 + Со>2).
(58')
Частные производные по ы, ыъ ш от формул (58) и (58х),
поделенные на г, дадут нам составляющие Rr импульсив-
ной силы и параметр L импульсивной пары. Выражая живую
силу с помощью /?, и L, найдем:
Г== - J + с£2).
(59)
524
О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ
§ 6
Так же найдем для каких-нибудь осей О' Y' и О'Х', имею-
щих произвольное начало О', определяемое по главным осям
координатами (£, т():
Г = у (b'R’*-j-а -j- c'L'2 + +
-1- 2e'L'R' + 2f'R'R^. (60)
Теперь постараемся выбрать при данных (;, tq) угол
характеризующий направление О'Х', так, чтобы в формуле (60)
получилось:
/=0. (61)
Чтобы получить формулу (60) из формулы (59) надо вы-
разить компоненты R, Rt, L импульсивных сил, взятые для
координат XOY, по компонентам тех же сил R', Rt', L', взя-
тым для координат X' О' Y', и подставить их величины в фор-
мулу (59).
Это можно сделать на основании сказанного в § 3.
На фиг. 13 усматриваем, что
R = R' ch
sin (40 sin (?) -р cos (ф) cos (?) +
cos (ty) sin (?) Ц- sin (40 cos (?)
— ch I — I sin (40 cos (?) cos (40 sin (?) -4-
ch
cos (40 cos (?) 4~ sin (40 sin (?) —
(62)
p
— L' sh t Icos ?,
L — R' sin (40 sh | ) — /?/
P
§ 6
О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ
525
Для нашей цели нужно по этим формулам составить
только / , т. е. коэфициент в выражении (60) при R'R^.
Этот коэфициент будет такой:
sin (г>) sin (?) 4~ cos (’]>) cos (?) X
cos (^) sin (?) + sin (ty) cos (?) 4“
sin (^) cos (?) cos (ty) sin (?) X
X ch I — j cos (^) cos (?) 4“ sin ($) sin (?) —
— c sh2 ( ~ j cos (ф) sin ('4 = 0.
Фиг. 13.
Это уравнение служит для определения $ по данному
положению точки О'. Ему можно дать следующий более про-
стой вид:
(а — b) tg2 ch ( ~~ j cos (?) sin (?) 4~
4~tg<p | c sh2 j 4~
ch2
cos2 ?
4~ CL ch2
cos2 ? — sin2 ?
— (a — b) ch ( ~ j cos (?) sin (?) = 0.
(64)
526 О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ § 6
Мы получаем отсюда два направления, соответствующие
осям О'Х' и O'Y'. Вообразив на поверхности псевдосферы
два семейства линий, касательные которых имеют эти на-
правления, постараемся составить диференциальное уравне-
ние этих семейств. Вместо ? и р введем новые переменные:
у — sh (j sin (?),
x = sh
(65)
Мы получим:
Но из чертежа (фиг. 13) видно, что
г sh I — ) cfcp
------------------------= — tg .
cfp---------------------s т
(66')
Подставляем сюда величину г
определенную
из фор-
мулы (66):
ch
dx
14~ -г- tg ?
1 dx ‘
(67)
§ 6
О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ
527
Это выражение вставляем в формулу (64):
sin (ср) cos (ср) tg (ср) —
(а — b) ch2
sin2 (с?) — cos2 (ср) —
cos
X tg(?) —
-
du I2
— (а — Ь) cos (ср) sin (ср) 1 4" tg (ср)
= 0 (68)
и отбираем в полученном уравнении коэфициенты при раз*
личных степенях
[ФА
\dx / *
Коэфициент при
будет такой:’
cos2 ср (а
tg (?) — ь ch2 ( у j tg8 (?) + b tg (?) —
— a ch2 jtg (?) -р «tg8 (?) — (а — b) tg8 (?) j —
— с sh2 j tg(?) == — (b -j- c) sh2 f-y-j tg (?),
cty
коэфициент при такой:
cos2 ? | — 2 (a — b) ch2 (
tg2(?) —
— b ch2 I ) [1 — tg2 (?)] tg2 (?) 4-6(1 — tg2 (?)] —
— a ch2 ( j [1 — tg2 (?)] 4- a tg2 (?) [1 — tg2 (?)] —
— 2 (a — b) tg2 (?)| — c sh2 ( у j [1 —• tg2 (?)] =
= COS2 cp
— (a — b) ch2 ( j tg2 (cp) 4~ b ch2 ( ~ j tg4 (cp) -4-
528
О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ
§ 6
-f- Ь — a ch2 () — a tg4 (?) — (а — tg2 (?)
dy
наконец, определяя коэфициент, независимый от —, полу-
чаем:
cos2 Ср
(а — b) ch2 (*“ I С?) 4“ СЬ2
7-) tg8 (?) — b tg (?) +
+ ach9 (у) tg(?) — a tg3(?) — (a — 6)tg(?) +
-j- с sh2 (у) tg (?) = (a -j- c) sh2 /у j tg (?).
Принимая во внимание найденные величины коэфициентов
и умножив полученное равенство на cos’2 (ср), мы сейчас же
найдем возможность по формулам (65) заменить р и <р через
х и у. Таким образом найдем для определения уравнения
искомых семейств взаимно ортогональных линий диферен-
циальное уравнение:
(Ь-\-с)ух +(а — Ь с) х^ — (Ь~\- с) у2] ^х~
— с) ху == 0. (69)
Для интеграции этого уравнения надо сделать подста-
новку:
X = U, у = ]fv,
dy^ л/~ dv
dx у v du9
§6 О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ 529
которая дает:
— (6 — с) — (а + с) У uv = О
и по разделении на
— приводится к виду:
?и Ка — 6) + (а + с) и — ~ с) —
— (a -f- с) v — 0.
Решая последнее уравнение относительно v и положив
dv
для сокращения письма = р, найдем диференциальное
уравнение в форме Клеро:
_ j_________р(а —6)
V PU (а + с)+Р (* + с)
(70)
Общий интеграл этого уравнения будет такой:
V Ии + (а + с) + |*(6 + с) ’
где р-— постоянное. Его можно
написать еще так:
и
а — Ъ
V
у-(а —6)
(a + c) + [i(6 + c)
1.
Возвращаясь к переменным х и у, найдем:
-------------*---------1 ----------------= 1. (71)
а — b------------------рь (д — о)
(« + с) + и (Ь + с) (а + с) + р(^ + с)
Если рассматривать х, у как декартовы координаты на
плоскости, то уравнение (71) представит нам два семейства
эллипсов и гипербол. Принимая а > 6, будем получать эл-
а-4-с „
липсы при р- < — j-.и гиперболы с действительною осью
Зак. 2365. — И. Е. Жуковский. Т I.
34
530
О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ
§ 6
OY при > 0. Полуось эллипсов и гипербол на оси OY
выражается формулой:
а — Ь
Уо =
(а + с)
При = zt ос эта полуось есть ; с уменьшением
абсолютной величины р она увеличивается для эллипсов и
уменьшается для гипербол, как это представлено на фиг. 14.
Указанные семейства линий, уравнения которых мы получили,
рассматривая х и у как декартовы координаты, не взаимно
ортогональны; приписывая же х и у значения, данные ура-
внениями (65), и рассматривая кривые на псевдосфере, мы
получим два семейства взаимно ортогональных линий, распо-
ложенных так же, как это показано на фиг. 14.
Легко усмотреть, что уравнение (71) может еще быть пред-
ставлено в виде:
у2
----<1 L- ' I
а — л о — л с — А
(72}
Фиг. 14.
где z — ch j. Действи-
тельно, подставив в урав-
нение (72)
Z2 — 1 -f - х2 -|- у2,
найдем:
»>2
xla + XET1- (7Г>
а + с Ь-\- с
Здесь всегда можно
определить параметр и,
удовлетворяя одновремен-
но двум уравнениям:
а — ____________а — Ь_______ X — Ъ______ у-(а — Ь)
а-}-с («~Ь с) + н (64~fc)’ Ь-\-с (а+ 4?) + ^(6 +с)’
(73)
§6 О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ 531
В форме (72) наше уравнение является аналогичным ура-
внению (1) для семейства соответственных ортогональных
линий на сфере.
Когда семейство линий (71), удовлетворяющих условию
(61), вычерчено на псевдосферической площадке, тогда реше-
ние вопроса о ее движении по инерции при существовании
одной импульсивной силы сейчас же
получается.
Проводим (фиг. 15) на неподвиж-
ной псевдосфере геодезическую ли-
нию О'X', направленную по рав-
нодействующей импульсивных сил.
Помещаем псевдосферическую пло-
щадку в ее начальное положение и
отмечаем из вычерченного на ней
семейства линий, данных уравне-
нием (71), линию O'Nt прикасаю-
щуюся к О'Х'. Выразив живую силу
относительно осей X' O'Y' по формуле (60), будем иметь в
рассматриваемый момент времени
Z/ = 0, /' = 0.
Параметры, характеризующие движение площадки, будут:
w = r(b'R' -\-f' R/ е'L') = rb R',
= г (f'R' + a'R/ + d'L') = 0,
со ^r(e'R'+d'R/+c'L')==re'R'.
(74)
Эти формулы показывают нам, что все движение пло-
щадки сводится к поступательному движению по О'Х' и
к вращению около точки прикосновения О'. По прошествии
Времени df линия О'N будет прикасаться к О'Х' новой точ-
кой О". Взяв новую ось O"Y' ортогонально О'Х', мы повто-
рим сделанное рассуждение и т. д. Таким образом придем к за-
ключению, что все движение площадки будет представляться
качением подвижной (сгибающейся по закону псевдосферы)
полодии O'N по геодезической линии О'Х' и посту-
пательным движением площадки по направлению О'X'. По-
следнее поступательное движение будет иметь постоянный
34*
532
О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ
§7
параметр w, так как по теореме живых сил имеем из фор-
мулы (60):
b'R'* = const,
и вследствие постоянства Rr сделаем заключение о постоян-
стве Ь для всех точек линии O'N\ постоянство же R' и Ьг
дает по первой формуле (74) постоянство w.
§ 7. Рассмотрим теперь случай, при котором все импуль-
сивные силы приводятся к одной паре.
Для решения задачи в этом случае надо отыскать семей-
ство линий, во всех точках которых
d '=0.
(75)
По формулам (64) и (60) получим:
d' = b sh (-Ц
\ г /
Р
sin (?)
— ch
cos (<р) sin (?) 4~
Р
cos (?) ch I — ) cos CP) cos (?) Ц-
+ sin (<р) sin (?) — с sh
cos (<р) = 0. (76)
Это уравнение, служащее для определения <р, приводится
соотношению:
[(а 4“ с) cos2 (?) + (b + с) sin2 (?)] ch j sh (“7“) +
+ (a — b) tg CP) sh f j sin (?) cos (?) = 0. (77)
Подставляя сюда tg(<p) из формулы (66) и умножая на
получаем диференциальное уравнение:
2[(а4~с) cos2(?)-j-(6с) sin2 (?)] sh ch ("7") (~) —
— 2 (а — b) sh2 (j sin (?) cos (?) с/? — 0,
интегрируя которое, находим:
(а4~ с) sh2 (— j cos2 ? 4“ (b 4~ с) sh2 (j sin2 ? = const. (78)
§ 7
О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ фигуры
533
С помощью переменных х и у это уравнение предста-
вляется так:
(а + с) х2 + (b -f- с) у2 — const.
(78')
Если бы х и у были декартовы координаты на плоскости,
то уравнение (78') представляло бы нам семейство подобных
эллипсов, имеющих центром центр инерции пластинки. Ана-
логичные кривые будут представлять на псевдосфере уравне-
ние (78). Воображаем, что эти кривые соединены с рассма-
триваемой материальной пластинкой и отметим ту из них Of N
(фиг. 15), которая в рассматриваемый момент времени прохо-
дит через центр О' импульсивной пары. Направив оси X' Or Y'
так, как представлено на фиг. 14, будем иметь:
Я'=0, 7?/ = 0, <' = 0.
Вследствие этого формулы (74) заменятся на следующие:
w = re'L,
wi = о,
О) = rc'L'.
(74')
Все движение пластинки в бесконечно малый промежуток
времени dt, прилегающий к рассматриваемому моменту вре-
мени, будет слагаться из вращения около точки О' и из
поступательного движения, направляющая которого О'Х'
прикасается к кривой O'N в точке О'. От этих движений
псевдосферическая площадка переместится так, что по про-
шествии времени dt некоторая точка О" кривой O'N всту-
пит в неподвижный центр О', так что для следующего про-
межутка времени dt мы можем повторить наши рассуждения
и т. д. Во все время движения кривая О'N, неизменно соеди-
ненная с площадкой, будет скользить через точку О'. Вра-
щение около центра О' будет при этом совершаться с по-
стоянным параметром <». Действительно, теорема живых сил
для рассматриваемого случая представится в виде [см. фор-
мулу (60)]:
c'L'2 — const;
отсюда мы делаем заключение о постоянстве с для всех
точек кривой O'N и на основании третьей формулы (74)
убеждаемся, что не изменяется все время движения.
534 О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ ФИГУРЫ § 8
§ 8. Случай, в котором все импульсивные силы приво-
дятся к паре с бесконечно удаленным центром, должен быть
подвергнут особому исследованию. Проведя ортогональ О'М
(фиг. 15) к семейству геодезических линий, идущих к беско-
нечно удаленному центру, заменяем импульсивные силы силой R'
и парой с параметром L'9 причем для всех точек ортого-
нали, принимаемых за центр пары, R' и L' постоянны и равны
между собой. Отыскиваем теперь на поверхности площадки
такое семейство линий, во всех точках которых
/' + <Г = 0, (79)
и предполагаем, что в начальный момент времени одна из
кривых O'N этого семейства прикасается к упомянутой орто-
гонали О'М. Приняв точку прикосновения О за начало
координат X'O'Y', указанных на фиг. 15, будем иметь вслед-
ствие R = L' и /?/ = 0 по формулам (74):
w = г (b' -f- е) R'9
= 0,
= г (е Ц- с) R'.
(74')
Отсюда по предыдущему придем к заключению, что все
время линия O'N будет катиться по ортогонали О'М и
скользить поступательными движениями, направленными по
касательным к этой ортогонали. При этом сумма параметров
-{-ф будет величиной постоянной, потому что по теореме
живых сил
Ь' -j- с' -j- 2е' = const. (80)
Мы не приводим здесь вывод уравнения семейства линий
удовлетворяющих уравнению (79), так как это уравнение
выходит довольно сложным. Заметим здесь, что оно могло бы
быть получено и без интегрирования, прямо пользуясь фор-
мулами (79) и (80), из которых следует исключить tg
§ 9. Мы теперь видим, какое различие получается в дви-
жении по инерции плоской и псевдосферической материальной
площадки. Если считать, как это делал Лобачевский, что
плоскость есть псевдосфера с очень малой отрицательной
кривизной и прямая линия есть геодезическая линия псевдо-
§ 9
О ДВИЖЕНИИ ПСЕВДОСФЕРИЧЕСКОЙ фигуры
535
сферы, тогда закон инерции остается верным только для
материальной точки. Материальная же фигура конечных раз-
меров будет, вообще говоря, двигаться по инерции так, что
центр ее тяжести пойдет не по геодезической линии, а по
некоторой волнистой кривой. Только при двух вполне опре-
деленных направлениях импульсивной силы были бы воз-
можны движения центра тяжести по кратчайшему пути с по-
стоянной скоростью.
Работа „О движении материальной фигуры по поверхности псевдо-
сферы* была сообщена автором 23 апреля 1902 г. в заседании Москов-
ского математического общества и напечатана в „Трудах Отделения физи-
ческих наук Общества любителей естествознания, антропологии и этно-
графии", т. XI, вып. 2, 1902. Прим. ред.
ON THE MOTION OF A MATERIAL PSEUDOSPHERICAL FIGURE
ON THE SURFACE OF A PSEUDOSPHERE
The problem of motion of a material plane figure on a plane
in Lobachevsky space is equivalent to the real problem in Eu-
clid’s space of motion of a material flexible lamina on the sur-
face of a fixed pseudosphere. The last problem is, in its turn, analo-
gous to the problem of motion of spherical figure on the surface
of a sphere or to that of rotation of a solid about a fixed centre.
The analogy between the above problems is used by Prof. Jou-
kovsky in his analysis of motion of a pseudospherical lamina
on the surface of a pseudosphere. First he considers the kine-
matics of such motion. Three kinds of motion of a pseudosphe-
rical figure can be distinguished:
1. Translation in which the points on a given geodesic Iiney
called the directrix of the translation, move with a constant velo-
city rw
— being the curvature of the pseudosphere and w
parameter J, all the other points moving along lines equidistant
from the directrix with velocities rwch where c? = the dis-
\r J
tance of the point from the directrix.
2. Rotation, in which one point of the figure, termed the pole,
remains fixed, while all the other points move along pseudo-
spherical circles with a velocity sh j, being the parameter
and d=the geodesic distance of the point from the pole.
3. Rotation about an infinitely distant centre. In this motion
all points of the figure move along lines orthogonal to
a family of geodesic curves intersecting at infinity, the ve-
locity of the points being we т 9 where w = the parameter and
SUMMARY
537
d = the distance of the point from the orthogonal curve, on
which the velocity is equal to w. Every small displacement of
the pseudospherical figure on the surface of a pseudosphere is
reduced to one of the three kinds of motion above indicated.
Prof. Joukovsky next proceeds to a detailed discussion of
the composition and resolution of the different kinds of motion.
Every motion may be regarded as composed of a rotation about
arbitrarily chosen centre and a translation about an axis through
this centre.
Passing to the discussion of the problems of compostition
and resolution of forces, Prof. Joukovsky considers only the
forces applied at points of the pseudospherical figure and ac-
ting in the tangent plane of the pseudosphere, since the forces
normal to the surface are balanced by the reactions. The action
of a force is unaffected if its point of application be transferred
along the line of action, i. e. along the geodesic line passing
through the point of application and tangent to the force. To
transfer the point of application of a force P to a point O'
that does not lie in the line of action of the force it is neces-
sary to draw through the point O' a geodesic orthogonal to the
line of action, OO' (Fig. 7), to transfer the force P to the
point O', and to apply at O' two equal and opposite forces
P —P ch (OO directed along the perpendicular to OO .
Thus a force P applied at O', will be obtained and a combina-
tion of forces (P, P) which Prof. Joukovsky terms a couple
with the centre at O' and with the parameter M= P sh j .
The work of a couple in a translation of a pseudospherical
figure having the directrix passing through О is zero. The
couple may be turned about its centre O' without changing its
effect, and the point О can be moved away from O', provided
the parameter M is unchanged. Several couples having a com-
mon centre may be compounded into a single couple, of which
the parameter is equal to the algebraic sum of parameters of
the couples compounded.
Making use of these properties of the couples every system
of forces applied to the figure may be reduced to a resultant
538
SUMMARY
force Pat an arbitrarily taken point О and a couple with centre at
О and the parameter M. This system is, in its turn, reduced
either to a single force, if P> M, or to a single couple, if P<M,
the centre of the couple moving at infinity if P=M.
The point, in rotating about which all the impulsive forces
are reduced to a couple having the point considered as its
centre, is termed the centre of inertia of a pseudospherical ma-
terial figure.
The centre of inertia does not coincide with the centre of
gravity; it makes the sum /— 2 m sh2 (Fig. 9). a mini-
mum. The principal axes of inertia are geodesic lines having
the property that for each translation in which one of such
lines is a directrix the resultant of the impulsive forces is redu-
ced to a force directed along the axis named. For an axis of
inertia Ц — 2 ти ch2 J (Fig- Ю) 1S a minimum.
If instead of the polar geodesic coordinates p and a the
coordinates x, y, z are introduced (Fig. 11) defined by formulae (50)
and as the coordinates of a geodesic line are taken the quan-
tities x', y\ z\ given by the same formulae (50), in which in this
case a is the length of a geodesic line, perpendicular from the ori-
gin to the geodesic, and a is the angle of the perpendicular
with the x-axis, the coordinates of the centre of inertia and
the principal axes of inertia will be determined from equations
(54) and (53).
The equations show that there exists only one centre of
inertia and two mutually perpendicular axes of inertia passing
through this centre. A translation due to inertia can take place
only along the principal axes of inertia, and a rotation only about
the centre of inertia.
In the general case of motion due to inertia there is to be
noted the geodesic line on the pseudosphere along which is di-
rected the impulsive force corresponding to the initial motion,
on the point which is the centre of the impulsive couple. The
force and the couple named remain unchanged curing the
motion.
By means of the above theorem of conservation of the im-
SUMMARY
539
pulsive force or of the impulsive couple the problem of motion
of the lamina is solved as follows.
If the impulsive forces are reduced to a resultant, draw on
the fixed pseudosphere a geodesic line О' X' along the resul-
tant and on the moving lamina draw a set of curves given by
equation (71), where — variable parameter, a,b,c — coefficients
in the expression of the kinetic energy (59) in terms of the
impulsive force (/?, Rr) and of the couple (L) referred to the
principal axes of inertia. Place the pseudospherical lamina in
its initial position and mark in the set of curves (71) the line
O'N tangent to O'X' (Fig. 15). The motion of the lamina will
be represented by the rolling of the movable polhode (bending
according to the pseudospheric law), O'N, over the geodesic
line O'X' and the translation along O'X'. The parameter of the
translation will be constant.
If all the impulsive forces are reduced to a single couple, draw
on the movable lamina a set of curves given by equation (78')
and mark the one (O'N in Fig. 15) passing through the centre
O' of the couple. The curve O'N moving with the lamina will
slide through O' and will rotate about the centre O' with a
constant parameter <*>.
ГЕОМЕТРИЧЕСКАЯ ИНТЕРПРЕТАЦИЯ ТЕОРИИ ДВИЖЕНИЯ
ПОЛЮСОВ ВРАЩЕНИЯ ЗЕМЛИ ПО ЕЕ ПОВЕРХНОСТИ
(1904 г.)
§ 1. Теория движения полюсов вращения земли по ее
поверхности развивалась главным образом с помощью анали-
тических исследований. Наиболее существенные стороны этой
теории разработаны, по моему мнению, Дарвином \ Воль-
терра 1 2 3 и Haugh’oM Дарвин исследовал влияние на движение
полюсов земли перемещения ее масс, изменяющее ее гира-
ционный эллипсоид, Вольтерра разработал вопрос о переме-
щении полюсов в зависимости от постоянных циклических
(по замкнутым траекториям) движений находящихся на земле
жидкостей, a Haugh объяснил эффектом упругости земли
удлинение периода Эйлера в период Чендлера. В прошлом,
1903 году появилась в печати третья тетрадь сочинения Клейна
и Зоммерфельда „Theorie des Kreisels", в которой предлагается
остроумный геометрический прием для разъяснения эффекта
упругости земли на удлинение периода обращения полюсов.
В том же году была напечатана работа П, К. Штернберга 4,
начало которой представляет обширную монографию теорети-
ческих исследований различных авторов о перемещении полю-
сов земли, а конец посвящен обработке наблюдений над изме-
нением широты Московской обсерватории.
1 Darwin, On the Influence of Geological Changes on the Earth’s-Axis
of Rotation, Philos. Trans., Vol. 167.
2 Vollterra, Acta Mathematica, 22/3, 22/4.
3 Haugh, The Rotation of an Elastic Spheroid, Philos. Trans., V.
4 П. К. Штернберг, Широта Московской обсерватории в связ»
с движением полюсов, Москва 1903.
§ 2
ИНТЕРПРЕТАЦИЯ ТЕОРИИ ДВИЖЕНИЯ ПОЛЮСОВ
511
В предлагаемой статье я даю однообразную геометри-
ческую методу изложения всех вышеупомянутых пунктов
теории движения полюсов земли, опирающуюся на принцип
сохранения главного момента количеств движения. При этом
заслуживает внимания указание на шестилетний период, под-
тверждающееся наблюдениями над широтой Московской
обсерватории, и упрощение анализа Haugh’a над удлинением
периода Эйлера в период Чендлера.
§ 2. Период Эйлера. ПусТь уравнение
z2 _ 1
С ~ М
х^ + у2.
А
(1)
которых эта по-
фиг. 1.
представляет поверхность гирационного эллипсоида земли.
Обозначим (фиг. 1) через Р, J и G точки, в
верхность пересекается: осью Oz, мгно-
венною осью вращения и главным момен-
том количеств движения. По известному
свойству гирационного эллипсоида, мгно-
венная ось вращения OJ будет перпенди-
кулярна к касательной плоскости, при-
касающейся к гирационному эллипсоиду
в точке G, а радиус OG будет величиной
постоянной во все время движения. Бу-
дучи неподвижной в пространстве, точ-
ка G перемещается вдоль поверхности
эллипсоида по параллельному кругу ради-
уса OG sin со скоростью <». OG sin X (oj — угловая скорость
вращения земли, и и X суть углы, указанные на фигуре) против
направления стрелки часов для наблюдателя, глядящего
от северного полюса. Время Т, в которое точка G, а следо-
вательно, и точка J (по данному построению J лежит на одном
меридиане с G) опишет круг около полюса инерции Ру будет
дано формулой:
При малой эксцентричности земного эллипсоида угол X
звыходит весьма малым (X — 0,001/), угол у-, представляющий
542 ИНТЕРПРЕТАЦИЯ ТЕОРИИ ДВИЖЕНИЯ ПОЛЮСОВ § 2
отклонение точки G или J от Р, как показывают наблюдения,
есть тоже небольшая величина (не превосходящая 0,3"), по"
этому при определении отношения синусов можно взять отно-
шение самих дуг. Определим это отношение, представив
уравнение (1) в полярном виде:
A=.^(l+scoS^), (3>
где г—радиус-вектор, 0 — широта, а
Эта последняя величина называется сжатием земного сфе-
роида. Так как
М Q.M
где а — экваториальный, а с — полярный радиус сфероида, то
а2 — с2
е = —
cfi —|- с2
или приближенно
Формула (3) при малом г может быть приближенно пред-
ставлена в виде:
r j/ лИ1"^0526]’ (3)
На фиг. (1) видно, что
tg X = — s cos 0 sin 6
при 6 — — и. Делая эту подстановку, находим с прибли-
жением
sin и 1
tg X X е 9
откуда по формуле (2);
т=— —. (7)
W £
§ з ИНТЕРПРЕТАЦИЯ ТЕОРИИ ДВИЖЕНИЯ ПОЛЮСОВ 543
Если за единицу времени при определении Т возьмем
звездные сутки, то
О)
у» 1
£
(5)
Сжатие земли, как это следует из геодезических измерений
и из вычислений лунно-солнечной прецессии (в ней фигури-
рует момент пары от силы притяжения материальной точки
на землю, зависящий от вели-
чины г), равняется 1/зо&> поэто-
му Т = 305 суткам. Таким об-
разом при абсолютной твер-
дости земли мгновенный полюс
вращения описывал бы около
ее оси инерции маленький кру-
жок в 305 суток. Число 305 на-
зывается периодом Эйлера.
§ 3. Влияние на движение
мгновенного полюса вращения
земли переноса масс, не изме-
няющего А и С, но изменяю-
щего расположение оси гирационного эллипсоида относи-
тельно части земли, считаемой недеформируемой» Предпо-
ложим, что недеформируемая часть земли соединена с неболь-
шой сравнительно массой, перемещающейся относительно
недеформируемой части так, что А и С не изменяются, но
положение оси гирационного эллипсоида ОР (фиг. 1) всего
вещества земли относительно недеформируемой его части
изменяется. Пусть ОР' будет направление оси инерции не-
деформируемой части земли, относительно которой ось ОР
отклоняется на некоторый малый переменный угол v. Движе-
ние оси ОР относительно твердой части земли может быть
или периодическим, как это имеет место относительно пере-
носа масс, связанного с временами года, или совершающимся
в одном направлении, как это имеет место в случае геологи-"
ческих процессов.
"544 ИНТЕРПРЕТАЦИЯ ТЕОРИИ ДВИЖЕНИЯ ПОЛЮСОВ § 3
Отметим (фиг. 2) на сфере радиуса с, соединенной с твер-
дой частью земли, место точек Р', Р, G и J, которые пред-
ставляют пересечения выше упомянутых направлений с этой
сферой, и постараемся определить движение на этой сфере
точки G (а следовательно и точки J) по данному движению
чГОЧКИ Р.
Пусть, для простоты, точка Р движется по дуге большого
круга, проходящей через точку 7х.
Так как точка G попрежнему будет неподвижна в про-
странстве (мы предполагаем, что главный момент количеств
движения в движении относительно твердой части земли есть
нуль или очень малая величина вследствие медленности пере-
носа массы), то ее относительная скорость GQ будет перпен-
дикулярна к GP и будет иметь величину:
GQ = ^GJ=^~PG = «*PG,
которую, на основании формулы (2Z), можно представить в виде:
GQ = ^PG.
Построим треугольник GQQ', подобный треугольнику
GPP , и разложим с помощью его скорость GQ на две
скорости:
GQ' = — GP\
QQ'=^PP.
Первая из этих скоростей перпендикулярна радиусу Р' G
и может быть включена в равномерное вращение с угловой
2^
скоростью -уг некоторых осей СО$ (прямая Ос параллельна
F'G) около точки Р', вследствие которого начало О этих
осей описывает окружность с центром Рг.
§ 3 ИНТЕРПРЕТАЦИЯ ТЕОРИИ ДВИЖЕНИЯ ПОЛЮСОВ 545
Относительно осей точка G имеет скорость QQ'9
которая дает по направлению этих осей компоненты:
ей 2^ DDf / 2~f \
cos^,
</С 2К D ту . / А
причем предположено, что при t = 0 ось О; перпендикулярна
к направлению РР, так что -у есть угол между О; и Q'Q.
Допуская, что полюс инерции Р движется по гармони-
ческому закону, положим:
РР — k sin
Р>
а,
где 7\ есть годичный период.
Уравнения (6) дадут нам:
t 2nk С / 2к
* ' 1 ~ I COS I rjr-
r 2^k С . / 2?
= -y~~ I Sin I
и приведут нас при определении постоянных аир под усло-
вием, что при Z = 0 имеем:
I л
\ Т— Т1 r+ Ti ) ’
с = о,
Г,
к следующим формулам:
$ = — — -
5 2 L
+ - cos
2
/ у________у
COS 2^1 -----ууу--1
т— тг
sin ^2^/ —1
sin { 2r.t
ТТ.
(8)
В § 2 была дана для Т величина 305 суток, т. е. около
12 месяцев; ниже будет показано, что вследствие упругости
Зак. 2365. — И. Е. Жуковский. Т. I.
35
546
ИНТЕРПРЕТАЦИЯ ТЕОРИИ ДВИЖЕНИЯ ПОЛЮСОВ
§ 3
земли период Т должен быть несколько более, что согласно
с наблюдениями, которые дают Т около 14 месяцев. Положив
Т— 14 месяцев, 7\ = 12 месяцев, найдем:
Т—7\ =6, Г+Л =0’46-
Это показывает, что вторые члены в формулах (8) не-
значительны сравнительно с первыми и могут быть перед
ними отброшены. Сделав это, найдем, что точка G описывает
на подвижных осях SOC около начала О окружность радиуса
£ — А _—А— (9)
2 Г—Т/ W
вращаясь на нашей фигуре по стрелке часов и совершая
оборот во время
т2=т т72т. (1°)
Любопытно заметить, что вследствие Т% — 6Т следует
ожидать трехлетний период, разделяющий наибольшие и наи-
меньшие изменения широт, происходящие от движения полюса.
Это совпадает с таблицей, данной в сочинении П. К. Штерн-
берга для изменения широты Московской обсерватории.
Переходим к предположению:
РР =k(l — e^)9
(И)
которое соответствует геологическим процессам.
§ 4
ИНТЕРПРЕТАЦИЯ ТЕОРИИ ДВИЖЕНИЯ ПОЛЮСОВ
547
Формулы (6) дают нам:
Р . 2~t
« = к sin ~уг~
2~к
~Т~
е~№
C)'T7t О?? Отг/
2^ 2^t Q . 2itt
2-t . 2*к _ы Т cos Т ~₽ s,n Т
2~
Т
(12)
С возрастанием времени вторые члены этих формул прибли-
жаются к нулю, и мы получаем:
, , . 2^
с = к sin -777-
С = —к cos
2^t
~Т'
(12')
При t большом формула (11) дает РР = к; формулы (12')
показывают, что при этом (фиг. 2) четыреугольник Р' OGP
обращается в параллелограмм, т. е. движение точки G пере-
ходит к вращению около нового полюса инерции Р.
§ 4. Влияние на движение полюсов вращения земли
циклических движений некоторой части ее массы, кото-
рые, не изменяя гирационный эллипсоид земли, дают в
относительном движении некоторый постоянный момент
количеств движения.
В этом случае вектор Gu представляющий главный мо-
мент количеств движения всей системы, будет геометрически
слагаться из вектора G, который представляет главный мо-
мент количеств движения твердой и подвижной части земли
в их общем движении, и из вектора G2, который представ-
ляет главный момент относительного движения масс, движу-
щихся относительно твердой части земли. Предполагая, что
передвижение масс имеет циклический характер, т. е. совер-
шается в замкнутых каналах, придем к заключению, что век-
тор G2 имеет постоянную величину и постоянное направле-
ние относительно твердой части земли; вектор Gt имеет по-
стоянную величину и постоянное направление в пространстве;
35*
548
ИНТЕРПРЕТАЦИЯ ТЕОРИИ ДВИЖЕНИЯ ПОЛЮСОВ
§4
что касается вектора G, то его величина и направление от-
носительно осей xyz, неизменно связанных с твердою частью
земли, получают некоторые малые изменения со временем.
Принимаем за оси xyz те, к которым отнесено уравнение (1),
и называем чрез шз проекции на эти оси угловой ско-
рости и чрез х, у, z координаты точки G, в которой век-
тор G пересекает поверхность гирационного эллипсоида (фиг. 4).
Мы можем написать:
~G
оа-
_С<03
~ G
. OG,
Z
. OG.
Фиг. 4.
Подставляя эти величины в уравнение (1), получаем:
G2
OG-з [А (V + О + Сш./] == , (13)
где М—масса твердой части земли
и вещества, участвующего в цикличе-
ском движении. Величина, стоящая в
скобках, представляет двойную живую
силу всей этой массы в ее вращатель-
ном движении с угловой скоростью
Назовем эту двойную живую силу
через А. В гидродинамике доказывается,
что при циклическом движении жид-
кости с потенциалом скоростей вся
*
живая сила системы слагается из %- и из живой силы жидкости
в ее относительном циклическом движении. При отсутствии
трения вся живая сила системы постоянна, а также
живая сила относительного циклического движения
вследствие этого А постоянно.
Формула (13) дает нам:
OG==—^=.
V Mh
постоянна
жидкости:
(14)
Проведем чрез точку О вектор OG2, имеющий величину
OG2 =
g2
V Mh
(14)
§ 5
ИНТЕРПРЕТАЦИЯ ТЕОРИИ ДВИЖЕНИЯ ПОЛЮСОВ
549
и направленный в сторону, прямо противоположную вектору
G2, и соединим точки G2 и G. Вектор G2G будет, очевидно,
направлен по вектору Gt и будет иметь такую постоянную
величину:
G2G = —.... ...
у/ Mh
(14")
В силу сказанного мы можем построить траекторию точки G
(а следовательно и весьма близкой к ней точки J) таким
образом: проводим из точки G2 постоянным радиусом G2G
сферу и определяем линию ее пересечения с поверхностью
гирационного эллипсоида; эта линия пересечения и будет
искомая траектория точки G. Эта траектория будет, вообще
говоря, иметь несимметричное расположение относительно
полюса инерции Р. Но дело в том, что при подсчете момента G2
для возможных циклов на поверхности земли или внутри
ее и по разделении этого момента на громадную величину
j/ Mh мы получаем чрезвычайно малую величину OG2 (сравни-
тельно с OG); точка G2 почти совпадает с О, и путь точки
G получается почти по параллельному кружку, как это было
сказано в § 2.
§ 5. О равновесии вращающегося жидкого эллипсоида.
Прежде нежели перейдем к определению эффекта упругости
земли на изменение периода 7\ изложим в краткой форме
определение связи между сжатием е и угловой скоростью
со при вращении около оси симметрии жидкого эллипсоида
вращения, весьма близкого к сфере. Пусть
х2 -f- Ц2 । z2
а2 с2
(15)
будет уравнение этого эллипсоида, причем полярная полу-
ось с, около которой совершается вращение с угловой ско-
ростью весьма близка к экваториальной полуоси а. Выра-
зим уравнение (15) в полярных координатах:
г2 с2
--------COS2 6
а2
550 ИНТЕРПРЕТАЦИЯ ТЕОРИИ ДВИЖЕНИЯ ПОЛЮСОВ § 5
и положим приближенно:
а2 —с2
cP
2^—
а
далее обозначим чрез R радиус сферы, имеющей объем,
равный объему рассматриваемого эллипсоида вращения, и
выразим с по R:
1--z«
Это позволит нам написать вышеприведенное полярное
уравнение поверхности эллипсоида в следующей упрощенной
форме:
r = R
/ 2
1 + г I cos2 6----—
(16)
Обратимся теперь к определению потенциальных функций
U и U' рассматриваемой жидкой массы на внутреннюю и
внешнюю точку. Везде внутри поверхности (16) мы должны
иметь:
Д2(/ = — 4^хр,
где х — коэфициент притяжения, а р— постоянная для всей
массы плотность жидкости; во всех точках вне поверхности (16)
мы должны иметь:
а2^'=о,
а в бесконечной дали
Г
на поверхности эллипсоида должны быть выполнены условия:
dU = dU'
dr dr
Легко усмотреть, что мы удовлетворим первым трем усло-
виям положениями h
1 Надо обратить внимание на выражение второго диференциального
параметра:
л „ 1 Г d ( 9dU\ , 1 d f ft dU\l
§ 5
ИНТЕРПРЕТАЦИЯ ТЕОРИИ ДВИЖЕНИЯ ПОЛЮСОВ
551
(17)
Что же касается четвертого и пятого условий, то им
можно удовлетворить подбором постоянных а, р, Согласно
этим условиям мы должны при г, определенном по формуле (16),
удовлетворить уравнениям:
M*r \ а ( 9А 2\ ТИх Зу / 2 \
---^H-2ar^cos26— -3 )= — “7-^cos26 —
Подставляем сюда г из формулы (16) и отбрасываем члены
порядка е2 и высших степеней, а также произведения еа и еу,
так как а и % окажутся порядка е. Это дает нам:
Написанные соотношения удовлетворяются при
ЗЛ/х
т = aR5,
3 Мкг I
а 5 R3 ‘ |
(18)
Подставляя эти значения г коэфициентов в формулы (17),
найдем искомый потенциал. Для внутреннего потенциала бу-
дем иметь:
U--
2/^+5 Я3 sr‘
ЗЛ/х
2 R '
(19)
552 ИНТЕРПРЕТАЦИЯ ТЕОРИИ ДВИЖЕНИЯ ПОЛЮСОВ § 6
На поверхности эллипсоида, т. е. при г, определенном из
формулы (16), эта функция будет такая:
U — 1 — тг е I cos2 6 — — ) . (20)
л [ з \ э / J
Теперь надо составить силовую функцию для центробеж-
ной силы. Эта функция, отнесенная к единице массы, будет
такая:
1 /?2 / 2
V = 0)2 (х2 у2) == — О)2 I cos2 6 — —
£ £ \ о
(21)
Гидростатическое давление р определяется по известной
формуле:
р = р(6Г+1/) +const. (22)
Для того, чтобы это давление было постоянно гна по-
верхности вращающегося эллипсоида, необходимо удовлетво-
рить условию:
(23)
6 4 М* '
Считая, что земля отвердела из жидкого состояния, най-
дем на основании сказанного в этом параграфе следующую
величину сжатия земли:
5(^R
4 g ’
е =
(24)
где g— напряжение тяжести при поверхности земли. Под-
ставляя в формулу (24) соответственные числовые значения,
получим j
6==232’
(25)
Это число несколько более того, которое соответствует
периоду Эйлера, что объясняется неоднородностью земли.
§ 6. Период Чендлера. Из вычислений над непосредствен-
ными наблюдениями по перемещению северного полюса Ченд-
лер 1 нашел, что период его обращения надо принять равным
427 звездным суткам (14,1 месяца). Это увеличение периода
объясняется упругостью земли (ее податливостью эффекту
1 Chandler, “Astronomical Journal", 1891—1902.
§ 6 ИНТЕРПРЕТАЦИЯ ТЕОРИИ ДВИЖЕНИЯ ПОЛЮСОВ 553
центробежной силы). Предположим, что земля отвердела из
жидкого состояния, при котором она была в равновесии при
вращении около оси Oz (фиг. 5) с угловою скоростью <о.
Отклонения ее частиц от этого положения будут вызывать
упругие силы. Пусть ось вращения земли сместилась из по-
ложения OPf в положение OJ. Если бы земля была жидкой,
то ее форма изменилась бы так,
ния направилась бы по оси О/,
но так как упругие силы пре-
пятствуют относительному пе-
ремещению частиц земли, то
форма ее изменяется менее и
сделается эллипсоидом враще-
ния с осью ОР.
Напишем выражение потен-
циала центробежной силы в об-
щем виде:
что ось эллипсоида враще-
И = [ш2 (х2 + у2 + Z2) (“1-V + <»2У + “з2)2]
и положим для нашего случая, что
= 0) -j- v), U>2 — 0, <03 — в),
где |х и v суть малые углы, указанные на фиг. 5. Мы получим!
v= + У2 - 2 (V + ц) xz]. (26)
Часть этого потенциала
V' = ^[x*+y*-2vxz] (27)
соответствует центробежным силам при вращении около оси
ОР. Так как эта ось есть по предположению ось симметрии
деформированного эллипсоида, то при значении сжатия е, дан-
ном формулой (24), мы будем иметь равновесие между упомя-
нутыми центробежными силами и ньютонианским притяжением.
554 ИНТЕРПРЕТАЦИЯ ТЕОРИИ ДВИЖЕНИЯ ПОЛЮСОВ § 6
Для уравновешивания сил упругости останется система сил
с потенциальной функцией:
S== — (28)
Пусть и9 v, W будут упругие смещения частиц земли, ве-
щество которой мы будем считать несжимаемым, и будем по-
лагать в выражениях нормальных и тангенциальных сил упру-
гости: N, N19 N.29 Т9 Т19 Т2 пуассоново отношение
При этом известные формулы:
7V=-^_ ~ ди _ 7)6 Т- Е , I dw dv \
1+7J . дх 1 1 — 2rJ , L 2(1 W ду dz /
примут вид:
7V=|.E~ —р, Т’=4Е (тг- + -7г)’ (30)
3 дх г 3 \ ду 1 dz / ' '
где р— есть некоторая функция координат, представляющая
предел, к которому стремится дробь
Е т]6
1 + т) 2т] — 1
Величину р можно рассматривать как добавочное гидро-
статическое давление, уравновешивающееся вследствие не-
сжимаемости жидкости. Везде внутри земли должны быть
удовлетворены три условия равновесия вида:
dN , дТ. , д7\ , Ж
дх ' ду ' dz дх ’
которые на основании формул (30) и (23) и условия несжи-
маемости
9 = ^4--^+-^ = °, (31)
дх ду dz 9
дадут нам:
Е д 3 Д2« = (Р + P“2HXZ) , Е д 0 У = ~ду 'Р P“J(1X2'’ Ел / I 2 ч 3" A‘2W ~dz 'Р р“ Р*2' • (32)
§ 6 ИНТЕРПРЕТАЦИЯ ТЕОРИИ ДВИЖЕНИЯ ПОЛЮСОВ 555
Искомые весьма малые смещения u, v, w должны быть
такими функциями координат, чтобы первые части формул (32)
были частными производными по координатам некоторой функ-
ции, чтобы везде внутри массы удовлетворялось условие (31),
а на свободной поверхности тангенциальные и нормальные
силы были равны нулю. Так как свободная поверхность в рас-
сматриваемом случае весьма близка к сфере радиуса R, то
для всех точек этой сферы мы должны иметь: скошение пря-
мых углов между радиусом сферы и ее касательной есть
нуль и
2Е J(8r)
-Т~Тг—Р~°’
(33)
где or есть проекция смещения точки на ее радиус-вектор г.
Мы удовлетворим всем упомянутым условиям положе-
нием:
и = (а Рг2) z Ц- Чх • xz,
v = yy • xz,
w — (а рг2) х 4" iz • xz,
(34)
где а, р и 7 суть коэфициенты, подлежащие определению.
Условие (31) приводит к уравнению:
xz (4р + 5у) = О,
которое удовлетворяется при
₽ = -|т. (35)
Для выражения условия, характеризующего отсутствие
скошения вышеупомянутых прямых углов, вообразим три весьма
близкие точки (х, у, z), (х1? ylf zt), (х2, у2, z.?), из которых
первая лежит на конце радиуса R, вторая — на направлении
того же радиуса на расстоянии &R от первой, а третья — на
касательной к шару радиуса R, параллельной плоскости yz,
на расстоянии от первой точки.
До смещения частиц угол между Д/? и Д/ прямой, вслед-
ствие чего
(Х1 — х) (х.3 — х) + (yt — у) (у>—у) + (z, — z) (z2 — z) = О. (36)
556
ИНТЕРПРЕТАЦИЯ ТЕОРИИ ДВИЖЕНИЯ ПОЛЮСОВ
§ 6
Так как упомянутый угол должен остаться прямым и после
смещения частиц, то приращение второй части уравнения (36)
от смещения частиц должно быть нулем.
Напишем это, заметив, что проекции по осям координат
весьма малых векторов А/ и &R суть:
пР®(д0 = 0, прд. (ДА?) = ДА! у,
прг (ДО = - д I ’ ПР* (д/?) = д* - •
y#2-f-z2 Г
Мы получим:
Подставляя сюда выражения смещений из формул (34),
после сокращения найдем:
— *У [2 (а+₽г2) 4- к2 + 2М = 0. (36")
Это условие должно быть удовлетворено при r = Rf
откуда
2а = — /?2(7+ 4р). (37)
Если бы мы выразили, что скошение прямого угла между
вектором А/? и вектором А/', параллельным плоскости ух»
есть нуль, то по симметрии формул (34) относительно осей Ох
и Oz нашли бы, что это условие приводит к такой же фор-
муле, как (36"), только надо будет ху заменить на zy. Таким
образом условие (37) характеризует, что скошен ия прямых
углов между вектором А/? и двумя векторами, прикасающимися
к сфере радиуса R, суть нули. Этим охарактеризовано, что
скошения всех прямых углов между направлением радиуса
и касательными к сфере суть нули, а следовательно на сво-
бодной поверхности рассматриваемого тела нет тангенциаль-
ных усилий. Чтобы показать, что на этой поверхности нет
нормальных усилий, мы должны оправдать уравнение (33), для
чего надо определить функцию р.
§ 6 ИНТЕРПРЕТАЦИЯ ТЕОРИИ ДВИЖЕНИЯ ПОЛЮСОВ
557
Прежде этого обнаружим, что смещения, выраженные фор-
мулами (34), обращают первые части уравнений (32) в частные
производные по координатам от некоторой функции коор-
динат.
Составляем по формулам (34) величины вторых диферен-
циальных параметров от смещений:
V = (Юр + 27) z = К10₽ + 2Т) xz],
A2t, = 0=^[(10₽ + 27)x4
Д2а> == (Юр + 2Т) х = [(Юр + 2т) xz].
Мы видим, что указанное условие внутри рассматривае-
мого тела удовлетворено и что, на основании формул (32),
Е
p — xz (10₽ + 2?) -j — р<о2и.
Это выражение может быть на основании соотношения (35)
представлено в таком простом виде:
(7Б \
—Т — P“V)• (38)
Чтобы составить условие (33), надо еще определить про-
екцию смещения на радиус-вектор г; она будет на основании
формул (34) такая:
8г = [2(а + Рг2) + тг2] ^ = [2«г + (2р + т)^]у • \ . (39)
Производная от этого выражения по г берется, обращая
х z
внимание на то, что— и — при этом надо считать постоян-
г г
ными:
^У=(2« + (37 + 6?)Н^.
Относя эту формулу к свободной поверхности (r — R) и
воспользовавшись соотношениями (37) и (35), получим:
558 ИНТЕРПРЕТАЦИЯ ТЕОРИИ ДВИЖЕНИЯ ПОЛЮСОВ § 6
Подстановка формул (38) и (40) в условие (33) дает нам:
xz Г19™ . 9 1 п
6-Е7 + р“2Р-|=0.
Отсюда следует, что
19 Е
(41)
Формулы (41), (35) и (37) позволяют нам определить
введенные в перемещения (34) коэфициенты 7, <х. Так как
при этом мы удовлетворили все внутренние и граничные
условия, то рассматриваемая задача по теории упругости ре-
шена. Для разрешения вопроса о периоде Чендлера нам важно
будет найти отношение между малыми углами v:
Угол v соответствует положению радиуса-вектора ОР, ко-
торый в деформированном эллипсоиде имеет наименьшую ве-
личину.
Мы имеем по замене в формуле (16) угла 6 на — v
(S S \
1 —------COS 2v ) ;
О Z j
с другой стороны по формулам (39), (37) и (35)
Р3 у sin 2v.
4
Вследствие этого радиус-вектор деформированного эллип-
соида выразится так:
r-[-8r = Р
е 1 / Ч
1 —&---------2 (е cos —2 (2V)
Вторая часть этой формулы будет иметь наименьшую ве-
личину при
е sin 2v тР2 cos 2v = 0,
т. е. при
le2, S&
* 2 е
§6
ИНТЕРПРЕТАЦИЯ ТЕОРИИ ДВИЖЕНИЯ ПОЛЮСОВ
559
Так как угол v по предположению мал, то эту формулу
можно написать так:
<42>
На основании формул (41) и (42) искомое отношение углов
может быть представлено в виде
v sz
рь 8 ’
где
^_15 /?2<»2р
S ~ 38 Е ’
Так как на фиг. 5 ось вращения OJ
не совпадает с осью инерции деформи-
рованного эллипсоида ОР, то эта ось вра-
Фиг. 6.
щения не будет перманентною осью, а будет медленно изме-
нять свое место. С точки зрения теории упругости это прои-
зойдет оттого, что мы удовлетворили поверхностнее условие
равновесия только с приближением, принимая рассматриваемую
массу за сферу радиуса R. Для точного удовлетворения по-
верхностных условий на поверхности эллипсоида вращения
пришлось бы присоединить к центробежным силам инерции
еще силы инерции, зависящие от перемещения в пространстве
мгновенной оси вращения.
Так как эти последние силы инерции будут малыми вели-
чинами порядка s2, то мы можем при определении упругих
смещений для данного момента времени эти силы отбрасывать,
как это было сделано выше; для решения же вопроса о дви-
жении в теле мгновенной оси вращения мы можем пользоваться
положенным в основание нашей методы исследования прин-
ципом неизменности главного момента количеств движения,
считая, что движение, соответствующее упругим деформациям,
дает исчезающий момент. При этом для всякого найденного
положения оси вращения мы будем воображать соответственные
(по формулам 34) упругие смещения.
Пусть на фиг. 6 точки: J, G, Р' и Р представляют соответ-
ственно точки пересечения: мгновенной оси вращения, главного
560 ИНТЕРПРЕТАЦИЯ ТЕОРИИ ДВИЖЕНИЯ ПОЛЮСОВ § 6
момента количеств движения, оси инерции недеформированной
и оси инерции деформированной земли со сферою радиуса с,
которую считаем соединенной с недеформированной землей.
Рассуждая как в § 2, приходим к заключению, что точка G
будет иметь по упомянутой сфере движение со скоростью • G/,
перпендикулярной к Р J, вследствие чего она будет описывать
круг около точки Р', двигаясь против стрелки часов с угловою
скоростью
<о. GJ
GP' *
Время же обращения по этому кругу будет:
г _ 2к GP _ 2~ GP GP _ 2^GP
1 GJ GJ* GP mGP'
n 1
При измерении времени звездными сутками дробь — вы-
ражает время Т обращения полюса земли, считая ее абсолютно
твердой. Точка G чрезвычайно близка к /, вследствие этого:
GP JP + v , v е'
GP~ JP ~ ’
Сказанное позволяет написать формулу:
Т' е'
±. = 1+-. (44)
Таким образом упругость земли удлиняет период обраще-
ния полюса. Так как период Чендлера Т' —14,1 месяца, а
период Эйлера Т = 10 месяцам, то
^- = 0,4. (45)
Эта формула служит для определения предполагаемого
1
модуля упругости земли Ь; мы можем здесь принять е =
и подставить теоретическую величину s', или же — заменить
s' и е их теоретическими величинами, делая предположение,
что неоднородность земли уменьшает как е, так и е' в оди-
§ 6 ИНТЕРПРЕТАЦИЯ ТЕОРИИ ДВИЖЕНИЯ ПОЛЮСОВ 561
накэвое число раз. В последнем предположении, на основании
формул (24) и (43), получим:
169^=0-4' <«>
Отсюда найдем величину Е, близкую к модулю упругости
стали. Это согласно с вычислением средней упругости земли,
сделанным Томсоном на основании данных по приливам и
отливам морей.
Работа „Геометрическая интерпретация теории движения полюсов вра-
щения земли по ее поверхности* была сообщена автором 17 октября 1903 г.
в заседании Отделения физических наук Общества любителей естествознания,
антропологии и этнографии и была напечатана в „Трудах Отделения физи-
ческих наук", т. XII, вып. 2, 1904 Прим. ред.
Зак. 2365. — Н. Е. Жуковский Т. I.
S6
A GEOMETRICAL INTERPRETATION OF THE THEORY OF MOTION
OF POLES OF ROTATION OF THE EARTH ON ITS SURFACE
In this paper Prof. Joukovsky develops a uniform geometri-
cal method allowing to investigate the influence on the displa-
cement of the poles of the earth on its surface of the elasticity
of the earth as well as of the displacement of masses, either
changing the position of the gyrational ellipsoid with respect to
the non-deforming portion of the earth, or having a cyclic motion.
The geometrical method is based on the principle of conserva-
tion of the principal moment of momentum.
In Fig. 1 is shown the gyrational ellipsoid whose axis is
taken as the rz-axis; OG is the principal moment of momen-
tum, and OJ is the instantaneous axis of rotation. Since by the
principle of conservation of the moment of momentum the point
G remains fixed in space, its relative velocity with respect to
the non-deforming portion of the earth will be, owing*to the
smaPness of angles л and J1
a) • OGsin X = cd • OGsin рь—— = cd OG • sin p- — = cd • PG • г,
sin рь p,
where e —------ is the contraction of the earth. If the earth
a
were absolutely rigid, this velocity would be constant and the
points G and J would describe on the surface of the earth a cir-
cle in a time
2-PG ^20
tnPG • s co e 1
which is Euler’s period.
A displacement of masses on the surface of the earth, taking
place without affecting the principal moments of inertia but brin-
ging about a change of position of the axis of gyrational ellipsoid
with repeat to the non-deformed portion of the earth, causes
SUMMARY
563
the pole P of the gyrational ellipsoid to move with respect to
the pole P' of the non-deformed portion of the earth. Hence
the relative velocity of G, GQ, can be resolved into two com-
ponents, one being the velocity of rotation about the pole P9
GQ' = a) • e * GP, and the other QQ = co • e • PP. The first of the
two components, directed at right angle to P'G9 can be inclu-
ded in the uniform rotation with angular velocity -y of the axes
£0^ about P (OE is parallel to P'G), causing the origin О to
describe a circle about P'. The second component, QQ', will
represent the velocity of G with respect to the axes SO*}; its
projections are given by expressions (6). The displacement of P
will be assumed to take place along the arc of the great circle
through P'.
When the motion of P is periodic, following the harmonic
law PfP==ks\n^~ t9 where Tr is the yearly period, equations (6)
are reduced to (8). If we take in these 7\ = 12 months and
T= 14 months (Euler’s period corrected by Chandler), the
second terms become small and the first give a harmonic motion
with a period of 6 years. Hence there must be expected a three-
year period between the maximum and the minimum variations
of latitude due to the motion of the pole — which is in agreement
with the results of observations on the variation of latitude
obtained at the Moscow Observatory.
If the motion of P is not periodic, P'P— k (1—e"^) due to
geological processes, equations (6) lead to formulae (12), in which
the second terms represent damping oscillations. When t is
large, P'P=k9 the quadrangle Pf ОGP becomes a parallelogram,
and the motion of G becomes that of rotation about the pole P.
When a portion of the mass of the earth has a cyclic motion
which does not affect the gyrational ellipsoid and its position
with respect to the earth, the principal moment of momentum
of the whole system, Gt, is equal to the geometrical sum of
vector G of the principal moment of momentum of the rigid and
of the displaced portion of the earth in their common motion,
and of vector G2 of the principal moment of the relative motion
of the masses displaced with respect to the rigid portion of the
36*
564
SUMMARY
earth. Vector Gt has a constant magnitude and a constant di-
rection in space; vector G2— a constant magnitude and a fixed
direction with respect to the rigid portion of the earth. Vector
G is variable both in magnitude and in direction. If all vectors
1
/7ЙЛ
are multiplied by
where M is the mass of the earth
and h = twice the
tional motion, the
kinetic energy of the
end of vector
G_
V'Mh
total mass in its rota-
will lie^on the gyratio-
nal ellipsoid and, owing to the
G
\/Mh
VMh
VMh
G G
fixed distance —from the end of vector —7——, hence it will
VMh VMh
describe on the gyrational ellipsoid a curve obtained by the
intersection of the ellipsoid with sphere described by radius
G G
—r.1 - from the end of vector—л—, Fig. 4. Due to the small-
V Mh VMh
Q
ness of vector —this curve will approximate a circle drawn
yMh
about the pole of the gyrational ellipsoid.
Before considering the influence of the elasticity of the earth
on the displacement of poles. Prof. Joukovsky determines the
relation (23) between the ellipticity e and the angular velocity
in the rotational motion about the axis of symmetry of a liquid
ellipsoid of revolution approximate to a sphere (§ 6). If we now
suppose the sphere to become solidified, then the displacements of
its particles from their initial positions will give rise to elastic
forces. Let the position of the axis of rotation be changed from
OP (the z-axis) to О/, Fig. 5. If the earth were liquid, then its
form would change so as to make the axis of the ellipsoid of revo-
lution to be directed along OJ; due to elastic forces the change
of form will be less and it will become an ellipsoid of revolu-
tion with the axis OP.
The potential of the centrifugal forces in rotating about GJ
(26) can be resolved in two parts (27) and (28). The first part
corresponds to the centrifugal forces of the rotation about OP, which
SUMMARY
565
are balanced by Newtonian attracting forces. The second part
corresponds to forces which must be balanced by forces of
elasticity. The differential equations of the theory of Elasticity,
on assumption that the value of Poisson’s ratio 'G — are re-
duced to equations (32), in which p denotes the limit of the frac-
E 1
tion । —1 f°r ~ *2* ^ese equations and all the boundary
conditions are satisfied by functions u, v, w (34), in which the
constants P, у and the function p are determined by formulae
(35), (37), (38), and (41). From formulae (34) is obtained for-
mula (39) for the displacement of particles along the radius-vec-
tor r, the shape of the deformed surface and the ratio of
angles — = ~ (43).
The point G, Fig. 6, will move about P with a velocity <*> • GJ
making a complete revolution in the time
p MP
1 uGJ ’
whence T': T — 1 —, where T — Euler’s period, and T' =
Chandler’s period. Taking Г'= 14, 1 months and T =10 months,
sz
we obtain — = 0,4 and for the modulus of elasticity of the earth E,
a value near to the elasticity of steel.
СВЕДЕНИЕ ДИНАМИЧЕСКИХ ЗАДАЧ О КИНЕМАТИЧЕСКОЙ
ЦЕПИ К ЗАДАЧАМ О РЫЧАГЕ
(1909 г.)
§ 1. В предлагаемом сочинении дается способ решения
различных динамических задач о кинематической цепи с од-
ной степенью свободы через сведение их на соответственные
задачи о рычаге, представляющем жесткую ферму, имеющую
вид скоростной диаграммы Мора1 с точкой опоры в полюсе
диаграммы.
Изложение начинается с определения скоростей точек
кинематической цепи с помощью скоростной диаграммы и их
ускорений с помощью одной новой диаграммы, которую мы
называем диаграммой центростремительных ускорений.
§ 2 Скоростная диаграмма Мора есть фигура, соответ-
ственная данной кинематической цепи. Соответствие устана-
вливается следующим образом. Взяв (фиг. 1) произвольный
полюс о, проводим через него вектор оа 9 геометрически
равный скорости точки цепи Л, и поворачиваем этот вектор
на прямой угол против часовой стрелки. Получим вектор оа,
конец а которого будем называть изображением точки цепи А
на скоростной диаграмме. Равным образом точку А будем
называть изображением точки а в кинематической цепи. Фи-
гура oabcde, представляющая изображения точек Ог, О2, О3,
О'з, Ох2, О'3 А, В, С, D, Е кинематической цепи, и есть
скоростная диаграмма Мора. При этом все неподвижные центры
вращения О1Э О2, О3 и все мгновенные центры вращения О\,
О'2, О'3, считая их присоединенными к соответствующим
звеньям, изображаются на этой диаграмме одним полюсом о.
Скоростную диаграмму abd... можно получить, построив
1 О 11 о Mohr, Abhandlungen aus dem Gebiete der Technischen Me-
chanik, Berlin 1906.
§ 2 ЗАДАЧИ О КИНЕМАТИЧЕСКОМ ЦЕПИ 567
сначала вспомогательную диаграмму a'b'd'..., а потом повер-
нув эту последнюю около полюса о на прямой угол в сто-
рону, обратную движению часовой стрелки. Это замечание
приводит нас к теореме I.
Теорема I. Прямая be, соединяющая две какие-нибудь
точки скоростной диаграммы, перпендикулярна к относи-
тельной скорости точки цепи С относительно В; при этом,
Фиг. 1.
если В и С лежат в цепи на одном и том же твердом
звене, то Ьс\\ВС и отношение bet ВС равно угловой скоро-
сти звена ВС.
Справедливость теоремы видна из того, что Ь'с' как пря-
мая, соединяющая концы скоростей ob' и ос' точек цепи В
и С, представляет скорость точки С относительно В, причем
если звено ВС твердое, то эта относительная скорость пер-
пендикулярна ВС и имеет величину ыВС.
На основании доказанной теоремы заключаем, что фигура
BCD, составленная из точек, лежащих на одном и том же
твердом звене, подобна соответственной фигуре bed, причем
коэфициентом подобия является [угловая скорость звена
Само построение диаграммы abd.... делается на основании
теоремы J, не прибегая к промежуточной диаграмме a'b'd'....
568
ЗАДАЧИ О КИНЕМАТИЧЕСКОМ ЦЕПИ
§ 2
Проводится из полюса о вектор оа, параллельный OtA и
равный скорости точки А; потом проводится прямая ab па-
раллельно АВ и продолжается до пересечения с прямой ob,
параллельной OJB, через точку Ь проводится прямая Ъс па-
раллельно ВС до пересечения с прямой ос, параллельной О3С;
на Ьс строится треугольник bed, подобный треугольнику BCD*,
через d проводится прямая de параллельно DE до пересечения
с прямой ое, перпендикулярной к направляющим ползуна Е.
Если к кинематической цепи, скоростная диаграмма кото-
рой построена, присоединяются новые точки, привязываемые
двумя стержнями к двум точкам цепи или лежащие на муфте,
скользящей по звену цепи, соединяемой шатуном с точкой
другого звена цепи, то построение изображения таких точек
на скоростной диаграмме может быть выполнено с помощью
проведения через изображения двух точек цепи двух прямых,
перпендикулярных к относительным скоростям новой точки
цепи относительно этих двух старых точек цепи. Это
простое замечание служит основанием к разрешению разнооб-
разных задач о скоростях кинематических цепей.
Рассмотрим несколько примеров.
На фиг. (2) представлен направляющий механизм Поселье
и его скоростная диаграмма. Докажем с помощью этой диа-
граммы, что точка D движется по прямой, перпендикулярной
CfO^. Опустив из о перпендикуляры of и oh на de и Ъс,
усматриваем вследствие одинаковых углов ос подобие:
Л ocf со Д оае,
из которого следует, что
of___________________________ос
ое оа
Таким же способом докажем, что
oh________________________ос
og оа'
Следовательно,
of________________________ oh
ое og'
Эта пропорция обнаруживает подобие
Л oef со Д ogh,
§2
ЗАДАЧИ О КИНЕМАТИЧЕСКОМ ЦЕПИ
569
из которого следует равенство углов, обозначенных на фигуре
буквами р.
Фиг. 2.
Прямая ох, проведенная на скоростной диаграмме парал-
лельно прямой С\Х, указанной пунктиром, делит угол аос
пополам. Так как
а — р = аоЬ — cod,
то эта прямая делит также и угол bod пополам.
570
ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ
§ 2
Но угол box равен углу О^ВОъ, который вследствие
О%В — О2^1 равен углу О2(\В, поэтому
xod = ХОх О2.
Этим доказано, что скорость точки D при всяком положе-
нии механизма перпендикулярна О1О2,т* е. точка D движется
по прямой, перпендикулярной
0102.
На фиг. 3 представлен ме-
ханизм Маркуса1 и его ско-
ростная диаграмма.
Для получения последней
надо вычертить сначала треу-
гольник оаб, стороны которого
параллельны соответственным
сторонам кинематической цепи.
Потом надо на основании тео-
ремы 1 разделить отрезок ob
в отношении
ос__ ОАС
7ъ~~св
и гпровести через точку с пря-
мую cd || CD, а через точку а —
прямую ad || AD. После этого
через полученную точку пере-
сечения d надо провести пря-
мую de |1 DE до пересечения
в точке е с прямой ое, перпендикулярной к направляющим
ползуна Е. Определим по скоростной диаграмме мгновенный
центр вращения звена DE. Этот центр будет изображением О'
на звене DE точки скоростной диаграммы о и получится, по-
строив треугольник DO'E, подобный треугольнику doe.
На фиг. 4 изображен механизм с качающимся цилиндром
и его скоростная диаграмма. Здесь а и с суть изображения
1 Скоростная диаграмма этого механизма исследована в статье
-Л. П. Смирнова „Кинематическое и динамическое исследование многозвенных
шарнирных механизмов", „Бюллетени Политехнического общества”, 1908, № 6.
§ 2
ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ
571
на скоростной диаграмме точки цепи А и точки штока С,
лежащей против шипа, на котором качается цилиндр; самый
же шип изображается на скоростной диаграмме точкой о. Так
как точка штока С имеет скорость, направленную по АС, то
ос перпендикулярно АС. На скоростной диаграмме отмечена
еще точка Ь, изображающая точку штока, лежащую против
сальника В [ей : Ьа — СВ: В А]. Что касается точки Ь', пред-
ставляющей на скоростной диаграмме сальник, то она строится
с помощью относи*
тельных скоростей
сальника относитель-
но шипа и относи-
тельно точки штока,
лежащей против саль-
ника.
На фиг. 5 предла-
гается определить в
указанном механизме
с двумя скользящими
муфтами мгновенный
центр муфты В с по-
мощью построения
скоростной диаграммы. Отлагаем на прямой оа, параллель-
ной От4,"скорость точки А в условленном масштабе и делим
оа в отношении ос: са = ОС: С А.
Проводим ad || AD до”пересечения в точке d с прямой od,
перпендикулярной направляющей муфты D. Делим ad в точке Ь
в отношении ab: bd = АВ: BD.
Точка b .будет изображением на^ скоростной диаграмме
точки шатуна AD, против которой лежит шип муфты. Точку Ь',
изображающую шип муфты, найдем, проводя перпендикуляры
к относительным скоростям точки муфты В относительно
точки шатуна В и точки С. Эта точка будет лежать на пере-
сечении перпендикуляра ЬЪ' к прямой ad и линии cb , парал-
лельной СВ.
Для решения задачи надо построить еще другую точку
муфты, например ту точку, которая пришлась бы против
точки А. Ее изображение найдется по скоростям этой точки
512
ЗАДАЧИ О .КИНЕМАТИЧЕСКОЙ ЦЕПИ
§ 3
муфты относительно точки муфты В и точки Л кривошипа АО.
Это изображение будет в а, причем а! У || аЬ и аа | ab.
Считая полюс о точкой, принадлежащей муфте аЬ'9 строим
его изображение в кинематической цепи, начертив треуголь-
ник В АО', подобный треугольнику У а о. Точка О' будет
искомый центр вращения муфты В.
§ 3. Диаграммой центростремительных ускорений мы на-
зываем фигуру, стороны которой параллельны соответствен-
ным сторонам цепи и равны квадрату длины изображения
этих сторон на скоростной диаграмме, разделенному на длину
сторон в цепи. Для диаграммы центростремительных ускоре-
ний цепи, представленной на фиг. 1, мы получаем длину
стороны (фиг. 6) построением дроби
аналогично и для всех других сторон. При таком построении
§ 3 ЗАДАЧИ О КИНЕМ АТИЧЕСКОЙ*ЦЕПИ 573
все точки, лежащие на одном и том же твердом звене, обра-
зуют в диаграмме центростремительных ускорений фигуру,
подобную соответственной фигуре в цепи с коэфициентом
подобия, равным квадрату угловой скорости звена. При этом
вектор будет представлять центростремительное ускорение
точки С при ее вращении в относительном движении отно-
сительно точки В; вектор же будет представлять абсолют-
ное центростремительное ускорение точки В относительно
неподвижной точки О2. Все точки опоры цепи С\, О2,.. .
изображаются на диаграмме центростремительных ускорений
отдельными точками а2,...
Если в цепь прибавляется новая точка, которая привязы-
вается двумя неизменными тягами к двум точкам цепи, не
лежащим на одном твердом звене, то, проведя на диаграмме
574
ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ
§ 3
центростремительных ускорений параллели этим тягам и
отложив на них от новой построенной точки относительные
центростремительные ускорения, мы, вообще говоря, не полу-
чим длин, равных расстоянию вновь построенной на диаграмме
центростремительных ускорений точки от изображений точек,
к которым она при-
соединена.
На фиг. 7 по-
строена диаграм-
ма центростремитель-
ных ускорений меха-
низма Маркуса, изо-
браженного на фиг. 3.
Построив часть диа-
граммы по вы-
шеупомянутому пра-
вилу, присоединяем
к ней новую точку 8,
являющуюся изобра-
жением на диаграм-
ме центростремитель-
ных ускорений точ-
ки цепи D. Для этого
проводим через точки 7 и а прямые: 78 |] CD, а81| AD, в пересе-
чении которых будет точка 8. Отложив от этой точки по
прямым 8а и 8у расстояния
8а'
da2
~~DA9
8TZ =
de2
~DC’
получим точки а' и у', не совпадающие с а и у.
Эти точки а' и у' мы будем рассматривать как изображе-
ния точек А и С, отнесенных к звеньям DA и DC.
Окончание построения Диаграммы центростремительных
ускорений для механизма Маркуса получится, проведя 8г || DE
и отложив
* de2
ое == -—
DE '
ЗАДАЧИ О КИНЕМАТИЧЕСКОМ ЦЕПИ
575
Фиг. 8.
.576 ЗАДАЧИ О КИНЕМАТИЧЕСКОМ ЦЕПИ § 3
Введем теперь условие, по которому на диаграмме центро-
стремительных ускорений следует строить изображение пол-
зушек. Мы видели (фиг. 5), что часть звена АВ и часть сколь-
зящей по нему муфты
АВ представляются на
диаграмме скоростей от-
резками прямых аЬ и
ab', образующих пря-
моугольник аЬЬ'а') вы-
сота которого bb' есть
скорость скольжения
муфты по звену. На
диаграмме центростре-
мительных ускорений
(фиг. 8) по найденному
изображению части зве-
на мы будем строить
изображение части муф-
ты р'а' так, чтобы фи-
гура (Заа'Р' была прямо-
угольником, имеющим
высоту
00' _ 2ia • bb'
№-------ИЛ' '
Легко усмотреть,
что эта высота есть
сложное центростреми-
тельное ускорение (по-
воротное ускорение)
в движении точки муф-
ты В относительно
звена AD. При этом
точку а' надо отложить
так, чтобы направление а* а совпадало с направлением пово-
ротного ускорения, что имеет место на нашей фиг. 8 незави-
симо от того, будет ли вращение звена ОХА совершаться по
часовой стрелке (см. фиг. 5), или обратно часовой стрелке.
§ 3 ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ 577
Точно так же в механизме, построенном на фиг. 4, в диа-
грамме центростремительных ускорений (фиг. 9) цилиндр,
вдоль оси которого скользит шток поршня, изображен пря-
мой Р'у', параллельной изображению части штока Ру, причем
фигура PPYy представляет прямоугольник с высотой
Все вопросы об определении ускорений точек кинемати-
ческой цепи по ускорению одной из точек ее решаются с по-
мощью нижеследующей простой теоремы.
Теорема II. Если через изображения р и у на диаграмме
центростремительных ускорений двух точек кинематиче-
ской цепи В и С (фиг. 6) проведем два вектора р/2 и Уу3,
представляющие ускорение точек В и С, лежащих в цепи
на одном и том же твердом звене, то прямая у2у3, соеди-
няющая концы этих векторов, перпендикулярна Ру. Фигура
соединяющая концы ускорений однозвенных точек
В, С, D, проведенных через точки Р, у, 8 на диаграмме центро-
стремительных ускорений, подобна фигуре Ру 8.
Доказательство первой части теоремы находится, если со-
образим, как получается ускорение точки С по ускорению
точки В (фиг. 1). Надо взять (фиг. 6) вектор ур, представляю-
щий центростремительное ускорение точки С относительно В
приложить к нему геометрически ускорение точки В, по-
том к полученному вектору еще приложить геометрически
тангенциальное ускорение точки С относительно В*, так как
это ускорение нормально к ру, то конец искомого вектора
У/з будет лежать на перпендикуляре /2/3 к прямой ру. Вторая
часть теоремы есть прямое следствие первой, так как всякий
треугольник входящий в состав фигуры, образованной
концами ускорений трех точек, лежащих на одном звене, бу-
дет с перпендикулярными сторонами к соответствующему
треугольнику Ру8.
Приведенная теорема справедлива и для двух точек диа-
граммы центростремительных ускорений, представляющих одну
и ту же точку, отнесенную к звену и к скользящей по нему
муфте.
Зак. 2365. — Н. Е. Жуковский. Т. I.
37
578 ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ § 3
На фиг. 8 ускорение Р'/б точки муфты В (фиг. 5) получим,
сложив геометрически поворотное ускорение точки муфты В
относительно точки стержня В с ускорением р/3 точки
стержня В и с некоторым ускорением скользящего движения
муфты, которое параллельно ₽а. Это показывает, что концы
векторов (3'/б и РУз, представляющих ускорения точек муфты В
и точки В стержня, будут лежать на прямой /3/б, перпен-
дикулярной РР'.
На фиг. 6 для определения ускорений всех точек кинема-
тической цепи по ускорению aj\ точки А надо: провести j\j2
перпендикулярно ар до пересечения с прямой о2/2, перпен-
дикулярной ра2; построить треугольник /2/3/4, стороны кото-
рого перпендикулярны сторонам треугольника Р 7 8, и, наконец,
провести прямую /4/б, перпендикулярную Зе, до пересе-
чения в точке /б с прямой е/б, параллельной направляющей
ползуна Е. Векторы a/t, р/2, 7/3, 3/4, е/б будут ускорения то-
чек А, В, С, D, Е данной кинематической цепи.
На фиг. 7 для определения ускорений всех точек кинема-
тической цепи по ускорению a/j точки А надо: провести j1j2
перпендикулярно ар до пересечения с перпендикуляром а2/2
к Р^2; через точку 7 провести 7/3 параллельно Р/2; через 7'
провести вектор 7' /:/, равный и параллельный вектору 7/3,
а через а' провести вектор а'//, равный и параллельный век-
тору а/4; через точки /3' и // надо провести прямые и
у 1 '/4, соответственно перпендикулярные прямым 87 и За; через
точку /4 пересечения этих перпендикуляров провести прямую
/4/б, перпендикулярную Зе, до пересечения с прямой е/б, парал-
лельной направляющей ползуна Е. Векторы: a/t, р/2, 7/3, 3/4, е/5
будут ускорения точек А, В, С, D, Е.
На фиг. 8 для определения ускорения всех точек кинема-
тической цепи по данному ускорению а/4 надо через jr про-
вести прямую /1/2, перпендикулярную За, и через 8 — прямую
3/2, параллельную направляющей муфты D; прямую раз-
делить в точке /3 в отношении /2/3 : /1/3 =3^ : pa; через точку
7 провести 7/4, параллельную a/n через /4 провести /4х парал-
лельно 1 и отложить на ней = через х провести
1 Точка Р" есть изображение точки Bt отнесенной к звену ВС. Прим, ред.
§4
ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ
579
хх' перпендикулярно уР" и через /3 провести у3/б перпенди-
кулярно ($' до пересечения с хх' в точке /б, наконец, через
проводим прямую уб/6 перпендикулярно (Га' до пересечения
с прямой jj/g, перпендикулярной а'а, в точке у6. Векторы
а/р %, Р7з> Р7б> а7б будут ускорения точек A, D, В, С меха-
низма, изображенного на фиг. 5, и точек В и Л, отнесенных
к муфте этого механизма.
На фиг. 9 для механизма с качающимся цилиндром для оп-
ределения ускорений всех точек по данному ускорению точки
А надо обратить внимание на то, что ускорение точки С ци-
линдра, представленной на диаграмме центростремительных
ускорений точкой 7', есть нуль. Конец ускорения точки С
штока, изображенной точкой ?, должен лежать, с одной сто-
роны, на перпендикуляре к 7'7 и, с другой, — на перпен-
дикуляре jj/g к прямой а?. Получив ускорение ?/2 точки С
штока, делим отрезок jj2 в точке /3 в отношении j\j\ '•]%]% —
= • Pi; точка Уз будет концом ускорения Ру3 точки В штока.
Конец У4 ускорения (Г/4 точки В сальника найдется в пересе-
чении прямой y3j4, перпендикулярной рр', и прямой пер-
пендикулярной Р'т'. Таким образом векторы ajlf *[/2, Р/3, Р'У4
представят нам ускорения точки Л, отнесенной к штоку
точки С, отнесенной к штоку точки В и отнесенной к цилин-
дру точки В.
§ 4. На основании теоремы П разрешаются разнообразные
вопросы, относящиеся к ускорениям кинематических цепей.
Если цепь переходит в данный момент в движение от состояния
покоя, то ускорения всех ее точек будут тангенциальные и опре-
деляются по скоростной диаграмме, причем эту скоростную диа-
грамму мы строим в предположении, что некоторое звено
цепи ЛОр которое будем называть главным звеном^ вращается
с угловой скоростью, равной единице. Тогда (фиг. 1) ускорение
c/Q
точки Л будет перпендикулярно АО,и будет равно АОГ =
= ао, ускорение же точки В будет перпендикулярно В О2
at
dQ L dQ л
и будет равно —77 оо, где—- есть угловое ускорение звена
CLI
Если угловые скорости звеньев цепи в начальный мо-
37*
580
ЗАДАЧИ О КИНЕМАТИЧЕСКОМ ЦЕПИ
§ 4
мент не равны нулю, то ускорение каждой ее точки слагается
геометрически из двух ускорений: из того ускорения, которое
имела^бы рассматриваемая точка, если бы главное звено ОГА
продолжало вращаться с той угловой скоростью, которую оно
имеет в рассматриваемый момент времени, и из того ускоре-
ния, которое рассматриваемая точка получила бы, если бы
§ 4
ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ
581
звено ОХА от покойного состояния перешло в движение при
угловом
ускорении
dt
Это заключение, очевидное с ана-
литической точки зрения, разъясняется геометрически при
рассмотрении диаграммы центростремительных ускорений.
Задавшись (фиг. 10) ускорением точки цепи А, строим
по вышеуказанному правилу многоугольник сто-
роны которого соответственно перпендикулярны сторонам
многоугольника а (3 7 8.. .; потом, начиная от точки Qj, строим
многоугольник • • •> стороны которого параллельны
сторонам многоугольника j\j2j.Ji • • • Обращая внимание на
диаграмму скоростей, усматриваем подобие:
Д С1Лрсо Д оаб,
причем Д J2J29 и подобие является следствием перпенди-
кулярности сторон. Из подобия имеем пропорцию:
k'h * ob ’
которая оправдывает сказанное, так как ускорение 7/3, напри-
мер, слагается геометрически из ускорения у3', которое имело
бы место, если бы вектор ОХА вращался равномерно с угло-
вой скоростью 2, и из ускорения \ пропорционального ос.
Будем называть ускорения $]2 , '[/У,.. • точек А9 В,
С, D,.. . ускорениями, соответствующими перманентному движе-
нию звена ОХА, или коротко*—ускорениями перманентного
движенияЧ
Для построения перманентных ускорений при главном
звене ОХА удобно строить диаграмму центростремительных
ускорений так же, как мы раньше указали относительно ско-
ростной диаграммы, т. е. в предположении, что главное зве-
но имеет угловую скорость, равную единице, как это сделано
нафиг. 11.
Тогда ускорение перманентного движения для точки С будет
иметь величину 22т/3 и направление у/3.
1 В своем сочинении „Аналоги ускорений и их применение к расчету
плоских стержневых систем", напечатанном в „Известиях Политехнического
института" за 1908 г., Л. В. Ассур рассматривает такие же ускорения и
называет их „аналогами ускорений".
582
ЗАДАЧИ О КИНЕМАТИЧЕСКОМ ЦЕПИ
§ 4
Умея находить ускорения точек кинематической цепи, мы
без труда найдем для каждого звена точку поворота и центр
ускорений. Для построения точки поворота удобно восполь-
зоваться нижеследующей кинематической теоремой:
Вектор, соединяющий полюс вращения с точкой поворота,
геометрически равен ускорению точки тела, лежащей в по-
люсе вращения, разделенному на квадрат угловой скорости;
скорость точки поворота геометрически равна скорости пе-
редвижения полюса вращения по полодии.
Определим точку поворота и центр ускорений для звена
ВС (фиг. 11). Считаем полюс вращения О' материальной точ-
кой, присоединенной к звену ВС, и определим ускорение
этой точки. Ее изображение на диаграмме центростремитель-
ных ускорений будет о'. По теореме II прямые j2v и j3v,
соединяющие концы ускорений (3/2 и х/3 точек В и С с кон-
цом ускорения a'v точки О , должны быть перпендикулярны
к и о'у. Отсюда следует, что точка v найдется в пересе-
чении перпендикуляров, восставленных из а2 и о3 к прямым
ро2 и Таким образом вектор o'vQ2 будет ускорением
точки О'. Если построим на кинематической цепи треуголь-
ник BON, подобный треугольнику pa'v, то найдем точку N,
которая будет точкой поворота звена ВС. Это следует из
указанной кинематической теоремы. Мы имеем Q2ov = О'Мо2,
где — угловая скорость звена ВС. Если разделим вектор
Q2o'v на <о2, то получим вектор О' N, имеющий на своем конце
точку поворота N.
Рядом с построением точки поворота на кинематической
цепи нам будет важно впоследствии получить ее изображение
на скоростной диаграмме. Это изображение п найдем, по-
строив Добп, подобный kO'BN. Вектор on, на основании
упомянутой кинематической теоремы, будучи повернут на
прямой угол вправо около точки о, дает нам скорость пере-
мещения мгновенного центра О' по полодии.
Построив на диаметре O'N окружность О'HN, мы полу-
чим поворотный круг звена ВС, на котором должен лежать
центр ускорения этого звена. Место Н этого центра
ускорения найдется как точка пересечения поворотного
круга с кругом, описанным около треугольника BO'D, где
§ 4
ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ
583
Фиг. 11.
584
ЗАДАЧИ О КИНЕМАТИЧЕСКОМ ЦЕПИ
§ 5
BD || Справедливость этого построения вытекает из ра-
венства:
LHO'N=/_ HBj.2.
Изображение поворотного круга на скоростной диаграмме
найдем, построив окружность nho на диаметре по, а изобра-
жением центра ускорения
С
Фиг.
12.
рычаге.
будет точка h при условии, что
L hon = Д HO'N.
Зная центр ускоре-
ния Н звена ВС и
ускорение его
точки О', мы без
труда построим уско-
рение любой точки
этого звена.
§ 5. Мы будем на-
зывать вспомогатель-
ным рычагом данной
кинематической цепи
определенно-статиче-
скую ферму, имею-
щую вид скоростной
диаграммы этой цепи
при угловой скорости
некоторого звена, на-
зываемого главным,
равной единице, с точ-
кой опоры в полюсе
диаграммы. Всем шар-
нирам цепи соответ-
ствуют шарниры на
муфты цепи (фиг. 5)
Скользящие
вспомогательном
представляются на вспомогательном рычаге звеном ab' стерж-
невого прямоугольника aba'b', одна из вершин которого Ь'
привязана звеном Ъ' с к точке с звена оа.
На фиг. 12 представлена кинематическая цепь и ее вспо-
могательный рычаг, причем за главное звено взят стержень
ОГА) так что оа — 0хА. Легко усмотреть, что при вращении
§ 5 ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ 585
вспомогательного рычага со скоростью 2, соответствующей
по величине и направлению угловой скорости главного звена,
все точки вспомогательного рычага будут иметь скорости,
геометрически равные скоростям точек цепи. Действительно,
векторы оа, об, ос... перпендикулярны скоростям точек
Л, В, С,... и, будучи умножены на станут равны этим
скоростям.
Отсюда следует, что, сообщая кинематической цепи бес-
конечно малое перемещение, охарактеризованное бесконечно
малым перемещением 8s точки Л, и сообщая одновременно-
я
вспомогательному рычагу поворот мы будем иметь
для всех точек цепи и для всех соответственных точек рычага
геометрически равные бесконечно-малые перемещения.
Докажем теперь теорему.
Теорема Ш. Условие равновесия кинематической цепи
под эффектом приложенных к ней сил может быть заме-
нено условием равновесия вспомогательного рычага, находя-
щегося под эффектом равных и параллельных сил, приложен-
ных к соответственным точкам. При этом упругие силы
в звеньях цепи равны упругим силам в соответственных
стержнях вспомогательного рычага.
Первая часть теоремы является очевидной из рассмотре-
ния условия равновесия в форме Лагранжа:
2Люэ (Р 8s) 8s = О,
в котором все бесконечно малые перемещения 8s для ки-
нематической цепи и вспомогательного рычага геометрически
равны. Что касается до второй части, то мы убеждаемся в ее
справедливости, делая последовательное разложение сил
Р19 Р»- • • на кинематической цепи и на вспомогательном
рычаге. При этом видим, что если стержень рычага вра-
щается в ту же сторону, в которую вращается звено цепи,
то растяжение или сжатие стержня рычага соответствуют
растяжению или сжатию звена цепи, но если стержень вспо-
могательного рычага ab вращается в сторону, обратную
вращению звена цепи Л В, то сила растяжения стержня ab
дает силу сжатия звена АВ и наоборот. Что касается сил
586
ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ
§ 5
растяжения или сжатия стержня ео, то они дадут нам давле-
ние ползуна Е на направляющие.
Переходим к динамическому применению теоремы вспо-
могательного рычага. Будем всем изображениям на вспомо-
гательном рычаге материальных точек кинематической цепи
приписывать такие же массы, какие имеют эти точки в кине-
матической цепи. Тогда при движении кинематической цепи и
при вращении вспомогательного рычага со скоростью 2, коли-
чества движения точки цепи и соответственной точки вспомоrat-
тельного рычага mQr будут геометрически равны, причем г
есть расстояние массы т точки рычага от его точки опоры.
Докажем теорему.
Теорема IV. Живая сила кинематической цепи равна
моменту инерции вспомогательного рычага относительно
его точки опоры, умноженному на половину квадрата угло-
вой скорости главного звена- Сила, действующая на какую-
нибудь точку покоющейся кинематической цепи, сообщает
главному звену такое же угловое ускорение, какое геометри-
чески равная сила, приложенная к соответственной точке
вспомогательного рычага, сообщает этому рычагу. Приведен-
ная масса кинематической цепи в данной ее точке равняется
моменту инерции вспомогательного рычага, разделенному
на квадрат расстояния соответственной точки от точки
юпоры вспомогательного рычага.
Доказательство первой части теоремы видно из равенства:
Smv2 2‘2 - .
~ ~2
где 2 — угловая скорость главного звена, первая сумма отно-
сится ко всем материальным точкам цепи, а вторая — ко все и
соответственным точкам вспомогательного рычага.
Для доказательства второй части теоремы предположим
(фиг. 12), что на кинематическую цепь и на вспомогательный
рычаг действует только одна сила Р2, причем цепь и рычаг
в начальный момент находятся в покое.
По теореме живых сил имеем для цепи:
Р2 cos (P2ds>) ds.2 = d .
§ 5
ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ
587
Эту формулу на основании вышесказанного можно пре-
образовать так:
P2r.2Q sin (P2r2) = 2 mr2
При составлении производной по времени во второй части
следовало бы обратить внимание на изменение величин г
вследствие изменения вида вспомогательного рычага, проис-
ходящего от передвижения точек цепи, но производная
d V
2цтг будет умножаться на малую величину второго по-
рядка Q2 и может быть отброшена. Мы получим:
P2r2sin(P2r2)
2тг*
что соответствует угловому ускорению вспомогательного ры-
чага под эффектом действующей на него силы Р2. Послед-
нюю формулу мы можем написать и в таком виде:
dv2 ___ Р2 sin (Р2г.?)
/2 пггА *
\ /
из которого следует третья часть данной теоремы.
Для примера определим приведенную массу к головке
кривошипа А в механизме с качающимся цилиндром, скорост-
Фиг, 13.
ная диаграмма которого дана на фиг. 4. Пусть J будет мо-
мент инерции кривошипа относительно центра — момент
инерции штока и поршня относительно их центра тяжести G;
т — масса штока и поршня; J2—момент инерции цилиндра
относительно оси, проходящей через центры шипов С. Этот
588 ЗАДАЧИ О КИНЕМАТИЧЕСКОМ ЦЕПИ § 6
момент инерции, умноженный на отношение ас1: Л С2, дает
момент инерции звена оЬ' относительно о. Положим, что
О А — г9 ОС = 1, ag = s, оас — 6, и постараемся выразить
приведенную массу в функции угла 6. Она найдется, если
разделим момент инерции вспомогательного рычага (фиг. 4)
на квадрат длины оа; при этом мы принимаем кривошип за
главное звено и полагаем оа — О А = г. Обращая внимание
на фиг. 13, напишем:
г2 cos2 6
г2
т
о г2 cos2 А
С4 ---------
5 82
г cos2 6
Т“
, л Г2 COS2 6} 1
+ А §2 j
§2--bm g2 cos‘20—2-g-cos20-f-l
COS2 6
"I2”’
где
8 — }/72 — r2 sin2 6 — r cos 6.
Чтобы получить значения приведенной массы для всех
последовательных положений механизма, надо в написанной
формуле приписывать углу 0 значения от тс до 0. При 0 = —
имеем (фиг. 4) случай кривошипа ОА, перпендикулярного
к штоку АС. Когда кривошип (фиг. 4) находится с левой
стороны от этого положения, тогда 6 > —, и в выражении
для S член, прибавляющийся к корню, будет положителен.
§ 6. Займемся теперь вопросом об определении времени
малых колебаний кинематической цепи около ее положения
равновесия. Решение этой задачи имеет существенное значе-
ние для исследования устойчивости кинематических цепей,
а также играет важную роль в теории регуляторов.
Исследуем сначала малые колебания физического маятника
около положения его равновесия (фиг. 14) под эффектом
системы сил.
Диференциальное уравнение движения будет иметь вид:
—х'Г)
2тг2
§6
ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ
589
где значок (') отмечает величины координат и компонентов
сил при весьма малом угле
поло-
жения равновесия. Эти
величины по их значе-
ниям в положении равно-
весия, т. е. при ср = О вы-
ражаются так:
v, v . дХ дх
X =ЛЧ--ч— И?---<~*ср,
1 дх 4 ду 4'
v, v , dY dY
Подставляя эти величи-
ны в уравнение движения
и замечая, что
2(^-хГ)==о,
отклонения ср маятника
от
Фиг. 14.
находим:
S=H~^(x'¥+sr)+
при этом
положено
dY 9 пдХ U 1
ду ду / J тг2
дХ
дУ
дУ
дх
. Если бы силы, действующие
на материальные точки маятника, сохраняли при различных ср
свою величину и направление, то члены, зависящие от произ-
водных компонентов сил, были бы равны нулю, и мы полу-
чили бы:
Обращаемся к кинематической цепи и ее вспомогатель-
ному рычагу. Относим вспомогательный рычаг к осям хоу,
имеющим начало в точке опоры рычага, а каждое звено цепи
к особым осям, параллельным вышеупомянутым осям, но имею-
щим начало в центре вращения соответственного звена. Напри-
мер (фиг. 15) звено АВ мы относим к осям имеющим
590
ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ
§6
начало в центре вращения этого звена О/. Согласно те-
ореме живых сил для кинематической цепи напишем:
<•/“ 2 I “ V 2
И.
Фиг. 15.
Здесь X, Y суть
проекции сил на оси
Ох и Оу, которые те
же, что проекции сил
на оси £ и каждого
звена. Значок (г) по-
ставлен, чтобы пока-
зать, что стоящие под
первой суммой величи-
ны берутся для смещен-
ных положений звеньев.
Так как мы рассматри-
ваем малые и медлен-
ные колебания кинема-
тической цепи, то вто-
рой член во второй
части формулы можно
отбросить как малую величину порядка <о2. Составим выра-
жения, входящие в первую часть равенства. По предыду-
щему имеем:
— %
со
где через мы называем угловую скорость главного звена
цепи OtA (фиг. 12), а через — угловую скорость звена АВ,
которой приписываем знак (—), так как звено АВ вращается
против стрелки часов, когда звено ОХА вращается по стрелке
часов. При составлении
надо обратить внима-
ние на то, что в смещенном звене АВ мгновенный центр
вращения будет уже не в точке О/, а в некоторой беско-
§6
ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ
591
нечно близкой точке с/; при этом вектор О/с/ будет гео-
метрически равен бесконечно малому пути, пройденному точ-
кой поворота N звена АВ при вращении этого звена на угол
(см. § 4). Легко усмотреть на фиг. 15, что
о).
пр5 (О/с/) = — р?1 = ₽ -1
прп (OiC/) = <х?1 = — а <?,
где а и 3 суть координаты точки поворота N на осях
Отсюда найдем:
с/Ц'
dt /
z t \
= —=------(о.? — av,) —Н- = —г
dt dt dt
(cfy V
~dt)
d*f\ j z I о \
dr\
~dt
2 cb
dt 1
Найденные нами величины следует подставить в равенство
живых сил, воспользовавшись при этом уравнением равновесия
<7£ <0.
=---------71 = —L (071,
dt dt <»
dt dt ® ”
и равенствами
Получим после отбрасывания малых величин третьего по-
рядка и небольших преобразований:
tfe ©
dt mr^
(\ / \ 2
Л(а-Е)+Г(?—+
Правило построения вспомогательного рычага показывает,
что между координатами точек кинематической цепи и
592
ЗАДАЧИ О КИНЕМАТИЧЕСКОМ ЦЕПИ
координатами х, у их изображений на вспомогательном ры-
чаге существует простая связь:
х. = —Ц.
а.
при этом скорости приписывается знак ( + ), если враще-
ние звена совершается в ту же сторону, в какую совершается
вращение главного звена, и знак (—) в обратном случае.
В вышеприведенных формулах написаны также соотношения
между координатами & точки поворота и координатами
аь bi изображения точки поворота на вспомогательном ры-
чаге. Будем вместо сил с компонентами Хь Yb действующих
на точки кинематической цепи, рассматривать силы с компо-
нентами (ЛД (УД приложенные к соответственным точкам
вспомогательного рычага, причем
Эти силы будем называть изображениями на вспомога-
тельном рычаге данных сил кинематической цепи. Пользуясь
указанными обозначениями, можем написанное равенство пред-
ставить в таком виде:
$ = хЛ-U S <а ~х)+
аг У\тг2 (
, уГ^(Л) а(У) а
+2, д„ у + дх х 2
д(Х) ])
Сравнивая эту формулу с вышеприведенной формулой ко-
лебания сложного маятника, составим для обеих формул
соответственные длины маятников Lo, L:
дУ 2 9 дХ
-ъх~2Т^хя
___________________gj^mr2_________________
2[(Л) (х-а) + (r)(W)]-£ ( '' + х‘- 2''' «,)
где g— ускорение от действия тяжести.
§ 7 ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ 593
Выражение L сравнительно с Lo приводит нас к теореме.
Теорема V. Длина математического маятника, соот-
ветствующего данной кинематической цепи, определяется
как относящаяся к физическому маятнику, представляю-
щему вспомогательный рычаг под действием двух групп сил:
1) сил, представляющих изображения на вспомогатель-
ном рычаге всех сил, действующих в кинематической цепи;
2) сил, равных и противоположных по направлению рав-
нодействующим изображений всех сил для каждого звена,
приложенных в изображениях точек поворота звеньев.
§ 7. Приложим теорему V к трем примерам. При этом
будем на вспомогательном рычаге обозначать соответствен-
м<9
Фиг. 16.
ные точки малыми буквами, как это делали на скоростной
диаграмме, полагая = 1 для главного звена, т. е. принимая
изображение главного звена на вспомогательном рычаге рав-
ным длине звена на цепи.
На фиг. 16 изображена схема десятичных весов и соответ-
ственного вспомогательного рычага. Опорные центры О{ и О2
изображаются на вспомогательном рычаге точкой о; точки
весов в, Е, F и все точки платформы и взвешиваемого тела
осуществляются на вспомогательном рычаге одной точкой bef;
точки D и К сливаются на вспомогательном рычаге в точку dk.
Это последнее обстоятельство получается по той причине,
Зак. 2365. — Н. Е. Жуковский. Т. I. 38
594 ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ § 7
что тяга DK вертикальна; слияние же точки / с точкой be
происходит вследствие известного условия в конструкции
весов:
OXD_O2K
О.В “ O2F ’
вследствие которого платформа движется поступательно.
. Центры тяжести С и Ct верхнего и нижнего коромысла
весов представятся на вспомогательном рычаге точками с, с3.
Так как всем материальным точкам кинематической цепи со-
ответствуют на вспомогательном рычаге точки равных масс
и они подобно расположены в каждом звене и его изобра-
жении, то с и ct будут центры тяжести изображений верхнего
и нижнего коромысла. Массы изображений нижнего и верх-
него коромысла будут равны массам М и Мх этих коромысел.
Мы принимаем за главное звено цепи АО19 так что О1А = оа
и OJD = od. Все части верхнего коромысла будут на вспомо-
гательном рычаге изображены в натуральную величину; все же
части нижнего коромысла будут уменьшены через умножение
их размеров на множитель
Если центры тяжести коромысел С и Сх отстоят от пря-
мых AD и О2К на расстояния h и А3, то их изображения с
и с{ на вспомогательном рычаге будут лежать: первое — ниже
линии Ok на расстояние А, а второе — выше $е на расстоя-
ние лЛр
Если моменты инерции верхнего коромысла относительно
центра Ох и нижнего — относительно центра О2 суть J и J\,
то моменты инерции изображений этих коромысел относи-
тельно о на вспомогательном рычаге будут J и Силам
Mg и MAg9 действующим на коромысла, будут соответствовать
во вспомогательном рычаге следующие изображения: сила Mg^
направленная вниз, и сила M^gK, направленная вверх. Назовем
массу гирь и чашки весов через тп, а массу взвешиваемого
груза, платформы и вертикальных тяг через тп3 и заметим,
что вследствие того, что угловая скорость всех упомянутых
тел равна нулю, изображения сил, действующих на эти тела
§7
ЗАДАЧИ О КИНЕМАТИЧЕСКОМ ЦЕПИ
595
на вспомогательном рычаге, су.ть нули. По теореме V найдем
длину математического маятника, колеблющегося одновре-
менно с десятичными весами, в следующем виде:
Mh±M^hx
Любопытно заметить, что эта длина не зависит от высоты
взвешиваемого тела.
На фиг. 17 представлена находящаяся под действием тя-
жести кинематическая цепь ОХАВО2 с опорными центрами
и Оо. Звенья ОГА и OJB равны между собой и жестко
соединены с равными стержнями, обремененными грузами.
В положении равновесия весь аппарат симметрично распо-
ложен относительно средней вертикальной линии. Строим
вспомогательный рычаг, принимая звено О+А за главное. При
этом оа = ob = OjЛ, ab = КАВ, где
' АО/'
Для построения точек поворота строим еще диаграмму
центростремительных ускорений, в которой аз1 = ро.2 = ЛО] и
ар = Л2?Х*2. Если восстановим из точек и нормали к aot
и %2 до их пересечения в точке v, то изображение v точки
38*
596
ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ
§ 7
поворота звена АВ на вспомогательном рычаге найдем, про-
ведя вектор on, параллельный o/v и имеющий величину:
vo/
ОП = —у—,
л
Из подобия треугольников на фиг. 17 находим пропорцию:
уд/ __до/____АО/
feo/ ЕО/ 9
откуда следует, что
= (О,А + АО,'>.’) - АО,а + »ЛО,'
Et Cxj
EOt
И
„ j_n ЛО|'> ЛО,'®+К(/4О,'’—£0/®)
°"=<1+*) -ёог --------ёо;-------—
Назовем веса стержней АО/J и BOJD вместе с грузами
через mg; они приложатся в центрах тяжести стержней F\
и F2. Вес верхнего звена АВ обозначим через mtg; он будет
приложен в середине звена Е. Изображения данных сил
на вспомогательном рычаге будут: направленные вниз две
силы mg, приложенные в изображениях и точек Ft и F2;
направленная вверх сила ^mtg, приложенная в точке е сере-
дины ab, и направленная вниз сила ^mrg, приложенная в изо-
бражении п точки поворота. Если J будут моменты инерции
рычагов и грузов AOt и ВО2 относительно точек опоры
и О2, a Л момент инерции звена А В относительно точки О/,
то длина математического маятника, имеющего одновременные
колебания с рассматриваемой кинематической цепью, будет:
. 2/+^
Q . (АО/ъ+'кАЕ*) ‘
2тпп------гГ7Т7--т\
ЕО{
Для того чтобы рассматриваемая цепь имела устойчивое поло-
жение равновесия, необходимо выполнение условия:
Q . АО/^АЕ*
—т„
На фиг. 18 представлена схема регулятора Уатта, муфта
которого соединена с балансиром DO2E, центр тяжести кото-
§ 7
ЗАДАЧИ О КИНЕМАТИЧЕСКОМ ЦЕПИ
597
рого совпадает с точкой его опоры О.2. Этот балансир по-
средством тяги EF, горизонтальной при рассматриваемой
угловой скорости, приводит в движение с помощью верти-
кальной ручки FO% паровпускной клапан, который вместе
с ручкой имеет точку опоры в Вправо от схемы регуля-
тора показан его вспомогательный рычаг, причем звено ОХА
Фиг. 18.
принято за главное звено. Установим сначала связь между
положением регулятора и угловой скоростью Q его вращения
около оси OrD. Для этого ко всем изображениям точек цепи
на вспомогательном рычаге приложим силы, геометрически
равные силам, действующим в кинематической цепи, и напи-
шем, что сумма моментов всех этих сил равна нулю:
2# Т тх + тх + M3gp — 2Q2 тхУ —
— 222 2 х т (Р — х) у = О,
где 2 есть сумма, распространенная на все материальные
точки стержня аЬ вместе с шаром; есть сумма, распростра-
598 ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ § 7
ненная на все материальные точки стержня ас\ есть масса
муфты; р — ос = АА' и g есть ускорение тяжести.
Назовем через М массу шаров и через s расстояние их
центров от через s' длину стержней от О. до шара и
через М. их массу, через I длину тяг АС — А'С и через М2
их массы, через 0 угол COJB. Мы имеем:
тх — Ms • sin 0 тс M.s' ‘ sin %
£
mx — MJ sin 0,
V / x M<> 79 . , h
7. m (p - x) и = I2 sin 0 cos 0,
mxy = s'2 sin 0 cos 0 4~ mxy,
где V2 распространяется только на массы шара. Если по-
строить оси х у', параллельные осям ху и имеющие начало
в центре b изображения шара, то
Х2 тху = т (х + х') (у ^у') = Мху,
где х, у — координаты точки Ь. Таким образом
М
2^ тху = —s'2 sin 0 cos 0 4” Ms2 sin 6 cos 0.
Ha основании всего сказанного угловая скорость & будет
удовлетворять уравнению:
2Ms 4- M.s' + (ЗМ2 + 2Л/3) I —
— — hMs^-^ — M.s'^ + ^MJ2] cosO = 0.
g \ ‘ 3 1 1 3 2 /
Переходим теперь к составлению знаменателя в выражении
длины маятника L. Прилагаем ко всем точкам вспомогатель-
ного рычага изображение сил, а к изображениям точек пово-
рота звеньев силы, противоположные равнодействующим изо-
бражений. Так как тяга EF изображается на скоростной
диаграмме одной точкой е/, то изображения сил, действующих
на эту тягу, суть нули; равным образом не надо обращать
внимания на равнодействующие изображений сил, действую-
ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ
599
щих на изображения точек поворота звеньев ОХВ, DO.JE, ВОЛУ
так как все точки поворота этих звеньев как неподвижные
точки опоры изображаются в о. Точки поворота звеньев С А
и СА' будут находиться в Изображая точку присоеди-
ненную к звену СЛ, получаем на вспомогательном рычаге
точку тг, а изображая точку С\, присоединенную к звену СА' у
получаем точку п .
К этим изображениям мы должны приложить: к п — силу
МАУ направленную по вертикали вниз, к п'— та-
g
кую же силу, направленную по вертикали вверх. Кроме того,
от равнодействующих изображений центробежных сил на
точки пип будут действовать вправо силы Q2p. Соста-
вляем теперь искомую величину знаменателя k в выражении L:
+ 2a2^jzn(p х)2 —2Q2^m(p —х)р —
-2Q^m^ -2Q2^izn!/2+2^-22p2.
Здесь распространяется на массы стержня ob вместе с ша-
ром, —на массы стержня асу а = ОгС. Два пред-
последних члена выражения к получились от выражений вида
/0(Х) 9\ _
/ котоРЬ1е рассматривались в $ 6.
Определяем значения входящих в выражение k сумм:
V ту — Ms cos в -j- Mrs' cos 6,
тУ " о cos 6,
(— У1 + (p — *)‘2) — P Si m (p — x)
= g Л/2/2 (sin2 H — cos2 6) — MjZ2 sin2 0,
Vm(x2—y2)
M
~~ s'2 (sin2 0 — cos2 6) Ms2 (sin2 0 — cos2 b)
600
ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ
§ 7
Подставляем значения этих сумм в выражения для к\
к = % cos 0 [<2Ms + + (ЗМ2 + 2М3) (] +
4-122 2Ms2+^s'2 + -^Z2 (sin20 — COS20).
Это выражение может быть на основании вышеприведен-
ного условия равновесия регулятора преобразовано таким
образом:
Г 2 2 1
к = № + ~~ sin26.
Переходим к определению числителя в выражении L.
Назовем через J момент инерции стержня О{В вместе
с шаром относительно оси О19 через — момент инерции
стержня СА относительно оси С, через — момент инерции
балансира DOJE относительно оси О2, через /3— момент инер-
ции клапана и его ручки около оси О3 и через т — массу
шатуна EF.
Так как за главное звено принято звено ОгАи то изобра-
жение его вместе с шаром на вспомогательном рычаге одина-
ково с самим звеном. Если назовем через i момент инерции
относительно о на вспомогательном рычаге изображения об,
то найдем i — J. Что касается момента инерции 2z\ относи-
тельно о изображений ас и а'с, то он найдется по известной
теореме о моментах инерции относительно двух осей, из ко-
торых одна проходит через центр тяжести:
4ir = 2Л - (| )2 2М2 + ( ^-)22М2 - 2Л + У Р2 2М2 =
==2(Л-|-?22Л/281п20).
Балансир DChE имеет на вспомогательном рычаге изображе-
ние Joe, подобное DCKE, с коэфициентом подобия
, _2/ sin 6
х—7do7’
поэтому, если назовем через z2 момент инерции изображения
балансира относительно точки опоры вспомогательного ры-
чага, то найдем:
/2 = л>2-
§ 8 ЗАДАЧИ О КИНЕМАТИЧЕСКОМ ЦЕПИ 601
Весь шатун EF изображается на вспомогательном рычаге мас-
сой т, сосредоточенной в точке ef. Этой точке относительно
о соответствует момент инерции
V — 4ml? sin2 0.
Ручка поворотного клапана O.F изображена на вспомогатель-
ном рычаге звеном о/, причем коэфициентом подобия является
величина
У 21 sin 6 • О2Е
~b2D- O.F ’
так что момент инерции z3 изображения ручки вместе с изо-
бражением клапана относительно точки опоры рычага будет:
Общий момент инерции всего вспомогательного рычага пред-
ставится в виде:
2i-j- 2z\ + 44" 4"Ч — 2 [•/+ Л + Р sin2 О 2М2] -f-
+ /2Х2 + 4ml2 sin2 0 + J3V2.
На основании всего сказанного приходим к заключению, что
регулятор колеблется около рассматриваемого положения
равновесия как маятник, имеющий длину:
£ _ 2 ( Л + Z2 sin2 6 2М>) + J2\2 + 4ml2 sin2 6 + JJ'2
S2 sin2 6 (Ws2 + ? Mxs'2 + M.A
\ 3 3 /
§ 8. Приложим теперь теорию вспомогательного рычага
к определению упругих сил в движущейся кинематической
цепи, принимая во внимание эффект сил инерции. Ускорение
каждой материальной точки кинематической цепи на основа-
нии § 4 слагается из перманентного ускорения, пропорциональ-
ного квадрату 22 угловой скорости главного звена, которое
определяется по диаграмме центростремительных ускорений,
и из ускорения, пропорционального , которое определяется
по скоростной диаграмме. Перенеся силы инерции от этих
двух групп сил на вспомогательный рычаг, мы увидим, что
602
ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ
§ 8
J2.
силы инерции, пропорциональные будут геометрически
равны силам инерции, которые бы развились в массах самого
вспомогательного рычага, если бы мы привели его из покоя
во вращение с ускорением равным угловому ускорению
главного звена. Вторая группа сил
перманентных ускорений, найдется
инерции, зависящая от
согласно со сказанным
в § 4. Предполагаем (фиг. 19), что скоростная диаграмма и
диаграмма центростремительных ускорений построены в пред-
положении, что главное звено ОХА вращается с угловой ско-
ростью, равной единице, так что скоростная диаграмма пред-
ставляет вспомогательный рычаг.
Для звена ВС центром ускорения будет точка Н пересе-
чения поворотного круга NHO'2 и круга BDO29 описанного
около треугольника BO’JD, в котором BD || р/2. Построим на
вспомогательном рычаге изображение п точки поворота, изо-
бражение поворотного круга nho и изображение h центра
ускорения, причем £HO\N = ^_hon — Ь. Если положим
ВС’
§ 8
ЗАДАЧИ О КИНЕМАТИЧЕСКОМ ЦЕПИ
603
то найдем для
ВС, величину:
ускорения точки СХ>, присоединенной к звену
Q2(32v = Q*№O'2N =
на вспомогательном рычаге направляется по
Это ускорение
вектору по от п к о. Сила инерции от перманентного ускорения
для какой-нибудь точки к звена Ьс будет:
г гло > kh mQ1 2 * j ,
kp = m'J2 • a • on —r —-r atAa ,
oh cos ft
где m масса точки к. Направление вектора кр образует с kh
угол ft.
Определим теперь равнодействующую сил инерции на
звене Ьс вспомогательного рычага от той и другой группы
dQ
сил инерции. Силы инерции, пропорциональные , дадут рав-
недействующую R = Mog , приложенную в центре тяжести
звена g{ и направленную перпендикулярно радиусу og в сто-
рону, обратную ускорению .
Перманентные силы инерции дадут по известной теореме
динамики равнодействующую
Ri =----agh,
COS ft
которая образует с вектором gh угол ft и проходит через точку
А7, лежащую на прямой hg и удовлетворяющую условию
Аг'А'«=Й’
где J—момент инерции звена Ьс относительно центра тя-
жести g.
На основании всего сказанного получаем теорему.
Теорема VI. Силы инерции, перенесенные на вспомога-
тельный рычаг, слагаясь, дают для каждого звена рычага
две силы:
1 Сила R будет приложена не в центре тяжести звена g, а в центре
качания звена, соответствующем точке привеса находящейся в полюсе ско-
ростной диаграммы. Прим, ред.
604
ЗАДАЧИ О КИНЕМАТИЧЕСКОМ ЦЕПИ
§8
/) силу
R = M-Sog
проходящую через центр тяжести звена и направленную
перпендикулярно к радиусу, соединяющему центр тяжести
с точкой опоры;
2) силу
=
cos О
образующую с радиусом gh, идущим к изображению центра
ускорения h, угол эта сила приложена в центре h' качания
звена, соответствующем точке привеса, помещенной в изо-
бражении h центра ускорения.
Приложим данную теорему к определению сил упругости
в кривошипном механизме.
На фиг. 20 и 21 представлен кривошипный механизм и его
вспомогательный рычаг. При этом мы считаем маховое колесо
Фиг. 20.
жестко соединенным с кривошипом и чертим его изображение
на вспомогательном рычаге аоЬ (фиг. 21), соединенное в точке о
с изображением кривошипа оа. В точке b на вспомогательном
рычаге мы должны сосредоточить сумму масс и поршня, штока
§ 8
ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ
605
и ползуна. За главное звено при построении вспомогательного
рычага мы принимаем ОгА — оа = г. Диаграмму центростре-
мительных ускорений мы не строим, так как в кривошипном
механизме очень просто определить точку поворота и центр
ускорения для шатуна. Для этого служит такое соображение.
Если за главное звено мы бы приняли В А и начали бы с этого
Фиг. 21.
вектора строить диаграмму центростремительных ускорений^
направляя а[3 по АВ, то пришлось бы отложить по /4Ot
где CA — s. Точка о2 попала бы в В, причем бесконечно
малый вектор ^В был бы перпендикулярен ВОГ. Восставляя
перпендикуляры из точек и о2 к векторам А^ и В<з2, мы
найдем в их пересечении точку поворота /V звена АВ, которая
не зависит от выбора главного звена (это заключение можно
сделать, не рассматривая бесконечно малый вектор Во2, прямо
по теореме II). Поворотный круг будет CBN.
При главном звене ОГА перманентное ускорение точки А
направлено по АОХ, ускорение же прямолинейного движения
точки В направлено по ВОГ. Искомый центр ускорения ша-
606
ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ
§ &
туна должен лежать на окружности OrAB, описанной около
треугольника ОХАВ. Точка Н пересечения этой окружности
с поворотным кругом будет центром ускорения. Изображение h
центра ускорения на вспомогательном рычаге найдем, проводя
вектор bh, параллельный вектору ВН, но имеющий напра-
вление, прямо противоположное вектору ВН, так как звено АВ
вращается в направлении, обратном вращению главного
звена Угол bh с горизонтальной линией будет равен
углу HCN — 6. Вектор bh определится по формуле
bh = BH-\,
где
. _ ab _АО}
~~АВ~~~АС'
Пусть g будет центр тяжести звена ab, включая в звено
в точке b присоединенную массу рь. Строим точку-/г, являю-
щуюся центром качания звена ab при точке привеса h, так что
где J—момент инерции звена ab вместе с массой у. На
основании теоремы VI равнодействующая перманентных сил
инерции, приложенных к звену ab вместе с массой будет
иметь величину:
cos 0 cos 6
Эта сила будет приложена к точке Л', будет образовать cgh
угол О и будет направлена, как представлено на фигуре.
Перманентные силы инерции, действующие на звено оа, явятся
центробежными силами, направленными по этому звену, и
дадут равнодействующую
Ql==MiQ2oc,
где — масса звена оа, а ос есть расстояние центра тяжести
этого звена с от о.
Покажем, что при большом моменте инерции махового
колеса угловое ускорение
dQ
dt
очень малая величина.
Назовем
через /0 момент инерции относительно точки о всего вспомо-
§ 8
ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ
607
гательного рычага. Этот момент будет весьма велик, так как
во вспомогательный рычаг включается изображение махового
колеса с его массами. Условие равновесия вспомогательного
рычага напишется так:
7° dQ = РоЬ _ 7Fri _
где Р есть сила давления пара на поршень, (F\ Fr) есть пара,
оказывающая сопротивление вращению махового колеса, при-
чем изображение его радиуса есть р, и Ое есть перпендику-
ляр, опущенный из О на направление силы Rv
Вторая часть написанного равенства для всякого положе-
ния кривошипного механизма есть определенная конечная
величина; множитель Jo в первой части очень велик, поэтому
угловое
ускорение
dt
очень мало.
Ввиду этой малости при
расчете сил упругости в кривошипном механизме можно
обращать внимание только на силы инерции, происходящие
от перманентных ускоре-
ний.
Сила N давления пол-
зуна на направляющие
найдется, под условием,
что сила Р вместе с си-
лой Rx дают равнодейству-
ющую, которая разла-
гается на давление N и
силу, проходящую на
вспомогательном рычаге
через точку а. На фиг. 22
это условие выполнено,
и мы видим, что
N=fp-
Фиг. 22.
Эта сила давления будет на нижнюю направляющую. Если
бы вектор N — fp имел обратное направление, то давление
ползуна приходилось бы на верхнюю направляющую. Сила
действия шатуна на шарнир а представляется вектором fs.
608 ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ§9
Момент этой силы относительно центра о, разделенный
на X, дает наибольший ломающий момент шатуна АОГ.
Сила же /s, слагаясь с центробежной силой кривошипа
ОгА, дает давление на подшипник махового колеса. Приложив
к точке а изображения шатуна силу, равную и противополож-
ную fs, мы можем определить растяжение и сгибающий мо-
мент в каком-нибудь сечении z шатуна нижеследующим
образом. Определяем массу тп части шатуна az и центр
тяжести к этой части; соединяем h с к и отлагаем на про-
должении hk центр качания h" звена az*, прилагаем к точке h"
силу
/?/ = тп——тг kh,
COS о
образующую с kh" угол 6. Составив сумму моментов сил sf
(сила, обратная fs) и /?/ относительно центра z, получим
искомый ломающий момент в сечении z*, определив же сумму
проекций этих сил на направление za, получим натяжение
звена аЪ вспомогательного рычага в сечении z. Это даст нам
сжатие в соответственной точке шатуна АВ1.
§ 9. В заключение нашего сочинения мы применим теорию
вспомогательного рычага к определению работы, потерянной
на трение в шарнирах кинематической цепи. Эту задачу мы
решим точно в случае, когда силы действуют только на звенья
цепи, имеющие неподвижные точки опоры, и приближенно
в общем случае. Пусть (фиг. 23) крайние кривошипы имеют
вид /, а промежуточные имеют вид II, шатуны же схемати-
чески представляются в виде III. Так как диаметр шипа кри-
вошипа будет несколько менее диаметра отверстия в шатуне,
то соприкосновение произойдет так, как это представлено на
фиг. 23, IV. Полная сила реакции подшипника шатуна на
шип кривошипа будет иметь направление А? или R', смотря
по тому, совершается ли вращение шипа по отношению
к подшипнику по часовой стрелке или против часовой стрелки.
Эти силы R и R' наклонены к общей нормали под углом
трения i и потому прикасаются к кружку, проведенному ра-
диусом p = rsinz из центра подшипника, где г — радиус под-
1 Аналогичный способ расчета кривошипного механизма изложен
в литографированных лекциях проф. Н. И. Мерцалова.
§ 9 ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ 609
шипника (в виду малой разности между радиусами шипа и
подшипника за г можно считать радиус шипа).
На фиг. 24 представлена кинематическая цепь, в которой
силы Р{, Р2, Р3 и Р4 действуют на кривошипы.
Из всех центров шарниров, включая сюда и опорные под-
шипники, проведем кружки соответственными радиусами р,
причем для кривошипов (вида If) ступенчатыми шипами надо
будет из одного центра проводить по два кружка, которые
будут вообще иметь различные радиусы р. Проведем для
каждого шатуна касательную, прикасающуюся к окружностям,
построенным при концах шатуна, как это представлено на
фиг. 24. Силу Рг продолжаем до пересечения с первой каса-
тельной и из точки пересечения проводим еще касательную
к окружности, построенной для опорного подшипника Ог. По
направлению этих двух касательных разлагаем силу Рг на
7\ и Сила будет полная сила давления на подшипник
О19 а сила 7\ будет силой действия и противодействия в под-
Зак. 2365. — Н. Е. Жуковский. Т. I.
39
610 ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ § 9
шипниках А и В шатуна АВ, а также и силой, сжимающей
шатун АВ- Силу 1\, передаваемую через нормальное давле-
ние и трение на кривошип О.2В, складываем с силой Р2,
действующей на этот кривошип.
Равнодействующую этих сил продолжаем до пересечения
с касательной на шатуне ВС и проводим из найденной точки
пересечения касательную к кружку, имеющему центр О2.
По этим двум касательным разложим найденную равно-
действующую на силы R2 и Т2. Первая сила будет сила
Фиг. 24.
давления на подшипник О2, а вторая дает силу сжатия звена
ВС. Продолжая построение указанным способом, мы, наконец,
получим силу 7*3, которая, слагаясь с силой Р4, действующей
на последний кривошип ОД), должна дать равнодействующую
/?4, которая прикасается к кружку, построенному для
центра О4.
Этим будет охарактеризовано условие равновесия в пред-
положении, что при малейшем увеличении силы Рг звено
ОХА начинает вращаться по часовой стрелке. Если нам задано
только направление силы Р4, то из упомянутого условия мы
можем определить ее величину. То обстоятельство, что при-
ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ
611
нятые нами направления касательных соответствуют силам
трения, развивающимся при вращении звена 0tA вправо,
видно из нижеследующего соображения. Сила нормального
давления в подшипнике О19 слагаясь с силой трения /4,
направленной по часовой стрелке, дает полную силу действия
на опорный подшипник сила нормального давления N2
в подшипнике Л, слагаясь с направленной по часовой стрелке
силой трения F2 (движение шипа А относительно неподвиж-
ного шатуна АВ будет направлено по часовой стрелке), дает
силу 7\ действия кривошипа OtA на шатун АВ и т. д.
Составим сумму элементарных работ всех сил трения в нашей
кинематической цепи при повороте ее главного звена ОгА на
угол Sep. Пусть отношения звеньев вспомогательного рычага
(фиг. 24) и цепи будут:
Оа . ОЬ _ Ос _ Od
ОХА Ъ О.В OSC~ Из’ OJ) —
ab Ьс у cd у
АВ 19 ВС 29 СЬ~ 3‘
При этом в неподвижных подшипниках Ои О2, О8,... мы
будем иметь углы поворота кривошипов:
Р-2^% ^38®,
углы же поворота кривошипов по отношению к подшип-
никам А, В, С, О (в В и С мы имеем по два шипа и по два
подшипника) будут последовательно:
М1 + М,
s?(^2+xi)> Мр^Н-М»
МР'з + М М^з + хзХ
(Рч + хз)-
Обозначим далее величины радиусов вспомогательных
кружков: для кривошипа ОХА — через рх для точки опоры и
через р\ для головки; для кривошипа О2В — через р2 для точки
опоры и через р2' и р2" для двух шипов головки и т. д.
Теперь мы- можем определить сумму элементарных работ
всех сил трения dF, составляя сумму произведений углов
39*
612
ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ
§ 9
поворота на соответственные радиусы р и соответственные
силы давлений, прикасающиеся к кружкам:
dF= 8?[/?1Р1+ Лр/ “Н Р-2 (^2?2 + Лр/1^2Р2//) +
+Р8 (/?§Р3 + Т2р2" + Т’зРзЭ + Р-4 (^4?4 + ТзРзЭ + ^1Л (Р/ + Р-зЭ ~Ь
+ х2г2 (р2"+Рз")+хз П (р/+р/)].
Переходим к общему случаю, когда силы действуют на все
звенья кинематической цепи, причем для упрощения построе-
ния предполагаем вследствие малости радиусов р, что силы
Фиг. 25.
реакций проходят прямо через центры О19 О2, *. • А, В, ...
Построение можно делать прямо на вспомогательном рычаге.
Переносим (фиг. 25) все действующие силы Pl9 Р>, ...
Ql9 • на вспомогательный рычаг-
Каждую из сил разлагаем на две параллельные, проходя-
щие через концы звена. Силу Р{ разлагаем на параллельные
силы аК и ор9 а силу — на две параллельные силы al и Ьд.
Сила ak приложена в точке а звена оа, а сила al—в точке а
звена Ьа.
В свою очередь силу ak разлагаем на ат и тк= Т19 а
силу al на ап и nl=Tl9 так чтобы mk и nl имели равные
§ 9
ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ
613
величины и противоположные направления* Это достигается
указанным на фигуре построением.
Точка е, лежащая на середине вектора 1к, соединяется с точ-
кой а; ае продолжается до точки / так, чтобы ае = ef\ из /
проводится /п |] та и fm |] па. Параллелограм kmln дает нам
искомые векторы: тк =nl= Ти выражающие силы действия
и противодействия в шарнире А. Сложив силы ор и ат = от,
мы получим силу давления Rx на подшипник Of, сложив же
силу ап с силой bq, мы получим силу Тх действия и проти-
водействия между шипом кривошипа О2В и шатуном АВ. Эту
силу, отнесенную к кривошипу О2В, надо сложить с силой Р>
и, рассматривая шатун ВС присоединенным ко второму шипу
кривошипа О2В, перейти к повторению указанного построения
для звеньев вспомогательного рычага оЬ и Ьс и т. д. Таким
образом найдутся давления Rif R%, ... в неподвижных под-
шипниках и давления Т19 Тх, Т2, Т2, ... в подшипниках на
шатунах.
Элементарная работа &F сил трения выразится формулой,
отличающейся от предыдущей тем, что для одного и того же
шатуна надо брать различные силы Т. Мы получим при этом
такую формулу:
87^= [/?1Р14~ 4- |а2 (Р2р2 -j~ ?/Р1 +
+ Нз (*зРз + ъРъ + Tsp/) + Р-4 +
+ МЛр/+ Л'РаЭН” ^(5Г2р2,,+ 7*2,Рз,,) + ^з(7’зРз,+^з'р4,)]«
Пользуясь этой формулой, мы можем находить с прибли-
жением силу уравновешивающую все данные силы, дей-
ствующие на кинематическую цепь вместе с развивающимися
в шарнирах силами трения. Предположим, что сила Рх дана
по направлению, и движение цепи должно начаться в сторону
силы Рх (на фиг. 24 по часовой стрелке). Сначала рассматри-
ваем равновесие вспомогательного рычага, не принимая во
внимание сил трения, и’определяем из условия равенства нулю
суммы моментов всех сил величину Рх.
После этого вносим поправку на трение.
614
ЗАДАЧИ О КИНЕМАТИЧЕСКОЙ ЦЕПИ
§ 9
Для этого по вышеуказанному способу определяем &F и
искомой силе приписываем значение:
где h — перпендикуляр, опущенный из о на данное направле-
ние силы.
Работа „Сведение динамических задач к задачам о рычаге" была сооб-
щена автором в Математическом обществе 16 декабря 1908 г. и напеча-
тана в «Математическом сборнике" т. XXVIII, 1911. Прим. ред.
REDUCTION OF DYNAMICAL PROBLEMS RELATING TO THE KINE-
MATIC CHAIN TO THOSE OF THE LEVER
In this work Prof. Joukovsky gives a method of solving
various dynamical problems of the kinematic chain with one
degree of freedom, by reducing them to corresponding problems
of the lever representing a rigid frame having the shape of Mohr’s
diagram of velocities and supported at the pole.
The method is based upon the construction of two
diagrams: Mohr’s diagram of velocities and that of centri-
petal accelerations. In both these diagrams each link of the
chain is represented by a similar figure so that, if AB is any
segment of the link represented by ab in Mohr’s diagram and
by «Р in the diagram of centripetal accelerations, then || ab || AB*
the ratio ab: AB is equal to the angular velocity ш of the
link, and оф = ab2: AB — <*>2AB.
By means of the diagram of centripetal accelerations it is
possible, from the acceleration of one point of the kinematic
chain, to construct the acceleration of any other point, making
use of the following rule: in the diagram of the centripetal
accelerations, the line joining the ends of the acceleration vec-
tors of two points of the same link is at right angle to the line
connecting these two points. (Theorem II).
Having the possibility for the construction of the accele-
ration of any point it is easy to find the .point (of rotation of
any link.
The construction of the diagrams is illustrated by several examp-
les in §§ 2, 3 and 4.
Prof. Joukovsky terms “the auxiliary lever" of the kinema-
tic chain the statically determinate frame having the shape of
the diagram of velocities of the chain, obtained when the angu-
lar velocity of a certain "main link" is equal to unity. The points
616
SUMMARY
of the auxiliary lever representing the points of the chain are
supposed to possess the same masses as the corresponding points
of the chain.
The dynamical relationship between the auxiliary levers and
the kinematic chain is expressed by two theorems:
The condition of equilibrium of the kinematic chain acted on
by forces can be replaced by the condition of equilibrium of
the auxiliary lever acted on by equal and parallel forces applied
at corresponding points. At the same time the elastic forces in
the links of the chain will be equal to those in the correspon-
ding members of the auxiliary lever. (Theorem III).
The kinetic energy of the kinematic chain is equal to the
moment of inertia of the auxiliary lever with respect to its point
of support multiplied by half the square of the angular velocity
of the main link. A force acted upon any point of the resting
kinematic chain imparts to the main link angular acceleration
equal to that imparted by a geometrically equal force applied
to the corresponding point of the auxiliary lever (Theorem IV).
These theorems Prof. Joukovsky applies to solve the two fol-
lowing problems.
Problem 1: To find the length of the mathematical pendulum
equivalent to the given kinematic chain, i. e. the length of the
pendulum of which the time of oscillation is equal to the period
of oscillation of the kinematic chain about the position of stable
equilibrium when the chain is acted upon by any given forces.
This length is determined by the following theorem:
Mathematical pendulum corresponding to a given kinematic
chain is equivalent to a physical pendulum representing the
auxiliary lever acted on by two group of forces: 1. representa-
tions on the auxiliary lever of all forces acting in the kinematic
chain; 2. forces equal and opposite in their direction to the
resultants of representations of all forces acting on each of the
links, applied to the points representing the points of rotation
of the links (Theorem V).
In the above theorem “the representation“ of a force F applied
to a point of the link is called the force F equal and paral-
lel to the force F, applied to the corresponding point of the auxi-
SUMMARY
617
liary lever, where is the angular velocity of the link acted on
by the force F9 and ю is the angular velocity of the “main link".
The theorem is applied to determine the length of the equiva-
lent pendulum for a decimal balance, for the chain shown in
Fig. 17, and for a centrifugal governor.
Problem 2: To determine the elastic forces in a moving ki-
nematic chain. To obtain the solution of this problem Prof.
Joukovsky proves the following theorem:
The inertia forces of any link, when transferred on to the
auxiliary lever is reduced to two forces, viz.
Rr = M og passing through the centre of oscillation
the force
correspon-
ding to the point of support of the auxiliary lever, and the
MQ2
force R2 =----г; ghk making an angle 6 with the radius gh drawn
cos о
from the centre of gravity g of the link to the representation of
the centre of acceleration and applied at the centre of oscil-
lation h' of the link corresponding to the point of suspension
placed at h (Theorem VI).
This theorem is applied to find the pressure of a slide on the
guides, to find the pressure of a flywheel on its bearings, to
find the magnitude of the bending couple on a crank and to
find the tension and the bending moment at any section of a
connecting rod.
In conclusion the theory of the auxiliary lever is applied to
determine the frictional losses in the hinges of the kinematic
chain.
О МЕХАНИЗМЕ Л. В. АССУРА.
(1917 г).
§1. В своем сочинении „Исследование плоских стержневых
механизмов с низшими парами с точки зрения их структуры
Фиг. 1.
и классификации" 1 А. В. Ассур указывает механизм, предста-
вляющий замкнутую цепь из шарнирно соединенных звеньев,
1 Часть II, вып. I, Петроград 1915.
О МЕХАНИЗМЕ Л. В. АССУРА
619
причем на каждом звене, кроме одного, имеется шарнирно
присоединенный поводок с неподвижной осью вращения, как
это изображено на фиг. 1.
Что указанное расположение звеньев представляет систему
с одной степенью свободы, видно из того, что отбрасывание
звена АЕ и прибавление поводка AF дает обыкновенную ра-
зомкнутую цепь, состоящую из кривошипов, соединенных же-
сткими звеньями; отбрасывая же кривошип AF и вводя вместо
него условие неизменяемости расстояния АЕ, мы заменяем
в нашей системе одну связь другой и тем оставляем систему
системой с полным числом условий.
В предлагаемой заметке указывается для механизма фиг. 1
способ определения скоростей, который, на мой взгляд, зна-
чительно проще способа ложных построений Мора, которым
пользуется Л. В. Ассур.
§ 2. Мой способ опирается на теорему о равенстве проекций
скоростей концов неизменяемой прямой на ее направление,
причем теорема остается верной и в предположении, что прямая
MN перекъдж? в шарнире О из одного звена в другое, как
это изображено на фиг. 2.
Этой теоремой Л. В. Ассур с успехом пользуется для
определения скоростей в открытых цепях, но отступается от
нее при переходе к замкнутым цепям.
Для определения скоростей механизма фиг. 1 по предла-
гаемому мною способу, надо через шарнир А провести про-
извольную прямую 7 и продолжить ее до пересечения с на-
правлением поводка /. От полученной точки пересечения (7, /)
надо отложить по направлению прямой 7 вправо некоторый
отрезок, который принять за проекцию скорости на эту прямую.
620
О МЕХАНИЗМЕ Л. В. АССУРА
Так как вся скорость точки 7, I должна быть перпендикулярна
к направлению поводка I (проекция скорости на направление
поводка вследствие неподвижности его точки опоры по указан-
ной теореме есть нуль), то, восставляя перпендикуляр из конца
упомянутого отрезка до пересечения с нормалью к поводку,
мы получим скорость точки 7, 7 и можем спроектировать эту
скорость на прямую 2, проходящую через точку 7, 7 и шарнир В.
Эту прямую надо продолжить до пересечения с направле-
нием поводка II и перенести в точку 2, II найденную проекцию
скорости на прямую 2. Из конца этой проекции надо восставить
перпендикуляр до пересечения с нормалью к поводку /7, и най-
денную скорость точки 2, II надо спроектировать на прямую 5,
проходящую через шарнир С. Продолжая такое построение,
мы найдем наконец проекцию скорости на прямую 5, прохо-
дящую через шарнир Е, и таким образом будем для точки 7,5
бесповодкового звена АВ знать проекции скорости на прямые
7 и 5, Восставляя перпендикуляр из концов этих проекций
к прямым 7 и 5, найдем по величине и направлению ско-
рость v точки 7,5 бесповодкового звена. Таким же способом
можно построить скорость V1 для некоторой другой точки этого
звена и, восстановив к этим скоростям перпендикуляры, найти
(фиг. 1) его мгновенный центр вращения О. Зная этот центр,
мы легко построим мгновенные центры вращения всех осталь-
ных звеньев. Для этого надо из центра О провести прямую
ОА до пересечения в точке Ог с продолжением поводка 7;
потом провезти прямую OtB до пересечения с поводком 77
в точке О,2 и т. д.
Найденные точки О, Oi9 О2, О3, О4 будут мгновенными
центрами вращения звеньев ЕА, АВ, ВС и DE на основании
теоремы о проекции скоростей концов прямой на эту прямую
§ 3. Если присоединить к бесповодковому звену поводок
с неподвижной точкой опоры, то механизм Ассура обратится
в жесткую определенно статическую систему стержней. Если
же в этой системе все или некоторую точку опоры поводков
присоединить посредством шарниров к точкам некоторого дру-
гого механизма, то получится новый более сложный механизм.
Стоя на этой точке зрения образования новых механизмов
Л. В. Ассур занимается вопросом об определении скоростей
О МЕХАНИЗМЕ Л. В. АССУРА
621
системы (фиг. 1) с прибавленным к звену ЕА поводком V
(не изображенным на фиг. 1) по заданным скоростям концов
всех поводков. Решение этой задачи заключено в решении
задачи, рассмотренной в § 2. Искомые скорости сложатся
геометрически из скоростей, которые будут получаться, делая
поочередно неподвижными концы всех поводков, кроме одного
и сообщая этому последнему за-
данную скорость.
Пусть (фиг. 3) дана скорость
конца поводка И, присоединен-
ного к звену ЕА. Чертим ее про-
екцию и на направление поводка
V и опускаем на продолжение
этого поводка из мгновенного
центра О перпендикуляр h. Угло-
вая скорость звена ЕА выразится
при этом формулой:
и
ш~~к-
Зная найдем угловую скорость
звена АВ по формуле:
• О А
0)1 - О.А
и т. д. Таким образом могут быть найдены мгновенные центры
и угловые скорости для каждого из вышеупомянутых звеньев
механизма Ассура, и предложенная им задача сведется к гео-
метрическому сложению скоростей всех этих движений.
Работа „О механизме Л. В. Ассура* была сообщена автором в заседа-
нии Московского математического общества 15 марта 1916 г. и напечатана
в „Математическом сборнике*, 1917. Прим. ред.
ON ASSUR’S MECHANISM
In this note Prof. Joukovsky gives a method, for determi-
ning the velocities of points in Assur’s mechanism represented
in Fig. 1. The method is based on the construction of the instant-
aneous centres of the links of the mechanism by means of the
known theorem: Projections of velocities of two points of a rigid
body on a straight line through these points are equal.
Приложение
ПЛАН ИЗДАНИЯ ПОЛНОГО СОБРАНИЯ СОЧИНЕНИИ
Н. Е. ЖУКОВСКОГО
Том I
Н. Е. Жуковский. — Биографический очерк, составленный проф.
В. В. Голубевым.
Общая механика
Кинематика
Приложение центров ускорений высших порядков к направляющему ме-
ханивму Чебышева.
Рычажный дубликатор Делоне.
О механизме Ассура.
Прибор Кемпе.
Механика кинематической цепи
Сведение динамических задач о кинематической цепи к задачам о рычаге..
Общая динамика
Sur le principe de la moindre action.
Sur un cas particulier du mouvement d’un point materiel.
Связь между вопросами о движении материальной точки и о равновесии
нити.
Аналогия двух задач механики.
О начале наименьшего действия.
К вопросу о движении точки под притяжением одного и двух центров.
О прочности движения.
О характеристических функциях Якоби и Гамильтона.
Определение силовой функции по заданному семейству траекторий.
Ober den Mittelwert des kinetischen Potentials.
Динамика твердого тела
Sur la percussion des corps.
К вопросу о наибольшем ударе.
624
ПЛАН ИЗДАНИЯ СОЧИНЕНИЙ Н. Е. ЖУКОВСКОГО
О влиянии колебаний штатива на время качания маятника.
О движении маятника с трением в точке привеса.
Об ударе абсолютно твердых тел.
Об артиллерийских снарядах Шапеля.
Планиграф Дарбу.
Локсодромический маятник Гесса.
Geometrische Interpretation des Hess’schen Failes der Bewegung eines
.schweren starren Korpers um einen festen Punkte.
Модель маятника Гесса,
О гироскопическом шаре Бобылева.
Геометрическая интерпретация рассмотренного С. В. Ковалевской слу-
чая движения тяжелого твердого тела около неподвижной точки.
Геометрическая интерпретация теории движения полюсов земли по ее
поверхности.
Ein neuer Gyroskopischer Apparat.
Об упругой оси турбины Лаваля.
О движении материальной псевдосферической фигуры по поверхности
псевдосферы.
Условия конечности интегралов уравнения А~РУ — 0.
Условие равновесия твердого тела, опирающегося на неподвижную пло-
скость некоторой площадью.
Замечание по поводу статьи Б. К. Млодзеевского „Об огибающей ор-
бит при иьютонианском притяжении14.
Статьи элементарные и педагогические
Прибор, изобретенный Н. Е. Жуковским, для определения моментов
инерции тел.
Sur un appareil nouveau pour la determination des moments de 1’inertie
des corps.
Элементарная теория гироскопов.
Toм II
Г ид родинамика
Кинематика жидкого тела.
Лекции по гидродинамике.
Обобщение задачи Бьеркнеса.
Том III
Гидродинамика
Случай движения жидкой площадки по инерции
Об ударе двух шаров, из которых один плавает в жидкости.
ПЛАН ИЗДАНИЯ СОЧИНЕНИЙ Н. Е. ЖУКОВСКОГО
625
О движении твердого тела, имеющего полости, наполненные однород-
ной капельной жидкостью.
Решение одной задачи гидростатики.
Видоизменение метода Кирхгоффа для определения движения жидкости
в двух измерениях при постоянной скорости, дайной на неизвестной линии
тока.
Определение движения жидкости при каком-нибудь условии, данном на
линии тока.
К вопросу о разрезании вихревых шнуров.
Заметка о движении вихревых колец.
О подсасывающем действии потока воздуха на пластинку.
О замене диска Рэлея продолговатой пластинкой.
О снежных заносах.
О снежных заносах и заилении рек.
Том IV
Волны. Вязкость. Реакция жидкости
О реакции вытекающей и втекающей жидкости. Статья I.
О реакции вытекающей и втекающей жидкости. Статья II.
К теории судов, приводимых в движение силой реакции воды.
О форме судов.
О спутной волне.
Движение волны со скоростью большей скорости звука.
Действие волнующейся жидкости на плавающие на ее поверхности
тела.
О гидравлической теории трения хорошо смазанных твердых тел.
О движении вязкой жидкости, заключенной между вращающимися экс-
центрическими цилиндрическими поверхностями.
О трении смазочного слоя между шипом и подшипником.
О движении воды на повороте реки.
Упрощенный вывод уравнения движения вязкой несжимаемой жидкости.
Прибор для определения коэфициента вязкости масел.
Том V
Вихри. Теория крыла. Авиация
О присоединенных вихрях.
De la chute dans Pair des corps legers de formes allongees, animees d un
mouvement rotatoire.
Вихревая теория лобового сопротивления, данная профессором Карма-
ном. Статья I.
Вихревая теория лобового сопротивления. Статья II.
Geometrische Untersuchungen uber die Kutta’sche Stromung
, Ober die Konturen der Tragflachen der Drachenflieger.
Зак. 2365. — H. E. Жуковский. T. I.
40
626 ПЛАН ИЗДАНИЯ СОЧИНЕНИЙ Н. Е. ЖУКОВСКОГО
Определение давления плоскопараллельного потока жидкости на контур
который в пределе переходит в отрезок прямой.
О поддерживающих планах типа Антуанетт
Ober die Tragflachen des Typus Antoinette.
О парении птиц.
О наивыгоднейшем угле наклона аэроплана.
Динамика аэропланов в элементарном изложении. Статья 1
Динамика аэропланов. Статья 2.
Аэродинамический расчет аэропланов.
Бомбометание с аэропланов.
Теория шаров-пилотов.
О падении в воздухе продолговатых легких тел, вращающихся около
своей продольной оси (статья 1).
Аэродинамическая лаборатория при кабинете прикладной механики
Московского университета.
Том VI
Винты. Ветряки. Вентиляторы Аэродинамическая труба
К теории летания.
О крылатых пропеллерах.
О полезном грузе, поднимаемом геликоптером.
Вихревая теория гребного винта. Статьи 1, 2, 3 и 4.
Essai sur la determination theorique de I’effet du courant aerien dirige
dans le plan de Thelice.
Теория гребного винта с большим числом лопастей
Аэродинамический расчет медленно движущихся мельниц.
Тихоходные ветряные мельницы.
Ветряная мельница типа Н. Е. Жуковского.
Насадки и диффузоры аэродинамических труб.
Том VII
Гидравлика
Теоретические исследования о движении подпочвенных вод.
О влиянии давления на насыщенные водой пески.
О парадоксе Дюбюа.
Прибор для определения сопротивления при движении воды.
Ober den hydraulischen Stoss in Wasserleitungsrohren.
О гидравлическом ударе и водопроводных трубах.
К вопросу о величине диаметра водонапорной колонны, соединенной
с открытым резервуаром.
О распределении скоростей в водопроводных трубах.
Об одной задаче, относящейся к подпрудной кривой.
О просачивании воды через плотины
ПЛАН ИЗДАНИЯ СОЧИНЕНИЙ Н. Е. ЖУКОВСКОГО
627
К вопросу о выборе на реке мест забора и выпуска воды для охлажде-
ния машин больших силовых станций.
О повреждении водопроводных труб.
Определение скорости продуктов горения в заводской трубе по фото-
графиям выбрасываемого ею дыма.
О движении воды в открытом канале и о движении газов в трубах.
О трении жидкости при большой разности скоростей ее струй.
Аналогия между движением тяжелой жидкости в узком канале и движе-
нием газа в трубе с большой скоростью.
Том VIII
Теория упругости. Железные дороги. Автомобили
О скольжении ремня на шкивах.
Распределение давлений на нарезках винта и гайки.
О прочности велосипедного колеса.
Вывод основных формул теории упругости.
Теория прибора инженера Ромейко-Гурко.
О давлении поршней в моторе „Гном".
Письмо к автору статьи „Влияние поступательной скорости колеса
на напряжение в рельсе*.
О приложении к строительной механике уравнения
g= -4<^.
Исследование устойчивости конструкции аэропланов.
К динамике автомобиля.
Работа (усилие) русского сквозного и американского несквозного тяго-
вого прибора при трогании поезда с места и в начале его движения.
Сила тяги, время в пути и разрывающие усилия в тяговом приборе
и сцепке при ломаном профиле.
О колебании паровоза на рессорах.
Заметка о плоском рассеве.
Том IX
Математика. Астрономия. Речи. Доклады. Характеристики и
биографии
Геометрическое разъяснение некоторых вопросов теории уравнений
с частными производными.
К вопросу о давлении диэлектрического газа в электрическом поле.
Заметка по вариационному исчислению.
Геометрическое доказательство теоремы С. А. Чаплыгина.
О графическом решении основного уравнения при вычислении планет-
ных орбит.
Упрощенное изложение Гауссова способа определения планетных орбит.
40*
628 ПЛ4Н ИЗДАНИЯ СОЧИНЕНИЙ Н. Е ЖУКОВСКОГО
Sur une demonstration nouvelle du theoreme de Lambert.
Sur la construction des courbes syndynamiques et synchronlques.
Решение одной задачи из теории комет.
Вывод формул движения частиц кометных хвостов, имеющихся в статье
Ф. А. Бредихина.
Речи. Доклады
Летательный аппарат О. Лилиенталя.
О гибели воздухоплавателя О. Лилиенталя.
Аэродинамические лаборатории Московского университета и Москов-
ского технического училища.
Ньютон, как основатель теоретической механики.
Старая механика в новой физике.
Механика в Московском университете за последнее пятидесятилетие.
О воздухоплавании.
Новые научные завоевания в теории сопротивления жидкостей.
Характеристики и биографии
Труды А. Ю. Давидова по аналитической механике.
Труды С. В. Ковалевской по прикладной математике
Некролог и очерк учебной деятельности Ф. Е. Орлова.
О трудах В. Г. Имшенецкого по механике.
О деятельности А. Г. Столетова.
Биография и ученые труды Ф. А. Слудского.
М. В. Остроградский.
Ученые труды М. В. Остроградского по механике.
О работах В. Я. Цингера по механике.
О работах Д. И. Менделеева по сопротивлению жидкостей и воздухо-
плаванию.
Н. А. Умов как математик.
Работы Гельмгольца по механике.
Биография и некролог Б. М. Бубекина.
Биография и некролог С. В. Гулевича.
Воспоминания о А. И. Ливенцове.
Краткая характеристика литературных работ А. И. Пермякова.
Отзыв о сочинении В. А. Михельсона „О нормальной скорости воспла-
менения гремучих газовых смесей
Том X
Неизданные сочинения Н. Е. Жуковского
В десятом томе предполагается поместить посмертные работы Н. Е
Жуковского, ранее нигде не печатавшиеся.
ПЛАН ИЗДАНИЯ СОЧИНЕНИЙ Н. Е. ЖУКОВСКОГО 629
КУРСЫ ЛЕКЦИЙ В ПЯТИ ВЫПУСКАХ
1. Теоретическая и аналитическая механика. Гидромеханика*
2. Прикладная механика
3. Теоретические основы воздухоплавания, ч. I. То же, ч. II.
4. Специальные курсы теоретической механики
5. Теория регулирования хода машин
Курсы лекций Н. Е. Жуковского имеют различный характер.
Курс теоретической механики вместе с аналитической механикой читан
Н. Е. Жуковским в МВТУ. Другой курс теоретической механики, вместе
с гидромеханикой, более серьезный, читан им в университете.
Курс прикладной механики — более элементарного характера.
Теоретические основы воздухоплавания — специальный курс, трактую-
щий те вопросы гидродинамики, знание которых необходимо для инженеров,
специализирующихся в авиастроении. Курс этот читался студентам старших
курсов МВТУ.
Специальные курсы теоретической механики — это лекции, читанные
студентам старших курсов университета.
Теория регулирования хода машин — специальный курс, читанный для
студентов-механиков в МВТУ.
ОГЛАВЛЕНИЕ
Предисловие............. 7
От редакции.............11
Н. Е. Жуковский. — Биогра-
фический очерк, составлен-
ный проф. В. В. Голу-
бевым ................. 15
Sur un cas particulier du
mouvement d'un point
materiel .............. 56
Об одном частном случае
движения материаль-
ной ТОЧКИ (перевод пре-
дыдущей статьи).........60
Резюме................. 64
Sur la percussion des
corps..................... 65
О соударении Тел (пере-
вод предыдущей статьи) . . 72
Резюме................. 78
К вопросу о наибольшем
ударе......................79
Резюме ... 85
Связь между вопросами
о движении материаль-
ной точки и о равнове-
сии гибкой нити . 86
Резюме ............. . 90
О начале наименьшего
действия.................. 91
Резюме................. 98
Описание инструмента
Кемпе для решения
уравнений высших сте-
пеней ............. 99
Резюме................103
К вопросу о движении ма-
териальной точки под
притяжением одного
и двух центров ... 104
Резюме и.............109
О прочности движения 110
Резюме...............206
О влиянии колебаний
штатива на время ка-
чания маятника .... 209
Резюме........... ... 216
О характеристических
функциях Якоби и Га-
мильтона ..........217
Резюме ....... 226
Приложение теории цен-
тров ускорений выс-
ших порядков к напра-
вляющему механизму
Чебышева.............227
Резюме...............235
Sur le principe de la
moindre action ... *236
Об ударе абсолютно
ТВерДЫХ тел (статья
первая)..,...........241
632
ОГЛАВЛЕНИЕ
Об ударе абсолютно
твердых тел (статья
вторая)... ... 254
Резюме...............261
Замечание по поводу
статьи Б. К. Млодзеев-
ского ......... ... 263
Резюме.................. 267
Uber den Mittelwert des
kinetischen Potentials . 268
О среднем значении ки-
нетического потен-
циала (перевод предыду-
щей статьи)............271
Резюме............... 274
Элементарная теория ги-
роскопов . 275
Резюме................ 286
Об артиллерийских сна-
рядах Шапеля . . 287
Резюме .... 292
Определение силовой
функции по данному
семейству траекторий 293
Резюме.................309
Sur un appareil nouveau
pour la determination
des moments d’inertie
des corps..............310
О новом аппарате для
определения моментов
ИНерЦИИ тел (перевод пре-
дыдущей статьи)......312
Резюме.................314
Условия конечности ин-
тегралов уравнения
2+av=o...............315
Резюме................323
Планиграф Дарбу .... 325
Резюме....................328
Рычажный дубликатор
Делоне 329
Резюме................331
Локсодромический маят-
ник Гесса............332
Резюме................349
О гироскопическом шаре
Д. К. Бобылева .... 352
Резюме................. . 368
Geometrische Interpreta-
tion des Hess’schen
Failes der Bewegung
eines schweren starren
Korpers um einen festen
Punkt...................370
О движении маятника
с трением в точке при-
веса ................379
Резюме ..................383
Геометрическая интер-
претация рассмотрен-
ного С. В. Ковалевской
случая движения тя-
желого твердого тела
около неподвижной
точки ................384
Резюме....................429
Условие равновесия твер-
дого тела, опирающе-
гося на неподвижную
плоскость некоторой
площадкой и могущего
перемещаться вдоль
этой плоскости с тре-
нием ................ 433
Резюме..................448
Ein neuer gyroskopischer
Apparat 450
ОГЛАВЛЕНИЕ
633
Новый гироскопический
аппарат (перевод предыду-
щей статьи) .........452
Резюме................454
Модель маятника Гесса . 455
Резюме................460
Об упругой оси турбины
Лаваля и об осях с ка-
чающимися подшип-
никами ...............461
Резюме................475
Аналогия двух задач ме-
ханики ..............478
Резюме.............. . 488
О движении материаль-
ной псевдосфериче-
ской фигуры по поверх-
ности псевдосферы . . 490
Резюме............. .... 536
Г еометрическая интер-
претация теории дви-
жения полюсов враще-
ния земли по ее по-
верхности ............540
Резюме.............. ... 562
Сведение динамических
задач о кинематиче-
ской цепи к задачам
о рычаге ........ 566
Резюме..................615
О механизме Л. В. Ассура 618
Резюме..................622
Приложение. План изда-
ния полного собрания
сочинений Н. Е. Жу-
ковского ..........623
CONTENTS
Preface . ............... 7
Editorial................ 11
N. E. Joukovsky.—Bibliogra-
phical Survey Compiled by
Prof. V. V. G о 1 о u b e v . . 15
Sur un cas particulier du
mouvement d’un point
materiel......................
On a Particular Case of
Motion of a Material
Point (Translation of the
56
above paper).............. 60
Summary................... 64
Sur la percussion des corps 65
On the Impact of Rigid
Bodies (Translation of the
above paper)............ 72
Summary.................. 78
On the Problem of Maxi-
mum Impact................ 79
Summary................... 85
Connection between the
Problem of Motion of a
Material Point and That
of Equilibrium of a
Flexible Cord ...... 86
Summary.................. 90
On the Principle of Least
Action.................. 91
Summary .................. 98
A Description of Kempe’s
Instrument for the So-
lution of Equations of
Higher Degrees . ... 99
Summary..................103
On the Problem of Motion
of a Material Point under
Attraction of One Centre
and of Two Centres . . 104
Summary..................109
On the Stability of Motion 110
Summary..................206
On the Effect of Oscilla-
tions of the Support on
the Time of Oscillation
of a Pendulum .... 209
Summary.............. ... 216
On Characteristic Func-
tions of Jacobi and of
Hamilton ................217
Summary..................226
An Application of the
Theory of Centres of
Acceleration of Higher
Orders to the Four-Bar
Chain of Chebyshev . 227
Summary..................235
Sur le principe de la
moindre action .... 236
On the Impact of Perfectly
Rigid Bodies (Paper I). 241
On the Impact of Perfectly
Rigid Bodies (Paper II). . 254
CONTENTS
635
Summary............. .... 261
Some Notes Concerning*
the Paper by B. Mlod-
sievsky . . .263
Summary . ...............267
Uber den Mittelwert des
kinetischen Potentials . 268
On the Mean Value of
Kinetic Potential (Tran-
slation of the above paper) . 271
Summary . ...............274
An Elementary Theory
of Gyroscopes . .275
Summary................. 286
On the Motion of Schapel’s
Projectiles . 287
Summary..................292
The Determination of the
Force Function Accor-
ding to a Given Set of
Path . . . . 293
Summary . . ..........309
Sur un appareil nouveau
pour la determination
des moments d’inertie
des corps................310
A New Apparatus for the
Determination of Mo-
ments of Inertia (Tran-
slation of the above paper) . 312
Summary.................. 314
Conditions of Finiteness
of Integrals of the Equa-
ti°n ЙЧ РУ = 0
315
Summary..................323
The Darboux Planigraph 325
Summary......... ... 328
A Delone Lever Duplicator 329
Summary .... ...... 331
Hess* Loxodromic Pen-
dulum . . 332
Summary..............349
On Bobylev’s Gyroscopic
Sphere......... . 352
Summary..................368
Geometrische Interpreta-
tion des Hess schen
Failes der Bewegung
eines schweten Korpers 370
On the Motion of a Pendu-
lum with Friction at the
Point of Suspension . . 379
Summary..................383
A Geometrical Interpreta-
tion of the Case Trea-
ted by S V. Kowa-
levski of Motion of a
Rigid Body about a
Fixed Point..............384
Summary .... ........429
Conditions of Equilibrium
of a Rigid Body Resting
by a Certain Area on
a Fixed Plane and Able
to Move with Friction . 433
Summary . . ........ . 448
Ein neuer gyroskopischer
Apparat............... 450
A New Gyroscopic Appara-
tus (Translation of the above
paper) ... .... 452
Summary..................454
A Model of Hess' Pendu-
lum ... 455
Summary .... 460
On the Flexible Shaft of
De Laval Turbine and
636
’CONTENTS
on Shafts Mounted in
Oscillating* Bearings . . 461
Summary..................475
An Analogy between Two
Problems of Mechanics 478
Summary .... •...........488
On the Motion of a Mate-
rial Pseudospherical Fi-
gure on the Surface of
a Pseudosphere...........490
Summary..................536
A Geometrical Interpreta-
tion of the Theory of
Motion of Poles of Rota-
tion of the Earth on
Its Surface ...... 540
Summary ..................562
Reduction of Dynamical
Problems Relating to
the Kinematic Chain
to Those of the Lever . 566
Summary...................615
On Assures Mechanism . . 618
Summary ... ...... 622
Appendix. Publication
Plan of the Collected
Works of N. E. Joukovsky 623
Редактор Ф. С. Шаховской .
Техн. ред. A. H. С а в a p и.
Сдано в набор 8/IX 1937 г.
Подписано к печ. 25!X 1937 г.
Автор, дог. № 223.
Инд. 20-5-4. Тираж 3000.
Колич. печ. лист. 39,75.
Учетно-авт. лист. 30. Формат
бум. 62У!94!16. Уполн. Глав-
лита № Б-28661. Зак. № 2365.
2-я тип. ОНТИ им. Евгении
Соколовой,Ленинград, пр.Крас-
ных Командиров, 29.
Опечатки
Стр. Строка Напечатано Следует По чьей вине
98 7 сверху е, ei, . . . С, Ср . . . Ред.
98 9 и 10 св. асЪ, . adc, a\diCy Ред.
98 И ъ,ьь. . . с,сь . . . Ред.
206 12 снизу « for for ot Ред.
401 8 „ 0 -.Г(ei—S2) (е2—s,) (е3- s2) 2 2 у R - (ei“s2) (e2—«2) (e3“ — R "$2) Тип.
612 3 сверху Г1Р1' Т^' Лр/ +w Тип. ч
Зак. 2365. Н. Е. Жуковский, Собрание сочинений, том I.