





































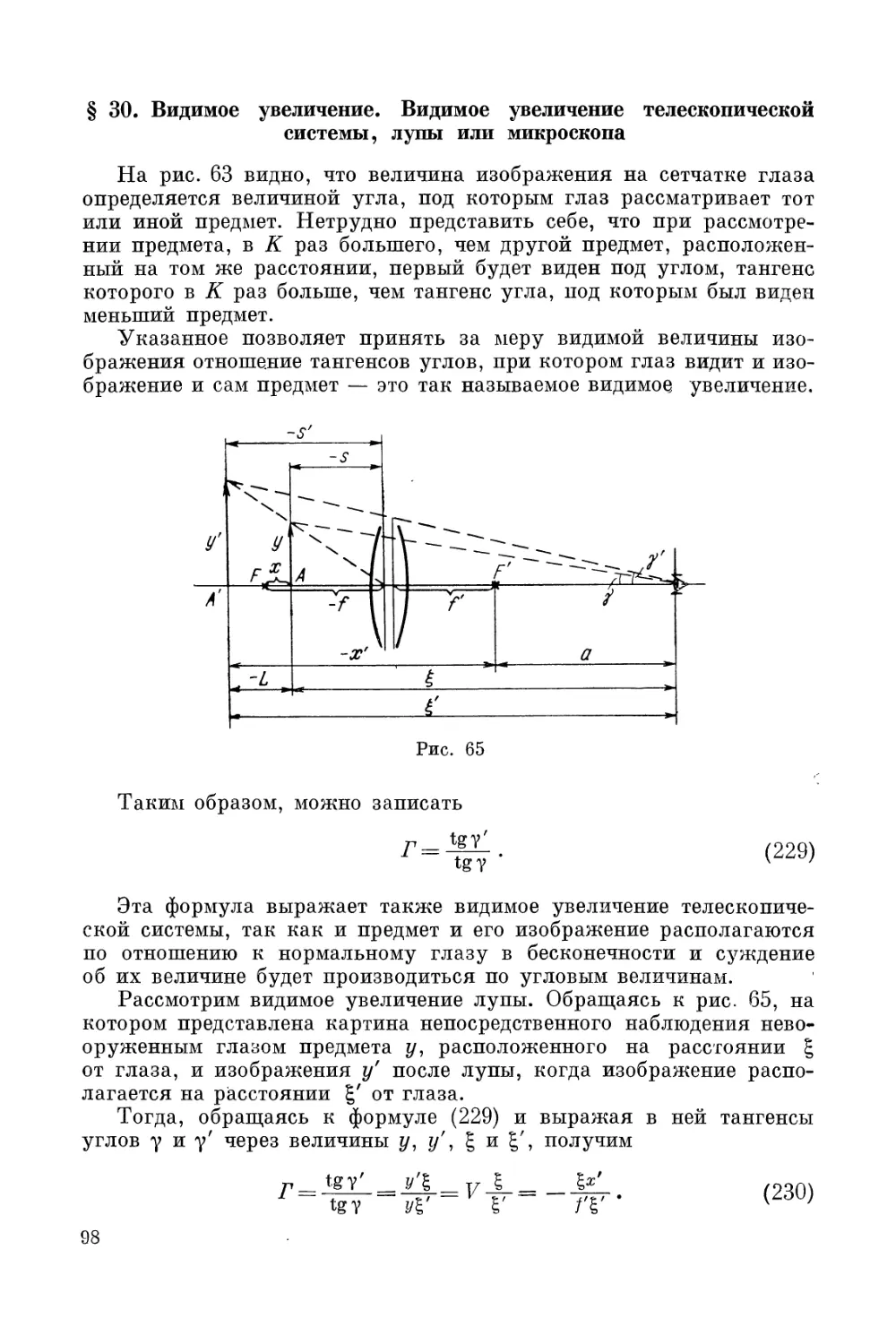
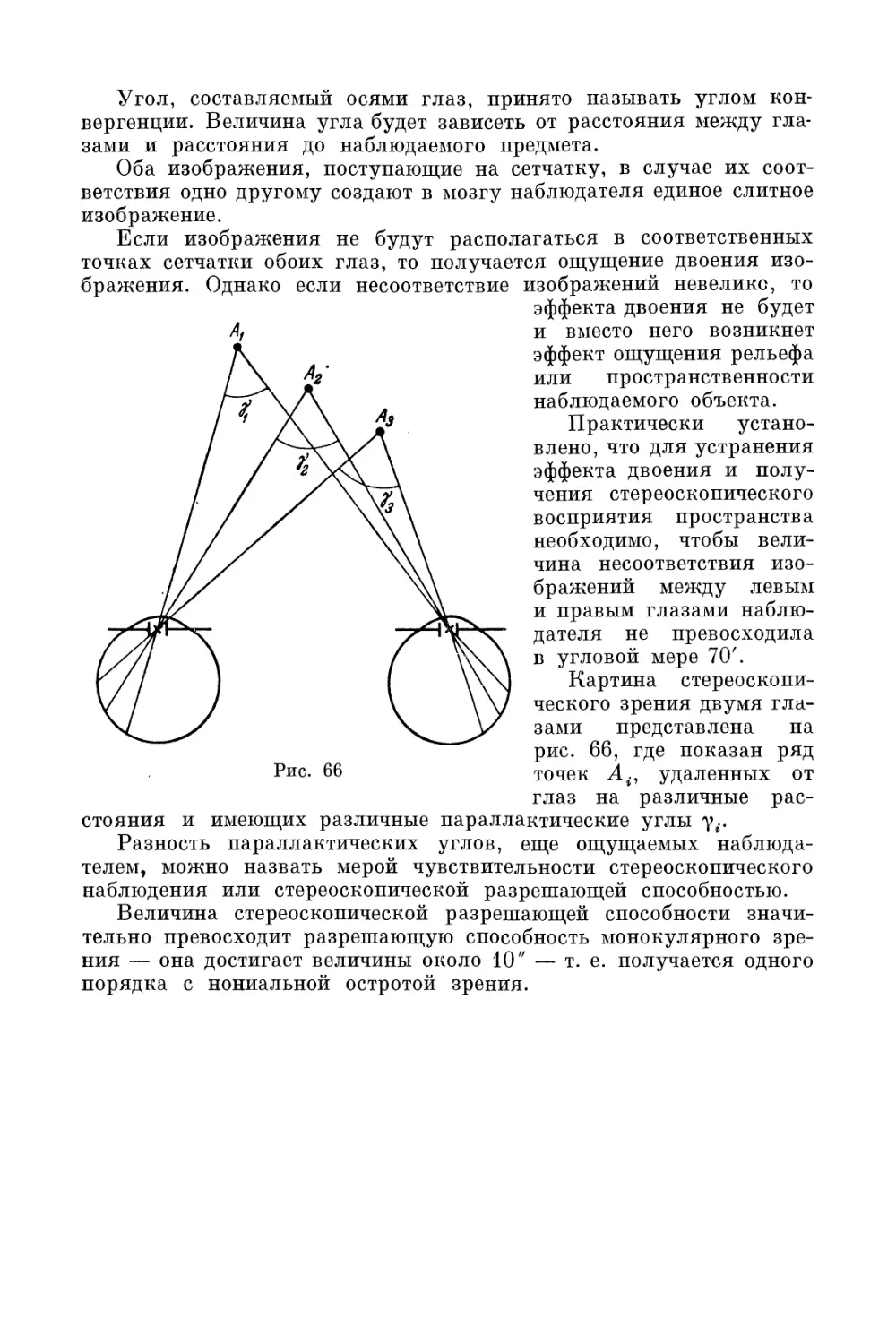









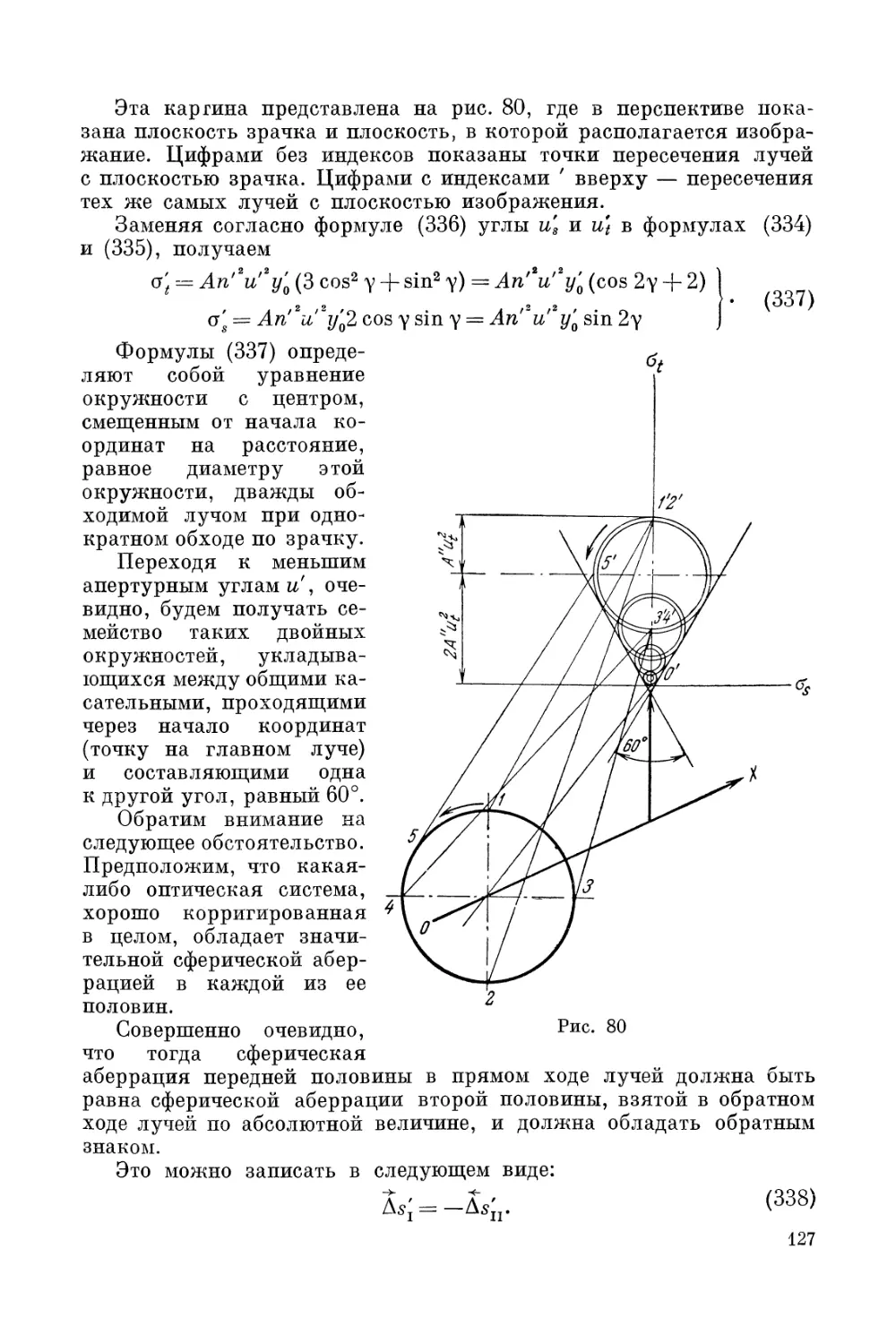




















































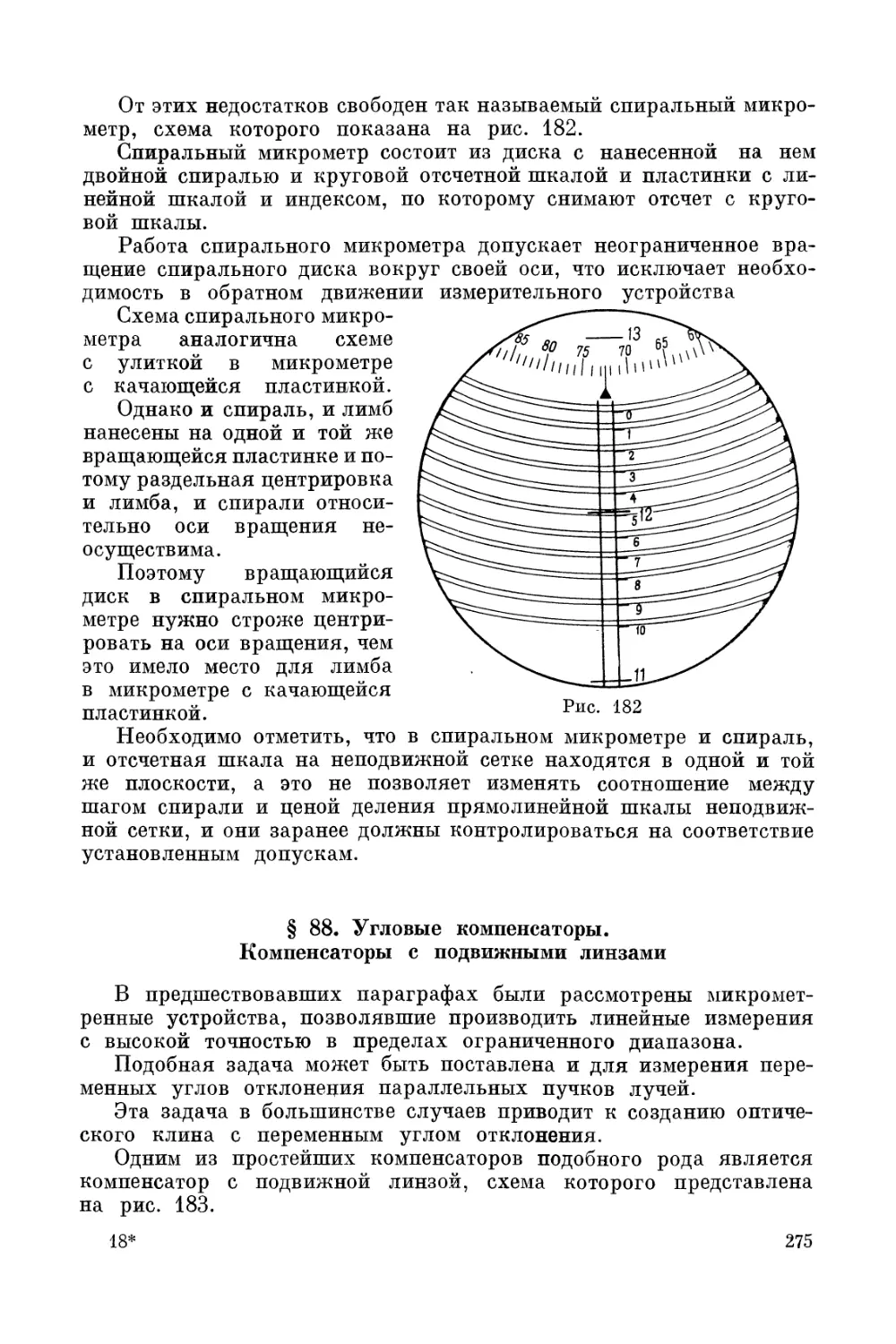




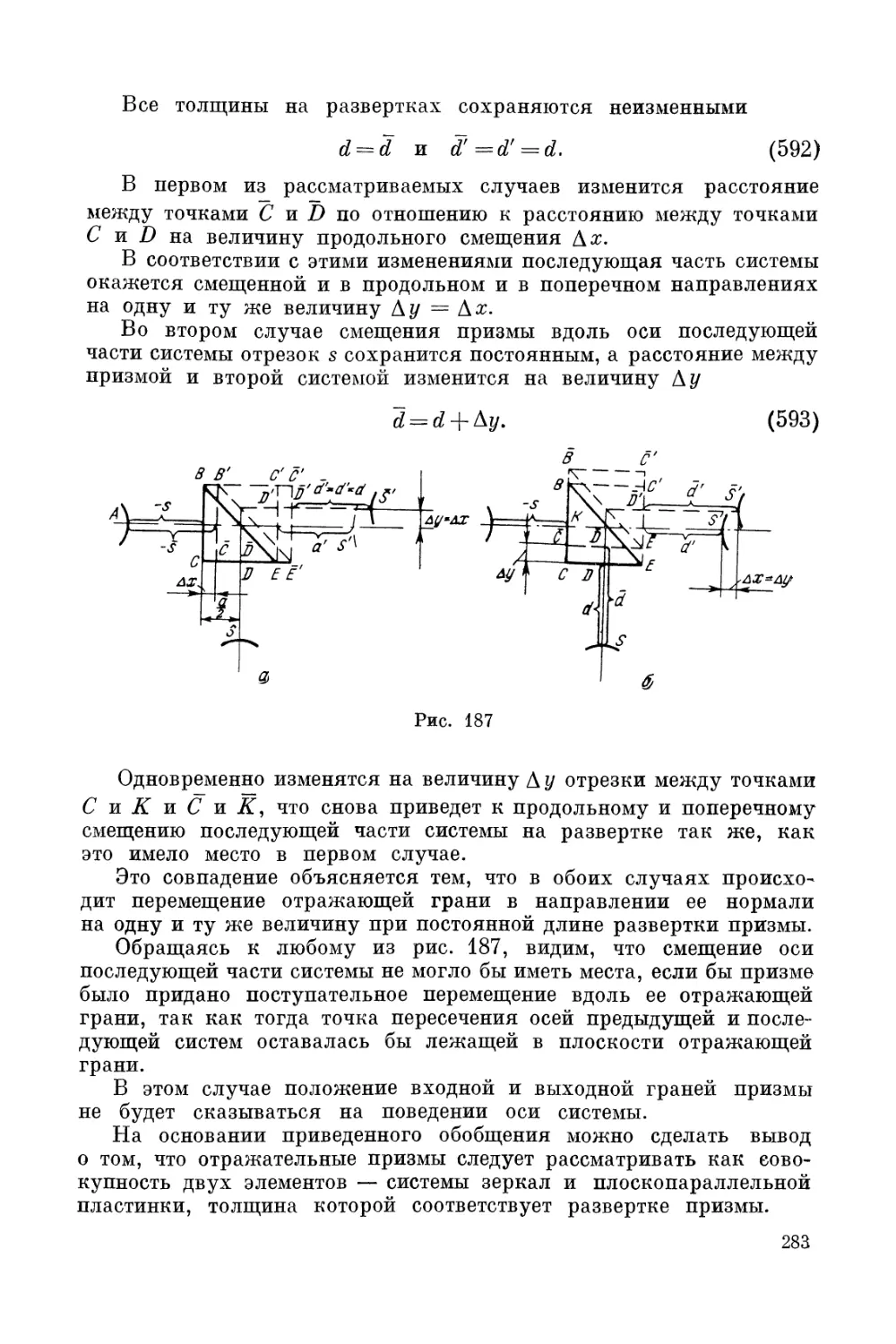



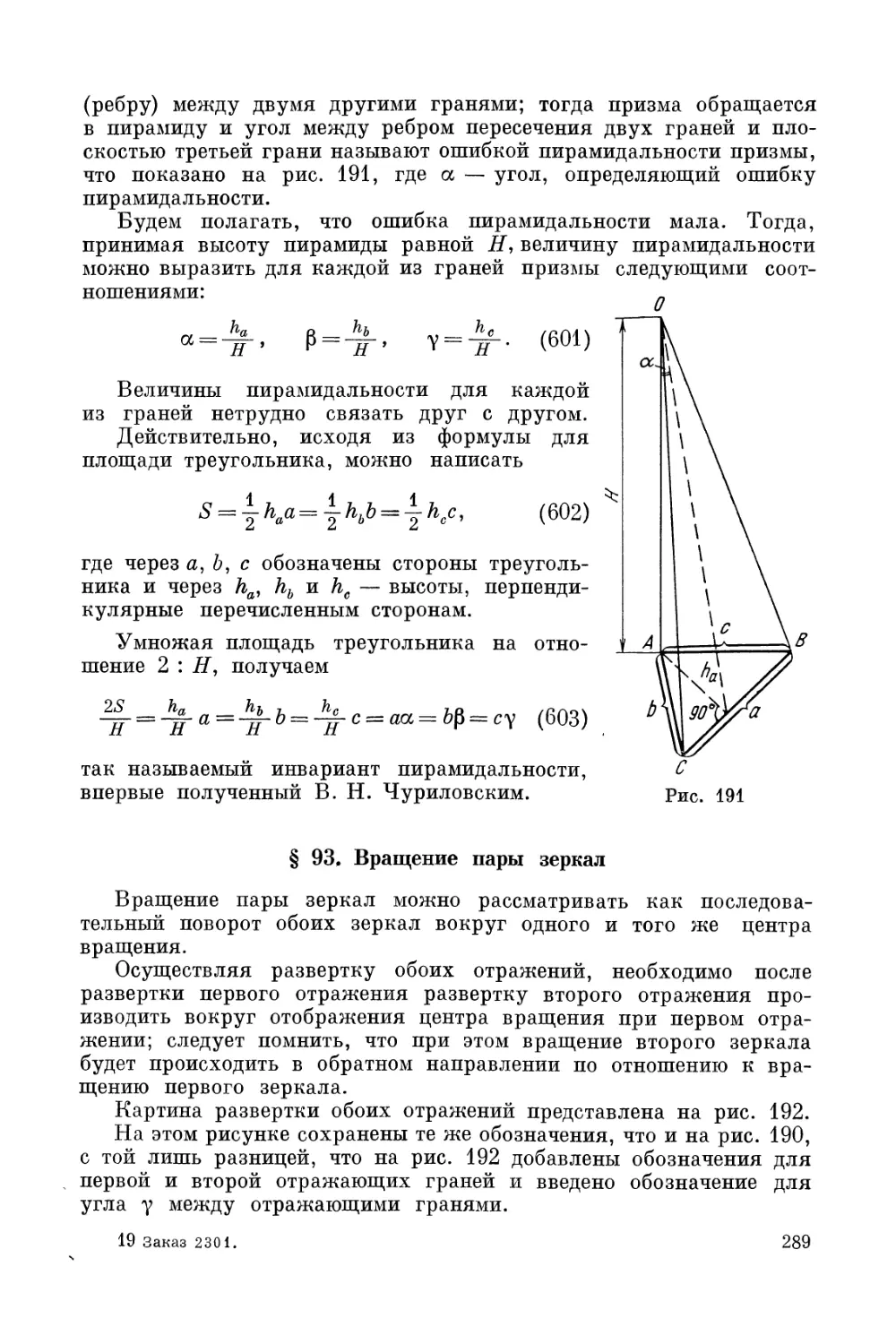


























Текст
М.М.РУСИНОВ
ЮСТИРОВКА ОПТИЧЕСКИХ ПРИБОРОВ
М. М. РУСИНОВ
ЮСТИРОВКА
ОПТИЧЕСКИХ
ПРИБОРОВ
ИЗДАТЕЛЬСТВО „НЕДРА*'
Москва 1969
Scan AAW
УДК 621.3.089.6 : 528
1-4-1
Юстировка оптических приборов. М. М. РУСИНОВ. Изд. «Недра»,
1969 г., стр. 328.
Книга посвящена рассмотрению разного рода ошибок, возникающих
в процессе сборки различных оптических приборов и способов устранения
этих ошибок.
В целях обобщения и систематизации материала в первой части книги
излагаются различные геометрические. схемы оптических приборов; вторая
и третья части посвящены общим вопросам из теории оптических приборов
и действию призм и зеркал; четвертая, последняя часть рассматривает юсти-
ровку отдельных характерных элементов оптических систем и сборку и юсти-
ровку главнейших оптических приборов в целом.
Кроме того, приводятся основы расчета допусков на отдельные опти
ческие детали.
Иллюстраций 208, таблиц 1, библ, названий 6.
2-7-2—2-7-1______
№ 431, темплан 1968 г.
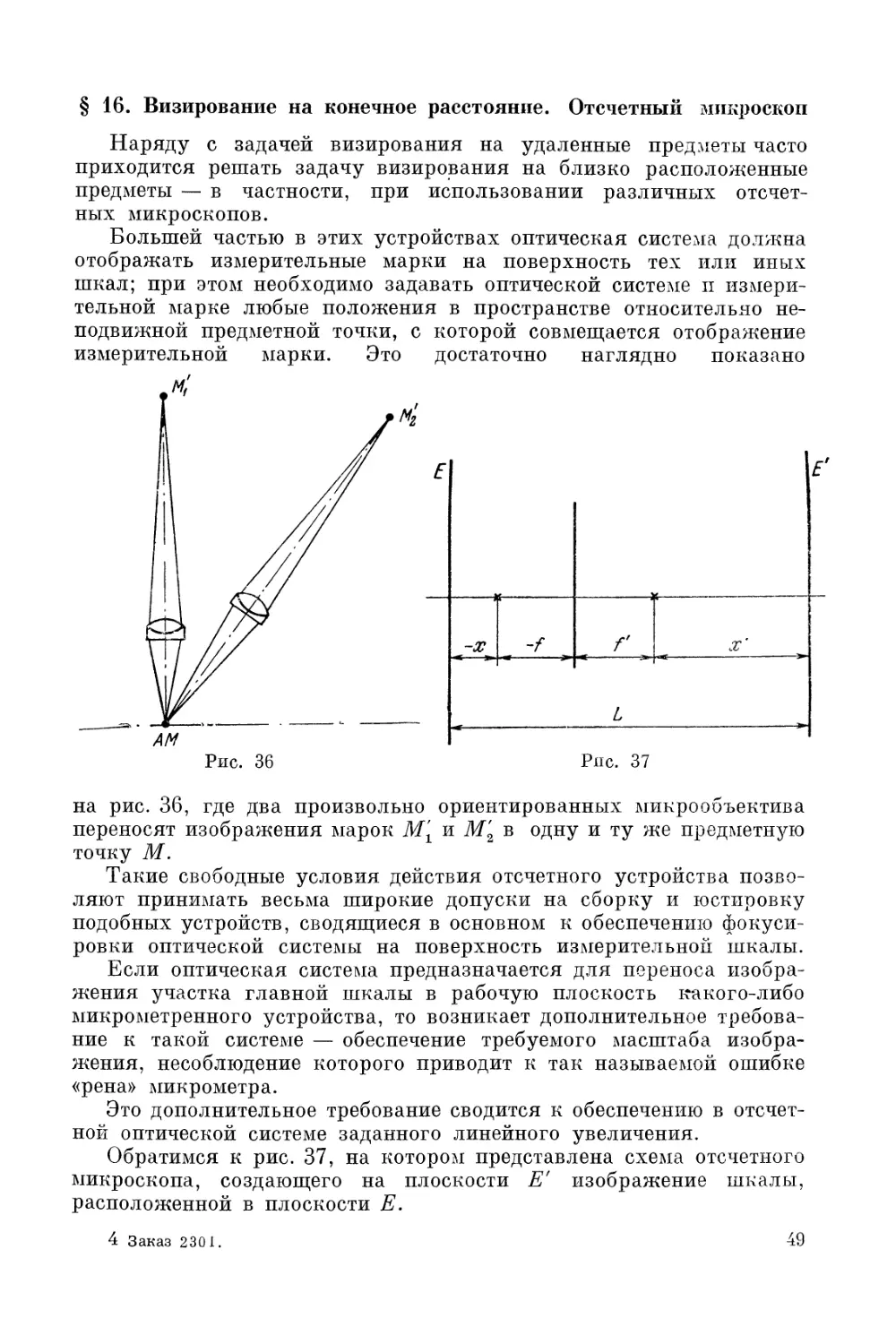
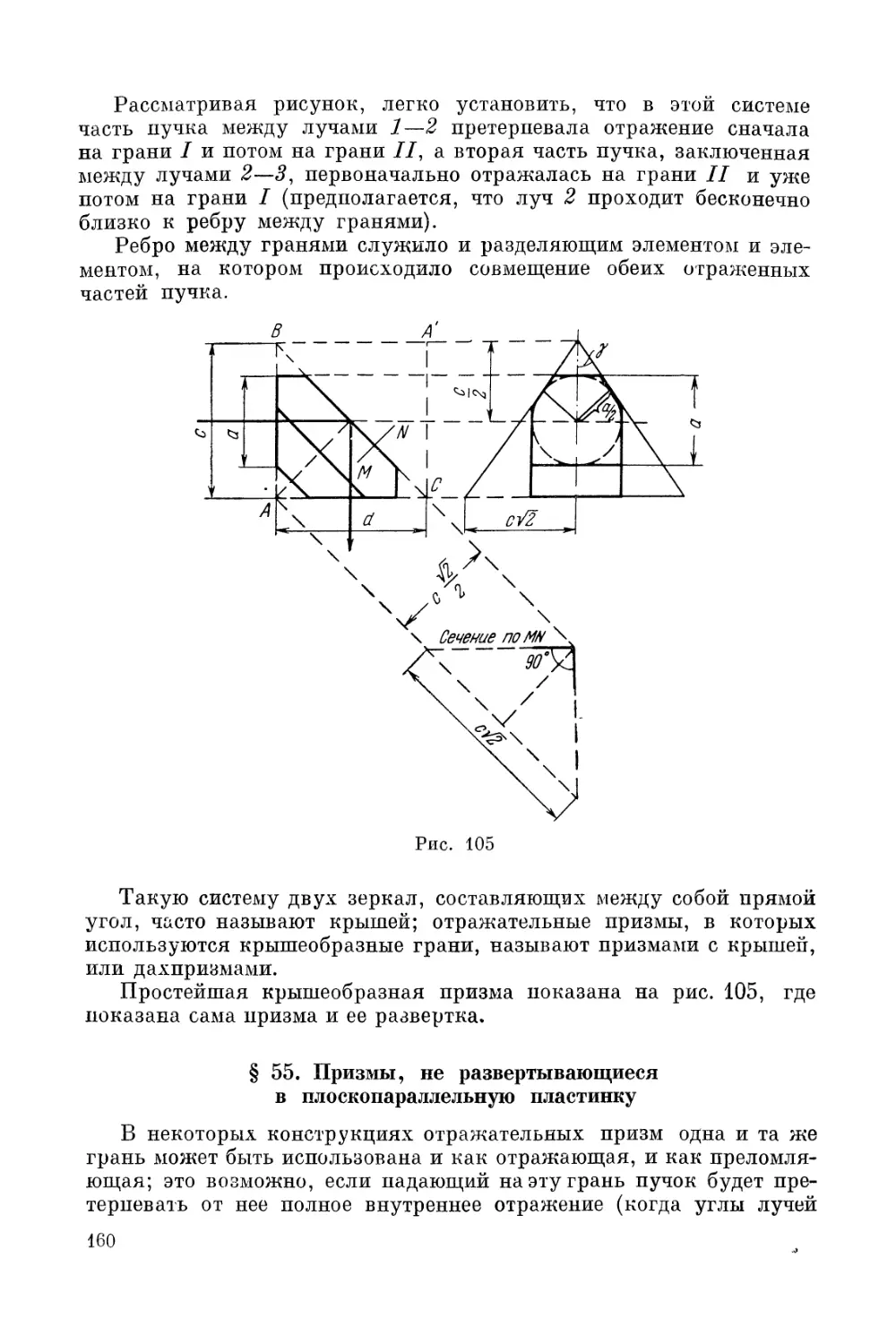
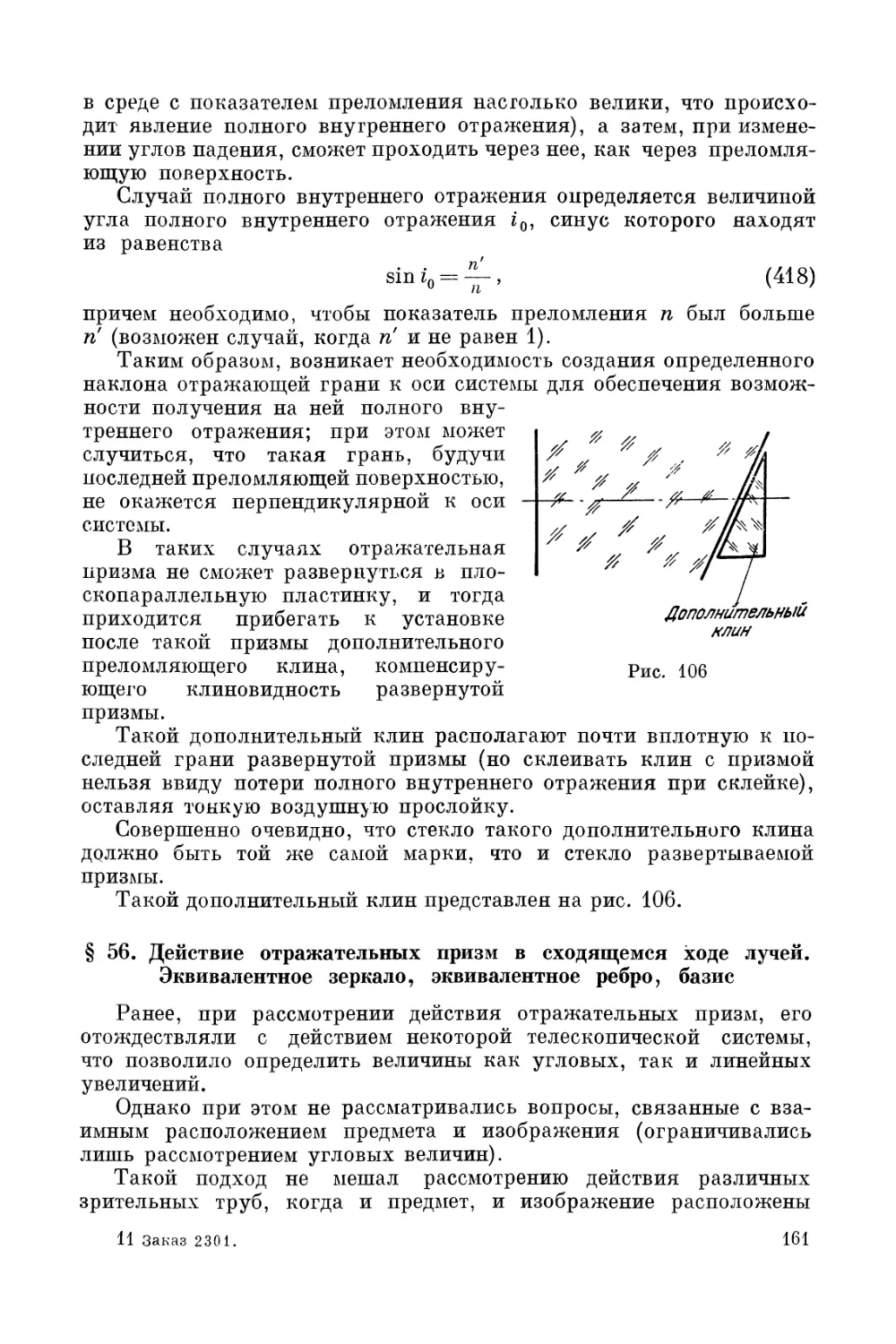
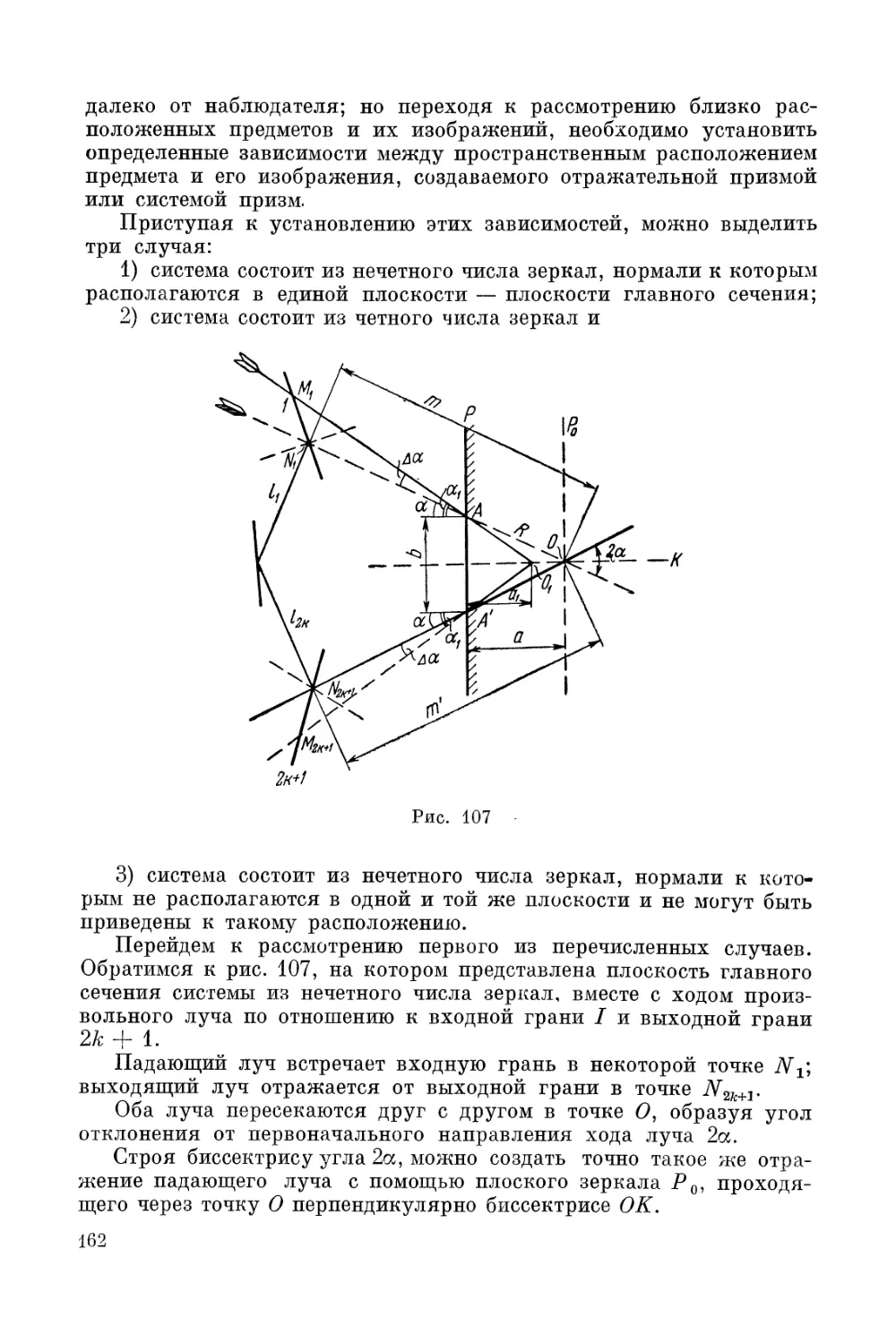
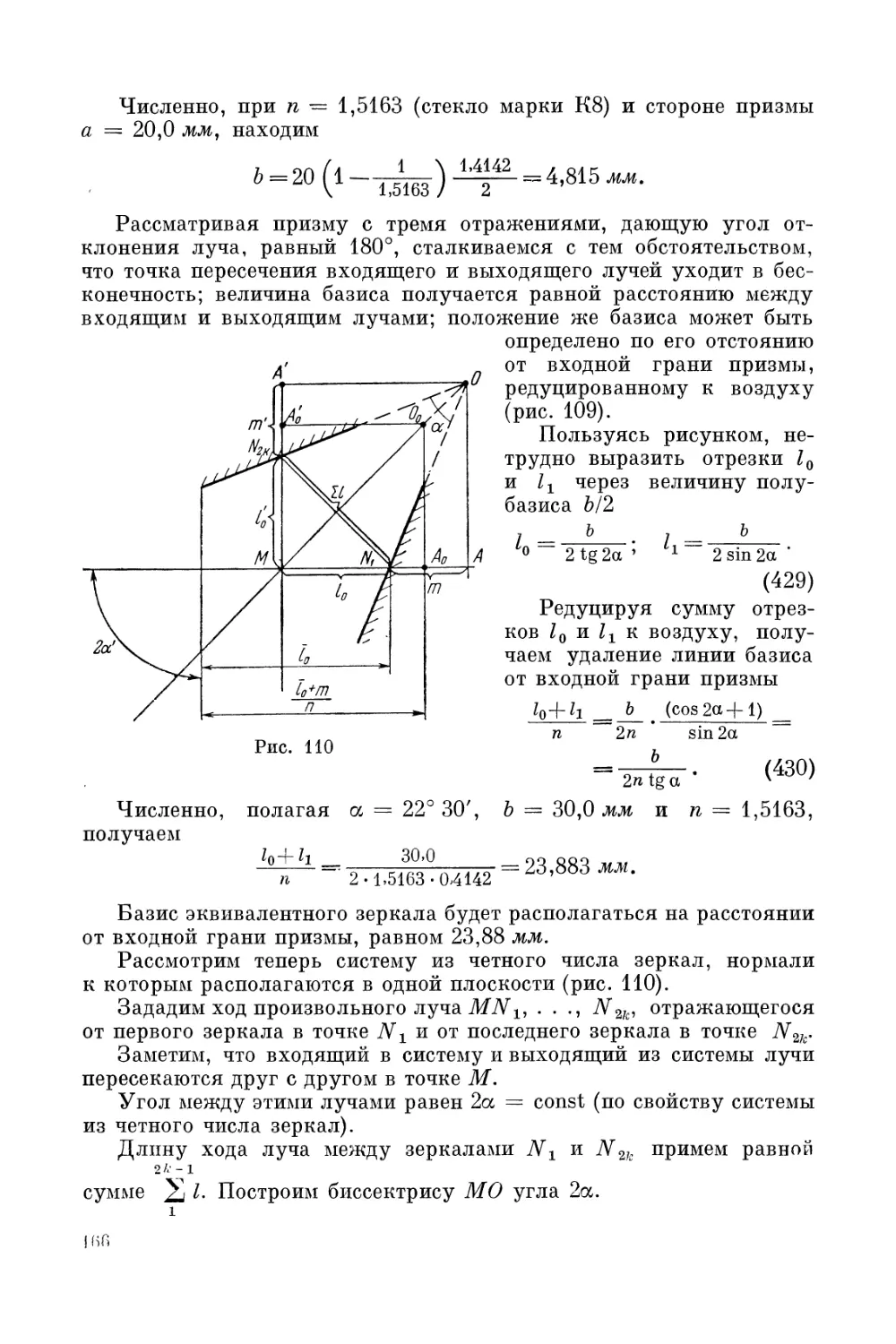
ВВЕДЕНИЕ
Создание любых приборов, в том числе и оптических, завершается
подготовкой их к эксплуатации. Подготовку можно охарактеризовать
как процесс доведения эксплуатационных свойств прибора до удо-
влетворения определенным техническим требованиям. Обычно это
называют процессом юстировки или выверки прибора. Однако под
выверкой нередко подразумевают более узкий процесс подготовки
измерительных приборов — обеспечение возможности производства
определенных измерений.
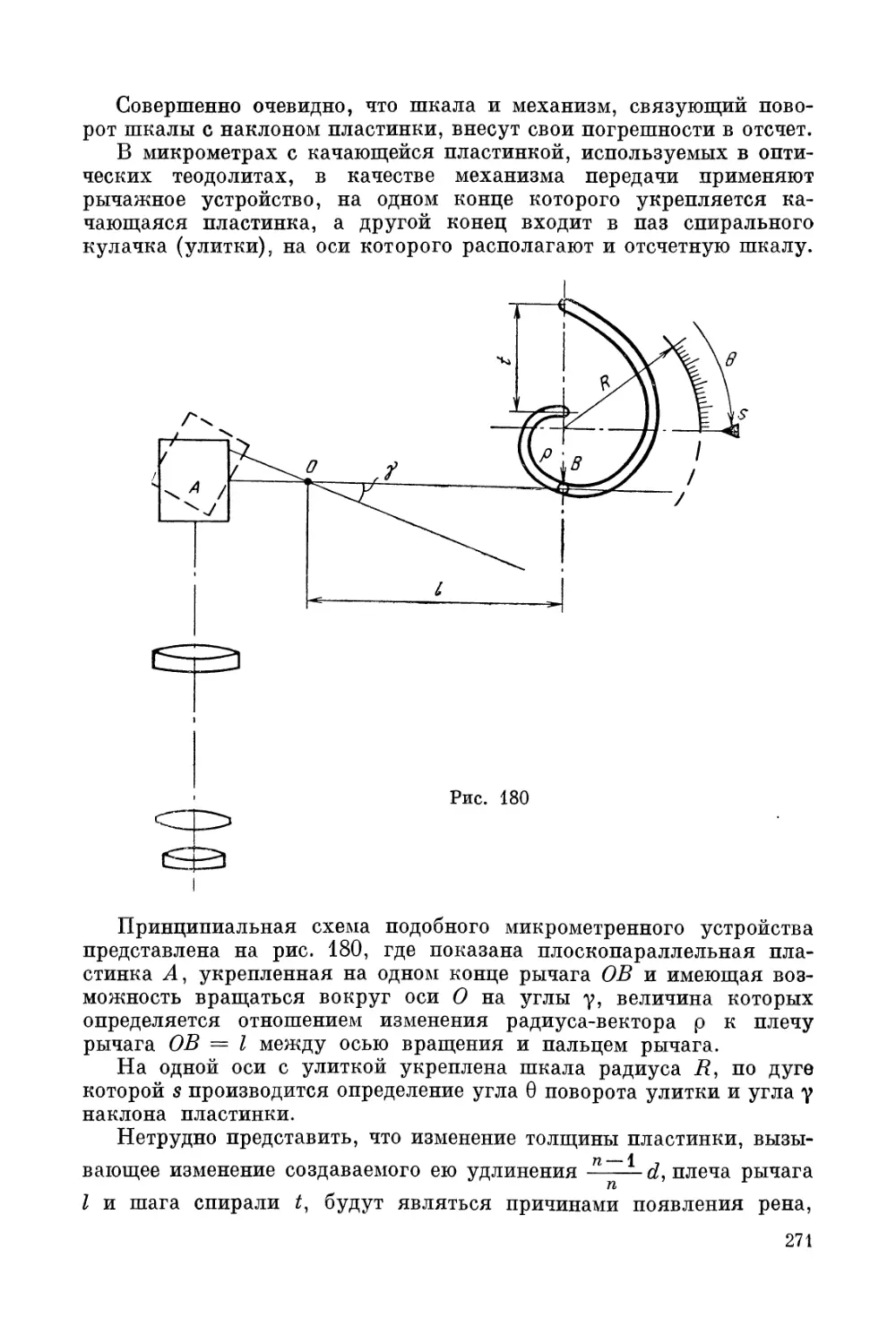
Совершенно очевидно, что если в приборе будут происходить
какие-либо перемещения деталей или узлов в соответствии с его
назначением, то такие перемещения должны осуществляться под
воздействием определенных усилий (например, движений руки),
с заданной точностью, в нужном диапазоне и т. д. Прибор должен
также удовлетворять требованиям к оптическим характеристикам, —
таким, например, как увеличение поля зрения, светосила, качество
изображения.
Следовательно, в оптических приборах должны удовлетворяться
определенные требования к механическим и оптическим узлам. Вместе
с тем не исключена возможность использования в приборах электри-
ческих, тепловых и каких-либо иных устройств, к которым также
предъявляются соответствующие требования.
При изготовлении некоторых простейших устройств возможен
случай, когда завершением процесса сборки (соединения деталей)
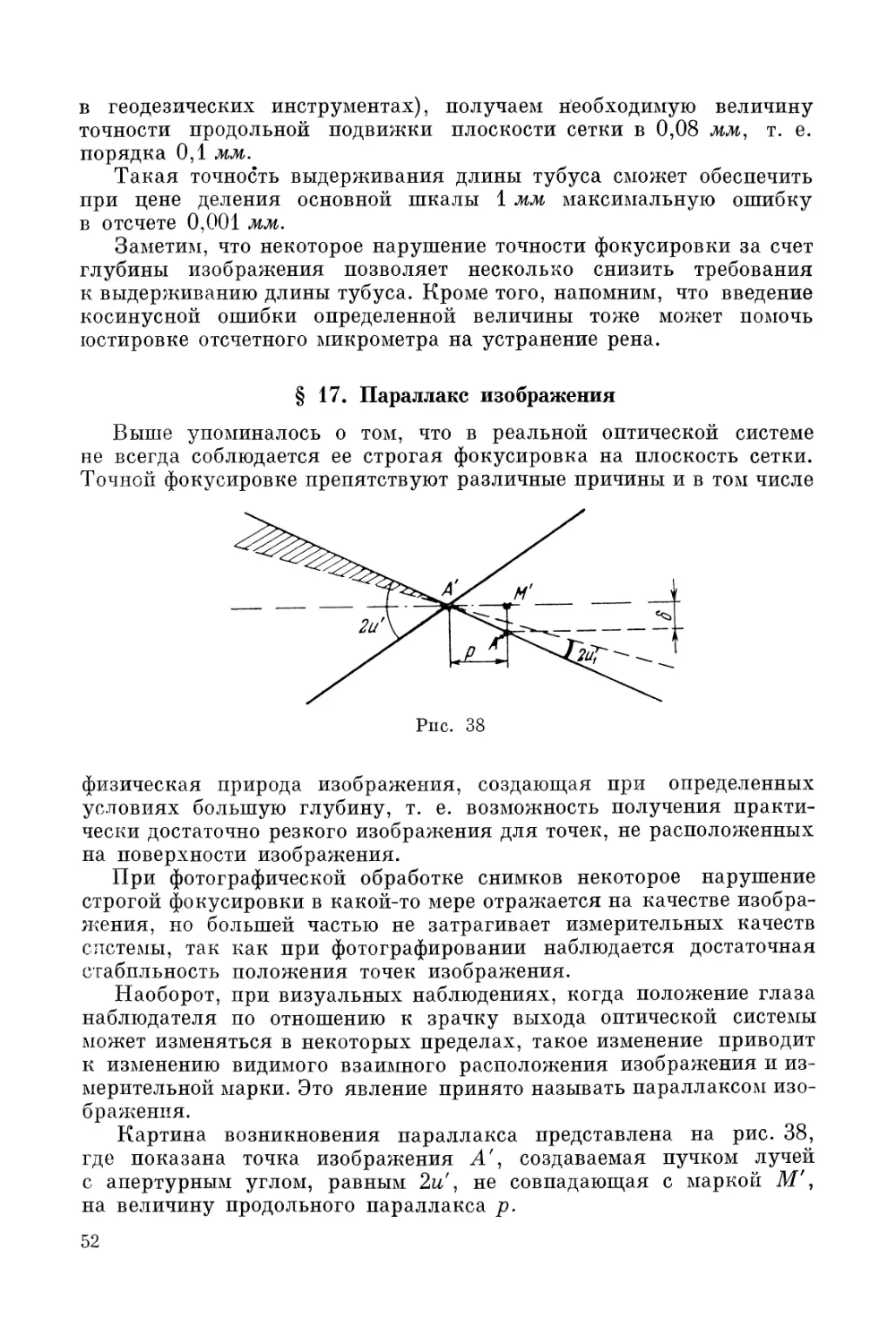
уже удовлетворяются требуемые свойства. В качестве примера можно
привести лупу, состоящую из одной линзы в оправе. Изготовление
такой лупы будет завершено после закрепления линзы в оправу.
При изготовлении лупы как будто бы выпадает процесс под-
готовки ее к эксплуатации в отношении соблюдения оптических
характеристик. Однако при изготовлении линзы, предназначенной
для этой лупы, возможен случай, когда по каким-либо причинам
величина ее фокусного расстояния выйдет за пределы допустимых
отклонений. В этом случае потребуется произвести, например,
изменение радиусов кривизны поверхностей линзы.
Изменения в элементах линзы, восстанавливающие ее эксплуата-
ционные свойства, можно рассматривать как процесс доводки или
юстировки прибора, перенесенный из стадии сборки в стадию
3
технологического процесса изготовления деталей (например, в ста-
дию комплектации или к установлению соответственных допусков
на изменение показателя преломления и на изменение радиусов и
толщины линзы).
Принципиально, располагая достаточно широкими технологи-
ческими возможностями, всегда можно установить такие допуски
на отдельные детали, при которых после сборки не потребуется
производить дополнительные операции по обеспечению заданных
свойств прибора.
Однако при большом количестве сопрягающихся в приборе дета-
лей (линзы, оправы и т. п.) может оказаться, что необходимые для
безъюстировочной сборки допуски на эти детали получатся очень
жесткими и их технологическое обеспечение будет весьма трудо-
емким. Иногда требуются такие допуски, которые не могут быть
обеспечены в данных конкретных условиях производства или не
могут быть экономически оправданы. Поэтому возникает необхо-
димость в расширении допусков для деталей и узлов. Но это рас-
ширение в общем случае может привести к тому, что требуемые
свойства прибора в целом не будут обеспечены. Тем не менее могут
быть случаи, когда отступления от номинала в различных деталях
(расширение допусков сделано для нескольких, а не для одной де-
тали) приведут к изменениям свойств прибора, равным по величине,
но обратным по знаку. Вследствие этого возникает взаимокомпенса-
ция определенных отступлений на различных деталях.
Определяя при производстве серии приборов величину отступле-
ний на деталях с расширенными допусками путем соответственных
измерений, можно скомплектовать детали так, чтобы и при рас-
ширенных допусках свойства прибора в целом удовлетворяли предъ-
являемым к нему требованиям. Такая комплектация получила широ-
кое распространение при массовом производстве фотографических
объективов для любительских фотоаппаратов.
Однако способ сборки с комплектацией деталей (селективная
сборка), позволяющий осуществлять расширение допусков, не един-
ственный. Значительно ранее возник метод юстировки с помощью
«юстировочного элемента». Этим методом можно устранить отступле-
ния от заданного свойства прибора. При этом не возникает необхо-
димости знать, в каких элементах прибора имеются отступления
и какой они величины. Важно, чтобы диапазон действия юстиро-
вочного элемента смог бы перекрыть возможные отступления, вызы-
ваемые другими элементами рассматриваемой системы.
Существенным также является возможность обеспечения нужных
изменений в юстировочном элементе при практической юстировке —
возможность «микрометренной подвижки» в юстировочном элементе.
Высказанные соображения позволяют определить юстировку
прибора как совокупность значений нескольких функций (определя-
ющих свойства прибора) определенных (заданных) интервалов от
соответствующих значений независимых переменных — параметров.
При этом значения функций и параметров практически должны
4
мало отличаться между собой и от своих номинальных (исходных
или расчетных) значений. Это положение можно представить в виде
следующих формул:
у1 = у1(х1, х2, х3, . . . , хт)
Уь = УЛх» х2, х3, . . . , хт) ,
Ук^УЛхц х2, ха, . . . , хт)
где ух, у2, . . ., ук — функции, определяющие собой те или иные
свойства системы; х±, х2, хт — параметры, являющиеся элементами,
определяющими саму систему.
Но значения функций, записанные в левой части формул (1),
можно представить, как сумму номинальных их значений и их изме-
нений, происшедших вследствие изменения параметров, определя-
ющих систему. Обозначая номинальные значения через у01, у02,. . .,
а их изменения через Дух, Ду2. • • и используя аналогичные обозна-
чения для параметров х, определяющих систему, можно формулы (1)
переписать в следующем виде:
У1 = У<л + ^У1 = УАхй1 + ^хк, . . . , х0,„ + Да;т)
У2 = У02 + ^У2 = Уг (x0L + Дхр . . . , хОм + \хт)
Ук = Уок+^ = Ук(хо1+^х1, . . . , zOw + Aa;J •
(2)
Задаваясь допуском на изменения свойств системы, следует ограни-
чить возможность изменения величин Ду15 Ду2 и т. д., что равно-
сильно соблюдению условий
1^2/1 | I ••• i А/с’ (3)
где положительные величины Дх, Д2. . . можно рассматривать,
как допуски на отступления от заданных свойств системы.
Перенося номинальные значения функций у01, у02, . . ., уОк в пра-
вую часть формул (2), получим выражения изменений этих функций
в зависимости от изменения параметров, определяющих систему.
В случае малости всех величин Дг/ и Ах, изменения функций можно
в первом приближении заменить их полными дифференциалами.
Это позволяет написать
dz/i
dy2
дхг дх2 ‘ + дхт
^dxi + ^dxi + ...+^dxm
dy*^l^dx^l^dXi + ' -+~d^dx™
(4)
Формулы (4) приводят к линейной зависимости между изменениями
параметров, определяющих собой систему, и изменениями свойств
самой системы.
Обратим внимание на следующее обстоятельство. Предположим,
что в частном случае число уравнений в формулах (4) будет равно
числу параметров. Тогда, задаваясь наибольшими
допустимыми значениями величин Ду, можно, решая эту
систему уравнений относительно величин Дгг, получить однозначное
решение для изменений всех параметров, определяющих собой
систему.
Совершенно очевидно, что если один из параметров получит
вследствие каких-либо причин изменение, не удовлетворяющее
полученному из решения системы уравнений, то никакими измене-
ниями других параметров нельзя удовлетворить поставленной за-
даче. В этом случае вынуждены признать задачу создания системы
с заданными свойствами неразрешимой.
Однако, если случайное изменение одного из параметров будет
меньшим, чем полученное из решения системы уравнений (4), то
уменьшая в соответственное число раз величину значений изменения
функций в левых частях уравнений (4), должны будем получить
кратное уменьшение значений изменения параметров, определя-
ющих систему, и в том числе произвольно измененного параметра.
Причем требуемое изменение этого параметра станет равным его
первоначальному произвольному изменению.
Осуществив соответственные изменения всех остальных пара-
метров, получим возможность компенсировать случайное изменение
одного параметра при сохранении заданных допусков на изменение
свойств системы.
Очевидно, кратное изменение отступлений от заданных свойств
системы в пределах установленных допусков нельзя считать един-
ственным решением задачи юстировки. Ее можно было бы поставить
значительно шире. Но практически сравнительно редко встречаются
с увеличением допусков для большого числа элементов системы.
Наоборот, для многих элементов можно установить достаточно
жесткие допуски, что значительно упрощает общую задачу сохра-
нения заданных свойств системы и частную задачу юстировки системы
при увеличении допусков на некоторые отдельные элементы
системы.
Необходимо отметить также, что практически ряд свойств си-
стемы, главным образом относящихся к сохранению качества изобра-
жения, нередко восстанавливается вместе с восстановлением ее дру-
гих свойств. Так, например, центрировка системы устраняет дефекты
изображения несимметричного характера и т. п.
Вместе с тем в приборах, предназначенных для выполнения
высокоточных измерений, юстировочные процессы приобретают особо
важное значение, так как только с их помощью удается обеспечить
работу приборов с заданной точностью и устранить вредное влияние
условий эксплуатации.
6
Часть I. ГЕОМЕТРИЧЕСКИЕ СХЕМЫ ОПТИЧЕСКИХ
ПРИБОРОВ
Глава I
СХЕМЫ ПРИБОРОВ ДЛЯ УГЛОВЫХ ИЗМЕРЕНИЙ
§ 1. Схема измерения плоских углов. Эксцентриситет лимба
Действие многих оптических приборов связано с решением той
или иной геометрической задачи. Например, геодезические приборы
определяют направления и их изменения на плоскости или в про-
странстве. Подобная задача встречается в разнообразных прицель-
ных устройствах.
При выполнении линейных измерений обеспечивается поступа-
тельное перемещение вдоль какого-либо направления; в фотограм-
метрии решается задача соответствия изображения предмету.
Вместе с тем очень часто приходится встречаться с измеритель-
ными приборами, в основе которых лежит сопоставление объекта,
подлежащего измерению, с соответственным эталоном — измери-
тельной шкалой или какой-либо концевой мерой.
Любая геометрическая схема осуществляется тем или иным
способом технически. Однако в самых разнообразных конструктив-
ных решениях основные свойства геометрической схемы всегда
сохраняются.
При овеществлении геометрических схем приходится встречаться
с использованием различных конструктивных узлов как механиче-
ских, так и оптических. Ошибки этих узлов накладываются на ошибки
геометрической схемы. Поэтому представляется целесообразным
последовательно изучить ошибки, рассмотреть сначала особенности
геометрических схем, а затем различных конструктивных узлов.
Рассмотрим задачу измерения плоских углов. Чтобы измерить
плоский угол между направлениями на две точки, требуется его
сравнить с эталонным углом. В качестве последнего большей частью
принимают угол, образуемый направлениями на какие-либо два
штриха круговой шкалы; вершина угла лежит на оси круговой
шкалы.
В идеальном случае, когда вершина измеряемого плоского угла
совпадает с осью круговой шкалы и когда плоскости шкалы и той,
в которой измеряется угол, будут либо совпадать, либо параллель-
7
ными, происходит полное соответствие измеряемого угла с эталонным
углом, если не считать ошибок в величине эталонного угла. Но прак-
тически такая идеальная геометрическая схема не может быть осу-
ществлена.
Главнейшей из ошибок при измерении плоских углов будет
несовпадение центра делений круговой шкалы — центра лимба —
с осью вращения визирной линии.
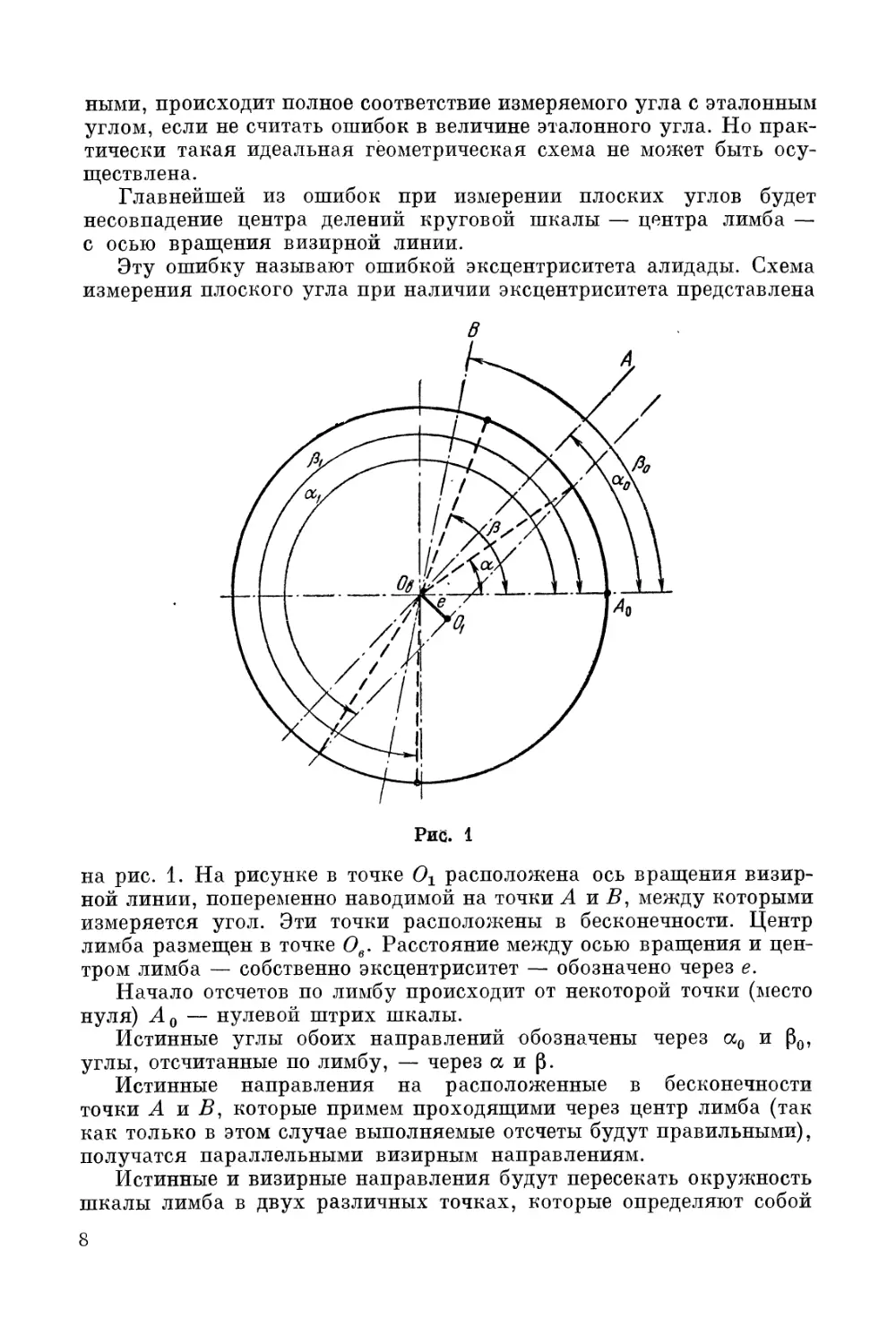
Эту ошибку называют ошибкой эксцентриситета алидады. Схема
измерения плоского угла при наличии эксцентриситета представлена
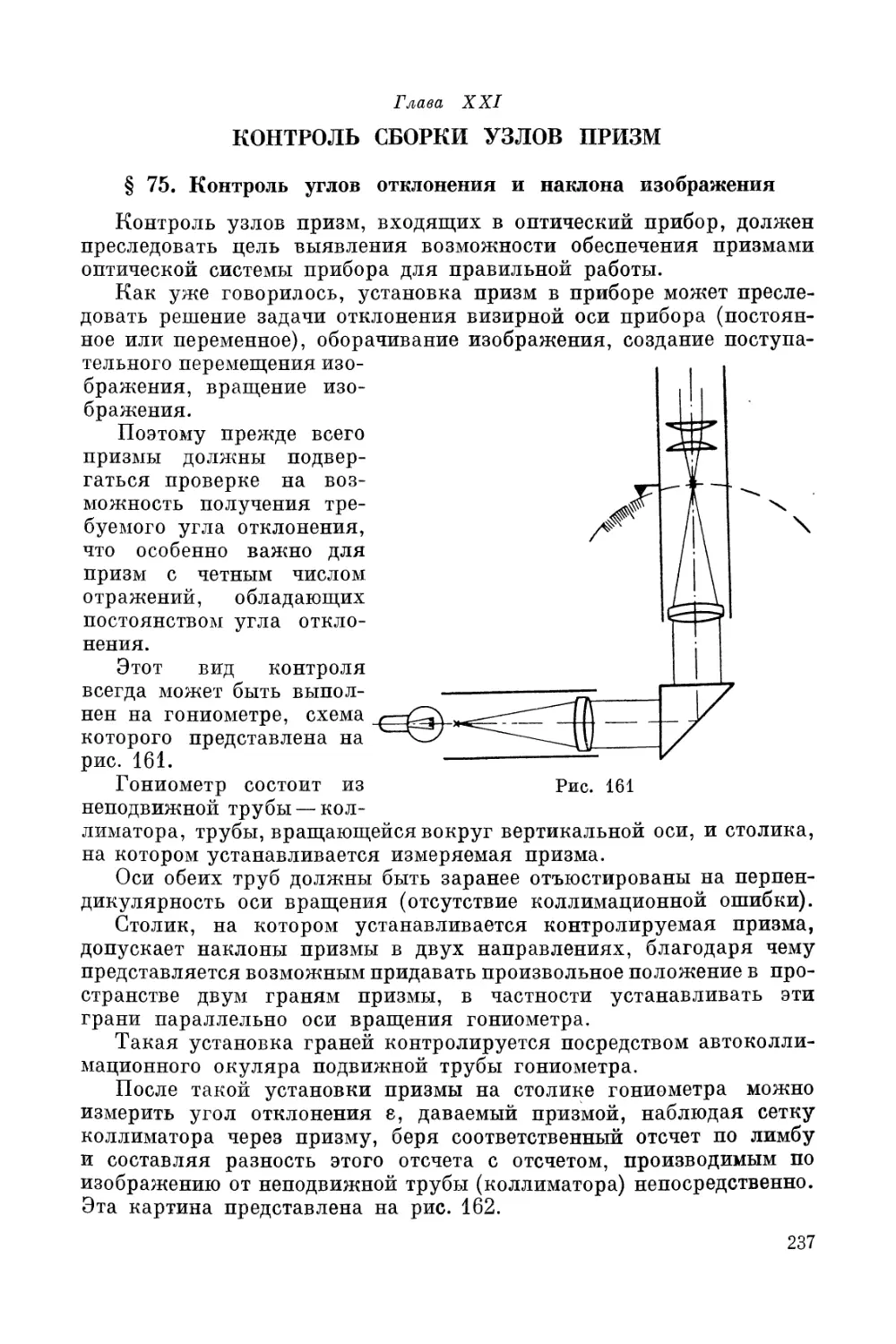
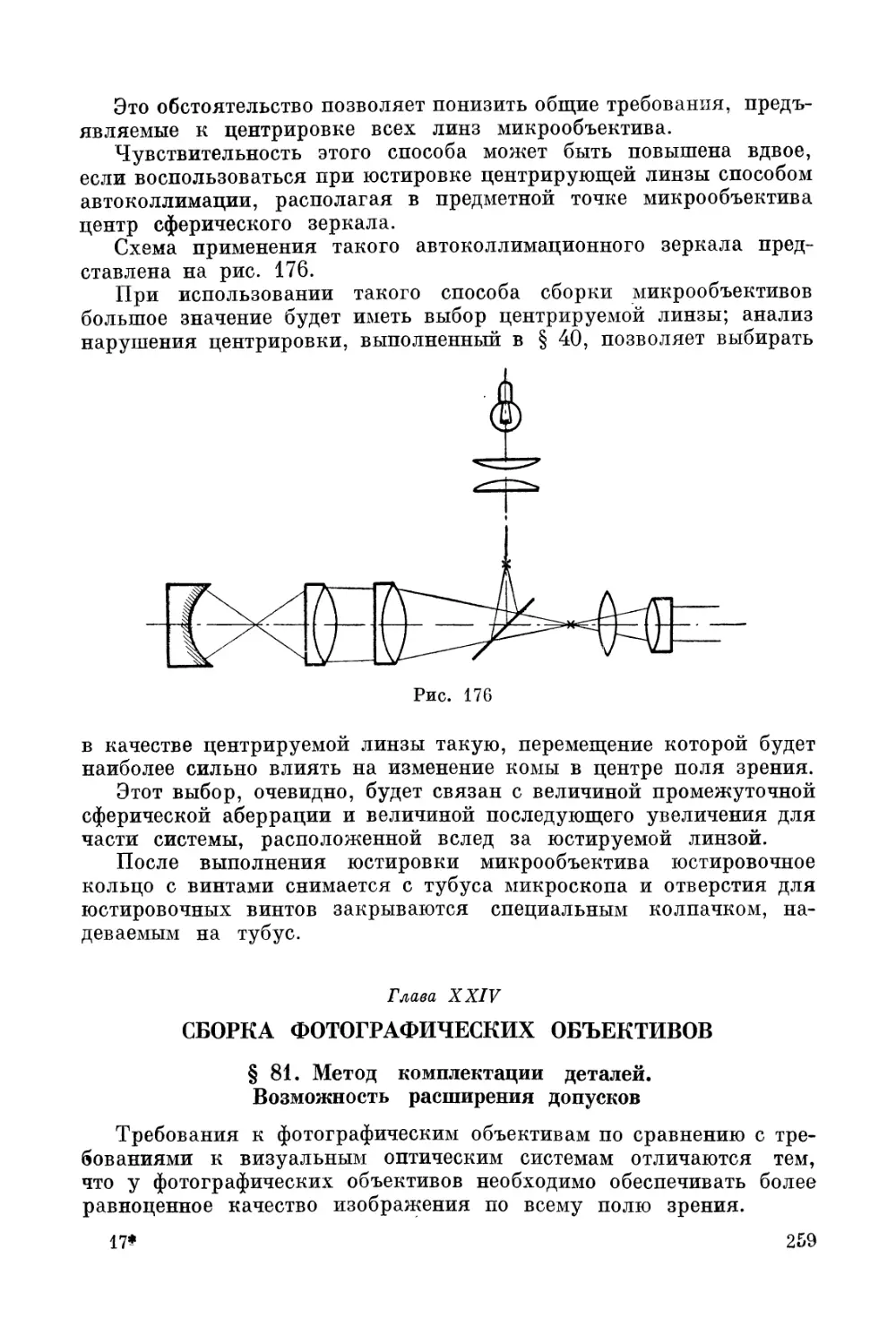
Рис. 1
на рис. 1. На рисунке в точке От расположена ось вращения визир-
ной линии, попеременно наводимой на точки Л и5, между которыми
измеряется угол. Эти точки расположены в бесконечности. Центр
лимба размещен в точке Ов. Расстояние между осью вращения и цен-
тром лимба — собственно эксцентриситет — обозначено через е.
Начало отсчетов по лимбу происходит от некоторой точки (место
нуля) Ао — нулевой штрих шкалы.
Истинные углы обоих направлений обозначены через сх0 и ро,
углы, отсчитанные по лимбу, — через аир.
Истинные направления на расположенные в бесконечности
точки А и В, которые примем проходящими через центр лимба (так
как только в этом случае выполняемые отсчеты будут правильными),
получатся параллельными визирным направлениям.
Истинные и визирные направления будут пересекать окружность
шкалы лимба в двух различных точках, которые определяют собой
8
окончания дуг, связывающих истинные углы а0 и ро и искаженные
углы аир. Разности углов Ла = а — а0 и А(3 = р — ро, как это
нетрудно видеть, определятся дугами, которые можно рассматривать,
как проекции эксцентриситета на окружность лимба. Разность
этих дуг в угловой мере и определит ошибку, которая возникает
в измеряемом угле вследствие наличия эксцентриситета.
Обратим внимание на следующее обстоятельство. Можно, не
изменяя направления на ту или иную точку, производить отсчеты
по лимбу как со стороны расположения наблюдаемой точки, так
и с диаметрально противоположной стороны лимба. Для этого надо
только продолжить истинное и визирное направления до противо-
положной стороны окружности шкалы.
Так как уже было сделано допущение о том, что истинное и ви-
зирное направления остаются параллельными благодаря удален-
ности точек А и В, то дуги и углы, возникающие как результат
наличия эксцентриситета, получатся одинаковыми по абсолютной
величине на обеих сторонах лимба, но будут противополож-
ными по знаку. Отсюда возникает возможность исключения
ошибки эксцентриситета путем взятия двойных отсчетов — с диа-
метрально противоположных сторон лимба.
Действительно, полагая с одной стороны лимба отсчеты равными
а = а0 + Аа; Р=Р0 + Ар, (5)
с другой стороны лимба должны получить отсчеты, равные
ах =а0-{-л —Да; р1=Р0 + л —Ар. (6)
Складывая соответственные отсчеты один с другим, нетрудно
убедиться, что ошибки, возникшие вследствие наличия эксцентри-
ситета, взаимно исключатся независимо от величины и ориентировки
эксцентриситета алидады. Таким образом, можно написать
czi сс = 2а0 Jtj Pi -f- Р = 2р0 *4~ • (7)
Далее можно составить разность полусумм обоих отсчетов
^1+₽__Л1±21_ = р„ + ^_-„<,_^ = ро_а<>, (8)
di di di di
которая будет равна углу между истинными направлениями
на точки А и В.
Способ отсчетов с взаимно противоположных сторон лимба может
быть использован в ином виде, например путем совмещения изобра-
жения штрихов в одном поле зрения обеих сторон лимба.
Вторая существенная ошибка при измерении углов — это ошибка,
возникающая от неравномерного деления шкалы лимба. Возникает
также ошибка при несовпадении плоскости лимба и плоскости,
в которой происходит измерение угла между направлениями на за-
данные точки.
9
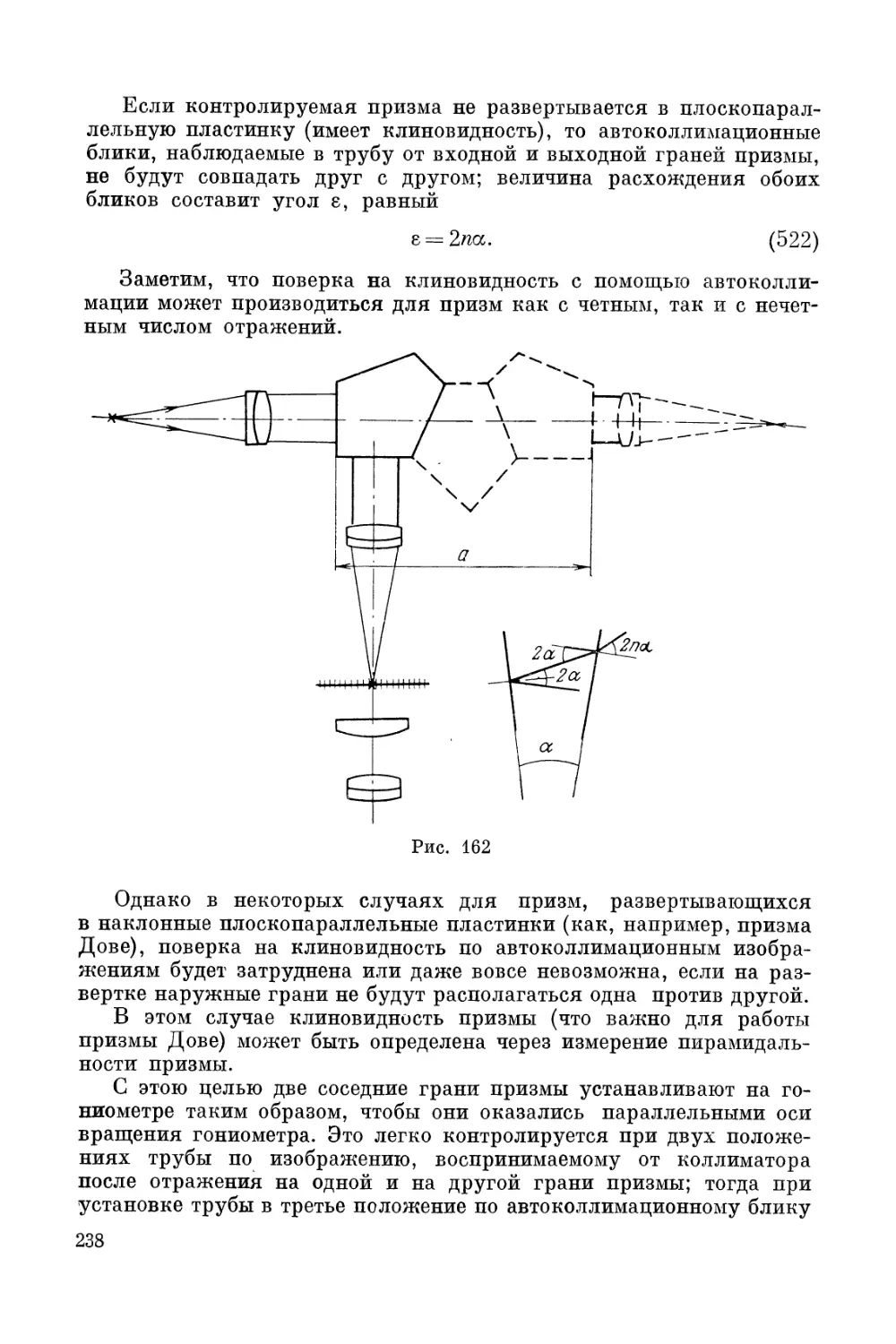
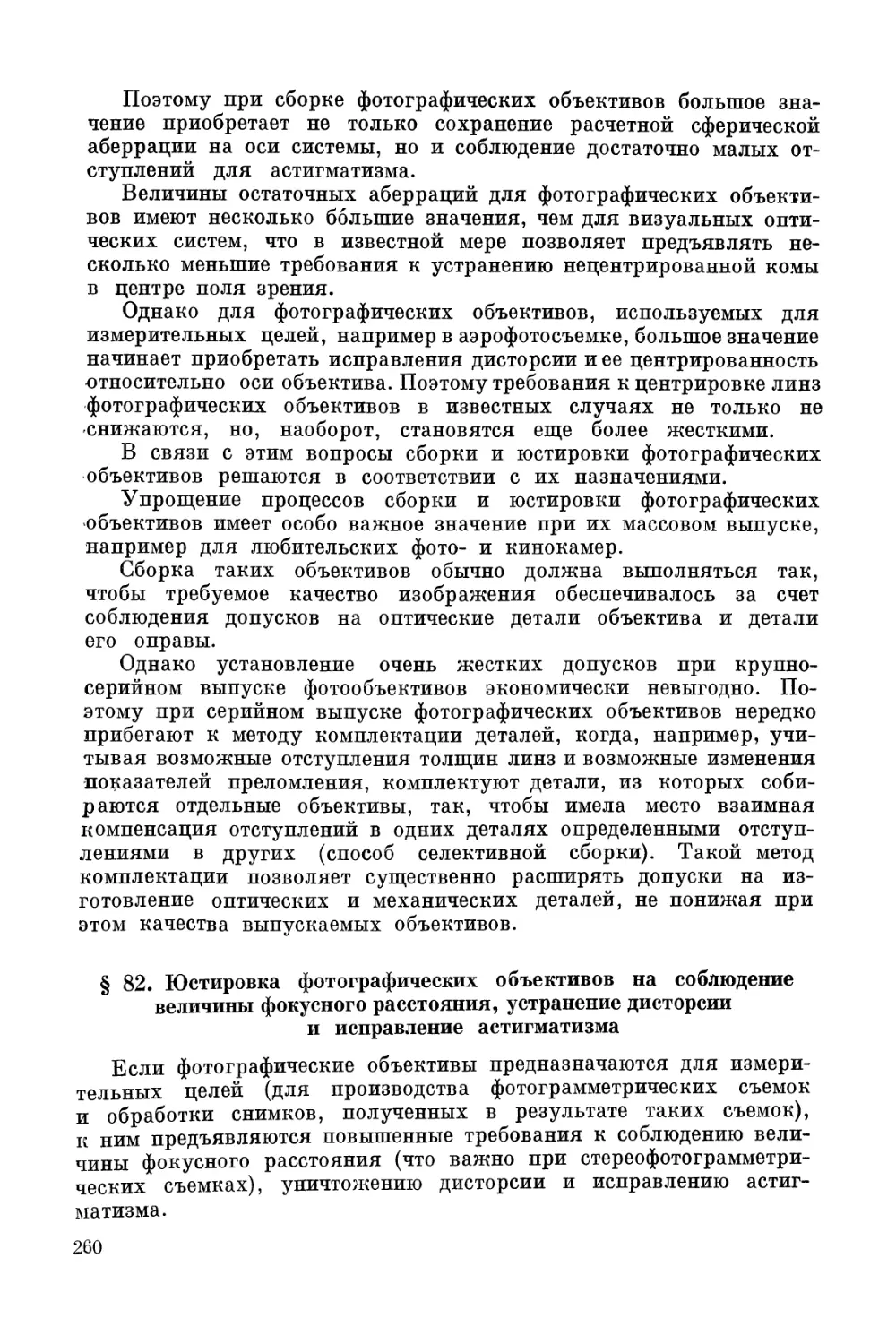
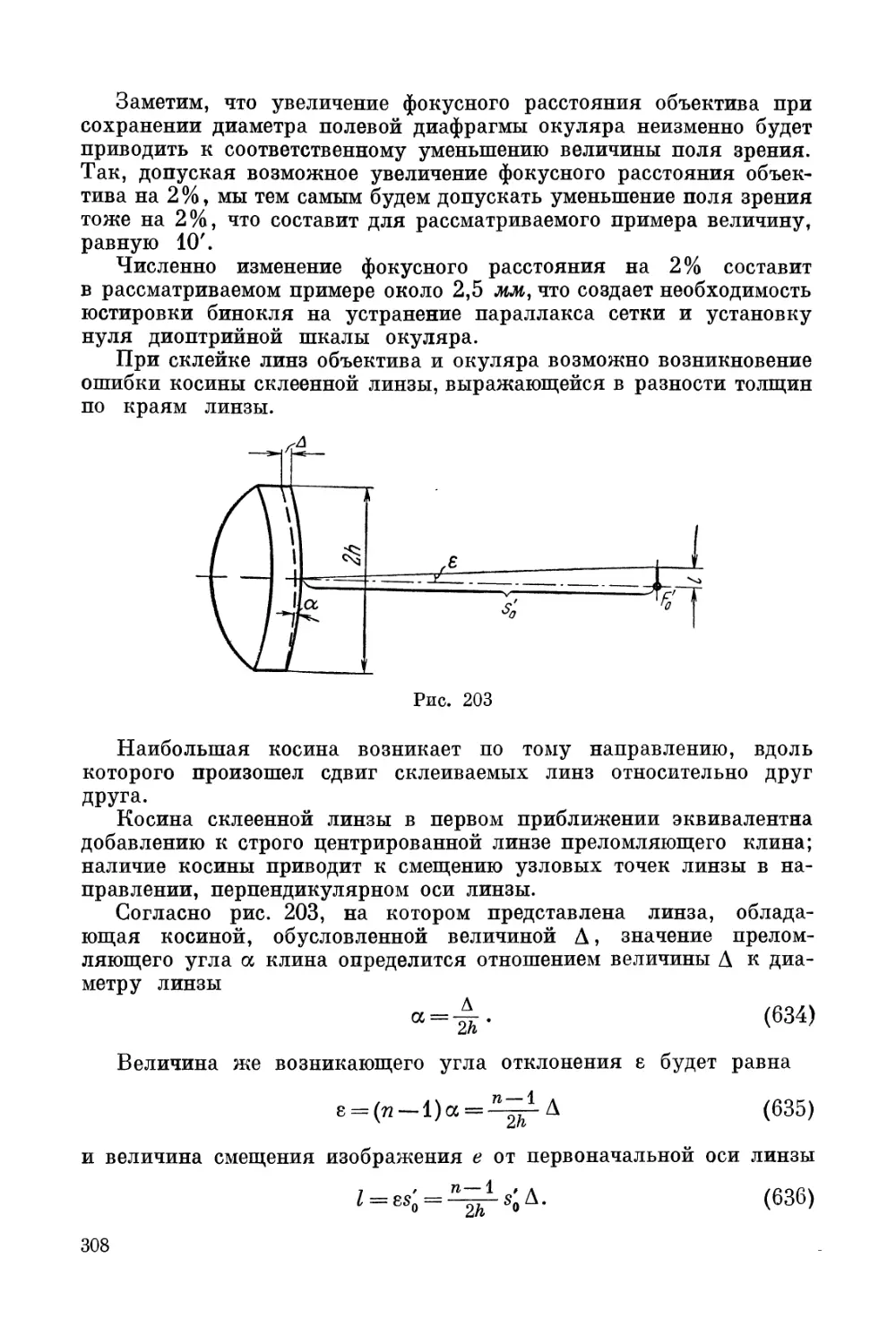
Обратимся к рис. 2. На этом рисунке показано совмещение изобра-
жения штрихов обеих диаметрально противоположных сторон лимба,
осуществляемое каким-либо оптическим совмещающим устройством
(например, с помощью системы призм), обеспечивающим совмещение
штрихов по направлениям, параллельным визирному направлению
(в точках Со и С'о и в точках С и С"). Стрелками показаны величины
углов, соответствующие снимаемым с лимба отсчетам.
При рассмотрении рисунка видно, что сумма отсчетов по совпа-
дающим штрихам, взятым с обеих сторон лимба, всегда получается
одинаковой для любой пары совпадающих штрихов.
Рис. 2
Действительно, при суммировании отсчетов по совпадающим
штрихам С и С', сумма этих отсчетов получится соответствующей
формуле (7); одновременно, сумма отсчетов по совпадающим штри-
хам С'о и Со, отстоящим от штрихов С" и С на равные дуги Да, также
получится равной 2а0 + л.
Заметим, что при вращении по ходу часовой стрелки линии визи-
рования, штрихи в нижней половине поля зрения будут для наблю-
дателя перемещаться в направлении, обратном движению часовой
стрелки, т. е. влево; штрихи в верхней половине поля будут пере-
мещаться вправо.
Благодаря этому при повороте визирной линии на некоторый
угол, штрихи шкалы лимба будут расходиться на удвоенный угол.
Это вдвое повысит точность совмещения штрихов.
Обратим внимание еще на одно обстоятельство. При снятии
второго отсчета по лимбу может случиться, что этот отсчет будет
10
производиться не в точке С", определяемой визирным направлением,
проходящим через точку С, а в некоторой точке С", отстоящей от
точки С" на длину дуги 8. При отсутствии эксцентриситета (при совпа-
дении оси вращения и центра лимба) величина этой дуги была бы
всегда постоянной. Однако из-за эксцентриситета она будет пере-
менной, так как определяется величиной постоянного угла у —
угла излома алидады, умноженной на переменное расстояние от оси
вращения до различных участков шкалы лимба. Но при малых
значениях угла у изменение дуги 8 будет иметь величину высшего
порядка малости, что в первом приближении позволяет принять
дугу за постоянную величину.
Существование такой дуги изменит снимаемые отсчеты и поэтому
в формулы (6) и (7) следовало бы ввести величину у. Однако в раз-
ности полусумм отсчетов, представленной формулами (8), вели-
чина у, как постоянная будет отсутствовать, потому что исключится
вместе с величиной .
Таким образом, наличие угла излома алидады при его малости
не сможет повлиять на окончательный результат измерения угла
между двумя направлениями.
Ошибки расположения штрихов на лимбе в общем случае носят
случайный характер. Поэтому для частичного их исключения при-
бегают к выполнению измерений на разных участках лимба.
Существенно, что шкала кругового лимба, являясь замкнутой,
имеет накопленную сумму ошибок расположения всех штрихов,
которая равна нулю. Поэтому, если производить измерение угла,
целое число раз укладывающегося в окружности, можно, последова-
тельно пользуясь всеми участками лимба, практически полностью
исключить влияние ошибок в расположении штрихов лимба.
§ 2. Измерение пространственных углов. Схема меридианного круга.
Коллимационная ошибка
Для измерения пространственных углов требуется установление
визирной линии в каких-либо двух направлениях. Наиболее удобно
это осуществлять посредством вращения визирной линии относи-
тельно двух осей, причем одна из них будет неподвижной в про-
странстве, а вторая ось, вокруг которой происходит вращение визир-
ной линии, в свою очередь будет вращаться относительно первой
оси.
Нетрудно представить, что если вторая ось окажется парал-
лельной первой, то придем к случаю, когда визирная линия будет
вращаться вокруг одной и той же оси. Поэтому для обеспечения
возможности изменения визирного направления в пространстве
понадобится, чтобы между обеими осями существовал некоторый
угол. Наиболее удобным будет угол, равный 90°.
Перпендикулярность обеих осей вращения выгодна еще и тем,
что в этом случае представляется возможным избежать существования
И
такой зоны в пространстве, в которую нельзя будет ввести визирное
направление.
В частном случае одну из осей можно направить параллельно
оси вращения Земли. Тогда вторую ось удобно выбрать параллельной
плоскости экватора, чем и обеспечится взаимная перпендикулярность
обеих осей.
Если при этом вторую ось сделать перпендикулярной плоскости
меридиана данного места, задавая оси горизонтальное направление,
то получим принципиальную схему меридианного круга, назначе-
нием которого будет измерение углов визирования в плоскости
меридиана. Простран-
ственное же изменение на-
правления визирной линии
будет складываться из
вышеупомянутого враще-
ния и вращения Земли.
Практически может
случиться, что линия ви-
зирования не будет строго
перпендикулярна горизон-
тальной оси вращения.
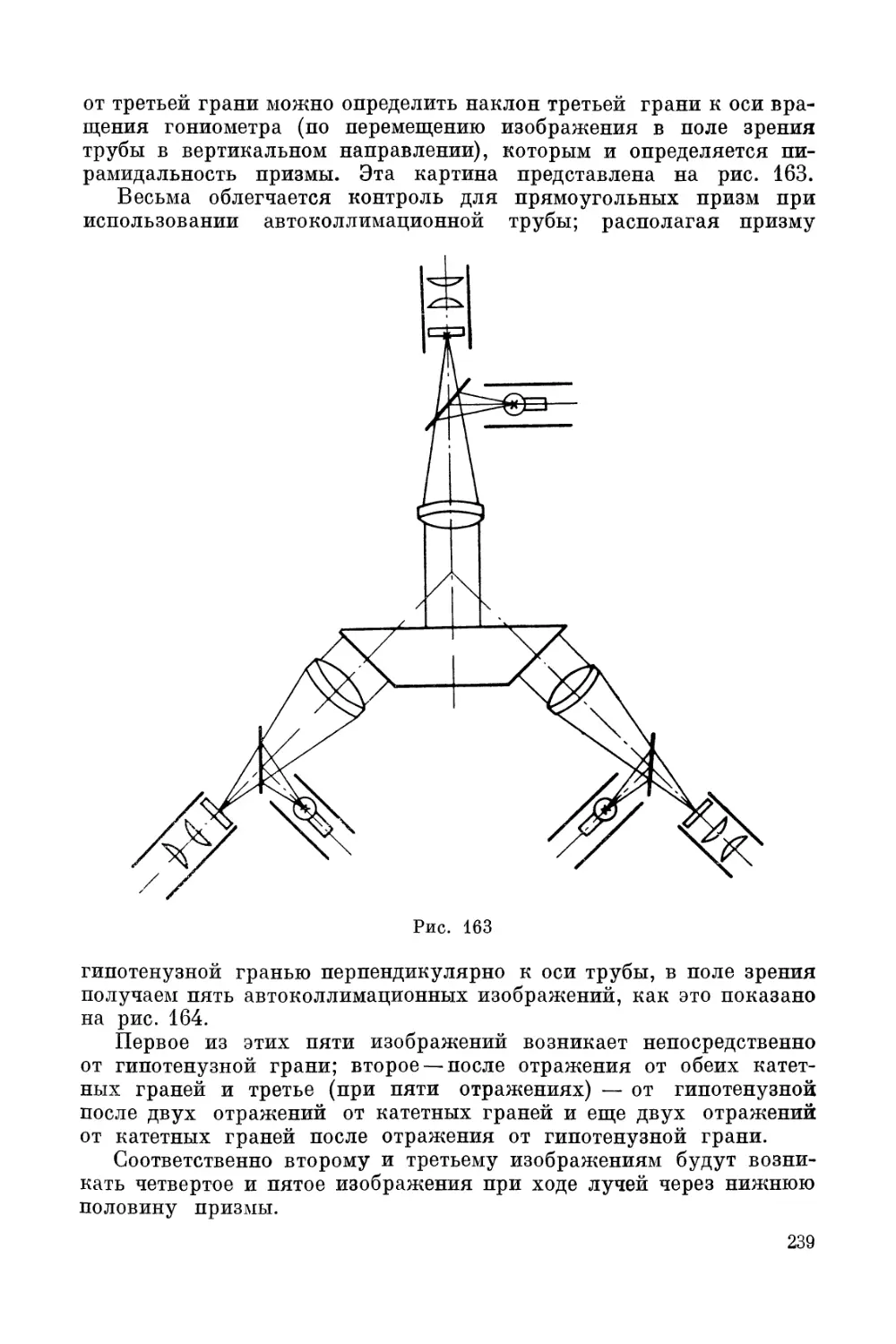
Схема такого случая пред-
ставлена на рис. 3, где
прямая А — А х — ось вра-
щения, а прямая В —В± —
визирная линия. Тогда
угол 0 между перпендику-
ляром к оси вращения и
визирной линией будет
характеризовать коллима-
ционную ошибку.
Визирная линия перемещается в плоскости лишь при отсутствии
коллимационной ошибки (при вращении вокруг горизонтальной
оси). Во всех других случаях визирная линия будет описывать кони-
ческие поверхности. Следствием этого след пересечения визирной
линии с плоскостью будет одной из кривых второго порядка; в ча-
стном случае при параллельности оси к плоскости, след визирной
линии на этой плоскости будет ветвью гиперболы.
При наличии коллимационной ошибки и в случае, когда визирная
линия пересекается (не скрещивается) с осью вращения, вместо
плоскости визирная линия будет описывать коническую поверхность
с углом при вершине, равным л — 20.
Можно также представить, что при повороте визирной линии
вокруг оси на 180° визирная линия отойдет от своего первоначаль-
ного направления на угол 20. При перекладке оси — установке
конца оси Аг (цапфы Ат) в подшипник (или лагер) цапфы Л и на-
оборот — направление оси визирования также изменится
на угол 20 — удвоенной коллимационной ошибки.
12
Эти два случая изменения направления визирной линии могут
быть использованы для обнаружения и измерения величины колли-
мационной ошибки способами поворота визирной линии на 180°
и перекладки оси в лагерах.
Первый способ удобен при фиксировании визирной линии с по-
мощью диоптров, но представляет известные затруднения при исполь-
зовании зрительной трубы. Второй способ может быть применен
также и для зрительной трубы, но он требует обеспечения строгого
равенства диаметров обеих цапф оси вращения.
Перекладка горизонтальной оси не всегда возможна; в частности,
она может быть не предусмотрена конструктивно. В этом случае
коллимационная ошибка может быть определена при введении визир-
ной линии в горизонталь-
ную плоскость и при после-
дующем повороте ее вокруг
вертикальной оси на 180°
и вокруг горизонтальной
оси также на 180°. Такой
прием заменяет собой пере-
кладку горизонтальной
оси, при этом влияние
ошибки неперпендикуляр-
ности обеих осей будет
исключено.
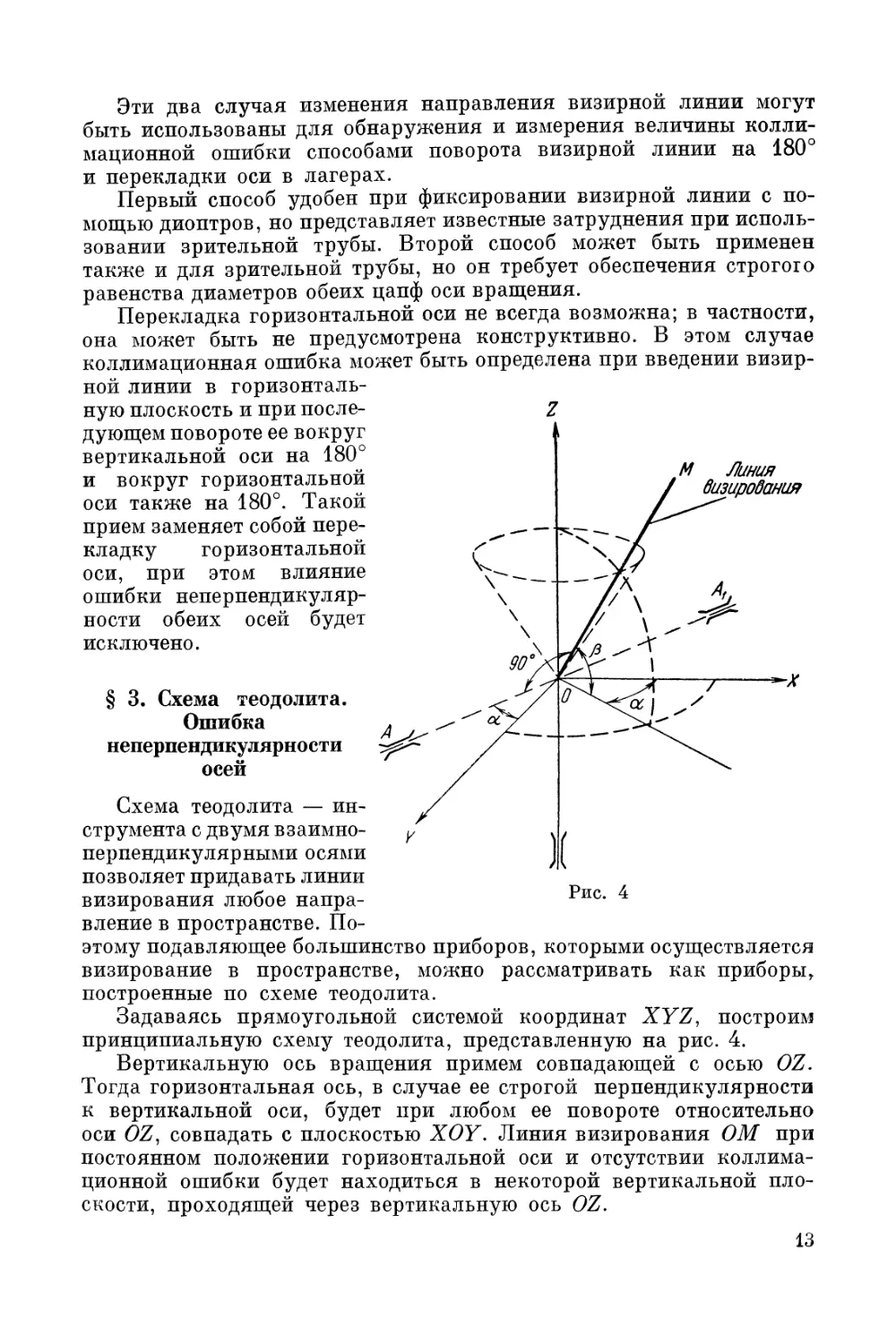
§ 3. Схема теодолита.
Ошибка
неперпендикулярности
осей
Схема теодолита — ин-
струмента с двумя взаимно-
перпендикулярными осями
позволяет придавать линии
визирования любое напра-
вление в пространстве. По-
этому подавляющее большинство приборов, которыми осуществляется
визирование в пространстве, можно рассматривать как приборы,
построенные по схеме теодолита.
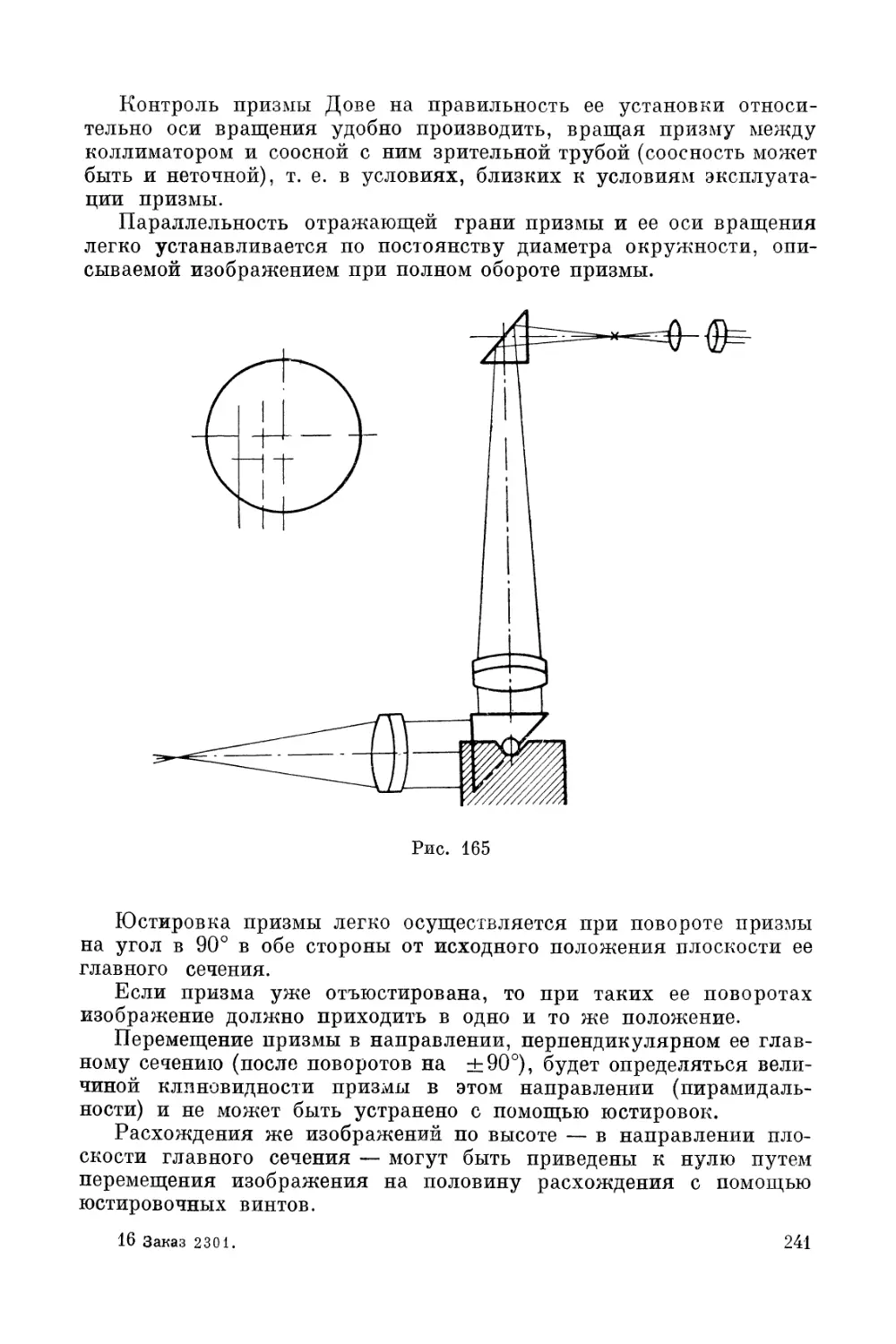
Задаваясь прямоугольной системой координат XYZ, построим
принципиальную схему теодолита, представленную на рис. 4.
Вертикальную ось вращения примем совпадающей с осью OZ.
Тогда горизонтальная ось, в случае ее строгой перпендикулярности
к вертикальной оси, будет при любом ее повороте относительно
оси OZ, совпадать с плоскостью XOY, Линия визирования ОМ при
постоянном положении горизонтальной оси и отсутствии коллима-
ционной ошибки будет находиться в некоторой вертикальной пло-
скости, проходящей через вертикальную ось OZ.
13
Направление линии визирования в пространстве можно опре-
делить азимутальным углом а и вертикальным углом р — углом
возвышения. Полагая вертикальный угол р неизменным и осуще-
ствляя вращение инструмента вокруг вертикальной оси, тем самым
заставим визирную линию описывать вокруг нее круговой конус.
Придавая углу р значение, равное 90°, направим визирную линию
вдоль вертикальной оси независимо от азимутального угла.
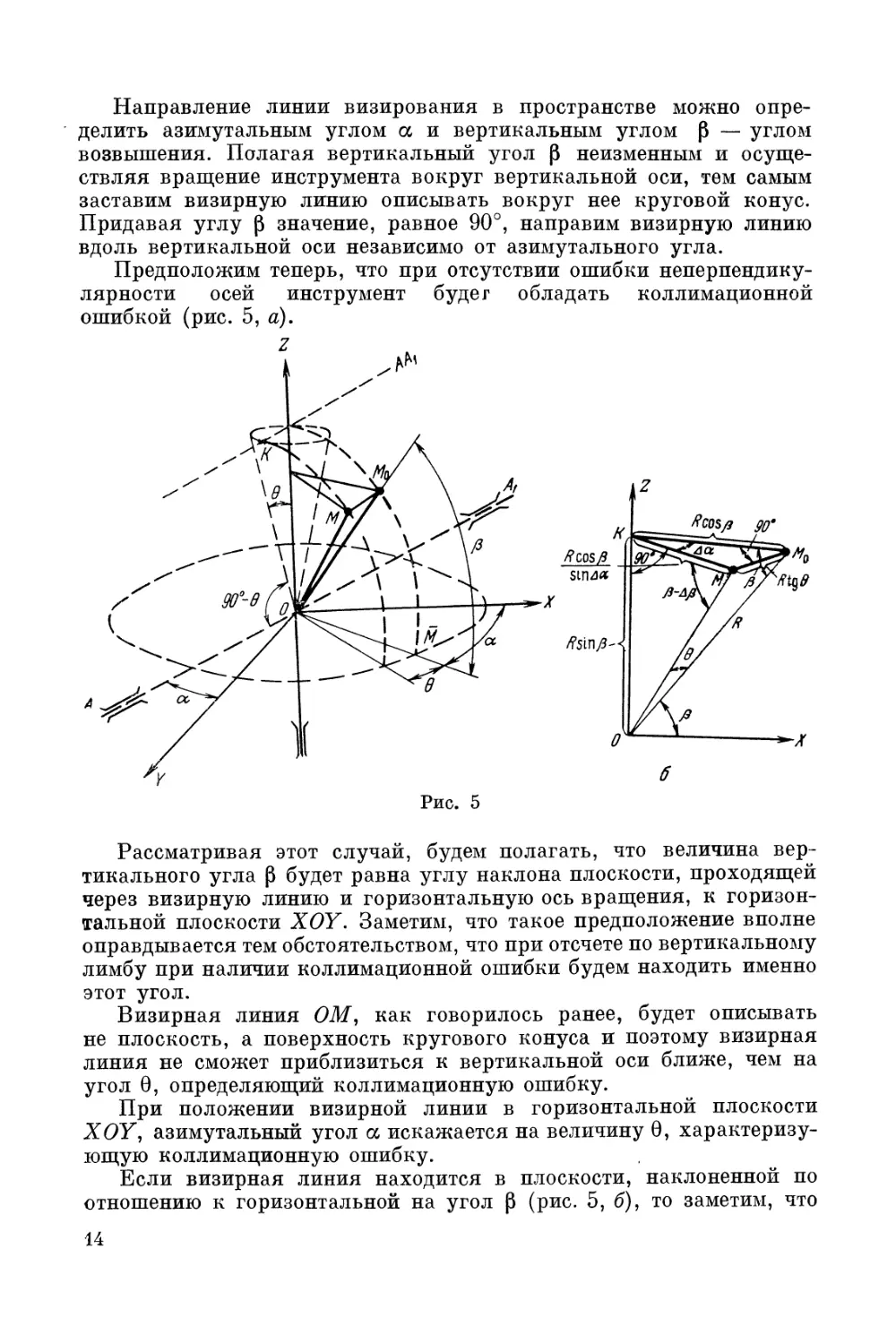
Предположим теперь, что при отсутствии ошибки неперпендику-
лярности осей инструмент будет обладать коллимационной
ошибкой (рис. 5, а).
Z
Рис. 5
Рассматривая этот случай, будем полагать, что величина вер-
тикального угла р будет равна углу наклона плоскости, проходящей
через визирную линию и горизонтальную ось вращения, к горизон-
тальной плоскости XOY. Заметим, что такое предположение вполне
оправдывается тем обстоятельством, что при отсчете по вертикальному
лимбу при наличии коллимационной ошибки будем находить именно
этот угол.
Визирная линия ОМ, как говорилось ранее, будет описывать
не плоскость, а поверхность кругового конуса и поэтому визирная
линия не сможет приблизиться к вертикальной оси ближе, чем на
угол 0, определяющий коллимационную ошибку.
При положении визирной линии в горизонтальной плоскости
XOY, азимутальный угол а искажается на величину 0, характеризу-
ющую коллимационную ошибку.
Если визирная линия находится в плоскости, наклоненной по
отношению к горизонтальной на угол р (рис. 5, б), то заметим, что
14
точка Мо находится на пересечении вертикальной плоскости (тре-
угольник М^КО) и плоскости треугольника М^МО. Точка К лежит
на оси OZ и имеет ординату, равную ординате точки MQ.
Угол, образуемый при этом отрезками MMQ и MQK, равен 90°.
Также будет равен 90° угол между отрезками ММ0 и ОМ0. Поэтому,
обозначая угол искажения азимутального направления между пло-
скостями КМО и КМQO через Да и полагая OMQ = R, можно на-
писать
R cos р tg Да = R tg 0. (9)
Отсюда находим, что
tg Да = (10)
& cos р 4 7
Зная угол Да, можно найти величину искаженного угла воз-
вышения, который обозначим через р — Др (этот угол будет меньше
по абсолютной величине, чем угол р).
Так как отрезок КМ перпендикулярен оси OZ, согласно
рисунку
#М=.Дсо8Р O^ = /?sinB. (И)
cos Да » г ' 7
Составляя отношение отрезков ОК и КМ. найдем
tg(p — Ap) = -^- = tgpcosAa. (12)
Формулы (10) и (12) позволяют вычислить ошибки, возникающие
в направлении визирной линии вследствие наличия коллимационной
ошибки.
Из этих формул следует, что наиболее быстро будет происходить
возрастание азимутальной ошибки при росте угла возвышения.
Определяя из формулы (12) tg Др, получим
Если коллимационная ошибка мала, то согласно формуле (10)
а формула (13) после некоторых преобразований примет вид
4₽ = —г-~(15)
Откуда после подстановки вместо величины Да ее значения из фор-
мулы (14) получим, что
15
Таким образом, в случае малой коллимационной ошибки вели-
чина азимутальной ошибки будет величиной первого порядка ма-
лости, а ошибка угла возвышения составит ошибку второго порядка
малости.
Перейдем теперь к рассмотрению ошибок, вследствие неперпен-
дикулярности осей, полагая, что коллимационная ошибка будет
равна нулю.
Обратимся к рис. 6. На нем представлена система двух осей,
из которых вертикальная ось совпадает с осью OZ, а горизонтальная
Рис. 6
ось ААг составляет с вертикальной угол, равный 90° + со, характе-
ризующий ошибку неперпендикулярности. Проекция горизонталь-
ной оси АА± на плоскость XOY будет AAj.
Восстановим к горизонтальной оси нормаль, расположенную
в плоскости XOY.
Угол между этой нормалью и осью ОХ будет называться азиму-
тальным углом а.
В случае, когда визирная линия совпадает с нормалью, визиро-
вание будет происходить строго в горизонтальной плоскости и ази-
мутальная ошибка будет отсутствовать. Если визирная линия будет
лежать в вертикальной плоскости, проходящей через прямую АА17
что будет соответствовать отсчету по вертикальному лимбу в 90°,
16
то она не будет вертикальна и займет некоторое направление OZ±,
составляющее с осью OZ угол со.
Ясно, что в этом случае при вращении инструмента вокруг вер-
тикальной оси визирная линия опишет в пространстве коническую
поверхность, внутри которой визирование будет, исключено.
Величина ошибки неперпендикулярности осей в теодолите легко
определяется косвенным путем, с помощью уровня, накладыва-
емого на цапфы горизонтальной оси инструмента. Тогда в случае
отсутствия ошибки неперпендикулярности при точной установке
вертикальной оси перекладка уровня (при равенстве диаметров
цапф) не должна вызывать изменения отсчета по уровню.
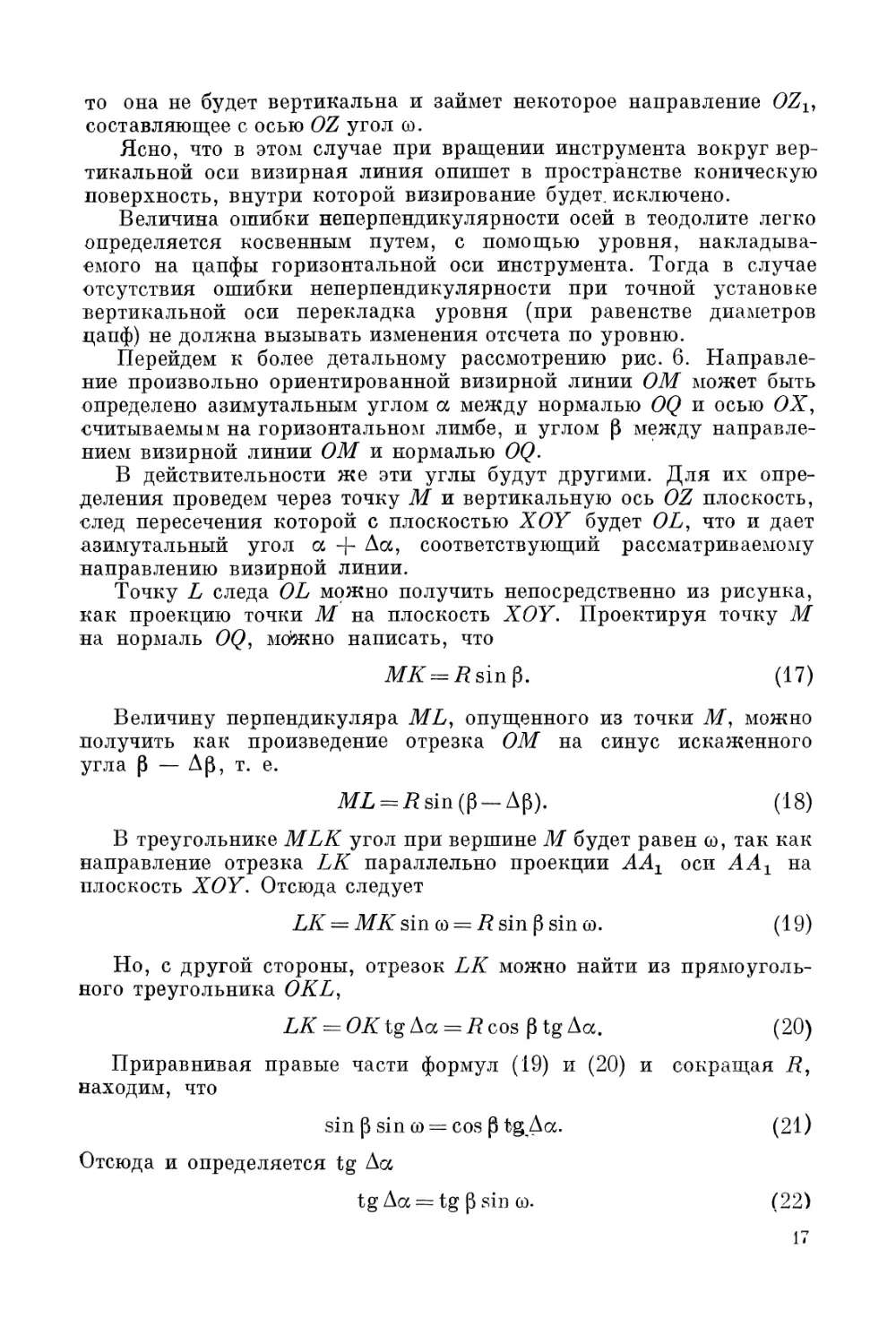
Перейдем к более детальному рассмотрению рис. 6. Направле-
ние произвольно ориентированной визирной линии ОМ может быть
определено азимутальным углом а между нормалью OQ и осью ОХ,
считываемым на горизонтальном лимбе, и углом |3 между направле-
нием визирной линии ОМ и нормалью OQ.
В действительности же эти углы будут другими. Для их опре-
деления проведем через точку М и вертикальную ось OZ плоскость,
след пересечения которой с плоскостью XOY будет OL, что и дает
азимутальный угол а -J- Да, соответствующий рассматриваемому
направлению визирной линии.
Точку L следа OL можно получить непосредственно из рисунка,
как проекцию точки М на плоскость XOY. Проектируя точку М
на нормаль OQ, можно написать, что
MTT-tfsinp. (17)
Величину перпендикуляра ML, опущенного из точки М, можно
получить как произведение отрезка ОМ на синус искаженного
угла р — Др, т. е.
TkfjC = 2? sin (Р — Д(3). (18)
В треугольнике MLK угол при вершине М будет равен о, так как
направление отрезка LK параллельно проекции АА± оси ААг на
плоскость XOY. Отсюда следует
LK = МК sin со = 2? sin р sin со. (19)
Но, с другой стороны, отрезок LK можно найти из прямоуголь-
ного треугольника OKL,
LK = OK tg Да = R cos р tg Да. (20)
Приравнивая правые части формул (19) и (20) и сокращая R,
находим, что
sin р sin со — cos Р tg^a. (21)
Отсюда и определяется tg Да
tg Да = tg p sin со. (22)
17
Величину ML можно определить из треугольника MLK,
ML = МК cosco. (23}
Эта формула в сочетании с формулами (17) и (18) дает
sin (Р —- Др) = sin р cos со. (24}
Используя в формуле (24) выражение для синуса разности углов
Р — Др, находим
cos Др —S1^^ = cos со. (25}
Отсюда
cos Др = cos со + • (26}
Возводя обе части равенства (26) в квадрат
cos2 Др = 1 — sin2 Др = cos2 со + 2 cos со + SI^- » (27)
получаем квадратное уравнение относительно синуса угла Др
sin2 Др - A + 2 cos со s*n дР — sin2 со = 0. (28)
r sin2 p 1 tg p v '
Решая это уравнение, находим, что
sin Д Р = — sin р cos р cos со ± sin Р У cos2 р cos2 со + sin2 со (29)
и после несложных преобразований
sin Др = — sin р cos р cos со ^1 — j/1 + Со^2^~ ) • (30)
Знак плюс в формуле (30) опускаем, так как он принадлежит
корню, возникшему при возведении обеих частей формулы (26)
в квадрат.
Из формулы (22) при малых углах неперпендикулярности осей со
получаем азимутальную ошибку
Aa = cotgp. (31)
Из формулы (30) получаем ошибку угла возвышения
Д₽ = - (32)
которая по сравнению с со будет величиной второго порядка
малости.
Сопоставляя формулы (32) и (16), видим, что ошибки в вертикаль-
ном угле при наличии обеих ошибок, и коллимационной и неперпен-
дикулярности осей, имеют одинаковый вид. Но величины азимуталь-
ных ошибок в обоих рассматриваемых случаях, как это следует из
формул (31) и (14), коренным образом различаются.
18
§ 4. Ошибки опор (подшипников) и осей. Влияние их на ошибки
измерения углов
При рассмотрении схем угловых измерений исходили из того
положения, что оси вращения как вертикальная, так и горизон-
тальная, идеальны, т. е. вращение осей в подшипниках (опорах)
происходит вокруг прямых линий, положение которых в пространстве
однозначно определяется положением их подшипников.
Однако и оси и подшипники практически не идеальны, они также
имеют ошибки.
Одной из ошибок узла (ось — подшипник) будет наличие зазора,
при котором возможно изменение направления оси в пространстве.
Такие ошибки носят случайный характер. Их величина определяется
отношением величины зазора к длине оси.
Обозначая угловую величину, характеризующую изменение на-
правления оси через у, величину зазора через & и длину оси через Z,
находим
У = ~. (33)
Так, например, при длине оси Z, равной 100 мм и величине за-
зора 8 = 0,001 мм, получим величину предельной ошибки наклона
оси, равную
= 0,00001 = 2".
Если эта ошибка будет допущена для вертикальной оси инстру-
мента, то она вместе с ошибкой угла возвышения может косвенным
путем через изменение ошибки неперпендикулярности осей повлиять
на величину азимутального угла.
Необходимо отметить, что для вертикальной оси выгодно, когда
усилие веса инструмента направлено вдоль оси вращения, так как
в этом случае не будет создаваться какого-либо преимущественного
усилия на прижимание оси к той или иной стороне подшипника.
Кроме того, имеет значение смазка, в какой-то мере способствующая
сохранению равномерности зазоров.
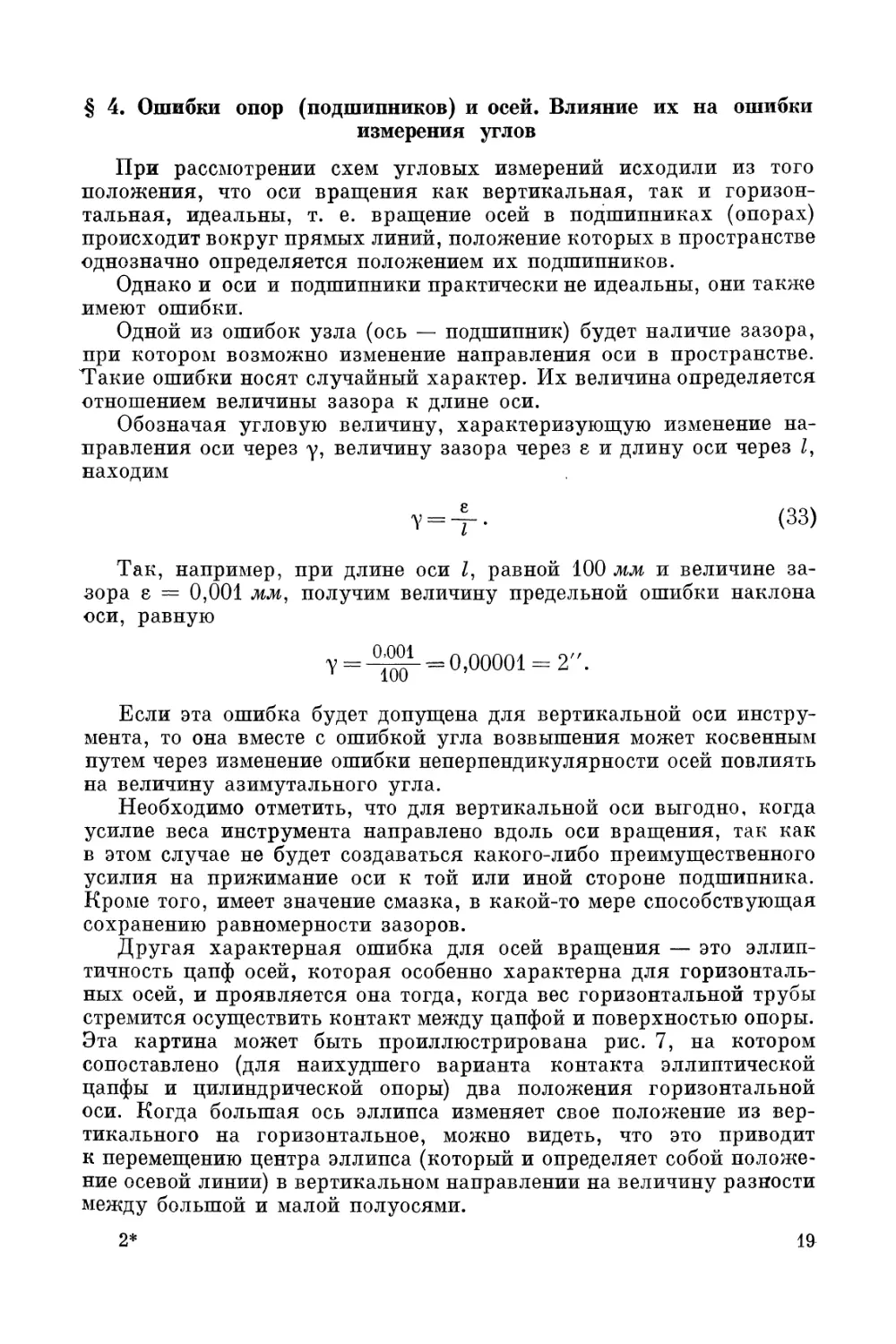
Другая характерная ошибка для осей вращения — это эллип-
тичность цапф осей, которая особенно характерна для горизонталь-
ных осей, и проявляется она тогда, когда вес горизонтальной трубы
стремится осуществить контакт между цапфой и поверхностью опоры.
Эта картина может быть проиллюстрирована рис. 7, на котором
сопоставлено (для наихудшего варианта контакта эллиптической
цапфы и цилиндрической опоры) два положения горизонтальной
оси. Когда большая ось эллипса изменяет свое положение из вер-
тикального на горизонтальное, можно видеть, что это приводит
к перемещению центра эллипса (который и определяет собой положе-
ние осевой линии) в вертикальном направлении на величину разности
между большой и малой полуосями.
2*
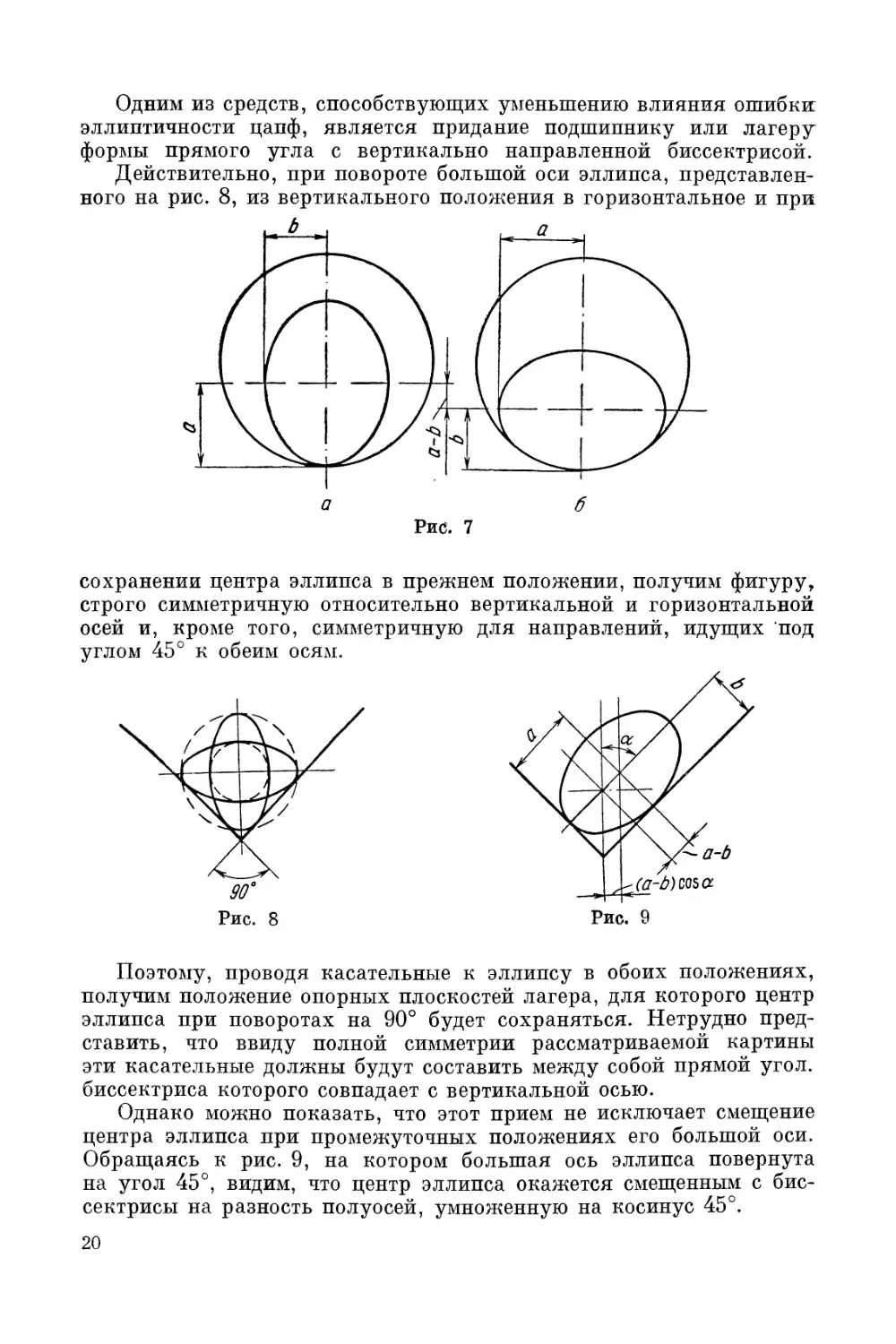
Одним из средств, способствующих уменьшению влияния ошибки
эллиптичности цапф, является придание подшипнику или лагеру
формы прямого угла с вертикально направленной биссектрисой.
Действительно, при повороте большой оси эллипса, представлен-
ного на рис. 8, из вертикального положения в горизонтальное и при
а б
Рис. 7
сохранении центра эллипса в прежнем положении, получим фигуру,
строго симметричную относительно вертикальной и горизонтальной
осей и, кроме того, симметричную для направлений, идущих под
углом 45° к обеим осям.
Поэтому, проводя касательные к эллипсу в обоих положениях,
получим положение опорных плоскостей лагера, для которого центр
эллипса при поворотах на 90° будет сохраняться. Нетрудно пред-
ставить, что ввиду полной симметрии рассматриваемой картины
эти касательные должны будут составить между собой прямой угол,
биссектриса которого совпадает с вертикальной осью.
Однако можно показать, что этот прием не исключает смещение
центра эллипса при промежуточных положениях его большой оси.
Обращаясь к рис. 9, на котором большая ось эллипса повернута
на угол 45°, видим, что центр эллипса окажется смещенным с бис-
сектрисы на разность полуосей, умноженную на косинус 45°.
20
При рассмотрении работы системы осей теодолита исходили
из того, что подшипники горизонтальной оси непосредственно рас-
положены (физически) на вращающейся вертикальной оси. Но воз-
можны случаи, когда горизонтальной осью будет служить изобра-
жение некоторой оси через оптический элемент (зеркало или призму),
установленный на вертикальной оси. Подобный случай более по-
дробно рассмотрен в § 60.
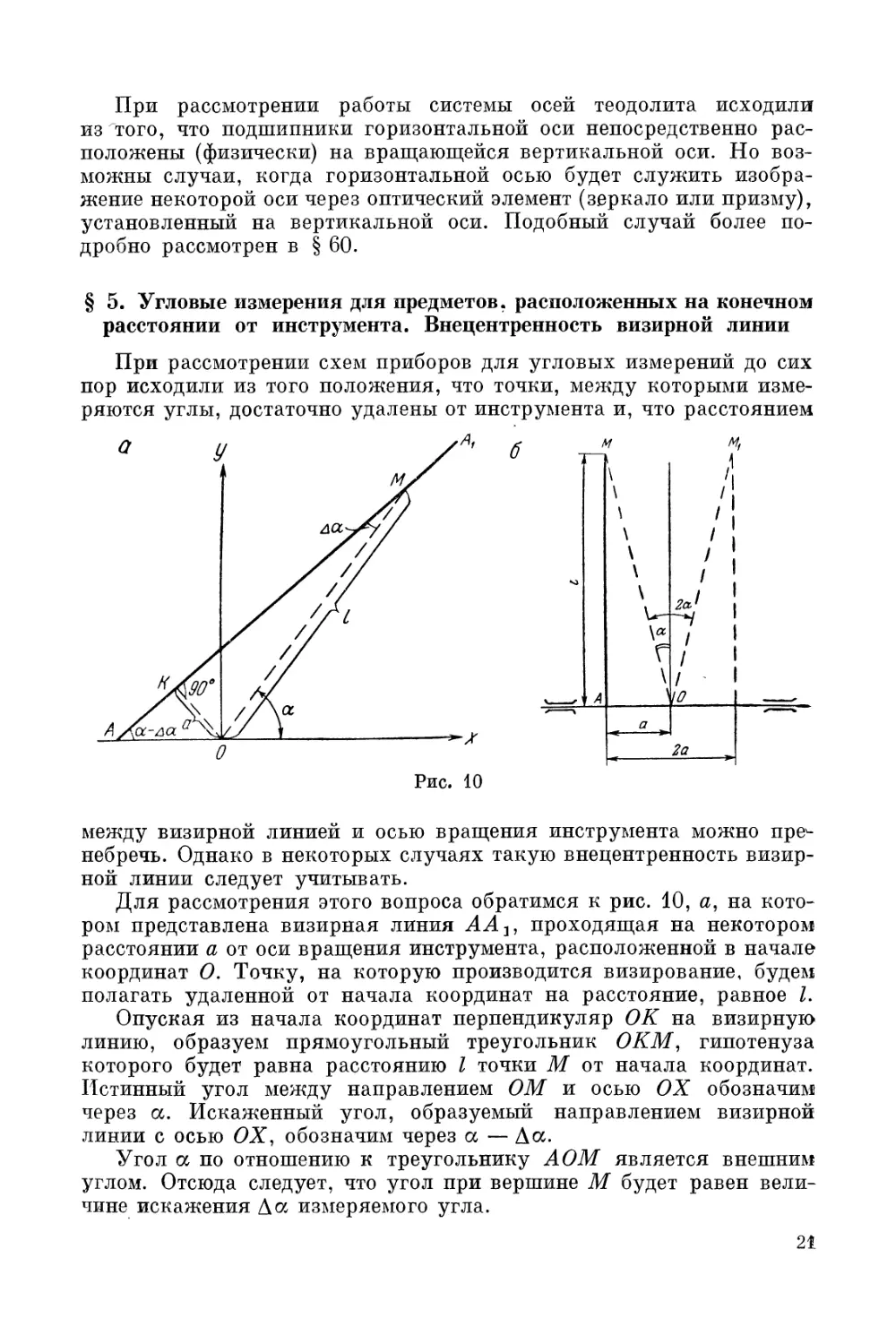
§ 5. Угловые измерения для предметов, расположенных на конечном
расстоянии от инструмента. Внецентренность визирной линии
При рассмотрении схем приборов для угловых измерений до сих
пор исходили из того положения, что точки, между которыми изме-
ряются углы, достаточно удалены от инструмента и, что расстоянием
Рис. 10
между визирной линией и осью вращения инструмента можно пре^-
небречь. Однако в некоторых случаях такую внецентренность визир-
ной линии следует учитывать.
Для рассмотрения этого вопроса обратимся к рис. 10, а, на кото-
ром представлена визирная линия А А 3, проходящая на некотором
расстоянии а от оси вращения инструмента, расположенной в начале
координат О. Точку, на которую производится визирование, будем
полагать удаленной от начала координат на расстояние, равное I.
Опуская из начала координат перпендикуляр ОК на визирную
линию, образуем прямоугольный треугольник ОКМ, гипотенуза
которого будет равна расстоянию I точки М от начала координат.
Истинный угол между направлением ОМ и осью ОХ обозначим
через а. Искаженный угол, образуемый направлением визирной
линии с осью ОХ, обозначим через а — Да.
Угол а по отношению к треугольнику АОМ является внешним
углом. Отсюда следует, что угол при вершине М будет равен вели-
чине искажения Да измеряемого угла.
21
Обращаясь к треугольнику О КМ, найдем величину угла Да
sin Да = •
(34)
Полагая, например, внецентренность визирной линии а равной
1 мм и расстояние I равным 100 000 мм., находим
SinAa = Aa = -^A_ = 2".
Таким образом, видим, что ошибка внецентренности визирной
линии может оказаться достаточно ощутимой.
Необходимо отметить, что ошиб-
ка внецентренности при постоян-
ном расстоянии до всех измеряе-
мых точек будет оставаться посто-
янной. В этом случае ее влияние
на точность измерения углов между
направлениями на различные точки
будет исключаться. Заметим, что
внецентренность визирной линии
при визировании на предметы,
расположенные на конечном рас-
стоянии, может рассматриваться,
как переменная коллимационная
ошибка.
Обращаясь к рис. 10, б, на
котором показано наведение вне-
центренной визирной линии AM,
проходящей на расстоянии а от
Рис. И начала координат, расположенного
в точке О, видим, что визирова-
ние на точку М из начала координат будет возможно лишь в том
случае, если визирная линия составит с направлением оси ординат
угол а = , характеризующий коллимационную ошибку.
Величина внецентренности а, как и влияние коллимационной
ошибки, может быть определена путем поворота трубы вокруг вер-
тикальной оси на 180°. Тогда расстояние между равноудаленными
ют оси точками М и Мг (точка Мг располагается на новом направле-
нии визирной линии после поворота) определит удвоенную величину
2а внецентренности визирной линии.
В случае внецентренности визирной линии при пространственных
угловых измерениях влияние ее на азимутальные углы и углы
возвышения будет различным.
Рассмотрим случай, когда визирная линия внецентренна по отно-
шению к вертикальной оси и не имеет этой ошибки по отношению
к горизонтальной оси (рис. 11).
.22
Примем, что горизонтальная ось совпадает с осью ОХ, а вер-
тикальная — с осью OZ. Пусть отсчитываемый вертикальный угол
равен Р, а азимутальный угол а — 90°.
При наличии внецентренности а визирной линии, проходящей
через некоторую точку М, отстоящую от начала координат на рас-
стоянии Z, получим истинные угловые координаты точки М равными
90° — Да для азимутального угла и Р — ДР для угла возвышения.
Спроектируем на плоскость XOY точку М. На этой плоскости
образуем треугольник ОМА, из которого нетрудно определить, что
sin Да = -у-« (35)
Перейдем к определению ошибки ДР в угле возвышения. Проекция?
расстояния I на плоскость XOY равна
7 = ОМ - I cos (Р - Д Р). (36)
Отрезок ММ можно найти из треугольника ММА
MM^MAtgfi (37)
и из треугольника ОММ
MM = Zsin(p—Др). (38)
Кроме того,
AM = . (39)
tg Да ' 7
Приравнивая правые части формул (37) и (38) и учитывая фор-
мулу (39), получим
ММ = а = I sin (Р - ДР). (40)
Йо в соответствии с формулами (35) и (36) можно исключить
из формулы (40) величины а и I Тогда
tg р cos Да = tg (Р — Др). (41)
Формула (41) позволит вычислить величину ошибки ДР в угле
возвышения. Развертывая правую часть в формуле (41) и производя
некоторые преобразования, можно выражение для величины tg ДР
получить в виде:
tg Д р = 1~c°sAa_ tg Р. (42)
& г 1 —tg2(3cosAa v 7
Полагая, что величина а мала, согласно формуле (35) получаем
угол Да малым. Величина же ошибки ДР в соответствии с форму-
лой (42) получается величиной высшего порядка малости
A₽=^-tg2p. (43)
23
Глава II
СХЕМЫ ЛИНЕЙНЫХ ИЗМЕРЕНИЙ
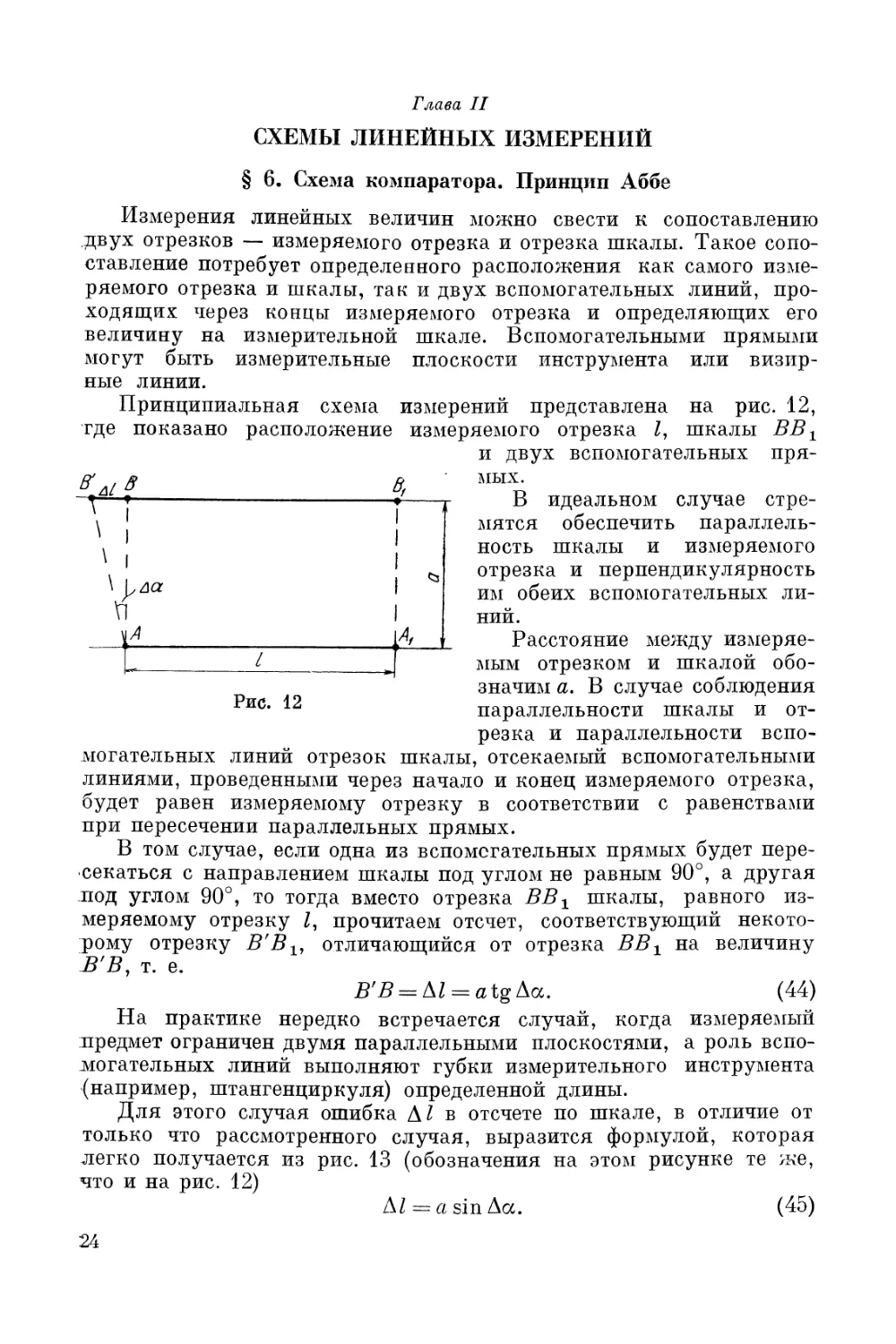
§ 6. Схема компаратора. Принцип Аббе
Измерения линейных величин можно свести к сопоставлению
двух отрезков — измеряемого отрезка и отрезка шкалы. Такое сопо-
ставление потребует определенного расположения как самого изме-
ряемого отрезка и шкалы, так и двух вспомогательных линий, про-
ходящих через концы измеряемого отрезка и определяющих его
величину на измерительной шкале. Вспомогательными прямыми
могут быть измерительные плоскости инструмента или визир-
ные линии.
Принципиальная схема измерений представлена на рис. 12,
где показано расположение измеряемого отрезка Z, шкалы ВВх
и двух вспомогательных пря-
мых.
В
мятся обеспечить параллель-
ность
отрезка и перпендикулярность
им обеих вспомогательных ли-
ний.
Расстояние между измеряе-
мым отрезком и шкалой обо-
значим а. В случае соблюдения
параллельности шкалы и от-
резка и параллельности вспо-
могательных линий отрезок шкалы, отсекаемый вспомогательными
идеальном случае стре-
шкалы и измеряемого
линиями, проведенными через начало и конец измеряемого отрезка,
будет равен измеряемому отрезку в соответствии с равенствами
при пересечении параллельных прямых.
В том случае, если одна из вспомогательных прямых будет пере-
секаться с направлением шкалы под углом не равным 90°, а другая
.под углом 90°, то тогда вместо отрезка ВВ± шкалы, равного из-
меряемому отрезку Z, прочитаем отсчет, соответствующий некото-
рому отрезку В'В^ отличающийся от отрезка ВВх на величину
В'В, т. е.
В'В = № = a tg Да. (44)
На практике нередко встречается случай, когда измеряемый
шредмет ограничен двумя параллельными плоскостями, а роль вспо-
могательных линий выполняют губки измерительного инструмента
(например, штангенциркуля) определенной длины.
Для этого случая ошибка AZ в отсчете по шкале, в отличие от
только что рассмотренного случая, выразится формулой, которая
легко получается из рис. 13 (обозначения на этом рисунке те же,
что и на рис. 12)
AZ = a sin Да.
(45)
24
Формула (45), в которой величина ошибки измерения зависит-
от синуса угла перекоса, послужила основанием для названия этой
ошибки синусной ошибкой, возникающей за счет перекоса
вспомогательных линий.
Совершенно очевидно, что такая ошибка может быть устранена,
если длина вспомогательных линий будет равна’нулю.
Рассмотрим случай, когда направление шкалы окажется непарал-
лельным измеряемому предмету. Тогда при вспомогательных прямых,
перпендикулярных измеряемому отрезку, получим, что отсчет
по измерительной шкале (рис. 14) не равен истинному значению ВВ±.
Величина ошибки измерения
Если величина угла перекоса Д |3 шкалы будет мала, то формула.
(46) переходит в приближенную формулу
Ы = (47>
Ошибка, возникающая при перекосе шкалы, зависит от косинуса
угла перекоса. Это послужило основанием называть ее косинус-
ной ошибкой.
Для устранения синусной ошибки не обязательно, чтобы объект
измерения непосредственно совмещался со шкалой. Аббе показал,
что для устранения синусной ошибки достаточно, чтобы измеряемый
предмет был размещен на направлении, являющемся продолжением
измерительной шкалы. Это условие обычно называют принци-
пом Аббе. Практически, при изготовлении прямолинейной
шкалы, всегда возможно некоторое отступление ее от номинальной
длины и от равномерного деления шкалы.
В случае наличия положительной ошибки в длине шкалы (длина
шкалы больше номинала) можно при производстве измерений вос-
пользоваться перекосом шкалы и вызываемой им косинусной ошибкой
для компенсации избыточности шкалы ДI.
25
Величина угла А [3 перекоса шкалы, необходимого для компенса-
ции ошибки AZ, может быть определена по формуле
д₽=/+, <48>
легко получаемой из формулы (47). Так, в случае если шкала при
длине I = 100 мм будет иметь ошибку, равную +0,01 мм, то
Др = |Л^=0,01]/Т = 0,014—50',
Заметим, что ошибки неравномерности прямолинейной шкалы
могут быть уменьшены при производстве ряда последовательных
измерений по всей длине шкалы, подобно тому, как об этом говори-
лось при рассмотрении процесса угловых измерений.
К устранению синусной ошибки путем соблюдения принципа
Аббе прибегают в случаях выполнения особо точных измерений,
в частности в схемах линейных компараторов. В ряде случаев изме-
рительная шкала может быть заменена точным измерительным
винтом. Это может быть, например, винтовой микрометр, при при-
менении которого также реализуется принцип Аббе.
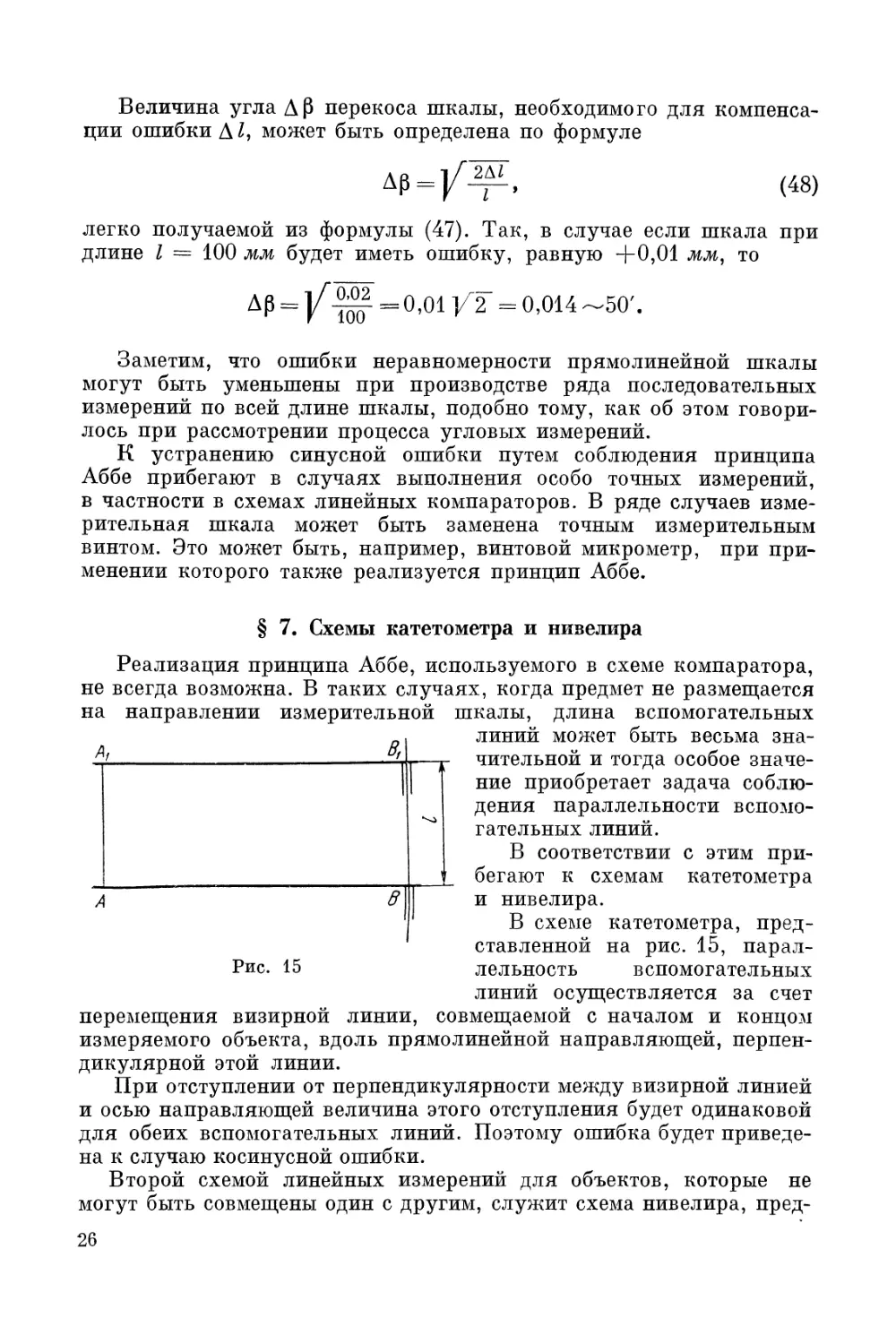
§ 7. Схемы катетометра и нивелира
Реализация принципа Аббе, используемого в схеме компаратора,
не всегда возможна. В таких случаях, когда предмет не размещается
на направлении измерительной шкалы, длина вспомогательных
линий может быть весьма зна-
чительной и тогда особое значе-
ние приобретает задача соблю-
дения параллельности вспомо-
гательных линий.
В соответствии с этим при-
бегают к схемам катетометра
и нивелира.
В схеме катетометра, пред-
ставленной на рис. 15, парал-
лельность вспомогательных
линий осуществляется за счет
перемещения визирной линии, совмещаемой с началом и концом
измеряемого объекта, вдоль прямолинейной направляющей, перпен-
дикулярной этой линии.
При отступлении от перпендикулярности между визирной линией
и осью направляющей величина этого отступления будет одинаковой
для обеих вспомогательных линий. Поэтому ошибка будет приведе-
на к случаю косинусной ошибки.
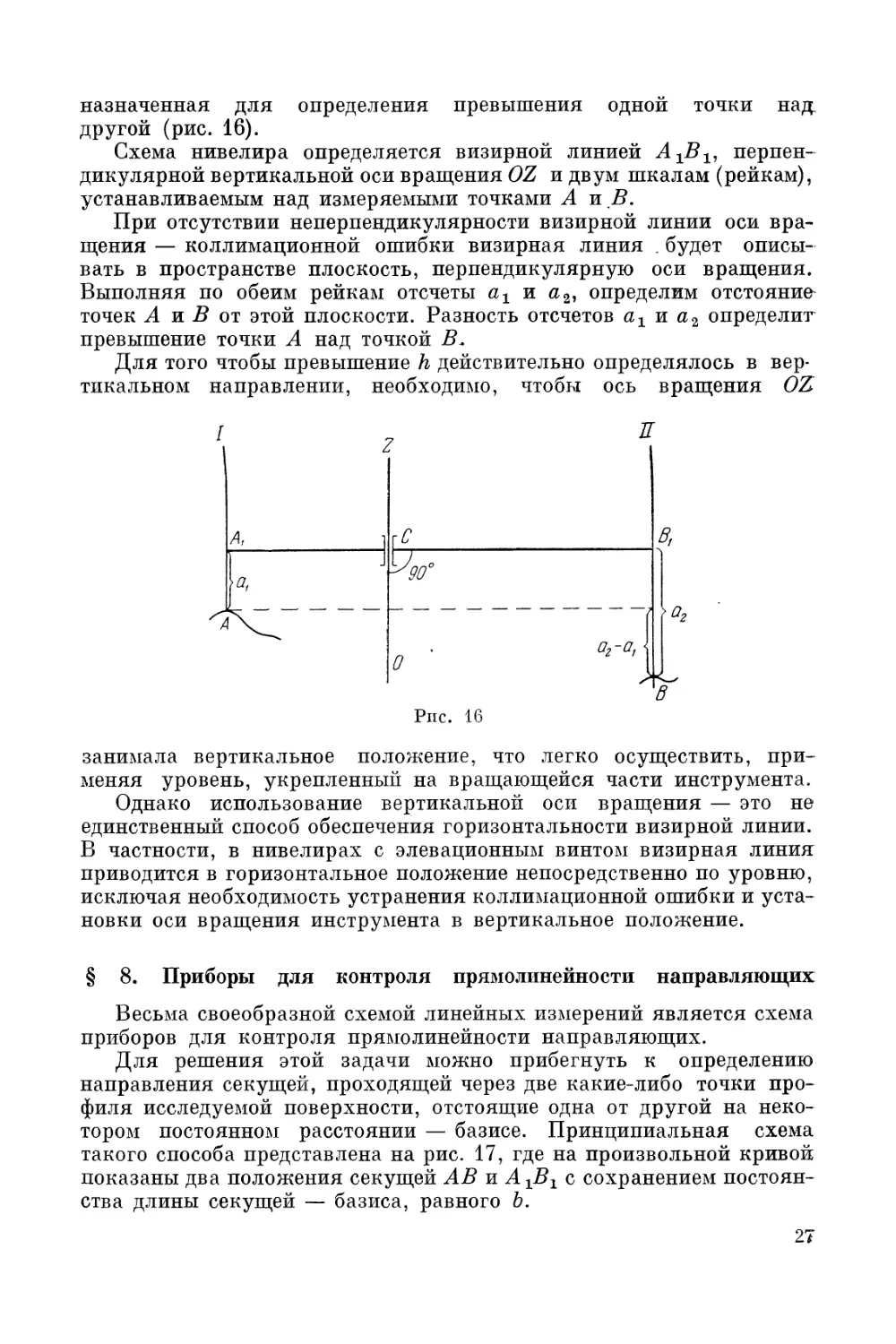
Второй схемой линейных измерений для объектов, которые не
могут быть совмещены один с другим, служит схема нивелира, пред-
26
назначенная для определения превышения одной точки над
другой (рис. 16).
Схема нивелира определяется визирной линией А-^В-^ перпен-
дикулярной вертикальной оси вращения OZ и двум шкалам (рейкам),
устанавливаемым над измеряемыми точками А и В.
При отсутствии неперпендикулярности визирной линии оси вра-
щения — коллимационной ошибки визирная линия . будет описы-
вать в пространстве плоскость, перпендикулярную оси вращения.
Выполняя по обеим рейкам отсчеты аг и а2, определим отстоянии
точек А и В от этой плоскости. Разность отсчетов а± и а2 определив
превышение точки А над точкой В.
Для того чтобы превышение h действительно определялось в вер-
тикальном направлении, необходимо, чтобы ось вращения OZ
занимала вертикальное положение, что легко осуществить, при-
меняя уровень, укрепленный на вращающейся части инструмента.
Однако использование вертикальной оси вращения — это не
единственный способ обеспечения горизонтальности визирной линии.
В частности, в нивелирах с элевационным винтом визирная линия
приводится в горизонтальное положение непосредственно по уровню,
исключая необходимость устранения коллимационной ошибки и уста-
новки оси вращения инструмента в вертикальное положение.
§ 8. Приборы для контроля прямолинейности направляющих
Весьма своеобразной схемой линейных измерений является схема
приборов для контроля прямолинейности направляющих.
Для решения этой задачи можно прибегнуть к определению
направления секущей, проходящей через две какие-либо точки про-
филя исследуемой поверхности, отстоящие одна от другой на неко-
тором постоянном расстоянии — базисе. Принципиальная схема
такого способа представлена на рис. 17, где на произвольной кривой
показаны два положения секущей АВ и А Х5Х с сохранением постоян-
ства длины секущей — базиса, равного Ъ.
27
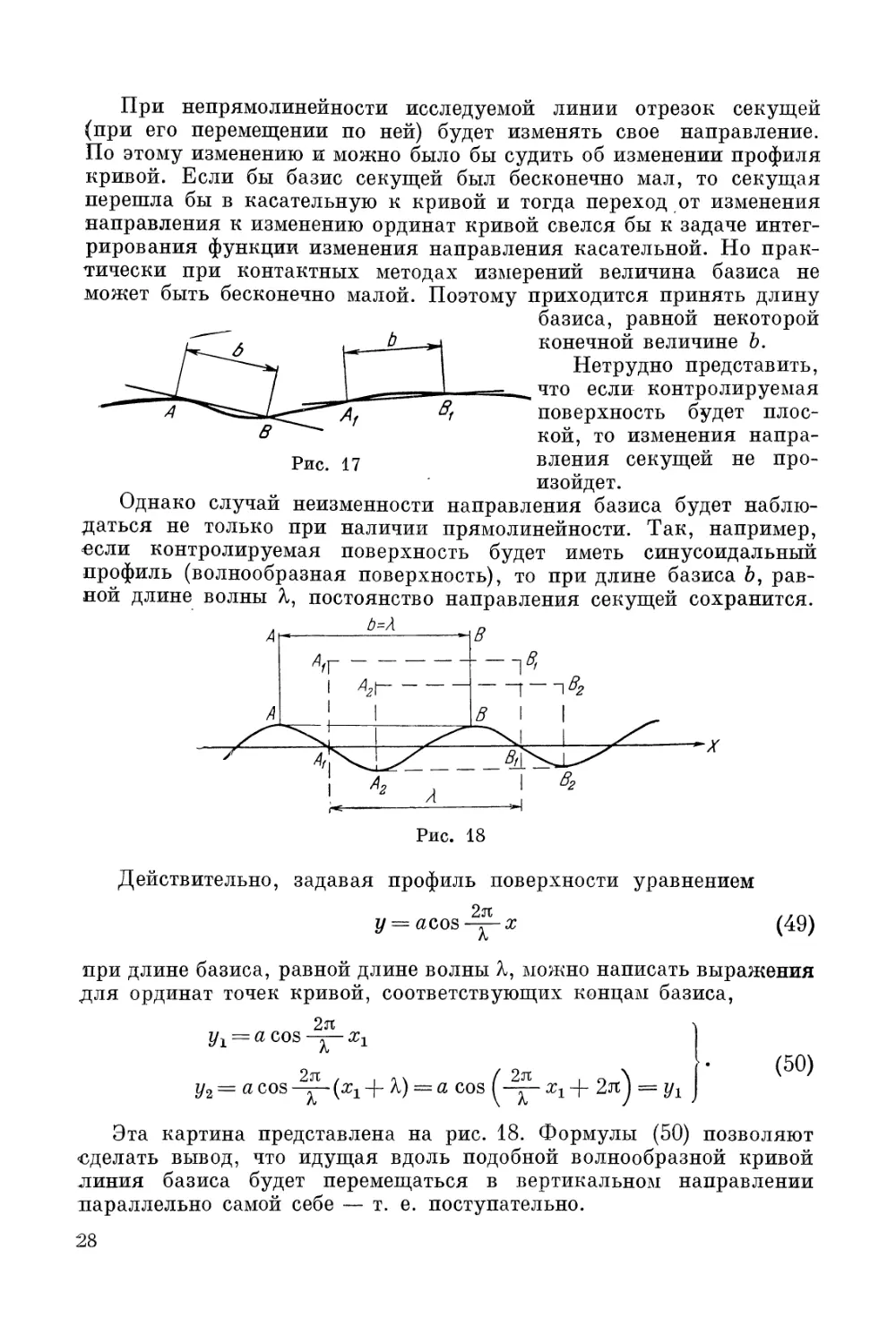
При непрямолинейности исследуемой линии отрезок секущей
(при его перемещении по ней) будет изменять свое направление.
По этому изменению и можно было бы судить об изменении профиля
кривой. Если бы базис секущей был бесконечно мал, то секущая
перешла бы в касательную к кривой и тогда переход от изменения
направления к изменению ординат кривой свелся бы к задаче интег-
рирования функции изменения направления касательной. Но прак-
тически при контактных методах измерений величина базиса не
может быть бесконечно малой. Поэтому приходится принять длину
базиса, равной некоторой
। т Ь_________________________ч конечной величине Ъ.
[ "^*7 । I Нетрудно представить,
~ ' — что если контролируемая
поверхность будет плос-
кой, то изменения напра-
рис 17 вления секущей не про-
изойдет.
Однако случай неизменности направления базиса будет наблю-
даться не только при наличии прямолинейности. Так, например,
«ели контролируемая поверхность будет иметь синусоидальный
профиль (волнообразная поверхность), то при длине базиса &, рав-
ной длине волны Л, постоянство направления секущей сохранится.
Действительно, задавая профиль поверхности уравнением
z/ = &cos-^-<r (49)
при длине базиса, равной длине волны %, можно написать выражения
для ординат точек кривой, соответствующих концам базиса,
2л
ух = a cos х±
2л / 2л \ (50)
у2 = cos—(<£].+ X) = а cos ( -у-х1+ 2л 1 = уг
Эта картина представлена на рис. 18. Формулы (50) позволяют
сделать вывод, что идущая вдоль подобной волнообразной кривой
линия базиса будет перемещаться в вертикальном направлении
параллельно самой себе — т. е. поступательно.
28
В подобном случае не было бы возможности заметить волнистость
поверхности и поэтому потребовалось бы измерить величину посту-
пательного перемещения какой-либо из точек базиса, например
его середины, в вертикальном направлении. Но ограничиться одним
таким измерением не смогли бы, так как и оно в определенных слу-
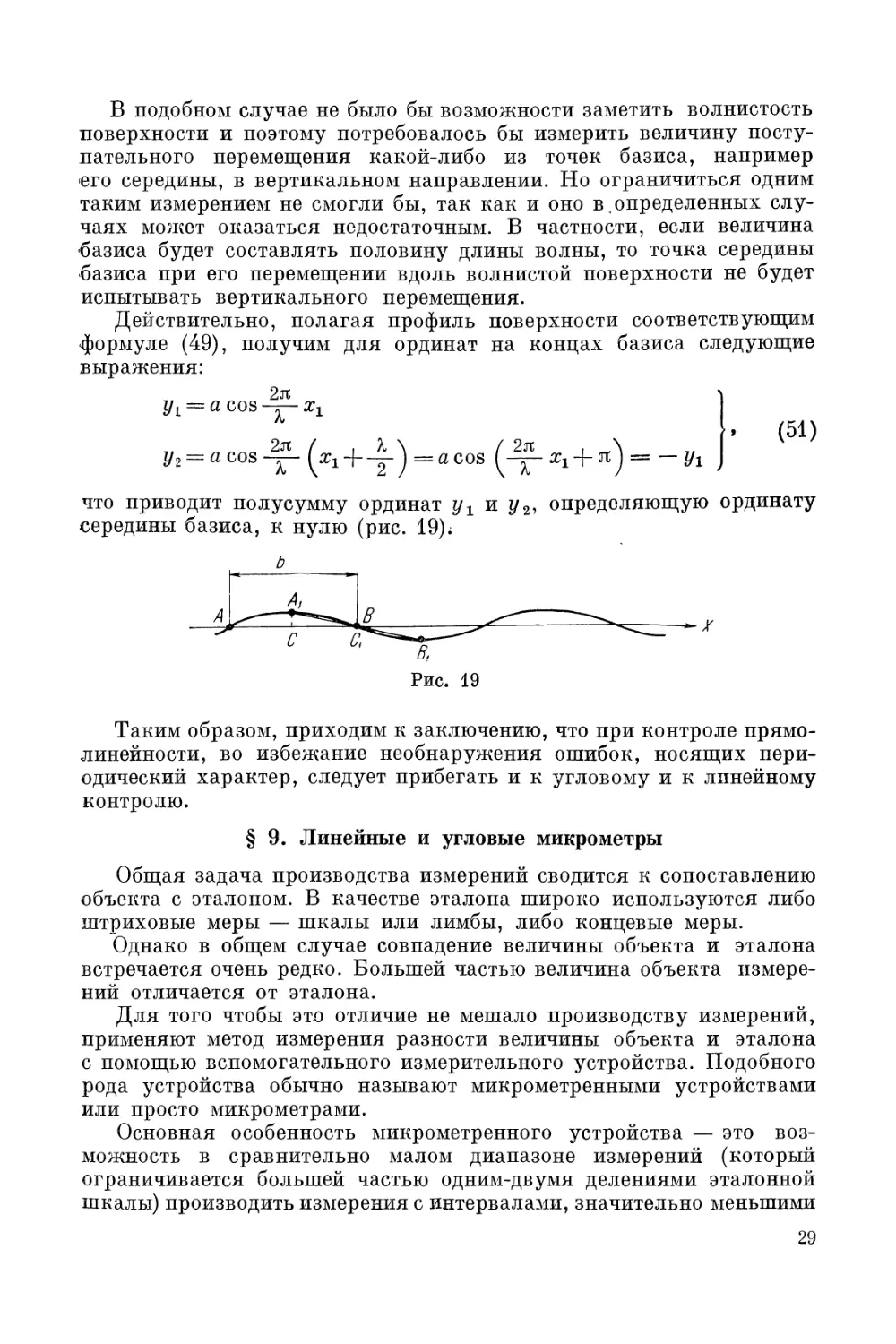
чаях может оказаться недостаточным. В частности, если величина
базиса будет составлять половину длины волны, то точка середины
базиса при его перемещении вдоль волнистой поверхности не будет
испытывать вертикального перемещения.
Действительно, полагая профиль поверхности соответствующим
формуле (49), получим для ординат на концах базиса следующие
выражения:
yL = a cos -у-
(51)
что приводит полусумму ординат уг и у 2, определяющую ординату
середины базиса, к нулю (рис. 19);
£
Рис. 19
Таким образом, приходим к заключению, что при контроле прямо-
линейности, во избежание необнаружения ошибок, носящих пери-
одический характер, следует прибегать и к угловому и к линейному
контролю.
§ 9. Линейные и угловые микрометры
Общая задача производства измерений сводится к сопоставлению
объекта с эталоном. В качестве эталона широко используются либо
штриховые меры — шкалы или лимбы, либо концевые меры.
Однако в общем случае совпадение величины объекта и эталона
встречается очень редко. Большей частью величина объекта измере-
ний отличается от эталона.
Для того чтобы это отличие не мешало производству измерений,
применяют метод измерения разности величины объекта и эталона
с помощью вспомогательного измерительного устройства. Подобного
рода устройства обычно называют микрометренными устройствами
или просто микрометрами.
Основная особенность микрометренного устройства — это воз-
можность в сравнительно малом диапазоне измерений (который
ограничивается большей частью одним-двумя делениями эталонной
шкалы) производить измерения с интервалами, значительно меньшими
29
по сравнению с интервалами, имеющимися на основной шкале изме-
рительного прибора (это определение может быть отнесено и к из-
мерениям, производимым с концевыми мерами).
Для обеспечения возможности измерения малых интервалов
используют разнообразные приемы и методы. Главнейшими из них
следует считать использование микрометренных винтов, увеличения
измеряемых интервалов с помощью микрообъектива, качающихся
плоскопараллельных пластинок, осуществляющих смещение изобра-
жения. Рассмотрим некоторые микрометренные устройства более
подробно. Наиболее распространенным из них будет микрометрен-
ный винт, обладающий достаточно постоянным шагом резьбы и не
имеющий мертвого хода.
Задаваясь небольшим шагом резьбы, например t = 0,5 мм, и диа-
метром головки винта — барабанчика со шкалой, равным D =
= 30 мм, получим длину окружности барабанчика равной 94,2 мм.
Деля окружность барабанчика на 100 частей, получим величину
одного деления, равную 0,942 мм, что соответствует повороту винта
на угол в 3,6°. Таким образом, повороту головки винта на одно
деление будет соответствовать его продольное перемещение на 1/100
шага, т. е. цена деления барабана будет равна 0,005 мм.
Если основную шкалу разделить на целые миллиметры, то, при-
нимая диапазон работы микрометра соответствующим пяти делениям
шкалы, сможем ограничиться расходом винта всего в 5 мм. Тогда,
задаваясь относительной ошибкой винта в его рабочем диапазоне,
например равной 0,01%, обеспечим величину абсолютной ошибки,
равной 0,0005 мм. Такая же относительная точность при рабочем
диапазоне в 100 мм привела бы к абсолютной ошибке, равной 0,01 мм,
что во многих случаях было бы совершенно неприемлемым.
Проанализируем возможные ошибки микрометренного винта,
при работе с которым сохраняются синусная и косинусная ошибки,
возникающие за счет несоблюдения принципа Аббе.
Соблюдая указанный принцип путем размещения оси винта
на направлении основной шкалы, можно легко устранить синусную
ошибку. Что же касается косинусной ошибки, то вследствие малой
длины рабочего диапазона эта ошибка редко будет достигать сколько-
нибудь ощутимых величин. Так, допуская перекос оси винта до 1° =
= 0,0175 радиана, при интервале измерений микрометра в 10 мм
получим величину косинусной ошибки на краю диапазона равной
= . <-10 -0,0015
\ cos др J 2 2
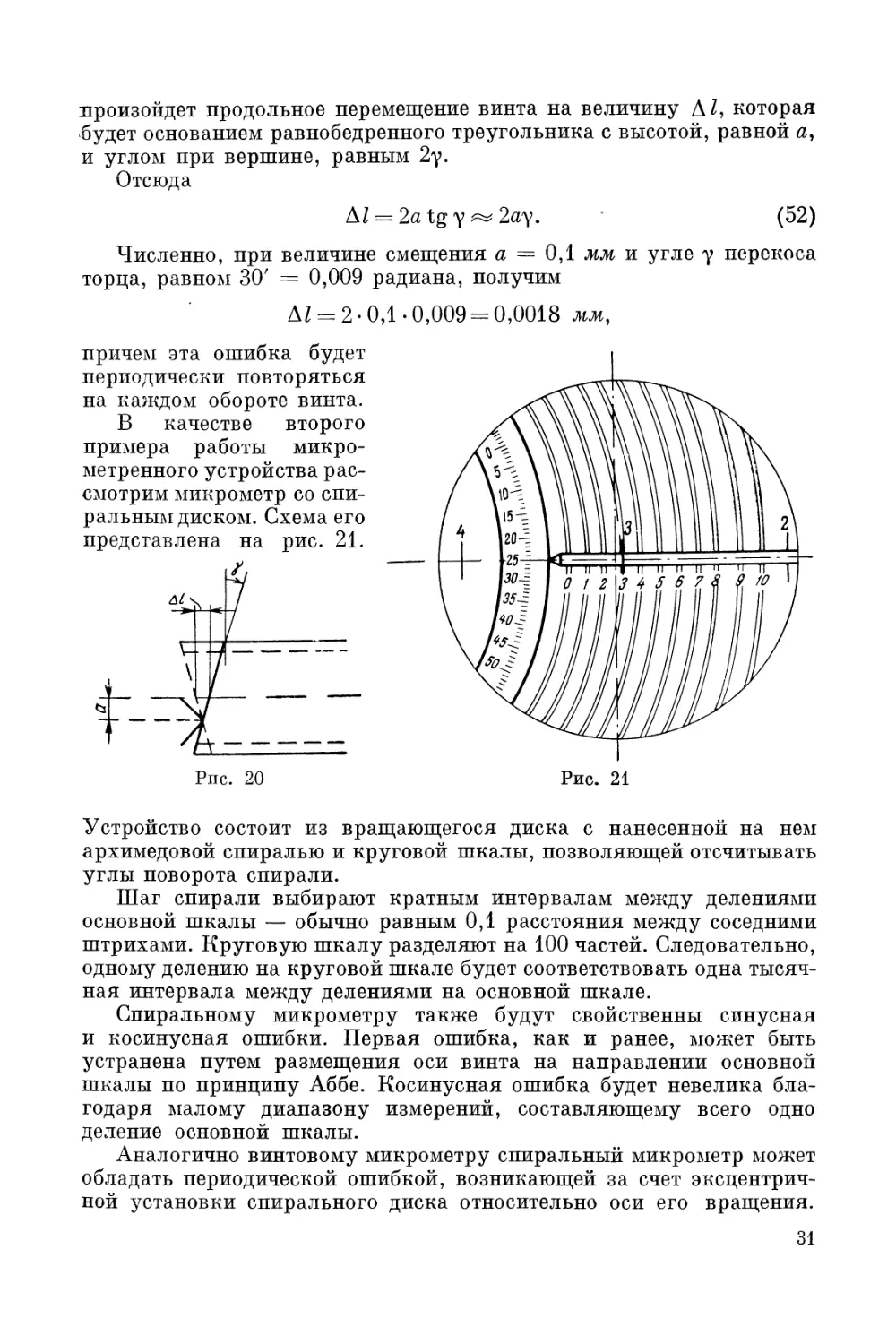
Заметим, что винтовому микрометру свойственна еще одна ошибка,
возникающая при перекосе упорной поверхности винта. На рис. 20
изображена опорная поверхность микрометренного винта, которая
с осью винта образует угол в 90° — у при одновременном смещении
центра упора на расстояние а от оси винта.
Нетрудно представить, что при повороте винта на 180° его опор-
ная плоскость составит с осью угол, равный 90° + у. При этом
30
произойдет продольное перемещение винта на величину A Z, которая
будет основанием равнобедренного треугольника с высотой, равной а,
и углом при вершине, равным 2у.
Отсюда
AZ = 2а tg у 2ау. (52)
Численно, при величине смещения а = 0,1 мм и угле у перекоса
торца, равном 30' = 0,009 радиана, получим
AZ = 2-0,1-0,009 = 0,0018 мм,
причем эта ошибка будет
периодически повторяться
на каждом обороте винта.
В качестве второго
примера работы микро-
метренного устройства рас-
смотрим микрометр со спи-
ральным диском. Схема его
представлена на рис. 21.
Рис. 21
Рпс. 20
Устройство состоит из вращающегося диска с нанесенной на нем
архимедовой спиралью и круговой шкалы, позволяющей отсчитывать
углы поворота спирали.
Шаг спирали выбирают кратным интервалам между делениями
основной шкалы — обычно равным 0,1 расстояния между соседними
штрихами. Круговую шкалу разделяют на 100 частей. Следовательно,
одному делению на круговой шкале будет соответствовать одна тысяч-
ная интервала между делениями на основной шкале.
Спиральному микрометру также будут свойственны синусная
и косинусная ошибки. Первая ошибка, как и ранее, может быть
устранена путем размещения оси винта на направлении основной
шкалы по принципу Аббе. Косинусная ошибка будет невелика бла-
годаря малому диапазону измерений, составляющему всего одно
деление основной шкалы.
Аналогично винтовому микрометру спиральный микрометр может
обладать периодической ошибкой, возникающей за счет эксцентрич-
ной установки спирального диска относительно оси его вращения.
31
Устранение этой ошибки потребует создания соответственного юсти-
ровочного устройства.
Рассматривая спиральное микрометренное устройство, следует
обратить внимание на два обстоятельства, выгодно отличающие его
от винтового микрометра. Во-первых, в то время, как перемещение
винта или гайки всегда ограничивается длиною винта, что в некото-
рых неблагоприятных случаях повлечет перемещение гайки или винта
из одного крайнего положения в другое, вращение спирального
диска может осуществляться неограниченно в обе стороны. Переход
из одного крайнего положения отсчета в другое крайнее положение
происходит непрерывно. Во-вторых, в спиральном микрометре отсут-
ствует необходимость в создании специальных устройств для выбира-
ния мертвого хода винта — пружин, создающих контакт между
винтом, гайкой и упором и вызывающих дополнительное трение.
Действие других видов микрометренных устройств, использу-
ющих различные оптические элементы — микрообъективы, кача-
ющиеся плоскопараллельные пластинки и т. п., рассмотрим
несколько позже, после установления их главнейших оптических
свойств.
Имея в своем распоряжении те или иные микрометренные устрой-
ства для производства линейных измерений, всегда можно применить
их для измерения малых дуг и тем самым превратить такие устрой-
ства в микрометры для угловых измерений.
Однако для производства угловых измерений существуют спе-
циальные микрометры, например оптические клинья с переменным
преломляющим углом, обычно называемые оптическими компенса-
торами.
Особенности оптических компенсаторов будут рассмотрены не-
сколько позже.
Глава III
НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ТЕОРИИ СОЛИНЕЙНОГО СРОДСТВА
§ 10. Основные положения. Правила знаков
В последующем изложении предполагается, что читатель знаком
с основными положениями теории оптических приборов. Такое пред-
положение позволяет ряд формул, выводимых в теории оптических
приборов, привести без доказательств. Однако целесообразно на-
помнить некоторые из выводов теории солинейного сродства, так как
это позволит более логично построить последующее изложение.
Теория солинейного сродства строится, как известно, на допуще-
нии, что оптическая система является строго центрированной. Однако
всегда приходится сталкиваться с более или менее значительными
нарушениями центрировки. Поэтому представляется полезным не-
32
сколько расширить те исходные положения, на которых принято
строить теорию оптических приборов.
Так, например, одним из исходных положений теории со л иней-
ного сродства является положение о сопряженности осей в простран-
стве предметов и в пространстве изображений и о центрированности
обоих пространств вокруг осей. Но, учитывая возможность наруше-
ния центрировки оптической системы, целесообразно ввести понятие
произвольно расположенных в обоих пространствах сопряженных
осей, которые в случае строго центрированной системы могут быть
выбранными и совпадающими с геометрической осью системы.
Понятие сопряженности прямых в пространстве предметов и
в пространстве изображений можно установить, исходя из абстра-
гирования картины хода лучей, т. е. ограничиться областью про-
странства, расположенной вблизи сопряженных осей, считая, что
углы между сопряженными прямыми и осью невелики.
Понятие плоскостей предмета и изображения заменим понятием
их поверхностей, полагая, что малые участки поверхностей— эле-
менты предмета и изображения можно рассматривать, как плоские.
Совершенно очевидно, что будет удобно сохранить те правила
знаков и обозначения, которые используются в теории оптических
приборов, например, чтобы отрезки, направленные слева направо
(по направлению света) и снизу вверх, имели положительный знак.
То же относится к углам лучей, пересекающих ось или прямую
(нормаль), от которой отсчитывается угол, сверху вниз.
§ 11. Линейное увеличение. Главные точки. Фокусные расстояния.
Формула Ньютона
В предыдущем параграфе уже говорилось о том, что в общем
случае поверхности предмета и изображения нельзя считать
плоскими.
Поэтому, выбирая в пространстве предметов и в пространстве
изображений сопряженные оси, будем полагать, что элементы пред-
мета и его изображения не будут перпендикулярны выбранным осям,
но сделаем допущение, что лучи, составляющие малые углы с осью
и исходящие из одной и той же точки предмета, лежащей на рассма-
триваемой плоскости (плоскости чертежа), всегда будут пересекаться
в пространстве изображений.
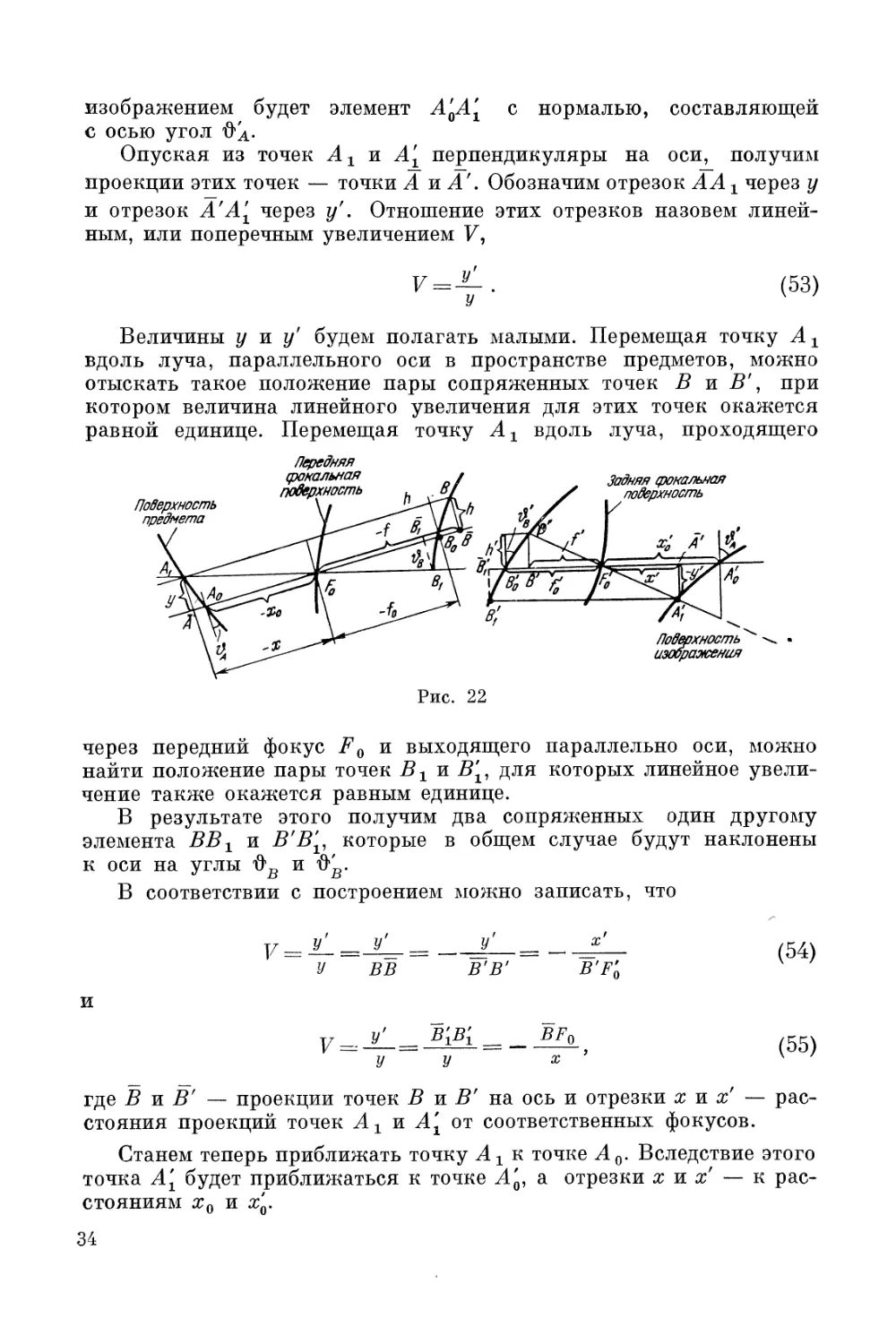
Тогда, обращаясь к рис. 22, на котором представлено располо-
жение осей в пространстве предметов и в пространстве изображений,
для некоторой точки Ао, лежащей на оси в пространстве предметов,
получим ее изображение в точке А'о, также лежащей на оси.
Удаляя точку Ао в бесконечность, получим новое положение
ее изображения в некоторой точке F'o, которую назовем задним
фокусом. Точка Fo, сопряженная точке изображения А'о, удаленной
в бесконечность, назовем точкой переднего фокуса.
Возьмем некоторый элемент поверхности предмета Л0Л17 нор-
маль которого составляет с осью угол и предположим, что его
3 Заказ 2301.
33
изображением будет элемент А^А^ с нормалью, составляющей
с осью угол Йа-
Опуская из точек Аг и Л' перпендикуляры на оси, получим
проекции этих точек — точки А и А'. Обозначим отрезок А А г через у
и отрезок А'А^ через у'. Отношение этих отрезков назовем линей-
ным, или поперечным увеличением У,
V = ^~
у
(53)
Величины у и у1 будем полагать малыми. Перемещая точку Аг
вдоль луча, параллельного оси в пространстве предметов, можно
отыскать такое положение пары сопряженных точек В и В1, при
котором величина линейного увеличения для этих точек окажется
равной единице. Перемещая точку Аг вдоль луча, проходящего
Передняя
Рис. 22
через передний фокус F§ и выходящего параллельно оси, можно
найти положение пары точек Вг и В^, для которых линейное увели-
чение также окажется равным единице.
В результате этого получим два сопряженных один другому
элемента ВВГ и В'В^, которые в общем случае будут наклонены
к оси на углы и
В соответствии с построением можно записать, что
T7 = J4=JC =—(54)
У ВВ В'В' В'Р’й
и
V = (55)
у у х ' '
где В и Bf — проекции точек В и В' на ось и отрезки х и х' — рас-
стояния проекций точек Аг и Л' от соответственных фокусов.
Станем теперь приближать точку А х к точке Ло. Вследствие этого
точка Л' будет приближаться к точке Л', а отрезки х и х — к рас-
стояниям х^ и х'о.
34
Наряду с этим будет происходить сближение точек В, Вх и их
приближение к точке Во, в которой элемент ВВГ пересекает ось.
Точки В' и В[ будут неограниченно приближаться к точке B'Q на оси.
Поэтому, переходя к пределу, получаем
V0 = limV = lim — = —---------— , (56)
где величины /0 и /', которые будем называть передним и задним
фокусными расстояниями, есть ни что иное, как расстояния от то-
чек Во и В'о до соответственных фокусов FQ и F'o.
Точки В0 и B'Q называются главными точками. Из формулы (56)
нетрудно получить известную формулу Ньютона
Vo = /o/o- (57)
Необходимо подчеркнуть, что в данном случае формула Ньютона
и формулы линейного увеличения выведены при произвольных
наклонах элементов предмета и изображения, а также при отсут-
ствии допущения о центрированности или даже хотя бы симметрии
системы.
§ 12. Формула отрезков от главных точек. Угловое и продольное
увеличения. Узловые точки
Аналогично выводу формулы для линейного увеличения и фор-
мулы Ньютона можно, опираясь на выбранные исходные положения,
вывести формулы отрезков от главных точек и формулы для про-
дольного и углового увеличений.
Обращаясь к тому же рис. 22, обозначим суммы отрезков х0
и /0, х'о и /' как отрезки и $' от главных точек до предмета и до
изображения
SO=Xo + fo'> + (58)
Решая формулы (58) относительно xQ и х'о и пользуясь формулой
Ньютона, получаем
Vo= (^о /о) ($о /о)~/о/о* (59)
После некоторых преобразований, получаем формулы:
1) отрезков
1-4— т-=°’ (б°)
2) продольного увеличения
<?=-р=у^2, (61)
3*
35
3) углового увеличения (рис. 23)
(62)
(63)
rr=—==-4=-4,
а х j
4) произведения увеличений
VW=--L.
Все эти формулы достаточно хорошо известны.
Задавая значение углового увеличения, равное единице, опре-
делим положение пары сопряженных точек, обладающих тем заме-
чательным свойством, что в этих точках углы, составленные сопря-
женными лучами с осью и в пространстве предметов и в пространстве
изображений, будут одинаковыми как по величине, так и по
знаку.
Это свойство узловых точек широко используется для переноса
направлений из пространства предметов в пространство изображений
и наоборот.
Для решения задачи переноса направлений, кроме узловых
точек, можно воспользоваться точками нулевых искажений, опре-
деляемых равенством углового увеличения: W = —1.
В оптических системах, расположенных в воздухе, переднее
и заднее фокусные расстояния по величине будут равны при разных
знаках. Поэтому при равенстве углового увеличения единице со-
гласно формуле (63) обращается в единицу и линейное увеличение;
в таких системах главные и узловые точки всегда будут совпадать.
Реальную оптическую систему, обладающую полем зрения конеч-
ной величины, всегда можно рассматривать, как совокупность мно-
жества элементарных оптических систем, для каждой из которых
в общем случае будут существовать свои фокусные расстояния и свое
положение главных и угловых точек.
Это обстоятельство приводит к выводу о том, что дать какие-либо
теоретические признаки для нахождения положения узловых точек
3G
невозможно, так как на любой паре сопряженных лучей всегда
можно найти положение пары лежащих на этих лучах узловых точек.
Подобная неопределенность характерна и для выбора осей в опти-
ческой системе, где также приходится сталкиваться с неопределен-
ностью понятия осей.
Все это приводит к необходимости введения дополнительных
условий, удовлетворение которым избавило бы от существующей
неопределенности.
Такими условиями могли бы быть условия прохождения оси
системы через центр зрачка и центр поля зрения. Определенная
этими условиями оптическая ось для центрированной системы совпала
бы с геометрической осью системы.
Для лучшего уяснения неопределенности нахождения положения
оси и узловых точек рассмотрим некоторые частные случаи.
В качестве одного из критериев нахождения оси можно выбрать
условие совпадения оси с нормалью к поверхности изображения.
Но тогда любая система, у которой поверхность изображения будет
сферой, центр которой совпадает с центром выходного зрачка, при-
ведет к совпадению всех главных лучей с нормалями поверхности.
Этим свойством будет обладать также оптическая система, построен-
ная из строго концентричных одна другой поверхностей, для которых
любая прямая, проходящая через их общий центр, будет и опти-
ческой и геометрической осью.
Более того, смещая в подобных системах диафрагму и, следова-
тельно, зрачок выхода, как это показано на рис. 24а и б пунктиром,
тем самым нарушим совпадение главных лучей с нормалями к по-
верхности изображения для всех световых пучков одновременно.
Конечно, для случая смещенного зрачка, можно было бы при-
бегнуть к дополнительному условию отсутствия излома направления
для главного луча, но и такой дополнительный критерий мог бы
быть удовлетворен, если перед системой расположить отклоняющий
клин, компенсирующий излом хода главных лучей за счет смещения
зрачка.
В качестве еще одного примера можно было бы рассмотреть кри-
терий, который характеризовался бы условием симметричности хода
37
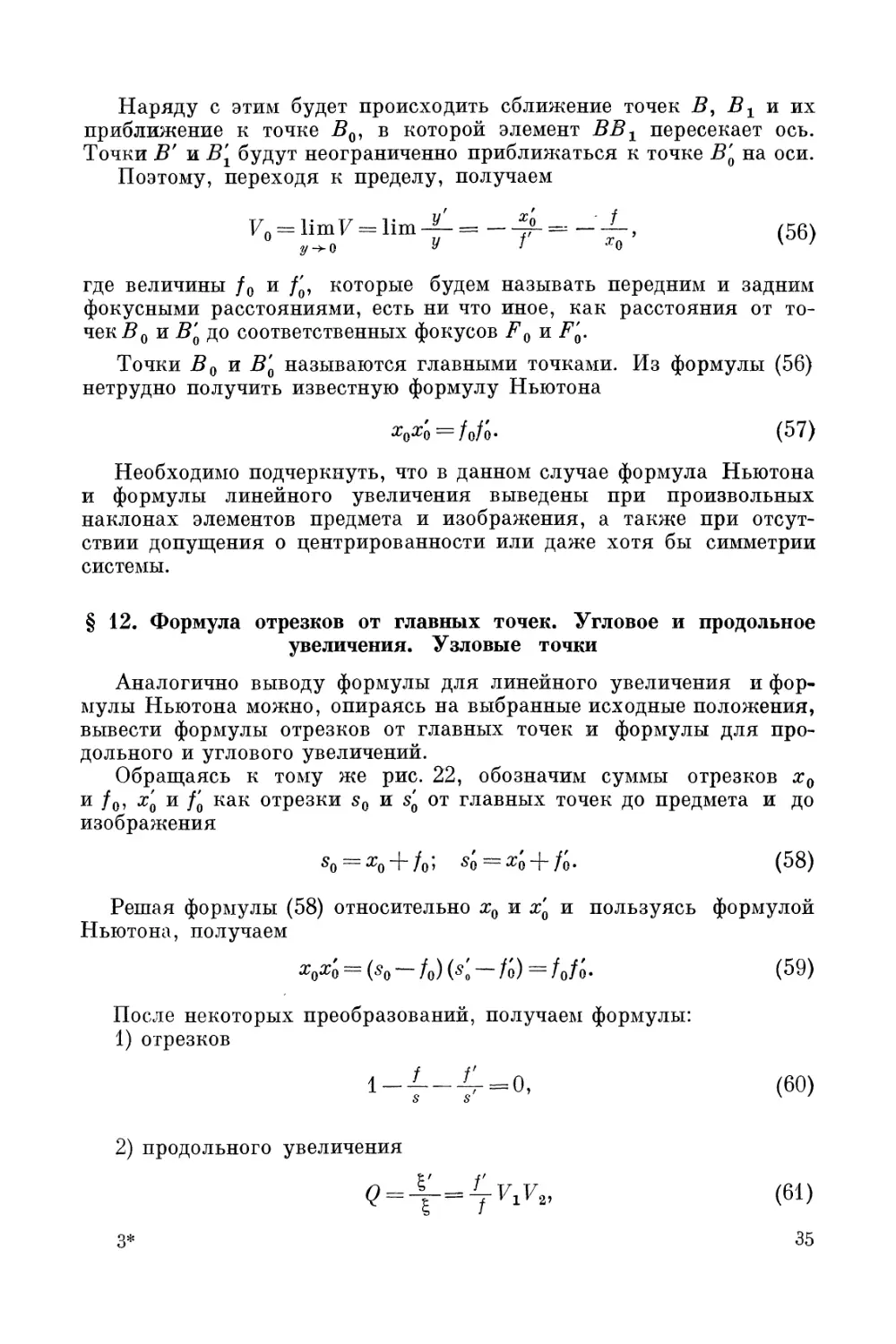
лучей в узловых точках относительно главного луча или оси. Но
и этот критерий легко мог бы быть удовлетворен в системе с теле-
центрическим ходом главных лучей в пространстве изображений,
приведенной на рис. 25, у которой величина изображения определя-
лась бы произведением из постоянной величины — фокусного рас-
стояния /' на полевой угол |3 (имеется в виду, что предмет для этой
системы расположен в бесконечности).
В подобной системе главные лучи в пространстве изображений
будут строго перпендикулярны к поверхности изображения, анало-
гично тому, как это было бы на геометрической оси системы.
Приведенные примеры, на наш взгляд, достаточно убедительно
демонстрируют неопределенность понятия оптической оси и поло-
жения узловых точек.
§ 13. Сложная система. Телескопическая система
Сложную систему всегда можно рассматривать как совокупность
двух систем, последовательно расположенных одна за другой. По-
этому, зная фокусные расстояния составляющих систем и рассто-
яние между ними, можно поставить задачу определения фокусного
расстояния эквивалентной системы.
Для сложной системы фокусное расстояние определяется изве-
стной формулой
f = (64)
сила системы, находящейся в воздухе,
<р = ^=<Р1 + <р2 —<Pi<p2cZ. (65)
Для телескопической системы (сила которой равна нулю) линей-
ное увеличение определяется формулой
Fo =-77- = const, (66)
h
38
угловое
продольное
W = — = const = Г,
*2
__ V ____, /2/2 __ Т/2 /2/1
W hf[ hh ’
(67)
(68)
Глава IV
ВИЗИРНЫЕ ОПТИЧЕСКИЕ СИСТЕМЫ
§ 14. Определение визирной линии. Зрительная труба —
телескопическая система
Одной из распространенных задач, решаемых с помощью исполь-
зования оптических систем, является задача визирования, которую
можно сформулировать как определение направления на выбранную
точку пространства.
Совершенно очевидно, что фиксирование какого-либо направле-
ния требует знания координат двух точек пространства. Одной
из них будет та точка, направление на которую желают определить.
Вторая точка должна быть постоянной, связанной с выбранной
системой координат. Но координаты произвольно выбранной точки
первоначально не известны, поэтому стоит задача их определения.
Подобную задачу можно решить посредством совмещения напра-
вления на уже известную точку — известного визирного направле-
ния с направлением на произвольную точку.
Визирное направление также должно определяться двумя точ-
ками, из которых положение одной может быть постоянным для
всех направлений, а вторая точка должна иметь переменные, но
всегда известные координаты.
Механически создание визирного направления могло бы быть
осуществлено с помощью линейки, вращающейся вокруг оси и совме-
щаемой с интересующей точкой и известным штрихом шкалы лимба.
Оптически визирное направление можно было бы осуществить,
совмещая оптическую ось зрительной трубы, наведенной на точку
предмета, с той или иной точкой шкалы лимба или с такой точкой,
положение которой относительно делений лимба будет определяться
постоянными величинами.
Принципиальная схема такого определения направления пред-
ставлена на рис. 26, где начало координат О совмещено с осью вра-
щения оптической системы и с осью лимба. Радиус шкалы лимба
примем равным R. Изображение А' произвольной точки простран-
ства А совмещается с помощью оптической системы с некоторой
39
точкой М', вращающейся вместе с оптической системой. Координаты
точки М' и координаты точки отсчета ЛГ0 по шкале лимба связы-
ваются через постоянные величины — угол А0 и расстояние АТ?
(в системе полярных координат).
у Л Совмещение точки изображения А'
| с точкой М' — «центром сетки»
может контролироваться различными
способами — визуально, фотографи-
чески или фотоэлектрическим устрой-
ством.
В общем случае точка А будет
расположена на конечном расстоянии
относительно начала координат О.
При изменении расстояния точки А
от начала координат будет изме-
няться и расстояние ее изображе-
ния А' относительно центра сетки М'
также в радиальном направлении.
Тогда только одним поворотом опти-
ческой системы вокруг оси нельзя
получить совмещения обеих точек И'
и М'.
В этом случае понадобиться или
перемещение точки М' вдоль ради-
уса-вектора, или перефокусировка
оптической системы, с помощью кото-
рой точка А' может быть возвращена
в точку М'. Оба таких способа со-
Рис. 26 здадут в пространстве предметов
перемещение точки А вдоль некото-
рой кривой (в самом общем случае), которую назовем визирной
линией.
Ранее, при рассмотрении геометрических схем, говорилось о ви-
зирных линиях, но тогда предполагалось, что они будут прямыми.
Таким образом, условимся называть визирной линией такую
линию в пространстве
предметов, перемещая
вдоль которой предметную
точку, всегда будем полу-
чать изображение этой
предметной точки совме-
щенным с центром сетки.
Переходя к пространству изображений после оптической системы,
очевидно, получим изображение визирной линии в виде кривой,
по которой будет перемещаться центр сетки при неподвижной опти-
ческой системе или, при подвижной оптической системе, изображение
визирной линии будет, перемещаясь, проходить через неподвижный
центр сетки.
40
Искривление визирной линии и будет дополнительной ошибкой,
вносимой оптической системой в геометрическую схему прибора.
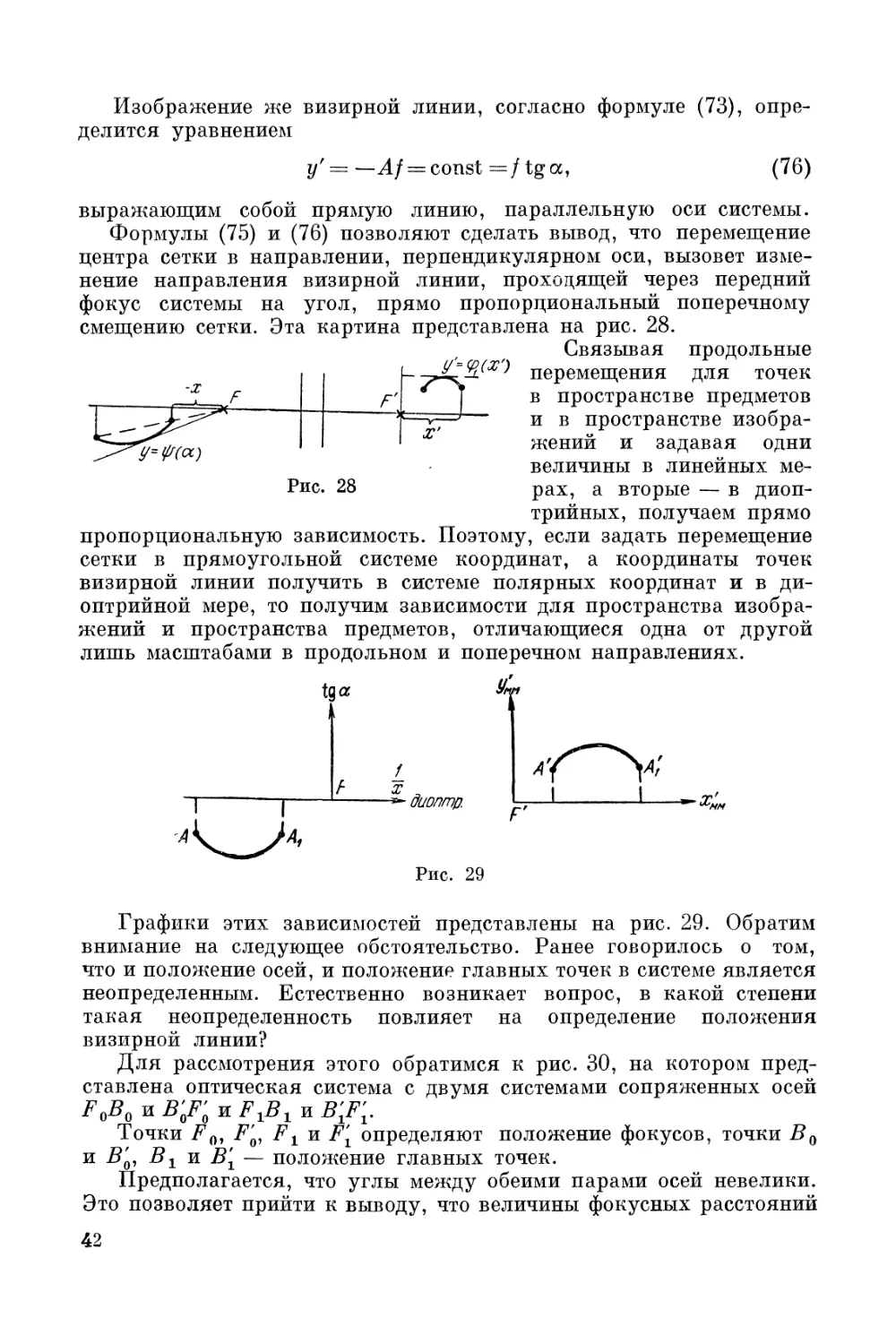
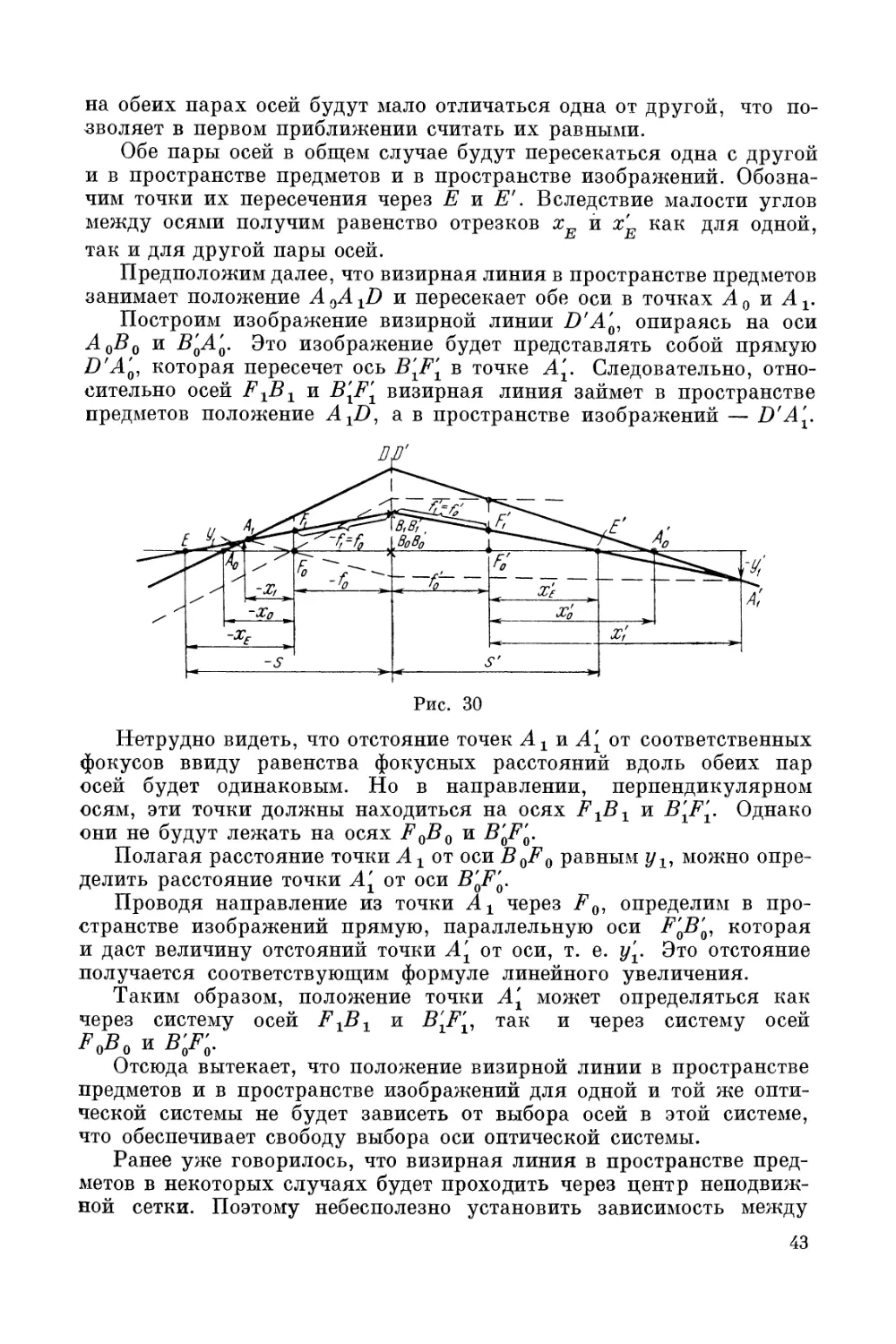
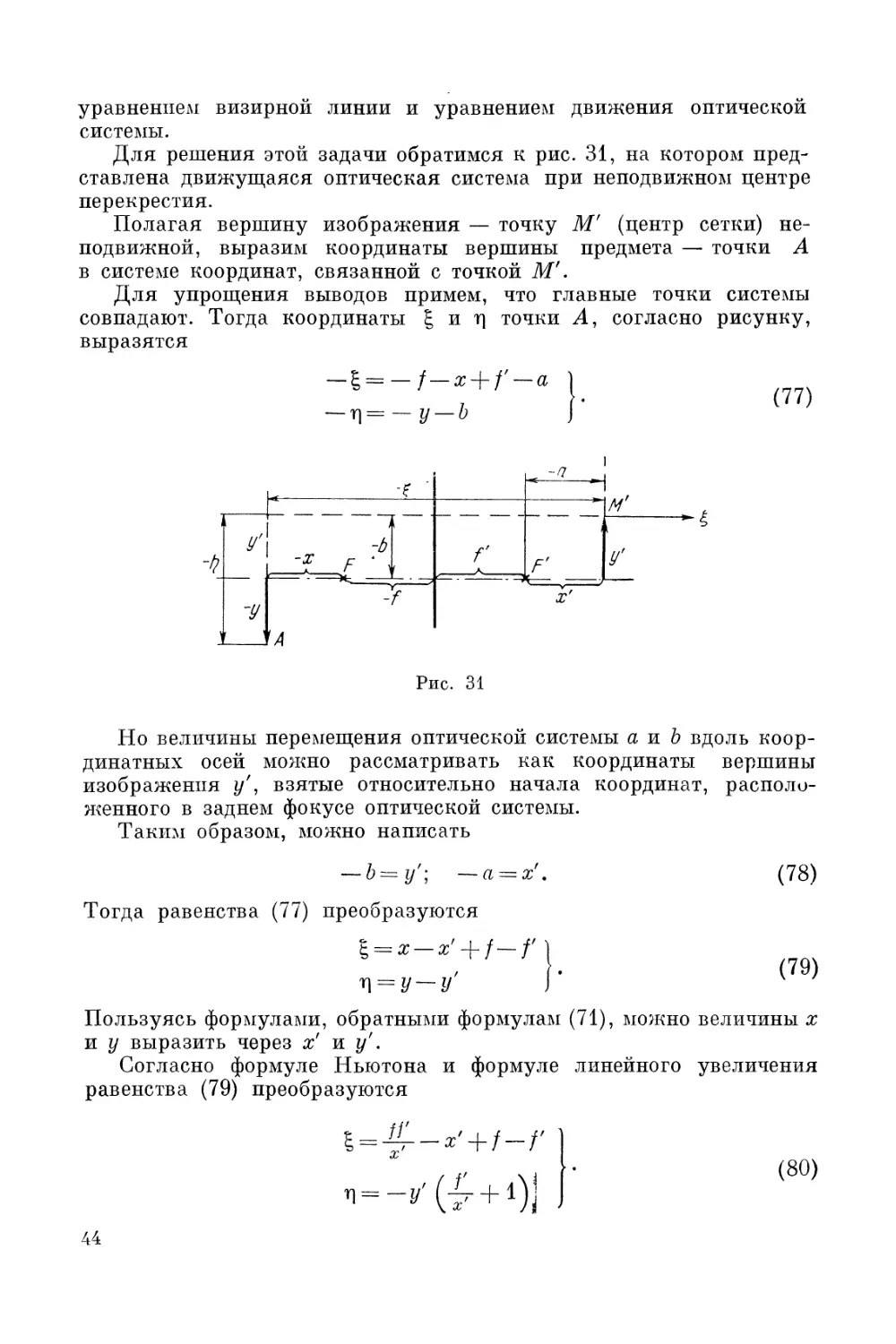
Рассмотрим процесс образования визирной линии. На рис. 27
представлена оптическая система, переносящая изображение неко-
торой кривой, расположенной в пространстве предметов, в простран-
ство изображений.
Кривую в пространстве предметов можно задать уравнением
в системе координат с началом, совпадающим с передним фокусом
оптической системы F
у=1|)(ж). (69)
Величины х и х легко связываются одна с другой через формулу
Ньютона. Следовательно, можно ординату у выразить через абс-
циссу х' в пространстве изображений
!/ = *(<), (70)
а величину ординаты у' найти через формулу линейного увели-
чения
/ = = (71)
Аналогичным путем можно выразить уравнение визирной лттнии
в пространстве предметов, исходя из ее уравнения в пространстве
изображений.
В частном случае линейной зависимости между величинами х
и у можно написать, что
y = AxJrB. (72)
Тогда зависимость между величинами у' и хг выразится фор-
мулой
/ = - + = + (73)
\ / J J
где коэффициенты А' и В' имеют следующие значения:
Л' = -у- и B' = —Af. (74)
Таким образом, в рассматриваемом случае зависимость между коор-
динатами изображения визирной линии будет также линейной.
Зададим условие равенства коэффициента В в формуле (72) нулю,
что будет соответствовать случаю прохождения визирной линии
через передний фокус F системы. Тогда для пространства предметов
получим
В = 0; у=Ах =—xtga, (75)
где а — угол наклона визирного направления по отношению к опти-
ческой оси.
41
Изображение же визирной линии, согласно формуле (73), опре-
делится уравнением
у' = —Af = const = / tg а,
(76)
выражающим собой прямую линию, параллельную оси системы.
Формулы (75) и (76) позволяют сделать вывод, что перемещение
центра сетки в направлении, перпендикулярном оси, вызовет изме-
нение направления визирной линии, проходящей через передний
фокус системы на угол, прямо пропорциональный поперечному
смещению сетки. Эта картина представлена на рис. 28.
Связывая продольные
перемещения для точек
в пространстве предметов
и в пространстве изобра-
жений и задавая одни
величины в линейных ме-
Рис. 28 рах, а вторые — в диоп-
трийных, получаем прямо
пропорциональную зависимость. Поэтому, если задать перемещение
сетки в прямоугольной системе координат, а координаты точек
визирной линии получить в системе полярных координат и в ди-
оптрийной мере, то получим зависимости для пространства изобра-
жений и пространства предметов, отличающиеся одна от другой
лишь масштабами в продольном и поперечном направлениях.
tga
Рис. 29
Графики этих зависимостей представлены на рис. 29. Обратим
внимание на следующее обстоятельство. Ранее говорилось о том,
что и положение осей, и положение главных точек в системе является
неопределенным. Естественно возникает вопрос, в какой степени
такая неопределенность повлияет на определение положения
визирной линии?
Для рассмотрения этого обратимся к рис. 30, на котором пред-
ставлена оптическая система с двумя системами сопряженных осей
F0B0 и B'F'O и F1B1 и В'Л
Точки Fo, F'o, Fr и F[ определяют положение фокусов, точки ВQ
и В', Вг и В' — положение главных точек.
Предполагается, что углы между обеими парами осей невелики.
Это позволяет прийти к выводу, что величины фокусных расстояний
42
на обеих парах осей будут мало отличаться одна от другой, что по-
зволяет в первом приближении считать их равными.
Обе пары осей в общем случае будут пересекаться одна с другой
и в пространстве предметов и в пространстве изображений. Обозна-
чим точки их пересечения через Е и Е'. Вследствие малости углов
между осями получим равенство отрезков хЕ й х'Е как для одной,
так и для другой пары осей.
Предположим далее, что визирная линия в пространстве предметов
занимает положение А 0А ±D и пересекает обе оси в точках А 0 и А г
Построим изображение визирной линии D'A'O, опираясь на оси
AqBq и B'0A'q. Это изображение будет представлять собой прямую
D'A'q, которая пересечет ось B^F^ в точке Л'. Следовательно, отно-
сительно осей F^B^ и B^F* визирная линия займет в пространстве
предметов положение AXD, а в пространстве изображений — D'А'г
Нетрудно видеть, что отстояние точек Аг и Л' от соответственных
фокусов ввиду равенства фокусных расстояний вдоль обеих пар
осей будет одинаковым. Но в направлении, перпендикулярном
осям, эти точки должны находиться на осях F1B1 и B^F^. Однако
они не будут лежать на осях FQBQ и В'В'.
Полагая расстояние точки Л х от оси BQFQ равным можно опре-
делить расстояние точки Л' от оси B'OF'O.
Проводя направление из точки Лх через Fo, определим в про-
странстве изображений прямую, параллельную оси F'QB'^ которая
и даст величину отстояний точки Л' от оси, т. е. у'г Это отстояние
получается соответствующим формуле линейного увеличения.
Таким образом, положение точки Л' может определяться как
через систему осей F1B1 и В'В', так и через систему осей
Р0В0 и B'0F'9.
Отсюда вытекает, что положение визирной линии в пространстве
предметов и в пространстве изображений для одной и той же опти-
ческой системы не будет зависеть от выбора осей в этой системе,
что обеспечивает свободу выбора оси оптической системы.
Ранее уже говорилось, что визирная линия в пространстве пред-
метов в некоторых случаях будет проходить через центр неподвиж-
ной сетки. Поэтому небесполезно установить зависимость между
43
уравнением визирной линии и уравнением движения оптической
системы.
Для решения этой задачи обратимся к рис. 31, на котором пред-
ставлена движущаяся оптическая система при неподвижном центре
перекрестия.
Полагая вершину изображения — точку М' (центр сетки) не-
подвижной, выразим координаты вершины предмета — точки А
в системе координат, связанной с точкой М'.
Для упрощения выводов примем, что главные точки системы
совпадают. Тогда координаты t и т] точки А, согласно рисунку,
выразятся
— £ = —/ —я + /'~а
—п= — у—ь
(77)
Но величины перемещения оптической системы а и Ъ вдоль коор-
динатных осей можно рассматривать как координаты вершины
изображения у', взятые относительно начала координат, располо-
женного в заднем фокусе оптической системы.
Таким образом, можно написать
— Ъ^=у'\ — а = х'. (78)
Тогда равенства (77) преобразуются
% = Х — х' f—f 1
z • (79)
П = У~У J
Пользуясь формулами, обратными формулам (71), можно величины х
и у выразить через х' и у'.
Согласно формуле Ньютона и формуле линейного увеличения
равенства (79) преобразуются
(80)
44
В случае, если в пространстве изображений уравнение визирной
линии будет представлено функцией
i/'=i|)(z'), (81)
то уравнения визирной линии примут следующий вид:
(82)
Но выражение -р- + 1 есть не что иное, как отношение разности
между линейным увеличением и единицей к линейному увеличению.
Тогда уравнения (82) будут иметь следующий вид:
(83)
Формулы (83) показывают, что при линейном увеличении, не-
большом и положительном, изменение ординаты ц будет соизмеримо
с величиной перемещения оптической системы. Изменение же абс-
циссы Е, будет определяться, в основном изменением величины х'.
Например, при V = 2, х будет равен 2/'. Тогда при изменении
х на 0,1/' = 10% величина первого члена в выражении абсциссы £
изменится на величину порядка 0,02/', т. е. всего на 2% или на одну
пятую часть изменения, вносимого величиной х непосредственно.
Подвижной оптический элемент может быть расположен между
неподвижной оптической системой и неподвижной сеткой. Тогда,
очевидно, уравнение визирной линии в пространстве предметов
определится через преобразование координат для неподвижной
системы промежуточного изображения визирной линии, полученного
через подвижную систему в соответствии с формулами Ньютона
и линейного увеличения.
Подобного рода устройства нашли широкое применение в гео-
дезических приборах со зрительными трубами, имеющими внутрен-
нюю фокусировку.
Совершенно очевидно, что и в этом случае можно воспользо-
ваться приемом выражения уравнения визирной линии в полярных
координатах и в диоптрийной мере. Тогда функция, определяющая
визирную линию в пространстве предметов, будет отличаться от
функции промежуточного изображения визирной линии (в простран-
стве между неподвижной и подвижной системами) лишь вертикальным
и горизонтальным масштабами.
Особый интерес вызывает использование в качестве фокусиру-
ющей линзы телескопической системы, обладающей постоянством
всех увеличений — линейного, углового и продольного. На рис. 32
45
представлена телескопическая система, обладающая линейным уве-
личением V и продольным увеличением Q.
При продольном перемещении предмета у на величину некоторого
отрезка изображение предмета у' переместится на величину
которая может быть определена через продольное увеличение Q,
равное для системы, расположенной в воздухе,
<? = -^- = V2. (84)
Само перемещение изображения по отношению к перемещению
предмета (или оптической системы при неподвижном предмете) опре-
делится разностью отрезков и £,
L'-L = Z'-l = (Q-i)l = (V^-in. (85)
Поперечное перемеще-
ние изображения при по-
перечном перемещении
системы на некоторую
величину Ъ определится
разностью величин
b, — b = (V—\)b. (86)
Так, при двукратном
линейном увеличении при
Рис. 32 продольной подвижке
фокусирующей телескопи-
ческой системы на 1 мм изображение переместится на 3 мм. Попе-
речное смещение на 0,1 мм вызовет такое же поперечное смещение
изображения.
§ 15. Визирный коллиматор. Автоколлимация
При рассмотрении вопроса об образовании визирной линии ис-
ходили из того положения, что действительное изображение, созда-
ваемое оптической системой, совмещается с материальной маркой
(центром сетки). Однако в конце предыдущего параграфа при рас-
смотрении действия фокусирующей линзы не обусловливали воз-
можность реализации изображения визирной линии между непо-
движной и подвижной системами.
Вместе с тем нетрудно представить случай, когда оптическая
система будет давать мнимое изображение. Но и такого рода системы
могут быть использованы для образования визирной линии в про-
странстве предметов.
Простейшей системой подобного рода может служить плоское
зеркало, с помощью которого получается мнимое изображение марки,
которое можно совместить с интересующей точкой пространства.
Такое зеркало представлено на рис. 33, где показана точка отобра-
жения М, полученная с помощью зеркала от реальной марки М'.
46
Это отображение совмещено с некоторой точкой пространства пред-
метов А, расположенной симметрично точке М' по отношению к пло-
скости зеркала Q.
Нетрудно видеть, что совмещение точки А и отображенной точки М
строго соблюдается для любого из лучей, проходящих через точки А
или М'. Это обстоятельство освобождает наблюдателя от необходи-
мости иметь фиксированное положение глаза или какое-либо устрой-
ство, контролирующее момент совмещения точки А с точкой М.
Следует отметить, что подобное устройство обладает одним суще-
ственным недостатком — невозможностью пропускания 100%-ного
светового пучка от точек
предметного пространства
Рис. 33 Рис. 34
Чтобы одно изображение не исключало другое, приходится при-
бегать к разным приемам, наиболее распространенным из которых
является использование зеркал с частичным серебрением или алю-
минированием.
Устройства подобного рода принято называть коллиматорными
устройствами, или коллиматорными визирами.
Однако такой пространственный коллиматор будет иметь сравни-
тельно ограниченное применение, так как при достаточно большом
удалении наблюдаемой предметной точки А от зеркала понадобится
соответственно удалять от зеркала марку М', что практически не
всегда представится возможным. Тем не менее коллиматорную схему
можно использовать при визировании на удаленные предметы, если
между реальной маркой и зеркалом поместить промежуточную
систему — коллиматор, переносящую изображение марки на нужное
расстояние или на бесконечность.
Такая схема коллиматорного визира показана на рис. 34. Совер-
шенно очевидно, что для удаления в бесконечность изображения М'
марки М", марку потребуется расположить в фокальной плоскости
объектива коллиматора.
В рассмотренном виде коллиматорные устройства обладают еще
одним недостатком, заключающимся в том, что наблюдаемое изобра-
жение предмета рассматривается при увеличении, равном единице.
Этот недостаток также можно устранить, если после коллиматорного
зеркала расположить оптическую систему с требуемым увеличением.
Введение такой системы не сможет повлиять на смещение пред-
метной точки и отображение марки, подобно тому, как это было
при использовании окуляра для рассматривания изображения, совме-
щенного с реальным центром сетки в обычных визирных системах,
рассмотренных в предыдущем параграфе.
а-коллиматор, б-зрачок глаза
Рис. 35
Оптическая система может быть расположена также перед кол-
лиматорным зеркалом. В этом случае, если система не телескопи-
ческая и дает изображение, расположенное вблизи зеркала, нет
необходимости в использовании коллимационной системы, отобра-
жающей реальную марку на бесконечность или на большое
расстояние.
Коллиматорные схемы могут быть построены на использовании
неплоских — сферических или несферических зеркал. В этом случае
возникают известные трудности с обеспечением нужного качества
изображения как от точек, принадлежащих пространству предметов,
так и от точек, сетки или марки, изображаемых зеркалом. При этом
необходимо учитывать оптическую силу отражающей поверхности.
Изображение марки и точек предмета может быть совмещено
без помощи полупрозрачного зеркала, а именно посредством исполь-
зования различных частей входного зрачка оптической системы,
после которой хотят получить совмещенные изображения. Схема
такого устройства показана на рис. 35, где представлена система,
вводящая изображение марки через зрачок глаза наблюдателя.
Заметим, что системы подобного рода будут требовать жесткой фикса-
ции положения глаза наблюдателя, в чем не было необходимости
при совмещении изображений с применением зеркала, имеющего
полусеребренную поверхность.
4S
§ 16. Визирование на конечное расстояние. Отсчетный микроскоп
Наряду с задачей визирования на удаленные предметы часто
приходится решать задачу визирования на близко расположенные
предметы — в частности, при использовании различных отсчет-
ных микроскопов.
Большей частью в этих устройствах оптическая система должна
отображать измерительные марки на поверхность тех или иных
шкал; при этом необходимо задавать оптической системе п измери-
тельной марке любые положения в пространстве относительно не-
подвижной предметной точки, с которой совмещается отображение
измерительной марки. Это достаточно наглядно показано
на рис. 36, где два произвольно ориентированных микрообъектива
переносят изображения марок М[ и М'2 в одну и ту же предметную
точку М.
Такие свободные условия действия отсчетного устройства позво-
ляют принимать весьма широкие допуски на сборку и юстировку
подобных устройств, сводящиеся в основном к обеспечению фокуси-
ровки оптической системы на поверхность измерительной шкалы.
Если оптическая система предназначается для переноса изобра-
жения участка главной шкалы в рабочую плоскость какого-либо
микрометренного устройства, то возникает дополнительное требова-
ние к такой системе — обеспечение требуемого масштаба изобра-
жения, несоблюдение которого приводит к так называемой ошибке
«рена» микрометра.
Это дополнительное требование сводится к обеспечению в отсчет-
ной оптической системе заданного линейного увеличения.
Обратимся к рис. 37, на котором представлена схема отсчетного
микроскопа, создающего на плоскости Е' изображение шкалы,
расположенной в плоскости Е.
4 Заказ 2301.
49
Расстояние между плоскостью предмета и плоскостью изображе-
ния примем равным L. Для упрощения выводов предположим, что
главные плоскости в оптической системе совпадают. Тогда длина
системы
L — — х— f f Ч- х . (87)
Предполагая, что система находится в воздухе (—/ = /') и выражая
величины х и х через линейное увеличение, находим, что
Z=(2-4~f)/'. (88)
Деля обе части выражения (88) на величину фокусного рассто-
яния f и дифференцируя, найдем зависимость между изменением
величины фокусного расстояния и изменением увеличения при по-
стоянной длине системы L. Получаем
^/--^-«=(1—1)^.
Отсюда получим величину изменения увеличения,
Относительная ошибка в увеличении равна
(89)
(90)
(91)
Но отношение длины L к фокусному расстоянию f нетрудно опре-
делить из формулы (88). Тогда
2___-__у
dV V df
(92)
(93)
или, делая сокращения,
dV _ 1-7 df .
V 1+7 * f
Формула (93) устанавливает зависимость между относительной
ошибкой в увеличении и относительной ошибкой в фокусном рассто-
янии оптической системы при постоянном расстоянии между пред-
метной плоскостью и плоскостью изображения. Например, при уве-
личении V = —10х (т. е. объектив отсчетного микроскопа имеет 10х
увеличение), получаем
dV _ 1 + 10 df __ И df __ 4 999 df
V - 1-10 ’ f ~-9‘ f ~ Ъ z f •
50
Приведенный пример показывает, что ошибка в увеличении —
реп отсчетного микроскопа — будет одного порядка с относительной
ошибкой в фокусном расстоянии микрообъектива. Поэтому, учиты-
вая, что фокусное расстояние может колебаться в довольно широких
пределах, возникает задача компенсации этой ошибки — задача
юстировки отсчетного микроскопа.
Нетрудно представить, что, отказываясь от постоянства рас-
стояния между предметом и изображением и ставя условие сохране-
ния увеличения постоянным, исходя из формулы (88), находим
dL = (2—^-V^df. (94)
Почленное деление формул (94) и (88) позволяет найти величину
относительного изменения длины L
dL _rdf'
L f ’
Формула (95) показывает, что необходимое относительное изме-
нение длины микроскопа — оптической длины тубуса — будет равно
относительной ошибке в фокусном расстоянии. Этот результат не-
трудно было бы предвосхитить, исходя из сохранения подобия всех
линейных размеров при изменении фокусного расстояния микро-
объектива.
Полученные формулы позволяют решить также еще одну юсти-
ровочную задачу — определение точности, с которой нужно выдер-
живать оптическую длину тубуса при обеспечении заданной
дрпустимой ошибки в увеличении.
Действительно, задаваясь величиной относительной ошибки в уве-
личении, при постоянном фокусном расстоянии системы получаем
dL=f(±-i)dV (96)
или, используя формулу (88),
——1
dL __ У2 7 + 1 dV
L ______1__~ У-1 * V •
V
Таким образом, задаваясь численно условием соблюдения мас-
штаба изображения с точностью 0,1%, приходим к выводу, что опти-
ческая длина тубуса должна выдерживаться с несколько более
высокой точностью. Обращаясь к рассмотренному примеру,
получаем
+ = zzl. = _ 0,818 + = 0,08 %.
При длине тубуса около 100 мм (имеются в виду микрообъ-
ективы с укороченной длиной тубуса, нередко встречающиеся
4* 51
в геодезических инструментах), получаем необходимую величину
точности продольной подвижки плоскости сетки в 0,08 мм, т. е.
порядка 0,1 мм.
Такая точность выдерживания длины тубуса сможет обеспечить
при цене деления основной шкалы 1 мм максимальную ошибку
в отсчете 0,001 мм.
Заметим, что некоторое нарушение точности фокусировки за счет
глубины изображения позволяет несколько снизить требования
к выдерживанию длины тубуса. Кроме того, напомним, что введение
косинусной ошибки определенной величины тоже может помочь
юстировке отсчетного микрометра на устранение рена.
§ 17. Параллакс изображения
Выше упоминалось о том, что в реальной оптической системе
не всегда соблюдается ее строгая фокусировка на плоскость сетки.
Точной фокусировке препятствуют различные причины и в том числе
физическая природа изображения, создающая при определенных
условиях большую глубину, т. е. возможность получения практи-
чески достаточно резкого изображения для точек, не расположенных
на поверхности изображения.
При фотографической обработке снимков некоторое нарушение
строгой фокусировки в какой-то мере отражается на качестве изобра-
жения, но большей частью не затрагивает измерительных качеств
системы, так как при фотографировании наблюдается достаточная
стабильность положения точек изображения.
Наоборот, при визуальных наблюдениях, когда положение глаза
наблюдателя по отношению к зрачку выхода оптической системы
может изменяться в некоторых пределах, такое изменение приводит
к изменению видимого взаимного расположения изображения и из-
мерительной марки. Это явление принято называть параллаксом изо-
бражения.
Картина возникновения параллакса представлена на рис. 38,
где показана точка изображения А', создаваемая пучком лучей
с апертурным углом, равным 2и , не совпадающая с маркой М',
на величину продольного параллакса р.
52
Предположим, что точка А' изображения будет рассматриваться
при использовании не всего апертурного угла 2и', а его части, соста-
вляющей апертурный угол 2u'v
Нетрудно представить, что если ось пучка с апертурным углом
2и[ совпадает с осью всего пучка лучей, рисующего изображение,
то будет казаться, что обе точки А' и М' совпадают. Если ось узкого
пучка лучей не совпадает с осью всего пучка, то будет казаться,
что А' располагается на оси узкого пучка. Это создаст впечатление,
что точка А' будет занимать некоторое положение Л", не совпада-
ющее с маркой М'.
Расстояние б между точками М' и А" называют поперечным
параллаксом, а расстояние между точками А' и М' — продольным
параллаксом р.
Определим величину возникающего поперечного параллакса б.
Пользуясь рисунком, видим, что ось узкого пучка лучей не может
удалиться от оси всего пучка больше, чем на разность половин обоих
апертурных углов 2и и 2и'г Отсюда получаем
$ = р (и'— и[). (98)
При быстром изменении участка апертуры из одного крайнего
положения в другое, будет казаться, что точка предмета переме-
щается относительно марки в поперечном направлении.
Полагая половину полного апертурного угла и' равной 0,1 рад,
а элементарный угол и[ равным 0,05 рад, получим разность углов,
равную 0,05 рад. Тогда величина поперечного параллакса окажется
равной ±1/20 величины продольного параллакса. Полагая продоль-
ный параллакс равным 0,1 мм, получим величину поперечного
параллакса, равную ±0,005 мм, т. е. достаточно ощутимую
при измерениях.
Одним из средств уменьшения поперечного параллакса может
служить уменьшение величины полного апертурного угла.
Явление параллакса может быть с успехом использовано для
контроля фокусировки изображения. Знак продольного параллакса,
подлежащего устранению, нетрудно определить по взаимному дви-
жению точки изображения и марки. Точка, более удаленная от глаза
наблюдателя, всегда будет перемещаться по отношению к более
близкой точке, следуя за движением глаза, в одну и ту же сторону.
Глава V
БИНОКУЛЯРНЫЕ СИСТЕМЫ
§ 18. Бинокулярная зрительная труба
Наличие базиса между двумя глазами позволяет воспринимать
протяженность пространства в глубину — ощущать рельеф или,
как говорят, получать стереоскопическую картину.
53
Естественно, что при использовании для наблюдения оптической
системы, например зрительной трубы, целесообразно воспользоваться
бинокулярным зрением.
При наблюдении удаленных объектов ось одного глаза становится
почти параллельной оси другого глаза. Поэтому для обеспечения
хороших условий наблюдения через бинокулярную систему следует
стремиться сделать визирные направления по выходе из окуляров
параллельными. Если не соблюдать условие параллельности полей
по выходе из окуляров, то изображения для правого и левого глаза
не наложатся одно на другое и получится двоение изображения.
Однако оси глаз могут изменять взаимное расположение в неко-
торых пределах — при визировании на близкие предметы угол
между направлениями осей глаз может доходить до величины,
равной 0,25 рад — около 15°; при этом длительное наблюдение
вызывает значительную утомляемость глаз.
Второй причиной, затрудняющей бинокулярное зрение, будет
несовпадение изображений по своей величине вследствие неравенства
увеличений в обеих трубках бинокулярной системы.
Наконец, если оборачивание изображений в обеих трубках со-
здается с помощью призм или зеркал, то возможен случай, когда
изображения будут развернуты в своей плоскости на разные углы.
Такую ошибку принято называть разностью наклонов изображений.
Кроме того, вследствие различия глазных базисов у различных
наблюдателей, возможно, что расстояние между центрами зрачков
глаз наблюдателя окажется не равным расстоянию между центрами
выходных зрачков бинокулярного прибора. Это обстоятельство
в известных случаях может сделать пользование бинокулярным
прибором невозможным.
§ 19. Непараллельность полей
Как уже говорилось ранее, понятие оси реальной оптической
системы есть понятие условное. Тем не менее понятие непараллель-
ное™ полей в бинокулярной оптической системе имеет вполне кон-
кретное значение.
Действительно, если речь идет о телескопической системе, не
изменяющей направления визирования, то тогда за направление
оси системы можно принять направление тех лучей, которые по
выходе из оптической системы строго сохранят свое направление.
Конечно, из множества лучей параллельного пучка предста-
вляется возможным любой из них принимать за ось системы. Но так
как интерес представляют не сами оси, то можно ограничиться лишь
определением направления осей.
Схематически это можно проиллюстрировать рис. 39, на котором
показан ход параллельных пучков лучей, входящих и выходящих
из телескопической системы.
Опираясь на условие сохранения направления входящих и выхо-
дящих из системы лучей, можно выбрать за направление оси некото-
54
рую прямую Л040, параллельную таким лучам. Однако, поставив
после системы клин с соответствующим углом отклонения, можно
сохранить направление уже для какого-то другого пучка лучей,
например параллельного прямой АгАг.
Таким образом, принимая за новую оптическую систему совокуп-
ность прежней системы с преломляющим клином и исходя из
принятого условия, следует принять за направление оси для сово-
купной системы направление A±AV
Перейдем теперь к рассмотрению бинокулярной оптической
системы, построенной из двух трубок с непараллельными осями.
Рис. 40
Эта картина представлена на рис. 40. Предположим, что первая
из трубок (на рисунке верхняя) направлена своей осью 4040 на
некоторую точку А, расположенную в бесконечности.
Если ось второй трубки AtAt по своему направлению не была
параллельной оси А0А0, а составляла с ней некоторый угол у, то
пучок лучей, исходивший из точки А, составит с осью второй трубки
полевой угол Р, равный углу у по абсолютной величине и обратный
по знаку.
Если вторая трубка обладает видимым увеличением Г, равным
ее угловому увеличению W, то пучок лучей, исходивший из точки Аг
составит по выходе из второй трубки угол Р', равный углу Р входа,
55
умноженному на увеличение Г трубки. В соответствии с этим можно
написать
= = = (99)
Обращаясь к рисунку видим, что выходящий из второй трубки
пучок лучей уже не будет параллелен пучку лучей, выходящему
из первой трубки, а составит с ним некоторый угол у'.
Величина угла у' легко определяется, как разность углов |3Х и у,
или
— у' = — — у (100)
или
у'^(1-Г) у. (101)
Формула (101) достаточно хорошо известна и определяет непарал-
лельность полей в бинокулярной оптической системе.
Формула (101) была получена, исходя из условия определения
направления оси отдельной трубки, как сохраняющегося в простран-
стве предметов и в пространстве изображений.
Размещая перед такой бинокулярной системой плоское зеркало
или преломляющий клин, не изменим угла между выходящими из
обеих трубок пучками лучей, исходившими из одной и той же точки
предмета, хотя добавление такого зеркала или клина нарушит
принятое условие определения оси отдельной трубки.
Поэтому за критерий непараллельности осей в бинокулярной
оптической системе следует принять нарушение парал-
лельности выходящих из обеих трубок пуч-
ков лучей, входивших в них параллельными.
Поскольку при визуальном визировании на близко расположен-
ные предметы получается непараллельность полей, то при установле-
нии допусков на их непараллельность в оптических приборах допуски
в плоскости глазного базиса устанавливают значительно большими
(примерно втрое), чем в направлении, перпендикулярном глазному
базису.
Обычно величину допуска вдоль линии базиса принимают на
конвергирование осей до 45х, в то время как в направлении, перпен-
дикулярном линии базиса, он не должен превышать 15х.
§ 20. Неравенство увеличений в обеих трубках. Взаимный наклон
изображений
При создании бинокулярного прибора вследствие каких-либо
причин всегда возможно отступление увеличения от номинального
значения. Не исключено, что для различных трубок могут быть
разные увеличения. Поэтому при равных полях зрения в простран-
стве предметов (что соответствует случаю наблюдения одного и того
же участка пространства) равенства выходных полей зрения в про-
странстве изображений не будет.
56
Эта картина представлена на рис. 41, где показаны две трубки
со строго параллельными осями в центре поля зрения, но с различ-
ными видимыми увеличениями 1\ и Г
Нетрудно представить, что если обе трубки имели бы равные
увеличения, например равные Г то при равенстве входных углов (3
после обеих трубок получились бы равные выходные углы Р', что
привело бы к параллельности обоих выходящих пучков.
Если увеличение во второй трубке будет отлично от увеличения
в первой трубке, то выходной угол Р' не будет равен углу Р' и между
выходящими пучками лучей возникнет разность углов Р' — Р',
которую следует рассматривать, как нарушение параллельности
осей на краю поля.
Полагая увеличения в трубках, равными 1\ и Г2 и дисторсию,
равную нулю, можно напи-
сать, что
tg К = Л tg 0;
tg02 = Atg0. (102)
Составим разность танген-
сов углов Р' и Р',
tg Рг—tg ₽;=(Л—Л) tgp
Рис. 41
(ЮЗ)
или, выражая тангенс угла Р через тангенс угла Р', согласно первой
формуле (102)
tg 01—tg 01 = tg 01-
(104)
В случае малой разности увеличений, можно заменить разность
тангенсов дифференциалом тангенса и разность увеличений диффе-
ренциалом увеличения.
Тогда формула (104) может быть переписана в следующем виде?
(105)
что позволяет определить непараллельность выходящих лучей
dp' = sin Р' cos Р' = sin 2Р'. (106)
Например, если окулярное поле зрения равно 2Р' = 45°, а отно-
шение dr : Г равно 0,01 — 1%, то величина непараллельности на
краю поля будет
(Z0 = 0,01 = 0,0035 ~ 12',
57
что едва укладывается в допуск на непараллельность, так как эта
величина будет одинаковой как в направлении базиса, так и в напра-
влении, перпендикулярном базису.
Перейдем теперь к рассмотрению взаимного разворота или
наклона изображений. Для упрощения выводов предположим, что
оси обеих трубок параллельны и их увеличения равны.
Обратимся к рис. 42. На нем показан вид на плоскости промежу-
точных изображений, расположенных в передних фокальных пло-
скостях окуляров. При этом изображение в плоскости второго оку-
ляра примем повернутым по отношению к изображению перед пер-
вым окуляром на угол у. Если этот угол будет малым, то нетрудно
Рис. 42
определить дугу dys, которая возникает из-за наклона изображения
перед вторым окуляром.
Пользуясь рисунком, находим
dy, = уу. (107)
Величину угла d$'s, возникающего вследствие наклона изобра-
жения, тоже нетрудно определить из рисунка,
=“та-sin = Y sin • (108)
Полагая угол наклона изображения у — 1°, а величину окуляр-
ного поля зрения, как и ранее, равной 2Р' = 45°, находим
dp; = 60' • sin 22° 30' = 60' • 0,3 - 18',
что будет несколько больше допуска на непараллельность осей
58
§ 21. Бинокулярный микроскоп. Конвергирование осей.
Оптика стереоскопа и стереокомпаратора
При работе с бинокулярным микроскопом, в отличие от биноку-
лярной зрительной трубы, наблюдают близко расположенные пред-
меты. Поэтому направление визирных осей в пространстве предметов
нельзя считать параллельным.
Вместе с тем раньше отмечалось, что для микроскопа само поня-
тие визирной оси может быть заменено визирной точкой. Вследствие
этого в понятие «параллельности осей» для бинокулярного микро-
скопа вложим представление о параллельности выходящих из обеих
трубок микроскопа световых пучков, исходящих из одной и той же
точки предмета.
Действие микроскопа, как известно, связано с точной фокусиров-
кой микроскопа по отношению к предмету. Тем не менее возможно
некоторое изменение расстояния между плоскостью предмета и опти-
ческой системой микроскопа.
Вследствие того, что оси микроскопов, представляющих в сово-
купности бинокулярный микроскоп (понимая под осями отдельных
микроскопов прямую, соединяющую центр поля зрения и центр
зрачка входа), составляют между собой значительный угол, опреде-
ляемый величиной двойной апертуры микрообъективов, будет про-
исходить смещение предметной точки с обеих осей микроскопов
при изменении предметного расстояния. В результате такого смеще-
ния в пространстве изображений произойдет нарушение параллель-
ности осей бинокулярного микроскопа.
Определим влияние изменения предметного расстояния в бино-
кулярном микроскопе на нарушение параллельности осей.
Обратимся к рис. 43, на котором показаны два микрообъек-
тива и два окуляра бинокулярного микроскопа при угле между
осями микрообъективов, равном 2ф.
Величину изменения предметного расстояния обозначим через
а — расстояние между идеальным положением предметной плоскости
и предметной точки А 0 и смещенной предметной плоскостью с неко-
торой новой предметной точкой А.
Нетрудно представить, что предметная точка А не будет лежать
ни на оси первого, ни на оси второго микроскопа.
Считая, что угол между осями микрообъективов мал, можно
отрезки А А х и А А 2 принять равными смещениям предметной точки
с осей микрообъективов. Зная величину фокусных расстояний для
обоих микроскопов, можно определить и величину изменения углов
световых пучков, выходящих из окуляров.
Пользуясь рис. 43, находим
, !а tg ф аГ ,
11
(109)
Численно для бинокулярного микроскопа с общим увеличением
50х (увеличение микрообъективов 5х, окуляров 10х) при изменении
59
предметного расстояния а = 0,1 мм и половине угла конвер-
генции ф = 0,1 получаем
у' = 0^50 0 1 = 0 002 7,
что создаст ошибку в полном угле конвергенции 2ф, равную 14'.
Очевидно, изменение величины предметного расстояния должно
вызвать соответственное перемещение окуляров. Величину этого
перемещения а' можно подсчитать, пользуясь формулой продоль-
ного увеличения,
a' = V2 • а=Ь2 =2,5 мм.
Следует заметить, что нарушение параллельности полей, возника-
ющее вследствие изменения предметного расстояния, будет происхо-
дить в направлении глазного базиса, где имеются возможности допол-
нительного изменения угла конвергенции за счет поворота осей
глаз наблюдателя.
Рассматривая геометрическую схему бинокулярного микроскопа,
необходимо обратить внимание на следующее обстоятельство.
60
Первый компонент оптической системы — микрообъектив, как
правило, имеет отрицательное линейное увеличение, значительно
большее единицы по абсолютной величине.
Поэтому, забегая несколько вперед, рассмотрим влияние переме-
щения микрообъектива в направлении, перпендикулярном оси,
на перемещение изображения.
Эту зависимость перемещения изображения, как функцию от сме-
щения объектива, можно установить, используя рис. 44, на котором
пунктиром показан микрообъектив в начальном положении, а сплош-
ными линиями — смещенным на величину а.
Нетрудно представить, что при таком смещении микрообъектива
точка Ло, первоначально располагавшаяся на оси объектива, станет
вершиной предмета у. Поэтому можно записать
-У=а. (110)
Рис. 44
Если микрообъектив имеет линейное увеличение, равное У,
то можно определить положение точки Л' изображения относительно
смещенной оси. Полное перемещение точки А', равное а , относи-
тельно ее начального положения Л', определится как сумма вели-
чины изображения у' и величины смещения а,
а' = у' + а= Vy-\-a = (1 — V) а. (111)
Поэтому даже при таком небольшом увеличении, как пятикрат-
ное, перемещение объектива вызовет значительное перемещение
изображения. Так, при а = 0,1 мм перемещение изображения а'
составит 0,6 мм и поэтому при фокусном расстоянии окуляра,
равном 25 мм, произойдет изменение направления выходящих из
окуляра световых пучков на угол у'
у' = —= -^ = 0,024 = 1° 20'.
— /о “О
Подобная величина совершенно недопустима. Отсюда возникает
необходимость в установлении строгой взаимной центрировки микро-
объективов с точностью порядка сотой или тысячной доли мил-
лиметра.
Естественно, что технологическое обеспечение столь строгой
це’нтрировки потребовало бы соблюдения чрезвычайно жестких
допусков на изготовление соответственных деталей и было бы
61
экономически совершенно неприемлемым. Поэтому взаимную цен-
трировку микрообъективов бинокулярного микроскопа приходится
обеспечивать соответственным юстировочным процессом.
Конструктивно для взаимной центрировки микрообъективов
применяют специальную юстировочную оправу, представленную
на рис. 45.
В такой оправе предусмотрены движения во всех направлениях
как правого, так и левого объективов, производимые тремя винтами,
расположенными один относительно другого под углами 120°. Эти
винты служат также для крепления оправ самих объективов к их
общей оправе.
Однако подобное устройство не позволяет осуществлять раздельно
подвижку объективов вдоль и перпендикулярно линии базиса.
Кроме того, оправа имеет из-
лишние движения. Известные
неудобства представляет также
' завинчивание или отвинчивание
i I отверткой стопоров.
— J--------------J---— В этом случае целесообраз-
I I нее было бы предусмотреть
движение объективов в двух
эксцентриковых обоймах, одной
Г \ из которых осуществлять юсти-
рис 45 ровку на параллельность осей
перпендикулярно линии базиса,
а другой — вдоль линии базиса.
Заметим, что иногда в конструкции бинокулярного микроскопа
заранее создают конвергентное направление осей, соответствующее
углу, который образуется при вершине треугольника, совпадающей
с предметной точкой и имеющей основанием глазной базис.
§ 22. Дальномерный треугольник. Стереоскопическое зрение.
Радиус стереоскопического зрения
Чрезвычайно важной особенностью стереоскопического зрения
является способность объемного или стереоскопического восприятия
пространства, позволяющая производить измерения по дальности.
Сопоставляя между собой изображения пространственных объек-
тов, наблюдаемые правым и левым глазом, замечаем, что эти изобра-
жения несколько отличаются один от другого. Так, обращаясь
к рис. 46, на котором представлено образование изображения для
правого и левого глаза, видим, что изображения не одина-
ковы.
Пусть в точках Ог и О2 расположены центры зрачков для левого
и правого глаза. Расстояние между этими центрами — глазной базис
равен Bq. Расстояния точек А и С от линии базиса будем называть
дальностью этих точек. Обозначим их через Е и Ег = Е + \ Е.
Угол при предметной точке, образуемый направлениями на центры
62
обоих входных зрачков, — параллактический угол а. Параллакти-
ческий угол при точке С обозначим через аг = а — Да.
Если точки А и С находятся в «створе», т. е. на одной и той же
прямой, проходящей через центр одного из зрачков, то они на изо-
бражении совпадают.
Но так как две точки не смогут попасть на одну и ту же прямую,
проходящую через центр второго зрачка, то их изображение А'2
и С2 во втором глазу будет раздельным.
изображениями называется
относительным стереоско-
пическим параллаксом
одной из точек относи-
тельно другой.
При удалении одной
из точек, например точки С
в бесконечность, и при
сохранении ее в створе
с точкой Л, получим, что
изображение этой точки С2
перейдет в положение N2.
Тогда расстояние между
точками N2 и А2 можно
назвать параллаксом точ-
ки А относительно бес-
конечно удаленной точки
или абсолютным стерео-
скопическим параллаксом
точки А.
Величина абсолютного
стереоскопического парал-
лакса или просто стерео-
скопического параллакса,
легко определяется из
подобия треугольников
Расстояние между этими
с равными углами при
вершине и имеющих основаниями базис Во и стереоскопический
параллакс р. Получаем
Р _ s'
Bq Е ‘
(112)
В случае, если дальность точек велика по отношению к базису
и фокусному расстоянию оптической системы, то величина параллак-
тических углов а будет мала, а картинные расстояния между базисом
и плоскостью изображения s можно будеть принять равными фокус-
ным расстояниям.
Полагая, кроме того, что поле зрения тоже мало, величину парал-
лактических углов можно принять равной отношениям базиса
к дальности соответствующих точек.
63
Тогда, исходя из формулы (112), можно выразить величину стерео-
скопического параллакса р
Р = ^0 ~
Формула (113) позволяет выразить расстояние Е как функцию
от угла а
(ИЗ)
(114)
а
Поэтому, измеряя величину параллактического угла а и зная
величину базиса 50, можно определить величину дальности Е.
Дифференцируя формулу (114), определяем величину ошибки
в измерении дальности Е
(115)
(116)
7 туг Bq у Е*
ап =------da =------— da
a2 Bq
и при почленном делении формулы (115) на формулу (114) получаем
величину относительной ошибки в расстоянии
dE da 7
=-------=-----77- da.
Е a Bq
Формула (116) позволяет определить величину относительной
ошибки в определении расстояния в зависимости от ошибки в изме-
рении параллактического угла, величины измеряемого расстояния
и величины базиса.
Глаз очень остро воспринимает изменение параллактического
угла. Для тренированного наблюдателя величина этого изменения
будет еще ощутимой при значениях угла da, доходящих до 10"
(0,00005 рад).
Принимая глазной базис Во равным 65 мм и пользуясь формулой
(114), можно определить предельное расстояние, п*ри котором наблю-
датель сохраняет стереоскопическое восприятие пространства. Это
расстояние называют радиусом стереоскопического зрения.
R = = 65 мм ‘106 = 1 3 км
10" 0,00005 '
Если пользоваться оптической системой с видимым увеличением
Г, то видимая величина параллактического смещения будет увели-
чена в Г раз; тогда формулы (114) и (116) следует переписать так:
а
(117)
и
dE Е , ,
(118)
где В — базис прибора.
64
В формулах (117) и (118) величина остроты стереоскопического
зрения в 10" будет относиться к углам а' после оптического прибора.
Из формулы (118) следует, что величина относительной ошибки
в измерении дальности будет обратно пропорциональна и увеличе-
нию, и базису.
Задаваясь параллактическим углом в 10", можно определить
радиус стереоскопического зрения прибора, т. е. то расстояние,
на котором наблюдатель, пользуясь прибором, еще будет получать
пространственное восприятие. Численно, задаваясь увеличением
прибора Г, равным 10х, и базисом В, равным 500 мм = 0,5 м,
получим для радиуса стереоскопического зрения прибора величину,
равную 100 км.
Составляя отношение величины радиуса стереоскопического зре-
ния для прибора к величине радиуса стереоскопического зрения
не вооруженного прибором наблюдателя, получаем так называемую
пластику прибора Р
R ВГ _ ВГ
Rq Во 65 мм ’
(119)
где величина базиса прибора В и глазного базиса BQ должны быть
выражены в одних и тех же линейных мерах.
Для рассмотренного примера получаем значение пластики Р =
= 77, т. е. в рассматриваемом приборе стереоскопическое восприятие
пространства увеличивается почти в 80 раз.
В некоторых случаях бинокулярные оптические приборы строят,
используя один объектив, осуществляя разделение световых пучков
после объектива и создавая тем самым два изображения для правого
и левого глаза.
Такое разделение световых пучков может быть осуществлено
за счет соответственного снижения яркости световых пучков, рису-
ющих разделенные изображения, при сохранении площади каждого
из выходных зрачков, равной площади выходного зрачка, которым бы
обладала монокулярная система с теми же оптическими характери-
стиками, что и бинокулярная.
Ясно, что для этого случая можно считать зрачки входа обоих
оптических каналов совмещенными, что приведет к базису, равному
нулю и к полной потере стереоскопического восприятия.
Однако световые пучки можно разделить на два канала путем
деления зрачка, находящегося внутри оптической системы (напри-
мер, между оборачивающими линзами), на две части без потери
яркости в каждом канале. Вследствие этого входной зрачок также
разделится на две части, которые можно рассматривать как само-
стоятельные сегментовидные зрачки, соприкасающиеся один с дру-
гим.
В этом случае базис прибора уже не равен нулю. За базис можно
принять расстояние между центрами обоих сегментов, как это пока-
зано на рис. 47, которое приближенно будет равно радиусу всего
входного зрачка.
5 Заказ 2301.
65
Тогда В базис прибора будет меньше глазного базиса В 0/ Тем
не менее величина пластики все же может быть большей единицы
за счет величины видимого увеличения прибора. Так, например,
для прибора с двадцатикратным увеличением при диаметре входного
зрачка, равном 60 мм (диаметр зрачка выхода равен 3 мм), получим
величину пластики, рав-
ную
Р = JP/ 20 в 9,2,
65
т. е. существенно большую,
чем для не вооруженного
прибором наблюдателя.
Д а льномерный тр еу-
гольник может быть осу-
ществлен не только с базой
в самом приборе. Так,
в геодезических приборах
нередко прибегают к даль-
номерному треугольнику, у которого базис — дальномерная рейка —
совмещается с объектом наблюдения. Однако и в том случае, если
рейка будет иметь постоянную длину, требуется точное измерение
угла в вершине дальномерного треугольника.
Задаваясь определенной относительной точностью измерения
расстояния в соответствии с формулой (118), приходим к требуемой
точности измерения параллактического угла. Так, если точность
измерения равна 1/500 величины измеряемой дальности, то для рас-
стояния в 1000 м величина параллактического угла равна 0,002 рад.
Тогда для обеспечения требуемой относительной точности измерения
дальности понадобится с такой же относительной точностью измерить
параллактический угол, что приведет к величине абсолютной ошибки
66
измерения угла, равной 0,002 : 500 = 0,000004, т. е. несколько
меньшей одной угловой секунды.
В некоторых случаях, например в дальномерах, используемых
в фотографических аппаратах, применяется дальномерная схема,
представленная на рис. 48, особенностью которой является примене-
ние кубика со склеенной полупосеребренной гранью. На этой грани
происходит совмещение световых пучков, поступающих из обеих
ветвей дальномерного треугольника.
За такой треугольник обычно принимают треугольник А О±О2,
образуемый предметной точкой А, точкой О± совмещения световых
пучков и точкой О2 — осью вращающегося зеркала, по углу пово-
рота которого и берется отсчет, определяющий величину параллак-
тического угла а.
Момент, при котором берется отсчет по углу вращающегося
зеркала, определяется по совмещению изображений от обоих кана-
лов — правого и левого.
Однако этот момент совмещения изображений не наступает одно-
временно для всех точек совмещаемых полей. Это объясняется тем,
что масштаб изображения в правом канале получается несколько
меньшим, чем в левом, а именно на величину отношения расстояния
Е к сумме этого расстояния с величиной базиса В дальномерного
устройства (расстояние вдоль правой ветви до точки совмещения
обоих изображений больше, чем в левой ветви, на величину базиса).
Поэтому в таких устройствах приходится ограничивать величину
участка поля, в пределах которого осуществляется совмещение
изображений.
Глава VI
ФОТОГРАФИЧЕСКИЕ И ПРОЕКЦИОННЫЕ СИСТЕМЫ
§ 23. Общая задача, решаемая фотографическими
и проекционными системами, передача изображения множества
точек предмета на единую поверхность изображения
Если в ранее рассмотренных геометрических схемах оптических
приборов разрешалась задача наблюдения и измерения по одной
какой-либо точке поля и обеспечение высококачественного изображе-
ния требовалось лишь в окрестности центральной точки поля, то
в фотографических и проекционных системах ставится более широкая
задача образования изображения множества точек для поля зрения
достаточно больших размеров и обеспечения возможностей произ-
водства измерений в любых участках такого поля зрения.
Задача создания оптической системы с большим полем зрения
может быть решена различными способами. Наиболее распростра-
67
ненным из них является создание обычной оптической системы —
линзовой или зеркально-линзовой, достаточно хорошо коррегиро-
ванной для поля зрения значительных размеров.
Необходимо заметить, что этот способ не единственный; ту же
задачу можно разрешить с помощью оптико-механических разверты-
вающих устройств, создающих изображение поэлементно, во вре-
мени.
Величина элементов, на которые раскладывается изображение,
может быть самой разнообразной: от элементарных точек до отдель-
ных участков.
Одним из возможных способов получения изображения является
применение волоконной оптики, где перенос каждой отдельной точки
изображения осуществляется отдельным волокном — световодом.
В большинстве случаев прием изображения осуществляется
не с помощью глаза, а фотографической эмульсией или передающей
телевизионной трубкой. Поэтому в фотографических и проекционных
системах большое значение приобретает процесс переноса световой
энергии и обусловливающие его светосила системы и светораспреде-
ление по полю зрения.
К изображениям, создаваемым фотографическими и проекцион-
ными системами, большей частью предъявляется требование соблюде-
ния подобия изображения предмету. Но такое требование иногда
заменяют какими-либо иными условиями, например созданием пано-
рамического изображения на цилиндрической поверхности, получе-
нием заданных перспективных искажений и т. п.
Другими требованиями, предъявляемыми к фотографической
и проекционной оптике, являются требования обеспечения заданной
разрешающей способности (переноса заданной «частоты» в изобра-
жении) и заданного контраста изображения.
Эти два требования объединяются в частотно-контрастной харак-
теристике системы.
§ 24. Трансформирование изображения. Общие закономерности
при трансформировании
Обычно при рассмотрении оптических систем предполагается,
что плоскости предмета и изображения перпендикулярны оптической
оси системы (в строго центрированных оптических системах). Если
при этом рассматриваемая система свободна от дисторсии, то обеспе-
чивается автоматически строгое подобие изображения предмету.
Однако эти условия соблюдаются не всегда. Поэтому рассмотрим
более общий случай, когда оптическая система (центрированная
и свободная от дисторсии) создает изображение плоского предмета,
не перпендикулярного оси системы.
Продолжая плоскость предмета до пересечения ее с передней
главной плоскостью оптической системы, получим линию пересечения
обеих плоскостей, которая должна изобразиться на задней главной
плоскости оптической системы прямой, удаленной вследствие равен-
68
ства линейного увеличения в главных плоскостях единице от оси
системы на то же расстояние, как и прямая на передней главной
плоскости.
Вместе с тем точка, в которой предметная плоскость пересекалась
с осью оптической системы, должна быть изображением, одновре-
менно принадлежащим и оптической оси, и плоскости, являющейся
изображением наклонной предметной плоскости.
Эта картина представлена на рис. 49, где Q и Q' — наклонные
плоскости предмета и изображения, Л0В0В'Л' — ось оптической
системы, Н и Н' — главные плоскости оптической системы, Во
и В‘о — главные точки оптической системы.
При проведении через ось оптической системы меридиональной
плоскости М и М', совпадающей с плоскостью рисунка, она пересе-
чет наклонные плоскости Q и Q 'но линиям AJB и B'A'Q, которые
можно назвать осями наклонных плоскостей Q и Q'.
Линии пересечения наклонных плоскостей с главными плоско-
стями оптической системы назовем главными линиями на наклонных
плоскостях. На этих прямых (как принадлежащих главным плоско-
стям) линейное увеличение равно единице. Следовательно, точки В
и В' на наклонных плоскостях будут обладать свойствами главных
точек.
Проводя через задний фокус оптической системы F'Q плоскость,
перпендикулярную оптической оси, пересечем ось на наклонной
плоскости изображения Q' в некоторой точке F', которую примем
за задний фокус системы наклонных плоскостей Q и Q'.
Проводя в пространстве предметов плоскость, параллельную
плоскости рисунка, можно показать, что задний фокус F' плоскости
Q' будет обладать тем свойством, что в нем пересекутся прямые,
параллельные оси наклонной плоскости Q.
Аналогично на предметной наклонной плоскости Q можно опре-
делить положение переднего фокуса F.
Расстояния между главными точками и фокусами для наклонных
плоскостей, по аналогии с такими же расстояниями на оси оптической
69
системы, можно назвать фокусными расстояниями / и /' системы
наклонных плоскостей.
Если будут известны углы р и р' наклона плоскостей Q и Q'
к главным плоскостям Н и Н' оптической системы, то легко выразить
их через главные фокусные расстояния /0 и Согласно рисунку
находим, что
/ sinp = —/0, /o=/'sinp\ (120)
В случае, если оптическая система находится в воздухе, то /0 =
= —и из формул (120) получим следующее соотношение между
фокусными расстояниями на наклонных плоскостях Q и Q'\
/ sin р = /' sin р'. (121)
Опустим из главных точек оптической системы перпендикуляры
R и R' на предметную наклонную плоскость и на ее изображение.
Назовем длину этих перпендикуляров предметным и картинным
расстояниями. Величина этих расстояний согласно рисунку будет
R = — fesinp; 7?' = fesinp', (122)
откуда вытекает, что отношение предметного и картинного расстоя-
ний будет
R sinp
R' sinp'
Из формул (121) и (123) следует, что
fR = -f'R', (124)
т. е. что произведение переднего фокусного расстояния на предмет-
ное расстояние равно произведению заднего фокусного расстояния
на картинное расстояние независимо от углов наклона предметной
плоскости и плоскости изображения.
Если совместить главные плоскости Н и Н' оптической системы,
то совместятся и главные линии наклонных плоскостей Q и Q', т. е.
произойдет пересечение наклонной предметной плоскости с наклон-
ной плоскостью изображения по одной прямой.
Объединенные главные точки оптической системы, если эта система
расположена в воздухе, будут одновременно узловыми точками,
что позволяет рассматривать их как перспективный центр
проекции, так как все лучи, проходящие через объединенные
главные точки, не будут изменять своего направления после выхода
из оптической системы. Поэтому, проводя через центр проекции
прямую, параллельную наклонной предметной плоскости и лежа-
щую также в плоскости рисунка, получим пересечение ее с наклон-
ной плоскостью изображения Q' в заднем фокусе F'.
По рисунку можно установить, что эта прямая составит с наклон-
ной плоскостью Q' угол ф, равный сумме углов р' и —р,
ф = р'~ р.
(125)
70
Пользуясь формулой (125) и свойством рассмотренной выше пря-
мой, можно определить расстояние точки А' — проекции центра
проектирования ВQB'Q на наклонную плоскость изображения —
от заднего фокуса F' на этой плоскости. Согласно рисунку получаем
R' = —x'a tg (180° — qp) = x’a tg ф. (126)
Определим отрезки s0 и s'Q вдоль оси объектива. Из треугольников
А^В^В и А'цВ'цВ' находим, что
50 = h tg р; So = ^tgp'.
Составляя отношение отрезков s0 и s0, получаем линейное
ние для точек Ао и А'о, оно будет равно
,so __ у __ tg р'
So A tg р *
(127)
увеличе-
(128)
Рис. 50
Отрезки s0 и s' можно выразить также через расстояния предмет-
ной Q и картинной Q' плоскостей от общего центра проекции BQB'Q.
Находим
So cos р' = В' — sQ cos р = В. (129)
Развернем картинную плоскость изображения Q', так, чтобы она
была продолжением предметной плоскости Q (рис. 50).
Построим на предметной плоскости точку А — отображение
точки А' и примем эти две точки за начала координат на предметной
и картинной плоскостях. Тогда координаты произвольной точки D
на предметной плоскости и ее изображения Д' на картинной плоскости
можно обозначить как L и wn иЕ' и и'.
Поставим теперь задачу определения элементарных увеличений
в направлении оси и перпендикулярно оси для такой пары произволь-
ных сопряженных точек. Для решения этой задачи понадобится опре-
делить лишь величину линейного увеличения в этой произвольной
паре сопряженных точек.
Действительно, величина линейного увеличения в точках D и D'
будет постоянной вдоль всей линии, перпендикулярной оси картин-
ной плоскости; она будет равна
= (130)
XD /
71
Для продольного увеличения в точке располагаем формулой
<h>- -4(л)’' (131)
Эти величины элементарных увеличений можно выразить через
абсциссу рассматриваемой точки D от проекции центра перспек-
тивы А' на картинной плоскости. Величина отрезка может быть
представлена, как разность отрезков х'А и x'D
Vd = Xd — x'a- (132)
Но величина отрезка х'А была определена согласно формуле (126),
поэтому из формулы (132) можно найти величину отрезка x'D, входя-
щего в формулы (130) и (131). Находим
• (133)
Используя формулу (133), преобразуем формулы (130) и (131).
Тогда получим
— 1t+tw) <134>
и
^-5Ч-г+тУ! <135>
ИЛИ
VD = 7z~—— (cos qp + sin ф), (136)
/ sin ср \ т 1 R Y / v 7
И
__о'2 / £' \2
• ~2~ CQS фЧ—тгт-зшф * (137)
ff sm2(p \ Y 1 7? T/ 4 7
Но так как согласно формуле (125)
/' sin ф = /' sin (р' — р) = f' sin р' cos р — /' cos р' sin р, (138)
то, пользуясь формулой (129), выразим косинусы углов р и р' через
отрезки $0 и Л,
/' sin ф = — R — sin р' —R' sin р (139)
S0 S0
и согласно формулам (124) и (125),
/' sin <р = —/?-^-sinp'4-7?-^sinp = /;7?(-^- —4*) =R- (140)
s0 so \ so so '
Умножая обе части формулы (124) на sin ф, находим, что
-/sin(p = 7?'. (141)
72
Заметим, что формулы (140) и (141) можно было бы получить
непосредственно из рис. 49, но тогда его следует усложнить.
Имея в распоряжении формулы (140) и (141), окончательно пре-
образуем формулы (136) и (137)
VD = — (cos ф + sin ф) (142)
и
R' ( , . \2 /Л / о\
qD = I COS ф + -д-7- sin ф I . (143)
Рис. 51
Определил! понятие об узловых точках и точках нулевых искаже-
ний равенствами углового увеличения Wo = 1 и Wc =— 1. Соответ-
ственно из этих равенств следует
^0~=f и xQ = f', х'с=—f и xc=—f. (144)
Обращаясь к рис. 51 видим, что положение точек С и С" нулевых
искажений на предметной и картинной плоскостях определяется
равными по величине и обратными по знаку расстояниями
-ВС = В'С' = f +Х= -f-xc. (145)
Соединяя точки нулевых искажений прямой СОС', проходящей
через центр проекции О, образуем равнобедренный треугольник СВС',
в котором углы при вершинах С и С' должны быть равными 90°—у.
Отсюда следует, что направление на точки нулевых искажений делит
пополам угол между перпендикулярами, опущенными из центра
73
проекции О на предметную и картинную плоскости, а точки нулевых
искажений С и С' располагаются между точками А и N и А' и 7V',
являющимися пересечениями перпендикуляров с обеими плоско-
стями.
Узловые точки предметной и картинной плоскостей располагаются
по другую сторону от фокусов на предметной и картинной плоско-
стях и при малых значениях угла ф удаляются на большие расстоя-
ния от центра проекции О (в пределе удаляются в бесконечность),
что мешает практическому их использованию.
Перейдем к рассмотрению перспективных искажений координат
произвольной точки снимка.
Обратимся к рис. 51, на котором точка А '— проекция центра
перспективы на картинную плоскость являет ( f изображением не-
которой точки А предметной плоскости Q.
Пусть произвольная точка предметной пл скости имеет относи-
тельно точки А координаты g и у. Оси абсцисс картинной и пред-
метной плоскостей предположим совпадающими с меридиональной
плоскостью оптической системы.
Сохраняя отношение картинного R' и предметного R расстояний
системы сопряженных наклонных плоскостей Q и Q', можно, по-
степенно уменьшая угол ф между этими плоскостями, привести его
к нулю.
Тогда формулы (142) и (143) примут следующий вид:
^ = -Т = ^о; = <146>
Эти формулы характеризуют постоянство обоих увеличений при
параллельности предметной и картинной плоскостей.
Если угол ф не будет равен нулю, то величины координат неко-
торой произвольной точки изображения свяжутся через формулы
линейного и продольного увеличений.
Т = т/1.' <147>
f = Q=-^VdVa, (148)
где VA и VD — линейные увеличения для обоих концов отрезков g
и Таким образом, отрезки у' и могут быть представлены в виде
y' = VDy, (149)
(150)
Обращаясь к формулам (142) и (143), видим, что в эти формулы
входит отношение расстояний R и 7?', которое, согласно формуле
(144) принято за значение увеличения при отсутствии перспектив-
ных искажений.
74
В соответствии с формулами (142) и (143) можно в формулах (149)
и (150) заменить произведения VDy и VD% через величины коорди-
нат точки D', являющейся изображением, которое было бы полу-
чено при отсутствии перспективных искажений. Поэтому
у'= (cos<p + -|7-sin(p) у'а (151)
И
= y VA (cos<p + ^7-sinq>) (152)
Но величина увеличения VA для проекции центра перспективных
искажений согласно формуле (130) выражается как
х'А R'
V.=-^ =--------(153)
А f f tg ср '
Тогда
= (cos<₽ +jksin(p) Bi- (154)
Пользуясь формулой (141), получаем
S' = ^o (coscp + -|r sincp) cosq). (155)
В случае, если угол ф мал (картинная и предметная плоскости
мало наклонены одна к другой), то формулы (151) и (155) переходят
в приближенные формулы
(156)
r=i;+-^q>. (157)
В формулах (156) и (157) заменим величину %' близкой ей вели-
чиной
Из этих формул получим величину искажений обеих координат
= (158)
(159)
Обратим внимание на следующее обстоятельство. Формулы (158)
и (159) выражают зависимость искажения координат точек на кар-
тинной плоскости Q' от величины угла наклона ф картинной пло-
скости по отношению к предметной плоскости и от величины картин-
ного расстояния Rr от центра перспективы до картинной плоскости.
75
Если при размещении объединенных главных плоскостей и глав-
ных точек оптической системы совместить последние с центром пер-
спективы и вращать оптическую систему вокруг этого центра, то
тем самым ни угол ф между предметной и картинной плоскостями,
ни величина картинного расстояния R' не изменяется (хотя при этом
нарушается сопряженность предметной и картинной плоскостей,
что в известных пределах, определяемых глубиной изображения,
не вызовет существенного нарушения резкости), т. е. величины
перспективных искажений сохранятся.
Обратимся к численному примеру. Для этой цели рассмотрим
перспективные искажения, возникающие при перекосе плоскости
окулярного микрометра в отсчетном микроскопе 10х увеличения,
предназначенного для увеличения одного интервала основной шкалы
с ценой деления 1 мм.
Если плоскость, в которой располагается окулярный микрометр,
будет наклонена к предметной плоскости на 30' —0,01 рад в напра-
влении основной шкалы, то отрезок g можно принять параллельным
оси основной шкалы. Поэтому, учитывая увеличение микрообъек-
тива, величина абсциссы g' равна 5 мм.
Полагая картинное расстояние R' равным 100 мм (приблизи-
тельно длине тубуса), нетрудно подсчитать величину ошибки Ag'
в плоскости окулярного микрометра; находим
д^ = ч§г52 = 0,0025 мм-
Перенося эту ошибку на предметную плоскость (т. е. на основ-
ную шкалу), получаем заметную величину
Д£ = ^- = ^5. ₽ 0,00025 мм.
ъ V 10
Нетрудно видеть, что при выполнении измерений с помощью такого
микрометра при наклоне плоскости изображения на 1°, получилась
бы уже ощутимая систематическая ошибка.
Обратим внимание на то, что если рассматриваемый перекос был
следствием неточной установки всего микроскопа (наиболее небла-
гоприятный случай), то плоскость сфокусированного изображения
составила был угол с плоскостью окулярного микрометра в 0,1 рад,
что привело бы к расфокусировке для g', равного 5 мм, всего
в 0,5 мм. Это было бы неощутимо в отношении потери резкости изо-
бражения.
Напомним для сравнения, что при наклоне изображения (его
развороте) на угол в 30' ввели бы косинусную ошибку, величина
которой при длине изображения 2g' = 10 мм создала бы в плоскости
окулярного микрометра рен, равный 0,0005 мм, т. е. в пять раз
меньший, чем ошибка, получаемая вследствие перспективных иска-
жений.
76
§ 25. Искажения изображения. Дисторсия
Для идеальной оптической системы создаваемое ею изображение
должно быть строго подобным предмету. Однако на практике даже
для строго центрированной системы наблюдаются искажения изобра-
жения, обусловленные несовершенством либо расчета системы, либо
ее исполнения.
Такие нарушения подобия изображения предмету или, как го-
ворят, нарушения ортоскопии, создаваемые оптической системой,
обычно называют дисторсией системы.
Разделим дисторсию на центрированную и нецентрированную.
Первая возникает в строго центрированной системе, когда вели-
чина дисторсии будет зависеть лишь от величины удаления рас-
сматриваемой точки от оси системы. Вторая возникает в оптической
системе с нарушенной центрировкой, когда величина дисторсии
будет зависеть не только от удаления точки от центра поля зрения,
но и от того направления, на котором эта точка располагается.
Рассмотрим дисторсию центрированной системы. Определим вели-
чину абсолютной или линейной дисторсии А у', как разность между
величиной фактического изображения и величиной неискаженного
изображения в произвольно выбранной меридиональной плоскости
= у'=Ж)- (160)
Вследствие симметрии изображения в центрированной системе
относительно ее оси можно установить, что при изменении знака
‘у аргумента г/' на обратный должен измениться также на обратный
знак у искаженного изображения у'. При этом по абсолютной вели-
чине искаженное изображение должно будет сохраниться неизмен-
ным.
Это обстоятельство приводит к выводу о том, что абсолютная
дисторсия будет нечетной функцией относительно величины неиска-
женного изображения.
Составляя отношение величины абсолютной дисторсии к величине
неискаженного изображения, получаем так называемую относитель-
ную дисторсию
А = -^ = . (161)
Уо Уо 7
Из определения относительной дисторсии вытекает, что она
должна быть четной функцией от у', т. е. при изменении знака у ар-
гумента у'о относительная дисторсия сохранится неизменной как
по абсолютной величине, так и по знаку.
При малых полях зрения любая оптическая система должна быть
свободной от дисторсии, так как в окрестности оси центрированной
системы соблюдаются все те условия, которые положены в основу
теории солинейного средства. Это дает основание принять, что при
разложении дисторсии в степенной ряд в этом ряде отсутствует член,
Содержащий аргумент у'о в первой степени.
77
Однако в степенной ряд, приближенно выражающий дисторсию,
всегда можно ввести член, зависящий от первой степени ординаты.
Этот прием при монотонном характере дисторсии позволяет суще-
ственно уменьшить величину дисторсии.
Физический смысл введения такого члена первого порядка заклю-
чается в том, что полученное после оптической системы реальное
изображение будет сравниваться не с изображением, полученным
в соответствии с теорией солинейного сродства, а с правильным изо-
бражением, наиболее близким по своей величине
к искаженному изображению предмета.
Эта картина иллюстрируется рис. 52, на котором представлено
изображение квадрата с помощью оптической системы, обладающей
положительной дисторсией.
Предмет Искаженное изображение Искаженное изображение
Рис. 52
Сплошными линиями на этом рисунке показано неискаженное
изображение квадрата, построенное в соответствии с законами соли-
нейного сродства, пунктиром — наиближайшее подобие изобража-
емого квадрата к картине изображения, полученной при наличии
дисторсии.
Отступления от наиближайшего подобия изображения предмету
называют фотограмметрической дисторсией.
Таким образом, оптическую и фотограмметрическую дисторсию
можно связать зависимостью
^У1 = by' — (162)
где 8 — некоторый произвольный постоянный коэффициент.
Перейдем к рассмотрению влияния дисторсии на величину эле-
ментарных увеличений изображения.
Предположим, что величина искаженного изображения будет
выражаться некоторой функцией от величины неискаженного изобра-
жения.
Обозначим эту функцию через
у' = / (г/»)-
(163)
78
Тогда величина дисторсии будет
Ьу' = у' — y’o = f(y'o) — У о- (164)
На рис. 53 представлена картина образования искаженного изо-
бражения в меридиональной плоскости и в плоскости изображения.
Рассмотрим искажение линейных размеров элемента изображе-
ния, расположенного в некоторой точке А'.
Вершиной неискаженного изо-
бражения пусть будет точка А'о.
Тогда для определения размеров
элемента в сагиттальном напра-
влении dy'o потребуется построить
треугольник на оси системы.
Этот треугольник, имеющий своим
основанием неискаженный элемент
изображения, ограничит сторо-
нами величину dy's искаженного
элемента изображения в сагит-
тальном направлении. Исходя из
этого можно написать, что
ЗУр __ dy& ___ ЗУз (165)
У'о У' f (У'о) ’
Отсюда
dy'^^f-dyi (166)
Уо
Для определения величины ис-
кажения размеров элемента изо-
бражения в меридиональном на-
правлении можно продифференци-
ровать функцию f (г/'). Тогда
dy't = df(y'o). (167)
Имея в своем распоряжении величины элементарных увеличений
как в сагиттальном, так и в меридиональном направлениях, нетрудно
выявить искажения изображения, возникающие при нарушении
центрировки оптической системы.
Для решения этой задачи обратимся к рис. 54, на котором пред-
ставлена картина изображения, получаемая внутри оптической си-
стемы, свободной от дисторсии в целом, но обладающей значитель-
ной дисторсией в пространстве, где расположено промежуточное
изображение.
Если в такой системе часть ее, предшествующая промежуточному
изображению, будет поступательно смещена в направлении, перпен-
дикулярном оптической оси на некоторую величину а, то эту вели-
чину можно рассматривать как величину дифференциалов предмета
перед последующей частью системы в области нулевых лучей и в са-
гиттальном и меридиональном направлениях.
79
В плоскости изображения после всей системы также произойдет
перемещение точек изображения, регламентируемое элементарными
увеличениями для нулевых лучей в сагиттальной и в меридиональ-
ной плоскостях.
Эти увеличения можно выразить формулами
К' = 44; к = -#; = (168)
° dy0 ’ dy8 ' 1 dyf v 7
Для предшествующей промежуточному изображению части системы
формулы увеличений следующие:
Кроме того, так как система в целом была принята свободной
от дисторсии, то все увеличения для нее должны быть равными
(по)
Из формулы (170) следует, что
Fo _ V’t Fo dy„ df (.!/„) -17* ° w (171)
И Fo _ Fo Уо = у" Уо (172)
’ v; Vo ’ Z(^) ° Ж) '
В рассматриваемом случае величины dy's, dy't и dy’Q можно, как
уже говорилось, приравнять величине а децентрировки предыдущей
части системы. Таким образом, получаем
V.-Vfi. (173)
<”4>
<175>
80
Предположим, что функция, выражающая собой величину дей
ствительного изображения после предшествующей части системы,
выражается уравнением
Тогда
и
что дает
< = ^ = -^-(179)
1 + 34^о 1 + М
Величина относительной дистор-
сии Д для предшествующей части си-
стемы может быть выражена формулой
д = ж)-у; (180)
Уо Уо
и тогда формулы (179) примут вид
= <1М>
Чтобы исключить смещение изображения в центре поля dy"Q,
вызванное нарушением центрировки системы, необходимо вычесть
величину этого смещения из величин dy"t и dy”s. Таким образом,
получим величины Ду" и Ду", характеризующие собой искажения
изображения, возникшие за счет нарушения центрировки
Ayt = dyt - di/0 = -1) dy0 = —ЗДVoa, (182)
^ys = dy'-dy0= (д^-1) dyQ = -Д7>. (183)
Заметим, что величины Ду'^ и Ду" будут иметь одни и те же знаки
при изменении знака у величины промежуточного изображения у',
так как эта величина входила в формулы (179) в квадрате. Кроме
того, искажение Ду" будет тангенциальным, т. е. направленным не
к центру поля зрения, а перпендикулярно к направлению на центр
поля.
Картина возникших искажений изображения за счет нарушения
центрировки системы представлена на рис. 55, где пунктиром
6 Заказ 2301. 81
показано неискаженное изображение — окружность, а сплошной
линией — «овал», вызванный нарушениями центрировки.
Численно, полагая увеличение последующей части системы Vo =
= 2 и величину относительной дисторсии для промежуточного изо-
бражения А = 0,1 (10%), при нарушении центрировки на величину
а = 0,03 мм, получаем
Ду'; = —3 0,1 2- 0,03 = -0,018 мм',
\у'' = —0,1 • 2 • 0,03 = —0,006 мм.
В рассмотренном примере представлена дисторсия нецентриро-
ванной системы. Познакомимся с нею более детально.
В самом общем случае нецентрированную дисторсию можно рас-
сматривать как функцию координат, определяющих положение точки
в плоскости изображения. Это позволяет определить дисторсию как
совокупность двух функций от двух параметров.
а,= сгг(г/, z); о^а^у, z), (184)
где oz и <уу — смещение точки изображения в направлении коорди-
натных осей z и у.
Предполагая, что функции (184) раскладываются в ряды по сте-
пеням координат рассматриваемой точки, можно разложить дистор-
сию нецентрированной системы на отдельные составляющие, содер-
жащие члены,, в которые входят величины координат в первых степе-
нях (определяющие собой дисторсию первого порядка), во вторых
степенях (дисторсия второго порядка), в третьих степенях (дистор-
сия третьего порядка) и т. д.
Тогда для дисторсии первого порядка можно написать
<уг=Агг + Вгу, —AyzA-Byy. (185)
Вращением системы координатных осей можно привести к нулю
один из членов, входящих в формулы (185). Это позволит представить
дисторсию первого порядка в виде
^г = А^ + Вгу, ау = Вуу. (186)
На рис. 56, а представлена картина искажения квадрата со
сторонами, параллельными координатным осям, при наличии дистор-
сии первого порядка.
В частном случае, когда оптическая система обладает одной
плоскостью симметрии, будет наблюдаться четность функции, харак-
теризующей искажения вдоль плоскости симметрии и нечетность для
функции, определяющей искажения в направлении, перпендикуляр-
ном плоскости симметрии.
Поэтому в формулах (186) должны отсутствовать члены для в2,
содержащие координату у в первой степени и, наоборот, для соста-
вляющей в могут существовать лишь те члены, в которые коорди-
ната у войдет в первой степени.
82
83
6*
Отсюда можно написать
ау = Вуу. (187)
Для дисторсии первого порядка при соблюдении условия сим-
метрии относительно одной плоскости будет наблюдаться симметрия
и во взаимно перпендикулярной плоскости. Но, тем не менее, в обоих
направлениях изображение уже не обладает одинаковым масштабом,
т. е. оно будет анаморфированным (рис. 56, б).
Перейдем к рассмотрению дисторсии второго порядка. В этом
случае общее выражение для составляющих дисторсии по коорди-
натным осям будет иметь следующий вид:
сгг=л;г2+5;г1/+с;!/2 ।
^ = Л22 + ^гг/ + С,;р2 J
Так же, как и в случае дисторсии первого порядка, соответствен-
ным поворотом координатных осей можно уничтожить один из чле-
нов разложения, например Тогда формулы (188) упростятся
о'г = Xz2 + B'zzy + czy2)
ay=B;Zy+c'y2 ) ( }
и при наличии в системе одной плоскости симметрии
ог^Л^ + Су2 )
= J
На рис. 56, в, г, д представлены картины искажений изображе-
ния квадрата, соответствующие первому, второму и третьему коэф-
фициентам в формуле (190).
При наличии одного первого коэффициента искажение изображе-
ния сведется к изменению масштаба вдоль плоскости симметрии
системы. Это дает основание первый коэффициент называть коэффи-
циентом масштабной дисторсии.
Наличие одного второго коэффициента приводит к искривлению
линий, перпендикулярных плоскости симметрии. Поэтому уместно
присвоить ему название коэффициента параболической дисторсии.
Искажения, возникающие при наличии третьего коэффициента,
имеют вид, напоминающий перспективные искажения. Это позволяет
назвать его коэффициентом перспективной дисторсии.
Характерно, что первые два коэффициента создают искажения
в направлении плоскости симметрии, а третий коэффициент — в на-
правлении, перпендикулярном плоскости симметрии.
Сочетание масштабной и перспективной дисторсии может в пер-
вом приближении быть равнозначным простым перспективным иска-
жениям.
При отсутствии плоскости симметрии в системе возможны более
сложные искажения изображения. Один из таких случаев предста-
влен на рис. 56, е, когда имеются два коэффициента В'2 и С'2.
84
Для дисторсии третьего порядка величины составляющих g2
и а у будут представлять собой функции третьих степеней относи-
тельно координат рассматриваемой точки. Соответствующим поворо-
том координатных осей устраняется один из членов в этих выраже-
ниях, что позволяет написать общие выражения для дисторсии
третьего порядка в виде:
о2 = A2z3 + B2z2y + C2zy2 + D2y3 |
Gy = B''z2y + C''zy2 + D''y3 J’ (191>
Четыре характерных случая для дисторсии третьего порядка
при наличии лишь одного из коэффициентов А'^ В"2, C"z, D"2 пока-
заны на рис. 56, ж, з, и, к.
Первый из этих случаев определяет, подобно предыдущему, мас-
штабную дисторсию третьего порядка, а второй случай — перспек-
тивную дисторсию третьего порядка.
Третий случай аналогичен параболической дисторсии, но только
не второго, а третьего порядка и, наконец, четвертый случай напо-
минает собой панорамные искажения и его можно назвать панорами-
ческой дисторсией. Учитывая, что в последней искажения наблю-
даются лишь в одном направлении, ее можно было бы назвать также
полубочкообразной или полуподушкообразной дисторсией.
Если в оптической системе имеется симметрия относительно двух
взаимно перпендикулярных меридиональных плоскостей, то в фор-
мулах (191) должны отсутствовать коэффициенты Л", В"2, С”у и D"z.
При равенстве всех четырех оставшихся коэффициентов один дру-
гому приходим к картине центрированной дисторсии третьего-
порядка. Действительно, составляя геометрическую сумму искаже-
ний g2 и Gy и выражая ее через геометрическую сумму координат
рассматриваемой точки, находим
Ст = J/ct? + ^ = A" -|/(z2 + i/2)3 = A"R3. (192)
Составляя отношения величин и а и z и R, убеждаемся в парал-
дельности направлений о и R
(з2 __ A'Az2+y2)z _ z .
o' — A"R* “ R * '
Часть II. ОБЩИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ ОПТИЧЕСКИХ
ПРИБОРОВ
Глава VII
ОПТИКА УЗКИХ СВЕТОВЫХ ПУЧКОВ
§ 26. Инварианты Гульстранда вдоль лучей. Инвариант Аббе
Рассмотрим меридиональное сечение некоторой преломляющей
поверхности S радиуса г (рис. 57). пип' — показатели преломления
до и после преломляющей поверхности, t и t' — отрезки, заключен-
ные между точкой преломления N и точками пересечения А и А'
Рис. 57
луча АКА', лежащего вблизи главного луча ANA' в меридиональ-
ной плоскости.
Главный луч ANA' образует с нормалью в точке его преломле-
ния углы i и Г. Луч АКА' образует с главным лучом углы du и du',
которые будем считать малыми.
Из рисунка следует, что
LN— tdu. (194)
Из треугольников AON и A'ON получаем
—i = y — п; у'= и'— ъ. (195)
86
Дифференцируя эти два выражения и замечая, что dy' = dy, находим
du —di = dy = dy' = du' — di'. (196)
Дифференцируя формулу, описывающую закон преломления, полу-
чаем
п cos i di — п cos i' di', (197)’
Эти две формулы показывают, что если углы du и di малы, то отсюда
вытекает малость всех остальных углов dy, di' и du .
Поэтому из рис. 57 следует, что
NM = t'du'-, NK = rdy. (198)
Пользуясь треугольниками NLK и NMK и пренебрегая ошиб-
ками высшего порядка малости, получаем, что
= ~ = = (199)
COS I COS I 1 ' '
Определим из формулы (196) величины углов di и di' и подста-
вим их в формулу (197). Находим
п cos i (dy — du) = n' cos i' (dy — du'). (200)
Но углы du и du' можно выразить через углы dy, используя
формулы (194), (198) и (199). После сокращений на угол dy получаем
. / 1 cos i \ , / 1 cos г'
п cos i ( — *-—] = п cos i (—-----—
(201}
Это выражение известно под названием инварианта Гульстранда
для меридионального луча. При равенстве углов i и I' нулю, оно
переходит в известный инвариант Аббе для нулевых лучей
<202>
Рассмотрим ход лучей в сагиттальной плоскости (рис. 58).
А и А' — точки пересечения луча АКА', идущего вблизи главного
луча в сагиттальной плоскости, с главным лучем ANA'.
Положение точки К пересечения сагиттального луча с прелом-
ляющей сферой радиуса г, описанной из центра О, находится путем
поворота плоскости рисунка на некоторый малый угол dy вокруг
прямой, проходящей через точки А, О и А'.
Используя эту особенность хода сагиттального луча и пользуясь
рисунком, находим
NK = s dus = r dy = s' du9 (203}
и из треугольников ANL и A'NL' соответственно
A£ = ssinj; A'L' = —s' sin i'. (204)
87
Из треугольников ALO и A'L'О следует
AL г — s cos г
A'L' s' cos i' — r
Из формул (204), используя закон преломления, находим
AL s sin i sn'
A'L' s' sin i' s'n
(205)
(206)
Приравнивая формулы (205) и (206), после некоторых преобра-
зований, получаем сагиттальный инвариант Гульстранда
cos i
(207)
cos i
г
который, как и меридиональный инвариант, при углах I и I', равных
нулю, переходит в инвариант Аббе.
С помощью инвариантов Гульстранда можно определить вели-
чину астигматизма, возникающего при ходе лучей через тонкую
плоскопараллельную воздушную прослойку, нередко встреча-
ющуюся в конструкциях различных отражательных призм.
Обратимся к рис. 59, на котором представлена плоскопараллель-
ная воздушная прослойка толщиной d по нормали, с ходом главного
луча, образующего, с нормалями углы — — i'v — \ и
—Ч = —Н-
Отрезок главного луча, заключенный между обеими преломля-
ющими плоскостями, обозначим через d и будем называть косой
толщиной прослойки.
Если предмет свободен от астигматизма, то тем самым обусло-
вливается равенство отрезков tr = sr.
88
Так как обе преломляющие поверхности плоские, то оба инва-
рианта Гульстранда упрощаются и принимают вид
п' cos2 i' п cos2 f п' _ п
t' t ’ s' s'
(208 >
Пользуясь ими, нетрудно определить величину отрезков после пре-
ломления на первой плоскости
f __ COS2 _ Si
1 П COS2fl 1’ 1 n
(209)
Вычитая из отрезков t[ и s' косую толщину cZ, найдем отрезки
Z2 —d
COS2 fl .
-----х-т- — a;
n cos2 fi x
s2 = s' — d = — — d.
z 1 n
Пользуясь затем инвариантами
Гульстранда вторично, получаем
отрезки Z' и s' после обеих пло-
скостей
./ . COS2 Й Л ' л
L = й-----z-4- nd', s9 = Sq — nd.
2 1 cos2 f{ 2 x
(211)
Составляя разность обоих выра-
жений (211), находим интересу-
ющую нас астигматическую раз-
ность
•;-Л-5Л <212’
и после некоторых преобразований
z2 —s2 = ^(^- —!) (213)
(210)
Из формулы (213) следует, что величина астигматизма, возни-
кающего вследствие наличия воздушной прослойки, прямо пропор-
циональна косой толщине и квадрату тангенса угла главного луча
с нормалями к плоскостям в пространстве между этими плоскостями.
В качестве примера рассмотрим величину астигматизма, возни-
кающего после воздушной прослойки толщиной 0,1 мм, разделя-
ющую среды с показателем преломления, равным 1,732 — (]/3) при
угле наклона плоскостей = 30°.
Пользуясь законом преломления, находим величины углов
sin г' — п sin 30° = у ]/’3 = sin 60°.
Косая толщина d будет равна
-°’2
89
и величина астигматической разности согласно формуле (213) —
t'2 - s'2 = 1,732 • 0,2 (Л- — 1) 3 = -0,693 мм.
Таким образом, выясняется, что величина астигматизма, вноси-
мого плоскопараллельной воздушной прослойкой, почти в семь раз
превосходит толщину самой прослойки.
§ 27. Инвариант Штраубеля. Инвариант Лагранжа — Гельмгольца
Для узких световых пучков, кроме инвариантов Гульстранда,
существует еще один инвариант, известный под названием ин-
варианта Штраубеля.
Для вывода этого инварианта обратимся к рис. 60, на котором
представлен ход главного луча ANA', образующего с осью системы
углы р и Р', и близкого к нему меридионального луча ANtA', обра-
зующего с осью системы углы Р ~НР и Р' + е?Р' на поверхности,
разделяющей среды с показателями пип'.
Расстояния NA и NA' обозначим через t и t', а углы падения
и преломления главного луча с нормалью ON через i и I'.
В соответствии с рисунком имеем
-dP=4y; d$'=^. (214)
Отрезки NL и KN± легко связываются один с другим через дугу
NNr и косинусы углов i и i'.
NL =NNT cos i; N1K^=NN1 cos Z'. (215)
Нетрудно связать между собой величины элементов предмета
и dyf и изображения dy't в меридиональной плоскости. Согласно
рисунку находим
—dyt cos р = t di; dy't cos P' = — t' di'. (216)
В формуле (216) углы di и di' суть изменения углов i и i' главного
луча при переходе от него ко второму меридиональному лучу, про-
ходящему через вершины элементов предмета и изображения и точку
N преломления главного луча на поверхности.
Дифференцируя закон преломления, получаем известное соот-
ношение
ncosZ di — п' cosi' di'. (217)
Перемножая отдельно правые и левые части формул (214), (215)
и (216) и пользуясь формулой (217), после сокращений приходим
к инварианту Штраубеля в меридиональной плоскости
n dyt cos р с?р = ri dy* cos Р' с?Р', (218)
SO
который при малых углах главного луча с осью системы переходит
в известный инвариант Лагранжа — Гельмгольца
п dyQ сф = п' dy'o d$'. (219)
Аналогично инварианту Штраубеля в меридиональной плоскости
можно получить выражение этого же инварианта и для сагиттальной
плоскости, имеющее вид, тождественный с инвариантом Лагранжа —
Гельмгольца, но с той лишь разницей, что для сагиттального ин-
варианта углы сф и сф' будут заключены между главным лучом
и близким к нему сагиттальным лучом (углы сф и сф' будут лежать
не в меридиональной плоскости, а в сагиттальной).
Обратим внимание на следующее важное обстоятельство. В ин-
вариант Штраубеля входят величины п, dy, cos |3 и сф, которые
одновременно являются величинами после предыдущей и теми же
величинами перед последующей поверхностью, что позволяет рас-
пространять инвариант Штраубеля как на все предыдущие, так и на
все последующие поверхности системы. Отсюда приходим к выводу,
что инвариант Штраубеля оказывается справедливым не
только для отдельной преломляющей поверхности, но и для
всей оптической системы в целом.
Ранее, в § 12, была получена формула (63), связывающая между
собой произведение из углового и линейного увеличения с отноше-
нием фокусных расстояний для нулевых лучей всей системы.
91
Сопоставляя это выражение с инвариантом Лагранжа — Гельм-
гольца, который, как частный случай инварианта Штраубеля, также
будет справедлив для всей системы (будет являться полным инва-
риантом), видим, что из формулы (63) может быть получено выраже-
ние, аналогичное инварианту Лагранжа — Гельмгольца, но отли-
чающееся тем, что в него вместо показателей преломления входят
фокусные расстояния системы
-fdyd$ = f'dy'dfi'. (220)
Исключая из формул (219) и (220) величины dy и dp, приходим
к выводу
4- = --^, (221)
/ п
что отношение фокусных расстояний любой оптической системы
равно отношению показателей преломления первой и последней
среды, взятому с обратным знаком.
§ 28. Простая линза в воздухе
Имея в своем распоряжении инвариант Аббе и пользуясь им
дважды, можно получить известные формулы:
1) для силы простой линзы в воздухе
2) для тонкой линзы
(223)
3) для концентричной линзы
<224>
4) для мениска с равными радиусами
(п — I)2 d
г2 п
(225)
Пользуясь инвариантами Гульстранда, можно получить формулу
для случая, когда тонкая линза совпадает со зрачком входа
ф cos2 р =
п cos — cos В
----n-i 'Фо=ф,-
(226)
Отсюда
ft = f, cos2 p
(227)
92
независимо от формы линзы и показателя преломления. Составляя
разность меридионального и сагиттального фокусных расстояний,
получаем
— = ~fs sin (228)
Из формулы (228) следует, что астигматизм тонкой линзы будет
определяться величиной ее фокусного расстояния и квадратом поле-
вого угла р. Например, при фокусном расстоянии, равном 200 мм
и величине полевого угла Р равного 2° —0,035 рад, получаем вели-
чину астигматической разности
ft-f8 = -200,0 • 0,0352 = -0,245 мм.
Заметим, что формула (228) неприменима для определения астиг-
матизма менискообразных линз, так как в них величина силы в зна-
чительной степени будет зависеть от их толщины.
Глава VIII
ГЛАЗ И ВИДИМОЕ УВЕЛИЧЕНИЕ
§ 29. Устройство глаза, аккомодация.
Разрешающая способность глаза
Человеческий глаз представляет собой шарообразное тело диа-
метром около 25 мм. Схематический разрез глаза представлен на
рис. 61.
Глазное яблоко заключено во внешнюю оболочку, называемую
склерой, защищающую внутренние части глаза от внешних воздей-
ствий, которая переходит в своей передней части в прозрачную рого-
вицу. К склере примыкает сосудистая оболочка, состоящая из сети
кровеносных сосудов. Внутреннюю поверхность сосудистой оболочки
выстилает сетчатая оболочка (ретина), состоящая из светочувстви-
тельных клеток.
За роговицей располагается передняя камера глаза, заполнен-
ная водянистой влагой с показателем преломления, равным 1,336.
Эта камера замыкается радужной оболочкой, являющейся частью
сосудистой оболочки, с отверстием в ней, называемым зрачком.
Диаметр зрачка может изменяться под воздействием соответствен-
ных мускулов в зависимости от количества света, поступающего
в глаз; диапазон изменения диаметра зрачка составляет от 2 до 7,
а иногда до 8 мм.
В дневных условиях величина зрачка глаза обычно не превосхо-
дит 4 мм.
Позади радужной оболочки и зрачка, в тонкой прозрачной сумке,
расположен хрусталик, представляющий собой двояковыпуклую
93
линзу слоистого строения с показателем преломления, равным
1,386 - 1,406.
Сумка соединена с сосудистой оболочкой ресничным телом или
цилиарной мышцей, назначением которой является изменение формы
передней поверхности хрусталика — ее радиуса кривизны, что поз-
воляет изменять фокусное расстояние Хрусталика и приводить изо-
бражение на поверхность сетчатки.
За хрусталиком располагается полость глаза, заполненная стекло-
видным телом с показателем преломления, равным 1,336.
Ретина глаза содержит около 7 миллионов колбочек и около
130 миллионов палочек — светочувствительных клеток.
Рис. 61
Периферия ретины занята
палочками, более чувстви-
тельными к малым освещен-
ностям, но дающим мало-
отчетливые изображения; па-
лочки неспособны к воспри-
ятию цветного изображения.
По мере приближения
к центральной части глаза
возрастает число колбочек
и они занимают углубление
диаметром около 1,25 мм,
называемое желтым пятном,
в пределах которого полу-
чается резкое и цветное изо-
бражение, соответствующее
углу поля зрения около 1,5°.
Благодаря большой и бы-
строй подвижности глаза по-
лучается резкое изображение
больших предметов, что по-
зволяет говорить о величине
поля зрения глаза около
100-120°.
Глаз не ощущает резко очерченной границы поля зрения. Опыт
показывает, что утрата ощущения этой границы происходит при
угле поля зрения около 90°.
Глаз человека благодаря возможности перехода от зрительного
восприятия с помощью палочек к восприятию изображения
с помощью колбочек может работать в весьма широком перепаде
освещенностей наблюдаемых предметов, начиная от 0,1 лк и
до 100 000 лк.
Однако переход от низких освещенностей к высоким, и наоборот,
требует некоторого времени (в особенности при переходе от боль-
ших освещенностей к малым), называемого временем адаптации.
Для полной адаптации на низкие освещенности глазу требуется
от нескольких минут до получаса и даже более.
94
Зрительное ощущение, полученное глазом, также не исчезает
мгновенно — для исчезновения зрительного впечатления требуется
около 0,1 сек. Это время называется временем остаточного зритель-
ного впечатления.
При интервале, меньшем, чем время остаточного зрительного
впечатления, глаз получает ощущение непрерывного восприятия
изображения.
У нормального глаза (в состоянии его полного покоя) задний
фокус должен располагаться на сетчатке. В таком состоянии глаз
будет приспособлен к рассматриванию удаленных предметов или,
как говорят, аккомодирован на бесконечность. При этом цилиарная
мышца не напряжена, хрусталик глаза имеет менее выпуклую форму
и наибольшее фокусное расстояние; удаленные предметы будут
видны наиболее резко.
Удаленную точку, которую глаз видит при полном покое, назы-
вают дальней точкой глаза.
Для наблюдения близко расположенных предметов необходимо
получить их изображение на сетчатке. Это может быть достигнуто
путем воздействия цилиарной мышцы на хрусталик. При этом хру-
сталик приобретает более выпуклую форму, его фокусное расстоя-
ние уменьшается, фокальная поверхность отходит от сетчатки и на
сетчатку приходит изображение более близких предметов.
Точку, которая видна резко при максимальном напряжении
цилиарной мышцы, называют ближней точкой глаза.
Из практики известно, что наиболее удобно рассматривать близко
расположенные предметы тогда, когда они располагаются на рас-
стоянии около 250 мм от глаза. Это расстояние называют расстоя-
нием наилучшего зрения.
Расстояние между дальней и ближней точками глаза, на кото-
рое глаз способен аккомодировать, называют широтой аккомо-
дации.
Величину аккомодации принято оценивать в величинах, обрат-
ных расстояниям, т. е. в диоптрийной мере.
Широта аккомодации для нормального глаза, когда дальняя
точка расположена в бесконечности, а ближняя на расстоянии наи-
лучшего зрения (на 250 мм), составляет четыре диоптрии (одна диоп-
трия равна одному метру в степени минус 1).
Глазу присущ ряд недостатков. Основные из них — это аметро-
пия, астигматизм, пресбиопия (потеря аккомодации с возрастом),
амблиопия (понижение остроты зрения) и косоглазие.
Аметропия возникает при несоответствии длины оси глаза по
отношению к его фокусному расстоянию. Различают два вида аме-
тропии. 1. Глаз называют миопическим, или близоруким, когда
дальняя точка расположена впереди глаза на конечном расстоянии.
2. Глаз называют гиперметропическим, или дальнозорким, когда
дальняя точка располагается позади глаза.
Расстояние от передней главной точки глаза до его дальней точки
принято считать мерой аметропии. Единица, деленная на расстояние
95
до ближней точки глаза, выраженное в метрах, дает меру аметропии
в диоптриях.
Аметропия глаза для дали легко исправляется с помощью очко-
вых стекол или подвижки окуляра оптического прибора. Основным
требованием для коррекции аметропии является совмещение зад-
него фокуса очковой линзы или изображения после оптического
прибора с дальней точкой глаза.
Для коррекции миопического глаза применяют отрицательные
линзы, а для коррекции гиперметропии — положительные.
Картина коррекции гиперметропического глаза представлена на
рис. 62, а, б, а коррекция миопического — 62, в, г.
Астигматизм оптической системы глаза приводит к тому, что
изображения в двух взаимно перпендикулярных плоскостях, про-
ходящих через ось глаза, не могут быть одновременно перенесены
на поверхность сетчатки и глаз сможет видеть резко либо линии од-
ного направления, либо второго, перпендикулярного первому. Кор-
рекция астигматизма достигается использованием цилиндрических
или торических очковых линз, размещаемых перед глазом и опре-
деленным образом ориентированных.
Одним из важных свойств глаза является острота зрения или
способность глаза разделять близко расположенные на предмете ли-
нии или точки. Острота зрения может быть охарактеризована обрат-
ной величиной наименьшего расстояния между разделяемыми точ-
ками, расположенными на определенном расстоянии от глаза. Если
предметы удалены, то об остроте зрения можно судить по величине
угла между разрешаемыми точками — разрешаемому углу.
Во всех случаях изображение близко расположенных точек
должно быть реализовано на сетчатке, и если оба изображения по-
падут на одну и ту же колбочку, то только эта колбочка будет иметь
зрительное раздражение и получится ощущение, не отличающееся
от восприятия одной точки. Поэтому необходимо, чтобы изображе-
96
ние от обеих разрешаемых точек попадало на две разные колбочки,
не соприкасающиеся одна с другой. Для этого необходимо, чтобы
расстояние между изображениями разрешаемых точек было больше,
чем диаметр колбочки, равный по Гельмгольцу 0,005 мм. Эта картина
представлена на рис. 63, где показано образование изображения на
сетчатке глаза от двух точек А х и А 2.
Для нахождения изображений от этих двух точек можно вос-
пользоваться двумя лучами, проходящими через передний фокус
глаза. Нетрудно видеть, что расстояние между изображениями А'г
и А'2 рассматриваемых точек будет равно
произведению из переднего фокусного рассто- И I
яния глаза / на угол между точками А± / "К I
и А 2, что позволяет выразить величину угла / \ I
разрешения глаза через отношение диаметра у yl ~\
колбочки к переднему фокусному расстоянию \ / I \
др=-^=1221=о,оооз=г. / \ I /
/ 15,4 / \ /
Необходимо отметить, что в некоторых \
особых случаях наблюдения разрешающая \ \
способность глаза может существенно уве- / ( /
личиваться. Так, например, при рассматри- / \ /
вании линии, имеющей небольшой излом / \-------6
(небольшое поступательное смещение), глаз \ / \
способен заметить смещение, определяемое \________/ \
угловой величиной около 10". Это объ- \ /
ясняется тем, что изображение смещенного \/
участка линии может разместиться уже на
другой группе колбочек (на рис. 64 пока-
зано расположение изображения на сетчатке Рис- 64
глаза).
Кроме того, глаз очень остро реагирует на изменение величины
светлого промежутка между двумя темными объектами. Так, про
межуток в 0,01 мм заметен при хорошем освещении с расстояния,
больше одного метра, что соответствует угловой величине, меньшей 5".
На этой особенности глаза основывается отсчетное устройство
в виде биссектора, когда оценивается расположение штриха основ-
ной шкалы в измерительных приборах между двумя штрихами оку-
лярного микрометра.
7 Заказ 2301.
97
§ 30. Видимое увеличение. Видимое увеличение телескопической
системы, лупы или микроскопа
На рис. 63 видно, что величина изображения на сетчатке глаза
определяется величиной угла, под которым глаз рассматривает тот
или иной предмет. Нетрудно представить себе, что при рассмотре-
нии предмета, в К раз большего, чем другой предмет, расположен-
ный на том же расстоянии, первый будет виден под углом, тангенс
которого в К раз больше, чем тангенс угла, под которым был виден
меньший предмет.
Указанное позволяет принять за меру видимой величины изо-
бражения отношение тангенсов углов, при котором глаз видит и изо-
бражение и сам предмет — это так называемое видимое увеличение.
Таким образом, можно записать
г== tgyz
tg? ’
(229)
Эта формула выражает также видимое увеличение телескопиче-
ской системы, так как и предмет и его изображение располагаются
по отношению к нормальному глазу в бесконечности и суждение
об их величине будет производиться по угловым величинам.
Рассмотрим видимое увеличение лупы. Обращаясь к рис. 65, на
котором представлена картина непосредственного наблюдения нево-
оруженным глазом предмета у, расположенного на расстоянии £
от глаза, и изображения у' после лупы, когда изображение распо-
лагается на расстоянии g' от глаза.
Тогда, обращаясь к формуле (229) и выражая в ней тангенсы
углов у и у' через величины у, у', g и получим
г= _ у £ __
tg? у^’ I' f'%'
(230)
98
Но величина g' может быть выражена через расстояние L между
предметом и изображением или через расстояние а между задним
фокусом F' и зрачком глаза
l' = %-L=a-x'. (231)
В соответствии с этим формула (230) примет вид
&
Обратим внимание на следующее обстоятельство. Величина L
для короткофокусной линзы может быть малой по отношению к рас-
стоянию до предмета. Тогда формула (232) переходит в следующую
приближенную формулу
(233)
Однако величина g' должна быть всегда положительной (изо-
бражение должно находиться перед глазом, чтобы глаз мог на него
аккомодировать). Поэтому для повышения видимого увеличения Г
выгодно второй член в скобках обратить в нуль, т. е. сделать отре-
зок равным бесконечности. Для этого предмет располагают в перед-
ней фокальной плоскости лупы. Тогда формула (232) переходит
в известную формулу для видимого увеличения лупы или микроскопа
г_ g 250
-г
Величину £ следует принимать равной расстоянию наилучшего
зрения.
Равенство нулю второго члена в формуле (232) может достигаться
за счет равенства нулю расстояния а между задним фокусом и вход-
ным зрачком глаза, что позволяет иметь расстояние между глазом
и изображением после лупы произвольным. При этом, очевидно,
формула для видимого увеличения будет той же самой, что и фор-
мула (234). Заметим, что этот случай получил очень широкое распро-
странение в микроскопии, где зрачок выхода оптической системы
микроскопа принято совмещать с ее задним фокусом.
§ 31. Стереоскопическое зрение
В нормальных условиях для объемного восприятия внешнего
пространства необходимо пользоваться бинокулярным зрением, т. е.
рассматривать предметы двумя глазами.
Если предмет находится в бесконечности и работа мышечного
аппарата не напряжена, то зрительные оси обоих глаз будут парал-
лельны и изображения приведены к центрам желтых пятен глаз,
т. е. к соответственным, или корреспондирующим, точкам сетчатки.
При наблюдении точек, расположенных близко, оба глаза пово-
рачиваются одновременно так, что их оси пересекаются в интересу-
ющей точке.
7*
99
Угол, составляемый осями глаз, принято называть углом кон-
вергенции. Величина угла будет зависеть от расстояния между гла-
зами и расстояния до наблюдаемого предмета.
Оба изображения, поступающие на сетчатку, в случае их соот-
ветствия одно другому создают в мозгу наблюдателя единое слитное
изображение.
Если изображения не будут располагаться в соответственных
точках сетчатки обоих глаз, то получается ощущение двоения изо-
бражения. Однако
если
несоответствие изображений невелико, то
эффекта двоения не будет
и вместо него возникнет
эффект ощущения рельефа
или пространственности
наблюдаемого объекта.
Практически устано-
влено, что для устранения
эффекта двоения и полу-
чения стереоскопического
восприятия пространства
необходимо, чтобы вели-
чина несоответствия изо-
бражений между левым
и правым глазами наблю-
дателя не превосходила
в угловой мере 70'.
Картина стереоскопи-
ческого зрения двумя гла-
зами представлена на
рис. 66, где показан ряд
точек А., удаленных от
глаз на различные рас-
стояния и имеющих различные параллактические углы у..
Разность параллактических углов, еще ощущаемых наблюда-
телем, можно назвать мерой чувствительности стереоскопического
наблюдения или стереоскопической разрешающей способностью.
Величина стереоскопической разрешающей способности значи-
тельно превосходит разрешающую способность монокулярного зре-
ния — она достигает величины около 10" — т. е. получается одного
порядка с нониальной остротой зрения.
Глава IX
СВЕТОВОЙ БАЛАНС ОПТИЧЕСКОЙ СИСТЕМЫ
§ 32. Ограничение световых пучков в оптической системе.
Зрачки и геометрическое виньетирование
Представить себе оптическую систему, не ограничивающую про-
ходящих через нее световых пучков, невозможно. В любой оптиче-
ской системе всегда имеются различные диафрагмы, или отверстия,
ограничивающие пучки лучей.
Даже в простейшем случае образования изображения только
одной точки предмета (например, расположенной на оси системы),
световой поток, излучаемый ею, будет ограничен диафрагмой, либо
расположенной перед системой (например, отверстием первой линзы),
либо внутри или позади оптической системы.
Если ограничение светового пучка будет осуществляться диафраг-
мой, расположенной позади или внутри системы, то можно разыс-
кать в предметном пространстве изображение этой диафрагмы, со-
зданное либо всей системой в обратном ходе лучей, либо ее частью,
расположенной впереди диафрагмы. Такое изображение будет огра-
ничивать входящие в систему световые пучки точно так же, как это
делала бы диафрагма, расположенная впереди системы.
Отверстие, ограничивающее световые пучки, входящие в систему,
их телесный или апертурный углы называют зрачком входа оптиче-
ской системы.
В пространстве изображений световые пучки будут также огра-
ничиваться изображением какой-либо диафрагмы (или материальной
диафрагмой), которое следует рассматривать как зрачок выхода
оптической системы.
Зрачки входа и выхода взаимосвязаны, они являются сопряжен-
ными. Иными словами зрачок выхода можно рассматривать как изо-
бражение зрачка входа и наоборот.
Зрачки входа и выхода могут быть расположены произвольно.
Так, размещая материальную диафрагму в одной из фокальных пло-
скостей, например в передней фокальной плоскости, отнесем ее изо-
бражение — выходной зрачок — в бесконечность.
В оптической системе может существовать несколько диафрагм.
Тогда за зрачок входа следует принимать ту диафрагму (или изо-
бражение ее), которую будет видно из точки предмета на оси системы
(или из точки изображения) под наименьшим углом. При образова-
нии изображения лишь этой точки поля все остальные диафрагмы
не будут иметь никакого влияния. Однако при образовании изобра-
жения предмета конечных размеров раньше или позже и другие
диафрагмы (или их изображения через всю систему или ее часть)
начнут ограничивать световые пучки, входящие в систему, т. е.
возникает так называемое явление виньетирования.
В простейшем случае виньетирование может возникнуть при
наличии двух диафрагм, расположенных в одном и том же
101
пространстве. Эта картина представлена на рис. 67, где показаны две
диафрагмы I и II, отстоящие от предметной плоскости на расстоя-
НИИ И £п.
Радиусы отверстий обеих диафрагм обозначим через рг и р .
Предположим, что апертурный угол пучка лучей, исходящих из
точки Ло, расположенной на оси системы, будет ограничиваться
диафрагмой I. Тогда, перемещая точку А по плоскости предмета,
можно придать ей такое положение Лг, когда световой пучок, попа-
дающий из нее в диафрагму I, коснется края диафрагмы II.
При дальнейшем перемещении точки А диафрагма II начнет сре-
зать пучки лучей, входящие в оптическую систему, и тогда, когда
точка А займет положение А 2, наклонный пучок срежется диафраг-
мой II полностью.
Рис. 67
Расстояния уг и у2 точек Аг и А2 от оси системы определяют
начало и окончание виньетирования.
Расстояние между обеими диафрагмами обозначим через а.
Определим сечение пучка лучей на отверстии диафрагмы I при
произвольном положении точки А на предметной плоскости.
Используя точку А как центр проекции, получим отображение
края диафрагмы II в плоскости диафрагмы I; при этом произойдет
увеличение радиуса отверстия диафрагмы II и смещение центра ото-
бражения этой диафрагмы с оси системы.
Обозначая все величины для отображения диафрагмы II чертой
вверху, можно написать
У Рн— 2р/ у — Pi
Откуда нетрудно получить выражение для меридионального диа-
метра
t
Зр^у + рц — — Pi) (236)
102
или
2Pz = (1 - у + рп + Pl = (1 - у + рп + Рг (237)
Формула (237) показывает, что изменение меридионального диа-
метра сечения пучка в плоскости зрачка будет линейной функцией
относительно величины предмета. Заметим, что эта формула будет
справедлива лишь в интервале между значениями уг у у2.
Значения величин у± и у2 легко определяются из условий 2р^ =
= 2рп и 2р^ = 0.
В соответствии с этим получаем
7/ — Pn~Pi . 7. _ -Р2 —Pi
У. =----1— , У2 ----ё— •
4 _ _11 ‘ *п
В частном случае
Рп = -т;Р- -Р,- (239)
т. е. когда отверстие первой диафрагмы касается осевого апертурного
пучка, граница начала виньетирования будет расположена на оси
системы.
Если предмет расположен в бесконечности, величины у, и
также обращаются в бесконечность и формулы (235—239) теряют
определенность.
Получающиеся неопределенности раскрываются при переходе
от величин у к тангенсам полевых углов (3.
После несложных преобразований находим
2Р/ = —atgp + pjj + f-j, (240)
^1 = -^^-; tgp2=Pl±Pn_. (241)
График линейного виньетирования при наличии двух диафрагм
представлен на рис. 68 ломаной линией, составленной из прямоли-
нейных отрезков: параллельного оси (для значений у' от нуля до у')
и отрезка наклонного к оси (в интервале от г/' до г/').
Для нахождения функции светораспределения по полю зрения
необходимо вычислить отношение площади D сечения наклонного
светового пучка к площади Z)o сечения осевого пучка — площади
входного зрачка.
Это отношение будем называть виньетированием по площади
и обозначим через F (Р).
Наименьшее значение площади D будет наблюдаться тогда, когда
начало виньетирования будет совмещено с осью системы (239). Вели-
чина этой площади определится как площадь, ограниченная дугами
103
двух равных окружностей (рис. 69). Четвертая часть этой площади
— будет равна половине площади сегмента, определяемого дугой
угла 2у. Таким образом,
D Ро v pgsinycosy
4 2 Y 2
(242)
Отсюда
Z) = ро (2у — sin 2у). (243)
Площадь Dq определится как площадь круга радиуса р0. В со-
ответствии с этим найдем для функции виньетирования по площади
Нетрудно установить зависимость между линецным виньетиро-
ванием и виньетированием по площади. Для этого можно задать ряд
значений для функции линейного виньетирования и найти соответ-
ствующие им значения углов у. Пользуясь рис. 69, получим
P<-Po(l—cos у); cos Y = l —= (245)
г О
После этого, пользуясь формулой (244), вычисляются значения
функции виньетирования по площади F (0).
Эти значения можно свести в таблицу.
р(0) 1,000 0,900 0’800 0’700 0,600 0,500 0,400 0,300 0,200 0,100
F(6) 1,000 0,873 0,747 0,624 0.505 0,391 0,285 0,188 0,104 0,037
При рассмотрении таблицы видно, что в интервале значений ли-
нейного виньетирования р (0) от 0,7 до 0,2 функция виньетирования
по площади приобретает значения, меньшие значений р (0) при-
близительно на величину 0,1.
104
Это позволяет дать простую приближенную зависимость
F(₽) = p(₽)-0,l, (240)
0,7 Р(р) 0,2.
§ 33. Виньетирование аберрационное
В случае размещения апертурной диафрагмы внутри оптической
системы предполагалось, что ее изображение будет получаться в со-
ответствии с теорией солинейного сродства, не учитывая влияния
аберраций оптической системы.
Однако в действительности изображение апертурной диафрагмы
строится с учетом общих законов образования изображения; в част-
ности, при возникновении линейного увеличения в зрачках системы
потребуется применять теорему Штраубеля.
Полагая, что материальная диафрагма круглая и имеет малый
радиус отверстия, равный р0 = р8 = р,, можно в соответствии с ин-
вариантом Штраубеля получить радиусы р' и р' изображения зрачка
для наклонного пучка, главный луч которого составляет в про-
странстве у материальной диафрагмы и в пространстве, где распо-
лагается зрачок, углы Р и Р' с осью системы.
В соответствии с формулой (218) можно написать для меридио-
нальной плоскости
pj ^_у _ П COS Р дф
Pt п' cos Р' z/p' ’
для сагиттальной плоскости
Ра у П ^Рз
Ра 8~ п'd$’8
и для нулевых лучей
Ро _у __ nd Ро
Ро ~ °~ п' dfi'o ‘
Отношение углов d$8 и dP' нетрудно получить, пользуясь
рис. 70, на котором показана материальная диафрагма с центром
в точке С, ее изображение с центром в точке С' и ход главного луча,
составляющего с осью системы углы р и Р'.
Поворачивая плоскость рисунка вокруг оси системы на малый
угол у, получаем углы dP8 и dp'. Тогда угол у в пространстве пред-
метов и в пространстве изображений может рассматриваться как
проекция углов dPs и dP'.
В соответствии с этим получаем, что
dPs = Y sin Р; dpi = у sin Р',
что позволяет представить формулу (248) в виде
у = Рз __ гс sin р
s pg Tz'sinP'
(247)
(248)
(249)
(250)
(251)
105
Перемножая правые и левые части формул (247) и (251), можно
получить площадь зрачка D' для наклонного пучка
U = ^’,^nVtV= (252>
Аналогичным путем получаем площадь зрачка для точки на оси си-
стемы
= яРо’= яУоРо = VqDq. (253)
Составляя отношение площадей D' находим функцию абер-
рационного виньетирования
Пользуясь формулами (247) и (251), получаем
(255)
В формулах (254) и (255) не участвуют величины радиусов диа-
фрагмы или зрачка входа. Это позволяет сделать вывод, что абер-
рационное виньетирование не зависит от диафрагм и-
р о в а н и я. Наоборот, возвращаясь к геометрическому виньетиро-
ванию, видно, что уменьшение отверстия апертурной диафрагмы
ослабляет виньетирование.
В частном случае, когда полевые углы (3 и Р' будут связаны между
собой через постоянство отношения их тангенсов, определяющее
постоянство углового увеличения
РГ0 = -^- = const, (256)
° tg р ' '
106
отношение дифференциалов <ф и сф' определится формулой
_2os2 Р (257^
<ф' KK°cos2p'
и тогда функция аберрационного виньетирования принимает вид
sinpcossp _ cos* р ,
^(pj-^o sinp'cos3p' - COS* (У (258)
независимо от величины углового увеличения Wo.
Из полученных формул вытекает, что аберрационное виньетирова-
ние может быть и меньше и больше единицы по своей абсолютной
величине, в то время когда геометрическое виньетирование не может
превосходить единицу.
§ 34. Светораспределение оптической системы по полю зрения
и светосила
Полагая предмет плоским и обладающим постоянной яркостью В
по всем направлениям, можно, согласно закону Ламберта, опре-
делить величину светового потока dF, входящего в систему от эле-
мента dS этого предмета, следующей формулой
dF = Ba cost dS, (259)
где, согласно рис. 71, со — телесный угол с вершиной, расположен-
ной в центре элемента dS светящейся поверхности; i — угол между
осью пучка лучей входящего в оптическую систему через зрачок D
и нормалью к поверхности.
Если в системе отсутствуют потери на поглощение света в стекле
и потери на отражение от поверхности линз, то световой поток dF
полностью выйдет из оптической системы и распределится на пло-
щади элемента изображения dSf.
Составляя отношение величины светового потока к площади
элемента изображения, получим освещенность Е этого элемента
E = ^ = Bmcosi4^- (260)
aS aS х
Если поверхность предмета плоская и перпендикулярна оси си-
стемы, то угол i будет равен полевому углу р, а телесный угол со
определится отношением проекции площади входного зрачка для
наклонного пучка на плоскость, перпендикулярную главному лучу
пучка, к квадрату расстояния £ между зрачком и элементом предмета.
Таким образом,
что позволяет представить освещенность Е в следующем виде
E=^=Bvms'^- (262)
107
Перенося элемент предмета на ось системы, необходимо в фор-
муле (262) заменить величины Z), £ и dS' на величины Do, £0 и dS0.
Величина косинуса угла |3 обратится при этом в единицу и тогда
для освещенности в центре поля зрения получаем следующее выра-
жение
Рис. 71
(263)
Составляя отношение освещенностей Е и EQ, получаем величину
светораспределения по полю зрения
(2М)
ИЛИ
0(P) = F(₽)cos^-g-. (265)
Если оптическая система будет свободна от дисторсии, то dSf —
— dS'Q и функция светораспределения выразится произведением
из четвертой степени косинуса полевого угла на функцию виньети-
рования
0(P) = /\P)cos4₽.
(266)
108
Численно, для поля зрения, равного 2(3 = 120°,
0(₽) = F(₽)COS* 60° = ^(₽).
Если величина функции виньетирования была бы равна единице
(отсутствие геометрического и аберрационного виньетирования),
то значение функции светораспределения равнялось бы Ф = 1/16 =
= 0,06—6% от освещенности в центре поля.
Эта величина может быть повышена лишь за счет использования
благоприятного аберрационного виньетирования. Так, при F (р) =
= 1 : cos р = 1: cos 60° = 2 светораспределение может быть под-
нято до 1/8—12% от освещенности в центре поля зрения.
Возвращаясь к формуле (263) и определяя отношение освещен-
ности Ео к яркости В предмета, определим светосилу системы
IT Eq
Н==~В
Dq cISq
Ц * dS'Q *
(267)
Отношение площади элемента изображения dS'o к площади эле-
мента предмета dS0 будет равно квадрату отношения линейных раз-
меров этих элементов, т. е. равно квадрату линейного увеличения Уо.
В соответствии с этим
ff— Dq-____ERL_—тгт/'2 (268)
П S2I/2 T72£2 Т/2
&(Г 0 К 0^0 у о
Формула (268) является универсальной. Она справедлива как
для предмета, расположенного на конечном расстоянии, так и для
предмета, лежащего в бесконечности.
Величину апертурного угла и'о можно представить в виде отно-
шения высоты h на главной плоскости к расстоянию точки изобра-
жения от главной задней точки. В соответствии с этим можно напи-
сать, что
= (269)
и, вынося в знаменателе величину /' за скобки,
h &
4i+4K/,(1-ro)’
(270)
что позволяет выражение для светосилы представить в следующем
виде
(271)
гт_ л / 2h\* 1
4 к /' J (1-Ео)2 ’
тэ 2/z
Величина — носит название относительного отверстия и одно-
значно определяет собой светосилу для предмета, лежащего в бес-
конечности (линейное увеличение Vo = 0).
109
Численно, для съемки при увеличении Уо = —1 (репродуциро-
вание в натуральную величину), светосила системы согласно фор-
муле (271), уменьшится по отношению к светосиле для бесконечно
удаленного предмета в четыре раза.
На практике может встретится случай, когда производится съемка
точечных источников света (например, звезд), т. е. таких, геометриче-
ские размеры которых получаются меньшими, чем дифракционный
кружок рассеяния.
Тогда, при равных величинах выходной апертуры величина эле-
мента изображения будет оставаться постоянной и количество свето-
вой энергии, вошедшей в зрачок входа оптической системы, будет
распределяться на одной и той же площади дифракционного кружка.
Отсюда нетрудно прийти к выводу, что светосила оптической си-
стемы при точечном предмете будет пропорциональной при одной
и той же выходной апертуре величине площади входного зрачка
системы.
§ 35. Потери света в оптической системе. Формула Френеля.
Просветление оптики
Потеря света в оптической системе возникает вследствие погло-
щения света в стекле, отражения от поверхностей линз и отражения
на зеркальных поверхностях.
Яркость пучка лучей, распространяющихся в какой-либо среде,
уменьшается при увеличении пройденного ими пути. Поэтому, пола-
гая на малом отрезке пути dl снижение яркости равным В и что
снижение яркости должно быть пропорциональным самой яркости
jB, имеем
dB = —kBdl. (272)
Отсюда
J^- = lgB = -fcZ + C. (273)
Определяя произвольную постоянную из условия равенства дли-
ны I нулю и принимая эту постоянную, равной логарифму началь-
ной яркости Во, получаем
B = B^ = BQxl, (274)
где величина т носит название коэффициента пропускания.
При прохождении света через поверхность, разделяющую две
среды с показателями п и п', часть света не преломляется, а отра-
жается от преломляющей поверхности.
Количество отраженной световой энергии может быть вычислено
по известной формуле Френеля
1 f sin2 G —Q . tg2(z —Г)\ /275\
2 \ sin2 (i -j-i') "Г" tg2 (z +?') I ’ L
110
где углы i и I' суть углы падения и преломления луча с нормалью.
При малых углах i и i' формула Френеля переходит в следующее
выражение:
(п —п)2
Г= {п'+п)2 •
Когда происходит преломление из стекла в воздух или наоборот,
то при показателе преломления стекла, равного 1,5, потери на отра-
жение достигают 4%. При более высоком показателе преломления,
например при п — 2,0, потери на отражение возрастают до 11%
на одной преломляющей поверхности.
Потери на отражение растут также при увеличении углов i.
Так, для стекла с показателем преломления, равным 1,6289, при i,
равном 0, 30, 45, 60, 70, 80 и 90°, г составит соответственно 5,7, 5,9;
6,8; 10,9; 19,2; 40,4 и 100%.
Потери на отражение в системе из т преломляющих поверхно-
стей можно вычислить по следующей формуле, принимая в среднем
потери на одной поверхности равными 5%,
к% = (1-0,95™) 100%. (277)
Потери света, возникающие на поверхностях склеек, разделя-
ющих среды со сравнительно близкими показателями преломления,
получаются весьма незначительными. Так, при показателях преломле-
ния 1,5 и 1,6 величина потерь на отражение составляет около 0,1%,
что позволяет при практических подсчетах ими пренебрегать.
В настоящее время потери на отражение могут быть снижены
путем просветления преломляющих поверхностей, достигаемого по-
средством покрытия их пленками соответственной толщины с соот-
ветственными показателями преломления.
Физическая сущность просветления заключается в том, что при
толщине пленки в четверть длины световой волны возникают два
отраженных световых потока от поверхности раздела «пленка —
стекло» и «пленка — воздух». Оба отраженных потока, когерентных
один другому, будут отличаться по фазе колебания на половину
световой волны и при интерферировании один с другим взаимно по-
гашаются (хотя и не полностью), вследствие чего и произойдет су-
щественное уменьшение суммарного светового потока, отраженного
просветленной поверхностью.
Существует несколько различных способов получения просветля-
ющих пленок. Наиболее простым из них является так называемое
химическое посветление, осуществляемое например, путем погруже-
ния на определенное время просветляемой линзы в слабый раствор
уксусной кислоты. При этом достигается снижение потерь света
на отражение примерно до 2%. Вторым способом, получившим более
широкое распространение, является физическое просветление, осу-
ществляемое посредством испарения фтористого магния в вакууме.
•Этот способ обеспечивает снижение отраженного светового потока
примерно до 1%.
111
В самое последнее время стали применять еще более совершен-
ные способы — это двухслойное и трехслойное просветление.
В зависимости от величины показателя преломления просветле-
ние получается различным для различных марок оптического стекла.
Для иллюстрации приводится таблица, характеризующая относи-
тельную величину отраженного потока.
Таблица
Просветление химическое Просветление физическое
nD г% nD Г%
1,50—1,52 3,0—2,7 до 1,55 1,6
1,56—1,60 2,2—2,0 1,55—1,60 1,4
1,61—1,64 2,0—1,7 1,60—1,65 1,0
1,65—1,70 1,7—1,4 1,65—1,70 0,9
1,71—1,75 1,3—1,1 . свыше 1,70 0,6
Эффект просветления также различен для разной длины волн.
Однако при применении многослойных пленок это различие суще-
ственно понижается.
Глава X
СВЯЗЬ МЕЖДУ ВОЛНОВОЙ И ГЕОМЕТРИЧЕСКОЙ ОПТИКОЙ
§ 36. Общие соображения. Принцип Ферма
Представления геометрической оптики не позволяют учитывать
некоторые оптические явления, существенным образом проявля-
ющие себя при образовании высококачественного изображения. К та-
ким явлениям принадлежат интерференция, дифракция и поляриза-
ция света. Поэтому для учета таких явлений приходится прибегать
к представлениям волновой оптики.
В геометрической оптике считается, что гомоцентрическому
пучку лучей в пространстве предметов в случае идеального изобра-
жения (свободного от аберраций) будет соответствовать гомоцентри-
ческий пучок лучей в пространстве изображений.
Для небольших апертурных углов и полей зрения гомоцентрич-
ность соблюдается. Однако она не соблюдается для реальных полей
зрения и апертурных углов. Здесь происходят отступления от гомо-
центричности — различного рода аберрации. Нарушения гомоцен-
тричности могут быть охарактеризованы различными способами.
Аберрации оптической системы могут оцениваться в виде продоль-
ных или поперечных аберраций в угловой или диоптрийной мере или
в виде различного рода коэффициентов.
112
Среди различных форм представления аберраций особый интерес
представляют отступления поверхности, перпендикулярной лучам
пучка от сферической поверхности — так называемые волновые абер-
рации.
Ценностью такого представления аберраций является возмож-
ность связывания с их помощью представлений геометрической оп-
тики с представлениями оптики волновой.
Представим себе, что в оптически однородной среде имеется све-
тящаяся точка S.
С точки зрения волновой теории света такую точку можно рас-
сматривать как источник световых колебаний, имеющих определен-
ную амплитуду а, частоту колебаний со, период Т и скорость распро-
странения с, одинаковую по всем направлениям.
Формула пути U колеблющейся точки следующая
U = acos^t. (278)
Задавая времени t ряд значений, равных t± = Т, t2 = 2Т, . . .
tk = кТ и т. д., видим что согласно формуле (278) колебательный
процесс будет в эти моменты времени иметь одну и ту же фазу коле-
бания, так как значения функции U для целых значений к сохра-
нятся неизменными. Поэтому световые возмущения, распространя-
ющиеся за время t±, t2 и т. д. из точки 5, пройдут расстояния, равные
7?1 = е?1, R2 - - ct^, . . ., Rjc — ctk.
Разности этих расстояний будут, очевидно, равны одной и той же
величине
к = сТ, (279)
представляющей собой длину волны света в рассматриваемой среде.
Множества точек, в которых сохраняется одна и та же фаза коле-
бания, составят систему эквидистантных одна другой поверхностей,
которые принято называть волновыми поверхностями.
В рассмотренном случае распространения световых возмущений
в однородной среде такие волновые поверхности должны предста-
влять собой семейство концентрических сфер с радиусами кривизны,
отличающимися один от другого на величину световой волны, и
с центром, расположенном в источнике света.
Волновые поверхности можно считать расположенными в про-
странстве неподвижно. Световая волна, распространяясь от источ-
ника света, будет совпадать с волновыми поверхностями в те мо-
менты, когда колебательный процесс находится в одной и той же
фазе колебания.
Если на пути распространения света будет находиться какая-
либо оптическая система, то световая волна при прохождении через
преломляющие или отражающие поверхности, изменит направление
своего распространения. Кроме того, очевидно, изменится и скорость
8 Заказ 2301.
113
распространения в зависимости от показателей преломления, входя-
щих в систему оптических сред.
Нетрудно себе представить, что при прохождении световой вол-
ной преломляющей поверхности форма волновой поверхности будет
изменяться. Поэтому, по выходе из оптической системы волновые
поверхности, в общем случае, утратят сферическую форму. Отсту-
пления волновых поверхностей от сферической формы будем назы-
вать волновыми аберрациями. Образование волновой аберрации
представлено на рис. 72.
Если бы оптическая система была идеально корригирована, то
выходящие из системы волновые поверхности также должны были бы
сохранить сферическую форму с центром в точке изображения.
Нетрудно видеть, что между любыми волновыми поверхностями
всегда сохраняется одно и то же число промежуточных волновых
поверхностей. Другими словами, по любому из лучей (нормалей
к волновым поверхностям) будет укладываться одно и то же число*
волн.
Отсюда вытекает очень важное свойство для идеально корригиро-
ванной оптической системы. Поскольку между источником света
и какой-либо волновой поверхностью всегда укладывается одинако-
вое число волн ввиду постоянства величины радиуса волновой по-
верхности, и так как при идеальном изображении между волновой
поверхностью и точкой изображения также будет укладываться
одно и то же число волн, то число волн между источником света
и точкой идеального изображения тоже должно быть постоянным,
по любому направлению.
Это положение известно под названием принципа Ферма-Малюса.
Аналитически его можно выразить следующим образом. Принимая,
что на отдельных участках рассматриваемого луча Z1? Z2, . . ., lm
между преломляющими поверхностями при показателях преломле-
ния zZjl, ?г2, . . пт будет находиться А15 N• • • , Nm волновых
поверхностей, то числа N можно выразить через отношения отрез-
ков I к длинам световых волн А,2, . . ., \п
= , . . . , ^)п = ф- = -Ц^. (280)'
М Л-q ^-2 М)
114
Суммируя величины 7Vlf N2, . . Nm получаем
m
^=27Vi=T2z‘”‘=const- (281)
i = l
Сумму ^l.n. нередко называют оптической длиной хода луча.
Из приведенных рассуждений следует, что эта сумма вдоль любого
из лучей для получения идеального изображения должна полу-
чаться постоянной.
§ 37. Переход от волновых аберраций к геометрическим
Представим себе участок волновой поверхности, заключенный
между двумя координатными плоскостями хоу и xoz.
Выберем на этой волновой поверхности некоторую точку М
с координатами (ж1, уГ1 zr) и построим в этой точке нормаль, пере-
секающую координатную
плоскость yoz в точке
с координатами лг0 и у0.
Эта картина представлена
на рис. 73.
У равнение волновой
поверхности представим
в виде
x = f(y,z). (282)
Следы пересечения этой
волновой поверхности с
плоскостями у = уг и z =
= zr выразятся уравне-
ниями
X = / (2, у ~ уг = const)
x = f(^z-=z1 = const, у)
Y
Рис. 73
(283)
Уравнения нормалей к этим следам, восстановленных в точке М,
будут
Ж——x—x1 = —y~U1 • (284)
dz ду
Система этих двух уравнений определяет проекции нормали
к волновой поверхности в точке М на обе координатные плоскости.
Полагая текущую координату х = 0, получаем величины попе-
речных аберраций = zQ и gs = yQ
= = + (285>
8*
115
Формула (285) дает выражения поперечных аберраций в зависи-
мости от общего уравнения волновой поверхности. Однако чтобы
установить зависимость поперечных аберраций от величины волно-
вых аберраций, обратимся к рис. 74, на который нанесена точка М
с рис. 73. Соединим эту точку с началом координат — точкой О.
Откладывая на этом направлении постоянный радиус R сферы
сравнения, получим несовпадение конца этого отрезка с точкой М
на некоторую величину 8, которую можно рассматривать как вели-
чину волновой аберрации.
Величина расстояния точки М от начала координат будет равна
геометрических аберраций
Пренебрегая в формуле (286)
квадратом малой величины 8 и диф-
ференцируя эту формулу в частных
производных по у и z, находим
-2R = 2 %- х + 2z = 2сгг;
dz dz 1 f’
-2R^ = 2^x + 2y = 2as. (287)
Формулы (287), как это нетрудно
видеть, дают непосредственную за-
висимость между поперечными абер-
рациями и волновой аберрацией.
Составляя отношения поперечных
аберраций к расстоянию R. можно
перейти к представлению аберрации
в угловой мере. Такое выражение
выгодно в тех случаях, когда изобра-
жение, создаваемое оптической системой, располагается в бесконеч-
ности, что часто встречается при оценке качества изображения
систем, работающих совместно с глазом. Таким образом, можно
написать
~Ъ =
(288)
Тогда координаты z и у можно отнести к координатной системе,
расположенной в плоскости выходного зрачка системы.
Возвращаясь к формулам (287), можно величины координат точ-
ки М на волновой поверхности выразить через апертурные углы ut
и us.
Полагая, что эти углы малы, можно получить приближенное
выражение прямоугольных координат z и у
z = Rut\ y = Rus.
(289)
116
После дифференцирования формул (289), преобразуем формулы
(287)
дг __ дг
dut ’ dus
Разлагая выражение для волновой аберрации в ряд по степеням
апертурных углов и учитывая, что волновая аберрация должна быть
симметричной по отношению к меридиональной плоскости, можно
написать
е==е0 + Л^ + Л^2 4-ЛХ + Л',^_)_С',^^+ . . . (291)
В этом выражении постоянную 80 можно исключить из рассмо-
трения выбором соответственного радиуса для сферы сравнения.
Член, содержащий апертурный угол ut в первой степени, может
быть приведен к нулю, если центр сферы сравнения будет располо-
жен на главном луче рассматриваемого пучка. Тогда оставшиеся
два члена второй степени относительно апертурных углов определят
собой астигматизм, члены третьего порядка — кому и члены четвер-
того — сферическую аберрацию.
Величины самих коэффициентов A't, А#, А} и т. д. в общем слу-
чае будут зависеть от величины предмета или изображения; их можно-
представить также как функции полевого угла (3. При небольших
полях зрения и небольших апертурах можно ограничиться разложе-
ниями по полю зрения также не выше четвертой степени. Тогда
общее выражение для волновой аберрации несколько упрощается.
Так, оба коэффициента, определяющие собой кому, будут равны.
Для сферической аберрации будет также существовать лишь один
независимый коэффициент, причем в ее выражении не сможет фигу-
рировать величина предмета, так как это привело бы к пятому
порядку разложения. На основании этого можно сделать важный
вывод о том, что при небольших полях зрения сферическая аберра-
ция по полю зрения сохраняется постоянной.
Коэффициент комы будет изменяться линейно, а коэффициенты
астигматизма — по квадратичной зависимости.
Заметим, что выражение аберраций в волновой форме выгодно
еще и тем, что волновые аберрации, возникающие в любой части
системы, переносятся в пространство изображений без каких-либо
преобразований; их можно непосредственно суммировать по любому
из рассматриваемых лучей.
(290)
§ 38. Дифракция. Дифракционная разрешающая способность
Ранее уже говорилось, что в ряде случаев представления гео-
метрической оптики оказываются недостаточными и приходится
использовать представления волновой оптики.
Рассмотрим распределение световой энергии в плоскости, про-
ходящей через геометрическое изображение светящейся точки, сво-
бодное от аберраций. Обращаясь к рис. 75, на котором представлена
117
картина идеальной волновой поверхности с расположенными на ней
элементами dSQ и dS1 на расстоянии Zo от точки изображения Ло,
можно принять согласно допущению об отсутствии волновой аберра-
ции, что расстояния от обоих элементов волновой поверхности до
этой точки Ао будут равны одно другому, т. е. Zx = Zo.
Поэтому световые возмущения будут приходить в точку Ло от
всех элементов волновой поверхности в одной и той же фазе коле-
бания.
Переходя к какой-либо другой точке плоскости изображения,
например к точке Аг, удаленной от точки Ао на некоторое расстоя-
ние г', пути Zq и Г± обладают некоторой разностью хода, которая
в первом приближении будет расти пропорционально первой сте-
пени отрезка г' и которую можно рассматривать, как своего рода
волновую аберрацию.
Наличие разности хода приведет к возникновению некоторой
разности фаз и световые возмущения не будут просто суммироваться;
при определенных разностях будет происходить вычитание и поэтому
в точку Аг придет уже другое количество световой энергии.
Интегрируя световые возмущения для всей площади зрачка
и удаляя точку А± от точки Ао, получим картину распределения
световой энергии на плоскости, проходящей через точку геометриче-
ского изображения.
Закон распределения световой энергии — освещенности — при
отсутствии аберраций и расфокусировки выразится через квадрат
отношений бесселевой функции первого порядка к ее аргументу
* = (292>
При этом величина освещенности Ео в центре дифракционного
изображения будет равна
Е0 = -~(ли'г)г. (293)
Отношение А : К в формуле (293) выражает собой величину ам-
плитуды, измеренную в длинах волн. Эта величина характеризует
яркость светового потока В.
118
Из формулы (293) вытекает, что величина освещенности в центре
дифракционного пятна будет расти пропорционально четвертой
степени выходного апертурного угла. Это объясняется тем, что при
увеличении выходной апертуры одновременно увеличивается и пло-
щадь входного зрачка, вследствие чего происходит возрастание све-
тового потока, входящего в систему, и уменьшение площади дифрак-
ционного пятна, на которой будет распределяться световая энергия,
так как согласно формуле (292) рост апертурного угла и' связан
с соответственным уменьшением расстояния г', определяющего раз-
мер дифракционного пятна.
Характер распределения световой Ел
энергии в дифракционном кружке рас-
сеяния, обусловленный формулой (292),
представлен в виде графика, приведенного
на рис. 76. Характерной особенностью
этого графика является касание кривой
оси абсцисс в нескольких точках, что
свидетельствует о существовании ряда
темных колец постепенно увеличивающе-
гося радиуса.
Первый из этих минимумов (радиус
первого темного кольца) определяется
величиной аргумента х в формуле (292),
равной 3,8317. Тогда диаметр централь-
ного дифракционного пятна будет
2r' = .3-’S31_7. /294) Рис’ 76
пи у
Совершенно очевидно, что если получить изображения двух то-
чек с центрами, расположенными на этом расстоянии, то они будут
отделены одна от другой первым минимумом и будут видимы раз-
дельно.
Если рассматриваемые точки начнут сближаться, то освещенность,
в промежутке между центрами точек начнет возрастать и при расстоя-
нии, соответствующем аргументу х, равному 1,6, величина минимума
будет одного порядка с максимумами и обе точки сольются.
Однако при несколько большем значении аргумента, равном 1,65'
(что соответствует расстоянию между центрами обоих точек, рав-
ному 3,ЗЛ : л?/), минимум окажется несколько меньше, чем макси-
мумы, и глаз человека сможет отделить одну точку от другой.
Полагая величину длины волны X, равной 550 нм, и выражая
апертурный угол и' через отношение диаметра зрачка к фокусному
расстоянию системы (если предмет расположен в бесконечности),,
можно выразить разрешающую способность в угловой мере
----550'3------206 000" = ,
1 000 000-3.142 " 2р ’
119
т. е. величина угловой разрешающей способности равна 120", раз-
деленным на диаметр зрачка входа, выраженный в миллиметрах.
Картина разрешения двух близко расположенных точек предста-
влена на рис. 77.
Глава XI
УЧЕНИЕ ОБ АБЕРРАЦИЯХ
§ 39. Сферическая аберрация
Изображение точки, расположенной на оси центрированной опти-
ческой системы, может обладать только центрированной сферической
аберрацией — несовпадением точек пересечения с осью системы
реальных лучей с положением изображения для нулевых лучей.
Картина образования сферической аберрации представлена на
рис. 78, на которой показана оптическая система и ряд входящих
в нее лучей, составляющих входные углы с осью системы равные и0,
——и2 (или высоты До, h2) и выходные углы u'Q, и и2. При
этом реальные углы образуют с осью системы точки пересечения А[
и А 2 на расстояниях и As2 от плоскости изображения для нуле-
вых лучей, проходящей через точку А'о.
Величины As' характеризуют собой величину продольной сфери-
ческой аберрации.
На этом же рисунке представлены поперечные аберрации сг^ и о2,
определяемые ординатами точек пересечения рассматриваемых лу-
чей с плоскостью изображения.
Поперечные аберрации связаны с продольными аберрациями
через тангенсы апертурных углов
о' — As' tg и As'и'. (295)
120
Величины сферической аберрации как продольной, так и попе-
речной можно выразить как некоторые функции от входных высот h
или от входных или выходных апертурных углов. Продольная сфери-
ческая аберрация Д s будет четной функцией от этих величин, а по-
перечная о' — нечетной функцией.
Сферическая аберрация системы, представленной на рис. 78г
изменяет свой знак при переходе от одних апертурных углов к дру~
гим, что иллюстрируется графиками продольной и поперечной сфери-
ческих аберраций, приведенными на том же рисунке.
Уравнение кривой продольной сферической аберрации такого
вида не может быть представлено уравнением второй степени и его
приходится выражать уравнением четвертой степени
Д/ = аи'2 + Ьи'* Д$'п + A-Sy. (296)
Первый член этого уравнения выражает сферическую аберрацию
третьего порядка, второй член — аберрацию пятого порядка. Таким
образом, пользуясь формулой (295), получаем следующее выражение-
для поперечной сферической аберрации
о' = t^su' = аи'3 + ^,5« (297)
Волновая сферическая аберрация третьего и пятого порядка
согласно формуле (296) выразится в виде
8 = А1Пи'* + Avu'e = 8Ш + 8 v. (298)
Дифференцируя, находим
~<j' = ^r = 4AIIIu,' + 6Avu'‘, (2Э«
ш
что позволяет связать один с другим коэффициенты в уравнении
волновой и продольной сферической аберрации.
4V=-|. (300)
Последнее позволяет волновую сферическую аберрацию выразить
через продольную сферическую аберрацию, а именно
(301)
Для юстировки оптических систем особый интерес представляет
сферическая аберрация воздушной прослойки между двумя сферами
одинаковых радиусов, которая возникает при нарушении воздушных
промежутков между линзами оптической системы. Определим для
этого случая величину возникающей сферической аберрации и ее
характер.
Обратимся к рис. 79, на котором представлена воздушная про-
слойка, разделяющая две поверхности с одинаковыми радиусами
кривизны г (гх = г2 = г).
Расстояние между центрами кривизны этих поверхностей к будет
равно толщине воздушной прослойки d по оси системы; первый
и последний показатели преломления примем равными п (п1 = п3 =
= п).
Углы луча А^^2А3 с осью системы примем равными и2,
и3, а с нормалями к обеим поверхностям — i2ni2. Угол между
обеими нормалями пусть будет равен Ду. Отрезки от точки А2,
образуемой пересечением луча с осью системы в пространстве воз-
душной прослойки, до центра первой поверхности обозначим через
q'l, а до центра второй поверхности — через q2.
Опуская из точки Ог на луч N2А2 перпендикуляр О^К, нетрудно
связать отрезок q[ и радиус кривизны г через углы и[ и
В соответствии с рисунком имеем
г sin = q± sin и[; г sin i2 = q2 sin (302)
122
Составляя отношение этих формул, находим
sin h _ ч'1 + d । । d
sin ii q[ qi q'i
Угол i2 можно выразить в виде разности
i2 = Ау.
В соответствии с этим формула (303) преобразуется
! I _d_ = sin (г( —Ду) .
q[ sin/J
(303)
(304)
(305)
Если толщина d мала, то и Ду тоже мал и формула (305) пере-
ходит в приближенную формулу
_d_ _ _ А?
~ г1 '
Отсюда легко находится угол Ду
Ду = —. (307)
Используя закон преломления, можно связать величины qx и q'%
перед первой и после второй поверхности с углами и2 и и3.
Находим
nLqx sin и± — n2q[ sin и2, n2q2 sin u2 = n3q2 sin w3. (308)
Углы u2 и и i с осью системы можно связать через углы iL и
и3 = и2 — i2 4- /' = Ui — h + % — Ч + (309)
Если d мала, то углы 12 и отличаются один от другого на малую
величину Ду. Вследствие этого углы ц и ъ2 будут близкими.
Дифференцируя выражение закона преломления и
зультат на исходную зависимость, имеем
dir __________________________ di
tg i' ~~ tgz
и, переходя к разностям i 2 — z{, получаем
г2 — Ч г2— ?1 А?
tg4 ““ tg?; — tgz; ’
что позволяет выразить формулу (309) в виде
Дгг==мз-«1=-^-Дт+Дт=(1-^4) Ду-
Деля почленно формулы (308), получаем
Q2 sin из == ?2 = q±+d = I _£ = sin(u1+
Ql sin zzj q'± q'± q1 sin u-^
(310)
(311)
(312)
(313)
123
Так как при малом А у величина А и тоже получается малой, то
формула (313) переходит в следующую приближенную формулу
91 \ tg ui ) 1
или
(314)
(315)
(316)
и, пользуясь формулами (312) и (309), получаем
41 i" ~г" tg U1 ) •
Если перейти к точке на оси системы, то углы и обра-
тятся в нуль и формула (316) переходит в формулу для нулевых
лучей
-^ = 1 + Г1+(«-1)т~] 4. (317)
41 L r J ?01
Вычитая из формулы (317) формулу (316), получаем отношение
продольной сферической аберрации As' к отрезку qr
]^}d. (319)
или после некоторых преобразований
As' _( 1 1 Г n — i (п cos i1 — cos ii) cos иг
41 14oi 4± L 4o 4icos ilcos H
Формула (319) выражает величину продольной сферической абер-
рации, возникающей при малой толщине d воздушной прослойки.
Однако эта формула достаточно сложна и практически во многих
случаях представляется более целесообразным определять влияние
изменения воздушных промежутков путем непосредственного про-
счета лучей через оптическую систему, в особенности, если есть воз-
можность воспользоваться для этой цели электронной счетной ма-
шиной.
§ 40. Условие синусов Аббе. Кома
В § 27 был получен меридиональный инвариант Штраубеля (фор-
мула (218), связывающий величину элемента предмета и элемента
изображения с показателями преломления и угловыми величинами [3
и р'. Пользуясь инвариантом, можно решить задачу сохранения
постоянства величины элемента изображения dyi (или величины
увеличения Vt) для любых лучей, проходящих через центр эле-
мента. Для этого нужно инвариант Штраубеля выразить через апер-
турные углы и и и' и тогда условие постоянства увеличения примет
вид
124
d111 ft cos и du -TT , /оол\
—— ---------—-7- = V z = const. (320)
dyt n cos и du 1 ' z
Интегрируя, находим
Vt J n' cos u' du’ =f n cos и du = Vtri sin ur == n sin и + C. (321)
Постоянная интегрирования С определится из условия, что при
малых углах величина увеличения Vt должна быть равной увели-
чению Vo для нулевых лучей, что приводит эту постоянную к нулю.
Таким образом, получаем
Vt = V0 = ” sin4 = const. (322)
Условие (322) известно под названием условия синусов Аббе,
гарантирующего при отсутствии сферической аберрации резкость
изображения небольшого элемента предмета, перпендикулярного оси
системы.
Однако в общем случае условие синусов Аббе не всегда соблю-
дается. Тогда, очевидно, будет существовать некоторая разность
между реальными увеличениями в меридиональной и в сагиттальной
плоскостях и линейным увеличением Vo для нулевых лучей.
Когда условие синусов Аббе не будет удовлетворено, величина
отношения п sin и : ri sin и' уже не будет равна увеличению Уо.
Полагая, что величина этого расхождения связана с величиной
выходного апертурного угла и будет четной функцией от него или
от его синуса, можно записать
= Уо (1 + Атг'2 sin2 u'4-Вп'4 sin4 и'. . .). (323)
Пренебрегая членами, содержащими синус угла и в степенях,
выше второй, и умножая обе части формулы (323) на п' sin и', полу-
чаем
п sin и == V^n' sin и' + К0Атг'3 sin3 и’. (324)
Дифференцируя, находим
п cos и du = VQn' cos и' du' ЗУ0Атг'3 sin2 и' cos и du'. (325)
Отсюда нетрудно получить величину отношения
,raC0S“l“, = Vt = = Vo (1 + 34n'2sin2 и') (326)
n cos и du 1 dy t 0 '
ИЛИ
^ = ^o(l + 3^). (327)
где под А У разумеется величина произведения из второго члена,
входящего в скобки формулы (323), на линейное увеличение Vo.
125
Также можно написать выражение для сагиттального линейного уве-
личения
vs = v0(i+4v)- (328)
Формулы (327) и (328) позволяют определить величину меридио-
нальной составляющей поперечной аберрации (Jt как разности вели-
чин y't — у'ъ и у'8 — y'Q.
Находим для луча, лежащего в меридиональной плоскости,
= У1Уо~ УцУв = 3 A VyQ = ЗАуоп'2 sin2 ut ЗАп,2и2у^ (329)
и для луча, лежащего в сагиттальной плоскости,
Ъ = (^-^о) У о = Д1/2/о = АУ’оп'*sin2 < = Ап'2и‘у'о. (330)
Обращаясь к выражениям для волновой аберрации (291), заме-
чаем, что величина комы будет определяться двумя членами, содер-
жащими апертурные углы ut и us в третьих степенях,
е = А"щ +C"utu8\ (331)
Дифференцируя по апертурным углам щ и u's, получим выраже-
ния для поперечных аберраций и vs. Таким образом,
~Gt = 3A"u2 + C"u'2. (332)
Сопоставляя формулу (332) с формулалш (330) и (329), приходим
к выводу о том, что коэффициенты в этих формулах должны быть
соответственно равны
-ЗА" = ЗАп,2у^ —С” = Ап'2у'о, (333)
откуда вытекает, что коэффициент А" будет равен коэффициенту С",
Дифференцируя формулу (331) по апертурному углу и8, можно
написать выражение для сагиттальной составляющей комы
а' = — 2C"u'fUg = 2An,2utu8yQ. (334)
Объединяя формулы (329) и (330), получаем общее выражение
для меридиональной составляющей
Gt = ЗАп,2и2 у'о + An'2u's2y'o. (335)
Апертурные углы щ и и8 можно представить как проекции апер-
турного угла и на меридиональную и сагиттальную плоскости.
Тогда
u't = u' cosy; sin у, (336)
где угол у будет определять собой угол между меридиональной
плоскостью и плоскостью, в которой лежит рассматриваемый луч.
126
Эта картина представлена на рис. 80, где в перспективе пока-
зана плоскость зрачка и плоскость, в которой располагается изобра-
жание. Цифрами без индексов показаны точки пересечения лучей
с плоскостью зрачка. Цифрами с индексами ' вверху — пересечения
тех же самых лучей с плоскостью изображения.
Заменяя согласно формуле (336) углы us и щ в формулах (334)
и (335), получаем
а' Ап'2и,2у'о (3 cos2 у + sin2 у) = An'2u'2y'Q (cos 2у + 2)
а' = Ап,2и'2у'о2 cos у sin у = Anf2u'2y'o sin 2у
(337)
Формулы (337) опреде-
ляют собой уравнение
окружности с центром,
смещенным от начала ко-
ординат на расстояние,
равное диаметру этой
окружности, дважды об-
ходимой лучом при одно-
кратном обходе по зрачку.
Переходя к меньшим
апертурным углам и', оче-
видно, будем получать се-
мейство таких двойных
окружностей, укладыва-
ющихся между общими ка-
сательными, проходящими
через начало координат
(точку на главном луче)
и составляющими одна
к другой угол, равный 60°.
Обратим внимание на
следующее обстоятельство.
Предположим, что какая-
либо оптическая система,
хорошо корригированная
в целом, обладает значи-
тельной сферической абер-
рацией в каждой из ее
половин.
Совершенно очевидно, Рис- 80
что тогда сферическая
аберрация передней половины в прямом ходе лучей должна быть
равна сферической аберрации второй половины, взятой в обратном
ходе лучей по абсолютной величине, и должна обладать обратным
знаком.
Это можно записать в следующем виде:
As' = —
(338)
127
Ясно, что суммирование таких аберраций приведет к их взаим-
ному уничтожению.
Полагая, что такая «внутренняя сферическая аберрация» в пер-
вом приближении может быть выражена в виде уравнения второй
степени от апертурного угла, можно написать
1^ = 0^ (339)
и тогда величина поперечной сферической аберрации может быть
представлена в виде
в^аи'^. (340)
Представим себе теперь, что вторая часть системы будет накло-
нена по отношению к первой части на некоторый угол у. Эта картина
представлена на рис. 81, где показан излом системы в некоторой
точке А. Вследствие такого излома углам выхода и[ из первой си-
стемы уже не будут соответствовать равные им углы ии; они будут
различаться на один и тот же угол излома
= — Y- (341)
Неравенство углов ип и и'х в свою очередь, приведет к нера-
венству суммируемых аберраций как продольных, так и попереч-
ных. Рассматривая суммирование поперечных аберраций, получим
следующее выражение для остаточной разности
сг = crz-4-0Гц = аи\ — а^и* — у)3. (342)
Раскрывая скобки в формуле (342) и делая сокращения, находим
о = Заи'^у — Заи^у2 4- ау3. (343)
Полагая, что угол у мал по отношению к углу и'г можно отбро-
сить все члены, содержащие этот угол в степени выше первой. Тогда
выражение для суммарной аберрации примет простой вид:
o'= Заи*у =3 As'у. (344)
128
Эта формула доказывает, что остаточная аберрация, возника-
ющая вследствие излома оси системы при наличии значительной
промежуточной сферической аберрации, будет комой (так как по-
перечная аберрация пропорциональна вторым степеням апертурных
углов) на оси системы и по своей величине ее меридиональная соста-
вляющая равна произведению из утроенной продольной сферической
аберрации на величину угла излома.
Таким образом, наличие комы на оси системы — в центре поля
зрения — является признаком существенного нарушения центри-
ровки системы.
Численно, полагая промежуточную сферическую аберрацию, рав-
ной 10,0 мм, и величину угла излома, равной 10' — 0,003 рад, на-
ходим весьма ощутимую величину комы, равную
сг = 3 • 10,0«0,003 = 0,09 мм.
Заметим, что поступательное смещение оси системы при наличии
только одной большой промежуточной сферической аберрации не
должно вызывать возникновения нецентрированных аберраций, так
как сферическая аберрация на небольшом расстоянии от оси си-
стемы будет оставаться постоянной, что обеспечит при суммирова-
нии аберраций от обоих частей системы ее исчезновение.
§ 41. Астигматизм и кривизна изображения
Дифференцируя в частных производных астигматические члены
в выражении, общем для волновой аберрации, получаем величины
поперечных аберраций для астигматизма, являющиеся функциями
первой степени от апертурных углов.
Таким образом, получаем
—= —о; = 2Л>;. (345)
Деля эти выражения на величины апертурных углов, находим
величины отстояния меридиональной и сагиттальной точек изобра-
жения xt и xs от плоскости изображения для нулевых лучей. Раз-
ность этих величин определит продольный астигматизм
х, = ^4-——2А'а ж=-4=-2А' (346)
f ut * s ug s 4 7
Заметим, что в точке At меридионального изображения будут
пересекаться лучи, лежащие в меридиональной плоскости, а в точке
A's — сагиттальные лучи.
Поэтому в меридиональной точке наблюдается отсутствие мери-
диональной составляющей в поперечных аберрациях. Сагитталь-
ные же лучи не смогут пересечься в этой точке и создадут некоторый
отрезок, лежащий в сагиттальной плоскости. Меридиональные лучи
также создадут некоторый отрезок в меридиональной плоскости,
проходящий через точку сигиттального изображения.
9 Заказ 2301.
129
Эта картина астигматического изображения представлена на
рис. 82. Внизу рисунка показаны отдельно поперечные аберрации,
получающиеся в различных сечениях астигматического пучка.
Рассмотрим общую картину изображения предмета в виде креста
и нескольких концентрических колец с центром, лежащим на оси
Рис. 82
системы, в том случае, когда
поверхность сагиттального изо-
бражения совпадает с плоско-
^7— — стью изображения для нулевых
лучей.
Когда поверхность мериди-
онального изображения не будет
совпадать с плоскостью изо-
бражения, все точки, рисуемые
меридиональными лучами, изо-
бразятся отрезками, направлен-
ными к центру поля зрения.
Вследствие этого произойдет
размытие изображения концен-
трических колец. Однако ради-
альные прямые, образующие
крест, останутся тонкими, так как отрезки, изображающие отдель-
ные точки
вет лишь
предмета, будут накладываться один на другой, что вызо-
неболыпое удлинение радиальных линий. Если же,
Рис. 83
наоборот, с плоскостью изображения для нулевых лучей совпадает
поверхность меридионального изображения, то тогда будет проис-
ходить размытие радиальных прямых по мере удаления рассматри-
ваемой точки от центра поля. Концентричные окружности при этом
будут изображаться резко (рис. 83).
В случае совпадения обеих астигматических точек и при несовпа-
дении их с плоскостью изображения для нулевых лучей возникнет
явление кривизны поля зрения, сущность которого сводится к кар-
тине, наблюдаемой при простой расфокусировке.
Ранее в § 28 было получено выражение для астигматизма тонкой
линзы при зрачке, совпадающем с самой линзой. Совершенно оче-
130
видно, что при перекосе тонкой линзы относительно оси системы
возникает астигматизм на этой оси системы. Однако величина такого
астигматизма будет практически менее ощутимой, чем возникновение
комы, рассмотренное в предыдущем параграфе.
§ 42. Дисперсия стекла. Хроматизм
До сих пор, рассматривая образование изображения, не затра-
гивали изменения показателей преломления в зависимости от изме-
нения длины световой волны. Такое изменение носит название дис-
персии.
Оптические стекла обладают нормальной дисперсией, при кото-
рой с увеличением длины волны величина показателя преломления
уменьшается.
Видимый участок спектра заключается в диапазоне между ли-
ниями А' и С" спектра; величина длины главнейших волн для линий
приводится ниже А' С D F 1 С'
X, нм 768’2 656’3 589,3 486,1 | 434,1
(347)
Для наиболее ходовых марок стекла, например для крона К8,
имеются следующие значения показателей преломления для линий D,
С и F спектра: nD ~ 1,5163; пс = 1,51385; nF = 1,52191; nF — пс ==
= 0,00806; v = 64,1.
Для обыкновенного флинта Ф1: nD = 1,6129; пс = 1,60814; nF =
= 1,62474; nF — nc = 0,01660; v = 36,9.
Обычно под дисперсией в узком смысле слова подразумевают
величину разностей показателей nD — пс, nF— nD и т. д., причем
дисперсию nF — пс называют средней дисперсией.
Приведенная выше величина
пв — В
V =-------
nF — пс
называется числом Аббе. Обратную величину числу Аббе называют
относительной дисперсией.
Совершенно очевидно, что любая оптическая система из линз
будет иметь различные показатели преломления для различных длин
волн. Следствием этого будет различие в положении и величине изо-
бражения, в аберрациях оптической системы.
Несовпадение цветных изображений по положению принято на-
зывать хроматизмом положения, или первым хроматизмом.
Его влияние на качество изображения сводится к тому, что рез-
кое и сфокусированное изображение может быть получено лишь
для одного какого-либо цвета. Изображения для других цветов не
9* 131
будут сфокусированы на ту же плоскость изображения. В резуль-
тате получится наложение на одно резкое изображение ряда различно
расфокусированных изображений для других цветов. На рис. 84
показано резко сфокусированное на плоскость изображение для
цвета D и налагающиеся на него изображения для цветов С и F
спектра.
Зная величину продольного хроматизма (расстояний цветных
изображений от основного), можно легко определить величину цвет-
ных кружков рассеяния. Для этого величину продольного хрома-
тизма следует умножить на величину выходного апертурного угла.
Если происходит несовпадение изображений для различных цве-
тов спектра по величине, то в системе наблюдается хроматизм увели-
чения, или второй хроматизм.
Величина хроматизма увеличения может быть определена либо
как разность увеличений для двух различных длин волн спектра,
либо как разность величин цветных изображений.
Составим разность увеличений Vp и Vc для двух различных
цветов
V — V -Ур Ус . . уг~ус
f с Ур Ус У
(348)
так как величина предмета не зависит от того, в каком цвете он
наблюдается.
Пользуясь выражением для линейного увеличения для основного
цвета, можно написать
= = A^=const. (349)
VD У yD yD V
Отсюда
y'F~y’C = ^y'D- (350)
Из формулы (350) следует, что при малых значениях у' разность
величины изображений будет также мала. Поэтому при устранении
первого хроматизма центральная часть поля зрения при наличии
132
второго хроматизма будет практически неокрашенной. Картина вто-
рого хроматизма представлена на рис. 85.
Рассмотрим действие объектива. Полагая, что его фокусное рас-
стояние будет разным для различных линий спектра, можно опре-
делить величину цветных изображений для удаленного предмета
Ус = — /ctg₽; у'б = — /btgp; ур = — /rtgp. (351)
Составляя отношение разности величины изображений для двух
цветов спектра к величине изображения для основного цвета и со-
кращая, находим
Уп
Формула (352) тождественна
формуле (349) и поэтому
хроматизм увеличения нередко
называют хроматизмом фокус-
ного расстояния.
Рассмотрим хроматизм про-
стой линзы в воздухе. Для
этого воспользуемся формулой
для силы линзы.
(п—1)2 d_
Г1Г2 п
Рис. 85
Два члена в этой формуле характеризуют собой следующее: первый —
силу тонкой линзы, второй — силу мениска с равными радиусами.
Дифференцируя первый член по показателю преломления, на-
ходим, что для тонкой линзы
с?ф df dn
ф /' n— 1 v
Откуда определяем хроматизм тонкой линзы
^<p = v и df = — f--
(353)
(354)
Дифференцируя по показателю преломления второй член той же
формулы, получаем, что для мениска с равными радиусами
с/ф __ (п+ 1) dn _ 72-1-1 1
ф п (п— 1) п V ’
(355)
чго дает величину хроматизма для этого мениска
<356>
133
Из формулы (356) следует, что при равных силад хроматизм
мениска превосходит величину хроматизма тонкой линзы более
чем в полтора раза.
Для линзы с концентричными одна к другой поверхностями было
получено выражение:
d
V2 ’
1
дифференцирование которого дает
бГф dn
“ф n(n—1)
Откуда для хроматизма концентричной линзы имеем:
(358)
Формула (358) показывает, что хроматизм концентричной линзы
при равных силах в п раз меньше хроматизма тонкой линзы.
Численно, для тонкой линзы с фокусным расстоянием в 200 л/л^,
изготовленной из стекла марки К 8 с числом Аббе 64,1, величина
хроматизма получается равной
Г 200,0 о л
df =— — =------—- = —ЗД мм.
v 644
Нетрудно определить величину хроматизма двух соприкаса-
ющихся тонких линз.
Так как сила системы, составленной из этих линз, будет равна
сумме сил обеих линз
ф = ф1 + ф2, (359)
то величина хроматизма определяется суммой
йф = (/ф1 + (/фа = ^- + ^-. (360)
Формула (360) позволяет решить задачу исправления хроматизма
для системы из двух соприкасающихся линз.
Приравнивая правую часть формулы (360) нулю, находим
<Р1
ф2
Таким образом, для устранения
обходимо, чтобы отношение сил
чисел Аббе, взятому с обратным
Отсюда вытекает невозможность ахроматизации системы из двух
тонких линз, изготовленных из стекла одной и той же марки или
имеющих одинаковые числа Аббе, так как в этом случае оптическая
сила системы должна быть равна нулю.
-t- <361)
хроматизма в данном случае не-
линз было равно отношению их
знаком.
В качестве примера приведем расчет составляющих сил линз,
исходя из условия ахроматизации и применяя марки стекол, при-
веденные выше. Полагая фокусное расстояние системы из обеих
линз равным 100 мм, находим
1 . vi 64
(Р=то=^ + ^; = 36-Ф2-
Решая эту систему уравнений относительно фх и ф2, получаем
ф! = 0,0228; /; = 44,0 мм\ ф2 = —0,0128; = —78,0 мм.
Соблюдение условия ахроматизации для двух каких-либо линий
спектра еще не гарантирует ахроматизации для других линии. Чтобы
такая ахроматизация могла быть, необходимо соблюдение двух
уравнений
Ф1_==_^1_==_2У£
фг v2 v2 ’
(362)
что возможно лишь в том случае, если у выбранной пары стекол
будут одинаковыми отношения частных относительных дисперсий
V< Vo . Пт — 77п а
— = — = const = —-----------— = 0.
V1 V2 «I —
(363)
Для подавляющего большинства марок оптического стекла эти
величины изменяются одновременно с изменением чисел Аббе, почти
по линейной зависимости
+ (364)
В формуле (364) коэффициент Ъ практически постоянен, а коэф-
фициент а может изменяться в сравнительно узких пределах. По-
этому для обеспечения равенства частных относительных дисперсий
приходится ограничиваться сравнительно близкими значениями
чисел Аббе, что вызывает известные затруднения при простой ахро-
матизации и приводит к крутым радиусам и к большим силам линз.
Стремление избежать этих затруднений привело к созданию спе-
циальных марок оптического стекла, позволяющих устранять вто-
ричный спектр (обеспечивать ахроматизацию для нескольких линий
спектра) при достаточно большой разности чисел Аббе. Такие стекла
иногда называют стеклами с укороченным вторичным спектром.
Системы с устраненным или с уменьшенным вторичным спектром
обычно называют апохроматами.
Кроме хроматизма положения и хроматизма увеличения иногда
бывает еще хроматизм в зрачке. Это встречается у телескопической
системы с промежуточным изображением, около которого распо-
лагается неахроматизованная линза — коллектив. В еще большей
степени проявляет себя хроматизм в зрачках в некоторых осветитель-
ных системах, построенных из неахроматизированных линз.
135
Хроматизм в зрачках при малых полях зрения проявляет себя
обычно незначительно. Однако при больших полях зрения он может
вызвать весьма ощутимые изменения окраски поля зрения.
Рис. 86
Сущность влияния хроматизма в зрачках на окраску поля зрения
заключается в том, что при большом хроматизме выходные зрачки
в оптической системе для различных цветов спектра могут далеко
отстоять один от другого, что приводит к существенному изменению
136
виньетирования для различных цветов. Вследствие этого какой-либо
один цвет будет преобладать над другими.
На рис. 86 показана картина изменения виньетирования при
различных величинах диафрагмы после системы, обладающей хро-
матизмом в зрачках: а — в случае, когда материальная диафрагма
равна по диаметру выходному зрачку, возникает окраска поля;
б — в случае, когда изображение неахроматизованного зрачка боль-
ше отверстия материальной диафрагмы, расположенной после си-
стемы, окраска поля не возникает; в — в случае, когда отверстие
диафрагмы превосходит изображения неахроматизованного зрачка,
окраски поля также не происходит.
Часть III. ЭЛЕМЕНТЫ ОПТИЧЕСКИХ СИСТЕМ
Глава XII
ЗЕРКАЛА И ПРИЗМЫ
§ 43. Задачи, решаемые с помощью призм
Центрированные оптические системы не могут решать задач,
связанных с изменением направления визирной линии (при постоян-
ном положении изображения) и поступательного переноса изобра-
жения в направлениях, перпендикулярных оси системы.
Поэтому для решения ряда задач, не укладывающихся в возмож-
ности центрированных оптических систем, приходится прибегать
к нарушениям центрировки, что удобно делать, применяя плоские
зеркала и отражательные призмы.
Использование плоских зеркал и отражательных призм в боль-
шинстве случаев не ведет к изменению аберраций оптической системы
и, следовательно, качества ее изображения.
Применение призм и зеркал обеспечивает:
1) изменение направления оси системы (постоянное или перемен-
ное) при переходе от пространства предметов к пространству изоб-
ражений;
2) поступательное смещение оси системы;
3) оборачивание изображения (постоянное или переменное);
4) изменение увеличения в одном или различных направлениях
(в случае применения преломляющих призм);
5) исправление некоторых аберраций, возникающих при создании
нецентрированных оптических систем (кособокий астигматизм, на-
клон плоскости изображения, кособокая кома, дисторсия, хроматизм
увеличения).
§ 44. Действие одного плоского зеркала
Рассмотрим действие плоского зеркала в плоскости его главного
сечения, которое образуется падающим лучом, нормалью и отражен-
ным лучом.
Обратимся к рис. 87. На этом рисунке представлен ход двух
параллельных лучей, лежащих в плоскости главного сечения зер-
138
кала, 1——Г и 2 — N2— 2', претерпевающих отражения в точках
N1 и N2 и отстоящих друг от друга на расстоянии, равном NrN2-
Углы обоих лучей с нормалями будут, очевидно, равны
Ч ~ (365)
Расстояние h между обоими лучами в первом случае (рис. 87, л,
когда плоскость зеркала расположена горизонтально) будет равно
h = NyN2cos = —h', (366)
а во втором случае h' = h. а
Из формулы (366) сле-
дует, что отраженные лучи
поменяются местами по
отношению к лучам, па-
давшим на зеркала для
первого случая, и не по-
меняются для второго.
Вместе с тем явление от-
ражения от плоского зер-
кала всегда можно рас-
сматривать как преобразо-
вание хода лучей, произ-
водимое некоторой теле-
скопической системой, так
как ход отраженных лучей
остается параллельным
и тогда можно говорить
обо всех увеличениях, при-
сущих телескопическим си-
стемам вообще.
В первом случае ввиду
изменения знака у вели-
чины h можно принять величину линейного увеличения в плоско-
сти чертежа равной —7, что согласно инварианту Лагранжа —
Гельмгольца приводит и к равенству углового увеличения также —1.
Это позволяет написать
Vt = wt = -1,
(367)
если плоскость рисунка принять за меридиональную плоскость.
Рассматривая некоторый луч 3—5', лежащий в сагиттальной
плоскости, проведенной через луч 1—7', и принимая луч 3—3'
параллельным ему (на нашем рисунке луч 3—3' спроектируется на
луч 7—7'), увидим, что для сагиттальной плоскости эти лучи не
будут меняться местами, что позволяет написать
V, = W, = 1. (368)
Таким образом, оба увеличения в сагиттальной плоскости (ли-
нейное и угловое) оказываются равными +1.
139
Следствием разности знаков для увеличений в меридиональной
и сагиттальной плоскостях явится то, что изображение предмета
претерпит оборачивание лишь в одном из направлений — мериди-
ональном и в результате получится зеркальное перевернутое изо-
бражение.
Обращаясь ко второму случаю, представленному на рис. 87, б, ви-
дим, что для него отраженные лучи и в меридиональной, и в сагит-
тальной плоскостях не изменят знака и у величины расстояния между
ними, что позволяет записать
^ = Ув==+1. (369)
Но оба угловых увеличения поменяют знаки, так как, пользуясь
инвариантом Лагранжа — Гельмгольца, получим
п' = ~п. (370)
Для наблюдателя, расположенного справа от зеркала, отраженное
изображение казалось бы неперевернутым и незеркальным; но так
как на самом деле наблюдать отраженное изображение можно лишь
с левой стороны зеркала, то тогда вследствие изменения левой сто-
роны на правую при переходе наблюдателя произойдет дополни-
тельное оборачивание изображения слева направо и изображение
станет зеркальным.
Формулы (367) — (370) полностью определяют поведение отра-
женных лучей, если известен ход какого-либо одного отраженного
пучка лучей.
Указанные формулы характеризуют свойства зеркала через
свойства телескопической системы; совершенно очевидно, что все
свойства зеркал могут быть получены и при помощи телескопических
систем, обладающих теми же самыми увеличениями, но построенных
на иных принципах (например, системы, построенные из цилиндри-
ческих линз с фокусными расстояниями, равными по величине,
но обратными по знаку; системы, построенные из волоконных эле-
ментов, и т. д.).
Заметим, что поступательное перемещение зеркала в направлении
его нормали приведет в первом случае к смещению отраженных
лучей в направлении нормали на удвоенную величину перемещения
зеркала.
Из рис. 87, а нетрудно видеть, что оборачивание изображения
происходит лишь в плоскости рисунка, совпадающей с плоскостью
главного сечения зеркала.
Если нормаль к зеркалу вращать вокруг падающего луча, то
вместе с нормалью будет вращаться и главное сечение, благодаря
чему произойдет поворот изображения в его плоскости на удвоенный
угол поворота нормали.
Во втором случае, представленном на рис. 87, б, нормаль может
даже совпадать с падающим лучом; тогда, очевидно, вращение зеркала
не приведет к вращению нормали и изображение останется неподвиж
140
ным; это вытекает также и из равенства обоих угловых увеличений
и по величине и по знаку.
Применение плоского зеркала преследует цель отклонения луча
от его начального направления на некоторый угол 8; величина этого
угла для первого случая выразится разностью 180° — 2i; для второго
будет просто равно 21.
Уменьшая углы t в первом случае и увеличивая их во втором,
можно прийти к одному и тому же углу отклонения, например рав-
ному 90°; тогда, очевидно, отражение от плоского зеркала можно
рассматривать принадлежащим как первому, так и второму случаям;
переход от одного случая к другому будет связан с выбором положе-
ния наблюдателя.
В
О
Рис. 88
в
§ 45. Отражение от системы двух зеркал
Простейший случай действия двух зеркал будет наблюдаться
тогда, когда плоскости главных сечений обоих зеркал будут совпа-
дать друг с другом и плоскостью рисунка, как это представлено на
рис. 88.
Углы падения и отражения
на первом зеркале обозначим
через и на втором —
через i2 и ^5 угол между обоими
зеркалами примем равным а.
Точку отражения луча на
первом зеркале обозначим
через на втором — через N2;
полный угол отклонения луча
после двух отражений обозна-
чим через 8.
Исходя из рассуждений пре-
дыдущего параграфа, нетрудно
установить, что после отраже-
ния от пары рассматриваемых
зеркал придем к телескопиче-
ской системе с угловыми уве-
личениями Wt = Ws — +1,
а это приведет при повороте па-
дающего на систему зеркал луча
на угол р к повороту отражен-
ного луча на тот же самый угол р
кальность изображения при этом будет отсутствовать.
Определим величину угла отклонения луча 8 от его первоначаль-
ного направления, которая согласно равенству угловых увеличений
+ 1 должна оказаться постоянной.
Из треугольника N±N2С следует, что
и в том же направлении; зер-
2^ = 8 — 2i2
(371)
141
и из треугольника N±N2E
f1 = a —12. (372)
Отсюда следует, что
8 = 2а . (373)
независимо от величины угла ix, определяющего поворот пары зер-
кал относительно падающего луча.
Рассматривая случай, когда отраженные лучи будут направлены
влево, что представлено на рис. 89, видим, что отражение на первом
зеркале будет происходить подобно тому, как это было при рассмо-
трении простого зеркала в первом из рассматриваемых случаев; вто-
рое же отражение будет происходигь аналогично второму случаю,
т. е. так, как это было связано
с изменением знака у пока-
зателя преломления.
Это приводит к необходимо-
сти принять разные знаки для
показателей преломления, что
определяет знаки увеличений
в меридиональной и в сагитталь-
ной плоскостях согласно фор-
мулам
V, = l = -Ws. (374)
Отсюда следует, что эта система зеркал, в отличие от предыдущей,
будет иметь разные знаки для угловых увеличений и сохранять
постоянство угла отклонения лишь в плоскости главного сечения;
однако возникающая в ней зеркальность изображения при переходе
наблюдателя справа налево будет скомпенсирована.
При вращении плоскости главного сечения такой системы зеркал
вокруг входящего луча в связи с изменением направления оборачи-
вания произойдет вращение изображения со скоростью, вдвое боль-
шей, чем скорость вращения самой системы зеркал.
Угол отклонения для этой системы зеркал определится по фор-
муле
8= 180°-2а. (375)
Так же, как и в случае рассмотрения действия одного зеркала,
можно осуществить переход от одного вида системы из пары зеркал
к другому. Однако при таком переходе необходимо изменить знак
у показателя преломления и одновременно с этим изменить положе-
ние наблюдателя.
Для системы из двух зеркал всегда сохраняется незеркальность
изображения, которую нетрудно распространить и на любое четное
число зеркал.
142
Обратим внимание на следующее обстоятельство. Плоскости
обоих зеркал, будучи продолженными до взаимного пересеченияг
образуют линию пересечения — ребро между отражающими гранями.
Такое ребро представ-
лено на рис. 90 точкой С; А
рассматривая на этом ""
рисунке ход какого-либо
произвольного луча, лежа-
щего в главном сечении
системы зеркал и прохо-
дящего на расстоянии а
от этого ребра, нетрудно
установить, что и выхо-
дящий из этой системы
зеркал отраженный луч
сохранит точно такое же
расстояние а от той же
точки С.
Рис. 90
Действительно, из равенства треугольников N^K^C и NXKC^
KCN2 и K2CN2 вытекает равенство отрезков СК± и СК2.
Обратимся к совокупности пары зеркал, обладающих тем свой-
ством, что их главные сечения располагаются в двух взаимно пер-
пендикулярных плоскостях. Эта картина представлена на рис. 91.
Будем полагать также, что и на первом, и на втором зеркале
лучи будут отклоняться от своего первоначального направления
на углы, равные 90°.
Нетрудно представить, что при этом нормали к обеим отражающим
плоскостям будут расположены в двух взаимно перпендикулярных
плоскостях и составят с отрезком луча NtN2 углы, равные 45°.
143
Это позволяет легко определить угол между обеими нормалями —
он будет равен 60°, так как эти нормали (если нормаль в точке
N2 перенести поступательно в точку можно рассматривать как
диагонали двух соседних граней куба (диагонали трех граней куба
составляют равносторонний треугольник).
Совершенно очевидно, что в этом случае ребро между отража-
ющими гранями уже не будет лежать в плоскости, параллельной
входящему и выходящему лучам, а будет к ним наклонено.
Рис. 92
Нетрудно установить
также, что и повороту си-
стемы таких зеркал вокруг
входящего луча будет со-
ответствовать поворот изо-
бражения уже не на удво-
енный, а на равный по-
вороту угол.
Можно показать, что
при произвольном угле
поворота пары зеркал во-
круг своего ребра не про-
изойдет никаких измене-
ний в ходе лучей после
отражения от обоих зеркал.
Пользуясь этим свой-
ством ребра пары зеркал,
можно установить некото-
рые закономерности, свя-
занные с поворотом этого
ребра вокруг биссектрисы
угла между входящим и
выходящим из системы
лучами.
Обратимся к рис. 92, на котором показано ребро пары зеркал,
составляющих между собой угол а.
Падающий на ребро пары зеркал луч AN и отраженный зеркалами
луч A'N составят между собой угол е.
Лучи AN и A'N лежат в плоскости, перпендикулярной ребру
пары зеркал.
Строя биссектрису угла 8, проведем плоскость Р, перпендику-
лярную этой биссектрисе.
Тогда из треугольников AMN и A'MN нетрудно получить ве-
личины отрезков AN и A'N, равных друг другу.
Получим
AN=MNtg^-.
(376)
Придавая ребру поворот на некоторый угол у вокруг биссектрисы
NM, повернем плоскость главного сечения на тот же самый угол у,
144
и тогда новая плоскость главного сечения пересечет плоскости,
проходившие через вошедший и отраженный лучи и ребро, по не-
которым прямым A±N и NA[, которые можно рассматривать, как
новые входящий и отраженный лучи.
Отрезки, отсекаемые точками М и А^, М легко находятся
из чертежа
= = (377)
1 cosy cosy & 2 ' '
Составляя отношения отрезков А ГМ и MN, определяем половину
угла отклонения между лучами ArN и A[N
8 tg4
(378>
Формула (378) показывает, что при небольших углах у поворота
ребра относительно его исходного положения угол отклонения луча,
создаваемого системой зеркал, будет изменяться на величину выс-
шего порядка малости.
Однако поворот ребра скажется на повороте изображения в его
плоскости, так как положение отрезка ААГ, определявшего исход-
ное направление на предмете, уже не будет перпендикулярным
новому положению плоскости главного сечения. Кроме того, по-
ворот изображения следует оценивать в плоскости, перпендикуляр-
ной входящему и выходящему лучам.
В силу этого углы поворота предмета и изображения вокруг обоих
лучей получатся равными проекциям угла у на плоскости, перпен-
дикулярные лучам
tg Y1 = 4^ - 4# cos 7 = tg Y cos |. (379)
Результирующий поворот изображения будет равен удвоенному
углу уг В случае малых углов у результирующий угол поворота
изображения будет равен
2у1 = 2у cos у. (380)
Таким образом, вращение ребра пары зеркал может быть исполь-
зовано в случае необходимости для изменения наклона изображения.
§ 46. Отражение от системы трех зеркал
Отражение от системы трех зеркал происходит либо тогда, когда
главные сечения всех трех зеркал совпадают друг с другом, либо
тогда, когда такое совпадение отсутствует.
Первый случай легко приводится к одному из случаев действия
одного зеркала, так как это сразу же вытекает из рассмотрения воз-
можных комбинаций увеличений для такой системы трех зеркал.
10 Заказ 2301.
145
-Кроме того, такая система трех зеркал может быть разделена на си-
стему двух зеркал, дающих постоянный угол отклонения и незер-
кальное изображение, и третье зеркало, создающее зеркальность
изображения и переменность угла отклонения.
Эти свойства системы трех зеркал с общей плоскостью главного
сечения сразу же можно распространить и на любое нечетное число
В плоскости S
4 —--------
В плоскости S
---------4'
- J3S
—-------2
2
В плоскости Т В плоскости В
В плоскости Т
Рис. 93
зеркал с общим главным сечением, присоединяя к системе, состоящей
из четного числа зеркал, еще одно зеркало.
Отсюда вытекает, что система из таких трех зеркал не будет
обладать какими-либо новыми свойствами по отношению к одиноч-
ному зеркалу.
Однако случай, когда три зеркала не совпадают своими главными
сечениями, не может быть приведен к случаю одного зеркала и по-
тому представляет особый интерес.
Действительно, сочетая случай системы из двух зеркал с глав-
ными сечениями, расположенными в двух взаимно перпендикуляр-
ных плоскостях, со случаем зеркала, дающего отраженный пучок
лучей в обратном направлении, приходим к системе, у которой ли™
146
нейное увеличение в обеих плоскостях будет равно —1 при показателе
преломления для последней среды с обратным знаком по отношению
к первой среде; вследствие этого получаем
И^ = Ж8 = 1. (381)
8 плоскости Т
В плоскости 8
4----I
2
3'
О'
/'
2'
О’
4'
В плоскости Т В плоскости 8
В плоскости Т
3
6
Рис. 93
* Этот последний — четвертый случай дает систему, обладающую
постоянством угла отклонения в обеих плоскостях при обратном
ходе отраженных лучей.
Итак, все рассмотренные шесть случаев следующие:
1) прямой ход; Wt = W8 = 1; система из двух зеркал с совпа-
дающими главными сечениями;
2) прямой ход; Wt = —1; Wg=l; одно зеркало (две ориентировки);
3) прямой ход; Wt = Ws = —1; система из двух зеркал с пер-
пендикулярными главными сечениями;
4) обратный ход; Wt = Wg = 1; система из трех зеркал;
5) обратный ход; Wt = —1; Ws = 1; система из двух зеркал
с совпадающими главными сечениями (две ориентировки);
10*
147
6) обратный ход; Wt = Ws = —1; одно зеркало, действующее
с обратным ходом отраженных лучей.
Приведенные случаи полностью исчерпывают всевозможные ком-
бинации угловых увеличений как при прямом, так и при обратном
ходе отраженных лучей.
Картины хода лучей для этих случаев приведены на рис. 93, а—з.
§ 47. Вращение изображения
Как было показано, при разных знаках угловых увеличений
при вращении системы зеркал будет происходить вращение изобра-
жения.
Обратимся к рис. 94, на котором представлен вид изображения
вдоль оси пучка до и после отражения его от системы зеркал.
Нетрудно видеть, что при повороте плоскости АВ вокруг оси пучка
на некоторый угол у по ходу часовой стрелки сопряженная ей плос-
кость А'В' после отражения от системы зеркал повернется на угол
у в противоположном направлении, если изображение поворачива-
лось лишь в направлении 2—4.
Отсюда вытекает, что при повороте системы зеркал на угол у
вокруг оси входящего в нее пучка лучей отраженный системой пучок
лучей повернется на угол 2у относительно своего первоначального
положения. Таким образом, изображение будет вращаться со ско-
ростью вдвое большей, чем скорость вращения самой системы.
Если же система зеркал с неполным оборачиванием будет не-
подвижна, то тогда она будет изменять направление вращения изо-
бражения на обратное.
Заметим, что вращение изображения с удвоенной скоростью бу-
дет наблюдаться лишь тогда, когда положение наблюдателя фикси-
ровано в пространстве; если же положение наблюдателя будет свя-
зано с самой оптической системой, то увеличения скорости вращения
изображения вдвое наблюдаться не будет. Так, если наблюдатель
148
будет связан с положением главного сечения системы зеркал, то
при ее вращении он будет наблюдать лишь относительное вращение
изображения по отношению к системе.
Равным образом, если расположение предмета будет связано
с системой (например, когда вращение визирной оси системы про-
исходит в вертикальной плоскости), то изображение будет связано
с самой системой и если она будет поворачиваться по отношению
к наблюдателю, то для него изображе-
ние будет вращаться вместе с системой. \
Эти два случая представлены на х—1
рис. 95 и 96. 44 X
\ ч \ 4
Ч 2 \
Глава XIII
ПЛОСКОПАРАЛЛЕЛЬНАЯ ПЛАСТИНКА
§ 48. Общие свойства плоскопараллельной пластинки
Рассмотрим ход лучей через плоскопараллельную пластинку,
представленный на рис. 97.
Произвольно идущий луч составляет с осью и нормалью к пла-
стинке углы Расстояние от точки пересечения луча с осью
до пластинки обозначим через $х; высоту на первой поверхности —
через hx и на второй поверхности через fe2.
Показатель преломления пластинки примем равным п и толщину
пластинки равной d.
149
Угол u2, равный углу преломления z{, определится на основании
закона преломления
п sin z' = sin i± = n sin z2 = sin z2 = sin щ. (382)
Высоты hr и h2 связываются согласно рисунку формулой
h2—h±= ~d tg u2. (383)
Отрезки s2 и sx можно выразить через высоты h2 и h±. Находим
Разделив обе части формулы (383) на tg и21 определяем величины
отрезков s2 и sx
^d.
tg «1
*2 =
(385)
Пользуясь законом преломления, можно отношение тангенсов
представить через отношение косинусов и показатель преломления
, cos щ d
s9 — s1--------------
2 х COS U% п
и, выражая косинусы через синусы,
, _ d Г 1 — sin2 их
51 п 1 / sin2 их
v 1------------------------
(386)
(387)
Из формулы (387) следует, что при больших углах иг отрезок s2
не может быть постоянным при постоянном отрезке таким образом,
при конечных углах плоскопараллельная пластинка будет обладать
сферической аберрацией для точки на оси.
В случае же малости апертурных углов иг величины косинусов,
входящие в формулу (386), обратятся в единицу и тогда отрезок
150
s02 для нулевых лучей уже не будет зависеть от углов иг и будет
постоянной величиной
4 = «1-4- (388)
Из разности формул (387) и (388) нетрудно получить выражение для
сферической аберрации плоскопараллельной пластинки
Д^ = ^-4= А-1 / (389)
2 02 I/ sm2 it! I n 4
\ 1 тг2 J
Пренебрегая в формуле (389) высшими степенями в разложении
синуса иг, нетрудно перейти к приближенной формуле для сфери-
ческой аберрации плоскопараллельной пластинки
о»)
Полагая величину показателя преломления равной 1,5, получаем
численное значение для сферической аберрации плоскопараллельной
пластинки
Д$'п = u*d 0,2uid.
В частности, при апертурном угле иъ равном 0,1, сферическая
аберрация получается равной
Д,П1< 0,002^=5^.
При больших апертурных углах, когда нельзя пользоваться
приближенным выражением для сферической аберрации, например
при угле равном 45°, согласно формуле (389) находим
д< = f 1 _ /ZMZV d .
I/ л_1_ П 7’5
\ г 4,5 J
Приближенная формула (390) дала бы нам заниженное значение
сферической аберрации, равное d/10.
Заметим, что сферическая аберрация плоскопараллельной пла-
стинки всегда положительна.
Возвращаясь к рис. 97, видим, что плоскопараллельная пластинка
вызывает перемещение точки пересечения луча с осью на вели-
чину Д.
Ее нетрудно определить из рисунка
Д = с/. (391)
Используя формулу (388), для нулевых лучей получим
До = ("-1)4- (392)
151
Формула (392) позволяет определить смещение изображения,
вызываемое плоскопараллельной пластинкой; она положена в ос-
нову способа редуцирования плоскопараллельной пластинки к воз-
духу, часто применяемого при расчетах призм.
Хроматизм плоскопараллельной пла-
стинки. Дифференцируя формулу (392) по показателю преломле-
ния, можно получить выражение хроматизма положения для плоско-
параллельной пластинки
О
п — 1 d
п2 v
(393)
Численно, полагая п = 1,5163 и v — 64,1, находим
0,5163 d ~ _d_
1,51632* 644 “ 300 ’
Величина хроматизма увеличения, вносимого плоскопараллель-
ной пластинкой, может быть получена, как произведение из хрома-
тизма положения на величину тангенса полевого угла
6/= fix' tgP'.
(394)
§ 49. Наклонная плоскопараллельная пластинка
Предположим, что плоскопараллельная пластинка будет накло-
нена к оси системы на угол |3 (рис. 98).
Обозначим толщину пластинки через d и отрезки вдоль луча
через $ и t.
Размещая предметную точку на первой поверхности пластинки,
можно принять
В соответствии с этим получаем
s1 = s[==t1 = t[ = 0, (395)
так как точка 4{, явля-
ющаяся изображением
предметной точки 4, так-
же совпадает с первой
поверхностью пластинки.
На второй поверхности
пластинки луч преломится
в некоторой точке TV2;
расстояние этой точки от
точки 7V\ — косую тол-
щину можно рассматри-
вать как отрезки s2 и t2
перед второй поверхностью.
__ . ___ и
S2 — 2 — COS 02
(396)
152
Используя меридиональный и сагиттальный инварианты, легка
находим величины отрезков s2 и ^2
1 __ п COS 02
s2 d
(397)
и
1 п COS3 02
Г2 d cos2 0x
Определим проекции отрезков t2 и s2 на ось пластинки (перпен-
дикуляр к обеим поверхностям пластинки). Получим
о cos3 0х d
Leos Pi=--------------------------------dr-’ —
2 COS3 02 n
и
(398}
(399}
, □ cos Bi d
S9 COS Pi =------.
2 ri COS 02 n
Зная величины этих проекций, нетрудно вычислить
опальное Д t и сагиттальное Д 8 смещения изображения
COS3P1 \ ,
п COS® р2 /
(400)
мериди-
(401)
COS 0Х
п COS 02
(402)
Деля правые и левые части формулы (401) на (402), получим от-
ношение меридионального и сагиттального смещений
cos3 Pi
__ П COS3 02
A? 1 1 cos Pi~ ‘
n COS 02
Определил! порядок величин, полагая п = 1,5 и величину угла
равной 45°
(403)
. 1--t4-0,83
Д/ 1.5
As = 1 1
1,5
. с 0’8
1>5
Отношение же сагиттального смещения к смещению изображения
для нулевых лучей будет равно
1—A cos Pi
п COS 02
1—-
п
Ao
(404)
= + cos Pi
и
As = (Z + Sa cos
153
и численно для рассмотренного случая
До
1
i-TT-O’8
1,5
= 1,35.
Формулы (403) и (404) показывают, что величины удлинений
могут весьма существенно отличаться друг от друга, особенно при
большой длине хода луча (см. ниже в § 99, в котором описывается
призма Дове).
Глава XIV
ПРЕЛОМЛЯЮЩИЕ ПРИЗМЫ
§ 50. Преломление пучка на наклонной плоскости
Предположим, что имеется наклонная плоскость, разделяющая
две среды с показателями преломления пип' (рис. 99).
Пусть падающий пучок лучей
!\ । , образует с нормалями к плоскости
п углы падения i и преломления Г;
_____ ширину пучка до преломления при-
мем равной h и после преломле-
\ ния hf. Тогда
I \Л^Х ДГ1ЛГг=-Ат.=-^тг. (405)
I V 1 * cos i cos i 4 7
2 \ ^х/ Отсюда нетрудно получить вели-
Nu чину линейного меридионального
увеличения
РИС. 99 Ъ' рла 7 г
(406)
* h cos i 7 v 7
Так как при этом ширина пучков лучей, идущих в сагиттальной
плоскости, не изменится, то не сможет измениться и величина са-
гиттального линейного увеличения.
Пользуясь инвариантом Лагранжа — Гельмгольца и зная ве-
личины линейных увеличений, нетрудно определить и угловые
увеличения
п ____ п cos i
Vtnr n'cos i' 1
ws = A
s 72
(407)
Обратим внимание на то обстоятельство, что для наклонной
преломляющей плоскости величина углового увеличения в обоих
случаях получается отличной от единицы.
154
§ 51. Преломляющий клин в воздухе
Преломляющий клин можно рассматривать как совокупность
двух преломляющих плоскостей с углом между ними, отличным
от нуля.
На рис. 100 показан ход двух параллельных пучков лучей,
проходящих через клин таким образом, что на одной из поверхностей
углы падения и преломления получаются равными нулю.
Совершенно очевидно, что на таких преломляющих поверхностях
ширина пучка лучей не сможет измениться и в силу этого линейное
меридиональное увеличение равно еди-
нице.
Поэтому тогда, когда падающий
пучок лучей будет нормален к первой
преломляющей поверхности, величина
меридионального линейного увеличения
определится величиной увеличения на
второй поверхности
__ cos *2 _ 1Л 1 — sin2 а
cosf2 г 1 — sin2 а ’ (408)
г,=1.
Однако угловые увеличения уже не
получатся равными угловым увеличе-
ниям для второй плоскости, так как
для клина в целом показатели прелом-
ления первой и последней сред будут
одинаковыми.
Таким образом, получаем угловые увеличения
W = 1 -cos^..-l/ 1~sia2a . W
1 Vt cos z2 г 1 — 722 sin2a ’ *
(409)
Определим угол отклонения луча е, создаваемый клином при
рассматриваемом ходе лучей.
Обращаясь к рис. 100, находим
e=z'—z2, (410)
величина синуса этого угла будет
sin 8 = sin i'2 cos i2 — sin i2 cos i', (411)
и, пользуясь законом преломления,
sin 8 = sin a (n ]/l—sin2 a —]/l — n2sin2a). (412)
В случае малости преломляющего угла ос клина формула (412)
переходит в приближенную формулу
8 = (/г —1)а. (413)
155
Рассмотрим ход лучей, проходящих вторую поверхность без
преломления.
Нетрудно видеть, что переход к этому случаю равносилен зер-
кальному отображению хода лучей в первом случае, а это сразу же
приводит к сохранению величины угла отклонения 8.
Совершенно очевидно, что величина меридионального линейного
увеличения получится обратной по отношению к увеличению для
первого случая, так как ширина входящего пучка меньше ширины
выходящего пучка.
Обозначая увеличение для второго случая со штрихом вверху,
находим
* Vt Г 1 — и2sin2a > * Vs
Аналогично изменятся и угловые увеличения
W', = — = 1/ ”2sm2a . p7' = J_ = i. (415)
t W’ t V 1 —sin2a ’ s V's ' '
Сопоставляя формулы (408), (409), (414) и (415), нетрудно прийти
к важному выводу о том, что меридиональные увеличения для клина
(как линейные, так и угловые) являются переменными величинами
и зависят от хода пучка лучей, преломляющегося через клин.
Глава XV
ОСНОВНЫЕ СПОСОБЫ,
ПРИМЕНЯЕМЫЕ ПРИ РАССМОТРЕНИИ ДЕЙСТВИЯ ПРИЗМ
§ 52. Развертка системы плоских зеркал
Способ развертки отражений является одним из наиболее широко
применяемых при рассмотрении действия отражательных призм.
Сущность этого способа заключается в том, что при каждом
из отражений на плоских поверхностях строится зеркальное ото-
бражение от рассматриваемой грани всех отраженных от нее лучей
и всех последующих отражающих граней.
На развертываемом таким образом отображении произойдет
спрямление всех отраженных лучей и при последовательном раз-
вертывании всех последующих отражающих граней все лучи ока-
жутся спрямленными, в том числе и ось системы.
На следах каждого из отражений можно найти точки встречи
любого из лучей с данной отражающей гранью и определить все
углы падения и отражения.
156
На рис. 101 представлены две отражающие плоскости I и II,
составляющие между собой угол а, и ход некоторого произвольного
луча, составляющего угол с нормалью к первому зеркалу в неко-
торой точке Л'1, и угол г2 с нормалью ко второму зеркалу в точке
Л^2.
Для построения зеркального отображения II', отражающей грани
II через грань I, необходимо построить в точке А пересечения обоих
зеркал угол = а с гранью I, чем и будет однозначно определено
положение отображенной грани 1Г.
Тогда, строя по другую сторону зеркала I угол получим раз-
вернутый ход отраженного луча; этот луч встретит развернутое
отображение зеркала 1Г в точке N2.
Нетрудно установить равенство треугольников NrN2 A aNrN2A,
имеющих равные углы при точках N и А и одну общую сторону.
Из равенства этих треугольников вытекает равенство отрезков
AN2 и AN2, определяющих положение точки N2, и равенство углов
i2 между нормалью к зеркалу II и углов с нормалью к его отобра-
жению II.
Способ развертки можно с успехом распространить и на случай
отражения от неплоских отражающих поверхностей; но при этом
зеркальное отображение хода отраженных лучей и всех последу-
ющих отражений придется строить относительно касательной к не-
плоской отражающей поверхности в точке ее пересечения с осью
системы.
Схема развертки неплоской отражающей грани представлена
на рис. 102; при таком развертывании обеспечивается спрямление
оси системы, но уже не обеспечивается спрямление лучей после
отражения.
Излом лучей, не пересекающих отражающую поверхность на
оси системы, явится следствием наличия оптической силы отража-
ющей поверхности, отличной от нуля.
157
§ 53. Редуцирование плоскопараллельной пластинки к воздуху
Аналогично спрямлению лучей после развертки отражений на
плоских отражающих поверхностях можно добиться спрямления
лучей и при их преломлении на плоских преломляющих поверх-
ностях; этого можно добиться путем соответственного изменения
толщины плоскопараллельной пластинки и замены ее показателя
преломления единицей.
Нередуцированная и редуцированная к воздуху плоскопарал-
лельные пластинки представлены на рис. 103, а, б. Нетрудно ви-
деть, что процесс редуцирования сводится к совмещению точек
А предмета п А' изображения после плоскопараллельной пластинки,
откуда нетрудно установить и зависимость между толщиной нере-
дуцированыой и редуцированной пластинок.
В соответствии с рисунком можно записать
d' = d-A. (416)
Пользуясь формулой (392), определяющей величину удлинения
для нулевых лучей, преобразовываем выражение (416)
d' = d~^ = d-{n-i)^^. (417)
Формула (417) и является основой для приема редуцирования
плоскопараллельной пластинки к воздуху.
Обращаясь к рис. 103, видим, что все элементы хода лучей до
и после плоскопараллельной пластинки сохраняются неизменными
(как, например, отрезки и s2l высоты hL и Л2), конечно, в пределах
погрешности, определяемой приближенностью формулы (392).
При больших углах наклона плоскопараллельной пластинки
к оси системы неточность формулы (392) может стать настолько зна-
чительной, что потребуется перейти к самостоятельному редуциро-
ванию как в меридиональной, так и в сагиттальной плоскостях;
такое редуцирование можно осуществить, прибегая к помощи формул
(401) и (402).
158
При редуцировании к воздуху плоскопараллельной наклонной
пластинки спрямление оси будет происходить согласно редуцирова-
нию в сагиттальной плоскости; однако при этом не произойдет уже
спрямления лучей в меридиональной плоскости.
Спрямление лучей, идущих в меридиональной плоскости, будет
достигаться при редуцировании по меридиональному удлинению
и при различных наклонах меридиональных пучков к оси системы
получится различным.
Заметим, что при редуцировании в меридиональной плоскости
можно получить спрямление оси, если переход к редуцированию
в меридиональной плоскости производить не в направлении нормали,
а в направлении выходящего пучка лучей.
Совокупное применение способов развертки отражений и реду-
цирования к воздуху плоскопараллельной пластинки позволяет
исключать из оптической системы отражательные призмы и приво-
дить оптические системы к системам, построенным лишь из круглой
оптики.
§ 54. Разделение хода лучей. Призмы с крышей (дахпризмы)
Иногда не представляется возможным осуществить необходимые
размеры той или иной отражающей грани по габаритным сообра-
жениям; тогда можно прибегнуть к разделению хода лучей на два
или более самостоятельных канала
с самостоятельным преобразованием
каждой из разделенных частей свето-
вого пучка — оборачиванием, посту-
пательным смещением; в последу-
ющем обе части пучка соединяются
воедино.
Совершенно очевидно, что при
этом в каждом из каналов должны
быть сохранены все оборачивания
и отклонения изображений, длины
ходов лучей и обеспечено точное
воссоединение обоих каналов
друг с другом.
Этот прием можно пояснить на примере действия системы двух
зеркал, составляющих между собой прямой угол (рис. 104). На
этом рисунке показан ход лучей параллельного пучка 1—2—3 до
и после отражения его от системы зеркал I и II, расположенных
под углом 90° друг к другу.
В этом случае отраженные системой зеркал лучи независимо
от того, будут они отражаться сначала на зеркале I и потом на
зеркале II или наоборот, составят со своим первоначальным на-
правлением угол, равный нулю; вместе с тем лучи 1—2—3 после
отражения от обоих зеркал расположатся в том же последователь-
ном порядке Г—2'—3' независимо от того, на каком из зеркал
происходило первое и на каком второе отражение.
159
Рассматривая рисунок, легко установить, что в этой системе
часть пучка между лучами 1—2 претерпевала отражение сначала
на грани I и потом на грани II, а вторая часть пучка, заключенная
между лучами 2—3, первоначально отражалась на грани II и уже
потом на грани I (предполагается, что луч 2 проходит бесконечно
близко к ребру между гранями).
Ребро между гранями служило и разделяющим элементом и эле-
ментом, на котором происходило совмещение обеих отраженных
частей пучка.
Такую систему двух зеркал, составляющих между собой прямой
угол, часто называют крышей; отражательные призмы, в которых
используются крышеобразные грани, называют призмами с крышей,
или дахпризмами.
Простейшая крышеобразная призма показана на рис. 105, где
показана сама призма и ее развертка.
§ 55. Призмы, не развертывающиеся
в плоскопараллельную пластинку
В некоторых конструкциях отражательных призм одна и та же
грань может быть использована и как отражающая, и как преломля-
ющая; это возможно, если падающий на эту грань пучок будет пре-
терпевать от нее полное внутреннее отражение (когда углы лучей
160
в среде с показателем преломления настолько велики, что происхо-
дит явление полного внутреннего отражения), а затем, при измене-
нии углов падения, сможет проходить через нее, как через преломля-
ющую поверхность.
Случай полного внутреннего отражения определяется величиной
угла полного внутреннего отражения /0, синус которого находят
из равенства
81иг0 = ^-> (418)
причем необходимо, чтобы показатель преломления п был больше
п' (возможен случай, когда п и не равен 1).
Таким образом, возникает необходимость создания определенного
наклона отражающей грани к оси системы для обеспечения возмож-
ности получения на ней полного вну-
треннего отражения; при этом может
случиться, что такая грань, будучи
последней преломляющей поверхностью,
не окажется перпендикулярной к оси
системы.
В таких случаях отражательная
призма не сможет развернуться в пло-
скопараллельную пластинку, и тогда
приходится прибегать к установке
после такой призмы дополнительного
преломляющего клина, компенсиру-
ющего клиновидность развернутой
Дополнительный
нлин
Рис. 106
призмы.
Такой дополнительный клин располагают почти вплотную к по-
следней грани развернутой призмы (но склеивать клин с призмой
нельзя ввиду потери полного внутреннего отражения при склейке),
оставляя тонкую воздушную прослойку.
Совершенно очевидно, что стекло такого дополнительного клина
дрлжно быть той же самой марки, что и стекло развертываемой
призмы.
Такой дополнительный клин представлен на рис. 106.
§ 56. Действие отражательных призм в сходящемся ходе лучей.
Эквивалентное зеркало, эквивалентное ребро, базис
Ранее, при рассмотрении действия отражательных призм, его
отождествляли с действием некоторой телескопической системы,
что позволило определить величины как угловых, так и линейных
увеличений.
Однако при этом не рассматривались вопросы, связанные с вза-
имным расположением предмета и изображения (ограничивались
лишь рассмотрением угловых величин).
Такой подход не мешал рассмотрению действия различных
зрительных труб, когда и предмет, и изображение расположены
И Заказ 2301. 161
далеко от наблюдателя; но переходя к рассмотрению близко рас-
положенных предметов и их изображений, необходимо установить
определенные зависимости между пространственным расположением
предмета и его изображения, создаваемого отражательной призмой
или системой призм.
Приступая к установлению этих зависимостей, можно выделить
три случая:
1) система состоит из нечетного числа зеркал, нормали к которым
располагаются в единой плоскости — плоскости главного сечения;
2) система состоит из четного числа зеркал и
Рис. 107
3) система состоит из нечетного числа зеркал, нормали к кото-
рым не располагаются в одной и той же плоскости и не могут быть
приведены к такому расположению.
Перейдем к рассмотрению первого из перечисленных случаев.
Обратимся к рис. 107, на котором представлена плоскость главного
сечения системы из нечетного числа зеркал, вместе с ходом произ-
вольного луча по отношению к входной грани I и выходной грани
2к + 1.
Падающий луч встречает входную грань в некоторой точке
выходящий луч отражается от выходной грани в точке N2k+i-
Оба луча пересекаются друг с другом в точке О, образуя угол
отклонения от первоначального направления хода луча 2сх.
Строя биссектрису угла 2сх, можно создать точно такое же отра-
жение падающего луча с помощью плоского зеркала Р 0, проходя-
щего через точку О перпендикулярно биссектрисе ОК.
162
Однако точку О пересечения направлений обоих лучей нельзя
рассматривать как предмет и изображение одновременно (хотя
в частных случаях это и осуществимо); поэтому, выбрав на входящем
луче некоторую предметную точку А, нужно на выходящем луче
получить ее изображение А'.
Так как точка А может быть выбрана на произвольном расстоянии
от точки О, то примем дополнительное условие, состоящее в том,
что точки А и А' будут располагаться на равных расстояниях АО
и А'О от точки О, образуя тем самым равнобедренный треугольник,
через основание которого А А' можно провести плоскость Р экви-
валентного зеркала, которая также должна быть перпендикулярна
биссектрисе ОК угла 2а и параллельна плоскости Р 0.
Основание А А' треугольника АО А' назовем базисом Ъ экви-
валентного зеркала.
Величина этого базиса определится по формуле
b = 2atga. (419)
Так как по условию точка А' является изображением точки А,
то отсюда следует, что сумма расстояний
^A + A'A2k+1 = Zl- (422)
1
Проведем теперь через точку А какой-либо другой произволь-
ный луч М±А, составляющий угол ах с нормалью к эквивалентному
зеркалу Р.
Разница в положении первого и второго лучей определяется
углом Да, равным
^а=а1 — а, (421)
По свойству системы из нечетного числа зеркал этот луч должен
составить тот же угол Да с первым лучом после его отражения от
системы зеркал и пройти через точку А', являющуюся изображением
точки А.
Нетрудно видеть, что при этом второй отраженный луч составит
с нормалью к эквивалентному зеркалу тот же самый угол аь
который он образовывал при падении на эквивалентное зеркало.
В силу этого пересечение направлений второго луча при входе
и выходе будет происходить в точке Оъ также лежащей на биссек-
трисе ОК угла 2a.
Ход обоих лучей был выбран произвольно; поэтому приходим
к выводу, что отражение любого луча системой нечетного числа
зеркал может быть заменено отражением от эквивалентного зеркала,
причем ход отраженного луча будет поступательно смещен по плос-
кости зеркала на величину базиса Ъ.
Нетрудно усмотреть, что положение точки А на плоскости экви-
валентного зеркала может быть выбрано совершенно произвольно;
однако перемещение точки А сразу же вызовет соответственное пере-
мещение точки А'.
11*
163
Необходимо заметить, что при вводе в ход лучей системы плос-
ких зеркал плоскопараллельной пластинки, т. е. осуществляя пере-
ход к отражательным призмам, потребуется выполнить редуцирование
толщины этой пластинки к воздуху; так, если все пространство
между входной и выходной гранями будет заполнено стеклом, то
все расстояния I. (в том числе и расстояние от входной грани до
первой отражающей грани и расстояние от последней отражающей
грани до выходной грани) должны быть разделены на показатель
преломления.
Переходя к рассмотрению действия призм, т. е. к совокупности
системы зеркал с плоскопараллельной пластинкой, необходимо
учитывать наличие у такой пластинки сферической аберрации,
что приводит к некоторому изменению величины базиса при измене-
нии хода лучей.
Поэтому величина базиса принимается равной расстоянию между
вершинами каустик входящего и выходящего из призмы пучков лу-
чей.
Чтобы определить величину базиса для системы зеркал, распо-
2/с
ложенных в воздухе, необходимо знать длину хода 2^ луча между
1
зеркалами и расстояния т и т' между точкой N± падения луча на
первое зеркало, точкой TV^+i падения луча на последнее зеркало
и точкой О пересечения входящего и выходящего лучей.
Обращаясь к рисунку, видим, что сумма расстояний т — R
и mf — R должна быть равна суммарной длине SI хода луча между
1
зеркалами
2 А’
т~\-т — 27? = 2 Л (422)
1
откуда и находится расстояние 7?
2fc
т-\-тг —2
Я =------2—^. . (423)
Умножая величину 27? на синус угла а, находим величину базиса
/ 2к \
Ь=\т-\-т' — 2^1 ^п
\ 1 /
(424)
Из формулы (424) следует, что величина базиса может быть
как положительной, так и отрицательной; условием же равенства
базиса нулю будет
2 Ат
т-\- т! = 2 £•
1
(425)
164
Для определения величины базиса отражательных призм следует
учитывать величину показателя преломления; это особенно просто
делается тогда, когда призма развертывается в плоскопараллельную
пластинку, перпендикулярную лучу (случай ненаклонной плоско-
параллельной пластинки); обозначая через т и т' расстояния от
точки О пересечения входного и выходного лучей до входной и вы-
ходной граней и расстояния от входной грани до точки первого от-
ражения через 70 и от точки последнего отражения до выходной
грани через Zg, можно определить величину расстояния R
2 к
Zq+ Zq+
1
п
(426)
а затем и базиса b
(427)
В частности, для простой прямоугольной призмы, представленной
на рис. 108 и обладающей одним отражением на гипотенузной грани,
2к
величина SI будет равна нулю, а 10 и 1'0 будут равны — .
1
Равным образом величины тит' также будут равны у. Вели-
чина базиса получается равной
Ь = а
/2
п) 2 ’
(428)
165
Численно, при п = 1,5163 (стекло марки К8) и стороне призмы
а = 20,0 жж, находим
ь = 20 (1 = 4,815 мм.
Рассматривая призму с тремя отражениями, дающую угол от-
клонения луча, равный 180°, сталкиваемся с тем обстоятельством,
что точка пересечения входящего и выходящего лучей уходит в бес-
конечность; величина базиса получается равной расстоянию между
входящим и выходящим лучами; положение же базиса может быть
определено по его отстоянию
от входной грани призмы,
редуцированному к воздуху
(рис. 109).
Пользуясь рисунком, не-
трудно выразить отрезки Zo
и через величину полу-
базиса Ь/2
I _ b i ==__ъ
0 2 tg 2а ’ 1 2 sin 2а ’
(429)
Редуцируя сумму отрез-
ков lQ и к воздуху, полу-
чаем удаление линии базиса
от входной грани призмы
Zq+Zi b (cos 2а+1)
п 2п sin 2а
b
2ratga
(430)
Численно,
получаем
полагая a = 22° 30', Ъ — 30,0 жж и п = 1,5163,
Zi
п
30,0
2.1,5163-04142
23,883 жж.
Базис эквивалентного зеркала будет располагаться на расстоянии
от входной грани призмы, равном 23,88 жж.
Рассмотрим теперь систему из четного числа зеркал, нормали
к которым располагаются в одной плоскости (рис. 110).
Зададим ход произвольного луча MN\, . . ., N 2к, отражающегося
от первого зеркала в точке 7V1 и от последнего зеркала в точке N2k.
Заметим, что входящий в систему и выходящий из системы лучи
пересекаются друг с другом в точке М.
Угол между этими лучами равен 2а = const (по свойству системы
из четного числа зеркал).
Длину хода луча между зеркалами и N2k примем равной
2 А’ - 1
сумме S /. Построим биссектрису МО угла 2а.
Предположим теперь, что предметная плоскость пересекает вхо-
дящий луч в некоторой точке А и перпендикулярна этому лучу.
Изображение точки А расположится на выходящем луче М в точ-
ке А' плоскости изображений, перпендикулярной лучу.
Изменяя положение точки А на входном луче, можно добиться
такого расположения точек А кА', что проходящие через них плос-
кости предмета и изображения пересекутся друг с другом на бис-
сектрисе МО угла 2а в точке О.
В результате получим два прямоугольных треугольника МА'О и
МА О с общей гипотенузой и равными острыми углами, откуда
следует равенство их катетов
Поэтому точка О, лежащая на линии пересечения предметной
плоскости с плоскостью изображения — ребре системы зеркал, —
будет являться одновременно и точкой предмета и точкой изображе-
ния; отсюда вытекает замечательное свойство точки О, заключающееся
в том, что произвольный луч, проходящий через эту точку и лежащий
в плоскости главного сечения системы зеркал, будет претерпевать
в этой точке постоянное отклонение на угол 2а без изменения
длины хода луча. Нетрудно представить, что ход любого простран-
ственного луча, не лежащего в плоскости главного сечения системы
зеркал, можно привести к лучу, лежащему в плоскости, проходящей
через ребро системы зеркал.
Тогда луч, отраженный этой системой зеркал, будет располагаться
в плоскости, также проходящей через ребро и отклоненной от первой
плоскости на угол, равный 2а; падающий и отклоненный лучи при
этом будут составлять равные углы 0 с нормалями к ребру в обеих
плоскостях.
В рассмотренном случае нормали ко всем зеркалам располага-
лись в одной и той же плоскости главного сечения зеркал; следствием
167
(не пере-
входящим
и показано
этого являлось сохранение хода луча при всех его отражениях
в одной и той же плоскости и пересечение входящего и выходящего
лучей друг с другом. Эта картина представлена на рис. 111.
Вторым следствием существования единой плоскости главного
сечения являлось отсутствие оборачивания изображения в направ-
лении, перпендикулярном плоскости главного сечения.
Имея в своем распоряжении четное число зеркал (не менее
четырех) можно представить случай, когда луч, входящий в систему
зеркал в плоскости, перпендикулярной ребру, после всех отражений
выйдет из этой плоскости, перейдя в какую-то другую плоскость,
также перпендикулярную
ребру, и уже будет только
скрещиваться
секаться!) с
лучом, как это
на рис. 112.
Такой системой зеркал
будет являться, например,
сочетание пары зеркал со
второй парой зеркал, па-
раллельных друг другу,
но с плоскостью главного
сечения, не совпадающей
с плоскостью главного
сечения первой пары зер-
кал.
Обращаясь к такому
общему случаю системы
четного числа
ребра системы.
зеркал,
решим задачу отыскания положения
Положение ребра вполне определится ходом луча, который после
отражения от всех зеркал системы выйдет, совпадая с направлением
входящего луча.
Положение плоскости главного сечения, перпендикулярной ребру,
может быть определено также через максимум угла отклонения
луча.
Направление ребра может быть определено и через оборачивание
изображения — как то направление, которое и в плоскости предмета
и в плоскости изображения сохраняется параллельным. Поэтому,
установив направление ребра, можно определить плоскость глав-
ного сечения системы зеркал и после этого, перемещая предметную
точку вдоль входящего луча, отыскать и положение ребра системы
в пространстве.
Если известно направление падающего и отраженного лучей,
то биссектриса угла между ними будет являться нормалью к плос-
кости, в которой располагается ребро системы зеркал.
Поэтому, вращая вокруг нормали падающий луч и сохраняя
угол его с нормалью, равным 90°, можно найти такое его положение,
168
когда отраженный луч пойдет по направлению падающего луча,
т. е. по направлению базиса.
Переходя к рассмотрению системы нечетного числа зеркал,
нормали к которым не приводятся к одной плоскости, получим
в качестве эквивалента такой системы ребро, перпендикулярное
плоскому зеркалу, как это представлено на рис. ИЗ.
Угол отклонения луча, идущего в плоскости, перпендикулярной
к ребру, сохранится постоянным; луч же, входящий в эту систему
зеркал по направлению ребра, после отражения от всех зеркал
выйдет вдоль того же ребра, но в обратном направлении.
Произвольный луч, составляющий некоторый угол с плоскостью,
перпендикулярной к ребру, после отражения сохранит тот же угол
с этой плоскостью; в частном случае система из нечетного числа
зеркал может переродиться в одно эквивалентное зеркало.
Отметим, что пространственная система нечетного числа зеркал
не приводится к какому-либо базису и обладает лишь одной точкой —
полюсом, в котором наблюдается совмещение предметной точки
с ее изображением.
Глава XVI
ВРАЩАЮЩИЕСЯ ЗЕРКАЛА И ПРИЗМЫ
§ 57. Вращение зеркала в параллельном пучке лучей
Вращение зеркала применяют обычно с целью изменения на-
правления визирной оси инструмента или прибора; поэтому по
своей схеме применение зеркала должно заменять действие враща-
ющейся трубы или коллиматора, создававших визирную линию или
визирное направление.
В идеальном случае применение зеркала не должно вносить
дополнительных ошибок в геометрическую схему прибора; однако
на самом деле в силу наличия ошибок в установке зеркала, оно
будет нарушать правильность действия идеальной схемы прибора.
Рассмотрим общий случай действия вращающегося зеркала,
когда ось вращения не совпадает с плоскостью зеркала.
Обратимся к рис. 114, на котором представлено вращающееся
плоское зеркало, нормаль к которому составляет с осью вращения
ON А угол а.
Предположим, что зеркало находится в параллельном ходе
лучей; благодаря этому представляется возможным рассматривать
произвольно выбираемые лучи. Поэтому для упрощения выводов
воспользуемся теми лучами, которые падают на зеркало в точку N,
расположенную на оси вращения зеркала.
Разместим на расстоянии h от точки N плоскость Р, перпендику-
лярную к оси вращения. Тогда ход как падающих, так и отраженных
169
зеркалом лучей можно определить, зная расположение точек
пересечения этими лучами плоскости Р.
Если падающий луч совпадает с осью вращения (луч AN), то
отраженный луч будет направлен по NA', и при вращении зеркала
вокруг оси он опишет коническую поверхность с углом при вершине,
равным 4а.
Расстояние R точки А' от оси вращения зеркала определится
формулой
/? = fetg2a, (432)
Рис. 114
и при вращении зеркала точка А' опишет на плоскости Р окруж-
ность радиуса R.
Нормаль к зеркалу пересечет плоскость Р в точке N' на расстоя-
нии от оси, равном Л- tg а, и при вращении зеркала нормаль опишет
окружность того же радиуса.
В случае, когда падающий луч будет составлять с осью вращения
некоторый угол Р, не равный нулю, отраженный луч не совпадет
с лучом NA'.
Если падающий луч BN будет неподвижен, то отраженный луч
при повороте зеркала выйдет из плоскости ANA'; его движение
относительно луча NA' будет происходить по конической поверх-
ности с углом при вершине, равным 2Р; одновременно ось конуса —
лучТУЛ' — будет вращаться вокруг оси вращения ON А, составляя
угол с этой осью в 2а.
Картина перемещения точки А' приведена на рис. 115, представ-
ляющем собой вид на плоскость Р в направлении оси вращения ОА.
170
Для удобства рассуждений можно заменить вращение плоскости
ANA' вращением точки В вокруг оси ON А, но в обратном направле-
нии (см. рис. 114).
Тогда точка В' будет описывать конус вокруг неподвижного
уже луча NA'.
Сечение этого конуса плоскостью Р даст эллипс с полуосями а
и д, уравнение которого можно записать в виде
1+1^- <«3)
Полуось а легко опре-
деляется из рисунка как
разность отрезков AN'
и АВ'\ находим
2а = h tg (2а + 0) —
— fetg(2a —Р). (434)
Полуось Ъ можно
ставить в виде
/j= «L.
/а2_^2
Величины а + £ и а —
— % получаются следую-
щими (для точкиЛ')*
a + ^=-7ztg(2a +
+ P)-fetg2a, (436)
a — £ = Л tg 2a —
-h tg(2a —13). (437)
пред-
(435)
Величина r| для принятого значения £ легко определяется из
чертежа (см. рис. 114).
Mgp (438)
1 cos 2a v 7
Формулы (434), (435), (438) позволяют определить малую полу-
ось Ь\ после некоторых преобразований выражения для обеих полу-
осей можно представить в виде
— Л sin 2[3
“ 2 ’ (cos2 (3 — sin2 2a)
tg р___________
У cos2 2a — sin2 2a tg2 (3
(439)
(440)
171
Формулы (439) и (440) позволяют построить эллипсы на рис. 115.
Рассматривая рис. 114, обратим внимание на следующее обстоя-
тельство.
Падающий и отраженный лучи и нормаль к зеркалу должны
всегда лежать в одной и той же плоскости; поэтому любая точка
пересечения луча, отраженного от зеркала, с плоскостью Р может
быть определена как пересечение следа движения отраженной точки
на плоскости Р с прямой, проходящей через предметную точку и
точку N' пересечения нормали к зеркалу с плоскостью Р.
Таким образом, обращаясь к рис. 115, на котором показана кар-
тина хода падающего луча, определяемая положением точки В (на
рис. 115 точка В принимается неподвижной), и картина движения
следа главного сечения зеркала, определяемая вращающейся линией,
занимающей положения NN'A', NN^A^ . . ., NN'-A^ можно по-
строить точки пересечения В', В[, . . ., В'к отраженного луча,
находя их на пересечениях соответственных эллипсов с пря-
мыми, проходящими через начальную точку В и движущуюся
точку В'.
Траектория движения точки В' представлена на рис. 115 сплош-
ной линией.
Изменяя величины углов а и р, можно получить ряд случаев,
характеризующих собой действие вращающегося плоского зеркала.
Поведение отраженного луча можно рассматривать и на плоско-
стях, касательных к сфере, описанной из точки 7V, как из центра;
тогда, очевидно, отраженный луч будет описывать на этих плоскостях
окружности, равные по своему диаметру начальной окружности,
определяемой углом Р падающего луча с осью вращения.
Этот прием позволяет вести рассмотрение даже и в том случае,
когда угол а будет равен 45° и когда точка А' в первом случае уйдет
в бесконечность.
Для этого случая поведение отраженного луча можно представить
на развернутой конической поверхности, касательной к сфере по
линии движения точки А".
Величина радиуса р такой конической развертки легко опреде-
ляется из рис. 114
p = 7ztg2a. (441)
Величина же угла конической развертки определится равенством
дуг разных радиусов. Таким образом, для радиусов г и р должно
выполняться соотношение
ry = yh snf2cz = у'р = y'h tg 2a, (442)
откуда, после сокращений,
у' = у cos 2а. (443)
Величина угла полной развертки у^ будет соответствовать слу-
чаю, когда у = 2л. Поэтому
у' = 2л cos 2а. (444)
J72
Можно поставить общую задачу аналитического определения
направления луча, отраженного от вращающегося зеркала, не совпа-
дающего с направлением оси вращения.
Обратимся к рис. 116, на котором в центре О сферы единичного
радиуса размещено вращающееся зеркало, нормаль к которому опре-
деляется направлением ON, падающий луч — направлением ОВ
и ось вращения — координатной осью OZ.
Угол отклонений изображения О А' оси от ее первоначального
угол между падающим лучом
s;
направления ОА обозначим через
и осью вращения — через а.
Примем, что исходное по-
ложение плоскости главного
сечения совпадает с плоскостью
рисунка; тогда, очевидно, и от-
раженный луч OB' также будет
расположен в плоскости рисунка
и его угол с осью OZ будет
равен 8 + а.
При повороте зеркала вокруг
оси OZ на некоторый угол у про-
изойдет поворот его главного
сечения
которая займет новое положе-
ние ONi, также повернется и на-
правление отраженного изобра-
жения оси вращения, которое
определится отрезком ОА^.
Вместе с тем падающий луч сохранит свое направление
отраженный же луч выйдет из повернутой плоскости
чения и займет направление, определяемое положением точки В[
на сфере.
Обозначим через Ду угол между плоскостью главного сечения
и плоскостью, проходящей через ось вращения и отраженный луч,
и через е+Де — угол между новым направлением отраженною
вместе с нормалью,
Рис.
не
неизменным;
главного се-
луча и осью.
Таким образом, на рис. 116 плоскость В^ОА будет наклонена
к плоскости А^ОА на угол Ду; угол В^ОА будет равен 8 +Ле
и угол А^ОА будет равен 8.
Для плоских зеркал угол между двумя отраженными лучами
сохраняется равным углу между теми же двумя лучами до их отра-
жения; поэтому угол между отраженным лучом и изображением оси
вращения должен сохраняться равным углу а; равным образом угол
между плоскостью, проведенной через ось вращения и отраженный
луч, и плоскостью главного сечения зеркала должен быть равен
углу при точке А[.
Для удобства выводов совместим новое положение плоскости
главного сечения зеркала с плоскостью рисунка, что представлено
на рис. 117.
173
В центре О сферы разместим начало системы прямоугольных
координат; ось OZ совместим с осью вращения зеркала; ось ОХ
примем лежащей в плоскости главного сечения (плоскость рисунка)
и ось OY — перпендикулярной плоскости рисунка.
Введем вторую систему координат OX'Y'Z', образуемую путем
поворота первой системы на угол 8 вокруг оси OY.
Тогда ось OZ' второй системы совпадет с изображением оси вра-
щения ОА{.
Обозначим через S проекцию точки В[ на плоскость XOY и че-
рез S' проекцию той же точки на плоскость XOY'.
Проекции этих точек на оси ОХ
и ОХ' обозначим соответственно
через Р и Р'.
Определяя координаты точки В j
в обеих системах координат, со-
гласно рис. 117, находим
х = — sin (s As) cos Ay
у = sin (s + As) sin Ay
z = cos(s4-As)
x = —sin a cos у
yf = sin a sin у
z' = cosa
(445)
(446)
В соответствии с формулами перехода из одной системы коорди-
нат в другую (или пользуясь рисунком) получаем
X = х' cos 8 — z sin 8
y = yf
z — x' sin 8 Z COS 8
(447)
После подстановки значений координат получаем
sin (s + As) cos Ay = sin a cos у cos s + cos a sin s, (448)
sin (s As) sin Ay = sin a sin у (449)
и
cos (s + Д&) = —sin a cos у sin s + cos a cos s. (450)
После деления правых и левых частей выражений (449) и (448)
получаем
, л sin V
tg Д Y = •/tai " \---
Nhr+cosOcoss
(451)
174
Формула (450) может быть представлена в несколько ином виде
cos (s + Де) = cos (s + а) + sin 8 sin а (1 — cos у). (452)
Рассмотрим несколько частных случаев действия плоского зер-
кала.
1. Угол 8 отклонения отраженного изображения оси мал. В этом
случае формула (451) преобразуется следующим образом:
tgAY=(l — tgaecosv)tgY (453)
при условии, что cosy ^>8, так как в противном случае нельзя счи-
тать величину выражения в скобках мало отличающейся от единицы.
Приближенной формулой (453) можно пользоваться лишь в пре-
делах первой четверти окружности; нетрудно установить, что вели-
чина дополнительного угла поворота Ду будет близка по величине
самому углу у и при угле отклонения 8, равном нулю, это равенство
станет точным. Тогда
tgAy^tgy. (454)
Обратимся к формуле (450). При малом 8 величина угла Де
определится приближенной формулой
cos Де — 8 sin Де = cos а — s sin a cos у, (455)
которая при 8, равном нулю, переходит в точную формулу
cos Де = cos a, (456)
что позволяет представить приближенную формулу (445) в виде
cos Де = cos a + 8 sin a (1 — cos у). (457)
2. Угол отклонения изображения оси вращения близок к 90°.
Для этого случая формула (451) может быть преобразована так:
sin у
sin е ,
—----k COS у COS £
tg a r
и при 8 = 90°
tg Ду = sin у tg a. (459)
Формула же (450) приобретает вид
cos (8 Де) = —sin Де = —sin a cos у. (460)
Ранее для рассмотрения действия вращающегося зеркала была
использована развертка конической поверхности, касательной к еди-
ничной сфере.
Пользуясь этим приемом, рассмотрим действие вращающегося
зеркала при различных углах 8 в некоторых, наиболее характерных
случаях (рис. 118).
175
1. При 8 = 0 основание конуса вырождается в точку и величины
г и р обращаются в нуль. Углы у' и у становятся равными; поэтому
направление отраженного луча можно строить непосредственно
из начала координат, причем плоскость отраженного луча будет
повернута на угол 2у относительно своего начального направления.
4 60°<в<90с'
7е=!20‘
5.^90° 8f20°<e<f80*
9 С-180°
6 90°<ё<120°
Рпс. 118
Поэтому при вращении зеркала вокруг оси на один оборот эта
плоскость сделает два оборота.
2. Угол е невелик, а угол а превышает угол 8. В этом случае
развертка уже не будет точкой, но угол развертки будет близок
к 360°. Точка В' опишет при повороте вправо и влево две спирале-
видные кривые, переходящие в предельном случае в две эквиди-
стантные окружности.
176
3. При 8 = 60° развертка конуса обращается в сектор, стягива-
емый полуокружностью; угол поворота плоскости, содержащей
отраженный луч, при крайних положениях зеркала составит вели-
чину, равную 270°.
4. При 60° < 8<90° дуга развертки станет меньше полуокруж-
ности и произойдет дальнейшее уменьшение угла между начальным
направлением плоскости, содержащей луч, и ее крайними положе-
ниями.
Рис. 119
5. При 8 = 90° конус превращается в цилиндр, касательный
к единичной сфере; при этом дуга развертки выпрямляется и углы
плоскости составят с началь-
ным направлением 180°.
6. При 90° < 8 < 120°
(вершина конуса через бес-
конечность перейдет влево от
начала координат и центры
разверток перейдут снизу
наверх) углы для плоскости
отраженного луча с ее перво-
начальным положением будут
лежать в пределах между 90
и 180°.
7. При 8 = 120° развертка
конуса снова будет ограни-
чена полуокружностью, но
с центром вверху и углы для
плоскости отраженного луча
с исходным положением
уменьшатся до 90°.
8. При 120° < 8 < 180°
развертка основания конуса
станет больше полуокруж-
ности, а угол между плоскостями отраженного луча лежит в пре-
делах между 90 и 0°.
9. При предельном переходе (8 = 180°) развертка обращается
в точку; при этом плоскости падающего и отраженных лучей сольются
и изображение станет стабильным.
От рассмотрения действия вращающегося зеркала нетрудно
перейти и к паре вращающихся зеркал с совпадающими главными
сечениями.
Такую систему можно рассматривать как телескопическую си-
стему с линейными увеличениями Vt и Vs, равными единице, что
сразу же приводит и к равенству единице угловых увеличений
Wt и W8.
Поэтому действие такой пары зеркал можно рассматривать как
действие одиночного зеркала, но с той разницей, что при этом
следует учитывать изменение увеличений в меридиональной пло-
скости.
12 Заказ 2301.
177
Это изменение сведется к изменению знака угла отраженного
луча и изменению поворота плоскости отраженного луча по отноше-
нию к плоскости главного сечения обоих зеркал.
В соответствии с этим перестроен чертеж и в новом виде предста-
влен на рис. 119. Если сделать совершенно аналогичные выводы,
то в результате их получим формулу для определения угла Ду
sin\--------------------------------------- <461>
\ tg а /
и для угла е + Д 8
с os (8 + Де) = cos (8 — а) — sin 8 sin cz (1 + cos у). (462)
Аналогично предыдущему можно было бы произвести и анализ
наиболее характерных случаев действия пары зеркал; такое иссле-
дование привело бы к обратной последовательности картин, полу-
ченных ранее.
Так, в первом случае, который приводится к системе параллель-
ных зеркал, вращения изображения не наблюдается и, наоборот,
для пары зеркал, составляющих между собой прямой угол, имеет
место случай вращения изображения с удвоенной скоростью по от-
ношению к скорости вращения зеркала.
§ 58. Вращающееся зеркало в сходящемся пучке лучей
В общем случае действие вращающегося зеркала в сходящемся
ходе лучей будет определяться следующими элементами;
1) углом а между плоскостью зеркала и осью вращения ОХ;
2) положением точки пересечения плоскости зеркала с осью
вращения по отношению к положению плоскости предмета или изо-
бражения;
3) положением предметной точки относительно оси вращения.
Нетрудно представить, что в частном случае совпадения предмет-
ной точки с точкой пересечения зеркала с осью вращения незави-
симо от угла между зеркалом и осью и от угла поворота зеркала
вокруг оси вращения точка изображения будет сохранять свое
положение в пространстве неизменным.
В силу этого удобно принять начало координат совмещенным
с точкой пересечения оси и зеркала; одну из координатных осей
направить по оси вращения и две остальные оси выбрать лежащими
в плоскости чертежа и перпендикулярно к нему.
Предметную плоскость можно выбрать перпендикулярной к оси
вращения. Тогда, принимая во внимание, что в общем случае ось
вращения будет составлять некоторый угол с нормалью к зеркалу,
можно сделать вывод, что плоскость изображения после отражения
от зеркала будет составлять некоторый угол с плоскостью предмета
и, следовательно, не может быть перпендикулярной к оси вращения.
178
Более того, так как зеркало по отношению к оси при своем
вращении может изменять положение нормали в пространстве, то
и плоскость изображения при вращении зеркала будет изменять
свое положение относительно плоскости предмета.
Следствием этого может явиться невозможность постоянной
фокусировки на изображение после вращающегося зеркала, что
резко ограничивает возможность использования вращающегося зер-
кала в сходящемся пучке лучей, ограничивая ее областью малых
углов между осью вращения и плоскостью зеркала или его нормалью.
Второй случай хотя и дает возможность сохранения положения
плоскости изображения неизменной, но практически не будет пред-
ставлять интереса, так как он приво-
дится к случаю неподвижною плоского
зеркала.
Это позволяет отказаться от рас-
смотрения общего случая действия
зеркала в сходящемся пучке лучей
и ограничиться случаем, когда угол
между осью и зеркалом мал.
Обратимся к рис. 120, на котором
представлен вид на плоскость изобра-
жения по направлению оси вращения.
След пересечения плоскости зеркала
с плоскостью изображения представлен
прямой PQ; смещение этого следа по
отношению к началу координат примем
равным отрезку Ь; угол нормали зеркала с осью OZ обозначим через у.
Предметную точку выберем расположенной на оси OZ на расстоя-
нии, равном а от начала координат.
Пренебрегая ошибками второго порядка малости, возникающими
при малой непараллельности плоскости зеркала и оси вращения,
можно построить изображение В' точки В и изображение О' начала
координат О, откладывая по другую сторону следа пересечения зер-
кала и плоскости изображения, отрезки, равные отстояниям точек О
и В от этого следа.
Пользуясь равенством треугольников ОВС и О'В'С', нетрудно
связать координаты, определяющие положение точки изображения
В', с помощью формул
z = a cos 2у + 2b cos у; у— a sin 2у + 2b sin у. (463)
Таким образом, при вращении зеркала вокруг оси, параллельной
его плоскости, путь, пробегаемый изображением произвольной точки
предмета, определится как геометрическая сумма двух путей: пер-
вого, представляющего собой окружность, пробегаемую за один
оборот зеркала дважды, с радиусом, равным расстоянию а произ-
вольно выбранной точки от оси вращения, и второго, также предста-
вляющего собой окружность, но пробегаемую за один оборот зеркала
12*
179
один раз при радиусе, равном удвоенному расстоянию от плоскости
зеркала до оси вращения.
Картина такой траектории суммарного движения точки В' (изо-
бражения произвольной точки предмета В) при вращении зеркала
представлена на рис. 121.
Эта траектория аналогична траекториям, которые уже встре-
чались в предыдущем параграфе, но отличается от них тем, что здесь
это плоская кривая, непосредственно обрисовывающая движение
точки изображения.
Сделанные выводы указывают на
полную возможность вращения изоб-
ражения с помощью зеркала или
отражательной призмы, действу-
ющих в сходящемся пучке лучей, используя для этой цели
простое зеркало — систему, принадлежащую ко второй группе
оборачивания изображения, с увеличениями по двум взаимно пер-
пендикулярным направлениям обратных знаков.
Совершенно очевидно, что если бы понадобилось решить задачу
вращения изображения при обратном ходе отраженных лучей, то
тогда пришлось бы воспользоваться системой зеркал, принадлежа-
щей к пятой группе оборачивания — в частности к системе пары
зеркал, расположенных под углом 90° друг к другу.
В этом случае за условную плоскость системы следовало бы при-
нять плоскость, проходящую через ребро системы зеркал.
При рассмотрении действия компенсирующей призмы в сходя-
щемся пучке лучей возможен случай, когда для эквивалентного
зеркала величина базиса не окажется равной нулю.
Очевидно, что при совмещении точки пересечения эквивалент-
ного зеркала с точкой пересечения оси вращения с плоскостью изо-
180
бражения, как это показано на рис. 122 (точка А'), предметная точка
на эквивалентном зеркале не попадет уже на ось вращения и при
вращении компенсирующей призмы будет описывать некоторую
окружность.
Однако, совмещая с осью вращения середину базиса эквивалент-
ного зеркала, видим, согласно рис. 123, что для предметной точки
4, располагающейся на оси враще-
ния, ее изображение окажется также
расположенным на оси вращения
в некоторой точке А', которая в силу
этого при вращении компенсирующей
призмы будет оставаться неподвиж-
ной.
§ 59. Действие качающегося
зеркала или призмы
При рассмотрении действия вра-
щающегося зеркала исходили из
того, что основным направлением,
которое рассматривалось в качестве
оси оптической системы, являлась
ось вращения.
Однако, обращаясь к частному
случаю вращающегося зеркала, когда
угол а между падающим лучом и осью
вращения близок к 90°, а угол 8,
составляющий удвоенный угол между
зеркалом и осью вращения, мал, можно было бы принять за направ-
ление оси системы луч, падающий на вращающееся зеркало и состав-
ляющий с осью вращения угол, близкий к 90°.
Такой выбор приводит к зеркалу, качающемуся вокруг оси вра-
щения, перпендикулярной оптической оси прибора.
Рассмотрим более детально действие такого качающегося
зеркала.
Обратимся к рис. 124, на котором показано зеркало, качающееся
вокруг оси OZ.
Ось ОХ расположим в плоскости рисунка, в этой же плоскости
расположим и ось оптической системы ОХ' и ось OZ'.
Благодаря такому выбору расположения осей оси OY и OY'
должны совпасть и тогда разворот системы координатных осей
прибора по отношению к системе координатных осей оси вращения
определится величиной угла Да, представляющего собой разность
угла а и угла в 90°.
Величину угла 8/2 между плоскостью зеркала и осью вращения
будем полагать малой.
Малость угла 8 будет соответствовать второму случаю, рассмот-
ренному в § 57.
181
В соответствии с формулой (453) малая величина угла & приво-
дит к близости углов Ду и у.
Определим величину угла наклона изображения х, возникающего
вследствие наличия угла наклона зеркала к оси вращения OZ
(рис. 125).
На рис. 125 представлено наклонное зеркало с нормалью ON;
проводя через эту нормаль и ось вращения плоскость, определим
-след пересечения ее с некоторой плоскостью Р, проходящей через
ось ОХ и составляющей с плоскостью XOZ угол х/2.
Отраженное изображение Р' плоскости Р должно проходить
через след пересечения плоскости Р — линию ОК — с плоскостью
зеркала.
При этом плоскость Р' должна будет занять положение симмет-
ричное с плоскостью Р относительно плоскости, проходящей через
нормаль и ось вращения OZ (плоскость Р' на рисунке не показана).
Поэтому, проводя через ось OZ плоскость, симметричную плос-
кости XOZ относительно плоскости нормали, получим между этой
плоскостью и плоскостью Р' угол, равный х/2.
Так как для зеркала, дающего отражение лучей в обратном на-
правлении, вращение изображения происходит в ту же сторону,
что и вращение предмета, то, приводя предмет из плоскости Р в плос-
кость XOZ, следует увеличить вдвое угол наклона изображения
к плоскости, проведенной симметрично плоскости XOZ.
Определим величину угла х/2. Обращаясь к рис. 125, можно
построить треугольник, содержащий угол 8/2, и треугольник, со-
держащий угол х/2, продолжая плоскость Р до пересечения ее
с плоскостью YOZ. Тогда, в соответствии с рисунком, находим, что
tg-^- = tg|-sin у. (464)
Нетрудно видеть, что угол х согласно предшествующим рассу-
ждениям и определит величину угла наклона изображения.
Что же касается определения направления отраженного зеркалом
луча, то его можно получить, полагая в формулах (453) и (457)
величину угла 8 малой, а величину угла а равной 90° — Дос. Тогда
tgAy^^-^e) tg у
(465)
и
cos Ле = sin Лее — 8 cos Лее cos у.
(466)
Легко видеть, что при 8 = 0 угол наклона изображения х также
‘будет равен нулю, а косинус угла Де будет равен синусу угла Дос
и при Д сс, равном нулю, также обратится в нуль, что приведет к по-
стоянству угла Де = 90°.
182
§ 60. Оптические шарниры
В различных случаях работы оптических приборов встречается
необходимость переноса изображения с одного направления на дру-
гое, когда угол между такими направлениями не является постоянным.
Эта задача может быть усложнена требованием, чтобы при таком
изменении направления не происходило вращения изображения
в его плоскости.
Оптические устройства, решающие подобную задачу — оптиче-
ские шарниры, — можно разделить на две группы: 1) когда измене-
ние направления оси проис-
ходит лишь в одной пло-
скости — эту задачу решают
плоские оптические шар-
ниры, 2) когда изменение
направления происходит в
пространстве — такую задачу
решают пространственные
шарниры.
Наиболее простым по
своей конструкции является
плоский двухзер-
кальный шарнир
(рис. 126), построенный на
использовании действия кача-
ющегося зеркала.
Двухзеркальный шарнир
может действовать и в парал-
лельном пучке лучей и в схо-
дящихся пучках, но во втором случае следует помнить, что шарнир
при развертке изображения не должен нарушать центрированности
оптической системы.
На рис. 126 представлены два положения I и Г качающегося
зеркала.
Ось, вокруг которой происходит вращение зеркала, предположим
лежащей в плоскости зеркала и перпендикулярной к плоскости
рисунка.
Положение этой оси определится точкой О — следом пересечения
плоскостей зеркала в его обоих положениях.
Эта же точка одновременно должна явиться и точкой, определя-
ющей собой ось, вокруг которой должно происходить вращение
обоих колен оптической системы.
Строя ход какого-либо луча, например луча AN К', определим
положение предмета в некоторой точке Л, расположенной относи-
тельно оси вращения на расстояниях Ъ по вертикальному и а по
горизонтальному направлениям.
Точку К' примем расположенной на расстоянии Ъ от точки N,
в которой происходит отражение луча от плоскости первого зеркала.
184
Построим отраженное изображение (развертку) предметного про-
странства после первого зеркала. В нем предметная точка займет
положение А', причем точки А', N и К' будут лежать на одной
прямой.
На развертке положение предметной точки А' относительна
точки О вращения зеркала, как и ранее, определится координатами
& и а.
Построим второе положение (/') зеркала, составляющее с первым
положением произвольный угол а.
Опираясь на развертку изображения после первого отражения,
построим картину в предметном пространстве, которую обозначим
буквами A-J^K^
Делая такое построение, увидим, что образовавшийся треуголь-
ник будет равен треугольнику А^К'О.
Таким образом, точка К± будет расположена на том же расстоя-
нии Ъ от оси вращения, что и точка К', отображением которой она
является. Отсюда следует, что и предметная точка А± также сохра-
нит свое удаление от оси вращения.
Совершенно очевидно, что новое положение оси А^гК± составит
с исходным направлением оси угол, равный удвоенному углу а.
Следовательно, действие двухзеркального шарнира сведется к то-
му, что потребуется обеспечить двукратную передачу вращения от
зеркала к обоим коленам оптической системы.
Необходимо отметить, что положение оси вращения относительно
хода луча было совершенно произвольным; поэтому при действии
двухзеркального шарнира отсутствует необходимость строгого раз-
мещения его оси вращения относительно оси оптической системы;
оптическая ось может проходить на любом расстоянии от оси вра-
щения.
Вместе с тем смещение оси шарнира с плоскости качающегося
зеркала приведет к нарушению согласованности осей обоих колен
и к нарушению центрировки оптической системы; кроме того, полу-
чится также и некоторое нарушение фокусировки системы.
Совершенно очевидно, что при действии двухзеркального шар-
нира в параллельном пучке лучей представляется возможным обес-
печивать положение оси вращения шарнира менее строго.
Второе, неподвижное зеркало двухзеркального шарнира пресле-
дует цель устранить оборачивание изображения, возникающего
у первого зеркала; кроме того, оно может быть использовано для
задания среднего направления излома оси.
Диапазон действия двухзеркального шарнира невелик; он огра-
ничивается конструктивными возможностями — значительным уве-
личением габаритов качающегося зеркала и возможностью взаимного
пересечения как оптических элементов, так и элементов механиче-
ской конструкции; величина диапазона обычно не превосходит
30-40°.
Панора мический плоский шарнир построен по
геометрической схеме вертикальной оси и связанной с ней визирной
185
линии, и его главным рабочим элементом является зеркало
или призма, создающие угол отклонения оси в 90°; ось враще-
ния визирного зеркала должна совпадать с осью оптической си-
стемы.
В плоском панорамическом шарнире возможно применение и двух-
зеркального вращающегося элемента, например пентапризмы или
призмы с крышей. Однако применение таких призм устраняет зер-
кальность изображения, и тогда при использовании компенсирующей
призмы, задачей которой
является компенсация вра-
щения изображения в поле
зрения и которая, в силу
этого, должна являться
призмой с нечетным числом
отражений, возникнет зер-
кальность изображения
после компенсирующей
призмы.
При этом независимо
от того, какой конструк-
тивный элемент исполь-
зуется в головной враща-
ющейся части шарнира,
компенсирующая приз-
ма — призма Дове — дол-
жна вращаться в ту же
сторону, что и головная
часть, но с вдвое меньшей
« G)
угловой скоростью, т. е.—.
Схема подобного пло-
ского шарнира представ-
лена на рис. 127. В тех
случаях, когда в качестве
компенсирующего элемента
используется призма, раз-
вертывающаяся в ненаклонную плоскопараллельную пластинку,
например призма Пехана, возможно использование панорамиче-
ского шарнира в сходящемся пучке лучей.
Четырехзеркальный плоский шарнир можно
представить как частный случай предыдущего шарнира, но с приме-
нением в качестве компенсирующего элемента не призмы типа Дове
(обладающей увеличениями, соответствующими пятому случаю дей-
ствия вращающегося зеркала), а призмы с двумя отражениями, да-
ющей обратный ход отраженных лучей.
Компенсация зеркальности изображения в этом случае может
быть осуществлена за счет добавления призмы III, как это показано
на рис. 128. Эта третья призма является частью оптики неподвиж-
186
ного колена шарнира и на нее можно возложить задачу создания
среднего направления выходящей оптической оси.
Призма Z, осуществляющая изменение угла визирования, вра-
щаясь вокруг оси, соединяющей ее с призмой II, создаст вращение
изображения вокруг этой оси.
После призмы II изображение переменит направление своего
вращения на обратное, но с прежней скоростью по ее абсолютной
величине. Поэтому потребуется компенсирующему элементу при-
дать дополнительный поворот в ту же сторону, что и головной призме,
благодаря этому скорость вращения головной призмы относительно
последней, неподвижной призмы III, удвоится, или, что то же самое,
вращение компенсирующего элемента
должно будет происходить со скоро-
стью, вдвое меньшей, чем абсолютная
скорость вращения головной призмы.
В соответствии с этим конструктивно
четырехзеркальный шарнир удобно
строить из системы трех звеньев —
первого, несущего головную призму,
второго, несущего компенсирующую
призму, и третьего, неподвижного звена.
Совершенно очевидно, что обе оси,
сочленяющие звенья, должны быть
параллельными друг другу.
Обратим внимание, что в схеме,
представленной на рис. 128, положение
промежуточного звена выбрано с таким
расчетом, чтобы вся система четырех-
зеркального шарнира не создавала оборачивания изображения;
однако, задавая промежуточному звену положение, перпендикуляр-
ное рассмотренному, в исходном положении получаем оборачи-
вающую систему призм Малафеева второго рода и тогда четырех-
зеркальный шарнир будет давать полное оборачивание изобра-
жения.
Нетрудно усмотреть, что задавая среднему звену промежуточ-
ные положения, можно добиться любого поворота изображения
в его плоскости.
Заметим, что в четырехзеркальном шарнире можно изменять
углы визирования на 360°, однако возможность неограниченного
вращения, как это было для панорамического шарнира, исключается.
Пространственный оптический шарнир
всегда можно осуществить, сочетая два плоских шарнира; простей-
шей комбинацией такого рода является добавление в панорамиче-
ском шарнире качания головной призмы, как это показано на
рис. 127, б.
Добавление качания не вызовет дополнительного вращения изо-
бражения, но диапазон действия качающейся призмы будет огра-
ничен.
187
Систему такого рода можно рассматривать как систему осей
теодолита; отсюда возникнет потребность предусмотреть в этой
конструкции обеспечение определенной перпендикулярности осей
и устранение коллимационной ошибки, вызываемой непараллель-
ностью плоскости головного зеркала и горизонтальной оси вращения.
Совершенно очевидно, что при использовании в таком простран-
ственном шарнире качающейся призмы и призмы Дове область при-
менения его будет ограничена работой в параллельных пучках
лучей.
Пространственный оптический шарнир можно создать и на базе
сдваивания плоского панорамического шарнира; при этом вместо
двух компенсирующих призм можно использовать одну призму,
но с дифференциальным приводом вращения от обоих вращающихся
элементов, причем скорости, передаваемые на компенсирующую
призму, должны быть равны половинам скоростей вращения этих
вращающихся элементов.
Передачи вращения на компенсирующую призму должны быть
подобраны таким образом, чтобы вращение компенсирующей призмы
происходило в ту же сторону, что и вращение изображения, полу-
чающееся от рассматриваемого элемента перед компенсирующей
призмой.
Сдвоенный панорамический шарнир может обеспечивать любые
направления визирной оси в пространстве без всяких ограничений;
он может действовать (при замене призмы Дове призмой, разверты-
вающейся в перпендикулярную оси плоскопараллельную пластинку)
и в сходящихся пучках лучей.
Для устранения зеркальности изображения в сдвоенном пано-
рамическом шарнире можно использовать в качестве одной из вра-
щающихся призм призму с двумя отражениями или добавить к этому
шарниру призму, дающую зеркальное оборачивание.
В панорамических шарнирах соответственным начальным пово-
ротом компенсирующей призмы можно создавать любое оборачи-
вание изображения.
Схема сдвоенного панорамического шарнира представлена на
рис. 129.
В качестве пространственного шарнира можно использовать
и сочетание двух систем, принадлежащих либо к третьей, либо
к шестой группам оборачивания, придавая им качания в двух взаим-
но перпендикулярных направлениях. Подобный пространственный
шарнир из системы двух призм с тремя отражениями в каждой пред-
ставлен на рис. 130.
Действие такого шарнира осуществляется путем вращения одной
из его призм в кардане с взаимно перпендикулярными осями, которые
в исходном положении должны быть перпендикулярны основному
визирному направлению.
Возможен и такой вариант шарнира, когда обе оси вращения от-
делены друг от друга и когда вращение обеих призм будет проис-
ходить независимо.
188
Совершенно очевидно, что диапазон действия такого простран-
ственного шарнира будет ограничен.
Действие любого пространственного оптического шарнира сво-
дится к приданию визирной оси любого произвольного направления
в пространстве; поэтому действие оптических шарниров может быть
всегда сведено к ранее рассмотренной геометрической схеме осей
теодолита — вертикальной оси, расположение которой в предметном
пространстве сохраняется неизменным, и горизонтальной, которая
со своими подшипниками вращается в предметном пространстве
вокруг вертикальной оси.
Справедливость этого утверждения для оптического шарнира,
построенного из двух прямоугольных призм, вращающихся вокруг
оптической оси, не вызывает сомнений; однако в случае создания
оптического шарнира из двух качающихся призм (оси вращения
которых всегда перпендикулярны оптической оси и физически не-
подвижны!) такие сомнения могут возникнуть. Поэтому остано-
вимся на этом вопросе более детально.
Обратимся к случаю, когда оптический шарнир согласно рис. 131
строится из двух качающихся призм I и II (например, куб-призм),
оси вращения которых скрещиваются перпендикулярно друг другу,
а направления осей перпендикулярны оптической оси и неподвижны
в пространстве.
189
Нетрудно представить, что в этом случае вращение призмы II
вокруг ее оси будет вызывать изменение визирного направления
в вертикальной плоскости, положение которой в пространстве может
изменяться при вращении призмы I вокруг вертикальной оси.
Поэтому, обращаясь к предметному пространству, приходим
к выводу, что отображение призмы II и ее оси через призму I уже
не будет сохраняться неподвижным в предметном пространстве;
наоборот, поворот оси вращения призмы II будет происходить в связи
с поворотом визирной плоскости и, таким образом, в предметном
пространстве отображение оси призмы II будет играть роль гори-
зонтальной оси в геометрической схеме осевой системы теодолита.
§ 61. Устройства для изменения глазного базиса прибора
При разработке бинокулярных оптических приборов необходимо
для обеспечения возможности работы с прибором различных наблю-
дателей, обладающих различными глазными базисами, изменять
расстояние между осями окуляров или, как говорят, изменять ве-
личину глазного базиса прибора.
Одним из простейших приемов решения этой задачи является
непосредственное изменение расстояния между осями обеих трубок
бинокулярного прибора, например изменение расстояния между
трубками бинокля путем их вращения вокруг оси шарнира, парал-
лельной осям визирования трубок.
190
Однако этот способ не может быть использован во всех случаях;
в сложных бинокулярных приборах, таких как дальномеры или сте-
реофотограмметрические приборы, этот способ применен быть не мо-
жет, так как это может нарушить измерительные качества прибора
и будет конструктивно очень громоздко. Поэтому для изменения
величины глазного базиса прибора часто прибегают к использованию
поступательного смещения окулярных осей, осуществляемого с по-
мощью каких-либо призм, не дающих при этом вращения изобра-
жения.
Такими призмами явля-
ются ромбические призмы,
вращение которых не вызы-
вает вращения изображения
(эти призмы принадлежат
к первой группе оборачива-
ния), или другие призмы,
обладающие одинаковыми
угловыми увеличениями
(третья, четвертая и шестая
группы оборачивания, на-
пример призма с тремя от-
ражениями (шестая группа),
дающая смещение оси при
обратном ходе лучей.
Эти призмы представлены
на рис. 132. Однако применение вра-
щающихся призм не является единственным способом изменения
глазного базиса прибора; для этой же цели можно использовать
поступательное смещение оси окуляра, возникающее при поступа-
тельном перемещении призм, дающих отрицательное линейное уве-
личение в направлении линии базиса прибора, например, призмы
с двумя отражениями от граней, составляющих между собой угол
в 90° (рис. 133).
191
Поступательное смещение этих призм вдоль направления линии
базиса вызовет удвоенное перемещение изображения; при этом длина
хода лучей в этих призмах сохранится неизменной, что обеспечивает
сохранение фокусировки системы.
Весьма простым и удобным способом изменения величины глаз-
ного базиса прибора является также мало применяемый способ кача-
Рис. 134
ющихся плоскопараллельных пластинок, размещаемых за окуля-
рами бинокулярного при-
бора; схема такого устрой-
ства показана на рис. 134.
В е личина р асстояния
между глазами наблюда-
телей может изменяться
в сравнительно нешироких
пределах — от 55 до 72 мм;
поэтому, устанавливая за
окулярами две качающиеся
плоскопараллельные пла-
стинки, создающие макси-
мальное смещение оси,
равное ±4 мм (что обес-
печивается при наклоне
плоскопараллельной пла-
стинки толщиной 18 мм,
изготовленной из стекла с показателем преломления, равным 1,8,
на угол ±25°; такая пластинка занимает около 10 мм воздушного
хода), можно обеспечить требуемый диапазон изменения глазного
базиса прибора.
Заметим, что при величине выходного зрачка прибора около
8 мм практически можно вообще отказаться от создания каких-либо
устройств для изменения глазного базиса прибора.
§ 62. Причины возникновения паразитных изображений
При сборке первых образцов различных оптических приборов
иногда приходится сталкиваться с наличием в приборе добавочных,
или, как говорят, паразитных изображений; такие паразитные изо-
бражения могут существенным образом мешать работе с прибором,
и -тогда возникает необходимость в их устранении.
Если подобные паразитные изображения резкие и неокрашенные,
то они могут быть вызваны либо наличием в приборе побочных вы-
ходных зрачков, либо отражениями от плоских граней каких-либо
деталей — большей частью разного рода защитных стекол. На
рис. 135 показан такой побочный зрачок у призменного бинокля,
расположенный в непосредственной близости к основному выходному
зрачку.
Причиной возникновения побочных зрачков является отражение
лучей, идущих вблизи плоских граней призм, расположенных па-
192
Рис. 135
раллельно оси прибора или с небольшими наклонами к ней; возник-
новение таких побочных зрачков в системе бинокля с различными
оборачивающими призмами показано на развертках, приведенных
на рис. 136, а и б. Пунктиром показаны дополнительные развертки,
возникающие на таких опасных гранях.
В некоторых случаях удается сравнительно легко устранить
побочные зрачки посредством установки соответствующих диафрагм
или ширм; так, например, устранение отражения от гипотенузной
грани оборачивающих призм системы Малафеева легко достигается
прорезыванием канавки на гипотенузной грани, показанной на
рис. 136, а стрелкой.
Грани, создающие побоч-
ные зрачки, нетрудно вы-
явить, рассматривая под
лупой через окуляр стенки
внутренней части оптической
системы.
Вторым источником пара-
зитных изображений явля-
ются отражения от преломля-
ющих поверхностей призм
или защитных стекол, обычно
расположенных впереди си-
стемы.
Такие изображения зна-
чительно ниже по яркости,
чем изображения, возника-
ющие от побочных зрачков;
они не исчезают, если на
месте выходного зрачка при-
бора поставить материальную
диафрагму с отверстием, равным или меньшим диаметра выходного
зрачка (в этом случае паразитные изображения от побочных зрачков
исключаются).
Такие паразитные изображения налагаются на основное и, вос-
полняя часть яркости, потерянной основным изображением, не могут
быть устранены в последующей части системы. Поэтому следует
заботиться об устранении самой возможности их возникновения.
Такие паразитные изображения удобно отыскивать, перемещая
перед головной частью прибора мощный источник света с узко
направленным световым пучком (чтобы, по возможности, не засве-
тить фон изображения).
На рис. 137 показаны три примера возникновения таких паразит-
ных изображений в головке наблюдательного прибора с остекле-
нием из плоских защитных стекол, имеющего в качестве визирной
призмы призму-куб. На рис. 137, а показано паразитное изображе-
ние, возникающее от задней грани призмы-куб; оно может быть устра-
нено посредством качающейся шторки, связанной с этой призмой.
13 Заказ 2301.
193
Установить происхождение такого паразитного изображения
нетрудно; оно не является зеркальным и движется вместе с движе-
нием головной призмы.
На рис. 137, б показано возникновение отражения от боковой
стенки остекления; это изображение будет зеркальным и будет
двигаться в направлении, противоположном основному изображению.
Его устранение значительно сложнее, так как ширму приходится
устанавливать по линии стыка защитных стекол.
б
Рис. 136
На рис. 137, в показано возникновение паразитного изображения
вследствие сложного отражения пучка лучей, прошедшего через
призму-куб при недостаточно больших ее габаритах; такое изобра-
жение получается зеркальным и неподвижным.
Его удается устранять, увеличивая габариты призмы-куба или
несколько уменьшая размеры входного зрачка в плоскости главного
сечения призмы для требуемого ее положения.
В фотографических (аэрофотосъемочных) объективах иногда воз-
никают засветки изображения (в особенности для широкоугольных
объективов) вследствие отражения солнечных лучей от крутых
поверхностей, близких или больших полусферы, — так называемые
«рюмки» или «утюги».
194
Устранение этих засветок очень затруднено; в известной степени
их действие несколько ослабляется противосолнечными блендами,
располагаемыми перед объективом.
Существенную роль в понижении общего контраста изображения
могут играть засветки, возникающие за счет отражений от стенок
оправ; в визуальных оптических
приборах при рассматривании про-
странства вблизи выходного зрачка
прибора иногда даже достаточно
отчетливо вырисовываются стенки
внутренней части прибора.
Если при этом зрачок глаза будет
по своему диаметру значительно
больше выходного зрачка прибора,
то лучи, отраженные от стенок при-
бора, смогут попасть в глаз наблюда-
теля и наложиться на основное изоб-
ражение предмета, следствием чего
явится понижение контраста изо-
бражения.
Для того чтобы можно было оце-
нить влияние засветки, возникающей
вследствие отражения от внутренних
стенок прибора, можно прибегнуть
к построению в обратном ходе лучей
изображения входного зрачка глаза-,
как это показано на примере теле-
скопической системы, представленной
на рис. 138.
На этом рисунке сплошными ли-
ниями показан ход лучей через теле-
скопическую систему в прямом ходе;
пунктиром — обратный ход лучей,
создающий изображение зрачка
глаза 2 ргл.
Так как зрачок глаза и выход-
ной зрачок прибора должны быть
совмещены друг с другом по положе-
нию, то и отображенное изображение
зрачка глаза в обратном ходе должно
разместиться в плоскости входного
зрачка системы; но так как зрачок глаза предполагался большим,
чем выходной зрачок прибора, то и отображение зрачка глаза
будет большим, чем входной зрачок. Соединяя отверстие диафрагмы
поля зрения и отображение зрачка глаза, получаем габарит хода
лучей, способных проникнуть в глаз наблюдателя; этот габарит
может пересечь собой внутренние стенки рассматриваемого прибора.
13*
195
Полагая, чго это пересечение произойдет на некоторой плоскости
А—А, расположенной на расстоянии а от переднего фокуса оку-
ляра, нетрудно определить положение изображения части трубки,
отражение от которой попадает в глаз наблюдателя.
Величины фокусного расстояния /об объектива и радиусы зрачков
обозначены на рисунке; кроме того, на рисунке показан радиус
R трубки и диаметр 2у' диафрагмы поля зрения.
В соответствии с рис. 138 находим
R У Рги У РгЛ^ У РгЛ У (4:67)
/иб /об Jок /об
откуда определим величину а
a==f'm(R~-p~. (468)
Ргл ~р~
На этом расстоянии целесообразно поставить последнюю диа-
фрагму для устранения засветки от стенок трубки.
Зная коэффициент отражения т от стенок трубки, нетрудно под-
считать величину коэффициента паразитной засветки ц, принимая
его равным отношению паразитной освещенности изображения к его
основной освещенности.
Величина коэффициента паразитной засветки определится как
произведение коэффициента отражения от стенок прибора на от-
ношение площади зрачка глаза к площади зрачка выхода прибора.
Вследствие этого можно написать
П = # = т-ф- (469)
^0 р
Численно, если диаметр выходного зрачка прибора будет равен
1 мм, а диаметр зрачка глаза будет равен 5 мм, то при коэффициенте
отражения т, равном одному проценту, получаем величину коэффи-
циента засветки ц, равную 25%.
196
Часть IV. СБОРКА И ЮСТИРОВКА ОПТИЧЕСКИХ СИСТЕМ
Глава XVII
РАЗДЕЛЕНИЕ ОПТИЧЕСКОЙ СИСТЕМЫ НА ОТДЕЛЬНЫЕ УЗЛЫ
§ 63. Общие соображения по разделению оптической системы
Во введении к настоящей монографии были высказаны некоторые
соображения, которые следует учитывать при разработке процесса
сборки и юстировки того или иного оптического прибора; попытаемся
сейчас эти соображения несколько более конкретизировать.
Первым из таких соображений должно явиться требование осуще-
ствимости решения задачи юстировки оптического прибора; оно сво-
дится к тому, чтобы выбор допусков на отдельные элементы системы
и выбор диапазона юстировочных подвижек при любых комбинациях
допустимых отклонений в отдельных деталях обеспечивал возмож-
ность удовлетворения требованиям, предъявляемым к данной опти-
ческой системе. Так, например, для телескопической системы, со-
стоящей из объектива и окуляра, могут быть заданы в предъявляемых
к ней технических требованиях величины видимого увеличения Г,
угла поля зрения 20 и диаметра выходного зрачка 2р'.
Величина видимого увеличения Г определяется отношением
фокусных расстояний объектива и окуляра
Г=-^- (470)
/ок
Обычно знак минус для видимого увеличения опускается.
Величина угла поля зрения телескопической системы выражается
известной формулой
tgp=- X- (471)
/об
(2у' — диаметр диафрагмы поля зрения); диаметр выходного зрачка
может быть выражен через увеличение и диаметр входного зрачка
2р' = -^-. (472)
Величины Г, 20 и 2р' по техническим условиям будут ограничены
определенными допусками.
197
Предельные величины этих допусков обозначим через ДГ,Д|3,
Др'. Дифференцируя формулы (470), (471) и (472), находим
dr __ dj^^ df0K / Z 7 Q\
Г f'o6 f'K 9 (
____„ dy__ (474)
sin (3 cos p y' f'o6 ’ ' 7
do^_=dp_dT (475)
P, P Г v '
— выражения, соответствующие формулам (4).
В полученных равенствах левые части можно считать заданными
(они выражают собой величины относительных допусков на оптиче-
ские характеристики системы); в правых же частях этих равенств
фигурируют величины dfQJfQ^ dy'/у' и cZp/p, пока еще
неизвестные, которые можно рассматривать как величины относи-
тельных допусков на отступления от заданных значений характери-
стик отдельных элементов оптической системы.
Определяя из равенства (475) отношение cZp/p, находим
^pz । dr (476)
р р' * г ' 7
Вначале примем, что величина относительного допуска на диаметр
входного зрачка будет равна нулю.
Тогда формула (476) перепишется в виде
с?р' dr
(477)
Отсюда следует, что величина относительного допуска на увели-
чение предопределяет величину возможного относительного допуска
на диаметр выходного зрачка.
Это означает, что в том случае, когда относительный допуск
на увеличение по абсолютной величине будет больше, чем относи-
тельный допуск на изменение величины выходного зрачка, мы не
сможем использовать такой широкий допуск и будем вынуждены
отграничиться величиной относительного допуска на
величину диаметра зрачка выхода.
Из формулы (476) следует, что относительный допуск на вели-
чину диаметра выходного зрачка будет зависеть от относительного
допуска на увеличение и относительного допуска на диаметр вход-
ного зрачка.
Если относительный допуск на диаметр выходного зрачка будет
шире относительного допуска на увеличение, то разность между
этими величинами можно принять равной относительному допуску
на диаметр входного зрачка.
<478>
198
Так, если задать допуск на увеличение Г в 3%, а допуск на диа-
метр выходного зрачка принять равным 5%, то величина относитель-
ного допуска на диаметр входного зрачка будет равна 2%.
Однако если руководствоваться величиной большего относитель-
ного допуска в рассматриваемом примере определения допуска на
величину диаметра выходного зрачка, то, задавая нулевую величину
относительного допуска на диаметр входного зрачка, нельзя обес-
печить заданный относительный допуск на увеличение; для этого
потребовалось бы задать согласованное отступление от номинальной
величины входного зрачка соответственного знака, что уже нельзя
было бы рассматривать как величину допуска.
Возвращаясь к формулам (473) и (474), видим, что в них входят
три пока еще неизвестные величины — dy' ly', и
Складывая правые и левые части этих двух формул, можно
исключить из них величину отношения df'^lf'^, таким образом,
получается следующее выражение:
.___________dyr dfQK ( / 7q\
Г sinpcos|3 у1 /;в • k 7
Сопоставим формулу (479) с формулой (473). В обеих формулах
левые части можно считать известными; правые же части содержат
но две неизвестные величины.
При рассмотрении формул заметим, что в формуле (479) левая
часть является суммой двух слагаемых относительных допусков,
тогда как в формуле (473) она выражена только одним относительным
допуском на увеличение.
Это обстоятельство позволяет в формуле (473) задать допуски
на фокусные расстояния объектива и окуляра, исходя, например,
из технологических соображений.
В рассматриваемой телескопической системе можно было бы уста-
новить относительный допуск на величину фокусного расстояния
объектива в 1 %, руководствуясь тем, что в объективе меньшее число
линз, чем в окуляре, и что, кроме того, в окуляре имеется воздуш-
ный промежуток, который также может повлиять на изменение
фокусного расстояния; для окуляра можно установить величину
относительного допуска в 2%.
Расширение величины относительного допуска для окуляра
целесообразно еще и потому, что требования к качеству изображения
окуляра более свободные, чем для объектива.
Установив относительный допуск на величину фокусного расстоя-
ния объектива, можно возвратиться к формуле (474) и с ее помощью
установить допуск на величину диаметра диафрагмы поля зре-
ния 2у'.
Совершенно очевидно, что в этом случае относительный допуск
на величину угла поля зрения должен быть шире, чем относительный
допуск на величину фокусного расстояния объектива (это обстоя-
тельство также следует учитывать при выборе допуска на величину
фокусного расстояния объектива). Так, если величина отношения
199
равна 2%, то на величину диаметра диафрагмы поля зре-
ния следует установить относительный допуск в 1%.
В рассмотренном примере телескопическая система разбита на
четыре элемента: объектив, окуляр, диафрагму поля зрения и диа-
фрагму, определяющую диаметр входного зрачка.
Совершенно очевидно, что разбивка системы именно на эти элемен-
ты преследовала собой возможность установления допусков для
этих элементов, гарантировавших соблюдение заданных технических
требований для всей системы в целом.
Вместе с тем, разбивая систему на объектив, окуляр и диафрагмы,
можно было бы присоединить коллектив к объективной части си-
стемы.
Это обстоятельство говорит о некоторой условности разбивки
оптической системы на отдельные узлы, так как в известных случаях,
действительно, коллектив лучше отнести к объективной части системы
(например, тогда, когда коллектив размещен между объективом
п сеткой, а между сеткой и глазной линзой окуляра расположена
ромбическая призма).
При разбивке системы на отдельные оптические узлы следует
руководствоваться рядом соображений, например:
— удобством совместной центрировки и сборки нескольких опти-
ческих деталей в общих тубусах (окуляры, половинки фотографи-
ческих объективов, объективы зрительных труб, объективы микро-
скопов);
— более или менее самостоятельным исправлением аберраций
(напомним выводы § 40, когда наличие значительной внутренней
сферической аберрации при изломе части оптической системы при-
водило к возникновению комы в центре поля зрения);
— возможностью самостоятельной юстирсвкл и юстировки по
отношению к элементам механической конструкции прибора;
— возможностью удобного контроля характеристик выделяемого
узла.
Необходимо отметить также и то, что наличие возможности са-
мостоятельной юстировки того или иного узла оптической системы
позволяет расширить допуски на изготовление оптических деталей,
входящих в данный узел.
§ 64. Сборка оптической системы из отъюстированных узлов
Руководствуясь соображениями, высказанными в предыдущем
параграфе, удобно при разделении оптической системы на отдель-
ные узлы отдельно собирать и юстировать узлы, состоящие из линз
(круглой оптики) и составленные из призм и зеркал.
Действительно, исходя из анализа действия плоскопараллельной
пластинки, к которой привсдится подавляющее большинство отра-
жательных призм, можно сделать заключение, что расположение
призм при их поступательных перемещениях относительно линзовой
части системы (если призмы не расположены между элементами лин-
200
завой части системы) не сможет повлиять на качество изображения
и фокусное расстояние всей системы.
Наоборот, линзовая часть системы в свою очередь не сможет
повлиять на оборачивание изображения, на действие визирных
устройств осей, лимбов и т. п.
В качестве характерного примера такого разделения оптической
системы па самостоятельные оптические узлы можно привести
оптическую систему киносъемочной камеры для выполнения трюко-
вых киносъемок по способу блуждающей маски.
Оптическая система этой кинокамеры естественным образом
распадается на собственно объектив и блок призм, разделяющих
Рис. 139
изображение на инфракрасное и видимое, фотографируемые затем
каждое на отдельную кинопленку.
В этом случае юстировка объектива производится совершенно
самостоятельно при замене блока призм плоскопараллельной пла-
стинкой, равной по своей толщине длине развертки призменного
блока камеры.
Схема оптики трюковой киносъемочной камеры представлена
на рис. 139, где сплошными линиями показан разделительный блок,
а пунктиром — его развертки по первому каналу, обозначенные
буквами с одним штрихом вверху, и по второму каналу, обозначен-
ные буквами с двумя штрихами вверху.
Рассмотрим более подробно действие блока разделительных призм.
Из-за чисто геометрических соображений совмещения видимого
и инфракрасного изображений блок разделительных призм не дол-
жен создавать двоения изображения ни за счет поступательного
смещения одного изображения относительно другого, ни за счет
их взаимного разворота. Кроме того, установка блока призм в ка-
мере должна обеспечивать одновременность фокусировки по обоим
каналам.
201
Рассогласование изображений в вертикальной плоскости, пер-
пендикулярной к плоскости рисунка (схема трюковой кинокамеры
дана на рис. 139 в плане), будет связано с неперпендикулярностью
отражающих граней к плоскости главного сечения блока призм;
эта неперпендикулярность сведется к ошибке пирамидальности
призм, входящих в разделительный блок.
Рассогласование изображений в плоскости рисунка может быть
связано как с изменением углов между гранями призм в плоскости
рисунка, так и с изменением линейных размеров призм, входящих
в разделительный блок.
Очевидно, что разделительный блок, обладающий указанными
ошибками, не сможет обеспечить требуемого совмещения изображе-
ний; однако и блок, в котором совмещение изображений обеспечи-
вается, может при неправильной его установке в камере вызвать
нарушение согласованности фокусировки в обоих каналах.
Это обстоятельство приводит к тому, что даже и при хорошо
отъюстированных отдельных узлах оптической системы возможно
невыполнение требований, предъявляемых ко всей системе в целом.
Это будет в случае, если не соблюдается правильная установка
оптических узлов относительно механических элементов собираемого
прибора. В рассмотренном случае это относится к установке раздели-
тельного блока призм по отношению к фильмовому каналу.
Подобное необеспечение требований к оптической системе в це-
лом возможно и при неправильной взаимной установке различных
отъюстированных оптических узлов.
§ 65. Оптические системы с одним юстировочным элементом
В тех случаях, когда для выполнения одного из требований,
предъявляемых к оптической системе, возникает необходимость
соблюдения очень высокой точности для обеспечения какой-либо
характеристики соответствующего элемента оптической системы,
можно прибегнуть к расширению допуска на эту характеристику
за счет введения в конструкцию прибора соответственного юстиро-
вочного элемента.
Ранее, в § 16, упоминалось о трудностях, возникающих при устра-
нении рена в отсчешых микроскопах, и выявлены две причины воз-
никновения рена — разворот основной шкалы и шкалы микрометрен-
ного устройства друг относительно друга и, что является наиболее
важным, изменение увеличения отсчетного микроскопа, связанное
с изменением фокусного расстояния микрообъектива.
Там же было установлено, что для устранения рена при измене-
нии фокусного рассюяния микрообъектива потребуется изменить
величину оптической длины тубуса.
Необходимо отметить, что при юстировке отсчетного микроскопа
приходится сохранять резкость изображения, что потребует обеспе-
чения определенной величины отрезка х' между задним фокусом
микрообъектива и плоскостью сетки.
202
Согласно формуле, определяющей линейное увеличение, величина
отрезка х' равна произведению фокусного расстояния на линейное
увеличение; сохраняя последнее постоянным, приходим к выводу
о том, что величина отрезка х должна изменяться пропорционально
изменению величины фокусного расстояния.
Таким образом, можно написать, что
х' = -Vf, (480)
откуда
= (481)
Сопоставляя формулу (481) с формулой (95), видим, что величина
относительного изменения dx /х' отрезка х будет равна необходи-
мому относительному изменению dL/L длины системы L.
Так как при увеличениях V, существенно больших единицы,
величины L и х' будут отличаться друг от друга на величину удвоен-
ного фокусного расстояния микрообъектива, то и изменение величины
отрезка х' будет одного порядка с изменением оптической длины
тубуса L.
Поэтому при юстировке отсчетного микроскопа с целью устране-
ния рена необходимо обеспечить возможность не только изменения
оптической длины тубуса — расстояния между предметом и изо-
бражением, но и изменения расстояния между объективом и плос-
костью сетки отсчетного микроскопа.
Таким образом, приходим к необходимости решения задачи юс-
тировки отсчетного микроскопа на устранение рена с помощью
устройства, обеспечивающего возможность двух подвижек — по-
движки для изменения расстояния между объективом и сеткой
и подвижки для фокусировки всего микроскопа.
Обратим внимание на последовательность устранения рена.
Сохраняя объектив неподвижным относительно предметной плос-
кости и изменяя при этом длину тубуса, при устранении рена будем
в какой-то степени ухудшать резкость изображения. Такое изме-
нение длины тубуса может быть выполнено за счет удаления оку-
лярной части и микрометренного устройства от объектива.
Восстановить резкость изображения можно путем подвижки
всего микроскопа, не изменяя расстояния между объективом и сет-
кой; такая подвижка будет значительно меньше, чем увеличение
длины аубуса, вызвавшее нарушение резкости изображения, и по-
тому практически почти не отразится на изменении увеличения
микроскопа и величины рена.
Выбирая последовательность юстировочных процессов, всегда
следует обращать внимание, насколько один из них будет разрушать
результат, достигаемый в другом юстировочном процессе.
В § 16 было установлено, что устранение рена порядка 0,1%
от длины шкалы микрометра потребовало обеспечения подвижки
для изменения оптической длины тубуса с погрешностью порядка
0,1 мм.
203
Ранее было уже сказано, что подобная подвижка может быть
выполнена от руки. Однако, рассматривая необходимую точность
подвижки для обеспечения изменения резкости изображения в ми-
кроскопе, приходим к более жестким требованиям к величине по-
движки.
Например, при увеличении микрообъектива, равном 10х, и на-
рушении фокусировки в плоскости сетки порядка 1,0—0,5 мм точ-
ность фокусировки микроскопа должна быть порядка 0,01—0,005 мм,
что обеспечить ручной подвижкой не представляется возможным.
Отсюда возникает потребность в создании специального устройства
для микрометренной юстировочной подвижки всего отсчетного мик-
роскопа при его установке относительно предметной шкалы.
Заметим, что такое юстировочное устройство, обеспечивающее
микрометренную подвижку того или иного оптического узла, не
обязательно иметь встроенным в прибор; в некоторых случаях для
таких подвижек может быть предусмотрено специальное юстиро-
вочное приспособление, удаляемое после окончания процесса юсти-
ровки. Кроме того, более тонкая юстировка может быть выполнена
и подгонкой посадочного места — шабровкой или введением про-
кладки требуемой толщины.
§ 66. Системы с несколькими юстировочными элементами
Общую задачу юстировки оптической системы на устранение
нескольких отступлений А 1? А 2, А 3 от заданных величин с помощью
нескольких юстировочных подвижек а, Р, у можно представить
в первом приближении как решение системы линейных уравнений
вида
Ах = А & + 4- Сху '
А2 = Л 2сх -f- 52р -f- С2у
Аз — ^за +^зР + ^зУ *
(482)
если речь идет о трех юстировочных элементах и трех устраняемых
отступлениях.
Решение этой системы уравнений приводит к равенствам
^iao + Ж + CiYo — 0
Л'А + 52ро + С2у0 = 0
^зао~Ь^зРо + £зУо~О >
(483)
где коэффициенты А, В и С характеризуют влияние каждого из
параметров юстировочных элементов на те или иные отклонения
оптических характеристик.
Величины этих коэффициентов в ряде случаев могут быть вы-
числены заранее; это часто реализуется при юстировке сложных
фотографических объективов, когда вместе с выпуском оптической
системы приводится и так называемая таблица влияния параметров.
204
Если значения коэффициентов А, В и С известны, то задача
юстировки может быть сведена к формальному решению системы
уравнений (482), что и делается при юстировке фотографических
объективов, предназначенных для измерительных целей, когда в ре-
зультате решений этой системы уравнений определяются требуемые
значения толщины прокладочных колец, обеспечивающих соблю-
дение требований, предъявляемых к объективу.
Однако в ряде случаев при юстировке оптических систем значе-
ния коэффициентов А, В и С могут оказаться неизвестными; в равной
степени могут быть неизвестны и исходные значения параметров
(подвижек) а, Р и у.
Дифференцируя формулы (482), можно получить зависимости,
связывающие изменения параметров и изменения юстируемых ве-
личин.
Находим, что
йД х = Аг da + В± -|- С\ dy
d&2 = А2 da + В2 + С2 dy
d^ з = А з da -{- В$ -4- С3 dy -
(484)
Задаваясь какими-либо значениями дифференциалов параметров,
можно определить величины коэффициентов Л, В и С как частных
производных от величин Д х, Д2 и Д3
А. = _dAi А, = _ дА2 , лч = . дДз 1
да 9 да 9 3 Эа
BL = эр > 52= 0А2 эр - _ ЭД3 эр
С1 ЭДХ ду 9 с2= = эд2 ду 9 .. ЭДз ду
(485)
Полагая значения полных дифференциалов йД х, йД 2 и d& 3 рав-
ными по величине и обратными по знаку величинам устраняемых
отступлений Д х, Д 2 и Д 5, можно получить систему уравнений
—Дх = да 1 дкг эр aAi Эу dy
Д2— да 1 эд2 др эд2 Эу dy (486)
—Д3 = 5А3 т -^-da Н да 1 , 5Дз 1 ар Сф + ЭЛз Эу dy
решая которую определяют необходимые изменения отдельных
параметров da, dfi и dy.
Однако использование формул (486) требует численного опре-
деления величин коэффициентов по формулам (485), что не всегда
возможно. Так, если подвижки в юстировочных элементах будут
производиться от руки или с помощью юстировочных винтов, не
205
имеющих соответственных отсчетных устройств, то численное опре-
деление коэффициентов осуществлено быть не может. Тем не менее
возможно так построить юстировочный процесс, что при отсутствии
числовых значений для коэффициентов задача совместного устра-
нения юстируемых отступлений будет решена.
Вернемся к рассмотрению формул (482). Предположим, что
коэффициенты Л2, As могут быть выражены через коэффициент AL,
коэффициенты В 2, В3 — через Вг и коэффициенты С2, С3 — через
коэффициент С±.
Тогда формулы (482) могут быть представлены в следующем
виде:
Ai — Ауэс + Суу
Д2 = aLA ух + + crCA у
\ 3 = а2А & +Ь2В$ А-с£1У >
(487)
Допустим, что в формулах (487) коэффициенты а, & и с не равны
друг другу. При этом соблюдаются следующие неравенства между
коэффициентами
1 >«2
Ъ2< Ь, > 1
> 1
(488)
которые сводятся к тому, что в первом из уравнений (487) влияние
коэффициента в первом члене больше, чем во втором и третьем урав-
нениях, что во втором члене второго уравнения коэффициент имеет
большее влияние, чем в первом и третьем уравнениях, и что в послед-
нем уравнении влияние третьего члена более сильно, чем в первом
и во втором уравнениях.
Зададим параметру а в первом уравнении некоторое изменение
Да, при котором произойдет изменение первого отступления на
величину
ДДХ = Л Да. (489)
Тогда второе отступление Д 2 получит изменение ДД 2, равное
ДД3= arA = ДД]. (490)
Предположим, что нужно сохранить второе отступление неизмен-
ным. Тогда во втором члене можно ввести некоторое изменение
параметра |3 с таким расчетом, чтобы оно создало изменение отступ-
ления Д 2, равное по величине и обратное по знаку изменению ДД 2.
Таким образом, можно написать
^ДД^-МДР- (491)
Изменение параметра Д|3 вызовет изменение первого отступле-
ния ДД{. Его величина будет равна
ДД; = В др = —ДДХ. (492)
2С6
Но по условиям (488) соотношений между коэффициентами коэф-
фициент а± меньше, а коэффициент Ъ± больше единицы; это позво-
ляет сделать вывод, что восстановление исходной величины второго
отступления при изменении первого отступления вызовет вторичное
изменение первого отступления, но уже меньшего, чем первичное;
иными словами, в результате подобной процедуры можно изменить
первое отступление, не затронув второго, т. е. прийти как бы к раз-
дельному устранению отступлений.
Нетрудно представить, что подобный процесс может быть рас-
пространен на третье отступление и так далее.
В рассмотренном случае задавались определенными соотноше-
ниями между коэффициентами а и &; однако в общем случае для
организации подобного юстировочного процесса достаточно, чтобы
лишь отношение коэффициентов а : Ъ было не равным единице.
Практически выбор последовательности изменения юстировоч-
ных параметров нетрудно произвести, исходя из устранения пер-
вого отступления и затем из восстановления под действием второго
параметра исходной величины второго отступления; тогда, сопо-
ставляя исходную величину перього отступления с вновь полученной
его величиной, нетрудно выяснить, в каком направлении следует
вести юстировочный процесс, добиваясь устранения первого из
отступлений.
Далее можно построить процесс юстировки второго отступления,
все время устраняя первое отступление, третьего отступления и так
далее.
Очевидно, что при разработке юстировочных элементов в каком-ли-
бо оптическом приборе нужно обеспечивать необходимые диапазоны
действия юстировочных подвижек; однако не следует и задавать
чрезмерно большие диапазоны действия юстировочных устройств.
Глава XVIII
КОНСТРУКТИВНЫЕ УЗЛЫ СИСТЕМ ИЗ КРУГЛОЙ оптики
§ 67. Круглая оптика для телескопических систем.
Объективы, окуляры
Как известно, видимое увеличение Г телескопической системы
определяет отношение фокусных расстояний объективной и окуляр-
ной частей, а также и величины предметного и окулярного углов
поля зрения.
Особенностью окулярной части телескопической системы (равно
как и окулярной части микроскопа) является необходимость доста-
точного удаления выходного зрачка от последней поверхности
окуляра для обеспечения совмещения с выходным зрачком окуляра
207
входного зрачка глаза. Кроме того, окуляры должны допускать
коррекцию аметропического глаза посредством соответственной пере-
фокусировки; важно, чтобы выполнение такой перефокусировки
для миопического (близорукого) глаза, связанное с углублением
окуляра, не было ограничено упором оправы окуляра в оправу
сетки.
Оправа окуляра должна быть снабжена диоптрийной шкалой,
позволяющей заранее отфокусировать окуляр с учетом известной
величины аметропии глаза наблюдателя.
Фокусные расстояния окуляров редко делают большими, чем
25—30 мм\ такие сравнительно небольшие фокусные расстояния
окуляров приводят к тому, что величина собственного увеличения
окуляра редко делается меньшей 10х.
Однако короткие фокусные расстояния окуляров создают и из-
вестные трудности в их осуществлении.
При малых фокусных расстояниях окуляры используются с до-
вольно большими относительными отверстиями, определяемыми
величиной отношения диаметра зрачка глаза к фокусному расстоянию
окуляра, чго в свою очередь определяет и величину относительного
отьерс1ия объективной части прибора. Кроме того, при меньших
фокусных расстояниях возрастают кривизна поля зрения и астиг-
матизм, отнесенные к пространству после окуляра.
Наконец, короткие фокусные расстояния окуляров приводят
к малым величинам переднего отрезка — расстояния от окуляра
до сетки и расстояния от последней линзы до выходного зрачка
окуляра.
Следует иметь в виду, что сама оптическая система окуляра
не несет измерительных функций; кроме того, установка глаза
по отношению к окуляру является в известной степени произвольной.
Все это существенно упрощает работу окуляров; кроме того,
в некоторых конструкциях окуляров воздушные промежутки малы
и это практически исключает их изменение в целях юстировки.
Довольно значительным воздушным промежутком обладает оку-
ляр Кельнера, поэтому в нем возможно некоторое изменение его
фокусного расстояния за счет изменения величины воздушного
промежутка.
Принимая в окуляре Кельнера оптические силы коллектива и глаз-
ной линзы равными и полагая также, что величина воздушного
промежутка близка к величине фокусного расстояния этих линз,
можно, используя формулу для силы сложной системы:
<Р = <Р1+ф2 — <Р1ф2<Л (493)
перейти к следующей формуле:
ср = ср! (2 — ср! d). (494)
Отсюда, принимая во внимание, что d /{, получаем
d<p df' _ d(d) ~ d(d) /zQr\
<p f 2j[d “ d ' ' '
208
Из формулы (495) следует, что относительное изменение фокус-
ного расстояния окуляра близко к относительному изменению
величины воздушного промежутка между линзами.
Кроме того, из этой же формулы нетрудно усмотреть, что при
воздушных промежутках, меньших фокусного расстояния линз,
одному и тому же абсолютному изменению воздушного промежутка
будут соответствовать меньшие относительные изменения фокусного
расстояния всего окуляра.
В качестве объективов зрительных труб широко используют
компоненты, склеенные из двух линз; однако такие объективы обла-
дают тем недостатком, что при больших диаметрах линз их склейка
вызывает значительные деформации поверхностей, что приводит
к резкому ухудшению качества изображения. Поэтому при диамет-
рах линз, превосходящих 80—100 мм, уже избегают применения
склейки и переходят к использованию двухлинзовых несклеен-
ных объективов с небольшим междулинзовым воздушным проме-
жутком.
Однако переход к несклеенному объективу приводит к системе,
оба элемента которой — простые отдельно стоящие линзы в воздухе —
будут обладать значительной сферической аберрацией в междулин-
зовом воздушном промежутке.
В соответствии с результатами, полученными в § 40, подобные
системы при нарушении центрировки будут обладать нецентрирован-
ными аберрациями, в частности комой в центре поля зрения. Кроме
того, величина воздушного промежутка довольно сильно влияет на
изменение сферической аберрации; эти два обстоятельства сущест-
венно повышают требования, предъявляемые к центрировке таких
объективов и к выдерживанию в них величины воздушного проме-
жутка.
Поэтому иногда прибегают к тому, что при расчете несклеенного
объектива делают радиус вогнутой поверхности несколько меньшим
радиуса выпуклой поверхности с тем, чтобы величина воздушного
промежутка обеспечивалась при касании линз по их краям.
Тогда представляется возможным избежать применения прокла-
дочного кольца между линзами объектива и заменить его тремя
тонкими станиолевыми прокладками по краю.
Такого рода конструкция несклеенного объектива при достаточно
жестких допусках на центрировку отдельных линз обеспечивает
достаточно хорошую его общую центрировку.
Необходимо отметить, что некоторая взаимная децентрировка
объектива и окуляра (происходящая главным образом за счет де-
центрировки окуляра при некоторой эксцентричности окулярной
резьбы) благодаря самостоятельному исправлению аберраций объек-
тивной и окулярной частей системы ощутимо не сказывается на из-
менении качества изображения для всей системы в целом; но в бино-
кулярной системе децентрировка окуляра может привести, как это
будет показано в дальнейшем, к заметному нарушению параллель-
ности полей.
14 Заказ 2301.
209
§ 68. Закрепление круглой оптики. Резьбовые оправы
Сопряжение линз с их оправами должно обеспечивать правильное
расположение линз в оптической системе, сохранять постоянство
этого расположения при изменении внешних условий и не должно
вызывать деформаций линз, нарушающих качество изображения.
Обычно для закрепления линз применяют латунные или дюрале-
вые оправы, имея в виду, что коэффициенты температурного расши-
рения стекла меньше этих же коэффициентов для указанных ме-
таллов. При понижении температуры в малых первоначальных за-
зорах между линзами и оправами возможно возникновение больших
натяжений, деформирующих форму преломляющих поверхностей
и понижающих качество изображения, даваемое оптической систе-
мой. Так, оптическое стекло марки ТК-16 имеет коэффициент линей-
ного расширения, равный 6,8-10“6—7,2-10-6, латунь имеет коэф-
фициент расширения, равный 10 • 10“6—20-10”6, и дюралюминий —
порядка 22 10-6. Поэтому при перепаде температур в 50° С и диамет-
ре линзы 100 мм возникает разность диаметров до 0,065 мм.
Поэтому во избежание зажатия линзы в ее оправе необходимо
оставлять при сборке некоторый зазор, изменением которого может
быть скомпенсировано изменение диаметров линзы и ее оправы.
В тех случаях, когда диаметры нескольких линз одинаковы
и разделяющие их воздушные промежутки невелики (как это имеет
место, например, в симметричных окулярах), при невысоких требо-
ваниях к центрировке оптической системы может быть использован
насыпной метод крепления линз в одном общем тубусе без применения
оправ для закрепления каждой из линз в отдельности.
При таком способе крепления оптики величины воздушных про-
межутков обеспечиваются прокладочными кольцами. Все линзы
после их укладки в общий тубус закрепляются в нем с помощью
резьбового кольца, воздействующего на линзы через все прокладоч-
ные кольца и сами линзы.
Такой способ удобен тем, что он обеспечивает наименьший воз-
можный диаметр тубуса; однако этот способ имеет и свои неудобства,
заключающиеся в том, что он требует последовательного проталки-
вания линз через весь тубус, вследствие чего даже при небольших
перекосах возможно заклинивание линз; кроме того, давление на
линзу, расположенную непосредственно за прижимным кольцом,
может значительно превосходить давление, необходимое для за-
крепления линзы, наиболее удаленной от зажимного кольца.
Необходимость обеспечения значительного зазора для легкого
продвижения линз через весь тубус создает затруднения при цен-
трировке системы.
Обратим внимание на особенности склейки линз. Если обе склеи-
ваемые линзы имеют одинаковый диаметр, то при их небольшом
относительном сдвиге, как это показано на рис. 140, а, произойдет
увеличение диаметра склеенной пары линз в направлении их сме-
щения; это одностороннее увеличение диаметра уменьшит зазор
210
между линзой и тубусом и ухудшит условия и качество сборки
и юстировки.
Чтобы избежать этого и улучшить качество центрировки, при-
бегают к приданию склеиваемым линзам несколько различающихся
диаметров, как это показано на рис. 140, б; в этом случае центри-
ровка склеенной линзы обеспечивается соответствием диаметра
большей линзы с широким пояском диа-
метру отверстия тубуса; разность же диа- / Хгд \
метров обеих линз позволяет производить их / \ \ / \
взаимную центрировку в процессе склейки. -I 1-|— —I не-
определим возможное изменение центри- \-/ / \-/
ровки последней поверхности склеиваемой \ / / \ / /
линзы, если известны ее радиусы и разность
диаметров обеих линз. а
Обратимся к рис. 141, на котором пред- Рис. 140
ставлено возможное смещение второй линзы
на величину dh, повернутой относительно центра О2 поверхност
склейки на угол dy.
Смещение центра О3 кривизны третьей поверхности обозначим
через б. Согласно рис. 141 следует
sinY = y-« (496)
Дифференцируя эту формулу,
получаем
cosydy=^, (497)
откуда легко определяется вели-
чина самого угла dy
7 dh dh
r r2cosy ]/Г2_Д2
(498)
Зная угол dy, нетрудно найти и величину смещения центра третьей
поверхности
д = Гз /2+d dh. (499)
/г2-7г2 v
Численно, полагая h = 25,0; г2 = 35,0; г3 = —75,0 и d = 10,
получаем
,_-7S.0-35,0+Wrft
/35,02- 25,02
— ^dh.
Заметим, что величина угла dy может рассматриваться как угол
дополнительного клина из двух сферических поверхностей (в первом
14* 211
приближении такой клин можно рассматривать как клин между
двумя плоскостями), возникшего за счет нарушения центрировки.
В рассмотренном случае, полагая величину смещения dh =
= 0,02 мм, получаем величину угла клина dy, равной
dy = Л_...?’02 . 0,0008 = 2'40".
Г /35,02- 25>02
Если диаметры линз, из которых построена оптическая система,
различны, прибегают к закреплению линз в самостоятельные оправы,
которые могут быть выполнены с одинаковыми наружными диамет-
рами и вставлены затем в один общий тубус.
Закрепление линз в оправах позволяет использовать возможность
придавать оправам длину, значительно превосходящую ширину
кромок (поясков) линз, величина которых обусловлена расчетом
оптической системы.
Большая длина оправ, в которые закрепляются линзы, позволяет
использовать эти оправы в качестве направляющих, фиксирующих
угловую центрировку линзы в оптической системе (отсутствие
перекосов).
При креплении линз в общем тубусе ввиду малой ширины ци-
линдрической кромки у линз их угловая центрировка определялась
центрировкой по торцам; в случае недостаточной параллельности
торцов у прокладочных колец произойдет перекос линз, входящих
в оптическую систему, относительно ее общей оси.
Длинные оправы, несущие закрепленные в них линзы, широко
используются при установке линз в длинных тубусах, где тре-
буется проталкивать линзы на значительной длине и где было бы
необходимо применять и длинные прокладочные кольца — трубки.
При закреплении линз в длинных оправах представляется воз-
можным избежать применения прокладочных колец и трубок и за-
креплять оправы с линзами в требуемых положениях посредством
стопорных винтов, проходящих через стенки наружной трубы —
тубуса.
Иногда (например, в некоторых конструкциях простейших фото-
объективов) используют соединение оправ, несущих отдельные линзы
оптической системы, посредством их свинчивания друг с другом.
Этот способ хотя и создает некоторые удобства при сборке и раз-
борке оптической системы (устраняет необходимость перемещения
деталей в тубусе), очень невыгоден в том отношении, что он не обес-
печивает хорошей центрировки и при изменении воздушных проме-
жутков за счет подрезки торцов у резьбовых оправ нарушает по-
стоянство центрировки отдельных линз.
Закрепление оптических деталей, осуществляемое с помощью
резьбовых колец, выгодно тем, что позволяет вынимать линзы из
оправ, не разрушая последних (как это имеет место при завальцовке
линз в оправах); однако действие зажимных колец вследствие не-
точности резьбы может приводить к зажатию линзы в одной точке,
что является причиной возникновения местных натяжений в линзе.
212
Поэтому, когда идет речь о закреплении линз с большими диа-
метрами, чтобы устранить возможность зажатия линзы в одной точке,
прибегают к установке между линзой и зажимным кольцом промежу-
точного пружинящего кольца, опирающегося на поверхность линзы
в трех точках, расположенных под углами в 120°.
§ 69. Закрепление линз с помощью закатки. Центрировка линз
при закатке
Наряду с закреплением линз с помощью резьбовых колец ши-
рокое распространение имеет закрепление линз в оправах с помощью
закатки (завальцовки).
Закрепление линз с помощью закатки представлено на рис. 142,
где показан разрез оправы, которая имеет тонкую кромку толщиной
около 0,2—0,4 мм, несколько выступающую за
кромку закатываемой линзы (на 0,1—0,7 мм).
Закатываемая линза вставляется в оправу,
посадочное место в которой растачивается не-
посредственно перед процессом закатки. Благодаря
этому первая поверхность линзы, ложась на про-
точенную кромку оправы, автоматически оказы-
вается центрированной относительно оси шпин-
деля станка, на котором производится закатка.
После этого, надавливая на кромку оправы (усик),
постепенно загибают ее до тех пор, пока линза не
окажется закрепленной в оправе.
Такое закрепление линзы является неразъем-
ным соединением, хотя в исключительных слу-
чаях и удается раскатать усик, не повредив ни
его, ни вынимаемую линзу.
Крепление линз с помощью закатки выгодно
в том отношении, что закрепляемая линза со- Рис. 142
прикасается с оправой по линии, образуемой
ребром заточки оправы, что гарантирует сохранение центри-
ровки передней поверхности линзы, и удерживается кромкой усика,
который благодаря незначительной толщине способен несколько
деформироваться; это обеспечивает постоянный контакт усика со вто-
рой поверхностью линзы, несмотря на возможные температурные
изменения линейных размеров оправы и самой линзы.
Постоянство этого контакта обеспечивает неизменность положе-
ния линзы относительно ее оправы и, следовательно, постоянство
положения линзы внутри системы.
Вместе с тем, изменяя в процессе выполнения закатки силу
нажима на усик на его отдельных участках, можно добиться извест-
ного перемещения линзы, заставляя ее продвигаться по ребру за-
точки оправы в направлении, перпендикулярном оси системы.
Очевидно, что такое продвижение линзы позволяет перемещать
центр кривизны ее второй поверхности и приводить его на ось
213
•системы, не смещая центр первой поверхности; при этом положение
центра кривизны второй поверхности линзы на оси системы обеспе-
чивалось расточкой посадочного места перед закаткой линзы.
Контроль центрировки закатываемой линзы при этом можно
производить по биению изображений, отражаемых от обеих поверх-
ностей линзы при вращении шпинделя станка, на котором произ-
водится закатка линз.
Можно построить процесс, обратный процессу центрировки
линзы по ее оправе, когда соосность линзы и оправы будет обеспе-
чиваться центрировкой оправы по
отношению к оси линзы, определя-
емой прямой, проходящей через
центры кривизны обеих ее поверх-
ностей.
Сущность этого способа, предло-
женного акад. В. П. Линником для
центрировки линз микрообъективов,
состоит в том, что с помощью так
называемого «плавающего патрона»
приводят на ось шпинделя станка
ось линзы, закатанную ранее в свою
оправу, имеющую припуск по по-
садочному диаметру, и уже затем
осуществляют окончательную про-
точку оправы линзы до заданного
диаметра и торцовку до заданной
длины.
Устройство «плавающего патрона»
дано на рис. 143, где показан его
разрез по оси шпинделя станка.
Плавающий патрон состоит из
трех основных деталей, из которых
первая навинчивается непосред-
ственно на резьбу шпинделя. Первая
ограничивается сферическим торцом
на оси вне второй детали.
Рис. 143
деталь на одном ее конце
с центром, располагающимся
Вторая промежуточная деталь прижимается к первой с помощью
пружины, действующей в направлении оси шпинделя. С другой
стороны, эта вторая деталь ограничивается плоскостью, к которой
прижимается торец третьей, последней детали.
Вторая деталь имеет возможность микрометренного перемещения
вокруг центра сферического торца относительно первой детали
под воздействием четырех винтов или двух винтов, расположенных
друг к другу под углом 90°, и противодействующих им пружин.
Третья деталь, как и вторая, прижимается к ней с помощью
цилиндрической винтовой пружины сжатия (эта пружина может
непосредственно прижимать все три детали друг к другу) и, так же
как вторая, имеет микрометренные винты, обеспечивающие ее
214
перемещение в двух взаимно перпендикулярных направлениях
в плоскости, перпендикулярной к оси шпинделя.
На третьей детали устанавливается технологическая оправка, на
которой закрепляется оправа линзы, подлежащая обточке после ее
центрировки относительно оси станка.
Технологическая оправка выбирается с таким расчетом, чтобы
центр сферы соприкосновения первой и второй деталей патрона
совпадал с центром кривизны одной из поверхностей закатываемой
линзы.
Совмещение оси линзы с осью вращения шпинделя станка с по-
мощью «плавающего патрона» осуществляется в такой последова-
тельности. Сначала, пользуясь винтами, обеспечивающими движе-
ние третьей детали относительно второй, приводят на ось центр
той поверхности, который расположен вблизи центра сферы между
первой и второй деталями.
Приведение на ось шпинделя центра этой поверхности линзы
осуществляют либо по биению отраженного изображения предмета,
либо с помощью автоколлимационного микроскопа или трубки За-
белина.
Затем на ось шпинделя приводят центр кривизны второй по-
верхности, воздействуя на винты, обеспечивающие перемещение
второй и третьей деталей относительно первой. При этом благодаря
тому, что центр первой отцентрированной поверхности был располо-
жен вблизи центра поверхности соприкосновения первой и второй
деталей, его смещение будет или равным нулю, или очень мало.
Поэтому, при совмещении центра еще не отцентрированной по-
верхности с осью шпинделя практически не происходит нарушения
центрировки уже отцентрированной поверхности, и, таким образом,
завершается процесс совмещения оси линзы с осью шпинделя станка;
после этого можно приступить к проточке оправы линзы по задан-
ным размерам, обеспечивающим ее посадку в тубус.
Точность центрировки, достигаемая как при центрировке при
закатке линзы, так и при обработке оправы после установки ее на
«плавающем патроне», определяется биением шпинделя станка и точ-
ностью, с которой производится центрировка линзы относительно
оси шпинделя.
Глава XIX
УСТРОЙСТВА ДЛЯ КОНТРОЛЯ СБОРКИ УЗЛОВ
КРУГЛОЙ оптики
§ 70. Устройства для контроля центрировки. Автоколлимационный
микроскоп, трубка Забелина. Прибор Максутова
В тех случаях, когда отдельная линза или компонент, склеенный
из двух линз, не находятся на шпинделе станка, где центрировку
проверяют обычно по биению изображения, прибегают к проверке
центрировки на приборе Максутова.
215
Схема прибора Максутова представлена на рис. 144, где он
показан в двух проекциях.
Прибор Максутова состоит из трех стержней с наконечниками
из пластмассы, на которые проверяемая на центрировку линза укла-
дывается своей нижней поверхностью.
Около двух основных стержней устанавливаются два более вы-
соких стержня; к этим двум стержням контролируемая линза при-
жимается своей кромкой.
Против одного из трех основных стержней устанавливается инди-
катор, щуп которого прижимается к верхней поверхности линзы.
Если контролируемая линза имеет
нарушения центрировки, то ее тол-
щина по краю не може! быть одина-
ковой — линза будет иметь так на-
зываемую «косину», которая и может
быть обнаружена на приборе Мак-
сутова, если линзу вращать, все
время прижимая ее к боковым
стержням.
Прибор Максутова имеет большое
значение тогда, когда приходится
изготавливать линзы с близко рас-
положенными центрами кривизны
обеих ее поверхностей — концен-
тричные линзы, мениски Максутова.
Центрировка таких линз должна
обеспечиваться еще при их шли-
фовке, и тогда роль прибора Мак-
сутова особенно возрастает.
Контроль центрировки с помощью
автоколлимационного микроскопа
или трубки Забелина построен на
наблюдении автоколлимационных
изображений, отраженных от обеих
поверхностей центрируемой линзы.
Однако при практической работе возникают известные трудности
в отыскании таких автоколлимационных изображений, так как даже
при незначительном нарушении фокусировки микроскопа изобра-
жение автоколлимационного блика может быть уже не видно. По-
этому необходимо заранее знать положение автоколлимационных
изображений, рассчитав их по известным параметрам центрируемой
линзы. Задача отыскания расположения автоколлимационного изобра-
жения по существу сводится к нахождению положения изображения
центра кривизны одной поверхности линзы, используя другую
поверхность.
Эта задача легко решается с помощью инварианта Аббе. Обра-
тимся к рис. 145, на котором представлена линза в воздухе, имеющая
радиусы гг и г2 и толщину по оси, равную d.
216
Положение центра кривизны первой поверхности относительно
вершины второй определяется отрезком $2, равным разности между
первым радиусом и толщиной линзы. Отрезок s2 определяет поло-
жение искомого автоколлимационного изображения
или
i — d.
(502)
(503)
части
В рассматриваемом случае п2 = n3 = 1, п2 = n, s2 = г
Из формулы (501) имеем
1 п п — 1
s2 ri — d г2 ’
откуда
~ = п ( 1 1 l z/ , 1
*2 \Г1 — d r2J~r r2 (rj — d)r2 T2 ’
Но выражение в скобках в числителе первого члена правой
формулы (503) есть расстояние между центрами поверхностей, обо-
значенное на рис. 145 буквой К. Тогда окончательно
K — r1 — d — r2
S’2~ n~(K^-2d) W
Г! — d +
Кроме положения изображения центра первой поверхности, для
определения истинной величины биения этого центра нужно знать
величину линейного увеличения, возникающего при его изображе-
нии через вторую поверхность.
217
Это линейное увеличение может быть определено по формуле
у n2g2 ______________________г2______
“ П2$2 (ГХ — d)] П
Рассмотрим работу автоколлимационного микроскопа, исполь-
зуемого для контроля центрировки.
Обратимся к рис. 146, на котором представлена предметная точка
4, являющаяся изображением через объектив микроскопа в обратном
ходе лучей светящейся точки, расположенной вблизи сетки окуляр-
ного микрометра.
Ось вращения шпинделя станка обозначим ОХ] через точку S
проходит центрируемая поверхность радиуса г.
В общем случае центр этой поверхности займет некоторое поло-
жение Ох, не совпадающее с осью вращения шпинделя и с предметной
точкой А микроскопа.
(505)
Отраженное от центрируемой поверхности изображение точки А
должно лежать на прямой, проходящей через центр Ог поверхности;
примем, что оно расположится в некоторой точке А^.
Обозначая расстояние от вершины поверхности до точки А через
s и до точки А[ через s', можно связать эти расстояния через инва-
риант Аббе, полагая, как всегда при отражении п' = —1.
Таким образом, можно написать
-(7-т)-тЧ. W
откуда
4 + — =—. (507)
S 1 S г Х
Исходя из формулы (506), можно написать
Формула (508) показывает, что если разность между отрезками
s и г мала, то будет мала и разность между отрезками s' и г.
218
Продифференцируем формулу (507). Находим
-^ + <=0. (509)
Полагая в исходной формуле значение отрезка s равным радиусу,
получим значение отрезка s', также равное радиусу.
В соответствии с этим формула (509) примет вид
ds'-\-ds = Q, (510)
откуда следует, что при исходных значениях s и s', равных радиусу,
изменения этих отрезков будут равны друг другу.
Поворачивая центрируемую поверхность вокруг оси шпинделя
на 180°, переведем положение центра этой поверхности в некоторую
точку 01, расположенную на равном расстоянии от оси шпинделя,
что и точка Ог, определявшая начальное положение центра поверх-
ности.
Вследствие перемещения центра поверхности произойдет и пере-
мещение изображения предметной точки Л', которая должна будет
занять положение Л" на прямой, проходящей через точку Л и новое
положение центра О', но при этом точка Л" сохранит свое расстоя-
ние s' от вершины поверхности.
Таким образом, образуются два подобных треугольника ЛОгО'
и ЛЛ^Л" с высотами s—г и s—s'.
Когда точка Л располагается вблизи центра поверхности Ог,
высоты могут быть приняты равными и ds — ds' = 2ds — % — рас-
стоянию между предметной точкой и ее изображением, отраженным
от центрируемой поверхности.
В этом случае величина основания Л'Л" большего треуголь-
ника будет равна удвоенной величине основания малого
треугольника, т. е. удвоенной величине децентрации — смещения
центра поверхности с оси вращения.
Отсюда величина отрезка а, равного основанию большего тре-
угольника, выразит учетверенную величину децентрации ц.
Если известно расстояние между сеткой окуляра и источником
света в автоколлимационном микроскопе £', то, зная линейное уве-
личение микрообъектива V, нетрудно определить величину расстоя-
ния между предметной точкой Л микроскопа и плоскостью, в кото-
рой располагается ее изображение, отраженное центрируемой по-
верхностью,
(511>
Полагая увеличение микрообъектива равным 10х и расстояние
между сеткой и источником света в автоколлимационном микро-
скопе, равным 10 мм, получим величину равную
£ = 7q2 =0’1 mm = s—s'.
219
При этом величина изображения децентрации в плоскости сетки
окуляра получится увеличенной в 40 раз; используя в микроскопе
окуляр с увеличением 10 х, получим видимое увеличение децентра-
ции после автоколлимационного микроскопа в 400 раз, что свободно
позволит ощущать децентрацию 0,002—0,003 мм.
Схема установки автоколлимационного микроскопа на станке
представлена на рис. 147, автоколлимационный микроскоп удобно
делать с изломом на 90° и монтировать его на пиноли задней бабки
станка. Автоколлимационный микроскоп следует снабжать юсти-
ровочным устройством, позволяющим совмещать предметную точку
с осью вращения шпинделя. Однако автоколлимационный микро-
скоп позволяет вести измерения и при смещении предметной точки
с оси шпинделя, так как в приведенном выше примере исходное
положение предметной точки (А на рис. 147) было выбрано произ-
вольным.
В тех случаях, когда линзы закатываются в оправу, предвари-
тельно проточенную на станке, что гарантирует правильность цен-
трировки первой поверхности линзы, положение автоколлимацион-
ного микроскопа может оставаться постоянным; вместе с тем, пере-
мещая микроскоп вдоль оси станка и совмещая его предметную точку
с изображением центра первой поверхности, можно проконтроли-
ровать и биение этого центра.
Если же центрировка линзы будет обеспечиваться по способу
проточки оправы после центрировки линзы с использованием «пла-
вающего патрона», то во время центрировки линзы потребуется
наблюдать оба автоколлимационных изображения; работая с авто-
Коллимационным микроскопом, пришлось бы все время передви-
гать его, переходя от контроля биения одного изображения к конт-
ролю биения второго.
В связи с этим удобнее воспользоваться для контроля центри-
ровки так называемой трубкой Забелина, позволяющей в одном
220
поле зрения наблюдать два автоколлимационных изображения
одновременно.
Схема трубки Забелина представлена на рис. 148. Она состоит
из двух разрезанных объективов, дающих изображения, располо-
женные в бесконечности; одна из половинок закрепляется неподвиж-
но, а вторая может перемещаться поступательно вдоль оси трубки.
Благодаря этому каждый из полуобъективов может быть сфокуси-
рован на свое автоколлимационное изображение.
После этих полуобъективов располагается телескопическая си-
стема, воспринимающая оба автоколлимационных изображения,
которые и будут наблюдаться одновременно в поле зрения этой теле-
скопической трубки.
Таким образом, трубка Забелина приводится к совокупности
двух автоколлимационных микроскопов с совмещенными полями
зрения и одним общим окуляром, причем каждый из микроскопов
обладает самостоятельной и независимой фокусировкой.
Исходя из ограниченности окулярного поля зрения (обычно не
превышающего 12—18 мм) предметное поле зрения автоколлима-
ционного микроскопа получается равным окулярному полю, делен-
ному на увеличение микрообъектива; может случиться, что перво-
начальное нарушение центрировки в контролируемой линзе будет
настолько значительно, что автоколлимационное изображение не
сможет уместиться в предметном поле зрения микроскопа и не попа-
дет поэтому в поле зрения окуляра.
Для устранения этого затруднения’в трубке Забелина предусмат-
ривается укрепление окуляра в отверстии матового стекла — экра-
на, плоскость которого совпадает с плоскостью автоколлимационного
изображения, создаваемого объективной частью трубки.
Поэтому, когда автоколлимационное изображение выходит за
пределы поля зрения окуляра, оно переходит на плоскость матового
стекла вне окуляра и может рассматриваться там непосредственно
невооруженным глазом.
Такое устройство в значительной степени облегчает отыскание
автоколлимационных изображений в начале процесса центрировки
линзы.
221
Следует упомянуть о том, что использование автоколлимационного
микроскопа дает более широкие возможности, чем только контроль
центрировки линзы, установленной на шпинделе станка. Так, авто-
коллимационный микроскоп может быть с успехом использован для
контроля уже полностью собранной оптической системы, например
фотографического объектива, без установки его на ось шпинделя
станка.
При этом, очевидно, должны будут отпасть ошибки измерений,
возникающие за счет биения самого шпинделя и за счет неточностей
установки контролируемого объектива.
Рис. 149
Принцип такого автоколлимационного способа контроля центри-
ровки собранной оптической системы заключается в следующем.
Предположим, что имеется оптическая система, не обладающая
идеальной центрировкой.
При расположении такой оптической системы в прямоугольной
системе координат (рис. 149) центры поверхностей этой системы
О19 О. . ., Ок не будут расположены в пространстве на одной
и той же прямой.
В равной степени не будут лежать на одной и той же прямой
и изображения O'v 0'2, . . ., О'к всех этих центров через все после-
дующие поверхности системы.
Предположим, что изображения центров поверхностей будут
расположены вблизи некоторой прямой CD.
Пусть автоколлимационный микроскоп имеет возможность пере-
мещения вдоль некоторой прямой АВ, не совпадающей с прямой
CD, но близко к ней расположенной.
222
Будем теперь перемещать предметную точку автоколлимацион-
ного микроскопа, последовательно совмещая ее с плоскостями,
проходящими через точки изображений центров поверхности OJ,
. .., Ок.
Тогда последовательно расположенные автоколлимационные изо-
бражения предметной точки от всех поверхностей оптической си-
стемы расположатся на удвоенных расстояниях от прямой АВ и зай-
мут в пространстве положения 0^, 0%, . . ., (С
Таким же образом можно выбрать две точки на условной оси
CD и также отобразить их на удвоенных расстояниях от прямой
АВ; получается некоторая прямая CD".
Исходя из подобия фигур, образуемых в плоскостях, перпенди-
кулярных прямой АВ. точками пересечения прямых CD и CD"
и центрами 0[ и 0"к. нетрудно прийти к выводу, что по отношению
к автоколлимационным изображениям центров О" прямая CD"
будет играть ту же роль, что и прямая CD по отношению к центрам О'.
Таким образом, получим относительно прямой CD картину на-
рушений центрировки оптической системы, но с вдвое большим по-
перечным масштабом величин децентрировок.
Имея в оптической системе автоколлимационного микроскопа
какой-либо окулярный микрометр, можно измерить величины децен-
трации для каждой из поверхностей оптической системы в обоих
направлениях. Существенно, что при этом смогли обойтись без уста-
новки оптической системы на какую-либо ось вращения, хотя и по-
теряли за счет этого четырехкратное повышение чувствительности
способа.
Известным затруднением при реализации этого способа может
явиться большой продольный разнос изображений центров после
исследуемой оптической системы; однако этого можно избежать,
помещая между исследуемой системой и автоколлимационным мик-
роскопом вспомогательную оптическую систему, переносящую все
изображения центров в ограниченное пространство, доступное для
автоколлимационного микроскопа.
Для быстрого нахождения положений автоколлимационных изо-
бражений при использовании этого способа следует заранее опре-
делить эти положения путем просчета нулевых лучей, последова-
тельно проводимых из всех центров поверхностей системы.
§ 71. Контроль фокусных расстояний и вершинных отрезков
Взаимное расположение узлов оптической системы определяется
величинами вершинных отрезков; поэтому перед сборкой оптической
системы следует определить величины этих отрезков.
Контроль вершинных отрезков удобнее всего производить для
предметной точки, расположенной в бесконечности.
Такую бесконечно удаленную точку можно получить при помощи
специально изготовленных коллиматоров, заранее отъюстированных
на бесконечность.
223
Однако с достаточно высокой точностью можно воспользоваться
и точкой, расположенной на конечном расстоянии, если учитывать
расстояние от предметной точки до переднего фокуса оптической
системы — величину х и потом вычесть из измеренной величины
вершинного отрезка величину х , найденную по формуле Ньютона.
Конечно, в целях уменьшения ошибок, вносимых измерением
расстояния между передним фокусом системы и предметной точкой,
желательно, чтобы предметная точка была удалена на 10—20 фо-
кусных расстояний контролируемой системы.
Заметим, что метод определения вершинного фокусного расстоя-
ния при конечном положении предмета может быть особенно выгод-
ным в случае, когда оптическая система имеет поле зрения значи-
тельных размеров и требует нахождения средней плоскости наводки,
наивыгоднейшей для большинства точек плоскости изображения.
Рис. 150
Большую точность определения вершинных отрезков можно
получить, используя автоколлимационный метод, если имеется до-
статочно хорошее плоское зеркало.
При использовании автоколлимационного метода всегда надо
следить за тем, чтобы автоколлимационное зеркало было располо-
жено возможно ближе к исследуемой оптической системе во из-
бежание потери части лучей отраженного пучка, не попадающих по-
сле отражения в зрачок испытуемой системы.
Измерение вершинных расстояний удобно сочетать с оценкой
качества изображения в центре поля зрения, если снабдить колли-
матор соответственной мирой или точкой.
Схема автоколлимационного измерения вершинного отрезка пред-
ставлена на рис. 150, где показано два положения автоколлима-
ционного микроскопа: первое — при наводке на изображение (по-
казанное сплошными линиями) и второе — на вершину поверхности
(показанное пунктиром).
Разность двух отсчетов дает величину вершинного отрезка.
Контроль фокусных расстояний представляет большие трудности,
чем контроль вершинных отрезков; существует ряд приборов и спо-
собов для определения фокусного расстояния.
Все эти приборы и способы можно разделить на три основные
группы:
1) способы, основанные на определении величины изображения,
даваемого оптической системой;
224
2) способы, основанные на определении величины апертурного
угла, соответствующего определенной ширине входящего в измеря-
емую оптическую систему параллельного пучка лучей;
3) способы, основанные на определении положения в оптической
системе главных плоскостей или использовании узловых точек.
К измерениям фокусного расстояния по первому способу отно-
сятся измерения фокусного расстояния с помощью коллиматора,
представленные на рис. 151. Зная величину фокусного расстояния
коллиматора, измеряя величину изображения 2у' в фокальной
плоскости измеряемой системы и зная величину объекта 2у в перед-
ней фокальной плоскости коллиматора, величину фокусного расстоя-
ния можно определить по формуле
Следует заметить, что способ измерения фокусного расстояния
при помощи коллиматора невыгоден по следующим соображениям:
а) необходимо точно измерить величину фокусного расстояния
объектива коллиматора;
б) при этом способе наличие дисторсии в измеряемой системе
будет вносить ошибки; для ослабления влияния дисторсии прибе-
гают к уменьшению участка поля зрения, в котором производятся
измерения, что в свою очередь понижает точность измерений в связи
с ростом относительной ошибки измерения величины изображения
шкалы;
в) размер изображения шкалы зависит от фокусировки измеря-
емой системы.
Развитием способа определения фокусного расстояния по вели-
чине изображения является способ измерения величины фокусного
расстояния на гониометре (рис. 152), широко применяемый при
измерении фокусного расстояния объективов аэрофотоаппаратов,
когда производится измерение углов под которыми наблюдается
изображение штрихов сетки Готье, устанавливаемой в фокальной
плоскости (плоскости прикладной рамки) аэрофотоаппарата при
обратном ходе лучей.
15 Заказ 2301.
225
Величина фокусного расстояния определяется по формуле
г=к
2 it <-*
г.-Чг- <513)
i=l
Этот способ позволяет по тем же измерениям найти и величину
дисторсии, как разности
^y'i = y'i — у'о = (514)
Формулы (513) и (514) получены в предположении, что сетка
Готье своим центральным перекрестием устанавливается на ось
объектива.
Однако в общем случае, когда сетка Готье устанавливается с не-
которой ошибкой, существует методика, позволяющая по резуль-
татам измерений определить и величину ошибки установки сетки.
Вторая группа способов, построенная на определении величин
апертурных углов, реализуется в специальных приборах для из-
мерения фокусных расстояний — так называемых фокометрах.
Схема фокометра Аббе приведена на рис. 153. Он состоит из
микроскопа, который, имея значительную вертикальную подвижку,
может быть наведен через измеряемую линзу на каждую из двух
шкал, отстоящих одна от другой на расстоянии а.
Отсчеты по шкалам при перемещении линзы на расстояние 2h
будут равны & и с. Образующиеся при этом два подобных треуголь-
ника будут иметь в своей общей вершине угол, равный удвоенному
апертурному углу 2uf, через который легко определяется и величина
искомого фокусного расстояния
2Л_ = _2&1_. (515)
2м с — о ' '
226
Измерения на фонометрах сравнительно мало распространены;
это объясняется невысокой точностью способа, ограничиваемой
в значительной степени малостью величин апертурных углов (при
больших апертурных углах измерения были бы усложнены не-
обходимостью учета условия синусов
Аббе) и невысоким качеством изображе-
ния шкал b и е, наблюдаемых через
измеряемую систему.
Способы определения фокусного рас-
стояния, построенные на определении
положения узловых точек, опираются
на неподвижность изображения при
вращении оптической системы вокруг
задней узловой точки при предмете,
расположенном в бесконечности, как
это показано на рис. 154.
Объектив при перемещении вдоль
его оси устанавливается на враща-
ющемся столике таким образом, чтобы
при небольших углах поворота вокруг
оси столика изображение, располага-
ющееся в предметной точке объектива
микроскопа, оставалось неподвижным
в поле зрения микроскопа.
При соблюдении этого условия задняя узловая (главная) точка
объектива окажется совмещенной с осью вращения столика; измеряя
расстояние от оси вращения столика до плоскости изображения,
получим величину фокусного расстояния объектива.
Нахождение положения задней узловой точки может быть заме-
нено нахождением расстояния между главными плоскостями системы;
исходя из условия равенства линейного увеличения единице; схема
нахождения главных плоскостей представлена на рис. 155, где по-
казано проектирование шкалы при помощи двух микроскопов через
15* 227
измеряемую оптическую систему; продольной подвижкой системы
между микроскопами добиваются равенства изображений, наблю-
даемых без измеряемой системы и с нею; одновременно измеряется
и необходимая раздвижка микроскопов, равная расстоянию Д
между главными плоскостями.
Определяя после этого положения переднего и заднего фокусов
оптической системы и зная ее длину, величину фокусного расстоя-
ния находят по формуле
SF + SF У — А
4
(516)
Обратим внимание на то, что при различных измерениях боль-
шинства оптических систем (исключая систему сложного микро-
скопа) величины расстояния между главными плоскостями изменя-
ются значительно меньше, чем вершинные фокусные расстояния.
Рис. 155
Обратимся к случаю простой линзы в воздухе. Напишем выра-
жение для оптической силы линзы с учетом ее толщины
(517)
определим высоту на второй поверхности линзы
hi=hL-u2d=h1(l-^~—(518)
Полученное в результате деления правой и левой частей формулы
(518) на величину выходного апертурного угла и3 отношение высот
h2 и h± к этому углу даст величину последнего отрезка и величину
фокусного расстояния линзы. Таким образом, можно записать
откуда и определяется разность между фокусным расстоянием и вер-
шинным отрезком
Р20)
228
Дифференцируя формулу (520), находим
d (/' — s') dn , d (d) dn dr± . df*
f — s' 71—1 ‘ d n r-L ' f
(521)
Формула (521) показывает, что при небольшой разности /' — s'
дифференциал этой разности будет мало изменяться при всех воз-
можных изменениях других параметров, определяющих эту линзу,
что и иллюстрирует собой высказанное ранее соображение о малости
изменения в положении главных плоскостей по отношению к изме-
нениям в положении изображения, даваемого системой.
Благодаря этому во многих случаях представляется возможным
отказаться от измерения фокусных расстояний, заменив эти измере-
ния определением фокусного расстояния через изменение положения
фокуса системы относительно ее последней поверхности, полагая
при этом, что изменением положения главной плоскости относи-
тельно вершины последней поверхности можно пренебречь.
Глава XX
КРЕПЛЕНИЕ ПРИЗМ И ЗЕРКАЛ
§ 72. Основные конструктивные узлы для крепления призм.
Устройства для юстировочных движений
Крепление призм должно обеспечивать возможность их установки
в оптической системе в соответствии с требованиями расчета системы;
оно должно быть достаточно надежным и не допускать перемещения
призм под воздействием тряски и ударов, которым может подвер-
гаться оптический прибор при его эксплуатации или транспорти-
ровке. Кроме того, крепление призм не должно вызывать натяжений
в призмах при возможных колебаниях температуры.
Поэтому нередко прибегают к различного рода эластичным
креплениям, когда возможные изменения линейных размеров призм
компенсируются прогибом или натягом закрепляющей призму де-
тали.
Характерным креплением такого рода является крепление пря-
моугольной призмы в бинокле, осуществляемое с помощью плоской
пружины, усилие которой прижимает призму ее гипотенузной гранью
к посадочной плоскости корпуса бинокля.
Схема такого крепления показана на рис. 156, а; между пружи-
ной и призмой обычно ставят пробковую или иную эластичную
прокладку во избежание точечного контакта пружины с призмой,
который может вызвать большие напряжения в точке контакта, спо-
собные даже привести к образованию выколок на призме.
229
Рис. 156
При закреплении призм между плоскостью призмы и посадочной
поверхностью, к которой прижимается призма, должен обеспечи-
ваться хороший контакт; при несоблюдении этого, например, когда
посадочная поверхность имеет выпуклость, возможно некоторое
качание закрепленной призмы.
Отсюда возникают требования к обеспечению достаточной пло-
скостности посадочной поверхности.
В некоторых случаях прибегают к установке призмы на три опор-
ные площадки, фиксирующие собой в пространстве положение
опорной плоскости призмы.
Призмы могут крепиться как путем опоры на рабочую (полиро-
ванную) поверхность (см. рис. 156, а), так и путем опоры на боковую
(шлифованную) поверхность.
Случай такого рода крепления пентапризмы показан на рис. 156, б.
Крепление с использованием боковой поверхности допускает,
если отсутствуют какие-либо ограничительные устройства, произ-
вольное перемещение и разворот призмы в плоскости ее главного
сечения. Поэтому для устранения такой неопределенности положе-
ния призмы прибегают к укреплению на посадочной плоскости оправы
ограничительных планок или ограничительного угольника.
Прижим призмы через ее боковую поверхность также может быть
осуществлен с помощью прижимной пружины.
В первом приведенном примере роль такой ограничительной
планки играет выфрезеровка в корпусе бинокля, не допускавшая
разворота призмы в плоскости ее гипотенузной грани, но допуска-
ющая некоторую подвижку призмы в продольном направлении,
что иногда используется для юстировочных целей.
Иногда прибегают к креплению призм путем укладывания их
в угловую оправу, соответствующую углу между двумя рабочими
гранями призмы, как это показано на примере крепления крыше-
образной призмы, представленной на рис. 156, в.
Прижим призмы к угольнику осуществляется через пружину,
опирающуюся на обе грани крыши.
Необходимо заметить, что закрепление призмы в угловую оправу
требует хорошего выполнения обеих плоскостей угольника и соблю-
дения требуемого угла между этими плоскостями, так как в против-
ном случае отпадает смысл применения угловой оправы, которая
могла бы быть заменена плоскостью с ограничительной планкой.
В некоторых случаях закрепление призм осуществляется через
выфрезеровку на призме, как это показано на рис. 156, з.
Наконец, небольшие призмы могут закрепляться на их оправах
с помощью закатки кромок оправ или загиба соответствующих лапок.
Иногда призмы могут быть и приклеены к своим оправам. Рас-
смотрим юстировочные устройства, используемые при установке
призм в нужное положение.
Юстировочные движения призм в общем случае должны склады-
ваться из их вращения и поступательного перемещения в различных
направлениях.
231
Сразу же можно установить, что для призм, располагаемых в па-
раллельном пучке лучей, поступательные движения будут приво-
дить лишь к поступательным перемещениям световых пучков, что
может вызывать либо поступательное перемещение зрачков, либо
их частичное срезание.
В силу этих соображений для призм, располагаемых в парал-
лельном пучке, нередко не предусматривают возможности их по-
ступательных подвижек, ограничиваясь лишь угловыми подвижками.
В частности, в тех случаях, когда речь идет об использовании вра-
щающихся или качающихся призм в параллельном пучке лучей
(визирных призм или компенсирующей призмы Дове), имеется
возможность ограничиться лишь одной юстировочной подвижкой,
так как вторая подвижка может быть включена во вращательное
движение призмы.
Рис. 157
Поэтому, если речь идет о юстировке головной визирной призмы,
го в ней достаточно обеспечить юстировочное вращательное движе-
ние, способное привести отражательную грань призмы к параллель-
ности с осью вращения призмы; при этом может быть скомпенсиро-
вана ошибка клиновидности визирной призмы в плоскости ее глав-
ного сечения за счет изменения места нуля шкалы визирования.
Однако ошибка клиновидности в плоскости, перпендикулярной
к главному сечению призмы (ошибка пирамидальное™ призмы),
уже не сможет быть уничтожена ни путем изменения начала отсчета,
ни путем юстировки призмы, и поэтому на ошибку клиновидности
должен устанавливаться соответственный допуск.
Юстировка призмы Дове также приводится к угловой юстировке
в плоскости главного сечения — на параллельность падающего
и выходящего из призмы лучей оси вращения призмы; при этом может
быть учтена ошибка клиновидности призмы в направлении ее глав-
ного сечения.
Ошибка клиновидности призмы Дове в направлении, перпенди-
кулярном к плоскости главного сечения, возникающая вследствие
пирамидальности призмы, не может быть устранена при юстировке
и на нее следует установить соответствующий допуск.
232
Крепление призмы Дове и юстировочное устройство предста-
влены на рис. 157.
При установке в приборе пентапризмы изменение угла визиро-
вания в плоскости главного сечения призмы исключается; поэтому
не возникает необходимости в осуществлении юстировочных уст-
ройств в этой плоскости.
Однако может встретится необходимость поворота всей плоскости
главного сечения призмы для совмещения ее с осью части прибора
до пентапризмы и после пентапризмы; такое движение может быть
осуществлено наклоном всей плоскости, на которой укреплена пен-
тапризма.
Кроме того, в известных случаях может потребоваться поворот
ребра между отражательными гранями пентапризмы вокруг биссек-
трисы угла между осями частей при-
бора до и после призмы, позволяющий,
как это показано в § 56, создавать по-
ворот изображения в его плоскости.
Такой поворот, очевидно, тоже может
быть осуществлен за счет соответствен-
ного наклона плоскости главного сече-
ния пентапризмы.
В некоторых случаях оправы призм
закрепляют на шаровом шарнире, до-
пускающем вращение призмы относи-
тельно двух осей; к числу таких кон-
струкций можно также отнести оправу
Рис. 158
призмы, укрепленную на одном упорном и трех регулировочных
винтах (на шарике и трех винтах), представленную на рис. 158.
Возможен вариант крепления подобной оправы на одном натяж-
ном (центральном винте) и трех упорных винтах.
Рассмотрим юстировочные^ движения для призм, действующих
в сходящемся пучке лучей.
Действие призмы, расположенной в сходящемся пучке лучей,
преследует, во-первых, совмещение изображения после передней
части оптической системы с его требуемым положением в последу-
ющей ее части и, во-вторых, совмещение осей предыдущей и после-
дующей частей системы.
Однако такое полное решение задачи осуществляется далеко
не всегда, и нередко ограничиваются решением лишь первой
части задачи — совмещением изображения с требуемым положе-
нием.
В тех случах, когда призма, связывающая две части системы,
располагается в сходящемся пучке лучей, решить эту задачу можно
двумя путями — или с помощью угловых подвижек призмы, или
с помощью поступательных подвижек.
Угловая юстировочная подвижка призмы схематически предста-
влена на рис. 159, а, где пунктиром показано исходное положение
призмы до ее поворота и сплошными линиями — после поворота,
233
приводящего изображение в заданную точку перед последующей
системой.
На рис. 159, б показано решение той же задачи, но с помощью
поступательной подвижки призмы из положения, показанного пунк-
тиром, в положение, показанное сплошными линиями.
Нетрудно видеть, что при угловых подвижках призмы практи-
чески сохраняется длина хода луча и фокусировка системы в целом;
заметим, что при угловых подвижках призм следует учитывать
эффект плоскопараллельной пластинки, в которую развертывается
призма.
Рис. 159
Во втором случае при поступательной подвижке призмы будет
происходить изменение длины хода, создающее нарушение фокуси-
ровки системы.
§ 73. Узлы крепления зеркал
Крепление зеркал во многом подобно креплению призм; однако
крепление зеркал, как правило, не следует осуществлять прижимом
через их боковые плоскости, так как это может служить причиной
«изгиба зеркала».
Поэтому крепление выполняют, укладывая зеркало на опорную
плоскость оправы, обычно выполняемую по контуру зеркала (цент-
ральная часть опорной плоскости выбирается фрезеровкой); прижим
зеркала обеспечивается через накладные планки, контакт которых
с плоскостью зеркала должен осуществляться диаметрально проти-
воположно участкам опорной плоскости, на которые ложится зер-
кало.
234
Круглые зеркала крепятся аналогично деталям круглой оптики,
но крепление зеркал требует большой тщательности в части устра-
нения условий, которые могут способствовать прогибу зеркала.
При креплении круглых зеркал несколько облегчается центри-
ровка зеркала, так как должна обеспечиваться центрировка лишь
одной отражающей поверхности, если речь идет о сферическом
зеркале.
В тех же случаях, когда требуется отцентрировать в системе
зеркало с несферической поверхностью, возникает необходимость
правильного расположения геометрической оси зеркала, что потре-
бует и наклона и поступательного перемещения зеркала в плоскости,
перпендикулярной оси.
§ 74. Закрепление деталей, подверженных тряске и ударам.
Борьба с вибрациями в оптических приборах
Совершенно очевидно, что крепление оптических деталей, под-
верженных тряске и ударам, должно быть более надежным, чем
при работе в обычных условиях.
Поэтому приходится избегать крепления более или менее массив-
ных деталей с помощью закатки, так как тонкая кромка может не
выдержать усилий, возникающих при ударной нагрузке.
Винтовые соединения как крепежные, так и юстировочные должны
иметь предохранения от возможности самоотвинчивания при тряске.
При креплении деталей пружинящими планками или иными
пружинящими устройствами должно быть соответственно усилено
давление закрепляющих пружин.
Детали весом200—300 г должны крепиться усилием порядкаЗ—4 кг.
В современных оптических приборах нередко встречаются раз-
ного рода электродвигатели (в кинокамерах, приборах со счетно-ре-
шающими устройствами). Кроме того, оптические приборы могут
быть подвержены внешним источникам вибраций (приборы, устана-
вливаемые на самолетах, кораблях и т. п.).
Поэтому нередко возникает необходимость устранения влияния
вибраций, способных при определенных условиях существенно
понизить качество изображения, а иногда и вовсе его разрушить.
Можно наметить ряд путей, помогающих ослабить вредное влия-
ние вибраций, которым подвергаются оптические приборы.
Это может быть:
1) ослабление мощности источника вибраций;
2) выбор наивыгоднейшей ориентировки плоскости поляризации
вибраций;
3) устранение возможного резонанса в приборе;
4) уменьшение амплитуд вибраций в приборе;
5) гашение вибраций — амортизация.
Вибрации, вызываемые электродвигателем, как это уже упоми-
налось, происходят в плоскости, перпендикулярной оси его враще-
ния, т. е. будут колебаниями поляризованными.
235
Поэтому, определенным образом ориентируя ось вращения дви-
гателя по отношению к оптической системе, можно в известной сте-
пени избежать вредного влияния вибраций. Так, например, если
речь идет о телескопической системе, предназначенной для произ-
водства угловых измерений в горизонтальной плоскости, влияние
вибраций, ухудшающих качество изображения в вертикальном
направлении, не сможет ухудшить условий для производства из-
мерений в горизонтальной плоскости.
Поэтому, располагая ось вращения двигателя в горизонтальной
плоскости перпендикулярно к оси прибора, исключим влияние виб-
рации на изображение в горизонтальном направлении.
Рис. 160
Вибрации в направлении оси прибора не смогут повлиять на
качество изображения, а вибрации в вертикальном направлении
не смогут ухудшить условий измерения. Кроме того, для телескопи-
ческой системы поступательные вибрации не могут влиять на ка-
чество изображения; поэтому, располагая центр тяжести ротора
вблизи центра тяжести всего прибора, можно избежать возникновения
угловых колебаний.
Схема подобного расположения двигателя относительно опти-
ческой системы представлена на рис. 160.
Устранение вибраций с помощью разного рода амортизационных
устройств достаточно хорошо известно, поэтому на нем останавли-
ваться не будем, тем более, что этот вопрос уже выходит за рамки
задачи юстировки оптических приборов.
236
Глава XXI
КОНТРОЛЬ СБОРКИ УЗЛОВ ПРИЗМ
§ 75. Контроль углов отклонения и наклона изображения
Контроль узлов призм, входящих в оптический прибор, должен
преследовать цель выявления возможности обеспечения призмами
оптической системы прибора для правильной работы.
Как уже говорилось, установка призм в приборе может пресле-
довать решение задачи отклонения визирной оси прибора (постоян-
ное или переменное), оборачивание изображения, создание поступа-
тельного перемещения изо-
бражения, вращение изо-
бражения.
Поэтому прежде всего
призмы должны подвер-
гаться проверке на воз-
можность получения тре-
буемого угла отклонения,
что особенно важно для
призм с четным числом
отражений, обладающих
постоянством угла откло-
нения.
Этот вид контроля
всегда может быть выпол-
нен на гониометре, схема
которого представлена на
рис. 161.
Гониометр состоит из
неподвижной трубы — кол-
лиматора, трубы, вращающейся вокруг вертикальной оси, и столика,
на котором устанавливается измеряемая призма.
Оси обеих труб должны быть заранее отъюстированы на перпен-
дикулярность оси вращения (отсутствие коллимационной ошибки).
Столик, на котором устанавливается контролируемая призма,
допускает наклоны призмы в двух направлениях, благодаря чему
представляется возможным придавать произвольное положение в про-
странстве двум граням призмы, в частности устанавливать эти
грани параллельно оси вращения гониометра.
Такая установка граней контролируется посредством автоколли-
мационного окуляра подвижной трубы гониометра.
После такой установки призмы на столике гониометра можно
измерить угол отклонения 8, даваемый призмой, наблюдая сетку
коллиматора через призму, беря соответственный отсчет по лимбу
и составляя разность этого отсчета с отсчетом, производимым по
изображению от неподвижной трубы (коллиматора) непосредственно.
Эта картина представлена на рис. 162.
237
Если контролируемая призма не развертывается в плоскопарал-
лельную пластинку (имеет клиновидность), то автоколлимационные
блики, наблюдаемые в трубу от входной и выходной граней призмы,
не будут совпадать друг с другом; величина расхождения обоих
бликов составит угол 8, равный
8 = 2/2<z. (522)
Заметим, что поверка на клиновидность с помощью автоколли-
мации может производиться для призм как с четным, так и с нечет-
ным числом отражений.
Рис. 162
Однако в некоторых случаях для призм, развертывающихся
в наклонные плоскопараллельные пластинки (как, например, призма
Дове), поверка на клиновидность по автоколлимационным изобра-
жениям будет затруднена или даже вовсе невозможна, если на раз-
вертке наружные грани не будут располагаться одна против другой.
В этом случае клиновидность призмы (что важно для работы
призмы Дове) может быть определена через измерение пирамидаль-
ности призмы.
С этою целью две соседние грани призмы устанавливают на го-
ниометре таким образом, чтобы они оказались параллельными оси
вращения гониометра. Это легко контролируется при двух положе-
ниях трубы по изображению, воспринимаемому от коллиматора
после отражения на одной и на другой грани призмы; тогда при
установке трубы в третье положение по автоколлимационному блику
238
от третьей грани можно определить наклон третьей грани к оси вра-
щения гониометра (по перемещению изображения в поле зрения
трубы в вертикальном направлении), которым и определяется пи-
рамидальность призмы. Эта картина представлена на рис. 163.
Весьма облегчается контроль для прямоугольных призм при
использовании автоколлимационной трубы; располагая призму
Рис. 163
гипотенузной гранью перпендикулярно к оси трубы, в поле зрения
получаем пять автоколлимационных изображений, как это показано
на рис. 164.
Первое из этих пяти изображений возникает непосредственно
от гипотенузной грани; второе — после отражения от обеих катет-
ных граней и третье (при пяти отражениях) — от гипотенузной
после двух отражений от катетных граней и еще двух отражений
от катетных граней после отражения от гипотенузной грани.
Соответственно второму и третьему изображениям будут возни-
кать четвертое и пятое изображения при ходе лучей через нижнюю
половину призмы.
239
Первое, третье и пятое изображения при вращении призмы
вокруг ребра ее прямого угла будут перемещаться в поле зрения;
второе и четвертое изображения сохранятся при этом неподвижными.
Расхождение второго и четвертого изображений определяет
ошибку призмы в прямом угле; величина этой ошибки будет созда-
вать угол расхождения 8, равный
Расхождение второго и четвертого автоколлимационных изобра-
жений с первым изображением по высоте будет являться следствием
ошибки пирамидальности
8 = 2/гу. (524)
Контроль правильности установки вращающихся призм отно-
сительно оси вращения удобно осуществлять путем перекладки
оси вращения (при условии равенства диаметров оси по обоим ее
концам) и сопоставления положений изображения до и после такой
перекладки. Схема такой установки представлена на рис. 165.
При этом, конечно, визирная призма должна предварительно
пройти контроль на отсутствие клиновидности.
240
Контроль призмы Дове на правильность ее установки относи-
тельно оси вращения удобно производить, вращая призму между
коллиматором и соосной с ним зрительной трубой (соосность может
быть и неточной), т. е. в условиях, близких к условиям эксплуата-
ции призмы.
Параллельность отражающей грани призмы и ее оси вращения
легко устанавливается по постоянству диаметра окружности, опи-
сываемой изображением при полном обороте призмы.
Рис. 165
Юстировка призмы легко осуществляется при повороте призмы
на угол в 90° в обе стороны от исходного положения плоскости ее
главного сечения.
Если призма уже отъюстирована, то при таких ее поворотах
изображение должно приходить в одно и то же положение.
Перемещение призмы в направлении, перпендикулярном ее глав-
ному сечению (после поворотов на ±90°), будет определяться вели-
чиной клиновидности призмы в этом направлении (пирамидаль-
ности) и не может быть устранено с помощью юстировок.
Расхождения же изображений по высоте — в направлении пло-
скости главного сечения — могут быть приведены к нулю путем
перемещения изображения на половину расхождения с помощью
юстировочных винтов.
16 Заказ 2301.
241
§ 76. Контроль оптической длины хода и линейных размеров призм
Как уже говорилось ранее, поступательное перемещение призм,
находящихся в параллельном пучке лучей, не играет существенной
роли в действии оптической системы, и поэтому соблюдение линей-
ных размеров самих призм также не имеет большого значения.
Однако в тех случаях, когда отражательные призмы распола-
гаются в сходящемся пучке лучей, поступательные перемещения
призм и их линейные размеры начинают играть серьезную роль
и потому также должны подвергаться соответственному контролю.
Такому контролю подлежат: 1) контроль длины хода луча в при-
зме (длины развертки) и 2) контроль величины перемещения изо-
бражения.
Для всех призм, которые развертываются в плоскопараллель-
ные пластинки, длина хода луча между входной и выходной гранями
будет постоянной для любого из лучей, перпендикулярного этим
граням.
Это позволяет осуществлять контроль длины развертки с по-
мощью перемещения автоколлимационного микроскопа, фокуси-
руемого на выходную и входную грани.
Измеренное перемещение микроскопа даст величину редуциро-
ванной длины хода луча в призме, т. е. ту величину, которую долж-
на обеспечить призма при сохранении и ее линейных размеров
и показателя преломления стекла, из которого она изгото-
влена.
Для призм, дающих поступательное смещение изображения,
требуется знать величину этого смещения.
Призмы, дающие полное оборачивание изображения (призма
Аббе, система призм Порро), обладают переменной величиной сме-
щения изображения в зависимости от положения призмы относи-
тельно оси системы; поступательное перемещение таких призм
в направлении, перпендикулярном оси, будет создавать удвоенное
перемещение оси в том же направлении.
Поэтому можно говорить об измерении смещения оси в подоб-
ных случаях лишь тогда, когда положение системы призм фикси-
ровано относительно какой-либо посадочной базы, по которой
происходит сопряжение системы призм с другими элементами
оптической системы.
Если же система призм не дает оборачивания изображения в пря-
мом ходе (как, например, ромбические призмы) или в обратном ходе
(как призма с тремя отражениями), то для таких систем величина
смещения оси будет постоянной и не зависящей от положения оси
относительно призмы.
Величина смещения изображения может быть замерена на микро-
скопе с достаточно большим предметным отрезком, снабженным
измерительной шкалой в направлении, перпендикулярном к оси
микроскопа, например на продольном компараторе Аббе.
Схема такого рода измерений представлена на рис. 166.
242
Особый интерес представляет случай контроля компенсирующей
призмы, расположенной в сходящемся пучке лучей.
Компенсирующая призма в этом случае будет отъюстированной
тогда, когда изображение точки, попадающее после призмы на пере-
сечение оси вращения с плоскостью изображения, будет оставаться
при вращении призмы неподвижным.
Равным образом юстировка призмы может, как и в случае призмы
Дове, контролироваться по постоянству диаметра окружности,
описываемой произвольной точкой изображения в плоскости изо-
бражения при вращении призмы.
Как уже говорилось ранее, для призм, располагаемых в сходя-
щемся пучке лучей, приведение изображения в заданную точку
поля зрения возможно путем угловых и поступательных подвижек.
Эти соображения сохраняют свою силу и при юстировке ком-
пенсирующих призм; результат юстировки компенсирующей приз-
мы в сходящемся пучке лучей сводится к пересечению условной
плоскости приведенного зеркала с плоскостью изображения по
линии, пересекающейся с осью вращения призмы.
Вместе с тем может оказаться (это имеет место и для компен-
сирующих призм в параллельном пучке лучей), что точка, вокруг
которой происходит вращение изображения, не располагается в за-
данной точке поля, например в его центре; тогда возникает задача
приведения в центр поля зрения точки пересечения оси вращения
с плоскостью изображения, что должно выполняться совершенно
независимо от юстировки призмы относительно оси вращения.
Как и при юстировке Цризмы Дове, клиновидность компенси-
рующей призмы, расположенной в сходящемся пучке лучей, может
компенсироваться при юстировке отражательной грани.
Однако в отличие от призм, устанавливаемых в параллельном
пучке, у призм в сходящемся пучке возможна юстировка клино-
видности и в плоскости, перпендикулярной к плоскости главного
16*
243
сечения призмы (ошибки пирамидальности), за счет наклона призмы
в этой плоскости; для этого призму используют как плоскопарал-
лельную пластинку.
При этом, конечно, следует учитывать и уменьшение габарита,
вносимое компенсирующей призмой.
Действительно, если развертка призмы будет равной расстоя-
нию Z, то смещение предметной точки вдоль оси системы будет равно
удлинению, вносимому призмой
Однако выходная грань призмы, которая на развертке, пред-
ставленной на рис. 166, была обозначена точкой В', на самом деле
будет располагаться в точке В, т. е. будет смещена влево на I — Ь.
Поэтому и реальное изображение точки А займет положение,
определяемое не точкой А', а точкой А".
Таким образом, рабочее плечо призмы будет равно
а = Ь—1-. (526)
Совершенно очевидно, что знак плеча будет определять напра-
вление движения изображения при наклоне всей призмы.
Схемы юстировки компенсирующей призмы представлены на
рис. 167, а (в плоскости главного сечения) и на рис. 167, б (в пло-
скости, перпендикулярной плоскости главного сечения).
Пунктиром на обоих рисунках показано положение призмы
до юстировки и сплошными линиями — после юстировки.
244
Глава XXII
СБОРКА ТЕЛЕСКОПИЧЕСКИХ СИСТЕМ
§ 77. Сборка монокулярной телескопической системы.
Устранение параллакса при установке сетки.
Диоптрийная трубка
Сборка простой монокулярной телескопической системы обычно
не представляет каких-либо затруднений и сводится к установке
объектива и окуляра в основной тубус трубы, который и опреде-
ляет центрировку всей системы.
В некоторых трубах, предназначаемых для использования па
близких расстояниях, предусматривается возможность изменения
расстояния между объективом и сеткой — «этим также определяются
и изменения длины трубы, возникающие за счет изменения темпе-
ратуры.
Нередко встречается необходимость использования трубы на
постоянном расстоянии от предмета; тогда возникает задача устране-
ния параллакса относительно сетки, который при производстве
измерений может в известной степени влиять на окончательный
результат.
Параллакс относительно сетки возникает вследствие нарушения
фокусировки — наличия продольного параллакса; тогда при пере-
мещении глаза в плоскости выходного зрачка возникают изменения
расстояния между соответственной точкой изображения и сеткой —
так называемый поперечный параллакс.
Наличие параллакса очень остро ощущается глазом и при изме-
нении положения глаза во время производства измерений при-
водит к ошибкам в отсчетах.
Величина поперечного параллакса не может быть больше про-
изведения величины А продольного параллакса на величину двой-
ного апертурного угла; таким образом, можно написать
о<А2и . (527)
Параллакс, наблюдаемый через окуляр, является угловым (у);
его величина может быть определена через отношение поперечного
параллакса к фокусному расстоянию /ок окуляра.
Таким образом,
у = ~ = ^-2и'. (528)
/ок Т
Численно, полагая величину продольного параллакса равной
ОД мм и относительное отверстие объектива равным 1 : 10, полу-
чаем величину поперечного параллакса, равную 0,01 мм, что при-
водит при фокусном расстоянии окуляра в 20,0 мм к угловому
параллаксу в 0,0005 радиана (Г40"), т. е. вполне ощутимой величине.
245
Поэтому для устранения продольного параллакса необходимо
обеспечивать довольно точную подвижку сетки относительно объек-
тива.
Для зрительных труб иногда возникают задачи, связанные
с нарушением прямолинейности линии визирования при изменении
наводки на различно удаленные предметы; весьма характерной
в этом отношении является труба с внутренней фокусировкой,
используемая в геодезических инструментах.
Возникновение нарушения прямолинейности визирной линип
было рассмотрено в § 14 (см. рис. 32).
Обращаясь к случаю трубы с внутренней фокусировкой, рас-
смотрим поведение движущейся оптической системы относительно
неподвижной сетки.
Исключим в формулах (80) параметр х', через который [свя-
зываются координаты g и р визирной линии перед движущейся
системой.
С этой целью обратимся к формулам (79)
1 = х — х' +f — f',
п^у-у',
где через £ и ц обозначены^ координаты предметной точки перед
движущейся системой относительно начала координат, располо-
женного в произвольной точке М' плоскости изображения.
Из второй формулы (79) получаем
я + / = У = —7"ж=--V"- (529)
Из формулы (529) легко найти величины х и х'
x^^±yLf х'=-----------уХ. (530)
У т) + / v 7
Подставляя эти значения х и х' в первую из формул (79), полу-
чаем выражение для абсциссы g как функции от величины ц
К=-^1 + ^ + 1-Г, (531)
которое можно привести к виду
<532>
В рассматриваемом случае движущаяся система расположена
в воздухе, что приводит к равенству по абсолютной величине перед-
него и заднего фокусных расстояний и позволяет упростить формулу
П2 = -^(п + У'), (533)
246
которую можно представить в виде квадратного уравнения
п2 — у /п — у У,2 = 0; (534)
решение этого уравнения относительно величины р позволяет выра-
зить ее как функцию от величины £
Т] = у'-j- (1 ± + 4 -£-). (535)
Величина у' в формуле (535) представляет собой смещение на-
чала координат (точки М') с оси движущейся системы, за которую
можно принять направление движения узловой точки подвижной
системы.
Если эта величина будет равна нулю, то величина ц также обра-
щается в нуль; иными словами, если перекрестие сетки оказывается
расположенным на оси системы, то и движение предметной точки
будет происходить по прямой, совпадающей с осью системы.
Если же величина смещения не будет равна нулю, то перемеще-
ние предметной точки будет происходить по некоторой кривой
второго порядка, описываемой формулой (535).
Обратимся к численному примеру. Задаваясь увеличениями,
равными 2,5; 2,0; 1,67, и пользуясь выведенными формулами, вычи-
слим соответствующие этим увеличениям величины g и гр
Принимая величину у' = 1 мм и f = —50 мм, получаем
£ = —13,33; —25,0; -45,0;
т| = 0,4; 0,5; 0,6.
Вместе с тем, исходя из крайних значений пар £ и ц, определим
отступление величины А Л от прямолинейности.
Эта величина будет равна
-!,) = о.5~ Jj5+g3 (0,6-0,/.)=.
= 0,5 — 0,4794 = 0,0206 мм.
Полагая фокусное расстояние для неподвижного объектива,
расположенного перед подвижной фокусирующей линзой, равным
100 мм, и исходя из того, что при £ = —45,0 мм предметная точка
расположится в задней фокальной плоскости объектива (визирова-
ние на бесконечность), придем к тому, что точка, определяемая
абсциссой £ = —25,0 мм, будет отстоять от фокальной плоскости
объектива на величину хг = 20,0 мм, а предмет перед объективом
расположится на расстоянии — х = 500 мм от переднего фокуса
объектива.
При этом величина погрешности на предмете будет увеличена
в пять раз (обратно увеличению неподвижного объектива) по отно-
шению к величине Ар и составит 0,1 мм.
247
— 1^) = — 0,012 мм.
Обратим внимание на то, что люфт подвижной системы соз-
дает величину угла, в котором может изменяться визирное на-
правление.
Величину люфта можно рассматривать как дифференциал изме-
нения величины у'.
Полагая dy' = 0,02, можно найти величину изменения dv\ при
выбранном увеличении V. При V = 2,5 получаем
= 0,02 (
Эта величина при фокусном расстоянии подвижного объектива,
равном 100,0 мм, приведет к изменению визирного направления
в пределах угла, равного 0,012 : 100 = 0,00012 = 24".
Такая величина во многих случаях может оказаться недопусти-
мой и придется прибегнуть к устранению люфта подвижной системы
путем ее одностороннего прижима с помощью пружины к боковой
стенке ее продольных направляющих.
Одной из основных задач при юстировке телескопических систем
является обеспечение их афокальности, которая достигается путем
совмещения задней фокальной плоскости передней (объективной)
части системы с передней фокальной плоскостью задней (окулярной)
части системы.
В случае нарушения афокальности телескопическая система
обращается в длиннофокусную оптическую систему, и изображение
бесконечно удаленного предмета такая система создаст уже не
в бесконечности, а на некотором значительном расстоянии от своего
выходного зрачка.
Это позволяет принять в качестве меры нарушения афокальности
величину, обратную расстоянию изображения от выходного зрачка
системы, тем более что величина этого расстояния определяет не-
обходимую аккомодацию глаза.
Величину нарушения афокальности измеряют в диоптриях (ж-1).
Глаз обычно не ощущает величины нарушения афокальности,
меньшей четверги диоптрии, и потому возникает задача повышения
чувствительности измерения нарушений афокальности.
Эта задача с успехом решается с помощью так называемой диопт-
рийной трубки — телескопической системы небольшого увеличения
(обычно порядка 4—5х), располагающейся после исследуемой теле-
скопической системы. Схема диоптрийной трубки представлена
на рис. 168, а.
Линейное увеличение диоптрийной трубки V будет равно обрат-
ной величине ее видимого увеличения Г; величина продольного
увеличения Q будет равна обратной величине квадрата видимого
увеличения (1/Г2).
В соответствии с этим величина нарушения афокальности в про-
странстве после диоптрийной трубки возрастет обратно пропорцио-
нально величине продольного увеличения, т. е. пропорционально
квадрату видимого увеличения, Так, при Г = 4х нарушение афо-
248
кальности возрастает в шестнадцать раз, нарушение фокусировки
исследуемой системы в 0,1 диоптрии возрастает до 1,6 диоптрии
и станет достаточно ощутимым для наблюдателя.
Обычно диоптрийную трубку снабжают подвижным объективом
и сеткой, относительно которой окуляр трубки имеет самостоятель-
ную фокусировку, позволяющую обеспечивать резкое видение сетки
аметропическим (нормальным) глазом без аккомодации.
Если передний фокус объектива диоптрийной трубки будет
расположен вблизи выходного зрачка исследуемой оптической
системы, то нарушение ее афокальности — расстояние от выходного
зрачка до изображения — можно рассматривать как расстояние х
от переднего фокуса F объектива диоптрийной трубки до предмета.
Поэтому величина расстояния х от заднего фокуса F' объектива
диоптрийной трубки до изображения, будучи обратной величине’
х (в соответствии с формулой Ньютона), явится величиной, прями
пропорциональной нарушению афокальности в диоптрийной мере,
что позволяет проградуировать линейную шкалу подвижки объек-
тива диоптрийной трубки непосредственно в диоптриях.
Так, полагая фокусное расстояние объектива диоптрийной
трубки /' равным 70,71 мм, получим величину подвижки объектива,,
соответствующую одной диоптрии, равную
, Г2 70/712 г п
х =------= ~= 5,0 мм.
х 1000
Устанавливая объектив диоптрийной трубки в нулевое положе-
ние (когда диоптрийная трубка обращается в телескопическую
систему) и помещая перед ним второй такой же объектив, пре-
вращаем диоптрийную трубку в микроскоп с микрообъективом,
249’
обладающим линейным увеличением V = —1, что позволяет исполь-
зовать шкалу, установленную в фокальной плоскости окуляра,
для измерения диаметров выходных зрачков, как это показано
на рис. 168, б.
§78. Сборка бинокулярной телескопической системы
Сборка бинокулярной телескопической системы отличается от
сборки монокулярной системы тем, что в ней необходимо обеспечить
наблюдение двумя глазами, что приводит к решению задачи юсти-
ровки на параллельность полей обеих телескопических систем.
Кроме того, в тех случаях, когда бинокулярная система предна-
значается для производства стереоскопических измерений, необхо-
димо обеспечивать в ней равенство увеличений в плоскости измери-
тельной сетки и отсутствие взаимного наклона изображений в обеих
трубках.
Рис. 169
Совершенно очевидно, что требование параллельности полей
сохраняется независимо от того, на какое расстояние раздвигаются
окуляры при изменении глазного базиса и на какую диоптрийность
устанавливаются окуляры для коррекции аметропии глаза.
Рассмотрим картину нарушения параллельности полей в бино-
кулярной телескопической системе.
Обратимся к рис. 169, на котором представлены две трубки,
оси которых составляют друг с другом некоторый угол у.
Оси трубок определяются как направления, вдоль которых наблю-
дается параллельность входящих и выходящих из системы пучков
лучей.
Предположим, что ось первой трубки направлена на какую-то
точку, расположенную в бесконечности. Тогда луч, идущий из
этой бесконечно удаленной точки, составит с осью второй трубки
входной угол, равный углу у между осями обеих трубок.
По выходе из второй трубки этот же луч составит с ее осью не-
который угол у', равный произведению угла у на видимое увели-
чение Г трубки.
250
Вместе с тем выходящий из второй трубки луч составляет со
своим первоначальным направлением угол 6, равный разности
углов у' и у.
Таким образом, величина угла 6, по которому определяется
конвергенция осей глаз наблюдателя, выразится формулой
б = у'~у = Гу-у = у(Г—1), (536)
откуда и определяется допуск на непараллельность полей в зави-
симости от видимого увеличения
У=;АГ. (537)
Численно, для бинокля
с увеличением 8х, считая
допуск на угол конвергенции
осей глаз в вертикальном
направлении (перпендику-
лярно линии базиса), рав-
ным 15', получаем величину
допуска на непараллельность
полей в бинокле, равную
двум угловым минутам. л
Если при этом длина
шарнира у бинокля будет
равна 100 мм, то приходим
к необходимости соблюдать
величину зазора в оси шар-
нира не более, чем 0,06 мм.
Следует обратить внимание и
Рис. 170
на то, что возможный люфт оку-
лярной нарезки тоже может быть причиной нарушения параллель-
ности полей, так как децентрация окуляра будет создавать изме-
нение направления выходящего из окуляра луча на угол, равный
отношению удвоенной децентрации к фокусному расстоянию оку-
ляра. Так, при децентрации окуляра в 0,05 мм и фокусном рассто-
янии 20,0 мм величина угла, в котором будет изменяться направле-
ние выходящего луча, составит 0,005 рад, т. е. около 17'.
Изменение параллельности полей может возникать также и вслед-
ствие непараллельности оси шарнира бинокля осям трубок. Так,
в частности, если ось шарнира составит с осями обеих трубок не-
который угол, равный 0 (оси трубок предполагаются в исходном
положении параллельными и расположенными в одной плоскости),
то при повороте оси трубки вокруг оси шарнира на некоторый угол
х ось трубки выйдет из исходной плоскости и составит с нею неко-
торый угол у, как это представлено на рис. 170.
Полагая расстояние от точки О пересечения оси трубки и оси
шарнира до начала плеча Ъ равным а, нетрудно определить вели-
чину плеча Ъ
b = a\>gQ. (538)
251
Кроме того,
с Ъ
sin у = — cos 9 = — sin х cos 9 = sin 9 sin x, (539)
а при малых углах у и 9
y = 9sinx. (540)
При изменении глазного базиса бинокля с 72 до 56 мм придется
повернуть обе трубки от исходного положения более чем на 30°;
поэтому при повороте каждой из трубок возникнет угол, больший,
чем 9/2. Так как при повороте трубок углы 9 будут направлены
в разные стороны, то между осями обеих трубок возникнет угол,
больший, чем угол 9.
Отсюда нетрудно сделать вывод, что величина непараллельности
оси шарнира и осей трубок должна быть одного порядка с допусти-
мой непаралллельностью осей в направлении, перпендикулярном
к линии базиса для всего бинокля.
Рис. 171
Поэтому представляется возможным производить предваритель-
ную юстировку на параллельность оси каждой из трубок по отно-
шению к оси шарнира; однако при этом придется вдвое ужесточить
допуск по отношению к допуску на непараллельность полей для
всего бинокля.
При крупносерийном производстве биноклей их корпусы из-
готавливаются литьем под давлением при правильной технологии
последующей механической обработки. Это обеспечивает одинако-
вое положение осей посадочных мест для объектива и окуляра,
поэтому непараллельность полей трубок бинокля будет обусловлена
в основном (исключая ошибки за счет нарушения центрировки
круглой оптики и узлов призм) отступлениями в совмещении оси,
вызванными нарушением линейных размеров и расположения призм.
Если при изготовлении призм и их установке не было допущено
значительных угловых ошибок, то призмы смогут внести лишь
поступательное смещение оси, которое удобно устранять поступа-
тельной подвижкой либо самих призм, либо объектива, что сейчас
является наиболее распространенным приемом юстировки бинокля.
Юстировка бинокля на параллельность полей может произво-
дится разными способами (в том числе и непосредственно по двоению
252
изображения достаточно удаленного объекта, так как допуски
на непараллельность достаточно велики), которые в основном могут
быть разделены на две основные схемы, построенные либо на исполь-
зовании одного коллиматора и одной наблюдательной системы
(их преимуществом является наблюдение изображений от обеих
трубок в одном поле зрения), либо на использовании сдвоенного
коллиматора и сдвоенных наблюдательных трубок.
Эти схемы представлены на рис. 171 и 172; в тех случаях, когда
требуется контролировать соблюдение параллельности полей при
различных углах излома шарнира, нередко прибегают к размеще-
нию между объективами коллиматоров и объективами бинокля
и между окулярами бинокля и объективами наблюдательных
трубок вращающихся ромбических призм.
В стереофотограмметрических приборах также приходится стал-
киваться с задачей юстировки приборов на параллельность полей;
однако решение этой задачи существенным образом будет отличаться
от обеспечения параллельности полей в телескопической бинокуляр-
ной системе.
Обращаясь к оптической схеме такого прибора, как стерео-
компаратор (рис. 173), видим, что в правой и левой ветвях стерео-
компаратора всегда можно придавать поступательные перемещения
обоим снимкам стереопары в их плоскостях во взаимно перпенди-
кулярных направлениях; поэтому всегда можно поставить иден-
тичные точки обоих снимков в такое положение, что лучи от этих
точек по выходе их из окуляров будут параллельными друг другу.
Измерительные марки в стереокомпараторе, располагающиеся
в промежуточном изображении, также могут перемещаться в своей
плоскости посредством юстировочных винтов.
Это обстоятельство при неподвижном положении окуляров по-
зволяет всегда добиваться параллельности полей за счет юстировки
измерительных марок и установки снимков стереопары.
Однако в действительности приходится сталкиваться с необхо-
димостью изменения глазного базиса прибора, обычно осущест-
вляемого посредством разворота ромбических призм, расположенных
перед окулярами прибора, что может быть причиной нарушения
253
параллельности полей, подобно тому, как это имело место у шарнира
бинокля.
Обратимся к рис. 174, а, на котором представлен узел вращаю-
щейся ромбической призмы и глазной линзы окуляра и пункти-
ром развертка эюго узла.
Точно так же, если базис ромбической призмы не будет парал-
лелен плоскости, проходящей через ось системы до окуляра и через
ось окуляра, как то представлено на рис. 174, б, будет иметь место
нарушение центрировки.
Рис. 173
В тех случаях, когда базис или плечо ромбической призмы а
не будет равно расстоянию между осью глазной линзы и осью пред-
шествующей части системы, получим некоторое смещение окуляра а
по отношению к оси системы как после развертки призмы, так
и после самой призмы.
Подобное смещение уже рассматривалось при разборе влияния
децентрировки окуляра за счет люфта окулярной резьбы, и тогда
была определена величина угловой ошибки, изменяющей свое на-
правление при вращении окуляра.
Поэтому было бы правильным для исключения этой ошибки
добиваться установки глазной линзы окуляра таким образом, чтобы
на развертке призмы она попала на ось вращения ромбической
призмы; тогда была бы обеспечена неподвижность в пространстве
оси окуляра, и если бы изображение измерительной марки тоже
было приведено на ось вращения, то и направление на измеритель-
ную марку сохранялось бы постоянным.
254
Однако при этом может случиться, что оси вращения обеих
ромбических призм вместе с их окулярами не будут параллельны
ДРУГ другу.
Обращая внимание на то, что ориентировка плеч обеих ромби-
ческих призм может быть принята в исходном положении перпен-
дикулярной глазному базису (рис. 174, в) и учитывая, что измене-
ние глазного базиса ограничено величиной ±8 мм, при плече
255
призмы порядка 25 жж, получим величины углов поворота порядка
±9°, следствием чего будет являться изменение параллельности
осей главным образом в направлении самого базиса (где допуск
на непараллельность значительно шире) и на величину, значительно
(втрое) меньшую, чем у шарнира бинокля.
Кроме того, при действии ромбических призм не происходит
наклона изображения для всей оптической системы, благодаря
чему можно не учитывать общего увеличения всей системы (увели-
чение окуляра будет учтено через его фокусное расстояние).
В силу этих соображений можно допускать довольно значитель-
ное несовпадение узловых точек окуляров с их осями вращения
и обеспечивать параллель-
ность полей за счет юстировки
сетки.
Строгое решение постоян-
ства параллельности полей
после окуляров при изме-
нении глазного базиса может
быть обеспечено посредством
размещения за окулярами
плоскопараллельных пласти-
нок, вращающихся вокруг
осей, перпендикулярных
глазному базису.
Схема такого устройства
представлена на рис. 175,
где окуляры и качающиеся
пластинки показаны в плане.
Используя стекла с пока-
зателями преломления по-
рядка 1,8, при толщине пластинки в 15 жж получим величину плеча,
равную удлинению такой пластинки
AZ = Г А181.15 = 66
п 1,8
что при качании пластинки на ±30° создает изменение глазного
базиса на 13,2 жж.
Заметим, что такая пластинка занимает сравнительно небольшой
участок в параллельном пучке лучей после окуляра (^8,4 жж).
256
Глава XXIII
СБОРКА МИКРООБЪЕКТИВОВ
§ 79. Сборка объективов с закреплением линз в резьбовых
и насыпных оправах
Закрепление линз в микрообъективах должно обеспечивать по-
лучение требуемого от них качества изображения; нарушение же
качества изображения обычно связано с аберрациями, присущими
большим апертурным углам — сферической аберрации и коме.
При соблюдении хорошей центрировки микрообъектива кома
в центре поля зрения будет отсутствовать в силу симметрии отно-
сительно оси, при нарушении центрировки будет возникать кома
второго порядка, постоянная по всему полю зрения.
Нарушение величины сферической аберрации для точки на оси
микрообъектива будет связано с рядом причин. Главнейшими из
них будут изменение показателей преломления и изменение толщины
линз и воздушных промежутков.
Величины этих изменений могут быть определены заранее
и тогда представляется возможным, имея в своем распоряжении
таблицу влияния воздушных промежутков на сферическую абер-
рацию, заранее определить размеры этих промежутков, требуемые
для компенсации возникающих изменений сферической аберрации.
Такое изменение воздушных промежутков может быть осуще-
ствлено за счет соответствующей подрезки торцов оправ отдельных
линз или введения между ними прокладочных колец определенной
толщины.
Соединение оправ, несущих линзы микрообъектива, может быть
осуществлено по резьбе, причем все оправы всегда должны завин-
чиваться до упора.
Значительно более распространенным является способ закрепле-
ния линз в оправах, имеющих один и тот же наружный диаметр,
равный внутреннему диаметру тубуса микрообъектива.
Недостатком первого способа соединения оправ линз на резьбе
является возможность нарушения центрировки при подрезке торцов
оправ с закрепленными в них линзами.
Существенно, что возникающие при подрезке оправ нарушения
центрировки будут присущи обеим поверхностям каждой из линз,
что не позволяет исправлять центрировку после подрезки, исполь-
зуя закатку.
Применение резьбовых оправ для крепления линз микрообъек-
тивов не позволяло построить технологический процесс таким обра-
зом, чтобы имела место определенная последовательность юстиро-
вочных операций, и требовало использования сборщиков микро-
объективов очень высокой квалификации. Способ же крепления
линз в насыпных оправах позволяет разделить процесс сборки
на последовательные операции.
Такими операциями будут:
17 Заказ 2301. 257
1) закатка линз в оправы, имеющие технологическую резьбу;
2) центрировка линз на «плавающем патроне» с помощью авто-
коллимационного микроскопа или трубки Забелина;
3) обточка оправ по наружному диаметру по тубусу микро-
объектива и по торцам;
4) предварительная сборка и определение необходимых изме-
нений воздушных промежутков;
5) подрезка колец или торцов оправ для получения требуемых
воздушных промежутков;
6) окончательная сборка микрообъективов.
Существенно, что при этом способе практически исключается
возможность нарушения центрировки при подрезке торцов оправ
или прокладочных колец.
Такой способ сборки микрообъективов в насыпных оправах
с обточкой оправ после центрировки линз, отцентрированных на
«плавающем патроне», был предложен в 30-х годах академиком
В. П. Линником.
§ 80. Юстировка на центрированность изображения посредством
децентрируемой линзы. Выбор центрирующей линзы
Несмотря на четкую последовательность сборочного и юстиро-
вочного процессов микрообъективов с использованием насыпных
оправ, при изготовлении сильных микрообъективов требовалось
соблюдать очень жесткие допуски на центрировку, что техноло-
гически представляло известные трудности; поэтому в целях расши-
рения допусков и облегчения процессов сборки и юстировки был
введен способ центрировки микрообъективов по изображению (на
устранение комы в центре поля зрения) за счет соответственной
децентрировки одной из линз микрообъектива.
С этой целью оправа одной из линз микрообъектива должна иметь
увеличенный зазор по отношению к тубусу микрообъектива, до-
пускающий в известных пределах перемещение такой линзы в пло-
скости, перпендикулярной оси микрообъектива.
В тубусе микрообъектива против оправки юстируемой линзы
должны быть четыре отверстия под углами в 90° один относительно
другого.
Надевая на тубус специальное юстировочное кольцо с четырьмя
винтами, упирающимися своими концами в оправу юстируемой
линзы, можно перемещать эту линзу в двух взаимно перпендику-
лярных направлениях.
Тогда, наблюдая в поле зрения микроскопа изображение светя-
щейся точки, можно путем соответственного перемещения юстиру-
емой линзы добиться устранения комы в центре поля зрения.
Существенно, что этот прием позволяет не только устранить
ту кому, которая возникла за счет неправильности исходного поло-
жения самой юстируемой линзы, но и кому, возникновение которой
было связано с нарушениями центрировки других линз микро-
объектива.
258
Это обстоятельство позволяет понизить общие требования, предъ-
являемые к центрировке всех линз микрообъектива.
Чувствительность этого способа может быть повышена вдвое,
если воспользоваться при юстировке центрирующей линзы способом
автоколлимации, располагая в предметной точке микрообъектива
центр сферического зеркала.
Схема применения такого автоколлимационного зеркала пред-
ставлена на рис. 176.
При использовании такого способа сборки микрообъективов
большое значение будет иметь выбор центрируемой линзы; анализ
нарушения центрировки, выполненный в § 40, позволяет выбирать
Рис. 176
в качестве центрируемой линзы такую, перемещение которой будет
наиболее сильно влиять на изменение комы в центре поля зрения.
Этот выбор, очевидно, будет связан с величиной промежуточной
сферической аберрации и величиной последующего увеличения для
части системы, расположенной вслед за юстируемой линзой.
После выполнения юстировки микрообъектива юстировочное
кольцо с винтами снимается с тубуса микроскопа и отверстия для
юстировочных винтов закрываются специальным колпачком, на-
деваемым на тубус.
Глава XXIV
СБОРКА ФОТОГРАФИЧЕСКИХ ОБЪЕКТИВОВ
§ 81. Метод комплектации деталей.
Возможность расширения допусков
Требования к фотографическим объективам по сравнению с тре-
бованиями к визуальным оптическим системам отличаются тем,
что у фотографических объективов необходимо обеспечивать более
равноценное качество изображения по всему полю зрения.
17*
259
Поэтому при сборке фотографических объективов большое зна-
чение приобретает не только сохранение расчетной сферической
аберрации на оси системы, но и соблюдение достаточно малых от-
ступлений для астигматизма.
Величины остаточных аберраций для фотографических объекти-
вов имеют несколько большие значения, чем для визуальных опти-
ческих систем, что в известной мере позволяет предъявлять не-
сколько меньшие требования к устранению нецентрированной комы
в центре поля зрения.
Однако для фотографических объективов, используемых для
измерительных целей, например в аэрофотосъемке, большое значение
начинает приобретать исправления дисторсии и ее центрированность
относительно оси объектива. Поэтому требования к центрировке линз
фотографических объективов в известных случаях не только не
снижаются, но, наоборот, становятся еще более жесткими.
В связи с этим вопросы сборки и юстировки фотографических
объективов решаются в соответствии с их назначениями.
Упрощение процессов сборки и юстировки фотографических
объективов имеет особо важное значение при их массовом выпуске,
например для любительских фото- и кинокамер.
Сборка таких объективов обычно должна выполняться так,
чтобы требуемое качество изображения обеспечивалось за счет
соблюдения допусков на оптические детали объектива и детали
его оправы.
Однако установление очень жестких допусков при крупно-
серийном выпуске фотообъективов экономически невыгодно. По-
этому при серийном выпуске фотографических объективов нередко
прибегают к методу комплектации деталей, когда, например, учи-
тывая возможные отступления толщин линз и возможные изменения
показателей преломления, комплектуют детали, из которых соби-
раются отдельные объективы, так, чтобы имела место взаимная
компенсация отступлений в одних деталях определенными отступ-
лениями в других (способ селективной сборки). Такой метод
комплектации позволяет существенно расширять допуски на из-
готовление оптических и механических деталей, не понижая при
этом качества выпускаемых объективов.
§ 82. Юстировка фотографических объективов на соблюдение
величины фокусного расстояния, устранение дисторсии
и исправление астигматизма
Если фотографические объективы предназначаются для измери-
тельных целей (для производства фотограмметрических съемок
и обработки снимков, полученных в результате таких съемок),
к ним предъявляются повышенные требования к соблюдению вели-
чины фокусного расстояния (что важно при стереофотограмметри-
ческих съемках), уничтожению дисторсии и исправлению астиг-
матизма.
260
Так как объективы подобного типа крупными сериями обычно
не выпускаются, то осуществить комплектацию их деталей обычно
не представляется возможным из-за отсутствия того количества
деталей, которое допускало бы выбор их с отступлениями от номи-
нала нужного знака и нужной величины.
Заказ оптических деталей с заранее обусловленными отступле-
ниями по существу ничем не отличается от ужесточения допусков
и поэтому также не целесообразен.
Таким образом, расширение допусков на изготовление оптиче-
ских деталей может быть осуществлено лишь за счет введения соот-
ветственных юстировочных процессов.
Еще во введении указывалось, что для выполнения нескольких
требований, предъявляемых к оптической системе, необходимо
определенное изменение величин соответствующего числа юсти-
ровочных элементов.
Такими юстировочными элементами в фотографических объекти-
вах являются воздушные промежутки.
Поэтому при подготовке юстировочного процесса для получения
заданного фокусного расстояния, устранения дисторсии и испра-
вления астигматизма прежде всего следует установить, какие воз-
душные промежутки и для решения какой юстировочной задачи
следует изменять и в каких пределах.
Попытаемся эти юстировочные задачи разделить, что могло бы
послужить установлению последовательности юстировочных про-
цессов.
Как известно, конструкции фотографических объективов весьма
разнообразны; тем не менее для измерительных целей употребляют
большей частью симметричные или близкие к симметричным объек-
тивы, что обусловлено возможностью хорошего исправления дистор-
сии в таких конструкциях.
Очевидно, что симметричность конструкций допускает разделе-
ние объектива на две одинаковые или мало отличающиеся друг
от друга половинки.
В каждой из таких половинок обеспечивается более или менее
полное исправление аберраций четных степеней — сферической абер-
рации на оси системы, астигматизма и кривизны поля; дисторсия
и кома в отдельной половинке большей частью остаются неиспра-
вленными, так как эти аберрации отдельных половинок взаимно
уничтожаются при переходе к целому объективу.
Вместе с тем известно, что при наличии значительной комы
в половинках симметричного объектива изменение положения диаф-
рагмы перед отдельной половинкой может сильно влиять на изме-
нение астигматизма; поэтому для целого симметричного объектива
изменение расстояния между его половинками может сильно влиять
на астигматизм и это расстояние можно использовать как юстиро-
вочный элемент для устранения астигматизма.
Ранее было показано, что сравнительно небольшое изменение
абсолютной величины воздушного промежутка в половинке может
261
вызвать значительное изменение ее фокусного расстояния; если
воздушные промежутки в обеих половинках изменить одинаково,
то симметрия системы и исправление дисторсии сохранятся.
Однако астигматизм каждой из половинок может измениться,
и эти изменения в целом объективе просуммируются. Поэтому,
изменяя расстояние между половинками, следует снова произвести
юстировку для исправления астигматизма.
Изменения дисторсии можно добиться, изменяя воздушные про-
межутки в обеих половинках, но в противоположном направлении;
при этом изменения астигматизма в обеих половинках будут равными
по величине и обратными по знаку, что приведет к их взаимному
уничтожению.
Такая же картина будет наблюдаться и с изменением величин
фокусного расстояния в обеих половинках; эти изменения будут
разных знаков и в целом объективе будут взаимно уничтожаться.
Это позволяет установить определенную последовательность
юстировочных процессов, начиная, например, с юстировки на устра-
нение дисторсии, подгонки фокусного расстояния и исправления
астигматизма.
Удобно, осуществляя процесс юстировки, следить за тем, чтобы
при изменении толщины прокладочных колец всегда имел место
некоторый припуск, что позволяет при окончательной подгонке
воспользоваться теми кольцами, на которых проводилась последо-
вательная юстировка.
Центрировку фотографических объективов тоже удобно выпол-
нять, используя насыпные оправы и контроль с помощью авто-
колимационного микроскопа; однако, в отличие от центровки
микрообъективов, ввиду больших диаметров оправ удобнее про-
изводить центрировку линз при их закатке, как это излагалось
в § 69-70.
§ 83. Нарушения центрировки фотографических объективов.
Нецентрированная дисторсия
Как бы совершенны не были приемы центрировки фотографиче-
ских объективов, всегда будут существовать остаточные ошибки
центрировки; поэтому следует оценить возможнее следствия до-
пускаемых отступлений.
Всегда можно представить случай, когда центрировка одного
из компонентов объектива будет нарушена более чем у других
компонентов.
Если при этом влияние ошибок центрировки других компонентов
будет еще неощутимо, то рассматриваемая система будет центриро-
ванной с нарушением центрированности одного компонента.
Примером этого будет объектив, состоящий из двух строго центри-
рованных компонентов, децентрированных один относительного
другого, что может произойти из-за чрезмерного зазора между
цилиндрическими направляющими оправы, соединяющей компоненты.
262
Величину такой децентрации можно считать малой по отношению
к линейным размерам обоих компонентов и величине изображения.
Исходя из этого, попытаемся "определить величины искаже-
ний изображений и их характер для оптической системы из двух
Рис. 177
центрированных половинок, смещенных одна относительно другой
при сохранении параллельности смещенных осей.
Картина такого поступательного децентрирования системы пред-
ставлена на рис. 177, а и б, где система показана до и после ее децен-
трировки. Здесь а0 — малое смещение осей половинок одна отно-
сительно другой.
263
Если бы децентрации отсутствовала, то изображение у[ после
первой половинки являлось бы предметом для второй половинки.
При наличии децентрации предметом для второй половинки
будет сумма г/'и а0.
На рис. 177, в представлен вид на плоскость, перпендикулярную
оси, промежуточного и окончательного изображений.
Нетрудно представить, что на промежуточном изображении
вершина С2 предмета для второй системы окажется смещенной
на величину aQ смещения первой системы независимо от того, где
располагается точка С 2 на плоскости промежуточного изображения.
Эту величину смещения вершины предмета можно разложить
на две составляющие — меридиональную, которую обозначим через
dy't, и сагиттальную dy'8, направленную перпендикулярно к мери-
диональной плоскости.
Эти составляющие будут представлять собой проекции смещения
а0 на меридиональную и сагиттальную плоскости.
Если известен угол поворота х меридиональной плоскости отно-
сительно плоскости смещения (плоскости симметрии), то dy't и dy's
определятся по формулам
d^ = a0cosx; dy's — aQ sin x. (541)
Эти величины второй половиной объектива будут представлены
с соответственными элементарными линейными увеличениями в мери-
диональной и сагиттальной плоскостях Vt2 и Vg2.
Величина меридионального увеличения может быть определена
как производная от величины изображения в меридиональной
плоскости
<542’
Линейное увеличение в сагиттальной плоскости для второй
половины объектива будет равно:
(543)
Переходя к изображению после всей системы и пользуясь фор-
мулами (541), (542) и (543) нетрудно определить величины смеще-
ния вершины изображения относительно ее исходного положения.
Эти смещения будут равны
dy't = Vadyt; dy\ = Vs2 dys (544)
ИЛИ
cZ^ = -^||-6z0cosx; dy's = я0 sin x. (545)
Основание предмета — точка лежащая на оси первой поло-
вины, изобразится второй половиной как точка, смещенная с оси
на величину aQ, поэтому основание изображения окажется смещен*
264
ным с оси второй половины на некоторую величину которую
можно рассматривать как изображения отрезка aQ с помощью вто-
рой половины.
Так как величина aQ мала, то ее изображение можно опреде-
лить через увеличение Vo для нулевых лучей. Таким образом,
ao = Voao- (546)
Величину а', так же как и величину я0, можно разложить
на меридиональную и сагиттальную составляющие dy'^t и dy'Q8.
Тогда, составляя разности величин dy't и dy^ в меридиональной и
величин dy's и dy'Q8 в сагиттальной плоскости, придем к величинам
дисторсии в меридиональном и сагиттальном направлениях, воз-
никшим за счет децентрации.
Эти величины представятся формулами
^y’t=^dy't~ dy'ol; ^y's = dy's — dy'tl. (547)
Величины дифференциалов dy'Qt и dyQ9 определяются как проек-
ции отрезка а'о на меридиональную и сагиттальную плоскости
dy'Qf ~ аоcos х — ао^о cos х
= ао sin % = aoVo sin х
Пользуясь формулами (545)—(548), находим
cosx
Лг/*=а° GJ~y°)sinx -
(548)
(549)
Если вторая^половина объектива свободна от дисторсии, то
величина сагиттального линейного увеличения равна линейному
увеличению для нулевых лучей
Vt2=-g- = const =70. (550)
Дифференцируя формулу (550), находим величину линейного
увеличения в меридиональной плоскости,
^2=lt=y«=const- (551)
Нетрудно видеть, что в этом случае децентрация второй поло-
вины не приводит к возникновению нецентрированной дисторсии;
отсюда можно сделать вывод, что причиной возникновения нецентри-
рованной дисторсии является наличие у второй половины значитель-
ной обычной дисторсии.
Большая дисторсия у той или иной части системы — обычное
явление. Специальное исправление дисторсии для части системы
производится лишь в очень редких случаях (например, для создания
265
положительного аберрационного виньетирования). Отдельные же
элементы оптической системы становятся свободными от дисторсии
тоже в очень редких случаях (такие случаи, как концентричность
поверхности центру зрачка).
Это приводит к выводу о том, что возникновение децентрирован-
ной дисторсии при децентрации оптической системы должно быть
обычным явлением.
Выявим характер возникающей нецентрированной дисторсии
для системы, обладающей значительной дисторсией третьего порядка.
Такую дисторсию можно выразить следующей зависимостью:
Уъ = ¥оУ2 + Ау1- (552)
В формуле (552) второе слагаемое в правой части и выражает
дисторсию третьего порядка.
Пользуясь формулой (552), определим линейные увеличения
в меридиональной Vi2 и сагиттальной Vg2 плоскостях. Находим
T'--sj-=r"+3-4’"
^=4=г«+^
Подставляя полученные значения линейных увеличений Vt2
и Vs2 в формулы (549), получаем
\у' = ЗАапу* cos х 1
Л я , • • (554)
Ду, = 4аоу2 sin % J
Умножая и деля правые части формул (554) на Ду2, выразим вели-
чину нецентрированной дисторсии через величину центрированной
дисторсии
A^ = 3a0^J-cosx
/ Д •
S = a°“?rsinx
Умножая и деля правые части формул (555) на увеличение V2
второй половины, можно заменить величину а0 ее изображением
а' и величину у2 ее неискаженным изображением у'2; тогда
величину абсолютной дисторсии второго компонента можно выразить
через относительную дисторсию Д 2.
Таким образом, получаем
Ду'— За'A2cosx; ky's = а'о Д2 sin х. (556)
Численно, полагая величину относительной дисторсии второй
части объектива равной 25%, а величину изображения a'Q децентра-
ции равной 0,05 мм, получим величину наибольшей меридиональ-
ной составляющей, равной 0,037 мм и наибольшей сагиттальной
составляющей — 0,012 мм.
266
Поступательная децентрация одной части системы по отношению
к другой является частным случаем возникновения дисторсии,
наиболее удобным для анализа и часто встречающимся практически;
ясно, что это не исключает других случаев децентрации системы,
связанных с децентрацией нескольких элементов, в общем имеющих
самую разнообразную ориентировку, что приводит к потери пло-
скости симметрии системы.
Наряду с возникновением децентрированной дисторсии децент-
рация системы приводит и к возникновению децентрированного
астигматизма.
Принципиально можно было бы поставить задачу получения
центрированной дисторсии и центрированного астигматизма путем
децентрации какого-либо элемента оптической системы, подобно
тому как это делается при юстировке микрообъективов для устра-
нения комы в центре поля зрения.
Однако решение подобной задачи было бы весьма затруднено
тем, что выбор центрирующего элемента для дисторсии и для астиг-
матизма может привести к его встречному влиянию; поэтому пока
представляется более целесообразным добиваться восстановления
центрированности системы, что автоматически будет приводить
к устранению и нецентрированной дисторсии, и нецентрирован-
ного астигматизма.
§ 84. Измерение дисторсии фотографического объектива
Задача юстировки фотографического объектива требует возмож-
ности достаточно быстрого определения дисторсии этого объектива.
Существует целый ряд различных способов определения дистор-
сии, большей частью связанных с установкой объектива в камере.
Однако такие способы измерения дисторсии требуют много времени,
что не позволяет использовать их в процессе юстировки объективов.
Поэтому остановимся на рассмотрении лишь одного способа
измерения дисторсии фотографического объектива на оптической
скамье, основанного на вращении объектива вокруг его задней
узловой точки.
Этот способ может быть реализован как в варианте с примене-
нием коллиматора, создающего перед исследуемым объективом па-
раллельный пучок лучей, так и в автоколлимационном варианте,
вдвое повышающем чувствительность способа.
Принципиальная схема обоих вариантов представлена на рис.
178, где показан объектив с главными плоскостями Н и Н', вра-
щающийся вокруг задней узловой точки, совпадающей с задней
главной точкой В', и повернутый на угол р по отношению к оси
оптической скамьи, которая проходит через ось вращения объектива
и предметную точку микроскопа, перемещающегося вдоль оси скамьи.
Ось параллельного пучка лучей, падающего на испытуемый
объектив (ось коллиматорного объектива), предполагается совпа-
дающей с осью скамьи.
267
Если бы испытуемый объектив был свободен от дисторсии, то
луч, проходящий по выходе из объектива через его заднюю узловую
точку 75', должен был бы составить с осью объектива угол, равный
углу Р лучей параллельного пучка, входившего в объектив.
При этом вершина изображения у' должна разместиться в пред-
метной точке А' микрообъектива.
При смещении узловой точки В' объектива с оси вращения вер-
шина изображения не сможет попасть в предметную точку микро-
скопа, т. е. изображение точки А' не совпадет с перекрестием
микроскопа.
Так как при небольших полях зрения дисторсия в любой опти-
ческой системе должна отсутствовать, то возникает возможность
контроля правильности установки исследуемого объектива на ось
вращения по стабильности положения изображения в поле зрения
микроскопа при поворотах исследуемого объектива вокруг оси
вращения на небольшие углы относительно его исходного положения.
После такой установки объектива на ось вращения его задней
узловой точкой переходят к измерению дисторсии, поворачивая
объектив на те углы, для которых измеряется дисторсия.
Схема измерения дисторсии представлена на рис. 178, где пока-
зано смещение изображения на величину Ду^ в плоскости изобра-
жения объектива, совпадающей с его задней фокальной плоскостью.
При небольшой измеряемой дисторсии точка А'г еще не выйдет
за пределы поля зрения микроскопа, что позволяет с высокой сте-
пенью точности измерить проекцию а величины абсолютной дистор-
сии на плоскость, перпендикулярную к оси скамьи.
По величине этой проекции нетрудно найти и величину самой
дисторсии исследуемого объектива
ДгГ=_(557)
COS Р V '
В случае автоколлимационной схемы величина а будет соответ-
ствовать удвоенной дисторсии, и тогда формула (557) должна быть
заменена формулой
^=2^- (558)
268
Если бы испытуемый объектив был строго центрирован, то при
перекладке объектива относительно его исходного положения вправо
и влево на равные по величине углы ±0 можно было бы измерить
в поле зрения микроскопа удвоенные величины а, что также могло
бы повысить точность измерения дисторсии вдвое.
Однако использование перекладки объектива при нарушенной
центрировке исключит возможность определения нецентрированной
дисторсии, которую можно обнаружить по разности величин ди-
сторсии для равных полевых углов разного знака и по смещению
изображения в плоскости, перпендикулярной плоскости рисунка.
Рис. 179
Заметим, что при наличии нецентрированной дисторсии в случае,
когда система сохраняет плоскость симметрии, возможно и такое
направление в поле зрения испытуемого объектива, для которого
не будет наблюдаться нарушение симметрии дисторсии, и тогда
нецентрированная дисторсия может остаться незамеченной.
Поэтому для полного контроля объектива на отсутствие не-
центрированной дисторсии необходимо измерять дисторсию по не-
скольким направлениям, для чего требуется обеспечивать возмож-
ность вращения испытуемого объектива вокруг его оси.
Тогда, наблюдая полную картину перемещения изображения
в поле зрения измерительного микроскопа при одном и том же поле-
вом угле и производя измерения как в меридиональной, так и в са-
гиттальной плоскостях, можно определить все величины, характе-
ризующие как центрированную, так и нецентрированную дисторсию.
Измерение дисторсии на оптической скамье выгодно еще и тем,
что попутно представляется возможным определить величину
269
астигматизма, измеряя величину продольной перефокусировки из-
мерительного микроскопа на меридиональное и сагиттальное изо-
бражение.
Схема такого рода измерения астигматизма представлена на
рис. 179, где показано необходимое перемещение микроскопа.
Приведенная схема позволяет производить измерение не только
астигматической разности, но и кривизны изображения, если будет
известно положение предметной точки, соответствующее наводке
на ось вращения объектива.
Тогда, наводя на изображение при исходном положении объек-
тива, получаем величину фокусного расстояния /' объектива, а ве-
личина кривизны поля зрения определится по формуле
rr = Z cos р —, (559)
где величина I может быть представлена как сумма фокусного рас-
стояния /' и перефокусировки а при переходе от точки в центре
поля к точке на периферии поля зрения. Это позволяет несколько
ослабить влияние погрешности измерения величины фокусного
расстояния, если перейти к формуле
х = /' (cos (3 — 1) + л cos р. (560)
Глава XXV
СБОРКА ОПТИЧЕСКИХ МИКРОМЕТРОВ
§ 85. Микрометр с качающейся плоскопараллельной пластинкой
Использование в качестве микрометренного устройства кача-
ющейся плоскопараллельной пластинки основывается на поступа-
тельном смещении изображения при наклоне плоскопараллельной
пластинки, расположенной в сходящемся пучке лучей.
Такое устройство выгодно тем, что расположение самой пла-
стинки и ее оси вращения относительно других элементов оптиче-
ской системы совершенно произвольное.
Перемещение изображения, создаваемое качающейся пластин-
кой, приблизительно пропорционально синусу угла наклона пла-
стинки к оси системы; поэтому во избежание нелинейности пере-
мещения пластинке не следует придавать больших углов наклона
к оси. Так, ограничиваясь углами, наклона, не превосходящими
±6° (±0,1 рад), получим нелинейность зависимости углов пово-
рота пластинки и смещения изображения, равную разности синуса
угла и дуги, что приведет к относительной ошибке на краю рабочего
q2
диапазона, равной — = 1/600.
Отсчет углов поворота пластинки переносится каким-либо меха-
ническим устройством на отсчетную шкалу.
270
Совершенно очевидно, что шкала и механизм, связующий пово-
рот шкалы с наклоном пластинки, внесут свои погрешности в отсчет.
В микрометрах с качающейся пластинкой, используемых в опти-
ческих теодолитах, в качестве механизма передачи применяют
рычажное устройство, на одном конце которого укрепляется ка-
чающаяся пластинка, а другой конец входит в паз спирального
кулачка (улитки), на оси которого располагают и отсчетную шкалу.
Рис. 180
I
Принципиальная схема подобного микрометренного устройства
представлена на рис. 180, где показана плоскопараллельная пла-
стинка А, укрепленная на одном конце рычага ОВ и имеющая воз-
можность вращаться вокруг оси О на углы у, величина которых
определяется отношением изменения радиуса-вектора р к плечу
рычага OB = I между осью вращения и пальцем рычага.
На одной оси с улиткой укреплена шкала радиуса R, по дуге
которой $ производится определение угла 9 поворота улитки и угла у
наклона пластинки.
Нетрудно представить, что изменение толщины пластинки, вызы-
Л — 4
вающее изменение создаваемого ею удлинения —-—d, плеча рычага
I и шага спирали t, будут являться причинами появления рена,
271
который, как уже указывалось, может быть устранен при юстировке
всего отсчетного микроскопа изменением его увеличения.
Двумя другими источниками ошибок явятся эксцентриситет
спирали улитки относительно ее оси вращения и эксцентриситет
шкалы относительно той же самой оси.
Ошибки, возникающие вследствие наличия эксцентриситета,
будут периодическими ошибками микрометра. Максимальная вели-
чина этих ошибок будет, очевидно, определяться величиной экс-
центриситета.
Обратим внимание на следующее обстоятельство. Период изме-
нения ошибки от эксцентриситета улитки и шкалы один и тот же,
так как оба эти элемента имеют одну и ту же ось вращения; равен-
ство же периодов позволяет осуществлять взаимную юстировку
обоих элементов один относительно другого.
Действительно, изменение радиуса-вектора спиральной канавки
при отсутствии эксцентриситета определится уравнением спирали
Архимеда.
р — ро = а0. (561)
Параметр а спирали в формуле (561) можно выразить через
шаг спирали t. Получаем
а =2^ (562)
что позволяет формулу (561) представить в виде
Р-Ро=2^-0- (563)
Если спиральный кулачок будет установлен на ось вращения
с эксцентриситетом с, то величина радиуса-вектора рх выразится
формулой
Pi~Po = 2}f0 + ccos(0 + eo)- (564)
В случае, если эксцентриситет будет отсутствовать, величина
угла поворота кулачка 9 определяется через дугу s шкалы
б- = 7?е + б-0. (565)
Формулы (563) и (565) позволяют исключить величину угла
и связать между собой величины р—р0 и s—s0.
Таким образом, можно написать
<566>
Если же шкала будет иметь эксцентриситет с', то величина
дуги может быть определена по формуле
— so= + с' cos (9 + 9Д
(567)
272
Полагая 0О = 01, а величину отношения модулей с' и с эксцент-
риситетов равной
с' 2nR
с t
(568)
и сопоставляя формулы (564) и (565), можно, почленно разделив
формулу (567) на (568), прийти к равенству правых частей формул
(564) и (567) и получить зависимость, связывающую величины —
р0 и Si—s0, исключая при этом углы 0.
Таким образом, можно написать
P1 Ро— 2nR (S1
(569)
Формула (569) по внешнему виду аналогична формуле (566).
При ее выводе оба эксцентриситета с и с' не принимались равными
нулю, а соблюдалось их определенное соотношение, представлен-
ное формулой (568).
Из формулы (568) следует, что отношение модулей с' и с экс-
центриситетов определяется отношением длины окружности шкалы
2лД к шагу спирали t, благодаря чему эксцентриситет с' будет
значительно большим, чем эксцентриситет с улитки.
Исходя из этого, можно более грубыми перемещениями шкалы
добиваться соблюдения требуемой величины соотношения обоих
эксцентриситетов и тем самым производить взаимную юстировку
шкалы и улитки на устранение периодической ошибки микрометра.
Контроль юстировки микрометра с качающейся плоскопарал-
лельной пластинкой удобно производить, пользуясь отклонением
луча от одной из плоскостей качающейся пластинки (например,
наблюдая изображение шкалы, отражаемое пластинкой через зритель-
ную трубу, как это показано на том же рис. 180).
§ 86. Микрометр с движущимся клином
Схема микрометра с движущимся клином представлена на рис. 181,
где показаны два положения клина (сплошными линиями и пунк-
тиром) и перемещение а изображения, соответствующее перемеще-
нию I клина вдоль оси системы.
Величина перемещения изображения связывается с перемеще-
нием клина формулой
а — I tg 8.
(570)
Схема позволяет в принципе работать и при больших значениях
угла отклонения 8, даваемого клином; однако, отмечая то, что клин
используется в качестве микрометренного устройства и что чем
больше /, тем точнее определяется а, приходим к выводу, что угол
8 мал.
18 Заказ 2301. 273
Действительно, величина отношения отрезка I к отрезку а долж-
на быть значительной — порядка 50—100, что сейчас же приводит
к величине угла 8 отклонения порядка 0,02—0,01 рад.
Недостаток движущегося клина в том, что при его значительном
удалении от плоскости изображения будет ощутимо ухудшаться
качество изображения, возникающее за счет роста хроматизма
увеличения (постоянного по полю зрения), если измерительный
клин не будет ахроматизован.
Ошибки измерительной схемы микрометра с движущимся клином
будут определяться ошибками в угле отклонения 8 и ошибками
при отсчете величины перемещения клина I.
Ошибки в угле отклонения 8 могут быть вызваны неточностью
изготовления величины преломляющего угла клина а и неточностью
установки главного сечения клина по отношению к плоскости,
в которой производятся измерения.
Рис. 181
Разворот клина на угол х в плоскости, перпендикулярной к оси
системы, приводит к изменению составляющей угла отклонения 8Х
в плоскости измерений в соответствии с формулой
81 = 8C0SX. (571)
Формула (571) показывает, что даже значительный разворот
клина (на угол 1—2°) приводит к величине угла 81? не отличающейся
от номинального значения угла 8 более чем на 0,001 его величины.
Таким образом, при достаточно аккуратном исполнении микро-
метра с подвижным клином нет необходимости в особой юстировке
микрометра с движущимся клином, если не считать устранения
рена, возникающего за счет оптической системы, создающей изобра-
жение, перед которым движется измерительный клин.
§ 87. Спиральный микрометр
Как микрометр с качающейся плоскопараллельной пластинкой,
так и микрометр с поступательно движущимся клином неудобны
в том отношении, что они должны быть органически встроены в опти-
ческую систему; кроме того, оба микрометра работают в ограничен-
ном диапазоне и не исключают необходимости их возврата в исход-
ное положение.
274
От этих недостатков свободен так называемый спиральный микро-
метр, схема которого показана на рис. 182.
Спиральный микрометр состоит из диска с нанесенной на нем
двойной спиралью и круговой отсчетной шкалой и пластинки с ли-
нейной шкалой и индексом, по которому снимают отсчет с круго-
вой шкалы.
Работа спирального микрометра допускает неограниченное вра-
щение спирального диска вокруг своей оси, что исключает необхо-
димость в обратном движении измерительного устройства
Схема спирального микро-
метра аналогична схеме
с улиткой в микрометре
с качающейся пластинкой.
Однако и спираль, и лимб
нанесены на одной и той же
вращающейся пластинке и по-
тому раздельная центрировка
и лимба, и спирали относи-
тельно оси вращения не-
осуществима.
Поэтому вращающийся
диск в спиральном микро-
метре нужно строже центри-
ровать на оси вращения, чем
это имело место для лимба
в микрометре с качающейся
пластинкой.
Рис. 182
Необходимо отметить, что в спиральном микрометре и спираль,
и отсчетная шкала на неподвижной сетке находятся в одной и той
же плоскости, а это не позволяет изменять соотношение между
шагом спирали и ценой деления прямолинейной шкалы неподвиж-
ной сетки, и они заранее должны контролироваться на соответствие
установленным допускам.
§ 88. Угловые компенсаторы.
Компенсаторы с подвижными линзами
В предшествовавших параграфах были рассмотрены микромет-
ренные устройства, позволявшие производить линейные измерения
с высокой точностью в пределах ограниченного диапазона.
Подобная задача может быть поставлена и для измерения пере-
менных углов отклонения параллельных пучков лучей.
Эта задача в большинстве случаев приводит к созданию оптиче-
ского клина с переменным углом отклонения.
Одним из простейших компенсаторов подобного рода является
компенсатор с подвижной линзой, схема которого представлена
на рис. 183.
18* 275
Компенсатор с подвижной линзой состоит из двух линз: под-
вижной и неподвижной, образующих в совокупности телескопиче-
скую систему с видимым увеличением Г, близким к единице.
Такой компенсатор используется в дальномерной насадке к гео-
дезическим трубам (предложенной В. А. Белицыным) для измере-
ния расстояний по дальномерной рейке.
Видимое увеличение компенсатора определяется отношением
фокусных расстояний его компонентов
Р __ /1 __ /2 + ^ ____л_____d_
/2 /2 /2
(572)
Полагая падающий на рассматриваемую систему пучок лучей
параллельным оси первой линзы, получим изображение светя-
щейся точки в заднем фокусе F[ первой линзы.
Рис. 183
Считая, что вторая линза компенсатора будет поступательно
смещена относительно первой линзы в направлении, перпенди-
кулярном к оси системы, на величину а, будем рассматривать эту
величину как предмет у2 перед второй линзой компенсатора, и тогда
величина угла 8 отклонения луча определится отношением
е=—g- = ^. (573)
/2 /2
Из формулы (573) следует, что задача измерения угла отклоне-
ния 8 сводится к измерению линейного перемещения а второй линзы,
которое может быть выполнено либо с помощью механического
устройства (например, измерительного винта), либо с помощью
отсчетного микроскопа.
Нетрудно видеть, что источником ошибки измерения является
изменение величины фокусного расстояния второй линзы, которое
может возникнуть как за счет изменения ее радиусов кривизны
(обычно эта ошибка будет мала), так и за счет изменения показа-
теля преломления стекла.
Изменение фокусного расстояния /' второй линзы приводит
к изменению отношения между углом отклонения 8 и величиной
перемещения линзы а и, таким образом, вызовет рен.
276
Заметим, что наклон компенсатора по отношению к падающему
пучку лучей на некоторый угол р вызовет появление некоторого’
начального угла отклонения др, величина которого будет обуслов-
лена отличием величины видимого увеличения Г от единицы.
Величина ДР может быть определена как разность углов Р'
и Р до и после телескопической системы
Др = р'-р = Гр-р-(Г-1) р. (574)
Юстировка компенсатора с подвижной линзой будет сводиться
к устранениию в нем рена.
§ 89. Двухклиновый компенсатор
Создание клина с переменным углом отклонения 8 может быть
осуществлено также и путем вращения в разные стороны двух пре-
ломляющих клиньев с одинаковыми углами отклонения.
Рис. 184
Схема такого компенсатора представлена на рис. 184, а, б, где
показаны клинья в их исходном положении, когда главные сечения
обоих клиньев совпадают и вершины клиньев направлены в одну
и ту же сторону (см. рис. 184, а), а также после разворота клиньев
в разные стороны на угол 90° от их исходного положения (см. рис.
184, б), когда снова произойдет совпадение главных сечений клиньев,
но при вершинах клиньев, направленных уже в противоположные
стороны, что приведет к равенству нулю суммарного угла отклонения.
Полагая угол отклонения каждого из клиньев в отдельности
равным 80/2, можно получить в исходном положении общий началь-
ный угол отклонения 8 равным углу 80; при развороте каждого
из клиньев на угол 90° величина суммарного угла отклонения будет
равна нулю и при угле разворота клиньев на 180° величина сум-
марного угла отклонения окажется уже равной углу 80.
В общем случае, когда углы разворота клиньев будут равны
углу х, величина суммарного угла отклонения выразится формулой
8 = e0cosx. (575)1
Рассматривая формулу (575), видим, что для компенсатора с вра-
щающимися клиньями имеет место нелинейная зависимость между
277’
углами поворота клиньев х и изменением угла отклонения е, что
приводит к нелинейности отсчетной шкалы.
Следствием такой нелинейности явится возникновение перемен-
ной ошибки в угле отклонения Де, когда отсчетная шкала будет
сбита относительно ее правильного положения на некоторый угол Дх.
Вводя в формулу (575) вместо углов 8 и х углы 8 + Де и х +
+ Дх, получаем
8 Де = 80 cos (х + Дх) = 80 (cos х cos Д х — sin х sin Дх). (576)
Использование формулы (575) позволяет выделить величину
ошибки в угле отклонения Д 8 через величину ошибки в угле поворота
Дх. Находим
Де = е0 [(cos Дх —-1) cos х — sin х sin Дх]. (577)
В случае, если углы х и Дх будут невелики, то, пренебрегая
ошибками третьего порядка малости, можно получить приближен-
ную формулу
Д8^ — 80 (Д^ + хАх) = —8 + (578)
Из формулы (577) следует, что наибольшее значение величины
Д8 будет при угле х, близком к 90°,
А8тах = — 8о81П ДХ. (579)
Шкала в районе углов х, близких к 90°, приобретает наиболь-
шую равномерность. Действительно, вводя угол у, определяющий
собой разность угла х и угла 90°, или, что то же, начиная отсчет
углов поворота клиньев от их противоположного положения, соот-
ветствующего нулевому углу отклонения, можно написать
8 = 80 cos х = 80 cos (90° — у) = 80 sin у. (580)
Разлагая синус угла у по степеням у в ряд, получаем
е = е0 (у-уг+ • • •) = 8oY (1 -уг+ • • •) ’ <581)
что дает практически линейную зависимость между углами 8 и у
при малых углах у.
Ошибка нелинейности шкалы даже при углах порядка 0,5 рад
(около 30°) получается равной 0,04, т. е. около 4%.
Роль сдвига шкалы на угол Ду нетрудно оценить, развертывая
формулу (580) после введения в нее величин Д8 и Ду. Находим
8 4- Де = 80 sin (у + Ду) = с0 sin Y cos Д Y + 8о cos Y 8*п Д Y* (582)
Вычитание из формулы (582) формулы (580) дает значение ошибки
в угле
Д8= — 80 ^г~ + 80 cosy Ду 80 cos у Ду. (583)
278
Из формулы (583) нетрудно установить, что в диапазоне углов
не выходящих за пределы ±30°, величина ошибки в угле отклоне-
ния Де будет почти пропорциональна ошибке смещения шкалы.
Заметим, что, кроме ошибки, возникающей за счет сдвига шкалы
в двухклиновом компенсаторе, возможно возникновение рена, обу-
словленного наличием угла между плоскостью совмещенных глав-
ных сечений клиньев и плоскостью, в которой производятся измере-
ния, аналогично тому, как это имеет место при развороте простого
клина относительно оси оптической системы.
Глава XXVI
О ДОПУСКАХ НА ОПТИЧЕСКИЕ ДЕТАЛИ
§ 90. Общие приемы расчета допусков
При сборке оптической системы составляющие ее оптические*
детали и их взаимное расположение в системе будут в большей
или меньшей степени отличаться от величин, заданных расчетом
оптической системы; существенно, чтобы совокупность всех этих
отступлений не могла неблагоприятно повлиять на основные опти-
ческие характеристики системы и качество ее изображения.
Отсюда возникает необходимость установления допустимости
тех или иных отступлений от номинальных величин, при которых
изменение свойств оптической системы еще будет приемлемо.
Изменения свойств системы могут быть разделены на изменения
габаритных характеристик (величины и расположения изображения
и зрачков оптической системы) и характеристик качественных
(сохранения фокусировки и различных аберраций системы).
Вопрос об установлении допусков на изготовление и взаимное
расположение деталей в оптической системе можно рассматривать,
опираясь на введение в том или ином месте оптической системы
некоторого «деформирующего элемента», возникающего при нару-
шении номинальных размеров или расположения той или иной
детали.
В ряде случаев для удобства анализа свойств деформирующих
элементов удобно заменять такие элементы, располагающиеся в раз-
личных частях системы, эквивалентными им, но расположенными
в одном и том же пространстве, например после оптической системы,
(в пространстве изображений) или перед системой (в пространстве
предметов).
Условимся различать деформирующие элементы четырех родовl
1) элементы, создающие отклонение оси оптической системы;.
2) элементы, создающие поступательные смещения части системы;.
3) элементы, привносящие в оптическую систему дополнитель-
ную оптическую силу;
279’
4) коррекционные элементы, не вызывающие перечисленных выше
отклонений, но влияющие на качество изображения.
Рассмотрим деформирующий элемент, создающий в оптической
системе отклонение оси.
Обратимся к рис. 185, на котором представлены две части I
и II оптической системы.
В точке Л, расположенной в пространстве предметов, находится
предмет у\ в точке С расположен центр зрачка входа, имеющего
радиус р.
После первой части системы получаем изображение у' предмета
в точка А'; изображение центра зрачка радиуса р' — в точке С'.
Изображение у" предмета после всей системы расположится
ьВ точке Л", а центр выходного зрачка радиуса р" — в точке С".
9?
I
Рис. 185
Пусть деформирующий элемент будет расположен в точке К'
в пространстве между I и II системами и будет создавать для всех
лучей угол отклонения, равный й'.
Углы й можно рассматривать как апертурные углы при сопря-
женных точках К, К’ и К” в пространстве предметов, промежуточ-
ном и после всей системы; поэтому, пользуясь угловыми увеличе-
ниями для обеих составляющих систем I и II, нетрудно найти углы
й и й" в пространстве предметов и в пространстве изображений
0 = -^-; й’ = И7п^'. (584)
Формулы (584) показывают, что деформирующий элемент, распо-
ложенный в точке К' и создающий углы отклонения лучей, равные
й1', можно заменять деформирующим элементом в пространстве
предметов, расположенным в точке К и создающим углы отклонения
й1, или элементом после всей системы, расположенным в точке К"
и создающим углы отклонения й".
Случай использования деформирующего элемента, дающего по-
ступательное смещение всех лучей на некоторую величину а, можно
рассматривать, как частный случай действия отклоняюшего эле-
мента, удаленного в бесконечность.
Этот случай представлен на рис. 186. Нетрудно видеть, что
изображение деформирующего элемента в пространстве предметов
280
расположится в переднем фокусе системы I, а изображение после'
всей системы — в заднем фокусе системы II.
Величины углов отклонения в пространстве предметов и в про-
странстве изображений определятся из соотношений
JJ ’ /п
(585 >
Нетрудно представить, что если деформирующий элемент рас-
положится в одном из фокусов составляющих систем, то эквива-
лентом подобному элементу явится параллельное смещение лучей:
в соответственном пространстве.
При сближении или удалении таких составляющих систем не-
возможно установить положение эквивалентного деформирующего’
Рис. 186
элемента; его приходится считать неопределенным. Поэтому огра-
ничимся для этого случая определением величины и положения9
изображения и выходного зрачка, пользуясь формулами для линей-
ного и продольного увеличений.
Измененное линейное увеличение будет равно
где Fj — линейное увеличение первой составляющей системы; V'n —
измененное линейное увеличение второй системы; ха — расстояние
от промежуточного изображения или зрачка до переднего фокуса
второй системы и величина Дяп — изменение расстояния между
системами.
Величину хп можно выразить через фокусное расстояние /п
второй системы. В соответствии с этим, пользуясь формулой (586),
получаем
V
4 V
V' =
(587>
281
Если вторая система находится в воздухе, то
1 -1" УцФп
(588)
Пользуясь этой формулой, можно найти линейные увеличения
для предмета и изображения и определить взаимное расположение
изображения и выходного зрачка для всей системы. Пользуясь
же формулой для продольного увеличения, получим
= л= 7'= ___ 11__________YAA____________
а cS / (1 + ^пЛ1Л^п)(1 + ЕПс(РпА^п)
(1+ ПаФн Д^п) (1 + ^ПсФн Д^п) (589)
Пренебрегая членами, содержащими величину Аа;п в степенях
выше первой, получаем приближенную формулу
= [1-(Иш + 7Пс)ФпА^п] Г (590)
§ 91. Деформирующие элементы, вызывающие поперечное смещение
последующей части системы
Поступательное смещение последующей части системы большей
частью возникает за счет поступательного смещения призм или
зеркал; поэтому начнем с рассмотрения этих элементов.
Рассмотрим два случая смещения простой прямоугольной призмы:
вдоль оси предшествующей оптической системы (рис. 187, а) и вдоль
оси последующей системы (рис. 187, б).
На рис. 187, а и б показаны развертки призм и положение по-
следующей части системы после развертки призмы; обозначения
на обоих рисунках одинаковы.
В точке А расположена предметная точка на расстоянии s от
первой поверхности призмы; исходное положение призмы опреде-
ляется буквами В, С и Е; те же буквы с чертой вверху определяют
смещенное положение призмы и буквы с чертой и штрихом — раз-
вертку смещенной призмы.
Через S обозначена вершина последующей части системы до
развертки и до смещения призмы, через S' — после развертки
и через S' — после смещения.
Точки пересечения оси последующей системы с выходной гранью
призмы и ее развертками до и после смещения обозначены через
Z), D' и D'.
Смещения деформирующего элемента и последующей части
системы вдоль координатных осей обозначим через Да; и Аг/.
Пользуясь рисунками, находим для первого случая
s = s-{-Aa;. (591)
282
Все толщины на развертках сохраняются неизменными
d = d и d' = d' =d. (592)
В первом из рассматриваемых случаев изменится расстояние
между точками С и D по отношению к расстоянию между точками
С и D на величину продольного смещения Дгг.
В соответствии с этими изменениями последующая часть системы
окажется смещенной и в продольном и в поперечном направлениях
на одну и ту же величину Ду = Дя.
Во втором случае смещения призмы вдоль оси последующей
части системы отрезок s сохранится постоянным, а расстояние между
призмой и второй системой изменится на величину Ду
d = d + Ду.
Рис. 187
6
Одновременно изменятся на величину Д у отрезки между точками
С и К и С и К, что снова приведет к продольному и поперечному
смещению последующей части системы на развертке так же, как
это имело место в первом случае.
Это совпадение объясняется тем, что в обоих случаях происхо-
дит перемещение отражающей грани в направлении ее нормали
на одну и ту же величину при постоянной длине развертки призмы.
Обращаясь к любому из рис. 187, видим, что смещение оси
последующей части системы не могло бы иметь места, если бы призме
было придано поступательное перемещение вдоль ее отражающей
грани, так как тогда точка пересечения осей предыдущей и после-
дующей систем оставалась бы лежащей в плоскости отражающей
грани.
В этом случае положение входной и выходной граней призмы
не будет сказываться на поведении оси системы.
На основании приведенного обобщения можно сделать вывод
о том, что отражательные призмы следует рассматривать как сово-
купность двух элементов — системы зеркал и плоскопараллельной
пластинки, толщина которой соответствует развертке призмы.
283
Справедливость такого приема легко доказывается тем, что
поступательное смещение плоскопараллельной пластинки не изме-
няет свойств оптической системы.
Можно воспользоваться также очень простым графическим при-
емом — продолжить ось последующей части системы до ее пе-
ресечения со смещенной отражающей гранью и от этой точки пост-
роить смещенную ось на развертке призмы.
На рис. 188, а, б и в аналогичным образом представлено посту-
пательное смещение пентапризмы вдоль оси предыдущей системы
и два случая смещения прямоугольной призмы с двумя отраже-
ниями — вдоль оси предыдущей системы и перпендикулярно этой оси.
Нетрудно видеть, что смещение пентапризмы напоминает рас-
смотренный случай смещения призмы с одним отражением, но отли-
чается от него тем, что смещение оси на развертке имеет знак, про-
тивоположный смещению призмы с одним отражением.
Для прямоугольной призмы с двумя отражениями поперечное
смещение создает удвоенное поперечное смещение оси на развертке
без нарушения фокусировки (расстояния между системами); про-
дольное же смещение призмы с двумя отражениями изменит рас-
284
стояние между системами на удвоенную величину перемещения
призмы без поступательного смещения оси.
Вместе с тем для призмы с двумя отражающими гранями можно
воспользоваться и более простым приемом для определения поло-
жения оси последующей части системы.
Обратимся к рис. 189, на котором представлена подвижка пента-
призмы по направлению биссектрисы ее угла отклонения.
Рассматривая плоскость, в которой расположена биссектриса
угла отклонения, видим, что и падающий, и отраженный лучи всегда
будут пересекаться друг с другом только в этой плоскости (не учи-
тывая наклона входной и выходной преломляющих граней);
поэтому если необходимо сохранить положение этой плоскости, то
нужно, чтобы точка С всегда находилась на биссектрисе между
осями предыдущей и последующей систем (исходный угол между
осями систем предполагается равным углу отклонения пары зеркал).
При соблюдении этого условия будет исключено поступательное
смещение оси последующей системы, но будет иметь место свобода
передвижения точки С в плоскости биссектрисы, влияющая на
изменение расстояния между предыдущей и последующей системами
на развертке.
Эти соображения хорошо объясняют отсутствие смещения оси
для прямоугольной призмы с двумя отражениями при ее продоль-
ной подвижке, как это было показано на рис. 187, б.
Свойства системы из двух зеркал могут быть распространены
и на систему больших чисел четных зеркал; но для этого понадо-
бится найти эквивалент точке С пересечения пары зеркал.
Такую эквивалентную точку — полюс четного числа зеркал —
можно определить как точку, при вращении вокруг которой системы
?85
четного числа зеркал не происходит поступательного смещения
лучей.
Совершенно очевидно, что и свойства призмы с одним отраже-
нием могут быть распространены на большее нечетное число зеркал;
в этом случае аналогично системе* из четного числа зеркал понадо-
бится найти эквивалент плоской отражающей грани — плоскости,
перпендикулярной биссектрисе угла отклонения.
Необходимо отметить, что призмы и с нечетным и с четным числом
отражений можно перемещать перпендикулярно общей плоскости
главного сечения призмы, не нарушая ни расположения осей, ни
расстояния между системами.
Однако если призмы не имеют общей плоскости главного сечения,
как, например, призма с крышей, то такое смещение, перпендику-
лярное плоскости, содержащей обе оси, может вызвать поступа-
тельное смещение оси в направлении, перпендикулярном начальной
плоскости обеих осей; для случая крышеобразной призмы такое
смещение не будет связано с нарушением расстояния между систе-
мами.
Если же призма с крышей не будет испытывать перемещения
в такой перпендикулярной плоскости, то ее поведение будет равно-
значно поведению простой прямоугольной призмы с одним отражением.
Призма с тремя отражениями — триппельшпигель-призма, рас-
смотренная в § 46, по своим свойствам аналогична прямоуголь-
ной призме с двумя отражениями, но ее поперечное перемещение-
будет вызывать поперечное перемещение оси последующей системы
в двух взаимно перпендикулярных направлениях на удвоенную
величину перемещения призмы.
При этом расстояние между предыдущей и последующей систе-
мами не изменится.
§ 92. Деформирующие элементы,
вызывающие изменение направления оси последующей системы
Простейшими элементами, вызывающими изменение направле-
ния оси последующей системы, являются простой преломляющий
клин или перекос осей предыдущей и последующей систем.
Действие таких элементов настолько просто, что едва ли нуж-
дается в специальном рассмотрении.
Более сложной задачей является установка в оптической си-
стеме призмы или зеркала; эту задачу удобно разделить на две —
поворот зеркальной системы и поворот плоскопараллельной пла-
стинки, эквивалентной по своей толщине развертке отражатель-
ной призмы.
Совершенно очевидно, что поворот приведенной плоскопарал-
лельной пластинки ничем не должен отличаться от уже рассмот-
ренного случая применения пластинки в микрометренном устрой-
стве; поэтому можно ограничиться рассмотрением поворота одной
лишь зеркальной системы.
286
Простейшей зеркальной системой является вращающееся пло-
ское зеркало. На рис. 190 показан поворот зеркала вокруг точки О,
отстоящей на некотором расстоянии b от оси предыдущей системы
и на расстоянии с от плоскости I—I зеркала.
Ось предыдущей системы пересекает плоскость зеркала в его
начальном положении I—I в точке N, составляя при этом угол г
с нормалью к зеркалу.
После поворота зеркала на угол а оно займет положение II—II.
Вершина 5 первой поверхности последующей системы после
развертки отражения для исходного положения зеркала будет
изображаться в некоторой точке S' на оси предыдущей системы
на расстоянии 10 от оси вращения зеркала.
После поворота зеркала на малый угол а вершина 5 будет отобра-
жаться в некоторой точке S'; отображенная ось последующей си-
стемы составит со своим исходным положением (осью предыдущей
системы) удвоенный угол 2а.
Обозначим расстояние между проекциями точек О и S' на ось
предыдущей системы через Z.
После развертки зеркала центр вращения О в начальном поло-
жении отобразится в точке О' на расстоянии с' = с от плоскости
зеркала; после поворота зеркала на угол а точка О' займет положе-
ние О', отстоящее от оси предыдущей системы на расстоянии Ъ'.
28*7
Длина дуги 0'0' будет равна 2са. Полагая, что нормаль к зер-
калу составляет угол i с осью предыдущей системы, нетрудно опре-
делить величину проекции дуги О'О' на ось второй системы,
равную е,
e = 2casini. (594)
Определим разность расстояний точек О' и О' от начального
положения оси последующей системы; находим
b' — b = 2са cos i. (595)
Пользуясь рисунком, найдем расстояние
I = b' sin 2а + (Zo + е) cos 2а, (596)
откуда, имея в виду малость угла а, определяем разность отрез-
ков I и 10
Al = I -—= 2ba + 2са sin I — 2 (b + с sin Z) а. (597)
Эта формула дает изменение расстояния между предыдущей
и последующей системами после поворота зеркала на угол а.
Необходимо отметить, что точка пересечения осей последующей
и предыдущей систем будет расположена на расстоянии т от осно-
вания перпендикуляра, опущенного из точки вращения О на ось
предыдущей системы, величину которого нетрудно определить
из рисунка,
_ ML __ OL — b __ b b
tg 2a tg 2a cos 2a tg 2a tg 2a
Пользуясь формулой (595), находим
&4-2cacosz — & cos 2a 2b sin2 a . ac cos i
Ш — !---------------- —— --------- —I----------
sin 2a 2 sin a cos a 1 sin a cos a
(598)
(599)
При малых углах a формула (599) переходит в приближенную
m = ccosi. (600)
Формула (600) определяет точку К излома оси после поворота
зеркала как проекцию основания перпендикуляра, опущенного
из центра вращения на плоскость зеркала.
Совершенно очевидно, что при вращении отражательной призмы
с одним отражением необходимо учитывать поступательное .смеще-
ние оси, вызываемое действием призмы, как плоскопараллельной
пластинки; такое поступательное смещение соответственным обра-
зом изменит положение точки излома оси.
При изготовлении призм всегда возможен случай, когда одна
из граней призмы окажется непараллельной к линии пересечения
288
(ребру) между двумя другими гранями; тогда призма обращается
в пирамиду и угол между ребром пересечения двух граней и пло-
скостью третьей грани называют ошибкой пирамидальности призмы,
что показано на рис. 191, где а — угол, определяющий ошибку
пирамидальности.
Будем полагать, что ошибка пирамидальности мала. Тогда,
принимая высоту пирамиды равной Н, величину пирамидальности
можно выразить для каждой из граней призмы следующими соот-
ношениями:
а = ^, Р = 4> У = (601)
Величины пирамидальности для каждой
из граней нетрудно связать друг с другом.
Действительно, исходя из формулы для
площади треугольника, можно написать
5 = = (602)
где через а, Ь, с обозначены стороны треуголь-
ника и через ha, hb и hc — высоты, перпенди-
кулярные перечисленным сторонам.
Умножая площадь треугольника на отно-
шение 2 : Н, получаем
-^- = -^-а = 4г& = -^-с = аа = &₽ = су (603)
НН Н Н '
так называемый инвариант пирамидальности,
впервые полученный В. Н. Чуриловским.
§ 93, Вращение пары зеркал
Вращение пары зеркал можно рассматривать как последова-
тельный поворот обоих зеркал вокруг одного и того же центра
вращения.
Осуществляя развертку обоих отражений, необходимо после
развертки первого отражения развертку второго отражения про-
изводить вокруг отображения центра вращения при первом отра-
жении; следует помнить, что при этом вращение второго зеркала
будет происходить в обратном направлении по отношению к вра-
щению первого зеркала.
Картина развертки обоих отражений представлена на рис. 192.
На этом рисунке сохранены те же обозначения, что и на рис. 190,
с той лишь разницей, что на рис. 192 добавлены обозначения для
первой и второй отражающих граней и введено обозначение для
угла у между отражающими гранями.
19 Заказ 2301.
289
Выполняя последовательный поворот обеих отражающих граней,
можно использовать формулы, выведенные в предыдущем параграфе
для поворота одиночного зеркала.
Совершенно очевидно, что при сохранении угла между отра-
жающими гранями у не может измениться направление оси по-
следующей системы. Поэтому нет необходимости рассматривать
этот вопрос; ограничимся лишь определением поступательного
смещения оси и изменения расстояния между системами.
Величину смещения оси в поперечном направлении можно опре-
делить по формуле
А у = 2 (с± cos i± + с2 cos j2). (604)
Рис. 192
Продольное же смещение будет равно
А/ = А/г Л/2 = 2 — b2 + с± sin i± — с2 sin Z2) а- (605)
Согласно рисунку, величина Ь2 может быть выражена через вели-
чину Ь±
b2 = b1 + 2с± sin (606)
что позволяет преобразовать формулу (605)
AZ= —2 (<?! sin^-]- c2sinZ2)^« (607)
В формулы (604) и (607) не входят координаты Ъг и Ь2 центров;
поэтому как продольное, так и поперечное смещение оси при пово-
роте пары зеркал будет зависеть лишь от отстояния центра вращения
от первого и второго зеркал и в частном случае совпадения центра
вращения с точкой пересечения обоих зеркал оба смещения оси
окажутся равными нулю.
290
Поведение пары зеркал или системы, состоящей из четного числа
зеркал, при ее повороте можно установить значительно проще,
если рассмотреть перемещение полюса N системы зеркал вокруг
оси вращения О так, как это показано на рис. 193, на котором пред-
ставлена развертка двух отражающих граней CN и DN, составля-
ющих между собой угол у и образующих в точке пересечения друг
с другом полюс N.
Рис. 193
Разместим начало координат О в центре вращения; ось g ориен-
тируем вдоль биссектрисы угла между осями предыдущей и по-
следующей системы; ось ц ориентируем перпендикулярно оси %-
Тогда после поворота системы зеркал на угол а полюс системы N
переместится в новое положение 7V\, которое можно определить
изменениями и Дц координат £ и т].
Если координаты полюса принять равными а и &, то при малых
углах а будут образованы два подобных прямоугольных треуголь-
ника с катетами а и Ь, Д % и Дц.
Нетрудно установить, что коэффициент подобия будет равен
углу а
+ ,608)
19*
291
откуда легко определяются величины Д£ и Дт]
Д£ = яа; Дт]=:&а, (609)
которые, как это было рассмотрено ранее, определяют половину
изменения расстояния между системами и половину поперечного
смещения оси последующей системы.
§ 94. Вращение системы зеркал вокруг оси, лежащей в плоскости
главного сечения
До сих пор рассматривался случай, когда ось вращения системы
зеркал располагалась перпендикулярно плоскости главного сечения
системы (перпендикулярно плоскости рисунка).
Рассмотрим случай, когда ось вращения будет лежать в пло-
скости главного сечения.
Обратимся к рис. 195, а и б, на которых представлена картина
действия системы зеркал, вращающихся вокруг оси ООг, располо-
женной в плоскости рисунка.
Будем полагать, что входные и выходные грани А и В перпен-
дикулярны оси предыдущей и последующей систем.
Расстояния входной и выходной граней от оси вращения ООГ
примем равными R и R'.
Углы наклона входной и выходной осей относительно оси вра-
щения обозначим через х и х'.
При повороте системы зеркал на малый угол у вокруг оси нор-
мали к входной и выходной граням опишут конические поверх-
ности и образуют малые углы js и f8 к своему исходному положению.
Согласно рис. 194, а можно написать
]\ = ysinx; 7' = ysinx'. (610)
292
Углы j8 и js будут лежать в сагиттальной плоскости (если за
меридиональную плоскость принять плоскость рисунка).
Угловое увеличение системы зеркал в сагиттальной плоскости
будет равно W8 = ±1 (отрицательное значение для увеличения
W8 будет соответствовать случаю наличия крыши).
Поэтому ось предыдущей системы после поворота призмы вокруг
оси вращения на угол у будет отклонена на величину, равную углу
WJ8 от своего исходного положения.
Угол расхождения между осями предыдущей и последующей
систем после поворота будет равен
(ею
Подставляя в формулу (611) значения углов f8 и j8 согласно
формуле (611) получаем
a = (sinx' —W8 sinx) у. (612)
Найдем положение точки К излома оси. Эта точка может быть
определена, исходя из условия пересечения изображения оси преды-
дущей системы после поворота призм с исходным положением оси
последующей системы.
Направления изображения оси предыдущей системы вполне
определяется величиной угла W8j8; поэтому требуется определить
положение какой-либо одной точки изображения предыдущей оси
после системы призм.
В качестве такой точки можно рассмотреть положение изобра-
жения точки О, расположенной от входной грани призмы А на
расстоянии R = s.
Примем расстояние точки О' от вершины В равным s'.
Зная s', можно определить высоту h" на поверхности В; вели-
чина высоты h's определится через угол а и расстояние R'. Тогда
расстояние точки К от вершины поверхности В выразится формулой
В К — ь" — R'l* s'Wsj8 (613)
а а * \ /
Пользуясь формулами (608) и (611), формулу (613) преобразуем
так
(614)
Rf sin х' — sWs sin x
JDA = ---: 777 :------
smx —W8 sinx
Зная величину отрезка BK, находим отрезок а между точками
К и О'\ эта величина после некоторых преобразований получается
равной
ТЭ ТУ ? §
а = В К — s =-------------;-------
1—
Sin X J
(615)
В частном случае равенства углов х и х' и углового увеличения
W8 = +1 величина а обращается в бесконечность, что будет соот-
ветствовать случаю, когда а = 0.
293
В другом частном случае, когда отрезок s' окажется равным
расстоянию R', величина а будет равна нулю при любых значениях
углов х и х' и углового увеличения Ws.
§ 95. Система из нечетного числа зеркал с совпадающими
главными сечениями
Система, состоящая из нечетного числа зеркал, может быть
рассмотрена путем последовательного поворота трех или большего
нечетного числа зеркал вокруг центра вращения и всех его последо-
вательных отражений подобно тому, как это проделывалось в § 91
для пары зеркал. Однако громоздкость этого приема достаточно
очевидна и поэтому целесообразнее прибегнуть к замене системы
нечетного числа зеркал одним эквивалентным зеркалом.
Такая замена может быть осуществлена в соответствии с § 58
следующим образом. Выбрав ход произвольного луча через си-
стему нечетного числа зеркал, как это представлено на рис. 195,
всегда можно найти точку А пересечения входящего и выходящего
лучей.
Угол между входящим и выходящим лучами примем равным
2г, где i — угол между падающим лучом и нормалью к эквивалент-
ному зеркалу.
Зная угол г, можно провести через точку А пересечения лучей
биссектрису АЕ угла между входящим и выходящим лучами.
Величину расстояния АК = а эквивалентного зеркала от точки А
можно рассматривать как высоту равнобедренного треугольника
АС С', боковые стороны которого будут равны полупериметру хода
луча в многоугольнике, образованном точкой пересечения А входя-
щего и выходящего лучей и всеми точками отражения N2 и N3.
294
Продолжая входящий и выходящий лучи до пересечения их
с плоскостью эквивалентного зеркала в точках С и С', получим
отрезок СС (основание равнобедренного треугольника), равный В
(в случае, если точка С будет расположена правее точки С"), который
можно назвать базисом эквивалентного зеркала.
Все лучи, падающие на эквивалентное зеркало в точку С, будут
после отражения от него исходить из точки С'.
При этом углы падения и отражения будут, как и всегда, равны.
Если какой-либо луч, падая на эквивалентное зеркало, встре-
тится с ним в другой точке (например, в точке D), то отраженный
луч выйдет из точки Z)', отстоящей от точки D на расстоянии, равном
длине базиса В.
Рис. 196
Заметим, что возможен случай, когда входящий и выходящий
лучи будут пересекаться лишь своими продолжениями, как это
показано на рис. 196, а; в этом случае стороны равнобедренного
треугольника равны полуразности сторон многоугольника, явля-
ющихся отрезками луча и отрезками продолжения лучей.
Величина базиса эквивалентного зеркала может принимать как
отрицательные, так и положительные значения и, как это показано
на рис. 196, б, величина базиса может быть и равна нулю.
При рассмотрении действия призм необходимо учитывать удли-
нение, вносимое плоскопараллельной пластинкой, в которую раз-
вертывается призма; можно также воспользоваться при определе-
нии положения эквивалентного зеркала редуцированием длины хода
луча в призме к воздуху.
295
Глава XXVII
ДОПУСКИ НА ЛИНЗОВЫЕ ЭЛЕМЕНТЫ ОПТИЧЕСКОЙ
СИСТЕМЫ
§ 96. Силовые деформирующие элементы. Расположение элемента
в системе
Ранее уже говорилось, что в оптической системе, кроме измене-
ний, создающих отклонения пучков лучей или их поступательное
смещение, могут существовать изменения, связанные с изменением
силы отдельных элементов оптической системы.
Такие деформирующие элементы, создающие возникновение или
изменение оптической силы, условимся называть силовыми дефор-
мирующими элементами.
Рассмотрим эффект действия силового деформирующего элемента,
расположение которого в оптической системе представлено на
рис. 197.
Рассматриваемая система составлена из двух систем с силами,
равными фх и ф2. Расстояние между системами примем равным d.
В точке А поместим предмет у\ в точке А' после первой системы
расположится изображение у' предмета, которое вторая система
перенесет в точку 4", где образуется изображение у" после всей
системы.
Расстояние от первой системы до предмета и промежуточного
изображения обозначим через sx и s'; для последующей системы
расстояния до точек А' и А” обозначим через s2 и s'.
Разместим в точке К пространства между составляющими си-
стемами деформирующий элемент с оптической силой, равной фл.
Расстояние между этим элементом и второй системой обозна-
чим через dk.
296
Деформирующий элемент создаст после себя новое промежуточ-
ное изображение, которое расположится в некоторой точке А',
величину которого обозначим через у'.
Расстояния от деформирующего элемента до точек А' и А' обо-
значим через sk и sk.
Вторая система перенесет изображение после деформирующего
элемента в некоторую точку А ”, расположенную на расстоянии s'2
после второй системы.
Величину деформированного изображения после всей системы
обозначим через у”.
Одновременно вторая система создаст после себя изображение
и самого деформирующего элемента в некоторой точке К”.
Покажем, что, размещая в точке К' другой деформирующий
элемент с соответственно подобранной силой <р*, можно действием
такого нового элемента заменить действие исходного деформи-
рующего элемента, располагавшегося ранее в точке К.
Для этого потребуется, чтобы элемент ср* мог перенести изобра-
жение точки А ” в ту же точку А ”, в которую изображение точки А
переносилось элементом с силой ср*.
Поэтому для элемента с силой ср* отрезки до точек А ” и А ” дол-
жны являться сопряженными отрезками sk и sk.
По условию элемент с силой ср* должен был находиться в точке
расположения изображения элемента с силой ср* через вторую опти-
ческую систему; в соответствии с этим точки N, А " и М' должны
располагаться на одной и той же прямой, так как точка М' должна
являться пересечением двух любых лучей, исходивших из вершины
М предмета, расположенного в плоскости деформирующего эле-
мента с силой cpfc как до, так и после установки деформирующего
элемента в системе.
Перейдем непосредственно к выводам. Полагая, что обе системы
и оба деформирующих элемента расположены в воздухе, можно
написать
Отрезки sk и sk и s* и s'k можно связать друг с другом через фор-
мулу продольного увеличения
Sk~ Qaksk = A’ Sk ~ QakSk “ аУkSk* (617)
Пользуясь формулами (617), преобразуем вторую из формул (616)
(618)
Обозначая отрезки от переднего фокуса второй системы до точек
К, А' и А' через хк, ха и ха, можно написать
**=*«-**=*«-<.• (619)
297
Деля почленнсЛформулу (618) на величину переднего фокусного
расстояния /2 второй системы, находим
1 _______ 1 sk
Vk a ft
sk
h
(620)
или
+ /2) +/?)’ (621)
откуда
—-— = —-—k—• ______1 -4- -L-. f622^
Vksk Vask /2 ’ Vksk Vask '
Разности правых и левых частей формул (622) дают
—----------------------LA==_2fc_ (6?3)
что позволяет окончательно преобразовать формулу (618)
(624)
Полученная формула не содержит величин sk и s'k, Va и Va,
которые определяют положение промежуточного изображения отно-
сительно деформирующего элемента. Отсюда вытекает, что действие
линзы с силой фй, установленной в точке расположения изображе-
ния К' линзы, обладающей силой ф^. и установленной в точке К.
равнозначны друг другу независимо от расположения промежуточ-
ного изображения.
§ 97. Определение силы деформирующего элемента.
Допуски на толщину линз, на юнстанты оптического стекла
Изменение силы линзы может возникнуть вследствие двух основ-
ных . причин: 1) изменения показателя преломления и 2) измене-
ния толщины линзы.
Изменение силы линзы могло бы быть вызвано и изменением
радиусов кривизны поверхностей линзы; но так как при контроле
линз под пробные стекла относительные изменения радиусов кри-
визны будут выражаться сотыми долями процента, то этими изме-
нениями можно пренебречь.
Поэтому можно ограничиться рассмотрением лишь двух упо-
мянутых выше случаев.
1. Изменение показателя преломления. Оп-
тическая сила тонкой линзы в воздухе определяется формулой
Фо = (п-1)(Т_£).
(625)
298
Дифференцируя эту формулу по показателю преломления, находим
* = <е26)
Полученная формула по внешнему виду похожа на формулу
хроматизма тонкой линзы с той лишь разницей, что величина ц
не будет являться числом Аббе (величина ц не связана с диспер-
сией стекла).
Рассмотрим случай изменения силы двухлинзового ахроматизи-
рованного объектива вследствие изменения показателя преломления.
Сила тонкого ахроматизированного объектива определяется сум-
мой сил составляющих его линз
Ф = Ф/с + фф. (627)
Дифференцируя формулу (627) и приравнивая с/ср — 0, получаем
условие ахроматизации
йф = 0 = <Ч + йф = ^ + ^. (628)
Полагая vk — 64,1 (стекло марки К8) и v(}) = 36,9 (стекло марки
Ф1), получаем
64,1 Q
Tfc— 644 —36,9 Ф —2’36(Р-
Если кроновая линза будет изготовлена из стекла IV категории
по показателю преломления (Дтг = ±20 - 10~4 ), то для стекла К8
__ 0’5163 ___ р г q л
±0,002 —258,1.
Предельная величина изменения силы кроновой линзы будет
равна
±0’0091ф = ±0,91% ф-
Таким образом, приращение силы кроновой линзы составит
около 1% от силы всего ахроматического компонента.
2. Изменение толщины линзы будет вызывать воз-
никновение деформирующего элемента в виде линзы с равными радиу-
сами и толщиной, равной изменению толщины основной линзы.
Сила такого деформирующего элемента определится по формуле
Лф = ~А~71)2- (629)
2£9
Полагая Ad = 0,3 мм, п = 1,5 и г = 100 мм, имеем
т 1,5 \ 100 / 40000 100 000
и фокусное расстояние
/' = = 100 000 мм —100 м.
Дф
Глава XXVIII
ПРИМЕРЫ ЮСТИРОВКИ ОПТИКИ НЕКОТОРЫХ ПРИБОРОВ
И РАСЧЕТА ЭЛЕМЕНТОВ ЮСТИРОВОЧНОГО ПРОЦЕССА
§ 98. Юстировочный процесс оптики бинокля
Одним из весьма характерных примеров анализа юстировоч-
ного процесса является юстировка призменного бинокля.
Конструктивная схема бинокля может быть разделена на три
основных элемента:
1) линзовая телескопическая система, состоящая из объектива
и окуляра;
2) оборачивающая система призм Порро I рода;
3) элементы механической конструкции — ось шарнира и поса-
дочные места объективов, окуляров и призм.
Анализ юстировочного процесса разделяется на две части:
I. Анализ допусков на оптические детали и элементы механи-
ческой конструкции.
II. Анализ действия юстировочных элементов.
Технические требования, предъявляемые к юстировке бинокля,
разделяются на две группы:
А. Соблюдение заданных геометрических характеристик — уве-
личения, поля зрения, диаметра выходного зрачка, параллель-
ности осей, расхода фокусировки окуляра.
Б. Обеспечение приемлемого качества изображения.
Механическая конструкция корпуса бинокля определяется сле-
дующими элементами, представленными на рис. 198: осью шарнира,
посадочной плоскостью оправы объектива и ее углом с осью шарнира,
посадочной плоскостью для призм и ее углом с осью шарнира, отвер-
стием для оправы окуляра и расстоянием а между центром этого
отверстия и центром отверстия для оправы объектива, переменным
эксцентриситетом оправы объектива и отверстием диафрагмы окуляра.
На рис. 198 призмы условно развернуты в одну плоскость,
совпадающую с осью шарнира.
На рис. 199 оптическая система бинокля представлена в нераз-
вернутом виде (сплошными линиями) и в развернутом виде (пунк-
тиром); данные оптической системы следующие:
увеличение Г = 6х; поле зрения 2(1 = 8° 30'; диаметр выход-
ного зрачка 2р' = 5,0 мм (все последующие линейные размеры
даны в мм)
300
<б = И7,90; 4 = 20,73 и з0к=-6,71;
Г1 = 72,94 г2 = —49,20 г3 = —230,69 Г4= оо Г5=оо Г6= оо Г7 = оо га = 55,3 г9 =-26,97 г10 = 15,02 ru=-ll,3 '’12=-79,75 < 4 = 6,6 «2 = 1,5302 v2 = 60,5 < /2 = 2,8 n3 = l,6164 v3 = 36,5 < /з = 39,7 < 4 = 43,1 «6 = 1,5688 v5 = 56,0 <4=2,0 d6 = 40,0 «7 = 1,5688 v7 = 56,0 < /, = 29,97 < Z8 = 4,5 «9 = 1,5163 v9 = 64,1 < Z9 = 14,7 <40 = 3,4 «ц = 1,5399 vu = 59,7 </u = l,0 «12 = 1,6199 v12 = 36,3
Рис. 198
Рис. 199
Расстояние 1± от ребра первой призмы до плоскости изображения
определится по рис. 199:
Zi = А + d5 + dQ 4- d7 + s0K = 86,78 мм
6t
то же для второй призмы:
Плечи обоих ребер после редуцирования толщин призм будут равны
^1 = 1^7 + ^5 + ^7 + 5ОК == »46 ММ,
^2 = ^- + ^7 + «ок = 35,98 мм.
После юстировки на параллельность полей ось трубки бинокля
будет параллельна оси шарнира; тогда ось объектива составит
с осью трубки углы и rij (см. рис. 198), которые определяются
неперпендикулярностью посадочной плоскости объектива к оси
шарнира.
302
Рис. 201
Следствием этого явится перемещение центра поля зрения объек-
тива по отношению к центру отверстия диафрагмы, создающее,
с одной стороны, увеличение угла поля зрения, равное величине
угла перекоса посадочной плоскости объектива.
Так, при угле перекоса g1? равном 2', произойдет прирост поле-
вого угла на 0,8%; это вызовет прирост астигматизма и кривизны
поля на 1,6%, что составит для объектива рассматриваемого би-
нокля около 0,01 мм и в диоптрийной мере для всего бинокля около
0,025 диоптрии.
Перекос посадочного места для си-
стемы оборачивающих призм будет равно-
значен повороту телескопической системы
с увеличением, равным —1. При этом
произойдет поворот базиса системы призм
на величину угла перекоса g2 и поворот
луча после системы призм на удвоенную
величину 2g 2 угла перекоса. Эта картина
представлена на рис. 200.
Начало базиса можно принять рас-
положенным в центре отверстия перед
первой призмой; длина Ьх составляющей
базиса вдоль оси системы без учета удли-
нения, вносимого призмами, будет равна
удвоенному расстоянию между ребрами
обеих призм и промежутка между приз-
мами, взятому со знаком минус.
Удлинение, вносимое призмами, со-
кратит величину этой составляющей на
величину, равную (d4 + ^б) —~—» и» таким
образом, получим величину Ъх приведенной составляющей базиса,
равной
b'x=bx + ^^(d4 + do)=== 56,98 мм;
окончательная же величина базиса b определится согласно рис. 201
как величина гипотенузы треугольника со сторонами а и Ь'х.
Эта величина представлена на рис. 200 отрезком СС", соеди-
няющим центр отверстия первой призмы и его изображение после
оборачивающей системы призм.
Численно величина базиса в рассматриваемом примере полу-
чается равной b = 64,7 мм.
Обозначим величину угла между осью объектива и направлением
базиса через 0. Тогда при повороте системы призм на угол g нетруд-
но определить величину еу смещения изображения в фокальной
плоскости окуляра. Оно будет равно
= + = sin 9 + 2Zg = (Z> sin 0 + 2Z) g,
303
где
-^+<is+^+^+s...
Численно, полагая величину перекоса посадочной плоскости
призм равной 2', получаем величину поперечного смещения изобра-
жения еу для рассматриваемой системы равной
^ = 0,1092 мм.
Продольное же смещение изображения вдоль оси системы ех
будет равно
ех — cos 0 = 0,017 мм.
Перейдем к рассмотрению влияния ошибок изготовления призм.
Каждая из призм, как правило, имеет ошибки углов и отступле-
ния от номинальных линейных размеров.
Ошибками углов явятся: ошибка в изготовлении прямого угла,
ошибка пирамидальности, ошибка наклона призмы относительно
посадочной плоскости, перекос ребра между катетами призмы и бо-
ковой нерабочей гранью призмы и ошибка в остром угле призмы,
Ошибками в линейных размерах будут: ошибка в длине хода,
равная удвоенной высоте ребра над гипотенузной гранью, отступле-
ние в показателе преломления, приводящее к изменению приведен-
ной длины хода луча в призме, ошибки в линейных размерах фасок
на острых углах по отношению к ребру между катетами и ошибка
в установке призмы в направлении плоскости ее главного сечения.
Рассмотрим влияние этих ошибок. Ошибки в прямом угле а
и ошибка пирамидальности приведут к возникновению угла откло-
нения 8, равного
8 = 2/га. (630)
который при ошибке в прямом угле будет лежать в плоскости глав-
ного сечения и при наличии пирамидальности — в плоскости, перпен-
дикулярной главному сечению.
Влияние ошибки в прямом угле для первой призмы будет сум-
мироваться с влиянием ошибки пирамидальности для второй призмы
и наоборот, так как обе призмы своими главными сечениями распо-
лагаются перпендикулярно друг к другу.
Положение точек излома оси уже было определено через вели-
чины плеч Zx и Z2; умножая полученные значения углов 8 на соответ-
ственные длины плеч, получим смещение изображения е в плоскости
диафрагмы окуляра
е =~1&. (631)
Численно, полагая ошибку в прямом угле или ошибку пирами-
дальности равной 2', получаем величины углов отклонения 8, рав-
ные (при п = 1,5688) 6' 07", что составит около 0,0018 рад.
304
При длине плеча для первой призмы 64,46 мм это приведет
к смещению изображения в фокальной плоскости окуляра на вели-
чину €, равную 0,0116 мм, что дает угловое смещение за окуляром
около Г 40".
Ошибка наклона призмы относительно посадочной плоскости
в направлении, перпендикулярном главному сечению, создает угол
отклонения 8, равный удвоенному углу наклона.
Ошибка % перекоса ребра призмы по отношению к боковой грани
(а также и разворот призмы в ее гнезде на посадочной площадке)
создаст угол поворота изображения в его плоскости — ошибку
наклона изображения.
Ошибки в острых углах призм приводятся к ошибке в располо-
жении ребра призмы по отношению к. фаскам, ограничивающим
гипотенузную грань; эти
ошибки эквивалентны про-
дольному перемещению приз-
мы в плоскости ее главного
сечения и приводят к удвоен-
ному поступательному сме-
щению оси после призмы.
Ошибку в остром угле
нетрудно перевести в ошибку
смещения ребра. Из рис. 202
следует, что ошибка в остром
угле, равная S, вызовет сме-
щение ребра, равное произ-
ведению из длины d хода
луча (нередуцированного!) на величину ошибки в остром угле.
Так, при ошибке в остром угле в 5' и длине хода луча в 40 мм полу-
чаем эквивалентный сдвиг ребра, равный 0,06 мм.
Ошибка в высоте призмы при сохранении положения ребра
приводит к изменению длины хода на удвоенную ошибку в высоте,
следствием чего явится изменение положения изображения в про-
дольном направлении (изменение фокусировки) на величину 2 ;
равным образом, изменение показателя преломления также при-
ведет к изменению положения изображения в соответствии с фор-
мулой для хроматизма положения плоскопараллельной пластинки
при условии замены числа Аббе v величиной ц, связанной с допу-
ском на изменеиие показателя преломления.
Численно, в соответствии с § 95, используя для призм стекло IV
категории по показателю преломления, получаем
п— 1
Дп
0,5688
20 • 10’4
284,4,
что дает величину смещения изображения
8s = =о,оз2 м„.
тгЗр, 2,46 • 284,4
20 Заказ 2301.
305
Ошибки в прямом угле и ошибки пирамидальности нарушают
развертку призмы в плоскопараллельную пластинку, что приводит
к возникновению в системе преломляющего клина; величина угла
отклонения 8, создаваемая таким клином, будет равна
8 = (/2 —1) 2а, (632)
так как угол преломляющего клина будет равен удвоенной ошибке
в прямом угле или ошибке пирамидальности.
Хроматизм увеличения Де, создаваемый таким клином, будет
Де = ± 2., (633)
Численно, полагая а = 2' и v = 56 (как в примере), получаем
величину Д 8 равной
Де = -^-^2" = 0,00001 рад,
что приводит к хроматизму увеличения при плече Z, равном 64,5 мм
\е = 0,00001 • 64,5 = 0,00064 мм*
Сопоставляя действие всех вышеперечисленных ошибок призм,
видим, что при выбранных допусках наибольшее влияние будут
иметь ошибки расположения ребер призм, создающие смещение
изображения, измеряемое десятыми долями миллиметра, тогда как
все другие ошибки будут создавать смещение изображения, изме-
ряемое сотыми долями миллиметра и менее.
В силу этих соображений следует оценить влияние ошибок
смещения изображения в фокальной плоскости окуляра на нару-
шение параллельности полей — оно выразится отношением этой
величины к фокусному расстоянию окуляра. Численно при смеще-
нии е, равном 0,2 мм, получаем
что уже лежит вне пределов допуска на параллельность полей
бинокля.
Заметим, что нарушение центрировки окуляра создает при его
вращении удвоенное смещение его узловых точек; так, биение оку-
ляра в 0,05 мм создаст смещение узловой точки в 0,1 мм, что вызо-
вет изменение направления поля трубки — нарушение параллель-
ности осей, равное
^=-^-=^=0’005~16'-
/ок
Анализируя все вышеизложенное, ‘возможно существенно об-
легчить юстировку оптической системы бинокля (или даже вовсе
устранить процесс юстировки на параллельность полей) и несколько
306
расширить допуски на изготовление оптических деталей (точность
ограничения фасок, ошибки в острых углах), если конструктивно
обеспечить достаточно строгое (порядка 0,05—0,03 мм) положение
ребер обеих призм — принципиально возможно даже исключение
юстировочного устройства из эксцентриковых оправ для объективов.
Рассмотрим ошибки, связанные с изменением элементов круглой
оптики.
В § 95 уже было рассмотрено влияние допусков на константы
оптических стекол для ахроматизированного объектива; по этим
формулам находим, используя стекла IV категории, числа ц для
стекол первой и второй линз объектива
.. _ 0,5302 _j __ 0,6164 __ oQg р,
20-10’4 2Ь5’1> Иг 20-Ю’4 3(J8,2,
Д= S’ = Si Ч = 0,0095<р; Аф2 = > = Ф = -0,0050ф.
pi ООО,1 р2 OUo,^
В наиболее неблагоприятном случае отступления Дф сил линз
могут сложиться друг с другом; это приведет к возможному изме-
нению силы всего объектива, равному
Аф= (Дф1) + (Дф2) = 0,0095ф + 0,0050ф = 0,0145ф = 1,5%ф.
Следует обратить внимание на то обстоятельство, что в измене-
нии силы объектива существенно большую роль играет изменение
показателя преломления первой (кроновой) линзы; поэтому пред-
ставляется целесообразным использовать для кроновой линзы стекло
III категории.
Аналогично изменению фокусного расстояния объектива в связи
с изменением показателя преломления стекол будет наблюдаться
и изменение фокусного расстояния окуляра; полагая, что величина
этого изменения составит, аналогично объективу, также около
1,5%, приходим к тому, что при изменении фокусных расстояний
объектива и окуляра возможно изменение видимого увеличения
трубки бинокля в пределах ±3%. Вместе с тем сохранение диаметра
отверстия оправы объектива с точностью ±0,1 мм составит в отно-
сительной мере около ±0,3%, т. е. величину, меныпую на порядок,
чем изменение увеличения.
Следствием этого при росте видимого увеличения Г будет соот-
ветственное изменение линейного увеличения V в зрачках, что при
постоянстве диаметра входного зрачка приведет к соответственному
уменьшению диаметра выходного зрачка, т. е. тоже на 3%.
При получении приведенных выше величин изменения фокусных
расстояний вследствие изменения показателей преломления не
учитывалось влияние других величин — влияние толщин линз,
величины воздушного промежутка между линзами окуляра, дефор-
мации поверхностей линз при их склейке.
Учет этих величин потребует соответственного увеличения до-
пустимых изменений в фокусных расстояниях, в видимом увеличении
и в величине диаметра выходного зрачка.
20*
307
Заметим, что увеличение фокусного расстояния объектива при
сохранении диаметра полевой диафрагмы окуляра неизменно будет
приводить к соответственному уменьшению величины поля зрения.
Так, допуская возможное увеличение фокусного расстояния объек-
тива на 2%, мы тем самым будем допускать уменьшение поля зрения
тоже на 2%, что составит для рассматриваемого примера величину,
равную 10'.
Численно изменение фокусного расстояния на 2% составит
в рассматриваемом примере около 2,5 мм, что создает необходимость
юстировки бинокля на устранение параллакса сетки и установку
нуля диоптрийной шкалы окуляра.
При склейке линз объектива и окуляра возможно возникновение
ошибки косины склеенной линзы, выражающейся в разности толщин
по краям линзы.
Наибольшая косина возникает по тому направлению, вдоль
которого произошел сдвиг склеиваемых линз относительно друг
Друга.
Косина склеенной линзы в первом приближении эквивалентна
добавлению к строго центрированной линзе преломляющего клина;
наличие косины приводит к смещению узловых точек линзы в на-
правлении, перпендикулярном оси линзы.
Согласно рис. 203, на котором представлена линза, облада-
ющая косиной, обусловленной величиной Д, значение прелом-
ляющего угла а клина определится отношением величины А к диа-
метру линзы
« = А. (634)
Величина же возникающего угла отклонения е будет равна
8 = (п — 1)а=-^=^- А (635)
и величина смещения изображения е от первоначальной оси линзы
(636)
308
Но величина отношения высоты h к отрезку $' может рассматри-
ваться как выходной апертурный угол и . Таким образом,
1==±1Г-^- (637)
Численно, при п = 1,5
/=-А,
4^
15
что при апертурном угле и == 0,125 и косине Д, равной
0,05 ж, дает
7 0,05 п л
1 ~ 4 • 0,125 — 0,1 *
Небезынтересно, что в выражение, связывающее смещение изо-
бражения с величиной косины, не вошла величина отрезка s'Q.
Обратим внимание на то обстоятельство, что величина апертур-
ного угла, через который связываются величины е иД, определяется
через диаметр линзы, который может быть больше диаметра пучка
лучей, проходящих через зрачки системы, и потому также может
превосходить величину истинного апертурного угла, обусловли-
ваемого величиной зрачка.
§ 99. Панорама
Оптическая система панорамы может быть разделена на два
узла — оптическую систему призм, состоящую из головной призмы
и призмы Дове, с помощью которой осуществляется визирование
по заданному направлению в пространстве, и последующую моно-
кулярную телескопическую систему.
Монокулярность оптической системы панорамы исключает не-
обходимость строгого обеспечения заданного направления оси в про-
странстве изображений после окуляра, так как отклонение оси
вверх или вниз и вправо или влево при монокулярном наблюдении
не будет ощутимо даже при значительной величине таких отсту-
плений.
В равной степени будет малоощутимым и наклон изображения
в поле зрения (кроме того, он всегда может быть устранен соответ-
ственным поворотом призмы Дове).
Изменение увеличения в телескопической системе панорамы
будет обусловлено теми же самыми причинами, что и в трубке би-
нокля, в силу чего ограничимся лишь рассмотрением действия
узла визирных призм.
Узел визирных призм панорамы состоит из двух призм — голов-
ной, с помощью которой обеспечивается требуемое направление
визирной оси в пространстве, и призмы Дове, задачей которой яв-
ляется сохранение ориентировки изображения в поле зрения
309
окуляра. Поэтому призму Дове представляется возможным присоеди-
нить к телескопической системе панорамы, так как она при своем
вращении не должна изменять направления оси визирования.
Узел призмы Дове можно представить состоящим из механиче-
ской оси вращения призмы, эквивалентной отражающей плоскости
(которую принимаем парал-
лельной оси вращения), ви-
зирной оси телескопической
системы, определяемой на-
правлением, соединяющим
узловые точки объектива
с центром перекрестия сетки
окуляра. Кроме того, если
призма Дове обладает пира-
мидальностью, то развертка
призмы обращается в клин,
влияние которого должно
учитываться.
Схематически узел приз-
мы Дове представлен на
рис. 204, а; на рис. 204, б
показана картина действия
призмы Дове, когда ее экви-
валентная отражательная
плоскость составляет некото-
рый угол а с механической
осью вращения.
Нетрудно представить, что
луч, падавший на призму
параллельно оси вращения,
после призмы будет отклонен
на угол 2а по отношению
к этой оси.
После поворота призмы
Дове вокруг оси на угол 180°
угол а изменится на угол — а
и луч, отраженный призмой,
составит угол — 2а с осью
вращения и отклонится от своего первоначального направления на
угол, равный 4а. Зная величину фокусного расстояния /' объек-
тива панорамы и измерив по сетке величину перемещения изображе-
ния а, нетрудно определить величину угла а.
Устранение ошибки непараллельности эквивалентной отража-
тельной плоскости призмы с осью вращения может быть обеспечено
перемещением изображения на расстояние а/2 путем изменения
угла между призмой и ее осью вращения. Для достижения этого
в конструкции оправы призмы Дове предусматривается возмож-
ность такого поворота.
310
При повороте призмы Дове на 90° изображение поворачивается
в поле зрения на 180°, и если взять на изображении какую-либо точку
М, расположенную на диаметре поля зрения, параллельном исход-
ному положению плоскости главного сечения призмы, то эта точка
займет некоторое новое положение также расположенное на том
же диаметре поля зрения.
Поделив пополам расстояние находим положение центра
вращения изображения — изображение точки, лежащей на оси
вращения призмы.
С этим центром вращения можно совместить центр перекрестия
сетки либо путем соответственной подвижки сетки (при этом центр
перекрестия может оказаться расположенным не в центре отвер-
стия диафрагмы поля зрения), либо путем поступательной или вра-
щательной подвижки крышеобразной призмы; эту же задачу можно ре-
шить и за счет поступательных подвижек — центрировки объектива.
В том случае, когда призма Дове обладает ошибкой пирамидаль-
ности, ее развертка представится пирамидой с квадратным осно-
ванием (рис. 205).
Тогда угол между ребрами развертки призмы будет равен уд-
военной ошибке пирамидальности 2|3, а угол между плоскостями
пирамиды, представляющий собой преломляющий угол клина раз-
вертки, будет равен 0J/2.
Необходимо обратить внимание на то, что ребро клина, в который
развертывается призма Дове в случае наличия пирамидальности,
311
составит с направлением оси вращения угол, близкий к 45°,
благодаря чему величина угла отклонения луча от его первоначаль-
ного направления уже не может определяться по формуле, получен-
ной для луча, ход которого лежит в плоскости главного сечения
клина.
Для рассматриваемого частного случая поворота ребра клина
на угол 45° можно воспользоваться следующей формулой, приводи-
мой без вывода,
е=(«/1—а’ (638)
справедливой для малых преломляющих углов а клина.
Так как в рассматриваемом случае преломляющий угол клина
а будет равен ошибке пирамидальности, умноженной на У 2, то вели-
чину угла отклонения клина можно выразить непосредственно
через ошибку пирамидальности
& = 2 ——lj р > (n — 1) а = 80. (639)
Численно, полагая величину ошибки пирамидальности £ = 30" =
= 0,00015 рад и показатель преломления п = 1,5, находим
8 = 0,870 = 0,00013=26",
что создаст неустранимое биение изображения после призмы Дове,
равное 20 = 52". Принимая видимое увеличение телескопической
системы панорамы равным Г = 4х, получаем величину биения
изображения после окуляра, равной 3' 28" — 0,001 рад.
Заметим, что величина ошибки пирамидальности в 30" при одно-
временном наблюдении отражения от гипотенузной грани и отраже-
ния от обоих катетов при п = 1,5 составит также 30" и еще не будет
ощутима невооруженным глазом.
Перейдем к рассмотрению действия головной призмы панорамы.
Головная призма обеспечивает одновременно и круговой обзор
путем вращения вокруг вертикальной оси и возможность изменения
угла визирования в вертикальном направлении посредством кача-
ния вокруг горизонтальной оси (в ограниченном диапазоне углов
визирования).
Таким образом, действие головной призмы панорамы анало-
гично работе теодолита; однако так как визирная труба панорамы
физически неподвижна, а в вертикальной плоскости происходит
лишь качание отображения трубы через визирную призму (в обрат-
ном ходе лучей), как об этом уже упоминалось ранее, в рассматри-
ваемом случае сталкиваемся с известным усложнением принципиаль-
ной схемы теодолита, что представляет определенный интерес.
Анализируя действие головной призмы, сталкиваемся уже не
с двумя принципиальными ошибками схемы теодолита — коллима-
ционной ошибкой и ошибкой неперпендикулярности осей, а с тремя—
312
ошибкой несовпадения визирной оси с вертикальной осью вращения,
ошибкой неперпендикулярности осей и непараллельностью при-
веденной отражательной плоскости головной призмы с горизонталь-
ной осью вращения. Кроме того, можно встретиться и с четвертой
ошибкой — пирамидальностью головной призмы, приводящейся к
действию преломляющего клина с главным сечением, совпадающим
с горизонтальной осью.
Действие этого клина аналогично уже рассмотренному случаю
пирамидальности у призмы Дове и поэтому не будем останавли-
ваться на его рассмотрении.
Обратим внимание на следующее обстоятельство. Переходя
к рассмотрению ошибки несовпадения визирной оси трубы и вер-
тикальной оси вращения, можно представить, что призма располо-
жена в пространстве неподвижно и что визирная ось трубы будет
вращаться вокруг вертикальной оси.
Благодаря этому в пространстве предметов будет наблюдаться
вращение визирной линии вокруг отображения вертикальной оси
в предметном пространстве, как это представлено на рис. 206, где
сплошными линиями показано одно из положений визирной трубы,
а пунктиром — ее отображение через головную призму в предмет-
ное пространство.
Из рассмотрения рис. 207 нетрудно прийти к выводу, что след-
ствием непараллельности визирной оси трубы и вертикальной оси
вращения явится вращение перекрестия по окружности вокруг
неподвижной точки поля, определяемой следом пересечения на-
правления оси вращения с плоскостью изображения.
313
Величина этой ошибки не зависит от неперпендикулярности
осей вращения головной призмы и от непараллельности приведен-
ной отражательной плоскости и горизонтальной оси вращения.
Обнаружить эту ошибку можно при снятой головной призме
о помощью коллиматора, установленного вместо головной призмы
(или перед головной призмой), что позволяет выполнить эту юсти-
ровку независимо от головной призмы и призмы Дове.
Рис. 207
Исключение ошибки несовпадения визирной оси трубы и вер-
тикальной оси вращения путем юстировки позволяет ограничиться
рассмотрением лишь двух других ошибок узла головной призмы —
неперпендикулярности осей вращения и непараллельности при-
веденной отражательной плоскости к горизонтальной оси вращения.
Неперпендикулярность осей вращения при совпадении плоско-'
сти зеркала с горизонтальной осью вращения будет отличаться
от случая неперпендикулярности осей при вращающейся трубе
тем, что уже не будет существовать единая плоскость для всех ви-
зирных направлений при вращении зеркала вокруг горизонтальной
оси; вместо этого визирная линия будет описывать коническую
поверхность.
314
Рассмотрим случай неперпендикулярности осей вращения более
подробно.
Обратимся к рис. 207, на котором представлена система коорди-
натных осей XYZ с началом координат в точке О пересечения
вертикальной оси вращения, совпадающей с осью OZ, и горизон-
тальной оси РР, составляющей угол 0 с осью OY и лежащей
в плоскости ZOY.
Нормаль ON к зеркалу предполагается перпендикулярной к оси
вращения РР; поэтому след пересечения плоскости, являющейся
геометрическим местом расположения нормалей при вращении
вокруг оси РР, с плоскостью, параллельной плоскости XOY и от-
стоящей от нее на расстоянии а, выразится прямой LN, параллель-
ной оси ОХ.
Расстояние точки L от начала координат определится из тре-
угольника ОМЬ
OL = -^. (640)
cos 9 v 7
Отраженный луч, нормаль и падающий луч должны лежать
в плоскости, проходящей через ось OZ, так как падающий луч совпа-
дает с вертикальной осью вращения; поэтому отраженный луч
всегда будет составлять с вертикалью угол, равный 21, где i —
угол нормали с осью OZ.
Вместе с тем плоскость, в которой лежит отраженный луч, уже
не будет совпадать с плоскостью XOZ и составит с нею некоторый
угол Да, величина которого может быть определена из треугольника
MLN. Пользуясь рисунком, находим
tgAa = atg9 =4^, (641)
Я . tg In V
____ tfT 7 _ ° U
где i0 — угол поворота нормали относительно плоскости ZOY.
Пользуясь треугольником M0N, нетрудно связать углы i и iQ
tg i = =-----у, ?0 .. (642)
& a cos 9 cos Да х '
Полагаем угол 0 малым; согласно формуле (641) будет мал и угол
Да, поэтому тангенсы углов I и £0 будут отличаться друг от друга
на величину высшего порядка малости.
Таким образом, можно написать, что
tg г = (1 + (1 + tg i0 (643)
или
tgj —tgi0 = -^-(1 +-^yo)tgjo. (644)
15
Рассматривая эту разность как дифференциал тангенса угла
г0, получим
dtgf0 = -^-=-^- (645)
& 0 cos2i0 cos210 4 1
откуда следует
= <6®>
Изменение угла i можно рассматривать как половину изменения
угла возвышения |3. Таким образом,
<647>
Иными словами, ошибка по высоте при наличии ошибки непер-
пендикулярности осей будет равна отношению квадрата ошибки
неперпендикулярности к tgf0.
Численно, полагая ошибку неперпендикулярности равной 10'
(0,003 рад), получим для визирования по горизонтали при z0 =
45° ошибку по высоте, равную
А р = = 0,0032 = 0,000009 = 1,8".
tg 45
При визировании вверх, на угол £ = 20°, что будет соответ-
ствовать г0 = 55°, величина ошибки по высоте будет равна
Др==та1=0’000006=1 >2"-
В то же время ошибки в азимутальном угле для тех же условий
будут равны
при /0 = 45°, Р = 0, Да = 0 = 10';
при /0 = 55°, р = 20°, Да =0,70 = 7'.
Таким образом, разность азимутальных ошибок равна
Дах — Да = 7' —10' = —3' = — 0,001 рад.
Теперь рассмотрим влияние ошибок непараллельности приве-
денной плоскости зеркала и горизонтальной оси вращения.
Обращаясь к рис. 208, на котором система координатных осей
выбрана таким образом, что ось OZ совпадает с вертикальной, а ось
OY с горизонтальной осями вращения и направление нормали
к плоскости зеркала представлено прямой ON, составляющей угол 0
с плоскостью XOZ, можно образовать прямоугольный треугольник
ONL, лежащий в плоскости, проходящей через нормаль и гори-
зонтальную ось вращения OY.
Проводя через катет LN этого треугольника плоскость, параллель-
ную плоскости XOY, определим на оси OY точку М, отстоящую
от начала координат на расстояние R.
316
В соответствии с рисунком нетрудно определить поворот пло-
скости, содержащей падающий луч, нормаль и отраженный луч,
относительно плоскости XOZ. Находим
tg Лее
? tgO
cos i0
R tgi0
tgO ,
sini 0
(648)
Зависимость между тангенсами углов i и iQ определяется
формулой
R tg i cos Да = R tg f0, (649)
Рис. 208
откуда
= (650)
& cos Да v 7
что при малых углах Ла и 0 даст
tg i = tg i0 (1 + = (1 + 2^-) tg *0- (651>
Определяя разность
tg i — tg i0 = ^7- = f f (652)
v COb* Iq d bill Iq LOb iq
317
или
(653)
(654)
2 tg г0
и переходя к углам Др — ошибке по высоте, получим
Др = 2Дг = -Л-.
r tg*o
Формула (654) тождественна формуле (647), полученной для
ошибки по высоте для случая неперпендикулярности осей; однако
ошибки в азимутальном угле будут несколько больше.
Численно, полагая 0 = 10' = 0,003 и углы iQ равными i0 = 45°
и i0 — 55°, получим соответственно
Aa = -JU- = =14',
sin z0 r *
да — 0 __ 0 ___
sin 55° ” 0,82 ’
что дает разность азимутальных углов около 2' = 0,0006 рад.
Полученные величины дают достаточно полное представление
о требованиях, которые следует предъявлять к изготовлению осе-
вого узла головной призмы панорамы.
§ 100. Широкоугольный фотографический объектив
Одной из особенностей юстировки широкоугольных фотографи-
ческих объективов, предназначенных для фотограмметрических
работ, является обеспечение отсутствия дисторсии как центрирован-
ной, так и нецентрированной.
Исправление центрированной дисторсии может быть обеспечено
за счет изменения величины соответственных воздушных проме-
жутков путем подрезки или сошлифовывания прокладочных колец;
для этого используется таблица влияния воздушных промежутков
на дисторсию, составляемая по результатам просчета лучей через
юстируемый объектив и по результатам обмера фактической дистор-
сии объектива на оптической скамье.
Устранение же нецентрированной дисторсии в подавляющем
большинстве случаев обеспечивается за счет соблюдения допусков
на центрировку отдельных линз объектива; поэтому возникает
необходимость расчета допусков на центрировку, исходя из допуска
на величину остаточной нецентрированной дисторсии.
Приемы такого расчета допусков были рассмотрены в § 83;
в качестве примера применения полученных формул рассмотрим
расчет допусков для широкоугольного объектива типа Руссар,
состоящего из двух наружных отрицательных линз и двух внутрен-
них положительных линз, которые можно рассматривать в качестве
третьего единого компонента.
318
Приведем данные подобного объектива и величины дисторсии
после первой линзы и перед последней линзой, а также их фокус-
ные расстояния и данные по дисторсии объектива в целом
/' = 100,025 мм, 20 = 122°, относ, отв. 1:6,8
г, мм d, мм п
53,90
3,29 1,6126 Дисторсия после первой линзы
31,90 0 60° 41' -52°
45,27 Д% -27,03% -18,25%
82,31 /' = -135,26
3,96 1,6128
Дисторсия перед последней линзой
246,94 0 60° 41' -52°
12,51 1,6126
Д% —28,3796 -19,0496
-32,44
/' = 69,44
6,59 1,5480
Дисторсия всего объектива
658,50
0,24 0 60° 41' -52°
2,29 1,5163 Д% 0,03% -0,014%
оо
2,13
-642,04
6,42 1,5480
31,62
16,05 1,6126
-80,25
44,15
-31,11
3,21 1,6126
-51,71
Анализируя приведенные данные, видим, что первой линзе
присуща значительная отрицательная дисторсия; средняя часть
более или менее свободна от дисторсии и третья, последняя, обладает
значительной положительной дисторсией, компенсирующей дисторсию1
обоих предшествующих частей.
Первая линза имеет отрицательное фокусное расстояние, боль-
шее, чем фокусное расстояние всего объектива; совокупность первой
линзы и двух положительных компонентов обладает положительной
силой, и ее фокусное расстояние меньше фокусного расстояния
объектива.
В соответствии с этим линейное увеличение совокупности двух
положительных компонентов и последней линзы будет отрицательно
31&
и по абсолютной величине меньше единицы, а увеличение последней
линзы будет положительным и большим единицы. Численно значе-
ния увеличений будут
т/ _ f _ 100,025 _ гч г? ___ f 100’025 ___л
И2“7Г~^йз^““'и’74’ Из~7^“^944““1’4Л
Примем величину поступательного смещения средней части
и последней линзы относительно первой равной aQ — 0,05 мм; сме-
щение последней линзы также примем равным а0 = 0,05 мм.
В соответствии с формулой (546) потребуется определить смеще-
ния изображения aQ = Va0.
В первом случае эта величина получается равной
* /"к гчг 100’025 _ ГЛ гу
«о — 0,05 2q — 0,037 мм
и во втором случае
*_п гаг 100,025 _гл
ал — 0,05 0,0/2 мм•
° Ь9,44
Рассматриваемый в примере объектив в целом практически
свободен от дисторсии. Поэтому дисторсию последующей части
системы в обратном ходе лучей можно приравнять дисторсии пред-
шествующей части в прямом ходе.
Вместе с тем в полученные в § 83 формулы входит величина
дисторсии последующей части системы в прямом ходе; если бы при
этом дисторсия в пространстве между частями системы не была
велика, ее можно было бы приравнять дисторсии предшествующей
части с обратным знаком. Однако в рассматриваемом случае дистор-
сия достаточно велика и поэтому следует определить величину
дисторсии в прямом ходе, исходя из величины дисторсии в обратном
ходе.
Величины дисторсии в прямом и обратном ходе для одного и того
же главного луча связываются точной формулой
(1 + Д) (1 + Д) = 1, (655)
откуда дисторсия в прямом ходе получается равной
А=------(656)
В рассматриваемом примере дисторсия первой линзы
и, следовательно, дисторсия последующей части объектива в обрат-
ном ходе была равна на краю поля зрения 27%; поэтому относи-
тельная дисторсия оставшейся совокупности в прямом ходе опре-
делится так:
s.™,“-tEw-0'37=37%-
320
Подставляя эту величину в формулы (556), получаем
Ду' = 3а'Д2 cosх = —3*0,037 *0,037 cos х = —0,041 cos и,
Ду' = —0,037 • 0,37 sin х = —0,0137 sin х.
Дисторсия перед последней линзой была равной — 28,37%;
поэтому ее дисторсия в прямом ходе получается равной
4: = = 0,396 = 39,6%,
Соответственно этому величина нецентрированной дисторсии
при смещении этой линзы будет
Д y't = —3.0,072 • 0,396 cos х = —0,0855 cos х,
Ду' = —0,072 • 0,396 sin х = —0,0285 sin х.
Полученные числовые значения для нецентрированной дистор-
сии показывают, что в неблагоприятных случаях величина нецентри-
рованной дисторсии может даже превосходить величины нарушения
центрировки самих линз.
Вместе с тем следует обратить внимание на то, что децентрация
последней линзы особенно сильно влияет на возникновение нецен-
трированной дисторсии; это позволяет воспользоваться последней
в качестве юстирующего элемента для устранения ошибок децен-
трировки, возникающих от других элементов объектива.
21 Заказ 230 <
ЛИТЕРАТУРА
1. Бардин А. Н. Сборка и юстировка оптических приборов. «Высшая
школа», 1968.
2. Пог а рев Г. В. Юстировка оптических приборов. «Машиностроение»,
1968.
3. П е р А. Г. Производство оптико-механических приборов. Оборонгиз,
1959.
4. Справочник конструктора оптико-механических приборов под редакцией
М. Я. Кругера и В. А. Панова. Машгиз, 1963, стр. 420—456.
5. Сухопаров С. А. Сборка и юстировка морских оптических дально-
меров. Оборонгиз, 1960.
6. Шошин И. А. Выверка и сборка фотообъективов. Справочная книга
оптика-механика, ч. 2, ОНТИ, 1937, стр. 83—90.
7. Эрвайс А. В. Юстировка и ремонт оптико-механических измери-
тельных приборов. Машгиз, 1958.
ОГЛАВЛЕНИЕ
Стр.
Введение .......................................................... 3
Часть I
ГЕОМЕТРИЧЕСКИЕ СХЕМЫ ОПТИЧЕСКИХ ПРИБОРОВ
Глава I. Схемы приборов для угловых измерений...................... 7
§ 1. Схема измерения плоских углов. Эксцентриситет лимба ... 7
§ 2. Измерение пространственных углов. Схема меридианного круга.
Коллимационная ошибка ......................................... И
§ 3. Схема теодолита. Ошибка неперпендикулярности осей .... 13
§ 4. Ошибки опор (подшипников) п осей. Влияние их на ошибки
измерения углов ............................................. 19'
§ 5. Угловые измерения для предметов, расположенных на конеч-
ном расстоянии от инструмента. Внецентренность визирной
линии ........................................................ 21
Глава II. Схемы линейных измерений................................ 24
§ 6. Схема компаратора. Принцип Аббе.......................... 24
§ 7. Схемы катетометра и нивелира............................. 26
§ 8. Приборы для контроля прямолинейности направляющих ... 27
§ 9. Линейные и угловые микрометры............................ 29
Глава III. Некоторые сведения из теории солинейного сродства .... 32
§ 10. Основные положения. Правила знаков...................... 32
§ 11. Линейное увеличение. Главные точки. Фокусные расстояния.
Формула Ньютона............................................... 33
§ 12. Формула отрезков от главных точек. Угловое и продольное
увеличения. Узловые точки..................................... 35
§ 13. Сложная система. Телескопическая система.............. 33
Глава IV» Визирные оптические системы........................... 39
§ 14. Определение визирной линии. Зрительная труба — телеско-
пическая система .............................................. 39
§ 15. Визирный коллиматор. Автоколлимация...................... 46
§ 16. Визирование на конечное расстояние. Отсчетный микроскоп 49
§ 17. Параллакс изображения ................................... 52
Глава V. Бинокулярные системы ..................................... 53
§ 18. Бинокулярная зрительная труба........................... 53
§ 19. Непараллельность полей................................... 54
21е 323
Стр.
§ 20. Неравенство увеличений в обеих трубках. Взаимный наклон
изображений .................................................. 56
§ 21. Бинокулярный микроскоп. Конвергирование осей. Оптика
стереоскопа и стереокомпаратора............................... 59
§ 22. Дальномерный треугольник. Стереоскопическое зрение.
Радиус стереоскопического зрения ............................. 62
Глава VI. Фотографические и проекционные системы ................. 67
§ 23. Общая задача, решаемая фотографическими и проекционными
системами, передача изображения множества точек предмета
на единую поверхность изображения...................... 67
§ 24. Трансформирование изображения. Общие закономерности
при трансформировании ................................. 68
§ 25. Искажения изображения. Дисторсия ...................... 77
Часть II
ОБЩИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ ОПТИЧЕСКИХ ПРИБОРОВ
Глава VII. Оптика узких световых пучков........................... 86
§ 26. Инварианты Гульстранда вдоль лучей. Инвариант Аббе ... 86
§ 27. Инвариант Штраубеля. Инвариант Лагранжа — Гельмгольца 90
§ 28. Простая линза в воздухе................................. 92
Глава VIII. Глаз и видимое увеличение............................. 93
§ 29. Устройство глаза, аккомодация. Разрешающая способность
глаза ........................................................ 93
§ 30. Видимое увеличение. Видимое увеличение телескопической
системы, лупы или микроскопа.................................. 98
§ 31. Стереоскопическое зрение ............................... 99
Глава IX. Световой баланс оптической системы..................... 101
§ 32. Ограничение световых пучков в оптической системе. Зрачки
и геометрическое виньетирование............................. 101
§ 33. Виньетирование аберрационное........................... 105
§ 34. Светораспределение оптической системы по полю зрения и
светосила ................................................... 107
§ 35. Потери света в оптической системе. Формула Френеля. Про-
светление оптики ............................................ 110
Глава X. Связь между волновой и геометрической оптикой ...... 112
§ 36. Общие соображения. Принцип Ферма....................... 112
§ 37. Переход от волновых аберраций к геометрическим......... 115
§ 38. Дифракция. Дифракционная разрешающая способность . . 117
Глава XI. Учение об аберрациях................................... 120
§ 39. Сферическая аберрация ................................. 120
§ 40. Условие синусов Аббе. Кома............................. 124
§ 41. Астигматизм и кривизна изображения..................... 129
§ 42. Дисперсия стекла. Хроматизм...........'................ 131
Часть III
ЭЛЕМЕНТЫ ОПТИЧЕСКИХ СИСТЕМ
Глава XII. Зеркала и призмы ..................................... 138
§ 43. Задачи, решаемые с помощью призм....................... 138
§ 44. Действие одного плоского зеркала....................... 138
324
Стр.
§ 45. Отражение от системы двух зеркал........................ 141
§ 46. Отражение от системы трех зеркал........................ 145
§ 47. Вращениэ изображения ................................... 148
Глава XIII. Плоскопараллельная пластинка ......................... 149
§ 48. Общие свойства плоскопараллельной пластинки............. 149
§ 49. Наклонная плоскопараллельная пластинка.................. 152
Глава XIV. Преломляющие призмы ................................... 154
§ 50. Преломление пучка на наклонной плоскости ............... 154
§ 51. Преломляющий клин в воздухе............................. 155
Глава XV. Основные способы, применяемые при рассмотрении действия
призм ..................................................... 156
§ 52. Развертка системы плоских зеркал........................ 156
§ 53. Редуцирование плоскопараллельной пластинки к воздуху . . 158
§ 54. Разделение хода лучей. Призмы с крышей (дахпризмы) . . 159
§ 55. Призмы, не развертывающиеся в плоскопараллельную пла-
стинку ..................................................... 160
§ 56. Действие отражательных призм в сходящемся ходе лучей.
Эквивалентное зеркало, эквивалентное ребро, базис......... 161
Глава XVI. Вращающиеся зеркала и призмы........................... 169
§ 57. Вращение зеркала в параллельном пучке лучей............. 169
§ 58. Вращающееся зеркало в сходящемся пучке лучей............ 178
§ 59. Действие качающегося зеркала или призмы................. 181
§ 60. Оптические шарниры ..................................... 184
§ 61. Устройства для изменения глазного базиса прибора........ 190
§ 62. Причины возникновения паразитных изображений............ 192
Часть IV
СБОРКА И ЮСТИРОВКА ОПТИЧЕСКИХ СИСТЕМ
Глава XVII. Разделение оптической системы на отдельные узлы . . . 197
§ 63. Общие соображения по разделению оптической системы . . 197
§ 64. Сборка оптической системы из отъюстированных узлов . . . 200
§ 65. Оптические системы с одним юстировочным элементом .... 202
§ 66. Системы с несколькими юстировочными элементами.......... 204
Глава XVIII. Конструктивные узлы системы из круглой оптики . . . 207
§ 67. Круглая оптика для телескопических систем. Объективы,
окуляры .................................................... 207
§ 68. Закрепление круглой оптики. Резьбовые оправы............ 210
§ 69. Закрепление линз с помощью закатки. Центрировка линз при
закатке .................................................... 213
Глава XIX. Устройства для контроля сборки узлов круглой оптики . . 215
§ 70. Устройства для контроля центрировки. Автоколлимационный
микроскоп, трубка Забелина. Прибор Максутова................ 215
§ 71. Контроль фокусных расстояний и вершинных отрезков . . . 223
Глава XX. Крепление призм и зеркал................................ 229
§ 72. Основные конструктивные узлы для крепления призм.
Устройства для юстировочных движений........................ 229
§ 73. Узлы крепления зеркал................................... 234
§ 74. Закрепление деталей, подверженных тряске и ударам. Борьба
с вибрациями в оптических приборах.......................... 235
325
Глава XXI. Контроль сборки узлов призм........................... 237
§ 75. Контроль углов отклонения и наклона изображения .... 237
§ 76. Контроль оптической длины хода и линейных размеров призм 242
Глава XXII. Сборка телескопических систем .... .................. 245
§ 77. Сборка монокулярной телескопической системы. Устранение
параллакса при установке сетки. Дпоптрийная трубка . . . 245
§ 78. Сборка бинокулярной телескопической системы........... 250’
Глава XXIII. Сборка микрообъективов ........................... 257
§ 79. Сборка объективов с закреплением линз в резьбовых и на-
сыпных оправах............................................... 257
§ 80. Юстировка на центрированность изображения посредством
децентрируемоп линзы. Выбор центрирующей линзы .... 258
Глава XXIV. Сборка фотографических объективов .................. 259'
§ 81. Метод комплектации деталей. Возможность расширения до-
пусков ..................................................... 259
§ 82. Юстировка фотографических объективов на соблюдение вели-
чины фокусного расстояния, устранение дисторсии и испра-
вление астигматизма.......................................... 260
§ 83. Нарушения центрировки фотографических объективов. Не-
центрированная дисторсия .................................... 262
§ 84. Измерение дисторсии фотографического объектива.. 267
Глава XXV. Сборка оптических микрометров......................... 270
§ 85. Микрометр с качающейся плоскопараллельной пластинкой 270
§ 86. Микрометр с движущимся клином.......................... 273
§ 87. Спиральный микрометр .................................. 274
§ 88. Угловые компенсаторы. Компенсаторы с подвижными линзами 275
§ 89. Двухклиновый компенсатор............................... 277
Глава XXVI. О допусках на оптические детали...................... 279
§ 90. Общие приемы расчета допусков.......................... 279
§ 91. Деформирующие элементы, вызывающие поперечное смещение
последующей части системы ................................... 282
§ 92. Деформирующие элементы, вызывающие изменение направле-
ния оси последующей системы.................................. 286
§ 93. Вращение пары зеркал.................................. 289
§ 94. Вращение системы зеркал вокруг оси, лежащей в плоскости
главного сечения ............................................ 292
§ 95. Система из нечетного числа зеркал с совпадающими главными
сечениями ................................................... 294
Глава XXVII. Допуски на линзовые элементы оптической системы . . 296
§ 96. Силовые деформирующие элементы. Расположение элемента
в системе ................................................... 296
§ 97. Определение силы деформирующего элемента. Допуски ца тол-
щину линз, на константы оптического стекла................... 298
Глава XXVIII. Примеры юстировки оптики некоторых приборов и рас-
чета элементов юстировочного процесса......................... 300
§ 98. Юстировочный процесс оптики бинокля................... 300
§ 99. Панорама ............................................. 309
§ 100. Широкоугольный фотографический объектив.............. 318
Литература ...................................................... 322
326
Русинов Михаил Михайлович
Юстировка оптических приборов
Редакторы издательства Л. М. Комаръкова, В. С. Щекутьева
Технический редактор Л. Д. Агапонова
Переплет художника Б. Г. Дударева
Корректор О. Н. Ильина
Сдано в набор 2/IX 1968 г. Подписано в печать 20/XI 1968 г.
Т-17116. Формат бОХЭО1/^. Печ. л. 20,5. Уч.-изд. л. 19,77.
Бумага № 1. Индекс 1—4—1. Заказ 2301/2587-15.
Тираж 4100 экз. Цена 1 р. 97 к.
Издательство «Недра». Москва, К-12, Третьяковский проезд, 1/19.
Ленинградская типография № 14 «Красный Печатник»
Главполиграфпрома Комитета по печати при Совете Министров СССР.
Московский проспект, 91.
Уважаемый читатель!
В издательстве ,,Недра“ готовятся к печати и
выйдут в свет в 1969 году новые книги по геодезии.
ВИДУЕВ Н.Г., КОНДРАТ. С. Вероятностно-статисти-
ческий анализ погрешностей измерений. 18 л. Ц. 2 р. 05 к.
ИОРДАН В. и др. Руководство по геодезии. Т. 6. Изме-
рение расстояний при помощи электромагнитных колебаний
и их геодезическое применение. Перевод с немецкого. 40 л.
Ц. 3 р. 13 к.
СМИРНОВ Н. В., БЕЛУГИН Д. А. Теория вероятно-
стей и математическая статистика в приложении к геоде-
зии. 20 л. Ц. 2 р. 25 к.
С подробными аннотациями на эти книги Вы можете озна-
комиться в тематическом плане издательства «Недра» на
1969 г., который имеется во всех книжных магазинах, рас-
пространяющих научно-техническую литературу.
Заказ на интересующие Вас нниги можно оформить в местных
книжных магазинах. При поступлении книг в продажу Вы будете
извещены.
Издательство «Цедра»
ЦЕНА 1 р. 97 к.
ИЗДАТЕЛЬСТВО „НЕДРА"
МОСКВА-1969
>
ЮСТИРОВКА ОПТИЧЕСКИХ ПРИБОРОВ
В издательстве ,,Недра"
готовятся к печати
и выйдут в свет
в 1969 г.
новые книги
по геодезии
Ганьшин В. Н. и др. Спра-
вочное руководство по крупно-
масштабным съемкам. 13 л.
Ц. 83 коп.
Л ютц А. Ф. Разбивка круп-
ных сооружений (основные
положения). Изд. 3, перераб.
и доп. 15 л. Ц. 1 руб.
М а з м и ш в и л и А. И. Спо-
соб наименьших квадратов.
25 л. Ц. 2 р. 78 к.
С подробными аннотациями
па эти книги Вы можете озна-
комиться в тематическом плане
издательства «Недра» на 1969 г.,
который имеется во всех книж-
ных магазинах, распростра-
няющих научно-техническую
литературу.
Заказ па интересующие Вас
книги можно оформии. в мест-
ных книжных магазинах. При
поступлении книг в продажу
Вы будете извещены.
Издательство «Недра»
сэ
сх.