


















































































































































































































































































































Автор: Крищенко А.П. Канатников А.Н.
Теги: анализ геометрия топология аналитическая геометрия
ISBN: 5-7038-1671-8
Год: 2000




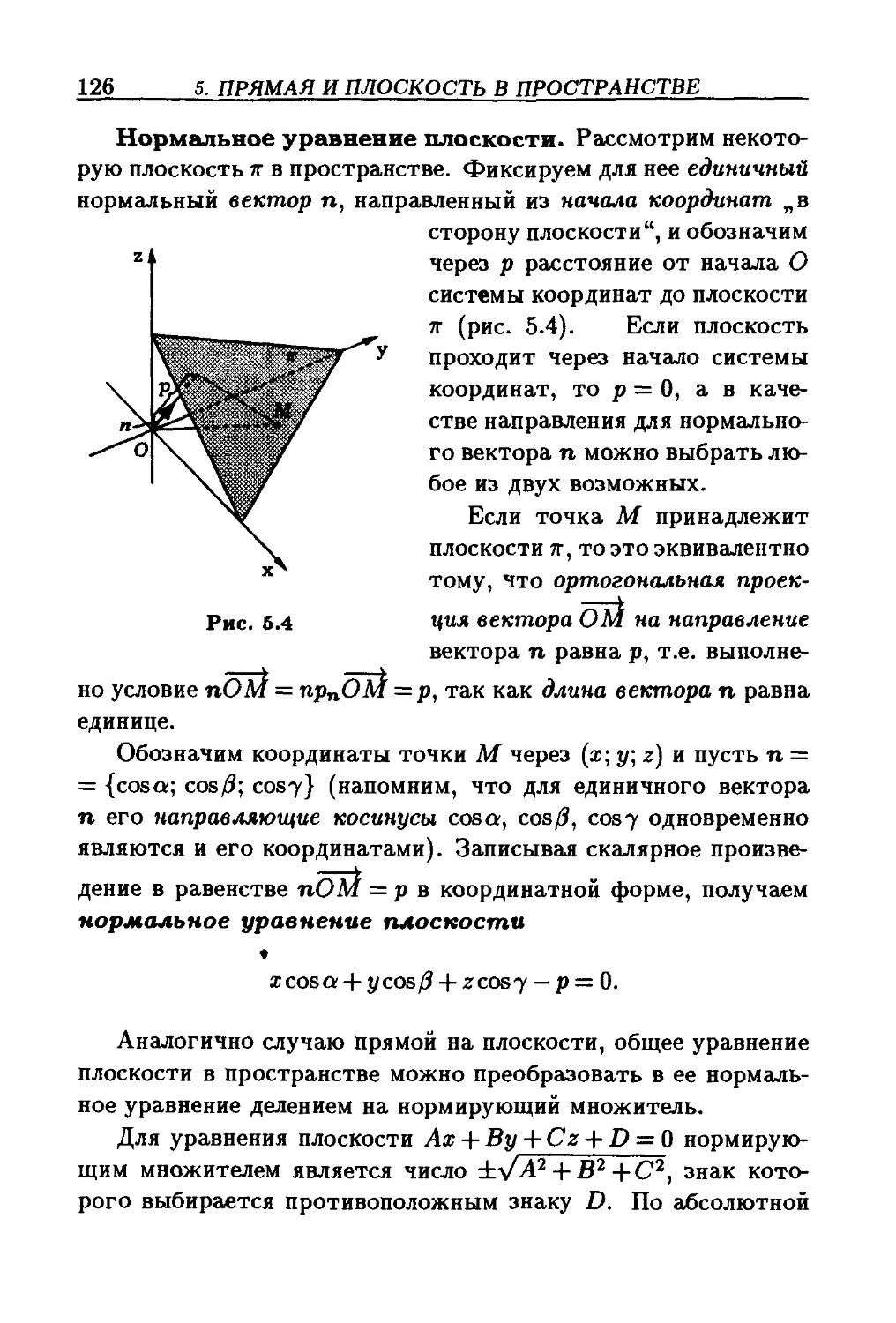
Текст
А.Н. Канатников, А.П. Крищенко
АНАЛИТИЧЕСКАЯ
ГЕОМЕТРИЯ
Под редакцией
д-ра техн, наук., профессора В.С. Зарубина
и д-ра физ.-мат. наук, профессора А.П. Крищенко
Допущено
Министерством образования
Российской Федерации
в качестве учебника для студентов
высших технических учебных заведений
2-е издание
Scan Pirat
Москва
Издательство МГТУ им. Н. Э. Баумана
2000
УДК 517.1(075.8)
ББК 22.151.5
К19
Рецензенты: проф. В.И. Елкин, проф. Е.В. Шикин
К19 Канатников А.Н., Крищенко А.П. Аналитическая гео-
метрия: Учеб, для вузов. 2-е изд. / Под ред. В.С. Зарубина,
А.П. Крищенко. - М.: Изд-во МГТУ им. Н.Э. Баумана, 2000. -
388 с. (Сер. Математика в техническом университете; Вып. III).
ISBN 5-7038-1671-8 (Вып. III)
ISBN 5-7038-1270-4
Книга является третьим выпуском учебного комплекса Математика
в техническом университете44, состоящего иэ двадцати выпусков, н знако-
мит читателя с основными понятиями векторной алгебры н ее приложений,
теории матриц и определителей, систем линейных алгебраических уравне-
ний, кривых н поверхностей второго порядка. Материал изложен в объеме,
необходимом на начальном этапе подготовки студента технического уни-
верситета.
Содержание учебника соответствует курсу лекций, который авторы
читают в МГТУ им. Н.Э. Баумана.
Для студентов технических университетов. Может быть полезен
преподавателям н аспирантам.
Ил. 111. Библиогр. 25 назв.
Выпуск книги финансировал
Московский государственный технический
университет им. Н.Э. Баумана
УДК 517.1(075.8)
ББК 22.151.5
ISBN 5-7038-1671-8 (Вып. III)
ISBN 5-7038-1270-4
© А.Н. Канатников,
А.П. Крищенко, 2000
© Московский государственный
технический университет
нм. Н.Э. Баумана, 2000
© Издательство МГТУ
им. Н.Э. Баумана, 2000
ПРЕДИСЛОВИЕ
Эта книга — третий выпуск комплекса учебников „Мате-
матика в техническом университете". Ее содержание выходит
за рамки аналитической геометрии и отражает тот курс, ко-
торый стал уже традиционным во многих вузах технической
ориентации. В этом курсе можно выделить три раздела: век-
торную алгебру, аналитическую геометрию и теорию матриц
и систем линейных алгебраических уравнений (СЛАУ).
Векторная алгебра, составляющая первую часть книги (гла-
вы 1, 2), тесно переплетается с элементарной геометрией и
представляет собой, по-существу, современный язык той части
геометрии, которая связана с понятиями параллельных прямых
и подобия. Мы предполагаем, что читатель хорошо знаком
с такими терминами, как точка, прямая, плоскость и знает
их свойства (в частности, признаки параллельности прямых,
признаки равенства и подобия треугольников, признаки парал-
лелограмма и т.д.).
Аналитическая геометрия, основным методом которой яв-
ляется метод координат, составляет вторую часть книги. По-
нятие системы координат, так же как и многие факты анали-
тической геометрии, известно любому начинающему студенту
со школьной скамьи. Изучение этого раздела геометрии в
техническом вузе отличается большей строгостью и система-
тичностью. В книге изложение аналитической геометрии, в
частности введение декартовой системы координат, опирается
на векторную алгебру. Ей посвящены главы 3 — 5. Основное
внимание уделено теории прямых и плоскостей, а также кривых
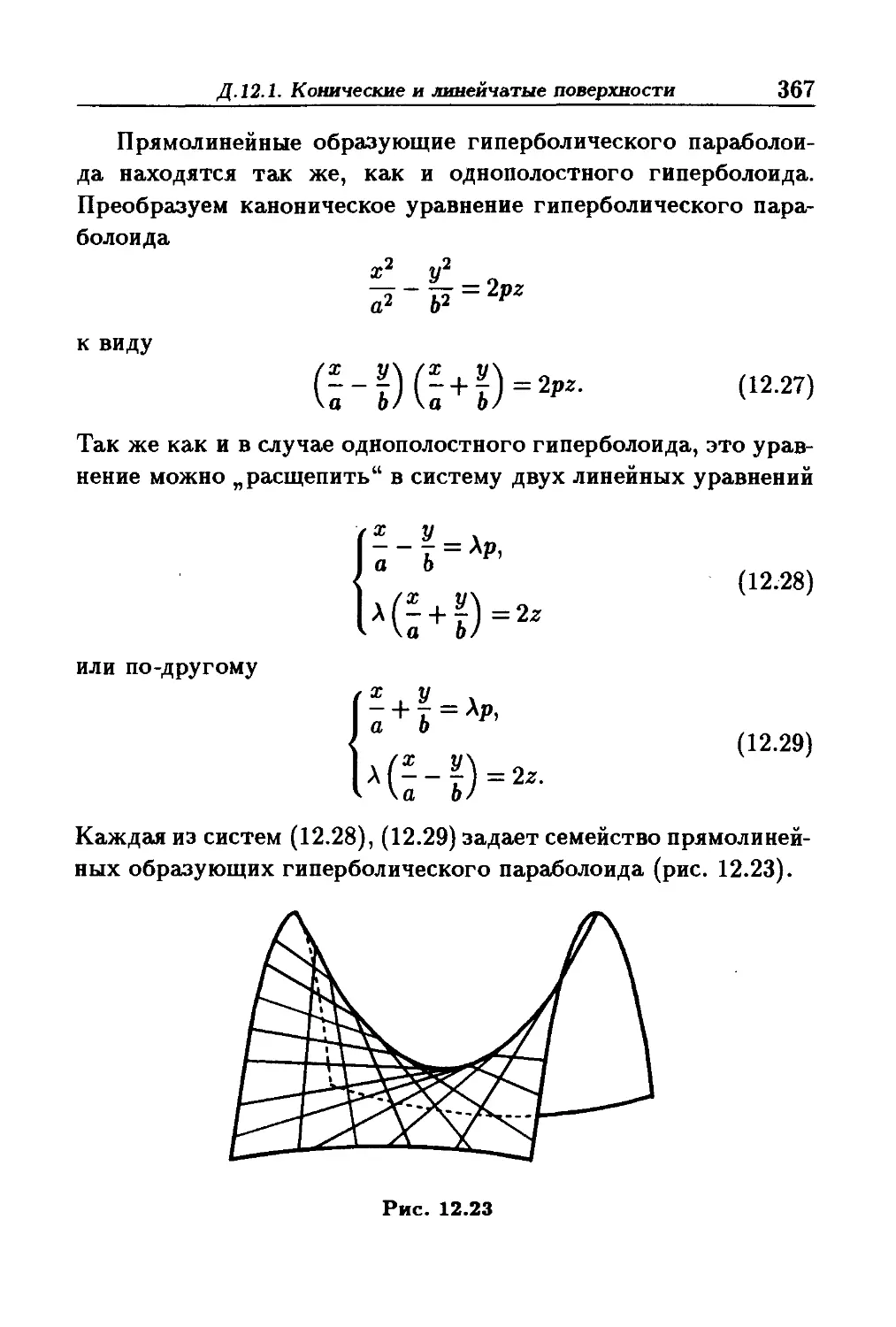
и поверхностей второго порядка (главы 11 и 12).
6
Предисловие
Третья часть книги посвящена основам матричной алгебры
(главы 6 — 8) и системам линейных алгебраических уравнений
(главы 9 и 10).
При отборе и изложении материала авторы стремились
предусмотреть возможные различия в объеме его изучения.
Сложные и второстепенные вопросы, обычно не входящие в
программу, даны в виде дополнений в конце соответствующей
главы.
Книга, как и другие выпуски комплекса учебников, имеет
развитый аппарат для поиска нужной информации, позволяю-
щий использовать книгу как справочник. Ключевые понятия,
которые должны быть известны читателю, в тексте книги
выделены курсивом. Любой определяемый термин в тексте вы-
делен полужирным курсивом, а номер страницы указан в
предметном указателе, который находится в конце книги. Тер-
мины в предметном указателе даны в алфавитном порядке по
существительному в именительном падеже. Ссылки предмет-
ного указателя разделяются на основные (даны в прямом на-
чертании) и неосновные (даны курсивом), которые указывают
на дополнительные сведения о термине. Ссылки на термины,
введенные в других выпусках комплекса, содержат номера этих
выпусков. Например, 1-215 означает страницу 215 первого вы-
пуска, а II — второй выпуск (соответствующее место в этом
выпуске можно найти по его предметному указателю).
В тексте также имеются ссылки, облегчающие поиск нуж-
ных определений и других сведений. Такие ссылки могут отно-
ситься как к данной книге, так и к другим выпускам комплекса
учебников. Например, (см. 1.2) отсылает читателя ко второму
параграфу первой главы этой книги, тогда как [1-7.5] означа-
ет ссылку на пятый параграф седьмой главы в первом выпуске.
Определения, теоремы, замечания, формулы и т.п. имеют двой-
ную нумерацию. Например, теорема 2.1 — это первая теорема
в главе 2, (2.1) — первая формула в главе 2, рис. 1.5 — пятый
рисунок в главе 1.
7
Большинство используемых обозначений помещены в переч-
не основных обозначений. В нем наряду с их краткой расши-
фровкой даны ссылки на разделы этого или других выпусков
серии, в которых вводится обозначение. Приведены также на-
писание и русское произношение букв латинского и греческого
алфавитов.
Перед чтением этой книги предлагаем в целях самоконтроля
выполнить несколько несложных заданий. В тексте каждого за-
дания прямым полужирным шрифтом выделены ключевые
термины, значение которых должно быть известно читателю, а
в конце указан выпуск комплекса, в котором можно справиться
об этих терминах при помощи предметного указателя выпуска.
Задания для самопроверки
1. Является ли множество R действительных чисел
упорядоченным и образуют ли натуральные числа его
подмножество? Что такое абсолютное значение (модуль)
числа? [I]
2. Имеют ли операции сложения и умножения действитель-
ных чисел свойства коммутативности, ассоциативности и
в чем состоит их свойство дистрибутивности? [I]
3. В чем выражается свойство антикоммутативности
некоторой бинарной операции? [I]
4. Что понимают под критерием некоторого утвержде-
ния? [I]
5. Из каких этапов состоит доказательство по методу
математической индукции? [I]
6. Что такое функция, алгоритм и рекуррентное
соотношение? Приведите примеры функций, заданных с
помощью рекуррентных соотношений. [I]
7. Укажите область определения (существования)
и область значений и постройте графики однозначных
ветвей многозначной функции у1 = х. [I]
8
Предисловие
8. Проверьте, является ли функция y = arsinar: а) четной;
б) нечетной. [I]
9. Сформулируйте определение взаимно однозначного
отображения двух множеств? [I]
10. Какие свойства имеют функции, непрерывные на
отрезке? [I]
11. Что такое вертикальные и наклонные асимптоты
графика функции и как их находят? [II]
12. На каких интервалах функция у = х+1/х является
возрастающей (убывающей)? [II]
13. Сформулируйте достаточное условие выпуклости
вверх графика функции у = f{x). [II]
14. Как вычисляется производная сложной функции
у=/($(*))? [И]
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ
4 и ► — начало и окончание доказательства
# — окончание примера, замечания
а € А, А Э а — элемент а принадлежит множеству А (множе-
ство А содержит элемент а) 1-1.1
А С В, В D А — подмножество А включено в множество В (В
включает А) 1-1.2
А С В, В D А — подмножество А включено в множество В или
совпадает с ним 1-1.2
N — множество натуральных чисел 1-1.3
R — множество действительных чисел 1-1.3
АВ — отрезок, соединяющий точки А и В 1.1
|АВ\ — длина отрезка АВ 1.1
А&,АВ — геометрический вектор с началом в точке А и
концом в точке В 1.1
|А^|,|АВ| — длина геометрического вектора 1.1
а,|а| — вектор и его длина 1.1, 1.2
О — нулевой вектор 1.1
а + Ь — сумма векторов а и b 1.3
Ла — произведение вектора а на число А € R 1.3
npja — ортогональная проекция вектора а на направление
вектора I 1.4
а,6 — угол между векторами а и Ь 1.4
а±Ь, L\LL2 — вектор а ортогонален вектору Ь, прямая L\
перпендикулярна прямой £2 4.1
а || b, L\ || £2 — вектор а коллинеарен вектору Ь, прямая £1
параллельна прямой £2 4.3
10
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ
52 ак — сумма п слагаемых «ц, а^, ап 1-2.6
к=1
т
52afcafc — линейная комбинация векторов с
fc=1 коэффициентами aj, а к, ат 1.5
а = {ж; у} (а — {я; У! z}) — задание вектора а из V2 (V3) с
помощью его координат в фиксированном базисе в
V2(V3) 1-5
Vi (V2 и Уз) — пространство коллинеарных векторов (компла-
нарных векторов и всех свободных векторов) 1.6
г (t,j и i,j,k) — ортонормированный базис в Vi (правый ор-
тонормированный базис в У2 и V3) 1.6
аЬ — скалярное произведение векторов а и Ь 2.2
axb — векторное произведение векторов а и Ь 2.3
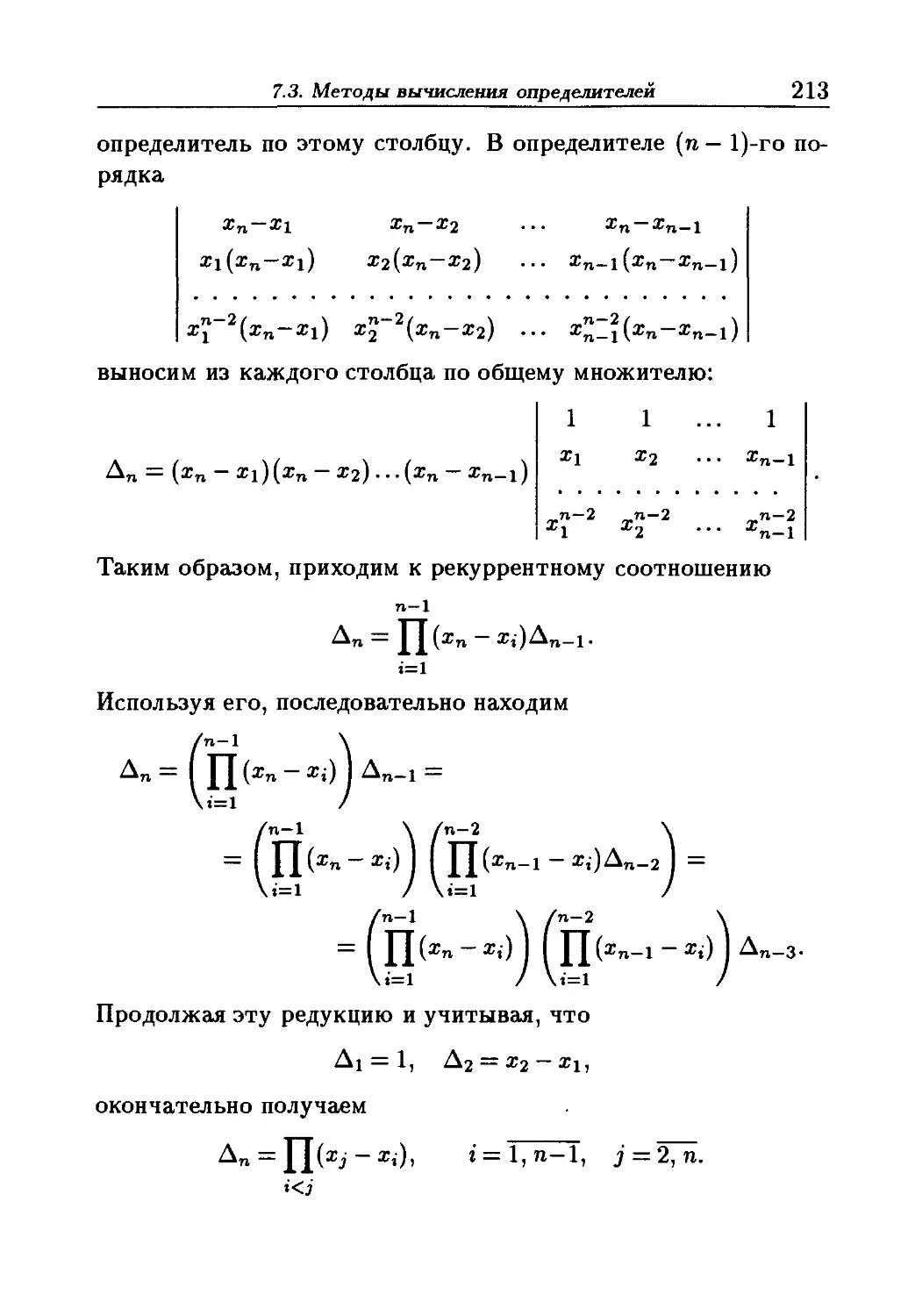
аЬс — смешанное произведение векторов а, Ь и с 2.4
Оху, Oij (Охуг, Oijk) — правая прямоугольная система ко-
ординат на плоскости (в пространстве) 3.1
М(ж; у) — точка М плоскости с координатами х (абсцисса) и
у (ордината) 3.1
М(х;у; z) — точка М пространства с координатами х (аб-
сцисса), у (ордината) и z (аппликата) 3.1
Р и — полярные координаты (полярные радиус и угол)
точки на плоскости 3.6
kl — абсолютное значение числа х 1-1.3
— из высказывания А следует В (В — необходимое условие для А, а. А — достаточное условие для В) 1-1.5
А^В ;— высказывания А и В равносильны 1-1.5
Е,1 — единичная матрица 6.1
0 — нулевая матрица 6.1
Ат — матрица, транспонированная к А 6.3
det А — определитель матрицы А 7.1
11
Д-1 — матрица, обратная к матрице А 8.1
RgA — ранг матрицы А 8.4
Ах = Ь — система линейных алгебраических уравнений (СЛАУ)
9.2
(А 16) — расширенная матрица СЛАУ Ах = b 9.3
у =. /(х) — переменное у — функция переменного х 1-2.1
/(а), /(х)| — значение функции f(x) в точке а 1-2.1
х = /-1(у) — функция, обратная к функции у = /(х) 1-2.3,
1-11.1
п
ат — произведение п сомножителей aj, ..., ат, ..., ап
m=1 1-2.6
к = 1,п — число к принимает последовательно целые значения
от 1 до п включительно 1-2.6
12
Основные обозначения
Буквы латинского алфавита
Начертание Произно- шение Начертание Произно- шение
A a A a a N n N п эн
В b В b бэ О о О о о
С с С с ЦЭ Р Р Р Р ПЭ
D d D d ДЭ Q q Q q ку
Ее Ее e R г R г эр
F f F f эф S s S s эс
G g G g же T t T t тэ
H h H h аш U u U u У
I i I i и V v V v вэ
Jj J 3 йот W w W w дубль-вэ
К k К к ка X x X x икс
LIL/ эль Y у Y у игрек
Mm Mm эм Z z Z z зэт
Представлен наиболее употребительный (но не единствен-
ный) вариант произношения (в частности, вместо „йот“ иногда
говорят ,,жи“).
Буквы греческого алфавита
Начер- тание Произно- шение Начер- тание Произно- шение Начер- тание Произно- шение
А а сШЬфЭЬ I ь йота Р Р ро
в /3 бета К х каппа Е a сигма
г 7 гамма Л А ламбда Т г тау
Д <5 дельта М ц ми Т v ипсилон
Е е эпсилон N v ни Ф фи
Z С дзета s е КСИ X X хи
Н 7/ эта О о омикрон Ф пси
0 $0 тэта П 7Г пи П ш омега
Наряду с указанным произношением также говорят „лямб-
да", „мю“ и „ню“.
1. линейные операции
НАД ВЕКТОРАМИ
1.1. Векторные и скалярные величины
В прикладных науках оперируют величинами различного
характера. В качестве примера обратимся к величинам, встре-
чающимся в физике и механике. Такие величины, как массу и
объем, характеризуют количественным значением, которое по
отношению к некоторому эталону (единице измерения) задают
действительным числом. Поэтому их называют скалярны-
ми. Напротив, скорость, ускорение, сила характеризуются не
только количественным значением, но и направлением. Их на-
зывают векторными величинами.
Скалярные и векторные величины не исчерпывают всех воз-
можных вариантов. Например, свойства кристаллических тел
передавать теплоту и деформироваться под действием нагруз-
ки не удается описать при помощи скалярных и векторных
величин. Для таких свойств в физике и механике используют
более сложные тензорные величины.
Перейдем к строгим определениям и понятиям.
Определение 1.1. Геометрическим вектором (также
направленным отрезком) называют любой отрезок, на ко-
тором выбрано одно из двух возможных направлений (рис. 1.1).
Любой отрезок однозначно определяется своими концами,
поэтому одно из двух возможных направлений для данного от-
резка можно задать, указав порядок концов, т.е. от какого
конца отрезка надо начать движение в заданном направлении,
для того чтобы, двигаясь по отрезку, попасть в его другой
14
1. ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД ВЕКТОРАМИ
конец. Это позволяет определить геометрический вектор про-
сто как упорядоченную пару точек: первую точку в паре на-
зывают началом геометрического вектора, а вторую —
его концом. Начало геометрического
вектора называют также точкой его
приложения.
Обозначение геометрических векто-
ров отражает указанную интерпрета-
д цию: если точка А является началом
геометрического вектора, а точка В —
Рис. 1.1
его концом, то геометрический вектор
обозначают АВ или А^. Второе обозначение явно подчеркива-
ет, от какого конца отрезка к какому происходит движение в
заданном направлении. В первом варианте направление опреде-
ляется порядком букв, обозначающих концевые точки, а черта
сверху предназначена для выделения геометрических векторов
среди других геометрических объектов.
Важной характеристикой геометрического вектора АД-i яв-
ляется его модуль, или длина, |AJ^|, равный длине |АВ\ от-
резка, соединяющего его начало А и конец В. Длина геометри-
ческого вектора может выражаться любым неотрицательным
числом. Геометрический вектор называют ненулевым, если
его длина положительна. Длина, равная нулю, соответству-
ет ситуации, когда начало и конец геометрического вектора
совпадают. В этом случае геометрический вектор называют
нулевым или нуль-вектором и обозначают О. Если длина
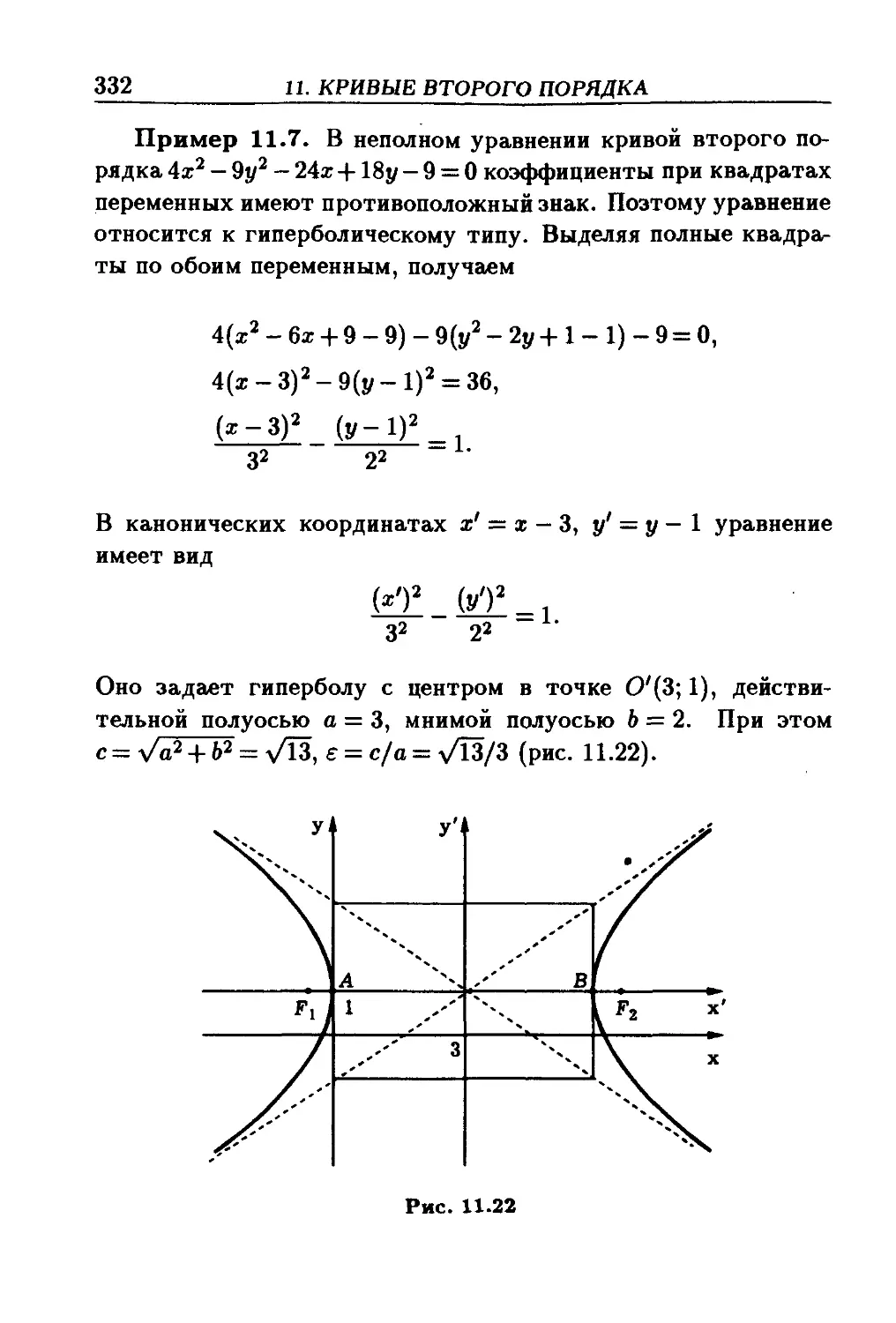
геометрического вектора равна единице, его называют ортом
или единичным.
Для нуль-вектора понятие направления теряет смысл, так
как начало и конец у него совпадают. Однако такому гео-
метрическому вектору удобно приписать произвольное направ-
ление, которое устанавливают в зависимости от конкретной
ситуации.
1.2. Типы векторов и их взаимное расположение 15
1.2. Типы векторов
и их взаимное расположение
Определение 1.2. Два геометрических вектора называют
коллинеарными, если они лежат на одной прямой1 или на
параллельных прямых.
Про пару коллинеарных геометрических векторов иногда
говорят, что один из них коллинеарен другому.
Все пары коллинеарных геометрических векторов можно
разделить на две группы:
- однонаправленные (или сонаправ ленные) коллине-
арные геометрические векторы, имеющие совпадающие
направления;
- противоположно направленные коллинеарные ге-
ометрические векторы, имеющие противоположные напра-
вления.
Если коллинеарные геометрические векторы и с£) не
лежат на одной прямой, то точки А, В, С н D образуют че-
тырехугольник, который является трапецией (рис. 1.2). В слу-
чае однонаправленных геометрических векторов отрезки АС и
BD, соединяющие соответственно два начала векторов и два
их конца, определяют боковые стороны трапеции (рис. 1.2, а).
Если же эти геометрические векторы противоположно напра-
вленные (рис. 1.2,6), то отрезки АС и BD являются диагона-
лями трапеции.
По определению считаем, что нуль-вектор коллинеарен лю-
бому другому. Определение 1.2 распространяется очевидным
образом на любое число геометрических векторов.
Определение 1.3. Три геометрических вектора называют
компланарными, если эти векторы лежат на прямых, парал-
лельных некоторой плоскости.
1 Говоря, что геометрический вектор лежит на прямой, мы подразуме-
ваем очевидную ситуацию, когда начало и конец вектора лежат на этой
прямой.
16
1. ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД ВЕКТОРАМИ
Рис. 1.2
Это определение теряет смысл, если его сформулировать
для двух геометрических векторов, потому что любые два
геометрических вектора лежат на прямых, параллельных не-
которой плоскости. Однако можно говорить о четырех ком-
планарных геометрических векторах или об их большем числе.
Определение 1.4. Два геометрических вектора называют
равными, если:
- они коллинеарны и однонаправлены;
- их длины совпадают.
В соответствии с определением 1.4 равные геометрические
векторы могут иметь различные точки приложения, но за-
дают одно и то же направление и имеют одинаковые длины.
В этом случае, т.е. когда заданы направление и длина, но не
фиксируется точка приложения, говорят, что задан свобод-
ный вектор. Термин подчеркивает, что точка приложения
геометрического вектора может меняться произвольно. В даль-
нейшем для удобства свободные векторы мы будем называть
просто векторами. Векторы обозначают одной строчной бу-
квой с дополнительной чертой или стрелкой вверху: а или
~af. Распространенным является также обозначение вектора
полужирным шрифтом а, которое в дальнейшем мы и будем
использовать.
Разный характер действия векторов в прикладных задачах
приводит к необходимости рассматривать другие типы век-
1.2. Типы векторов и их взаимное расположение
17
торов. Например, вектор угловой скорости и вектор силы,
действующей на абсолютно твердое тело, можно перемещать
только вдоль прямых, на которых они находятся. Такие век-
торы называют скользящими векторами. Наконец, гео-
метрические векторы, точка приложения которых не может
изменяться, называют еще связанными векторами. К ним
относятся скорости в потоке жидкости или газа.
Пример 1.1. В зависимости от учета тех или иных кон-
кретных условий одну и ту же векторную величину иногда
удобно рассматривать как свободный, скользящий или связан-
ный вектор. Например, вектор ускорения земного притяже-
ния является связанным вектором, поскольку его модуль и
направление зависят от расположения точки приложения от-
носительно центра Земли. Поэтому при расчете траектории
полета, например с Земли на Луну, его считают связанным
вектором. Однако в задаче о движении снаряда при стрель-
бе на небольшую по сравнению с радиусом Земли дальность
изменения вектора ускорения земного притяжения вдоль тра-
ектории снаряда незначительны и его принимают постоянным
по модулю и направленным вертикально вниз, т.е. считают сво-
бодным вектором. Учет кривизны поверхности Земли приведет
к необходимости считать этот вектор уже скользящим, т.е.
постоянным при перемещениях лишь вдоль радиуса к центру
Земли.
Замечание 1.1. Многие понятия, связанные с геометриче-
скими векторами, переносятся и на свободные векторы; Так,
говорят о начале (точке приложения) вектора, конце
вектора, модуле (длине) вектора. Различают векто-
ры ненулевые (включая единичные, или орты) и нуле-
вые (нуль-векторы), векторы коллинеарные и векторы
компланарные. Коллинеарные векторы могут быть одно-
направленными (сонаправленными) и противоположно
направленными.
18 1. ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД ВЕКТОРАМИ
1.3. Линейные операции и их свойства
Над векторами можно выполнять различные операции.
Свойства этих операций определяют правила преобразования
выражений, содержащих векторное величины. Эти правила и
составляют предмет векторной алгебры.
Обсуждение векторных операций начнем с двух из них —
сложения векторов и умножения вектора на число. Эти опера-
ции часто объединяют общим термином линейные операции.
Определение 1.5. Суммой а + Ь двух векторов а и Ь
называют вектор с, построенный по следующему правилу па-
раллелограмма. Выбрав для векторов а и Ь общее начало,
строим на этих векторах параллелограмм. Тогда диагональ
параллелограмма, выходящая из общего начала векторов, опре-
деляет их сумму (рис. 1.3).
Замечание 1.2. Наряду с правилом параллелограмма су-
ществует равносильное ему правило треугольника. Совме-
стим начало вектора Ь с концом вектора а. Тогда суммой этих
векторов будет вектор с, напало которого совпадает с началом
а, а конец — с концом Ь (рис. 1.4). Отметим, что если векторы
а и b коллинеарны, то их сумму по правилу параллелограмма
определить нельзя, а правило треугольника в этом случае при-
менимо.
Рис. 1.3
Рис. 1.4
1.3. Линейные операции и их свойства 19
Замечание 1.3. В определении 1.5 существует произвол в
выборе точки приложения векторов. Чтобы определение бы-
ло корректным, надо убедиться, что результаты, получаемые с
различными точками приложения, равны между собой. Убеди-
тесь в этом самостоятельно! #
Операция сложения векторов по своим свойствам напомина-
ет операцию сложения чисел.
1°. Сложение векторов коммутативно: a + b — b + a.
4 Если складываемые векторы неколлинеарны, то свойство не-
посредственно вытекает из правила параллелограмма, так как
в этом правиле порядок векторов не играет роли. Если же век-
торы коллинеарны, то их сложение сводится к сложению или
вычитанию их длин в зависимости от того, являются ли скла-
дываемые векторы однонаправленными или противоположно
направленными. ►
2°. Сложение векторов ассоциативно: (а + Ь) 4- с = а +
+ (6 + с).
4 Доказать это свойство проще всего при
треугольника. Выберем в качестве начала
А (рис. 1.5), и пусть а = АЁ.
Совместим начало вектора b с
точкой В, и пусть b = В(3. На-
конец, начало вектора с совме-
стим с концом С вектора 6, и
пусть тогда с
Непосредственно из постро-
ения получаем
помощи правила
вектора а точку
АЬ = А& + ВЁ = А$ + (В& + С$) = а + (6 + с),
А^ = А^ + сЬ=(А^ + В^) + С^=(а + Ь)+с,
20
1. ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД ВЕКТОРАМИ
т.е. геометрический вектор AD изображает и левую часть
доказываемого равенства, и правую. ►
3°. Существует такой вектор О, что для любого вектора а
выполняется равенство а + О = а.
◄ Действительно, непосредственной проверкой можно убедить-
ся, что указанному условию удовлетворяет нулевой вектор.
Проверку удобно проводить при помощи правила треуголь-
ника. ►
4°. Для любого вектора а существует такой вектор Ь, что
а + Ь = О.
◄ Действительно, таким является вектор (—а), противопо-
ложный к вектору а, т.е. вектор, коллинеарный а, той же
длины, что и а, но противоположно направленный. Если в ка-
честве точки приложения этого вектора выбрать конец вектора
а, то конец противоположного вектора совпадет с началом век-
тора а. Согласно правилу треугольника, суммой векторов а и
(—а) будет вектор с совпадающими началом и концом, т.е. ну-
левой вектор. ►
5°. Для любых векторов а и Ь существует такой вектор х,
что а + х = Ь. При этом вектор х определен однозначно.
◄ Указанному условию удовлетворяет вектор (—а) + Ь, так как
с учетом свойств 2°-4°
a -f- х = о, 4- ((—в) -f- b) — (a -f- (—в)) -pb = O-pb = b.
Если вектор х удовлетворяет равенству а + х = Ь, то,
прибавив слева к обеим частям последнего равенства вектор
(—а), получим с учетом свойств 1°, 2°, что х = (—а) + Ь.
Действительно,
(-а) + (а + = ((-а) 4-а)-|-® = 0-|-® = ® = (-а) + Ь.
Значит, вектор х определен однозначно. ►
1.3. Линейные операции и их свойства
21
Свойство 5° позволяет ввести операцию вычитания век-
торов.
Определение 1.6. Разностью Ь — а двух векторов а и
Ь называют такой вектор х, что а + х = Ь.
С алгебраической точки зрения переход от а + х — Ь к
х = Ь — а (в соответствии с определением 1.6) означает, что
при переносе вектора в другую часть равенства перед ним надо
менять знак.
Корректность определения разности векторов, т.е. суще-
ствование и единственность вектора х устанавливает свой-
ство 5°. Практически для вычисления разности векторов мож-
но воспользоваться правилом тре-
угольника. Совместим начала век-
торов а и Ь, тогда вектор с началом h
в конце вектора а и концом, совпа- Jr I
дающим с концом Ь, равен разности .г
Ь — а этих векторов (рис. 1.6). "а
Операцию вычитания векторов рис 1>6
также относят к линейным, так как
она определяется операцией сложения и является обратной
сложению.
Определение 1.7. Произведением вектора а на чи-
сло А называют вектор Аа, коллинеарный вектору а, с длиной
|А| |а|, однонаправленный с а при А > 0 и противоположно на-
правленный при А < 0.
Замечание 1.4. Если А = 0, то, согласно этому определе-
нию, вектор 0а должен иметь длину 0 |а| = 0, т.е. должен быть
нулевым вектором. Поэтому, хотя остальные характеристики
в определении и не определены (коллинеарность, направлен-
ность), произведение вектора на число 0 определено однознач-
но: 0а есть нулевой вектор.
Пример 1.2. Произведение вектора а на число —1 есть
вектор, противоположный к а, т.е. (—1)а= (—а). #
22 1. ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД ВЕКТОРАМИ
Операция умножения вектора на число обладает свойством
ассоциативности, а совместно с операцией сложения она удо-
влетворяет двум свойствам дистрибутивности.
6°. Умножение вектора на число ассоциативно: (Ад)а =
= А (да).
◄ Действительно, обе части равенства представляют собой век-
торы, коллинеарные исходному вектору а. Поэтому равенство
будет верным, если совпадут длины векторов и их направления.
Равенство длин векторов очевидно. Если числа Аид имеют
один и тот же знак, то векторы в обеих частях будут однона-
правлены с вектором а. Если же А и д имеют противоположные
знаки, то оба вектора в равенстве являются противоположно
направленными по отношению к а. Итак, в любом случае в
равенстве стоят векторы одного направления и одинаковой дли-
ны, т.е. равные векторы. ►
7°. Умножение вектора на число дистрибутивно относитель-
но векторов: А (а + Ь) = Аа + ХЬ.
◄ При А = 0 свойство очевидно, так как в этом случае слева
будет нулевой вектор (произведение вектора на число 0), а
1.4. Ортогональная проекция
23
справа — сумма двух нулевых векторов. Если А О, свойство
вытекает из правила параллелограмма и свойств подобных
параллелограммов. На рис. 1.7 представлены случаи для А > О
и А < 0. ►
8°. Умножение вектора на число дистрибутивно относитель-
но чисел: (А4-д)а = Аа4-Д<х.
4 В указанном равенстве — три коллинеарных вектора. По-
этому доказательство сводится к подсчету длин векторов, ко-
торым присвоены знаки, учитывающие направление. Если А
и д имеют положительные знаки, то все три вектора в ра-
венстве имеют одно направление, совпадающее с направлением
вектора а. При сложении этих векторов справа складываются
их длины, а доказываемое равенство равносильно следующему:
(А 4-д) |а| = А|а| 4-д|а|. Случай, когда Аид отрицательны,
аналогичен.
Пусть Аид имеют противоположные знаки. Для опреде-
ленности будем считать, что А > 0, д < 0. Противоположный
случай сводится к этому заменой обозначений и учетом комму-
тативности сложения чисел и векторов. Если А > 0, д < 0, то
при сложении векторов Ха и да вычитаются их длины, так как
складываются векторы противоположного направления. По-
лучаемый при этом вектор будет однонаправленным с а при
|А| > |д| и противоположно направленным при |А| < |д|. Его дли-
на, согласно определению произведения вектора на число, равна
|А + д||а|. Учитывая направление этого вектора, заключаем,
что он равен (А 4- д)а, т.е. доказываемое равенство верно и при
противоположных знаках коэффициентов А и д. ►
1.4. Ортогональная проекция
Пусть на плоскости заданы прямая L и точка А. Опустим
из точки А на прямую L перпендикуляр (рис. 1.8, а). Тогда его
основание (точку О) называют ортогональной проекцией
точки А на прямую L. Если прямая L и точка А заданы
24
1. ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД ВЕКТОРАМИ
в пространстве, то в этом случае ортогональной проекцией
точки А на прямую L называют точку О пересечения прямой L
с перпендикулярной ей плоскостью, проходящей через точку А
(рис. 1.8, б). Если точка А лежит на прямой L, то она совпадает
со своей ортогональной проекцией на L.
О
L
а
Рис. 1.8
Для вектора АЁ (на плоскости или в пространстве) можно
построить ортогональные проекции на прямую L его нача-
ла и конца (рис. 1.9). Тогда вектор ОдОв, соединяющий эти
проекции Оа и Ов и лежащий на прямой L, называют орто-
гональной проекцией вектора А& на прямую L.
Прямую, на которой задано од-
но из двух возможных направлений,
называют осью. Выбранное напра-
вление на оси изображают с помо-
щью стрелки на соответствующем
конце оси. Ортогональную проек-
цию ОаОв вектора А/l на ось I мож-
но полностью описать длиной вектора ОдОв> приписав ей знак,
указывающий направление вектора. Если направление ОдОв
совпадает с заданным направлением оси, то берут знак плюс, а
если направление вектора противоположно направлению оси, то
берут знак минус. Длину вектора ОаОв со знаком, определя-
1.4. Ортогональная проекция
25
ющим направление этого вектора, называют ортогональной
проекцией вектора А$ на ось I и обозначают пр^а.
Обратим внимание на то, что ортогональной проекцией
вектора на ось является число, в то время как ортогональная
проекция вектора на прямую — это вектор. Чтобы вектору
соответствовало число как его проекция, на прямой нужно
выбрать одно из двух возможных направлений.
Каждый ненулевой вектор I однозначно определяет ось:
его можно рассматривать расположенным на некоторой прямой
и задающим на ней направление. Поэтому ортогональную
проекцию вектора на такую ось называют ортогональной
проекцией вектора на направление вектора I.
Угол между направлениями двух ненулевых векторов назы-
вают углом между этими векторами. Угол может изме-
няться в пределах от 0 до тг. Крайние значения 0 и 7Г отвечают
коллинеарным векторам, соответственно однонаправленным и
противоположно направленным. Если хотя бы один из двух
векторов является нулевым, то угол между такими векторами
не определен. Удобно, однако, считать, что в этом случае угол
имеет произвольное значение. Так, нулевой вектор коллинеарен
любому другому, что формально соответствует углу 0 (или тг).
Конкретное значение, приписываемое углу между нулевым век-
тором и каким-либо другим, выбирают исходя из конкретной
ситуации.
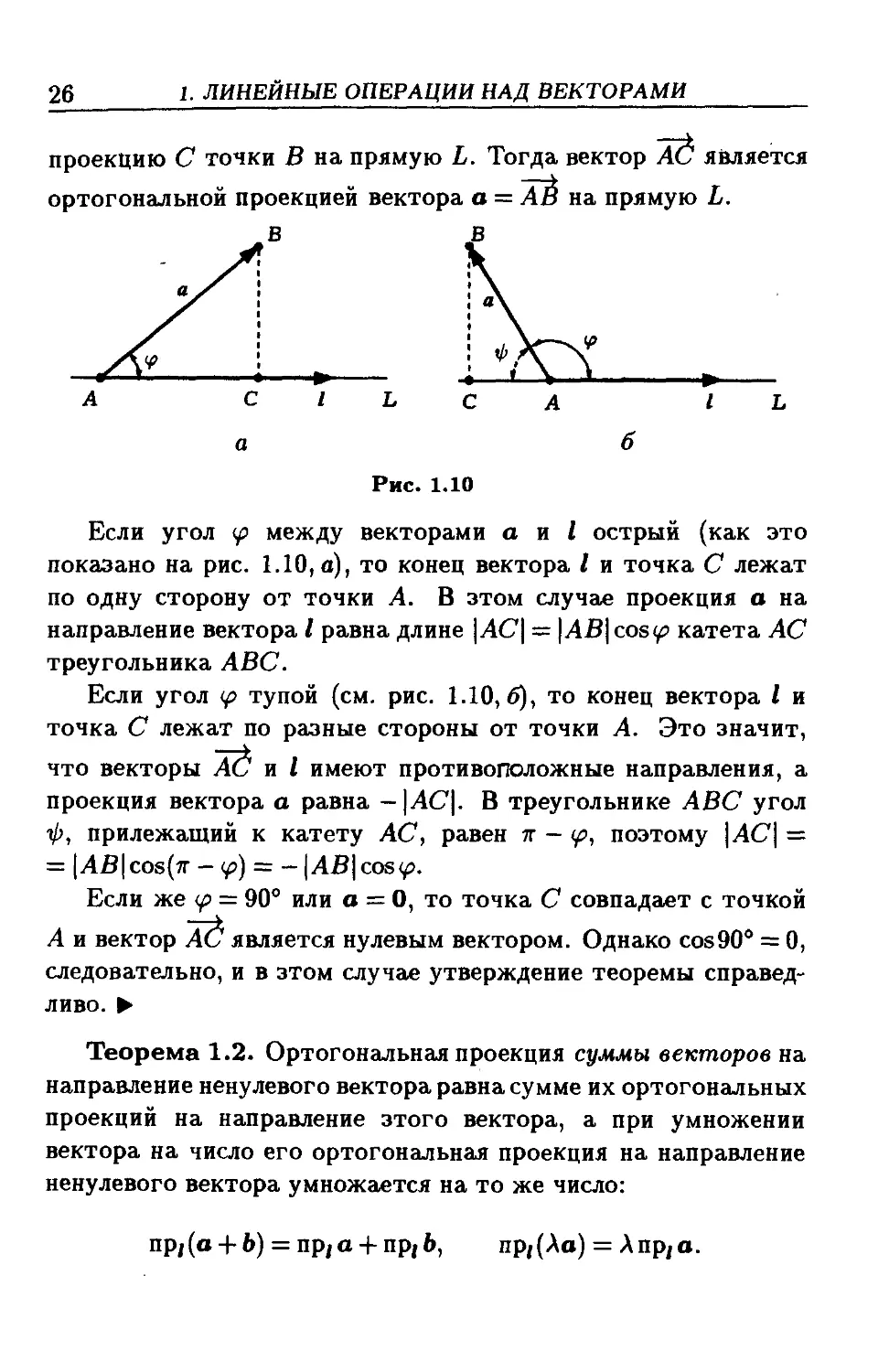
Теорема 1.1. Ортогональная проекция вектора а на
направление ненулевого вектора I равна длине |а|, умноженной
на косинус угла ip между векторами а и I, т.е.
пр/а = |a|cos(a,Z),
где (а,Г) — угол между векторами а и I.
◄ Пусть вектор I лежит на прямой L, а его началом является
точка А. Совместим начало вектора а с точкой А, и пусть его
концом будет точка В (рис. 1.10). Построим ортогональную
26
1. ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД ВЕКТОРАМИ
проекцию С точки В на прямую L. Тогда вектор АС является
ортогональной проекцией вектора а = ЛЁ на прямую L.
Если угол 9? между векторами а и I острый (как это
показано на рис. 1.10, а), то конец вектора I и точка С лежат
по одну сторону от точки А. В этом случае проекция а на
направление вектора I равна длине |АС\ — |AB|cos9? катета АС
треугольника АВС.
Если угол тупой (см. рис. 1.10,6), то конец вектора I и
точка С лежат по разные стороны от точки А. Это значит,
что векторы А($ и I имеют противоположные направления, а
проекция вектора а равна -|АС|. В треугольнике АВС угол
-ф, прилежащий к катету АС, равен л - <р, поэтому | АС\ —
= |AB|cos(tf - <р) = — |AB|cos<p.
Если же <р = 90° или а = О, то точка С совпадает с точкой
А и вектор А(5 является нулевым вектором. Однако cos90° = 0,
следовательно, и в этом случае утверждение теоремы справед-
ливо. ►
Теорема 1.2. Ортогональная проекция суммы векторов на
направление ненулевого вектора равна сумме их ортогональных
проекций на направление этого вектора, а при умножении
вектора на число его ортогональная проекция на направление
ненулевого вектора умножается на то же число:
пр, (а+ 6) = пр, а + пр, Ь, пр, (Ла) = А пр, а.
1.5. Линейная зависимость и независимость векторов
27
4 Доказательство следует из рис. 1.11. В случае а имеем
пР|а = |АВ|, пр,Ь = -|ВС|, пР/(а + Ь) = |АС| = |АВ|-|ВС|. В
случае б пр,а = |АВ| и, если А > 0, прДАа) = |АЕ| = А|АВ|.
Остальные варианты (точка С не принадлежит отрезку АВ в
случае а, А 0 в случае б) рассматриваются аналогично. ►
Рис. 1.11
1.5. Линейная зависимость
и независимость векторов
Введенные нами линейные операции над векторами дают
возможность составлять различные выражения для векторных
величин и преобразовывать их при помощи установленных для
этих операций свойств.
Исходя из заданного набора векторов «1, ..., ап, можно
составить выражение вида
п
= а1а1 + ... + о<Г1аГ1, (1.1)
»=1
где ац, ..., ап — произвольные действительные числа. Это
выражение называют линейной комбинацией векторов
ai, ..., ап. Числа а,-, г = 1, п, представляют собой коэффи-
циенты линейной комбинации. Набор векторов называют
еще системой векторов.
28
I. ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД ВЕКТОРАМИ
В связи с введенным понятием линейной комбинации векто-
ров возникает задача описания множества векторов, которые
могут быть записаны в виде линейной комбинации данной сис-
темы векторов aj, ап. Кроме того, закономерны вопросы
об условиях, при которых существует представление вектора в
виде линейной комбинации, и единственности такого предста-
вления.
Если каждый вектор может быть представлен в виде ли-
нейной комбинации данной системы векторов и притом един-
ственным способом, то мы можем интерпретировать вектор
как набор коэффициентов соответствующей линейной комбина-
ции. Тогда взаимосвязи между геометрическими объектами —
векторами — будут представлены некоторыми числовыми со-
отношениями, а мы получим возможность изучать свойства
векторов и других геометрических объектов алгебраическими
методами.
Определение 1.8. Векторы си, ..., ап называют линейно
зависимыми, если существует такой набор коэффициентов
a-i, ..., an, что
сив! +... + апап - О (1.2)
и при этом хотя бы один из этих коэффициентов ненулевой.
Если указанного набора коэффициентов не существует, то
векторы называют линейно независимыми.
Если ai = ... = an = 0, то, очевидно, спец + ... + апап =
= О. Имея зто в виду, можем сказать так: векторы си, ...,
ап линейно независимы, если из равенства (1.2) вытекает, что
все коэффициенты си, ..., an равны нулю.
Следующая теорема поясняет, почему новое понятие на-
звано термином „зависимость" (или „независимость"), и дает
простой критерий линейной зависимости.
Теорема 1.3. Для того чтобы векторы были линейно
зависимы, необходимо и достаточно, чтобы один из них являлся
линейной комбинацией остальных.
1.5. Линейная зависимость и независимость векторов
29
4 Необ ходимость. Предположим, что векторы «и, ап
линейно зависимы. Согласно определению 1.8 линейной зави-
симости, в равенстве (1.2) слева есть хотя бы один ненулевой
коэффициент, например aj. Оставив первое слагаемое в левой
части равенства, перенесем остальные в правую часть, меняя,
как обычно, у них знаки. Разделив полученное равенство2 на
а>, получим
«2 «п
а.1 =---аг — ...---оп,
«1 О?1
т.е. представление вектора aj в виде линейной комбинации
остальных векторов 02, ..., ап.
Достаточность. Пусть, например, первый вектор ai
можно представить в виде линейной комбинации остальных
векторов:
Oi = ^2®2 + • • • + 0п&п-
Перенеся все слагаемые из правой части в левую, получим
ai-/32a2-.. .-Д„ап = О,
т.е. линейную комбинацию векторов ai,..., ап с коэффициента-
ми ai = 1, а2 = —fl2, ..., ап = —Дп> равную нулевому вектору. В
этой линейной комбинации не все коэффициенты равны нулю.
Согласно определению 1.8, векторы сц, ..., ап линейно зави-
симы. ►
Определение и критерий линейной зависимости сформули-
рованы так, что подразумевают наличие двух или более век-
торов. Однако можно также говорить о линейной зависимо-
сти одного вектора. Чтобы реализовать такую возможность,
2 У нас нет такой операции „ деление вектора на число Поэтому фор-
мально вместо „разделим равенство на число оц “ мы должны были бы
говорить „умножим равенство на число l/ai“. Однако подобная педан-
тичность усложняет изложение, в то время как формально не определенное
понятие деления достаточно очевидно.
30
1. ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД ВЕКТОРАМИ
нужно вместо „векторы линейно зависимы" говорить „система
векторов линейно зависима". Нетрудно убедиться, что выра-
жение „система из одного вектора линейно зависима" означает,
что этот единственный вектор является нулевым (в линейной
комбинации имеется только один коэффициент, и он не должен
равняться нулю).
Понятие линейной зависимости имеет простую геометриче-
скую интерпретацию. Эту интерпретацию проясняют следую-
щие три утверждения.
Теорема 1.4. Два вектора линейно зависимы тогда и
только тогда, когда они коллинеарны.
4 Если векторы а и b линейно зависимы, то один из них, на-
пример а, выражается через другой, т.е. а = ЛЬ для некоторого
действительного числа А. Согласно определению 1.7 произведе-
ния вектора на число, векторы а и Ь являются коллинеарными.
Пусть теперь векторы а и b коллинеарны. Если они оба
нулевые, то очевидно, что они линейно зависимы, так как любая
их линейная комбинация равна нулевому вектору. Пусть один
из этих векторов не равен 0, например вектор Ь. Обозначим
через А отношение длин векторов: А=|а|/|Ь|. Коллинеарные
векторы могут быть однонаправленными или противоположно
направленными. В последнем случае у А изменим знак. Тогда,
проверяя определение 1.7, убеждаемся, что а = ХЬ. Согласно
теореме 1.3, векторы а и Ь линейно зависимы. ►
Замечание 1.5. В случае двух векторов, учитывая крите-
рий линейной зависимости, доказанную теорему можно пере-
формулировать так: два вектора коллинеарны тогда и только
тогда, когда один из них представляется ’как произведение
другого на число. Это является удобным критерием коллине-
арности двух векторов.
Теорема 1.5. Три вектора линейно зависимы тогда и
только тогда, когда они компланарны.
1.5. Линейная зависимость и независимость векторов
31
< Если три вектора а, 6, с линейно зависимы, то, согласно
теореме 1.3, один из них, например а, является линейной
комбинацией остальных: a = (3b 4- 7с. Совместим начала
векторов Ь и с в точке А. Тогда векторы Д6, 7с будут
иметь общее начало в точке А и по правилу параллелограмма
их сумма, т.е. вектор а, будет представлять собой вектор с
началом А и концом, являющимся вершиной параллелограмма,
построенного на векторах-слагаемых. Таким образом, все
векторы лежат в одной плоскости, т.е. компланарны.
Пусть векторы а, Ь, с компланарны. Если один из этих
векторов является нулевым, то очевидно, что он будет линей-
ной комбинацией остальных. Достаточно все коэффициенты
линейной комбинации взять равными нулю. Поэтому можно
считать, что все три вектора не являются нулевыми. Совме-
стим начала этих векторов в общей точке О. Пусть их концами
будут соответственно точки А, В, С (рис. 1.12). Через точку
С проведем прямые, параллельные прямым, проходящим через
пары точек О, А и О, В. Обозначив точки пересечения че-
рез Д' и В', получим параллелограмм ОА'СВ', следовательно,
О($ = ОА' + ОВ'. Вектор ОД' и ненулевой вектор а = о! колли-
неарны, а потому первый из них может быть получен умноже-
нием второго на действительное
число а: О А' = аОА. Аналогично
OB' = (30%, Д е R. В результате
получаем, что 0$ = аoi+noi,
т.е. вектор с является линейной
комбинацией векторов а и Ь. Со-
гласно теореме 1.3, векторы а, Ь, с
являются линейно зависимыми. ►
Теорема 1.6. Любые четыре вектора линейно зависимы.
◄ Доказательство проводим по той же схеме, что и в теоре-
ме 1.5. Рассмотрим произвольные четыре вектора а, Ь, с и d.
32
1. ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД ВЕКТОРАМИ
Если один из четырех векторов является нулевым, либо сре-
ди них есть два коллинеарных вектора, либо три из четырех
векторов компланарны, то эти четыре вектора линейно зависи-
мы. Например, если векторы а и Ь коллинеарны, то мы можем
составить их линейную комбинацию аа + /36 = О с ненулевыми
коэффициентами, а затем в эту комбинацию добавить оставши-
еся два вектора, взяв в качестве коэффициентов нули. Получим
равную О линейную комбинацию четырех векторов, в которой
есть ненулевые коэффициенты.
Таким образом, мы можем считать, что среди выбранных
четырех векторов нет нулевых, никакие два не коллинеарны и
никакие три не являются компланарными. Выберем в качестве
их общего начала точку О. Тогда концами векторов a, 6, с, d
будут некоторые точки А, В, С, D (рис. 1.13). Через точку D
проведем три плоскости, параллельные плоскостям О ВС, ОСА,
О АВ, и пусть А', В', С — точки пересечения этих плоскостей с
прямыми О А, ОВ, ОС соответственно. Мы получаем паралле-
лепипед ОА/С//В/С"В//£)А//, и векторы а, Ь, с лежат на ребрах
параллелепипеда, выходящих из вершины О. Так как четырех-
Рис. 1.13
угольник ОС"DC' является
параллелограммом, то of) =
= ОС^' + ОС'. В свою оче-
редь, отрезок ОС" является
диагональю параллелограм-
ма ОА'С'В', так что ОС^' =
= ОА^ + ОВ'. Значит,
of) = ОА'+ ов'+ ос'.
Остается заметить, что
пары векторов оХ 0 О и Оа\
' коллинеарны, и, следовательно,
можно подобрать коэффициенты а, /3, у так, что О А' = аОА,
1.6. Базис
33
OB' — (Ю& и ОС' — yOd. Окончательно получаем
0$ = об! + 00$ + уО^.
Следовательно, вектор 0$) выражается через остальные три
вектора, а все четыре вектора, согласно теореме 1.3, линейно
зависимы. ►
1.6. Базис
Аналогично трем моделям геометрии (геометрии на пря-
мой, на плоскости и в пространстве) мы рассмотрим три мно-
жества свободных векторов, или, как говорят, три простран-
ства векторов: пространство V1 всех коллинеарных между
собой векторов, т.е. параллельных некоторой прямой, про-
странство V3 всех компланарных между собой векторов, т.е.
параллельных некоторой плоскости, и пространство V3 всех
свободных векторов.
Рассмотрим пространство Ур Любой ненулевой вектор
пространства Vi называют базисом в Vi. Любые два вектора
этого пространства, будучи коллинеарными, линейно зависи-
мы, т.е. один из них может быть получен из другого умноже-
нием на число. Выберем и зафиксируем в Vi базис, т.е. вектор
е / О. Тогда любой вектор х € Ц представляется в виде х = Хе.
Это равенство называют разложением вектора х в бази-
се е, а число А — координатой вектора х в этом базисе.
Отметим, что коэффициент А при этом определен однозначно.
Действительно, этот коэффициент равен А = ±|®|/|е|, причем
выбирают знак плюс, если векторы х и е однонаправлены, и
знак минус в противоположном случае.
Рассмотрим пространство Ц- Любую упорядоченную пару
неколлинеарных векторов в пространстве V2 называют бази-
сом в Ц- Выберем в этом пространстве базис, т.е. два не-
коллинеарных вектора ei, ег. Согласно теореме 1.5, эти два
34
1. ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД ВЕКТОРАМИ
вектора и любой третий вектор х, будучи компланарными,
линейно зависимы. Поэтому один из них является линейной
комбинацией двух других. При этом можно утверждать, что
вектор х выражается через ei и е^. Действительно, запишем
линейную комбинацию этих векторов
ах + Д1в1 + /32е2 = О, (1.3)
в которой один из коэффициентов не равен нулю. Сразу делаем
вывод, что а / 0, так как в противном случае в равенстве (1.3)
слева можно опустить первое слагаемое, и мы получим, что
векторы ei, е2 линейно зависимы. Но этого быть не может,
так как они неколлинеарны (см. теорему 1.4). Так как а / О,
мы можем разделить равенство (1.3) на а. В результате,
перенося последние два слагаемых в правую часть, получаем
представление вида
® = Aiei + A2e2, (1.4)
которое называют разложением вектора х в базисе ei,
е2, а коэффициенты Ai, А2 этого представления — координа-
тами вектора х в базисе ei, е2.
Отметим, что в представлении (1.4) коэффициенты Ах и А2
определены однозначно. Это можно обосновать, анализируя
доказательство теоремы 1.5 (используемый в доказательстве
параллелограмм однозначно определен диагональю и прямыми,
на которых лежат смежные стороны). Однако то же можно
установить, используя лишь факт линейной независимости
векторов ei и е2.
В самом деле, если есть два представления
® = Aiei + А2е2 = fiiei + /х2е2,
то, перенеся в последнем равенстве все слагаемые влево и
используя свойство 8° (см. с. 23) дистрибутивности умножения
вектора на число относительно чисел, получим
(Ai - ^i)ei + (А2 - д2)е2 = О.
1.6. Базис
35
Коэффициенты в этом равенстве слева равны нулю, так как
векторы ei, в2 линейно независимы (они неколлинеарны, см.
теорему 1.4). Таким образом, Ai =Д1, Л2 = М2> и два взятых
нами представления вектора х совпадают.
Рассмотрим пространство У3. Любую упорядоченную трой-
ку некомпланарных векторов называют базисом в V3. Выбе-
рем в У3 базис, т.е. любые три некомпланарных вектора ej,
«2, е3. Эти три вектора с добавленным к ним произвольным
четвертым вектором х линейно зависимы (см. теорему 1.6).
Можно доказать так же, как мы это делали в случае простран-
ства V2, что вектор х является линейной комбинацией векторов
«1» е2> е3:
х = Aiei + А2е2 + А3е3. (1.5)
При этом коэффициенты в представлении (1.5) определены
однозначно, так как векторы ei, в2, е3 линейно независимы.
Представление вектора х в виде (1.5) называют разложением
вектора в базисе ei, е2, е3, а коэффициенты Ai, А2 и А3
разложения — координатами вектора х в базисе ej, ег, е3.
Векторы в базисах пространств V2 и У3, согласно опреде-
лению базисов, являются упорядоченными. Порядок векторов
в базисе устанавливает порядок среди координат любого век-
тора, и поэтому координаты всегда считают тоже упорядочен-
ными. Если базис, например, в пространстве У3 фиксирован,
то каждому вектору из У3 соответствует единственная упоря-
доченная тройка чисел, составленная из его координат. Кроме
того, каждой упорядоченной тройке чисел соответствует един-
ственная линейная комбинация векторов базиса, т.е. вектор
из У3, координаты которого совпадают с этой тройкой чисел.
Поэтому, если базис фиксирован, то векторы можно рассматри-
вать как упорядоченные наборы их координат в этом базисе.
Эту возможность часто используют, отождествляя векто-
ры с упорядоченными наборами их координат. Например,
если вектор х из У3 в базисе ei, ег, е3 имеет разложение
х = 2в! + Зе2 - 4е3, то этому вектору соответствует упорядо-
36
I. ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД ВЕКТОРАМИ
ченная тройка его координат, которую часто записывают так:
{2; 3; —4}. Более того, отождествляют вектор с упорядоченной
тройкой координат и пишут х = {2; 3; —4}, вкладывая в это ра-
венство указанный выше смысл.
Итак, если базис в пространстве Vi, V2 или V3 фиксирован,
то любой вектор из этого пространства однозначно опреде-
лен своими координатами, записанными в порядке следования
векторов базиса. Поэтому можно сказать, что координаты
вектора являются представлением, или „изображением“, этого
вектора в данном базисе.
1.7. Вычисления в координатах
Выясним, что происходит с координатами векторов при
выполнении линейных операций.
Теорема 1.7. При сложении двух векторов их координаты
в одном и том же базисе складываются. При умножении
вектора на число координаты этого вектора умножаются на
это число.
◄ Для простоты остановимся, например, на пространстве V3.
Фиксируем в Уз базис ei, ег, ез. Возьмем два произвольных
вектора х и у и запишем их разложения в выбранном базисе:
х = xiei + х2е2 4- жзвз, У = У1 ei 4- у2е2 4- у3е3.
Используя свойства линейных операций, вычисляем сумму этих
векторов:
® + У = (®iei 4- х2е2 4- ж3е3) + (j/те 1 + у2е2 4- уэе3) =
- («1 + У1 )ei 4- (х2 4- У2)е2 + (®з + Уз)е3-
Мы получили разложение суммы векторов в фиксированном
базисе. Отсюда заключаем, что координаты ж,- и у, исходных
слагаемых, соответствующие одному вектору е; в базисе (i =
= 1,2,3), складываются.
1.7. Вычисления в координатах
37
Аналогично с учетом свойств линейных операций имеем
Хх = A(xie 1 + х2е2 + ж3е3) = (Azjei + (Аж2)е2 + (Аж3)е3.
В итоге получаем разложение вектора Хх в фиксированном
базисе. Из этого разложения видим, что каждая из координат
исходного вектора х умножена на число А. ►
Разложение вектора в базисе имеет простой геометриче-
ский смысл. Рассмотрим, например, пространство V3. Разло-
жение вектора d в базисе, скажем а, 6, с, показано на рис. 1.13.
Координатами вектора d будут отношения
. , |оа'| |овд |ос'|
“ |ОА| ’ Ь |ОВ| ’ с |ОС| ’
где знаки выбирают в зависимости от того, является соответ-
ствующая пара коллинеарных векторов (например, 0%. и ОА!
для da) однонаправленной или нет.
Теорема 1.8. Для того чтобы два вектора были кол-
линеарны, необходимо и достаточно, чтобы их одноименные
координаты в одном и том же базисе были пропорциональны.
◄ Докажем теорему в случае пространства V3. Фиксируем в У3
базис elf е2, е3. Рассмотрим разложения в выбранном базисе
векторов х и у:
х = xiei + х2е2 + х3е3, у = ухех + у2е2 + у3е3. (1.6)
Если одноименные координаты этих векторов пропорциональ-
ны, т.е. существует такое A G R, что выполнены равенства
Ж1 = Ау1, х2 = Ху2, х3 = Ху3, (1.7)
то
х = Xiei + х2е2 + х3е3 = Xy^i + Aj/2e2 + Ау3е3 =
= A(yiei + y2e2 4- y3e3) = Xy
и из теорем 1.3, 1.4 следует, что векторы х и у коллинеарны.
Достаточность условия доказана. Для доказательства его
38 1. ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД ВЕКТОРАМИ
необходимости предположим, что векторы х и у коллинеарны.
Но тогда по теореме 1.4 они линейно зависимы и в силу
теоремы 1.3 один из них, например х, является линейной
комбинацией „остальных", т.е. х — Ху. Подставляя в это
равенство разложения (1.6), получаем
x1e1+x2e2 + x3e3 = X(y1e1 + у2е2 + узвз),
или
(®1 - Ayi)ei + (х2 - Ху2)е2 + (х3 - Ху3)е3 = О.
А поскольку вектор О в любом базисе имеет нулевые координа-
ты, то из последнего равенства следуют соотношения (1.7). ►
Следствие 1.1. Для того чтобы два вектора были колли-
неарны, необходимо и достаточно, чтобы отношения их одно-
именных координат в одном и том же базисе были равны.
4 Выражая Л из соотношений (1.7) и приравнивая полученные
дроби, находим, что
1/1 У2 Уз
Отметим, что в условии (1.8) в знаменателях дробей могут
стоять нули, но при этом подразумевается, что и в числителе
соответствующей дроби стоит нуль. Для пространства V2 усло-
вие (1.8) сводится к равенству только первых двух дробей. ►
Пример 1.3. Пусть векторы ei,e2 образуют базис в V2.
Векторы а = 2е\ — Зв2, 6 = —ei + Зег линейно независимы,
так как 2/(—1) / —3/3. Поэтому они тоже образуют базис в
том же V2. Найдем разложение в этом базисе векторов ех и
с = 3ej — бег-
Чтобы найти разложение вектора ei, вычислим сумму век-
торов а и Ь:
a + b = ei.
Следовательно, искомым разложением является ег = а 4- Ь.
(1-8)
1.7. Вычисления в координатах 39
Чтобы найти разложение вектора с, поступим следующим
образом. Пусть с = + Л2Ь. Подставив в это равенство
разложения векторов с, а, 6 в базисе ei, е2, приведем подобные
слагаемые в правой части равенства. Получим, что
3ei — 6е2 = Ai(2ei — Зе2) + А2(—ej + Зе2) =
= (2Ai — A2)ei + (—ЗА1 + ЗЛ2)е2.
Поскольку каждый вектор в любом базисе имеет единственное
разложение, то Ai, Л2 должны удовлетворять системе уравнений
J 2А1 — А2 = 3,
[ ЗЛ1-ЗЛ2 = 6.
Решая эту систему, находим, что Ai = 1, Л2 = -1. Это значит,
что с = a — Ь.
Определение 1.9. Базис называют ортогональным, ес-
ли он состоит из векторов, лежащих на взаимно перпендикуляр-
ных прямых. Базис называют ортонормиров анным, если он
ортогональный и состоит из единичных векторов.
Параллелепипед, изображенный на рис. 1.13, в ортонорми-
рованием базисе в Уз является прямоугольным, а точки А', В1,
С — ортогональными проекциями точки D на соответствую-
щие прямые. Координаты вектора d = о£) в ортонормирован-
ием базисе равны ортогональным проекциям этого вектора на
направления векторов, образующих этот базис.
Ортонормированный базис в пространстве Уз принято обо-
значать, с учетом порядка, буквами i, j, k, в У2 — соответ-
ственно г, j и в У1 — г.
В случае ортонормированного базиса в пространстве Уз
легко найти расстояние от точки О до произвольной точки
X. По теореме Пифагора \ОХ|2 = |ОХ,|2 4- \OXj|2 + |№|2
(рис. 1.14), где точки X,, Xj, Xk — ортогональные проекции
точки X на соответствующие оси. Но длины отрезков О Xi,
40
1. ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД ВЕКТОРАМИ
OXj, OXk — это абсолютные значения координат вектора
х = 0% в базисе г, j, к. В результате получаем формулу
для вычисления длины вектора х с координатами {хг, Х2; хз}
в ортонормированном базисе г, j, к пространства V3:
|®| = \/xi + xl + x3> х Уз- (1-9)
Аналогично вычисляют длину вектора из пространства V?
по его координатам ii, Х2 в ортонормированном базисе:
|®| = У®1 + ®2> (1-10)
и длину вектора из Vj с коорди-
натой xi в ортонормированном
базисе:
|®| = V®? = 1®1|, ® € Vj. (1.11)
Пусть ненулевой вектор х € V3 образует с направлениями
векторов ортонормированного базиса i, j, k углы а, /3 и 7 соот-
ветственно. Величины cosa, cos/3, cosy называют направляю-
щими косинусами вектора х
(рис. 1.15).
Направляющие косинусы век-
тора можно использовать при вы-
числении его координат. Если
ненулевой вектор х Е V3 имеет в
ортонормированном базисе t, j,
k координаты {«i; Х2; жз} и на-
правляющие косинусы COSO, COS/5,
cosy, то
Ж1 = |®|cosa, Х2 = |®|cos/3, ж3 = |®|cosy. (1-12)
Используя формулу (1.9) для вычисления длины вектора,
получаем
|®|2 = |®|2cos2a + |®|2cos2/3 + |®|2 cos2 у,
Вопросы и задачи
41
откуда после сокращения на |®| / 0 вытекает следующая фор-
мула связи для направляющих косинусов:
cos2 а + cos2 /3 4- cos2 у = 1. (1.13)
В начале главы мы говорили о том, что векторные величи-
ны имеют скалярную характеристику (длину) и направление.
Направляющие косинусы не зависят от длины вектора: при
умножении вектора на положительное число направляющие ко-
синусы не изменяются. Именно они и характеризуют направле-
ние вектора. Если известны длина вектора и его направляющие
косинусы, то вектор определен однозначно.
Направляющие косинусы могут быть заданы углами а, /3,
7 из отрезка [0,л], удовлетворяющими соотношению (1.13). В
качестве примера можно взять вектор {cosa; cos/3; cosy}. Со-
гласно формулам (1.9) и (1.13) этот вектор имеет единичную
длину, а значения coso, cos/3, cosy представляют собой напра-
вляющие косинусы этого вектора.
В случае ортонормированного базиса в пространстве V2
направление вектора удобно указывать одним углом <р, кото-
рый отсчитывается от первого векто-
ра базиса против хода часовой стрел-
ки (в случае положительного значе-
ния). Угол <р, длина вектора х и его
координаты {zi; жг} связаны соотно-
шениями:
Рис. 1.16
Xi = |® | cos^, Ж2 = |se|sin<p.
Вопросы и задачи
1.1. Что можно сказать о сумме А& 4- В<5 4- сХ трех
векторов?
1.2. Доказать, что если медианы треугольника АВС пересе-
каются в точке М, то: а) Ahi = (а% + А&) /3; б) мХ 4- 4-
42
1. ЛИНЕЙНЫЕОПЕРАЦИИ НАД ВЕКТОРАМИ
1.3. Пусть биссектриса угла А треугольника АВС пересе-
кает противоположную сторону в точке L. Выразить вектор,
однонаправленный с вектором , через векторы ЙиМ
1.4. Как связаны вектор Ж? и ортогональная проекция
пр_^(4^ + В^) ?
1.5. Доказать, что ABCD — параллелограмм, если =
= 2а - 3b + с, Ж? = а - Ь 4- 2с, А15 = -а 4- 2b 4- с.
1.6. Найти длину вектора а — — г 4- 3j 4- k.
1.7. Может ли некоторый ненулевой вектор образовывать с
векторами г, j и k углы, равные соответственно: а) 120°, 135°,
45°; б) 120°, 135°,60°.
1.8. Найти значения параметра t, при которых вектор а =
= — i 4-1j 4- 4fc имеет длину, равную 5, и образует с вектором j
тупой угол.
1.9. Найти значения параметра t, при которых вектор а =
= i+(t-t2)j -2k: а) образует с вектором j угол 90°; б) кол-
линеарен вектору Ь = —2г — j + 4k; в) является противополож-
но направленным вектору Ь = —2г 4- j 4- 4k.
1.10. Доказать, что три вектора линейно зависимы, если
среди них есть нуль-вектор.
1.11. Доказать, что если ABCD — трапеция, то векторы
линейно зависимы.
1.12. Доказать, что векторы а = i 4- 2 j, b = i — 3j и с =
= 4i — 2j линейно зависимы. Выразить: а) вектор с через
векторы а и Ь; б) вектор а через векторы Ь и с; в) вектор
Ь через векторы а и с.
1.13. Доказать, что векторы а = i + 2j, b = i-3j и с =
= 2i4-4j линейно зависимы. Можно ли выразить вектор b через
векторы а и с?
Вопросы и задачи
43
1.14. Выяснить, образуют ли базис в V2 векторы: a) a =
= » + j, b = i-j; б) a = -i + 2j, b = 2i-4j.
1.15. Доказать, что если три ненулевых вектора линейно
зависимы, то любой из них является линейной комбинацией,
остальных.
1.16. Найти все значения параметра t, при которых векторы
a = i + j' + к, b — i — 3j + к, c = 3» — 5tj + tk образуют базис
в V3.
1.17. Доказать, что равновесие точки невозможно под дей-
ствием: а) двух неколлинеарных сил; б) трех некомпланарных
сил.
1.18. В V3 заданы п векторов. Как можно построить их
сумму?
1.19. Доказать, что система из п векторов, соединяющих
центр масс системы из п материальных точек с этими точками, -
линейно зависима.
2. ПРОИЗВЕДЕНИЯ
ВЕКТОРОВ
2.1. Определители второго
и третьего порядков
В этой главе приведены начальные сведения об определите-
лях второго и третьего порядков. Это вызвано тем, что неко-
торые формулы векторной алгебры, записанные через опреде-
лители, имеют достаточно компактный вид и удобны как при
изложении теории, так и при решении задач. Более полная те-
ория определителей изложена далее (см. 7).
Четырем числам а^, bi, а2, Ъ2 можно поставить в соот-
ветствие выражение а^Ь2 — c^i, которое называют определи-
телем второго порядка и обозначают в виде следующей
таблицы из двух строк и двух столбцов, отделяемой слева и
справа вертикальными линиями:
— —
«1 h
а2 Ь2
(2-1)
Числа ai и Ь2 из-за их расположения в определителе (2.1) на-
зывают диагональными элементами определителя второго
порядка и говорят, что они расположены на его главной диа-
гонали. Аналогично числа а2 и Ь\ расположены на второй
(или побочной) диагонали определителя. Можно сказать,
что определитель второго порядка равен произведению его
элементов главной диагонали минус произведение элементов по-
бочной диагонали, например:
3 7
5 —2
= 3(—2) — (5-7) = —41.
2.1. Определители второго и третьего порядков 45
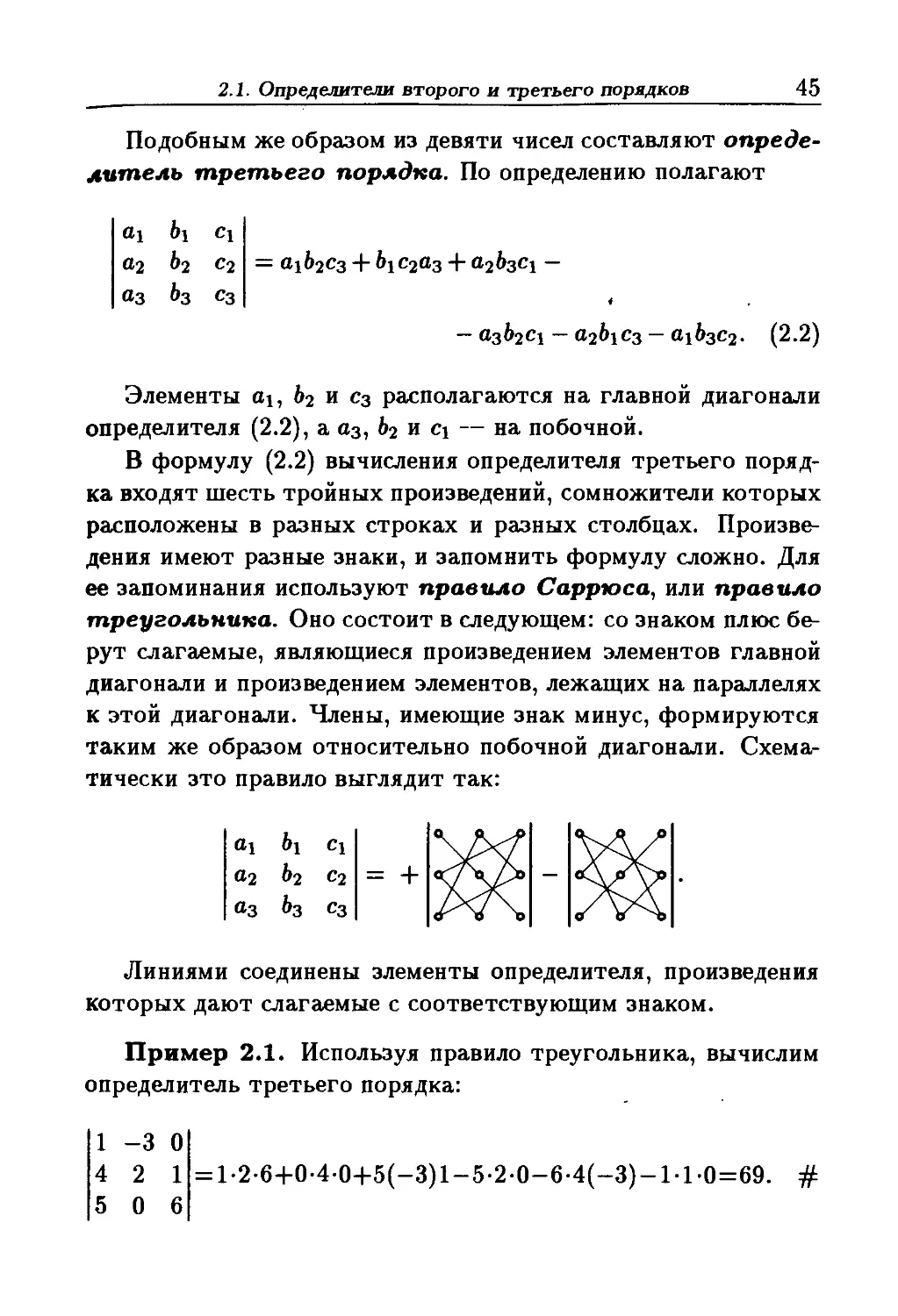
Подобным же образом из девяти чисел составляют опреде-
литель третьего порядка. По определению полагают
«1
«2
аз
bi
&2
Ьз
С1
с2 — а1^2с3 + Ь\С2аз + П2^3С1 —
Сз
— Яз^2с1 — а2^1с3 — а1^3с2- (2.2)
Элементы «ц, Ьг и сз располагаются на главной диагонали
определителя (2.2), а аз, Ь2 и ci — на побочной.
В формулу (2.2) вычисления определителя третьего поряд-
ка входят шесть тройных произведений, сомножители которых
расположены в разных строках и разных столбцах. Произве-
дения имеют разные знаки, и запомнить формулу сложно. Для
ее запоминания используют правило Саррюса, или правило
треугольника. Оно состоит в следующем: со знаком плюс бе-
рут слагаемые, являющиеся произведением элементов главной
диагонали и произведением элементов, лежащих на параллелях
к этой диагонали. Члены, имеющие знак минус, формируются
таким же образом относительно побочной диагонали. Схема-
тически это правило выглядит так:
Линиями соединены элементы определителя, произведения
которых дают слагаемые с соответствующим знаком.
Пример 2.1. Используя правило треугольника, вычислим
определитель третьего порядка:
1
4
5
-3 О
2
О
1
6
= 1-2-6+0-4-0+5(—3)1 —5-2-0—6-4(—3) —1-1-0=69. #
46
2. ПРОИЗВЕДЕНИЯ ВЕКТОРОВ
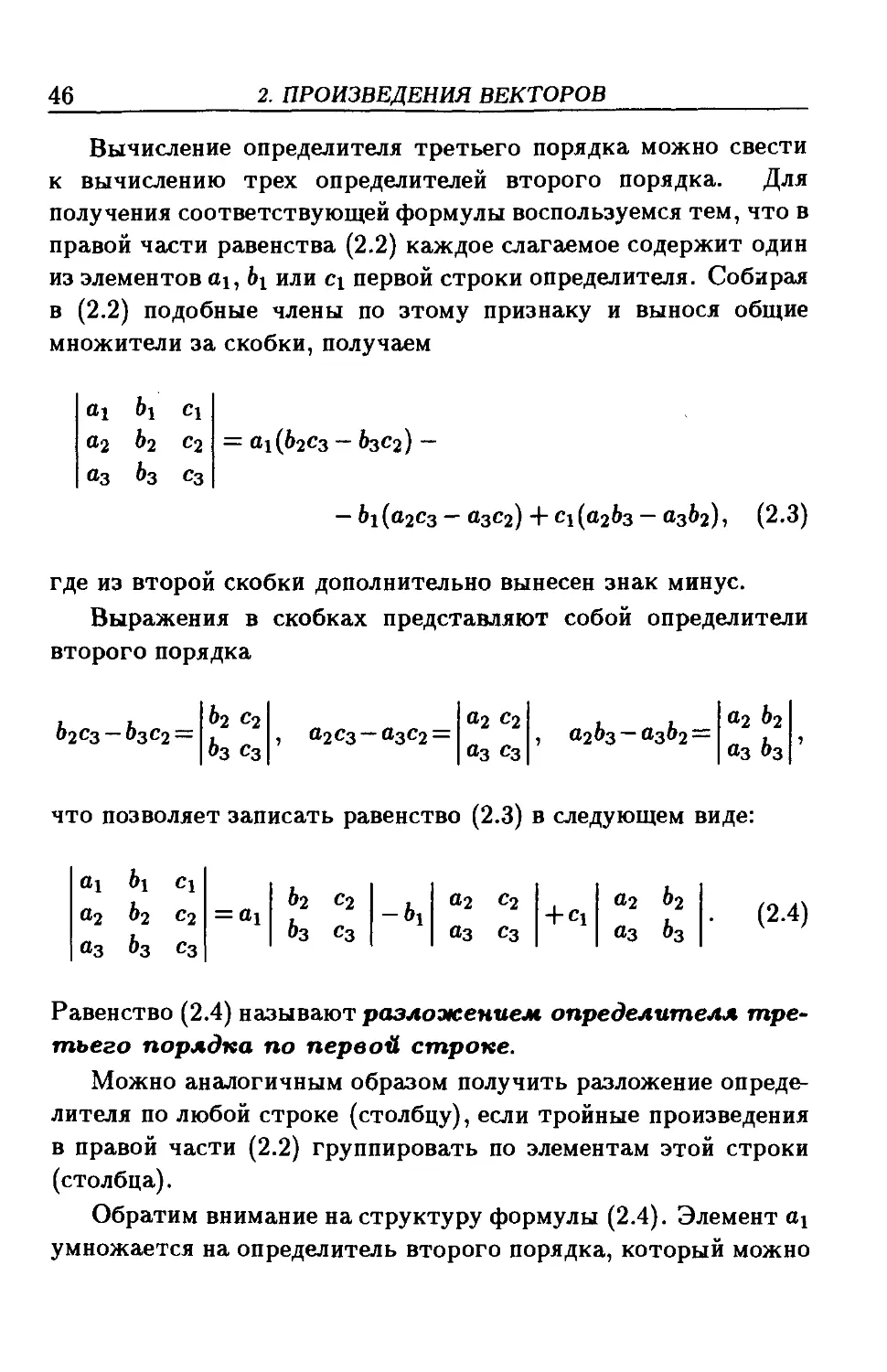
Вычисление определителя третьего порядка можно свести
к вычислению трех определителей второго порядка. Для
получения соответствующей формулы воспользуемся тем, что в
правой части равенства (2.2) каждое слагаемое содержит один
из элементов «ц, bi или ci первой строки определителя. Собирая
в (2.2) подобные члены по этому признаку и вынося общие
множители за скобки, получаем
ai bi ci
а2 ^2 с2
«з 63 с3
= ai(62c3 — 63с2) —
— bi (агсз — 0,302} + ci (аг^з — «3^2) 5 (2-3)
где из второй скобки дополнительно вынесен знак минус.
Выражения в скобках представляют собой определители
второго порядка
Ь2С3 —^Зс2 =
Ьг С2
63 с3
О2сЗ~аЗс2 =
0,2 С2
а3 с3
0263 — 0362 —
0,2 62
ОЗ 63
что позволяет записать равенство (2.3) в следующем виде:
О1
а2
аз
bi
62
63
С1
С2
сз
= О1
Ъ2
63
С2 _ & “2
С3 1 Оз
С2
сз
+ С1
О2
аз
62
63
(2-4)
Равенство (2.4) называют разложением определителя тре-
тьего порядка по первой строке.
Можно аналогичным образом получить разложение опреде-
лителя по любой строке (столбцу), если тройные произведения
в правой части (2.2) группировать по элементам этой строки
(столбца).
Обратим внимание на структуру формулы (2.4). Элемент Oj
умножается на определитель второго порядка, который можно
2.1. Определители второго и третьего порядков 47
получить из вычисляемого определителя третьего порядка вы-
черкиванием в нем 1-й строки и 1-го столбца, на пересечении
которых расположен элемент «ц. Аналогично, элемент b\ (ci)
умножается на определитель второго порядка, который можно
получить из вычисляемого определителя вычеркиванием в нем
1-й строки и 2-го (3-го) столбца, на пересечении которых рас-
положен этот элемент. Отметим, что знаки слагаемых в правой
части (2.4) чередуются начиная со знака плюс.
Пример 2.2. Вычислим определитель третьего порядка
а b с
2-13
-4 5 1
a,b,c € R,
используя его разложение по 1-й строке:
Определители второго и третьего порядков находят приме-
нение при решении систем линейных уравнений. Рассмотрим,
например, систему двух линейных уравнений
а1Х + Ь1у = С1,
а2х + Ь2у = с2
(2-5)
относительно неизвестных х, у и найдем ее решение методом
исключения неизвестных. Для этого первое уравнение умно-
жим на —а2, второе — на а( и после почленного сложения
этих выражений и приведения подобных членов получим соот-
ношение
(«1^2 — «251)У = «1^2 — «2^1-
48
2. ПРОИЗВЕДЕНИЯ ВЕКТОРОВ
Исключив аналогичным приемом из уравнений системы (2.5)
неизвестное у, найдем
(01^2 ~ а2Ь^)х = 61^2 ~ с2^1-
Если определитель
Д = °*
bi
а2
который называют определителем системы второго по-
рядка (2.5), не равен нулю, то единственное решение этой
системы имеет вид
где определители
ci Ь,
(2-6)
С2 Ь2
«1
«2
С1
С2
v —
получаются из определителя Д заменой столбца коэффициентов
при соответствующем неизвестном на столбец правых частей
системы (2.5).
Решение системы (2.5) в виде (2.6) называют формулами
Крамера (Г. Крамер (1704-1752) — швейцарский математик).
Они выражают при Д / О единственное решение системы (2.5)
через ее коэффициенты.
Аналогичным образом может быть записано решение сис-
темы трех линейных уравнений
' агх + bry + c^z = di,
• a2x + b2y + c2z = d2,
„ азх + b3y + c3z = d3
(2-7)
относительно неизвестных
x, у, z. Формулы Крамера в этом
случае имеют вид
X = __
Z = “
У = ~г
(2-8)
2.2. Скалярное произведение
49
где
«1 bi С1 d\ bi Cl
д = «2 Ьг С2 /0, Дх = di bi Ci
«3 Ьз Сз Лз Ьз Сз
сц d\ ci di b\ d\
— ®2 ^2 c2 Й2 ^2 di
«з d^ c3 a-3 Ьз ds
и позволяют найти единственное решение системы при условии,
что определитель А системы третьего порлдка не ра-
вен нулю.
Пример 2.3. Система трех линейных уравнений
2х - Зу - 4г = 6,
За: + 5у + 2г = 1,
5х + 2у - Зг = 8
имеет единственное решение, так как ее определитель
2 -3 —4
Д = 3 5 2 = -19
5 2 -3
не равен нулю. Вычисляя еще три определителя
6 -3 -4 2 6-4 2-3 6
д*= 1 5 2 = -19, Д„ = 3 1 2 =0, дг= 3 5 1 = 19,
8 2-3 5 8-3 5 2 8
по формулам Крамера (2.8) находим, что единственным реше-
нием рассматриваемой системы является х = 1, у = 0, г = — 1.
2.2. Скалярное произведение
Есть несколько операций умножения векторов. В резуль-
тате первой из них мы получаем действительное число, т.е.
скалярную величину.
50
2. ПРОИЗВЕДЕНИЯ ВЕКТОРОВ
Определение 2.1. Скалярным произведением двух
векторов а и Ь называют число, равное |а| |6|cos<p — произ-
ведению длин |а| и |Ь| этих векторов на косинус угла ip между
ними.
Скалярное произведение векторов а и Ь далее будем обозна-
чать ab, хотя в литературе встречается и обозначение (а, 6).
Используя теорему 1.1, можно выразить скалярное произве-
дение двух векторов через ортогональную проекцию на напра-
вление. Если вектор а ненулевой, то скалярное произведение
аЬ векторов а и Ь получается перемножением длины вектора
а и ортогональной проекции вектора b на направление векто-
ра a: ab = |а| про Ъ. Аналогично при 6/0 имеем равенство
ab= |Ь|прьа.
Если угол между двумя ненулевыми векторами прямой (т.е.
равен 90°), то такие векторы называют ортогональными.
Если хотя бы один из двух векторов является нулевым, то
их скалярное произведение будет равно нулю независимо от то-
го, какое значение выбрано в качестве угла между векторами.
Нулевой вектор считают ортогональным любому другому век-
тору.
Теорема 2.1. Для того чтобы два вектора были ортого-
нальны, необходимо и достаточно, чтобы их скалярное произ-
ведение равнялось нулю.
◄ Согласно определению 2.1, скалярное произведение ненуле-
вых векторов а и 6 равно |а| |6| cos</>. Поэтому его знак опреде-
ляется углом (р между векторами а и 6:
- угол <р острый: ab > 0;
- угол <р тупой: ab < 0;
- угол <р прямой: ab = 0.
Мы видим, что два ненулевых вектора ортогональны тогда
и только тогда, когда угол между ними прямой. Если один из
векторов является нулевым, то скалярное произведение также
равно нулю. При этом угол между векторами не определен,
2.2. Скалярное произведение
51
но, как уже было отмечено, считают, что нулевой вектор
ортогонален любому другому. ►
Скалярное произведение имеет следующие свойства.
1°. Скалярное произведение коммутативно: ab=ba.
4 Свойство непосредственно вытекает из определения 2.1, так
как скалярное произведение не зависит от порядка сомножите-
лей. ►
2°. Совместно с умножением на число операция скалярного
умножения ассоциативна: (Аа)Ь=А(аЬ).
4 Если 6 = 0 — нулевой вектор, то обе части доказываемого
равенства равны нулю. Если же 6 / 0, то, используя выраже-
ние скалярного произведения через ортогональную проекцию
вектора на направление вектора 6 и утверждение теоремы 1.2,
получаем
(Аа)Ь = Ь(Аа) = |6| прь(Аа) = А|Ь|прьа = А(аЬ). ►
3°. Скалярное умножение и сложение векторов связаны
свойством дистрибутивности: (а +Ь)с = ас +Ьс.
4 Доказательство аналогично предыдущему. При с = 0 обе
части доказываемого равенства равны нулю. Если же с / 0, то
удобно выразить скалярное произведение через ортогональные
проекции векторов на направление вектора с. Используя
теорему 1.2, находим
(а + Ь)с = |с| прс (а + 6) = |с| (прс а + прс 6) =
= |с|прс а + |с|прс 6 = ас 4- Ьс. ►
Величину аа называют скалярным квадратом вектора
а и обозначают а2.
4°. Свойство скалярного квадрата: а2 0, причем а2 = О
только при а = 0.
52
2. ПРОИЗВЕДЕНИЯ ВЕКТОРОВ
◄ Действительно,
а2 = аа= |а| |а| cosO — |а|2.
Поскольку квадрат длины вектора — всегда неотрицательное
число, то неравенство а2 0 выполнено всегда. Равенство
а2 = 0 эквивалентно соотношению |а| = 0, т.е. тому, что а —
нулевой вектор. ►
Замечание 2.1. Свойства 2°-3° часто объединяют в свой-
ство линейности скалярного произведения относительно
первого сомножителя. Благодаря коммутативности скалярно-
го произведения (свойству 1°) скалярное произведение линейно
и по второму сомножителю. Действительно,
а(АЬ) = (АЬ)а = А(Ьа) = А(аЬ),
а(Ь-|-с) = (Ь + с)а = Ьа-|-са = аЬ + ас. #
Свойства скалярного произведения часто используют при
решении задач.
Пример 2.4. Найдем длину вектора а = Зс — 2d при
условии, что |с| = 5, \d| = 4, а угол <р между векторами end
равен 60°.
Поскольку |а| = у/аа, то, вычисляя скалярный квадрат
вектора а, находим, что
аа = (Зс — 2d) (Зс — 2d) =
— 9сс — 12cd + 4dd = 9 |с|2 — 12 |с| |d|cos</? + 4 |d|2 =
= 9 • 25 — 12 • 5-4 • 0,5 + 4 • 16= 225 — 120 +64= 169.
Следовательно, |а| = у/аа = 13.
Пример 2.5. В треугольнике АВС угол при вершине А
равен 120°, а длина стороны АС в три раза больше расстояния
между вершинами А и В. Найдем острый угол между
стороной ВС и медианой AM треугольника.
2.2. Скалярное произведение
53
Угол <р между стороной
ВС и медианой AM (рис. 2.1)
равен углу между векторами
В& и АЙ. Согласно опреде-
лению 2.1 скалярного произ-
ведения, косинус угла выра-
жается через скалярное произведение этих векторов и их длины
с помощью формулы
cos kp =
Пусть |4В| = s. Тогда |4С| = 3s, и поскольку вЗ = А(5 — А&,
то
аЙ=А% + ВЙ = А$ + 0,5В^ = 0,5(4^ + 4^)
и поэтому
аЙ-В(5 = 0,5(411 + 4^) (4^ - 4^) =
= 0,5(14^|2 - 14^|2) = 0,5(9з2 - з2) = 4s2.
Вычислив длины векторов АЙ и
14Л?| = V АЙ • АЙ = 0,5\/(^ + 4^)(4^+ 411) =
= 0,5 У(4^2 + 24^-4^ + 4^2 =
= 0,5\/9s2 + 6s2cos 120° + s2 = 0,5s\/7,
= V (A& - 24^ • A& + A& = г/эз2 - 6s2 cos 120° + s2 = зд/13,
54
2. ПРОИЗВЕДЕНИЯ ВЕКТОРОВ
найдем, что
4s2 8
COS<P = 0,5sx/7sx/13 = Ж
и поскольку € (0, тг/2), то = arccos(8/>/91). #
Пусть векторы а и Ь из V3 заданы своими координатами
в ортонормированием базисе г, j, k: а — {ха; уа; za}, Ь =
= {^ь', Уь', Zb}. Это означает, что имеются разложения
а = xai + yaj + zak, Ь = xbi + уьз + Zbk.
Используя их и свойства 1°-4° скалярного произведения,
вычислим
ab = (xai + yaj + zak) (xbi + ybj + zbk) =
= xaibii + xaybi 3 + xazbik +
+ y«Xbji + УаУЬЗЗ + У a Zb j k +
+ zaxbki + zaybkj + zaZbkk -
= XaXb& + УаУЬЗ2 + = XaXb + УаУЬ + ZaZb.
Окончательный ответ получен с учетом того, что ортонор-
мированность базиса «, j, к означает выполнение равенств
ij — ik =jk — O, ii = 33 = kk = 1. Таким образом,
ab= хахь + уауь + гагь, (2.9)
т.е. скалярное произведение векторов в ортонормированном
базисе равно сумме попарных произведений одноименных ко-
ординат.
Из теоремы 2.1 и формулы (2.9) получаем следующий кри-
терий ортогональности векторов а и Ь:
xaXb + yayb + zazb = 0. (2.10)
Вспомним, что, согласно определению 2.1 скалярного про-
изведения,
аЬ=|а||Ь| costp,
2.2. Скалярное произведете
55
где = (а,Ь) — угол между векторами а и Ь. Зная, как
выражается скалярное произведение и длины векторов через
их координаты в ортонормированном базисе, можно вычислить
и косинус угла между ненулевыми векторами. Действительно,
исходя из формулы
ab
Получаем
cosV = ад,+«.!» +ад
Vzl + s.+2lVzl+
В случае, когда a,b € V2 и известны координаты этих
векторов в ортонормированном базисе «, j:
a = xai + yaj, b = xbi + ybj,
справедливы формулы, аналогичные (2.9)-(2.11): для вычисле-
ния скалярного произведения
ab = xaxb + yayb,
(2.12)
для критерия ортогональности
Xaxb + yayb = О
и для косинуса угла между ненулевыми векторами a, Ь
cos (а, Ь) =
хахь + уауь
у/Ха + У^ХЬ+УЬ
Пример 2.6. Найдем значения параметра t, при которых
векторы а = {£; 1 — t; 7} и b = {t + 1; 2; —2}, заданные своими
координатами в ортонормированном базисе, ортогональны.
Используя критерий (2.10) ортогональности векторов, по-
лучаем уравнение
t(t + 1) + 2(1 -1) - 14 = 0 .
относительно параметра t. Решая это квадратное уравнение,
находим, что лишь при t = -3 и t = 4 данные векторы ортого-
нальны.
56
2. ПРОИЗВЕДЕНИЯ ВЕКТОРОВ
2.3. Векторное произведение
Векторное произведение вводится для двух векторов из V3.
Оно опирается на следующее понятие.
Определение 2.2. Упорядоченную тройку некомпланар-
ных векторов а,Ь,с называют правой, если направление век-
тора а совмещается с направлением вектора Ь при помощи
кратчайшего поворота вектора а в плоскости этих векторов,
который со стороны вектора с совершается против хода, часо-
вой стрелки. В противном случае (поворот по ходу часовой
стрелки) эту тройку называют левой.
Так как три некомпланарных вектора образуют базис в
V3, то также говорят о правых и левых базисах. Каждый
базис является либо правым, либо левым, т.е. все базисы в V3
разделяются на два класса: класс правых базисов и класс левых
базисов. Класс, к которому относится фиксированный базис,
называют его ориентацией.
Определение 2.3. Векторным произведением векто-
ров а и Ь называют такой вектор с, который удовлетворяет
следующим трем условиям.
1. Вектор с ортогонален векторам а и Ъ.
2. Длина вектора с равна |с| = |а| |Ь| sin <р, где (р — угол
между векторами а и Ь.
3. Упорядоченная тройка векторов а,Ь,с является правой
(рис. 2.2).
Векторное произведение векторов а и Ь далее будем обо-
Рис. 2.2
значать ахЬ, хотя в литературе
встречается и обозначение [а,Ь].
Если векторы а и b коллине-
арны, то условие 3 в определении
2.3 становится неопределенным,
так как тройка векторов будет
2.3. Векторное произведение
57
компланарна. Однако при этом, согласно условию 2 определе-
ния, длина векторного произведения должна равняться нулю.
Это однозначно определяет векторное произведение как век-
тор, равный нуль-вектору. Поэтому дополним определение 2.3,
полагая, что векторное произведение двух коллинеарных век-
торов есть нуль-вектор. В это дополнение входит и случай,
когда хотя бы один из двух векторов является нулевым, так
как в этом случае эти два вектора коллинеарны.
Векторное произведение используют, например, в механи-
ке. Так, момент силы F, при- ?
ложенной к точке М, относи-
тельно некоторой точки О равен
OJllxF (рис. 2.3). Однако роль
векторного произведения выхо-
дит далеко за рамки его механи- рис 3
ческой интерпретации.
Свойства векторного произведения можно разделить на две
категории: геометрические и алгебраические. Рассмотрим
первую категорию — геометрические свойства.
1°. Для того чтобы два вектора были коллинеарны, необ-
ходимо и достаточно, чтобы их векторное произведение равня-
лось нуль-вектору.
◄ Необходимость следует из приведенного выше обсуждения
определения 2.3 векторного произведения в случае коллинеар-
ных сомножителей. Докажем достаточность. Если ахЬ = 0, то
|ахЬ| = 0, т.е. |а| |t>|sin<p = 0, где tp — угол между векторами а
и Ь. Но тогда выполнено, по крайней мере, одно из трех ра-
венств: |а| = 0, |Ь| = 0 или sin у? = 0. Однако каждое из этих
равенств влечет коллинеарность векторов а и Ь. ►
2°. Если векторы а и b неколлинеарны, То модуль |ахЬ|
их векторного произведения равен площади параллелограмма,
построенного на этих векторах как на смежных сторонах
(рис. 2.4).
58
2. ПРОИЗВЕДЕНИЯ ВЕКТОРОВ
◄ Свойство объясняется тем, что модуль векторного произве-
дения и площадь параллелограмма по
двум смежным сторонам и углу меж-
// ду ними вычисляют по одной и той
же формуле как произведение длин
векторов (сторон параллелограмма)
Рис. 2.4 на синус угла между ними. ►
3°. Если ненулевые векторы а и Ь ортогональны, то для
геометрического построения вектора ахЬ достаточно совме-
стить их начала и в плоскости, перпендикулярной вектору 6,
повернуть вектор а на 90° вокруг вектора Ь по ходу часовой
стрелки (если смотреть с конца вектора Ь), а затем умножить
повернутый вектор на число |t>|.
◄ Действительно, так как векторы а и Ь ортогональны, их
векторное произведение есть вектор, ортогональный и а, и Ь,
который по модулю равен |а| |Ь|. Векторы
ь а и ахЬ лежат в плоскости, перпендику-
лярной вектору Ь. Поэтому мы можем
90<> получить вектор ахЬ поворотом векто-
л. ра а вокруг вектора Ь на прямой угол с
Г 7 А последующей корректировкой длины при
J помощи умножения на число |Ь|. Так как
тройка векторов а, Ь, ахЬ, по опреде-
axb лению векторного произведения, является
правой, поворот должен выполняться по
Рис. 2.5 и /г* ~
ходу часовой стрелки (рис. 2.5). ►
Для геометрического построения векторного произведения
в общем случае нам потребуется следующее понятие. Про-
екцией пр^а вектора а = А& на плоскость тг назовем
вектор, соединяющий ортогональные проекции на плоскость 7Г
начала А и конца В вектора а (рис. 2.6). Напомним, что ор-
тогональной проекцией точки на плоскость называют
основание перпендикуляра, опущенного из этой точки на плос-
кость.
2.3. Векторное произведение
59
Проекция вектора на плос-
кость сохраняет свойства проек-
ции вектора на прямую: проек-
ция суммы векторов равна сум-
ме их проекций, при умножении
вектора на число его проекция
на плоскость умножается на это
число.
Рис. 2.6
4°. Пусть тг — плоскость, перпендикулярная вектору Ь.
Тогда axb = (np^a)xb.
На рис. 2.7 векторы а, Ь и а — пр^а изображены с общим
началом в некоторой точке плоскости тг.
Прежде всего отметим, что
эти векторы компланарны, так
как направление вектора Ь и пер-
пендикуляр из конца а на плос-
кость тг параллельны. Поэтому
векторы ахЬ и (np^a)xb колли-
неарны, так как они перпендику- Рис 2.7
лярны плоскости, параллельной
векторам а, b и npffa. Более того, векторы ахЬ и (пр7Га)хЬ
однонаправлены. Поэтому они равны, если равны их длины.
Проверим равенство длин:
|axb| = |a||b|sin<p, |(np„a)xb| = |пр„а||Ь|.
Но |np„a| = |а| sin </>, значит, длины совпадают. ►
5°. Чтобы геометрически построить векторное произведе-
ние векторов а и Ь, надо, совместив их начала, спроектировать
вектор а на плоскость тг, перпендикулярную вектору Ь. По-
лученную проекцию в плоскости, перпендикулярной вектору Ь,
повернуть вокруг вектора Ь на угол 90° по ходу часовой стрел-
ки (если смотреть с конца вектора Ь) и результат поворота
умножить на число |Ь|.
60
2. ПРОИЗВЕДЕНИЯ ВЕКТОРОВ
◄ Сформулированное свойство непосредственно вытекает из
свойств 3° и 4°. ►
Алгебраические свойства векторного произведения исполь-
зуют при преобразовании выражений, в которые входят век-
торные величины. Важнейшими алгебраическими свойствами
являются следующие три:
- свойство антикоммутативности ахЬ = —Ьха;
- свойство ассоциативности совместно с умножением на
число (Аа)хЬ= А(ахЬ);
- свойство дистрибутивности относительно сложения (а +
+ Ь)хс = ахс + Ьхс.
4 Доказывая свойство антикоммутативности, заметим, что ес-
ли векторы а и Ь коллинеарны, то в обеих частях равенства
ахЬ = —Ьха в соответствии со свойством 1° стоит нулевой век-
тор. Если же векторы а и Ь неколлинеарны, то существует
плоскость, которой они параллельны. В силу первого усло-
вия определения 2.3 векторного произведения векторы ахЬ и
Ьха перпендикулярны этой плоскости и, следовательно, кол-
линеарны. Ясно, что и длины векторов ахЬ и Ьха равны,
поскольку совпадают с площадью одного и того же паралле-
лограмма (свойство 2°). Остается доказать, что векторы ахЬ
и Ьха имеют противоположное направление. Это следует из
того, что если тройка векторов а,Ь,ахЬ правая, то тройка
Ь,а,ахЬ — левая. Поэтому, заменив в последней тройке третий
вектор на противоположный, получим правую тройку векторов
Ь,а,— ахЬ, причем вектор — ахЬ коллинеарен вектору Ьха и
имеет ту же длину. Согласно определению 2.3, это означает,
что вектор — ахЬ равен векторному произведению векторов Ь
и а, т.е. ахЬ— -Ьха.
Свойство ассоциативности доказывается аналогично. В
случае коллинеарных векторов а и Ь, а также при А = 0 век-
торы (Аа)хЬ и А(ахЬ) равны нуль-вектору, поскольку каждый
из них является или векторным произведением коллинеарных
2.3. Векторное произведение
61
векторов, или произведением вектора на число, равное ну-
лю. Следовательно, в рассматриваемых случаях равенство
(Аа)хЬ= A(axt>) выполнено.
Предположим теперь, что векторы а и Ь неколлинеарны,
а А / 0. Покажем сначала, что в левой и правой частях до-
казываемого равенства стоят коллинеарные векторы, равные
по длине. Действительно, если считать, что векторы а, Ь и
Аа имеют общее начало, то пары а, b и Аа, b неколлинеарных
векторов порождают одну и ту же плоскость, которой перпен-
дикулярны их векторные произведения ахЬ и (Аа)хЬ. Поэтому
векторы А(ахЬ) и (Аа)хЬ коллинеарны. Вычисляя их длины,
убеждаемся, что эти длины равны, так как
|А(ахЬ)| = |А| |ах(>| = |А| |а| |Ь|sin<р,
где (р — угол между векторами а и Ь, а
|(Аа)хЬ| = |Аа| |t>|sin = | А| |а| |Ь| sin = |А| |а| |b|sin(p,
где — угол между векторами Аа и Ь и использовано равенство
sin = sin </>, выполненное при всех А / 0.
Два коллинеарных вектора, равные по длине, либо совпа-
дают, либо являются противоположными друг другу. Нам
достаточно исключить последнюю возможность, доказав, что
векторы (Аа)хЬ и А(ахЬ) являются однонаправленными.
Если А > 0, то векторы а и Аа однонаправлены. Следова-
тельно, векторы (Аа)хЬ и ахЬ тоже являются однонаправлен-
ными. А поскольку векторы ахЬ, Х(ахЬ) тоже однонаправле-
ны, то однонаправлены и векторы (Аа)хЬ и А(ахЬ).
Если А < 0, то векторы а и Аа являются противоположно
направленными. Следовательно, векторы (Аа)хЬ и ахЬ тоже
являются противоположно направленными. Умножение векто-
ра ахЬ на отрицательное число А меняет его направление на
противоположное. Поэтому векторы (Аа)хЬ и А(ахЬ) имеют
одинаковое направление.
62 2. ПРОИЗВЕДЕНИЯ ВЕКТОРОВ
Остановимся на доказательстве свойства дистрибутивно-
сти1. Если с = 0, то равенство является очевидным, так как
и слева, и справа будут стоять нулевые векторы. Поэтому этот
случай далее не рассматриваем и полагаем, что с / 0. Мы
также можем считать, что |с| = 1, так как равенство в общем
случае
(а + Ь)хс = ахс + Ьхс
при помощи свойства ассоциативности легко преобразовать к
форме
|с| (а + Ь) хс' = |с| ахс' + |с| Ьхс', с' = —,
Iе I
т.е. к частному случаю тройки векторов а, Ь, d, для которой
И = 1.
Итак, пусть |с| — 1. Вспомним геометрическое свойство 5°
(см. с. 59), дающее геометрическую интерпретацию произведе-
ния двух векторов. При нашем дополнительном условии |с| = 1
преобразование произвольного вектора х в векторное произ-
ведение ххе происходит за два шага: проектирование х на
плоскость тг, перпендикулярную вектору с, и поворот проек-
ции в этой плоскости на прямой угол. Согласно свойству 4°
векторного произведения (см. с. 59), получаем
(a + b)xc= (npff(a + b))xc= (пр^а-Ьпр^Ь)хс,
ахс + Ьхс = (np^ajxc-f- (пр^. 1>)хс,
и нам остается показать, что
(npff а + пр„ Ь) хс = (пр„ а) хс + (np„ Ь) хс.
Следующее далее доказательство опирается на геометрическое пред-
ставление векторного произведения и в этом смысле достаточно наглядно,
так как в нем в основном используются понятия элементарной геометрии.
Далее будет приведено и другое доказательство, более короткое, но и более
формальное (см. 2.4).
2.3. Векторное произведение
63
Обозначим а' = прка, Ъ' = прк6. Согласно свойству 5°, век-
торное умножение этих векторов на вектор с заключается в их
повороте на прямой угол в плос-
кости тг. Согласно правилу па- с
раллелограмма, сумма поверну-
тых векторов получается из сум- .......—
мы исходных а' + Ь' поворотом
на прямой угол, или, другими
словами, умножением на вектор рис 2 g
с (рис. 2.8). ►
Замечание 2.2. Доказанные свойства ассоциативности и
дистрибутивности векторного произведения объединяют, ана-
логично случаю скалярного произведения, в свойство линей-
ности векторного произведения относительно первого со-
множителя. В силу свойства антикоммутативности векторного
произведения векторное произведение линейно и относительно
второго сомножителя:
ах(А6) = —(А6)ха = —А(6ха) = А(ахб),
ах (6 +с) = -(6 +с) ха = -(Ьха + сха) = ахб + ахс.
Пример 2.7. Найдем площадь S треугольника, построен-
ного на векторах а = 3с — 2dn b = c + d при условии, что |с| = 1,
|<f| = 4, а угол <р между векторами с и d равен 30°.
Для решения задачи воспользуемся формулой
S = 0,5|ах6|.
Используя алгебраические свойства векторного произведения,
находим, что
ахЬ = (Зс — 2d)x(c + <f) = 3cxc + 3cxd — 2<fxc — 2dxd =
= 3cxd + 2cxd = 5cxd.
Поэтому
S = 0,5|ax6| = 0,5|5cxd| = 2,5 |c| |d|sin^ = 5. #
64 2. ПРОИЗВЕДЕНИЯ ВЕКТОРОВ
Алгебраические свойства позволяют вычислить векторное
произведение через координаты векторов и векторные про-
изведения векторов, образующих базис. Наиболее просто
соответствующие формулы выглядят в ортонормированном
базисе.
Рассмотрим правый ортонормированный базис i, j, k.
Векторные произведения всевозможных пар векторов базиса
(всего 9 пар) выглядят следующим образом:
ixj = к,
jxk = i,
kxi = j,
jxi = -k,
kxj = -i,
ixk - -j.
(2.13)
Векторные произведения базисных векторов на себя не приве-
дены, так как все они равны нуль-вектору.
Таблицу произведений (2.13) удобно трактовать как пра-
вило циклической перестановки: произведение двух базис-
ных векторов равно третьему, причем знак плюс выбирает-
ся, если тройка векторов (первый сомножитель, второй со-
множитель, произведение) получается
из исходного базиса г, у, к цикличе-
ской перестановкой. На рис. 2.9 этот
\ порядок соответствует движению про-
а 1 тив хода часовой стрелки. При дви-
/ жении на рис. 2.9 от первого сомно-
* -S жителя ко второму по ходу часовой
* стрелки в правых частях соответству-
Рис. 2.9 /о 1
ющих равенств (2.13) появляется знак
минус.
Рассмотрим два вектора а и Ь, заданных своими коорди-
натами в ортонормированном базисе i, j, к: а = {ха; уа; za},
Ь = {хь; уь; гь}. Тогда имеют место разложения этих векторов
а = xai + yaj + zak, b = xbi + ybj + zbk.
2.3. Векторное произведение
65
Исходя из этих представлений и алгебраических свойств век-
торного умножения, получаем
axb = (xai + yaj + zak)x(xbi + yb3 + zbk) =
= xaXbixi + xayt>ixj + xazbixk +
+ УаХЬЗ xi + УаУьЗ *3 + yaZbjxk +
4- zaXbkxi + zaybkxj + zazbkxk =
= (yaZb ~ ybZa)i + (zaXb - zbxa)j + (xayb - xbya)k =
Уа
Уь
г — Ха Za 3 + Ха Уа к.
Zb Xb Zb хь УЬ
Чтобы упростить полученную формулу, заметим, что она
похожа на формулу разложения определителя третьего поряд-
ка по 1-й строке, только вместо числовых коэффициентов стоят
векторы. Поэтому можно записать эту формулу как определи-
тель, который вычисляется по обычным правилам. Две строки
этого определителя будут состоять из чисел, а одна — из век-
торов. При вычислении определителя, умножение векторов на
числа и сложение векторов выполняются по обычным правилам,
введенным для этих линейных операций в гл. 1. Итак, форму-
лу вычисления векторного произведения в ортонормированном
базисе г, j, к можно записать в виде
ахЬ =
i
ха
хь
3 к
Уа Za .
УЬ zb
(2-14)
Пример 2.8. Найдем все векторы, ортогональные векто-
рам ni = {3; 1; -2} и n2 - - {1; -1; 1}.
Отметим, что векторы ni и п2 неколлинеарны, так как их
координаты непропорциональны, например:
Совместим начала этих векторов в некоторой точке. Тогда
существует единственная плоскость, содержащая эти векто-
66
2. ПРОИЗВЕДЕНИЯ ВЕКТОРОВ
ры. Искомое множество векторов, ортогональных данным, со-
впадает с множеством векторов, перпендикулярных указанной
плоскости, а зто множество совпадает с множеством векторов,
коллинеарных векторному произведению
m xni =
* 3
3 1
1 -1
к
-2
1
= — i — 5j — 4к.
Ответ: А(—i — 5j — 4fc), где A G R.
2.4. Смешанное произведение
Определение 2.4. Смешанным произведением трех
векторов а, Ь, с называют число, равное (ахб)с — скалярному
произведению векторного произведения первых двух векторов
и третьего вектора.
Смешанное произведение отличается от скалярного и век-
торного произведений в первую очередь тем, что имеет три
сомножителя, а не два. Обозначают смешанное произведение
трех векторов а, Ь, с так: аЪс.
Смешанное произведение имеет простой геометрический
смысл.
Теорема 2.2. Смешанное произведение трех некомпланар-
ных векторов abc равно объему параллелепипеда, построенного
на этих векторах как на ребрах, выходящих из одной вершины,
взятого со знаком плюс, если тройка векторов а, Ь, с — правая,
и со знаком минус, если зта тройка — левая.
◄ Вектор ахЬ перпендикулярен грани указанного параллеле-
пипеда, построенной на векторах а и 6, и в силу свойства 2
векторного произведения (см. с. 57) имеет длину, равную пло-
щади S этой грани (рис. 2.10). Обозначив через е единичный
вектор, ортогональный векторам а и Ь и однонаправленный
2.4. Смешанное произведение
67
с векторным произведением
ахЬ, получим
ахЬ = Se.
Смешанное произведение
abc равно скалярному произ-
ведению вектора Se на век-
тор с и равно S |c|cos^, где
— угол между векторами
ахЬ и с. Отметим, что число
Рис. 2.10
|c|Cosy> равно проекции вектора
с на направление вектора е, а его модуль, т.е. ||c|cos9?|, равен
высоте h параллелепипеда. Знак проекции определяется углом
между сие. Если < 90°, то векторы сие находятся по
одну сторону от плоскости векторов а, Ь. Значит, тройки век-
торов а, Ь, е и а, Ь, с имеют одну и ту же ориентацию —
правую. В этом случае смешанное произведение положитель-
но и равно объему параллелепипеда со знаком плюс. Если же
<р > 90°, то ориентация указанных троек различная, т.е. тройка
а, Ь, с является левой, и смешанное произведение будет равно
объему параллелепипеда со знаком минус. ►
Замечание 2.3. Если векторы а, Ь, с компланарны, то
параллелепипед, построенный на них, вырождается (лежит в
плоскости). Поэтому ему следует приписать нулевой объем.
Непосредственно из определения заключаем, что для компла-
нарных векторов а, Ь, с векторы ахЬ и с ортогональны, т.е.
(ахб)с = 0. Значит, теорема верна и в случае, когда векторы
компланарны. #
Как видно из определения, смешанное умножение векто-
ров является вторичной операцией и определяется при помощи
скалярного и векторного умножений. Однако смешанное умно-
жение играет важную роль в геометрических приложениях, что
и подтверждает теорема 2.2. Исходя из этой теоремы, а также
из свойств скалярного и векторного произведений, можно полу-
чить несколько важных свойств для смешанного произведения.
68
2. ПРОИЗВЕДЕНИЯ ВЕКТОРОВ
1°. Для смешанного произведения действует правило цикли-
ческой перестановки:
(ахб)с — (Ьхс)а = (сха)Ь= -(Ьха)с = -(схЬ)а = ~(ахс)Ь.
◄ Действительно, все шесть указанных произведений по абсо-
лютной величине дают объем одного и того же параллелепипе-
да, а знак произведений определяется ориентацией тройки со-
множителей. При циклической перестановке векторов в тройке
ориентация не меняется, при перестановке местами двух век-
торов в тройке ориентация меняется на противоположную. ►
Замечание 2.4. Из доказанного свойства получаем, что
abc = (axb)c = а(Ьхс),
т.е. порядок двух операций, дающих смешанное произведение,
не является существенным. Это объясняет, почему в обозна-
чении смешанного произведения знаки образующих операций
опускаются.
2°. Три вектора а, Ь, с компланарны тогда и только тогда,
когда их смешанное произведение равно нулю.
◄ Это вытекает из теоремы 2.2 и замечания 2.3. ►
3°. Для смешанного произведения выполняется свойство
ассоциативности относительно умножения векторов на число:
(Аа)Ьс= А(аЬс).
◄ Обозначив Ьхс — е и используя свойство 2° ассоциативности
скалярного произведения относительно умножения на число,
получим
(Аа)Ьс = (Аа)(Ьхс) = (Аа)е = А(ае) = А(а(Ьхс)) = А(аЬс). ►
4°. Для смешанного произведения выполняется свойство
дистрибутивности (ai +а2)Ьс = а16с + а2Ьс.
2.4. Смешанное произведение
69
4 Обозначив Ьхс = е и используя свойство 3° дистрибутивно-
сти скалярного произведения, получим
(ах + а2)Ьс = (ai + а2) (Ьхс) = (ах + а2)е = а^е + а2е =
= ai(6xc)+а2(Ьхс) =aibc + a26c. ►
Замечание 2.5. Свойства 3° и 4° смешанного произведе-
ния сформулированы для первого сомножителя. Однако при
помощи циклической перестановки можно доказать аналогич-
ные утверждения и для второго и для третьего сомножителей,
т.е. верны равенства
a(Xb)c = X(abc), ab(Xc) = Х(аЬс),
а(Ь1 + Ь2)с = аЬ1С + аЬ2с, ab(ci + с2) = аЬсх + аЬс2,
и в итоге имеем свойство линейности смешанного произ-
ведения по каждому сомножителю.
Замечание 2.6. Отметим, что при доказательстве свойств
смешанного произведения мы не использовали свойства вектор-
ного произведения. Наоборот, обоснование свойств векторного
произведения можно строить на основе свойств смешанного
произведения. Покажем это на примере свойства дистрибутив-
ности векторного произведения, доказательство которого мы
обещали привести.
Сначала обратим внимание на следующее. Если векторы
и ®2 таковы, что для любого вектора у выполняется равенство
Х1У = х2у, (2.15)
то = ®2. Действительно, равенство (2.15) означает, что
(®х — х2)у = 0. Так как вектор у любой, мы можем положить
у — xi - х2. Тогда получим (®х — ®2)2 = 0, но это возможно
только при xi — х2 = О, т.е. при xi = х2.
Согласно доказанному, равенство
(ах -|-а2)хЬ = аххЬ-|-а2хЬ
70 2. ПРОИЗВЕДЕНИЯ ВЕКТОРОВ
будет выполняться, если для любого вектора с
((<ц +а2)х6)с = (aix6)c+ (а2хЬ)с,
или
(ai + а2)Ьс = aibc + а26с.
Но последнее равенство верно, так как выражает доказанное
свойство 4° дистрибутивности для смешанного произведе-
ния. #
Пусть векторы а, Ь, с заданы своими координатами в ор-
тонормированном базисе’, а = {ха; уа\za}, Ь = {хь; уь; zb}, с =
= {жс; Ус1 zc}. Чтобы найти их смешанное произведение, вос-
пользуемся формулами для вычисления скалярного и векторно-
го произведений:
аЪс = а(Ьхс) =
Уь
Ус
хь
Zc хс
zb . хь уь
Zc Хс ус J
УЬ zb хь
Уа
Ус zc хс
Zb
Zc
+ za
хь
Хс
УЬ
Ус
Ха
хь
Хс
Уа
УЬ
Ус
za
Zb
Zc
Согласно полученной формуле, свойство 2° смешанного про-
изведения можно сформулировать так: необходимым и до-
статочным условием компланарности трех векторов, заданных
координатами в ортонормированном базисе, является равен-
ство нулю определителя третьего порядка, строками которо-
го являются координаты этих векторов.
Пример 2.9. Найдем объем треугольной пирамиды, по-
строенной на векторах а = {-2; 1; -2}, Ь = {1;0;-1} и с =
= {1; 1; 1} как на смежных ребрах.
Трем векторам с общим началом можно сопоставить как
треугольную пирамиду, так и параллелепипед, причем объем
2.5. Приложения произведений векторов
71
пирамиды будет в 6 раз меньше объема параллелепипеда, рав-
ного модулю смешанного произведения аЬс данных векторов.
Итак, объем пирамиды равен V = |а6с|/6 = 1, поскольку
аЪс =
-2 1
1 О
1 1
-2
-1
1
= -6.
2.5. Приложения произведений векторов
Рассмотрим различные приложения произведений векторов
на следующих примерах.
Пример 2.10. Работа А постоянной силы F при прямоли-
нейном перемещении материальной точки из положения М\ в
положение М2 равна А = |F| |MiAfj)cosy? (рис. 2.11, а). Поэто-
му с помощью скалярного произведения зта работа вычисляется
по формуле
А = Fs, s = М1М2.
Рис. 2.11
Если к материальной точке приложено п постоянных сил
fi, i = 1,п, то при том же ее перемещении сумма А их работ Ai
равна работе равнодействующей силы
п
72
2. ПРОИЗВЕДЕНИЯ ВЕКТОРОВ
поскольку
я=£>=£>= (£>)•=г..
«=1 »=1 »=1
Из этого равенства следует, что система сил не совершает
работу, если их равнодействующая ортогональна вектору пе-
ремещения s. Ясно, что равенство А = Fs = 0 справедливо и в
случае, когда равнодействующая равна нулю или отсутствует
перемещение, или верно и то и другое.
Пример 2.11. Круговой диск вращается с постоянной
угловой скоростью ш вокруг перпендикулярной ему оси вра-
щения L, проходящей через его центр О (рис. 2.11,6). Пусть
v — скорость точки Р. Тогда
v = шхоР,
где ш — вектор угловой скорости.
Пример 2.12. На движущуюся со скоростью v частицу с
электрическим зарядом q магнитное поле с магнитной индук-
цией В действует с силой Лоренца
f = qvxB.
Если векторы v и В коллинеарны, то г х В = О и при постоян-
ном магнитном поле частица будет совершать прямолинейное
равномерное движение. Если же векторы ® и В неколлинеарны,
то f / О, но мощность, развиваемая этой силой, равна нулю:
W = fv = q(v х B)v = qvBv = О,
поскольку смешанное произведение компланарных векторов
равно нулю. Следовательно, заряженная частица массой т
в постоянном магнитном поле сохраняет свою кинетическую
энергию mv2/2.
Д.2.1. Двойное векторное произведение
73
Рассмотрим случай, когда векторы v и В ортогональны,
т.е. vB = 0. Поскольку и сила Лоренца f ортогональна В, то
частица остается в плоскости, перпендикулярной вектору В, и
двигается по окружности радиуса R, который определяется из
условия равновесия возникающей при этом центробежной силы
и действующей силы Лоренца,
mv2/R = g|vxB| = g|v | |В| sin 90°.
Отсюда
R ?|В|
Дополнение 2.1. Двойное векторное
произведение
Трем векторам а, Ь и с можно поставить в соответствие
вектор, равный ах(Ьхс). Этот вектор называют двойным
векторным произведением векторов а, Ь и с. Двойное
векторное произведение встречается в механике и физике.
Двойное векторное произведение выражается через линей-
ную комбинацию двух из трех своих сомножителей по формуле
аХ(ЬХс) = Ь(ас) — с(аЬ).
Докажем это. Обозначим через х разность левой и правой
частей этого равенства
х = ах (Ьхс) — Ь(ас) + с(аЬ).
Нам достаточно показать, что х = О.
Предположим, что векторы Ь и с коллинеарны. Если они оба
нулевые, то в выражении для вектора х все слагаемые равны
нулевому вектору и поэтому равенство х = О выполнено. Если
же один из коллинеарных векторов Ь, с ненулевой, например
74 2. ПРОИЗВЕДЕНИЯ ВЕКТОРОВ
с, то для другого вектора при некотором а Е R выполнено
равенство Ь = ас. Но тогда
х = ах (осхс) — ас(ас) + са(ас) = О.
Предположим теперь, что векторы Ь и с неколлинеарны.
Тогда их векторное произведение не равно нулевому вектору
и ортогонально ненулевому вектору Ь. Векторы
образуют правый ортонормированный базис в V3 (это и отра-
жено в обозначениях). В этом базисе справедливы следующие
разложения векторов:
Ь = |Ь|г, c = cii + c2fc, a = a1i + a2j-|-a3fc,
и поэтому
Ьхс = -|b|c2j, ax(bxc) = -|b|c2(aifc - 03г).
Кроме того,
ас = ai Ci — азс2, аЬ = а1|Ь|.
В результате находим, что и в случае неколлинеарных векторов
Ь и с выполнено равенство
х = -|b|c2(a1fc- а3г) - (а^ - d3c2)|b|i Н- dX|b|(cii Н- с2fc) = 0.
Вопросы и задачи
2.1. Вычислить определители:
2 0 3
7 1 6
6 0 5
а)
б)
1 1 1
4 5 9
16 25 81
Вопросы и задачи
75
2.2. Решить уравнения и неравенства:
д)
1-х
0
0
39
2 — х
0
-1
X
-1
7Г
2х
5 + х
= 0;
б)
1
х2
X3
X
-1
2
3
2
x 4-10
X
-1
1
-4
3
1
= 0;
1
5
25
ж2
3
-6
x + 2
1
-3
ж3
4
6
-1
-2
X
= 0;
X
1
0
0
х
2
1
5
1
3
9
2.3. Найти все значения параметра t, при которых система
двух линейных уравнений
tx — 3y = 2,
2x + (t - 5)y = 5
имеет единственное решение. Найти зависимость этого един-
ственного решения от параметра t.
2.4. Доказать справедливость равенств:
в)
ai + о'\
d2 + dj
62
61
6з
6i
62
ai 61
0,2 Ь2
a2
6i
62
Adi
Ad2
bi
62
О1 61
d2 62 ’
a2
ai
аз
c2
Cl
сз
di
d2
аз
6i
62
63
Cl
C2
C3
ai С1 61
а2 с2 62
аз сз 63
ai
d2
аз
0
62
Ьз
0
0
сз
ai
0
0
0 0
62 0
0 с3
ai
0
0
Ь\
62 С2 = di62C3.
0 с3
С1
; б)
= А
вектора с =
a — 26, если известно, что
2.5. Найти длину
|а| = 3, |6| = 5 и угол между векторами а и 6 равен 45°.
76
2. ПРОИЗВЕДЕНИЯ ВЕКТОРОВ
2.6. Найти угол между векторами с = а — 26 и d = За 4- 26,
если известно, что |а| = 3, |6| = 5 и угол между векторами а и
Ъ равен 120°.
2.7. Найти значения параметра t, при которых векторы
с —a — tb a d = a + tb имеют одинаковую длину.
2.8. Найти площадь треугольника, построенного на векто-
рах а = 2г — j + 3fc и b = i + j — k.
2.9. В треугольнике АВС угол при вершине А равен 45°,
|4В| = 1, | АС| = 4. Найти угол между медианой и биссектрисой,
которые проведены из вершины А.
2.10. Точки В\ и В? принадлежат соответственно прямым
L\ и L?, которые пересекаются в некоторой третьей точке
А. Выразить через АВ\ и АВ? векторы, направленные по
биссектрисам углов между прямыми.
2.11. Найти угол между векторами а и 6, если они имеют
одинаковую длину, а векторы с = а — 26 и d = а 4- 36 ортого-
нальны.
2.12. Найти объем параллелепипеда, построенного на век-
торах а = i — j -|- 3fe, 6 = 2г 4- j — k, c = 3i + j + 2k.
2.13. При каких значениях t векторы a = ti — t2j 4- t3k,
b = 2i — j — fc, с = —4г 4- 2j 4- 5fc компланарны.
2.14. При выполнении какого условия равнодействующая
двух сил, приложенных к одной точке, будет направлена по
биссектрисе угла между ними?
2.15. Найти работу силы F = i + k при перемещении мате-
риальной точки на вектор а = Зг — 2j 4- k.
2.16. Найти угол между ненулевыми векторами а и 6, если
они удовлетворяют соотношению |ах6| = ab.
2.17. Векторы а, 6 и с некомпланарны, а векторы ах(бхс)
и 6 коллинеарны. Найти угол между векторами а и 6.
Вопросы и задачи
77
2.18. Доказать, что для любых трех векторов справедливо
равенство
(ахЬ) хс = (ас)Ь - (Ьс)а,
причем в его правой части в круглых скобках стоят скалярные
произведения соответствующих векторов.
2.19. Доказать, что любые векторы а, Ь и с удовлетворяют
соотношению
ах(Ьхс) -|-сх(ахЬ) 4-Ьх(сха) = О.
2.20. Доказать, что для любых четырех векторов а, Ь, с и
d выполнено тождество
(axb)(cxd) = (ас) (fed) - (ad)(bc).
2.21. Доказать, что если два вектора равной длины лежат
на одной прямой и однонаправлены, то их моменты относитель-
но любой точки равны между собой.
2.22. Доказать, что если частица массой т с электрическим
зарядом q со скоростью v попадает в постоянное магнитное по-
ле с магнитной индукцией В и векторы v и В неколлинеарны
и неортогональны, то она будет двигаться по цилиндрической
спирали. Вычислить радиус основания соответствующего пря-
мого кругового цилиндра и расстояние между соседними вит-
ками спирали.
2.23. Для каких векторов а, Ь и с выполнены соотноше-
ния: а) |а — Ь| = |а + Ь|; б)|а-Ь|>|а + Ь|; в) |а- Ь| < |а + Ь|;
г) аЬ = |а| |Ь|; д) |ахЬ| =.|а| |Ь|; е) аЬс = |а| |Ь| |с|.
2.24. Найти все векторы х € Уз, удовлетворяющие данному
условию: а) ах — 0; б)ахх = 0; в)ахх = Ь- г) ахх = Ьхх.
2.25. Какому условию удовлетворяют векторы а и Ь, если
для любого вектора х € Рз выполнено равенство ахх = Ьхх.
2.26. Доказать, что для векторов а, Ь и с, удовлетворяющих
условию а 4- Ь + с= 0, выполнены равенства ахЬ = Ьхс = сха.
2.27. Доказать компланарность векторов а — Ь, Ь — сис — а.
3. СИСТЕМЫ КООРДИНАТ
В основе аналитической геометрии лежит возможность од-
нозначного описания точек при помощи наборов чисел, называ-
емых координатами. Описание множества с помощью соотно-
шений между координатами входящих в него точек позволяет
привлечь для его исследования алгебраические методы, что зна-
чительно расширяет возможности анализа. Обратно, зависимо-
сти (уравнения, неравенства и их системы) можно интерпрети-
ровать как зависимости между координатами точек и ассоции-
ровать с ними множество, составленное из точек, координаты
которых удовлетворяют этим зависимостям, и, следовательно,
получить наглядное представление чисто алгебраической зада-
чи (например, в случае поиска решений уравнений и их систем).
Таким образом, возникает своеобразный мостик, связывающий
алгебру и геометрию. Его роль выполняет система координат.
3.1. Декартова система координат
Существуют различные способы задания точек набором ко-
ординат. Аналитическая геометрия опирается на простейшую
систему координат — прямоугольную, которая известна из
школьного курса математики. Мы дадим определение прямо-
угольной системы координат, используя векторную алгебру.
Фактически мы построим систему координат более общего ви-
да, в которой оси координат могут находиться по отношению
друг к другу под произвольным углом. Прямоугольная систе-
ма координат будет частным случаем, когда углы между осями
координат будут прямыми.
Назовем декартовой (аффинной) системой коорди-
нат пару, состоящую из фиксированной точки О и некоторого
3.1. Декартова система координат
79
базиса. Соответственно трем пространствам Vi, V?, V3 полу-
чаем три варианта декартовой системы координат: на прямой,
на плоскости и в пространстве. Декартовыми [аффинны-
ми) координатами произвольной точки М являются коор-
динаты вектора ол? в заданном базисе.
С декартовой системой координат связаны следующие по-
нятия:
- начало [системы) координат — точка О в составе
декартовой системы координат;
- репер — базис в составе декартовой системы координат,
для векторов которого выбирается общая точка приложения в
начале координат;
- оси координат (координатные оси) — прямые, на
которых лежат векторы репера, задающие направление на
этих прямых. Оси имеют специальные названия (в порядке
нумерации): ось абсцисс, ось ординат я ось аппликат.
Координаты точки именуются по осям: абсцисса, ордината
и аппликата. На плоскости отсутствует ось аппликат, на
прямой также нет оси ординат.
- координатные плоскости — плоскости, определяе-
мые парами векторов репера. Понятие используется для де-
картовой системы координат в пространстве;
- радиус-вектор точки М — вектор Ом, соединяющий
начало координат О с этой точкой.
Декартову систему координат общего вида часто называют
косоугольной системой координат.
Если репер декартовой системы координат является орто-
нормированным базисом, то такую систему координат назы-
вают декартовой прямоугольной системой координат,
или просто прямоугольной системой координат, а декар-
товы координаты точки — ее прямоугольными координа-
тами.
Далее будем использовать в основном прямоугольные сис-
темы координат, т.е. будем предполагать, что репер предста-
80 3. СИСТЕМЫ КООРДИНАТ
вляет собой ортонормированный базис, причем обязательно
правый. Отметим, что базис в У2 (т.е. на плоскости) назы-
вают правым (левым), если первый его вектор совмещается
со вторым с помощью кратчайшего поворота против хода (по
ходу) часовой стрелки.
Итак, под системой координат подразумевается пря-
моугольная система координат с правым базисом, а под ко-
ординатами точки — ее прямоугольные координаты. Ис-
пользование других систем координат будет обязательно ого-
вариваться. Для обозначения декартовых систем координат,
например в пространстве, будем использовать обозначения ти-
па Oijk, где О — начало системы координат, а г, j, к —
ортонормированный репер (базис), или Oxyz [I], где указаны
обозначения для координатных осей.
3.2. Преобразование прямоугольных координат
Все прямоугольные системы координат в изучаемом про-
странстве, вообще говоря, равноправны, т.е. выбор одной из
них ничуть не хуже (и не лучше) выбора другой. Те или иные
предпочтения отдают исходя из особенностей конкретной зада-
чи. Использование различных систем координат ставит задачу
преобразования координат точки, т.е. задачу вычисления ее
координат в одной системе координат по ее координатам в дру-
гой системе.
Пусть Oijk — некоторая прямоугольная система коорди-
нат в пространстве, которую мы условно назовем старой, а
O'i'j'k1 — вторая прямоугольная система координат, которую
будем называть новой (рис. 3.1). Считаем, что известны коор-
динаты точки Oz(i>i; Ь2; />з) и векторов
V — {<*11! а21! j' = {«и! «22! «32}, fe* = {<*13; <*2з; <*зз)
в старой системе координат. Пусть для точки М известны
ее координаты (ж; у; z) в старой и координаты (а;*; у'; z') в
3.2. Преобразование прямоугольных координат
81
(3.1)
j'
новой системах координат. Это значит, что выполняются два
равенства
О'М = x'i' + y'j' + z'k'
и
= xi + yj 4- zk.
M
a k r"—\
/ -------------&
---------------------
/ О j
//I
Рис. 3.1
Векторы и О'М связаны соотношением ОМ — 00' +
+ О'М, причем координаты вектора 00' являются также
координатами начала координат О' новой системы координат
относительно старой, т.е.
00' = bii-\- bij + Ьзк.
Поэтому
Ол1 = 00' + О'М = b^i 4- i>2j 4- Ьзк 4- x'i' 4- y'j' 4- z'k' =
= bi»4-M 4-&з&4-
4- x'(ani 4- oi2i3 4- а31к) 4-
4- j/ (<*12* 4- 01223 + а32&) 4-
4- /(ant 4- 01233 + азз&) =
= (anxz 4- ot12y' 4- otl3z' 4- b^i 4-'
4- (t*21SZ 4- О122У1 4- 0123^' 4- &2)j 4-
4- (oi3ix'+ oi32y'+ 0133Z'+ Ьз)к, (3.2)
82_______________3. СИСТЕМЫ КООРДИНАТ__________________
т.е. получено разложение вектора 0$ в репере старой сис-
темы координат. Оно должно совпадать с (3.1) в силу един-
ственности координат вектора в одном и том же базисе. При-
равнивая соответствующие коэффициенты разложений в (3.1)
и (3.2), получаем
х = ana:z + а12у' 4- а13/ +
у = at21x'+ а22у'+ at23z'+ b2, (3.3)
z - о^х' -|- <t32t/z + <133 z' + Ь3.
Соотношения (3.3), выражающие старые координаты через
новые, представляют собой систему трех линейных уравнений
относительно неизвестных х', у', z'. Чтобы найти новые
координаты х', у', z' по известным старым, необходимо решить
эту систему относительно новых координат. Система (3.3)
при любых х, у, z имеет единственное решение, поскольку
ее определитель отличен от нуля. Это следует из того, что
выполнены равенства
«и an an <111 <121 <131
а21 <122 <123 = <112 а22 а32 = <ffez = l,
<131 а32 <133 <113 «23 <133
так как векторы i', j', k' образуют правый ортонормированный
базис и объем построенного на них параллелепипеда равен 1
(или —1 в случае левого базиса).
Набор коэффициентов в системе (3.3) отражает положе-
ние репера новой системы координат, а свободные члены
Ь2, Ьз характеризуют изменение начала координат. Если репер
системы координат не изменился, а поменялось лишь начало ко-
ординат, то формулы преобразования выглядят более просто:
х = х' + bi,
у = у' + Ь2,
z = z' + b3.
(3-4)
3.2. Преобразование прямоугольных координат
83
Преобразование (3.4) называют параллельным переносом
системы координат в пространстве на вектор 00'.
Все вышеизложенное относится к прямоугольной системе
координат в пространстве. Прямоугольная система координат
на плоскости отличается от пространственной лишь тем, что
репер состоит из двух векторов, а точки имеют всего две
координаты. Преобразование системы координат на плоскости
описывается уравнениями
х = anx' + anJ/' + bi,
у = а21х'+ а22у'+ b2,
(3-5)
где {«ii; a2t}> i = 1,2, — координаты векторов j' нового
репера относительно старого (»,j), a (bi;b2) — координаты
точки О’ начала новой системы координат в старой системе
координат.
Преобразование параллельного переноса системы ко-
ординат на плоскости выглядит так:
X = х' + 61,
у = у' + Ь2.
Если начала новой и старой систем координат на плоскости
совпадают, а изменяется лишь репер системы координат, то
формулы преобразования координат имеют вид:
ж = ana/+ ant/,
у = a2ix' + a22y'.
(3.6)
Здесь возможны два случая. В первом из них новый репер
может быть получен из старого поворотом последнего на неко-
торый угол <р вокруг общего начала систем координат, причем
полагают, что <р > 0 (у> < 0) при повороте против хода (по ходу)
часовой стрелки. В этом случае преобразование (3.6) назы-
вают поворотом системы координат на плоскости на
84
3. СИСТЕМЫ КООРДИНАТ
угол <р. Нетрудно убедиться, что
координаты векторов г' и j' ново-
го репера относительно старого вы-
ражаются через угол поворота <р:
i! — {cosу?; sin<р}, j' = {—sin 9?; cos9)}
(рис. 3.2).
Зная координаты векторов ново-
го репера относительно старого, мы
можем записать уравнения для поворота системы координат на
плоскости:
х = х' cos 9? — t/sin 9?,
(3-7)
у = х sin9) + у C0S9?.
Если преобразование состоит в последовательном выполнении
поворота и параллельного переноса, то оно имеет вид:
х = х' cos 9? -у' sin у> + 6Ъ
. . / 1
у = X Sin 9? + у COS9> + 02-
Система (3.8) легко решается относительно х', у1, и обратное
преобразование координат, отражающее переход от новой сис-
темы координат к старой, будет иметь вид:
х' = х cos 9? + у sin 9? +
у' = —xsin<p + ycos(p + b'2,
где b'r = &1COS9? + &2sin9?, b'2 = — £>1 sin</?-j- b2cos<p. Как видим,
старая система координат получается из новой с помощью
поворота на тот же угол 9?, но в противоположную сторону
(на угол —9? в положительном направлении), и параллельного
переноса (на вектор О'З).
Во втором случае с помощью поворота старого репера во-
круг начала координат на некоторый угол <р можно совместить
лишь векторы i и г', но при этом векторы j и j1 окажутся про-
тивоположными и для их совмещения потребуется выполнение
преобразования зеркального отражения плоскости относитель-
но первой оси координат.
3.3. Простейшие задачи аналитической геометрии
85
В первом случае о двух реперах на плоскости говорят,
что они имеют одинаковую ориентацию, а во втором —
противоположную.
Аналогичную терминологию используют и для простран-
ства. Если начало новой и старой прямоугольных систем ко-
ординат в пространстве совпадают и изменяется лишь репер
системы координат, то формулы преобразования координат
имеют вид:
х = апх' 4- а12у' +
у= «21^ + «222/' +«23^, (3.9)
Z = аздх' + «322/' + «ЗЗ^-
Преобразование (3.9) называют поворотом системы коор-
динат в пространстве, если реперы новой и старой систем
координат имеют одинаковую ориентацию, т.е. являются оба
правыми или левыми. Как и в случае плоскости, это связано с
тем, что реперы с одинаковой ориентацией можно совмещать
с помощью поворотов. Например, можно сначала совместить
векторы i и г' с помощью поворота старого репера вокруг век-
тора гхг1, а затем выполнить второй поворот вокруг вектора
V для совмещения повернутого вектора j с вектором . При
этом векторы k и k' автоматически совпадут для реперов одной
ориентации и будут противоположными для реперов противо-
положной ориентации. В последнем варианте требуется, как
и в случае плоскости, выполнение дополнительного преобра-
зования зеркального отражения (относительно координатной
плоскости, определяемой векторами г' и j').
3.3. Простейшие задачи аналитической геометрии
Рассмотрим некоторые задачи аналитической геометрии,
связанные со взаимным расположением точек на плоскости или
в пространстве.
86
3. СИСТЕМЫ КООРДИНАТ
Векторы и точки. Задача состоит в том, чтобы выразить
координаты вектора через координаты точек его начала и
конца.
Рассмотрим в пространстве прямоугольную систему ко-
ординат и вектор АЁ с координатами {Z;m;n}, у которого
известны координаты точек его начала А(жа; уа\ za) и конца
В(хъ',уь‘, 2ь). Обозначим через О начало системы координат.
Тогда координаты точек А и В представляют собой координа-
ты их радиус-векторов оХ и О&. Следовательно, О& — оА =
= {хь — ха', уь — Уа', Zb — za} и из соотношения А& = 0$ — оХ
заключаем, что {/; т; п} = {жь - ха; уь - уа', гь - za], т.е.
/ = жь-жа, т = уь-уа, n = Zb~za
(3.10)
В случае прямоугольной системы координат на плоскости
координаты вектора АЁ = {1;т} на этой плоскости и коор-
динаты точек его начала А(ха]уа) и конца В(хь',уь) связаны
аналогичными соотношениями
1 = хь-ха, т = уь-уа. (3.11)
Из (3.10) и (3.11) вытекают правила:
- координаты вектора получают вычитанием из координат
его конца координат его начала;
- координаты конца вектора получают сложением коорди-
нат вектора с координатами его начала;
- координаты начала вектора получают вычитанием из
координат его конца координат вектора.
Деление отрезка в заданном отношении. Задача
состоит в том, чтобы на данном отрезке MiM? найти точку М,
делящую отрезок в заданном отношении: |Л/1 М\: |Л/Л/2| =р: q.
Для точки М из отрезка М1М2 векторы Л/1Л1 и ММ? кол-
линеарны и однонаправлены (рис. 3.3). Следовательно, один
из них может быть получен из другого умножением на поло-
3.3. Простейшие задачи аналитической геометрии
87
жительное число. Пусть, на- .
-----------> ----i ---Щ
пример, ММ2 — ХМ1М. Число _________________________
А равно отношению длин отрез- М,
ков ММ2 и М2М, т.е. X = q/p. рис< 3<3
Поэтому
MiA4 = М^Й + А/А/г = А/1Л) + -Л/1Л) =
Р Р
откуда
A/jA) = -^-Л/1ЛЙ. (3.12)
р+ч
Пусть концы Mi и М2 отрезка М1М2 заданы своими ко-
ординатами в произвольной прямоугольной системе координат
Oijk в пространстве: Mi(xi; уг; zj), М2(х2; Уг,’ ^г)- Найдем ко-
ординаты точки М в этой же системе координат. Для этого
запишем равенство (3.12) через радиус-векторы входящих в не-
го точек
ОЙ - OAfJ = -^-(ОЙ -
р+чу
и найдем, что
— ~~~ОМ2 Н—j—OMi — ?.{х2; У2\^2} Н—~{ж 1! J/Г, 21} =
р+ч р+ч р+ч р+ч
рх2 + ЧХ1. РУ2 + ЧУ1. Р22 + 4Z1
Р+Ч ' Р+Ч ' Р+Ч
Итак, если обозначить координаты точки М через (ж; у; z),
то
рх2 + qxi ру2 + qyi pz2 + qzi
-------, У —-------, z —-------
р+ч р+ч р+ч
(3.13)
88
3. СИСТЕМЫ КООРДИНАТ
Если точка М — середина отрезка MiM%, то р = q— 1, и
поэтому из (3.13) следует, что координаты М равны полусумме
соответствующих координат начала и конца отрезка, т.е.
х = ^, г=Ц±й. (3.14)
В случае плоскости нет аппликат и из (3.12) следует, что ко-
ординаты точки M(a;;t/), делящей отрезок М1М2 в отношении
|М1Л/| : |Л/Л/21 =р : q, определяются через координаты точек
A^i(^i’iJ/i) и М2^Х2', у2) концов этого отрезка с помощью ра-
венств
рх2 + qxi ру2 + qyi
X = -------, у = ------,
p+q p+q
которые для середины отрезка переходят в соотношения
®1 + ®2 J/1+J/2
Ж = У=~~2~'
Пример 3.1. В вершинах А(4; 4; 4), В(-2;6;4), С(-4;4;2)
треугольника АВС расположены материальные точки равной
массы. Найдем координаты центра масс этой системы точек.
Центр масс указанной системы точек совпадает с точкой
М пересечения медиан треугольника АВС. Пусть точка N —
середина стороны ВС. Тогда ее координаты (ж; у; z) равны
полусумме соответствующих координат точек В и С, следова-
тельно, х = —3, у = 5, z = 3. Медиану AN точка М делит в
отношении |АМ\: |Af7V| = 2:1, поэтому координаты (хо! Уо! zo)
центра масс рассматриваемого треугольника в соответствии с
(3.13) равны
_2-(-3) + 1-4_ 2 _2-5+1-4 14 2-3+1-4 10
Х°~ 2+1 - 3’ У°~ 2+1 “ 3 ’ Z°~ 2+1 " 3 ’
Длина отрезка. Задача вычисления длины отрезка (или
расстояния между двумя точками) по координатам его концов
в прямоугольной системе координат известна из школьного
3.4. Вычисление площадей и объемов 89
курса геометрии. Мы выведем эту формулу при помощи
векторной алгебры.
Длина отрезка — это длина вектора, соединяющего его
концы, а длину вектора можно определить, вычислив его ска-
лярный квадрат. Пусть концы отрезка и М2 заданы сво-
ими координатами в прямоугольной системе координат Oijk:
Mi(xi;t/i;zi), М2(Х2У,У2;?2У Тогда
мХ = {х2 - xi; у2 - 2/1; z2 - 21}.
Скалярный квадрат вектора Mi М2, заданного своими ко-
ординатами в ортонормированном базисе i, j, k, находится с
помощью формулы (2.9) для вычисления скалярного произведе-
ния:
Ml М22 = (®2 - *1)2 + (j/2 - J/1)2 + (22 - 21)2.
Итак, длина отрезка Mi М2 вычисляется по формуле
|М1М2| = у/(х2 - Х1)2 + (t/2 - J/1)2 + (22 - Z1)2.
3.4. Вычисление площадей и объемов
Вычисление площадей многоугольников и объемов много-
гранников, заданных координатами своих вершин в прямо-
угольной системе координат, основывается на использовании
скалярного, векторного и смешанного произведений векторов.
Если параллелограмм задан в пространстве координатами
своих вершин, то для вычисления его площади нужно найти
координаты двух векторов, соответствующих смежным сторо-
нам параллелограмма, а затем модуль их векторного произве-
дения. Аналогично вычисляется площадь треугольника, равная
половине модуля векторного произведения векторов, на кото-
рых он построен как на смежных сторонах.
Пример 3.2. Пусть три вершины треугольника заданы
своими координатами: А(4;4;4), В(1;2;3), С(3; —1;2).
90
3. СИСТЕМЫ КООРДИНАТ
Для определения площади &.АВС с помощью (3.10) найдем
координаты векторов и А&.
А$ = {1 - 4; 2 - 4; 3 - 4} = {-3; -2; -1},
А& = {3 - 4; -1 - 4; 2 - 4} = {-1; -5; -2}.
Затем по (2.14) вычислим их векторное произведение:
—» - 5j + 13fc.
-1 -5 -2
Модуль этого векторного произведения равен
= х/(-1)2+(-5)2+132 = У195,
и, следовательно,
S&ABC=
\А$кА&\ _ >/195
2 2 '
Для вычисления объема параллелепипеда, заданного коорди-
натами своих вершин, нужно найти координаты трех векторов,
соответствующих смежным ребрам, а затем вычислить модуль
смешанного произведения этих векторов. Через смешанное
произведение вычисляется и объем произвольной треугольной
пирамиды SABC (см. пример 2.8), поскольку он равен 1/6
объема параллелепипеда, построенного на ребрах Й, Л? и
лЗ. Таким образом, объем этой пирамиды равен Vsabc =
Пример 3.3. Найдем объем V пирамиды SABC, заданной
координатами своих вершин: А(2;-1;1), В(5;5;4), — 1),
5(4; 1;3).
3.5. Кривые и поверхности
91
Используя (3.10), вычисляем координаты векторов, напра-
вленных по ребрам пирамиды:
А% = {5 - 2; 5 - (-1); 4 - 1} = {3; 6; 3},
А& = {3 - 2; 2 - (-1); -1 - 1} = {1; 3; -2},
А!) = {4 — 2; 1 — (—1); 3 — 1} = {2; 2; 2},
И определяем объем с помощью смешанного произведения най-
денных векторов:
А$А(*А§ =
3
-2
2
= -18,
У = ^|А^А^Д^| = 3.
6
3
1
2
6
3
2
3.5. Кривые и поверхности
Множество точек на плоскости или в пространстве можно
описать системой уравнений и (или) неравенств, связывающих
координаты точек из этого множества. И одна из важнейших
задач аналитической геометрии — построение уравнения или
системы уравнений и неравенств, описывающих заданное мно-
жество.
Определение 3.1. Если уравнению F(x,t/,z) = 0 удовлетво-
ряют те и только те тройки чисел х, у, z, для которых точка
М(х; у; z) принадлежит множеству S в пространстве, то урав-
нение F(x,y,z) = 0 называют уравнением множества S, а
само множество S — геометрическим образом этого урав-
нения.
Вышесказанное также относится и к описанию множеств
на плоскости, но с единственным отличием — уравнению
соответствует функция F(x,y) двух переменных х и у, а не
трех.
92
3. СИСТЕМЫ КООРДИНАТ
Определение 3.2. Если уравнению F(x,y) — 0 удовлетво-
ряют те и только те пары чисел х и у, для которых точка
М(х; у) принадлежит множеству Г на плоскости, то уравне-
ние F(x,y) — 0 называют уравнением множества Г, а само
множество Г — геометрическим образом этого уравнения.
Рассмотрим простейший вариант, когда множество точек в
пространстве описывается одним уравнением вида F(x,t/,z) = О,
где F(x,y,z) — функция трех переменных, а переменные х,
у, z представляют собой координаты точки в пространстве
относительно фиксированной прямоугольной системы коорди-
нат. Если не налагать на функцию F(x,t/,z) никаких ограни-
чений, то от подобного описания мало проку, так как тогда
при помощи уравнения можно описать любое множество точек
в пространстве. Действительно, вспомним общее толкование
функции как закона, который любому набору, в данном случае
из трех, аргументов ставит в соответствие единственное число.
Такой закон можно задать различными способами. Например,
выберем произвольное множество S в пространстве. Положим
F(x,y,z) = 0, если точка с координатами (г; у; z) принадлежит
множеству S, и F(x,t/,z) = 1 в противном случае. Тогда урав-
нение F(x,y,z) = 0 будет задавать в точности множество S.
В рамках аналитической геометрии рассматривают урав-
нения F(x,y,z) = 0 (F(x,y) — 0 на плоскости), для которых
функция F является многочленом своих переменных.
Определение 3.3. Многочленом от п переменных
Xi, ..., хп называют функцию вида
т
F(xi,... ,хп) — • • •xni
»1+...+«п=0
где ii, ..., гп — целые неотрицательные числа; —
действительные числа, причем хотя бы один из коэффициентов
«й Для которых ii + ... + гп = т, не равен нулю. Число т
называют степенью многочлена от п переменных.
3.5. Кривые и поверхности
93
Определение допускает нулевое значение степени многочле-
на. Независимо от числа переменных многочлены нулевой сте-
пени имеют вид F = ао,...,о и являются постоянными функциями.
Вид многочленов первой степени зависит от количества пере-
менных. Например, F — 2х - 4у + 5z - 1 — многочлен первой
степени от трех переменных, a F = х — у + 3 — многочлен пер-
вой степени от двух переменных. При п < к любой многочлен
степени m от п переменных можно рассматривать как много-
член той же степени от к переменных, т.е. от большего числа
переменных.
Уравнение F(xi,...,a:n) = 0, в левой части которого стоит
многочлен от п переменных, называют алгебраическим.
Определение 3.4. Алгебраической поверхностью на-
зывают геометрический образ в пространстве, соответству-
ющий уравнению F(x,y,z) = 0, где F — многочлен от трех
переменных х, у, z.
Степень многочлена F в уравнении F = 0 называют поряд-
ком уравнения, или его степенью.
Определение 3.5. Алгебраической кривой (или лини-
ей) на плоскости называют геометрический образ на плос-
кости, соответствующий уравнению F(x,y) = 0, где F — мно-
гочлен от двух переменных х, у.
При преобразовании системы координат уравнение поверх-
ности (кривой) изменяется. Пусть х, у, z — старые коорди-
наты, х', у', z' — новые координаты, связанные со старыми
уравнениями (3.3), а поверхность в старой системе координат
описывается уравнением F(x,y,z) = 0. Тогда, чтобы получить
уравнение поверхности в новой системе координат, необходимо
в исходное уравнение подставить вместо переменных х, у, z их
выражения через новые переменные х1, у1, z'.
В случае алгебраической поверхности (алгебраической кри-
вой) преобразование координат в уравнении приводит к мно-
гочлену той же степени, что и степень первоначального урав-
94
3. СИСТЕМЫ КООРДИНАТ
нения. Действительно, при преобразовании координат степень
многочлена не может возрасти, но тогда она не может и умень-
шиться, так как при обратном преобразовании она должна
была бы возрасти. Следовательно, степень многочлена в урав-
нении отражает характер самой поверхности (кривой) и не
связана с выбором системы координат.
Степень многочлена в уравнении, описывающем данную ал-
гебраическую поверхность (кривую на плоскости), определя-
ется неоднозначно. Например, поверхность, которая задается
уравнением F(x,y,z) = 0, где F — многочлен, может быть так-
же описана и уравнением (F(x,y,z))2 = 0, порядок которого
вдвое больше. Но среди всех уравнений, описывающих дан-
ную алгебраическую поверхность (кривую на плоскости), есть
уравнение наименьшего порядка.
Определение 3.6. Минимальный порядок уравнения, опи-
сывающего алгебраическую поверхность (алгебраическую кри-
вую на плоскости) в прямоугольной системе координат, назы-
вают порядком этой поверхности (кривой).
Отметим, что наиболее распространенные кривые на плос-
кости (прямые и окружности) и поверхности в пространстве
(плоскость, сфера, конус), которые изучаются в курсе школь-
ной геометрии, являются алгебраическими порядка 1 или 2.
Кривая в пространстве может рассматриваться как линия
пересечения двух поверхностей. Описывая каждую из поверх-
ностей при помощи уравнения в одной и той же системе коор-
динат, например Fi(x,y,z) = 0, F2(x,y,z) = 0, задают и линию
пересечения этих поверхностей системой двух уравнений
Fi(x,y,z) = 0,
F2(x,y,z) = 0.
Кривые на плоскости или в пространстве можно описывать
и другими способами. Так, кривую можно рассматривать как
3.5. Кривые и поверхности
95
траекторию движущейся точки и описывать, задавая коорди-
наты точки как функции времени. Мы приходим к системе
трех уравнений
' x = 4>(t),
< У = Щ), (3.15)
,2 = Х(<).
Кривая на плоскости может быть описана аналогичной систе-
мой двух уравнений. Такие системы называют параметриче-
скими уравнениями кривой, а переменное t — параметром [II].
Его содержательный смысл (время) не является существенным,
да и происхождение параметра может быть различным — не
только исходя из механической интерпретации кривой как тра-
ектории движения.
Если удается исключить параметр из системы (3.15), то
получается система двух уравнений, которая характеризует
кривую в пространстве как пересечение двух поверхностей.
Возможен и обратный переход, при котором в систему двух
уравнений вводят дополнительный параметр так, чтобы новая
система могла быть представлена в виде (3.15).
Пример 3.4. Кривую в пространстве, заданную системой
двух уравнений
Г х2 4-у2 - г2 = О,
х — z + 1 = О,
<.
можно задать параметрически. Для этого исключаем из пер-
вого уравнения переменную z и получаем х2 + у2 - (1 4-ж)2 = О
или у2 = 2x-f-l. Решая последнее уравнение относительно х,
приходим к системе двух уравнений, эквивалентной исходной:
г у2-1
2
_ I/2 4-1
Z~ 2
96 3. СИСТЕМЫ КООРДИНАТ
Остается ввести параметр, положив t = у, и записать параме-
трические уравнения рассматриваемой кривой:
t2 - 1
Х~ 2 ’
< y = t,
Поверхность в пространстве может быть также задана
параметрическими уравнениями, но параметров в этом случае
должно быть два.
Пример 3.5. Сфера радиуса R с центром в начале
координат описывается параметрическими уравнениями
!х = Rcosdcostp,
у = 7?cos$sin<p,
z — flsintf,
в которых параметр •& соответствует географической широте
на поверхности Земли, а — географической долготе. Пара-
метры должны изменяться в пределах |$| л/2, -л < <р л.
3.6. Полярная система координат
Кроме прямоугольной системы координат на плоскости
часто используют полярную систему координат, кото-
рая полностью определяется
упорядоченной парой точек О
и 01. Первую из них — точ-
ку О — называют полюсом
полярной системы коорди-
нат. Из полюса в направле-
нии второй точки 01 проводят
луч Ор, называемый полярной
осью (рис. 3.4).
3.6. Полярная система координат
97
Расстояние между точками О и Oi выбирают в качестве
единицы масштаба. Ясно, что полюс полярной системы ко-
ординат О, ее полярная ось I и установленная единица мас-
штаба однозначно определяют на плоскости положение точки
01. Поэтому выбор этой тройки геометрических объектов ча-
сто рассматривают как выбор конкретной полярной системы
координат.
Положение точки М в полярной системе координат фик-
сируется расстоянием р между точкой М и полюсом О, называ-
емым полярным радиусом, и углом <р между полярной осью и
вектором 0л1 — полярным углом. Полярный радиус и поляр-
ный угол составляют полярные координаты точки М на
плоскости, которые записывают так: М(р; <р). Полярный угол
измеряют в радианах и отсчитывают от полярной оси. Если
значение угла положительно, то его отсчитывают против хода
часовой стрелки, в противном случае — по ходу часовой стрел-
ки (см. рис. 3.4). Для полюса р = 0, а угол <р не определен. Для
остальных точек плоскости р > 0, а полярный угол <р определен
с точностью до 2тг. Поэтому для полярного угла иногда фик-
сируют промежуток его изменения, например (—тг,тг], [—тг,7г)
или [0,2тг).
Координаты точки на плоскости часто записывают как в
полярной, так и в прямоугольной системах координат и исполь-
зуют преобразования этих координат друг в друга. Если нет
специальных указаний, то при этом подразумевают следующее
взаимное расположение прямо-
угольной и полярной систем ко-
ординат (рис. 3.5): полюс поляр-
ной системы координат совме-
щен с началом прямоугольной
системы координат; полярная
ось совпадает с положительной
частью оси абсцисс, а масштаб в
полярной системе для вычисле-
Рис. 3.5
98 3, СИСТЕМЫ КООРДИНАТ
ния расстояний берется равным единице длины в прямоуголь-
ной системе координат. В этом случае прямоугольные коорди-
наты (ж; у) точки М на плоскости выражаются через ее поляр-
ные координаты (р,<р) с помощью соотношений (см. рис. 3.5)
х = pcoscp,
у = psincp.
(3.16)
С учетом ограничения <pG(-7r,7r] на полярный угол полярные
координаты точки определяются через ее прямоугольные ко-
ординаты следующим образом:
Р- у/^2 + у2,
' arctg(y/x), тг4-arctg(y/x), х > 0; х < 0, У > 0;
¥>= < -л 4-arctg(y/i), х < 0, У < 0;
тг/2, х = 0, У > 0;
I -*/2, х = 0, у < о.
(3-17)
Пример 3.6. Найдем полярные координаты точек М(3;4)
иЯ-1;1).
Для точки М имеем: р — \/32 4-4^ = 5, = arctg(4/3), а для
точки N — р = ^/(-l)2-f-12 = \/2, = л- + arctg(-1) =
3.7. Цилиндрическая
и сферическая системы координат
Для введения цилиндрической системы координат в
пространстве выберем плоскость Р и зафиксируем на ней неко-
торую полярную систему координат с полюсом О и полярной
осью Ор. Через точку О перпендикулярно плоскости Р про-
ведем ось Ог, выбирая ее направление таким образом, чтобы
возрастание полярного угла со стороны положительного на-
правления оси Ог происходило против хода часовой стрелки
(рис. 3.6, а). Фиксируем единицу масштаба для расстояния
между точками.
3.7. Цилиндрическая и сферическая системы координат
99
Цилиндрическими координатами точки М в про-
странстве называют упорядоченную тройку чисел р, ip, z, в
которой (р; <р) — полярные координаты ортогональной проек-
ции точки М на плоскость Р, a z — ортогональная проекция
вектора 0А% на ось Oz (см. рис. 3.6, а).
Координата р точки М равна ее расстоянию до оси Oz.
Название этой системы (цилиндрическая) связано с тем, что
точки с одинаковой первой координатой р образуют боковую
поверхность неограниченного прямого кругового цилиндра ра-
диуса р.
На рис. 3.6, б показано стандартное взаимное расположе-
ние цилиндрической и прямоугольной систем координат в про-
странстве. Плоскость Р совмещена с координатной плоско-
стью прямоугольной системы координат, проходящей через
оси абсцисс и ординат, и в этой плоскости согласованы по-
лярная и прямоугольная системы координат. Ось Oz цилин-
дрической системы координат автоматически совпадает с осью
аппликат. При таком взаимном расположении цилиндрической
и прямоугольной систем координат прямоугольные координа-
ты (ж; у, z) точки М выражаются через ее цилиндрические
координаты (р; tp; z) с помощью равенств
х = pcostp,
у = psin<p,
Z = Z.
(3.18)
100
3. СИСТЕМЫ КООРДИНАТ
Для нахождения цилиндрических координат по прямоугольным
можно воспользоваться (3.17) с учетом того, что третьи коор-
динаты любой точки в этих системах совпадают.
Сферическая система координат в пространстве вво-
дится точно так же, как и цилиндрическая система. Отличие
имеется лишь в определении третьих координат точек. Сфе-
рическими координатами точки М в пространстве назы-
вают упорядоченную тройку чисел р, <р, д, в которой р — длина
вектора ОЛ?, <р — полярный угол ортогональной проекции точ-
ки М на плоскость Р, а д — угол, который образует вектор Ол1
с положительным направлением оси Oz (рис. 3.7, а).
Замечание 3.1. Используют и другой вариант сфериче-
ской системы координат, в которой в качестве угла д берется
угол между вектором и плоскостью Р. #
Отметим, что д G [0,тг], а сферическая координата р точки
равна ее расстоянию до точки О. Название системы (сферичес-
кая) соответствует тому, что точки с одинаковой первой коор-
динатой р образуют поверхность сферы радиуса р с центром в
точке О.
Для стандартного взаимного расположения сферической и
прямоугольной систем координат в пространстве (рис. 3.7, б)
преобразования координат имеют вид:
х = psin$cos<p,
у = psindsintp, (3.19)
z = рсо&д
Вопросы и задачи
101
И
р= Vz2 + y2 + z2,
д = arccos—......-=i
^ж24-у24-г2
arctg(y/a:), х > 0;
л 4-arctg(y/a:), х < 0, у^0;
-7r + arctg(j//a:), х < 0, у < 0;
тг/2, х = 0, у > 0;
-тг/2, ж = 0, у<0.
(3.20)
Замечание 3.2. В цилиндрической и сферической систе-
мах координат могут накладываться ограничения на возмож-
ные значения угла </?, отмеченные выше для полярной системы
координат, с тем чтобы этот угол определялся для каждой точ-
ки однозначно. Значение второй координаты в этих системах
для точек оси Oz не определено, и положения таких точек пол-
ностью определяются значениями двух других координат.
Вопросы и задачи
3.1. Доказать, что если уравнение х2 4- ху + у - 1 = 0 за-
писать в новых координатах х', у' с помощью преобразования
координат
х = агх'+/3iy',
y = a2x' + 02y',
то при
«1
«2 Дг
7^0
порядок уравнения не изменится. Привести пример, показы-
вающий, что при нарушении этого условия порядок может
уменьшиться.
3.2. Найти преобразование координат на плоскости: а) при
параллельном переносе системы координат на вектор {—3;5};
б) при повороте на угол —тг/З.
102
3. СИСТЕМЫ КООРДИНАТ
3.3. Выяснить, задают ли формулы: а) х = х' + у', у = х' —
- у'; б) х = 0,5ж' - у/Зу'/2, у = у/Зх'/2 4- 0,5у' поворот системы
координат на плоскости. Если задают, найти угол поворота.
3.4. Найти расстояние между точками М\ и М2, если
они заданы своими полярными координатами pi,<pi и Р2,У>2
соответственно.
3.5. Окружность радиуса а катится без скольжения по оси
абсцисс в ее положительном направлении, вращаясь с угловой
скоростью 1 рад/с. В момент времени t = 0 точка М окруж-
ности совпадает с началом системы координат. Доказать, что
эта точка движется по циклоиде х = a(t- sint), у = а(1 - cosi).
Построить эту кривую.
3.6. Нарисовать на плоскости кривую, по которой движется
точка с координатами a: = sini, j/ = sin2L Прокомментировать
это движение точки.
3.7. Доказать, что множество точек на плоскости, произве-
дение расстояний от которых до точек 2i(-a;0), 7-2(0; а) есть
величина постоянная, равная а2, представляет собой кривую
(лемнискату), которая описывается уравнением (х2 + у2)2 =
= 2а?(х2 - у2). Записать уравнение этой кривой в полярной
системе координат и построить кривую.
3.8. Что представляют собой множества точек в простран-
стве, равноудаленных от точек: а) А(0;0;-10), 23(0; 0; 10);
б) А(1;1;0), В(—1;—1;0); в) А(1;2;3), В(-1;-2;-3) ? По-
строить соответствующие геометрические образы и найти их
уравнения.
3.9. Найти координаты центра масс системы четырех мате-
риальных точек одинаковой массы т, расположенных на плос-
кости, если даны их координаты (5; 9), (1; -7), (-4; -8), (2; 2).
3.10. Найти объем четырехугольной пирамиды SABCD,
если в ее основании лежит параллелограмм ABCD и извест-
ны координаты вершин 5(-5;1;9), А(1;3;-7), В(-4; -2,-8),
Вопросы и задачи
103
С(-2; 1; 2). Чему равна высота этой пирамиды, опущенная из
вершины S?
3.11. Луч света, исходящий из точки А(—2; 4) в сторону
оси абсцисс, после зеркального отражения от этой оси прошел
через точку В(4; 12). Найти координаты точки отражения и
точки пересечения луча с осью ординат.
3.12. Найти угол, под которым из начала прямоуголь-
ной системы координат виден отрезок, соединяющий точки
В(4; 10; 8) и С(2; 2; 2).
3.13. Доказать, что два ортонормированных базиса в про-
странстве, имеющих одинаковую ориентацию, можно совме-
стить друг с другом при помощи поворота вокруг некоторой
оси. Найти вектор, задающий направление этой оси, и угол
поворота.
3.14. Найти координаты центра масс треугольника с верши-
нами А(—1; 7; 4), В(13; 5; 2), С(7; —1; —4), если масса треуголь-
ника равномерно распределена по его площади.
3.15. На плоскости расположены три точки A(l + t; 3 — t),
В(3 —t;6-f-2t) и С(—14-t;t). Выяснить, при каких значениях
параметра t из точки А не видна точка С.
3.16. Доказать, что в полярной системе координат рассто-
яние между точками Mi(pi; <рг) и М2(/?2;9?2) вычисляется по
формуле
= yjpl - 2/hp2cos(9?i - <р2) +р%.
4. ПРЯМАЯ НА ПЛОСКОСТИ
4.1. Алгебраические кривые
первого порядка
Остановимся на изучении алгебраических кривых первого
порядка на плоскости, т.е. кривых, которые в заданной пря-
моугольной системе координат описываются алгебраическим
уравнением первого порядка ах + Ьу -Ь с = 0, где хотя бы один
из коэффициентов а или Ь отличен от нуля1. Это уравнение
называют также линейным уравнением.
Теорема 4.1. Любая прямая на плоскости представляет
собой алгебраическую кривую первого порядка и любая алге-
браическая кривая первого порядка на плоскости есть прямая.
◄ Рассмотрим произвольную прямую L на плоскости. Пусть
точка Мц(хц\уц) лежит на L, а ненулевой вектор п = {а; 6}
перпендикулярен этой прямой. При таких исходных условиях
произвольная точка М(х; у) принадлежит прямой L тогда
и только тогда, когда вектор ортогонален вектору п
(рис. 4.1). ____
Зная координаты векторов MqN1 =
п к ={х — хо\у — j/о} и п, запишем условие
Л о ортогональности этих векторов через
их скалярное произведение: а(х — хц) +
+ Чу - Уо) = 0 или ах -Ь by -Ь с = 0, где
с = — ах0 — Ьуо. Так как п 0, то либо
рис 4 г а 0, либо 6^0. Первое утверждение
теоремы доказано.
1 Условие, что коэффициенты а и 6 одновременно не обращаются в нуль,
коротко можно записать так: а2 + Ь2 О.
4.1. Алгебраические кривые первого порядка 105
Для доказательства второго рассмотрим произвольное урав-
нение первого порядка с двумя неизвестными ах 4- by 4- с = 0,
а2 4-62 0. Это уравнение имеет хотя бы одно решение. Напри-
мер, если а 0, то решением уравнения является х = —с/а, у = 0.
Это значит, что геометрический образ уравнения является не-
пустым и содержит какие-то точки. Пусть точка М0(х0; у0)
принадлежит указанному образу, т.е. выполняется равенство
ахо 4- Ьуо 4- с = 0. Вычтем это равенство из рассматриваемого
уравнения. В результате получим новое уравнение, эквива-
лентное исходному. Это новое уравнение после группировки
слагаемых примет вид
а(х - ж0) 4- Ь(у - у0) = 0. (4.1)
Нетрудно увидеть, что полученное уравнение представляет со-
бой условие ортогональности векторов п = {а; 6} и МоЛ/, где
М — это точка с координатами (х; у). Следовательно, если
точка М(х; у) принадлежит геометрическому образу уравне-
ния ах 4- by 4- с = 0, то вектор п ортогонален вектору Л/оЛ/, т.е.
точка М лежит на прямой, проходящей через точку Мо перпен-
дикулярно вектору п. ►
Определение 4.1. Уравнение вида
ах 4- by 4- с = 0, а24-Ь2^0, (4.2)
называют общим уравнением, прямой.
Из доказательства теоремы 4.1 следует, что коэффициенты
а и b в общем уравнении прямой имеют простой геометри-
ческий смысл. Это координаты вектора, перпендикулярного
прямой. Такой вектор называют нормальным вектором
прямой. Он, как и общее уравнение прямой, определяется с
точностью до (ненулевого) числового множителя.
Пусть прямая L задана уравнением (4.2). Если точка
Л4о(хо; Уо) лежит на прямой L, то ее координаты удовлетворяют
106
4. ПРЯМАЯ НА ПЛОСКОСТИ
уравнению (4.2), т.е. ахо -Ь Ъуо + с = 0. В любой точке Mi(x^ уг),
не лежащей на прямой L, значение левой части уравнения (4.2)
равно
axi + byi + с = axi -Ь byi - ах0 - Ьу0 =
= a(ri - ж0) + Ъ(у1 - уо) = пМ0МУ1 / 0.
Знак скалярного произведения tiMqMi определяется углом
между вектором MqMi и нормальным вектором прямой п.
Если точки Му и Mi расположены по одну сторону от прямой
L (рис. 4.2, а), то, подставив их координаты в левую часть
уравнения (4.2), мы получим значения с одним знаком. Если
такая подстановка координат точек М\ и Mi приводит к
значениям с разными знаками, то эти точки лежат по разные
стороны от прямой L (рис. 4.2, б).
а б
Рис. 4.2
Пример 4.1. Выясним, как по отношению к прямой
Зх — 4у + 5 = 0 расположены точки 4(4; 4) и В(6; 6).
Подставив координаты точки А в левую часть общего урав-
нения прямой, получим положительное число 1, а подстановка
координат точки В приводит к отрицательному числу —1. Зна-
чит, точки 4 и В расположены по разные стороны от данной
прямой. #
4.2. Специальные виды уравнения прямой
107
Уравнение (4.1) очень полезно при решении задач. Оно
позволяет по координатам точки на прямой L и координатам
нормального вектора прямой L записать уравнение прямой без
промежуточных вычислений.
4.2. Специальные виды уравнения прямой
Кроме общего уравнения прямой на плоскости часто исполь-
зуют и другие уравнения прямой. Это связано с тем, что, в за-
висимости от геометрического описания прямой на плоскости,
ее уравнение может быть получено в некотором специальном
виде. Кроме того, каждому виду уравнения соответствует свой
геометрический смысл его коэффициентов, что также важно.
Фиксируем на плоскости прямоугольную систему координат
Оху.
Уравнение с угловым коэффициентом. Определим
прямую L на плоскости, задав точку Мо(хо;уо) на этой прямой
и угол <р, на который надо повернуть против хода часовой
стрелки ось абсцисс Ох до совмещения с прямой (рис. 4.3).
Предположим, что </?^7г/2.
Точка М(ж; у) принадлежит
прямой L тогда и только тогда,
когда вектор составляет
с осью Ох угол <р или 7Г —
при этом отношение координат
этого вектора равно tg</?. Это
условие можно записать в виде
Рис. 4.3
У~Уо
х-х0
= tg¥’.
Находя у, приходим к уравнению
y = kx + b, (4.3)
rflefc = tg<p; b = yo-xotg4>.
108
4. ПРЯМАЯ НА ПЛОСКОСТИ
Уравнение вида у = кх + b называют уравнением прямой
с угловым коэффициентом. Параметр к (угловой коэф-
фициент прямой) равен тангенсу угла наклона прямой. Па-
раметр Ь равен ординате точки пересечения прямой с осью Оу.
Векторное и параметрические уравнения прямой.
Определим прямую L на плоскости точкой М0(х0\ уо) на этой
прямой и ненулевым вектором s = {/;m}, параллельным ей
(рис. 4.4). Такой вектор s называют направляющим век-
тором прямой L.
Если точка М(®; у) принадлежит прямой L, то это эквива-
лентно тому, что вектор МоЛ/ коллинеарен вектору з, т.е. эти
векторы принадлежат одному и
тому же пространству Vj. Так
как вектор s не равен нулевому,
он образует базис в этом про-
странстве Ц. Следовательно,
для некоторого числа t выпол-
няется равенство Мо1\} = ts.
Воспользовавшись тем, что Мой} = {х — xq', у — j/o}> « =
= {/; тп), запишем это равенство в координатах:
X — Хо = It,
У~Уо = mt,
или
X = Xo + lt,
у = Уо + rnt.
(4-4)
Уравнения (4.4) называют параметрическими уравнения-
ми прямой. Точка М(хо;уо), лежащая на прямой, соответ-
ствует значению параметра t = 0.
Если равенство = ts записать через радиус-векторы
го я г точек Мо и М соответственно, то в результате получим
4.2. Специальные виды уравнения прямой
109
векторное уравнение прямой
г — го = ts, или г = го 4- ts. (4.5)
Каноническое уравнение прямой. Модифицируем вы-
вод параметрических уравнений прямой. Коллинеарность век-
торов МоЛ/ и з, согласно следствию 1.1, эквивалентна равен-
ству отношений их одноименных координат:
= (4.б)
I т
Уравнение (4.6) называют каноническим уравнением пря-
мой. Это уравнение можно также получить, исключив из
параметрических уравнений (4.4) параметр t.
Уравнение прямой, проходящей через две точки.
Зададим прямую L на плоскости двумя различными точками
М1(Х!,У1) и М1(х2,у2) на ней.
Тогда вектор параллелен L и ее каноническое урав-
нение (4.6) как уравнение прямой, проходящей через точку
Л71 (ж 1, ?/1), с направляющим вектором s = имеет вид
х^х1 = У.^Ук, (4.7)
%2 -Xi У2-У1
Уравнение (4.7) называют уравнением прямой, проходящей
через две точки.
Уравнение прямой в отрезках. Определим прямую L ее
точками А(а,0) и В(0,Ь) пересечения с осями координат, пред-
полагая, что эти две точки не совпадают с началом системы
координат, т.е. что а / 0 и 6/ 0 (рис. 4.5).
Записывая уравнение прямой L в виде (4.7) по двум ее
точкам А и В, получаем
х — а _ у — 0
0-а ~ 6-0’
110
4. ПРЯМАЯ НА ПЛОСКОСТИ
Рис. 4.5
откуда -xfa+1 = у/6, или
- + ? = 1- (4-8)
а о
Уравнение прямой (4.8) называют
уравнением прямой в отрез-
ках.
Нормальное уравнение пря-
мой. Определим прямую L при
помощи перпендикулярного ей еди-
ничного вектора п и расстояния
р > 0 до прямой от начала системы координат. Существуют
два единичных вектора, перпендикулярных прямой L. Из этих
двух выберем тот, который имеет начало в точке О и направлен
„в сторону прямой“ L (рис. 4.6).
Выбранный вектор п однозначно определяется своим углом
с осью Ох, который отсчитывается против хода часовой
стрелки. Координаты вектора
п легко вычисляются через этот
угол: n = {cosy>; sin</>).
Условие, что точка М(х; у)
принадлежит прямой L, эквива-
лентно тому, что ортогональная
проекция радиус-вектора точки
М на направление нормального
вектора прямой равна рассто-
янию р от'точки О до прямой: прпОл/ — р (см. рис. 4.6).
Проекция прп совпадает со скалярным произведением век-
торов и п, так как длина нормального вектора п равна
единице, и это приводит к равенству Ол/n =р. Записав ска-
лярное произведение в координатах, получим уравнение
прямой L в виде
a:cos</3-bysin</5-p = 0.
(4-9)
4.3. Взаимное расположение двух прямых
111
Уравнение (4.9) называют нормальным уравнением пря-
мой. Параметрами в этом уравнении являются угол <р между
нормальным вектором прямой и осью Ох и расстояние от на-
чала системы координат до прямой.
Общее уравнение прямой ах -Ь by -Ь с = 0 можно преобра-
зовать в ее нормальное уравнение делением на нормирующий
множитель ±-\/а2 -Ь Ь2, знак которого выбирается противопо-
ложным знаку с. По абсолютной величине нормирующий мно-
житель представляет собой длину нормального вектора {а; 6}
прямой, а выбор знака означает выбор нужного направления из
двух возможных. Если с = 0, то прямая проходит через начало
координат (р = 0). В этом случае знак нормирующего множи-
теля можно выбирать любым.
Пример 4.2. Для получения нормального уравнения пря-
мой из ее общего уравнения Зх — 4у -Ь 10 = 0 вычисляем нор-
мирующий множитель ±у/а2 -Ь Ь2, который для данной прямой
отрицателен и равен —л/З2 -Ь 42 = —5. Поэтому нормальное
уравнение прямой имеет вид
3 4 „ Л
--ж-Ь -у-2 = 0.
О о
В данном случае имеем р = 2, cos</> = —3/5, sintp = 4/5, а
<р = arccos(—3/5).
4.3. Взаимное расположение двух прямых
Фиксируем на плоскости прямоугольную систему коорди-
нат. Две прямые на плоскости могут быть параллельными
или пересекаться. Пересекающиеся прямые могут быть пер-
пендикулярными. Какая из этих возможностей реализуется для
прямых Li и Z>2, всегда можно выяснить с помощью их общих
уравнений
Li’. a1x + biy + ci = 0,
Li', aix 4- Ьъу -Ь с2 = 0.
112
4. ПРЯМАЯ НА ПЛОСКОСТИ
Действительно, для параллельности прямых Li и L% необходи-
мо и достаточно, чтобы были коллинеарными их нормальные
векторы ni = {ai; bi} и пг = {аг; Ьг}, а коллинеарность векто-
ров равносильна пропорциональности их координат. Поэтому
Li||L2 ~ = Г- (4Л°)
аг ©г
Так как последнее равенство преобразуется в соотношение
ai&2 — аг&1 = 0, то полученное условие параллельности двух
прямых можно записать при помощи определителя второго
порядка:
Li || L2 =0. (4.11)
01 02
Прямые L\ и Ьг перпендикулярны тогда и только то-
гда, когда ортогональны их нормальные векторы. Условие
ортогональности нормальных векторов = {a^bi} и «г =
= {«2; £>2} эквивалентно равенству нулю их скалярного произ-
ведения П1П2 = 0, т.е., согласно (2.12), условию
aia2 -Ь Ьх^г — 0. (4.12)
И условие параллельности, и условие перпендикулярности
можно записать через угловые коэффициенты прямых. Для
этого необходимо выразить угловые коэффициенты прямых
через коэффициенты их общих уравнении: кг = — ai/&i, ki =
= — a^/bi. Эти выражения позволяют записать условия (4.10) и
(4.12) следующим образом:
- условие параллельности: &! = fc2;
- условие перпендикулярности: fcifc2 = —1.
Две пересекающиеся прямые Li и L2 образуют два смежных2
угла. Один из этих углов совпадает с углом между нормаль-
ными векторами. А угол между двумя векторами можно вы-
числить при помощи скалярного произведения. Отметим, что
2 Два смежных угла в сумме дают 180°.
4.4. Расстояние от точки до прямой 113
косинусы двух смежных углов различаются знаками, так как
cos(tt — <р) = — cosy?. При этом положительное значение косину-
са соответствует острому углу. Значение <р (меньшего из углов
между прямыми L\ и £г) вычисляется согласно формуле
_ |та1’г2| _ |в1в2 + ^1^2|
|’г1||п2| y/aj + bjy/a^ + b^
Угол между прямыми можно также выразить через угловые
коэффициенты прямых. Этот угол представляет собой раз-
ность углов наклона прямых. Если к\ = tgy?i и &2 = tg</?2 —
угловые коэффициенты прямых Li и L2, то
tg„=tg(„,-„2)=£5A
Приведенная формула учитывает не только значение угла, но
и направление поворота вокруг точки пересечения прямых,
при котором прямая L2 совмещается с прямой Lp Прямую
L2 можно поворачивать как по ходу часовой стрелки, так и в
противоположном направлении. Два возможных угла поворота
(без учета знака) в сумме равны 180°. Значение острого угла
поворота с учетом его направления определяется по формуле
к\ к2
4.4. Расстояние от точки до прямой
Для вычисления расстояния от данной точки М до прямой
L можно использовать разные способы. Например, если на пря-
мой L взять произвольную точку Мо, то можно определить
ортогональную проекцию вектора Mold на направление нор-
мального вектора прямой. Эта проекция с точностью до знака
и есть нужное расстояние.
Другой способ вычисления расстояния от точки до пря-
мой основан на использовании нормального уравнения прямой.
114
4. ПРЯМАЯ НА ПЛОСКОСТИ
Пусть прямая L задана нормальным уравнением (4.9). Если
точка М(х;у) не лежит на прямой L, то ортогональная про-
екция прпОл! радиус-вектора точки М на направление еди-
ничного нормального вектора п прямой L равна скалярному
произведению векторов Ол1 и п, т.е. xcos</>4- у sin 9?. Эта же
проекция равна сумме расстояния р от начала координат до
прямой и некоторой величины S (рис. 4.7). Величина <5 по аб-
солютной величине равна расстоянию от точки М до прямой.
При этом 5 > 0, если точки М и О находятся по разные стороны
от прямой, и 6 < 0, если эти точки расположены по одну сто-
рону от прямой. Величину 6 называют отклонением точки
М от прямой.
Отклонение S для точки М(х;у} от прямой L вычисляется
как разность проекции пр,
Рис. 4.7
Ол1 и расстояния р от начала ко-
ординат до прямой (см. рис. 4.7),
т.е. 8 = ж cos +у sin 9? — р.
По этой формуле можно по-
лучить и расстояние р(М, L) от
точки М(х;у) до прямой L, за-
данной нормальным уравнением:
p(M,L) = |<5|=|xcos9?4-ysin9?-p|.
Учитывая приведенную выше
процедуру преобразования обще-
го уравнения прямой в ее нор-
мальное уравнение, получаем формулу для расстояния от точки
М(х;у) Д° прямой L, заданной своим общим уравнением:
P(M,L) =
|аж + Ьу + с|
Va2 4- Ь2
(4-13)
Пример 4.3. Найдем общие уравнения высоты АН, ме-
дианы AM и биссектрисы AD треугольника АВС, выходящих
из вершины А. Известны координаты вершин треугольника
А(-1;-3),В(7;3),С(1;7).
4.4. Расстояние от точки до прямой
115
Прежде всего уточним условие примера: под указанными
уравнениями подразумевают уравнения прямых Lah, Lam и
Lad, на которых расположены соответственно высота АН,
медиана AM и биссектриса AD указанного треугольника
(рис. 4.8).
Чтобы найти уравнение прямой Lam, воспользуемся тем,
что медиана делит противоположную сторону треугольника по-
полам. Найдя координаты (zijj/i) середины стороны ВС xi =
= (7 + 1)/2 = 4, У1 = (3 + 7)/2 =
= 5, записываем уравнение для
Lam в виде уравнения прямой,
проходящей через две точки,
х + 1 j/4-З
4 + 1 5 + 3’
После преобразований получа-
ем общее уравнение медианы
8х — 5у — 7 = 0.
Чтобы найти уравнение высоты Lah, воспользуемся тем,
что высота перпендикулярна противоположной стороне тре-
угольника. Следовательно, вектор перпендикулярен вы-
соте АН и его можно выбрать в качестве нормального вектора
прямой Lah- Уравнение этой прямой получаем из (4.1), под-
ставляя координаты точки А и нормального вектора прямой
Lah-
(-6)(х + 1)+4(У + 3) = 0.
После преобразований получаем общее уравнение высоты
Зх — 2у- 3 = 0.
Чтобы найти уравнение биссектрисы Lad, воспользуемся
тем, что биссектриса AD принадлежит множеству тех точек
116 4. ПРЯМАЯ НА ПЛОСКОСТИ
N(x; у), которые равноудалены от прямых Lab и Lac- Уравне-
ние этого множества имеет вид
= (4-14)
и оно задает две прямые, проходящие через точку А и делящие
углы между прямыми Lab и Lac пополам. Воспользовавшись
уравнением прямой, проходящей через две точки, найдем общие
уравнения прямых Lab и Lac-
т ж +1 _ У + 3 т . ж + 1 __ У + 3
АВ'' 7+1 - 34-3’ АС' 1 + 1 “7 + 3’
После преобразований получаем
Lab- За: —4у —9 = 0, Lac- 5х-у + 2 = 0.
Уравнение (4.14) с помощью формулы (4.13) для вычисления
расстояния от точки до прямой запишем в виде
|3х — 4у — 9| _ |5ж — у + 2|
УЗ2+ (-4)2 " V52 + (-1)2 ‘
Преобразуем его, раскрыв модули:
5х —у+ 2
За: - 4у - 9 = ±5--р=—.
у/26
В итоге получим общие уравнения двух прямых
(3 + 25/л/26)х + (-4 ± 5/v^6)y + (—9 +10/у/26) = 0.
Чтобы выбрать из них уравнение биссектрисы, учтем, что вер-
шины ВкС треугольника расположены по разные стороны от
искомой прямой и поэтому подстановки их координат в левую
часть общего уравнения прямой Lad должны давать значения
с разными знаками. Выбираем уравнение, соответствующее
верхнему знаку, т.е.
(3 - 25/\^6)х + (-4 + 5/V^6)l/4- (-9 - 10/v^6) = 0.
Вопросы и задачи
117
Подстановка координат точки В в левую часть этого уравнения
дает отрицательное значение, поскольку
(3 - 25/^26)7+ (-4 4- 5/v^6)3 4- (-9 - 10/v^6) =
= 21 - 12 - 9 4- (-175 4-15 - 10)/V^6 = -170/V26,
и такой же знак получается для координат точки С, так как
(3 - 25/v^6)l 4- (-4 4- 5/v^6)7 4- (-9 - 10/V^6) =
= 3 - 28 - 9 4- (-25 4- 35 - 10)/V^6 = -34 < 0.
Следовательно, вершины В и С расположены по одну сторону
прямой с выбранным уравнением, а потому уравнением биссек-
трисы является
(3 4- 25/\/26)х 4- (-4 - 5/v^6)y 4- (-9 4- 10/v^6) = 0.
Вопросы и задачи
4.1. Найти общее уравнение прямой: а) проходящей через
начало системы координат; б) параллельной оси абсцисс (ор-
динат).
4.2. Выяснить расположение точек А(2; — 1), В(8; 19) и
С(7; 17) относительно прямой х = 1 4-1, у = — 2 4- 3t.
4.3. Найти точку пересечения прямых х = 2 4-1, у = — 4 — 2t
и Зх 4- 5у — 7 = 0.
4.4. Найти координаты точки, симметричной точке А(3; 7)
относительно прямой: а) х = -2 -1, у = 4 4-1- б) 2х - 5у 4- 5 = 0.
4.5. Найти координаты точки пересечения высот треуголь-
ника с вершинами в точках А(3; —4), В(-5; 10) и С(6; 4).
4.6. Луч света, вышедший из точки А(1; 4), прошел на
одинаковом расстоянии от точек В(-2;6) и С(7;3). Найти
уравнение его траектории.
118
4. ПРЯМАЯ НА ПЛОСКОСТИ
4.7. Найти уравнения сторон параллелограмма ABCD, если
известны координаты его двух вершин 4(— 1; — 2), В(3; —4) и
точки М(0; 1) пересечения диагоналей.
4.8. Прямая, проходящая через точку М(1; 4) и не прохо-
дящая через начало системы координат, отсекает от первой
четверти координатной плоскости треугольник минимальной
площади. Найти ее уравнение.
4.9. Найти уравнение прямой, которая касается окружности
радиуса 2 с центром в начале системы координат и проходит
через точку М(3; 1).
4.10. Найти расстояние между прямыми: а) х = — 2 + t, у —
= 3 + 2t и 2х — у + 8 = 0; б) х = 2 — 3t, у — 1 +1 и 2х + у 4- 3 = 0.
4.11. Найти координаты вершин квадрата по уравнению од-
ной из его сторон Зх — 4у + 20 = 0 и точке М(—3; 4) пересечения
его диагоналей.
4.12. Найти угол между медианой и высотой треугольника
АВС, выходящими из вершины 4(1; —5), если известны коорди-
наты точки М(2; 1) пересечения его медиан и вершины В(5; 0).
4.13. Найти уравнение множества точек на плоскости,
которые удалены от прямой (х — 2)/3 = (у + 1)4 в два раза
дальше, чем от прямой х = 1 — 12t, y = 5 + 5t.
4.14. Доказать, что медианы (высоты, биссектрисы) тре-
угольника пересекаются в одной точке.
4.15. Найти площадь треугольника, если известны коор-
динаты его двух вершин 4(1; 6), В(3; 8) и точки пересечения:
а) медиан М(4; -4); б) высот Я(5;0).
5. ПРЯМАЯ И ПЛОСКОСТЬ
В ПРОСТРАНСТВЕ
5.1. Алгебраические поверхности
первого порядка
Уравнение первого порядка с тремя неизвестными имеет
вид Ах 4- By 4- Cz 4- D = 0, причем хотя бы один из коэффи-
циентов А, В, С должен быть отличен от нуля. Оно задает в
пространстве в прямоугольной системе координат Oxyz алге-
браическую поверхность первого порядка.
Свойства алгебраической поверхности первого порядка во
многом аналогичны свойствам прямой на плоскости — геоме-
трическому образу уравнения первого порядка с двумя неиз-
вестными.
Теорема 5.1. Любая плоскость в пространстве является
поверхностью первого порядка и любая поверхность первого
порядка в пространстве есть плоскость.
4 Как утверждение теоремы, так и ее доказательство анало-
гичны теореме 4.1. Действительно, пусть плоскость тг задана
своей точкой Mq и ненулевым вектором п, который ей пер-
пендикулярен. Тогда множество всех точек в пространстве
разбивается на три подмножества. Первое состоит из точек,
принадлежащих плоскости, а два других — из точек, располо-
женных по одну и по другую стороны плоскости. Какому из
этих множеств принадлежит произвольная точка М простран-
ства, зависит от знака скалярного произведения nMobk. Если
точка М принадлежит плоскости (рис. 5.1, а), то угол между
векторами п и MqA/ прямой, и поэтому, согласно теореме 2.1,
120
5. ПРЯМАЯ И ПЛОСКОСТЬ В ПРОСТРАНСТВЕ
Рис. 5.1
Если же точка М не принадлежит плоскости, то угол между
векторами п и Мо^ острый или тупой, и поэтому пМ0^ > 0
или пЛ/оЛ/ < 0 соответственно (см. доказательство теоремы
2.1), причем знак этого скалярного произведения один и тот же
для всех точек, расположенных по одну сторону от плоскости
(рис. 5.1, б).
Обозначим координаты точек Mq, М и вектора п через
(х0; Уо! z0), (х; у; z) и {А; В; С} соответственно. Так как =
= {х — ХО; У - Уо; z - zo}, то, записывая скалярное произведение
из (5.1) в координатной форме (2.9) как сумму попарных
произведений одноименных координат векторов п и MqAI,
получаем условие принадлежности точки М рассматриваемой
плоскости в виде
А(х — х0) + В(у — Уо)+C(z— zo) = 0. (5.2)
Раскрытие скобок дает уравнение
Ax + By + Cz + D = 0, (5.3)
где D = —Axq — Вуо — Czq и хотя бы один из коэффициентов
А, В, или С отличен от нуля, так как вектор п = {А; В; С}
5.1. Алгебраические поверхности первого порядка
121
ненулевой. Это означает, что плоскость является геометриче-
ским образом уравнения (5.3), т.е. алгебраической поверхно-
стью первого порядка.
Проведя изложенное доказательство первого утверждения
теоремы в обратном порядке, мы докажем, что геометриче-
ским образом уравнения Ах + By + Cz + D = 0, А2 4- В2 + С2 О,
является плоскость. Выберем три числа (х = х0, у = уо, z = zo),
удовлетворяющих этому уравнению. Такие числа существу-
ют. Например, при А 0 можно положить у0 = 0, z0 = 0 и
тогда хо = —D/А. Выбранным числам соответствует точка
М0(х0; у0;2г0), принадлежащая геометрическому образу задан-
ного уравнения. Из равенства Ахо 4- Вуо 4- Czq 4- D = 0 следует,
что D = — Ахо — Вуо — Czq. Подставляя это выражение в рас-
сматриваемое уравнение, получаем
Ах 4- By 4- Cz — Ахо — Вуо - Czq = О,
что равносильно (5.2). Равенство (5.2) можно рассматривать
как критерий ортогональности векторов п = {А; В; CJ и
МоЛ^, где точка М имеет координаты (х; у; z). Этот критерий
выполнен для точек плоскости, проходящей через точку Мо
перпендикулярно вектору п = {А; В; CJ, и не выполнен для
остальных точек пространства. Значит, уравнение (5.2) есть
уравнение указанной плоскости. ►
Уравнение Ах 4- By 4- Cz 4- D = 0 называют общим уравне-
нием плоскости. Коэффициенты А, В, С при неизвестных в
этом уравнении имеют наглядный геометрический смысл: век-
тор п = {А; В; С} перпендикулярен плоскости. Его называют
нормальным вектором плоскости.
По известным координатам точки, принадлежащей некото-
рой плоскости, и ненулевого вектора, перпендикулярного ей, с
помощью (5.2) уравнение плоскости записывается без каких-
либо вычислений.
122 5. ПРЯМАЯ И ПЛОСКОСТЬ В ПРОСТРАНСТВЕ
Пример 5.1. Найдем общее уравнение плоскости, пер-
пендикулярной радиус-вектору точки А(2; 5; 7) и проходящей
через точку Мо(3; —4; 1).
Поскольку ненулевой вектор 0% = {2; 5; 7} перпендикулярен
искомой плоскости, то ее уравнение типа (5.2) имеет вид
2(x-3)4-5(y-|-4) + 7(z-l)=0.
Раскрывая скобки, получаем искомое общее уравнение плоско-
сти 2х + 5у + 7z + 7 = 0.
5.2. Специальные виды уравнения плоскости
Векторное и параметрические уравнения плоскости.
Пусть Го и г — радиус-векторы точек Мо и М соответственно.
Тогда Мол1 = г — Го, и условие (5.1) принадлежности точки
М плоскости, проходящей через точку Мо перпендикулярно
ненулевому вектору п (рис. 5.2, а), можно записать с помощью
скалярного произведения в виде соотношения
п(г - Го) = 0,
(5-4)
которое называют векторным уравнением плоскости.
Рис. 5.2
Фиксированной плоскости в пространстве соответствует
множество параллельных ей векторов, т.е. пространство
5.2. Специальные виды уравнения плоскости
123
Выберем в этом пространстве базис ei,e2, т.е. пару неколли-
неарных векторов, параллельных рассматриваемой плоскости,
и точку Мо на плоскости. Если точка М принадлежит плоско-
сти, то это эквивалентно тому, что ей параллелен вектор Mq^
(рис. 5.2, б), т.е. он принадлежит указанному пространству V2.
Это означает, что существует разложение вектора Мо1^ в ба-
зисе ei,e2, т.е. существуют такие числа ti и t2, для которых
Mobl = tier + t2e2.
Записав левую часть этого уравнения через радиус-векторы
го и г точек Mq и М соответственно, получаем векторное
параметрическое уравнение плоскости
r = ro + t1e1 + t2e2, ЬЛеК- (5.5)
Чтобы перейти от равенства векторов в (5.5) к равенству
их координат, обозначим через (хо; Уо! 2о), (х, У‘,z) координаты
точек Мо, М и через {eix-, е^; ei2), {е2х; e2j/; e2z} координа-
ты векторов ei, е2. Приравнивая одноименные координаты
векторов г и Го + ti^i + t2e2, получаем параметрические
уравнения плоскости
х = хо + tieix +
< y = yo + tieiy + t2e2y,
. z = z0 + t1elz + t2e2z.
(5-6)
Плоскость, проходящая через три точки. Предполо-
жим, что три точки Mi, М2 и Мз не лежат на одной пря-
мой. Тогда существует единственная плоскость л, которой
эти точки принадлежат. Найдем уравнение этой плоскости,
сформулировав критерий принадлежности произвольной точ-
ки М данной плоскости л. Затем запишем этот критерий
через координаты точек. Указанным критерием является опи-
сание плоскости тг как множества тех точек М, для кото-
рых векторы Mi М2, Mi М3 и MiA1 компланарны. Критерием
124 5. ПРЯМАЯ И ПЛОСКОСТЬ В ПРОСТРАНСТВЕ
компланарности трех векторов является равенство нулю их
смешанного произведения (см. 2.4). Смешанное произведе-
ние вычисляется с помощью определителя третьего порядка,
строками которого являются координаты векторов в ортонор-
мированном базисе. Поэтому, если (a:,; t/t; zt) — координаты
точек Mi, г = 1,2,3, a (x-,y;z) — координаты точки М, то
= {z-zi; у-ух; z-zx}, М^М^ = {х2-хх', у2-ух', z2-zx},
M1M3 = {x3—xi; y3—t/i; z3—zi} и условие равенства нулю сме-
шанного произведения этих векторов имеет вид
X — хг
Х2 — Хх
Хз — Хх
У-У1
У2-У1
Уз~У1
Z — Zx
Z2-Zx
Z3-ZX
= 0.
(5-7)
Вычислив определитель, получим линейное относительно
х, у, z уравнение, являющееся общим уравнением искомой
плоскости. Например, если разложить определитель по 1-й
строке, то получим
J/2-J/1
!/з-!/1
22 21 (z-zi)- Х2 Х1
Z3-Z1 Х3-Хх
Z2-Zx
Z3-ZX
(у~У1) +
Х2 — Хх
Х3-Хх
У2-У1
Уз~У1
(z - Zx) = 0.
Это равенство после раскрытия скобок преобразуется к общему
уравнению плоскости.
Отметим, что коэффициенты при переменных в последнем
уравнении совпадают с координатами векторного произведе-
ния МхМ2хМхМ3. Это векторное произведение, будучи произ-
ведением двух неколлинеарных векторов, параллельных плос-
кости 7Г, дает ненулевой вектор, перпендикулярный 7Г, т.е. ее
нормальный вектор. Так что появление координат векторно-
го произведения в качестве коэффициентов общего уравнения
плоскости вполне закономерно.
Рассмотрим следующий частный случай плоскости, прохо-
дящей через три точки. Точки Мх (а; 0; 0), М2(0-, Ь; 0), ЛГ3(0; 0; с),
5.2. Специальные виды уравнения плоскости 125
abc 0, не лежат на одной прямой и задают плоскость, которая
отсекает на осях координат отрезки ненулевой длины (рис. 5.3).
Здесь под „длинами отрезков" понимают значение ненулевых
координат радиус-векторов точек Mi, i= 1,2,3.
Поскольку М1М2 = {-а; b; 0}, Mi М3 = {—а; 0; с}, М1Л1 =
= (x—a; у; z), то уравнение (5.7) принимает вид
х — a
—a
—a
У z
b 0
0 с
= 0.
Вычислив определитель, найдем
bc(x — а) + acy+ abz = 0,
разделим полученное уравнение
на abc и перенесем свободный
член в правую часть,
х у z
- + f + - = !•
abc
Это уравнение называют уравнением плоскости в отрез-
ках.
Пример 5.2. Найдем общее уравнение плоскости, которая
проходит через точку с координатами (1;1;2) и отсекает от
осей координат отрезки одинаковой длины.
Уравнение плоскости в отрезках при условии, что она
отсекает от осей координат отрезки равной длины, скажем
а ф 0, имеет вид
X у Z
- + - + - = 1.
а а а
Этому уравнению должны удовлетворять координаты (1; 1; 2)
известной точки на плоскости, т.е. выполняется равенство
4/а= 1. Поэтому а = 4 и искомым уравнением является х 4-
126 5. ПРЯМАЯ И ПЛОСКОСТЬ В ПРОСТРАНСТВЕ
Нормальное уравнение плоскости. Рассмотрим некото-
рую плоскость тг в пространстве. Фиксируем для нее единичный
нормальный вектор п, направленный из начала координат „в
сторону плоскости", и обозначим
через р расстояние от начала О
системы координат до плоскости
тг (рис. 5.4). Если плоскость
проходит через начало системы
координат, то р = 0, а в каче-
стве направления для нормально-
го вектора п можно выбрать лю-
бое из двух возможных.
Если точка М принадлежит
плоскости тг, то это эквивалентно
тому, что ортогональная проек-
ция вектора Ол1 на направление
вектора п равна р, т.е. выполне-
но условие nOhi = прпОЛ^ = р, так как длина вектора п равна
единице.
Обозначим координаты точки М через (ж; у; z) и пусть п =
= {cosa; cos/?; COS7} (напомним, что для единичного вектора
п его направляющие косинусы cosa, cos/?, cos7 одновременно
являются и его координатами). Записывая скалярное произве-
дение в равенстве nOhi = р в координатной форме, получаем
нормальное уравнение плоскости
a: cosa + t/cos/? + ZCOS7 — р = 0.
Аналогично случаю прямой на плоскости, общее уравнение
плоскости в пространстве можно преобразовать в ее нормаль-
ное уравнение делением на нормирующий множитель.
Для уравнения плоскости Аж + By + Cz + D = 0 нормирую-
щим множителем является число ±-\/А2 + В2 + С2, знак кото-
рого выбирается противоположным знаку D. По абсолютной
5.3. Уравнения прямой в пространстве
127
величине нормирующий множитель представляет собой дли-
ну нормального вектора {А; В; С} плоскости, а знак соответ-
ствует нужному направлению единичного нормального вектора
плоскости. Если плоскость проходит через начало системы ко-
ординат, т.е. D = 0, то знак нормирующего множителя можно
выбрать любым.
5.3. Уравнения прямой в пространстве
Общие уравнения прямой в пространстве. Прямую
в пространстве можно рассматривать как линию пересечения
двух плоскостей. Если плоскости
TTiZ A\x->rB\y + C\z->rD\ = 0, тг2: А2х + В2у + C2z + Z>2 = О
непараллельны, то пересекаются по прямой. Точка M{x’,y,z)
принадлежит этой прямой тогда и только тогда, когда ее
координаты удовлетворяют уравнению каждой из плоскостей,
т.е. являются решениями системы уравнений
Г Aix + Biy + Ciz + Di = О,
А2х + В2у + C2z + D2 = О,
которую называют общими уравнениями прямой.
Векторное уравнение прямой. Описание прямой в
пространстве при помощи общих уравнений — не единственный
способ. Прямую L в пространстве можно также однозначно
задать любой ее точкой Мо и параллельным ей ненулевым
вектором в.
Любой ненулевой вектор, параллельный прямой, называют
направляющим вектором прямой.
Если точка М принадлежит прямой L, то это эквивалентно
тому, что вектор Мол1 коллинеарен вектору s (рис. 5.5). Так
как s 0, то вектор s является базисом в пространстве Ц
128
5. ПРЯМАЯ И ПЛОСКОСТЬ В ПРОСТРАНСТВЕ
Рис. 5.5
коллинеарных ему векторов. Поэто-
му для некоторого числа t выполня-
ется равенство Мол1 = ts. Так как
Мол) = - OMq = г - го, где г и
го — радиус-векторы точек М и Mq
соответственно, то условие М 6 L можно записать в виде урав-
нения
г = г0 + ts,
(5-9)
которое называют векторным уравнением прямой в про-
странстве.
Параметрические уравнения прямой в простран-
стве. Предположим, что известны координаты {/; т; п} на-
правляющего вектора s прямой L и точки М0(х0; у0‘ z0) G L в
прямоугольной системе координат. Обозначим через (ж; у, z)
координаты произвольной точки М.
Критерием принадлежности точки М прямой L является
условие коллинеарности векторов = {х - х0; у - уо', z - zo}
и s (см. рис. 5.5), что равносильно пропорциональности их
координат (см. теорему 1.8). Обозначив через t коэффициент
пропорциональности, получим равенства х - х0 = tl, у — уо = tm,
z — zq = tn. Но тогда
'x = x0 + lt,
* t/ = y0 + ni£,
Z = Z0 + nt,
(5.10)
и (5.10) называют параметрическими уравнениями пря-
мой в пространстве. Шесть коэффициентов в системе урав-
нений (5.10) имеют наглядный геометрический смысл: они
представляют собой координаты одной точки на прямой, со-
ответствующей t = 0, и координаты направляющего вектора
прямой, который соединяет точки, соответствующие значени-
ям параметра t = 0 и t = 1.
5.3. Уравнения прямой в пространстве 129
Итак, если задана система трех уравнений вида (5.10), в
которой хотя бы один из коэффициентов I, т, п отличен
от нуля, то эта система определяет в пространстве прямую,
причем тройка коэффициентов zof Z/сь zo задает на прямой
точку, а тройка коэффициентов I, т, п представляет собой
координаты направляющего вектора прямой.
Канонические уравнения прямой в пространстве.
Как и в случае прямой на плоскости, из параметрических
уравнений (5.10) можно исключить параметр t и записать
результат в виде
х-х0 _ у-уо _ z-z0
I т п
Уравнения (5.11) называют каноническими уравнениями
прямой в пространстве.
Канонические уравнения представляют собой, по существу,
другую форму записи условия коллинеарности векторов
и s, состоящую в пропорциональности их координат (см.
следствие 1.1).
В знаменателе канонических уравнений допускается нуле-
вое значение. Чтобы понять смысл нулевых значений параме-
тров /, т, п, обратим внимание на параметрические уравнения
прямой (5.10), в которых нет проблемы нулевых знаменателей.
Например, при I = 0 из (5.10) следует, что х = xq. Мы видим,
что если в канонических уравнениях один из знаменателей (или
два, но не все три) равен нулю, то соответствующий числитель
тоже равен нулю.
Уравнения прямой, проходящей через две точки.
Каждая прямая в пространстве однозначно задается любыми
двумя своими различными точками. Если известны коорди-
наты этих точек Mi(xi; t/i; zi) и !/2! то в качестве
направляющего вектора прямой подходит ненулевой вектор
М1М2 = {х2 — ац; У2 — У1‘, z2 ~ zi}. Зная его координаты и ко-
ординаты точки Mi на прямой, можно записать канонические
130 5. ПРЯМАЯ И ПЛОСКОСТЬ В ПРОСТРАНСТВЕ
уравнения прямой (5.11). В результате получим
х-xi _ у~У1 _ Z-Z1 _
Х2 - Х1 У2- У1 z2 - Z1
уравнения прямой, проходящей через две точки.
Пример 5.3. Точки Mi(l;2;3) и Л12(3;2;1) определяют
проходящую через них прямую
х — l_t/-2_z — 3
3- 1 = 2-2 " 1-3'
Нуль в знаменателе второй дроби означает, что для координат
всех точек прямой выполнено равенство у = 2. Поэтому прямая
расположена в плоскости у — 2 = 0, параллельной координатной
плоскости xOz и пересекающей ось ординат в точке с ордина-
той 2.
Изменение формы уравнений прямой. Переход от ка-
нонических уравнений прямой к параметрическим и обратно
достаточно очевиден и сводится к введению или исключению
параметра t. Одна форма уравнений непосредственно записы-
вается по другой, так как в них используются одни и те же
параметры, задающие координаты точки на прямой и коорди-
наты направляющего вектора.
Пример 5.4. Найдем координаты точки В, симметричной
точке А(2; 3; —1) относительно прямой
а: — 1 _ у + 2 _ z-1
' 1 ~ -1 ~ 2 '
В вычислениях будем опираться на следующее геометриче-
ское построение точки В: а) через точку А проводим плоскость
тг, перпендикулярную прямой L; б) находим точку М пересе-
чения прямой L и плоскости тг; в) отрезок AM удлиняем до
отрезка АВ так, чтобы точка М оказалась в середине отрезка
АВ (рис. 5.6).
5.3. Уравнения прямой в пространстве
131
Так как плоскость я- перпен-
дикулярна прямой L, то в ка-
честве нормального вектора п
плоскости можно выбрать на-
правляющий вектор прямой L:
n = {1; -1;2). По известным
координатам нормального век-
тора плоскости л- и принадле-
жащей ей точки А записыва-
ем уравнение плоскости я- в ви-
Рис. 5.6
де (5.2):
1(® - 2) + (-1)(у- 3) + 2(z + 1) = 0.
Чтобы найти координаты точки М пересечения прямой и
плоскости по их уравнениям, запишем параметрические урав-
нения прямой L:
x = l + t, y=—2 — t, z=l + 2t.
Подставив эти выражения для координат точки на прямой в
уравнение плоскости, получим уравнение для параметра t
(1 +1 - 2) - (-2 - t - 3) + 2(1 + 2t + 1) = 0,
решение которого дает значение параметра для точки М.
Найдя это значение t — —4/3 и подставив его в параметрические
уравнения прямой, получим координаты точки пересечения
х = 1-4/3= -1/3, у = -2 + 4/3= -2/3, z = 1 - 8/3= -5/3.
Поскольку эта точка должна делить отрезок АВ пополам,
ее координаты, согласно (3.14), равны полусумме соответству-
ющих координат точек А и В. Следовательно, обозначив через
(х1; у'; z1) координаты точки В, получим равенства
Ц^ = -1/3, Ц^ = -2/3. ^ = -5/3.
Отсюда х' = —8/3, у' = —11/3, z' = —7/3.#
132
5. ПРЯМАЯ И ПЛОСКОСТЬ В ПРОСТРАНСТВЕ
Достаточно просто выполняется переход от канонических
уравнений к общим. Нетрудно увидеть, что на самом деле
канонические уравнения представляют собой особую форму
записи общих уравнений. Действительно, двойное равенство
(5.11) равносильно системе двух линейных уравнений
' х~хо _ У~У° _ 0
I т
% ж о % ^0 «
— —— у,
п
(5.12)
которые представляют собой частный вид общих уравнений
прямой в пространстве.
Самым сложным является переход от общих уравнений к
каноническим или параметрическим.
Так как плоскости tti и 7Гг, соответствующие отдельным
уравнениям из общих уравнений (5.8) прямой, непараллельны,
то один из определителей второго порядка
Ai Bi
Аг Вг
Ai Ct
А2 С2
Bi Ct
в2 с2
представляющих собой координаты векторного произведения
нормальных векторов этих плоскостей, не равен нулю. Предпо-
лагая, что первый из этих определителей является ненулевым:
Д =
Ai
Аг
Bi
В2
/О,
изложим три способа перехода от общих уравнений к канони-
ческим или параметрическим.
Первый способ состоит в том, что в системе (5.8) для z
назначают два различных значения и по формулам Крамера
находят два различных решения системы двух уравнений с
двумя неизвестными хну. Эти два решения системы (5.8)
дают координаты двух разных точек Mt и М2 на прямой. А две
известные точки прямой позволяют найти уравнение прямой,
5.3. Уравнения прямой в пространстве
133
проходящей через две точки, которое фактически совпадает с
каноническими уравнениями прямой.
Отметим, что в качестве
направляющего вектора s пря-
мой, заданной общими урав-
нениями (5^8), можно выбрать
П1ХП2 — векторное произве-
дение двух нормальных векто-
ров плоскостей (рис. 5.7).
Действительно, это вектор-
ное произведение является век-
тором, который ортогонален
каждому нормальному векто-
ру, а потому он параллелен как
„ и Рис. 5.7
одной, так и другой плоскости,
т.е. параллелен их линии пересечения. Нахождение одной точки
на прямой и ее направляющего вектора можно рассматривать
как второй способ перехода от общих уравнений прямой к ее
каноническим уравнениям.
Пример 5.5. Найдем канонические уравнения прямой,
совпадающей с линией пересечения плоскостей
7Ti: х — y + z-2 = 0, 7Г2: х + у - z = 0.
Чтобы найти координаты некоторой точки на прямой, подста-
вляем в уравнения плоскостей z — 0 и решаем соответствующую
систему двух линейных уравнений относительно я и у
ж-у = 2,
<
ж + у = 0.
Значения х = 1 и у = — 1 единственного решения системы по-
лучаются сложением и вычитанием уравнений системы. Итак,
точка с координатами (1; —1; 0) расположена на прямой.
В качестве направляющего вектора прямой берем векторное
произведение П1ХП2 нормальных векторов гц = {1; — 1; 1} и
134 5. ПРЯМАЯ И ПЛОСКОСТЬ В ПРОСТРАНСТВЕ
п2 = {1;1; — 1} плоскостей ти и тг2. По формуле (2.14) для
вычисления векторного произведения в координатах находим
П1ХП2 =
* 3
1 -1
1 1
k
1
-1
= 2j 4- 2fc,
т.е. направляющим вектором прямой будет s = {0; 2; 2}. Най-
денный вектор s для простоты заменим коллинеарным ему
вектором {0; 1; 1}.
Проведенные вычисления позволяют написать канонические
уравнения искомой прямой
z-l t/4-1 z
Третий способ перехода от общих уравнений прямой к
ее каноническим или параметрическим уравнениям состоит
в следующем. Решаем систему (5.8) по правилу Крамера
относительно неизвестных х и у, рассматривая неизвестное z
как параметр:
Ciz+Di Bi
C%z -|-Z)2 В2
~~ Ai Bi~
A2 B2
Ai Ciz+Di
A2 С2г+Р2
~ Ax Bi
A2 fi2
D D
— "^(С'г^+^г) — = aiz+fli,
— -^-(Ciz+Di) — -^(С22г-Ь£>2) — а2з4-/32.
Обозначив z через t и добавив уравнение z = t, получим
параметрические уравнения прямой:
x-ait + 0i,
y = a2t + 02,
z — t.
5.4. Взаимное расположение прямых и плоскостей
135
5.4. Взаимное расположение прямых
и плоскостей
Взаимное расположение плоскостей. Пусть даны две
плоскости, заданные в прямоугольной системе координат сво-
ими общими уравнениями,
л-р Aiaj-t-Biy + Ciz-l-Di = 0, тг2: А2х + В2у + C2z + D2 = 0.
Один из двух углов между этими плоскостями (обозначим его
через <р) равен углу между их нормальными векторами ni =
= {Ах; В\-, Ci} и п2 = {А2; В2; С2} (рис. 5.8), а другой угол равен
тг — <р.
Рис. 5.8
Поэтому, согласно определению 2.1 скалярного произведе-
ния,
г~пя — (W1,Tt2) _ ^2 С1С2______
COS<P“ |щ| |п2| " уд? + В* + С}у/А* + в* + С22 ’
Если две данные плоскости перпендикулярны, то это экви-
валентно тому, что их нормальные векторы ортогональны.
Критерием ортогональности двух векторов является равенство
нулю их скалярного произведения (см. теорему 2.1). Поскольку
скалярное произведение двух векторов, заданных в коорди-
натах, вычисляется как сумма произведений их одноименных
136
5. ПРЯМАЯ И ПЛОСКОСТЬ В ПРОСТРАНСТВЕ
координат, критерием перпендикулярности плоскостей тгх и тгг
является выполнение равенства
+ BiВ2 4- С1С2 — 0.
Аналогично две плоскости параллельны, если их нормальные
векторы коллинеарны. Критерием же коллинеарности двух
векторов является равенство отношений их координат (см.
следствие 1.1). Поэтому условие параллельности двух плоско-
стей записывается в виде двойного равенства
Ai = В1. = С1
А2 В2 С2
Замечание 5.1. Это двойное равенство имеет смысл и в
том случае, когда в знаменателе одной из дробей стоит нуль.
Это значит, что и в числителе той же дроби стоит нуль. #
Параллельные плоскости могут совпадать или быть различ-
ными. Левые части общих уравнений совпадающих плоскостей
отличаются на ненулевой числовой множитель, и это можно
записать как равенство отношений соответствующих коэффи-
циентов их уравнений:
di = ^. = £i = 2i
а2 В2 С2 D2
Случай же
А2 В2 С2 В2
соответствует тому, что плоскости параллельны, но не совпа-
дают.
Угол между прямыми. Угол между двумя прямыми мож-
но найти, используя направляющие векторы прямых. Острый
угол между прямыми равен углу между их направляющими
векторами (рис. 5.9) или является дополнительным к нему,
5.4. Взаимное расположение прямых и плоскостей 137
если угол между направляющими
векторами тупой. Таким обра-
зом, если для прямых Li и L2 из-
вестны их направляющие векторы
si и S2, то острый угол ip между
этими прямыми определяется че-
рез скалярное произведение:
|sl«2|
l«i| |«г|
Например, пусть з, = {/,; m,; n,}, i = 1,2. Используя форму-
лы (1.9) и (2.9) для вычисления длины вектора и скалярного
произведения в координатах, получаем
IZ1Z2 + ГП1П12 + пхпг!
COS 09 = —. . . .
у/Ц + mJ + + m% + n%
Взаимное расположение прямых. Для двух прямых в
пространстве возможны четыре случая:
- прямые совпадают;
- прямые параллельны (но не совпадают);
- прямые пересекаются;
- прямые скрещиваются, т.е. не имеют общих точек и
непараллельны.
Рассмотрим два способа описания прямых: каноническими
уравнениями и общими уравнениями. Пусть прямые Li и L2
заданы каноническими уравнениями:
Х-Х1 У~У1 Z-Zi Х-Х2 У-У2 Z-Z2
Ь1. —-— =-------—------, Ь2- —— =---------=------• (5.13)
«1 ГП1 П1 12 m2 П2
138 5. ПРЯМАЯ И ПЛОСКОСТЬ В ПРОСТРАНСТВЕ
Для каждой прямой из ее канонических уравнений сразу опре-
деляем точку на ней Mi(xi; t/i; 6 In, M2(x2; уг; z2) € L2 n
координаты направляющих векторов Si = {/i;nn;ni} для £i,
S2 = G2,Hl2,'n2) ДЛЯ L2.
Если прямые совпадают или параллельны, то их направляю-
щие векторы si и з2 коллинеарны, что равносильно равенству
отношений координат этих векторов:
J1 = ^1 = Z!L. (5.14)
12 тп2 п2
Если прямые совпадают, то направляющим векторам кол-
линеарен и вектор
^2-^1 _ У2 ~У1 _ 32-^i
11 ТП1 П1
Это двойное равенство также означает, что точка М2 принад-
лежит прямой Li. Следовательно, условием совпадения прямых
является выполнение равенств (5.14) и (5.15) одновременно.
Если прямые пересекаются или скрещиваются, то их на-
правляющие векторы неколлинеарны, т.е. условие (5.14) нару-
шается. Пересекающиеся прямые лежат в одной плоскости и,
следовательно, векторы si, з2 и MiM2 являются компланар-
ными. Условие компланарности этих векторов можно записать
через смешанное произведение как равенство нулю определите-
ля третьего порядка, составленного из их координат (см. 2.4):
«2-^1
/1
/2
t/2 - У1 z2 - zi
ту ni
т2 п2
(5.16)
Условие (5.16) выполняется в трех случаях из четырех,
поскольку при Д / О прямые не принадлежат одной плоскости
и потому скрещиваются.
5.4. Взаимное расположение прямых и плоскостей
139
Сведем все условия воедино:
Li и L2 совпадают
Li и Li параллельны,
но Li / Li
Li и Li пересекаются
Li и Li скрещиваются
I выполнены условия
° I (5.14) и (5.15);
J выполнено (5.14),
( нарушено (5.15);
J выполнено (5.16),
( нарушено (5.14);
О нарушено (5.16).
Если две прямые заданы общими уравнениями
Anc + Bitz+Ciz + D^O,
А2х + B2y+C2z + D2 = 0,
L2:
A3 х 4- Вз у 4- Сз z 4- D3 — 0,
А4х 4- В4 у 4- С4 z 4- £>4 = 0,
то мы можем рассмотреть систему уравнений:
Aix 4- В\у 4- Ciz 4- Di — О,
А2х 4- В2у 4- C2z 4- D2 — О,
А3х 4- В3у 4- C3z 4- £>3 = О,
(5-17)
„ А4Х 4- В4У 4- C4Z 4- D4 = 0.
Взаимное расположение прямых характеризуется количе-
ством решений у системы (5.17). Если прямые совпадают, то
система имеет бесконечно много решений. Если прямые пересе-
каются, то эта система имеет единственное решение. В случае
параллельных или скрещивающихся прямых решений нет. По-
следние два случая можно разделить, если найти направляющие
векторы прямых. Для этого достаточно вычислить два век-
торных произведения niXn2 и П3ХП4, где п, = {А,; В,; С,},
i= 1,2,3,4. Если полученные векторы коллинеарны, то данные
прямые параллельны.
Пример 5.6. Исследуем взаимное расположение прямых
ж-1 у-2 г-Ь1 т
1-: —--------Г = Li:
z - у - z4-1 = 0,
x + y + 2z-2 = 0.
140 5. ПРЯМАЯ И ПЛОСКОСТЬ В ПРОСТРАНСТВЕ
Направляющий вектор si прямой Li находим по каноническим
уравнениям этой прямой: si = {1;3; —2). Направляющий век-
тор s2 прямой £2 вычисляем с помощью векторного произведе-
ния нормальных векторов плоскостей, пересечением которых
она является:
S2 — П1 хп2 =
* 3
1 -1
1 1
к
-1
2
= -г - 3j + 2k.
Поскольку sj = —з2, то прямые параллельны или совпадают.
Выясним, какая из этих ситуаций реализуется для данных
прямых. Для этого подставим координаты точки Л4о(1; 2; —1) €
€ Li в общие уравнения прямой Л2. Для первого из них
получаем 1 = 0. Следовательно, точка Мо не принадлежит
прямой £2 и рассматриваемые прямые параллельны.
Расположение прямой и плоскости. Взаимное распо-
ложение прямой и плоскости в пространстве допускает три
случая. Прямая и плоскость могут пересекаться в одной точке.
Они могут быть параллельны. Наконец, прямая может лежать
в плоскости. Выяснение конкретной ситуации для прямой и
плоскости зависит от способа их описания.
Предположим, что плоскость тг задана общим уравнением
тг: Ах -|- By + Cz + D = 0, а прямая L — каноническими уравне-
ниями
х~х0 _ у-уо _ Z-Zq
I т п '
Уравнения прямой дают координаты точки Мо(а;о; t/oj 2о) на
прямой и координаты направляющего вектора з = {I; т] п} этой
прямой, а уравнение плоскости — координаты ее нормального
вектора п — {А; В; С}.
Если прямая L и плоскость тг пересекаются, то направля-
ющий вектор з прямой не параллелен плоскости тг. Значит,
нормальный вектор п плоскости не ортогонален вектору з, т.е.
их скалярное произведение не равно нулю. Через коэффици-
енты уравнений прямой и плоскости это условие записывается
5.4. Взаимное расположение прямых и плоскостей
141
в виде неравенства
А14- Bm + Cn ф 0.
Если прямая и плоскость параллельны или прямая лежит в
плоскости, то выполняется условие s Ln, которое в координа-
тах сводится к равенству
Al + Bm + Cn — 0.
Чтобы разделить случаи „параллельны11 и „прямая принадле-
жит плоскости", нужно проверить, принадлежит ли точка пря-
мой данной плоскости.
Таким образом, все три случая взаимного расположения
прямой и плоскости разделяются путем проверки соответству-
ющих условий:
L принадлежит я
( Ах0 4- Ву0 4- Cz0 4- D = 0,
[ Al 4- Вт 4- Сп = 0;
L параллельна л* <=>
( Ах0 4- Ву0 4- Czq 4- D / 0,
[4/4- Вт 4- Сп = 0;
L пересекается с тг <=> А1 + Вт 4- Сп / 0.
Если прямая L задана своими общими уравнениями:
L А\х 4- Bly -\-C\z 4- Di = 0,
А2® 4* В2У 4- C2Z 4- D2 ~ 0,
то проанализировать взаимное расположение прямой и плоско-
сти тг можно следующим образом. Из общих уравнений прямой
и общего уравнения плоскости составим систему трех линей-
ных уравнений с тремя неизвестными
А\х 4- Biy 4- Ciz 4- D\ = 0,
< А2Х -J- В2У 4- C2Z -j- D2 = 0, (5.18)
Ах 4- By 4- Cz 4- D =0.
Если эта система не имеет решений, то прямая параллельна
плоскости. Если она имеет единственное решение, то прямая
и плоскость пересекаются в единственной точке. Последнее
142
5. ПРЯМАЯ И ПЛОСКОСТЬ В ПРОСТРАНСТВЕ
равносильно тому, что определитель системы (5.18)
Ai Bi G
Аг В2 С2
АВС
отличен от нуля. Наконец, если система (5.18) имеет бесконеч-
но много решений, то прямая принадлежит плоскости.
Угол между прямой и плоскостью. Угол <р между
прямой
x-xo_y-yo_z-zo
I т п
и плоскостью
тг: Ах + By -|- Cz 4- D = О
находится в пределах от 0° (в случае параллельности) до 90° (в
случае перпендикулярности прямой и плоскости). Синус этого
„ угла равен |cosф\, где -ф — угол
между направляющим вектором
прямой s и нормальным векто-
рОМ п плоскости (рис. 5.10). Вы-
-----т"----’числив косинус угла между дву-
мя векторами через их координа-
Рис. 5.10 ты (см. (2.11)), получим
sirup = | cos V>| =
| AZ + Вт -J-Cnl
y/A2 + В2 + C2y/l2 4- m2 4- n2
Отсюда
lAZ + Bm + Cnl
<p = arcsin — =/ =: - ~ =. (5.19)
у/A2 + В2 + СЧ12 4- m2 4- n2 V '
Условие перпендикулярности прямой и плоскости эквива-
лентно том$, что нормальный вектор плоскости и направляю-
щий вектор прямой коллинеарны. Через координаты векторов
это условие записывается в виде двойного равенства
А _ В _С
Г т п‘
(5.20)
5.5. Расстояние до плоскости и до прямой
143
5.5. Расстояние до плоскости и до прямой
Расстояние от точки до плоскости. Рассмотрим в
пространстве некоторую плоскость л и произвольную точку
Мо. Выберем для плоскости единичный нормальный вектор
п с началом в некоторой точке Mi € л, и пусть р(Мо, л) —
расстояние от точки Мо до плоскости л. Тогда (рис. 5.11)
р(Л/0,л) = |прпМ1А/о| = |пМ1А^|, (5.21)
так как |n| = 1.
Если плоскость л задана
в прямоугольной системе ко-
ординат своим общим урав-
нением
Рис. 5.11
п: Ах + By + Cz + D = 0,
то ее нормальным вектором является вектор с координатами
{А; В; С} и в качестве единичного нормального вектора можно
выбрать
{А; В; С}
у/А2 + В2+С2
Пусть (ж0; t/o; *о) и (xi;yi;zi) — координаты точек Мо и Mi.
Тогда выполнено равенство
Axi + Byi + Czi + D — О,
так как точка Mi принадлежит плоскости, и можно найти
координаты вектора
MiM^q'.
MiM*o
= уо-i/i; zo-zi}.
144 5. ПРЯМАЯ И ПЛОСКОСТЬ В ПРОСТРАНСТВЕ
Записывая скалярное произведение nMiMo в координатной
форме и преобразуя (5.21), получаем
,м х = И(го ~ xi) + B(t/p - t/i) + C(zp - zi)| =
' VA2 + B2 + C2
_ |Аж0 + Byp + Czq - (Aci + Byi + Czi) | _
VA2 + B2 + C2
_ |Acq + By0 + Czq + £>|
y/A2 + B2 + C2 ’
поскольку Axi + Byi + Czi = —D. Итак, чтобы вычислить
расстояние от точки до плоскости нужно подставить коорди-
наты точки в общее уравнение плоскости, а затем абсолютную
величину результата разделить на нормирующий множитель,
равный длине соответствующего нормального вектора.
Расстояние от точки до прямой. Расстояние от точки
Л^1(ж1)!/1,г1) До прямой L, заданной каноническими уравнения-
ми
Х-Хо у-уо Z-ZQ
j — ——— „
I т п
может быть вычислено при помощи векторного произведе-
ния. Действительно, канонические уравнения прямой дают
нам точку Mo(xq\ уо\zq) на прямой и направляющий вектор
s = {I; тп; п} этой прямой. Построим параллелограмм на векто-
рах з и AfoAfi- Тогда расстояние
от точки Mi до прямой L будет
равно высоте h параллелограмма
(рис. 5.12). Значит, нужное рас-
Д стояние может быть вычислено
\х^М0 по формуле
„ г г\ |М)Л/1 Хз|
Рис. 5.12 p(M,L) = J L,
5.5. Расстояние до плоскости и до прямой
145
где числитель представляет собой площадь этого параллело-
грамма. Используя формулы вычисления длины вектора и
векторного произведения векторов через их координаты, по-
лучаем
p(Mi,L)=
У1-Уо z0 т п 2 + Х1~ X0 Z1—ZQ 1 п 2 + ®1-®O У1~Уо 1 т
2
(5.22)
Расстояние между прямыми. Если прямые пересека-
ются, то очевидно, что расстояние между ними равно нулю.
Случай совпадающих прямых также малосодержателен. Поэто-
му о расстоянии между прямыми имеет смысл говорить, только
если они параллельны или скрещиваются. Два указанных слу-
чая с точки зрения вычислений заметно расходятся.
Чтобы найти расстояние между параллельными прямыми,
достаточно вычислить расстояние от произвольной точки, на-
пример, второй прямой до первой прямой, т.е. можно восполь-
зоваться формулой (5.22). Таким образом, если две параллель-
ные прямые заданы каноническими уравнениями
х-хг У~У1 z-Z! х — х2 У~У2 z - z2
— ----=-------=-------, l2: —------—-------=-------
<i mi ni ‘2 m2 «2
то расстояние между ними вычисляется по формуле
У2-У1 z2- Zi mi ni 2 + ®2“®1 22-21 11 «1 2 + ®2-®1 У2-У1 h mi
y/ll + ml + nl
Расстояние между скрещивающимися прямыми можно нахо-
дить, используя смешанное произведение. Пусть, как и выше,
прямые Li и Ь2 заданы каноническими уравнениями. Так как
146
5. ПРЯМАЯ И ПЛОСКОСТЬ В ПРОСТРАНСТВЕ
они скрещиваются, их направляющие векторы si, S2 и вектор
М1М2, соединяющий точки на прямых, некомпланарны. Поэто-
му на них можно построить параллелепипед (рис. 5.13). Тогда
расстояние между прямыми равно высоте h этого параллеле-
пипеда. В свою очередь, высоту параллелепипеда можно вы-
числить как отношение объема параллелепипеда к площади его
основания. Объем параллелепипеда равен модулю смешанного
произведения трех указанных векторов, а площадь параллело-
Рис. 5.13
Записывая смешанное и
грамма в основании параллеле-
пипеда равна модулю векторно-
го произведения направляющих
векторов прямых. В результате
получаем формулу для расстоя-
ния p(Li,L2) между прямыми:
Р(Ь1,1/2) —
|3132-^1 Мг|
|31Х32|
векторное произведения в коорди-
натах, окончательно получаем
Р(^1,^2) =
Расстояние между прямой и плоскостью. Если прямая
L и плоскость л пересекаются, то расстояние между ними
равно нулю. Если же они параллельны, то расстояние от
прямой до плоскости есть расстояние от любой точки прямой до
плоскости. Пусть плоскость задана общим уравнением я: Ах +
+ jEh/-|-C'z-|-.D = 0, а прямая — каноническими уравнениями
X-XQ у-уо _ Z-Zp
L:
I
тп
п
Д.5.1. Пучки и связки
147
Канонические уравнения прямой позволяют сразу найти коор-
динаты одной точки на этой прямой: М0(х0\ j/o! zo)- Поэтому
расстояние р(Л,тг) между прямой L и параллельной ей плоско-
стью тг равно
p(L,n') = p(M0,ir) =
| Ах0 + Вуо + Czq + £)|
х/А2 + В2 + С^
Дополнение 5.1. Пучки и связки
Пучок плоскостей. Пучком плоскостей в простран-
стве называют семейство всех плоскостей, содержащих фик-
сированную прямую. Пучок однозначно определяется любой
парой своих различных плоскостей. Любые две непараллельные
плоскости однозначно определяют некоторый пучок плоско-
стей.
Рассмотрим вопрос о том, как, зная уравнения двух различ-
ных плоскостей пучка, найти уравнения остальных плоскостей
пучка.
Теорема 5.2. Для того чтобы плоскость принадлежала
пучку плоскостей, определяемому парой непараллельных плос-
костей
iti‘. Агх + Biy + Ciz-|-Di = О, 7Г2: А2Х + В2У + C2Z4-D2 — О,
необходимо и достаточно, чтобы ее общее уравнение можно
было записать в виде
+ /3(A2x + B2y + C2z+D2) = 0, <*2 + Д2^0. (5.23)
◄ Достаточность. Покажем, что при любых значениях
параметров а и Д, одновременно не равных нулю, уравнение
(5.23) задает плоскость тг, содержащую общую прямую плоско-
стей л-i и л-2. Отметим, что после приведения в (5.23) подобных
148
5. ПРЯМАЯ И ПЛОСКОСТЬ В ПРОСТРАНСТВЕ
слагаемых получим уравнение
(аЛ1 + /ЗА2)х + (aBi + /ЗВ2)у + (<*Ci + flCi)2 + (a^i + ^^2) = О,
являющееся уравнением первого порядка, так как в нем хо-
тя бы один коэффициент при переменных отличен от нуля.
В самом деле, поскольку плоскости 7Г1 и л2 непараллельны,
их нормальные векторы ni = {Ai; Bi; Ci} и n2 = {Аг; В2; С2}
неколлинеарны, а значит, векторное произведение щХп2 не
является нулевым вектором. Поэтому хотя бы один из опреде-
лителей второго порядка
Ai Bi Ai Ci Bj C*i
А2 В2 ’ А2 С2 ’ В2 С2
представляющих собой координаты этого векторного произве-
дения в прямоугольной системе координат, отличен от нуля.
Пусть, например, первый из них не равен нулю. Тогда система
А1а-|- А2/3 = О,
Bia + B20 = 0
имеет единственное решение и им является а = [} = 0. Это зна-
чит, что если а и /3 одновременно не обращаются в нуль, то
либо коэффициент Aia-|-А2/3 при переменной х, либо коэффи-
циент B1O1 + В2(3 при переменной у в уравнении (5.23) отличен
от нуля.
Итак, (5.23) является уравнением плоскости. Остается убе-
диться, что эта плоскость проходит через прямую пересечения
плоскостей л"! и л2. Но если точка М0(х0; у0; zq) принадлежит
одновременно плоскостям и тг2, то одновременно выполня-
ются соотношения
А1Жо + В1Уо + С12о-|-£\ = 0,
A2®o + В2уо + C2zo + В2 = 0.
Следовательно, для координат точки Мо выполняется и соот-
ношение (5.23), т.е. точка Мо лежит в плоскости л. Тем самым
Д.5.1. Пучки и связки
149
мы показали, что точки пересечения плоскостей 7Г1 и 7Г2 лежат
на плоскости тг.
Необходимость. Пусть плоскость 7Г3: А3Х + Взу +
4-C3Z 4-2?з = О содержит общую прямую плоскостей tfi и тг2.
Докажем, что ее уравнение можно записать в виде (5.23) при
некоторых значениях параметров а и Д. Заметим, что нормаль-
ные векторы ni, п2, пз трех плоскостей тг15 тг2, л-3, имеющих
общую прямую, лежат в одной плоскости 7ГП, перпендикулярной
этой общей прямой (рис. 5.14). Векторы пг и п2 неколлине-
арны, так как соответствующие им плоскости непараллельны.
Поэтому эти два вектора образуют базис в пространстве У2
векторов, параллельных 7ГП. Это значит, что вектор пз являет-
ся линейной комбинацией векторов ni и п2, т.е. при некоторых
значениях а и Д
Пз = ащ +/3п2.
Рис. 5.14
На прямой, общей для трех плоскостей, зафиксируем точку
Mq(xq; Уо! zq) и рассмотрим произвольную точку М(х; у; z) и
вектор Мол} = ОЙ - шй-
Координаты точки Мо удовлетворяют равенствам (5.24). С
помощью этих равенств можно выразить свободные члены Di
и £>2 в уравнениях плоскостей через координаты точки Мо и
записать векторные уравнения этих плоскостей:
л-i:
= 0,
^2* ^2 (оЙ ~ ОМ^ = 0.
(5.25)
150
5. ПРЯМАЯ И ПЛОСКОСТЬ В ПРОСТРАНСТВЕ
Но
тогда векторное уравнение пз
(О^-ОЛ^о)
— 0 плоско-
сти 7Гз преобразуется к соотношению
(ащ 4- /Зп2)
или
ani (olti - ОМ^ + 0п2 (оЙ - оЩ = 0.
Преобразуя векторные уравнения плоскостей и 7Г2 к их об-
щим уравнениям, получаем уравнение вида (5.23), т.е. плос-
кость 7Гз пучка описывается этим уравнением. ►
Пучок прямых на плоскости. Аналогично пучку плоско-
стей в пространстве рассматривают пучок прямых на плоско-
сти. Пучком прямых на плоскости называют семейство всех
прямых, проходящих через фиксированную точку плоскости.
Пучок однозначно определяется любой парой своих прямых.
Для пучка прямых на плоскости справедлив следующий аналог
теоремы 5.2.
Теорема 5.3. Для того чтобы прямая входила в пучок
прямых, определяемый парой непараллельных прямых
Lc aiz-l-biy + ci =0, Л2: а2ж + Ь2у + с2 = 0,
необходимо и достаточно, чтобы ее общее уравнение можно
было записать в виде
a(aia:-|-bij/-|-Ci)-|-/J(a2a:-|-b2j/-|-c2) = 0, а2 + Д2/0. (5.26)
Связка плоскостей. Связкой плоскостей называют
семейство всех плоскостей в пространстве с одной общей точ-
кой. Связка плоскостей однозначно определяется любой трой-
кой своих плоскостей, не принадлежащих одному пучку плос-
костей.
Действительно, две различные плоскости связки пересека-
ются по прямой и определяют тем самым пучок плоскостей.
Д.5.1. Пучки и связки
151
Если третья плоскость связки не принадлежит этому пучку, то
у таких трех плоскостей имеется единственная общая точка,
определяющая связку плоскостей.
Три различные плоскости могут не иметь общих точек
(рис. 5.15, а), иметь их бесконечно много (рис. 5.15, б) или иметь
единственную общую точку. В первых двух случаях нормаль-
ные векторы плоскостей компланарны. Если же нормальные
векторы трех плоскостей некомпланарны, то о таких плоско-
стях говорят, что они находятся в общем положении. Три
плоскости, находящиеся в общем положении, пересекаются в
единственной точке и однозначно определяют связку плоско-
стей. Это следует из того, что условие некомпланарности
нормальных векторов плоскостей л,-: Aix + В,у + C,z 4- £>, = О,
i = 1,2,3, в координатной записи означает, что определитель
Ai Вг Ci
Аг Вз Сз
4з Вз Сз
Рис. 5.15
152
5. ПРЯМАЯ И ПЛОСКОСТЬ В ПРОСТРАНСТВЕ
отличен от нуля и это приводит к существованию единствен-
ного решения у системы трех линейных уравнений с тремя
неизвестными
Aix + В\у + Ciz + D\ = О,
* А2Х + Вгу + Сг^-Ь D2 — О,
, Аз3- + В3у + Сз® + D3 — 0.
Теорема 5.4. Для того чтобы плоскость входила в связку
плоскостей, определяемую тройкой плоскостей я,-: А,-® + В,у+
+ C\z + Dt: = 0, г = 1,2,3, общего положения, необходимо и
достаточно, чтобы ее общее уравнение можно было записать
в виде
O!(Ai®-|-Bij/-|-Ciz-|-Di) + /3(А2х -j- В2У -f- C2Z -j- D2) +
+ 7(^3® + B3J/ + C3Z-I-£>з) = 0, (5.27)
где а2 + Д2 + 72 / 0.
◄ Доказательство аналогично доказательству теоремы 5.2.
Различие состоит лишь в том, что в случае пучка плоскостей
нормальные векторы двух непараллельных плоскостей образу-
ют базис в V2, а нормальные векторы трех плоскостей общего
положения образуют базис в V3. ►
Если дана точка Mo(xo,yo,zo), то связку плоскостей, про-
ходящих через эту точку, легко определить, рассмотрев три
плоскости, параллельные координатным, т.е. х = ®о, У — Уо,
z — zq. По теореме 5.4 получим уравнение связки:
а(х - ®о) + Д (у - Уо) + T(z - z0) = 0.
Коэффициенты а, Д и 7, являясь координатами нормального
вектора плоскости в базисе из трех нормальных векторов
выбранных плоскостей, в данном случае есть его координаты в
прямоугольной системе координат.
Вопросы и задачи
153
Вопросы и задачи
5.1. Найти общее уравнение плоскости: а) проходящей че-
рез начало системы координат; б) параллельной координатной
плоскости хОу (yOz); в) параллельной оси ординат (аппли-
кат); г) проходящей через ось ординат (аппликат).
5.2. Найти канонические уравнения прямой: а) проходя-
щей через начало системы координат; б) параллельной оси
абсцисс (ординат, аппликат); в) совпадающей с осью абсцисс
(ординат, аппликат); г) параллельной координатной плоско-
сти хОу (yOz).
5.3. Найти общее уравнение плоскости, проходящей через
начало системы координат и перпендикулярной плоскостям
2ж — Зу - z + 5 = 0, 4ж - 3z + 1 = 0.
5.4. Найти общее уравнение плоскости, проходящей через
точки Л/Д—1;3;2), Л4г(4; 1;0) и параллельной прямой
ж4-2 _ у- 1 _ 2 4-5
3 -4 1 '
5.5. Найти общее уравнение плоскости, проходящей через
точку Л/1(1; —2; 1) и прямую
х - 1 у4-1 z - 1
2 3 2
5.6. Исследовать взаимное расположение пар плоскостей:
а) Зж - у 4- 2z — 4 = 0, —6ж 4- 2у - 4z — 4 = 0;
б) ж 4- 2у — 2z — 4 = 0, 2ж 4- 4у — 4z — 8 = 0.
5.7. Найти все значения параметра t, при которых плоско-
сти tx - у - z — 4 = 0, ж 4- 2у - 3z - 5 = 0, (2 - t)x 4- у - 24z +1 = 0
находятся в общем положении.
5.8. Найти общее уравнение плоскости, проходящей через
точки Л/1(0;1;— 2), ^(1; 2; 1) и перпендикулярной плоскости
ж — у+ 3z - 12 = 0.
5.9. Найти канонические уравнения прямой, параллельной
плоскостям ж — у — z — 5 = 0, ж + 2у + 2z = 0 и проходящей через
точку Afi(l; 0; -2).
154 5. ПРЯМАЯ И ПЛОСКОСТЬ В ПРОСТРАНСТВЕ
5.10. Найти параметрические уравнения перпендикуляра,
опущенного из точки Mi(l; 1; -2) на прямую
х + 2 _ у- 1 _ z + 5
3 “ 2 “ 2 '
5.11. На плоскости х + у — z = 0 найти точку с наименьшим
расстоянием до начала системы координат.
5.12. Найти уравнение множества точек, равноудаленных
от плоскостей:
а) х — 2y + 4z — 3 = 0, Зж - 6у+12z + 7 = 0;
б) х — 2y + 4z + 5 = 0, 4ж + y + 2z — 11 = 0.
5.13. Выяснить, в какой из двух углов между плоскостями
я + Зу — 2г+1 = 0, Зж — y+2z+2 = 0 попадает точка Л/(1; 1; — 1),
в острый или тупой.
5.14. На каком минимальном расстоянии от начала системы
координат пройдет точка при прямолинейном ее движении из
точки М(5; 0; 1) в направлении точки A4i(—5; 1; 3).
5.15. Найти канонические уравнения прямой, симметрич-
ной прямой х — 1 = 1 — у = z относительно плоскости х + Зу —
- 2z +1 = 0.
5.16. Найти координаты основания перпендикуляра, опу-
щенного из точки М(3; - Г, 2) на плоскость 2х - 2y + z - 1 = 0.
5.17. Для треугольника с вершинами Л(2; 3; —2), В(4; —1; 4),
С(2;— 3; 2) найти канонические уравнения медианы, высоты и
биссектрисы, проходящих через вершину А.
5.18. Найти уравнение геометрического места точек, рав-
ноудаленных от точек Л(1; 4; -3), В(3; 0; -5).
5.19. Найти канонические уравнения проекции прямой
х - 1 у - 2 z+1
1 ~ 2 ~ 5
на плоскость 2х — Зу + z — 1 = 0. Составить уравнение проекти-
рующей плоскости.
6. МАТРИЦЫ
И ОПЕРАЦИИ НАД НИМИ
6.1. Виды матриц
Определение 6.1. Матрицей типа (или размера) тхп
называют прямоугольную числовую таблицу, состоящую из тп
чисел, которые расположены в т строках и п столбцах. Состав-
ляющие матрицу числа называют элементами этой матри-
цы. Как правило, их обозначают строчной буквой с двумя
индексами, например a,j, где i — номер строки (i= l,m), j —
номер столбца (j = 1, п), в которых расположен этот элемент.
Матрицы обозначают
/ «11 012
®21 а22
\ ®ml ат2
aln
a2n
®mn
ИЛИ
®11 «12 ••• aln
®21 022 ••• a2n
aml Om2 • • • Omn
Используют и другие сокращенные обозначения: или
просто (a,j), если по тексту ясно, в каких пределах изменяются
индексы i и j. Матрицу как единый объект обозначают
прописной буквой: А, В и т.д. Элемент матрицы А, стоящий
в г-й строке и j-м столбце, мы будем также записывать в виде
[4],-у, что удобно при проведении доказательств.
Элементами матриц могут быть не только действительные
числа, но и комплексные, и даже другие математические объек-
ты. Например, мы будем встречаться с матрицами, элементами
которых будут многочлены или матрицы.
Множество всех числовых матриц типа тхп, элементами
которых являются действительные числа, обычно обозначаю,
Mmn(R).
156 6. МАТРИЦЫ И ОПЕРАЦИИ НАД НИМИ
Если матрица имеет тип 1хп, т.е. если у матрицы всего
одна строка, А = (ац, а^, ..., ain), то матрицу называют
матрицей-строкой. Индекс строки можно опустить: А =
= (ai, аг, ..., an). Число элементов в матрице-строке называют
ее длиной.
Если матрица имеет тип mxl, т.е. у матрицы один столбец:
то ее называют матрицей-столбцом. Число элементов
в матрице-столбце называют ее высотой. Индекс столбца
можно опустить:
/ а1 \
а2
\ат /
При т = п, т.е. когда матрица имеет столько же столбцов,
сколько и строк, ее называют квадратной порядка п:
012 ••• а1п \
a2i 022 а2п
\ ^nl Оп2 • • Опп /
а при т^п — прямоугольной. Множество всех квадратных
матриц порядка п, элементами которых являются действитель-
ные числа, обозначают Afn(R). У квадратных матриц выделя-
ют последовательности элементов ац, 022, ..., апп — главную
диагональ, и ani, an-i,2, ..., Oin — побочную диагональ.
Элементы главной диагонали называют диагональными. По-
нятия диагонального элемента и главной диагонали распро-
страняют и на прямоугольные матрицы.
6.1. Виды матриц
157
Если в квадратной матрице порядка п все элементы, сто-
ящие вне главной диагонали, равны нулю, т.е. если матрица
имеет вид
(0 ... О'*
О 0,22 • • • О
О 0 ... О ,
\ 0 0 ... апп/
то ее называют диагональной и обозначают diag(an,..., ann).
Если в диагональной матрице порядка п на диагонали стоят
единицы, то ее называют единичной и обозначают обычно Е
или Г.
... 0\
... О
... О
\0 О ... 1/
Матрицу типа mxn, все элементы которой равны нулю,
называют нулевой матрицей соответствующего типа и обо-
значают буквой в или цифрой 0.
Часто используют матрицы и других видов, например верх-
ние треугольные матрицы
а11 а12 ••• aln
0 0,22 • - • а2п
0 0 ... a3n
\ 0 0 ... апп)
у которых элементы, расположенные под главной диагональю,
равны нулю, и нижние треугольные матрицы, у которых,
158
6. МАТРИЦЫ И ОПЕРАЦИИ НАД НИМИ
наоборот, элементы над главной диагональю равны нулю:
ан 0 0 ... О'*
а21 а22 0 ... О
\ dnl dn2 ®n3 • • • Onn /
Отметим, что диагональные матрицы являются частным слу-
чаем как верхних, так и нижних треугольных матриц. Более
того, множество диагональных матриц совпадает с пересече-
нием множества верхних треугольных матриц и множества
нижних треугольных матриц.
К трехдиагональным матрицам относят такие ква-
дратные матрицы, у которых ненулевыми элементами могут
быть лишь диагональные элементы и соседние с ними в строке
или столбце:
/ а11 012 0 0 ... 0 0 0 \
а21 «22 023 0 ... 0 0 0
0 а32 Озз 034 ... 0 0 0
0 0 0 0 ... ап-1,п-2 On—1,п—1 On— 1 ,п
\ 0 0 0 0 ... 0 Оп,П—1 Опп /
Прямоугольные матрицы вида
а11 012 а13 ••• а1т ••• ®1п
О 022 а23 • • • а2т • • • О2п
О 0 азз ... а3т ... а3п
\ О О 0 ... атт ... атп)
у которых элементы, расположенные под главной диагональю,
равны нулю, называют верхними трапециевидными.
Важную роль в дальнейшем изложении играют ступенча-
тые матрицы (матрицы ступенчатого вида). Так называют
6.2. Линейные операции над матрицами
159
матрицу типа mxn, если для любой ее строки выполнено сле-
дующее условие: под первым слева ненулевым элементом стро-
ки и предшествующими ему нулевыми элементами строки все
элементы матрицы равны нулю. Следующие матрицы имеют
ступенчатый вид:
/0 2 3 0\ /3 1 3 3\ /113 3\
(00—11), (0021), (030 1).
\0 0 03/ \0 0 0 0/ \0 0 1 -1/
6.2. Линейные операции над матрицами
Прежде чем обсуждать какие бы то ни было операции над
матрицами, договоримся, какие матрицы мы будем считать
равными.
Определение 6.2. Две матрицы называют равными,
если они имеют один и тот же тип и если у них совпадают
соответствующие элементы.
Определение 6.3. Суммой матриц А = (ojj) и В =
= (bij) типа тхп называют матрицу С= (cjj) того же типа
с элементами c,j = a,j + b,j, i — l,m, j = l,n.
Для суммы матриц используют обозначение: С = А + В. В
подробной записи
6ц 612 ••• 6in
&21 622 ••• &2п
6щ1 6т2 ... Ьтп /
О1П + 61Т1
a2n + &2n _ q
\ Н»п1 6щ1 От2 Ьт2 ... атп -|- Ьтп /
' «11 «12 ••• «In ’
а21 «22 ••• а2п
\ ат1 Пт2 • • • атп /
^Оц + бц 012 + 612
021 + 621 022 + 622
160
6. МАТРИЦЫ И ОПЕРАЦИИ НАД НИМИ
Замечание 6.1. Сумма определена только для матриц
одного типа.
Пример 6.1. Найдем сумму двух матриц
(12 3 0\ /013 3\ /13 6 3\
2 1 -1 1 1 + 1 4 3 0 11 = 16 4 -1 21.
05 2 3/ \2 3 1 -1 / \2 8 3 2/
Определение 6.4. Произведением матрицы А = (a-ij)
типа тхп на число a G R называют матрицу С = (cjj) типа
тхп с элементами c,j = aaij.
Подробно это произведение выглядит так:
^ац 012 ••• а1п \ /Лац ®ai2 ... otain \
а21 а22 • • • а2п аа21 01022 .. OtO2n I
а = I .
\ ®п>2 • • • / \ лвт1 оют2 .. • otamn /
Замечание 6.2. Операции сложения и умножения на
число для матриц аналогичны одноименным операциям над
векторами. Эти операции также называют линейными.
Для любых матриц А = (а;Д В = (Ь^) и С = (су) из Mmn(R)
верны следующие свойства линейных операций.
1°. Сложение матриц коммутативно: А + В = В + А.
◄ Доказательства равенств матриц часто проводят, основыва-
ясь на определении 6.2, т.е. доказывают, что матрицы, стоящие
в левой и правой частях равенства, имеют на одинаковых ме-
стах равные элементы. Так, свойство коммутативности суммы
матриц следует из равенств
[Д + B]t-j = aij + bij = bij + a, j = [В + А],у,
среди которых первое и третье следуют из определения 6.3
суммы двух матриц, а второе верно в силу коммутативности
сложения действительных чисел. ►
6.2. Линейные операции над матрицами
161
2°. Сложение матриц ассоциативно: (Д4-В) 4-С = А 4- (В 4-
+ С).
< Как и в случае коммутативности, свойство ассоциативности
вытекает из равенств
[(А 4- В) + C]ij = [44- В],-у + [С],у = (a,-j + btJ) + C{j =
= aij 4- (bij + c,j) = [4],j 4- [B 4- C]jj = [4 4- (B 4- C)]jj,
которые имеют место в силу определения 6.3 суммы двух
матриц и ассоциативности сложения действительных чисел. ►
Свойства 1° и 2° позволяют не заботиться о порядке опе-
раций сложения матриц и порядке слагаемых в матричных
выражениях.
3°. Существует такая матрица О G Mmn(R), что для любой
матрицы 4 € Afmn(R) выполнено равенство 44-0 = 4.
◄ Матрица О — это нулевая матрица 9 типа тхп. Действи-
тельно, [4 4- 0]у = [4],у 4- [0]у = ai} 4- 0 = a,} = [4]ty. ►
4°. Для любой матрицы 4 G Mmn(R) существует такая
единственная матрица В Е Afmn(R), для которой выполнено
равенство А 4- В = 0, где 0 — нулевая матрица.
◄ Если 4 4- В = 0, то [4 4- B]tJ = % 4- bjj = [0]у = 0 и, сле-
довательно, а,} 4- bij = 0. Значит, элементами by матрицы В
являются bij = — aij, и это доказывает как единственность, так
и существование матрицы В. ►
Матрицу В, о которой говорится в свойстве 4°, называют
противоположной А и обозначают через —А. Эта матрица
получается из матрицы 4 умножением на число —1.
Свойства 3° и 4° позволяют ввести операцию вычитания
матриц. Разностью Р — Q матриц Р и Q одного типа
называют матрицу Р+(—Q).
162 6. МАТРИЦЫ И ОПЕРАЦИИ НАД НИМИ
5°. Умножение матрицы на число ассоциативно: (А//)Д =
= А(дД).
~ (^P)aij ~ ^(Paij) ~ ►
6°. Умножение матрицы на число дистрибутивно относите-
льно суммы действительных чисел: (А + д)Д = АД 4- дД.
◄ [(А 4- д)A]ij = (А 4~— Xo,ij 4~ p&ij = [АД-Jtj 4" [АД 4-
+ дД].г ►
7°. Умножение матрицы на число дистрибутивно относите-
льно суммы матриц: А(Д + В) = АД 4- АВ.
◄ [А( А 4- В)],у = А[А 4- B]ij — X(aij 4- bij) = Аа,у 4- Ai»tJ = [АД],у 4-
+ [АВ]Ъ = [АД + АВ],У. ►
8°. Умножение матрицы на 1 не меняет ее: 1 • Д = Д.
◄ [1 ’ -^]tj = 1 ’ [^]*j = [^]*г ►
6.3. Транспонирование матриц
Определение 6.5. Для матрицы Д= (a,j) типа тхп ее
транспонированной матрицей называют матрицу Дт =
= (c.j) типа пхт с элементами c,j = Oj,.
При транспонировании матрицы ее строки становятся сто-
лбцами новой матрицы с сохранением их порядка. Точно так же
столбцы исходной матрицы превращаются в строки транспо-
нированной. Поэтому транспонирование можно рассматривать
как преобразование симметрии матрицы относительно ее глав-
ной диагонали. Подробнее:
012 ••• ain \ / а11 а21 ••• ат1
а21 022 ••• a2n I _ 012 а22 ... От2
\Oml От2 ••• 0>тп / \ ®1п в2п ••• Omn
6.3. Транспонирование матриц
163
Пример 6.2. Транспонируем следующие три матрицы:
(1
3
-1
2\
4 I
О/
1 3 -1\
2 4 0/ ’
(“1, а2,
а2
/61
i>2
= (bl, b2, bm). #
\bm J
Свойства операции транспонирования.
1°. (AT)T = A.
4 Отметим, что матрицы (Ат)т и А имеют одинаковые разме-
ры. Кроме того, [(АТ)Т]о = [(АТ)]у, = [А]^. ►
2°. (А + В)т = Ат + Вт.
[М + -B)T]v = [(А + B)]jj = [4]j,- + [B]ji = [AT],j + [BT]jj = [AT +
+ BT]v->
3°. (AA)T = AAT, A e R.
◄ [(AA) = [AA]jf- = A[A]jj = A[A = [AA ►
Если AT = А, то матрицу А называют симметрической, a
если Ат = — A — кососимметрической. И в том и в другом
случае матрица должна быть квадратной. Элементы симмет-
рической матрицы, расположенные на местах, симметричных
относительно диагонали, равны между собой. Действительно,
[AT]ij = [A]ji и из равенства Ат = А следует, что [А];; = [ А]^.
Элементы же кососимметрической матрицы, расположенные
на местах, симметричных относительно главной диагонали,
отличаются знаком, а диагональные — равны нулю. Действи-
тельно, [AT]jj = [A]ji и из равенства Ат = — А следует, что
№ = В частности, при г = j выполняются равенства
[A]jj = — [A]jj = 0.
164
6. МАТРИЦЫ И ОПЕРАЦИИ НАД НИМИ
Пример 6.3. Матрицы
3 —2
-2 О
1 -4
1\
—4 I — симметрические,
2/
( О 2\
a- I л „ и
\-2 О/
-2
О
4
1\
—4 I — кососимметрические.
О/
6.4. Умножение матриц
Определение 6.6. Пусть даны матрица А = (а^) типа
тхп и матрица В = (Ь^) типа пхр. Произведением матриц
А к В называют матрицу С = (cij) типа тхр с элементами
п
cij = 'У ^aikbkj>
k=l
которую обозначают С = АВ.
Произведение определено лишь в том случае, когда количе-
ство столбцов первого сомножителя равно количеству строк
второго. В формировании элемента c,j произведения АВ участ-
вуют элементы »-й строки матрицы А и j-ro столбца матрицы
В. Поэтому правило умножения матриц называют также пра-
вилом умножения „строка на столбец":
j 3
О
2
Пример 6.4. Найдем произведение двух матриц
12 3 4
-11-22
/2\
О / 1-2 + 2-0 + 3-3 + 4-1 \ / 154
3 ” \ —1-2 +1-0 — 2-34-2• 1J "\-6/‘
V/
6.4. Умножение матриц
165
Пример 6.5. Произведением прямоугольной матрицы и
матрицы-столбца является матрица-столбец:
<ац а12
021 а22
\Ornl ат2
1 Xi >
Х2
\хп/
( aiiXi+ai2X2+...-t-ainxn
(121Х1+а22Х2 + ---+а2пХп
\Omia;l+Om2a:2 + ”-+omiA
Пример 6.6. Найдем произведение трех квадратных мат-
риц второго порядка, перемножив сначала первые две матри-
цы, а затем результат их произведения и третью
1 2\ /-1 0 \ /0 -4\
3 4Д 2 -з) \2 -1)
-1 + 4 0-6\/
-3 + 8 0 — 12/ V
О -4\
2 -1)
(3
\5
-6 \ /0 -4\ _/-12
-12 J \2 -1)~ \ —24
матрицу:
Умножение матрицы-строки X типа 1хп на матрицу-стол-
бец У типа nxl дает матрицу типа 1x1, которую отождествля-
ют с числом:
XY = (Ж1, х2, хп) . =
\Уп/
п
= (Х1У1 + Х2У2 + -. + хпУп) = ^ХкУк-
к=1
Таким образом, произведение любой матрицы-строки и любой
матрицы-столбца, имеющих одинаковое количество элементов,
есть число, равное сумме произведений их элементов с одина-
ковыми индексами. Если матрица-строка и матрица-столбец
имеют разное количество элементов, то их перемножить нельзя.
166
6. МАТРИЦЫ И ОПЕРАЦИИ НАД НИМИ
Замечание 6.3. Для числовых матриц типа 1x1 матрич-
ные операции суммы, разности, умножения и умножения мат-
риц на действительные числа совпадают с соответствующими
арифметическими операциями суммы, разности и умножения
над действительными числами. Вот почему их и отождествля-
ют с числами.
Существование произведения АВ двух матриц не означает
существования их произведения ВА. Например, матрицы из
примера 6.4 нельзя умножить в другом порядке.
Чтобы матрицу А типа тхп можно было умножить на
матрицу В и слева, и справа (т.е. чтобы были определены оба
произведения В А и АВ), матрица В должна иметь тип пхт.
Квадратные матрицы А и В можно перемножить, если они
имеют один порядок, причем в этом случае определены оба
произведения (АВ и ВА), хотя равенство АВ = ВА обычно
нарушается.
Пример 6.7. Найдем произведения двух пар матриц А, В
и С, D в одном и другом порядке:
/1 2\Г11Л_Г1 ЗА
(34) (oij \37j’ ВА \01J\34j (34)’
Обратим внимание, что CD = С, DC = О, хотя ни одна из этих
двух матриц не является нулевой. #
Если определены оба произведения АВ и ВА и выполнено
равенство АВ = В А, то матрицы А и В называют коммути-
рующими или перестановочными. Коммутирующие мат-
рицы всегда квадратные и одного порядка.
Пример 6.8. Произведение диагональных матриц одно-
го порядка есть диагональная матрица, элементами которой
6.4. Умножение матриц
167
являются произведения соответствующих элементов перемно-
жаемых матриц. Диагональные матрицы одного порядка явля-
ются перестановочными. Действительно,
ai 0 ... О \
О 0.2 ... О
(Ьг 0 ... 0\
О Ь2 ... О
О 0 ... ап/
\0 0 ... Ьп)
Операция умножения матриц имеет следующие свойства.
1°. Умножение матриц ассоциативно, т.е. (АВ)С = А(ВС).
4 Если матрицы А,В,С имеют типы тхп, пх/г, kxl соответ-
ственно, то
[(ЛВ)С],7 = £[АВ),,.[С]Г, = Рк =
г=1 г=1 \з=1 /
= ЕЁИЫВМС],., = Е£[Л),.([В]..(С]Г)) =
г=1 з=1 г=1 з=1
= DAk = [А(ВС)],7. ►
2°. Умножение матриц дистрибутивно относительно сложе-
ния матриц, т.е. (А + В)С — АС + ВС.
168 6. МАТРИЦЫ И ОПЕРАЦИИ НАД НИМИ
4 Если матрицы А, В имеют тип тхп, а матрица С — тип
пх/г, то
[(А + В)С]„ = £[Л+ B]jr[C]rj = £([A]ir + [B]jr)[Clrj =
Г = 1 Г = 1
=Пиысъ+илад=Ёиысь+=
Г = 1 Г=1 Г=1
= [4С]Ъ- + [ВС]0- = [АС + ВС]Ъ-. ►
3°. Существует такая матрица Е € Afn(R), что для любой
матрицы А € Afn(R) выполнены равенства АЕ = ЕА = А.
•4 В качестве матрицы Е можно взять единичную порядка п. ►
4°. Для любой матрицы А € Afn(R) и нулевой матрицы
0 € Afn(R) выполнено равенство 40 = 0.
4 Вычислим элементы произведения 40:
п п
[40]ij = Н4].г[0]п = = О'
Г = 1 Г = 1
Видим, что все элементы матрицы 40 равны нулю. ►
5°. Для любых матриц 4 и В типов тхп и пхА: выполнено
равенство (4В)Т = ВТ4Т, т.е. транспонированное произведение
двух матриц равно произведению в обратном порядке транс-
понированных матриц.
< [(АВ)’],, = [АВ)„ = £[АЫВ)„ =
Г = 1
= £>’),, [Вт),г = Е[ВТ]|Г[Ат]г, = [ВТАТ)„. »
Г=1 Г=1
Операция умножения матриц позволяет ввести операцию
возведения квадратной матрицы в натуральную степень. Поло-
жим 41 = 4, 4n+1 = ААп, п = 1,2,... Отметим, что две степени
6.5. Блочные матрицы
169
Ап и Ат одной и той же матрицы являются матрицами одно-
го порядка и перестановочны: АпАт = АтАп = Ап+т. Введем
также нулевую степень квадратной матрицы, полагая А0 = Е,
где Е — единичная матрица того же порядка.
Введенная степень матрицы позволяет для квадратной мат-
рицы вычислять выражения вида
апАп + о,п—1 Ап 1 +... + аоА.0, а, Е R, i = 0,n,
т.е. многочлены от одного матричного аргумента.
Пример 6.9. Вычислим значение квадратного трехчлена
р(ж) = Зж2 — 4ж + 5 для квадратной матрицы
А —
О 2\
-1 1) ’
Поскольку р(х) — Зж2 — 4х + 5х°, то р(А) = ЗА2 — 4А + 5А°, где
А0 = Е — единичная матрица второго порядка. Вычислив
находим
2А л ( 0 2V ni1 -
Р(^) 3^ _х J 4^ 1J+5^0 1у)
= /-б б\ /О -8\ 0\ = /-1 -2\
\-3 -Зу + \4 -4у + \° 5/ \ 1 ~2)
6.5. Блочные матрицы
Если разделить некоторую матрицу А на части вертикаль-
ными и горизонтальными прямыми, то получаются прямо-
угольные ячейки, являющиеся сами по себе матрицами. Эти
ячейки называют блоками матрицы. Сама матрица А может
170
6. МАТРИЦЫ И ОПЕРАЦИИ НАД НИМИ
рассматриваться как таблица, элементами которой являются
более мелкие матрицы Мар: А — (Мар). При таком построе-
нии матрица А составляется из блоков, и поэтому ее называют
блочной. Например, матрицу
( «и «12 «13 «14 «15
«21 «22 «23 «24 «25
А = «31 «32 «33 «34 «35
«41 «42 «43 «44 «45
\«51 «52 «53 «54 «55 /
разобьем на следующие блоки:
/ «11 «12 «13 «14 «15 \
«21 «22 «23 «24 «25
«31 «32 «33 «34 «35
«41 «42 «43 «44 «45
\ «51 «52 «53 «54 «55 /
и обозначим их
(«и
«21
«31
«12
022
«32
013
«23
«33
(«14
«24
«34
«15
«25
«35
Л121 —
«42 «43
«52 «53
Afj2 —
«44
«54
«45
«55
Тогда матрицу А можно записать в виде блочной матрицы,
элементами которой будут эти матрицы Мар:
А-(Ма0)-^м1^
Мц
М%2
Для составления блочной матрицы из серии матриц Ма@
необходимо, чтобы подмножества матриц из серии с одинако-
вым значением индекса а имели одинаковое количество строк,
а подмножества матриц с одинаковым значением индекса /3 —
6.5. Блочные матрицы
171
одинаковое количество столбцов. Эти подмножества образуют
соответственно „блочные" строки и „блочные" столбцы (соот-
ветствующие нескольким строкам или столбцам обычной запи-
си матрицы).
Пример 6.10. Указанным требованиям удовлетворяют
следующие четыре матрицы:
012 «13 \ , Л112 = f \ 021 i>12 i>22
\«21 022 «23 /
/ СЦ С12 С1з\ / <^11 dl2
М21 = 1 С21 С22 с23 I , Л/22 = 1 ^21 ^22
\С31 С32 Сзз / \^31 <^32
Поэтому из них можно составить блочную матрицу
А = ( ^12 = у Л/21 Л/22 / <ац а12 О1з «21 «22 «23 О* о* w I-* 1—1 1—1 о- о- ъэ •-* ю ю
Си С12 С13 С21 С22 С2з \ С31 С32 С33 du ^12 d2i d22 dsi d32 /
Основное свойство блочных матриц состоит в том, что
операции над блочными матрицами совершаются по тем же
правилам, что и операции над обычными матрицами. В самом
деле, это в достаточной степени очевидно для суммы матриц и
произведения матрицы на число. Однако относительно суммы
это можно утверждать лишь в том случае, когда размеры
слагаемых блочных матриц, равно как и размеры отдельных
блоков с равными индексами у слагаемых, совпадают.
Подробнее рассмотрим ситуацию с умножением блочных
матриц. Пусть блочные матрицы А = (Аа@) и В = (Вру)
удовлетворяют двум условиям.
1. Число „блочных" столбцов матрицы А совпадает
числом „блочных" строк матрицы В (т.е. индекс /3 д-v
изменяется в одинаковых пределах).
172
6. МАТРИЦЫ И ОПЕРАЦИИ НАД НИМИ
2. Для любых индексов а, 0, у число столбцов у матрицы
Аар совпадает с числом строк у матрицы В^^.
Тогда
АВ — (Сау), Са^ — ' АарВ^.
/3
Для доказательства этого равенства достаточно расписать обе
его части через элементы матриц.
Указанные два условия довольно сложны, но все упроща-
ется, если блоки матриц — это квадратные матрицы одного
порядка. В этом случае условия близки к обычным: число
„блочных" столбцов множимого должно совпадать с числом
„блочных" строк множителя.
Представление матриц в блочном виде часто оказывается
удобным при нахождении суммы и произведения, если матрицы
имеют достаточно большие размеры, а их согласованные раз-
биения на блоки содержат нулевые, единичные, диагональные,
треугольные матрицы.
Пример 6.11. Найдем произведения следующих блочных
матриц предполагая, что все операции определены:
(А Е\(С\_(АС\ (в Е\(А В\_(С D\.
у’ ©Де я; вр
(А ЗЕ\(С\ (AC + 3DX „
в )\DJ~ (-C + BDJ' *
При транспонировании блочной матрицы транспонирова-
нию подлежат и ее элементы. Например,
Мп Л112\Т_ /М’ Л1*
Л121 М22 / \М^2 М22
6.6. Прямая сумма матриц
173
Пример 6.12. Транспонируем блочную матрицу
т
Оц 012 013 014 015 \ т
021 022 023 024 025 _ [ -411 -412 А _
031 O32
\ O41 042
033 O34 O35
043 O44 О45 /
А21 А22
ОЦ 021
012 O22
031 O41
032 О42
013 023
014 024
015 025
033
О 34
«35
043
®44
®45
6.6. Прямая сумма матриц
Определение 6.7. Пусть даны квадратные матрицы А
порядка т и В порядка п. Прямой суммой матриц А и
В называют квадратную блочную матрицу С — А ф В порядка
т + п, равную
(А е
В
где 0 обозначает нулевой блок {нулевую матрицу типа тхп
вверху справа и пхт внизу слева).
Укажем основные свойства прямой суммы матриц.
1°. Ассоциативность: (АфВ) фС = Аф (ВфС)
4 В результате выполнения операций в левой и правой частях
равенства получается одна и та же блочно-диагональная
матрица
А
е
е
е
в
е
е
е
с
где нулевые матрицы имеют соответствующий тип. ►
174 6. МАТРИЦЫ И ОПЕРАЦИИ НАД НИМИ
2°. Пусть квадратные матрицы Ai и А? имеют порядок т,
а квадратные матрицы В\ и Bi — порядок п. Тогда
(Ах Ф ^1) + (А2ф Bi) = (Ai + Ai) ф (Bi + Bi),
(Ai ф Bi)(Ai ф Bi) — A}Ai ф BiBi.
◄ Действительно, эти записи означают следующее:
Ai 0 \ / Ai S \ _ / Ai + Ai 0 \
0 Bj + \e BiJ~\ 0 Bi+Bi)'
(Ai 0 \ (Ai 0\ _/AiA2 0 \
\0 В,Д0 Bi)~\ 0 BiB27’
что соответствует операциям над блочными матрицами. ►
6.7. Линейная зависимость строк и столбцов
Строки и столбцы матриц можно рассматривать как мат-
рицы-строки и, соответственно, матрицы-столбцы. Поэтому
над ними, как и над любыми другими матрицами, можно
выполнять линейные операции. Ограничение на операцию
сложения состоит в том, что строки (столбцы) должны быть
одинаковой длины (высоты), но это условие всегда выполнено
для строк (столбцов) одной матрицы.
Линейные операции над строками (столбцами) дают воз-
можность составлять строки (столбцы) в виде выражений
ctiai+ ... + аааа, где ai, ..., aa — произвольный набор строк
(столбцов) одинаковой длины (высоты), а a-i, ..., а, — дей-
ствительные числа. Такие выражения называют линейными
комбинациями строк (столбцов).
Определение 6.8. Строки (столбцы) <ц, ..., at назы-
вают линейно независимыми, если равенство
а1О1 + ... + 0!вав = 0,
(6.1)
6.7. Линейная зависимость строк и столбцов 175
где О в правой части — нулевая строка (столбец), возможно
лишь при o-i = ... = а, = 0. В Противном случае, когда су-
ществуют такие действительные числа a-i, ..., аа, не равные
нулю одновременно, что выполняется равенство (6.1), эти стро-
ки (столбцы) называют линейно зависимыми.
Следующее утверждение известно как критерий линейной
зависимости.
Теорема 6.1. Строки (столбцы) си, ..., аа линейно зави-
симы тогда и только тогда, когда хотя бы одна (один) из них
является линейной комбинацией остальных.
◄ Доказательство проведем для строк, а для столбцов оно
аналогично.
Необходимость. Если строки ai, ..., а, линейно за-
висимы, то, согласно определению 6.8, существуют такие дей-
ствительные числа си, ..., аа, не равные нулю одновременно,
что aiOi +... + аааа = 0. Выберем ненулевой коэффициент а,'.
Для простоты пусть это будет си. Тогда
<*1 «1 = (-02)02 + • • • + (~<*г)аа
и, следовательно,
(012 \ ( as\
----I ®2 + • • • + I-I ae>
СИ / \ О?1 /
т.е. строка си представляется в виде линейной комбинации
остальных строк.
Достаточность. Пусть, например, си = A2Ci2 4-...4-Aeae.
Тогда 1си + (-А2)а2 + • • • 4- (~Ae)ae = 0. Первый коэффициент
линейной комбинации равен единице, т.е. он ненулевой. Соглас-
но определению 6.8, строки си, ..., аа линейно зависимы. ►
Теорема 6.2. Пусть строки (столбцы) af, ..., аа линейно
независимы, а каждая из строк (столбцов) Ь\, ..., bi является
их линейной комбинацией. Тогда все строки (столбцы) си, ...,
аа, bi, ..., bi линейно зависимы.
176
6. МАТРИЦЫ И ОПЕРАЦИИ НАД НИМИ
4 По условию, bi есть линейная комбинация си, ..., аг, т.е.
61 =0-101 4-...4-авав, а-,-€ R, * = 1, я.
В эту линейную комбинацию добавим строки (столбцы) 62, ...,
bi (при I > 1) с нулевыми коэффициентами:
6i = o-ioi 4-... + аааа + О62 +. •. + 06;.
Согласно теореме 6.1, строки (столбцы) ai, ..., ae, 61, ..., 6;
линейно зависимы. ►
6.8. Элементарные преобразования матриц
Следующие три операции называют элементарными пре-
образованиями строк матрицы:
1°. Умножение г-й строки матрицы на число А / 0:
<Оц 012 О1п
0,1 а,-2 а,п
\ От2 Ощп /
Oil 012 ... О1П >
Aa,i Аа,-2 • • • Аа,п
\ ат1 Ощ2 • • • атп /
которое будем записывать в виде (г) -> А (г).
2°. Перестановка двух строк в матрице, например г-й и fc-й
строк:
Г ап 012 ••• О1п '
0,1 0,2 ... Oin
Ofcl Ofc2 ... Ofcn
\ omi Ощ2 ... Ощп /
' ац в12 ••• oin '
Ofci ak2 • • • Ofcn
>
0,1 Oj2 • • •..ain
\ ат1 ат2 • • • атп /
которую будем записывать в виде (г) (fc).
6.8. Элементарные преобразования матриц
177
3°. Добавление к
коэффициентом А:
г-й строке матрицы ее к-й строки с
< ап “12 • • ®1п / “11 “12 * ®ln \
“и “«2 • “ti+Aajti а^г+Ааи •
“н “£2 • • Якп “jtl “jt2 Ukn
\ ami “m2 • • ^тп / 1 “ml “m2 у
что будем записывать в виде (г) —> (г) + А(&).
Аналогичные операции над столбцами матрицы называют
элементарными преобразованиями столбцов.
Каждое элементарное преобразование строк или столбцов
матрицы имеет обратное элементарное преобразование,
которое преобразованную матрицу превращает в исходную.
Например, обратным преобразованием для перестановки двух
строк является перестановка тех же строк.
Каждое элементарное преобразование строк (столбцов) мат-
рицы А можно трактовать как умножение А слева (справа) на
матрицу специального вида. Эта матрица получается, если
то же преобразование выполнить над единичной матрицей.
Рассмотрим подробнее элементарные преобразования строк.
Пусть матрица В получается в результате умножения г-й
строки матрицы А типа тхп на число А / 0. Тогда В = Е,(Х)А,
где матрица _Е,(А) получается из единичной матрицы Е порядка
т умножением ее г-й строки на число А.
Пусть матрица В получается в результате перестановки
г-й и к-й строк матрицы А типа тхп. Тогда В = F^kA, где
матрица Fik получается из единичной матрицы Е порядка т
перестановкой ее г-й и к-й строк.
Пусть матрица В получается в результате добавления к г-й
строке матрицы А типа тхп ее к-й строки с коэффициентом А.
Тогда В = Gik(tyA, где матрица Gik получается из единичной
матрицы Е порядка т в результате добавления к г-й строке
178
6. МАТРИЦЫ И ОПЕРАЦИИ НАД НИМИ
k-w. строки с коэффициентом А, т.е. на пересечении i-й строки
и к-го столбца матрицы Е нулевой элемент заменен на число А.
Точно так же реализуются элементарные преобразования
столбцов матрицы А, но при этом она умножается на матрицы
специального вида не слева, а справа.
С помощью алгоритмов, которые основаны на элементар-
ных преобразованиях строк и столбцов, матрицы можно пре-
образовывать к различному виду. Один из важнейших таких
алгоритмов составляет основу доказательства следующей тео-
ремы.
Теорема 6.3. С помощью элементарных преобразований
строк любую матрицу можно привести к ступенчатому виду.
◄ Доказательство теоремы состоит в построении конкретно-
го алгоритма приведения матрицы к ступенчатому виду. Этот
алгоритм состоит в многократном повторении в определенном
порядке трех операций, связанных с некоторым текущим эле-
ментом матрицы, который выбирается исходя из расположения
в матрице. На первом шаге алгоритма в качестве текущего
элемента матрицы выбираем верхний левый, т.е. [Л]ц.
1*. Если текущий элемент равен нулю, переходим к опе-
рации 2*. Если же он не равен нулю, то строку, в которой
расположен текущий элемент (текущую строку), добавляем с
соответствующими коэффициентами к строкам, расположен-
ным ниже, так, чтобы все элементы матрицы, стоящие в столб-
це под текущим элементом, обратились в нуль. Например, если
текущий элемент — то в качестве коэффициента для к-ъ
строки, k = i + l,..., нам следует взять число — Вы-
бираем новый текущий элемент, смещаясь в матрице на один
столбец вправо и на одну строку вниз, и переходим к следу-
ющему шагу, повторяя операцию 1*. Если такое смещение
невозможно, т.е. достигнут последний столбец или строка, пре-
образования прекращаем.
2*. Если текущий элемент в некоторой строке матрицы
равен нулю, то просматриваем элементы матрицы, расположен-
6.8. Элементарные преобразования матриц
179
ные в столбце под текущим элементом. Если среди них нет
ненулевых, переходим к операции 3*. Пусть в к-й строке под
текущим элементом находится ненулевой элемент. Меняем ме-
стами текущую и к-ю строки и возвращаемся к операции 1*.
3*. Если текущий элемент и все элементы под ним (в том
же столбце) равны нулю, меняем текущий элемент, смещаясь
в матрице на один столбец вправо. Если такое смещение
возможно, т.е. текущий элемент находится не в самом правом
столбце матрицы, то повторяем операцию 1*. Если же мы уже
достигли правого края матрицы и смена текущего элемента
невозможна, то матрица имеет ступенчатый вид, и мы можем
прекратить преобразования.
Так как матрица имеет конечные размеры, а за один шаг
алгоритма положение текущего элемента смещается вправо
хотя бы на один столбец, процесс преобразований закончится,
причем не более чем за п шагов (п — количество столбцов
в матрице). Значит, наступит момент, когда матрица будет
иметь ступенчатый вид. ►
Пример 6.13. Преобразуем матрицу
/1 2 1 1\
I 2 3 2 4 I
\4 5 4 6/
к ступенчатому виду с помощью элементарных преобразований
строк.
Используя алгоритм из доказательства теоремы 6.3 и за-
писывая матрицы после окончания выполнения его операций,
получаем
1
2
4
2
3
5
1
2
4
1
4
6
(2)(2) - 2(1)
(3)(3) - 4(1)
/1 2 1
~ I О -1 О
\0 -3 О
(1 2
О -1
О о
1\
2 ~
2/
1 1\
О 2 1.
0—4/
180
6. МАТРИЦЫ И ОПЕРАЦИИ НАД НИМИ
Вопросы и задачи
6.1. Какого вида будет матрица Ат, если сама матрица
А является: а) единичной; б) нулевой; в) верхней треуголь-
ной; г) нижней треугольной; д) трехдиагональной; е) диа-
гональной; ж) блочной?
6.2. Для матриц
(1 2 1
2 3 2
0 -1 1
/-1\
с= 1
\ 3/
вычислить: а) АВ; б) А(В+ВТ); в) (АС)ТА; г) ВАТ; д) СТВ;
е) А1 АВ; ж) СТВАТ+2СТА\ з) ЗАВС-АС.
6.3. Показать, что для любой матрицы А € AfTOn(R) опреде-
лены произведения АтА и АА1.
6.4. Привести примеры ненулевых квадратных матриц А и
В третьего порядка, для которых АВ = 0.
6.5. Доказать, что если две матрицы перестановочны, то
они квадратные и одного порядка.
6.6. Доказать, что сумма и произведение двух верхних
(нижних) треугольных матриц из Mn(R) есть верхняя (нижняя)
треугольная матрица из Mn(R). Чему равны диагональные
элементы у произведения двух верхних (нижних) треугольных
матриц из Mn(R)?
6.7. Являются ли симметрическими следующие матрицы:
а) единичная; б) квадратная нулевая; в) нулевая? Какие из
этих матриц являются кососимметрическими?
6.8. Доказать, что если матрица является одновременно
и симметрической, и кососимметрической, то она квадратная
нулевая.
Вопросы и задачи
181
6.9. Доказать, что для любой матрицы А € Aln(R) матрица
А-f- Ат является симметрической, а А — Ат — кососимметриче-
ской.
6.10. Вычислить А1999, А2000, А2001, если
. . (0 1
а)Л=(1 о
б) А =
О
-1
-1
О
-1
О
В) А = ( j
6.11. Найти An, п = 2,3,.если
. . (1 1А -х . /1 аЛ _
а)л=\о 1/’ 6)A=U i)1Q!eR-
6.12. Построить пример ступенчатых матриц А и В, сумма
которых не является ступенчатой матрицей.
6.13. Представить элементарные преобразования столбцов
матриц как умножение преобразуемой матрицы справа на
матрицы специального вида.
6.14. Вычислить значение квадратного трехчлена р(х) =
= — 4ж2 + 2х + 3 для матриц
1 -1 0\
3 2 -1 I
-1 0 2/
6.15. Найти произведение двух матриц, перейдя к блочным
матрицам согласно заданному разбиению на блоки
0 1
0 0
0 0
\0 0
1 0 2
1 1 1
2 0 0
0 2 0
0 0 2
1 °\
0 1
о о
о о
о о/
Z1 2
3 4
0 0
о о
о о
1 о
\0 1
1 °\
0 1
2 2
3 2
1 1
О О
О О/
и вычислив произведение блочных матриц (см. пример 6.11).
182
6. МАТРИЦЫ И ОПЕРАЦИИ НАД НИМИ
6.16. При помощи элементарных преобразований привести
к ступенчатому виду следующие матрицы:
(1
2
-3
-3 -2\
1 1 ;
2 2/
(3 1 0\
1 -2 -1 | .
-2 -3 -1/
6.17. Определено ли произведение АВ, если А — матрица-
столбец, а В — матрица-строка?
6.18. Можно ли произвольную квадратную матрицу пред-
ставить в виде суммы симметрической и кососимметрической
матриц? Если такое представление существует, то единственно
ли оно?
6.19. Для каких матриц Ли В выполнено равенство: а) (А +
4-B)2 = A24-2AB4-B2; б) А2 - В2 = (4 + В)(А - В)?
6.20. Существуют ли матрицы А и В, удовлетворяющие
равенству: а) АВ 4- Вт Ат = Е\ б) АВ — ВтАт = В?
7. ОПРЕДЕЛИТЕЛИ
7.1. Определители n-го порядка
Мы уже познакомились с определителями второго и тре-
тьего порядков, которые использовали в векторной алгебре и
при решении систем двух и трех линейных уравнений. Теперь
мы приступаем к изучению определителей произвольного по-
рядка. В теории таких определителей используются понятия
перестановки, подстановки и их четности. Соответствующий
материал подробно изложен в [1-4.5], а мы напомним только
самые необходимые сведения.
Всякое расположение чисел 1, 2, 3, ..., п в определенном
порядке называют перестановкой из п чисел. Из п чи-
сел можно образовать п! различных перестановок. В об-
щем случае перестановку записывают в виде матрицы-строки
а= (щ, аг, • ••, ап)- Перестановку (1, 2, 3, 4, ..., п) называют
нормальной.
Два числа а,- и oj в перестановке а = (щ, аг, • ••, ап)
образуют инверсию, если aj > а,-, но при этом оц стоит в
перестановке правее aj (т.е. г > j). Общее количество инверсий
в перестановке а обозначают |а|, и если это число четное,
то перестановку называют четной, а если оно нечетное —
нечетной.
Пример 7.1. Определим, какова четность перестановки
а — (4, 5, 1, 3, 6, 2), т.е, выясним, является она четной или
нечетной. Для этого подсчитаем в а количество инверсий.
Правее числа 4 стоят три числа, меньшие его: 1, 3 и 2.
Следовательно, числу 4 соответствует три инверсии с числами,
стоящими справа от него. Справа от числа 5 стоят также
три числа, которые меньше 5. Следовательно, числу 5 тоже
184 7. ОПРЕДЕЛИТЕЛИ
соответствует три инверсии с числами, стоящими справа от
него. Аналогично находим, что число 1 не образует инверсий с
числами, стоящими правее его, числа 3 и 6 образуют по одной
такой инверсии. Общее количество инверсий в перестановке
а равно |а| = 3 + 3 + 0+14-1= 8, т.е. четно. Следовательно,
перестановка а является четной. #
Транспозицией перестановки называют такое ее пре-
образование, при котором в ней меняются местами какие-либо
два элемента, а другие остаются на своих местах.
Теорема 7.1. Любая транспозиция меняет четность пере-
становки.
◄ Пусть транспозиция состоит в том, что в перестановке а
меняются местами ее г-й и j-й элементы, т.е.
Q — (• • •, О1{, ..., Oj, ...) > (.. ., Oij, ..., Q,', .. .),
где многоточиями обозначены числа, сохраняющие свои места.
Если числа а, и являются соседними в перестановке, т.е.
J = 14-1,
Q (• • •, Ot{, Olj, . . .) ,
и образуют инверсию, то при транспозиции эта инверсия ис-
чезнет, а если ее не было, то она появится. Для любой другой
пары элементов из перестановки их взаимное расположение
при транспозиции не меняется. Поэтому общее количество ин-
версий в перестановке при транспозиции изменяется ровно на
единицу. Следовательно, перестановка меняет свою четность.
Если числа а, и а,- стоят в перестановке через т промежу-
точных чисел, т.е. j = i + т + 1,
Q (. •., Oij, Ck,i+l, ^4’4-2 j •••, ai+m, Qiji •••)>
то их транспозицию можно реализовать с помощью последо-
вательных транспозиций только соседних пар чисел. Действи-
тельно, число а, можно поменять местами последовательно с
7.1. Определители n-го порядка
185
a,-+i, oti+2, ..., oti+m, затем уже в перестановке
(..., <*»+2> •••> ^t+m) ai, aj> • • •)
поменять местами с aj, после чего число aj, уже стоящее слева
от а, , поменять местами последовательно с а,+т, ..., а,+2, a.+i-
В результате нужная перестановка
(..., CXj, 0)4-1) ai+2) • • • > ai+m > ai) • • •)
будет получена за счет выполнения 2тп +1 транспозиций сосед-
них чисел. Поскольку при этом четность перестановки каждый
раз изменялась, а всего этих изменений было нечетное число,
то в результате четность перестановки изменилась на проти-
воположную. ►
Из двух перестановок (щ, а2, ..., <*п) и (/?х, /?2, ..., 0П)
одних и тех же чисел можно составить новый объект
/32 ... (Зп\
\оц а2 ... ап /
который называют подстановкой n-й степени.
Подстановку называют четной, если перестановки, из ко-
торых она состоит, имеют одинаковую четность, и нечетной
в противоположном случае. Четность подстановки (7.1) совпа-
дает с четностью числа |/?| + |а| — общего количества инверсий
в строках подстановки, которое обозначают |ст|.
Транспозицией подстановки называют любую пере-
становку ее столбцов. Поскольку транспозиция подстановки
вызывает транспозиции и в образующих ее перестановках, то,
согласно теореме 7.1, очевидно, что транспозиция подстановки
не меняет ее четность.
Каждая подстановка вида (7.1) задает взаимно однозначное
отображение множества чисел 1, 2, 3, ..., п на себя, при кото-
ром отображается в щ, /32 — в а2 и т.д. В соответствии с
186
7. ОПРЕДЕЛИТЕЛИ
интерпретацией подстановок как отображений две подстанов-
ки считают равными, если они отличаются только порядком
записи своих столбцов. Например, подстановки
/1 3 4 2\ /1 2 3 4\
\2 4 1 3/ И \2 3 4 1/
равны, так как вторая получается из первой перестановкой
столбцов.
Соглашение о равенстве подстановок позволяет записать
любую подстановку так, чтобы первая строка являлась нор-
мальной перестановкой. Поэтому различных подстановок п-й
степени имеется ровно п!
Определение 7.1. Определителем порядка п, соответ-
ствующим квадратной матрице
аи 012 ••• О1п \
. 021 022 • • • О2п I
\ ®ni ап2 ... аппj
порядка п (определителем квадратной матрицы порядка
п), называют сумму п! слагаемых
det А = l)Hoiaio2a2.. .апап, (7.3)
О
которая берется по всевозможным подстановкам вида
( 1 2 ... п \
<7=1 ) .
\ “1 «2 • • • <*п /
Определитель матрицы А часто называют просто опреде-
лителем, или детерминантом, и обозначают
011 ®12 ••• а1п
021 022 ••• О2п
Oni оп2 ... апп
или det А, называя А матрицей этого определителя.
7.1. Определители n-го порядка
187
Определение 7.1 в частных случаях п = 2 и п = 3 дает то же,
что и введенные ранее в 2.1 определения. Например, при п — 2
из элементов матрицы
ап
021
012
022
можно составить только два указанных в определении произ-
ведения 011022 и 012021, которым соответствуют подстановки
и <т2 =
1 2
2 1
четная и нечетная соответственно, так как |cti| = 0, а [стг! = 1.
Поэтому, согласно формуле (7.3),
det А = (— 1)0Оца22 + (— 1)1О12в21 = ОцО.22 ~ a12a21-
Каждое слагаемое в сумме (7.3) представляет собой произ-
ведение п элементов матрицы (7.2). При этом все сомножители
находятся в разных строках и в разных столбцах матрицы, по
одному в каждой строке (каждом столбце). В произведении со-
множители упорядочены по номерам строк (другими словами,
по первому индексу), и этот порядок определяет знак слагае-
мого. Однако на самом деле выбранный порядок не является
существенным. Если мы изменим порядок сомножителей кон-
кретного слагаемого, то подстановка, образованная номерами
строк и столбцов сомножителей, будет иметь тот же знак, что и
подстановка, использованная в сумме (7.3). В частности, сумма
(7.3) совпадает с суммой
detA = J2(-l)|T|a^iaA2...a^nn,
которая берется по всем подстановкам т вида
Pl @2 ••• Рп\
\ 1 2 ... п ):
188
7.ОПРЕДЕЛИТЕЛИ
7.2. Свойства определителей
Поскольку определители соответствуют квадратным ма-
трицам, в их теорию легко переносится матричная термино-
логия {порядок, элементы, строки, столбцы, диагональ, диа-
гональные элементы, виды матриц и определителей, транспо-
нирование, элементарные преобразования строк и столбцов,
линейные комбинации строк и столбцов и др.). При изучении
определителей используют эту возможность, подразумевая од-
нако, что терминология относится к матрице определителя.
Свойство 7.1. Определитель не меняется при транспони-
ровании.
◄ Фактически требуется доказать, что для любой квадратной
матрицы А (7.2) выполнено равенство det А1 = det А.
Прежде всего отметим, что если произведение
° 1а 1 a2ot2 • • • апап
является слагаемым в определителе det А, то оно является сла-
гаемым и в определителе det Ат. Действительно, если сомножи-
тели этого произведения расположены в разных строках и раз-
ных столбцах в матрице А, то они обладают этим же свойством
и в транспонированной матрице Ат. Знак этого слагаемого в
det А определяется подстановкой
а =
2
«2
п
(Хп
Однако в транспонированной матрице сомножители этого сла-
гаемого расположены на симметричных относительно диаго-
нали матрицы местах. Поэтому в det Ат его знак определяется
подстановкой
ах а2 ••• <*п
1 2 ... п
7.2. Свойства определителей
189
Четности подстановок ст и т совпадают, так как общее число
инверсий в их строках равно числу инверсий в перестановке
(<*1, аг, •••, <*п)- Поэтому совпадают и знаки рассматриваемо-
го слагаемого в det А и det Ат. Следовательно, det А1 = det А. ►
Согласно свойству 7.1, строки и столбцы определителя рав-
ноправны в том смысле, что любое доказанное утверждение о
строках определителя сразу переносится на столбцы и наобо-
рот. Учитывая это, мы, хотя и формулируем нижеследующие
утверждения для строк и столбцов, доказательства проводим
только в одном варианте.
Свойство 7.2. При перестановке двух строк (столбцов)
определитель меняет свой знак на противоположный.
◄ Обозначим через Д определитель матрицы А (7.2), а через
Д1 — определитель, полученный из Д перестановкой t-й и у-й
строк:
ац 012 ••• <4п an 012 • •• ain
д = а,1 <42 • • • Qin , Ai = ajl aj2 ••• Ojn
0,1 Oj2 • • • ajn <41 Oj2 ••* Qin
ап1 аП2 ... Qnn Qni an2 • • • ann
Если произведение oiai... о|а,... ... апап является слагае-
мым в определителе Д, то оно является слагаемым и в опре-
делителе Д1, и наоборот. Это следует из того, что если сомно-
жители этого произведения расположены в разных строках и
разных столбцах в матрице определителя Д, то они обладают
этим же свойством и в матрице определителя Д1, и наоборот.
Знак этого слагаемого в Д определяется подстановкой
1
«1
ст =
i ... j ... п
ai ... aj ... ап
190
7. ОПРЕДЕЛИТЕЛИ
Однако в Ai знак этого же слагаемого определяется подста-
новкой
(1 ... j ... г ... п \
) •
... ai ... aj ... ап /
Поскольку первая строка подстановки т получается из первой
строки подстановки а при помощи одной транспозиции, а вто-
рые строки у них совпадают, эти подстановки имеют разную
четность. Значит, определители А и Д[ содержат одинаковые
по абсолютной величине слагаемые, но с противоположными
знаками. ►
Свойство 7.3. Если все элементы j-ro столбца определите-
ля представлены в виде суммы двух слагаемых, то определитель
равен сумме двух определителей, у которых все столбцы, кроме
j-ro, такие же, как и в данном определителе, а j-й столбец пер-
вого определителя состоит из первых слагаемых j-ro столбца
данного определителя, а второго — из вторых слагаемых:
ап ... а'^+а"1
Я21 ••• o'2j+a%j
Oni ••• о' +а"-
пк nj 1 nj
О1п ац ... а'^ ... ain ац ... a^j ... ain
О2п = a2i ... a'2j ... a2n + «21 ••• 02j ... O2n
^пп ani ... anj ... ann ani ••• a^j ... ann
Аналогично, если все элементы г-й строки определителя пред-
ставлены в виде суммы двух слагаемых, то определитель равен
сумме двух определителей, у которых все строки, кроме г-й,
такие же, как и в данном определителе, а г-я строка первого
определителя состоит из первых слагаемых г-й строки данного
определителя, вторая — из вторых слагаемых:
а11 012 ••• Oin
ац 012 ... «ш
Оц 012 ... Я1п
Oni оп2 ... апп
Oni оп2 •.. апп
а'! п" а"
“«1 ai2 '•• ain
Gnl Оп2 ... апп
7.2. Свойства определителей
191
◄ Пусть, например, элементы г-й строки определителя пред-
ставлены в виде суммы двух слагаемых. Тогда
Дц 012 ••• aln
41+<! <»й+<2 ••• <+<
О"п1 ®п2 ... апп
~ 1)' 'а1а1а2а2 • • • (aiai + aiaj) • •-впап —
a
— 1)' 'а1ог1 • • -aia, • • -anan + '( 1)1 'aiaj • •-а,а; • •-апагп —
«г о
ац 012 ••• <И.п
ац 012 ••• а1п
<1 <2 ••• ain
®nl ап2 • • • @пп
Qni ап2 ... апп
что и требовалось доказать. ►
Свойство 7.4. Общий множитель элементов строки или
столбца может быть вынесен за знак определителя. Для
умножения определителя на число достаточно умножить на это
число элементы любой строки или любого столбца:
Оц . • • aij • • ®ln ац ... aij .. aln
Лац . Xaij • Xain = A а,т ... a^ ..
«п1 .. anj • ^nn °nl ... anj Gnn
itfll - • Xaij • ®ln ац .. aij ®ln
Oil . . Xaij • ain = A ац .. a^ ... ^in
ani • Xanj • ®nn ®nl anj Qnn
192
7. ОПРЕДЕЛИТЕЛИ
◄ Пусть, например, элементы г-й строки определителя имеют
общий множитель А. Тогда
ац ... aij ... а1п
Аоц ... Ao.ij ... Аа|п —^(—1)1 'aiai ...(Аа,аД...апап—
...................... О’
oni .•• Qnj ••• апп
ац ... ац ... ain
— А^( 1)' 'aiai...а;а,...апап — А ал ... ац ... ,
а ....................
ani .• anj ... ann
где первое и последнее равенства выполняются в силу опреде-
ления 7.1. ►
Доказанное свойство диссонирует со свойствами умножения
матрицы на число. Действительно, при умножении матрицы
на число все ее элементы умножаются на число. Но умножение
определителя на число — это лишь умножение одной строки
или столбца матрицы определителя на это число. Поэтому, если
А — квадратная матрица порядка п, то det(AA) = AndetA.
Свойство 7.5. Определитель равен нулю, если он имеет:
1) нулевую строку (столбец);
2) хотя бы две одинаковые строки (столбца);
3) хотя бы две строки (столбца), элементы которых пропор-
циональны;
4) хотя бы одну строку (столбец), являющуюся линейной
комбинацией других строк (столбцов).
◄ 1) Так как определитель является суммой произведений эле-
ментов из каждой строки, то в каждом таком произведении
есть нуль — какой-то элемент из нулевой строки. Следова-
тельно, все слагаемые в сумме (7.3) равны нулю, как и сам
определитель.
7.2. Свойства, определителей
193
2) В соответствии со свойством 7.2 определитель меняет
знак при перестановке строк. Если некоторый определитель Д
имеет одинаковые строки, то при их перестановке он изменяет
знак, но в то же время при такой перестановке он не изменяет-
ся, так как переставляемые строки одинаковы. Следовательно,
Д = — Д, т.е. 2Д = 0, откуда Д = 0.
3) Пусть, например, элементы 1-го столбца пропорциональ-
ны элементам j-ro столбца с коэффициентом пропорционально-
сти А. Тогда в силу свойства 7.4 общий множитель элементов
1-го столбца можно вынести за знак определителя:
A«ij Я|2 ... «ij ... aln
Xa^j «22 ••• a2j «2п
Xttnj 0>n2 • • • «nj • • • «nn
«lj «12 • • • «lj • • • «In
«2j «22 ••• «2j ••• «2n
«nj «n2 • • • «nj • • • «nn
= A
Последний определитель равен нулю, так как имеет два одина-
ковых столбца.
4) Пусть, например, 1-й столбец определителя Д является
линейной комбинацией всех остальных столбцов:
п
52 ^ка1к «12 ••• «1п
к=2
п.
52 ^ка2к «22 «2п
к=2
Хк еК, к = 2,71.
п
52 ^капк «п2 • • • «пп
к=2
Некоторые коэффициенты линейной комбинации, представ-
ляющей 1-й столбец, могут быть нулевыми. Это равносильно
тому, что соответствующие столбцы не участвуют в линейной
комбинации. Используя свойства 7.3, 7.4 определителя, полу-
194
7. ОПРЕДЕЛИТЕЛИ
чаем
«12 «12
«22 «22
«п2 «п2
«1п «1п «12
«2п +... + Ап «2п «22
«пп «пп «п2
«1п
«2п
«пп
— АгО + • • • + Ап0 — 0;
где последние определители равны нулю, так как имеют по два
одинаковых столбца. ►
Свойство 7.6. Определитель не изменится, если к любой
его строке (столбцу) прибавить линейную комбинацию других
строк (столбцов):
п
«11+ 52 ^fc«Ut «12 ••• «1п
k-2
п
«21+52 Ajt«2fc «22 ••• «2п
fc=2
п
«nl+52^«nfc «п2 • • • «пп
fc=2
«И «12 •.. «1п
«21 «22 •.. «2п
«п1 «п2 ... «пп
Afc € R (к 1-му столбцу прибавлена линейная комбинация осталь-
ных столбцов);
п п п
«11 + 52 М.1 «12 + 52 kiai2 • • «1п+ 52 kiain
»=2 »=2 «=2
«21 «22 «2п
«п1 «п2 • «пп
«11 «12 ••• «1п
«21 «22 ••• «2п
«п1 «п2 • • • «пп
к, € R (к 1-й строке прибавлена линейная комбинация остальных
строк).
7.2. Свойства определителей
195
◄ В силу свойства 7.3 определитель можно представить в виде
суммы двух определителей, один из которых равен нулю в силу
свойства 7.5. Например, для 1-го столбца это означает, что
п
«ll+52^fc«lfc «12 ••• aln
к=2
п
«21 + 52 ^fc«2fc «22 • • • «2п
к=2
п
«nl + 52 ^к^пк «п2 • • • «пп
к=2
п
52 ^k^lk «12 ••• «1п
к=2
п
52 ^fc«2fc «22 • • • «2п
к=2
п
52 ^fc«nfc «п2 — «пп
к=2
«11 «12 • • «1п
«21 «22 • • «2п +
«п1 «п2 • • • «пп
«11 «12 ••• «1п
«21 «22 • • • «2п
«п1 «п2 • • • «пп
В матрице А вычеркнем t-ю строку и j-й столбец, в которых
стоит элемент atJ . Из оставшихся элементов можно составить
новую квадратную матрицу (п — 1)-го порядка, сдвинув строки
и столбцы после вычеркивания. Такой способ образования этой
матрицы означает, что элемент матрицы А, расположенный
в к-й строке, при к > i оказывается в (к — 1)-й строке новой
матрицы. Аналогично, при I > j этот же элемент оказывается
в (/ — 1)-м столбце новой матрицы. Определитель построенной
матрицы обозначают через M,j и называют минором (мат-
рицы А и ее определителя Д), соответствующим элементу atJ.
Число Aij = (-l)‘+jM,j называют алгебраическим дополне-
нием, соответствующим этому же элементу а,у.
Миноры и алгебраические дополнения позволяют, в частно-
сти, вычислять определитель n-го порядка путем сведения его
к вычислению п определителей (п— 1)-го порядка.
196
7. ОПРЕДЕЛИТЕЛИ
Свойство 7.7. Определитель Д квадратной матрицы А =
= (a,j) порядка п можно представить в виде
п п
Д = J>jAy = £(-1)‘+Ч;М0, (7.4)
j=i j=i
или
п п
Д = J>yAv = 22(-1)‘+>аъМъ. (7.5)
»=1 i=i
◄ Докажем равенство (7.4). Поскольку, согласно определению
7.1 определителя, в каждое его слагаемое в качестве сомно-
жителя входит один элемент г-й строки, можно разделить все
слагаемые в сумме (7.3) на п групп так, чтобы в каждой группе
слагаемые имели один и тот же элемент г-й строки. Вынеся в
этих группах общий элемент г-й строки за скобку, получим
Д — det А — ^( 1)' ••• • • • ®пап —
(Т
= ®»1 ' (~1)' { ’ • • • ®пап 4"
<г(«,1)
"Ь ®«2 ^ ^ ( I)’ { ' ^а1О1 •••««-!,а;_1а»+1,а,+1 ---«пап + ••• +
<г(.,2)
"Ь ®«'п ' (~ 1)' ^«1а! •••а«-1,а<_1а«+1,о.+1---“пап =
<г(«,п)
п
=~ ^ > (~I)’ • •.®«—l,a,_i®«+1,а,+1 • •-®nan>
j=l <z(«,j)
где а(г, j) (j = 1, п) обозначает подстановку, в которой под
числом г стоит число j — индексы общего множителя a,j,
вынесенного за знак суммы.
Остается доказать, что сумма
(~l)l ®«+1,а<+1 • • .®nan (7-6)
7.2. Свойства определителей
197
равна алгебраическому дополнению . Для этого достаточно
выразить количество инверсий в подстановке <7 (г, j) через коли-
чество инверсий в подстановке т, которая получается из <т(«,J)
вычеркиванием столбца (i, j)T и уменьшением на единицу эле-
ментов, больших i в 1-й строке и больших j во 2-й. Отметим,
что этот способ получения подстановки (п — 1)-й степени т из
подстановки n-й степени полностью соответствует по-
строению матрицы минора Му. Подстановка т соответствует
тем местам в матрице минора Му, на которых оказались сомно-
жители произведения alai ...a,-i,ai_1at+i,a,+1 ...аПа„- Поэтому
Mij — '(—1)1 . .Я|—1,а;—1 •••®пап"
Для подсчета инверсий в подстановке столбец (i,j)T
переставим i — 1 раз с соседним слева столбцом, что переместит
его на место 1-го столбца, не изменив относительного порядка
остальных столбцов. В полученной подстановке
i 1 ... г — 1 г -Ь 1
j «1 ... at_j а;+1
n
<*n
четность которой совпадает с четностью а(г, j), вычеркнем 1-й
столбец и получим
i — 1 г +1
«.-1 ««+1
п
«п
При вычеркивании 1-го столбца количество инверсий в 1-й
строке уменьшится на г — 1, а во 2-й — на j - 1. Следовательно,
общее число инверсий уменьшится на i + j - 2, и поэтому
(7-7)
198
7. ОПРЕДЕЛИТЕЛИ
где |т'| равно сумме инверсий в 1-й и 2-й строках т'. Теперь
уменьшим на единицу те элементы в т', которые больше г в
1-й строке и больше j во 2-й. При этом количество инверсий в
строках не изменится, а в результате получим подстановку т.
Поэтому сумма (7.6) с учетом равенства (7.7) принимает вид
2(~ 1) — 1)' l>Oi-ia«+l|Oi+i •••anan =
= (-1)‘^Мъ = А0-,
что и завершает доказательство. ►
Представления определителя в виде (7.4) и (7.5) называют
его разложениями по г-й строке и j-му столбцу соответ-
ственно.
Разложения по строке (7.4) и столбцу (7.5) дают правила,
в соответствии с которыми определитель n-го порядка сводит-
ся к п определителям (п — 1)-го порядка, раскладывая которые
получим n(n — 1) определителей (п — 2)-го порядка и т.д. Эти
вычисления получаются громоздкими, однако процесс упроща-
ется, если среди элементов определителя имеется много нулей.
Целесообразно раскладывать определитель по тому ряду (стро-
ке, столбцу), в котором больше нулей. Если же в этом смысле
некоторые ряды одинаковы, то удобнее выбирать тот из них, в
котором элементы имеют большие значения по абсолютной ве-
личине, поскольку это упрощает выполнение арифметических
вычислений. В этом полезно убедиться самостоятельно, вычи-
сляя разложением по 2-му столбцу следующий определитель.
Пример 7.2. Вычислим определитель четвертого порядка
3 1-1 2
-513-4
20 0 1 -11
1-5 3-3
7.2. Свойства определителей
199
Определитель удобнее всего раскладывать по 3-й строке:
-1
3 =
3
= 20(—9 — 20 + 6 + 30 + 12 — 3) + 1(—9 — 4 + 50 — 2 - 60 — 15) +
+ 11(9 - 25 + 3+1+ 45+15) = 20 • 16-40+11-48= 808.
Пример 7.3. Вычислим
определитель n-го порядка
1 1 1
1 0 1
1 1 0
1 1 1
1
1
1
0
Не меняя величины этого определителя, вычитаем 1-ю стро-
ку из всех остальных строк (см. свойство 7.6) и, раскладывая
полученный определитель по 1-му столбцу (см. свойство 7.7),
находим, что
1 1 1 ... 1
0 -1 0 ... 0
d = 0 0 -1 ... 0
0 0 0* ... -1
-1 0
0 -1
-1
0 0
0
Свойство 7.8. Определитель верхней (нижней) треу-
гольной матрицы равен произведению элементов ее главной
200
7. ОПРЕДЕЛИТЕЛИ
диагонали, т.е.
ап а12 ... ain
0 а22 ... а2п
ац 0 ... О
a2i а22 ... О
О 0 ... апп
= аца22...апп
ап1 ап2
• •• «пп
◄ Воспользовавшись свойством 7.7, последовательно расклады-
ваем определители верхнего треугольного вида по 1-му столбцу
и получаем
«11 а12 ... а1п
0 а22 ... а2п
— «п
«22
0
«23
«зз
а2п
а3п
0 0 ... апп
О"п,п
0 0
= «11«22
азз «34
0 а44
«Зп
«4п
«пп
= «11«22 •--«пп = JJ««i-
«=1
0 0
Для вычисления определителей нижнего треугольного вида
используется их разложение по 1-й строке. ►
Пример 7.4. Поскольку диагональная матрица является
верхней треугольной матрицей, ее определитель равен произ-
ведению диагональных элементов. В частности, определитель
единичной матрицы Е равен единице. #
С помощью элементарных преобразований строк любая
матрица приводится к ступенчатому виду (см. теорему 6.3).
Квадратная матрица ступенчатого вида является частным слу-
чаем верхней треугольной матрицы, у которой диагональные
элементы, начиная с некоторого, могут быть равны нулю.
Определитель такой матрицы легко найти по свойству 7.8. В
алгоритме приведения к ступенчатому виду используется пе-
рестановка строк, при которой определитель матрицы меняет
7.2. Свойства определителей
201
знак. Изменение знака можно учесть, например, дополни-
тельным умножением определителя или одной из строк на — 1.
Следовательно, квадратную матрицу всегда можно привести
элементарными преобразованиями строк к верхнему треуголь-
ному виду с сохранением значения ее определителя.
Пример 7.5. Вычислим определитель четвертого порядка
12 3 4
2 3 4 1
3 4 12
4 12 3
Этот определитель называют циркулянтом четвертого по-
рядка, поскольку его строки являются так называемыми ци-
клическими перестановками элементов 1-й строки. Его вычи-
сление основано на преобразовании к треугольному виду. На
первом этапе получаем нули в 1-м столбце ниже главной диаго-
нали:
12 3 4 2 3 4 1 (2)-» (2)-2(1) 12 3 4 0 -1 -2 -7
d = 3 4 12 (3) (3) -3(1) 0 -2 -8 -10
4 12 3 (4) -4(4) -4(1) 0 -7 -10 -13
На втором этапе получаем нули во 2-м столбце ниже главной
диагонали:
(3) -> (3) - 2(2)
(4)-4 (4) — 7(2)
1
0
0
0
2 3 4
-1 -2 -7
0-4 4
0 4 36
На третьем этапе получаем нуль в 3-м столбце под диагональю:
d~ (4W(4) + (3) ~
12 3 4
0 -1 -2 -7
0 0-44
0 0 0 40
= 1(—1)(—4)40 = 160.
202
7. ОПРЕДЕЛИТЕЛИ
Если в процессе преобразований оказывается, что равные
нулю элементы расположены по одну сторону от побочной диа-
гонали, то можно последовательно раскладывать определитель
по 1-му столбцу (или по 1-й строке) или, изменяя порядок строк
(столбцов) на обратный и учитывая свойство 7.2, преобразовы-
вать определитель к треугольному виду.
Пример 7.6. Вычислим определитель n-го порядка:
0 0 ... 0 kin,
0 0 ... fc2,n-i к2п
U Кп—1,2 ••• »п—1,п-1 »п—1,п
‘ni кп2 ... &п-1,п кпп,
= (-l)(n+4)(n-1)/2A;nlfcn-i,2...*:2,n-i*:ln =
= (_l)n(n-1)/2A.niA.n_i 2 ,,,k2 n_lkln.
Свойство 7.9. Сумма произведений элементов какой-либо
строки (столбца) определителя Д матрицы А (7.2) на алгебраи-
ческие дополнения, соответствующие элементам другой строки
(столбца) этого же определителя, равна нулю:
У ^ijAkj = 0, к г; (7.8)
j=i
Aik = 0, k^j. (7.9)
«=1
◄ Докажем равенство (7.8), соответствующее утверждению для
строк. Для этого рассмотрим вспомогательный определитель
7.2. Свойства определителей
203
Ai, полученный из А заменой элементов к-й строки (к г)
числами Ci, с?, сп:
а11 021 012 022 . .. О1П ••• d2n
Д1 = а,1 а,-2 • • • din
С1 С2 • • • Cn
аП1 Оп2 • • • ^nn
Разложим определитель Ai по к-й строке:
п
Д1 = 'cjAkjl
3=1
где Akj — алгебраические дополнения, соответствующие эле-
ментам к-й строки как в определителе Ai, так и в определителе
А. Положив Cj = a^, j — 1, п, получим, что в определителе Ai
совпадают г-я и к-я строки. В соответствии со свойством 7.5
этот определитель равен нулю, т.е.
п
= 0, к £ г.
3=1
Аналогично доказывается равенство (7.9). ►
Свойство 7.10. Если А и В являются квадратными
матрицами порядков пит соответственно, то det(A ф В) =
= det A det В.
◄ Нужно доказать, что блочная матрица
(А е\
в)
имеет определитель, равный det A det В.
204
7. ОПРЕДЕЛИТЕЛИ
Мы докажем более общий результат, состоящий в том, что
определитель блочно-треугольной матрицы
(7-10)
при любой матрице С тоже равен det A det В.
Как уже отмечалось, квадратную матрицу всегда можно
привести элементарными преобразованиями строк к верхнему
треугольному виду с сохранением ее определителя. Выполним
над первыми п строками матрицы (7.10) такие элементарные
преобразования строк, которые приводят матрицу А к верхне-
му треугольному виду А' с сохранением ее определителя. Затем
выполним над последними т строками полученной матрицы
такие элементарные преобразования строк, которые приводят
матрицу В к верхнему треугольному виду В' с сохранением ее
определителя. Отметим, что эти преобразования не зависят от
элементов матрицы С и при их выполнении определитель мат-
рицы (7.10) не будет меняться, а сама матрица примет верхний
треугольный вид
типа пхт, получившаяся в
где Ci — некоторая матрица
результате преобразования матрицы С.
Согласно свойству 7.8, определитель матрицы D1 треуголь-
ного вида равен произведению ее диагональных элементов,
которое в данном случае получается умножением произведе-
ния диагональных элементов матрицы А' треугольного вида,
равного det Az, на произведение диагональных элементов мат-
рицы В' треугольного вида, равного detBz. Таким образом,
detD — detD' = det Azdet Bz = det AdetB. ►
Свойство 7.11. Определитель произведения двух квадрат-
ных матриц A, Be A/n(R) равен произведению их определите-
лей, т.е. det(AB)= det A det В.
7.2. Свойства определителей
205
А
-Е в)'
Пусть С = АВ. Рассмотрим две блочные матрицы
Mi = I _Е в) и М2 =
где Е — единичная матрица порядка п.
Из доказательства свойства 7.10 следует, что detA/j =
= det Mi = det AT det BT — det A det В.
Для вычисления определителя det М2 сделаем в матрице М2
п перестановок строк с изменением знака одной из переста-
вляемых строк так, чтобы определитель при этом не менялся:
(п+ 1)-ю строку матрицы М2 умножим на —1 и поменяем места-
ми с 1-й строкой; (п + 2)-ю строку умножим на —1 и поменяем
местами со 2-й строкой и т.д. и закончим умножением на — 1
последней строки и перестановкой ее с n-й строкой. В резуль-
тате матрица М2 примет вид
М3 —
е е\
A CJ’
и опять, как и выше, получаем, что detM3 — det EdetC = detC.
Следовательно, detA/г = detA/3 = detC = det (AB).
Осталось доказать, что матрицу Mi элементарными пре-
образованиями строк можно преобразовать в матрицу М2, не
изменив ее определителя. Записав матрицы Mi и М2 через их
элементы
'ап. • Я]п 0 . .. 0 ^оц . • ®1п сп . •• С1п\
М1 = ®nl • • апп 0 . .. 0 , м2 = «п1 • • &пп Cnl • • ^пп
-1. . 0 Ьц . • ^1п -1 . . 0 0 . .. 0
.. -1 ^nl • • ^пп / \о . . -1 0 . .. 0 /
отмечаем, что первые п столбцов у них совпадают.
206
7. ОПРЕДЕЛИТЕЛИ
В матрице Mi к (п + 1)-му столбцу прибавим 1-й, умно-
женный на Ьп; 2-й, умноженный на £>21, и т.Д. и закончим
прибавлением n-го столбца, умноженного на bni. В результате
в (п + 1)-м столбце в строках п +1,..., 2п образуются нули, а в
остальных строках, например i-й строке, г = 1,..., п, —
п
^^jkbkj = Сд.
fc=l
Повторим аналогичные преобразования со столбцами (п + 2)-м,
(п + 3)-м, ..., (2п)-м. В результате получим матрицу М2, не
изменив при преобразованиях определитель в силу свойства 7.6.
Вывод: матрицы Mi и М2 имеют одинаковые определители и,
следовательно, det (АВ) = det A det В. ►
7.3. Методы вычисления определителей
При вычислении определителей применяются различные ме-
тоды, основанные на свойствах определителей. Часто исполь-
зуемый метод состоит в преобразовании определителя к более
простому виду, что мы видели в рассмотренных примерах.
Иногда удобно вычислять определители, комбинируя при-
менение различных их свойств. Рассмотрим конкретные при-
меры.
Пример 7.7. Вычислим определитель (п+ 1)-го порядка
X Cj С2
Ci X С2
С1 с2 х
Сп
Сп
Сп
С1 с2 Сз ... X
7.3. Методы вычисления определителей
207
Прибавим к 1-му столбцу все остальные:
« + Е С« Cl С2 ... С„
1=1
д_ *+ЕС«’ Х С2 ••• сп
п
X+'E'Ci С2 Сз ... X
i=l
п
(выносим за знак определителя общий множитель х + Е ci и
i=i
вычитаем из каждой строки, начиная с последней, предыдущую
строку)
п
= (*+&)
1=1
1 С] с2 ... сп
О х — ci 0 ... О
О с2 - х х — с2 ... О
О 0 0 ... х - сп
(раскладываем по 1-му столбцу)
п
= +
1=1
х — Ci О
С2 - X X — с2
О О
О
О
х-сп
(используем свойство 7.8)
п п
= (ж+22с,)П(а:_с’)-
t=l i=l
208
7. ОПРЕДЕЛИТЕЛИ
Пример 7.8. Вычислим циркулянт шестого порядка
д = 1 2 3 4 5 6 2 3 4 5 6 1 3 4 5 6 1 2 4 5 6 1 2 3 5 6 1 2 3 4 6 1 2 3 4 5
Выполняя последовательно преобразования (6) —> (6) —(5), (5) —>
(5)—(4), (4) -4 (4)—(3), (3) -4 (3)-(2), (2) -4 (2)-(1), получаем
1 2 3 4 5 6
11111-5
1 1 1 1-5 1
1 1 1-5 1 1“
11-5111
1-51111
вычитаем из первых пяти строк шестую и раскладываем
определитель по 1-му столбцу)
0 7 2 3 4 5
0 6 0 0 0 -6
0 6 00-6 0
“ 0 6 0 -6 0 0
0 6 -6 0 0 0
1-51111
(выносим общий множитель 6 к 1-му столбцу остальные)
7 2 3 4 5 1 0 0 0 -1
= -64 100-10 10-100 1-1000 = -64
7 2 3 4 5
6 0 0 0 -6
XX — 6 0 0 -6 0
6 0 -6 0 0
6 -6 0 0 0
из четырех строк и прибавляем
21 2 3 4 5
0 0 0 0 -1
0 0 0 -1 0 = — -64-21. #
0 0 -1 0 0
0 - 1 0 0 0
7.3. Методы вычисления определителей
209
Основой одного из подходов является получение некоторого
соотношения, связывающего значение определителя Дп поряд-
ка п с определителями, например, той же структуры, но более
низких порядков:
Дп = /(Дп_1,Дп_2,...,Дп-л), к < п. (7.11)
Такого рода соотношения (7.11) называют рекуррентными
[I], как и соответствующий метод вычисления определителей.
Этот метод заключается в том, что сначала непосредствен-
но по общему виду определителя вычисляют столько опреде-
лителей низших порядков, сколько их имеется в правой части
рекуррентного соотношения. Далее, по общему виду опреде-
лителя или с помощью рекуррентного соотношения вычисляют
еще некоторое количество определителей низших порядков и
подбирают вид их записи. Это делается для того, чтобы можно
было уловить закономерность и записать формулу (в виде ги-
потезы) , выражающую определитель Дп непосредственно через
его элементы. Наконец, справедливость гипотезы при любом
п доказывается с помощью метода математической индукции.
Общую формулу, выражающую определитель Дп непосред-
ственно через его элементы, можно получить и другим путем.
Для этого в рекуррентное соотношение, выражающее опре-
делитель n-го порядка, подставляют выражение определителя
(п — 1)-го порядка из того же рекуррентного соотношения с
заменой п на (п — 1) и т.д.
Пример 7.9. Вычислим определитель n-го порядка
ki х х ... х х
х kj х ... х х
х х кз ... х х
х х х ... kn_i х
ххх... х кп
210
7. ОПРЕДЕЛИТЕЛИ
Представим элемент в правом нижнем углу в виде кп =
= х + (кп — ж), а остальные элементы последнего столбца — в
виде х — х + 0. Используя свойство 7.3 и учитывая указанные
представления для элементов последнего столбца, разобъем
определитель на сумму двух:
кг X X . ж X ki X X ... ж 0
X к2 ж . ж X X к2 ж ... ж 0
Дп = X X кз ж X + X X к3 ... ж 0
X X X . • кп-! X X X ж ... кп—1 0
X X ж . X X X X ж ... ж кп~
В первом определителе вычитаем последний столбец из осталь-
ных, а второй раскладываем по последнему столбцу
к\ — ж 0 0 ж
0 к2- х . 0 ж
д„ = 0 0 • кп-1 — х ж + (&п х)Дп—ij
0 0 0 ж
откуда
Дп = х(кг - ж)... (Агп_! - ж) + (А:п - ж) Д„_х. (7.12)
Полученный результат представляет собой рекуррентное соот-
ношение для вычисления Дп через Дп-1.
Чтобы найти формулу для вычисления Дп непосредствен-
но через его элементы, начнем вычислять определители низших
порядков и записывать их значения в такой форме, чтобы мож-
но было уловить общую закономерность и высказать гипотезу
о формуле для Дп.
Поскольку Д1 = |fci| = Л?! (здесь, очевидно, |fci | есть обозначе-
ние определителя первого порядка, а не модуля), то выражение
7.3. Методы вычисления определителей
211
для Ai можно представить в виде
Д1 = х + (кг — х) = x(A:i — х)
Далее, используя полученное рекуррентное соотношение, вы-
числяем значение для Д2 и выполняем необходимые преобра-
зования:
Д2 = х(кг - ж) + (Аг2 - =
/. \^2~ х ,, . ,. \ (1 1 \
= x(ki - х)------1- х(к\ - ж)(к2 - х) I - + - =
к2 - х \х ki — xj
= х(кх - х) (к2 - х) И + —Ц: + ;) •
у Д» ~* X X J
Анализируя выражения для Д1 и Д2, можно заметить следую-
щую закономерность, которой подчиняется последовательность
определителей Дп, п € N:
Дп = х(кх-х)...(кп— х) ( - + ----1--r-i— +...+ —-—) =
\ж к\ — х к2 — х kn — xj
<71”
\ чС/ Л> 1 Л/ /
1=1 1=1 7
Формула (7.13) пока еще является гипотезой и ее нужно до-
казывать. Воспользуемся методом математической индукции.
1. При п = 1 формула (7.13) совпадает с полученным ранее
выражением для Др
2. Предположим, что уже доказана справедливость формулы
(7.13) для Д2, ..., Дп-1- В частности,
Дп-1 = x(ki - х)... (fcn_i - х) х
/11 1 1 \ ,
х - + т--------+т-----+ --- + Т----- • (7.14)
\ж «1 — х к2 — х кп_1 — х /
212
7. ОПРЕДЕЛИТЕЛИ
3. Подставляя (7.14) в рекуррентное соотношение (7.12),
окончательно имеем
Дп = x(ki - х)... (кп_! - ж) + (fcn - ж) An_i =
~(кп—х)х(к1—х)... (&n_j—ж) | — | f-т к • •4_т ) ==
\кп—ж ж ki~x кп_1-х /
ч „ ч/1 1 1 1 \
= x(ki - ж)... (кп - ж) I - 4- --F -----1-... 4- ---).
\ ж кг— х к? — х кп — х J
Пример 7.10. Вычислим часто встречающийся в приложе-
ниях определитель Вандермонда n-го порядка (А.Т. Ван-
дермонд (1735-1796) — французский математик):
1 1 ... 1 1
Ж1 Ж2 ... Жп—1 Жп
.п-2 -.п-2 -п-2 -.п-2
1 Л2 ••• ***п—1 •‘п
Все строки начиная с 1-й, но кроме последней, умножаем на
жп и из каждой полученной строки вычитаем стоящую ниже
строку. Чтобы эти умножения не изменили определитель,
запишем перед ним компенсирующий коэффициент 1/ж"-1 и
получим
хп-хг Жп-«2 Яп-Жп-1 0
1 ЖХ(ЖП-Ж1) ж2(жп-ж2) • хп_ 1 (жп—Жп—1) 0
ХПп~1 ж^ 2(жп-Ж1) ж" 2(ж„-ж2) . н 3 3 1 1 *— ю ТГ 3 1 н 3 1 Sv* 0
-.п-1 жх ж"-} п—1 1 е з Н
Последний столбец в последнем определителе умножим на сто-
ящий перед определителем коэффициент, а затем разложим
7.3. Методы вычисления определителей
213
определитель по этому столбцу. В определителе (п — 1)-го по-
рядка
2п-21
Хп-Х2
Х2(хп-Х2)
хп 2-п—1
Xn-lfXn-Xn-i)
(з-п 2-1) 2-2 (^n Ж2) •" Хп- 1(а'П З'П—1)
выносим из каждого столбца по общему множителю:
1 1 ... 1
Дп = (*п - Я1)(2:п -х2)...(хп -Хп-1)
Х1 Х2 ... Хп-1
Таким образом, приходим к рекуррентному соотношению
п—1
Дп = П(®п - Я«)Дп-1-
i=l
Используя его, последовательно находим
Продолжая эту редукцию и учитывая, что
Д1 = 1, А2 = Х2-Х1,
окончательно получаем
Дп = П(хз ~ *•)’ г = з =
i<j
214
7. ОПРЕДЕЛИТЕЛИ
Првмер 7.11. Вычислим определитель n-го порядка
Дп =
5
2
О
3
5
2
О
О
О
О О
3 О
5 3
О 0 0 0 ... 5
Разложим Д„ по 1-му столбцу:
Дп — 5Дп_ j — 2 3 0 0 ... 0 2 5 3 ... 0 0 2 5 ... 0 0 0 0 ... 5
Разложим определитель (п — 1)-го порядка во втором слагаемом
по 1-й строке. В результате получим рекуррентное соотноше-
ние
Д„ = 5Д„-1-6Д„_2.
Чтобы вычислить Д„ при помощи этого рекуррентного
соотношения, сведем соотношение к формуле геометрической
прогрессии. Запишем полученное выражение в двух вариантах:
Дп — 2Дп-1 — 3(Дп-1 — 2Дп-2), Дп ~ ЗДп-1 = 2(Дп-1 — ЗДп_2).
Тогда Дп-1 — 2Д„_2 = 3(Дп-2 - 2Д„_з), Дп-i - ЗДп-2 = 2(Дп-2 - ЗД„_з).
Подставив два последних равенства в предыдущие, находим
Дп — 2Дп-1 — 32(Дп-2 2Дп_з), Дп ~ ЗДп-1 = 2 (Дп-2 ~ ЗДп-з)
Вопросы и задачи
215
и, продолжал процесс, получаем
Дп - 2An_i = 3П-2(Д2 - 240,
Дп - ЗДп-1 = 2П-2(Д2 — ЗДх).
Исключим из двух последних равенств Дп-1:
Д„ = (Зп-1 - 2п-1)Д2 - 6(3П-2 - 2п-2)Д1.
Так как
5 3
2 5
Д1 = |5| = 5, Д2 =
= 19,
то Дп = 19(Зп“1 - 2n-1) - 30(Зп“2 - 2n-2) = 3n+1 - 2n+1.
Вопросы и задачи
7.1. Вычислить
определители:
а)
5
3
1
2
1
0
3
0
2
0
4
0
7
2
5
3
6)
0
8
7
0
5
3
2
4
2
5
4
1
0
4
1
0
7.2. Не раскрывая определители, доказать равенства:
а)
а Ъс
b са
с ab
= (6-а)(с-6)(с-а);
1
1
1
6)
• 2
sirr а
sin2 /3
sin2 (3
cos2 а
cos2 /3
cos2 /3
cos 2а
cos 2/3
cos 2/3
= 0.
7.3. Записать циркулянт n-го порядка и вывести формулу
для его вычисления в зависимости от числа п, воспользовав-
шись вычислениями из примера 7.8.
216
7. ОПРЕДЕЛИТЕЛИ
7.4. Элементы квадратной матрицы являются непрерывны-
ми функциями на отрезке [а; 6]. Доказать, что ее определитель
является непрерывной функцией на этом отрезке.
7.5. Найти все кососимметрические матрицы второго по-
рядка с нулевым определителем.
7.6. Доказать, что определитель кососимметрической мат-
рицы нечетного порядка равен нулю. Верно ли это утвержде-
ние для кососимметрических матриц четного порядка? Приве-
сти соответствующие примеры.
7.7. Доказать, что
1 2 3 ... п
-1 0 3 ... п
-1 -2 0 ... п = п!
-1 —2 -3 ... 0
7.8. Доказать, что
1 1 1 ... 1 1 2 1 ... 1 1 1 3 ... 1 1 1 1 ... п = (п-1)
7.9. Выясните, имеют ли решения следующие уравнения:
1 1 1 1 1 1
а) е2а; е-2а; ех = 0; б) sinz cos ж ех = 0
2е2а; -2е-2* ех COSZ -sins ех
8. ОБРАТНАЯ МАТРИЦА
И РАНГ МАТРИЦЫ
8.1. Обратная матрица и ее свойства
Определение 8.1. Пусть А — квадратная матрица
порядка п. Квадратную матрицу В того же порядка называют
обратной к А, если АВ = ВА = Е, где Е — единичная
матрица порядка п.
Обратную матрицу обозначают А-1. Она позволяет опре-
делить целую отрицательную степень матрицы А. А именно,
для п > 0 полагают А~п = (А-1)п.
Теорема 8.1. Если квадратная матрица А имеет обратную
матрицу, то обратная матрица единственная.
◄ Предположим, что матрица А имеет две обратные матрицы
В и В1. Тогда, согласно определению 8.1 обратной матрицы,
выполнены, в частности, равенства АВ1 = Е и ВА = Е. Ис-
пользуя ассоциативность умножения матриц, получаем
В = BE = В (АВ1) = (ВА)В' = ЕВ' = В1,
т.е. матрицы В и В' совпадают. ►
Квадратная матрица не всегда имеет обратную. Устано-
вить, имеет ли данная матрица обратную, позволяет следую-
щий критерий.
Теорема 8.2. Для того чтобы квадратная матрица А
порядка п имела обратную, необходимо и достаточно, чтобы
det А / 0.
218
8. ОБРАТНАЯ МАТРИЦА И РАНГ МАТРИЦЫ
41 Необх од и мост ь. Пусть А 1 — матрица, обратная к А.
Тогда det(АА-1) = detE= 1, но, согласно свойству 7.11 опреде-
лителей, det(AA-1) = detAdetA-1. Поэтому detAdetA-1 = 1
и, следовательно, det А 0.
Достаточность. Пусть det А / 0. Рассмотрим алгебра-
ическое дополнение AtJ = (—l)‘+jMtJ матрицы А, соответству-
ющее элементу atJ (MtJ — минор этого же элемента).
Согласно свойству 7.7 определителей, для любого i = 1,п
выполнены равенства (7.4)
п
aij А^ = det А.
j=i
Согласно свойству 7.9 определителей, для любых индексов k^i
выполнены равенства (7.8)
п
^aijAkj=0.
Рассмотрим теперь квадратную матрицу В порядка п с элемен-
тами
b = Aji-
0,3 det А’
Матрица С = АВ имеет элементы
п п А 1 п
Cik = = Sav£tA = =
j=i j=i j=i
fl,
I0’
k = i,
A; ^4 i,
т.е. C — это единичная матрица.
Аналогично матрица С = В А имеет элементы
c*=i - А “ det А^°0 Л‘* -
i=l i=l t=l
fl,
0,
3 = k,
следовательно, матрица С' является единичной.
8.1. Обратная матрица и ее свойства 219
Согласно определению 8.1, матрица В является обратной
для А: В = А-1. ►
Следствие 8.1. Если квадратная матрица А имеет обрат-
ную, то det А-1 = (det А)-1.
◄ Действительно, detA-1detА = det(A-1A) = detE = 1. ►
Квадратную матрицу с ненулевым определителем называ-
ют невырожденной или неособой. В противном случае,
когда определитель матрицы равен нулю, ее называют выро>
жденной. Итак, для существования обратной матрицы А-1
необходимо и достаточно, чтобы сама матрица А была невы-
рожденной.
Теорема 8.3. Если квадратные матрицы А и В порядка
п имеют обратные матрицы, то и их произведение имеет
обратную матрицу, причем (АВ)-1 = В-1 А-1.
◄ В соответствии с определением 8.1 обратной матрицы доста-
точно доказать два равенства:
(АВ)В-1А-1 =Е, (В-1А-1)(АВ) = Е.
Используя ассоциативность умножения матриц (см. 6.4), полу-
чаем
(АВ)(В-1А-1) = А(ВВ-1)А-1 = АВА-1 = АА-1 = Е,
(В-1 А-1)(АВ) = В-1(А-1А)В = В-1 ЕВ = В~1В = В,
что и требовалось доказать. ►
Теорема 8.4. Если матрица А порядка п имеет обратную,
то и транспонированная матрица АТ имеет обратную, причем
(Ат)-1 = (А-1)т.
• 4 Нужно убедиться, что АТ(А-1)Т = Е и (А-1)ТАТ = Е. Ис-
пользуя свойство произведения матриц относительно операции
транспонирования, имеем
АТ(А-1)Т=(А-1А)Т = ЕТ = Е,
(А-1)ТАТ = (АА-1)Т = ЕТ = Е. ►
220
8. ОБРАТНАЯ МАТРИЦА И РАНГ МАТРИЦЫ
8.2. Вычисление обратной матрицы
Применяют два основных метода вычисления обратной
матрицы. Первый вытекает из теоремы 8.2 и состоит в сле-
дующем. Пусть дана квадратная матрица А порядка п. Мат-
рицу А*, транспонированную к матрице (А,у) алгебраических
дополнений, называют присоединенной. Как следует из до-
казательства теоремы 8.2, если А — невырожденная матрица,
то обратная к ней имеет вид
А"1 = у-Ц-А*.
det А
Таким образом, чтобы для квадратной матрицы порядка п
найти обратную матрицу, надо вычислить один определитель
порядка п и составить присоединенную матрицу, т.е. вычи-
слить п2 определителей порядка п — 1. Метод присоединенной
матрицы эффективен при п = 2 или п = 3, но при росте п ста-
новится слишком трудоемким.
Пример 8.1. Выясним, имеет ли матрица
обратную и если имеет, то найдем ее.
Поскольку detA = —2, матрица А является невырожденной
и, согласно теореме 8.2, имеет обратную. Для ее вычисления
последовательно находим
1/ 4 -2\/-2 1 \
2 \-3 1J \1,5 —0,5/
Отметим, что для квадратной матрицы А второго порядка
присоединенная матрица А* получается перестановкой в А
диагональных элементов и изменением знака двух других.
8.2. Вычисление обратной матрицы
221
АА-1 =
А-1А =
Проверка ответа выполняется в соответствии с определени-
ем 8.1 обратной матрицы:
1 2\ /—2 1 \_/1 0\
3 4у \ 1,5 -0,5 J ~ \0 1) '
-2 1 \/1 2\_/1 0\
1,5 -0,5J \3 4J ~ \0 1/ ’ *
Второй метод вычисления обратной матрицы состоит в
преобразовании исходной матрицы к более простому виду с
помощью элементарных преобразований строк. Чтобы найти
матрицу А-1, обратную к А, фактически надо решить матрич-
ное уравнение АХ = Е. Отметим, что если над матрицей А
выполняется какое-либо элементарное преобразование строк,
то это же преобразование осуществляется и над матрицей АХ,
поскольку любое элементарное преобразование строк матрицы
эквивалентно умножению ее слева на соответствующую мат-
рицу специального вида (см. 6.8). Таким образом, если в
уравнении АХ = Е над матрицами А и Е одновременно вы-
полнить какое-либо элементарное преобразование строк, т.е.
домножить это равенство слева на некоторую матрицу специ-
ального вида, то в результате получится новое матричное урав-
нение AiX = Bi. Оба эти матричные уравнения имеют одно и
то же решение, так как любое элементарное преобразование
строк имеет обратное элементарное преобразование строк.
Последовательность элементарных преобразований строк надо
подобрать так, чтобы на s-м шаге матрица А превратилась в
единичную матрицу. В результате этих s шагов получается
уравнение А3Х = В3, где А3 = Е, т.е. X = В3. Итак, поскольку
А~1 является решением уравнения АХ = Е, которое эквива-
лентно X = В3, то А-1 = В3.
Чтобы синхронно выполнять преобразования над матрица-
ми в левой и правой частях матричного уравнения АХ = Е,
записывают блочную матрицу (А|Е) и выполняют такие эле-
ментарные преобразования строк этой матрицы, чтобы вместо
А получить единичную матрицу Е.
222 8. ОБРАТНАЯ МАТРИЦА И РАНГ МАТРИЦЫ
Пример 8.2. Продемонстрируем изложенный метод нахо-
ждения обратной матрицы для матрицы из примера 8.1. Для
этого записываем матрицу (А|Е) и выполняем элементарные
преобразования ее строк в следующем порядке:
1
О
1 2
3 4
/1
J \0
1
2
—2 -3
1
О
0 -2
-2 -3
0 —2
1 1,5
1 I ~
1 / ~
1\
-0,5 J
Таким образом,
\ 1,5 —0,5 7*
8.3. Решение матричных уравнений
Мы рассмотрим два вида матричных уравнений отно-
сительно неизвестной матрицы X: АХ — В и ХА = В, где А
я В — известные матрицы, причем матрица А квадратная
и невырожденная. Некоторую матрицу называют решением
матричного уравнения относительно неизвестной матрицы
X, если при ее подстановке вместо X матричное уравнение пре-
вращается в тождество.
Начнем с уравнения АХ = В и изложим два метода его
решения.
Первый метод предполагает вычисление обратной матри-
цы А-1 (например, при помощи присоединенной матрицы) и
дает запись решения матричного уравнения в виде X = А-1 В.
Действительно, подставляя X = А~1В в уравнение АХ = В,
получаем А(А~гВ) = В, т.е. В = В, и X = А-1 В является реше-
нием матричного уравнения АХ = В. Более того, это решение
единственно, так как для любого другого решения X' выпол-
нено тождество АХ' = В, после умножения которого слева на
8.3. Решение матричных уравнении
223
А-1 оказывается, что A-1 (AX') = А~1 *В, т.е. (А-4А)А7 = Х и,
следовательно, X' = X.
Второй метод основан на элементарных преобразованиях
строк блочной матрицы (А | В) и имеет своей целью преобра-
зование ее к виду (Е|Bi), в котором вместо матрицы А стоит
единичная матрица Е. Тогда матрица Bi и будет решением
уравнения. Если матрица В совпадает с единичной, то в этом
частном случае получается метод элементарных преобразова-
ний вычисления обратной матрицы.
Пример 8.3. Найдем решение матричного уравнения АХ =
— В, имеющего вид
1
3 4/ V 8/'
Воспользуемся методом элементарных преобразований. Для
этого запишем матрицу (А|В) и выполним те же элементарные
преобразования ее строк,) что и в примере 8.2 (так как матрицы
А и цели преобразований^ совпадают):
1 2 5 б\ /1 2 5 б\
3 4 7 8/ \0 -2-8 -10/
1 0 -3
0 -2 -8
-4\ /1 0 -3
-10/ \0 1 4
—4
5
Итак,
/-3 -4\
У 4 5/ ’
Проверка ответа выполняется подстановкой найденного реше-
ния в исходное уравнение:
1 2\/-3 -4\ = /5 б\
3 4/ у 4 5/~ \7 8/
Матричное уравнение ХА = В также можно решить двумя
способами. Если известна матрица А-1, то умножаем справа
224
8. ОБРАТНАЯ МАТРИЦА И РАНГ МАТРИЦЫ
на А 1 матричное уравнение ХА = В и после очевидных пре-
образований
(ХА)А-1 = ВА-1, Х(АА~1) = ВА~1> ХЕ = ВА~'
получаем ответ в виде произведения двух матриц X = ВА-1.
Пример 8.4. Найдем решение матричного уравнения X А =
= В, имеющего вид
Z1 2
УЗ 4
5 б\
7 8/
Поскольку обратная матрица А 1 известна (см. пример 8.2), то
Z-1 2\
—0,5/— \ -2 3/‘
Другой метод решения матричного уравнения ХА = В со-
стоит в транспонировании его левой и правой частей (ХА)Т =
— В*, АТХТ = Вт. После введения новой неизвестной матрицы
Y = Хт получаем уравнение вида АТУ = Вт, которое решается
методом элементарных преобразований.
Пример 8.5. Чтобы решить матричное уравнение из
примера 8.4, транспонируем его
1 3AvT=f5
2 4/ уб 8j‘
После элементарных преобразований строк блочной матрицы
получаем
1 3 5<
0 1 2
13 5 7
2 4 6 8
1
0
-2
3
8.4. Ранг матрицы
225
Итак,
ут_/-1 - 2\ /-1 2А
\ 2 ЗУ’ У-2 3J’
что, конечно же, совпадает с решением этого уравнения, най-
денным в примере 8.4.
8.4. Ранг матрицы
Определение 8.2. Минором порядка к матрицы А ти-
па тхп называют определитель, который составлен из эле-
ментов этой матрицы, стоящих на пересечении произвольно
выбранных к строк и к столбцов с сохранением порядка этих
строк и столбцов.
Если выбранные строки имеют номера ii, 1’2, ..., г*,, а
столбцы — ji, ]2, ..., jk, то соответствующий минор будем
обозначать М/1/2"/*.
О миноре говорят, что:
- строки 11, i2) • • •, ik и столбцы ji, j2> • • •, jk матрицы входят
в него;
- он образован этими строками и столбцами;
- он располагается на пересечении этих строк и столбцов;
- он располагается в этих строках и столбцах матрицы.
Строки, входящие в минор, попарно различны, и в обо-
значении минора естественно упорядочить их по возрастанию
номеров. Это же относится и к столбцам. Правило возраста-
. ,3,5,6
ния номеров означает, что, например, М1 3 ’4 является минором
некоторой матрицы, расположенным на пересечении 1-й, 3-й и
4-й строк с 3-м, 5-м и 6-м столбцами, в то время как 34
минором не является, потому что нарушен порядок столбцов
(5-й столбец указан в верхних индексах перед 3-м). Это просто
226
8. ОБРАТНАЯ МАТРИЦА И РАНГ МАТРИЦЫ
определитель третьего порядка, который получается из минора
^1’3’4 матрицы при перестановке в нем первых двух столб-
цов. Поэтому, согласно свойству 7.2 определителей, 3’® =
Л#3,5,6
— ^1,3,4'
Итак, мы следуем соглашению, что обозначение со-
ответствует минору матрицы, если верхние и нижние индексы
в нем строго возрастают. В противном случае, если индексы
расположены в ином порядке, это обозначение соответствует
определителю, который получается из соответствующего ми-
нора перестановкой строк и столбцов.
Пример 8.6. У матрицы третьего порядка
(ац 012 О1з \
021 022 а23 1
О31 O32 O33 /
девять миноров первого порядка, девять миноров второго
порядка и один минор третьего порядка.
Определение 8.3. Рангом матрицы называют число,
которое равно максимальному порядку среди ее ненулевых
миноров.
Для ранга матрицы А используют обозначение Rg А.
Если квадратная матрица порядка п невырождена, то ее
ранг равен ее порядку п: ненулевым является единственный ми-
нор максимального порядка п, совпадающий с определителем
матрицы. В частности, ранг единичной матрицы Е порядка п
равен п.
Если квадратная матрица вырождена, то ее ранг меньше ее
порядка: единственный минор максимального порядка, равно-
го порядку матрицы, является нулевым, и в этом случае ненуле-
вые миноры имеют меньший порядок. Ранг нулевой матрицы
полагают равным нулю.
8.4. Ранг матрицы
227
Ранг диагональной матрицы равен количеству ее ненулевых
диагональных элементов.
Непосредственно из определения ранга матрицы следует,
что ранг имеет следующее свойство, полностью его характе-
ризующее.
Свойство 8.1. Если ранг матрицы равен г, то матрица
имеет хотя бы один минор порядка г, не равный нулю, а все ее
миноры больших порядков равны нулю.
Теорема 8.5. При транспонировании матрицы ее ранг не
меняется, т.е. RgAT = RgA.
◄ Если мы покажем, что при транспонировании матрицы А
ее ранг г не убывает, т.е. RgAT г, то сможем прийти к
следующему заключению. Поскольку (Ат)т = А, то г = Rg А
<С RgАг Rg(AT)T = RgA = г, и поэтому RgАт = г.
Итак, докажем, что RgAT г. Согласно определению 8.3
ранга матрицы, существует ее минор порядка г, отличный от
нуля. Пусть это будет минор М = . При транспониро-
вании строки и столбцы меняются местами. Поэтому минору
М, образованному строками ii, г2, ..., ir и столбцами Ji, у’г» • • •,
jr матрицы А, соответствует минор N = матрицы Ат,
образованный строками д, j2, •Jr и столбцами i'i, г‘2, ..., ir-
Ясно, что эти миноры получаются один из другого операцией
транспонирования. Согласно свойству 7.1 определителей, они
равны. Таким образом, найден минор r-го порядка в матрице
Ат, а именно минор N, который не равен нулю. Следовательно,
RgAT г. ►
Теорема 8.6. Ранг матрицы не меняется при элементар-
ных преобразованиях ее строк и столбцов.
4 Согласно теореме 8.5, ранг матрицы не будет меняться при
элементарных преобразованиях ее столбцов, если он не изме-
няется при элементарных преобразованиях ее строк. Поэтому
228
8. ОБРАТНАЯ МАТРИЦА И РАНГ МАТРИЦЫ
случай столбцов можно не рассматривать. Так как элемен-
тарные преобразования обратимы, нам достаточно доказать,
что ранг матрицы при элементарных преобразованиях строк не
увеличивается, а для этого нужно показать, что произвольный
минор N = преобразованной матрицы А' равен нулю,
если его порядок I превышает ранг г исходной матрицы А.
При умножении г-й строки матрицы А на число Л / О
возможны два случая.
1. Элементы г-й строки не входят в минор N. Тогда минор
N является минором матрицы А и равен нулю, так как I > г.
2. Элементы г-й строки входят в минор N. Тогда, согласно
свойству 7.4 определителей, N = ХМ = 0, где М = —
минор матрицы А, который равен нулю, так как его порядок I
больше г.
При перестановке двух строк в матрице А с номерами г и к
возможны три случая.
1. Элементы обеих строк входят в минор N. Тогда, согласно
свойству 7.2 определителей, перестановка соответствующих
строк в миноре N изменяет его знак, но превращает в минор
М = матрицы А порядка I > г. Следовательно, N =
= -М = о’"'
2. Элементы обеих строк не входят в минор N. Тогда минор
N является минором матрицы А и равен нулю, так как I > г.
3. Одна из строк (г-я) входит в рассматриваемый минор N,
а другая (/г-я) не входит. Не нарушая общности доказатель-
ства, можем считать, что г-я строка матрицы есть 1-я строка
минора, т.е. г = г'д. Минор N представляет собой определитель
N = М = составленный из строк и столбцов матрицы
А. Этот определитель, вообще говоря, не является минором
А из-за нарушения порядка строк. Восстановив естественный
порядок строк, мы получаем минор матрицы А порядка I > г,
который совпадает с М = N или отличается знаком. Следова-
тельно, N = М = 0.
При добавлении к г-й строке матрицы А ее /г-й строки с
коэффициентом Л возможны три случая.
8.4. Ранг матрицы
229
1. Элементы обеих строк входят в минор N. Не нарушая
общности доказательства можем считать, что i — г\, а к = г'г-
Тогда, согласно свойствам 7.3, 7.4 определителей,
N = = М’1*2"’! + АМ/1/2’"7-' = о,
глиз...«1 1 kkt3...ti ’
поскольку минор равен нулю как минор матрицы
А порядка I > г, а определитель равен нулю как
определитель, имеющий две одинаковые строки.
2. Элементы г-й строки не входят в минор N. Тогда минор
N является минором матрицы А и равен нулю, так как I > г.
3. Элементы г-й строки входят в рассматриваемый минор,
а элементы fc-й строки не входят. Не нарушая общности
доказательства, можем считать, что i = i\. Тогда, согласно
свойствам 7.3, 7.4 определителей,
V = Л = О,
поскольку М-^2' 'п равен нулю как минор матрицы А порядка
I > г, а равен нулю как определитель, который, возмож-
но, отличается от минора матрицы А порядка I > г следованием
строк.
Итак, элементарные преобразования строк матрицы А не
увеличивают ее ранг. Но тогда ранг сохраняется. Действи-
тельно, если предположить, что при некотором элементарном
преобразовании строк матрицы ранг уменьшился, то выполне-
ние соответствующего обратного элементарного преобразова-
ния строк привело бы к исходной матрице. Следовательно, ранг
должен возрасти, чего быть не может.
Наконец, при последовательном выполнении элементарных
преобразований строк матрицы А ее ранг не меняется, посколь-
ку он сохраняется на каждом шаге при выполнении конкретно-
го элементарного преобразования. ►
230
8. ОБРАТНАЯ МАТРИЦА И РАНГ МАТРИЦЫ
8.5. Теорема о базисном миноре
Среди миноров матрицы могут быть как равные нулю, так
и отличные от нуля.
Определение 8.4. Минор М матрицы А называют базис-
ным, если выполнены два условия:
а) он не равен нулю;
б) его порядок равен рангу матрицы А.
Матрица А может иметь несколько базисных миноров.
Строки и столбцы матрицы А, в которых расположен выбран-
ный базисный минор, называют базисными.
Следующую теорему, занимающую одно из центральных
мест в теории матриц и ее приложениях, называют теоремой
о базисном миноре.
Теорема 8.7. Базисные строки (столбцы) матрицы А,
соответствующие любому ее базисному минору М, линейно
независимы. Любые строки (столбцы) матрицы А, не входя-
щие в М, являются линейными комбинациями базисных строк
(столбцов).
◄ Доказательство проведем для строк. Пусть ранг матрицы
А = (ajj) типа тхп равен г. Фиксируем какой-либо ее
базисный минор М и соответствующие ему базисные строки
матрицы А.
Докажем, что базисные строки линейно независимы. Пред-
положим, что они линейно зависимы. Тогда по теореме 6.1 одна
из них является линейной комбинацией остальных базисных
строк. Согласно свойству 7.5 определителей, минор М равен
нулю. Это противоречит тому, что минор М базисный.
Теперь докажем, что любая строка матрицы А, не входящая
в базисный минор, является линейной комбинацией базисных
строк. Предположим, не ограничивая общности доказатель-
ства, что базисный минор М расположен в верхнем левом углу
8.5. Теорема о базисном миноре
231
матрицы. Пусть i — номер строки, не являющейся базисной,
т.е. r+ 1 i т. Покажем, что определитель порядка г +1
ац 021 012 • 022 • • «1г •• «2г Olj а2>
д =
аГ1 Ог2 . * ®гг arj
а«1 0,2 . • °«г aij
полученный добавлением к минору М элементов i-й строки и
произвольного j-ro столбца матрицы A, j = 1,п, равен нулю.
При j г определитель равен нулю, так как он содержит два
одинаковых столбца. Если же j > г, то Д = 0, так как в
этом случае Д является минором матрицы А, порядок которого
равен г + 1 и больше раига матрицы. Итак, Д = 0.
Раскладывая определитель Д по последнему столбцу, полу-
чаем равенство
+ -42,r+lO2J + • ••+ А-,г+1°г> + ^r+l,r+l°«J = 0,
в котором через А1)Г+1, Аг,г+1, •••, Arjr+i, Ar+i)r+i обозначены
алгебраические дополнения соответствующих элементов оп-
ределителя. Отметим, что эти алгебраические дополнения не
зависят от номера j, т.е. не зависят от того, элементы какого
из столбцов матрицы А взяты в качестве последнего столбца
определителя Д. Кроме того, Ar+i>r+i = М / 0. Поэтому из
последнего равенства следует, что для всех j = 1, п
aij — ^l°lj + &2O2j + • • • + brarj,
где коэффициенты Ьь = — Afc,r+i/Ar+i(r+i, к = 1, г, не зависят
от j, а это означает, что г-я строка (r+ 1 г т) матрицы
А является линейной комбинацией первых г ее строк, т.е.
линейной комбинацией ее базисных строк. ►
Следствие 8.2. Для того чтобы квадратная матрица была
невырожденной, необходимо и достаточно, чтобы ее строки
(столбцы) были линейно независимы.
232
8. ОБРАТНАЯ МАТРИЦА И РАНГ МАТРИЦЫ
◄ Необходимость. Если квадратная матрица А невыро-
ждена, то ее ранг равен ее порядку, а ее определитель является
базисным минором. Поэтому все строки (столбцы) являются
базисными и по теореме 8.7 о базисном миноре они линейно
независимы.
Достаточность. Если все строки (столбцы) квадрат-
ной матрицы А являются линейно независимыми, то они явля-
ются базисными. Действительно, если бы только некоторые из
них были базисными, то, согласно теореме 8.7 о базисном ми-
норе, оставшиеся были бы линейными комбинациями базисных
и, следовательно, строки (столбцы) матрицы А, согласно тео-
реме 6.2, были бы линейно зависимыми. Так как все строки и
столбцы квадратной матрицы А являются базисными, а им со-
ответствует определитель матрицы, то он является базисным
минором и, следовательно, согласно определению 8.4, отличен
от нуля, т.е. квадратная матрица А невырождена. ►
Теорема 8.8. Линейно независимые строки (столбцы)
матрицы, количество которых равно рангу матрицы, являются
базисными строками (столбцами).
◄ Докажем теорему для строк. Зафиксируем произвольный
набор из г линейно независимых строк матрицы, где г — это
ранг матрицы. Нам достаточно показать, что хотя бы один из
базисных миноров расположен в фиксированных строках. От-
бросим остальные строки матрицы и докажем, что ранг новой
матрицы, содержащей г строк, равен г. Так как новая матрица
не имеет миноров порядка больше чем г, то ее ранг не может
превосходить г. Если бы он был меньше г, то только часть этих
г фиксированных строк были бы базисными в новой матрице,
а остальные, согласно теореме 8.7 о базисном миноре, являлись
бы их линейными комбинациями. Согласно теореме 6.2, послед-
нее означало бы линейную зависимость фиксированных г строк,
что противоречит условию теоремы.
Итак, ранг новой матрицы равен г. Ее базисный минор име-
ет порядок г и является ненулевым минором порядка г исходной
8.6. Вычисление раита матрицы
233
матрицы, расположенным в рассмотренных фиксированных г
строках. ►
Теорема 8.9. Для любой матрицы ее ранг равен макси-
мальному количеству ее линейно независимых строк (столб-
цов).
◄ Доказательство теоремы проведем для строк. Согласно те-
ореме 8.7 о базисном миноре, базисные строки линейно неза-
висимы. Следовательно, максимальное количество к линейно
независимых строк матрицы не может быть меньше ранга г
матрицы. Итак, к г.
Остается доказать, что к г. Отбросим те строки матри-
цы, которые не входят в число рассматриваемых к. Тогда ранг
полученной матрицы из к строк равен к. Действительно, если
бы он был меньше к, то только часть из этих к строк были бы
базисными в новой матрице, а остальные, согласно теореме 8.7
о базисном миноре, являлись бы их линейными комбинациями.
Согласно теореме 6.2, это означало бы линейную зависимость
рассматриваемых к строк, что не так. Итак, ранг новой мат-
рицы равен к. Ее базисный минор имеет порядок к и является
не равным нулю минором порядка к исходной матрицы. Сле-
довательно, к г. к
Следствие 8.3. Для любой матрицы максимальное число
линейно независимых строк равно максимальному числу линей-
но независимых столбцов.
8.6. Вычисление ранга матрицы
Для вычисления ранга матрицы применяют два метода:
метод окаймляющих миноров и метод элементарных преобра-
зований.
Метод окаймляющих миноров. Минор М' матрицы А
называют окаймляющим для минора М, если он получается
из последнего добавлением одной новой строки и одного нового
234
8. ОБРАТНАЯ МАТРИЦА И РАНГ МАТРИЦЫ
столбца матрицы А. Ясно, что порядок окаймляющего минора
М' на единицу больше, чем порядок минора М.
Метод окаймляющих миноров позволяет найти один из ба-
зисных миноров матрицы и состоит в следующем. Выбирается
ненулевой минор первого порядка (ненулевой элемент матри-
цы}. К очередному ненулевому минору последовательно доба-
вляются такие строка и столбец, чтобы новый окаймляющий
минор оказался ненулевым. Если этого сделать нельзя, то по-
следний ненулевой минор является базисным (что утверждает
следующая ниже теорема). Этот процесс рано или поздно за-
кончится из-за ограниченных размеров матрицы.
Теорема 8.10. Если для некоторого минора матрицы
все окаймляющие его миноры равны нулю, то он является
базисным.
◄ Утверждение теоремы следует из доказательства теоремы
8.7 о базисном миноре. Тем не менее приведем доказательство
теоремы 8.10 полностью.
Не ограничивая общности доказательства, предположим,
что минор М порядка г матрицы А = (a^j) отличен от нуля,
расположен в верхнем левом углу матрицы А и все его окайм-
ляющие миноры равны нулю. Рассмотрим минор
«11 «21 «12 «22
д = «Г1 «г2
а.1 «»2
«1г «ij
«2г «2j
«гг «г?
«»г Oij
полученный добавлением к минору М элементов г-й строки и
j-ro столбца матрицы А. Он равен нулю при любых значениях
г — г-|-1, т и j = 1, п. Если j г, то А = 0, поскольку этот
определитель содержит два одинаковых столбца. Если же j > г,
то А = 0, так как в этом случае А является окаймляющим для
минора М. Итак, А = 0.
8.6. Вычисление ранга матрицы
235
Фиксируем для г любое из значений г + 1, т. Рас-
кладывая определитель А по последнему столбцу, получаем
равенство
+ >12,r+la2j + ••• + A-.r+lOrj + >lr+l,r+laV = 0,
в котором через Ai)r+i, A2,r+i, • ••, A-,r+i, A’+i.r+i обозначены
алгебраические дополнения соответствующих элементов опре-
делителя. Отметим, что эти алгебраические дополнения не
зависят от номера j, т.е. не зависят от того, элементы какого
из столбцов матрицы А взяты в качестве последнего столбца
определителя А. Кроме того, Ar+i,r+i = М / 0. Поэтому из
последнего равенства следует, что для всех j = 1, п
aij = bjaij + Z>2a2j + • • • + brarj,
где коэффициенты bk = — >U)r+i/Ar+i>r+i, k=l,r, не зависят
от j, а это означает, что г-я строка матрицы А является
линейной комбинацией первых г ее строк. Вычитая из г-й
строки матрицы А линейную комбинацию первых г ее строк
с коэффициентами Ь\, йг, •••, Ьг, получаем нулевую строку, не
меняя при этом ранга матрицы А.
Проделав это для всех г = г-f-l, т, получим матрицу с теми
же первыми г строками, но нулевыми остальными строками.
Ранг полученной матрицы равен рангу исходной матрицы А и,
очевидно, равен г, так как в ней есть неравный нулю минор
М порядка г, а любой минор г +1 или большего порядка будет
иметь хотя бы одну нулевую строку и, следовательно, будет
равен нулю. Это означает, что минор М является базисным в
исходной матрице А. ►
Пример 8.7. Найдем ранг матрицы
/2—4 3 1 0\
1 -2 1-42
А~ 0 1-1 3 1 ‘
\4 -7 4 -4 5/
236
8. ОБРАТНАЯ МАТРИЦА И РАНГ МАТРИЦЫ
На первом шаге выбираем любой ненулевой элемент матри-
цы, например левый верхний элемент, т.е. 2. Это ненулевой
минор первого порядка.
На втором шаге строим окаймляющий минор второго по-
рядка. Добавляем 2-ю строку и 2-й столбец и вычисляем полу-
чающийся окаймляющий минор
Это окаймление не подходит. Меняем 2-й столбец на 3-й.
Получаем минор второго порядка
.и,з _ 2 3
^1,2 — । ।
= -1/0.
Это окаймление подходит.
Третий шаг: добавляем к этому минору 3-ю строку и можно
снова попытаться использовать 2-й столбец. Оказывается, что
3
1
-1
= 44-3-4-2=1/0,
значит, выбранный минор третьего порядка подходит.
Четвертый шаг: добавляем 4-ю строку (других нет) и 4-й
столбец и вычисляем определитель четвертого порядка
2-431 0 0 19 П 1 0
1 zl 2 3 4 1-2 1-4 1-2 1-4 U 1 <7
0 1-13 — 0 1-13 SX —- 1 -1 3 = 0.
1 0 12
4—7 4-4 0 1 0 12
Выбранный окаймляющий минор не подходит. Меняем 4-й
столбец на 5-й:
2-4 3 0 0 0 1-4
0 1 —4
, -1 2 3 5 1-2 12 1-212
<2,3 4- 0 1-11 0 1-11 = —- 1-1 1 = 0.
1 0-3
4—7 4 5 0 10-3
8.6. Вычисление ранга матрицы
237
Итак, ненулевой минор третьего порядка имеет два
окаймляющих минора четвертого порядка и оба они равны
нулю. Других окаймляющих миноров четвертого порядка нет.
Поэтому делаем вывод, что — базисный минор, а ранг
матрицы равен трем.
Метод элементарных преобразований. При элемен-
тарных преобразованиях строк (столбцов) матрицы ее ранг,
согласно теореме 8.6, не меняется. С помощью этих преобразо-
ваний можно так упростить матрицу, чтобы ранг новой мат-
рицы легко вычислялся.
Например, согласно теореме 6.3, с помощью элементарных
преобразований строк любую матрицу можно привести к сту-
пенчатому виду. Ранг же ступенчатой матрицы равен ко-
личеству ненулевых строк. Базисным в ней является минор,
расположенный на пересечении ненулевых строк со столбцами,
соответствующими первым слева ненулевым элементам в ка-
ждой из строк. Действительно, этот минор ненулевой, так как
соответствующая матрица является верхней треугольной, а лю-
бое его окаймление содержит нулевую строку. Поэтому приве-
дение матрицы к ступенчатому виду с помощью элементарных
преобразований строк позволяет вычислить ранг матрицы.
Пример 8.8. Найдем ранг матрицы методом элементар-
ных преобразований. Для этого достаточно привести матрицу
к ступенчатому виду, воспользовавшись, например, алгорит-
мом из доказательства теоремы 6.3 (см. с. 178). Отметим,
что вычисления удобно проводить, если текущий элемент ра-
вен единице. Поэтому операцию 2* алгоритма (перестановка
строк) будем выполнять не только для замены нулевого теку-
щего элемента (так было заложено в алгоритме), но также и
для того, чтобы в качестве текущего элемента получить еди-
ницу или другое небольшое целое число. Отметим также, что
можно в любое время умножать ту или иную строку матрицы
на ненулевое число, в частности сокращать элементы строки
238
8. ОБРАТНАЯ МАТРИЦА И РАНГ МАТРИЦЫ
на общий множитель, хотя это и не предусматривается алго-
ритмом. Эта дополнительная операция позволяет упростить
вычисления:
А =
/2
1
О
-2
-1
1
-3
-4
-2
1
-7
3
1
-1
4
1
-4
3
-4
0\
2
1
2
О
\4
-1
-2
1
-3
-2
-4
1
—7
1
3
-1
4
-4
1
3
-4
О
О
\0
-1
О
1
1
-2
О
1
1
О
О
\0
-1
1
О
1
-2
1
О
1
-1
1
О
О
-2
1
О
О
1
-1
1
1
1
-1
1
О
О
О
Полученная матрица ступенчатого вида имеет три ненулевые
строки, поэтому ранг этой матрицы и, следовательно, матрицы
А равен трем. Базисным минором в последней матрице явля-
ется Mi23-
Вопросы и задачи
239
Замечание 8.1. Приведенные два метода существенно
отличаются друг от друга. При нахождении ранга конкретной
матрицы методом окаймляющих миноров может потребоваться
большое количество вычислений. Это связано с тем, что метод
требует вычисления определителей, порядок которых может
возрасти до минимального из размеров матрицы. Однако в
результате будет найден не только ранг матрицы, но и один из
ее базисных миноров.
При нахождении ранга матрицы методом элементарных
преобразований требуется гораздо меньше вычислений. При-
чем разница в объемах вычислений возрастает с ростом разме-
ров матрицы и усложнением ее вида. Но этот метод позволяет
найти базисный минор лишь для матрицы ступенчатого вида,
полученной в результате элементарных преобразований. Что-
бы найти базисный минор исходной матрицы, нужны дополни-
тельные вычисления с учетом уже известного ранга матрицы.
В примере 8.8, вычислив наудачу минор третьего порядка, сто-
ящий в тех же строках и столбцах, что и в преобразованной
матрице ступенчатого вида, получим
Следовательно, он является одним из базисных миноров мат-
рицы А.
Вопросы и задачи
8.1. Для заданной матрицы выяснить, существует ли обрат-
ная матрица, и, если существует, найти ее:
(4 0 -1\
-1 4 -1 I .
3 3 -1/
Сделать проверку ответов.
240 8. ОБРАТНАЯМАТРИЦА И РАНГ МАТРИЦЫ
8.2. При каких а 6 R следующие матрицы имеют обратные:
а)
б)
-1
— 1 4-а
/1 1 1 \
в) I 2 3 а I .
\ 4 9 а2 /
1 — а
1
2
а
4 + а
3
8.3. Пусть А — невырожденная матрица. Что можно утвер-
ждать о виде матрицы А-1 и (или) ее элементах, если матрица
А является: а) единичной; б) диагональной; в) симметрической;
г) кососимметрической; д) нижней треугольной; е) верхней тре-
угольной?
8.4. Доказать, что матричное уравнение ХА = В с невыро-
жденной матрицей А имеет единственное решение.
8.5. Решить матричные уравнения:
8.6. Найти матрицу X из матричного уравнения:
а) АТ(Х - В-1) А-1 = (АВ)"2;
б) ВА(ЗХ + 2ВТ)-1А-1 = АВ'1 А.
8.7. Найти определитель матрицы А, если известно, что
АТА = 4А-1АТ. Зависит ли он от порядка матрицы А? Приве-
сти пример матрицы второго (n-го) порядка, удовлетворяющей
указанному равенству.
8.8. Какой порядок имеет невырожденная матрица, если она
удовлетворяет условию А3 + ЗА = 0?
8.9. Методами окаймляющих миноров и элементарных пре-
образований найти ранг матрицы:
/3 1 -2 0\
12 1-1
5 5 0 -2 ’
\4 3-l -1/
/2 1 0 1\
1 3-12
1-1-2 0 ’
\4 3-3 3/
/2 1 3\
1 -1 1
1 1 1
\0 1 1/
Вопросы и задачи
241
8.10. При всех a € R найти ранг матрицы:
(8 2 а\ /а 1 —1\ / a 0 1\
3 0 1 I ; б) 0 -2 2 I ; в) 0 2а 1 1 .
4 1 2а/ \ 1 2 а/ \ 1 1а/
8.11. Доказать, что если для матриц А и В определено их
произведение АВ, то всегда Rg(AB) max{RgA, RgB).
8.12. Привести примеры таких матриц А и В, что:
a) Rg(AB) < max{RgA, RgB); б) Rg(AB) = max{RgA, RgB).
8.13. Пусть матрицы А и В имеют один и тот же тип.
Всегда ли выполнены следующие неравенства:
a) Rg(A + B) ^RgA + RgB; б) Rg(A-В) RgA + RgB?
8.14. Привести примеры таких матриц А и В, что:
a) Rg(A-f-B) < RgA + RgB; б) Rg(A- В) < RgA + RgB;
в) Rg(A + В) = RgA + RgB; г) Rg(A - В) = Rg А + RgB.
8.15. Доказать, что ранг матрицы А не изменится, если ее
умножить слева (справа) на любую невырожденную матрицу.
8.16. Пусть А — квадратная матрица, элементы которой
являются функциями, непрерывными на отрезке [а; 6]. Можно
ли утверждать, что ранг этой матрицы является функцией,
непрерывной на этом отрезке? Привести иллюстрирующие
примеры.
8.17. Найти все матрицы X второго порядка, удовлетворя-
ющие условию: а) X2 = Е; б) X2 = -Е; в) X2 = 0; г) X3 = X;
д) ХХТ = Е; е) ХТХ = -Е.
8.18. Доказать, что если невырожденная матрица А пере-
становочна с матрицей В, то и матрица А-1 перестановочна с
матрицей В.
8.19. Доказать, что если некоторая квадратная матрица А
удовлетворяет равенству А3 — А2 + А + Е = 0, то она невыро-
жденная. Выразить матрицу А-1 через матрицу А с помощью
многочлена второй степени.
9. СИСТЕМЫ ЛИНЕЙНЫХ
АЛГЕБРАИЧЕСКИХ УРАВНЕНИЙ
9.1. Основные определения
Система т линейных алгебраических уравнений
с п неизвестными (сокращенно СЛАУ) представляет собой
систему вида
+ «12^2 +••• + ain®n = ^i,
+ а22г2 + --- + «2n®n — &2, (9 1)
+ Ящ2®2 4" • • • + ®mn^n = ^т-
Уравнения системы (9.1) называют алгебраическими потому,
что левая часть каждого из них есть многочлен от п перемен-
ных Xi,хп, а линейными потому, что эти многочлены имеют
первую степень.
Числа a,j 6 R называют коэффициентами СЛА У. Их
нумеруют двумя индексами: номером уравнения г и номером
неизвестного j. Действительные числа Ь\, ..., Ьт называют
свободными членами уравнений.
Запись СЛАУ в виде (9.1) будем называть координатной.
СЛАУ называют однородной, если bi = £>2 = • • • = Ът = 0.
Иначе ее называют неоднородной.
Решением СЛАУ, да и вообще всякой системы уравне-
ний, называют такой набор значений неизвестных ii,...,x„,
при подстановке которых каждое уравнение системы превра-
щается в тождество. Любое конкретное решение СЛАУ также
называют ее частным решением.
Решить СЛАУ — значит решить две задачи:
- выяснить, имеет ли СЛАУ решения;
- найти все решения, если они существуют.
9.1. Основные определения
243
СЛАУ называют совместной, если она имеет какие-либо
решения. В противном случае ее называют несовместной.
Однородная СЛАУ всегда совместна, поскольку нулевой набор
значений ее неизвестных всегда является решением. Как пока-
зывает следующий пример, для неоднородных СЛАУ возможны
различные случаи.
Пример 9.1. Рассмотрим три системы двух уравнений с
двумя неизвестными:
. Гж1 + ж2 = 3, . Гж1+ж2 = 3, . Г Ж1+ ж2 = 3,
' — ж2 = 1; ' (Ж1+ж2 = 4; ' (2ж1+2ж2 = 6.
С геометрической точки зрения уравнения каждой из этих
СЛАУ задают прямые на плоскости xi<?x2 (рис. 9.1). Ре-
шениям СЛАУ соответствуют точки пересечения указанных
прямых. Складывая почленно уравнения в первой системе,
получаем = 2, ж2 = 1 — единственное ее решение. Геометри-
чески это подтверждается тем, что соответствующие прямые
пересекаются в единственной точке (2; 1) (рис. 9.1, а). Из урав-
нений второй системы следует, что 3 = 4. Следовательно, эта
СЛАУ несовместна, и геометрически это соответствует двум
параллельным несовпадающим прямым (рис. 9.1,6). Наконец,
третья СЛАУ такова, что второе ее уравнение является след-
ствием первого: оно получается из первого умножением на 2.
Рис. 9.1
244
9. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
Геометрически это означает, что уравнения задают одну и ту
же прямую (рис. 9.1, в). Следовательно, координаты любой
точки этой прямой удовлетворяют каждому из уравнений сис-
темы, т.е. третья СЛАУ совместна и имеет бесконечно много
решений, #
Если СЛАУ (9.1) имеет решение, и притом единственное, то
ее называют определенной, а если решение неединственное —
то неопределенной. При т = п, т.е. когда в (9.1) количество
уравнений совпадает с количеством неизвестных, СЛАУ назы-
вают квадратной.
9.2. Формы записи СЛАУ
Кроме координатной формы (9.1) записи СЛАУ часто ис-
пользуют и другие ее представления.
Рассматривая коэффициенты а^ СЛАУ при одном неиз-
вестном Xj как элементы столбца, a Xj как коэффициент, на
который умножается столбец, из (9.1) получаем новую форму
записи СЛАУ:
«21
Ж1 +
022
«2п
Хп =
ж2 + ••• +
i»2
\ ®ml /
\ат2/
\Ьт /
или, обозначая столбцы соответственно сн, ..., ап, Ь,
+ ... + хпап — Ь.
(9-2)
Таким образом, решение СЛАУ (9.1) можно трактовать как
представление столбца Ь в виде линейной комбинации столбцов
ai, ..., ап. Соотношение (9.2) называют векторной записью
СЛАУ.
Обратим внимание на то, что слева в каждом уравнении
системы (9.1) стоит сумма попарных произведений — так же,
9.3. Критерий совместности СЛАУ
245
как и в произведении двух матриц. Если взять за основу
произведение матриц, то СЛАУ (9.1) можно записать так
(см. пример 6.5):
/Ь1\
i»2
< Оц ац ••• «1п \ /Ж1 ’
«21 «22 ••• «2п I Ж2
\ «ml «m2 • • • «тп / у хп у
\Ьт/
или Ах = Ь, где А — матрица типа тхп;
неизвестных; Ь — столбец свободных членов:
^«11 012 ••• «1п
«21 «22 ••• а2п
х — столбец
/ *1 \
»=
Х^т /
«ml «m2 • • • «тп
Поскольку А, х и Ь являются матрицами, то запись СЛАУ (9.1)
в виде Ах = Ь называют матричной. Если Ь = О, то СЛАУ
является однородной и в матричной записи имеет вид Ах = О.
Приведенные рассуждения показывают, что задачи:
а) решения СЛАУ (9.1);
б) представления столбца в виде линейной комбинации дан-
ных столбцов;
в) решения матричных уравнений вида Ах = b
являются просто различной формой записи одной и той же
задачи.
9.3. Критерий совместности СЛАУ
„Триединство“ форм записи СЛАУ позволяет легко полу-
чить критерий совместности СЛАУ. Напомним, что содержа-
тельный смысл это понятие имеет для неоднородных СЛАУ
{однородные СЛАУ всегда совместны).
246
9. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
Матрицу
1 аи 012 ••• ain
021 022 • • • а2п
\0ml 0т2 ••• 0mn /
называют матрицей {коэффициентов) СЛАУ (9.1), а мат-
рицу
011 012
(А|Ь) = 021 022
01п
®2п
Ь1\
i»2
\0щ1 0т2
Ощп
Ьт /
расширенной матрицей СЛАУ (9.1). Расширенная матри-
ца полностью характеризует СЛАУ. Это означает, что по этой
матрице однозначно (если сохранить обозначения для неизвест-
ных) восстанавливается сама СЛАУ.
Критерий совместности СЛАУ дает следующая теорема
Кронекера — Капелли (Л. Кронекер (1823-1891) — немец-
кий математик, А. Капелли (1855-1910) — итальянский мате-
матик).
Теорема 9.1. Для совместности СЛАУ Ах = Ь необходимо
и достаточно, чтобы ранг ее матрицы А был равен рангу ее
расширенной матрицы (А|Ь).
◄ Необходимость. Отметим, что ранг матрицы А СЛАУ
Ах = Ь не превосходит ранг расширенной матрицы (А | Ь). По-
этому нам достаточно показать, что ранг матрицы А системы
не меньше ранга ее расширенной матрицы (А|Ь). Если система
совместна, то, записывая ее в векторной форме, делаем вывод,
что существуют такие значения неизвестных ®i, ..., хп, для
которых О1Ж1 + ... + апжп = Ь, где а, — столбцы матрицы А,
Ь — столбец свободных членов. Это означает, что последний
столбец Ь в расширенной матрице системы является линейной
комбинацией остальных столбцов. Выберем какой-либо ба-
зисный минор матрицы А. Для простоты пусть он содержит
9.3. Критерии совместности СЛАУ 247
строки с номерами 1, 2, ..., к и столбцы с теми же номерами,
т.е.
ац ai2 ••• aik
«21 «22 ••• «2А:
0к1 Ок2 • • • акк
Согласно теореме 8.7 о базисном миноре, базисные столбцы
линейно независимы, в то время как для каждого j > к су-
ществуют такие Xij € R, i = 1,к, что a.j = Aiyai + ... + А^а*.
Поэтому столбец
Ь = aixi + ... + akXk + ак+iXk+i +... + апхп =
= aixi + ... + akXk + (Ai^+iai Хк,к+1Ок)хк+1 +
+ ... + (AlnOi + ... + Xknak)xn
является линейной комбинацией базисных столбцов матрицы А.
Это означает, что М является также базисным минором и
в расширенной матрице (во-первых, он ненулевой; во-вторых,
если взять какой-либо окаймляющий минор М', то либо он будет
минором матрицы А, т.е. нулевым, либо он будет содержать
столбец Ъ и, следовательно, не может быть ненулевым, так как
его столбцы линейно зависимы). Поэтому Rg(A|b) = RgA.
Достаточность. Пусть Rg(A|b) = RgA. Выберем в А
базисный минор М (как и выше). Тогда он будет базисным и
в матрице (А|Ь). Значит, столбец Ь можно представить как
линейную комбинацию базисных столбцов ai, ..., a*.:
b = ®iai +... + x°kak-
Полагая ж^+1 = ж^+2 = ... = ж° = О, получаем решение х{, ..., ж°
исходной СЛАУ, поскольку
b = x^d! +... + Xkdk = X1<11 +... + х°как + Oafc+1 +... + Oan.
Это означает, что СЛАУ совместна, к
248
9. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
9-4. Формулы Крамера
Рассмотрим СЛАУ (9.1) с квадратной невырожденной мат-
рицей А в матричной записи Ах = Ь. В такой форме СЛАУ
представляет собой частный случай матричного уравнения
АХ = В при В = b и X = х (см. 8.3). Поэтому она имеет един-
ственное решение х = А-1Ь, где А-1 — матрица, обратная к А.
Чтобы выразить это единственное решение через коэффи-
циенты СЛАУ, запишем А-1 в виде: А-1 = («у), где =
— Aji/det А, а Ау,- — алгебраическое дополнение элемента а^
матрицы А. Перейдем от матричного равенства х = А-1Ь к
его координатной записи. Тогда для первых элементов в столб-
цах левой и правой частей последнего равенства имеем
, . , . . , АцЬ1 + A2ii>2 + ... + Anibn
Ж1 = ацЬ1 + «1262 + • • • + «inftn =-----т—;------------•
Числитель представляет собой разложение по 1-му столбцу
определителя
Ь1 012
i>2 а22
«1п
«2п
Ъп ат2
®mn
получающегося, если в матрице А заменить 1-й столбец на
столбец свободных членов. Аналогично находим, что
Д,-
Xj-detA’ J
(9.3)
где Aj — определитель матрицы, получающейся из матрицы
А заменой j-ro столбца на столбец свободных членов. Таким
образом, установлено следующее правило Крамера.
Теорема 9.2. СЛАУ с квадратной невырожденной матри-
цей имеет решение, и притом единственное, которое определя-
ется по формулам Крамера (9.3).
9.5. Однородные системы
249
Следствие 9.1. Однородная СЛАУ с квадратной невыро-
жденной матрицей имеет единственное решение — нулевое.
Если матрица СЛАУ не является квадратной невырожден-
ной, то формулы Крамера не работают и приходится исполь-
зовать другие методы нахождения решений.
9.5. Однородные системы
Следующая теорема описывает важнейшее свойство множе-
ства решений однородной системы т линейных алгебраических
уравнений с п неизвестными
ацЖ1-|- а12х2 +... + а1пжп = 0,
а21Ж1 + а22х2 +... + а2пхп = 0,
. amixi + am2x2 +...+ ^тп^п — 0.
Теорема 9.3. Если столбцы а?<2), ..., — решения
однородной СЛАУ Ах — О, то любая их линейная комбинация
также является решением этой системы.
•4 Рассмотрим любую линейную комбинацию данных решений:
х = £А*®Ю, Afc € R.
k=i
Тогда
s s s
Ax = A^^XkX^ = '^XkAxW = ^AfcO = 0,
k=l k=l k=l
т.е. столбец x является решением однородной СЛАУ. ►
Следствие 9.2. Если однородная СЛАУ имеет ненулевое
решение, то она имеет бесконечно много решений.
250 9. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
4 Если х — ненулевое решение однородной СЛАУ, то для
любого А € R решением однородной СЛАУ является и А®. ►
Естественно попытаться найти такие решения ®(*), ®^
системы Ах = О, чтобы любое другое решение этой системы
представлялось в виде их линейной комбинации и притом
единственным образом. Оказывается, что это всегда возможно
и приводит к следующему определению.
Определение 9.1. Любой набор из к = п — г линейно
независимых столбцов, являющихся решениями однородной
СЛАУ Ах = О, где п — количество неизвестных в системе,
аг — ранг ее матрицы А, называют фундаментальной
системой решений этой однородной СЛАУ.
При исследовании и решении однородных систем линей-
ных алгебраических уравнений будем использовать следующую
терминологию. Если в матрице А однородной СЛАУ Ах = О
фиксировать базисный минор, то ему соответствуют базис-
ные столбцы и, следовательно, набор неизвестных, отвечающих
этим столбцам. Указанные неизвестные называют базисны-
ми, или зависимыми, а остальные неизвестные — свобод-
ными, или независимыми.
Теорема 9.4. Пусть дана однородная СЛАУ Ах = О
с п неизвестными и RgA = г. Тогда существует набор из
к = п — г решений а^1), ..., х^ этой СЛАУ, образующих
фундаментальную систему решений.
◄ Не ограничивая общности, можно считать, что базисный
минор матрицы А сосредоточен в верхнем левом углу, т.е. рас-
положен в строках 1, 2, ..., г и столбцах 1, 2, ..., г. Тогда
остальные строки матрицы А, согласно теореме 8.7 о базисном
миноре, являются линейными комбинациями базисных строк.
Для системы Ах = О это означает, что если значения ®i, ..., хп
удовлетворяют уравнениям, соответствующим строкам базис-
ного минора, т.е. первым г уравнениям, то они удовлетворяют
и остальным уравнениям. Следовательно, множество решений
9.5. Однородные системы
251
системы не изменится, если отбросить все уравнения начиная с
(г + 1)-го. Сделав это, получим систему
' ацЖ1 + 012^2 + • • • + а1пхп = О,
«21®! + «22®2 + • • • + «2п®п = О,
„ «г!®1 + аг2х2 +... + агпхп = 0.
Разделим базисные ®i, ..., хг и свободные жг+1, ..., хп
неизвестные, перенеся последние в правую часть, а в левой
оставив базисные:
«11®1 + О12®2 + • • + О-1гхг = -а1,г+1®г+1 ~ • • • — «1п®п>
«21® 1 + «22®2 + • • • + «2г®г = ~«2,r+l®r+l ~ ~ «2п®п>
(9-5)
«г!®1 4" «г2®2 -|- — + аггхг— ®г,г4-1®г4-1 ••• агпхп'
Если мы зададим произвольные значения независимых не-
известных жГ4-1, ..., хп, то относительно базисных неизвестных
получим квадратную СЛАУ с невырожденной матрицей, реше-
ние которой существует и единственно. Таким образом, любое
решение однородной СЛАУ однозначно определяется значе-
ниями независимых неизвестных жг+1, ..., хп. Рассмотрим
следующие к = п — г серий значений независимых неизвестных
®Г-|-1> • • • > ®п-
•‘V+I = 1, ^1 = 0, XW Хг + 1 = 0,
хг+2 = 0, х{г+2 = х{к} хг+2 = 0, (9-6)
_(1) = 0; х(п} = 0; XW = 1.
Здесь номер серии укгран верхним индексом в скобках, а сами
серии значений выписаны в виде столбцов. В каждой серии
xr+i = !> если J1 = Ь и ®r+j = °> если / *•
252
9. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
Далее, г-й серии значений независимых неизвестных одно-
значно соответствуют значения зависимых не-
известных. Значения независимых и зависимых неизвестных
в совокупности дают решение системы (9.5). Покажем, что
столбцы
г = 1, к,
(9-7)
образуют фундаментальную систему решений. Так как эти
столбцы по построению являются решениями однородной сис-
темы Ах = О и их количество равно к, то, в соответствии с
определением 9.1 фундаментальной системы решений, остается
доказать линейную независимость решений (9.7). Пусть есть
некоторая линейная комбинация решений а^1), ..., х^), равная
нулевому столбцу:
сца^1) + ... + akX^ — 0.
Тогда левая часть этого равенства является столбцом, ком-
поненты которого с номерами г + 1, ..., п равны нулю. Но
(г + 1)-я компонента равна cti 1 + а20 +... + «*,0 = «1. Аналогич-
но, (г + 2)-я компонента равна «2 и, наконец, к-я компонента
равна а*,. Поэтому «х = а2 = ... = а*. = 0, что означает линей-
ную независимость решений х^,... ,х№). к
Построенная при доказательстве теоремы 9.4 фундамен-
тальная система решений (9.7) имеет достаточно специальный
вид, поскольку, согласно (9.6), в любом из решений (9.7) все
значения независимых неизвестных равны нулю, кроме одно-
го, которое равно единице. Такие фундаментальные системы
решений называют нормальными.
9.5. Однородные системы
253
Следствие 9.3. С помощью нормальной фундаментальной
системы решений (9.7) однородной СЛАУ (9.4) множество всех
решений можно описать формулой
х = cia^1) +... + СкХ^к\ (9.8)
где постоянные с,, i — 1, к, принимают произвольные значения.
◄ Согласно теореме 9.3, столбец (9.8) является решением
рассматриваемой однородной СЛАУ Ах = 0. Поэтому остается
доказать, что любое решение
9 =
92
\9п/
этой однородной СЛАУ можно представить в виде (9.8). Рас-
смотрим столбец х = gr+iscW +... + дпх^. Этот столбец со-
впадает со столбцом д по элементам с номерами r + 1, ..., п и
является решением СЛАУ (9.5). Поэтому столбцы д и х совпа-
дают, так как решения системы (9.5) однозначно определяются
набором значений ее независимых неизвестных жг+1, ..., хп,
а у столбцов д и х эти наборы совпадают. Следовательно,
д = х = gr+ix^ +... + дпх^к\ т.е. решение д есть линейная ком-
бинация столбцов а^1), ..., х^ нормальной фундаментальной
системы решений, что завершает доказательство. ►
Следствие 9.4. Для существования ненулевого решения
у однородной квадратной СЛАУ необходимо и достаточно,
чтобы ее матрица была вырождена.
◄ Если матрица однородной системы невырождена, то, со-
гласно следствию 9.1, однородная СЛАУ имеет только нулевое
решение. Если же матрица однородной системы вырождена, то
ее определитель, являющийся в квадратной матрице единствен-
ным минором максимального порядка, равен нулю. Значит,
ранг г матрицы системы меньше ее порядка и, следовательно,
254
9. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
меньше количества п неизвестных. Поэтому к = п — г > 0 и од-
нородная СЛАУ имеет нормальную фундаментальную систему
из к > 0 решений (9.7). Каждое из этих решений является не-
нулевым (значение одного из неизвестных в каждом решении
равно единице). ►
Однородная СЛАУ (9.4) может иметь не только нормальные
фундаментальные системы решений, но и другие фундамен-
тальные системы решений. Оказывается, что утверждение
следствия 9.3 имеет место не только для нормальной фунда-
ментальной системы решений, но и для произвольной фунда-
ментальной системы решений, что и утверждает следующая
теорема.
Теорема 9.5. Если ..., х^ — произвольная фун-
даментальная система решений однородной СЛАУ Ах = 0, то
любое ее решение х‘ можно представить в виде
X = CiO^1) + ... + СкХ^ ,
(9.9)
где ci, ..., Ск — некоторые постоянные.
Эту теорему называют теоремой о структуре общего реше-
ния однородной СЛАУ. Это вызвано тем, что, согласно теоре-
мам 9.3 и 9.5, при заданной фундаментальной системе решений
а^1), ..., однородной СЛАУ (9.4) выражение
х00 = ci®(1) +. •. + скх^к\
(9.10)
где ci, ..., Ск принимают произвольные значения, описывает
все множество решений. Соотношение (9.10) называют общим
решением однородной СЛАУ.
4 Пусть некоторое решение однородной СЛАУ Ах = 0 имеет
вид
х =
9.5. Однородные системы
255
Не ограничивая общности, опять будем предполагать, что
базисный минор матрицы А сосредоточен в верхнем левом углу,
т.е. в первых г строках и столбцах. Тогда (см. доказательство
теоремы 9.4) рассматриваемая однородная СЛАУ (9.4) имеет
те же решения, что и система
011^1 + а12х2 + • • • + AlA — О,
а21х1 + а22х2 + • • • + Я,2пхп = О,
аг1Х! + аг2х2 + ... + агпхп = 0.
которую можно записать в виде
ац2!1 + ai2x2 + ... + airxr = -«i.r+i^r+i — ••• — ain®n,
«21х 1 +в22х2 + ••• + a2rxr = -a2,r+l®r+l ~ Л2пХп,
L Orixi-f-Or2X2-f-• • • ~f~ OrrXr— ar^r+l^r+l ••• ®rn®n"
Эта система, рассматриваемая как СЛАУ относительно базис-
ных неизвестных Ж1, ..., хг, имеет невырожденную матрицу,
так как ее определитель совпадает с базисным минором мат-
рицы А исходной СЛАУ (9.4). Решая систему относительно
базисных неизвестных (например, с помощью формул Краме-
ра), получаем соотношения
Х1 = «l.r+l^r+l + •••+ «In^n,
х2 = O^.r+lZr+l + •••+ Ol2nxn,
(9.U)
ХГ — ^r.r+l^r+l + • . • + OlrnXnt
где otij 6 R — некоторые числа. Запишем фундаментальную
систему решений а^1), ..., в координатной форме:
* — 1, к,
256
9. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
и составим из столбцов ®, а^1), матрицу
4” 41’ 41’ ... »<*>\ ...
в = 4°> ... 4fe)
42. 2!(1) •*>+1 ... 42.
ио) ж(1) лп ... xV)
Последние к столбцов матрицы В образуют фундаментальную
систему решений и, согласно определению 9.1, линейно неза-
висимы, а так как по теореме 8.9 ранг матрицы равен макси-
мальному числу линейно независимых столбцов, то RgB к.
Покажем, что RgB к. Так как столбцы матрицы В являются
решениями системы Ах = 0, их элементы удовлетворяют соот-
ношениям (9.11), т.е.
(») (’) । । (•')
sr = ai,r+ia:r+i + -"+
(О («) , , (’)
, х2 = а2,г+1^г+1 +.••+ OinXk,
Xf — 4” '•‘А’&гпХп .
где i = 0, г. Вычтем из первой строки матрицы В линей-
ную комбинацию последних к = п — г строк с коэффициентами
ai,r+i, • ••, ain- Тогда, согласно первому равенству из (9.12),
получим нулевую строку. Аналогично преобразуем строки
2-ю, ..., г-ю, используя оставшиеся равенства (9.12). В ре-
зультате этих преобразований мы получим матрицу, у которой
первые г строк нулевые. Так как при этом ранг матрицы не
меняется, то RgB п — г = к.
Поскольку RgB = к, а последние к столбцов матрицы В, как
уже отмечалось, линейно независимы, то, согласно теореме 8.8,
они являются базисными и, следовательно, первый столбец х,
9.6. Неоднородные системы
257
согласно теореме 8.7 о базисном миноре, является их линейной
комбинацией. Это означает, что существуют такие постоянные
с, (» = 1, к), что выполнено равенство (9.9). ►
9.6. Неоднородные системы
Рассмотрим произвольную СЛА У Ах = Ь. Заменив стол-
бец Ь свободных членов нулевым, получим однородную СЛАУ
Ах = 0, соответствующую неоднородной СЛАУ Ах = Ъ. Спра-
ведливо следующее утверждение о структуре произвольного
решения неоднородной СЛАУ.
Теорема 9.6. Пусть столбец а?0 — некоторое решение
СЛАУ Ах = Ь. Произвольный столбец х является решением
этой СЛАУ тогда и только тогда, когда он имеет представление
х = х° + у, где у — решение соответствующей однородной
СЛАУ Ау = 0.
◄ Если х — решение СЛАУ Ах = Ь, -то
А(х — х°) = Ах — Ах° = Ь — Ь = 0.
Поэтому столбец у = х — х° является решением соответству-
ющей однородной СЛАУ, и мы получаем представление х =
= х° + у.
Обратно, если у — произвольное решение соответствующей
однородной системы, то х = х° + у — решение системы Ах = Ь,
так как
А(х° + у) = Ах° + Ау = Ь + 0 = Ь. ►
Следствие 9.5. Пусть х' и х" — решения неоднородной
системы Ах = Ь. Тогда их разность у — х' — х" является
решением соответствующей однородной системы Ау = 0.
Теорема 9.6 сводит проблему решения СЛАУ к случаю од-
нородной системы: чтобы описать все решения неоднородной
258 9. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
СЛАУ, достаточно знать одно ее решение (частное решение)
и все решения соответствующей однородной СЛАУ.
Чтобы решить неоднородную систему, надо, во-первых,
убедиться, что она совместна (например, по теореме 9.1 Кроне-
кера — Капелли), а во-вторых, найти частное решение х° этой
системы, чтобы свести ее к однородной системе.
Следствием теорем 9.5 и 9.6 является теорема о структуре
общего решения СЛАУ.
Теорема 9.7. Пусть а?0 — частное решение СЛАУ Ах = Ь
и известна фундаментальная система решений аИ1), ..., х^
соответствующей однородной системы Ах = 0. Тогда любое
решение СЛАУ Ах = Ь можно представить в виде
X = Х° + С\Х^ + С2Х^ +... + СкХ^к\ (9.13)
где с,- eR,i=l,fc.
Как и в случае однородной СЛАУ, название теоремы отра-
жает то, что формула
х = х° + хоо, хоо = C1®(1) + ... + Cfea?(fe), (9.14)
при произвольных постоянных Ci € R, i = 1, к, описывает все
множество решений СЛАУ Ах = Ь. Формулу (9.14) называют
общим решением СЛА У.
Как найти частное решение неоднородной СЛАУ Ах = Ь?
Пусть для соответствующей однородной системы 4а? = 0 вы-
браны базисные и свободные неизвестные. Базисный минор
матрицы А является базисным и для расширенной матрицы
(4| Ь), если СЛАУ Ах = Ь совместна. Поэтому строки базисно-
го минора определяют те уравнения СЛАУ Ах = Ь, из которых
следуют остальные. Эти остальные можно отбросить. Итак,
пусть есть СЛАУ
( ацХ1 + ai2X2 +••+ ainxn = bi,
J a21^1 + 022^2 + •••+ O2nXn=b2,
OmlXl + am2X2 + ... + amnXn — bm,
9.7. Как решать СЛАУ ?
259
и базисный минор матрицы СЛАУ сосредоточен вверху слева:
Оц 012 ••• О1Г
м = 021 022 ... О2г /0.
ari аГ2 • • • агг
Тогда исходная система эквивалентна следующей:
{011211 + 012X2 + • • • + Oln^n = Ь1,
021X1 + 022^2 + • • • + «2п®п = &2,
OriXi + оГ2Х2 +... + агпхп = Ъг.
Зададим нулевые значения xr+i = ... = хп = 0 для свободных
неизвестных и получим СЛАУ с невырожденной матрицей
011X1 + 012X2 +... + oirxr = 51,
021X1 + 022X2+ ..• +О2гХг = &2,
, аг1х1 + <*г2х2 + • • • + ОГГХГ = Ьг,
имеющей единственное решение. Решая последнюю систему,
находим значения xj, х°. Тогда частным решением будет
столбец
/х?\
х°
О
<0/
9.7. Как решать СЛАУ ?
В принципе все уже изложено в предыдущих разделах.
Однако описанная схема может быть достаточно трудоемкой
из-за того, что некоторые вычисления будут несколько раз
повторяться. Покажем, как этих повторений можно избежать.
260 9. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
Пусть задана СЛАУ Ах = Ь. Запишем ее расширенную мат-
рицу (4|Ь). Каждому элементарному преобразованию строк
расширенной матрицы соответствует аналогичное преобразо-
вание уравнений в исходной СЛАУ:
а) умножение г-й строки матрицы на число А 0 означает
умножение г-го уравнения СЛАУ на это же число;
б) перестановке г-й и k-й строк в матрице отвечает переста-
новка г-ro и к-го уравнений СЛАУ;
в) добавление к г-й строке матрицы ее к-й строки равнознач-
но замене г-ro уравнения его суммой с к-м уравнением СЛАУ.
Эти преобразования СЛАУ не меняют ее множество реше-
ний. Поэтому приведение расширенной матрицы системы с
помощью элементарных преобразований ее строк к ступенча-
тому виду означает сведение СЛАУ к эквивалентной системе,
имеющей ступенчатую матрицу.
Итак, сначала приводим расширенную матрицу (4| Ь) за-
данной СЛАУ с помощью элементарных преобразований строк
к ступенчатому виду (А'|Ь'). При этих преобразованиях ранги
матриц не меняются, поэтому Rg(4|6) = Rg(4'|6')> а Rg4 =
= Rg А'. Ранги матриц А' и (Д' | Ь') равны количеству их
ненулевых строк. Если эти ранги равны, то по теореме 9.1
Кронекера — Капелли СЛАУ совместна, а в противоположном
случае — несовместна.
В случае совместности в матрице А' ступенчатого вида
выбираем, следуя 8.6, базисный минор и фиксируем соответ-
ствующие ему базисные и свободные неизвестные. В матрице
(4'|Ь') ступенчатого вида отбрасываем нулевые строки (им
соответствуют тривиальные уравнения) и по получившейся ма-
трице восстанавливаем СЛАУ. В уравнениях этой СЛАУ слага-
емые со свободными неизвестными переносим в правые части
и получаем систему, матрица которой является верхней тре-
угольной и невырожденной, так как ее определитель совпадает
с базисным минором матрицы А'. Последовательно исключая
неизвестные, выражаем базисные неизвестные через свободные.
9.7. Как решать СЛАУ ?
261
Свободные неизвестные обозначаем как произвольные посто-
янные и записываем общее решение СЛАУ в виде линейной
комбинации столбцов, выделяя в правых частях полученных
выражений в отдельные столбцы: а) свободные члены; б) ко-
эффициенты при каждой произвольной постоянной. В этой
записи столбец свободных членов есть частное решение СЛАУ,
а столбцы при произвольных постоянных образуют нормальную
фундаментальную систему решений однородной СЛАУ, соот-
ветствующей заданной неоднородной системе.
Если исходная СЛАУ является однородной, то изложенный
метод решения чуть упрощается, поскольку в расширенной
матрице последний столбец является всегда нулевым и не
меняется при элементарных преобразованиях строк. Имея
это в виду, его опускают, т.е. все преобразования проводят с
матрицей системы.
Пример 9-2. Решим однородную СЛАУ
Х1 - х2 + ХЭ- х4 = 0,
xi+ х2 + 2хз+ Зх4 = 0,
2х! + 4ж2 + 5жз + 1ОЖ4 = О,
2^1 — 4^2 + х3 — 6x4 = 0.
Чтобы найти общее решение, запишем матрицу системы
и преобразуем ее при помощи элементарных преобразований
строк к ступенчатому виду:
/1 -1 1 /1 -1 1 /1 -1 1 -1\
1 1 2 3 1 0 2 1 4 0 2 1 4
2 4 5 10 0 6 3 12 0 0 0 0
\2 —4 1 -б) \° -2 -1 -4} \0 0 0 0/
Базисный минор в преобразованной матрице стоит вверху
слева и имеет второй порядок. Это значит, что ранг г мат-
рицы системы равен двум, фундаментальная система решений
262
9. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
состоит из п — г = 4 — 2 = 2 решений, а сама СЛАУ эквивалент-
на следующей системе, которая соответствует преобразованной
матрице:
( Xi — Хъ + Хз — Х4 = О,
| 2x2 + х3 + 4x4 = 0.
Базисными неизвестными являются xj и х2, а свободны-
ми — хз и х4. Выражаем базисные неизвестные через свобод-
ные:
( = — 1,5x3 — хз,
| х2 = -0,5х3 - 2x4.
Вводим обозначения хз = ci, х4 = с2 и записываем общее реше-
ние СЛАУ:
xi = -l,5ci -с2,
х2 = -0,5ci - 2с2,
= с1>
х4 = с2.
Используя матричную форму записи, получаем
х =
f -l,5ci -с2 \
—0,5сх — 2с2
С1
\ С2 /
= С1
/—1,5\
-0,5 I
1 I
\ 0 /
+ С2
-2
0 ’
\ 1 /
где
/-1,5\
-0,5
/-1\
-2
0
\ 1 /
нормальная фундаментальная
система решений, a ci, с2 —
произвольные постоянные.
9.7. Как решать СЛАУ ?
263
Пример 9.3. Решим неоднородную СЛАУ
Х1 - Х2 + Хз - Х4 = 4,
Xi + + 2®з + 3®4 = 8,
2ii + 4®2 + 5®з + 10®4 = 20,
2®i — 4®г + хз — 6®4 = 4.
Преобразуем расширенную матрицу этой СЛАУ при помо-
щи элементарных преобразований строк к ступенчатому виду:
Л
1
2
\2
-1 1
1 2
4 5
-4 1
-1
3
10
-6
\0
-1
2
6
-2
1
1
3
-1
-1
4
12
-4
(1 -1 1
0 2 1
ООО
0 0 0
-1
4
0
0
Теперь видно, что для преобразованной матрицы минор
является базисным. Поэтому Rg А = Rg(A| Ь) = 2 = г, и, соглас-
но теореме 9.1 Кронекера — Капелл и, СЛАУ совместна. Кроме
того, СЛАУ свелась к эквивалентной системе
х1~ ®2 + ®3— ®4 = 4,
2®2 + хз + 4х4 = 4,
которая соответствует преобразованной матрице. Однако
можно продолжить преобразования в матрице, упрощая базис-
ные столбцы (1-й и 2-й) с помощью элементарных преобразова-
ний строк так, чтобы в каждом из них остался один ненулевой
элемент, причем нулевые строки можно отбросить:
/1 -1 1
0 2 1
0 0 0
\0 0 0
-1 4\
4
0
0/
1-11-1
0 2 14
1 0 1,5 1
0 1 0,5 2
б\
2 )
4
0
0
4
4
264
9. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
По этой матрице восстанавливаем систему
+ 1,5х3 + х4 = 6,
Х2 + 0,5жз + 2ж4 = 2.
Перенося свободные неизвестные хз, х4 в правые части урав-
нений, получаем
J Xi = 6 — 1,5хз — х4,
[ х2 = 2 — 0,5хз - 2х4.
Для свободных неизвестных положим хз = ci, х4 = С2, и тогда
xi = 6- l,5ci -с2,
х2 = 2 - 0,5ci - 2с2,
®з = сь
х4 = с2,
или
х —
^6 — 1,5ci — С2
2 — 0,5ci — 2с2
ci
к с2
/6\ /-1,5\ /-1
2 . -0,5 -2
о +С1 1 + с2 0
W к о J к 1
Полученное общее решение очень наглядно: 1-й столбец —
частное решение неоднородной СЛАУ, а два последних — нор-
мальная фундаментальная система решений соответствующей
однородной СЛАУ (ср. пример 9.2).
Пример 9.4. Решим неоднородную СЛАУ
xi - х2 + х3 - х4 = 4,
xi + хг + 2хз+ Зх4= 8,
2xj + 4х2 + 5х3 + 10х4 = 20,
2xi — 4x2 + - 6х4 = 5,
отличающуюся от системы из примера 9.3 лишь одним коэффи-
циентом.
9.7. Как решать СЛАУ ?
265
Преобразуем расширенную матрицу этой СЛАУ при помо-
щи элементарных преобразований строк к ступенчатому виду:
/1
1
2
\2
-1 1
1 2
4 5
-4 1
-1 4\ /1
3 8 1 0
10 20 1 ~ 0
-6 5/ ко
-1 1
2 1
6 3
-2 -1
-1
4
12
-4
4\
4 I
12 I
-3/
1 -1 1 -1 4\ /1 -1 1 -1 4\
0 2 1 4 4 1 0 2 1 4 4
0 0 0 0 0 0 0 0 0 1
0 0 0 0 М \° 0 0 0 о/
Теперь видно, что в преобразованной матрице минор явля-
ется базисным для матрицы системы, а минор — для
расширенной матрицы. Поэтому RgA = 2, Rg(A|b) = 3 и, со-
гласно теореме 9.1 Кронекера — Капелли, СЛАУ несовместна.
Впрочем, несовместность очевидна и так, потому что послед-
ней матрице соответствует СЛАУ, в которой третье уравнение
имеет вид: 0®i + 0i2 + 0®з + O14 = 1.
Пример 9.5. Найдем все матрицы, перестановочные с
матрицей
Обозначим искомые матрицы через X. Условие перестановоч-
ности означает выполнение матричного равенства АХ = ХА.
Чтобы существовало произведение в левой части этого равен-
ства, матрица X должна иметь две строки, а чтобы существо-
вало произведение в правой части — два столбца. Следователь-
но, X — квадратная матрица второго порядка, т.е.
266
9. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
и для ее нахождения требуется решить матричное уравнение
/ 1 2\ /xi ®2\ А /1 2\
\ 3 4 у \ аг3 аг4 у \ а:3 х4 / \ 3 4 у '
Перемножая матрицы в этом уравнении и приравнивая элемен-
ты, стоящие на одинаковых местах в получающихся матрицах,
приходим к равносильной системе четырех уравнений
11+2а:з= ii + 3i2,
®2 + 2®4 = 2®i +4i2,
Заг1+4аг3= i3 + 3i4,
3i2 + 4i4 = 2i3 + 4i4,
или
3ar2 — 2®3 = 0,
2ii + 3z2 — 2®4 = 0,
®i + x3 - = 0,
3i2 — 2i3 = 0.
Эта система имеет простой вид, и мы можем отойти от общей
схемы решения однородных СЛАУ, продемонстрированной в
примере 9.2. Легко увидеть, что если из второго уравнения
вычесть удвоенное третье, то получится такое же уравнение,
как первое и последнее. Поэтому первые два уравнения в этой
системе можно отбросить и тогда
*1 + х3- ar4 = O, fii = -i3 + i4,
3i2 — 2i3 = 0, | X2 = 2®3/3.
Итак, x3, x4 — независимые неизвестные, a ®i, i2 — зависимые
неизвестные. Для независимых неизвестных положим х3 = ci,
х4 = с2 и тогда получим ответ в виде
11 = -ci +с2,
Х2 = 2С1/3,
Хз — С1,
„ Х4 = С2,
или в матричной форме
с2 - С1
С1
2ci/3
с2
Д.9.1. СЛАУ с комплексными коэффициентами
267
где ci, с2 € R — произвольные постоянные. Если фиксировать
для ci, С2 конкретные значения, то из множества всех переста-
новочных с А матриц будет выделена одна. Например, при
Ci = 0 и С2 = 0 получается нулевая матрица, а при ci = 0 и
С2 = 1 — единичная.
Дополнение 9.1. СЛАУ с комплексными
коэффициентами
Изложенный в главах 6-9 материал относится к „действи-
тельному" случаю, поскольку элементами матриц я определи-
телей, коэффициентами СЛАУ являлись действительные чи-
сла. В качестве решений СЛАУ также рассматривались наборы
действительных чисел. Оказывается, что имеется „комплекс-
ное" обобщение указанного материала. Для получения соот-
ветствующего комплексного варианта того или иного из при-
веденных результатов достаточно заменить в формулировках и
доказательствах действительные числа на комплексные [1-4.3].
Специально подчеркнем, что для уравнений с комплекс-
ными коэффициентами сохраняется вся теория СЛАУ. В том
числе остаются справедливыми: условия совместности СЛАУ
(см. 9.3) и свойства их решений; правило и формулы Краме-
ра (см. 9.4) для квадратных СЛАУ с невырожденной матри-
цей-, условие существования ненулевого решения у однородной
СЛАУ; метод решения СЛАУ на основе приведения расширен-
ной матрицы к ступенчатому виду.
Пример 9.6. Решим квадратную СЛАУ второго порядка с
комплексными коэффициентами (г — мнимая единица, г2 = — 1)
ii - ix2 = г + 1,
ii + 2х2 = 2i.
Вычисляем определитель det А матрицы СЛАУ:
det А =
1 —г
1 2
= 1 • 2 -1(-г) = 2 + г / 0.
268
9. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
Следовательно, матрица СЛАУ невырождена, и система имеет
решение, притом единственное. Чтобы его найти, воспользу-
емся формулами (9.3) Крамера:
Д2 _ 1 1 г+1
det А 2 + г 1 2г
Ai _ 1 г+1 —г _(г + 1)2 + 2г2_
det А 2 + г 2г 2 2 + г
2г _ 2г(2 - г) _ 2 + 4г
~T+i~ 5 5 ’
2г -(г+1) _ -1 + г _ —1 + Зг
2 + г “ 2 + г “ 5
Вопросы и задачи
9.1. Решить СЛАУ и найти нормальную фундаментальную
систему решений соответствующей однородной системы:
’ 3ii + 4i2 + 2а:з - i4 = 3,
2®i + 2i2 + 3а:з - 2i4 = -1,
ii+2i2- i3+ i4= 4,
611 — 8z2 + 4®3 — 2z4 = 3;
In +2®з- ®4 = 5,
3zi - ®2+ ®з + 2®4 = 1,
®i-2®2+ i3 + 2®4 = 3,
5®i - 3®2 + 4®3 + 3z4 = 9,
5®i - 5®2 + 3®з + 6z4 = 7.
9.2. Решить матричное уравнение
1 —2\ /2 0\y /4 1\
1 17+ \i i/A \3 -1) ’
9.3. Найти общее решение СЛАУ Ах = bi~ 2bi, если извест-
ны общие решения систем Ах = bi и Ах — Ъ2-
9.4. Может ли неоднородная СЛАУ Ах = b быть неопреде-
ленной, если столбцы ее матрицы линейно независимы (линейно
зависимы)?
9.5. Может ли неоднородная СЛАУ Ах = Ъ быть неопре-
деленной, если соответствующая однородная СЛАУ является
определенной (неопределенной)?
Вопросы и задачи
269
9.6. Совместна или несовместна СЛАУ, если столбцы ее рас-
ширенной матрицы линейно независимы (линейно зависимы)?
9.7. Может ли неоднородная СЛАУ Ах = Ь быть совмест-
ной (несовместной), если соответствующая однородная СЛАУ
является определенной (неопределенной)?
9.8. Привести примеры совместной и несовместной СЛАУ,
у которых строки матрицы системы линейно зависимы. Что
можно утверждать о совместности СЛАУ, если строки ее
матрицы (расширенной матрицы) линейно независимы?
9.9. Квадратная СЛАУ Ах = Ъ имеет невырожденную мат-
рицу А, а свободные члены являются непрерывными функция-
ми на отрезке [а, 6]. Доказать, что любое решение этой СЛАУ
состоит из функций, непрерывных на этом отрезке.
9.10. Найти условие, при выполнении которого линейная
комбинация решений неоднородной СЛАУ будет: а) решением
этой же СЛАУ; б) решением соответствующей однородной
СЛАУ.
9.11. Сколько решений может иметь неоднородная (одно-
родная) СЛАУ, если столбцы ее матрицы линейно независимы?
9.12. Доказать, что неоднородная СЛАУ совместна, если
строки ее матрицы линейно независимы.
10. ЧИСЛЕННЫЕ МЕТОДЫ
РЕШЕНИЯ СЛАУ
10.1. Проблемы, связанные
с вычислениями
При разработке любого численного метода решения какой-
либо математической задачи возникает несколько общих про-
блем.
Первая проблема состоит в том, что теоретически коррект-
ный метод, приводящий к решению за конечное число операций,
может оказаться плохим или вообще неприемлемым, если это
конечное число операций окажется слишком большим. Напри-
мер, при решении СЛАУ с квадратной невырожденной матри-
цей порядка п по правилу Крамера необходимо вычислить n+1
определитель n-го порядка. При вычислении только одного из
этих определителей „в лоб“, согласно определению 7.1, требует-
ся n!n — 1 арифметических операций. Таким образом, всего для
решения системы требуется (n + l)(n!n — 1) + п операций. Уже
при п = 23 это число имеет порядок 1021. Даже при скорости
109 операций в секунду потребуется не менее 30000 лет!
Вторая проблема связана с тем, что в практических за-
дачах приходится иметь дело с неточными данными. При
решении СЛАУ с квадратной матрицей требуется, чтобы опре-
делитель Д матрицы системы был отличен от нуля. Однако
нарушение этого условия, т.е. соотношение Д = 0, никогда не
выполняется точяо, так как коэффициенты СЛАУ содержат,
вообще говоря, погрешности, и определитель можно вычислить
лишь приближенно. При этом, если определитель Д мал по
сравнению с коэффициентами системы, то небольшие погреш-
ности могут приводить к существенному изменению решения.
10.1. Проблемы, связанные с вычислениями 271
Пример 10.1. Рассмотрим системы
у=1, У=1,
|® + 1,01у = 1; (®4-1,01у=1,1.
Решение первой них — х = 1, у = 0, решение второй — х = —9,
у = 10. Как видим, изменение всего лишь одного коэффициента
на 10% приводит к совсем другому результату. Понять при-
чину этого феномена проще всего с помощью геометрической
интерпретации СЛАУ. Данные системы можно рассматривать
как пары прямых на плоскости. Тогда их решения изобража-
ются точками пересечения этих пар прямых. В нашем случае
прямые „почти параллельны“ (рис. 10.1). Поэтому незначитель-
ное изменение положения одной из них приводит к большому
смещению точки пересечения. #
Рис. 10.1
Говорят, что СЛАУ плохо обусловлена, если незначи-
тельные изменения ее коэффициентов могут привести к суще-
ственному изменению ее решения. Если этого не происходит,
СЛАУ называют хорошо обусловленной.
Третья проблема, возникающая в процессе вычислений, так-
же связана с погрешностями и вызвана тем, что вычисления
при помощи компьютера или калькулятора выполняются лишь
272 10. ЧИСЛЕННЫЕ МЕТОДЫ РЕШЕНИЯ СЛАУ
с конечным числом значащих цифр и потому их результаты со-
держат ошибки округлений (этого можно избежать только при
вычислениях в целых числах, но диапазон целых чисел, исполь-
зуемых в компьютере, очень узкий, и это может привести к
переполнению его разрядной сетки). В силу этой особенности,
даже если все коэффициенты в СЛАУ заданы точно, решение
получается, как правило, приближенным.
10.2. Прямые и итерационные
методы решения СЛАУ
Мы остановимся на решении только таких СЛАУ, у кото-
рых матрица является квадратной я невырожденной. В этом
случае система имеет решение, и притом единственное. Для
его нахождения используются различные методы. Выбор мето-
да решения СЛАУ определяет не только объем вычислений, но
и точность получаемого этим методом результата.
Прямые методы решения СЛАУ выполняются за
фиксированное число арифметических операций, не зависящее
ни от значений коэффициентов, ни от требуемой точности
вычислений (но зависящее, разумеется, от порядка системы).
Если вычисления проводятся точно (например, в целых числах),
то прямой метод всегда дает точное решение. Поэтому такие
методы иногда называют точными. Пример точного метода
(хотя и неприемлемого на практике для больших систем) — это
правило Крамера.
Итерационные методы решения СЛАУ принципи-
ально иные и априори строятся на том, что ответ в лю-
бом случае будет приближенным. Каждый итерационный ме-
тод сводится к построению последовательности столбцов
... , ®(п), ..., которая в пределе дает решение СЛАУ. Каж-
дый очередной столбец вычисляется на основе уже найденных и
является более точным приближением искомого решения. Вы-
числение очередного столбца называют итерацией. В опре-
10.3. Метод Гаусса
273
деленный момент процесс прерывают, а последний полученный
столбец принимают за приближенное решение данной СЛАУ.
Как уже отмечалось, прямые методы решения СЛАУ выпол-
няются за фиксированное число шагов, зависящее для каждого
конкретного прямого метода лишь от размеров системы. Точ-
ность получаемых при этом решений зависит как от свойств
методов, так и от того, является СЛАУ хорошо обусловленной
или нет. В некоторых случаях прямые методы могут давать
неверные результаты.
Итерационные методы решения СЛАУ в сравнении с пря-
мыми методами, как правило, более устойчивы к погрешностям
вычислений. Это связано с тем, что при использовании итера-
ционных методов ошибки вычислений, содержащиеся в —
результате n-й итерации, могут компенсироваться при вычи-
слении — следующей, (п 4- 1)-й итерации. Плохая обу-
словленность СЛАУ обычно приводит к тому, что замедляется
сходимость последовательности к решению системы и уве-
личивается число итераций для обеспечения нужной точности
решения.
10.3. Метод Гаусса
Рассмотрим квадратную СЛАУ
' ацхг + ... + ainxn = bi,
< ..................
, 4* • • • 4* Чпп^п = Ьп
с невырожденной матрицей А.
Если в методе решения этой СЛАУ, изложенном в 9.7, за-
фиксировать определенный порядок преобразований (а любой
численный метод должен базироваться на точном порядке вы-
числений), то получится численный метод, известный как ме-
тод Гаусса исключения неизвестных (или просто метод
Гаусса). Метод Гаусса имеет следующий алгоритм, состоящий
274
10. ЧИСЛЕННЫЕ МЕТОДЫ РЕШЕНИЯ СЛАУ
из 2п — 1 шага. Запишем расширенную матрицу системы
/ ац а12 а13 • . • ain ьА
а21 а22 а23 • • • а2п Ьг
(4|Ь) = «зг а32 азз • • азп ^3
\ап1 аП2 апз • dnn Ьп/
На первом шаге делим 1-ю строку расширенной матрицы на ее
1-й элементап и получаем новую строку (1, а]2, «13, ...,а]п,Ь1).
Верхние индексы в коэффициентах а^ и Ь* указывают на то,
что соответствующий элемент расширенной матрицы СЛАУ
был пересчитан на к-м шаге метода Гаусса. Затем из каждой
последующей г-й строки вычитаем 1-ю, умноженную на коэф-
фициент ац. В результате получаем матрицу
/1 а12 а13 • • а1п
0 ,а22 а23 . • а2п
0 а32 азз • • а3п Ъ'з
\0 ап2 апЗ • • апп Ьп)
На втором шаге делим 2-ю строку на ее диагональный эле-
мент а22 и получаем новую 2-ю строку (0, 1, а|3, ..., а2п, Ь2)
расширенной матрицы. Затем из каждой последующей г-й стро-
ки (г = 3,...,п) вычитаем полученную строку с коэффициентом
aj2 из 2-го столбца. В результате получаем матрицу
/1 а}2 а13 ••• а1п
0 1 а23 ... а2п Ь1
0 0 азз а3п bl
\0 0 апз ••• апп ч/
10.3. Метод Гаусса
275
Процесс продолжаем до последней строки расширенной
матрицы. На n-м шаге остается разделить последнюю строку
на ее диагональный элемент а""1, и мы получим матрицу
/1 “12 “13 • • “in
0 1 «23 • • а2п
0 0 1 • “Зп Ь1
\0 0 0 . . 1 к)
В результате выполненных преобразований приходим к
СЛАУ, эквивалентной исходной. Матрица этой СЛАУ являет-
ся верхней треугольной и имеет диагональные элементы, рав-
ные единице. На этом завершается первая часть алгоритма
метода Гаусса, которую называют прямым ходом метода
Гаусса.
Вторая часть алгоритма состоит в преобразовании верх-
ней треугольной матрицы в единичную, эту часть называют
обратным ходом метода Гаусса. Итак, продолжаем пре-
образования.
На (п + 1)-м шаге (первый шаг обратного хода) вычитаем
последнюю строку из всех предшествующих с коэффициентами
из п-го столбца. Получаем матрицу
/1 “12 “13 • • “1.П-1 0
0 1 «23 • • “in 1 0 &2+1
0 0 1 . - 1 3,п—1 0 Ч+1
0 0 0 . 1 0 е:
\0 0 0 0 1 ьп /
На (п + 2)-м шаге вычитаем (п — 1)-ю строку из всех предше-
ствующих с коэффициентами из (п — 1)-го столбца. Получаем
276
10. ЧИСЛЕННЫЕ МЕТОДЫ РЕШЕНИЯ СЛАУ
матрицу
°12 °13
1 <Х2з
О 1
°1,п—2
• • • а2,п—2
• • аЗ,п-2
О о
о о
о о
Процесс продолжаем до 2-й строки. На последнем (2п — 1)-м
шаге вычтем из 1-й строки 2-ю с соответствующим коэффици-
ентом Oj2 и в результате получим расширенную матрицу вида
(Е|У), где
у=(^-иГ"2, -
столбец, представляющий собой искомое решение.
Последовательные шаги алгоритма могут быть сведены к
серии формул (в них а^- = a,j, 6° = bi):
• прямой ход
- г-й шаг, г = 1,...,п — 1:
а*--1
aii
b) akj = akj1 ~akilaij’ J = i +
= * = i + l,...,n;
— n-й шаг:
10.4. Особенности метода Гаусса
277
• обратный ход
- г-й шаг, г = п-f-1,...,2п- 1:
п
x3 = bs- a’sjXj, s = 2n- i.
j=«+i
В приведенных формулах представление процесса вычисле-
ния как преобразования расширенной матрицы системы те-
ряется. Двойной нижний индекс в буквенных обозначениях
означает, что в процессе вычислений необходимо использовать
двумерный массив. Верхний индекс отражает лишь шаг про-
цесса вычисления. Отметим, что коэффициенты а'к- и Ь'к, вычи-
сляемые в процессе прямого хода метода Гаусса, при обратном
ходе непосредственно используются для определения решения
системы, значит, никаких преобразований расширенной мат-
рицы при обратном ходе вообще выполнять нет необходимости.
10.4. Особенности метода Гаусса
Разумеется, изложенный в 10.3 метод пригоден только в
том случае, если матрица СЛАУ невырождена (иначе еди-
ничная матрица в результате элементарных преобразований
строк не получится). Но даже если это требование выполнено,
мы можем на каком-то шаге получить нуль в качестве диаго-
нального элемента, на который необходимо делить. Это может
случиться даже на первом шаге.
Пример 10.2. К системе с расширенной матрицей
О 1 2 3\
1 2 3 4 1
2 5 6 1/
мы не можем непосредственно применить изложенный алго-
ритм и вынуждены предпринять дополнительные действия, на-
пример предварительно переставить на первое место 2-ю или
3-ю строку. #
278 10. ЧИСЛЕННЫЕ МЕТОДЫ РЕШЕНИЯ СЛАУ
В практике численных методов диагональные элементы
матрицы, на которые в методе Гаусса приходится делить,
называют ведущими, или главными. При каких условиях
ведущие элементы не обращаются в нуль?
Рассмотрим угловые миноры матрицы А системы, сосре-
доточенные в ее верхнем левом углу: Д1 = М/, Дг — •••>
д*=• • • > а.
Теорема 10.1. СЛАУ Ах = Ь может быть решена мето-
дом Гаусса тогда и только тогда, когда все угловые миноры
матрицы А системы отличны от нуля.
4 Отметим, что элементарные преобразования прямого хода
метода Гаусса являются также элементарными преобразова-
ниями определителей Аь. В результате таких преобразований
угловые миноры изменяются, но не меняются ранги соответ-
ствующих матриц. Это значит, что угловой минор к-ro поряд-
ка равен нулю тогда и только тогда, когда равен нулю угловой
минор того же порядка верхней треугольной матрицы, полу-
ченной в результате прямого хода. Но это возможно лишь в
том случае, если один из ведущих элементов равен нулю. Нао-
борот, если все миноры Д*, отличны от нуля, то и все ведущие
элементы метода Гаусса являются ненулевыми. ►
Сформулированный критерий проверить трудно, может
быть, не легче, чем решить саму систему. Поэтому он интере-
сен, скорее, с теоретической точки зрения, чем с практической.
Однако в одном важном случае выполнение критерия следует из
вида матрицы. Говорят, что в матрице А = (a,j) диагональные
элементы преобладают, если для каждой строки с номером i
выполняется неравенство
la»»l > la»jl, (Ю-1)
т.е. каждый диагональный элемент по абсолютной величине
превосходит сумму абсолютных величин всех остальных эле-
10.4. Особенности метода Гаусса
279
ментов своей строки. Такие матрицы называют матрицами
с диагональным преобладанием.
Отметим, что в матрице с диагональным преобладанием
все диагональные элементы отличны от нуля. Действительно,
если бы некоторый диагональный элемент ац матрицы равнялся
нулю, то из (10.1) следовало бы неравенство
0 = |а»»| > |«»j|
или 0 > 0.
Теорема 10.2. Если в матрице А преобладают диагональ-
ные элементы, то все угловые миноры этой матрицы отличны
от нуля.
4 Отметим, что преобладание диагональных элементов в ма-
трице означает, что и в каждом угловом миноре диагональные
элементы преобладают. Поэтому достаточно доказать, что
определитель матрицы с преобладанием угловых элементов от-
личен от нуля.
Рассмотрим определитель
ац «12 • ^1п
д = «21 «22 • «2п
«П1 «п2 • • «пп
у которого диагональные элементы преобладают. Тогда ац /0
и для его матрицы можно выполнить первый шаг метода Гаус-
са. В результате первого шага получим определитель
1 «12 «13 ... «1п
0 «22 а23 ... а2п
Д1 = 0 «32 «33 ... °3п
0 «п2 «пЗ ... «пп
280
10. ЧИСЛЕННЫЕ МЕТОДЫ РЕШЕНИЯ СЛАУ
с элементами
1 1 ri--
aij — ~ > akj — akj 3 — 2, n.
flu > an
Убедимся, что у нового определителя Д1 диагональные эле-
менты также преобладают. Для этого оценим сумму модулей
всех элементов к-ъ (к > 1) строки, кроме 1-го (он равен нулю)
и к-го (он диагональный):
(используем преобладание ац в 1-й строке)
« Е |°«|+г-4 - i«»i)=Еы+1-м1 -
l«lll
= £2iafcji-
(используем преобладание a^k в к-й строке)
< |a*rfc| -
|ан||аи|
l«n|
<*kk ~
«май
«и
= 14*1.
Итак, после первого шага прямого хода метода Гаусса пре-
обладание диагональных элементов в матрице сохранилось. Ис-
пользуя разложение определителя Д1 по 1-му столбцу, прихо-
дим к определителю (п — 1)-го порядка с преобладанием диаго-
нальных элементов, который является минором определителя
Д1, соответствующим единице в верхнем левом углу. Дока-
зательство завершается методом математической индукции по
порядку определителя. Для определителей первого порядка,
т.е. чисел, утверждение теоремы очевидно. ►
При транспонировании матрицы ее угловые миноры транс-
понируются и потому сохраняют свое значение. Поэтому если
10.4. Особенности метода Гаусса
281
к системе с данной матрицей применим метод Гаусса, то он
применим и к системам с транспонированной матрицей. Дру-
гими словами, метод Гаусса применим к системам, в матрицах
которых диагональные элементы являются преобладающими в
столбцах.
Если метод Гаусса не проходит, т.е. один из угловых мино-
ров обращается в нуль, то в алгоритм приходится включать
дополнительные действия, например перестановку строк. С
дополнительной перестановкой строк метод Гаусса можно при-
менять к любым системам с невырожденной матрицей, и он
будет давать правильное решение в предположении, что все вы-
числения выполняются точно.
Однако, даже если метод Гаусса проходит без модификаций,
все равно могут возникнуть неприятности. Дело в том, что из-
за ошибок вычислений вместо ведущих элементов, на которые
предстоит делить, мы получаем лишь их некоторое приближе-
ние. Значит, вместо теоретического нуля мы можем получить
число, хотя и малое, но не нуль. Тогда дальнейшие вычисления
могут привести к переполнению разрядной сетки компьютера,
вызванному делением большого числа на малое (это фактически
можно расценивать как деление на нуль). Если же переполне-
ние не произойдет, то дальнейшие вычисления не будут иметь
никакого отношения к реальному решению. Конечный резуль-
тат будет определяться не исходными данными, а причудливой
игрой ошибок вычислений.
Пример 10.3. Система
'4x4- Зу =3,
< 10x4-7,51y4-8z =-0,49,
2х - у — z = О
имеет решение (0, 1, —1), в чем можно убедиться непосред-
ственной проверкой.
Применим метод Гаусса, предполагая, что вычисления вы-
полняются с точностью до четырех значащих цифр. После
282
10. ЧИСЛЕННЫЕ МЕТОДЫ РЕШЕНИЯ СЛАУ
первого шага получаем матрицу
1 0,75 0
0 0,01 8
0 -2,5 -1
0,75
-7,99
-1,5
Следующий шаг рассмотрим подробнее. Делим 2-ю строку
на ее диагональный элемент
1
0
0
0,75 0 0,75 \
1 800 -799 |
-2,5 -1 -1,5 )
и вычитаем ее из 3-й строки с коэффициентом —2,5. В
последнем столбце мы должны из —1,5 вычесть произведение
(—2,5)(—799) = 1997,(5). Заданная точность требует, чтобы
мы отбросили последний пятый знак и в качестве вычитаемого
взяли число 1997. Вычтя его из —1,5, получим —1998,(5) и снова
должны отбросить лишний знак. В итоге получим:
1 0,75 0 0,75 \
0 1 800 -799 I .
0 0 1999 -1998 /
Деление 3-й строки на ведущий элемент в последнем столбце
дает —0,9995. В результате обратного хода метода Гаусса
получаем в качестве решения х = 0,3, у = 0,6, z = —0,9995, что
значительно отличается от верного решения. #
Рассмотренный пример показывает, что дополнительная
перестановка строк может помочь и в борьбе с ошибками
округления. Действительно, если перед выполнением второго
шага прямого хода переставить 2-ю и 3-ю строки, то, как
показывают непосредственные расчеты, ошибки в результате
не появляются, и мы получаем верное решение. Отметим, что
указанная перестановка строк перед вторым шагом приводит
к матрице системы с преобладанием в строках диагональных
элементов.
10.4. Особенности метода Гаусса
283
Итак, перестановкой строк матрицы в процессе вычислений
по методу Гаусса можно улучшить характеристики матрицы и
повысить надежность метода. Точно так же можно переста-
влять столбцы, что равносильно изменению порядка неизвест-
ных. Таким способом не всегда можно получить матрицу с
преобладанием диагональных элементов в строках, но тем не
менее перестановки улучшают работу метода.
Перестановку строк и столбцов матрицы можно выполнять
непосредственно в процессе вычислений перед выполнением
очередного шага прямого хода. Перестановка столбцов должна
фиксироваться, так как потом, когда будет получено решение,
следует расставить значения найденных переменных в нужном
порядке. Перестановку строк запоминать нет необходимости.
Основная цель перестановки строк и столбцов — получение
в качестве ведущего элемента возможно большего коэффициен-
та матрицы. Поэтому на г-м шаге прямого хода метода Гаусса в
г-й строке выбирают наибольший по абсолютной величине эле-
мент и соответствующий столбец меняют местами с г-м. В
результате перестановки новый ведущий элемент становится
наибольшим по абсолютной величине в своей строке (хотя, воз-
можно, и не преобладающим). Выбор наибольшего ведущего
элемента г-й строки делают в столбцах с номерами г, г +1,..., п,
так как первые г - 1 элементов строки к г-му шагу обнуляют-
ся. Описанный алгоритм модифицированного метода Гаусса с
дополнительной перестановкой столбцов называют методом
Гаусса с выбором главного элемента.
Выбор главного элемента можно также проводить по столб-
цу, переставляя строки так, чтобы на г-м шаге ведущий элемент
по абсолютной величине превосходил элементы своего столбца
начиная с (г + 1)-го. Оба подхода не имеют преимуществ друг
перед другом, каждый может использоваться, когда стандарт-
ный метод Гаусса не работает (т.е. один из угловых миноров
равен нулю). С точки зрения ошибок округления и выбор по
столбцу, и выбор по строке не являются безупречными, хотя
в большинстве случаев дают хороший результат. Оба подхода
284
10. ЧИСЛЕННЫЕ МЕТОДЫ РЕШЕНИЯ СЛАУ
можно комбинировать, и тогда выбор главного элемента вы-
полняется и по строкам, и по столбцам, а именно: в качестве
главного элемента на i-м шаге выбирается наибольший из эле-
ментов a'kj, k,j = i,n. Всего, следовательно, возможны три
стратегии выбора главного элемента.
Пример 10.4. Применим метод Гаусса с выбором главного
элемента по строке к системе из примера 10.3. Первый шаг
совпадает с первым шагом метода Гаусса. Перед вторым
шагом меняем местами 2-й и 3-й столбцы. Получаем
1 0 0,75 0,75 \
0 8 0,01 -7,99 I .
0 -1 -2,5 -1,5 /
На втором шаге делим 2-ю строку на 8 и прибавляем к
3-й (вычитание с коэффициентом -1). Получаем следующую
матрицу (с учетом округлений):
1 0 0,75
0 1 0,00125
0 0 -2,499
0,75 \
-0,9987 I .
-2,499 /
В конечном счете ошибки вычислений появляются, но с учетом
округлений мы получаем точное решение.
10.5. Метод прогонки
Рассмотрим СЛАУ с трехдиагональной матрицей
ац а12 0 0 ... 0 0 0 >
®21 а22 а23 0 ... 0 0 0
А = 0 вз2 Язз Я34 ... 0 0 0
V 0 0 0 0 ... 0 ЯП_11П апп)
10.5. Метод прогонки
285
Для СЛАУ с такой матрицей метод Гаусса упрощается. На
каждом i-м шаге прямого хода нужно пересчитывать только
две строки: г-ю и (г + 1)-ю. После прямого хода расширенная
матрица СЛАУ будет иметь вид
/ 1 «1 О
О 1 а2
О 0 1
ОМ
О 02
о 03
\ О О О
1 0J
Элементы этой матрицы можно вычислить по формулам
t = 2,3,
п — 1,
Обратный ход метода Гаусса также упрощается:
Хп — 0П1
Х{ = 0i~ otiXi+i, г = п - 1,П -2,...,1.
Описанный алгоритм для решения СЛАУ с трехдиагональной
матрицей называют методом прогонки.
Замечание 10.1. При решении СЛАУ с трехдиагональ-
ной матрицей методом Гаусса перестановки строк и столбцов
приводят, вообще говоря, к нарушению трехдиагональности
матрицы. Исключение составляет ситуация перед (п — 2)-м
шагом, когда перестановка двух последних строк оставляет
матрицу трехдиагональной. Учитывая это, в методе прогон-
ки перестановки строк и столбцов не используют.
286 10. ЧИСЛЕННЫЕ МЕТОДЫ РЕШЕНИЯ СЛАУ
Следующий пример показывает, что ошибки округления при
использовании метода прогонки столь же опасны, как и при
использовании метода Гаусса.
Пример 10.5. Несколько изменим СЛАУ из примера 10.3,
добавив еще одно уравнение и введя четвертую переменную
так, чтобы получилась система
4а: 4- Зу — 3,
10a: + 7,51y + 8z =-0,49,
- 2,5у — z + t = —1,50,
z + t — —1
с трехдиагональной матрицей. Ее точным решением является
ж = 0, y = l,z = -l,t = 0, в чем можно убедиться непосредствен-
ной проверкой.
Применим метод прогонки, предполагая, что вычисления
выполняются с точностью до четырех десятичных знаков.
После выполнения первых двух шагов метода прогонки, так
же как в примере 10.3, получаем матрицу
/1
I 0
0
\0
0,75 0
1 800
0 1999
0 1
0 0,75 \
0 -799 |
1 -1998 I
1 -1 /
Выполнив третий и четвертый шаги, приходим к следующей
матрице:
/1 0,75 0 0
0 1 800 0
0 0 1 0,5002 • 10~3
\0 0 0 1
0,75
-799
-0,9995
-0,5003 • 10~3
В результате обратного хода получаем в качестве решения
х = 0,3, у = 0,6, z = —0,9995, t = —0,5003 • 10“3, что, как и в
примере 10.3, значительно отличается от верного решения.
Д.10.1. Мультипликативные разложения матриц
287
Дополнение 10.1. Мультипликативные
разложения матриц
Рассмотрим СЛАУ Ах — Ь. Если представить каким-либо
образом матрицу А в виде произведения А = PQR трех (или
другого числа) невырожденных матриц Р, Q, R, то СЛАУ
Ах — Ь можно разложить на три системы:
{Pz = b,
Qy = z,
Rx = y.
Последовательно решая эти системы, мы получим решение
исходной СЛАУ.
Представление невырожденной матрицы в виде произведе-
ния нескольких матриц называется мультипликативным
разложением матрицы. Решение любой СЛАУ в конеч-
ном счете сводится к обращению матрицы (т.е. вычислению
обратной к ней). Поэтому наиболее важны такие мультипли-
кативные разложения матрицы, в которых сомножители легко
обратить. Назовем наиболее известные виды легко обращае-
мых матриц.
Для обращения диагональной матрицы достаточно заме-
нить все ее диагональные элементы на обратные к ним числа.
Ортогональная матрица А (удовлетворяющая соотноше-
нию АТ А = Е) обращается при помощи операции транспониро-
вания: А-1 = А1.
Верхняя треугольная матрица, у которой все элементы под
главной диагональю равны нулю, интересна тем, что решение
системы с такой матрицей методом Гаусса упрощается: фак-
тически требуется выполнить лишь обратный ход.
Нижняя треугольная матрица, у которой все элементы над
главной диагональю равны нулю, аналогична верхней треу-
гольной матрице, и в случае такой матрицы метод Гаусса
288
10. ЧИСЛЕННЫЕ МЕТОДЫ РЕШЕНИЯ СЛАУ
также упрощается: прямой ход метода Гаусса сразу приводит
к ответу.
Оказывается, что метод Гаусса можно интерпретировать
как один из способов построения мультипликативного разложе-
ния матрицы А системы в произведение А —• LU двух матриц,
где L — нижняя треугольная матрица, a U — верхняя тре-
угольная с диагональными элементами, равными единице. Это
разложение матрицы А называют LU -разложением.
Отметим, что произведение верхних треугольных матриц
тоже является верхней треугольной матрицей. При этом соот-
ветствующие диагональные элементы просто перемножаются.
Обратная к верхней треугольной матрице также является верх-
ней треугольной. Все это верно и для нижних треугольных
матриц.
Наиболее важное наблюдение заключается в том, что лю-
бое элементарное преобразование строк какой-либо матрицы
равносильно умножению этой матрицы слева на невырожден-
ную матрицу специального вида (см. в.8). То же верно и
для последовательных шагов метода Гаусса. Таким образом,
выполнение прямого хода метода Гаусса означает умножение
уравнения Ах = Ь слева на некоторую невырожденную матрицу
S, равную произведению матриц специального вида для эле-
ментарных преобразований прямого хода, причем в результате
такого умножения система преобразуется к виду Ux = Ь' — Sb,
где U — верхняя треугольная матрица с единицами по главной
диагонали. Обозначив L = S-1, заключаем, что А = LU.
Выясним, какой вид имеет матрица L. Для восстановления
k-я строки в матрице А надо k-ю строку матрицы U умножить
на а1^1 и к результату последовательно прибавить 1-ю, 2-ю,...,
(k — 1)-юстроки с коэффициентами соответственно a^i, a£2,...,
ak~k-i- Это равносильно умножению матрицы U слева на
матрицу-строку
(' _1 Л:—2 л Л^
( akli ak2i "•> afc,fc-l’ ак,к > "•> 0)
Д.10.1. Мультипликативные разложения матриц
289
длины п. Следовательно, если из таких строк составить
матрицу
/ «и 0 0 ... 0 \
«21 а22 0 ... 0
L = аз1 а|2 азз 0 ’
\ аП1 а^2 апЗ ••• “пп1/
то матрица А получается из матрицы U умножением слева на L.
Как видим, использование прямого хода метода Гаусса, приво-
дящего к верхней треугольной матрице U, дает коэффициенты
а-, позволяющие записать матрицу L.
Теорема 10.3. Если для квадратной матрицы А существу-
ет //(/-разложение А = LU, то это разложение единственное.
Пусть А = LxUi = L2U2. Матрицы L2 и U2 невырождены. По-
этому, умножив равенство LyUi = L2U2 на обратные матрицы
слева и справа, запишем
(L~1Ll)(U1U~1) = E.
Мы получили мультипликативное разложение единичной мат-
рицы Е. Установив, что единичная матрица имеет единствен-
ное //(/-разложение (с единицами на главной диагонали (/), а
именно Е — ЕЕ, мы тем самым докажем, что
L^Li = Е, UiU^1 = Е.
Из этих равенств следует, что Li = L2 и Ui = U2, т.е. теорема
будет доказана.
Итак, покажем, что представление Е = LU единственно.
Обозначим
//и 0 0 ... О
/21 /22 о ... о
(/=
«12 «13
1 «23
«1п
«2п
у /п1 /п2 /пЗ • • • Inn
\0 О О
О
1
290 10. ЧИСЛЕННЫЕ МЕТОДЫ РЕШЕНИЯ СЛАУ
Рассмотрим произведение i-й строки матрицы L на 1-й столбец
матрицы U. Оно равно 1ц. Но LU = Е, поэтому произведение
г-й строки L на 1-й столбец U равно нулю при г = 2,..., п. Таким
образом, 1ц =0 при г = 2, ...,п и все элементы 1-го столбца
матрицы L, кроме первого, равны нулю. Первый же равен
/ц — 1.
Теперь рассмотрим произведение г-й строки L на 2-й стол-
бец U начиная с третьей и учтем, что 1ц — 0 при г = 2,..., п.
Получим, что I22 = 1, Ц2 = 0 при г = 3,..., п. Продолжая про-
цесс последовательно по столбцам матрицы U, приходим к
заключению, что L является единичной матрицей. Но тогда
из равенства LU = Е следует, что и U является единичной мат-
рицей. к
//{/-разложение может выполняться по формулам метода
Гаусса. Если несколько изменить порядок операций (не ме-
няя причинно-следственных взаимосвязей), то алгоритм можно
записать в виде формул. На г-м шаге (г = 1,2,...,п) сначала
вычисляются элементы г-го столбца матрицы L:
г-1
kr = air-^TjikUkr, г = г, г+1, ...,п,
к-1
а затем г-й строки матрицы U:
urJ —
j = r+l,r + 2, ...,п.
При реализации алгоритма на компьютере матрицы L и U
можно хранить в одном двумерном массиве, так как диагональ-
ные элементы матрицы U известны заранее и их хранить не
нужно. При этом они записываются как одна матрица, у кото-
рой на главной диагонали и под ней стоят элементы L, а над
главной диагональю — элементы U.
Д.10.1. Мультипликативные разложения матриц
291
//{/-разложение существует для тех матриц, для которых
выполним прямой ход метода Гаусса. Его можно использовать
для решения различных задач:
- для решения нескольких систем с одинаковой матрицей и
различными правыми частями;
- для обращения матриц;
- для вычисления определителей (detА — detLdetU, где
det U = 1, adetZ, равен произведению диагональных элементов).
Есть небольшая асимметрия между нижней треугольной
и верхней треугольной матрицами в //(/-разоложении матри-
цы А, поскольку лишь диагональные элементы матрицы U
равны единице. Матрица L может быть представлена в ви-
де произведения L — LD нижней треугольной матрицы L с
единицами на главной диагонали и диагональной матрицы
//, состоящей из диагональных элементов матрицы L, т.е.
£> = diag(/u, ..., 1пп). Это представление приводит к ново-
му разложению А = LDU матрицы А в произведение ниж-
ней треугольной, диагональной и верхней треугольной мат-
риц, причем диагональные элементы обеих треугольных мат-
риц равны единице. Такое представление матрицы называют
LDU-разложением. Из единственности //(/-разложения вы-
текает единственность и ////(/-разложения.
Предположим, что матрица А является симметрической.
Запишем ее ////(/-разложение: А = LDU. В силу свойств произ-
ведения матриц и операции транспонирования получаем Ат =
= UTDLr = L'DU', т.е. ////(/-разложение транспонированной
матрицы. Но по условию А = Ат. Поэтому, согласно единствен-
ности ////(/-разложения, заключаем, что для симметрической
матрицы А выполняются равенства L — U^ и LT = U, эквива-
лентные друг другу. Значит, для симметрической матрицы ее
////(/-разложение имеет вид А = LDLr.
Пусть симметрическая матрица А к тому же является поло-
жительно определенной, т.е. все ее угловые миноры имеют
положительное значение. Исходя из алгоритма //(/-разложения,
292 10. ЧИСЛЕННЫЕ МЕТОДЫ РЕШЕНИЯ СЛАУ
можно показать, что в этом случае диагональные элемен-
ты матрицы L все положительны. Значит матрица D из
//.©{/-разложения А имеет на диагонали только положительные
значения, а потому ее можно представить в виде D — DD —
= DDr, где © = diag(v777, у/1^, ..., Учитываем это в
//©(/-разложении симметрической матрицы:
А = LDL1 = (LD) (0*1?) = (/,©) (LD)1.
Мы получили еще одно мультипликативное разложение для
симметрической положительно определенной матрицы в виде
А = SST, где S — это нижняя треугольная матрица. Это
разложение называют SSr-разложением или разложением
Холецкого.
Симметрические положительно определенные матрицы чаг
сто встречаются в прикладных задачах (например, в матемаг
тической физике). Выполнение разложения Холецкого, вытекаг
ющего из ©©-разложения, может быть проведено по таким же
простым формулам, как и само //©-разложение. Но хранение
информации о разложении Холецкого требует меньше операг
тивной памяти, так как нужно хранить только одну нижнюю
треугольную матрицу S.
Вопросы и задачи
10.1. Решить СЛАУ методом Гаусса. Сделать проверку
найденных решений:
5х-5у + 5г = 2,
25х + 15 у + Юг =
а) Зх — 5у + 5z — 3,
б) 15х + 13у + 4г =
5,
3,
.2х- у + 2г = -1;
10а: + 4у+ 6г =-2.
10.2. Решить СЛАУ с трехдиагональной матрицей методом
прогонки:
{2X1+
®1 + Зх2 + 2х3
2х2 - «з + х4 = 1,
хз + 3x4 = 5;
= 5, ( 2xi 4- х2
= 9, . I xi+2x2+ хз
। х24-2хз+ Х4 = 12,
( Хз + 2Х4 = 11.
= 4,
= 8,
Вопросы и задачи
293
10.3. Составить программу на одном из алгоритмических
языков, реализующую: а) метод Гаусса; б) метод Гаусса с
выбором главного элемента.
Используя составленную программу, решить систему
{0,lxi - 8,0хг+ 9,3хз — 8,2x4 = 1,5,
-3,3xi + 2,4хг - 2,8х3 +2,4x4 = 2,
-2,6a:i + 1,9x2 - 2,2хз + 1,9х4 = -1,
— 1,3x1 + 9,3x2 - 1,1хз + 9,5х4 = О
методом Гаусса и методом Гаусса с выбором главного элемента.
Сравнить результаты.
10.4. Найти LU- и LDU-разложения следующих матриц:
а)
-5
-5
-1
5\
5 ;
2/
б)
-10
-14
-28
4\
2 I .
2! /
5
3
2
2
3
5
Выполнить проверку полученных ответов.
10.5. Найти SST-разложение симметрических матриц:
(4 6 10\
6 10 12 1;
10 12 35/
(25 15 10 \
15 13 4 1.
10 4 6/
Выполнить проверку полученных ответов.
11. КРИВЫЕ ВТОРОГО ПОРЯДКА
Кривая второго порядка на плоскости в прямоугольной
системе координат описывается уравнением
Ах2 + Вху+ Су2 + Dx + Еу +F = 0, (И.1)
в котором коэффициенты А, В, С одновременно не обращаются
в нуль.
В этой главе мы не ставим себе задачу выявить все кривые,
которые могут быть представлены уравнением второй степени,
т.е. мы не будем проводить их полную классификацию. Это
удобно выполнять при помощи методов линейной алгебры [IV].
Здесь же мы опишем известные кривые второго порядка и
их свойства, а также покажем, как можно упростить неко-
торые частные виды уравнения второго порядка при помощи
преобразования параллельного переноса системы координат и
определить вид кривой и ее характеристики.
11.1. Эллипс
Определение 11.1. Множество всех точек на плоскости,
для которых сумма расстояний до двух фиксированных точек
Fi и F2 есть заданная постоянная величина, называют эллип-
сом.
Определение эллипса дает следующий способ его геометри-
ческого построения. Фиксируем на плоскости две точки Fj и
F2, а неотрицательную постоянную величину обозначим через
2а. Пусть расстояние между точками Fi и F2 равно 2с. Пред-
ставим себе, что нерастяжимая нить длиной 2а закреплена в
точках Fj и F2, например, при помощи двух иголок. Ясно, что
11.1. Эллипс
295
это возможно лишь при а с. Натянув нить карандашом, на-
чертим линию, которая и будет эллипсом (рис. 11.1).
Рис. 11.1
Итак, описываемое множество не пусто, если а с. • При
а = с эллипс представляет собой отрезок с концами Fi и
Fi, а при с = 0, т.е. если указанные в определении эллипса
фиксированные точки совпадают, он является окружностью
радиуса а. Отбрасывая эти вырожденные случаи, будем далее
предполать, как правило, что а > с > 0.
Фиксированные точки Fi и Fi в определении 11.1 эллип-
са (см. рис. 11.1) называют фокусами эллипса, расстояние
между ними, обозначенное через 2с, — фокальным рассто-
янием, а отрезки F\M и FiM, соединяющие произвольную
точку М на эллипсе с его фокусами, — фокальными ради-
усами.
Вид эллипса полностью определяется фокальным расстоя-
нием IF1F2I = 2с и параметром а, а его положение на плоско-
сти — парой точек Fi и Fi.
Из определения эллипса следует, что он симметричен отно-
сительно прямой, проходящей через фокусы Fi и Fi, а также
относительно прямой, которая делит отрезок F\Fi пополам
и перпендикулярна ему (рис. 11.2, а). Эти прямые называют
осями эллипса. Точка О их пересечения является центром
296
И. КРИВЫЕ ВТОРОГО ПОРЯДКА
симметрии эллипса, и ее называют центром эллипса, а точ-
ки пересечения эллипса с осями симметрии (точки А, В, С и D
на рис. 11.2, а) — вершинами эллипса.
Число а называют большой полуосью эллипса, а Ь =
= у/а2 — с2 — его малой полуосью. Нетрудно заметить,
что при с > 0 большая полуось а равна расстоянию от центра
эллипса до тех его вершин, которые находятся на одной оси
с фокусами эллипса (вершины А и В на рис. 11.2, а), а малая
полуось Ь равна расстоянию от центра эллипса до двух других
его вершин (вершины С и D на рис. 11.2, а).
Уравнение эллипса. Рассмотрим на плоскости некоторый
эллипс с фокусами в точках Fi и F2, большой осью 2а. Пусть
2с — фокальное расстояние, 2с = |FiF2| < 2а. Согласно опре-
делению 11.1 эллипса, его образуют те точки М, для которых
|F1M| + \F2M I = 2а.
Выберем прямоугольную систему координат Оху на плоско-
сти так, чтобы ее начало совпало с центром эллипса, а фокусы
находились на оси абсцисс (рис. 11.2, б). Такую систему коорди-
нат называют канонической для рассматриваемого эллипса,
а соответствующие переменные — каноническими.
В выбранной системе координат фокусы имеют координаты
Fi(c;0), F2(—с; 0). Используя формулу расстояния между
11.1. Эллипс
297
точками, запишем условие |Fi&f| + |F2M| = 2а в координатах:
^/(а: - с)2 4- у2 + ^/(а: + с)2 + 1/2 = 2а. (11.2)
Это уравнение неудобно, так как в нем присутствуют два
квадратных радикала. Поэтому преобразуем его. Перенесем
в уравнении (11.2) второй радикал в правую часть и возведем
в квадрат:
(а: - с)2 + у2 = 4а2 - (х + с)2 + у2 + (х + с)2 + у2.
После раскрытия скобок и приведения подобных слагаемых
получаем
x/(a: + c)2 + i/2 = а + ех, (11.3)
где е = с/а. Повторим операцию возведения в квадрат, чтобы
убрать и второй радикал:
(х + с)2 + у2 = а2 + 2еах + е2х2,
или, учитывая значение введенного параметра е,
т2
Л
Так как а2 — с2 = Ь2 > 0, то
а:2 у2
^ + ^=1. «>»>». (11.4)
Уравнению (11-4) удовлетворяют координаты всех точек,
лежащих на эллипсе. Но при выводе этого уравнения использо-
вались неэквивалентные преобразования исходного уравнения
(11.2) — два возведения в квадрат, убирающие квадратные ра-
дикалы. Возведение уравнения в квадрат является эквивалент-
ным преобразованием, если в обеих его частях стоят величины
298
11. КРИВЫЕ ВТОРОГО ПОРЯДКА
с одинаковым знаком, но мы этого в своих преобразованиях не
проверяли.
Мы можем не проверять эквивалентность преобразований,
если учтем следующее. Пара точек Fi и F2, IF1F21 = 2с, на плос-
кости определяет семейство эллипсов с фокусами в этих точ-
ках. Каждая точка плоскости, кроме точек отрезка F1F2, при-
надлежит какому-нибудь эллипсу указанного семейства. При
этом никакие два эллипса не пересекаются, так как сумма фо-
кальных радиусов однозначно определяет конкретный эллипс.
Итак, описанное семейство эллипсов без пересечений покры-
вает всю плоскость, кроме точек отрезка F1F2. Рассмотрим
множество точек, координаты которых удовлетворяют урав-
нению (11.4) с данным значением параметра а. Может ли
это множество распределяться между несколькими эллипсами?
Часть точек множества принадлежит эллипсу с большой по-
луосью а. Пусть в этом множестве есть точка, лежащая на
эллипсе с большой полуосью а. Тогда координаты этой точки
подчиняются уравнению
2 2
Xj + ^ = 1, 62 = а2 —с2, (11.5)
u q*
т.е. уравнения (11.4) и (11.5) имеют общие решения. Однако
легко убедиться, что система
а:2 у2
а2 + ^2^2 = 1,
Х- + ^- = 1
1а2 а2-с2
при а / а решений не имеет. Для этого достаточно исключить,
например, х из первого уравнения:
2 / 1_________а2 \ _ а2
\а2 - с2 (а2 — c2)a2J а2 ’
П.1. Эллипс
299
что после преобразований приводит к уравнению
у2с2(а2 — а2)
(а2 — с2) (а2 — с2)
= ~(а2~а2),
не имеющему решений при а / а, поскольку
(а2 — с2)(а2 — с2) = Ь2Ь2 > 0.
Итак, (П.4) есть уравнение эллипса с большой полуосью а > 0 и
малой полуосью b = у/а2 - с2 > 0. Его называют каноническим
уравнением эллипса.
Вид эллипса. Рассмотренный выше геометрический спо-
соб построения эллипса дает достаточное представление о
внешнем виде эллипса. Но вид эллипса можно исследовать и
с помощью его канонического уравнения (11.4). Например,
можно, считая у 0, выразить у через х: у = 6^/1 — х2/а2, и,
исследовав эту функцию, построить ее график [II]. Есть еще
один способ построения эллипса. Окружность радиуса а с цен-
тром в начале канонической системы координат эллипса (11.4)
описывается уравнением х2 + у2 = а2. Если ее сжать с коэф-
фициентом а/Ь > 1 вдоль оси ординат, то получится кривая,
которая описывается уравнением а:2 + (уа/Ь)2 = а2, т.е. эллипс.
Замечание 11.1. Если ту же окружность сжать с коэффи-
циентом а/Ь < 1 вдоль оси ординат, т.е.
фактически растянуть в этом напра-
влении, то получится кривая, которая
описывается уравнением (11.4), в ко-
тором а < Ь. Это тоже эллипс, но в
системе координат Оху (рис. 11.3) его
фокусы расположены на вертикальной
оси симметрии. Каноническую систе-
му координат для этого эллипса можно
получить в результате поворота сис-
темы Оху на 90°, что соответствует
замене переменных х' = у, у' = —х.
300 11. КРИВЫЕ ВТОРОГО ПОРЯДКА
Эксцентриситет эллипса. Отношение фокального рас-
стояния эллипса к его большой оси называют эксцентриси-
тетом эллипса и обозначают через Е. Для эллипса, задан-
ного каноническим уравнением (11.4), Е = 2с/2а = с/а. Если
же в (11.4) параметры а и b связаны неравенством а < Ь, то
фокусы расположены на вертикальной оси симметрии эллипса,
с = Vb2 — а2, е = 2с/2Ь = с/Ь.
При с = 0, когда эллипс превращается в окружность, и
Е = 0. В остальных случаях 0 < £ < 1. Если зафиксировать
фокусы эллипса и менять его форму, устремляя эксцентриситет
к единице, то в пределе получим отрезок, соединяющий фокусы,
который можно назвать вырожденным эллипсом с а = с и Ь = 0.
Если же, наоборот, зафиксировать параметр а и устремить е
к нулю, то в пределе мы получим окружность радиуса а. Эта
предельная ситуация соответствует равенству параметров а и
b уравнения (11.4).
Уравнение (11.3) эквивалентно уравнению (11.4), поскольку
эквивалентны уравнения (11.4) и (11.2). Поэтому уравнением
эллипса является и (11.3). Кроме того, соотношение (11.3)
интересно тем, что дает простую, не содержащую радикалов,
формулу для длины IF2M| одного из фокальных радиусов точки
М(х; у) эллипса: |F2Af| = a + sx.
Аналогичная формула для второго фокального радиуса мо-
жет быть получена из соображений симметрии либо повторени-
ем выкладок, в которых перед возведением в квадрат уравнения
(11.2) в правую часть переносится первый радикал, а не второй.
Итак, для любой точки М(х-,у) на эллипсе (см. рис. 11.2)
\FiMI = а - ех,
(11.6)
|F2M| = a + £i, V '
и каждое из этих уравнений является уравнением эллипса.
Пример 11.1. Найдем каноническое уравнение эллипса с
большой полуосью 5 и эксцентриситетом 0,8 и построим его.
11.1. Эллипс
301
Зная большую полуось эллипса а = 5 и эксцентриситет е =
= 0,8, найдем его малую полуось Ь. Поскольку Ь = >/а2 — с2, а
с = еа = 4, то Ь = \/52 — 42 = 3. Значит каноническое уравнение
имеет вид
£2 у2
---1- — = 1
52 + З2
Для построения эллипса удобно изобразить прямоугольник с
центром в начале канонической системы координат, стороны
которого параллельны осям симметрии эллипса и равны его
соответствующим осям (рис. 11.4). Этот прямоугольник пе-
ресекается с осями эллипса в его вершинах 4(—5; 0), В(5; 0),
С (О’, —3), D(0‘, 3), причем сам эллипс вписан в него. На рис. 11.4
указаны также фокусы Г1,г(±4; 0) эллипса.
Геометрические свойства эллипса. Перепишем первое
уравнение в (11.6) в виде |FiAf| = (а/е - х)е. Отметим, что ве-
личина ч/е — х при а > с положительна, так как фокус Fi не
принадлежит эллипсу. Эта величина представляет собой рас-
стояние до вертикальной прямой d: x = a/s от точки М(х; у),
лежащей левее этой прямой. Уравнение эллипса можно записать
в виде
|FiM| _
ч/е — х
302
11. КРИВЫЕ ВТОРОГО ПОРЯДКА
Оно означает, что этот эллипс состоит из тех точек М(х', у)
плоскости, для которых отношение длины фокального радиуса
F\M к расстоянию до прямой d есть величина постоянная,
равная е (рис. 11.5).
У прямой d есть „двойник" — вертикальная прямая d1, сим-
метричная d относительно центра эллипса, которая задается
уравнением х = —а/е. Относительно d' эллипс описывается так
же, как и относительно d. Обе прямые dud1 называют дирек-
трисами эллипса. Директрисы эллипса перпендикулярны
той оси симметрии эллипса, на которой расположены его фоку-
сы, и отстоят от центра эллипса на расстояние а/е = а2/с (см.
рис. 11.5).
Расстояние р от директрисы до ближайшего к ней фокуса
называют фокальным параметром эллипса. Этот пара-
метр равен
а а2 а2 — с2 Ь2
р=----с =-----с—-------= —.
£ с с с
Эллипс обладает еще одним важным геометрическим свой-
ством: фокальные радиусы FiM и F}M составляют с каса-
тельной к эллипсу в точке М равные углы (рис. 11.6). Прежде
11.1. Эллипс
303
чем доказывать это, убедимся, что касательная к эллипсу суще-
ствует в любой его точке. Рассматривая у как функцию от х,
неявно заданную уравнением (11.4) [II], и дифференцируя его:
Чх]с? + 2уу'/Ь2 = 0, находим производную
у'(х) = -xb2/(ya2), у/0.
Рис. 11.6
Видим, что для всех точек эллипса, кроме вершин А и В,
производная, а значит, и касательная существуют. Найдем ее
уравнение в произвольной точке M(xq; уо) эллипса. Воспользо-
вавшись уравнением касательной
у-уо = у'(хо)(х-хо)
к графику функции у = у(х) в точке М, получим
х°Ь2
у — уо —----2\х~хо)
УоО.
или
ХХО ууо х20 у1
а2 + Ь2 а2 Ь2'
304
11. КРИВЫЕ ВТОРОГО ПОРЯДКА
т.е.
ххо . УУо 1
а2 + b2
поскольку координаты точки М удовлетворяют уравнению
(11.4) эллипса. Касательные в вершинах А и В также суще-
ствуют, в чем можно убедиться, рассматривая х как неявную
функцию у. Полученное уравнение касательных распространя-
ется и на касательные в точках А и В.
Нормальным вектором касательной к эллипсу является век-
тор п с координатами {®о/в2! Sfo/Ь2}. Утверждение, что фо-
кальные радиусы F\M и F2M составляют с касательной к
и П2
эллипсу в точке М равные углы, эквивалентно утверждению
о параллельности нормального вектора касательной и биссек-
трисы MN угла F1MF2 (см. рис. 11.6). Убедимся в том, что
последнее верно для любой точки М эллипса. Рассмотрим век-
торы FjA1 и F2a1. Векторы ni =
коллинеарны векторам FiA^ и и имеют одинаковую длину,
равную |FiA1| |F2a)|. Поэтому их сумма ni + п2 представля-
ет собой диагональ построенного на них ромба, являющуюся,
как известно, биссектрисой внутреннего угла ромба. Таким
образом, согласно теореме 1.8, достаточно доказать пропорци-
ональность координат вектора ni + п2 и нормального вектора
п касательной, что следует из равенств
| F$\F\aI + j FjA?| F$ =
= (a + £xo){®o - с; Уо} + (a “ £®o){®o + c; y0} =
= {(a + Ex0) (x0 - c) + (a - ex0)(x0 + c); 2ay0} =
= {2ax0 - 2cex0; 2ay0} = 2a| (1 - x0-, уь} =
o J b2 1 ,2fx0 Уо]
Доказанное геометрическое свойство имеет наглядный фи-
зический смысл. Если в фокусе Fi расположить источник света,
11.2. Гипербола
305
то луч, выходящий из этого фокуса, после отражения от эл-
липса пойдет по второму фокальному радиусу, так как после
отражения он будет находиться под тем же углом к кривой, что
и до отражения. Таким образом, все лучи, выходящие из фо-
куса Fi, сконцентрируются во втором фокусе F2, и наоборот.
Исходя из данной интерпретации доказанное свойство называ-
ют оптическим свойством эллипса.
11.2. Гипербола
Определение 11.2. Геометрическое место точек плоско-
сти, для которых разность расстояний до двух фиксированных
точек есть величина постоянная, называют гиперболой.
Замечание 11.2. Говоря о разности расстояний, подразу-
мевают, что из большего расстояния вычитается меньшее. Это
значит, что на самом деле для гиперболы постоянным является
модуль разности расстояний от любой ее точки до двух фикси-
рованных точек. #
Определение гиперболы аналогично определению эллипса.
Различие между ними лишь в том, что для гиперболы по-
стоянна разность расстояний до фиксированных точек, а для
эллипса — сумма тех же расстояний. Поэтому естественно,
что у этих кривых много общего как в свойствах, так и в ис-
пользуемой терминологии.
Фиксированные точки в определении гиперболы (обознаг
чим их Fi и F2) называют фокусами гиперболы. Расстояние
между ними (обозначим его 2с) называют фокальным рас-
стоянием, а отрезки FiM и F2M, соединяющие произвольную
точку М на гиперболе с ее фокусами, — фокальными ради-
усами.
Вид гиперболы полностью определяется фокальным рассто-
янием |FiF2| = 2с и значением постоянной величины 2а, равной
разности фокальных радиусов, а ее положение на плоскости —
положением фокусов Fi и F2.
306 11. КРИВЫЕ ВТОРОГО ПОРЯДКА
Из определения гиперболы следует, что она, как и эллипс,
симметрична относительно прямой, проходящей через фокусы,
а также относительно прямой, которая делит отрезок F1F2 по-
полам и перпендикулярна ему (рис. 11.7). Первую из этих осей
симметрии называют действительной осмо гиперболы, а
вторую — ее лсяижой осью. Постоянную величину а, участву-
ющую в определении гиперболы, называют действительной
полуосью гиперболы.
Середина отрезка F1F2, соединяющего фокусы гиперболы,
лежит на пересечении ее осей симметрии и поэтому является
центром симметрии гиперболы, который называют просто
центром гиперболы.
Для гиперболы действительная ось 2а должна быть не боль-
ше, чем фокальное расстояние 2с, так как для треугольника
F1MF2 (см. рис. 11.7) справедливо неравенство
||F1M|-|^M||^|F1F2|.
Равенство а = с выполнено только для тех точек М, которые
лежат на действительной оси симметрии гиперболы вне интер-
вала F1F2. Отбрасывая этот вырожденный случай, далее будем
предполагать, что а < с. Отметим также, что случай а = 0 со-
ответствует геометрическому месту точек, равноудаленных от
фиксированных точек Fi и F2. Как известно из курса школь-
ной геометрии, это геометрическое место представляет собой
прямую, перпендикулярную отрезку FiF2 и проходящую через
его середину. Этот случай мы также не будем рассматривать.
11.2. Гипербола
307
Уравнение гиперболы. Рассмотрим на плоскости неко-
торую гиперболу с фокусами в точках Fi и Fi и действительной
осью 2а. Пусть 2с — фокальное расстояние, 2с = |FiF2| > 2а.
Согласно замечанию 11.2, гипербола состоит из тех точек
М(ж; у), для которых 11FjAf | — |F2M| | = 2а. Выберем прямо-
угольную систему координат Оху так, чтобы центр гиперболы
находился в начале координат, а фокусы располагались на оси
абсцисс (рис. 11.8). Такую систему координат для рассматрива-
емой гиперболы называют канонической, а соответствующие
переменные — каноническими.
Рис. 11.8
В канонической системе координат фокусы гиперболы име-
ют координаты Fi(c; 0) и F2(—с; 0). Используя формулу рассто-
яния между двумя точками, запишем условие | |FiM| — |F2M| | =
= 2а в координатах
|с)2 + у2 - ^(х + с)2+ у2| = 2а,
где (х; у) — координаты точки М. Чтобы упростить это
уравнение, избавимся от знака модуля:
У(х - с)2 + у2 - У(ж + с)2 + у2 = ±2а,
перенесем второй радикал в правую часть и возведем в ква-
драт:
(х - с)2 + у2 = (х + с)2 + у2 ± 4а^/(х-Ьс)2 + у2 + 4а2.
308
11. КРИВЫЕ ВТОРОГО ПОРЯДКА
После упрощения получим
-ех — а = ±^/(х + с)2 + j/2,
или
х/(х + с)2 + j/2 = \ех + а|,
(П-7)
где е — с/а. Возведем в квадрат вторично и снова приведем
подобные:
(е2 - 1)х2 - у2 — с2 - а2
или, учитывая равенство е = с/а и полагая Ь2 = с2 — а2,
а2 Ь2 “
(П-8)
Величину Ь > 0 называют мнимой полуосью гиперболы.
Итак, мы установили, что любая точка на гиперболе с фо-
кусами Fi(c;0) и F2(-c;0) и действительной полуосью а удо-
влетворяет уравнению (11.8). Но надо также показать, что
координаты точек вне гиперболы этому уравнению не удовле-
творяют. Для этого мы рассмотрим семейство всех гипербол
с данными фокусами Fi и F2. У этого семейства гипербол оси
симметрии являются общими. Из геометрических соображений
ясно, что каждая точка плоскости (кроме точек, лежащих на
действительной оси симметрии вне интервала F^F?, и точек,
лежащих на мнимой оси симметрии) принадлежит некоторой
гиперболе семейства, причем только одной, так как разность
расстояний от точки до фокусов Fi и F2 меняется от гиперболы
к гиперболе. Пусть координаты точки М(х; у) удовлетворяют
уравнению (11.8), а сама точка принадлежит гиперболе семей-
ства с некоторым значением а действительной полуоси. Тогда,
как мы доказали, ее координаты удовлетворяют уравнению
£-1 = 1, Ь2^-а2.
а2 Ъ2
11.2. Гипербола
309
Следовательно, система двух уравнений с двумя неизвестными
х2
а2
а2
с2 — а2 Х’
У.-— = 1
с2-а2
имеет хотя бы одно решение. Непосредственной проверкой
убеждаемся, что при а а это невозможно. Действительно,
исключив, например, х из первого уравнения:
2 / а2 1 \ _ а2
V \ (с2 — а2)а2 с2 — а2 ) а2
после преобразований получаем уравнение
j^c^a2 — а2)
(с2-а2)(с2-а2)
-(а2-а2),
которое при ii/а не имеет решений, так как
(с2_а2)(с2_а2) = Ь2Ь2>0.
Итак, (11.8) есть уравнение гиперболы с действительной полу-
осью а > 0 и мнимой полуосью Ь = \/с2 — а2 > 0. Его называют
каноническим уравнением гиперболы.
Вид гиперболы. По своему виду гипербола (11.8) заметно
отличается от эллипса. Учитывая наличие двух осей симметрии
у гиперболы, достаточно построить ту ее часть, которая
находится в первой четверти канонической системы координат.
В первой четверти, т.е. при х 0, у 0, каноническое уравнение
гиперболы однозначно разрешается относительно у.
а
(И-9)
Исследование функции у(х) дает следующие результаты [II].
310
11. КРИВЫЕ ВТОРОГО ПОРЯДКА
Область определения функции — {а:: х а} и в этой области
определения она непрерывна как сложная функция, причем
в точке х = а она непрерывна справа. Единственным нулем
функции является точка х = а.
Найдя производную функции у(х)
У' = =
Ьх
а\/хг — а2 ’
заключаем, что при х > а функция монотонно возрастает.
Кроме того,
lim f(x) = +co,
x->a+0 '
а это означает, что в точке х = а пересечения графика функции
с осью абсцисс существует вертикальная касательная. Функ-
ция у(х) имеет вторую производную
у" = — ab(x2 — а2)-3/2
при х > а, и эта производная отрицательна. Поэтому график
функции является выпуклым вверх, а точек перегиба нет.
Указанная функция имеет наклонную асимптоту, это выте-
кает из существования двух пределов [II]:
. г f(x) ь г '/я2 ~“2 ь
k = hm —*-*• = — hm -----------------= —,
х->+оо х а х-н-оо х а
b= lim (f(x) — кх) = — lim (\/х2 — а2 — х\ =
Х-++0О ' ' а Х-У+оа \ /
Ь .. —а2
= - lim . у -----------
а Х-+4-0О у/х2 — а2 -{• х
Наклонная асимптота описывается уравнением у = (Ъ/а)х.
Проведенное исследование функции (11.9) позволяет постро-
ить ее график (рис. 11.9), который совпадает с частью гипер-
болы (11.8), содержащейся в первой четверти.
11.2. Гипербола
311
Так как гипербола симметрична относительно своих осей,
вся кривая имеет вид, изображенный иа рис. 11.10. Гипербола
состоит из двух симметричных ветвей, расположенных по
разные стороны от ее мнимой оси симметрии. Эти ветви
не ограничены с обеих сторон, причем прямые у = ±(b/a)x
являются одновременно асимптотами и правой и левой ветвей
гиперболы.
Рис. 11.9
Рис. 11.10
Оси симметрии гиперболы различаются тем, что действи-
тельная пересекает гиперболу, а мнимая, будучи геометриче-
ским местом точек, равноудаленных от фокусов, — не пересе-
кает (поэтому ее и называют мнимой). Две точки пересечения
действительной оси симметрии с гиперболой называют верши-
нами гиперболы (точки А(а; 0) и В(—а; 0) на рис. 11.10).
Построение гиперболы по ее действительной (2а) и мни-
мой (2Ь) осям следует начинать с прямоугольника с центром в
начале координат и сторонами 2а и 2Ь, параллельными, соответ-
ственно, действительной и мнимой осям симметрии гиперболы
(рис. 11.11). Асимптоты гиперболы являются продолжениями
диагоналей этого прямоугольника, а вершины гиперболы —
точками пересечения сторон прямоугольника с действительной
осью симметрии. Отметим, что прямоугольник и его положе-
ние на плоскости однозначно определяют форму и положение
гиперболы. Отношение Ь/а сторон прямоугольника определя-
ет степень сжатости гиперболы, но вместо этого параметра
обычно используют эксцентриситет гиперболы. Эксцентри-
ситетом гиперболы называют отношение ее фокального
312
11. КРИВЫЕ ВТОРОГО ПОРЯДКА
расстояния к действительной оси. Эксцентриситет обознача-
ют через е. Для гиперболы, описываемой уравнением (11.8),
Е=-с1а. Отметим, что если эксцентриситет эллипса может
принимать значения из полуинтервала [0,1) (значение 0 соот-
ветствует предельному варианту эллипса — окружности), то
эксцентриситет гиперболы всегда попадает в интервал (1,-f-oo).
Построим прямоугольник с центром в начале системы ко-
ординат Оху и сторонами 2а, 2Ь, параллельными осям абсцисс
и ординат соответственно. Проведем прямые у = (Ь/а}х и
у = — (Ь/а}х, на которых лежат диагонали прямоугольника.
Существует две гиперболы, соответствующие построенному
прямоугольнику (рис. 11.12). Первая из них описывается ка-
ноническим уравнением (11.8), а вторая — уравнением
X2 и2
(11.10)
a* tr
Вторую гиперболу называют сопряженной по отношению к
первой, а уравнение (11.10) — каноническим уравнением
сопряженной гиперболы. Действительная и мнимая оси
11.2. Гипербола
313
первой гиперболы являются соответственно мнимой и действи-
тельной осями сопряженной гиперболы, а асимптоты у них
общие.
Пример 11.2. Найдем каноническое уравнение гиперболы
по ее действительной полуоси а = 4 и фокальному расстоянию
2с = 10. Построим гиперболу и определим координаты ее
вершин, фокусов и уравнения асимптот.
Так как действительная полуось а гиперболы известна, то,
чтобы найти каноническое уравнение гиперболы, достаточно
определить мнимую полуось Ь. Поскольку с = 5, Ь = \/с2 — а2,
то Ь = у^52 — 42 = 3. Итак, искомое уравнение имеет вид
42 З2 “
Построим прямоугольник, соответствующий заданной ги-
перболе (рис. 11.13). Продолжим его диагонали до асимптот
гиперболы и построим саму гиперболу. Уравнениями асимптот
являются у = ±Зж/4, вершины находятся в точках (±4; 0), а фо-
кусы совпадают с точками (±5; 0).
314
11. КРИВЫЕ ВТОРОГО ПОРЯДКА
Геометрические свойства. Геометрические свойства
гиперболы во многом повторяют свойства эллипса. Вернемся
к формуле (11.7). Она эквивалентна каноническому уравнению
гиперболы и дает выражение для длины фокального радиуса
FzM ее точки М(х; у):
|F2M| = у/(х + с)2 + у2 — ±(ех + а), (11-11)
где знак плюс соответствует правой ветви гиперболы, а знак
минус — левой.
Аналогично можно получить формулу для длины другого
фокального радиуса, если при выводе канонического уравнения
гиперболы перед первым возведением в квадрат в правую часть
равенства перенести не второй, а первый квадратный радикал.
При этом вместо (11.7) получим
ех — а = ± \/(х — с)2 + у2,
откуда
|FiM| = >J{x- с)2 + у2 — ±(ех - а),
(11.12)
11.2. Гипербола
315
где, как и в (11.11), знак плюс соответствует правой ветви
гиперболы, азнак минус — левой. Каждое из уравнений (11.11),
(11.12) является уравнением гиперболы.
Гипербола не проходит через свои фокусы (при 0 < а < с).
Поэтому фокальные радиусы любой ее точки М имеют нену-
левую длину, т.е. |FiM| / 0 и |F2M| /0. Но тогда в (11.11) и
(11.12) правые части тоже отличны от нуля, и эти уравнения
гиперболы можно переписать в следующем виде:
^L=£, J£iML=£. (п.13)
|ог + я/е| |х — а/е|
Рассмотрим прямую d': x = —afe (рис. 11.14). Выражение
|яг 4-<г/е| представляет собой расстояние от точки М(х;у) до
прямой d'. Аналогично выражение ±(х -я/е) равно расстоянию
|х — а/е| от точки М гиперболы до прямой d: х — я/е. Поэтому
из уравнений (11.13) следует, что гипербола состоит из таких
точек, для которых отношение расстояния до фокуса F2 (фо-
куса Fi) к расстоянию до прямой d' (прямой d) есть величина
постоянная, равная ее эксцентриситету е. Эти две прямые d и
d' называют директрисами гиперболы.
Рис. 11.14
316
11. КРИВЫЕ ВТОРОГО ПОРЯДКА
Геометрически директрисы определяются как прямые, пер-
пендикулярные действительной оси симметрии гиперболы и
удаленные от ее центра на расстояние, равное отношению дей-
ствительной полуоси к эксцентриситету.
Расстояние р от директрисы гиперболы до ближайшего к
директрисе фокуса, как и у эллипса, называют фокальным
параметром гиперболы. Отметим, что
а а2 с2 - а2 Ь2
р — с---— с----—--------— —.
Е с с с
Гипербола также имеет и оптическое свойство, анало-
гичное оптическому свойству эллипса. Оно состоит в том, что
лучи, вышедшие из одного фокуса, после отражения от ближай-
шей ветви гиперболы распространяются так, будто вышли из
другого фокуса (рис. 11.15).
Оптическое свойство гиперболы доказывается примерно
так же, как и эллипса. Это свойство эквивалентно утвержде-
нию о параллельности направляющего вектора касательной в
точке M(xq; уо) гиперболы и биссектрисы угла F\MF}. Убе-
димся в этом. Вычислим вектор, направленный по биссектрисе
угла FiMFz, и сравним его с направляющим вектором каса-
тельной.
11.2. Пшербола
317
Пусть точка М гиперболы не является ее вершиной. Рас-
смотрим функцию у от х, неявно заданную уравнением (11.8).
Дифференцируя (11.8), получаем 2х/а2 — 2уу'/Ь2 = 0, откуда на-
ходим производную
y'(x) = xb2/(ya2).
Уравнение касательной в точке М можно записать в виде
у-ур = у'(хо)(х~хо)-
Подставив выражение для значения производной в точке М,
получим
хрЬ2
У — Уо —---j(x-xo),
Уоа2
или
ххр уу0 xl yg
а2 Ь2 "а2 Ь2 ’
что приводит к уравнению касательной
ххр уур
а2 Ь2 ’
поскольку координаты точки М удовлетворяют уравнению
(11.8) гиперболы. Это уравнение справедливо и для касатель-
ных к гиперболе в ее вершинах, которые в этих точках вер-
тикальны. Следовательно, в качестве направляющего вектора
касательной к гиперболе можно выбрать вектор я с координа-
тами {ур/Ь2]х0/а2}.
Рассмотрим векторы и F^. Векторы пх =
И П2 = коллинеарны векторам F\l^ и F^ и имеют
одинаковую длину, которая равна |FiA1| Поэтому их
сумма пх + пг представляет собой диагональ построенного на
них ромба, являющуюся, как известно, биссектрисой внутрен-
318
11. КРИВЫЕ ВТОРОГО ПОРЯДКА
него угла ромба. Вычисляем эту сумму:
4- =
= (ех0 + а){«0 - с; у0} + (ех0 - «){«о + с; t/o} =
= {(ех0 + «)(®о - с) + (е«о - а)(®0 4- с); 2ежО!/о} =
Г у2«2 1
- {2ехо - 2ас; 2е«оУо} = 2е{хо ~ °2; хоУо} = 2е< хоУо ? =
о 2/УО
-2гуоа |ft2, fl2|.
Видим, что этот вектор коллинеарен вектору з.
Гипербола, приведенная к асимптотам. Если у гипер-
болы совпадают действительная и мнимая полуоси, т.е. а — Ь,
то угол между асимптотами равен 2arctg(6/a) = 2arctgl = тг/2,
т.е. является прямым. Такую гиперболу называют равно-
бочной. Для нее кроме канонической системы координат, в
которой оси координата совпадают с осями симметрии гипер-
болы, рассматривают также и другую, осями которой являются
асимптоты. Выведем уравнение гиперболы в этой системе ко-
ординат, которую обозначим Оху. Пусть i, j — ее репер, а г',
j' — репер канонической системы координат Ох'у' (рис. 11.16).
Каноническая система координат повернута относительно
системы Оху на угол 7г/4. Поэтому (см. 3.2)
Значит, координаты х', у' канонической системы координат
выражаются через координаты х, у с теми же коэффициентами:
, V2 V2
»=-г«+-г»,
11.2. Гипербола
319
Уравнение равнобочной гиперболы в канонической системе
координат имеет вид (ж')2 - (у')2 = а2, где а — действительная
(она же мнимая) полуось гиперболы. Заменив в этом уравнении
канонические переменные на х, у, получим
| (® + У)2 - | (х - У)2 = а2,
или
а2
(Н-14)
Уравнение (11.14) называют уравнением гиперболы в
асимптотах.
Замечание 11.3. Уравнение
а2
задает сопряженную гиперболу для равнобочной гиперболы
(11.14).
Пример 11.3. Найдем координаты вершин, фокусов и
уравнения асимптот гиперболы ху = — 8 и построим ее.
320
11. КРИВЫЕ ВТОРОГО ПОРЯДКА
Данное уравнение является уравнением в асимптотах для
сопряженной равнобочной гиперболы. Поэтому оси координат,
т.е. прямые х = 0, у = 0, являются ее асимптотами. Для этой
гиперболы —а2Iе! — —8, поэтому а2 = 16 и а — Ь = 4. Но тогда
с = у/а2 4- Ь2 = V42 + 42 = 4>/2, и, учитывая обозначения вершин
и фокусов, находим: А(-2\/^; 2>/2), В(2у/2; -2у/2), Fi(-4;4),
F2(4;—4) (рис. 11.17).
Рис. 11.17
11.3. Парабола
Рассмотрим на плоскости прямую и точку, не лежащую на
этой прямой. И эллипс, и гипербола могут быть определены
единым образом как геометрическое место точек, для которых
отношение расстояния до данной точки к расстоянию до данной
прямой есть постоянная величина е. При 0 < е < 1 получается
эллипс, а при Е > 1 — гипербола. Параметр е является экс-
центриситетом как эллипса, так и гиперболы. Из возможных
положительных значений параметра е одно, а именно Е = 1, ока-
зывается незадействованным. Этому значению соответствует
11.3. Парабола
321
геометрическое место точек, равноудаленных от данной точки
и от данной прямой.
Определение 11.3. Геометрическое место точек, равно-
удаленных от фиксированной точки и от фиксированной пря-
мой, называют параболой.
Фиксированную точку называют фокусом параболы, а
прямую — директрисой параболы. При этом полагают, что
эксцентриситет параболы равен единице.
Из геометрических соображений вытекает, что парабола
симметрична относительно прямой, перпендикулярной дирек-
трисе и проходящей через фокус параболы. Эту прямую назы-
вают осью симметрии параболы или просто осью параболы.
Парабола пересекается со своей осью симметрии в единствен-
ной точке. Эту точку называют вершиной параболы. Она
расположена в середине отрезка, соединяющего фокус парабо-
лы с точкой пересечения ее оси с ее директрисой (рис. 11.18).
Уравнение параболы. Для
вывода уравнения параболы вы-
берем на плоскости начало ко-
ординат в вершине параболы, в
качестве оси абсцисс — ось пара-
болы, положительное направле-
ние на которой задается поло-
жением фокуса (см. рис. 11.18).
Эту систему координат называ-
ют канонической для рассма-
триваемой параболы, а соответ-
ствующие переменные — кано-
ническими.
Рис. 11.18
Обозначим расстояние от фокуса до директрисы через р.
Его называют фокальным параметром параболы.
Тогда фокус имеет координаты F(p/2;0), а директриса
d описывается уравнением х = —pf^. Геометрическое место
322
11. КРИВЫЕ ВТОРОГО ПОРЯДКА
точек М(х\ у), равноудаленных от точки F и от прямой d,
задается уравнением
+у2 = |ж + ||- (П.15)
Возведем уравнение (11.15) в квадрат и приведем подобные.
Получим уравнение
у2 = 2рх, (11.16)
которое называют каноническим уравнением параболы.
Отметим, что возведение в квадрат в данном случае — экви-
валентное преобразование уравнения (11.15), так как обе части
уравнения неотрицательны, как и выражение под радикалом.
Вид параболы. Если параболу у2 = х, вид которой считаем
известным, сжать с коэффициентом 1/(2р) вдоль оси абсцисс,
то получится парабола общего вида, которая описывается
уравнением (11.16).
Пример 11.4. Найдем координаты фокуса и уравнение
директрисы параболы, если она проходит через точку, кано-
нические координаты которой (25; 10).
В канонических координатах уравнение параболы имеет
вид у2 = 2рх. Поскольку точка (25; 10) находится на параболе,
то 100 = 50р и поэтому р = 2. Следовательно, у2 = 4х является
каноническим уравнением параболы, х = — 1 — уравнением ее
директрисы, а фокус находится в точке (1; 0).
Оптическое свойство параболы. Парабола имеет сле-
дующее оптическое свойство. Если в фокус параболы
поместить источник света, то все световые лучи после отраже-
ния от параболы будут параллельны оси параболы (рис. 11.19).
Оптическое свойство означает, что в любой точке М парабо-
лы нормальный вектор касательной составляет с фокальным
радиусом МF и осью абсцисс одинаковые углы.
Проверим это. Выберем произвольную точку М(х0; Уо) на
параболе, описываемой уравнением (11.16). Рассматривая в
11.4. Неполные уравнения кривой второго порядка
323
уравнении (11.16) переменное х как функцию у (а: = у2/(2р)), за-
пишем уравнение касательной в точке М: х — xq = х'(уо)(у — уо).
Поскольку х' = у/p, то ^'(уо) = Уо/Р- Подставляем выражение
для производной в уравнение касательной х — xq = уо(у — уо)/р
и получаем рх — рх0 = уоу - Уд- Координаты точки М удов-
летворяют уравнению параболы, т.е. уц = 2ржо- Значит, урав-
нение касательной можно записать в виде рх — уоу + рхо = 0.
По уравнению касательной на-
ходим ее нормальный вектор в
точке М: п = {р; — уо}. Убедим-
ся, что этот вектор коллинеа-
рен вектору М&+ |A/F|t, кото-
рый направлен вдоль биссектри-
сы угла, образованного прямым
и отраженным лучами (» — ортп,
задающий направление оси Ох).
Отметим, что, согласно (11.15),
расстояние МF равно xq + р/2.
Поэтому
Рис. 11.19
М? + |МF|» = - ж0; -уо} + (ж0 + р/2){1; 0} = {р; -у0},
т.е. этот вектор совпадает с выбранным нормальным вектором
касательной.
11.4. Неполные уравнения
кривой второго порядка
Если в уравнении
Ax2 + Bxy + Cy2+Dx + Ey + F = 0, А2 + В2 +С2 / 0, (11.17)
кривой второго порядка на плоскости либо В = 0 (нет слагаемо-
го с произведением переменных), либо А = С = 0 (нет слагаемых
с квадратами переменных), то такое уравнение называют не-
полным.
324
11. КРИВЫЕ ВТОРОГО ПОРЯДКА
Неполное уравнение второго порядка при помощи парал-
лельного переноса системы координат и, возможно, дополни-
тельного поворота системы координат на плоскости на угол
тг/2, —тг/2 или тг можно преобразовать либо в каноническое
уравнение эллипса, либо в каноническое уравнение гиперболы,
либо в каноническое уравнение параболы, либо в уравнение ги-
перболы в асимптотах. Кроме того, есть особые случаи, когда
уравнение не сводится ни к одному из вышеперечисленных (слу-
чаи вырождения кривой второго порядка).
Замечание 11.4. Поворот системы координат на плоско-
сти Оху на угол тг/2 (—тг/2, тг) соответствует введению новых
переменных х = у, у=—х, (х — —у, у = х; х =—х, у = —у).
Такие замены переменных удобно называть переобозначени-
ями переменных.
Рассмотрим преобразование неполного уравнения кривой
второго порядка. Если уравнение второго порядка не содержит
слагаемого с произведением переменных (В = 0), то для его
преобразования используют выделение полного квадрата по
каждому из переменных, которые входят в уравнение во второй
и в первой степени. Напомним, что для квадратного трехчлена
ах2 + Ьх + с, а 0, выделением полного квадрата по х называют
следующее его тождественное преобразование:
2 , ( 2 Ь \ / 2 Ь Ь2 Ь2\
ax2 + bx + c=al х2 + ~х I +с=а[ ж2+ 2—-х+ —) +с=
\ a J \ 2а 4cr 4сг/
( j п Ь Ь2\ Ь2 , \2 j
= а I х2 + 2—х + —— ) - — + с = а(х - z0)2 + d,
\ 2а 4а*/ 4а
где х0 = -6/(2а); d = c- Ь2/(4а).
При В = 0 возможны три варианта.
1. В первом варианте при А^ОиС^О уравнение (11.17)
путем выделения полного квадрата по х (при D 0) и по у (при
Е 0) приводится к виду
A{x-x0)24-C(y-yQ)2 = Fl, (11.18)
11.4. Неполные уравнения кривой второго порядка
325
где
D Е . D2 Е2
Х°~ 24’ Уо~ 2С' ~ +4А + 4С
Если в (11.18) F' 0, то, введя обозначения а2 = [F'l /|4|,
Ь2 = |FZ|/|С| и учитывая знаки коэффициентов в (11.18), при-
ходим к одному из следующих четырех уравнений:
(ж-жр)2 (у-уо)2 ,
а2 Ь2
(* ~ *о)2 _ (у —Уо)2 _
а2 Ь2
(х-х0)2 , (у-ур)2
а2 + Ь2
(х - ж0)2 (у-ур)2 _
а2 Ь2
Геометрическим образом последнего уравнения является пу-
стое множество, которое иногда называют мнимым элли-
псом. Первое (второе, третье) из этих уравнений называют
смещенным уравнением гиперболы (сопряженной ги-
перболы, эллипса), поскольку после параллельного переноса
системы координат
ж' = ж - Жр, у' = у - !/р
в новых переменных эти уравнения примут соответственно вид
(^-(уТ,
а2 Ъ2
а2 Ъ2
(Н2 , (уТ = 1
а2 + Ъ2
Отметим, что среди последних трех уравнений канонический
вид всегда имеют первые два и третье (при а Ь) уравнения.
326
11. КРИВЫЕ ВТОРОГО ПОРЯДКА
Если же в последнем уравнении а и b удовлетворяют неравен-
ству а < Ъ, то это уравнение примет канонический вид после
переобозначения переменных х = у1, у = —х1.
Если в уравнении (11.18) F' = 0, то оно имеет вид
А(х - х0)2 + С(у - уо)2 = 0.
Геометрическим образом этого уравнения при АС > 0 будет
точка с координатами (ато! Уо), а при АС <0 — пара пересека-
ющихся прямых
х/Й(* - «о) ± \/|С|(у - Уо) = °-
2. Второй вариант соответствует А 0, С = 0. При Е 0,
т.е. когда в уравнении присутствует слагаемое с у в первой
степени, выделяем полный квадрат по переменному х (при
D 0). Перенеся затем остальные слагаемые в правую часть,
получим
А(х - х0)2 = -Еу + F',
где xq = -D/(2A)- F' = D2/(4A) — F. В результате приходим к
уравнению
А(х-х0)2 = -Е(у-уо),
где Уо = F'/E. Полагая р = |jE|/(2|A|), найдем смещенное
уравнение параболы (ж — ато)2 == 2р(у — Уо) (при АЕ < 0) или
(х — xq)2 = —2р(у — уо) (при АЕ > 0). После параллельного
переноса системы координат
х' - X - XQ, у' -у-уо
эти уравнения сводятся к (а/)2 = 2ру' и (а/)2 = —2ру' соответ-
ственно. Наконец, полученные уравнения преобразуются в ка-
ноническое уравнение параболы у2 = 2рх после переобозначения
переменных х = у1, у = —х' и х = —у', у = х' соответственно.
Если в этом варианте слагаемое с у в первой степени в
уравнении отсутствует (Е = 0), то уравнение имеет вид
Ах2 + Dx + F = 0, А^О,
11.4. Неполные уравнения кривой второго порядка
327
т.е. является квадратным относительно х. Это один из выро-
жденных случаев, поскольку (11.17) является уравнением отно-
сительно одного переменного. Выделение полного квадрата в
этом случае сводит уравнение к одному из трех видов:
(x-x0)2 = a2, (z-zo)2 = 0, (х-х0)2 = -а2,
где хо = —D/(2A), а = ^/|-F + £>2/(44)| / 0. Первое из этих
уравнений описывает на плоскости пару параллельных прямых
х = xq ± а, которые во втором случае сливаются в одну прямую
х = хо- Третье уравнение задает на плоскости пустое множе-
ство (уравнение пары мнимых параллельных прямых).
3. Третий вариант 4 = 0, С 0 аналогичен второму (сво-
дится к нему переобозначением переменных х = у, у=—х).
Поэтому при D 0, т.е. когда в уравнении присутствует
слагаемое с х в первой степени, выделяя полный квадрат по
переменному у (при Е 0) и перенося остальные слагаемые в
правую часть, находим
С(у — уо)2 =—Dx + F1,
где j/o = —F/(2C); F' = Е2/(4С) — F. В результате приходим к
уравнению
С(у - уо)2 = ~D(x — х0),
где хо = F'/D. Полагая р = |2?|/(2IC'D, мы опять получим
смещенное уравнение параболы (у — уо)2 = 2р(х — xq) (при
CD < 0) или (у — уо)2 = —2р(х — xq) (при CD > 0). После
параллельного переноса системы координат
X1 = х - Хо, у' = у-уо
первое из этих уравнений преобразуется в каноническое урав-
нение параболы (у')2 = 2рх', а второе сведется к уравнению
(у')2 = —2рх'. Последнее уравнение преобразуется в канониче-
ское уравнение параболы у2 = 2рх после переобозначения пере-
менных х = —х', у = —у'.
328
11. КРИВЫЕ ВТОРОГО ПОРЯДКА
Если в этом варианте слагаемое с х в первой степени в
уравнении отсутствует (Z) = 0), то уравнение имеет вид
Cy2 + Ey + F = 0, С/0,
т.е. является квадратным относительно у. Это тоже один из
вырожденных случаев, в котором выделение полного квадрата
по у дает уравнение одного из трех видов:
(!/-!/о)2 = а2, (у-!/о)2 = 0, (у- уо)2 = -а2,
где уо = —Е/(2С); а = ^/|-F + Е2/(4С)| 0. Так что и в этом
случае получаем пару параллельных (различных, совпадающих,
мнимых) прямых, параллельных оси Ох.
Рассмотрим случай, когда в уравнении (11.17) отсутствуют
квадраты переменных, т.е. оно имеет вид
Bxy + Dx + Ey + F = 0, В/0. (11.19)
Такое уравнение можно привести к виду
(х - х0)(у - уо) + F1 = 0,
где xq = —Е/В-, уо = -D/B-, F' = F - хоуо- Полагая |/р/| = а2/2,
в зависимости от знака F' приходим к одному из уравнений
а2 а2
(х-х0)(у-у0) = у, (х-хо)(у-уо) = (И.20)
Если а 0, мы получаем смещенное уравнение гипер-
болы в асимптотах. Название отражает то, что после па-
раллельного переноса системы координат х1 = х — xq, у' = У~Уо
уравнение превратится в уравнение гиперболы в асимптотах
х’у1 = а2/2 или в уравнение сопряженной гиперболы в асимпто-
тах х'у' = —а2/2.
Если а = 0, оба уравнения (11.20) будут одинаковы, их
геометрическим образом будет пара пересекающихся прямых
X = х0 и у = уо.
11.4. Неполные уравнения кривой второго порядка 329
Несложный анализ приведенных преобразований неполного
уравнения кривой второго порядка показывает, что при АС > О,
В = 0 геометрическим образом уравнения могут быть лишь
эллипс (окружность при А = С), точка или мнимый эллипс.
Поэтому случай АС > О, В = 0 называют эллиптическим.
В то же время в случае АС <0, В = 0 геометрическим
образом уравнения могут быть лишь гипербола или пара пе-
ресекающихся прямых, которую можно рассматривать как вы-
рожденный случай гиперболы. Аналогична ситуация и в случае
А = С = 0, В 0. Эти случаи называют гиперболическими.
Наконец, если в уравнении из трех коэффициентов при
слагаемых второго порядка отличен от нуля только один, А
или С, то геометрическим образом может быть или парабола,
или пара параллельных (совпадающих) прямых. Этот случай
называют параболическим.
В задачах на исследование кривых второго порядка, задан-
ных в прямоугольной системе координат неполными уравнени-
ями, обычно требуется определить каноническое уравнение и
вычислить в системе координат Оху: для параболы — коорди-
наты вершины и фокуса, уравнение директрисы', для эллипса —
координаты центра, вершин и фокусов, полуоси и эксцентри-
ситет, уравнения директрис, а для гиперболы — еще и урав-
нения асимптот.
Пример 11.5. Исследуем кривую второго порядка, задан-
ную своим уравнением 9а:2 + 4у2 — 18ж + 16у — 11 = 0.
В этом неполном уравнении второго порядка коэффициенты
при квадратах переменных имеют одинаковый знак. Значит
уравнение относится к эллиптическому типу. Выделяя полные
квадраты по обоим переменным, получаем
9(ж2 - 2х +1 - 1) + 4(у2 + 4у + 4 - 4) - 11 = 0,
9(z-1)2 + 4(!/ + 2)2 = 36,
(ж~ !)2 , (у + 2)2
22 + З2 “
330
11. КРИВЫЕ ВТОРОГО ПОРЯДКА
Следовательно, после параллельного переноса системы ко-
ординат х' = х — 1, у' = у + 2 получим уравнение
Рис. 11.20
(*У . (У')2
22 + 32
которое задает эллипс с полуося-
ми а = 2, 6 = 3. Так как а < Ь,
то фокусы лежат на вертикаль-
ной оси симметрии. Поэтому
с = у/b2 — а2 = \/5, а эксцентриси-
тет е = с/Ь = 75/3. Центр элли-
пса находится в точке О' с ко-
ординатами (1; — 2) (рис. 11.20).
Отметим, что полученное урав-
нение эллипса не является кано-
ническим, для перехода в кано-
ническую систему координат требуется дополнительный пово-
рот системы координат О'х'у' на угол 90°.
Приведем остальные характеристики кривой:
Система координат
Координаты вершин
Координаты фокусов
Уравнения директрис
О'х'у'
Л(-2;0)
В(2;0)
С(0; -3)
0(0; 3)
Fi (0; - Л)
F2(0; Тб)
у' = ±9/у/5
Оху
А(1-2; -2)
В(1 + 2; -2)
С(1; -2-3)
0(1; -2 + 3)
Fi(l; -2-75)
Г2 (1; - 2 + 75)
у + 2 = ±9/у/5
Пример 11.6. Неполное уравнение 4а:2 + 16у2 + 8а: — 64у +
+ 4 = 0 кривой второго порядка тоже относится к эллиптиче-
скому типу. Выделяя полные квадраты по обоим переменным,
11.4. Неполные уравнения кривой второго порядка
331
получаем
4(ж2 + 2z + 1 - 1) + 16(у2 - 4у + 4 - 4) + 4 = О,
4(а: + I)2 + 16(t/— 2)2 = 64,
(х + 1)2 , (у-2)2
42 22
Выполнив параллельный перенос системы координат х' — х + 1,
у' = у — 2, запишем каноническое уравнение эллипса
(*х)2 . (уТ,
42 22
с полуосями а = 4, 6 = 2. Так как a > b, то фокусы лежат на
горизонтальной оси симметрии. Поэтому с = у/a2 — Ь2 = 2у/3,
а эксцентриситет e=.cfa = \/3/2. Центр эллипса находится в
точке О' с координатами (—1; 2) (рис. 11.21).
Приведем остальные характеристики кривой:
Система координат О'х'у' Оху
Координаты вершин Л(-4;0) Л(—1—4; 2)
В(4;0) В(—1 +4; 2)
0(0; -2) С(-1; 2-2)
D(0; 2) D(-l; 2 + 2)
Координаты фокусов Fi (-2>/3; 0) Л (-1 - 2л/3; 2)
Г2(2л/3;0) F2(-l + 2^/3;2)
Уравнения директрис х' = ±8/у/3 х + 1 = ±8/л/3
332 п. КРИВЫЕ ВТОРОГО ПОРЯДКА
Пример 11.7. В неполном уравнении кривой второго по-
рядка 4а:2 - 9t/2 - 24а: + 18у -9 = 0 коэффициенты при квадратах
переменных имеют противоположный знак. Поэтому уравнение
относится к гиперболическому типу. Выделяя полные квадра-
ты по обоим переменным, получаем
4(ж2 - 6х + 9 - 9) - 9(у2 - 2у + 1 - 1) - 9 = 0,
4(z — З)2 — 9(у—I)2 = 36,
(ж-3)2 (у-1)2
З2 22
В канонических координатах х' = х — 3, у' = у — 1 уравнение
имеет вид
(»')г W ,
З2 22
Оно задает гиперболу с центром в точке О'(3; 1), действи-
тельной полуосью а = 3, мнимой полуосью 6 = 2. При этом
с — \/а2 + 62 = \/13, £ = с/а = у/13/3 (рис. 11.22).
Рис. 11.22
11.4. Неполные уравнения кривой второго порядка
333
Приведем сводку остальных характеристик по этой гипер-
боле:
Система координат О'х'у'
Оху
Координаты вершин
Координаты фокусов
Уравнения директрис
Уравнения асимптот
Л(-3; 0)
В(3; 0)
Fi (-л/13; 0)
F2(-/13;0)
х' = ±9/л/1з
у' = ±2/31/
А(3- 3; 1)
В(3±3; 1)
Fi(3- л/13; 1)
F2(3 + V^3; 1)
х - 3 = ±9/л/13
у — 1 = ±2(х — 3)/3
Пример 11.8. Неполное уравнение кривой второго по-
рядка х2 + 2х - бу + 7 = 0 относится к параболическому типу,
поскольку содержит только одно слагаемое с переменным в ква-
драте. Выделяя полный квадрат по х, получаем
(х2 + 2ж + 1-1)-бу + 7 = О,
(ж + 1)2 = 6(у- 1).
В координатах ж' = ж + 1, у' = у - 1 уравнение имеет вид
(ж')2 = 2-3у'.
Это парабола с вертикальной осью симметрии, для которой р =
= 3, ар/2 = 1,5. Вершина параболы находится в точке О'(—1; 1)
(рис. 11.23).
Рис. 11.23
334
11. КРИВЫЕ ВТОРОГО ПОРЯДКА
Укажем остальные характеристики кривой:
Система координат О'х'у'
Координаты фокуса F(0; 1,5)
Уравнение директрисы х' = —1,5
Оху
F(—l; 1 + 1,5)
х + 1 = -1,5
Пример 11.9. Неполное уравнение ху~ х — 2у4- 6 = О кри-
вой второго порядка относится к гиперболическому типу, по-
скольку оно не содержит слагаемых с квадратами переменных,
но имеет слагаемое с их произведением. Преобразуем уравне-
ние:
х(у — 1) — 2(у—14-1) 4-6 = 0,
(у - 1)(® — 2) 4-4 = 0,
(ж - 2)(у—1) = —8/2.
В канонических координатах х' = х - 2, у' = у — 1 уравнение
имеет вид
х'у' = -(2\/2)72,
т.е. представляет собой уравнение сопряженной гиперболы в
асимптотах с полуосями а = b = 2\/2. Далее находим с =
= у/а2 + 62 = 4, £ = с/а = 4/(2>/2) = у/2. Центр гиперболы
находится в точке О'(2; 1) (рис. 11.24).
Рис. 11.24
Д.11.1. Полярные уравнения
335
Даем сводку остальных характеристик по этой кривой:
Система координат
Координаты вершин
Координаты фокусов
Уравнения директрис
Уравнения асимптот
О'х'у'
Л(-2; 2)
В(2; —2)
2у/2)
F3(2y/2; -2л/2)
у' = х'±2>Д
у' = о
х' = О
Оху
А(2-2; 1 + 2)
В(2 + 2; 1 — 2)
FJ2-2V2; 1 + 2л/2)
F2(2 + 2V2; 1 — 25/2)
у - 1 = ±2у/2(х - 2)
у—1 = 0
х —2 = 0
Дополнение 11.1. Полярные уравнения
Часто используют уравнения эллипса, гиперболы и парабо-
лы в полярной системе координат. На вид этих уравнений
влияет взаимное расположение канонической системы коорди-
нат кривой и полярной системы координат. Мы фиксируем
полюс полярной системы координат в фокусе кривой. При этом
для эллипса выбираем левый фокус, а для гиперболы правый,
если рассматривать их расположение в канонической системе
координат. Полярную ось выбираем так, чтобы ее направление
совпадало с положительным направлением оси абсцисс канони-
ческой системы координат.
Все три вида кривых описываются общим свойством: для
любой их точки отношение расстояний до фокуса и до дирек-
трисы постоянно и равно эксцентриситету кривой. Значение
эксцентриситета определяет тип кривой. Если зафиксировать
фокальный параметр, так что положение директрисы в вы-
бранной системе координат будет оставаться неизменным, мы,
варьируя эксцентриситет, получим единый ряд эллипсов, па-
раболы, правых ветвей гипербол (рис. 11.25, а). Конкретная
кривая определяется своим эксцентриситетом г при помощи
уравнения
(11.21)
\МР\ '
где р — полярный, он же фокальный, радиус точки М на
кривой; МР — перпендикуляр, опущенный иэ точки М на
директрису d (рис. 11.25,6).
336
11. КРИВЫЕ ВТОРОГО ПОРЯДКА
Так как
\М Р| = p + pcos<p,
то, подставив это выражение в (11.21), получим
p + pcos<p
или
. (11.22)
1 — £COS</J
Уравнение (11.22) называют полярным уравнением эллип-
са, параболы и правой ветви гиперболы.
Если точка М (рис. 11.26) принадлежит левой ветви гипер-
болы, то
|Л/Р| = -pcosip -р,
и поэтому из (11-21) полярное уравнение левой ветви гиперболы
получаем в виде
Р= . ~Р£- • (И-23)
l+ecos<p
Вопросы и задачи
337
Вопросы и задачи
11.1. Доказать, что у сопряженных гипербол фокальные
расстояния совпадают.
11.2. Доказать, что при повороте канонической системы
координат на угол тг/2 уравнение сопряженной гиперболы
превратится в каноническое уравнение гиперболы.
11.3. Найти уравнение эллипса, если его оси симметрии
параллельны осям координат, которых он касается, а центр
находится в точке (—3;2).
11.4. Найти уравнение гиперболы с центром в точке (2; 1),
если ее оси симметрии параллельны осям координат, ее асим-
птота проходит через начало системы координат и эта гипер-
бола касается: а) оси абсцисс; б) оси ординат.
11.5. Найти уравнение равнобочной гиперболы с центром
в точке (2; 1) и проходящей через начало системы координат,
если одна из ее асимптот: а) вертикальна; б) горизонтальна;
в) параллельна прямой у = х.
11.6. Найти уравнение параболы с вершиной в точке (1; 3),
проходящей через точку (3; — 1), ось симметрии которой: а) вер-
тикальна; б) горизонтальна.
338 11. КРИВЫЕ ВТОРОГО ПОРЯДКА
11.7. Преобразовать уравнение кривой второго порядка и
построить его геометрический образ в системе координат Оху,
определив: для параболы — координаты вершины и фокуса,
уравнение директрисы; для эллипса — координаты центра,
вершин и фокусов, полуоси и эксцентриситет, уравнения ди-
ректрис; для гиперболы — еще и уравнения асимптот:
а) ху- х-у+1 = 0;
б) ху-х -у + 5 = 0;
в) 4а:2 — 9у2 — 16а: — 36у - 56 = 0;
г) 4а:2 - 25у2 - 16а: - 100у 4- 16 = 0;
д) х2 - 16у2 - 2а: - 64у - 47 = 0;
е) х2 — 10а: - 4у 4- 57 = 0;
ж) ху - 9а: - 4у + 72 = 0;
з) 2а:2 + 2у2 + 4х — 8у+ 11 = 0;
и) 2х2 - у2 4- 4х - 8у + 36 = 0.
11.8. Составить уравнение параболы, если ее фокусом
является точка (2; -4), а директрисой: а) ось ординат; б) ось
абсцисс; в) прямая у = 8.
11.9. Доказать, что в полярных уравнениях кривых второго
порядка знаменатели не обращаются в нуль.
11.10. Найти каноническое уравнение кривой второго по-
рядка по ее полярному уравнению:
. 15 15 5
а) р=-—--------; б) р =----------; в) р =---------.
5 — 3cosy? 3 — 5 cos у? 1 —cos<p
12. ПОВЕРХНОСТИ
ВТОРОГО ПОРЯДКА
12.1. Поверхность вращения
и преобразование сжатия
Поверхность вращения. Простейшие поверхности в про-
странстве — это плоскости. Они являются геометрическими
образами уравнений первой степени от трех переменных. Дру-
гой достаточно простой тип поверхностей составляют поверх-
ности вращения.
Определение 12.1. Поверхность Q называют поверхно-
стью вращения, если она образована окружностями с цен-
трами на некоторой прямой L (оси вра-
щения), которые расположены в плоско-
стях, перпендикулярных L (рис. 12.1).
Уравнение поверхности вращения Q
имеет наиболее простой вид, когда нача-
ло О прямоугольной системы координат
лежит на оси вращения, а ось Ог совпа-
дает с ней. Пересечение поверхности Я
с координатной плоскостью Oxz — это
некоторое множество S (рис. 12.2), вра-
щение которого образует J2.
Предположим, что множество S в рис< 12,i
плоскости Oxz описывается уравнением
<p(x,z) — 0. Рассмотрим произвольную точку M(x;y;z). Она
удалена от оси Ог на расстояние d = \/х2 + у2. Если точка
М лежит на поверхности вращения Я, то точки Mi(x\-, 0; z),
Л^2(®2> 0; z) с той же аппликатой z, что и М, и абсциссами xi=d,
340
12. ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
х2 = —d принадлежат множеству S. Поэтому
0 = 4>(xx,z) = y>(d,z) = <p(\/x2 + y2,z),
0 = 4>(x2,z) = <p(—d,z) = (p(-y/x2 + y2,z)
и условие M € Q сводится к тому, что координаты точки М
удовлетворяют равенству
у>(±хЛ;2+у2,я)=0. (12.1)
Уравнение (12.1) и есть уравнение
поверхности Q, которая образова-
на вращением подмножества S —
= {(a:;z): >p(x}z) = 0}, расположен-
ного в координатной плоскости
Oxz. Из уравнения множества S
уравнение (12.1) соответствую-
щей поверхности вращения полу-
чается заменой х на ±у/х2 4- у2.
Преобразование сжатия. Под преобразованием сжа-
тия к координатной плоскости Oxz мы понимаем такое пре-
образование, при котором точка М(х;у; z) смещается в точку
М'(х; y/k; z), к > 0. Параметр к называют коэффициентом
сжатия. При к > 1 точки пространства, расположенные на
одной прямой, перпендикулярной плоскости Oxz, в результа-
те такого преобразования сближаются, т.е. преобразование —
действительно сжатие. При 0 < к < 1 преобразование фактиче-
ски является растяжением.
Пусть в пространстве в прямоугольной системе коорди-
нат Oxyz некоторое множество Q задано своим уравнением
F(x,y,z) = 0. При преобразовании сжатия к координатной
плоскости Oxz с коэффициентом к это множество превратит-
ся в новое множество Q1 с уравнением F(x,ky,z) — 0. Это
следует из того, что точка (я; у, z) тогда и только тогда при-
надлежит множеству Q1, когда точка (х; ку, z) принадлежит
множеству Q.
12.2. Эллипсоиды
341
12.2. Эллипсоиды
Поверхность, которая получается при вращении эллипса
вокруг одной из его осей симметрии, называют эллипсоидом
вращения (рис. 12.3)
Уравнение эллипсоида вращения выведем, расположив на-
чало прямоугольной системы координат в центре эллипса и
совместив ось аппликат Ог с осью вращения, а координатную
плоскость Oxz — с плоскостью эллипса (рис. 12.4). Тогда урав-
нение эллипса будет иметь вид
Если в этом уравнении заменить х на ±у/х2 + у2 (см. 12.1), то
получится уравнение
х2 + У2 Z2 _
а2 + Ь2
соответствующей поверхности вращения. Итак, эллипсоид
вращения с осью вращения Ог описывается уравнением
Рис. 12.3
Рис. 12.4
342
12. ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
Применив к эллипсоиду вращения преобразование сжатия к
координатной плоскости Oxz, получим эллипсоид общего ви-
да. Если к — коэффициент сжатия, то уравнение эллипсоида
будет иметь вид
х2 t к2 у2 , г2 ,
а2 а2 + Ь2
или, после переобозначения параметров,
я2 у2 Z2 л
к — Ч-= 1.
а2-----------------Ь2 с2
(12.3)
Уравнение (12.3) задает поверхность второго порядка. Его
называют каноническим уравнением эллипсоида. Три па-
раметра а, b и с, входящие в него — это полуоси эллипсоида
(рис. 12.5). Если все три полуоси эллипсоида попарно различны,
то эллипсоид называют трехосным.
Рис. 12.5
При совпадении каких-либо двух полуосей (как, например,
в уравнении (12.2)) эллипсоид является поверхностью вращения
(эллипсоидом вращения). Если равны все три полуоси (а = Ь =
= с — г), то эллипсоид превращается в сферу радиуса г, которая
описывается уравнением
Х2 + у2 + ? = Г2.
12.3. Гиперболоиды
343
12.3. Гиперболоиды
При вращении гиперболы вокруг одной из ее осей сим-
метрии получается поверхность, называемая гиперболоидом
вращения. Выбор оси вращения влияет на тип гиперболоида.
Если осью вращения является действительная ось симметрии
гиперболы, то поверхность вращения будет состоять из двух
частей (полостей). Это двуполостный гиперболоид вра-
щения (рис. 12.6). При вращении гиперболы вокруг ее мнимой
оси симметрии поверхность будет состоять из одной полости
(рис. 12.7). Такую поверхность называют однополостным
гиперболоидом вращения.
Для вывода уравнений гиперболоидов вращения расположим
прямоугольную систему координат так, чтобы ось вращения,
являющаяся осью симметрии гиперболы, совпадала с осью
аппликат Ог, а сама гипербола располагалась в координатной
плоскости Oxz с центром в начале системы координат.
Для случая двуполостного гиперболоида вращения уравне-
ние гиперболы будет иметь вид
Рис. 12.6
Рис. 12.7
344 12. ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
Заменив в нем х на ±^х2 + У2 (см- 12’1), получим уравнение
а2 + а2 Ь2~
(12.4)
В случае однополостного гиперболоида вращения гипербола
будет описываться уравнением
X2 Z2 _
а2 ~ Ь2 -1‘
Опять меняем х на радикал гЬу/х2 + у2, получаем
X2 у2 Z2
а2 + ^~Ь2
(12.5)
уравнение однополостного гиперболоида вращения.
Гиперболоиды вращения преобразованием сжатия к коор-
динатной плоскости Oxz превращаются в двуполостный и
однополостный гиперболоиды общего вида. При коэффи-
циенте сжатия к их уравнениями будут соответственно
х2 к2у2 z2 _ х2 к2у2 z2 _
а2 + а2 Ь2~ И а2 + а2 Ь2 ~
После переобозначений параметров эти уравнения преобразу-
ются в каноническое уравнение двуполостного (рис. 12.8)
Д2
а2 Ь2 с2
(12.6)
и однополостного (рис. 12.9) гиперболоидов
-4-^-- — =
а2 Ь2 с2
(12.7)
12.4. Эллиптические параболоиды
345
Как видно из уравнений (12.6), (12.7), оба гиперболоида явля-
ются поверхностями второго порядка.
Рис. 12.8
Рис. 12.9
12.4. Эллиптические параболоиды
При вращении параболы вокруг ее оси получаем парабо-
лоид вращения (рис. 12.10). Чтобы найти его уравнение,
выберем прямоугольную систему координат, направив ось Oz
по оси вращения и совместив координатную плоскость Oxz с
плоскостью параболы. Пусть при этом парабола описывается
уравнением х2 = 2pz, р > 0. Тогда для получения уравнения по-
верхности вращения нужно заменить в этом уравнении х на
±\4г2 + у2 (см. 12.1):
2pz = х2 + у2.
Преобразование сжатия параболоида вращения к коорди-
натной плоскости Oxz с коэффициентом k дает поверхность
346
12. ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
более общего вида — эллиптиче-
ский параболоид, уравнением ко-
торого будет
2pz — х2 + k2y2.
После переобозначения параметров
получаем каноническое уравне-
ние эллиптического параболо-
ида
X2 и2
(12-8)
Рис. 12.10 Видим, что эллиптический парабо-
лоид является поверхностью вто-
рого порядка. При а = b он превращается в параболоид вра-
щения.
12.5. Конусы
При вращении прямой L, пересекающейся с осью враще-
ния, образуется прямой круговой конус (рис. 12.11). Точка
Рис. 12.11
пересечения вращающейся прямой с осью
вращения остается неподвижной, ее назы-
вают вершиной конуса.
Как и ранее, уравнение будем выводить
в прямоугольной системе координат, ось
Ог которой совпадает с осью вращения,
а начало системы координат — с верши-
ной конуса. Ось Ох расположим так, что-
бы прямая L находилась в координатной
плоскости Oxz и описывалась уравнени-
ем z = k\x. В этой системе координат
уравнение поверхности вращения получа-
ется из уравнения прямой заменой х на
12.6. Цилиндрические поверхности
347
±-уЛг2 4-у2 (см. 12.1). В результате такой замены получаем
z = ±ki -\/х2 + у2. Возведя уравнение в квадрат, придем к соот-
ношению z2 = к2(х2 + у2), а разделив его на с2 = fc2a2, получим
каноническое уравнение прямого кругового конуса
а2 а2 с2’
Преобразование сжатия прямого кругового конуса к коор-
динатной плоскости 0x2 с коэффициентом к дает эллипти-
ческий конус. Его уравнение имеет вид
х2 k2y2 _ z2
а2 + а2 с2'
или, после переобозначения параметров,
X2 у2 _ Z2
а2 + Ь2 ~ с2'
(12.9)
Уравнение (12.9) называют каноническим уравнением
эллиптического конуса. Эллиптический конус при а = b
совпадает с прямым круговым конусом, и оба они являются
поверхностями второго порядка.
12.6. Цилиндрические поверхности
При вращении прямой вокруг оси вращения, параллельной
этой прямой, образуется поверхность, которую называют кру-
говым цилиндром (рис, 12.12). Эта поверхность является
частным случаем цилиндрической поверхности, получаю-
щейся при движении прямой в пространстве, которая остается
параллельной своему исходному положению (рис. 12.13). Если
на движущейся прямой фиксировать точку, то она опишет кри-
вую, которую называют направляющей цилиндрической
поверхности (см. рис. 12.13). Можно также сказать, что
цилиндрическая поверхность представляет собой множество
348 12. ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
точек на прямых, параллельных фиксированной прямой. Эти
параллельные прямые называют образующими цилиндриче-
ской поверхности.
Рис. 12.12
Рис. 12.13
В качестве направляющей цилиндра можно взять любую
кривую, образованную пересечением цилиндрической поверх-
ности с плоскостью, не параллельной образующим. Выберем
прямоугольную систему координат так, чтобы образующие
цилиндрической поверхности были параллельны оси Ог. В ка-
честве направляющей выберем кривую, являющуюся пересече-
нием цилиндрической поверхности с координатной плоскостью
хОу (рис. 12.14).
Рис. 12.14
12.6. Цилиндрические поверхности
349
Направляющая в плоскости хОу описывается некоторым
уравнением двух переменных <р(х,у) = 0. Точка M(x‘,y;z) ле-
жит на цилиндрической поверхности тогда и только тогда,
когда ее абсцисса и ордината (фактически координаты точки
N(x-, у; 0) на плоскости хОу) подчиняются уравнению направля-
ющей. Поэтому в выбранной системе координат цилиндриче-
ская поверхность описывается уравнением <р(х,у) = 0 — уравне-
нием своей направляющей, которое трактуется как уравнение
трех переменных х, у и z. Верно и обратное утверждение: если
в некоторой прямоугольной системе координат в пространстве
поверхность описывается уравнением, не содержащим одного
из переменных, то эта поверхность является цилиндрической.
Итак, критерием для цилиндрической поверхности является
отсутствие в. ее уравнении в подходящей системе координат
одного из переменных.
Цилиндр второго порядка — это цилиндрическая по-
верхность, направляющая которой в плоскости, перпендикуляр-
ной образующим, представляет собой кривую второго порядка.
В выбранной выше прямоугольной системе координат цилиндр
второго порядка описывается уравнением второй степени
Ах2 + 2Вху + Су2 4- 2Dx 4- 2Еу 4- F = 0,
где А2 4-В2 4-С2 0.
Это уравнение можно упростить подходящим выбором сис-
темы координат. Фактически речь идет о приведении к кано-
ническому виду уравнений второго порядка от двух перемен-
ных (см. 11.4, а также [IV]). Канонические уравнения кривых
второго порядка приводят к трем видам цилиндров второго
порядка:
- эллиптическому (рис. 12.15, а) с каноническим уравне-
х2 У2
нием 4- 77 = 1;
а2 о2
350 12. ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
- гиперболическому (рис. 12.15, б) с каноническим урав-
х2 У2
нением —? - -тх = 1;
cr tr
- параболическому с каноническим уравнением у2 = 2рх
(рис. 12.15, в).
Отметим, что если направляющей является пара пересекаю-
щихся (параллельных, совпадающих) прямых, то соответствую-
щая им цилиндрическая поверхность представляют собой пару
пересекающихся (параллельных, совпадающих) плоскостей.
Рис. 12.15
12.7. Метод сечений
351
12.7. Метод сечений
Для выяснения формы поверхности в пространстве по ее
уравнению
Ф(х,у,г) = 0 (12.10)
часто используют так называемый метод сечений. Он со-
стоит в анализе пересечений поверхности с плоскостями, парал-
лельными координатным плоскостям, например с плоскостями
вида z = с, где параметр с пробегает все действительные зна-
чения. Для каждого значения с система уравнений
Ф(х,у,г) = 0,
Z = с
к
(12.11)
задает соответствующее пересечение. Критерием принадлеж-
ности точки М(х; у; z) этому пересечению являются следующие
условия: a) z = с; б) координаты х и у ее проекции на ко-
ординатную плоскость хОу, т.е. координаты точки W(x;y;0),
удовлетворяют уравнению
Ф(х,у,с) = 0. (12.12)
Зная эти пересечения, т.е. кривые (12.12), можно предста-
вить форму поверхности. Отметим, что указанный „рентген“
поверхности можно проводить другими плоскостями, но они
должны быть параллельными между собой.
Обычно при исследовании формы поверхности методом се-
чений используют две точки зрения на уравнение (12.12). Пер-
вая состоит в том, что его интерпретируют как уравнение
проекции на координатную плоскость хОу сечения (12.11). Со-
гласно второй точке зрения предполагают, что в секущей плос-
кости имеется прямоугольная система координат с началом в
точке О' пересечения секущей плоскости с осью Ог и осями, О'х
и О'у, которые проектируются на соответствующие оси Ох и
Оу системы координат Oxyz. Это позволяет говорить о (12.12)
как об уравнении сечения (12.11) в секущей плоскости.
352
12. ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
Пример 12.1. В качестве примера рассмотрим уравнение
эллиптического параболоида (12.8)
х2 у2
~2+T2=2z
а2 Ъ2
и исследуем его форму методом сечений.
Пересечение этой поверхности с плоскостью z = с описыва-
ется уравнением
х2 у2
При с < 0 пересечение пусто, при с = 0 оно совпадает с началом
системы координат Oxyz, а при с > 0 представляет собой
эллипс
X2 у2
(ау/2с)2 + (Ь-\/2с)2
Оси этого эллипса с ростом параметра с увеличиваются, и
можно представить форму поверхности (рис. 12.16, а). Кстати,
слово „эллиптический" в названии поверхности и указывает на
то, что среди ее сечений имеются эллипсы.
Пересечения этой же поверхности как с плоскостью х = с
(рис. 12.16, б), так и с плоскостью у = с (рис. 12.16, в) представ-
ляют собой параболы
с2 у2
~^+Ъ=2г
а2 о2
и
X2 с _
’^+Ь2 =
соответственно. Параболы в каждом из этих семейств сече-
ний имеют равные параметры (они не зависят от значения с).
Эти сечения позволяют дать еще одно геометрическое постро-
ение эллиптического параболоида. Рассмотрим параболу Pi,
находящуюся в плоскости у = 0, и аналогичную параболу Pi
12.7. Метод сечений
353
б
в
Рис. 12.16
354
12. ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
Рис. 12.17
в плоскости х = 0 (рис. 12.17, а). Пусть вторая парабола Ра
перемещается в пространстве так, что:
- вершина параболы Рг все время находится на параболе Pj;
- ось параболы Ра параллельна оси параболы Pj;
плоскость параболы Ра перпендикулярна плоскости пара-
болы Рр
Тогда в результате такого перемещения и образуется элли-
птический параболоид. При этом роли парабол Pj и Рг можно
поменять,, т.е. перемещать параболу Pi, используя параболу Р2
как направляющую. #
Уравнение
X2 и2
J-&=2z <12ЛЗ>
отличается от уравнения (12.8) эллиптического параболоида
лишь знаком одного слагаемого и тоже задает поверхность вто-
рого порядка. Ее называют гиперболическим параболои-
дом, а само уравнение (12.13) — каноническим уравнением
гиперболического параболоида.
12.8. Неполные уравнения поверхности второго порядка 355
Исследуем вид гиперболического параболоида методом се-
чений. Его пересечения с плоскостями у = с при любом значе-
нии с являются параболами:
X2 с2
-2 - = 2^.
Пересечения с плоскостями х = с тоже при всех значениях с
являются параболами:
с2 у2
— _ __ — Оу
а2 62
Обозначим через Р\ параболу, находящуюся в сечении г/ = О,
а через — аналогичную параболу в сечении х — 0. Переме-
щая, как и выше, параболу Р? по параболе Pi (рис. 12.17,6),
получаем седлообразную поверхность гиперболического пара-
болоида.
Пересечения гиперболического параболоида с плоскостями
z = с при с / 0 являются гиперболами
--^ = 2с
а2 62 ’
а при с — 0 — парой пересекающихся прямых
^-^ = 0
а2 62
Выбор названия поверхности объясняется характером се-
чений: горизонтальные сечения гиперболического параболои-
да — это гиперболы, а два других семейства рассмотренных
сечений — параболы.
12.8. Неполные уравнения
поверхности второго порядка
Поверхность второго порядка в пространстве в задан-
ной прямоугольной системе координат описывается уравнени-
ем с десятью коэффициентами:
Ах2 + By2 + Cz2 + Dxy + Exz+ Fyz + Gx + Hy + Kz + L = 0,
356
12. ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
причем среди первых шести коэффициентов, от А до F, должен
быть хотя бы один ненулевой.
Мы, как и в случае кривых второго порядка, не будем про-
водить полную классификацию поверхностей второго порядка,
отложив ее до изучения курса линейной алгебры [IV].
В этом разделе мы рассмотрим случай неполного уравнения
поверхности второго порядка, т.е. когда в уравнении отсут-
ствуют попарные произведения переменных:
Ах2 4- By2 + Cz2 + Gx + Hy+Kz + L = 0. (12.14)
Такое уравнение второго порядка при помощи параллельно-
го переноса системы координат и, возможно, переобозначения
переменных можно преобразовать в одно из канонических урав-
нений поверхности второго порядка или в уравнение вырожден-
ной поверхности второго порядка, хотя в некоторых особых
случаях для упрощения уравнения параллельного переноса не-
достаточно. Такие особые случаи подробно анализируются в
[IV].
Для преобразования уравнения (12.14) используют выделе-
ние полного квадрата по каждому из переменных, входящих в
уравнение во второй и первой степени (см. 11.4 или [I]). При
этом возможны три варианта.
1. В первом варианте уравнение (12.14) содержит квадраты
всех трех переменных. Выделение полного квадрата по х (при
G / 0), по у (при Н / 0) и по z (при К / 0) преобразует
уравнение (12.14) к виду
А(х - х0)2 4- В(у - у0)2 4- C(z - z0)2 = Г, (12.15)
где
G Н К , G2 Н2 К2
Х° ~ 2А’ Уо~ 2В' Z°~ 2С' ~ + 4А + 4В + 4G’
Пусть в полученном уравнении (12.15) I//0. Тогда, введя
обозначения а2 = |L'|/|А|, b2 = |L'| / |В|, с2 = |1/|/ |С|, придем к
12.8. Неполные уравнения поверхности второго порядка
357
смещенному уравнению поверхности второго порядка.
В зависимости от знаков коэффициентов уравнения (12.15) это
могут быть уравнения эллипсоида
(х-х0)2 (у~Уо)2 (г-з0)2_
„г + — + -1- <12Л6)
однополостного гиперболоида
(* ~ *о)2 (у ~ Уо)2 _ (* ~ *о)2 _
a2 ft2 с2 ’
(* ~ *о)2 _ (у —Уо)2 + (з-зо)2 = j (12.17)
а2 ft2 с2 ’
(х - х0)2 _ (у - г/р)2 _ (z - zq)2 _
а2 b2 с2 ~ ’
двуполостного гиперболоида
(х - *о)2 (у - Уо)2 _ (г - гр)2 _
а2 + Ь2 с2 ~ ’
(х-хо)2 (у-уо)2 (z-z0)2_i (12.18)
а2 Ь2 с2 ’
(х ~ до)2 _ (У~Уо)2 (*-*о)2 _
а2 Ь2 с2
или мнимого эллипсоида
(х-х0)2 (у- Уо)2 . (г — го)2 _ 1
а2 + Ь2 + с2 ~ ’
называемого так потому, что уравнение напоминает уравнение
эллипсоида, но в отличие от последнего описывает пустое
множество.
Если L' = 0, то, вводя обозначения а2 = 1/|А|, Ь2 = 1/|В|, с2 =
= 1/ |С|, также приходим к смещенному уравнению поверхности
второго порядка. В зависимости от знаков коэффициентов
358
12. ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
уравнения (12.15) это могут быть уравнения конуса
(* ~ До)2 (У~Уо)2 _ (* - г0)2 _
а2 + 62 с2
(д ~ До)2 _ (У ~ Уо)2 , (г ~ го)2 п (12 19)
а2 Ь2 с2
(д~ Zp)2 _ (у - t/o)2 (г-zp)2 _
а2 Ь2 “ с2
или точки
- До)2 , (у-Уо)2 , (* - *о)2 _ п
а2 Ь2 с2
Замечание 12.1. После параллельного переноса системы
координат
х' = х-х0, у’ = у-уо, z'— Z — Zq
в точку О'(хо; Уо! го) уравнение (12.16) и первые в тройках урав-
нений (12.17)-(12.19) в новых переменных примут канониче-
ский вид, в то время как остальные уравнения в (12.17)-(12.19)
преобразуются к каноническому виду дополнительным пере-
обозначением переменных в соответствующей координатной
плоскости. Это переобозначение переменных важно с тео-
ретической точки зрения, так как позволяет определить тип
поверхности, хотя положение этой поверхности в системе ко-
ординат O'x'y'z' принципиально иное, нежели в канонической
системе координат (на рис. 12.18 приведены три варианта по-
ложения однополостного гиперболоида). На практике допол-
нительное изменение системы координат не реализуют и изо-
бражают поверхность в системе координат O'x'y'z', получаю-
щейся параллельным переносом. Переобозначение переменных
рассматривают как чисто алгебраическую операцию, позволя-
ющую выяснить положение поверхности относительно системы
координат.
12.8. Неполные уравнения поверхности второго порядка 359
Рис. 12.18
2. Во втором варианте уравнение (12.14) содержит квадра-
ты двух переменных. Здесь выделяются три подварианта:
а) А / О, В / О, С = 0;
б) А/ 0, В = 0, С/0;
в) А = 0, В/ 0, С/ 0.
Эти подварианты сводятся друг к другу переобозначением
переменных. Поэтому они дают одни и те же результаты, и нам
достаточно рассмотреть лишь один из них, например первый.
Если А / 0, В / 0, а С = 0, то в случае К = 0 третье пере-
менное z вообще не входит в уравнение (12.14), которое в этом
случае является уравнением цилиндра второго порядка. Все
возникающие ситуации и тип поверхности полностью характе-
ризуются направляющей цилиндра в плоскости хОу (см. 11.4).
360
12. ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
В случае К / 0 выделение полного квадрата по х (при G / 0)
и по у (при Н / 0) преобразует уравнение (12.14) к виду
А(х - х0)2 + В(у - у0)2 = -K(z - х0), (12.20)
где
G Н U , G2 Н2
х°~ 2А' Уо~ 2В' Z°~ К' ~ + 4А + 4В
Введя обозначения а2 = 1/|А|, b2 = 1/|В|, p=|JFC|/2, придем
к смещенным уравнениям поверхности второго порядка.
зависимости от знаков коэффициентов в (12.20),
быть уравнения или эллиптического параболоида
(У~Уо)2 _ч
^2 —2p(Z Zq),
(у —Уо)2_ ,
— — 2p(z zq),
В
это могут
(12.21)
(x~Xq)2
а2
(х - Xq)2
а2
или гиперболического параболоида
(s-so)2 _ (У ~ Уо)2 _ 2п/_ , ч
а2 J2 -2Р(г zo),
(х - *о)2 _ (У~Уо)2 _ _2о, _ , ч
а2 1,2 zo)-
3. В третьем варианте уравнение (12.14) содержит квадрат
только одного переменного. Здесь также возникают три сим-
метричных подварианта (квадрат х, квадрат у, квадрат z).
Остановимся на случае А / 0. Если уравнение не содержит или
слагаемого с у в первой степени, или такого же слагаемого с
z, то реализуется случай цилиндра второго порядка, который
сводится к исследованию направляющей цилиндра. Если же в
уравнении присутствуют оба указанных слагаемых первой сте-
пени, как, например, в уравнении x2-|-t/-|-2z = 0, то приведение
уравнения к каноническому виду требует поворота системы ко-
ординат в пространстве. Анализ таких уравнений приведен
в [IV].
(12.22)
12.8. Неполные уравнения поверхности второго порядка
361
Пример 12.2. Упростим уравнение
4х2 + 9у2 4- 36z2 - 8х - 36у + 72z + 40 = О
поверхности второго порядка с помощью параллельного пере-
носа прямоугольной системы координат.
Уравнение содержит каждое из трех переменных в первой
и во второй степени. Поэтому по каждому переменному
выделяем полный квадрат:
4(х2-2х4-1-1) +
+ 9(i/2 - 4i/+ 4 - 4) + 36(z2 + 2z + 1 - 1) + 40 = 0,
4(х - I)2 + 9(з/- 2)2 4- 36(z+ I)2 = 36,
(х ~ I)2 (у ~ 2)2 о
k-^L + i^L + (^+l)2 = l-
Приходим к смещенному уравнению эллипсоида с центром в
точке О'(1; 2; —1) и полуосями a = 3, b= 2, с= 1. Соответству-
ющее каноническое уравнение получается после параллельного
переноса системы координат х' = х — 1, у' — у — 2, z' = z 4-1 и
имеет вид
З2 22
Пример 12.3. Выясним, какая поверхность является гео-
метрическим образом уравнения
х2 - у2 4- z2 — 2х 4- 4у — 2z — 3 = 0.
Как и в примере 12.2, по каждому переменному выделяем
полный квадрат:
(х2 - 2х 4-1 - 1) - (у2 - 4у 4- 4 - 4) 4- (г2 - 2z 4-1 - 1) - 3 = 0,
(х — I)2 — (у — 2)24-(z — I)2 = 1.
362
12. ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
Приходим к смещенному уравнению однополостного гиперболо-
ида вращения с центром в точке О'(1; 2; 1). После параллельно-
го переноса системы координат в эту точку х' — х — 1, у' = у - 2,
z' = z — 1 уравнение принимает вид
(х')2-(/)2 + (/)2 = 1.
Это уравнение не является каноническим из-за несоответствия
знаков. Осью вращения гиперболоида является ось О'у' новой
системы координат (рис. 12.19, а).
Выясним, какую поверхность определяет
Пример 12.4.
уравнение второго порядка
х2-4z2 + 8y + 8z- 12 = 0.
В уравнении нет слагаемого х первой степени и слагаемого у
второй степени. Полный квадрат выделяем только по перемен-
ному z:
х2 - 4(z2 - 2z+ 1 - 1) 4- 8у - 12 = О,
х2 — 4(z — 1)24-8у — 8 = О,
^_(z_1)2 = _2(j/-1).
Д.12.1. Конические и линейчатые поверхности 363
Приходим к смещенному уравнению гиперболического парабо-
лоида. Выполнив параллельный перенос системы координат
х' = х, у' = у — 1, z' = z — 1 в точку Oz(0; 1; 1) получим уравнение
вида
- (z')2 = -2S',
которое преобразуется в каноническое дополнительным пере-
обозначением переменных (рис. 12.19, б).
Замечание 12.2. Для определения вида поверхности и по-
строения ее в новой системе координат (после параллельного
переноса) можно использовать метод сечений. Конечно, если,
как в примере 12.2, уравнение поверхности имеет канонический
вид, то можно воспользоваться приведенным выше выводом ка-
нонических уравнений поверхностей второго порядка. Однако
в примерах 12.3, 12.4 (см. рис. 12.19, а, б) ситуация сложнее, и
использование метода сечений представляется целесообразным
для исключения ошибок.
Дополнение 12.1. Конические
и линейчатые поверхности
Поверхность, которая образуется при движении прямой,
проходящей через некоторую фиксированную точку А, назы-
вают конической. Точка А — это вершина конической
поверхности, а всевозможные прямые на поверхности, пред-
ставляющие собой положения движущейся прямой, — это обра-
зующие конической поверхности (рис. 12.20). Примеры
конических поверхностей дают прямой круговой и эллиптиче-
ский конусы.
Траекторию 7 некоторой фиксированной точки В на дви-
жущейся прямой (но не вершины) можно рассматривать как
направляющую конической поверхности. При этом ко-
ническую поверхность можно определить как множество все-
возможных прямых, проходящих через фиксированную точ-
364 12. ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
ку А (вершину) и пересекающих заданную кривую 7 (направ-
ляющую).
Если начало прямоугольной системы координат Охуг со-
впадает с вершиной конической поверхности, то уравнение
F(x,y,z) = 0 этой поверхности будет иметь следующее свой-
ство. Если F(xo,yo,zo) = 0, то и F(Axo, Ayo, Azo) = 0 для любого
действительного числа А. Это следует из того, что через лю-
бую точку конической поверхности, не являющуюся вершиной,
проходит образующая. Точки М(х0; t/о; ^о) и ЛГ(Ахо; Ау0; Az0)
лежат на этой прямой. Уравнения с описанным свойством на-
зывают однородными. Итак, при указанном выборе системы
координат уравнение конической поверхности будет однород-
ным. Верно и обратное утверждение: геометрическим образом
однородного уравнения является коническая поверхность. Ал-
гебраическое уравнение будет однородным, если оно содержит
слагаемые одной и той же степени. Например, каноническое
уравнение (12.9) эллиптического конуса состоит из слагаемых
второй степени.
Коническая поверхность относится к более широкому клас-
су линейчатых поверхностей, образуемых движущейся
прямой (рис. 12.21). Если движущаяся прямая все время про-
ходит через фиксированную точку (что, вообще говоря, необя-
зательно), то линейчатая поверхность будет конической. Если
прямая движется поступательно, оставаясь параллельной свое-
Д.12.1. Конические и линейчатые поверхности
365
му исходному положению, мы получаем другой вид линейчатой
поверхности — цилиндрическую поверхность.
Рис. 12.21
Линейчатыми, но не коническими, поверхностями являют-
ся однополостный гиперболоид и гиперболический параболоид.
Чтобы убедиться в этом, рассмотрим однополостный гипербо-
лоид, заданный своим каноническим уравнением
X2 у2 Z2
------1- --------= 1.
а2 62 с2
(12.23)
Перенесем второе слагаемой левой части уравнения в его
правую часть
а2 62
и преобразуем уравнение к следующему виду:
(М)(ММ‘4)(ЧГ )
При любом значении параметра Л система
(12.25)
представляет собой общие уравнения прямой. Эта прямая при
любом А принадлежит однополостному гиперболоиду, посколь-
ку при А О уравнение (12.24) гиперболоида получается перем-
ножением уравнений системы (12.25) и сокращением на А. При
366
12. ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
А = 0 (12.24) следует из (12.25), поскольку обе части уравне-
ния (12.24) содержат множители, равные нулю. Таким образом,
однополостному гиперболоиду принадлежит бесконечно много
прямых, описываемых общими уравнениями (12.25). Если к
этим прямым добавить еще одну прямую
1-f = о,
ж (12-26)
- + - = 0,
а с
которую естественно соотнести с бесконечным значением пара-
метра А, то через каждую точку однополостного гиперболоида
будет проходить одна прямая семейства, лежащая на гипербо-
лоиде. Соответствующее значение А можно найти из систе-
мы (12.25). Итак, гиперболоид, который задается уравнением
(12.23), представляет собой множество прямых, описываемых
уравнениями (12.25). Эти прямые называют прямолинейны-
ми образующими однополостного гиперболоида.
Однополостный гиперболоид име-
ет также второе семейство прямоли-
нейных образующих, которое описы-
вается системой уравнений
аналогичной (12.25), с тем же со-
глашением о значениях параметра Л
Рис. 12.22 (рис. 12.22). Наглядным примером
однополостного гиперболоида с дву-
мя семействами прямолинейных образующих являются секции
Шаболовской телебашни. Автор оригинальной идеи, заложен-
ной в конструкцию телебашни, он же ее конструктор — русский
инженер В.Г. Шухов (1853-1939).
Д.12.1. Конические и линейчатые поверхности
367
Прямолинейные образующие гиперболического параболои-
да находятся так же, как и однополостного гиперболоида.
Преобразуем каноническое уравнение гиперболического пара-
болоида
2 2
а2 Ь2
к виду
(Н)(И)=* <‘2-)
Так же как и в случае однополостного гиперболоида, это урав-
нение можно „ расщепить “ в систему двух линейных уравнений
(12.28)
или по-другому
(12.29)
Каждая из систем (12.28), (12.29) задает семейство прямолиней-
ных образующих гиперболического параболоида (рис. 12.23).
Рис. 12.23
368 12. ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
В случае однополостного гиперболоида вращения, т.е. при
а = Ь, каждое из двух семейств прямолинейных образующих по-
лучается вращением одной прямой семейства вокруг оси враще-
ния поверхности. Это значит, что однополостный гиперболоид
вращения можно получить вращением прямой, которая являет-
ся скрещивающейся по отношению к оси вращения.
Рассмотрим, например, семейство (12.25), полагая, что
а = Ь. Каждая прямая семейства пересекает координатную
плоскость хОу в точке, лежащей на окружности х2 + у2 = а2
(других точек гиперболоида в плоскости хОу нет). С другой
стороны, прямолинейная образующая не может быть парал-
лельна этой плоскости, так как соответствующим сечением
гиперболоида является эллипс). Выбрав произвольную точку
M(acos<£>; asin 0) на указанной окружности, найдем значение
параметра А для прямой семейства (12.25), проходящей через
М. Отметим, что прямолинейная образующая, соответству-
ющая А = 0, пересекает эту окружность в точке (0;—а;0), а
соответствующая бесконечному значению А — в точке (0; а; 0).
Это непосредственно следует из (12.25). Подставим в первое
уравнение системы (12.25) координаты точки М
acos<£> _ / asin<£>
а у а
и решим уравнение относительно А:
A=-^L. (12.
1 — sin
Зная параметр А, мы можем найти направляющий вектор s
прямой (12.25) как векторное произведение нормальных векто-
ров двух плоскостей, определяемых уравнениями системы (не
забывая при этом, что а = Ь):
i
1/а
Х/а
3 k
Х/а ~^/с
—\/а Х/с
з =
А2 - 1 . 2А . А2 + 1,
-----*----3----z—k
ас ас а2
Д.12.2. Конические сечения
369
qk = psintpt — pcostpj — qk,
Длина полученного вектора равна
. . У(А2 - 1)2а2 + 4А2а2 + (А2 + 1)2с2 (l + A2)v/^2+^2
S — а2с ~ а2с
Разделив вектор з на его длину, получим единичный направля-
ющий еектпор
А2 -1 . 2А .
5О=Д2ТТ^-Д2ТТ^-
где р = а/\/а2 + с2, q = c/yja2 + с2, а параметр А заменен на
<р согласно формуле (12.30). Можно показать, что вектор so
получается из вектора с координатами {0; —р; — q}, соответ-
ствующего А = 1, поворотом на угол <р вокруг оси Ог [IV].
Следовательно, прямая семейства (12.25), соответствующая па-
раметру А, получается поворотом вокруг оси аппликат прямой
того же семейства, соответствующей параметру А = 1.
Дополнение 12.2. Конические сечения
Важнейшей особенностью прямого кругового конуса явля-
ется то, что все кривые второго порядка трех типов: эллипсы,
гиперболы, параболы — могут быть получены как конические
сечения, т.е. сечения конуса различными плоскостями.
Рассмотрим прямой круговой конус, который в прямоуголь-
ной системе координат Oxyz описывается уравнением
ж2 + у2 - z2 = 0 (12.31)
и геометрически получается при вращении вокруг оси Ог пря-
мой z = х, принадлежащей координатной плоскости хОг. В
силу круговой симметрии поверхности (12.31) можно ограни-
читься только сечениями при помощи плоскостей, перпенди-
кулярных координатной плоскости хОг. Таким плоскостям
соответствуют уравнения Ах + Bz + D = 0, А2 + В2 0.
370
12. ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
Если В = 0, то секущая плоскость описывается уравнением
х = х0, где Xq = —D/А, и параллельна координатной плоско-
сти уОг. Подставив значение абсциссы xq в уравнение конуса
(12.31), найдем, что сечение в плоскости х = xq описывается
уравнением z2 — у2 = Xq (см. 12.7) и при xq 0 представляет со-
бой равнобочную гиперболу (рис. 12.24, а), а при xq = 0 — пару
прямых, которые являются образующими конуса (рис. 12.24, б).
Рис. 12.24
Пусть в уравнении секущей плоскости коэффициент В 0.
Тогда плоскость можно представить уравнением z = кх + Ь,
где к = —A/В, Ь= —D/В. В силу симметрии конуса относи-
тельно плоскости Оху достаточно ограничиться случаем, когда
к < 0. Коническое сечение для рассматриваемой плоскости в
пространстве будет описываться системой двух уравнений
Чтобы получить уравнение кривой в секущей плоскости, рас-
смотрим прямоугольную систему координат O'vu, взяв в каче-
гве координатных осей О'и и O'v прямые, являющиеся Пересе-
Д.12.2. Конические сечения
371
нениями секущей плоскости с координатными плоскостями хОг
и хОу (рис. 12.25).
Координаты и и и произвольной точки в секущей плоскости
будут связаны с ее координатами х, у и z в пространстве
соотношениями
и
Х = Хо + UCOS<p = Xq-7=====,
VI + k2
< У = V, (12.33)
ku
vt+t*’
где p — угол между коническим сечением, перпендикулярным
координатной плоскости xOz, и координатной плоскостью хОу
(см. рис. 12.25), причем k = tgа х0 = -Ь/к.
Рис. 12.25
Подставляя (12.33) в первое уравнение системы (12.32),
получаем уравнение конического сечения в системе координат
O'vu
Xq-
u \2 о ( ku \2 п
--- - ) + V - I " I = о
л/Т+Р' ' у/Т+к2'
Раскрывая скобки и приводя подобные, находим
1-fc2
1 + fc2
U2 +
26 b2 « п
—.....-.м + — + и2 = 0.
Лгл/1 + Аг2 к2
(12.34)
372 12. ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
При к = — 1, когда секущая плоскость образует с плоско-
стью хОу тот же угол, что и образующие конуса, конические
сечения будут представлять собой параболы (рис. 12.26,а) и
описываться уравнением и2 = 6a/2(u — Ь/а/2). Варьируя пара-
метр b в уравнении секущей плоскости, в качестве конического
сечения можно получить любую параболу.
а б в
Рис. 12.26
При к — 1 (fc < 0) уравнение (12.34) примет вид
i-fc2 / ьУТ+&\2 2_ b2
1 + fc2 yu+fc(l-fc2)) +V 1-fc2’
(12.35)
Здесь возможны два варианта. При —1 < к 0, т.е. когда
секущая плоскость образует с плоскостью хОу меньший угол,
чем образующие конуса, выполнено неравенство 1 - к2 > 0
и поэтому уравнение (12.35) конического сечения является
уравнением эллипса (см. рис. 12.26,6). И здесь, варьируя
параметры b и к в уравнении секущей плоскости, мы можем
получить в сечении любой эллипс.
Вопросы и задачи
373
При к < — 1, т.е. когда секущая плоскость образует с плос-
костью хОу больший угол, чем образующие конуса, имеем
1 — к2 < 0, так что коническое сечение, описываемое уравне-
нием (12.35), является гиперболой (рис. 12.26, в). Варьируя
параметры b и Л, можно получить в коническом сечении лю-
бую гиперболу.
Вопросы и задачи
12.1. Исследовать форму поверхности второго порядка
методом сечений:
а) х2 — 2у — z2 = 1; б) х2 — у2 — 4 = 0;
в) 4а:2 + 4у2 + 5г2 4-1 = 0; г) у2 — z2 — х2 = 0;
д) У2 + z2 - х2 = 0; е) у2 - z2 4- х2 = 0;
ж)ху = 0; з) 2а:2 4-2у2 4-4х — 8у4-И = 0.
Установить названия этих поверхностей и сделать рисунок в
заданной системе координат.
12.2. Найти уравнения проекций на координатные плоско-
сти пересечений поверхностей:
а) х2 4- у2 4- z - 4 = 0, х2 4- у2 - z = 0;
б) x24-y2-z-9 = 0, х2 4- у2 - 1 = 0;
в) х2 4- у2 — z = 0, 4х — 4у — z 4- 8 = 0.
12.3. Найти уравнение конуса с вершиной в точке (1; —3; 2),
образующие которого составляют угол 60° с координатной
плоскостью: а) хОу; б) xOz; в) yOz.
12.4. Доказать, что уравнение х2 — Зу2 4- z2 = 2х — 2z — 2
задает конус, и найти его вершину.
12.5. Найти уравнение конуса с вершиной в начале системы
координат, если в него вписана сфера х2 4- у2 4- (z — 4)2 = 1.
12.6. Найти каноническое уравнение эллипсоида с полуося-
ми 5, 3 и 2.
374
12. ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
12.7. Преобразовать уравнение поверхности второго поряд-
ка с помощью параллельного переноса системы координат и
построить ее в новой системе координат:
a) xz — х — z +1 = 0; б) у2 + z2 — 4у — 4z + 4 = 0;
в) 4а:2 + 9у2 + z2 — 16а: — 36у + 2z + 296 = 0;
г) 4а:2 — у2 + z2 — 24а: + 2у — 4z + 35 = 0;
д) х2 - у2 - z2 - 4у - 2z - 1 = 0.
12.8. Установить название поверхности второго порядка
при всех значениях параметра t:
а) х2 — 2х - z +1 = 0; б) х2 - ty2 + (t + l)z2 — 4у — 4z + 4 = 0;
в) х2 + 2у2 + Зг2 - 16а: — 8у + 12«-|-t = 0;
г) х2 — у2 + z2 - 4а: + 2у - 4z +1 = 0;
д) tx2 - (t - 1)у2 - (t + 2)z2 -1 = 0.
12.9. В прямоугольной системе координат задана прямая
х — 1 _ у + 2 _ z+ 1
2 “ t ~Т ‘
Найти все значения параметра t, при которых поверхность,
образованная при вращении данной прямой вокруг оси: а) Ох;
б) Оу; в) Oz, является конусом, и определить вершину этого
конуса.
СПИСОК РЕКОМЕНДУЕМОЙ
ЛИТЕРАТУРЫ
Учебники и учебные пособия
Александров П. С. Курс аналитической геометрии и линейной алгебры:
Учеб, для вузов. М.: Наука, 1979. 512 с.
Беклемишев Д.В. Курс аналитической геометрии и линейной алгебры:
Учеб, пособие для физ.-мат. и инж.-фиэ. специальностей вузов. 6-е изд.,
стереотип. М.: Наука, 1984. 319 с.
Беллман Р. Введение в теорию матриц / Пер. с англ, под ред.
В.Б. Лидского. М.: Наука, 1969. 368 с.
Гонтмахер Ф.Р. Теория матриц. 3-е изд. М.: Наука, 1967. 576 с.
Ефимов Н.В. Краткий курс аналитической геометрии. 12-е изд.,
стереотип. М.: Наука, 1975. 272 с.
Ильин В.А., Позняк Э.Г. Аналитическая геометрия: Учеб, для универ-
ситетов. 4-е изд., доп. М.: Наука, 1988. 224 с.
Курош А.Г. Курс высшей алгебры. 8-е изд. М.: Наука, 1965. 432 с.
Ланкастер П. Теория матриц / Пер. с англ. С.П. Демушкина. М.:
Наука, 1978. 280 с.
Погорелов А.В. Аналитическая геометрия: Учеб, для мат. и физ.
специальностей вузов. 4-е изд., стереотип. М.: Наука, 1978. 208 с.
Постников М.М. Аналитическая геометрия. 2-е изд., перераб. М:
Наука, 1986. 414 с.
Хорн Р., Джонсон Ч. Матричный анализ / Пер. с англ, под ред.
Х.Д.Икрамова. М.: Мир, 1989. 655 с.
Справочные издания
Александрова Н.В. Математические термины: Справочник. М.: Высш,
шк., 1978. 190 с.
Бронштейн И.Н., Семендяев К.А. Справочник по математике для
инженеров и учащихся втузов. 13-е изд., испр. М.: Наука, 1986. 544 с.
Воднев В.Т., Наумович А.Ф., Наумович Н.Ф. Математический словарь
высшей школы / Под ред. Ю.С. Богданова. Минск: Вышэйш. шк., 1984.
528 с.
376 Список рекомендуемой литературы
Выгодский М.Я. Справочник по высшей математике. 13-е изд., стерео-
тип. М.: Физматлит, 1995. 872 с.
Корн Г., Корн Т. Справочник по математике (для научных работников
и инженеров) / Пер. с англ, под ред. И.Г. А Романовича. М.: Наука, 1973.
832 с.
Математический энциклопедический словарь / Гл. ред. Ю.В. Прохоров.
М.: Сов. знцикл., 1988. 848 с.
Сигорский В.П. Математический аппарат инженера. 2-е изд., стерео-
тип. Киев: Техмка, 1977. 768 с.
Фор Р., Кофман А., Дени-Папен М. Современная математика / Пер. с
франц, под ред. А.Н. Колмогорова. М.: Мир, 1966. 272 с.
Задачники
Беклемишева Л.А., Петрович А.Ю., Чубаров И.А. Сборник задач по
аналитической геометрии и линейной алгебре: Учеб, пособие / Под ред.
Д.В. Беклемишева. М.: Наука, 1987. 496 с.
Данко П.Е., Попов А.Г., Кожевникова Т.П. Высшая математика в
упражнениях и задачах: В 2 т. Т. 1. 4-е изд., испр. и доп. М.: Высш,
шк., 1986. 304 с.
Клетеник Д.В. Сборник задач по аналитической геометрии. 14-е изд.,
исправл. М.: Наука, 1986. 222 с.
Окунев Л.Я. Сборник задач по высшей алгебре. М.: Просвещение,
1964. 184 с.
Сборник задач по математике для втузов: Ч. 1. Линейная алгебра и
основы математического анализа: Учеб, пособие для втузов. / Под ред.
А.В. Ефимова и Б.П. Демидовича. 2-е изд. М.: Наука, 1986. 428 с.
Цубербиллер О.Н. Задачи и упражнения по аналитической геометрии.
29-е изд., стереотип. М.: Наука, 1968. 366 с.
предметный указатель
Абсцисса точки 1-78, 79
Алгебра векторная 18
Аппликата точки 79
Базис в Ц 33
— У2 33
---правый (левый) 80
— V3 35
---правый (левый) 56
- ортогональный 39
- ортонормированный 39
Блок матрицы 169
Вектор 16
- геометрический 13
— единичный 14
— ненулевой 14
— нулевой 14
- единичный 17
- направляющий прямой 108, 127
- ненулевой 17
- нормальный плоскости 121
— прямой 105
- нулевой 17
- противоположный 20
- свободный 16
- связанный 17
- скользящий 17
Векторы геометрические
коллинеарные 15
---однонаправленные
(соиаправленные) 15
---противоположно
направленные 15
- - компланарные 15
- - равные 16
- коллинеарные 17
— однонаправленные
(соиаправленные) 17
— противоположно направленные
17
- компланарные 17
- линейно зависимые 28
— независимые 28
- ортогональные 50
Величина векторная 13
- скалярная 1-215, 13
Вершина гиперболы 311
- конической поверхности 363
- конуса 346
- параболы 321
- эллипса 296
Высота матрицы-столбца 156
Гипербола 1-107, 305
- равнобочная 318
- сопряженная 312
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
378
Гиперболоид вращения 343
— двуполостный 343
— однополостный 343
- двуполостный 344
- однополостный 344
Детерминант 186
Диагональ матрицы главная 156
- - побочная 156
- определителя вторая 44
— главная 44
— побочная 44
Директриса гиперболы 315
- параболы 321
- эллипса 302
Длина вектора 17
— геометрического 14
- матрицы-строки 156
Дополнение алгебраическое 195
Запись СЛАУ векторная 244
- - координатная 242
— матричная 245
Инверсия 1-166, 183
Итерация 272
Квадрат вектора скалярный 51
Комбинация линейная векторов 27
— строк (столбцов) 174
Конец вектора 17
— геометрического 14
Конус прямой круговой 346
- эллиптический 347
Координата вектора 33
Координаты вектора 34, 35
Координаты точки 1-78, 80
- - декартовы (аффинные) 79
— полярные 1-151, 97
- - прямоугольные 79
— сферические 100
— цилиндрические 99
Косинус направляющий вектора 40
Коэффициент линейной комбинации
27
- сжатия 340
- угловой прямой 108
Коэффициенты СЛАУ 242
Кривая второго порядка 294
- (линия) алгебраическая на
плоскости 93
Критерий ортогональности
векторов 54
Лемниската П, 102
Линейность произведения
векторного 63
— скалярного 52
— смешанного 69
Д/1атрица 155
- блочная 170
- блочно-диагональная 173
- блочно-треугольная 204
- вырожденная 219
- диагональная 157
- единичная 157
- квадратная порядка п 156
- кососимметрическая 163
- невырожденная 219
- неособая 219
- нулевая 157
379
Матрица обратная 217
- определителя 186
- ортогональная 287
- положительно определенная 291
- присоединенная 220
- противоположная 161
- прямоугольная 156
- с диагональным преобладанием
279
- симметрическая 163
- СЛАУ 246
— расширенная 246
- ступенчатая, 158
- транспонированная 162
- трапециевидная верхняя 158
- треугольная верхняя 157
- - нижняя 157
- трех диагональная 158
Матрица-столбец 156
Матрица-строка 156
Матрицы коммутирующие 166
- перестановочные 166
- равные 159
Метод Гаусса 273
— исключения неизвестных 273
— с выбором главного элемента
283
- прогонки 285
- решения СЛАУ итерационный
272
--прямой 272
--точный 272
- сечений 351
Минор 195
- базисный 230
- окаймляющий 233
Минор порядка к 225
- угловой 278
Многочлен от п переменных 92
Модуль вектора 17
— геометрического 14
Направляющая поверхности
конической 363
— цилиндрической 347
Начало вектора 17
— геометрического 14
- (системы) координат 79
Неизвестное базисное 250
- зависимое 250
- независимое 250
- свободное 250
Нуль-вектор 14, 17
Образ геометрический 91, 92
Образующая поверхности
конической 363
— цилиндрической 348
- прямолинейная гиперболоида
однополостиого 366
Операция линейная 18, 160
Определитель 186
- Вандермонда 212
- второго порядка 44
- матрицы 186
- порядка п 186
- системы второго порядка 48
— третьего порядка 49
- третьего порядка 45
Ордината точки 1-78, 79
Ориентация базиса 56
- реперов одинаковая 85
- - противоположная 85
380
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Орт 14, 17
Ось 24
- абсцисс 79
- аппликат 79
- гиперболы действительная 306
— мнимая 306
- координат 79
- ординат 79
- параболы 321
- полярная 96
- эллипса 295
Отклонение точки от прямой 114
Отрезок направленный 13
Парабола 1-107, 321
Параболоид вращения 345
- гиперболический 354
- эллиптический 346
Параметр фокальный гиперболы
316
— параболы 321
— эллипса 302
Пара упорядоченная 1-78
Переменные канонические 296, 307,
321
Перенос параллельный системы
координат в пространстве 83
на плоскости 83
Переобозначение переменных 324
Перестановка 1-83, 183
- нечетная 1-166, 183
- нормальная 183
- четная 1-166, 183
Плоскость координатная 79
Поверхность алгебраическая 93
- второго порядка 355
Поверхность вращения 339
- коническая 363
- линейчатая 364
- цилиндрическая 347
Поворот системы координат в
пространстве 85
на плоскости 83
Подстановка 1-164, 185
- нечетная 1-166, 185
- четная 1-166, 185
Подстановки равные 186
Положение общее плоскостей 151
Полуось гиперболы действительная
306
— мнимая 308
- эллипса большая 296
— малая 296
- эллипсоида 342
Полюс полярной системы
координат 96
Порядок поверхности (кривой)
алгебраической 94
- уравнения 93
Правило Крамера 248
- параллелограмма 18
- Саррюса 45
- треугольника 18, 45
Преобразование сжатия 340
- элементарное обратное 177
— столбцов матрицы 177
— строк матрицы 176
Проекция вектора на плоскость 58
- ортогональная вектора на
направление 25
-----ось 25
-----прямую 24
381
Проекция ортогональная точки на
плоскость 58
---прямую 23
Произведение вектора на число 21
- векторное 56
— двойное 73
- матриц 164
- матрицы на число 160
- скалярное 50
- смешанное 66
Пространство Vi 33
- V2 33
- V3 33
Пучок плоскостей 147
- прямых 150
Радиус полярный 1-151, 97
- фокальный 295, 305
Радиус-вектор 79
Разложение вектора в базисе 33, 34,
35
- матрицы мультипликативное 287
— LDU 291
— LU 288
— 55Т 292
- определителя по столбцу 198
---строке 198
— третьего порядка по первой
строке 46
- Холецкого 292
Размер матрицы 155
Разность векторов 21
- матриц 161
Ранг матрицы 226
Расстояние фокальное 295, 305
Репер 79
Решение СЛАУ 242
— общее 258
— однородной общее 254
- - частное 242
- уравнения матричного 222
Свойство оптическое гиперболы
316
— параболы 322
— эллипса 305
Связка плоскостей 150
Сечение коническое 369
Система векторов 27
- двух линейных уравнений 47
- координат 80
-- декартова (аффинная) 78
---прямоугольная 79
— каноническая 296, 307, 321
— косоугольная 79
- - полярная 96
— прямоугольная /-77, 79
— сферическая 100
— цилиндрическая 98
- решений фундаментальная 250
---нормальная 252
- трех линейных уравнении 48
- уравнений линейных
алгебраических 242
СЛАУ 242
- квадратная 244
- неоднородная 242
- неопределенная 244
- несовместная 243
- обусловленная плохо 271
— хорошо 271
- однородная 242
382
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
СЛАУ определенная 244
- совместная 243
Степень многочлена от
п переменных 92
- уравнения 93
Столбец базисный 230
Строка базисная 230
Строки (столбцы) линейно
зависимые 175
---независимые 174
Сумма векторов 18
- матриц 159
— прямая 173
Теорема Кронекера — Капелли 246
- о базисном миноре 230
Тип матрицы 155
Точка приложения вектора 17
геометрического 14
Транспозиция перестановки 1-166,
184
- подстановки 185
Тройка некомпланарных векторов
левая 56
---правая 56
У гол между векторами 25
- полярный 1-151, 97
Уравнение алгебраическое 93
- гиперболы в асимптотах 319
---смещенное 328
— каноническое 309
— полярное 336
— смещенное 325
— сопряженной каноническое 312
---смещенное 325
Уравнение каноническое
гиперболоида двуполостного 344
---однополостного 344
— конуса прямого кругового 347
---эллиптического 347
-- параболоида гиперболического
354
---эллиптического 346
— эллипсоида 342
- кривой второго порядка неполное
323
- линейное 104
- матричное 222
- множества 91, 92
- однородное 364
- параболы каноническое 322
— полярное 336
— смещенное 326, 327
- плоскости векторное 122
---параметрическое 123
— в отрезках 125
— нормальное 126
— общее 121
- поверхности второго порядка
смещенное 357
- прямой векторное 109, 128
— в отрезках ПО
— каноническое 109
- - нормальное 111
- - общее 105
— проходящей через две точки 109
— с угловым коэффициентом 108
- эллипса каноническое 299
- - полярное 336
— смещенное 325
383
Уравнения плоскости параметрические 123 - прямой канонические 129 — общие 127 — параметрические 108, 128 — проходящей через две точки 130 Цилиндр гиперболический 350 - круговой 347 - параболический 350 - эллиптический 349 Член уравнения свободный 242
<Х*окус гиперболы 305 - параболы 321 - эллипса 295 Эксцентриситет гиперболы 311 - параболы 321 - эллипса 300
Формулы Крамера 48, 248 Элемент ведущий 278 - главный 278
Ход метода Гаусса обратный 275 прямой 275 - диагональный 44, 156 - матрицы 155 Эллипс 294
Центр гиперболы 306 - эллипса 296 - мнимый 325 Эллипсоид 342 - вращения 341
Циклоида II, 1 OS Цилиндр второго порядка 349 - мнимый 357 - трехосный 342
ОГЛАВЛЕНИЕ
Предисловие 5
Основные обозначения 9
1. Линейные операции над векторами 13
1.1. Векторные и скалярные величины.................. 13
1.2. Типы векторов и их взаимное расположение.... 15
1.3. Линейные операции и их свойства................. 18
1.4. Ортогональная проекция ......................... 23
1.5. Линейная зависимость и независимость векторов . . 27
1.6. Базис........................................... 33
1.7. Вычисления в координатах........................ 36
Вопросы и задачи................................. 41
2. Произведения векторов 44
2.1. Определители второго и третьего порядков.... 44
2.2. Скалярное произведение.......................... 49
2.3. Векторное произведение............х......... 56
2.4. Смешанное произведение ......................... 66
2.5. Приложения произведений векторов................ 71
Д.2.1. Двойное векторное произведение.................. 73
Вопросы и задачи................................. 74
3. Системы координат 78
3.1. Декартова система координат .................... 78
3.2. Преобразование прямоугольных координат.......... 80
3.3. Простейшие задачи аналитической геометрии .... 85
3.4. Вычисление площадей и объемов................... 89
3.5. Кривые и поверхности............................ 91
3.6. Полярная система координат...................... 96
3.7. Цилиндрическая и сферическая системы координат . 98
Вопросы и задачи................................ 101
385
4. Прямая на плоскости 104
4.1. Алгебраические кривые первого порядка.......... 104
4.2. Специальные виды уравнения прямой.............. 107
4.3. Взаимное расположение двух прямых.............. 111
4.4. Расстояние от точки до прямой ................. 113
Вопросы и задачи................................ 117
5. Прямая н плоскость в пространстве 119
5.1. Алгебраические поверхности первого порядка .... 119
5.2. Специальные виды уравнения плоскости........... 122
5.3. Уравнения прямой в пространстве................ 127
5.4. Взаимное расположение прямых и плоскостей .... 135
5.5. Расстояние до плоскости и до прямой............ 143
Д.5.1. Пучки и связки................................ 147
Вопросы и задачи................................ 153
6. Матрицы н операции над ними 155
6.1. Виды матриц.................................... 155
6.2. Линейные операции над матрицами................ 159
6.3. Транспонирование матриц........................ 162
6.4. Умножение матриц............................... 164
6.5. Блочные матрицы................................ 169
6.6. Прямая сумма матриц............................ 173
6.7. Линейная зависимость строк и столбцов.......... 174
6.8. Элементарные преобразования матриц............. 176
Вопросы и задачи................................ 180
7. Определители 183
7.1. Определители n-го порядка...................... 183
7.2. Свойства определителей......................... 188
7.3. Методы вычисления определителей ............... 206
Вопросы и задачи................................ 215
8. Обратная матрица и ранг матрицы 217
8.1. Обратная матрица и ее свойства................. 217
8.2. Вычисление обратной матрицы.................... 220
8.3. Решение матричных уравнений.................... 222
386
ОГЛАВЛЕНИЕ
8.4. Ранг матрицы..................................... 225
8.5. Теорема о базисном миноре........................ 230
8.6. Вычисление ранга матрицы......................... 233
Вопросы и задачи.................................. 239
9. Системы линейных алгебраических уравнении 242
9.1. Основные определения............................. 242
9.2. Формы записи СЛАУ ............................... 244
9.3. Критерий совместности СЛАУ....................... 245
9.4. Формулы Крамера.................................. 248
9.5. Однородные системы............................... 249
9.6. Неоднородные системы ............................ 257
9.7. Как решать СЛАУ ?................................ 259
Д.9.1. СЛАУ с комплексными коэффициентами................ 267
Вопросы и задачи.................................. 268
10. Численные методы решения СЛАУ 270
10.1. Проблемы, связанные с вычислениями.............. 270
10.2. Прямые и итерационные методы решения СЛАУ . . 272
10.3. Метод Гаусса.................................... 273
10.4. Особенности метода Гаусса....................... 277
10.5. Метод прогонки.................................. 284
Д.10.1. Мультипликативные разложения матриц.............. 287
Вопросы и задачи.................................. 292
11. Кривые второго порядка 294
11.1. Эллипс.......................................... 294
11.2. Гипербола....................................... 305
11.3. Парабола........................................ 320
11.4. Неполные уравнения кривой второго порядка .... 323
Д. 11.1. Полярные уравнения.............................. 335
Вопросы и задачи.................................. 337
12. Поверхности второго порядка 339
12.1. Поверхность вращения и преобразование сжатия . . 339
12.2. Эллипсоиды...................................... 341
12.3. Гиперболоиды.................................... 343
12.4. Эллиптические параболоиды....................... 345
387
12.5. Конусы.......................................... 346
12.6. Цилиндрические поверхности...................... 347
12.7. Метод сечений .................................. 351
12.8. Неполные уравнения поверхности второго порядка . 355
Д.12.1. Конические и линейчатые поверхности............. 363
Д.12.2. Конические сечения ............................. 369
Вопросы и задачи............................. 373
Список рекомендуемой литературы 375
Предметный указатель 377
Учебное издание
Математика в техническом университете
Выпуск III
Канатников Анатолий Николаевич
Крищенко Александр Петрович
АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ
Редактор Н.Г. Ковалевская
Художник С.С. Водчиц
Корректоры Е.В. Авалова, О.В. Калашникова
Оригинал-макет подготовлен
в Издательстве МГТУ им. Н.Э. Баумана
под руководством А.Н. Канатникова
Изд. лиц. №020523 от 25.04.97
Подписано в печать 04.09.2000. Формат 60x88 1/16.
Печать офсетная. Бумага офсетная № 1.
Усл. печ. л. 24,25. Уч.-изд. л. 23,48.
Тираж 3000 зкэ. Заказ 6091
Издательство МГТУ им- Н.Э. Баумана.
107005, Москва, 2-я Бауманская, 5.
Отпечатано в Производственно-издательском комбинате ВИНИТИ.
140010, г. Люберцы Московской обл., Октябрьский пр-т, 403.
Тел. 554-21-86
ISBN 5-7038-1671-8
Комплекс учебников из 20 выпусков
Под редакцией В. С. Зарубина и А. П. Крищенко
I. Введение в анализ
II. Дифференциальное исчисление функций
одного переменного
III. Аналитическая геометрия
IV. Линейная алгебра
V. Дифференциальное исчисление функций
многих переменных
VI. Интегральное исчисление функций
одного переменного
VII. Кратные и криволинейные интегралы.
Элементы теории поля
VIII. Дифференциальные уравнения
IX. Ряды
X. Теория функций комплексного переменного
XI. Интегральные преобразования
и операционное исчисление
XII. Дифференциальные уравнения
математической физики
XIII. Приближенные методы математической физики
XIV. Методы оптимизации
XV. Вариационное исчисление и оптимальное управление
XVI. Теория вероятностей
XVII. Математическая статистика
XVIII. Случайные процессы
XIX. Дискретная математика
XX. Исследование операций