



































































































Текст
Я. И. ЕСИПЕНКО
МЕХАНИЧЕСКИЕ
ВАРИАТОРЫ.
СКОРОСТИ
Допущено Министерством
высшего и среднего специального
образования УССР
в качестве учебного пособия
для студентов технических вузов УССР
ГОСУДАРСТВЕННОЕ ИЗДАТЕЛЬСТВО
технической литературы УССР
Киев — 1961
В книге изложены вопросы теории, расчета и
конструирования механических вариаторов скоро-
сти с принудительным и автоматическим регули-
рованием скорости, даны технические характери-
стики и указаны области применения наиболее
распространенных конструкций вариаторов.
Книга предназначена для студентов, изучаю-
щих курс «Детали машин» и выполняющих кур-
совые проекты по дисциплинам из области машино-
строения, а также для конструкторов и техни-
ческих работников заводов и фабрик различных
отраслей промышленности.
ПРЕДИСЛОВИЕ
,А
Семилетним планом предусматривается дальнейшее мощное раз-
витие производительных сил нашей страны, переход народного
хозяйства на более высокий технический уровень с применением
высокопроизводительных машин и механизмов и внедрением ме-
ханизации и автоматизации в производство.
В области механизации и автоматизации производственных
процессов большое значение имеет применение простых и надеж-
ных вариаторов скорости, особенно в тех случаяк, когда необхо-
димо увеличить производительность машины за-счет изменения
скорости.
Сведения о бесступенчатом регулировании скорости содер-
жатся в отдельных статьях, заметках и кратких аннотациях,
что затрудняет их использование. С целью восполнения суще-
ствующего пробела автором настоящей работы собран, система-
тизирован и обобщен материал о бесступенчатом регулировании
скорости. В работе использованы материалы ЦНИИТМАШ,
ЭНИМС, заводских и фабричных конструкторских бюро, а также
результаты исследований автора. 1
Настоящая книга не претендует на исчерпывающую полноту
материала по вопросу механического бесступенчатого регулиро-
вания.
Замечания и пожелания просим направлять по адресу: Киев,
Пушкинская, 28, Гостехиздат, УССР.
1*
ВВЕДЕНИЕ
Вариаторами скорости называются устройства, у которых при
постоянном числе оборотов ведущего вала число оборотов ведо-
мого вала может непрерывно, без_ступеней. изменяться в пределах
определенного диапазона.
Существуют электрические, механические, гидравлические и
электромагнитные вариаторы скорости.
В работе рассматриваются только механические вариаторы
скорости, получившие широкое распространение. Они применя-
ются в бумажной, пищевой, легкой, текстильной, стекольной
и других отраслях промышленности.
Не подлежит сомнению, что широкое использование вариато-
ров скорости в различных отраслях техники может дать значи-
тельный экономический эффект. Как известно, производитель-
ность многих механизмов может быть значительно увеличена за
счет изменения скорости рабочей машины. Поэтому проблема
бесступенчатого регулирования посредством вариаторов скорости
весьма актуальна.
В дореволюционной России применение вариаторов было огра-
ничено. Наиболее распространенными, особенно в текстильной
промышленности, были вариаторы лобовой и с коническими бара-
банами. В тот период не проводились ни теоретические, ни экспе-
риментальные исследования по передачам с бесступенчатым регу-
лированием скорости.
После Великой Октябрьской социалистической революции вы-
сокие т*емпы развития машиностроения как основы нового мощ-
ного технического прогресса во всех отраслях промышленности и
народного хозяйства СССР, широкое внедрение механизации и
автоматизации процессов производства поставили проблему бессту-
пенчатого регулирования скорости исполнительных машин и ме-
ханизмов в число первоочередных задач.
К числу первых работ в области бесступенчатого регулиро-
вания скорости, опубликованных в 1935—1936 гг., следует от-
нести работы проф. Заславского В. И. и Дика А. Я. [6] о динамике
инерционного вариатора с автоматическим регулированием скорости.
В 1936—1937 гг. публикуются работы Кузьмина Г. Л., Тау-
5
рок В. Г. [35], Опейко Ф. А., проф. Малышева А. П. [19], В работе
проф. Малышева А. П. [19] рассматривается задача определения
положения нескользящей точки и реальных радиусов начальных
окружностей катков вариаторов скорости при непосредственном их
касании.
Несколько позже, в 1940—1948 гг., была проведена большая
работа в ЦНИИТМАШ Светозаровым В. А. [34] по исследованию
и изысканию рациональных конструкций торовых вариаторов
скорости.
В 1948 г. более обобщающие материалы по механическим
вариаторам скорости были опубликованы проф. Решетовым Д. Н.
в Энциклопедическом справочнике машиностроения, т. 2.
Более глубокие теоретические и экспериментальные исследо-
вания, относящиеся к определению коэффициентов скольжения
в различных конструкциях вариаторов скорости, были проведены
в 1949—1957 гг. проф. Кожевниковым С. Н. [16], проф. Реше-
товым Д. Н., Михайловой В. А. [27], Мальцевым В. Ф. [20], [22]
и др.
Задача определения усилия, необходимого для управления
торовым вариатором скорости, была решена Ревковым Е. А. [32].
Опубликованные работы Пронина Б. А. [30], [31], обобщающие
результаты исследований передач с бесступенчатым регулирова-
нием скорости, включают и передачи с клинчатыми ремнями.
Этим не исчерпывается список отдельных исследователей, ис-
следовательских учреждений, работы которых посвящены вопросам
бесступенчатого регулирования скорости.
Классификация вариаторов
скорости
Конструкции механических вариаторов скорости (рис. 1) можно
разделить на две основные группы:
I. Вариаторы с принудительным регулированием скорости,
II. Вариаторы с автоматическим регулированием скорости.
К вариаторам с принудительным регулированием скорости от-
носятся конструкции, которые позволяют регулировать скорость
вручную по мере надобности. В этой группе по принятой клас-
сификации различают фрикционные и жесткие вариаторы.
Фрикционные подразделяются на вариаторы: а) с непосред-
ственным касанием рабочих тел качения; б) с промежуточным
жестким звеном (ролик, кольцо и т. п.); в) с промежуточным
гибким звеном (ремень).
Работа жестких вариаторов основывается на заклинивании
деталей механизмов, специально для этого предназначенных, или
на передаче движения непосредственным давлением выступов ра-
бочих тел вариатора.
Заклинивание имеет место в вариаторах:
а) с фрикционными зажимами;
6
б) с муфтами свободного хода с роликами;
в) с муфтами свободного хода с рычажными механизмами.
В вариаторах с передачей давлением применяются:
а) храповые механизмы;
б) специальные цепи;
в) специальные зубчатые колеса.
Жесткие вариаторы в зависимости от характера движения ве-
домого вала можно еще подразделить на вариаторы с пульсирующей
угловой скоростью за период одного оборота ведомого вала и ва-
риаторы с постоянной угловой скоростью ведомого вала при любом
передаточном отношении в пределах диапазона регулирования.
Вариаторы скорости, у которых регулирование скорости осу-
ществляется специальными дополнительными устройствами, а также
те, у которых конструкция отдельных элементов и узлов вариа-
тора выполнена так, что скорость ведомого вала является наперед
заданной функцией угла поворота ведущего вала или функцией
крутящего момента на выходном валу, отнеоены к вариаторам
с автоматическим регулированием.
Они делятся на:
а) вариаторы с автоматическим регулированием скорости по за-
данной программе, причем программа устанавливается и изме-
няется в соответствии с требованиями, наперед заданными;
б) вариаторы с автоматическим регулированием скорости выход-
ного вала по заданному закону за период, соответствующий
одному обороту ведущего вала;
в) вариаторы с автоматическим регулированием скорости в за-г
висимости от величины крутящего момента на выходном валу.
7
Они подразделяются на две подгруппы: статические и инерцион-
ные.
К числу инерционных вариаторов скорости относятся те, работа
которых основана на использовании сил инерции движущихся
деталей, специально для этого предназначенных. В обоих под-
группах вариатор может обладать или не обладать идеальной
характеристикой.
Характеристика вариатора называется идеальной в том случае,
когда в пределах заданного диапазона регулирования обеспечи-
вается постоянство мощности и числа оборотов двигателя при
различных значениях крутящего момента на выходном валу.
Принятая классификация является упрощенной и не охваты-
вает все возможные схемы и конструкции механических вариа-
торов скорости. Однако разнообразие существующих конструкций,
применяемых и предлагаемых к применению, ею исчерпываются.
В заключение следует отметить, что большинство конструкций
вариаторов имеют серьезные недостатки, особенно это относится
•к вариаторам для мощностей выше 15—20 кет. Поэтому изыскание
простых конструкций механических вариаторов, которые были бы
надежны в работе и позволяли передавать большие мощности,
является проблемой сегодняшнего дня.
_ Глава первая __
ТЕОРЕТИЧЕСКИЕ ИССЛЕДОВАНИЯ ВАРИАТОРОВ
СКОРОСТИ С НЕПОСРЕДСТВЕННЫМ КАСАНИЕМ
РАБОЧИХ ТЕЛ
1. ВАРИАТОРЫ, У КОТОРЫХ ОБРАЗУЮЩАЯ КАТКОВ
ЯВЛЯЕТСЯ ПРЯМОЙ ЛИНИЕЙ
Определение передаточного отношения вариатора скорости
Рассмотрим передачу вращения коническими катками (рис. 2, а)
при условии, что буксование отсутствует и вершины О и 0г об-
разующих конусов не совпадают, причем вершина ведущего конуса
Oj расположена на образующей ведомого конуса, т. е. расстояние
между вершинами конусов положительное
а = 00 г > 0.
Изменение передаточного отношения 1\_2 = вариатора осу-
ществляется перемещением ведущего катка 1 вдоль образующей
OS ведомого катка 2.
Вследствие несовпадения вершин конусов только в одной из
точек касания (точке К) окружные скорости катков 1 и 2 будут
равны. Во всех остальных точках касания происходит неизбежное
скольжение и износ катков. Кроме того, тела вращения, сопри-
касающиеся в начальный момент по линии, после приложения
внешних сил деформируются и соприкасаются по некоторой пло-
щадке шириной t (рис. 3).
Давление р на площадке контакта, по теории Герца, изме-
няется по полуэллипсу, а элементарные силы трения, возникаю-
щие вследствие скольжения, прямо пропорциональны давлениям
и не параллельны между собой. При вращении катков равнодей-
ствующая давлений смещается относительно плоскости XOZ и
создает сопротивление перекатыванию.
Задача определения действительных радиусов качения катков
с учетом распределения давлений по полуэллипсу [27] приводит
к необходимости пользоваться номограммой, построенной для этой
цел(и, и решение ее не дает общей аналитической зависимости.
Исследованиями [27] также установлено, что для часто встре-
чающихся в практике соотношений размеров контактной площадки
у, не превышающих 0,25, можно без больших погрешностей для
инженерных расчетов решать задачу, считая, что все силы трения
параллельны между собой и перпендикулярны к образующей
катков.
В соответствии с изложенным в решении поставленной задачи
приняты следующие допущения:
to
Рис. 3. Схема распределения давлений на площадке контакта.
сопротивление перекатыванию (от упругих сил — не учитыва-
ется) незначительно;
элементарные силы трения параллельны между собой и пер-
пендикулярны к образующей по линии касания;
сила нажатия, расположенная нормально к образующей кат-
ков, распределяется по длине b контактной линии равномерно,
скорости обоих катков равны в точке К.
Радиус гх (см. рис. 2, а) начальной окружности ведомого катка
2 определяют из условия его равновесия. На рис. 2, б показан
график изменения скорости скольжения
До = vt — v2,
а также график сил трения pf, отнесенных к линии касания
катков.
Следует отметить, что направление момента Мх сил полез-
ных !сопротивлений противоположно направлению вращения ве-
домого катка 2, а силы трения pf противоположны направлению
относительного скольжения. Так например, для ведомого катка 2
силы трения на участке SK направлены в сторону вращения, а
Н
на участке КС — в сторону, противоположную направлению вра-
щения.
Для ведущего катка 1 — наоборот: силы трения на участке SK
направлены в сторону, противоположную направлению вращения,
а на участке КС — в сторону вращения.
При условии равномерного вращения уравнение моментов сил,
приложенных к ведомому катку, имеет вид
гх
sin 8, sin
— Мхj pfysin\dy — pfysin\dy = 0, (1.1)
Гх fjt
sin sin 3,
N Q2
где p = — = ---давление на единицу длины катка;
f — коэффициент трения поверхностей катков (табл. 1);
5, — угол образующей ведомого конуса;
R2, гх и — соответственно наибольший, начальный и наимень-
ший радиусы окружностей катка в пределах контакт-
ной линии.
Таблица 1
Значения коэффициента / трения скольжения во фрикционных передачах
Наименование материала и условия смазки f
Сталь по стали со смазкой 0,04—0,05
» » » или чугуну всухую 0,15—0,20
» . » текстолиту или фибре всухую 0,20—0,25
» или чугун по коже всухую 0,20—0,35
» по ферродо всухую 0,30—0,35
» или чугун по резиие всухую 0,35—0,45
> » » » дереву » 0,35—0,5
Сталь — бумага в питающих приспособлениях 0,20
Резина — бумага 0,40
Латунь с рифленой поверхностью — бумага 0,40
Подставляя значение р в уравнение (1.1), после интегриро-
вания и преобразований получаем
+ U-2>
Из рис. 2, а видно, что
^2 = rxcP + ySin82;
= гх ср sin §2»
где гхср — средний радиус катка.
12
Заменяя и Иг в формуле (1.2) их значениями, имеем
+ <13>
Решая уравнение (1.3) относительно гх, получаем
= I)., (1.4)
у 'хер W 4/
Условие равновесия ведущего катка / при равномерном его
вращении определяется из уравнения моментов
Го rt
sin sin 5j
— Mj— j р}угsinOjdy + j pfyiSin8Xdy = 0. (1.5)
sin sin 8,
После интегрирования, подстановки значений
P = 6^T1; A! = '‘ocP + ySinO1; <! =/-„ср—у Sin 8,
и ряда преобразований получаем
Л1.“гжк[<р + (т51"8.)’-'?]. <>-6>
где г0, r2, rlt госр — соответственно начальный, наибольший, наи-
меньший и средний радиусы ведущего катка;
8г — угол образующей конуса катка.
Решая уравнение (1.6) относительно радиуса г0, имеем
— ЛТО ,L7>
Радиус г0 при известном гх определяется также из равенства,
составленного в соответствии с рис. 2, а,
— g — —О . <
sin 8а sin ’
откуда
r0 = (rx-asinS2)|g. (1.8)
Передаточное отношение вариатора
I __ Л1 _= _[х___ ____гх sin 82__ (19)
1-2 Пх = ®х ” г0 ~ (гх — a sin 82) sin 81 ’ ' ’ '
где гх определяется по формуле (1.4), а г0— по формуле (1.8).
Анализируя формулу (1.4), можно видеть, что радиус гх на-
чальной окружности ведомого катка равен среднему радиусу гХср
при следующих условиях:
— = —• (1 10)
4 Q2P
Sin8„ —0; (1.11)
6 = 0. (1.12)
13
Условие (1,10) в общем случае практически никогда не вы-
полняется, так как при нажатии катков с большой силой, равной
' гл 4Л4Ж
понижается коэффициент полезного действия вариатора, увели-
чиваются износ, трущихся поверхностей и габарить/ всего меха-
низма.
Условие (1.11) соответствует цилиндрической форме катков,.
а условие (1.12) — касанию катков по бесконечно малой длине
образующей (например, в интеграторах).
Формулу (1.4) удобнее анализировать, переписав в виде
b sin 82 (Мх sin fesin 82\ ,, , о.
ГХ Ср \ ср/ 4ГХ Ср /
Обозначая
' Мх sin &2_ 1
СР/ “ 7
и решая это равенство относительно Q2, получаем
= (1.14)
гх ср/
Это известная формула, которой пользуются при расчетах
в случае совпадения вершин образующих конусов, где р — так
называемый коэффициент надежности.
Подставляя у в формулу (1.13), имеем
___Ь sin 82 М ftsinB2\
Тх Ср \ Р 4ГХ ср /
(1.15)
В соответствии с (1.7) для радиуса начальной окружности веду-
щего катка1" 1 получаем
Ь sin 8, / 1 b sin 8i
>госр \ Р ^г«ср
(1.16)
По формуле. (1.15) радиус начальной окружности ведомого
катка в случае смещения вершин конусов равен среднему ра-
диусу
при условии
1 __Ь sin 82
"Р - 4гх ср
В заключение следует отметить, что, как правило, размеры
катков существующих и проектируемых вариаторов^ скорости
удовлетворяют неравенству
1 b sin 82
Р ^г®ср
(1.17)
14
поэтому радиусы начальных окружностей катков при расположе-
нии вершины ведущего конуса на образующей ведомого всегда
меньше средних радиусов.
Небезынтересным является рассмотрение случая холостого
хода. По формуле (1.4) при Мх = О
так как
2 , ZfcsinbA2 Rl + Rl
r’cp+ 1-2—
(1.18)
В рассматриваемой схеме вершина конуса ведущего катка
расположена выше оси X и отрезок 00 v считается положительным.
Если Oj ниже оси X (рис. 4), то картина относительного скодь-
Рис. 4. Схема скольжения по линии контакта при расположении вершины ве-
домого конуса на образующей ведущего.
жеиия и положение радиусов начальных окружностей гх и г0
изменяется.
Как и прежде, составляя уравнение моментов сил, приложен-
ных к ведомому катку, получаем
sin 8,
— мх— J pfysin^dy -I- pfy sin\dy = O. (1.19)
rx Ri
sin 8, sin 83
15
После интегрирования и преобразований, произведенных подоб-
но тем, которые были сделаны в первом примере, получаем:
Рис. 5. Схема скольжения по линии контакта конусов, когда их
вершины, направлены в разные стороны.
•Радиус начальной окружности ведущего катка определяется
также в зависимости от гх в соответствии с рис. 4:
г0 = (гя + ащпМ|Й|. (1.24)
Ы 11
Анализ формул (1.21) и (1.23) показывает, что радиусы на-
чальных окружностей ведомого и ведущего катков при расположе-
нии вершины ведомого конуса на образующей ведущего всегда
больше средних радиусов, даже при коэффициенте надежности
Р = 00.
16
Из изложенного вытекает, что при передаче вращения кони-
ческими фрикционными катками, проектируемыми с совпадением
вершин конусов, в случае даже незначительного смещения ( + Да)
происходит изменение радиусов начальных окружностей катков.
-Передача в этих условиях работает с неустойчивым передаточным
отношением.
Выше рассматривались схемы вариаторов с катками, вершины
образующих конусов которых направлены в одну сторону. Не
исключена возможность расположения вершин конусов в разные
стороны (рис. 5). Регулирование скорости при данной схеме может
осуществляться перемещением катков вдоль оси вала при соот-
ветствующем изменении расстояния между валами.
Углы Зх и й2 образующих конусов в рассматриваемом случае
могут быть равными при параллельном расположении осей валов
и различными при непараллельных валах. Результаты выводов
не зависят от того, какая из схем рассматривается, так как усло-
вие равновесия каждого катка записывается отдельно.
Как и прежде, определяя радиусы начальных окружностей
катков по уравнению моментов сил, получаем для ведомого катка
формулу (1.21) и для ведущего — формулу (1.16), из которых видно,
что при расположении вершин конусов в разные стороны радиус
Начальной окружности ведомого катка всегда больше среднего, а
ведущего — меньше среднего радиуса.
При известном радиусе гх начальной окружности ведомого
катка радиус г0 ведущего катка в соответствии с рис. 5 опреде-
ляется также по формуле
г0 = (а---гЦ-1 sin 5V
u \ sin б2/ 1
Определение максимальной скорости скольжения в
зоне контакта рабочих тел
Как указывалось выше, качение катков без скольжения про-
исходит по начальным окружностям радиусов г0 и гх, все другие
точки касания в зоне контактной поверхности имеют разные ско-
рости, вследствие чего происходит неизбежное скольжение и
износ катков.
Величина скорости скольжения Др = pt — р2 изменяется по
закону прямой (см. рис. 2) и имеет максимальные значения в
точках, граничащих с максимальным и минимальным радиусами
одного из катков, ограниченного по ширине размером Ь.
Для ведущего катка 1 скорости точек С и S соответственно
равны
vct = ps, = r2wi
и для ведомого катка 2
Vc2 = R^x-, VSts = R2ux,
где (Dj и (ох — угловые скорости катков 1 и 2.
2 171 ₽- I 17
к
Максимальная скорость скольжения в точке С равна
Дус=ус2 — vCl (1.25)
и в точке S
^vs = vS1 — vSi. (1.26)
Подставляя значения скоростей, заменяя
<»! г0
*1—2 X
и пользуясь формулами (1.8) и (1.24), после преобразований
получаем:
Дпс = Ю1 k Mx±asinMsin51 _ 1
1 L 1 rx sin 82 !J ’ ' ’
Д = <ох J Г2 — R2 • (1 • 28)
В формуле (1.27)
7?i = T?2 — b sin %
и
г1 = г3 — b sin 8Х.
Из формул (1.27) и (1.28) следует, что при всех прочих рав-
ных условиях скорости скольжения увеличиваются с увеличением
смещения а вершин конусов.
Определение к. п. д. вариатора скорости
Полный коэффициент полезного действия вариатора скорости,
как и к. п. д. любого механизма, определяется отношением рабо-
ты сил сопротивления, приложенных к ведомому звену, к работе
движущих сил, приложенных к ведущему звену. Таким путем
учитываются потери на преодоление всех вредных сопротивлений,
возникающих в кинематических парах системы рассматриваемого
вариатора: трение в подшипниках, трение качения в зоне контак-
та фрикционных катков и др.
Наиболее приемлемым в практике методом вычисления к. п. д.
является приближенный метод: сначала определяют реакции в
кинематических парах без учета сил трения, а затем по найден-
ным реакциям — работу сил трения и к. п. д. механизма.
Считая решение этой задачи общеизвестным, рассмотрим толь-
ко определение потерь на трение скольжения по линии касания
катков.
Воспользуемся известным соотношением между крутящими мо-
ментами ведущего и ведомого звеньев механизма
^х = М ,4-2^.
откуда
т; = тг*- > 0 -29)
18
где т) — коэффициент полезного действия механизма;
h-z— — — передаточное отношение.
г0
Крутящие моменты Мх и Мг при положительном смещении
вершин конусов соответственно определяются по формулам (1.3)
и (1.6), при отрицательном смещении — по формулам (1.20) и (1.22).
Подставляя в формулу (1.29) значения Мх, Л11,./1_2и Qt —
= после преобразований получаем
г0 sin I ± г2жср ± fA sing J т г®]
4=------------------ту-----у-уЛ (1.30)
'’xsinoj ± гаср ± ^—sinM Т Го|
где
г0 ~ Их 4- a sin о2) .
и ' х i sin 82
Верхние знаки относятся к случаю положительного смещения
вершин конусов, а нижние — к случаю отрицательного смещения.
Для схемы вариатора, у которого вершины конусов направ-
лены в разные стороны, числитель формулы (1.30) имеет нижние
знаки, а знаменатель — верхние.
Частные случаи схем вариаторов
Рассмотрим некоторые частные случаи схем вариаторов, у ко-
торых вершины конусов направлены в одну и в разные стороны.
Рис. 6. Схема направления сил трения при 82 = 90°.
I
Изменяя угол образующей ведомого конуса в сторону его
увеличения до 52 = 90°, получим схему механизма, которая пред-
ставлена на рис. 6.
2*
19
Формулы (1.15) и (1.21) для рассматриваемого случая будут
иметь вид
. . (13])
При положительном смещении вершины Ог ведущего конуса;
которое .соответствует расположению катков на рис. 6, следует
в формуле (1.31) принять верхние знаки, а при расположении
вершины 0х справа от О — нижние знаки.
Рис. 7. Схема скольжения по линии контакта лобового вариатора
скорости.
В промышленности для передачи небольших мощностей приме-
няется вариатор, схематически изображенный на рис. 7. Рассматри-
ваемая схема представляет собой частный случай, соответствую-
щий условиям: §2 = 90°, 8Х = 0, вершина ведущего конуса удалена
на а = + со.
Крутящий момент Мх на ведомом валу в данном случае опре-
деляется по формуле (1.20), а радиус окружности гх катка 2 —
по формуле (1.21).
Крутящий момент Afj на валу ведущего катка 1 определяется
по уравнению моментов сил
— — pf (4 — ej /-j + pf (у + e) fi = °,
где e = rx — rXcP' и р = ,
20
Решая уравнение моментов сил относительно М1У имеем
(1.32)
Подставляя в формулу (1.29) Мх по формуле (1.20), по
формуле (1.32), г\_2 — г-~ и Л\ = N2 = Q2, получаем
Как* видно из формулы (1.33), -q не зависит от t\.
Рис. 8. Схема скольжения по линии контакта при 82 > 90°.
Увеличивая угол В2 образующей ведомого конуса до величины,
большей 90°, получаем вариатор скорости с одним внутренним и
другим внешним конусами (рис. 8 и 9). В большинстве случаев
такие вариаторы строятся с параллельным расположением осей
валов, поэтому
sin == sin S2, 8Х-{-В2 = 180°. :
21
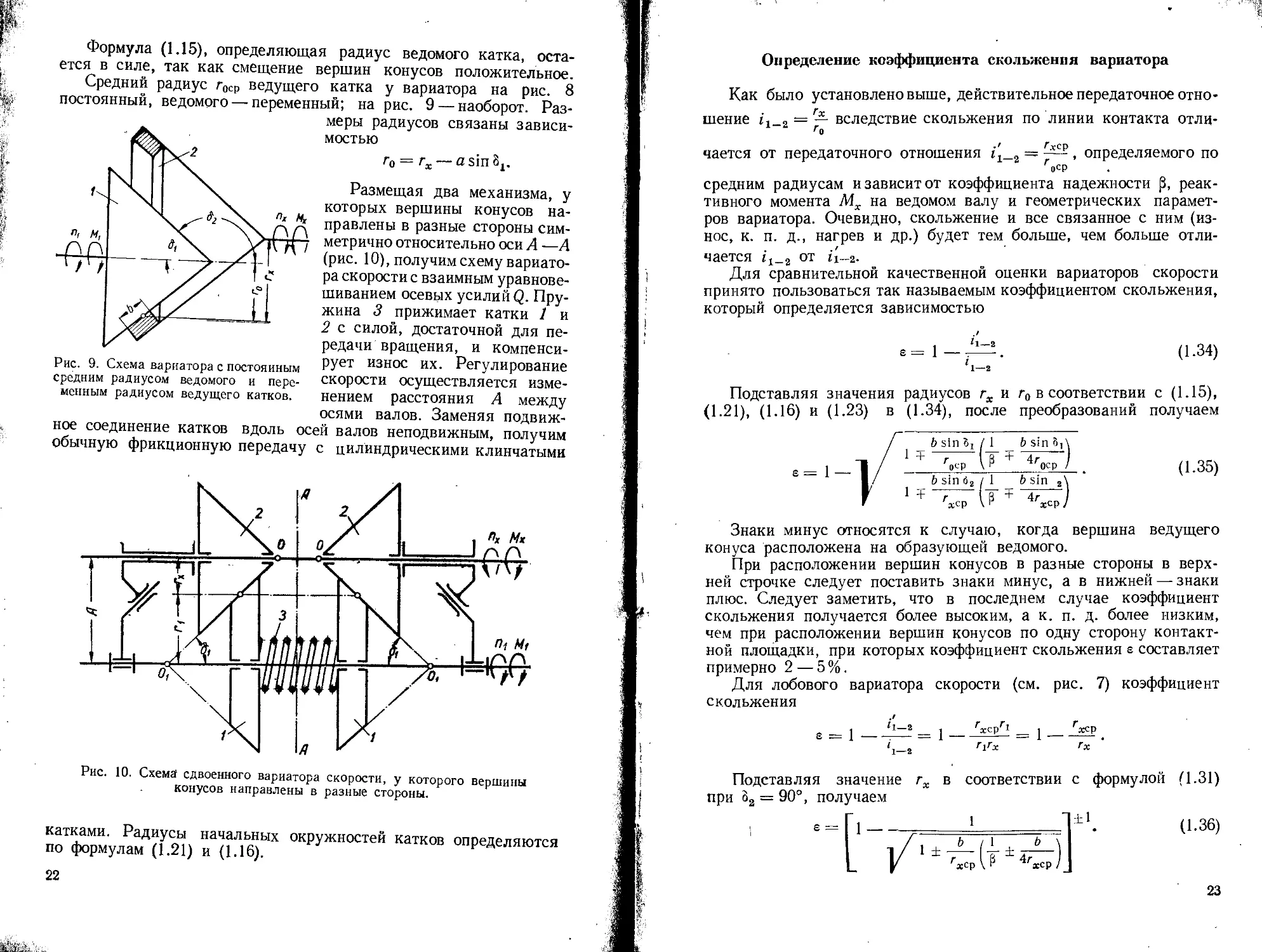
Формула (1.15), определяющая радиус ведомого катка, оста-
ется в силе, так как смещение вершин конусов положительное.
Средний радиус госр ведущего катка у вариатора на рис. 8
постоянный, ведомого — переменный; на рис. 9 — наоборот. Раз-
Рис. 9. Схема вариатора с постоянным
средним радиусом ведомого и пере-
менным радиусом ведущего катков.
ное соединение катков вдоль ос
обычную фрикционную передачу
меры радиусов связаны зависи-
мостью
г0 = гх — a sin 8V
Размещая два механизма, у
которых вершины конусов на-
правлены в разные стороны сим-
метрично относительно оси А —А
(рис. 10), получим схему вариато-
ра скорости с взаимным уравнове-
шиванием осевых усилий Q. Пру-
жина 3 прижимает катки 1 и
2 с силой, достаточной для пе-
редачи вращения, и компенси-
рует износ их. Регулирование
скорости осуществляется изме-
нением расстояния А между
осями валов. Заменяя подвиж-
гй валов неподвижным, получим
с цилиндрическими клинчатыми
Рис. 10. Схема сдвоенного вариатора скорости, у которого вершины
конусов направлены в разные стороны.
катками. Радиусы начальных окружностей катков определяются
по формулам (1.21) и (1.16).
22
Определение коэффициента скольжения вариатора
Как было установлено выше, действительное передаточное отно-
шение г\_2
Г X
= — вследствие скольжения по линии контакта отли-
ло
чается от передаточного отношения г^_2 — ^5, определяемого по
госр
средним радиусам и зависит от коэффициента надежности £, реак-
тивного момента Мх на ведомом валу и геометрических парамет-
ров вариатора. Очевидно, скольжение и все связанное с ним (из-
нос, к. п. д., нагрев и др.) будет тем больше, чем больше отли-
чается г\_2 от ii-2.
Для сравнительной качественной оценки вариаторов скорости
принято пользоваться так называемым коэффициентом скольжения,
который определяется зависимостью
(1-34)
Подставляя значения радиусов гх и г0 в соответствии с (1.15),
(1.21), (1.16) и (1.23) в (1.34), после преобразований получаем
b sin 8, / 1 _ b sin 8Л
1 + госр \ 3 + 4грср / . (1.35)
b sin б2 / 1 Ь sin 2\
1 + ~7 I"в" + 4г /
хер хер J
Знаки минус относятся к случаю, когда вершина ведущего
конуса расположена на образующей ведомого.
При расположении вершин конусов в разные стороны в верх-
ней строчке следует поставить знаки минус, а в нижней — знаки
плюс. Следует заметить, что в последнем случае коэффициент
скольжения получается более высоким, а к. п. д. более низким,
чем при расположении вершин конусов по одну сторону контакт-
ной площадки, при которых коэффициент скольжения е составляет
примерно 2 — 5 %.
Для лобового вариатора скорости (см. рис. 7) коэффициент
скольжения
е — 1 _ f'~2 1 rxcpri _ ।___ rxcp
Vx rx
Подставляя значение гх
при о2 = 90°, получаем
в соответствии с формулой (1.31)
(1.36)
23
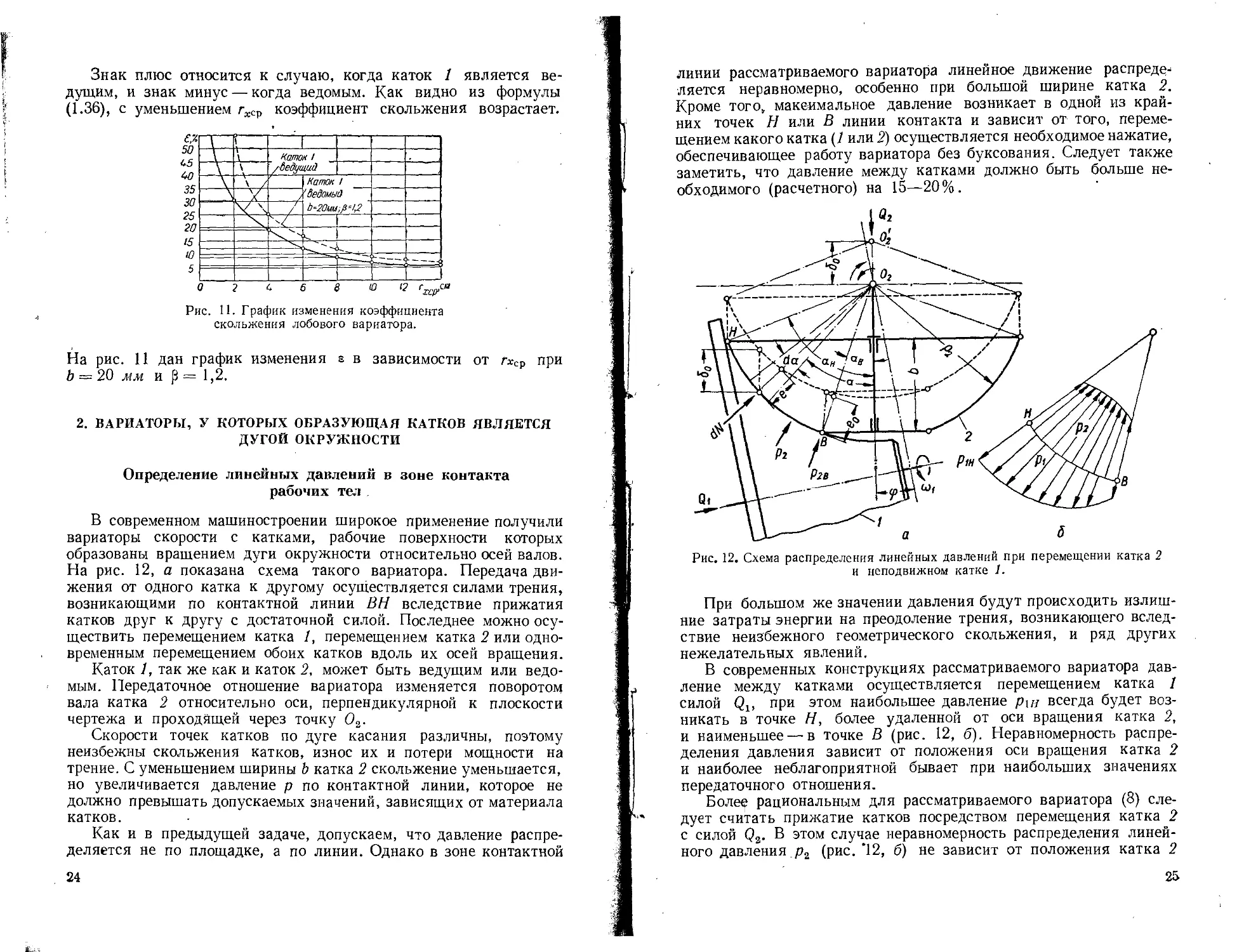
Знак плюс относится к случаю, когда каток 1 является ве-
дущим, и знак минус — когда ведомым. Как видно из формулы
(1.36), с уменьшением гжСр коэффициент скольжения возрастает.
Рис. 11. График изменения коэффициента
скольжения лобового вариатора.
На рис. 11 дан график изменения s в зависимости от гхср при
b = 20 мм и р = 1,2.
2. ВАРИАТОРЫ, У КОТОРЫХ ОБРАЗУЮЩАЯ КАТКОВ ЯВЛЯЕТСЯ
ДУГОЙ ОКРУЖНОСТИ
Определение линейных давлений в зоне контакта
рабочих тел
В современном машиностроении широкое применение получили
вариаторы скорости с катками, рабочие поверхности которых
образованы вращением дуги окружности относительно осей валов.
На рис. 12, а показана схема такого вариатора. Передача дви-
жения от одного катка к другому осуществляется силами трения,
возникающими по контактной линии ВН вследствие прижатия
катков друг к другу с достаточной силой. Последнее можно осу-
ществить перемещением катка 1, перемещением катка 2 или одно-
временным перемещением обоих катков вдоль их осей вращения.
Каток 1, так же как и каток 2, может быть ведущим или ведо-
мым. Передаточное отношение вариатора изменяется поворотом
вала катка 2 относительно оси, перпендикулярной к плоскости
чертежа и проходящей через точку 02.
Скорости точек катков по дуге касания различны, поэтому
неизбежны скольжения катков, износ их и потери мощности на
трение. С уменьшением ширины b катка 2 скольжение уменьшается,
но увеличивается давление р по контактной линии, которое не
должно превышать допускаемых значений, зависящих от материала
катков.
Как и в предыдущей задаче, допускаем, что давление распре-
деляется не по площадке, а по линии. Однако в зоне контактной
24
линии рассматриваемого вариатора линейное движение распреде-
ляется неравномерно, особенно при большой ширине катка 2.
Кроме того, максимальное давление возникает в одной из край-
них точек И или В линии контакта и зависит от того, переме-
щением какого катка (7 или 2) осуществляется необходимое нажатие,
обеспечивающее работу вариатора без буксования. Следует также
заметить, что давление между катками должно быть больше не-
обходимого (расчетного) на 15—20%.
Рис. 12. Схема распределения линейных давлений при перемещении катка 2
и неподвижном катке 1.
При большом же значении давления будут происходить излиш-
ние затраты энергии на преодоление трения, возникающего вслед-
ствие неизбежного геометрического скольжения, и ряд других
нежелательных явлений.
В современных конструкциях рассматриваемого вариатора дав-
ление между катками осуществляется перемещением катка 1
силой Qu при этом наибольшее давление р\ц всегда будет воз-
никать в точке Н, более удаленной от оси вращения катка 2,
и наименьшее — в точке В (рис. 12, б). Неравномерность распре-
деления давления зависит от положения оси вращения катка 2
и наиболее неблагоприятной бывает при наибольших значениях
передаточного отношения.
Более рациональным для рассматриваемого вариатора (8) сле-
дует считать прижатие катков посредством перемещения катка 2
с силой Q2. В этом случае неравномерность распределения линей-
ного давления р2 (рис. '12, б) не зависит от положения катка 2
25
и определяется только размерами углов ая и ав. Эти углы в су-
ществующих конструкциях соответствуют участку дуги с наиболее
равномерным распределением давления р2. Как в первом, так и во
втором случаях желательно, чтобы величина силы Q2 или Qx ре-
гулировалась автоматически в зависимости от крутящего момента
на ведомом валу и положения катка .2.
Ниже изложены теоретические исследования для двух случаев:
давление между катками осуществляется перемещением катка 2
и перемещением катка 1.
Предполагая, что каток 1, изготовленный из стали, не дефор-
мируется, а деформируется только каток 2, изготовленный из
текстолита или других пластических материалов, и что линейное
давление прямо пропорционально деформации в направлении нор-
мали, напишем
е
~С’
где р2— линейное давление в кг/см\
е — деформация катка 2 в см\
С — коэффициент пропорциональности.
Деформация по нормали произвольно выбранной точки (рис. 12,а)
определяется равенством
е = % cos а,
где оо — перемещение центра O'i в 02 вследствие деформации катка 2;
а — угол, координирующий элементарную дугу контактной
линии, ограниченной углом da.
Подставляя значение е в формулу для р2, получаем:
So
р2 = -g COS а; р2Н = -g COS ая; р2В = -J cos ав.
%
Решая полученные равенства относительно g и приравнивая
их, имеем:
cos a cos а ,, п'тч
Pi Р2Н CQS , Pi р2В CQS . ( • )
Проектируя все силы на направление действия силы Q2, рас-
смотрим равновесие катка 2
ан ан
Q2 = J dN cos а = р2 J р., cos ada,
“В “В
где р2 — радиус кривизны образующей катка 2.
Подставляя в правую часть значение р2 из формулы (1.37),
после интегрирования и преобразования получаем максимальное
значение линейного давления в точке В
Р2В =
2Q2cosaB
(1-38)
р2 I (ая — <%в) + у (sin 2а „ — sin 2ав)
26
Соответственно минимальное давление в точке Н
2Q2cosaH
Р2Н = ----Г-----------j-----------------
?2 (“И — ов) + у <sin 2аН ~ sin 2aB)
Среднее линейное давление с достаточным приближением при-
нимаем как среднее арифметическое
Р2В + Р2Н <?2 <cos ав + cos ан) ..
Р2ср =-----2----= ~Г--------------i-----------------1 ’ -39>
Р2 («н — ав) + -2 <sin 2itff — sin 2ав)
или
Р2ср ~
где С2 — величина постоянная.
По аналогии с изложенным были получены формулы для ли-
нейных давлений по контактной линии, когда катки прижимаются
усилием Qx посредством перемещения катка 1 Вдоль оси (рис. 13, а)
Р\в + Р\Н
Picp — 2 —
Qi [sin (ЯН —?) + sin(aB — <р)]
Р2 — «в) + у Sin 2 (aB — <р) — у sin 2 — <р)
ИЛИ
Picp = QiCx,
где Сг — величина переменная.
Рис. 13. Схема распределения линейных давлений при перемещении
, катка 1 и неподвижном катке 2.
2Л
Закон изменения отношения максимального линейного давле-
ния к минимальному (при ан = 52° и а.в = 40°) для различных
положений катка 2 показан на графике рис. 13, б, а закон изме-
38 30 20 10 0 10 20 30 40
Рис. 14. График изменения средних
линейных давлений в зависимости
от положения катка 2.
нения средних давлений — на
рис. 14. Из графиков видно, что
более рациональной является кон-
струкция, у которой необходимое
давление между катками осуще-
ствляется перемещением не кат-
ка /, как это имеет место в суще-
ствующих моделях, а катка 2. На
рис. 15 показано два предельных
положения катка 2, которые опре-
деляются положением оси враще-
ния через углы ф, и <р2.
Определим зависимость меж-
ду ®j и основными параметрами
Ь и р2 катка 2 при рабочей поверхности катка 1, ограниченной
углом 90°.
Из рис. 15 видно, что
(1.41)
«// = у — и а.в = <р2,
p2cosaB — p2cosa// = &, или cosas — cos а.н = — ,
р2
Подставляя значения ав и а.н из (1.41), получаем
cos<p2 —sin?1 = у . (1.42)
28
В большинстве случаев при проектировании вариатора принимают
?2 = ?i> тогда
cos ?2 — sin ?2 = у 1 — sin 2?2 = 4 ,
г2
откуда
sin2<р2 — sin2<р± = 1 — . (1-43)
Когда вариатор составлен из трёх катков (см. рис. 20),
?1=?2=у-— аН И «н + аВ=~.
Как видно из рис. 15, при угле <рг качение катков без сколь-
жения происходит в одном полюсе е, а при угле <р2 .окружные
скорости катков могут быть равными в двух полюсах т и с.
Определение передаточного отношения вариатора при ведущем
катке 1 и ведомом 2
Как и в предыдущих случаях, в рассматриваемой задаче при-
нято допущение, что элементарные силы трения параллельны
между собой и перпендикулярны образующей в плоскости чертежа.
Рассмотрим сначала случай чистого качения катков в двух
полюсах. Передаточное отношение вариатора (рис. 16)
; Вв ^0
*1-2 — — = “У ,
го 'о
где .
— р2 sin 0Сс, Rq — р2 sin ос,?!,
r0 = А — р2 cos (ас — ср) и Го = А — p2cos(am — ср).
Подставляя значения радиусов в формулу для i2, получаем
= ра Sin % = Рз sin (i 44ч
1-2 А — р2 cos (ae — ср) А — р2 cos (ат — ср) • ' ’ J
Неизвестным в формуле (1.44) является угол ат или ас, опре-
деляющий соответственно полюсы качения тис.
Определим углы ас и а.т из условия равновесия моментов всех
сил, приложенных к катку 2, относительно его оси вращения.
На рис. 16, а показан график разности окружных скоростей
v2 и для исследуемого случая. Штриховой линией ограничены
концы векторов скоростей и3 катка 2 и сплошной — концы век-
торов скоростей катка 1.
В соответствии с графиком на участке ст силы трения, воз-
никающие вследствие скольжения и приложенные к катку 2,
направлены в сторону, противоположную направлению его вра-
щения, а на участках Вс и mH — в направлении вращения.
29
Рис. 16. Схема скольжения по линии контакта при ведущем катке J и ведомом 2.
30
Сумма моментов внешних сил и сил трения, действующих на
каток 2 относительно оси 002, запишется так:
— — Мтс -f- М св 4- Мтц = 0, (1.45)
где Мх — момент внешних сил;
Мтс — момент сил трения на участке дуги тс;
Мсв — момент сил трения на участке дуги сВ;
Мтн — момент сил трения на участке дуги mH.
На любом участке дуги контактной линии, ограниченной уг-
лом da, элементарный момент сил трения равен
dM = dNf р2 sin а,
(1.46)
где dN— нормальное давление, приложенное как равнодействую-
щая линейных давлений к рассматриваемому элементу
Дуги;
р2 — радиус кривизны образующей катка 2;
а — угол, координирующий рассматриваемый элемент дуги.
Нормальное давление dN определяем по среднему линейному
давлению
dN = р2срр2^а.
Подставляя значение dN в формулу (1.46) и интегрируя в преде-
лах рассматриваемых дуг, имеем
МСВ = р2Р2ср/ (cos ав — cos ас)
Мтс — P2P2cpf (COS ССс COS й/n)
Мтн = p|P2cpf (COS а,т — cos ан)
(1.47)
После подстановки полученных значений моментов в формулу
(1.45) и простых преобразований получаем
Мх = ?lp2cpf (2 COS а.т — 2 cos a.c 4- cos aB — cos сад). (1.48)
Решая равенство (1.48) относительно (cosac — cosam) и подстав-
ляя значение р*ср по формуле (1.39), имеем
cos ac — cos am =
cos aB — cos оад
2
Mx (ан — ав> + у <sin 2aw — sin 2яв)
P2Q2/ (COS aB + COsaH)
.(1.49)
* При подстановке действительного значения р2 по формуле (1-37) фор-
мула (1.49) имеет вид
1 / 4MxcosaB
COS* 1 2 * 4 а. — COS2 = —- cos2aR — COS 2a„----
C m Д. I b " 2r
4 \ Р2ВР2/
Последующие преобразования этой формулы приводят к громоздким уравне-
ниям четвертой степени. Точность результатов, получаемых по средним ли-
нейным давлениям, достаточна для практического применения.
31
Обозначим
cos аг — cos ат = В.
(1.50)
Для решения уравнения (1.50) определим геометрическую зави-
симость между углами ас и ат из треугольника 0т02 (рис. 16, г).
По теореме синусов
---й = (1-51)
COS <р0 sin о sin 4 '
где 0 = 90° - (Хр) ’
ф = 90° — ;
ф0 = 2-гс + ср — угол, определяющий положение катка 2.
Подставляя значения 0 и ф в равенство (1.51), имеем после
преобразований
tg =_______л.~Р2-£^У»__. (1.52)
tg j (Л + р2 cos <р0)
Подставляя в уравнение (1.52) значения
, /~1 ~ COS ат . ar А1 — C°S
tg ~2' = |/ 1 + cos а- ’ Д = |/ 1 + COsac
и решая его относительно cos ат, получаем
2Лр2 COS <р0 — Л2 COS ас — Р2 COS2 ср0 COS ac
cosam=-----------g------------------------•. (l.bo)
Л2 + pg cos2 <f№ — 2Лр2 cos <f№ cos ac
Полученное значение cosam подставляем в формулу (1.50) и,
обозначая Л/р2 = К, после преобразований получаем
1 / К , COStpo , D\
COS ОСс — ТТ I '---f- —/7-f- В I
2 \coscpo 1 К 1 /
/1 / К , coscpo , „V ( BK , В cos <p0'i .. t-,.
Таким же путем получаем
1 I К , cos ср0 D\
cos а.т — -------------— В] —
т 2 ’casco,, 1 К /
/1 / к । cos То _ rV_ /i _ вк _ Bcos?o) /] спч
4 (cos ?0 + К °! V 2 cos ®0 2К р
Анализ графика (рис. 16, а) разности скоростей катков пока-
зывает, что скорости скольжения могут быть и однозначными
(рис. 16, б), что соответствует граничному положению, при кото-
ром происходит буксование вследствие недостаточной силы нажат
32
Тия Q2 или вследствие увеличения момента Мх внешних сил до
предельного. В этом случае аСмакс = а,„мин и соответственно
cosac — cos ат = 0.
Решая уравнение (1.49) относительно Q2 при асмакс = «тмин
и обозначая силу нажатия, при которой cos ас— cos ат = 0, через
Q2mhh> а необходимую силу нажатия — через Q2 = QaMHHP, получаем
мх [(aw — ав) + 4 (sin 2ан~ sin 2а в)]
^2 ^2МИН^ Р рг/(COS2 ав — COS2 -56)
где р — коэффициент надежности, который рекомендуется прини-
мать равным 1,15—1,2.
Теперь исследуем работу вариатора, когда общая образующая
начальных конусов пересекается с образующей катков не в двух,
а в одном полюсе. Рассматриваемый случай соответствует усло-
вию, при котором полюс с уходит за пределы точки В или полюс
т уходит за пределы точки Н. Полагая соответственно для каж-
дого условия ас = ав и ат = ан и обозначая точку пересечения
образующей начальных конусов с образующей катков буквой е,
из формулы (1.49) получаем
1 {
cos ае = -^ cos ав -f- cos ан ±
— ав) + V (sin 2ан —sin 2ав) Ц
+---------п -------—------г------1 - (1.57)
— p2Q2/(cosaB 4-cosa/y) ) ' '
Знак плюс относится к случаю, когда ас = ав, и минус — когда
«т = О-н.
Необходимую силу нажатия катков для случая однополюсного
качения можно определить по формуле (1.57), полагая, что на-
чальный момент буксования имеет место при ае = ав или ае = ан
(рис. 16, в). В результате решения этой задачи получим формулу
(1.56).
Важным в рассматриваемой задаче является определение угла
<ртс, в пределах которого происходит качение катков в двух
полюсах. В общем случае переход от двухполюсного к однопо-
люсному качению катков может быть при двух значениях ®тс:
при повороте оси вращения катка 2 влево или вправо от верти-
кали. Кроме того, в каждом из этих положений оси катка 2 воз-
можны два случая: за пределы контактной линии перемещается
полюс с или полюс т. Это зависит от межосевого расстояния А
и углов ав, ан и ®.
В первом случае предельное положение определяется совмеще-
нием полюса с с точкой В, во втором — совмещением полюса щ
с точкой Н.
3 171
33
Решая уравнение (1.54) относительно <р0 при ас=ав, получаем,
значение <?тс для первого случая
COS тс — К
1 -|- COS2 ав — в COS ав
2 COS ав — В
Г Л + COS2aB — BcosaB
\ 2 cos ав — В
(1.58)
Соответственно решая уравнение (1.55) при ат = а#, опреде-
ляем значение ср^с для второго случая
1 + COS2 + В COS ав
2 cos -|- В
COS Гтс = К
1 4- cos2 4- В cos аи 2
2 cos ав + В j 1
' (1-59)
Определение передаточного отношения вариатора
при ведущем катке 3 и ведомом 1
Напишем сумму моментов сил, приложенных к ведомому кат-
ку 1 (рис. 17) при ведущем катке 2
-Мг +Мт1С1-МС1в-ММт1 = 0. (1.60)
Элементарный момент сил трения для любого участка дуги
касания катков определяется по формуле
dM = dNfrx. (1.61)
Как и прежде,
dN = p2p2cpda.
Плечо силы трения гх определяется равенством
гх = А — p2cos(tx — <р0), (1.62)
где ®0 = + ср.
Подставляя значения dN и гх в формулу (1.61) и заменяя
cos (а —• ср0) = cos а cos ср0 -f- sin tx sin cp0, получаем
p -f = A da — p2 cos cp0 У cos adz — p2 sin cp0 J sin ada. (1.63)
Интегрируя правую часть равенства (1.63) в пределах дуг
схВ, сгт1, т^Н, соответственно получаем:
= р2Р2ср/ [А (<Ч — aB) — p2cos ср0 (sin aCi — sin aB) -f-
-f- p2 sin cp0 (cos aCl—cosaB)]; (1-64)
= p2P2cpf [A (am, — aCi) — p2cos cp0 (sin ami — sin aC1).-f-
p2 sin cp0 (cos ami — cos aC1)]; (1.65)
= РгРгср/ И (ан — «mJ — p2 cos cp0 (sin aH — sin aOT1) -f-
+ p2sincPo(cosaH—cosam,)]. (1.66)
34
Подставляя значения MC1B, Мт>с,, МИгП1 и р2Ср из формулы
(1.39) в сумму моментов (1.60), после преобразований получаем
А
2
„ a<J — (sinam, — sinaj — tg ср0 (cos at, — cosam,) =
. r2 k-u-5 то
y}
= о Расп' — aB>— <sinat1~ sin°-B> ~ ?0 (cos XB — COSa#) 4-
га то
Ml (ан — aB) + — (sin 2aH
J-----L_______________________________
P2Q2/ (COS aB 4. cos aH) cos <p0
(1-67)
— sin 2aB)j
Рис. 17. Схема скольжения по линии контакта при ведущем
катке 2 и ведомом 1.
Уравнение (1.67) решается табличным способом. Для этой
цели следует задаться рядом значений аС1 и по формуле (1.52)
определить соответствующие им ат,.
Результаты действий, произведенных для левой части уравне-
ния по каждому значению аС1 и ami, сравнивают с правой частью,
которая для данного значения ср0 = 2-гс ± ср является величиной
постоянной.
Подставляя в формулу (1.67) предельные значения углов am =
= ан и ас = ав, соответствующие условию, граничащему с буксо-
ванием, получаем
Г А (УВ — хв) — (Sin ан — sin ав) — tg ср0 (cos ав — cos aH) =
г 2 то
[1 1
(аН — ав) + ~2 (sin 2aH — sin 2aB)
P2Q2/ (cos aB 4. COS aH) cos " (1.68)
3*
35
Обозначая левую часть равенства (1.68) через D, определим
необходимую силу нажатия
— ав) + — (sin 2ан — sin 2ав)
0-2 ~ Dfaf (cosaB 4- cos aH)costp0
₽. (1.69)
Выше был рассмотрен случай пересечения образующей началь-
ных конусов с образующей катков в двух полюсах. Пересечение
образующих в одном полюсе соответствует двум условиям:
= о-в при ami = аг,
или
otm, = «w при аС1 = а^,
где С; — полюс качения.
Подставляя эти условия в формулу (1.67), соответственно
получаем
2 (гТУСГ ae‘ — sin 'f’o cos / =
\p2 < 0^ Yо 7
= (a^ ~ (sin a£ -b sin a/f) + tg cp0 (cos aB 4- cos aH) ±
Mj («Н — + у (sin 2aH — sin 2a£)
+ —-—---------------i------\--------- • (1-70)
P2Q2HCOS aB + cos aH) cos cp0 v >
Рассматривая предельное значение угла aei, граничащее с мо-
ментом буксования, когда ай1 = ав или ае, = aw, получаем фор-
мулу (1.69), определяющую необходимую силу нажатия катков.
Уравнение (1.70), как и уравнение (1.67), решается табличным
способом.
Передаточное отношение вариатора при ведущем катке 2 и
ведомом 1 определяется отношением (рис. 17). при двухполюсном
качении катков
_ _ Л — р2 cos (чС1 —у) _ Л — р2 cos (ami — у)
Гз-1 ~ Ro ~ p2sinaCi р2 sin ami '
и при однополюсном качении
А — р2 cos (а — ср)
«0-1 = ------С--------
- 1 p2sina
(1-72)
Заканчивая исследования кинематики вариатора, следует от-
метить, что наименьшее скольжение, а следовательно, и наимень-
ший износ катков имеют место при двухполюсном качении. Со-
отношение между А и ср при двухполюсном качении катков
определяется формулой (1.52), приведенной к виду
, , . /«m — ас\
1 + tg tg у cos[ )
A = p2COS?0—--------- = p2COScp0 - - (1.73)
l-tgTtg- cosl-^—I
36
Полагая, что
ан + ав
ат= ас = ---2----- ’
получаем приближенно
1 + tg2 +
л \ 4 / cos ср„ ,,
Л ~ р2 cos ср0----— = ?2------------77+^-----• (1 74>
Предельные значения углов ср, при которых качение одно-
временно происходит в двух полюсах, определяется по формулам
(1.58) и (1.59).
Определение коэффициента полезного действия вариатора
Не останавливаясь на общеизвестных методах определения
полного к. п. д. механизма, определим к. п. д. вариатора с уче-
том только потерь, возникающих вследствие геометрического
скольжения катков в зоне контактной линии.
Прежде всего рассмотрим случай, когда каток 1 — ведущий, а
каток 2 — ведомый, качение катков происходит без скольжения
в двух полюсах.
В качестве исходного выражения, определяющего к. п. д.
вариатора, принимаем известную формулу
где Мх—крутящий момент на ведомом валу вариатора в кг-см;
М1— крутящий момент на ведущем валу в кг-см;
iv_2 — передаточное отношение.
Крутящий момент на валу катка /, когда он является веду-
щим (см. рис. 16), определяется по формуле
М, - МтН - МВс + Мст = 0. (1.76)
Подставляя в формулу (1.75) значения Л4Г по формуле (1.48),
z'i-2 по формуле (1.44), Мтц по формуле (1.66), МВс по формуле
(1.64) и Мтс по формуле (1.65), после ряда преобразований по-
лучаем
А — р2 cos(a'c — ср)
7j1_ 2 _ —
— (2а —2am+a„—ав) —cos ср0(2 sin а,— 2 sin am+sin a^ — sin ав\
, ps____________________________________________'___
p2 sin ac |_ 2 cos am — 2 cos ac + cos aB — cos
— sincp0 ; (1.77)
где aj = ac.
Предполагая, что в формуле (1.77) = а.н при ac = ae или
а.с = aB при am = ae, а также как в одном, так и в другом слу-
37
чаях а.'с — ае, получаем формулу, определяющую к. п. д. вариа-
тора при однополюсном ка.чении катков
•П1-2- А — р2 cos (яе — с) ГА „ .
р2 sin ае — (2ае —а» —— cos ср0 (2 sin — sin — sin a^) P2 sin cp0 COsaH 4- COS aB — 2 COS ae
(1-78)
В случаях передачи движения от катка 2 к катку 1 исходное
уравнение для определения к. п. д. вариатора имеет вид
= <L79)
При двухполюсном качении катков момент М, определяется
из формулы (1.67) в соответствии с формулой (1.39):
Mi = /РгРгср И (2ami — 2ac, + aB — aH) —
— p2 cos cp0 (2 sin ami — 2 sin ac, -|- sin aB — sin a«) — (1.80)
— p2 sin cp0 (2 cos ac, — 2 cos am, -|- cos — cos aB)].
Сумма моментов всех сил относительно оси вращения веду-
щего катка 2 (рис. 17) запишется так:
Мх 4* Мтц -|- Мвс — №Ст — 0. (1.81)
Подставляя в формулу (1.81) значения моментов МтН, Мвс,
МСт по формуле (1.47), имеем
Л4Х = р2р2ср/ (2 cos ac, — 2 cos am, cosaH — cos aB). (1.82)
Подставляя в формулу (1.79) значения М, по формуле (1.80),
Л4Х по формуле (1.82) и г2-1 по формуле (1.71), после преобра-
зований получаем
Д
— (2ат,—2аС1+аВ—~ cos ?о (2 sin ат,—2 sin ac +sin ав—sin ан)
•n — Г?____.________________________ 1__________!_______________
12-1 |_ 2 cos aC1 — 2 cos ат 4- cos — cos aB
где etc, — etc,*
В случае пересечения образующей начальных конусов с обра-
зующей катков в одном полюсе по тем же условиям, что и при
выводе формулы (1.78), получаем
7I2—1 =
н
+ — 2яе,) — cos ср0 (sin ан 4- sin ав — 2 sin
2 cos ае — cos ав — cos ав
— sincp0
p2 sin ае, _____
Л — р2 COS (ае,—<ро) ‘
(1-84)
38
В частном случае (рис. 18) при ведущем стальном катке 1,
ведомом 2 из текстолита, постоянном Мх = 150 кг-см, f = 0,2,
{3= 1,2, р2 = 100 мм, А =142 мм получены следующие резуль-
таты: Q2 — 90 кг; р2в = 66 кг/см\ ср = ± 39°; ав = 39°; — 51°;
Ь = 15 мм-, = 25° 13'20"; аг = 50°7'30"; а„, —ас^1°; =
= 0,546-4-1,748 и т]1_2 = 0,995ч-0,931 (рис. 19).
Рис. 18. Схема вариатора с однополюсным и двухполюсным
качением катков.
Рис. 19. График изменения к. п. д. и передаточного отно-
шения вариатора в зависимости от положения катка 2.
39
Вариатор скорости, составленный из трех катков ,
В машиностроении наиболее широкое применение получили
вариаторы, составленные не из двух, а из трех катков (рис. 20).
Каток 1 является ведущим, 3— ведомым или наоборот. Каток 2
является промежуточным и служит для изменения передаточного
отношения. Результаты теоретических исследований, изложенные
выше, применимы и для данного вариатора, если последователь-
но рассматривать катки 1 и 2 при ведущем 1 и затем катки 2
и 3 при ведомом 3. При этом следует учесть, что сила Q2, при-
жимающая каток 2, в данном случае воспринимается не одним,
а двумя катками (1 и 3). Следовательно, в знаменатель формулы
(1.39), определяющей среднее линейное давление, необходимо
ввести двойку
, Q2 (cos ав + cos ан)
А'гср—----1------------j------------------т~ • U-00/
2ра (ая — “В) + у (sin 2яВ — sin 2ав)
Соответствующие изменения следует внести также во все фор-
мулы, в которые входит значение р2ср-
Общее передаточное отношение z\_3 вариатора, составленного
из трех катков, определяется произведением z1_2z2_3, например,
при однополюсном качении катков
_ . . _ А — р2 cos (aCi + ср)
Z1-3 — Н—2^2—3~ Д — р2 cos (afii + р)
(1-86)
40
Верхние знаки соответствуют отклонению оси ролика 2 вправо
от вертикали, а нижние — влево.
Коэффициент полезного действия вариатора
TQl-S = ТГк_2^2_3- О-87)
Коэффициент скольжения рассматриваемого вариатора скорости
определяется по формуле
S = S1 + S2 4" ®1®2- (1.88)
Рис. 21, График изменения коэффициента скольжения торового
вариатора.
Пренебрегая произведением можно с достаточной для
практических целей точностью определить
г — ®1 + г2,
(1.89)
где гд— коэффициент скольжения для контакта катков 1 и 2
при ведущем катке 7: !
и е2— коэффициент скольжения для контакта катков 2 и 3 при
ведущем катке 2:
Передаточные отношения z[_2 и z2_3 определяются по средним
радиусам, а действительные передаточные отношения г\_2 и z2_3 —
с учетом скольжения по контактной площадке.
На рис. 21 дан график изменения коэффициента скольжения
е в зависимости от передаточного отношения для вариатора, вы-
полненного по схеме торового вариатора [27].
В заключение следует отметить, что рассматриваемый вари-
атор при сопоставлении его с другими схемами имеет наимень-
шее значение е.
41
3. ОПРЕДЕЛЕНИЕ ПЕРЕДАТОЧНОГО ОТНОШЕНИЯ,
КОЭФФИЦИЕНТА СКОЛЬЖЕНИЯ И К. П. Д. ВАРИАТОРОВ,
РАБОТАЮЩИХ С НАЧАЛЬНЫМ КОНТАКТОМ В ТОЧКЕ
Известно, что в общем случае тела качения, соприкасающиеся
в начальный момент в точке,
Рис. 22. Схема расположения полю-
сов качения при начальном контакте
фрикционных катков в точке.
под действием нормальных сил
деформируются и контакт в
точке переходит в контакт по
некоторой площадке, имею-
щей эллиптическую форму
(рис. 22, а). Скорости колес ва-
риатора в различных точках
контакта будут различными, и
.только в одной из них (точке О),
которая не совпадает с цент-
ром О' площадки (рис. 22, б),
окажутся одинаковыми. Распо-
ложение точки О зависит от рас-
положения осей валов фрик-
ционных колес и взаимного рас-
положения вершин образующих
Рис. 23. Схема вариатора с на-
чальным контактом в точке.
конусов по касательной к площадке контакта (рис. 23). В частном
случае, когда оси валов расположены в одной плоскости, точка О
(см. рис. 22, б), в которой скорости одинаковы, и точка при-
ложения равнодействующей сил трения F расположены на линии
малой полуоси эллипса, а расстояния I и 1м от центра площадки
для данного передаточного отношения зависят только от коэф-
фициента надежности
о__ Nf__ гхср
р “ F “ Мх "
Потерн, возникающие вследствие скольжения между площад-
ками контакта, очевидно, будут тем меньше, чем меньше расстоя-
ние In между точками О и
42
Построив график геометрического места точек О и Ot в за-
висимости от р (рис. 24), можно установить оптимальное значе-
ние коэффициента надежности, при котором потери на скольже-
ние будут минимальными. По графику оптимальное значение р
находится в пределах от 1,25 до 1,67.
Величина скорости скольжения для точки касания О'
(см. рис. 23) определяется так:
Дуо- = — [уо']2>
где
[уо-]1 = «Л sin сц
и
[уо. j2 — (1)2^2 sin а2.
Подставляя значения ско-
рости [Уо'], точки О’ катка 1
И СКОРОСТИ [У0']2 точки О'
катка 2 в формулу для Дуо-,
получаем
b.vo' = sin 04 — <о2/2 sin a2.
Заменяя
(l, — I) sin a,
<0, = T,—, ,
2 1 (Z2 + 6 Sin “8
после преобразований имеем
Рис. 24. График геометрического места
точек О и Ол в зависимости от ф
Л + ?2
Z2 ± Z
ДУо- = coj/ sin aj
(1.90)
Соответственно скорость скольжения для точки приложения рав-
нодействующей сил трения F (точки определяется формулой
Дуо, = Wj sin
V2 i О
(1.91)
Коэффициент скольжения е для рассматриваемого случая
определяется формулой
s=l-^, (1.92)
где i — передаточное отношение вариатора, определяемое по сред-
Zo sin a,
ним радиусам: t = ;
r ' Zj Sin ctj
Zg — передаточное отношение вариатора, определяемое по радиу-
сам, соответствующим нескользящей точке О: z"g=
<> Подставляя значения i и zg в (1.92), определяем
. _ 1_______— О
/1 (/а ± /) *
(1.93)
43
Потери на трение в зоне контакта определяются коэффициен-
том полезного действия
Мг
71
где Л42 = F (12 + !м) sin а2 — крутящий момент, приложенный к ве-
домому валу (см. рис. 23);
М1 = F (Ji 4- 1м) sin — крутящий момент на ведущем валу.
Подставляя значения М2, Adj и ig в формулу для т), имеем
(^2 Т ^м) (F I)
71 = (/2 ± /) (4 + 1М) '
(1-94)
В формулах (1.91), (1.93) и (1.94) нижние знаки относятся к
случаю расположения вершин конусов по одну сторону от центра
О' контактной площадки.
Величины Arox, е и т], качественно характеризующие проек-
тируемый вариатор скорости, определяются, если известны ко-
ординаты / и 1М точек О и О1: При этом следует отметить, что
рассматриваемую в данном случае задачу определения размеров
I и 1м следует решать с учетом неравномерности распределения
давленйя (см. рис. 22, а) по площадке контакта и непараллель-
ное™ сил трения.
Принятое нами ранее допущение о равномерном распределении
давления и параллельном расположении сил трения может, при-
вести значительной погрешности [27]. Так, например, при
у = 1 погрешность достигает 25 %. .
С 'целью упростить практическое определение величин lN, 1м
и I [48] построена номограмма (рис. 25) в координатах, представляю-
щих собою отношения
In I 1м
у ab ’ У ob У ab ’
где а и Ь — полуоси эллипса площадки контакта.
Номограмма построена для различных значений |3 с учетом
отношения радиусов кривизны фрикционных колес в аксиальном
сечении гах к радиусу кривизны колес rqu в сечении, перпенди-
кулярном аксиальному.
Величина [/ ab определяется из уравнения Герца
1
т2
3 , (1.95)
Vab = C Vгахгйи
^ахГциЕ
где С — коэффициент, зависящий от отношения —, который опре-
?qu
деляется по графику (рис. 26);
44
tn — коэффициент Пуассона;
Е— модуль упругости;
N — нормальное давление.
Анализируя номограмму, приведенную на рис. 25, следует
заметить, что наименьшие потери, возникающие вследствие сколь-
жения на площадке контакта, соответствуют шаровым поверх-
Определение скорости скольжения Ду01, коэффициента сколь-
жения е и к.п.д. т; производится в такой последовательности.
По исходным данным — передаточному отношению I =
2’ Р^У-
сам тел качения и нормальному давлению N — определяется от-
ношение — и соответствующий ему коэффициент С (по гра-
' qu
фику на рис. 26). По формуле (1.95) определяется значение
У^аЬ. Задавшись значением (3, по номограмме (рис. 25) в соот-
ветствии с известным — определяем значение —~, ~L= и
гч.и f ab V ab
45
~, а затем I, lN и 1м, подставляя уже определенную по фор-
V ab __
муле Герца величину Vab. Длины образующих и /2 касатель-
ных конусов определяются по схеме вариатора скорости. Под-
ставляя полученные значения величин в формулы (1.91), (1.93) и
(1.94), определяем искомые величины, соответствующие данному
передаточному отношению.
4. ПРОВЕРКА РАБОЧИХ ТЕЛ ВАРИАТОРОВ НА КОНТАКТНЫЕ
НАПРЯЖЕНИЯ СЖАТИЯ
Прочность контактирующих поверхностей катков вариаторов
в большой мере зависит не от давлений на единицу длины кон-
тактной линии, а от контактных напряжений сжатия. В случаях,
когда эти напряжения превышают определенные пределы, возни-
кает под влиянием циклических нагрузок усталостное разруше-
ние — выкрашивание. При обильной смазке усталостное разруше-
ние поверхностей, изготовленных из стали, прогрессирует.
Условие прочности рабочих тел (катков) по максимальным
напряжениям сжатия в зоне контакта определяется по формулам
Герца-Беляева. Для катков, рабочая поверхность которых огра-
ничена дугами окружностей постоянного радиуса и которые в
начальный момент, при отсутствии деформаций, соприкасаются
по линии, условие прочности имеет вид
W = 0,418 ]/^<[0]к (1.96)
и в случае первоначального касания в точке
(1.97)
где зМакс — максимальное напряжение сжатия на контактной
площадке;
Q — сила сжатия катков;
46
г. 2£]£2
Е ~ Tig------приведенный модуль упругости материалов катков;
Ь — длина контактной линии;
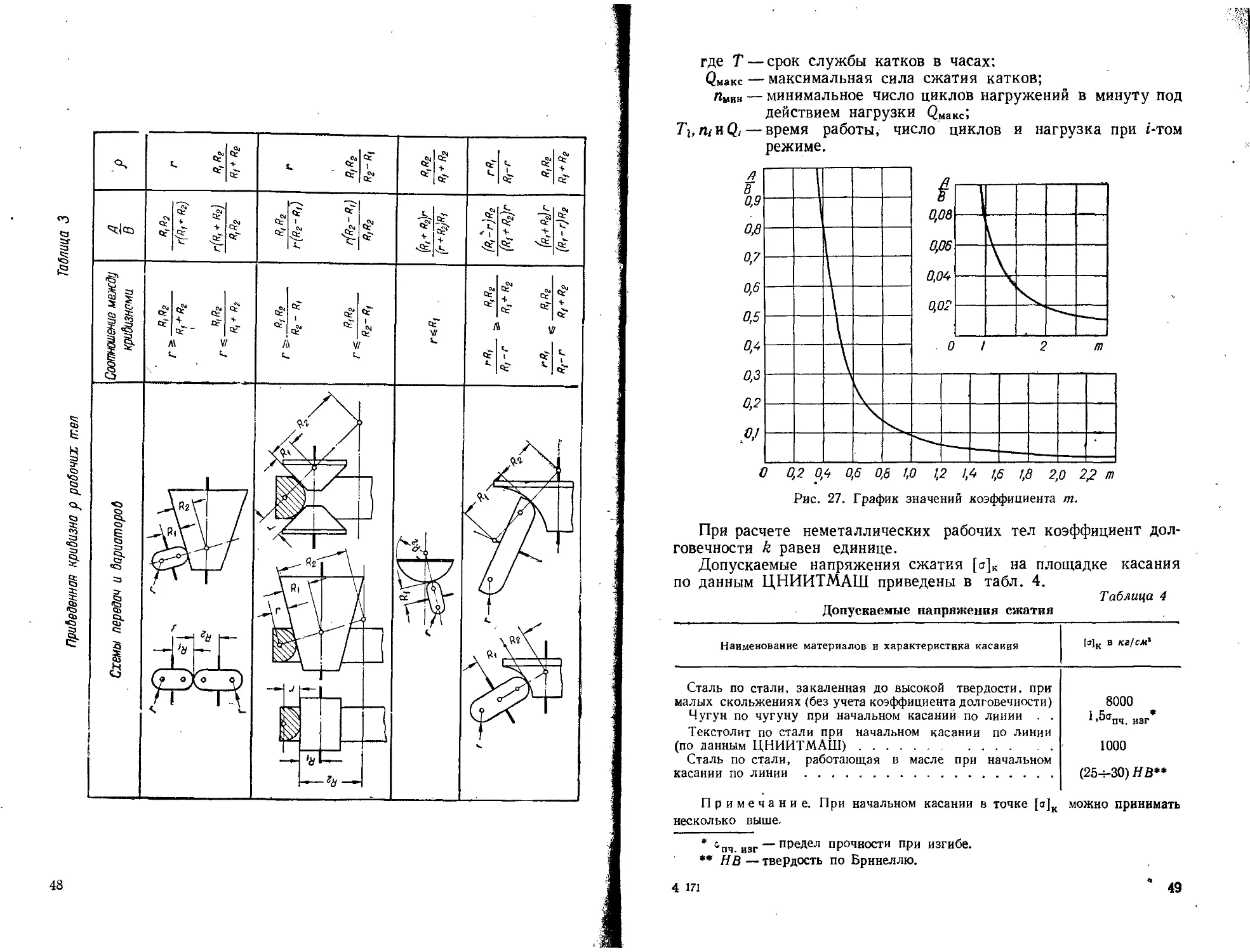
р = °- , 5---приведенный радиус кривизны катков (определя-
ется в соответствии с табл. 2 и 3);
Приведенная кривизна р рабочих теп Таблица 2
т — коэффициент, выбираемый по графику (рис. 27) в
зависимости от отношения А: В (табл. 3). Для
рабочих тел, ограниченных плоскостью или сфе-
рической поверхностью т — 0,388;
k — коэффициент долговечности, который определяется
по формуле
k
щ / Qi \2
Ю’ Zj ’
(1.98)
47
Приведенная кривизна р рабочих тел
1—га—I
48
где Т — срок службы катков в часах:
Смаке — максимальная сила сжатия катков;
Имин — минимальное число циклов нагружений в минуту под
действием нагрузки QMaKC;
Ti,mnQi — время работы, число циклов и нагрузка при г-том
режиме.
Рис. 27. График значений коэффициента ш.
При расчете неметаллических рабочих тел коэффициент дол-
говечности k равен единице.
Допускаемые напряжения сжатия [<з]к на площадке касания
по данным ЦНИИТМАШ приведены в табл. 4.
Таблица 4
Допускаемые напряжения сжатия
Наименование материалов и характеристика касания
Сталь по стали, закаленная до высокой твердости, при
малых скольжениях (без учета коэффициента долговечности)
Чугун по чугуну при начальном касаний по линии . .
Текстолит по стали при начальном касании по линии
(по данным ЦНИИТМАШ)...................................
Сталь по стали, работающая в масле при начальном
касании по линии ......................................
fj]K в кг!см*
8000
1 ’5апч. изг
1000
(25ч-30) НВ**
Примечание. При начальном касании в точке [а]к можно принимать
несколько выше.
* спч. изг — предел прочности при изгибе.
** НВ — твердость по Бринеллю.
4 171
49
При выборе материалов для рабочих поверхностей катков
вариаторов скорости следует исходить из требований предъяв-
ляемых к ним: 1) возможно высокий и устойчивый коэффициент
трения; 2) высокая сопротивляемость износу; 3) малая способ-
ность к поглощению влаги; 4) незначительные явления отстава'
ния деформации в области упругих изменений вследствие часто
повторяющейся нагрузки, в противном случае потери упругого
гистерезиса будут большими; 5) величина деформаций в зоне
контакта катков должна быть небольшой, так как с увеличе-
нием деформаций увеличиваются потери упругого скольжения.
По данным ЦНИИТМАШ [34], хорошие результаты получены
при сочетаниях: текстолит по стали 25 или 30 и закаленная
сталь\по закаленной стали.
Кожа, ферродо, резина и им подобные материалы для рас-
сматриваемых условий непригодны.
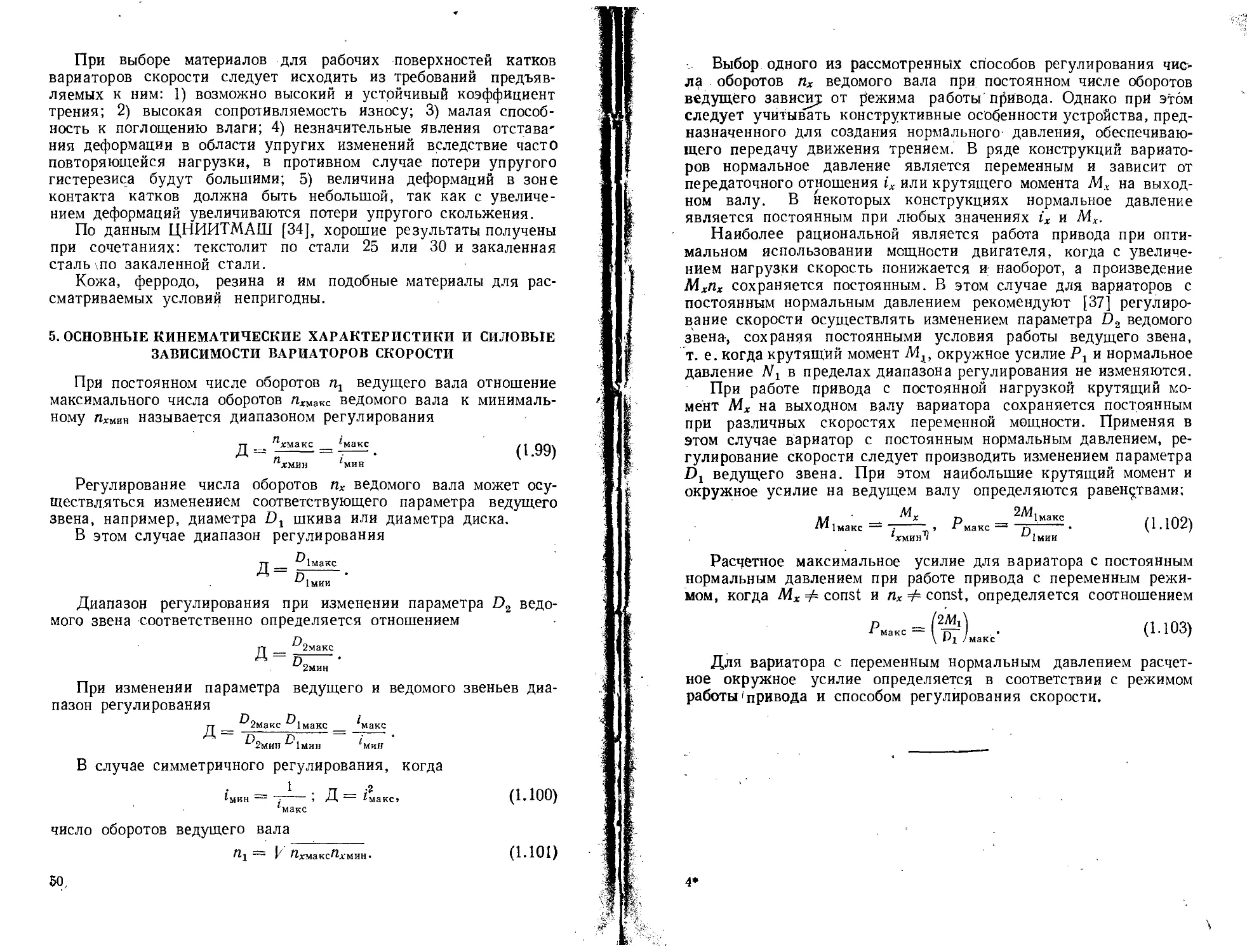
5. ОСНОВНЫЕ КИНЕМАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ И СИЛОВЫЕ
ЗАВИСИМОСТИ ВАРИАТОРОВ СКОРОСТИ
При постоянном числе оборотов пг ведущего вала отношение
максимального числа оборотов пхмакс ведомого вала к минималь-
ному «хмин называется диапазоном регулирования
д___яхмакс _ *макс 0 gg^
пхмин гмин
Регулирование числа оборотов пх ведомого вала может осу-
ществляться изменением соответствующего параметра ведущего
звена, например, диаметра Dr шкива или диаметра диска.
В этом случае диапазон регулирования
д=§^.
и 1 МИИ
Диапазон регулирования при изменении параметра О2 ведо-
мого звена соответственно определяется отношением
д = ^-с.
1у2мин
При изменении параметра ведущего и ведомого звеньев диа-
пазон регулирования
Д^2макс Р1макс *макс
D Г' ~~i ’ ‘
2мин 1мин
В случае симметричного регулирования, когда
1мин == ; Д = ^макс, (1.100)
*макс
число оборотов ведущего вала
Ml == ]' ИхмаксИхмин. (1.101)
50,
Выбор одного из рассмотренных способов регулирования чис-
ла оборотов пх ведомого вала при постоянном числе оборотов
ведущего зависну от режима работы привода. Однако при этом
следует учитывать конструктивные особенности устройства, пред-
назначенного для создания нормального давления, обеспечиваю-
щего передачу движения трением. В ряде конструкций вариато-
ров нормальное давление является переменным и зависит от
передаточного отношения ix или крутящего момента Мх на выход-
ном валу. В некоторых конструкциях нормальное давление
является постоянным при любых значениях 1Х и Мх.
Наиболее рациональной является работа привода при опти-
мальном использовании мощности двигателя, когда с увеличе-
нием нагрузки скорость понижается и наоборот, а произведение
Мхпх сохраняется постоянным. В этом случае для вариаторов с
постоянным нормальным давлением рекомендуют [37] регулиро-
вание скорости осуществлять изменением параметра D2 ведомого
звена, сохраняя постоянными условия работы ведущего звена,
т. е. когда крутящий момент Mlt окружное усилие Рг и нормальное
давление Nr в пределах диапазона регулирования не изменяются.
При работе привода с постоянной нагрузкой крутящий мо-
мент Мх на выходном валу вариатора сохраняется постоянным
при различных скоростях переменной мощности. Применяя в
этом случае вариатор с постоянным нормальным давлением, ре-
гулирование скорости следует производить изменением параметра
Dj ведущего звена. При этом наибольшие крутящий момент и
окружное усилие на ведущем валу определяются равенствами;
дд _____ Мх р ___________ 2Л1]Макс
1макс — “у 1 9 * макс — г\
*хмин7/ и 1 МИИ
Расчетное максимальное усилие для вариатора с постоянным
нормальным давлением при работе привода с переменным режи-
мом, когда Мх Ф const и пх #= const, определяется соотношением
(1.102)
макс
I . (1.103)
макс
Для вариатора с переменным нормальным давлением расчет-
ное окружное усилие определяется в соответствии с режимом
работы1 привода и способом регулирования скорости.
и .. _ Глава вторая .и , ।
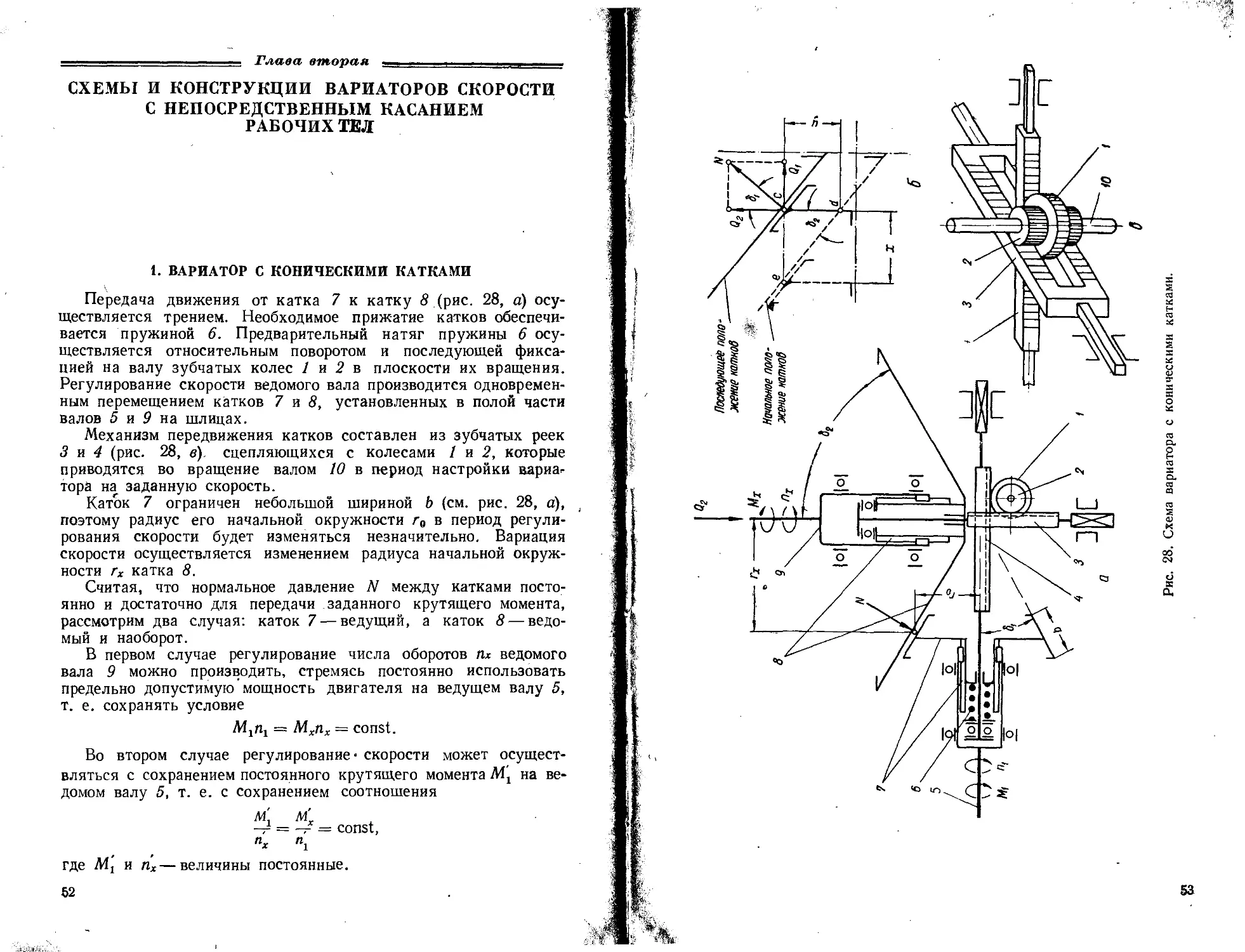
СХЕМЫ И КОНСТРУКЦИИ ВАРИАТОРОВ СКОРОСТИ
С НЕПОСРЕДСТВЕННЫМ КАСАНИЕМ
РАБОЧИХ ТЕЛ
1. ВАРИАТОР с КОНИЧЕСКИМИ КАТКАМИ
Передача движения от катка 7 к катку 8 (рис. 28, а) осу-
ществляется трением. Необходимое прижатие катков обеспечи-
вается пружиной 6. Предварительный натяг пружины 6 осу-
ществляется относительным поворотом и последующей фикса-
цией на валу зубчатых колес 1 и 2 в плоскости их вращения.
Регулирование скорости ведомого вала производится одновремен-
ным перемещением катков 7 и 8, установленных в полой части
валов 5 и 9 на шлицах.
Механизм передвижения катков составлен из зубчатых реек
3 и 4 (рис. 28, в), сцепляющихся с колесами 1 и 2, которые
приводятся во вращение валом 10 в период настройки вариа-
тора на заданную скорость.
Каток 7 ограничен небольшой шириной b (см. рис. 28, a), ,
поэтому радиус его начальной окружности гв в период регули-
рования скорости будет изменяться незначительно. Вариация
скорости осуществляется изменением радиуса начальной окруж-
ности гх катка 8.
Считая, что нормальное давление N между катками посто-
янно и достаточно для передачи заданного крутящего момента,
рассмотрим два случая: каток 7 — ведущий, а каток 8 — ведо-
мый и наоборот.
В первом случае регулирование числа оборотов Пх ведомого
вала 9 можно производить, стремясь постоянно использовать
предельно допустимую мощность двигателя на ведущем валу 5,
т. е. сохранять условие
Mj/ij = Mxtix — const.
Во втором случае регулирование* скорости может осущест-
вляться с сохранением постоянного крутящего момента Мг на ве-
домом валу 5, т. е. с сохранением соотношения
М[ М’х
~г = — = const,
«х «1
где М[ и пх—величины постоянные.
52
Рис. 28. Схема вариатора с коническими катками.
53
Диапазон Д регулирования скорости определяется отноше-
нием: /
для первого случая
гг _ ^хмакс _ гхмакс
' п г 9
хмин хмин
для второго случая
д/ __ П1макс _ *хмин
П1МИН гхмакс
Радиусы начальных окружностей катков гх и г0 (при веду-
щем катке 7) определяются по формулам (1.15), (1.21), (1.8)
и (1.24).
Рассматриваемый вариатор скорости может найти применение
для передачи мощностей до 3 кет при максимальном числе обо-
ротов ведущего вала ziiMaKc = 1000-4-1500 об/мин. Диапазон регу-
лирования Д 2-т-З.
Лучшим материалом для ведущего катка следует считать
текстолит марки ПТ, для ведомого — сталь 45.
Усилие Qj пружины 6, действующее на каток 8, определя-
ется по параллелограмму сил (рис. 28,6)
_ AL sin 82₽
Qi = Qa 1g = - т tg Sx,
'хер/
ИЛИ
rOcpl
Максимальное напряжение сжатия на площадке касания кат-
ков определяется по формуле (1.96).
Поставленное условие постоянства нормального давления N
между катками выполняется, если отношение перемещений кат-
ков вдоль осей соответствует тангенсам углов образующих (см.
рис. 28, б), т. е. если
tg §2 или 7 = tg Sj.
У X
За один оборот вала 10 величины х и у равны:
х =
,
cos pj
У = к—г
COS ₽2
где z, — число зубьев колеса /;
z2 — число зубьев колеса 2;
и тПг — соответственно нормальные модули колес 1
Р, и 32 — соответственно углы наклона зубьев колес
Разделив х на у, получаем
. . cos
tg О 2 ~ -----а~~ •
г2тпг cos
и 2;
1 и 2.
(2.1)
54
Условие (2.1) легко удовлетворить, так как в правой части
все величины являются независимыми переменными. Ими сле-
дует задаться, за исключением одной, и найти последнюю.
Если правая часть равенства (2.1) будет меньше, tg82, то
нормальное давление N будет изменяться от больших значений
Рис. 29. Вариатор с ведущим цилиндрическим катком и коническим барабаном.
к меньшим при увеличении числа оборотов ведомого вала 9 и
наоборот. Отмечаемое свойство может оказаться весьма ценным
при проектировании вариаторов для некоторых частных случаев.
2. ВАРИАТОР С ЦИЛИНДРИЧЕСКИМ КАТКОМ
И КОНИЧЕСКИМ БАРАБАНОМ
Рассматриваемый вариатор (рис. 29) отличается от предыду-
щего тем, что образующая ведущего катка 3 параллельна оси
вращения. Ведомый каток 4 имеет форму конического барабана,
установленного на валу 7 на направляющих шпонках.
Сила Q2 нажатия катков, необходимая для передачи крутя-
щего момента трением, обеспечивается пружиной 5. Сила
упругости пружины регулируется гайкой 6.
Изменение числа оборотов ведомого вала 7 осуществляется
перемещением катка 3 вдоль его оси посредством вращения зуб-
чатого колеса 2, находящегося в зацеплении с круглой рейкой
1, установленной в отверстии полого вала 8.
55
В рассматриваемой схеме вершина ведомого конуса всегда
расположена на образующей ведущего, поэтому для определения
радиуса гх начальной окружности ведомого барабана следует
пользоваться формулой (1.21).
Необходимая сила нажатия пружины определяется по фор-
муле
где Р — коэффициент надежности, который следует принимать
равным 1,15—1,2.
При проверке на прочность по контактным напряжениям сжа-
тия следует пользоваться формулой (1.96).
Рассматриваемый вариатор имеет большие габариты по длине.
Диапазон регулирования Д sss 2. Передаваемая мощность N =
= 1,5-j-2 л. с.
3. ВАРИАТ0Р С РЕВЕРСИРОВАНИЕМ ВЕДОМОГО ВАЛА
Принципиальная конструктивная схема
показана на рис. 30. Регулирование числа
лобового вариатора
оборотов ведомого
Рис. 30. Лобовой вариатор скорости.
вала 6 осуществляется вращением маховичка 5, который соеди-
нен с катком 2 тягой 4. Штифт 3, жестко соединяющий каток
2 с тягой 4, перемещается вдоль паза полого вала 1.
Передаточное отношение вариатора и соответственно диапа-
зон регулирования определяются по формулам, выведенным для
схемы, представленной на рис. 7.
56
Сила Q2 прижатия катков определяется из равенства
Q2 = ^.
2 rOf
Значения величин такие же, как и в предыдущем уравнении.
При проверке катка 2 на контактные напряжения сжатия по
формуле (1.96) приведенный радиус кривизны р = гй.
Рассматриваемый вариатор прост по конструкции, позволяет
легко, на ходу, изменять величину и направление оборотов ве-
домого .вала. Он применяется для передач небольшой мощности в
испытательных машинах, фрикционно-винтовых прессах, в при-
воде конвейеров, в различных машинах текстильной, трикотаж-
ной, бумажно-целлюлозной, полиграфической и других отраслях
промышленности, а также в механизмах приборов.
К недостаткам следует отнести: низкий к.п.д. (т) = 0,8-^-0,85),
большое геометрическое скольжение, а следовательно, и износ
трущихся поверхностей катка и диска.
4. ВАРИАТОР С ПЕРЕМЕННЫМ ДАВЛЕНИЕМ МЕЖДУ КАТКАМИ
Ведущий каток 4
(рис. 31) установлен на
рассматриваемого вариатора скорости
валу двигателя 1. Каток 5 с внутрен-
Рис. 31. Вариатор с переменным давлением между катками.
ним конусом соединен с ведомым валом 7 направляющими шпон-
ками и прижат к катку 4 пружинами 6. Регулирование числа
оборотов ведомого вала достигается поворотом червячного колеса
2 в направляющей стойке 3 посредством червяка 8. Фланцевый
двигатель 1 прикреплен к червячному колесу 2 со смещением
осей на величину е; на такую же величину смещена ось чер-
вячного колеса относительно оси ведомого вала 7. Такое распо-
57
ложение элементов вариатора позволяет изменять радиус ведо-
мого катка 5 в пределах от гх = г0 до гх — гмаКс.
На рис. 31 слева показана схема трех положений катка 4 от-
носительно катка 5 (I, II, III), а справа — эскиз конструкции,
соответствующий положению II, т. е. когда смещение оси двига-
теля относительно оси червячного колеса перпендикулярно плоско-
сти чертежа.
При совпадении осей вала двигателя и ведомого вала вариатор
работает как коническая фрикционная муфта (при наименьшем
усилии прижатия катков пружинами 6). Прижатие катков с мак-
симальным усилием соответствует положению III двигателя при
максимальном передаточном отношении
________ **макс
*макс —_~ •
'о . '
Переменное давление между катками, зависящее от i, явля-
ется одним из существенных недостатков рассматриваемой кон-
струкции, так как для использования полной мощности двигателя
в пределах регулирования достаточным является постоянное усилие
Го1 ‘
Радиус гх начальной окружности ведомого катка определяется
по формуле (1.15). Диапазон регулирования Д^ 2. Передаваемая
мощность N ^2 л. с. Полный к. п. д. т]^0,85-^-0,9.
5. ВАРИАТОР С ПОСТОЯННЫМ ДАВЛЕНИЕМ МЕЖДУ КАТКАМИ
• Ведущий каток 1 (рис. 32) установлен подвижно в осевом на-
правлении на валу двигателя, каток 2 жестко соединен с ведо-
мым валом 3. Сила Q нажатия одного катка на другой обеспечи-
вается пружиной, вмонтированной в каток 1 (на рисунке не
Рис. 32. Вариатор с постоянным давлением между катками.
58
показана). Один конец пружины имеет опорную поверхность на
катке 1, а второй.— на буртике вала двигателя.
Изменение передаточного отношения производится перемеще-
нием двигателя по U-образным направляющим посредством рычага.
Угол наклона направляющих соответствует углу образующей кат-
ков, что обеспечивает постоянное давление в зоне их контакта
при любом положении. Расчет основных параметров (за исключе-
нием пружины) не отличается от расчета вариатора с переменным
давлением между катками (см. рис. 31).
6. ВАРИАТОР С ВЕДОМЫМ КОНИЧЕСКИМ И ВЕДУЩИМ
СФЕРИЧЕСКИМ КАТКАМИ
Общий вид сверлильного станка с применением рассматривае-
мого вариатора скорости показан на рис. 33. Ведущий сферический
Рис. 33. Вариатор скорости сверлильного стайка.
59
каток' / укреплен на валу двигателя, а ведомый конический 2—
на валу шпинделя станка.
При вертикальном положении двигателя шпиндель станка
получает наименьшее число оборотов, которое возможно в данной
конструкции. При вращении горизонтального регулировочного вин-
та 3 гайка его получает поступательное движение и смещает мотор
вправо; при этом изменяется отношение радиусов окружностей
качения фрикционных катков, а следовательно, и число оборотов
шпинделя. Гайка регулировочного-.винта кинематически связана
со стрелкой, которая указывает на циферблате число оборотов
шпинделя. При отклонении оси мотора вправо цапфы, на которых
он подвешен перемещаются в направляющих, чем обеспечивается
постоянный контакт между катками. В период работы катков не-
избежным является скольжение. Это вызывает нагревание. Для
охлаждения катков на валу шпинделя установлен вентилятор.
Вариатор применяется для передачи мощностей до 2 'л. с.
Диапазон регулирования Д= 1 5-ь2.
--—. , ,, — Глава третья , - ———
СХЕМЫ И КОНСТРУКЦИИ ВАРИАТОРОВ СКОРОСТИ
С ПРОМЕЖУТОЧНЫМ ЖЕСТКИМ ЗВЕНОМ
1. ЛОБОВОЙ ВАРИАТОР С ПРОМЕЖУТОЧНЫМ
РОЛИКОМ
Два диска 1 и 2 (рис. 34), одинаковых
ны на параллельно расположенных валах:
второй — ведомый. Ролик 3 яв-
ляется промежуточным звеном.
Перемещением его вдоль оси
регулируется скорость ведомого
вала. . 1 — -
Передаточное отношение ва-
риатора определяется по фор-
муле 1 = Ь=^. (3.D '
«2 Г1 ' ’
по диаметру, установле-
один из них — ведущий,
I-— я —-1
Рис. 34. Схема лобового вариатора
с промежуточным роликом.
2. ДВУХДИСКОВЫЙ соосный
ВАРИАТОР
Ролик / (рис. 3 ), установ-
ленный на ведущем валу /,
и ролик 2, установленный на
ведомом валу II, частично пре-
дохраняют диски 3 и 4 от пе-
рекоса. Регулирование скорости
ведомого вала может осуще-
ствляться перемещением роли-
ка /, перемещением ролика 2
или перемещением обоих роли-
ков вдоль их осей.
Передаточное отношение
i = = г-1. (3.2)
г3
Рис. 35. Схема двухдискового соос-
ного вариатора.
Необходимая сила нажатия дисков зависит от положения ро-
ликов, ее можно определить из условия
M1=2R1fr1,
61
где Мг — крутящий момент на ведущем валу;
/?, = _------нормальное давление на ролик 1; (3.3)
1 rz + Г 3
f — коэффициент трения;
гг — радиус ведущего ролика.
Подставляя значение RL в формулу для Л1г и решая ее отно-
сительно Q, получаем
(3.4)
Ч? 1Г3
Момент, передаваемый ведомым валом,
мх = М/^7].
Х 1 2 Гз
3. ВАРИАТОР С РАСПОЛОЖЕНИЕМ ОСЕЙ ВАЛОВ ПОД УГЛОМ
под углом Ро, можно применить
Рис. 36. Схема вариатора с пере-
секающимися осями валов.
В случаях, когда оси ведущего и ведомого валов расположены
вариатор, схема которого показана
на рис. 36. Один из дисков (7 или 2)
может быть ведущим, второй —
ведомым. Изменение передаточного
отношения достигается поворотом
катка 3 относительно оси, прохо-
дящей через центр О кривизны
образующей катков 1 и 2.
Усилие нажатия Qt зависит от
положения катка 3 и определяется
формулой
Qx = р. (3.5)
4. ВАРИАТОР С ДИФФЕРЕНЦИАЛОМ
Ведущий диск 1 вариатора
(рис. 37, 7) находится в постоян-
ном контакте с катками 2, которые при любом положении карет-
ки 3 расположены по обе стороны оси диска 1 и вращаются в
разные стороны. Катки 2 неподвижно соединены с центральными
коническими колесами дифференциала. Ведомым является вал 4
(соединенный с осью сателлитов), скорость которого регулируется
перемещением каретки 3. На рис. 37, II и 37, III показаны пре-
дельные положения каретки с катками. Угловая скорость ведо-
мого вала определяется в соответствии со схемой рис. 38.
Угловая скорость левого катка 2
1 (И -
2Л —
Угловая скорость правого катка 2
<»1 (Г1 4- х)
2П.---~~72 •
Угловая скорость ведомого вала
а)2Л - И2п X
f 2
Рис. 37'. Варианты положений ведомого звена лобового вариатора
с дифференциалом.
Передаточное отношение вариатора
i _
(Од. X
Сила Q прижатия диска 1 к каткам 2 определяется из усло-
вийг передачи крутящего момента 7ИХ силами трения, создаваемы-
ми нормальными давлениями Rx
и Т?2. При х = 0 нормальные дав-
ления равны между собой, а при
х > О одно из нормальных давле-
ний, которое меньше по своему
значению, лимитирует величину
передаваемого момента Мх. При
положительном значении xR2 < Rx
и крутящий момент на ведомом
валу
= 2Z?2fr2.
Рассматривая равновесие дис-
ка 1 под действием сил Qf Т?2
и Rlt получаем:
Q = + R2;
Ri (п — х) = р2 (гг 4- х).
Подставляя значение Ru имеем
Рис. 38. Схема лобового вариатора
с дифференциалом.
63
Подставляя в формулу для Q значение
р __ Мх
получаем
п — MgTiP
4 rzf (Г! — X)
(3.7)
Анализ формулы (3.7) показывает, что при неизменном Мх с
увеличением х сила прижатия Q возрастает, а при х = rL одно
из. нормальных давлений равно нулю й диск 2 проскальзывает,
не передавая вращения ведомому валу.
В соответствии с изложенным пределы регулирования рас-
сматриваемого вариатора ограничены размером ± х < rv Диапа-
зон регулирования вариатора Д— + (хмаКс: хмнн). Коэффициент
полезного действия вариатора переменный (с увеличением пере-
даточного отношения к. п. д. уменьшается, а при х = 0 т] = 0).
5. ВАРИАТОР СИСТЕМЫ «SH»
Принципиальная схема вариатора системы «SH» показана на
рис. 39. Оси ведущего и ведомого валов вариатора расположены
Рис. 39. Схема вариатора системы «SH».
соосно. Контактной поверхностью ведущих катков / и 5 являет-
ся внешняя поверхность конуса, а ведомых дисков 2 и 6 —
внутренняя.
Диск 2 с катком 5, так же как и каток 1 с диском 6, рас-
положены соосно. Валы диска 2 и катка 5 связаны между собой
шлицевым соединением или при помощи многозаходной резьбы с
большим углом подъема винтовой линии. Резьба промежуточной
64
гайки (на схеме не показана), соединяющей два полых вала,
так же, как и резьба на валах, должна иметь разное направле-
ние витков, что обеспечивает одинаковые условия работы вариа-
тора при реверсивном вращении ведущего вала.
Постоянное давление между катками и дисками осуществляе-
тся пружиной 4. Скорость ведомого’вала регулируется посредством
вращения червячного колеса 3, в диск которого вмонтирован узел
промежуточного катка 2 и диска 5.
Величина эксцентриситета е должна быть равна полуразности
радиусов
г2 г1мин г3мнн
е ~~ 2 ~ 2
.Общее передаточное отношение вариатора
___________ “I
1-3 ~ Г1Гз — “3
(3.8)
Изготовляются вариаторы системы «SH» с передаточным от-
ношением
; — r‘ifl —10
•макс — г — *v
г1минг3мин
при к. п. д. от 0,85 до 0,90.
6. ВАРИАТОР С БОЛЬШИМ КОЛИЧЕСТВОМ ПРОМЕЖУТОЧНЫХ
ДИСКОВ
Движение от ведущего вала 5 многодискового вариатора
(рис. 40) к промежуточному валу 3 с коническими дисками /
передается при помощи зубчатой передачи с. ведущей шестерней 4,
ведомой 2 и паразитного колеса 6. Конические диски 1 располо-
жены между дисками 8 с ободом и прижаты с двух сторон пру-
жиной 10 так, что сила трения между ними достаточна для пере-
дачи заданного крутящего момента на ведомом валу 9.
Промежуточных валов 3 с дисками 1 может быть несколько
(в рассматриваемой конструкции их установлено три). Регулиро-
вание скорости осуществляется поворотом промежуточных валов 3
при помощи рычагов 7, которые соединены с кольцом управле-
ния 11 тягами. Оси колес 6 неподвижны.
Общее передаточное отношение вариатора определяется фор-
мулой
где z3 и z5 — числа зубьев зубчатых колес 2 и 4\
• га и ri — радиусы фрикционных дисков 8 и 1.
5 471 . 65 '
Усилие Q пружины 10, прижимающей диски вариатора, зави-
сит от величины крутящего момента на ведомом валу и равно
Q —
где р — коэффициент надежности, равный 1,2—1,5;
г2 — радиус качения дисков 8;
Рис. 40а. Многодисковый вариатор.
f — коэффициент трения скольжения;
Ki — число конических дисков 1, размещенных на одном валу 3;
— число промежуточных валов 3.
При проектировании рассматриваемого вариатора особое вни-ч
мание следует уделять механизму изменения положения проме-
жуточных валов 3, так как в случае различных значений ради-
усов (лх) дисков 1, сидящих на различных валах (для определен-
ного положения), будет происходить излишнее скольжение по всей
контактной линии дисков с большими потерями на трение.
66
Рассматриваемый вариатор может быть использован для авто-
матического управления, когда надо изменять передаточное отно-
шение в зависимости от нагрузки или заданной скорости. К- п. д.
вариатора колеблется в пределах от 0,85 при наибольших пере-
даточных отношениях до 0,9 — при наименьших. Передаточное
отношение является нормальным в пределах от 1 до 5. Макси-
мальное число оборотов ведущего вала 3000 об/мин. Передавае-
мая мощность до N = 400 л. с.
Рис. 406. Многодисковый вариатор.
7. ВАРИАТОР С КОНИЧЕСКИМИ БАРАБАНАМИ
И ОХВАТЫВАЮЩИМ КОЛЬЦОМ
Два конических барабана (рис. 41), вершины конусов которых
направлены в разные стороны, закреплены на параллельно рас-
положенных валах. Барабан 1 — ведущий, барабан 2— ведомый.
Между барабанами установлен ролик 4, который частично раз-
гружает валы барабанов от изгиба. Передача движения от бараба-
на 1 к барабану 2 осуществляется силами трения, возникающими
5* 67
/
по линиям контакта с кольцом 3. Регулирование скорости
производится путем перемещения кольца 3 вдоль осей барабанов.
Для этой цели в рассматриваемой конструкции рамка 7 с коль-
цом 3 и промежуточным роликом 4 установлена на двух винтах
5 и 6, которые соединены между собой цепной передачей. Следует
отметить, что между кольцом и барабанами по линии контакта
неизбежно скольжение.
В начальный момент, когда ведущий барабан неподвижен,
кольцо 3 находится в подвешенном состоянии на барабане 1
Рис.
42. Схема действия сил при
кольца.
условии самозаклинивания
(рис. 42, а) с- незначительным зазором в нижней части между
кольцом и ведомым барабаном 2. При вращении барабана I центр
кольца смещается, а зазор сокращается до нуля. В точке В кон-
такта (рис. 42, б) возникает сила трения F2 вследствие сопротив-
лений движению на ведомом валу. В дальнейшем силы трения Ft
и F2 «натягивают» кольцо на барабаны, автоматически регулируя
силу прижатия кольца к барабанам в зависимости от величины
крутящего момента на ведомом валу.
Изложенное выполнимо только в том случае, если каждая из
точек касания А и В (рис. 42, б) расположена в пределах угла
трения р, построенного для противоположной точки касания.
Считая кольцо абсолютно жестким, рассмотрим это условие.
На рис. 42, б показано предельное положение точек А и В
и в соответствии с рисунком получаем, что минимальная хорда
АВ = 2 у cosp = Dcosp. (3.10)
68
69
Для всех положений кольца, включая и предельные, действитель-
ный размер хорды .—
AB>Dcosp. (3.11)
Для рассматриваемого случая, когда оси валов ведущего и
ведомого барабанов расположены в вертикальной плоскости и ва-
риатор в период пуска находится под нагрузкой, Б. А. Пронин
[31] рекомендует ставить кольцо 3 с предварительным натягом.
Отношение силы трения Nf к окружному усилию Р при этом
будет всегда выше обычно принимаемого, а величина нормаль-
ного давления N может быть определена из равенства.
s = a{|,/ 1 +[|-°-15S- <ЗЛ2>
где о — предварительный натяг (берется со знаком минус);
— расстояние между осями валов;
г2и/'1—средние радиусы барабанов в пределах линии контакта;
Е — модуль упругости материала кольца;
J—момент инерции сечения кольца;
7?и — расстояние от центра кольца до центра тяжести его сечения.
8. ВАРИАТОР С РАЗДВИЖНЫМИ КОНУСАМИ
И СТАЛЬНЫМ КОЛЬЦОМ
Вариатор скорости изображен на рис. 43. Ведущий-многошпо-
ночный вал 5 соединен с двумя стальными коническими катка-
ми 2 и 3. Ведомый вал 6 расположен параллельно ведущему и
соединен с коническими катками 7 и 9.
Между катками зажато стальное кольцо 8, которое трением
передает движение от ведущего вала к ведомому. Нормальное
давление между катками и кольцом обеспечивается упругостью
последнего. Это давление автоматически увеличивается с увели-
чением крутящего момента на ведомом валу вследствие самоза-
тягивания кольца.
Конические катки 2 и 7 установлены в картере на подшипни-
ках, а катки 3 и 9 вращаются в подвижных втулках 1 и 4.
Втулки 1 к 4 соединены между собой тягой с направляющими
вилками. Передаточное отношение определяется отношением ра-
диуса Rx к Изменение его осуществляется вращением штур-
вала 10, соединенного с втулкой 1 посредством зубчатого колеса
и рейки.
Рассматриваемая конструкция вариатора применяется для пе-
редачи мощности от 0,5 до 10 кет с диапазоном регулирования
Д = 6; 9; 12; 14; 16. Максимальное число оборотов входного вала
не должно превышать 1500 об/мин. Конические катки и кольца
изготовляются из шарикоподшипниковой стали с последующей»
термической обработкой до высокой твердости. Угол образующей
конуса для катков составляет примерно 65°.
70
Рис, 43. Конструкция вариатора с Коническими раздвижными дисками и
стальным кольцом.
71
9. ВАРИАТОР С ТОРООБРАЗНЫМИ ДИСКАМИ
Принципиальная схема вариатора дана на рис. 44. На валах
3 и 8, расположенных соосно, установлены диски 2 и 5, рабочие
поверхности которых являются частями поверхности тора. Между
дисками 2 и 5 расположены промежуточные ролики 4, свободно
вращающиеся на осях 1. Оси роликов соединены между собой
Рис. 44. Схема вариатора с торообразными дисками.
секторами зубчатых колес. Необходимое нормальное давление
между дисками создается пружиной 6, усилие которой регули-
руется гайкой 7. Изменение передаточного отношения вариатора
осуществляется поворотом рычага 9, положение которого фикси-
руется в соответствии с заданным числом оборотов ведомого вала.
Передаточное отношение определяется по формуле
i = = (3.13)
Пх гг i * * * v '
Применяется рассматриваемый вариатор для мощностей от 1
до 6 л. с.
На рис. 45 показана конструкция вариатора, где с целью
распределения усилия нажатия на большее количество контакт-
ных поверхностей установлено три ролика 1, которые смонтиро-
ваны в специальной обойме 9 (рис. 46, а). Сила нажатия в ва-
риаторе (см. рис. 45) регулируется автоматически, в зависимости
от момента на ведомом валу. Для этого имеется специальное
Рис. 45. Конструкция вариатора с торообразными дисками.
72
73
устройство, принцип действия которого заключается в следующем:
между опорным кольцом 4 и ведомым диском 8 установлена шай-
ба 5; на боковых поверхностях кольца 4 и шайбы 5 сделаны
круговые канавки с трехкратным плавным изменением глубины,
как это показано на рис. 46, б; в этих канавках располагаются
Рис. 46. Общий вид:
а) обоймы с роликами; б) самозатягиваю-
щего механизма.
три шарика 2, заключенные в се-
паратор 6 (позиции на рис. 45,
46 и 47 одни и те же).
На обойму с роликами /
(см. рис. 45), которая может
поворачиваться, действует мо-
мент, равный сумме моментов
на ведущем 11 и ведомом 3
валах; с изменением этого мо-
мента изменяется положение
обоймы 9 и шайбы 5, которые
связаны пальцем 7. Вследствие
переменной глубины канавки
шарики, перекатываясь в ней,
увеличивают или уменьшают
давление между дисками.
Определим условие работы
механизма самозатягивания,
приняв условно, что движение
от Диска 10 к диску 8 пере-
дается Только одним роликом.
Окружное усилие, переда-
ваемое ведущим диском
лику /, в соответствии
значениями по рис. 47
г.
10 ро-
с обо-
равно
°1
Чр,
— А — р COS (ае — <р) •
(3.14)
Такое же уравновешивающее усилие будет приложено к роли-
ку в пятне контакта ролика 1 с ведомым диском 8. Следователь-
но, момент, приложенный к обойме 9, равен
Мо = 2РН,
(3.15)
где Н — расстояние от оси вращения дисков до точки приложе-
ния равнодействующей 2Р:
Н = А — р cos ае cos ср.
(3.16)
74
Окружное усилие, передаваемое на шарик механизма самоза-
тягивания, равно ..
РШ = ^Ъ, (3-17)
где 1) — коэффициент, учитывающий потери на трение при пово-
роте обоймы 9.
Рис. 47. Схема действия сил в самозатягивающем механизме.
Осевая составляющая окружного усилия равна
Выражая Мо через МКР1, получаем
Л 2М«Р1 И C°S C°S 71 /Q 104
[А — р cos (ае — <р)]гш tg? ’ '
Условие равновесия диска 8
<2ш = Nsin(ae +<р). (3.20)
Условие работы вариатора без буксования
Nf>P,
или ' ______MKpi____ (3 21)
sin (ае 4- tf) А— pcos(ae — <р) ' ' ' '
Подставляя в формулу (3.21) значение Qm из (3.19), получаем
2Мкр1 (А — р COS ае COS?) Л| Л4Кр1
[А — р cos (ае — ?)] гш tg •( sin (ае + <р) А—р cos (ае-?) ’ ' ' '
75
< 2Д (Л — р cos яе cos о) ,
й ' гш sin (ае + <р) *
Для конструкции, показанной на рис. 45, угол ае = 90°, сле-
довательно, формула принимает вид
откуда
(3.23)
, 2/Лт]
rmcos<P
В частном случае при /=0,2,
А = 142 мм, т) = 0,5, гш = 30 мм
?макс = 39°, получаем
, 2 • 0,2 • 142 • 0,5 _
4 < 30 • 0,777 ~
= 1,218 и Y <50°30'.
При ср = 0 получим tg т = 0,9466
у<43°30'.
В соответствии с результатами,
полученными при решении примера,
можно рекомендовать у = 40ч- 45°.
Размер шариков принимается конструктивно и проверяется
на прочность.
и
Рис. 48. Схема определения при-
веденного радиуса кривизны
рабочих поверхностей шарика
и беговой дорожки.
(3.24)
и
Максимальное напряжение сжатия на площадке контакта
шарика с канавкой кольца самозатягивающего механизма опреде-
ляется по известной формуле для случая контакта шарика с то-
роидом при rs= оо (рис. 48)
_ 4100® /<2Ш /2 ц®
'макс~ *0 V Г2) <1°|СЖ’
(3.25)
где Quj — усилие, действующее на все шарики;
К — число шариков;
76
ср0 — коэффициент, учитывающий неравномерность распределения
нагрузки между шариками (ф0 = 0,75);
Хо — определяется из графика на рис. 49 по вспомогательному углу 6,
который для данного случая может быть найден по формуле
1
cos 0 = 2-^-р. (3.26)
Для шарикоподшипниковой стали допускаемое напряжение
[<з]сж не должно превышать 30 000 кг!см?.
10. ТОРОВЫЙ ВАРИАТОР КОНСТРУКЦИИ ЦНИИТМАШ
СИСТЕМЫ СВЕТОЗАРОВА
Вариатор скорости конструкции ЦНИИТМАШ составлен из
дисков, у которых образующей рабочих поверхностей является
Рис. 50. Схема сил самозатягивающего механизма системы ЦНИИТМАШ.
дуга окружности. Ведущий диск 1 (рис. 50) и ведомый — 3 рас-
положены соосно, средняя плоскость промежуточных роликов 2
смещена относительно оси их поворота. Регулирование скорости
осуществляется изменением угла ф наклона роликов 2.
Рассматриваемый вариатор выгодно отличается от других ва-
риаторов такого же типа тем, что смещение промежуточных
77
роликов от оси их поворота выбрано в соответствии с условием,
обеспечивающим минимальное скольжение по линии контакта
дисков во всех положениях роликов 2. Последнее достигается тем,
что вершина О конуса, образующая которого, является касатель-
ной к рабочей поверхности ролика 2 в полюсе качения, во всех
положениях ролика находится на незначительном расстоянии от
оси вращения дисков 1 и 3. Рекомендуемые геометрические соот-
ношения размеров вариатора, удовлетворяющие указанным усло-
виям, приведены в табл. 5.
Таблица 5
Рекомендуемые размеры (в мм) тел качения
в вариаторах ЦНИИТМАШ
Диски прижимаются автоматически самозатягивающим меха-
низмом так, что сила прижатия дисков зависит от величины кру-
тящего момента М3 на ведомом валу. Износ рабочих поверх-
ностей компенсируется перемещением дисков 1 и 3 вдоль их оси
вращения.
Два промежуточных ролика 2 (рис. 51) монтируются в рамке
9, которая шарнирно связана с траверсой 10 и может переме-
щаться, скользя по направляющим 1, создавая таким образом
равномерное распределение давления между роликами 2. Меха-
низм поворота роликов 2 приводится в движение маховичком 3
и состоит из шестерни 4, которая находится в зацеплении с рей-
кой 5,. прикрепленной к ползуну 7, скользящему по прямолиней-
ным направляющим. Движение от ползуна 7 к осям 8 передается
посредством сухарей 6. Диски на схеме рис. 51 не показаны.
Диапазон регулирования скорости вариатора Д = 6н-8.
78
Материалы для фрикционных пар рекомендуется принимать:
Ст. 3 по текстолиту или закаленная сталь по такой же зака-
ленной стали (ШХ15).
Небольшое скольжение в зоне
контакта дисков позволяет проекти-
ровать вариатор с сухими поверхно-
стями тел качения.
По данным ЦНИИТМАШ, к. п. д.
вариатора колеблется в пределах
0,92 — 0,93 при стальных дисках 1
и 3 (см. рис. 50) и роликах 2 из
текстолита, и 0,94 — 0,96 при ро-
ликах из стали. Торовые вариа-
торы системы Светозарова проекти-
руются для мощностей до 20 кет
при числе оборотов входного вала
от 960 до 1460 об/мин.
Конструкция вариатора показана
на рис. 52, характеристики даны
в табл. 6, основные габаритные раз-
меры— в табл. 7.
Приближенное, но достаточно
Рис. 51. Схема вариатора си-
стемы ЦНИИТМАШ.
точное значение межосевого расстоя-
ния А (см. рис. 50) можно опреде-
лить по формуле (1.74).
Сила нажатия Q2 определяется в соответствии с формулой
(1.69) и равна
2Л13 [(«я — ав) + -у (sin2a^ — Sin 2 ав\]
Q _ ___________________________________3
О р2/cos ср0 (cos -J-cos а^) Z >’
где Z — число роликов 2 п;
D —--------(ан — <*в) — (sin ан — sin ав) — tg % (cos ав — cos aw).
рг cos ср0
Зависимость между силой Q3 и Q2- (рис. 50) определяется
равенством
^3 х-2 2 cos а
(3.27)
Максимальное линейное давление в зоне контакта, при усло-
вии, что прижатие фрикционных пар осуществляется перемеще-
нием дисков 1 и 3 и распределяется на два ролика, определя- •
ется в соответствии с формулой (1.40) при = ®Макс и равно
Оз sin (ан — ср) '
Pin =----------------J—--------------р-------------.
Р2 [(аН ав) + 2* sin 2 (ав ср) -g- sin 2 (aH ср)]
По формуле (1.86) определяется передаточное отношение ва-
риатора.
79
Рис. 52. Конструкция вариатора ЦНИИТМАШ:
’ — штырь; 2 — нажимная шайба; 3 — выходной вал; 4 — нажимная шайба; 5 — штифт; 6— чека; 7— чашка; S — глушитель; 9 кожух
лушителя; 10 — направляющая планка; // — ползун; 12 — диск .указателя; 13 — рейка; 14 — цапфа; /5 — сухарь; 16 — корпус; /7 — цапфа-
'8 — траверза рамки; 19 — шестерня; 20 — стержень; 21 — планка; 22 — центр; 23 — ролик; 24 — щиток; 25 — букса; 26 — крышка; 27 — за-
щелка; 28 — пружина; 29 — траверза; 30 — установочный.винт; 31 — чека; 32 — рамка;
80
Таблица 6
Обороты валов и передаваемые мощности нормальных вариаторов
системы Светозарова
Условное обозначение Защищенное выполнение Закрытое выполнение
при пг = 960 об/мин при пг = 1460 об/мин = 960 или 1460 об/мин W в кет
У в кет «2 N в кет
00-ТУ-8 0,07 — 0,17 333—2660 0, 1—0,25 500 — 4000
2-ТУ-6 1—2 385 — 2400 1,5— 2,4 575 — 3600 —
(2-Т-4) 2 — 3 — 3 — —
1М-4-С 2,8 —5,6 — 4-8 — 2
1М-4-Т 1,5 —2,2 — 2,2 — 1
2М-4-С 5,5—10 — 7,8—15 — 4
2М-4-Т 2,7 —4,4 — 4 — 4,4 — 2
ЗМ-4-С 11 16 480 — 1920 16 720 — 2880 8
ЗМ-4-Т 5,5 — 7 7 — 4
3-Т-4М 5,5-7 7 — —
6М-С-4С 100 — 100 — —
Примечания: 1. Если указаны два значения мощности, то меньшее
соответствует минимальному числу оборотов выходного вала. Если указано
одно значение мощности, то это означает, что она может быть передана на всем
диапазоне регулирования.
2. Передачи 2-ТУ-6 и 3-Т-4М допускают непосредственное соединение
с двигателями, имеющими п = 2900 об/мин, но без длительного превышения
указанной максимальной мощности.
3. (2-Т-4) — является модификацией 2-ТУ-6.
4. Кроме 6М-С-4С, все указанные передачи допускают вертикальное рас-
положение валов.
5. Для передач 6М-С-4С при мощности 100 кет рекомендуется кратко-
временный режим работы.
Более подробный расчет величин, определяющих характери-
стику вариатора при нажатии дисков путем перемещения роли-
ков 2, приведен в гл. 1, раздел 2.
Угол подъема "[ канавки самозатягивающего механизма (рис. 50)
определяется из условия
F = Nf Р, (3.28)
где
м3 = м3__________________
г03 Л — ра cos (ае — у)
— окружное усилие.
Подставляя значения Р в равенство (3.28), получаем
W -------- (3.29)
/ [-4 - °2 cos (% — у)] • 4 ’
Рассматривая равновесие диска 3, имеем
Q3 = N sin (ае — ф),
6 171
81
607
Рис. 53. Конструкция вариатора ЭНИМС.
ИЛИ
_ M3sin(ae —у)
Уз- f [Л _ рг cos (ае - Т)] •
Сила Q3 создается самозатягивающим механизмом и опреде-
ляется в соответствии с рис. 50
п - щ M:i
Чз tg 7 Гш tg 7 •
(3.31)
82
6*
83
Приравнивая правые части равенств (3.30) и (3.31), получаем
f — p2COS(a—<р)1
tgv > '-I---VA21. (3.32)
6 1 гш sin (ae — <p) 7
Максимальные напряжения сжатия в зоне контакта шарика
определяются по формуле (3.25).
В заключение следует отметить, что при наличии ряда пре-
имуществ рассматриваемого вариатора перед заграничными изго-
товление его требует 2-го класса точности.
Кроме того, наличие большого числа сопряжений в механизме
рамки, поддерживающей ролики, не обеспечивает точной установ-
ки двух роликов в положение, при котором они бы вращались
с одинаковым числом оборотов, поэтому создается дополнитель-
ное скольжение в зоне контакта роликов с дисками и износ их.
Такой же торовый вариатор конструкции' ЭНИМС с тремя
промежуточными роликами показан на рис. 53. Диски выполнены
самоустанавливающимися. Вариатор рассчитан для передачи мощ-
ности до 10 кет при числе оборотов входного вала п1 =
= 1500 об/мин. Диапазон регулирования Д = 6,25.
11. ПЛАНЕТАРНЫЙ ВАРИАТОР СИСТЕМЫ «КОЛУМБИЯ»
Схема вариатора системы «Колумбия» представлена на рис. 54.
Ведущий 1 и ведомый 7 валы вариатора расположены соосно.
Рис. 54. Схема вариатора системы «Колумбия».
На ведущем валу 1 (рис. 55), который состоит из двух частей,
соединенных пальцевой муфтой 2, закреплены два сферических
диска 5 и 4, сжатые винтовыми пружинами 6 и 3. Ведомый вал,
7 (см. рис. 54) жестко соединен с трех поводковым водилом 8. На
каждом поводке водила свободно в осевом направлении посажена
качающаяся вилка 9 с роликом 10, который может вращаться
84
в подшипниках вилки. Планетарные ролики 10 с одной стороны
опираются на фрикционные диски 5 и 4 ведущего вала,
с другой — на кольца 12 и 11. Кольцо 12 может перемещаться
в направляющих параллельно оси ведущего вала, а кольцо И —
неподвижно. Когда кольцо 12 находится в левом крайнем поло-
жении, ролики 10 катятся по большему диаметру дисков 5 и 4 и
ведомый вал при этом получает наибольшее число оборотов. При
смещении кольца 12 вправо пружины 3 и 4, удлиняясь, изменяют
положение роликов и этим самым изменяется чусло оборотов
ведомого вала в сторону умень-
шения. В вариаторах рассматри-
ваемого типа диапазон регули-
рования Д до 5. Передаваемая
мощность не более 18 л. с.
Передаточное отношение ва-
риатора определяется из плана
скоростей (рис. 54)
tg'f ’
Рис. 55. Механизм ведущих дисков
вариатора системы «Колумбия».
(3.33)
здесь tg р = —
Подставляя значения tgp и tg у в (3.33), получаем
гъ (^-fi)-
n (rfe-rb) '
(3.34)
Радиусы rk, и соответственно гь определяются полюсами
качения р{ и pk.
Конструкция вариатора изображена на рис. 56. Следует от-
метить, что габариты вариатора по длине большие, детали по-
водка вследствие больших изгибающих моментов при относи-
тельно небольших усилиях громоздкие.
85
12. ПЛАНЕТАРНЫЙ ВАРИАТОР СИСТЕМЫ «ЭШЕР-ВИСС»
На шлицевой части ведущего вала 9 (рис. 57, а) с возмож-
ным перемещением вдоль оси установлен диск 5, имеющий по
окружности вогнутую беговую дорожку. На ведомом валу 1
жестко закреплен гладкий фрикционный диск 2.
Передача движения от диска 5 к диску 2 осуществляется по-
средством двух или нескольких грибообразных роликов 4, рас-
положенных на одинаковом расстоянии по окружности. Оси ро-
ликов 4 вращаются в подшипниках и имеют свободу перемещения
Рис. 57. Схема планетарного вариатора системы «Эшер-Висс»
с планетарным редуктором.
вдоль оси вращения. Подшипники качаются на цапфах в поводке 6.
Закругленные края роликов 4 опираются на диск 5 и установлен-
ное в корпусе вариатора кольцо 3, а сферическая поверхность
роликов 4 прижимается к диску 2.
Трущиеся поверхности дисков закалены и отшлифованы. Си-'
ла трения для передачи движения обеспечивается пружиной 7,
которая регулируется гайкой 8. Передаточное отношение вари-
атора изменяется перемещением кольца 3 вдоль оси по его на-
правляющим.
Вариатор выполнен в сочетании с планетарным зубчатым ре-
дуктором, у которого колесо zr неподвижно, а блок зубчатых
колес z2 и z' сателлита вращается на эксцентрике вала 1. Ко-
лесо z3 жестко соединено с ведомым валом.
Передаточное отношение рассматриваемого устройства опреде-
ляется формулой
i = iBiP, (3.35)
86
Рис. 58. Конструкция вариатора системы «Эшер-Висс» с планетарным редуктором.
87
где ip — передаточное отношение редуктора, которое определя-
ется в соответствии с планом скоростей (рис. 57, б).
: = tgp _ = VHZ*__________
р tg ( ~ (R1 — Ri) v3_2- (Zi - г2) Уз_2,
Из подобия треугольников имеем
v ,R« v ,г,
Vh = . =____з~2_г ,
R’2 — Rz z' — г2 *
Подставляя значение Vh в формулу (3.36), после
ваний получаем
1
1Р —--------.
1 _ г1г2
г2г3
Передаточное отношение вариатора определяется
(рис. 57)
г- _ __________гх ч- г3________
в к 2r3r sin а 1 ‘
Г1 "г г Ci + г3 — 2/г sin а)
(3.36)
преобразо-
(3.37)
формулой
(3.38)
Конструкция рассматриваемого вариатора показана на рис. 58.
Первоначальное минимальное нажатие дисков осуществляется
пружиной 2, а с увеличением крутящего момента на ведомом
валу усилие нажатия увеличивается вследствие перемещения
диска 7, соединенного с ведущим валом 3 несамотормозящей
резьбой с трением качения. Последнее достигается наличием ша-
риков, расположенных по винтовой линии резьбы винта и гайки.
Направление вращения ведущего вала при этом не безразлично.
Вариатор применяется в бумагоделательных и текстильных
машинах для мощностей от 2 до 16 л. с. при числе оборотов на
входном валу п1 = 1500 об/мин. Коэффициент полезного действия
вариатора переменный, наибольшее значение 0,9.
13. ПЛАНЕТАРНЫЙ ВАРИАТОР С КОНИЧЕСКИМИ БАРАБАНАМИ
Ведущий вал 1 вариатора (рис. 59) соединен с поводком 2,
в подшипниках которого вращаются два конических барабана 4
с наклонно расположенными осями вращения, угол наклона со-
ответствует углу образующей конических барабанов. В части,
расположенной ближе к вершине конуса, неподвижно закреплены
конические шестерни z2, которые находятся в зацеплении с ко-
лесом 2, внутреннего зацепления. Колесо zx закреплено на ведо-
мом валу 5. Стальное кольцо 3 охватывает конические барабаны
с натягом. Движение от вала 1 к поводку 2 передается кулач-
ком 7, который, опираясь на корпусы подшипников, одновременно
прижимает конические барабаны 4 к кольцу 3. По мере увели-
чения крутящего момента увеличивается сила нажатия между
барабаном и кольцом, что обеспечивает необходимую силу трения
88
в зоне их контакта. Кольцо 3 расположено в направляющих
корпуса вариатора и может перемещаться вдоль оси валов по-
средством поворота вилки 6. Последним и достигается изменение
передаточного отношения i, которое определяется по формуле
1
] г2г5 ’
21Г3
(3.39)
где z2 и Zj — числа зубьев зубчатых колес;
г5 и г3 — сопряженные радиусы соответственно кольца и бара-
бана.
Рис. 59. Планетарный вариатор с коническими барабанами.
Рассматриваемые вариаторы скорости применяются для пере-
дачи мощностей до 15 л. с., имеют высокий к. п. д., большой
диапазон регулирования.
14. ПЛАНЕТАРНЫЙ ВАРИАТОР ПИРОЖКОВА
Принципиальная схема вариатора показана на рис. 60. Ва-
риатор состоит из двух совершенно одинаковых механизмов, сим-
метрично расположенных относительно вертикальной оси. Дви-
жение от ведущего диска 2, установленного на валу с возмож-
ным перемещением вдоль оси, к ведомому кольцу 7 передается
через ролики-сателлиты 6. Форма и размеры роликов 6 выбраны
так, что действующие на них силы в точках А, В, С, D обеспе-
89
чивают их полное равновесие, а оси 4, свободно установленные
в сепараторе 3, предназначены только для того, чтобы поддер-
живать заданное расстояние между роликами. Диск 5 установлен
неподвижно и образующая СО ролика 6 является мгновенной
осью его вращения. В точке А правые ролики соприкасаются
с левыми и катятся друг относительно друга без скольжения.
Число роликов-сателлитов в каждом ряду определяется услови-
ями соседства и не должно быть менее трех. Рекомендуемое чис-
ло роликов в каждом ряду равно шести.
Рис. 60. Схема планетарного вариатора системы Пирожкова.
Регулирование скорости осуществляется перемещением колец
7 при помощи винта 8 с правой и левой резьбой. Необходимые
силы трения по линиям контакта обеспечиваются пружинами 1,
либо самозатягивающим устройством с автоматическим регули-
рованием силы нажатия в зависимости от крутящего момента на
выходном валу.
Так как в процессе регулирования скорости не исключена
возможность установки левого и правого колец 7 в точках ро-
ликов, имеющих разные скорости, в схеме предусмотрен диф-
ференциал, состоящий из конических зубчатых колес zt и z2.
В этом случае ведомым звеном вариатора является зубчатое колесо
z3, соединенное с водилом дифференциала.
Предварительные экспериментальные исследования вариатора,
проведенные автором конструкции, показали, что он меньше и
легче вариатора Светозарова примерно в 10 раз. При числе обо-
ротов входного вала пх = 3000 об/мин число оборотов ведомого
90
звена z3 может плавно изменяться в пределах от -J-1600 об/мин
до —1600 об/мин.
В рассматриваемой схеме кольцо 7 может быть неподвижным,
а диск 5 — ведомым.
В заключение следует отметить, что изготовление рассматри-
ваемого вариатора должно производиться по высокому (примерно
2-му) классу точности. Кроме того, конструктивно сложным яв-
ляется механизм съема мощности с колец 7. Не исключается
также затруднение в точной на-
стройке на заданное число обо-
ротов ведомого вала и на ста-
бильность этого числа после на-
стройки, особенно в интервале
больших передаточных чисел.
15. ВАРИАТОР С ШАРАМИ,
ВРАЩАЮЩИМИСЯ НА ОСЯХ
Рис. 61. Схема шарового вариатора
с физическими осями вращения.
Принципиальная схема ва-
риатора изображена на рис. 61.
Движение от ведущего диска 1
к ведомому 3 передается по-
средством шара 4, который вра-
щается на оси 5. Равновесие
шара поддерживается свободно
вращающимся кольцом 2. Передаточное отношение регулируется
изменением угла наклона оси шара. Передаточное отношение
вариатора равно
Г2Л2
(ЗЛО)
где /?2 и Р3 — радиусы дисков;
i\ и г2 — радиусы качения шара.
Из чертежа получаем
г2.= рш sin (а — £); G = Рш Sin (а 4-Y);
cos у =
COS Р =
A-Rs
Рш
А~ R2 .
Рш ’
Подставляя значения г2 и гг в формулу для i,
Rs sin (я 4- у)
Rs sin (я — Р) '
получаем
(3.41)
В частном случае, при Л?2 — Л?3, имеем
. =
Sin (а — 7) ' '
На рис. 62 дана конструкция рассматриваемого вариатора.
Оси пяти шаров, расположенных на одинаковом расстоянии по
окружности, поворачиваются диском с криволинейными прорезями.
91
Необходимое давление между дисками и шарами создается авто
матически шариковыми самозатягивающими механизмами, уставов
ленными на ведущем и ведомом валах.
Рис. 62. Конструкция вариатора с физическими осями вращения.
Рассматриваемые вариаторы изготовляются для мощностей от
0,75 до 12 л. с. Диапазон регулирования Д < 9. Максимальный
коэффициент полезного действия т; = 0,9 при i = 1. Вариатор
обильно смазывается.
16. ШАРОВОЙ ВАРИАТОР БЕЗ ФИЗИЧЕСКИХ ОСЕЙ
ВРАЩЕНИЯ ШАРОВ
Схема вариатора показана на рис. 63. Принцип работы вариа-
тора заключается в следующем. Шар 4, который является про-
межуточным звеном при передаче движения от ведущего диска 1
к ведомому 2, опирается на четыре точки: а, Ь, с и d (рис. 63,
а и б). Две точки (а и t>) являются точками касания шара с ро-
ликами 3, а две другие (с и d) — точками касания шара с дисками
1 и 2. Изменяя угол а, определяющий положение осей роликов 3
(рис. 63, в и б) в период передачи движения от диска 1 к диску
2, изменяется соответственно положение геометрической оси вра-
щения шара 4 и значение радиусов гс и rd, а следовательно, и
передаточное отношение вариатора. В соответствии с обозначениями,
принятыми по схеме рис. 63, б, передаточное отношение вариатора
где Д2 и /?3 — радиусы дисков 1 и 2.
Учитывая удобство компоновки узлов вариатора, рекомендуют
92
([29], [30]) принимать диаметр шарика равным диаметру ролика
с расположением их под углом <р = 45°. Тогда в соответствии со
схемой рис. 63, б имеем
(3-44)
При рш — 0,5dp и cos 45° = -^ получаем
У 2
^2=2Рш (/2 + у cos pj, R.3 = 2рш(/2 + у cos т) .
Рис. 63. Схема вариатора без физических осей вращения.
Радиусы качения шарика (рис. 63, б, в)
rc = pmsin(a + Р), rd = рш sin (а — у).
Подставляя значение радиусов в формулу (3.43), имеем
sin (a +3)(j/2 + 4cos-fj
i = ---------]----f-----L . (3.45)
sin (а — 7) (/2 1- cos 3 j
Углы у и p рекомендуют принимать 35—45°.
В частном случае, когда = /?3, получаем
При а = 90° передаточное отношение i = 1, при а = р переда-
точное отношение равно бесконечности и при а < (3 ведомый вал
вращается в противоположную сторону. Угол а наклона оси ша-
рика (к вертикали) и угол <р наклона оси ролика, при располо-
жении их по квадрату, находятся в такой зависимости; tga =
— tg ф cos 45°.
93
Рис. 64. Конструкция вариатора ЭНИМС
1 —рабочие шары; 2 — червячные колеса; 3, 4 — отверстия для заливки и спуска масла;
ческий диск; 9— ось ролика; 10— направляющие ролики; 11—ведущий конический
кольца; /7 —пружины; 18—
Конструкция вариатора показана на рис. 64'. Четыре ролика
10 встроены в червячные колеса 2, которые поворачиваются по-
средством одного червяка 19, расположенного в центральной
части вариатора. Вращение червяку сообщается валиком 5, рас-
положенным в отверстии ведомого вала 6.
Необходимое давление в зоне контакта, обеспечивающее пере-
дачу движения, создается механизмом самозатягивания, составлен-
ным из шариков 15, которые перекатываются в канавках пере-
менной глубины шайб 7 и 12, установленных на ведущем и ведомом
94
без физических осей вращения шаров:
5 — валик управления; 6 — ведомый вал; 7, 12 — прижимные шайбы; 8 — ведомый кони-
диск; 13 — ведущий вал; 14 — пальцы; 15 —шарики прижимного устройства; 16, 20 —
разъемный корпус; /9 — червяк.
валах и в ступицах дисков. Давление между телами качения ре-
гулируется автоматически и зависит от суммы крутящих моментов
на ведущем и ведомом валах вариатора.
К числу достоинств вариатора следует отнести то, что он до-
пускает большой диапазон регулирования (до 15 — 20), позволяет
изменять направление вращения ведомого вала при постоянном
направлении вращения ведущего. Венцы червячных колес уста-
новлены в плавающей рамке, поэтому давление между роликами
распределяется равномерно. Форма тел качения проста.
95
К недостаткам вариатора следует отнести значительное геомет-
рическое скольжение, особенно при больших передаточных отно-
шениях, поэтому предусматривается обильная смазка. Поверхность
тел качения должна обладать высокой твердостью.
Расчет основных элементов вариатора следует производить
в такой последовательности.
В соответствии с ГОСТ 3722-54, выбирается диаметр шарика
из ряда: 12; 14; 15; 16; 17; 19; 20; 21,431; 22,225; 23,019; 25,4;
26,988; 28,576; 30; 31,75; 35,72; -38,1; 40; 50; 60; 63,5; 76,2;
100; 152,4.
Определяется допускаемое усилие сжатия шарика из формулы
(1-97)
Q =
m3kE2 ’
где можно принять т = 0,5 и k = 1.
Крутящий момент, передаваемый вариатором, определяется
[26] по формуле
Г / У7* V 1
f I 5 + 1 COS а 4- 1
м = _ г° ’ (ЗЛ7)
у2 cos pp (—ly cos а1 j
где z — число шариков;
/ — коэффициент трения скольжения (при обильной смазке
принимают f = 0,04).
Осевое усилие, прижимающее диски к шарикам, равно
Т = —./У? . (3.48)
А2/
Таблица 8
Основные характеристики и размеры (в мм) нормального ряда
шаровых вариаторов ЭНИМС
Модель вариатора Номиналь- ная мощность в кет пг в об/мин д Диаметр шарика Масло А С Е d, d.
ВБ-15 0,2 1500 10 16 Индустриаль- 220 НО 115 12 12
ВБ-25 0,6 1500 10 25 ное 12 310 155 160 18 18
ВБ-30 1,0 1500 10 30 330 185 188 20 20
ВБ-40 1,7 1000 10 40 Индустриаль- 418 235 238 25 25
ВБ-50 2,8 1000 10 50 ное 50 530 290 295 25 25
96
Вариаторы строятся для мощностей до 3 кет при окружной ско-
рости на телах качения до 20 м/сек. Коэффициент полезного дей-
ствия переменный и значительно падает при больших передаточ-
ных отношениях, так, например, при i= 1 т; = 0,85 -г-0,9 и при
i = 10 7j = 0,3.
Основные размеры и характеристики для пяти моделей вари-
атора даны в табл. 8.
17. ПЛАНЕТАРНЫЙ вариатор с шаровыми
САТЕЛЛИТАМИ
На ведущем валу вариатора (рис. 65, а) закреплен диск 1,
который передает движение ведомому диску 2 посредством шаро-
Рис. 65. Схема вариатора с шаровыми сателлитами
вых сателлитов 4, обкатывающихся по неподвижному кольцу 7.
Оси шаров расположены в направляющих поводках 5, свободно
вращающихся относительно центральной оси вариатора. Переда-
точное отношение изменяется поворотом осей шаровых сателлитов.
Последнее достигается перемещением вдоль оси валов полой тяги
6, соединенной шарнирно с осями сателлитов.
Сила нажатия в зоне контакта рабочих поверхностей обеспе-
чивается пружиной 3. Передаточное отношение вариатора опреде-
лим, рассматривая его, как две простых планетарных передачи,
из которых первая составлена из поводка 5, диска 1 и кольца 7,
вторая — из поводка 5, диска 1 и диска 2.
7 171
97
Для первой передачи (рис. 65, б) по формуле Виллиса полу-
чаем П1 — п5 r^Ri г1Г"
При п7 = 0 имеем п5 = . (3.49) rirt
Для второй передачи запишем «I — т5 r'tR2 Mg — ^5 Г Гм 1 4
откуда «1 = — «2 Mr + П6(1 + •
Подставляя получаем значения п5 из формулы (3.49), после преобразований 1 + ^zd (3-50) 1 LA S • r"tRi
Пр схеме на рис. 65, б видно, что
/"'—PuiCos а, г* = pmsin (а 4-Р), г'" = рш sin (ср—а).
Подставляя эти значения в формулу (3.50), имеем 1 1 ^7 C0S ° { = nsin(a4-P) t R7 sin (у—a) • V5,01' R2 sin (a-J-₽)
В частном случае, при ср = ₽ и /?, = /?7, формула (3.51) приоб-
ретает вид
1 I ^?7 cos a = ri sin (a + ?) _ J sin(y —a) sin (<р 4- a)
Рассматриваемый вариатор строится с диапазоном регулирования
от + 10 до —6.
... — - Глава четвертая _________________
ВАРИАТОРЫ СКОРОСТИ С ПРОМЕЖУТОЧНЫМ
ГИБКИМ ЗВЕНОМ
1. ОПРЕДЕЛЕНИЕ ОСНОВНЫХ ПАРАМЕТРОВ ВАРИАТОРА
С КЛИНЧАТЫМ РЕМНЕМ
И РАЗДВИЖНЫМИ ШКИВАМИ
Рис. 66. Схема клииоре-
менного вариатора с раз-
движным шкивом.
Вариаторы с клинчатыми ремнями и раздвижными шкивами
получили широкое применение в промышленности, так как в боль-
шинстве случаев они просты по конструкции, бесшумно работают,
не требуют большого первоначально-
го натяжения ремня, надежны в ра-
боте, скорость ведомого вала легко и
просто регулируется во время работы
вариатора. Большое разнообразие су-
ществующих конструкций шкивов,
различные сочетания сдвоенных ва-
риаторов, а также сочетания клино-
ременного вариатора с различными
схемами зубчатых передач, позволяют
легко выбрать одну наиболее рацио-
нальную из числа существующих схем
в соответствии с заданной мощностью
и с необходимым диапазоном регули-
рования скорости.
Принципиальная схема наиболее
простого вариатора показана на рис.
66. Раздвижной шкив 2 состоит из
двух дисков переменного диаметра,
шкив 1 — постоянного диаметра. Ре-
гулирование угловой скорости ведо-
мого вала осуществляется изменением
расстояния А между осями шкивов
(при постоянной длине ремня) путем
перемещения одного из валов, обычно
вала двигателя. С увеличением меж-
осевого расстояния ремень 3, натягиваясь, разводит диски шкива
2 и огибает их по дуге окружности меньшего диаметра.
7*
99
При уменьшении межосевого расстояния ремень под действием
пружин 4 перемещается на больший диаметр. Сила трения между
ремнем 3 и шкивами обеспечивается силами упругости пружин 4,
расположенных на шкиве 2 по окружности, описанной из центра
вала.
Шкив 2 устанавливается на вал со скользящей шпонкой, что
дает ему возможность перемещаться вдоль оси рала и самоуста-
навливаться в положение, соответствующее средней плоскости
движения ремня.
Определение усилий, действующих на пружины
В принятой теории ременных передач на дуге в пределах угла
обхвата а различают: 1) дугу скольжения, расположенную со
стороны сбегающей ветви, в пределах которой происходит упругое
проскальзывание ремня по шкиву; 2) дугу покоя, расположенную
со стороны набегающей ветви, в пределах которой ремень, сохра-
няя первоначальное натяжение, не деформируется и не проскаль-
зывает.
Нормальное давление Nx
Т ~ 24g f ’ котоРая Действует
ределяются в соответствии с
покоя и на дуге скольжения
(рис. 67, а) и его составляющая
на диск параллельно оси вала, оп-
условиями работы ремня на дуге
Суммарное усилие, действующее
на диск, равно
7 = Лк + Л,к, 4 (4.1)
где Тск — усилие, возникающее в пределах дуги скольжения;
Так — усилие, возникающее в пределах дуги покоя.
В пределах угла покоя радиальная составляющая QnK опреде-
ляется из условия постоянства натяжения S ремня. В соответст-
вии с рис. 67, б имеем
di
dQnK = 2Ssiny.
Принимая sin у — ~ и интегрируя в пределах угла апк (угла по-
коя), получаем
QnK — *5<Хпк*
Составляющая Тпк, действующая параллельно оси вала, с уче-
том сил трения, направленных вдоль образующей, определяется
из параллелограмма сил (рис. 67, в) и равна
гр ___ &пк
пк ~ 2 tg (f-j- Р) ’
где 2f — угол желоба шкива;
р — угол трения.
ipo
Для ведущего шкива в формулу для Тпк следует подставить
значение натяжения 3, —ведущей, а для ведомого шкива — 32 —
натяжение ведомой ветви ремня. Поэтому усилие, действующее
вдоль оси вала ведомого шкива, всегда меньше усилия, действую-
щего вдоль оси вала ведущего шкива, так как S2 > 32.
Определение угла покоя апк связано с рядом затруднений.
Поэтому усилие Т рекомендуют [31] определять по усилию Тск,
принимая коэффициент надежности для ведущего шкива р= 1,5-~2,
для ведомого р = 1,2 ч- 1,4 и апк = 0.
Рис. 67. Схема сил, действующих на двухдисковый шкив кли-
ноременного вариатора.
Зависимость между натяжениями Sj и S2 определяется извест-
ной формулой Эйлера
^ = е^, (4.3)
02
где е — основание натуральных логарифмов;
7' — — приведенный коэффициент трения;
/ — коэффициент трения скольжения ремня по шкиву;
а — угол обхвата.
Значения величин ef'a даны в табл. 9.
Сила трения между шкивом и ремнем при постоянном крутя-
щем моменте на валу должна быть равна
М
^==3,-3, = ^? = -^, (4.4)
где Л4кр1—крутящий момент на валу рассматриваемого шкива;
Рх — радиус, равный расстоянию от нейтральной линии
ремня до оси вращения шкива;
Рх — окружное усилие.
101
Таблица 9
Значения “
Угол обхвата а0 Отношение дуги обхвата к окружности Коэффициент трения f (приведенный)
0,2 0,25 0,3 0,35 0,4 0,45 0,5
36 од 1,13 1,17 1,21 1,25 1,29 1,33 1,37
72 0,2 1,29 1,37 1,46 1,56 1,65 1,76 1,87
108 0,3 1,45 1,6' 1,76 1,93 2,13 2,34 2,57
144 0,4 1,65 1,87 2,18 2,41 2,73 3,1 3,51
153 0,425 1,7 1,95 2,23 2,55 2,91 3,33 3,8
162 0,45 1,76 2,03 2,34 2,69 3,1 3,57 4,11
171 0,475 1,82 2,11 2,45 2,84 3,3 3,83 4,45
180 0,5 1,87 2,19 2,57 3,00 3,51 4,11 4,81
189 0,525 1,93 2,28 2,69 3,17 3,74 4,41 5,2
198 0,55 2,00 2,37 2,82 3,35 3,98 4,74 5,63
216 0,6 2,13 2,57 3,1 3,74 4,52 5,45 6,59
252 0,7 2,41 3,0 3,74 4,66 5,81 7,24 9,02
288 0,8 2,75 3,51 4,52 5,81 7,47 9,6 12,35
324 0,9 3,1 4,11 5,45 7,24 9,6 12,74 16,9
380 1 3,51 4,81 6,59 9,02 12,35 16,9 23,14
В соответствии с рис. 67, а равнодействующая радиальных
давлений ремня на шкив равна
Qx = 2NX sin у = .
Подставляя значение Fx из уравнения (4.4), получаем
Rxf'
(4-5)
Рассматривая равновесие правого диска шкива в момент пе-
ревода на меньший диаметр (рис. 67, а), устанавливаем, что нор-
мальное давление Nx ремня уравновешивается силами упругости
Тх пружин, силами трения Fa и Fb, которые возникают между
направляющими поверхностями ступиц дисков от силы Nx, и си-
лами трения Fe на направляющих пальцах от половины крутя-
щего момента Л4кр). Силы трения Fp, Fa и Fb направлены в
противоположную сторону движения диска. Считая, что равно-
действующая Тх сил упругости пружин и равнодействующая Fp
приложены по оси вала, составляем уравнения моментов всех сил
и определяем опорные реакции А и В. Затем, проектируя все силы
на горизонтальную ось и подставляя значения опорных реакций,
после ряда преобразований, получаем:
1. Для случая, когда правый диск перемещается слева на-
право
Тх [ 1 + rx (т0 — £0)] = [ 1 + zy (т0 — k0) + Дмин tg2 у (m0+k0) —
— 5 tg т (m0 + k0) + тос tg Т] — (mo + k0) — (4.6)
— ЛЛ1 + G ("*o —-Ш
102
где /?мин — минимальный радиус шкива;
rlt с и S — размеры ступицы правого диска (рис. 67, а);
= и = коэффициенты;
[л — коэффициент трения скольжения между трущимися
поверхностями ступиц дисков;
Fр = р0 — сила трения;
d0— диаметр окружности, по которой расположены на-
правляющие пальцы;
р0— коэффициент трения скольжения между направляю-
щим пальцем и подвижным диском.
Подставляя значение Qx из формулы (4.5) и обозначая посто-
янные величины через
£о = 1 + G (/«о — ko) + #мин tg2 г (т0 + k0) — S tg у (/п0 + k0) -р
и -pmoctgY
Я = 1 + Д (т0 — k0),
получаем
Л = onTTfT-L [Ео-----(т0 4- £0)1 — [V (4.7)
х 2RxDof tg 7 L cos2 7 ' u 1 0,J d0 '
2. Для случая, когда правый диск перемещается справа на-
лево, знак перед ц и [i0 изменяется на обратный.
Анализируя формулы (4.6), (4.7) и величины т0 и k0, которые
в них входят, можно установить, что при с = 2^! подвижный
диск заклинивается. Для приближенных расчетов можно принять
в формуле (4.7) £0 = 1 и Do = 1.
Из формулы (4.7) также видно, что в случае значительной
перегрузки вариатора, превышающей принятое значение коэффи-
циента jj, ремень может автоматически развести диски шкива и
«уйти» на меньший диаметр при неизменном расстоянии между
центрами шкивов.
В соответствии с изложенным при проектировании привода
, вариатор следует устанавливать в числе первых передач от вала
двигателя в кинематической цепи передаточного механизма.
Определение размеров пружин
Диаметр d проволоки круглого сечения винтовой пружины
определяется по условию прочности;
‘*=‘.6/45’ <4-«)
где г — число пружин;
7\ — максимальное усилие, действующее на пружины, оп-
ределяемое по формуле (4.6) при Rx = Z?MBH;
103
[т]к — допускаемое напряжение на кручение для материала
пружины в кг/сл2, выбираемое по табл. 10;
С = -j- — индекс пружины, определяющий отношение среднего
диаметра D пружины к диаметру d проволоки
(С = 4-ь12);
k = — коэффициент, учитывающий напряжения среза, угол
подъема витков и влияние кривизны проволоки пру-
жины.
Таблица 10
Механические свойства пружинных сталей и допускаемые напряжения на кручение [т]к для витых пружин сжатия, в кг/мм1
Группа стали Механические свойства * (средине значения)
°пц °пч тпц Мк
Углеродистая 100 130 70 60
Кремнистая 150 170 95 90
Марганцевая 115 130 75 70|Не
Кремнемарганцевая . . 145 160 95 90 бо-
Кремнехромистая . . . 145 160 95 901 лее
Хромованадиевая .... 130 145 85 80
Примечание. апц — предел пропорциональности; аггч — ности; тпц — предел текучести. предел проч-
Первоначальный прогиб f0 пружины (рис. 68), соответствую-
щий положению ремня на наибольшем радиусе раздвижного
шкива, определяется по формуле
с __ 8ToiD3 д,
Gd*z ’ ' '
где i — число рабочих витков пружины;
То — минимальное усилие, действующее на пружины, опреде-
ляемое по формуле (4.6) при Rx = /?макс;
G — модуль упругости материала пружины при сдвиге в
кг/см?.
При положении ремня на наименьшем радиусе /?мви прогиб
пружины равен
/=^0 + ^ = ^. (4.Ю)
В соответствии с рис. 68
Л = 2 (Ямакс - /?мии) tg Т. (4.11)
* Данные приведены для термически обработанных пружин. Закалка
пружин производится в масле при температуре 780—880° С в зависимости от
состава стали. Отпуск — при температуре 400 — 500° С.
104
Подставляя в формулу (4.10) значение f0 из уравнения (4.9),
Д — из уравнения (4.11), 7\ и То — в соответствии с формулой
(4.7), после преобразований получаем
. _ ЯмаксЯмин°0<^4гЛ tg2 7
2Л4к111,адз£0 •
Формула (4.12) определяет число рабочих витков пружины,
удовлетворяя условию, при котором нормальное давление между
дисками и ремнем при = /?мин
и Rx = /?Макс в соответствии с при-
нятым коэффициентом надежно-
сти р равно необходимому дав-
лению, а при любом другом
радиусе — больше необходимого
(максимальное отклонение не пре-
вышает 4%).
Длина пружины /0 в свободном
состоянии определяется соотноше-
нием
= fo + А +
+ (i ф- 2)d -f- 5 мм. (4.13)
Шаг витка пружины в свобод-
ном состоянии равен
/ = 7Т2> (4Л4>
I -f-
Рнс. 68. Схема перемещения диска
шкива клиноременного вариатора.
где 2 — число нерабочих витков пружины.
Определение пределов регулирования скорости
В соответствии с рис. 69 для шкива, состоящего из двух
дисков,
~ [^?макс — ^?мии 4" ^0 4* (^ — Л»)] tg Y> (4-15)
откуда
А'макс’= ^?мии 4- 9*7;-А, (4.16)
где аа — ширина ремня по наиболее растянутому слою;
h — высота сечения ремня;
2у— угол желоба шкива.
Для шкивов, состоящих из трех дисков (рис. 70), имеем
^?макс — ^?мин
где = сх 4- ег.
105
Подставляя в формулу для 7?маКс значения:
cl = 2tg? ^°’ в1 = 2tg? Т = Т Ш Т>
после преобразований получаем
/?макс= /?МИв+ Д-2Й. (4.17)
l& 7
Обозначая наибольший радиус ведомого шкива /?2макс и наи-
меньший R2 мин> зависимость между которыми определяется теми
Рис. 69. Схема перемещения диска Рис. 70. Схема перемещения дисков
Двухдискового шкива клиноременного трехдискового шкива клиноременного
вариатора. вариатора.
же формулами (4.16) или (4.17), можно найти наибольшее пере-
даточное отношение вариатора
^2 макс
‘макс — п
''мин
и наименьшее передаточное отношение вариатора
; _ ^2 мин
‘мин — ~п •
''макс
Разделив 1Макс на (мии, получим величину Дв — диапазон регули-
рования скорости вариатора \
р р
___ х2 макс^макс
б “р п
v2 минАмин
(4.18)
Обозначая /?2 мин : #мии = iB и подставляя в формулу (4.18)
значения Аймаке и 2?Макс в соответствии с формулой (4.16), после
преобразований получаем для вариатора с двух дисковыми веду-
щим и ведомым шкивами
Дв — 1
1+/в
^мнн(в
^мнн'в
МпП D
(4.19)
106
Обозначая через
°0 L
2tgy h
Дмии
имеем
1 + *в
'в
(4.20)
и =
Дв — 1 4* U
Подставляя в формулу (4.18) значения Дгмакс и Дмакс в соот- ,
ветствии с формулой (4.17), получаем для вариатора с трехдис-
ковыми ведущим и ведомым шкивами
Д’в= 1 +
1 + 'в
ДмиДв
(4.21)
Соответственно, обозначая через
Амин
имеем
Дв = i + 2ul-^-B + ^.
*в *в
(4.22)
Анализируя формулы (4.20) и (4.22), замечаем, что при дан-
ном Дмин, /г и у диапазон регулирования Дв зависит от а0 и iB.
Однако величина iB при значениях больше единицы мало влияет
на диапазон регулирования, следовательно, основным параметром,
влияющим в большой степени на Д, является ширина tz0 ремня.
Расчет ремней клиноременных вариаторов скорости
Определение основных размеров деталей клиноременных вариа-
торов (выбор сечения ремня, минимального диаметра шкива,
определение числа ремней и т. д.) производится в такой же по-
следовательности, как и при расчете обычной клиноременной пе-
редачи.
2. КОНСТРУКЦИИ ШКИВОВ С РАЗДВИЖНЫМИ ДИСКАМИ
Конструкция шкива с раздвижными дисками показана на
рис. 71. Диск 2 при натяжении ремня 3 может перемещаться
вдоль оси по ступице 5. Пружины 1, установленные на пальцах,
затягиваются одной общей шайбой 7 посредством гайки. Винт 6
может служить ограничителем величины перемещения диска 2
относительно ступицы 5. Диск 4 закреплен на ступице 5 непо-
движно.
107
Предел изменения диаметра шкива можно увеличить, приме-
няя конструкцию шкива (рис. 72), который состоит из трех дис-
ков. Диск 6 этого шкива закреплен на ступице 3 неподвижно,
а диски 9 и 7 подвижны в осевом направлении. Положение дис-
ков на рис. 72 соответствует расположению ремня 8 на наиболь-
шем диаметре. Вначале, при увеличении расстояния между цент-
Рис. 71. Конструкция двухдискового шкива клиноременного вариатора.
рами ведущего и ведомого шкивов, перемещается диск 7 справа
налево, диск 9 при этом остается неподвижным.
Крайнее левое положение диска 7 Определяется совмещением
клинообразной круговой канавки на пальце 5 с выступом фикса-
тора 1. Этому положению соответствует расположение рабочих
поверхностей дисков 7 и 6 по одной образующей.
При дальнейшем увеличении расстояния между центрами
шкивов начнет перемещаться диск 9 слева направо, фиксатор 1
при этом поднимется вверх, освободив палец 11. Диск 9 и па-
лец 11 соединены между собой фасонной шайбой 4.
Осевое усилие пружин 2 и 10 должно быть достаточным для
передачи крутящего момента силами трения, возникающими
между рабочими поверхностями дисков и ремнем.
108
Рис. 72. Конструкция трехдискового шкива клииоременного вариатора.
Другой шкив клиноременного вариатора может быть с посто-
янным диаметром или составленным из двух или трех дисков
с возможным изменением диа-
метра, по которому огибается
натянутый ремень, что значи-
тельно повышает диапазон регу-
лирования скорости.
Изменение положения ремня
между дисками шкива осуще-
ствляется от руки, эпизоди-
чески, при остановленном дви-
гателе. На рис. 73 показана
конструкция такого шкива, со-
ставленного из двух дисков.
Диск 5 жестко соединен со
ступицей 3, которая неподвиж-
но устанавливается на валу
привода. Диск 4 может пере-
мещаться вдоль оси на ступи-
це 3 и фиксируется в заданном
положении посредством гайки 1
и контргайки 2. Шкив, состав-
ленный из трех дисков, показан
на рис. 74. Диск 11 относитель-
но ступицы 5 закреплен непо-
движно,
Рис. 73. Конструкция двухдискового
шкива клиноремеиного вариатора,
регулируемого во время остановки
привода.
а диски 9 и 10 могут перемещаться вдоль ее оси.
Перемещение дисков, а следовательно, и изменение положения
109
ремня между дисками осуществляется вращением маховика 3,
соединенного с винтом 13 посредством шпонки. Винт 6 с гайкой 8
и контргайкой 7 установлены для регулирования предельного
смещения диска 9 относительно диска 10, при котором рабочие
поверхности обоих дисков должны совместиться по одной обра-
зующей. Такая регулировка необходима для нормальной работы
ремня в случае расположения его на стыке двух дисков.
Устройством, предохраняющим винт 13 от произвольного вра-
щения, является гайка 2. Маховик 3, зажатый между гайкой 2
Рис. 74. Конструкция трехдискового шкива клиноремеиного вариа-
тора, регулируемого во время остановки привода.
и фасонной шайбой 4, фиксирует винт 13 в заданном положении.
Шплинт 1 ограничивает ход гайки 2 и предохраняет ее от пол-
ного свинчивания. Сила упругости пружин 12 должна обеспечить
работу ремня между дисками 10, 9 и И без их дополнительных
деформаций.
Конструкции шкивов на рис. 71 и 72 позволяют осуществить
плавное регулирование скорости в пределах возможного диапа-
зона и в том случае, если диаметр второго шкива будет изме-
няться не плавно, а по ступеням.
На рис. 75, а показана другая конструкция трехдискового
шкива. Изменение радиуса шкива по ступеням макс, Ri сР
и /?2мнн осуществляется поворотом рукояток 5 и <5 на угол 60°.
Деталь рукоятки 5 (рис. 75, б), соединенная с ней неподвижно,
Имеет три выступа, которые при соответствующем положении
110
относительно рукоятки 6 (рис. 75, в) входят в пазы отверстия
последней и не препятствуют перемещению дисков 1 и 2
вправо под действием пружин 8. Ремень 4 при этом смещается
с максимального диаметра шкива на средний. При повороте ру*
коятки 6 (вместе с рукояткой 5) в положение, при котором ее
выступы совпадают со шпоночными пазами в ступице диска 2,
Рис. 75. Конструкция трехдискового шкива клиноременного вариатора,
регулируемого по ступеням во время остановки привода.
перемещается диск 2 под действием пружин 7. В последнее
случае положение дисков 3 и 2 соответствует работе ремня нд
минимальном радиусе ^мин.
3. ВАРИАТОР СИСТЕМЫ «РВЕ»
В настоящее время на предприятиях легкой промышленности
широко применяется привод с клиноременным вариатором под
названием РВЕ для транспортных устройств и других механизг
мов.
Привод изготовляется серийно на Киевском экспериментальг
но-механическом заводе управления легкой промышленности.
Принципиальная схема привода показана на рис. 76. КлинОг
Ш
вой ремень 7 (сечения В, ГОСТ 5813-51, группа Л, сечение
22 х 12,5, 2 у = 40°, длина ремня по внутренним волокнам L =
= 1180 мм) вариатора передает движение от двигателя 2 к двух-
ступенчатому червячному редуктору 3. Выходной вал червячного
редуктора может соединяться с валом рабочей машины или
исполнительного механизма цепной передачей, ведомая звездоч-
ка 4 которой в комплект привода не входит и проектируется
Рис. 76. Схема привода системы «РВЕ».
в каждом отдельном случае в зависимости от общего передаточ-
ного отношения механизма привода. Двигатель 2 привода уста-
новлен на специальных салазках 1. Вращением винта салазок
(во время работы привода) достигается изменение передаточного
отношения привода. Конструкция шкивов вариатора показана на
рис. 71 и 74.
Стационарный тахометр 5 (типа ТКМ-300-4-2000, корабель-
ный магнитный; изготовляется отечественными заводами) подклю-
чен посредством гибкого вала 6 к валу червяка первой ступени
червячного редуктора и позволяет без больших погрешностей
контролировать скорость вала червяка первой ступени вариа-
тора.
Конструкция привода РВЕ и его техническая характеристика
даны на рис. 77.
112
Рис. 77. Конструкция и характеристика привода системы «РВЕ».
4. КЛИНОРЕМЕННЫЙ ВАРИАТОР С МНОГОДИСКОВЫМИ ШКИ ВАМИ.
И ПОСТОЯННЫМ РАССТОЯНИЕМ МЕЖДУ ОСЯМИ ВАЛОВ
В случаях, когда расстояние между параллельно расположен-
ными осями валов должно быть постоянным, можно применить
конструкцию вариатора, показанную на рис. 78. Ведущий и ве-
домый шкивы этого вариатора одинаковы.
Каждый из шкивов состоит из одного целого конического
диска и второго — составленного из трех телескопически склады-
вающихся частей. В среднюю часть 3 составного диска встроены
фиксаторы 8t ограничивающие свободу ее перемещения. Сила
упругости пружины 1 должна быть достаточной для удержания
ремня в заданном положении при работе его на наименьшем диа-
метре. Конструкция шкивов рассматриваемого вариатора позволяет
получить большой диапазон регулирования скорости при малой
ширине стандартного ремня.
Регулирование скорости производится вращением винта 5 по-
средством маховичка 6. К гайке 7 винта 5 жестко прикреплены
вилки 4, которые входят в пазы втулок 2, передающих движение
сплошным дискам.
8 171
113
Рис. 78. Конструкция клиноременного вариатора с трехдисковыми
- шкивами.
114
Максимальная мощность [5], передаваемая вариатором, состав-
ляет 1 кет при числе оборотов ведущего вала nL = 1500 об/мин.
Диапазон регулирования при наибольшем диаметре шкива (204 мм)
и клиновом ремне типа Б равен Д = 2,32, максимальное переда-
точное отношение tMaKC = Д = 1,52.
5. К ЛИНО РЕМЕННЫЙ ВАРИАТОР С ДВУХДИСКОВЫМИ ШКИВАМИ
, И НЕИЗМЕННЫМ РАССТОЯНИЕМ МЕЖДУ ОСЯМИ ВАЛОВ
Конические диски вариатора (рис. 79) в зоне контакта с кли-
новым ремнем имеют радиальные выступы и впадины (пазы).
Диски на валу устанавливаются так, чтобы выступы одного
диска входили во впадины другого, как в кулачковой муфте.
В таком сочетании два диска образуют шкив с возможным
перемещением узкого стандартного клинового ремня по образую-
щим. Следует отметить, что при этом ремень работает в небла-
гоприятных условиях (интенсивный износ о грани выступов).
Одни разноименные диски ведущего и ведомого шкивов за-
крепляются на валу неподвижно, другие — могут перемещаться
вдоль вала по направляющим шпонкам. При таком расположении
подвижных дисков ремень в процессе регулирования скорости
всегда находится в плоскости, перпендикулярной осям валов.
На одном из валов подвижный диск 3 перемещается принуди-
тельно, посредством переводки, состоящей из винта 1 и вилки 2,
изготовленной за одно целое с гайкой. Переводное кольцо 4 по-
коится на упорных подшипниках трения качения.
Подвижный диск 5 второго вала опирается на пружину 6 и
устанавливается автоматически в зависимости от положения дис-
ка, устанавливаемого переводкой. Сила упругости пружины 6
регулируется гайкой 7 и должна быть достаточной для передачи
заданного крутящего момента.
Если крутящий момент на входном валу постоянен, то веду-
щим должен быть шкив с подпружиненным диском, так как
с увеличением окружного усилия, при переходе ремня на мень-
ший диаметр, пружина сокращается по длине и прижимает его
с большей силой. Размеры пружины 6 определяются так же, как
и для клиноременного вариатора с регулировкой скорости изме-
нением межосевого расстояния, по формулам: (4.8), (4.9), (4.11),
(4.12). Характеристика вариатора [5] такая же, как и вариатора,
показанного на рис. 78.
6. КЛИНОРЕМЕННЫЙ ВАРИАТОР С КОЛИЧЕСТВОМ РЕМНЕЙ
БОЛЬШЕ ОДНОГО
Передаваемая мощность рассмотренных выше клиноременных
вариаторов скорости весьма ограничена по той причине, что дви-
жение передается только одним ремнем. При передаче движения
большим количеством ремней, конструкция шкивов усложняется
и увеличивается значительно по ширине.
8*
115
Рис. 79. Конструкция клиноременного вариатора с радиальными пазами на дисках шкивов.
J16
На рис. 80 показан шкив с раздвижными дисками для трех
ремней. На ступице 1 со шпонкой неподвижно монтируются
диски 8, расстояние между которыми фиксируется втулками 2 со
шпоночными пазами. Весь комплект деталей затягивается гайкой 4.
Подвижные диски 7 устанавливаются на втулках 2 и затяги-
ваются болтами 6. Расстояние между дисками 7 определяется
длиной дистанционных трубок 3, надетых на болты 6.
Положение дисков 7 относительно дисков 8 регулируется гай-
кой 5 при остановленном приводе с последующей регулировкой на-
тяжения ремней изменением межосевого расстояния шкивов или на-
тяжным роликом. Второй шкив обычный, с постоянным диаметром.
Рис. 80. Конструкция шкива клиноре-
менного вариатора для трех ремней.
Рис. 81. Конструкция шкива клино-
ременного вариатора с возможным
регулированием иа ходу.
Увеличение или сокращение числа ремней не влечет за собой
изменения конструкции, при этом увеличиваются или'сокращаю-
тся число одноименных деталей и габариты шкива по ширине.
На рис. 81 показан шкив с раздвижными дисками для трех
ремней несколько иной конструкции.
Неподвижные диски 1 затянуты на ступице гайкой 3. Под-
вижные диски 2 опираются на втулку 4 через радиально-упорный
шарикоподшипник. Втулке 4 препятствует вращаться рычаг 7.
Регулирование осуществляется на ходу вращением винта 5
посредством цепной передачи 6. Натяжение ремней регулируется
натяжным роликом.
7. КЛИНОРЕМЕННЫЙ ВАРИАТОР В СОЧЕТАНИИ
С ДИФФЕРЕНЦИАЛОМ
В рассматриваемой конструкции (рис. 82) ведущий шкив со-
стоит из дисков 2, 3 и 4, которые установлены на ступице 1,
причем средний диск 3 может перемещаться вдоль оси вала по
направляющим шпонкам. В ведомый шкив вмонтирован зубчатый
117
Рис. 82. Конструкция вариатора с планетарным редуктором.
дифференциальный редуктор. Оси 7 запрессованы неподвижно
в отверстиях диска П и имеют по две консоли. На правых кон-
солях установлены сателлиты 13 на игольчатых подшипниках,
левые консоли входят в отверстия дисков 9 по скользящей по-
садке. Оси 7 с диском 11 образуют поводок дифференциального
редуктора. Сателлиты 13 находятся в зацеплении с солнечным
колесом 19 и зубчатым колесом внутреннего зацепления, которое
изготовлено за одно целое с диском 6. На валу 17, на скользя-
118
Рис. 83. Конструкция уплотне-
ния между дисками клиноремен-
ных шкивов.
щей посадке установлена гильза 18 с дисками И и 6, которые
смонтированы на ней на шариковых подшипниках. Гильза 18
соединена с корпусом вариатора посредством подшипника 16.
Диски 6 и 5 соединены между собой направляющими шпон-
ками 14 и подвижны относительно друг друга только в осевом
направлении. Опорой для диска 5 служит шариковый подшип-
ник 15. Диски 9 и 11, как поводок дифференциала приводятся во
вращение клинчатым ремнем 10, а диски 6 и 5 с колесом внутрен-
него зацепления — ремнем 12.
Регулирование скорости ведомого вала осуществляется его
перемещением вдоль оси с дисками 9 и 5 посредством маховика 8.
Имеющиеся в гильзе 18 пазы для
шпонок вала позволяют перемещаться
последнему. Диск 3 ведущего шкива
при этом самоустанавливается.
Для увеличения диапазона регу-
лирования скорости на дисках веду-
щего шкива сделаны радиальные
пазы с взаимным смещением по фазе
на полшага.
Особое внимание при проектиро-
вании вариатора [22] должно быть
обращено на уплотнение между дис-
ками 11 и 6, так как просачиваю-
щееся масло, предназначенное для
смазки зубьев зубчатых колес, по-
падает на клинчатые ремни, что
ухудшает их работу. Рациональная
конструкция уплотняющего устройства с маслоотражательным
кольцом и манжетным уплотнением показана на рис. 83.
В табл.. 11 даны предельные числа оборотов выходного вала
вариатора для некоторых сечений клиновых ремней при 2у = Зч°,
= 1,25, — =2,5 и числе оборотов ведущего вала =
^мин гш
— 1440 об/мин.
Таблица 11
Предельные числа оборотов выходного вала
клиноремеипого вариатора в сочетании с диффе-
ренциальным редуктором
Сечение ремня р ТЗ со пмакс в об/мин пмин в об/мин
о 70 2916 —486
А 100 2720 —316
Б 140 2600 — 164
В 200 2480 — 104
Г 300 2460 —86
119
Здесь 2f — угол желоба шкива;
DMHH— минимальный диаметр ведомого шкива;
^мин — минимальный диаметр ведущего шкива;
гш— число зубьев солнечной шестерни дифференциала;
zK — число зубьев колеса с внутренним зацеплением.
В одесском технологи-
ческом институте имени
И. В. Сталина был по-
строен вариатор рассматри-
ваемой конструкции со сле-
дующими параметрами [22]:
передаваемая мощность W =
= 7 л. с., ремни сечения В,
П.2 макс — 2520 об/мин, «2 Мин =
= —503об/мин. Была также
исследована его характери-
стика. Результаты исследо-
ваний представлены в виде
Рис. 84. График изменения к.п.д. вариа-
тора в зависимости от М и п.
графиков.
На рис. 84 показаны кри-
Рис. 85. График изменения е0 в зависи-
мости от М и п.
вые изменения к. п. д. ва-
риатора при различных чис-
лах оборотов выходного вала
в зависимости от крутящего
момента, а на рис. 85 даны
кривые изменения коэффи-
циента падения скорости г0
ведомого вала.
е0 = (1-^100%,
X м ч
где и и ия — суммарное
число оборотов
соответственно
ведомого и ве-
дущего валов,
снятое по пока-
заниям счетчика при работе вариатора под на-
грузкой;
иМх и их — число оборотов соответственно ведущего и ведомого
валов, определенное за один и тот же промежуток
времени при работе на холостом ходу.
Из конструктивных соображений рекомендуют [22] принимать
> 1,25 и <2,5.
d. Z
WS«UU *-ТТ1
120
8. СДВОЕННЫЕ КЛИНОРЕМЕННЫЕ ВАРИАТОРЫ
Диапазон регулирования скорости клиноременных вариаторов
с двухдисковыми шкивами ограничен вследствие малой ширины а0
стандартных ремней.
Последнее время разрабаты-
вались различные конструкции
широких клиновых ремней, одна
из которых показана на рис. 86.
Лучшими следует считать ремни,
армированные стальными тро-
сиками.
Рекомендуемый ряд [31] се-
чений широких ремней приве-
ден в табл. 12.
В случае применения широ-
ких ремней средняя плоскость
желоба, образуемого раздвиж-
ными дисками, в процессе регу-
Рис. 86. Конструкция шкива клиноре-
менного вариатора с широким ремнем.
лирования скорости может сме-
щаться на большую величину, создавая таким образом перекос
ремня по отношению к средней плоскости нераздвижного шки-
ва. Конструкция шкива, показанная на рис. 87, предотвращает
перекос ремня, так как диски 1 и 2 кинематически соединены между
Таблица 12
Рекомендуемый ряд сечений широких клиновых ремней
‘(угол 2^ для всех ремней принят 36°)
Номера электродвигателей и наименование расчетных величин Условное обозна- чение Размер- ность Номера ремней
1 2 3 4 5
Номера электродвигателей* А-31 А-41 А-51 А-61 А-71
А-32 А-42 А-52 А-62 А-72
А-61-2 А-71-2
Максимальный момент на валу
• электродвигателя Мтах К2-СМ 69 193 475 1000 2020
Ширина широкой грани ремия а ММ 37,5 53,0 70,0 88 0 110,0
Высота ремня h мм 11,5 15,0 18,5 22,0 26,0
а — 3,26 3,52 3,78 4,00 4,23
т II 1 S Э 1 3 & — 5,5 6,5 8,0 10,0 12,0
Диапазон регулирования д — 4,75 4,50 4,05 3,53 3,20
Максимальное боковое давление р кг/см2 9,25 8,35 7,20 5,80 4,60
* Если число пар полюсов не указано, то габариты всех двигателей од-
ни и те же.
121
собой через зубчатые рейки 3 и 4, прикрепленные к ним,
и шестерню 5, ссь которой закреплена в полом валу 6.
Рис. 87. Конструкция шкива клиноремен-
ного вариатора с симметричным переме-
щением дисков.
Ввиду отсутствия широ-
ких ремней необходимо изыс-
кивать новые схемы вариато-
ров, позволяющих получить
большой диапазон регулиро-
вания скорости с применением
обычных узких ремней.
На рис. 88, а, б и в даны
схемы сдвоенных вариаторов
с диапазоном регулирования:
Дз = ДгД2 =
__ 11макс ггмакс
11МИН !2МИН
К основным недостаткам
рассматриваемых схем вариа-
торов следует отнести их
большие габариты.
По схеме на рис. 88, а
ведущий 1 и ведомый 2 валы
расположены соосно, а на промежуточном валу 3 установлены
ведомый шкив первой ступени и ведущий шкив
На первой и на второй ступенях ведущие шкивы
раздвижные, ведомые — с постоянным диаме-
тром. Изменение передаточного отношения осу-
второй ступени.
о
Рис. 88. Схемы сдвоенных клииоременнух вариаторов:
а — с соосным расположением ведущего н ведомого шкивов; б — с постоянным, меж-
центровым расстоянием шкивов; в— с несоосным расположением ведущего и ведомого
шкивов.
ществляется перемещением промежуточного вала 3 в сторону
изменения межосевого расстояния (по направлению стрелки).
122
Схема вариатора на рис. 88, б отличается тем, что изменение
передаточного отношения от ведущего вала 1 к ведомому 2 осу-
ществляется одновременным перемещением дисков ведущего и
ведомого шкивов вдоль соосно расположенных осей валов.
Диск 4 на промежуточном валу является общим для ведомого
шкива первой ступени и для ведущего шкива второй ступени.
Диски 3 и 5 жестко закреплены на промежуточном валу,
диск 4 может самоустанавливаться, перемещаясь по направляю-
щей шпонке вдоль вала.
По схеме на рис. 88, в ведущий 1 и ведомый 4 шкивы имеют
постоянный диаметр, шкивы 2 и 3 промежуточного вала состав-
лены из раздвижных дисков. Регулировка передаточного отно-
шения осуществляется поворотом рычага (рис. 89) с рукояткой 1
и фиксацией его в заданном положении. Рычаг рассматриваемого
устройства является звеном четырехзвенного механизма, шатун
которого — корпус 6 подшипника с неподвижными вдоль оси вала
дисками 3 и 4. В процессе изменения скорости вал 7 с жестко
123
*
закрепленными на нем дисками 2 и 5 перемещается вдоль сси
относительно дисков 3 и 4, вследствие чего радиус окружности
касания ремня одного шкива будет уменьшаться, а другого —
увеличиваться.
Оси шарниров четырехзвенного механизма расположены под
углом к оси корпуса 6 так, что при различных положениях ру-
коятки 1 клинчатые ремни сохраняют движение в одной и той же
плоскости.
Диски раздвижных шкивов рассматриваемого устройства имеют
радиальные выступы и впадины и расположены так, что выступы
одного входят во впадины второго.
Такая конструкция шкивов позволит увеличить диапазон ре-
гулирования, но при этом быстрее изнашиваются ремни о грани
выступов.
9. РЕЗУЛЬТАТЫ ЭКСПЕРИМЕНТАЛЬНЫХ ИССЛЕДОВАНИЙ
ВАРИАТОРОВ С КЛИНЧАТЫМИ РЕМНЯМИ
Для руководства при проектировании клиноременных вариа-
торов скорости ниже изложены некоторые экспериментальные
данные, полученные при
исследовании [24] кон-
струкции с гладкими шки-
вами и конструкции со
шкивами, имеющими ради-
альные пазы.
Схема стенда, на кото-
ром производились срав-
нительные исследования,
представлена на рис. 90.
Ведущий шкив 14 уста-
навливался на вал якоря
двигателя <3 со свободно
качающимся статором. Ве-
домый шкив 13 закрепился
Рис. 90. Схема экспериментальной уста-
новки.
на валу гидротормоза 12. ’
Стойки 9 двигателя смонтированы на тележке 8, которая, пере-
мещаясь на роликах под действием груза 6, подвешенного на
рыгаче 7, создает необходимое натяжение ремней.
Крутящий момент на ведущем валу определяется по пока-
заниям весов 5, на чашку которых опирается конец рычага 4,
прикрепленного к статору двигателя. Точно так же, посредством
весов 1 и рычага 2, прикрепленного к гидротормозу, определял-
ся крутящий момент на ведомом валу.
Передаточное отношение вариатора определялось по показа-
ниям счетчиков оборотов, один из них 10 — подключался к валу
якоря двигателя, а другой 11—к валу гидротормоза.
124
Оба вариатора испытывались только с одним ремнем сечения
В при числе оборотов ведущего шкива п = 1450 об/мин. Пред-
варительные натяжения ремня соответствовали напряжениям <з0 =
= 12-?-15 кг/см2. Передаваемая номинальная мощность при
а0 = 12 кг/сл? равнялась N = 6,8 л. с. Испытания вариаторов
проводились при следующих передаточных числах:
1) вариатор с гладкими шкивами
1'макс ~ 1,16, iCp = 1, 1'мнн = 0,853,
2) вариатор с радиальными пазами на дисках шкивов
1макс = 1,0, iCp — 1, 1мнн — 0,75.
На рис. 91, а, б, в, г приведены кривые зависимости коэффи-
циента скольжения s от коэффициента тяги
Р
Т ~ 2S/
где Р — окружное усилие, передаваемое ремнем;
S„ — усилие первоначального натяжения одной ветви ремня.
На рис. 92, а, б, в, г даны кривые зависимости к. п, д. от
величины крутящего момента Мк на ведомом валу.
Анализируя приведенные графики, можно установить следую-
щее.
1. При предварительном натяжении ремня, которое создает
напряжение з0 = 15 кг]см?, для обоих вариаторов коэффициент
скольжения s получается наибольшим, а коэффициент тяги
— наименьшим.
2. Вариатор с гладкими дисками работает с наименьшим г
и наибольшим а> при передаточном отношении i — = 1.
3. У вариатора с радиальными пазами на дисках s больше,
а меньше, чем у вариатора с гладкими дисками.
4. К. п. д. вариатора с гладкими дисками на 5% выше, чем
у вариатора с радиальными пазами при а0 = 12 кг/см2 и на 10%
выше при а0 = 15 кг/см2.
5. Наибольший к. п. д. обоих вариаторов достигается при
i = 1.
6. Для вариатора с гладкими дисками наиболее выгодной
является работа при высоких числах оборотов ведомого вала,
а для вариатора с радиальными пазами на дисках — при низ-
ких.
7. Радиальные пазы дисков шкивов следует делать сквозными,
что способствует уменьшению сопротивления от завихрения воз-
духа.
8. Радиус закруглений выступающих углов паза следует на-
значать порядка R ~ 3 мм.
125
9. Рекомендуемое число пазов может быть г= 12 ~ 18.
10. Вариаторы с радиальными пазами на дисках не пригодны
для работы с перегрузками из-за быстрого износа ремня при
буксовании.
Рис. 91. График зависимости коэффициета скольжения е от коэффициента
тяги ср:
а — при <з0 == 12 кг}см* у вариаторов с гладкими дисками шкивов; б — при ст0 = 12 кг!см*
у вариаторов с дисками шкивов, имеющих пазы; в — при а6 = 15 у вариаторов с
гладкими дисками шкивов; а — при а0 = 15 кг/гма у вариатора с дисками шкивов, име-
ющих пазы.
11. Угол 2 у профиля ремня переменный и зависит от радиу-
са кривизны при огибании шкива, поэтому с целью обеспечения
прилегания ремня всей боковой плоскостью на различных диа-
метрах необходимо рабочую поверхность дисков проектировать по
криволинейной образующей. Первым приближением к требуемому
126
ч
0,9
0,85
0,8
0,75
0,7
0,65
о,о
О
Рис. 92. График зависимости к. п. д. от величины крутящего момента Мк:
а — при 12 кг/см* у вариаторов с гладкими дисками шкивов; б — при а0 = 12 кг!см*
у вариаторов с дисками шкивов, имеющих пазы; в — при а0 = ]5 кг}см* у вариаторов с
гладкими дисками шкивов; в — при а0 — 15 кг/см2 у вариаторов с дисками шкивов, име-
ющих пазы.
профилю рабочей поверхности дисков может быть двойной конус,
как показано на рис. 93.
12. При постоянном межцентровом расстоянии между шкивами
вариатора только в одном из положений дисков длина ремня
127
соответствует необходимому первоначальному натяжению, при
всех других положениях дисков ремень получает большее или
Рис, 93. Профили рабочих поверхностей
дисков шкивов с переменным углом 7.
меньшее натяжение. Поэтому в рассматриваемых конструкциях
вариаторов необходимо предусматривать устройства, компенсирую-
щие несоответствие длины ремня.
10. КЛИНОРЕМЕННЫЙ ВАРИАТОР С КОЛОДКАМИ, ПРИКРЕПЛЕН-
НЫМИ К ШИРОКОМУ РЕМНЮ
Принципиальная схема вариатора
Для бесступенчатого регулирования скорости широкое при-
менение получили устройства, у которых в качестве гибкой свя-
зи применяется широкая плоская лента с прикрепленными к ней
колодочками (рис. 94).
Колодочки из твердой древесины прикрепляются с одной сто-
роны или с двух сторон к ленте и обеспечивают жесткость лен-
ты при сжатии ее с боковых сторон. Более рациональным сле-
дует считать прикрепление колодок с двух сторон ленты, при
котором исключается изгиб ленты по граням колодок в местах
заделки.
Клиновой ремень огибает конические диски, установленные на
параллельно расположенных валах с постоянным межцентровым
расстоянием.
Диски представляют собой усеченные конусы и установлены
попарно на валах, образуя клиновой желоб, ширина которого
может по желанию, посредством рычажного механизма, регули-
роваться перемещением дисков в осевом направлении.
Система рычагов построена так, что при сближении пары дис-
ков на одном валу вторая пара дисков (на втором валу) раздви-
гается. При этом изменяются радиусы окружностей ведущих и
ведомых дисков, по которым огибается ремень, а следовательно,
изменяется и передаточное отношение вариатора.
128
На рис. 95 показаны две принципиальные схемы рассматри-
ваемого вариатора скорости, которые отличаются одна от другой
конструкцией рычажных механизмов.
На рис. 95,а рычаги 1 и 2 попарно соединяют левые и пра-
вые диски, установленные подвижно на валах. Концы рычагов с
Рис. 94. Конструкция широкого ремня с колодочками.
одной стороны соединены с винтом 4 посредством гаек 3 и 5 с пра-
вой и левой резьбой, а шарниры, относительно которых проис-
ходит поворот рычагов, установлены на гайках винта 6 с правой
и левой резьбой.
Вращением винта 4 осуществляется регулировка передаточ-
ного отношения, а вращением винта 6 регулируется натяжение
ремня при различных передаточных отношениях, так как постоян-
ная длина ремня при постоянном межцентровом расстоянии валов
не обеспечивает постоянного натяжения при переходе его на
другие диаметры.
Регулировка натяжения посредством винта 6 осуществляется
также и в случае вытяжки ремня в процессе работы вариа-
тора.
На рис. 95,6 каждый из рычагов 1 и 2 попарно соединяет
на разноименных валах левый диск с правым и правый с левым.
9 in
129
В средней части, между осями валов, рычаги установлены на
цапфах гаек винта 3 с левой и правой резьбой.
Концы рычагов с обеих сторон соединены пружинами, кото-
рые предназначены для автоматического регулирования натяжения
ремня в период изменения передаточного отношения, то есть в
процессе регулирования положения дисков.
б
Рис. 95. Схема колодочно-ременного
вариатора:
Рассматриваемый вариатор
применяется для передачи мощ-
ностей до 60 л. с. с диапазоном
регулирования до 16.
Определение
передаточного отношения
и диапазона регулирования
скорости вариатора
В основу рассматриваемых
ниже расчетов приняты следую-
щие положения [16]:
1. Угол 7 (рис. 96) между
основанием и образующей ко-
нуса одинаков как для ведущих,
так и для ведомых дисков.
2. При постоянных длине
ремня и межцентровом расстоя-
нии А валов натяжение ремня в достаточной степени будет постоян-
а — с регулированием натяжения ремня от
руки; б — с автоматическим регулирова-
нием натяжения ремня.
ным при различных передаточных отношениях, если сумма сопря-
женных диаметров, огибаемых ремнем, является величиной посто-
янной, то есть
(#2сР ± Др) + (/?1сР + Др) = const,
где /?2ср и /?1Ср — соответственно средние радиусы ведомых и
ведущих дисков (рис. 96);
А X
Др = 7-----
‘ tg-r
величина изменения средних радиусов при пере-
мещении ведомых и ведущих дисков в осевом
направлении на величину X.
3. В случае необходимости натяжение ленты регулируется
одним из способов, описанных при рассмотрении двух принци-
пиальных схем (см. рис. 95,а, б).
С учетом принятых выше положений и в соответствии с
рис. 96 передаточное отношение вариатора определяется фор-
мулой
— Ра — Т йр
1-2 Pl #lcp ± ДР
(4. 24)
130
Подставляя значение Др и обозначая среднее передаточное
отношение
^зср • Дтср — io> получаем
1
4-2 — \ ‘
1 1 ^icp Дёт
(4. 25)
Полное использование рабочих поверхностей ведущих и ведо-
мых дисков в пределах заданного диапазона регулирования ско-
рости возможно при условии,
Хмакс дисков в сторону уве-
личения средних радиусов
будут равны по абсолютному
значению перемещениям в
сторону уменьшения средних
радиусов. Поэтому формула
(4.25) для определения ма-
ксимального и минимального
передаточного отношений пе-
репишется так:
. , ^макс
2макс = io--------х------; (4- 26)
j . 'макс
1 ср 7
j ^макс
~~ z0^ 1 ср tg7
11_2мнн = t0 /,макс - (4. 27)
+ ^cptgf
когда максимальные перемещения
Рис. 96. Схема перемещений ленты в пе-
риод регулирования скорости.
И соответственно диапазон регулирования
д =
Й—2макс
z 1 —2мнн
1 | ^макс | | 1 । ^макс
ioi?lcP ^7 ' \ "Г ~^icp tgT
1 _ ^макс W . _ ^макс
iotficp tg7 ) \ 7?1ср tg7
(4. 28)
Решая уравнение (4. 28) относительно
i-макс
Я1сР ‘gf
, получаем,
->кс = то = W+HIk+JL _i_ . /~|(Д +D Йо +1)Г 7 М
^cp‘g7 ° 2(Д —1) |/ [-2(4-!) ] ~г°- (4-29)
При условии /?2ср = 7?1сР получим симметричную передачу,
При ЭТОМ Zo = 1; Д = /21-2макс;
i 1—.’маке — J/ Д. (4.30)
При проектировании вариатора в качестве исходных данных
могут быть даны значения ii—гмакс и i'i—2мин, при этом формулы
9*
131
(4.26) и (4. 27) решаем совместно относительно —15- и отно-
*'1ср чп
сительно i0 и получаем:
Хмакс Й—2макс Й—2мин _ 'Г . 1Л о 1 \
^ср + zl—2макс + '1— 2мин °’
____ 2*1— 2макс z'l — 2мнн 4* zl — 2макс + zl — 2мин-, л
‘О— ------------------------------------- о I ;-Т~7-. .
Z + Zl-2MaKC +z1-2mhh
В частном случае, для симметричной передачи при /0= 1»
имеем
х /2 — 1
мзкс 1—2 макс 33^
^1ср tg j (z l— 2 макс 4" 1)
Пользуясь полученными формулами, задавшись средним радиу-
сом 7?icp, определяют основные параметры ведущих и ведомых
дисков.
В соответствии с рис. 96 имеем:
Ягер = «0Я 1 с р;
R. = Ягер + -^с = Я2ср (1 + Яо); (4.34)
G = Ягер - = Я2ср (1 - яо); (4.35)
Я1 = Я1еР(1 + Я0); (4.36)
/1 = Я1ср(1-Я0). (4,37)
Пример. При П1 = 1400об/лшн, п2 макс=2000 об/мин, п2 мии=400 об/мин
и -f = 15° определить основные размеры дисков.
1. Диапазон регулирования:
д *1—2 макс .
zl—2 мин
_ П1 _ 1400 _ ос • «1 1400
1~2МаКС «2мнн 400 ' ’ Z1-2MHl,_n2MaKe” 2000
Следовательно,
2. Среднее передаточное отношение [по формуле (4.32)]
. _ 2 3,5 • 0,7 + 3,5 + 0,7 _ 11,9 _
'° 2+ 3,5+ 0,7 ~ 6,2 ’9
3. Задавшись средним радиусом 7?1ср = 130 мм, определяем наибольшее , пе-
ремещение Хмакс диска вдоль оси (формула (4.29)
т хмакс _ (54-1)(1,92 4-1) -1 / Г(5 + 1) (1 92 + 1)12 1 92- 05
° ~ , 2(5-1) V 1""2(5^й)-----------------] ~ ~ °’
Хмакс = ср^о tg 1 = 130 • 0,5 • 0,268 « 17,4 мм.
J32
4. Определяем основные размеры дисков:
а) ведущего
Pi = /?1ср (1 + Тв) = 130 • 1,5 = 195 мм;
ri = ^icp f1 ~ го) = 130 • 0,5 = 65 мм;
b ~ 2/макс — ~ 1 = (193 ~ 65) 0,268 = 35 мм;
б) ведомого
Р2ср = Р1ср /0 = 130 • 1,92 = 250 мм;
R, = R2cp (1 + Тв) = 250 • 1,5= 375 мм;
Гг — Р2ср (1 — Тв) = 250 • 0,5 = 125‘ мм;
b = 35 мм.
Примечание: Ширина диска b в рассматриваемом примере опреде-
ляется в пределах перемещения нейтрального слоя ремня; действительная ши-
рина Ьд должна быть увеличена с обеих сторон в зависимости от толщины
ремня Вк с колодочками (см. рис. 94) на величину 0,5BK tg 7, то есть
' *Д = 6 + М£Ь (4.38)
Этот же пример рассмотрим для частного случая, когда вариатор сим-
метричный, размер среднего радиуса Р1ср = 130 мм н диапазон регулирова-
ния Д = 5.
В этом случае /]_2 макс • il_2 мии = 1 и для того, чтобы получить за-
данное число оборотов на ведомом валу, необходимо изменить число оборотов
входного вала вариатора.
Обозначая измененное число оборотов входного вала вариатора л/,
напишем
л/ л/ _ 1
и2макс w2mhh
откуда
'<=/л2макс «гмин. (4.39)
Для нашего примера
«1 = Кл2макс«2МИИ = /20°0 • 400 = 895 об/мин.
Следовательно, передаточное отношение дополнительной передачи со-
ставляет
Максимальное передаточное отношение вариатора
4-2 макс = 7; = УД = Г5"= 2-236-
Максимальное перемещение диска Хмакс в соответствии с формулой (4.33)
> .2 ]
Лмакс 4—2 макс 5 — 1 _ 4 Л qqq
Д1СР 1g 7 “ 1 ~ (4-2 макс + I)2 ~ 3,236* - 10,45 -
и хмакс = 130 • 0,389 • 0,268 = 13,4 мм.
Размеры ведущего и ведомого дисков в данном случае одинаковые:
* = 2Хмакс=2’ 13,4 = 27 мм;
R2 = Ri = Р1ср (1 + Pi) = 130 • 1,383 = 180 мм;
r2 = ri = Р1ср (1 - Гх) = 130 • 0,617 =80 мм.
133
Результаты решения примера показывают, что при одних и тех же сред-
них радиусах ведущих дисков, габариты несимметричного вариатора больше, '
чем симметричного, но при этом симметричный вариатор требует дополнитель-
ной передачи к входному валу с передаточным отношением »= 1,565.
Последнее является приемлемым, так как конструкции рассматриваемого
вариатора из-за большого веса ремня не допускают больших скоростей, а сле-
довательно, и больших чисел оборотов входного вала.
В существующих конструкциях, максимальная скорость ремня не превы-
шает 8—9 м/сек, а число оборотов входного вала колеблется в пределах
320—600 об/мин.
Определение основных размеров ремня
Минимальная ширина В ремня по нейтральному слою опре-
деляется по условию, что ремень должен занять предельное по-
ложение на наибольшем радиусе при полном сближении дисков.
В соответствии с рис. 94 имеем
В > 2(7?! — rj tg у = 4Хмакс. (4.40)
Принятые размеры ремня следует проверить на прочность
с учетом ослабления его отверстиями для болтов, прикрепляющих
колодочки, по формуле
°=^+£и^<1о]р’ (4-41)
где а — напряжения, возникающие в поперечном сечении ремня;
[<з]р — допускаемые напряжения при растяжении;
F = ВЪр — площадь поперечного сечения ремня;
<р = 0,7 — коэффициент, учитывающий ослабление
стиями для болтов;
Еи — модуль упругости материала ремня при
$! — натяжение ведущей ветви ремня, которое
по формуле
s __
ремня отвер-
изгибе;
определяется
о2
n(uK- 1) ' g ’
7Икр1 — крутящий момент на- входном валу вариатора:
/;—минимальный радиус ведущего диска;
q — погонный вес ремня с колодочками и крепеж-
ными деталями;
v — скорость ремня;
g — ускорение свободно падающего тела;
L. «1
к = Z7 — наименьшее число колодочек, прилегающих к
шкиву в пределах угла обхвата ах = к — 2ф
(рис. 97),
sin<p=—г-, sin₽ = 2^;
t — шаг колодочек;
А — межцентровое расстояние;
(4.42)
134
коэффициент;
приведенный угол трения;
_ 1 + tg Mg р1
" 1 - tg Mg р1
г sin 7
tg p = f — коэффициент трения скольжения для сопря-
женных поверхностей диска и колодочки.
2Ь
I
Рис. 97. Схема расположения колодочек
на диске шкива.
Пределы прочности и модули упругости для некоторых мате-
риалов ремня приведены в табл. 13.
Таблица 13
Предел прочности материалов ремней
Наименование материала ремня апч в кг!см*
У 1. Кожаные ремни: одинарный по целому месту 250
двойной по целому месту 2. Прорезиненные ремни: для одной прокладки номинальной толщины ремней * без сквиджей 200 440
для одной прокладки номинальной толщины ремней со сквиджами 370
3. Текстильные ремни: хлопчатобумажные шитые 350
хлопчатобумажные цельнотянутые 350
хлопчатобумажные тканые прошивные 380
шерстяные тканые 300
Примечание. Для всех ремней модуль упругости принимается
£„ = 600-т-1000 кг/ли2.
* Для ремней с двумя и более прокладками допускается снижение пре-
- дела прочности:
при г = 2 на 2%; приг = 3 на 10%; при г = 4 на 15%.
135
>40 - ' -
'%
Прилегающие к шкиву поверхности колодочек следует прове-
рить на смятие по наиболее нагруженной колодочке
cos у асм ^2 , (4.43)
где Д7 = с sinE к Х(1 4-tg ₽ tg р1) sin у (4.44)
— нормальное давление на колодочку;
FK — hacp — площадь торца одной колодочки.
Для твердых пород дерева [а]см = 800-4-900 кг/см2, а для
колодок, покрытых кожей, [а]см = 12-4-15 кг/см2.
Конструкции вариаторов
На рис. 98 показана наиболее распространенная конструкция
колодочно-ременного вариатора.
Регулирование натяжения ремня в рассматриваемой конструк-
ции осуществляется вращением винта 11, а регулирование ско-
рости — вращением винта 13 посредством маховичка 14. Марка
вариатора выбирается в зависимости от передаваемой мощности
и диапазона регулирования.
Диапазон регулирования
д л2макс л2мин Таблица 14 • Данные для выбора марки вариатора с ко лодочно-ременной лентой
Мощность двигателя в л. с. Диапазон регулирования скорости
10 : 1 В : 1 6 : 1 < 5:1 4 : 1 3 : 1 2 : 1
0,3 000 000 000 000 000
0,7 00 ООО 000 000 000
1,4 0 00 00 00 000 000
2,1 0 00 00 00 00 ООО
2,4 0 0 0 00 00 00
3,5 2 0 0 0 00
3,9 2 2 - 0 0 0
4,5 2 2 2 0 0
5,7 2 0
6,7 9,3 2 2 2
136
137
§ Таблица 15
Характеристика вариатора с колодочно-ременной лентой
Марка вариа- тора Наименование параметров Диапазон регулирования
10 : 1 8 : 1 6 : 1 5 : 1 4 : 1 3 : 1 2 : 1
ООО Нормальное число оборотов ведущего вала . . Минимальное » » ведомого » . . Максимальное » » » » . . Передаваемая мощность Ммин л. с. ...... 8 Л^акс * с 520 212 1272 1 2,3 540 241 1205 1 1 2,4 560 280 1120 1,25 2,5 580 334 1002 1,5 2,6 600 424 . 850 1,9 2,7
00 Нормальное число оборотов ведущего вала . . Минимальное » » ведомого вала . . Максимальное » » » » . . Передаваемая мощность Ммин л. с 8 8 ^макс л- с 420 172 1032 1,6 4 440 196 980 1,9 4,2 460 230 920 2,2 4,4 480 277 831 2,6 4,6 500 353 706 3,4 4,8
0 Нормальное число оборотов ведущего вала . . Минимальное » » ведомого » . . Максимальное » » » » . . Передаваемая мощность Ммин л. с. » . . 8 8 Л'макс Л- с- 8 • • 390 138 1104 2,6 6,85 400 163 . 978 2,86 7,0 410 183 915 3,2 7,2 425 212 848 3,7 7,5 440 254 768 4,5 7,7 450 317 634 5,6 8,0
2 Нормальное число оборотов ведущего вала Минимальное » » ведомого » Максимальное » » » » Передаваемая мощность Ммии л. с. » . » » л. с. » макс 320 101 1010 3,25 10,0 330 117 936 3,75 10,6 340 139 834 4,5 11 350 156 780 5,0 11,3 360 180 720 6,0 11,6 370 214 642 7,0 12 380 269 538 8,5 12,2
ством маховичка 2. Натяжение ремня регулируется пружинами 3
не только в процессе регулирования передаточного отношения,
но и при изменении нагрузки.
В заключение следует отметить, что колодочно-ременные ва-
риаторы имеют большой диапазон регулирования скорости; сим-
метричные вариаторы при изменении средних радиусов ведущих
дисков в сторону уменьшения работают как редукторы и при
изменении в сторону увеличения — как мультипликаторы. Вариа-
тор может устанавливаться как горизонтально, так и вертикально.
Коэффициент полезного действия вариатора колеблется в пре-
делах от 0,8 до 0 95 и зависит от передаточного отношения. Ко-
лодочно-ременные вариаторы сравнительно тихоходны, велики по
габаритам, ремень в процессе перешивки можно укорачивать не
на любую величину, а на кратную шагу колодочек.
Пример подбора колодочно-ременного вариатора и проверки
деталей ремня на прочность
Задано: мощность двигателя N = 1 квт= 1,36 л. с. число
оборотов, вала двигателя лм = 930 об/мин, диапазон регулиро-
вания Д — 6.
По табл. 14 выбираем марку вариатора 00 с диапазоном регу-
лирования Д = 6.
Характеристика вариатора: пг = 420 об/мин, пх „акс =
= 1032 об/мин, Лхмин=172 об/мин, ^нн = 1,6л. с., Д^макс =
= 4 л. с., максимальное передаточное отношение Л_2 макс =
= р^Д = j/"6 = 2,45; Л_2мин =2^.
В соответствии с табл. 15, нормальное число оборотов входного
вала не должно превышать пг = 420 об/мин, поэтому между
вариатором и двигателем проектируем ременную передачу с пере-
даточным отношением
• _ __ 930 _ Q
Zp ~ щ ~ 420 ~ •
Наружный диаметр диска раздвижного шкива, в соответствии
с таблицей на рис. 98, 0= 220 мм. Задавшись предварительно
высотой ленты с колодочками (см. рис. 94)
8К = (2/г 8Р) = 2,16 4- 4,5 = 36,5 мм,
определяем максимальный и минимальный радиусы начальных
окружностей дисков шкива:
р д~Вк_ 220- 36,5^ 2
Ri 92 о? с
G = —----1-----= 245~ 37>5 мм-
‘1—2 макс
140
Минимальная ширина ремня В по нейтральному слою опре-
деляется по формуле (4.40)
В = 2 (/?х — rj tg у = 2 (92 — 37,5) 0,364 40 мм.
Угол желоба шкива принимаем = 40°. Предусматривая зазор
между ступицами дисков при положении ремня на наибольшем
диаметре в соответствии с ГОСТ 101—54, принимаем В = 60 мм,
== 4,5 мм.
Рис. 100. График максимальных скоростей ремня колодочно-
ременного вариатора.
Ремень прорезиненный, типа А. Скорость ремня на минималь-
ном радиусе шкива
_ 2nrjni
С1 мин — 60
2 • 3,14 • 37,5 • 420
60 • 1000
1,65 м/сек,
на максимальном радиусе
2^7?!/?! _ 2 • 3,14 92-420
Р1 макс — 60 — 60-1000 —* М/ССК,
В соответствии с графиком, приведенным на рис. 100, ot макс не
превышает допускаемого значения при
/. N \ Ю0% = 100 = 0,325.
I «хмин 1 420
Из таблицы на. рис. 98 шаг колодочек t = 23 мм, размеры
колодочек соответственно принимаем (см. рис. 94) h ~ 16 мм,
— 18 мм.
Угол обхвата р (см. рис. 97), соответствующий половине шага
колодочек,
sl„ ₽ _ Ш- _ _ 0,307; ₽ » 18«.
141
Число k колодочек, прилегающих К шкиву в пределах угла
обхвата аг,
А — ±1
где
«£ = те'— 2Ф и sin ф = Г-1 .
По таблице на рис 98; межцентровое расстояние А = 260 мм%
следовательно,
sin^ = 92Tj7’5- = 0,21, ф^12°, ах= 156°.
* zn(J ‘ х
Соответственно, число колодочек
, 156° Л ПЛ
k ~ 2 • 18° ~ 4'34-
Натяжение ведущей ветви ремня определяется по формуле (4.42)
где
Л1КР1 = 71 620 т] = 71 620 0,98 = 227 кг • см
—крутящий момент на входном валу;
т; — к. п. д. ременной передачи от двигателя к вариатору;
.. — 1 + tgMgpz .
1 — tg р tg р' ’
р' — приведенный угол трения, tg р' = /' = .
Коэффициент трения кожи по чугуну принимаем f ~ 0,2;
Л 9 Л 9
соответственно tg р' = -упуо~ = - 0 -342 - = 0,585; р' = 30°20'. Под-
ставляя значения (3 и pz в формулу для и, получаем
_ I + 0.325 • 0,585 _ 1,19 _ . _
U ~~ 1 — 0,325 • 0,585 ~ 0,81 ~ 1,4Л
Задавшись размерами крепежных деталей ремня, определяем
вес погонного метра ремня; в нашем случае q = 4 кг/м.
Подставляя значения полученных величин в формулу для Slt
имеем
_ 227 1,474-8< . 1,642 _ 7fi
01 — 3,75 (1,474-34 — 1) + 4 9,81 — '° кг-
В соответствии с формулой (4.41) напряжения в поперечном
сечении ремня с учетом ослабления его отверстиями для болтов
и с учетом напряжений при изгибе ремня на шкиве меньшего диа-'
метра равны
'277 ~ 6 • 0,45 • 0,75 + 600 75 = 74 .
142
Коэффициент запаса прочности ремня
апг 370 с
П = -- —
а /4
Рекомендуется п = 5 ч- 8.
Нормальное давление, возникающее на контактной поверхности
наиболее нагруженной колодочки, определяется по формуле (4.44)
кт _ с _______sin Р______ уд 0,307 ~ по к,
. h ~ 51 (1 + tg₽tgp')sinT '° 1,19 • 0,342 кг'
Напряжения смятия на торцевой поверхности колодочки в соот-
ветствии с формулой (4.43)
COS 7 58 . 0,94 . n , 2
’ /шср2 ~ 2 • 1,8 • 1,6 ~ 10 Кг/СМ ’
что меньше допускаемого. Принятые размеры ремня и колодочек
оставляем без изменения.
Давление на вал вариатора от натяжения ведущей и ведомой
ветвей ремня
Q-S, 4- S2 = 5,+^ = 76 4- ~~90 кг.
Величиной Q можно воспользоваться для проверки вала вариа-
тора на прочность.
(4.45)
11. ВАРИАТОР С КОНИЧЕСКИМИ БАРАБАНАМИ И ГИБКИМ
КОЛЬЦОМ, ЗАЖАТЫМ МЕЖДУ НИМИ
На ведущем валу вариатора укреплен один конический бара-
бан, а на ведомом — второй. Между барабанами зажато свободно
висящее кольцо 6 (схема на рис. 101) из кожи или эластичной
прочной прорезиненной ткани.
Движение передается через гибкое кольцо и его положение
определяет передаточное отношение
• _ Г2Х _ Щ
~ fix — пх
Изменение числа оборотов ведомого вала осуществляется сме-
щением свободно висящего кольца 6 вдоль образующей конуса
посредством вилки, которая на схеме не показана.
Неизбежное скольжение гибкой ленты между барабанами,
которое возникает вследствие разности скоростей по ширине
ремня, обусловливает небольшую ширину ремня и малый угод
наклона образующей конических барабанов. В силу этого вариа-
тор может применяться для передачи небольших мощностей и даёт
малый диапазон регулирования скорости (до 4) при сравнительно
большой длине барабанов.
На рис. 101 дана конструкция рассматриваемого вариатора.
На ведущем валу 1 жестко закреплен барабан 5. Ведомый бара-
143
Рис. 101. Вариатор с гибким звеном между
коническими барабанами.
144
бан 3 соединяется с валом 4 направляющими шпонками и нахо-
дится под постоянным давлением пружины 2, действующей на
барабан в осевом направлении и обеспечивающей достаточную
силу трения между гибким кольцом 6 и барабанами, необходи-
мую для передачи заданного крутящего момента на ведомом валу,-
Изменение передаточного отношения осуществляется переме-
щением рычага 7, положение которого фиксируется во впадинах
направляющей рейки под действием груза.
Необходимая сила пружины (схема рис. 101)
Q = N sin а.
Условие передачи крутящего момента трением
<Р1,
где
F = Nf.
Из (4.46) и (4.47)
sin а
(4.46)
(4.47)
(4.48)
При определении Q следует подставлять минимальное значение
г1х = гг радиуса ведущего барабана. Тогда, анализируя формулу
(4.48), можно видеть, что коэффициент надежности р равен за-
данному при положении гибкого кольца на минимальном радиу-
се fj, в других положениях он будет большим.
Ширину ремня b определяют по формуле
h — -- Мк^
Q friq ’
(4.49)
где q — допускаемое давление на единицу ширины ремня, при
нимаемое от 35 до 40 кг/см.
Диапазон регулирования скорости вариатора
гг__ 'макс _ __ (^2 Т 2/ sin а) (dj -f- 2Z sin сс) ..
'мин ^1^2
10 171
Глава пятая
ЖЕСТКИЕ ВАРИАТОРЫ СКОРОСТИ
1. ОБЩИЕ СВЕДЕНИЯ
К группе жестких вариаторов скорости отнесены вариаторы,
у которых передача усилий осуществляется не трением, а по-
средством заклинивания отдельных деталей специальных уст-
ройств предназначенных для этой цели, например, муфт сво-
бодного хода, храповых механизмов, зубчатых передач.
Жесткие вариаторы скорости позволяют осуществить передачу
болыйих мощностей, а некоторые из них при этом сохраняют
постоянное передаточное отношение. К недостаткам рассматри-
ваемых вариаторов скорости следует отнести сложность их кон-
струкций.
В группе жестких вариаторов скорости различают статические
и инерционные вариаторы. Работа инерционных вариаторов ско-
рости, в отличие от статических, основана на использовании сил
инерции движущихся деталей, специально для этого предназна-
ченных.
Рассмотрим некоторые устройства, применяемые для регули-
рования скорости и передачи усилий в жестких вариаторах.
2. ХРАПОВЫЕ И ФРИКЦИОННЫЕ МЕХАНИЗМЫ
Схемы храповых механизмов
Применение храповых механизмов в общих схемах вариаторов
скорости не дает возможности получить строго постоянной угло-
вой скорости на выходном валу и, как правило, за период одного
оборота ведущего вала движение ведомого получается неравно-
мерным, пульсирующим.
Сказанное легко установить, анализируя работу храпового
механизма по рис. 102.
На ведущем валу этого механизма, вращающемся с постоян-
ной угловой скоростью, неподвижно закреплен кривошипный
диск 1 с винтовым механизмом для регулирования размера ра-
диуса /у кривошипа.
Коромысло 3, на котором установлена собачка 4, соединяется
через шатун 2 с пальцем кривошипа.
146
Колебательное движение коромысла 3 преобразуется во вра-
щательное храпового колеса 5 с неравномерной угловой скоро-
стью о>2 в период рабочего хода и остановкой в период холостого
ведомого вала в зависимости от
хода. График угловой скорости о>2
времени t показан на рис. 103, а.
Закон изменения о>2, периоды ра-
бочего /р и холостого /х ходов за
период соответствующий одно-
му обороту ведущего вала, могут
быть различными и зависят от
Рис. 102. Схема вариатора с хра-
повым механизмом.
Рис. 103. График зависи-
мости (<о = f(t) для вариатора
с храповым механизмом;
а — с периодом остановки; 6 —
с периодом остановки равным
нулю; в — с пульсирующим дви-
жением при V мин >0.
сократить до нуля путем вве-
Рис. 104. Схема вариатора со
сдвоенным храповым механиз-
мом.
схемы кривошипно-шатунного ме-
ханизма. Изменение величины о>2
осуществляется изменением ради-
уса кривошипа гг.
Период холостого хода можно
дения дополнительного храпового механизма (рис. 104). Храповые
колеса, жестко соединенные с зуб-
чатыми колесами, передают при-
мерно одинаковое по скорости, но
разное по знаку движение валам,
на которых они установлены. По же-
ланию, один из валов может быть
использован как ось для поддержа-
ния храпового механизма. График
о>2 = f (t) для рассматриваемого ме-
ханизма показан на рис. 103, б.
Угловую скорость о>2 ведомого
вала можно получить более равно-
мерной, если храповый механизм,
показанный на рис. 104, сдвоить,
а их кривошипы сместить на 90°
Из графика (рис. 103, в) угловой скорости — видно,
что собачка каждого из храповых механизмов в соответствующий
период времени, опережая по скорости вращение вала, захваты-
вает сопряженное с ней храповое колесо и сообщает ему движение
10* 147
один относительно другого.
до тех пор, пока скорость вала не станет меньше той, которая
может быть передана валу другим механизмом.
Регулировку угла поворота храпового колеса, не изменяя
скорости собачки и угла поворота а коромысла, можно осущест-
Рис. 105. Схема храпового ме-
ханизма с регулируемым хо-
лостым ходом в начальный
период движения коромысла.
вить щитком, как это показано на
рис. 105. Поворачивая щиток 1 и фи-
ксируя его в желаемом положении
посредством рукоятки 3 в отверстиях
неподвижного сектора 2, можно пе-
рекрыть один или несколько зубьев
храпового колеса в пределах угла
поворота собачки. Оставшееся число
зубьев определяет угол поворота хра-
пового колеса.
На рис. 106, а показан график
о>2 = f (0 Для механизма, показанного
на рис. Ю5. Из графика видно, что
в момент начала зацепления собачки
с зубцом храпового колеса будет про-
исходить удар, так как в этот период
скорость собачки значительно больше
нуля при скорости храпового колеса
равной нулю.
Другой способ регулирования угла
поворота храпового колеса при не-
изменном угле качания коромысла с собачкой показан на рис. 107.
Ролик 2 собачки 3 в период поворота коромысла 4 встречается
с неподвижной шиной 1 и катится по ней. Плоскость качения
Рис. 106. График зависимости «>, = /(/) для вариатора с храповым
механизмом:
а —с холостым ходом в начальный период движения коромысла; б— с холо-
стым ходом в конце периода движения коромысла.
шины устанавливается так, чтобы в заданном положении собачка
вышла из зацепления с храповым колесом и продолжала свое
перемещение вхолостую. График о>2 == f (/) для этого механизма
показан на рис. 106, б.
Вывод собачки из зацепления при большом давлении на зубец
сопряжен с износом вершин зубьев колеса и собачки, а также
с ударом под действием сил упругости напряженных деталей
механизма при мгновенном снятии нагрузки.
148
Рассмотренные выше устройства позволяют регулировать угол
поворота храпового колеса ступенчато, на величину, кратную
шагу зубьев. Регулирование на
величину меньшую, чем угол, со-
ответствующий шагу, осуществ-
ляется дифференциальными со-
бачками, каждая из которых может
быть установлена на отдельной
оси (рис. 108) или на одной общей
оси (рис. 109). Как в первом,
так и во втором случаях собачки
должны располагаться относи-
тельно зубьев со смещением на
величину, равную:
Рис. 107. Храповый механизм с хо-
лостым ходом в конце периода
движения коромысла.
где t — шаг зубьев;
k—число собачек.
При этом угол поворота колеса может быть отрегулирован
на величину
360°
Расположение собачек на одной оси увеличивает габариты меха-
Рис. 108. Храповый механизм с
дифференциальными Собачками,
закрепленными на разных осях:
а — две собачки; б — три собачки.
низма по ширине, а - при расположе-
нии на разных осях требует более
сложной конструкции коромысла.
Рис. 109. Храповый механизм с
дифференциальными собачками,
закрепленными на одной оси:
а—две собачки; б — три собачки.
149
Расчет размеров зубьев храповых колес и собачек
Зубья храповых колес рассчитываются на изгиб по формуле
/«=1,81/- /р , (5,1)
|/ гф[’]и ’
где т — модуль колеса;
Мкр — крутящий момент на валу храпового колеса;
z—число зубьев колеса;
[<з]и — допускаемое напряжение на изгиб (табл. 16).
Таблица 16
Допускаемые линейные давления и допускаемые напряжения на изгиб
для деталей храповых механизмов
Материал храпового колеса и собачки Чугунное литье Стальное литье Поковка из Ст. 3, Ст. 4
ф = — т 1,5-ь 3,5 1,5-ьЗ,5 1,0-ь1,5
Допускаемые линейные давления [р] на кромки зубьев в кг/см 100 300 300
Допускаемые напряжения на изгиб [а]н в кг/см? 300 900 1000
ф = —— отношение, которым следует задаться в пределах
от 1,5 до 3,5;
b — ширина колеса.
Данные для построения зубьев храповых колес и собачек
приведены в табл. 17.
Зубья храпового колеса следует проверить на линейное дав-
ление, по формуле
Р=-^-<[р}. (5.2)
Значения [р] даны в табл. 16.
Опасное сечение собачки проверяется на сложное сопротив-
ление
Л1 р
асум = + -р- < [<з]и, (5.3)
где Р = — окружное усилие;
Ма=Р1— момент, изгибающий собачку (рис. НО).
150
Таблица П
Размеры (в м.и) зубьев храповых колес и собачек и их построение
Модуль т t h а hi Модуль tn t h a hi «1
6 18,25 4,5 6 6 4 18 56,55 13,5 18 16 12
8 25,13 6 8 8 4 20 62.83 15 20 18 12
10 31,42 7,5 10 10 5 22 69,12 16,5 22 20 14
12 37,70 9 12 12 6 24 75,40 18 24 20 14
14 43,98 10,5 14 14 8 26 81,68 19,5 26 22 14
16 50,27 12 16 14 8 30 94,2 22,5 30 22 16
U7 = -g--момент сопротивления опасного сечения собачки;
F = Ьх — площадь опасного сечения
собачки;
[<з]и — допускаемые напряжения на
изгиб для материала собачки
(табл. 16).
Механизмы с фрикционными
зажимами
Конструкция храпового механизма
с дифференциальными собачками упро-
щается применением зажимов, захваты-
вающих гладкие цилиндрические колеса
силами трения. Принципиальная схема
такого механизма показана на рис. 111, а.
Передача движения от зажима 1 к
гладкому цилиндрическому колесу 2
осуществляется при условии
Рис. ПО. Схема храпового
механизма к расчету осиов-
иых размеров деталей на
прочность.
Nf>F = P,
(5.4)
151
где Р = — окружное усилие;
А
f — коэффициент трения скольжения.
Из рис. 111 видно, что
F = Ntg-j.
Подставив это значение в формулу (5, 4), получаем
f > tgy.
Й-Й
Для желобчатых колес
Рис. 111. Схемы фрикционного зажима:
а — гладкое колесо; б — желобчатое колесо.
Так как f = tg р, где р— угол трения, то Я
Р > Y- (5.5) -Я
При замене гладкого цилиндрического колеса желобчатым 'Я
(рис. 111,6) с клинообразной формой должно соблюдаться условие Яи>
р' > Y. (5.6) Я
/ р
где р = — приведенный угол трения. Ж
В соответствии с формулами (5.5) и (5.6), задавшись радиусами Я
Р и г (рис. 111,а), определяем межосевое расстояние 'Я
А > jA Р2 4- г2 4- 2Pr cos р < Р + г. (5.7) Я
Размер b контактной линии зажима определяется по линейному Я
удельному давлению [р], приведенному в табл. 16: Я
152 Ж
для гладких колес
h = N_ = Мкр
[р] R tg 7 Ip]
(5.8)
для клинчатых колес
к _ _ ^кр ?5 97
[р] 2R sin a tg т [р] • v '
Необходимо заметить, что при передаче больших крутящих
моментов и при малых углах поворота коромысла следует также
учитывать влияние деформаций, которые в значительной степени
изменяют картину движения ведомого звена по сравнению с
той, которая получается при условии, что звенья механизма абсо-
лютно жесткие. Последнее также относится и к механизмам с хра-
повыми колесами.
Целесообразно при передаче больших крутящих моментов уста-
навливать несколько зажимов с равномерным распределением по
дуге окружности так, чтобы уравновесить силы, действующие на
вал колеса и коромысло.
3. МУФТЫ СВОБОДНОГО ХОДА
Конструкции муфт свободного хода
Из числа существующих конструкций муфт свободного хода в
вариаторах большей частью применяются односторонние, которые
позволяют передавать враще-
ние ведомому звену только
в одном направлении, причем
муфта в период работы авто-
матически включается или
выключается • в зависимости
от того, в какую сторону на-
правлено относительное дви-
жение ведущего и ведомого
элементов муфты.
На рис. 112 показана од-
носторонняя муфта свобод-
ного хода. В выемках звез-
Рис. 112. Муфта свободного хода.
дочки 1 расположены роли-
ки 3, которые подпружинены
в двух-трех точках по длине
ролика пружинами 6 через
штифты 7. Ведущим эле-
ментом муфты может быть звездочка 1 или барабан 2.
Если ведущим элементом муфты является звездочка 1, движе-
ние барабану 2 передается при вращении звездочки 1 по часовой
стрелке. При этом ролики 3 перекатываются в суженную часть
153
выемки и заклиниваются. Сообщая барабану 2 вращение по часо-
вой стрелке (от другой кинематической цепи) с большей скоростью
или при вращении звездочки 1 против часовой стрелки, ролики
уходят в более широкую часть выемки и муфта автоматически
выключается.
В случае, когда ведущим элементом муфты является барабан 2,
движение звездочке 1 передается при вращении барабана 2 про-
тив часовой стрелки. Муфта автоматически выключается при вра-
щении барабана 2 по часовой стрелке или при вращении звездочки /
против часовой стрелки со скоростью большей, чем скорость ба-
рабана 2.
Поверхности роликов 3, звездочки 1 и барабана 2 должны
обладать высокой твердостью HRC = 62 ч-64. Делаются они из
легированных хромистых сталей (ЗОХ, 35Х, ШХ15).
При изготовлении деталей муфты из цементованной стали глу-
бина цементации должна быть не менее 1,5 мм.
Муфта работает надежно при условии, если точность изготовле-
ния ее достаточно высокая, обычно не ниже 2-го класса точности.
С целью экономии легированных сталей сопряженные рабочие
поверхности роликов 3 изготовлены в виде пластинок 4, запрессо-
ванных в пазы трапецеидальной формы звездочки /ив виде
кольца 5,запрессованного в барабан 2.
Другая конструкция односторонней муфты свободного хода,
предназначенная для передачи больших крутящих моментов, по-
казана на рис. 113. Эта муфта устроена следующим образом: на
полом валу 1 посредством шпонок жестко закреплена втулка 9
с клинообразными круговыми канавками. В этой втулке по дуге
окружности просверлены сквозные отверстия для подачи смазки
к трущимся поверхностям внутренних клиньев 10, которые в зави-
симости от направления вращения втулки 9 могут скользить или
заклиниваться. Заклинивание внутренних клиньев 10 в желобах
круговых канавок втулки 9 осуществляется посредством роликов 8,
наружных клиньев 3 и обоймы 6. В отверстие, нарезанное в клине
10, завернут винт 4 с конической головкой, имеющей две канавки
по образующей конуса. Коническая головка входит в отверстие
клина 3 и опирается поверхностью канавки на шарик 13, уста-
новленный в отверстие с пружиной. Такое соединение двух клиньев
10 и 3 позволяет делать простую регулировку натяга, уменьшает
возможность пробуксовки и проскальзывания втулки 9 в период
рабочего хода. Роликовый сепаратор состоит из двух шайб 2,
соединенных стержнями 12.
Рассматриваемая конструкция состоит из двух муфт свободного
хода, расположенных на одной втулке 9, являющейся ведущим
звеном с колебательным движением. Каждая из муфт соединена
с ведомым звеном конструкции коническими зубчатыми коле-
сами 5 и 7.
Расположение клиньев в каждой муфте таково, что они со-
вершают попеременно рабочий ход, если вращать втулку 9 в разных
154
fl-fi
Рнс. 113. Муфта свободного хода с подвижными клиньями.
155
направлениях. Шестерня 11 при этом получает непрерывное пуль-
сирующее движение в одном направлении.
В последние годы в машиностроительной технике все чаще
начали применяться муфты свободного хода с эксцентричными
роликами (рис. 114,а). В радиальном зазоре между деталями 1 и 2
установлены эксцентричные ролики 3 с пазами на торцовой поверх-
Рис. 114. Муфта свободного хода с эксцентричными роликами.
ности. Пазы расположены с двух сторон ролика и изготовлены
под некоторым углом к радиальной прямой, не равным 90°
(рис. 114,6). Две спиральные пружины 4, установленные в пазы
роликов с предварительным натягом, стремятся повернуть ролики
в положение, готовое к заклиниванию муфты.
Муфта простая по конструкции и не сложная в изготовлении
(при наличии стандартов на ролики). Большое число роликов,
расположенных по окружности, позволяет передавать большие
крутящие моменты при небольших габаритах муфты.
156
В период свободного хода ролики, не вращаясь, скользят по
рабочим поверхностям деталей муфты. Это увеличивает сопротив-
ление движению и образует местный износ роликов.
На рис. 114,в дана конструкция эксцентричного ролика с ин-
дивидуальной пружиной.
Специальные муфты свободного хода
К специальным муфтам свободного хода относятся те, вто-
рые применяются только или почти только в вариаторах скорости.
Одна из таких муфт показана на рис. 115.
Рис. 115. Специальная муфта свободного хода.
Ведущим звеном этой муфты является вал 1, который полу-
чает от специального механизма колебательное движение относи-
тельно своей оси. Ведомое звено 7 представляет собой зубчатое
колесо, изготовленное из двух одинаковых частей, соединенных
болтами 2.
Принцип действия муфты заключается в следующем: призма-
тической формы сухарь 6, закругленные концы которого уста-
новлены в пазах вала 1 и зажима 5, при вращении вала 1 по
направлению стрелки поворачивается относительно вала 1, стре-
мясь перейти из наклонного положения в радиальное, и действует
на зажим 5, как на рычаг второго рода.
157
Силы трения Fc и Fm, создаваемые нормальными давлениями
Ne и Nm в точках с и т, передают крутящий момент от вала
зубчатому колесу в период рассматриваемого рабочего хода.
Вращение вала 1 против стрелки соответствует холостому ходу;
сухарь 6 при этом отклоняется в сторону увеличения угла ср, а
пружина 4 подтягивает зажим 5 в исходное положение. Пружи-
ны 4 прикреплены к шпильке 3, ввернутой в тело вала 1.
Число механизмов, вмонтированных в зубчатое колесо, обычно
не менее трех.
Определение основных размеров муфты свободного хода
с роликами
При проектировании муфты весьма важным является вопрос
выбора оптимального угла <р (рис. 116), при котором удовлетво-
рялись бы следующие условия: 1) безотказное самозаклинивание
Рис. 116. Схемы сил, действующих на ролик муфты свободного хода:
а — период перекатывания ролика; б — начальный период заклинивания? в — период
заклиненного состояния.
ролика 3 между выемкой звездочки / и внутренней поверхностью
барабана 2; 2) нормальные условия работы ролика в заклиненном
состоянии; 3) свободное саморасклинивание ролика в момент пе-
реключения на холостой ход.
Процесс самозаклинивания ролика можно разделить на три пе-
риода: закатывание ролика, заклинивание, заклиненное состояние.
Первые два периода происходят в очень короткий промежуток
времени, почти мгновенно, последний — соответствует периоду
рабочего хода муфты, который не ограничен во времени.
Изложенное рассмотрим на схемах, изображенных на рис. 116.
В начальный момент перекатывания ролика силы, приложенные
к нему, образуют момент пары сил, способствующих перекаты-
ванию ролика в сторону вершины угла ср (рис. 116,а). В послед-
ний период перекатывания ролика, соответствующий началу закли-
нивания, направление силы трения приложенной к ролику
в точке 0г меняет свой знак, так как силы, приложенные к ро-
лику, стремятся вытолкнуть его в более широкую часть угла ср..
Очевидно, если ролик удерживается между плоскостями и не вы-
158
Рис, 117. Схемы сил, действующих
на ролик муфты свободного хода в
период перекатывания ролика.
талкивается в тот период, когда сила трения меняя ёвой
знак, обращается в нуль (рис. 116,6), то в последующий период
он тем более будет надежно удерживаться в заклиненном состоя-
нии под действием однозначных сил трения и A^2f2, направ-
ленных к вершине угла ср (рис. 116,в).
На рис. 117 показаны силы, приложенные к ролику в период
его перекатывания перед заклиниванием. Проектируя равнодей-
ствующие и S2 нормальных давлений и сил трения на ось х,
а затем на ось у, получаем:
SiCosPi—S2cos(<p—р2)=0; (5.10)
S1sin p1+S2 sin (<p—p2)=0. (5.11)
Подставляя значение -Sj из
(5.10) в (5.11), после преобра-
зований получаем
= — <Р (5.12)
или
? = Рг Pi> (5.13)
где tg p2=f2 — коэффициент тре-
ния скольжения
в зоне контакта
ролика с бараба-
ном;
tg Pi = fi — коэффициент тре-
ния скольжения в зоне контакта родика со звездочкой.
Из изложенного можно записать:
а) условие перекатывания ролика
р2 Р1> (5- 14)
б) условие самозаклинивания при = 0
<?<Р2; (5.15)
в) условие заклиненного состояния
Рг + Pi*
(5.16)
Сопоставляя полученные результаты, заключаем, что при вы-
боре угла ср следует пользоваться неравенством (5.15). С учетом
сопротивлений, возникающих от трения качения [21], формула
(5.15) имеет вид
?<Рг —(5.17)
где ф — угол трения качения.
159
Для муфт, детали которых изготовлены из закаленной стали
с твердостью HRC = &2-—&3, максимальный коэффициент трения
скольжения [13], [28] можно принять равным f = 0,132 -т-0,15,
угол, удовлетворяющий условию самозаклинивания ролика при
этом, ср С 6°57' — 7°57'.
При различных по величине коэффициентах трения скольжения
/1 и /2 следует определить ср для меньшего из них и полученный
результат, с изменением
Рис. 118. Номограмма для
определения угла в зави-
симости от коэффициента
трения скольжения f.
Назначенный угол '?а
в сторону уменьшения, назначить для
проектирования муфты, то есть
?a = f, (5.18)
где р — коэффициент надежности, ко-
торый рекомендуется принимать
равным от .1,3 до 12.
Угол <ра в зависимости от f можно
определить по графику (рис. 118), ко-
торый построен в соответствии с фор-
мулой (5.15).
Назначая угол фа, следует учиты-
вать, что при больших его значениях
может произойти пробуксовка роликов
по сопряженной поверхности барабана,
а при малых фа возможно чрезмерное
заклинивание роликов, которое препят-
ствует автоматическому выключению
муфты и не исключает возможности
быстрого разрушения роликов и сопря-
женных с ними поверхностей.
при проектировании муфты является
исходным параметром для определения расстояния а от центра
муфты до плоскости выемки звездочки 1 (см. рис. 117). При этом
диаметром муфты D и диаметром ролика d следует задаться.
Из рис. 117 видно, что
cos ера =
2а + d
D — d '
(5.19)
Решая (5.19) относительно а, имеем
а = у [D cos фа — d (1 cos фа)]• (5.20)
Длину ролика I следует назначить конструктивно, пользуясь
соотношением
d
1,5.
160
Проверка на прочность основных элементов муфты
’•w
Детали муфты 1 и 2 (рис. 117) следует проверить на напряже-
ние сжатия по формуле Герца-Беляева [13], [21]. Напряжение
в зоне контакта звездочки 1 с роликом 3
С1 макс = 0,59 /^^[о]сж. (5.21)
Напряжение в зоне контакта детали 2 с роликом:
а2 макс = 0,59 )/^(А—1)<[а]сж, (5.22)
где
/ nd — размеры ролика в см',
Ег и £а = 2- 106 — модуль упругости материала деталей 1 и 2
в кг/см2',
[3]сж — допустимые напряжения сжатия в кг/см2, кото-
рые можно принять для стали ШХ15 до
5000 кг/см2;
и Nz— соответственно нормальные давления в кг
в зоне контакта ролика с деталями 1 и 2, которые
определяются в зависимости от крутящего
момента Мкр, передаваемого муфтой.
Условие, необходимое для передачи движения муфтой,
Мкр<^гЛШ>г, (5.23)
где z — число роликов, расположенных по окружности;
D — диаметр барабана в см\
= —сила трения между роликом и барабаном в ка;
— коэффициент, учитывающий неравномерность рас-
пределения нагрузки между роликами и зависящий
от класса точности, по которому изготовлена муфта
(<Р2~0,75).
Решая уравнение (5.23) относительно У2, имеем
2М
N = «р_( (5.24)
и в соответствии с формулой (5.10) при = f2 получим
Л\ = Л/2 (cos ъ -ь f2 sin <рэ). (5.25)
Прочность ролика обычно не проверяется, так как он находи-
тся в более благоприятных условиях (в смысле распределения
напряжений).
Толщина стенки барабана 5 (рис. 117), принятая конструктив-
но. может быть проверена на прочность по напряжениям, возни-
11 17J 161
кающим при изгибе от радиальных сил, приложенных в зоне
контакта с роликом, по формуле
30Мкр (О, + D)zk
°и— DBftV < IsJh,
(5.26)
где Мкр — крутящий момент, передаваемый муфтой, в кг-см;
В — ширина барабана в см;
е •— коэффициент, зависящий от числа z роликов,
е =
(5.27)
при z = 3 е = 0,06 и
при z = 5 е = 0,02
k — коэффициент, зависящий от размеров наружного Dx
и внутреннего D диаметров барабана и определяемый
по табл. 18.
Таблица 18
Значение коэффициента k
£>1+О 4В 0,6 0,7 0.8 0,9 1 1,5 2 3 । 4 5
k 2,89 2,13 1,79 1,63 1.52 1,3 1,2 1,12 1,09 1,07
Максимальное число роликов муфты по условиям возможного
Рис. 119. Схема условия сосед-
ства роликов.
соседства (рис. 119) определяется
так:
гМакс = , (5.28)
где
а = у + 0. (5.29)
В соответствии с рис. 119 имеем
2а . a 2S
c°si=^; sm6 = po
S = т — (D -2 d’ sin tf>d.
Подставляя значение 5 в фор-
мулу для sin 6, получаем
. 2m — (D — d) sin ¥(3
sin 0 =
£>о
Размерами tn и Do следует задаться, размер а определяется
по формуле (5.20).
162
'W
4. ВАРИАТОР КАРНИНА
На ведомом валу /9 вариатора (рис. 120) установлено две
муфты свободного хода с заклиниванием роликов 11 при враще-
нии ведущей части 10 муфты по часовой стрелке. Ведущие части
10 муфты с прикрепленными к ним рычагами 8 и 20 установле-
ны на валу 19 свободно; ведомая часть муфты — барабан 9 для
обеих муфт является общей и с валом 19 соединена жестко.
, Рычаги 8 и 20 с консольно закрепленными на них роликами 7
получают колебательное движение от ведущего вала 3, на кото-
ром установлено два кулачка 4 с относительным смещением по
фазе на угол 180°. Углы периода подъема профилей кулачков 4
больше углов периода опускания примерно на 20 — 30°, поэтому
начало подъема одного из рычагов происходит не в момент на-
чала опускания второго, а несколько раньше. График скорости
вращения ведомого вала при этом получается с некоторым пере-
крытием нулевой скорости (рис. 121).
Постоянный контакт между роликами рычагов и кулачками
осуществляется работающими на растяжение пружинами 12
(см. рис. 120).
Регулирование скорости ведомого вала осуществляется измене-
нием межцентрового расстояния между ведущим валом 3 и ведо-
мым 19 посредством вращения винта 1, соединенного с траверсой
17 посредством гайки 2. К траверсе прикреплены корпуса 18 и 16
подшипников вала 3.
Корпус подшипника представляет собой призматической формы
ползун, перемещающийся в направляющих картера вариатора
с фиксацией его зажимными болтами после настройки на задан-
ную скорость.
Механизм настройки вариатора состоит из двух пар зубчатых
колес, ведущее из которых 15 имеет число зубьев гг и соедине-
но с винтом 1 жестко, ведомое 14 соединено неподвижно с ци-
ферблатом 13, установлено на винт свободно и имеет число
зубьев г4 = Zj — 1.
Промежуточные зубчатые колеса 5 и 6 с одинаковым числом
зубьев соединены между собой шпонкой и вращаются на одной
обшей оси. Стрелка механизма настройки прикреплена к вин-
ту 1. При вращении винта 1 происходит одновременно вращение
стрелки и циферблата с относительным их перемещением вслед-
ствие разности чисел зубьев гт на ведущем и г4 на ведомом колесах.
Передаточное число механизма
г = ^ = ?1
г4 zi — 1 ’
Число оборотов циферблата и винта nz в относительном
движении связаны зависимостью:
Иц = пв ~ • (5.30)
11* 163
164
Рассматриваемый вариатор скорости применяется в приводах
конвейеров обувных фабрик и других транспортных устройствах
предприятий легкой промышленности.
К числу его основных недостатков следует отнести:
1. Регулирование скорости путем перемещения ведущего вала
требует дополнительного устройства, позволяющего передавать
движение этому валу при неподвижном двигателе. В качестве
такого устройства применяют ременную передачу с расположе-
Рис. 121. График угловой скорости ведомого вала вариатора
Карпина.
нием линии центров шкивов перпендикулярно плоскости пере-
мещения подшипников вала в средней части их хода. Но и
в этом случае натяжение ремня при различных положениях вала
получается различным.
2. Ведомый вал вариатора вращается только в одну сторону
независимо от направления вращения ведущего.
3. Изменение передаточного отношения вариатора с изменением
крутящего момента на ведомом валу при заданном положении
ведущего вала, являющееся результатом деформаций рычагов
и других деталей, воспринимающих нагрузку при передаче
движения.
4. Непостоянная угловая скорость ведомого вала.
В табл. 19 приведены результаты экспериментальных иссле-
дований вариатора Карпина при различных крутящих моментах
на выходном валу. Исследования проводились со сменными ку-
лачками, профиль которых, близкий к окружности, позволял
получить разные углы качания рычага с роликом.
165
Таблица 19
Результаты исследований характеристики вариатора Карпина
Эксцентриситет экс- центрика (кулачка) в мм ! Крутящий момент на выходном валу в кг.м Минимальное пере- даточное отношение ZMHH Максимальное пере- даточное отношение гмакс Диапазон регулиро- вания D Мощность на веду- щем валу N ъ а. с. Коэффициент полез- ного действия Примечание
0 100 0,15 0
15 145 338 2,3 0,23—0,17 0,22
2. 30 220 1220 5,55 0,26—0,19 0,26
50 750 бук- 0,29 0,54 Начало буксова-
сует ния при 40 кг м
0 40 103 2,6 0,23—0,31 0
4,5 15 47 132 2,8 0,29—0,36 0,44—0,19
30 53 187 3,5 0,30—0,47 0,6 —0,25
50 64 361 5,7 0,30—0,62 0,63—0,23 Первые значения
0 35 73 2,1 0,25—0,26 0 двойных цифр
6,5 15 38,5 83 2,15 0,41—0,29 0,46—0,3 соответствуют
30 44 105 2,4 0,51—0,36 0,65—0,39 гми.> и вт0Рые —
50 49,5 148 3.0 0,72—0,39 0.7 —0,42 ZM3KC
0 22 47 2,15 0,28—0,26 0
9 15 22 52,5 2,35 0,51—0,36 0,64—0,39
30 25 60 2,4 0,77—0,46 0,76—0.52
50 31,5 74,5 2,35 0,19—0,57 0,63—0,58
0 18,2 28 1,5 0,26—0,29 . 0
14 15 20 31,5 1,5 0,57—0,46 0,65—0,50
30 22,7 35 1,5 0,98—0,67 0,56—0,53
50 — 40 — 1,19 0,50
Передаточное отношение вариатора без учета деформаций
деталей под нагрузкой равно:
и i = —, т /5.31)
где ср — максимальный угол поворота рычага при заданном рас-
стоянии между центрами ведущего и ведомого валов.
Такой же вариатор скорости, но с постоянным натяжением
ремня ременной передачи показан на рис. 122. В этой конструк-
ции вариатора ведущий вал 4 перемещается по криволинейным
направляющим с радиусом кривизны, равным межцентровому
расстоянию клиноременной передачи.
Вал двигателя 2 и ось 1 поворота ведущего вала 4 вариатора
соосны. На валу 4 закреплены кулачки 3. Регулирование скорости
осуществляется вращением винта 6, плавающая гайка которого
соединена с траверсой 5 подвижно в вертикальном направлении.
.166
Вид /?
Рис. 122. Модернизированный вариатор Карпина.
167
5. ВАРИАТОР «SHIMPO INDUSTRIAL СО»
С целью уменьшения коэффициента неравномерности движе-
ния ведомого рала фирма «Shimpo Industrial Со» (Япония) в вы-
Рис. 123. Вариатор «Shimpo Industrial СО».
пускаемых
рех число
Рис. 124.
Вал вариато-
ра «Snimpo
Industrial
Со» для ре-
гулирования
эксцентри-
ков.
ею вариаторах скорости (рис. 123) увеличила до четы-
кулачково-рычажных механизмов с муфтами свободного
хода. Регулирование числа оборотов ведомого вала
осуществляется не изменением межцентрового рас-
стояния, а изменением величины эксцентриситета
эксцентриков.
Четыре эксцентрика 1 установлены на прямо-
угольной в поперечном сечении поверхности полого
ведущего вала 2 со смещением эксцентриситета экс-
центриков по фазе на 90°.
При вращении вала 2 эксцентрики попеременно
передают Движение ведомому валу 5 через коро-
мысла 7, соединенные с муфтами свободного хода 6.
Регулировка числа оборотов ведомого вала осуще-
ствляется изменением величины эксцентриситета экс-
центриков 1 посредством осевого перемещения вала
управления 4. На валу 4 имеются наклонно распо-
ложенные лыски, которые посредством сухарей 3
передвигают эксцентрики 1 в радиальном направле-
нии. Эксцентриситет всех эксцентриков при любом
положении вала управления 4 одинаков. Вал 4 по-
казан на рис. 124.
6. КРИВОШИПНО-СООСНЫЙ ВАРИАТОР
Вариатор скорости, схема которого представлена
на рис. 125, состоит в основном из двух механиз-
мов, смонтированных на соссных ведущем и ведомом валах.
Один из механизмов (детали 1, 2, 3, 4) является ведущей
частью вариатора, которая передает вращение эксцентрично уста-
168
Рис. 125. Схема кривошипно-эксцен-
трикового импульсного вариатора.
новленной шайбе 2 с круговым пазом и преобразует это движе-
ние в колебательное движение кривошипа 4 с регулируемым
углом качания. Второй механизм — ведомый (детали 5, 6, 7) ~
преобразует колебательное движение во вращательное с пере-
менной скоростью. Изменение
числа оборотов ведомого вала
осуществляется изменением ве-
личины эксцентриситета г. шай-
бы 2.
Рассмотрим более подробно
каждый из этих механизмов.
Ведущая часть вариатора со-
стоит из полого вала 2(рис. 126)
и сплошного 1 с многозаход-
ной винтовой резьбой. Эта
система двух валов укреп-
ляется на трех подшипниках.
На валу 1, который может по-
ворачиваться относительно ва-
ла 2, закреплены два эксцен-
трика 5 и 8 с противоположным расположением эксцентриситетов.
На эксцентрике 8 свободно установлен диск 6; отверстие в.
диске равно диаметру эксцентрика, а ось его смещена на величи-
ну, равную двум эксцентриситетам эксцентрика. Шайба 7 с круго-
Рис. 126. Механизм регулирования экс-
центриситета эксцентрика,
можно получить вращением вала
вым направляющим пазом
свободно установлена на вы-
ступающей части диска 6.
Противовес 4 установлен
на эксцентрике .5 таким об-
разом, что при любом поло-
жении вала 1 относительно
вала 2 он уравновешивает
массы, вращающиеся с экс-
центриком 8. Для этой цели
диск 6 и противовес 4 соеди-
нены направляющим паль-
цем 9, скользящим в пазе
диска вала 2 и в пазе дис-
ка 6. Изменение величины
эксцентриситета диска 6 и
шайбы 7 с круговым пазом>
1 относительно вала 2. Это
вращение осуществляется перемещением хомутика 3 в осевом
направлении.
Хомутик <3 соединен с двумя пальцами, пропущенными через;
косые пазы в валу 2 и входящими во впадины резьбы нарезан-
ной части вала 1. Угол подъема паза противоположен углу подъема
резьбы. Как видно из рис. 126, при перемещении хомутика 3
16»
вдоль оси вала, величина эксцентриситета диска 6 и шайбы 7
с круговым пазом будет изменяться в сторону уменьшения. При
повороте вала 1 относительно вала 2 на 180° диск 6 с шайбой
7 устанавливаются концентрично относительно оси вала I.
Рассматриваемый механизм позволяет плавно изменять величи-
ну эксцентриситета от нуля до максимума при автоматическом,
уравновешивании вращающихся масс.
Ведомая часть вариатора показана на рис. 127. Между диска-
ми 1 по концентрической окружности расположены пять сателли-
Рис. 127. Планетарный механизм с муфтами свободного хода
в сателлитах.
лов 3. Все сателлиты находятся в зацеплении с центральным
зубчатым колесом 4 внешнего зацепления и с колесом 2 внутрен-
него зацепления. Сателлиты 3 установлены на кривошипных
валиках 5 и соединены с ними муфтами свободного хода. Каждый
кривошипный валик может свободно вращаться в отверстиях дисков
1. Пальцы кривошипов с роликами (на рис. 127 не показаны) располо-
жены в круговом пазе шайбы 7 (см. рис. 126), установленной на веду-
щей части вариатора. Вращением эксцентрично расположенной
шайбы 7 сообщается колебательное движение кривошипным вали-
кам 5 (рис. 127) и тот из них, направление вращения которого
совпадает в данный момент с направлением, соответствующим
заклиниванию муфты свободного хода, и угловая скорость кото-
рого больше угловых скоростей всех других кривошипов, пере-
даст движение сателлиту 3, а вместе с ним и ведомой части
вариатора. Кривошипные валики, движение которых не совпадает
170
звеном
должно
этом одно из колес 4 или 2
Рис. 128. Схема рычажного механизма для
преобразования колебательного движения
во вращательное.
с периодом заклинивания муфт свободного хода, не препятствуют
холостому вращению сателлитов.
Ведомым звеном ведомой части вариатора может быть централь-
ное колесо 4, при этом колесо 2 с внутренним зацеплением долж-
но быть неподвижным; при неподвижно установленном колесе 4
ведомым звеном будет колесо 2 и, наконец, ведомым
могут быть диски 1, при
быть неподвижный, а дру-
гое— удалено из схемы.
Каждый из рассмотрен-
ных вариантов, при всех
прочих равных условиях,
дает разное передаточное
отношение.
Скорость ведомого зве-
на вариатора зависит от
угла поворота кривошип-
ных валиков, кроме того,
ведомый вал вариатора мо-
жет вращаться только в
одном направлении, со-
ответствующем рабочему
ходу муфт свободного хода.
Неравномерность вращения
ведомого вала уменьшается
с увеличением числа сател-
литов.
Вариаторы такой кон-
струкции могут передавать
•мощности до 20 л. с., число оборотов ведущего вала не должно быть
больше 1200 об/мин, при этом максимальное число оборотов ведо-
мого вала составит около 500 об/мин и может уменьшаться до нуля.
В качестве ведомой части вариатора может служить другой
механизм (рис. 128). В нем муфты свободного хода с сателлитами
заменены рычажными механизмами.
Каждый из рычажных механизмов состоит из: рычага 7, шату-
на 8, зажима 9 и пружины 10. Рычаг 7 установлен на шпиль-
ке 11 диска 3 ведомой части вариатора и получает относительно
этой шпильки колебательное движение от вращения эксцентрично
установленной шайбы 4 с круговым пазом. Зажим 9 в зависимос-
ти от направления движения может скользить или заклиниваться
между неподвижными кольцами 1 и 2.
Рассмотрим работу рычажного механизма, считая, что он уста-
новлен в начальное рабочее положение.
При вращении шайбы 4 против или по часовой стрелке, ниж-
ний конец рычага 7 с роликом, расположенным в пазу шайбы 4,
поднимается вверх, зажим 9 заклинивается, а дальнейший подъем
рычага заставит ось его // и диск 3 двигаться по часовой стрел-
171
ке. При этом пружина 10, соединяющая зажим 9 со стойкой 12,
укрепленной на диске 3, растягивается.
При опускании рычага 7 зажим 9 освобождается, а растянутая
пружина стремится подтянуть его в исходное рабочее положение.
Таких механизмов на дис-
ке 3 монтируется несколько
(пять-шесть) и каждый из них
последовательно приводит его
во вращение.
Очевидно, число оборотов
вала ведомой части вариатора
зависит от величины экс-
центриситета шайбы 4 с
круговым пазом, а степень
Рнс. 130. График изменения угловой ско-
рости и>х ведомого вала вариатора в зави-
симости от угла поворота кривошипа
при номинальной нагрузке.
Рис. 129. Схема кривошипно-ша-
тунного импульсного вариатора.
неравномерности вращения — от количества рычажных механизмов.
Величину эксцентриситета можно регулировать поворотом до-
полнительного эксцентрика 5 относительно эксцентрика 6, кото-
рые относятся к ведущей части вариатора.
Рассматриваемые вариаторы могут быть легко приспособлены
к автоматическому регулированию скорости. С целью широкого
использования этих вариаторов в современном машиностроении
они были подвергнуты теоретическим и экспериментальным ис-
следованиям [23].
Основные сведения по результатам исследований, относящиеся
к вопросу равномерности вращения ведомого вала при различных пе-
редаточных отношениях с различными нагрузками, приведены ниже.
Кинематическая схема ведомой части исследованного вариато-
ра показана на рис. 129.
172
Пазовый кулачок с кривошипами в данной схеме заменены
кривошипно-шатунными механизмами, коромысла которых, совер-
шая колебательное движение, в какой-то части хода передают ,
его зубчатым колесам через муфты свободного хода. Оси ко-
лес г1 неподвижны. Ведомый вал вариатора жестко соединен с
колесом z2. Регулирование числа оборотов п( ведомого вала
осуществляется плавным
изменением радиуса кри-
вошипа. Исследуемый ва-
риатор скорости от мотора
с мощностью N — 1,5 л. с.
приводил в движение то-
карный станок с при-
веденным моментом инер-
ции движущихся масс все-
го механизма передачи
0/005 кг- м. сек2.
На рис. 130 показаны
графики изменения угло-
вой скорости ведомого
Рис. 131. Кривые коэффициента неравно-
мерности вращения ведомого вала.
Рис. 132. Кривые изменения неравномер-
ности вращения ведомого вала при различных
нагрузках на выходном валу. .
вала в зависимости от угла
поворота ср кривошипа при
номинальной нагрузке на
тормозе.
Кривые изменения угло-
вой скорости построены для
различных чисел оборо-
тов пх ведомого вала.
Сплошными линиями по-
казаны результаты экспе-
риментальных исследова-
ний и пунктирными ЛИГ
ниями — результаты тео-
ретических исследований.
Анализируя результаты исследований, можно заметить, что
при пх = 50-:-600 об/мин коэффициенты неравномерности враще-
ния Son, полученные опытным путем, несколько меньше теорети-
ческих о, а при пх = 600 -н 1000 об/мин — больше.
Последнее объясняется тем, что проскальзывание муфт свобод-
ного хода в диапазоне малых и средних чисел оборотов больше
влияет на уменьшение коэффициента неравномерности, чем для
больших чисел оборотов. Кроме того, по результатам исследова-
ний установлено, что коэффициент неравномерности Воп увеличи-
вается с увеличением нагрузки на ведомом валу, причем послед-
нее в большей степени сказывается при малых числах оборотов.
Графики изменения коэффициентов неравномерности при раз-
личных числах оборотов и различных нагрузках показаны на
рис. 131 и 132.
173
7. ВАРИАТОР С ПЕРЕМЕННЫМ РАДИУСОМ КРИВОШИПА
Рис. 133. Схема вариатора с пере-
менным радиусом кривошипа.
Существенным недостатком вариаторов скорости с муфтами
свободного хода является пульсирующее вращение ведомого вала
с большой степенью неравномерности. В рассматриваемой кон-
струкции степень неравномерности значительно снижается за счет
автоматического изменения ради-
уса кривошипа механизма в период
каждого его оборота.
Принципиальная схема меха-
низма вариатора скорости(рис. 133}
составлена из кривошипно-шатун-
ного механизма, ползун которого
является зубчатой рейкой /. на-
ходящейся в зацеплении с зубча-
тыми' колесами 2, установленными
на выходном валу 3. Передача дви-
жения выходному валу 3 осуще-
ствляется муфтами свободного
хода, встроенными в зубчатые
колеса 2.
Постоянство угловой скорости
выходного вала достигается равно-
мерным движением зубчатой рей-
пути вследствие соответствующего
ки 1 на среднем участке её
изменения радиуса кривошипа с пальцем В.
Регулирование передаточного отношения осуществляется изме-
нением радиуса Rx пальца D
коромысла.
Кинематика механизма за-
ключается в следующем.
Ведущий вал 4 посред-
ством жестко закрепленных
на нем шестерен передает
движение зубчатым колесам,
установленным свободно на
оси. В одном зубчатом колесе
имеются радиальные направ-
ляющие, по которым перемещается ползунок; к другому зубча-
тому колесу жестко прикреплен пазовый кулачок-эксцентрик 5.
Ползунок имеет два пальца: один палец В соединен с шатуном
размера I, а другой — входит в паз эксцентрика 5.
При таком соединении и различных по величине угловых
скоростях пазового эксцентрика и ползунка, можно получить
вращение пальца В с автоматическим изменением радиуса криво-
шипа по желаемому закону. Для нашего случая траектория паль-
ца В кривошипа должна проходить по эллиптической кривой,
поэтому передаточное отношение между ведущим валом 4 и па-
и
!t ! \f I
О 90 180 210 ' 360
Рис. 134. График угловой скорости вы-
ходного вала вариатора с переменным
радиусом кривошипа.
174
зовым кулачком принято равным единице, а передаточное отноше-
ние между ведущим валом 4 и колесом с пазом для пальца В равно
трем.
Зубчатая рейка 1 с одним из колес 2 соединена непосредственно,
а с другим — посредством паразитного колеса 6. Такое соединение
зубчатой рейки с колесами позволяет при различных направлениях
движения рейки получать движение
направлении.
Соединяя выходной вал вариа-
тора с двумя рассмотренными меха-
низмами, кривошипы которых сме-
щены по фазе на угол 90°, получим
непрерывное движение вала с угло-
вой скоростью, соответствующей дан-
ному значению Rx, как показано на
рис. 134.
Рассматриваемый вариатор ско-
рости имеет «свободный ход», т. е.
не препятствует вращению выходного
вала за счет сил инерции в направ-
лении рабочего хода.
Выходной вал вращается в одном
направлении и не зависит от на-
правления вращения ведущего.
Передаточное число при проекти-
ровании вариатора может быть вы-
брано от г~кс со до гмин, обуслов-
ленного габаритными размерами.
выходного вала в одном
Рис. 135. Конструкция цепи
зубчато-цепного вариатора.
8. ЦЕПНЫЕ ВАРИАТОРЫ
Отличие цепного вариатора ско-
ррсти от колодочно-ременного заклю-
чается в том, что лента с колодками
заменена специальной цепью, кото-
рая обкатывается по рабочим поверх-
ностям конусов с радиально распо-
ложенными пазами.
Цепь вариатора (рис. 135)состоит
из ряда плоских звеньев 1, соеди-
ненных между собой шарнирно.
В средней части звеньев 1 имеются отверстия для обойм 3
с набором тонких стальных пластин 2. Каждая из пластинок 2
свободно перемещается в обойме 3 в направлении, перпендику-
лярном оси цепи. Величина перемещений пластин ограничена до
необходимой так, что выпадение их из обоймы не происходит.
Радиальные пазы у каждой пары дисков смещены на угол,
соответствующий половине их шага так, что поперечные пластин-
175
ки 2, выталкиваемые зубьями левого диска, укладываются, соот-
ветственно профилю, во впадинах правого диска.
Регулирование скорости осуществляется вращением махович-
ка 1 (рис. 136), который установлен на винт с правой и левой
Рис. 136. Схема зубчато-цепного вариатора.
резьбой. Гайки 2 винта соединены шарнирно с рычагами 5 (ус-
ловно показаны штрих-пунктирными линиями), посредством ко-
торых изменяется расстояние между дисками 4, 5 и 6, 7.
В рассматриваемой схеме длина цепи не равна необходимой
для всех положений дисков в пределах возможного диапазона
регулирования, поэтому натяжение цепи регулируется специаль-
ными натяжными устройствами.
На рис. 137 показана схема вариатора с натяжным устрой-
ством, которое состоит из рычагов 1 и 3, закрепленных шарнирно
176
в точках 01 и 0%. Левые концы рычагов опираются на пружины 2,
а к правым концам рычагов прикреплены башмаки 4 и 5, по по-
верхности которых скользит движущаяся цепь. Натяжное устрой-
ство самоустанавливается при любом положении цепи. Взаимосвязь
между геометрическим положением цепи и натяжением ее ветвей
зависит от большого числа факторов, в том числе и от конструкции
натяжного устройства.
Таблица 20
Значения S и и]макс зубчато-цепного вариатора скорости
А/, в л. с. Лмакс 8 в %
I II III I II III 1 11 III
1 3,52 2,92 2,61 0,894 0,813 0,836 2,58 4,64 5,09
2 2,92 2,92 2,6] 0,862 0,763 0,813 2,60 5,39 6,16
2,45 2,92 2,61 2,24 0,52 0,701 0,730 4,07 7,18 8,05
0,43 4,35 — — 0,821 — — 3,19 — —
В табл. 20 приведены результаты экспериментальных исследо-
ваний [4] рассматриваемого вариатора: в зависимости от мощности
на ведущем валу, даны значения максимального к. п. д.—т]макс
и значения коэффициента изменения передаточного отношения,
определяемого отношением
8 = -^-н • 100 %,
'х
где ix — передаточное число при холостом ходе;
iH —передаточное число при нагрузке.
Исследования производились при различных натяжениях цепи:
I — нормальном, II — увеличенном, III — ослабленном.
Число оборотов ведущего вала во всех случаях соответство-
вало 880 об/мин.
На рис. 138 дан график изменения к. п. д. вариатора в за-
висимости от передаваемой мощности для различных значений ix,
а на рис. 139 —график изменения 8.
Результаты исследований сводятся к следующему:
1. При ix = 1 к. п. д. вариатора наибольший (т]макс = 0,9).
2. Оптимальное предварительное натяжение цепи равно
So = (1,2ч- 1,25)^2,
где q—вес погонного метра цепи;
v — средняя скорость цепи при ix = l;
g — ускорение свободно падающего тела.
'/4 12 Ш
177
3. Неравномерность натяжений ветвей цепи в большой мере
зависит от диапазона регулирования скорости, поэтому диски
вариаторов с большим диапазоном регулирования следует выпол-
нять не по прямолинейной, а по криволинейной образующей.
Рис 138. График изменения к. п. д. зубчато-цепного
вариатора в зависимости от передаваемой мощности
для различных ix при щ = 880 об/мии.
4. Минимальный рабочий диаметр дисков следует определять
из условий полного зацепления зубьев дисков с пластинами цепи.
5. Оптимальным числом обо-
Рис. 139. График изменения переда-
точного отношения зубчато-цепного
вариатора в зависимости от переда-
ваемой мощности для различных ix
при = 880 об/мин и нормальном
натяжении цепи.
ротов ведущего вала следует счи-
тать п = 600 -4- 900 об/мин.
6. Диапазон регулирования Д
не должен быть больше 8.
7. Передаваемая мощность
не более N = 35 л. с.
8. Для лучшего прилегания
пластин к зубьям дисков их сле-
дует выполнять трапецеидаль-
ного сечения с углом между гра-
нями
где А =0,3-4-0,6 мм— средняя толщина пластинки;
ПСр—средний радиус диска.
9. Число пазов на рабочей поверхности дисков рекомендуется
принимать z — 60.
178
Рис. 140. Конструкция зубчато-цепного вариатора.
72 12
171
179
10. Материалом для дисков может служить цементированная
молибденовая сталь с твердостью после термообработки HRC =
= 60s-62, а для пластин — закаленная сталь 4ОХН с твердостью
HRC = 46 — 48.
11. Вариатор следует располагать в картере с обильной
смазкой.
На рис. 140 дана конструкция вариатора скорости.
9. ПЛАНЕТАРНЫЙ ВАРИАТОР С ЗУБЧАТЫМ ВЕНЦОМ ИЗ
ТОНКИХ ПЛАСТИН
Схема вариатора изображена на рис. 141. Блок из планетарных
конических шестерен 5 и 2 свободно закреплен в подшипни-
ках водила 3, соединенного с ведущим валом шпонкой. Кониче-
ская шестерня 5 сцепляется с внутренним венцом 6, закрепленным
на ведомом валу, а коническая шестерня 2 сцеплена с. внутренним
венцом /, который при по-
мощи маховичка 4 может
перемещаться вдоль цент-
ральной оси.
Венец 1 набран из тон-
ких пластинок Т-образ-
ной формы в специальном
ободе. В местах, где нет
сцепления с коническим
колесом 2, венец представ-
ляет собой гладкий обод,
а в местах сцепления зубья
конической шестерни 2
выжимают соответствую-
щие им впадины.
После прохождения ко-
нической шестерни 2 пла-
Рис. 141. Планетарный вариатор с зубчатым СТИНКИ устанавливаются в
венцом из тонких пластин. первоначальное положение
специальными пружинами.
Для различных положений венца 1 рабочий радиус конической
шестерни 2 будет различным, вследствие чего будет изменяться
передаточное отношение, определяемое формулой
Щ _ 1
где z5 и z6 — числа зубьев колес 5 и 6;
г± — радиус начальной окружности венца Г,
га— радиус начальной окружности конической ше-
стерни 2.
180
10. ВАРИАТОР СКОРОСТИ СИСТЕМЫ «СИ»
Рассматриваемая передача (рис. 142) представляет собой ко-
робку скоростей, ведущим звеном которой является прямозубая
цилиндрическая шестерня 1, а ведомым — зубчатый конусный
блок 2, составленный из конических зубчатых колес с одинако-
вым модулем.
Разность чисел зубьев зубчатых колес конусного блока мо-
жет быть равна 1, 2, 3, ... , поэтому регулирование скорости
Рис. 142. Схема вариатора системы «СН».
ступенчатое и передача по принятой классификации не может
быть отнесена к вариаторам скорости. Однако эту передачу не-
обходимо рассмотреть, так как строго постоянное передаточное
отношение на каждой ступени в ряде случаев удовлетворяет ос-
новному требованию, предъявляемому техническими условиями.
Изменение передаточного отношения осуществляется переме-
щением шестерни 1 вдоль оси вала 3, расположенного парал-
лельно образующей конусного блока. Для возможного перехода
шестерни 1 от одной ступени к другой во время работы под
нагрузкой у каждого конического зубчатого колеса со стороны
основания конуса и со стороны его вершины на противополож-
ных дугах сделаны полукруговые пазы, без зубьев. Ширина
каждого паза, примерно равна 0,3 Ь, где b — ширина колеса. При
этом необходимо отметить, что расцепление подвижной шестер-
ка 12*
181
ни 1 с зубьями одного конического колеса и сцепление её с
зубьями смежного колеса следующей ступени может происходить
только по определенным образующим конического блока, кото-
рые условимся называть образующими перехода. Таких обра-
зующих может быть одна, если разность зубьев смежных ко-
лес является числом нечетным, или две, со смещением по фазе
на 180°, если разность зубьев является числом четным. Начало
и скорость перемещения шестерни 1 в период переключения
должны быть выбраны таким образом чтобы в момент, когда
одна из образующих перехода пересекает активную часть линии
зацепления, подвижная шестерня 1 находилась бы уже в плос-
кости соединения двух смежных колес.
Поставленное условие выполняется механизмом переключения
в такой последовательности.
Рукоятка 4 (рис. 142) усилием руки перемещается по на-
правлению стрелки Б и поворачивает рычаги 6 с валом 7 отно-
сительно оси х-х. При этом стержень 8а (узла 8) нажимает на
пружину 86 и поворачивает стрелку 9 на угол, при котором
цилиндр переключения 10 захватывает её и перемещает с ка-
реткой И и шестерней 1 .влево (положение 7) на величину,
соответствующую расстоянию между гребнями. В момент пере-
хода стрелки 9 в смежную кольцевую выточку кулачок 5
возвращает рукоятку 4 в исходное положение, при котором
стрелка 9 скользит по кольцевой выточке (положение II).
Гребни цилиндра переключения 10 имеют правые и левые
прорези, что позволяет перемещать шестерню 1 как влево, так
и вправо (положение 111) относительно шлицевого вала 3. Вал
цилиндра переключения 10 соединен с валом конического бло-
ка 2 зубчатыми колесами 12 и 13.
Перемещение каретки 11 с шестерней 1 вправо осуществля-
ется перемещением рукоятки 4 в направлении, указанном стрел-
кой А.
Передача «СН» изготовляется для мощностей от 1,5 до 50 кет
с диапазоном регулирования до 3,5.
Конусный блок монтируется из эвольвентно-конических колес
с одинаковым углом 8 при вершине и одинаковыми радиусами
окружностей выступов и впадин в плоскости стыка смежных
колес (рис. 143). Образующие впадин и выступов изменяются
по одному и тому же закону прямой линии, т. е. параллельны
между собой.
В частном случае, когда ширина b колес одинакова (рис. 143),
а радиусы г делительных окружностей расположены в средней
части их, получаем
rn — rn-i = (zn — zn_i) • &tg8, (5.32)
где г„ и zn-t — числа зубьев смежных колес;
т— модуль зубчатых колес.
182
Из формулы (5. 32) видно, что для рассматриваемого част-
ного случая разность чисел зубьев смежных колес является ве-
личиной постоянной и равна
(5-33)
Коэффициенты смещения (рис. 143) режущего инструмента по
абсолютному значению равны между собой гмакс = гмин и соот-
ветственно
Гп п—1 — 1/ 2 —
— /72Смакс“Ь^£мнн “ 2/72 ^макс
ИЛИ
zn—i — 4sMaKC. (5.34)
Таким образом, разность
чисел зубьев определяется
наибольшим и наименьшим
значением коэффициента
смещения, которое огра-
ничивается условиями за-
острения вершин головок
зубьев и подрезанием их
НОЖеК. ПрИ £макс = емин — 1,
Рис. 143. Конусный блок вариатора системы
«СН».
получаем
Zn Zn—। — 4 .
Длина L конусного блока (рис. 143)
Т = (/« — /-1) + b = nb, (5.35)
2#1&макс
где b = ,
п — число конических зубчатых колес в блоке,
г-, гт ,
Подставляя соответствующие значения г = и о, после пре-
образований имеем
Т = 2/go ^1 ”1* ^Емакс) = fib,
откуда
П = (Zn ~ 21 + 4®макс) • (5-36)
Учитывая равенство (5.34) и подставляя значения btgb по фор-
муле (5.33), получаем
Zn — Z1
Zn — Z n—i
(5.37)
+ 1
183
и соответственно наибольшее число зубьев zn при заданном zx
равно
= (?n —Zn-i)(n—1) + . (5.38)
Рекомендуют принимать [14] минимальное число зубьев z, > 20 и
отношение в пределах от 6 до 10.
Диапазон регулирования передачи
(гп — гп-1)(я — 1) | !
(5.39)
Пример. Определить основные параметры конусного блока при диапазоне
регулирования Д= 1,5.
Принимаем: г, = 20, m = 3 и г„—г„_, = 1.
Рис. 144. График зависимости п = }(Д)
при ?i = 20.
Длина конусного блока
Из графика на рис. 144 опреде-
ляем число ступеней п= 11.
„ &
Задавшись отношением — = 8, по
т
формуле (5.33) определяем
^» = g(z„-z„_1) = 0,0625;
8 = 3°35'.
Ширина зубчатого колеса в соответ-
ствии с формулой (5.33)
m(zn —z„_i) 3
6 =----27#^ =<125 = 24^
L = nb = 11 - 24 = 264 мм.
Наибольшее число зубьев колеса блока
zn = (zn — zn_1)(/z — 1) -J- Zj = 10 + 20 = 30 .
Диапазон регулирования
Д = (z„ -zn,)(n -1) + j = 10 + j = ь5 .
*1
. — Глава шестая
ВАРИАТОРЫ С АВТОМАТИЧЕСКИМ РЕГУЛИРОВАНИЕМ
СКОРОСТИ ПО ЗАДАННОМУ ЗАКОНУ
1. ИМПУЛЬСНЫЙ ВАРИАТОР С ПРОГРАММНЫМ
УПРАВЛЕНИЕМ
На рис. 145 показана схема модернизированного вариатора
Карпина с пристроенным к нему механизмом для управления
скоростью выходного вала. От ведущего вала 1 к валу 4 движе-
ние передается зубчатыми колесами 2 и 3. На валу 4 посред-
ством направляющих шпонок закреплены кулачки 5 и 6, кото-
рые по мере надобности могут перемещаться вдоль оси вала.
Кулачки 5 и 6 смещены по фазе на угол 180° и имеют пере-
менный профиль по высоте вдоль образующей.
Ведомый вал 14 вращается посредством двух муфт свободно-
го хода, состоящих из общего барабана 15, соединенного с ва-
лом 14 посредством кулачковой муфты, и свободно качающихся
звездочек 13, неподвижно соединенных с рычагами И и 12.
При поочередном подъеме рычагов 11 и 12 вверх ролики 16
муфты свободного хода заклиниваются и передают пульсирую-
щее вращение валу 14 через барабан 15. Опускание рычагов
соответствует холостому ходу муфт. .
Автоматическое регулирование скорости вала 14 по наперед
заданному закону осуществляется перемещением кулачков 5 и 6
вдоль оси вала посредством вилки 19, сидящей на оси 18. Ось 18
соединена с профилированной шайбой 21 коромыслом, составлен-
ным из двух частей 32 и 34.
Детали 32 и 34 во время настройки устанавливаются одна
относительно другой винтом 36. Пружина 35 обеспечивает пос-
тоянный контакт между шайбой 21 и роликом коромысла.
Шайба 21 в случае необходимости может быть заменена другой,
с профилем, удовлетворяющим вновь заданному закону измене-
ния скорости.
Вращение шайбе 21 передается от вала 4 с эксцентриком 22
посредством сдвоенного храпового механизма 23, 24, 25, 26, 27,
28 и червячной передачи 29, 30.
Переключение вала 14 на большую постоянную скорость осу-
ществляется сцеплением зубчатых колес 20 и 41 посредством
185
рукоятки 39 и вилки 40. При этом кулачковая муфта, соединя-
ющая вал 14 с муфтами свободного хода, выключается. Ревер-
сирование вала достигается сцеплением зубчатых колес 20, 31, 33.
Механизм автоматического регулирования скорости может быть
выключен путем поворота рычага 23 на угол, при котором ку-
Рис. 145. -Схема импульсного вариатора с
программным управлением.
лачок 22 работает вхолостую. Поворот рычага 23 осуществляется
вращением торцового кулачка 38 рукояткой 37.
Пружины 17 обеспечивают постоянный контакт между роли-
ками 7, 8 (их оси 9, 10) и кулачками 5, 6.
2. ЛОБОВОЙ ВАРИАТОР С ПРОГРАММНЫМ УПРАВЛЕНИЕМ
Передача движения от ведущего диска 1 (рис. 146) к ведомому
2 осуществляется посредством промежуточного ролика 3, зажа-
того между дисками. Угловая скорость <о2 ведомого диска 2 ре-
гулируется перемещением ролика 3 по вертикали. Ось ролика 3
смонтирована в каретке 4, которая может слегка поворачиваться
относительно направляющей 5 и скользить вдоль ее оси.
Перемещение каретки 4, вдоль оси направляющей 5, как это
показано на схеме, осуществляется кулисным механизмом; коро-
мыслом 6, ползуном 7 и кулисой 8.
186
С целью упростить механизм автоматического управления
скоростью ведомого вала ось ролика 3 смещена относительно
линии центров дисков на величину Е. Вследствие этого ролик 3
стремится перемещаться в направлении, при котором радиус гХ1
увеличивается, если диск 1 вращается в направлении, показан-
ном стрелкой, и наоборот.
Коромысло 6 кулисного механизма соединено с валом 9 (рис. 147);
последний' в свею очередь соединен с валиками 7 и 4 посредством
зубчатых колес 6, 8, 5 и 12 так, что движение может переда-
ваться от коромысла к валикам или от валиков к коромыслу.
Рис. 146. Схема лобового вариатора с перекрещивающимися
осями валов.
К валикам 7 и 4 прикреплены пальцы 2, которые входят в
пазы поршней 1 гидравлической системы управления. Масло в
цилиндры поступает через распределительный золотник 11, сое-
диненный с валом автоматического управления зубчатым коле-
сом 10. Ход каждого поршня регулируется и ограничивается
упором 3. ।
Регулирование скорости осуществляетя следующим образом.
Ролик 3 (см. рис. 146) вследствие смещения его оси относи-
тельно линии центров дисков стремится перемещаться к оси ве-
домого диска 2, а один из поршней 1 (рис. 147), к которому
подведено масло, перемещает его через систему зубчатых колес
в противоположном нарравлении на величину хода, определяе-
мую положением упора 3.
Следовательно, крайнее положение поршня определяет поло-
жение ролика 3 (см. рис. 146) и соответственно число оборотов
диска 2, а число положений ролика определяется числом порш-
ней гидравлической системы управления.
187
Передача масла к тому или иному поршню определяется
положением золотника 11 (рис. 147), который связан с пультом
программного управления.
Рассматриваемая система регулирования скорости может быть
применена для условий, соответствующих работе одношпиндель-
ного автомата.
Рис. 147. Схема гидравлического механизма управления вариатором.
Следует также отметить, что данный вариатор не пригоден
для работы с реверсивным движением.
Изменение технологии производства влечет за собой только
перестройку положений упоров 3.
Определение сил, действующих на ролик при параллельном
расположении его оси относительно линии центров дисков
На рис. 148, а показана схема лобового вариатора. Диск 1 —
ведущий, ролик (расположенный под диском) — ведомый. Из гра-
фика скоростей скольжения видно, что в любой точке касания
результирующая скорости скольжения может быть разложена на
две составляющие, одна из которых направлена по касательной
к окружности ролика, а вторая — параллельно его оси.
Скорость по касательной в одной из точек по линии контак-
та равна нулю, максимальные же значения соответствуют край-
ним точкам, ограничивающим ширину ролика. Скорости сколь-
жения, направленные параллельно оси ролика, в любой точке
равны
v0 = Ewj — const,
где Е — величина смещения оси ролика;
“i — угловая скорость ведущего диска 1.
188
Максимальная скорость скольжения по касательной в точке
а определяется разностью скоростей
Оа ~ Пар Vai >
(6.1)
где vap — <ор г0 — скорость ролика;
Г 1Ь
vai = rX] — I_ — ей — составляющая скорости диска;
“1
о)р = —----угловая скорость ролика;
г0 — радиус ролика;
b — ширина ролика;
е — величина смещения (от средины ролика)
точки k касания ролика с диском, в
которой скорость скольжения по каса-
тельной равна нулю;
гХ1 — радиус, определяющий положение
точки k.
Подставляя значения оаР и оа1 в формулу (6.1), получаем
Рис. 148. Схема сил, действующих иа ролик лобового вариатора
с перекрещивающимися осями валов при холостом ходе.
Скорость скольжения по карательной в произвольной точке
касания определяется из соотношения
b
2 ®
13 171
189
Подставляя значение va по формуле (6.2), имеем
VT = WjX]. (6.3)
Положение результирующей скорости скольжения и силы тре-
ния dF в произвольной точке касания определяется по схеме
(рис. 148, а).
tg 7 = — = . (6.4)
Соответственно
Точно такие же соотношения получим, рассматривая лобовую
фрикционную передачу (рис. 148, б), когда ролик 3 является
ведущим, а диск 2 — ведомым.
Суммарная составляющая сил трения, приложенных к ролику,
направлена вдоль его оси и при работе вариатора вхолостую
равна
So = $1 + S2, (6-5)
где
о ь ,
^~е Т + е
S2 = J dF cos у и Sx = J dFr cos cp. (6.6)
о о
Обозначая силу прижатия диска 1 к ролику 3 через Q, опре-
делим элементарную силу трения
dFj = dF = fpdx = fydx.
Подставляя значения dF и dFt в формулы (6.6) и заменяя
IE Е
COS Y = —_ ~ '_______ , COS ® = г — —. ,
yT + tg2 т УЕг + х? V Е2 + X2
после интегрирования и преобразований получаем
s0=j Ef [in (А=-а)-.+ Х24^ + (ь-^2. +
। + In (b + 2e) + + 2e)2 ] , (6 7)
Величину So с достаточным приближением можно определить
при е = 0, тогда
= ' (6.8)
Для ролика, зажатого между двумя дисками 1 и 2, как это
имеет место в рассматриваемой схеме, получаем
So = 4Qf f In- + -^f -+6- - 4Q/C. (6.9)
190
Рис. 149. График зависимости С = f (Е) при 6=2 см и при b = 4 см.
Значения С = f (Е) при Ь = 2 см и b = 4 см даны на графике
(рис. 149).
Формула (6.9) определяет усилие So, приложенное к ролику
при холостом ходе и направленное вдоль его оси. При работе
над нагрузкой крутящий мо-
мент Л41, приложенный к
диску /, и реактивный мо-
мент, приложенный к диску 2
(рис. 150), также создают
усилия, приложенные к ро-
лику, а их составляющие,
направленные вдоль оси,
определяются из равенств
(рис. 150):
С* All • • •
= —- COS Sin =й
^хср
^ср(1 +tg2W’ •
SM, = nA COS ф2 sin ф2 =
Лхср
_ м2 tg ф2
^ср(1 +tg2-M ’
и
Sm = Sm, — Sm,- (6.12)
Рис. 150. Схема сил, действующих на
'ролик вариатора от внешних моментов.
Без учета к. п. д. вариатора момент на ведомом диске 2 равен
р
(6.13)
Ггср
13*
191
Подставляя значения Sm, и Sm, в формулу (6.12) и заменяя
Л4а по формуле (6.13), после преобразований имеем
е — М1 / Ml Мз ) Щ
Из рис.
150 находим
Е Е
tg Ф1 = — и tg ф2 = о—
хер vxcp
Подставляя эти значения в формулу (6.14) и обозначая /?хср : rxcp=j
А
и соответственно rxcp = пру > получаем
Рис. 151. Номограмма и — f (7) при
Е = 1 см и при Е = 2 см.
Sm = МУЕ (1 -|-
[д2 + Ег И + 0г —
~ АЧ* + £2(1 + /)2 ’ (6-15)
или Sm — MjU.
Значение (7 = / (г)дляЕ=1 см
и Е = 2 см при А = 15 см даны
на рис. 151.
Суммарное усилие, прило-
женное к ролику и направлен-
ное вдоль его оси, при пере-
даче крутящего момента Мх
равно
Е = Sq Sm —
= 4Qf £.& + lA^ + fe2 .
b 2£
+ MjE (I + I)2 ^Д2 + £2 (1 + /)2—
~ Д2/2 4- £2 (1 4- О2 ' (6-16)
Кроме осевого усилия, на ролик действует пара сил от состав-
ляющих, направленных перпендикулярно оси ролика. По рис. 148, а
при г = 0 имеем
dM.Vi = 2dFxx sin 7 — 2Qf у хг sin 7. (6.17)
Заменяя
sin „ =. tg? = xr
/1 + tg2 7 ]Ae2 4- xl
получим
„ 0 , e xfdx
(6J8>
192
Интегрируя полученное дифференциальное уравнение, после
преобразований, имеем
М
lnI7
2 +
Для рассматриваемого вариатора, когда ролик зажат между
двумя дисками, получаем
\ Т + V Е + \ 2 ) J
3. ВАРИАТОР С ПЕРЕМЕННОЙ УГЛОВОЙ СКОРОСТЬЮ
НА ВЫХОДНОМ ВАЛУ (ВАРИАТОР РЕТТИХА)
Ведущий вал 2 и ведомый 8 рассматриваемого вариатора
(рис. 152) вращаются в одном направлении и за период одного
оборота ведущего вала с постоянной угловой скоростью ведомый
Рис. 152. Вариатор Реттиха.
также совершает один оборот, но с переменной угловой скоростью,
изменяющейся по закону синуса.
Работа механизма осуществляется следующим образом. От
шкива 1 клиноременной передачи движение передается ведущему
валу 2, на котором жестко закреплена зубчатая рейка 3 в виде
диска с зубьями 4, расположенными по всей плоскости диска.
193
Зубья 4 рейки находятся в зацеплении с зубьями 5 цилиндри-
ческих зубчатых колес 11 и 6, причем колесо 6 выполнено заодно
целое с коническим зубчатым колесом.
Ось 10 колес 11 и 6 установлена диаметрально в обойме 9 и
вращается в подшипниках, а обойма 9 свободно вращается в кор-
пусе вариатора. Зубья конического колеса находятся в зацеп-
лении с зубьями конической шестерни 7, соединенной с выходным
валом 8.
В том случае, когда эксцентриситет е равен нулю, ведущий
вал 2 и ведомый 8 расположены соосно и вращаются как одно целое
с постоянной угловой скоростью.
При смещенном расположении осей валов зубчатые колеса 6
и 11, кроме вращательного движения с обоймой 9, совершают
еще колебательное движение относительно оси 10, которое сопро-
вождается скольжением зубьев 5 относительно зубьев рейки 4.
Полный цикл вращения ведомого вала 8 с переменной скоростью
по синусоидальному закону соответствует одному обороту веду-
щего вала. Наибольшие значения угловой скорости ведомого вала
смещены по фазе на угол 180°.
Степень неравномерности вращения ведомого вала регулируе-
тся изменением эксцентриситета е.
Рассматриваемый вариатор может быть использован в установ-
ках для испытания абразивных камней на разрыв, а также в
приспособлениях для снятия заусенцев и затупления острых кро-
мок в окнах маслосъемных колец.
,— Глава седьмая ,
ВАРИАТОРЫ С АВТОМАТИЧЕСКИМ РЕГУЛИРОВАНИЕМ
СКОРОСТИ В ЗАВИСИМОСТИ ОТ КРУТЯЩЕГО МОМЕНТА
НА ВЕДОМОМ ВАЛУ
1. ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИКИ
ЛОБОВОГО ВАРИАТОРА
Рассмотрим характеристику лобового вариатора по схеме, по-
казанной на рис. 153 при условии, что ведущий диск 1 не ме-
няет своего положения относительно оси промежуточного диска 2
(ут = const), а ведомый диск 3, ступица которого соединена с вы-
ходным валом винтовой парой,
перемещается вдоль оси в зави-
симости от крутящего момен-
та Мх, сжимая при этом пру-
жину 4. Мощность, передаваемая
вариатором, равна
дг __ Мхпх
х ~ 71 620 •
(7.1)
В соответствии с рис. 153 имеем
п пх
Пх= — =—,
х I Ут
Рис. 153. Схема лобового вариатора
с автоматическим регулированием ско-
рости.
где п и пх— соответственно числа оборотов ведущего и ведомого
валов вариатора в минуту.
Подставляя значение пх в (7.1), получаем
".-дао- <7'2>
Осевое усилие винта, сжимающее пружину, определяется по
формуле
О =_____У*----.
'ср tg (? + Р)
Прогиб спиральной пружины с витками круглого сечения равен
8QxzD3
— Gd*
195
ИЛИ
1 = ______8A1xzD3
Х — 'ср (? + Р) Gdi '
(7.3)
где Гер — средний радиус резьбы вала;
с?—угол подъема винтовой линии резьбы; .
р — угол трения винтовой пары;
Лх — прогиб пружины;
г — число витков пружины;
D — средний диаметр пружины;
d — диаметр проволоки пружины;
G — модуль упругости второго рода.
Формулу (7.3) перепишем в виде
1Х = МХА,
где А — величина постоянная для данного вариатора.
Зависимость величины х от Мх определяется из следующих
условий (рис. 153):
Х= Хт — (\х — Хо) = хт — МХА + М0А, (7.4)
где хт — расстояние, определяющее положение ведомого диска
при номинальном крутящем моменте Мо на ведомом валу;
Ч — прогиб пружины, соответствующий моменту Л40.
Подставляя значение х в фор-
мулу (7.2), определяющую мощ-
ность, передаваемую вариато-
ром, получаем
= ут71 620 ^х ^Хт —
— МХА+МОА). (7.5)
Кривые изменения величин
N, х и i в зависимости от Мх
для данного вариатора при
ут = 10 см — const, Л40 = М
(момент на ведущем валу) и А —
г, г . . =0,00313 приведены на рис. 154.
Рис. 154. График изменения я, х и t ’ , ' 1
в зависимости от Мх при ут = const, уравнения (7.5) И приве-
Ма= М и А = 0,00313. денного графика видно, что мощ-
ность, передаваемая вариатором
по принятой схеме, не постоянна и изменяется по закону пара-
болы. Очевидно, для того, чтобы мощность, передаваемую вариа-
тором, получить постоянной, следует перемещать ведущий диск /
(ут const), сохраняя при этом закон перемещения ведомого
диска 3 (см. рис. 153) таким, как это было установлено в выше-
рассмотренном примере.
Определим, как должна изменяться величина ут при условии
постоянства мощности без учета потерь.
196
По условиям статики поставленному требованию удовлетворяет
равенство
«-Т- . <7-6>
Подставляя значение х из уравнения (7.4), получаем
У=^(хт-МхА + МаА). (7.7)
При рассмотрении полученного уравнения видно, что величи-
на у должна изменяться по закону параболы и в этом случае ва-
риатор будет иметь идеальную характеристику.
Весьма существенным в рассматриваемой задаче является
определение А, при котором у не
выйдет за пределы конструктивно
заданных размеров промежуточного
диска 2.
Взяв производную и прирав-
няв ее нулю, определим значение Мх,
при котором у будет максималь-
ным,
= + А — 2М = О,
dMx М ‘ М х М
откуда
^=|(т + Мо)-
Рис. 155. График зависимости Л\
х и i в зависимости от Мх при
изменении значения у по за-
кону, соответствующему посто-
янству мощности.
Подставляя полученное значение Мх в уравнение (7.7), после
преобразований имеем
У = ^М^тА-МиА)\ (7.8)
Здесь Л40 определяется по формуле (7.6) при минимальном
значении у = у0 и максимальном значении х = хт = ут, т. е.
M0 = ^M = i0M.
Подставляя значение Л40 в формулу (7.8) и решая ее относи-
тельно А, получаем
Л = Л[(2-1’о) + 2/K=7;]. (7.9)
Л4/о"
Кривые изменения величин х, у, N и i в зависимости от Мх
приведены на рис. 155, из которого видно, что с увеличением Мх
от Мо до Мт ведущий диск 1 (рис. 153) следует перемещать из
положения, соответствующего минимальному значению у0, в поло-
жение, определяемое его максимальным значением ут, а затем
возвращать в исходное положение.
197
Регулирование величины ут вручную затруднительно, особен-
но в тех случаях, когда необходимо установить ведущий диск
с достаточной степенью точности. Это возможно, если заданный
крутящий момент на ведомом диске не изменяется продолжитель-
ное время.
Указанный недостаток не имеет места, если изменить принци-
пиальную схему вариатора так, чтобы ведомый диск получил пе-
ремещение не только за счет деформации пружины, но также и
за счет перемещения опоры пружины в осевом направлении.
Рис. 156. Схема лобового вариатора с переме-
щающейся опорой пружины.
Конструктивная схема узла вариатора с перемещением опоры
пружины показана на рис. 156. Диск 3, перемещаясь вдоль оси
по нарезанной части вала, сжимает пружину 2 и поворачивает её
опору 1. Ролик 4, установленный на опоре пружины, перекаты-
вается по торцу профилированной шайбы 5, а ведомый диск 3
при этом перемещается не только за счет деформации пружины,
но и за счет перемещения ее опоры.
Сохраняя прежние обозначения и полагая, как в первом при-
мере, что у = ут = const, Мо = М и хт = ут, напишем условие
постоянства мощности, передаваемой вариатором, без учета к.п.д.
Мп = Л1хпх = const.
В соответствии с поставленным условием размер х1г опреде-
ляющий положение ведомого диска 3 при заданном моменте Мх,
определяется так:
Размер х, определяющий положение диска 3 с учетом только
деформации пружины при Мо = М, определяется уравнением (7.4)
х = хт — МХА + МА.
198
Очевидно, дополнительное перемещение kx диска 3 за счет
перемещения опоры пружины будет равно разности
kx=x-X1 = xm-MxA+MA-^. (7.11)
По условию принято, что хт = ут, кроме того, в целях упро-
щения конструкции рассматриваемого узла желательно, чтобы
при Мх — М и при Мх = Мт величина kx равнялась нулю, а угол
подъема винтовой линии резьбы вала соответствовал бы не более
чем одному обороту (в относительном движении) диска при пере-
мещении его вдоль оси на величину хт— х0. Здесь х0 — мини-
мальное значение х, при котором крутящий момент Мх равен
Мт — максимальному заданному значению.
При этих условиях уравнение (7.11) принимает вид
kx = 0 = ym+MA-MxA-^,
откуда
дл __ (Ут + МД) + (Ут — МА)
т* ~ 2А
то есть kx будет равно нулю при двух значениях Мх, когда:
1) мх = м-,
2) Мх = ~ = Мт=. (7.12)
/1 Л0
Формула (7.12) определяет значение А, при котором удовлетво-
ряется поставленное условие:
д _ хо_ = 8zP3
М гср (Т + Р)Gdi'
(7.13)
При известном А можно найти максимальное значениеkx=km.
Для этой цели, взяв производную по уравнению (7.11) и
приравняв ее нулю, получаем
dkx_M _____ Л —О
dM лл2 У”1 71 U
атх Мх
откуда Мх, при котором kx = km, будет равно
(7.14)
Подставляя полученное значение Мх в уравнение (7.11), после
преобразований получаем
кт = (Уу^-УМАУ> (7.15)
199’
Кривые изменения величин х, х1( i, kx и N в зависимости от
Мх даны на рис. 157, из которого видно, что мощность N в пре-
делах изменения момента Мх от нуля до номинального Мо воз-
растает по наклонной прямой, при дальнейшем увеличении Мх
мощность сохраняется посто-
янной.
В заключение следует за-
метить, что вариатор, по-
строенный в соответствии с
рассматриваемой схемой, не
может быть использован для
реверсивного движения.
В случае необходимости,
реверсивное движение осуще-
ствляется при условии, что
ведомый диск с валом соеди-
Рис. 157. График изменения N, xlt I, х и kx
в зависимости от Мх для вариатора с
перемещающейся опорой пружины.
ности цилиндра. Характеристика г
ковой, т. е.
нен промежуточным звеном в
виде полого цилиндра с раз-
ноименной резьбой в отвер-
стии и на наружной поверх-
1х резьб должна быть одина-.
Г1СР tg (cpi -f- рО = г2ср tg (cj>2 + p2).
2. ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИКИ ВАРИАТОРА
С КАЧАЮЩИМСЯ НА ВОДИЛЕ КОНИЧЕСКИМ ДИСКОМ
Рассматриваемый вариатор скорости, в отличие от лобового,
с изменением крутящего момента на ведомом валу автоматически
регулирует передаточное отношение независимо от направления
вращения ведущего вала.
От конического диска 1
(рис. 158), закрепленного на
ведущем валу, движение си-
лами трения передается дис-
ку 2. Диск 2 закреплен на
валу 3 направляющими шпон-
ками и может перемещаться
вдоль оси вала, изменяя при
этом длину пружины 6. Зуб-
чатое колесо вращаясь
вместе с валом <5, передает
движение ведомому валу 4 че{
новлен в подшипниках водила
Рис. 158. Схема вариатора с качающимся
на водиле коническим диском.
/
ез зубчатое колесо z2. Вал 3 уста-
5 и вместе с ним может качаться
относительно оси вала 4, при этом изменяется положение диска 2
относительно оси вала 3 и диска 1 и соответственно изменяется
передаточное отношение вариатора.
200
Положение водила 5 зависит как от величины, так и направ-
ления крутящего момента Мх, приложенного к ведомому валу 4,
так как с изменением момента Мх изменяется давление Рх на
зубья колес Zj и z2 и составляющая нормального давления между
дисками, воспринимаемая пружиной 6.
При исследовании характеристики вариатора принимаем сле-
дующие допущения: сила трения вдоль образующей конуса в
период работы вариатора равна нулю; радиальная составляющая
нормального давления Qx между дисками 1 и 2 (рис. 159, а) при
Рис. 159. Схема сил, действующих иа ведомый диск вариатора.
всех возможных положениях водила параллельна окружному уси-
лию Рх зубчатых колес Zj и z2 (рис. 159, б) и равна ему по
величине, что соответствует z2 = со.
Тогда угол а образующей конических дисков определяется из
условий (рис. 159, а)
Qx = ; Т = р tg а.
х COS а х х &
Величина силы Рх без учета потерь определяется формулой
р го
rxRi ‘
Передача движения коническими дисками без буксования воз-
можна при условии
= (7.16)
^xt rx r cos а ’ —' 7
где f — коэффициент трения скольжения;
|3 — коэффициент надежности;
Л4о — крутящий момент на валу ведущего диска;
20J
r0 — радиус начальной окружности ведомого диска 2;
гх — радиус начальной окружности ведущего диска /;
/Д — радиус начальной окружности зубчатого колеса zt.
Подставляя значение Рх в равенство (7.16), получаем
cosa = ^. (7.17)
Деформация Хо пружины, соответствующая первоначальному
соосному положению дисков 1 и 2 и обеспечивающая передачу
номинального крутящего момента Л1о на ведущем валу, опреде-
ляется по известной формуле
. „ 8zD" Ма , .
0 — То Gdi — tg а • А.
Величина Хо будет сохраняться до тех пор, пока Тх не станет
больше То, в дальнейшем деформация пружины будет изменяться
по закону
Xx = TxA = ^Mga. А.
Перемещение диска 2 вдоль оси вала в соответствии с рис.
159, а равно
m = Хх — Хо.
Подставляя значения Хх и Хо, имеем
m = ~ tga • A— ^rtga • А. (7.18)
Из того же рис. 159, а получаем
гх=г0—mtga.
Подставляя в последнее равенство значение m из формулы
(7.18), имеем
гж = Га + ^ё2а-А-^2а-А. (7.19)
Общее передаточное отношение вариатора определяется фор-
мулой
; Rzro • Г»
х Rirx 2гх-
Подставляя значение гх из уравнения (7.19), получаем
ix = —ж—%:-------------------• <7-20)
Al А2
Из условий статики без учета к. п. д. вариатора имеем
' УИо = ^.
1Х
202
Подставляя значение ix из формулы (7.20), получаем
Л1' = Л1ж^ + Л1хЛ10^^ — (7.21)
А2 Л2г0 °2Г0
Как видно из формулы (7.21), Л40' зависит от Мх и изменя-
ется по закону параболы, а положение вершины параболы и рас-
положение ее ветвей зависит от А. Это значит, что при всех
прочих равных условиях и различных А максимальный коэффици-
ент перегрузки km двигателя, равный
будет различным.
Взяв производную М,', по Мх из уравнения (7.21) и прирав-
няв ее нулю, определяем значение Мх, при котором Мо будет
иметь максимальное значение. Затем, подставляя полученное зна-
чение Мх в уравнение (7.21), после преобразований получаем
А = [(2km - 1) - 2 Vkm(km-l)] . (7.22)
Уравнение (7.22) определяет характеристику пружины А по
выбранной величине коэффициента перегрузки km.
На рис. 160 даны кривые изменения мощности N'o на веду-
щем валу вариатора для некоторых значений km при постоянном
числе оборотов двигателя.
В рассматриваемой схеме (рис. 159) радиус г0 ведомого диска
постоянный, а ведущего гх переменный. Если же, как показано
на рис. 161, постоянным сделать радиус г0 ведущего диска, а
ведомого гх — переменным, то при определенных условиях, с уче-
том принятых допущений, характеристика вариатора будет иде-
альной [10].
Как и прежде
Tx=^tga, T0=^tga
и т = Хх — Хо = ТХА — Т 0А.
В соответствии с рис. 161
rx = r0 + m tg a.
Подставляя значение m, получаем
^ = ro + ^tg2a-A-^tg2a.A. (7.23)
Л2 Al
Крутящий момент на ведущем валу определяется из выраже-
ния
Д4, MxRtr0 _ Мхг0
° RlrX hrx
203
(7.24)
Подставляя значение гх из формулы (7.23), имеем
м'------------------MxRj_______
° j^MJ^ + Mx^
t\ir о ro
Из уравнения (7.24) видно, что в общем случае момент М’на
ведущем валу не постоянный, а при постоянном числе оборотов
Рис. 160. График изменения N'o в зависимости от Мх при раз-
личных Кт.
двигателя непостоянной будет и его мощность, однако при усло-
вии, что
2
крутящий момент на ведущем валу равен
К = Мо - = const. (7.25)
Следовательно, мощность на ведущем валу постоянна при из-
менении Мх от значения Мх = Мо^- до значения Мх = .
«1 Riro
Постоянство мощности при изменении Мх в указанных пре-
делах обеспечивается при условии, что характеристика пружины
определяется выражением:
л = Г’26)
204
а первоначальный прогиб пружины равен (
= (7.27)
Если вследствие износа дисков, неточной сборки или по иным
причинам не будет соблюдено только равенство (7.27), то харак-
теристика вариатора будет лишь асимптотически приближаться
к идеальной с увеличением полезной нагрузки. Максимальное
отклонение будет иметь место на изломе характеристики, т. е. в
момент, когда передача перестает работать как фрикционная муф-
Рис. 161. Схема деформации пружины в зависимости от переме-
щения ведомого диска.
та и начинается сдвиг конусных дисков. Относительная величина
этого отклонения равна относительной ошибке в затяжке пружины.
В случае невыполнения только равенства (7.26) характеристика
вариатора будет идеальной, но не в соответствии с заданной
мощностью.
Угол наклона образующей конусных дисков определяется так
же, как и в первом случае, по формуле 1
' <7-28»
г где гх — радиус ведомого диска. 1
Формула (7.28) определяет угол а для каждого значения гх,
при котором нормальное давление Qx в пределах заданного диа-
пазона равно необходимому. С целью упрощения конструкции ко-
нических дисков угол образующей а можно принять постоян-
ным, определяя его при гх = г0. При этом для всех положений
14 171 205
ведомого диска, за исключением соосного, величина Qx будет боль-
ше необходимой. Характеристика вариатора при различных зна-
чениях Хо и А показана на рис. 162.
В соответствии с изложенным расчет основных размеров вариа-
тора можно производить в такой последовательности.
Рис. 162. График изменения Л40 в зависимости от Мх при различных Хо и А.
По заданным крутящему моменту Мо на входном валу и ди-
апазону регулирования Д определяется максимальный крутящий
момент на валу шестерни zlf по формуле
Мг макс = МоДт]^
1 г0
где — к. п. д. фрикционного вариатора с коническими дисками
(т]1 ~ 0,85 0,9);
гхмакс = ГоД — максимальный радиус начальной окружности ведо-
мого конического диска.вариатора;
го — радиус начальной окружности ведущего коническо-
го диска вариатора (размером его следует задаться).
В соответствии с макс и принятым передаточным отноше-
нием i2 зубчатой передачи из условий прочности определяются
размеры зубчатых колес zx и z2.
Задавшись коэффициентом надежности р = 1,2—=—1,3 и коэф-
фициентом трения скольжения f для фрикционных дисков (табл. 1),
определяем:
cos а = ; Хо = ~~ ;
’ ° tg а
Л _ ^^0 ___ Rlr о
= Л40 tg а ~ Мо tg2 а '
Размеры пружины должны удовлетворять условиям прочности
по формуле (4.8) и условию постоянства мощности на ведущем
валу по формуле (7.26).
206
т
В формулу (4.8) для рассматриваемого случая следует под-
ставить- значение
М
гр 'Т' __ х макс г
< 1 — * х макс —
Число рабочих витков пружины равно
AGd*
г~ 8DS *
3. ЛОБОВОЙ ВАРИАТОР
На рис. 163 представлена конструкция лобового вариатора,
разработанная в соответствии со схемой на рис. 156, позволяю-
щей получить идеальную характеристику. Крутящий момент М9
передается от ведущего диска 1 к ведомому 8 посредством четы-
рех промежуточных дисков 2, установленных взаимно перпенди-
кулярно в обойме б, которая под действием суммы моментов Л1о
и Мх может поворачиваться в корпусе вариатора.
Плавающий в отверстии обоймы 6 стакан 3 с промежуточным t
диском 2 несет бочкообразной формы ролик 5, который своими
цапфами опирается на стакан, а сферической поверхностью — на.
рессору 4. Рассматриваемая конструкция узла промежуточного
диска 2 позволяет ему самоустанавливаться, а с увеличением
крутящего момента (при повороте обоймы б) ролик 5, пере-
катываясь по рессоре 4, изогнутой с переменным радиусом отно-
сительно оси валов, прижимает диски 2 к дискам 1 и 8 с доста-
точной силой. Кривизна рессор регулируется винтами 9.
Ведомый диск 8 с увеличением крутящего момента Мх пере-
мещается к центру дискапо нарезанной части неподвижного
в осевом направлении ведомого вала, вследствие чего происходит
изменение передаточного отношения. Диск 8 перемещается не
только за счет деформации пружины 7, но и за счет перемеще-
ния ее опоры. Диск 1 занимает постоянное положение относительно
оси промежуточного диска 2. Смазка трущихся поверхностей
осуществляется разбрызгиванием масла, залитого в корпус вари-
атора .
4. ВАРИАТОР С КАЧАЮЩИМСЯ НА ВОДИЛЕ КОНИЧЕСКИМ
ДИСКОМ
Вариатор с качающимся на водиле коническим диском может
быть выполнен в двух вариантах. Один из них, в котором ведо-
мый конический диск постоянного радиуса скользит по ведущему
диску переменного радиуса (в соответствии с рис. 159), не обес-
печивает получения идеальной характеристики (вариатор «РК»).
В другом варианте (рис. 164) ведущий диск постоянного ради-
уса, а ведомый — переменного, что позволяет получить идеальную
характеристику.
14* • 207 '
Пружина 3, вмонтированная в полый вал 4, прижимает ведо-
мый диск 2 к ведущему диску 1 и обеспечивает постоянный кон-
такт между дисками, создавая силу трения между ними, доста-
точную для передачи движения. Вал диска 2 с изменением кру-
тящего момента Мх на ведомом валу 5 меняет свое положение
этом в осевом направлении.
При проектировании ва-
риатора следует учесть не-
обходимость в уравнове-
шивании масс на водиле 6,
качающихся относительно
оси вала 5.
Рассматриваемая кон-
струкция вариатора разра-
ботана для передачи мощ-
ности N — 5 л. с. при
2200 об/мин на входном
валу. На рис. 165 приве-
дена характеристика этого
вариатора.
5. ВАРИАТОР «DE LAVAUD»
относительно диска 1, перемещаясь при
Рис. 165. Характеристика вариатора с качаю-
щимся на водиле коническим диском. Вариатор «de Lavaud»
применяется в автомобилях
взамен коробки скоростей. На рис. 166 схематически изображено
устройство вариатора.
Ведущий вал 1, конец которого имеет фасонную головку,
приводит во вращение втулку 2 с прямоугольным отверстием.
Втулка 2 расположена под некоторым углом ср к оси вала 1 и
передает колебательное движение обойме 9, укрепленной на втул-
ке 2, посредством подшипников качения. Таким образом, рассмат-
риваемый узел вариатора является механизмом, который служит
для преобразования вращательного движения вала 1 в колеба-
тельное движение обоймы 9.
Шатуны 5, которые соединены с обоймой 9 шарнирно, при-
водят в движение муфты свободного хода 6, установленные на
ведомом валу 7. Муфты свободного хода, имея в одном направ-
лении вращения рабочий ход, а в обратном — холостой, передают
вращательное движение ведомому валу 7 в одном направлении.
Регулировка числа оборотов ведомого вала осуществляется
следующим образом.
Пружина 4, которая находится все время в сжатом состоянии,
нажимает на вилку 3, соединенную с цапфой 8. Цапфы же 8 и 10
укреплены в стенках втулки 2 и проходят через пазы головки вала 1.
Поэтому пружина 4 при давлении на вилку <3 стремится уста-
новить обойму 9 в наклонное положение. Реактивный момент на
ведомом Валу через муфты свободного хода действует на шатуны
210
5, которые стремятся повернуть обойму 9 в вертикальное поло-
жение.
Таким образом, обойма 9 под суммарным действием шатунов 5
и пружины 4 автоматически устанавливается в такое положение, л
при котором крутящий момент на ведущем валу будет соответ-
Рис. 166. Схема вариатора «de Lavaud» с автоматическим
регулированием скорости.
ствовать моменту сопротивления ведомого вала. При вертикальном
положении обоймы 9, т. е. при <р = 0, ведомый вал не вращает-
ся, а при ср = срмакс ведомый вал получает наибольшее число
оборотов.
6. ВАРИАТОР «CONSTANTINESCO»
Вариатор, изобретенный румынским инженером Константинеско
представляет собой инерционный механизм, автоматически регули-
рующий передаточное отношение в зависимости от величины крутя-
щего момента на выходном валу. Принцип действия рассматривае-
мого вариатора заключается в том, что вращательное движение
ведущего вала преобразуется в колебательное, а затем во враща-
тельное с переменной скоростью на выходном валу.
На рис. 167 изображены четыре схемы вариатора. Отдельные
звенья вариатора и их взаимодействие рассмотрим по схеме 1.
Ведущий вал 1 с закрепленным на нем кривошипом 2 посред-
ством шатуна 3 приводит в колебательное движение маятник 4
с грузом 5. Маятник 4 через шарнир 6 подвешен к звену 7> ко-
торое верхним шарниром соединено с неподвижным кронштейном 8.
На шарнире 6, кроме маятника, укреплены шатуны 9. Звено 7
2Ц
может качаться относительно верхнего шарнира, а маятник 4 —
относительно шарнира 6. Два шатуна 9 соединены с муфтами
свободного хода 10, которые передают движение ведомому валу 11.
Схема // -соответствует малому числу оборотов ведущего вала
при большом моменте сопротивления вращения на ведомом. В этом
случае звено 7 неподвижно, так как силы инерции груза 5 и
маятника 4 незначительны.
Если увеличить число оборотов ведущего вала или изменить
момент сопротивления ведомого в сторону уменьшения (схема ///),
то амплитуда колебаний груза уменьшится, а звено 7 получит
колебательное движение относительно верхнего шарнира. Шатуны 9,
Рис. 167. Схема инерционного вариатора «Constantinesco»
которые соединены со звеном 7, приведут в движение муфты
свободного хода, вращая ведомый вал в одном направлении.
Схема IV соответствует максимальному числу оборотов веду-
щего вала при минимальном сопротивлении вращению на ведомом.
Груз 5 в этом случае почти неподвижен, а муфты свободного хода
поворачиваются на максимальный рабочий угол.
Очевидно, что число оборотов ведомого вала будет изменяться
прямо пропорционально амплитуде колебаний шарнира 6. А так
как с изменением сопротивления на ведомом валу амплитуда ко-
лебаний шарнира 6 изменяется автоматически, то вместе с ней
автоматически регулируется и передаточное отношение. При этом
обеспечивается необходимый крутящий момент на ведомом валу,
соответствующий моменту сопротивления движению.
7. ВАРИАТОР ЗАСЛАВСКОГО
Работа вариатора скорости проф. В. И. Заславского, так же
как и вариатора «Constantinesco», основана на использовании сил
инерции масс, которые предназначены специально для этой цели
и связаны со звеньями кинематической цепи механизма. Схема и
конструкция вариатора Заславского существенно отличаются от
вариатора «Constantinesco» и имеют в сопоставлении с последним
ряд преимуществ.
212
Схема вариатора показана на рис. 168. Вариатор состоит из V
трех основных узлов: кривошипно-шатунного механизма I с ко-
ромыслом, планетарного механизма II и механизма III, состав-
ленного из конических зубчатых колес с муфтами свободного хода.
Кривошипно-шатунный механизм служит для преобразования
равномерного вращения входного вала 2 в колебательное движение
' коромысла, жестко связанного с ведущей солнечной шестерней 9
планетарной передачи. Картер 14 планетарной передачи с блоком
Рис. 168. Схема инерционного вариатора В. И. Заславского.
сателлитов 10 представляет инерционную массу, свободно колеблю-
щуюся вокруг своей оси. Она служит для преобразования гармо-
нического колебания ведущей солнечной шестерни 9 в колебание
той же частоты, но переменной амплитуды ведомой солнечной
шестерни 13, соединенной с конической шестерней 29 механиз-
ма III. Коническая шестерня 29 находится в зацеплении с кони-
ческими колесами 30, в которые вмонтированы муфты свободного
хода 19. Муфты свободного хода выпрямляют колебательное дви-
Ж9ние шестерни 13 во вращательное движение выходного вала 28.
Описание конструкции и принципа действия муфт свободного хода
даны в главе пятой к рис. 113.
Механизм реверса на схеме (рис. 168) не показан. Конструкция
вариатора скорости дана на рис. 169 с обозначением одноимен-
ных деталей в соответствии со схемой на рис. 168.
Ведущий вал 1 рассматриваемого вариатора передает движение
коленчатому валу 2 посредством конических зубчатых колес.
Шатун 5 соединяет шейку 3 коленчатого вала 2 с шейкой 6 ко-
ромысла вала 7, образуя четырехзвенный шарнирный механизм,
213
преобразующий вращательное движение вала 2 в колебательное
движение вала 7. ,
Маховик 4 служит для более равномерного вращения.
На валу 7 установлена солнечная шестерня 9, соединенная
с валом посредством втулки и пружинного буфера 8. Буфер 8
частично поглощает динамические усилия, которые возникают при
передаче Движения. Массивный картер 14 планетарной передачи
с сателлитами 11 и 12, жестко сидящими на одном валике 10,
может свободно колебаться вокруг своей оси. Сателлит 11 соеди-
няется с шестерней 9, а сателлит 12— с шестерней 13, которая
изготовлена заодно целое с валом 15. Две муфты свободного хода
(детали 16, 17, 18, 19, 20), установленные на валу 15 и соединенные
с системой зубчатых колес, преобразуют колебательное движение
вала 15 во вращательное вала 28 с движением в одном направ-
лении. Муфты свободного хода установлены одна противоположно
214
другой. При вращении вала 15 по часовой стрелке правая муфта ‘Г
свободного хода заклинивается и вращает зубчатое колесо 25 по-
средством колеса 21. Левая муфта свободного хода при этом;
вращается вхолостую относительно вала 15 в обратном направлении,
получая движение через промежуточные шестерни 21, 24. При
обратном направлении вращения вала 15 действие муфт свобод-
ного хода взаимно меняется, и зубчатое колесо 25 получает дви-
жение от левой муфты свободного хода посредством промежу-
точных зубчатых колес 24 и 21. Зубчатые колеса 24 сидят на .
валах 23.
Следует отметить, что зубчатое колесо 25 вращается все время
в одном направлении, а зубчатое колесо 26, получая вращение
от колеса 22,— в обратном. Изменение направления вращения ведо- \
мого вала 28 осуществляется переключением кулачковой муфты 27.
Вариатор Заславского может иметь применение в различных
отраслях промышленности; основная же цель его применения за-
ключается в том, чтобы заменить ступенчатую коробку скоростей
автомобиля. К основным достоинствам вариатора следует отнести:
1. Вариатор автоматически регулирует скорость в зависимости
от сопротивления дороги при почти постоянных мощности и числе
оборотов двигателя. При этом характеристика привода прибли-
жается к идеальной.
2. Работа вариатора не зависит от направления вращения
двигателя и допускает движение вперед, по инерции, за счет
живой силы.
3. При остановках на подъеме вариатор автоматически затор-
маживается и препятствует качению под уклон.
4. Нет необходимости в муфте сцепления, а остановка и тро-
гание с места регулируются тормозами и дросселем.
5. При перегрузке вариатора двигатель не глохнет, работая при
полном числе оборотов даже в случае остановки ведомого вала.
К основным недостаткам вариатора следует отнести сложность
конструкции, в частности муфт свободного хода, и неуравнове-
шенность отдельных звеньев механизма.
В 1933 г. проф. В. И. Заславским были произведены иссле-
дования вариатора методом графических построений, а несколько
позже А. Я. Диком [6] были произведены аналитические иссле-
дования характеристики вариатора.
Методика и результаты проведенных исследований ввиду их
громоздкости в настоящей работе не приведены.
к
Литература
1. Артоболевский И; И., Теория механизмов и машин, М., 1940.
2. А черкан Н. С., Расчет и конструи р ование металлорежущих станков,
Машгиз, 1949.
215
3. Гофман А. И., Влияние передаточного числа иа натяжение цепи
зубчато-цепиого вариатора скорости, Сборник научных трудов Львовского
лесотехнического института, т. I, 1955.
4. Гофман А. И., Исследование зубчато-цепного вариатора скорости,
Расчет, конструирование и исследование передач, часть II, Одесса, 1958.
5. Дашкевич Б. П. и др. Атлас деталей машин, Гостехиздат УССР,
Киев, 1958.
6. Дик А. Я., Динамика инерционной прогрессивной передачи, 'Воен-
ная академия механизации и моторизации РККА им. Сталина И. В.. 1936.
7. Добровольский В. А. и др., Детали машин, Машгиз, 1959.
8. Есипеико Я. И., Определение коэффициента полезного действия
торового вариатора, Известия высших учебных заведений, «Технология легкой
промышленности», № 6, 1958.
9. Есипенко Я- И., Автоматическая бесступенчатая фрикционная
передача с идеальной характеристикой, Научные труды, выпуск XVII (При-
кладная механика. Механизация металлургических цехов), Металлургиздат,
1949.
10. Есипенко Я. И. иЦехиович С. М., Бесступенчатая фрикци-
онная передача с идеальной характеристикой, Научные труды, выпуск XVII
(Прикладная механика. Механизация металлургических цехов), Металлург-
издат, 1949.
11. Есипенко Я. И., Рациональная конструкция вариатора скорости
для технологических конвейеров предприятий легкой промышленности, Сборник
трудов Киевского технологического института легкой промышленности, вы-
пуск V, 1953.
12. Есипенко Я. И., Рациональная конструкция привода конвейера
для предприятий легкой промышленности, Сборник трудов Киевского техно-
логического института легкой промышленности, выпуск VII, 1955.
13. Иванов Е. А., Муфты приводов, Машгиз, 1954.
14. Имре Секей, Зубчатый конусный блок, составленный из эволь-
вентно-конических колес, Известия высших учебных заведений, «Машиностро-
ение», № 7, 1959; № 7, 1960.
* 15. Кожевников С. И., Есипенко Я. И. и Раскин Я. М.,
Элементы механизмов, Оборонгиз, 1956.
16. Кожевников С. И., Исследование скольжения в бесступенчатой
клииоременной передаче с колодками, Научные труды, выпуск XVII (При-
кладная механика. Механизация металлургических цехов), Металлургиздат,
1949.
17. Кожевников С. Н., Теория механизмов и машин. Машгиз, 1954.
18. Коре ня ко А. С. и КременштейнЛ. И., Теория механизмов
и машин, Гостехиздат УССР, Киев, 1952.
19. Малышев А. П., К вопросу об определении передаточного числа
у фрикционных передач, Сборник научно-исследовательских трудов Москов-
ского текстильного института, т. I, 1937.
20. Мальцев В. Ф., Клииоременные бесступенчатые передачи со стан-
дартными ремнями, «Вестник машиностроения», № 10, 1953.
21. Мальцев В. Ф., Роликовые механизмы свободного хода, Машгиз,
1959.
22. Мальцев В. Ф. и Ковалев П. А., Исследование дифференциаль-
ного вариатора, Расчет, конструирование и исследование передач, часть II,
Одесса, 1958.
23. Мальцев В. Ф. и Л у й з о А. И., Исследование равномерности
вращения ведомого вала импульсной бесступенчатой передачи, Расчет, кон-
струирование и исследование передач, часть II, Одесса, 1958.
24. Мальцев В. Ф. и Орлик И. С., Испытание клиноременных пере-
дач со стандартными ремнями, «Вестник машиностроения», № 5, 1957.
25. Машиностроение, Энциклопедический справочник, т. 2, М., Машгиз,
1948.
26. Михайлова В. А., Исследование фрикционных вариаторов,
ЭНИМС, 1955.
216
27. Михайлова В. А. и Решетов Д. Н., Потери на площадке
контакта в регулируемых фрикционных передачах, «Вестник машиностро-
ения», 2, 1957.
28, Поляков В. С. и Барбаш И. Д., Муфты, Машгиз, 1955..
29. Пронин Б. А., Клиноременные передачи, Машгиз, 1952.
30. Пронин Б. А., Передачи с бесступенчатым регулированием ско-
ро сти, Машгиз, 19ъ'г>.
31. Пронин Б. А., Клиноременные и фрикционные передачи и вари-
аторы, Машгиз, 1960.
32. Рев ков Е. А., Об определении усилия, необходимого для управ-
ления бесступенчатой торовой фрикционной передачей, «Вестник машинострое-
ния», № 2, 1952.
33. Руденко Н. Ф., Планетарные передачи, М., 1947.
34. Светозаров В. А., Фрикционные трансформаторы, ЦНИИТМАШ,
ки. 4, Машгиз, 1947.
35. Т ay рок В. Г., Механические бесступенчатые передачи, Машгиз, 1947.
36. Тел е'яГн и к о в И. Ф., Исследование нагрузочной способности то-
роидной фрикционной пары сталь — текстолит, Автореферат на соискание
ученой степени кандидата технических наук, М., ,1954.
37. Чернавский С. А. и др., Проектирование механических передач,
Машгиз, 1959.
38. Шаумян Г. А., Автоматы, Машгиз, М., 1952.
39. Экспресс-информация, Серия — Редукторостроение и детали машин,
1959.
40. ЭНИМС, Испытание образца вариатора ВР-1 с широким ремнем и
раздвижными шкивами, М., 1957.
41. Altman F. G., Zahnradgetriebe, Reibqetriebe und Kupplungen UDI—
Zeitschrift, 1955, 97, № 19-20, 631—638.
42. Das «Excelsior» Regelgetriebe, Europa Technic, 1955, № 21, 16.
43. Denoziere D., A new Integrated Motor Speed Changing Unit 2, 5HP-1
to 6 range, Techn. franc., 1955, 3, № 1-3, 47—48.
44. Der Stufenlose Ailtrieb. Lubig Max, Maschinenbautechnik, 1955, 4, № 5,
261—266.
' 45. Die Wirkungsweise des PK- und SH-Triebes, Europa Technic. (Dtsch), 1955,
№ 21, 8, 10.
46. Hall у day W. M., Friction Devices for Intermittent Rotary Mo-
tion, Prod. Engng, 1955, 26, № 8, 176—177.
47. Les variateurs et reducteurs Omnia, Ingrs et technicieus, 1955, Ks 78-, 93.
48. Lutz O., Griindsatzliches fiber stufenlos Verstellbare Walzgetriebe,
Konstruktion, 1955, 7, № 9, 330—335; 1958, 10, № 11, 425—427.
49. Miniature variable speed gear, Power and Works Engng, 1955, 50,
№ 589, 258.
50. Multiple Discs Provide Infinitely Variable Drive, Oil Engine, 1955,
23. № 269, 248—249.
51. Spector Leo, F., Mechanical Adjustable Speed Drives, Part 1, Mach
Design, 1955, 27, № 4, 168—199.
52. Spector Leo. F., Mechanical Adjustable Speed Drives, Part 2, Mach.
Desing, 1955, 27, № 6, 178—194.
53. StufenlosverstellbaresGetriebe, Ind.—Anz., 1955, 77, № 77, 1107—1108.
54. Stufenlosverstellbare mechanische .Antriebe mit grbssem Regelbereich,
Mashinenbautechnik. 1955,- 4, № 1, 19—24.
55. Three recent Developments in Mechanical transmission Equipment,
Power, 1955, 99, № 6, 168.
56. Variable Speed Pulley for Use in Limited Space, Power Engng., 1956,
60, № 1, 44, 46.
Оглавление
Стр.
Предисловие........................................................ 3
Введение; .......................................................... 5
Классификация вариаторовскорости . . . -..................... 6
Глава первая. Теоретические исследования вариаторов скорости с
непосредственным касанием рабочих тел
1. Вариаторы, у которых образующая катков является прямой линией . . 9.
Определение передаточного отношения вариатора скорости ... 9
Определение максимальной скорости скольжения в зоне контакта
рабочих тел............................................. 17
Определение к. п. д. вариатора скорости.................... 18
Частные случаи схем вариаторов............................. 19
Определение коэффициента скольжения вариатора.............. 23
2. Вариаторы, у которых образующая катков является дугой окружности 24
Определение линейных давлений в зоне контакта рабочих тел . 24
Определение передаточного отношения вариатора при ведущем кат-
ке 1 и ведомом 2......................................... 29
Определение передаточного отношения вариатора при ведущем
катке 2 и ведомом 1...................................... 34
Определение коэффициента полезного действия вариатора ... 37
Вариатор скорости, составленный из трех катков............ 40
3. Определение передаточного отношения, коэффициента скольжения
и к. п. д. вариаторов, работающих с начальным контактом в точке ... 42
4. Проверка рабочих тел вариаторов на контактные напряжения сжа-
тия ............................................................ 46
5. Основные кинематические характеристики и силовые зависимости
вариаторов скорости.............................................. 50
Глава вторая. Схема и конструкции вариаторов скорости с
непосредственным касанием рабочих тел
1. Вариатор с коническими катками................................. 52
2. Вариатор с цилиндрическим катком и коническим барабаном........ 55
3. Вариатор с реверсированием ведомого вала....................
4. Вариатор с переменным давлением между катками ................. 57
5. Вариатор с постоянным давлением между катками ................. 58
6. Вариатор с ведомым коническим и ведущим сферическим катками . . 59
Г лава третья. Схемы и конструкции вариаторов скорости с промежуточным
жестким звеном
1. Лобовой вариатор с промежуточным роликом...................... 61
2. Двухдисковый соосный вариатор................................ 61
218
3. Вариатор с,расположением осей валов под углом .......... 62
4. Вариатор с дифференциалом................................. 62
5. Вариатор системы «SH» ...................................... 64
6. Вириатор с большим количеством промежуточных дисков ........ 65
7. Вариатор с коническими барабанами и охватывающим кольцом. ... 67
8. Вариатор с раздвижными конусами и стальным кольцом ......... 70
9. Вариатор с торообразными дисками............................ 72
10. Торовый вариатор конструкции ЦНИИТМАШ системы Светозарова . 77
11. Планетарный вариатор системы «Колумбия»..................... 84
12. Планетарный вариатор системы «Эшер — Висс».................. 86
13. Планетарный вариатор с коническими барабанами............... 88
14. Планетарный вариатор Пирожкова.............................. 89
15. Вариатор с шарами, вращающимися на осях..................... 91
16. Шаровой вариатор без физических осей вращения шаров......... 92
17. Планетарный вариатор с шаровыми сателлитами................. 97
Глава четвертая. Вариаторы скорости с промежуточным гибким звеном
»
1. Определение основных параметров вариатора с клинчатым ремнем и
раздвижными шкивами....................’......................... 99
Определение усилий, действующих на пружины................100
Определение размеров пружин...............................103
Определение пределов регулирования скорости. . . к» . .' . . . 105
Расчет ремней клиноременных вариаторов скорости . .......107
2. Конструкции шкивов с раздвижными дисками.....................107
3. Вариатор системы «РВЕ»......................................111
4. Клиноременный вариатор с многодисковыми шкивами и постоянным
* расстоянием между осями валов..................................Из-
S. Клиноременный вариатор с двухдисковыми шкивами и неизменным
расстоянием между осями валов............................. > . • 115
6. Клиноремениый вариатор с количеством ремней больше одного . . . 115
7. Клоноременный вариатор в сочетании с дифференциалом...........117
8. Сдвоенные клиноременные вариаторы..................f ... . 121
9. Результаты экспериментальных исследований вариаторов с клинчаты-
ми ремнями .....................................•................124
10. Клиноременный вариатор с колодками, прикрепленными к широко-
му ремню......................................................... 128
Принципиальная схема вариатора.............................128
Определение передаточного отношения и диапазона регулирова-
ния скорости вариатора ................................... 130
Определение основных размеров ремня........................134
Конструкции вариаторов................................... 136-
Пример подбора колодочно-ременного вариатора и проверки дета-
лей ремня на прочность..................................140
11. Вариатор с коническими барабанами и гибким кольцом, зажатым
между ними........................................................143
Г лава пятая. Жесткие вариаторы скорости
1. Общие сведения............................................... 146
2. Храповые и фрикционные механизмы...............................146
Схемы храповых механизмов...................................146
Расчет размеров зубьев храповых колес и собачек.............150
Механизмы с фрикционными зажимами...........................151
3. Муфты свободного хода..........................................153
Конструкции муфт свободного хода........................... 153
Специальные муфты свободного хода..........1................157
Определение основных размеров муфты свободного хода с ро-
ликами ..................................................158
Проверка на прочность основных элементов муфты..............161
219
4. Вариатор Карпина.............................................. 163
5. Вариатор «Shimpo Industrial Со».............'...................168
6. Кривошипно-соосный вариатор................................... 168
7. Вариатор с переменным радиусом кривошипа.-................. . . 174
8. Цепные вариаторы................................................175
9. Планетарный вариатор с зубчатым венцом из тонких пластин .... 180
10. Вариатор скорости системы «СН» .................................181
Г лава шестая. Вариаторы с автоматическим регулированием скорости
по заданному закону
,1. Импульсный вариатор с'программным управлением .................185
2. Лобовой вариатор с программным управлением......................185
Определение сил, действующих на ролик при параллельном рас-
положении его оси относительно линии центров дисков .... 186
“ Р е 1 3. Вариатор с переменной угловой скоростью на выходном валу (варна-
В в е I тор Реттиха).....................................................
Г лава седьмая. Вариаторы с автоматическим регулированием скорости в
зависимости от крутящего момента на ведомом валу
I
1. Исследование характеристики лобового вариатора.................195
2. Исследование характеристики вариатора с качающимся на водиле ко-
“а1 иическим диском........................................... . 200
3. Лобовой вариатор......................-........................207
4. Вариатор с качающимся на водиле коническим диском .............207
5. Вариатор «de Lavaud»....................................... 21Q
6. Вариатор «Constantinesco»..........;...........................211
7. Вариатор Заславского.........................'. ............212
Bai Литература........................................................215
3. О
и к
4. П|
тия
5. О<
вар
1. Ва
2. Ва
3. Ва1'
4. Ва
5. Ва
6. Ва
Г лаве
1. 7
2. Л
218
Яков Иванович Есипенко
Механические вариаторы скорости
Редакторы Г. П. Кудрявцев, М. А. Василенко
Обложка художника Пацалюк П. Л1.
Технический редактор С. М. Матусевич' Корректор Л. А. Грищенко
Сдано в набор 18/V 1961 г. Подписано к печати 13/IX 1961 г. Формат бумаги 60 х 90/л.
Объем: 13,75 физич. лист.; 13,75 условн. лист.; 15.67 учетно-издат. лист. Тираж 7000.
БФ 08425. Цена 93 коп.
--------------------i---------------------------------------------__________—
Государственное издательство технической литературы УССР
Киев, Пушкинская. 28
Отпечатано с матриц Книжной фабрики им. Фрунзе Главполиграфиздата Министерства
культуры УССР, Харьков, Донец-Захаржевская, 6/8, в типографии «Коммунист» Главпо-
лиграфиздата Министерства культуры УССР, Харьков, Пушкинская, 29. Зак. 171.