






















































































































































































































Автор: Мельников Ю.П. Попов С.В.
Теги: электротехника кибернетика радиотехника радиоэлектронные аппараты
ISBN: 978-5-88070-195-7
Год: 2008




Текст
Ю.П. Мельников, С.В. Попов
РАДИОТЕХНИЧЕСКАЯ
РАЗВЕДКА
Методы оценки эффективности
местоопределения источников
излучения
Москва, «Радиотехника», 2008
УДК 621.396
М48
ББК 32.811.7
Рецензент:
заслуженный деятель науки и техники РСФСР,
докт. техн, наук, проф. Е.Г. Логачев
Мельников Ю. П., Попов С. В.
М48 Радиотехническая разведка. Методы оценки эффективности ме-
стоопределения источников излучения. - М.: «Радиотехника»,
2008.-432 с.: ил.
ISBN 978-5-88070-195-7
Рассмотрены методы местоопределения источников радиоиз-
лучения (пеленгационные, временные, доплеровские, доплеровско-
временные, многопозиционные и др.), а также методы определения
вектора скорости подвижных объектов как из неподвижного, так и
подвижного пунктов наблюдения; приведены аналитические соот-
ношения для оценки координат объектов и для погрешностей этих
определений (каждый из методов графически иллюстрируется);
освещены отдельные вопросы построения станции РТР.
Для радиоинженеров, разработчиков аппаратуры, аспиран-
тов и студентов вузов радиотехнических специальностей.
ISBN 978-5-88070-195-7
УДК 621.396
ББК 32.811.7
© Издательство «Радиотехника», 2008
© ЗАО «САЙНС-ПРЕСС», оригинал-макет, оформление, 2008
ОГЛАВЛЕНИЕ
Предисловие.................................................7
Введение ...................................................8
Литература к введению......................................10
Глава 1. Определение координат объектов путем
многократной пеленгации. Оценка погрешностей...............11
1.1. Определение координат источников радиоизлучения
при их пеленгации из двух разнесенных пунктов.
Погрешности местоопределения............................11
1.2. Многократная пеленгация источника радиоизлучения
во время полета. Обработка результатов измерения
по методу наименьших квадратов поправок углов...........14
1.3. Весовые методы обработки результатов многократной
пеленгации..............................................18
1.4. Влияние ширины зоны обзора на точность
местоопределения. Результаты моделирования..............22
1.5. Методы оценки погрешностей определения дальности
до неподвижного ИРИ с помощью станции РТР
с неподвижной бортовой антенной, установленной
на перемещающемся носителе...............................25
1.6. Методы определения систематических ошибок
пеленгатора, установленного на движущемся носителе.......33
1.7. Эффективность пространственной селекции
при многократной пеленгации двух РЛС, не различаемых
по параметрам их сигналов...............................46
1.8. Сравнение различных алгоритмов пространственной
селекции пеленгов, не различаемых по техническим параметрам ..51
Литература к главе 1....................................64
Глава*2. Определение текущих координат и параметров
движения объектов с работающими на них источниками
излучения с помощью угловых и линейных измерений...........66
2.1. Методы оценки погрешностей определения текущих
координат и скорости движения объектов с помощью
угловых измерений с движущегося носителя................66
2.2. Методы оценки погрешностей определения текущих
координат и скорости движения объектов по данным
единичных угловых и линейных измерений в условиях РЭП....78
2.3. Определение дистанции и элементов движения объекта
наблюдения методом предвычисляемых фиктивных пеленгов....85
3
2.4. Методы определения текущей дальности при
пеленговании неманеврирующим наблюдателем объекта
с известной скоростью движения или дальностью
до конечной точки маршрута. Оценка погрешностей.........92
2.5. Определение и прогнозирование координат равномерно
движущегося в пространстве объекта по данным единичных
локационных измерений..................................103
2.6. Оценка текущих координат движущегося объекта
по данным пеленгования....................................ПО
2.7. Возможности определения направления движения объекта
по информации от средств радиотехнической разведки.....116
2.8. Методы оценки погрешностей определения модуля
скорости и текущих координат движущегося объекта
при известном направлении его движения.................123
Литература к главе 2...................................131
Глава 3. Пеленгационно-временные методы определения
координат источников излучения............................133
3.1. Варианты временного способа местоопределения
сканирующих источников излучения при наблюдении
из нескольких приемных пунктов...........................134
Приложение........................................... 140
3.2. Определение и прогнозирование расстояния между
движущимися с постоянной скоростью излучателем
и наблюдателем по доплеровской модуляции периода
принимаемого сигнала...................................140
3.3. Методы определения координат маловысотных объектов
при пассивной локации с использованием эффекта отражения
радиосигналов от водной поверхности......................144
3.4. Доплеровско-временные методы местоопределения
источника излучения с движущегося носителя...............153
3.5. Кинематический метод определения дальности
до источника радиоизлучения движущимся наблюдателем......158
3.6. Интерферометрический способ определения
относительных координат неподвижного источника
радиоизлучения движущимся наблюдателем.................166
Литература к главе 3...................................169
Глава 4. Пеленгационно-энергетические методы определения
координат источников излучения............................174
4.1. Измерение дальности при малых высотах полета
и малых курсовых углах на объект.........................174
4.2. Определение дальности по характеристикам
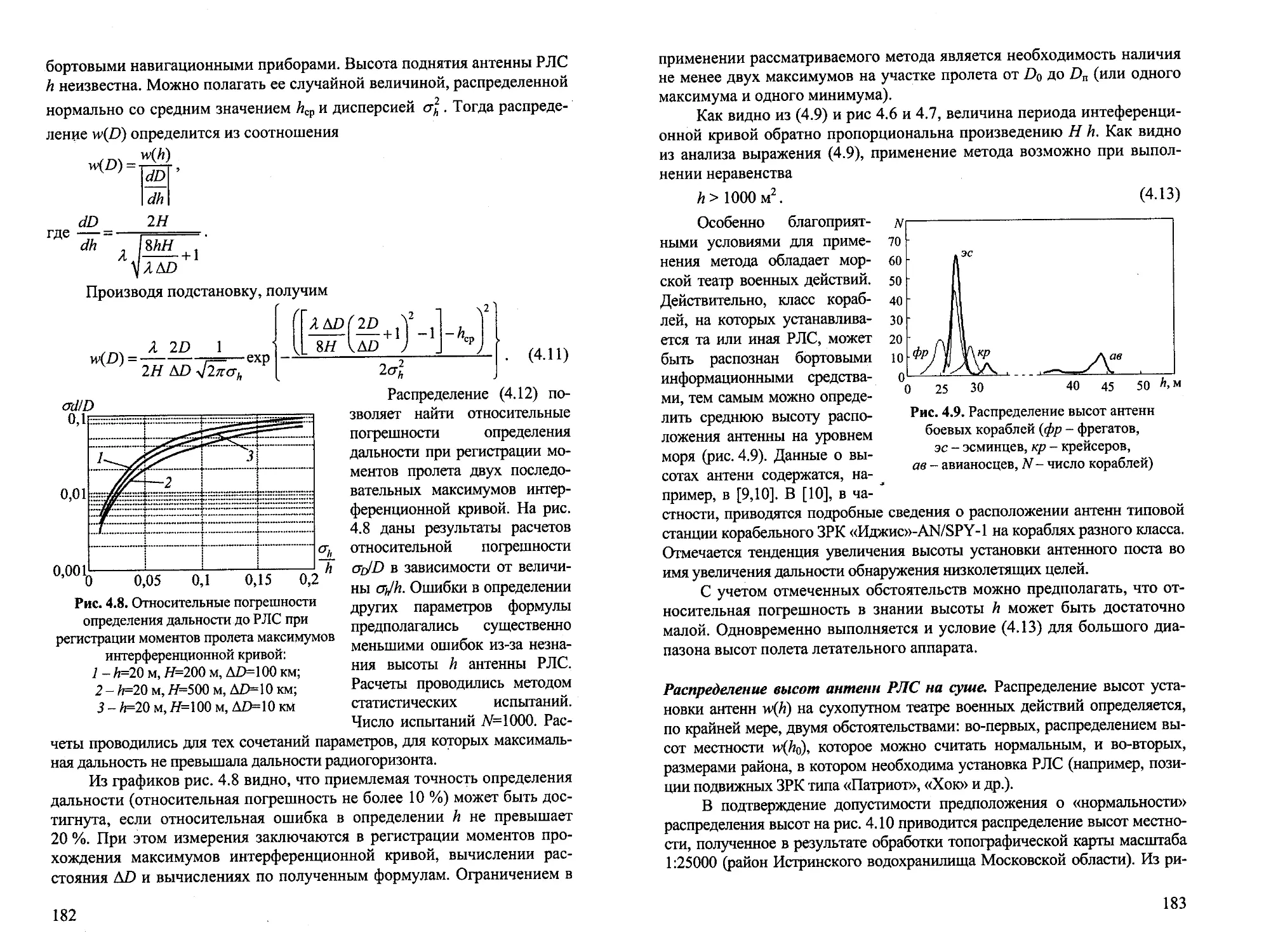
интерференционной кривой.................................181
4
4.3. Определение дальности методом регистрации пролета
радиогоризонта..........................................187
4.4. Определение дальности методами энергетических
измерений...............................................190
4.5. Кинематический метод местоопределения источника
радиоизлучения бортовым амплитудным пеленгатором
с фиксированным положением луча........................200
4.6. Оценка и прогнозирование взаимного расположения излучателя
и наблюдателя, движущихся с постоянной скоростью,
с использованием измерений энергетических величин......207
Литература к главе 4...................................219
Глава 5. Определение координат источников излучения
с помощью многопозиционных методов........................222
5.1. Потенциальные точности разностно-дальномерной
системы воздушной радиотехнической разведки.............222
5.2 Учет навигационных и инструментальных погрешностей
измерения времени.......................................225
5.3. Методы оценки точности определения координат
надводного корабля авиационной активно-пассивной
системой в условиях РЭБ................................234
5.4. Методы оценки погрешностей пассивного определения
координат объектов при использовании сигналов удаленной
обзорной РЛС.......(...................................242
5.5. Определение дальности до неизлучающих воздушных
объектов аппаратурой РТР...............................253
Литература к главе 5...................................262
Глава 6. Методы позиционирования объектов относительно
источников излучения..................................... 265
6.1. Пеленгационные (угломерные)
методы позиционирования ЛА.............................266
6.2. Беспеленговые методы позиционирования ЛА..........276
6.3. Комбинированные и многопозиционные методы
позиционирования ЛА....................................290
Литература к главе 6...................................298
Глава 7. Интегральные характеристики эффективности
определения кординат источников радиоизлучения............303
7.1. Характеристики радиолокационного поля, оценивающие
эффективность определения координат....................303
7.2. Статистические характеристики распределений угловых
расстояний между направлениями визирования объектов
в групповых целях на морском ТВД.......................306
7.3. Интегральные характеристики эффективности
местоопределения множества РЛС радиолокационного поля...319
5
7.4. Методика оценки вероятности накрытия движущегося
объекта зоной обнаружения автономного средства
по результатам предварительного определения координат
средством разведки................................... 327
7.5. Методы оценки интегральных характеристик
эффективности местоопределения объектов, составляющих
морские групповые цели............................... 333
Литература к главе 7...................................338
Глава 8. Методы оценки эффективности элементов
приемников РТР, определяющих успешное решение
задачи местоопределения...................................340
8.1. Методы оценки эффективности поиска и селекции
сигналов РЛС...........................................340
8.2. Варианты режимов поиска сигналов РЛС диапазонах
частот и азимутов......................................350
8.3. Методы оценки эффективности обнаружения
сигналов беспоисковыми устройствами РТР................372
8.4. Некоторые пути минимизации числа ложных приемов
и повышения разрешающей способности
приемно-пеленгаторных устройств аппаратуры
воздушной РТР..........................................385
Литература к главе 8 ..................................422
Заключение............................................... 428
Список наиболее часто употребляемых
сокращений и обозначений .................................429
6
ПРЕДИСЛОВИЕ
Настоящую монографию можно рассматривать в качестве продол-
жения книги «Воздушная радиотехническая разведка. Методы оценки
эффективности», вышедшей в издательстве «Радиотехника» в 2005 г.
Целесообразность такого продолжения была вызвана двумя обстоятель-
ствами: сравнительной сложностью решения в радиотехнической раз-
ведке задачи определения координат объектов источников радиоизлу-
чения (ИРИ), когда, как правило, исключена возможность измерения
дальности из одной точки, и наличием большого числа способов место-
определения ИРИ, не получивших к настоящему времени математиче-
ского описания в виде алгоритмов определений координат и оценки эф-
фективности этих определений.
Так же, как и в упомянутой монографии, стиль изложения в на-
стоящей книге определялся прикладной направленностью. В качестве
обязательного требования к методикам, разработанным в ходе исследо-
ваний, считалось получение количественных оценок, связывающих тех-
нические характеристики аппаратуры с точностью местоопределения.
Наряду с аналитическими методами применялись методы матема-
тического моделирования на ЭВМ, что позволило находить неточности
в каждом из них и получать более надежные оценки.
Книга содержит восемь разных по объему глав, охватывающих
различные методы местоопределения источников излучения, а также
отдельные вопросы построения станции РТР, реализующей эти методы.
Авторы приносят глубокую благодарность рецензенту, докт. техн,
наук, проф. Е.Г. Логачеву за полезные замечания и доброжелательную
критику.
Авторы искренне признательны Л. И. Мельниковой и Л. В. Бело-
зерцевой за постоянную помощь и поддержку при работе над книгой.
7
ВВЕДЕНИЕ
Применение средств радиоэлектронной разведки (РЭР) в военном
деле имеет более чем столетнюю историю [1]. По мере развития и совер-
шенствования радиосвязных, радиолокационных и других радиотехниче-
ских средств расширялись области применения РЭР. В настоящее время
она занимает равноправное место в ряду информационных систем.
Как известно, главными достоинствами средств радиотехнической
разведки (РТР) являются высокая дальность, обеспечивающая принци-
пиальную возможность превентивного обнаружения объекта, имеющего
активную радиолокационную станцию (РЛС), возможность распознава-
ния типа ИРИ, а затем и типа объекта, на котором ИРИ установлен, а
также скрытность (отсутствие активного излучения). Одновременно не-
обходимо учитывать и главные недостатки РТР, состоящие в невозмож-
ности обнаружения объекта при отсутствии на нем или вблизи него ра-
ботающего на излучение ИРИ, низкой точности измерения дальности до
ИРИ из одной точки и необходимости использования угловых измере-
ний для определения координат ИРИ.
Главными задачами любого информационного средства являются:
обнаружение объекта, распознавание типа и определение его координат.
Первые две задачи применительно к воздушной РТР достаточно под-
робно рассмотрены в [2, 3]. Третья задача - определение координат -
решается обычно с существенно меньшей точностью, чем в бортовых
РЛС, и, как правило, за достаточно большое время, которого в боевых
условиях может не быть. Дополнительно к задаче определения коорди-
нат необходимо измерение параметров движения цели (ПДЦ) - курса и
скорости, что также требует временных затрат.
Таким образом, проблемной задачей РТР, особенно при использо-
вании на морском театре военных действий, где преобладающее боль-
шинство объектов с ИРИ подвижны, является определение координат и
параметров движения целей, увеличение точности и снижение времени
этих определений. Заметим, что определению координат ИРИ в послед-
нее время уделяют большое внимание специалисты по авиационным
радиолокационным системам управления, рассматривающие местооп-
ределение источника активных помех. Проблеме определения коорди-
нат и параметров движения объектов с источниками радиоизлучения на
борту и посвящена настоящая монография.
Основные публикации по вопросам местоопределения в воздуш-
ной РТР частично содержатся в библиографиях книг [2,3,5,6], а также в
списках литературы каждой из глав настоящей работы. Вопросы место-
определения, главным образом применительно к разведке с помощью
наземных средств, рассматриваются в учебнике [4]. Представляемая
книга, как видится авторам, имеет отличия от упомянутых, состоящие
8
не только в перечне рассмотренных способов местоопределения, реали-
зуемых, в основном в воздушной РТР, но и в характере материала,
имеющего прикладную направленность.
Книга содержит семь глав, охватывающих различные методы ме-
стоопределения, и заключительную - восьмую, где рассматриваются
отдельные вопросы построения станции воздушной РТР, от решения
которых зависит эффективное определение координат источников ра-
диоизлучения.
Классификация методов местоопределения и разбивка материала
монографии на главы не является достаточно строгой по объективным
причинам, связанным, с одной стороны, с разнообразием сочетаний из-
меряемых параметров (пеленги, производные изменения пеленгов при
перемещении носителя средств РТР, уровни входных сигналов, момен-
ты времени прихода отдельных импульсов и пачек импульсов и др.) и, с
другой, - с неизбежными и разнообразными сочетаниями используемых
измерителей, «проникновением» отдельных методов друг в друга, а
также комплексным их использованием. Существо методов местоопре-
деления раскрывается в названиях глав и параграфов.
Все рассмотренные методы местоопределения доведены до конеч-
ных аналитических соотношений, проверяемых численными примера-
ми. Большинство сопровождается оценкой точности определения коор-
динат в диапазоне типовых значений измеряемых в станции РТР угло-
вых, временных и энергетических параметров. Каждый из методов гра-
фически иллюстрируется.
Материал книги базируется на частично опубликованных в перио-
дических изданиях работах авторов по рассматриваемой тематике в те-
чение более чем четырех десятков лет.
9
Литература к введению
1. Портала М.А. В начале эпохи радиоэлектронных войн, - М.: Ору-
жие и технологии, 2004.
2, Мельников Ю.П. Методы оценки эффективности воздушной ра-
диотехнической разведки. - МО, 1996.
3. Радзиевский А.Г., Сирота А.А. Информационное обеспечение ра-
диоэлектронных систем в условиях конфликта. - М.: ИПРЖР,
2001.
4. Смирнов Ю.А. Радиотехническая разведка. - М.: Воениздат, 2001.
5. Радзиевский А.Г., Сирота А.А. Теоретические основы радиоэлек-
тронной разведки. - М.: Радиотехника, 2004.
6. Мельников Ю.П. Воздушная радиотехническая разведка (методы
оценки эффективности). -М.: Радиотехника, 2005.
10
ГЛАВА 1
Определение координат объектов путем
многократной пеленгации.
Оценка погрешностей
Преобладающее большинство методов определения координат источ-
ников радиоизлучения (ИРИ) при радиотехнической разведке, в том
числе и рассмотренных в настоящей книге, использует в качестве ос-
новного измеряемого параметра направление (пеленг) на ИРИ. При
этом для определения дальности дополнительно могут измеряться вре-
менные характеристики сигнала, энергетические величины, их произ-
водные и т.д. Меньшая, но, тем не менее, основная и в значительной ме-
ре традиционная часть методов местоопределения использует для изме-
рения дальности только угловые измерения. В настоящей главе рас-
сматриваются методы двукратной и многократной пеленгации непод-
вижного объекта с движущегося носителя, методы оптимальной обра-
ботки результатов пеленгации, а также методы определения дальности с
использованием неподвижных слабонаправленных и высоконаправлен-
ных антенн, размещенных на движущемся носителе. Рассматриваются
также два вопроса, имеющих непосредственное отношение к проблеме
местоопределения ИРИ путем их пеленгации - методы измерения для
последующего «списания» систематических ошибок бортовых пеленга-
торов и методы пространственной селекции «одноцветных» пеленгов,
т.е. пеленгов, не различаемых по измеряемым техническим параметрам.
1.1. Определение координат источников радиоизлучения
при их пеленгации из двух разнесенных пунктов.
Погрешности местоопределения
В последующем изложении предполагается, что задача селекции
решена, т.е. все пеленги, подлежащие обработке, принадлежат только
рассматриваемой радиолокационной станции (РЛС). При пеленгации не-
подвижного источника излучения, расположенного в точке Л (рис. 1.1), из
двух точек В и С, отстоящих друг от друга на расстояние L, координаты
этого источника определяются путем решения треугольника А В С по
двум углам (aj и а2)и основанию L.
В соответствии с рис. 1.1,а имеем:
£ since, _ Zsina, _ L sin a, sin a-, ,,
Dc= —-----—, Db =-------!—, D =------1, (1.1)
sm(<z2 —Qj) sin(a2-a|) sin(a2~a])
где at, a2 - курсовые углы, измеренные на разведуемую РЛС в точках С
и В (пеленги); D - расстояние до РЛС по линии траверза; L - база пелен-
гации; ось ОХ совпадает с направлением полета.
11
Для симметричного относительно по линии травеза случая (рис. 1.1,6),
когда треугольник АВС - равнобедренный, справедливы выражения
Рис. 1.1. Определение координат по двум и нескольким пеленгам
Погрешность местоопределения (расстояние между истинным по-
ложением разведуемой РЛС и найденным в процессе обработки резуль-
татов измерений) находится в соответствии с [3] по формуле
а .7^1+^«2 (1 3)
sin у
где А) и R2 - расстояния между каждым пеленгационным пунктом и
РЛС; сга1 и сга2 - среднеквадратические погрешности пеленгации;
у - угол между двумя пеленгами (применительно к рис. 1.1 R\=DC;
Ri=Db, у=а2 - «О.
При выводе (1.3) предполагалось, что корреляция между погреш-
ностями измерения пеленгов отсутствует и погрешность угловых изме-
рений достаточно мала, т.е. ста1 и аа2 « 1. Обычно можно полагать,
что <та1 = <та2 = аа . Тогда
sin у
Для симметричного случая (рис. 1.1,6), когда
„ ( L А „ „ D
y = 2arctg — и Ri =R2 =———,
\2DJ cos(y/2)
12
можно записать выражение
d24i(. I? V’5 гл /хЛ 1 \
L I 4D2 а \ 4а2)
(1-5)
Рис. 1.2. Зависимость относительной
погрешности определения координат
от отношения дальности к базе
при двукратной симметричной
пеленгации: кривая 1 - сго =0,5°;
кривая 2 - а =1 °; кривая 3 - а =2°
где a=D/L.
Нормированная по отношению к дальности по линии траверза зави-
симость (1.5) приведена на рис. 1.2 в функции от D)L=a для разных по-
грешностей угловых измерений.
Как видно из рис. 1.2, зависимости имеют минимумы, положение ко-
торых определяется дифференци-
рованием (1.5) по а, в результате
чего аопт = V2/2 , что соответст-
вует /опт = 71 - 2arctg(aoirr) = 70,5°.
В области значений углов
54°</<90° погрешности опреде-
ления места не превышают ми-
нимальную более чем на 6 %.
Таким образом, при дву-
кратной пеленгации на базе, срав-
нимой с дальностью до объекта
по линии траверза, и точности
измерения пеленга порядка ^от-
носительная погрешность место-
определения составляет ~3% для
погрешности измерения угла по-
рядка 0,5°. При этом предполагается, что координаты пеленгационных
пунктов определяются с существенно более высокой точностью, нежели
координаты разведуемой РЛС (например, методами спутниковой навига-
ции [4]), и с составляющими погрешности из-за неточности знания коорди-
нат ЛА можно не считаться.
В [3] приводится зависимость погрешности местоопределения (для
двукратной пеленгации), отнесенной к величине базы L, в виде
L sin (3
R L Y 2 /?
— + — -cos В
L 4RJ
2R2 И
L2 +2 ’
(1-6)
где ft- угол между базой и линией R, соединяющей центр базы с разве-
дуемым объектом (ем. рис. 1.1,а).
Из (1.6) определяется оптимальный угол между пеленгами при по-
стоянной базе /О111~109°. Однако при воздушной РТР, как правило, важ-
на погрешность определения местоопределения, отнесенная к дальности
до объекта, так как величина базы является переменной и сама может
выбираться в зависимости от условий ведения разведки.
13
Для симметричного случая (см. рис. 1.1,6), когда /3=90°, R=D и
точности определения линий положения равны между собой, большая
полуось эллипса ошибок совпадает с биссектрисой острого угла пересе-
чения линий положения и составляющие погрешности местоопределе-
нйя по двум взаимно перпендикулярным осям ОХ и ОУ равны
. I2 о-лА/гС I2 ..
cr=crrsinr/2=— - 1+—г , <rv=crfcosr/2=——— 1+—г . (1.7)
х г 2 \ 4L/J у r ' L \ 4Cji)
При прямолинейном полете самолета-разведчика максимальное
отношение L/D определяется шириной бортового сектора разведки. Из-
за неизбежного затенения несущими поверхностями летательного аппа-
рата величина этого сектора обычно не превышает 60...70° и близка к
оптимальному значению (см. рис. 1.2). В этом случае погрешности оп-
ределения координат при симметричной двукратной пеленгации на базе
L определяются приближенными выражениями
<rx«l,06aaD, (1.8)
При этом «0IIT = V2/2 =D/L. Тогда
L
В результате относительные погрешности определения координат
источника радиоизлучения по двум взаимно перпендикулярным осям
при двукратной его пеленгации на оптимальной базе определяются со-
отношениями
fe) «1,06<тв, (^) »1,5сга, Ы «1,84^. (1.9)
\ и / опт \ U /опт \ X/ /опт
Из этих соотношений следует, что погрешность определения по-
перечной координаты (дальности) примерно на 40 % превышает по-
грешность определения продольной координаты, а радиальная погреш-
ность примерно на 70 % превышает погрешность определения продоль-
ной координаты.
1.2. Многократная пеленгация источника
радиоизлучения во время полета.
Обработка результатов измерения
по методу наименьших квадратов поправок углов
За время пролета района разведки пеленги на одну и ту же разве-
дуемую РЛС измеряются неоднократно. Ставится задача нахождения
такого алгоритма обработки полученной информации, чтобы погрешно-
сти определения координат были бы минимальны.
14
Задача обработки результатов многократной пеленгации подсказа-
на практикой астрономических и геодезических измерений. Ее решение
в классической форме приводится во многих работах, например в [5, 6]
и др. В них описывается последовательность действий по вычислению
координат, удовлетворяющих определенным поставленным условиям,
даются аналитические оценки погрешностей. Полученные в упомяну-
тых и других работах оценки не могут быть непосредственно использо-
ваны для определения эффективности местоопределения при воздуш-
ной РТР в силу различий в процессе пеленгации и ряда других особен-
ностей, однако разработанный в них подход может быть применен к
рассматриваемой прикладной задаче.
Для получения соотношений, позволяющих количественно оцени-
вать эффективность местоопределения РЛС при обработке данных воз-
душной РТР по методу наименьших квадратов поправок углов, рас-
смотрим последовательность действий в соответствии с [5].
Координаты т точек полета, в которых измеряются пеленги на
РЛС (пеленгационные пункты), предполагаются известными точно. Из
каждого пункта на РЛС измеряется пеленг величиной
Этап 1 - определение координат опорной точки х0, у0, как точки
пересечения любых двух пеленгов, угол между которыми удовлетворяет
условию 30° < /< 120°.
Этап 2 - определение неленгов на опорную точку а1о и вычисле-
ние расстояний от каждого пеленгационного пункта до опорной точки Ri0.
Этап 3 - определение коэффициентов
sin ai0 , cosajo
=-----b,=—^\ 1,=^-а1о. (1.10)
*40 *40
Этап 4 - составление сумм вида
т т т т т
Y/J,
z=l 1=1 i=l >=1 i=l
или в обозначениях Гаусса соответственно:
[аа], [*&], [п/>], И, [/>/]. (1.11)
Этап 5 - определение координат по формулам
х = х0 + Дх; у = у0 + Ьу ,
где ~ [аа][Ы]-[аЬ][аГ]
[аа] [W] - [aZ>][aZ>l ’ [аа] [W] - [aZ>][aZ>]
Погрешности местоопределения по двум взаимно перпендикуляр-
ным осям оцениваются согласно [5] величинами дисперсий ошибок:
D =----------------- £> =--------, (1.12)
х [aa][W>]-[ab][ab] у [аа][ЬЬ]-[аЬ][ай]
где оа - среднеквадратическая погрешность измерения пеленга.
15
Подстановка в последние выражения коэффициентов (1.10), вы-
численных для каждого измеренного пеленга, позволяет получить зна-
чения дисперсий погрешностей при любом расположении пеленгацион-
ных пунктов относительно разведуемого объекта. Однако выражения в
общем случае получаются громоздкими, зависящими от большого числа
параметров и поэтому ненаглядными.
В практике воздушной РТР весьма часто имеет место прямолиней-
ный полет самолета-разведчика и снятие пеленгов на РЛС через равные
промежутки времени (в такт с моментами облучения самолета главным
лучом антенны разведуемой РЛС либо в такт с изменением частоты поис-
кового приемника). Кроме того, при симметричном относительно строи-
тельной оси боковом секторе обзора бортовой станции РТР летательного
аппарата база пеленгации оказывается симметричной относительно ли-
нии траверза на разведуемую РЛС. Рассмотрение этого симметричного
случая многократной пеленгации (см. рис. 1.1,6) позволило получить про-
стые выражения для дисперсий ошибок и выявить ряд закономерностей,
свойственных различным методам обработки информации. Отметим, что
несимметричный случай приближенно может быть сведен к симметрич-
ному путем замены базы пеленгации L на эквивалентную:
£зкв « 0,5 L (sin «1 + sin ат),
где «] и ат- курсовые углы на РЛС при 1-ми т-м измерении; D - рас-
стояние от цели до центра базы (так же, как и в симметричном случае).
На рис. 1.1,6 через D обозначено расстояние до РЛС по линии травер-
за, через L - длина базы, т.е. расстояние по оси полета, на протяжении ко-
торого осуществляется пеленгация объекта. В соответствии с этим рисун-
ком координаты пеленгационных пунктов, симметричных относительно
линии траверза, совпадающей с осью ОУ, определяются как
. £(и-/ + 1)
х, = х„_,+1 = - (и - т +1) Дх =-—---,
где n=0,5w - число пар пеленгационных пунктов.
Необходимые для вычисления коэффициентов значения углов и их
функций определяются соотношениями
Г 2Dn
а, = arctg — = arctg ----------- ,
|Ди-/+1)£_
tga, 1
sin а,- = , , cos а, = . ...- .
Vl + tg2®/ >/l + tg2ar,
Координаты опорной точки предполагаются совпадающими с
истинным положением разведуемой РЛС, т.е. х0 = 0; у0 = D, поэтому
R, = D/sinai.
Раскрывая значения сумм (1.10) и подставляя их в (1.12), можно
найти выражения для дисперсий:
16
(1.13)
ЛДг) =................ , ДДу) =——---------------
32a4n4V'-x-----8 а2 и2 У1—з—1--—
£f(i2 +4а2п2)2 ^(i2 +4а2п2)2
где a=D/L - отношение расстояния до РЛС по линии траверза к базе.
Для большого числа пеленгов (п »1 и а > 1) последние выражения
упрощаются и дисперсии погрешностей местоопределения при обра-
ботке результатов пеленгации по методу наименьших квадратов выра-
жаются формулами
2~ 0,5ст2£>2
°* ~ (, 0,167 0,0125У
п 1- 1
5,9 ст2 D2 а2
(, 0,3 0,0267 Y
а2 а ) У а а 7
Еще более простые выражения имеют место при одновременном
выполнении неравенств п »1 и а > 3:
0,1 a D 2,43 <т£>2
----f—, <?у* —f—
yjn L yjn
(1.14)
(1.15)
Зависимости относительных среднеквадратических погрешностей
определения координат —и —— от числа пар пеленгов при сим-
<7e D ста D
метричной базе и от расположения объекта относительно линии полета
(a=D/L) приведены на рис. 1>.3, где сплошные линии соответствуют по-
грешностям ст,,, пунктирные - о>.
Рис. 1.3. Зависимости относительных погрешностей определения координат
неподвижного объекта при обработке по методу наименьших квадратов п пар
независимых пеленгов, измеренных на симметричной базе
17
1.3. Весовые методы обработки результатов
многократной пеленгации
Результаты многократной пеленгации, рассматриваемые как неза-
висимые измерения, могут быть обработаны методом весовых коэффи-
циентов в соответствии с формулами [5]
п п
'X/iPxi ^yiP.vi
* = —„---------, у = ^п------------------, (1.16)
/=1 /=1
где п - число независимых пар пеленгов; х, у - средневзвешенные
оценки координат объекта;х;,у,-координаты точки пересечения z-й
пары пеленгов; pxi, pvi - весовые коэффициенты z-й пары пеленгов, ко-
торые для получения минимальных погрешностей должны быть выбра-
ны обратно пропорциональными дисперсиям каждого измерения.
Определим значения дис-
персий Dx, Dv в общем случае
пеленгования двумя засечками.
На рис. 1.4 изображена схема
пеленгования из двух точек
(z,j) точки М, расположенной в
центре координат [3]. Из-за уг-
ловых погрешностей измерен-
ные линии положения отстоят
от действительных на расстоя-
ния U и V; положение пелен-
гуемой точки при этом опреде-
ляется как М. Ошибки Ах, Ду
по осям ОХ и ОУ равны отрез-
кам МС и MN соответственно.
Если предположить, что ошиб-
ки существенно меньше рас-
стояний до пеленгационных пунктов (откуда следует «почти параллель-
ность» линий положения ЕМ\ \MG и ЕМ 11MG), из рис. 1.4 получим со-
отношение
Рис. 1.4. Линии положения
при пеленгации из двух точек
Ах = DC - MD =
V cosa;
sin/
Ucos а,
+-------
siny
где у- угол между пеленгами.
18
Поскольку дисперсия определяется выражением
Dx = J |(Лг)2 w(U,V)dUdV,
где w(t/,K) =
1 \ U2 V2 \
-------ехр------z-----j- ;
2тгаиау 2<Ту J
а у = Rj<ra', сти = Rpa', Y = aj~ai-> аа~ среднеквадратическая по-
грешность пеленгации, то справедливо соотношение
а2 (я2 cos2 а, + R2 cos2 )
~ : 2/ ч
Sin («;-«;)
Рассуждая аналогичным образом, получим
ст2 (Я, sin2 а, + Я,2 sin2 а,
D = -----11
(1-17)
(1-18)
(1-19)
sin2(ay. - а,)
Из (1.17) и (1.18) следует соотношение для линейной ошибки мес-
та (1.3), широко используемое при оценке точности местоопределения
объекта по двум пеленгам [3, 5]:
Dr=a2=Dx + Dv=-^---------J
sin (а.-а,)
Для принятых выше значений весовых коэффициентов, обратно
пропорциональных дисперсиям единичных измерений, дисперсии со-
ставляющих линейных погрешностей по двум взаимно перпендикуляр-
ным осям, получаемые в результате весовой обработки по соотношени-
ям (1.16), определяются следующими формулами:
£(%)=—, ад=-Ц.
[ft] [/>,]
Найдем дисперсии в соответствии с последними выражениями при-
менительно к попарно симметричным пеленгам (см. рис. 1.1,6), измерен-
ным во время прямолинейного полета. Из (1.17), (1.18) и (1.20) имеем:
.2 „2
а
(1.20)
D =----------------------- d =------------.
х *2/ \ ’V *2/ \
sin (щ-а) sin \ai~aj)
— R2 cos2 a, + R2 cos2 a, R2 sin2 a, + R2 sin2 a•
l*J J f 1 J l*J J 11 J
Поскольку для симметричных пеленгов справедливы равенства
19
cos2»,. = cos2aj, sin2»,. = sin2 «y, sin2(»,-a7) = sin22a,., R^Rj,
из последних выражений следует:
2
Ьх=----------------, by=------
32 °" "'J (Z2+4a2H2)2 8 °2 "2§(i2+4aV)2
, (1.21)
что совпадает с (1.13).
Таким образом, потенциальные точности обработки по методу
наименьших квадратов поправок углов и весового способа обработки
попарно симметричных пеленгов одинаковы.
Потребителя развединформации, вообще говоря, не интересуют
отклонения по осям координат X и У, тем более, что ориентировка этих
осей может быть выбрана произвольно. Для него, как правило, интерес-
на абсолютная величина отклонения
г = |7(Лх)2+(Ау)2|.
В связи с этим можно предположить, что весовые коэффициенты
целесообразно принимать обратно пропорциональными дисперсиям Dr
(1.19). Однако в этом случае дисперсия суммарной погрешности равна
или превосходит дисперсию, полученную при обработке в соответствии
с (1.20), где весовые коэффициенты выбраны обратно пропорциональ-
ными дисперсиям (1.13). То есть имеет место следующее неравенство:
1 < 1 1
у—!— ’ yJ_ + yJ_
^-‘D +D D '—‘D
I j ^Xl i ^yi
Последнее неравенство доказывается приведением его левой части
к виду
у _________DxiDyi ~ DxjDyi_____
Dx,DxjDyiDyj (Dxi + DyiWxj + Dyy ) ’
Таким образом, использовать в качестве весового коэффициента
1 sin2 (а,-ау)
^~^=»2(/?2 + /?2)
имеет смысл только в случае, когда для любых i и j справедливо выра-
жение Dxij = DVij и неравенство (1.22) обращается в равенство.
Уточняющий алгоритм весовой обработки пеленгов. Пеленги на раз-
ведуемую РЛС измеряются во время полета последовательно по мере
приближения к линии траверза и дальнейшего удаления от нее. Воз-
можны ситуации, связанные с изменением маршрута или режима рабо-
ты разведуемой РЛС, когда все пеленги измерить не удается. При необ-
ходимости оперативного использования результатов разведки желате-
20
лен алгоритм обработки, дающий координаты объекта по данным заме-
ров небольшого числа пеленгов и непрерывно уточняющий эти коорди-
наты по мере поступления новых измерений. Весовой метод обработки
предоставляет такую возможность.
Действительно, в выражения для весовых коэффициентов 1/DX и
1ZDV входят только те величины, которые могут быть измерены по ре-
зультатам двукратного пеленгования. Как следует из (1.16), формула
для уточнения координат при переходе от (и-1)-й пары пеленгов к
и-й имеет вид
и-1
X„-^Pxt+XnPxn
^Pxi + Pxn
1
где хя. | и х„ - оценки координат по оси ОХ, полученные при весовой об-
работке (и-1) и п измерений соответственно; х„ - координата, полученная
при и-м измерении; pxi - весовые коэффициенты для /-й пары пеленгов.
Выше был рассмотрен порядок обработки, когда два пеленга, со-
ответствующие одному независимому измерению, выбирались симмет-
ричными относительно линии траверза. Этот порядок может быть ус-
ловно описан так: 1,2и; 2,2и-1; 3,2и-2;..., где цифры обозначают номера
пеленгов. Можно показать", что число возможных путей весовой обра-
ботки 2п пеленгов определяется выражением
Я2л=П(2/-!).
/=2
Ошибки местоопределения, получаемые при использовании раз-
ных путей обработки, существенно различны.
В качестве примера рассмотрим случай четырехкратной симмет-
ричной пеленгации (и=2, см. рис. 1.1,6). Здесь возможны следующие три
комбинации пеленгов по парам, соответствующим трем путям обработ-
ки: 1 и 2; 3 и 4 или 1 и 3; 2 и 4 или 1 и 4; 2 и 3.
Весовые коэффициенты для координаты Y в соответствии с (1.18)
и (1.20) имеют вид
sin2(a, -а)
Pvij ~ ’ 2 2 '
sinz a sin2 а,
sm а,- sin aj
Принимая во внимание очевидные соотношения между тригоно-
метрическими функциями углов аь а2, аз, а4, для первых двух путей
обработки после ряда преобразований получим:
21
2sin2(a,-a2)
A 2-34 ~ ~~~2 ^~2 ’
sin «2 sin a,
~ - - -
sin at sin a2
Аз-24 _
2 sin2 (a । + a2)
sin2a2 , sin2 a,
. 2
sin a{ sm a2
В связи с тем, что at < л/2 и а2 < л/2, имеем
sin2(ai + а2) > sin2 (а2 - а^р^м <Р1з-з4-
Аналогично можно показать, что />14-23 />13-24-
Проведя подобные рассуждения для весовых коэффициентов ко-
ординаты Л, получим два неравенства для ошибок местопределения:
Or 14-23 - Or 13-24 - Or 12-34-
Например, для = 30° и а2=45° ошибки местоопределения при
разных путях обработки равны:
Оу 14-23 =1>2 Ro’o, О> 1з_24 =1,36 RcTa, «Т,-12-34 =5,lR<Ta.
Численный расчет ошибок, получаемых при различных путях обра-
ботки для больших значений п, подтвердил неравенство (1.22). Он показал,
что наилучшая точность имеет место при комплектовании пар из симмет-
ричных пеленгов, когда ошибки определяются соотношением (1.21).
1.4. Влияние ширины зоны обзора
на точность местоопределения.
Результаты моделирования
Если зона обзора аппаратуры РТР имеет вид сектора с осью, пер-
пендикулярной строительной оси самолета-разведчика, то ширина сек-
тора /связана с параметром a=D/L соотношением
Рис 1.5. Зависимость оптимального значения
отношения дальности к базе пеленгации от
числа независимых пар пеленгов
у - 2arctg — .
<2a )
При заданном числе пар
пеленгов (п) на объект, изме-
ренных в прямолинейном
полете, существует опти-
мальное значение а, дающее
минимум дисперсии о>2. Это
значение находится диффе-
ренцированием выражения
для о>2, определяемого из
(1.19). Так, выше было пока-
зано, что для п=\ справедли-
вы выражения
°опт=^’ z»nr(" = 1)«70,5°.
22
Результаты решения уравнения dD,Jda=Q для любого п приводятся
на рис. 1.5.
Интересно отсутствие зависимости оптимального угла между
крайними пеленгами /Опт от числа пар пеленгов при большом и, т.е. при
п > 10 величина /ОПТ®102°40' = const. Этот факт объясняется малым ве-
сом результатов пеленгации с больших расстояний.
Однако на практике может быть такой случай, когда увеличение
числа пеленгов может быть достигнуто только ценой удлинения базы L.
Действительно, линейный интервал между соседними пеленгами, про-
порциональный скорости полета и длительности интервала Т между
моментами измерения этих пеленгов (например, период вращения ан-
тенны РЛС или период поиска по частоте и др.) AL-УТ обычно является
постоянной величиной для данной совокупности пеленгов. Зафиксиру-
ем значение дальности до объекта по линии траверза D, тогда число пар
пеленгов определится как п=к/2а, где k=DizV.=Const. При использовании
введенных обозначений выражение для дисперсии Dr в соответствии с
(1.13) и (1.19) приобретает вид
(1-24)
Эта зависимость изображена на рис. Г.6. Из ее рассмотрения сле-
дует, что при заданных D и AL
достигается тем большая точ-
ность местоопределения, чем
большая база пролета обеспе-
чивается выбранным сектором
обзора.
Полученные выше выра-
жения для дисперсий характе-
ризуют потенциальную точ-
ность местоопределения при
обработке по методу наимень-
ших квадратов поправок углов
и по методу весовых коэффи-
циентов. Эти выражения отра-
жают влияние ширины зоны
обзора на точность местоопре-
деления при многократной пеленгации неподвижных объектов. Точность
названа потенциальной по той причине, что в методе наименьших квад-
ратов положение опорной точки полагалось совпадающим с положением
Рис. 1.6. Зависимость относительной
дисперсии погрешности места
от отношения дальности
к базе пеленгации
23
пеленгуемого объекта, а в весовом методе весовые коэффициенты пред-
полагались известными (определялись по взаимному положению пелен-
гуемого объекта и пеленгационных пунктов). Кроме того, как было отме-
чен выше, при выводе формул для весовых коэффициентов было сделано
допущение о параллельности линий положения (см. рис. 1.4).
Для оценки пределов изменения параметров, где сделанные допу-
щения справедливы, был поставлен статистический эксперимент на
ЭВМ, в ходе которого задавались координаты пеленгационных пунктов
и пеленгуемого объекта, вычислялись пеленги на объект и накладыва-
лись ошибки на эти пеленги. Обработка результатов таких «измерений»
проводилась по одному из рас-
смотренных выше методов.
Совокупность пеленгов, из-
меренных за один «пролет», счи-
талась одной из к реализаций. Чис-
ло к варьировалось от 100 до 1000.
Обработка результатов мо-
делирования показала, что оба
метода примерно равноценны.
Ниже приведены значения нор-
мированных среднеквадратиче-
Рис. 1.7. Результаты статистического
эксперимента на ЭВМ при а=0,5:
1 - <та = 0,1; 2 - <та = 0,05;
3 - <уа = 0,025
Рис. 1.8. Результаты статистического
эксперимента на ЭВМ при а = 2:
1 - сга= 0,1; 2 - <та = 0,05
ских ошибок места (tT'JDcia), ус-
редненные по этим двум мето-
дам. В частности, на рис. 1.7, 1.8
приведены результаты статисти-
ческого эксперимента для разных
отношений дальности по линии
траверза к базе (а=0,5 и а=2) и
разных угловых ошибках. Число
реализаций для каждой точки
Л=1000. Сплошными линиями
нанесены зависимости потенци-
альной точности, вычисленные
по формулам (1.13). На основе
анализа результатов эксперимен-
та и зависимостей, представлен-
ных на рис. 1.7 и 1.8, можно сде-
лать два вывода: во-первых, сте-
пень совпадения расчетных зави-
симостей с экспериментальными результатами тем выше, чем меньше
значение a=D/L и чем меньше погрешность пеленгации <то; во-вторых,
при возрастании числа обрабатываемых пеленгов не наблюдается асим-
птотического приближения к расчетным зависимостям. Причиной от-
клонений являются пеленги, пересекающиеся под малыми углами.
24
У
Рис. 1.9. Пеленгация при малых углах
между пеленгами
Для получения количественных соотношений между параметрами а
и <та, при которых справедливы расчетные зависимости, рассмотрим схе-
му пеленгации при малых углах между пеленгами (рис. 1.9).
В качестве критерия спра-
ведливости допущения о парал-
лельности линий положения
примем отношение длин отрез-
ков AF / AD, равное
AF _ sin(0,5y + егя)
AD sin(0,5/-cra)
Считая, что условие па-
раллельности удовлетворяет-
ся, если эти отрезки отличают-
ся не более чем на 10%, можно
записать
аа„< 0,025. (1.25)
Из приведенных на
рис. 1.7 и 1.8 результатов экс-
периментов видно, что если последнее условие выполнено, то расхож-
дение экспериментальных данных с расчетными не превышает единиц
процентов.
1.5. Методы оценки погрешностей определения
дальности до неподвижного ИРИ
с помощью станции РТР с неподвижной
бортовой антенной, установленной
на перемещающемся носителе
В широко распространенных станциях воздушной РТР, предназначен-
ных для обнаружения РЛС в широком диапазоне волн [7, 8 и др.], как
правило, отказываются от специальных пеленгаторов, неподвижные
бортовые антенны таких станций имеют широкие диаграммы направ-
ленности. Поэтому с этих станций вынужденно снимается требование
местоопределения. Однако обработка результатов амплитудных изме-
рений сигналов позволяет получить от в таких станций не только сторо-
ну расположения объекта относительно линии полета (справа, слева), но
приближенно и дальность до него.
Другим случаем применения неподвижной антенны, установлен-
ной на ЛА, является пеленгация объекта с помощью бортовой аппарату-
ры, имеющей высоконаправленные антенны, например, в интересах мо-
ниторинга и в дальнейшем защиты систем спутниковой навигации от
25
непреднамеренных помех [28-30]. Ниже рассматриваются два случая,
соответствующие разным величинам направленности бортовых антенн.
Слабонаправленная неподвижная бортовая антенна. Оценим по-
грешности определения координат разведуемой РЛС при измерении в
станции разведки обстановки времени облучения, т.е. времени сущест-
вования сигнала на входе приемника. В основе метода лежит возмож-
ность приема станцией воздушной РТР излучения РЛС по боковым ле-
песткам. При этом чем ближе находится источник излучения, тем более
дальние боковые лепестки могут быть приняты. Если разведуемая РЛС
работает в режиме кругового обзора, то расстояние от РЛС до самолета-
разведчика оказывается связанным с временем облучения.
В [9-11] и др. приводятся экспериментально измеренные диаграммы
направленности РЛС в области главного, бокового и заднего излучений.
Используя данные подобных измерений, можно построить зависимость
времени (или угла) облучения от дальности до РЛС. Процедура построе-
ния состоит в перемещении на этой зависимости относительного коэф-
фициента усиления антенны от угла G(6I)/GO прямой, параллельной оси
абсцисс, обозначающей пороговый уровень приемника РТР, по вертикали
и в пересчете суммарного за период вращения антенны угла превышений
этого порогового уровня для каждого из положений. В связи с тем, что в
формировании суммарного угла облучения участвует большое количест-
во случайных выбросов диаграммы направленности, флюктуации сгла-
живаются и зависимость суммарного угла облучения от порогового уров-
ня, однозначно связанная с отношением дальности D до РЛС к макси-
мальной дальности D№, становится достаточно плавной.
На рис. 1.10 дается пример такого построения, из которого следу-
ет, что даже для достаточно изрезанных диаграмм (см. [10, рис. 2.2]) за-
висимость имеет монотонный характер. На рис. 1.10 DM обозначает мак-
симальную дальность обнаружения по главному лучу диаграммы на-
правленности, а #обл - суммарный угол за время одного оборота антен-
ны, при повороте на который входной сигнал превышает пороговый.
Достаточно представительный экспериментальный материал, относя-
щийся к диаграммам направленности антенн РЛС, приводится также в
[П, 12] и др.
На рис. 1.11 изображена схема перемещения самолета-разведчика
относительно разведуемой РЛС, расположенной в точке А. Предполага-
ется, что антенны станции РТР расположены вдоль бортов ЛА. С
уменьшением по абсолютной величине координаты X сигнал возрастает
из-за уменьшения дальности и угла между направлением главной оси
бортовой антенны РТР и направлением на РЛС (т. е. увеличения коэф-
фициента усиления бортовой антенны).
26
®обл* град
Рис. 1.10. Зависимость суммарного угла облучения
от дальности до РЛС
Рис. 1.11. Перемещение самолета-разведчика
относительно РЛС
В [10] используется аппроксимация диаграммы направленности
бортовой неподвижной антенны станции РТР в виде
0 при 1</,
^обл __ . 1,77- In Г при 0,22 <Z<1, (1.26)
*0 0,46/у при 0,073 < у <0,22,
2л при /<0,073.
Здесь - ширина диаграммы направленности антенны разведуемой
РЛС в горизонтальной плоскости на уровне половинной мощности;
27
п А 77m2 l,38arctg2(a//7)
P^\+(aip)2 exp --------°
L
при
^20
при 1,04^
где дю ~ ширина диаграммы направленности антенны бортовой станции
РТР в горизонтальной плоскости на уровне половинной мощности;
a = x/D^ P = y/DK0-, y = DlD„o-, D = yjx2+y2, DM0 - даль-
ность обнаружения РЛС при совпадении главных лучей антенн станции
РТР и разведуемой РЛС без учета ослабления при распространении
радиоволн.
Результаты расчета по последним формулам для 02о =1 (57,3°) при-
ведены на рис. 1.12. Из этих зависимостей следует, что при отсутствии
ошибок измерений времени облучения, а также флюктуаций измеряемой
величины координаты РЛС могут быть определены по результатам не-
скольких замеров.
Рис. 1.12. Зависимость нормированного времени облучения
от координат разведуемой РЛС при прямолинейном полете
самолета-разведчика
Основными причинами ошибок измерений являются:
флюктуации диаграммы направленности антенны бортовой стан-
ции РТР, ее несимметричность и изрезанность;
флюктуации диаграммы направленности разведуемой РЛС из-за
отражений от подстилающей поверхности и местных предметов, эти от-
ражения изменяются при изменении направления на РЛС;
флюктуации мощности РЛС и чувствительности приемника аппа-
ратуры РТР за время разведки;
ошибки измерителя времени облучения.
28
Полагая, что все эти при-
чины проявляются в виде
флюктуаций времени облуче-
ния, распределенных по нор-
мальному закону с дисперси-
ей о;2, найдем зависимость
ошибки измерения координат
сгх и <Ту от числа облучений.
Для этой цели аппроксимиру-
ем одну из зависимостей,
изображенных на рис. 1.12,
треугольником (рис. 1.13).
Измерения времени облуче-
ния осуществляются в точках
с координатами х,-. При этом
2хтах - база пролета, на про-
тяжении которой может быть
Рис. 1.13. Аппроксимация изменений
времени облучения при прямолинейном
полете самолета-разведчика
обнаружено применение РЛС. Результаты отдельных замеров показаны в
виде отрезков прямых, длина которых флюктуирует относительно своих
средних значений, определяемых сторонами треугольника:
^трО-Ь-Хтр|)
•^тах
^обл 0
0
при Хтр - Хтах < X,. < Хтр + хтах,
при Х,.>Хтр+Хтах, (L27)
при х^х^-х^.
Для оценки потенциально достижимой точности измерения поло-
жения траверза (координаты х,?) воспользуемся методикой, изложенной,
например в [5, 13, 14] и др.
В соответствии с неравенством Рао-Крамера [5, 6] можно записать
.2 >
хтр -
Е-
J______
<72 InZ.
(1.28)
где L - функция правдоподобия выборки; Е - оператор получения мате-
матического ожидания.
Плотность вероятности единичного измерения времени облучения
в точке х, определим формулой
ж)=—4=ехр
<7/>/2я’
((-О2
. 2ст2 .
29
где ст, - среднеквадратическая погрешность измерения времени облуче-
ния, принятая не зависящей от координаты х,; - среднее значение вре-
мени облучения в точке /.
Учитывая аппроксимацию для /обл, в виде (1.27), а также принимая
не зависимыми ошибки в отдельные моменты наблюдения, получим
функцию правдоподобия выборки из п измерений в виде
или после логарифмирования
Обозначая 1-
= /(х,;хтр), получим
'max
dxm
1
X
max
______1_
. ^max
при
при
Учитывая далее выражение для логарифма функции правдоподо-
бия, запишем уравнение
J2lnZ,
cr^max ’
откуда
_ _ ^/^max
°vmin ~ , / >
trp'Jm
где ст, - ошибка измерения времени облучения; х max - половина зоны
видимости РЛС (см. рис. 1.13), - время облучения на линии траверза;
т - число облучений.
По аналогичной методике может быть найдена минимальная
ошибка измерения координаты у (при условии известности Хтр). В част-
ности, для у > 0,25 £>тах можно записать выражение
а . х *уг°'
(1.30)
30
где to - время облучения главным лучом антенны разведуемой РЛС;
Z>max ~ максимальная дальность обнаружения РЛС станцией РТР при
совпадении главных лучей их антенн без учета потерь при распростра-
нении радиоволн.
Анализ имеющихся материалов по структуре диаграмм направ-
ленности разведуемых РЛС в сочетании с моделью функционирования
аппаратуры РТР показал, что в соответствии с (1.29) и (1.30) относи-
тельные ошибки в определении координат оцениваются следующими
величинами:
-3—® 0,05...0,1, — »0,2....0,3 •
*тах У
Таким образом, измерение времени облучения в станциях разведки
радиотехнической обстановки и последующая статистическая обработка
результатов измерений позволяют получать от этих простых станций
информацию о районе расположения РЛС.
Высоконаправленная неподвижная бортовая антенна. Рассмотренный
выше метод определения координат источника радиоизлучения путем об-
работки сигналов, поступающих от неподвижной приемной бортовой ан-
тенны, может быть распространен на случай использования бортовой
РЛС, работающей в пассивном режиме пеленгации. По сравнению с рас-
смотренным выше случаем слабонаправленной неподвижной бортовой
антенны, характерной для авиационных станций РТР, использование вы-
соконаправленной антенны бортовой РЛС имеет свои особенности.
В качестве первой из этих особенностей назовем кратковремен-
ность прохождения зоны видимости источника радиоизлучения и выте-
кающие из этого сложности использования данного метода определения
дальности до сканирующих РЛС. Действительно, период сканирования
антенны разведуемой РЛС и даже период между импульсами зондиро-
вания оказывается сравнимым с временем прохождения зоны видимо-
сти, поэтому изменение уровня сигнала, вызванное перемещением но-
сителя, складывается с изменением уровня излучаемого сигнала. В свя-
зи со сказанным наиболее предпочтительным является использование
описываемого метода местоопределения применительно к ПРИ, не из-
меняющим уровня излучения за время прохождения зоны видимости.
Таким источником может быть, например, станция активных помех, оп-
ределение дальности до которой является одной из актуальных задач
бортовой РЛС, работающей в условиях радиоэлектронной борьбы.
В качестве второй особенности назовем необходимость точного
измерения уровня входного сигнала с одной стороны и его зависимость
от угла отклонения направления на ПРИ от главного направления диа-
граммы направленности антенны бортовой РЛС.
31
Рис. 1.14. Определение
дальности до источника
радиоизлучения
с помощью
высоконаправленной
неподвижной бортовой
антенны
На рис. 1.14 показана схема измерения
дальности до ИРИ, расположенного в точке И,
удаленной от линии полета по направлению
траверса на расстояние D.
Если главный луч антенны шириной в,
измеренной на определенном уровне G(0/2)
по отношению к усилению в главном направ-
лении (60), направлен перпендикулярно оси
симметрии ЛА, движущемуся со скоростью V,
то измеряя интервал времени А/ между по-
следовательными прохождениями сигналом
уровней G(0/2), можно определить даль-
ность до ИРИ на линии траверса по формуле
D~-- а-31)
Относительная среднеквадратичная по-
грешность определения дальности находится
по соотношению
где
(1-32)
- относительные среднеквадратичные
(1.33)
погрешности измерений скорости (Г), интервала времени А/ и угла в.
В последующих материалах монографии описанный метод опре-
деления дальности рассмотрен в более общем виде: для разных углов
между направлением движения ЛА и осью неподвижной антенны, для
разных аппроксимаций диаграммы направленности антенны и др. Здесь
будут оценены только временные затраты на определение дальности.
Так, из (1.31) следует, что минимальный интервал времени, необ-
ходимый для измерения дальности, определяется как
Д/=^
V
Тогда при скорости 100 м/с (вертолет) и ширине диаграммы на-
правленности (0) бортовой антенны, в пределах которой производятся
измерения уровней сигнала, порядка ~3°, величина Дг для дальностей
D, равных 50, 100 и 200 км, равна соответственно 26, 53 и 105 с. При
скорости 300 м/с (самолет) и ширине диаграммы направленности 2°, для
тех же дальностей величина А/ составляет 9, 18 и 36 с. Сравнение с
временными затратами при многократной пеленгации свидетельствует о
преимуществах во времени более чем на порядок.
32
1.6. Методы определения
систематических ошибок пеленгатора,
установленного на движущемся носителе
Систематические ошибки пеленгаторных устройств, обусловленные
влиянием элементов конструкции носителя, а также производственны-
ми и установочными допусками, в ряде случаев не могут быть опреде-
лены и исключены при отладке пеленгатора на носителе перед эксплуа-
тацией ввиду невозможности проведения контрольных измерений во
всем реальном диапазоне условий работы пеленгатора (диапазона пе-
ленгов, углов места, частот и пр.). Особенно это относится к самолет-
ным пеленгаторным устройствам. Другой причиной систематической
ошибки при пеленговании являются погрешности курсовых систем но-
сителя (инерционная и скоростная погрешности гирокомпаса, остаточ-
ная девиация и др.). Наличие систематических ошибок приводит к по-
грешностям при решении навигационной задачи определения собствен-
ного положения движущегося носителя по пеленгам известным образом
расположенных ориентиров или при определении координат разведуе-
мых объектов методами активной или пассивной локации.
Варианты графического исключения систематической ошибки при
местоопределении судна по пеленгам двух или трех ориентиров, приве-
денные в [15], могут быть реализованы лишь при условии наличия в зо-
не действия пеленгатора нескольких ориентиров с известными коорди-
натами, совместно наблюдаемых и неоднократно пеленгуемых в про-
цессе перемещения судна, с последующим выполнением достаточно
точного графического построения пути судна, точек пеленгования, ли-
ний пеленгов и сопоставления результатов построения с истинным рас-
положением ориентиров. Указанные условия и графические построения
не всегда выполнимы в различных реальных ситуациях, что ограничи-
вает возможность использования данного метода.
Для определения и компенсации систематических ошибок пеленга-
ционных измерений в системе «Неподвижный пеленгатор - движущаяся
цель» существует расчетный метод [16, 17], позволяющий решать задачу
компенсации угломестной систематической ошибки и переменной со-
ставляющей ошибки по азимуту; постоянная составляющая систематиче-
ской ошибки измерения азимута в этой ситуации не определяется, о чем
упомянуто в [16]. Данный метод основан на использовании инвариантов
принятой кинематической модели движения цели, имеющих место в си-
туации с неподвижным пеленгатором, но не распространяющихся непо-
средственно на рассматриваемый в настоящем материале случай пеленго-
вания объектов с движущегося носителя, в связи с чем приведенные в
[16,17] расчетные алгоритмы не могут быть применены.
33
Таким образом, целью настоящего материала является получение
соотношений для определения систематических ошибок движущегося
пеленгатора по данным пеленгования неподвижных объектов с априор-
но неизвестными координатами и выражений для оценки погрешностей
этого определения.
Определение и исключение систематических ошибок пеленгатор-
ных устройств, функционирующих на движущихся носителях (в част-
ности, на ЛА), можно произвести путем обработки результатов много-
кратного пеленгования неподвижного объекта при контрольных полетах
или непосредственно в процессе эксплуатации, используя то обстоя-
тельство, что определенные при движении носителя последовательные
значения пеленгов или координат объекта образуют совокупность вели-
чин, однозначно (при достаточном количестве измерений) определяе-
мую значениями систематической ошибки и текущих координат носи-
теля в момент отсчета пеленгов. Условием достаточности в общем слу-
чае является возможность представления последовательности значений
систематической ошибки в моменты отсчетов разложением в ряд, число
членов которого меньше числа произведенных последовательных изме-
рений. Еще раз подчеркнем, что знание истинных координат объекта
обязательным не является.
Будем различать локационный и пеленгационный методы местоо-
определения.
Локационный метод местоопределения. В этом методе одновременно
определяются пеленг и дальность, а при наличии систематических оши-
бок последовательно определяемые во время движения носителя значе-
ния координат объекта Х-,У- будут смещены относительно истинных
координат X0,Y0, причем величина смещения будет различна для изме-
рений, произведенных в разных точках траектории xi,y;.
В простейшем случае наличия только постоянной составляющей
систематической ошибки измеряемые координаты определяются через
истинные как
X', = Хо cosA0-Уо sin До +x,(l-cosA0),
У!- Yo cos До - Хо sin До + х, sin До.
Здесь До - постоянная систематическая ошибка; носитель движется пря-
молинейно вдоль оси OX (yi = 0).
При этом ошибка пеленгования и истинные координаты объекта
могут быть определены по двум последовательным измерениям, напри-
мер, по формулам
* • Yi~Y2 С
До = arc s in —-- = arc cos 1-----L
Х2 — X] Х2- X]
(1.36)
34
_ х\ (х2-xt)+(X]-x'^x'2-x'})+y;(y;-y2) ,,
л0 — , vi.j I)
х2-Х1
Уо = Y^-X^-Y^-X^ (1 38)
x2 -*|
Если величина систематической ошибки зависит от текущего зна-
чения пеленга (или, при прямолинейной траектории, от координат носи-
теля), то эта зависимость может быть представлена степенным или три-
гонометрическим рядом, в котором для определения коэффициентов
членов достаточно произвести +1 последовательное измерение коорди-
нат в процессе движения носителя. Однако, учитывая, что радиальная
скорость и разрешающая способность при локационном местоопределе-
нии обычно выше тангенциальной, особенно при локации на больших
дальностях, более простым и точным путем представляется определение
истинных координат и ошибок пеленгования по данным только линей-
ных измерений - дальностей до объекта и отрезков траектории носите-
ля. При этом задача сводится к нахождению угловых и линейных пара-
метров треугольников по измеренным трем сторонам (отрезкам пути
(x,+i - х,) и соответствующим дальностям и А,).
Пеленгационный метод местоопределения. Он применяется, напри-
мер, в РТР. Для выявления наличия и определения значений системати-
ческих ошибок пеленгования можно использовать то обстоятельство,
что наличие систематический ошибок приводит, в общем случае, к не-
совместимости уравнений пеленгов при числе их больше двух, так как
линии пеленгов не проходят через общую точку - «рассыпаются». На-
пример, для трех пеленгов, измеренных с постоянной ошибкой, опреде-
литель
tgaj-l
tgaj-l
tgaj-i
~Х, tgC^'
-x2 tga2
-x3 tgaj
(139)
не равняется нулю. В этом случае задачей обработки результатов много-
кратного пеленгования будет нахождение поправок к пеленгам, исклю-
чающих (или, при наличии соизмеримых случайных ошибок, минимизи-
рующих) уклонения измеренных пеленгов (или вычисленных координат)
относительно истинных; здесь а] - измеренный в точке Xj пеленг объекта).
Представим зависимость ошибки от текущего положения носителя
в процессе пеленгования (при прямолинейной траектории) степенным
рядом вида
л * Xi~X\
а, = а; + До + Д] —---L +...,
Х2 — X]
(1-40)
35
где а, = arc tg
Л"о xi
- истинный пеленг в точке х,-; Xo,Yo - координаты
объекта; До, Дц Дг, - величины, характеризующие постоянную, ли-
нейную и т.д. составляющие систематической ошибки соответственно.
Решая систему этих уравнений, записанных для п последователь-
ных пеленгов, принципиально возможно определить истинные коорди-
наты и составляющие разложения систематической ошибки до (п-2)-го
порядка. Эти величины могут быть выражены как через координаты то-
чек пересечения различных пар пеленгов Ху; Yy (ij - индексы пеленгов,
измеренных в точках траектории носителя с координатами хь х7), так и
непосредственно через значения пеленгов. Например, в случае наличия
только постоянной составляющей ошибки, когда для определения ее
достаточно трех пеленгов, величина ошибки выражается через коорди-
наты точки пересечения пар пеленгов и соответствующие координаты
носителя следующим образом:
Д = arctg ^.2) + x2ff.2 ^2,з) + х2(^2,3
° g Xi(Xu -Xli2) + x2(Zli2 -X2>3) + x3(X, 3 - JTI>3)
(1-41)
Выражения для определения систематических ошибок, представ-
ляемых двумя членами разложения (1.40), включают в себя данные че-
тырехкратного пеленгования и получаются несколько более громоздки-
ми. Приближенные формулы для вычисления постоянной и линейной
составляющих ошибок по данным угловых измерений для случая, когда
ошибки не превышают единиц градусов (tgA = Д и членами порядка Д2
можно пренебречь), представляют собой соотношения вида
АС-РЕ
BC-EF’
AF-BD
BC-EF'
Х2 ~ X] о с . D Х2 " X]
где А = —-'-83ltga2-B2]tga3; В = -±-L^3i ~^20
X3-Xj х3-х,
c = x4ZA(52i_^2Zij4i+^42; D = tga2-j21tga4;
х2 ~Xt х4 - Xj х4 - xl
£ = ^2i_V^i + ^.
x2 - Xj x3 - Xj x4 - X|
^. = tga,-tgay.
В случае, если имеется только постоянная составляющая ошибки,
выражение для ее определения по данным трехкратного пеленгования
имеет в принятых обозначениях простейший вид
36
tgAo=A/B.
(1-43)
В случае наличия систематической ошибки, постоянной в преде-
лах всего сектора пеленгования и не изменяющейся во времени в про-
цессе движения носителя, величина ее определяется по (1.41). При этом
величины Х/. Уу в (1.41) определяются как
Х,.;=х,. + (ху-х,.)
sin cos а.
sin(ay- -а,)
у;,7 = (ху-х,.)
sin a; sin «у
sin(ay - «у)
(1.44)
а формула (1.41) может быть представлена в более удобном для вычис-
лений виде:
tgA а- = ~xi)sin(“з~)sin~(*з~*i)sin(«2 ~«1)sin«з
0 В (x2-x,)sin(a3-a,)cosa2-(x3-x,)sin(a2-«|)cosa3
При выполнении измерений через одинаковые расстояния, прохо-
димые носителем, когда Л) -Xi = Xi-Х\ (или через одинаковые времен-
ные интервалы при постоянной скорости), последняя формула несколь-
ко упрощается:
. A sin(«,-a.) sin а,-2 sin (a,-a,) sin а, ,,
tg До ® i------^-2---Ь!---з. . (1.46)
В sin (а3 - а,) cos а2 - 2 sin (а2 - «,) cos а3
Принципиально возможно определение и исключение составляю-
щих и более высоких порядков, однако при этом усложняются выраже-
ния и повышаются требования к точности отсчета пеленгов и определе-
ния координат носителя.
Для вычисления ошибок по формулам (1.41)-(1.46), оперирующим
отношениями разностей близких величин, входящие в них величины
должны определяться с достаточно высокой точностью: так, точность
отсчета пеленгов должна быть, по предварительной оценке, не менее
чем на 1-1,5 порядка выше по сравнению с определяемыми величинами
ошибок. Это обстоятельство ограничивает возможную точность опреде-
ления систематических ошибок данным способом, однако использова-
ние данных многократного пеленгования с последующей статистиче-
ской обработкой результатов измерений и вычислений позволит решить
данную задачу и при не столь высоких требованиях к точности измере-
ния пеленгов.
Приведем численные примеры, позволяющие оценить порядок ве-
личин и убедиться в справедливости полученных соотношений.
Как уже было отмечено, в случае наличия систематической ошиб-
ки, постоянной в пределах всего сектора пеленгования и не изменяю-
щейся во времени в процессе движения носителя, величина ее опреде-
ляется по (1.41). При этом величины Х^, Уу определяются по соотноше-
ниям (1.44), а формула (1.41) может быть представлена в более удобном
для вычислений виде (1.46).
37
Пример. При прямолинейном перемещении носителя вдоль оси
ОХ, условных значениях координат х, =90, х2 =130, х3 = 160 и измерен-
ных с постоянной (систематической) ошибкой До = 1,5° пеленгах (отно-
сительно оси ОХ} а\= 38,3699°, «2 =46,5°, «3 =54,6301° результаты вы-
числений по формулам (1.41), (1.45) и (1.46) практически совпадают:
по (1.41) - До = arctg 0,0-4790 = 1,4997778°;
0 6 0,183179
0 0023701
по (1.45) - До = arctg —--= 1,50000334°;
0 6 0,09050845
по (1.46)- До = arctg °’ °-°518278 = 1,49998°.
0,19792196
Частные значения координат Ху ,Yyсоставляют:
Ху2 =250,85491, Х2,3 =249,07111, Хз =249,82874,
У1.2=127,3545, У2,3 =125,47477, Yy3 = 126,54206.
При наличии систематической ошибки, линейно изменяющейся
при перемещении носителя вдоль оси ОХ (или во времени - в случае
равномерного движения носителя), постоянная и линейная составляю-
щие ошибки До и Д] определяются по формуле (1.42). При исходных
данных измерений Xi=90, х2=130, х3=160, х4=200, «1=35,6199°, «2=44,75°,
«3=53,6301°. «4=68,880135° вычисления по указанным формулам дают
следующие результаты:
А 0,001076446 , л^по , А
Дп »------------«-1,4679 (истинное значение Дп =-1,25 ),
° -0,0420045 °
А -0,0006579295 n ОП„АО , А ,ОА
Д ®® 0,8974 (истинное значение Д, = 1 ).
-0,0420045 1
Вычисленные значения величин A,B,C,D,E,F в формуле (1.42) со-
ставляют:
Л= - 0,00988351, В= 0,09166107, С=1,6725461,
D=- 0,003660287, £=0,48102983, £=0,4060286.
Как видно из приведенного численного примера, относительная
ошибка определения До составляет приблизительно 17%, а Д, - прибли-
зительно 10%.
Результаты статистического эксперимента. Представляет интерес
оценить значения погрешностей в определении систематических оши-
бок для различных соотношений между случайной (о) и систематиче-
ской (Д) погрешностями пеленгации, различных «геометриях», а также
для различного числа измерений (и). Оценка влияния упомянутых вели-
чин на относительную погрешность определения постоянной состав-
ляющей систематической погрешности (стд/Д) была проведена методом
статистического эксперимента на ЭВМ. Результаты даются в виде гра-
38
фиков, а также в виде аналитических соотношений, аппроксимирующих
экспериментальные зависимости.
Для учета влияния случайных погрешностей измерений угловых и
линейных величин координаты объекта, определенные из двух пеленга-
ционных пунктов путем измерения дальностей и азимутов, вычислялись
по соотношениям
%, = 7?1cos(a1 + Д0) + х1, Kj =7?| sin (at +Д0),
X'z = T?2cos (a2 + Д0) + х2, У2 = T?2sin (а2+Д0).
Моделировалось прямолинейное движение носителя пеленгацион-
ной аппаратуры относительно неподвижного излучающего объекта,
расположенного на рас-
стоянии Уо несимметрично
относительно линии тра-
верса (рис. 1.15), а также
симметрично относительно
траверса (рис. 1.16).
Было исследовано
большое количество разно-
образных вариантов взаим-
ных расположений пеленга-
ционных пунктов и непод-
вижного объекта, а также
различные соотношения ме-
жду систематической и слу-
чайной погрешностями. Ни-
же приводится только не-
сколько из них, охватываю-
щих достаточно широкий
диапазон исходных данных,
как при несимметричном, так
и при симметричном распо-
ложении базы пеленгации
относительно объекта. Ре-
зультаты даются в виде гра-
фиков (рис. 1.17-1.21), а ис-
ходные данные для каждого
из рисунков - в табл. 1.1.
На всех рисунках постоянная составляющая систематических по-
грешностей: для кривых 1- До=1°; для кривых 2 - До=1,5°; для
Рис. 1.15. Местоопределение объекта,
расположенного в точке О при
несимметричной базе пеленгации
Рис. 1.16. Местоопределение объекта,
расположенного в точке О при симметричной
базе пеленгации
кривых 3 - До =2°.
39
Таблица 1.1. Исходные данные для оценок погрешностей
определения систематических ошибок пеленгации методом
статистических испытаний
Номер рисунка /° к Координаты X пеленгационных пунктов (У/=0) Координаты объекта
xt х2 Хз Хо Го
1,17а 16,7 90 130 160
1,186 53,13 0,001 90 170 250
1,19в 67,3 170 250 330 250 120
1,20г 128,7 0 250 500
1,21 128,7 0,01 0 250 500
/Д, %
<4 /Д, %
Рис. 1.17. Относительные погрешности
определения систематической ошибки
при несимметричной базе пеленгации
и угле между крайними пеленгами
у= 16,80° (я); относительные погрешно-
сти при у=53,13о (б); относительные по-
грешности при у=67,3° (в); относитель-
ные погрешности при у=128,7° , i=0,001
(г); погрешности определения система-
тических ошибок пеленгации методом
статистических испытаний (б)
40
На рис. 1.17,6 приводятся результаты математического моделиро-
вания, в ходе которого находятся погрешности определения систе-
матической ошибки пеленгации для случая взаимного расположения
объекта и пеленгационных пунктов: 2fo=25O; Уо=120; 2^=90; 2^=170;
Лз=250: угол между крайними пеленгами у =53,13°. Систематическая
ошибка пеленгации за время измерений постоянна и равна соответст-
венно 1; 1,5 и 2° для кривых с номерами 1,2, и 3. Среднеквадратическая
случайная ошибка (на рисунках обозначена как <та) нанесена на гори-
зонтальной оси и выражается в тысячных долях градуса (&=0,001). От-
носительная среднеквадратическая погрешность определения величины
Л выражена в процентах. Число испытаний <7=1000. Из рис. 1.17,6, в ча-
стности, следует, что для принятых исходных данных относительная
погрешность порядка единиц процентов в определении систематиче-
ской ошибки может быть достигнута при достаточно высоких точностях
пеленгации (порядка сотых долей градуса).
На рис. 1.17,<7 показаны результаты моделирования для несиммет-
ричной базы протяженностью 70 линейных единиц, при меньшем рас-
стояния до объекта по линии траверса (120 единиц) и малом угле между
крайними пеленгами у = 16,8°.
Как следует из сравнения рис. 1.17,а и 1.18,5, погрешности в опре-
делении систематических ошибок в первом случае более чем на порядок
превышают погрешности, полученные при / = 53,13° (см. рис. 1.17,6).
В результате анализа обширного статистического материала были
сделаны следующие выводы:
случаи несимметричного (см. рис. 1.15) и симметричного (см.
рис. 1.16) по отношению к линии траверза расположения пеленгацион-
ных пунктов при одинаковых углах у между крайними пеленгами дают
примерно одинаковые погрешности величины (сгд/Д);
имеет место весьма заметная зависимость погрешностей от угла
между крайними пеленгами (например, на рис. 1.17,6, где этот угол
/=128,7°, погрешности меньше чем для рис. 1.17,5, где /=53,13° при-
мерно в 5 раз);
относительные среднеквадратические ошибки зависят от отноше-
ния <та/Д случайной и систематической погрешности (рис. 1.17,гирис.
1.17,6) и др.
Обработка данных, полученных в ходе статистического экспери-
мента, позволила получить приближенную зависимость, изображенную
на рис. 1.18:
д-
Д
у \( 1 Л2,4
0,65|—2-||-----!---
V Д y^sin(//2)J
(1-47)
41
Рис. 1.18. Зависимость относительной среднеквадратической погрешности
определения систематической ошибки от угла между крайними пеленгами
для симметричного расположения базы относительно объекта:
кривая 1 - (Стд/Д) = 0,02; кривая 2 - (crJA) = 0,067; кривая 3 - (aJ^)=Q,2
Номера у кривых на этом рисунке соответствуют значениям отно-
шения случайной погрешности <та к систематической А.
Из формулы (1.47) и рис. 1.18 следует, что наиболее выгодны с
точки зрения наименьших погрешностей случаи с максимальным углом
(у) между крайними пеленгами. Однако величина угла у на подвижных
носителях, например ЛА, ограничивается максимальной величиной сек-
тора обзора, выбираемого с учетом трудностей обеспечения заданной
точности пеленгации на краях сектора. Трудности могут быть вызваны
отражениями от выступающих поверхностей, а также выбранным спо-
собом пеленгации (например при фазовом способе погрешности пелен-
гации на краях сектора с ростом угла у растут примерно по закону
l/cos(y/2)).
Имеются возможности увеличения точности определения система-
тической погрешности при статистической обработке результатов неод-
нократных измерений. Для п независимых измерений может быть при-
менен весовой способ обработки [5], в соответствии с которым средняя
величина систематической погрешности А находится из выражения
А = ~;-----, (1.48)
/=|
где р, - весовой коэффициент /-го измерения, включающего три пеленга;
п - число независимых измерений (по три пеленга в каждом).
В соответствии с [5] для получения минимальных среднеквадрати-
ческих ошибок в определении средней величины А весовые коэффициен-
ты каждого независимого измерения должны выбираться обратно про-
порциональными дисперсиям, т.е. согласно (1.47)
42
Pi = -—ГТ * k (sin (/, / 2)) ’ , (1.48a)
[ £д ]
< Д )
, 1
где к =---—г-.
0,681^1
< Д J
Относительная среднеквадратическая погрешность измерения ве-
личины Д при такой обработке определяется из соотношения
_______1______
JHsin^/2)]4,8
(1-49)
Таким образом, если за один сеанс наблюдения (например за полет
по прямой в зоне обнаружения сигналов неподвижного объекта О (см.
рис. 1.16)) измерено т независимых пеленгов (т=3«) при одинаковом
интервале между соседними пеленгационными пунктами, равном dx, то
из них можно сформировать п троек, каждая из которых эквивалентна
одному измерению величины Д. Для каждой тройки определяется зна-
чение угла у,-, а по соотношениям (1.48) и (1.49) определяется средне-
взвешенное значение систематической погрешности Д.
Вообще говоря, небезразлично, из каких пеленгов формировать
тройки. По аналогии с методами оптимальной обработки результатов
многократной пеленгации [10] в интересах определения координат из-
лучающего объекта можно полагать, что наилучшие результаты будут
иметь место в случае, когда число троек с большими углами между
крайними пеленгами будет максимальным для заданной геометрии се-
анса наблюдений, а минимальный угол между крайними пеленгами для
тройки с наименьшим весовым коэффициентом будет максимальным.
Этому условию при симметричной пеленгации соответствует следую-
щий порядок формирования троек (см. рис. 1.16): первая тройка форми-
руется из 1-, (да/2)- и т-го пеленгов; вторая - из 2-, (ти/2+1)- и
(w-l)-ro пеленгов; третья - из 3-, (m/2-l)- и (да-2)-го пеленгов и т. д.
Угол между крайними пеленгами z'-й тройки при таком порядке
формирования определяется выражением
=2arctg (tg(/max/2))fl--{
1 Зп
(1.50)
Подстановка последнего выражения в (1.48) дает значение весово-
го коэффициента z-й тройки пеленгов:
43
Pj Я5 k2
sin-
Шпах/2) 1----,---
____________\____5n J
Jl + (tg(/max/2))2fl-^^>|
V \ у
(1-51)
Среднеквадратическая погрешность в определении величины сис-
тематической ошибки А при весовой обработке и формировании троек
пеленгов по описанному выше правилу выражается в виде
sin-
(1-52)
__________у in J
Jl + (tg(r^/2))2fl-^l
V \ in J
На рис. 1.19 приводятся результаты расчетов по последнему соот-
ношению при постоянной величине отношения случайной погрешности к
систематической (ox/A)=const=l для трех значений величины рабочего
сектора утах. Из рисунка, в частности, следует, что удовлетворительные
точности определения величины А (относительные погрешности не выше
10 %) могут быть достигнуты при обработке достаточно большого числа
измерений (и>100), величине рабочего сектора не менее 90° и погрешно-
сти пеленгации в несколько раз меньшей ожидаемой систематической по-
грешности.
Рис. 1.19. Относительная погрешность определения систематической ошибки
при обработке и независимых пеленгов:
кривая 1 - утах= 120°; кривая 2 - утах= 90°; кривая 3 - утах= 60°
44
На основании изложенного можно сделать следующие выводы:
1. При использовании пеленгационного метода определения коор-
динат неподвижных объектов с движущегося носителя систематические
ошибки пеленгования могут быть определены, а в дальнейшем и ис-
ключены путем обработки совокупности пеленгов, измеренных выше
точках траектории, в частности, по приведенным выше формулам, зна-
ние истинных координат объекта при этом обязательным не является.
2. Для прямолинейного перемещения носителя погрешность в оп-
ределении систематической ошибки пеленгации пропорциональна от-
ношению случайной погрешности пеленгования к систематической и
обратно пропорциональна синусу угла между крайними пеленгами в
степени 2,4.
3. Статистическая весовая обработка результатов достаточно боль-
шого (>100) числа измерений позволяет определять систематическую
ошибку пеленгования с относительной погрешностью не более 10 % при
случайных погрешностях пеленгации, не превышающих нескольких де-
сятков процентов от систематической и рабочих секторах не менее 90°.
4. Определение и в дальнейшем исключение систематической
ошибки пеленгования при локационном методе определения координат
возможно как путем совместного использования угловых и линейных
измерений, производимых в различных точках траектории движения
носителя, так и только по результатам линейных измерений; при этом
последний способ является более предпочтительным.
5. Методика и формулы, приведенные выше, позволяют определить
систематическую ошибку при условии, что случайная составляющая
ошибки существенно меньше, а разрешающая способность пеленгатора
выше, чем определяемая систематическая ошибка (различие должно быть
не менее чем на 1,5-2 порядка при использовании минимального числа
пеленгов). Определение систематической ошибки излагаемым способом
возможно при пеленговании неподвижных или относительно малопод-
вижных (несущественно меняющих свое положение за время пеленгова-
ния) объектов. Эти обстоятельства ограничивают возможную область
практического применения вышеизложенных методов.
6. Приведенные методика и формулы могут быть использованы для
определения систематической ошибки пеленгаторов на этапе проверки и
испытаний аппаратуры. При местоопределении неподвижных целей дан-
ная методика может быть использована и непосредственно в процессе
измерения координат с учетом отмеченных выше ограничений.
45
1.7. Эффективность пространственной селекции
при многократной пеленгации двух РЛС,
не различаемых по параметрам их сигналов
При определении координат нескольких РЛС методом много-
кратной пеленгации сначала решается задача группирования пеленгов,
относящихся к одному и тому же экземпляру РЛС. Эта задача
сравнительно легко решается в случае, когда возможна параметрическая
идентификация сигналов. Если же сигналы РЛС по техническим
параметрам не различимы, источниками информации являются сами
пеленги, а также время и координаты точек их измерения.
Рассмотрим связь эффективности решения задачи группирования с
техническими характеристиками станции воздушной РТР, такими как
ошибка пеленгации, плотность (или число N) не различаемых по пара-
метрам РЛС на местности, сектор обзора, число пеленгов. Обычно разли-
чают ошибки группирования пеленгов двух родов: пропуск существую-
щих РЛС n,v и выделение в качестве истинных - ложных илож.. Вводится
отношение, характеризующее ошибки пространственной селекции:
-^ош — (^1 ^пр + ^2 ^лож ) / Ирлс»
где ИрдС - число не различаемых РЛС на местности, пеленги на которые бы-
ли измерены в процессе воздушной РТР; Ь} и Ь2 - весовые коэффициенты.
Из общих рассуждений очевидно, что чем больше число РЛС - N и
погрешность пеленгации (сга), тем больше Кош, т.е. тем ниже качество
группирования. Однако зависимость качества группирования от этих и
других параметров достаточно сложна и включает также функции алго-
ритма обработки пеленговой информации, взаимного расположения
РЛС на местности, очередность их появления в зоне разведки и т.д. В
настоящем материале рассматриваются соотношения, связывающие ве-
роятность правильного группирования пеленгов, измеренных на две со-
седние не различаемые по параметрам РЛС, с погрешностью пеленга-
ции, числом пеленгов, сектором обзора, дальностью и расположением
этих РЛС относительно базы пеленгации.
Алгоритм группирования состоит в следующем.
Шаг 1. Из группы пеленгов берется первый пеленг и последо-
вательно сравнивается с другими до тех пор, пока угол пересечения пе-
ленгов не превзойдет некоторую заданную величину, после чего эти два
пеленга предполагаются опорными и относительно точки их пересече-
ния строится доверительный круг радиуса Ro.
Шаг 2. Подсчитывается число пеленгов, проходящих через круг.
Если число превышает пороговое, то принимается решение, что круг
включает точку, где расположена РЛС, и все пеленги, проходящие через
круг, принадлежат именно этой РЛС.
46
£,/2
Рис. 1.20. Группирование пеленгов
на не различаемые по параметрам РЛС
при их расположении параллельно линии
полета («горизонтальное» расположение)
Шаг 3 . Сгруппированные таким образом пеленги обрабатывают-
ся по методу наименьших квадратов, в результате чего определяются
координаты РЛС.
Шаг 4. Пеленги, участво-
вавшие в вычислении координат
истинной РЛС, исключаются из
дальнейшего рассмотрения (вы-
черкиваются).
На рис. 1.20 показано так
называемое «горизонтальное»
расположение двух РЛС - I и II.
Найдем вероятность того, что
пеленги, снятые на РЛС I, прой-
дут через круг I, а также вероят-
ность того, что пеленги, снятые
на РЛС II, пройдут через круг II и
не будут до этого вычеркнуты,
т.е. не пройдут через круг I. Для простоты выкладок будем полагать, что
центры обоих доверительных кругов совпадают с истинными координа-
тами РЛС.
Вероятность того, что пеленги (углы между линией полета и на-
правлением на РЛС), измеренные на РЛС II, пройдут через круг II, оп-
ределяется выражением
Рц=Р |«|< arctg
где Ro - радиус круга; Do - расстояние до РЛС по линии траверса;
0,5Д/2 - расстояние от линии траверза (перпендикуляр к линии полета
на РЛС) до i-ro пеленгационного пункта по линии полета ЛА (рис. 1.20);
а - угол, отсчитываемый от направления на истинное положение объек-
та, расположенного в точке Л.
Для нормального распределения погрешностей пеленгации с дис-
персией <та2 из последнего выражения следует, что
arctg
47
Поскольку в формировании координат точки II участвуют только
те пеленги, проходящие через круг II, которые не прошли через круг /,
вероятность правильного группирования z-го пеленга, принадлежащего
РЛС II, определяется из выражения
^пг /7 Р ( < d< CCqI ).
Здесь 8j = arc tg
/г>о2+(О,5Д)2
+ arc tg
Л)
Jz)2 + (0,5Z,.-7?)2
а0,.= arctg
^о2+(О,5£о,)2
R - расстояние между точками А и В
(см. рис. 1.20).
Для нормального распределения погрешностей пеленгации спра-
ведливо выражение
Лг// -О^Фв
где 8 > 0.
Для выбора радиуса «пороговой» окружности существуют сле-
дующие соображения. При увеличении Ro растет вероятность правиль-
ного группирования пеленгов объекта I. Вероятность правильного груп-
пирования пеленгов объекта II ведет себя более сложно. При малых
значениях порогового радиуса 8< 0 и вероятность Рш11 с возрастанием Ro
растет. При дальнейшем росте Ro появляется возможность прохождения
пеленгов через круг I (5> 0) и скорость роста Рпг/1 падает. При дальней-
шем увеличении Ro вероятность Ртц уменьшается. Для последующих
оценок принято R„ =2аа Do. Влияние расстояния между объектами d на
эффективность группирования однозначно: при увеличении d вероят-
ность правильного группирования увеличивается.
Рассмотрим случай взаимного расположения двух объектов на ли-
нии, перпендикулярной линии полета - так называемое «вертикальное»
расположение (рис. 1.21). Радиусы доверительных кругов соответствен-
но равны: Roi = 2 craDol; Rol/ = 2 Вероятность правильного группи-
рования определяется выражением
Ртц = р(-А/ < «/ < «о/) = 0,5 фв
где aOi = arctg
Ro
7d22+(0,5Z,)2
48
Д,- = arc tg
(1-53)
2Д0/
A
-arctg ---—
L
Рис. 1.21. «Вертикальное» расположение пеленгуемых РЛС:
а - большое значение базы пеленгации; б - малое значение базы пеленгации
На рис. 1.22 приводят-
ся результаты расчета веро-
ятности группирования пе-
ленгов объекта II по полу;
ченным выше соотношени-
ям для «горизонтального»
(пунктирные кривые) и
«вертикального» (сплош-
ные линии) расположения
объектов относительно ба-
зы пеленгации и разных
значений погрешности пе-
ленгации сго и сектора обзо-
ра у. При этом полагалось,
что значение вероятности
правильного группирования
каждого пеленга одинакова
и равна усредненной по
всей базе пеленгации вели-
Рис. 1.22. Вероятности правильного
группирования пеленгов, измеренных
на две РЛС, не различимые
по техническим параметрам: кривая 1 - <та = 1 °,
у= 90°; кривая 2 - <та = 2°,
у= 90°; кривая 3 - <та = 1°, /= 90°;
кривая 4 - сга = 1°, /= 60°; кривая 5 - <та = 2°,
/= 90°; кривая 6 - <та = 2°, /= 60°
чине. Величина сектора обзора определяет максимальное удаление пер-
вого пеленгационного пункта по оси ОХ от линии траверза.
Как видно из графиков, вероятность правильного группирования
пеленгов при «горизонтальном» расположении разведуемых РЛС всегда
выше, чем при их «вертикальном» расположении. Это объясняется тем,
49
что при «вертикальном» расположении большинство пеленгов, принад-
лежащих РЛС II, проходит также через круг I и вычеркивается, изыма-
ется из рассмотрения, так как по принятому алгоритму пеленги РЛС I
обрабатываются первыми.
Решение об истинности очерченной доверительным кругом области
принимается на основании подсчета числа пеленгов, прошедших через
круг, и сравнении его с пороговым значением т0. Величина т0, так же как
и Ro, выбирается с учетом требуемых значений вероятностей обнаруже-
ния и пропуска. Если общее число пеленгов т, измеренных на данную
РЛС, примерно известно, то задача выделения занятой области может
быть сведена к известной в радиолокации задаче обнаружения пачки из т
импульсов. Этой задаче посвящено большое число работ, предложены и
исследованы многочисленные критерии, типа «к из т», «к подряд из т» и
др. Будем пользоваться критерием «к из т», применительно к которому
оптимальное пороговое число импульсов связано с полным числом им-
пульсов в пачке приближенной зависимостью [22] кот «1,5 т0’5.
Вероятность правильного выделения занятой области при исполь-
зовании критерия «к из т» определится как
^опт ~ 1 т I
Рвыд=1-У --------—^пгС-^гГ’''- (!-54)
выд /!(от-1)! пг "г 7
Зависимости (1.54) для т = 10, 20, 30 и £Опт= 1,5 от0,5 приведены на
Рис. 1.23. Вероятности правильного
выделения занятых областей при
использовании критерия «к из от»
в функции вероятности Рш :
кривая 1 - от=30; кривая 2 - от=20;
кривая 3 - от=10
рис. 1.23. Последние соот-
ношения, а также рис. 1.22 и
1.23 позволяют определить
вероятности выделения заня-
тых областей при многократ-
ной пеленгации двух не раз-
личаемых по параметрам
РЛС для описанного выше
алгоритма и допущении о
совпадении центров довери-
тельных окружностей с ис-
тинными положениями РЛС.
На рис. 1.24 приводятся
результаты расчета вероят-
ности правильного выделе-
ния занятых областей для по-
грешности пеленгации <т = 2° двух разных положений РЛС относитель-
но базы пролета и различных значений т и у. Как видно из этого рисун-
ка, обработка пеленгов по критерию «к из пг» подчеркивает разницу в
вероятности определения занятости области пересечения пеленгов (кри-
50
Рис. 1,24. Вероятности правильного
выделения занятых областей
при использовании критерия «к из т»
в функции относительной дальности
вые идут круче, чем на рис. 1.22). На рис. 1.24 кривые 1, 2 соответству-
ют горизонтальному расположению РЛС, кривые 3-6- вертикальному.
При этом другие параметры соответственно равны: кривая 1 - у = 90°,
т = 30; кривая 2 - у = 90°, т= 10; кривая 3 - у = 90°, т =30; кривая 4 -
у= 60°, т = 30; кривая 5 - у= 90°, т= 10; кривая 6 - у= 60°, т =10.
Из расчетов следует важный вывод: высокие вероятности выделе-
ния занятых областей (Р > 0,9) возможны для РЛС, удаленных по гори-
зонтали не менее чем на 6 % от Do, а по вертикали - не менее чем на
30...40 % от£>о.
Большим резервом уменьшения ошибок группирования является
увеличение числа пеленгов т и угла обзора у. Так, из рис. 1.24 видно, что
увеличение числа пеленгов втрое (с десяти до тридцати) повышает раз-
решающую способность (рас-
стояние между соседними
РЛС при вероятности пра-
вильного объединения > 0,9)
при вертикальном располо-
жении почти в два раза, уве-
личение сектора от 60°
эквивалентно
разрешающей <
примерно на 60%.
Поскольку обычно чис-
ло пеленгов пропорциональ-
но базе пеленгации, один пе-
реход от сектора у= 60° к сек-
тору у= 90° означает увели-
чение числа пеленгов в 1,7 раза, что приводит к суммарному увеличе-
нию разрешающей способности более чем вдвое по сравнению со слу-
чаем /=60° при том же расстоянии между соседними пеленгационными
пунктами.
до 90°
увеличению
способности
1.8. Сравнение различных алгоритмов
пространственной селекции пеленгов,
не различаемых по техническим параметрам
Выше были получены соотношения, позволяющие оценить возможность
пространственной селекции (группирования) двух РЛС, не различаемых по
техническим параметрам. При этом был сделан ряд допущений: о совпаде-
нии центра доверительной окружности с истинным положением РЛС, об
известности числа измеренных пеленгов и др. В некотором смысле можно
считать полученные там оценки потенциальными. Ниже предполагается
51
снять большинство из упрощающих предположений. Будут рассмотрены
несколько алгоритмов: достаточно универсальный - «площадной» и более
эффективные, но менее универсальные «разностные» алгоритмы, а также
алгоритм группирования, использующий специфику воздушной РТР, гипо-
тезу о непрерывной работе РЛС и информацию о моментах первоначально-
го обнаружения каждого объекта разведки.
«Площадной» алгоритм группирования. Рассмотрим вначале несколь-
ко простейших случаев. На рис. 1.25 показаны схемы многократной пе-
ленгации, осуществляемой достоверно из каждого пеленгационного
пункта базы пролета L, двух объектов разведки - РЛС, расположенных
на расстоянии d друг от друга «горизонтально» (рис. 1.25,а) и «верти-
кально» (рис. 1.29,6). Погрешности пеленгации при построении рисун-
ков приняты нулевыми.
Рис. 1.25. Многократная пеленгация двух РЛС,
расположенных горизонтально (а) и вертикально (б)
В соответствии с «площадным» алгоритмом на плоскости образуется
некоторая замкнутая область, внутри которой подсчитывается число пере-
сечений пеленгов, измеренных на совокупность не различаемых по техни-
ческим параметрам РЛС, находящимся в зоне видимости станции воздуш-
ной РТР. Очевидно, что при достаточной величине этой области или малой
погрешности пеленгации в нее попадут все точки пересечения п пеленгов,
измеренных на данную РЛС. Таких точек пересечения будет и(и-1)/2. Од-
нако, кроме «истинных» («своих») пеленгов, в эту же область неизбежно
попадут и «чужие», измеренные на соседнюю РЛС. Уменьшение размеров
области уменьшает число точек пересечения, как «своих», так и «чужих».
Размеры области должны выбираться из условий минимума ошибки.
Из рис. 1.25 видно, что перемещение по плоскости и подсчет числа
точек пересечения в каждом положении позволяют выделить районы
повышенной плотности пересечений, которые, как правило, соответст-
вуют месту расположения разведуемой РЛС.
52
Вероятность попадания точек пересечения в «доверительную» об-
ласть зависит, как уже было отмечено, от ее размеров, погрешностей
пеленгации, а также ориентации осей симметрии области и удаления
центра относительно истинного места расположения РЛС. Например,
вероятность попадания в «доверительную» область в виде эллипса, оси
которого совпадают с направлениями рассеивания и равны кЕ, где Е -
вероятное отклонение по каждой из взаимно перпендикулярных осей,
определяется формулой [24]
Рэлл = 1 - ехр (- (к р)2).
Для прямоугольной «доверительной» области с размерами по вза-
имно перпендикулярным осям координат гх и гу и центром, совпадаю-
щим с истинным положением объекта, можно записать
(1-55)
Если пользоваться критерием полной взвешенной ошибки группи-
рования (см., например, [25]), устанавливающим связь между вероятно-
стью пропуска (отнесение совокупности «истинных» точек пересечения
к «ложной» области) Рпр и вероятностью ложных тревог (отнесение
«ложных» точек к «истинной» области - Рлт), то
Рош = а Рпр + Ъ Рт, (1.56)
где а и b - весовые коэффициенты.
Следовательно, существуют оптимальные размеры «доверитель-
ной» области, при которых обеспечивается минимальная полная веро-
ятность ошибки. Эти размеры определяются погрешностями местооп-
ределения и ожидаемым расстоянием d между объектами. В последую-
щих оценках принято, что «доверительная» область представляет собой
прямоугольник со сторонами 2 гх, 2 rv, где
d/2
К
при
при
d<ax,
d > ах-
(1.57)
Значение rv определяется выражением, подобным (1.57), с заменой а, на av.
Величина d, учитывающая различия взаимных положений объек-
тов, является средним значением проекции t/cos /3 расстояния d между
ними на базу пеленгации, р-угол между отрезком и базой пеленгации.
При d« D и расстояниями между пеленгационными пунктами
I« D можно записать, что
53
d = 2d/Tt. (1.58)
При невыполнении этих условий справедливо выражение
-= 2(£+£+0= (1.59)
^(D + d)2+l2
Вероятности Рпр и Рт могут быть определены следующим обра-
зом. Если известны вероятности попадания «истинной» и «ложной» то-
чек пересечения в «доверительную» область (Р„, Рл), например, в соот-
ветствии с выражением (1.55), и они являются постоянными величина-
ми, то при достаточно большом числе пеленгов математическое ожида-
ние и дисперсия числа точек, попавших в «доверительную» область, со-
ответственно равны:
ти = пР„ , тл = п Рл, (1.60)
D„ = nP„ (1-Ри), D„ = п Рл (1-Рл),
где п - полное число «истинных» или «ложных» точек пересечения.
Для принятия решения об «истинности» или «ложности» совокуп-
ности сгруппированных точек пересечения может быть использован по-
роговый алгоритм. Пороговое значение п0, при превышении которого об-
ласть считается «истинной», определяется в соответствии с соотношени-
ем [27]
сфи] -сг2т2 + <г.сг2(т2 -т{)2 + (а2 - crj2)InЛ^а2 /of .. .,.
п0 ---------------------------------------------------. (1.61)
<т2 О’]
Здесь для рассматриваемого случая
°г1=7й/>и(1--Ри); о’2=л/иРл(1-рл); «г,=иРи; т2=пРл;
. /’(Л1)(С12-СП) ,, ,
=----!--iz---_ коэффициент правдоподобия,
ЛА)(С21 С22)
где Р(А\), Р(Л2)~ вероятности появления «истинных» и «ложных» об-
ластей; С,у - элементы платежной матрицы.
Если полагать, что появление «истинных» и «ложных» областей
равновероятны, потери при их правильном распознавании нулевые
(Си =С22= 0), при неправильном - одинаковые (С]2 = С2] = 1), то
и0 = (wi о> + От] о]) /(о-l + ст2) (Е62)
или после подстановки -
„ .„ри7л(1-л)+л^и(1-^и)
0 7рл(1-рл)+>/ри(1-ри)
В результате вероятности пропуска и ложных тревог соответст-
венно равны
(1-63)
54
пр
= 0,5 + 0,5Фв
РЛТ=О,5-О,5ФВ
»0~иРи
72нРи(1-Ри)
”о--иЛ
72иРл(1-Рл)
(1.64)
(1.65)
Полная взвешенная вероятность ошибки в соответствии с (1.56)
при равных весовых коэффициентах а = b = 0,5 равна
Р ОШ
0,5 + 0,25Фв
. П° пР" -0,25Фв . --
72nP„(l-P„)J В[72иРл(1-Рл)
(1.66)
Пороговый «площадной» алгоритм целесообразен при сравнитель-
но большом (по крайней мере большем двух) числе РЛС, не различае-
мых по техническим параметрам, когда проверке на «истинность» под-
лежат многие области сгруппированных точек пересечения. Если же
имеется всего две РЛС и необходимо принять решение относительно
двух областей, то может быть использован более эффективный алго-
ритм. По этому алгоритму решение об «истинности» принимается в
пользу области с наибольшим числом точек пересечения пеленгов. Ве-
роятность принятия правильного решения для двух РЛС при нормаль-
ном распределении числа «истинных» (у) - W(y) и числа «ложных» (х) -
W(x) точек в сравниваемых областях находится в соответствии с выра-
жением
V
Р(у>х) = Jlf(x)c/x,
и средняя вероятность для всех значений у вычисляется по формуле
Р(у > х) = J J W(х) W(y)afy dx
или после интегрирования -
Р(у >х) = 0,5 + 0,5ФВ
mv —тх
(1-67)
Подстановка полученных выше выражений для математических
ожиданий и дисперсий приводит к соотношению
^(РИ~РЛ)
Р(ни >ял) = 0,5 + 0,5ФВ
>/2Ри(1-Рй) + 2Рл(1-Рл)
(1.68)
Для определения координат РЛС с точностью, определяемой по-
тенциальными возможностями пеленгаторов, необходимо, чтобы все
55
пеленги, измеренные на данную РЛС, были сгруппированы в «истинной»
области данной РЛС. Результативность этапа группирования характеризу-
ется условной вероятностью попадания «истинных» точек пересечения в
«истинную» область Р(И/И). Таким образом, результирующая эффектив-
ность правильного группирования в интересах местоопределения РЛС, не
различаемых по параметрам, должна оцениваться произведением
Ррез= Р(И/И)(1 -Рош) применительно к (1.66) (1-69)
или
Ррез = Р(И/И)Р(ии>нл) применительно к (1.67). (1-70)
Для получения количественных оценок рассмотрим частный случай
пеленгования двух РЛС при минимальном числе пеленгов (и = 3) на каж-
Рис. 1.26. Точки пересечения шести пеленгов
на две РЛС
дую из них, когда появляется
шесть точек «ложных» пере-
сечений: три из них располо-
жены на расстояниях, мень-
ших Do от оси ОХ (рис. 1.30),
другие три - больших Do.
Пусть в точках А и В
расположены РЛС, расстояние
между ними - d, линия АВ па-
раллельна базе, симметричной
относительно перпендикуляра
к середине АВ. Пеленгация
производится из трех точек
маршрута, разнесенных на
расстояние /. Пеленги измеря-
ются со среднеквадратически-
ми ошибками <та, погрешности
местоопределения точек А,В,С,Д,Е, как было показано в п. 1.1, определяют-
ся соотношениями
av ® Лс^Ь1 / L, ax^craDI 41, (1.71)
где Do - дальность до линии, соединяющей пеленгационные пункты;
L - расстояние между крайними пеленгационными пунктами (база пе-
ленгации).
В соответствии с рис. 1.30 расстояния от оси х до точек пересече-
ния при безошибочной пеленгации
Da = DB = D, Dd = 2LD /(d+2L), DE = DC = DL/(d+L).
Будем полагать, что путем последовательного перемещения «дове-
рительной» области по плоскости XOY выявлены три зоны с наиболь-
шей плотностью точек пересечения пеленгов: в окрестностях точки А,
56
гонки В и точек C,D,E. В системе координат каждой из доверительных
областей, центры которых совпадают с точками А, В и центром тяжести
треугольника CDE, математические ожидания и среднеквадратические
отклонения по взаимноперпендикулярным осям имеют следующий вид.
Для точек А и В: тх = mv = 0; сгх= аа DO42; <rv = сга72 D2 IL .Для
точки D'. тх = 0; т,, = 0,5 Do [2//(У+2/)-1/(</+/)]; сгх = (<т„ ZVT2) / [2/ /
(<Z+2Z)]; (Tv = (Та /142 [2lDJ(d+2rj\2-, Для точек С,Е: тх = l[l- (d+2l)/2(d+I)];
mv = 0,5 Do [l/(d+l)-2l/(d+2l)]-, К = (ств D /42) * [l/(d+l)]- ay = 42 (ra
[DJ/ld+I)]2 /1. __
L „ Таблица 1.2. Расчетные значения m
Значения этих величин
ппя исходных данных D = и ст для числового примера
ИСлмДНЫл. ДсаНМЫЛ. J-Sq - —
= 200 км, / = 50 км, <тй = 0,01, То™ тг я ъ
d= 10 км даны в табл. 1.2 —на в'--------g-----g-----------
На рис. 1.27 даны ре- ---------£---------------~6----------
зультаты расчета по полу- ----------—------——-------------------
ченным выше соотношениям -----------'--------’—----:::—
((1.69) - кривые 1,3 и (1.70) -
кривые 2,4) для вышеприве-
денных исходных данных.
«Доверительная область» -
прямоугольник со сторонами
2 гх и 2 rv (1.57), Do = 200 км,
L= 100 км.
Из этого рисунка следу-
ет, что правильное группиро-
вание пеленгов на одну РЛС с
вероятностью 0,8 при нали-
чии еще одной РЛС, не раз-
личаемой с первой по техни-
ческим параметрам, располо-
женной на расстоянии
<7=20 км от первой на линии,
параллельной базе L пеленга-
ции, может быть достигнуто
Рис. 1.27. Вероятность правильного
группирования шести пеленгов на две РЛС по
«площадному» алгоритму:
кривые 1,2 - <га = 0,01;
кривые 3,4 - <та = 0,02; кривая 5 -
приближенная зависимость для сга = 0,01
при L = 100 км Do = 200 км, сга = 0,01. При вдвое меньшей базе L или
вдвое больших погрешностях пеленгации удовлетворительное группиро-
вание (следовательно, и местоопределение) возможно, когда между РЛС
будет расстояние d> 40...50 км. Правильное группирование пеленгов на
один объект в зоне пеленгации предполагает «вычеркивание» из даль-
нейшего рассмотрения использованных для первой РЛС пеленгов. Таким
образом, задача группирования пеленгов на вторую РЛС существенно уп-
рощается.
57
Полученные в примере количественные оценки для частного
случая двух РЛС при пеленгации из трех точек (см. рис. 1.26), могут
быть приближенно распространены на более общие случаи путем
изменения исходных данных с учетом следующих обстоятельств.
1. Увеличение числа пеленгов (и > 3), измеренных на каждый объ-
ект, улучшает условия группирования, так как «истинные» точки пере-
сечения продолжают группироваться вокруг «истинной» области, а
«ложные» распределяются более равномерно - в треугольнике 1 -Д- 3,
(см. рис. 1.26 , где показаны точки пересечения при трех и пяти пелен-
гационных пунктах). Таким образом, приведенные на рис. 1.27 оценки
являются «пессимистическими», при п > 3 вероятности правильного
группирования увеличиваются.
2. Увеличение числа РЛС, не различаемых по параметрам (Л/ >2),
усложняет задачу группирования пеленгов. Итоговая вероятность груп-
пирования пеленгов при этом может быть учтена следующим прибли-
женным соотношением:
Ррез(М>2)«[Ррез(Л/ = 2)]"’\ (1.72)
где Ррез(Л/ = 2) и Ррез(М > 2) - результирующие вероятности правильного
группирования при числе РЛС, равном или большем двух соответственно.
При М > 2 и равномерном распределении объектов на местности со
средней плотностью р № Md1 можно пользоваться приближенной
эмпирической зависимостью
Ррез« 1 -ехр [-0,11 d/ (craD 72)], (1.73)
которая для аа = 0,01 изображена на рис. 1.27 пунктиром.
3. Учет подвижности целей (например, корабельных или самолет-
ных РЛС) может быть приближенно осуществлен увеличением погреш-
ности угловых измерений. В [10] показано, что среднеквадратическая
погрешность определения координат цели, движущейся равномерно и
прямолинейно со скоростью V в течение всего времени ее пеленгации с
летательного аппарата, перемещающегося с постоянной скоростью v,
определяется приближенной зависимостью
сг~ VD/(v 72). (1.74)
При этом предполагается, что угловые погрешности пеленгации
равны нулю. Погрешности, вызванные ошибками пеленгации, с одной
стороны, и неизвестностью вектора скорости - с другой, можно считать
независимыми, поэтому в соответствии с (1.71) и (1.74) суммарная по-
грешность по оси OY при двух пеленгах можно описать выражением
ау сумм « 72aX/^ + ^2/2v2. (1.75)
С такой же погрешностью, как следует из (1.71) и (1.75), определяется
дальность до неподвижной цели, если пеленговать ее из двух пунктов,
удаленных на расстояние L, с эквивалентной погрешностью <тэ,
58
(T3=aay/l+[7D/(2vLa)]2.
(1-76)
Например, при скоростях цели и летательного аппарата-разведчика
соответственно V = 10 м/с и v = 70 м/с, отношении дальности до цели к
базе пеленгации D / L = 2 и погрешности измерения угла <та =0,01
эквивалентная погрешность угловых измерений ст, = 3,7 сга.
Компенсировать столь существенный рост эквивалентной погрешно-
сти пеленгации, вызванный незнанием вектора скорости цели, можно, ис-
пользуя определенные криволинейные траектории полета летательного ап-
парата-разведчика, например, в виде одинарной или двойной петли [34].
Как следует из вышеизложенного, использование двух разнесен-
ных в пространстве ЛА для синхронного пеленгования также позволяет
компенсировать погрешности, вызванные движением цели. Однако это
не решает задачу правильного группирования пеленгов на две и более
не различаемые по параметрам РЛС даже при нулевых ошибках пелен-
гования, так как «ложные» пересечения при этом не отсеиваются. Необ-
ходимо, так же, как и при пеленгации с одного ЛА, увеличение числа
пеленгационных пунктов либо за счет увеличения числа ЛА, либо за
счет их перемещения.
4. Особенности группирования при малом числе пеленгов. Полу-
ченные выше соотношения основаны на теореме Ляпунова, справедли-
вой при достаточно большом числе к точек пересечения пеленгов. При
малом к необходимо использовать теорему о повторении опытов. В ча-
стности, для рассмотренного выше примера (см. рис. 1.26) и принятых
там исходных данных (£>о=200 км, L =100 км, ста=0,01, /=50 км) вероят-
ность попадания каждой из трех «истинных» точек пересечения в об-
ласть А равна Р=0,62, а «ложных» точек C,D,E в «ложную» область -
соответственно Рс = Ре = 0,24 и =0,288. Отсюда находится вероят-
ность непопадания ни одной,
либо ровно одной, либо ровно
двух и ровно трех точек в «ис-
тинную» (кривая а) и «ложную»
(кривая Ь) области (рис. 1.28).
При установке порогового
значения к0=2 вероятность пре-
вышения порога для «истинной»
области РпО(исг)=0,69 и для «лож-
ной» области - РИО(ложн)=0,06. В
результате итоговая эффектив-
ность правильного группирова-
ния Ррез= 0,56, что несколько
превышает результат, получен-
ный по асимптотическим соот-
Рис. 1.28. Вероятности попадания
в прямоугольник ровно «к»
59
ношениям (см. рис. 1.27). Учет вышеизложенного позволил построить за-
висимости эффективности правильного группирования пеленгов на РЛС
от расстояния d между ними для ряда типовых вариантов применения
(рис. 1.29). При этом, как и ранее, D = 200 км, L = 100 км, аа = 0,01, т -
число РЛС. Кривые 1 и 2 построены для неподвижных целей в количестве
двух (кривая 7) и трех (кривая 2). Кривые 3 и 4 соответствуют двум (кри-
вая 3) и трем целям (кривая 4), движущимся со скоростью V = 3,4 м/с,
скорость летательного аппарата в обоих случаях v = 100 м/с; кривая 5 со-
ответствует скорости целей
V = 10 м/с, скорости летатель-
ного аппарата v =65 м/с и числу
целей т = 3. Кривая 6 оценива-
ет эффективность группирова-
ния двух РЛС по разностным
алгоритмам, рассматриваемым
ниже.
Из кривых следует, что
удовлетворительное группи-
рование пеленгов в типовых
вариантах применения при
разведке подвижных целей
(кривые 4, 5) возможно при
d > 50 км. Для неподвижных
Рис. 1.29. Вероятности правильного
группирования пеленгов, измеренных
на неподвижные (кривые 1,2,6)
целей эта величина снижается по крайней мере вдвое.
«Разностно-угловой» алгоритм группирования. При достоверном из-
мерении пеленгов в каждом пеленгационном пункте одновременно на
две не различаемые по параметрам РЛС может быть применен доста-
точно эффективный алгоритм, основанный на сравнении двух пеленгов
в каждой точке пеленгации. В отличие от рассмотренного выше «пло-
щадного» алгоритма сортировка пеленгов производится до вычисления
координат точек пересечения по принципу: «все большие в каждой паре
пеленги принадлежат РЛС, имеющей меньшие значения координаты х».
Значения разности пеленгов (Да) в соответствии с рис. 1.25 определя-
ются соотношениями
. z D + Q,5dsmB Z)-0,5<7sin В
Да(х, Д) = arctg--’ ^-arctg----------’ И , (1.77)
-х-0,5а cos р -x + 0,5dcosp
где Д - угол между осью ОХ и направлением отрезка d, соединяющего
два пеленгуемых объекта: Д= 0° (на рис. 1.25,а), Д= 90° (на рис. 1.25,6).
Величина Да по-разному изменяется в зависимости от положения
отрезка d и координат пеленгационного пункта. Для «горизонтального»
расположения (см. рис. 1.25,а) и принятых в выше в качестве примера
значений геометрических величин (Do = 200 км, L = 100 км, d= 10 км)
60
величина Да при переходе от первого пеленгационного пункта к по-
следнему меняется незначительно (от 2,69° до 2,86°), для «вертикально-
го» расположения (см. рис. 1.25,5) - от +0,388° до - 0,388°.
Для приближенных количественных оценок найдем значение раз-
ности углов, усредненное по всем значениям координаты х и угла /7:
L/2
ir/2 L/2
Да =— j" J &а(х,/3) d[3 dx.
о
(1-78)
-£/2
Применительно к упомянутым значениям исходных данных чис-
ленное интегрирование дает Да =1,8°.
Использование соотношения (1.67) позволяет определить вероят-
ность того, что значение пеленга, измеренного в одном из пеленгацион-
ных пунктов, на объект, расположенный в точке А, будет больше пелен-
га на объект, расположенный в точке В. При этом предполагается, что
точка А находится ближе на оси ОХ к пеленгационному пункту, чем
точка В. Таким образом,
Р(«а >«/,)« 0,5+ 0,5Фв
Да
аа>/2
(1-79)
Например, при <то=0,01 и расстоянии между объектами <7=10, 5 и 2,5
км соответственно Р = 0,998; 0,89; 0,57. Если число измеряемых
пеленгов равно п, то использование даже достаточно жесткого критерия
«и из и» дает практически достоверное разделение пеленгов на два объек-
та, удаленных, друг от друга на 10 км - (см. кривую 6 на рис. 1.29).
Увеличение числа объектов более двух приводит к росту неопре-
деленности при использовании данного алгоритма, особенно при их
«разноуровневом» расположении относительно базы пеленгации, когда
разности углов отдельных пар пеленгов могут проходить через ноль.
Алгоритм, использующий информацию о разности расстояний ме-
жду точками пересечения пеленгов. Рассмотрим случай «горизон-
тального» расположения двух селектируемых объектов (см. рис. 1.25,а)
и равномерной беспропускной пеленации на базе длиной L с одинако-
выми интервалами 1. Из предыдущих выкладок и рис. 1.25 следует, что
точки пересечения первого пеленга, измеренного на точку В, со вторым,
третьим, четвертым и т.д. пеленгами, измеренными на точку А (точки
1,2,3,...,/') на рис. 1.25 удалены от оси ОХ на расстояния
Dt = iDol/(d + Н). (1.80)
При «вертикальном» расположении соотношение для D, более
громоздко, однако тенденция увеличения расстояния D по мере роста i
сохраняется, о чем свидетельствует рис. 1.25,5.
Полезная информация о «ложности» точек пересечения содержит-
ся в расстояниях между точками:
61
Dod I
(1.81)
ДО,.,+1
'’,+1 [<7 + (/ +1) /](</ + i I)
Наибольшая величина ДОу+i, очевидно, соответствует значению i - 1:
ДО1, =------. (1.82)
1,2 [d + l](d + 2l)
Задача состоит в принятии решения о точках 1,2,..,/ - принадлежат
ли они объекту (гипотеза «Z» - «истинная» точка), расположенному в
районе точек 1,2,...,/, или они образованы пересечением пеленгов, изме-
ренных на объекты, расположенные на большом удалении от этих то-
чек, т. е. в точках А и В (гипотеза «У» - «ложные» точки).
Алгоритм принятия решения состоит в сравнении вычисленных по
результатам измерений пеленгов значений ДО с пороговым ДО0. По-
следнее выбирается в соответствии с соотношением (1.62), преобразо-
ванным применительно к рассматриваемому случаю:
ДОг ст, + ДОУ ст.
ДО0=--------у-----—
(1.83)
ДПг=О.
где XDx,M)y,cTx,av - математические ожидания и среднеквадратические
погрешности значений ДО для гипотез «X» и «У» соответственно.
Из вышеизложенного следует, что
ДО>-------------,
у (d + l)(d + 2l)
Среднеквадратические погрешности сгу и сгг определяются как по-
грешности измерения дальности при двукратном пеленговании, т.е. в
соответствии с (1.71). При этом для события «У» для каждой из точек
„ <Tay[2( 2Р01'2
l'y I \d+l)’ 2'у 21 \d + 2l
Среднеквадратическая погрешность измерения разности 2 (<ту)
находится в соответствии с правилами для композиции нормальных за-
конов:
(1-84)
(1.85)
Для события «Z» :
о1г = (^2 оа И) * [Do//(2D„+2/) + Do l/(d+2l)]2,
c2z = (^2 Ga /21) * [Dol/(2Do+2l) + (Dol/(d+2l)l
При этом предполагается, что «истинная» цель находится на рас-
стоянии 0,5(0, + О,+;) от оси ОХ. Далее,
3<7 + 4/
(1.86)
(1-87)
-]2
= 0,39(7 D21
а 0 [(J+ /)(</ +2/)
(1.88)
62
Например, для Do = 200 км, <7=10 км, I = 50 км, оа = 0,01 из (1.85)
и (1.88) получим, что crv = 9,11 км, ст = 9,47 км. Таким образом, порого-
вое значение разности расстояний АО0 после подстановки полученных
выше выражений определится соотношением
=___________(D0dl)(2d + 4l)2-Q,39/y/2________ (1 89)
° (</ + l)(d + 27)V(<7 + 2/)4 + 4(<7 + /)4 + 0,39(3<7 + 4/)4 ’
Знание порогового значения разности расстояний позволяет найти
вероятность правильного решения о «ложности» точек 1 и 2 и пропуска
истинной цели:
Р(Т/У)= j W/AD) dAD, P(Y!Z)= J WZ(AD) dAD,
ADq ADo
где W (AD ), IV (AD) - плотности распределения расстояний между точ-
ками для гипотез «У» и «Z» соответственно.
Интегрирование (в предположении, что указанные распределения
подчиняются нормальным законам) дает выражения
Р (Y/Y) = 0,5 - 0,5 Фв [(ДО0 - ADV) / (av V2 )], (1.90)
Р (Y/Z) = 0,5 - 0,5 Ф„ [AD01 (с^2 )]. ' (1.91)
Например, для Da = 200 км, <7=10 км, I - 50 км, сга = 0,01 имеем:
AD =27 км, ау = 9,11 км, oz = 9,47 км и P(Y/Y) = 0,925, P(Y/Z) = 0,29.
Расчеты для других исходных данных показывают, что зависи-
мость результирующей вероятности группирования (7’рез) от <7 примерно
повторяет зависимость, полученную для алгоритма группирования по
разности углов (кривая 6 на рис. 1.29).
Алгоритм группирования, использующий гипотезу о первоначальном
обнаружении работающей РЛС на линии радиогоризонта. Если
предположить, что радиолокационные станции работают в стационар-
ном режиме и момент их включения предшествует началу попадания их
в зону разведки, а кроме того, считать, что излучения РЛС, подлежащих
группированию, обнаруживаются достоверно в момент их появления
из-за радиогоризонта, задача группирования существенно упрощается.
Рассмотрим полет приближенно в направлении на РЛС. Можно
предполагать, что вероятность появления из-за радиогоризонта одновре-
менно двух и более РЛС практически равна нулю по причине неизбеж-
ных отличий в дальностях, высотах на местности и т.д. Таким образом,
сначала обнаруживается одна РЛС, затем через интервал At - вторая. За
время At можно приближенно оценить координаты первой РЛС как по
углу (используя усреднение нескольких пеленгов с учетом собственного
перемещения в пространстве), так и по дальности, например, методом ре-
гистрации пролета линии радиогоризонта по известному соотношению
Ррг«4,12 (4н + 4Й),
63
где Н - высота полета, м; h - прогнозируемая высота антенны разведуе-
мой РЛС над подстилающей поверхностью, м; £>рг - дальность радиого-
ризонта, км.
Таким образом, к моменту первоначального обнаружения второй
РЛС, не различаемой с первой по техническим параметрам, координаты
первой будут приближенно измерены и тем точнее, чем больше интервал
времени А/ (меньше скорость полета, меньше плотность не различаемых
по параметрам РЛС). В этих условиях группирование пеленгов сущест-
венно упрощается по сравнению с ситуациями, рассмотренными выше, и
становится практически достоверным. Действительно, центр «довери-
тельной» области устанавливается в точке наиболее вероятного располо-
жения первой РЛС, все пеленги, использованные для ее местоопределе-
ния, вычеркиваются из дальнейшего рассмотрения. Кроме того, сигналы
вновь появившейся станции могут быть отселектированы от сигналов
первой РЛС по времени прихода и т.д. Тот же прием может быть приме-
нен и ко второй из обнаруживаемых РЛС, когда на вход анализирующего
устройства начинают поступать сигналы третьей РЛС и т.д.
Описанный алгоритм исходит из молчаливого предположения о
том, что в зоне разведки к моменту появления очередной РЛС необна-
руженных и нелокализованных целей не существует. Однако в реальной
обстановке это условие может не выполняться. Например, при исполь-
зовании приемников с медленным поиском по частоте на скоростных
ЛА, недостоверным приемом в зоне видимости и т.д. В этих условиях
необходимо использование более универсальных алгоритмов, рассмот-
ренных выше.
Литература к главе 1
1. Ефимов Ю.В., Пирумов В.С., Партала В.А. и др. Радиоэлектронная
борьба в ВМФ. От Порт-Артура до наших дней. - М.: Издательский
дом «Оружие и техника», 2004.
2. Защита радиолокационных систем от помех. Состояние и тенденции
развития / Под ред. А. И. Канащенкова и В. И. Меркулова. - М.: Радио-
техника, 2003.
3. Сайбель А.Г Основы теории точности радиотехнических методов
местоопределения.-М.: Оборонгиз, 1958.
4. Соловьев Ю.А. Спутниковая навигация и ее приложения. - М.: Эко-
Трендз, 2003.
5. Линник Ю.В. Метод наименьших квадратов и основы математико-
статистической теории обработки наблюдений. - М.: Физматгиз, 1962.
6. Крамер Г. Математические методы статистики. - М.: Мир, 1975.
7. Зарубежное военное обозрение: 1973, № 1, 3, 8,11, 12; 1974, №1,2 ,6,
77, 10, 11, 12; 1975, № 1, 2, 5, 8, 10; 1976, № 3, 5, 7, 10, 12; 1977, № 6,
12; 1978, № 2, 5, 7, 8, 9, 12; 1979, № 5, 6, 7; 1980, № 2, 3, 5, 10, 11;
1981, № 3, 8,10; 1982, № 3,4, 5,11,12; 1983, № 3,6, 7, 8; 1984, № 1,2,
4, 7,11,12; 1985, №1,2,3,9,10.
64
8. Torrieri, D. J., Principles of Milytary Communication Systems. - USA,
Dedham, MA: Artech House Tnc. April 1981.
9. Электромагнитная совместимость радиоэлектронных средств и не-
преднамеренные помехи. Составитель Дональд Р.Ж. Уайт, вып. 1:
Сокр. пер. с англ, под ред. А. И. Сатира. - М.: Сов. радио, 1977.
10. Мельников Ю.П. Методы оценки эффективности воздушной радио-
технической разведки. - М.О., 1996.
11. Царьков Н.М. и др. Электромагнитная совместимость радиоэлектрон-
ных средств / Под ред. Н.М. Царькова. - М.: Радио и связь, 1985.
12. Сатир А.И. К вопросу о вероятностной оценке уровня бокового из-
лучения антенн. - Радиотехника, 1971, т. 26, № 3.
13. Бернстейн Р. Исследование угловой точности обзорного радиоло-
катора / Под ред. Л. С. Гуткина. - М.: ИИЛ, 1960.
14. Сверлит П. Максимальная точность определения угловых коорди-
нат импульсной радиолокационной станцией. - Вопросы радиоло-
кационной техники, 1957, № 2.
15. Справочник капитана дальнего плавания / Под ред. Г. Г. Ермолаева.
-М.: Транспорт, 1988.
16. Булычев Ю.Г., Коротун А.А. Компенсация систематических ошибок
измерений в угломерных системах. - Радиотехника и электроника,
1992, №10.
17. Булычев Ю.Г., Коротун А.А. Компенсация систематической по-
грешности в радиопеленгаторах. - Радиотехника, 1998, № 2.
18. Бакин С.А., Шустов Л.Н. Основы радиопротиводействия и радио-
технической разведки. - М.: Сов. радио, 1968.
19. Палий А.И. Радиовойна. -М.: Воениздат, 1963.
20. Палий А.И. Радиоэлектронная борьба. -М.: Воениздат, 1974.
21. Защита от радиопомех / Под ред. М. В. Максимова. - М.: Сов. радио, 1976.
22. Шварц М. Статистическая теория решений и обнаружения сигналов
в шуме // «Современная радиолокация». - М.: Сов. радио, 1969.
23. Мельников Ю.П., Попов С.В. Методы оценки погрешностей пара-
метров движения объекта при его активной и пассивной локации в
условиях РЭП. - Радиотехника, 1998, № 3.
24. Вентцель Е.С. Теория вероятностей. -М.: Физматгиз, 1962.
25. Гуткин Л.С. Теория оптимальных методов радиоприема при флюк-
туационных помехах. -М.: Госэнергоиздат, 1961.
26. Южаков В.В. Современные методы определения местоположения ис-
точников радиоизлучения. - Зарубежная радиоэлектроника, 1987, № 8.
27. Горелик А.Л. и др. Селекция и распознавание на основе локацион-
ной информации / Под ред. А.Л. Горелика. - М.: Радио и связь, 1990.
28. Задорожный А.И, Соловьев Ю.А. и др. Авиационное применение
спутниковых приемников в условиях помех. Сб. тр. 3-й НТК «Пла-
нирование глобальной радионавигации». - М., 2000.
29. Gromov, К., Akos, D., Pullen, S„ Enge, P„ and Parcinson, B., Interference
Direction Finding for Aviations of GPS. - ION GPS ’99, 14—17 September
1999, Nashville, TN.
30. Butch, F„ A Concept for GNSS Interference Monitoring. - ION GPS
’99, 14-17 September 1999, Nashville, TN.
65
ГЛАВА 2
Определение текущих координат
и параметров движения объектов
с работающими на них источниками излучения с
помощью угловых
и линейных измерений
В главе рассматриваются способы определения текущих координат и
скорости (модуля и направления) прямолинейно и равномерно движу-
щихся в пространстве объектов средствами РТР (преимущественно при
движении на плоскости, в частности, на водной поверхности). Носитель
средства разведки либо неподвижен, либо движется с постоянной или пе-
ременной по направлению скоростью, осуществляя специальный маневр.
Основным измерительным инструментом является пеленгатор, а также, в
отдельных случаях, бортовая РЛС, осуществляющая одиночные измере-
ния дальности до объекта. Два рассматриваемых в главе способа названы
по принятым в них известными исходными данными. В первом из их
принимаются известной величина модуля скорости движения объекта, во
втором - отдельные точки траектории его движения (начальная, либо ко-
нечная точка маршрута). На протяжении всей главы приводятся фор-
мульные соотношения и оцениваются погрешности определений анали-
тическими либо статистическими методами. Существо рассматриваемых
способов отражается заголовками параграфов.
2.1. Методы оценки погрешностей определения
текущих координат и скорости движения объектов
с помощью угловых измерений
с движущегося носителя
Задача определения текущих координат и скорости движения объектов,
в частности, надводных кораблей (НК) с работающими РЛС, неодно-
кратно рассматривалась применительно к корабельным средствам ме-
стоопределения, т.е. для пары «НК - НК». Элементы движения цели,
измеряемые по четырем пеленгам, определяются по соотношениям ра-
боты [1], однако в ней не приводятся аналитические выражения для на-
хождения направления и модуля скорости, а также соотношения для по-
грешностей. Воздушная РТР по сравнению с разведкой «НК - НК» име-
ет ряд особенностей, зависящих от существенно больших скоростей
разведки, что приводит к другим типовым геометрическим соотноше-
ниям. Поэтому результаты, полученные для задач «НК - НК», не могут
быть непосредственно применимы к задачам «ЛА - НК». Ниже дается
66
формула для оценки погрешностей в определении текущих координат
движущегося объекта в функции отношения скоростей носителя аппа-
ратуры разведки к скорости объекта при местоопределении последнего
но двум пеленгам. Выводятся также соотношения для определения те-
кущих координат и параметров движения объекта пеленгационными
методами при выполнении специального маневра по траектории.
Определение текущих координат объектов. Можно полагать, что по-
грешности местоопределения движущихся надводных кораблей опреде-
ляются, как минимум, двумя составляющими: 1) погрешностями из-за
движения НК, обусловленными неизвестностью скорости корабля и не-
одновременностью измерения пеленгов при точной пеленгации; 2) по-
грешностями местоопределения неподвижной цели при измерении пе-
ленгов с ошибками.
Погрешности местооп-
ределения объекта из-за не-
известности вектора скоро-
сти НК при двукратной пе-
ленгации с одного ЛА, ле-
тящего с постоянной скоро-
стью Ир, можно определить
следующим образом (рис.
2.1). За время t полета само-^
лета от точки А до точки В
(А и В - точки измерения
пеленгов) НК перемещается
на расстояние СС, равное
Рис. 2.1. Погрешности местоопределения
движущейся цели при ее двукратной
пеленгации с нулевыми ошибками
^нк4>-
Предполагается, что величина скорости НК (ИНк) и курс (J3) кораб-
ля за время /р не изменяются. В момент измерения второго пеленга НК
находится в точке С, но пеленги пересекаются в точке О. Расстояние
ОС есть линейная ошибка (А) местоопределения, вызванная движением
НК. Эта величина находится из треугольника СС'О в виде
ОС = А = (Инк tP sin fl) / sin /,
где / - угол пересечения пеленгов; угол между первым пеленгом и
направлением вектора скорости НК (угол ОС Q.
Учитывая, что tp = — и L = ^R^ + R%- 2.Я1Л2со8/л/б2 - 4ас, получим
& _ ИНК^Л2 + Я2 ~Zflj/^cosysin/?
KpSiny
67
где Ri и R2- дальности от точек пеленгования до точки О; Ир - скорость
полета самолета-разведчика; у- угол пересечения пеленгов.
Полагая, что курс НК является случайной величиной, распреде-
ленной по равномерному закону в соответствии с выражением
w(P) = —5—, справедливым при 0 < р < л, найдем дисперсию погреш-
(2л-)
ности местоопределения в виде
, 2гГд2(Д)1 Pf Гд (/?)!
’'-J — '"’- 1 —
О L J о L. -I
Кнк (Л12 + - 2R{R2COS^
(>/2 Fp sin у)
Для случая Ri = R2=R последнее выражение упрощается:
d KpV2cos(y/2)
(2.1)
(2.2)
щЛГ
2R I
(2.3)
(2.4)
Представляет интерес зависимость среднеквадратической погреш-
ности местоопределения НК, вызванной его движением, от времени
пролета базы летательным аппаратом (временем контакта с целью). По-
скольку база пролета определяется выражениями
L = Кр /р, у/2 = arctg (0,5 Vp tp /D),
где D = R cos (y/2) - расстояние от базы пролета до линии траверза, то
из (2.2) получим
КнкА
^=-ыкг
Vp41
Из (2.3) следует, что при базах пролета, не превышающих полови-
ны R, с погрешностью не более 10 % можно полагать, что
I'D
VPJ1
На рис. 2.2 представлены зависимости погрешностей местоопреде-
ления при двукратной пеленгации, обусловленных только движением
НК (oj) от скоростей Ицк, Ир и дальности D. Значение дальности
D = 200 км соответствует дальности прямой видимости цели при типо-
вых высотах применения вертолета, D = 400 км - дозвукового самолета.
При этом кривая 1 - Кцк = 25 узлов, D - 400 км; кривая 2 - Инк = 25 уз-
лов, D = 200 км или КНк =12,5 узлов, D = 400 км; кривая 3 - Инк =12,5
узлов, D =200 км. Из графиков следует, что ошибка Oj, вызванная неиз-
68
вестностью вектора скорос-
ти корабля, для вертолетов
заключена в пределах
15...30 км, а для самолетов
- в пределах 10... 15 км.
Для оценки погрешно-
стей местоопределения
движущейся цели при не-
нулевых ошибках пеленга-
ции можно воспользоваться
приближенным предполо-
жением о независимости
ошибок, вызываемых неиз-
вестностью скорости при
идеальном пеленгаторе и
ошибок, вызванных по-
Рис. 2.2. Зависимость погрешности
местоопределения корабля от скорости
ЛА при двукратной пеленгации
с нулевыми ошибками
грешностями измерения пеленгов при определении координат непод-
вижной цели. Погрешности определения координат неподвижных ис-
точников излучения по двум взаимно перпендикулярным осям для сим-
метричной базы в соответствии с (2.6) определяются выражениями
у[п
L
где oj, <ту - среднеквадратические погрешности по оси, параллельной и
перпендикулярной линии полета (базы) самолета-разведчика, соответ-
ственно; <та - среднеквадратическая погрешность пеленгации; п - число
пар независимых пеленгов, измеренных на базе L\D- расстояние до це-
ли по линии траверза.
Приведенные выражения справедливы при D/L > 3 и п >1 .
Для получения зависимости суммарной погрешности местоопре-
деления подвижной цели от времени контакта заметим, что при D/L > 3
погрешность по оси OY существенно превышает погрешность по оси
ОХ, т.е. »сгхи поэтому
(TD=^x+(Ty ЯСГу. (2-5)
Кроме того, если принять, что пеленги можно считать независи-
мыми, когда угловой интервал между ними равен или превышает сред-
неквадратическую погрешность пеленгации <тя, то число независимых
пар пеленгов, измеренных на базе L, равно
%
п *—
2aaD
(2.6)
69
Последнее соотношение, позволяя оценить максимальное число
независимых пар пеленгов, измеренных на одну РЛС за время пролета
базы L, не учитывает ограничений, возникающих, например, в поиско-
вых приемниках, когда интервал между перестройками (7),) может ока-
заться большим, чем временной интервал между соседними независи-
мыми пеленгами, т.е., когда Тп > , то число независимых пар пе-
Гр
1,
ленгов п%~—.
2ГП
Таким образом, для поисковых станций с достоверным приемом
сигналов за каждый цикл перестройки число пар пеленгов, измеренных
на каждую РЛС, равно:
VP
п ®———
D
при
Гр
?р
2 71
(2.7)
при
гР
В общем случае недостоверность события измерения пеленгов через
угловой интервал сгн может быть учтена средней вероятностью Р^, вы-
числяемой с учетом временных (поиск) и энергетических ограничений:
Гр^р
п ®,
2^П
°П,В
— j P(D)dD
Д'пв о
(2-8)
при
где Pq, =
°дР
VpTnDm
упв
j P(D)dD
О
(2.9)
при
Здесь P(D) - зависимость вероятности обнаружения от дальности до
РЛС, определяемая по полученным выше соотношениям; DnB - даль-
ность прямой видимости.
Подставляя (2.8) в (2.5) и принимая во внимание, что L =Vp tp, по-
лучим
-11,5
<Тд«3,4£
Р°д
С учетом погрешностей из-за движения цели суммарная погреш-
ность определения координат движущегося НК при многократной пе-
ленгации работающей на нем РЛС определяется выражением
70
*^Лсумм ~
3,4D
-ii.s]2 Г I2
Daa + ^НК-0
w₽J 1л<
и суммарная относительная погрешность описывается формулой
^"i/сумм
D
На рис. 2.3 представлены зависимости относительных среднеквадра-
тических погрешностей местоопределения движущихся НК при их много-
кратной достоверной (Рср = = 1) пеленгации от времени контакта при сга =
0,5° и значениях Ир, ИНк и D, приведенных в пояснениях к рис. 2.2.
При времени разведки более 400 с кривые приближаются к посто-
янному значению, определяемому погрешностями из-за неизвестности
вектора скорости цели (2.4), (см. рис. 2.2).
Из графиков (см. рис. 2.2 и 2.3) следует, что погрешности, вызванные
неизвестностью вектора скорости, достаточно велики и зачастую превы-
шают погрешности местоопределения неподвижной цели при заданных
ошибках пеленгации.
Радикальным решением задачи РТР подвижных источников излу-
чения является использование двух летательных аппаратов, осуществ-
ляющих синхронное пеленгование цели на базе L. В этом случае в каж-
дый сеанс измерения углов РЛС можно считать неподвижной, а по-
грешности - определяющимися по формулам двукратной пеленгации.
При использовании одного ЛА для компенсации этой погрешности, а
также для определения таких
параметров движения, как
курс и скорость корабля, при-
меняют специальные маневры
по траектории и скорости.
Один из таких маневров (спо-
соб фиктивного пеленга) рас-
смотрен в [1] применительно к
корабельным пеленгаторам.
Для определения параметров
движения в упомянутой рабо-
те рекомендуется построение
на планшете. Соотношений
для оценки погрешностей не
приводится.
Не ставя перед собой
задачу оптимизации вида
Рис. 2.3. Зависимость суммарной
относительной погрешности
местоопределения корабельных РЛС
от времени разведки при достоверной
пеленгации с ошибками аа= 0,5°
71
Рис. 2.4. Пеленгация движущейся цели на
маршруте в виде вытянутой петли:
кривая а - разомкнутая петля;
кривая b - замкнутая петля
траектории ЛА с точки зрения
минимальных погрешностей,
рассмотрим типичную для
РТР разомкнутую (а) или
замкнутую (Z>) вытянутую
петлю, состоящую из трех
или двух, участков полета (со
скоростью v) по одной и той
же прямой, соединенной ви-
ражами на 180° (рис. 2.4).
Если обозначить базу
между точками измерения пе-
ленгов через l=vT, где Т - вре-
мя однократного прохождения
ЛА между этими точками, а
через а, р, у, 8 - величины
этих пеленгов, то пеленг для
вытянутой незамкнутой петли
(обозначена на рис. 2.4, как а), когда четвертый пеленг 8 измеряется на
расстоянии по оси ОХ от первого пеленга а, выражение для угла у/
между курсом цели и направлением полета ЛА имеет вид
_ arctg{2sina[£ sin 8 sin /3 sin(a - у) - £ sin a sin 8 sin(/f - y)+ ->
cos a [2£ sin(/? - y) sin 8 sin a - 2 sin p sin у sin(<5 - a)] —>
—> + sin sin у sin(<5 - a)]}
-+-A-B-C ’
где A = £cos<5sin<zsin/?sin(«-y); В = E, cos p sin 8 sin a sin(a - y);
C = 2 sin p sin(a - y) sin(<7 - a).
Координаты цели при ее последнем пеленговании и дальность до
нее определяются по следующим формулам:
_ 2Lsin/?sinysin(« + </)
2 sin(/7 - у) sin(a + у/) - sin(/? + у/) sin(« - у) ’
х=_21
tgy sin у
Скорость цели находится по формуле
v vp {sinGg-y)[ysinGg-y)-Zsinysin/?]}
НК L + у/) sin у sin(/? - у)
где vp = Ы Т-скорость самолета-разведчика.
72
Точка измерения четвертого пеленга может не лежать на оси ОХ
(прямой между точками 1 и 2). В этом случае значение пеленга <5отсчи-
тывается в точке пересечения пеленга с прямой, соединяющей точки 1 и
2, а значение £ равно отношению промежутка времени между момента-
ми измерения первого и четвертого пеленгов к промежутку времени
между моментами измерениям первого и второго пеленгов.
Для вытянутой замкнутой петли (полет вдоль линии боевого со-
прикосновения), когда точка измерения четвертого пеленга совпадает с
точкой 2, куда переместился ЛА, замкнув петлю, выражения для у/, V и
R упрощаются, Так, проекции вектора скорости на линию базы и пер-
пендикуляр к нейсоответственно равны:
Гпар = (L/QT) [ ctg«(ctg/?-3 ctg<5) + ctg/(ctg/?+ ctg<5)],
Kllepn= (2L/QT) (ctga- ctg/7— ctgy+ ctg<5),
где Q = ctga (ctg/2 +3ctg<5) - ctg/4ctga-3ctg^) - ctg<^4ctg/?~ ctg/).
Модуль вектора скорости НК -
^НК=#пар)2+(^ерП)2-
(v
г перп
v
\ пар 7
направление движения - у/ = arctg
и дальность до цели из точки^измерения последнего пеленга -
_ 2Z(ctgy + 2ctg>?-3ctga!)
(Jsin#
Определение параметров движения. Рассмотрение проводится приме-
нительно к маршруту ЛА (см. рис.2.4) по замкнутой петле (Ь). Если вос-
пользоваться допущением, обычно выполняемым при воздушной РТР
на морском театре военных действий (ТВД):
D » VT,
то можно, не прибегая к дифференцированию полученных выше гро-
моздких выражений, найти достаточно простые соотношения. Действи-
тельно, из последнего неравенства следует, что пеленги, измеренные на
цель из точек 1 и 3, а также 2 и 4, параллельны. Отсюда вытекает, что
для измерения величины перемещения цели за время ЗТ между измере-
нием первого и четвертого пеленгов достаточно знать расстояние между
точками пересечения первого со вторым и третьего с четвертым. При
этом EF~2VT=d и EF]\AD, т.е. для определения курса (у/) достаточно
знать угол между EF и осью абсцисс.
Сделанное допущение является источником методической погреш-
ности, тем меньшей, чем меньше отношение VT/R. Так, если Р777?<0,05,
то относительные погрешности EV/V < 0,05; ER/R < 0,01; Еу/< 1,5°. Эти
73
погрешности, как правило, существенно меньше погрешностей, вызывае-
мых, например, ошибками инерциальной навигации [31].
Описанный подход позволяет свести задачу отыскания погрешно-
сти определения скорости к задаче определения величины и направле-
ния отрезка d, соединяющего две точки пересечения пеленгов (7,2 и
* у
Рис. 2.5. Определение положения
линии, соединяющей две точки,
координаты которых найдены с
погрешностями <зх и crv
3,4). Такая же задача возникает
при одновременном пеленгова-
нии прямолинейно движущейся
цели с двух ЛА в два разных мо-
мента времени, при определении
скорости цели с помощью борто-
вой РЛС одного ЛА и т.д. На рис.
2.5 показана схема определения
положения вектора скорости по
двум точкам, координаты кото-
рых найдены с погрешностями,
описываемыми эллипсами с по-
луосями ах и ст,. Из рисунка мо-
жет быть получено приближен-
ное выражение для погрешности
измерения расстояния в виде
у \* 2 \г
' ( <тг ] ,2 к<Ух . I
2 ——-bcos^/0 +к —- + sin(/0
(. 2^о ) \ J
(2.Ю)
где к = сту/(тх, остальные обозначения ясны из рис. 2.5.
Погрешность приближения (2.10) тем меньше, чем меньше отно-
шение <тх/do и ксгх /do. Так, при kax/do ~ 0,2 погрешность ® 0,01; при
ка/do « 1 погрешность приближения порядка 0,5.
Аналогично может быть получено приближенное выражение для
оценки погрешности определения курса:
(2.Н)
На рис. 2.6 приводятся результаты расчета по формулам (2.10),
(2.11) погрешностей определения курса и расстояния. При этом кривая
1 - 45°, к=5; кривая 2 - ip= 45°, £=1; кривая 3 - у/ = 45°, к= 5; кри-
вая 4 - у/= 0°,к = 1.
Из графиков следует, что при параллельных курсах НК и ЛА ({/= 0) и
при сгх/d0 погрешности измерения курса не превышают 10°, а относитель-
ная погрешность измерения модуля скорости crv/ V=c>jl dQ=0,14 (<rd/a=i,4;
crx/d(f=O,l). При этом величины aJVи практически не зависят от к. Для
74
курса у/ = 45° влияние к на относи-
тельную погрешность определения
скорости существенно; так, при к=\
aj К=0,14, а при Л=5 crv / И=0,68 и
ГТ|(,=1О0.
Возможности определения
параметров движения цели при не-
известном курсе (например, рас-
пределенном на интервале от 0 до
2 л) оцениваются по результатам
интегрирования (2.10) и (2.11) или
по аппроксимирующим эти резуль-
таты формулам для средних значе-
ний погрешностей:
Рис. 2.6. Погрешности определения
расстояний и направления
перемещения: <jJctx - сплошная линия;
штриховая линия
— ®(1,4 + —|ехр | 0,32 + ^—|(*-1)
I \ dn j
v
11 — 0,5 exp [-0,5(k -1)]}
Ошибки аппроксимации не превышают 10 % при 0 <о^/<70с 1 и 1<Аг< 10.
Более подробно вопросы определения параметров движения цели по
результатам единичных измерений пеленгов рассматриваются в [2].
Оценка погрешности определения скорости цели. Для использования
полученных соотношений необходимо знать параметры <т„ сги <У0, Ш опре-
деляемые, в свою очередь, характеристиками аппаратуры разведки, скоро-
стью ЛА и временем разведки /р. Применительно к аппаратуре РТР, опре-
деляющей координаты методом пеленгации, используем полученные выше
соотношения с учетом обработки результатов пеленгации по методу наи-
меньших квадратов поправок углов (2.6). Эти соотношения можно записать
в следующем виде:
1 + 4а2 1 при и = 1,
сгх 4а2 V2 V2 (2.12)
° а В 71
2\/п при п »1,
1 + 4а2 г-
т- = ал/2 при и = 1,
° у J 2ау/2 (2.13)
D 2,4а
при п »1,
4п
75
к =
2 а
3,4 а
при
при
п = 1,
п»\,
(2.14)
где а = D/L, D - расстояние до РЛС по линии траверза, L - база пролета;
п - число пар независимых пеленгов; аа - среднеквадратическая по-
грешность пеленгации: следующие приближения в (2.12) и (2.13) спра-
ведливы при а > 2.
Рассмотренный случай измерения по два пеленга на каждую точку
(см. рис. 2.4) в терминах, принятых в (2.12)-(2.14), соответствует и=1,
поэтому для использования в оценках погрешностей измерения пара-
метров движения справедливы следующие равенства:
<тх
er D 2V L
da=2VT =----Е-,
V2 3
t=3T, к = 2а = —,
Р
2>/2 tpV’
(2.15)
Обозначив crxD/(Vtp) = z, из (2.10) и (2.11) получим
— »1,5 z ^(0,53z + cos )2 + к1 (0,53z к + sin у/0 )2,
(2.16)
«у/2 arctg
1,06 к z
1 + tgVp
1 + fc2tgV0
Результаты расчета по этим формулам приведены на рис 2.7 для
Рис. 2.7 Погрешности определения курса
и скорости НК в функции отношения
пройденного за время разведки пути НК
к линейной погрешности пеленгации:
av / V - сплошные линии;
<jv - штриховые линии
погрешности пеленгации
аа = 8,8-10“3 и отношения
(vp /КНк ) скоростей ЛА и
НК, равного 20. При этом
кривые 1 и 4 соответствуют
значению {^=0°, кривые 2 и
5 - значению ^45° , кри-
вые 3 и 6 - значению ^=90°.
Из графиков, в частно-
сти, следует, что с ростом
угла у/ от нуля (параллель-
ный курс) до 90° (контр-
курс) относительные по-
грешности определения мо-
дуля скорости увеличива-
ются (при малых z) в не-
сколько раз, а погрешности
измерения курса уменьша-
76
ются. Удовлетворительная точность (относительная ошибка скорости
меньше 20% и курса меньше 13°) достигается, если Vtv > 15 axD, т.е. ко-
гда перемещение НК за время разведки более чем на порядок превыша-
ет линейную погрешность пеленгации.
Разработанная методика может быть использована для приближен-
ной оценки погрешности определения скорости также и при многократ-
ной пеленгации, когда и»1 и пеленги обрабатываются по методу наи-
меньших квадратов. Действительно, переход от четырех пеленгов на вы-
тянутой петле (см. рис. 2.4) к т позволит вычислять координаты точек Е,
F, С с большей точностью, определяемой соотношениями (2.12) - (2.14).
Для определения числа независимых пеленгов так же, как и ранее,
сделано предположение о том, что если значения углов, измеренные на
РЛС, отстоят более чем на среднеквадратическую погрешность пелен-
гации, то эти пеленги можно полагать независимыми. Для поисковых
станций РТР сделано предположение, что пеленги, измеренные через
время перестройки Та, также являются независимыми, т.е. принято, что
Т rarctg(vT/(2£>))
n = min-!---• -----ь----------
2ТП’
Т rarctg(v7’/(2Z>))'| 3,67aaJED
В частности, если — < ---------*---------- , то — »------- д—.
2Г„ |_ <тх J d0 К/''5
Подстановка этих значений в (2.10), (2.11) и использование (2.15)
приводит к соотношениям для относительных погрешностей измерения
скорости НК при многократной пеленгации на вытянутой петле. Здесь эти
соотношения из-за громоздкости не приводятся, однако результаты рас-
чета по ним даются на рис.
2.8. Зависимости соответст-
вуют следующим значениям
параметров: ИНк = 10 м/с,
vp = 200 м/с, D = 100 км,
Г=30 с, ста=8,8-10-3. При этом,
так же, как и на рис. 2.7, кри-
вые 1 и 4 соответствуют зна-
чению ^=0°, кривые 2 и 5 -
значению (Z=45°, кривые 3 и
6-значению ^90°.
Из этих зависимостей
следует, что измерение ско-
рости НК с борта ЛА с по-
грешностью не более 30%
по модулю и 10° по курсу
требует выполнения плоской
Рис. 2.8. Погрешности курса и скорости
при многократной пеленгации объекта
на вытянутой петле в функции
от продолжительности разведки:
av/V - сплошные линии;
- штриховые линии
77
петли при Z)=100 км с общим временем разведки Z^20 мин и размахом
петли Л»80 км. Для измерений с теми же погрешностями на больших
дальностях требуется увеличивать длину петли и, соответственно, про-
должительность разведки. Однако эти увеличения не пропорциональны
увеличению дальности. Так, при увеличении дальности до 400 км (в че-
тыре раза) длина петли должна быть увеличена примерно втрое.
Все примеры расчета получены для симметричного случая, т.е. для
расположения цели на перпендикуляре к середине петли в момент /р/2
(см. рис. 2.4).
2.2. Методы оценки погрешностей определения
текущих координат и скорости движения объектов
по данным единичных угловых и линейных
измерений в условиях РЭП
В общем случае для объекта, движущегося с постоянной скоростью,
подлежат определению его координаты (X, Y) и характеристики вектора
скорости - величина и направление (И, (/) или его проекции на оси ко-
ординат (Vx,Vv). При осуществлении постоянного радио- или гидролока-
ционного наблюдения объекта в отсутствии радиоэлектронного подав-
ления (РЭП) периодически поступающие данные о пеленге и дальности
позволяют вести непрерывное определение его текущих координат и
параметров движения (ПД).
Будем полагать, что условия РЭП сводятся к тому, что определе-
ние дальности до объекта путем измерения задержки зондирующего
сигнала в активной РЛС либо невозможно, либо носит единичный ха-
рактер, например, реализуется только на первом кратковременном этапе
наблюдения, когда активные помехи радиолокационному каналу еще не
ставятся. На последующих этапах, когда включаются активные помехи,
основным источником информации о положении объекта становятся
данные измерений его текущих угловых координат, получаемые путем
пеленгования, (в частности, помехового) излучения объекта (электро-
магнитного или акустического). Предполагается, кроме того, что источ-
ник помехового сигнала совмещен с обнаруживаемым объектом и что
пеленги на него достоверно идентифицируются, т.е. задача селекции
неразличаемых по параметрам пеленгов, измеренных на разные объек-
ты, здесь не рассматривается.
Имеющиеся публикации по рассматриваемому вопросу (например,
[2, 3, 4] и др.) не охватывают указанной специфики условий РЭП, кото-
рая для потребителя информации бортовых средств радиолокационной
и радиотехнической разведки сводится к резкому ограничению числа
измерений, когда не удается построить эффективный рекуррентный ал-
горитм. Кроме того, измерения разнотипны и нерегулярны, часто необ-
78
ходимо строить специальный маневр носителя наблюдательных пунк-
тов (НП), например, типа двойной или одинарной петли и т.д.
Задача определения координат и скорости движения морских целей,
в частности, надводных кораблей с работающими РЛС, неоднократно
рассматривалась применительно к корабельным средствам местоопреде-
ления, т.е. для пары «НК - НК». Элементы движения цели, измеряемые
но четырем пеленгам, определяются по соотношениям работы [1], однако
в ней не приводятся аналитические выражения для нахождения курса и
модуля скорости, так же, как и соотношения для погрешностей.
Рассмотрим получение аналитических зависимостей для определе-
ния текущей дальности до движущегося объекта и его скорости при ог-
раниченном (2...4) числе измерений из произвольных точек простран-
ства, а также оценку погрешностей указанных определений.
Если пеленгование производится (в общем случае несинхронно)
несколькими пространственно разнесенными НП или одним НП, распо-
ложенным на движущемся носителе, определение координат и ПД объ-
екта осуществляется с использованием данных о координатах точек
расположения НП или движущегося носителя в моменты пеленгования.
В случае одного неподвижного НП в качестве исходных данных для
вычисления дальности могут использоваться априорно известная в ряде
ситуаций величина скорости объекта (И) или координаты какой-либо
точки траектории объекта (например, по данным единичного радиоло-
кационного измерения [2], с последующим координатным отождествле-
нием информации, например, по алгоритмам [5]). В последнем случае
скорость и текущая дальность определяются по данным этого контакта
(дальности и пеленгу) и двум измерениям пеленга, выполняемым до или
после радиолокационного контакта (П1,2,з,Я3 или 7?i,nA2i3 соответствен-
но) по следующим формулам:
JZ - ^32 ^'3 ~ ~ (^сЗ ~ -*Г )] * ~~ ^3, ~У1~ МзЩ^сЗ ~*2)]
^31^32 - tgn,)
у _ ^32^§П2 [^з ~ У1 ~ (^сз ~ Xi)] ~ ^з itg^Ii [^3 ~ У2 ~ tgn2 (RC3 - х2)]
^3l^320gH2-tgn,)
(2.17)
или
У __ ^2i [ft?i ~Уз ~ *§Пз(Л?1 ~хз)]~7з1 [Л-i ~У2~ ~хг)]
^21^31(tgn3 — tgn2)
у _ T^tglb [-ftji ~ Уз ~ ^Ц;(Лз ~хз)] ~ 7з1^Пз [Т?5, — у2 -tgn2(7?e, — х2)]
^21^31 (tgn3 — tgn2)
(2-18)
79
2J _ (^31 ^21 )(^cl^g^2 fttl)+ ^21 (x3^^2 -Уз) ^3l(x2^g^2 ^2)
3 ^.(Ш - tgn2)COSn3
где Rsi = Ri sinll, + yt; Rc, = R, cosll, + xb xt ,у, - координаты точек z-x из-
мерений; Ту - интервалы времени между z-м иу'-м измерениями.
Если определение координат и ПД производится только по дан-
ным пеленгования (например, [2]), то для рассматриваемого расположе-
ния точек пеленгования и траектории объекта в одной плоскости нахо-
ждение четырех неизвестных - проекций вектора скорости (ТХ,ТУ) и ко-
ординат какой-либо точки траектории объекта (обычно первой для дан-
ной серии пеленгов - в общем случае может быть осуществлено
по четырем последовательным измерениям пеленга на объект (П1,2,з,4) из
нескольких пространственно разнесенных точек с известными коорди-
натами Xi,yi, некоторые из которых могут совпадать (рис. 2.9). В частном
случае, когда носитель пеленгатора также движется с постоянной ско-
ростью, это утверждение несправедливо.
Рис. 2.9. Варианты траекторий носителя пеленгатора для определения
параметров движения объекта и его координат:
а - первый вариант; б - второй вариант; в - третий вариант
Искомые величины находятся в результате решения системы из
четырех уравнений вида
tgllj =(}<-х,),
непосредственно вытекающих из соотношений текущих координат объ-
екта и точек пеленгования в моменты измерения пеленга, отстоящие от
момента первого измерения на интервалы, как это показано на рис. 2.10.
80
Рис. 2.10. Пример траектории носителя аппаратуры разведки
для определения параметров движения объекта
Здесь X, = + КД,; = V VyTn; i = 1,2,3,4.
Полученные из этих уравнений выражения для X},Y},Vx,Vv имеют
следующий вид:
% _ Г31 [^21^32(^1 ~^4) ~ ^41^34(^1 ~ ^2)]+ ^21^41^24(^1 ~Аз)
^31(^21^32^41-^41^34^21) + ^21?41^24^31
у _ ^31(^21^32-^14 ~ ^41^34^12) + ^21^41^24^13
1 УЗД ~T^M + T2iTA}324S3i ’
у _ ^41(^у2 ~^x2tgn2)-7’2|(<5'J>4 -^.дГцПд)
’ (2 20)
у Г41 tgn4Ц-2 - ^2^П2) ~ ^П2(^4 - ^4{ёП4)
у ВДД2
где A,.=y,.-x,.tgn,.;^.=tgn,-tgny; ^.=Д,1^-Ду^П,.; З—Х^-х;, 8yi=Y3-yi-,
Xi ,yi - координаты точек нахождения НП, в которых был измерен z-й пе-
ленг; Тп - интервал времени между измерениями /-го и первого пеленга
в данной серии измерений.
Расстояние до объекта относительно точки измерения четвертого
пеленга определяется следующим выражением:
81
R4 = (X} + КХГ41 - x4)Scn4 = (Xi + И„Г41 - y4 )Cscn4. (2.21)
При линейном расположении точек пеленгования на оси и совме-
щении начала координат с одной из них, а также в случае выполнения
нескольких (двух-трех) измерений пеленга из одних тех же точек вы-
ражения (2.17)-(2.20) упрощаются. Так, например, при поочередном из-
мерении пеленга в двух точках (П] ,П3 в точке х=0, у=0 и П2 ,П4 в точке
х=1, у=0) через одинаковые интервалы времени Т:
х _2/[tgn3(tgn4 -tgn2) + 2tgn2(tgn4 -tgn3)]
1 (tgn, - tgn4 )(tgR3 - tgn2) + 3(tgnj - tgll2 )(tgn3 - tgn4) ’
K^tgnu (2.23)
y = 2V(X,-/)(3tgn2-tgn4)
x 3T(tgn2-tgn4)
V = ^(3tgn4 -tgn2)-2(X, ~/)tgn2tgn4)
3T(tgn2 -tgn4)
Если П4=П2 (т.е. вектор скорости объекта совпадает с линией пе-
ленга), то
х _ Ztgfl2 х itgn4 у _Х3-Х}
1 tgn2-tgn,’ 3 tgn4-tgn3’ х 2Т ’ (226)
T^tgn,. т3=здт3, Vy=^-
Описанная процедура поочередного измерения пеленга из двух то-
чек может быть интерпретирована как сеанс пеленгования с одного но-
сителя, движущегося с постоянной скоростью галсами длиной / с дву-
кратным изменением курса на 180° (рис. 2.9,а). Возможны и другие ва-
рианты маневра, в частности, с однократным изменением курса на 180°,
при этом первый и четвертый пеленги могут измеряться в одной и той
же точке, а два других - в точке разворота и в середине прямого или об-
ратного галса (рис. 2.9,6,в). На рис. 2.10 приведен пример взаимного
расположения траекторий объекта и носителя.
При третьем варианте маневра и последовательности измерений
пеленгов может быть также осуществлено определение дальности и ПД
методом «фиктивных пеленгов», основанным на предположении, что
при продолжении носителем движения прямым галсом после точки из-
мерения второго пеленга (точки разворота) скорость изменения пеленга
объекта постоянна до моментов измерений третьего и четвертого пелен-
гов на обратном галсе.
Это позволяет построить на продолжении линии прямого галса
фиктивные точки пеленгования с координатами Oxi=x2+(x2-xi)7’,-2/7’2i
ФУ1=У2+(У2- У\)Та/Т2\ и фиктивные пеленги ФП1=П2+(П2-П1)Д2/Т’21, точ-
82
ки пересечения которых с соответствующими (z-ми) истинными пелен-
гами дают текущее местоположение объекта в данные моменты време-
ни. Здесь Тй - интервал времени между измерениями / -го и второго пе-
ленгов. При этом для третьего варианта маневра (рис.2.9,в), где точка и
момент измерения третьего пеленга лежат в середине пространственно-
го и временного интервалов между вторым и четвертым пеленгами,
дальность и ПД объекта определяются по формулам
I sin(On3) 2/ sin(On4)
/Vl =------------, U — ---------------
sin(On3 - П3)
_ I 2sin(On4)cosH4
X ГТЧ
I 2sin(<I>n4)sinn4 sin(On3.)sinn3
43 sin(On4 - П4) зш(ФП3 - П3) ’
/?4 =-------------,
sin(<I>n4 -П4)
sin(On3.)cosn3 1
sin(On4-n4) 5т(ФП3-П3) 2
(2.27)
K” T
sm(On4-n4)
где ФП3 = П2 + 0,5(П2 - П]); ФП4 - 2П2 —П]; Т43 - интервал времени ме-
жду измерениями третьего и четвертого пеленгов.
Сравнительная оценка погрешностей определения дальностей про-
водилась статистическим моделированием для разных курсов объекта
от 0 до 315° с интервалом в 45° при постоянной длине пути (£) пелен-
гуемого объекта за сеанс пеленгации (А = VT^ = 3 FT). Начальная точка
траектории объекта располагалась на перпендикуляре к середине базы
1{Х = 1/2) на расстоянии У, .превышающем длину пути объекта в 12,5 раз
или в 6,25 раза. При этом от-
носительная величина базы
(галса) составляла соответст-
венно 12% и 24% для перво-
го варианта маневра (3 галса)
и 18% и 36% - для второго и
третьего (2 галса), отношение
скоростей носителя и объек-
та v/V= 4,5.
Результаты статистиче-
ского моделирования для оце-
нок погрешностей при опре-
делении дальности по форму-
лам (2.17)-(2.25) представлены
на рис. 2.11 для ошибок пелен-
гациио;, = 0,3°, при этом кри-
вые 7,2,3 соответствуют пер-
вому, второму и третьему ва-
риантам маневра и У/Л = 6,25;
кривая 4 - первому варианту
Рис. 2.11. Результаты статистического
моделирования оценки случайных
погрешностей определения дальности
по формулам (2.17) - (2.25)
для ошибок пеленгации ап = 0,3°
83
Рис. 2.12. Результаты статистического
моделирования оценки случайных
и систематических погрешностей определения
дальности по формулам (2.17)—(2.25)
для ошибок пеленгации а„ =0,3°
(кривые 3,4); <т;1=0,7о (кривая 5).
маневра и Y-JL = 12,5; число
испытаний равно 100.
На рис. 2.12 наряду со
случайными погрешностя-
ми (кривые 3...5 с индика-
цией на левой вертикальной
шкале) показаны также за-
висимости систематических
погрешностей от курса объ-
екта (кривые 1,2, правая
вертикальная шкала графи-
ка), которые появляются
при использовании метода
«фиктивного пеленга» (тре-
тий вариант маневра) - ос-
тальные исходные данные
для рис. 2.12 таковы:
У1/£=6,25 (кривые 7,5) и
Ki/Z=12,5 (кривые 2,4,5);
Из рассмотрения результатов моделирования следует, в частности,
что лучший результат, т.е. наименьшие погрешности, дает трехгалсовый
маневр, использование «фиктивного пеленга» приводит к меньшим слу-
чайным погрешностям, но возникающие при этом систематические ошибки
(кривые 7,2 на рис. 2.12) в большинстве случаев превышают случайные.
Оценка погрешностей определения ПД объекта в общем случае
может быть произведена путем моделирования или дифференцировани-
ем полученных выше выражений. Результаты моделирования, при-
веденные на рис. 2.11 и 2.12, могут быть распространены на другие зна-
чения сгп при использовании приближенных соотношений для и=1.
Для некоторых конкретных вариантов и ситуаций, в частности, для
трехгалсового маневра с двукратным изменением курса на 180° - (см. рис.
2.9,б,в) в условиях, когда перемещение объекта за время Т много меньше
дальности, можно получить достаточно простые соотношения для анали-
тической оценки этих погрешностей. Из этих условий следует, что пелен-
ги, измеренные на объект из точек 7 и 3, а также 2 и 4, приближенно па-
раллельны и для измерения величины перемещения объекта за время ме-
жду измерением первого и четвертого пеленгов достаточно знать рас-
стояние между точками пересечения первого со вторым и третьего с чет-
вертым. При этом d = 2VT и отрезок d приближенно параллелен курсу
объекта, т.е. для определения курса (</) достаточно знать угол между от-
резком и осью абсцисс.
84
Сделанное допущение является источником методической погреш-
ности, тем меньшей, чем меньше отношение VT/R. Так, если VT/R < 0,05,
то относительные погрешности АР7Г < 0,05; &R/R < 0,01; Д|/< 1,5°. Эти
погрешности в типовых условиях применения, как правило, существенно
меньше погрешностей, вызванных ошибками пеленгации, так же, как и
погрешности, вызванные, например, мерцающими шумовыми помехами,
излучаемыми с носа и кормы корабля.
Применение описанного подхода для оценки погрешностей опре-
деления параметров движения объекта при его пеленговании на криво-
линейном маршруте носителя аппаратуры разведки приводится в п. 2.1
и иллюстрируется рис. 2.7 и 2.8.
Полученные аналитические соотношения для определения теку-
щей дальности и параметров движения объекта охватывают достаточно
большое число ситуаций наблюдения средствами активной и пассивной
локации в условиях жесткого дефицита как по числу измерений (2...4),
так и по их качеству (главным образом, угловые). Относительные по-
грешности определения текущей дальности, минимальные при исполь-
зовании маневра типа двойной вытянутой петли, составляют 5... 10 %
для отношения пути объекта к дальности ~0,1 и уменьшаются по мере
роста времени наблюдения. Курс объекта, движущегося со скоростью
и 0,1 от скорости носителя, определяется с погрешностью порядка 10° за
время маневра последнего общей продолжительностью порядка 10 мин,
скорость объекта при этом определяется с погрешностью 5... 10%.
2.3. Определение дистанции и элементов
движения объекта наблюдения
методом предвычисляемых фиктивных пеленгов
Известен ряд вариантов графических и расчетных способов определе-
ния расстояния и элементов движения (ЭД) движущегося с постоянной
скоростью объекта по данным его пеленгования с маневрирующего ко-
рабля [4-7]. Так, в [6, 7] описано определение ЭД по четырем пеленгам,
при котором свой корабль выполняет маневр с двукратным изменением
курса и промежуточным уменьшением скорости хода до возможно
меньшей величины, причем производится приближенная оценка рас-
стояния до объекта в момент обнаружения [6], измерение трех пеленгов
на объект при движении с малой скоростью по направлению первого
пеленга и измерение четвертого пеленга после изменения курса с уве-
личением скорости. По нанесенным на карту местам своего корабля и
пеленгам выполняется графическое построение линии курса объекта и
фиктивного пеленга на него из точки, где находился бы свой корабль в
момент измерения четвертого пеленга, если бы он перед этим не изме-
нил скорости и курса. Место объекта определяется как точка пересече-
85
ния линии фиктивного пеленга с линией фактически измеренного чет-
вертого пеленга.
В работах [4, 7] приведены варианты определения дистанции до
объекта слежения по пеленгам, измеряемым в начале и конце маневра
для случаев выполнения наблюдателем маневра с изменением борта
слежения, т.е. с пересечением курса объекта у него по корме, или же без
пересечения курса, на прежнем борту объекта, но при изменении пози-
ции слежения по пеленгу.
В первом случае на карте проводят пеленги на объект до и после
пересечения его курса и между линиями пеленгов вмещают отрезок, па-
раллельный курсу объекта и равный пройденному объектом пути за
время маневра. Точка окончания этого отрезка на линии второго пелен-
га определяет место объекта.
Во втором случае, добившись постоянства пеленга на цель, т.е.
уравняв скорости движения, определяют и прокладывают на карте на-
чальный пеленг, затем увеличивают скорость и после существенного
изменения пеленга на объект из точки нахождения наблюдателя в конце
маневра прокладывают линию второго пеленга, из точки начала маневра
откладывают отрезок, равный пути наблюдателя, если бы он шел с
прежней скоростью, из точки конца этого отрезка проводят линию фик-
тивного пеленга, параллельную начальному пеленгу, до пересечения с
измеренным в конце маневра вторым пеленгом. Точка пересечения оп-
ределяет место объекта. Как видно, реализация способа [7] требует вы-
полнения специального маневра и ряда промежуточных графических
построений. В [4] маневры и графические построения достаточно про-
сты, однако предполагаются известными элементы движения, исполь-
зуемые при построении маневра или графическом решении задачи.
К тому же упомянутые графические построения не позволяют непо-
средственно применять обработку данных измерений на ЭВМ, что су-
щественно для повышения точности и скорости определений.
В [8] приведены формульные выражения для определения коорди-
нат и скорости объекта по четырем пеленгам на него из двух или более
разнесенных точек через произвольные интервалы времени. Выражения
имеют универсальный характер и позволяют вычислять текущие коор-
динаты движущегося с постоянной скоростью объекта при любой тра-
ектории движения своего корабля, однако, они достаточно громоздки,
что затрудняет их использование, например, на непрограммируемом
калькуляторе. Применение определенных видов маневра (например,
двух-трех возвратных галсов, как в [8]), позволяет упростить расчетные
соотношения, но накладывает временные ограничения на выполнение
достаточно сложного маневра.
От некоторых недостатков свободен описанный ниже метод опре-
деления дистанции с предвычислением произвольного числа фиктивных
86
пеленгов, позволяющий автоматизировать процесс вычисления. Соглас-
но предлагаемому способу, наблюдатель после обнаружения объекта,
двигаясь с постоянной скоростью (рис. 2.13) или оставаясь на месте
(рис. 2.14), производит три последовательных измерения пеленгов на
объект (П1,П2,П3) с одновременным измерением и запоминанием вре-
менных интервалов (Т12 и Г2з) между моментами измерений и собствен-
ных координат наблюдателя (Mi,M2,M3). По этим данным вычисляются
прогнозируемые значения пеленгов на объект через некоторые, в общем
случае произвольные интервалы времени, прошедшие после измерения
третьего пеленга (7з4,7з5 и т.д.) из точек, в которых находился бы на-
блюдатель при движении его с тем же курсом и той же скоростью через
эти временные интервалы (М’4,М’5 и т.д.), или из первоначальной точ-
ки, если наблюдатель неподвижен. Прогнозируемые фиктивные точки и
пеленги вводятся в ЭВМ или наносятся на карту при необходимости
графических построений. Затем выполняется маневр по направлению
и/или скорости, выбираемый, например, исходя из условий оптимиза-
ции последующего наблюдения и точности определения координат
[7,9]. Через некоторые интервалы времени после третьего измерения,
например, равные принятым при вычислении прогнозируемых фиктив-
ных пеленгов (Ф4, Ф5 и т.д.) производят следующие измерения пеленгов
на цель (П4, П5 и т.д.), вводят их значения в ЭВМ (или/и при необходи-
мости прокладывают их на карте) и определяют последовательные мес-
та нахождения объекта как точки пересечения измеренных и фиктивных
пеленгов, соответствующих одинаковым интервалам времени от момен-
та измерения третьего пеленга. Вычисление прогнозируемых фиктив-
ных пеленгов и соответствующих им точек (М’) на линии первоначаль-
ного курса наблюдателя может производиться и применительно к фак-
тически имеющим место моментам измерения действительных пеленгов
на объект (П4, П5 и т.д.) после выполнения маневра.
Рис. 2.13. Пеленгация движущегося с постоянной скоростью (Г) объекта
наблюдателем, движущимся со скоростью v и совершившим маневр
по направлению
87
На рис. 2.13, 2.14 фиктивные пеленги показаны пунктиром, а из-
меренные - сплошными прямыми. Порядковые номера измеренных пе-
ленгов и точек их пересечения с линией движения объекта обозначены
цифрами
Рис. 2.14. Пеленгация движущегося с постоянной скоростью Vобъекта
неподвижным наблюдателем
В общем случае выполнения измерений пеленгов ПьП2,Пз через
произвольные временные или угловые интервалы прогнозируемое на
z-й момент значение фиктивного (Ф) пеленга на объект от неподвижно-
го или продолжающего движение с постоянной скоростью наблюдателя,
вычисляется по формуле
с1„(ф.) r23^,ctgn3(ctgn2 -ctgni)-ri2r3lctgnl(ctgn3 -ctgn2)
“ctgn2)
Если пеленгация объекта производится через одинаковые угловые
интервалы, т.е. П3 - П2=П2 - Пь то значения прогнозируемых на произ-
вольные (z-e) моменты времени фиктивных пеленгов (Фг) определяются
из достаточно простого выражения
1ё(Ф,- - П2) = tg(n3 - П2) > (2-29)
72371/ 1l213i
где Ту, Ту- интервалы времени между моментами соответственно пер-
вого или третьего, измерений и моментом, для которого рассчитывается
фиктивный пеленг: Т^Тп+Т^+Ту,.
При неподвижном наблюдателе (см. рис. 2.14) и при выполнении
отсчетов через одинаковые угловые интервалы (П3 - П2= П2 - П1) значе-
ния курсового угла относительно линии движения объекта в точках пе-
ресечения ее с линиями второго и третьего пеленгов (КУО2 и КУО{), по-
зволяющие определить курс объекта, могут быть найдены по формулам
tgKyO2 = tg(n3 -П2)^, (2.30)
Аг Лз
88
^уо3 =
7]2cos(I13 П,)- T2i
(231)
В частном случае выполнения измерений пеленгов ПьПгДз через
одинаковые промежутки времени значение прогнозируемого четвертого
пеленга на объект (П4) через такой же интервал времени (т. е. при
Тз4=Т22=Т12) для соответствующей точки на продолжении линии курса
наблюдателя можно определить из выражения, непосредственно выте-
кающего из соотношения, приведенного в [20]:
ctg(IT4 -П,) = |[4ctg(n3 - ПД - ctg(n2 - П2)]. (2.32)
Отметим, однако, что практическая ценность относительно простого
выражения (2.32) ограниченна, так как оно позволяет получить значение
прогнозируемого пеленга только на один (определенный) момент време-
ни, т.е. произвести лишь однократное измерение дистанции до объекта
после выполнения наблюдателем маневра за этот интервал времени.
Задача, поставленная в [20], может быть решена в процессе прямоли-
нейного равномерного движения наблюдателя путем сравнения измерен-
ных в произвольные моменты времени пеленгов на объект с прогнозируе-
мыми их значениями по данным предыдущих наблюдений с использовани-
ем приводимых в настоящем материале соотношений.
Для оценки погрешностей определения дальностей до движущего-
ся объекта, а также модуля скорости и направления движения в общем
случае могут быть использованы соотношения, приведенные в [8]. Там
же даются примеры численных оценок для маневра типа «замкнутая
петля» и «разомкнутая петля», соответствующего однократному и дву-
кратному изменению курса наблюдателя на 180°.
Дадим количественную оценку погрешности для случая измерения
пяти пеленгов через равные интервалы времени Т и однократного изме-
нения курса наблюдателя на 90° непосредственно после измерения
третьего пеленга (см. рис. 2.13, 2.14) по минимальному числу пеленгов,
т.е. без набора промежуточных пеленгов и их совместной обработки.
Значения четвертого и пятого фиктивных пеленгов определяются
из формулы (2.28), которая применительно к условиям одинаковых ин-
тервалов между моментами измерения пеленгов приобретает вид
ctgO 3ctgn3(ctgn2 -ctgn^-ctgn/ctg^ -ctgn2) _
4 4ctgII2 - 3ctgll1 - ctgll3
ctgO 2ctgn3 (ctSn2 - ctgni) - ctgni (ctgn3 - ctgn2) (2 34)
5 3tgn2 - 2ctgn, - ctgll3
Расстояния от точек измерения пеленгов до объекта, расположен-
ного в точках 4 и 5, находятся из треугольников, боковыми сторонами
89
которых являются измеренные и фиктивные пеленги на одну и ту же
точку, а основанием - расстояния между точками измерения пеленгов и
точками построения фиктивных пеленгов на оси ОХ (см. рис. 2.13):
(2.35)
где v2v - скорость наблюдателя по оси OY после выполнения маневра и
следования с новым курсом; 7з4 и Тз5 - интервалы времени между мо-
ментами измерения третьего и четвертого пеленгов и третьего и пятого
соответственно (для рассматриваемого примера Т\2 =107’, 7’34=5Т и
7’35=107).
Модуль скорости V и курс а объекта наблюдения определяются по
формулам
v = 7(х5-х4)2 + (у5-у4)2
у, — у.
а = arctg—2---
х5 -х4
(2.36)
где Х4 =7j3vlx +А4созП4 ; Х5 =7’13v1i + 7?5cosII5 ; Y4 = T34v2v +T?4sinll4 ;
Y5 = T-iXiy + ^sinllj.
Пример. Были выбраны следующие значения параметров: началь-
ные координаты объекта наблюдения JG=O; У]=100 единиц; скорость
Кх=4, Yv=-3 единицы; начальные координаты наблюдателя Х|=у!=0; ско-
рость на первом участке Vix=2, vlv=0; на втором участке после выполне-
ния поворота на 8 румбов v2=Q, vlv=2. (Линейные величины и скорости
выражены в условных единицах, согласованы между собой и рис. 2.13.)
Точные значения измеренных и фиктивных пеленгов для интерва-
ла наблюдения Т=5 временных единиц соответственно равны: П1=90о,
П2=83,290163192°, П3=74,054604099°, 114=48,3664066°, П5=18,434948823°,
Ф4=61,389540334, Ф5=45°.
Предполагалось, что погрешностями измерения собственных ко-
ординат наблюдателя (в предположении использования спутниковой
навигации), равно как и погрешностями измерения моментов и интерва-
лов времени, можно пренебречь. Погрешности пеленгации предполага-
лись случайными, нормально распределенными со средним значением,
равным точному значению пеленга и среднеквадратическим отклонени-
ем, меняющимся от 0 до 0,2°. Расчеты проведены для минимально не-
90
обходимого числа измерений и для двух значений интервала наблюде-
ния Т=5 и Г=10 временных единиц.
На рис. 2.15 и 2.16 даются результаты расчета относительных сред-
неквадратических отклонений <tr/R, ctd ID результатов определений
дальностей до объекта (Л4, Л5) и расстояния при разных значениях
времени наблюдения Т. Относительная погрешность измерения расстоя-
ния Z>45 эквивалентна относительной погрешности измерения скорости
объекта. Даются также среднеквадратические погрешности сг„ определе-
ния курса объекта, а. Из графиков, например, следует, что для получения
относительных погрешностей, не превышающих 10% и курса не более 1°,
необходимо измерять пеленги с угловой погрешностью не более 6 угло-
вых минут с временным эквивалентным интервалом, равным Г=10. Уве-
личение временного интервала вдвое при тех же значениях скорости и
при том же начальном расположении объектов приводит к уменьшению
относительных погрешностей не менее чем в два раза.
Рис 2.15. Относительные погрешности определения текущих координат
и курса движущегося объекта при времени наблюдения Т-5 ед.
Рис. 2.16. Относительные погрешности определения текущих координат
и курса движущегося объекта при времени наблюдения Г=10 ед.
91
При автоматическом выполнении последовательных измерений
пеленга и вычислений фиктивных пеленгов, координат наблюдателя и
дальностей до объекта для повышения точности определения ЭД можно
использовать известные методы статистической обработки совокупно-
сти измерений [10]. В частности, такой обработке можно подвергать по-
следовательность определяемых в ходе маневра наблюдателя проекций
вектора скорости объекта на оси координат Vx = (Xj - Х^/Ту, Vy = (Yj-
- Yi)/Tj, где прямоугольные координаты объекта X. Yt определяются те-
кущими координатами наблюдателя х,, у, и проекциями дальности D, до
объекта (Z>, sinri,, Z), cosII,), вычисляемой при каждом измерении пелен-
га П,- с использованием соответствующих фиктивных пеленгов и коор-
динат наблюдателя (Ф„ М,, МД.
Был также выполнен расчет маневра и графического решения три-
ангуляционной задачи определения дальности при одинаковых значе-
ниях пеленга и разных временных интервалах между моментами изме-
рения пеленгов. Численные значения параметров: скорость наблюдателя
v = 10 уз., скорость объекта И=20 уз., начальная дистанция около
40 каб., значения измеренных пеленгов - П|=0°; П2=10°; П3=20°, вре-
менные интервалы - Ti2=291 с, 7)3=207 с, фиктивные пеленги Ф4=30°,
Ф5=40°; Фб=50°, соответствующие им временные интервалы 7)4=303 с,
7)5=432 с. Интервал времени, соответствующий определенному (задан-
ному) значению прогнозируемого z-ro пеленга (ГИБ) при выполнении
первых двух отсчетов пеленга через одинаковые угловые интервалы
может быть вычислен по формуле
т .
3' +
tg(nn,.-n2)
tg(n3-n2)
Однако на практике проще рассчитывать соответствующее данно-
му моменту значение фиктивного пеленга при каждом очередном изме-
рении пеленга на объект в процессе маневрирования.
(2.37)
где Q, =
2.4. Методы определения текущей дальности
при пеленговании неманеврирующим наблюдателем
объекта с известной скоростью движения
или дальностью до конечной точки маршрута.
Оценка погрешностей
Определение дальности до движущегося объекта по данным его пелен-
гования одиночным наблюдателем обычно производится путем измере-
ния нескольких (не менее четырех) пеленгов на объект в процессе вы-
92
волнения наблюдателем специального маневра с изменением своего
курса и/или скорости. Варианты маневра наблюдателя и соответствую-
щих графических или расчетных методов обработки совокупности из-
меренных пеленгов для определения дальности приведены в ряде книг и
статей, например, [1,3,4,8]. Однако выполнение маневра с изменением
направления или/и скорости движения наблюдателя на достаточно зна-
чимую величину за время пеленгационного контакта требует соответст-
вующих маневренных и скоростных возможностей и не всегда может
быть реализовано, особенно при пеленговании скоростных объектов и
кратковременности контакта. В таких ситуациях определение дальности
до движущегося с постоянной скоростью объекта в ряде случаев может
быть осуществлено путем использования некоторых дополнительных
сведений о параметрах движения объекта, априорно известных или оп-
ределяемых в процессе наблюдения с учетом конкретной обстановки.
Такими сведениями, в частности, могут быть величина скорости, харак-
терная для данного наблюдаемого объекта (например, скорость косми-
ческого аппарата на определенном участке орбиты, крейсерская ско-
рость самолета или беспилотного объекта данного типа и т.п.) и про-
странственное расположение некоторой точки, вероятно лежащей на
линии курса объекта (например, являющейся возможной конечной или
начальной точкой прямолинейного отрезка пути наблюдаемого объекта:
вход в узкость или порт, аэродром, авианесущий корабль, атакуемая
цель, стартовая позиция).
Некоторые частные примеры использования подобных дополни-
тельных сведений при пеленгационном определении дальности до дви-
жущегося объекта имеются в литературе, в том числе в вышеупомянутых
работах [4,8], а также в [2]. Так, в [8] полагаемые известными к моменту
начала маневрирования сведения об отдельных параметрах движения
объекта (курса, скорости) используются при выборе вариантов маневра и
в последующем графическом определении дистанции, что упрощает эти
операции, но не снимает необходимости выполнения наблюдателем ма-
невра с изменением своего курса или скорости. В [2, 8] один из приведен-
ных вариантов определения текущей дальности до объекта, пеленгуемого
из неподвижного наблюдательного пункта, предполагает использование
информации о расстоянии до объекта в начальный момент наблюдения,
априорно известном или измеряемом в результате однократного радиоло-
кационного контакта, а в другом варианте [2] приближенное первичное
значение дальности находится в начале наблюдения по первым измере-
ниям пеленга и априорно известной скорости объекта. В перечисленных
примерах рассмотрены лишь некоторые из возможных вариантов пелен-
гационного определения дальности (координат) движущегося объекта с
использованием дополнительных сведений, позволяющих упростить или
исключить маневр наблюдателя.
93
Таким образом, целью данного материала является получение ана-
литических выражений для общих случаев определения дальности до
пеленгуемого объекта с частично известными параметрами движения и
оценка точности этих определений. Приводятся формульные выражения
для определения дальности до пеленгуемого объекта, движущегося с
постоянной известной скоростью при неподвижном и равномерно дви-
жущемся (неманеврирующем) наблюдателе, а также для случая движе-
ния объекта с неизвестной постоянной скоростью в направлении точки с
известными координатами при пеленговании его неподвижным наблю-
дателем. В обоих случаях искомые данные о дальности и параметрах
траектории объекта получаются путем обработки трех измерений пе-
ленга на объект Пь П2,Пз, выполненных в последовательные моменты
времени ЛАб (или двух временных интервалов T2\=h~ti и Т32=1з-Ь);
Рис. 2.17. Схема пеленгации объекта,
движущегося к точке Ц
координаты наблюдателя в
моменты пеленгования пола-
гаются известными.
При пеленговании из
неподвижного наблюдатель-
ного пункта объекта, движу-
щегося с постоянной извест-
ной (по модулю) скоростью И
в неизвестном направлении
(не проходящем через точку
нахождения наблюдателя)
дальность до него в момент
измерения третьего пеленга 7?3 (рис. 2.17) может быть определена по лю-
бой из формул
R =__________ИГ31Г32 sin^(ctgnl-ctgn2)_________
3 sin n3[T21(ctg П2-ctg n3)-Z32(ctg П,-ctg П2)] ’
V r3lsin (П, + ф)
Ку —----------------- 5
sm Д31
V Т3, sin (03 - Д3,) _ И Т32 sin (03 - Д32)
.... —
sin Д31 sin Д 32
где Тз1=Т'21+Тз2', Д,т=П,- Пь (i >у); ф-угол между траекторией объекта
и опорным направлением; &з - угол между курсом объекта и линией
третьего пеленга (т.е. курсовой угол), при этом:
;с181^-?а.)--.5^п;-«aj—(2.41)
^32ctg пз (ctg п, - ctg П2) - 7),ctg П) (ctg П2 - ctg П3)
. t sinA31 sinA32
в3 = arctg---------------------—-------
Т2А sin Д32 cosA31 - Т32 sin Д21
(2.42)
94
На основании приведенных выражений (2.38)-(2.42) можно также
определить значения таких характеристик текущего взаимного распо-
ложения объекта и наблюдателя, как курсовой параметр р - минималь-
ное расстояние от наблюдателя до прямолинейной траектории объекта -
и интервал времени Тру (или расстояние А;,3) до момента выхода объекта
в соответствующую точку траектории, где курсовой угол 6*р=90°
(рис. 2.17), которые определяются по соотношениям
p=Ri sin в}; Spi=R&os fy.
Если отсчет значений пеленгов вести от направления первого пе-
ленга (П1=0), выражения (2.38-2.41) очевидным образом упрощаются.
В частности, выражение (2.38) сводится к (2.39), угол ф становится рав-
ным курсовому углу в первый момент времени Zi(6i), а формула (2.41)
преобразуется в формулу
ф = О, = arctg--------—------------= arctg------------—-------------
ctgll2 —7j] ctgП3 Г2, ctgA21 ~?3i ctgД31
. (2.43)
Если к тому же измерения пеленгов производятся через равные
интервалы времени (различать со случаем измерения через равные уг-
ловые интервалы), то Т), =7з2=7’=О,57з1 и курсовой угол определяется
соотношением
ф = в, = arctg-----5-----= arctg--------!--------. (2.43а)
ctgll2 -2ctgTI3 ctg Д21-2ctg А31
При выполнении измерений через интервалы времени, за которые
пеленг на объект изменяется на одинаковую величину (А32=А3|)5 выра-
жения (2.41) и (2.42) приводятся к виду
, 7)|Sin П,-7’4,sinll, ...
ф = arctg—-----1---*-----, (2.44)
T32cosn3 -T^jCOsR]
въ = arctg
T^isin A3i
7’21cosA31 -Т32
(2-45)
а расстояние до объекта 7?3 может быть определено как
А3=-_£Щ^_. (2.46)
V ^21 + ?32 ~ 2 ^21 2j2COSA3]
При этом величина интервала времени до выхода объекта в точку
траверза (на курсовой параметр р) будет описываться выражением
Г,, -T2]cosA31)
Тл = 32,v 32-. (2.47)
Р 7’22 +r322 -2r21T32cosA31
При указанном условии (A32=A2i) достаточно просто определяется
курсовой угол при линии второго пеленга
95
ff2 = arctg ^3|———. (2.48)
^21 - ^32
В случае, когда скорость объекта не известна, но имеются сведе-
ния о расположении какой-либо точки на наблюдаемом или прогнози-
руемом участке траектории объекта, в частности, дальности до него в
момент измерения первого пеленга Я, (как в [8]) или о дальности (d) и
направлении на прогнозируемую точку траектории, текущая дальность
и скорость определяется по формулам:
при известной первой дальности R\ -
R _ Rx 7^2sin A2i (2.49)
?2iSin Д32
r = ^sinA31 , (2.5о)
r31sin#3
где курсовой угол в момент измерения третьего пеленга находится по
формуле (2.42);
при известном расстоянии до прогнозируемой точки d (рис. 2.17) и
упрощающих условиях измерения пеленгов через одинаковые угловые
интервалы (Дз2=Д21) и отсчете их относительно направления на эту точку-
R ^siniyT^sinlb), (251)
3 T21sinA31
v = rf(r2iSinn,-T32sinn3) (2 52)
^21 isin (#3 + Д31)
где курсовой угол находится по формуле (2.45).
Расстояние, которое остается пройти объекту до выхода в прогно-
Рис. 2.18. Пеленгация объектов, движущихся
с постоянной и известной
скоростью (И) и К2), прямолинейно
перемещающимся со скоростью v
наблюдателем
зируемую точку Ц (Дцз), бу-
дет вычисляться по формуле
_<&пП3_
*\13 — о ~
sin
аЫпП33/т^ +Г32 -2r21T32cosA31
7^sinA31
(2.53)
В случае, когда при пе-
ленговании движущегося с
известной скоростью V объ-
екта наблюдатель движется
прямолинейно с постоянной
скоростью v < V на интерва-
ле времени Тз; (рис. 2.18) и
96
измерения пеленгов производятся относительно линии движения на-
блюдателя, дальность R находится из соотношения
д ^[^(cos^+singictgnj-v]
3 cosn3-sinn3ctgri|
где ф- угол между траекториями объекта и наблюдателя.
Значения функций sin^, cos^ определяются из уравнения
cos^ + gsin^ = ^-, (2.55)
где q _ т32 ctg П3 (ctg П2 - ctg П,) - Г2| ctg П, (ctg П3 - ctg П2)
Т32 (ctg П2 - ctg П]) - Г2| (ctg П3 - ctg П2)
Последнее уравнение при соблюдении вышеуказанного
выполнения отсчетов времени и пеленгов через одинаковые
интервалы (A32=A2i) преобразуется в более простое:
, . . T3-,cosn3-7),cosn, v
cos ф+sin 6$ —-----— --------=—.
r32sin П3 - T21sin П] V
В частном случае движения объекта и наблюдателя на параллель-
ных курсах (^=0), признаком чего является выполнение соотношения
Т32 (ctg п2 - ctg П1) = ^21 (ctg П3 - Ctg П2), (2.57)
условия
угловые
(2.56)
дальность до объекта определяется как
R _ Т3|(К - v)sin П, _ Г32 (И - v)sin П2
3 sinA31 sinA32
В более общем случае прямолинейного движения наблюдателя с
непостоянной скоростью справедливо выражение
K7’31sin(n1-<p)-/31sinn1
кз ------------------------
(2.58)
sinA31
(2.59)
и уравнение для определения угла ф имеет вид
cos^ + Qsin^ = Уз2<с{ёП2-с1ёП1)-/2,(с1ёП3-ctgn2)
V [Т32 (ctg П2 - ctg П0-T2I(ctg П3 - ctg П2)]
(2.60)
где /2ь Ьъ /з1=/21+Л2- отрезки пути наблюдателя, проходимые им за со-
ответствующие интервалы времени T2i, Ti2, Т31.
При выполнении отсчетов пеленга (и соответствующих моментов
времени) через одинаковые угловые интервалы (Д32=Д21) формула (2.60)
упрощается:
, . , Г32созП3-T^cosn, /„sinn, ~/,,sinn,
созф + sinz# ---2—21-----L = —я-----з 21----1— (2.61)
r32sin П3 - T21sin П] K(r32sinn3-r21sinnj)
97
При неподвижном объекте (К=0) выражения (2.54), (2.58), (2.60)
принимают вид, обычный для решения задачи триангуляционного ме-
стоопределения такого объекта движущимся пеленгатором, а при не-
подвижном наблюдателе (v=0, Д,—0) выражения (2.54), (2.59) и (2.55),
(2.60) могут быть приведены к (2.39) и (2.41) соответственно.
Рассмотрим погрешности определений дальности R и направления
ф движения объекта по некоторым из приведенных соотношений. В свя-
зи с тем, что обе искомые величины в общем случае являются функция-
ми большого числа переменных, влияние которых трудно оценить на-
глядно, был выбрана схема пеленгации, описываемая соотношениями
(2.39) и (2.43а) (см. рис. 2.17). В этой схеме пеленгатор неподвижен, а
отсчет пеленгов ведется от первого из них через равные интервалы вре-
мени; число переменных, определяющих значение R, невелико, что по-
зволяет получить удобные для дальнейшего использования зависимо-
сти, по которым можно выявить достаточно общие закономерности. Для
получения количественных результатов был использован метод стати-
стического моделирования (число испытаний - 2000).
На первом этапе получения оценок погрешностей модуль скорости
V полагался известным точно, а изменению подлежали среднеквадрати-
ческие погрешности пеленгации, курс объекта (в данном случае равный
углу между линией первого пеленга и направлением движения объекта)
и величина скорости. В ходе обработки и анализа результатов было
подтверждено известное по работам в области пеленгации положение,
что погрешность определения координат зависит главным образом от
отношения (£) угла между крайними пеленгами (у) к ошибке измерения
одиночного пеленга (сго). Начальная «геометрия» схемы измерений (в
данном случае курс объекта) влияет существенно меньше.
На рис. 2.19 показаны зависимости относительной среднеквадра-
тической ошибки (СКО) определения дальности до объекта в момент
измерения третьего пеленга (<тЛЗ/7?з) - кривые 1,3 и курса (сгф/ф) - кри-
вые 2,4 от отношения (Аг) для частных значений начального курса: кри-
вые с номерами 1,2 соответствуют начальному курсу ^=45°, а кривые
3,4- начальному курсу ^=26,6°.
Анализ результатов моделирования дает основание для следую-
щих выводов:
относительная СКО определения дальности до объекта с ростом
величины отношения у/сга имеет падающий характер с переменной про-
изводной;
для измерения с погрешностями порядка 10... 15% необходимо,
чтобы угол между крайними пеленгами превышал СКО пеленгации не
менее чем в 35...40 раз;
зависимости относительной СКО определения дальности и курса
имеют одинаковый характер и по величине отличаются незначительно;
98
величина начального курса незначительно влияет на погрешности.
Зависимости на рис. 2.19 аппроксимируются следующим прибли-
женным соотношением:
а<-<гя-_. 3’3<7«
Ф ( . кл
sin------------
180
справедливом при 20 < к < 100,25°<</»<90°, к=у/аа, где ста- в радианах.
Рис. 2.19. Зависимость относительной погрешности измерения дальности
от отношения угла между крайними пеленгами к ошибке пеленгации
На втором этапе оценок погрешностей предполагалось, что пелен-
ги измеряются безошибочно и что модуль скорости объекта отличается
от предполагаемого значения. Отклонение действительной скорости
объекта Ио от ее предполагаемого значения V при неподвижном наблю-
дателе приводит к соответствующей (пропорциональной) систематиче-
ской ошибке по дальности, но не влияет на точность определения угло-
вых параметров ф и в. При движущемся наблюдателе величина этой
ошибки может быть различной в зависимости от направлений движения
и взаимного расположения объекта и наблюдателя.
Пример зависимости
систематической состав-
ляющей погрешности опре-
деления дальности по фор-
мулам (2.54) и (2.55) от сте-
пени различия априорно
принятого и действительно-
го значений скорости объ-
екта (И/Ио) для одной из
возможных ситуаций, когда
скорость объекта предпола-
гается равной скорости на-
блюдателя (K=v), приведен
на рис. 2.20.
Рис. 2.20. Зависимость относительных
погрешностей определения дальности
от ошибки в априорных данных
о скорости объекта
99
Значение первого пеленга на объект равно 90°, последующие
отсчеты производятся в точках траектории наблюдателя, разнесенных
на 1/8 величины начальной дальности до объекта (см. рис. 2.18).
Начальные координаты объекта и наблюдателя приняты следую-
щими: хо=х11=0, у,|=0; уо=1. Курс наблюдателя - вдоль оси ОХ, курс
объекта, равный +а° , отсчитывается от оси ОХ по часовой стрелке,
курс, равный -а° - против часовой стрелки, курс 180° соответствует
контркурсу и т.д. Погрешность характеризуется отношением расчетного
и действительных значений дальности 7?/7?ист; отдельные линии
графиков соответствуют разным курсам объекта (+45°,±90°,±135°и
180°) относительно курса наблюдателя.
Как видно из рис. 2.20, для диапазона курсов объекта от ±90° до
180° систематическая ошибка по дальности будет лежать в пределах
(10...20)% в интервале скоростей объекта, отличающихся в 1,5 раза (от
0,8 до 1,2 от предполагаемого значения F); погрешность определения
курса объекта по формуле (2.55) при этом не превышает 12°.
При близких значениях курсов объекта и наблюдателя в данной
частной ситуации (при Ksv) пеленг на объект в процессе наблюдения
почти не изменяется и погрешности существенно возрастают. В этом
случае следует изменить курс или скорость наблюдателя. Необходи-
мость в таком маневре может возникнуть также в случае использования
данной методики при местоопределении относительно тихоходных объ-
ектов (при K<v), когда неоднозначность решения уравнения (2.55) и, со-
ответственно, дальности не всегда может быть разрешена за счет отбра-
сывания одного из решений как явно нереального.
Заметим, что при значительном превышении скорости наблюдате-
ля относительно объекта обычно имеется техническая возможность вы-
полнения наблюдателем маневра за время пеленгационного контакта.
Если информация о возможном значении модуля скорости объекта
задается в виде относительного среднеквадратического отклонения
(оу/К), то относительные погрешности в определении дальности (сгл/2?)
и курса /ф) могут быть оценены на статистической модели, вклю-
чающей вычисления по соотношениям (2.39) и (2.43а). Здесь, как и при-
менительно к рис. 2.20 предполагается, что погрешности пеленгации
равны нулю. Результаты вычислений представлены на рис. 2.21.
На этом рисунке номерами 1,2 обозначены зависимости относи-
тельной погрешности определения курса (с^ /ф) для 25°<Ф<90°, а номе-
рами 3,4 - определения дальности (ctr/R). При этом кривые с номерами
1 и 3 соответствуют отношению (к) угла между крайними пеленгами (/)
к ошибке измерения одиночного пеленга (сга), равному £=64, а кривые с
номерами 2 и 4 - отношению £=25.
100
Рис. 2.21. Зависимости относительных
погрешностей определения дальности и курса
объекта от относительной погрешности
априорных данных о его скорости при нулевых
ошибках пеленгации
Рис. 2.22. Зависимость относительной
погрешности измерения дальности от
отношения угла между крайними пеленгами к
ошибке пеленгации для различных
погрешностей в априорных данных о величине
скорости объекта
Из рис. 2.21, в частно-
сти, следует, что относитель-
ная погрешность определе-
ния курса объекта (<Уф /ф) и
при 25°<Ф<90° в рассмат-
риваемой схеме измерений
(см. рис. 2.17) не зависит от
точности априорных дан-
ных о величине модуля
скорости, а определяется
только величиной к. По-
грешность определения
другого параметра - даль-
ности 7?з - с увеличением
величины <Тк растет при-
мерно пропорционально ве-
личине сгг
Переход к общему
случаю, когда отличны от
нуля погрешности пеленга-
ции, а также ошибки апри-
орных данных о модуле ско-
рости объекта, позволил по-
строить семейство зависи-
мостей относительной по-
грешности определения
дальности до объекта от ве-
личины к (отношения угла
между крайними пеленгами
к среднеквадратической
ошибке пеленгации) (рис. 2.22). На этом рисунке приняты следующие
обозначения: кривая 1 соответствует случаю, когда модуль скорости из-
вестен точно, для кривой 2 относительное значение avIV =0,1 , для кри-
вой 3 - <tv/V =0,2, для кривой 4 - <yv/V =0,5.
Анализ результатов статистического моделирования позволил пред-
ложить следующее соотношение (для курса действительное при
25°<Ф<90о), учитывающее одновременно оба источника погрешностей:
2
3,3
. к яА2
sm-----
180 )
(2.63)
101
Как следует из рис. 2.22 и соотношения (2.63), для определения даль-
ности с ошибкой 10... 15% при неподвижном наблюдателе необходимо,
чтобы угловой интервал между крайними пеленгами превышал СКО пе-
ленгования примерно в 40...60 раз, что близко к полученному в [4]. При
движущемся наблюдателе соответствующее превышение должно сос-
тавлять не менее 70...80. Применение совместной статистической обработ-
ки группы пеленгов (и >12... 15), позволяет уменьшить это соотношение.
Для п независимых измерений может быть применен весовой спо-
соб обработки [10], в соответствии с которым средняя величина дально-
сти (R) до объекта находится из выражения
t^Pi
> (2-64)
z=i
гдер^- весовой коэффициент z'-ro измерения, включающего три пеленга;
п - число независимых измерений (по три пеленга в каждом).
В соответствии с [10] для получения минимальных среднеквадрати-
ческих ошибок в определении средней величины R весовые коэффициен-
ты каждого независимого измерения должны выбираться обратно про-
порциональными дисперсиям, например, для схемы измерений (см.
рис. 2.17) в соответствии с (2.62). Можно ожидать уменьшения погреш-
ностей при такой обработке в несколько раз по сравнению с измерением
по одной тройке пеленгов. Здесь необходимо отметить, что весовая обра-
ботка результатов пеленгации по схеме рис. 2.17 не позволяет уменьшить
ошибки из-за незнания точного значения модуля скорости, так как пред-
полагается, что она остается неизменной за весь период пеленгации.
Кроме схемы пеленгации (см. рис. 2.17), с позиций оценки погреш-
ностей были рассмотрены и другие схемы, например, оценено влияние
ошибок измерений временных и угловых интервалов, приводящее к от-
клонению величины коэффициента Q при синусе в уравнениях (2.55,
2.56) от его истинного значения Q„„, на вычисляемый угол между векто-
рами скорости объекта и наблюдателя ф. Определена зависимость изме-
нения вычисляемого по формуле (2.54) расстояния до объекта от вариа-
ции угла ф вокруг его истинного значения ^ист, а также характер зависи-
мости угла ф от предполагаемой величины отношения скорости объекта и
наблюдателя v/V и значения коэффициента Q, определяемого совокупно-
стью данных измерений углов и временных интервалов П,- и Ту,. Анализ
статистического расчетного материала свидетельствует о правильности
приведенных расчетных соотношений, а также о возможности их приме-
нения при достижимых точностях измерения пеленгов.
102
2.5. Определение и прогнозирование координат
равномерно движущегося в пространстве объекта
по данным единичных локационных измерений
Расчетное определение текущих и прогнозируемых координат движуще-
гося объекта по данным нескольких измерений его угловых координат,
при наличии единичных прямых измерений дальности или без них, может
представлять интерес как средство повышения надежности сопровожде-
ния прерывисто наблюдаемого объекта средствами активной и пассивной
локации, в частности, при решении задач наведения по лучу или в упреж-
денную точку (например, [13,14]) при наличии помех.
Применение линейной экстраполяции, допустимое в пределах отно-
сительно небольших угловых смещений, может привести к значительным
погрешностям при увеличении интервала экстраполяции ввиду сущест-
венно нелинейного, в общем случае, характера изменения угловых коор-
динат при движении объекта и пеленгатора в пространстве. Тогда может
оказаться целесообразным использование более сложных, но точных ме-
тодов вычисления прогнозируемых координат, приведенных ниже.
При сопровождении объекта только по угловым координатам про-
гнозируемое положение линии визирования (азимут Д, и угол места £„)
на некоторый момент времени t„ определяется по трем совместно про-
изведенным в последовательные моменты времени t\, ti, h измерениям
угловых координат объекта /?|,2,з и гуг.з по следующим формулам [11]:
В = arcctg ^2AicosAs'n(A ~ Д)~^2|АзС05Д5'п(А ~ А) (2 65)
r32Tnisin/73sin(^2 -Д)- T21Tn3sin^sin(/?3 -Д2) ’
sin(/?3 — Д)
еп = arcctg-----------------1----------,
81П(ДП - Д) • tg£-3 - sin(/?n - Д3) • tg^
где ?2i= h - t\! Тзг= ty- t2~ интервалы времени между моментами изме-
рений; ГП1= fn~ h: Tm= tn - ?з - интервалы между моментами измерений
и моментом, для которого определяются прогнозируемые значения ази-
мута и угла места объекта.
Приведенные формулы для экстраполяции положения линии визи-
рования действительны как для неподвижного наблюдателя, так и при
движении его в горизонтальной плоскости с постоянной скоростью v.
В последнем случае прогнозируемые значения угловых координат объ-
екта будут относиться к экстраполированной точке положения наблю-
дателя, в которой он окажется в момент времени tn, если будет продол-
жать движение с прежней скоростью (т.е. в точке, лежащей на продол-
жении линии движения наблюдателя и отстоящей от точки его нахож-
дения в момент последнего третьего наблюдения t3 на расстояние гТпз).
Факт постоянства направления движения объекта на интервале времени
103
(2.66)
измерений может быть проверен по совпадению измеренного в третий
момент угла места гг3 с вычисленным его значением (б3) по формуле
(2.67), аналогичной формуле (2.66):
sin(/?2 - Д)
£3 = arcctg--------------------—------!,
tg^2sin( Д - Д)- tg£-jsin( Д - Д)
(2.67)
а факт постоянства горизонтальной проекции его скорости (при непод-
вижном наблюдателе) - по выполнению соотношения
91 + (Д - Д)=9з,
где q\ и q3 - курсовые углы объекта (углы между курсом объекта и на-
правлением на наблюдателя соответственно) в моменты tx, t2 , вычис-
ляемые по формулам
q{ = arcctg | ctg(/?2 - Д) - ctg($ - Д) |, (2.68)
V32 hi )
a = arc.-tr ^(Д -&)cos(& -Д)-Т328ш(Д - Д) (2.69)
3 Tixsm(pi-px)sm{pi~pi)
При последующих измерениях проверка постоянства скорости
объекта может производиться путем сравнения экстраполированных и
фактически измеренных угловых координат; при нерегулярной наблю-
даемости вычисление экстраполируемых значений этих координат
должно производиться на моменты наблюдения с использованием ранее
измеренных и запомненных данных. Признаком равномерности движе-
ния объекта в горизонтальной плоскости будет являться также равенст-
во определенного по первым трем и вновь вычисляемого при каждом
следующем измерении параметра Q (6123=6234), характеризующего курс
наблюдаемого объекта:
r32cos&sin (Д - Д) - r2lcos#sin (Д - Д)
123 Т215тДsin (Д - Д) - r32sin/?3sin (Д - Д) ’
r43cosl4sin (Д - Д ) - r32cos/?2sin (Д - Д)
234 T32sin^2sin (Д - Д ) - Т^втД sin (Д - Д ) ’
(2.70)
Интервал времени после последнего из тройки использованных
для экстраполяции измерений, через который азимут объекта достигнет
какого-либо заданного или характерного для данной ситуации значения
Д , определяется по формуле
т __________Ti\Tn 8»П(Д~Д)8»П(Д~Д)______________ (2 71)
1,3 Т2isin (Д - Д) sin (Д* - Д) - T32sin (Д - Д) sin (Д’ - Д)
Таким характерным значением может являться прогнозируемое зна-
чение азимута объекта в момент пересечения его траектории с горизон-
тальной плоскостью, т.е. соответствующее нулевому углу места
104
= arcctg COS^gg| C0S^gg2 , (2.72)
Sinp2tgf, - sinpjtgg2
где ft (₽=o) - значение искомого азимута, вычисленное в момент времени t3.
Очевидно, при неизменности элементов движения объекта в по-
следующие моменты это значение азимута должно оставаться постоян-
ным (Л = Л=^4= -) И, так же, как и вычисляемые по формулам
(2.67-2.70) параметры, может использоваться для контроля постоянства
скорости объекта.
Другими характерными параметрами могут быть угол места объ-
екта в момент нахождения его на некотором определенном выбранном
направлении, в частности, на линии движения наблюдателя, и время,
остающееся до наступления такого момента (или уже прошедшее после
него). При выполнении отсчетов азимута объекта относительно этого
выбранного направления или линии движения наблюдателя указанное
характерное значение угла места будет соответствовать нулевому ази-
муту и определяться следующим образом:
. sin(A-fi.)
£2(д=о) _ arcctg . „ ~n~t ‘ (2.73)
Интервал времени, остающийся до наступления этого момента вы-
числяется по формуле (2.71), которая применительно к данному случаю
может быть представлена в виде
<2'74)
T32sin/?3sin (Д2 - Д)
В случае движения объекта на постоянной высоте область нулево-
го угла места удаляется в бесконечность и соответствующее условию
е=0 значение азимута Д₽=о), вычисляемое по формуле (2.72), не может
быть достигнуто. Признаком такой ситуации является приближающаяся
к бесконечности величина временного интервала Гп3(г=0) = /(i.=0) -t3, оп-
ределяемая по формуле (2.71) для значения азимута, равного Д(г=0). Со-
путствующими признаками могут быть нулевая величина числителя в
формуле (2.72) или выполнение следующего соотношения:
tgg2 (cosfltgg3 - cos^tgg,) = Г31 р
tg£3(cos/?|tg£'2-cos^2tg£'|) Т21
При фиксации моментов измерений через такие интервалы време-
ни, за которые азимут объекта изменяется на одинаковые угловые ин-
тервалы, формулы (2.65) и (2.71-2.72) очевидным образом упрощаются.
В частности, прогнозируемое через определенный интервал времени Тп3
105
значение азимута и время, через которое азимут объекта примет некото-
рое заданное значение Д при вышеуказанном условии (Д - Д -Д - Д),
могут быть найдены из выражений
Т Т —ТТ
А = Д + arcctg ctg (д _ д)
_У32Уп1+У2Н пЗ
у 7"3ir32(pn 1)
п3 Гм+йЛД.-Дг)’
где Рп
<^(Д-Д)
^(д’-д)
(2.76)
(2.77)
Кроме того, при этом условии для неподвижного наблюдателя
достаточно просто определяется курсовой угол, соответствующий вто-
рому моменту измерений:
q2 - arcctg
Ь—?к^(Д-Д)
(2.78)
Характер выражаемой соотношениями (2.76) и (2.77) взаимозависи-
мости величин прогнозируемого (задаваемого) значения азимута Д* и не-
обходимого для достижения этого значения времени Тп3 иллюстрируется
графиками (рис. 2.23 и 2.24), рассчитанными для случая фиксации момен-
тов времени при изменении значений азимута в смежных измерениях на
одинаковую величину, равную 10° (Д - Д =Д - Д =10° ).
Рис. 2.23. Зависимость приращения
азимута на движущийся объект
от относительного времени
экстраполяции
Рис. 2.24. Зависимости
относительной величины интервала
экстраполяции от отношения
измерительных временных интервалов
На рис. 2.23 показана зависимость (кривые 7-6) приращения ази-
мута (Д =Д) от интервала времени экстраполяции Гп3 , отнесенного к
суммарному времени измерения Дь при разных соотношениях измери-
тельных временных интервалов Д1/Д2 (номера кривых соответствуют
численным значениям указанного отношения T2i/T32). На рис. 2.24 при-
ведены зависимости относительной величины временного интервала
106
экстраполяции Тп21Т^, соответствующего достижению заданных фикси-
рованных приращений азимута (Z?rJ =Z%) - 20, 30, 40 и 60°, от соотноше-
ния измерительных временных интервалов 721 /?32 •
При необходимости определять прогнозируемое положение объек-
та также и по дальности, как это требуется для наведения в упрежден-
ную точку, последовательные измерений угловых координат объекта
должны производиться из нескольких (не менее чем двух) пространст-
венно разнесенных точек; при этом в случае выполнения измерений с
борта движущегося носителя его движение во время сеанса пеленгова-
ния должно быть неравномерным (с изменением курса и/или скорости).
Необходимые для прогнозирования положения в пространстве
равномерно движущегося объекта шесть параметров его траектории, за-
даваемых, например, в виде начальных координат (в момент начала на-
блюдений ?i) Х\, Уь Н\ и составляющих вектора скорости Vx, Vy, V2 объ-
екта, принципиально могут быть определены по трем совместным изме-
рениям его азимута и угла места, однако более удобным представляется
определение указанных параметров траектории раздельно для проекций
ее на координатные плоскости (хОу, xOz, yOz) с использованием четырех
последовательных измерений угловых координат.
В частности, наиболее простые расчетные соотношения получаются
при использовании в качестве базовой горизонтальной плоскости хОу. Это
позволяет решить задачу определения параметров траектории движения
объекта раздельно и последовательно для горизонтальных и вертикаль-
ных составляющих. При этом могут быть частично использованы приве-
денные в [8] результаты решения подобной задачи пеленгационного оп-
ределения координат движущегося объекта на плоскости. Параметры тра-
ектории, принадлежащие горизонтальной плоскости (Х}, У) =Xi tg/?i,
Vx, Vv) определяются из системы линейных уравнений
^12-^1 ~ ^г^21^ё^2 + ^у^21 = ^2>
ад-7лТ3^Д + И731=Д3, (2.79)
<^14^1 ~ + УуТ41 = Д4,
где Sjj = tg/?; - tg/^; А,- = у,- - х, tg/3); xh у: - координаты точек нахождения
наблюдателя в моменты измерения соответствующих (г-х) азимутов,
причем в первый момент наблюдатель находится в начале координаты.
Для вычисления упомянутых параметров могут быть использова-
ны формулы, приведенные в [8], или их модификации, получаемые не-
посредственно из (2.79):
У ^23^31 (^4^21 -^2^41) <^24^41 (^3^21 “^2^31) /">«0'1
^24^41 (^31^21 - ^21^31)“ ^32^31(^41^21 “ ^21^41)
107
у __(^3^2I ^2^31X^41^21 ^21^41)~(^4^21 ^2^41X^31^21 ^21^31) (2 81)
^21 [^23^31(^41^21 — ^21^41)”"^24^41(^31^21 -<^21^31)]
у -_(^4^21 ^2^41X^12^31 ^13^21) (^3^21 ^2^31X^12^41 ^14^2|) (2 82)
Т21 [923^31(^12^41 -®14^21)_®24^41(^12^31 - ^13^21)]
где д} = ctgfi -ctgjBj; V,-=у, ctgfi -х/.
Вертикальная скорость объекта определяется формулой
(2-83)
*41
Здесь Я^Х,-^-; Н4=(X,-x,)-^-+h^ где Х4 = X, + ИХГ4|; >U -
СО8Д COS/?4
высота (вертикальная координата) наблюдателя в момент четвертого
измерения;Х\ и ^вычисляются по формулам (2.80) и (2.81).
Прогнозируемые на момент t„ координаты объекта относительно
выбранной точки пространства с координатами хп, у„ , йп находятся из
очевидных выражений
^=7(ДУ)2+(АГ)2+(Д7)2) /?„= arcctg^,
ДУ
ау
£ = arcctg-----,
AZ cos/7„
(2.84)
где ДАЧУ, +УХ Тп1 -х„;\Y=Y\ +F„ Tnj-у„; bZ=H} + Vz Гп1 -йп; Tn} = tc-t{.
Проверка факта прямолинейного и равномерного движения объек-
та на интервале прогнозирования - после выполнения четвертого изме-
рения - производится путем сравнения вычисляемых (прогнозируемых)
и фактически наблюдаемых (измеряемых) угловых координат; в про-
цессе первичных измерений частичная проверка возможна в случае, ес-
ли три подряд измерения производятся неподвижным или равномерно
движущимся наблюдателем, когда могут использоваться формулы
(2.67Н2.69).
Если в процессе локационного сопровождения прерывисто наблю-
даемого объекта возможны единичные прямые измерения дальности, то
для прогнозирования его положения в пространстве будет достаточно
трех актов измерений угловых координат, в одном из которых (напри-
мер, в первом) определяется также дальность (Rfi. В этом случае вычис-
ление параметров траектории объекта, так же, как и в предыдущем ва-
рианте, может быть произведено раздельно для горизонтальной и по-
следующим нахождением вертикальной скорости из соотношения, по-
добного (2.83).
108
Для вычисления составляющих вектора скорости объекта в гори-
зонтальной плоскости можно использовать следующие, несколько мо-
дифицированные по сравнению с данными в [8], формулы:
_ Eicosa, [r32sinfl - cosfl(r3ltg/72 - r2ltg^3)] + Д3|Г21 - Д2Т3|
у = ^lcosgl [s*n/?l GSlCtgA ~ ^21c^gA) ~ ^32COS^I ] + ^3^21 ~ ^2^31 (2 86)
у~ 532г21т3|
Вертикальная скорость У- в данном, наиболее простом решении за-
дачи (с использованием в качестве базовой горизонтальной плоскости)
определяется как
31
Здесь Я1=Л18Ш£'|; Я3 = (Х3 -х3)-^- + й3, где X3=Xl + VxT31, Vx вы-
cos Р3
числяется по формуле (2.84).
Для иллюстрации большей сложности расчетных выражений при
использовании в качестве базовой какой-либо из вертикальных плоско-
стей (в частности, плоскости xOz) приведем формулу для определения
вертикальной скорости в этом случае:
У = [^(Фз^! -Фг^з,)+co^eosgi^z] + (Ф2^ -^)гз i ~(Фз^ ~*з)Г21 87а)
(Ф2 Фз)^!^!
, cos/?, , .
где ф,- =----х, = п. = 0.
tg*z
Прогнозируемые координаты объекта в данном варианте ситуации
определяются так же, как и в предыдущем - из выражений (2.84) с уче-
том того, что начальные координаты объекта при этом будут следую-
щими: Xi = R\ cos/?i cos£-|; У =R\ sin/?i cos^i ; H\ =R3 sin£i, а значения Vx
, Vy, Vz вычисляются по формулам (2.87)-(2.87a).
Ошибки прогнозирования дальности и угловых координат будут
зависеть от погрешностей измерений и возрастать с увеличением интер-
вала прогнозирования. Увеличение числа измерений по отношению к
минимально необходимому позволит повысить точность экстраполиро-
вания, однако конкретные способы оптимизации обработки большего
числа данных и достигаемый при этом выигрыш для различных приве-
денных в настоящем материале вариантов ситуаций являются предме-
том отдельного исследования.
109
2.6. Оценка текущих координат движущегося объекта
по данным пеленгования
Определение и прогнозирование координат движущихся объектов (мор-
ских, воздушных, космических) необходимы для оценки текущей об-
становки и управления движением наблюдаемых объектов (НО) или но-
сителя наблюдательного пункта (НП).
В общем случае подлежат определению текущие угловые координа-
ты и дальность до НО, а также их производные (скорость, ускорение), в
частности, текущие значения модуля и направления скорости НО. При
осуществлении постоянного радиолокационного наблюдения объекта ре-
гулярно поступающие данные о пеленге и дальности позволяют вести не-
прерывную оценку его текущих координат и параметров движения. Од-
нако иногда (в частности, для объектов с малой радиолокационной эф-
фективной отражающей поверхностью) наблюдатель располагает лишь
измерениями текущих угловых координат объекта, получаемыми путем
пеленгования его излучения (собственного или переотраженного) в опти-
ческом, ИК- или радиодиапазоне (например, по навигационным огням,
бортовому радио или световому маяку и др.). В этом случае для опреде-
ления дальности до объекта необходимо наличие каких-либо дополни-
тельных данных, имеющих линейную размерность. При расположении
НП на движущемся носителе [18-20] такими данными являются разности
координат носителя в моменты измерения пеленгов. В случае неподвиж-
ного или относительно медленно движущегося НП может использоваться
априорно известная скорость Ко наблюдаемого объекта конкретного типа
или дальность £>0 до этого объекта в определенный момент времени.
Точность определения координат НО зависит от ряда факторов:
расположения траектории объекта относительно НП, величины интер-
Рис. 2.25. Расположение траектории
движения НО относительно НП
вала времени наблюдения и ско-
рости объекта, точности измере-
ния пеленгов и числа измерений за
время) наблюдения, а также от спо-
соба обработки данных пеленго-
вания и точности исходных дан-
ных о параметрах траектории НО
(скорости или дальности).
Моделировались ситуации, в
которых НО движется из точки с
координатами хо=1О, Уо=ЗО с на-
чальной скоростью Ко = 0,3 и уско-
рением а—1/300 или а=0 на сбли-
жение с НП по прямолинейной
траектории, параллельной оси У
ПО
(курс бг=180°) или оси х (2г=270°); НП расположен в начале координат
(рис. 2.25). Измерение пеленга а проводится через равные промежутки
времени Д? = 3; максимальное время наблюдения 7’тах = 60. Размерности
всех величин даны в относительных согласованных между собой едини-
цах. Среднеквадратическая ошибка (СКО) пеленгования сг^ =0,25.
Рассмотрим два метода расчета координат НО.
1. Метод определения данных путем расчета по формульным вы-
ражениям.
В случае равномерного движения (K=Ko=const) справедливы вы-
ражения:
a = «i,
2 = arctg
(Г3-/4)sin(a, -a,)sina3 ~(t2-t|)sin(«3 -«Jsina,
(Г3 -t4)sin(«2 -a])cosa3 ~(t2 -t])sin(a3 -«^cos».
sin(a3-a,)
В случае равноускоренного движения
_ . —b ± \lb* 2 - 4ас
а = а,, 2 = arctg ------------- ,
2а
+ cr2, (2.88)
(2.89)
где
a = 3sin(a3 -a!)cosa2cosa4 -3sin(a2 -aj)cosa3cosa4 -sin(a4 -aj)cosa2cosa3;
b = 3sin(«2 - a,) sin(a3 + a4) + sin(a4-a])sm(a2+a3) - 3sin(a3-a! )sin(a2+a4);
c = 3sin(a3-a1)sina2sina4-3sin(a2-a1)sina3sina4-sin(a4-(Z1)sina2sina3;
Osin(a2 -a,) arf2
sin(2-«2)
t
Dsin(a3-a])sm(Q-a2)-2Dsm(a2
sin(2~ aj)sin(2~ a, )t2
2. Метод наименьших квадратов.
Этот метод основан на известном соотношении [10]:
(2-90)
/=1
где «изм,, а, - измеренное и оцениваемое значения пеленга в /-Й момент
времени соответственно.
В случае равномерного движения пеленг в г-й момент времени оп-
ределяется выражением
= arctg
DjSina, + V, (tj -1}) sin 2
Djcosaj + P[ (t, -) cos 2i
111
В случае равноускоренного движения
«. = arctg 2Disin^i Н2^(?,- -Q + «o(',-~?i)2)sinQ
г^соза, +(2И](/, -Z1) + a0(t, -t1)2)cos2i
Минимизируя (2.90) по altQt Dt для равноускоренного движения,
получим
2(аизм/
ч Ва, _ п
aJ8Qi~0>
ч daj п
g(«M3M, a^dDj-°-
При минимизации этого же выражения по ai,Ql и а0 для рав-
ноускоренного движения получим
V’r ч ^ai п
2j(«H3M/-«,)^-=0-
lw da°
Раскладывая функцию (2.90) в ряд Тейлора в окрестностях при-
ближения a?,Q?,D? для равномерного и a?,Q?, И® и а0 для равноус-
коренного движения соответственно, запишем линейные системы урав-
нений вида
п Е /=1 5а? 5а. 5а, —-Да +—-AQ + —-AD dat dQ dD, 5а, dat
п £ da? da: da, ^ct + AQ н Д£) dax dQy dDx Ba? _ уз 5Q ” Д^изм; -a?)8^
п Е . /=1 da? . daj 5а —-Да+—-Л(2+—-М) daj dQ1 dDj da? у,, 50] ~^(0Cmui ox Ba? -a,)— dD}
112
п Е /=1 5а° —-Да + дах ба,° ба? ба? 6Q dV{ да j ба? _ у. дах дах
п Е /=1 да^ —-Да + дах ба? ба? ба? ' —-ДО +—-ДК +—-Да 6Q 6f^ ба ба?_у ад
п Е /=1 да] —-Да + дах ба? ба,° ба? 6Q дУ{ ба ~ 0 п ^~=§(“изм/ 1 дУх
п Е ’ба° . —-Да + дах ба° ба? ба? —'-ДО+—-ДУ +—'-Да 6Q 5И, ба да м да
Решая эти системы относительно Да, Д£?, ДО для равномерного и
Да, Д£, ДИ, Да для равноускоренного движения, находим оптимальные
оценки начальных значений. В качестве первичных начальных прибли-
жений берутся значения, получаемые по формулам (2.88) и (2.89) после
поступления пеленгов а],а2,а3. Результаты моделирования представ-
лены ниже на рисунках.
Зависимости относительных величин случайной и систематической
ошибок определения текущей дальности до НО (aD/mD и 8DID) от ве-
личины углового перемещения объекта за время наблюдения Д/7, отнесен-
ной к СКО пеленгования {Д/3tад) для случая, когда НО движется с посто-
янной скоростью Ио, величи-
на которой точно известна,
даны на рис. 2.26. Кривые 2 и
3 показывают ход СКО, от-
несенной к математическому
ожиданию дальности mD, а
кривые 4 и 5 - ход система-
тической ошибки (смещение
оценки дальности
8D = mD -D), отнесенной к
истинному значению теку-
щей дальности D, для курса
объекта Q,=27Q° и Qr =180°
соответственно. На этом же
рисунке приведена зависи-
мость случайной ошибки оп-
Рис. 2.26. Зависимости ошибок
определения дальности от относительной
величины углового перемещения для случая
движения объекта с постоянной скоростью
и курсом 180°
ределения дальности по минимальному числу измерений - трем пеленгам
(первому, среднему и последнему) на угловом интервале Д/3 без использо-
вания промежуточных значений пеленгов (кривая 7).
ИЗ
Дальность вычислялась по формуле (2.88), используемой в первом
методе для получения первичного приближения ошибки дальности, при
нескольких значениях начальной координаты объекта х0 (от 6 до 30 ед.).
Из рис. 2.26 видно, что для определения дальности до объекта, дви-
жущегося с постоянной известной скоростью, с относительной СКО
(<Тд / mD) не выше 10.. .15% по упрощенному алгоритму (трем пеленгам),
необходимо, чтобы угловой интервал межу крайними пеленгами в 55...65
раз превышал СКО пеленгования сг^, а при совместной статистической
обработке по первому методу группы пеленгов (не менее 12... 15), изме-
ренных на угловом интервале ДД, этот интервал должен иметь величину
(40...50)<Тд . Значение систематической ошибки при этом не превышает
единиц процентов и лишь для минимального из указанных значений уг-
ловых интервалов (~40 сг^) может доходить до ~10%.
На рис. 2.27 показаны зависимости случайной и систематической
ошибок определения дальности до объекта, движущегося с постоянным
ускорением курсом 180°, для случаев обработки данных пеленгования по
методу 1 (кривые 1 и 4) и по методу 2 (кривые 2 и 3). При использовании
метода 1 предполагалось, что
объект движется равномерно
с известной скоростью Ио, со-
ответствующей действитель-
ной скорости объекта в на-
чальной точке траектории.
При обработке данных пелен-
гования по методу 2, учиты-
вающему наличие ускорения,
полагались известными на-
Рис. 2.27. Зависимости ошибок определения чальные координаты объекта
дальности от относительной величины х0, у0 или дальность Do. В ре-
углового перемещения для случая движения зультате обработки определя-
объекта с постоянным ускорением лись текущая дальность, курс
и курсом 180 объекта (так же, как и в мето-
де 1), начальная скорость Vo и ускорение объекта.
Сравнение величин ошибок при разных методах обработки в диа-
пазоне интервалов изменения пеленга объекта Д/7 за время наблюде-
ния, представленных на рис. 2.27, показывает, что случайная ошибка
определения дальности при использовании адекватного ситуации, но
более сложного метода 2, оказывается в 2...3 раза большей, чем при ис-
пользовании относительно простого метода 1. Так, если при методе 2
для получения СКО по дальности 20% необходимо выполнить около 20
измерений пеленга в угловом интервале, не менее чем в 100...ПО раз
114
превышающем величину СКО пеленгования, то дри методе 1 такая
ошибка достигается при выполнении пеленгования в угловом интервале
всего ~40 и почти вдвое меньшем числе измерений.
Систематическая ошибка при увеличении относительной величи-
ны углового интервала Д/7/сг^ (и соответствующего увеличения време-
ни наблюдения) от 40 до ~ 100 для метода 2 уменьшается примерно от
25 до 10%, а для метода 1 линейно увеличивается с 20 до 30% за счет
прогрессирующего увеличения различия между текущей скоростью
объекта и ее первоначальным значением, принимаемым в методе 1 в ка-
честве априорно известной константы.
Сопоставление зависимостей, показанных на рис. 2.27, позволяет
сделать вывод, что в рассматриваемых условиях использование данных,
получаемых по методу 2, становится целесообразным лишь после вы-
полнения достаточно большого числа измерений (~20) при диапазоне
изменения пеленга объекта не менее ЮОсгд.
При обработке данных пеленгования, получаемых по меньшим уг-
ловым и временным интервалам, более эффективным оказывается при-
менение алгоритма 1, в котором не учитывается ускорение. Так, при уг-
ловом интервале (Д/?/<Тд)«40 результирующая ошибка определения
дальности по методу 1 будет не более 20% приблизительно в 50% слу-
чаев (измерений), в то время как при определении дальности по методу
2 эта ошибка может составлять 35...40% и для получения показателей,
аналогичных указанным для метода 1, необходимо иметь данные пелен-
гования объекта в пределах, по крайней мере, вдвое большего углового
интервала при соответственно большем числе измерений.
На рис. 2.28 показаны ход случайной и систематической ошибок
определения дальности до объекта, движущегося с ускорением курсом
270°, при обработке данных пеленгования по методу 1 (кривые 7 и 2 со-
ответственно), а также зна-
чения этих ошибок при об-
работке данных по методу 2
в точке с максимальным
значением углового интер-
вала (Д/7/сг^)«146 (пози-
ции 3 и 4). Как видно из
графиков, зависимости
ошибок от величины угло-
вого интервала (кривые 7,
2), близки к зависимостям,
полученным для метода 1
при курсе объекта 180°
Рис. 2.28. Зависимости ошибок определения
дальности от относительного углового
перемещения объекта
115
(кривые 1 и 4 на рис. 2.27). Результирующая погрешность определения
дальности в данном случае не будет превышать 13... 15% с вероятно-
стью от 0,5 в области угловых интервалов 55...60до ~1 в области
максимальных угловых интервалов. Использование более сложного ме-
тода 2 снижает результирующую погрешность довольно незначительно
(до 8... 10%) даже в области максимальных интервалов (позиции 3 и 4
на рис. 2.28 при (Д/7/сг^) »150 , число измерений ~20), а при меньших
значениях интервалов следует ожидать по аналогии с данными для кур-
са 180°, приведенными на рис. 2.27 ухудшения показателей точности
этого метода по сравнению с методом 1. В связи с этим использование
первого метода в данных условиях целесообразно и при курсах объекта,
близких к тангенциальным.
Таким образом, рассмотренный метод определения координат
движущегося объекта по данным многократного пеленгования, осно-
ванный на предположении о постоянстве вектора скорости, величина
которой считается априорно известной, может использоваться для опре-
деления текущей дальности до объектов, движущихся с постоянной
скоростью или с относительно небольшим ускорением (таким, при ко-
тором за время наблюдения скорость изменяется не более чем на ~ 10%),
в условиях, когда угловое перемещение объекта за время наблюдения
превышает величину СКО пеленгования не менее чем в 45.. .55 раз.
2.7. Возможности определения направления
движения объекта по информации
от средств радиотехнической разведки
В работах [8, 11] были получены соотношения для определения с по-
мощью средств РТР направления движения объекта, имеющего на борту
источник радиоизлучения, при использовании многократной его пелен-
гации и специального маневра по траектории. Это рассмотрение может
быть отнесено к общему случаю, ограничением для которого является
только условие равномерности и прямолинейности движения объекта.
При этом для получения информации о курсе цели требуется достаточ-
но большое время, сравнимое с временем полета самолета-разведчика
на расстояние до объекта. Однако существует достаточно большое чис-
ло частных случаев, когда время определения курса может быть суще-
ственно уменьшено при обеспечении достаточной точности.
Ниже будут рассмотрены два таких частных, но достаточно рас-
пространенных, случая:
разведка подвижных объектов, РЛС которых работают в сектор-
ном режиме с постоянной угловой скоростью (например, РЛС управле-
ния оружием истребителей с антенной механического сканирования);
116
Рис. 2.29. Взаимное расположение
движущегося объекта (точка О)
с РЛС переднего обзора и носителя
аппаратуры РТР (точка Н)
разведка подвижных объектов, имеющих РЛС кругового обзора с
антенными постами, расположенными вблизи отражающих конструк-
ций (например, мачт или рубок).
Определение направления движения объектов по излучению РЛС,
работающей в секторном режиме. Помимо РЛС истребителей и дру-
гих ЛА с размещением антенн в носовой части фюзеляжа, секторный
обзор, как правило, применяется в корабельных РЛС судовождения, по-
садочных и других РЛС с ограниченной зоной обзора. Например, в том
случае, когда их антенны расположены впереди надстроек и т.п.
На рис. 2.29 показано взаимное
расположение ЛА (точка О) с РЛС
переднего обзора, работающей в сек-
торе с угловой шириной у . Наблю-
дение ведется с ЛА, расположенного
в точке Н. Если в РЛС используется
антенна с механическим сканирова-
нием и постоянной угловой скоро-
стью вращения со, то главный луч
антенны облучает летательный аппа-
рат - носитель аппаратуры РТР за
время двойного прохождения угло-
вого сектора у дважды. При этом
расстояния между смежными облу-
чениями неодинаковы и зависят от
взаимного расположения точек О нН
и направления движения объекта.
Действительно, как следует из рис. 2.29, угловое расстояние между
облучениями определяются углами Д и у , а, следовательно, измеряя вре-
мя между соседними облучениями, а также пеленг на движущийся объект
(угол а), можно определить угол 0 между направлением оси симметрии
сектора сканирования и направлением от носителя аппаратуры РТР на объ-
ект (линия НО). Угол 0 и определяет направление движения объекта от-
носительно наблюдателя (относительный курс) (рис. 2.30).
аппаратуры РТР главным лучом антенны РЛС движущегося объекта,
сканирующей в секторе
117
Как известно, аппаратура РТР распознает тип излучающей РЛС с
достаточно высокой вероятностью, а по нему и тип объекта, на которой
эта РЛС установлена. Полученные сведения позволяют по имеющимся
априорным данным получить информацию о ширине (у/) сектора и
применяемых скоростях сканирования {со). Заметим, что для решения
поставленной задачи достаточно знать одну из названных характери-
стик ( у/ или со), так как измеряемый станцией РТР период сканиро-
вания Т-^ связан с величиной сектора и скоростью сканирования соот-
ношением (рис. 2.30)
^= —• (2-91)
со
При известной ширине симметричного сектора сканирования (у/)
относительный курс объекта определится как
р = ус/2-\,
где Д, т.е.
/? = </( 0,5-2/д/Т^). (2.92)
Если ширина сектора неизвестна, но известна угловая скорость
сканирования (со), то с использованием (2.91) получим
/? = ®(0,57^-2гд). (2.93)
Задача устранения неоднозначности в определении направления дви-
жения объекта с точностью до 180°, как правило, не возникает, т.е. курс с
такой точностью обычно известен, так же, как и расположение РЛС на объ-
екте с точностью до полусферы. В случае же неизвестности расположения
РЛС на объекте или наличия нескольких РЛС (например, на корабле двух
РЛС судовождения, ответственных за носовой и кормовой сектора) устра-
нение неоднозначности с точностью до 180° производится путем увеличе-
ния времени наблюдений и регистрации изменений углов.
Погрешности определения величины 0 (относительно движущегося
объекта) определяется погрешностями априорных данных о ширине секто-
ра, его ориентации и скорости сканирования, а также точности измерения
временных интервалов. Последние, в свою очередь, определяются шири-
ной диаграммы направленности РЛС объекта, отношением сигнал/шум на
входе приемника РТР и погрешностями измерительных устройств. Как по-
казывают расчеты, для типовых условий погрешности измерения относи-
тельного курса объекта составляет единицы угловых градусов.
Определение направления движения корабля, имеющего РЛС круго-
вого обзора с антенным постом, расположенным вблизи отражаю-
щих конструкций. Имеется достаточно большое число работ, посвя-
118
щенных корабельным РЛС, где рассматриваются вопросы влияния ко-
рабельных надстроек, в частности, мачт, на диаграмму направленности
антенны РЛС дальнего обнаружения. Например, в [20] говорится о
влиянии переизлучения мачт, находящихся в зоне действия антенн кора-
бельных РЛС, и о необходимости в связи с этим учитывать девиацию. В
[21] влияние переизлучения на характеристики антенн доказывается тео-
ретически. В статье [22] приводятся результаты экспериментальных ис-
следований на полигонах многофункциональной РЛС типа HR-76 обна-
ружения и сопровождения низколетящих целей в диапазоне 8,6...9,4 ГГц.
Из работы следует, что влияние мачты приводит к уменьшению усиле-
ния антенны и увеличению уровня боковых лепестков. В работе [23]
приводятся результаты теоретических и экспериментальных исследова-
ний потерь, вызванных переотражениями от окружающих рассеиваю-
щих объектов - мачт, стержневых опор и др. Измерения проводились на
частоте 5,5 ГГц.
Представляет интерес статья [24], посвященная исследованию влия-
ния отражений от мачт на характеристики корабельных антенн несколь-
ких типов весьма распространенных РЛС: AN/SPS-48 AN/SPS-48C,
AN/SPS-49, AN/SPS-55. Отмечается, что в секторах шириной от 10 до
30° при ориентации антенны в сторону одной из мачт наблюдается су-
щественное увеличение среднего уровня боковых лепестков. Это же по-
ложение подтверждается работой [25], где данное увеличение для стан-
ции типа AN/SPS-10 при облучении ее антенной мачты диаметром 16
дюймов, расположенной на расстоянии 10 футов от антенны, оценива-
ется величиной порядка 3 дБ.
В [31] утверждается, что структура диаграммы направленности ан-
тенн корабельных РЛС кругового обзора, измеряемая на борту самоле-
та-разведчика, зависит от курса корабля. В направлении палубы корабля
наблюдается более высокий уровень боковых лепестков, что позволяет
определять курс корабля относительно станции РТР.
Таким образом, обзор основных результатов приведенных работ
позволяет сделать вывод о возможности регистрации станцией РТР мо-
мента прохождения луча антенны корабельной РЛС направления на
мачту или другую отражающую конструкцию. Оценки возможностей
таких измерений и ожидаемые точности даются ниже.
Существо метода - определение курса корабля при использовании
сигналов корабельных РЛС, отраженных от мачт или надстроек этого
корабля, поясняется на рис. 2.31. Станция РТР обнаруживает сигналы
корабельной РЛС кругового обзора и измеряет период вращения Твр ан-
тенны этой РЛС, фиксируя моменты t0 облучения самолета-разведчика
главным лучом, а также ’моменты облучения главным лучом /н надстро-
ек корабля (например, соседних антенных постов, мачт и др.).
119
1
Рис. 2.31. Определение курса корабля
Измеренные величины позволяют за несколько оборотов антенны
определить угол у/ между направлением полета самолета-разведчика и
курсом надводного корабля по формуле
= а + 1л——-
Т
< »р 7
(2-94)
Рассмотрим методы оценки вероятности обнаружения сигнала, отра-
женного от надстроек, и погрешности определения курса корабля. Предпо-
лагается, что чувствительность разведприемников достаточна для обнару-
жения сигналов корабельных РЛС «вкруговую», т.е. при любом положении
ее антенны. Определение момента tH облучения надстроек главным лучом
РЛС возможно путем регистрации превышения некоторого порога хо вход-
ным сигналом PBxS, принимаемым станцией РТР. Этот сигнал, в свою оче-
редь, можно представить как сумму двух сигналов: сигнала бокового излу-
чения антенны корабельной РЛС (первое слагаемое) и сигнала этой же
РЛС, отраженного от надстроек (второе слагаемое):
^(0) |
Glo 4яч72
(2.95)
где Сю - коэффициент усиления антенны РЛС; <тА - эффективная по-
верхность рассеяния надстройки; Gi(6) - коэффициент усиления антен-
ны при отклонении от главного луча на угол 0,
£>2(4л-)2
В последнем выражении Л - длина волны; Р\ - мощность излучения;
Gi - коэффициент усиления антенны станции РТР; D - расстояние от
РЛС; Е,- коэффициент потерь.
Принимая, согласно [27], распределение уровня сигнала, посту-
пающего по боковым лепесткам, логарифмически нормальным с дис-
120
Персией о2 и средним значением, убывающим по мере удаления от
главного луча по закону
G,(0)
Gjo
ехр[-2,78(б>/(90)2]
0,0625
.(0/0о)2
при О<0<0о,
при 0О < 0 < л,
(2.96)
где 6Ь - ширина главного луча антенны РЛС; /я=\.. .2 - коэфициент каче-
ства позиции РЛС, получим выражения для вероятности обнаружения
сигналов от надстроек и вероятности ложных тревог (без учета накопле-
ния в устройствах обработки сигнальных и шумовых выбросов) в виде
' х '
р _1 1ф ° G10 4лс/2
об" " 2 2Ф стЛ
(2.97)
(2.98)
dr,
величины
^(0) ст
Хо, —----> ----и ст
GI0 4л d2
измеряются в децибелах.
На рис. 2.32 приводится
график результатов расчета
по формуле (2.97) для эсмин-
ца Spruance при х0 =25 дБ,
// = 1,5 и ст = 6 дБ. Если
^=1/360 (одно ложное об-
наружение за период обзо-
ра), то практически досто-
верно можно определить
курс НК при условии, что
отклонение линии движения
НК от пеленга на него не
Рис. 2.32. Вероятность и погрешность
определения курса в функции от угла для
эсминца типа Spruance: кривая 1 - при
<т^/с/2 =1; кривая 2 - при d2 =0,\;
кривая 3 - при сг/( / d2 =0,01; кривая 4 -
погрешность определения курса
121
менее 60° (при 0О = 1° и при <тАId2 =0,1). Например, эсминец
«Spruance» имеет две мачты с антенными постами, расположенными на
расстоянии примерно 20 м друг от друга [29]. Мачты металлические
(сплошной или ажурной конструкции). Эффективная поверхность рас-
сеяния таких конструкций, включающая также сами антенны, составля-
ет десятки квадратных метров.
Для оценки потенциальной точности измерения курса использу-
ется соотношение, полученное для оценки угловой точности РЛС [27]:
(0,4...0,6)<90
Vn0T* М'Ж
(2.99)
где в0 - ширина диаграммы направленности РЛС на уровне половин-
ной мощности; 3<JN0 - отношение энергии импульса, ограниченного
огибающей, к энергии шума.
Применительно к рассматриваемому случаю для надстройки ши-
риной / (см. рис. 2.31) можно приближенно полагать, что угловая шири-
на отраженного сигнала выражается в виде
#отр ®2arctg-^- + #0 (2.100)
и справедливо следующее выражение:
эс= /д(^)
No 4л d2 / С10
Тогда (2.99) преобразуется к виду
( 0 \ ( I A d
пот « 0,3 - 2arctg— + 0О •
( 2d
(2.101)
Необходимо учесть погрешности, вызванные случайными смеще-
ниями центра отражения вдоль длины /. Например, если в качестве от-
ражателя фигурирует соседний антенный пост, то положение максиму-
ма отражений существенно зависит от ориентации зеркала антенны это-
го поста и т.д. Следует учитывать также систематические погрешности,
вызванные несимметричностью расположения антенного поста относи-
тельно оси симметрии корабля. Например, на авианосцах антенны РЛС
размещаются, как правило, на «острове», смещенном относительно оси
симметрии на значительную часть ширины верхней палубы к правому
борту. При незнании типа корабля эта систематическая ошибка не мо-
жет быть учтена при единичном измерении и должна рассматриваться,
как случайная.
122
Упомянутые погрешности при допущении о равномерном распре-
делении центра отражения в пределах максимальной ширины надстрой-
ки /тах можно приближенно определить по соотношению
стсм ® arctg• (2.
\4dy/l)
Тогда суммарная погрешность определения курса составит
О’сумм » а/^пот+^см • (2-103)
Из графиков рис. 2.32 следует, что практически во всем диапазоне
значений углов О, где возможно уверенное обнаружение сигналов от
надстроек, погрешность не превышает 10° при / d2 = 0,1.
Таким образом, в частных, но достаточно распространенных, слу-
чаях разведки подвижных объектов, РЛС которых работают в сектор-
ном режиме с постоянной угловой скоростью и объектов, имеющих
РЛС кругового обзора с антенными постами, расположенными вблизи
отражающих конструкций (например, мачт или рубок), возможно опре-
деление направления движения этих объектов средствами РТР с по-
грешностями порядка единиц градусов за время, измеряемое несколь-
кими периодами вращения антенн РЛС этих объектов. Точность опре-
деления направления движения объекта зависит от угла в между кур-
сом объекта и направлением ла ЛА, а также от отношения ЭПР над-
стройки к квадрату дальности до нее. Погрешность определения курса
за одно измерение имеет порядок единиц градусов.
2.8. Методы оценки погрешностей определения модуля
скорости и текущих координат движущегося объекта
при известном направлении его движения
Методы определения параметров движения равномерно переме-
щающегося объекта, рассмотренные в п. 2.7, имеют несколько досто-
инств. Первое состоит в возможности определения курса объекта в те-
чение короткого интервала времени - от десятков секунд (несколько пе-
риодов вращения антенны Taf>) до единиц минут. Последняя оценка со-
ответствует случаю, когда угол межу линией движения и пеленгом на
объект не превышает десятков градусов и необходим пролет базы для
изменения этого неблагоприятного соотношения.
Второе достоинство состоит в необязательности криволинейного
маневра траекторией ЛА.-разведчика типа «петля», «полупетля», «змей-
ка» и т.д. [8]. Действительно, модуль скорости V и дальность R до объ-
екта определяются по трем пеленгам (а,на прямолинейной траек-
тории ЛА-разведчика, при этом первый пеленг а (рис. 2.33) выбирается
123
из условий получения минимальных погрешностей. Выражения для
скорости и дальности имеют вид
у = vi7isina sin(^ ~ Г) ~ ViT2smy sin (or - /?)
7]sin(/?-y)sm(a + ^')-7’2sin(«-/7)sin(y + {(') ’
R + v2r2)(ctg>g + ctg!/)- >
sin/fTj (ctg/ - ctg/?)(ctga + ctg(/) -
_» ~V2(7!+72)(ctg« + ctg^) (2.105)
-Г, (ctg/? - ctga)(ctg/ + ctg;/)] ’
где T\ и T2 - интервалы времени между соседними пеленгами; V[ и v2 -
средние скорости ЛА на этих интервалах.
При Т\ = Т2 = Т и V] = v2 =v формулы упрощаются:
у = vlsin а sin(l ~ Г) ~sin У sin(a ~ I)] ; (2.1 об)
sin(Р - у) sin(a + у/) - sin(a - Р) sin(/ + у/) ’
R = 2vT---------------------------------------. (2.107)
sin(/7 - /)sin(a + уг)~ sin(a - /?)sin(/ + iy)
Рис. 2.33. Пеленгация движущегося с
известным курсом объекта с целью
определения дальности до него и
величины скорости
Погрешности определения ко-
ординат движущегося объек-
та при «симметричном» рас-
положении пеленгационных
пунктов относительно линии
траверса. Вывод соотношений
для оценки погрешностей про-
веден для «симметричного» слу-
чая, когда средний пеленг пер-
пендикулярен базе пеленгова-
ния (см. рис. 2.33), кроме того,
принято, что VT«D, поэтому
cos a «cos/, где/ = .&-/, при
этом sin(a -/)« а - у'.
Из (2.106) следует, что
К ~ а-у’ R 1
v 2cos2a sin(/ 2vT 2 cos а
откуда можно получить:
®г~Цг{ 1+[1+2(а-/)tga]2} + а^а - t (2.108)
V |«-X|V 1 } tg V
^-»cretga»<Ta —, (2.109)
124
где
Vt 2L)
D + ^sin^ —+ sm</
a = arctg-----------= arctg —2-----
t„ v
V-^-V-^COSI/ —-COSf/
Vt Ш
£>-^sin,/ --sun/
Y' = arctg— -—— - arctg -----------
v— -V-^-cosys —-cos(/
(2.110)
tp = 2T-время разведки.
На рис. 2.34-2.36 пред-
ставлены графики результа-
тов расчета по формулам
(2.109Н2.П0) для v/K= 20,
сго = Стд = оу = 0,01 и разных
значений £>, /р и av . Приво-
дятся также результаты, по-
лученные методом Монте-
Карло, например, кривая 2 на
рис. 2.34.
На рис. 2.34 в качестве
исходных данных для расчета
было принято: £>=145 км;
/р=2000 с; К=14,1 м/с; v=70
м/с.; аа= с5з=сг/=О,О1; £^0,1).
На рис. 2.35 исходны-
ми данными для расчета от-
носительных погрешностей
определения скорости объ-
екта были приняты следую-
щие значения: <та=0,01;
схр=0,1; К=10 м/с; v=200 м/с.;
£063=30 с.
Для расчета относи-
тельной погрешности опре-
деления дальности до дви-
жущегося объекта (рис. 2.36)
были приняты следующие
исходные данные.- кривая
кривая 1 - £>=100 км;
сгоо=0,01; 'Р=90°; кривая 2 -
Рис. 2.34. Относительные погрешности
определения скорости объекта и дальности до
него по трем пеленгам в функции от угла Т
между направлениями движения объекта и
ЛА: кривая 1 получена по формуле (2.107);
кривая 2 - методом Монте-Карло; кривая 3
иллюстрирует зависимость aR от угла Ф
Рис. 2.35. Относительные погрешности
определения скорости объекта при
оптимальной обработке многократной
пеленгации за время разведки:
кривая 1 -£>=100 км, Ч* =90°;
кривая 2 -£>=100 км, Ч* =45°;
кривая 5 — £>=400 км, Ч* = 90°
125
D=100 км; Т=45О; 0^=0,01; кривая 5 - />100 км; 0^=0,01; кривая 4 -
/>400 км; Ч'=90°; еъо=О,О1; кривая 5-/>400 км; 4х =90°; 0^0=0,01.
Анализируя графики, можно сделать по крайней мере три вывода:
1) оценки, полученные по приближенным формулам (2.109),
(2.110) превышают на 10...20% оценки, полученные по точным форму-
лам, т.е. являются пессимистическими;
2) относительная погрешность определения модуля скорости на
дальности порядка 150 км и более, даже при малых с>и,<3р,<з./ не снижа-
ется меньше 20 %; эта погрешность сильно зависит от угла ;
Рис. 2.36. Относительные погрешности
определения дальности до движущегося
объекта при оптимальной обработке
многократной пеленгации в функции от
времени разведки
3) относительные по-
грешности измерения рас-
стояния до движущейся цели
(<rR / А) примерно на порядок
меньше относительных по-
грешностей измерения моду-
ля скорости.
При оптимальной обра-
ботке независимых измерений
более чем трех пеленгов по-
грешность уменьшается в
V”=^p/37,o63 раз, где Гобз-
интервал между измерениями
независимых пеленгов. По аналогии с местоопределением неподвижной
цели можно говорить об эквивалентном увеличении точности пеленга-
ции:
&аэ(п>\)
.. у1 Уду
(2.U1)
где сга0 - погрешность одиночного измерения.
Из графиков, в частности, следует, что относительная погрешность
измерения дальности до прямолинейно и равномерно движущегося объекта
при известном направлении движения, образующем угол 45° < у/ < 90° с
направлением движения ЛА-разведчика, составляет для рассматриваемых
исходных данных единицы процентов и имеет тот же порядок, что и по-
грешность определения дальности до неподвижной цели.
Далее, при />100 км и 45°<у/ <90°, относительная погрешность
измерения скорости снижается с 30...40 % при 1Р =10 мин до единиц
процентов при Zp=40 мин. Увеличение D до 400 км приводит к 8... 10-
кратному увеличению погрешностей. Погрешность измерения курса
при изменении среднеквадратической ошибки от =0,01 до =0,2
126
слабо (~20%) влияет на относительную погрешность измерения R и V,
что хорошо согласуется с результатами, полученными по формулам
(2.109) и (2.110).
Оценка погрешностей определения дальности до цели при «несим-
метричной» базе. Оптимальное значение первого пеленга. Рассмотрен-
ный «симметричный» случай расположения базы относительно траверса
объекта обеспечивает минимальные погрешности при фиксированной
дальности D (см. рис. 2.33). Для получения погрешностей в «несиммет-
ричных» случаях можно использовать то обстоятельство, что выражения
для погрешностей определения дальности до неподвижной (см. (1.15)) и
подвижной (см. (2.109)) цели отличаются только множителем V2 .
Это обстоятельство позволяет предположить, что относительные
изменения погрешностей, полученные при переходе от «симметрично-
го» случая к «несимметричному» для неподвижной цели, будут такими
же и для подвижной цели.
Для случая «симметричного» расположения базы L и неподвижной
цели (рис. 2.37,а) погрешность измерения дальности D по линии травер-
са при D>2L в соответствии с (1.15) выражается формулой
„ . 2,4^
а)
Рис. 2.37. Схема пеленгации при «симметричной» (а)
и «несимметричной» базе (6)
Случай «несимметричного» расположения базы (рис. 2.37,6) мо-
жет быть сведен к «симметричному» относительно эквивалентной базы
L, =СД, перпендикулярной линии траверса D3=OE, являющейся биссек-
трисой треугольника ДЕС. Отношение сга/4п можно принять при та-
ком переходе примерно равным исходному из-за приблизительного
уравновешивания влияний «несимметричности» расположения базы на
числитель и знаменатель.
При таких допущениях из рис. 2.37,6 следует:
127
А=_е_, ^,2±r,
sin/? 2
t D
а = arctg—,
D
arctg----
x-L
D
к- arctg-----
L-x
при x > L,
при L > x,
(2.113)
2£sinofsin/
СД = L =-----------------------------,
sinar cos(/? -y) + sin/ cos(a -Д)
где x - расстояние от точки измерения первого пеленга до линии траверса.
Подстановка выражения (2.113) в (2.112) дает возможность опре-
делить коэффициент увеличения погрешности измерения дальности до
цели, расположенной на расстоянии D от линии полета, при «несиммет-
ричности» расположения базы по сравнению с «симметричным»:
(а-у\ . . ч
cos ---- (sinа + sin/)
0~Рнс _ ~ у 2 J ______________
а°с 2 sin2 [ sin a sin /
I 2 J '
Рис. 2.38. Зависимость коэффициента
увеличения погрешности измерения
дальности D при переходе от «симметричной»
базы L к «несимметричной»
от расстояния х до линии траверса
Графики результатов
расчета по последнему соот-
ношению приводятся на рис.
2.38. При этом предполага-
лось, что цель неподвижная:
кривая 1 получена при
£/0=0,2; кривая 2 - при
£/£>=0,4; кривая 3 - при
£/£>=1; кривая 4 - при £/0=2;
кривая 5 - при £/0=3
Для ориентировочных
оценок (погрешности 10... 15
%) семейство кривых аппрок-
симировано зависимостью
&D нс Г X £ ।
&dc к О 20 J
Из рис. 2.38, в частности, следует, что наименьшие погрешности
имеют место в «симметричном» случае (х=0,5О); при условии
х < 0,7(£+О) они не превышают двукратных по отношению к «симмет-
ричному» случаю. Дальнейшее увеличение несимметрии приводит к
резкому росту погрешностей.
128
При разведке источников радиоизлучения, расположенных на
движущихся кораблях, типичным является первоначальное обнаруже-
ние цели на малых курсовых углах на дальности Dao с последующим от-
воротом на угол а для пеленгации на базе L (рис. 2.39).
Существует оптимальное значение а, соответствующее мини-
мальным погрешностям. Из полученных ранее соотношений следует,
что погрешность измерения дальности, отнесенная к линейной погреш-
ности пеленгации на дальности с угловой ошибкой аа0 / 4п , равна
а°- -*2,4^sin2g^.
D L
ПО Г~
\1П
Рис. 2.39. Пеленгация с отворотом
от курса на объект
Зависимости, построенные
по этому выражению, представ-
лены на рис. 2.40. Из их анализа
видно, что у кривых имеется
слабо выраженный минимум,
смещающийся вправо по мере уменьшения отношения L/DaQ. Отклонения
от оптимальных в сторону больших углов а -> 90° приводит к незначи-
тельным потерям в точности. Для типовых условий на морских театрах
военных действий, когдз
L/Dnfi< 0,3, рациональными яв-
ляются углы отворота
а = 60°...80°. При этом
I ~ 7 4 Дю
D ’ L
х"по Г~
V э/л /mjn
Рис. 2.40. Зависимость погрешности
определения дальности до неподвижной цели
от величины первого пеленга, отнесенной к
линейной погрешности на дальности ее
первоначального обнаружения:
кривая 1 - LIDno= 1; кривая 2 -£/£>по=0,5;
кривая 3 - L/D„a=0,33; кривая 4 - Z/Dno=0,2
Полученные результаты
справедливы при многократ-
ной пеленгации на «несиммет-
ричных» базах неподвижных
целей или целей, движущихся
с существенно меньшими ско-
ростями, чем ЛА-разведчик.
Для сравнимых скоростей не-
обходимо учитывать направления движения НК и ЛА. При этом направле-
ние движение ЛА-носителя аппаратуры РТР является известным, а направ-
ление движения НК определяется по отражениям от надстроек (см. п. 2.7).
На дальности £)110 определяется оптимальное значение угла а отворота
(первого пеленга).
129
Решение неоднозначно. Прежде всего отметим особые точки. Так,
при параллельных или встречно-параллельных курсах справедливо вы-
ражение а ± = ± к л , где к - целое; погрешности бесконечны.
Те же погрешности будут при параллельности пеленгов, т.е. при
II • Р •
a =arcsm —sin,/ .
у,, град
40
80
120
160.
200
240
280
320.
360
0 40 80 120 160 200 240 280 320 а град
Рис. 2.41. Зависимость погрешности
определения дальности до движущегося
объекта от величины первого пеленга а и
направления движения объекта Т для £>=200
км; Г= 1000с; К=10 м/с; v=44,4 м/с;
<то= <Тр = о/=0,01; о> /£>по=0,0 1 exp(z)
Изменение а от 0 до 2л
при у - const ведет к после-
довательной смене высоких и
низких значений погрешно-
сти (в общем случае до пяти
«хребтов» с четырьмя «сед-
ловинами» между ними). На
трехмерном рис. 2.41 приво-
дятся результаты расчета от-
носительной погрешности
ад/£)|Ов зависимости от уг-
лов а и у/. При этом безраз-
мерный числовой параметр
(z) у кривых связан с погреш-
ностью соотношением
-^-«0,01exp(z).
^по
Анализ графиков позволяет дать практические рекомендации:
наибольшие точности («й/£)по- порядка единиц процентов) име-
ют место, если НК движется к точке первоначального обнаружения
= 180°) и угле отворота 30...90° или 270...330°;
наихудшая точность (не лучше 15...20 % для принятых исходных
данных) при любых а достигается при движении цели перпендикулярно к
направлению на точку первоначального обнаружения (у - 90°); при этом
наименьшие ошибки будут в области значений углов 300 < а < 340°;
для приближенных оценок можно полагать, что угол отворота а,
соответствующий минимальным ошибкам, определяется соотношением
| а-^|®лг/2.
В заключение можно сделать следующие выводы.
1. При известном направлении движения объекта с помощью
средств РТР можно определить его скорость и координаты по трем и
более пеленгам, измеренным без необходимого при отсутствии этой
информации маневра ЛА по скорости и траектории.
130
2. Относительные погрешности определения дальности до объекта,
движущегося перпендикулярно к симметричной базе пеленгации, незначи-
тельно превышают погрешности для неподвижных целей, относительные
погрешности измерения скорости при тех же условиях - на порядок больше.
3. Типичным способом радиотехнической разведки, например, на
море, является обнаружение излучения РЛС корабля на малых курсовых
углах с последующим отворотом на угол а для пеленгации на прямо-
линейной базе длины L. При разведке малоподвижных целей оптималь-
ный угол а близок к 90°; при сравнимых скоростях корабля и ЛА (ко-
рабль на максимальной скорости и вертолет на скорости барражирова-
ния) необходим учет направлений движения корабля, оптимальные зна-
чения угла а определяется соотношением [а - = л72 .
Литература к главе 2
1. Скворцов М. И. и др. Основы маневрирования кораблей / Под. ред.
М.И. Скворцова. - М.: Воениздат, 1966.
2. Макухина Т.П., Миленький А В., Натальченко О.С., Попов С.В. Оцен-
ка текущих координат движущегося объекта по данным пеленгова-
ния. - Вопросы радиоэлектроники. Сер. АСУПР, 1992, вып.2.
3. Булычев Ю.Г, Коротун А.А., Манин А.П., Моторкин В.А. Опреде-
ление координат цели по угломерным данным подвижного прием-
ного пункта. - Радиотехника, 1992, № 4.
4. Хвощ В.А. Тактика подводных лодок. - М.: Воениздат, 1989.
5. Мельников Ю.П. Методы оценки эффективности отождествления
информации от бортовой РЛС и станции радиотехнической раз-
ведки. - Радиотехника, 1996, № 10.
6. Мотрохов А.Н. Определение дистанции до объекта маневра-
Морской сборник, 1972, № 9.
7. Справочник вахтенного офицера / Под ред. А.П. Проничева - М.:
Воениздат, 1975.
8. Мельников Ю.П., Попов С.В. Методы оценки погрешностей опре-
деления параметров движения объекта при локации в условиях ра-
диоэлектронного подавления. - Радиотехника, 1998, № 3.
9. Справочник капитана дальнего плавания / Под ред. Г.Г. Ермолае-
ва. - М.: Транспорт, 1988.
10. Линник Ю.В. Метод наименьших квадратов и основы математико-
статистической теории обработки результатов наблюдений. - М.:
Физматгиз, 1962.
11. Мельников Ю.П., Попов С.В. Определение дистанции и элементов
движения объекта методом предвычисленных фиктивных пелен-
гов. - Морской сборник, 2000, № 6.
12. Булычев Ю.Г. и др. Идентификация параметров траекторий по из-
мерениям подвижного пеленгатора. - Радиотехника, 1990, № 1.
131
13. Локк А.С. Управление снарядами: Пер. с англ. - М.: Гос. издат.
технико-теоретической литературы, 1957.
14. Справочник офицера ПВО / Под ред. Г. В. Зимина. - М.: Воениздат,
1981.
15. Южаков В.В. Современные методы определения местоположения
источников радиоизлучения. - Зарубежная радиоэлектроника,
1987, № 8.
16. Мельников Ю.П., Попов С.В. Определение дистанции и элементов
движения объекта методом предвычисляемых фиктивных пелен-
гов. - Морской сборник, 2000, № 3.
17. Мельников Ю.П., Попов С.В. Определение и прогнозирование коор-
динат равномерно движущегося в пространстве объекта по данным
единичных локационных измерений. - Радиотехника, 2002, № 3.
18. Nardone, С. and Aidala, V., Criteria for Bearings-Only Target Motion
Analysis. - IEEE Trans, on AES, v.AES-17, no. 2, March, 1981.
19. Kong Sun Zhong, Ming Zhang. Passiv location and tracking using DOA
and TOA measurements of single nonmaneivering observer. H Proc.
IEEE Nat. Aerosp. And Electron. Conf. (NAECON). Dayton, May
22-27, 1988, no. 4.
20. Поляк Г. Определение факта маневра цели. - Морской сборник,
1988, № 4.
21. Латинский С.М. Девиация судовых радиолокационных станций.
-Л.: Судостроение, 1966.
22. Knight, Р., Reradiation from masts and similar obstacles at radio fre-
quencies. - Proc. Instn. Electr. Engrs, 1967, 114, no. 1, 30^12.
23. Koppl Werner. Radar antenna/mast near-field interactions. - APS Int. Simp.
Los Angeles Calif. 1981. Digest. vol.l» New York, 1981, pp. 111-114.
24. Cown, B.J., Papanicolopulos, C.D., Ryan, C.E. Jr. - Antennas and Propag.
AP-Sint. Simp.Dig. Boston, Mass., vol.2, New York, 1984, pp. 859-862.
25. Roy, J. Bi’ondi, Bradford E. Kruger. The unimast concept-S mayor de-
parture in shipboard radar antenna installation philosop. - Naval Engi-
neers Journal, April 1981, pp. 83-89.
26. Richard C. Johnson. Radar Search Antennas and RFI (Rado-frequency
interference). - IEEE Transactions on Electromagnetic Compatibility,
vol. EMC-6, Yuly 1964, no. 2, pp. 1-8.
27. Теоретические основы радиолокации / Под ред. В.Е. Дулевича. -
М.: Сов. радио, 1978.
28. Мельников Ю.П. Воздушная радиотехническая разведка (методы
оценки эффективности). - М.: Радиотехника, 2005.
29. Jane’s Fighting Ships, Ed. Captain Richard, 1988-89.
30. Мельников Ю.П., Попов С.В. Определение дальности при пеленго-
вании объекта с частично известными параметрами движения. -
Радиотехника, 2003, № 4.
31. Соловьев Ю.А. Системы спутниковой навигации. - М.: Эко-Трендз,
2000.
132
ГЛАВА 3
ПЕЛЕНГАЦИОННО-ВРЕМЕННЫЕ МЕТОДЫ
ОПРЕДЕЛЕНИЯ КООРДИНАТ
ИСТОЧНИКОВ ИЗЛУЧЕНИЯ
В главе описываются методы определения координат, объединен-
ные по признаку необходимости для их реализации измерений интерва-
лов времени, что в сочетании с традиционной в РТР пеленгацией и дало
название материалу всей главы.
Приведены основные формулы для определения координат на-
правленных сканирующих излучателей по интервалам времени между
последовательными моментами приема сигналов на нескольких про-
странственно разнесенных приемных пунктах. Отмечается также воз-
можность определения местоположения и угловой скорости сканирую-
щих в секторе излучателей.
Даются формулы для определения и прогнозирования дальности
до движущегося в пространстве объекта-источника излучения с фикси-
рованной частотой по нескольким последовательным измерениям пе-
риода принимаемого сигнала, в том числе для случая отсутствия данных
об угловых координатах излучателя и текущем пространственном по-
ложении наблюдателя.
Рассмотрены приближенные соотношения для оценки дальности и
высоты полета объекта-источника радиоизлучения по данным измере-
ний углов места и параметров интерференционной модуляции прини-
маемых сигналов с учетом отражений от водной поверхности.
Приведены формулы для определения дальности и направления
на неподвижный излучатель с прямолинейно движущегося объекта по
измеряемым на борту отрезкам его пути за последовательные времен-
ные интервалы, содержащие определенное число отсчетов.
Рассмотрена возможность определения дальности до излучателя
модулированных радиосигналов как отношения тангенциальной скоро-
сти наблюдателя к угловой скорости линии визирования путем комби-
нирования разностно-временного и дифференциально-доплеровского
способов пеленгования и местоопределения.
Также рассмотрена возможность определения курсового угла и
дальности до излучателя по нескольким интервалам времени между по-
следовательными моментами приема сигнала излучателя в смежных ле-
пестках интерференционной диаграммы двух объединенных по выходу
разнесенных антенн при прямолинейном движении наблюдателя с из-
вестной скоростью.
133
3.1. Варианты временного способа местоопределения
сканирующих источников излучения при наблюдении
из нескольких приемных пунктов
Преимуществом временного способа местоопределения источни-
ков излучения, основанного на измерении функционально связанных с
координатами источника интервалов времени между моментами приема
одноименной фазы несущей или модуляции сигнала на нескольких про-
странственно разнесенных и известным образом расположенных при-
емных пунктах (ПП), является отсутствие необходимости применения
сложных и имеющих ограниченную диапазонность пеленгаторных уст-
ройств и относительная простота технической реализации измерения
временных интервалов с высокой точностью. Одним из вариантов этого
способа является известный (например [1-3, 8-10]) гиперболический
или разностно-дальномерный, основанный на измерении разностей
времени распространения сигналов от излучателя до трех ПП; скорость
распространения сигнала v при этом предполагается известной.
Рис. 3.1. Определение координат
сканирующего источника
излучения при трех приемных
пунктах
К другому варианту, применимому
в случае местоопределения сканирую-
щих с постоянной угловой скоростью СО
направленных излучателей (РЛС, лазер-
ных локаторов, радиомаяков, прожекто-
ров, возможно, в будущем, также неко-
торых космических объектов - пульса-
ров), можно отнести использование для
этой цели данных измерений интервалов
времени между последовательными об-
лучениями нескольких разнесенных ПП,
связанных линией ретрансляции сигнала
или обмена информацией [4,5].
Комбинированное применение временного и пеленгационного
способов позволяет определять дальность до излучателя с помощью
двух ПП, один из которых содержит пеленгатор, а другой является
ретранслятором сигнала [6]. При этом в случае сканирующего излуча-
теля по интервалу между облучениями двух ПП ДТ и угловой скорости
со определяется угол между направлениями на эти ПП из точки нахож-
дения излучателя - угол засечки у=со ДТ, что позволяет найти дальность
до излучателя D по известному расстоянию между ПП (А) и измеренно-
му пеленгу а. Например, при использовании двух ПП (рис. 3.1), даль-
ность до излучателя в точке 1 определяется равенством
sin(a + у,)
Г1
134
При использовании трех ПП местоопределение сканирующего из-
лучателя производится без применения пеленгаторных устройств путем
измерения двух интервалов времени (ДТ12 и АТ^) между моментами об-
лучения этих ПП с последующим определением углов засечки у, и
Дальность и направление на излучатель в точке 2 находятся из очевид-
ных выражений
„ , sin а „ е
D2 = А-----, р = 8 + а + ух-л,
sin У]
где угол а определяется из тригонометрических соотношений в смеж-
ных треугольниках как
В sin у, sin (у, + у, + А)
а = arctg------------------------------- ;
A sin у2 + В sin у! cos(y, +у2 +<У)
(3.1)
ух=со8Т2Х; /2=<уЛГ23.
В случае расположения баз А и В под прямым углом (5= л/2) фор-
мулы для определения координат излучателя можно представить в виде
О2=-.__________, (3.2)
V tg2/i (5 - Atgy2 )2 + tg2y2 - BtgYi )2
tgyx(B-Atgy2)
(3.3)
Если излучатель работает в режиме кругового обзора и имеется
возможность приема сигналов при нескольких последовательных облу-
чениях, то можно определить угловую скорость и затем местоположе-
ние излучателя, измерив интервал времени между облучениями, т. е.
период оборота антенны То& [5], и а также определить углы засечек как
у = 2л:8Тх2/Т^и у2 = 2л-ДТ23/:Гоб.
В случае возможности одновременного приема излучения на всех
трех ПП (при относительно широкой диаграмме направленности излу-
чателя или за счет бокового излучения его антенны) координаты источ-
ника определяются разностно-дальномерным способом - по интервалам
между моментами времени (Л, t2, Г3 для ПП-1, -2, -3 соответственно) од-
ноименной фазы несущей или модуляции сигнала, например, по сле-
дующим формулам, полученным в результате совместного решения
уравнений двух линий положения (гипербол):
D2=--------v(^2-wr,cosJ)---------, (34)
2 (Д]Г2 - A2T! cos 8 + Г]Г2 sin ft sin 8)
135
A, - /zA, + г. sin ft sin 3
Р-ахс cos——!=-^---1, (3.5)
цтг — Г] cos#
где Д]= /| - t2, Аг ~ h ~ h ~ интервалы между моментами приема на соот-
ветствующих ПП; v - скорость распространения; т i =A/v, г2 =B/v - «ба-
зовые» временные интервалы; U - т^- р- U/w.
При комбинированном применении временного и пеленгационно-
го способов [6] в данном случае дальность до излучателя относительно
точки 1, где расположен пеленгатор, будет определяться как
Рис. 3.2. Определение координат
сканирующего источника излучения
при четырех приемных пунктах
-О'] _----------- , IJ.Uf
2(Д] +Г] cos а)
Если измеряемыми величинами являются разности фаз несущей
частоты сигнала, как в [7], то для перехода к временным интервалам
можно использовать очевидные соотношения
Д1 = ДФ12/2л£ Д2 = ДФ32/ 2л/;
где ДФ = 2ил+ Л<р- полная разность фаз;/- несущая частота сигнала.
Можно также выразить
все временные интервалы в
формулах (3.4) и (3.5) через эк-
вивалентные им разности фаз -
измеряемые и «базовые», опре-
деляемые расстояниями А и В и
частотой, которая предполага-
ется известной или измеряемой
во время приема.
При использовании
большого количества ПП, на-
пример четырех (рис. 3.2), по
совокупности измеряемых
интервалов времени можно определить наряду с координатами излуча-
теля также скорость распространения сигнала v (при одновременном
облучении всех ПП) или угловую скорость обзора а> (при поочередном
облучении ПП). Последнее может оказаться необходимым для местооп-
ределения источников, работающих в режиме секторного обзора с неиз-
вестной угловой скоростью. Один из возможных вариантов записи ос-
новных формульных зависимостей для определения координат излуча-
теля при использовании четырех ПП будет таким:
P2=5sjn(^)i (3.7)
sin/
Л fB sin6/ _ ,, J
Р = arcctg - — ---—----——- + ctg[z? + (Ь +1)/] к
(С sin у Sinff + (о + 1)у] J
136
Неизвестный средний угол засечки у может быть найден из соот-
ношений сторон и углов в трех смежных треугольниках (рис. 3.2):
. [B[^(Psin<5-cosJ) + 5 + C(Osin£-cosff)lsinarsinZ>rl .
у = arc sin 1 ьJf, (3 8а)
[ JC(/’sin<J-cos<J)(2sin£-cosf)sin(a + /> + l)y J
или
у =—arc
b [ AC(P - cX%8)(Q - etgf) sin 8sin e sin у sin(a + l)y
(3.86)
p_ Bsmbycosay + Csmycos[£ + (a + b + l)y]
b sin by sin ay + C sin у sin[f + (a + b + l)y ’ АГ23 ’
Q_Bsinbycos(b + l)y + Csinycos£ A A
Csin/sin£,-.DsinZ>/sin(Z> + l)/ AT^
При линейном расположении баз В и С и ортогональном к ним по-
ложении базы Л (8= л/2, £•= л) исходные выражения для итерационного
вычисления угла /можно представить в более простом виде
у = arctg-
(А А
—--tg(7/ tg(Z> + l)/
А Д + С_/______
А
В + С
I А
-1 tg(Z> + l)/-l tga/ + —
J в
(3.9а)
или
1
у=—arctg
а
( С)
tg(Z> + l)r- 1 + — tgy
\ д/
[tg(Z> +1)/ - tgy] - tgy • tg(6 + 1)у
A Jj
(3.96)
Соотношения (3.1)-(3.3) и (3.7)-(3.9) справедливы в условиях пре-
небрежимости разностей времени приема сигналов (А) на разных ПП,
обусловленных различным их удалением от излучателя и конечной ско-
ростью распространения сигнала v по сравнению с измеряемыми интер-
валами между моментами облучения (А7). Вывод формул (3.8)-(3.9)
достаточно громоздок и здесь не приводится, заметим только, что эти
формулы можно получить из теоремы, соответствующей варианту ли-
нейного расположения всех ПП (8 = £ = л), согласно которой в такой
конфигурации имеет место соотношение
ACsinysin(a+b+l)y= B(A+B+Qsmysinby. (3.10)
(Формулировка этой теоремы приведена в приложении.)
137
Угловая скорость излучателя определяется по вычисленным вели-
чинам углов засечки и измеренным интервалам времени, например, как
й)= у1\Т22>. В ситуациях, когда наряду с измерением интервалов между
облучениями разных ПП возможен также одновременный прием сигна-
лов, излучаемых данным источником, на смежных ПП, определение ме-
стоположения излучателя можно провести по данным совместных из-
мерений угла засечки и времени запаздывания в каждой из смежных пар
ПП. Так, при трех ПП (см. рис. 3.1) дальности D\, D2, D2 до излучателя
кругового обзора находятся как
1 - cos у2
l-cosy2
где у = г ЛТ12; у2= ю\Т22, а = = tx-t2, k2 = t2-12.
Если угловая скорость излучателя не может быть достоверно опреде-
лена (при секторном или однократном режиме обзора), величины углов за-
сечки в данных условиях можно найти по двум измеренным значениям
времени запаздывания (А) и Аг) и отношению углов у\ и %, равному (при
постоянной угловой скорости обзора) отношению соответствующих угло-
вых интервалов (y^afi, где а = А7)2 / ^Т21). Из выражений для D2 в (3.11)
можно получить соотношение (3.12), связывающее искомую величину с
известными и измеряемыми параметрами, и принципиально вычислить уг-
лы засечки и, тем самым, местоположение излучателя:
у 2 = 2arcsin-
А2 - ОД )2 cos2 - vAj sin
(3.12)
138
Практическая реализация вычислительных процедур по данной
формуле требует достаточно высокой точности измерений временных
интервалов (АТ и Д). Еще в большей степени это относится к формулам
(3.8) и (3.9), особенно при относительно больших расстояниях до излу-
чателя (в 5... 10 раз превышающих величину базы), когда углы пересе-
чения линий положения (окружностей) становятся слишком малыми.
Для повышения точности измерений интервалов времени между облу-
чениями, представляющими собой некоторый отрезок времени, в тече-
ние которого удовлетворяется критерий «облучения» (например, по ам-
плитуде) фиксация моментов облучения должна производиться по ка-
ким-либо характерным точкам, например, по максимуму амплитуды или
по серединам «пачек» принимаемых сигналов. В случае импульсной
модуляции сигнала с периодом повторения Тп возникает погрешность
определения интервалов времени, которую можно оценить как
сгдг =Гп/>/б . Это ограничивает точность местоопределения, достижи-
мую при однократном измерении. Однако применение совместной об-
работки результатов многократных измерений с использованием, по
возможности, обоих вариантов временного способа местоопределения
позволит в значительной степени снизить влияние этой и других слу-
чайных составляющих ошибки (за счет быстрых флюктуаций уровня
сигнала, нестабильности угловой скорости излучателя и др.).
В заключение заметим, что в качестве некоторых из разнесенных
пунктов, осуществляющих ретрансляцию сигналов наблюдаемого излу-
чателя на центральный (главный) ПП могут быть использованы искус-
ственные или природные объекты (здания, корабли, горные склоны и
вершины, мысы и возвышенности на береговой черте, возможно, также
локальные интенсивные метеообразования) с достаточно большой эф-
фективной площадью рассеяния и известными или определяемыми в
процессе наблюдения координатами [11]. Применение подвижных ПП и
совместной обработки данных ряда последовательных измерений, по-
лучаемых при разном их расположении, позволит уменьшить число ПП
(до двух и даже одного).
Таким образом, показана принципиальная возможность определе-
ния координат и угловой скорости направленных сканирующих излуча-
телей по каждому одиночному циклу обзора путем измерения интерва-
лов времени между приемами излучения на четырех приемных пунктах.
139
Приложение
Теорема. Две прямые, проведенные внутри треугольника через
одну из вершин, делят противоположную сторону на три отрезка, отно-
шение произведения величин крайних из которых к произведению ве-
личин среднего отрезка и всей этой стороны (равной сумме отрезков)
равно отношению произведений синусов углов, противолежащих вы-
шеназванным отрезкам и стороне.
3.2. Определение и прогнозирование расстояния между
движущимися с постоянной скоростью излучателем
и наблюдателем по доплеровской модуляции периода
принимаемого сигнала
Определение дальности до движущегося объекта-источника излу-
чения) одиночным наблюдателем обычно производится путем пеленго-
вания объекта с одновременным выполнением наблюдателем специаль-
ного маневра по курсу или/и скорости. Варианты такого маневра и со-
ответствующих методов обработки совокупности измеренных пеленгов
для определения дальности до равномерно движущегося объекта приво-
дятся в ряде литературных и патентных источников, например, в
[12-19].
Однако при высоких скоростях движения объекта и наблюдателя,
характерных, в частности, для космических летательных аппаратов
(КЛА), выполнение наблюдателем маневра с изменением курса или/и
скорости на достаточно значимую величину за время пеленгационного
контакта не всегда оказывается возможным. В таких ситуациях опреде-
ление дальности до движущегося с постоянной скоростью объекта без
выполнения наблюдателем маневра может быть осуществлено путем
использования наряду с данными пеленгования некоторых дополни-
тельных данных о параметрах движения объекта, априорно известных
(таких как величина скорости, расположение траектории [20]) или изме-
ряемых в процессе наблюдения, в частности, доплеровской модуляции
частоты принимаемого сигнала. Характер изменения частоты последо-
вательно принимаемых сигналов в процессе движения наблюдателя и
объекта зависит от взаимного расположения их траекторий в
пространстве и текущего положения объекта и наблюдателя и является
достаточно информативным параметром, принципиально позволяющим
определять и прогнозировать расстояние до объекта как при
использовании этих данных совместно с данными пеленгования, так и
без них.
140
Вариант комбинированного пеленгационно-доплеровского метода
местоопределения излучателя неманеврирующим наблюдателем с ис-
пользованием измерений направления и времени прихода сигналов рас-
смотрен в [21] для случая, когда источник движется с постоянной ско-
ростью и излучает импульсные сигналы с постоянной частотой повто-
рения. При этом доплеровское смещение частоты модуляции (т.е. изме-
нение интервалов между принимаемыми импульсными сигналами)
можно определить путем измерения интервалов между моментами при-
хода последовательных импульсов, период повторения которых апри-
орно известен, подобно тому, как это изложено в [22] для разностно-
дальномерного или доплеровского интегрального методов местоопреде-
ления применительно к решению задачи самоопределения КЛА по ра-
дионавигационной точке. Вариант использования такого метода, кото-
рый можно назвать доплеровско-временным, для беспеленгового место-
определения неподвижного из-
лучателя движущимся наблюда-
телем изложен в [23].
Если период повторения им-
пульсов (Тп) излучателя априорно
известен, то для определения его
координат и параметров движения
на плоскости достаточно измерить
величины двух интервалов време-
ни Тц и Тэг между тремя последо-
вательными моментами t\, tj
(Т2\= h~t\, Тз2= h-ti), заключаю-
щих в себе некоторое число периодов повторения принимаемого сигнала
(A2i и А32), и значения пеленгов или курсовых углов излучателя в эти мо-
менты. Различия между измеренными наблюдателем интервалами времени
и истинными их величинами, соответствующими данному числу периодов
сигнала (Л21=№1ГП-321 и <Му1=Ыу1Тп - Т32), характеризуют разности дально-
стей «объект-наблюдатель» в последовательные моменты времени (<), ко-
гда выполняются отсчеты (А/, =Rj-Ri =c§t,j, где с - скорость распростране-
ния сигнала).
Система формульных выражений для определения начальных ко-
ординат излучателя Х\, У, и проекций вектора его скорости Vx, Vv в наи-
более простом виде, соответствующем движению наблюдателя на плос-
кости из точки начала координат вдоль одной оси с измерением курсо-
вых углов излучателя П;относительно этой оси (рис. 3.3), имеет вид
Рис. 3.3. Перемещение источника
радиоизлучения на расстояние S
и наблюдателя, измеряющего пеленги
Пь П2, и П3 на базе L
141
cosTI] [Т21 (Д31 cosllj -х3)-Т31 (Д21 cos Щ хг)]
Г21 (созП3 -созП,)-Т}1 (cosTI2 -cosllj)
sin П, (Г21Д31 sin П3 - Г31Д21 sin П2)
7^( (sin П3 -sinll))-7’31(sinll2 -sinFIj) ’
(3-13)
2-cosII1)(A31cosn3-x3)-(cosn3-cosni)(A21cosn2-x2
Г21 (cos П3 - cos Ц) - 7"31 (cos П2 - cos Ц)
(sinll2 -sinlljAjj sinll3 -(sinll3 -sinni)A2|SinII2
y ^[(sinllj-sinni)-7’31(sinll2-sinllj)
где хг координата наблюдателя в i-й момент времени.
Значение периода повторения сигнала Та может быть уточнено по
данным дополнительных измерений пеленга и числа периодов принято-
го сигнала на третьем интервале времени Г43 (П4 и JV43) по следующей
формуле:
у __________________^3Д1^12^34~^ДДз^24 +^21^31^14^23_______________
J''21sinn2(7^1S14-7^1S]3)+A31sinII3(7^15l2-^1314)+j%1sinn4(^1513-75i312)
(3.14)
Здесь - sin Пsin П,.
Как видно из (3.13) и (3.14), для вычисления значений координат и
параметров движения излучателя, позволяющих прогнозировать даль-
нейшее его положение, в изложенном методе местоопределения наряду
с измерениями доплеровской модуляции периода принимаемого сигна-
ла используются данные пеленгования излучателя и сведения о коорди-
натах наблюдателя или величинах отрезков его пути между точками
выполнения измерений. Принципиально возможно определять текущее
и прогнозируемое расстояние между прямолинейно и равномерно дви-
жущимися в пространстве излучателем и наблюдателем с использова-
нием только данных измерений доплеровского изменения частоты или
периода принимаемого сигнала на нескольких (при априорно известном
периоде - не менее трех) временных интервалах подобно тому, как это
изложено в [12] применительно к местоопределению неподвижного из-
лучателя. Расстояние до излучателя в четвертый момент (т.е. в момент
окончания третьего мерного интервала) определяется по формуле
_ с 132^42^43^41 ~ ^31^41^43^42 + ^21^41^42^43 (3 15)
2 Г31Г41Г43<Й42 -Т32Т42Г43&41
Прогнозируемое на некоторый произвольный момент времени /5
расстояние между излучателем и наблюдателем Я5, а также интервал
142
времени до момента максимального их сближения (7МИП) могут быть
найдены по величинам дальности до излучателя в какие-либо три по-
следовательные момента времени, например, I], t2, /4, из формул, анало-
гичных приведенным в [24]:
R5 = Мч2 , (3.16)
V У2И41 721742 У4И42
7’2 n2 ml п2 т (т \ т \ 1)2
41^2 ~742Л1 ^21 П41 +‘42)^4 , 7ч
^мин4 «2 m т^2 г,,
2(ад-ад+ад)
Здесь T54=ts - Z4 и TMm4=tum - /4 - интервалы времени между моментом
последнего измерения (74) и моментом, для которого делается прогноз
расстояния, или моментом максимального сближения соответственно,
при этом Rj = R4+ c3t41, R2= R4 + c8t42.
Прогнозируемая величина минимального расстояния между на-
блюдателем и объектом в момент максимального сближения (7МИ11) при
условии продолжения их движения с постоянными скоростями нахо-
дится из выражения (3.16) подстановкой в него определяемого по (3.17)
значения интервала Ти = TKmi4 при соответствующей корректирбвке ве-
личин T5i и Т52 (с учетом того, что 7’51=Т54+7’4) и Т^Т^Чг)-
Если точное значение периода повторения импульсов априорно
неизвестно, оно может быть найдено в процессе обработки подобно то-
му, как указывалось выше - с использованием измерения длительности
еще одного, четвертого мерного интервала времени Т54, также содержа-
щего некоторое определенное число (Л^) периодов принимаемого сиг-
нала. Формульные выражения для решения аналогичной задачи в более
простом случае, когда излучатель неподвижен, а скорость наблюдателя
известна, приведены в [23], однако в рассматриваемой ситуации (при
движении объекта и наблюдателя с неизвестными скоростями) соответ-
ствующие расчетные соотношения приобретают достаточно сложный и
громоздкий вид и здесь не приводятся.
Использование данных о скорости или координатах наблюдателя в
ряде последовательных точек его траектории совместно с вычисляемы-
ми значениями дальности до излучателя в этих точках позволит полу-
чить дополнительные сведения об относительной ориентации траекто-
рий наблюдателя и объекта и его курсовых углах, однако в изложенном
беспеленговом варианте доплеровско-временного метода определения
дальности ввиду симметричности решения этой задачи относительно
линии движения наблюдателя сторона нахождения излучающего объек-
та не определяется; вычисляемые по (3.15) расстояния представляют со-
бой радиусы окружностей (в пространстве - сферических поверхно-
стей), в одной из точек которых в соответствующий момент времени
находится излучающий объект.
143
Численный пример, иллюстрирующий возможный порядок изме-
ряемых временных интервалов при движении объекта и наблюдателя с
первыми космическими скоростями (8 км/с) по скрещивающимся траек-
ториям, проекции которых на параллельную им обеим плоскость услов-
но показаны на рис. 3.3, приводится ниже. Расстояние между траекто-
риями в точке скрещивания </=80 км. Величины обозначенных на
рис. 3.3 расстояний, относящихся к данному примеру, км: 51=1002,3971;
Л2=869,02243; Л3=737,56355; Я4=609,26185; /?5=486,621. Начальные уда-
ления излучателя и наблюдателя от точки скрещивания траекторий (S и
L, соответственно) 5=320, £=800. Известный априорно период повторе-
ния импульсного сигнала излучателя Тп=4-10”3с.
Отсчеты временных интервалов Ту наблюдателем производятся
через 2500 периодов принятого сигнала, при этом измеренные величины
последовательных интервалов, с, будут составлять: Т21=9999555,42-10"6;
Т32=9999561,8 10'6; £,3=9999572,3-10'6; £34=9999591,2-10'6. Скорость
распространения сигнала с=3-105км/с. Величины запаздывания сигнала
Sty, используемые в (3.15): J/41=1310,4505-10'6; <5/42=865,8686-10-6;
&4з=427,6723-ЮЛ
3.3. Методы определения координат маловысотных
объектов при пассивной локации
с использованием эффекта отражения радиосигналов
от водной поверхности
При пассивной локации воздушных объектов-источников излуче-
ния с борта корабля прием сигналов от объектов в условиях спокойного
моря или умеренного волнения сопровождается интерференционными
явлениями (изменениями амплитуды и фазового фронта), обусловлен-
ными сложением в точке приема прямого сигнала излучателя и запаз-
дывающего относительно него отраженного от морской поверхности
сигнала, сдвиг фаз между которыми зависит от расстояния до объекта R,
высот подъема объекта Н и приемного пункта h и длины волны 2.
В частности, как можно заключить из приведенных в [25-28, 47] дан-
ных, для углов скольжения ^<1°-1,5° эффект зеркального отражения (с
преобладанием когерентной составляющей отраженного сигнала) будет
иметь место в сантиметровом диапазоне волн при волнении до двух
баллов, а в дециметровом диапазоне - до трех-четырех баллов.
Условия распространения радиосигналов с учетом влияния отра-
жений от земной (морской) поверхности достаточно подробно изложе-
ны в [25-28], а различные методы снижения мешающего влияния зер-
кального отображения объекта («антипода») при измерении угла места
низколетящих целей предлагаются и рассматриваются в ряде статей
(например [29-33]) и обширной патентной литературе, в основном,
144
применительно к радиолокационному сопровождению таких целей. В то
же время при пассивной локации объекта по излучениям его бортовых
радиотехнических средств наличие интерференционной модуляции, за-
висящей от взаимного расположения излучающего объекта и точки
приема и изменяющейся при их перемещении, может быть использова-
но для оценки координат объекта (дальности и высоты полета) по дан-
ным нескольких разнесенных в пространстве или/и времени измерений
различных параметров принимаемых сигналов - углов места, времен-
ных, пространственных или частотных периодов интерференционной
модуляции, соотношений амплитуд и фаз на выходах многоэлементной
антенной системы.
Известен ряд вариантов методов и устройств для определения ко-
ординат воздушного объекта (излучателя радиосигналов) с другого объ-
екта (приемного пункта), находящегося над поверхностью Земли, с ис-
пользованием измерений и совместной обработки прямого и отражен-
ного от поверхности сигналов излучателя. Так, в [10,11] описаны уст-
ройства для пассивного определения расстояния до объекта-излучателя
по данным измерения угла места этого объекта, разности времени при-
хода прямого и отраженного от поверхности сигналов и высоты прием-
ного пункта. В бортовом пассивном радиолокаторе [36] расстояние до
другого самолета, оснащенного передатчиком, определяется по разно-
сти времени прихода прямого и отраженного от какой-либо наземной
цели сигналов, углам места этой цели и самолета-излучателя и собст-
венной высоте. В пассивной самолетной системе [37] дальность до воз-
душной цели и ее высота над поверхностью моря вычисляются по зна-
чениям углов места объекта-цели и его зеркального отображения с уче-
том высоты приемного пункта. В [38,39] измерение дальности до излу-
чателя производится в результате совместной обработки прямого и от-
раженного от поверхности Земли сигналов путем их сравнения и опре-
деления различия характеристик, в частности, дальность до самолета-
постановщика активных помех [38] вычисляется по разности времени
поступления прямых и отраженных сигналов и разностной доплеров-
ской частоте этих сигналов, определяемым с помощью линий задержки
и корреляторов.
При наблюдении с борта корабля маловысотных (Н < 300 м) объ-
ектов разность времени прихода прямых и отраженных сигналов не пре-
вышает нескольких наносекунд и большинство перечисленных методов
не может быть непосредственно применено. Ниже приведены некото-
рые принципиально возможные пути оценки дальности при пассивной
локации таких объектов, в том числе с использованием отдельных ме-
тодов из кратко охарактеризованных выше.
В ситуациях, когда, несмотря на наличие зеркального отражения сиг-
нала, возможно измерение угла места объекта - за счет использования ан-
тенны с весьма узкой диаграммой или применения многоканальных антен-
145
Рис. 3.4. Определение координат
излучающего объекта при измерении
углов места прихода сигнала от
источника и от его антипода
Рис. 3.5. Определение координат
излучающего объекта при измерении
угла места прихода сигнала от
источника и пространственного
периода интерференционной
модуляции
Рис. 3.6. Определение координат
излучающего объекта при измерении
угла места прихода сигнала от
источника и скорости (числа
наблюдаемых периодов)
интерференционной модуляции
ных устройств со специальной обра-
боткой сигналов (как в [29-33]), ко-
ординаты излучающего объекта мо-
гут быть определены путем измере-
ния его угла места с одновременным
определением какого-либо из сле-
дующих параметров:
1) угла прихода сигнала от
антипода (рис. 3.4), как в [37];
2) пространственного периода
интерференционной модуляции ам-
плитуды суммы прямого и отра-
женного сигналов, определяемого
путем обработки совокупности ам-
плитуд сигналов, одновременно
принимаемых несколькими разне-
сенными в вертикальной плоскости
слабонаправленными элементами
антенной системы, или последова-
тельно принимаемых при измене-
нии высоты точки приема на неко-
торую величину ДЛ (рис. 3.5); сум-
марный сигнал формируется путем
сложения прямого и отраженного
сигналов на высокой или промежу-
точной частоте;
3) частотного периода интер-
ференционной модуляции ампли-
туды суммарного сигнала (при из-
лучении объектом широкополос-
ного сигнала, например шумовой
заградительной помехи);
4) скорости (числа наблюдае-
мых периодов) интерференцион-
ной модуляции амплитуды сум-
марного сигнала и изменения угла
места объекта в процессе его дви-
жения в направлении на приемный
пункт (рис. 3.6).
В третьем и четвертом случаях возможно также использовать яв-
ление периодического изменения положения фазового фронта суммар-
ного сигнала, однако такие измерения обычно оказываются более слож-
ными, чем измерения амплитуд сигналов.
146
Изменяющаяся при перемещении объекта и/или точки приема ве-
личина фазового сдвига между интерферирующими сигналами, опреде-
ляющая текущие параметры суммарного сигнала в точке приема, зави-
сит от разности хода сигналов Д7?, длины волны А и фазового угла ко-
эффициента отражения, который в нашем случае может быть принят
равным 180° [25-27]. Разность хода сигналов А/? для случаев, когда рас-
стояние R относительно невелико и кривизной поверхности Земли мож-
но пренебречь, находится по формуле [25-27]
ДА-*"*
R
(3-18)
Если расстояние R сравнимо с дальностью радиогоризонта Лрг,
влияние кривизны земной поверхности, сказывающееся в уменьшении
разности хода и величины угла скольжения, следует учитывать; вариан-
ты соответствующих формульных выражений и методик приведены в
[1—4]. Согласно [25-27] разность хода определяется как
. „ 2ЯЙ ,
ДЯ=---- 1-
R
(3.19)
где и, г2 - расстояния от точек излучения и приема до точки отражения;
аэфф=8500 км - эффективный радиус Земли.
На основе этого выражения, соответствующим образом преобразо-
ванного, может быть найдена йеличина разности хода с использованием
графиков из [25, 27] или путем решения кубического уравнения [25, 27].
Другой вариант формулы для вычисления Д7? приведен в [28]:
2Hh t 1 < R/z Y t 1 Г ЛЯ У
R 2O^U + ^J ][_ 2a^U + ^J
(3.20)
Это выражение позволяет непосредственно вычислять ДЛ, но не-
сколько громоздко. Более простая приближенная формула, предложен-
ная в [26], может быть записана в следующем виде:
дл=^
(3.21)
R
гДе Лр.^^зФФ (7й+7я) - дальность радиогоризонта, часто пред-
ставляемая как Rpr » 4,12(7/! + 7я) , при этом высоты hiA.H выражают-
ся в метрах, a Rpr - в километрах.
Подобным же образом в [26] предлагается с целью учета кривизны
Земли корректировать и значение угла скольжения у/:
147
H + h
R
(3.22)
При наблюдении объектов в ближней зоне - на дальностях до
12-15 км, что в большинстве ситуаций значительно меньше радиогори-
зонта, можно приближенно полагать земную поверхность плоской и ис-
пользовать приведенную выше простую формулу (3.18) для разности
хода сигналов.
Формульные выражения для определения дальности R и высоты
полета объекта Н, получаемые из геометрических соотношений (см.
рис. 3.4) и приближенного (справедливого для принятых предпосылок)
выражения для разности фаз прямого и отраженного сигналов
AxHh
(0 =----
AR
(3.23)
приведены ниже.
Ввиду относительной малости высот расположения точки приема
и объекта относительно дальности синусы углов места могут быть за-
менены аргументами, а величины горизонтальной и наклонной дально-
стей можно считать практически одинаковыми. Приведем соотношения
для расчета величин R и Н для разных схем измерения (рис. 3.4-3.6):
случай 1 (см. рис. 3.4) -
R = 2й—
sin(cz + /?) <5-2/
sin(a + /3) 8-2у
(3.24)
2\h„h 2Дй„й
иЛ - 2Дй„ sin у nA - 2Дй„/
" ' пГ (3.25)
nAh _ nAh
nA - 2Ahn sin у nA - 2ДЛ„/
случай 3 (общий) -
пс . пс
------sin у--------у
2h\f„ 2h\fn
h h
l-2/?^-siny 1-2/i-^-y
nc nc
(3.26)
148
случай 4 (см. рис. 3.6) -
2й2(1-М?| 2й2Г1-—'l
I Sin/J , к Yn)
n2-2/?(siny„-sin/0) пЛ - 2й(ул - у0) ’
(3.27)
H = h 1 +
2/i(sin/n - sin у0)
nA - 2A(sin - sin y0)
h 1 +
Wn~/o)
и2-2й(/„-у0)
где a, P - углы прихода прямого и отраженного сигналов в вертикальной
плоскости и разность этих углов соответственно; 8 = а- (Зя 2Н/R;
8hn - величина смещения точки приема, соответствующая п циклам из-
менения амплитуды суммарного сигнала (между одноименными экстре-
мумами); Д/„- частотный интервал, охватывающий п периодов измене-
ния амплитуды суммарного сигнала; с - скорость распространения сигна-
ла; /о > Yn~ соответственно начальный и конечный углы места объекта
(через п периодов интерференционной модуляции суммарного сигнала).
При разведке объектов,
находящихся на предельно ма-
лых высотах - порядка первых
десятков метров (так, согласно
[28] типичной, оптимальной
для преодоления системы ПВО
при полете над морем является
высота 15 м) зачастую оказы-
вается невозможно осущест-
вить угловое разрешение пря-
мого и отраженного сигналов и
rf.
Рис. 3.7. Схемы многоэлементных (я) и
трехэлементных (б) антенн для измерения
углов места низколетящих целей
непосредственное измерение угла места объекта ввиду малости угловой
разности 8 и ограничений на допустимый вертикальный размер антен-
ной системы. В этих условиях приближенные оценки координат объекта
можно получить близким к голографическому методу путем совместной
обработки данных измерений амплитудных и/или фазовых соотноше-
ний сигналов на выходах нескольких вертикально разнесенных элемен-
тов и-элементной антенной системы (рис. 3.7,а). Применение таких ан-
тенных систем для измерения угла места низколетящих объектов опи-
сано в [30, 31, 33] и [40-44]. В нашем случае наряду с углом места
должны определяться также линейные координаты объекта - дальность
и высота, для чего можно использовать, например, приведенные ниже
формульные соотношения, полученные в предположении, что фронты
прямой и отраженной волн плоские и действительны некоторые приня-
тые ранее упрощающие допущения:
149
( h
(1 - m* 2 * *) sin kdj% - tg<I>7- Ц1 + m2J cos kdjX - sj
(1 - m2 j tg®y. sin kdj% + (1 + m2 j cos kdjX - S
(3.28)
где Фу - разность фаз сигнала наj-й базе (dj ),у=1,2,3,.. .и-1;
S = 2m cos kx 2^ d, + dj
< 1=0
d0=h;k= 2/г/Я ; x=H!R^ 6/2;
1
m +— =
m
2 cos2kx'y\di +
/=0
p ( I s'
----— cos 2kX^dj-cos2kx^dj
“s 4 \ /=о z=0 У
r •
cos 2kx^ dj - cos 2kx^ dt
i=0 i=0 ~^r
cos 2kx^ dj - cos 2kхУ',dt '
i=0 i=0
В последнем выражении p - квадраты амплитуды напряжения
сигнала, принятого соответствующим элементом антенной системы;
l,r,s,t = 0,1,2,3...и-1; т - относительная амплитуда сигнала от зеркаль-
ного отображения объекта.
В частном случае трехэлементной антенной системы с равными
базами d и высотой подъема среднего элемента h (рис. 3.7,6) выражения
примут вид
,h\
tg Г
_ (1 - m2)tgkdx ~ 1ёФвс[1 + т2- 2m(cos 2khx - sin 2M/tgfa7y)]
(1 - m^tgtb^tgkdx +1 + m2 - 2w(cos 2khx - sin 2khx^gkdx}
2P
m = cos 2khx +-5 * *— sin 2khx sin 2kdx -
2P Y
cos2tt/H-----—sin 2khx sin 2kdx -1
(3.30)
P + P -2P
tg№)= B n5~ ctg2^Z,
где Фвс - разность фаз между сигналами, принятыми верхним и средним
элементами; Рв, Ре, Рн - квадраты напряжений сигналов, принятых верх-
ним, средним и нижним элементами соответственно.
150
Из приведенных основных соотношений можно получить систему
расчетных уравнений для численного определения дальности и высоты
объекта по данным амплитудных и/или фазовых измерений с учетом
разрешения возможной неоднозначности, а также производить сравни-
тельный анализ точностных показателей системы при вариациях коли-
чества и расположения элементов.
Требования к точности измерения параметров сигналов при раз-
ведке объектов на малых и, особенно, на предельно малых высотах бу-
дут достаточно высоки ввиду чувствительности результатов расчетов по
приведенным относительно сложным формульным выражениям к
ошибкам измерений; по ориентировочной оценке допустимы погрешно-
сти порядка единиц градусов по фазе и долей процента по амплитуде.
Такие точности принципиально могут быть получены при отслежива-
нии и статистической обработке измерений сигналов бортовых РЛС
воздушных объектов с потенциалом (ДмпСганг) 60-80 дБ/Вт в течение
некоторого интервала времени. При этом по нескольким определяемым
в процессе отслеживания последовательным значениям величины / (вы-
числяемым на основании измерений только амплитуд сигналов на вы-
ходах элементов антенной системы) можно оценить подлетное время
т (3.31)
1 Xj-Xi
где Tpj - подлетное время нау'-й момент; Ту - интервал времени между
/- и j-m измерениями; - соответствующие значения данного парамет-
ра, вычисляемые по вышеприведенным формулам.
При наличии априорных данных о вероятной величине скорости V
наблюдаемого объекта данного конкретного типа, идентифицируемого,
например, по результатам анализа параметров излучаемых им сигналов,
дальность до него в J-й момент будет, очевидно, Rj=VTpJ, а высота поле-
та объекта определяется как
(3.32)
Xi~Xj
Факт движения объекта в направлении приемного пункта с посто-
янной скоростью и высотой устанавливается по постоянству значения
пеленга и взаимному соответствию данных последовательных измере-
ний и вычислений подлетного времени и высоты.
Методическая ошибка определения координат за счет неучета в
приведенных формулах кривизны Земли в ближней зоне соизмерима с
соответствующей погрешностью определения разности хода AR по уп-
рощенной формуле. Так, при H=h=24 м и R=5 км параметр / и даль-
ность, вычисляемые по формулам для трехэлементной антенной систе-
мы, отличаются от истинных на ~3% - аналогично величине АЛ.
151
В заключение отметим возможность определения подлетного вре-
мени (а при наличии сведений о скорости объекта - и координат) по
скорости интерференционной модуляции амплитуды принимаемого
сигнала в процессе движения объекта при одноканальной антенной сис-
теме (как в приведенном выше четвертом случае (см. рис. 3.6), но без
измерения углов места объекта). Использование этого явления для ре-
шения обратной задачи - определения дальности до неподвижного из-
лучателя (РЛС) с борта самолета - рассматривалось в [45], в частности,
исходя из предположения, что высота подъема антенны наземного (над-
водного) излучателя приближенно априорно известна (с ошибкой не бо-
лее первых десятков %). При этом дальность до излучателя, в направле-
нии на который движется самолет, определялась по отрезку его пути
между моментами прохождения двух последовательных экстремумов
интерференционной кривой.
Для нахождения дальности до РЛС при неизвестной высоте уста-
новки антенны в [45] предлагается измерять расстояния, пролетаемые
самолетом между тремя экстремумами, с последующим вычислением
дальности и высоты антенны путем решения системы двух уравнений с
двумя неизвестными в радикалах. Подобные (частично аналогичные)
методы использования интерференционной модуляции принимаемого
сигнала для определения дальности до излучателя с борта самолета
приведены и в [46], однако эти методы, использующие данные о собст-
венном поступательном движении пункта приема (самолета), не могут
быть непосредственно применены в нашем случае. К тому же такой
путь совместного нахождения двух неизвестных параметров сопряжен с
относительно сложной вычислительной процедурой и, соответственно,
повышенными результирующими ошибками, особенно когда высота
полета объекта может лежать в достаточно широком диапазоне значе-
ний, отличающихся в несколько раз. Приведенные ниже формульные
выражения позволяют раздельно и более просто определять искомые
параметры по числу и длительностям нескольких (не менее двух) по-
следовательно наблюдаемых периодов интерференционной модуляции,
фиксируемых, например, как интервалы между одноименными экстре-
мумами. Подлетное время Тр находится из выражения.
р NTm-MTn ’ (}
где М - число периодов в первом временном интервале (Тм); N - сум-
марное число периодов во всем интервале времени измерений (TN).
При наличии данных о вероятной величине скорости объекта V
дальность до него в момент последнего измерения (в момент прохожде-
ния последнего, jV-го, экстремума) определяется как R=VTv. Высота по-
лета объекта Н при этом вычисляется по формуле
152
H = v M^N-M)TmTn(Tn-Tm) (3 34)
2h(NTM-MTN)2
Методическая ошибка определения дальности и высоты по этому
методу, обусловленная неучетом кривизны земной поверхности, для ча-
стного но достаточно типичного случая h =Н=2 5 м и 2=3 см не превышает
10-12 % при начале сопровождения объекта на рубеже 10-12 км. Уве-
личение времени измерений (числа наблюдаемых периодов М и N) по-
вышает точность оценок.
Приведенные материалы показывают принципиальную возмож-
ность пассивного определения координат маловысотных объектов в
ближней зоне по данным измерений и обработки параметров интерфе-
ренционной модуляции принимаемых сигналов, в том числе и для случая
предельно малых высот. При этом для каждого рассмотренного случая
пассивной локации разработан метод определения координат объектов,
включающий математические соотношения, связывающие измерения па-
раметров с искомыми координатами.
3.4. Доплеровско-временные методы местоопределения
источника излучения с движущегося носителя
Доплеровские методы местоопределения обычно используются в
спутниковых радионавигационных системах [22, 48, 49], где опорные
радионавигационные точки (РНТ) размещены на движущихся по опре-
деленным орбитам спутникам и координаты объекта навигации вычис-
ляются про измерениям доплеровского смещения частоты излучаемых
РНТ сигналов с учетом известного текущего положения этих РНТ.
Принципиально возможно применить эти методы для определения
положения объекта, движущегося с известной скоростью относительно
неподвижных излучателей (телевизионные передатчики, РЛС, гидроаку-
стические маяки и т. п.) с известными координатами. При использовании
в качестве таких РНТ РЛС с периодической импульсной модуляцией наи-
более удобным представляется измерять на борту объекта обусловленное
его движением доплеровское смещение частоты модуляции сигнала РЛС
(т. е. изменение интервалов между принимаемыми импульсными сигна-
лами) путем сопоставления моментов прихода фронтов последователь-
ных импульсов с учетом интервала между их излучением для разностно-
дальномерного или доплеровско-интегрального метода (см. [28, п. 7.5]).
Приводимые ниже варианты этого метода можно назвать доплеровско-
временными.
Если период повторения импульсов (Тп) данной РЛС, используе-
мой в качестве РНТ, априорно известен, то для определения своих ко-
ординат относительно этой РНТ (дальности и пеленга или курсового уг-
ла) достаточно измерить на борту объекта величины двух интервалов
153
Рис. 3.8. Измерение координат источника
излучения с периодической импульсной
модуляцией сигнала
времени Т2\ и Т}2 между тремя
последовательными момента-
ми Л, t2, t2 (T2l = t2 - tt, T22 =73—
- t2), заключающих в себе не-
которое число периодов по-
вторения принимаемого сиг-
нала (/ и т), и пройденные за
эти интервалы отрезки пути
объекта 5ц и S22 (рис. 3.8).
Различия между истинными и
измеренными на борту интер-
валами времени, соответст-
вующими данному числу пе-
риодов сигнала I и т
{8 t2I =/Т„-Т2] к 8 t32 = mTn- Т22), характеризуют разности дальностей
от объекта до РНТ на границах мерных интервалов пути VT\2 и VT22.
При прямолинейном движении объекта дальность и курсовой угол РНТ
в третий момент времени будут определяться как
п - ^1з(^32 ~‘^2з)~‘^2з(^31 ~^12з) ГЗ 35)
3 2(Д31523 -Д325|3) ’
v - агссоз Аз2 А31) ~ А31 С$23 а32 )
*^1з(^32 ~^2з) ~*^2з(^31 ~51з)
(3.36)
где 513 = 512 4- S23; Д,7- = с 8с - скорость распространения сигнала.
В случаях, когда расстояние до РНТ заведомо значительно больше
отрезков пути S12 и S23, можно использовать несколько более простые
приближенные формулы, приведенные здесь в виде, соответствующем
представлению отрезком пути объекта через его скорость V, предпола-
гаемую постоянной на интервале времени измерений:
R /УГзН(ГИ^32)*2-Г32<|2
3 2^-К2)
(3.37)
Mi
% = arctg--------------,
^+Т22)К2-Т22К,
(3.38)
где =
Если точное значение периода повторения импульсов РЛС апри-
орно неизвестно, величины интегрального доплеровского смещения пе-
риода Sty за мерные интервалы времени Ту могут быть определены в
процессе обработки с использованием измерения еще одного интервала
154
времени Тдз, также содержащего некоторое определенное число перио-
дов принимаемого сигнала (и). При выполнении отсчетов временных
интервалов Т2\, Т32, Тц через одинаковое число периодов (l=n=m) сум-
марные временные сдвиги периода сигнала РНТ связаны между собой
соотношениями
Л21 - Т32 T2I + 3t22, 3t43 — Т32 Т43 + 3t32,
а величина St32 определяется из уравнения
(3.39)
По найденным таким образом величинам запаздывания 3t,у и фор-
мулам (3.35), (3.36) или (3.37), (3.38) вычисляются текущие относитель-
ные координаты объекта навигации. Кроме того, расстояние до РЛС в
четвертый момент времени (Яд) принципиально возможно определять с
использованием только данных измерений временных интервалов, ха-
рактеризующих доплеровское изменение периода сигнала (т. е. без из-
мерения отрезков пути объекта):
_ с ^32^42 (Лз^41 _Т4]^4з) - T3XT43 (T438t42 -Тп3^3)
^32^42 (^41^43 ~ ^43^41) - ^31^41 (^42^43 - ^43^42 )
При наличии в полосе принимаемых частот сигналов нескольких
РЛС с периодической импульсной модуляцией задача определения ко-
ординат может решаться сразу по всем этим РЛС путем применения из-
вестных устройств селекции нескольких периодических импульсных
последовательностей и параллельной обработки отселектированных
сигналов разных РЛС с определением их пеленгов и дальностей по при-
веденным выше алгоритмам.
Другой вариант доплеровско-временного метода местоопределе-
ния, позволяющий определять координаты источников излучения с не-
периодической модуляцией (РЛС с переменной частотой повторения
импульсов, телевизионные передатчики и др.), основан на измерении
разностной доплеровской частоты сигнала, принимаемого на разнесен-
ные антенны, подобно тому, как это имеет место в дифференциально-
фазовом радиопеленгаторе и доплеровском измерителе угловой скоро-
сти (см. [48, пп. ЗД; 6.3]). Ряд практически не отличающихся примеров
использования этого эффекта для определения местоположения источ-
ника радиоизлучения с движущегося носителя содержится в патентах
США [50-53].
155
В излагаемом здесь варианте определения относительных коорди-
нат излучателя (РЛС) производится по скорости изменения разностной
доплеровской частоты путем подсчета числа периодов этой частоты в
последовательных временных интервалах с вычислением по этим дан-
ным и отрезкам пути объекта дальности и курсового угла РЛС (рис. 3.9).
Отсчет периодов разностной частоты, длительность которых в процессе
движения объекта изменяется, может осуществляться путем фиксации
моментов прохождения разности фаз сигналов, принимаемых разнесен-
ными вдоль объекта (в направлении его движения) антеннами, через не-
которое определенное значение (нуль или л) с помощью устройства фа-
зового сравнения (суммарно-разностная мостовая СВЧ-схема, фазовый
детектор и т.п.). Ввиду малости расстояния между антеннами по отно-
шению к дальности до излучателя фазовый фронт сигнала можно счи-
тать плоским. При этом дальность и курсовой угол РНТ (Я3 и v3) опре-
деляются по величинам отрезков пути объекта (5,2 и 532) за два последо-
вательных интервала времени 7~2i и Т32, содержащих, соответственно, / и
т периодов разностной доплеровской частоты, в результате решения
уравнений
Рис. 3.9. Измерение координат источника излучения
с непериодической модуляцией сигнала:
а - последовательность измерения;
б - схема блока антенны
156
cos2 i9.
mA
~d
где Л - длина волны излучения РЛС; d - расстояние между антеннами на
рис. 3.9; S13 = £12 +52з-
Если длина волны (несущая частота) сигналов источника излуче-
ния неизвестна (и не измеряемся в процессе приема и обработки сигна-
лов), определение относительных координат объекта принципиально
возможно произвести по трем последовательным измерениям отрезков
пути £|2, S23, S34 объекта за интервалы времени Тгь Тзг, Т43, содержащие
I, т, п периодов разностной частоты. Соответствующие расчетные вы-
ражения могут быть представлены, например, в следующем виде:
sJ.y-i-2/ sdz---2t
(3-42)
<94 = arcctg t,
где x, у, z, t находятся из уравнений
х 5)4 2 tS^ +1 z I £34;
У P24 ~ 2/£2з+ (z ~ Рз4>
y> I A 7 1
k У) \ 2)
(J + m + ri) (x2 + l)(z - t)=n (z2 + l)(x-1);
(m + и)(у2 + l)(z - t)=H (z2 + l)(y -1).
(3.43)
157
Реализация изложенных вариантов может производиться как по-
рознь, так и совместно, с помощью обычных (в том числе штатных) вы-
числительных средств и с применением достаточно простых и малога-
баритных антенных и приемных устройств, особенно при использова-
нии в качестве РЛС высокопотенциальных источников излучения, таких
как РЛС и телевизионные передатчики.
Ввиду относительно медленного изменения измеряемого на борту
периода модуляции принимаемого сигнала или периода разностной час-
тоты в процессе движения объекта в ряде ситуаций нет необходимости
в непрерывном приеме сигналов РЛС. Поэтому наличие пропусков от-
дельных групп импульсов не скажется на подсчете общего числа перио-
дов сигнала в мерных интервалах времени, а моменты прохождения
разности фаз через нуль могут быть определены интерполяцией по со-
вокупности близлежащих отсчетов на выходах устройства фазового
сравнения. Приведем численные примеры, иллюстрирующие порядок
значений измеряемых параметров.
Применительно к рис. 3.8:
С=7,7408; /=от=п=2500; Т2} =9,9997913; Т32=9,99980651;
Т21=9,99982828; 7>0,004; *>1=208,7* КГ6; Л32=193,49*10^;
*43=171,716*10^; £,=1,3755786; JC2=1,1335346; А3=456,231; Л4 =404,716;
п3=44,5390; о4=52,249°.
Применительно к рис. 3.9:
/=5; т=и=10; 513=63,3372; S23 =35,3137; S24 =58,3333; 534 =23,0196;
S14 =86,3568; х=5,307132;у=7,0; z=15,14143; /=0,75; *2=100; Л3 =140,028;
/?4=125,0; v3 =45,573°; v4=53,13°.
В заключение заметим, что для обеспечения однозначности место-
определения необходимо дополнительно определять сторону (борт)
приема излучения.
3.5. Кинематический метод определения дальности до
источника радиоизлучения движущимся наблюдателем
Рассмотрим вариант кинематического метода определения коор-
динат неподвижных или относительно медленно движущихся ИРИ, ос-
нованный на комбинированном применении пеленгационного и диффе-
ренциально-доплеровского методов, а также оценим точность местооп-
ределения и время, необходимое для этого.
Ранее был рассмотрен беспеленговый дифференциально-допле-
ровский метод определения координат неподвижного ИРИ с борта оди-
ночного ЛА В основе этого метода местоопределения лежит измерение
скорости изменения разности фаз сигнала (т.е. о разности доплеровских
сдвигов его частоты) на выходах разнесенных вдоль ЛА антенн, прин-
цип и варианты реализации которого приведены в ряде источников (в
частности [54-59]). Однако, наряду с такими достоинствами, как широ-
158
кодиапазонность, ограничиваемая лишь соответствующими возможно-
стями антенных и приемных устройств, меньшая критичность к степени
стабильности несущей частоты и параметров модуляции сигналов раз-
ведуемых ИРИ (по сравнению с рядом других методов местоопределе-
ния с использованием доплеровской обработки или формированием ис-
кусственной апертуры), малые габариты и простая конструкция исполь-
зуемых слабонаправленных антенн и устройств приема и обработки
сигналов, позволяющие размещать такую аппаратуру практически на
любых носителях, данный метод имеет также некоторые присущие ему
ограничения. Они связаны, в частности, со сложностью достижения не-
обходимой точности измерений и последующей вычислительной обра-
ботки совокупности мало отличающихся разностей последовательно
фиксируемых величин временных интервалов между моментами про-
хождения суммы/разности сигналов через некоторые экстремальные
значения [59]), что приводит к необходимости достаточно длительного
отслеживания сигналов каждого из разведуемых ИРИ.
Последнее обстоятельство ограничивает пропускную способность
бортового устройства разведки и снижает вероятность точного местооп-
ределения прерывисто работающих ИРИ, причем уменьшение точности и
количества данных измерений может привести не только к снижению
точности определения координат, но и к возникновению грубых ошибок
(ложных результатов) за счет нарушения сходимости вычислительных
процедур по достаточно сложным алгоритмам, используемым в [59].
Возможными путями повышения точности этих измерений за счет
увеличения скорости изменения разности фаз и, тем самым, чувствитель-
ности данного метода являются применение умножения частоты в при-
емном тракте и увеличение базы - величины разноса антенн вдоль ЛА
вплоть до максимально возможной, ограничиваемой длиной фюзеляжа,
что не снимает основных ограничений применимости метода, отмечен-
ных выше. Существенное повышение быстродействия и упрощение вы-
числительных процедур может быть достигнуто путем использования для
определения местоположения ИРИ наряду с данными измерений скоро-
сти изменения разности фаз также данных пеленгования ИРИ с борта ЛА.
Такое комбинированное применение дифференциально-доплеровского и
пеленгационного методов определения координат является, по существу,
одним из возможных вариантов технической реализации кинематическо-
го метода нахождения дальности R как отношения скорости наблюдателя
Ki к угловой скорости линии визирования & [62]:
у
R = -L. (3.44)
со
При этом для нахождения величины угловой скорости использу-
ются результаты измерений скорости изменения разности фаз на выхо-
дах разнесенных антенн, являющиеся исходными данными для вычис-
159
ления местоположения ИРИ в беспеленговом дифференциально-
доплеровском методе, рассмотренном в [59].
В [62] отмечается, что для получения удовлетворительной точности
определения дальности до движущегося ИРИ кинематическим методом
требуется применение достаточно сложных алгоритмов обработки; коли-
чественные показатели точности при этом, а также вопрос возможности и
целесообразности использования метода для определения дальности до
неподвижных ИРИ в указанной статье не рассматриваются.
При использовании кинематического метода измерение пеленга
(или курсового угла) ИРИ может производиться с помощью бортовых
амплитудных или фазовых пеленгаторов, в частности, с использованием
антенных устройств бортовых РЛС или дополнительных слабонаправ-
ленных антенн, образующих вместе с разнесенными антеннами диффе-
ренциально-доплеровского канала многобазовую систему фазового пе-
ленгатора. При достаточно большой базе, величина которой для ряда
самолетов-носителей аппаратуры разведки может составлять до первых
десятков метров, а для кораблей - порядка сотни метров и более, прин-
ципиально возможно наряду с измерением скорости изменения разно-
сти фаз производить также оценку направления прихода сигнала разно-
стно-временным способом - путем измерения времени запаздывания
приема разнесенными антеннами одноименной фазы модуляции сигна-
ла, которое зависит от угла между линией базы и направлением на из-
лучатель.
Этот метод пеленгации, не требующий применения направленных
антенн, был изложен еще в [60] («метод временной разности»), где пе-
ленг источника импульсно-модулированных сигналов определялся по
разности времени прихода сигнала к двум одинаковым антеннам, изме-
ряемой с помощью регулируемой калиброванной задержки в одном из
приемных трактов при совмещении отметок сигналов на экране индика-
тора. Величина задержки на базе I при этом определяется как
ti =(l/c)cos v, (3.45)
где I - длина базы; с - скорость распространения сигнала; v - угол меж-
ду направлением на ИРИ и линией базы, совпадающий при продольном
расположении базы с курсовым углом (бортовым пеленгом) ИРИ.
Совместное использование данных измерений разности времени
прихода сигнала на разнесенные антенны и скорости изменения разно-
сти фаз этих сигналов в процессе движения носителя, как это имеет ме-
сто, например, в пассивной системе измерения расстояния [10], позво-
ляет реализовать кинематический метод нахождения дальности по оп-
ределяемому вышеуказанным образом курсовому углу ИРИ и, величине
скорости носителя V и угловой скорости линии визирования а>, выра-
жаемой через скорость изменения разности фаз 0.
160
Учитывая, что разность фаз сигналов (0) на базе / связана с курсо-
вым углом (направлением линии визирования) и соотношением
0= 2?r(//A)cost>, (3.46)
угловая скорость со может быть представлена как
со = 02/2^/sinD, (3.47)
где 0 - скорость изменения разности фаз, определяемая как
0 = ~T7sin2u’ (3.48)
Л к
где А - длина волны.
Тангенциальная скорость определяется через скорость носителя V
и курсовой угол как Jusino, так что результирующее выражение для вы-
числения дальности будет иметь вид
Я=2л7Г8ш2о/Я 0, (3.49)
где курсовой угол о находится по измеренной разности времени приема
г/ как
о = arccos ctiII.
Подобным образом опреде-
ляется дальность до ИРИ в пас-
сивных интерферометрических
дальномерных системах [63,64],
где наряду с данными измерений
скорости перемещения приемника
и угла между направлением на
ИРИ и осью антенной системы
используется информация о ско-
рости изменения фазы.
Для определения стороны
прихода сигнала относительно
линии продольной базы I можно
использовать аналогичную двух-
(3.50)
Рис. 3.10. Определение дальности до
ИРИ с использованием четырех
бортовых антенн
антенную систему с поперечно ориентированной базой (рис. 3.10), на-
пример, с расположением антенн на оконечностях крыльев самолета-
носителя аппаратуры разведки.
Наряду с определением стороны приема информация о разности
времени прихода сигнала на поперечной (перпендикулярной продоль-
ной оси самолета) базе d (т^) позволяет получить дополнительный неза-
висимый отсчет величины курсового угла:
v = arcsin ccjd,
(3.51)
161
при котором дальность можно выразить непосредственно через величи-
ну задержки и скорость изменения разности фаз на продольной базе
0 как
r=v™(4l\2.
Л® \ d )
(3.52)
Можно также определять курсовой угол по данным совместных
измерений величин задержки на обеих базах:
v = arctg (hjdrl). (3.53)
Приведем иллюстративные примеры возможных совокупностей
точных численных значений измеряемых и вычисляемых величин
(рис. 3.10):
1) И=250 м/с; 1=30 м; 2=0,1м; 0 = 1807с; и = 60,878°; R=114,47 км;
2) И=250 м/с; /=30 м; 2=0,25 м; 0= 187с; t>=52,531°; £=377,96 км,
(здесь по сравнению с примером 1 минимально-необходимое время для
определения скорости изменения разности фаз (предполагаемое равным
времени однократного ее изменения на 2д) должно быть на порядок
большим, однако составляющим всего около 20 (при условии непре-
рывного приема сигнала разведуемого источника излучения).
Величина Д£ и дисперсия ошибки вычисления дальности DK опре-
деляются приведенными в [62] выражениями
Д£=(ДИ,«-ДбуИ,)%2, (3.54)
PHWfy®2, (3.55)
где Д£ = £-£; Д<о=<п -г&; ДИ,= И, - V,; £,ct,K( - оценки соответст-
вие. 3.11. Зависимости относительной
погрешности измерения дальности
до ИРИ от курсового угла
вующих величин; Dv и -
дисперсии ошибок Оценива-
ния Vt и со; угловая скорость
со выражается через измеряе-
мые параметры 0, 2 и о как
было определено выше.
На рис. 3.11 представле-
ны зависимости, полученные
методом статистических испы-
таний, относительной средне-
квадратической ошибки опре-
деления дальности в функции
курсового угла 7. Расчеты про-
водились для следующих исходных данных: £=100 км, И=250 м/с, 2=10 см,
7=30 м. Кривая / соответствует среднеквадратической погрешности изме-
рения курсового угла ИРИ сга =0,025 (~1,5°) и погрешности измерения ско-
162
роста изменения разности фаз = 0,01 1 / с 0,5° / с); остальные кривые
построены для следующих значений параметров: кривая 2 - ста=0,05 (~3°) и
сг^=О,01 11с (® 0,5°/с); кривая 3 аа=0,025 (~1,5°) и <jd = 0,1 1/с(®6° / с);
кривая 4 - <та=0,05 (~3°) и <т^=0,2 1/с(®11°/с); кривая 5 - оа =0,1 (~6°)
и ст-0 =0,4 1/с(«237с)..
Из графиков следует, что наименьшие ошибки определения даль-
ности имеют место при курсовых углах близких к 90°. При этом отно-
сительная среднеквадратическая погрешность не превышает 10% в диа-
пазоне углов ~ 35°...90° и точности измерения пеленга ~1,5°...3° и про-
изводной разности фаз от 0,57с до 23%. Меньшие погрешности изме-
рения соответствуют более широкому диапазону курсовых углов, при
котором обеспечивается допустимая погрешность измерения, не пре-
вышающая 10 % от дальности.
Для повышения точности может оказаться целесообразным ис-
пользовать измерения скорости изменения разности фаз не только на
продольной базе 0;, но и на поперечной базе Qd с вычислением угло-
вой скорости по формуле
со= ®dA Undcosv. (3.56)
Приведенное изложение и примеры определения местоположения
ИРИ кинематическим методом относятся к типичной для воздушной
разведки ситуации, когда дальности до разведуемых объектов значи-
тельно превышают высоту полета ЛА и задача местоопределения может
решаться как плоскостная, а определяемая данным методом наклонная
дальность R практически совпадает с горизонтальной дальностью Dr. В
случаях нахождения разведуемых ИРИ на дальностях, соизмеримых с
высотой полета ЛА Н или ненамного (в 3-5 раз) превышающих ее, надо
учитывать, что величины времени запаздывания приема (и разностей
фаз) сигнала на продольной и поперечной базах зависят не только от
курсового угла ИРИ, но и от его угла места у:
т/ =(//c)costx:osy, (3.57)
Td =(<7/c)sin!)cosy. (3.58)
Для получения более точного значения курсового угла следует ис-
пользовать его выражение через арктангенс отношения произведений
величин разноименных баз и задержек по приведенной выше формуле
(3.53). Угол места, определяемый при этом как
у - arccos-^-^/т/ + , (3.59)
может быть, с учетом поправок на текущие величины крена и тангажа ЛА,
использован для практически мгновенной оценки дальности до ИРИ через
предполагаемую известной высоту полета ЛА (Н). Наклонная дальность
при этом выражается как R = Я/sin у, а горизонтальная как Dr=7/ctgy
163
Приведем два примера совокупностей возможных значений изме-
ряемых временных интервалов и соответствующих им координат ИРИ,
находящихся на относительно малых дальностях, при следующих ис-
ходных параметрах: /= 40 м; d= 28 м; Н= 16,9 км:
1) г/ = 0,1133 мкс; Td= 0,0458 мкс; о = 30°; /= 11,1°; R = 87,7 км;
2) п= 0,0632 мкс; tj= 0,0766 мкс; v =60°; у= 18,7°; R - 52,7 км.
При наличии в составе бортовой аппаратуры ЛА пеленгаторных уст-
ройств представляется целесообразным предусмотреть также возможность
применения относительно простой в технической реализации дифференци-
ально-доплеровской обработки сигналов с использованием определяемой
вышеизложенным путем угловой скорости линии визирования совместно с
данными пеленгования ИРИ для нахождения дальности кинематическим
методом, что позволит сократить время определения местоположения ИРИ
по сравнению с методом многократного пеленгования, в том числе и при
разведке движущихся объектов. В частности, при определении координат
движущейся с постоянной скоростью радиоизлучающей цели простейшим
кинематическим методом (см. [62, п. 1.2.2]) - по двум измерениям бортово-
го пеленга цели (щи щ) и угловой скорости линии визирования (сщ и <у2),
осуществляемым в процессе выполнения ЛА-разведчиком маневра с изме-
нением курса (рис. 3.12), дальность находится как отношение изменения
тангенциальной скорости ЛА относительно цели к изменению угловой ско-
рости линии визирования по формуле
7?=F(sinD2-sinui)/(<o2-co1), (3.60)
полученной в предположении, что перемещения цели и ЛА за время
выполнения маневра и измерений малы по отношению к дальности (т.е.
в ситуации R\~Rz — К.
При выражении угловых скоростей а>\ и а>2 через скорости изме-
нения разности фаз на продольной базе 0Л и 0/2 как это производи-
лось выше, формула приобретает вид
D .. 2л7 sin19lsin52(sin.92-sin191)
л = г-------:---------:---------. (3.01J
2 0;2sin<9|-©^sin^
Рис. 3.12. Определение дальности
кинематическим методом
Приведем в качестве примера
возможные порядки величин скоро-
сти изменения разности фаз и време-
ни измерений для случая относи-
тельно невысоких скоростей цели и
ЛА-разведчика (например вертолета),
выполняющего маневр в виде двух
галсов, как на рис. 3.12. При исход-
ных данных и параметрах ситуации,
характеризуемых приведенными ни-
же их значениями: 2=0,03 м; 1=9 м;
164
</i=45°; Л]=180 км; «1=30°; u2=90°; И=50 м/с и скорости цели 10 м/с скорости
изменения разности фаз будут составлять около 7,5 % на первом галсе и
около 30 7с - на втором.
Полагая, что для определения величины этой скорости достаточно
выполнить отслеживание результатов обработки сигнала на выходе фазо-
измерительного устройства в течение времени изменения разности фаз на
(4.. ,6)тг, получим, что время измерения на первом галсе может составлять
приблизительно 1,5...2 мин, а на втором - меньше 1 мин, так что и с уче-
том времени разворота ЛА (вертолета) на 60° полное время определения
координат цели не будет превышать единиц минут. При скорости цели
50 м/с в той же ситуации скорость изменения разности фаз на первом и
втором галсе будет около 18 и 527с соответственно и полное время изме-
рений будет иметь величину того же порядка. Взаимное смещение ЛА и
цели за это время может составить, в среднем, около 10... 15 км. При вы-
соких скоростях цели и ЛА точность оценки дальности по приведенной
упрощенной формуле может оказаться недостаточной и потребуется
применение более сложных алгоритмов обработки, приведенных, напри-
мер, в [17,45], или двухпозиционной системы [65].
На рис. 3.13 приво-
дятся результаты расчета
погрешностей определе-
ния дальности до под-
вижного объекта по фор-
муле (3.61) - кривые 3, 4
для следующих исходных
данных: И=50 м/с, 2=3 см,
/=9 м, 7?о=ЮО км, ь>1=20°,
Рг-var и постоянной по-
грешности пеленгации
ста= 1,5° и числе испыта-
ний <7=10000. При этом
кривая 3 соответствует
погрешности измерения
Рис. 3.13. Зависимость относительной
погрешности измерения дальности до подвижной
цели от угла между линией визирования и
направлением второго галса
разности фаз и <7^ = 0,025 1/с(® 1,57с), кривая 4 - 0^ = 0,05 1/с(=3°/с).
Как видно из рис. 3.13, погрешности измерения дальности, не превы-
шающие 20%, имеют место только при высоких точностях измерения
производной разности фаз (1,5 7с). Увеличение погрешностей этих изме-
рений приводит к неприемлемым ошибкам местоопределения (кривая 4).
Заметим, что большие ошибки следуют из структуры формулы (3.61)
(разность близких величин в знаменателе), что отмечается также в [62].
На этом же рисунке построены зависимости относительной по-
грешности измерения дальности, рассчитанные по формуле (3.59) для
неподвижной цели при тех же начальных условиях (И=50 м/с, Л=3 см,
1=9 м, скорость объекта -10 м/с) и отсутствии маневра по углу, т. е.
165
и\=и2=и. Кривая J соответствует сг^ =0,05 1/с(»3°/с), кривая 2 -
0-0 =0,1 1/с(»6°/с).
Как видно из рис. 3.13, погрешность местоопределения в случае
использования (3.59) более, чем на порядок меньше, чем при использо-
вании (3.61). Однако использование (3.59) предполагает неподвижность
объекта наблюдения, поэтому в итоговом результате необходим учет
его перемещения за время измерения производной разности фаз. На это
потребуется, как отмечалось выше, 2...3 мин, в течение которых объект,
двигаясь со скоростью 10 м/с, переместится на 1...2 км. Эта величина
должна быть учтена в качестве дополнительной методической погреш-
ности. Суммарная относительная ошибка, таким образом, составит ве-
личину, не превышающую 1...8% в диапазоне курсовых углов 60...90°
(кривая 1 на рис. 3.13)
Таким образом, по результатам оценки быстродействия рассмотрен-
ного варианта кинематического метода определения дальности с исполь-
зованием дифференциально-доплеровской обработки принимаемых сиг-
налов можно сделать вывод о целесообразности его применения в борто-
вой аппаратуре пассивной локации источников радиоизлучения. Относи-
тельные погрешности определения дальности при этом могут составлять
единицы процентов для неподвижных ИРИ и десятки процентов - доя
подвижных, когда выбор предпочтительных алгоритмов обработки зави-
сит от соотношений скоростей объекта и наблюдателя и погрешностей
бортовых измерителей пеленга и производной разности фаз.
3.6. Интерферометрический способ определения
относительных координат неподвижного источника
радиоизлучения движущимся наблюдателем
Задача обнаружения и определения координат ИРИ различного ха-
рактера (радио- и телевизионных передатчиков, радиомаяков и радио-
локаторов, индустриальных источников излучения и др.), находящихся
в зоне возможного приема их сигналов бортовой аппаратурой ЛА, мо-
жет представлять интерес как при решении навигационной задачи само-
определения ЛА по излучателям с известными координатами [22,66],
так и для выявления источников помех средствам связи и навигации, в
частности, приемникам систем спутниковой навигации (таких, как
GPS), недостаточная устойчивость функционирования которых в кон-
фликтных ситуациях отмечалась еще в [66].
Широко известный и описанный во многих публикациях (например
[67-69]) триангуляционный метод местоопределения источников излуче-
ния, основанный на приеме и пеленговании их сигналов в двух или более
точках траектории ЛА, разнесенных на известные расстояния, с после-
166
дующим вычислением дальности до источника по измеренным углам и
расстояниям, требует для своей реализации наличия в составе бортовой
аппаратуры специальных пеленгаторных устройств, установка которых
на ЛА сопряжена с определенными трудностями как по массогабаритным
ограничениям, так и по условиям размещения антенн, особенно при веде-
нии разведки излучателей в широком диапазоне волн. В связи с этим та-
кими комплексами приемно-пеленгаторных устройств обычно оснащают-
ся только отдельные, специально оборудованные ЛА [70], что ограничи-
вает возможности осуществления достаточно полного и оперативного
мониторинга электромагнитной обстановки.
Более простыми и пригодными для размещения на неспециализи-
рованных и малогабаритных носителях, в том числе на беспилотных
ЛА, будут варианты построения аппаратуры, использующие беспелен-
говые методы местоопределения [23, 57, 59], в частности, изложенный в
[59] и п. 3.4 настоящей книги дифференциально-доплеровский метод,
основанный на измерении разностной доплеровской частоты сигналов,
принимаемых на две разнесенные вдоль борта носителя слабонаправ-
ленные антенны, путем подсчета количества периодов этой частоты в
последовательных временных интервалах Т2\ и Т22, за которые носитель
проходит соответствующие отрезки пути (5,2 и 52з)- Координаты излу-
чателя вычисляются на основании результатов измерений по приведен-
ным в указанной статье и в п. 3.4 формулам.
Данная измерительная процедура по существу эквивалентна под-
счету числа экстремумов (максимумов и минимумов) в некотором угло-
вом интервале многолепестковой интерференционной диаграммы, рав-
ном величине изменения курсового угла излучателя при пролете носи-
телем определенного отрезка пути (рис. 3.14). Ниже приводятся фор-
мульные соотношения, позволяющие вычислить относительные коор-
динаты объекта-источника излучения по величинам отрезков пути но-
Рис. 3.14. Интерферометрический способ определения координат
объекта относительно неподвижного источника излучения
167
сителя за интервалы времени между тремя последовательными момен-
тами (Л, ?2, 6) приема сигнала в максимумах соседних интерференцион-
ных лепестков суммарной диаграммы пары объединенных по выходу
(например, через тг-мост) антенн, разнесенных на базу d; фиксация этих
моментов может быть выполнена с достаточной точностью путем сум-
марно-разностной обработки сигналов на выходе моста.
За интервалы времени между этими моментами (?2i=^2 -Ли Гз2=Л_
- Z2 или 7з1=/3 - Л) носитель проходит известные отрезки пути Sn и 52з,
при постоянной скорости носителя V равные VT2\ и VT22. Длина волны
излучения А измеряется в процессе приема. Пространственное (угловое)
расположение максимумов лепестков, регистрируемых по суммарному
выходу моста, определяется условием
Д Ф= (2x/k)sina/ =0,2 тг, 4тг, бтг...,
где k=A/d, а, - угловое положение лепестка данного номера (/= 0, 1,2,
3,...), т. е. угол между максимумом лепестка и нормалью к базе.
Полагая, что носитель движется на сближение с излучателем и от-
счет интервалов времени (или отрезков пути носителя) начат в момент
приема сигнала в максимуме некоторого лепестка с неизвестным номе-
ром х, имеем соотношения
5i2=Drp(tgax - tg«x-i), 5i3 =^Tp(tg«x - tgax„2). (3.62)
Разности тангенсов можно представить как
-tgax-tgax_!=(l/A2x2-ir'/1-[l/A2(x-l)2-l]’'/!, (3.63)
tgax-tgax_2=(l/^x2-l)-'/2-[l/A2(x-2)2-l]“'/’,. (3.64)
что позволяет составить следующие уравнения для вычисления тра-
верзной дальности Dtp и номера первого из наблюдаемых лепестков (х):
(3.65)
где
^ = (1-А:2х2)[1-А:2(х-1)2];
Г = (1-Л2х2)^1-Л2(х-2)2^.
(3.66)
(3.67)
По найденным номерам лепестков могут быть определены соот-
ветствующие им значения углов a, =arcsin ik между направлением на из-
лучатель и нормалью к базе (которая предполагается параллельной
прямолинейной траектории носителя) и, тем самым, курсовые углы из-
лучателя (»;) и дальности до него (Д) в моменты измерений, в частно-
сти, их текущие значения в момент последнего, третьего измерения:
168
Vy=itH-ax-2, Di=D^QYa^2 (3.68)
Искомый номер (x) лепестка, к которому относится первый зафик-
сированный максимум амплитуды сигнала, принципиально возможно
найти также из соотношения
8Р
Q , * .Q lr{Q
•j->4 II *р2 /ti2 7’2 'т’З I I 'т’Д
Z21 '31 J к '2Г'31 '21 '31/ к'21
»р2 m2
р'31 '21
тг»2 *р2
'21'31
Q__R_
rpl, гт<1
'21 '317
х2
где ; Q=
.2
п_ (^-2)2
|2 ’ 1-&2(х-2)2 '
R
т4
1ъ\~ J
(3.69)
По вычисленному значению номера первого из наблюдаемых ле-
пестков (х) и отрезку пути носителя 513=rr31 находим траверзную даль-
ность DTp:
) =___L±3i__
к(4р-^у
(3.70)
Курсовые углы и текущие дальности определяются как указыва-
лось выше.
Литература к главе 3
1. Патент США № 2493097, 1950.
2. Патент США № 3518674, 1970.
3. Заявка Великобритании № 1262223, 1972.
4. Патент Германии № 738336, 1943.
5. Патент ФРГ № 1113253, 1962.
6. Патент США №3212091, 1965.
7. Заявка Великобритании № 1139193, 1969.
8. Справочник по радиолокации / Под ред. М. Сколника. Т. 4. - М.:
Сов. радио, 1973.
9. Кондратьев В.С., Котов А.Ф., Марков Л.Н. Многопозиционные
радиотехнические системы. - М.: Радио и связь, 1986.
10. Караваев В.В., Сазонов В.В. Статистическая теория пассивной ло-
кации. - М.: Радио и связь, 1987.
11. Мельников ЮЛ. Методы оценки погрешности определения коор-
динат объектов при использовании сигналов удаленной обзорной
РЛС. - Радиотехника, 2000, № 9.
169
12. Основы маневрирования кораблей / Под общ. ред. М. И. Скворцо-
ва. - М.: Воениздат, 1966.
13. Пат. США № 4179697. Пассивный метод измерения дальности, 1979.
14. Пат. США № 4558323. Пассивный способ определения дальности
’ авиационного бортового излучателя с использованием одного дат-
чика, 1985.
15. Булычев Ю.Г., Коротун А.А. Манин А.П. Идентификация парамет-
ров траекторий по измерениям подвижного пеленгатора. - Радио-
техника, 1990, № 1.
16. Вайпан С.Н., Вакуленко А.А., Кузьмин Г.В., Ягольников С.В. Метод
обработки пеленговой информации в подвижных радиотехниче-
ских комплексах для оценки параметров траекторий излучающих
объектов. - Радиотехника, 1996, № 11.
17. Мельников Ю.П., Попов С.В. Методы оценки погрешностей опре-
деления параметров движения объекта при локации в условиях ра-
диоэлектронного подавления. - Радиотехника, 1998, № 3.
18. Мельников Ю.П., Попов С.В. Определение дистанции и элементов
движения объекта методом предвычисляемых фиктивных пелен-
гов. - Морской сборник, 2000, № 6.
19. Мельников Ю.П., Попов С.В. Определение и прогнозирование коор-
динат равномерно движущегося в пространстве объекта по данным
единичных локационных измерений. - Радиотехника, 2002, № 3.
20. Мельников Ю.П., Попов С.В. Методы определения дальности при
пеленговании неманеврирующим наблюдателем объекта с частич-
но известными параметрами движения. - Радиотехника, 2003, №4.
21. Kang Sun Zhong, Ming Zhang. Passive location and tracking using DO A
and TOA measurements of single nonmanoeuvring observer. - Proc.
IEEE Nat. Aerosp. and Electron. Conf. (NAECON). Dayton. 1988.
22. Шебшаевич B.C. Введение в теорию космической навигации. - М.:
Сов. радио, 1971.
23. Мельников Ю.П., Попов С.В. Метод местоопределения источника
помех спутниковым системам с движущегося носителя. - Новости
навигации. НТЦ «Интернавигация» и РОИН, 2000, № 4.
24. Мельников Ю.П., Попов С.В. К местоопределению летательного
аппарата относительно объектов, оснащенных ответчиками, по
единичным измерениям дальности. - Новости навигации. НТЦ
«Интернавигация» и РОИН, 2002, № 1.
25. Распространение ультракоротких радиоволн / Пер. с англ, под ред.
Б. А. Шиллерова. - М.: Сов. радио, 1954.
26. Калинин А.И., Черенкова Е.Л. Распространение радиоволн и работа
радиолиний.-М.: Связь, 1971.
27. Справочник по радиолокации (ред. М. Сколник) / Пер. с англ, под
общ. ред. КН. Трофимова. Т. 1. - М.: Сов. радио, 1976.
28. Буров Н. И. Маловысотная радиолокация. - М.: Воениздат, 1977.
170
29. Barton D.K. Low-angle radar tracking. - Proc. IEEE, vol. 62, no. 6,
1974; Радиолокационное сопровождение целей при малых углах
места. - ТИИЭР, т. 62, № 6.
30. White, W.D. Low-angle radar tracking in the presence of multipath. -
IEEE Trans. AES, 1974, no. 6; Автосопровождение целей с малыми
углами места при многолучевом распространении радиоволн. -
Экспресс-информация. «РЛ, ТЛВ, РС», ВИНИТИ, 1975, № 22.
31. Howard James Е.А. A low angle tracking system for fire control radars.
Rec. - IEEE 1975 Int. Radar Conf., Arlington. N.Y., 1975; Радиолока-
ционная станция управления оружием с устройством слежения за
целями, расположенными под малыми углами. Экспресс-
информация. «РЛ, ТЛВ, РС», ВИНИТИ, 1975, № 36.
32. Peter, R. Dax. Keep Track of That Low-Flying Attack. - Microwaves,
no. 4, April 1976.
33. Lo, Wong, Litwa. Новый метод радиолокационного сопровождения
целей при малых углах места. - «Electronic letters», 1991, no. 6;
Экспресс-информация. «Радиотехнические устройства и системы»
, ВИНИТИ, 1992, № 2.
34. Малышкин Е.А. Пассивная радиолокация. - М.: Воениздат, 1961.
35. Пат. США № 3939476. Пассивное устройство измерения расстоя-
ния для защиты хвоста, 1976.
36. Пат. США № 4370656. Применение бистатической бортовой ра-
диолокационной системы для определения расстояния между са-
молетами, 1983.
37. Пат. США № 3229283. Пассивная радиолокационная самолетная
станция измерения дальности и высоты цели, 1966.
38. Пат. США № 3242490. Определение дальности до самолета-
постановщика активных помех с помощью бортовой приемной ап-
паратуры, 1966.
39. Пат. США № 3721986. Система измерения дальности, 1973.
40. Пат. США № 3568193. Радиолокационная приемная система для
измерения угла места с подавлением помех от боковых лепестков,
1971.
41. Пат. США № 3757326. Система слежения за низколетящими целя-
ми, 1973.
42. Пат. (заявка) Великобритании № 1449196. Определение сектора
углов с помощью радиоинтерферометра, 1976.
43. Пат. США № 4316191. Система обработки РЛС, работающей по
низколетящим целям, 1982.
44. Авт.св. СССР № 1396782. Устройство определения угла места низ-
колетящего объекта, 1988.
45. Мельников Ю.П. Воздушная радиотехническая разведка. Методы
оценки эффективности. - М.: Радиотехника, 2005.
171
46. Бородин А.М., Усков Н.В. Проектирование систем радиопротиво-
действия и радиотехнической разведки методами моделирования.
- Тирасполь, 2002.
47. Гутник В.Г., Кулемин Г.П., Шарапов Л.И. Особенности обратного
рассеяния радиоволн сантиметрового и миллиметрового диапазо-
нов морской поверхностью при малых углах скольжения. - Успехи
современной радиоэлектроники, 2005, № 1.
48. Беляевский Л.С., Новиков В.С., Олянюк П.В. Основы радионавига-
ции. - М.: Транспорт, 1982.
49. Соловьев Ю.А. Системы спутниковой навигации. - М.: Эко-Трендз,
2000.
50. Патент США №3789410, 1974.
51. Патент США № 4350984, 1982.
52. Патент США № 4422076, 1983.
53. Патент США № 4626860, 1986.
54. Заявка СССР № 1568017 от 12.07.1973. Способ местоопределения
источников излучения с движущегося носителя.
55. Пат. США № 3789410. Способ пассивного определения дальности,
1974.
56. Пат. США № 3935574. Способ определения положения источника
сигналов, 1976.
57. Пат. США № 4350984. Способ определения местоположения ис-
точников излучения на основе разности доплеровских частот,
1982.
58. Южаков В.В. Современные методы определения местоположения
источников электромагнитного излучения. - Зарубежная радио-
электроника, 1987, № 8.
59. Мельников Ю.П., Попов С.В. Дифференциально-доплеровский ме-
тод местоопределения источника излучения с движущегося носи-
теля. - Новости навигации. НТЦ «Интернавигация» и РОИН, 2001,
№1.
60. Техника сверхвысоких частот / Пер. с англ, под ред. Я. Н. Фельда.
Кн. 1. -М.: Сов. радио, 1952.
61. Пат. США № 3873984. Пассивный способ измерения расстояния
до излучающего источника, 1975.
62. Дрогалин В. В., Дудник П.И. и др. Определение координат и пара-
метров движения источников радиоизлучений по угломерным
данным в однопозиционных бортовых радиолокационных систе-
мах. - Зарубежная радиоэлектроника, 2002, № 3.
63. Пат.США № 3813671. Система для измерения дальности до источ-
ника электромагнитного излучения, 1974.
64. Пат. США № 4704613. Радиолокационная дальномерная система,
1987.
172
65. Дрогалин В.В., Ефимов В.А. и др. Способы оценивания точности
определения местоположения источников радиоизлучений пассив-
ной угломерной двухпозиционной бортовой радиолокационной
системой. - Успехи современной радиоэлектроники. Зарубежная
радиоэлектроника, 2003, №5.
66. Рязанов С.Н., Фатеев В.Ф. Методы и средства автономной нави-
гации космических аппаратов. - Зарубежная радиоэлектроника,
1991, №6.
67. Шлезингер Р.Дж. Радиоэлектронная война. - М.: Воениздат, 1963.
68. Вакин С.А., Шустов Л.Н. Основы радиопротиводействия и радио-
технической разведки. - М.: Сов. радио, 1968.
69. Дрогалин В.В. и др. Определение координат и параметров движения
источников радиоизлучений по угломерным данным в однопозици-
онных бортовых радиолокационных системах. - Зарубежная радио-
электроника. Успехи современной радиоэлектроники, 2002, № 3.
70. JVoika J.L., An Experimental Airborne RFJ Location Sistem. - Techn.
Papers 11th. Annual E.Coast Conf. Aerospace and Navigat., Baltimore,
Md. 1964, N.Y.JEEE, 1964.
71. Мельников Ю.П., Попов С.В. Доплеровско-временной метод ме-
стоопределения источника помех спутниковым системам с дви-
жущегося носителя. - Новости навигации. НТЦ «Интернавигация»
и РОИН.2000, № 4.
72. Мельников Ю.П., Попов С.В. О беспеленговых методах позицио-
нирования летательных аппаратов относительно источников излу-
чения. - Зарубежная радиоэлектроника. Успехи современной ра-
диоэлектроники, 2002, № 12.
173
ГЛАВА 4
ПЕЛЕНГАЦИОННО-ЭНЕРГЕТИЧЕСКИЕ МЕТОДЫ
ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ
ИЗЛУЧЕНИЯ
В главе рассматривается несколько способов местоопределения
источников радиоизлучения, объединенных общностью измерений од-
ной из координат (дальности) преимущественно путем измерений уров-
ня принимаемого сигнала и его изменениями, вызванными перемещени-
ем летательного аппарата.
Один из способов, использующий отражения от подстилающей
поверхности, может быть применен в авиации при малых высотах поле-
та по направлению на ИРИ, когда пеленги, измеряемые на него, пересе-
каются под небольшими углами.
Рассмотрены также способы приближенной оценки дальности, на-
пример, метод радиогоризонта, особенно результативный на море, а
также методы измерения абсолютных значений уровней сигналов и их
производных. Для каждого из рассмотренных способов приводится
приближенная оценка ожидаемой точности.
Приведены также варианты способа оценки дальности до непод-
вижного излучателя с борта ЛА по изменению амплитуды принимаемо-
го сигнала в процессе полета при прохождении луча неподвижной бор-
товой антенны через направление на излучатель.
Получены соотношения для определения и прогнозирования отно-
сительного положения и дальности до излучающего объекта по не-
скольким последовательным измерениям уровня мощности принимае-
мого сигнала, в частности, для ситуаций параллельного сближения или
расхождения, с использованием данных пеленгования и априорных све-
дений о скорости объекта, частоте излучения, величине погонного зату-
хания сигнала на трассе распространения.
4.1. Измерение дальности при малых высотах полета
и малых курсовых углах на объект
Многие варианты боевого применения авиации требуют полета на
малых высотах по кратчайшему пути на объект. Если этот объект имеет
в составе РЛС, то задачей средств РТР летательного аппарата становит-
ся обнаружение и определение дальности до РЛС при малых курсовых
углах цели. Использование пеленгационных методов в этих условиях
имеет особенности.
Действительно, применение пеленгации в вертикальной плоско-
сти, когда не требуется набора горизонтальной базы (так называемого
174
угломестного способа) ограничено по причине больших ошибок из-
мерения дальности, определяемых выраже-
нием
(4-1)
где aD - среднеквадратическая погрешность
измерения дальности; <тум - среднеквадрати-
ческая погрешность измерения угла места;
D - дальность до объекта; Н- высота полета.
Из формулы видно, что даже при высо-
ких точностях измерения угла места погреш-
ности определения дальности при высотах
полета менее 500 м недопустимо велики.
Для оценки области применения метода
пеленгации в горизонтальной плоскости
найдем зависимость ошибки измерения
дальности от курсового параметра EF
Рис.4.1. Пеленгация цели
при малых курсовых углах
(рис. 4.1). Угол пересечения двух пеленгов, измеренных на РЛС из точ-
ки первоначального обнаружения (£>=£>0) и из точки выдачи данных,
например для пуска ракеты (Z>=D„), находится как
sin« Г _ [УЗ 2 1
smj/ =---- D0cosa-yjDn -Z)osin а .
Е.. L J
(4.2)
В то же время среднеквадратическая ошибка определения дально-
сти при двух симметричных относительно биссектрисы угла у/пеленгов
в соответствии с соотношениями гл. 2 определяется выражением
о- ~ Daa
D V2sin($//2)
(4-3)
Здесь <та - среднеквадратическая погрешность измерения пеленга.
Считая, что оба пеленга симметричны относительно биссектрисы
и измерены с дальности £)„, из последних выражений можно получить
формулу для относительной погрешности измерения дальности:
Д,
cosa-
. 2
-sin а
Н
Строго говоря, необходимо первому пеленгу ставить в соответст-
вие расстояние £>0, второму - Da, поэтому расчет по последнему соот-
ношению дает несколько завышенное значение ошибки.
175
При малых курсовых углах
°а&Рп
Dn г.
sinc^jDg
Рп • 2
cosa- —v-sin а
\Do
(4.4)
Обозначая Do/D„=k и относительный курсовой параметр через
EF/D=y (см. рис. 4.1), а также используя соотношение sina = /к, по-
строим зависимость относительной погрешности определения дально-
сти от относительного курсового параметра. Эта зависимость приведена
на рис. 4.2. Из рисунка можно получить область значений курсовых па-
раметров, в которой относительные ошибки не превышают допустимые
Рис. 4.2. Зависимость относительной
погрешности измерения дальности
до РЛС от курсового параметра
(например 0,1).
Как видно из графиков,
для достижения приемлемых
точностей измерения дальности
даже в ограниченных участках
значений курсовых параметров
необходимы высокие точности
измерения углов. При значени-
ях курсового параметра меньше
0,3 метод двукратной пеленга-
ции без специального маневра
(отворота, «змейки» и др.) во-
обще непригоден. Последую-
щее изложение посвящено
главным образом методам оценки погрешностей определения дальностей
до РЛС при измерения уровней мощности входных сигналов (так назы-
ваемых энергетических методов).
Отметим, что одним из важнейших свойств воздушной РТР является
то, что приемник размещается на движущемся носителе, поэтому исполь-
зование методов измерения дальности путем энергетических измерений
при постоянных расстояниях до источников излучения (например [1]) не-
посредственно неприемлемо. Более того, именно движение летательного
аппарата должно быть использовано для определения координат, в част-
ности, при малых курсовых углах.
Характеристики входного сигнала. Интерференционный множи-
тель. Сигнал на входе разведприемника, размещенного на низколетя-
щем летательном аппарате, может быть представлен по крайней мере
двумя составляющими - регулярной и случайной. Регулярная состав-
ляющая, в свою очередь, слагается из прямого и зеркально- отраженно-
го сигналов. Случайная составляющая обусловлена диффузным отраже-
нием. Доля зеркального и диффузного отражения определяется неров-
ностями поверхности, главным образом, в пределах участка, сущест-
венного для отражения, углом на цель и длиной волны.
176
Зависимость регулярной составляющей от параметров трасс при-
нято описывать так называемым интерференционным множителем или
множителем Земли (см., например, [2, 3,4] и др.):
Ф(0,0т)= 1 + R2 + ^^-+^ cosf 4я/?51П<9 + /]. (4.5)
V F 2(0-0) F(0m-0) I Л
Здесь R - модуль коэффициента
отражения; (3 - аргумент коэффи-
циента отражения; F(0m+0) - нор-
мированная диаграмма направлен-
ности передающей антенны; в -
угол между подстилающей по-
верхностью и направлением на
цель (рис.4.3); 0т - направление
максимума передающей антенны;
h - высота передающей антенны;
Л - длина волны.
Для рассматриваемого случая
Рис. 4.3. Отражения
от подстилающей поверхности
совпадения максимума диаграммы
направленности антенны с направлением на цель 0 = 0т, F(0) = 1 и ин-
терференционный множитель равен
Ф(0,0т) = 11 + R2F2(20)+2RF(20)cos[smg.+ Д |.
1 \ л J
(4.6)
Коэффициент отражения.
Как известно, модуль коэф-
фициента отражения при
малых углах 0 близок к еди-
нице. Представляет интерес
получение приближенных
выражений для коэффици-
ента отражения для реаль-
ных шероховатых поверхно-
стей. Для этой цели были
использованы эксперимен-
Рис. 4.4. Зависимости коэффициента
отражения от угла на цель и длины волны
тальные данные, приведен-
ные в [4] и частично вос-
произведенные на рис. 4.4.
Эксперимент был поставлен на ровном открытом поле, поросшем
травой, с неровностями, не превышающими нескольких сантиметров. То
есть для длины волны й»3 см можно полагать, что /?и/2 » 1, где h„ - сред-
няя высота неровностей. Кривые хорошо аппроксимируются выражением
177
Я»ехр(-13-^
(4-7)
В [6] приводится другая аппроксимация экспериментальных зави-
симостей, подтверждаемая данными, полученными на морских трассах:
К* „ (2л h sin#)2
К- v Л2
где К» - коэффициент отражения от шероховатой поверхности;
К-----коэффициент отражения от гладкой поверхности.
Как уже было отмечено, составляющая входного сигнала, назы-
ваемая также шумовой, обязана своим возникновением диффузным от-
ражениям. В связи с этим представляет интерес связь между коэффици-
ентом отражения, полученным экспериментально для реальной поверх-
ности, и коэффициентом «сигнал/шум». В терминологии [7] отношение
«сигнал/шум» имеет вид
F2 )
^0 пад 1
Здесь £о21ид ~ квадрат напряженности поля падающей волны; S Е\ - сум-
ма квадратов шумовых составляющих; а - величина, обратная отноше-
нию «сигнал/шум» по мощности.
Если полагать, что при экспериментальных измерениях коэффици-
ента отражения определяется только когерентная составляющая, равная
Еотр.к» ТО
Е1
р2 _ отр.к
F2
‘Е'Опад
Поскольку Е2отр.к + Е2ш = ^отр.сумм , где Е2отр.сумм пропорциональна сум-
марной отраженной энергии, то, полагая, что основная часть энергии
отражается, получим:
р2 — г2 / г* 2 _ г2 / г 2 _ ] _ _у2
отр.сумм' -^О пад ш ' -^*0 пад А •
Частота флюктуаций, вызванных неоднородностями на местно-
сти. Рассмотрим случай, когда зона, существенная для отражений,
представляет собой поверхность с периодически чередующимися уг-
лублениями (рис. 4.5). Период неровностей на местности - 21. Тогда
расстояние, проходимое разведприемником от пропадания до появления
отраженного сигнала, равно Д£>&Н1 /h.
Таким образом, частота флюктуаций отраженных сигналов,
обусловленная влиянием неподвижных неоднородностей со средней
длиной периода на местности, равной 21, при перемещении самолета-
разведчика со скоростью V, равна
178
f*Vhl(2Ht).
Учет подвижных неоднород-
ностей (качающиеся под ветром де-
ревья, морские волны и т.п.) приво-
дит к расширению спектра флюк-
туаций в область верхних частот.
В [4], например, приводится
выражение для средних частот
спектра при отражении от качаю-
щихся под ветром деревьев:
/~2т/Д
Рис. 4.5. Учет влияния
неоднородностей на местности на
флюктуации входного сигнала
где v - скорость перемещения ветвей (равная в рассмотренном примере
1м/с при скорости ветра 5 м/с.).
Таким образом, спектр флюктуаций простирается от единиц до со-
тен Герц. Учет этих флюктуаций необходим при рассмотрении методов
измерения дальности до РЛС, использующих измерения уровня входно-
го сигнала. Полученные значения верхней границы спектра флюктуаций
позволяют предполагать, что если «полезные» составляющие изменения
входной мощности имеют существенно более узкий спектр, то можно
рассчитывать на успешную фильтрацию «шумовой» составляющей при
статистической обработке сигналов.
Регулярная составляющая входного сигнала. Регулярная составляю-
щая входной мощности сигнала, поступающего от разведуемой РЛС,
определяется известным соотношением
= z2/;g,0g20h>2 (48)
с 16 л-2/)2
где 2 - длина волны; Р\ - мощность излучения РЛС; G(o, G2o - коэффи-
циенты направленного действия (к.н.д.) передающей и приемной антенн
соответственно (или коэффициент усиления антенны, отличающийся от
к.н.д. на единицы процентов); - коэффициент потерь; Ф - интерфе-
ренционный множитель.
Используем полученную в [8] аппроксимацию диаграммы направ-
ленности антенны РЛС по полю в виде
exp -1,39| при ^<1,
F(20) = - о,: [(0/ 23 0О) И) J при 1<2£< л_ 3) 3)
где - ширина диаграммы направленности антенны на уровне поло-
винной мощности в вертикальной плоскости.
179
Для малых высот полета очевидно приближенное соотношение
sinfaH/D, используя которое, а также (4.6) и (4.7), получим искомое вы-
ражение в виде
с 16л-2/)2 I Л )
-expl-----J27^(20)cos 1 — I. (4.9)
Последняя формула может быть преобразована в виде зависимости
квадрата отношения интерференционного множителя к дальности:
2 1 +F(2ft ехр|----exp--------12F(20)cos I ——
_-____________\____d I_____k___z 2---------x _ _Z Mim
Рис. 4.6. Изменение уровня входного
сигнала при полете на РЛС:
Яй=4000м2,/> /1= 1
Рис. 4.7. Изменение уровня входного
сигнала при полете на РЛС:
Яй=10000м2,й// = 1
По последнему соотно-
шению проведены расчеты
для различных сочетаний па-
раметров. На рис. 4.6 и 4.7
представлены отдельные ре-
зультаты этих расчетов в ви-
де зависимости отношения
Ф2/02 от дальности. При рас-
четах было принято ft = 1°,
Л= 3 см, /гп/А=1. Параметром
у кривых является величина
(Н Л).
Полученные соотноше-
ния при сделанных предпо-
ложениях позволяют выбрать
тот или иной способ измере-
ния дальности для разных
сложившихся ситуаций.
В работах [5,2,6] и др.
приводятся зависимости уров-
ней сигнала на входе радиоло-
кационного приемника от
дальности до объекта - Pm(D)
для разных характеристик под-
стилающей поверхности. Из
этих зависимостей непосредст-
венно следует достаточно
сложная функциональная связь
180
между несколькими параметрами кривой Pm(D) и дальностью, что указы-
вает на возможность оценки дальности до РЛС при измерении параметров
кривой РЮ(О) по мере сближения с РЛС.
4.2. Определение дальности по характеристикам
интерференционной кривой
Не претендуя на полноту охвата вопроса, рассмотрим несколько
вариантов измерения дальности по параметрам зависимости уровня
входного сигнала от дальности при использовании полученных выше
приближенных соотношений.
Определение дальности по периоду интерференционной кривой. Из
рассмотрения выражения (4.9) и рис. 4.6 и 4.7 следует, что период ин-
терференционной кривой меняется в зависимости от дальности при не-
изменных остальных параметрах. Максимумы интерференционной кри-
вой имеют место при выполнении равенства
4л hsinff „
--------+ B = 2i,
Л
где /3- некоторая начальная фаза, постоянная в течение времени наблю-
дения; i - целое число.
Приравнивая разность аргументов косинуса в выражении (4.6) ве-
личине 2 л, получим уравнение
Л
sin#, -sin# =— .
2 1 2h
Здесь в\ - угол цели, находящейся в первом из рассматриваемых макси-
мумов интерференционной кривой; fy. - угол цели, находящейся в по-
ложении второго из рассматриваемых максимумов.
Учитывая, что D2 = D] - АО и что sin в ~ HID, после ряда преобра-
зований получим
D2=D = 0,5BD
8Hh ,
----+ 1
Л BD
-1.
(4.Н)
Здесь ДО - расстояние, на которое уменьшилась дальность до РЛС при
переходе от первого из рассматриваемых максимумов интерференцион-
ной кривой ко второму.
При курсовых углах, близких к нулю, величина ДО равна расстоянию,
пройденному самолетом в прямолинейном полете за время от момента об-
наружения первого максимума до момента обнаружения второго.
Таким образом, в последнем отношении длина волны Л измеряется
станцией РТР, значение Н, так же, как и величина ДО, определяется
181
бортовыми навигационными приборами. Высота поднятия антенны РЛС
h неизвестна. Можно полагать ее случайной величиной, распределенной
нормально со средним значением /гср и дисперсией сг^. Тогда распреде-
ление w(D) определится из соотношения
w(h)
где
и>(О) -
dP
dh
dP 2H
dh 8hH
УЛЛР
Производя подстановку, получим
/г" 2D 1
w(P) -------г==--ехР
2H&Pj2^<rh
Я АОГ20 Л2 ,
--- ---+ 1 -1
8Н к АО J
2a2h
(4.Н)
Рис. 4.8. Относительные погрешности
определения дальности до РЛС при
регистрации моментов пролета максимумов
интерференционной кривой:
1 - /=20 м, 77=200 м, AD=100 км;
2 - /=20 м, /7=500 м, Д£>=10 км;
3 - h=20 м, /7=100 м, Д7>=10 км
Распределение (4.12) по-
зволяет найти относительные
погрешности определения
дальности при регистрации мо-
ментов пролета двух последо-
вательных максимумов интер-
ференционной кривой. На рис.
4.8 даны результаты расчетов
относительной погрешности
Од/О в зависимости от величи-
ны о^/Л. Ошибки в определении
других параметров формулы
предполагались существенно
меньшими ошибок из-за незна-
ния высоты h антенны РЛС.
Расчеты проводились методом
статистических испытаний.
Число испытаний А=1000. Рас-
четы проводились для тех сочетаний параметров, для которых максималь-
ная дальность не превышала дальности радиогоризонта.
Из графиков рис. 4.8 видно, что приемлемая точность определения
дальности (относительная погрешность не более 10 %) может быть дос-
тигнута, если относительная ошибка в определении h не превышает
20 %. При этом измерения заключаются в регистрации моментов про-
хождения максимумов интерференционной кривой, вычислении рас-
стояния АО и вычислениях по полученным формулам. Ограничением в
182
применении рассматриваемого метода является необходимость наличия
не менее двух максимумов на участке пролета от Do до D„ (или одного
максимума и одного минимума).
Как видно из (4.9) и рис 4.6 и 4.7, величина периода интеференци-
онной кривой обратно пропорциональна произведению Н h. Как видно
из анализа выражения (4.9), применение метода возможно при выпол-
нении неравенства
h > 1000 м2.
Особенно благоприят-
ными условиями для приме-
нения метода обладает мор-
ской театр военных действий.
Действительно, класс кораб-
лей, на которых устанавлива-
ется та или иная РЛС, может
быть распознан бортовыми
информационными средства-
ми, тем самым можно опреде-
Рис. 4.9. Распределение высот антенн
боевых кораблей {фр - фрегатов,
эс - эсминцев, кр - крейсеров,
ав - авианосцев, N- число кораблей)
лить среднюю высоту распо-
ложения антенны на уровнем
моря (рис. 4.9). Данные о вы-
сотах антенн содержатся, на-
пример, в [9,10]. В [10], в ча-
стности, приводятся подробные сведения о расположении антенн типовой
станции корабельного ЗРК «Иджисц-AN/SPY-l на кораблях разного класса.
Отмечается тенденция увеличения высоты установки антенного поста во
имя увеличения дальности обнаружения низколетящих целей.
С учетом отмеченных обстоятельств можно предполагать, что от-
носительная погрешность в знании высоты h может быть достаточно
малой. Одновременно выполняется и условие (4.13) для большого диа-
пазона высот полета летательного аппарата.
Распределение высот антенн РЛС на суше. Распределение высот уста-
новки антенн w(h) на сухопутном театре военных действий определяется,
по крайней мере, двумя обстоятельствами: во-первых, распределением вы-
сот местности w(Z?o), которое можно считать нормальным, и во-вторых,
размерами района, в котором необходима установка РЛС (например, пози-
ции подвижных ЗРК типа «Патриот», «Хок» и др.).
В подтверждение допустимости предположения о «нормальности»
распределения высот на рис. 4.10 приводится распределение высот местно-
сти, полученное в результате обработки топографической карты масштаба
1:25000 (район Истринского водохранилища Московской области). Из ри-
183
NW
Рис. 4.10. Пример распределения
высот местности
сунка следует, что с достаточным
приближением можно полагать
приведенное распределение нор-
мальным.
При сужении требуемого
района установки позиции РЛС до
точки распределение высот уста-
новки антенн стремится к распре-
делению высот местности, т. е. w(h)
® w(h0). Наоборот, при расширении
района, где предписывается раз-
мещение позиции РЛС, распреде-
ление w(h) будет отличаться от
распределения vdho) в силу того, что для повышения дальности обнаруже-
ния низколетящих целей выгоднее позиции с большей высотой. Таким об-
разом, максимум распределения w(h) будет смещен вправо, в сторону
больших значений высот относительно максимума распределения w(ho).
Если в районе, где предписано размещение позиции РЛС, есть т хол-
мов, то можно полагать (разумеется, отвлекаясь от других факторов,
влияющих на принятие решения о размещении, например, подъезды, нали-
чие леса и т.д.), что антенна будет установлена на самом высоком из них.
Вероятность того, что высота холма, где установлена антенна, пре-
вышает некоторый уровень А», равна
P = P(h>h,)^w(h0)dh,
h.
где w(h0') =
MJ
1
V^aeXP
Здесь Лоер - среднее значение высот.
Вероятность того, что хотя бы один холм из т имеющихся в рай-
оне превысил уровень А., равна
Pm(h>h.) = 1-(1-РГ
в предположении одинакового распределения высот всех т холмов.
Следовательно, распределение высот установки антенн может быть
найдено дифференцированием:
д'ГPm(h>ht)'l т . dP
W = -т(1 - РГ~'
dh, dth
Поскольку -
dP d \ 1 "f
dh, dh, J
(А) Азср)
0-2
dh^
=’^exp
(k-Afcp)2
o—2
1
184
то w(h) = m(l-P)m 1 , ехр
>12ясг
2ст2 . ’
Используя известное обозначение для функции Лапласа
фл W = |ехр(-0,5/2)с//,
получим 1-Р = 1- ^w(h0)dh = ФЛ
h.
6-Лр
СТ
Или в окончательном виде
и<Л) = ти(фл |
I L o’ Jj
ехр
2ст2
(4-14)
Таким образом, исходное нормальное распределение высот дефор-
мируется первым множителем. На рис. 4.10 для разных значений т по-
строено распределение
и(х)=ги{Фл(х)}'"~1-^Х-ехр(-0,5х2),
^-^ср
где х =-------
ст
Рассмотрение графиков рис.
4.11 дает возможность судить об
увеличении асимметричности
распределения при увеличении т.
Положение максимума распреде-
ления находится дифференциро-
ванием выражения (4.14), что по-
сле ряда преобразований приво-
дит к трансцендентному уравне-
нию, решаемому графически:
/и-1
Результаты решения даны
на рис. 4.12.
Величины максимумов на-
ходятся подстановкой корней
последнего уравнения в (4.14):
™т = шфл Ч(х) =-------f-.
т-1
Рис. 4.11. Распределения высот установки
антенн на местности
Рис. 4.12. Величины максимумов
распределений (4.14)
185
Поскольку для больших X
.... ехр(-0,5х2) w,(x) . Фл
Фл (х) ® 1-•-/-=—- = 1 —- = 1------—, то в максимуме
х72л- х zw —1
1 / 1 \т
_ W-1 . I. 1 ]
фл«—' фл«= 1—
т \ mJ
т-1
2т
Тогда величина максимума выражается в виде wm(x) =----=—,
т~1 2т 2
что и подтверждается рис. 4.10.
Для оценочных расчетов можно полагать, что распределение wm(x)
приближенно нормальное с математическим ожиданием и среднеквад-
ратичным отклонением, определяемым из рис. 4.11 или из следующих
аппроксимирующих эти кривые зависимостей:
хт «1,4 (1g m)3'4, <ттэкв « ст ехр(-0,51g т}.
(4.15)
Величина т (число холмов в районе выбора позиции, равное числу
некоррелированных областей в этой зоне) определяется как
где R - радиус круга, соответствующего зоне выбора позиции; г - ин-
тервал корреляции неровностей на местности.
Определение дальности до РЛС при неизвестной высоте антенны.
Для больших значений произведения Hh > 4000 м2 (см. рис. 4.6) на рас-
стоянии Do - Dn укладывается несколько периодов интерференционной
кривой, разных по своей протяженности. Это обстоятельство может
быть использовано для составления системы уравнений
(4.16)
Неизвестными в этой системе уравнений являются Z>i и h. Для оп-
ределения величин М)\ и AZ>2, так же, как и ранее, требуются, наряду с
навигационными измерениями, измерения типа индикации моментов
достижения максимумов входной мощности.
Определение дальности по первому максимуму или первому минимуму.
Выше было приведено условие (4.13) применимости метода определения
дальности по периоду интерференционной кривой. Было отмечено, что
при малых значениях произведения Hh расстояние между соседними мак-
186
симумами интерференционной кривой превосходит разность дальностей
(По - D„), за время пролета которой должны быть получены сведения о
расстоянии до РЛС. При невыполнении условия (4.13) может быть ис-
пользован метод измерения дальности, основанный на определении по-
ложений первого минимума или первого максимума интерференционной
кривой. Действительно, как следует из (4.6), положения первого макси-
мума и второго минимума приближенно определяются как
D J™. D
Imax > ^2 mm
(4.17)
В то же время для малых высот пролета должно выполняться не-
равенство, означающее однозначность отсчета:
77рГ > D[ max.
Другими словами, при выполнении этого неравенства можно быть
уверенным, что первый встретившийся после пролета радиогоризонта
максимум является первым максимумом интерференционной кривой,
положение которого определяется формулой (4.17)
На рис. 4.6, 4.7 положения максимумов несколько сдвинуты отно-
сительно значений, рассчитанных по формулам (4.17). Это объясняется
влиянием множителя 1/D2. Точное положение первого максимума опре-
деляется на участке £>РГ > D > 2Н Ыл из уравнения
dD
а второго минимума - на участке 2Hh/A>£»4Hh/3A из того же уравнения.
Отметим, что сама по себе структура интерференционной кривой
содержит информацию обо всех параметрах (Н, h, к, R, D, (%), опреде-
ляющих ее ход. Значительная часть этой информации может быть из-
влечена из этой кривой путем ряда измерений, главным образом, энер-
гетических.
4.3. Определение дальности методом регистрации
пролета радиогоризонта
Известно, что уровень входной мощности испытывает резкий ска-
чок при пересечении линии радиогоризонта. Величина скачка оценива-
ется несколькими десятками децибел, а протяженность - несколькими
десятками километров. Указанное обстоятельство может быть исполь-
зовано для определения дальности до РЛС, работающих в режиме кру-
гового обзора,
187
Согласно дифракционной формуле Введенского [3], напряжен-
ность поля в области неглубокой тени определяется соотношением
Еэфф=7Рё8ЛГЯ(Л)Я(г),
где PG - энергетический потенциал передающей станции; N, H(h), H(z) -
коэффициенты, зависящие от высоты поднятия антенн и других парамет-
ров трассы.
Зависимость от дальности определяется множителем S, в свою
очередь равным
8 = ехр
(4.18)
где В - безразмерный слабоменяющийся коэффициент, зависящий от
параметров почвы и длины волны (его величина меняется в пределах
46,5.. .54,5); 2 - длина волны; а - радиус Земли; D - расстояние до РЛС
(все линейные размеры выражены в километрах).
В связи с большим диапазоном изменения S обычно выражают в
децибелах. Обозначая коэффициент S, выраженный в децибелах, как 8*,
получим
8. = 20
^Z)lge~[^2
alfi. JVC
(4.19)
Наклон зависимости 8» в области «тени» (зависимости, заменяю-
щей интерференционный множитель Земли в области «света») опреде-
ляется дифференцированием выражения (4.19). Подставляя значения а и
В в (4.19) и учитывая, что Л « D, получим
dS„ _ 3,38 4,3
dD~ з]Т D ’
или приближенно
dS,________3,4
dD~
(4.20)
(4.21)
В двух последних выражениях длина волны Л выражается в см, даль-
ность D - в км, а производная dS/dD - в дБ/км.
Таким образом, полагая, что дальность радиогоризонта Врг опре-
деляется как дальность, на которой мощность сигнала снижается в де-
сять раз по сравнению с уровнем сигнала на этой же дальности в сво-
бодном пространстве, получим выражение для интерференционного
множителя (в дБ) в области «света» и «тени» в виде
Ф. «101g
, г.2^2 (4;z7?sin#
1 + R2F2 + 2RFcos ---------+ В
I Л )]
при
D<Dpr- &D,
Ф. «-10-3,4
при
^/1
188
В зоне £>р, > D > (£>рг - AD) осуществляется плавное сопряжение
двух зависимостей. Здесь и далее расстояния R, D, Dpr, AD выражаются
в километрах, длина волны Л - сантиметрах. Величина AD может быть
найдена из уравнения
Г 1
-10,17—
0,3-10 L J=l,
решение которого дает AD « 3 >/л .
Таким образом, переходя от выражения интерференционного мно-
жителя в децибелах к обычной форме и учитывая (5.36), получим общее
приближенное соотношение, учитывающее влияние подстилающей по-
верхности на уровень сигнала на входе станции воздушной РТР в виде
Ф « Jl + R2F2 + 2RFcos Г-7г/;-п6> + ПрИ d < Dpr - 3%Л,
’ \ л J (422)
D-О„г[км]
-0,17- рг
Ф «0,3-10 №[см1 приЕ>>£>рг.
На рис. 4.13 приведен пример построения зависимости (4.22). Из
рисунка следует, что для использования описанного метода необходимо
иметь чувствительность при-
емников по крайней мере не
хуже, чем
_0Д£
'прм ~2 ’
^рг
. A2PjG]0G20y/ ,.
где к =----1 102 20 , (4.23)
16я
или
_ Q,U2^G10G20</ . 2.
прм 16^3Д2Г Л ’
Действительно, при
меньшей чувствительности
Рис. 4.13. Зависимость интерференционного
множителя от дальности в области полутени
и «света» от дальности (£>р, = 60 км)
дальность превышения порога
Do будет меньше, чем Dpv. Это
приводит к увеличению величины £>0 вследствие неопределенности произ-
водной зависимости на участках от £>рг до первого максимума, положение
которого заранее может быть неизвестно.
Если предположить, что чувствительность приемника достаточна
и неравенство Do > Dpr выполнено, то существо определения дальности
по описываемому методу регистрации пролета радиогоризонта состоит
в фиксации момента превышения входной мощности порогового уров-
ня, определяемого равенством
189
0,1*10
(£>pr-W
Решение этого уравнения имеет вид
Z> = Z>0=3VIlg
О,Ik
f„(dpi.-VI)2
(4.25)
где Л выражается в сантиметрах, £>р| и 3/л - в километрах, к - в Вт км2.
Как видно из выражения (4.24), отличительной особенностью метода
радиогоризонта является крайне слабая зависимость дальности (а следова-
тельно, и ошибки ее определения) от энергетического потенциала разве-
дуемой РЛС и чувствительности разведприемника. Действительно, измене-
ние отношения к!Рп в десятки раз меняет величину дальности на несколько
процентов. Слаба также зависимость дальности, определяемой для нор-
мальной рефракции по формуле (4.26), от высоты передающей антенны.
£>рг=4,12(л/я+Тл).
(4.26)
Здесь дальность £>рг выражается в километрах, а высоты На h-в метрах.
Действительно, так как обычно H»h, то Dpr ~4,\2у[н , поэтому
dD/oh^O.
Говоря о достоинствах метода радиогоризонта, нельзя забывать о не-
устойчивости величины напряженности электромагнитного поля в области
полутени и тени, зависимости ее от состояния атмосферы, почвы и т.д. Не-
даром для определения величины дальности радиогоризонта предлагается
несколько формул вида (4.26), коэффициенты в которых отличаются на де-
сятки процентов. Имеют место также явления дальнего тропосферного
распространения ультракоротких волн, например, над морской поверхно-
стью в теплое время года, когда дальность обнаружения источников радио-
излучения в несколько (и даже в десятки) раз превышает расчетную и т.д.
Однако при наличии прогноза на состояние тропосферы этот метод
может быть использован для первоначальных приближенных оценок
дальности до разведуемых РЛС. В этом направлении наряду с получен-
ными выше формулами могут быть использованы соотношения, приве-
денные в [11].
4.4. Определение дальности методами
энергетических измерений
Методы измерения мощности сигнала. Мощность на входе раз-
ведприемника определяется соотношениями (4.6) и (4.8). В максимумах
интерференционной кривой интерференционный множитель и мощ-
ность входного сигнала определяются из соответствующих выражений
190
Hi+яг)2
Ф=1 + ЯГ, p =-i—.
м * м Ls
Отсюда D = (1 + RF)^ (4.27)
Определение дальности по (4.27) требует знания величины к, т. е. в
соответствии с (4.23) - знания энергетического потенциала разведуемой
РЛС - Р\ Стю- Эти данные могут быть получены косвенным путем на
основании распознавания типа РЛС по измеренным параметрам приня-
того сигнала. Кроме того, необходим не только факт регистрации мак-
симума интерференционной кривой, но измерение абсолютной величи-
ны мощности в этом максимуме. Здесь причинами погрешностей могут
быть также временные рассогласования момента облучения самолета-
разведчика главным лучом РЛС и момента достижения максимума ин-
терференционной кривой.
Для уменьшения влияния неопределенности в значениях излучае-
мой мощности может быть использован метод, требующий измерения
перепада мощностей в двух соседних максимумах.
Методы измерения разности уровней мощности входных сигналов.
Применительно к малым значениям угла в (см. рис. 4.3) можно полу-
чить простое соотношение для дальности до РЛС. Действительно, при
малых 0 справедливо выражение
sin О* 0~ HID,
и тогда
№
( 13^ (
«ехр —— ехр
1,39-4Я2>
(4-28)
где h - средняя высота неровностей местности в зоне, существенной
для отражения; - ширина диаграммы направленности передающей
антенны в вертикальной плоскости.
Величина RF меняется незначительно при малых углах в, поэтому
для соседних максимумов можно записать приближенное равенство
R\ F\ ~Rz F2 ~R F.
_ dPu 2fc(l + RF)2
Тогда —®-------i—;——.
n n l2kAD(l + RF)2
Отсюда D «3--------------— . (4.29)
Здесь AD - расстояние, на которое уменьшается дальность до РЛС за
время пролета расстояния между двумя максимумами интерференцион-
ной кривой; (Р2 - Р\) - перепад мощности сигнала в этих двух соседних
максимумах.
191
Если энергетический потенциал разведуемой РЛС неизвестен, то
можно пользоваться измерением отношения мощностей входного сиг-
нала в двух соседних максимумах интерференционной кривой.
Метод измерения отношения уровней мощности сигналов соседних
максимумах. Действительно, уровни мощности в двух соседних макси-
мумах вычисляются по формулам
Р = + W д = ^(1 + ^)2
Di
Р2 (1 + R2F2)2D?
поэтому —-=--------—-
Р, (i+ад) а
Учитывая, что D} =D2 +AD, после преобразований получим
D2=D=----------------- (4.30)
1+ад
Величина отношения (1 +У?} F)/(l+R2 F2)=a может быть найдена
путем подстановки в (4.28) приближенного значения дальности перво-
начального обнаружения D\. Это значение может быть найдено, напри-
мер, методом радиогоризонта или пеленгационным методом (см. выше).
Погрешности определения дальности при малых ошибках измерения
мощности. Полные дифференциалы выражений (4.27), (4.29), (4.30)
имеют вид
(<©),=
d(RF)JdD
d(RF)
dD
dk
dk+\^-\dP,
ldP\
dD
d(RF)
(<ZD)3=W
.da J
(dD)2 =
dD~\' ГdD'
d(RF) + — dk+ — dPx +
'"'J L^J
J(AD) + — dR +
d(AD)] L^J
da +
\_dk
dD
dD
'dD'
1адГ+ dP>
\^-]dP2.
dP2
2’
Здесь индексы 1, 2, 3 у знака полного дифференциала (dD) соответст-
венно обозначают три метода определения дальности: путем измерения
абсолютного значения уровня сигнала, разности и отношений уровней
мощности в двух соседних интерференционных максимумах.
Подставляя в выражения для полных дифференциалов значения
частных производных и переходя к конечным приращениям 3D, 8k, 8Р,
8(RF), 8а, получим
ЗРЛ 8(RF) nc(8k 8Р\
Djt 1 + RF I k P)
192
рРА 1 [ 28(RF) 8к 8Р} ЗР2 8(8Р)]
{ D )2~ 3[1 +RF + к * Р2-Р} Р2-Р* 8D J’
/(ДР) аЗР2
к£>Л ДО
Учитывая, что среднеквадратическая ошибка линейной комбина-
ции независимых случайных ошибок х = ^Дх; определяется как
f
<7 = , получим
£(^)Г+0,25«2 + 0,25М2
1 + RF J V к ) \Р )
ab\ 1 fl2a(RF)~l2 Гак}2 Г аР У f аР2 У Г а(3£>)}2
D J2 3^L l + RF J \kj \P2~Pi) \p2~pi) { 3D J
g-Qk _ Г сг(ДР)У a2^ aP2a2P{ P2a^
~Dj3aj[~8D~J + 4P2(a^-^)2 + 4/?(aTt-V^)2 + (a^-^)2 ’
Можно полагать, что ошибки в определении множителя (1+RF),
отношения (l+7?j Fi)/(1+A2 Р2) -an разности расстояний &D малы по
сравнению с ошибками измерения входной мощности Р\ и Р2 и в опре-
делении энергетического потенциала к разведуемой РЛС. Кроме того,
считая, что opi = ап = ар, получим
(4.32)
Последнее равенство при RF^\ упрощается:
193
а^ + Р*
8fcf 1-^-1
D h
или, если положить , = P.,
7Д4 + Р2
примет вид
(0/Л 0,125
д
(4.33)
Из последних выражений можно получить значения допустимых по-
грешностей измерений уровня входного сигнала при заданной допустимой
относительной ошибке измерения дальности. Так, например, для выполне-
ния условия ao/D <0,1 для каждого из трех способов определения дально-
сти должны выполняться соответственно следующие три неравенства:
\ / \2 / \ ( \г
<Jo,O4- , — < Jo,045-0,5 ^ ,
.РЛ V \ к J < Р A v Vk J
(4.34)
Выразив Р. и АР через Р2 и через отношения дальностей:
приведя неравенства (4.34) к мощности, измеряемой во втором макси-
муме интерференционной кривой (Р2) и положив Р2 = Р, получим
^•| <Jo,O4-| —| ,
. Р Л V I к )
(4.35)
Например, при £>j /£>2 = 80 км/40 км = 2 для обеспечения необхо-
димой точности измерения дальности (<10%) в точке Р>2= 40 км должны
быть выполнены неравенства
194
<. 0,04-f^|
p h N U J
<0,75. 0,045-0,5\^-
,PJ2 N к к J
<0,025.
.Ph
Из полученных соотношений следует, что при малых разбросах
(ст*/А:<0,1) (энергетический потенциал известен достаточно точно) наибо-
лее предпочтительным является первый метод (4.27), требующий относи-
тельных точностей измерения уровня входного сигнала не более 0,2. Вто-
рой метод требует в тех же условиях относительной погрешности по-
рядка 0,15. При больших неопределенностях в знании энергетического
потенциала РЛС (o*/fc >0,1) преимущество первого метода сходит на
нет, а при о)Д=0,2 он становится вообще неприменимым при любых
точностях измерения мощности Р2.
Граница применимости второго метода (измерение разности уров-
ней сигнала по (4.28)) соответствует значению сгД=0,3. Применимость
третьего метода (измерение отношений уровней сигнала по (4.30)) не
зависит от достоверности знания энергетического потенциала & РЛС,
однако он требует весьма высоких точностей измерения Р.
С учетом оговоренных выше допущений и проведенных преобразо-
ваний выражений (4.32) приближенные формулы для оценки погрешностей
измерения дальностей тремя энергетическими методами имеют вид
На рис. 4.14 приведены результаты расчета относительных погреш-
ностей измерения дальностей, рассчитанные по формулам (4.36) для от-
195
ношения дальностей смеж-
ных наблюдений £)1/£>2=2;
нумерация на кривых соот-
ветствует индексам формул
(4.36).
Последнее соотноше-
ние в (4.36) является функ-
цией отношения
ар!Р
Рис. 4.14. Относительные погрешности
Рис. 4.15. Зависимость множителя,
Вид функции fiDJDi)
представлен на рис. 4.15, от-
куда следует, что доя наибо-
лее распространенных значе-
ний отношения дальностей
1,3<Di/D2 < <2fiPi/D2) « 8 по-
следняя формула в выраже-
нии (4.36) может быть записа-
на в виде
определяющего погрешность измерения _ ,
расстояния до РЛС от отношения дальностей Плотности распределе-
ния. Приведем выражения
для одномерных функций распределения дальности при определении ее
по каждому из трех соотношений (4.27), (4.29), (4.30).
Так, согласно (4.27), имеем
, поэтому
щ(П) = ^
D
Г ——1 ~
I D Л ~ I Р J'
2Ц1 + ДГ)2
wi(g) = ' эм -exPl
D у/Зтгр
(4.37)
„ - k(\ + RF)2
Здесь Р =----=5---;
D2
<Тр - среднеквадратическая погрешность измере-
ния мощности; D- математическое ожидание дальности.
196
Аналогично для соотношения второго метода(4.29) можно записать
, з21
2£(1 + ЛЕ)2ДО -п
—-------------&Р ,
D3 J
3k(\ + RF)2 ДО
w2 (О) = — , ’^=r exp
O4<t2V2^
1
4<Тр .
где ДР = Р2-Р{ - разность мощностей входного сигнала в точках вто-
рого и первого максимумов, измеренных точно.
п 2k&D(l + RF)2(D}+D2)
Поскольку ДР =----------2~~2 ------ ’ т0
22D] D2
w2(7)) =
3MO(1 + 7?F)2
exp
-0,5*ДО(1 + ЛО)2
1 £)| + jD2
2O2O2
Для сравнения двух последних выражений для распределения
w2(O) воспользуемся приближенным равенством
ДР»
-2РДО
D
тогда будем иметь
откуда находится окончательное выражение для распределения w2(O):
Ц1 + РР)2 F
D2
(4.38)
Сравнение распределений (4.37) и (4.38) показывает, что средне-
квадратическая погрешность во втором случае превышает среднеквад-
ратическую погрешность в первом случае примерно в 0,67 (DI&D) раз
по линейному множителю и в 1/л/2(О/ДО) раз - по показателю степе-
ни. Это означает преимущества второго метода только для сравнитель-
но больших значений ДО (ДО > 0,7 О). Во всех остальных случаях вы-
годнее первый метод. Заметим, что такой же вывод следует из сравне-
ния полных дифференциалов, приведенных выше.
Плотность распределения дальности в случае использования
третьего способа определения дальности - по отношению уровней сиг-
нала в двух соседних максимумах (4.30), находится из выражения
197
w(D) =
AD a
1 + ЛЯ Р2
где а =------i-1-; у = —
l-R2F2 Л Р.
(,+—Т
гт к. D ) „ ,
Подставляя значение у - -у -, найденное из исходной фор-
ат
мулы, в предыдущее выражение, получим
2
2А£)[1 + —]
",)(р)= -«-д- "И
D
а
(4.39)
Распределение частного двух независимых случайных нормально
распределенных величин находится как
wGO= J|m| Wj(i/) w2(wv)<Zw =
1 Г
=7=2 rexp ~
дат «
(и-и)2 +(иу-иу)2
2a2
du.
о
Здесь у =—; Р1=и-,
Р,=и; Р2=иу.
и
Последний интеграл приводится к табличному. В обозначениях
[37] он записывается как
f Z 2^4, 1 v я
|хехр(-//х -2их)аг =----—
J 2/z 2// V А
v2
ехр-----1 - Фв
P).
Поэтому
^з(>,)=(1±/-)^Р(-^
Л-(1 + у2)
^о(1 + ХУ)ехР -*v~-
>/я-(1 + >-2)
X
X-
1 + Фв
*o(l + jy)
198
_ и
где х0 =—
о
В частных случаях, когда х0» 1 (малые ошибки), имеем
Хр(у-у')2
1 + /
2х0(1 + уу)ехр -
Wj (у) ~L
(4.40)
Для х0« 1 (большие ошибки) получим
w3 (>) ® —5— частный случай распределения Коши.
л-(1 + /)
Для выяснения границ справедливости приближенных аналитиче-
ских соотношений для погрешностей определения дальности (4.36) и
других были рассчитаны дисперсии распределений, соответствующие
различным формулам определения дальности (4.27)...(4.30). Расчет был
проведен методом статистических испытаний, а результаты расчета
приведены на рис. 4.16 и 4.17. Две цифры у каждой кривой обозначают
дальности Di и Di, км.
Рис. 4.17. Относительные
погрешности измерения дальности
вторым энергетическим методом
(статистический эксперимент)
Рис. 4.16. Относительные
погрешности измерения дальности
первым (кривые 7) и третьим
(кривые 3) энергетическими методами
(статистический эксперимент)
Сопоставление этих графиков с результатами расчетов по анали-
тическим формулам (см. рис. 4.14) свидетельствует об их практическом
совпадении вплоть до значений относительных ошибок измерения
мощности, превышающих 0,2...0,3. Большие значения ошибок измере-
ния мощности интереса не представляют, так как приводят к неприем-
лемым погрешностям в измерении дальности.
199
4.5. Кинематический метод местоопределения источника
радиоизлучения бортовым амплитудным пеленгатором
с фиксированным положением луча
Определение местоположения ИРИ с борта ЛА обычно произво-
дится либо триангуляционными методами по данным пеленгования
ИРИ в процессе полета с последующим вычислением его координат,
либо энергетическими, либо их сочетанием и др. [8]. Возможен также
вывод ЛА в район нахождения ИРИ с помощью приводного устройства,
определяющего текущее отклонение курса ЛА от направления на ИРИ
[12, 13]. Недостатком этих методов является, как правило, значительное
время определения координат ИРИ ввиду необходимости пролета ЛА
расстояния, соизмеримого с дальностью до ИРИ. Кроме того, реали-
зующая эти методы бортовая радиопеленгационная аппаратура пред-
ставляет собой достаточно сложное техническое устройство, особенно в
части конструкции, габаритов и размещения на ЛА антенных систем для
приема и точного пеленгования излучений в широких переднем или/и
боковых секторах обзора, что ограничивает возможности установки та-
кой аппаратуры на скоростных и малоразмерных ЛА.
В этом отношении более простым является приведенный в [14,15]
вариант построения самолетного пеленгатора бокового обзора с двумя
неподвижными направленными антеннами, лучи которых расположены
под фиксированными углами относительно ЛА, в частности, под углами
± 30° относительно траверзного направления (или 60° и 120° относи-
тельно продольной оси ЛА). Определение координат ИРИ производится
триангуляционным путем по двум последовательным засечкам ИРИ и
базе - отрезку пути ЛА за интервал времени между этими засечками.
Неподвижные антенные устройства, формирующие такие фиксирован-
ные лучи, могут быть выполнены в виде располагаемых побортно невы-
ступающих линеек излучателей (плоских спиралей или вибраторов), что
позволяет размещать их и на скоростных ЛА. Однако остается в силе та-
кой недостаток, как невысокое быстродействие метода, определяемое
временем пролета базы, достаточно значительным при больших дально-
стях до ИРИ. Кроме того, определение местоположения только по двум
засечкам при наличии в зоне приема нескольких близких по параметрам
ИРИ может приводить к образованию ложных отметок целей за счет пе-
репутывания принадлежности засечек тем или другим ИРИ [8], что сни-
жает достоверность получаемых данных. Это ограничивает эффектив-
ность применения данного варианта построения бортовой аппаратуры
для местоопределения ИРИ в сложной радиотехнической обстановке.
Однако в таком пеленгаторе с фиксированным положением лучей
может быть реализован другой, более быстродействующий способ оп-
ределения координат ИРИ, представляющий собой вариант кинемати-
200
ческого метода нахождения (вычисления) дальности R до цели с борта
движущегося со скоростью V ЛА как отношения тангенциальной скоро-
сти ЛА V, к угловой скорости цели со [16]:
R=V,a>, (4.41)
где И, = J's in о, v - курсовой угол цели; со - угловая скорость, рад.
Величина угловой скорости цели со в пеленгаторе с фиксированным
положением луча может быть определена в результате измерения и
обработки величин и скорости изменения уровней последовательно
принимаемых сигналов в процессе прохождения луча через направление на
ИРИ при движении ЛА, в частности, путем измерения интервала времени Т
между моментами приема сигналов с одинаковыми уровнями в начале и
конце прохождения луча через цель, определения отношения уровней
(амплитуд) этих сигналов А к максимальному наблюдавшемуся значению
Лпах (г=Л/4пих), вычисления по этим данным и априорно известным
параметрам луча (форме и ширине по уровню половинной мощности #0,5)
величины сектора приема по относительному уровню г (Д) и нахождения
угловой скорости как отношения
со=в,1Т„ (4.42)
где Тг - время прохождения луча по уровню г через ИРИ.
Параметры луча, т. е. диаграммы направленности антенны (ДНА),
определяются распределением поля в раскрыве и его формой. Для пря-
молинейного синфазного раскрыва и часто применяемого косинусои-
дального распределения с пьедесталом ДНА описывается формулой [17]
FH(U) =
2
1-Д)-+А
ж sin U 2fl-(l-A)cost7
А-----+----’ ---------
U /г2-4G2
(4-43)
Здесь А - пьедестал, т.е. уровень поля на краю раскрыва; U=(xL / 2)sin0,
где L - размер апертуры; 2 - длина волны; Q - угол относительно норма-
ли, являющейся в данном случае направлением главного лепестка ДНА.
При А = 1, что соответствует наиболее просто реализуемому для
линейки вибраторов равномерному распределению, выражение для
ДНА принимает вид
FH(U) = sinU/U. (4.44)
Зависимость коэффициента усиления от угла G(0) в пределах глав-
ного лепестка (ГЛ) ДНА удовлетворительно представляется приведен-
ной в [18] тригонометрической аппроксимацией (рис. 4.18), которую
можно записать как
G(ff) = Go cos4 (Ве/воЛ (4.45)
где Go - усиление в максимуме ГЛ ДНА; #015 - ширина ГЛ по уровню
половинной мощности; В - коэффициент, равный 65,53°.
201
Рис. 4.18. Сравнение аппроксимаций
главного лепестка диаграммы
направленности антенны:
V)= ехр[ -1,3863(0/©о,5)2] - (sinl/)/[Z;
V2=cos2(65,63 O/O0,j) - (sinLW
Данная аппроксимация
более точно соответствует
форме ГЛ за пределами 0О,5,
чем часто используемая и
также приведенная в [18] ко-
локолообразная аппроксима-
ция
G(0)=Goexp[-Z4(0/0o,5)2],
(4.46)
На рис. 4.18 приведены
графики отклонения этих ап-
проксимаций от формы ГЛ
для раскрыва с равномерным
распределением в пределах
углов до 0/0о,5 ~ 0,8, где ко-
эффициент усиления меньше максимума (Go) примерно на 8,8 дБ. Как
видно, тригонометрическая аппроксимация (4.45) имеет меньшее от-
клонение от теоретической формы ГЛ (4.44) вблизи его краев, чем
колоколообразная (4.46).
Использование тригонометрической аппроксимации позволяет оп-
ределить ширину ГЛ по уровню г=А/Аы как
0n s г-
0. = 2—— arccosVr .
В
(4.47)
Величины амплитуд обрабатываемых сигналов в пределах ГЛ
ДНА (А и Лтах) предполагаются пропорциональными корням квадрат-
ным из мощности принимаемых сигналов ИРИ.
Результирующее выражение для определения дальности до ИРИ с
учетом (4.41), (4.42) и (4.47) может быть записано в виде
В = РТГ
BsinS
20о 5arccosVr
(4.48)
В изложенной методике угловая скорость определяется в результа-
те обработки измерений амплитуд и моментов времени приема сигнала
ИРИ в максимуме ГЛ ДНА и в расположенных по обе стороны от мак-
симума точках с фиксацией моментов равенства амплитуд в этих точ-
ках, для чего требуется непрерывное отслеживание данных измерений
амплитуды и сравнение их с предыдущими в течение всего прохожде-
ния луча через направление на цель. Возможен более простой способ
приближенной оценки угловой скорости путем обработки только трех
последовательных измерений амплитуды сигнала А2, Л2 на одном из
скатов ГЛ, выполняемых через одинаковые интервалы времени Д/. При
этом величина угловой скорости находится как
202
~ @0,5 1
cos—— arccos—
ВД/ 2
(4.49)
(4.50)
0 I А2
или й)=0,6—, In——
At у Л]Л3
для тригонометрической и колоколообразной аппроксимации ГЛ ДНА
соответственно.
Формулы (4.49) и (4.50) получены на основе приближенного допуще-
ния, что двум равным смежным отрезкам прямолинейного пути ЛА КА/,
малым по отношению к дальности до цели, соответствуют одинаковые из-
менения ее курсового угла д, что, наряду с неизбежной неточностью ап-
проксимации, обусловливает приближенный характер определяемой вели-
чины <о. Кроме того при вычислении дальности с использованием полу-
чаемых таким образом данных об угловой скорости возникает дополни-
тельная погрешность за счет наличия отклонения направления на ИРИ во
время измерения амплитуд на том или другом скате луча (ГЛ) от середины
этого луча, расположенного под фиксированным углом у относительно
продольной оси носителя. Значение курсового угла цели v в момент третье-
го измерения амплитуды сигнала (Л3) может быть представлено как
о3 = <р + 6», + 28. (4.51)
0 ]
Здесь 8 = arccos—
В 2
при тригонометрической или
(4.52)
2sin(2?£/#05}
(4.53)
А1
<У = 0,6В05 1п—— при колоколообразной аппроксимации формы ГЛ
’ V Я1Л3
соответственно; а величина отклонения направления на цель от оси луча
в момент первого измерения вычисляется по соответствующим форму-
лам (4.52) или (4.53):
_ В05 4^1 А2 + yjA3/A2 - 2^А2/А}
Ц - arctg----------------------------
1 4к8 А3
где к= 1,388.
Результаты вычислений по формулам, основанным на разных ап-
проксимациях, естественно, несколько различны. Для иллюстрации сте-
пени этого различия и порядка величины погрешности, обусловленной
приближенным характером используемых формульных выражений,
приведем численный пример.
203
Пример. Бортовым пеленгатором с фиксированным лучом шири-
ной ^0.5=7°, направленным под углом <9=60° к продольной оси самолета,
движущегося со скоростью И=0,25 км/с, через одинаковые интервалы
времени Д/=16 с произведено три измерения амплитуд сигнала А\, Аг,
Аз, отношения которых между собой составляют Л,/Л2=0,744 и
Л2/Лз=0,81. Расчеты по вышеприведенным формулам дают следующие
результаты: <5=0,9943°, «=0,062144 %, -5°, и3=56,985°, #=193,28 км
и <5= 1,2245°, «=0,076528 %, 0х= -4,875°, ^=57,574°, #=158 км при ис-
пользовании тригонометрической и колоколообразной аппроксимаций,
соответственно.
Истинные значения разностей курсовых углов и других величин
для трех последовательных моментов измерений, полученные из гео-
метрических соотношений, и соответствующих им временных интерва-
лов составляют: <5)2=1,О37°, <52з=1,0629°, со12=0,06481 °/с, «23=0,06643 %,
fl= -4,9°, п3=57,2°, #=183,52 км, #=181,26 км, #=179,06 км.
Как видно, использование тригонометрической аппроксимации да-
ет несколько меньшую погрешность оценки дальности. Усреднение ре-
зультатов, получаемых при разных аппроксимациях, позволяет в усло-
виях данного примера получить более точное значение дальности на
момент третьего измерения #р^176 км. Заметим, что реальная ДНА из-
за различных дестабилизирующих факторов отличается от (4.43) и ее
аппроксимаций (4.44), (4.45). Тем не менее, в силу того, что эти отличия
могут быть предварительно измерены и учтены при обработке (по ана-
логии со «списанием» девиации) метод позволяет рассчитывать на зна-
чительное увеличение быстродействия по сравнении с методами [14] и
[15] при сохранении требуемой точности.
Приведенный вариант определения угловой скорости цели по соот-
ношениям амплитуд последовательно принимаемых сигналов при прохож-
дении ГЛ ДНА через направление на ИРИ, не учитывает влияния на уровни
этих сигналов изменения дальности до ИРИ в процессе измерений за счет
движения ЛА. Изменение уровня мощности принимаемых сигналов, обу-
словленное изменением дальности до ИРИ за время прохождения луча че-
рез цель, будет приводить к изменению формы огибающей амплитуд сиг-
налов по отношению к форме ГЛ ДНА и к смещению центра формируемо-
го в косом сечении луча сектора приема по уровню г(0г) относительно но-
минального положения середины луча, соответствующего направлению
Оценку изменения ширины ГЛ ДНА и смещения его центра с учетом изме-
нения уровня сигнала за счет перемещения ЛА можно произвести путем
вычисления величин углового отклонения в обе стороны от оси ГЛ ДНА £i
и е2 , соответствующих одинаковому для обеих сторон относительному
уровню принимаемого сигнала, в результате решения уравнения
sin($3~£i)cos2(BeiIOqj )= sin(p+£2)cos2 (4.54)
204
Рис. 4.19. Зависимость смещения центра сектора
приема Л<р от относительного уровня отсчета
при 5 = 7°; <р = 45°
Численные проверки показывают, что в большинстве типичных
ситуаций - сочетаний значений во,$ и р отклонения центра сектора
приема от номинального направления середины луча <р достаточно ма-
лы. Так, для луча с 0О,5 =2° смещение центра сектора приема, измеряе-
мого по установленному уровню в косом сечении луча в процессе про-
хождения луча через направление на цель, при ^=60° и 45° составляет:
по уровню -3 дБ около 0,014° и 0,024°, а по уровню -7,37 дБ, где шири-
на ГЛ ДНА примерно в 1,5 раза больше, - около 0,0115° и 0,02° соот-
ветственно. Изменение ширины (сужение) сектора приема по сравне-
нию с нормальным сечением по этому же уровню г(Я) имеет порядок
единиц угловых секунд, т.е. практически отсутствует. Для 0О,5 =7° при
ориентации оси фиксированного луча <р = 60°, 45° и 30° смещение цен-
тра сектора приема составляет: по уровню -3 дБ около 0,167°, 0,292° и
0,494°, а по уровню -7,37 дБ - около 0,14°, 0,242° и 0,428° соответст-
венно. Величина сужения сектора при этом также пренебрежимо мала
по сравнению с шириной луча и составляет первые единицы минут.
Как следует из при-
веденных данных, вели-
чина смещения зависит от
уровня отсчета и умень-
шается при его пониже-
нии, т.е. при расширении
сектора приема. На рис.
4.19 показан график изме-
нения величины смещения
в зависимости от уровня
отсчета (величины сектора
приема) для случая <р=45°
и Д),5=7°. Как видно, наи-
большая величина смеще-
ния соответствует точке максимума и составляет около 0,32°. Приведен-
ные данные позволяют полагать, что изложенная методика определения
дальности до ИРИ бортовым пеленгатором с фиксированным лучом мо-
жет быть использована в достаточно широком диапазоне углов боковых
секторов обзора.
При ориентации лучей в области переднего или/и заднего секторов
обзора и более широкой ДНА величина пути ЛА, соответствующая про-
лету косого сечения луча, становится соизмеримой с дальностью до цели
и влияние изменения дальности до ИРИ на соотношения уровней после-
довательно принимаемых сигналов становится существенным. В этом
случае координаты ИРИ могут быть найдены по данным измерений ам-
плитуд сигналов, принятых в трех (или более) точках пути ЛА, и расстоя-
ниям между этими точками.
205
В простой, но достаточно типичной ситуации прямолинейного дви-
жения ЛА с постоянной скоростью V (рис. 4.20) курсовые углы ИРИ в мо-
менты измерений th /3 (»i, v2, г>з) находятся в результате решения системы
уравнений, подобной приведенной в [19] для пеленгатора бокового обзора
с неподвижной антенной и траверзным положением луча:
sint>2 cos25(^-l>2)/(905 _ А2
зтц со82В(^-ц)/0О5 4 ’
sint>3 cos2B(<p-u3)/0O5
зтц cos2B(^-ц)/0о5 4 ’
sint>2sin(y3-ц) T3I
sint>3sin(t>2-ц) T2{
где 721, 7з1 - интервалы времени между моментами t\-t2 и tr~t2 соответ-
ственно; 5=65,53°.
Дальность до ИРИ в момент третьего измерения А3 определяется
как
Кз=УТ31—
sin(u3 - ц)
(4.56)
Пример. Бортовым
пеленгатором с неподвиж-
ным лучом шириной
00,5=30°, ориентированным
под углом ^>=30° к про-
дольной оси ЛА (как в
[13]), движущегося со ско-
ростью И=0,25 км/с, на ин-
тервале времени 7)| =90 с
произведено три измерения
амплитуд сигнала Л1, А2, А2,
которые соотносятся между
собой как А2/А\= 1,627 и
Л3/Л1=2,ЗО8. Отношение
интервалов времени между
измерениями Т33/Т2\ =1,61.
Уравнениям (4.55) удовле-
Рис. 4.20. Схема измерений для определения
координат ИРИ при фиксированном
положении ДНА
творяют значения курсовых углов в1=13,5°, г>2=18° и t>3=22,5°, при кото-
рых дальность до цели в третий момент составляет R2 =33,58 км.
Более частое выполнение измерений (например, через 10 с) и со-
вместная обработка результатов вычислений для разных сочетаний дан-
ных об амплитудах сигналов, получаемых в различных точках пути, по-
206
зволит снизить погрешность за счет возможной нестабильности мощно-
сти ИРИ и ошибок измерений, при этом в качестве вычисляемого и
уточняемого в процессе обработки параметра целесообразно использо-
вать траверзную дальность цели
K7;,/(ctgo-ctgDt).
В других рассмотренных ранее ситуациях, когда влияние измене-
ния дальности до ИРИ за время наблюдения на результаты измерений
пренебрежимо мало, для повышения точности определения координат
следует производить совместную обработку и весовое усреднение ре-
зультатов ряда последовательных измерений амплитуд сигналов на
обоих скатах ГЛ ДНА и соответствующих вычислений угловой скоро-
сти цели по разным вариантам изложенной в статье методики. Влияние
быстрых флюктуаций уровня принимаемого сигнала на результаты об-
работки может быть устранено применением в пеленгаторе компенса-
ционного канала [19] и использованием при вычислении ширины секто-
ра приема вг и угловой скорости цели отношений амплитуд сигналов в
основном (пеленгационном) и компенсационном каналах с учетом из-
вестной величины различия коэффициентов усиления антенн этих кана-
лов. Наличие компенсационного канала позволит также исключить
влияние изменения уровня сигнала за счет сближения (или удаления)
ЛА с (от) ИРИ и использовать для оценки их координат более простые
по сравнению с формулами (4J55) расчетные соотношения.
4.6. Оценка и прогнозирование взаимного
расположения излучателя и наблюдателя,
движущихся с постоянной скоростью,
с использованием измерений энергетических величин
Определение дистанции и элементов движения объекта-источника
излучения по данным его пеленгования неманеврирующим наблюдате-
лем может быть произведено при наличии априорно известных (или
предполагаемых наиболее вероятными в данной обстановке) сведений о
величине скорости объекта или/и координатах какой-либо точки его
траектории [20-24], или с использованием выполняемых одновременно
с пеленгованием измерений доплеровской модуляции частоты (несущей
или модуляции) принимаемых сигналов, обусловленной взаимным пе-
ремещением объекта и наблюдателя в процессе разведки [25,26]. Прин-
ципиально возможно также определять текущее и прогнозируемое рас-
стояние между прямолинейно и равномерно движущимися излучателем
и наблюдателем только по результатам измерений доплеровской моду-
ляции частоты или периода импульсной модуляции принимаемого сиг-
нала без использования данных пеленгования [26].
207
Искомые характеристики пространственного положения и пара-
метров движения объекта находятся в результате вычислительной обра-
ботки совокупности измерений пеленгов и/или доплеровских сдвигов
частоты, значения и характер изменения которых в процессе движения
объекта и наблюдателя определяются их взаимным текущим располо-
жением. Предметом обработки являются изменения - вариации изме-
ряемых параметров (пеленга и/или частоты), несущие информацию о
координатах и движении объекта, причем информационная содержа-
тельность этих вариаций («количество информации»), существенно
влияющая на результирующую точность и саму возможность успешной
реализации соответствующих достаточно сложных вычислительных ал-
горитмов, зависит от степени превышения диапазона вариации изме-
ряемого параметра относительно величины ошибок измерений (подобно
отношению «сигнал/шум»). Так, согласно приведенным в [21, 24] ре-
зультатам моделирования сходных задач для определения с погрешно-
стью до 10... 15% текущих координат объекта по данным пеленгования
диапазон изменения углового положения объекта за время наблюдения
должен превышать СКО измерения пеленга не менее чем в несколько
десятков раз, чему в типичных случаях пеленгования радиоизлучающих
источников может соответствовать угловое смещение объекта (поворот
линии визирования) порядка первых десятков градусов. Можно пола-
гать, что требуемое для решения задачи местоопределения объекта от-
ношение диапазона вариации доплеровского смещения частоты, обу-
словленного изменением радиальной скорости в системе «наблюдатель-
объект» в процессе наблюдения, к погрешности измерения этой частоты
будет иметь величину того же порядка.
Таким образом, условием решения задачи определения координат
объекта неманеврирующим наблюдателем с применением вышеназванных
методов является наличие достаточно значимых изменений пеленга объек-
та или/и частоты принимаемого сигнала. Однако возможны ситуации, ко-
гда бортовой пеленг или курсовой угол «наблюдатель-объект» (дно) за вре-
мя наблюдения практически не изменяется и линия визирования сохраняет
свое положение в пространстве, перемещаясь параллельно самой себе, в ре-
зультате чего сумма проекций скоростей объекта V и наблюдателя v на ли-
нию визирования, т. е. радиальная скорость, остается постоянной; скорости
и курсовые углы при этом удовлетворяют соотношению
vsin9HO=KsingOH (4.57)
где <70Н - курсовой угол «объект-наблюдатель».
Такая ситуация обычно ассоциируется с наведением управляемого
снаряда на цель по методу параллельного сближения [27] или с движени-
ем наблюдателя на сближение с объектом поиска вплотную [28]. Диапа-
зон соответствующих этой ситуации курсовых углов объекта qm может
быть достаточно широким, ограничиваемым лишь реально возможными
208
соотношениями скоростей объекта и наблюдателя. В [28] приведены таб-
лицы сочетаний значений курсовых углов и соотношений скоростей, при
которых сближение наблюдателя с объектом вплотную возможно.
Выполнению условия (4.57) соответствует не только рассматривае-
мая в [27, 28] ситуация сближения, т.е. движения объекта и наблюдателя
по сходящимся курсам, но и множество вариантов их движения по расхо-
дящимся и параллельным курсам, а также случаи нахождения объекта
прямо по курсу или позади наблюдателя (при qno=0° или 180°). На рис.
4.21 представлены варианты расположения и направлений движения объ-
екта относительно наблюдателя, из которых видно, как одним и тем же
значениям курсовых углов объекта (<?н0) практически во всем возможном
диапазоне их значений может соответствовать множество разных траек-
торий объекта - сходящихся, параллельных, расходящихся, как удовле-
творяющих условиям взаимной безопасности движения, так и представ-
ляющих непосредственную, в том числе скорую, угрозу столкновения.
В этих условиях, когда отсутствие изменений измеряемых значений
пеленга и частоты сигнала не дает возможности произвести оценку об-
становки и дальности до объекта, может оказаться целесообразным при-
бегнуть к энергетическим методам, основанным на использовании из-
вестной зависимости уровня мощности принимаемого сигнала (р) от
дальности до излучателя D и условий распространения:
PC4 С
р= пер /(£>)ф (4,58)
16 л- D
где Рпер, бизл - мощность передатчика и коэффициент усиления антенны
излучающего устройства соответственно; Gnp - коэффициент усиления
Рис. 4.21. Варианты направлений движения объекта относительно наблюдателя:
а - параллельное сближение; б - параллельное расхождение;
в - движение на параллельных курсах
209
антенны приемного устройства, 2 - длина волны; 1(D) - потери на трассе
распространения; Ф(Л, Н, D) - интерференционный множитель, завися-
щий от дальности и высот расположения приемной и передающей антенн
(huH) над отражающей радиоволны подстилающей поверхностью.
Варианты таких методов приводятся, в частности, в [29-33]. Оста-
новимся сначала на тех из них, где влиянием потерь на трассе и отраже-
ниями от подстилающей поверхности можно пренебречь, т. е. 1(D) ~1 и
®(h,H,D)~l.
При наличии априорных данных об энергетическом потенциале
данного излучателя (мощности передатчика Рпер и коэффициенте усиле-
ния антенны бизл) оценка дальности может производиться непрерывно в
процессе приема сигнала путем вычисления на основе известной зави-
симости уровня мощности от дальности (например [8]):
D = —I ^>тР^мзл^'пР^ |2 (4 59)
4тг р j
где р - мощность сигнала на выходе приемной антенны; - суммарный
коэффициент аппаратурных потерь (за счет несовпадения поляризаций
приемной и передающей антенн, несогласованности параметров прием-
ного тракта со спектром сигнала и т.п.), остающийся постоянным в каж-
дой конкретной ситуации.
Оценка скорости сближения ИСб производится по изменению даль-
ности за некоторый интервал времени между последовательными момен-
тами (г, и tj) определения соответствующих значений дальности Z), и Dj:
D-D.
(4-60)
1Ji
где = tj -1, - интервал времени между моментами измерений.
При дальнейшем следовании объекта и наблюдателя теми же кур-
сами и скоростями сближение вплотную возможно через интервал вре-
мени Tc5j:
(4-61)
где pi,pj - уровни мощности принятого сигнала в i- и j-й моменты вре-
[Pj Di
мени соответственно; г„- =, /— = —— корень из отношения этих мощ-
Jl и Dj
ностей, численно равный в данных условиях обратному отношению од-
ноименных дальностей.
210
Как видно, для определения времени сближения не требуется знать
величину энергетического потенциала излучателя, достаточно иметь
основание полагать его неизменным в течение сеанса наблюдения. Со-
вместная обработка совокупности последовательных измерений, разли-
чающихся на достаточно значимую по сравнению со случайной по-
грешностью величину, позволит соответствующим образом повысить
результирующую точность определения текущей дальности, скорости и
времени сближения.
Знание скорости сближения позволяет найти скорость объекта V и
курсовой угол «объект-наблюдатель» q0H путем совместного решения
соотношения (4.57) и выражения скорости сближения через сумму про-
екций скоростей объекта и наблюдателя на линию визирования:
Кс6 = vcos qH0 + Ccosgol„ (4.62)
в результате чего находится курсовой угол «объект-наблюдатель»:
7о„ - arcctg (Kc6/vsmg„0 - ctg дно) (4.63)
и далее величина скорости объекта V после подстановки полученного
значения qoa в (4.57) или (4.62).
Знание времени сближения T^j позволяет определить точку на тра-
ектории наблюдателя, в которой произойдет (или, при расходящихся
курсах, - могло бы иметь место) сближение вплотную, и отрезок пути
наблюдателя до этой точки:
*^'сб —^Тсбу •
Таким образом, наличие априорных данных об энергетическом по-
тенциале излучателя дает возможность определить дальность и пара-
метры движения объекта в ситуации параллельного сближения или рас-
хождения и прогнозировать последующее взаимное расположение объ-
екта и наблюдателя.
Если достаточно точных данных о потенциале излучателя нет, но
известна его частота (например, соответствующая определенной спек-
тральной линии, характерной для используемого в данном излучателе
квантового генератора), скорость сближения можно определить по вели-
чине обусловленного эффектом Доплера (Ch. Doppler) смещения частоты
сигнала при движении излучателя или/и приемника, т. е. по разности из-
меренной частоты сигнала f и априорно известного ее значения f0:
V^c(f0-fi/f (4.64)
где с - скорость распространения сигнала.
По найденной таким образом скорости сближения и определяемо-
го из отношения последовательно измеряемых уровней сигналов по
формуле (4.61) времени сближения вычисляется текущая дальность
n (4.65)
J Г- — 1
JI
211
Скорость объекта и курсовой угол qOif находятся из соотношений
(4.57) и (4.62), как и в предыдущем варианте исходных данных.
Если энергетический потенциал и частота излучателя неизвестны,
но имеются априорные сведения о вероятной величине скорости наблю-
даемого объекта данного типа, опознаваемого, например, по результатам
анализа параметров излучаемого сигнала, текущая дальность до объекта
может быть найдена по определяемому из (4.57) значению курсового угла
«объект-наблюдатель»:
?01I=arcsinHsin?n0
(4.66)
и определяемому из выражения (4.61) времени сближения вплотную
путем решения треугольника (рис. 4.22) по формуле
Dj = Т^2 +v2 + 2Evcos(g„o + 9oH) (4.67)
или из соотношений
Dj ~ VTc5j
sin(?,l0 + tf01I) _ T sin(<7H0 + qml)
: VJc6/
sm^o smg0II
(4.68)
Заметим, что данные измерений и обработки энергетических соот-
ношений позволяют производить оценку и прогнозирование взаимного
положения излучающего объекта и наблюдателя и без использования
данных пеленгования. Так, факт параллельного сближения с объектом,
являющийся признаком возможности столкновения, может быть уста-
новлен по соотношениям трех последовательно измеренных уровней
мощности принимаемого сигнала рк pj, рк, например, по равенству рас-
считанных с использованием второго и третьего измерений (pj и рк) ве-
личин времени сближения
вплотную, отсчитываемых
от момента первого изме-
рения (Геб,), т.е. по выпол-
нению условия
^=-^-=^..(4.69)
1-^
Рис. 4.22. Геометрия ситуации сближения
вплотную
Величина остающегося
до момента сближения ин-
тервала времени (которая
может непрерывно уточ-
няться по данным после-
дующих измерений) дает возможность оценить степень необходимости
выполнения тех или иных действий, соответствующих ситуации. Наличие
априорных данных о величине энергетического потенциала или частоте из-
212
лучателя позволит определять текущую дальность до него D, а если при
этом известна вероятная величина скорости наблюдаемого объекта V, то и
найти курсовые углы qH0 и qon путем решения треугольника «обьект-
наблюдатель-точка встречи» (рис. 4.22) по трем сторонам - VT^, vTc6 и D.
Если (4.69) не выполняется, что соответствует ситуации движения
(сближения или удаления) объекта и наблюдателя в пространстве по
скрещивающимся или пересекающимся траекториям без сближения
вплотную, данные трех измерений уровня сигнала позволяют опреде-
лить интервал времени между моментом последнего, «£»-го измерения
и моментом максимального сближения:
Т^-Т^-Т^ + Т^
^kirki ~ ?kirkj + ^/)
(4.70)
а также оценить, насколько будет отличаться минимальное расстояние
«наблюдатель-объект» от такового в момент последнего измерения, т.е.
прогнозировать степень сближения с объектом:
£>min _ гк1^сбк(^сбк + ?kj) rkJ^c6k(^c5k + ^ki) ! (^б* + +
&к у Т/Рк! TjiTki ^ki^lg
(4.71)
При выполнении измерений через равные интервалы времени
(7’у=7},=7) формула (4.70) очевидным образом упрощается, а выражение
(4.71) можно привести к виду
в®.-
Dk \ 8(^-2^+1)‘
(4.72)
В случае, когда энергетический потенциал излучателя известен и
текущее расстояние до него определяется непосредственно по измеряе-
мой мощности принимаемых сигналов, при расчете времени сближения
и минимального расстояния до объекта по вышеприведенным формулам
отношения уровней сигналов в них могут быть заменены на соответст-
вующие отношения квадратов расстояний.
Приведенные здесь выражения для прогнозирования соотношений
уровней мощности и дальностей при движении без сближения вплот-
ную по данным измерений только уровней сигналов являются модифи-
кациями подобных формул в [32, 34], полученных на основе возвратных
уравнений третьего порядка для квадратов последовательных чисел
[35], в нашем случае соответствующих дальностям. Пути определения и
прогнозирования расстояния при равномерном движении излучателя и
наблюдателя в пространстве без сближения вплотную с использованием
только данных пеленгования или измерений доплеровского смещения
частоты рассматривались в [23,26].
213
В вышеизложенных вариантах использования энергетических со-
отношений для оценки взаимного положения излучающего объекта и
наблюдателя предполагалось, что условия распространения сигнала
близки к таковым для свободного пространства, т.е. влиянием потерь на
трассе и отражений от подстилающей поверхности можно пренебречь.
Если ослабление в среде распространения достаточно велико (напри-
мер, при работе в миллиметровом диапазоне) и соотношения уровней
сигналов, измеряемых в последовательные моменты времени при сбли-
жении или удалении наблюдателя и объекта, значительно отличаются от
таковых в свободном пространстве, расчетные соотношения для опре-
деления дальности должны строиться с учетом коэффициента (множи-
теля) ослабления а, величина которого для данной длины волны и по-
годных условий обычно известна. Учитывая, что зависимость ослабле-
ния сигнала от дальности 1(D) при распространении в одну сторону
имеет вид (например, [36] ) /(D)=exp(-0.23aD), где а -погонное ослаб-
ление, дБ/км, величины отношений измеряемых в последовательные
моменты времени (Гу>*) уровней сигналов (pjlpt, pdpt) будут связаны с
отношениями соответствующих дальностей (Д^,*) следующим образом:
IpJ Df exp(-0,115aDj)
" у Pj Dj ехр(-0,115«£>,)
_ [pH _ Д ехр(-0,115aZ4)
Ь у р, Dk exp(-0,115«Z>,)
-----i--exp(0,l ISaVM,
D^Tji---сб J,h
—ехр(0,115«Кб4).
~ Vсб1 ki
(4-73)
На основании равенств (4.73) можно получить уравнение
rki Tki ехр(0,1 ISaP^Tji) - ry, 7}; exp(0,l ISaV^T^ = Гу rki Tkj, (4.74)
из которого определяется скорость сближения Кс6 .
Величины дальностей в первый момент (//, £>,) и в момент послед-
него измерения (т.е. текущая дальность Dk) находятся как
г V Т
D, -------------------- (4.75)
гъ-ехр(0,115аКсб4)
к ^-ехр(0,115а7с64.)
(4.76)
Если измерения производятся через кратные временные интервалы
(Tki =nTji, где п - целое число) уравнение (4.74) приводится к алгебраиче-
скому заменой х=ехр(О,115а7),-), х"=ехр(0,115а7и), в частности, при вы-
полнении измерений через одинаковые промежутки времени (Д=7},- =Т) -
к квадратному уравнению вида
х2-2—x + rki=0. (4.77)
Г{!
214
(4-78)
(4-79)
Величина скорости сближения, км/с, при этом определяется как
у. _8,691пх
сб ~ аТ
В (4.78) единица измерения а- дБ/км; Т- с. При наличии данных
четырех (р,, pj, рь рт) последовательных измерений уровня сигнала, вы-
полняемых через равные промежутки времени Т, значение вспомога-
тельной неизвестной величины х находится из простого выражения
и может уточняться при каждом последующем измерении.
Приведем условный численный пример, иллюстрирующий воз-
можные соотношения измеряемых и вычисляемых величин.
Пример. Бортовой излучатель работает в коротковолновом участ-
ке миллиметрового диапазона волн, где погонное затухание в нижних
слоях тропосферы а составляет около 0,4 дБ/км.
При значениях радикалов отношений четырех последовательно
измеренных через одинаковые интервалы Т = 20 с уровней мощности
сигналов r21=l,5; r3i=2,41; г32—1,6; r42=2,89; г4,=4,34 вычисленные по
формулам (4.75) и (4.78) величины дальности в момент первого измере-
ния (В,) и скорости объекта V будут:
при определении величины х по формуле (4.77) с использованием
данных первой тройки измерений (г2ь r31) - 7=0,191 км/с, £>]=18,7 км;
то же при использовании подобных отношений г32, г42, принадле-
жащих следующей (сдвинутой на одно измерение) тройке, /=0,194 км/с,
Z>i=19,2 км;
при определении величины х по формуле (4.79) - 7=0,2 км/с,
.01= 20,0 км, что соответствует истинным их значениям.
Выбор действительного для данных условий значения корня уравне-
ния (4.77), решаемого по результатам первой тройки измерений, может
производиться по критерию соответствия получаемых с его использовани-
ем величин скорости и дальности объекта реально возможным в наблю-
даемой ситуации. При большем числе измерений истинное значение про-
межуточной неизвестной величины х выявляется как совпадающее при вы-
числениях ее по данным последующих измерений уровня сигналов.
Таким образом, использование априорных данных только о величи-
не погонного затухания в диапазоне длин волн излучателя позволяет про-
извести оценку дальности и скорости сближения по отношениям уровней
мощности нескольких последовательно принимаемых сигналов. Попутно
заметим, что при работе по многочастотному или широкополосному, в
том числе тепловому источнику излучения, в разных участках диапазона
частот которого погонное ослабление имеет различную (известную) ве-
личину, принципиально возможно производить определение дальности
215
по каждому измерению путем сравнения уровней мощности принимаемо-
го излучения в различных участках диапазона или на отдельных спек-
тральных линиях, величины затухания для которых отличаются в доста-
точно значительной степени. Основанные на этом принципе пассивные
измерители дальности в оптическом диапазоне, работающие по лампе-
вспышке и по тепловому источнику, описываются в патентах США (№№
3103586, 3117228,3576371), подробно излагаемых в [37].
Использование энергетических соотношений для оценки дальности
до движущегося излучателя при наличии интерференционной модуляции
принимаемого сигнала рассматривалось в [8, 31, 33]. В этих условиях из-
менение уровня мощности принимаемого сигнала при изменении рас-
стояния (сближении или удалении) между объектом и наблюдателем
имеет немонотонный характер с поочередно следующими замираниями и
увеличениями уровня относительно соответствующего свободному про-
странству, что накладывает некоторые определенные ограничения на
возможности использования вышеизложенных вариантов энергетическо-
го метода определения дальности, времени и скорости сближения. Квази-
периодическое изменение уровня принимаемого сигнала, образуемого в
результате векторного сложения прямых и отраженных от подстилающей
поверхности радиочастотных колебаний, излучаемых объектом, обуслов-
ливается циклическим изменением разности фаз ДФ между этими коле-
баниями при изменении разности хода Д£> и, соответственно, времени за-
паздывания отраженного сигнала относительно прямого в процессе дви-
жения наблюдателя и объекта:
„ ДО
ДФ = 2л------\-ш,
Л
(4.80)
где <р - фазовый угол коэффициента отражения, для морской поверхно-
сти обычно принимаемый равным п.
Очевидно, оценка времени сближения путем сравнения уровней
мощности последовательно принимаемых сигналов в этой ситуации бу-
дет возможна, если используются данные измерений уровня в моменты,
когда фазовый сдвиг ДФ принимает одинаковое, в частности, нулевое
значение, соответствующее синфазному сложению прямого и отражен-
ного сигналов, т.е. в моменты прохождения последовательных интерфе-
ренционных максимумов уровня сигнала, как это предлагается в [8].
Факторами, осложняющими выполнение таких измерений, являются
необходимость длительного отслеживания изменений уровня прини-
маемого сигнала с фиксацией величин последовательно наблюдаемых
максимумов и ограниченная точность определения моментов их дости-
жения и интервалов между этими моментами ввиду медленного изме-
нения уровня в районах максимумов.
Другим путем определения времени сближения может быть исполь-
зование явления монотонного изменения временных интервалов между
216
последовательными моментами прохождения уровня сигнала через экс-
тремальные значения (минимумы или максимумы), обусловленного зави-
симостью скорости изменения разности хода Д£> от текущего расстояния
между объектом и наблюдателем. Величина разности хода, зависящая от
дальности D и высот расположения приемной и передающей антенн (h и
И), в общем случае - с учетом сферичности Земли, вычисляется по фор-
мулам, приведенным, например, в [38,39]. Так, согласно [38]:
(Д-4)21
2аН
где а=8500 км - эффективный радиус Земли; 4 - расстояние от наблю-
дателя до точки зеркального отражения на подстилающей поверхности,
которое зависит от h, Н, D и находится из уравнения
243-3£>42+[£)2-2а(/г+Я)]4+2а/гГ)=0,
решение которого дано там же.
В [39] приведен другой вариант этого уравнения, а также более
простая, приближенная формула для определения разности хода, кото-
рая может быть записана в несколько преобразованном виде [33]:
.,-]2
1-f— 1
(4.81)
D I 2ahJI_
(4.82)
(4.83)
D
(4.84)
где Др1.=^(7л+4я) - дальность радиогоризонта, часто представ-
ляемая как
Дрг =4,123 (ТА +4Й).
В последнем выражении единица измерения Dpr, Huh- км.
Как видно по формулам (4.81) и (4.83), в диапазоне дальностей, не
превышающих (0,25-0,3)£>рг, величину разности хода можно с некото-
рой погрешностью (до ~10—17%) определять по упрощенной формуле
t\D=2hH!D, при этом разность фаз прямого и отраженного радиочастот-
ных сигналов будет следующей:
и hH
ДФ = 4л-----\-<р .
AD
Варианты расчетных выражений для определения дальности с ис-
пользованием соотношений величин последовательных интервалов между
экстремумами, основанные на упрощенном представлении зависимостей
разности хода и фазового сдвига от дальности, пренебрегающем кривизной
земной поверхности, даны в [8,31,33]. Приведем предложенную в [33] фор-
мулу для оценки подлетного времени (т.е. времени сближения вплотную)
по числу и длительностям нескольких последовательно наблюдаемых пе-
риодов интерференционной модуляции в течение двух смежных времен-
ных интервалов 7}, и Ту, определяемых по следующему соотношению:
217
Тсбк =---------’
c6k NTjt-МГн
(4.85)
где M - число периодов интерференционной модуляции в первом вре-
менном интервале (7},-); N - суммарное число периодов во всем интер-
вале времени измерений (Ту.
На рис. 4.23 приведены графики пространственного расположения
экстремумов (максимумов и минимумов), рассчитанные с учетом (а) и
без учета (б) кривизны Земли для частного случая нахождения излу-
чающего объекта и наблюдателя на одинаковой высоте 25 м над зер-
кально отражающей спокойной морской поверхностью; длина волны
излучателя X равна 3 см. Как видно, интервалы между экстремумами для
упрощенной модели, соответствующей плоской подстилающей поверх-
ности (б), незначительно отличаются от таковых для точной картины (а)
на дальностях до 10-12 км, погрешность определения времени сближе-
ния по формуле (4.85) при этом будет составлять 10-15%. Наличие све-
дений о вероятной величине скорости данного объекта позволит опре-
делить дальность и курс объекта с использованием собственной скоро-
сти наблюдателя и курсового угла дио, как это производилось в выше-
приведенных подобных случаях. На больших дальностях определение
1-й максимум —
3-й минимум,
1-й минимум
2-й максимум
2-й минимум
3-й максимум
4-й максимум
Р(О)
а) б)
Рис. 4.23. Пространственное расположение интерференционных экстремумов,
рассчитанные по точной (а) и приближенной (б) формулам, и зависимости
входной мощности от дальности до ИРИ
218
времени сближения может производиться как рассматривалось выше -
по отношениям нескольких последовательно измеряемых уровней мощ-
ности принимаемых сигналов путем выполнения измерений в точках
максимумов [8]; ввиду невысокой точности фиксации таких точек мо-
жет оказаться целесообразным одновременно оценивать время сближе-
ния по измерениям интервалов между минимумами, где крутизна зави-
симости уровня принимаемого сигнала от дальности (или времени) зна-
чительно выше.
Изложенные варианты показывают принципиальную возможность
оценки текущего и прогнозируемого взаимного положения движущихся
с постоянной скоростью излучателя и наблюдателя в ситуациях парал-
лельного сближения или удаления путем использования данных после-
довательных измерений уровня мощности принимаемых сигналов.
Литература к главе 4
1. Уфаев В.А., Афанасьев В.И., Разиньков С.Н. Оценка координат ис-
точника радиоизлучения на основе измерения амплитуды электро-
магнитного поля. - Радиотехника, 2003, № 10.
2. Справочник по радиолокации / Под ред. М. Сколника'. Пер. с англ.
Т. 1. - М.: Сов. радио, 1976.
3. Черный Ф.Б. Распространение радиоволн. - М.: Сов. радио, 1962.
4. Аренберг А.Г. Распространение дециметровых и сантиметровых
волн. - М.: Сов. радио, 1957.
5. Дулевич В.Е., Мельник Ю.А. и др. Теоретические основы радиоло-
кации / Под ред. В. Е. Дулевича, изд. 2-е. - М.: Сов. радио, 1978.
6. Голев КВ. Расчет дальности действия радиолокационных станций.
- М.: Сов. радио, 1962.
7. Браудэ С.Я., Комаров Н.Н., Островский И.Е. О статистическом
характере рассеяния сантиметровых радиоволн взволнованной по-
верхностью моря. - Радиотехника и электроника, 1958, № 2.
8. Мельников Ю.П. Методы оценки эффективности воздушной ра-
диотехнической разведки. - М.О., 1996.
9. Jane's Fighting Ships, Edited by Captain Richard, 1988-89.
10. Леонтьев H.A., Берлин Г.И. Некоторые проблемы развития кора-
бельных зенитных ракетных комплексов и систем. - Морская ра-
диоэлектроника, 2003, № 3 (6).
11. Цурков М.Л. Обоснование расчета предельной дальности прямой
видимости с учетом экспоненциальной рефракции. - Радиотехни-
ка, 2003, № 11.
12. Техника сверхвысоких частот / Пер. с англ, под ред. Я.Н. Фельда.
Кн. 1. - М.: Сов. радио, 1952.
219
13. Woika J.L. An experimental airborne RFI location system for use with
FAA flight inspection aircraft. - Techn. papers 11th Annual E. Coast
Conf. Aerospace and Navigat. Electron., Baltimore, Md, 1964, N.Y.,
IEEE, 1964.
14. Шлезингер Р.Дж. Радиоэлектронная война / Пер. с англ, под ред.
А. М. Пархоменко. -М.: Воениздат, 1963.
15. Вакин С.А., Шустов Л.Н. Основы радиопротиводействия и радио-
технической разведки. -М.: Сов. радио, 1968.
16. Дрогалин В.В., Дудник П.И. и др. Определение координат и пара-
метров движения источников радиоизлучений по угломерным
данным в однопозиционных бортовых радиолокационных систе-
мах. - Зарубежная радиоэлектроника. Успехи современной радио-
электроники, 2002, № 3.
17. Ямпольский В.Г., Фролов О.П. Антенны и ЭМС. - М.: Радио и
связь, 1983.
18. Виноградов Е.М., Винокуров В.И., Харченко И.П. Электромагнитная
совместимость радиоэлектронных средств. - Л.: Судостроение, 1986.
19. Мельников Ю.П., Попов С.В. О повышении точности пеленгования
прерывисто поступающих импульсных радиосигналов направлен-
ной сканирующей антенной путем учета амплитуд принимаемых
сигналов. - Проблемы интеллектуального и военного транспорта,
№ 6; Юбилейный сборник ОАО «НПП «Радар ММС», март 2005.
20. Основы маневрирования кораблей / Под ред. М. И. Скворцова. -
М.: Воениздат, 1966.
21. Макухина Т.П., Миленький А.В., Натальченко О.С., Попов С.В.
Оценка текущих координат движущегося объекта по данным пелен-
гования. - Вопросы радиоэлектроники, сер. АСУПР, 1992, вып. 2.
22. Мельников Ю.П., Попов С.В. Методы оценки погрешностей опре-
деления параметров движения объекта при локации в условиях ра-
диоэлектронного подавления. - Радиотехника, 1998, № 3.
23. Мельников Ю.П., Попов С.В. Определение и прогнозирование коор-
динат равномерно движущегося в пространстве объекта по данным
единичных локационных измерений. - Радиотехника, 2002, № 3.
24. Мельников Ю.П., Попов С.В. Определение дальности при пеленго-
вании объекта с частично известными параметрами движения. -
Радиотехника, 2003, № 4.
25. Kang Sun Zhong, Ming Zhang. Passive location and tracking using DOA
and TOA measurements of single nonmanoeuvring observer. - Proc.
IEEE Nat. Aerosp. and Electron. Conf. (NAECON). Dayton. 1988.
26. Мельников Ю.П., Попов С.В. Определение и прогнозирование рас-
стояния между движущимися с постоянной скоростью излучате-
лем и наблюдателем по доплеровской модуляции периода прини-
маемого сигнала. - Проблемы транспорта, 2003, № 9.
220
27. ЛоккА.С. Управление снарядами: Пер. с англ. Г. В. Коренева. - М.:
ГИТТЛ. 1957.
28. Абчук В.А., Суздаль В.Г. Поиск объектов. - М.: Сов. радио, 1977.
29. Патент ФРГ № 1623427. Устройство определения дальности и ази-
мута передатчика путем образования отношения интенсивностей
принимаемых сигналов, 1975.
30. Патент ФРГ № 2849282. Способ и устройство определения рас-
стояния между подвижным радиоприемным и неподвижным ра-
диопередающим пунктами, 1980.
31. Бородин А.М., Усков Н.В. Проектирование систем радиопротиводей-
ствия и радиотехнической разведки методами моделирования. -
Бендеры: ООО «РВТ», 2002.
32. Мельников Ю.П., Попов С.В. О беспеленговых методах позицио-
нирования летательных аппаратов относительно источников излу-
чения. - Зарубежная радиоэлектроника. Успехи современной ра-
диоэлектроники, 2002, № 12.
33. Мельников Ю.П., Попов С.В. Некоторые пути определения коор-
динат маловысотных объектов при пассивной локации с использо-
ванием эффекта когерентного отражения радиосигналов от глад-
кой водной поверхности. - Успехи современной радиоэлектрони-
ки, 2004, № 3.
34. Мельников Ю.П., Попов С.В. К местоопределению летательного
аппарата относительно объектов, оснащенных ответчиками, по
единичным измерениям дальности. - Новости навигации. НТЦ
«Интернавигация» и РОИН, 2002, № 1.
35. Маркушевич А. И. Возвратные последовательности. - М.: Наука,
1975.
36. Радиотехнические системы / Под ред. Ю. М. Казаринова. - М.:
Высшая школа, 1990.
37. Молебный В. В. Оптико-локационные системы. - М.: Машино-
строение, 1981.
38. Распространение ультракоротких радиоволн / Пер. с англ, под ред.
Б. А. Шиллерова. - М.: Сов. радио, 1954.
39. Калинин А. И., Черенкова Е. Л. Распространение радиоволн и рабо-
та радиолиний. - М.: Связь, 1971.
40. ВентцельЕ. С. Теория вероятностей. -М.: ГИФМЛ, 1962.
41. Градштейн И. С., Рыжик И. М. Таблицы интегралов, сумм, рядов
и произведений. - М.: Физматгиз, 1962.
221
ГЛАВА 5
ОПРЕДЕЛЕНИЕ КООРДИНАТ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ
С ПОМОЩЬЮ МНОГОПОЗИЦИОННЫХ МЕТОДОВ
Многопозиционные (разнесенные) системы воздушной радиотех-
нической разведки [1, 2, 3, 4] имеют возможность моноимпульсного оп-
ределения координат разведуемых РЛС при использовании высокоточ-
ного разностно-дальномерного способа (РДС) измерения линий поло-
жения. В главе рассматривается влияние на итоговую погрешность оп-
ределения координат отельных составляющих: погрешности местооп-
ределения самолетов-разведчиков, погрешности измерения разности
хода из-за внутренних шумов приемников, нестабильности амплитуд
импульсов и длительностей их фронтов. Рассматриваются методы оцен-
ки эффективности разведки разнесенной системой заданного района.
Отдельные материалы посвящены разнесенным системам, где дополни-
тельными источниками сигналов являются отражающие объекты.
Рассматривается также метод определения координат надводного
корабля с помощью бортовой РЛС и станции РТР, размещенной на дру-
гом ЛА. Кроме пеленгов для увеличения точности определения коорди-
нат измеряются задержки сигналов, излученных корабельными РЛС или
станциями помех. Оцениваются погрешности определения координат
при разных сочетаниях точностей измерений и взаимных расположений
системы относительно НК.
Оцениваются также погрешности активно-пассивной двухпозици-
онной системы, работающей в условиях радиоэлектронного подавления.
5.1. Потенциальные точности разностно-дальномерной
системы воздушной радиотехнической разведки
Рис. 5.1. Разведка разнесенной
системой воздушной РТР
Рассмотрим потенциальные точ-
ности местоопределения РЛС ра-
диолокационного поля в случае
разведки зоны, имеющей форму
прямоугольника со сторонами L*I
(рис. 5.1). Разведывательные лета-
тельные аппараты летят вдоль
большей стороны прямоугольника
на расстоянии у от нее с интерва-
лами d друг от друга. Разведуемая
РЛС находится в точке F с коор-
динатами ХьУ].
При одинаковых и независи-
мых ошибках измерения разности
222
хода для обеих линий положения (т.е. сг^ = adc = <Td) из [19] следует вы-
ражение для среднеквадратической ошибки сгг определения координат:
г- J 1
ar-ad * -^sin[0)5(^c]
------------+—=-!----------. (5.1)
smz(0,5^) sinz(0,5<pc)
Если crdA * adC, то
а __________J________ I ! adC
2sin[0,5(^ +^с] Vsin2(0,5^) sin2(0,5$9c) ’
(5-2)
где Г=сгг / ad - отношение погрешностей, называемое геометрическим
фактором;
<рс= arctg
Xj-Xb
У)-Уь.
-arctg
X; -xb-d
У,~Уь
<рА=жЛ§
xt -xb + d
. У>~Уь .
- arctg
Xj-*b
У.-Уь,
2y = ^+<pc= arctg
х,- -xb + d
. У<~Уь .
-arctg
xi -xb-d
У<~Уь
На рис. 5.2 даны результаты вычислений по формуле (5.2) поля по-
грешностей в виде безразмерной величины Г для следующих исходных
данных: L* 1 = 400 х 200 км2; у = 50 км; d= 100 км. Рис. 5.2,а соответст-
вует центральному расположению группы разведывательных ЛА отно-
сительно зоны разведки (х£>=0 на рис. 5.1). Цифры у кривых соответст-
вуют значениям геометрического фактора Г.
а) б)
Рис. 5.2. Поле погрешностей Г =У(ху): а - при хь = 0;б- при хь = 200 км
Рисунок 5.2,6 соответствует крайнему левому положению центра
разведывательной системы относительно зоны разведки. На рисунке
видна высокая неравноточность измерений и существенная зависимость
их от расположения разведчиков относительно района разведки.
223
Полученное двумерное распределение погрешностей полезно при
планировании заданий на разведку, оценке результатов его выполнения
и т.д. Однако при сравнении различных вариантов реализации системы,
формировании требований к отдельным ее элементам и т.д. удобнее ис-
пользовать одномерное распределение или даже несколько чисел. Такой
характеристикой может быть функция вида
Р(/<Г,.) = ^—7 = 1,2,..., и, (5.3)
где Sj (in J < Г,) - суммарная площадь внутри заданного района, где геомет-
рический фактор не превышает Г, (рис. 5.3).
Зависимости, изображенные на этом рисунке с погрешностью не
более 5%, аппроксимируются кривой логарифмически-нормального рас-
пределения
lnJ-д
сгг>/2
(5.4)
Р(1пУ<1пГ)»0,5 + 0,5Ф
ц и <тг - параметры распределения.
Рис. 5.3. Интегральные распределения
погрешностей определения координат
Кривая 1 на рис. 5.3 со-
ответствует значениям пара-
метров // ® 2,2 и <тг» 0,6 (цен-
тральный ЛА находится на-
против центра поля); кривая
2 - значениям /л « 3,3 и ®
1,5 (центральный летатель-
ный аппарат находится на-
против края поля). Из кривых
при учете того, что <тг = Гсг</,
может быть найдена относи-
тельная площадь заданной
зоны разведки (а при равно-
мерном распределении РЛС в зоне и относительное число РЛС в зоне),
где потенциальные погрешности не превышают допустимые. Например,
непосредственно из рис. 5.3 (кривая 7) следует, что при погрешности из-
мерения разности хода, равной oj =30 м, примерно половина РЛС разве-
дуется с погрешностью, не превышающей 300 м.
Полученные соотношения выявляют зависимость достижимой
точности местоопределения от времени разведки. Действительно, по-
грешности мгновенного местоопределения любой РЛС заданной зоны
при произвольном расположении ЛА относительно центра зоны заклю-
чены между кривыми 1 и 2. Если же время работы РЛС на излучение
224
превышает время пролета летательными аппаратами всей зоны и она
последовательно просматривается областью наибольшей точности, рас-
положенной вдоль перпендикуляра в точке В к базе, распределение по-
грешностей определяется кривой 3. Даже средние значения в этих двух
случаях отличаются более чем на порядок. В связи с этим, ставя задачу
достижения каких-либо точностей местоопределения, необходимо уста-
навливать время, отпускаемое на разведку.
5.2. Учет навигационных и инструментальных
погрешностей измерения времени
Учет погрешностей определения координат самолетов-разведчиков.
Погрешности местоопределения воздушной РТР в общем случае склады-
ваются из погрешностей измерения линий положения и погрешностей
определения координат ЛА относительно земли. Применительно к рас-
сматриваемому случаю необходимо учитывать погрешности определения
координат РЛС относительно центра системы ЛА (точка В на рис. 5.4), а
также самого центра и двух остальных ЛА относительно земли. Рассмот-
рим дополнительные погрешности, вносимые в измерение положения
РЛС относительно центра системы, и ошибки измерения положения
крайнего ЛА (точка С на рис. 5.1) относительно центрального.
На рис. 5.4 ЛА расположены в
точках В и С, разведуемая РЛС - в
точке F, так же как и на рис. 5.1. Точка
С’показывает положение ЛА, опреде-
ляемое навигационной системой с ли-
нейной погрешностью г.
Учитывая, что г « ВС, г « BD и
г « FC (рис. 5.4), а также, что ВС ||
BD и FC || FC и, следовательно, BD »
ВС и FE ® FC’, получим выражение
для линейной разности хода, возни-
кающей из-за ошибки в определении
Рис. 5.4. Навигационные
погрешности
координат ЛА относительно точки В.
Эта погрешность равна разности отрезков DC и СЕ, т.е.
А = DC’-СЕ = г [sin 0-cos (0-Д)], (5.5)
где г и 0- полярные координаты точки С’, являющиеся случайными ве-
личинами; /3- угол на разведуемую РЛС.
Если полагать, что положение точки С’ определяется угломерно-
пеленгационными методами, то плотность распределения погрешностей
координат точки С определяется соотношением, следующим из [19]:
225
, _ rsiny
w(r,0)=--------4---=exp-
IxCTuCFy^l-p
!-P2L au
sin2# ^sinOsin^-O)
sin2(/-#)
(5.6)
где &u , ay - среднеквадратические погрешности (СКП) определения
линий положения; у - угол между линиями положения; р - коэффици-
ент корреляции.
Дисперсия величины А находится по формуле
П[Д(г,#)] = | |[Д(г,#)]2 w(r,O)drd0 .
Поскольку для угломерно-пеленгационного метода у = л/2, поло-
жив их = пи и av = Uy при отношении осей эллипса погрешностей
crv /<jx = к > 1 и р = 0 (независимые погрешности измерений линии поло-
жения), из (5.6) получим выражение
w(r>0) = т~^-2Г ехр
2лахк
0,5г2 [ . 2 л cos2 6*
—z— sm # +—г—
а2 I к2
(5.7)
Z2(Psin2# + cos2#)
2р .
Обозначив t = r / сгх и приведя (5.5) к виду
Д = 2г соь(Д/2 + л74) sin(#- {3/2 - л/4), получим
П[Д(г,#)]
яЛ
— X
47
dO dt.
Интегрирование с использованием [9] позволяет получить выра-
жение для дополнительной среднеквадратической погрешности ст,/,,, на-
званной здесь «навигационной», отнесенной к среднеквадратической
погрешности определения координат ау по оси ОУ собственно навига-
ционной системы:
ст* (в л") lcos2(B/2 + sr/4)
—^- = 2cos — + — L-------------- + sin2 (0/2 + л74). (5.8)
uv \2 4Л к ’
Результаты расчета по последней формуле даются на рис. 5.5. На
рисунке принято сгн - crv.
Положительное значение угла Д для точки С’ (см. рис. 5.1,а) соответ-
ствует объектам правее точки С, для точки А ’ - левее точки А, отрицатель-
ные - наоборот. Наибольшие погрешности системы РТР из-за навигацион-
ных ошибок определения координат самолетов имеют место в зоне развед-
226
ки, расположенной между
перпендикуляром к маршру-
ту полета из крайней точки
базы (точки А и С).
Отметим, что использо-
вание на ЛА спутниковой ра-
дионавигационной системы,
особенно в дифференциаль-
ных режимах, когда погреш-
ности определения коорди-
нат составляют единицы мет-
ров ([130]), позволяют не
учитывать эти погрешности в
итоговых оценках.
Рис. 5.5. Относительные навигационные
погрешности в функции от угла на РЛС
Погрешности измерения разности хода из-за внутренних шумов
приемника. В соответствии с [11] временная погрешность (Ст]ш) из-за
2
внутренних шумов приемника, имеющих дисперсию сгш , при измерении
момента прохождения сигнала с амплитудой Рс, нарастающей с крутиз-
ной S, на некотором фиксированном уровне равна
при Л»1. (5.9)
Это выражение для линейно нарастающего фронта может быть
приведено к виду
~ ^фр.вых
(5.10)
где Гфр.вых. - длительность фронта импульса на выходе усилителя (входе
измерителя); Рш - пороговая чувствительность приемника; ко - коэффи-
циент передачи огибающей высокочастотного сигнала с учетом детек-
тора, в дальнейшем принято, что к0 = 1/V2 .
Величина Гфр.ВЬ1Х связана с полосой А/ пропускания усилителя при-
емника и длительностью фронта на его входе ГфР соотношением [12, 13]
2 f 1 Y
'Г I 4“ I — — I
фр.ВЫХ V фр ~ I I
(5.Н)
Поскольку при измерении разности хода импульсов необходимо
два независимых измерения на двух самолетах, отстоящих от разведуе-
мой РЛС на расстояния D\ и Di, учитывая (5.10) и принимая А/ и Гфр
обоих приемников одинаковыми, из двух последних равенств получаем
среднеквадратическую погрешность измерения временных интервалов
227
2 Г 1 У Р12+£»2
Do
(5.12)
где Do - дальность обнаружения при Рс = Рш без учета затухания в атмо-
сфере:
(513)
V 1 ш
Здесь А - длина волны; Р\ - мощность излучения разведуемой РЛС; G)f
G2 - коэффициенты направленного действия антенны разведуемой РЛС и
станции РТР соответственно; 7- коэффициент потерь (0,2...0,5).
Погрешности из-за нестабильности уровня сигнала. Мощность сиг-
нала на входе разведприемника с учетом (5.13) может быть представле-
на в виде
(r)G2V2>\( G\ А
° I D2 AG1oJ’
(5.14)
гдер—^Р^-, (5.15)
4л
Gio - коэффициент направленного действия антенны РЛС в главном на-
правлении.
Величины у/, D и (Gi / G)0) для процесса РТР можно рассматривать
как случайные и независимые. Их распределения согласно [14] и [15]
выражаются формулами
(5.16)
ПРИ D™<D<D™> (5.17)
кМпах Mnin)
Gt I -0,5Г f GA
<rg>/2^ G10J ст2 [_ (Gio J
при-^->0, (5.18)
G1O
где Стр - энергетический параметр разведываемого радиолокационного
поля (РЛП), зависящий от состава РЛС (для современного РЛПа
v - 0,4...0,6 км Вт1/2, для перспективного РЛП оу = 0,8... 1,2 км Вт1/2);
Dmin, Dmax - минимальная и максимальная дальность разведки соответст-
венно; agn pg-параметры логарифмически-нормального распределения.
Уровень мощности (Рс) на входе разведприемника, как результат
перемножения нескольких случайных величин, распределен по лога-
рифмически-нормальному закону [40]:
228
H^)=—77=7 ехР
сгрл/2л-Рс
0,5(lnPc -Ар)2
(5-19)
со следующими параметрами:
Ар= \~D) + Pg’
(5.20)
В свою очередь, математическое
ожидание /Жу/ID) и дисперсия [о(ИД)]2
распределения y^D), а также и (G\t G)0)
находятся из (5.16)-(5.18).
Для нахождения погрешности из-
мерения временного положения вход-
ных сигналов в функции от параметра
распределения входной мощности рас-
смотрим процесс определения времен-
ного положения линейного фронта им-
пульса (рис. 5.6) по моменту прохожде-
ния им фиксированного уровня Uo. Из
этого рисунка следует, что время от на-
чала импульса до момента регистрации
равно
Рис. 5.6. Определение временного
положения фронта импульса
7 ^фр.вых^Л) (1/(7]) при О; > Оо- (5.21)
Поскольку UJUq = ^PJP0 , по (5.19) и (5.20) может быть найдено
распределение нормированного временного отклонения t = А/ГфР.Вых в
виде усеченного логарифмически-нормального распределения, справед-
ливого при 0 < t < 1:
,. 1 [Inг-(-0,5// )]
МО = 7----г\~Г=--------ехР ] - г-----Д-,2
(cr /V2)VZrtF(r = l) [2(<т /х/г]
(5.22)
1пГ + 0,5//р
где F(z) = |w(0<* = 0,5 + 0,5Ф
о
Безразмерная СКП измерения временного положения сигнала на-
ходится при этом по формуле
Г: ГЧ Э2
(5.23)
<тл = .1 J?2w(0 dt - w(0 dt
У о [о
Приведем пример расчет погрешностей из-за нестабильностей
уровня сигнала: энергетический параметр радиолокационного поля
229
<эц,=1кмВт|/2, параметры распределения диаграммы направленности -
<Tg =1,612 (7дБ), —9,21 (-40 дБ ниже главного).
Рассчитанные по формуле (5.20) параметры распределения (5.19)
имеют следующие значения:
для разведки типового радиолокационного поля с высоты 20 км
при Д,1ах =500 км и Z>min =50 км параметр /Zp—23,6 дБ/Вт (среднее значе-
ние выходной мощности сигнала Рс = 5,5 10~н Вт) и параметр сгр =2,7
(11,7 дБ);
для разведки с высоты 6 км при =300 км и Z>min =30 км
ц>= -20 (Рс=2 Ю'9 Вт) и сгр=1,5 (6,7 дБ).
Распределение времени срабатывания (5.22) будет иметь парамет-
ры //,= -2; ст, =1,9 и F{t=V) = 0,85 при пороге измерения, равном 1/50 от
средней мощности. Тогда СКП измерения времени в соответствии с
(5.23) crdl = 0,232 и р = 0,19. Для порога измерения, равного средней
мощности, когда р = 0, СКП измерения времени crdl =0,278. Заметим, что
величина crdl не может быть больше чем 12~°’5 = 0,29, что соответствует
равномерному распределению в интервале 0... 1.
Считая погрешности измерения временного положения из-за внут-
ренних шумов (5.12) и из-за различий уровней входного сигнала (5.23)
независимыми, а также учитывая необходимость удвоения дисперсии, так
как каждая линия положения определяется измерением разности момен-
тов прихода двух импульсов, для искомой погрешности, вызванной
флюктуациями амплитуд, получим
I / 1 V IГ? + Гр
= К + Т7 2^‘ • (5'24)
1 / V ‘-'о
При высокой чувствительности приемников, когда Dd» Dy и
Do »D2, погрешность adt оказывается преобладающей. Для ее умень-
шения могут быть использованы специальные схемы измерения вре-
менного положения сигнала на постоянном относительном уровне или
схемы, сжимающие динамический диапазон входных сигналов [41].
Снижение погрешности измерения при сжатии динамического диа-
пазона. Обозначая коэффициент динамического диапазона через
£ = JTmax /Umin , ИЗ рИС. 5.6, ПОЛуЧИМ
~<2 =f Y1 1
^”фр \ £7min J \ £ J
откуда для равномерного распределения w(Z) имеем
а
Л~ 2>/з ’
(5.25)
230
При сжатии динамического диапазона с 60 дБ (£=1000) до 10 дБ
(£= -710 ) получим незначительное увеличение точности (стл уменьшает-
ся с 0,29 до 0,2). Если же при таком сжатии динамического диапазона
сохранить и исходный вид распределения w(t), то для рассмотренного
примера погрешность снижается в несколько раз. Более детальное рас-
смотрение погрешностей, вызываемых схемами измерения временных
интервалов, необходимо вести для каждой из этих схем.
Таким образом, величина <?л в (5.24) может принимать значения от
0,05 до 0,29 в зависимости от совершенства схемы измерителя.
Погрешности из-за нестабильности длительности фронта. Сум-
марная инструментальная погрешность. Измерение момента прихо-
да импульса на одинаковом относительном уровне его фронта является
хорошей мерой по борьбе с погрешностями из-за различий амплитуд
входных сигналов, имеющих одинаковые длительности фронтов. Одна-
ко достаточно быстрым флюктуациям подвержена и сама длительность
фронта. Причинами таких флюктуаций помимо нестабильностей в бло-
ках передатчиков могут быть отражения от местных предметов в районе
расположения антенны РЛС, флюктуации условий распространения ра-
диоволн и т.д.
В табл. 5.1 приведены результаты обработки 150 эксперименталь-
ных реализаций наблюдений шести различных типов РЛС, при этом
приемник и осциллограф имели полосу пропускания не менее 20 МГц.
Таблица 5.1. Результаты экспериментальных измерений длительностей
импульсов
Номер типа РЛС МКС г*фр.ВЫХ.9 МКС Офр ^ИЗМ Ги/ Тфр.Вых С^фр/^фр.вых
1 6 0,3 0,1 и 0,05 0,3
2 2,5 0,5 0,07 17 0,2 0,14
3 2,5 0,22 0,05 33 0,09 0,23
4 2 0,28 0,05 41 0,14 0,18
5 6 0,55 0,13 15 0,09 0,24
6 1,2 0,25 0,07 34 0,21 0,28
Приняты следующие обозначения: ги - средняя длительность им-
пульса; Гфр.вь1х - средняя длительность импульса на выходе приемника;
о-фр - СКО длительности фронта импульса от среднего; NmM - число из-
мерений данной длительности.
Как подтверждено результатами обработки измерений, длитель-
ность фронта импульса является случайной величиной, распределенной
по нормальному закону с дисперсией <Тфр2. Величины погрешностей, по-
лученные, например, в [26], имеют тот же порядок.
231
Из табл. 5.1 следует, что величина погрешности 8(рис. 5.7), вызванной
нестабильностью длительности фронта импульса, может быть сравнимой с
погрешностью из-за внутренних шумов приемника и различия уровней
входных сигналов, т.е. о^^р.^0,23 Гфрвьк. Для уменьшения этих погрешно-
стей необходимы измерители временного положения, осуществляющие,
помимо фиксации времени перехода нарастающим напряжением порога,
также измерение самой длительности фронта и амплитуды импульса.
Таким образом, ошибки из-за нестабильности длительностей
фронтов двух импульсов должны быть учтены в (5.24) добавлением в
подкоренное выражение слагаемого
°иест.фр ® • 0,23 Гфр вь|х ) =0,1 Гфр вь1х ,
и суммарная инструментальная погрешность измерения разности хода
сигналов (в единицах длины) определится выражением
I ( 1
— J 'Н ?+2<тЛ+0,1, (5.26)
сумм и фр j и q2 611 v 7
Рис. 5.7. Зависимости суммарной
инструментальной погрешности
измерения разности хода от дальности
где с - скорость распростране-
ния электромагнитной энергии;
последнее выражение не учиты-
вает погрешностей из-за неста-
бильности величины с, которые
могут иметь тот же порядок, что
и рассмотренные выше.
Для иллюстрации характе-
ра зависимости инструменталь-
ных погрешностей от дальности,
длительности фронта импульса и
ширины полосы пропускания
приемника на рис. 5.7 приведены
зависимости, рассчитанные по
(5.26) для следующих исходных данных: D\ = D2 = D, с = 300 м/мкс,
£>о = 1000 км. Другие данные помещены в табл. 5.2.
Таблица 5.2. Исходные данные для расчетов погрешностей
Номер кривой на рис. 5.7 Полоса пропускания Д/J МГц Длительность фронта Гфр, мкс скп сг^, мкс
1 10 0,2 0,23
2 20 0,2 0,23
3 10 0,1 0,23
4 20 0,1 0,23
5 20 0,1 0,1
232
Расчет погрешностей местоопределения отдельных РЛС произво-
дится по формулам (5.1) или (5.2) с учетом суммы дисперсий погрешно-
стей навигации (5.8) и инструментальных погрешностей (5.26).
Например, координаты РЛС Xi=yi = 100 км, система РТР находит-
ся в центре маршрута разведки зоны (см. рис. 5.1, координаты точки В:
хь = 0; уь = -50 км; d = 100 км). Расстояния до РЛС из трех точек систе-
мы РТР соответственно равны DA = 245 км; Dc= 150 км; DB= 175 км.
Навигационные погрешности самолетов определяются эллипсом с по-
луосями av =20 м = 2 о>, что дает в среднем стд.навл = <7ц.нав с = 1,15-20 =
=23 м. Чувствительность приемников и энергетический потенциал РЛС
соответствуют дальности £>о = 1000 км (5.13), длительность фронта им-
пульса и полоса пропускания соответственно равны 0,1 мкс и 20 МГц,
что дает с использованием (5.23) adl = 0,23. Таким образом, из (5.26)
имеем о-сумм =15 м и = о?с= 27,5 м. Пользуясь графиками поля по-
грешностей (см. рис. 5.1,5) или формулами (5.1) и (5.2), для заданного
расположения РЛС находим Г ® 8, следовательно, погрешность место-
определения РЛС <тмо « 220 м.
Для оценки возмож-
ностей определения коор-
динат любой РЛС, распо-
ложенной в зоне разведки,
при условии ее достовер-
ного обнаружения необхо-
димо воспользоваться ме-
тодикой, изложенной в
п. 5.4, дополнив ее учетом
различного рода погреш-
ностей в соответствии с
Рис. 5.8. Интегральные оценки точности
разнесенной системы РТР
формулами п. 5.5. На рис.
5.8 приведены интеграль-
ные оценки системы РТР
без пролета зоны разведки с размерами L*l = 400x200 км2; Do = 1000 км;
Гфр = 0,1 мкс; А/ = 20 МГц; adl = 0,23. Зависимости показывают вероят-
ность того, что СКП (сгА) не превышает допустимую величину (сгДо).
Кривые 7 и 2 соответствуют центральному расположению самоле-
тов относительно зоны разведки, при этом для кривой 1 - сгднав = 20 м, а
для кривой 2 - Стд.иав = 60 м. Кривые 3 и 4 соответствуют крайнему рас-
положению системы РТР относительно зоны разведки (3 - стд.нав = 20 м,
4 - <Тд.нав = 60 м). Зависимости позволяют определить относительное
число РЛС, координаты которых найдены со среднеквадратической по-
грешностью, не превышающей допустимую.
233
5.3. Методы оценки точности определения координат
надводного корабля авиационной активно-пассивной
системой в условиях РЭБ
Боевой НК с точки зрения авиационных бортовых систем, решаю-
щих задачу разведки, может рассматриваться в виде источника инфор-
мации о дальности до него в нескольких качествах. Во-первых, как от-
ражатель радиолокационных сигналов, во-вторых, как излучатель сиг-
налов корабельных радиолокационных и связных станций и в-третьих,
как излучатель помеховых сигналов. Обычно рассматриваются обнару-
жители отдельно для каждого из упомянутых источников информации.
В табл. 5.3 приводятся сравнительные характеристики эффектив-
ности бортовых информационных средств при решении задачи опреде-
ления дальности до надводной цели в интересах целеуказания ракетно-
му оружию. Типовые количественные оценки получены на основании
работ [17,18] для дальности до цели типа «эсминец» порядка 100 км и
типовой бортовой РЛС, устанавливаемой на ЛА.
Таблица 5.3. Сравнительные характеристики эффективности
информационных средств
Источник информации Условия функционирования Информационное средство
Без помех В помехах
1. Корпус как отражатель 0,85-0,9 0,2-0,3 БРЛС, с одного борта
2. Корабельная РЛС — 0,4-0,6 РТР, с двух бортов
3. Корабельная РЛС - 0,8-0,9 БРЛС+РТР, с одного борта, отраж.сигналы
4. Корабельная РЛС - 0,7-0,8 РТР, с двух бортов, отраж. сигналы
5. Станция активных помех - 0,7-0,8 БРЛС+РТР, с двух бортов, отраж. сигналы
Вторая строка таблицы соответствует случаю пеленгации кора-
бельной РЛС с двух бортов станциями РТР на базе порядка 50 км, тре-
тья - случаю расположения аппаратуры на одном борту и использова-
ния режима приема переотраженных сигналов, когда в качестве отража-
теля используется соседний корабль [6]. В четвертой строке помещен
случай, когда линии положения формируются двумя пеленгаторами
станции РТР, размещенными на двух бортах, а также измерителем раз-
ности хода сигнала импульсной корабельной РЛС. Пятая строка отно-
сится к случаю активно-пассивной системы, расположенной на двух
ЛА, где линии положения цели формируются двумя пеленгаторами,
один из которых является частью БРЛС, а также измерителем разности
хода помехового сигнала.
234
Из табл. 5.3 следует, что в
случае ведения боевых дейст-
вий, когда возможны разные со-
четания условий функциониро-
вания, наиболее универсальной
из перечисленных является ин-
формационная система, бази-
рующаяся на двух ЛА. Состав
аппаратуры на каждом ЛА мо-
жет быть выбран по результатам
анализа типовых условий функ-
ционирования и прогнозирова-
ния характеристик элементов
активно-пассивной системы.
На рис. 5.9 дается иллю-
страция вариантов построения
активно-пассивной авиацион-
ной системы для решения зада-
чи определения координат НК в
условиях радиоэлектронного
подавления. Номера вариантов
соответствуют номерам источ-
ников информации в табл. 5.3:
Рассмотрим четвертый и
пятый варианты построения
системы, в частности, возмож-
ности формирования линии по-
ложения по результатам измере-
ния разности хода сигнала, из-
Рис. 5.9. Варианты определения координат
корабля информационными средствами
летательных аппаратов
б)
Рис. 5.10. Несимметричный (а) и
симметричный (б) случай взаимного
расположения элементов системы (Р и О)
относительно объекта разведки (И)
лученного корабельным источником. Таким источником может быть им-
пульсный сигнал корабельной РЛС (точка И на рис. 5.10). Погрешности
измерения разности хода определяются в этом случае точностью измере-
ний временного положения импульса, принятого в двух точках пространст-
ва (точках Р и О) [19, 20]. Использование в качестве источника излучения
сигнала корабельной станции активных помех не столь очевидно, поэтому
более подробно остановимся на типовых режимах работы этой станции.
В публикациях, посвященным средствам РЭБ [18, 24] или вопро-
сам помехозащиты БРЛС [23], приводятся следующие типовые режимы
работы станций активных помех:
1) ответная маскирующая прицельная или заградительная шумовая
помеха;
2) ответная имитационная помеха с уводом по дальности;
3) ответная имитационная помеха с уводом по углу;
4) ответная имитационная помеха с уводом по скорости;
235
5) мерцающая помеха;
6) хаотическая импульсная помеха;
7) скользящая маскирующая шумовая помеха;
8) непрерывная шумовая помеха.
Применительно к рассматриваемой задаче представляют интерес
временные характеристики этих режимов.
В первых шести из названных режимов можно выделить моменты
времени, означающие либо начало генерирования помехи (хаотическая
импульсная помеха, ответные помехи), либо смену параметров (напри-
мер, скользящая маскирующая шумовая помеха в процессе изменения
частоты возникает в полосе приемника в моменты времени, соответст-
вующие совпадению частоты помехи и частоты настройки приемника) и
т. д. Здесь возникают по крайней мере две проблемы: идентификация
импульсных сигналов, принятых в разных точках пространства, и дос-
тижение необходимой точности их регистрации. Не останавливаясь на
количественных оценках возможностей решения упомянутых проблем,
отметим только, что идентификация (устранение неоднозначности) воз-
можна при использовании дополнительных измерений пеленгов из двух
точек пространства, а точность регистрации может быть повышена при
рациональном выборе характеристик измерителей.
Наиболее сложно задача измерения разности хода помеховых сиг-
налов решается применительно к непрерывной шумовой помехе, когда
необходимы корреляционные устройства, позволяющие сравнивать два
шумовых процесса, принятые на двух бортах. Длительности этих про-
цессов должны быть не менее интервала неоднозначности. Аппаратура
подобного плана реализовывалась в наземных пассивных корреляцион-
ных системах. Можно предполагать что возникнут серьезные трудности
при установке подобной аппаратуры на борту ЛА, однако, прогресс вы-
числительной техники позволяет надеяться на возможности преодоле-
ния этих трудностей.
В последующем изложении предполагается, что проблема иденти-
фикации решена, а погрешности измерения разности хода сигналов
учитываются в общих соотношениях для суммарных погрешностей ме-
стоопределения объекта.
Для получения аналитических соотношений, характеризующих
достижимые точности рассматриваемого метода определения коорди-
нат, обратимся к рис. 5.10. На нем приняты следующие обозначения.
Источник излучения расположен на разведуемом объекте - в точке И; в
точке Р расположен самолет-разведчик, на борту которого размещена
многофункциональная РЛС, способная измерять дальность до объекта И
(в случае отсутствия помех самоприкрытия объекта И); пеленг на объ-
ект И (в случае наличия помех самоприкрытия); способная принимать
сигналы корабельной РЛС, работающей в диапазоне волн бортовой
236
РЛС, а также способная измерять дальность до второго звена активно-
пассивной системы - летательного аппарата, расположенного в точке О.
Аппаратура этого ЛА (точка О) включает станцию РТР, принимающую
сигналы, исходящие от объекта И, ретранслятор для передачи этих сиг-
налов на ЛА, расположенный в точке Р, а также ответчик для увеличе-
ния точности измерения расстояния d между точками Р и О.
В общем случае в рассматриваемой системе измеряются следую-
щие величины:
- угол Р между направлениями на объекты И и О;
- расстояние d между точками Р и О\
- разность хода А сигнала, излученного в точке И и принятого в
точке Р по направлениям ИР и ИОР.
Система уравнений, связывающая расстояния между объектами и
измеряемые величины, имеет вид
D+d-R = b,
(5.27)
sin/? sina
D1=d1+R1-2Rd€mP.
Решение (5.27) относительно неизвестных величин D, R и а запи-
сывается как
= 2д?2 (1 - cos/7) - 2rfA(l - cos/?) + А2
2Д - 2с/(1 - cos/?)
R = D + d-b, (5.28)
. (Rsinp\
a =arcsm -— .
I D )
Для симметричного случая (рис. 5.10,5) имеем: а = р, откуда
d= A, D = R=—(5.29)
2cos/?
При условии независимости погрешностей измерений величин d, А
и р среднеквадратическая погрешность измерения дальности записыва-
ется в виде
(5.30)
(8D\ (8D} (8D\ 222
где —, — , — - частные производные; ст.; ст^; ст» -дис-
5Д ) V dd) др) р
Персии ошибок измерений величин d, А и /? соответственно.
237
Выражение для частной производной по переменной Д записыва-
ется как
5D _ Д2 - 2<У(1 - cos/?)(A + dcosfi)
ЭЬ 2 [Д - </(1 - cos/?)]2
При/?—>90°
8D ~ tf-ldk
db~ 2(Д-6)2 ’
Для симметричного случая (рис.5.10,6)
Для частной производной по переменной d
dD -4<72(l-cos/?)2 + 8t7A(l-cos/?)-2A2(l-cos/?)
dd 4[A-c/(l-cos/?)]2
Для симметричного случая (рис. 5.10,6)
oD _ 1 + cos/?
dd 2cos2/?
Для частной производной по переменной А
dD _ dk(2d - A)sin/?
^~2[A-t/(l-cos/?)]2 ’
Для симметричного случая (рис.5.10,6)
dD Asin/? _ I 4£>2
dp 2cos2/? °V d2
(531)
5.32)
(5.33)
(5.34)
(5.35)
(5.36)
(5.37)
Подстановка полученных выражений для частных производных в
(5.30) позволяет получить значения СКП измерения дальности до цели с
помощью рассматриваемой активно-пассивной системы. Применитель-
но к симметричному случаю
_ _ - _
hr г, г 2п\2 2 [ 1 + C0S/7 , 2 I Sin/? /. \2
^=^0.5-0,5tg/J) КЛ •
(5.38)
Пример расчета для базы пеленгации d=50 км и симметричного
расположения точек О и Р относительно объекта И приведен на
рис.5.И. Среднеквадратические погрешности измерения угла Д рас-
стояния d и разности хода приняты следующими: ор = 0,26°; cj = 30 м;
Од= 100 м. На этом же рисунке даются результаты статистического экс-
238
перимента для числа испытаний <7=100. При числе испытаний большем
1000 кривая, соответствующая статистическому эксперименту, практи-
чески сливается с кривой, полученной по приведенным расчетным фор-
мулам, что подтверждает их справедливость.
Как было отмечено
выше, рассматриваемая ак-
тивно-пассивная система
имеет в своем составе два
пеленгатора (в точках Р и О,
см. рис.5.10). Пеленгатор в
точке О является составной
частью станции РТР, выпол-
няет в основном функции
устранения неоднозначности
и имеет меньшую точность
по сравнению с пеленгато-
ром РЛС, расположенной на
первом ЛА (точка Р). На рис.
5.11 показана зависимость
погрешности измерений
Рис. 5.11. Относительные погрешности
определения дальности до цели при
пеленгации из двух точек (кривая 7) и при
измерении разности хода сигнала и пеленга на
него (кривая 2), ломаная кривая 3 - результаты
статистического эксперимента
дальности до цели при сим-
метричной пеленгации из двух точек (см. рис.5.10,6), рассчитанная по
формуле, известной из [19,20]:
Соотношение (5.38) получено при условии, что координаты пелен-
гационных пунктов известны точно (crj = 0). Величины погрешностей
пеленгации приняты в расчетах равными аа = 1,43°; од = 0,26°.
Как видно из рис. 5.11, относительная погрешность измерения даль-
ности растет пропорционально дальности и для принятых погрешностей
измерения Op, Cj и сгд на дальности 100 км имеет порядок нескольких ки-
лометров, что в ряде случаев достаточно для решения задачи целеуказания.
В то же время погрешности определения координат путем пеленгации из
двух точек имеют в несколько раз большие значения. Снижение погрешно-
стей в варианте использования только пеленгационного метода возможно
только за счет установки на втором ЛА (точка О) пеленгатора такой же вы-
сокой точности, что и пеленгатор, размещенный в точке Р (БРЛС).
Структура подкоренного выражения (5.38), представляющего собой
суммарную дисперсию погрешностей определения дальности, позволяет
выделить три весовых коэффициента, зависящих только от угла /}.
= (0,5-0,5,g^)2, . *4-^
' ' 2cos р) 4C0S Р J
239
Рис. 5.12. Зависимость слагаемых,
определяющих точность местоопределения
в формуле (5.38), от угла Р : кривая 1 - к&,
кривая 2 - kj-, кривая 3-кр
. д п4
kh«kd*kp^Q,25^P = -^.
а
Зависимости этих ко-
эффициентов от угла Р
изображены на рис. 5.12.
Из этого рисунка видно,
что в диапазоне углов,
представляющем практи-
ческий интерес, когда рас-
стояние до объекта превы-
шает величину базы (с/), т.
е. при р > 60°, весовые ко-
эффициенты становятся
близкими друг к другу,
стремясь к одному и тому
же пределу:
Из последних соотношений следует весьма полезная для практики
зависимость:
При Do » d
+ ’ (5>40)
Например, для приведенной на рис. 5.11 зависимости относительной
погрешности определения дальности при <jp - 0,26°, = 30 м; од= 100 м
и <£=50 км с учетом того, что <£=А для Dq = 100 км, получим <тд=1,98 км,
что достаточно близко к результатам, показанным на рис. 5.11.
Таким образом, рассмотренный метод определения координат НК с
помощью бортовой РЛС и станции РТР, размещенной на другом лета-
тельном аппарате, в котором кроме пеленгов измеряются также задержки
сигналов, излученных корабельными РЛС или станциями помех и приня-
тых на разных ЛА, имеет существенно более высокие точности по срав-
нению с традиционными методами только активного или только пассив-
ного местоопределения. Эти преимущества особенно значительны в ус-
ловиях интенсивной РЭБ, неизбежных при военных действиях на море.
Определение координат неподвижного ИРИ при сочетание пеленга-
ционного, разностно-дальномерного и разностно-доплеровского ме-
тодов. Вопросам использования разнесенного приема в информацион-
ных системах авиационных комплексов активной и пассивной воздуш-
ной разведки при различных сочетаниях измерителей посвящено боль-
ше количество работ (см., например, [1,4—8]), однако, только в послед-
ние годы появились публикации о техническом воплощении известных
ранее идей в действующие системы [25-27].
240
Например, согласно [27], измерение координат источников излучения
в высокоточной разнесенной системе РТР производится путем совместного
применения угломерного, разностно-дальномерного (TDOA, Time
Difference of arrival) и разностно-доплеровского (DD, Differential Doppler)
методов пеленгации. Точка положения ИРИ определяется как точка пере-
сечения трех поверхностей положения: плоскости пеленга, поверхности,
равной разности доплеровского сигнала, и поверхности, равной временной
задержке сигнала. По некоторым данным, на борту самолета Е-3 AWACS
имеется также канал измерения разности фаз принимаемого сигнала.
В настоящей главе приводятся соотношения для оценки погрешно-
стей измерения дальности до ИРИ путем измерения пеленгов на него и
разностей времени прихода сигнала; разностно-доплеровский метод в
них не рассматривался.
Приведем несколько соотношений для оценки точности этого мето-
да, применяемого совместно с пеленгационной и разностно-дальномер-
ной системой для частных случаев взаимного расположения пунктов на-
блюдения и ИРИ, для этого воспользуемся соотношениями [7].
Рассмотрим расположение ИРИ (точка И) на перпендикуляре к се-
редине базы, образованной двумя наблюдательными пунктами, разме-
щенными на подвижных носителях в точках Р и О (см. рис. 5.10,6).
Введем обозначения:
kv = 2D0 ld-,kF= kv (l — va/vb)',kT=dl2D0 + va/vb,
где Do - расстояние до ИРИ по линии траверса; d - расстояние между
приемными пунктами; va, vb - скорости пунктов наблюдения (в рассмат-
риваемом случае - перпендикулярно базе).
В [7] дополнительно принято, что относительная погрешность из-
мерения разности дальности равна относительной погрешности измере-
ния времени, т.е. adld = aTlT , и что относительная погрешность изме-
рения разности доплеровских частот равна относительной Погрешности
измерения несущей частоты, т.е. aFo IF 0=оу If.
В предположении статистической независимости ошибок в [7] по-
лучено выражение для суммарной погрешности измерения угла, изме-
ренного в точке И, между направлениями от ИРИ до наблюдательных
пунктов (на рис. 5.10,6 это угол РИО, обозначенный через у):
(5.41)
В [7] приводятся результаты расчетов по последнему соотноше-
нию для следующих исходных данных: /=10000 МГГц; v=300 м/с;
aFo =1Гц; ad =3м; сг„ = 0,3м/с, при <//г=0,1 стг=1,8°, а при d/r=l
ст, =0,13°.
241
В заключение приведем основные характеристики системы разне-
сенной высокоточной РТР, работающей с использованием пеленгацион-
ного, разностно-дальномерного и разностно-доплеровского способов
[17,27] (табл. 5.4). Условия получения (геометрия, отношение «сиг-
нал/шум» и др.) указанных в таблице значений точности не описываются.
Тем не менее, сам факт публикации подобной таблицы свидетельствует о
потенциальной возможности существенного повышения точности место-
определения ИРИ по сравнению с традиционными способами РТР,
Таблица 5.4. Основные характеристики системы высокоточной РТР
(по данным [17])
Характеристика Значение
Диапазон разведуемых частот, ГГц 0,5...18
Период просмотра, с 2
Скорость разведки источников излучения, целей/с 150...200
Вероятность распознавания типа цели 0,95
Дальность обнаружения и распознавания цели по главному лепестку диаграммы направленности антенны ИРИ Радиогоризонт
Точность определения координат в режиме высокой точности, % от дальности: импульсный сигнал непрерывный сигнал 0,01...0,02 0,03... 0,05
5.4. Методы оценки погрешностей пассивного
определения координат объектов при использовании
сигналов удаленной обзорной РЛС
В [28] предложены методы определения местоположения им-
пульсной РЛС кругового обзора и реализующие их устройства а также
совокупности объектов, находящихся в зоне действия этой РЛС. Упо-
мянутые координаты находятся путем обработки информации, полу-
чаемой пассивным приемником прямых и переотраженных сигналов,
размещенным на значительном удалении от РЛС. Объекты, облучаемые
главным лучом обзорной РЛС, и вынесенный пассивный приемник
представляют разновидности разнесенной системы местоопределения,
варианты которых рассмотрены в [1,29,30] и др.
В качестве типовых вариантов применения основных положений,
заявленных в [28], называется «пассивное» определение координат уда-
ленной РЛС, определение координат объектов, находящихся в ее зоне об-
зора и отображение на индикаторе кругового обзора удаленного от РЛС
пассивного приемника поля объектов, наблюдаемых РЛС (вынесенный
индикатор). В связи с тем, что в названных и других известных нам рабо-
тах не содержится соотношений для оценок погрешностей определения
координат методов, описанных в [28], представляет интерес получение
соотношений для оценок точности указанных определений.
242
На рис. 5.13 приводится схема взаимно-
го расположения объектов в соответствии с
[28]. В точке И расположена РЛС кругового
обзора; в точке О - точечный отражающий
объект; в точке Р - пассивный приемник сиг-
налов; расстояние от РЛС до точечного объ-
екта ИО - d; расстояние от приемника до РЛС
и от приемника до отражающего объекта со-
ответственно РИ - R и РО - D; угол между
направлениями от приемника на РЛС и отра-
жающий объект ИРО - Р\ угол между на-
правлениями от РЛС к приемнику и отра-
жающему объекту РИО - у/.
Погрешности определения координат облу-
чаемых объектов относительно РЛС на
удаленном индикаторе. При достаточно
большом удалении приемного пункта от РЛС,
Рис. 5.13. Взаимное
расположение излучателя
(И), отражателя (О) и
разведчика (Р)
т.е. при РИ » ИО, можно полагать, что ИР~ИВ и РО~ВО (например, при
РЯ=110 км и ЯО=Ю км последнее равенство выполняется с погрешно-
стью 0,34%). В этих условиях справедливо приближенное равенство
А ~ (ИО + ОР) - ИР = d (1 - cos </), (5.42)
где А - разность хода прямого и отраженного от объекта, расположен-
ного в точке О, сигнала.
В соответствии с [116] в точке расположения приемника (точка Р)
предполагается отображение информации, получаемой на экране РЛС в
координатах «дальность-азимут». При этом развертка индикатора круго-
вого обзора по азимуту запускается импульсами, принимаемыми в мо-
менты облучения приемной антенны главным лучом РЛС, а развертка по
дальности - импульсами «прямых» сигналов, прошедших от РЛС по пути
ИР. Погрешности такой индикации без учета ошибок собственно системы
отображения можно оценить на основе следующих рассуждений. Опи-
санный выше запуск азимутальной развертки индикатора кругового обзо-
ра, установленного в точке Р, эквивалентен проведению нескольких ос-
новных операций - фиксирования двух-трех следующих подряд момен-
тов облучения антенны приемника главным лучом антенны РЛС, вычис-
ления на основании этих измерений периода вращения антенны Т, запус-
ка и синхронизации развертки по азимуту. Угол 5/в соответствии с выше-
сказанным измеряется и вычисляется по соотношению
2тг Д/
V = (5.43)
где А? - время задержки между моментом облучения самолета-разведчика
главным лучом и моментом появления отраженных сигналов.
243
Таким образом, погрешность измерения азимутальных координат
объекта определяется по крайней мере двумя составляющими: погреш-
ностью измерения периода вращения антенны и погрешностью измере-
ния интервала времени А/. Из (5.43) следует, что
(5-44)
где од, и ат- СКП измерения интервала А/ и периода вращения антенны Т.
Погрешности измерения координат в двух взаимно перпендику-
лярных направлениях X и Y (направление X перпендикулярно направле-
нию от РЛС на объект, направление Y совпадает с ним) определяются
выражениями
ayd=ad, (5.45)
где ad- погрешность измерения дальности от РЛС до объекта.
Потенциальная погрешность измерения угловых координат в РЛС
кругового обзора (см., например, [31]) выражается формулой
0,6#о
(Т = ——гггзн.
^а.пот ,
(5.46)
где #0 - ширина диаграммы направленности антенны РЛС, Ес - энергия
сигнала, ограниченная огибающей принятой пачки, No - спектральная
плотность шума.
Поэтому погрешность измерения периода вращения антенны равна
О,6#оТ
2''r-^2£’cnpaM/No
а погрешность измерения интервала времени А/ в предположении неза-
висимости измерений моментов начала и окончания интервала равна
_ 6 в0Т Jl/Ec пр,м + 1/£с отр Q, 60оТ
X2^2EC OTp/N0 ’
Здесь Е’с.прям и Е'с.отр - энергия пачек «прямого» сигнала, принятого по
главному лучу РЛС и отраженного от объекта (точка О) соответственно.
Очевидно, что Е’с.прям » Ekoip, поэтому из последнего соотношения
следует, что
О,6#о(/
axd = da « ,
xu ™ /о г* /
(5.47)
(5.48)
Если ограничить величину d интервалом 5...40 км, а отношение
Ecm^N0>\, то для типовых РЛС с шириной луча #0=1...2° погрешность
по координате X(axd) составляет от десятков до сотен метров.
244
Для определения величины погрешности про оси OY используем
приближенное равенство (5.42), справедливое при D»d и R»d, из
которого следует, что
1 - cos у/
или
~ Acos(/?/2)
2sin2(y/72) ’
откуда после дифференцирования можно получить
17 \2 7 7 Т\2
(5.49)
(5.50)
(5.51)
Последнее слагаемое преобладает над первым в подавляющем
большинстве случаев (когда у/» 0,025), поэтому
о- ~ -- °,6<70о /5 52
yd tg^/2) tg(y,/2^2Ec/N0
На рис. 5.14 показаны зависи-
мости, построенные на результатах
расчета по формулам (5.48), (5.52)
для следующих исходных данных:
£>=400 км, Од =30 м, 0^=0,5°,
Ecjmf/No=2, (9О=1,5° и d=5, 10, 20, 30
км. Из графиков следует, что в
большинстве случаев («90%) по-
грешность измерения взаимного по-
ложения НК не превышает 1 км, а в
половине случаев - 200 м.
Определение дальности от при-
емного пункта до РЛС. Для оцен-
ки погрешностей измерения даль-
Рис. 5.14. Погрешности определения
дальностей между объектами в
зависимости от угла между
направлениями «И-Р» и «И-О» и
дальности между ними
ности до самой РЛС необходимо рассмотреть систему уравнений
d + D = R + &, £>/sin(/ = iZ/sin^, d2 = R2 +D2-2RDcos/3, (5.53)
которая может быть составлена для всех объектов, находящихся в зоне
видимости РЛС (точка//) (см. рис. 5.13).
Решение системы дает:
-----Мп»4-#)------, (5 М)
sin у/ + sin/? - sin(</ + Д)
245
Asin у/
(5.55)
Д =-------------------------,
sin у/ + sm/? - sin((/ + P)
Asin/?
(5.56)
dx =----------------------,
sm у/ + sin/? - sin((zz + P)
Здесь индекс «,» означает первый вариант измерения дальности (см.
рис. 5.13).
Когда в зоне наблюдения приемника работают более одной обзор-
ных РЛС, как правило, совмещенных с отражающими объектами, то по-
является избыточность числа измеряемых параметров, число систем
уравнений (5.53) пропорционально увеличивается и, что особенно важно,
появляются взаимосвязанные системы уравнений, составленные относи-
тельно одной и той же пары объектов при замене объекта-отражателя на
объект-излучатель и наоборот. Избыточность позволяет исключить изме-
рение в пассивной станции какого-либо из трех параметров Д А или у/.
Это может оказаться необходимым, например, при заведомо нестабиль-
ной скорости сканирования антенны РЛС, когда не удается измерить угол
(/или когда измерение параметров с требуемой точностью (например, уг-
ла Р в метровом диапазоне) затруднительно и т.д.
Рассмотрим второй (II) случай, когда на двух объектах, могущих
также быть и отражателями, работает по одной обзорной РЛС. Здесь
возможно измерение углов у/\ и у/2, а также разностей хода А, и Аг раз-
новременно в течение нескольких смежных оборотов антенн РЛС. Из-
мерение указанных величин позволит без использования пеленгатора на
приемном пункте найти угол и расстояние между объектами, а также
дальность по следующим формулам соответственно:
Рп = я-(у/\ + у^),
d^^+bpil,
D _A[+A2 sin(/2
п 2 sin((/]+(/2)
Рассмотрим третий случай (III), когда измеряются два угла у/\ и у/2,
но только одна разность хода А2 (например, при недостаточной чувстви-
тельности приемника для приема отраженных сигналов от объектов с
малой ЭПР), тогда (5.59) для D примет вид
D-------------
^ТП ~ . Г~.--- •
, sini/, „ ismi/,
1-----— +Р -------*-*-
sin(/2 ysiny/2
При (/2 =л/2 и R ® D » d (5.60) преобразуется к виду
2^2______________________________А2
(5.57)
(5.58)
(5.59)
(5.60)
Ап ~ ~7~2 х , ,
| Л- | / „\ 2 2г/2-{/
I —+ л’1-(лч-2){/] +(/,
(5.61)
246
Когда измеряются А], Д2 и у/2 (например, антенна первого объекта
сканирует в секторе, не захватывающем приемный пункт), то справед-
ливо выражение
2At/2sinV2-Дб72 +Д3 + (d2-A2)Jcos;/2 ,
—и SID ^2 )
где d= (Д] + Д2)/2; Д = (Д| - Д2)/2.
В частности, при уъ =л/2
Представляет интерес также случай (V), когда измеряются только
разности хода Д| и Д2 и разность углов р между направлениями на объ-
екты:
Z)v = —.........-АсА.. (5.64)
У 16 2(l-cos/?) 4
При D » R» d (типичное соотношение для наблюдения за уда-
ленной РЛС):
(5.65)
Погрешности определения дальности от приемного пункта до РЛС.
Далее рассмотрим только погрешности определения дальности а, вто-
рая координата - азимут - определяется обычным способом: пеленгаци-
ей из приемного пункта.
Формула (5.55) для D при одной работающей РЛС может быть
приведена к виду
£>! =-----Acos(^/2)------- (5 66)
2sin( р / 2) sin(y< / 2 + р / 2)
Поскольку было принято, что R » d, то с учетом известного ра-
венства D / d = sin y/l sin Р для случаев у/> > р получим
D«A^tg(?//2). (5.67)
Взятием полного дифференциала находится СКП определения
дальности:
которая с учетом того, что R » d, а следовательно, и
247
K^2dsin2 ((//2),
преобразуется к виду
D if стд У (2
sin(/ y^</tg(f/72)J \ d ) v
(5.69)
(5.70)
Здесь Од ,сг^ ,crr- СКП измерения величин Д, /Зтл (/соответственно.
Третье слагаемое в подкоренном выражении (5.70) обычно суще-
ственно меньше второго, которое, в свою очередь (при {/ > 2°), значи-
тельно превосходит первое, и поэтому можно полагать, что
Ь2 ст п
<td «-----— при (/> 2°, (5.71)
d sin(/
aD « — / при </» 0. (5.72)
d у/
Приведем выражение для погрешности определения D, когда РЛС
работают на двух объектах. При вычислении D по формулам (5.59) и
(5.60) (измерение величин Дь Д2, f/i, ць) погрешность приближенно равна
°п’ш ^-(^+(/2) dsinj/
(5.73)
(5.74)
и при (/« 90°
_.Д2У2^
П>Ш ~ д
Здесь предполагается, что измерение каждого из углов (/ и |/2 осущест-
вляется независимо и с погрешностью <rv.
При измерениях Ai, Д2, (/2 в частном случае, когда (/2 ~ 90°, имеем
~ <тд(Д2 + Д2) ~<7дТ2П2
^'^(Д.-Д,)2' J2
а при измерении Д], Д2 и /3-
~Dcrfi -,д2(ТД
р К d
(5-75)
(5.76)
Выражения (5.69)-(5.76) могут быть сведены к функциям угла у/,
что позволяет построить зависимость (рис. 5.15) погрешностей для раз-
личных способов местоопределения. Кривые рассчитывались: / -по фор-
мулам (5.71), (5.72); II-по (5.73), (5.74);IY-по (5.75), Y-по (5.76). При
расчетах принято: D = 400 км, d=20 км, сг/= 510"3, йд=10-3, оу= 30 м. По-
грешности измерения угла р приняты существенно меньшими, чем по-
248
грешности угла у/, из-за значительно меньшего влияния на процесс изме-
рения угла ft нестабильностей положений элементов антенны, нестабиль-
ностей фазовых трактов и др. Обозначения кривых соответствуют индек-
сам в формулах (5.70)-(5.76).
Из графиков, в частности, следует, что для принятых исходных дан-
ных относительная погрешность измерения дальности D не более 10% до
одного из двух объектов, нахо-
дящихся в зоне взаимной ра-
диолокационной видимости,
обеспечивается в 85% случаях
при измерении параметров А, у/
и /?(формулы (5.55), (5.70)) при
одной работающей РЛС. Та же
погрешность имеет место при
измерении А], Аг и р при двух
работающих РЛС (формулы
(5.64), (5.65), (5.76)). Измерение
параметров Ai, А2 и ^(формулы
(5.62), (5.63), (5.75)) обеспечи-
вает 10 % погрешности в 60 %
случаях взаимного положения
объектов.
Рис. 5.15. Погрешности определения
дальности от приемного пункта
до объектов в зависимости от угла между
направлениями «И-P» и «И-О»
для рассмотренных выше случаев
В случае отсутствия пеленгатора на приемном пункте, когда изме-
ряются параметры вращения двух антенн разведуемых РЛС (углы у/\ и
у/p, а также разности хода, даже при достаточно высокой точности этих
измерений (од=30 м, су= 0,5-10"2), дальность D измеряется с относи-
тельной погрешностью более 15% (формулы (5.59)-(5.61), (5.73),
(5.75)). Успешное использование этого способа возможно при меньших
отношениях Did, чем было принято выше.
Если в зоне действия разнесенной системы местоопределения, со-
стоящей из п объектов, находящихся в зоне взаимной радиолокационной
видимости, работает одновременно У обзорных РЛС, то отдельные объек-
ты могут быть и «излучателями» (расстояние R, рис. 5.14) и «отражателя-
ми» (расстояние D) и к каждому из них могут быть АГ раз применены полу-
ченные выше соотношения. Усредненная дальность Sicp до z-го объекта в
этом случае может находиться оптимальной обработкой результатов от-
дельных измерений, например, нахождением средневзвешенных значений:
s.ср = « J (М/Ру + kjDjiPji) > (5-77)
п
где к, - число РЛС, работающих на z-м объекте, причем
<=1
Ру и Pji - весовые коэффициенты, обратно пропорциональные дис-
249
персиям погрешностей измерений,, найденным, в свою очередь, по со-
отношениям (5.70)-(5.76); а - коэффициент, который находится из ус-
ловия нормировки:
п
а (kiPu+kjPji) = l-
Например, для измерения по описанному выше методу (формула
(5.72)) весовые коэффициенты р,у для постоянных погрешностей изме-
рения углов /?и ^выражаются в виде
_ ^sinVy
X ^sinVy
у=1;Л'
(5.78)
Очевидно, что увеличение как числа отражающих объектов в зоне
видимости РЛС, так и числа работающих РЛС на них приводит к значи-
тельному увеличению точности измерения дальности по сравнению со
случаем, когда на одном из двух объектов работает единственная РЛС.
Действительно, число независимых измерений за один оборот антенны
увеличивается в (и-1)7У раз и относительные погрешности в диапазоне
углов 10° < у/< 170° могут быть снижены для тех же исходных данных
до единиц процентов. Одновременно с увеличением точности увеличи-
вается и загрузка системы обработки информации. Однако, поскольку
местоопределение здесь производится для каждой пары объектов один
раз за период вращения антенны, требуемое для определения координат
быстродействие остается небольшим. Предшествующая местоопределе-
нию задача идентификации сигналов решается методами, использую-
щими отраженные сигналы, с высокой вероятностью даже для РЛС, не
различаемых по техническим параметрам: несущей частоте, длительно-
сти импульса и др. Вопросы идентификации, так же как и вопросы энер-
гетической доступности прямых и отраженных сигналов, здесь не обсу-
ждаются.
Как следует из вышеизложенного, особенно существенный выиг-
рыш в точности определения координат рассматриваемый метод дает
применительно к взаимному расположению объектов, находящихся в
зоне обзора удаленной РЛС. В этой связи представляется интересным
сравнить погрешности определения взаимного положения объектов при
их локации с помощью активной РЛС, работающей на дальности D в
отсутствии помех, а также станцией, определяющей координаты объек-
тов (при условии, что на каждом из них работает хотя бы одна РЛС) пе-
ленгационными методами.
При расположении двух объектов в некоторых точках А иВ с ко-
ординатами хл=0, уА=0 и хв, у в соответственно и расстоянием между ни-
250
ми, равном d0, из-за погрешностей измерений полученное в результате
разведки расстояние dmK между объектами и угол ^/изм равны
d = ^xA ~хв)2 +(УА -Ув)2 +2t/0[(*B -*Jcos!/0 + (ув -ул)зт^0] + 4/02,
= arctg
Ув-Ул
ХВ~ХА.
(5.79)
!/0 = arctg
yb-ya
хв-Ха.
где хА, хв, уА, ув - измеренные координаты объекта с погрешностями,
распределенными по нормальному закону с математическими ожида-
ниями ХА, Ya, Хв, Yb и дисперсиями о>2 и crv2; угол у/0 опрецеляется в со-
ответствии с рис. 5.13 по соотношению у/0 = л/2 - у/.
Выражения для погрешностей измерения координат между сосед-
ними объектами (сг^, cryd) могут быть получены из (5.79), однако в общем
виде они достаточно громоздки. Для значений <rxdt, <jvcI < 0,2d приближен-
но (с погрешностями менее 5%) справедливо следующее выражение:
, (°* f
2 — + crxcos
ст2
+ -7- + cr>'sin^o
(5.80)
На рис. 5.16 приводятся
зависимости, полученные в ре-
зультатах расчета по формуле
(5.80), а в случаях невыполне-
ния условий, при которых
справедлива эта формула
(сг^сг^/сОДг/), - результаты,
полученные методом стати-
стических испытаний. Кривые
для Ой/имеют индекс «х», кри-
вые для cTyj - индекс «у». При-
менительно к РЛС, располо-
женной в точке Р и работаю-
щей без помех (кривые Их, Пу),
можно полагать, что
сгу~ aD, axxD аа. (5.81)
(Хл, М
Рис. 5.16. Сравнительные характеристики
погрешностей определения расстояния
между удаленными объектами с помощью
РЛС (/7), станции РТР в традиционном
режиме (I) и в режиме использования
отраженных сигналов (ПГ)
где aD и сга - СКП измерения дальности до цели и ее азимута соответст-
венно.
251
Для станции РТР, работающей в традиционном режиме много-
кратной пеленгации (кривые Ix, Iv), в соответствий с гл. 1:
0,7<таУ
4п
у ь4п
(5.82)
Здесь L - база пеленгации; п — число пар независимых пеленгов, опре-
деляемое при достаточной чувствительности поискового приемника по
соотношению
n=L /(2Кпол/пер),
где, в свою очередь, /пер - время перестройки приемника; Ипол - скорость
полета прямолинейно перемещающегося летательного аппарата.
Применительно к методу, использующему отражения от объектов
(кривые III), и d=10 км зависимость о;/Vх) определяется по формуле (5.52).
На рис. 5.16 приведены упомянутые зависимости погрешностей
определения взаимного положения, полученные для следующих исход-
ных данных: Z)=400 км, d = 10 км; для РЛС, расположенной в точке Р:
отаРЛС=0,25°, oSrf=0,3° км; для РТР: <таРТр=0,5о, £=100 км, Кпол=900 км/час,
/пер = 10 с. Из рисунка следует, что погрешности пеленгационного мето-
да (кривые Ix, Iv) даже при достаточно высокой точности пеленгации,
принятой для расчетов, превышают расстояние между объектами. От-
метим, кроме того, что необходимый для традиционной РТР режим -
«на каждом объекте хотя бы одна работающая РЛС» - при дальней РТР
маловероятен. Погрешности для бортовых РЛС (кривые IIX, IIV) на поря-
док ниже, чем для традиционной РТР, и в 90% значений углов ^не пре-
вышают 2 км. Однако они достигаются в благоприятных беспомеховых
условиях, которые во время конфликта также маловероятны.
Как следует из рис. 5.16, для метода РТР, использующего отра-
женные сигналы (кривая IIIv) погрешность в 90% случаев не превышает
1 км. Получение соотношений для оценки погрешностей рассматривае-
мого пассивного способа местоопределения удаленных объектов, облу-
чаемых РЛС кругового обзора, а также проведенные количественные
оценки показали, что ошибки определения дальности до РЛС сравнимы
с ошибками, получаемыми традиционными пеленгационными метода-
ми, и составляют единицы процентов. Однако эти результаты достига-
ются при наблюдении из одного пункта, что эквивалентно экономии ап-
паратурных или временных ресурсов. Существенно большие преиму-
щества по точности по сравнению с традиционными метод переотра-
женных сигналов имеет при определении взаимного положения объек-
тов в группе, когда погрешности в основном определяются характери-
стиками самой РЛС и в меньшей степени - характеристиками пассивной
приемной аппаратуры.
252
5.5. Определение дальности до неизлучающих
воздушных объектов аппаратурой РТР
Основным недостатком аппаратуры воздушной РТР, построенной
по традиционным принципам (например, [32-34), является невозмож-
ность определения дальности до объекта из одной точки пространства.
Исключение составляет угломестный способ местоопределения, не при-
менимый, однако, для разведки наземных объектов с дальностей, в 5-7
раз превышающих высоту полета, и вообще не применимый для развед-
ки воздушных целей. Другим недостатком, заложенным также в самой
природе пассивной РТР, является невозможность обнаружения и место-
определения неизлучающих объектов. В то же время особенности рабо-
ты станции РТР позволяют в определенных условиях решить задачу ме-
стоопределения неизлучающих объектов. Главная из этих особенностей
состоит в возможности одновременного приема сигналов различных ра-
диоэлектронных средств (в частности, РЛС), в зоне действия которых
пролетает самолет. Наиболее мощные из них можно использовать в ка-
честве источника электромагнитной энергии, подсвечивающей цель.
Сочетание приема станцией РТР прямых и отраженных от атакующих
неизлучающих объектов сигналов с измерением разности времени меж-
ду моментами прихода этих сигналов дает возможность определить
дальность до неизлучающих объектов.
Использование для определения координат неизлучающих объек-
тов радиолокационных систем, в которых передатчик и приемник не со-
вмещены в пространстве, рассматривается в целой отрасли радиолока-
ции - разнесенной радиолокации [1,5,7,35]. Однако отличие рассматри-
ваемых ниже способов состоит в том, что в разнесенной радиолокации
передающий и приемный пункты составляют единую, связанную систе-
му, в то время как для исследуемых в настоящем материале случаев
точное расположение подсвечивающей РЛС не всегда известно, равно
как и ее технические характеристики. Важным отличием является также
необходимость приема сигналов от РЛС как по главному, так и по боко-
вому излучениям ее антенны.
Возможность применения в аппаратуре РТР различного рода до-
полнительных измерений сигналов, пришедших на вход приемника раз-
ными путями, для определения координат излучателей рассматривалась
в пп. 5.1, 5.2, а также в [36-39,6].
В частности, работы [36,38] посвящены вопросам определения коор-
динат ЛА по сигналам его высотомера, а работы [37,39] - определению ко-
ординат воздушных целей при использовании в качестве подсвечивающей
(«посторонней») РЛС авиационной станции радиолокационного дозора ти-
па AWACS. В [6] рассмотрены методы оценки погрешностей определения
координат групповой цели, составленной из нескольких отражающих (на-
пример, надводных) объектов, оснащенных РЛС кругового обзора.
253
В названных и других известных работах не упоминается об ис-
пользовании режима разнесенной локации в станции РТР, входящей в
состав информационного комплекса ЛА, где ее применение может ока-
заться весьма полезным для определения дальности до неизлучающих
объектов, например, для предупреждения столкновения воздушных су-
дов, обороны ЛА и др. Настоящий материал посвящен этой области
применения, и особый акцент сделан на использовании отмеченного
эффекта при получении информации бортовыми средствами РТР за счет
излучений наземных РЛС, в зоне действия которых находится ЛА.
Энергетические ограничения. Рассмотрим энергетические соотноше-
ния при РТР неизлучающих объектов с использованием подсвета от
РЛС радиолокационного поля. Это необходимо для оценки диапазонов
дальностей «РЛС-самолет» и «объект-самолет», а также энергетических
потенциалов станций воздушной РТР.
При радиолокации с вынесенной точкой приема [1] требуемый
приемный потенциал станции РТР определяется как
С2=(4л)3Д27?2(С/Ш)„О1р (58з)
Рг
где Рг - чувствительность разведприемника при отношении сиг-
нал/шум=1; G2 - коэффициент усиления антенны станции РТР; P\G\-
энергетический потенциал подсвечивающей РЛС; А - длина волны; ст-
эффективная поверхность рассеяния разведываемого объекта с учетом
различия в направлениях облучения и приема; Г)\, г^- коэффициенты
ослабления в антенно-фидерных трактах; £> - дальность от разведывае-
мого (приближающегося) объекта до самолета; R - дальность от РЛС до
самолета; (С/Ш)потр - потребное для нормальной работы приемника РТР
отношение «сигнал/шум» по мощности на его входе.
Из (5.83) для типовых параметров 2=20 см, P\Gi= 5-1O10 Вт, эд г)2 =0,5;
(С/Ш)П01р =5; G2!P2 =1013 1/Вт и о= 1 м2получаем DR=iООО км2, т.е. при вы-
боре достаточно дальней РЛС подсвета (порядка 100 км) сигналы от объек-
тов с ЭПР = 1м2 могут быть приняты, начиная с дальностей, меньших
10 км. Однако при расположении отражающего объекта на расстоянии
10 км от подсвечивающей РЛС дальность обнаружения сигналов, отражен-
ных от объекта, достигает 100 км.
Рассмотрим основные соотношения для известного с ошибкой or
расположения подсвечивающей РЛС. Приведем основную схему
(рис. 5.17) измерения дальности до объекта О с самолета, оснащенного
станцией РТР (точка Р). В точке И расположена РЛС, работающая в ре-
жиме обзора. В качестве объекта может быть ЛА, на котором отсутству-
ет радиоизлучение. Станция воздушной РТР принимает сигналы в ши-
роком секторе обзора (в идеале, вкруговую) как по главному направле-
254
нию излучения РЛС (точка И), так
и по боковому, измеряет угол (J3)
между направлениями прихода
прямого (излучаемого по боковым
лепесткам антенны РЛС) и отра-
женного сигнала, а также разность
времени (Д() между приходом этих
сигналов. Строго говоря, измеря-
ются два угла: азимут и угол мес-
та, определяющие положение
плоскости ИОР в пространстве.
Измерение Д, позволяет по-
строить в каждый момент времени
эллипс, являющийся геометриче-
ским местом точек, у которых суь
и Р) является постоянной, т.е.
Рис. 5.17. Измерение дальности до
объекта
расстояний от фокусов (точки И
ИО + D = R + c&i = const,
где с - скорость распространения электромагнитных волн.
Пересечение пеленга из точки Р с эллипсом дает точку О, а значит,
и расстояние D. Величина D может быть найдена из треугольника ОРИ
при использовании теоремы косинусов:
(R + Д - О)2 = D2 + R2 - 2RD cos Д
где Д = сД,.
Таким образом,
Д(2Л + Д)
~ 2 [/?(!-созД) + Д]
(5.84)
Из выражения для полного дифференциала можно найти ошибку
измерения дальности D. Обозначая через (од, стд) СКП измерения
разности расстояний Д, угла Д и расстояния R, получим
J, v 2 2
11+——— I <Тд +£)2сг»8т2Д + Гд-£>(1-со8Д)12~ .
I R ) А р Р L * * * V /J Z?2
(5.85)
Поскольку обычно Од « D<jp и R »D, из (5.85) можно получить
приближенное выражение
1 2.2» D2<72r
-В. »------- / cHs 1П 2 В + f-
D l-cos/П P 4Я4
(5.86)
Из (5.85) и (5.86)) следуют рекомендации по уменьшению ошибок
измерения дальности.
255
1. Увеличение угла >0до 180°, т.е. выбор в качестве подсвечивающих
таких РЛС, чтобы направление на них было противоположным ожидае-
мому направлению подхода атакующих объектов. При /?—> 180°, как сле-
дует из (5.85), (5.86)), Д-» 2D и [A-£>(l-cos >0)]-> 0, тогда аь -> сгд/2;
2. Работа преимущественно с «дальними» РЛС или с РЛС, место-
положение которых известно с большей точностью {<tr!R —> 0). В этих
случаях третье слагаемое под знаком радикала в (5.85) близко к нулю и
погрешность определения дальности до приближающегося объекта вы-
ражается в виде
Dcrpsmfi
l-cos/7
(5.87)
Рис. 5.18. Погрешности измерения дальности
до объекта в функции дальности до него и
точности измерения угла р при известном
расположении подсвечивающей РЛС
На рис. 5.18 приведены
зависимости СКП aD от даль-
ности D, точности измерения
угла Р (tip), точности измере-
ния расстояния до РЛС сгя, а
также самого угла между на-
правлениями на РЛС и отра-
жатель р. В расчетах было
принято, что Од=30 м, а
Я=50 км. Кривая 1 соответст-
вует значениям параметров
/2=90°, 0^5°, 0^=20 км; кривая
2 - >0=90°, сгд=2°, Оя=10 км; кривая 3 - >0=135°, сгд=2°, Од=10 км; кривая 4 -
>0=180°, од=5°, Од=20 км.
Случай неизвестного расположения подсвечивающей РЛС. Ранее пред-
полагалось, что расстояние до РЛС известно с ошибкой стл. Однако такая
информация может отсутствовать. Также станция воздушной РТР может
измерять дополнительный, не учитываемый ранее параметр, а именно
угол измеренный в точке И между направлениями на приближающий-
ся объект и самолет, оснащенный станцией РТР Р. Такое измерение воз-
можно при отслеживании излучений обзорной РЛС на протяжении хотя
бы одного периода вращения Гвр ее антенны, когда
2лГор/7;р, (5.88)
где /ор - интервал времени между моментами облучения атакующего
объекта и самолета главным лучом обзорной РЛС.
Из рис. 5.17 и теоремы синусов следует:
п ОИ sm(P + y/) n 7?sin(/z
R —- •
sin>0 sin(>0 +1//)
256
Используя теорему косинусов, получим
ОН . , к .. . .jsmgcosg = д+R_D
у sin (у/ + (3) sin {у/ + /3)
Совместное решение последних трех уравнений дает
sinQg + ty) д Asin;/ |Д
sin/? sin(;/ + fl) J
откуда
n Asin(/? + ;/)
Л —---------------------,
sin/? + sin у/ - sin(/? + yr)
Asin;/
sin/? + sin у/ - sin(/? + y/)
(5.89)
Приведем выражение для погрешности определения дальности до
приближающегося объекта, справедливое при обычно выполняемом ус-
ловии R » D, (т.е. ;/-> 0):
Л lf<TAY [ crjsin2/? ( [ а2
1-cos/? Ш A J (1-cos/?)2 4<т|
(5.90)
Поскольку величина av обычно не превышает долей ширины диа-
граммы направленности РЛС, можно полагать, что < 0,3 ор, и тогда
последнее выражение можно упростить:
—“—+сгд8т2/?.
1-cos/? уD ) р
(5.91)
Результаты расчета по
формуле (5.91) при R»D,
сг„<0,3о^ сгд=30 м представ-
лены на рис. 5.19. Номера
кривых соответствуют сле-
дующим сочетаниям значений
параметров: кривая 1 - у9=90°,
<тр=5°, Ок=20 км; кривая 2 -
/3=90°, ар=2°, ак= 10 км; кри-
вая 3 - /М35°, <тр=5°, с«=20
км; кривая 4 - /М35°, од=2°,
оя=10 км; кривая 5 - /7=180°,
о^=5°, о/=20 км; кривая 6 -
/7=180°, ар=5°, о«=10 км.
Рис. 5.19. Погрешности измерения дальности
до объекта в функции от расстояния до него
при неизвестном расположении
подсвечивающей РЛС
257
Рие. 5.20. Вариант расположения объекта
вблизи подсвечивающей РЛС
Из этого рисунка следует важный практический вывод о том, что в
широких диапазонах значений параметров 90°< /3 <180°; 0< D <5 км;
ор< 2° может быть достигнута точность, сравнимая с точностью, обес-
печиваемой бортовой активной РЛС (погрешности определения дально-
сти. порядка 100-200 м).
Случай расположения отражающего объекта вблизи подсвечиваю-
щей РЛС. Выше рассмотрен случай, когда R » D, что бывает, напри-
мер, при определении коор-
динат приближающихся к
самолету объектов при под-
светке их «дальней» РЛС
кругового обзора. Энергети-
ческие соотношения будут
соблюдены, если расстояние
R от РЛС до самолета со
станцией РТР останется также большим, а расстояние OH=d от РЛС до
отражающего объекта малым. Это возможно при радиотехнической раз-
ведке с больших дальностей неизлучающих объектов, расположенных
вблизи от РЛС кругового обзора (рис. 5.20).
Сопоставляя рис. 5.17 с рис. 5.20, можно заметить соответствие
величин:
отрезок D на рис. 5.17 соответствует отрезку d на рис. 5.20;
угол Р рис. 5.17 соответствует у на рис. 5.20;
угол у рис 5.17 соответствует Р на рис. 5.20.
(5.92)
И в том и в другом случае сохраняется равенство Д= ОИ + D- R, a
слагаемые ОИ и D входят в него одинаковыми знаками, следовательно,
все формулы, выведенные для D ((5.89), (5.84)), и погрешности <rD ((5.86),
(5.91)), справедливы и для d и при соответствующей замене аргумен-
тов. Например, из формулы (5.90) при использовании (5.92) получим
, Г \2 2 ~ 7 2 А
d М , 1 + _^_
D l-cos^Wd; (1-cosi/)2^ 4<т2,
Случай отсутствия пеленгатора в станции воздушной РТР. Если
имеется одна подсвечивающая РЛС, то угол у/ может быть измерен по
разности времени между моментами облучения самолета и объекта глав-
ным лучом подсвечивающей обзорной РЛС. Если, кроме того, известно
расстояние R до РЛС, то измерение разности хода прямых и отраженных
сигналов дает возможность определять угол Р по соотношению
258
. A(27? + A)sin(/
В = arcsin---1-------------7, (5.94)
2R(R + A)(l - cos (/) + A2
а значит, и D по формуле (5.89) или непосредственно из выражения
D~2R(R + A)(l - cos iff) + А2 <595)
2[7?(l-cosf/) +А]
Выражения для погрешностей аналогичны полученным ранее
(5.89), (5.90), (5.93).
Если известно расположение двух подсвечивающих РЛС в преде-
лах радиогоризонта, т. е. R\ и Т?2, а также разность их курсовых углов £
(рис. 5.21), то измерение разностей хода прямого, (принятого по боко-
вому излучению) и отраженного сигналов А] и А2 дает возможность оп-
ределить координаты объекта О по следующим соотношениям:
D=—а1(27?|+а1)—
г^а-сов^+Д!]
cos/? = —[7?2(cos£cos/? +
Щ2Кг+ЬгУ
+sin£sin/?-l)-A2] + — + 1. (5-97)
R\
Величина входит в правую и левую часть последнего выражения.
Явная формула для cos/? более громоздка:
п „ A,«2sin^ (27?, + А,) ± д/ПКВ .. поч
cosB = cos2arctg------,1 2 r —1----------------------г ,(5.98)
(27?! + А,) {\R2 [(1 + cos<f) + Д2 ] - А2 (27?2 + Д2)}
где
ПКВ=Д)Д2(27?1+А,)(27?2+А2){2[(/?J+A])(7?2+A2)-7?17?2cos^ -
-Д1(27?1+Д1)-Д2(27?2+А2)}.
В рассмотренном случае периоды вращения Т\ и Т2 подсвечиваю-
щей РЛС не измеряются, равно как и углы \у\, ц/2.
Использование полученных соотношений возможно при располо-
жении подсвечивающих РЛС вне радиолокационной видимости с обо-
роняющегося самолета (за радиогоризонтом) на известных расстояниях
7?1 и Т?2, что соответствует, например, приему излучений ранее разве-
данных РЛС противника или «своих» РЛС, расположенных за линией
фронта. Такая ситуация может возникнуть на больших дальностях до
РЛС, а также при малых высотах полета самолета, когда прием излуче-
ний по боковым лепесткам оказывается невозможным, а прием по глав-
ным лучам антенн мощных обзорных РЛС в области «полутени» воз-
можен. При этом моменты облучения самолета (точка Р, момент /,) и
259
я,
и.
Рис. 5.21. Вариант расположения двух
подсвечивающих РЛС
p_Wi
sin£
отражающего объекта (точка О,
момент /о) главными лучами ан-
тенн РЛС, так же, как и перио-
ды их вращения Гвр„ могут быть
измерены, так как точка О на-
ходится в зоне радиовидимости
как подсвечивающей РЛС (точ-
ки Их и Ир, так и обороняюще-
гося самолета (точка Р).
В этом случае координаты
объекта находятся по формулам
(5.99)
Д = (5.100)
где £ = arctg
ctg(!//l+!y2+£)-
Т?2 sin(y2
/?i sin (/|Sin(t/! -ц/2 + £)
(5.101)
Определение координат объекта в трехмерном пространстве. Ино-
гда необходимо знать положение объекта в трехмерном пространстве
(например, при больших перепадах высот самолета и приближающегося
объекта и др.). Рассмотрим два
случая построения станции воз-
душной РТР.
1. Станция РТР пеленгует в
двух плоскостях (азимутальной и
угломестной). Таким образом,
измеряются (рис. 5.22): Д - угол
места отражающего объекта; у-
угол места РЛС; а - разность
азимутов точки О и И; Н- высо-
та полета самолета; А - разность
моментов приема прямого и отраженного сигналов.
Координаты определяются по формулам
h = Н-D cos Д
_ А(2Я + A cos у)
"2[Я(1 - cos Р cos у - cos a sin fl sin у) + A cos у]
2. Станция РТР пеленгует в одной плоскости (азимутальной).
Рис. 5.22. Случай пеленгации объектов
станцией РТР в двух плоскостях
(5.102)
(5.103)
260
Здесь необходимо по
крайней мере три подсвечи-
вающих РЛС с известными ко-
ординатами: 7?i, R2, R3 - на-
клонные дальности до РЛС,
гь Гз - соответствующие им
горизонтальные дальности - на
рис. 5.23. Измеряются а,, а2, а3
- углы «цель-РЛС» в горизон-
тальной плоскости и Ai, Д2, Аз -
запаздывание переотраженных
Рис. 5.23. Случай пеленгации в одной
плоскости с тремя подсвечивающими
РЛС
от объекта сигналов по отношению к прямым сигналам, принятым по бо-
ковому излучению этих РЛС.
Координаты отражающего объекта находятся по формулам
d (7?! + А,)2 [(J?3 +Д3)-(Л2 +А2)] + (7?2 +А2)2[(7?1 +А,)-(Я3 +Д3)] + ?
2[(7?j + A^Ojeosaj -r2cosa2) +
? +(R3 + А3)2[(Я2 + А2) - (Я, +А,)]+(7?! +A,)(r2-r32)+ ?
+(Я2 + A2)(/jcosa,1 -r3cosa3} +
. +(Я2 + A2)(r2 -r2) + (7?3 +A3)(r2 -r2) ,
+(R3 + A3)(r2cosa2 - ^cosotj)]
D (r3cos«3 -r2cosg2)[(^ + А,)2 -Л|2]+>
2[(7?| + A^rjCostZj - r2cosa2) + (R2 + AjX^cosa, -
X^cosg, - r3cos«3)[(T?2 + A2)2 - r2] +
-r3cos«3) + (R3 + A3)(r2cos«2 - zjcosctj)]
+(r2cosa2 -yosa,)^ + A3)2 -r32]
Л = Я-л/о2-(/2 . (5.105)
Выражения для ошибок в определении дальности по соотношени-
ям (5.95)-(5.106) не приводятся вследствие их громоздкости, однако ос-
новные закономерности в изменениях этих ошибок определяются соот-
ношениями для основных случаев (5.86), (5.91), (5.93) и графиками (см.
рис. 5.18 и 5.19).
Использование излучения РЛС радиолокационного поля, над кото-
рым выполняют задачу самолеты, позволяет при помощи аппаратуры
воздушной РТР определять дальность до приближающихся объектов, в
том числе при отсутствии на них работающих источников излучения. При
этом точности определения дальности в достаточно широких диапазонах
261
условий могут быть сравнимыми с точностями активных радиодальноме-
ров (порядка 100 м) при сохранении главного преимущества РТР - отсут-
ствия демаскирующего излучения с борта обороняющегося самолета.
Рассмотренные варианты использования подсвечивающих РЛС
радиолокационного поля для определения дальности до неизлучающих
объектов при помощи станций воздушной РТР свидетельствуют о
больших возможностях в этом направлении. Возможно применение
станций РТР без пеленгаторов вообще, с пеленгатором в одной или двух
плоскостях, а также использование одной или нескольких подсвечи-
вающих РЛС за радиогоризонтом и в его пределах. Ошибки определе-
ния дальности до объекта этими способами могут быть оценены по со-
отношениям, полученным в настоящей главе.
Литература к главе 5
1. Аверьянов В.Я. Разнесенные радиолокационные станции и систе-
мы. - Минск: Наука и техника, 1978.
2. Техническая информация ЦАГИ, 1973, № 3.
3. Радиоэлектроника за рубежом, НИИ экономики и информации по
радиоэлектронике, 1973, № 14 (712).
4. Черняк В. С. Многопозиционная радиолокация. - М.: Радио и связь,
1993.
5. Черняк В.С., Заславский Л.П., Осипов А.В. Многопозиционные ра-
диолокационные станции и системы. - Зарубежная радиоэлектро-
ника, 1983, № 1.
6. Мельников Ю.П. Методы оценки погрешностей пассивного опре-
деления координат объектов при использовании сигналов удален-
ной обзорной РЛС. - Радиотехника, 2000, № 9.
7. Кондратьев В.С., Котов А.Ф., Марков Л.Н. Многопозиционные
радиотехнические системы / Под ред. В.В. Цветнова. - М.: Радио и
связь, 1986.
8. Сайбель А.Г. Разностно-дальномерный метод радиопеленгования.
- Радиотехника, 2003, № 4.
9. Градштейн И.С., Рыжик И.М. Таблицы интегралов, сумм, рядов и
произведений. -М.: Физматгиз, 1962.
10. Соловьев Ю.А. Спутниковая навигация и ее приложения. - М.:
Эко-Трендз, 2003.
11. Тихонов В.И. Статистическая радиотехника. - М.: Сов.радио,1966.
12. Бартон Д., Вард Г. Справочник по радиолокационным измерени-
ям. - М.: Сов. радио, 1976.
13. ИцхокиЯ.С. Импульсные устройства. - М.: Сов. радио, 1959.
14. Электромагнитная совместимость радиоэлектронных средств и не-
преднамеренные помехи. Составитель Дональд Р.Ж. Уайт, вып.1 /
Пер. с англ, под ред. А.И. Сапгира. - М.: Сов. радио, 1977.
262
15. Мельников Ю.П. Воздушная радиотехническая разведка. Методы
оценки эффективности. - М.: Радиотехника, 2005.
16. Уфаев В.А. Погрешности оценивания временной задержки при
структурной неоднородности сигналов. - Радиотехника, 2003, № 10.
17. Перунов Ю.М., Фомичев К.И., Юдин Л.М. Радиоэлектронное по-
давление информационных каналов систем управления оружием /
Под ред. Ю.М. Перунова. — М.: Радиотехника, 2003.
18. Партала А.Н. Средства радиоэлектронной борьбы ВМС зарубеж-
ных стран, Академия наук СССР. - СПб.: Творческое объединение
«Юпитер», 1991.
19. Сайбель А.Г. Основы теории точности радиотехнических методов
местоопределения. - М.: Оборонгиз, 1958.
20. Мельников Ю.П. Методы оценки эффективности воздушной ра-
диотехнической разведки. - М.О., 1996.
21. Мельников Ю.П., Попов С.В. Методы оценки погрешностей опре-
деления параметров движения объекта при его активной и пассив-
ной локации в условиях РЭП. - Радиотехника, 1998, № 3.
22. Дрогалин В.В., Дудник П.И., Канащенков А.И. и др. Определение
координат и параметров движения источников излучений по угло-
мерным данным в однопозиционных бортовых радиолокационных
системах. - Зарубежная радиоэлектроника. Успехи современной
радиоэлектроники, 2002, № 3.
23. Канащенков А.И., Меркулов В.И., Самарин О.Ф. Облик перспек-
тивных бортовых радиолокационных систем. Возможности и огра-
ничения. - М.: ИПРЖР, 2002.
24. Современная радиоэлектронная борьба. Вопросы методологии /
Под ред. В.Г. Радзиевского. - М.: Радиотехника, 2006.
25. Афинов В., Модернизация системы АВАКС. - Зарубежное военное
обозрение, 1995, № 6.
26. Афинов В. Модернизация системы АВАКС. - Зарубежное военное
обозрение, 1995, № 7.
27. Король О., Шушков А. В космосе - система радиотехнической раз-
ведки высокой точности, или еще раз о USA-160, USA-173. - Но-
вости космонавтики, 2004, т. 14, № 7 (258).
28. Патент США № 4.176.357 от 27.11.79.
29. Справочник по радиолокации / Под ред. М. Сколника. - М.: Сов.
радио, 1978.
30. Цурков М.Л. Обоснование расчета предельной дальности прямой
видимости с учетом экспоненциальной рефракции. - Радиотехни-
ка, 2003, № 11.
31. Финкельштейн М.И. Основы радиолокации. - М.: Радио и связь,
1978.
32. Вакин С.А., Шустов Л.Н. Основы радиопротиводействия и радио-
технической разведки. - М.: Сов. радио, 1968.
263
33. Палий А.И. Радиовойна. - М.: Воениздат, 1963.
34. Палий А.И. Радиоэлектронная борьба. - М.: Воениздат, 1974.
35. Дрогалин В.В., Ефимов В.А., Канащенков А.И. и др. Способы оце-
нивания точности определения местоположения источников ра-
диоизлучения пассивной угломерной двухпозиционной бортовой
радиолокационной системой. - Успехи современной радиоэлек-
троники. Зарубежная радиоэлектроника, 2003, № 5.
36. Ягольников С.В. Разностный метод определения координат ЛА по
сигналам их высотомеров одним бортовым средством разведки. -
Радиотехника, 1997, № 5.
37. Гладков В.Е. Обнаружение целей с использованием «посторонне-
го» источника излучения. - Радиотехника, 1997, № 9.
38. Ягольников С.В. Метод оценки точностных характеристик разно-
стного способа определения координат ЛА по сигналам его высо-
томера. - Радиотехника, 1998, № 2.
39. Гладков В.Е. Измерение координат воздушных целей с использо-
ванием РЛС типа AWACS. - Радиотехника, 1999, № 12.
40. Хан Г, Шапиро С. Статистические модели в инженерных задачах.
-М.: Мир, 1969.
41. Митяшев Б.Н. и др. Временная фиксация импульсов с большим
динамическим диапазоном амплитуд. - Радиотехника, 1975, № 1.
264
ГЛАВА 6
МЕТОДЫ ПОЗИЦИОНИРОВАНИЯ ОБЪЕКТОВ
ОТНОСИТЕЛЬНО ИСТОЧНИКОВ ИЗЛУЧЕНИЯ
Последующее изложение и соотношения, полученные в его ходе,
относятся в основном к вопросам позиционирования ЛА относительно
источников излучения, однако они могут быть применены и в других
областях (например в гидроакустике), где важны вопросы скрытности,
точности и т.д.
Бортовая аппаратура РТР, предназначаемая для поиска, анализа и
пеленгования сигналов ИРИ, в основном таких, как РЛС, и Последую-
щего определения типов и местоположения этих РЛС, может быть ис-
пользована также для решения обратной задачи - определения текущего
местонахождения ЛА по данным разведки РЛС с априорно известными
координатами, т.е. путем использования этих РЛС в качестве радиона-
вигационных точек (РНТ). Актуальность наличия возможности авто-
номного решения навигационной задачи на борту ЛА в режиме самооп-
ределения по радиоориентирам-РНТ, обеспечивающего повышенную
скрытность, помехоустойчивость и живучесть по сравнению с исполь-
зованием неавтономных систем, отмечается в [1], в частности, в связи с
уязвимым местом систем глобального позиционировании (таких как
GPS) - недостаточной помехоустойчивостью [2], особенно в конфликт-
ных ситуациях при наличии активных помех, пример чего приводится в
[3]. В числе возможных ориентиров-РНТ в [1] указываются РЛС управ-
ления воздушным и морским движением, радиостанции, радиомаяки и
другие ИРИ, координаты и параметры излучений которых будут приве-
дены в имеющимся на борту ЛА каталоге РНТ. Преимуществом исполь-
зования именно РЛС в качестве РНТ по сравнению с другими ИРИ яв-
ляется высокий уровень излучаемой мощности сигналов РЛС, обуслов-
ленный применением в них остронаправленных антенн и высокомощ-
ных импульсных передатчиков, что позволяет получить в приемной ап-
паратуре РТР достаточно высокое отношение сигнал/шум для осущест-
вления точных измерений параметров сигналов.
Бортовая аппаратура РТР в зависимости от типа и комплектации
может определять (измерять) с различной полнотой и точностью такие
параметры сигналов РЛС, как несущая частота, частота (период) следо-
вания импульсов, длительность импульсов, длительность облучения ос-
новным лепестком сканирующей диаграммы направленности антенны
(ДНА), период обзора пространства, уровень мощности принимаемых
сигналов, параметры внутриимпульсной модуляции, вид поляризации,
параметры законов перестройки несущей частоты и модуляции сигна-
лов, а также угловые координаты РЛС - курсовой угол и угол места. Ре-
265
зультаты измерений на борту ЛА текущих значений и характера изме-
нения большинства этих параметров в процессе полета могут быть в той
или иной мере, в зависимости от типа ЛА (воздушный, космический) и
его характеристик, использованы для определения пространственного
расположения и параметров движения ЛА относительно РЛС. При этом
могут использоваться также данные от датчиков бортового навигацион-
но-пилотажного комплекса о текущем положении ЛА (курс, крен, тан-
гаж, высота полета, путевая скорость, величины расстояний, пройден-
ных за определенные интервалы времени, и др.).
6.1. Пеленгационные (угломерные) методы
позиционирования ЛА
Позиционирование с использованием информации о текущих коор-
динатах ЛА и координатах одной РАС. Наиболее распространенным
методом определения местоположения разведуемых РЛС в самолетной
аппаратуре РТР является пеленгационный метод, при котором коорди-
наты РЛС определяются в результате обработки данных пеленгования
этих РЛС в процессе полета с использованием информации о текущих
координатах и параметрах движения
Рис. 6.1. Варианты обзора пространства
бортовой аппаратурой РТР
системы фазового пеленгатора (Аг); с
ЛА.
На рис. 6.1 показаны вариан-
ты обзора пространства бортовой
аппаратурой РТР. Приняты сле-
дующие обозначения: а - сектор-
ное или круговое сканирование
направленной антенной; b - ска-
нирование пространства в боковых
секторах за счет движения ЛА с
использованием различным обра-
зом ориентированных неподвиж-
ных направленных антенн (Ь^ь)
или слабонаправленной антенной
- пеленгование в переднем секторе
двумя неподвижными направленными антеннами с пересекающимися
диаграммами (cj, С2).
Пеленгование - определение направления прихода радиоизлучения
и измерение угловых координат ИРИ — состоит в сравнении времени при-
хода радиосигналов на пространственно разнесенные антенные элементы
(излучатели), которое может осуществляться разными методами - фазо-
вым, амплитудным, частотным, временным (импульсным) и комбиниро-
ванием этих методов [4].
При фазовом методе измеряемым параметром является разность
фаз несущей частоты сигнала на выходах антенн.
266
При временном - интервалы времени между моментами приема на
эти антенны импульсно-модулированного сигнала, направление прихо-
да при этом определяется относительно пространственной конфигура-
ции расположения антенн на ЛА, обычно относительно линии их распо-
ложения.
При частотном (доплеровском) методе измеряется скорость изме-
нения фазы или разности фаз несущей частоты или частоты модуляции
принимаемого сигнала, которое возникает за счет эффекта Доплера при
действительном или имитированном движении (перемещении) антенн и
зависит от направления этого движения относительно направления при-
хода сигнала.
При амплитудном методе прием сигналов производится направ-
ленной антенной или несколькими антеннами, определенным образом
ориентированными в пространстве так, что амплитуды или отношения
амплитуд сигналов на выходах антенн являются функцией направления
прихода. Прием электромагнитных излучений направленной антенной
носит избирательный по направлению характер, обзор пространства и
поиск излучений РЛС бортовой аппаратурой РТР может осуществляться
разными способами: путем секторного или кругового сканирования на-
правленной диаграммой (вариант а), в частности, с использованием бы-
стро вращающихся антенн (150...600 об/мин и выше [5,6]), либо путем
последовательного просмотру пространства в процессе поступательного
движения ЛА с использованием неподвижных антенн, диаграммы на-
правленности которых ориентированы в боковых секторах ЛА [7,8] (ва-
рианты Ь) или в переднем секторе [9,10] (вариант с). В последнем слу-
чае бортовой пеленгатор может использоваться в качестве приводного
устройства для вывода ЛА на ИРИ (на радиомаяк-РНТ [4, 5] или на раз-
ведуемый источник радиопомех [9]).
Определение направления на РЛС при пеленговании направленной
антенной обычно производится по положению оси диаграммы направ-
ленности в момент прохождения направления на РЛС в процессе скани-
рования антенны или перемещения ДНА вместе с ЛА, определяемый по
максимуму амплитуды или по середине пачки принятых импульсных
сигналов [11] с использованием компенсации приема по боковым лепе-
сткам и с учетом, при необходимости, отношений уровней сигналов в
пачке [12]. При ориентации неподвижной (или двух неподвижных) ДНА
в области переднего сектора (вариант с) основным способом определе-
ния направления прихода будет сравнение амплитуд сигналов, приня-
тых двумя антеннами с пересекающимися диаграммами [9,10]. Принци-
пиально возможно также вычисление координат РЛС по данным изме-
рений амплитуд нескольких последовательных сигналов, принимаемых
разными участками основного лепестка ДНА (при известной форме ос-
новного лепестка) в процессе движения ЛА [12,13].
267
Позиционирование ЛА при наличии в рабочей зоне станции РТР не-
скольких РЛС с известными координатами. Пеленгование наземных
РНТ обеспечивает возможность управления полетом на РНТ и от нее в
любом заданном направлении, а также оценку местонахождения ЛА. При
наличии в рабочей зоне бортового пеленгатора двух или нескольких со-
вместно наблюдаемых РНТ-РЛС определение местоположения ЛА может
производиться методом обратной триангуляции - по пеленгам на эти
РЛС, координаты которых известны [14]. При двух РНТ место ЛА опре-
деляется как точка пересечения двух пеленгов самолета (ПС) относитель-
но этих радиоориентиров. Пеленг самолета выражается через пеленг ра-
диоориентира (ПР) относительно ЛА как ПС=ПР±180°, где знак «+» при
180° соответствует расположению ЛА западнее РНТ, а знак «-» - восточ-
нее [4]. Детальный анализ погрешности местоопределения здесь не про-
изводится (он приведен в [4,15-17]), заметим только, что для исключения
больших погрешностей оценки местоопределения ЛА используемые РНТ
должны быть, согласно [4], разнесены на расстояния, соизмеримые с рас-
стоянием от каждой из них до ЛА.
При наличии в зоне приема бортовой аппаратуры РТР нескольких
РЛС-РНТ, пеленги которых измеряются практически одновременно (в
интервале времени, за который перемещение ЛА пренебрежимо по от-
ношению к дальности), точность местоопределения может быть повы-
шена путем совместной обработки данных пеленгования по методу
наименьших квадратов с минимизацией расстояний ЛА от линий пелен-
гов [15,18] с использованием приведенных ниже формул, подобных по-
лученным в [18] для решения прямой задачи РТР - определения коор-
динат РЛС по данным многократного пеленгования с борта носителя,
движущегося по произвольной траектории с фиксацией значений коор-
динат носителя в моменты пеленгования:
х _ 'LS^yjS. -'LS.'Ly^C, -ZStCZXiSPi+ZSfaiCt
' (6.1)
у ZCfZyrf - ZSjCiZyiSjCi - YC-YXiSjCi +
Y.S-Y.C- -(ZSiCi)2
Здесь Si = sin а,-; C, = cos a,; a, - ПС относительно z-го радиоориентира,
определяемый через бортовой ПР (как указывалось выше); X,Y- коорди-
наты ЛА.
При только двух совместно пеленгуемых РНТ формулы (6.1) при-
водятся к виду
Х_У\~ + *2ctgg2 - XiCtgcq
ад-ед ’ (62)
r_=x2-x1 + y,tgg1-y2tg«2
tga,-tga2
268
Погрешность местоопределения может быть охарактеризована
средним квадратом ошибки места, который при равноточных измерени-
ях пеленгов находится по формуле
(г12 + r2 ) C°s eCV > (6.3)
где и, г2 - расстояния от РНТ до объекта; у - угол пересечения пеленгов;
<та - среднеквадратическая ошибка пеленгования.
Формула (6.3) вытекает из соответствующей формулы в [17] с уче-
том того, что ошибка z'-й пеленгационной линии положения определяет-
ся как <таг„ где г, - расстояние от i-й РНТ до объекта (ЛА).
При наличии в районе полетов сети стационарных РЛС обзора
пространства и управления воздушным движением совместное пеленго-
вание тех или других групп этих РЛС в процессе полета позволит осу-
ществлять определение текущих координат и параметров движения ЛА
без излучения бортовых радионавигационных средств. Заметим, что ап-
паратура РТР с остронаправленными антеннами и чувствительными
приемными устройствами позволит принимать излучения высокопотен-
циальных РЛС обзора воздушного пространства (с мощностью передат-
чиков порядка мегаватта и коэффициентом усиления антенн около
35...40дБ) за пределами радиогоризонта за счет явлений дифракции и
дальнего тропосферного распространения радиоволн [19...21], что дает
принципиальную возможность использовать для навигации также такие
удаленные РЛС, подобно тому", как это имеет место, в частности, в сис-
теме позиционирования дальнего действия [22], где положение объекта
определяется путем радиотриангуляции по отношению к двум радио-
маякам, расположенным за пределами прямой радиовидимости.
Позиционирование ЛА по данным однократного пеленгования одной
РЛС в горизонтальной и вертикальной (угломестной) плоскостях.
При наличии в зоне приема аппаратуры РТР только одной РЛС с априор-
но известными координатами решение навигационной задачи по данным
однократного пеленгования РЛС-РНТ возможно, если наряду с определе-
нием направления на РЛС в горизонтальной плоскости измеряется также
угол места данной РЛС - уум. В этом случае расстояние (наклонная даль-
ность) от РНТ до ЛА (R) вычисляется по следующей формуле [23]:
R = Я/sin уум, (6.4)
а горизонтальная дальность (В,ор) -
ЯГОр — H/ctg Уум , (6.5)
где Н— высота полета ЛА.
Такой пеленгатор может быть выполнен, в частности, на основе
временного или фазового метода с использованием нескольких ненаправ-
ленных антенн, разнесенных на определенные расстояния (базы) в преде-
лах ЛА, например, установленных вблизи оконечностей крыльев и фюзе-
269
ляжа. Если пеленгатор имеет две пары антенн с взаимно перпендикуляр-
ными базами, расположенными в горизонтальной плоскости, причем одна
база (Z) ориентирована вдоль продольной оси ЛА, а другая (d) - поперек,
то курсовой угол 6 и угол места уум РЛС при временном методе опреде-
ляются выражениями [24]
1т
<9 = arctg—(6.6)
o'г,
/ум = arccos~^(lrd)2 +(drl')2 , (6.7)
где г/, - разности времени прихода сигналов на антенны продольной и
поперечной баз, соответственно; с - скорость распространения сигнала.
При фазовом методе угловые координаты ИРИ определяются по
формулам, приведенным в [25] для частного случая равенства баз (т.е.
при l=d):
Q ,
<9 = arctg—- , (6.8)
0,
/ум = arccos f "|, (6.9)
где &i, &d~ разности фаз на продольной и поперечной базе соответст-
венно; 2 - длина волны.
Варианты технической реализации бортовых пеленгаторов, осно-
ванных на временном (импульсном) методе, приведены в [26...28]. При
использовании фазового метода для совместного обеспечения точности
и однозначности измерения пеленга обычно применяются многобазные
фазовые пеленгаторы, содержащие несколько разнесенных на разные
расстояния (базы) антенн; пеленг цели определяется в результате совме-
стной обработки совокупности разностей фаз на выходах этих антенн.
Конструкция и размещение многоантенной системы на ЛА, а также ап-
паратурное и алгоритмическое обеспечение многоканального приема,
калибровки приемных трактов и вычислительной процедуры определе-
ния пеленга в многобазном пеленгаторе представляют определенные
сложности. В некоторых случаях более простым может быть примене-
ние сочетания временного и фазового методов обработки сигналов на
выходах меньшего количества антенн (до двух, как в устройстве пас-
сивной дальнометрии [29]).
Недостатком угломестного метода является ограниченная и отно-
сительно небольшая дальность, в пределах которой может быть обеспе-
чена удовлетворительная точность местоопределения с учетом реально
достижимой погрешности измерения угла места. Как видно из (6.4),
(6.5), при R(Drop)/H > 8-10 угол места будет иметь величину порядка
270
единиц градусов, что уже соизмеримо с возможной погрешностью его
измерения и флюктуационными колебаниями ориентации осей ЛА в по-
лете. Так, например, в [30] величина суммарной СКО бортового пелен-
гатора оценивается как лежащая в пределах 0,3.. .0,4° при пеленговании
в плоскости горизонта и 0,4...0,6° для вертикальной плоскости, что свя-
зано с влиянием отражений от подстилающей поверхности и рефракци-
онными ошибками в вертикальной плоскости. Указанные оценки вели-
чин СКО пеленгования надо рассматривать как оптимистические, дос-
тижимые при работе в ограниченном частотном диапазоне. Соответст-
вующее выражению (6.4) соотношение ошибок в [30] приводится в виде
/ Я)+Луум / tgyyM и отмечается, что основной вклад дает второе
слагаемое. Согласно оценке, приведенной в [16], эта радиальная состав-
ляющая погрешности местоопределения угломестным способом стг без
учета ошибок измерения высоты Н и возможного разброса высоты по-
зиции РЛС-РНТ приближенно равна
<тг~<т^/Н, (6.10)
где стум - погрешность пеленгации в вертикальной плоскости.
Как видно, радиальная погрешность резко увеличивается с возрас-
танием дальности, в связи с чем область применимости угломестного
метода обычно (например, [16]) принимается ограниченной пределами
дальности до 5-7/7. Поэтому угломестный метод местоопределения мо-
жет быть практически использован лишь при ведении разведки с высот-
ных и космических ЛА.
Позиционирование с использованием кинематического метода ме-
стоопределения. При полете на малых и средних высотах, когда угло-
местный способ неэффективен (действует только в относительно малом
участке диапазона дальностей вблизи ЛА), а в ограничиваемой радиого-
ризонтом зоне приема могут оказаться лишь единичные РЛС-РНТ, од-
номоментное самоопределение (с опорой на величину высоты Н или на
расстояния между несколькими совместно наблюдаемыми РЛС) стано-
вится невозможным, и для определения координат движущегося пелен-
гатора относительно неподвижного ИРИ необходимо использовать дан-
ные о параметрах движения ЛА - носителя пеленгатора. Так, дальность
до пеленгуемого ИРИ может быть определена кинематическим методом
[31] - как отношение тангенциальной скорости ЛА К, к угловой скоро-
сти линии визирования цели со:
R=V,lco. (6.11)
Угловую скорость линии визирования можно определить по ско-
рости изменения измеряемой на продольной базе I разности фаз 0/, ко-
торая связана с курсовым углом на ИРИ (направлением линии визиро-
вания) соотношением
0 = 24//2)cos 0. (6.12)
271
При этом угловая скорость со может быть представлена как
со = &/J2nls.m в, (6.13)
где 0 - скорость изменения разности фаз, определяемая скоростью из-
менения курсового угла в.
Тангенциальная скорость И, определяется через скорость ЛА и
курсовой угол в как V, = Ksin в, так что результирующее выражение для
вычисления дальности будет иметь вид
R = F-^sin26>. (6.14)
Л&
Подобным образом определяется дальность до ИРИ в пассивных
интерферометрических дальномерных системах [29,32], где наряду с
данными измерений скорости перемещения носителя аппаратуры раз-
ведки, угла между направлением на ИРИ и базой антенной системы ис-
пользуется информация о скорости изменения фазы. Курсовой угол при
временном или фазовом методе пеленгования находится по формулам
(6.6) или (6.8).
Приведем иллюстративный численный пример возможной сово-
купности точных значений измеряемых и вычисляемых параметров при
определении дальности кинематическим методом, позволяющий ориен-
тировочно оценить требуемое для этого время измерений. Так, при
V = 250 м/с, I = 30 м, 2= 0,1 м, курсовом угле в = 60,878° и дальности
114,47 км скорость изменения разности фаз 0 будет составлять 180° /с
и для оценки дальности с точностью порядка 1 ...2% погрешность изме-
рения разности фаз должна быть также около 1% от величины измене-
ния этой разности за мерный отрезок времени, т.е., например, около
5... 7° при времени измерения около 4 с.
Величина и дисперсия ошибки вычисления дальности (4R и Dg~)
определяются приведенными в [31] выражениями
ДЯ = (ДК,ю-Да>К,), (6.15)
DR= (Dv+DJl2)/co2, (6.16)
где AR=R-R , &ау=а>-а>, AVt= Vt-Vt, R,a>,V, - оценки соответствую-
щих величин; DyuDm- дисперсии ошибок оценивания V, и со (со выра-
жается через измеряемые параметры 0, 2 и 6, как было определено
выше, для повышения точности можно дополнительно использовать
измерения скорости изменения разности фаз также на поперечной базе).
При пеленговании ИРИ амплитудным методом - с помощью на-
правленных (в частности, неподвижных) антенн, диаграммы направлен-
ности которых ориентированы в боковых секторах ЛА (см. рис. 6.1, ва-
рианты bia^b) под постоянными углами 01,2 к продольной оси. Угловую
скорость цели можно определить по времени прохождения диаграммы
272
направленности такой антенны, ширина которой по уровню половинной
мощности 0о.5 известна, через направление на цель в процессе движения
ЛА [33], после чего находится дальность, например, на основе приве-
денных в [23,33] соотношений, преобразованных к виду
R=VttcIO^, (6.17)
где tc - время пересечения целью ДНА пеленгатора; K,=Fsin v, V - путе-
вая скорость ЛА.
Недостатком данного варианта кинематического метода определе-
ния дальности с использованием неподвижных направленных антенн
бокового обзора является однократный характер акта определения
дальности, осуществляемого лишь во время прохождения ДНА через
направление на цель. При наличии в составе бортовой аппаратуры РТР
направленной сканирующей антенны (см. рис. 6.1, вариант а), рабо-
тающей в управляемом режиме, охарактеризованная выше процедура
определения дальности может быть многократно повторена путем оста-
новки сканирования и фиксации положения луча в направлении на РЛС
с измерением времени прохождения ДНА направления на цель и после-
дующей переброской луча в новое фиксированное положение для изме-
рения этого времени при другом направлении (курсовом угле) на цель.
Изменение уровня мощности принимаемых сигналов за счет изменения
дальности до ИРИ в процессе прохождения луча через цель при t>/90°
будет приводить к смещению центра формируемого в косом сечении
луча сектора приема относительно номинального положения середины
луча, соответствующего направлению v. Однако приведенные в [13] ре-
зультаты численных проверок величины такого смещения показывают,
что в большинстве типичных ситуаций (сочетаний значений 0О.5и v), от-
клонения центра сектора приема от номинального направления середи-
ны луча v достаточно малы. Так, для луча с 0О,5 = 2° смещение центра
сектора приема, измеряемого по уровню -ЗдБ в процессе прохождения
косого сечения луча через направление на цель при t>=60° и о=45°, со-
ставляет около 0,014° и 0,024° соответственно, а для луча с 0О,5 =7° при
тех же v - около 0,167° и 0,29°. Величина изменения (сужения) сектора
приема по сравнению с номинальной величиной ширины луча 0О,5 при
этом пренебрежимо мала и составляет первые единицы минут. В [13]
приведены также варианты определения угловой скорости цели и, соот-
ветственно, дальности до нее по времени пересечения целью ДНА на
уровне, отличном от уровня половинной мощности, а также по скорости
изменения уровня принимаемого сигнала на скате главного лепестка
ДНА в процессе движения ЛА, основанные на использовании двух ви-
дов аппроксимации формы главного лепестка.
К недостатку кинематического метода, ограничивающему возмож-
ности его использования, можно отнести необходимость осуществления
непрерывного приема и точного измерения отслеживаемого параметра
273
сигнала (фазы или амплитуды) на протяжении мерного отрезка времени,
что не всегда может быть обеспечено в отношении сигналов РЛС, рабо-
тающих в режиме периодического обзора пространства, ввиду обычно
имеющих место глубоких флюктуаций уровня бокового излучения ан-
тенн этих РЛС в процессе сканирования.
Определение координат и путевой скорости ЛА по четырем пеленгам
на источник радиоизлучения. В типичных ситуациях ведения воздушной
РТР определение местоположения ИРИ с борта движущегося одиночного
ЛА обычно производится по данным его пеленгования из двух (как в аппа-
ратуре РТР с двумя фиксированными лучами (см. рис 6.1, b\aJ)) или боль-
шего числа точек пространства с точно известными координатами путем
решения триангуляционной задачи или с использованием более сложных
алгоритмов обработки совокупности измерений пеленгов [16,18].
Рис. 6.2. Определение координат и параметров
движения ЛА, движущегося с постоянной
скоростью, по четырем пеленгам на РНТ
Решение обратной за-
дачи навигационного само-
определения ЛА по пелен-
гам на единственную на-
блюдаемую РЛС-РНТ в
простейшем случае будет
заключаться в нахождении
дальности до нее как сто-
роны треугольника, вычис-
ляемой по двум углам (пе-
ленгам), и стороне - отрез-
ку пути ЛА, пройденному
за интервал времени между
моментами измерения пеленгов и определяемому бортовой автономной
радионавигационной системой в результате счисления пути (как инте-
грал путевой скороста ЛА на этом интервале времени). Если ЛА дви-
жется с постоянной скоростью, параметры которой точно не известны,
они могут быть определены совместно с координатами ЛА по четырем
последовательным измерениям направлений на РНТ (рис. 6.2) в резуль-
тате решения системы линейных уравнений [34]
Y1 - Xi ctgyzi =У! -XjCtg^j,
К1+ Kv7’12-A)ctg^2- ^xT12Ctgy/2 = y2-X2Ctgy/2,
Ei + PyTu-^ctgff/j- YxTi3Ctgi//3 = y3-x3ctgi//3, (6.18)
El + VyT14 - Xt Ctgy/4 - VXTU Ctgt//4 = y4 - X4 Ctg^4,
где i/fj - пеленги (азимуты) РНТ в г-е моменты времени 6 ({=1,2,3,4);
Г1; - интервалы времени между первым и последующими моментами из-
мерений (Г, = Z, - /]); Xi, К) - координаты ЛА в первый момент; Vx, Vv -
составляющие (проекции) вектора путевой скорости ЛА; х„ у, - координа-
ты РНТ, направления на которые определяются в i-e моменты времени в
процессе полета ЛА.
274
Условия минимизации ошибки местоопределения можно оценить
путем исследования определителя системы (6.18) при разных вариантах
взаимного расположения точек измерения на траектории ЛА и пелен-
гуемых РНТ.
Позиционирование с использованием информации от нескольких
сканирующих антенн. Остановимся еще на одном методе почти одно-
моментного определения пеленга и дальности до ИРИ, основанном на
последовательном пеленговании цели сканирующими антеннами с раз-
личным образом расположенными в пространстве диаграммами направ-
ленности. Так, в пассивной системе измерения дальности [35], содер-
жащей разнесенные на расстояние (базу) d синхронно сканирующие в
горизонтальной плоскости с угловой скоростью со направленные антен-
ны с параллельно ориентированными диаграммами, расстояние до из-
лучающего объекта вычисляется по интервалу времени между последо-
вательными приемами этими антеннами излучения объекта (РЛС) Д/21 и
углу прихода сигнала (Р, например, по формуле (при отсчете угла при-
хода ср от нормали к базе)
7?=</cos^/(wA/2i . (6.19)
Сложность реализации этого метода на борту ЛА заключается в
необходимости точного измерения весьма малого углового интервала
между направлениями на цель из точек расположения антенн на ЛА или
соответствующего ему промежутка времени между моментами приема в
точках максимума практически совпадающих в пространстве диаграмм
параллельно ориентированных антенн, характеристики направленности
и расстояние между которыми существенно ограничены условиями их
размещения. Так, при максимально возможном разносе антенн в преде-
лах ЛА на 30...40 м угловое различие направлений на цель из точек на-
хождения этих антенн при дальности всего около 30...40 км даже в на-
правлении нормали к базе не превышает первых единиц угловых минут,
что значительно меньше достижимой ширины ДНА в данных условиях
и практически не может быть определено (измерено) со сколь-нибудь
удовлетворительной точностью ни посредством временных, ни угловых
измерений. При более типичных дальностях до РЛС-РНТ (порядка со-
тен километров) это угловое различие не превышает первых десятков
угловых секунд, т. е. будет практически необнаруживаемым бортовой
пеленгаторной аппаратурой.
Однако возможен другой вариант реализации одновременного
сканирования поверхности Земли параллельными диаграммами с борта
ЛА. При нем наряду с обычно используемой остронаправленной в гори-
зонтальной плоскости сканирующей по азимуту пеленгаторной антен-
ной с относительно широкой (веерной, косекансной) диаграммой на-
275
правленности в вертикальной плоскости, след которой на земной по-
верхности проходит через точку под ЛА, применена вторая, синхронно
сканирующая с первой, антенна с аналогичной диаграммой, ориентиро-
ванной наклонно по отношению к диаграмме первой антенны так, что
след диаграммы второй антенны расположен эксцентрично относитель-
но вертикали ЛА и параллелен следу диаграммы первой антенны [36].
При этом, так же как в ранее охарактеризованной системе [35], даль-
ность до излучателя определяется по интервалу времени между прие-
мами излучения по вертикальному и наклонному лучам А/в1|, например:
„ Htgz
К ...... 5
(6.20)
где х ~ Угол между вертикальным и наклонным лучами в вертикальной
плоскости; Д/в1| - интервал времени между приемами излучения по вер-
тикальному и наклонному лучам; Н- высота полета ЛА.
Угловая разность и, соответственно, временной интервал между по-
следовательными приемами А/в„ в этом варианте значительно больше,
чем в системе [35], что принципиально позволяет почти одномоментно
определять пеленг и дальность до ИРИ в пределах зоны обзора радиусом
около100...200 км при высоте полета ЛА //=5-10 км. Другой вариант
пассивного измерения дальности и/или угла места излучающей цели с
помощью сканирующей антенной системы, формирующей два плоских,
наклоненных один относительно другого луча, приведен в [37]. Ограни-
чивающим фактором в реализации этого метода может являться степень
возможности установки на ЛА остронаправленных сканирующих антенн
ввиду их значительных габаритов и сложностей размещения с учетом не-
обходимости обеспечения требуемой точности пеленгования.
6.2. Беспеленговые методы позиционирования ЛА
Пеленгационные методы определения местоположения ЛА по из-
меряемым на борту угловым координатам РНТ, как правило, требуют
для своей реализации применения достаточно сложных в техническом
отношении и критичных к условиям размещения пеленгационных ан-
тенных устройств, что ограничивает достижимые технические характе-
ристики (точность, диапазон частот, сектора обзора) и область исполь-
зования таких бортовых пеленгаторов, особенно на скоростных ЛА.
Единичные примеры технических решений с применением временного
метода определения направления прихода импульсного сигнала на не-
сколько разнесенных в пределах ЛА ненаправленных антенн простой
конструкции могут быть реализованы лишь на больших ЛА, имеют ог-
раниченную точность ввиду технических сложностей измерения весьма
малых временных интервалов и являются, скорее, нетипичными исклю-
276
чениями в ряду вариантов пеленгационных методов, используемых в
бортовой аппаратуре. В этой связи могут представлять интерес не тре-
бующие применения сложных и громоздких остронаправленных антенн
и, соответственно, более простые и экономные в реализации беспелен-
говые методы определения относительных координат ИРИ с борта ЛА,
такие как доплеровские, временные и энергетические, используемые
самостоятельно или совместно с пеленгационными методами.
Измерение координат ЛА при использовании измерений доплеров-
ских смещений несущей частоты и частоты модуляции сигналов.
Доплеровские методы позиционирования широко используются в спут-
никовых навигационных системах, где опорные РНТ-излучатели раз-
мещены на движущихся по определенным орбитам спутниках и коор-
динаты объектов навигации вычисляются по измерениям доплеровского
сдвига частоты этих излучателей с учетом известного положения спут-
ников. Известен и ряд вариантов решения обратной задачи - определе-
ния местоположения источника излучения по доплеровскому смещению
его частоты, обусловленному движением источника или наблюдателя
(например, [38...42]). Отметим, что решение этой задачи в ряде случаев
осложняется отсутствием априорных данных о точном значении часто-
ты того или иного ИРИ, в связи с чем для вычисления его координат
приходится использовать данные только об относительных изменениях
частоты. Ниже приведены ^системы уравнений, связывающие измерен-
ные в последовательные моменты времени t\, t2, h значения частоты
принимаемого сигнала (f,f2,fi) и пройденные движущимся с постоян-
ной скоростью ЛА за интервалы времени между этими моментами от-
резки пути 5,3, $23 с искомыми величинами дальности и курсового угла
ИРИ в третий момент времени и [42]:
<? <
1 + — 2cos&
о /
l + 2cos53
cos#, + —
____________^з
•^cos5, +-(A-1)
/з ПЛ J
(6.21)
cos&+-^-
^-cos&+—
/з d/з J
Здесь Sb и 5гз - отрезки пути ЛА за интервалы времени Т\3 = /3 - /| и
Тгз =6 - h соответственно; с - скорость распространения сигнала;
V - скорость ЛА.
Другой вариант записи уравнений, использующий отношения раз-
ностей измеряемых частот, имеет вид
277
1+W:
M
l + ^lf2COS#;+^i
M R3
V I 9 ( Q \
cos&+ —-cosA /1 + — 2coSi9i+ —
3 r3 Д яД R}J
a #23
cos&,+-^-
Ri
1 + ^2-f 2cos A + —
V M *3J /,-Л
COS#, + — -[ COS#, + —
М *3.
cos#3 -
V А
2cos£3 + -42.
#21
' R\ .
(6.22)
cos^ + -^2. -^3
cos#3 —-.-------- ... _
1 + ^2. ( 2cos #3 + ^2.^
V M 3 R3J
Пример взаимного положения траектории ЛА и неподвижного излу-
чателя-РНТ показан на рис. 6.3. При условных значениях измеренных в
моменты времени t\, t2, t3 частот (/] =1000021932, f2 =1000018052,
f2 =1000015482, скорости), (K=7,741) и отрезков пути (Si2 =202,679,
#23 =73,663 и #1з =276,342) соответствующие решениям систем уравнений
(6.21), (6.22) значения дальности и курсового угла составляют R3 =400 и
6»3 =53,13°.
В случаях, когда ско-
рость ЛА можно считать по-
стоянной, но ее величина
точно не известна, по резуль-
татам измерений частоты
сигнала может быть найден
только курсовой угол #з, на-
пример, из уравнений (6.22),
путем замены в них линей-
ных величин #1з, #23, Я3 на
соответствующие им вре-
менные интервалы 7)3, Ту,
ТЯ}. При этом определяемый из уравнений интервал Tr3 будет равен време-
ни, за которое ЛА достиг бы излучателя, двигаясь в его направлении из
точки третьего измерения с той же скоростью (ГДз =R3/V). Нахождение
собственных координат в данном случае будет принципиально возможно
по определяемым в процессе прямолинейного движения ЛА четырем на-
Рис. 6.3. Определение координат ЛА
беспеленговыми методами
278
правлениям (курсовым углам) на два или более излучателя-РНТ с после-
дующим вычислением координат и составляющих вектора скорости ЛА из
системы уравнений (6.18).
При использовании в качестве РНТ РЛС с периодической импульс-
ной модуляцией более удобным представляется измерять на борту ЛА
обусловленное его движением доплеровское смещение частоты модуля-
ции сигнала РЛС (изменение интервалов между принимаемыми импульс-
ными сигналами) путем сопоставления моментов прихода фронтов по-
следовательных импульсов с учетом интервалов между их излучением
подобно тому, как это изложено в [42, п. 7.5] для разностно-даль-
номерного или доплеровского интегрального методов. Приводимый ниже
вариант этого метода можно назвать доплеровско-временным [39].
Если период повторения импульсов (Тп) данной РЛС, используе-
мой в качестве РНТ, априорно известен, то для определения своих ко-
ординат относительно этой РНТ (дальности и пеленга или курсового уг-
ла) достаточно измерить на борту ЛА величины двух интервалов време-
ни 1\2 и Тгз между тремя последовательными моментами времени lt, (2,
t3, заключающих в себе некоторое известное число периодов повторения
принимаемого сигнала (/ и m ), и пройденные за эти интервалы отрезки
пути ЛА S12 и 523. Различия между истинными и измеренными на борту
интервалами времени, соответствующими данному числу периодов сиг-
нала I и m (Ли = Л'п - Т12 и <5/23 = mT„ - Т2з), характеризуют разности
дальностей от РНТ до ЛА на границах мерных интервалов пути S]2 и 523.
При прямолинейном движении ЛА дальность и курсовой угол РНТ в
третий момент времени будут определяться как
yj _ ^13(^23 ~^2з) ~ ^23(^13 ~ -У.з) <6 23)
2(Д135'23 -Дгз^з)
&3 = arccos А2з№/ ~ А^з) ~ , (6.24)
*^1з(^23 ~ *$2з) ~ ^2з(^13 — *$1з)
где 513 = 5]2 + S23', cStjj.
В случаях, когда расстояние до РНТ заведомо значительно больше
отрезков пути S12, S23, можно использовать несколько более простые
приближенные формулы, приведенные ниже в виде, соответствующем
представлению отрезков пути ЛА через его скорость И, предполагаемой
постоянной на интервале времени измерений:
^7’12з+[(Т13+7’23)^2-ВД]2
/м —
2(^1 ~К2)
7]3
= arctg-----------------,
(Г33 + Т23)К2-Т23К3
(6-25)
(6.26)
279
-0,5
; к2 =
-0,5
HkY-i
. ^12 J
где кх =
' , ч 7
ркL
I ^23 J
Если точное значение периода повторения импульсов РЛС-РНТ ап-
риорно не известно, величины интегрального доплеровского смещения
периода за мерные интервалы времени Ту могут быть определены в
процессе обработки с использованием еще одного интервала времени Т}4,
также содержащего некоторое определенное число периодов принимае-
мого сигнала п. При выполнении отсчетов временных интервалов Т\2, Т23,
Т34 через одинаковое число периодов (/ = m = и) суммарные временные
сдвиги периода принимаемого сигнала РЛС-РНТ связаны между собой
соотношениями St]2 = Ггз -Г]2 + St23 и <5/34 = Т^з -Т34 + §t23, а величина St23
определяется из следующего уравнения:
3St I ^3 ^3 ^24^ ^2+^34, г _
23 гтч rf гтч rri О I I I Т гр ГГ I о 23 *
723_ у12 у34“ 7 23 ±\С J V23~-'l2 734~у23У Z
(6.27)
По найденным таким образом величинам запаздывания Sty и фор-
мулам (6.23),(6.24) или (6.25),(6.26) вычисляются текущие относитель-
ные координаты ЛА. Кроме того, расстояние до РЛС-РНТ в четвертый
момент времени Л4 принципиально возможно определить с использова-
нием только данных измерений временных интервалов, характеризую-
щих допплеровское изменение периода сигнала, т.е. без измерения от-
резков пути ЛА:
д -с ^23^24(^34^14 7)4^34) 7"137~'i4(T34<S’t24 T24<?t34)
2 ^23^24(^14^34 “^34^14) “^13^14(^24^34 “^34^24)
(6.28)
В качестве опорной линейной величины здесь выступает скорость рас-
пространения сигнала с.
Приведем набор численных значений измеряемых и вычисляемых
величин, соответствующий некоторой гипотетической, но принципи-
ально возможной ситуации:
И=7,7408; 7=от=л=25ОО; 7’12=9,9997913; Т23=9,99980651;
Г34=9,99982828; Т„=0,004; <5г12=208,7-10^; <5^=193,49-10-6;
Л34=171,716-Ю'6; Ki=l,3755786; К2=1,1335346; Я3=456,231;
7?4=404,716; 03=44,539°; 04=52,249°.
Точность метода будет зависеть, в частности, от стабильности час-
тоты излучаемого сигнала РНТ, необходимость обеспечения которой от-
мечается в [38]. Ввиду относительно небольшой величины доплеровского
смещения частоты в диапазонах работы разведуемых ИРИ при скоростях,
характерных для воздушных ЛА, приведенные варианты метода могут
быть использованы, в основном, при навигации космических ЛА.
280
Позиционирование при изменении разностной доплеровской частоты
сигнала, принимаемого на разнесенные антенны. Другой вариант доп-
леровского метода местоопределения, не столь критичный к стабильно-
сти частоты сигнала и позволяющий использовать в качестве РНТ ИРИ с
непериодической модуляцией (РЛС с переменной частотой повторения
импульсов, телевизионные передатчики и др.) основан на измерении раз-
ностной доплеровской частоты сигнала, принимаемого на разнесенные
антенны, подобно тому, как это имеет место в дифференциально-фазовом
радиопеленгаторе и доплеровском измерителе угловой скорости в [4]. Ряд
практически не отличающихся примеров использования этого эффекта
для определения местоположения ИРИ с движущегося носителя содер-
жится в патентах США [29,44-46]. В одном из возможных вариантов это-
го метода [41] определение относительных координат излучателя-РНТ
производится по скорости изменения разностной доплеровской частоты
путем подсчета числа периодов этой частоты в последовательных вре-
менных интервалах с вычислением по этим данным и отрезкам пути ЛА
дальности и курсового угла РНТ. Отсчет периодов разностной частоты,
длительность которых в процессе движения ЛА изменяется, может осу-
ществляться путем фиксации моментов прохождения разности фаз сигна-
лов, принимаемых разнесенными вдоль ЛА (в направлении его движения)
всенаправленными в горизонтальной плоскости или слабонаправленными
антеннами, через некоторое определенное легко регистрируемое значение
(нуль или п) с помощью устройства фазового сравнения (суммарно-
разностная мостовая СВЧ-схема, фазовый детектор и т.п.). Ввиду малости
расстояния между антеннами по отношению к дальности до излучателя
фазовый фронт сигнала можно считать плоским. При этом дальность и
курсовой угол РНТ в какой-либо точке прямолинейного участка траекто-
рии ЛА могут быть вычислены по величинам двух смежных отрезков пу-
ти ЛА S]2 и 52з за последовательные интервалы времени Гц и Т2з, содер-
жащие соответственно / и т периодов разностной доплеровской частоты,
в результате решения уравнений
f Г ”|2 If Г “12'
2 п , + I _ I 2 п (1 + т)Л -2 .
2) cos Э3 + ------- [В =4 cos 493------------В +1,
I L d J J [ L d J .
(6.29)
. Dill UTi Dill 171 ,
где A =----------—7+1; В =---------------—=-+1; a - расстояние между
(S23 о I (% _Y
+ cos A — + cos &
1*3 ) 1*3 J
антеннами; Sb = S\2 + S23; 2 - длина волны; /?з и в3 - искомые дальность и
курсовой угол РНТ в третий момент времени.
281
Длина волны излучения данного ИРИ-РНТ обычно априорно извест-
на. Принципиально возможно произвести определение (вычисление) даль-
ности и курсового угла ИРИ и при неизвестной длине волны по трем по-
следовательным измерениям отрезков пути (Sl2, S23, £34) ЛА за интервалы
времени, содержащие I, т, и п периодов разностной частоты. Соответст-
вующие расчетные выражения приведены в [41], однако более рациональ-
ным будет использование данных измерителя частоты (длины волны) при-
нимаемых сигналов, обычно входящего в состав бортовой аппаратуры РТР.
Приведем пример возможных совокупностей величин отрезков пу-
ти ЛА и числа периодов разностной доплеровской частоты, соответст-
вующих определенным значениям дальности и курсового угла ИРИ-
РНТ: 5i2=28,0235; 523=35,3137; 534=23,0196; d/X =100; /=5; »?=и=10;
7?з=140,028;/?4=125,0; 03=45,573°; 04=53,13о.
Возможна и другая обработка данных подсчета числа периодов
разностной частоты сигналов, принимаемых на разнесенные вдоль ЛА
антенны при пролете определенных отрезков пути. Эта процедура по
существу эквивалентна определению числа экстремумов (максимумов и
минимумов) в некотором угловом интервале многолепестковой интер-
ференционной диаграммы двухэлементной антенны, равном величине
изменения курсового угла ИРИ за время измерения. Относительные ко-
ординаты ИРИ-РНТ можно вычислить по величинам смежных отрезков
пути ЛА за интервалы времени между тремя последовательными мо-
ментами приема сигнала в максимумах соседних интерференционных
лепестков суммарной диаграммы пары объединенных по выходу (на-
пример, через я--мост) антенн, разнесенных на базу d [47]; фиксация
этих моментов может быть выполнена с достаточной точностью путем
суммарно-разностной обработки сигналов на выходе моста.
За интервалы времени между этими моментами Тп и Т^з ЛА проходит
известные отрезки пути Si2 и 523, при постоянной скорости V, равные РТ|2 и
РТгз. Пространственное (угловое) расположение максимумов лепестков,
регистрируемых по суммарному выходу моста при одновременном мини-
муме сигнала - по разностному, определяется условием ДФ = (2jr/fc)sina, = 0,
2 л, 4 л, 6л-..., где k=/Jd\ а, - угловое положение лепестка данного номера
(z = 0,1,2,3,...), т.е. угол между максимумом лепестка и нормалью к базе.
Длина волны излучения 2 априорно известна или измеряется в процессе
приема. Полагая, что ЛА движется на сближение с ИРИ и отсчет интерва-
лов времени (или отрезков пути ЛА) начат в момент приема сигнала в мак-
симуме некоторого лепестка с неизвестным номером х, имеем соотношения
5i2=£>Tp(tg ах - tg ax.j),5i3=5i2+523=£>Tp(tg ах - tg ax.2).
Разности тангенсов можно представить как
tg ax - tg ах_, = (1/^х2-1Г'/г- [ 1/^(х-1 )2-1 ]~'/г,
tg ax - tg ax_2 = (l/kb2-!)-* - [1/^(х-2)2-1]-'л ,
что позволяет составить следующие уравнения для вычисления тра-
верзной дальности D-rp и номера первого из наблюдаемых лепестков х:
282
' S12 Y 4x2(x-l)2Ar-[x2+(x-l)2(l-2Px2)]2
^pJ ( S]2 У Г 2 , , .,2г, ,.2 2<
(6.30)
S13 У 4х2(х-2)2У-[х2+(х-2)2(1-2Аг2х2)]2
c
У-2[х2+ (x-2)2(l-2^2x2)
где х = (1-Л2)[1-£2(х-1)2]; У = (1-Л2)[1-Р(х-2)2].
По найденным номерам лепестков могут быть определены соответ-
ствующие им значения углов а,- = arcsin ik между направлением на ИРИ и
нормалью к базе (которая предполагается расположенной вдоль носите-
ля) и, тем рамым, курсовые углы ИРИ-РНТ (0, ) и дальности до него (Л,) в
моменты измерений, в частности, их текущие значения в момент послед-
него, третьего измерения 0у=л12-ах_г и Ry=D^ec ах_2 • Искомый номер (х)
лепестка, к которому относится первый зафиксированный максимум ам-
плитуды сигнала, принципиально возможно найти также из соотношения
8Р
Q ! ^УДз"^ ,6 2pfg Н
т»4 II 'г>2'т<2 гр2 rp2 I п-’Д rp4 I
'12 '1зД '12'13 '12 213У <'12 '137
_(рТ2-Т2г Q F?
гр2 <т<2 гп2 >р2 ’
< '12'13 '12 '137
гпе р,- С*'1)' г... (х~2)2
l-Px2’^ l-Y(x-l)2’ 1-£2(х-2)2 ’
(6.31)
По вычисленному значению номера первого из наблюдаемых лепест-
ков (х) и отрезку пути ЛА 5|3 =РТ|з находим траверзную дальность как
с
D1p = HVp-^)' (6,32)
Курсовые углы и текущие дальности определяются, как указыва-
лось выше.
Приведем пример совокупности характеризующих ситуацию ис-
ходных и результирующих значений величин, удовлетворяющих приве-
денным соотношениям: к = )Jd = 0,05; 7)2=29,3788 с; 7)3=56,365796 с;
К=0,25 км/с;х=10; «х=30°; 0^=26,743686°; «х.2=23,578179°; 75^=100 км.
После того как определены номера лепестков приема и, как след-
ствие этого, их ширины и угловые положения, оценка текущей дально-
сти и пеленга ИРИ-РНТ может производиться также изложенным в пре-
дыдущем материале кинематическим методом - по времени прохожде-
ния цели через известным образом ориентированную диаграмму на-
правленности антенны в процессе движения ЛА, т.е. по времени приема
283
сигнала ИРИ данным лепестком интерференционной диаграммы двух-
элементной антенной системы. Возможность определения дальности до
ИРИ подобным методом, в том числе и с использованием диаграммы
направленности интерферометрического типа, отмечалась еще в [33].
Другой вариант обработки информации о лепестковой структуре ин-
терференционной диаграммы двухэлементной антенной системы, полу-
чаемой путем отслеживания скорости изменения разности фаз на выхо-
дах антенн в процессе движения ЛА, приведен в [48].
Позиционирование при измерениях изменений временных интерва-
лов между последовательными облучениями летательного аппара-
та сканирующими антеннами. Еще один беспеленговый временной
метод, позволяющий определить положение ЛА относительно РЛС, ра-
ботающих в режиме периодического обзора пространства с круговым
или секторным сканированием, основан на использовании явления из-
менения временных интервалов между последовательными облучения-
ми ЛА периодически сканирующей ДНА РЛС при движении ЛА (кроме
частных случаев движения ЛА в направлении на РЛС или от нее), обу-
словленного изменением взаимного расположения ЛА и РЛС от перио-
да к периоду обзора и имеющего частично сходный характер с допле-
ровским эффектом. Обработка данных измерений нескольких таких ин-
тервалов позволяет вычислить параметры пространственного располо-
жения ЛА по отношению к РЛС [34] и тем самым осуществить самооп-
ределение ЛА по данной РЛС-РНТ. В наиболее типичном случае ис-
пользования в качестве РНТ РЛС кругового обзора, координаты, режи-
мы работы и параметры излучаемых сигналов которых априорно из-
вестны (имеются в бортовом каталоге РНТ), свои относительные коор-
динаты (дальность и курсовой угол) могут быть определены на борту
движущегося с постоянной скоростью ЛА по двум смежным интерва-
лам времени Тц и Т23 между тремя последовательными облучениями
ЛА основным лепестком ДНА РЛС по формулам, аналогичным приве-
денным в [49] для решения обратной задачи определения дальности при
пеленговании неподвижным наблюдателем объекта с частично извест-
ными параметрами движения:
= arctg ZLsi-n^3s.in^ ; 7] 2 sin cos 3 - Т23 sin = arctg—^^si^2 , Т|2 ^23 ^12 ^^®13 j 1J • с» ’ sino13 sino13 (633) (6.34) (6.35)
где ^12=2л|(7’12-7’о6)|/7’об; <52з=2л--|(Т2з-Тоб)|/7’об, То6 - период обзора РЛС;
Д13=Д12+Д23; ^13=^12+^23; #1, @3> Лз - курсовые углы и дальность до РНТ в
соответствующие моменты времени (см. рис. 6.3); V- скорость ЛА.
284
Интервалы между моментами приема облучений ЛА основным ле-
пестком РЛС, работающей в режиме кругового обзора, могут быть как
больше, так и меньше периода обзора (периода сканирования или
периода оборота антенны РЛС ) в зависимости от сочетаний двух усло-
вий - направления вращения ДНА и расположения РЛС относительно
ЛА - по правому или левому борту, дающих в результате эффект либо
попутного, либо встречного движения луча РЛС относительно движе-
ния ЛА. При этом, например, сокращение интервалов при нахождении
РЛС в переднем секторе ЛА соответствует встречному направлению
движения луча, а увеличение - попутному.
Типичная величина изменения интервалов, как видно из приведен-
ных ниже численных примеров, может быть порядка первых десятков
микросекунд. Так, в случае нахождения РЛС кругового обзора в перед-
нем секторе ЛА при угловой скорости обзора РЛС 30% и попутном
движении луча величины последовательных интервалов времени между
облучениями могут составлять: 7'12=12,149015 с; Т23=12,161628 с;
7^4=12,183119 с, а при - скорости обзора 45% и встречном направлении
движения луча возможные величины интервалов могут иметь значения:
Ti2=7,865062 с; Т23=7,837133 с и 734=7,806777 с.
Использование большего числа измерений временных интервалов
позволит решить задачу определения собственных координат по РЛС-
РНТ и в случаях отсутствия точных данных о параметрах и режимах об-
зора пространства РЛС, используемых в качестве РНТ, в том числе по
работающим в режиме секторного обзора.
При отсчете длительностей всех интервалов через одинаковое чис-
ло периодов облучения дальность и курсовой угол РЛС-РНТ в момент
окончания четвертого интервала могут быть выражены через соотноше-
ния R5 = Vy[p2 + s2 и $5 = arctg(p/.s), где обобщенные геометрические
параметрыр и 5' на рис. 6.3 удовлетворяют следующим уравнениям [34]:
р{(7^3-7]2) [р +s +735(2s+7^5)]+7^3(2s7^3+7]37^5)|
P2(p2+7?27L)+(5+^5){p2713+(';+735) _2p2+(5+7^)(^+7[5)J _Г23-7]2
arc* .p{(734—+‘у2+745(2л+7]5)_+7]4(2s,7^t + T247-j5)j ^34 7^
^t8p2(p2+7’23T34)+(S+T35){p2T24+(^7’45)[2p2+(5+T35)(5+T25)]}
arctg
P^-T^+s^ + T^s+T^
p2 р2+(д + Т45)(2д + 7]5) + 7]4Г45 +5(i+7^j)2(5 + 7]5)
(6.36)
р{(7з4 7^)[p +52+T45(25+7]5) +7^4(2s7^4+7^47]5)}
arctg— —3--------Ь------------------=!_ -------------1---
p\p2 +T^)+(s+Tis){p2Tu +(т+745)[2р2 +(5-+T35)(5 + 725)]}
2з4~2в
285
При работе РЛС в секторном режиме периодом обзора (облучения)
в отсчетах интервалов, фигурирующих в уравнениях (6.36), следует счи-
тать сумму времен прямого и обратного хода луча. Приведем пример
возможных значений последовательных периодов облучения движуще-
гося’ ЛА для частной ситуации работы РЛС в режиме сканирования в
секторе ±60° со скоростью 30%: 7)2=8,122765 с; 7)3=8,149495 с;
7)4=8,183627 с; 7’45=8,226389 с.
Однако, как можно заключить по виду уравнений (6.36), определе-
ние относительных координат ЛА по секторно-сканирующей РЛС при
отсутствии точных данных о режиме и угловой скорости обзора сопря-
жено с существенным усложнением вычислительной процедуры и сни-
жением результирующей точности за счет многократно увеличивающе-
гося влияния погрешностей измерений временных интервалов.
Значительно более простым и широко используемым является
применение сканирующих с априорно известными параметрами ИРИ-
РНС с остронаправленными диаграммами для измерения углового по-
ложения самолета относительно определенного направления, в частно-
сти, для определения положения самолета относительно продольной
оси ВПП по измеряемым на борту временным сдвигам между момента-
ми облучения при прямом и обратном ходе луча, как в микроволновых
системах посадки MLS [4].
Известны также предложения [50,51] использовать теоретически
имеющий место факт разновременности облучения разнесенных в пре-
делах ЛА антенн сканирующей ДНА РЛС или другим остронаправлен-
ным излучателем для определения углового положения и дальности ЛА
относительно этого излучателя по интервалам времени между облуче-
ниями. Однако возможность их практического применения в нашем
случае ограничивается теми же факторами, что и в ранее охарактеризо-
ванной системе определения дальности по разности времени приема
двумя разнесенными в пределах ЛА сканирующими антеннами с парал-
лельными диаграммами [35] - сложностью регистрации весьма малых
амплитудных различий и соответствующих временных разностей между
моментами приема сигналов РЛС по максимумам главных лепестков
ДНА РЛС, линейная ширина которых практически во всем диапазоне
дальностей намного превосходит размеры ЛА, а крутизна зависимости
амплитуды от изменения угла в области максимума ДНА минимальна.
Позиционирование с использованием измерений уровней мощности
сигналов источников излучения. В ситуациях, когда ЛА движется в
направлении на излучатель или от него (при курсовых углах ИРИ, близ-
ких к нулю или 180°), радиальная скорость и, соответственно, смещение
частоты принимаемого сигнала, а также наблюдаемый интервал време-
ни между последовательными облучениями ЛА сканирующей ДНА РЛС
286
остаются постоянными или изменяются очень медленно и доплеровские
методы местоопределения практически неработоспособны.
Более универсальны в этом отношении энергетические методы, ос-
нованные на использовании зависимости уровня мощности принимаемо-
го сигнала от дальности до излучателя. Известны различные варианты
определения дальности до оптического или радиотехнического излучате-
ля по уровню (интенсивности) принимаемого сигнала, в том числе путем
преобразования отношений интенсивностей сигналов, принимаемых од-
новременно или последовательно в разных точках пространства [16, 52-
54]. Применительно к случаю прямолинейного движения ЛА расчетные
соотношения для определения дальности и курсового угла излучателя-
РНТ по отношениям интенсивностей (уровней мощности) сигналов, при-
нятых в трех точках траектории ЛА, имеют вид [42]
^12^13^23
(6.37)
R3 = А I------------------ >
^2з(Зз1-1)-^з(5з2-1)
cos,9 5,2з(а32-1)-^23(^31-1)
3 2^S12S13S23[S23(53I-1)-513(332-1)]
Здесь 53i, <Э32- отношения уровней мощности сигналов в точках нахож-
дения ЛА в моменты измерений (<Э31 = Ру/Р\ и <Э32 = P3IP2, где Р, - интен-
сивность сигнала в z-й точке); 5,у - расстояние между соответствующими
точками.
Если ЛА движется с постоянной скоростью, величина которой
точно не известна, то величины расстояний 5,у и вычисляемая по форму-
ле (6.37) дальность будут иметь приближенный характер, но курсовые
углы излучателя в третий и последующие моменты времени могут быть
определены подобно тому, как это отмечалось применительно к допле-
ровскому способу для формул (6.21), (6.22), только по временным ин-
тервалам и данным измерений параметров принимаемого сигнала:
COS & = ^(Э32-1)-^22з(^31-1)
Кроме того, может быть определен интервал времени, через кото-
рый движущийся с той же постоянной скоростью ЛА выйдет на траверз
излучателя, или при нулевом курсовом угле - в точку его нахождения:
т = t -t Г'з(5з2-1)-^3(^-1)
р3 р 3 2[Т23(531-1)-7]3 (532 -1)]-
Здесь /р - момент выхода ЛА на траверз излучателя.
Другим путем беспеленгового прогнозирования текущего положе-
ния движущегося с постоянной скоростью ЛА относительно ИРИ
(дальности в какой-либо последующий момент времени, интервала вре-
287
(6.38)
(6.39)
(6.40)
мени до момента максимального сближения) может быть вычисление
этих параметров по трем значениям дальности Rx, R2, R2, определяемым
из (6.37), (6.38) и треугольников, содержащих эти дальности и отрезки
пути или интервалы времени Tl2, Т22, TXy=Ti2+T2i:
(6.41)
(6.42)
п _ Н2Л4 п2 ^14^34 п2 , 2
1\.л — Л---Л---------IV) Н-----K-i ,
11 Т 'Г * Т 'Г т т J
V 712713 112223 У13У23
7’2 ©2 п2 /пр .т \п2
_ 13^2 *23*4 *12^13 + *23)^3
/Зп™ 2(T22Rt-TX2R* + Ti2Rl)
Здесь Тзть-интервал времени от момента третьего измерения до момен-
та максимального сближения.
Прогнозируемая по трем значениям дальности величина мини-
мального расстояния между ЛА и объектом (7?,п;п) в момент максималь-
ного сближения (?min) находится из (6.41) подстановкой в него значения
интервала 7з4=7з,П|П, определяемого по (6.42).
Необходимо отметить, что прогнозирование взаимного располо-
жения ЛА и объекта по трем последовательно измеренным дальностям с
использованием соотношений (6.41), (6.42) будет действенным и в си-
туации, когда объект, так же как и ЛА, движется с постоянной скоро-
стью, величина и направление которой неизвестны. Такая ситуация мо-
жет быть, например, если движущийся объект (другой ЛА) оснащен от-
ветчиком, взаимодействующим с бортовым запросчиком данного ЛА
[55]. При выполнении измерений дальности через одинаковые интерва-
лы времени (Т22=Т\2=Т) расчетные формулы для прогнозирования вза-
имного расположения в пространстве двух движущихся с постоянной
скоростью объектов (ЛА) несколько упрощаются, в частности, выраже-
ние для Tjmin принимает более удобный для анализа вид
Т -т ^R2-Ry-^
Зшт 2(RX-2R2+Rl) ’
а минимальное расстояние между объектами А|тап определяется по формуле
(6.43)
(6.44)
= 2 (4Я2-7?2-ЗЛ2)2
^nm у 3 8(R2-2R2+R2)
Использование приведенных расчетных соотношений, полученных
на основе возвратных уравнений третьего порядка для квадратов после-
довательных чисел [56], в нашем случае соответствующих дальностям,
позволяет прогнозировать возможность опасного сближения объектов,
движущихся по скрещивающимся или пересекающимся траекториям, и
определить момент достижения какого-либо установленного рубежа
при нахождении объектов в районе их максимальной близости, где
применение обычных (линейного или параболического) методов экст-
288
раполирования дальности по данным единичных измерений не дает
требуемой точности ввиду существенной нелинейности изменения рас-
стояния между объектами в этой области (вблизи точки перегиба, соот-
ветствующей моменту времени нахождения объектов на минимальном
расстоянии JJrajn). Определение стороны нахождения, текущих коорди-
нат и траектории движения корреспондирующего объекта возможно пу-
тем обработки данных ряда измерений дальности при выполнении ЛА
маневра по курсу.
При решении навигационной задачи с использованием в качестве
РНТ неподвижных излучателей-ответчиков положение ЛА в трехмер-
ном пространстве определяется известным образом по трем дальностям,
измеренным до соответствующих РНТ в некоторый момент времени
[43]. В случае наличия в зоне видимости ЛА только одного ответчика и
при известной путевой скорости ЛА курсовой угол ответчика определя-
ется по двум измерениям дальности и отрезку пути S,2 = РТ12:
cos Э2 =
2R2Sn
(6.45)
Если скорость ЛА точно не известна, но остается постоянной на
интервале времени измерений, то курсовой угол РНТ-ответчика и ско-
рость ЛА могут быть определены по трем измерениям дальности [42]:
cos= ^з^ -Rb -^Т23 -7?227]з + R*Ti2) , (6 46)
2R3KtMR"t23 - R$Ti3 + Я3% j
V - ^2^1з+^з^12 (ft 47}
V W»
Приведенные формульные соотношения для вычисления угловых
координат РНТ иллюстрируют принципиальную возможность беспе-
ленгового самоопределения ЛА по одиночной РНТ на основе опреде-
ляемых тем или иным методом дальностей до нее как с использованием
результатов точных измерений путевой скорости и отрезков пути ЛА,
так и без таких данных.
Некоторым недостатком беспеленговых методов является невоз-
можность определения стороны (борта) нахождения ИРИ при использо-
вании всенаправленных в горизонтальной плоскости антенн и прямоли-
нейном полете ЛА, однако при решении навигационной задачи, когда
вероятное текущее положение ЛА относительно данной РЛС-РНТ ори-
ентировочно известно, этот недостаток несущественен и при необходи-
мости может быть устранен выполнением дополнительных измерений
при измененном курсе.
289
6.3. Комбинированные и многопозиционные методы
позиционирования ЛА
В большинстве из приведенных выше методов определения коор-
динат ЛА относительно РНТ в качестве опорных базовых величин при
вычислении дальности используются значения скорости ЛА или отрез-
ков пути ЛА за определенные интервалы времени, в течение которых
измеряемый параметр сигнала (пеленг, уровень мощности, доплеров-
ский сдвиг частоты, промежутки времени между облучениями) изменя-
ется на достаточно значимую величину. В некоторых ситуациях выпол-
нение этого условия может быть сопряжено со значительными времен-
ными затратами. Одним из возможных способов повышения точности и
быстродействия местоопределения ЛА может быть комбинированное
применение разных методов. Другим путем, возможным при наличии в
зоне приема бортовой аппаратуры РТР объектов, переотражающих сиг-
налы РЛС-РНТ, или/и при групповых действиях ЛА является примене-
ние многопозиционных вариантов методов определения координат с
использованием еще одного или нескольких пространственно разнесен-
ных приемных пунктов (других ЛА) или переотражающих объектов
(местных предметов или ретрансляторов) и совместной обработкой сиг-
налов, принимаемых, пеленгуемых, отражаемых или ретранслируемых
отдельными объектами данной группы. Измерение дальностей от ЛА до
РЛС и пространственно разнесенных от них переотражающих объектов
при этом производится по величине определяемого на борту времени
запаздывания приема переотраженных сигналов. При движении ЛА рас-
стояния до РЛС и отражателей и соответствующие разности времени
прихода прямого и переизлученного сигналов изменяются определен-
ным образом, зависящим от текущего положения ЛА, что дает возмож-
ность, зная траекторию ЛА или координаты излучающих (отражающих)
объектов, определить взаимное положение излучателя и ЛА.
В случаях, когда неизвестными являются координаты как РЛС, так и
отражателей, разностно-дальномерную методику целесообразно использо-
вать совместно с другими методами определения координат - пеленгаци-
онными и временными. Так, в системе пассивного измерения дальности по
разности времени прихода сигнала [57] расстояние от движущегося наблю-
дателя до неподвижного излучателя определяется путем совместной обра-
ботки данных измерений скорости наблюдателя, текущих значений азиму-
тов излучателя и отражателя и трех разностей времени прихода прямого и
переизлученного сигналов. В методах определения координат объектов из
одной точки пространства при использовании сигналов удаленной обзор-
ной РЛС [58] наряду с измерением разности времени приема прямых и пе-
реотраженных сигналов используется угломерный метод определения ко-
ординат отражающего объекта. В методах определения собственного ме-
стоположения объекта, оснащенного пассивной станцией, относительно
290
передатчика, излучающего импульсные сигналы в узком сканирующем лу-
че [59], также используются данные измерений разностей времени прихода
импульсов, принимаемых всенаправленной антенной непосредственно от
передатчика и переотраженных от ряда отражателей. Наряду с этим с по-
мощью пеленгационной антенны определяется направление на передаю-
щую станцию, а также углы между направлениями на эту станцию и отра-
жателями, а по измеряемым интервалам между моментами облучения ска-
нирующим лучом передатчика пассивной станции и отражателей могут
быть определены углы между направлениями передатчик-наблюдатель (т.е.
объект, оснащенный пассивной станцией) и передатчик-отражатели. Сово-
купность этих данных позволяет достаточно просто вычислить расстояния
до передатчика и всех отражателей.
Местоопределение ЛА по четырем измерениям времени запаздыва-
ния при неизвестных координатах отражателя. При использовании
только беспеленговых методов определить координаты излучателя и
отражающего объекта относительно движущегося ЛА возможно по че-
тырем последовательным измерениям времени запаздывания переотра
женного сигнала (рис. 6.4).
Дальности и курсовые
углы излучателя и отражателя
в точке траектории ЛА, где
произведено четвертое изме-
рение времени запаздывания
(Т?4 и #4), а также геометриче-
ские параметры ситуации -
расстояние (база) / между из-
лучателем (И) и отражателем
(О) и наклон этой базы отно-
сительно линии траектории
(а) находятся из выражений
Рис. 6.4. Местоопределение ЛА по четырем
измерениям времени запаздывания при
неизвестных кооплинатах отпажателей
*, -*4
. n &4sina + cosa±O
sm &4a,6.=-±-r=------=—->
#4 ±2) +1
tgg- ^14(^1 ~ ^2) ~ ^12(^1 ~ ^4)
^j5i2(^] — k4) — &4>Sj4(fc| — k2)
(6.48)
(6.49)
(6.50)
1- —
где kt ~~г £> =
2—-1
У
Kkj-k^
2514(£1sina + cosa) ’
291
Ti - время запаздывания переотраженного сигнала в z-й точке измерений;
с - скорость распространения сигнала.
Величину базы /, связанную с значениями к,, определяем из соот-
ношения
(ку - fc4)(^2 ~ ^з) _ ^14^23 (6 51)
— ^2 )(^3 ~ ^4 ) *^12^34
Пример возможного набора численных величин измеряемых и вы-
числяемых параметров при этом: 5]4=108; 5|3=52; 523=32; 5з4=24;
7^=121,655; 6^=53,13°; 6*4^=43,67°; а=143,13°; I = 20; А,77=204; Л j 0=213,242;
Я277=150; Л2О=166,709; Л3О=140; A4H=R4a=12Q-, Л4О=7?4б=121,655. Соот-
ветствующие значения остальных параметров даны в табл. 6.1.
Таблица 6.1. Значения измеряемых и вычисляемых параметров
Параметры Номера точек измерений
1 2 3 4
CTi 10,7584 13,2907 15,7645 18,34475
ki -0,52104 -0,3561 -0,2167 -0,08305
CTi 29,2416 26,7093 24,2355 21,65525
k. 0,521045 0,3561 0,21669 0,083047
Позиционирование при использовании разностно-дальномерного ме-
тода совместно с измерением разности времени между последова-
тельными облучениями объекта сканирующей ДНА РЛС. Комбини-
рованное применение разностно-дальномерного метода совместно с ва-
риантом временного, основанного на измерении разности времени меж-
ду последовательными облучениями объекта сканирующей ДНА РЛС,
позволит повысить точность определения координат или сократить чис-
ло измерений по отдельным параметрам и время их выполнения. В ча-
стности, если излучателем является высокопотенциальная РЛС с остро-
направленным лучом, работающая в режиме кругового обзора, а прием-
ник на борту ЛА оснащен всенаправленной антенной [59] и обеспечива-
ет возможность приема как сигналов РЛС, переизлученных отражаю-
щим объектом в момент облучения его сканирующим лучом РЛС, так и
соответствующих им зондирующих сигналов, излучаемых в этот мо-
мент по боковым лепесткам антенны РЛС, то относительные координа-
ты этой РЛС могут быть определены по измеренным в двух точках тра-
ектории ЛА значениям времени запаздывания приема переотраженного
сигнала и интервалам между моментами облучения ЛА и переотра-
жающего объекта сканирующим лучом РЛС АТ.
Пример взаимного расположения ЛА, РЛС и отражателя для дан-
ного варианта приведен на рис. 6.5. Соответствующие этой ситуации
292
расчетные выражения для определения дальности R2 и курсового угла в2
можно представить в следующем виде:
Л2 = 512[sin192ctg(/2 -/jj-cosiSj], (6.52)
sini92ctg(y2 -yj-cos^ =
5l2Gsin.92 - Bsin(/2 - y,)
+ Fsin(/2 - ^)]
(6.53)
Рис. 6.5. Местоопределение ЛА по РНТ-РЛС
(точка И) и отражателю (точка О) с
неизвестными координатами при
комбинированном использовании временного
и разностно-дальномерного метода
Здесь у1=2лД7’1/7’1; у2=2лЕТ2/Т2, 1\2 -временные интервалы между
моментами облучения ЛА и
отражателя и между после-
довательными облучениями
ЛА сканирующим лучом
РЛС соответственно, изме-
ренные в точках А] и А2 тра-
ектории ЛА; величины пара-
метров В, Е, F, G вычисля-
ются по формула
G = cr2[2r1-r2(l-cos/1)],
F = ст, [2г2 - Tj (1 - cosy2)],
В =c2riT2(r2 ~ri)>
Е = 2[г2 (1 - cosy,) - Г] (1 - cosy2)].
Возможные значения
измеряемых параметров при
этом: Т1 = 96; т2 =140; A^llS,!; ^/7=120; Т?2=63; 02=32,768°;
512=62,079; у|=360°(Д7’|/7’1)=73,74°; у2=360°(Д7’2/7’2)=90°.
Для снятия неопределенности в отношении стороны (борта) нахо-
ждения излучателя, не определяемой при прямолинейном движении ЛА
ввиду осевой симметрии решаемой задачи, следует произвести допол-
нительные измерения при измененном направлении движения (курсе); в
последнем из вариантов для этого достаточно еще одного (третьего) из-
мерения величин запаздывания и временных интервалов г и ДТ с вычис-
лением отношения интервала ДТ к периоду облучения ЛА РЛС То& в
третьей точке траектории.
Комбинирование разностно-дальномерного и пеленгационного методов.
Это позволит определить дальности до РНТ (РЛС кругового обзора) и
отражателя из одной точки (At на рис. 6.5) после измерений периода об-
лучения ЛА, в большинстве ситуаций практически совпадающего с пе-
риодом обзора РЛС Гоб, временного интервала ДТ между моментами
облучения отражателя и находящегося в точке А\ ЛА, времени запазды-
вания приема сигнала (импульса), переотраженного от отражателя, по
отношению к этому же импульсу, излученному боковым лепестком
293
ДНА РЛС ть курсовых углов РЛС 01а, и отражателя 0]б и угла
у1=2^Д777'об, по формулам
Л,.=----------, (6.54)
sm(^6 - .91а) + sin - sin(^6 - 51а + /,)
Rl6 =-------------«I-------------------- (6.55)
sin(^g - 6>la) + sin - sin(^6 - <9la + y})
Численные значения курсовых углов в примере, иллюстрирующем
рис. 6.5: & 1о=16,50808°; & 16= 32,76808°.
Определение координат ЛА при совместном использовании времен-
ного и пеленгационного методов позиционирования в случае извест-
ной дальности до пассивного отражателя. В случае, когда находя-
щийся в районе РЛС-РНТ пассивный отражатель также является РНТ,
координаты которой содержатся в бортовом каталоге (в частности, при-
ведено расстояние его от РЛС (/)), определение расстояний до этих РНТ
- активной и пассивной - из одной точки (Л|) возможно при комбини-
ровании временного метода с пеленгационным. Соответствующие фор-
мулы имеют вид
,а sin(6>16-^J ’
Ri6=l Si^.........
sin(^-.9la)
(6.56)
(6.57)
Величина базы I при указанных выше значениях углов и времени
задержки составляет 33,6.
Комбинированное применение в этой ситуации только беспелен-
говых методов - временного и разностно-дальномерного (с измерения-
ми времени между облучениями объектов сканирующей РЛС кругового
обзора и времени запаздывания приема переотраженных импульсов от-
носительно принимаемых непосредственно от РЛС) позволяет опреде-
лить дальности до обеих РНТ из каждой точки, где производятся изме-
рения. Так, дальности до РЛС (Ria) вычисляются по формуле
до=—— (6.58)
2[ст; -/(1-cosy,)]
Угловые координаты РНТ (курсовые углы), а также некоторые па-
раметры траектории ЛА могут быть определены или уточнены по не-
скольким последовательным измерениям дальности при прямолиней-
ном движении ЛА с использованием (6.45)-(6.47).
«Одномоментный» метод позиционирования при групповых дейст-
виях летательных аппаратов. При групповых действиях нескольких
ЛА, связанных линией взаимного обмена информацией и взаимного
ориентирования, решение навигационной задачи самоопределения мо-
294
жет быть произведено практически одномоментно по каждому облуче-
нию группы ЛА какой-либо РЛС-РНТ. Так, при совместных действиях
двух ЛА (ЛА1 и ЛА2) определение дальностей (Rj и R2 соответственно)
от них до РЛС, сканирующей с известной угловой скоростью со [60],
или, для РЛС кругового обзора, с известным периодом Тоб, в беспелен-
говом варианте осуществляется по данным измерений интервала между
облучениями этих ЛА (АТ) и времени запаздывания приема ретрансли-
рованного с другого ЛА импульса РЛС по отношению к непосредствен-
но принятому (ть т2) путем решения уравнений вида
2Т?] (2?) + Д]2)(1 - cosy) = /2 - Д22, (6.59)
2R2(R2 +Д21)(1-соз/) = /2 -Д21, (6.60)
где Д12=с(Т1- т2)/2; Д21=с(т2 - Ti)/2; / - расстояние между ЛА1 и ЛА2;
ть г2 — величины запаздывания приема переотраженного сигнала на ЛА1,
ЛА2 соответственно; у=2^А77Гоб = соЛТ.
Если на одном из ЛА (ЛА1) имеется пеленгатор, измеряющий угол
(«) между направлением на РЛС и линией базы, дальность 7?| определя-
ется как
sinfo + rt (661)
siny
При наличии пеленгаторов на обоих ЛА может быть реализован
режим синхронного обзора пространства параллельными лучами, как в
[35], с определением дальности на основе выражения (6.19), которое в
данном случае записывается как R=lcoscplco\f, угол <р отсчитывается от
нормали к базе.
Возможны и другие варианты комбинирования методов и режимов
работы аппаратуры РТР на взаимодействующих ЛА, в частности такие,
как синхронное пеленгование РНТ с обоих ЛА и совместное использо-
вание данных пеленгования и результатов измерений времени запазды-
вания переотраженного сигнала.
Беспеленгаторное местоопределение трех взаимодействующих ЛА
относительно одной РЛС кругового обзора по измерениям интерва-
лов времени между облучениями. При совместных действиях трех ЛА
определение собственных координат относительно одиночных РНТ,
представляющих собой РЛС кругового обзора, может быть осуществле-
но без применения пеленгаторных устройств путем измерения двух ин-
тервалов времени ДТ12 и \Т22 между моментами облучения этих ЛА [61]
с последующим определением углов засечки у]2 и у23 (рис. 6.6).
295
Необходимое вычисление угловых координат и дальностей от ЛА
до РНТ может быть произведено, например, с использованием следую-
щих формульных выражений [62]:
а. = arctg
/23sin/12sin(/12+/23 + Д)
/l2sin/23 + /23sin/l2cos(/l2 + /23 + 8)
(6.62)
(3 = а + 6+уп-л,
Рис. 6.6. Определение местоположения
группы взаимодействующих ЛА
относительно одной РЛС-РНТ
а также очевидных соотношений
Я2
*3
, sina
12” ,
sin/12
, sin/?
'23 ~
Sin/23
Здесь углы yi2 и у3з определяются,
как и в предыдущих вариантах:
у|2=2^Д7’12/7’об и у2з=2л-Д7’23/7’о6.
Другой вариант решения данной
геометрической задачи см. [63,
п. 2.6; 3.2].
Мгновенное позиционирование
трех взаимодействующих ЛА,
оснащенных станциями РТР. В
случае возможности одновремен-
ного приема излучаемых РЛС-
РНТ сигналов на всех трех ЛА координаты ЛА определяются разност-
но-дальномерным методом, подробно рассмотренным в [4, 16, 63]. Вы-
числение дальностей и углов принципиально может производиться
практически мгновенно по величинам интервалов между моментами
приема данного импульса на разных ЛА, например, с использованием
итерационной процедуры по формулам [62]
c(wr2 - VW,cost?)
IV) - ' - -T-I
2(Д/12г2 - Дг32Г]СО8 8 + T^2sm/3sm8)
п М,- иМ,, + г, sin В sin 8
р = arccos—-— 1 ---------
(6.63)
(6.64)
ХГГ32 Г]2 COS 8
где Д?12=6-t2; M32=t3-t2- интервалы между моментами приема на соот-
ветствующих ЛА (ЛА1, ЛА2, ЛАЗ); с - скорость распространения сиг-
нала; Г1=/12/с; т2=12з/с - «базовые» временные интервалы; м = г2-Д/22;
w = г2 - Д/32; p=u/w.
При комбинированном применении временного и пеленгационно-
го методов в данном случае дальность от ЛА1, оснащенного пеленгато-
ром, до РЛС-РНТ будет определяться как
296
J?! =--------—-----------
2(АГ|2 + Г, cos а)
(6.65)
В ситуациях, когда наряду с измерением интервалов между облу-
чениями разных ЛА возможен также одновременный прием сигналов,
излучаемых РЛС, на смежных (соседних) ЛА, определение координат
можно произвести по данным совместных измерений угла засечки и
времени запаздывания в каждой из пар смежных ЛА. Так, дальности от
ЛА до РНТ-РЛС кругового обзора находятся из следующих выражений:
>1=1 |2/22 ~(cArl2)2(/ + cosy12) !
2 у /-cosyI2
, _ 2/|2 - (сДГ|2)2(/ + cosy12) сАГ|2
"2 у 4(/-cos/12) 2
; Мз -(сД/32)2(/ + cos/23) сА/32
у 4(/-cosy23) 2
> =1 /2& ~ (сА?з2 )2 О + cos/23) [
3 2 у /-cosy23
(6.66)
(6.67)
(6.68)
Здесь At\ 1 = ti-ti- kin = h-t2.
Если угловая скорость обзора РЛС-РНТ не может быть достоверно
определена, величины углов засечки в данных условиях можно найти по
двум измеренным значениям времени запаздывания (A?]2 и А/32) и отно-
шению углов Ун и у23, равному (при постоянной угловой скорости обзо-
ра со) отношению соответствующих временных интервалов (yj2 = ау2з,
где a=ATi2/AT23). Из (6.67) можно получить соотношение, связывающее
искомую величину у23 с известными и измеряемыми параметрами и
принципиально позволяющее вычислить углы засечки и, тем самым,
координаты ЛА относительно РЛС-РНТ:
y23 = 2arcsin'
з -(cA?32)2cos2 у23/2 -cAz32siny23/2 sin^
фи -(cA/12)2cosay23/2 -cA/j2sinay23/2
(6.69)
Точность и сама возможность практической реализации вычисли-
тельных процедур по данной формуле существенно зависят от точности
измерений временных интервалов АТ и А/, так что приведенное соот-
ношение (6.69) имеет, скорее, характер иллюстрации наличия и прин-
ципиальной возможности использования определенных связей между
различными измеряемыми параметрами принимаемых сигналов в отно-
сительно сложной (по сравнению с двумя ЛА) системе трех взаимодей-
ствующих ЛА.
297
Рассмотренные варианты определения координат ЛА относитель-
но стационарных РЛС с априорно известными параметрами излучаемых
сигналов, выполняющих роль РНТ, позволяют сделать вывод о возмож-
ности использования бортовых средств РТР для решения навигацион-
ной задачи самоопределения воздушных ЛА по этим РЛС с применени-
ем различных методов в зависимости от технических данных аппарату-
ры РТР. При наличии в составе бортовой аппаратуры пеленгаторных
устройств с точностью пеленгования порядка первых единиц градусов,
как это имеет место для станций определения координат ИРИ [16,30] и
перспективных систем РЭП [65], местоопределение ЛА целесообразно
производить по данным пеленгования РЛС-РНТ с обработкой их по
(6.1) или/и (6.18) в зависимости от ситуации, для чего будет достаточно
внесения некоторых дополнений в программное обеспечение бортовых
устройств обработки информации. Если бортовая аппаратура РТР и
РЭП позволяет определять направление прихода излучений РЛС лишь
приближенно, с точностью до 10-15° или только до стороны или секто-
ра (бокового, переднего), то определение собственных координат оди-
ночного ЛА относительно РЛС-РНТ, работающей в режиме кругового
обзора, будет возможно временным методом - путем измерений интер-
валов между последовательными облучениями и вычислений курсовых
углов и дальностей по формулам (6.33)-(6.35).
В более общем случае, в частности, при использовании в качестве
РНТ других видов ИРИ (УКВ-радиостанций, телевизионных передатчи-
ков) может представлять интерес применение дифференциально-
доплеровского метода.
При групповых действиях ЛА, связанных радиолинией взаимного
обмена информацией и взаимного ориентирования, определение коор-
динат ЛА по РЛС-РНТ может успешно осуществляться с использовани-
ем различных вариантов как пеленгационных, так и беспеленговых ме-
тодов - временного и разностно-дальномерного, а также с комбиниро-
ванным их применением.
Таким образом, решение навигационной задачи самоопределения
на борту ЛА в автономном режиме на основе измерений относительно
наземных ориентиров, рассматриваемой в [1] применительно к навига-
ции космических аппаратов, может осуществляться с помощью борто-
вой аппаратуры РТР воздушных ЛА с использованием в качестве РНТ
РЛС и других ИРИ с априорно известными координатами и параметра-
ми излучаемых сигналов, внесенных в память бортовых устройств об-
работки информации.
Литература к главе 6
1. Рязанов С.Н., Фатеев В.Ф. Методы и средства автономной нави-
гации космических аппаратов. - Зарубежная радиоэлектроника.
Успехи современной радиоэлектроники, 1991, № 6.
298
2. Жолнеров В.С., Зарубин С.П., Писарев С.Б., Царев В.М. Уязви-
мость спутниковых навигационных систем при воздействии не-
преднамеренных и преднамеренных помех и перспективы повы-
шения надежности координатно-временного обеспечения. - Ново-
сти навигации. НТЦ «Интернавигация» и РОИН, 2004, № 1.
3. Гапионок А.В., Катенин В.А., Катенин А.В., Меркушов Н.С. Опыт
боевого использования спутниковых навигационных систем вто-
рого поколения в современных войнах. - Морская радиоэлектро-
ника, 2004, № 1(7).
4. Беляевский Л.С., Новиков В.С., Олянюк П.В. Основы радионавига-
ции. -М.: Транспорт, 1982.
5. Техника сверхвысоких частот. Кн. 1 / Пер. с англ, под ред.
Я.Н. Фельда. - М.: Сов. радио, 1952.
6. 12-40GHz acquisition and directionfinding antennas. - Micro wave J.,
197215, no. 1.
7. Шлезингер Р.Дж. Радиоэлектронная война / Пер. с англ, под ред.
А.М. Пархоменко. - М.: Воениздат, 1963.
8. Вакин С.А., Шустов Л.Н. Основы радиопротиводействия и радио-
технической разведки. - М.: Сов. радио, 1968.
9. Woika J.L An experimental airborne RFI location system for use with
FAA flight inspection aircraft. - Techn. papers 11th Annual E.Coast
Conf. Aerospace and Navigat. Electron., Baltimore, Md, 1964,
New York, IEEE, 1964, 3.5.3/1-4.
10. Пат. США № 3720945. Приемное устройство, 1973.
11. Кузьмин С.З. Основы проектирования систем цифровой обработки
радиолокационной информации. - М.: Радио и связь, 1986.
12. Мельников Ю.П., Попов С.В. О повышении точности пеленгования
прерывисто поступающих импульсных радиосигналов направленной
сканирующей антенной путем учета амплитуд принимаемых сигна-
лов // Проблемы интеллектуального и военного транспорта. Вып. 6 /
Под ред. ГВ. Анцева. - СПб.: ОАО «НПП «Радар ММС», 2005.
13. Мельников Ю.П., Попов С.В. Кинематический метод местоопреде-
ления источника радиоизлучения бортовым амплитудным пелен-
гатором с фиксированным положением луча,- Электромагнитные
волны и электронные системы, 2005, № 11-12.
14. Poirot J.L. andMcWillians G.V. Navigation by the Inverse Triangula-
tion Methods.-JEEE Trans. AES, 1976, vol. 12, No. 2.
15. Линник Ю.В. Метод наименьших квадратов и основы математико-
статистической теории обработки наблюдений. - М.: физматгиз, 1962.
16. Мельников Ю.П. Воздушная радиотехническая разведка. Методы
оценки эффективности. - М.: Радиотехника, 2005.
17. Белавин О.В. Основы радионавигации. - М.: Сов. радио, 1977.
18. Мельников Ю.П., Попов С.В. Определение координат объекта по
данным пеленгования из нескольких точек с минимизацией рас-
стояний до пеленгационных прямых (в печати).
299
19. Ames L.A., Newman P., Rogers T.F. VHF Tropospheric Overwater
Measurements Far Beyond the Radio Horizon. - Proc, of the IRE,
pp. 1369-1373, October, 1955.
20. Арманд H.A., Введенский Б.А., Гусятинский И.А. и др. Дальнее
Тропосферное распространание ультракоротких радиоволн / Под.
ред. Б.А. Введенского, М.А .Колосова, А.И. Калинина, Я.С. Шифри-
на. - М.: Сов. радио, 1965.
21. Шарыгин Г.С. Статистическая структура поля УКВ за горизонтом.
- М.: Радио и связь, 1983.
22. Пат. США № 3553691. Система дальнего действия для определе-
ния положения, 1971.
23. Васин В.В., Степанов Б.М. Справочник-задачник по радиолокации.
-М.: Сов. радио, 1977.
24. Мельников Ю.П., Попов С.В. Вариант кинематического метода оп-
ределения дальности до источника радиоизлучения движущимся
наблюдателем (в печати).
25. Гришин Ю.П., Ипатов В.П., Казаринов Ю.М и др. Радиотехнические
системы / Под ред. Ю.М. Казаринова. - М.: Высшая школа, 1990.
26. Техника сверхвысоких частот. Кн. 2 / Пер. с англ, под ред.
Т.Р. Брахмана. - М.: Сов. радио, 1953.
27. Пат. США № 3577146. Пассивная моноимпульсная система изме-
рения дальности, 1971.
28. Пат. (заявка) Великобритании № 1350031. Пеленгация, 1974.
29. Пат. США № 3789410. Устройство пассивной дальнометрии, 1974.
30. Тисленко В.И., Савин А.А. Оптимальная фильтрация координат и па-
раметров движения излучателя бортовым подвижным угломером при
наличии ограничений на его траекторию И Проблемы интеллектуаль-
ного и военного транспорта. Вып. 6 / Под ред. Г.В. Анцева. - СПб.:
ОАО «НПП «Радар ММС», 2005.
31. Дрогалин В.В., Дудник П.И. и др. Определение координат и пара-
метров движения источников радиоизлучений по угломерным
данным в однопозиционных бортовых радиолокационных систе-
мах. - Зарубежная радиоэлектроника. Успехи современной радио-
электроники, 2002, № 3.
32. Пат. США № 4704613. Радиолокационная дальномерная система, 1987.
33. Николаев А.Г., Перцов СВ. Радиотеплолокация. - М.: Сов. радио, 1964.
34. Мельников Ю.П., Попов С.В. О возможности определения координат
движущегося объекта относительно направленных сканирующих из-
лучателей с априорно неизвестными параметрами сканирования И
Проблемы транспорта. Вып. 6 / Под ред. ГВ. Анцева. - СПб.: Между-
народная Академия транспорта, АООТ «НПП Радар ММС», 2001.
35. Пат. США № 4339755. Пассивная система измерения дальности,
использующая сканирующие приемные устройства, 1982.
300
36. Мельников Ю.П., Попов С.В. Определение дальности до наземных из-
лучателей бортовым пеленгатором с наклонным лучом (в печати).
37. Пат. США № 4670758. Система и способ измерения дальности по
углу снижения, 1987.
38. Пат. США № 3863256. Способ и устройство для определения от-
носительного направления и дальности, 1975.
39. Chan Y.T. and Tower J. J. Passive Localization from Doppler-Shifted
Frequency Measurements. - IEEE Trans. Signal Process. 1992, no. 10.
40. Мельников Ю.П., Попов С.В. Метод местоопределения источника
помех спутниковым системам с движущегося носителя. - Новости
навигации. НТЦ «Интернавигация» и РОИН, 2000, № 4.
41. Мельников Ю.П., Попов С.В. Дифференциально-доплеровский
временной метод местоопределения источника излучения с дви-
жущегося носителя. - Новости навигации. НТЦ «Интернавигация»
и РОИН, 2001, № 1.
42. Мельников Ю.П., Попов С.В. О беспеленговых методах позицио-
нирования летательных аппаратов относительно источников излу-
чения. - Зарубежная радиоэлектроника. Успехи современной ра-
диоэлектроники, 2002, № 12.
43. Шебшаевич В. С. Введение в теорию космической навигации. - М.:
Сов. радио, 1971.
44. Пат. США № 4350984. Способ определения местоположения ак-
тивно действующих источников излучения на основе разности до-
плеровских частот, 1982.
45. Пат. США № 4422076.Пассивная система с синтезированной апер-
турой для определения местоположения источника электромаг-
нитного излучения, 1983.
46. Пат. США № 4626860. Пассивная радиолокационная система с
синтезированным раскрывом антенны для воспроизведения изо-
бражения источника электромагнитного излучения, 1986.
47. Мельников Ю.П., Попов С.В. Интерферометрический способ опре-
деления относительных координат неподвижного источника ра-
диоизлучения движущимся наблюдателем. - Новости навигации.
НТЦ «Интернавигация» и РОИН, 2003, № 4.
48. Пат.США № 3935574. Способ определения положения источника
сигналов, 1976.
49. Мельников Ю.П., Попов С.В. Определение дальности при пеленго-
вании объекта с частично известными параметрами движения. -
Радиотехника, 2003, № 4.
50. Пат. Германии № 738336. Устройство для определения расстояния
до сканирующего остронаправленного излучателя, 1943.
51. Пат. США № 4393382. Система пеленгации и измерения расстоя-
ния для определения местоположения сканирующих источников
излучения, 1983.
301
52. Пат. ФРГ № 1623427. Устройство определения дальности и азиму-
та передатчика путем образования отношения интенсивностей
принимаемых сигналов, 1975.
53. Пат. ФРГ № 2849282. Способ и устройство определения расстоя-
ния между подвижным радиоприемным и неподвижным радиопе-
редающим пунктами, 1980.
54. Мельников Ю.П., Попов С.В. Оценка и прогнозирование взаимного рас-
положения излучателя и наблюдателя, движущихся с постоянной ско-
ростью, с использованием энергетических соотношений (в печати).
55. Мельников Ю.П., Попов С.В. К местоопределению летательного
аппарата относительно объектов, оснащенных ответчиками, по
единичным измерениям дальности. - Новости навигации. НТЦ
«Интернавигация» и РОИН, 2002, № 1.
56. Маркушевич А.И. Возвратные последовательности. - М.: Наука, 1975.
57. Пат. США № 3863257. Пассивное измерение дальности по разности
времени прихода сигнала при многопутевом распространении, 1975.
58. Мельников Ю.П. Методы оценки погрешностей пассивного опре-
деления координат объектов при использовании сигналов удален-
ной обзорной РЛС. - Радиотехника, 2000, № 9.
59. Пат. США № 4438439. Способ и устройство для определения соб-
ственного положения в пространстве, 1984.
60. Пат. США № 4008470. Пассивная система измерения дальности, 1977.
61. Пат. ФРГ № 1113253. Способ определения местоположения РЛС с
равномерно вращающимся направленным лучом, 1962.
62. Мельников Ю.П., Попов С.В. Некоторые варианты временного спо-
соба местоопределения сканирующих источников излучения при
наблюдении из нескольких приемных пунктов // Проблемы транс-
порта. Вып. 8 / Под ред. Г.В. Анцева. - СПб.: Международная ака-
демия транспорта, ОАО «НПП Радар ММС», 2003.
63. Бронштейн И.Н., Семендяев К.А. Справочник по математике для
инженеров и учащихся вузов / Под ред. Г. Гроше и В. Циглера'.
Пер. с нем. Изд. перераб. - М.: Наука; Лейпциг: Тойбнер, 1981.
64. Кондратьев В.С., Котов А.Ф., Марков Л.Н. Многопозиционные
радиотехнические системы / Под ред. В.В. Цветнова. - М.: Радио и
связь, 1986.
65. Перунов Ю. М., Фомичев К. И., Юдин Л. М. Радиоэлектронное по-
давление информационных каналов систем управления оружием /
Под ред. Ю.М. Перунова. - М.: Радиотехника, 2003.
302
ГЛАВА 7
ИНТЕГРАЛЬНЫЕ ХАРАКТЕРИСТИКИ
ЭФФЕКТИВНОСТИ ОПРЕДЕЛЕНИЯ КОРДИНАТ
ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ
Рассмотрим статистические характеристики взаимного располо-
жения объектов РТР типового радиолокационного поля сухопутного
ТВД, соотношения для распределений расстояний между ближайшими
объектами, а также выражения для числовых характеристик этого рас-
пределения. Дается гистограмма распределения расстояний между объ-
ектами типового поля из 377 РЛС и аппроксимирующая ее зависимость.
Применительно к групповым целям, типичным для морских ТВД, при-
водятся основные положения методики определения статистических ха-
рактеристик распределений углов визирования на цели в группах ко-
раблей, имеющих определяющее значение для вычислений вероятно-
стей идентификации объектов, наблюдаемых активными и пассивными
информационными средствами.
Выводятся соотношения для оценки вероятностей накрытия зоной
обнаружения автономного информационного средства поражения дви-
жущегося объекта, координаты которого были определены системой
целеуказания заранее. Приводятся формулы для интегральных оценок
эффективности местоопределения с погрешностью не более допустимой
для различных способов определения координат.
7.1. Характеристики радиолокационного поля,
оценивающие эффективность определения координат
Существуют два подхода к вопросу об оценке эффективности ме-
стоопределения объектов разведки - источников радиоизлучения.
В первом случае точность определения координат считается заданной и
вероятность местоопределения рассчитывается как вероятность получе-
ния данных о координатах с погрешностью не более допустимой.
Этот случай характерен для задач, в частности, связанных с указа-
нием района расположения цели (целеуказанием) различным средствам,
имеющим собственные источники получения информации, но меньшей
дальности или ограниченного поля обзора. Например, для вывода само-
лета в район расположения объекта до его визуального обнаружения
летчиком или обнаружения бортовыми оптическими средствами с огра-
ниченной дальностью действия и т.д.
Однако не всегда можно указать требуемую точность местоопре-
деления. Это имеет место, например, при решении задачи разведки од-
новременно несколькими средствами (фото, телевизионной, тепловой и
303
др.) или РТР сложных объектов, обслуживаемых несколькими РЛС. Со-
вместная разведка разными видами средств обязательно включает в се-
бя обработку результатов с целью идентификации отметок разнотипных
средств. Здесь требование эффективного местоопределения трансфор-
мируется в требование правильной идентификации отметок (координат
на местности), полученных средствами РТР, с отметками того же объек-
та, полученными другими средствами. Вероятность определения коор-
динат с заданной точностью в этом случае равна вероятности правиль-
ной идентификации отметок на местности.
При разведке сложных объектов только средствами воздушной
РТР (ВРТР), (например, объектов, обслуживаемых несколькими РЛС),
возникает задача привязки отметок, полученных от нескольких РЛС, к
одной точке (предполагается, что расстояние между радиотехническими
средствами одного и того же объекта, например, корабля, существенно
меньше погрешностей местоопределения станции воздушной РТР). Это
задача сводится к идентификации отметок по координатам, а ее эффек-
тивность оцениваемая вероятностью правильной идентификации.
Таким образом, наряду с оценкой эффективности местоопределе-
ния как вероятности определения координат с погрешностью не более
допустимой, правомерен второй подход, где мерой эффективности яв-
ляется точность местоопределения и вероятность правильной иденти-
фикации отметок на местности, полученных в различных измерениях.
В обеих задачах на вероятность местоопределения (правильной
идентификации) влияет не только точность определения координат
станции РТР, но и взаимное расположение соседних объектов, так как
отметки, полученные от РЛС, близких к разведуемой, могут быть оши-
бочно идентифицированы с последней.
Несмотря на общую неравномерность распределения РЛС на круп-
ных участках местности [1—4], всегда можно выделить районы меньших
размеров, где расположение РЛС примерно равномерно. К этим участ-
кам, где плотность РЛС на местности имеет постоянную величину р,
можно применить закон Пуассона, согласно которому вероятность того,
что на площади S расположено ровно к РЛС, определяется формулой [5]
Р(*)=Ц^-ехр(-р5). (7.1)
к!
Обозначая событием А появление хотя бы одной РЛС в круге ра-
диуса х с центром, совпадающим с точкой расположения любой РЛС
поля, а случайной величиной X - расстояние между центром упомяну-
того круга и ближайшей соседней РЛС, найдем
Р(Л) = Р(Л"<х) = 1-ехр(-^?х2). (7.2)
304
Плотность распределения расстояний W-, между ближайшими сосед-
ними точками («нулевой» и первой соседней) определится дифференци-
рованием:
Wf = 2 лрх [ехр (-л-рх2)]. (7.3)
Аналогично получим распределение расстояний между «нулевой»
точкой и z-й соседней:
^^^^(ярУх^ехр^лрх2)
р-1)!
Известно [16] выражение для распределения линейных расстояний
х между i соседними заявками для пуассоновского потока с интенсивно-
стью 2 (распределение Эрланга):
ц;.(х) = Л'х' / = 1,2.................................... (7.5)
Полученное выражение (7.4) представляет собой аналог распреде-
ления Эрланга для случая пуассоновского распределения на плоскости.
Математическое ожидание (1-й начальный момент) для (7.4) с уче-
том [17] записывается как
_ Гр+ 0,5)
>/лрр-1)!’
(7.6)
где Г(х) - гамма-функция.
Второй начальный момент и дисперсия выражаются соответст-
вующими формулами:
1
лр
. Г2р + 0,5)
[G--1)!]2 .
(7.8)
Из (7.8) следует, что среднее расстояние между соседними РЛС
записывается в виде
_ 0,5
Х\=~Г
ЧР
(7.9)
а среднеквадратическое отклонение определяется выражением
0,26
сг,.=-т^.
(7.Ю)
305
Рис. 7.1. Гистограмма расстояний (г) между
соседними РЛС в типовом радиолокационном
поле и аппроксимирующая ее функция
распределения
На рис. 7.1 приведена в
качестве примера гистограм-
ма расстояний г между со-
седними РЛС в типовом ра-
диолокационном поле, со-
ставленном доя примера из
А=377 РЛС, а также аппрок-
симирующая эту гистограмму
зависимость (7.1). Среднее
значение хк равно 11 км, а
сгг = 8,8 км.
7.2. Статистические характеристики распределений
угловых расстояний между направлениями визирования
объектов в групповых целях на морском ТВД
Типовыми надводными целями на морских ТВД являются группы ко-
раблей, составляющие определенным образом построенные боевые поряд-
ки (ордера), которые обеспечивают эффективное взаимодействие в различ-
ных ситуациях [6]. При воздушной разведке корабельных групп типовым
является взаимодействие активных и пассивных бортовых информацион-
ных средств, когда главным способом идентификации отметок, получен-
ных разными средствами, являются углы, измеренные на объекты. Извест-
но [7], что эффективность идентификации в этом случае определяется точ-
ностью измерений пеленгов обоими информационными средствами и уг-
ловыми расстояниями между соседними объектами группы. Таким обра-
зом, получение статистических характеристик распределений угловых рас-
стояний между линиями визирования на объекты групповой цели позволит
оценить эффективность совместной работы активных и пассивных инфор-
мационных средств при действиях по типовой цели на морском ТВД.
Кроме того, известно, что успешность функционирования борто-
вых РЛС при действиях по групповым надводным целям в значительной
степени зависит от наличия в группе кораблей-постановщиков помех
(ПП), характеристик станций активных помех, а также расстояний (</„„)
между кораблями-целями и кораблями-постановщиками помех. Так как
обычно дальность (D) до корабельной группы существенно больше рас-
стояния между кораблями в группе, то проекция последнего на перпен-
дикуляр к линии визирования от ЛА к групповой цели (<7nncos аш1), где
апп - угол между линией «цель-ПП», характеризует угловое расстояние
цели (0) от постановщика активных помех.
306
Угловые расстояния между целями и ПП в типовых условиях при-
менения РЛС по подвижной группе, как правило, являются случайными,
поэтому поставленная задача решается нахождением распределений
W(0) для различных типовых расположений целей в группах. Количест-
венная мера помехоустойчивости, средняя вероятность обнаружения
целей в группе, расположенной на дальности D от РЛС, определятся
при этом интегрированием:
4пах
£бн(Я)= J W>,0) W(0}d0. (7.11)
о
Здесь - зависимость вероятности обнаружения цели от дально-
сти и углового расстояния до ПП; 0тах - максимальное угловое расстоя-
ние для данной группы.
Рассмотрим несколько распределений, с разной степенью приближе-
ния описывающих расположение целей в реальных подвижных группах.
Пуассоновское распределение. Можно говорить о пуассоновском рас-
пределении «потока объектов» вдоль линии, перпендикулярной направ-
лению визирования. Этот поток характеризуется средним числом объ-
ектов, приходящихся на единицу углового расстояния. В этом случае
случайная величина, представляющая собой угловое расстояние между
соседними объектами, распределена по экспоненциальному закону:
Иг(0) = Л ехр (-20). (7.12)
Среднее значение и среднеквадратическое отклонение соответст-
венно равны
(7.13)
А
Этим распределением можно пользоваться для приближенных
оценок, когда известна величина Л.
Равномерное распределение угловых координат. Если известно, что
координаты объектов, включая и ПП, распределены равномерно на уг-
ловом интервале а, т.е. что
1К(0П11) = 1Р(0Ц) = 1 при О<01Ш<а и О<0ц<п, (7.14)
а
и они независимы, то разность угловых координат (Д0= 0№- 0W) по прави-
лам нахождения композиции законов распределения будет иметь плотность
вероятности, которая описывается с помощью распределения Симпсона:
(1 + Л0/а)/а при -а< Д0<О,
№(&0) = < (1-Д0/ а)/ а при О<Д0<а, (7.15)
0 при \0>а, &0<-а.
307
Поскольку диаграммы направленности антенн станций активных
помех обычно симметричны, для оценивания уровня помехового сигнала,
поступающего на вход приемника бортовой РЛС, имеет значение абсо-
лютное значение углового рассогласования (^(0)= РЩД6|) =W(| - 6>w|)
между направлением на ПП и на цель. Из выражения (7.15) искомое рас-
пределение определяется как
1Е(0) = -
О
2(1-<?/а)/а
О
при 0 < О,
при 0 < 0 < а,
при 0 > а.
(7.16)
Это распределение, называемое распределением прямоугольного
треугольника, имеет математическое ожидание и среднеквадратическое
отклонение соответственно
0=-, (тв = -^. (7.17)
3 3>/2
Распределение вида (7.16), так же, как и вида (7.12), удобно для
первоначальных оценок.
Равномерное распределение объектов в круге. Зачастую можно пола-
гать, что координаты объектов распределены равномерно на какой-то
площади, например, в квадрате или в круге. В первом случае распреде-
ление угловых расстояний между объектами в случае, когда линия ви-
зирования перпендикулярна одной из сторон квадрата, описывается со-
отношением (7.16).
Во втором случае при равномерном распределении объектов в кру-
ге радиуса г частность появления объекта с координатой х, отсчитывае-
мой от начала координат, совпадающего с точкой пересечения окруж-
ности с диаметром, перпендикулярным линии визирования, пропорцио-
нальна расстоянию от точки х до линии окружности. Плотность распре-
деления с учетом нормирующего множителя записывается как
И\(х})='2 *' %| при 0<Xj<2r. (7.18)
лг
В предположении, что координаты двух точек независимы и распре-
деление их угловых координат подчиняется одному и тому же закону,
можно определить распределение углового расстояния между двумя точ-
ками по правилам нахождения композиции двух законов распределения.
Если обозначить случайной величиной х сумму двух случайных
величин X] и х2, то распределение суммы двух независимых случайных
величин определится как
W(x) = jwi(xi)W2(x-xl)dxt. (7.19)
308
(7.20)
расстояний между объектами групповой
цели для равномерного распределения
объектов в круге (кривая 7) и в квадрате
(кривая 2); пуассоновское распределение
(кривая 3)
Поскольку %] и х2 > 0, может быть использовано положение [5], со-
гласно которому композиция законов распределения (суммы) двух не-
отрицательных величин находится в виде
Ж(х) = ^(х^Сх-х,)^ .
о
Использование соотноше-
ния (7.20) применительно к раз-
ности двух неотрицательных
случайных величин, а также то-
го обстоятельства, что распре-
деление абсолютного значения
представляет собой в рассмат-
риваемом случае сумму двух
симметричных ветвей, сдвину-
тых относительно друг друга по
оси ОХ на величину 2г, позво-
лило получить распределение
JV(0) абсолютных величин угла
между направлением на цель и
ПП при равномерном распределении последних в круге радиуса г. На
рис. 7.2 показано распределенйе угловых расстояний между объектами
групповой цели для равномерного распределения двух объектов для
г=0,5 в круге и квадрате, а также пуассоновское распределение Пра-
вильность выполненного построения была подтверждена также методом
статистических испытаний.
Зависимость удовлетворительно аппроксимируется соотношением
1Г(х)®^^-ехр(-4,9х2'4) ПРИ (7.21)
В угловых величинах это соответствует значениям угла в пределах
Q<9<2r/D.
Математическое ожидание и среднеквадратическое отклонение у
распределения (7.21) соответственно равны
х»0,27, 0,195. (7.22)
В угловых величинах это соответствует следующим выражениям:
_ г 0 39 г
6» «0,27—= 0,54-, (7.22а)
D D 9 D
В достаточно большом относительном числе ситуаций применения
РЛС и аппаратуры РТР по групповым подвижным целям можно пола-
гать, что расстояние D от ЛА до группы целей существенно превышает
309
расстояние между самими целями, т.е. что Р»г, поэтому выражение
(7.21) можно записать в виде
Рис. 7.3. Варианты расположения объекта
(точка О) и ПП в групповой цели: а - цель
и ПП расположены в точке пересечения
окружности и диаметра, проходящего
через точку расположения цели; б - цель
расположена на окружности,
ПП - в центре круга
2 г
при О<0<~. (7.23)
Помимо вышеперечислен-
ных существуют и другие рас-
пределения
Для цели и постановщика
помех, расположенного в точке
пересечения окружности ра-
диуса г и диаметра, проходяще-
го через точку расположения
цели (рис. 7.3,а), распределение
углового расстояния W(0) запи-
сывается в виде (r/Z)=0,05)
№(0) =
Р202
4г1
при
(7.24)
Р
Среднее значение угла между целью и ПП и его дисперсия нахо-
дятся из (7.24) интегрированием:
0 = | 0W(0)d0,
Q
О
(6-6»)2 W(0)d0
Математическое ожидание угла между целью и ПП, а также сред-
неквадратическое отклонение этой величины соответственно равны
— 4г г
6> =--«1,27—-,
ЛР р
(7.25)
Для цели, расположенной на окружности радиуса г, и ПП, распо-
ложенного в центре круга (рис. 7.3,6), распределение углового расстоя-
ния 17(6) имеет вид (гЛО=0,05)
IP г
17(0) =---==—= при 0<6< —. (7.26)
Р
Л Г. 1---Z—
N г
Среднее значение и среднеквадратическое отклонение для этого
случая равны
310
— 2r г
0= — = 0,64—,
TtD D
= 0,616—.
D
(7.27)
Зависимости №(0) для обоих
вариантов изображены на рис. 7.4.
При рассмотрении вариантов груп-
повых целей, которыми являются
боевые порядки надводных кораб-
лей, выполняющих различные бое-
вые задачи, необходимо использо-
вать различные сочетания приве-
денных выше распределений, а так-
же уметь находить такие статисти-
Рис. 7.4. Распределения угловых
расстояний между двумя объектами
групповой цели при их расположении
и в точках пересечения диаметра
круга и окружности (кривая /) и в
центре круга и на окружности
(кривая 2)
характеристик групповых целей,
ческие характеристики групповой
цели, которые учитывали бы прави-
ла распределения функций корабля
ПП среди кораблей группы. Кроме
того, необходимо сформулировать
правила усреднения статистических
учитывающие как различие расположения каждой из целей относитель-
но ПП, так и расположение самого ПП. Немаловажным также является
выработка правила расчета характеристик групповой цели при наличии
в ней нескольких ПП различного взаимного положения.
Рассмотрим в качестве примера группу из трех НК, расположенных
в точках пересечения диаметра с окружностью радиуса г и в центре круга
(см. рис. 7.3,а). Постановщиком помех может быть любой из кораблей.
Надо найти усредненные статистические характеристики групповой цели
при случайном расположении ПП (в центре круга и в одной из точек пе-
ресечения диаметра с окружностью - всего три варианта). Рассмотрение
показывает, что в двух ситуациях распределение будет определяться со-
отношением (7.26), (кривая 1 на рис. 7.4), в третьей - соотношением
(7.24), (кривая 2 на рис. 7.4). Действительно, имеет место следующие три
варианта размещения ПП (см. рис. 7.3):
1) в точке 1 (в условно левой точке пересечения диаметра с окруж-
ностью);
2) в точке 2 в центре круга;
3) в точке 3 (в условно правой точке пересечения диаметра с ок-
ружностью).
В первом варианте цель, расположенная в точке 2, удалена от ПП
на расстояние г, а цель, расположенная в точке 3 - на расстояние 2г. Во
втором варианте цели, расположенные в точках 1 и 3, удалены от ПП на
одинаковое расстояние - г. В третьем варианте цель, расположенная в
точке 1, удалена от ПП на расстояние 2г, а цель, расположенная в точке
2 - на расстояние г.
311
Учитывая эти обстоятельства, можно записать соотношение для
усредненного распределение угловых расстояний между целями и ПП
при случайном и равновероятном расположении ПП в одной из трех на-
званных выше точек:
£>(1/3) 2£>(2/3)
L D202 L D202
JI----5- ЯГ.1-------т—
V 4r2 V г2
£>(1/3)
L D2e2
« 1------Z-
V 4г2
при О<0<-^,
при
(7.28)
Распределение (7-28) составлено из двух ветвей, где использованы
соотношения (7.24) и (7.26). При этом множители (1/3) и (2/3) выбраны
в соответствии с оговоренной выше частностью того и другого распре-
деления и нормирующим условием
2г
jw(0)d0 = l.
о
Среднее значение у распределения (7.28) находится из (7.25),
(7.27) путем суммирования с учетом нормирующих коэффициентов
(1/3) и (2/3) в виде
— 4г 2г 8г г
0=(l/3)Zl + (2/3)—= —«0,85—. (7.29)
TtD nD 3xD D
Статистические характеристики трех вариантов групповых над-
водных целей. Можно выделить три варианта групповых НК.
Рис. 7.5. Вариант 1. Групповая
цель из семи НК (номерами
обозначены НК-цели,
входящие в группу)
Вариант 1. На рис. 7.5 показана
групповая цель из семи НК, условно на-
званная «прямоугольник». В центре этой
группы расположен корабль-постановщик
помех. В силу сделанного выше предпо-
ложения о случайном и равномерном рас-
пределении угла между линией визирова-
ния и какой-либо осью симметрии боевого
порядка корабельной группы плотность
распределения угла в между направлени-
ем на ПП и z-й целью определяется соот-
ношением (7.26), а средние значение и
среднеквадратическое отклонение - вы-
312
ражением (7.27). Математическое ожидание угла в, усредненное по
всем п целям, имеющим разные удаления от ПП, находится как
п
0=—2—. (7.29а)
nDrt
Приведенные выше распределения угловых расстояний между
объектами группы позволяют найти интегральное распределение F(x),
т.е. зависимость вероятности того, что величина углового расстояния
между целью и ПП не превышает величины х и т.д. Далее, для расчета
вероятности обнаружения целей в корабельных группах, прикрытых по-
становщиками активных помех, необходимо использовать основные со-
отношения [7], учитывать диаграммы направленности антенн БРЛС,
особенно в области первых боковых лепестков, а также меры, принятые
в БРЛС по повышению помехозащищенности, как это сделано, напри-
мер, в [8].
Число вариантов формирования групповых целей на морских ТВД
может быть достаточно большим. Рассмотрение любого из них может
быть произведено на базе полученных соотношений. В качестве приме-
ра такого приложения ниже рассматриваются две более сложных схемы,
составленные из двух условных концентрических окружностей.
Вариант 2. На рад. 7.6 изображена групповая цель из пяти НК.
Линейные и угловые размеры следующие: R = 10... 15 миль ~18...27 км,
г ~ 0,47? = 4...6 миль ~ 7,2... 10,8 км, а~24°, а ~ 7?sina=4...6 миль
~ 7,2... 10,8 км.
Рассмотрим ситуацию, когда в каче-
стве ПП (цели, излучающей помеху) ис-
пользуется корабль в точке 1. В этом слу-
чае все остальные корабли (точки 2,3,4,5)
рассматриваются в виде отражающих це-
лей. Для оценки вероятности их обнару-
жения необходимо знать распределение
угловых расстояний относительно ПП.
Так, для цели 2, удаленной на расстояние
2г от ПП, имеет место случай, рассмот-
ренный выше, применительно к которому
для равновероятного направления визиро-
вания по отношению к линии, соединяю-
щей точки 7 и 2, распределение угла меж-
ду направлениями на цель 2 (точка 2) и
ПП (точка 7) определяется соотношением
(7.24), т.е.
Рис. 7.6. Вариант 2. Групповая
цель из пяти НК (в качестве
ПП может быть любой
из пяти НК, любые два
из пяти НК и т.д.)
313
Р_____
Р202
4г2
n 2r
при 0 < и < —,
и математическое ожидание этого угла и среднеквадратическое откло-
нение - соотношениями
— 4г г
е=—«1,27-ч
лР Р
Применительно к рассматриваемому случаю, когда расстояние
между целью в точке 2 и ПП dn = 2г, выражения для распределения, ма-
тематического ожидания и среднеквадратического отклонения соответ-
ственно записываются как
Ж(6>) =
2Р
Р202
^2
при 0 < в <
(7.30)
6» =-«0,637^2-,
лР Р
(7.31)
Аналогично находятся статистические характеристики для всех ос-
тальных целей (точки 3,4,5). На основании этих характеристик может
быть построено усредненное распределение угловых расстояний между
каждой целью и ПП, расположенном в точке 1. Пример такого усреднен-
ного распределения дается выражением (7.28) применительно к группе из
трех целей. Вид распределения приводится на рис. 7.4, а среднее значение
и среднеквадратическое отклонение определяются соотношением (7.29).
Применительно к групповой цели, изображенной на рис. 7.6, такое
достаточно полное построение не приводится, а дается только выраже-
ние для математического ожидания усредненного распределения угла в
между целью и ПП, расположенного в точке 1. Это выражение, полу-
ченное на основании (7.30), (7.31), имеет вид
= —------- У = — У du . (7.32)
1 (и-1)л-Р^ ” 2лР~^ 11
Здесь п - полное число кораблей в группе, (в рассматриваемом случае
и=5); индекс «1» означает расположение ПП в точке 1.
Для получения численных значений статистических характеристик
групповой цели из пяти НК необходимо вычислить величины du в долях R:
d\2= 0,8 R;
d}3 = y]R2sin2a + (J?cosa - 0,47?)2 » 0,65Я,
314
J14 =y]R2sm2a + (Rcosa-0,4R)2 «1,3757?,
di5 = Jr2+(0,4R)2 «1,0777?.
Подстановка полученных значений в (7.32) дает
£«0,62—.
1 D
Аналогично находятся значения 0, для расположения ПП в любой
из пяти точек групповой цели. Соответствующие значения равны
£«0,62—, £«0,88—, £«0,88—, £, «0,877—.
DDD D
Представляет интерес получение среднего значения математиче-
ского ожидания в для случайного расположения ПП в любой из пяти
точек групповой цели (см. рис. 7.6.). Это значение находится по сле-
дующему соотношению:
£ = —!—У У<7, ,.. (7.33)
1 I
Применительно к варианту 2 величина в равна G,T1R/D.
Вариант 3. На рис. 7.7 изображена еще одна групповая цель
(из шести НК). Линейные и угловые размеры групповой цели следую-
щие: R = 5...7 миль ~9...12,6 км, г ~0,5 R = 4,5...6,3 км, а~ 20°,
а = Rsin а = 0,342 R. Станции активных помех могут работать только на
боевых кораблях, занимающих точки 4, 5, 6.
Статистические характеристики угловых распределений находятся
по той же методике, что и для групповой цели варианта 2. Здесь приво-
дятся только средние значения применительно к конкретным размерам
групповой цели и расстояниям между ее элементами.
Среднее значение угла между ПП, расположенном в точке 4, опре-
деляется по соотношению типа (7.32) с учетом особенностей групповой
цели варианта 3:
£4 = —---—У rf4; =—У d4i. (7.34)
(«-1)л-£»^ 4' 41
i*4 j*4
Здесь п - полное число кораблей в группе (в рассматриваемом случае
и=6); индекс «4» означает расположение ПП в точке 4; для других рас-
положений ПП в групповой цели среднее значение 0}- определяется по
315
(7.34) с учетом различий в значениях djj, результаты этих вычислений
суть следующие:
й «0,906—, 1 «0,906—, £«0,77—.
4 D D D
Усредненное по всем возможным положения ПП значение угла
в определяется по (7.33). Оно равно 03 » 0,86/?/D, индекс «3» означает
групповую цель третьего варианта.
Рис. 7.7. Вариант 3. Групповая цель из
шести НК. (В качестве ПП может быть
любой из НК, расположенных в точках
Рис. 7.8. Среднее значение угла между
направлением на ПП и цель в функции
дальности для двух вариантов построения
групп кораблей; в группе работает один
постановщик активных помех на любом
из кораблей группы
Полученные численные зна-
чения средних величин углов ме-
жду ПП и любой целью для груп-
повых целей позволяют постро-
ить зависимости в от дальности в
виде рис. 7.8. Диапазон значений
углов для одной и той же группо-
вой цели определяется заданным
диапазоном изменения основного
размера - радиуса R. При этом
предполагается, что остальные
соотношения между расстояния-
ми остаются неизменными. По-
строение выполнено для группо-
вых целей вариантов 2 и 3.
Из рис. 7.8 следует, что на
дальностях первоначального об-
наружения групповой цели (на-
пример, 250 км) среднее значе-
ние углового расстояния между
целями и ПП составляет 1,5...2
для групповых целей вариантов
2 и 3. С уменьшением дальности
эти угловые расстояния увели-
чиваются по закону R/D.
На рис. 7.8. кривые 1, 2 со-
ответствуют второму варианту
групповой цели (см. рис. 7.6) и
7?=15 и 10 миль соответственно,
кривые 3, 4 - третьему варианту
(см. рис. 7.7) и 7?=7 и 5 миль.
Статистические характеристики распределения углов между на-
правлениями на цели и ПП при наличии в группе нескольких кораб-
лей-постановщиков помех. Если в группе кораблей имеется несколько
ПП, необходимо применительно к каждому из них для каждой цели
316
формировать соответствующие частные распределения, на основе кото-
рых затем строить суммарные распределения. Наличие таких суммар-
ных распределений даст возможность получить математические ожида-
ния и дисперсии. Для приближенной оценки математических ожиданий
может быть предложен подход, основанный на том, что наибольшее
влияние на бортовую РЛС оказывает тот ПП, который находится на
меньшем угловом расстоянии относительно направления на цель.
Это положение действительно не только в случае примерного ра-
венства энергетических потенциалов разных ПП, но и при их достаточ-
но большом различии, так как крутизна амплитудной характеристики
диаграммы направленности типовой бортовой РЛС составляет единицы
и даже десятки дБ/град, в то время как различия в энергетике однотип-
ных корабельных станций активных помех, установленных на кораблях
составляет, как правило, несколько дБ [9].
В рамках применения этого положения предлагается использовать
две оценки - верхнюю, соответствующую большим значениям матема-
тического ожидания угловых расстояний между направлениями на цели
и ПП (в известной мере «оптимистическую» для бортовой РЛС), и ниж-
нюю, соответствующую меньшим значениям математического ожида-
ния («пессимистическую»),
Д ля получения верхней оценки для каждой цели группы определяется
ПП, от которого эта цель удалена на меньшую дальность. Применительно к
этому ПП проделываются все вычисления, которые выполнялись в преды-
дущем материале, где рассматривались корабельные группы с единствен-
ным ПП. Средние характеристики определяются по тем же законам.
Проделаем соответствующие вычисления для вариантов 2 и 3
применительно к двум ПП в группе кораблей.
Вначале для варианта 2 (см. рис. 7.6) предположим, что ПП находятся
в точках 1 и 2. Тогда минимальные расстояния для целей, расположенных в
точках 3, - 4/13=0,65/?; в точке 4 - dl5=d25=l,077R; в точке 5 - d2^=O,65R.
Среднее значение определяется в виде
^12 -771 У тш(4/,1или2).
3?гП2/=м,5
Для расположения ПП в точках 1 и 3 среднее значение запишется как
д 1 4 1 V
<9'з=Т—ДТ / - mmW,iw»3) ит.д.
3 nD 2Ла5
Вычисленное в соответствии с приведенными соотношениями
среднее значение математического ожидания углового расстояния меж-
ду каким-либо из двух случайно выбранных ПП и любой целью для ва-
рианта 1 групповой цели и любой целью равно
(0) = 0,57—,
' 'вар 1 £)
317
для варианта 2 и 3 соответственно
(0) «0,64—; (0) «0,64—.
Для получения нижней оценки будем исходить из того, что удвое-
ние числа ПП означает увеличение с единицы до двух числа ситуаций,
когда ПП и любая из целей находятся на одной линии визирования (при
случайном и равномерно распределенном в круге направлении наблюде-
ния группы кораблей бортовой РЛС). Эффект от этого явления прибли-
женно эквивалентен уменьшению вдвое расстояния между каждой из це-
лей и ПП по сравнению со случаем наличия в группе одного ПП. То есть
нижняя оценка определяется путем уменьшения радиуса групповой цели
R в N„a раз, где Nm - число ПП в группе. Нижняя и верхняя оценки сред-
них значений математических ожиданий угловых расстояний между ПП и
любым кораблем для трех вариантов групповых целей даются в табл. 7.1.
Там же приводится средняя оценка (среднее между нижней и верхней).
Таблица 7.1. Средние значения математических ожиданий угловых
расстояний между кораблем-ПП и любым другим кораблем группы
(в долях R/D)
№ варианта групповой цели № рисунка В группе один корабль-ПП В группе два корабля-ПП
Верхняя оценка Нижняя оценка Средняя оценка
1 7.5 0,77 0,57 0,38 0,48
2 7.6 0,86 0,64 0,43 0,535
3 7.7 0,85 0,64 0,425 0,532
Рис. 7.9. Среднее значение угла между
направлением на ПП и цель в функции
дальности для трех типов групп кораблей.
В группах работает по два ПП,
расположенных на любых кораблях групп
(обозначения кривых те же, что и на рис. 7.8)
На рис. 7.9 показаны
зависимости среднего значе-
ния математического ожи-
дания углового расстояния
между направлениями на ПП
и любую цель группы от
дальности для двух вариан-
тов групповой цели.
Из рис. 7.9, в частно-
сти, следует, что математи-
ческие ожидания угловых
расстояний между ПП и це-
лями на дальностях порядка
200 км не превышает единиц
градусов. Увеличение числа
ПП в группе дополнительно
уменьшает эти величины.
318
7.3. Интегральные характеристики эффективности
местоопределения множества РЛС
радиолокационного поля
Интегральные характеристики эффективности при пеленгацион-
ных методах местоопределения. Выше были рассмотрены методы оп-
ределения координат разведуемых РЛС и предложены соотношения,
оценивающие ошибки разных способов местоопределения, применяе-
мых в воздушной РТР. Большинство полученных зависимостей пред-
ставляет собой какую-либо функцию дальности до РЛС (обычно даль-
ности по линии траверза о=ДР), которая позволяет найти вероятность
определения координат с ошибкой не более г о также в зависимости от
дальности Рм0 (РУ). В связи с этим интегральная характеристика эффек-
тивности местоопределения, представляющая собой относительное чис-
ло РЛС радиолокационного поля, координаты которых найдены с
ошибкой не более г0, может быть найдена интегрированием:
D3
(7.35)
о
где D3 - заданная ширина зоны разведки по одну сторону от оси полета.
Для эллиптического рассеивания вероятность того, что ошибка ме-
стоопределения не превысит заданной величины г0, определяется фор-
мулой [19]
Jr ехр
о
г2(а2+<т2) 1 r2(g2-g2)
(2ахау)2 J °[ (2ахаг)2
(736)
где /о - модифицированная функция Бесселя нулевого порядка; ах ,сгг-
среднеквадратические погрешности определения координат, являющие-
ся функциями дальности (ось ОХ эллипса параллельна оси полета).
В частных случаях, когда сгх = 0 и ах = av, интеграл (7.36) преобра-
зуется к виду
^(Я) = Фв
г0
^y(D)
Д.(О) = 1-ехр
при ах = О,
(7.37)
2ctJ(D)
при <тх =
(7.38)
где Фв =-^= Jexp(-/2) dt.
При подстановке в (7.35) выражений (7.36)-(7.38) можно получить
среднее значение вероятности местоопределения с ошибкой, не превы-
319
Рис. 7.10. Зависимость относительного
числа РЛС, координаты которых
определены с погрешностью не более
г0, от ошибки по оси Y
шающей допустимую, или процент
РЛС, разведанных с погрешностью
не более г0. Результаты интегриро-
вания в предположении, что <tv(Z>)
пропорционально дальности и
oj/crv=const, приведены на рис. 7.10
в функции от параметра а, равного
= kD
го
(7.39)
Семейство кривых, охваты-
вающее все возможные сочетания
ох и сги удовлетворительно ап-
проксимируется функцией
(7.40)
В гл. 1 настоящей монографии были получены выражения для
среднеквадратических погрешностей определения координат РЛС при
оптимальной обработке большого числа (т=2п >10) пеленгов, измерен-
ных на РЛС, а также отношения этих погрешностей (1.14, 1.15). Для
симметричной относительно линии траверза пеленгации из этих соот-
ношений следует, что
1,72стаР
г ~ ---2---- ,
у Vmtg(//2)
(7-41)
— ®0,57tg(//2). (7.42)
ау
Использование последних равенств в (7.40) дает простое прибли-
женное выражение для расчета относительного числа разведанных РЛС,
координаты которых определены методом многократной пеленгации с
погрешностью, не превышающей г0:
[1,52 - 0,4tg(y / 2)] r0 4т tg(y / 2)
где у - ширина сектора обзора (угол между крайними пеленгами); D3 -
заданная ширина зоны обзора (по одну сторону от линии полета); т -
число независимых пеленгов; <та - среднеквадратическая погрешность
пеленгации.
320
(7-43)
7го«1-ехр
Результаты расчета по со-
отношению (7.43) приведены на
рис. 7.11. Параметрами у кривых
принята величина а, = —-.
Выражения (7.41) и (7.42),
использованные для получения
расчетной формулы (7.43), спра-
ведливы при т » 1. При малых
т (в пределе w=2), когда
Рис. 7.11. Относительное число РЛС,
разведанных с ошибкой не более г0, от
размеров зоны при достоверной
многократной пеленгации
<т - Рсг°
у sin(Z/2)
и — = tg(Z/2)>
<7
относительное число разведан-
ных РЛС определяется выражением
(2,62-1,2 tg(//2)) r0 sin(y/2)
(7.44)
Расчет по формуле (7.44) дает результаты, расходящиеся с получен-
ными по формуле (7.43) при подстановке в нее т = 2 не более чем на 10 %.
Для высотных разведывательных ЛА может быть использован уг-
ломестный способ определения координат, в котором дальность до РЛС
определяется путем измерения угла на нее в вертикальной плоскости
[20]. Погрешности местоопределения без учета ошибок измерения вы-
соты Н приближенно равны
сг±~Н_
(7-45)
где «Тум - погрешность пеленгации в вертикальной плоскости (предпола-
гается в дальнейшем для упрощения выкладок, что точности пеленга-
ции в обеих плоскостях одинаковы, т.е. что <7ум = оа.
Аргумент, введенный для построения общих зависимостей типа
рис. 7.10, для угломестного метода определяется из соотношения
г0 гон
или
Уу.Р2
н
На рис. 7.12 приведены зависимости относительного числа РЛС,
разведанных с погрешностью не более г0, в функции от параметра b при
достоверном их обнаружении.
321
Рис. 7.12. Относительное число РЛС,
разведанных угломестным способом с
погрешностью не более г0, в функции
параметра Ь, при достоверном их
обнаружении
Для расчета кривых исполь-
зовалось численное интегрирова-
ние выражений (7.37) и (7.38) при
учете (7.45) и (7.46). С ростом
дальности в соответствии с (7.45)
отношение (c^/crj -> 0, поэтому
точки на графике, соответствую-
щие какой-либо высоте полета, по
мере роста дальности удаляются
от кривой crx=av и приближаются
к кривой ах =0. Указанное обстоя-
тельство отражает аппроксими-
рующая кривая
P(r < r0) »l-exp(-2/i),
показанная на рис. 7.12 пунктиром.
Таким образом, для угломестного способа определения координат
можно записать приближенную формулу
P(r < r0)»1 - ехр -
(7-47)
Лг<г»)
1,0
0,8
0,6
0,4
0,2
0
Г=60°
100 км
\с= =10 км
0 100 200 300 400 500
£>3, км
Рис. 7.13. Относительное число РЛС,
разведанных угломестным способом,
в функции дальности, при достоверном
их обнаружении
ниченности зоны обзора по углу места. Очевидно, что
Зависимость (7.47) приве-
дена на рис. 7.13, где парамет-
ром у кривых принята величина
С = у]Н rQ / <та , выраженная в ки-
лометрах.
При расчете относительно-
го числа РЛС, разведанных с по-
грешностью не более го угломе-
стным методом, необходимо
учитывать так называемую
«мертвую зону», т. е. участок
местности шириной ±£>мз, в пре-
делах которого обнаружения
РЛС не происходит из-за огра-
Рс(г < 'Ь) = Р& < То) - Рт(г < Го) Нг
где Рс(г < г0) - относительное число РЛС, разведанных с погрешностью
не более г0 в пределах всей ширины зоны от 0 до D3; Р3(г < г0) - относи-
тельное число разведанных РЛС в пределах всей заданной зоны без уче-
та ограничений из-за необнаружения сигналов РЛС, находящихся вне
322
рабочей зоны; Рмз(г < г0) - относительное число разведанных РЛС в
пределах от 0 до DK3 при достоверном обнаружении сигналов.
С учетом отмеченных ограничений по зоне обнаружения для уг-
ломестного метода можно записать выражение
Р(г <г0)®1-ехр -
1-ехр —
При выводе данных соотношений предполагалось, что обнаруже-
ние разведуемых РЛС осуществляется достоверно. Таким образом,
(7.43) и (7.47) характеризуют потенциальные возможности местоопре-
деления станции РТР. Учет мертвой зоны для угломестного метода вы-
ражением (7.48) уже означает отход от идеальных условий обнаруже-
ния. Очевидно, что определение координат возможно только у обнару-
женных РЛС. Применительно к угломестному методу, где для опреде-
ления координат достаточно однократного обнаружения, учет этого об-
стоятельства производится умножением в (7.35) вероятности местооп-
ределения на вероятность обнаружения, которая, как показано в преды-
дущих главах, является функцией дальности. Поэтому относительное
число разведанных РЛС, координаты которых определены с погрешно-
стью не более г0 , при угломестном местоопределении находится из вы-
ражения
1 3 "
7™ = М < 'о) = ~ JW PMO(D) dD .
3 о
(7.49)
При многократной пелен-
гации вероятность местоопре-
деления PU0(D) с заданной точ-
ностью является, помимо точ-
ностных характеристик, функ-
цией числа (те) обнаружений
каждой РЛС (числа измерен-
ных на нее пеленгов), расстоя-
ний между пеленгационными
пунктами и т.д. Вероятности
обнаружения при многократ-
ной пеленгации находятся по
соотношениям предыдущих
глав. Здесь только ограничимся
численным примером.
Рис. 7.14. Зависимость относительного
числа РЛС, разведанных с погрешностью
не более 10 км, от дальности при
использовании многократной пеленгации с
учетом недостоверности обнаружения
На рис. 7.14 приведены результаты расчета зависимости вероятно-
сти обнаружения от дальности по соотношениям гл. 4 для следующих
исходных данных: у/= 0,36 км Вт0,5, От|П = 28 км, DK0 = 50 км; 1а=1 с;
323
Dia=5W км. При этом кривые 2, 3 соответствуют обнаружению не менее
двух раз за пролет, а кривые 4, 5 ~ трех. Здесь же нанесена зависимость
вероятности местоопределения от дальности при достоверном обнару-
жении (кривая 7), рассчитанная по соотношению (7.37) для го=10 км и
<та=0,02.
Результирующие зависимости, учитывающие в соответствии с
(7.49) обнаружение и местоопределение, отображаются кривыми 3
(ш=2) и 4 (ш=3). Интегралы от первых двух функций (кривые 1 и 2) в
пределах дальностей 0.. .500 км, соответственно равны Р^нхр « 0,5 и Рм0.
ср (г < го) ® 0,15. Величина среднего относительного числа разведанных
РЛС с погрешностью не более г0=Ю км.
Как видно из приведенного численного примера, учет вероятности
обнаружения при многократной пеленгации приводит к существенному
уменьшению относительного числа разведанных РЛС по сравнению со
случаем достоверного обнаружения, особенно для больших зон разведки.
Вероятность обнаружения зависит не только от дальности, но и от
характеристик разведуемой РЛС, т. е. в конечном счете от ее типа, по-
этому относительное число разведанных РЛС всех типов, составляющих
радиолокационное поле, определится как
1 4
Дазв с --V Pi ^пазв, , (7.50)
Pc j=\
где Pj - средняя плотность на местности РЛС у-го типа; q - число типов
РЛС; Рразв- относительное число разведанных РЛСу-го типа;
<?
7=1
Использование найденного в [7] распределения энергетического
параметра (у/), характеризующего радиолокационное поле с точки зре-
ния возможностей обнаружения, позволяет привести формулу (7.50) к
виду
со
^ве=ррззв(^)^)^. (7.51)
о
Выражения (7.49-(7.51) связывают средние значения относитель-
ного числа разведанных РЛС всех типов, составляющих радиолокаци-
онное поле, с погрешностями, не превышающими г0. Для оценочных
расчетов можно использовать понятие эквивалентной РЛС, введенное в
[7]. Параметры этой РЛС выбираются таким образом, чтобы интеграль-
ные характеристики обнаружения реального поля и поля, составленного
только из эквивалентных РЛС, были одинаковыми.
324
Интегрирование в соответствии с выражениями (7.35), (7.49) и
(7.51) с целью оценочных расчетов также может быть заменено более
простой операцией. Действительно, в начале настоящего материала
найдены достаточно простые выражения для относительного числа РЛС
(средних вероятностей), обнаруженных в заданной зоне разведки, а
также относительного числа РЛС, координаты которых измерены с по-
грешностью не более заданной:
A D3
P^=yr ]P<*AD)dD, Р^^-р- }P^D)dD-
V* о и' о
В то же время можно показать, что, если обе подынтегральные
функции в последних выражениях монотонны, то в зависимости от зна-
ка производных этих функций выражение (7.49) можно оценить сле-
дующими приближенными соотношениями:
если (11 | > о, то Рвазв с„ > Ро6н СВРМО ,
1 I I dD ) ' рззв-ср оинхр ми.ср'
если | < о, то Рвазв св < Ро6н СВРМО св, (7.52)
1 dPi ) к ) 3 р«-»вхр Wil.ср ми. ср ' ' '
(/УР А (dP
если -Jffi. =о, ТО Рваэвсв =РобнсрЛю ср •
1 jt\ 11 I z pujis.cp uvti.cp Mv. cp
В воздушной РТР всегда выполняется неравенство dPMJdD < 0;
кроме того, в беспоисковых станциях также всегда dP^ IdD < 0. В по-
исковых станциях (см. гл. 4) на участке 0 < D < £>мин dP^a IdD > 0, одна-
ко здесь обычно Рмо~ 1 и dPKJdD = 0; при D > DM„„ dPMJdD < 0. Таким
образом, всегда dPMJdD < 0 и dPMJdD < 0, тогда в соответствии с (7.52)
выполняется неравенство
Рразв.ср — Робн.срРмо. ср •
Для оценки величины Р^ср можно записать следующее выражение:
min {Ррбн.ср, Рмо. ср} — ^разв.ср — Т^оби.ср *7>мо.ср,
откуда вытекает приближенная оценка для Рразвср в виде среднего от
двух крайних значений
-Рразв.ср~ 0,5 {min [Дрбн.ср? Т^мо.ср] +Робн.ср*-^мо.ср}• (7.53)
Для рассмотренного выше численного примера, иллюстрирующего
рис. 7.14: Л>би.Ср=0,16; Рмо.ср=0,5; Рразв.ср» 0,1 - по точной формуле (7.49);
приближенная формула (7.53) дает значение />ра3в.ср!в 0,12.
Таким образом, полученные соотношения дают возможность нахо-
дить оценки интегральных характеристик эффективности местоопределе-
ния разведуемых РЛС при разных способах измерения линий положения.
325
Рис. 7.15. Поле погрешностей Г =У(х>у)
Интегральные характери-
стики эффективности место-
определения разнесенных сис-
тем. В гл. 5 получены двумерные
распределения погрешностей оп-
ределения координат разнесенны-
ми разностно-дальномерными
системами. Пример такого рас-
пределения в виде поля погрешно-
стей разностно-дальномерной сис-
темы, размещенной на трех вытя-
нутых в линию ЛА, отстоящих
друг от друга на расстояние по-
рядка 100 км, дается на рис. 7.15.
Центральный ЛА отстоит от середины участка, подлежащего разведке, на
расстояние, равное 200 км. Величины геометрического фактора - Г (отно-
шение среднеквадратических погрешностей измерения координат к разно-
ста хода сигналов) даются не-
посредственно на кривых.
Такие распределения по-
лезны при планировании зада-
ний на разведку, оценке ре-
зультатов его выполнения и т.
д. Однако при сравнении раз-
личных вариантов реализации
системы, формировании тре-
бований к отдельным ее эле-
ментам и т.д. удобнее одно-
мерное распределение или да-
же несколько чисел. Такой ха-
Рис. 7.16. Интегральные распределения
погрешностей определения координат
ракгеристикой может быть
функция вида
/ = 1,2,...,и,
(7.54)
где 5, (In J < Г,) - суммарная площадь внутри заданного района, где гео-
метрический фактор не превышает Г, (рис.7.16).
Зависимости рис. 7.16 с погрешностью не более 5% аппроксими-
руются кривой логарифмически-нормального распределения
P(ln J < In Г) = 0,5 + 0,5Ф
In J - р
(7.55)
326
где Ф(л) = -у= J
-t ) df, ц и сгг - параметры распределения.
Кривая 1 на рис. 7.16 соответствует значениям параметров /л ® 2,2
и ст,» 0,6 (центральный ЛА находится напротив центра поля); кривая 2 -
значениям ц « 3,3 и <тг~ 1,5 (центральный ЛА находится напротив края
поля). Из кривых при учете того, что стг = Гсг^ , может быть найдена от-
носительная площадь заданной зоны разведки (а при равномерном рас-
пределении РЛС в зоне и относительное число РЛС в зоне), где потен-
циальные погрешности не превышают допустимые. Например, непо-
средственно из рис. 7.16 (кривая 7) следует, что при погрешности изме-
рения разности хода, равной ad =30 м, примерно половина РЛС разведу-
ется с погрешностью, не превышающей 300 м.
Полученные соотношения выявляют зависимость достижимой точно-
сти местоопределения от времени разведки. Действительно, погрешности
мгновенного местоопределения любой РЛС заданной зоны при произволь-
ном расположении летательных аппаратов относительно центра зоны за-
ключены между кривыми 7 и 2 (рис.7.16). Если же время работы РЛС на
излучение превышает время пролета летательными аппаратами всей зоны и
она последовательно просматривается областью наибольшей точности,
расположенной вдоль перпендикуляра в точке В к базе (см. рис. 5.1), рас-
пределение погрешностей определяется кривой 3. Даже средние значения
в этих двух случаях отличаются более чем на порядок. В связи с этим,
ставя задачу достижения каких-либо точностей местоопределения, необ-
ходимо устанавливать время, отпускаемое на разведку.
7.4. Методика оценки вероятности накрытия
движущегося объекта зоной обнаружения
автономного средства по результатам
предварительного определения координат
средством разведки
Одним из применений информации, полученной средствами раз-
ведки, является использование ее для целеуказания другим, автономно
применяемым средствам, имеющим собственную аппаратуру обнару-
жения, но меньшего радиуса действия или работающую на других фи-
зических принципах. Эффективность решения задачи целеуказания
оценивается обычно вероятностью накрытия объекта зоной обнаруже-
ния информационными средствами автономного средства [14,15].
Для одномерного случая и неподвижной цели (скорость цели К=0)
вероятность попадания ее в симметричную зону обнаружения автоном-
ного средства (7?) с размерами ± L и границами а и Д центр которой
совмещен с началом координат, при нормальном распределении ошибок
327
с центром рассеивания в точке тх и среднеквадратическим отклонением
сг, определяемом выражением
г, ч 1
/(*)=—с=ехР
(Х~тх)2
2а2 .
(7.56)
равна
Р(ХсК) = Фв
(7-57)
2 л
где Фв(х) = —|ехр(-/2)сй - функция Лапласа.
Если центр зоны обнаружения остается в начале координат, а
центр рассеивания смещен по оси ОХ на расстояние Vt, где t - время,
прошедшее от момента последнего измерения координат цели до
момента «открытия» зоны обнаружения автономного средства (время
«устаревания»), то вероятность попадания цели в зону обзора R
(вероятность накрытия) в соответствии с [10] равна
Р(Хс/?)=1
_1_
2
(7.58)
Рассмотренный случай соответствует наведению в точку с координа-
той x=Vt, а центр квадратной зоны обнаружения автономного средства R
расположен в начале координат (х=0). Однако реальной схеме наведения на
цель, переместившуюся за время устаревания на расстояние Vt, соответст-
вует наведение в «настоящее место цели» - (НМЦ), т.е. в начало координат.
Координаты цели смещаются на величину Vt, и задача определения вероят-
ности попадания цели в зону R заключается в нахождении вероятности то-
го, что центр зоны (распределенный по нормальному закону с /их=0) будет
удален от точки с координатами Vt не более чем на величину L.
Поскольку тх= 0 и а= Vt-L, fl=Vt+L в соотношении
Р(ХсЛ)=1
_ ( В-тЛ . (а-тЛ
Фв г- - Фв -------Т^-
Ч стл/2 ) Ч O-V2 /
ТО
P(X^R) = ± Ф,
(В-mr\ . (a-m,
'в ~—г^- - Фв ----
I сгл/2 ) I стч/2
=1 ф
2
( L + Vt] ( L-Vt\
'в --т=- + фв -г=-
J Чо-лЮ.
328
При наведении автоном-
ного средства на НК следует
рассматривать плоский случай,
когда нормальный закон рас-
пределения записывается как
3 ....
f(x,y) =
1
---------х
2ло-хо-у
хехр
(х-т^2 (х-ту)
2^ 2<ту
где тх, mv - математические
ожидания координат цели по
осям ОХ и ОУ; а х и ст v -
среднеквадратические откло-
нения по осям ОХ и ОУ.
Вероятность попадания
точки в прямоугольную зону
R, ограниченную величина-
ми а, р, 8, у (рис. 7.17),
определяется соотношением
Рис. 7.17. Зона обзора R для расчета
вероятности попадания цели с координатами,
распределенными по нормальному закону с
центром в точке тх, ту
Рис. 7.18. Поверхность распределения
нормального закона на плоскости и зона R
X
I О'—j I <TXVZ
X
Для зоны обнаружения R в виде квадрата с центром, совпадающим
с началом координат, т.е. при a —L, Д =L, y—L, 3 = L (рис. 7.18), ве-
роятность накрытия цели равна
х
(7.59)
В случае расположения центра рассеивания в начале координат,
т.е. тх = ту = 0 , круговом рассеивании сгх = ау = а и квадратной зоны
обнаружения R со стороной 2L, вероятность накрытия цели зоной обна-
ружения автономного средства выражается в виде
329
Р[(^,У)с/?] = Фв
Располагая цель в точке с координатами тх =Vt и ту=0 и центр
рассеивания в начале координат, получим
или
Р[(ХУ)сЛ]=1
и для кругового рассеивания -
Р[(Х,У)сЯ] = - фв +фв —
(7.60)
Меняя местами центр зоны обнаружения R и центр рассеивания,
как это было сделано применительно к линейному случаю, получим
привычную схему рассмотрения применения оружия при наведении в
настоящее место цели, когда центр рассеивания совпадает с началом
координат, а координаты цели равны по осям ОХ и ОУ соответственно:
Vt и 0. Как было показано выше, вероятность накрытия цели зоной R
при такой замене не изменяется и определяется соотношением (7.60).
Так как направление координатной оси ОХ, по которой перемещалась
цель, выбиралось произвольно, то можно полагать, что полученное вы-
ражение справедливо в общем случае.
Можно использовать также выражение через приведенную функ-
цию Лапласа:
Ф(х) = Фв(рх)=-^]
тогда аналог выражения (7.59) запишется как
Р[(^,У)С7?]=1
X
ф
(7.61)
£
где р - —® 0,477 ; ст - среднеквадратическое отклонение; Е - веро-
ятное отклонение («срединное» отклонение, «срединная» ошибка).
330
Выражение (7.60), определяющее вероятность накрытия цели зо-
ной обнаружения автономного средства, наведенного в настоящее место
цели (в точку с координатами 0,0), через приведенную функцию Лапла-
са при круговом рассеивании, когда Ех = Ev = Е, запишется как
L-Vt} *( L + Vt
---- +Ф ------
Е ] £
ф|—
I £
(7.62)
Для круговой зоны обнаружения R в ([12, 14] приводятся соотно-
шения распределения расстояний г от объекта, начавшего двигаться при
Г=0 с постоянной скоростью и равномерно распределенным курсом,
при круговых ошибках местоопределения ах = ау = а :
, ТЛ Ч Г ( Г2 + (Vmty
Ж(г,КнКЛ<Т)=—СХр-------- НК ’
2а2
Л>
(7.63)
где /о - модифицированная функция Бесселя нулевого порядка.
Отсюда находится вероятность того, что объект находится в круге
радиуса L:
Z/cr
P(r <L) = -^r f rexp -
o’ ? I
r2+(W>2>
2сг2 )
(7.64)
О
На рис. 7.19 построены зависимости для определения вероятности
накрытия движущейся прямолинейно и равномерно со скоростью V це-
ли зоной обнаружения головки самонаведения ракеты в виде квадрата
со стороной 2L (см. (7.60)-(7.62)) и кругом диаметра 2L (см. (7.64). На-
ведение осуществляется в НМЦ, т.е. в точку, где она находилась в мо-
мент последнего измерения координат системой целеуказания, когда
время устаревания Т= 0.
Как видно из сравнения зависимостей, рассчитанных для квадрата и
круга, расхождения при ма-
лых значениях параметров
W а и Ы сг не превышают
единиц процентов и убывают
по мере роста указанных ар-
гументов.
При Е>сг из (7.60) мо-
жет быть получена прибли-
женная формула
Ч сг>/2 J
Рис. 7.19. Вероятность накрытия движущейся
со скоростью V цели квадратом (сплошные
линии) со стороной 2L и кругом диаметра 2L
(пунктир) через время Т после начала ее
движения (а - круговая
среднеквадратическая погрешность
определения точки начала движения)
331
’ =- Ф
накр 2 1
(7.65)
'„Pf К
Из последнего соотношения следует, что для обеспечения высоких
вероятностей накрытия цели (например, более 0,95) необходимо, чтобы
выполнялись условия
L - Инк/ > 1,65 ст или Л>Кнк/ + 1,65ст . (7.66)
Для РнаКр > 0,99 необходимо, чтобы
L-Vmt> 2,33 ст или Z>FHKf + 2,33CT. (7.67)
Выражение типа (7.66), (7.67) применительно к элементам системы
устройство целеуказания - ракета с головкой самонаведения - движущая-
ся цель приводится в [13], где оно связывает ширину зоны захвата голов-
ки самонаведения (ГСН) автономного средства со скоростью движения
цели, временем устаревания информации t и погрешностью определения
координат цели в момент последнего измерения ее координат, которая
складывается из среднеквадратического отклонения, накопленного нави-
гационной системой ракеты в процессе маршрутного полета (от момента
выдачи целеуказания до момента «открытия» ГСН) - <?„, и среднеквадра-
тической погрешности определения координат цели средствами целеука-
зания в момент последнего измерения ее координат стцу. Считается, что
источники погрешностей независимы, поэтому можно положить, что
а = yja2 + . В [13] приводится выражение вида
£ = 17 + 3^ + ст^ .
(7.68)
Как видно из сравнения (7.66), (7.67) и (7.68), выражения отлича-
ются только числовыми коэффициентами. В частности, (7.68) получает-
ся из (7.65) при использовании достаточно высокого значения коэффи-
циента, эквивалентного накрытию цели с вероятностью более 0,995.
Полученное приближенное соотношение (7.65) и его частные реа-
лизации могут быть использованы для обоснования требований к точ-
ности целеуказания. Так, например, при заданной требуемой вероятно-
сти накрытии одиночной цели, равной 0,99, из (7.67) следует, что необ-
ходимо выполнение неравенств
1а2+сг2
УГ*+ач~ 2,33 ’
. < Г-^~^НкИ _ 2
цу-^1 2,33 J
при
2,33ан.
(7.69)
332
Зона обнаружения ГСН может отличаться от круга или квадрата:
например, иногда рассматривают зону в виде прямоугольника или по-
лосы вдоль направления полета ракеты. В последнем случае говорят о
режиме «наползания» на цель. Для такого варианта формула вероятно-
сти накрытия движущейся цели (7.64) преобразуется к виду
л72Л/соза
Р(г<1)=- Г Г -^ехр
л J J а
о о
г2 + (Ин|</)2
1а2
(7.70)
Здесь L - половина ширины полосы захвата.
Результаты расчета по
последнему соотношению
приводятся на рис. 7.20. Из
сравнения с результатами для
зоны обнаружения в виде
квадрата и круга (см. рис.
7.19) следует, что режим «на-
ползания» имеет преимуще-
ства в вероятности накрытия
цели, особенно в диапазоне
значений VT/a > 4 и больших рис. 7,20. Вероятность накрытия движущейся
значений U а . Однако следу- цели полосой ширины 1L через время Т после
ет подчеркнуть меньшую се- начала движения (<т - среднеквадратическая
лективную способность этого " погрешность определения координат цели в
режима, особенно прояв- начале движения)
ляющуюся при действиям по групповым целям, глубоко эшелонированным
по дальности. Из качественных рассуждений следует, что разделение двух
целей, мало отличающихся по координате У, с большей вероятностью осу-
ществляется при круговых и квадратных зонах обзора ГСН.
Полученные соотношения и графики, их иллюстрирующие, позво-
ляют рассчитывать важнейший показатель системы целеуказания - ве-
роятность накрытия движущейся надводной цели зоной обнаружения
ГСН и обосновать требования к элементам этой системы. Для бортовой
аппаратуры разведки определяется допустимая погрешность определе-
ния координат и допустимое время обработки информации, входящее
вместе с временем полета ракеты в суммарное время устаревания.
7.5. Методы оценки интегральных характеристик
эффективности местоопределения объектов,
составляющих морские групповые цели
При РТР групповых морских целей возникают две задачи: оценка
средней вероятности идентификации по угловым координатам отметок
объектов, полученных разными бортовыми средствами, и оценка сред-
333
них значений ошибок определения дальностей между объектами группы
при использовании сигналов корабельных РЛС, отраженных от сосед-
них кораблей ордера
Интегральные характеристики эффективности угловой идентифи-
кации отметок объектов морских групповых целей. Процедура иден-
тификации по угловым координатам отметок объекта, измеренных из
одной точки разными средствами [7,95], зависит от расстояния между
объектами, погрешности определения координат средствами РТР, а
также от алгоритма принятия решения. Рассмотрим достаточно распро-
страненный линейный случай идентификации по угловым координатам
(пеленгам), имеющий место при обнаружении объекта станцией РТР и
другим более точным средством (например, оптико-электронным сред-
ством или бортовой РЛС с развитой антенной).
На рис. 7.21 показано распре-
деление ошибок определений пе-
ленгов, измеренных бортовой стан-
цией РТР на объекты А и В, истин-
ное положение которых, согласно
сделанному выше допущению, най-
дено с помощью более точного ин-
формационного средства
По угловым координатам эти
объекты отстоят друг от друга по
оси ОХ. перпендикулярной линии
визирования, на расстояние d. Ниже
рассматривается два алгоритма. Согласно первому из них (№ 1) отождеств-
ление считается состоявшимся, если пеленг, измеренный на источник ра-
диоизлучения, размещенный на объекте А, не будет отстоять от истинного
пеленга на точку А более, чем на величину d0, и одновременно пеленг, из-
меренный на объект, находящийся в точке В, не попадет в область, удален-
ную от истинного положения точки А более, чем на величину d0.
Обозначая через ха и хь случайные значения пеленгов, измеренных
на объекты, расположенные в точках А и В соответственно, запишем
правило принятия решения по алгоритму № 1 (на языке Pascal):
if (abs(xa)<rf0) and (abs(x4)>rf0) then true (7.71)
Считая распределения ошибок при пеленгации объектов в точках
А и В нормальными с математическими ожиданиями 0 и d и одинако-
выми дисперсиями, равными с?х, можно записать выражения:
Y W(x)
Рис. 7.21. Распределения ошибок
измерения пеленгов на объекты А кВ
W{xb) ехрНХГ/П • <7-726)
&х \ 2°х J
334
Вероятность правильного отождествления информации от БРЛС и
РТР для алгоритма записывается как
Р = ф
* ОТОЖД В I
1 л г а I d 4 1 I d dn
• 1-0,5 Фв -------Фв ----------#
I crryJ2 I I <Tr-Jl
(7.73)
где Фв(х) = jexp(-/2)dt.
На рис. 7.22 изображены за-
висимости, построенные по ре-
зультатам расчета по (7.73). По
оси абсцисс отложена нормиро-
ванная величина расстояния меж-
ду объектами (d/a^, в качестве
параметров у кривых приняты от-
ношения порогового расстояния
d0 к среднеквадратической по-
грешности измерения пеленга сгх.
При этом номера у кривых чис-
ленно равны этому отношению.
Из рассмотрения кривых
Рис. 7.22. Зависимости вероятности
отождествления объектов по угловым
координатам от углового расстояния
между ними и типа алгоритма обработки
следует, что для получения достаточно высоких вероятностей отожде-
ствления (более 0,8) целесообразно использовать пороговые значения
djox > 2, при этом указанные вероятности достигаются при расстояниях
(d) между объектами, больших Зсгх.
В соответствии со алгоритмом № 2 отождествление считается со-
стоявшимся, если «своя» отметка (х„) находится ближе «чужой» (х*)
[22]. То есть
If abs(xa) < abs(x4) then true
(7.74)
Вероятность этого события для определенного значения ха нахо-
дится по аналогии с (7.73) как
рОТожд(^) = 1-0,5
Для любых значений ха, распределенных в соответствии с (7.72а),
средняя вероятность отождествления определяется интегрированием
335
Результаты расчета по соотношению (7.75) также представлены на
рис. 7.22 (кривая 5). Из сравнения с результатами расчета вероятности
отождествления по алгоритму № 1 следует, что алгоритм № 2 сущест-
венно эффективнее алгоритма № 1, особенно при малых значениях d/ox.
В частности, высокие вероятности отождествления (более 0,8) достига-
ются примерно при вдвое меньших значениях d/crx (равных » 1,5).
Зависимость (7.75) удовлетворительно (с погрешностью порядка
единиц процентов) аппроксимируется формулой
р
* отоад
I d1 I
»1-0,5ехр -0,3 -у .
(7-76)
В п. 7.2 приводятся статистические характеристики распределений
угловых расстояний (6*) между двумя произвольно выбранными объек-
тами в ордерах разных схем построения. Эти характеристики даются в
виде аналитических выражений, например (7.21, 7.23, 7.24, 7.26, 7,28),
либо в виде средних значений, являющихся функцией типа схемы по-
строения группы кораблей, а также отношения радиуса ордера Л к даль-
ности (D) до него, т. е. в виде
0 = (7.77)
где к - коэффициент пропорциональности, изменяющийся в пределах
0,5...0,8.
Чтобы воспользоваться графиками и соотношениями настоящего
материала, необходимо учесть, что величины d и сгх на графиках
рис. 7.22 и в (7.75) соответствуют величинам 3D и Daa, где <та - по-
грешность пеленгации. Таким образом, ((7.76) будет записываться как
Р
* отожд
/ w? У
= 1-0,5ехр -0,3 —
\Da„
(7.78)
Например, при разведке групповой цели с радиусом к=20 км с
дальности £>=200 км станцией РТР с пеленгатором, имеющем средне-
квадратическую погрешность около одного градуса, вероятность угло-
вой идентификации отметок по алгоритму № 2 составляет приблизи-
тельно 0,9, а по алгоритму № 1 приблизительно 0,7. Если же &=10 км, то
вероятности идентификации по угловым координатам соответственно
равны 0,7 и 0,5.
Интегральные характеристики эффективности определения рас-
стояний между объектами в морских групповых целях при использо-
вании переотраженных сигналов от кораблей строя. В гл. 5 были
получены выражения для погрешностей определения расстояний d ме-
336
жду объектами при использовании в аппаратуре РТР переотраженных
сигналов. В соответствии с (5.51) СКП измерения координаты У опреде-
ляется приближенным соотношением
(7.79)
(7.80)
I/ ч2 г , ч\2
где <Тд- СКП измерения разности времени (А) прихода прямого и пе-
реотраженного сигналов; у/ - угол между направлениями на носитель
РТР и отражатель, измеренный на излучателе (см. рис. 5.14), av - СКП
измерения этого угла.
Последнее слагаемое преобладает над первым в подавляющем
большинстве случаев (когда у/» 0,025), поэтому
Ла?
ayd “ tg((//2) ’
На рис. 5.15 даны результаты расчета по выведенным
соотношениям для следующих исходных данных: £>=400 км, сгд =30 м,
= 0,5°, 0О = 1,5° и d = 5; 10; 20; 30 км. Из графиков следует, что
величина погрешности существенно меняется при изменении у/, однако
в большинстве случаев (®90%) погрешность измерения взаимного
положения НК не превышает 1 км, а в половине случаев - 200 м.
Для получения средних значений погрешностей, учитывающих
распределение расстояний между объектами в конкретных корабельных
группах необходим целенаправленный анализ таких групп, подобный
тому, что был проведен в п. 7.2, но применительно не к угловым, а к ли-
нейным расстояниям. Однако для приближенных оценок можно вос-
пользоваться допущением о примерно равномерном распределением
объектов в круге радиуса R .
Тогда в соответствии с (7.3), (7.9) и др. средняя плотность п
объектов в круге выражается в виде
п
а среднее расстояние между ними как
, 0,5Ry[^
а*----j=—
Можно найти среднее значение погрешности измерений
расстояния d путем интегрирования (7.34):
f dcrv W! \А A (W(ys)dy/
avd ® -----S-— W(y/)dw = dor 1-----— .
Jtg((//2) v J tg({//2)
V\
(7.81)
337
Полагая распределение углов у/ равномерным в интервале от
у/х до л, найдем
2(l-ln(sin(^/2)))
» da ------------------. (7.82)
Подстановка в (7.82) выражения (7.81) дает возможность получить за-
висимость средней погрешности определения взаимного положения объек-
тов в корабельной группе при использовании в бортовой станции РТР сиг-
налов корабельных РЛС, отраженных от соседних кораблей строя:
. _ Яа^тг (l-ln(sin(;/1/2)))
yd -Jn (л--!/1)
(7.83)
Рис. 7.23. Усредненные значения
погрешностей определения расстояний между
объектами корабельных групп
радиуса R
На рис. 7.23 приведен
пример расчета по формуле
(7.83) для следующих зна-
чений параметров: (/]=18°,
=0,5° и разных радиу-
сов корабельной группы,
включающей п кораблей,
каждый из которых может
выполнять роль излучателя
и отражателя. Возможность
увеличения точности при
обработке нескольких изме-
рений в расчетах не учиты-
валась.
Как видно из рис. 7.23, средние значения погрешностей в 90%
возможных значений угла у/ не превышают 400 м даже для малочис-
ленных групп.
Литература к главе 7
1. Военный зарубежник, 1958, №№ 8; 1959, №№ 6,9; 1960, №№ 2, 5,10,
12; 1961, № 8; 1962, № 4, 10; 1963, №№ 12; 1964, № 1; 1965, №№ 1, 6,
7, 8; 1966, №№ 9, 10; 1967, №№ 2, 10; 1968, №№ 2, 77, 8, 9, 11; 1969,
№№3,6,11; 1970, №№ 1,2,3,5,7,11; 1971, №№ 1,6,7; 1972,3,8.
2. Зарубежное военное обозрение, 1973, №№ 1, 3, 8, 11, 12; 1974, №№
1,2, 6, 77,10, 11, 12; 1975, №№ 1,2, 5, 8, 10; 1976, №№3, 5,7,10,12;
1977, №№ 6, 12; 1978, №№ 2, 5, 7,8, 9, 12; 1979, №№ 5, 6, 7; 1980,
№№2, 3, 5, 10, 11; 1981, №№ 3, 8, 10; 1982, №№3,4, 5, 11, 12; 1983,
№№ 3, 6, 7, 8; 1984, №№ 1,2,4, 7,11,12; 1985, №№ 1,2,3, 9, 10.
338
3. Морской сборник; 1982, №№ 1, 2, 44, 6, 7, 9; 1984, №№ 4, 3; 1985,
№№ 1, 2, 5, 8, 9; 1986, №№ 1, 3, 4, 5; 1987, №№ 6, 11; 1988, №№ 6,
7, 8, 9, 10, 12; 1989, №№ 5, 11; 1990, №№ 3; 1991, №№ 2, 9; 1992,
№ 2; 1993, №№ 1, 8; 1994, №№ 5, 8; 1995, № 6.
4. Зарубежное военное обозрение, 1986, №№ 1, 3, 5; 1987, №№ 1, 2,
5, 8, 9, 10, 11; 1988, №№ 1, 2, 6; 1989, №№ 2, 6, 8, 9, 10; 1990, №№
8, 11, 12; 1991, №№ 1,5,7, 8, 9, 10; 1992, №2; 1993, №8.
5. Вентцелъ Е.С., Овчаров Л.А. Прикладные задачи теории вероятно-
стей. - М.: Радио и связь, 1983.
6. Морской энциклопедический справочник: В двух томах. Т. 2 / Под
ред. Н.Н. Исанина. - Л.: Судостроение, 1987.
7. Мельников Ю.П. Воздушная радиотехническая разведка (методы
оценки эффективности). - М.: Радиотехника, 2005.
8. Мельников Ю.П. Методы статистического учета взаимного распо-
ложения объектов в групповой цели и их использование при оцен-
ке помехоустойчивости бортовых РЛС. - Радиотехника, 2002, № 9.
9. Партала А.В. Средства радиоэлектронной борьбы ВМС зарубеж-
ных стран. - СПб.: ТХО «Юпитер», 1991.
10. Вентцель Е.С. Теория вероятностей. - М.: ГИФМЛ, 1962.
11. Абезгауз Г.Г. и др. Справочник по вероятностным расчетам. - М.:
Воениздат, 1970.
12. Абчук В.А, Матвейчук Ф.А., Томашевский Л.П. Справочник по ис-
следованию операций. —М.: Воениздат, 1979.
13. Анцев Г.В., Земляное А.Б., Ткачев В.Р., Турнецкий Л.С. Актуальные
вопросы информационного обеспечения тактических противокора-
бельных крылатых ракет. - Морская радиоэлектроника, 2003, № 3 (6).
14. Коортап О. The Theory of Search. - Operations Research, 1956,
vol. 4, no. 3-5.
15. Абчук B.A., Суздаль В.Г. Поиск объектов. - М.: Сов. радио, 1977.
16. Кофман А., Крюон 3. Массовое обслуживание. Теория и приложе-
ния. - М.: Мир, 1965.
17. Градштейн И.С., Рыжик И.М. Таблицы интегралов, сумм, рядов и
произведений. - М.: Физматгиз, 1962.
18. Военная мысль, 1994, № 2.
19. Сайбель А.Г. Основы теории точности радиотехнических методов
местоопределения.-М.: Оборонгиз, 1958.
20. Вакин С.А., Шустов Л.Н. Основы радиопротиводействия и радио-
технической разведки. - М.: Сов. радио, 1968.
21. Мельников Ю.П. Методы оценки эффективности отождествления
информации от бортовой РЛС и станции радиотехнической раз-
ведки. - М.: Радиотехника, 1996, № 3.
22. Милохов Ю.Н. Алгоритм объединения информации двух пеленга-
торов обзорного типа при наличии помех. - Труды ЦНИИ 30 МО,
1966, вып.137(207).
339
ГЛАВА 8
МЕТОДЫ ОЦЕНКИ ЭФФЕКТИВНОСТИ
ЭЛЕМЕНТОВ ПРИЕМНИКОВ РТР,
ОПРЕДЕЛЯЮЩИХ УСПЕШНОЕ РЕШЕНИЕ ЗАДАЧИ
МЕСТООПРЕДЕЛЕНИЯ
8Л. Методы оценки эффективности поиска и селекции
сигналов РЛС
Процедурам определения координат и элементов движения носи-
телей разведуемых ИРИ (РЛС), осуществляемым в результате обработ-
ки совокупности различных измеренных параметров сигналов этих
РЛС, несущих информацию об их пространственном расположении от-
носительно ЛА-носителя аппаратуры РТР (пеленгов или курсовых уг-
лов, несущих частот и частот повторения импульсов, уровней мощно-
сти, величин разностей времени прихода сигналов в пространственно
разнесенные точки, интервалов между моментами облучения и др.),
предшествуют процедуры поиска излучений РЛС в диапазонах частот и
углов, определения значений этих параметров и осуществления селек-
ции (разделения) данных измерений и обработки сигналов различных
РЛС для их поэкземплярной идентификации при определении коорди-
нат. Анализ методов выполнения ряда этих процедур, в частности, па-
раметрической и временной селекции импульсов, идентификации РЛС
по данным измерений параметров сигналов, пространственного разде-
ления однотипных РЛС по совокупности пеленгов, сравнения вариантов
направления перестройки при поиске по частоте и т.п. содержится в
[1-4], однако приведенные в них материалы не исчерпывают всех воз-
можных вариантов этих методов, а некоторые вопросы, например, пути
повышения быстродействия процедур поиска сигналов и обеспечения
однозначности измерения частоты и пеленга в динамическом диапазоне
подробно не рассматриваются. Ниже изложены отдельные дополни-
тельные аспекты теоретического анализа, расчетных оценок и методов
технического решения некоторых из вышеупомянутых вопросов, а так-
же варианты структур и режимов работы устройств поиска сигналов в
диапазонах частот и азимутов.
Методы расчетной оценки требований к быстродействию и пропуск-
ной способности аппаратуры воздушной РТР. Одним из существенных
факторов, в значительной степени определяющих требования к быстро-
действию и пропускной способности устройств поиска и обработки сиг-
налов разведуемых РЛС, является возможное число одновременно воз-
действующих на входы аппаратуры РТР потоков сигналов разных РЛС,
340
(8.1)
находящихся в пределах зоны приема. Аналогичные вопросы возникают
при анализе условий работы бортовых ответчиков систем вторичных РЛС
(ВРЛС) и госопознавания в поле действия многих РЛС-запросчиков, пе-
рекрывающих друг друга по дальности, а также при оценке ЭМС группы
РЛС, находящихся в пределах взаимной радиолокационной видимости.
Одновременное поступление сигналов многих РЛС на входы устройств
декодирования в ответчиках и устройств анализа и пеленгования в аппа-
ратуре РТР может вызвать информационную перегрузку этих устройств,
приводящую к пропускам запросных сигналов или развединформации об
отдельных РЛС. Оценка вероятности готовности бортовой аппаратуры к
беспомеховой обработке сигналов какой-либо из множества (N) находя-
щихся в зоне приема этой аппаратуры РЛС кругового обзора (КО) с оди-
наковыми или близкими параметрами сканирования и шириной диаграм-
мы направленности антенны произведена в [5] методами теории массово-
го обслуживания.
В предположении, что суммарный поток облучений (заявок) пуас-
соновский, вероятность отсутствия сигнала на входе (т.е. вероятность
нахождения аппаратуры в незанятом состоянии) Ро, согласно [5], опре-
деляется как
360 1
Ро=---------=-------
360+М9 l+Np
0,5 гл
где />гл - вероятность облучения главным лепестком, равная отношению
ширины ДНА к величине сектора сканирования (для РЛС КО ргл = 0о,5 /360°
[6,7], где 0о,5-ширина ДНА по уровню половинной мощности).
Для приведенного в [5] примера с А=30 РЛС и 0о,з=1° вероятность
отсутствия сигналов на входе Ро составляет « 0,92.
Вероятное число совместно воздействующих облучений РЛС с
близкими параметрами можно приближенно оценить, полагая, что сум-
марный поток облучений образованным N случайными потоками с оди-
наковыми вероятностями облучения рга. При этом вероятность наличия
на входах бортовой аппаратуры сигналов одной, двух и более («Л») РЛС
вычисляется по схеме совпадения независимых событий или импульсов
нескольких случайных потоков [8,9]:
(8-2)
Для условий вышеупомянутого примера из [5] вероятность нали-
чия сигналов только одной РЛС (Рзо, 0 будет =0,077, а при 0o,s=5° и
N=50 (как в [10]) вероятности отсутствия и наличия облучений состав-
ляют: Р50, о~О,5; Р50,1=0,35; Р50, г~0,12 и Р50, 3=0,027. Число совпадающих
облучений главными лепестками РЛС КО остается относительно не-
большим и при нахождении ЛА-носителя аппаратуры в более сложных
341
радиолокационных полях, приведенных в [1—4, 11] и включающих в се-
бя несколько сотен РЛС, в том числе большое число однотипных РЛС
КО с остронаправленными антеннами. Так, при 7V=100 и 0о.5=1° вероят-
ность совпадения облучений главным лепестком ДНА трех РЛС состав-
ляет всего ~2,5-КГ1 и даже при А=200 будет менее 0,02.
В реальных условиях время приема сигналов при облучении глав-
ным лепестком может превышать величину, соответствующую номи-
нальной ширине ДНА по уровню - 3 дБ (0o,s) за счет большей мощности
или более близкого расположения отдельных РЛС. Для учета этого в
расчетах ЭМС принимается, что ширина главного лепестка по уровню -
10 дБ (6>0,i) равна удвоенной ширине ДНА по уровню половинной мощ-
ности [6,7]. Отметим попутно, что ширина главного лепестка ДНА по
нулям в0 превышает, в большинстве случаев, величину д0<5 в 2,3-2,6 раз,
в зависимости от формы раскрыва (круглый, прямолинейный) и вида
распределения поля в раскрыве (равномерное, параболическое или ко-
синусоидальное, с пьедесталом или без, и др.) [12]. Вероятность тройно-
го совпадения облучений РЛС с шириной ДНА 2° в поле 100 РЛС со-
ставляет ~0,016, а при А=200 - приблизительно 0,075. Даже при ширине
ДНА 5° вероятность тройных совпадений облучений главными лепест-
ками в поле 100 РЛС будет около 0,11, а совпадения четырех облучений
- 0,038. Такое число одновременно принимаемых сигналов различных
РЛС не превышает технических возможностей аппаратурных или алго-
ритмических средств временной селекции периодических импульсных
последовательностей.
Использование (8.2), определяющей вероятность совпадения неза-
висимых случайных событий, для оценки вероятности совпадения об-
лучений нескольких однотипных РЛС, работающих в режиме периоди-
ческого обзора пространства, не является строго адекватным ситуации,
хотя и дает практически соответствующие действительности результаты
при не слишком больших значениях вероятности облучения отдельных
РЛС, т.е. при отсутствии приема сигналов по боковым лепесткам ДНА
РЛС.
Для более точной оценки вероятности несовпадения облучений N
РЛС с одинаковыми периодами обзора следует рассматривать совокуп-
ность вариантов раздельной (неперекрывающейся) расстановки N ин-
тервалов времени облучения в пределах периода обзора от максимально
плотного (с примыкающими друг к другу интервалами) до максимально
разреженного, когда интервалы времени облучения разных РЛС разне-
сены в пределах периода на величины этих интервалов. В случае почти
одинаковых длительностей облучения, как это будет иметь место при
разведке по главным лепесткам ДНА однотипных РЛС, вероятность не-
совпадения Рт, т.е. вероятность попадания облучения каждой из РЛС на
свободный, не занятый облучением другой РЛС участок периода, будет
342
зависеть от случайного сочетания начальных фаз периодов обзора раз-
ных РЛС и лежит в пределах [13,14]
П[1-2(г-1)Рга]<рнс<П(1-г>гл). (8.3)
/~2 1=2
В большинстве ситуаций, когда вероятность совпадения облуче-
ний главными лепестками невелика, оценку вероятности отсутствия та-
ких совпадений можно производить по формуле [13-15]
Графики вероятности
несовпадения облучений N
однотипных РЛС приведены
на рис. 8.1. Формула (8.4) и
графики позволяют также
оценить вероятность несов-
падения импульсов при од-
новременном воздействии
(совпадении) облучений N
РЛС с одинаковыми часто-
тами повторения импульс-
ных сигналов.
(8-4)
Рис. 8.1. Вероятности несовпадения
облучений N однотипных РЛС
Учет возможностей приема по боковым лепесткам диаграмм направ-
ленности РЛС. Охарактеризованная выше ситуация может иметь место
при работе бортовой аппаратуры, рассчитанной на прием излучений РЛС
по их главным лепесткам ДНА и находящейся на значительном удалении
от этих РЛС, например, при полете ЛА-носителя над морем или пустын-
ной местностью, граничащей с областью расположения разведуемых ра-
диолокационных средств. При нахождении ЛА в районе с относительно
равномерным размещением РЛС на местности (как в радиолокационных
полях из [1-4, 11]) перепад уровней мощности (динамический диапазон -
ДД) принимаемых сигналов за счет расположения РЛС в диапазоне даль-
ностей от минимальной, за которую можно принять удвоенную высоту
полета ЛА Н, до максимальной, соответствующей радиогоризонту РГ (РГ
[км] = 4,123 Vh[m]), может быть выражен как ДД [дБ]=66,4 - 101gH [м] и
будет составлять ~26.. .36 дБ для высот полета ЛА в пределах 1... 10 км. С
учетом различий энергетического потенциала разных типов обзорных
РЛС и наличия некоторого запаса чувствительности приемных устройств,
выбираемой из расчета на прием сигналов РЛС с минимальным потен-
циалом на максимальной дальности, величина ДД и максимального уров-
ня входных сигналов увеличивается еще на 5-10 дБ. Величина ослабле-
ния значительной части области бокового излучения РЛС относительно
343
уровня ГЛ ДНА, определяемая перепадом коэффициента усиления между
главным и боковыми лепестками, с одной стороны, и характером местных
предметов на позиции РЛС - с другой, лежит в пределах, ориентировоч-
но, от -25.. .-35 дБ для радиолокационных запросчиков [10] до 30.. .40 дБ
- для РЛС с остронаправленными антеннами (например [6]), так что сиг-
налы ряда близлежащих РЛС будут приниматься бортовой аппаратурой
не только по главному, но и по некоторой части боковых лепестков, в за-
висимости от расстояния и уровня излучаемой мощности этих РЛС. Ве-
роятность приема сигналов /-й РЛС по боковым лепесткам ДНА (ры) оп-
ределяемая, например, как относительная часть периода обзора данной
РЛС, в течение которой имеет место прием ее бокового излучения, будет
различной для разных РЛС радиолокационного поля, в связи с чем число
совместно воздействующих облучений нескольких РЛС должно рассчи-
тываться по схеме совпадений событий разной вероятности. Ввиду при-
ближенности и вероятностного характера исходных данных о расположе-
нии на местности и уровне бокового излучения различных РЛС радиоло-
кационного поля использование точных, достаточно сложных расчетных
выражений для определения числа совпадающих неравновероятных со-
бытий (т.е. облучений с разными вероятностями приема приведен-
ных, в частности, в [9], не имеет практического смысла. Для оценки веро-
ятности воздействия на аппаратуру того или иного числа совпадающих
облучений или вероятности непревышения некоторого их количества
следует использовать приближенные выражения, вытекающие из приве-
денных в [9] формул (2.4.3') и (2.4.5.). Так, вероятность совпадения «к»
облучений N РЛС с разными вероятностями приема приближенно оцени-
вается по формуле
Р
N,k к[
Upr2_izl
2[ а .
(8.5)
N N
где я = £р6л,.; = .
/=> /=1
Полагая, что радиолокационное поле может быть представлено как
совокупность R множеств «среднестатистических» (или эквивалентных,
как в [1,2]) РЛС различных классов, объединяющих группы близких по
назначению и параметрам типов РЛС (РЛС дальнего обнаружения воз-
душных целей, радиолокационные запросчики, диспетчерские РЛС, су-
довые и корабельные навигационные РЛС и др.) и прием ведется в сек-
торе у, параметры а и b можно представить в следующем виде:
R R rJmm
a = '£aj=r'£ J Pj(r) Pj(r')rdr’ (8-6)
/=] /==! r. .
J J }min
344
R R rJ"^
* = J Pj^P2j(r'>rdr’ <8-7)
7=1 7=1 r, .
У mm
где tj min. rj тах-минимальная и максимальная дальность приема сигналов
РЛС у-го класса; pj- средняя плотность РЛС у-го класса на местности; pj-
вероятность приема сигналов РЛС у-го класса.
Для определения расчетным путем величин а и b с учетом бокового
излучения РЛС возможно использовать какую-либо известную аппрок-
симацию бокового излучения в виде монотонной кривой, спадающей по
мере отклонения от направления главного максимума ДНА [11,12,16], на
которую может накладываться случайная составляющая [1, 2], в виде
трехуровневой ступенчатой аппроксимации ДНА доя областей главного,
боковых и задних лепестков [17], в виде постоянного среднего уровня с
наложенной на него случайной составляющей, распределенной по лога-
рифмически-нормальному (логнормальному) закону [6, 7,18, 19], либо по
логпрямоугольному (логравномерному) или логтреугольному закону [14,
15, 20], характеризующемся дисперсией о2 (а ~ 5-10 дБ) и величиной
среднего уровня относительно изотропного излучателя (7бл.м, которая для
остронаправленных антенн в большинстве случаев лежит в пределах
3-12 дБ [6] и при отсутствии конкретных данных принимается равной
7-10 дБ с учетом влияния местных предметов на позиции РЛС [7].
В дальнейшем используются представления распределения уров-
ней бокового излучения логравномерным или логтреугольным закона-
ми, позволяющие получить относительно простые аналитические рас-
четные выражения и более соответствующие имеющей место в действи-
тельности ограниченности области существования уровня бокового из-
лучения. Вероятность облучения основным лепестком ргя будем считать
постоянной. Тогда вероятность облучения в зависимости от дальности
будет определяться следующими выражениями при логравномерной
или логтреугольной аппроксимации соответственно:
при 2Н<г<га,
при ra<r<rb, (8.8)
при гь<г<ггл,
р +(1-Р)
гл глЧпг6-1пга
^=0/2^
Д,аВн(г) =
раКп 4 '
1
Ргл+(1-Ргл) 1-2
Р (Н =
1 треуг V /
.1п2(Г(,/га)
Ргл=^/2^
при 2Н <г<га,
при га<г<гт,
(8.9)
при гт<г^гй,
при гь < г < ггл.
345
где ггл - потенциально-предельная дальность приема по главному лепе-
стку, определяемая из уравнения дальности
''ra='/2(jPpnc+G!pnc+<Jnp+2A-pnp-22 дБ;
га, гь -границы зоны вероятностного приема бокового излучения:
fa=rm-q<r, rb=r„+qa;
rm - медианная дальность, соответствующая вероятности приема
бокового излучения, равной 0,5: гт=гтп-'/г(ОРЛС-б!бл.м);
<7=/2 л/з и q=xA для логравномерной и логтреугольной аппрок-
симаций соответственно; GPjTC, Ррлс~коэффициент усиления антенны и
мощность передатчика РЛС; Gnp, рпр -коэффициент усиления антенны и
чувствительность приемника бортовой аппаратуры, соответственно.
В (8.8), (8.9) применяются следующие единицы измерения: ггл, Л,
Гт, га, ГЬ - дБ/м; Ррлс, Рпр, - дБ/Вт; СРЛС, Gnp, G^,.»., q8, - дБ.
Рис. 8.2. Вероятности приема в
диапазоне дальностей при
логравномерной (а) и логтреугольной
(б) аппроксимациях
Характер изменения веро-
ятности приема в диапазоне
дальностей при логравномерной
и логтреугольной аппроксимаци-
ях показан на рис. 8.2.
На основании приведенных
выражений можно определить
значения а и b с учетом характе-
ристик поля и параметров при-
емной аппаратуры. Если, как это
обычно принимается, величина pj
является постоянной в пределах данного района, соответствующего сек-
тору приема, результирующие формулы приобретают достаточно про-
стой вид. Вычисления несколько упрощаются, если пренебречь величи-
ной ргл в зоне приема боковых лепестков (т.е. исключить заштрихован-
ную на рис. 8.2 область), что можно считать допустимым для случая
оценки вероятности разведки РЛС с остронаправленными антеннами.
Для компенсации возникающей при этом погрешности можно расши-
рить пределы интегрирования для зоны приема по главному лепестку,
например, до гт . Тогда (опуская индексы принадлежности величин оп-
ределенному классу РЛС) при прямоугольной аппроксимации имеем
YP
2
+ Лл(4-''т)-4Я2
2(lnrft-1пга)
(8.10)
346
b = yp I rdr +
- rb rrn
------- [rln2 — dr + Pm irdr
|„2rA J Г J
ln — ra rm
r„
YP
2
m2H#2
(8.H)
Интегрированием выражений (8.9) можно получить формулы для
определения а и b при логтреугольной аппроксимации. Так, величина а
при этом (с учетом принятых упрощений) будет определяться как
YP {гь-га}г
2 1п2^
L Г°
+ Р^л-г2)-4Н2
(8.12)
Сравнение результатов расчетов по формулам (8.10)—(8.11) и
(8.12), произведенное для нескольких типичных значений исходных
данных, показывает, что различия между ними не превышают 10-15%.
Для сравнения приведем выражения для а и b при равномерной аппрок-
симации, полученные интегрированием выражений (8.8) без упрощаю-
щих предположений (8.13) и (8.14):
2
2 2
--------------+ Ргл Гг2 - 4Я2
2(lnrfc-lnra)
(8.13)
(8.14)
Упрощение расчетных выражений для а и Ъ становится более замет-
ным в случаях, когда дальность разведки, т.е. верхний предел интегриро-
вания выражений (8.8) и (8.9), ограничивается величиной радиогоризонта.
Найденные таким образом величины а и b позволяют использовать (8.5) и
другие приведенные в [9] формулы для расчета распределения вероятно-
сти числа совпадающих облучений РЛС с учетом бокового излучения.
Величина а может также служить характеристикой наиболее вероятного
числа совпадающих облучений, определяемого из условия
^£ = e-a— (-fl+— = 0 (8.15)
дк к\ [Д 2а) a2 J
/ \ К
где U = к—11 + — |-&2—+ 1; К = 1па + С-У' — .
Д 2а) 2а2 2
Здесь С=0,577216 - постоянная Эйлера.
347
•b
Рис. 83. Связь наивероятнейшего числа
совпадающих облучений к с величиной а
Формула (8.15) получена
в результате формального при-
менения процедуры нахожде-
ния экстремума к выражению
(8.5). Характер взаимосвязи ве-
личин а и Ь, соответствующих
данному значению наиболее
вероятного числа совпадающих
облучений, виден из графика
рис. 8.3. Как видно, это число
может быть приближенно при-
нято равным ближайшему к ве-
личине (а+0,25) целому числу.
Распределения принимаемых сигналов по вероятности облучения.
На основании выражений (8.8) или (8.9) можно найти также распреде-
ления принимаемых сигналов по вероятности облучения, которые могут
представлять интерес для оценки вероятности успешного выполнения
операций анализа и пеленгования сигнала при ограниченном быстро-
действии бортовой аппаратуры анализа и обработки. Число РЛС с дан-
ной вероятностью облучения (т.е. расположенных на соответствующей
этой вероятности дальности) пропорционально элементу площади и ве-
личине пространственной плотности РЛС р(г) для этой дальности; при
постоянном р плотность вероятности количества РЛС, соответствующая
данной вероятности облучения, будет wN (p)=dS(p)/S. Выражая даль-
ность через вероятность облучения, получим для зоны приема бокового
излучения (пренебрегая величиной ргл> при равномерной аппроксима-
ции r(p)=rb(.ralrbf-, учитывая, что вероятность приема вне этой зоны по-
стоянна (равна />гл или 1), распределение РЛС поля по вероятности об-
лучения приближенно можно представить в виде
1 „2 _ д гт‘.
''гл - гь + 2 Jr (р) 8 [г (р)] + га1 2 - 4Я2
о
при Р = РГЛ,
i~rb +2 Jr(p)5[r(/>)]
—rfr?—
г2 -4Н2
'гл
при ргя<р<\,
при p = i.
(8.16)
Аналогичным образом можно найти распределение облучений по
величине их вероятности или длительности; плотность вероятности этого
348
распределения wXp) будет пропорциональна произведению рД5(р). Функ-
ция распределения облучений по вероятности (относительной длительно-
сти облучения) при равномерной аппроксимации определяется выраже-
ниями (8.17)
Fr(p) =
1
ргл (4 - гъ) + 2 jp Г(р)д [г(р)] + га2 - 4Я2
О
2 2
--------------4Я2
2(lnrh-lnra)
при ргл<р<1,
при р = ргл,
при р = 1.
(8.17)
Распределения (8.16) и (8.17) являются дискретно-непрерывными;
знаменатель в (8.16) представляет собой полное число РЛС (или, при
постоянной плотности - площадь сектора разведки), а в формуле (8.17)
- величину а, определенную выше (без учета ргл в зоне приема боковых
лепестков). Типичные графики функций F^p) и FT(p) (интегральных
распределений количества и длительности облучения) для случая отсут-
ствия ограничения дальности приема бокового излучения радиогори-
зонтом (РГ) показаны на рис. 8.4.
В диапазоне дальностей га < г < гь определяемые по (8.8) или (8.9)
вероятности облучения позволяют оценить интегральное время облуче-
ния, соответствующее сумме длительностей облучений отдельными бо-
ковыми лепестками за период оборота антенны РЛС. Прерывистый ха-
рактер приема по боковым лепесткам можно учесть, представив зави-
симость числа боковых лепестков от уровня (или вероятности облуче-
ния) некоторой сходной с гауссоидой функцией, ограниченной преде-
лами ra - rb, или применив какую-либо кусочно-линейную аппроксима-
цию подходящего вида. Максимальное число лепестков, соответствую-
щее медианному уровню бокового излучения, можно приближенно оце-
нить, полагая ширину лепестков и ширину провалов между ними на
этом уровне одинаковыми и равными учетверенной ширине главного
349
Рис. 8.4. Интегральные распределения числа FN (а) и длительности FT
облучений (6) при ггл=РГ и равномерной аппроксимации
лепестка в0,5 . Использование вышеприведенных расчетных соотноше-
ний позволит производить аналитические оценки частных показателей
эффективности функционирования бортовой аппаратуры при варьиро-
вании различных характеристик радиолокационного поля и отдельных
параметров аппаратуры (чувствительности, избирательности и разре-
шающей способности, точности анализа) более оперативно, чем с при-
менением имитационного моделирования.
8.2. Варианты режимов поиска сигналов РЛС
диапазонах частот и азимутов
Показатели эффективности режимов поиска. При использовании
поискового метода обнаружения и определения частот сигналов в ши-
роком диапазоне для сокращения времени поиска применяются, в част-
ности, режим поиска с переменной скоростью и дополнительным при-
емным трактом с увеличенной полосой пропускания [21-23] или режим
многоступенчатого поиска [24,25]. Показателем эффективности приме-
ненного алгоритма поиска может служить степень снижения времени
обнаружения сигнала по сравнению с простейшим случаем одноступен-
чатого поиска, а также степень приближения времени поиска к теорети-
чески минимально-возможному при заданной величине просматривае-
мого диапазона.
Время просмотра диапазона частот А/ или диапазона азимутов Да
узкополосным частотно-избирательным устройством с полосой AF или
сканирующей апертурой шириной Д0 при одноступенчатом поиске бу-
дет выражаться формулой
Ty=WI&F)5t=XjSt (8.18а)
350
или
Т1а=(Да/Д0)<5/=/аЛ, (8.186)
где Х/i /а- число разрешаемых градаций по частоте или азимуту соответ-
ственно; Л- время наблюдения, необходимое для обнаружения сигнала,
например, равное одному-трем периодам импульсного сигнала РЛС,
имеющим минимальную частоту повторения.
При многоступенчатой процедуре поиск по частоте производится в
несколько этапов (ступеней), на первом из которых просматривается
весь диапазон Д/ с разрешающей способностью (полосой) Д/>ДР, на
втором этапе с более высокой разрешающей способностью dfi
просматривается полоса частот Д/j, соответствующая той
из разрешаемых градаций первой ступени, где был обнаружен сигнал на
первом этапе, и так до последней, л-й ступени, где поиск с окончатель-
ной (требуемой) разрешающей способностью ДР производится в полосе
частот, соответствующей разрешаемой градации предпоследней ступе-
ни Д/,-1. При этом возможны дополнительные потери времени за счет
переключения режима поиска при переходе от данной ступени к после-
дующей, а также ввиду необходимости некоторого расширения про-
сматриваемых на последовательных этапах участков с учетом возмож-
ной неточности определения положения градации. Будем считать, что
запас на величину просматриваемого участка состоит из двух состав-
ляющих: зависящей от величины данного участка с коэффициентом
пропорциональности р, пропорциональной разрешающей способности в
этой ступени с коэффициентом q; время перехода v примем одинаковым
для всех ступеней. Тогда, обозначив для единообразия входной диапа-
зон Д/как Д/о а разрешающую способность на последней ступени ДР как
Д/я, выражение для максимального времени поиска при и-ступенчатой
структуре Т„ можно будет записать в виде
Т ^St(\ + p)Yi^ + n(qSt + v'). (8.19)
Оптимальные с точки зрения минимизации времени поиска при
данном числе ступеней значения разрешающих способностей на после-
довательных ступенях Д/должны удовлетворять системе уравнений
5Т„ _ Д/о , 1 г Q
б(Д/) Д/2 Д/2 ’
8Т„ _ 1
дШ bfi Д/з ’
(8.20)
8Тп Д/„2 ! 1 _р
5(¥„-i) А/Л1 д/«
351
и выражаются через заданные величины # (в дальнейшем обозначаемая
без индекса^) и п следующим образом:
46=44/"- (8.21)
Число разрешаемых градаций в промежуточных ступенях поиска
к,, определяемое как
= = (8.22)
46
оказывается одинаковым для всех ступеней (подобно величинам граней
и-мерного параллелепипеда заданного объёма в задаче нахождения его
минимального периметра).
С учетом (8.22) выражение (8.19) принимает вид
Tn=8t(\ + p)nx"n+n(q8t + u). (8.23)
д— 1
^=г(1+г>)
Значение п, минимизирующее относительные временные затраты
на поиск TJ8t, находится из условия
1-11пй + ^ + ^ = 0. (8.24)
п ) ot
Выражение (8.24) может быть представлено в виде
С, (8.25)
v
1 2. Я —
где Х = -Хп', С = --~ ft .
е е(1 + р)
Из (8.25) по известной, определяемой техническими параметрами
аппаратуры величине параметра потерь (<?+t)/J/)/(l+p) можно определить
оптимальные для заданного диапазона значение к и число ступеней по-
иска. Соответствующие выражения имеют вид
к = еХ, (8.26)
В идеальном случае, когда дополнительные потери отсутствуют,
оптимальное число ступеней п0 и число разрешаемых градаций в ступе-
ни к0 определяются как и0=1п/ и к0=е, аналогично нахождению основа-
ния наиболее экономной системы счисления.
Относительное время поиска в идеальном случае будет
7;/^ = elnZ, (8.28)
и выигрыш по отношению к простому (одноступенчатому) поиску со-
ставляет
352
r»o _e lnz
Ъ X
(8.29)
Зависимости оптималь-
ного числа ступеней п0 и вы-
игрыша времени от величины
X в идеальном случае приве-
дены на рис. 8.5. Наличие до-
полнительных потерь приво-
дит к изменению оптималь-
ных значений числа ступеней
п и числа разрешаемых гра-
даций в ступени к, а также к
некоторому увеличению вре-
мени поиска по отношению к
идеальному случаю.
Зависимости TJTna п/п0 и
к от величины параметра по-
терь (<?+v/<5/)/(l+p) приведены
на рис. 8.6. Из графиков рис.
8.6 видно, что увеличение па-
раметра потерь приводит к
значительному изменению оп-
Рис. 8.5. Зависимости оптимального числа
ступеней и выигрыша времени от величины
Рис. 8.6. Зависимости параметров
оптимизированной структуры
тимальных величин и и к, тогда
как время поиска увеличивает-
ся не столь существенно.
На рис. 8.7 показаны
расположение областей, со-
ответствующих различным
значениям оптимального чис-
ла ступеней поиска, и харак-
тер изменения границ этих
областей, иллюстрирующие
зависимость числа ступеней
от величин диапазона обзора
и параметра потерь. Из рас-
многоступенчатого поиска (Т„ 1Тпй,п1пй,к )
от величины параметра потерь
смотрения графиков рис. 8.6
и 8.7 можно заключить, что
при наличии дополнительных
потерь времени для обычно
Рис. 8.7. Зависимость параметра потерь
и оптимального числа ступеней поиска
от величины диапазона обзора
имеющего место диапазона значений / = 102...103 достаточным оказы-
вается применение двух-трех ступеней поиска.
В случае, когда обработка обнаруженной цели требует дополни-
тельных затрат времени (поиск с остановкой для анализа), а также при
353
наличии нескольких последовательно обрабатываемых целей в диапа-
зоне обзора, выигрыш времени за счет применения многоступенчатого
поиска уменьшается. При времени анализа Тт и числе целей в диапазо-
не поиска m средний интервал поиска будет //w и характеризующее вы-
игрыш отношение суммарных временных затрат на поиск и анализ при
многоступенчатом и простом поиске имеет вид
т ейг^ + ^Щ-
_ m St
% | ^«и
m St
Рис. 8.8. Зависимости выигрыша
времени обзора при многоступенчатом
поиске от средней плотности
расположения целей и времени анализа
(8.30)
Характер зависимости вели-
чины выигрыша от относительно-
го времени анализа Тш /St при не-
скольких значениях показателя
плотности расположения сигна-
лов в диапазоне поиска //т, ил-
люстрируемый графиками рис.
8.8, позволяет полагать, что при-
менение многоступенчатого по-
иска в этих условиях приводит к
ощутимому сокращению времени
лишь в случае, когда время ана-
лиза не превышает существенно
прямых затрат на поиск.
Недостоверное обнаружение сигнала за промежуточный обзор. Рас-
смотрим еще ситуацию, когда вероятность обнаружения цели за один
промежуточный обзор участка диапазона (одну ступень поиска) Р, не
равна единице и зависит от величины А/ - разрешающей способности в
данной ступени. Полагая, что вероятнейшее значение времени обнару-
жения на одной ступени Т, при этом характеризуется отношением
т: =^±Lst = ^-St, (8.31)
причем оконечной разрешающей способности А/й соответствует вероят-
ность обнаружения Р„, выражение для выигрыша времени за счет при-
менения многоступенчатого поиска можно записать в виде
т„" = р„ у 44 ч 1
Ъ zfatii Pi'
(8.32)
Зная характер зависимости Р, от А/, можно определить оптималь-
ные (минимизирующие соотношение (8.32)) значения А/ через заданные
величины Р„ и х- В качестве примера рассмотрим случай, когда вероят-
ность обнаружения в i-й ступени связана с разрешающей способностью
зависимостью
354
P=P-aln-^-.
' ¥,
(8.33)
Таким выражением можно, в частности, представить вероятность
обнаружения флюктуирующего радиосигнала при многоступенчатом по-
иске по частоте или направлению, когда с изменением разрешающей спо-
собности ширины полосы пропускания или ширины ДНА меняется чув-
ствительность приемника или выигрыш антенны (соответственно и изме-
нение уровня (порога) срабатывания) при изменении разрешающей спо-
собности лежит в пределах, допускающих линейную аппроксимацию ин-
тегрального закона распределения уровня сигнала (как при логравномер-
ном законе или в среднем участке логнормального или логтреугольного
распределений). При этом выражение (8.32) принимает вид
_____1____ (834)
дл
Выше отмечалось, что увеличение числа ступеней свыше трех уже
не дает существенного выигрыша для принятых как типичные значений
% (порядка 102...103). В данном случае, учитывая, что с увеличением
(расширением) разрешаемых градаций в первых ступенях вероятность
обнаружения падает и время поиска возрастает, следует ожидать, что
выигрыш времени от увеличения числа ступеней будет еще меньше.
В связи с этим ограничимся рассмотрением случаев двух- и трехступен-
чатого поиска. Оптимальные значения разрешающих способностей в
последовательных ступенях находятся решением системы уравнений,
получаемых на основе (8.34) способом, аналогичным таковому для
(8.20). Полученные в результате решения такой системы уравнений вы-
ражения, связывающие искомые величины разрешаемых градаций в
ступенях с исходными параметрами Р„ и /, имеют следующий вид:
для двухступенчатого поиска -
/ = (Д//Д/2)2
(P2-<zlnA//A/~2)2
Р2[Р2-а(1пД//Д/2+1)]’
(8.35)
для трехступенчатого поиска -
3 [р3-а1п^Й
Tj-aln
(У2/У3)2(Р3-а1пУ2/У3)2]2
¥
Р? Р3-а|1п^-+1
3 Т‘¥з
2
Р3-а-
1п(У2М)2(Р3-а1пДГ2/у3)2 и]’
Р3[Р3-а(1п¥2/¥з)]
(8.36а)
355
Рнс. 8.9. Определение
оптимизированной структуры
двухступенчатого поиска при
обнаружении флюктуирующей цели
Рис. 8.10. Определение
оптимизированной структуры
трехступенчатого поиска при
обнаружении флюктуирующей цели
(8366)
Результаты решения уравне-
ний (835) и (836) представлены в
виде графиков на рис. 8.9, 8.10,
показывающих зависимости оп-
тимальных величин относитель-
ных разрешающих способностей
А/ /Д/г,(з) в последовательных сту-
пенях от значения /для нескольких
значений вероятности обнаружения
на последней ступени /*2,(3) и пока-
зателя крутизны зависимости чув-
ствительности от разрешающей
способности - коэффициента а.
Используемые в расчетах значения
коэффициентов (ои и а2) соответст-
вуют двум случаям изменения
уровня порога срабатывания обрат-
но пропорционально относитель-
ной величине разрешающей спо-
собности - для at, и корню квад-
ратному из этой величины - для а2.
Значение СКО флюктуаций уровня
сигнала было принято равным 8 дБ.
Из рассмотрения графиков можно
заключить, что для принятых пред-
посылок в случаях относительно
высокой вероятности обнаружения
(Р^=0,5...0,8) и менее резкой зави-
симости порога срабатывания от
величины разрешающей способно-
сти (а=а2=0,087) оптимальные раз-
решающие способности в ступенях
близки к таковым для случая дос-
товерного приема (A/i=/I/2 и Д/i =
у|/3, Д/^у273), также приведенным на
графиках. При более низких веро-
ятностях приема и более резкой за-
висимости чувствительности от величины градации (a=ai=0,174) опти-
мальные значения градаций в первых ступенях снижаются.
356
Z = 60
Д=0,5
0,6
0,5
0,4
0,3
/ = 120Р,=0,3
0,21
0,3 0,5 0,7 0,9 1,1 1,3
Рис. 8.11. Зависимость выигрыша
времени поиска от числа ступеней и
допуска на величину градации в ступени
при обнаружении флюктуирующей цели
Для определения выигрыша и
оценки влияния отклонения вели-
чины градации от оптимальной бы-
ли произведены расчеты отноше-
ния Т JT ] (см. (8.34)) для некото-
рых значений параметров Л, и / при
вариациях разрешающей способно-
сти в первой ступени поиска. Из
представленных в виде графиков на
рис. 8.11 результатов расчетов
можно сделать вывод о том, что ве-
личина выигрыша за счет примене-
ния многоступенчатого поиска при
вероятностном обнаружении мень-
ше, чем в случае достоверного; от-
клонения величин градаций от оп-
тимальных, определяемых по гра-
фикам рис. 8.9, 8.10, на времени поиска сказываются незначительно. Отме-
тим, что в обоих приведенных случаях (/=60, Р„=0,5 и/=120, Р„ =0,3) при-
менение трехступенчатого поиска не дает выигрыша времени по сравне-
нию с двухступенчатым даже в данном идеальном случае, когда отсутст-
вуют дополнительные потери времени на переход от ступени к ступени и
запас по величине градации.
Условия минимизации среднего времени поиска. В приведенных выше
случаях рассматривались вопросы снижения максимального времени
поиска, соответствующего наиболее неблагоприятному расположению
цели в исследуемом пространстве - в последней по ходу поиска града-
ции. При заданной (предполагаемой) плотности вероятности распреде-
ления положения цели в диапазоне поиска аналогичным путем могут
быть найдены условия минимизации среднего времени поиска. Так, при
равномерном распределении среднее время поиска ввиду очевидной
симметричности распределения длительностей циклов поиска в диапа-
зоне от Ттах до Tmin будет
7'cp=(7™x+Tmin)/2. (8.37)
Для случаев равенства числа разрешаемых градаций во всех сту-
пенях (к; = к) максимальное и минимальное относительные времена по-
иска могут быть определены как
W<5/=log^[(l+p)K+g+^-]; (8.38)
ot
(l+p+q+ ) (8.39)
ot
При этом выражение (8.37) представляется в виде
357
=log^f [(*+1) +Ч+ 1
ot 2 ot
(8.40)
и величина к, минимизирующая среднее время поиска, находится из ус-
ловия
5— , z . х 2 он—
(1+р)[1__!----
дк 2 In к V In к к In к) к\пк
(8-41)
которое сводится к уравнении) вида, аналогичного (8.25):
У1пУ=Д (8.42)
гдеУ = —
е
1 + р
В идеализированном случае (при отсутствии дополнительных по-
терь времени) к0=3,59 и Усро/<5/=1,81п/; характер изменений к и Тсро при
увеличении параметра потерь D в (8.42) и вариациях величины к сходен
с таковыми для случая максимального времени поиска.
Остановимся еще на варианте организации поиска, позволяющем
несколько уменьшить время определения координаты (номера града-
ции) цели за счет перехода на следующую ступень без выполнения опе-
рации обнаружения в последней градации данной ступени [23,24]. Если
исключить условие обязательного обнаружения на первых ступенях по-
иска и производить переход на каждую последующую ступень после
прохождения всех, кроме последней, градаций данной ступени (при от-
сутствии цели в предыдущих градациях) - «усеченная» процедура по-
иска, то максимальное время обнаружения Ту тах сокращается на время
просмотра числа градаций, равного числу ступеней, предшествующих
последней, и относительная величина его определяется как
=и[(1+р)(к-1)+д+^]+1. (8.43)
ot ot
При этом в каждом цикле поиска при отсутствии сигнала будет
производиться последовательное включение всех ступеней и период
«холостого» обзора будет равен максимальному времени поиска в отли-
чие от случая полной (неусеченной) процедуры, когда холостой цикл
равен времени обзора одной, первой ступени.
Рассмотрим условия минимизации среднего времени усеченного
поиска в предположении равновероятного расположения цели в диапа-
зоне и при одинаковом числе разрешаемых градаций во всех ступенях.
Распределение возможных длительностей циклов усеченного поиска в
358
диапазоне значений от минимального, равного таковому для неусечен-
ного, до максимального будет несимметричным ввиду того, что вероят-
ность перехода на следующую ступень для различных градаций одной
ступени неодинакова (для последней просматриваемой градации веро-
ятность перехода вдвое выше таковой для предыдущих). С учетом из-
ложенного относительное среднее время многоступенчатого усеченного
поиска Т у может быть представлено в виде
и
£=(1+р) +1
8t Inr 2 к \ +р к
(8.44)
Оптимальное значение к находится из следующего условия
Г ( и
= + i—!-----!_ 1 + 2-^—+
дк [21ПЛ- ln/г /с In/с 1 + p
I 7
2 2
—Г"1—5----
к к In к
(8.45)
Определенное из (8.45) оптимальное значение к слабо зависит от /
и находится в пределах 2,1... 1,9 при изменении / от 80 до 4* 103.
Для величин /, лежащих в упоминаемых выше типичных для прак-
тики пределах, оптимальное значение к может быть принято равным 2;
несущественными отклонениями от этой величины, учитывая некри-
тичность зависимости времени поиска от величины к, можно пренеб-
речь. Тогда максимальный выигрыш за счет использования оптималь-
ной усеченной процедуры поиска по отношению к оптимальной полной
характеризуется выражениями:
для среднего времени поиска -
Tyovr/T^ =0,804(1+0,347/lnz), (8.46)
для максимального времени -
=0,532(1+0,694/lnz). (8.47)
Учитывая, что для усеченного поиска холостой цикл равен макси-
мальному времени обзора и возрастает с увеличением к, а выигрыш
снижается, следует считать целесообразным использование усеченной
процедуры поиска только при малом (2...4) числе разрешаемых града-
ций в ступенях. Заметим, что в [23] процесс поиска по частоте произво-
дится путем последовательного деления пополам просматриваемого
участка диапазона, что в нашем изложении соответствует числу града-
ций в каждой ступени равному двум.
359
Полученные для ряда вариантов рассматриваемой задачи формулы
и графики могут быть использованы для выбора оптимизированных алго-
ритмов многоступенчатого поиска и определения выигрыша времени, а
также при оценке степени оптимальности конкретных вариантов по-
строения по отношению к теоретически предельно оптимальным для
данных условий.
Использование поисковых режимов при обнаружении перестраиваемых
по частоте РЛС. При рассмотрении приведенных выше вариантов много-
ступенчатого поиска предполагалось, что время обнаружения и анализа
сигнала St в каждой разрешаемой градации на всех ступенях одинаково и
определяется параметрами модуляции сигнала (например, равно трем пе-
риодам повторения импульсного сигнала РЛС), причем это время сущест-
венно больше времени отклика частотно-избирательных элементов, фор-
мирующих градации в ступенях, в том числе элемента с наименьшей поло-
сой, соответствующей разрешаемой градации последней, и-й ступени AF
(или Д/,). Очевидным условием обнаружения при этом является наличие на
входах аппаратуры РТР сигнала разведуемой РЛС, сохраняющего свое по-
ложение в какой-либо точке частотного диапазона в течение времени поис-
ка по частоте. Это может иметь место при разведке неперестраиваемых по
частоте РЛС при длительностях облучения, не меньших времени поиска по
частоте, что обычно выполняется при ведении разведки по боковому излу-
чению антенн РЛС.
Однако использование поисковых методов для обнаружения крат-
ковременно существующих сигналов с быстро изменяющимися пара-
метрами, в частности, с перестройкой от импульса к импульсу, не дает
гарантированного приема этих сигналов, кроме случаев, когда длитель-
ность цикла поиска по частоте меньше длительности импульса. Такому
режиму поиска при разведке коротких импульсных сигналов (с дли-
тельностью порядка первых единиц мкс и менее), называемому иногда
режимом сверхбыстрой перестройки или быстрым достоверным поис-
ком, присущи определенные ограничения, связанные с конечной скоро-
стью отклика частотно-избирательного элемента на воздействие сигнала
[21,22,26 и др.]. Известно (например, [26]), что при последовательном
частотном анализе величина частотного диапазона Д/ разрешающая
способность AF и минимальное время просмотра всего диапазона Tj в
простейшем случае связаны между собой соотношением вида
т, = аД//(ДГ)2 (8-48)
или
T\&F = ax. (8.48а)
где/= Д f /&F- число разрешаемых градаций, характеризующее относи-
тельную величину диапазона; а - коэффициент, зависящий от формы и
допусков на динамическое расширение и смещение максимума резо-
нансной характеристики, а также от уровня отсчета.
360
Снижение времени обзора по отношению к определяемому формулой
(8.48) при сохранении заданной разрешающей способности может быть
достигнуто применением рассмотренного в [21,22] метода переменной ско-
рости анализа с регулировкой частоты развертки, когда поиск сигнала в по-
лосе обзора ведется с повышенной скоростью, а при обнаружении сигнала
скорость перестройки автоматически снижается до оптимальной, обеспе-
чивающей минимальную ширину динамической полосы частотно-изби-
рательного элемента. При этом в [21,22] отмечалось, что для обнаружения
сигнала на этапе поиска с повышенной скоростью может быть применен
дополнительный приемный тракт с увеличенной полосой пропускания, как
это имеет место при двухступенчатой процедуре поиска.
Представляет интерес выяснение предельных возможностей сокра-
щения времени обзора при использовании многоступенчатого поиска с по-
следовательным уточнением, осуществляемым путем изменения разре-
шающей способности при переходе от ступени к ступени. С учетом допол-
нительных временных затрат, обусловленных конечностью времени пере-
хода от ступени к ступени и необходимостью некоторого расширения ве-
личин просматриваемых на последовательных этапах участков ввиду воз-
можных неточностей определения и установки частотных градаций при
поиске и переключении ступеней, выражение для максимального времени
обзора при многоступенчатой процедуре т„ можно записать в виде
тп =а(1 + /2)РЦ- + -^ + ----+-^^Кии (8.49)
V 'Дд// ДЛ AF2J
или, если считать Д/= Д/о и AF = Д/,, в виде
r„ = a(l + p)2^-+«L>- (8.49а)
Здесь /? - относительная величина запаса на величину просматриваемого
участка; о - время перехода; п - число ступеней.
Оптимальные в смысле минимизации времени обзора значения по-
лос пропускания (разрешающих способностей) в промежуточных сту-
пенях Д/ должны удовлетворять системе уравнений
Wo, 1 _0
5(ДЛ) Д/3 Д/22 ’
2Д/ । 1
б(Д/2) Д/23 Д/з2
(8.50)
дт„ 2А/„2 ( 1 Q
а(д/„_1) д/Д, Af2
Полученное в результате решения (8.50) выражение для Д/j опт с
учетом (8.48а) имеет вид
361
Д/от =AF2”-' ^ 2"~'
(8.51)
где i = 1,2, 3,... п-1.
Подставив (8.51) в (8.49), получим
(2Л -1) + пи. (8.52)
Аг ' '
Численная проверка путем вариаций промежуточных полос про-
пускания вокруг значений, соответствующих (8.51), подтверждает, что
определяемое формулой (8.52) время обзора при данном числе ступеней
действительно минимизировано, т.е. условие (8.50) при определении оп-
тимальных полос пропускания в промежуточных ступенях является
достаточным. Оптимальное в указанном смысле число ступеней для
обзора заданного диапазона находится из условия
(»Ь2-1 „rfUp + „.O, (8.53)
дп ДГ(2 я-1)
которое может быть представлено в виде
г,, V&F
Z In Z = — -----------,
4а(1 + р)1п2
(8.54)
В идеализированном случае оптимальное число ступеней иопт и со-
ответствующее время обзора будут следующие:
«опт= log2z, (8.55)
4а ( 1 )
глопт~ I-1 • (8-56)
х)
Предельный диапазон обзора при заданных значениях времени об-
зора г и разрешающей способности будет зависеть от величины парамет-
ра гА/74а и числа ступеней и определяется, согласно (8.52), выражением
tAFA 2”
. 4а Д2"-1)
(8.57)
При условии rAF/4a>l диапазон обзора при увеличении числа сту-
пеней может возрастать неограниченно; время обзора при этом не будет
превосходить величины 4а/&F.
362
Рис. 8.12. Выигрыш времени поиска
при двухступенчатой я=2 (кривая /) и
оптимизированной (кривая 2)
процедуре поиска по сравнению с
одноступенчатым (и=1)
в зависимости от перекрываемого
диапазона
Рис. 8.13. Зависимость выигрыша
времени поиска от числа ступеней:
кривая 1 -/=32; кривая 2 -/=128;
кривая 3 -/=512;
Полученные соотношения ил-
люстрируются графиками на рис.
8.12, 8.13 и 8.14. На рис. 8.12 пока-
заны зависимости отношений t2/ti и
Л1,опт/Г|, характеризующих получае-
мый при двухступенчатой и при оп-
тимизированной многоступенчатой
процедуре выигрыш времени по
сравнению со случаем одноступен-
чатого поиска, от величины пере-
крываемого диапазона.
На рис. 8.13 приведены графи-
ки зависимости выигрыша времени
от числа ступеней для трех значений
X- Как видно из графиков, основной
выигрыш обусловливается перехо-
дом от одноступенчатого поиска к
двухступенчатому; дальнейшее уве-
личение числа ступеней вплоть до
оптимального значения относитель-
но немного сокращает время обзора.
Зависимости оптимального
числа ступеней от значения пара-
метра потерь v&F/a(l+p) и величины
диапазона показаны на рис. 8.14; так
же, как в рассмотренном выше вари-
анте многоступенчатого поиска с -
постоянным временем анализа в разрешаемых градациях на всех ступе-
нях, при наличии дополнительных потерь времени оптимальное число
ступеней для данной величины / уменьшается по сравнению с идеали-
зированным случаем, показанным на рис. 8.12.
Из сравнительного анализа этих графиков можно заключить, что
величина выигрыша времени поиска при многоступенчатой процедуре
слабо зависит от изменения числа ступеней свыше некоторого значения;
для обзора диапазона с достаточно типичной величиной/-до «150.. .250
достаточным будет применение двухступенчатого поиска.
Время обзора можно несколько уменьшить использованием усе-
ченной процедуры поиска, когда переход на последующую ступень на
каждом из промежуточных этапов производится после просмотра в
данной ступени всех разрешаемых градаций кроме последней (если, ко-
нечно, сигнал не был обнаружен в какой-либо из предыдущих града-
ций); просмотр всех градаций при этом осуществляется только в по-
следней ступени. Применение такой процедуры при многоступенчатом
поиске с фиксированным временем анализа во всех градациях рассмат-
363
ривалось выше; в данном случае величина сокращения максимального
времени обнаружения и анализа составляет 8т = 1/Д/. за счет ис-
ключения из числа просматриваемых последней градации в каждой сту-
пени; кроме оконечной, что дает заметный выигрыш в случае оптималь-
ной структуры поиска (при малом числе разрешаемых градаций в сту-
пенях). Так, для идеализированного случая (8.56) при сохранении соот-
ношений, определяемых как оптимальные для случая неусеченного по-
иска, максимальное время анализа при усеченной процедуре будет
а | . 2
rv =--- 3---
д/Ч х.
(8.58)
Полученные выражения для величин времени поиска определяют
максимально возможные значения времени поиска одного сигнала, могу-
щие иметь место при самом неблагоприятном расположении сигнала в
Рис. 8.14. Зависимость
оптимального числа ступеней поиска
от величины диапазона и параметра
потерь. Сплошные кривые
обозначают границы различных
значений оптимального числа
ступеней поиска, пунктирные
кривые 1-4 обозначают середины
этих областей и соответствуют
иопт=2; 3; 4; 5
просматриваемом диапазоне - в по-
следней по ходу поиска градации. Ус-
ловия минимизации среднего времени
поиска будут зависеть от предполагае-
мого вида распределения вероятности
расположения сигналов в частотном
диапазоне. Можно полагать по анало-
гии с изложенными выше результата-
ми рассмотрения этого вопроса приме-
нительно к поиску с фиксированным
временем анализа, что оптимальные
величины частотного перекрытия в
промежуточных ступенях в этом слу-
чае будут несколько больше (а число
ступеней соответственно меньше), чем
таковые, минимизирующие макси-
мальное время поиска.
К недостаткам многоступенчатого построения можно отнести воз-
растание сложности и некоторое снижение чувствительности приемного
устройства аппаратуры РТР при увеличении числа ступеней за счет
расширения полос пропускания в первых ступенях.
В связи с этим, а также учитывая выявленную тенденцию к сниже-
нию величины возрастания выигрыша времени при увеличении числа
ступеней и уменьшение их числа для минимизации среднего (а не мак-
симально-возможного) времени поиска при равновероятном располо-
жении сигналов в диапазоне обзора и при наличии дополнительных
временных потерь, можно полагать практически нецелесообразным
применение в аппаратуре поиска и анализа более двух-трех ступеней
последовательного уточнения.
364
Оценка вероятности обнаружения пачки импульсов перестраивае-
мой несущей частотой. Прием сигналов значительной части РЛС из
числа входящих в разведуемое радиолокационное поле может осущест-
вляться только в течение коротких интервалов времени при облучениях
ЛА-носителей аппаратуры РТР главным лучом ДНА этих РЛС, имею-
щих кратковременный характер и содержащих соответствующее огра-
ниченное число зондирующих импульсных сигналов. Типичная дли-
тельность приема сигналов РЛС КО по главному лучу лежит в пределах
(1...2)0О15 Т^2к [1,2,11] и при достаточно типовых, в среднем, значениях
параметров обзора пространства для таких РЛС Та&~\0с и 0о,5=1° со-
ставляет десятки мс (=30... 60 мс), чему соответствует =10... 20 импуль-
сов. Сходные величины имеют длительности среднего времени облуче-
ния совокупности РЛС типового радиолокационного поля, полученные
в результате моделирования процесса разведки с борта ЛА [1,2,11]. Со-
гласно этим данным средняя длительность времени облучения при вы-
соте полета ЛА 20 км составляет около 70...90 мс. Некоторое увеличе-
ние среднего времени облучения по сравнению с указанным выше мож-
но отнести за счет влияния более длительного приема сигналов близко
расположенных РЛС с учетом боковых лепестков. Кратковременность
существования сигнала ограничивает достижимые точностные и веро-
ятностные показатели разведки таких сигналов поисковым устройством.
Еще в большей степени такие ограничения возникают при разведке сиг-
налов РЛС с быстрой (поимпульсной) перестройкой несущей частоты,
которые согласно [1,2,11] могут составлять значительную часть РЛС
типового радиолокационного поля. Представляет интерес оценка веро-
ятности обнаружения поисковым устройством ограниченной последова-
тельности (пачки) импульсных сигналов, в том числе с перестройкой
частоты, при разных режимах поиска.
Последовательный поиск импульсных сигналов, характеризую-
щихся длительностью импульса ти и периодом повторения Та, в про-
странстве с числом разрешаемых градаций / в зависимости от соотно-
шения периода и длительности сигнала и периода поиска П может осу-
ществляться в трех режимах:
1) медленного достоверного поиска (МДП), когда время просмотра
одной градации St > ТП (т.е. П > /Д,);
2) быстрого достоверного («сверхбыстрого») поиска (БДП), когда
период поиска П < ти (т.е. St < тя/%у,
3) вероятностного поиска (ВП), когда/Гп>П>ти (т.е. Тп><5/>т//) [5,27].
Режим БДП, принципиально обеспечивающий возможность досто-
верного обнаружения за минимальное время (один период повторения
сигнала), не всегда может быть реализован ввиду ограниченности числа
разрешаемых градаций в этом режиме в связи с конечностью времени
просмотра одной градации St, определяемого временем установления и
365
отсчета показаний в поисковом устройстве. Применение широкополос-
ных дисперсионных сжимающих фильтров (при поиске по частоте) свя-
зано с дополнительными техническими трудностями и ограничениями,
в частности, обусловленными необходимостью точного сопряжения за-
кона частотной перестройки гетеродина с характеристикой фильтра, что
ограничивает возможность реализации такого режима поиска в широ-
ком диапазоне частот.
Осуществление режима МДП в процессе приема пачки из 10...20
импульсов возможно лишь при малом числе разрешаемых градаций в
диапазоне поиска, т.е. с весьма ограниченными точностью и разрешае-
мой способностью, особенно при использовании в качестве критерия
обнаружения условия приема хотя бы трех импульсных посылок для
анализа параметров сигнала. В этой связи представляет интерес вопрос
сравнительной оценки временных затрат и вероятности обнаружения
при использовании других вариантов организации поиска, в том числе о
целесообразности применения режима ВП и выбора скорости поиска.
В качестве показателя эффективности при сравнительной оценке
различных режимов поиска могут быть использованы такие характери-
стики, как вероятность обнаружения за определенный интервал времени
Р„ средняя частота (или время) обнаружения при заданной вероятности
и т.п. Вероятность обнаружения сигнала, не изменяющего своего поло-
жения в исследуемом пространстве, за период поиска П (при П >ГП) и за
период повторения сигнала Т„ (при П <ТП) будет определяться анало-
гично [8] выражениями
Р = = 1 + JL _ (8.59)
К' q ХТП Тп
р (8.60)
п х qn п
где Дг-минимально-необходимое время анализа; q=T„/T„ - скважность
сигнала.
В случае, когда вероятности обнаружения в последовательных
циклах поиска аналогично принятому в [2] можно считать независимы-
ми (например, при наличии вариаций периода поиска или/и при вобуля-
ции периода сигнала, при некратных соотношениях этих периодов, при
вариациях начальных фаз циклов поиска), упомянутые выше характери-
стики будут определяться следующими формулами:
для режима П >Та для П <Та -
^,(п>о=1-(1-^)п
2Д?
Т
Jn у
(8.61)
366
для режима П < Тп -
Л(п<.)=1-(1-Лп)7’"=1-[1-|
Та 2AzV^
<?П Гп )
(8.62)
Величина необходимого вре-
мени анализа AZ зависит от кон-
кретных условий, не превышает ги
и может быть представлена в виде
AZ = тя/т, где / > /и >1. При этом
очевидным условием приема явля-
ется также выполнение соотноше-
ния St >\t, которое можно записать
в виде
П// > т/т, П// > T„!qm,
H/Tn>x/qm', П// > Az. (8.63)
При крайних из указанных
значений AZ выражения (8.59) и
(8.60) приобретают вид
П
Z^n
П 1 (, 2
---+— 1— L
хК А х)
2
х qn
т (
_n_ h__i+_.
Х) X
т„
(8.63а)
(8.636)
(8.63в)
(8.63г)
На рис. 8.15 и 8.16 показаны
зависимости Рп, Рт и Pt от величи-
ны отношения П/Гп, определенные
для целых значений П/Г,, при край-
них значениях Az для случаев
/=200, 9=500 (рис. 8.15) и /=16,
9=50 (рис. 8.16). На рис. 8.15 и 8.16
приведены также зависимости
Р(мот от П/Г,,. Графики построены
по уравнениям (8.61), (8.62) и
(8.63а-г) с учетом (8.63). Из приве-
денных соотношений и графиков
видно, что при времени обнаруже-
Рис. 8.15. Зависимости вероятности
обнаружения от режима поиска для
случая / = 200, 9 = 500, 5 = 100
Рис. 8.16. Зависимости вероятности
обнаружения от режима поиска для
случая/= 16, 9 = 50, s = 8
367
ния (анализа) Д1, меньшем длительности сигнала (т=2), область режима
ВП П< Та, которую можно назвать областью быстрого вероятностного
поиска (ВВП), имеет несколько лучшие показатели по вероятности об-
наружения за заданное относительно небольшое время (10 Тп), чем об-
ласть медленного вероятностного поиска (МВП), где П>Т„. При указан-
ном условии вероятность обнаружения за заданное время имеет мини-
мальное значение в области МВП; положение минимума может быть
найдено из следующего уравнения:
---—+1пр+^
д(—1 zt/i—?_+2А£_Л/] I ? гп
1л J Ч ЧТа Та ХТа)
•^1 = 0, (8.64)
ХТа)
где Д/=ги/щ, т>2.
График зависимости величины параметра П//Гп, соответствующе-
го минимальной вероятности обнаружения, от значений q нт приведен
на рис. 8.17.
При разведке перестраиваемых
сигналов, когда координата (номер
градации) сигнала в процессе поиска
изменяется, причем скорость изме-
нения соизмерима со скоростью по-
иска, вероятность обнаружения бу-
Рис. 8.17. Зависимость величины Дет зависеть как от режима поиска,
параметра П/ %ТП,
соответствующего минимальной
вероятности обнаружения,
так и от параметров перестройки
сигнала (закона, скорости и пределов
перестройки). Так, если перестройка
от значений q и m осуществляется от импульса к им-
пульсу по равномерному случайному
закону в пределах области величиной 5 разрешаемых градаций, то в
случае выполнения условия лП/х >ТП выражения для вероятности обна-
ружения за один период повторения Рт (Пер) и за период поиска Р„(пер)
имеют вид
Г & 2ги )
Л + гц---\х .
р _к___________m ) _ 1
- --
УТ ( 2
1 + А1п
<?п v tn
(8.65)
Р
1 п(пер)
1 + ^2-fl-—
<?П V m )
in
(8.66)
В частности, при МДП и т=2 Ра(Пер) лежит в пределах 1>Л1(,^>0,632
в зависимости от диапазона перестройки сигнала s (от 5=1 до з=х соответ-
ственно). Зависимости /\пер) и РП(пер>от 71Д1 для 5=//2 и некоторых значе-
368
ний т также приведены на рис. 8.15 и 8.16. Случай, когда время поиска в
диапазоне возможных значений частоты сигнала меньше периода повто-
рения, описывается соотношениями, подобными для БВП.
Время достоверного обнаружения неперестраиваемых сигналов
может быть снижено с помощью многоступенчатой процедуры поиска с
изменяемой полосой пропускания (т.е. числом разрешаемых градаций)
при переходе от ступени к ступени, как это излагалось ранее. Например,
двухступенчатый поиск позволяет осуществить достоверное обнаруже-
ние (прием хотя бы одного импульса) в диапазоне за время около 27’1Ъ^'Л,
а применение усеченного поиска, когда переход на последующую сту-
пень производится с предпоследней (а не последней) градации преды-
дущей ступени, позволяет еще более снизить время обзора диапазона, в
пределе до Тус= Tn[£(log2x) +1].
В случае, когда возможность увеличения скорости поиска ограни-
чивается временем установления отсчета в избирательном устройстве
(временем установления колебаний в контуре или формирования поля в
раскрыве), реализация режима БДП при заданных величинах ти, диапа-
зона обзора по частоте или пространству и числе разрешаемых градаций
X может оказаться невозможной. Остановимся на этом случае примени-
тельно к задаче поиска по частоте в диапазоне, характеризуемом вели-
чиной полосы частот Д/=ft-fu и коэффициентом перекрытия по частоте
Pf=ft /fH, при этом Л/'=/,(д/-1). Минимально-необходимое время анализа
Azmin может быть определено как
а = аХ _
AF А/ /н(Р/-1)’
(8.67)
где AF - требуемая разрешающая способность по частоте; а - коэффици-
ент, зависящий от формы полосы пропускания частотно-избирательного
элемента и допустимого отклонения динамической характеристики этого
элемента от статической обычно равен 0,6-0,9; - нижняя частота час-
тотного диапазона.
Тогда, как это следует из (8.60) с учетом (8.63), период поиска
должен удовлетворять соотношению
П>«//А/ (8.68)
и режим ВП может быть реализован в области, которую можно описать
выражением
n/T„>aX/qTK&F. (8.69)
Вероятность обнаружения за период повторения сигнала для пре-
дельного режима ВП будет (см. (8.60), (8.69)) следующей:
Рт (8.70)
" Х\ a J
369
Как видно из (8 70), при/>АЕг„/а -1 величина Рт<1. Таким обра-
зом, достоверное обнаружение при заданных &F и ги может быть осуще-
ствлено в режиме БДП в диапазоне с числом градаций
/<ДЕги/а-1, (8.71)
т.е. в диапазоне частот с полосой &f<x&F= Гти/а-1). Если заданы
диапазон просматриваемых частот Д/ и величина ти, то, учитывая что
/=Д//АЕ, из условия (8.71) может быть получено выражение для воз-
можного числа разрешаемых градаций для режима БДП:
X < -(11+^^- -11 (8.72)
2^V a J
Если соотношение (8.72) не удовлетворяется, осуществить досто-
верное обнаружение по каждому импульсу принципиально возможно
путем использования рассмотренного выше режима многоступенчатого
поиска с последовательным уточнением, производящимся в течение
длительности импульса.
Особенности обнаружения групп импульсов с поимпульсной несущей
частоты. Остановимся еще на выборе режима поиска для обнаружения
кратковременных сигналов («пачек», т.е. групп импульсов, следующих
через период Гп), в случае, когда режим БДП (или МДП) не может быть
реализован [28]. Если сигнал существует в течение интервала времени
гТ„, т.е. представляет собой группу г импульсов, то, в принятом условии
независимости событий обнаружения сигнала в последовательных цик-
лах поиска, вероятность обнаружения (приема не менее одного импуль-
са) Рар>] в области МВП (П >Т„) имеет вид
1 С ГР { уР \ 1
(8.73)
где Е(гТп /П) - целая часть отношения (гГп/П); Тп < П <хТП;
1<г<х; Тп<П<хТп 1+Я--11 .
q\m J
В области БВП (при П< Гп) выражение для вероятности обнаруже-
ния аналогично (8.62), а предельные соотношения имеют вид
Л=(АЕги/«-1)//;
Едпред = (W-1)//,
Л>1 = 1-[1-(m-l)//]r.
В этом случае, учитывая, что rPT> 1-(1-Рт)г, может оказаться целе-
сообразным проведение последовательного поиска по г участкам полного
диапазона так, чтобы поиск в каждом из г участков продолжался один пе-
риод повторения. При величине г, соизмеримой с 1/Pr, такая организация
370
поиска позволяет осуществить достоверное обнаружение сигнала или
значительно повысить вероятность обнаружения. Например, при г = 10,
Д/= 4-108Гц, AF = 4-106Гц, ги = 2-ЮЛ, а = 0,8 Рт= (10- 1)/100 =0,09.
При последовательном поиске по 10 участкам Ро5н = 0,9, в то время
как при поиске во всем диапазоне Роби= 1-0,911°=0,61. Такое повышение
вероятности обнаружения при последовательном просмотре диапазона
(по г участкам) может иметь место при разведке неперестраиваемых
сигналов. При поимпульсной перестройке частоты сигнала в пределах,
превышающих единичный участок поиска //г (или в случаях, когда
верхняя и нижняя границы диапазона перестройки сигнала не располо-
жены в одном и том же участке), вероятность обнаружения будет мень-
ше. В предельном случае, когда перестройка частоты сигнала произво-
дится во всем диапазоне, вероятность обнаружения при последователь-
ном поиске по участкам будет
7^1(пер)
= rR 1-fl-—
(8.74)
Значение [1—(1—l/r)]r в зависимости от величины г лежит в преде-
лах 1.. .0,632. Возможны и другие варианты осуществления поиска с по-
вышенной вероятностью обнаружения Ро6н по сравнению с простым од-
ноступенчатым, например, проведение поочередно в г-1 участках дос-
товерного поиска и в последнем-вероятностного. При равновероятном
нахождении сигнала в любом участке диапазона результирующая (ус-
редненная) вероятность обнаружения будет такой же, как в предыдущем
случае (при поиске последовательно в г участках в одинаковом режиме).
Применение БДП с последовательным уточнением, производящимся по
импульсам, позволило бы в данном примере обеспечить достоверное
обнаружение при заданной разрешающей способности всего по двум
импульсам, однако для реализации этого режима приемное устройство
должно иметь в своем составе дополнительный приемный тракт с более
широкой полосой пропускания.
Результаты, полученные при рассмотрений режимов поиска им-
пульсных сигналов, формулы и графики можно использовать при выбо-
ре рационального режима поиска в различных конкретных случаях и
оценке достижимой вероятности обнаружения, в том числе, при развед-
ке сигналов с перестройкой и кратковременных сигналов (пачек, содер-
жащих 10...20 импульсов). Однако обеспечить гарантированное обна-
ружение кратковременных и перестраиваемых сигналов поисковой при-
емной аппаратурой возможно только при использовании БДП, который
в силу ряда технических ограничений находит применение преимуще-
ственно лишь для частотного анализа в отдельных участках диапазона.
371
8.3. Методы оценки эффективности обнаружения
сигналов беспоисковыми устройствами РТР
Гарантированное обнаружение кратковременных излучений РЛС
радиолокационного поля, работающих поочередно в паузном режиме, и
сигналов РЛС с электронным сканированием и быстрой перестройкой
несущей частоты, в том числе от импульса к импульсу, также содержа-
щихся в типовых радиолокационных полях [1, 2, 11, 62], может быть
обеспечено беспоисковым приемно-пеленгаторным устройством с па-
раллельным обзором диапазона частот и углов, осуществляющим одно-
временный прием сигналов во всем разведуемой диапазоне. Определе-
ние положения принимаемого сигнала в диапазоне частот или углов
производится в результате формирования приемным (пеленгаторным)
устройством выходного сигнала, какой-либо параметр которого (ампли-
туда или соотношение амплитуд, временная задержка, разность фаз) на-
ходится в функциональной зависимости от несущей частоты или пелен-
га входного (принимаемого) сигнала. Так, например, при функциональ-
ном способе пеленгации используется несколько (две или больше) ан-
тенн, обеспечивающих прием сигналов в одном и том же секторе. Опре-
деление пеленга производится по разности фаз сигналов на выходах
пространственно разнесенных антенн с учетом несущей частоты сигна-
ла, которая должна измеряться одновременно (функционально-фазовый
метод), или/и в результате сравнения амплитуд на выходах антенн, на-
правления максимумов диаграмм которых смещены на некоторый опре-
деленный угол (методы фазового либо амплитудного мгновенного срав-
нения - (ФМС и АМС) или их сочетание [11]).
Функциональный метод измерения частоты может быть реализо-
ван с помощью частотных различителей или дискриминаторов, преоб-
разующих отклонение частоты от некоторого заданного опорного зна-
чения в напряжение, пропорциональное этому отклонению, выполняе-
мых, в частности, на отрезках длинных линий или двойном тройнике
[5], либо в виде интерференционных измерителей, основанных на ис-
пользовании зависимости сдвига фаз сигналов, проходящих по разным
трактам, от разности длин трактов и частоты [3, 5, 29-31]. Некоторым
недостатком таких функциональных измерителей частоты является от-
сутствие разделения одновременно принимаемых сигналов с различны-
ми частотами, что приводит к ошибочному определению их частот при
совместном воздействия нескольких (двух или более) сигналов на изме-
ритель.
Для устранения этого недостатка путем разнесения таких сигналов
во времени в [5] предлагается поставить на входе измерителя дисперси-
онный фильтр, преобразующий частотные различия сигналов во вре-
менные. Заметим, что и само по себе определение частоты сигнала, как
одиночного, так и многочастотного, принципиально возможно произво-
372
дить путем измерения величин запаздывания частотных составляющих
спектра при прохождении дисперсионной линии задержки. Анализ
спектров радиоимпульсов дисперсионно-временными методами рас-
сматривался в [32, 22]. Для обеспечения достаточно высокой точности
измерения частоты (порядка единиц МГц [31]) в широком диапазоне
частот (с перекрытием до октавы) в приемниках с мгновенным измере-
нием частоты (МИЧ) используются многоканальные фазовые дискри-
минаторы с несколькими разными СВЧ-линиями задержки. Ввиду тех-
нической сложности выполнения таких многоканальных дискриминато-
ров в коротковолновом участке диапазона (6... 12... 18 ГГц), а также в
целях унификации широкодиапазонные приемники с МИЧ обычно вы-
полняются с преобразованием входного ВЧ-сигнала путем понижения
частоты и уплотнения спектра до диапазона, например, 2...6 ГГц, ти-
пичного для таких приемников [31].
Одновременный прием излучений в весьма широкой полосе частот
обеспечивает возможность беспропускного обнаружения и определения
частоты каждого импульса в пачке сигналов РЛС при облучении носи-
теля аппаратуры РТР, однако следствием такой широкополосности при-
емника с МИЧ являются пониженная чувствительность по сравнению с
узкополосными поисковыми приемниками и подверженность воздейст-
виям помех от всевозможных источников ЭМ излучений (РЛС, радио-
связь, телевизионные передатчики, радиорелейные линии, бортовое ра-
дио- и электрооборудовани'е). Для исключения или ослабления отдель-
ных мешающих излучений можно использовать заграждающие узкопо-
лосные фильтры на входе приемника, настраиваемые на частоты помех
[31], однако эти усовершенствования приведут к дополнительному ус-
ложнению конструкции приемника и снижению его преимуществ в час-
ти массогабаритных показателей, быстродействия и простоты обслужи-
вания по сравнению с другим вариантом построения беспоискового
приемного устройства-измерителя частоты сигналов - многоканальным
приемником с пространственным разделением сигналов разных частот.
Одновременное разделение сигналов по частоте позволяет опреде-
лять частоты нескольких поступающих в одно и то же время сигналов и
обычно производится с помощью набора частотно-избирательных уст-
ройств (полосовых фильтров, резонаторов) с примыкающими полосами
пропускания. Функцией частоты принимаемого сигнала является номер
канала, в котором зарегистрирован факт приема. Максимальная ошибка
измерения частоты в этом случае <5/= ±А/ф/2, где АД, - полоса пропуска-
ния фильтра.
Если в требованиях к аппаратуре разведки устанавливается вели-
чина относительной ошибки измерения частоты df^f^ где -
средняя частота настройки фильтра, то число каналов NK в разведывае-
мом диапазоне частот А/определяется как [29]
373
lg i + y
N*a ~TT’ (8.75)
I 1 + a f
где fn - нижняя граничная частота разведываемого диапазона.
Условие одинаковой относительной ширины всех фильтров (кана-
лов) в диапазоне частот Д/ соответствующее постоянной величине от-
носительной ошибки определения частоты в этом диапазоне, равно-
значно условию постоянства частных коэффициентов частотного пере-
крытия всех фильтров
где/Вф,-,/нф/_ верхняя и нижняя частота /-го фильтра, соответственно.
Тогда число частотных каналов будет определяться как
Ук=^, (8.76)
где Pj=fjfn - коэффициент перекрытия частотного диапазона Д/
Выполнение широкодиапазонного многоканального приемника-
измерителя частоты с постоянной относительной шириной полос про-
пускания каналов приводит к значительному перепаду разрешающей
способности и точности определения значения частоты сигнала в диапа-
зоне частот. Такой путь построения фильтровой системы - с постоян-
ным (одинаковым) перекрытием всех фильтров мог практиковаться, ко-
гда фильтры выполнялись на волноводных и коаксиальных линиях пе-
редачи и достижимые электрические и массогабаритные характеристи-
ки их ограничивались конструктивно-технологическими возможностя-
ми и допусками. В частности, величина перекрытия полосовых или по-
лосно-пропускающих фильтров (ППФ) на коаксиальных линиях, обыч-
но применявшихся в дециметровом и части сантиметрового диапазона,
могла составлять 1,15...1,5 [33], для ППФ на полосковых линиях пер-
вых вариантов с еще не отработанными конструкциями и материалами
подложки было получено перекрытие около 1,1 [34]. В более совершен-
ных конструкциях на микрополосковых линиях (МПЛ) приемлемые ха-
рактеристики в ППФ (потери в полосе, крутизну скатов) можно полу-
чить при перекрытии >1,05 [35], а согласно [36] в наиболее оптималь-
ных конструкциях ППФ (на встречных стержнях) полоса пропускания
составляет от 2.. .3 до 60%.
Однако выполнение приемника-измерителя частоты даже в отно-
сительно ограниченном поддиапазоне (с перекрытием около двух) на
основе таких фильтров требует создания нескольких десятков фильтров
с разными центральными частотами и точно примыкающими друг к
374
другу полосами пропускания, а также систему равномерной разводки
входного сигнала на множество этих фильтров с обеспечением миними-
зации их взаимного влияния, приводящего к искажению частотных ха-
рактеристик и возрастанию потерь. Это является весьма сложной зада-
чей при выполнении всех элементов на МПЛ, особенно с учетом огра-
ниченных возможностей подстройки таких элементов и получения при
этом высоких добротностей. Кроме того, полосы пропускания даже
наиболее узких фильтров на МПЛ (с к/ =1,02... 1,03) значительно пре-
вышают ширину спектра сигналов большинства РЛС в наиболее насы-
щенных участках диапазонов частот (от 1...1,5 ГГц и выше [1,2,11]), что
не дает возможности селекции и точного определения частот РЛС с
близкими параметрами, особенно однотипных. Для осуществления та-
кой селекции полосы отдельных частотно-избирательных элементов
должны иметь величину, соизмеримую с шириной спектра сигналов,
например, порядка 10 МГц.
Создание миниатюрных узкополосных ППФ возможно на основе
высокодобротных резонаторов различных типов и конструкций. Так, из-
меритель несущей частоты одиночных СВЧ-радиоимпульсов на основе
резонаторов [37] содержит 50 объемных резонаторов, установленных на
широкой стенке волновода трехсантиметрового диапазона и имеющих
полосы пропускания 10 МГц в общей полосе 500 МГц с возможностью
грубой установки частоты и точной настройки в пределах 50...60 МГц. К
резонаторам подключены кристаллические детекторы, после которых
стоят микросхемы с триггерами и светодиоды.
В других конструкциях микроминиатюрных ППФ для интеграль-
ных СВЧ-схем используются ферритовые образцы из монокристалла
железо-иттриевого граната (ЖИГ) в виде сферы, помещенной в магнит-
ное поле, изменением величины которого можно довольно в широких
пределах перестраивать резонансную частоту по линейному закону. Ве-
личина полосы пропускания такого фильтра с числом резонаторов от
2 до 4 составляет 20...30 МГц [35]. Пример бортового многоканального
анализатора на ЖИГ-фильтрах приведен в [29] со ссылкой на [38]. Этот
анализатор помех в диапазоне 2400...3650 МГц содержит 125 узкопо-
лосных каналов, каждый из которых имеет полосу пропускания 10 МГц.
Для реализации узкополосных ППФ применяют также высокодоб-
ротные диэлектрические объемные резонаторы в виде таблеток или бру-
сков, имеющие размеры по сравнению с волноводными в 3-5 раз мень-
ше [36]. В качестве примера приводятся данные о характеристиках
фильтра на четырех диэлектрических резонаторах с полосой 50 МГц
при центральной частоте 9, 65 ГГц, у которого при расстройке относи-
тельно центра всего на 50 МГц затухание увеличивается не менее чем
на 17 дБ. Конструкции многоканальных частотно-избирательных уст-
ройств на диэлектрических резонаторах описаны, например, в [39,40].
375
Можно упомянуть также о возможности создания блоков полосовых
фильтров для многоканальных по частоте приемников на основе использо-
вания эффектов взаимодействия магнитостатических волн (МСВ) в тонких
ферритовых пленках [3]; конструкция и основные характеристики
13-канальной гребенки фильтров на МСВ с центральной частотой 3,45 ГГц
и полосой пропускания каждого канала 20 МГц описаны в [41].
Другим техническим вариантом создания многоканальных модулей
полосовых фильтров и ряда элементов функциональной обработки сигна-
лов является применение акустоэлектронной техники обработки, в част-
ности, на базе устройств с использованием поверхностных акустических
волн, позволяющих создать точные, малогабаритные и высокотехноло-
гичные частотно-избирательные элементы, такие как полосовые фильтры
с встречно-штыревыми преобразователями, при размещении которых на
общей подложке получаются многоканальные блоки полосовых фильтров
с относительно малыми габаритами [3, 42]. Тем самым реализуется мно-
гоканальная схема построения беспоискового по частоте приемника с об-
работкой на поверхностных акустических волнах.
Еще одним направлением создания беспоисковых приемников с про-
странственным разделением и многоканальной индикацией принимаемых
сигналов по частоте, а в некоторых вариантах - и по направлению, является
применение акустооптической (или акустооптоэлектронной) техники обра-
ботки. Входной сигнал после переноса на промежуточную частоту посту-
пает через пьезоэлектрический преобразователь на акустооптический мо-
дулятор (ячейку Брэгга), освещаемый параллельным когерентным лазер-
ным пучком. В результате акустооптического взаимодействия в ячейке ла-
зерный луч отклоняется, причем величина отклонения пропорциональна
частоте анализируемого радиосигнала. Отклоненные лучи фокусируются
на линейной матрице фотоприемников, например, фотодетекторов на при-
борах с зарядовой связью. Такая схема фактически реализует многоканаль-
ную по частоте фильтрационную обработку и обеспечивает одновременное
определение частоты нескольких сигналов в широкой полосе анализа. Опи-
сание принципов работы и вариантов выполнения акустооптических при-
емников-частотомеров приведены в большом числе публикаций, например,
[3,31,43,44] и др. Как отмечается в [3, 31], созданные ячейки Брэгга могут
функционировать в участках общего диапазона от 50 МГц до 2...5 ГГц с
перекрытием до октавы (с максимальной шириной полосы беспоискового
многоканального по частоте приема до 500.. .2000 МГц). Возможность раз-
ведки сигналов РЛС, работающих в диапазонах более высоких частот - до
20 ГГц и выше, обеспечивается соответствующим широкополосным пре-
образованием (транспонированием, т.е. переносом) частоты входных сиг-
налов в диапазон работы акустооптического приемника.
Приведенный краткий обзор позволяет полагать, что разработан-
ные на базе различных физических принципов и технических решений
известные конструкции узкополосных резонаторов и фильтров СВЧ и
376
многоканальные частотно-избирательные системы на их основе, а также
акустооптические беспоисковые приемники-частотомеры обеспечивают
возможность создания приемных устройств аппаратуры РТР с мгновен-
ным обнаружением и определением несущих частот импульсных сигна-
лов РЛС со скрытными режимами работы, с быстрой перестройкой час-
тоты, с синхронным излучением на нескольких частотах и т.п.
Достоинствами многоканального приемника по сравнению с МИЧ-
приемником являются также возможность получения максимальной чув-
ствительности ввиду узкой шумовой полосы каждого канала и высокая
помехоустойчивость в связи с тем, что наличие помехи в каком-либо ка-
нале не будет существенно влиять на прием сигналов в других каналах.
Надо отметить также принципиальную возможность съема радиосигна-
лов с выходов отдельных каналов (фильтров) в ряде конструкций частот-
но-избирательных систем для последующего анализа амплитудных и фа-
зовых соотношений, хотя это сопряжено с дополнительными усложне-
ниями конструкции. Факторами, ограничивающими область применения
многоканальных измерительных структур с расфильтровкой по несущей
частоте в широком диапазоне частот, являются конструктивная слож-
ность таких устройств, содержащих множество точных подстраиваемых
элементов, разнородность и слабая унификация элементов СВЧ-уст-
ройств в диапазоне с большим перекрытием - порядка 10 и выше, типич-
ном для современной аппаратуры РТР, а также отмеченная выше слож-
ность осуществления анализа радиочастотных параметров сигналов на
выходах всех фильтров в большом диапазоне частот.
В связи с этим одним из основных направлений обеспечения раз-
ведки во всем необходимом широком диапазоне частот от 100...200 Мгц
до 20...40 ГГц будет являться использование одного (или двух) поддиа-
пазона в качестве базового, в который транспонируются остальные под-
диапазоны. Обзор всего диапазона частот при этом может осуществляться
либо последовательно - путем поочередного подключения отдельных
поддиапазонов к базовому, либо одновременно, когда выходы всех под-
дипазонов одновременно совместно подключены к входу базового под-
диапазона, а частота сигнала определяется с учетом его расположения по
частоте в пределах как базового, так и входных (транспонируемых) под-
диапазонов [3,5,27,29,31,42,45].
В первом случае достигается более высокая чувствительность при-
емного устройства за счет того, что шумовые полосы транспонируемых
поддиапазонов накладываются на шумовую полосу базового поддиапа-
зона поочередно, а не совместно, как в случае, когда выходы всех под-
диапазонов одновременно подключены к базовому поддиапазону.
Однако во втором случае обеспечивается одновременный обзор
всего диапазона частот и беспропускной прием всех излучений вплоть
до излучаемых на различных частотах единичных импульсов, т.е. прак-
тически 100%-я вероятность перехвата излучений РЛС.
377
Рис. 8.18. Схема многоканально-
функционального приемника с
многократным преобразованием частоты
Варианты структурных
схем таких многоканальных
приемников с транспониро-
ванием полос каналов в об-
щий поддиапазон, который в
свою очередь расфильтровы-
вается на ряд каналов, также
транспонируемых в после-
дующий, общий для всех
участок диапазона и т.д.,
приводятся в [3, 5, 11, 27, 29,
31, 42]. Частота принятого
сигнала определяется как
дискретная функция сово-
купности номеров каналов, в которых было зарегистрировано наличие
сигнала, причем в случае одновременного прихода двух или более сиг-
налов возможно образование дополнительных ложных отсчетов значе-
ний их частот. Этот тип приемного устройства может быть назван мно-
гоканально-функциональным приемником (МФП) с многократным пре-
образованием частоты [11, 29]; в [5] и некоторых других источниках
употребляется также условное название «матричный приемник» с ука-
занием на то, что определенным образом расположенные полосы про-
зрачности фильтров этого приемника образуют своеобразную матрицу.
Пример схемы МФП с многократным преобразованием частоты
приведен на рис. 8.18. Выходы всех т фильтров каждой ступени, кроме
последней (от Фц...Фт1 до Ф11И_1...Фтл_1), через объединенные по выхо-
дам смесители См подключены к входам фильтров следующей ступени.
На смесители, кроме сигналов с выходов фильтров, подаются колебания с
гетеродинов Г, частоты которых в каждой ступени выбираются так, что-
бы на выходе всех смесителей данной ступени преобразованные (транс-
понированные) частоты сигналов лежали в одном и том же частотном ин-
тервале, равном полосе пропускания одного фильтра этой ступени. На
выходах всех фильтров включены также детекторы Д, сигналы с выходов
которых подаются на вычислитель частоты принятого сигнала.
Оценка степени выигрыша в числе избирательных фильтров МФП
по отношению к многоканальному приемнику с независимыми каналами
произведена в [5,29] для показанного на рис. 8.18 случая, когда число па-
раллельных канальных фильтров (т) во всех п последовательных ступе-
нях одинаково. Учитывая, что число каналов многоканального приемника
определяется как ЛГ„к=Д /Д/ф, общее число каналов МФП с одинаковым
числом каналов т в каждой из п ступеней составляет УМфП = тп, а полная
входная полоса частот такого МФП будет b.f=mn, где ДД -полоса вы-
ходного фильтра; Д/- полоса частот входного диапазона; отношение Умк
378
к М,фп, характеризующее величину выигрыша, в соответствии с [5, 29]
выражается как
и-1
TV 1 Г AX' "
. (8.77)
^мфп 4A4j
Например, если число ступеней w=3, а число разрешаемых града-
ций по частоте х=Д/7Afy = 1000, то выигрыш в числе фильтров Nm/NM$n
составляет 33. Оцениваемый таким образом выигрыш, учитывающий
разницу в числе фильтров только для одного варианта структуры МФП,
и при заданном числе ступеней имеет иллюстративный характер. Для
оценки технико-экономического выигрыша от применения МФП следу-
ет учитывать влияние других факторов и производить оценку выигрыша
по некоторому обобщенному критерию.
Оценка оптимальности структуры многоканального приемника с по-
следовательным транспонированием поддиапазонов. Эта оценка мно-
гоканально-функционального или «матричного» приемника - МФП -
может быть произведена на базе критерия «стоимость - эффективность»,
например, по степени минимизации показателя «стоимость» при фикси-
рованной «эффективности». В качестве показателя технической эффек-
тивности приемника можно принять количество разрешаемых градаций
по частоте /, характеризующее такие параметры приемника, как избира-
тельность, разрешающую способность и достижимую точность определе-
ния частоты сигнала, а в качестве «стоимости» - число различных эле-
ментов приемника (усилителей, фильтров, гетеродинов, смесителей, де-
текторов и др.) с учетом относительного «веса» каждого из них по приня-
той шкале «стоимости» (массогабаритным показателям, сложности и на-
дежности в эксплуатации, стоимости производства и обслуживания или
какой-либо комбинации этих показателей).
Число разрешаемых градаций по частоте /, численно равное отно-
шению полосы частот входного диапазона к полосе канального фильтра
последней ступени, может быть представлено как
п
/ = П^’ <8-78)
/=1
где т,- число параллельных каналов (фильтров) в /-й ступени: п - число
ступеней.
Показатель «стоимости» Q будет пропорционален сумме числа
элементов во всех ступенях с учетом их весов:
е = ^(а,+6,ти,), (8.79)
/=1
где а,- - «вес» устройств, общих для данной ступени и не определяемых
непосредственно числом каналов в ней т, (усилители СВЧ и ПЧ, уст-
379
ройства проверки и калибровки); bt - «вес» устройств, относящихся к
одному каналу данной z-й ступени (фильтр, смеситель, детектор, видео-
усилитель, а также приходящаяся на один канал часть гетеродинного
устройства, разветвителя и соединителя).
Анализ показывает, что при фиксированном значении числа ступеней
п весовая функция Q=fim,n^) минимальна при числе каналов в каждой (г'-й)
ступени (от/), обратно пропорциональном их весу в данной ступени (£>,). При
этом оптимальное число каналов в ступени определяется как
п
т1от
(8.80)
и выражение для весовой функции принимает вид
(8.81)
Для оценки оптимального числа ступеней и0Пт аналитическим пу-
тем примем, что весовые коэффициенты ait b, в последовательных сту-
пенях изменяются по определенному закону, например, монотонно
уменьшаются по мере понижения частоты в ступенях и находятся в по-
стоянном отношении:
a,+i = ар - ар'; bM = biq = b^‘; p<\,q<\. (8.82)
«Вес» устройств, относящихся к одному каналу, в последней, и-й
ступени может измениться более резко за счет отсутствия в этой ступе-
ни ряда элементов (смесителей, гетеродинов, выходного соединителя),
имеющихся во всех предыдущих ступенях. Примем, что это дополни-
тельное изменение характеризуется множителем г. Тогда
bn-b\qnAr. (8.83)
С учетом (8.82) и (8.83) выражения (8.80) и (8.81) приобретают вид
Г—-i] 1
W,onr = <Г 2 ’ (/ Г)” ’ (8-84)
(8.85)
Оптимальное число ступеней, соответствующее минимальному
значению весовой функции при заданных значениях /, р, q, г, находится
из условия S0min /дп = 0, которому соответствует уравнение
а, р” In р Г~[ I—
Z^(l-p)
(8.86)
380
На рис. 8.19 показана за-
висимость «опт от / при ajb\ = 6;
3 и 1,5 ддяр = q = 0,9 и г = 0,25.
При упрощающем предпо-
ложении равного веса общих
элементов во всех ступенях
(р=1), оправданном при одно-
типном их техническом выпол-
нении, в частности, при исполь-
зовании во всех ступенях транзи-
сторных усилителей, выражение
(8.86) представляется в виде
Рис. 8.19. Зависимости оптимального
числа ступеней от / для различных
сочетаний весовых коэффициентов
1 -
(г)' =ехр
1 и-1
^(ХГГ" q 1
А
+ 1
(8.87)
В заключение заметим, что методически задача нахождения опти-
мизированной структуры МФП сходна с задачей оптимизации процеду-
ры многоступенчатого поиска и в своих простейших формулировках эти
задачи имеют решения вполне аналогичного вида.
Многоканальные и многоканально-функциональные пеленгационные
системы представляют собой совокупность пространственно-избиратель-
ных каналов, образуемых несколькими примыкающими друг к другу диа-
граммами направленности антенных устройств (набора отдельных направ-
ленных антенн или многолучевой антенной решетки), совместно перекры-
вающими подлежащий наблюдению сектор пространства. Определение на-
правления прихода сигналов производится по номеру канала (одного или
двух соседних), в котором зарегистрирован прием сигнала. В многоканаль-
но-функциональных пеленгаторах направление прихода сигнала дополни-
тельно уточняется с использованием амплитудного или/и фазового мгно-
венного сравнения сигналов, принятых по соседним каналам [3,5,11,29].
Многоканальные пеленгаторы, как и многоканальные приемники-частото-
меры, применяются преимущественно, в условиях, когда требуется гаран-
тированное обнаружение, определение типов и пеленгование РТС, излуче-
ния которых имеют кратковременный характер и связаны с непосредствен-
ной угрозой применения средств поражения. Типичным примером такой
ситуации является налет СВН (самолетов, ПКР с РЛ ГСН) на надводные
корабли, когда подлетное время ПКР после включения ее РЛ ГСН может
составлять всего около 15 с [46] и только практически мгновенное обнару-
жение и опознавание излучений РЛ ГСН ПКР с момента их включения и
определение направлений на эти ПКР позволит принять необходимые ме-
ры по парированию нападения.
Для обеспечения достаточно высокой точности пеленгования в ряде
известных конструкций многоканальных пеленгаторов (например [47, 48])
381
используется большое число направленных антенн (15...20 и более) с при-
мыкающими и частично пересекающимися диаграммами, совместно пере-
крывающими весь круговой диапазон направлений 360°. Конструкции са-
мих направленных антенн достаточно просты и надежны, однако наличие в
составе пеленгатора большого числа приемных трактов, каждый из кото-
рых может включать в себя смеситель, УПЧ, детектор и видеоусилитель с
последующими схемами сравнения амплитуд, определения канала с наи-
большей амплитудой сигнала и формирования точного значения направле-
ния прихода сигнала, усложняет конструкцию многоканального пеленгато-
ра и ограничивает достижимые показатели надежности.
Принципиально возможно значительно сократить число приемных
трактов при том же или даже большем числе направленных антенн путем
введения комбинаторного кодирования номеров пространственных кана-
лов, в данном случае - антенн, по которым был принят сигнал. Сокращение
числа приемных трактов по отношению к числу антенн достигается за счет
объединения выходов определенным образом сгруппированных антенн с
несмежными диаграммами направленности (ДН), в результате чего оказы-
вается возможным использовать каждый из приемных трактов для усиле-
ния импульсных сигналов, принимаемых с разных направлений. Определе-
ние пеленга (номера пространственного канала приема, соответствующего
ДН какой-либо антенны или зоне пересечения пары смежных ДН) при этом
производится путем дешифрирования сочетания номеров приемных трак-
тов, на выходах которых был зафиксирован факт приема сигнала.
Однозначность определения пеленга сигнала при дешифрировании
обеспечивается построением схемы соединений выходов антенн, осу-
ществляющей объединение их в группы таким образом, чтобы каждой
антенне и каждой паре соседних антенн соответствовала единственная
комбинация номеров приемных трактов, по которым будет проходить
сигнал, принятый этой антенной или этой парой антенн.
Одним из вариантов такого построения может быть подключение к
выходу каждой антенны кругового пеленгатора делителя на два тракта
(например, СВЧ мостовой схемы) и последующее объединение выходов
этих трактов с помощью соединительных СВЧ-схем в несколько различ-
ных групп таким образом, что сочетания номеров групп, образующие ко-
ды направлений приема (отдельных антенн или зон двойного приема по
соседним антеннам), не повторяются. Объединенные в эти группы выхо-
ды антенн через групповые соединители подключаются к приемно-
усилительным трактам по числу групп. Например, в 15-антенном круго-
вом пеленгаторе с делением выхода каждой антенны на два тракта и при
использовании шести групп (и, соответственно, приемных трактов), объ-
единяющих различные выходы антенн, порядок подключения отдельных
выходов антенн к групповым соединителям и последующим приемным
трактам (обозначаемым далее как А, В, С, D, Е, F) в последовательности
их кругового расположения может быть следующий: ВС, АЕ, CD, АВ,
382
DF, AC, BF, CE, AF, BE, AD, EF, BD, CF, DE. Число сочетаний по четы-
ре, соответствующих случаям приема в зонах пересечения соседних ДН,
очевидно, должно быть не менее числа самих антенн, что точно выполня-
ется в данном случае - при использовании шести приемно-усилительных
трактов. При большем числе групп и приемно-усилительных трактов и
разветвлении выходов всех антенн на одинаковое число направлений
(трактов) - два, три, и т.д. возможное число антенн кругового пеленгатора
с комбинаторным объединением групп каналов и последующим опреде-
лением номера пространственного канала приема путем дешифрирования
сочетания номеров приемных трактов, в которых имел место прием сиг-
нала, будет определяться числом сочетаний (по два, по три и т.д.), кото-
рому соответствует не меньшее число сочетаний из удвоенного числа
элементов. Так, при разделении выходов антенн на два направления при-
менение семи трактов позволяет использовать 21 антенну, восьми трактов
- 28 антенн, а девяти трактов - 36 антенн. При разделении выходов ан-
тенн на три направления и использовании 9 и большего числа общих
трактов возможное число антенн кругового пеленгатора с комбинатор-
ным кодированием резко возрастает (в два и более раз) и уже превосхо-
дит практические потребности аппаратуры РТР.
В изложенном варианте кодирования номеров направлений приема
(единичных антенн и зон пересечения ДН соседних антенн) использовалось
деление выходов всех антенн на одинаковое число направлений, что огра-
ничивало количество используемых при кодировании сочетаний. При ис-
пользовании сочетаний с разным числом элементов и делении выходов ан-
тенн на разное число направлений возможен дополнительный выигрыш в
числе применяемых приемно-усилительных трактов или увеличение числа
антенн кругового пеленгатора, причем с увеличением числа трактов этот
выигрыш быстро возрастает. В 15-антенном круговом пеленгаторе приме-
нение кодирования направлений приема с использованием сочетаний с
разным числом элементов позволяет ограничиться использованием всего
пяти приемных трактов, т.е. в три раза меньшим числа антенн.
Кодообразующая схема соединений выходов антенн и трактов, обес-
печивающая формирование тридцати неповторяющихся кодовых сочета-
ний, соответствующих 15 антеннам и 15 зонам приема по двум смежным
антеннам с пересекающимися ДН, приведена на рис. 8.20. Использование
шести приемных трактов позволит обеспечить однозначное определение
зоны приема в круговом пеленгаторе с 25 антеннами (т.е. с вчетверо боль-
шим их числом по сравнению с числом трактов) и осуществить кодирова-
ние 50 направлений. Ниже приведен пример распределения выходов ан-
тенн между шестью приемными трактами, использующий принятые ранее
буквенные обозначения трактов:
CDE, В, СЕ, АВ, DEF, С, AD, F, ABC, DE, BF, Е, ABF,
CD, АЕ, D, AEF, ВС, DF, AC, EF, BCD, A, BD, AF.
383
При использовании семи трактов возможно кодирование направления
приема в 50-антенном круговом пеленгаторе, что более чем вдвое превы-
шает число кодируемых направлений при тех же семи трактах и делении
выходов всех антенн на одинаковое число направлений (на два, как это рас-
сматривалось выше).
Разветвление выходов антенн на разное число ветвей (трактов) техни-
чески более сложно и может приводить к неравномерности потерь сигнала
при делении его на различное число выходов в разных антеннах, т.е. к не-
равномерност эффективной чувствительности многоканального пеленга-
тора в различных направлениях. При этом сама по себе процедура разветв-
ления сигнала на выходах антенн на несколько направлений и последую-
щего сведения их в меньшее число приемных трактов приводит к сниже-
нию эффективной чувствительности пеленгатора по отношению к структу-
ре с полным числом приемных трактов, равном числу антенн. Приведем
пример разводки выходов многолучевой двумерной структуры, содержа-
Рис. 8.20. Кодообразующая схема
соединений антенных трактов
15-антенного кругового пеленгатора
с пятью приемными каналами
и комбинаторным определением
сектора приема
щей 45 пространственно-избира-
тельных каналов, расширение ко-
торых в динамическом диапазоне
не превышает их полуширины в
любом направлении, на 10 прием-
ных трактов (А, В, С, D, Е, F, G, Н,
К, L), при которой обеспечивается
однозначность определения на-
правления как в случаях приема
сигнала по какому-либо одному
пространственно-избирательному
каналу, так и в случаях приема его
по соседним каналам (в зонах пере-
сечения ДН соседних лучей):
DH EG НК BF ЕН
CL В AF С AG D BL
АН DG HL DE ВН F АЕ
CF Е ВС А СК GL СН
GAKDL FH BD EF DK
BEHCEKCGLAC
GKAB FL AD ЕК
Составление схем разводки выходов антенн при использовании для
кодирования соединений с различным числом элементов (т.е. при исполь-
зовании различного числа выходов у разных антенн) производилось пу-
тем эмпирического подбора ввиду неразработанности и определенных
сложностей формализации методики нахождения оптимизированных
схем такой разводки, максимизирующей число используемых сочетаний
при кодировании направлений приема в круговом пеленгаторе.
384
8.4. Некоторые пути минимизации числа ложных
приемов и повышения разрешающей способности
приемно-пеленгаторных устройств аппаратуры
воздушной РТР
Особенностями условий работы самолетной аппаратуры разведки
излучений РЛС наряду с большим частотным диапазоном являются
весьма значительный динамический диапазон принимаемых сигналов за
счет разброса потенциалов разведуемых РЛС, дальностей до них и пе-
репада уровней сигналов, излучаемых по главным и боковым лепесткам
ДНА РЛС, а также скрытный и кратковременный характер излучений
ряда РЛС, работающих в паузном режиме или/и с быстрой перестрой-
кой параметров сигналов, в связи с чем для обеспечения беспропускной
разведки необходимо учитывать при обработке разрозненные и нерегу-
лярно принимаемые сигналы вплоть до отдельных импульсов. В этих
условиях одним из существенных требований к приемным устройствам
самолетной аппаратуры РТР с преобразованием частоты (панорамным
приемникам и транспонаторам поддиапазонов) становится минимизация
числа ложных по частоте приемов, возникающих при супергетеродин-
ном приеме за счет преобразования на гармониках частот сигнала и ге-
теродина при выполнении условия
|±<c±»/r|=F, (8.88)
где уё,/г - частоты сигнала и гетеродина соответственно; тип- номера
гармоник частот сигнала и гетеродина соответственно; F - промежуточ-
ная частота.
В качестве основного канала обычно используется один из кана-
лов, образуемых первыми гармониками:
1) разностный с нижней настройкой гетеродина
/C-/.=F; (8.89а)
2) суммарный
/с+/г = ^; (8-896)
3) разностный с верхней настройкой гетеродина
f~f.= F. (8.89в)
Остальные каналы приема при этом являются ложными и приводят
к размножению целей, что искажает воссоздаваемую радиотехническую
обстановку и повышает загрузку аппаратуры обработки, регистрации и
передачи данных, в связи с чем увеличивается вероятность пропуска ис-
тинных целей.
Обычным способом подавления ложных каналов приема является
включение на входе панорамного приемника узкополосного преселек-
тора, перестраиваемого сопряженно с гетеродином. Однако при исполь-
385
зовании в качестве гетеродинов генераторов с электронным управлени-
ем частотой, таких как ЛОВ или синтезатор, для реализации преиму-
ществ электронного управления настройкой приемника (возможность
регулировки полосы и скорости поиска в широких пределах, гибкость и
безынерционность управления, в качестве преселекторов) также долж-
ны применяться приборы с электронным управлением, что, с учетом не-
обходимости сопряжения закона перестройки преселектора с законом
перестройки гетеродина при работе в весьма широком частотном диапа-
зоне с перекрытием по частоте Pf(p/=fJfK, (где .4 ,fH - верхняя и нижняя
частоты диапазона) до двух и более значительно усложнит техническое
выполнение аппаратуры.
Так, например, система радиотехнической разведки PMR/USR [49,
50], осуществляющая поиск, обнаружение и анализ радиосигналов в
диапазоне 1... 18 ГГц с использованием трех антенн, работающих в диа-
пазонах частот 1...4, 4...8 и 8... 18 ГГц, где обзор по частоте в различ-
ных участках диапазона производится путем свипирования с перемен-
ной частотой от 0,3 до 300 ГГц/c, в качестве преселекторов применены
перестраиваемые ЖИГ-фильтры, а в качестве источника колебаний всех
гетеродинов используется синтезатор-возбудитель, обеспечивающий
электронную перестройку первых гетеродинов сопряженно с пере-
стройкой фильтров-преселекторов, имеет объем свыше 5 м3 при общем
весе 385 кг, что ограничивает область применения такой аппаратуры.
Поэтому в ряде случаев при проектировании самолетной аппара-
туры предпочтительным является использование других путей миними-
зации ложных приемов, в частности, путем установления оптимальных
в этом смысле соотношений между заданными (подлежащими разведке)
диапазонами частот сигналов и выбираемыми при проектировании при-
емных устройств аппаратуры разведки значениями промежуточной час-
тоты и диапазона перестройки частоты панорамного гетеродина. Крите-
рием оптимальности может быть сокращение числа и снижение уровней
комбинационных каналов приема (ККП) до условно приемлемого инте-
грального показателя, например, соответствующего некоторой расчетно
допустимой вероятности ложного обнаружения, усредненной по диапа-
зону панорамного обзора.
Оценка уровней ККП содержится в ряде книг и статей (в частности,
[6,51-56] и др.), однако экспериментальные данные разных источников
имеют большой разброс ввиду большого разнообразия схем, вариантов
технического выполнения и режимов работы исследованных преобразо-
вателей частоты, а расчеты уровней ККП, базирующиеся на каких-либо
аппроксимациях реальных характеристик различных типов преобразова-
телей, также носят приближенный характер за счет неизбежных неточно-
стей аппроксимаций и неполного учета всех влияющих факторов. Час-
тичная нейтрализация этих факторов и неточностей может иметь место
386
при расчетных оценках не абсолютных, а относительных уровней ККП,
т.е. степени ослабления приема по комбинационному каналу порядка т, п
относительно чувствительности приема по основному каналу; отношение
этих уровней, дБ является динамическим диапазоном приемника относи-
тельно комбинационного канала данного порядка £>ккп ,m,« [54].
При использовании достаточно распространенной экспоненциаль-
ной аппроксимации вольтамперной характеристики смесительного
СВЧ-диода по постоянному току величина выходного сигнала преобра-
зователя частоты при приеме по комбинационному каналу порядка т, п
согласно [55] определяется выражением
Рт.я=2Яо(/ое“£°)2^Ис)Л2(^г), (8-90)
где Ro, i0, а - выходное сопротивление, ток утечки и показатель нели-
нейности вольтамперной характеристики кристаллического диода соот-
ветственно; Uc, Ut - амплитуды переменных напряжений сигнала и ге-
теродина; Eq - смещение диода по постоянному току; 1т, 1„ - модифици-
рованные функции Бесселя 1-го рода порядков т, п соответственно.
Сходное выражение для амплитуды тока промежуточной частоты
на выходе смесителя, образованной m-й гармоникой сигнала (помехи) и
и-й гармоникой гетеродина в условиях, когда уровень помехи (сигнала)
может превышать уровень мощности гетеродина, приводится в [56]:
^.я=Чеа£оАп(«^)^(«^)- (8-91)
Поскольку в нашем случае уровни сигнала на входе смесительного
диода малы (микроватты и менее, вплоть до пиковатт), то aU«l и
функция Im(a.Uc) может быть аппроксимирована так же, как в [55], пер-
вым членом соответствующего ряда
„тгтт
(8-92)
Для выражения уровня выходного сигнала преобразователя через
входную мощность можно использовать подстановку t/2c = , где
/?вх-входное сопротивление смесительного диода. Приняв за характери-
стику уровня ККП порядка т, п отнесенную к пороговому входному
сигналу (рс) величину мощности сигнала на входе смесителя рвх при
которой уровень выходного сигнала смесителя для комбинационной со-
ставляющей данного порядка (рот,„) равен таковому для основного прие-
ма (ри) при пороговом значении мощности входного сигнала, на осно-
вании формул (8.90) и (8.92) имеем
Ръ\т,п
Рс
^т,п
т-1
( 2 рГ т
l«XxPcJ L 7»(aCZr).
(8.93)
387
Рис. 8.21. Относительное ослабление комбинационных каналов приема (D) при
разных сочетаниях гармоник сигнала (т) и гетеродина (и) для трех показателей
нелинейности смесительного диода («) и двух напряжений гетеродина (С7Г)
Рис .8.22. Зависимости уровней ККП от напряжения гетеродина
где pc-мощность сигнала на входе смесителя, соответствующая порого-
вой чувствительности приемника.
Как видно, динамический диапазон по ККП зависит от величины
порогового сигнала (реальной чувствительности) и характеристик сме-
сителя. На рис. 8.21 приведены графики ослабления ККП различных
порядков (т.е. динамического диапазона DmJ,), рассчитанные для поро-
гового сигнала рс = 1О“10 Вт При изменении величины порога на 10 дБ
степень ослабления меняется на 5 дБ для второй гармоники сигнала и на
7,5 дБ - для четвертой, уменьшаясь при снижении чувствительности.
Зависимости уровней некоторых ККП от напряжения гетеродина и
величины показателя нелинейности смесительного диода иллюстрируется
388
графиками на рис. 8.22, 8.23,
8.24. Отображенные на графи-
ках результаты расчетов оце-
нок динамического диапазона
по разным ККП имеют при-
ближенный характер, позво-
ляющий, однако, ранжировать
эти ККП по степени опасности
мешающего влияния их на
достоверность данных пано-
рамного анализа радиотехни-
ческой обстановки (или по ве-
роятности образования лож-
ных целей) с учетом относи-
тельных уровней ККП, обра-
зуемых различными конкрет-
Рис .8.23. Зависимости уровней ККП
по одноименным гармоникам
от напряжения гетеродина
ными сочетаниями номеров гармоник частот сигнала и гетеродина.
Рис. 8.24. Зависимости уровней ККП от показателя нелинейности
смесительного диода
Принятый в ряде источников способ характеристики ККП их поряд-
ком, т.е. числом, равным сумме номеров гармоник сигнала и гетеродина
|от|+|и|, не является информативным в обычных ситуациях супергетеро-
динного приема, когда уровень сигнала на несколько порядков меньше
уровня мощности гетеродина и зависимость уровня ККП от номеров их
гармоник (т и п) весьма различна. В частности, используемое в [52,53]
графическое представление величины ослабления различных ККП в зави-
симости от их порядка не дает возможности различить уровни ККП,
имеющих одинаковый порядок, но образуемых разными сочетаниями но-
меров гармоник и, как видно из приведенных графиков, значительно от-
личающихся по уровню. Это не позволяет использовать сгруппированные
таким образом данные для сопоставления с другими источниками и про-
389
гнозирования уровней тех или иных конкретных ККП. Например, каналы
5-го порядка, образуемые четырьмя возможными сочетаниями номеров
гармоник частот сигнала и гетеродина от первых до четвертых, отлича-
ются по уровням (величинам ослабления) на десятки децибел и их совме-
стное или усредненное представление без указания данных по отдельным
сочетаниям этих номеров неинформативно, в частности, и потому, что
практически не будет отличаться от подобного обобщенного представле-
ния уровней каналов других соседних порядков.
Приведенные в виде графиков на рис. 8.21-8.24 результаты рас-
четных оценок, а также имеющиеся в литературе экспериментальные
данные об относительных уровнях ККП позволяют полагать, что при
динамическом диапазоне входных сигналов около 30...35 дБ достаточ-
но исключить или хотя бы минимизировать возможность возникновения
мешающих ККП, в образовании которых участвует вторая гармоника
частоты сигнала, а при 40...45 дБ также и третья. Так, в [51] полагается
достаточным предотвратить возможность воздействия ККП, образуе-
мых сочетаниями второй гармоники сигнала и первой и третьей гармо-
ник гетеродина. При этом должны быть безусловно исключены ККП с
участием первой гармоники сигнала. Необходимость предотвращения
ККП, образуемого второй гармоникой сигнала и первой гармоникой ге-
теродина при динамическом диапазоне свыше ~30 дБ, ограничивает
максимальный диапазон панорамного обзора без применения преселек-
тора одной октавой. Для поиска в более широком диапазоне следует
иметь на входе преобразователя перестраиваемый преселектор, напри-
мер, в виде набора переключаемых широкополосных фильтров. Требо-
вание минимизации числа ККП, образуемых с участием второй и треть-
ей гармоник сигнала, будет являться одним из исходных требований
при выборе промежуточной частоты и способа преобразования наряду с
исключением приема по зеркальному каналу и ККП с первой гармони-
кой сигнала, а также обычных требований максимального перекрытия
по диапазону частот принимаемых сигналов pf и унификации по-
строения приемного тракта и гетеродинных устройств в смежных диа-
пазонах.
Варианты выбора промежуточной частоты панорамных приемни-
ков РТР. Известен ряд вариантов аналитических и графических методик
выбора промежуточной частоты (ПЧ) в широкодиапазонных панорам-
ных приемниках [22, 51-53, 57-61]. В аналитических методах выбор ПЧ
обычно производится исходя из заданной величины полосы обзора пу-
тем решения ряда неравенств, выражающих задаваемые ограничения и
условия исключения различных групп ККП (например, [57, 58]). Это
требует проведения достаточно громоздкой последовательности чис-
ленных расчетов и не дает наглядной связи между выбираемыми пара-
390
метрами и степенью пораженности просматриваемого диапазона частот
ложными приемами.
Более наглядными являются некоторые варианты графоаналитиче-
ской методики выбора ПЧ, представляющие множество вытекающих из
основного уравнения супергетеродинного приема (8.88) разновидностей
совместного расположения по частоте ККП с различными сочетаниями
номеров гармоник и основного канала приема при разных типах преоб-
разования в виде совокупности линий, анализ взаимного расположения
которых на графиках позволяет найти области с наименьшим количест-
вом ККП заданного вида. Однако и эта методика не исключает необхо-
димости выполнения дополнительных расчетов для нахождения точных
оптимальных значений искомых параметров, максимизирующих вели-
чину частотного перекрытия панорамного приемника с учетом задан-
ных критериев и ограничений.
Для выбора основных соотношений в приемнике, позволяющих
максимизировать перекрытие при панорамном приеме без перестраи-
ваемого преселектора или при конвертировании диапазонов в многока-
нально-функциональном приемнике с последовательным транспониро-
ванием поддиапазонов, более удобно иметь формульные соотношения и
графики, в явном виде представляющие зависимость достижимого пе-
рекрытия по входному диапазону от соотношений входных и выходных
частот в преобразователе с учетом порядков ККП и гармоник частот ге-
теродина и сигнала. Такие соотношения и графики можно получить из
(8.88) путем выражения зависимости коэффициента частотного пере-
крытия входного (сигнального) диапазона , равного отношению
крайних частот перекрываемого диапазона входных сигналов приемни-
ка Рус=^св//сн, гдеТсв ,7сн _ верхняя и нижняя частоты перекрываемого
диапазона, от искомых и задаваемых параметров и порядка ККП.
Панорамные приемники без преселектора. В панорамном приемнике
без преселектора для трех возможных типов преобразования (8.89 а,б,в),
каждый из которых принципиально может быть использован в качестве
основного канала приема, при перестройке приемника в диапазоне
входных частот частота гетеродина (4) должна изменяться соответст-
венно в пределах
/сн-^<Л< Pfcfm~F, (8.94а)
F- P/cfm<fr<F-fm, (8.946)
F+f™<fr<F+ pfcfm. (8.94b)
При этом условия наличия ККП порядков т, п в диапазоне обзора
с перекрытием р^ при использовании в качестве основного преобразо-
391
вания типа (8.89а), (8.896), а при использовании в качестве основного
канала приема преобразования типа (8.89в) - будут определяться систе-
мами уравнений
F=\±m p/cfm± n(pff№-F) j,
F=\±mp/cfm±n(fm-F)\, (8.95)
F = I ± mfCH ± h( pfJm - F) |,
F = | pfcfw ± w(F + рЛ/сн) I,
F = | ± m pfJm ± h(F +/c„) I.
F = | ± m/CH± n(F + рЛ/сн) I-
(8.96)
Из уравнений (8.95) и (8.96) можно получить выражения, опреде-
ляющие достижимый коэффициент перекрытия панорамного приемника
с учетом ККП различных порядков в зависимости от величины отноше-
ния F/fсн . При использовании в качестве основного преобразования ти-
пов (8.89а), (8.896) эти выражения имеют вид
, F р
Й±ОТ/СН’ Л п fm п’
и + 1 F п п и±1 F
р _ - , р----------------
т fm т Jc т т fCK
(8.97)
и образуют 12 отдельных уравнений.
Для преобразования типа (8.89в) из условий (8.96) получаются
шесть уравнений, которые могут быть представлены как
и±1 F п + 1 F п т и±1 F
------, pf =-----+—, р( ---------.
т-п /сн ' т / т ‘ п п
(8.98)
Неблагоприятные значения ПЧ, при которых ККП данных поряд-
ков совпадают с основным каналом приема в начальной (низкочастот-
ной) точке входного диапазона, для типов преобразования (8.89а,б) и
(8.89в) определяются соответственно из соотношений
F п + т
/сн И±1 ’
F _т-п
fen п - 1
(8.99)
(8.100)
которые получаются из уравнений (8.95) и (8.96) при р^ = 1.
392
Определение оптимальных значений ПЧ, обеспечивающих макси-
мальное перекрытие, может быть произведено из вышеприведенных
уравнений или, что более удобно, из построенных по этим уравнениям
совмещенных графиков зависимости от значения F!fCM для ККП
различных порядков.
Графики для типов основного приема (8.89а,б) приведены на
рис. 8.25, для типа (8.89в) - на рис. 8.26. На графиках отображено боль-
шинство параметров, определяющих величину перекрытия ККП; выде-
лены линии, ограничивающие перекрытие по каналам относительно
низких порядков (т=1,2 и п<4,5). Номера гармоник частот сигнала (т) и
гетеродина (и), образующих данный ККП, указаны над соответствую-
щими им линиями. Графики позволяют произвести сравнительную
оценку числа и порядков ККП и достижимого с их учетом перекрытия
для всевозможных вариантов преобразования и определить оптималь-
ные значения ПЧ в различных частных случаях. Так, из графика на
рис. 8.25,а видно, что применение разностного преобразования с ниж-
ней настройкой гетеродина (тип 8.89а) при динамическом диапазоне
(ДЦ) входных сигналов свыше 30...35 дБ не дает возможности получить
перекрытие больше 1,08... 1,1. Суммарное преобразование (тип 8.896)
принципиально позволяет получить перекрытие до 1,5...2 при большом
ДД сигналов, но при этом требуется использовать сверхвысокую про-
межуточную частоту (СВПЧ), значительно (в 6-8 и более раз) превы-
шающую частоту входных сигналов. Разностное преобразование с
верхней настройкой гетеродина (тип 8.90в), при котором ПЧ может
быть как меньше, так и больше частоты сигнала, дает меньшее число
ККП, причем линии приемов по низким гармоникам сигнала, в основ-
ном ограничивающие перекрытие, в этом варианте располагаются на
графике выше, чем в вариантах (8.89а,в).
Как можно заключить из сравнения приведенных графиков пере-
крытия, этот тип преобразования является наиболее предпочтительным
для использования в широкодиапазонных панорамных супергетеродин-
ных приемниках без перестраиваемого преселектора. Так, если считать
ограничивающими перекрытие ККП порядков четвертого и ниже, то в
области F/fсн <1 при некоторых оптимальных значениях F/fm, соответст-
вующих области высоких ПЧ (F=0,4/CH, 0,25/сн, 0,667/Сн, 0,883/сн), может
быть получено перекрытие до 1,2... 1,33. При использовании сверхвысо-
кой ПЧ (СВПЧ), в 4...5 раз превышающейyiH, возможно получение пе-
рекрытия до 2 при ДД сигналов до 40...50 дБ; ограничивающим в этом
случае является ККП вида
Величина перекрытия по частоте перестраиваемого гетеродина
может быть выражена через параметры р^ и Flfm соотношениями
для преобразований типа (8.89а), (8.896). (8.89в) соответственно:
393
б)
Рис. 8.25. Зависимости от значения F/fc„ для преобразования с выделением
разностной (а) и суммарной (б) ПЧ при нижней настройке гетеродина
394
Рис. 8.26. Зависимости от значения F/fCH для преобразования с выделением
разностной ПЧ при верхней настройке гетеродина
о
/Г6 F/fm-pf/
.F!fea+pfc
Р/Т‘ + l ‘
(8.101а)
(8.1016)
(8.101b)
Сравнительная оценка требуемых при разных типах преобразова-
ния перекрытий по частоте гетеродина показывает, что при разно-
стном преобразовании с верхней настройкой гетеродина (8.101в) требо-
вания к перекрытию ниже, чем при других типах преобразования. В ча-
стности, применение СВПЧ позволяет использовать гетеродинное уст-
ройство с перекрытием всего в 1,4... 1,6 в приемнике с общим перекры-
тием около 10, причем величина СВПЧ может быть в ~1,5 раза ниже,
чем при использовании суммарного преобразования (8.896).
Графики, построенные по (8.97), (8.98), позволяют произвести вы-
бор оптимальных значений первой ПЧ для панорамного супергетеро-
динного приемника без узкополосного перестраиваемого преселектора
при различных типах преобразования и определить число и порядки
ККП в диапазоне перестройки. В случае необходимости учета влияния
на перекрытие величины полосы пропускания по ПЧ (ДГ=Нв-Рн, где FB,
FH - верхнее и нижнее значение ПЧ) это может быть произведено путем
проверки принятого критерия перекрытия по графику в двух точках
приведенного значения ПЧ FJfcn и FJf.H, соответствующих краям поло-
сы пропускания ПЧ.
395
Уравнения, связывающие коэффициент частотного перекрытия по
входу с относительной величиной ПЧ и частотой гетеродина при широ-
кополосном преобразовании (конвертировании или транспонировании,
т.е. переносе) отдельных участков диапазона из области высоких частот
в более низкочастотную область или наоборот, могут быть получены
путем, аналогичным использованному при выводе соотношений (8.97) и
(8.98). Учитывая, что частота (фиксированная) транспонирующего гете-
родина f^ для основных типов преобразования (8.89а,б,в) выражается
соответственно как
/тг=/сн-^н, (8.102а)
/тг=^н-/сн, (8.1026)
/rr=F„ + p/CH, (8.102b)
где Fn — нижняя частота выходного диапазона транспонатора, условия
наличия ККП порядков т, п при перекрытии по входу р/ и при исполь-
зовании преобразований типов (8.89а,б) могут быть записаны в виде
FH = | ± т pffm± n(fa,~ F„) I,
FH+ (pz Су-1)/"сн= | ± mfcn± n(fc„-FH) I, (8.103)
FH + (Pj 1)/сИ _ ± mpffzn zb и(/сн — F„) I,
и при использовании преобразования типа (8.89в) -
F„ = | ± щ/с„± n(pffCH + Fa) I,
F„ = | ± wp/сн ± n(pffm + F„) I, (8.104)
FH+ (Р/-1Усн= I ± n(pffCH + F„) I,
+ (Pf 1)/ch~~ 1 ± Wp/сн± n(pffm~b FH) |.
Полученные из (8.103) выражения для коэффициента перекрытия
по входу транспонатора pf могут быть представлены в виде следующих
групп:
и±1 F п п и±1 F„
f ™ т ™ т fm
Pf (8.105)
* — W V Jen J \ Jen J
и образуют 12 отдельных уравнений. Вытекающие из (8.103) при р/=1
неблагоприятные соотношения частот, соответствующие наличию ККП
или гармоник на выходе транспонатора независимо от величины пере-
крытия по входу (т.е. в низкочастотном конце входного диапазона), оп-
ределяются выражением, аналогичным формуле (8.99):
FH _п±т
fen п +1
(8.106)
396
При транспонировании с разностным преобразованием и верхней
настройкой гетеродина (тип (8.89в) уравнения (8.104)) выражения для
коэффициента перекрытия по входу представляются в следующем виде:
т и±1 F„
П п /сн
2.
т + 1
Pf~~n + \
(8.107)
Построенные по уравнениям (8.105) и (8.107) графики перекрытия
входного диапазона при транспонировании для разных типов преобра-
зования представлены на рис. 8.27 и 8.28. Часть линий ККП относи-
тельно высоких порядков, располагающихся в наиболее насыщенных
участках графиков (область FJfCii=\...2 на рис. 8.27,6), во избежание из-
лишней перегрузки графика не показана.
Приведенные на рис. 8.27, 8.28 графики позволяют практически
без каких-либо дополнительных вычислений производить выбор опти-
мальных соотношений при транспонировании диапазонов с учетом ККП
разных порядков. Из графиков видно, что разностное преобразование с
верхней настройкой гетеродина при транспонировании так же, как при
панорамном приеме, дает меньшее число ККП; преобразование «вверх»
(в область СВПЧ) позволяет получить перекрытие по входу до двух без
помех от ККП в значительном ДД (до 40...50 дБ). При транспонирова-
нии с понижением частоты наряду с неблагоприятными значениями ПЧ
существует ряд относительно оптимальных значений (77н/4в=0,167; 0,25;
0,6; 0,67), определяемых непосредственно из графиков и обеспечиваю-
щих перекрытие до 1,1... 1,3 при минимальном числе ККП на выходе
преобразователя. Рассмотрение рациональной разбивки конвертируемо-
го диапазона на поддиапазоны в [61] производится на базе именно этого
типа преобразования.
Другой вариант отображения степени пораженности, т.е. величины
относительной части диапазона, где имеют место те или иные ККП, и
расположения их в диапазоне входных частот можно получить при ис-
пользовании графического представления совместного расположения по
397
б)
Рис. 8.27. Графики перекрытия входного диапазона при транспонировании для
преобразования с выделением разностной (а) и суммарной (б)
ПЧ при нижней настройке гетеродина
398
преобразования с выделением разностной ПЧ с верхней настройкой гетеродина
частоте ККП с различными сочетаниями номеров гармоник и основных
каналов приема при разных типах преобразования на обобщенном гра-
фике преобразования частоты, построенном по основному уравнению
(8.88), приведенному к виду
|±»?х±пу| = 1, (8.108)
v№x=feIF,y=fvl F.
На графике рис. 8.29 представлено расположение разностных ос-
новных и комбинационных каналов приема, образуемых гармониками
частот сигнала и гетеродина вплоть до пятых номеров. Линии основных
(или основного и зеркального) каналов приема на графике соответству-
ют уравнениям у-х=1 и х-у=1. Максимальная величина перекрытия
диапазона частот сигнала р^, свободного от приема по зеркальному
каналу при данной настройке гетеродина (у), может быть определена из
соотношений хв = у+1, ха = у-1 и = хв/х„ = (у+1 )/(у-1). При использо-
вании в панорамном приемнике дециметрового и сантиметрового диа-
пазона первой ПЧ в области до 200...250 Мгц, достаточно типичной для
аппаратуры РТР (например, [49-51]), соответствующие значения х и у
будут лежать в пределах от нескольких единиц до нескольких десятков
(до сотни) и величина перекрытия pf°, ограничиваемая зеркальным ка-
налом приема, в большей части диапазона не превышает 10-20%.
Если учитывать возможность приема ККП вида ±2х±2у, линии ко-
торых находятся между линиями основного и зеркального приемов, ве-
личина диапазона, свободного от ложных приемов, будет еще значи-
тельно меньше. В этих условиях осуществление панорамного обзора в
требуемом широком диапазоне (с перекрытием 1,5-2 и выше), будет
приводить к размножению целей в два и более раз.
399
Рис. 8.29, Обобщенный график преобразования частоты
Применение сложных схем преобразователей частоты с фазовым
подавлением зеркального канала [35, 36] в широкодиапазонных пано-
рамных приемниках, работающих в указанном большом ДД, малоэф-
фективно и могло бы быть использовано лишь для формирования при-
знака различения приема по прямому (основному) и зеркальному кана-
лам при определении частоты принимаемого сигнала по значению час-
тоты панорамного гетеродина в момент приема. Эти недостатки практи-
чески устраняются при использовании низкой («нулевой») ПЧ-порядка
единиц МГц, как в панорамном приемнике диапазона 2...4 ГГц
[63],описанном в [21, 22]. При этом отметка принимаемого сигнала на
экране панорамного индикатора (ЭЛТ) имеет вид двух зеркально распо-
ложенных относительно частоты гетеродина пачек импульсных сигна-
лов, имеющих форму огибающих полосы пропускания УПЧ, разнесен-
ных на удвоенную частоту среза низких частот этой полосы. Величина
частоты среза должна соответствовать наибольшей возможной ширине
спектра видеоимпульсов сигналов РЛС для предотвращения эффекта
прямого детектирования принимаемых радиоимпульсных сигналов [51].
Для определения частоты принимаемых сигналов на панорамную
развертку выведены частотные метки, имеющие вид провалов на раз-
вертке, от пяти маркерных резонаторов, формируемых в моменты сов-
падения частоты панорамного гетеродина с фиксированными частотами
настройки резонаторов.
Более точное определение частот сигналов возможно путем ис-
пользования перестраиваемого резонатора-волномера, метка которого
400
перемещается по развертке до совмеще-
ния с серединой провала между двумя
отметками (огибающими полосы УПЧ)
принимаемого сигнала, соответствую-
щей нулевой частоте биений, т.е. часто-
те гетеродина в момент приема данного
сигнала. Наличие такого волномера соз-
дает также возможность остановки и
длительного удержания настройки при-
емника (т. е. частоты гетеродина) на
выбранном сигнале путем включения в
этом режиме АПЧ гетеродина под час-
а) б)
Рис. 8.30. Отметки сигналов
импульсных РЛС и метка
волномера на панорамном
индикатореприемника
с «нуль-ПЧ»:
а) - одна РЛС; б) - три РЛС
тоту резонатора. Возможный вид участка развертки с отметками при-
нимаемых импульсных сигналов и меткой волномера (огибающей его
резонансной кривой) в обратной полярности, совмещенной с центром
отметки сигнала, показан на рис. 8.30. При необходимости сужения от-
метки волномера, ширина которой определяется добротностью его кон-
тура и может оказаться соизмеримой с отметкой сигнала, что ухудшит
его наблюдаемость, возможно применение процедуры двойного диффе-
ренцирования огибающей метки, приводящей к ее сжатию подобно то-
му, как это рассматривается в [22,64] применительно к обработке сигна-
ла в виде колоколообразного импульса (в нашем случае - «провала»),
К недостаткам панорамного приемника с низкой («нулевой») ПЧ
можно отнести снижение разрешающей способности по частоте ввиду
расширения более чем вдвое участка развертки, занятого отметкой сиг-
нала, за счет последовательного приема по прямому и зеркальному ка-
налам с разносом их на удвоенную частоту среза нижних частот тракта
ПЧ, как это видно из рис.8.30, и значительные искажения амплитудных
и фазовых характеристик принимаемых коротких импульсных сигналов,
обусловленные малым числом периодов высокочастотного заполнения
импульсов при низкой (порядка единиц МГц) промежуточной частоте.
Так, при ПЧ в пределах, например, 3.. .5 МГц и длительности импуль-
са 0,5...1 мкс в приемном тракте успевает сформироваться, в среднем,
лишь 2...4 периода колебаний, причем частота заполнения последователь-
но принимаемых сигналов в процессе свипирования изменяется от верхней
частоты ПЧ до нижней и обратно. В этих условиях сигналы на выходе УПЧ
будут представлять собой короткие отрезки переходных процессов, раз-
личных для последовательных импульсов с разной частотой заполнения,
что не дает возможности получения необходимой для анализа и пеленгова-
ния информации об амплитудных и, особенно, о фазовых соотношениях
принимаемых сигналов, время установления которых может превышать
время установления амплитуды более чем в 1,5 раза [65].
Согласно [21, 22] для формирования огибающей импульсов необ-
ходимо иметь 5... 10 периодов колебаний ПЧ. Повышение верхней час-
401
тоты УПЧ (до 15...20 МГц) частично устранит этот недостаток, но еще
более ухудшит разрешающую способность и повысит вероятность со-
вместного попадания в полосу приемника сигналов нескольких РЛС.
К тому же для ведения разведки в требуемом широком диапазоне час-
тот-с перекрытием Сус не менее 10, в связи с ограниченной диапазонно-
стью перестраиваемых гетеродинных устройств (ЛОВ, ГДГ) необходи-
мо иметь набор из нескольких приемников, в том числе с использовани-
ем в качестве гетеродина синтезатора (как в [49, 50]), либо применять
транспонирование нескольких частотных диапазонов в один базовый
диапазон. Ввиду этих недостатков и ограничений приемники с «нуль-
ПЧ» не нашли широкого применения в аппаратуре РТР.
Исключение зеркального приема. Преимущественным путем расшире-
ния свободного от зеркального приема диапазона панорамного обзора в
аппаратуре РТР стало применение двойного преобразования частоты с
высокой первой промежуточной частотой, повышенной до возможного и
технически рационального для каждой конкретной аппаратуры предела.
Так, в системе радиотехнической разведки [49,50] используется
первая ПЧ 250 МГц, что принципиально позволяет вести панорамный
обзор в участке диапазона шириной до 500 МГц без приема зеркальной
помехи. В низкочастотной части диапазона данной системы этому соот-
ветствует участок 1000... 1500 МГц, а на графике рис. 8.26 - значения
х=4...6 при верхней настройке гетеродина. Область панорамного прие-
ма на графике при этом будет отображаться в виде прямоугольника
(квадрата), диагональю которого является отрезок линии основного
приема у-х = 1 между вышеуказанными значениями х, как показано на
рис. 8.29 (область 7), причем высокочастотная граница области (правый
нижний угол квадрата) касается линии зеркального приема х-у = 1, а
низкочастотная (противоположный угол) - линии ККП второй гармони-
ки сигнала 2х-у =1.
Проходящие через область приема линии ККП, образованных раз-
личными сочетаниями номеров гармоник сигнала и гетеродина, нагляд-
но отображают число и расположение ложных каналов приема в диапа-
зоне частот, что позволяет непосредственно оценить долю диапазона,
пораженную тем или другим ККП, определить требования к преселек-
тору и сравнить эти параметры при различных расположениях области
приема на графике, т.е. для различных значений обобщенной частоты
гетеродина «у». Так, в пределах показанной на графике области 7 из
двадцати имеющихся ККП три образованы с участием второй гармони-
ки гетеродина - 2у-2х =1, 2х-2у =1 и Зу-2х =1, причем первый из них
расположен вблизи основного канала у-х =1 и при отсутствии на входе
преобразователя частоты узкополосного преселектора может быть при-
чиной образования ложных по частоте целей при поиске практически во
всем диапазоне.
402
Положение области с перекрытием р^ =2 по критерию отсутствия
в ней зеркального канала приема может быть найдено из условия
р^ = хв/х„ = (у+1)/ (у-1) =2, чему соответствуют значения у=3, хв=4,
хн=2. В квадрате с диагональю у-х=1 и границами хн=2 и хв=4 находится
22 ККП, из которых 3 образовано с участием второй гармоники сигнала
2х~у =1, присутствующей примерно в половине диапазона, 2у-2х =1 -
в ~70% диапазона и 2х-2у =1 - в ~25% диапазона.
Возможно увеличение перекрытия диапазона частот перестройки
приемника без зеркальной помехи до трех путем дальнейшего повыше-
ния ПЧ вплоть до сближения ее с нижней частотой диапазона панорам-
ного обзора (х„=1, у=2, хв=3), когда возникнет возможность прямого
прохождения сигнала (помехи) через тракт ПЧ независимо от текущей
настройки гетеродина. Эта область содержит 28 ККП, из которых 4 - с
участием второй гармоники сигнала (2х-у, 2у-2х, 2х-2у, и Зу-2х),
имеющих ослабление относительно основного канала приема ориенти-
ровочно в пределах около 25...30 дБ.
Таким образом, при проектировании панорамных приемных уст-
ройств, предназначаемых для работы в ограниченном динамическом
диапазоне принимаемых сигналов (не превышающем 30 дБ), примене-
ние высокой первой промежуточной частоты, лежащей вблизи низко-
частотной границы входного диапазона частот, позволяет исключить
прием по зеркальному каналу при панорамном обзоре весьма широкого
диапазона (с перекрытием до двух и даже трех) без применения пере-
страиваемого преселектора.
Исключение помех от каналов комбинационного приема. При необ-
ходимости исключения помех от ККП в большем динамическом диапа-
зоне - до ~40...45 дБ, т.е. ККП с вторыми и, возможно, с третьими гар-
мониками частоты сигнала, определение возможной величины перекры-
тия диапазона панорамного приема и соответствующих оптимальных
значений ПЧ с использованием графика (см. рис. 8.29) становится менее
наглядным и требующим перебора и численного сравнения вариантов.
Более удобно использовать приведенную выше методику выбора
оптимальных типов преобразования и значений ПЧ панорамного при-
емника по графикам перекрытия рис. 8.22 и 8.23. Для преобразования
типа (8.89в) - с верхней настройкой гетеродина, оптимальные относи-
тельные значения ПЧ, определяемые непосредственно из графиков
(см. рис. 8.23), соответствуют точкам хн=2,5 и х„=1 (области 2А и 2Б на
графике рис. 8.29) и обеспечивают возможность панорамного обзора без
помех от ККП с вторыми гармониками сигнала в диапазоне с перекры-
тием до 1,2 (область 2А) и до 1,5 (область 2Б).
Из графиков на рис. 8.25, 8.26 также видно, что при дальнейшем
существенном повышении ПЧ до значений, превышающих верхнюю час-
403
тоту диапазона принимаемых сигналов в два и более раз (область сверх-
высоких промежуточных частот-СВПЧ), становится возможным осуще-
ствить панорамный прием в диапазоне с перекрытием до двух без помех
от вторых гармоник, а при ПЧ>ХВ (область 3 на графике рис. 8.29) - и без
помех от третьих гармоник сигнала и ККП с их участием, что позволяет
исключить возникновение ложных целей при работе в динамическом
диапазоне входных сигналов до 40.. .50 дБ.
При необходимости исключения мешающего влияния более высо-
ких гармоник и образуемых ими ККП это может быть достигнуто соот-
ветствующим повышением ПЧ с перемещением области приема на гра-
фике (см. рис. 8.29) в район малых значений х (х<0,125...0,1). Дополни-
тельным достоинством приемника с СВПЧ является возможность ис-
пользования в качестве гетеродина электронного прибора (например,
ЛОВ), перестраиваемого в диапазоне с относительно небольшим час-
тотным перекрытием, для панорамного приема сигналов в весьма широ-
ком диапазоне - до нескольких октав. Это преимущество СВПЧ исполь-
зуется, в частности, в приемнике [66] с перекрытием =11 (от 50 до
550 МГц), где применение первой ПЧ 2 ГГц позволило осуществить пе-
рестройку во всем диапазоне с подавлением гармоник на 60 дБ при пе-
рестройке частоты первого гетеродина в пределах 2,05...2,55 ГГц
(р/г«1,25).
Требуемое перекрытие диапазона частот перестройки гетеродина
при верхней настройке (вариант преобразования (8.89в)) может
быть выражено через диапазон панорамного приема и величину ПЧ как
Рр = (1+хв)/(1+х„) (8.109)
и уменьшается при повышении СВПЧ (т.е. при уменьшении х„ в области
х<1). Коэффициент шума смесителя в приемнике с СВПЧ рассматри-
вался в [67].
Применение СВПЧ позволяет решить задачу создания широкодиа-
пазонного супергетеродинного панорамного приемника, осуществляю-
щего поиск в полосе частот с перекрытием до двух без образования
ложных целей за счет ККП в динамическом диапазоне входных сигна-
лов до 45...50 дБ и более при использовании в качестве преселектора
неперестраиваемого широкополосного фильтра. Фильтр должен обеспе-
чивать затухание на низкочастотной границе диапазона, достаточное
для доведения результирующего подавления ККП вида у-2х =1 до за-
данной величины рабочего ДД аппаратуры. Если этот диапазон относи-
тельно невелик (не превышает 30 дБ) и возможностью возникновения
или мешающим влиянием ложных приемов с участием вторых гармоник
сигнала можно пренебречь, приемник с СВПЧ, в два и более раз пре-
вышающей максимальную частоту разведываемого диапазона частот,
404
позволяет осуществить панорамный обзор в полосе с перекрытием, ог-
раничиваемым лишь широкополосностью антенных и входных уст-
ройств.
Например, низкочастотный участок диапазона вышеупомянутой
станции PMR/USR [49,50] 1...4 ГГц (/?ус = 4) при первой ПЧ 8 ГГц пе-
рекрывается с помощью гетеродина, перестраивающегося в диапазоне
9... 12 ГГц (/?уг =1,33), а применение первой ПЧ 16 ГГЦ принципиально по-
зволяет осуществить непрерывную перестройку приемника и панорамный
прием в диапазоне 1.. .8 ГГц (р;^ =8) при перестройке гетеродина при этом
в диапазоне 17.. .24 ГГц, т.е. с перекрытием () всего около 1,4.
При работе в динамическом диапазоне, превышающем 30 дБ, по-
давление основного помехообразующего ККП вида у-1х при перестрой-
ке во всем диапазоне может производиться путем поочередного под-
ключения к входу преобразователя частоты с помощью СВЧ-переклю-
чателя широкополосных фильтров с примыкающими полосами пропус-
кания и перекрытием около октавы, имеющих требуемое затухание на
низкочастотной границе полосы, как указывалось выше. Создание пере-
страиваемой частотной метки на панорамном индикаторе с обеспечени-
ем возможности остановки перестройки и удержания настройки прием-
ника на выбранном сигнале реализуется при использовании в качестве
свипирующего гетеродина-такого прибора, как ЛОВ, аналогично изло-
женному выше с применением резонатора-волномера, перестраиваемого
либо в диапазоне частот гетеродина непосредственно, либо в транспо-
нированном к диапазону частот сигнала участке с помощью второго ге-
теродина, преобразующего сигнал первой ПЧ (СВПЧ) в диапазон вто-
рой ПЧ (например, 60 МГц, как в [49, 50]).
Применение СВПЧ в приемном устройстве с синхронным гетероди-
ном. Частота гетеродина отличается от частоты входного сигнала во
всем диапазоне перестройки на определенное фиксированное значение.
Такие устройства применяются, в частности, в фазовых пеленгаторах и
фазометрической технике для переноса информации об измеряемых
разностях фаз на фиксированную стабильную промежуточную частоту
[11,68,69] или для стабилизации ПЧ при уходах частоты гетеродина
[70]. Формирование синхронного гетеродинного сигнала производится с
помощью схем с многократным гетеродинированием и фильтрацией
[11] либо схем с применением модуляторов одной боковой полосы
(ОБП) [69].
В первом варианте при простейшем его выполнении-с двойным
преобразованием частоты - входной сигнал^ наряду с подачей на пер-
вый смеситель (или смесители, если приемник многоканальный) пода-
ется также на дополнительный смеситель, другой вход которого запитан
от фиксированного гетеродина с частотой F. На выходе смесителя
405
включен полосовой фильтр, выделяющий либо полосу суммарных час-
тот от F+уён до F+pf/m (преобразование типа (8.896)), либо полосу разно-
стных частот от F- pf fm до F-fm, и усилитель выходного сигнала до-
полнительного смесителя до уровня, достаточного для эффективного
гетеродинирования. Этот выходной сигнал подается на гетеродинный
вход первого смесителя, на выходе которого в результате преобразова-
ния либо разностного вида (F + /с) - fe=F, либо суммарного (F - fc) +
+fe=F, образуется сигнал со стабильной ПЧ, значение которой F остает-
ся неизменным при изменении частоты входного принимаемого сигнала
во всем диапазоне от /сн до fm=pfcfm [11].
Такие схемы с многократным преобразованием могут рассматри-
ваться как вариант систем фильтрации с возвратным гетеродинировани-
ем [71], используемых, в частности, в гетеродинных трактах приемни-
ков и синтезаторах сетки частот.
В схемах с модулятором ОБП гетеродинный сигнал, т.е. сигнал,
смещенный по частоте относительно принимаемых сигналов на величи-
ну промежуточной частоты, формируется с использованием либо ли-
нейной фазовой модуляции с помощью ЛБВ или фазовращателя анало-
гично тому, как это описано в [5,46] применительно к формированию
сигнала помехи, либо путем фазовой селекции одной боковой полосы
гармонически модулированных сигналов с использованием балансных
модуляторов. Вход и выходы устройства смещения частоты на базе мо-
дулятора ОБП подключаются к входу приемника и гетеродинным вхо-
дам первых смесителей соответственно, как это представлено в [69] (ва-
риант с модулятором ОБП в общем тракте), т.е. так же, как подключены
вход и выходы охарактеризованного выше устройства смещения с
двойным гетеродинированием.
Приемники с синхронным гетеродином позволяют осуществлять
безнастроечный прием и обработку (амплитудное и фазовое мгновенное
сравнение) сигналов в полосе частот, в том числе сигналов с быстрой
(поимпульсной) перестройкой частоты, что необходимо для обнаружения
и пеленгования кратковременных и скрытных излучений, особенно в ус-
ловиях острого дефицита времени разведки и последующей реакции.
Такие условия характерны, в частности, для работы корабельных
пеленгаторов [47,48], представляющих собой пеленгационные системы
с набором направленных антенн и соответствующих приемных каналов,
гетеродинные входы смесителей которых запитаны от общего для всех
каналов устройства сдвига частоты. Вход устройства сдвига (модулято-
ра ОБП) подключен к отдельной всенаправленной антенне. Определе-
ние пеленга принимаемого сигнала производится в результате мгновен-
ного сравнения сигналов в каналах, выполняемого на фиксированной
промежуточной частоте.
406
В системе [47] имеются также частотные дискриминаторы для
мгновенного определения частоты сигналов. В самолетной аппаратуре
РТР преимущественно используются многобазные фазовые пеленгато-
ры с измерением разностей фаз сигналов по промежуточной частоте-на
выходах трактов ПЧ многоканального супергетеродинного приемника,
перестраиваемого в диапазоне частот. Такой пеленгатор обеспечивает
возможность мгновенного приема и точного пеленгования радиосигна-
лов в достаточно широком секторе углов - до 90°...100°, однако после-
довательный характер обзора частотного диапазона перестраиваемым
приемником позволяет достоверно обнаруживать лишь излучения, вре-
мя существования которых больше времени перестройки приемника в
диапазоне частот. Прием и пеленгование кратковременных излучений и
сигналов с быстрой перестройкой несущей частоты при этом будет
иметь вероятностный характер. Беспропускное обнаружение и фазовое
пеленгование таких сигналов принципиально возможно осуществить
при помощи применения синхронного гетеродинирования с использо-
ванием устройства сдвига частоты в виде модулятора ОБП или охарак-
теризованной выше схемы с преобразованием частоты и фильтрацией
гетеродинирующего сигнала.
Точность фазовых измерений в схемах с переносом сигналов на
фиксированную ПЧ с помощью устройств сдвига в значительной степе-
ни определяется степенью подавления зеркальной и комбинационных
спектральных составляющих в составе выходного сигнала устройства
сдвига частоты, взаимодействие которых в смесителях приемника при-
водит к возникновению побочного сигнала промежуточной частоты с
произвольным сдвигом фазы [69]. В схемах с модуляторами ОБП, где
разделение полос и подавление зеркальной боковой частоты произво-
дится путем фазовой селекции, достижимая величина подавления огра-
ничивается, так же как в смесителях с фазовым подавлением зеркально-
го канала, неизбежными неидентичностями фазовых и амплитудных ха-
рактеристик элементов схемы в диапазоне частот и динамическом диа-
пазоне, особенно в столь широких пределах - с перекрытием порядка
октавы и перепадом уровня до нескольких десятков децибел.
В то же время, как можно заключить из приведенных выше мате-
риалов, при использовании синхронного гетеродинирования в прием-
ном устройстве с СВПЧ может быть обеспечено глубокое подавление
зеркальной и комбинационных помех (на 40...45 дБ и более) в широком
диапазоне частот входных сигналов относительно простыми техниче-
скими средствами - с помощью неперестраиваемых частотно-избира-
тельных устройств (СВЧ-фильтров). Выбор оптимальной величины
СВПЧ и оценку наличия и порядков ККП в приемнике с синхронным
гетеродином можно произвести с использованием приведенных выше
графиков зависимости перекрытия от относительной величины ПЧ при
407
панорамном приеме и широкополосном транспонировании частотных
диапазонов для суммарного и разностного вариантов преобразования.
Анализ методов ослабления комбинационных помех в более сложных
системах с возвратным гетеродинированием содержится в [71].
Таким образом, применение СВПЧ совместно с использованием
синхронного гетеродина на базе устройства сдвига с преобразованием
частоты и фильтрацией принципиально позволяет создать безнастроеч-
ный супергетеродинный многоканальный приемник фазового пеленга-
тора, обеспечивающий возможность мгновенного (беспоискового)
приема и пеленгования сигналов в широком диапазоне частот и углов
[11]. При включении в состав такого приемно-пеленгаторного устройст-
ва также функционального мгновенного измерителя частоты (например,
как в [5] или [47]) и анализатора внутриимпульсной частотной модуля-
ции, подсоединенных к выходу преобразователя устройства сдвига (т.е.
к тракту гетеродинирующего сигнала), образуемый таким образом из-
мерительный комплекс аппаратуры позволит осуществлять беспропуск-
ное обнаружение, анализ и пеленгование импульсных радиосигналов в
широком диапазоне частот при относительно небольшом объеме обору-
дования. Включение в состав этого комплекса панорамного гетеродин-
ного устройства, перестраиваемого в диапазоне выходных частот уст-
ройства сдвига, позволит использовать комплекс как в поисковом, так и
в беспоисковом режиме в зависимости от радиотехнической обстановки
и характера решаемых задач путем подключения к гетеродинным вхо-
дам первых смесителей приемных трактов либо панорамного гетероди-
на, либо выхода устройства сдвига частоты. На рис. 8.31 приведен при-
мер структуры широкодиапазонного двухканального приемника с ис-
пользованием СВПЧ и возможностью работы в поисковом режиме с ис-
пользованием панорамного гетеродина (а), или в беспоисковом - с ис-
пользованием синхронного гетеродинирования путем применения уст-
ройства сдвига с преобразованием частоты (б). Численные значения
диапазонов частот и величины СВПЧ указаны применительно к вариан-
ту ведения разведки в части диапазона упоминаемой выше станции
PMR/USR и имеют иллюстративный характер.
Увеличение точности измерения несущей частоты и разрешающей
способности по несущей частоте. При ведении воздушной разведки
ИРИ с высот 8... 10 км и выше в зоне приема бортового комплекса аппа-
ратуры приема, анализа и пеленгования радиоизлучений могут нахо-
диться десятки, а иногда и сотни излучающих РЛС [1,2,11], в том числе
ряд однотипных высокопотенциальных РЛС обзора воздушного про-
странства (например таких, как РЛС управления воздушным движением
П-30(35), «Утес», ATSR-22(44) [72,73] и др.) с многоканальными мега-
ваттными передатчиками, сигналы которых будут приниматься борто-
408
Рис. 8.31. Пример структуры двухканального приемника
со сверхвысокой ПЧ и панорамным (а) и синхронным (б) гетеродином
вой аппаратурой РТР в диапазоне дальностей вплоть до радиогоризонта
и даже далее. При этом в полосе пропускания приемников поиска и ана-
лиза могут оказаться одновременно несколько сигналов от однотипных
РЛС с весьма близкими частотами (например, сигналов, излучаемых по
каналам с магнетронами одинаковых литеров), спектры которых сопри-
касаются или частично перекрываются, что осложняет выполнение их
раздельного анализа, пеленгования и поэкземплярной идентификации.
Пример наложения отметок импульсных сигналов, близких по частоте
РЛС, был показан на рис. 8.30, иллюстрирующем достаточно типичную
картину наблюдения сигналов таких РЛС на экране панорамного инди-
катора приемника с «нуль-ПЧ».
Возможности сужения полосы пропускания для повышения разре-
шающей способности по частоте ограничиваются условиями неискажен-
ной передачи формы и длительности сигналов разведуемых РЛС, а также
при ведении поиска по частоте - временными и вероятностными соотно-
409
шениями при обнаружении импульсных сигналов, кроме того, таким пу-
тем невозможно разделить сигналы с перекрывающимися спектрами.
Применение специальных временных селекторов для разделения
принадлежащих отдельным РЛС последовательностей импульсных сиг-
налов по периоду повторения [1,2, 74—77] связано с дополнительным
усложнением аппаратуры и снижает ее быстродействие, требуя опреде-
ленных временных затрат (не менее нескольких периодов повторения)
для выделения отдельных импульсных последовательностей и строби-
рования устройств анализа и обработки; к тому же такие методы при-
годны для разделения только регулярных импульсных сигналов с по-
стоянной частотой повторения.
Другой путь разделения близких по частоте импульсных сигналов
с перекрывающимися спектрами, основанный на умножении их частот в
приемном тракте (по высокой или промежуточной частоте) и после-
дующей частотной селекции, принципиально позволяет разделить такие
сигналы по каждому принимаемому импульсу независимо от количест-
ва совпадающих сигналов, в том числе и в случаях наложения (пере-
крытия) их частотных спектров. Возможность разделения таким путем
амплитудно-модулированных, в том числе импульсных сигналов с час-
тично перекрывающимися спектрами основана на том, что в результате
умножения их несущих или промежуточных частот в п раз во столько
же раз увеличивается разность между центральными частотами их спек-
тров, в то время как ширина самих спектров, определяемая спектром
модулирующей функции (длительностью и формой импульса), остается
неизменной. В приемном тракте аппаратуры анализа сигналов процеду-
ра умножения, приводящая к увеличению частоты сигнала в п раз,
должна сопровождаться преобразованием частоты с понижением ее в
диапазон, где наиболее эффективно могут быть осуществлены частот-
ная фильтрация и усиление сигналов, например, до исходного значения,
если умножение производится на промежуточной частоте. Эти проце-
дуры, приводящие к увеличению частотной расстройки между близки-
ми сигналами при умножении и последующем преобразовании с пони-
жением частоты, можно представить в следующем виде:
исходные сигналы с частотами wt и w2 = w\+a:
£4i[l-Fi(/)]siiW;
L'm2[l-F2(Z)]sinw2/=t/m2[l-F2(/)]sin(wi+<T)Z; (8.110a)
сигналы после умножения частоты в п раз -
t4i[l-^iW]sin«wiZ,
um2[ 1—sin nw2/=t7m2[l-F2(Z)]sin(HWi+H<T); (8.1106)
сигналы после преобразования вида/с^. приW\=2pf -
C4i[l-F^Olsin wjZ;
l-F2(/)]sin(Wl +na)t. (8.11 Ob)
410
Как видно, величина частотной расстройки между сигналами а по-
сле умножения и преобразования частоты увеличивается в п раз.
Частотная селекция и разделение сигналов для их раздельного
анализа после умножения и преобразования могут выполняться с по-
мощью набора частотных фильтров с примыкающими полосами про-
пускания или, если по условиям работы аппаратуры имеется соответст-
вующий ресурс времени, - с помощью одного фильтра, последователь-
но настраиваемого на частоты анализируемых сигналов путем пере-
стройки гетеродина понижающего преобразователя частоты. Варианты
включения умножителя-преобразователя в приемный тракт - с пере-
стройкой по частоте и последовательным приемом разрешаемых сигна-
лов (а) и с многоканальной расфильтровкой и параллельным приемом
сигналов (б) показаны на рис. 8.32. Применение изложенной процедуры
б)
Рис. 8.32. Варианты включения умножителя-преобразователя
в приемный тракт: а - с перестройкой про частоте и последовательным
приемом разрешаемых сигналов; б - с многоканальной расфильтровкой
и параллельным приемом сигналов
411
обработки позволяет повысить разрешающую способность по частоте в
п раз, причем дополнительные устройства умножения, преобразования
и фильтрации могут быть подключены к приемному тракту аппаратуры
без его существенных изменений, лишь с помощью вводимых для этого
коммутационных устройств.
Полосы пропускания фильтров, соответствующих ширине спектра
импульсных сигналов указанных выше высокопотенциальных РЛС
(с длительностями импульсов 2,7; 3,6/1,8 и 1,2 мкс соответственно),
подлежащих разделению, могут быть значительно (примерно на поря-
док) уже полосы основного тракта УПЧ, рассчитываемой, как правило, с
учетом возможности приема и более широкополосных сигналов.
Практически достижимая степень увеличения разрешающей спо-
собности по частоте будет ограничиваться величиной допустимого
снижения результирующей чувствительности аппаратуры анализа за
счет ухудшения соотношения сигнал/шум при умножении частоты.
Этот вопрос рассматривался в литературе, в частности, в [78...81], где
для несколько различных предпосылок произведены оценки такого
ухудшения. Так, при удвоении частоты соотношение сигнал/шум на вы-
ходе снижается согласно [78] и [80] на величину приблизительно 3 и
4 дБ соответственно, а из приведенных в [79, 81] графиков можно за-
ключить, что величина такого снижения лежит в пределах 3...6 дБ в за-
висимости от соотношения полос пропускания трактов на входе и вы-
ходе удвоителя частоты.
Полагая в качестве примера, что типичная ширина спектра им-
пульсных сигналов для указанных выше однотипных РЛС составляет
около 0,8...1 МГц и что для разрешения сигналов достаточно разнесе-
ния их центральных частот примерно на эту же величину, получим, что
при исходном различии центральных частот сигналов с перекрываю-
щимися спектрами 0,1...0,2 МГц (практически не позволяющем разде-
лить такие сигналы средствами частотной селекции) требуемое разнесе-
ние по частоте может быть достигнуто за счет восьмикратного умноже-
ния частоты, например, введением в усилительный тракт ПЧ трех по-
следовательно включенных удвоителей-преобразователей частоты.
Возможное снижение соотношения сигнал/шум при этом (на величину,
ориентировочно, до 10... 13 дБ) не исключает возможности приема и
анализа сигналов высокопотенциальных РЛС, уровень мощности кото-
рых на входе приемника обычно значительно превышает его рабочую
чувствительность, рассчитываемую на обеспечение разведки РЛС с го-
раздо более низким потенциалом.
Остановимся еще на возможности повышения точности определе-
ния частоты и разрешающей способности многоканально-функциональ-
ного приемника (МФП) без увеличения числа частотно-избирательных
каналов путем использования умножения частоты принимаемых сигна-
лов на выходах отдельных ступеней МФП с последующим применени-
412
ем операций рециркуляции и повторной (неоднократной) частотной
расфильтровки сигналов с помощью одной и той же частотно-
избирательной системы (гребенки фильтров) (рис. 8.33). Поступающий
сигнал 10-сантиметрового диапазона после усиления в УВЧ подается на
вход частотно-избирательной системы из четырех полосовых фильтров
с примыкающими полосами одинаковой ширины по 125 МГц, совмест-
но перекрывающими диапазон 2,7...3,2 ГГц. На выходе каждого фильт-
ра включены обычные для МФП устройства-детектор Д для фиксации
факта наличия сигнала в этом канале (фильтре) и преобразователь час-
тоты (смеситель СМ и гетеродин ГЕТ), транспонирующий полосу час-
тот данного канала в общий для всех каналов участок более низкочас-
тотного диапазона, в данном случае такой, чтобы значения частот в нем
были в четыре раза меньше, чем во входном диапазоне (675.. .800 МГц).
Выходы преобразователей через соединитель с развязанными плечами
подключены к усилителю диапазона промежуточных (транспонирован-
ных) частот УПЧ, выход которого может быть соединен с входом час-
тотно-избирательной системы второй ступени МФП. В нашем случае
выход усилителя транспонированного сигнала подается на последова-
тельно соединенные учетверитель частоты, линию задержки ЛЗ и СВЧ-
коммутатор К, включенный в тракт входного сигнала (на входе УВЧ),
образующие рециркуляционное кольцо. Принятый сигнал проходит че-
рез один из четырех фильтров, номер которого фиксируется с помощью
детектора, преобразовывается в диапазон более низких частот и после
усиления поступает на учетверитель частоты. На выходе последнего
транспонированная полоса частот одного канала растягивается в четыре
раза и становится равной входному диапазону, а положение принятого
сигнала в этом диапазоне соответствует его относительному положению
в полосе частот канала, в результате чего при вторичном прохождении
Рис. 8.33. Структура МФП с умножением частоты и рециркуляцией сигналов
413
рециркулированного сигнала через один из четырех фильтров будет оп-
ределено его положение в полосе частот фильтра с точностью до одной
четверти этой полосы.
Таким образом, использование умножения частоты и однократной
рециркуляции сигнала позволяет получить разрешение по частоте и
точность определения частот сигналов такую же, как при 16-канальной
фильтровой системе, а применение двукратной рециркуляции было бы
эквивалентно частотной расфильтровке с использованием 64-канальной
системы. Примеры построения и использования рециркуляторов сигна-
лов СВЧ и их отдельных элементов (коммутаторов СВЧ, линий задерж-
ки) имеются, в частности, в [46]. Оценки снижения чувствительности за
счет применения умножения частоты приводились выше.
Возможности уменьшения ложных отсчетов частоты в многока-
нально-функциональном приемнике. Возникновение помех (ложных
отсчетов частоты) в многоканально-функциональном приемнике при
работе в ДД входных сигналов возможно как за счет образования ККП
и, тем самым, комбинационных полос транспонирования на гармониках
частот сигналов и транспонирующих гетеродинов, в результате чего
происходит размножение по частоте поступающих на последующую
ступень сигналов, так и при совместном срабатывании видеосигнальных
выходов соседних каналов данной ступени за счет неидеальности (ко-
нечной крутизны скатов) частотных характеристик фильтров. Рацио-
нальный выбор частот гетеродинов, величин полос пропускания ка-
нальных фильтров и расстановки их по частоте в широкодиапазонном
МФП, позволяющий, по возможности, минимизировать количество и
уровни ККП, можно произвести с использованием приведенных выше
графиков перекрытия (см. рис. 8.27а,б и 8.28), а также графика широко-
полосного преобразования (транспонирования) поддиапазонов МФП
(рис. 8.34), отображающего совокупность основных и комбинационных
каналов приема в координатах отношений изменяющихся в соответст-
вующих пределах значений частот входных и выходных (преобразован-
ных в диапазон промежуточных частот) сигналов и F к фиксирован-
ной частоте транспонирующего гетеродина -fjfn- и Flf^.
Области приема для нескольких поддиапазонов представлены на
графике рис. 8.34 в виде огибающих частных областей приема, образо-
ванных каналами данного поддиапазона. Каждая из частных областей
приема, соответствующих отдельным частотным каналам, может быть
представлена на графике в виде квадрата, ограниченного по оси fJf- поло-
сой пропускания канального фильтра на входе преобразователя данного
канала и по оси Fap!fT- полосой пропускания выходного фильтра преобра-
зователя. Диагональю квадрата, так же как для области приема на графи-
ке (см. рис. 8.29), является линия основного приема.
414
Рис. 8.34. График транспонирования поддиапазонов МФП
При выборе частот гетеродинов и границ полос пропускания ка-
нальных фильтров МФП учитываются также требования непрерывного
перекрытия всего диапазона волн, максимальной степени совместного
использования последовательных ступеней для приема сигналов в раз-
личных поддиапазонах и желательности соблюдения некоторых опре-
деленных частотных границ поддиапазонов, обусловливаемых диапа-
зонностью применяемых в МФП антенн, элементов СВЧ-трактов и уси-
лительных устройств.
Для обеспечения возможности исключения ложных отсчетов час-
тоты при срабатывании соседних частотных каналов в динамическом
диапазоне принимаемых сигналов в МФП должен использоваться оди-
наковый способ преобразования частоты в пределах данной ступени
(поддиапазона) - с верхней или нижней настройкой гетеродина.
На рис. 8.34 схематически показан также вариант разбивки под-
диапазонов МФП на частотные каналы (фильтры), содержащий
10 поддиапазонов - от 1-го условного поддиапазона до 10-го, и приве-
дено расположение некоторых поддиапазонов (ступеней МФП, обра-
зуемых совокупностью канальных фильтров) на графике транспониро-
вания. Как видно из графика, все каналы 1-, 2-, 4- и 6-го поддиапазонов,
в основном, расположены в оптимальной области, где отсутствуют ККП
на гармониках частот сигнала и гетеродина с малыми номерами, только
на краях отдельных каналов возможны ККП вида Зг(с) ~2с(г), ослаб-
ленные относительно основного канала приема на 30-40 дБ. Для обес-
печения минимального числа ККП при соблюдении возможной унифи-
кации последовательных ступеней в различных поддиапазонах исполь-
415
зуется как верхняя, так и нижняя настройка гетеродинов. Схема по-
строения ступеней 4-7-10 поддиапазонов МФП приведена на рис. 8.35,
а возможный вариант расстановки всех поддиапазонов в полном диапа-
зоне частот с перекрытием pf около 100 - на рис. 8.36. Последователь-
ные ступени используются (одновременно или последовательно) для
приема сигналов в соответствующих более низкочастотных поддиапа-
зонах. В приведенном примере полоса канала последней, десятой сту-
пени составляет 10 МГц, а полное число разрешаемых градаций во всем
диапазоне - приблизительно 1000 при общем числе частотных каналов
48. Если в последней ступени увеличить число каналов до 16, то число
градаций возрастет вдвое, а число каналов - до 56. Возможно также
применение дополнительной низкочастотной ступени узкополосной
расфильтровки каналов 10-го поддиапазона на 8 каналов по 1,25 МГц,
как показано на рис. 8.36.
Рис. 8.35. Вариант схемы построения ступеней 4-7-10 поддиапазона МФП
Исключение неоднозначности измерения частоты при срабатыва-
нии соседних каналов в одной или нескольких ступенях достигается пу-
тем последовательного, начиная с последней ступени, определения но-
меров сработавших каналов с отсеиванием ложных номеров в результа-
те учета расположения сработавшего канала относительно середины
поддиапазона в последующей ступени. Так, при срабатывании в после-
дующей ступени канала, расположенного, например, в низкочастотной
половине поддиапазона, из двух сработавших в предыдущей ступени
каналов в зависимости от вида настройки гетеродинов этой ступени ис-
тинным будет являться более высокочастотный или низкочастотный ка-
416
Устройство обработки и управления
10000 3000 1000 100 30
Рис. 8.36. Вариант расстановки поддиапазонов МФП
с перекрытием -100 в Диапазоне частот
нал при нижней или верхней настройке гетеродинов соответственно.
При этом расширение полосы приема канальных фильтров всех ступе-
ней, кроме предпоследней, в динамическом диапазоне принимаемых
сигналов не должно превосходить половины полосы пропускания на
каждую сторону. Для фильтров предпоследней ступени при нечетном
числе каналов в последней ступени и при условии линейности сквозной
амплитудной характеристики двух последних ступеней также допусти-
мо симметричное расширение полосы приема в два раза. При четном
числе каналов последней ступени для обеспечения однозначности от-
счета величина расширения (на каждую сторону ската характеристики
фильтра) не должна превосходить полуширины разности полос пропус-
кания фильтров данной и предыдущей ступеней. Кроме того, должно
соблюдаться указанное выше условие одноименной настройки гетеро-
динов в пределах каждой из ступеней. При выполнении этих вполне
технически осуществимых условий обеспечивается принципиальная
возможность реализации автоматического алгоритма однозначного оп-
ределения частоты (совокупности номеров каналов); так, например, мо-
жет быть применен поочередный опрос каналов по ступеням, начиная с
последней, причем направление опроса в данной ступени задается ви-
дом настройки гетеродинов и расположением канала, определенного
как сработавший (истинный) в ступени, опрошенной перед этим. На-
правление опроса задается таким образом, чтобы первый по порядку
опроса сработавший канал был истинным.
417
Ввиду того, что прием сигналов в МФП производится одновре-
менно в широкой полосе частот, при оценке коэффициента шума и ре-
зультирующей чувствительности приемника в каждом из поддиапазо-
нов необходимо учитывать влияние суммарной мощности шума осталь-
ных ступеней, в результате которого чувствительность снижается, осо-
бенно в последних ступенях. Оценка чувствительности такого приемни-
ка производилась в [82] при некоторых упрощающих предпосылках, в
частности, для постоянной в диапазоне частот спектральной плотности
шума. Однако в действительности спектральная плотность шумов в раз-
личных поддиапазонах и в пределах полосы частот отдельных поддиа-
пазонов и даже каналов неравномерна за счет совместного влияния не-
равномерностей коэффициентов шума и усиления входных устройств
этих поддиапазонов. Вследствие этого при сложении шумов разных
диапазонов возникает значительный перепад их уровня в частотных
диапазонах последующих ступеней и обусловливаемая этим неравно-
мерность чувствительности в пределах полос отдельных каналов и под-
диапазонов. Уравнять чувствительность во всем диапазоне частот МФП
или определенным образом ранжировать ее величину в разных поддиа-
пазонах в соответствии с возможным уровнем ППМ разведуемых ИРИ в
этих участках возможно применением регулировки коэффициента пере-
дачи на выходах отдельных под диапазонов при их объединении на вхо-
дах последующих ступеней. Такая регулировка возможна, например, с
помощью амплитудных корректоров, выполненных на основе решетки
перестраиваемых резонаторов для поглощения проходящей энергии в
определенных участках диапазона частот [46] и позволяющих, в частно-
сти, выравнивать присущую ЛБВ микроструктурную неравномерность
коэффициента усиления в диапазоне частот.
Оценка возможностей подавления помех в поисковых пеленгатор-
ных устройствах при использовании компенсационного канала. При
пеленговании излучений сканирующих РЛС амплитудным пеленгато-
ром с направленной сканирующей антенной в режимах быстрого или
медленного достоверного поиска (БДП или МДП), когда эффективная
чувствительность по полю аппаратуры РТР (ЭЧП=4/>пр/6:|,рЛ2; где />1ф-
чувствительность приемника; Спр-коэффициент усиления антенны, А -
длина волны) выбирается из условия приема излучений РЛС по их
главному лучу, т.е. соответствия (превышения) плотности потока мощ-
ности излучения в точке нахождения ЛА (ППМ=РрлССрлс/4рЛ2, где
Ррлс - мощность РЛС; брлс - коэффициент усиления антенны РЛС; R -
расстояние ЛА-РЛС) относительно ЭЧП аппаратуры РТР, возникнове-
ние ложных пеленгов за счет приема излучения РЛС по боковым лепе-
сткам ДН пеленгационной антенны возможно, если перепад уровней
принимаемых сигналов от минимального, соответствующего ППМ от
РЛС с минимальным энергетическим потенциалом (РрлсСрлс), находя-
щейся на максимальном расстоянии, где должна осуществляться раз-
418
ведка (до радиогоризонта или на дальности, превышающей радиогори-
зонт - в областях дифракции и дальнего тропосферного распростране-
ния радиоволн), и при наиболее неблагоприятных условиях (туман,
дождь и т.п.) на трассе распространения, до максимального, обуславли-
ваемого диапазонами возможных вариаций значений указанных факто-
ров, превышает перепад между величинами коэффициента усиления пе-
ленгационной антенны по главному и боковым лепесткам. При этом на-
до учитывать, что в отличие от антенн РЛС, конструкция которых оп-
тимизируется применительно к работе в относительно узком частотном
диапазоне и на определенной поляризации, а место установки выбира-
ется с учетом минимизации мешающих отражений, существенно
влияющих на уровень бокового излучения, антенны самолетных ампли-
тудных пеленгаторов должны осуществлять прием излучений РЛС с
различной поляризацией в весьма широком частотном диапазоне (с пе-
рекрытием /у от 1,4...1,7 до 3...4 [33]) и работать в условиях влияния
переотражений сигналов разведуемых РЛС от различных элементов
конструкции самолета.
Эти обстоятельства обусловливают значительно более высокий
уровень боковых лепестков ДНА таких пеленгаторов, что создает пред-
посылки для возникновения ложных приемов по пеленгу в динамиче-
ском диапазоне воздействующих излучений различных РЛС. Особенно
подверженной мешающему влиянию приемов по боковым лепесткам
оказывается работа пеленгатора в режиме вероятностного поиска, рас-
считанного на прием сигналов по боковым лепесткам ДН антенн РЛС и
использующего в связи с этим высокочувствительные приемные уст-
ройства. Для подавления помех по боковым лепесткам ДНА поисковых
пеленгаторных устройств применяется дополнительный (компенсаци-
онный) канал приема с отдельной антенной, перекрывающей сектор
возможного приема по боковым лепесткам ДН основной антенны и
имеющей коэффициент усиления, превышающий уровень компенси-
руемых боковых лепестков. Компенсация импульсных сигналов, одно-
временно принимаемых по боковым лепесткам пеленгационного канала
и по компенсационному каналу, обычно производится в результате
сравнения их амплитуд с последующим бланкированием тех импульсов,
амплитуда которых в компенсационном канале больше, чем в основном
[10,83,84]. Условием эффективной компенсации при этом является пре-
вышение ЭЧП компенсационного канала относительно ЭЧП основного
в области боковых лепестков пеленгационной антенны. Ввиду того, что
уровень боковых лепестков пеленгационной антенны в диапазонах уг-
лов, частот и поляризаций варьирует в весьма широких пределах ( СКО
уровня боковых лепестков «средненаправленных» антенн согласно, на-
пример, [6] и ряда других источников составляет от 7...9 до 10... 13 дБ,
а соответствующий максимальный разброс-десятки дБ), а также с уче-
том неизбежной неравномерности коэффициента усиления компенсаци-
419
одной антенны в этих же диапазонах значений параметров сигналов
реализация условий компенсации имеет вероятностный характер. Пара-
метры распределения уровня мешающего сигнала могут быть определе-
ны по характеристикам ДН с учетом мощности мешающей РЛС.
Примем, что антенны пеленгатора и РЛС, разнесенных на расстоя-
ние R, сканируют в секторах щ и и2. Текущие значения эффективной
чувствительности пеленгатора по полю (ЭЧПп) и плотности потока
мощности (ППМ) РЛС определяются мгновенными значениями коэф-
фициентов усиления соответствующих антенн в направлении «пеленга-
тор-РЛС». При этом в пределах главных лепестков ДНА пеленгатора и
РЛС (xi и х2) их коэффициенты усиления G, и G2 постоянны, а уровни
боковых лепестков характеризуются распределениями wi(a) и w2(a).
С учетом перечисленного вероятность (относительное время) превыше-
ния сигналом РЛС уровня пороговой чувствительности приемно-
пеленгаторного устройства рпр не менее чем на некоторую величину Д в
общем случае можно определить через сочетание возможных вариантов
взаимного положения ДНА:
Р(Д) = М/,(Д) + ||<1_^.Ъ2(Д) +
С»2 у Cq J \ 7 \ J
Г1, Д S g — h, 8 г
где Д(Д) = к Р2(д) = J wc(p)dp; Д(А)= Г w (p)dp;
0,Д>£-«; J J
1 * «11 —
00 /7-Д 00 00
Р4(Д)= Jwclp) j wnp(p)dpdp = jdd jw^(p)wc(p + d)dp.
-00 ^30 A -O0
Здесь g и h - значения ЭЧП и ППМ по главным лепесткам, дБ/(Вт/м2);
g= РрлсС рлс/4рЛ2; /г=4ррпр/СПр22, wc(p) и wnp(p) - плотности вероятности
распределения ППМ и ЭЧП по боковым лепесткам ДНА для данной
дальности, определяемые (аналогично таковым для главных лепестков)
мощностью передатчика РРЛс, чувствительностью приемника рпр и рас-
пределениями усиления wt(a) и w2(a); с - чувствительность по полю;
д - уровень помех по боковым лепесткам.
Определения Р](Д), Р2(Д) и Р3(Д) представляются очевидными,
выражение для Р4(Д) является интегральной взвешенной суммой числа
случаев превышения текущим уровнем ППМ, излучаемой по боковым
лепесткам РЛС, мгновенного значения ЭЧП пеленгатора по боковым
лепесткам его антенны на величину, не меньшую Д.
420
При наличии в станции РТР канала компенсации, ЭЧП которого в
диапазоне условий приема характеризуется распределением wK(p), вы-
ражения для вероятности того, что уровень помехи превышает порого-
вый уровень компенсационного канала при приеме по боковым лепест-
кам Р з(Д) и Р'4(А), будут иметь следующий вид:
g-Л 00
Р3'(Д) = J %р(р) JwK(p)dpdp, (8.112)
—00 р
00 00 00 00
Рд(Д)= fwnpGO jwJp) j ws.(y)dydpdp= jw(S)dd =
-oo p р+Д Д
00 00 00
= jdd jwnp(p)wc(p + d) fwK(p)dpdp, (8.113)
A -°o p
где w(J) - плотность распределения величины превышения уровня.
Критерием качества канала компенсации могут служить мини-
мально возможное значение вероятности исключения (компенсации)
приема на боковых лепестках
оо р
Д min = J wnp(P) J %(Р)^РФ- (8.114)
или максимальная вероятность некомпенсации
оо оо
Дктах = f %р(Р) рк(Р)^РФ- (8- И5)
-® р
Расчет вероятности приема мешающего сигнала (при Д=0) и вероят-
ности превышения уровня чувствительности на определенную величину,
а также оценку качество компенсации помех можно произвести, исполь-
зуя какую-либо удобную для расчетов аппроксимацию ДНА пеленгатора
в области боковых лепестков. Применение преимущественно упоминае-
мой в литературе логнормальной аппроксимации (например [6,7,18,19])
связано с выполнением относительно сложных вычислительных проце-
дур по численному интегрированию с учетом ограниченности реальной
области существования уровней боковых лепестков. Для расчетных оце-
нок удобнее воспользоваться более простыми ограниченными аппрокси-
мациями - логравномерной или, при необходимости получения несколь-
ко более точных результатов - логтреугольной. Так, вероятность неком-
пенсации для показанных на рис. 8.37 а-д вариантов аппроксимаций и
взаимных расположений ЭЧП основного (пеленгационного) и компенса-
ционного каналов (w„p и wK соответственно) в ситуации воздействия об-
лучения главным лепестком ДНА РЛС на пеленгатор по боковым лепест-
421
кам ДН его антенны, вычисленная по приведенной выше формуле, опре-
деляется следующими, достаточно простыми выражениями:
j(a)____. р(б.в) __ С + d _
™ ~2{b-a){d-cY НК “ 2(Ь-а) ’
(b-a) L J
(8.116)
(с + </-2а)Ч^
2(b-a) L 6
► ЭЧП
► ЭЧП
Рис. 8.37. Варианты аппроксимаций
и взаимных расположений ЭЧП
пеленгационного и компенсационного
каналов
Здесь а, b - границы распределе-
ния ЭЧП пеленгатора в области
боковых лепестков его антенны;
с, d - границы распределения
ЭЧП компенсационного канала,
как показано на рис. 8.37.
Формульные выражения для
вероятности превышения и плот-
ности распределения уровня сиг-
нала в ситуациях, когда воздейст-
вие помех по боковым лепесткам
ДНА пеленгатора может происхо-
дить за счет излучения по боко-
вым лепесткам ДНА РЛС (выра-
жения A(A) и РХД) из формул
(8.111) и (8.113), данные в [15,20],
имеют достаточно громоздкий
вид и здесь не приводятся ввиду
практически пренебрежимо малой
вероятности возникновения такой
помехи в аппаратуре воздушной
РТР с учетом большого суммар-
ного ослабления сигналов, излу-
чаемых по боковым лепесткам
ДНА РЛС и поступающих на при-
емник пеленгатора по боковым
лепесткам его антенны.
Литература к главе 8
1. Мельников Ю.П. Методы оценки эффективности воздушной ра-
диотехнической разведки. - СПб.: Нестор, 1998.
422
2. Мельников Ю.П. Воздушная радиотехническая разведка (методы
оценки эффективности). - М.: Радиотехника, 2005.
3. Радзиевский В.Г., Сирота А.А. Информационное обеспечение ра-
диоэлектронных систем в условиях конфликта. - М.: ИПРЖР,
2001.
4. Бородин А.М., Усков Н.В. Проектирование систем радиопротиво-
действия и радиотехнической разведки методами моделирования.
- Тирасполь-Бендеры.: ООО «РВТ», 2002.
5. Вакин С.А., Шустов Л.Н. Основы радиопротиводействия и радио-
технической разведки. - М.: Сов. радио, 1968.
6. Уайт Дональд Р.Ж.(составитель). Электромагнитная совмести-
мость радиоэлектронных средств и непреднамеренные помехи.
Вып. 1: Пер. с англ. - М.: Сов. радио, 1977.
7. Виноградов Е.М., Винокуров В.И., Харченко И.П. Электромагнит-
ная совместимость радиоэлектронных средств. - Л.: Судостроение,
1986.
8. Седякин Н.М. Элементы теории случайных импульсных потоков. -
М.: Сов. радио,1965.
9. Абезгауз Г.Г., Тронь А.П. и др. Справочник по вероятностным рас-
четам. - М.: Воениздат, 1970.
10. Харрис К.Е. Некоторые вопросы построения обзорных радиолока-
ционных систем с активным ответом: Пер. с англ, под ред.
К.Н. Трофимова. - М.: Сов. радио, 1957.
11. Мельников Ю.П., Попов С.В., Усков Н.В. Методы обоснования не-
обходимых технических характеристик аппаратуры воздушной ра-
диотехнической разведки и возможностей их технической реали-
зации. - Труды ЦНИИ № 30 МО, 1969, вып. 210 (286).
12. Ямпольский В.Г., Фролов О.П. Антенны и ЭМС. - М.: Радио и
связь, 1983.
13. Мельников Ю.П., Попов СВ. О вероятности раздельного приема
бортовым ответчиком импульсов суммарного потока перекры-
вающихся сигналов нескольких ВРЛС. - Новости навигации. НТЦ
«Интернавигация» и РОИН, 2003, № 1.
14. Мельников Ю.П., Попов С.В. Оценка количества совпадающих об-
лучений объекта сканирующими РЛС. - Изв. вузов. Сер. Приборо-
строение, 2006, № 1.
15. Попов С.В. Расчет взаимных помех при оценке ЭМС группы РЛС.
- В сб. Вопросы судостроения. Сер. Радиолокация, 1974, вып. 3.
16. Бородич С.В. ЭМС наземных и космических радиослужб. Крите-
рии, условия и расчет. - М.: Радио и связь, 1990.
17. Винокуров В.И., Харченко В.П. Статистическая оценка электромаг-
нитной совместимости. - Изв. вузов. Сер. Радиоэлектроника, 1972,
т. XV, № 4.
423
18. Johnson R.C. Radar Search Antennas and RFI. - IEEE Trans, vol.
EMS-6, no. 2, July 1964.
19. Grase S. K„ Miller S.N. Experimental determination of antenns sidelobe
statistics. - Proc. IEEE, 1966, 54, no. 11.
20. Мельников Ю.П., Попов С.В. К расчету вероятности подавления
помех при оценке электромагнитной совместимости РЛС подвиж-
ных объектов. - Изв. вузов. Сер. Приборостроение, 2004, т.47, № 8.
21. Мартынов В.А., Селихов Ю.И. Панорамные приемники и анализа-
торы спектра. - М.: Сов. радио, 1964.
22. Мартынов В.А., Селихов Ю.И. Панорамные приемники и анализа-
торы спектра. 2-е изд., перераб.и доп. - М.: Сов. радио, 1980.
23. Ревенок Д.А. Поиск сигнала по частоте при большом отношении
сигнал/шум. - Изв. вузов. Сер. Радиоэлектроника, 1983, т. 26, № 4.
24. Попов С.В. К оценке сокращения времени обзора при многосту-
пенчатой процедуре поиска с последовательным уточнением. -
Вопросы радиоэлектроники. Сер. ОТ, 1969, № 19.
25. Мельников Ю.П., Попов С.В. О минимизации времени последова-
тельного частотного анализа при многоступенчатой процедуре по-
иска. - Радиотехника и электроника, 2004, т. 49, № 1.
26. Харкевич А.А. Спектры и анализ. - М.: ГИТТЛ, 1957.
27. Шлезингер Р. Дж. Радиоэлектронная война / Пер. с англ, под ред.
А.М. Пархоменко. - М.: Воениздат, 1963.
28. Мельников Ю.П., Попов С.В. К сравнительной оценке различных
режимов поиска импульсных сигналов. - Изв. вузов. Сер. Прибо-
ростроение, 2006, № 3.
29. Атражев М.П., Ильин В.А., Марьин Н.П. Борьба с радиоэлектрон-
ными средствами. - М.: Воениздат, 1972.
30. East Р. W. Design techniques and performance of digital IFM. - IEE
PROC, vol. 129. Pt. F, no. 3, JUNE 1982.
31. Щербак В.И., Водянин НИ. Приемные устройства систем радио-
электронной борьбы. - Зарубежная радиоэлектроника, 1987, № 5.
32. Тверской В.И. Дисперсионно-временные методы измерений спек-
тров радиосигналов. - М.: Сов. радио, 1974.
33. Техника сверхвысоких частот. Т. 1 / Пер. с англ, под ред.
Я.Н. Фельда. -М.: Сов. радио, 1952.
34. Печатные схемы сантиметрового диапазона. Сборник статей / Пер.
с англ, под ред. В.И. Сушкевича. - М.: Изд-во иностранной литера-
туры, 1956.
35. Проектирование радиоприемных устройств / Под ред. А.П. Сивер-
са. - М.: Сов. радио, 1976.
36. Микроэлектронные устройства СВЧ / Под ред. Г.И. Веселова. - М.:
Высшая школа, 1988.
424
37. А. с. СССР № 1392515. Измеритель несущей частоты одиночных
СВЧ-радиоимпульсов на основе резонаторов, 1988.
38. Miller, В., New System Augments В-52 ECM Ability. - Awiation
Week and Space Technology, 1966, vol. 84, no. 4.
39. Lammers, U.H. and Stiglitz, M. R., A 96-channel multiplexer with Di-
electric Resonators. - Microwave J., 1979, vol. 22, no. 10.
40. А. с. СССР № 1483523. Многоканальный частотный разделитель
на диэлектрических резонаторах, 1989.
41. Adam, J. D., Daniel, M.R., and Talisa, S. H„ MSW filterbanks. - Mi-
crowave J. 1988, 31, no 2.
42. Allen, D. E., Channelised receiver. A viable solution for EW and ESM
systems. - IEE PROC. vol. 129, pt. F, no. 3, JUNE 1982.
43. Chang I.C. Acousto-Optic Channelized Receiver. - Microwave J.,
MARCH 1986.
44. А. с. СССР № 943594. Акустооптический частотомер, 1982.
45. Приемные устройства для систем радиоэлектронной борьбы. Экс-
пресс-информация «Радиотехника СВЧ», реф. 38, 1987, № 8; Re-
ceivers and receiver technology for EW systems. Lochhead D.L. - Mi-
crowave J., 1986,29, no.2.
46. Перунов Ю.М., Фомичев К.И., Юдин Л.М. Радиоэлектронное по-
давление информационных каналов систем управления оружием. -
М.: Радиотехника, 2003.
47. Пат. США № 3787864/Система мгновенного разрешения сигнала,
1974.
48. Пат. США № 3886556. Многоканальный приемник пеленгацион-
ной системы, 1975.
49. A microwave electromagnetic surveillance system. - Microwave J.,
1967, 10, no 6.
50. Вартанесян В.А. Радиоэлектронная разведка. - M.: Воениздат,
1975.
51. Техника сверхвысоких частот. Т. 2 / Пер с англ, под ред. Т.Р. Брах-
мана. - М.: Сов. радио, 1953.
52. Голубев В.Н. Частотная избирательность радиоприемников АМ-
сигналов. - М.: Связь, 1970.
53. Голубев В.Н. Эффективная избирательность радиоприемных уст-
ройств. -М.: Связь, 1978.
54. Князев А.Д. Элементы теории и практики обеспечения электромаг-
нитной совместимости радиоэлектронных средств. - М.: Радио и
связь, 1984.
55. Орлов Л.М. Анализ взаимной модуляции, возникающей при ис-
пользовании кристаллического смесителя: Пер. с англ. - ТИИЭР,
1964, т. 52, № 2.
425
56. Ибатуллин Э.А. Электромагнитная совместимость и помехоустой-
чивасть информационных систем. - Казань: Изд-во Казанского
университета, 1989.
57. Светлов Н.И. Выбор промежуточной частоты панорамного прием-
ника. - Радиотехника, 1956, т. 11, № 10.
58. Днепровский В.М. О влиянии комбинационных составляющих тока
смесителя на выбор промежуточной частоты. - Радиотехника,
1960, т. 15, №4.
59. Шарапов Ю.И. Номограммы преобразования частоты Fr - Fc,
Fr- Fn, Fn- Fc. - Радиотехника, 1999, № 9.
60. Мельников Ю.П., Попов С.В. К выбору промежуточной частоты и
типа преобразования в широкополосных конвертерах и панорам-
ных приемниках И Проблемы транспорта. Вып. 3 / Под ред.
Г.В. Анцева; АООТ «Радар ММС». - СПб.: РДК-принт, 2000.
61. Сараев С.М. Рациональная разбивка конвертируемого диапазона
радиоприемника на поддиапазоны при разностном преобразовании
частоты с верхней настройкой гетеродина. - Радиотехника,1985,
№6.
62. Смирнов Ю.А. Радиотехническая разведка. - М.: Воениздат, 2001.
63. Кейси Р. Панорамный приемник с нулевой промежуточной часто-
той. - Электроника, 1961, № 15.
64. Кузовлев А. С., Хохлов В.И. К вопросу повышения разрешающей
способности панорамного радиоприемного устройства. В кн. Во-
просы применения временной компрессии в радиоизмерительной
технике. - Тр. Таганрогского радиотехнического института, 1969.
65. Перегудов Ф.И. О переходном процессе по фазе в резонансном
усилителе. - Изв. Томского политехнического института, т. 105;
отдельн. оттиск, изд-во Томского университета, 1960.
66. Пат. США № 4979230. Гомодинный приемник сигналов кабельно-
го телевидения со смещением частоты вверх для подавления помех
соседних каналов, 1990.
67. Жалнераускас В.И. Шумовые параметры СВЧ приемно-
усилительных устройств. - Техника средств связи. Сер. Радиоиз-
мерительная техника, 1984, № 4.
68. Белавин.О.В., Вейцель В.А., Ульянов В.С. Коротковолновые радио-
пеленгаторы. -М.: Оборонгиз, 1959.
69. Скорик Е.Т., Ясинский В.Л. Фазоизмерительные схемы СВЧ-
диапазона. Аналитический обзор. Вып. 78. - Минрадиопром, 1968.
70. Segrave Patrick А.С., Court Patrick R.J., Reiter Abraham M.A.
A unique method of rendering television intermediate frequencies inde-
pendent of tuner oscillator drift. - IEEE Trans. Broadcast and Telev.
Receivers, 1964, 10, no. 3; Экспресс-информация. «Радиолокация,
телевидение, радиосвязь», 1965, № 14. Реф. 75. Метод повышения
426
стабильности промежуточной частоты при уходе частоты гетеро-
дина.
71. Левин В.А., Норкин Г.А. Радиотехнические системы фильтрации с
возвратным гетеродинированием. - М.: Сов. радио, 1979.
72. Грачев В.В., Кейн В.М. Радиотехнические средства управления
воздушным движением. -М.: Транспорт, 1975.
73. Кузнецов А.А., Дубровский В.И. Эксплуатация радиооборудования
аэродромов и трасс. - М.: Транспорт, 1981.
74. Авт. св. СССР № 785984. Устройство для временного разделения
двух импульсных последовательностей, 1980.
75. Пат. США № 4258362. Устройство слежения за произвольным
числом сигналов, 1981.
76. Авт. св. СССР № 851759. Устройство для разделения двух после-
довательностей импульсов, 1981.
77. Пат. США № 4721958. Процессор для обработки импульсных сиг-
налов в реальном времени, 1988.
78. Бабий В.И., Виткевич В.В. Радиоинтерферометр с умножением
частоты. - Радиотехника и электроника, 1964, № 6.
79. Теряев Б.Г. Отношение сигнал/помеха на выходе удвоителя и учет-
верителя частоты. - Электросвязь, 1970, № 12.
80. Ли За Сон. Воздействие сигнала и шума на умножитель частоты. -
Электросвязь, 1972, № 7.
81. Теряев Б.Г., Ковалев О.А. Отношение сигнал/помеха на выходе де-
тектора, удвоителя и учетверителя частоты. - Радиотехника, 1973,
№6.
82. Руднев Л.Н. О чувствительности прйемников-измерителей частоты
с параллельным обзором частотного диапазона. - Радиотехника,
1977, т. 32, №2.
83. Croney J., Wallis Р. A side lobe suppression system for primary radar. -
The Radio and Electronic Eng., 1964, vol. 28, no. 4. (Крони Ф., Уоллис П.
Система подавления боковых лепестков диаграммы направленно-
сти антенны первичного радиолокатора.- Зарубежная радиоэлек-
троника, 1966, № 5.)
84. Лазуткин Б.А. Радиотехнические устройства с компенсацией по-
мех. - Киев: Техника, 1972 (на украинском языке).
427
ЗАКЛЮЧЕНИЕ
Рассмотренные в монографии вопросы, разумеется, далеко не ис-
черпывают тему определения координат источников излучении, как в
смысле наличия необходимых подробностей в представленных материа-
лах по каждому из описанных методов, так и перечня самих методов.
Действительно, прикладная направленность книги предполагает
количественные оценки достижимой точности, а также возможностей
технической реализации каждого из рассмотренных методов местооп-
ределения. Такие оценки повсеместно делаются, но далеко не с равно-
ценной и желаемой подробностью. Наиболее надежным представляется
получение аналитических соотношений для погрешностей определения
координат в возможно широком спектре условий применения, а также
проведенное параллельно математическое моделирование. Заключи-
тельным этапом исследования каждого способа должны явиться оценки
технической реализуемости с привлечением информации об опыте раз-
работки и испытаний. По вполне понятным причинам такой полный на-
бор в настоящее время нереализуем. Тем не менее, именно эта имею-
щаяся неполнота является стимулом для дальнейших исследований, вы-
бора направлений этих исследований применительно к описанным ме-
тодам, перспективность которых можно оценить на основании пред-
ставленных материалов.
В отношении ассортимента рассмотренных в монографии методов
местоопределения необходимо отметить, что продолжающееся интен-
сивное развитие радиоэлектронных средств и режимов их использова-
ния постоянно ставит перед специалистами в области радиотехнической
разведки новые задачи по своевременному обнаружению сигналов этих
средств и определения координат ИРИ с заданной точностью. Высокая
динамика радиоэлектронной борьбы, когда конфликтующие средства
«общаются» друг с другом на скоростях света, делает временные харак-
теристики аппаратуры РТР не менее значимыми, чем точностные. В
этих условиях весьма перспективными представляются исследования в
области комплексного применения различных способов РТР, как по-
рознь, так и в сочетании с другими информационными средствами. Та-
ким образом, отмеченные выше области очерчивают дальнейшие на-
правления исследований методов определения координат ИРИ, отправ-
ными точками для которых, как надеются авторы, может послужить ма-
териал настоящей книги.
428
Список наиболее часто употребляемых
сокращений и обозначений
Сокращения
АПЧ - автоматическая подстройка частоты
ВВП - быстрый вероятностный поиск
БДП - быстрый достоверный поиск
ВП - вероятностный поиск
ВРЛС - вторичная радиолокационная станция
ВЧ - высокая частота, высокочастотный
ГД Г - генератор на диоде Ганна
ГЕТ - гетеродин
Д - детектор
ДД - динамический диапазон
ДН - диаграмма направленности
ДНА - диаграмма направленности антенны
ЖИГ - железо-иттриевый гранат
ИРИ - источник радиоизлучения
К - коммутатор (переключатель трактов)
ККП - комбинационный канал (каналы) приема за счет преобразования
на гармониках частот сигнала и гетеродина
КО - круговой обзор
ЛА - летательный аппарат
ЛЕВ - лампа бегущей волны
ЛЗ - линия задержки
ЛОВ - лампа обратной волны
МВП - медленный вероятностный поиск
МДП - медленный достоверный поиск
МИЧ - мгновенное измерение частоты
МПЛ - микрополосковая линия
МСВ - магнитостатические волны
МФП - многоканально-функциональный приемник
НК - надводный корабль
ОБП - одна боковая полоса (модулятор ОБП - модулятор одной боко-
вой полосы)
ПФЦ - параметры движения цели
ПКР - противокорабельная ракета
ППМ - плотность потока мощности излучения РЛС
ППФ - полосно-пропускающий фильтр
ПЧ - промежуточная частота
РГ - радиогоризонт
РЛ ГСН - радиолокационная головка самонаведения
РЛС - радиолокационная станция
РТР - радиотехническая разведка
429
РЭР - радиоэлектронная разведка
СВН - средства воздушного нападения
СВПЧ - сверхвысокая промежуточная частота
СВЧ - сверхвысокая частота
СКО - среднее квадратическое отклонение, средняя квадратическая
ошибка
СМ - смеситель (в преобразователе частоты радиосигналов)
УВЧ - усилитель высокой частоты
УПЧ - усилитель промежуточной частоты
ФМС - фазовое мгновенное сравнение
ЭЛТ - электроннолучевая трубка
ЭМ - электромагнитный
ЭМС - электромагнитная совместимость
Обозначения
2?ккп, т,п, Dm„ - динамический диапазон (относительное ослабление)
комбинационного канала приема по гармоникам частот сигнала и гете-
родина порядков т, п
tsf - диапазон частот
AF - полоса пропускания УПЧ или узкополосного фильтра, опреде-
ляющая разрешающую способность приемника по частоте
Л, Лиги - частота сигнала
fca,fcu~ верхняя и нижняя частота сигнала соответственно
/,/гет- частота гетеродина
ftr - частота транспонирующего гетеродина
верхняя и нижняя частота диапазона частот
F- промежуточная частота
FB, F„- верхнее и нижнее значения частоты в диапазоне промежуточных
частот
СБл т ~ средний (50%) уровень боковых лепестков ДНА относительно
изотропного излучателя
Gnp- коэффициент усиления приемной антенны
Gpnc- коэффициент усиления антенны РЛС
Н- высота полета ЛА
т - номер гармоники частоты сигнала;
число частотных каналов (фильтров) в одной ступени МФП
п - номер гармоники частоты гетеродина;
число ступеней поиска при многоступенчатой процедуре;
число ступеней в МФП;
коэффициент умножения в умножителе частоты радиосигнала
N - число РЛС, число потоков облучений или потоков импульсных сиг-
налов, образуемых излучениями РЛС
430
П - период поиска сигналов в диапазоне частот или азимутов
Рт- вероятность несовпадения облучений нескольких РЛС
Pi, Pi-\ot- вероятность обнаружения сигнала за время t и за время, рав-
ное 10 периодам повторения сигнала (г=10Т„)
Ррлс- мощность передатчика РЛС
Рпр - чувствительность приемных устройств аппаратуры РТР
ргл - вероятность облучения главным лепестком ДНА РЛС
р5д - вероятность приема по боковым лепесткам
q - скважность импульсного сигнала РЛС
г,.л - потенциально-предельная дальность приема излучения РЛС по
главному лепестку ДН ее антенны
Гб,, - дальность приема медианного (50%) уровня бокового излучения РЛС
га, гь - ближняя и дальняя границы вероятностного приема излучения
РЛС в области существования боковых лепестков ее антенны
Т„ - максимальное время поиска при многоступенчатой (и-ступенчатой)
процедуре поиска
Т„- период повторения импульсного сигнала РЛС
у- сектор приема бортовой аппаратуры РТР
ft,5, ft,], ft - ширина главного лепестка ДНА по уровню половинной мощ-
ности (ft,5), по уровню 0,1 мощности (ftj) и по нулевому уровню (Ио)
в\, ft- сектора сканирования антенн пеленгатора (ft) и РЛС (ft)
к - число разрешаемых^ градаций в промежуточных ступенях при мно-
гоступенчатой процедуре поиска
л. - длина волны ЭМ излучения РЛС
pj— плотность расположения РЛСу-го типа на местности
Р/~ коэффициент частотного перекрытия диапазона, равный отношению
верхней частоты диапазона к нижней частоте
о2 - дисперсия распределения уровня боковых лепестков
ги- длительность импульсного сигнала РЛС
и- время перехода от ступени к ступени при многоступенчатом поиске
число разрешаемых градаций в диапазоне обзора
431
Научное издание
Юрий Петрович Мельников
Сергей Васильевич Попов
Радиотехническая разведка
Методы оценки эффективности
местоопределения
источников излучения
Зав. редакцией
Л. А. Стасышина
Изд. № 13. Сдано в набор 18 01.2008.
Подписано в печать 4.07.2008. Формат 60x90 1/16.
Бумага газетная. Гарнитура Таймс.
Печать офсетная.
Печ. л. 27. Тираж 500 экз. Зак. № 982.
Издательство «Радиотехника».
107031, Москва, К-31, Кузнецкий мост, д. 20/6.
Телефакс: (495)621-48-37; 625-78-72, 625-92-41.
E-mail: info@radiotec.ru
www.radiotec.ru
Отпечатано в ООО
«Новый век»