





























































































Автор: Чувиковский В.С.
Теги: техника средств транспорта физика строительство судостроение издательство судостроение физика жидкости
Год: 1963




Текст
В. С. ЧУВИКОВСКИЙ
ПРИНЦИПЫ ДИНАМИКИ
В СТРОИТЕЛЬНОЙ
МЕХАНИКЕ КОРАБЛЯ
34-HOg - -J !С
БИБЛИОТЕКА
lean xf радсн. Корабметр. ।
Институт* agj
ИЗДАТЕЛЬСТВО «СУДОСТРОЕНИЕ»
Ленинград
1964
УДК 629 12—212: 531
Книга является первой монографией в серии подгото-
вляемых издательством «Судостроение» научно-теорети-
ческих работ, посвященных основам и методам строитель-
ной механики корабля. В ней изложены основные прин-
ципы динамики применительно к строительной механике.
Книга рассчитана на инженеров-кораблестроителей,
студентов старших курсов кораблестроительных институ-
тов и аспирантов. Она будет полезна также специалистам
других областей техники, интересующимся проблемами
строительной механики.
ЧУВИКОВСКИЙ ВЛАДИСЛАВ СЕРГЕЕВИЧ
ПРИНЦИПЫ ДИНАМИКИ в СТРОИТЕЛЬНОЙ МЕХАНИКЕ КОРАБЛЯ
Тем. план 1964 г. № 97
Общественный рецензент: секция строительной механики корабля
НТО судпром, им. А. Н. Крылова.
Научный редактор В. В. Новожилов
Редактор А. А. Освенская
Переплет художника Б. А. Рогачевскоео
Технический редактор Ю. Н. Коровенка Корректор В. М. Альфимова
Сдано в набор 20/11 1964 г М-11258. Подписано к печати 5/V 1964 г.
Формат бумаги 60 X 9O‘/tl. Печ. л. 12 Уч.-изд. л. 11 Изд. № 1485-63. Тираж 1100 эка.
Цена 70 к. Заказ Ns 1757
Издательство «Судостроение». Ленинград, Д-65, ул. Гоголи. 8
Ленинградская типография 76 6 Главполнграфпрома
Государственного комитета Совета Министров СССР по печати.
Ленинград, ул. Моисеенко, 10
ОТ АВТОРА
Большинство разделов строительной механики корабля бази-
руется на общих принципах динамики. Именно эти принципы
позволяют с единой точки зрения осмыслить основные энергети-
ческие теоремы, касающиеся упругих и упруго-пластических си-
стем, главнейшие расчетные методы определения деформаций
в конструкциях, взаимосвязь между статическими и динамиче-
скими деформациями и, в частности, квазистатические методы
динамического расчета конструкций. Только с общих позиций
динамики можно обоснованно подойти к таким важнейшим вопро-
сам, как линеаризация системы, выбор обобщенных координат
при решении данной конкретной задачи, максимально возможное
упрощение расчетной схемы и т. д.
Однако изучение указанных принципов специалистами по
строительной механике встречает определенные затруднения.
Имеется много курсов аналитической механики, но почти все они
весьма обширны и для их изучения требуется очень много времени.
Кроме того, в них очень трудно произвести необходимый отбор
материала, так как наряду с вопросами, крайне важными для
строительной механики, эти курсы содержат много больших
и сложных разделов, нужных совсем в других областях техники —
автоматике, теории механизмов, приборостроении, баллистике,
ракетостроении и т. л. Наконец, в этих курсах не учитывается
специфика строительной механики, многие важные положения
которой рассмотрены в них недостаточно подробно.
Настоящая книга предназначена для восполнения отмечен-
ного пробела в литературе. Она рассчитана в основном на инже-
неров, студентов старших курсов кораблестроительных инсти-
тутов и аспирантов, которые, обладая знаниями строительной
механики в объеме обычных институтских программ, хотят их
закрепить, углубить и расширить, чтобы: иметь возможность
сознательно выполнять сложные расчеты, читать специальную
литературу или перейти к самостоятельным научным исследова-
ниям.
При написании книги был использован опыт обучения аспи-
рантов, специализирующихся в различных областях исследова-
ний прочности корабля.
1* 3
Книга состоит из двух разделов: в первом изложены общие
положения динамики, во втором — основные положения дина-
мики линейных механических систем. В целом книга содержит
материал, используемый во всех областях строительной механики.
В нее не включены такие разделы, как нелинейные колебания,
вариационные методы механики, которые по своей специфике
должны излагаться отдельно.
Автор стремился выяснять принципиальную сторону рассма-
триваемых вопросов, уделяя гораздо меньше внимания частным
примерам, чтобы читатель не терял за частностями главного
Многочисленные примеры применения общих положений меха-
ники к конкретным задачам можно найти во всех курсах строи
тельной механики.
Изложение принято по возможности строгим, не в ущерб,
однако, физическому осмысливанию результатов. Болес того,
автор старался показать, что чисто физические рассуждения могут
быть не менее строгими, чем аналитические изыскания.
Новизна предпринимаемой попытки изложить принципы ди-
намики применительно к строительной механике корабля увели-
чивает, естественно, возможность различных промахов и недо-
статков. Указания на них будут с благодарностью приняты.
В заключение автор считает своим долгом поблагодарить члена-
корреспондента АН СССР профессора В. В. Новожилова И кан-
дидата технических наук О. М. Палия за ценные замечания, сде-
ланные ими при чтении рукописи, а также Е. В. Сухотину за по-
мощь при ее оформлении.
Отзывы о книге просим напраалять в адрес издательства:
Ленинград, Д-65, ул, Гоголя, 8.
РАЗДЕЛ ПЕРВЫЙ
ОБЩИЕ ПОЛОЖЕНИЯ ДИНАМИКИ
ГЛАВА I»
ОСНОВЫ МЕХАНИКИ. ОБЩИЕ ПОНЯТИЯ
И ЗАВИСИМОСТИ ДИНАМИКИ МАТЕРИАЛЬНОЙ
ТОЧКИ
§ 1. АКСИОМАТИЧЕСКИЙ МЕТОД
1. Современная аналитическая механика, как и многие другие
науки, .использует аксиоматический метод, сущность которого
состоит в следующем.
Путем обобщения результатов наблюдений и экспериментов
над Объектами и явлениями материального мира, относящимися
к рассматриваемой науке, вырабатываются основные понятия.
Они всегда представляют некоторую абстракцию реальных объек-
тов и явлений и отражают лишь некоторые их свойства. Напри-
мер, основные понятия современной строго аксиоматически по-
строенной геометрии выражаются всем известными терминами
точка, прямая, плоскость и т, д.
Основные понятия определены обычно с помощью описаний,
дающих лишь общее представление о них, а также с помощью
физических процедур, позволяющих получить или измерить опре-
деляемый объект или явление. Логически строгих определений
основных (исходных) понятий построить нельзя, так как всякое
логически строгое определение нового понятия обязательно бази-
руется на каких-то старых понятиях (определение «гипотенуза
есть сторона прямоугольного треугольника, лежащая против пря-
мого угла» использует понятия треугольник, прямой угол и т. Д.).
Не случайно в «Началах» Евклида прообразе аксиоматически
построенной геометрии — приведены следующие далекие от стро-
гости формулировки: «точка есть то, что не имеет частей», «пря-
мая линия -есть та, которая одинаково лежит относительно всех
своих точек», и т. п.
Вместо данной системы основных понятии можно всегда ввести
другую систему. Тогда первые основные понятия станут производ-
ными и смогут быть логически определены через вторые, но зато
нельзя будет логически сформулировать новые (вторые) основные
понятия.
5
Обобщение результатов экспериментов и наблюдений дает
также возможность установить аксиомы, т. е. исходные зависи-
мости и отношения между основными понятиями. Затем, на базе
основных понятий и аксиом, уже чисто логически доказываются
различные следствия (теоремы),- вводятся новые (производные)
понятия, словом, строится все остальное здание данной науки,
Аксиомы не могут быть логически доказаны. В самом деле,
всякая новая теорема всегда доказывается с помощью других,
известных ранее, зависимостей. Следовательно, исходные (перво-
начальные) зависимости принципиально недоказуемы. Нужно
экспериментально или наблюдением проверить правильность
аксиом, а затем просто принять их.
Иногда аксиомы трактуются как очевидные истины, не требую-
щие доказательства, однако такая трактовка совершенно неверна.
В строгом изложении всякой науки должна быть четко доказана
любая новая зависимость: в сложных вопросах иногда самые оче-
видные вещи оказываются неверными. Но для того чтобы исполь-
зовать логику, необходимы какие-то исходные положения, которые
постулируются без применения логических доказательств.
Конечно, выбор аксиом в какой-то мере произволен: данные
аксиомы всегда можно трактовать как теоремы и доказывать их
с помощью других зависимостей. Но тогда эти другие зависимости
необходимо проверить экспериментом или наблюдением, принять
за исходные и отказаться от их логического доказательства.
Естественно, что в качестве аксиом обычно принимают такие
зависимости, которые наиболее просты и легче всего проверяются.
Тем не менее многие из них далеко не очевидны и представляют
собой очень тонкие обобщения.
2. Принятые аксиомы не должны включать «лишних» утвер-
ждений, которые доказуемы на основе других утверждений, со-
держащихся в аксиомах. Но зато в них следует оговорить все
используемые в дальнейшем исходные зависимости между основ-
ными понятиями (даже самые очевидные).
Например, предложенная Гильбертом строгая система аксиом
евклидовой геометрии содержит такую аксиому: «На каждой
прямой лежат по крайней мере две точки. Существуют по крайней
мере три точки, не лежащие на одной прямой». Характерна оче-
видность приведенной аксиомы н скупость ее утверждений. Пря-
мая, как известно, содержит не Две, а бесконечное .множество
точек и существует также бесконечное множество точек, не лежа-
щих на одной прямой, но это уже вполне доказуемо на основе
других аксиом Гильберта и значит не должно содержаться в самих
аксиомах.
Изменяя систему аксиом, которым подчиняются данные
объекты (основные понятия), мы получим другую теорию. Так,
изменение аксиомы параллельности приводит от геометрии Евклида
к геометрии Лобачевского. Аналогично изменение аксиом класси-
6
ческой механики приводит к теории относительности. Геометрия
Евклида логически так же верна, как и геометрия Лобачевского,
а классическая механика — как и теория относительности; все
дело в различии их аксиом. Степень соответствия тех или иных
аксиом объектам и процессам материального мира может быть про-
верена только экспериментально или наблюдением.
Необычность некоторых аксиом геометрии Лобачевского или
теории относительности не должна нас смущать: разница между
ними и соответствующими обычными аксиомами евклидовой гео-
метрии или классической механики проявляется в совершенно
необычных для нас условиях (например, при громадных расстоя-
ниях, громадных скоростях движения), когда привычные пред-
ставления просто ие могут быть использованы. Кстати сказать,
аксиомы классической механики первоначально вовсе не казались
обычными или очевидными; они вызывали самые ожесточенные
споры даже среди очень крупных ученых. Их нынешняя очевид-
ность — просто следствие нашей привычки обращения с ними.
Теория аксиоматического метода в настоящее время довольно
хорошо разработана и содержит много интересных положений
о полноте, независимости, непротиворечивости аксиом и пр.
[4, 5, 8]. Однако для дальнейшего достаточно приведенных крат-
ких сведений.
§ 2. МАТЕРИАЛЬНАЯ ТОЧКА. ПРОСТРАНСТВО И ВРЕМЯ
СКОРОСТЬ И УСКОРЕНИЕ
1. Часто считают, что основными понятиями механики яв-
ляются только сила и масса, аксиомами — три закона Ньютона.
В действительности число основных понятий и аксиом значи-
тельно больше. Например, механика не может обойтись без основ-
ных понятий материальной точки, пространства и времени,
свойства и отношения которых определяются рядом аксиом.
Материальной точкой называется физическое тело, размерами
которого при описании его движения можно пренебречь.
Естественно, что возможность такого пренебрежения всецело
определяется конкретными условиями задачи. Например, рас-
сматривая движение планет вокруг Солнца, можно заменять их
материальными точками (размеры тела малы по сравнению с про-
ходимыми расстояниями), но этого уже нельзя делать при изуче-
нии суточного вращения планеты вокруг своей оси. Здесь ее
целесообразно представить как шарообразное тело конечных
размеров.
Часто в виде материальном точки условно представляют тело,
размеры которого вполне соизмеримы с расстояниями, движущееся
чисто поступательно (без вращений). В этом случае движение
одной геометрической точки тела, например центра тяжести,
полностью определяет движение всего тела.
2. Поскольку всякое движение происходит в пространстве
и во времени, то пространство и время также представляют основ-
ные понятия механики.
Принятое в классической механике пространство валяется
однородным, изотропным и евклидовым: в нем нет «привилегиро-
ванных» точек (однородность) и направлений (изотропность),
а его свойства описываются еаклидовой геометрией (аксиома).
Движение тела в однородном изотропном пространстве, не
имеющем «естественной» ориентации, можно определить лишь
по отношению к другому телу или системе тел, которые играют
роль пространственной системы отпета (начало отсчета и система
координат). Для определения положения тела относительно си-
стемы отсчета вводится основное понятие длины, которая изме-
ряется с помощью единицы длины (см, м). Принимается, что длины
(геометрические размеры) не зависят от движения тел (аксиома)
Так как пространство однородно и изотропно и в нем нет «при-
вилегированной» системы отсчета, то нельзя говорить о каком-то
«абсолютном движении»; всякое даижение относительно. В одной
системе координат тело покоится; в другой оно в это же время
совершает весьма быстрое и причудливое движение.
В системе предполагается наличие «часов», т. е. равномерного
физического процесса, для определения моментов времени, соот-
ветствующих определенным положениям тела в пространстве;
вводится единица времени (сек., мин.). Все моменты времени равг
исправны. Принято (аксиома), что в разных системах отсчета,
произвольно движущихся друг относительно друга, время оди-
наково; в этом смысле его называют абсолютным временем (не
в смысле существования привилегированного события, от которого
отсчитываются даты, а в смысле независимости времени от системы
координат).
Иными словами, движение относительно, поскольку выра-
жение «событие В произошло там же, где райьше произошло
событие А» имеет смысл только для определенной системы коор-
динат (относительно координат, связанных с поездом, пассажир
каждое утро просыпается на одном месте, но относительно коор-
динат, связанных с Землей, он просыпается весьма далеко от преж-
него места). Время абсолютно, поскольку выражение «событие В
произошло тогда же, когда и событие Л» не требует указания на
систему отсчета (двенадцать часов по московскому времени насту-
пает одновременно и в системе координат, связанных с поездом,
и в системе координат, связанных с Землей).
Отмеченные выше свойства пространства и времени приняты
(аксиоматизированы) в классической механике как обобщение
наблюдений и опытных данных применительно к медленным по
сравнению со скоростью света движениям и телам «обычных»
размеров и масс, которые проходят «обычные» расстояния (т. е.
без выхода в микромир и мир космоса).
8
Формулированию этих свойств предшествовали длительные
споры и коренное изменение существовавших ранее взглядов.
Даже сам Ньютон еще не вполне осознал кинематическое «равно-
правие» различных систем координат и предполагал наличие
некоего однородного изотропного абсолютного пространства, кото-
рое «по самой своей сущности безотносительно к чему бы то ни
было внешнему остается всегда одинаковым и неподаижным» [9].
Отказ от абсолютного пространства и установление современных
аксиом классической механики о пространстве и времени отно-
сятся лишь к концу XIX и началу XX веков.
3. Положение материальной точки относительно тела отсчета
определяется обычно тремя декартовыми прямоугольными коор-
динатами х, у, z или радиусом-вектором г, т. е. направленным от-
резком, начало которого совпадает с началом отсчета, а конец —
с рассматриваемой точкой.
Геометрическое место точек, последовательно занимаемых
движущейся материальной точкой, называется траекторией мате-
риальной точки. Траектория является одновременно геометри-
ческим местом концов радиуса-вектора, откладываемого от начала
координат, т. е. годографом радиуса-вектора.
В то время как материальная точка даижется по своей траек-
тории, проекции ее на оси координат двщжутся каждая по своей
оси, т. е. результирующее движение как бы составлено из трех
прямолинейных движений {составляющих движения).
Вводя единичные векторы {орты) ек, еу, ег вдоль осей ох, оу, oz
и обозначив время буквой I, можно записать
г -Л» I <-,.У I V (1-1)
или
7(0-ё1х(0 + ё,у(0 +V(0- (11а)
Величины х, у, z представляют проекции радиуса-вектора на оси
координат.
Элементарное перемещение точки
dr = ejix 4- eydy 4- ejlz, (1. 2)
т. e. также может быть разложено на три составляющих элемен-
тарных перемещения.
Длина ds элементарной дуги траектории точки, с точностью
до величин второго порядка малости, равна длине dr (стягиваю-
щей хорде)
ds - dr = 1 'dx* | dtf (1.3)
Вектор dr направлен no касательной к траектории в сторону
даижения.
9
Скоростью v материальной точки называется векторная вели-
чина, равная пределу отношения малого перемещения Дг к соот-
ветствующему этому перемещению малому времени Д/ при
стремлении Д/ к нулю
Аг
А/
v ~ lirn
Л/-Ю
= V + Vi + «Л (1.4)
dx • du dz
где ai' = ]t>'^- = y>-^i=z— производные от координат по вре-
мени, которые называются составляющими скорости движения.
Составляющая скорости есть предел отношения пути, прохо-
димого проекцией точки, к времени, т. е. скорость указанной проек-
ции в ее прямолинейном движении.
Вектор скорости о, как и вектор элементарного перемеще-
ния dr, направлен по касательной к траектории точки в сторону
движения. Величина скорости
£) = ]/х« + ^ + ?.
(1.5)
Единица скорости — см!сек и т. д.
Длина пути, пройденного точкой за время t — to,
s= Jds = = §vdt = J y^ + z^dt. (1.6)
Если задана скорость движения точки х (/), у (/), z (/)» то
само даижение определяется очевидными выражениями
x(i) = |i<«+x,; HV) = jydl+nQ; г(1) r \ zdz Л г,„ (1.7)
где x0, y0, z0 — координаты точки в начальный момент t = tn.
4. В механике весьма важную роль играет понятие ускорения.
Ускорением а материальной точки называется векторная ве-
личина, равная пределу отношения малого приращения скоро-
сти До к соответствующему этому приращению малому време-
ни М при стремлении Д/ к нулю
— ..Ли do <Рг - d3x , ~ d*y . -
° = = = ° С*'ЛГ + '"’Зр + '
^^х + е^у + ё^. (1.8)
о dax d*y d*z
Здесь = х; = у, — 2 — вторые производные от
координат по времени {составляющие ускорения}, которые
10
представляют собой ускорения проекций точки и их прямоли-
нейном движении.
Величина ускорения
а = угх‘ + ? + ?. (1-ВД
Единицы ускорения — см1сек.*, м!сек* и т. п.
Вектор а направлен так же, как и вектор Д v. Это направление
можно определить, если построить годограф вектора скорости,
т. е. откладывать вектор скорости от
одной точки и иайти геометрическое
место его концов. Тогда вектор
ускорения будет устремлен по ка-
сательной к годографу в сторону
перемещения конца вектора ско-
рости.
Когда задано ускорение движе-
ния точки x(t), y{t), z(t), то само
движение определяется зависимо-
стимй
x(O = f | xdtdt+xj
^(0 = 1 J ydtdt + 'yj + y^
ziO^^pdtdt + Zot + z^,.
движения (рис. 1, а).
(I- Ю)
Произвольные постоянные х0, у0,
z0, хй, у0, — значения координат
и составляющих скоростей в началь-
ный момент t = /0.
Иногда целесообразно разложить
вектор ускорения а по касательной
SH нормали ап к траектории точки,
ля простоты ограничимся наиболее
важным практически случаем плоского ___________ _____
Как уже отмечалось, вектор ускорения и вектор изменения
скорости всегда совпадают по направлению. Следовательно, за
малый промежуток времени Ы тангенциальная (касательная)
составляющая at ускорения обусловит малое приращение скоро-
сти До* = т. е. изменит величину скорости, но оставит
прежним ее направление (рис. 1, б). Нормальная составляющая ап
за то же малое время даст приращение скорости Дпл = алД/,
U
направленное перпендикулярно к первоначальному вектору о
(рис. 1, в); это изменит направление вектора скорости, но оставит
прежней его величину (of = оI. 2-|-Дц„ и при малом До„ с точ-
ностью до величин второго порядка малости v1 = о).
Из сказанного ясно, что
dv
a* = ~dt'
(I-11)
Таким образом, касательное ускорение характеризует изме-
нение скорости по величине; оно может быть как положительным,
так и отрицательным.
Для вычисления величины ап найдем радиус кривизны е
траектории в рассматриваемой точке А и заменим малую дугу As
кривой малой дугой окружности AAL радиуса @ (рис. 1, а). Вели-
чину скорости в точке Аг оставим без изменения, так как нормаль-
ное ускорение не влияет на нее.
Треугольники АОВ и ДХСО подобны ввиду равенства углов
АОВ и CAjD. Значит
Доя V » v я п
—- -= — или Де,. =-----АВ.
АВ оВ оВ
Но при стремлении Да к нулю оВ стремится к е, АВ стремится
к Де, т. е.
Доп = — As.
" е
Разделив обе части равенства на Ы и устремив Д( к нулю,
окончательно получим
(112)
Нормальное ускорение характеризует изменение скорости по
направлению. Оно всегда положительно и направлено к центру
кривизны.
§ 3. ПЕРВАЯ АКСИОМА МЕХАНИКИ (ЗАКОН ИНЕРЦИИ).
ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ КООРДИНАТ
I. Введенных выше основных и производных понятий меха-
ники, а также вспомогательных аксиом достаточно, чтобы сформу-
лировать. первую аксиому (первый закон) механики (закон инерции
или принцип инерции Галилея — Ньютона)', существует по край-
ней мере одна пространственная система отсчета, называемая
в дальнейшем инерциальной, в которой всякое ускорение (т. е. вся-
кое изменение скорости) материальной точки обусловливается не-
скомпенсированным действием на нее других материальных объек-
тов.
J2
Прямые опыты и наблюдения, произведенные с высокой сте-
пенью точности, показывают, что инерциальной является гелио-
центрическая система, начало которой расположено в центре масс
солнечной спстемы (т. е. практически на Солнце), а оси коорди-
нат направлены на так называемые неподвижные звезды (одна
из неподвижных звезд — Полярная).
2. Из существования хотя бы одной инерциальной системы
чисто логически вытекает существование бесчисленного множе-
ства таких систем.
В самом деле, пусть х, у, z, t - координаты точки и время
в инерциальной системе координат, а х’, у', г', 1‘ — координаты
и время в любой другой системе, которая движется равномерно
и прямолинейно относительно данной инерциальной системы (оси
второй системы параллельны осям первой системы). На основании
принятых в классической механике свойств пространства и вре-
мени (см. § 2) можно записать (частный случай так называемых
преобразований Галилея — Ньютона):
х' = x-f-x0 aot
У' = У -3-!/о + ₽о<
z’ = z + z0 + у0/
t = С
(1-13)
Здесь х0, у0, z0 — координаты начала системы (х‘, у', z') в си-
стеме (х, у, г), взятые с обратным знаком; ав, р0, у0 — проекции
скорости системы (х', у', г') относительно системы (х, у, z). взя-
тые с обратным знаком.
Дифференцируя обе части (1. 13) даа раза no t, находим
. х' = х; у‘ = у; г' = г, (1.14)
т. е. ускорения материальной точки в обеих системах одинаковы,
и, следовательно, система (х’, у', г’) также инерцнальна.
Легко установить, что вывод о равенстве ускорений в системах
(х, у, г) и (х', у', г') остается справедливым и в том случае, когда
оси системы (х’, у’, z') не параллельны осям х, у, г.
Это непосредственно вытекает из общего положения, что ско-
рость и ускорение материальной точки одинаковы в любых не-
подвижных друг относительно друга системах координат (вектор
элементарного перемещения dr, а следовательно, и все его произ-
водные, могут измениться лишь при движении начала отсчета).
Ясно, что, повернув оси системы (х’, у , г’}, т. е. по существу
перейдя к новой системе (х", у", z”), неподвижной по отношению
к (х', у', z'), получим те же ускорения (одинаковые векторы а',
проекции вектора с на оси координат будут различаться).
13
Учитывая сказанное, в качестве инерциальной системы часто '
принимают Землю (геоцентрическая система), поскольку Земля
движется в гелиоцентрической системе с малыми ускорениями по
сравнению с ускорениями в рассматриваемых механических си-
стемах; можно полагать, что в рассматриваемые промежутки вре-
мени она перемещается по отношению к Солнцу почти равномерно
и прямолинейно. Однако в некоторых задачах (опыт Фуко и пр.)
небольшая неинерциальность Земли начинает сказываться
и поэтому необходимо возвращаться к гелиоцентрической си-
стеме.
Иногда за инерциальную систему можно принимать коорди-
наты, связанные с равномерно движущимся относительно Земли
кораблем, поездом, самолетом и пр. Возможность выбора прибли-
женных инерциальных систем обусловливается конкретными осо-
бенностями задачи.
В дальнейшем, если не оговорено противное, будем полагать
системы координат инерциальными.
3. Первый закон механики, в его современной трактовке,
постулирует существование хотя бы одной инерциальной системы
и указывает определяющее свойство таких систем. Только после
этого можно переходить ко второму закону, рассматривающему
поведение материальной точки именно в инерциальной системе
(см. § 4)-
Обычно приводимая ньютонова формулировка [91: «вся-
кое тело сохраняет свое состояние покоя или прямолинейного
и равномерного даижения, если только приложенные к нему силы
не побуждают его изменить свое состояние» касается постулирован-
ного им (см. § 2), но ие признаваемого современной наукой, абсо-
лютного пространства, которое, кстати сказать, нельзя никак
физически обнаружить, а поэтому и нельзя узнать, равномерно ли
движется тело по отношению к этому «абсолютному простран-
ству». Второй закон сформулирован Ньютоном также примени-
тельно к абсолютному пространству. Поэтому чисто логически
первый закон (в ньютоновой формулировке) оказывается простым
следствием второго закона и не заслуживает названия аксиомы
(если нет силы, то ускорение равно нулю и, значит, движение
равномерно и прямолинейно, см. § 4).
Смысл формулировки первого закона, данного Ньютоном,
заключался в отрицании традиционных для того времени взгля-
дов, согласно которым сила есть причина скорости, а не ускорения.
Нужно было сначала отвергнуть старые взгляды (первый закон),
а затем уточнить новые (второй закон). Таково историческое,
но вовсе не логическое определение классических формулировок.
При отрицании современной наукой абсолютного пространства
роль первого закона сильно возрастает, и он становится действи-
тельно независимой аксиомой, а также физической и логической
основой второго закона.
14
§ 4. СИЛА. МАССА, ВТОРАЯ АКСИОМА (ВТОРОЙ ЗАКОН)
МЕХАНИКИ
I. Прежде чем перейти к другим аксиомам механики, необхо-
димо ввести основные понятия силы и массы.
Сила есть мера механического воздействия на материальную
точку (тела) со стороны других материальных объектов; она изо-
бражается вектором и характеризует величину этого воздействия
(длина вектора), а также его направление в данный момент вре-
мени (направление вектора).
Поскольку в инерциальной системе координат всякое изме-
нение скорости материальной точки есть результат нескомпенсн-
рованного механического воздействия на нее других материальных
объектов, то ясно, что указанные изменения определяются си-
лами; можно сказать, что сила есть причина изменения скорости
материальной точки в инерциальной системе координат.
Механическое воздействие на материальную точку (тело) может
быть моделировано, а сила может быть измерена, например пру-
жинным динамометром. В этом случае направление воздействия
определяется осью пружины и знаком ее деформации (растяже-
ние — сжатие); за единицу величины силы следует принять вели-
чину воздействия при определенной величине деформации.
Опыты (в инерциальной системе координат) с высокой степенью
точности показывают следующее.
Сила, приложенная к телу (материвльной точке), вызывает
его ускорение, которое направлено по направлению силы и не за-
висит от положения и скорости тела в момент действия силы.
Отсюда ясно, что все тела обладают свойством сопротивляться,
до некоторой степени, действию сил (инертностью) — иначе уско-
рения были бы бесконечными; инертность тела характеризуется
скалярной величиной — иначе ускорение не могло быть направ-
лено одинаково с силой.
Силы складываются по закону сложения векторов, т. е. две
одинаковые по величине силы (два одинаковых воздействия),
направленные в одну сторону, вызывают удвоенное ускорение;
две одинаковые по величине силы, направленные в разные сто-
роны, вызывают нулеаое ускорение (отсюда способ тарировки
динамометра и установления величины заданной силы), и вообще
суммарное ускорение тела от действия нескольких сил равно уско-
рению от действия силы, представляющей их векторную сумму.
Поэтому ряд сил можно всегда заменить одной силой.
Величина ускорения тела пропорциональна величине дей-
ствующей силы. Из сказанного нетрудно заключить, что скаляр-
ная величина, характеризующая инертность тела, есть постоянная.
Различные тела прд действием одинаковой силы получают раз-
ные ускорения. Следовательно, инертность у различных тел раз-
лична.
15
Постоянная скалярная величина, характеризующая меру
инертности данного тела (материальной точки), называется его
массой или, более точно, инертной массой.
Инертную массу удобно определять через вес тела, т. е. через
силу его притяжения Землей.
В самом деле, различные тела имеют различный вес, причем
меру, определяющую стремление тела к притяжению, т. е. ска-
лярную величину, пропорциональную силе притяжения, можно
называть его тяжелой массой. Опыт показывает, что ускорения
свободного падения различных тел в одном и том же районе зем-
ного шара строго одинаковы. Следовательно, сила тяжести всегда
пропорциональна его инертной массе или, иначе, тяжелая масса
пропорциональна инертной массе. Соответствующим выбором
единиц их можно сделать равными.
Таким образом получаем физический способ измерения масс:
можно принять массу какого-либо тела за единицу, а массы осталь-
ных тел находить из соотношения весов (сил тяжести) тела-эта-
лона и рассматриваемого тела.
2. Обобщая приведенные факты и выбрав соответствующим
образом систему единиц, дадим следующую формулировку сто-
рой аксиомы (второго закона) механики:
Произведение массы материальной точки на ее ускорение в инер-
циальной системе координат равно векторной сумме действующих
на точку сил
та = (1.15)
где т — масса; а ускорение; Ft — действующая на точку сила.
В проекциях на декартову систему координат
тах -= тх - ^Fh х; тау - ту ^Fi,y;
та, - m2 — ^Flt(1.15а)
Силы в общем случае являются функциями координат точки,
ее скорости и времени; более сложные зависимости встречаются
крайне редко. Поэтому уравнения (I. 15а) переписываются в виде
тх -= Fx (х, у, г, х, у, г, l) 1
ту=- Fy(x, у, z, х, у, z, t) [ (1.156)
mz = F, (х, у, z, х, у, z, t) )
Решение указанных уравнений движения материальной точки
рассмотрено ниже (§ 7). Сейчас лишь отметим, что векторное урав-
нение (1. 15) или скалярные уравнения (I. 156) вместе с началь-
ными условиями, т. е. начальным положением (г0 или х0, у0, z0)
и начальной скоростью (о® или %, »Oz), полностью опре-
деляют движение, т. е. г (() или х (t), у (t), z (f).
16
В механике и физике широко используется система единиц CGS,
где в качестве основных единиц приняты сантиметр, грамм-
масса и секунда. Тогда в качестве единицы силы, называемой
дина, должна приниматься сила, которая сообщает телу с мас-
сой I г ускорение 1 см/се/Р.
В технике применяется техническая система единиц — метр,
килограмм-сила {кгс), секунда. В качестве единицы силы принят
вес тела с массой 1000 г в точке земного шара с ускорением
свободного падения g — 9,81 м/сек2-, 1 кгс — 9,81 • 106 дин.
В настоящее время вводится так называемая международная
система единиц—СИ (ГОСТ 9867—61), где основные единицы —
метр, килограмм-масса, секунда, а единицей силы является
ньютон (я), т. е. сила, сообщающая массе в 1 кг ускорение
1 м/сек2. Ясно, что 1 кгс = 9,81 н.
3. Заметим, что Ньютон при формулировке второго закона
механики ввел понятие количества движения материальной точки.
Определяемого вектором р, который равен произведению массы
на ее скорость
р = mv. (1. 16)
При постоянной массе
("7)
ИЛИ
d(mo)=2M- (1.17а)
Иными словами, производная по времени вектора количества
движения материальной точки в инерциальной системе координат
равна векторной сумме действующих на точку сил.
Произведение силы на элементарный интервал времени ее
действия называется элементарным импульсом силы. Из (I. 17а)
видно, что элементарное приращение количества движения мате-
риальной тонкие инерциальной системе координат равно векторной
сумме элементарных импульсов сил, действующих на точку.
Приведенные формулировки эквивалентны основной форму-
лировке второго закона механики.
4. Формулировка второго закона, данная самим Ньютоном 191,
гласит: «изменение количества движения пропорционально при-
ложенной силе и происходит по направлению той прямой, по ко-
торой эта сила действует».
§ 5. ТРЕТЬЯ АКСИОМА МЕХАНИКИ
(ЗАКОН ДЕЙСТВИЯ И ПРОТИВОДЕЙСТВИЯ)
1. Механическое действие материальных объектов друг на
друга и, в частности, действие любого материального объекта
на материальную точку не может быть односторонним. Объект
действует иа точку, но и точка действует на объект.
В. С, Чувиковсквб 1757
17
Оставаясь в рамках механики точки и обобщая соответствую-
щие экспериментальные данные, приходим к следующей форму-
лировке третьей аксиомы (третьего закона) механики.
Каково бы ни было взаимодействие двух материальных точек,
ускорения обеих точек в инерциальной системе координат, полу-
чающиеся в результате такого взаимодействия, направлены в проти-
воположные стороны и находятся друг к другу в постоянном отно-
шении, равном обратному отношению масс этих точек.
Иными словами, если тл и аА — масса и ускорение точки А,
а тв м ав — масса и ускорение точки В, то
сЛ:пл=тв:тл. (1.18)
Формула (I. 18) дает принципиальную основу для экспери-
ментального определения масс тел по ускорениям в результате
их взаимодействия, без непосредственного измерения кли сравне-
ния сил. Таким образом, все величины, входящие во второй закон
механики, могут быть определены физически совершенно неза-
висимо друг от друга.
В принципе можно было бы ввести понятие массы н ее еди-
ницу на основании опытов по взаимодействию материальных точек,
без всякого упоминания силы. При этом массы понимались бы
как некие скалярные величины, определяющие отношение ускоре-
ний взаимодействующих точек. Затем, на основе опытов с прибо-
рами типа динамометров, следовало бы установить закон сложе-
ния сил и единицу силы. Наконец, нужно было бы эксперимен-
тально показать, что введенные ранее массы н есть меры инерт-
ности тел, которые входят во второй закон.
Отмеченный, несколько необычный, подход дает возможность
лучше показать полную физическую реальность как понятия
массы, так и понятия силы — в противовес высказываемым иногда
взглядам, что реальна лишь масса, а сила есть просто коэффициент
в уравнении (I. 15), либо, наоборот, что реальна лишь сила,
а масса является коэффициентом.
2. Используя второй закон, получаем более обычную формули-
ровку третьего закона (закона действия и противодействия):
Силы, с которыми взаимодействуют две материальные точки,
всегда равны и направлены в противоположные стороны.
В ньютоновой формулировке 191: «действие всегда равно
противодействию, или, иначе, — действия двух тел друг на друга
всегда равны и противоположно направлены».
§ 6. ДВИЖЕНИЕ В ИЕИНЕРЦИАЛЬНЫХ СИСТЕМАХ
КООРДИНАТ
I. Пусть имеется неинерциальная система координат, которая
движется поступательно с некоторым постоянным ускорением —вд
по отношению к инерциальной системе координат. Тогда уравне-
18
ние движения материальной точки в неинерциальной системе при-
мет вид
a- is)
В более общем случае, когда величина и направление —
есть функция времени, уравнение движения в неинерциальной
системе координат записывается в виде
О = "2 Л+ «,(<)• (1.19а)
В еще более общем случае, когда неинерциальная система вра-
щается относительно инерциальной системы, в правую часть урав-
нения движения войдут координаты движущейся точки.
2. Для решения конкретных задач иногда удобно пользоваться
неннерциальными системами, так как кинематика рассматривае-
мого движения и вся картина явления при выборе такой системы
могут сильно упроститься. Поэтому возникает необходимость
перестройки основных зависимостей механики применительно к лю-
бым неннерциальным системам.
Для этой цели, как и многих других, полезно ввести понятие
о силах инерции.
Силой инерции материальной точки будем называть векторную
величину
(1.20)
где а — ускорение точки в инерциальной системе координат.
В соответствии со вторым законом механики (I. 15) сила
инерции
т. е. равна равнодействующей всех сил, приложенных к точке,
взятой с обратным знаком. Ее можно трактовать как суммарное
усилие, которое прикладывается точкой ко всем другим материаль-
ным объектам (в соответствии с третьим законом механики).
Часто дебатируется вопрос о том, реальны или фиктивны силы
инерции. Приведенная выше трактовка показывает их реальность.
Так, например, если материальная точка массы т, соединен-
ная тягой с точкой о, вращается вокруг этой точки с постоянной
v, то согласно формулам (I. 11) н (I. 12) ее ускорение
/'к = —та,
скоростью
и направлено все время к центру о. На точку со стороны тяги дей-
ствует постоянная по величине сила F, направленная к центру и
равная
2»
19
С другой стороны, сама точка прикладывает к тяге силу инер-
ции, которая равна по величине F и направлена в обратную сто-
рону (растягивает тягу). Инерция может даже разорвать тягу,
как это бывало не раз с маховиками механизмов.
Недоразумения по вопросу о реальности сил инерции обусло-
влены прежде всего тем, что иногда (например, в принципе Далам-
бера, см. ниже) их условно прикладывают к самой материальной
точке; тогда они действительно становятся фиктивными. Кроме
того, иногда рассматривается движение под действием ряда сил,
т. е. влияния ряда материальных объектов; сила инерции в этом
случае уже не приложена к одному определенному объекту, а рас-
пределяется (раскладывается на составляющие) по разным объек-
там — отсюда снова появляется возможность не учитывать реаль-
ности единой силы инерции как таковой. Наконец, иногда необ-
ходимо вводить фиктивные силы инерции для перехода от инерци-
альных к неинерциальным системам координат.
3. Пусть материальная точка имеет в неинерциальной системе
координат ускорение а; пусть, далее; ускорение в инерциальной
системе равно Разность — а обозначим через а„.
Согласно (I. 15) имеем
mai — S Ft ~ tn а)
или _ _
= + (1-21)
Здесь FK^ - —таи — фиктивная сила инерции материальной
точки; мы называем ее фиктивной потому, что она не приложена
со стороны материальной точки ни к каким материальным объектам.
Из (1. 21) видно, что неинерциальность системы координат
компенсируется введением в правую часть уравнений движения
фиктивных сил инерции FK (f. После этого уравнения (а значит и
все законы) движения материальной точки в неинерциальной си-
стеме координат принимают тот же вид, какой они имеют в инер-
циальной системе.
Естественно, что переходя к неинерциальной системе, мы
должны не только ввести добавочный член в уравнение движения,
но и принять новые начальные условия.
4. Определение вектора ускорения аа представляет чисто ки-
нематическую задачу.
Пусть имеется некоторая (инерциальная) система координат;
перемещение материальной точки в этой системе координат опре-
деляется радиусом-вектором (/), скорость — вектором vt (f) =
=-- гь ускорение — вектором c<i(/)=-q. Пус>ь, далее, имеется
другая (неинерциальная) система; в ней движение этой же мате-
риальной точки определяется радиусом-вектором г (/), скорость —
вектором v (/) = г, ускорение — вектором а (I) — г. Известно,
20
что начало неинерциальной системы движется относительно начала
инерциальной системы, причем это движение определяется радиу-
сом-вектором гв (0- Кроме того, неинерциальная система вра-
щается по отношению к инерциальной системе около своего начала
о с угловой скоростью со. Требуется найти разность = Ci — «•
Напомним, что в кинематике угловой скоростью © называют
вектор, длина которого ® представляет предел отношения малого
угла поворота Да тела вокруг некоторой оси к соответствующему
малому интервалу времени Д/
Да da
w =г- 11ГП -п-.
(I- 22)
Направление о совпадает с направлением оси вращения. Если
смотреть вдоль оси по направлению и, то поворот тела будет про-
исходить по часовой стрелке.
Решение поставленной кинематической задачи довольно длинно
[141 и не представляет большого интереса для строительной
механики, так как здесь мы имеем дело обычно лишь с частными
случаями относительного движения координатных систем. По-
этому ограничимся окончательным ответом
а„ =-- r2 + d)'.ir+ w л (и X г) 4 2 (со X v). (I- 23)
Знак умножения означает векторное произведение двух век-
торов, основные правила и перевод в координатную форму кото-
рого приведены в любом курсе векторной алгебры (см. также § 9).
Первые три члена формулы (I. 23) представляют собой ускоре-
ние переносного движения точки вместе со второй (неинерциаль-
ной) системой, т. е. такого движения, когда вторая система рас-
сматривается как некое твердое целое. Последний член является
так называемым кориолисовым, или дополнительным, ускорением;
оно возникает при перемещении точки во вращающейся второй
системе.
Ускорение точки в первой, неподвижной, системе координат
равно сумме переносного ускорения точки (вместе со второй по-
движной системой), относительного ускорения (относительно вто-
рой системы) и кориолисова ускорения. Интересующий нас век-
тор ая есть разность между ускорением в первой системе и отно-
сительным ускорением.
Сущность кориолисова (дополнительного) ускорения легко по-
нять на следующей простой модели. Пусть штанга оВ вращается
вокруг оси о с постоянной угловой скоростью (рис. 2). Если на
штанге закреплен груз /И, то он является неподвижным в системе
коордикат, которая связана со штангой (относительное ускорение
равно нулю). В системе, связанной с Землей, груз имеет радиаль-
ное ускорение, направленное к точке о (переносное ускорение),
21
Если теперь груз М начинает двигаться по штанге, то в системе,
связанной со штангой, он получит ускорение, направленное вдоль
штанги (относительное ускорение). Однако сумма переносного и
относительного ускорений не будет равна ускорению в системе,
связанной с Землей. В самом деле, эта сумма по-прежнему пред-
ставляет некоторое радиальное ускорение. Между тем траектория
точки в «земной» системе имеет явно искривленный вид и, следо-
вательно, существует еще некоторое дополнительное ускорение,
направленное перпендикулярно к штанге.
Рис. 2
В простейшем и для нас наиболее важном случае чисто посту-
пательного движения второй системы координат
ёв = г8. (1.23а)
В случае чисто вращательного движения второй системы, без
движения точки в неинерциальной системе координат,
ав = <вхг + ox (©Xr). (1.236)
Если в инерциальной системе координат при t = t0 было
гх(/) = Ла и r(t) ==_гоь то в неннерциальной системе 7(4) =
= r0 = rm — г8 (4); г (4) = Аи— г» (4)— % х го. гДе ^ — на-
чальная угловая скорость ©0 == © (4).
5. Чтобы проиллюстрировать путь решения задач механики
в неннерциальных системах координат и преимущества, которые он
иногда дает, рассмотрим вопрос о положении легкого шарика
массы т, надетого без трения на круговое кольцо, вращающееся
вокруг оси ох с постоянной угловой скоростью <о (рис. 3).
Реальными силами, действующими на шарик, являются сила
веса mg (g — ускорение силы тяжести) и реакция кольца N, на-
правленная к центру. Составить н решить уравнения движения
шарика в неподвижной, т. е. инерциальной, системе координат
22
весьма затруднительно. Кроме того, найдя из этих уравнений по-
ложение шарика на кольце, следует рассмотреть, в динамической
постановке, устойчивость указанного положения, т. е. устойчи-
вость движения.
Если же перейти к неинерциальной системе, связанной с коль-
цом, то все существенно упростится.
Вертикальное перемещение шарика в обеих системах одина-
ково. Круговое движение в горизонтальной плоскости инерциаль-
ной системы координат вызывает ускорение — = <о2г, направлен-
ное к центру вращения, т. е. к оси х; указанного ускорения в не-
инерциальной системе нет. Следовательно, решая задачу в неинер-
циальной системе, необходимо Добавить фиктивную силу инер-
ции то2г, направленную от осн х.
Силы N, mg и ты2 г находятся в равновесии, если удовлетво-
ряется уравнение
mco2J?s sin a (cos а — = О-
Отсюда получаем два условия sin а = 0 или cos а =
первое выполнимо при любом со, а второе только когда < 1
или со2 > . Таким образом, при малых угловых скоростях ша-
рик может находиться только в нижней точке. С увеличением со
появляется второе положение равновесия, причем угол а все
время растет вплоть до 90°.
Нетрудно исследовать устойчивость обоих положений. Для
этого необходимо отклонить шарик из рассматриваемого положе-
ния и посмотреть, какие силы возникают — восстанавливающие
или отклоняющие. Легко видеть, что если возможно только ниж-
нее положение, то оно устойчиво; с появлением двух положений
равновесия устойчивым становится только верхнее.
§ 7. ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ ДВИЖЕНИЯ МАТЕРИАЛЬНОЙ
ТОЧКИ
i. Общие уравнения движения материальной точки в инерци-
альной системе координат получены нами в виде
nix = Fx (х, у, а, х, у, i, t)
niy - Fy (л, у, z, л, у, z, t)
mz = Fx (х, у, z, х, у, z, t)
(1.156)
Из них можно по известному закону движения x(f), у (f),
z (f) простым дифференцированием определить равнодействующую
23
приложенных к точке сил, либо по известным силам и начальным
условиям найти дальнейшее движение точки.
Начальными условиями являются координаты и проекции ско-
ростей точки в начальный момент t — t0
х (—= xo'f У (А>) — Уti< z (4i) —: zo
х (t0) = х0; у (to) = Уо, г (t0) = г0
(I- 24)
Если результирующая сила задана как однозначная непрерыв-
ная функция, то частное решение уравнений (1. 156), удовлетво-
ряющее условиям (1. 24), будет единственным. В этом легко
убедиться, использовав очевидный способ решения.
Пусть Д/—малый промежуток времени, в течение которого
силы и перемещения можно считать меняющимися по линейному
закону. Тогда
х (t0 + Д/) =- х0 4 х0Д/, у(/0 + М) =-- у0 4 у0М
2 (to 4 ДО = 20 4 Z0 Ы
х (to 4 ДО = *0 4 X (Q М =
“ *0 4 Fx (Х0- Уо’ 20» ХО, Уо< ZO’ ^о)
(1.25)
У (to “I ^0 — М> 4* Гу Уо* 2о> хо’ Уо’ zo> Q
i (It + АО - it + -%- Г. (>,„ ус. Xt. Xt, yt. it. О
Приняв координаты и скорости в момент t0 4* Д t за новые
начальные условия, по аналогичным (рекуррентным) формулам
нетрудно найти координаты и скорости в момент 4 4 2Д/
и т. д. С уменьшением Д t решение неограниченно приближается
к точному.
Приведенный способ весьма удобен для программирования на
современных электронных цифровых вычислительных машинах,
так как вся программа включает лишь рекуррентные зависимости
типа (I. 25), а расчет сводится к последовательному применению
одной и той же программы.
2. Согласно теории дифференциальных уравнений общее реше-
ние (общий интеграл) системы (I. 156) содержит шесть произволь-
ных постоянных
л --- (/. q.....q), у -- Фй (Г, q, . .. q);
2==Ф8(/,с1... , q). (1.26)
Значения постоянных могут быть однозначно определены ука-
занными выше начальными условиями.
24
Общих и всегда пригодных методов решения (I. 26) не сущест-
вует, так как уравнения (I. 156) далеко не всегда интегрируются
в конечном виде. Однако иногда возможен следующий метод
Пусть нам удалось проинтегрировать обе части (1. 156) по-
членно, т. е. устранить вторые производные по времени Тогда
получим
<Dt- (х, у, z, х, у, г, t) —Ci = О (I =-- 1, 2, 3). (1. 27)
где q — произвольная, постоянная интегрирования.
Соотношения (I. 27) называются первыми интегралами уравне-
ний движения, как и вообще любые соотношения
Ч? (х, У> г< х, у, г, t, сь с8) = О, (1.28)
которые имеют место как следствие (1. 156), каковы бы ни были
постоянные.
Поскольку все первые интегралы (1. 27) по самому способу их
получения независимы друг от друга, причем в каждом из них
присутствует Хотя бы одна производная по времени, то они могут
быть разрешены относительно х, у, г
У, z, t. Cj, са, с0)
y=-fs(x, У. z, t, С1, св, с3)
(I. 29)
z- fs(x, у, г, t, clt с3, с3)
Если удается сделать это аналитически, а затем проинтегри-
ровать обе части (I. 29), то можно избавиться от первых производ-
ных и получить
ф/ (л, у, z, t, съ . . ., Се) = 0 (1 = 1,2, 3). (I. 30)
Выражения (I. 30) называются вторыми интегралами уравне-
ний движения, как и вообще любые соотношения типа
ф (х. у, 2. t, cit . . се) = О, (I. 31)
которые имеют место как следствие (I. 156), каковы бы ни были
постоянные.
Из зависимости (1. 30) исключаем х, у, 2, т. е. находим общее
решение (I. 26).
Источником получения первых и вторых интегралов не обяза-
тельно служит последовательное интегрирование (1. 156). В ряде
случаев они находятся, например, из каких-либо общих теорем
механики.
Зная из любых источников некоторое количество независимых
интегралов, можно исключить из них некоторые неизвестные и
тем самым упростить решение задачи.
Независимость функциональных уравнений и возможность
исключения из них некоторых переменных проверяются по при-
веденной ниже теореме анализа.
25
Пусть имеется k функциональных уравнений
Ф1(*1......^)= о
ф,(*1------*„)==<>
(1-32)
Необходимы.м и достаточным условием возможности исключе-
ния из них к переменных является неравенство тождественно нулю
определителя
Г)ф; ЗФд
дхх ’ dxk
дФ* дФк
дх, ' ” дх*
(1.33)
Под разрешимостью уравнений не-следует понимать обязатель-
ную возможность получить решение в явном виде; достаточно
табличного представления функции.
Ясно, что число независимых первых интегралов не может
быть больше шести. В самом деле, из любых шести независимых
вторых интегралов выразим все неизвестные через произвольные
постоянные н время. Подставив эти выражения в седьмой незави-
симый первый интеграл (I. 28), если бы он существовал, мы полу-
чили бы в левой чаСти функции только от произвольных постоян-
ных и времени; удовлетворить тождественное равенство такой ле-
вой части нулю при любых t к можно только в том случае,
когда седьмой интеграл есть простое следствие первых шести
интегралов.
Аналогично нетрудно установить, что число независимых вто-
рых интегралов не превышает трех.
3. Рассмотрим решение уравнений (I. 156) в частном случае,
когда сила зависит только от времени.
Имеем
tnx = Fx (/); ту =--Fy (t)\ mz = Fx (t). (1.34)
После первого интегрирования получаем первые интегралы
t.
‘-i Jf*d'==c»-
t.
(1.35)
Из начальных условий находим: с> = х0; съ — у0; с3 — г0-
26
После второго интегрирования имеем ^вторые интегралы
У—(7 —й- рт (1-36)
<> * Г. dr = с.
При / = видим, что сл == л0, сг == уп, с3 ~ г0.
В частном случае постоянной силы
X - г„ +М' - '.) + ~ЛД~г<|,)'
У = Ун + Уо (7 70) + 77 7ь "
г = ^ + >.(/ ~ У + -i-f.
(1.37)
4. Покажем на простых примерах целесообразность определе-
ния первых и вторых интегралов.
Пусть сила F постоянно параллельна некоторой плоскости.
Направив ось oz перпендикулярно этой плоскости, получим третье
уравнение (I. 156) в ввде
mz == 0. (1.38)
Интегрирование его дает
г—q = 0, z—Cjt—«2 = 0.
Используя начальные условия, имеем
z= z0, z = z0/+z0, (1.39)
где z0 и z0 — начальная координата и скорость в момент t — t^.
Первые уравнения (I. 156) преобразуются к более простому
• виду
тх = Fx (л, у, zot + z0, х, у, zo, t) I
my = (*» У* У< z0. i) J
Общее решение этих двух уравнений имеет только четыре про-
извольные постоянные. Если z0 = 0, то движение оказывается
плоским.
27
В случае, когда F имеет постоянное направление, можно на-
править ось ох параллельно силе и получить
ту — 0, mz - 0, 0-41)
откуда после интегрирования
У =-- Уо; г ” 20; у - ybt + у*, г == zof 4- z„. ([. 42)
Первое уравнение (I. 156) имеет вид
тх Fx(x, у, t t у0', zt + zo, х, у,,, z0, i), (i. 43)
а его общий интеграл содержит только две произвольные посто-
янные.
Если-у0 и z0 равны нулю, то движение прямолинейно.
5. Пусть сила имеет постоянное направление, начальная ско-
рость точки направлена по линии действия силы, а величина
силы зависит только от скорости. В этом случае целесообразно
взять ось параллельно силе и рассматривать только одно уравне-
ние движения
«!*х dv t / , dx л ...
О-44»
Интегрирование (1. 44) дает
Решая (I. 45) относительно V, имеем
dx .. ч
° -тг ci)
или после второго интегрирования
х =-- f <Pi (/, Ci)dt -I- c2. (1. 46)
Можно использовать и другой путь решения. Имеем
т^^Цо),
После интегрирования записываем
. rmdv
‘ J /(«) +
Так как dx = vdt, то
. то do г mv do .
*=-да-- Нтт4-*
28
6. Специально рассмотрим важный для теории колебаний слу-
чай, когда сила имеет постоянное направление, начальная скорость
направлена по линии действия силы, а величина силы есть про-
извольная функция от положения точки.
Выберем ось ох параллельно силе и запишем
= (!•«)
Умножим обе части на 2-^-
<L48>
После интегрирования (I. 48) будем иметь
~ 2 If
Из начального условия х == х0 получим ct = т$. После вы-
полнения квадратуры можно записать
(£ )2 Ч’(Л’- Т (1-49)
Более естественный путь вывода основной зависимости (I. 49)
на основании закона сохранения энергии показан в следующем
параграфе (п. 7).
Знак радикала определяется знаком начальной скорости о0.
Если 1>0 = 0, то движение происходит в сторону силы и знак
опять ясен.
Из (1. 49) следует
7. В некоторых задачах полезно использовать не общие урав-
нения (I. 156), а так называемые внутренние, или естественные,
уравнения, особенно когда задана форма траектории как функция
длины пути s.
Если материальная точка с массой т движется под действием
результирующей силы F по некоторой (для простоты, плоской)
кривой, то силу можно проектировать на касательную и нормаль
в данной точке. Отсюда непосредственно получаем [см. (I. i I) и
(I. 12)1 внутренние уравнения
а'"ТГ’ = <L81)
где Ft и F„ —соответственно касательная и нормальная составляю-
щие силы.
29
Если сила все время нормальна к траектории, то Ft = 0 и
v = const, а величина F = Fn обратно пропорциональна радиусу
кривизны. Когда сила все время направлена по касательной, то
f, = 0; q = со, и, следовательно, трактория будет прямолинейной.
Силу Fn называют центростремительной силой; сила, равная
по величине и противоположная по направлению, называется
центробежной.
§ 8. РАБОТА СИЛ. СИЛОВОЕ ПОЛЕ.
ПОТЕНЦИАЛЬНАЯ И КИНЕТИЧЕСКАЯ ЭНЕРГИИ.
ЗАКОН СОХРАНЕНИЯ ЭНЕРГИИ
i, Пусть F — сила, приложенная к движущейся материаль-
ной точке, ds — элементарное перемещение точки. Элементарной
работой dA силы на этом элементарном перемещении называется
величина, равная скалярному произведению двух векторов
dA =Fds = FdscosfF, ds). (1.52)
Иначе говоря, элементарная работа есть скалярная величина,
равная произведению величины силы па величину элементарного
перемещения и на косинус угла между ними.
Величина элементарной работы будет положительной, отри-
цательной или равной нулю, в зависимости от того, составляет ли
сила с перемещением острый, тупой или прямой угол. Положи-
тельная работа называется работой Движущей силы, отрицатель-
ная — работой сил сопротивления.
После несложных преобразований (I. 52) имеем
dA = Fjlx + Fffly J- Fjiz, (1.52a)
t. e. работа силы на элементарном перемещении равна сумме работ
составляющих этой силы на составляющих элементарного пере-
мещения.
Полная работа силы на пути s
А = j Fdi „ Jf,* =,’J Fjlx + JFJy + 'J Fjk. (1.53)
« s x* yt it
где Ft — проекция силы на направление ds-, xlt yt, zb xs, i/2, z2 —
координаты начальной и конечной точек пути,
В общем случае, когда сила зависит от скорости точки, для
вычисления (I. 53) нужно знать не только траекторию, но и за-
висимости координат от времени х = х (О, у = у (/), z == г (f).
Тогда
+ + dl. (1.53а)
В системе CGS за единицу работы принята величина, равная
дине, умноженной на сантиметр (дин-см) и называемая эргом (эрг}.
30
В технической системе единиц за единицу работы принята вели-
чина, равная килограмм-силе, умноженной на метр (кгсм). В между-
народной системе единицей работы является джоуль (дж), равный
ньютону-метр (нм); 1 эрг = 1 • 10"7 дж\ 1 кгсм — 9,81 дж.
Работа силы, отнесенная к времени, называется мощностью
ДА dA
w == lim-ry =-57.
Д6>-0 &t at
(1-54)
Мощность равна скалярному произведению силы на скорость
точки ее приложения w •= Fv.
В системе CGS единица мощности — эрг в секуцду (арг/сек),
в технической системе — килограммометр в секунду (кгм'сек),
в международной системе — джоуль в секунду или ватт (вт).
1 вт = 1 дж/сек = I07 эрг!сек;, I кгм!сек = 9,81 вт. Кроме того,
в качестве единицы мощности используется лошадиная сила
(л. с.), равивя 75 кгм!сек, или 735,5 вт.
2. В механике важное значение имеет понятие поля.
Пусть каждой точке пространства или части-пространства соот-
ветствует некоторый вектор, полностью определенный для этой
точки; тогда говорят, что в пространстве или его части задано
векторное поле. Последнее может быть стационарным или неста-
ционарным в зависимости от его постоянства или переменности во
времени.
Если вектор поля представляет собой силу, действующую на
материальную точку, которая находится в данной точке простран-
ства, то мы Имеем силовое поле. В дальнейшем, если специально
ие оговорено противное, будем рассматривать стационарные си-
ловые поля^ Силы таких полей зависят только от положения
точки F =-- F (х, у, г) и называются позиционными.
Примером стационарного силового поля служит поле притя-
жения Солнцем какой-либо планеты (система координат связана
с Солнцем). Силы притяжения — позиционные; они зависят только
от положения планеты относительно Солнца.
Иногда вместо самого силового поля удобно пользоваться по-
лем его напряженности.
Например, Солнце, т. е. материальная точка массы /пх, при-
тягивает планету, т. е. материальную точку массы т2, согласно
экспериментально установленному закону притяжения Ньютона
f==T-^, (1.55)
где г — расстояние между обеими материальными точками;
у — так называемая постоянная тяготения (у
*= 6,685-10“® сх?1г'сег?}.
Величина силы притяжения F зависит от массы т2, и поэтому
для каждой планеты имеем свое силовое поле. Чтобы уменьшить
31
число рассматриваемых полей, условимся называть напряжен-
ностью поля тяготения / силу притяжения, отнесенную к единице
притягиваемой массы т2,
f-£-, f-"hF- (1-56)
Аналогично вводится понятие напряженности для поля элек-
трических сил (сила относится к единичному заряду электрической
точки) и т. л.
Силовое поле называется однородным, когда соответствующая
сила во всем поле остается постоянной по величине и направлению.
Оно называется центральным, если силы всегда направлены к не-
которому центру. Например, для камня, падающего на Землю
с небольшой высоты, поле тяготения можно рассматривать как
однородное. Поле притяжения Солнцем его планет яаляется цен-
тральным.
Изменение напраалений сил поля удобно представлять сило-
выми линиями', направление силы, действующей в данной точке
поля, совпадает с направлением касательной к силовой линии.
Это определение дает и правило построения силовых линий. Из
однозначности функции F (х, у, г) следует, что через каждую точку
поля проходит одна и только одна силовая линия.
Аналитически силовые линии представляют решения (интег-
ральные кривые) системы дифференциальных уравнений
ИЛИ
dy Fy’
dy
dz
(1.57a)
В последней системе z играет роль независимой переменной,
а х и у — неизвестные функции; общее решение х = х (z) и
у — у (г) содержит две произвольные постоянные, которые могут
быть выбраны так, чтобы силовая линия проходила через данную
точку поля.
В однородном поле силовые линии — параллельные прямые.
В центральном поле скловые линии радиально сходятся к центру.
3. В дальнейшем для нас особый интерес представят консер-
вативные или потенциальные силовые поля.
Силовое поле носнт название консервативного, если работа
сил этого поля, приложенных к движущейся материальной точке,
зависит только от начального и конечного положений материаль-
ной точки и не зависит от формы ее пути.
Указанное условие равносильно, очевидно, тому, что работа
силы F при движении материальной точки от произвольного, но.
фиксированного затем положения 1 с координатами (х0, у0, z0)
32
до любого другого положения 2 с координатами (х, у, z) предста-
вляет однозначную функцию
Л-e “ Ч> (*, У, г). (I. 58)
При дальнейшем перемещении материальной точки на вели-
чину ds в положение 3 элементарная работа
= F-ds = q> (х + dx, у + dy, 2 + dz) —
- q> (х, у, z); (1. 59)
пользуясь независимостью работы от пути, заменим прямые пере-
мещения 2—3 движением 2—1 и 1—3.
Выражение (I. 59) переписывается в виде
F-ds — F^dx + Fsdy+ F/Iz =-- +
+ + * (1.59a)
или
'V 5' (1-596)
Иными словами, проекции Fx, Fy, Fx силы консервативного
силового поля (консервативной силы) равны частным производным
по х, у, z от некоторой однозначной функции <р (х, у, г), в которой
эти переменные рассматриваются как независимые. Элементарная
работа консервативной силы выражается полным дифференциалом
функции <р.
Функция, отвечающая выражениям (I. 596), называется сило-
ной функцией консервативного силового поля — консервативной
силы. Она имеет размерность работы.
Нетрудно доказать и обратное положение: если силы F (х, у, г),
заданные в силовом поле, равны частным производным по х, у, z от
некоторой однозначной функции <р (х, у, г), т. в. имеют силовую
функцию, то это силовое поле консервативно.
В самом деле, если выполняются равенства (I. 596), то
Л1-« = f F^x + J -i- J F/z = <p (x, y, z) —
*• v
— ffe.ft.?»). (1-60)
т. e. величина работы действительно не зависит от пути.
Интересно отметить что правые части выражений П. 58) и
(1.60) отличаются на постоянное слагаемое (г0, уй, z0).
Это объясняется тем, что силовая функция, заданная выраже-
ниями (I. 596), вообще определяется лишь с точностью до произ-
вольной постоянной; последнюю всегда можно подобрать так,
3 В. С. Чувиковскнй 1757 f. . 33
I БИБЛИОТЕКА
> г « > f » л п I Нмжградси. Kop«4«*crf. I
чтобы в любой точке х0, у0, z0 (нулевой точке) функция <р (хя,
ус, zj — 0, как то и было сделано в (I. 58).
Можно физически интерпретировать силовую функцию как
работу силового поля при перемещении материальной точки из
нулевой в заданную точку пространства. Отсюда ясно, что силовая
функция не зависит от системы координат (лишь бы все системы
были взаимно неподвижны), хотя формальное ее определение и
связано с проекциями силы на координатные оси,
В общем случае, согласно (I. 60), полная работа консерватив-
ной силы равна алгебраическому приращению силовой функции
между начальным и конечным положениями материальной точки.
Отсюда следует, что работа консервативной силы по любому замк-
нутому пути рана нулю.
Очевидно, что если на материальную точку действует несколько
сил, имеющих силовую функцию, то равнодействующая их также
имеет силовую функцию, равную сумме силовых функций соста-
вляющих.
Легко вывести необходимое математическое условие существо-
вания силовой функции. Продифференцируем первое равенство
(I. 596) по у.
а второе по х
dFx fPtp dFv
ду дхду дх
dFx dFu
ИЛИ
аналогично, получаем
dF„ „ dFv dF,
dF.. dF,
Поступая
dFx
Как известно из анализа, зависимости (I. 61) являются также
и достаточными условиями существования полного дифферен-
циала, т. е. функции <р.
Из (I. 61) ясно, что далеко не каждое силовое поле консерва-
тивно.
Пусть силовая функция существует, т. е. поле консервативно.
Приравнивая силовую функцию произвольной постоянной, полу-
чаем уравнение семейства поверхностей
Ф (х, у, г) =- с. (1-62)
Эти поверхности называются поверхностями уровня, или экви-
потенциальными поверхностями.
Через каждую точку поля ха, у0, z0 проходит поверхность
уровня и притом только одна
<Р (х, у, z) =- Ч> (х0. Уо. Zo).
Сила F действует по нормали к поверхности уровня, проходя-
щей через точку приложения силы, и направлена в сторону воз-
растания функции <р. Первая часть утверждения прямо вытекает
из (I. 60), поскольку ясно, что работа сил поля при движении точки
34
по поверхности уровня равна нулю и, следовательно, сила перпен-
дикулярна перемещению. Вторая часть утверждения следует из
того, что элементарная работа dtp положительна для перемещения
в сторону действия силы, а при положительном dtp функция у воз-
растает.
Вектор, проекции которого на координатные осн равны част-
ным производным некоторой функции <J (х, у, г) по координатам х,
у, г, называется градиентом функции <р в точке х, у, z. Поэтому
F (х, у, г) = grad <р. (I. 63)
4. Простейшим примером консервативного силового поля мо-
жет служить любое однородное поле и, в частности, поле притяже-
ния Земли вблизи ее поверхности.
Если направить ось z вертикально вниз, то сила, действующая
на точку т, будет
F, = 0. О, Fx = mg.
Отсюда
<f =-- tngz.
Работа силы тяжести при переходе материальной точки из
положения (х0. у0, z0) в положение (х2, ylt zj
Д = Ч> (*i. Уъ *i) — <р (х0, у0, z0) = mg (Zi — z0).
Имеем силовую функцию и силовое поле центральных пози-
ционных сил.
Обозначим через г радиус-вектор материальной точки от-
носительно центра поля о; значение F будем считать положитель-
ным, если сила направлена к центру.
Элементарная работа
dA — —Fdscos (г, ds) = —Ft»cos (rv)dt — —Fdr.
Если -/ = !]) (r), TO
—Fdr ~ —ф (r)dr =- —d f ф (r)dr =- dtp (r),
где
Ч(г) =* — Ji|>(r)dr.
Поверхности уровня <p (г) == const — сферы с центром о.
Пусть, например, величина силы обратно пропорциональна
квадрату расстояния от центра ф (г) = Тогда
,А
Внешние статические силы, действующие ив те или иные точки
конструкции, обычно не меняют своего направления в процессе
35
деформации (так называемые «мертвые силы»). Поэтому точка,
находящаяся под нагрузкой, перемещается по существу в одно-
родном, а следовательно, и консервативном силовом поле; сила,
действующая на точку, имеет постоянную величину и направ-
ление.
Однако иногда в строительной механике приходится иметь дело
с так называемыми «следящими силами», которые меняют свою
ориентацию вместе с ориентацией участка конструкций — пово-
рачиваются вместе с участком. Такие силы уже не консервативны.
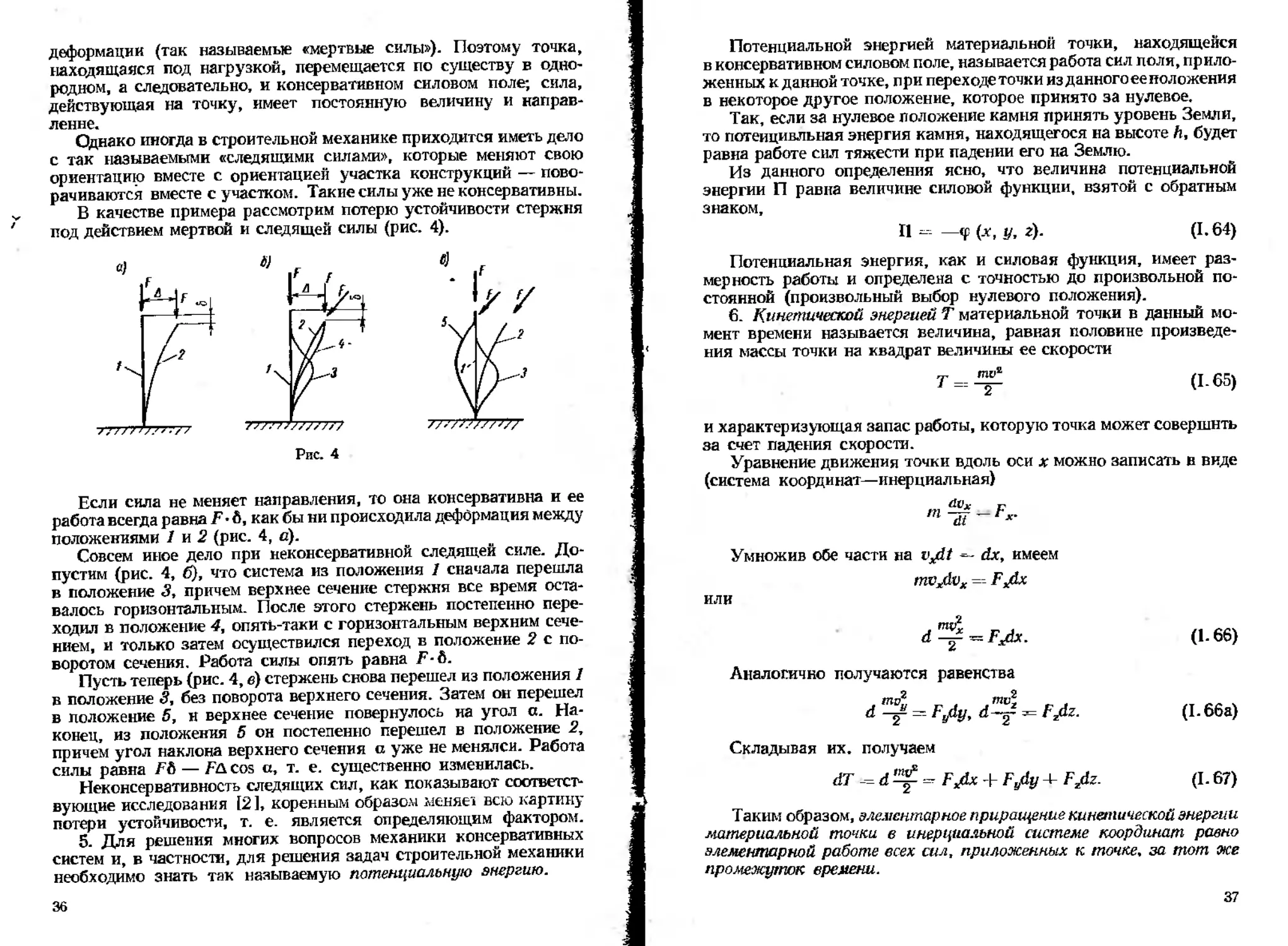
В качестве примера рассмотрим потерю устойчивости стержня
под действием мертвой и следящей силы (рис. 4).
Рис. 4
Если сила не меняет направления, то она консервативна и ее
работа всегда равна F • 6, как бы ни происходила деформация между
положениями 1 и 2 (рис. 4, с).
Совсем иное дело при неконсервативной следящей силе. До-
пустим (рис. 4, б), что система из положения / сначала перешла
в положение 3, причем верхнее сечение стержня все время оста-
валось горизонтальным. После этого стержень постепенно пере-
ходил в положение 4, опять-таки с горизонтальным верхним сече-
нием, и только затем осуществился переход в положение 2 с по-
воротом сечения. Работа силы опять равна Е-б.
Пусть теперь (рис. 4, в) стержень снова перешел из положения 1
в положение 3, без поворота верхнего сечения. Затем он перешел
в положение 5, н верхнее сечение повернулось на угол а. На-
конец, из положения 5 он постепенно перешел в положение 2,
причем угол наклона верхнего сечения а уже не менялся. Работа
силы равна Ft> — F& cos а, т. е. существенно изменилась.
Неконсервативность следящих сил, как показывают соответст-
вующие исследования [2 ], коренным образом меняет всю картину
потери устойчивости, т. е. является определяющим фактором.
5. Для решения многих вопросов механики консервативных
систем и, в частности, для решения задач строительной механики
необходимо знать так называемую потенциальную энергию.
36
Потенциальной энергией материальной точки, находящейся
в консервативном силовом поле, называется работа сил поля, прило-
женных к данной точке, при переходе точки из данного ее положения
в некоторое другое положение, которое принято за нулевое.
Так, если за нулевое положение камня принять уровень Земли,
то потеицивльная энергия камня, находящегося на высоте h, будет
равна работе сил тяжести при падении его на Землю.
Из данного определения ясно, что величина потенциальной
энергии П равна величине силовой функции, взятой с обратным
знаком,
(1,64)
Потенциальная энергия, как и силовая функция, имеет раз-
мерность работы и определена с точностью до произвольной по-
стоянной (произвольный выбор нулевого положения).
6. Кинетической энергией Т материальной точки в данный мо-
мент времени называется величина, равная половине произведе-
ния массы точки на квадрат величины ее скорости
и характеризующая запас работы, которую точка может совершить
за счет падения скорости.
Уравнение движения точки вдоль оси х можно записать в виде
(система координат—инерциальная)
/и —_ f
1 di х'
Умножив обе части на vjlt — dx, имеем
= F„dx
или
d-^-^F^dx. (1.66)
Аналогично получаются равенства
(1.66a)
Складывая их. получаем
<Я" -= dUf --- Fjlx + Fj'y + F/z. (1.67)
Таким образом, элементарное приращение кинетической энергии
материальной точки в инерциальной системе координат равно
элементарной работе всех сил, приложенных к точке, за тот же
промежуток времени.
37
Проинтегрировав (I. 67) в пределах от t0 до I, можно записать
"j- - (/> t- * ('• 68>
Если система координат инерциальна, то изменение кинетиче-
ской энергии движущейся материальной точки за некоторый про-
межуток эремени равно полной работе всех сил, приложенных
к точке, за тот же промежуток времени.
Указанная формулировка представляет в сущности одну из
форм закона сохранения энергии.
Если силы позицнонны, то (I. 63) можно представить в виде
(1.68а)
где v и v0 — скорости в начале и конце пути точки;
s — путь точки.
Деля обе части (I. 67) на dt, видим, что производная от кинети-
ческой энергии по времени равна мощности приложенных к точке
сил.
Пусть силы, действующие на точку, консервативны, т. е. имеют
силовую функцию. Тогда согласно (I 67)
<1Т_ + -<(П (1.67а)
ИЛИ
d (7 + П) = 0, т. е. Т + П =-- Е = const, (I. 69)
где Е — постоянная, которая называется полной механической
энергией материальной точки.
Отсюда следует закон о сохранении энергии материальной
точки в случае консерватнаных систем: если силы, действующие
на материальную точку, являются консервативными, то ее полная
механическая энергия в инерциальной системе координат остается
неизменной.
Интегрирование обеих частей равенства (1. 69) дает
___ ... ту? ту? _ „
т,-т,=-/—г = п>-п> =
= П(х„ й. z,) —П(х0,14. г.) (1.70)
В ряде случаев некоторые силы, действующие на точку, не
производя! работу, так как все время оказываются перпендику-
лярными к траектории; примером могут служить реакции гладкой
недеформируемой поверхности, по которой скользит материальная
точка. Указанные силы не фигурируют, естественно, в зависимо-
стях для кинетической энергии.
38
7. В случае консервативных сил закон сохранения энергии
(1. 69) всегда дает возможность непосредственно получить первый
интеграл уравнений движения — выразить квадрат скорости как
функцию координат.
Это легко видеть хотя бы на примере движения точки под
действием неизменной по направлению силы, являющейся произ-
вольной функцией координаты (см. § 7, п. 6). Из (I. 69) сразу имеем
i (.£).
или
Никаких искусственных приемов, примененных в § 7, не по-
требовалось.
Если силы не консервативны, а просто позиционны, но известен
путь движения точки, то закон сохранения энергии (1. 68а) также
позволяет найти интеграл уравненай движения.
Действительно, пусть точка движется по заданной кривой.
Будем определить ее положение длиной пройденного пути s — s0
от начального положения s0. Скорость всегда направлена по ка-
сательной к заданной кривой. Получаем
или
у=± rm
Окончательно имеем
ds . . С ds
at — —-.- , i — 4=1 —r~-
J
Знак радикала определяется знаком начальной скорости или
направлением равнодействующей всех сил, когда г (s0) «= 0.
8. Необходимо еще раз’ подчеркнуть, что законы Сохранения
энергии в виде (I. 68), (1.68а) справедливы только в инерци-
альных системах.
Их можно применять и в неинерциальных системах, если ввести
фиктивные силы, компенсирующие неннерциальность системы
координат (сч. § 6).
9. Интересно проследить конкретное взаимодействие факто-
ров, которые обеспечивают одновременное выполнение закона
сохранения энергии (I. 68), (I. 58а) или (1. 69) в двух инерциаль-
ных системах, движущихся равномерно и прямолинейно друг
3?
относительно друга. Ведь на первый взгляд сделать это довольно
трудно, так как кинетическая энергия точки определяется ее ско-
ростью, а скорости в обеих инерциальных системах далеко не оди-
наковы.
Ограничимся простейшим случаем, когда на точку с массой т
действует постоянная сила F.
Пусть в некоторой инерциальной системе координат в началь-
ный момент t — 0 скорость точки v = 0. Тогда в момент t она
будет
Путь, пройденный точкой, составит
Приращение кинетической энергий точки и работа силы F
будут
т. е. закон сохранения энергии, естественно, выполняется.
Рассмотрим эту же точку в другой инерциальной системе,
которая движется со скоростью оо относительно первой системы;
направление противоположно напраалению F.
Во второй системе скорость точки
. Vn 4- — t,
* ° ' т
путь, пройденный точкой,
. F?
4.-1^ + -^-.
приращение кинетической энергии и работа силы
₽з/г mt»? F2/2
АГ. - V + + ^г-----Г " Fv°‘ + Ж- '•
4,=^+^-
Кинетические энергии точки в обеих системах различны, но
различны и пути, проходимые точкой. В результате изменение
энергии по-прежнему равно работе силы.
Аналогичный анализ легко провести и в общем случае произ-
вольной силы и произвольно направленного прямолинейного
относительного движения систем координат.
40
10. Понятие потенциальной энергии и консервативных сил
обобщается для случая нестационарных силовых полей.
Нестационарное поле будем называть консервативным, если
существует силовая функция <j (к, у, г, I), удовлетворяющая
условиям
F.fx.y.z. О у. z, 0 = у I
где Fx, Fu, Fx — проекции сил поля.
Потенциальную энергию определим соотношением
П (х, у, z, /) = —*Р (*» </» z> С- (!.64а)
Например, если поле однородно, но его силы есть функции
времени, то, направив ось ох параллельно силам, получим
F (х, 0 = / (/), П (х.
Из (I. 67) имеем
dT = <1Л - |- ® dy + Stdz =
dx 1 ду п oz
d:t-^dl — <Ш +®Л (1.676)
ИЛИ
<ЦГ + П) = ^Л.
Элементарная работа ЛА уже не является полным дифферен-
циалом силовой функции «р. Соотношение (I. 60) также не имеет
места.
Называя по-прежнему Т + П = Е полной механической
энергией, получим
f = -> ' d-596>
т. е. полная производная по времени от полной механической энер-
гии точки, находящейся в нестационарном консервативном поле,
равна частной производной по времени от потенциальной энергии.
§ в. ЗАКОН СОХРАНЕНИЯ КОЛИЧЕСТВА ДВИЖЕНИЯ И ЗАКОН
СОХРАНЕНИЯ МОМЕНТА КОЛИЧЕСТВА ДВИЖЕНИЯ
I. Закон сохранения количества движения материальной точки
непосредственно вытекает из формулы (I. 17а), если положить
в ней 2А “ 0: при отсутствии внешних сил количество движе-
41
j'F.dt. "-72>
ния материальной точки в инерциальной системе координат
остается неизменным.
Формулу (I. 17а) можно заменить следующими:
d (люх) = 2 Fi,x d (mv&) ~ 2 Fl,H di’ d(mvz) — 2 • 71)
или
t
mvx — mv0, x — j dt,
t
nwy—tnv^y = J Fydt, mv2—mvOt г
Отсюда ясно, что если какая-либо проекция суммы внешних
сил, действующих на материальную точку, равна нулю, то соот-
ветствующая проекция вектора количества движения материаль-
ной точки в инерциальной системе координат остается неизменной.
Сумма элементарных импульсов за время t — t0, т. е. интеграл
(1.73)
называется импульсом силы за время t — t0. Из (I. 72) следует,
что приращение количества движения материальной точки в инер-
циальной системе координат за некоторое время равно импульсу
равнодействующей всех сил, приложенных к точке, за это же время.
Зависимости (I. 71) н (I. 72) могут быть использованы для
получения первых интегралов уравнений движения, если хотя бы
некоторые проекции силы на осн координат равны нулю или пред-
ставляют собой функции лишь времени. Мы уже фактически поль-
зовались ими в § 7 (пп. 3 и 4).
Часто силы действуют очень короткое время по сравнению
с общим временем движения, например при ударе. Действие.таких
кратковременных сил удобно описывать, используя абстрактное
понятие мгновенного импульса.
Мгновенным импульсом называется значение интеграла (I. 73)
при стремлении t к /0 и одновременно бесконечном возрастании
величины F. В действительности^ сила F, хотя и -велика, но ко-
нечна, а промежуток t — /р, хотя и мал, но тоже конечен. Однако
чтобы не заниматься детальным рассмотрением этого промежутка,
можно считать импульс мгновенным, не изменив при этом, есте-
ственно, его величины и направления. Тем самым мы условно
устремляем время действия силы к нулю, а величину самой силы
к бесконечности.
Мгновенный импульс, как и обычный импульс, изображается
вектором р. В резул ьтате действия на точку массы т мгновенного
импульса точка получает мгновенное приращение скорости и =
42
= р : tn, но никакого скачкообразного изменения положения
точки не происходит; как бы ни была велика сила, но за очень
малое время приращения координат бесконечно малы.
2. Моментом силы F относительно точки о называется, как
известно из статики, произведение величины силы F и плеча d,
т. е. длины перпендикуляра, опущенного из точки о на направле-
ние силы (рис. 5).
Действие момента силы характеризуется плоскостью, в кото-
рой лежат вектор F и точка о, величиной момента и направлением,
в котором момент стремится производить враще- .
ние — по часовой или против часовой стрелки. Гг
Легко видеть, что момент может быть представ- •
лен^также и векторным произведением радиуса-
вектора точки приложения силы на вектор силы »
м - г х Т. (1- 74) -/
Для этого напомним, что векторное умноже- /
ние определяется так. Построив оба перемножав- •
мых вектора в точке о, проводим перпендикуляр рис_’ $
к плоскости обоих векторов. Векторным произве-
дением векторов называется третий вектор, величина которого
равна произведению величин перемножаемых векторов и синуса
угла между ними. Вектор произведения обращен-по указанному
выше перпендикуляру в ту сторону пространства, откуда враще-
ние первого из перемножаемых векторов в направлении ко вто-
рому является положительным, т. е. по часовой или против часо-
вой стрелки; мы будем'принимать положительным вращение про-
тив часовой стрелки.
Величина М как раз равна величине момента, так как
г sin (г, F) = d. Направление вектора М полностью определяет
и плоскость действия момента силы и направление, в котором он
стремится произвести вращение.
Имеем следующие свойства векторного произведения (см. лю-
бой курс векторной алгебры):
1) при перестановке перемножаемых векторов векторное про-
изведение меняет знак _ - ’
FxF = -(fXr); ' (1.75)
2) векторному произведению присуще обычное правило пере-
множения многочленов
(fi + rs + + rn) X (Fj 4- Fa -I- F ~г • • » 4* Fn) =
= rt X Ft -1- Zj X Fa -j- • • -j- x Fn rE X Fx -j- ra X Ft -|-
+ - - • +rBX^.4- - - - +r.X?j-HBxA+- • +r„XF„, (1- 76)
порядок сомножителей здесь существенен;
43
3) при умножении перемножаемых векторов на какое-либо
число и их произведение умножается на это число
krX I г, F); (1.77)
4) если е1г е2, е3 — орты трех координатных осей, то
r'ZF (г,/, г,Л)», I (с/; —С/,)«2 НГЛ— r,Fx)ia. (1.78)
Момент количества движения материальной точки относи-
тельно точки о определяется, подобно моменту силы, либо произ-
ведением величины то на плечо d, плоскостью то и точки о,
а также направлением вращения, либо векторным произведением
JV = г X trio, (I, 79)
где г — радиус-вектор материальной точки относительно точки о.
Нетрудно доказать общую теорему: производная по времени от
момента количества движения материальной точки в инерциаль-
ной системе координат относительно какой-либо точки о равна
моменту действующих сил относительно точки о
Для доказательства напомним сначала, что производная от
векторного произведения функций определяется аналогично про-
изводной от скалярных функций
dr- —\ dr - , - dmv
~d-xmv)^wxfnv +rx~ai-.
Первое слагаемое равно нулю, поскольку dr и о совпадают
по направлению. Следовательно,
d г- , , -\ ~ , dmv
^СгХ'т) = гх-гг.
Но согласно предыдущему в инерциальной системе координат
d - е
-л- то = г,
di
откуда окончательно
= ~ = (1.80)
Из (I. 80) вытекает закон сохранения момента количества дви-
жения материальной точки: если момент сил, действующих на
материальную точку, относительно какой-либо точки о равен
нулю, то момент количества движения материальной точки
в инерциальной системе координат относительно точки о остается
неизменным.
Общая зависимость (I. 80) может быть разложена по осям
координат. Она равносильна трем скалярным равенствам
44
[см. (1. 78) ]
ytnvz — zmvy yFx — zFy
zmvx — хтог -- zFx — xFz
xmVy — ymvx = xFy — yFx
(I-81)
Заметим, что равенства (I. 81), а следовательно, и общие тео-
ремы о моменте количества движения представляют собой по су-
ществу просто новую комбинацию уравнений движения материаль-
ной точки (I. !5б). Например, умножив обе части уравнения
mvx — Fz на у, а обе части уравнения tnvy = Fy на г и затем
вычитая одно из другого, получим первое равенство.
Можно рассуждать иначе: в силу уравнений движения mv = F,
следовательно, и момент вектора tnv относительно любой точки о
равен моменту вектора F относительно этой точки. Но проекции
этих моментов на оси координат выражаются соответственно ле-
выми и правыми частями (I. 81). Снова видим, что(1. 81) является
лишь комбинацией (I. 156).
Однако приведенная комбинация, да еще выраженная физи-
чески через понятия моментов, иногда оказывается очень удоб-
ной; выражения (L 81) непосредственно дают первые интегралы
уравнений (I. 156), если хотя бы некоторые составляющие момента
сил по каким-либо осям равны нулю; они позволяют также путем
интегрирования обеих частей получить первые интегралы, когда
некоторые составляющие момента сил являются функциями
только времени (в частности, постоянными величинами).
3. В качестве простейшего, но важного примера использова-
ния теорем о моменте количества движения рассмотрим враще-
ние материальной точки по окружности радиуса г вокруг цен-
тра о.
Поскольку радиус-вектор здесь всегда перпендикулярен век-
тору количества движения, то момент количества движения отно-
сительно точки о
N — rmv = rmrto = ho,
(I. 82)
где I = mrs — момент инерции массы т относительно точки о;
to — угловая скорость вращения.
Производная от момента количества движения
dN _ . da>
di ' 1 ~dt
(1.83)
где M — момент внешних сил относительно точки о.
Если М — 0, to — const, т. е. вращение равномерное.
45
Если М = М (0, то из (I. 83) путем интегрирования получаем
<о(О — <•>«--- = (I. 84)
где шв — начальная угловая скорость в момент t = t0.
Второе интегрирование дает
а — (/— 4)а>0— J 2И(т)</т — «д = 0, (1.85)
где а = а (/) — угол поворота радиуса-вектора от фиксирован-
ного положения;
ас — начальный угол поворота в момент t = tD.
Теорема о моменте количества движения позволила исключить
радиальные составляющие сил, действующих
на точку, так как они не дают моментов отно-
сительно центра О; В результате этого опреде-
ление движения точки весьма упростилось.
Если М есть только функция времени, то
уравнение кругового движения точки оказы-
вается по форме таким же, как и уравнение
прямолинейного движения точки под действием
силы, зависящей только от времени. Роль коор-
динаты играет угол поворота, роль массы — мо-
мент инерцик /, роль силы—момент сил М
(см. § 7, п. 3).
4. Частным случаем рассмотренной задачи
является задача о математическом маятнике,
т. е. о колебаниях материальной точки, подвешен-
ной на нерастяжимой нити длиной I (рис. 6).
На материальную точку действуют две силы: сила тяжести mg,
направленная вниз, и натяжение нити, направленное по радиусу.
Воспользовавшись зависимостью (1. 83), получим следующее
уравнение моментов относительно точки о:
— — 1 м ________^sina
dt / от?
из рассмотрения
Рис. 6
<fa
или, заменив ш через <0 “ »
-уцг + glsma = 0.
(1.86)
Дифференцнвльное уравнение (1.86) вместе с начальными
условиями a (tD) » a0 и a (Zo) == a0 позволяет выразить а как
функцию времени, т. е. найти закон движения материальной точки.
Его общее решение может быть сведено к квадратурам, как ука-
46
зано в § 7 (п. 6), поскольку (1. 86) имеет тот же вид, что и урав-
нение прямолинейного движения точки под действием силы, зави-
сящей только от положения точки.
Удобство решения задачи через теорему о моменте количества
движения состоит в том, что мы полностью исключили из рассмо-
трения натяжение нити.
5. Теоремы о моменте количества движения весьма полезны
и при рассмотрении более общего класса задач о движении мате-
риальной точки в произвольном центральном силовом поле; они
позволяют исключить центральные силы.
Например, момент количества движения планеты массы т при
перемещении ее по эллиптической орбите вокруг Солнца С (рйс. 7)
должен оставаться постоянным, так как
силы притяжения центральны, а других 1
сил нет. Отсюда ясно, что скорость планеты Mj ----
в перигелии Р должна быть больше ее ско- у г/' °-
роста в афелий А как отношение^ : гх. При л г, ?—Тг----
рассмотрении промежуточных положений s'V”u
следует учесть, что угол между г и rnv все ---""
время меняется. Однако г sin а всегда рнс 7
больше гх я, значит, скорость в любой точ- 11
ке меньше, чем в перигелии.
Более подробное рассмотрение указанного вопроса можно
найти в [6, 14, 7, 31.
6. Законы сохранения количества движения и сохранения
момента количества движения выполняются, как указывалось,
лишь в инерциальных системах координат.
Вводя фиктивные силы, компенсирующие неинерциальность
(см. § 6, п. 6), можно распространить эти законы на любые системы
координат.
7. Очевидна связь закона сохранения количества движения
с законом сохранения энергии. Если на точку не действуют ника-
кие силы, то остаются неизменными и количество движения точки
и ее кинетическая энергия. Силы, действующие на материальную
точку, совершают работу и увеличивают кинетическую энергию
точки; одновременно увеличивается количество движения. Суще-
ствует соотношение
T=s- (‘-S’)
где Т — кинетическая энергия точки;
р — ее количество движения;
т — масса.
Менее наглядна связь закона сохранения энергии с законом
сохранения момента количества движения. В самом деле, пусть,
например, точка массы т двигается по окружности радиуса гх
с постоянной величиной скорости пх = «Dxfx, а ее кинетическая
47
тх£ г-. - 1 л
энергия 71 = . Пусть, далее, в какой-то момент t гибкая
связь, соединяющая точку с центром окружности о, укоротилась
и стала равна г,. Поскольку никаких тангенциальных сил, дающих
момент относительно о, не действовало (гибкая связь вообще
может передавать только радиальные силы), то момент количе-
ства движения точки останется неизменным, и, значит, ее ско-
рость о2 будет ©2 — у- = Vfk (k > П. Кинетическая энергия
zt, хгп ,9
точки составит 12 = —у = / .
Прирост кинетической энергии объясняется работой радиаль-
ных сил, передаваемых укоротившейся связью. Радиальные силы
направлены от точки к центру и,
следовательно, при уменьшении ра-
/ [ диуса с г, до г2 совершают положи-
/ S\ тельную работу. Последняя должна
/ / Т,1 \ быть равной приросту кинетической
/ / // \ \ энергии.
I I n/'fpC-~Т\ / Если связь, соединяющая точку
\ с Центром о, в момент t не укора-
\ у jgi чивается, а удлиняется, т. е. г2>ги
\ у то коэффициент k = гх : га станет
меньше единицы и кинетическая энер-
гия точки упадет. Это объясняется
Рис- 8 тем, что радиальные силы будут при
удлинении связи совершать отрица-
тельную работу (сила направлена против перемещения). Никакого
нарушения закона сохранения энергии здесь, конечно, нет.
Заметим, что согласно закону сохранения количества движе-
ния определяется «конечный» эффект изменения скорости v. Само
изменение v происходит (в полном соответствии с уравнениями
движения материальной точки, см. § 2, п. 4 и § 7, п. 7) по касатель-
ной к траектории составляющей силы, которая обусловливает
касательное ускорение: переходя с орбиты на орбиту, материаль-
ная точка движется по некоторой кривой (рис. 8), и радиальная
сила дает к ней касательную составляющую. Используя теорему
о количестве движения, мы можем отказаться от детального рас-
чета «переходного» движения точки.
Можно представить себе и более сложные случаи взаимодей-
ствия закона количества движения с законом сохранения энергии.
Пусть, например, материальная точка движется с постоянной ско-
ростью по кругу с центром о и соединена с ним гибкой тягой дли-
ной гг, но одновременно прикреплена и к гибкой тяге с большей
длиной г2, которая пока «не работает» (рис. 9). Пусть далее
в какой-то момент тяга rt перерезается, точка летит по касатель-
ной к окружности со скоростью ©в и, достигнув круга радиуса г2.
48
начинает вращаться по нему со скоростью о2 — ~ v}, т. е. с умень-
шенной кинетической энергией. Поскольку в период «свободного
полета» точки обе тяги были «отключены», никакой работы внеш-
них сил не совершалось; снова вовникает вопрос о причинах изме-
нения кинетической энергии. ______
Ответ, как и раньше, довольно прост. s' '"'n!7
Тяга г2 при любой жесткости не может X. v X
«мгновенно» изменить движение точки. / х/" '"''V» / \
При очень больших усилиях рывка и / 7\гг т / \
очень малых длительностях его (дей- f I
ствие типа мгновенного импульса) точка I \ /
пройдет все же какой-то, хотя бы и \ \ у j
очень малый путь. В это время силы \ /
тяги г8 совершат некоторую отрицатель- /
ную работу, равную изменению кине- ______
тической энергии. В пределе дажебеско-
нечно большая сила на бесконечно ма- Рис‘ 9
лом пути (и за бесконечно малое время)
совершит вполне конечную работу. Согласно зависимости (I. 87),
мгновенный импульс вызывает изменение кинетической энергии,
но не нарушает, естественно, закона ее сохранения.
Теорема о моменте количества движения дает возможность,
не рассматривая «свободный полет», а также рывок, прямо опре-
делять конечный эффект движения.
ГЛАВА II
ОБЩИЕ ПОНЯТИЯ И ЗАВИСИМОСТИ ДИНАМИКИ
МЕХАНИЧЕСКИХ СИСТЕМ
§ 1. МЕХАНИЧЕСКАЯ СИСТЕМА. УРАВНЕНИЯ ДВИЖЕНИЯ И СВЯЗЕЙ.
КЛАССИФИКАЦИЯ СВЯЗЕЙ
1. Любое множество конечного или бесконечного количества
материальных точек, рассматриваемых как единая совокупность,
называется механической системой. При этом следует иметь в виду,
что масса некоторых или даже всех точек в ряде случаев может
не учитываться. В частности, масса не рассматривается, если
исследуются статические деформации.
Если на абсолютные по отношению к данной системе коорди-
нат или на относительные друг относительно друга положения
н скорости точек не наложено заранее никаких ограничений, то
система называется свободной. В случае, когда на абсолютные или
относительные положения или скорости хотя бы некоторых точек
заранее наложены какие-либо кинематические ограничения, ch-
в. С. Чувиковскнй 1757
49
стема носит название несвободной. Условия, которые ограничи-
вают произвольность перемещений и скоростей точек, называются
связями.
Пусть, например, мы рассматриваем косточки конторских сче-
тов, расположенные в одном ряду, как механическую систему;
тогда проволока этого ряда ограничит их движение определенной
траекторией и явится связью. Система несвободна.
Абсолютно твердое тело можно представить как механическую
систему, все точки которой расположены на неизменных расстоя-
ниях друг от друга. Неизменность расстояний безусловно огра-
ничивает произвольность относительных перемещений и, следова-
тельно, представляет собой связи системы. Система несвободна.
Упругое тело, не связанное с какими-либо опорами и тому
подобными устройствами, представляет собой систему материаль-
ных точек, которые могут двигаться друг относительно .друга
и относительно выбранной системы координат произвольным обра-
зом и с произвольными скоростями (в зависимости от действую-
щих сил) — здесь никаких связей нет, и система свободна (в ки-
нематическом смысле).
2. Движения свободной системы полностью определены п
векторными дифференциальными уравнениями (п — число точек)
Ш.1)
и 2п векторными начальными условиями
ri (*о) “' Г1, О. ri (М — Гi, О'
(П.2)
Здесь Ft — равнодействующая внешних (по отношению к си-
стеме) сил, приложенных к i-й точке;
Ftj — внутренняя свла, действующая на i-ю точку со
стороны /-й точки;
~П, г1г — радиус-вектор, скорость и ускорение i-й точки;
mi — масса i-й точки.
Вместо (II, I) и (II. 2) нетрудно записать Зп скалярных урав-
нений и 6п скалярных начальных условий
tniXi = Ftx + V f‘7, х. т,-У, — Fiy -j- 2 Fij, у, (II. la)
i i
mz.- — it ^>7, i
Mi Ml, O’ Zl(t<^ = Zi,0 ) ... o.
- ... - ‘ ч \ i (П.2a)
M*o) = */, 0« K(U = F«,o- Zi (Q = Zi, 0 J
50
В случае несвободной системы к указанным уравнениям и на-
чальным условиям добавляются аналитические выражения для
условий связей. Наличие связей означает физически, что, кроме
внешних и внутренних сил, на систему действуют неизвестные
пока реакции связей, которые и осуществляют заданные ограниче-
ния перемещений и скоростей. Определив реакции связей, можем
рассматривать систему как свободную.
Непосредственно интегрирование уравнений (И. 1) или (IL 1а)
при заданных начальных условиях, а иногда и при дополнитель-
ных условиях связи выполнимо лишь в исключительных случаях
ввиду большого числа неизвестных. Поэтому основной целью
механики систем материальных точек является изыскание путей
исключения этих неизвестных и упрощения соответствующих
уравнений.
3. Саязи обычно классифицируются следующим образом.
Если связь выражается равенством, в которое входят в общем
случае координаты точек, скорости и время, т. е.
/(гх, л,, .... ~гп, ..., rn, t) О (II.3)
или
f(xlt у„ г„ ..., х„, уп, zn, Л1г ylt zt, ....
хп> Уп> t) = 0, (II- За)
то она называется удерживающей, или двухсторонней.
Удерживающие связи «работают» во всех направлениях. На-
пример, условие (х2 + у2 {- z~) — г* = 0 выражает, что мате-
риальная точка не должна покидать поверхности шара, центр
которого совпадает с началом координат, а радиус равен г.
Если связь выражается .неравенством в общем случае вида
и?., о, (п.4)
то она называется неудержиеающей, или односторонней.
Неудерживающие связи работают только в некоторых направ-
лениях. Так, условие (х2 + у2 — z2) — га > 0 выражает, что
точка движется в пространстве вне указанного выше шара или
скользит по его поверхности
Когда в (II. 4) в данный момент движения имеет место равен-
ство, то говорят, что связь напряжена. Поскольку движение си-
стемы с неудерживающей связью можно разбить на участки так,
чтобы иа некоторых из них связь была напряжена и работала как
удерживающая, а на других не была напряжена и как бы отсут-
ствовала, то в дальнейшем все связи, как правило, предполагаются
удерживающими.
Если в зависимости (II. 3) или (II. За) не входят явно скорости
точек, т. е. если связь выражается равенством
f(rk, t) = 0 (k =1,2.......л) (II. 5)
51
или
f{xk, yk, гк, /) = 0 (k = 1,2....л), (И. 5а)
то она называется геометрической, или конечной, или позиционной.
Геометрическая связь накладывает ограничения на положе-
ния точек в пространстве, но не накладывает ограничений на их
скорости, кроме тех, которые автоматически вытекают из ограни-
чений на положения точек.
В общем случае (II. 3) или (II. За) связь называется кинемати-
ческой, или дифференциальной.
Каждая геометрическая связь влечет за собой, как следствие,
кинематическую связь; для этого нужно лишь продифференци-
ровать {II. 5а) почленно
<“-6>
Такую кинематическую связь будем называть интегрируемой,
поскольку интегрированием ее можно свести к геометрической
связи
г». О—с--О,
где с — произвольная постоянная.
Иногда можно проинтегрировать кинематические связи и более
общего вида.
Система называется голономной, если на ее точки не наложены
кинематические неинтегрйруемые связи. У голономной системы
все связи могут быть представлены как геометрические. Иногда
сами геометрические связи называются голономными. Неголоном-
ной считается система, содержащая кинематические неинтегри-
руемые связи, которые иногда сами называются неголономными.
Связь носит название стационарной, или склерономной, если
в нее не входит явно время; в противном случае она оказывается
нестационарной, или реонояной.
4. -Рассмотрим примеры систем с различными связями.
I) Балка, свободно опертая по концам х = 0 и х = I на не-
подвижные опоры, представляет голономную систему со стацио-
нарными геометрическими связями. Если прогиб балки у = у (х),
то уравнения связей
у (0) - 0, у (I) = 0.
Та же балка в случае заданного вертикального движения же-
стких опор является голономной системой с нестационарными
геометрическими связями
</ (0) — «и (?) =0, (/ И — <«, (/> = о.
2) Две материальные точки с координатами jcx (<), yt (f),
Zi (f) и x2 (/), ys (f), z2 (/), соединенные жестким стержнем по-
52
стоянкой длины /, представляют голономную систему со стацио-
нарными геометрическими связями
(х, — х,)2 + fri — i/»)2 + (г, — z,)2 — /" = 0.
Если длина стержня меняется как заданная функция времени,
то система голономна и обладает геометрическими нестационар-
ными связями
(*1 - Ха)« + (у, - yj* + (2, - га)2 - Р (0 = 0.
Наконец, если стержень является упругим, т. е. его длина
заранее не известна, то система свободна.
3) Рассмотрим жесткий стержень длины I с двумя острыми
колесами массы т по концам. Концы стержня могут перемещаться
по плоскости только в направлениях, перпендикулярных к
стержню, т. е, скорости масс и оа должны быть перпендику-
лярны к нему.
Расположим систему координат хоу в плоскости качения
стержня. Тогда условие неизменности расстояний между массами
примет вид
(xs — xj» + (у8 — — Р = 0.
Условия перпендикулярности скоростей концов стержня к его
оси имеют вид
(х, — X,) X, + (у, — у, = 0;
(х, — х,) 4, 4 (у, — л, = 0.
Три написанных уравнения не являются независимыми. На-
пример, третье уравнение можно получить, дифференцируя по
времени первое из них и складывая со вторым
Таким образом, условия связей
(*8 — Xj)’ 4 [уг — I/i)a - Р = 0;
(ха — ха) Xl + (уа — i/О yt = 0.
Видим, что система неголономна, так как она содержит кине-
матическую неинтегрируемую связь (второе уравнение). Если бы
второе уравнение можно было непосредственно проинтегриро-
вать, то мы получили бы два уравнения относительно четырех
координат. Задавая две координаты, например положение одного
из кондов, нетрудно было бы найти две другие — положение дру-
гого конца. Но это противоречит физическому существу задачи,
так как второй конец может, естественно, занимать любое поло-
жение на окружности радиуса I, центр которой совпадает с пер-
вым концом.
53
§ 2. ОБОБЩЕННЫЕ КООРДИНАТЫ. ВОЗМОЖНЫЕ И ВИРТУАЛЬНЫЕ
ПЕРЕМЕЩЕНИЯ- СТЕПЕНИ СВОБОДЫ
1. Рассмотрим в основном голономные (в частности, свобод-
ные) системы, но главнейшие определения дадим сразу и для не-
голономных систем.
Если голономная или неголономная система имеет п точек,
то положение ее определяется Зп декартовыми координатами xit
Hi, Zj. Однако все они независимы только у систем без геометри-
ческих связей. Когда на систему наложено h геометрических свя-
зей, определяемых h независимыми выражениями вида (И. За),
то из последних выражений можно исключить h декартовых коор-
динат — выразить их через остальные координаты. Число неза-
висимых декартовых координат равно, таким образом, Зп — ft.
Задавая независимые декартовы координаты, можно определить
положение системы, хотя и не всегда однозначно. Наоборот,
всякому положению механической системы соответствует всегда
одна определенная совокупность независимых декартовых коор-
динат, через которую выражаются все остальные координаты.
Например, пусть материальная точка вращается по окружно-
сти радиуса г вокруг начала координат. Между декартовыми коор-
динатами (х, у) точки имеется стационарная геометрическая связь
X2 + _ rZ =- О
Поэтому она имеет только одну независимую координату,
скажем х.
Другая координата
У = | |
т. е. представляет даузначную функцию х. Однако любому задан-
ному положению точки соответствует лишь одно значение незави-
симой координаты, через которое выражается другая координата.
При стационарных геометрических связях (II. 5а) выражения
зависимых координат через независимые времени не содержат;
в случае нестационарных связей время войдет в эти выражения.
Так, приняв в предыдущем примере геометрическую связь вида
хй -Ь у2 — г2 (/) = О,
получим
у — ±1
Кинематические неиитегрируемые связи, если таковые имеются,
01раничивают скорости, но не накладывают ограничений на воз-
можные положения системы и поэтому не влияют на число неза-
висимых координат.
2. В механике положение системы часто определяется через
обобщенные, или лагранжевы, координаты.
Обобщенными координатами механической системы называют
любые независимые скалярные параметры, которые в своей сово-
купности однозначно определяют любое положение системы, до-
пускаемое хотя бы в какой-то момент времени наложенными на
систему связями.
В качестве обобщенных координат принимают углы, различ-
ные расстояния, коэффициенты в разложениях декартовых коор-
динат по различным функциям, площади и другие, даже не имею-
щие прямого физического истолкования, величины. Обобщенными
координатами могут считаться и независимые декартовы коорди-
наты, если положение системы определяется ими однозначно.
В рассмотренном выше примере движения материальной точки
вокруг начала координат о независимая декартова координата х
не может быть принята за обобщенную, так как она не определяет
однозначно положения точки. За обобщенную координату q можно
принять угол между осью ох и радиусом г (необходимо, конечно,
условиться о направлении отсчета угла).
Все Зп декартовых координат механической системы одно-
значно выражаются через ее обобщенные координаты qlt . ., qm
в силу самого определения последних
х, = 4i(qt....qm. О |
У/ = («71, Чт, 0 | (И. 7)
«<=-’Xi (<71.Ят. J
Так, в рассмотренном примере при г = г (/) имеем
х = г (t) cos <р, у = г (0 sin <р.
Уравнения геометрических связей в (II. 7) не содержатся,
поскольку q-t, по определению, независимы. Функции (II. 7) после
подстановки их в условия геометрических связей вместо декарто-
вых координат точек должны обращать упомянутые условия
в тождества.
Если исключить из (II. 7) все qm, то получим условия геоме-
трических связей.
При стационарных геометрических связях всегда можно вы-
брать обобщенные координаты так, чтобы время t в (II. 7) не
входило. Положив в нашем примере г = const (стационарная
связь), получим
х = г cos <р, у = г sin q>.
Однако, вообще говоря, наличие в (II. 7) времени еще не сви-
детельствует о пестационариостп связей. В том же примере г =-
= const допустимо выбрать обобщенную координату и другим
образом. Пусть вокруг начала координат о с постоянной угловой
скоростью ш вращается полупрямая, причем в момент t = 0 она
совпадает с положительной частью ох. За обобщенную координату
55
точки примем угол яр между вращающейся полупрямой и радиу-
сом г. Положение точки также будет однозначно определено,
но в зависимости (II. 7), несмотря на стационарность связи, войдет
время
х = г cos (о/ -г яр), у — г sin (е>/ яр).
Легко показать, что число обобщенных координат т всегда
равно т = Зп — h (п — число точек системы, h — число незави-
симых геометрических связей).
Действительно, всякое заданное положение системы может
быть однозначно выражено через Зп — h независимых декартовых
координат или через т обобщенных координат; напомним, что
заданной совокупности независимых декартовых координат может
соответствовать не одно положение системы, но заданное опреде-
ленное положение системы может быть определено через един-
ственную их совокупность. Отсюда ясно, что при фиксированном t
существует Зп — h зависимостей вида
= •••> 9m);
%k ” ЭСа (91 > • • — 9m)»
где xit yjt zk — независимые декартовы координаты;
91» 9m — обобщенные координаты.
Пусть т <С Зп — h. Тогда из любых т зависимостей можно
выразить все qx, . . ., qm через т независимых декартовых коор-
динат. Подставив затем выражения для q в оставшиеся Зп—h—т
зависимостей, выразим оставшиеся независимые декартовы коор-
динаты через т выбранных. Получилось явное противоречие
условию независимости.
Совершенно аналогично можно записать т зависимостей вида
9i fi (*i, ys, zk} (Зп — h аргументов);
9m - ys; Zk)
и показать, что если т > Зп — h, то все q не могут быть незави-
симыми.
Противоречия снимаются только при т = Зп — h.
Движение механической системы полностью определено, если
обобщенные координаты заданы как функции времени qk = qk (f).
Производные от обобщенных координат по времени qk называют
обобщенными скоростями, а вторые производные qk — обобщен-
ными ускорениями.
Реальнее скорости и ускорения точек системы являются про-
изводными от (И, 7). Так,
(“-в»
56
В некоторых конкретных задачах бывает целесообразно выби-
рать большее число скалярных параметров, определяющих поло-
жение точек системы, чем это необходимо. Тогда они уже не будут
независимыми друг от друга и можно говорить об избыточных
обобщенных координатах.
Если число принятых параметров s -J- т, а число обобщенных
координат т = Зп — А, то между параметрами можно составить s
независимых условий вида
................................5.™ О 0. (П.9)
которые представляют собой обобщенные условия геометрических
связей.
Исключение из (II. 9) s параметров позволяет найти т обоб-
щенных координат.
3. Часто необходимо рассматривать возможные бесконечно ма-
лые или, для сокращения, просто возможные перемещения меха-
нических систем.
Возможным перемещением механической системы в момент t
называется всякое бесконечно малое перемещение, которое пере-
водит ее из какого-либо положения С, допускаемого условиями
связен в момент t, в положение С, допускаемое условиями связи
в момент / т ДА
Пусть движение системы п материальных точек определено
параметрическими уравнениями их радиусов-векторов относи-
тельно обобщенных координат
Й = п(91......О- (11.10)
В произвольный момент t значения всех ft- могут быть произ-
вольными.
Если система голономна, то все Qi н t могут иметь произволь-
ные независимые приращения. Тогда
П + drt = ft + dqt......qm -[- dqm, t 4 dt).
Разложив правую часть в ряды, вычтя rt и оставив первые
члены рядов, получим
<15,+ (II. Н)
О<?1 О?г oqm Ol ' ’
Зависимость (II. II) представляет наиболее полное выраже-
ние для возможного перемещения голономной системы в момент t.
Ее нетрудно предстввнть и в скалярном виде. Например,
dxf = -^rr-dq. -j- . . -J- 4^- dq~ -J- Ду- dt, (II. 1 la)
‘ OQj 41 1 1 dqm ЧП-. i qi > \ /
где
Л/ = лД%, .... qm.t).
57
Заметим, что во многих частных случаях возможные переме-
щения допустимо рассматривать как конечные, а не бесконечно
малые; необходимо лишь, чтобы на конечном перемещении сохра-
нялась линейность зависимостей для всех приращений dr,- (или
dxh dyi, dzt). Это часто используется в задачах строительной ме-
ханики.
Пусть д, в (II. 10) не обобщенные координаты, а параметры,
содержащие s избыточных координат. Тогда существует s усло-
вий обобщенных геометрический связей
....«,„0-0. (11.12)
Выражения для возможного перемещения голономной системы
будут по-прежнему иметь вид (II. 11), но между приращениями dqt
должны существовать условия
>4-^4+ . . . + о. (и. 13)
У неголономной системы приращения dq( не произвольны, а за-
висят от ограничений в скоростях точек, даваемых кинематиче-
скими связями. Следовательно, зависимость (II. И) к ней непри-
менима.
Для учета кинематических связей и вычисления возможных
перемещений неголономных систем удобно пользоваться поня-
тием возможных скоростей. Возможными скоростями механиче-
ской системы в момент t назовем скорости, допускаемые в этот
момент связями. Тогда возможные перемещения можно получить
как произведения возможных скоростей на элементарные прира-
щения времени.
У голономной системы никаких ограничений по скоростям нет,
поэтому возможны все скорости, вычисляемые по формулам
типа (II. 8). Если умножить (П. 8) на dt, то получим уже известное
выражение (II. Па) для возможного перемещения голономной
системы.
Воспользовавшись (II. 8), нетрудно записать все кинемати-
ческие связи неголономной системы в виде
Л(?1. fe. - - 9т. 9» <h.<Ьп. 0 (п- !4)
где / = I, - hy; hi — число неинтегрируемых кинематических
связей.
Решение уравнения (II. 14) относительно hi скоростей qk
дает т — hi = Зп — h— независимых обобщенных скоростей,
допускаемых всеми связями.
Возможными скоростями в данный момент t являются любые
совокупности qi (i - 1, 2, . . ., т), удовлетворяющие (II, 14),
а возможные перемещения определяются изменениями обобщен-
ных координат dqt = qtdt. Здесь уже не все qt будут независи-
мыми.
58
4. Иногда важно рассмотреть не действительные возможные
перемещения системы, а твк называемые виртуальные перемещения.
Виртуальным перемещением механической системы в момент t
называется всякое бесконечно малое перемещение, которое пере-
водит ее из какого-либо положения С, допускаемого условиями
связей в момент t, в положение <?', допускаемое условиями свя-
зей в тот же момент t.
При стационарных связях возможные перемещения совпадают
с виртуальными. При нестационарных связях виртуальные пере-
мещения есть возможные перемещения в предположении «оста-
новленного» времени.
Чтобы отличить виртуальные перемещения от возможных,
их обозначают буквой 6, а не d.
Для голономных систем имеем
+>*’- " 15>
В случае избыточных координат уравнения связи
Л- /’(«,. ...«J- О. (Ч. 16)
Соотношения между приращениями параметров
<П17>
Из (II. 15) видно, чтц,если вариации 6% дают приращение t>rt,
то вариации — 6rf дают приращение — 6%. Иначе говоря, вир-
туальные перемещения голономной системы обратимы. Обратимы
и возможные перемещения голономной системы при стационарных
связях.
При вычислении виртуальных перемещений неголономных
систем следует рассматривать виртуальные скорости, которые
отличаются от возможных скоростей «остановленным» временем.
Виртуальные скорости голономной системы вычисляются по
формулам типа
(IL8a>
Умножение зависимостей типа (II. 8а) на 6/ дает уже известное
выражение виртуального перемещения голономной системы.
У неголономной системы виртуальные скорости должны удов-
летворять условиям кинематических связей типа (II. 14) при дан-
ном фиксировании t.
5. Большое значение имеет так называемое число степеней
свободы системы.
Числом степеней свобода механической системы называется
число независимых друг от друга скалярных параметров, одно-
59
значке определяющих любое возможное (или любое виртуальное)
перемещение системы.
Из выражений (II. 11) и (II- 15) ясно, что у голономных систем
число степеней свободы совпадает с числом обобщенных коорди-
нат, т. е. равно т = Зп — h, где п — число точек, h — число
геометрических связей.
У неголономных систем возможные и виртуальные скорости,
а следовательно, возможные и виртуальные перемещения опре-
деляются Зя - h - независимыми параметрами (hi — число
неинтегрируемых кинематических связей). Следовательно, они
имеют Зп — h — hi степеней свободы. Иными словами, «в малом»
(т. е. при бесконечно малых перемещениях) неголономная система
менее свободна, чем «в большом» (т. е. при конечных перемеще-
ниях). Голономные стютемы одинаково свободны в малом и в
большом.
Сказанное хорошо иллюстрируется примером неголономной
системы, который приведен в п. 4 § I. Ясно, что стержень с коле-
сами может занять в конечном итоге любое положение на плоско-
сти, причем указанное положение определяется тремя независи-
мыми параметрами, например двумя координатами одного конца
и углом, который составляет стержень с какой-либо осью коор-
динат. В то же время возможное, т. е. бесконечно малое, переме-
щение далеко не произвольно и определяется всего двумя пара-
метрами, например двумя перемещениями концов в направлении,
перпендикулярном оси стержня.
Исследования неголономных систем имеют свои особенности по
сравнению с исследованиями голономных, причем неголономные
системы почти не встречаются в задачах строительной механики.
Поэтому свойства неголономных систем рассматривать подробно
не будем. Ниже всегда подразумеваем голономность системы.
6. Приведем иллюстрирующие примеры.
А. Абсолютно твердое тело, движущееся в плоскости, пред-
ставляет собой голономную систему с тремя степенями свободы.
В качестве обобщенных координат можно принять две координаты
одной из его точек и еще один параметр, определяющий ориента-
цию тела относительно этой точки, например угол между фикси-
рованной на теле прямой, проходящей через указанную точку,
и одной из осей координат. Связи стационарны, поэтому возмож-
ные и виртуальные перемещения совпадают. Они определяются
как малые перемещения выбранной нами точки и малые повороты
тела около нее.
Б. Абсолютно твердое тело, движущееся в пространстве,
является голономной системой с шестью степенями свободы. Поло-
жение тела определяется, например, положениями трех любых
его точек, которые имеют в совокупности девять координат, но
неизменность расстояний между точками дает три условия, по-
зволяющие выразить три координаты через шесть остальных.
60
Можно поступать иначе. Заметим, что положение тела также
вполне определено, если известны положение одной его точки
(три координаты) и три угла, определяющие его ориентацию отно-
сительно фиксированной точки. Указанные шесть величин удобно
принять за обобщенные координаты. Возможные перемещения
совпадают с виртуальными и определяются малыми приращениями
обобщенных координат.
В. Система двух жестких стержней, соединенных шарниром,
голономна и имеет при движении в плоскости четыре степени сво-
боды. Положение системы известно, если заданы две координаты
Рис. ю
шарнира н еще два параметра, определяющие ориентацию стерж-
ней относительно шарнира, например углы между каждым стерж-
нем и одной из осей координат. Возможные перемещения совпа-
дают с виртуальными и определяются малыми перемещениями
шарнира н малыми поворотами стержней около него.
Г. Пусть мы имеем поршень А, который движется в направ-
ляющих, и жесткий стержень В, несущий на конце массу т
(рис. 10). Поршень соединен упругой пружиной с с жестким осно-
ванием и упругой спиральной пружиной k со стержнем В.
Очевидно, что это голономная система с двумя степенями сво-
боды. Произвольное положение системы определяется, например,
перемещением хг поршня относительно его начального (равновес-
ного) положения и углом п. Можно задавать перемещение. хг
а дополнительное перемещение х2 массы т, а также другие ком-
бинации двух произвольных параметров.
Д. Пусть материальная точка скользит вдоль жесткого
стержня, который вращается в плоскости хоу вокруг точки о
по заданному закону «р (t) (рис. 11).
Поскольку положение стержня строго определено, то это голо-
номная система с одной степенью свободы: положение точки
6,
полностью определяется, например, ее отстоянием от начала
координат г = г (t).
Ясно, что условия связей могут быть записаны в виде
2 = 0, A-tgvm = ^.-/W=0
Первая связь — стационарна, вторая — нестационарна.
Возможные dr и виртуальные 6г перемещения не совпадают
(рис. И). Перемещение 6г реально осуществить нельзя.
Если у той же системы не задан закон вращения стержня, то
она является голономной с двумя степенями свободы: положение
z точки известно, если задан угол <р
у / и отстояние точки от начала коор-
/ динат. Имеется одна стационарная
/ СВЯЗЬ 2 = 0.
z/Zpr s''' Возможные и виртуальные пере-
I мешения теперь совпадают; они опре-
/ деляются любыми малыми прираще-
/ s's' ниями угла ф и отстояниями г от
/srS точки о. В частности, можно дать
приращение только г и положить
еу'______________________rf<p — 0, т. е. перемещение, показан-
р п ное на рис. 11 как 6г, также являет-
ся возможным и, следовательно,
реально осуществимым.
Е. Свободно опертвя балка с неподвижными опорами, рассмот-
ренная в п. 4 § 1, имеет бесконечное количество степеней свободы:
ее положение (деформация) определяется прогибом у = f (х), т. е.
бесконечным числом значений у. Возможные и одновременно вир-
туальные перемещения балки из любого деформированного состоя-
ния показаны на рис. 12, а.
Если задано движение опор ^ (/) и (/), то положение балки
по-прежнему определяется прогибом у = f (х), т. е. бесконечным
количеством значений у. Однако связй ее стали уже нестационар-
ными и возможные перемещения не совпадают с виртуальными
(рис. 12, б).
Часто вместо координат у, являющихся одновременно и обоб-
щенными координатами, вводят другие обобщенные координаты.
Например, прогиб балки с жесткими опорами иногда представ-
ляют в виде суммы бесконечного ряда
, . пх г . 2я*
пях
Здесь обобщенные координаты — коэффициенты разложе-
ния fn.
62
Ж. Остановимся подробнее на весьма важном вопросе о числе
степеней свободы реальных механических систем и идеализации
этих систем.
Строго говоря, каждая реальная механическая система имеет
очень много степеней свободы. Например, согласно обычным моле-
кулярным представлениям число степеней свободы равно сумме
степеней свободы молекул, из которых состоит система. В большин-
стве случаев, однако, целесообразно отвлечься от молекулярного
Рис. 12
строения вещества и считать его сплошной средой (обычный прием
теории упругости, строительной механики и теории пластич-
ности); тогда мы приходим к системам с бесконечным числом сте-
пеней свободы.
Тем не менее, практически часто удается идеализировать си-
стему так, что можно рассматривать всего несколько степеней.
Возможность той или иной идеализации всецело определяется
конкретными условиями задачи.
В качестве простого примера рассмотрим вертикальные коле-
бания линейно упругой невесомой балки, на которой закреплено
тело массы т (рис 13 о) Такая система, как уже указывалось
выше, имеет бесконечно много степеней свободы; ее положение
всегда определяется координатами у бесконечного количества
точек у = у (л). Но несмотря на это в курсвх динамики сооруже-
ний обычно пишут, что система превращается в систему с одной
63
степенью свободы. Более того, точное решение задачи действи-
тельно сводится к решению одного дифференциального уравне-
ния, куда входит лишь одна координата — перемещение z (t) =
= у (li, f) массы т.
Дело здесь в том, что при решении поставленной задачи мы
в неявном виде пользуемся своим умением точно выполнять стати-
ческие расчеты балок, рассматривая их именно как системы с бес-
конечным числом степеней свободы. Таким образом мы определяем
и как бы исключаем беско-
нечно много координат.
Методом динамики дейст-
вительно определяется
только одна координата.
В самом деле, пусть
статический прогиб рас-
сматриваемой балки в точ
ке х — под действием
единичной вертикальной
силы, приложенной в той
же точке, равен 6, а фор-
ма прогиба / (х). Тогда
У= (*)•
Тогда уравнение дви-
жения массы т при внеш-
ней силе F (f) может быть
записано в виде
mz^F(t)------^+mS ^F(t)—zc + mg
или
tnz 4- cz ~ F (f) 4- mg. (11. 18)
Здесь c = - j- — так называемая жесткость балки в точке
х = 11г т. е. величина, равная силе, которая вызывает единичный
прогиб у == 1; гс = ----реакция балки на массу т при пере-
мещении массы на величину z; mg — вес массы т.
После решения (Ц. 18) при заданных начальных условиях
2 (to) = z0 и z (t0) = z0 нетрудно найтн прогиб балки
У = У(х. t) = z(f)f(x). (И. 19)
Таким образом, мы определили статическими методами строи-
тельной механики неходкую величину 6 и форму прогиба f (х),
затем методами динамики нашли координату z (/), наконец, вырази-
ли через нее бесконечно большое количество координат точек балки.
64
Поскольку мы учли все многообразие степеней свободы реаль-
ной системы, то правильнее говорить, что рассмотренная система
имеет бесконечно много степеней свободы, ио одну динамическую
степень.
Числом динамических степеней свободы будем называть число
независимых скалярных параметров, однозначно определяющих
любое возможное (или любое виртуальное) перемещение точек,
масса которых принимается во внимание. Сами эти параметры назо-
вем динамическими обобщенными координатами. Динамические
степени свободы полностью определяют кинетическую энергию при
любом положении системы. Они могут быть найдены только мето-
дами динамики.
Обычно принятая терминология динамики сооружений может
привести (и действительно иногда приводит) к недоразумениям,
так как она находится в противоречии с общим определением числа
степеней свободы системы, которое дано в аналитической механике.
Сказанное станет еще более очевидным, если рассмотреть
ту же задачу, но силу F(l) приложить в произвольной точке
х ~ /s (рис. 13, б). Для составления уравнения движения
массы tn, помимо величины 6 и функции f (х), определим из точ-
ного статического расчета прогиб балки б, в точке х — от дейст-
вия единичной силы, приложенной в точке х = 12, а также форму
всего прогиба от этой силы
у = MiИ-
На массу помимо ее веса действует только сила, при-
кладываемая балкой, причем величина силы равна R (а) =
- —с (г — F (f) 6J, где г — суммарное перемещение массы,
F (f) \ — перемещение точки балки с координатой х = lt от дей-
ствия силы F (f). Уравнение дйижения массы имеет вид
mz = —с (z — F (f) $0 !- mg
или
tnz cz = F (f) efij + mg. (II. 18а)
Решив (II. 18а) при заданных начальных условиях, имеем
у = у (х, О = [г (0 - F (/) 6J f (X) + F (t) (х). (11. 19а)
Ясно, что при решении задачи мы широко используем статиче-
ский расчет балки как системы с бесконечным числом степеней
свободы, но методами динамики определяем лишь одну обобщен-
ную координату z(f).
Таким же образом нетрудно показать, что невесомая упругая
балка с п сосредоточенными массами является не системой с я
степенями свободы, как это обычно указывается в курсах динамики
сооружений, а системой с бесконечным числом степеней свободы,
но с п динамическими степенями свободы — величинами верти-
кальных перемещений масс, зная которые можно с помощью точ-
В С Чуаикоэскяй 1757
65
ного статического расчета найти прогиб балки, т. е. положение
всех остальных точек.
Если массой балки пренебрегать нельзя, то все степени свободы
становятся динамическими.
Действительно, в курсах сопротивления материалов и строи-
тельной механики выводится известное соотношение, выражаю-
щее условие статического равновесия элемента балки длиной dx
(П-20)
где Е — модуль упругости;
/ (х) — переменный момент инерции поперечного сечения
балки;
р (х) — интенсивность внешней статической поперечной на-
грузки.
Это соотношение и есть дифференциальное уравнение изгиба
балки, решение которого при заданных граничных условиях дает
возможность выполнить статический расчет и найти бесконечное
количество координат у = у (х). когда задана любая статическая
нагрузка.
Умножая обе части (II. 20) на dx, имеем
(И. 20а)
В левой части — силы упругости, действующие на элемент,
в правой —внешняя нагрузка, приходящаяся на него.
Пусть масса балки распределяется по закону т0 (х). Рассмот-
рим уравнение движения элемента длиной dx, масса которого равна
то (х) dx и который можно рассматривать (ввиду его малости) как
материальную точку.
Если балка занимает положение у — у (х, f), то согласно
(II. 20а) при фиксированном t на элемент действуют силы упру-
гости
—£-(£'«-&),ь-
Знак минус взят потому, что силы упругости направлены про-
тив положительной внешней нагрузки.
Кроме сил упругости, имеем вес балки grn0 (х) dx и внешнюю,
в общем случае, динамическую нагрузку р (х, t) dx. Отсюда
wn(x)dx-^ =— </х • f)dx
или
[£/- />(* О -! т<1 (*)&• (И. 21)
66
Уравнение (II. 21) является искомым уравнением движения
элемента и, следовательно, дифференциальным уравнением дина-
мического изгиба балки. Бесконечное количество координат опре-
деляется указанным «динамическим» уравнением, которое должно
быть решено при заданных граничных условиях на концах балки
и заданных начальных условиях.
Например, в случае свободно опертой балки с неподвижными
опорами имеем:
граничные условия
В(0, О - 0. y(l. t) - 0. _ 0.
начальные условия
И*. Ц ^l1)’
где у0 (*) и Уо (*) — Две независимые функции отх, удовлетворяю-
щие условиям геометрических связей, т. е.
Уп (0) •= Уо (0 « 0.
Заметим, что условия равенства нулю скоростей на концах
балки не являются, конечно, кинематическими связями, свидетель-
ствующими о неголономности системы. Они предстаиляют простое
следствие геометрических связей.
Пренебрежение массой гп0 (х) снова переводит «динамическое»
уравнение (II. 21) в «статическое» уравнение (II. 20).
Часто упрощение задачи происходит за счет пренебрежения
не какими-то массами, а податливостью конструктивных элементов.
Так, в примере «Г» п. 6 (рис. 10) систему можно рассматривать как
имеющую две степени свободы, только полагая равной кулю подат-
ливость стержня на изгиб (или равной бесконечности его жест-
кость). Если, дополнительно, пренебречь массами поршня и стер-
жня по сравнению с массой т и рассматривать только малые от-
клонения от исходного состояния, то система будет иметь одну
динамическую степень свободы (по-прежнему две степени свободы
в обычном смысле).
Составим уравнение движения массы т в случае, когда
к поршню приложена горизонтальная сила F (/). Жесткость ли-
нейной пружины равна с; жесткость витой пружины равна k; под
жесткостью с будем понимать частное от деления горизонтальной
силы, приложенной к концу пружины, на удлинение пружины;
под жесткостью k — частное от деления момента М, приложенного
к стержню, па утл поворота стержня.
Если к точке В приложена горизонтальная единичная сила,
то горизонтальное перемещение массы tn равно — -)• -4- =
От действия силы F(/), приложенной в точке Л, поршень и масса
5* R7
или
переместятся на величину . Обозначим величину -i- через с.
С О,
(жесткость системы от силы в точке В), а величину------через 62
(податливость системы от силы на поршне). Тогда
тх -с,(х —Л(/)62)
F(l)ctt>t.
(11.22)
тх
После того как из уравнения (И. 22) и начальных условий опре-
делено значение х =- х (/). нетрудно найти перемещение поршня
V1(O =С| (х(0 — F (/)б.]б8 -’-Г (11.23)
Характер допустимых упрощений (идеализаций) определяется
не только свойствами рассматриваемой механической системы,
внешними силами и начальными условиями, но и тем, на какие
именно вопросы необходимо получить ответ
Так, в разобранном случае нас- интересовали малые перемеще-
ния системы, и мы могли пренебрегать изменениями координаты у
массы т, каков бы ни был характер действующих на систему сил.
Если бы требовалось исследовать произвольные перемещения, то
необходимо было бы ввести две динамические степени свободы
независимо от наличия или отсутствия массы поршня и стержня.
Пусть мы рассматриваем свободные колебания маятника при
небольшом трении и нас интересует лишь небольшой интервал
времени. Тогда вполне допустимо вообще отказаться от учета тре-
ния. Однако даже малыми силами нельзя пренебрегать, когда не-
обходимо рассматривать большие интервалы времени: в течение
большого времени даже малое трение приведет к заметному или
даже полному затуханию колебаний
Условия допустимости идеализации мы формулируем, обычно
указывая, что какая-то величина «мала» или, наоборот, «велика».
Эти термины справедливы, строго говоря, если оговорено, по срав-
нению с чем она мала или велика. Земля мала по сравнению с про-
ходимыми ею расстояниями в движении относительно Солнца,
поэтому размерами ее можно пренебречь и во многих задачах небес-
ной механики рассматривать Землю как материальную точку;
с другой стороны, Земля велика по сравнению с летящим камнем
и расстояниями его полета, поэтому камень можно рассматривать
как точку, а Землю — как бесконечную плоскость. В приведенном
примере с маятником для пренебрежения трением необходимо,
чтобы показатель затухания был мал по сравнению с частотой ко-
лебаний (логарифмический декремент мал по сравнению с едини-
цей), а время наблюдения не было велико по сравнению с перио-
дом колебаний (см. ниже).
Однако иногда трудно предопределить, с какой именно вели-
чиной нужно сравнивать данную величину. Тогда термины мал и
68
велик теряют, конечно, свою определенность, но все же обычно
сохраняют известный смысл; даже расплывчатые характеристики
дают некоторые представление о допустимой идеализации. Часто,
решив задачу с такими расплывчатыми характеристиками, можно
затем «обратным ходом» уточнить их. Например, решая задачу
об изгибе балки, мы заранее пренебрегаем сдвигом, полагая, что
влияние сдвига мало, причем трудно сказать болеё определенно
об этой малости. Получив решение без учета сдвига, мы можем
затем уточнить влияние сдвига и получить более ясное суждение
о порядке свободной погрешности.
Умелая идеализация рассматриваемой реальной системы, т. е.
сокращение степеней ее свободы и пренебрежение различными вто-
ростепенными факторами без существенного ущерба для точности
решения, представляет иногда главную трудность исследования,
которой нужно уделять самое пристальное внимание.
§ 3. РАБОТА. ОБОБЩЕННЫЕ СИЛЫ- ИДЕАЛЬНЫЕ СВЯЗИ.
ПОТЕНЦИАЛЬНАЯ И КИНЕТИЧЕСКАЯ ЭНЕРГИИ.
ЗАКОН СОХРАНЕНИЯ ЭНЕРГИИ
1. Работа сил, приложенных к механической системе, равна
сумме работ сил, приложенных к каждой точке.
Пусть' F,- — равнодействующая сила на t-й точке системы,
г{ — радиус-вектор точки. Тогда сумма элементарных работ при
виртуальных перемещениях системы (см. (2. 15)]
1=1 1=1 j=i
= (П-24)
Величина
<п2б>
1=1
называется обобщенной силой, отнесенной к обобщенной коорди-
нате 9/, или обобщенной силой, соответствующей этой координате.
В координатной форме
1—1 1=1 ' '
= 22 QMr (И- 24а>
69
где
= <IL2Sa>
Таким образом, обобщенная сила, соответствующая какой-либо
обобщенной координате, есть коэффициент, который стоит перед
этой координатой в зависимости для работы свл на виртуальном
перемещении системы. Именно так обычно следует вычислить
значение Qf, не обращаясь непосредственно к (II. 25) или (II. 25а).
Целесообразно дать интересующей нас координате вариацию
составить выражение для работы всех сил на перемещении 6gf
и найти коэффициент перед
Размерность обобщенной силы может не совпадать с' размер-
ностью обычных физических сил; она определяется как частное
от деления размерности работы на размерность обобщенной коорди-
наты.
Рассмотрим примеры.
А. Пусть маятник массы М2 и веса Р2 подвешен на жесткой
невесомой связи длиной I к грузу массы М± и веса Pt (рис. 14).
Груз связан с основанием упругой связью жесткости с и может
скользить без трения по этому основанию.
Рассматриваемая система имеет две степени свободы и за обоб
щенные координаты удобно принять = х, q2 -- ф, где х — от-
клонение Mt от положения, в котором связь с не напряжена,
Ф — угол отклонения маятника от вертикали. На систему точек Mt
и М2 действуют силы Р1г РгнР = сх.
70
Если дать координате х возможное приращение 6х, то
бЛ = Pi sin абх 4- Р 2 sin абх — схбх =
= ((Pi + PJ sin о — ex] fix
и, следовательно,
Qi = (Pi — P2) sin « — ex.
Давая приращение 6<p, получим
М = —Psl sin фбф,
и поэтому
Qz = —P.J бш <р.
Б. Если свободно опертая балка (рис. 12, а) загружена распре-
деленной нагрузкой Р (х), а прогиб ее представлен в виде ряда
У
т. е. выражен через обобщенные координаты fk, то обобщенными
силами будут
Qk = J Р (х) sin-^ dx.
о
В. В случае, когда та же балка загружена в сечении х = Xj
внешним моментом М, обобщенная сила
„ kn knx,
Q = т —р cos—~.
2. Важное значение в механике имеет понятие идеальных свя-
зей. Связи называются идеальными, или связями без трения, если
сумма работ реакций этих связей на любых виртуальных переме-.
щениях системы всегда равна кулю.
В виде идеальных можно представить большинство практи-
чески встречающихся связей. Например, реакция R гладкой по-
верхности на движущееся по ней тело всегда направлена по нор-
мали к этой поверхности и, следовательно, перпендикулярна
перемещению 6г точки соприкасания тела; элементарная работа
7? • 6г равна нулю, т. е. гладкая поверхность — идеальная связь.
Связь, сохраняющая расстояние между двумя точками си-
стемы, также идеальна. В самом деле, реакции такой связи на обе
точки направлены по прямой линии, соединяющей точки, и, со-
гласно третьем}' закону механики, равны между собой, но противо-
положно направлены. Проекции любых виртуальных перемещений
обеих рассматриваемых точек на соединяющую их прямую строго
одинаковы; следовательно, суммарная работа реакций связи
всегда равна нулю.
71
Аналогично можно рассмотреть и другие случаи связей.
Если некоторые связи дают силы трения, то последние на осно-
вании соответствующих экспериментальных данных выражают
аналитически через элементы движения, и затем относят к катего-
рии внешних сил. Неидеальную связь заменяют идеальной связью
и некоторой внешней силой. Так, шероховатую поверхность можно
представить в виде гладкой поверхности и силы трения, выражен-
ной, например, через скорость точки соприкосновения.
В дальнейшем, если специально не оговорено противное, будем
полагать все связи идеальными.
Важно учесть, что в случае неидеальных связей, когда силы
трения еще не представлены как внешние, общего числа уравне-
ний движения (II. 1а) и условий связей недостаточно для опреде-
ления движения механической системы.
Действительно, пусть п — число материальных точек, Л —
число геометрических связей. Неизвестны Зп координат точек
и, в общем случае, Зп проекций реакций связей на оси координат.
Имеется Зп уравнений движения и 'h условий связей. Не хватает
6п — Зп — h =- Зп — h дополнительных условий, число которых
равно числу обобщенных координат.
В случае идеальных связей выполняются равенства
Jltft.A- I- Ri. Al, + ft, ,6г,) = 0. (11.26)
где Л, у, Rlt г — проекции на оси координат реакции
связи, приложенной к i-ii точке, f>xt, f>yh bzt — вариации коорди-
нат точки при виртуальном перемещении.
Среди Зп величин fix,, ба, имеется Зп — h независимых,
©стальные h величин можно выразить через независимые и, под-
ставив их в (11.26), записать недостающие Зп — Л уравнений;
каждое такое уравнение получается, если положить вариации
всех независимых переменных равными нулю (кроме одного).
Когда задача решается в обобщенных координатах, то идеаль-
ность связей дает возмржность сразу записать т — Зп — h
условий
= <1L27>
т. е. обобщенные силы реакций идеальных связей (обобщенные
реакции связей), соответствующие любой обобщенной координате,
равны нулю.
3. Силы, действующие на механическую сисгему, называют
консервативными, если работа этих сил зависит только от началь-
ного и конечного положений точек системы и не зависит от формы
их пути. В числе указанных сил должны рассматриваться не только
72
внешние, но и внутренние силы, зависящие в общем случае от
взаимного положения точек.
Сформулированное условие равносильно, очевидно, тому, что
работа всех сил при перемещении из произвольного, но затем
фиксированного положения системы I с координатами точек (xoi,
yoi, zj) (£=1,2, . л) до другого положения 2 с координатами
(Xi, yit z.) представляет однозначную функцию Зя координат
А1-2~ Ф(*ь Vi> zi) (i= I, 2,•••,«)- (11.28)
При дальнейшем перемещении всех точек на величину ds(
в положение 3 элементарная работа
rfA-3- <P(JQ + Vi rdyi, Zt ]~dzi) — (p(xt, ylt xt), (11.29)
так как, пользуясь независимостью работы от пути, можно заменить
перемещение 2—3 перемещениями 2—! и I—3.
Выражение (И. 29) переписывается в виде
rf^a-3 = 2 С27', ~
f=i
+ ~d'h (Ч-ЗО)
«=1
откуда
f" 3D
Иначе говоря, проекции F, х, Flt Ftt z консервативных сил,
действующих на точки механической системы, равны частным про-
изводным ио координатам этих точек х{, уь zt от некоторой одно-
значной функции <р (x/f ylt z£) (i = I, 2, . . ., я), в которой коорди-
наты точек рассматриваются как независимые переменные.
'Функция, отвечающая выражениям (II. 31), называется сило-
вой функцией консервативных сил. Она имеет размерность работы.
Физически силовую функцию можно интерпретировать как
работу всех сил при перемещении механической системы из неко-
торого нулевого положения в заданное положение. Отсюда ясно,
что силовая функция может буть определена только с точностью
до произвольной постоянной и что она не зависит от системы коор-
динат, хотя формальное ее определение связано с проекциями
силы на координатные оси.
Поскольку согласно (II. 29) элементарная работа равна элемен-
тарному изменению силовой функции, т. е.
^8-3 — ^Ф8-3«
73
то !>абота консервативных сия равна алгебраическому приращению
силовой функции между начальным и конечным положениями меха-
нической системы.
Ясно, что
^i-г^’Ра —Ф1- (11.32)
Отсюда очевидна справедливость утверждения: если силы,
действующие на механическую систему, имеют силовую функцию,
то они консервативны.
Работа консервативных сил при возвращении системы в исход-
ное состояние (т. е. работа на замкнутом пути} равна нулю.
Потенциальной энергией механической системы, находящейся
в консервативном силовом поле, называется работа сил поля, при-
ложенных ко всем ее точкам, при переходе всех точек из данного
их положения в некоторое другое положение, которое принято
за нулевое состояние системы.
Легко видеть, что величина потенциальной энергии II равна
силовой функции с обратным знаком
И(х„ у„ г,)——<р(х„ у„ г,). (11.33)
Она также определена с точностью до произвольной постоян-
ной.
Имеем
^1-8 = 11! —П2. (11.32а)
Пусть связи системы стационарны. Тогда можно выразить де-
картовы координаты через обобщенные, причем время в соответст-
вующие зависимости не войдет. После замены переменных
в (II. 33) получим
П = П(?1,--,9„)^П(?,). (11.34)
Элементарная работа сил на виртуальном перемещении согласно
(П. 30) и (11.33)
М = -«!- — (11.35)
_ Сравнивая (II. 35) с (II. 24), имеем [обобщение (II. 31)]
«/-—. (И-36)
т. £. обобщенная сила, соответствующая какой-либо обобщенной
координате, равна частной производной от потенциальной энер-
гии системы по этой координате, взятой с обратным знаком; по
тенциальная энергия должна быть выражена как функция обоб-
щенных координат. Это положение представляет теорему Лаг-
ранжа и широко используется в теории упругости и строительной
механике. Заметим, что при доказательстве теоремы мы нигде не
74
применяли условия линейности системы: теорема справедлива
для любых консервативных систем.
Иногда формула (11.36) записывается без знака минус. Это
справедливо в том случае, когда рассматривается потенциальная
энергия внутренних сил системы, а под Q,- понимается внешняя
сила, равная внутренней силе с обратным знаком.
Из равенства типа (II. 36) путем их почленного дифференциро-
вания можно получить
*?/ <>Q* _ |
— dqjdqk ’ d9j dqkdQi I __
(“37>
dq, j
Равенства (II. 37) представляют необходимое условие потенци-
альности сил. В анализе показывается, что они являются одновре-
менно и достаточным условием, так как при выполнении их
имеется функция <р, удовлетворяющая выражению
= (II. 35а)
г=| 1—1
которое обеспечивает независимость работы от вида перемещения
системы из начального положения в конечное.
В случае нестационарных связей потенциальная энергия будет
зависеть и от времени, так как оно входит в зависимости (II. 7)
П = П(,1,...,?„, <) (11.34а)
Одиако это никак не отражается на равенстве (II. 35), по-
скольку при виртуальных перемещениях фиксированное время
«останавливается». Останется в силе и равенство (II. 36).
’Элементарная работа сил на возможном перемещении выра-
жается через потенциальную энергию как
<tL38>
(см. гл. I, § 8, п,-Юо нестационарном консервативном поле). •
Потенциальную эвергию, зависящую от времени, обычно на-
зывают обобщенной потенциальной энергией. В дальнейшем само
изложение будет показывать, о какой — обобщенной или необоб-
шейной — потенциальной энергии идет речь; поэтому слово обоб-
щенная обычно будет опускаться.
4. В строительной механике и теории упругости часто прихо-
дится иметь дело с идеально упругими телами {идеально упругими
механическими системами}.
75
Тело (механическая система) называется идеально упругим,
если внутренние силы, действующие на любую его материальную
точку, однозначно зависят только от взаимного расположения
всех его точек, но не от их скоростей, предшествующей «истории»
деформирования и т. п.
В силу третьего закона механики внутренние силы между точ-
ками всегда должны быть равны и противоположно направлены,
т. е. Fij = Рц (первый индекс указывает точку, на которую дей-
ствует сила, второй точку, со стороны которой она действует).
Если дополнительно положить, что эти силы действуют по пря-
мым, соединяющим точки, и однозначно зависят лишь от абсолют-
ной величины расстояния между точками, то можно доказать, что
внутренние силы имеют силовую функцию, а тело — потенциаль-
ную энергию.
Рассмотрим f-ю и /-ю точки. Пусть F — общая величина сил Fy
и F и, будем считать ее положительной, когда точки притягиваются.
Чтобы вычислить сумму элементарных работ сил Fij и Fjt на
бесконечно малых перемещениях точек, примем подвижную декар-
тову систему с началом в точке i; оси подвижной системы направим
параллельно осям неподвижной системы. Перемещение любой
точки в неподвижной системе равно ее перемещению вместе с по-
движной системой (переносное движение), сложенному с перемеще-
нием относительно подвижной системы (относительное движение).
Но в переносном движении обеих точек внутренних сил ие возни-
кает (расстояние между точками не меняется), и поэтому работы
их равны нулю. В относительном движении элементарная работа
внутренних сил равна Fdr, где г — расстояние между точками
(см. п. 4 § 2 и I о движении точки в центральном силовом поле).
Итак, полная элементарная работа взаимного перемещения точек I
и i
dAtj ^—F (г) dr ~ Fa, + Fv, Fo-, -j-
+ Fjlt ^dXj + Fjlt jiy, 4- Fji, jdZj. (II. 39)
Введем силовую функцию
ФиИ-—Si. *1. X-L-Hi, Z,),
определенную с точностью до произвольной постоянной и являю-
щуюся функцией координат обеих точек, поскольку
' ---> V, — + to, — + (*> - Zf.
Тогда
dA^—dcpij. (11.39а)
Вычислим для каждой i-й точки все силовые функции ее взаимо-
действия со всеми остальными точками системы. Тогда потенциаль-
76
ную энергию всех внутренних сил системы можно определить как
П(л(. </,. г,)---Zh х’’ !Л' г1>' <П-40)
Множитель -g- появился потому, что функция <р относится
сразу к двум точкам.
Имеем
dA - -<Ш, (II. 41)
где dA элементарная работа внутренних сил при элементарных
приращениях координат всех точек системы, <йП - элементарное
изменение потенциальной энергии, соответствующее этим прира-
щениям координат.
Если система перешла из положения I в положение 2, то работа
внутренних сил, естественно,
Л1_. = Я1 П8. (II. 32а)
Приведенное выше условие для внутренних сил (они действуют
по прямой, соединяющей точки, и однозначно зависят только от
взаимного расстояния между точками) является достаточным ус-
ловием их консервативности. Однако оно необязательно. Можно
допустить возможность более сложных взаимодействий, но про-
сто постулировать, что внутренние силы идеально упругого тела
консервативны, т. е. что имеется такая функция П координат его
точек, при которой выполняются равенства (II. 41) и (II. 32а).
Консервативность внутренних сил идеально упругого тела от-
ражает его свойство накапливать при нагружении некоторую по-
тенциальную энергию и возвращать ее без потерь, когда тело воз-
вращается в исходное состояние.
В строительной механике обычно предполагается, что за нуле-
вое положение тела принято его натуральное состояние, когда
все внутренние силы равны нулю. Тогда для всякого иного состоя-
ния потенциальная энергия положительна.
Естественно, что внутренние силы идеально упругого тела Qs
и потенциальная энергия их П могут быть выражены через обоб-
щенные координаты системы
П П(?1 4m)> (11.42)
Qs = Qs(?>. , ЗП d9s > (11.43)
причем oQs _ OP,. (II. 14)
Для определения потенциальной энергии идеально упругой
системы можно поступать двояким образом: либо вычислять ее как
77
работу внутренних сил при переходе из данного положения в при-
нятое нулевое положение, либо воспользоваться тем, что в иде-
ально упругой системе отсутствует рассеивание энергии и нахо-
дить потенциальную энергию как работу внешних статических
сил при переходе из нулевого положения в данное положение.
5. В линейных задачах строительной механики и теории упру-
гости зависимость между внутренними силами механической си-
стемы и перемещениями линейна (это свойство является определе-
нием линейной системы)
Q.-----lf.a,+ -+с,М (5 = 1...........“)• (11.45)
где — постоянные коэффициенты, называемые коэффициен-
тами жесткости, или просто жесткостями.
В силу условия консервативности внутренних сил (II. 44)
имеем соотношение взаимности
crf -•= c*s. (II. 46)
Иначе говоря: коэффициент жесткости линейной идеально
упругой системы при k-й обобщенной кооодинате для s-й обоб-
щенной силы равен коэффициенту жесткости при s-й обобщенной
координате для k-й обобщенной силы.
Если решить систему (II. 45) относительно qs, то получим
= — («зiQi + ai2Q2 4-------г asmQm) (s =•- I, • - -> m), (II. 47)
где — постоянные коэффициенты, называемые коэффициен-
тами податливости или просто податливостями.
В линейной алгебре доказывается общая теорема: пусть
имеется система
ПцХ, + и1гхе + .. 4. щ -= Cl,
aAlx, + ak2x2 -i- ...-{- q;
r*i ! 4“ — Cm,
причем коэффициенты ai} = a}i (матрица системы симметрична),
тогда решение системы может быть представлено в виде
*1 = fcuQ i bKc2 ... 4-
xk bkiCi 4- bk^:2 4- . . 4~ b^Cm’,
xm — bmlCi -1- bm2C2 -| bmttf.-„„
где обязательно bif -- Ьц (обратная матрица также симметрична).
7Я
В силу этой теоремы
ал = аь- (11.48)
Соотношение (11. 48) выражает весьма важную теорему взаим-
ности (теорему Максвелла)-, коэффициент податливости линейной
идеально упругой системы для s-й обобщенной координаты от k-й
обобщенной силы равен коэффициенту податливости для k-й
обобщенной координаты от s-й обобщенной силы.
Любому коэффициенту податливости можно дать простую фи-
зическую интерпретацию: коэффициент податливости равен
приращению обобщенной координаты q„ при действии единичной
обобщенной силы Q*. Поэтому допустима иная формулировка
теоремы взаимности: приращение обобщенной координаты qs линей-
ной идеально упругой системы при действии единичной обобщенной
силы Qh равно приращению обобщенной координаты qk при дейст-
вии единичной обобщенной силы Qs (иногда называется теоремой
Бетти).
Физическая интерпретация коэффициентов жесткости более
'сложна и не представляет особого интереса.
Для преобразования аналитических зависимостей потенциаль-
ной энергии линейного идеально упругого тела удобно пользо-
ваться теоремой Эйлера об однородных функциях. Функция не-
скольких переменных называется однородной функцией этих пере-
менных степени т, если при умножении всех переменных на произ-
вольную величину k сама функция увеличивается в k'n раз, т. е.
f(?A ......................<7г. ftn)- (П.49)
Как показал Эйлер, сумма произведений частных производных
однородной функции на соответствующие переменные равна произ-
ведению самой функции на степень ее однородности.
Действительно, пусть
?2* = «а> - - «т* = «т-
Отсюда
f(«i. «2. Um)^kmf(q!. «72........qm),
где f (щ, и2, .... ит) — сложная функция параметра k.
Если взять от обеих частей последнего тождества производные
по k. то
Фо . , ... , <>l dum _
dtii i)k ' дих dk ‘ дцт dk
= ^41 + • • + i «- “ «!. • - «»)
При k — I имеем
Tfa 4*'5 -щ- * + ’ •1 fls...^)- 5°)
79
Это и требовалось доказать.
Чтобы получить выражение потенциальной энергии линейно
деформируемого тела, заметим, что элементарное ее приращение
на виртуальном перемещении
т т шт
8П=2-=-ч 2<г,ч(„si)
1 ' I )=!
откуда
11 -у-^ОЛ- (11.52)
1=1 Л=1 ~ 1
Потенциальная энергия оказывается квадратичной однородной
функцией обобщенных координат и поэтому к ней применима тео-
рема Эйлера, которая непосредственно связывает (II. 52) с (11.51).
Третий член (II. 52) выражает теорему Клапейрона-, потен-
циальная энергия линейной идеально упругой системы равна полу-
сумме произведений обобщенных сил на соответствующие обобщен-
ные координаты.
Подставив (II. 47) в (II. 52), имеем
п =----'Г V Qfl. - ~ 2 2 "W2* (! 1.53)
1 ,=| *=|
и по теореме Эйлера
(11.54)
Иными словами (теорема Кастильяно): частная производная
от потенциальной энергии линейной идеально упругой системы по
какой-либо внутренней обобщенной силе равна по величине соот-
ветствующей обобщенной координате. (Потенциальная энергия
должна быть выражена как функция обобщенных сил.)
Если Qft не внутренние, а внешние (статические) обобщенные
силы, равные по величине и противоположно направленные вну-
тренним обобщенным силам, то в зависимостях (II. 45), (II. 47),
(II. 51) —(II. 54) нужно, очевидно, изменить знак минус на плюс.
Теоремы Клапейрона, Максвелла и Кастильяно можно вывести
и чисто физически
В самом деле, если изменение обобщенной координаты qk про-
порционально изменению соответствующей внутренней обобщен-
ной силы Од,, т. е.
Qk ^-кЧк,
то работа силы Q* равна площади треугольника оАВ (рис. 15, а)
Ak~ ~2~ Qk^it-
80
Но в идеально упругой системе суммарная работа внутренних
сил зависит только от конечного положения системы (конечного
значения сил) и не зависит от пути деформации (способа нагру-
жения). Следовательно, мы можем нагружать систему, все время
оставляя неизменной форму деформации вплоть до заданной;
для линейно упругой системы это будет означать неизменность
соотношений величин внутренних сил и пропорциональность
или
я —
т„ е. теорема Клапейрона доказана.
Чтобы доказать теорему Максвелла, поступим так. Дадим внеш-
ней статической силе Qk приращение 6Qk от нулевого положения
системы, тогда координата qk получит приращение akkf>Qk.
а координата qs — приращение a.s1tbQk. Сила совершит
работу
4" eQ*WQfe-
После этого дадим приращение силы 6Qe. Координата получит
приращение и приложенная ранее сила 6Qft произведет
работу
(коэффициент -у- отсутствует, так как свла &Qk не менялась).
Кроме того, будем вме1ь приращение координаты q&. равное
ass6Qs, и работу силы Qf
4*
В. С. Чуввковский 1757
81
Суммарная работа сил t>Qk и 6QS составляет
4 SQA.SQ» -i- + 4 в<2.“»е<2.-
Если дать сначала приращение 6QS, а затем 6Qfe, то суммарная
работа сил f>Qs и будет составлять
Из равенства работы сил независимо от порядка нагружения
получаем
o.k^Qsf>Qk -=
и
°*S = ask’
Приведенное доказательство позволяет дать новую формули-
ровку теоремы взаимности: работа какой-либо обобщенной силы
на перемещениях линейной идеально упругой системы, возникающих
от действия другой обобщенной силы, равна работе этой другой
силы на перемещениях, возникающих от действия первой обобщен-
ной силы (иногда называется теоремой взаимности работ).
Чтобы доказать теорему Каствльяно, рассмотрим линейную
упругую систему, загруженную внешними статическими обобщен-
ными силами Qj (/ = 1, . т). Потенциальная энергия есть
функция от Q/.
Дадим силе Q, приращение 6Q,-. Тогда потенциальная энергия
получит приращение
йП хо
С другой стороны, работа внешних сил раньше была равна
42 са-
После приращения &Q/ она составляет
4 2 <2* to+“>№) -!- 4 № + 6<2/> («;+
k+i
Разность работ, равная приращению потенциальной энергии,
с точностью до величин второго порядка малости представляется
в виде
Д- ю,=4 2 wc, н 4 ’/<2,-
82
Сокращая обе части этого выражения на 6Q,, учитывая (II. 48)
и меняя знак в правой части (II. 47), имеем
~dQT =*2- Сла*/ + ~2 *7/ ~ ~2~ 2 Qkalk + “g-4?/ = <7/-
При расчете статически неопределимых систем иногда исполь-
зуют так называемую теорему о минимуме потенциальной энергии
(или начало наименьшей работы), которая представляет частный
случай теоремы Кастильяно. Сущность теоремы: если мы, имен
любую линейную апатически неопределимую систему, выберем
любую совокупность лишних неизвестных, то величина потен-
циальной энергии системы, рассматриваемая как функция лишних
неизвестных. обращается действительными значениями последних
в минимум.
В самом деле, если отбросить п связей л-кратной статически
неопределимой системы, то система станет статически определи-
мой. Отброшенные саязи можно заменить их обобщенными реак-
циями /?z и выразить через указанные лишние неизвестные все
остальные статически определимые внутренние силы, т. е. в конеч-
ном итоге выразить потенциальную энергию как функцию всех
7?,- О' = т).
Заметим, что обобщенные координаты, соответствующие 7?f,
всегда равны нулю. Действительно, если эта лишняя неизвестная
есть реакция неподвижной связи (жесткой опоры, жесткой заделки
и т. п.), то соответствующее перемещение есть нуль по исходному
условию Если же неизвестная вводится за счет «разрезания» са-
мой системы (например, опорные моменты в неразрезной балке),
то обобщенное перемещение снова нуль, поскольку обобщенная
реакция представляет в этом случае совокупность усилий, прило-
женных к обоим краям разреза, а обобщенным перемещением-будет
расхождение краев, которое не допускается (например, углы
поворота смежных пролетов на опоре должны быть равны).
В силу теоремы Кастильяно
т. е. потенциальная энергия имеет экстремум.
Исследование второй производной от энергии показывает, что
указанный экстремум есть минимум.
6. Нелинейные задачи строительной механики и теории упру-
гости характеризуются нелинейными зависимостями
С. = /(?,. «>, . : ЧтЬ <П.55)
?.-<p,(Q,. Q,. . . .. <2Л- (П. 56)
6* 83
При этом, естественно, теряют смысл соотношения взаимности
и нарушается приведенная теорема Кастильяно. Однако последняя
допускает обобщение.
Назовем дополнительной работой функцию
ф = 2<2а-П(»,). <п-57)
где Qs — внешние обобщенные силы;
П (w — потенциальная энергия, выраженная через обоб-
щенные координаты.
Если дать внешним силам малые приращения (вариации) &Qt-,
то деформации системы возрастут и функция Ф, с точностью до
бесконечно малых высшего порядка, получит приращение
т т т
Оф - 2 <?А/ + 2 8<2Л- 2 % 6И-
По теореме Лагранжа
следовательно,
= (”S8>
С другой стороны, используя (II. 56), можно выразить (II. 57)
череа Qt; тогда
еф = 2-%-е<2/ (1I-5S>
Сравнение (II. 58) и (II. 59) показывает, что
Il -gj-. (П.60)
т. е. частная производная от дополнительной работы упругой
системы по обобщенной силе равна соответствующей обобщенной
координате (обобщенная теорема Кастильяно). Дополнительная
работа при использовании этой теоремы должна быть выражена
как функция обобщенных сил.
В случае линейной системы дополнительная работа равна
потенциальной энергии и поэтому зависимости (II. 60) и (II. 54)
не находятся в противоречии
Физический смысл теоремы Лагранжа и обобщенной теоремы
Кастильяно особенно вцден в случае неч инейной системы с одной
степенью свободы (рис. 15, б), когда потенциальная энергия выра-
жается площадью оАВ, а дополнительная работа — площадью оАС.
84
Ясно, что
~ ,. АП «. ДФ
Q=lim-r—, <7- lim-.-^.
х Д? ’ Д(?
7. Приведем примеры.
А. Если на линейно деформируемый стержень длины I и по-
стоянного сечения F действует растягивающая сила Ро, то его
удлинение А/ равно, как известно.
где Е — модуль нормальной упругости.
Примем Д/ за обобщенную координату, а Р„ — за обобщенную
силу. Тогда по теореме Клапейрона
1 Р2/
П —-2-Р0Д/- 2£р-
(11.61)
Имеет место теорема Кастильяно
д/
~ ар„ EF
Поскольку
MEF
то
WEF
- 9/
(П.61а)
и выполняется теорема Лагранжа
д(Ы) '
Применять теоремы Лагранжа и Кастильяно к потенциальной
энергии, выраженной как смешанная функция Рс и Д/, нельзя.
Действительно, если
п -
то
ап
ап______£
2
Б. Пусть материал растянутого стержня постоянного сечения
имеет переменный модуль нормальной упругости, зависящий от
нормальных напряжений Е = Е (о). Тогда стержень будет нели-
нейно деформируемым.
Удлинение стержня может быть найдено по обобщенной теореме
Кастильяно
дФ
Можно также выразить потенциальную энергию через обобщен-
ную координату Д/
О 0 0
где £ и у — текущие значения Д/;
Е (%) — зависимость модуля нормальной упругости от удли-
нения.
По теореме Лагранжа можно выразить обобщенную силу
р ___
7 °- дД/ ’
В. Рассмотрим (рис 16) систему двух стержней, соединенных
шарниром и загруженных вертикальной силой Pv. В недеформи-
рованном состоянии стержни горизонтальны.
Составляя выражение потенциальной энергии системы, имеем
11 2^(Л/Д
где Е, F, I — модуль нормальной упругости, площадь сечения
и длины каждого стержня.
86
С другой стороны.
Отсюда
Следовательно,
Г. Пусть мы имеем стержень постоянного сечения длиной I,
находящийся под действием крутящих моментов. Рассечем его
двумя близкими сечениями на расстоянии dx друг от друга и при-
ложим к сечениям выделенного таким образом элемента два равных
по величине и противоположно направленных момента М (г)
Примем эти моменты за обобщенную силу; обобщенным перемеще-
нием, соответствующим такой силе, будет угол относительного
поворота сечений, т. е. О dx (6'— погонный угол закручивания).
По теореме Клапейрона получаем
П --i-f - J- (11.62)
Здесь с — жесткость на кручение, входящая в зависимость
. м ~
О = , G — модуль сдвига.
Д. Если стержень длиной / изгибается моментами с эпюрой
М (л), то для вычисления энергии можно поступить так же, как
и в случае кручения.
Выделив элемент длиной dx и приняв приложенные к нему
изгибающие моменты М (л) за обобщенную силу, найдем, что
обобщенное перемещение есть отпосптсльный позоре" се«ерий v.dx,
где
М(х)
~ Е1(х) '
87
Отсюда
п - 4* iм W * «л т I Тцгг -
О о
= 4-{£/(*)«’W*'" (»-63)
О
Е, Из теоремы Кастильяно непосредственно следует Так назы-
ваемый интеграл перемещений (интеграл Мора) для определения
деформаций в стержневых системах.
Пусть Р (к), М (x)D, Л4 (л)к — осевая сила, изгибающий момент
и крутящий момент в стержне, F (х), с (х), I (г) — площадь
стержня, жесткость на кручение и момент инерции. Пусть, далее,
осевые силы мвлы по сравнению с эйлеровыми силами стержней,
т. е. дополнительные изгибающие моменты, возникающие от осе-
вых сил при изгибе стержня, пренебрежимо малы по сравнению
с начальными изгибающими моментами (система линейна относи-
тельно всех трех видов усилий).
Запишем теорему Кастильяно (II. 54) в вариационном виде
2 0I.54«)
Обозначим через Qs обобщенную силу, соответствующую ин-
тересующему нас обобщенному перемещению. Например, если нас
интересует прогиб в точке з, то это будет поперечная свла, прило-
женная в этой точке.
Предположим теперь, что все силы остаются неизменными,
а сила Qs варьируется; в частном случае она первоначально может
быть равна нулю. Вследствие линейности системы осевые усилия
в стержнях, изгибающие моменты и крутящие моменты получают
приращения Р (x)sSQs, М (x)HS6Qg, М (x)Ksf>Qs, пропорциональные
6QS; Р (*)«. Af (x)k-s. А4 (x)ks — дополнительные осевые усилия и
моменты при 6QS = 1.
По формуле (II. 54а) имеем
«Ж «По, (11.546)
Первоначальное значение
п _ г P(xYdx , ( м _ г м (xtfdx
—J2EF(x) т* J 2Е/{х) ! J 2с (х) С '
Ее значение после вариации 6QS
п . ЛГУ _ f |Р(х)+Рн)^й|Мх f |Л4 (xh, + Ai (x)HA»,t*dx ,
и -Г j 2£f , J 2Е/ т
f [М (x)K-t-A1(x)K^Qs]gdx
+ J 2c(x)G
88
Используя (II. 54) и пренебрегая квадратом малой величины
&QS, имеем
_ fP(x)P(x)sdx , f Л1 (л)дЛ4 (х)И1<Ь: f М (х)кМ (x)KSdx
“J £'F(x) J ЕЦх) c(x)G
Для примера найдем перемещение точки А кругового стержня
загруженного свлой Ро (рис. 17).
Изгибающий момент в точке В, определяемый углом <р,
М (ч>)„ = PnR sin <f.
Обозначим вертикальное направление номером 1 и горизон-
тальное — номером 2.
Дополнительный изгибающий момент,
который возникает от единичной верти-
кальной силы в точке А,
М (Ч)м = R sin Ф-
Значит, вертикальное перемещение точ-
ки А составляет
РЯ2 f . s . nR*P
ч> чл> = ^ег-
0
Дополнительный изгибающий момент от единичной горизон-
твльной свлы в точке А
Л4(ф)и2 -/?(!—cosч>).
Следовательно, горизонтальное перемещение в этой точке
TJ-fsMO— cosifjdcp-——-.
О
Ж. Известно, что прогиб середины пролета шарнирно опертой
балки под действием момента, преложенного на опоре,
f _ Mi
' 16£7 ‘
Найти угол поворота на опоре от действия силы, приложенной
в середине пролета.
По теореме взаимности непосредственно получаем
ф-ТбёГ-
8. Мощностью в действительном движении системы называется
величина, равная сумме скалярных произведений векторов свл
89
на скорости точек их приложения
л _ п / т _ _ \
-2qa + 2f,->. („ей»
Здесь Ft — равнодействующая сил, приложенных к t-й точке.
При выводе (II. 65) использованы формулы (II. 11) и (11.25).
Первое слагаемое в правой части (II. 65) называется виртуаль-
ной мощностью /V'. Виртуальная мощность равна сумме скаляр-
ных произведений векторов сил на виртуальные скорости точек
их приложения.
Заметим, что мощности могут быть также определены как
работы сил на действительных или виртуальных перемещениях
системы, отнесенных к единице времени.
9. Кинетической энергией Т системы материальных точек на-
зывается сумма кинетических энергий всех ее точек.
На основании полученных ранее выводов о кинетической энер-
гии точки (см. главу I) непосредственным суммированием полу-
чаем: дифференциал (элементарное прирашрние) кинетической
энергии системы материальных точек равен сумме элементарных
работ всех внешних и внутренних сил, действующих на систему.
Анвлогично: изменение кинетической энергии системы за ко-
нечный промежуток времени равно сумме работ всех внешних и
внутренних сил, действующих на систему, за тот же промежуток
времени.
Если связи системы идеальны и не зависят от времени, то
дифференциал кинетической энергии равен сумме элементарных
работ всех активных сил. Изменение кинетической энергии системы
за конечный промежуток времени равно сумме работ всех активных
сил з& тот же промежуток времени. Реакции идеальных, но за-
висящих от времени связей могут совершать работу, изменяя ки-
нетическую энергию.
Пусть все силы, действующие на систему, потенциальны, т. е
система находится в консервативном и стационарном силовом
поле. Согласно (11.32а) работа сил при переходе системы из по-
ложения 1 в положение 2 равна разности потенцивльной энергии
системы в положениях 1 и 2
А,_9 П,- Па.
Но, с другой стороны.
Отсюда для системы в консервативном поле
Г !- П = const.
(11.32а)
(II. 66)
90
Формула (II. 66) выражает закон сохранения энергии в кон-
сервативных механических системах', в механических системах, на
ходящихся в консервативном стационарном силовом поле (консер-
вативных системах), сумма кинетической и потенциальной энер-
гии всегда остается постоянной.
Часто в строительной механике потенциальной энергией си-
стемы называют потенциальную энергию только ее внутренних
сил, а полной энергией — сумму кинетической энергии и потен-
циальной энергии внутренних сил. Тогда, очевидно, изменение
полной энергии механической системы за данный промежуток вре-
мени равно сумме работ внешних сил, действующих на систему,
за тот же промежуток времени,
10 Кинетическая энергия системы материальных точек
Т - (И.67)
где Vi — скорость i-й точки.
Дифференцируя (И. 67) по времени и замечая, что t'7
= Vt vit имеем
Т = Xmivrvi = ViFi - N, ((I. 68)
где Fs равнодействующая сил, приложенных к г-й точке.
Иными словами, производная по времени от кинетической энер-
гии системы материальных точек равна сумме работ за единицу
времени (мощностей) всех сил, приложенных к системе.
11. Выразим кинетическую энергию системы в обобщенных ко-
ординатах, полагая, что все связи голономны, но не стационарны.
СКОРОСТЬ V{ точки I
2дп dri
' ~ЗГ‘
Кинетическая энергия точки
дг\ drt \{ дГ{ dri
Д-Зй-’" г«?’=
, дц дг,- \________
~ЯГ)-
1 х* &г‘ Х^ „ ^ri X* ^ri 1 . dri dr,
— 9 ,7i‘ .Ли dqx Ли <ia: 1 vt dq/ 2 Л dt
1 V X1 dri X* dri - I ™ dri
<W/ -1- m‘ ST Z -г -T ~дГ ~дГ
91
Кинетическая энергия всей системы
Введем обозначения
V* дп r)ri Л V1 dfl D
2ss;-^ - A-1 т-4 = Bi-
=t- <"•«»
где Atj, Bj, To — некоторые функции обобщенных координат и
времени. Тогда
г=4-22/.лл+2вл/+7’» м
вли
Г = Т2 + Тг + То. (II. 70в)
В (11. 70в) 7’г представляет квадратическую функцию обоб-
щенных скоростей, 7*1 - линейную функцию, Т9 — функцию ну-
левой степени.
При стационарных связях 7\ и Tv равны нулю. Поэтому ки-
нетическая энергия превращается в однородную квадратичную
функцию обобщенных скоростей
Т 4’2 2<П.70б>
S—I /=1
В скалярной форме при стационарных голономных связях
Г -= Т, - 4- 2 ml W + % -I- 2')= ал<А + +
/«=1
-I- . . -I- Ь . . . ч- + ..., (II. 70в)
где
92
Координаты arr и ars называются коэффициентами инерции
системы; они, в общем случае, не постоянны, а изменяются вместе
с конфигурацией системы.
Физически очевидно, что выражение (II. 70в) положительно
для всех значений скоростей, больших нуля. Математически это
выражается так называемыми детермицантными неравенствами
Сильвестра
При нестационарных голономных связях имеем скалярную
зависимость
Т =-7я-1-7\ +70 — Cjrfi-b -h +2aus<71?2 +
I* ^191 + ^2*7в Г • • • |_ ^тЯт "Ь (»• 70г)
где выражения остаются, как и при стационарных связях;
Примеры вычисления кинетической энергии различных ме-
ханических систем будут рассмотрены ниже, особенно при выводе
и применении уравнений движения системы в обобщенных коор-
динатах.
12. Любое данное состояние движения системы можно пред-
ставить как получившееся мгновенно из состояния покоя (в рас-
сматриваемой ее конфигурации) после приложения мгновенных
импульсов. Согласно данным, приведенным в главе 1, имеем
т1х1 = Х'1, iriiiji Y„ tn^j- Z'j, (11.72)
где Xi, Yi, Zi — соответствующие мгновенные импульсы по
осям х, у, г.
Умножив зависимости (II 72) соответственно на f—, ~,
ifQr ддг
и сложив их, получим
Рг = Рг, (П.73)
93
где
Р. I (П. 74)
(11.75)
i=i ' dqr dqr dqr '
Величины pt называются обобщенными составляющими ко-
личества движения, а величины Рг — обобщенными составляющими
импульса (или просто обобщенными количествами движения и
обобщенными импульсами).
Если подставить в (II. 74) значения скоростей по типу (II. 8),
то после некоторых преобразований найдем
Р, !>, i VbJ = (11.76)
dq,
В случае стационарных связей по теореме Эйлера об одно-
родных функциях имеем
т-т _ 1 ! ОТ _i_ дТ - ЭГ\
“ \ dq, dqt dqm /
= -J- (fj»i -I Ы1 >- !- Pm?J- (II- 77)
Коэффициент br при стационарных связях равен нулю и
Рг = «1^1 + СгЛ + • • • + «тЛт - (П • 76а)
13. Пусть система со стационарными связями находится в по-
ложении, определенном обобщенными координатами qlt q2, ....
qm. Пусть, далее, q„ q,, pr, pr некоторые значения обобщенных
скоростей и соответствующих им обобщенных количеств движе-
ния в этом положении.
Из (II. 76а) непосредственно следует соотношение взаимности
для обобщенных скоростей и количеств движения
РА, + РА = РА, + РЛ. (И- 78)
При ps — 0, р'г — 0 получаем
,IL7ta>
Если обе киор.далацд, т е ./г к qs. имеют одинаковый харак-
тер, например обе являются углами или линейными размерами,
то (И. 78а) может быть интерпретирована следующим образом:
скорость типа г, создаваемая импульсом типа s, равна скорости
типа s, создаваемой импульсом типа г.
94
§ 4. ОБЩИЕ ЗАКОНЫ ДИНАМИКИ: ЗАКОН ДВИЖЕНИЯ
ЦЕНТРА ИНЕРЦИИ, ЗАКОН КОЛИЧЕСТВА ДВИЖЕНИЯ
И ЗАКОН МОМЕНТА КОЛИЧЕСТВА ДВИЖЕНИЯ-
ТЕОРЕМА КЕИИГА. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
1. Вернемся к уравнениям движения материальной точки ме-
ханической системы (11. 1а), которые имеют вид
т<т=2А< + 2А«. <||М>
где т( — масса /-й точки, X/ — проекции на ось х внешних
сил, действующих на точку, X/w, — проекции на ось х внутренних
сил, действующих на точку. Суммы 2 распространяются на все
силы Ft и Flt, действующие на т£.
Складывая уравнения (II. 79) для всех точек системы, будем
иметь
24? -=2 2 А< 2 2 А<»
где двойное суммирование распространяется теперь на все силы
F[ и Fit, приложенные ко всем точкам системы.
Поскольку внутренние силы по третьему закону Ньютона
взаимно равны и противоположно направлены, то 2 2 Х/е равна
нулю. В результате
2^=т2^ -42'"<^ = 22а.-. «'.во)
Количеством движения механической системы называется
сумма количества движения всех ее точек. Эта величина является
векторной; проекции указанного вектора на оси координат равны
2 miv г». 2 mi Viy, 2 •
Отсюда на основании (11. 80) получаем теорему о количестве
движения системы или закон количества движения: производная
по времени от проекции количества движения материальной си-
стемы на какую-либо ось равна сумме проекций всех внешних сил
на ту же ось или в векторной форме — производная по времени
от количества движения системы равна равнодействующей всех
внешних сил, приложенных к системе.
Из (11.80) непосредственно получаются зависимости типа
d 2 т,о1х - 22 dl, (И. 80а)
1. е. Злемен/иирнл прирйи^енш Ки.шчестез движения сигят.чы
равно сумме элементарных импульсов внешних сил за это время.
После интегрирования (II. 80а) получим: приращение коли-
чества движения системы за некоторое время равно суммарному
импульсу всех внешних сил за то же время.
95
2. Напомним, что центром инерции механической системы
называется точка с координатами хс, ус. ze. которые определяются
по формулам
хс2mi-а2т&ь т1Уй ^2^ = 2mi2i- (п.81)
Дифференцируя (II. 81), получим
М dt* ~~ т di* 1 df*
.. daz£ V <?Zi
М dt? ~2лт1 di*
(II. 82)
где М = Em, — масса всей системы.
Если использовать зависимости типа (II. 80), то будем иметь
«^-22^. «4>-22>'-
^=22*.-
(11.83)
Иными словами (закон движения центра инерции системы):
центр инерции механической системы движется как свободная
материальная точка, масса которой равна массе всей системы и
которая находится под действием всех внешних сил, перенесенных
параллельно им самим в эту точку.
3. В случае, когда сумма внешних сил равна нулю, получаем
закон сохранения движения центра инерции: если сумма сил,
действующих на систему, равна нулю, то центр инерции системы
находится в состоянии покоя или равномерного прямолинейного
движения.
Кроме того (закон сохранения количества движения системы):
при равенстве нулю суммы внешних сил количество движения си-
стемы остается постоянным по величине и направлению в течение
всего времени движения.
4. Умножим первое уравнение (11. 79) на у,, а второе на х,
и сложим их почленно
(*< S'~)=2 +»л> + 2 +И‘х^
или
у + итд,) = 2 (*iYi + ftX,) - 2 + УХи)-
Если сложить все аналогичные уравнения дня всех точек си-
стемы, то будем иметь
2 ==22 +у>х‘У> 84>
96
поскольку двойная сумма 2 2 (^У1е—УгХ-ь) — 0 (ввиду равен-
ства внутренних сил согласно третьему закону Ньютона).
Обращаясь к зависимостям (I. 81). видим, что левая часть
(II. 84) представляет производную от суммы моментов количества
движения всех точек системы относительно оси г, а правая часть —
сумму моментов всех внешних сил относительно той же оси.
Аналогичные зависимости справедливы и для других осей.
Итак (закон момента количества движения системы): произ-
водная по времени от суммы моментов количества движения всех
точек системы относительно какой-либо неподвижной оси или
неподвижной точки равна сумме моментов всех внешних сил от-
носительно той же оси или той же точки.
Сумма моментов количества движения всех точек называется
моментом количества движения системы.
Если суммарный момент всех внешних сил относительно ка-
кой-либо неподвижной оси или относительно какой-либо непо-
движной точки равен нулю, то момент количества движения си-
стемы относительно этой оси или относительно этой точки
остается постоянным во все время движения (закон сохранения
момента количества движения системы).
5. Часто движение системы разделяют на движение ее центра
инерции и движение всех ее точек относительно центра инерции.
Обозначим через хс, ус, zc координаты центра инерции от-
носительно неподвижных осей (данной инерциальной системы
координат); через xt, yt, zt — координаты i-H точки системы от-
носительно неподвижных осей; через х,-, yt, — координаты
i-й точки системы относительно системы координат, двигающейся
поступательно вместе с центром инерции,
yt = yc + yit Z{---Zc\-Zi. (И.85)
Умножив обе части равенств на тг и суммируя их по всем точ-
кам, получим
2 mtXi = хс 2 + 2
2 ус 2 гщ + 2 ;
2 mt2t = zc 2 mt -F 2 -
или, учитывая (II. 81),
2«w=o, -О» (П.86)
Продифференцируем (П 86) по t
^m{xi — 0, ^т,у,- - 0, =0. (11.87)
Иными словами: количество движения системы в ее движении
относительно центра инерции равно нулю.
В. С. Чуаиковский 1757
97
Однократное дифференцирование (11. 84) по / даст
2 mpct = хс 2 mi- 2 т1У, = Ус 2 тн 2 «Л = гс 2 trit, (11.88)
т е. количество движения механической системы в неподвижной
системе координат равно количеству движения центра инерции
в предположении, что е нем сосредоточена вся масса механической
системы.
Количества относительного движения материальных точек
системы представляют собой систему векторов, результирующий
вектор которой равен нулю. Отсюда, согласно обшей теории век-
торов, результирующий момент количества относительного дви-
жения есть постоянная векторная величина для любом точки про-
странства (количества движения сводятся к парам векторов,
сумма которых равна нулю, но момент постоянен).
Количество абсолютного движения есть сумма количеств пере-
носного движения точек и количества относительного дви-
жения 2 miri’ Векторы параллельны друг другу и пропор-
циональны массам точек их приложения; следовательно, они
имеют равнодействующую, приложенную в центре инерции и
равную 2т«/с = -^гс- Отсюда имеем: момент количества движения
механической системы в неподвижной системе координат относи-
тельно какой-либо точки о равен сумме моментов количества
движения материальных точек относительно центра инерции
и момента относительно точки о количества движения центра
инерции в предположении, что в нем сосредоточена вся масса ме-
ханической системы.
6. В дополнение к сказанному представляет большой интерес
выразить кинетическую энергию системы через кинетическую
энергию движений относительно центра инерции и кинетическую
энергию центра инерции.
Продифференцируем первую из формул (II. 85)
dxj _ dxc Axt
dt ~~dt dT’
Отсюда
2 "" (тг )’ - 2 ™<J 24t 2 "!<T L
По
2mi = M и =^r^imiXj=Q,
98
следовательно,
Учитывая аналогичные равенства относительно координат
Уь Уо У1 и zb zc> z‘-
получаем
VT VT Ч-2
(1L89>
где Vi и Vi — скорости точки в неподвижной системе координат
и в системе, связанной с центром инерции, vc — скорость центра
инерции в неподвижной системе
координат.
Из зависимости (11. 89) вы-
текает теорема Кенига', кинети-
ческая энергия механической си-
стемы в неподвижной системе 11
координат равна .сумме ее кине-
тической энергии е движении
относительно центра инерции
и кинетической энергии движе-
ния центра инерции в предполо-
жении, что в нем сосредоточена вся масса механической системы.
7. Приведенные в настоящем параграфе общие теоремы дина-
мики механических систем оказываются весьма полезными при
решении конкретных задач.
Использование закона количества движения дает возмож-
ность полностью исключить все внутренние силы системы. Однако
он не исключает внешних сил и, в частности, реакций связей;
этим можно пользоваться при определении последних.
В качестве простейшего примера рассмотрим задачу о на-'
хождении реакции /? жидкости, вытекающей со скоростью v из
сосуда через отверстие с площадью $ (рис. 18).
Количество движения, получаемое жидкостью за время dt,
равно qus<7/o2, где — плотность жидкости. Приравнивая его
импульсу силы за то же время непосредственно получаем
gost)2rf/ =- Rdt, К =- QqSv2. Нам совершенно не потребовалось
изучать детали взаимодействия частиц жидкости и стенок сосуда.
Закон моментов количества движения также позволяет сразу
предсказывать ряд качественных и количественных закономер-
взаимодействия ее элементов. Так, изучая вращение какого-либо
небесного тела вокруг своей осн, можно сразу видеть, что сокра-
щение его радиуса вследствие остывания вызовет ускорение вра-
щения и т. п.
Применение теоремы Кенига дает возможность упростить
вычисление кинетической энергии системы, что очень важно при
составлении общих уравнений динамики механических систем
(см. главу III).
8. Если движение механической системы рассматривается отно-
сительно некоторой неинерциальной системы координат, то в соот-
ветствии со сказанным в § 6 главы I необходимо компенсировать
эту неинерциальность введением фиктивных сил инерции, которые
относятся к внешним активным силам. После указанной компен-
сации все уравнения и все законы движения механической
системы принимают тот же вид, что и в инерциальной системе.
ГЛАВА 1И
УРАВНЕНИЯ ДИНАМИКИ МЕХАНИЧЕСКИХ СИСТЕМ
§ I. ДИНАМИЧЕСКИЙ ПРИНЦИП ВИРТУАЛЬНЫХ ПЕРЕМЕЩЕНИЙ.
УРАВНЕНИЯ ЛАГРАНЖА ПЕРВОГО РОДА
I. Уравнения движения материальных точек несвободной
механической системы в инерциальной системе координат запи-
сываются в виде
m[ri=Fi-{-Rl , n), (III. 1)
где mi и r{ — масса и ускорение t-й точки, Ff и /?,- — равно-
действующие активных сил и сил реакций, приложенных к этой
точке.
Примем, как обычно, что связи идеальные. Тогда в любом по-
ложении системы и при любых виртуальных перемещениях имеем
5 = 0. (111-2)
Подставим в (III. 2) выражения реакций из (III. I) и запишем
2 (А— тл|йг,-<1 (111.3)
(=1
или в координатной форме
2 Ito. * — 6х‘ ’Г to, и — + to, г — mizi) - - °-
(III. За)
Равенство (III. 3) или (III. За) называется общим уравнением
динамики. Оно выражает динамический принцип виртуальных
перемещений — при движении системы с идеальными связями
100
сумма работ активных сил и сил инерции на любых виртуальных
перемещениях в любой момент времени равна нулю.
Заметим специально, что реакции идеальных связей не работают
именно на виртуальных, а не на возможных перемещениях. При
нестационарных связях они могут совершать работу на действи-
тельных бесконечно малых и конечных перемещениях системы.
Например, реакции подвижных опор балки (рис. 12, б) безусловно
производят такую работу.
2. Поскольку 6г, (или 6xt, 6yh — произвольные вир-
туальные перемещения, то вариационное уравнение (III. 3) или
(III. За) представляет по существу совокупность уравнений.
В частности, при отсутствии связей все йг4 совершенно неза-
висимы. Отсюда сразу следует известная ранее совокупность
уравнений движения свободной механической системы
т{г, — Fi = 0.
Пусть теперь на систему наложены геометрические (голоном-
ные) нестационарные связи (II. 5 а); число связей равно й. В этом
случае между вариациями ох,-, бу{, 6z{ должна существовать за-
висимость типа (III. 13)
2(#в*'+т£-ви+-жгвг‘)=° f’-1’ '>• (I,L4)
Умножим каждое из уравнений (III. 4) на пока неопределен-
ные множители Xv (функции времени) и сложим их
2 к 2 > Ч = °- о» 6)
Если изменить в (III. 5) порядок суммирования и сложить
его с (III. За), то получим
2 К^7*. * — тл) bxi + У — т‘У‘) ЬУ‘ + ~ &Z‘ +
<=1
т2ъ+ %»».+>4]“°- 61
В (III. 6) имеется 3n — h независимых и произвольных вир-
туальных перемещений бху, бу,, бгр, остальные й перемещений
могут быть выпажены через них.
Пусть мы подобрали множители так, чтобы выражения типа
h
(й*, * — + 2 ’
v=l *
J01
стоящие перед зависимыми виртуальными перемещениями, были
равны нулю. Это даст как раз h уравнений относительно h множи-
телей Xv.
Тогда в (Ill. 6) остаются только члены с независимыми вир-
туальными перемещениями. Но множители перед независимыми
перемещениями также должны равняться нулю, иначе не удов-
летворится (III. 6). Следовательно, все множители перед всеми пе-
ремещениями есть нули, и мы окончательно получаем уравнения
Лагранжа первого рода
т«< = + 8j‘ + •• ((=1,2. , п).
(III.7)
Уравнения (111. 7) вместе с условиями связи (11. 5а) позво-
ляют определить Зп координат и h множителей Xv.
Из (III. 1) видно, что реакции идеальных связей выражаются
через множители Лагранжа hv и уравнения связей
«... 2’.^. к,„-к,,, (|П«)
Несмотря на свою строгость метод уравнений Лагранжа пер-
вого рода редко применяется на практике. Основной его недоста-
ток состоит в том, что общее число уравнений (III. 7) и (II. 5а)
увеличивается с увеличением числа связей. Поэтому обычно ис-
пользуют уравнения Лагранжа второго рода (см. ниже); они за-
писываются через обобщенные координаты и их число падает
при наложении связей.
§ 2. СТАТИЧЕСКИЙ ПРИНЦИП ВИРТУАЛЬНЫХ ПЕРЕМЕЩЕНИИ.
ПРИНЦИП ДАЛАМБЕРА
1. Положением равновесия системы называется такое положе-
ние, которое сохраняется неограниченно долго, если только в на-
чальный момент времени система находилась в этом положении
и скорости всех ее точек были равны нулю.
Пусть все связи идеальные и двухсторонние (удерживающие).
Псскол’лку рассматривается рг&гг-сгсие. то гх можно с^гта-ч
также стационарными1.
1 Можно специально сконструировать нестационарные связи, не нарушающие
условий равновесия, но это будет практически малоинтересный случай.
102
Статический принцип виртуальных перемещении формул и
руется следующим образом: чтобы некоторое совместное со свя-
зями положение системы было положением равновесия, необходимо
и достаточно равенство нулю суммы работы всех активных сил
на любом виртуальном перемещении из этого положения, т. е.
(III. 9)
или
• ^,гМ=- ° (Ш.9а)
Поскольку связи предполагаются стационарными, то виртуаль-
ные перемещения совпадают с возможными и допустимо говорить
о принципе возможных перемещений.
Для доказательства статического принципа виртуальных пере-
мещений заметим, что система будет находиться в положении рав-
новесия тогда и только тогда, когда результирующая активная
сила Ft, действующая на каждую ее точку, будет уравновеши-
ваться результирующей реакцией связи Rt, приложенной к этой
точке, т. е.
Fs Ri 0. (III. 10)
Уравнения (III. 10) непосредственно возникают из уравнений
движения (111. I).
По условию идеальности связей (II. 2в)
i; йа, ~ о,
причем у двухсторонних связей величина сохраняется при
любом Следовательно,
2 о.
т. е. условие (111. 9) или (III. 9а) необходимо.
Достаточность условия (III. 9) докажем от противного. Пред-
положим, что (111. 9) выполняется, но система вышла из поло-
жения равновесия, т. е. получила на некоторых действительных
перемещениях <fr4 определенные скорости и определенную кине-
тическую энергию.
По закону сохранения энергии х’казянная кинетическая энер-
гия равна сумме работ F( и R, на перемещениях drlt т. е.
2 (Л । Ri)dr{>0.
103
Работой приращений сил F, и 7?,- на перемещениях dr{ пре-
небрегаем, поскольку она выражается членами второго порядка
малости.
Ввиду стационарности связей можно заменить rfrf на некото-
рые 6rf. Тогда из условия идеальности связей находим
/=1
что противоречит исходному условию.
Статический принцип виртуальных перемещений (Ill. 9) или
(III. 9а) является общим принципом аналитической статики,
из которого можно получить решение любой частной задачи. Оче-
видно, что он даст столько независимых скалярных уравнений,
сколько имеется независимых виртуальных перемещений, т. е.
число, равное числу степеней свободы.
Удобство его применения состоит в автоматическом исключе-
нии всех сил связи из уравнений равновесия.
В своих простейших частных случаях он был известен еще во
времена Галилея под названием «золотого правила механики» -
выигрыш в силе компенсируется проигрышем в перемещении и
наоборот. Однако в общей формулировке его дали только И. Бер-
нулли и в последующем Лагранж.
Доказательства принципа основаны на предположении об
идеальности связей. При неидеальных связях нужно, как указы-
валось выше, выделить силы трения и отнести их к категории внеш-
них сил.
2. Для изучения несвободных систем целесообразно выразить
условия (III. 9) или (III. 9а) в обобщенных координатах.
Согласно (II. 15) имеем
Подставив 6г/ в (III. 9) и учитывая (II. 24), получим
^/=2^=0- (П1.96)
Ввиду произвольности 6^ необходимо, чтобы все Qf равня-
лись нулю. Иными словами: все обобщенные силы системы в по-
.клеении ее равновесия равны нулю
Для консервативной системы по теореме Лагранжа получаем
~ = о...... -г-=о. (111.9b)
’ ддт ' '
104
т. е. равновесие консервативной системы возможно только в тех
ее положениях, в которых потенциальная энергия имеет стацио-
нарные значения (максимумы, минимумы, точки перегиба).
3. Приведем примеры.
А. Рассмотрим произвольное свободное тело, которое имеет,
как уже известно, шесть степеней свободы. В качестве его обоб-
щенных координат примем три поступательных перемещения
идоль осей оу, ог и три вращательных перемещения вокруг
этих осей.
Легко видеть, что принцип виртуальных перемещений дает
шесть уравнений
by^Fy-^O, bz%Fx = O;
бфд2>1х = о, = 0, бфг2Л=о,
где 2 Fx, 2 Fy, 2 — сумма проекций внешних сил на
оси х. у, г-,
X Мх, 2 Му, 2 Мг — сумма моментов внешних сил отно-
сительно этих осей;
bx, by, bz виртуальные перемещения вдоль осей;
6<р — виртуальные углы поворота вокруг
осей.
Ввиду произвольности вариаций обобщенных координат имеем
2^х = о, 2^-0, SF, = 0,
£Мх = 0, SMj, = 0, EAfx = O,
т. е. приходим к общим уравнениим геометрической статики.
Б. При наложении на твердое тело связей число степеней
свободы и соответственно число уравнений равновесия умень-
шается.
Пусть, например, одна точка тела сделана неподвижной;
этим устранена всякая возможность поступательных перемеще-
ний. Виртуальными перемещениями тела являются его пово-
роты вокруг трех координатных осей. Уравнения равновесия при-
нимают вид
6фх 2 Мх — 0, Му = 0, 6фг2 Мг = 0
или
SMx = 0, %My=Q, £Л!2=0.
В. Пусть имеется произвольная несвободная система тел,
находящаяся под действием сил веса, М — суммарная масса всех
тел, zc — вертикальная координата центра тяжести.
По принципу виртуальных перемещений в положении равно-
весия получаем
Afg6zc = 0,
105
и, следовательно, условие равновесия имеет вид
Й2Г = 0.
Иными словами (принцип Торичелли): положениями равнове-
сия системы тяжелых тел могут быть только такие, при кото-
рых ее центр тяжести занимает наивысшее, наинизшее или дру-
гое стационарное положение по вертикали.
4. Отдельного рассмотрения требует случай односторонних
(неудерживающих) связей.
Если все односторонние связи в рассматриваемом положении
не напряжены, то система будет вести себя, как при их отсутствии,
т. е. данная выше формулировка принципа виртуальных переме-
щений остается в силе. Поэтому положим, что рассматриваемое
положение напрягает хотя бы некоторые односторонние связи.
Тогда все виртуальные перемещения системы можно разделить
на две группы: а) при которых не выключается ни одна из напря-
женных связей; б) при которых хотя бы некоторые односторонние
связи выключаются.
Пусть система находится в равновесии. Ясно, что при виртуаль-
ных перемещениях группы «а» она продолжает вести себя как
система с двухсторонними связями, т. е. сумма работ всех актив-
ных сил на этих перемещениях должна равняться нулю. При
виртуальных перемещениях группы «б» реакции 7?,- выключае-
мых связей мгновенно пропадают и соответствующие активные
силы Ft в зависимости (III. 10) остаются неуравновешенными.
Но для отключения связей необходимо, чтобы движение проис-
ходило по направлению 7?j, т. е. против Ft\ отсюда следует, что
активные силы совершат отрицательную работу.
Иными словами: для равновесия системы с односторонними
(неудержиеающими) стационарными идеальными связями необ-
ходимо, чтобы сумма работ всех активных сил на любых ее вир-
туальных перемещениях из рассматриваемого положения была
равна нулю или отрицательна, т. е.
(in. п)
/—I
Условие (III. II) является вместе с тем и достаточным усло-
вием равновесия. Это легко установить из закона сохранения
энергии подобно тому, как делалось в п. 1.
В качестве простейшего примера рассмотрим равновесие тя-
желого гладкого шара на горизонтальной гладкой новерхностя,
когда его вес уравновешивается нормальной реакцией. При всех
виртуальных перемещениях Ьх и бу в горизонтальной плоскости
работа активной силы (веса) равна нулю; при подъеме шара 6z
она становится отрицательной.
406
5. Если переписать уравнение движения материальной точки
системы (III. 1) в виде
Л- г —rntfi -=0, (III. 12)
то его допустимо трактовать как уравнение равновесия этой
точки под действием активной силы Ft, реакции связей /?,- и силы
инерции F„ti — —т^. Требуется лишь силу инерции условно
приложить к свмой точке, т. е. рассматривать в данном случае
как фиктивную.
В этом состоит очень важный принцип Даламбера — при дви-
жении механической системы любое ее положение можно рассмат-
ривать как положение равновесия, если к активным силам, дей-
ствующим на систему е указанном положении, прибавить фик-
тивные силы инерции.
Используя принцип Даламбера, можно перенести приемы и
методы решения статических задач на задачи динамики. В частно-
сти, зная движение системы, нетрудно найти величины динами-
ческих реакций связей. Они равны статическим реакциям связей
системы, находящейся в равновесии под действием активных сил
и фиктивных сил инерции.
Иногда, наоборот* удобно использовать принцип Даламбера
для составления уравнений движения системы. Чтобы исключить
реакции связей и уменьшить тем самым число уравнений, полезно
применять статический принцип виртуальных перемещений
(III. 9) или (III. 9а) Тогда мы немедленно придем к уравнениям
типа (III. 3) или (III. За).
6. Приведем примеры.
А. Сосуд с жидкостью движется в горизонтальной плоскости
с постоянным ускорением о относительно инерциальной системы
координат. Нужно определить форму и положение поверхности
жидкости.
На каждый элемент массы dm жидкости действует вертикаль-
ная активная сила тяжести, равная dF - gdm. Добавим к ней
фиктивную силу инерции dF„ = —айт;_тогда получим резуль-
тирующую активную силу dF 4- dFn — (g — a) dm.
Видим, что в результате постоянного ускорения системы на-
правление и величина силы тяжести как бы изменились, и система
должна находиться в состоянии равновесия при измененной силе
тяжести.
Отсюда ясно следующее. У неподвижного или равномерно
движущегося сос^а поверхно*. о жидкости представляет гори-
зонтальную плоскость. У движущегося с постоянным ускорением
сосуда поверхность является плоскостью, наклоненной к гори-
зонту под углом <р, где ig <р = ~.
107
Поскольку движение сосуда как бы меняет силу тяжести, то
в сосуде будет меняться гидростатическое давление.
Б. Составим уравнение движения твердого тела, вращающегося
около неподвижной оси.
Из статики известно, что условием равновесия тела, вращаю-
щегося около оси, является равенство нулю суммы моментов
актняных сил относительно этой оси. По принципу Даламбера
к активным силам нужно добавить силы инерции.
Если частица массы dm находится на расстоянии г от оси вра-
щения, то согласно формулам (I. II) и (I. 12) она будет иметь
касательное ускорение а( и нормальное ускорение ап, причем
at — гф и ап = гф2, (III. 13)
где ф -= ф (/) — угол поворота тела от начального положения.
Нормальное ускорение направлено к оси, и поэтому разви-
вающиеся от него силы инерции никаких моментов вызывать не
будут.
Силы инерции, развивающиеся от касвтельного ускорения.
dF„ =- — Гф dm
и их момент относительно оси
dM в = — г2ф dm.
Обозначим через I интеграл по объему тела v
I=\r3dm (III. 14)
(V>
и назовем его моментом инерции массы тела относительно оси.
Тогда уравнение движения примет следующий очевидный вид:
М — ф(=-0 или ф/ — М, (III. 15)
где М — момент активных сил относительно оси.
Заметим, что (III. 15) аналогично по структуре уравнению
прямолинейного движения точки. Роль внешней силы играет
момент внешних сил, роль массы — момент инерции массы,
роль перемещения — угол поворота.
§ 3. ПОНЯТИЕ ОБ УСТОЙЧИВОСТИ СОСТОЯНИЯ РАВНОВЕСИЯ
СИСТЕМЫ ПО ЛЯПУНОВУ, ТЕОРЕМА ДИРИХЛЕ.
УСТОЙЧИВОСТЬ «В МАЛОМ» Н «В БОЛЬШОМ»
I. Простейшие примеры позволяют выяснить смысл понятия
устойчивости равновесия системы.
Пусть мы имеем маятник (рис. 19), качающийся в вертикальной
плоскости. Ясно, что он может находиться в двух состояниях
равновесия (рис. 19, с и 19, б), когда точка С массы т занимает
иаинизшее и наивысшее положения (см. принцип Торичелли,
108
I. второе —
§ 2). Именно в этих состояниях (<р =» О и <р л) работа активных
сил (силы Беса) равна нулю на любых виртуальных перемещениях.
Ясно, однако, что оба указанных состояния «неравноправны».
При отклонении маятника от положения <р = О на небольшой
угол в дальнейшем не происходит «самопроизвольного» прираще-
ния величины этого угла; при отклонении маятника от положения
<р = п на любой конечный угол будет происходить дальнейшее
самопроизвольное отклонение системы. Первое положение (со-
стояние) естественно назвать
чивым.
Кроме устойчивого и не-
устойчивого состояния равно- •
весия, возможно так называв- ?
мое безразличное состояние,
когда система, будучи откло-
ненной от положения равно-
весия на произвольное конеч-
ное (в известных пределах)
перемещение, всегда окажет-
ся в новом положении равно-
весия н не будет стремиться
вернуться к прежнему поло-
жению или, наоборот, уда-
литься от него. Классический
пример — гладкий шар на гладкой горизонтальной плоское™.
Строгое определение устойчивости состояния равновесия дано
А. М. Ляпуновым.
Состояние равновесия системы называется устойчивым в малом,
или устойчивым по Ляпунову, если при достаточно малом откло-
нении от него и достаточно малых начальных скоростях все точки
системы никогда не уйдут от своего равновесного положения
далее любого наперед заданного какого угодно малого расстоя-
ния, а их скорости никогда не превысят любых наперед заданных
каких угодно малых значений.
Так, пусть любое положение системы определяется обобщен-
ными координатами qt, q2, . . ., qm, причем в рассматриваемом
положении равновесия опи все равны нулю, что всегда можно
сделать заменой переменных. Это положение (состояние) равно-
весия будет устойчивым в малом, если для любых наперед задан-
ных положительных чисел в, и е2 можно подобрать два других
положительных числа ч], и ?]«> так, что при соблюдении начальных
условий
(III 16)
в любой момент времени будут выполняться условия
k/(OK«i. (/ = 1,2, ...,m). (111.17)
109
Из определения ясно, что г], <Z^i, Ч2 <е2, так как в против-
ном случае неравенства (III. 17) будут нарушаться уже при t = О.
2, Для систем, находящихся под действием консервативных
сил, устойчивость равновесия часто может быть определена по
теореме Дирихле: если для механической системы, находящейся
под действием стационарных консервативных сил и подчиненной
голономным идеальным стационарным связям, потенциальная
энергия в положении равновесия имеет минимум, то это положе-
ние является устойчивым в малом.
Для доказательства теоремы примем, что в положении равно-
весия потенциальная энергия равна нулю. Это всегда можно сде-
лать без нарушения общности, поскольку она определена с точ-
ностью до произвольной постоянной.
Положение механической системы, определяемое обобщенными
координатами щ, qa, . . ., q,n, представим положением некоторой
изображающей точки в /«-мерном пространстве. Например, для
системы с двумя степенями свободы (т = 2) любое ее положе-
ние можно представить при помощи обобщенных координат qy
и qa. Согласно теореме Дирихле утверждается, что если взять
достаточно малый /п-мерный куб с центром в начале координат
и сторонами 2т], и задавать начальное отклонение в его пределах,
а начальные производные от qj (Г) подчинит!, условию |q,-(O)T<
< Ч2» где Чг — достаточно малое положительное число, то изо-
бражающая точка не выйдет за пределы любого наперед заданного
куба с центром в начале координат и сторонами 2е1, а производ-
ные qf (f) всегда будут подчинены условию | q, (t) | < е2, каковы бы
ни были наперед заданные положительные числа щ и е8
В случае т -=- 2 оба куба выродятся в квадраты.
Поскольку в начале координат потенциальная энергия II
равна нулю и принимает минимальное значение, то она положи-
тельна в некоторой малой окрестности начала координат. Сле-
довательно, е, всегда можно полагать достаточно малым, чтобы
на гранях предельного куба qs — ± б1(/=1, ...,/«) потенциальная
энергия была не обращающейся в нуль положительной функцией.
Пусть минимум II на гранях равен те, т е
П(«„ <Ь. .... fc«) > m.
Il - ±«i 0 -1. 2. '»)
(Ill. 18)
Для системы с двумя степенями свободы нгеесть минимум П(ф(, q.J
на стеронах предельного квадрата — ±Elt q.2 = ±е,.
Число 1]! будем выбирать так. чтобы для любой точки внутри
куба со с юр она «и 2ц,значение II По не иревосчии» *-
Пи П (qt. qa, , q,„) < |
|9/|<Ч, 0 - I, 2........т) I
(III 19)
по
Возможность указанного выбора обусловлена непрерыв-
ностью II и тем, что при Hi = q^— qm = О энергия
П = 0. Так, при т — 2 для выбора th нужно построить функцию
z = П = П (qlt qB), пересечь поверхность II (qu q^ плоскостью
П = те : 2 и получить кривую пересечения; затем спроектиро-
вать кривую на плоскость осей qj и qz и найти область значений qu
дв, внутри которой II (qlf q^ <те: 2. Квадрат со сторонами 2т)1
должен быть вписан в найденную область.
Для выбора числа поставим всегда выполнимое условие
Та 7-(«,(0))<,п,:2 (III.20)
при
При отмеченном выборе th и г]8 изображающая точка не мо-
жет «покинуть» куб со сторонами 2е> и двже достичь его граней.
Рассуждая от противного, положим обратное — пусть в ка-
кой-то момент точка достигает граней куба.
По закону сохранения энергии для Т и II в этот момент
Г? II -то : Ц><те. (П1.21)
Поскольку согласно (III. 18) энергия П на гранях больше или
равна те, го Т < О, что противоречит физическому смыслу.
Полученное противоречие подтверждает правильность первона-
чального утверждения
Ввиду положительности П (для всех точек внутри предельного
куба со сторонами 2ej) значение Т никогда не может превзойти ms,
т. е.
Т<те при (/ = I, 2, ..., tn).
Отсюда следует, что выбор ’И и указанным выше способом
еще не гарантирует выполнение условия \qt (/)! <Г е2. Его вы-
полнение связано с удовлетворением дополнительного неравенства
Г (0, 0, , qf, 0)>mF,
если
ft-О (fe + /|. |«,-| (III. 22)
Но неравенство (III. 22) также может быть удовлетворено,
поскольку, уменьшая размеры предельного куба со сторонами 2elt
МОЖНО СКОЛЬКО угодно уменьшить Шг
Итак, при выполнении условий теоремы Дирихле всегда вы-
готняютя усчовия Л11 17) т е равновесие действительно устой-
чиво.
Если положение равновесия не соответствует минимуму по-
тенциальной энергии, то исследование вопросов его устойчивости
существенно усложняется.
Н I
А. М. Ляпунов доказал следующее, правда, не совсем полное
обращение теоремы Дирихле (теорема Ляпунова): если состояние
равновесия соответствует просто некоторому стационарному зна-
чению потенциальной энергии и если, как обычно бывает, отсут-
ствие ее минимума обнаруживается уже по членам второго порядка
в разложении функции ГГ (ft, q2, . . qm) в ряд Тейлора, то рав-
новесие неустойчиво.
3. Покажем применение теорем Дирихле и Ляпунова на про-
стейшем примере.
Рассмотрим маятник (рис. 20), находящийся в вертикальном
положении <р = 0. С маятником соединена ненапряженная спи-
ральная пружина. Приотклонении маят-
ника восстанавливающий момент М пру-
жины равен с|ф|, где с —постоянный
коэффициент жесткости.
Примем, что в положении равнове-
сия <р — 0 потенциальная энергия
П (0) = 0. Тогда
П (<р) - — Ра (I — cos<p) ;
— sin 4. + ир;
-5-=- -- — Ра cos Ф 4- с.
o<ps т
При ф = 0
ЙП п '^П ,
-д— = °- = — Рй' - ' С-
Йф Йф®
Отсюда ясно, что при с > Ра вторая производная П больше
нуля, т. е. энергия имеет минимум и в силу теоремы Дирихле по-
ложение равновесия устойчиво. Если с < Ра, то вторая произ-
водная отрицательна и согласно теореме Ляпунова равновесие
неустойчиво.
Чтобы найти другие положения равновесия ф — фр, достаточно
приравнять нулю производную П
Если 0 < с < Ра, то для — л < ф < л будем иметь два
одинаковых по вели шне, ко разных по знаку зпа lennn фр. Для пах
(-S-) >0
\ 0фа /фр
и, следовательно, равновесие устойчиво.
112
Если Ра, то других положений равновесия, кроме <рр — О,
не имеется.
4. Заметим, что устойчивость системы в малом еще не означает
ее устойчивости в техническом смысле.
Действительно, определение Ляпунова касается лишь каких
угодно малых отклонений от положения равновесия; для техники
важны, хотя и малые, но вполне конечные отклонения.
Например, высокий круглый стержень, свободно стоящий на
гладкой поверхности (рис. 21), всегда устойчив в малом, так как
при любом каком угодно малом, но конечном ра-
диусе его поперечного сечения г можно найти такой
малый начальный угол и такую малую начальную
скорость (р, что опрокидывания стержня не про-
изойдет. Однако в действительности реальные воз-
можные отклонения и начальные скорости могут
быть больше, и если г очень мал, то стержень обя-
зательно опрокинется. Он не может считаться
устойчивым.
Учитывая сказанное, необходимо ввести поня-
тие устойчивости в большом.
Оценивая устойчивость в большом, необходимо
7/
Рис. 21
задать предельные конечные величины возможных возмущений
системы [в нашем случае, например, предельные величины (0)
и <р (0) ] и предельно допустимые конечные ее отклонения [для
рассматриваемого стержня — предельно допустимый угол <р (0 и
предельно допустимую скорость <р(/) или только предельно
допустимый угол], а затем выяснить, могут ли предельно воз-
можные возмущения вызвать отклонения, превышающие допу-
стимые. Если не могут, то система устойчива в большом, если
могут — неустойчива.
Варианты возмущений могут быть различными. Так, в нашем
случае в качестве возмущений допустимо рассматривать началь-
ное искривление стержня вследствие неправильной обработки,
смещение линии действия силы веса от оси стержня вследствие
неоднородности масс и т. п. Поэтому сама постановка задачи
всегда требует специального анализа. Подробности и примеры
решения таких задач относятся к специальным курсам теории
устойчивости конструкций.
§4. УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО РОДА
1. Для решеп:.я практдчеспгл задач дспампкк особенно удобно
пользоваться уравнениями движения в иообщенных координатах —
уравнениями Лагранжа второго рода.
Пусть голономная система с нестационарными связями имеет
п точек и т степеней свободы; пусть далее все декартовы коорди-
8 вс. ЧувиковскяЯ 1757
113
наты точек выражены через обобщенные координаты и время
Xi =Xl(t, <Ji, 9а. •••» 9m) 1
У, = Vi (t, 9i. 9a. - - 9m) (* = 1.2.П) | (III. 23)
9i. 92- 9m) J
Виртуальные перемещения при данном фиксированном t
^-2-$-^. «»=2^ч. с»»)
Подставим (III. 24) в общее уравнение динамики (III. За) и
после преобразований получим
£((,- (41.25)
1=Л
где fj — обойденная сила инерции;
(^ — обобщенная активная сила
» <ш 271
Поскольку все 69, совершенно произвольны, уравнение (III. 26)
распадается на следующие гп уравнений с т неизвестными
(/-I, 2, ...»/и). (111.28)
Совокупность (III. 26) является совокупностью уравнений дви-
жения. Она определяет все обобщенные координаты в зависимости
от t и 2т постоянных интегрирования, которые позволяют выбрать
произвольно т координат и Первые их производные.
Большим преимуществом совокупности (III. 28) перед сово-
купностью уравнений Лагранжа первого рода является сравни-
тельно малое число уравнений: в задачах механики число степе-
ней свободы обычно невелико по сравнению с числом точек си-
стемы. Однако непосредственное составление этой совокупности
часто бывает затруднительным, поскольку вычисление fj требует
оперирования с выражениями (III. 23).
2. Чтобы облегчить составление уравнений движения, про-
должим преобразования выражений (III. 23).
Координаты yit Zt и 9, представляют собой ф)ньци>1 от I.
Условимся, однако, считать переменные t и qi независимыми
при частном дифференцировании, которым будем пользоваться,
и обозначим штрихами полные производные xlt у,, zt и qt, рас-
сматриваемых как функции от t.
114
Беря полную производную от первой из формул (III. 23),
получаем
• дх: , дхг • , дк: • , , дх> • ,,¥¥
x,=Tr + ^-’,J ^7’2+'"+ (14.29)
Аналогичные выражения получаем и для у'. и z’..
Если по принятому принципу считать переменные /, и,
кроме того, независимыми при частном дифференцировании,
то получим
= Ж 0=1.(Ш.ЗО)
и аналогичные формулы для у и 2’.
Легко убедиться в справедливости равенства
(41.31)
если выполнить полное дифференцирование и заменить в правой
части х' его выражением (III. 29). Такие же соотношения имеем
для у и 2.
Выражение (III. 26) нетрудно представить так:
4 j;- 2'*j
n
2_ / , d дх, , , d dy, , . d dz, \
t_f mi \X St dqt + ~dt dqj "I" ~dt~dqf)
или в силу (III. 30) и (III. 31)
r d ( • 9xi , > , dz 'i
/'="2j'"4xX+j'^ *
/-1
С другой стороны, кинетическая энергия системы
т=2 т‘ +у’‘+г'у <ш- з2>
115
Если подставить в (III. 32) вместо х’, у\ ?' их выражения
типа (III. 29) и условиться считать переменные t, q и qT независи-
мыми при частных дифференцированиях, то предыдущее выра-
жение для [j примет простой вид
Уравнения (III. 28) окончательно записываются в удобной
форме
<Ш34’
Вместо qj (производная qf по f) удобнее, как это делалось
в других параграфах, писвть qt-. Тогда
4«)-<- = 0/- (Ш.35)
Уравнении (III. 35) и называются уравнениями Лагранжа вто-
рого рода.
Для их составления необходимо: 1) выразить кинетическую
энергию через обобщенные координаты, как это делалось в главе'! I;
2) продифференцировать Т, считая t, qw q независимыми перемен-
ными при частном дифференцировании; 3) составить выражения
элементарной работы при вариациях 6^-; 4) найти все Q/.
Если движение механической системы отнесено к неинерциаль-
ной системе координат, то при составлении выражения для Т учи-
тывают только относительные скорости точек. При определении же
обобщенных сил учитывают не только действительные активные
силы, но и силы инерции точек механической системы, компенси-
рующие неинерциальность выбранной координатной системы. Ки-
нематические параметры движения координатной системы войдут
только в обобщенные силы.
В случае консервативных сил
<?/=--F»
где П — потенциальная энергия системы.
Уравнения Лагранжа тогда принимают вид
4(f)<",э6>
Если ввести функцию L = Т — П, называемую кинетическим
потенциалом, или функцией Лагранжа, и учесть, что
4L=o,
Я»
116
то уравнения Лагранжа для системы, находящейся в консерва-
тивном силором поле, можно представить в виде
d dL dL
dg, d4i
(Ш. 37)
3. В качестве примера составим уравнения движения маятника
(рис. 22) с массой т, подвешенной на упругой связи жесткости с.
Маятник имеет две степени свободы; в качестве обобщенных
координат выберем угол <р отклонения связи от вертикали н удли-
нение s связи от ее положения при
статическом равновесии. /f/4
Активные силы, действующие на \г\
массу: вес Р = mg и сила натяжения |\ \
связи F. ! \ \ <_
Разложим скорость массы т на две 'F
составляющие — по оси связи и перпен- Г^\ \ /
дикулярно к ней. Тогда \ \ /
. }
Qv - -i-1— т§ <z + s>810 I
* !
= —/ng(Z-hs)6in<p; Рис. 22
Qs = [mg cos <p6s — F6s] — mg cos <p —
— c[(/ — /0) >s] = mg (cosy — ]) — cs,
где g — ускорение силы тяжести;
I — длина связи, растянутой весом Р = mg-,
10 — первоначальная длина связи, с (Z — /0) = mg-
Кроме того,
— s)£ <р, ~ ms-,
dip ds
dT fl \ ‘2
т^=°. -3r = m(Z +s)<f!.
Пппставив найденные выражения в (Ш. 35k будем иметь
т |(/ + s)* <р -|- 2 (/ -f- s) <ps| = —mg (I -Ь s) sin <p;
ms—m (I + s) <p2 = mg (cos <p — 1) —cs
117
или после преобразований
(/4- s) ф -1- 2<ps 4- g sin ф = 0;
s(l 4 s) ф2 -f- -^-s 4-g(I — cos ф) = 0.
Другие примеры уравнений Лагранжа будут приведены ниже.
4. Заметим, в заключение, что уравнения Лагранжа второго
рода применимы только к голономным системам. Для неголоном-
ных систем вместо них применяют так называемые уравнения
Аппеля, которые излагаются в курсах аналитической меха-
ники (3, 7, 141.
РАЗДЕЛ ВТОРОЙ
ОСНОВНЫЕ ПОЛОЖЕНИЯ ДИНАМИКИ ЛИНЕЙНЫХ
МЕХАНИЧЕСКИХ СИСТЕМ
ГЛАВА JV-
КОЛЕБАНИЯ ЛИНЕЙНЫХ СИСТЕМ
С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
§ 1. ОБЩИЕ ЗАМЕЧАНИЯ О ЛИНЕАРИЗАЦИИ СИСТЕМЫ
1. Для решения многих задач строительной механики необхо-
димо рассматривать колебания различных механических систем
около положения их устойчивого равновесия.
Указанные колебания, вообще говоря, нелинейны, т. е. описы-
ваются нелинейными дифференциальными уравнениями относи-
тельно обобщенных координат, что означает неприменимость к ним
известного принципа наложения. Однако во многих важных слу-
чаях задачи колебаний поддаются линеаризации, особенно если
рассматриваются так называемые малые колебания.
2. При рассмотрении условий линеаризации удобно пользо-
ваться общими уравнениями Лагранжа второго рода, которые при-
годны для любых голономных систем,
= q (IV. 1)
где Т — кинетическая энергия, выраженная через обобщенные
координаты;
9; — обобщенная координата (/ =1, 2, . . ., /и);
Q, — обобщенная сила, соответствующая /-й обобщенной коор-
динате.
В наиболее интересном для строительной механики случае
консервативной системы вместо (IV. 1) можно записать
® =0, (IV. 1а)
At 1) д<и д(Н '
где П — потенциальная энергия.
Рассмотрим сначала кинетическую энергию и предположим для
простоты, что связи стационарны. В технике задачу с нестационар-
ными связями можно обычно свести к задаче со стационарными
связями, если изменить систему координат на иеинерциальную
(более подробно об этом см. главу V).
119
Как показано в главе II, выражение для кинетической энергии
такой системы имеет вид
т = 2А.ВД». (IV. 2)
где q} и qk — обобщенные координаты, Ал — Ajk (qlt qa, ..
qm) — коэффициенты, зависящие от обобщенных
координат.
Не нарушая общности, примем, что в рассматриваемом поло-
жении равновесия обобщенные координаты имеют нулевое зна-
чение, т. е.
«1 ™ «2 =••“?» = 0.
Если указанное условие нарушается, необходимо сделать оче-
видную замену переменных и добиться его выполнения.
Разложим коэффициенты Ajk в окрестности положения равно-
весия в ряд Маклорена по степеням обобщенных координат
А»(?1. 1г...М *=(>«. +2 (т£-),«.+ - <IV'3>
Здесь индекс «0» означает, что соответствующая функция бе-
рется при нулевых значениях аргумента.
Если коэффициент =f= 0, то можно подобрать такие ма-
лые отклонения системы, при которых в разложении (IV. 3) пер-
вый член существенно больше любых других членов, и поэтому
можно полагать
A Ik =» •“ aik> (IV- 4)
где а1к = ак/ = (Л#)о — так называемые квазиинерционные ко-
эффициенты системы.
Тогда
(IV. 2а)
/»1
т. е. кинетическая энергия представляет определенно-положитель-
ную квадратичную форму с постоянными коэффициентами от
обобщенных скоростей. Ясно, что подстановка (IV. 2а) в уравне-
ния движения (IV. I) или (IV. 1а) не дает никаких нелинейных
членов или членов с переменными коэффициентами.
Обратимся к потенциальной энергия. Патожпп, как обычно,
что в рассматриваемом положении равновесия она равна нулю.
Кроме того, по теореме Дирихле
(Я1_\ =/ОТ_\ = ...=/«L\=0.
\ /0 \ 09г /о \ д9т/о
120
Следовательно, разложение П в ряд Маклорена по степеням q,
в окрестности положения равновесия имеет вид
П(«..о....2(^).»л+- <IV 5>
Если коэффициенты
=с№ + 0,
то всегда можно подобрать такие малые отклонения системы, при
которых в разложении (IV. 5) допустимо ограничиваться только
первыми членами. Тогда
h=42 2<wa. <iv6>
где Cjk — постоянные величины, называемые квазиупругими коэф-
фициентами жесткости.
Потенциальная энергия в пределах малых отклонений оказы-
вается определенно-положительной квадратичной формой от обоб-
щенных координат с постоянными коэффициентами. Подстановка П
в виде (IV. 6) в уравнение (IV. 1а) так же, как и подстановка
(IV. 2а), не приводит к нелинейным членам или членам с пере-
менными коэффициентами.
В результате при достаточно малых отклонениях консерватив-
ной системы от положения устойчивого равновесия уравнения
движения окавываются линейными дифференциальными уравне-
ниями с постоянными коэффициентами.
Аналогично и обобщенная сила Q/ в более общих уравне-
ниях (IV. I) при малых отклонениях системы оказывается, как
правило, линейной функцией с постоянными коэффициентами,
т. е. уравнения движения (IV. 1) также обращаются в линейные
дифференциальные уравнении, имеющие постоянные коэффи-
циенты.
3. Таким образом, решая вопрос о возможности линеаризации
данной конкретной задачи, необходимо прежде всего оценить
область отклонений, в пределах которой систему можно рассматри-
вать как линейную (для консервативной системы это область, где
кинетическая и потенциальная энергии с достаточной точностью
выражаются квадратичными формами). Если интересующие нас
отклонения находятся в пределах указанной области, то задача
линейна. В протинном случае мы вынуждены рассматривать ее как
нелинейную.
Хороищ.4 примером, жинктрнрующцм указанное положение,
может служить известная задача И. Г. Бубнова о статическом из-
гибе вытянутой прямоугольной пластины конечной жесткости
(балка-полоска с распором, т. е. с иееближающимися свободно
концами). При очень малых прогибах пластины (балки-полоски)
121
цепные напряжения очень малы по сравнению с изгибными и
можно считать, что вся потенциальная энергия равна потенциаль-
ной энергии изгиба, пропорциональной второй степени стрелки
прогиба; тогда задача оказывается линейной. С увеличением
стрелки прогиба соотношения меняются — цепные напряжения
становятся соизмеримыми с изгибными, в потенциальной энергии
начинает играть роль энергия цепных напряжений, которая про-
порциональна не второй, а четвертой степени стрелки прогиба;
задача становится нелинейной. Все дело в том, что при интерес-
ных для практики прогибах уже нельзя рассматривать потен-
циальную энергию пластины конечной жесткости как квадратич-
ную функцию от обобщенных координат и необходимо учитывать
более высокие члены разложения (IV. 5).
Обычные балки судового корпуса также могут иметь распор,
однако их изгиб рассматривается в линейной постановке, по-
скольку балка гораздо жестче пластины и сломается раньше, чем
ее отклонения от положения равновесия выйдут эа область приме-
нимости линейной теории.
В динамических задачах нелинейность может «проникнуть»
в уравнения для перемещений (уравнения движения) как через
кинетическую, так и потенциальную энергию, а у неконсерватив-
ных систем — через обобщенную силу; в статических задачах. —
только через потенциальную энергию (обобщенную силу).
Для качественного анализа задач полезно выделить два основ-
ных вида нелинейностей — кинематическую и физическую. Первая
возникает вследствие нелинейности различных кинематических
соотношений для перемещений и деформаций элементов системы;
вторая — вследствие нелинейности, присущей самой физической
природе материала системы или сил, действующих иа систему.
Применительно к статическим задачам кинематическую нелиней-
ность, как правило, называют геометрической.
Наглядным примером кинематической (геометрической) нели-
нейности может служить уже рассмотренный нами в главе III
маятник, соединенный со спиральной пружиной (§ 3, п. 3). Его
кинетическая и потенциальная энергии оказываются, при боль-
ших отклонениях, нелинейными функциями <р именно из-зв кине-
матических (геометрических) соотношений.
Если материал пружины маятника ие подчиняется закону Гука,
то это приведет к физической нелинейности, так как зависимость
усилие — деформация окажется нелинейной. Во многих случаях
существует соотношение
о (ГУ 7)
где о — нормальное напряжение в материале;
ех — относительное удлинение при одноосном на-
пряженном состоянии;
Ех, Еа, Е, — константы материала.
122
Тогда жесткость пружины будет выражаться тем же законом.
В случае малых отклонений удлинения ех будут также малы,
и задача линеаризируется, поскольку для достаточно малых ех
можно положить
сх = Е&, (IV. 7а)
если только £i 4я 0.
4. Особо следует отметить так называемые существенно нели-
нейные задачи, которые не допускают линеаризации даже при
любых каких угодно малых отклонениях системы от положения
равновесия.
Возможность их появления видна уже из общих зависимо-
стей (IV. 3) и (IV. 5). В самом деле, если коэффициент (A/ft)0 за-
' Ро
Рис. 23
висимости (IV. 3) равен нулю, то кинетическая энергия принци-
пиально не может быть выражена как квадратичная функция
обобщенных скоростей как бы малы ни были отклонении. Анало-
гично и потенциальная энергия не может оказаться квадратичной
функцией, если только в зависимости (IV. 5) окажутся равными
нулю производные
Пример существенно нелинейной задачи был приведен в § 3
главы II, когда рассматривалась потенциальная энергия деформа-
ций стержневой системы рис. 16. Она оказалась функцией четвер-
той степени обобщенной координаты — вертикального перемеще-
ния уала сочленения стержней.
Если несколько видоизменить систему и к невесомым стержням
добавить массы т (рис. 23), то существенная нелинейность войдет
через кинетическую энергию. Малые горизонтальные перемеще-
ния х масс т от положения равновесия
х “ 2/
и, следовательно,
Т = 2~ = «АА
1-23
Можно, конечно, попытаться составить выражение кинетиче-
ской энергии, приняв в качестве обобщенной координаты переме-
щение х, но тогда существенная нелинейность войдет в уравнение
через обобщенную силу.
К существенной нелинейности задачи приводят в ряде случаев
физически нелинейные факторы, например при отсутствии первого
члена в зависимости (IV. 7) между напряжениями и деформациями
материала упругой системы. Тот же существенно нелинейный
эффект дают при составлении уравнений свободных колебаний
силы так называемого сухого трения, которые равны постоянной
величине для любой ненулевой скорости (рис. 24).
н
Рис. 24
5. При рассмотрении кинематической (геометрической) нели-
нейности, входящей через потенциальную энергию, обычно пра-
вильно связывают ее с величиной отклонения данной упругой
системы (упругого тела) от положения равновесия: для любой
упругой системы, если только она не является существенно не-
линейной, можно указать область малых отклонений, в пределах
которой ее допустимо рассматривать как линейную. Однако вместе
с этим часто ошибочно полагают, что степень нелинейности харак-
теризуется прежде всего величиной относительных деформаций ех,
еу, ег элементов тела. Таким образом, линейная теория упругости
оказывается как бы теорией малых относительных деформаций,
а нелинейная теория — теорией больших относительных дефор-
маций.
В. действительности линейная и нелинейная теории упругости
рассматривают относительные деформации одного порядка малости
н величины ех, еу, ег сами по себе еще ничего не означают. Так,
в частности, можно взять две совершенно одинаковые балки-
полоски пластины и одной из них дать распор (затруднить откло-
нение кромок), а другую оставить без распора. Обе пластины
могут иметь одинаковые максимальные относительные деформа-
ции, ио одна из иих будет системой с большой нелинейностью,
а другая — линейной системой.
124
В подробных курсах теории упругости доказывается, что ком-
поненты деформаций элемента упругого тела имеют вид
i = <, I -!, ['i + (s V„- %)2]
тй=I ’•> ( ' ( i V.„ + +
(IV. 8)
где e* и y*v — точные значения относительного удлинения и от-
носительного сдвига;
ех и уХу— приближенные выражения, принимаемые в ли-
нейной теории;
ди _ ди да
е*~ дх ’ Ъуду + дх ’
дш ди да , dw
= ~дх + ~дГ ’ ^уг =: ~дг ‘ ду
(IV. 8а)
и, v, w — линейные перемещения элемента вдоль осей X,
У,
со», <о2 — углы поворота элемента вокруг осей х, у, г.
Зависимости типа (IV. 8) могут превратиться в зависимости
типа (IV. 8а), если:
а) относительные удлинения и относительные сдвиги малы по
сраинению с единицей;
б) углы поворота пренебрежимо малы по сравнению с едини-
цей, а квадраты и произведения углов поворота пренебрежимо малы
по сравнению с относительными удлинениями и сдвигами.
Напомним, что в случае балки-полоски конечной жесткости
нелинейность появляется именно при учете квадратов угла пово-
рота сечений. Малость компонентов деформаций еще не характе-
ризует степени линейности системы.
6. Заметим, что указанная выше линеаризация любой механи-
ческой системы происходит по существу за счет отбрасывания ма-
лых членов в уравнениях даижения (или равновесия). Действи-
тельно, если учесть в зависимости для кинетической и потенциаль-
ной энергии ряд членов, а не только первые члены, то мы всегда
получаем нелинейные дифференцизльные уравнения. При малых
отклонениях от положений устойчивого равновесия члены высших
порядков в рядах (IV. 3) и (IV. 5) малы по сравнению с первыми
членами, и, отбрасывая их, мы отбрасываем в уравнениях движе-
нии нелинейные члены, которые оказываются малыми по сравне-
нию с линейными.
125
Однако следует указать, что такой «арифметический» подход
к оценке членов дифференциальных уравнений справедлив не во
всех случаях; иногда наличие в уравнении даже очень малого
члена может привести не только к большим количественным,
но и качественным изменениям решения.
Чтобы доказать это, рассмотрим классический пример Бореля,
относящийся к уравнению
tnxs + Ах8 =: const. (IV. 9)
Его решениями являются синусоидальные функции, имеющие
осцилляторный характер с чередованием максимум-нуль-минимум
и т. п.
Если взять уравнение
nzx8 4- Ах8 -= const 4- Ч (IV. 10)
то оно уже не будет иметь осцилляторнего решения даже при лю-
бых каких угодно малых значениях положительного параметра Л.
Действительно, это уравнение после дифференцирования дает
{тх 4- Ах) х = - X,
что исключает возможность равенства х == 0 и, следовательно,
обращения х в максимум или минимум.
Получив уравнение (IV. 10) и отбрасывая пренебрежимо малый
член Kt, мы пришли бы к неправильному решению лаже Для срав-
нительно малого интервала времени.
Сказанное в полной мере относится и к некоторым более важ-
ным для практики случаям. Например, силы неупругого сопро-
тивления механической системы могут быть очень малыми по
сравнению с силами иверции и силами упругости, т. е. член диф-
ференциального уравнения даижения, учитывающий сопротивле-
ния, может быть очень малым по сравнению со всеми остальными
членами. Однако отбрасывание его приводит к качественному изме-
нение решения; при резонансе система якобы получает бесконечно
большие амплитуды; свободные колебания оказываются незату-
хающими и т. п.
Пренебрежение малыми членами в уравнениях равновесия
приводит к качественному искажению картины потери устойчи-
вости механической системы.
В самом деле, вернемся к уже рассмотренному в главе III
примеру (рис. 16). При обычно принятой линеаризации задачи
получаем условие равновесия
Pay -=- (IV. 11)
откуда эйлерово значение силы Р
126
Согласно (IV. 11), при Р = Р9 система может находиться в со-
стоянии равновесия при любом <р, т. е. равновесие нейтрально.
На самом же деле приведенное выше уточненное решение дает
для каждого Р только два (симметричных) угла <р, т. е.
вполне определенное положение системы.
Аналогичное явление происходит и в других системах. Рас-
сматривая устойчивость системы в линейной постановке, по Эй-
леру, мы всегда приходим к уравнениям нейтрального равновесия,
которые позволяют затем найти эйлеровы силы. В действитель-
ности найденного равновесия нет, и при заданном значении внеш-
них сил система может находиться только в одном или нескольких
вполне определенных положениях. Решение задачи устойчивости
для линеаризированной системы не отражает истинного поведения
конструкции и дает по существу лишь сигнал о быстром нараста-
нии деформаций, но не~о величинах последних.
Сделанные выше замечания свидетельствуют о той тщатель-
ности подхода, которую нужно проявлять при линеаризации
каждой конкретной задачи.
Следует помнить, что всякая реальная механическая система
не является ни линейной, ни консервативной, ни ограниченной
малым числом степеней свободы; более того, строго говоря, все
свойства ее вообще не могут быть совершенно точно описаны ка-
кими-либо конечными математическими соотношениями. Состав-
ляя те или иные конечные соотношения, мы всегда вводим опре-
деленную идеализацию. Задача исследователя состоит в том, чтобы
посредством умелого физического анализа принять «удачные»
упрощения, которые в максимальной степени облегчали бы мате-
матические решения без большого ущерба для точности интере-
сующего его конкретного результата.
Для получения указанного результата необходимо удержать
в математических соотношениях, описывающих поведение системы,
столько членов, чтобы система оказалась «грубой» (по терминоло-
гии А. А. Андронова и его школы), т. е. чтобы малые изменения
вида математических соотношений (учет следующих членов) и ма-
лые изменения параметров системы (неточность данных) не изме-
няли существенно характер движений; степень малости зависит,
естественно, от условий задачи и, в частности, от требуемой точ-
ности оценки характера движения; так, при очень грубой оценке
характера движения допустима и эйлерова постановка задач
устойчивости конструкций.
К сожалению, стандартных рецептов физического анализа за-
дач не существует Именно это имел в виду Н Е Жуковский,
когда говорил, что искусство механика состоит в том, чтобы
уметь составлять интегрируемые уравнения. Однако сделанные
выше замечания должны в известной степени облегчать указан-
ный анализ.
127
§ 2. СВОБОДНЫЕ КОЛЕБАНИЯ
1. Пусть положение системы с одной степенью свободы опре-
деляется обобщенной коордиватой qY = q\ в положении равнове-
сия 9 = 0. Положим далее, что на систему наложены идеальные
голономные стационарные связи и что она не относится к числу
существенно нелинейных.
Тогда для малого отклонения и для малой обобщенной скорости
можно записать
г = (IV. 12)
Если, кроме того, система находится в поле консервативных
сил, то потенциальная энергия (для малых отклонений)
П==4-С9», (IV. 13)
где с — постоянный коэффициент.
Величину а удобно назвать обобщенной массой, а величину с —
обобщенным коэффициентом жесткости. По терминологии, введен-
ной в судостроение Ю. А. Шиманским, они называются приведен-
ной массой и приведенной жесткостью системы.
Уравнение движения в форме Лагранжа
где L = Т — П.
После преобразований согласно (IV. 12) и (IV- 13) получаем
aq + cq = 0 (IV. 14)
или
q -f- = О, (IV. 14а)
где X2 =. с : а.
Характеристическое уравнение однородного дифференциаль-
ного уравнения (IV. 14а) имеет вид
s* + X2 = О, (IV. 15)
т. е.
= iX, sa = —ik.
Общим решением (IV. 14а) будет
г, г MU I /> /X*
Ч 'Г- "£ >
где сх и с2 — произвольные постоянные интегрирования.
Выделяя из указанного решения вещественную часть, имеем
q — A cos kt + В sin kt. (IV. 16)
128
Здесь А и В — снова произвольные постоянные.
Вместо (IV. 16) можно записать
q — A cos kt В sin kt = Ао sin (М + -ф), (IV. 16а)
где
А = А о sin 1]), В — А с cos ф.
Таким образом, механическая система с одной степенью сво-
боды, подчиненная идеальным стационарным голономным свя-
зям и находящаяся в поле консервативных сил, совершает около
устойчивого положения равновесия гармонические колебания.
Величина наибольшего отклонения Ао называется, как из-
вестно, амплитудой колебания, аргумент kt | ф — фазой коле-
бания, а ф — начальной фазой; к — круговая частота колебаний.
Если при t =» 0 имеем q =-- q0, q — q0, то
* = arctg^ (IV. 17)
или
Ч = +- р sin (w + arc , (IV. 166)
ИЛИ
q =-- sin kt + Acosta. (IV. 16b)
Из (IV. 166) видно, что для возникновения колебаний необхо-
димо дать системе начальное отклонение или начальную скорость
(или то и другое вместе).
Колебания, возникающие вследствие начальных отклонений
и начальных скоростей, называют свободными колебаниями; ча-
стоту к — круговой частотой свободных колебаний или собствен-
ной частотой системы. Частота не зависит от начальных условий
и определяется только параметрами системы (свойство изохрон-
ности).
Наименьший промежуток времени, по истечении которого
система снова занимает свое положение, называется периодов
колебаний. Его величина, очевидно,
Т = (IV. 18)
Частотой колебании v называют число колебаний в единицу
времени, т. е.
V - (IV. 19)
9 В. С. Чупиковский I7S7 129
Заметим, что величины а и с зависят от выбора обобщенной
координаты, а Т, Л и v — не зависят от него.
Из формул (IV. 12) и (IV. 13) непосредственно следуют прак-
тические правила, удобные для вычисления обобщенной жесткости
и обобщенной массы.
Обобщенная жесткость с численно равна удвоенной потенциаль-
ной энергии системы в положении, когда q получает свое единич-
ное значение.
Рис. 25
Обобщенная масса а численно равна сумме произведений всех
элементарных масс системы на квадраты их перемещений в поло-
жении, когда q получает свое единичное значение.
2. В качестве примера определим частоту свободных колебаний
системы (рис. 25). Стержень предполагаем недеформируемым.
Mh If — i-л масса и ее момент инерции;
тв, »о — погонная масса и погонный момент инерции стержня;
с1» се — жесткости пружин.
За обобщенную координату примем угол <р, отсчитываемый
йротйв часовой стрелки. Тогда обобщенная жесткость
с = 2П,_, = cfi + с,е.
Обобщенная масса
а = J m^dx -f- Af,/? 4- /И2/г Afa/1 + j t0 dx + /, + /9 + /а.
130
Круговая частота свободных колебаний
mJ- +Mfi + + М/з + lj +/, + /, + /,
‘rf + 'S
Если за обобщенную координату принять вертикальное пере-
мещение б правого конца стержня, то
с =2Па=1
а = j т0 (f)‘ dx + М, (±)' + М, (±)‘ + М, (-£-)’ +
О
+/'о(т)’й'+л(т)'+/>(т)'+7>(т)’
о
Частота л оказывается неизменной.
3. Уравнение свободных колебаний простейшей одномассовой
системы (рис. 26) имеет вид
тх + сх — 0 или х + Xsjc - 0, >
т. е. подобно общему уравнению (IV. 14) или s
(IV. 14а). Следовательно, свободные колебания г ’
любой линейной системы с одной степенью свободы S
могут быть моделированы свободными колебаниями г
указанной простейшей системы, если под а пони- | от |
мать некий эквивалент массы т, под с — экви- *
валент жесткости пружины с, под q — эквивалент Рис. 26
вертикальных смещений х массы т от положения
ее статического равновесия. При этом, правда, далеко не во всех
случаях будут сохраняться размерности всех величии; послед-
ние определяются, в конечном счете, размерностью обобщенной
координаты.
10. А. Шиманский [19] предложил в качестве обобщенной коор-
динаты всегда выбирать линейное перемещение какой-либо точки
конструкции (точки приведения). Тогда а имеет размерность
массы, ас — размерность жесткости; можно считать, что масса
и жесткость конструкции «приведены» к точке приведения.
4. При изучении свободных колебаний иногда полезно исполь-
зовать энер! етпческие соотношения
Поскольку все силы, по условию, консервативны, то рассеива-
ния энергии не происходит и
Т + П =- const.
9* «3|
Максимальная кинетическая энергия равна максимальной по-
тенциальной энергии
Т - П
* max •*max-
С другой стороны, согласно (IV. 16а)
п™ж- усЛ«'
Рис. 27
Приведенный вывод, не внося, естественно, ничего нового,
часто бывает полезен для практических расчетов, поскольку в ряде
случаев удобнее выразить Т и П через амплитуды колебаний,
чем составлять уравнение движения. Он лежит в основе так назы-
ваемого метода Реле.ч для приближенного определения частот
свободных колебаний сложных систем, при котором задают форму
колебаний и систему сводят к системе с одной степенью свободы.
Рассмотрим, например, невесомую балку, несущую сосредото-
ченные массы (рис. 27). Зададим ее свободные колебания в виде
у (х, sin (М -г Ф), (IV. 20)
где / (х) — форма колебаний.
Задаваясь / (х), превращают балку в систему с одной степенью
свободы.
Скорости точек балки
- Ч(Л)СО5(Х/+<>);
максимальные перемещения и скорости
^-mav =- hf <
максимальная кинетическая энергия
7-max
(IV. 21)
132
максимальная потенциальная энергия
(IV.22)
О
|де X; — координата i-й массы.
Приравниваем (IV. 21) и (IV. 22). Отсюда
Если балка весомая и ее погонная масса равна т0, то
Xs = —2-----------------—. (IV. 24)
f "'of2 (*)ах 4- 2 тгР (*«>
б
Если точно заданы f (х), формулы (IV. 23) и (IV. 24) дают истин-
ное значение частоты. Однако часто f (а) задают приближенно,
выбирая эту функцию как похожую на ожидаемую форму, с обя-
зательным условием, чтобы были удовлетворены все свизи си-
стемы. В этом случае частоту также определяют приближенно.
Масштаб функции f (а) никак не сказывается на результате,
так как он одновременно и одинаково меняет Пи?.
Иногда форму колебаний f (х) задают как форму статического
прогиба балки под действием какой-либо статической нагрузки;
это удобно тем. что условия связи выполняются совершенно
автоматически.
Если, например, принято, что f (а) есть прогиб от действия
сосредоточенных сил Р, = приложенных в точках Л/ (g —
ускорение силы тяжести), то
* = -,-------------------- (iv.Ma)
J '"of2 (x) 4 2J mif3
о
В зависимости (IV. 24 а) потенциальная энергия выражена
через работу внешних сил, вызывающих прогиб
5. Рассмотренные выше свободные колебания системы в поле
лонсервативных сил оказываются незатухающими bdsu> toio, чю
консервативные силы не могут давать рассеивания энергии —
работа консервативной силы на замкнутом контуре равна нулю.
Наличие сил сопротивления (диссипативных сил) сильно ме-
няет картину колебаний.
133
Уравнение свободных колебаний системы с сопротивлениями
напишем так:
"U/ дч~
(IV. 25)
где Q — обобщенная сила, соответствующая силам сопротивления.
Во многих важных случаях силы сопротивления Rlt действую-
щие на i-ю точку механической системы, пропорциональны первой
степени скорости этой точки
— (IV. 26)
где ₽/ — постоянный коэффициент.
Найдем обобщенную силу таких сопротивлений, причем сразу
обратимся к голономной системе с т степенями свободы, т. е.
с т обобщенными координатами qm.
Согласно сказанному в главе II
= (/-'.2.............(IV.27)
или, принимая во внимание (IV. 26),
По (III. 30)
dri __dvi
Следовательно,
<$-—Z- l
dQi dqj 2 dq- “ 2
Функция
ф_, (IV. 28)
называется диссипативной. функцией Релея.
Учитывая эту функцию, окончательно получаем
Q“- - ?-()- 1-2.3......<Л). (IV.29)
Диссипативная функция отличается от кинетической энергии
системы только постоянным коэффициентом (0,- вместо mJ. Следо-
вательно, для малых колебаний системы со стационарными свя-
134
зями она твкже может быть представлена как определенно поло-
жительиая квадратичная форма обобщенных координат
GV. зо)
где bjk — bkj — постоянные положительные коэффициенты.
Для системы с одной степенью свободы
Ф
поэтому (IV. 25) имеет вид
aq + bq 4- cq — 0 (IV. 31)
или
q + 2hq + Mq =-- 0, (IV. 31a)
где
2* = 4-
Уравнение (IV. 31a) является однородным дифференциальным
равнением второго порядка с постоянными коэффициентами,
то характеристическое уравнение
s’ + 2hs 4- Xя = 0. (IV. 32)
Корни характеристического уравнения
s2 == — h 4-Vtf—tf, st-..—h~(IV.33)
В случае малого сопротивления (h < X)
s, = —Л-Н!/*1—**, «, = — h —
Общее решение (IV. 31a)
q = e~M (cj cos t) X2 — Л2 4- ca sin t)- X®—Л2) =
-• Affi-»' sin (f У Х»—Л® + ф), (IV- 34)
где сг и с2 — постоянные интегрирования
с2 — А 0 sin ф;
cs = А о cos ф.
Из (IV. 34) видно, что при t -> со член e~Lt -> 0 и, следова-
тельно, q -* 0, т. е. движение затухает. График функции q =<
=• q (t) представлен на рис. 28. Эта функция не является периоди-
ческой, так как значение q не повторяется через какие-то постоян-
135
ные промежутки времени, но максимальные отклонения дости-
гаются через промежутки, равные
T=V^№- <IV-35>
Величину Т, которая определяется (IV. 35), условно называют
периодом затухающих свободных колебаний.
Время t', в которое достигаются максимальные отклонения,
можно определить по формуле
Последующие максимальные отклонения
Лое-/,г sin (Г р I2 — Л® 4- V)> (Г"*7) sin V № — № 1- ф).
Лое-Л </’+2Г> sin (/' |' К1 — /г 4- ф),.
Отсюда видно, что отношение каждой амплитуды к предше-
ствующей амплитуде есть постоянное число, равное e~hT и на-
зываемое декрементом колебания. Натуральный логарифм его
In e~hr = —hT носит название логарифмического декремента ко-
лебания.
Максимальное отклонение достигается несколько раньше, чем
sin (Г ) Х2 — Л3 -!-»]>) обращается в единицу, т. е. t" > С.
График движения находится между даумя кривыми Afp~hT
И —A.j?~hT, on касается этих кривых в точках, соответствую-
щих t". Если при i — t0 имеем q -- qv, q = q0, то
zi________1 f a2 4-
q0 Ytf — h* (IV. 37)
ф arc tg........•••• v • —. ' ° ’
136
В случае большого сопротивления (й > Л) корни характери-
стического уравнения
sl=.-—h 4-у'й8 —Zs<0, st -h —|/^=Х?<0. (IV.38)
Общее решение (IV. 31а)
q е~ы (с2е' h' -
(IV. 39)
Движение оказывается затухающим апе-
риодическим.
Если при t = 0 имеем q =- q0, q=q0,TO
_ s±gp — go c _ go ~~ S1?O 5)
So — S. ’ 2 S, — Sl *
гдез1 ms2—корни характеристическогоурав-
• неиия.
При h -- X g)
S, S, = —Л (IV. 40)
и
9 = е~'“(с1 I- CjZ), (IV. 41)
где с1 =-- q0, с2 = q0 Ч hq0.
Рис. 29
В зависимости от значений q0 и q0 графики решений (IV. 39)
и (IV. 41) имеют вид, представленный на рис. 29.
§ 3. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
1. Вынужденными колебаниями системы называют ее колеба-
ния под действием внешних сил, заданных как функции времени.
Общее уравнение вынужденных колебаний линейной консер-
вативной системы с одной степенью свободы и стационарными
связями имеет вид
=<m (IV-42)
где Q (/) — обобщенная внешняя сила (возмущающая сила).
После преобразований (IV. 42) получаем
aq Ч cq = Q (t) (IV. 42а)
или, наконец,
? + = f(f), (IV. 426)
где J (0 - Q (0 : с
Решение (IV. 426) нетрудно получить известным методом ва-
риации произвольных постоянных.
Будем искать q в виде
q - ct sin Kt 4- ca cos Ki, (IV. 43)
137
аналогичном решению соответстиующего однородного уравнения,
однако величины с, и с2 станем рассматривать не как постоянные,
а как функции времени сх == ci (<), ся =-- с2 (t).
Поскольку для определения и с2 имеется только одно урав-
нение (IV. 426), то можно их связать еше одной произвольной
зависимостью.
Составим выражение скорости
q — сгК cos М — CjX sir Kt + ct sin Kt + c2 cos Kt
ii выполним соотношение
c, sin Kt + c2 cos Kt = О, (IV. 44)
t. e.
q -- CiK cos Kt — c2K sin Kt. (IV. 45)
Ускорение
q ~ —схЛ’ sin Kt — csX4 cos Kt + cxX cos Kt — CjlsinXf. (IV. 46)
После подстановки (IV. 43) и (IV. 46) в (IV. 426) запишем
q cos Kt — c2 sin Kt -- Д Q (t). (IV. 47)
Из (IV- 47) и (IV. 44) находим
4-Д c2 = — ^Q(0sinlt
Интегрирование дает
=- — J Q (E) sin K£d% + B2
(IV. 48)
где и Ba — постоянные,
E — текущее время.
После подстановки (IV. 48) в (IV. 43) имеем
? = sin М j Q (I) cosXg dg — cos Kt j Q (E) sin +
4- Вг sin Kt 4- B2 cos Kt stn Kt + B2 cos Kt -j-
+ 4)<2(0>®1И-Е)‘5- (IV. 49)
138
Если при t = 0 имеем q = qa, q -- q0, то
Ч =-f. cos Ki + sin KI + $ <2 (E) sin X (i - E) (IV. 50)
В (IV. 50) первые два слагаемых выражают свободные колеба-
ния, порождаемые начальными возмущениями q0 и q0, а третье
слагаемое — движение, вызванное возмущающей силой Q (/).
В некоторых случаях полезна иная форма решения. Положим
Q (£) =-- и, sin X (t — £) d& =-- dv
и проинтегрируем третий член (IV. 50) по частям. После преобра-
зований получим
4 = JJ |-^-«ln XI ГТ, [<?«) — Q(0)cmW —
— | <5(Э«кХ(< —5)dsl -»„cosX/ + ^-sinXr+-l ^Q(<) —
- <?(0)cosM-J <2(E)cosX(Z —g)dg 1. (IV. 51)
2. Дадим очень наглядную физическую интерпретацию ин-
тегралов (IV. 50) и (IV. 51), называемых интегралзми Дюамеля.
Во-первых, из принципа наложения непосредственно следует,
что действие начальных возмущений qv и д0, а также действие
самой возмущающей сиды разделяются; поэтому наличие первых
двух членов в (IV. 50) и (IV. 51) совершенно очевидно и остается
лишь установить вид третьего члена.
Разложим возмущающую силу Q (Н) на ряд элементарных им-
пульсов Q (£) d% (рнс. 30) и просуммируем действия каждого из
них в отдельности.
139
Система с обобщенной массой а под действием мгновенного
обобщенного импульса 1 в момент 5 мгновенно приобретает обоб-
щенную скорость
и в дальнейшем будет совершать свободные колебания, обусловлен-
ные этой начальной скоростью; никаких начальных перемещений
она мгновенно получить не может.
В момент t обобщенная координата q, обусловленная указан-
ными свободными колебаниями от начальной скорости, состав-
ляет (IV. 16в)
Интегрирование действия всех импульсов непосредственно дает
третий член (IV. 50).
Вместо разложения Q (I) на элементарные импульсы можно
разложить ее на ряд элементарных сил, которые мгновенно при-
кладываются и в дальнейшем остаются постоянными; элементар-
ные силы могут быть как положительными, так и отрицательными
(рис. 31). Величина элементарной силы, которая прикладывается
в момент g, очевидно равна Q (g) di. Кроме того, в мо«мент £ — 0
мгновенно приложена сила Q (0).
Обозначим через k (х) (% — текущее время) изменение обоб-
щенной координаты q под действием постоянной единичной обоб-
щенной силы Q == const, внезапно приложенной к системе в мо-
мент х - 0 (рнс. 32). Тогда движение системы, обусловленное
действием силы Q (г), очевидно, будет
Q (0) k (0 + f Q (0 k (t - 0 d£. (IV. 52)
14Q
Остается найти k (х).
Вычисление третьего члена формулы (IV. 50) для случая
Q (g) = const — Qo дает q = (1 — cos ОД (IV. 53)
т. е. система совершает свободные колебания около положения
статического равновесия под действием силы Qc; амплитуда сво-
бодных колебаний qCT — Qo : с, максимальное отклонение си-
стемы от первоначального положения qmxt 2^ст
Из (IV. 52) ясно, что
МЙ-7(1-«»*•/)• (IV. 54)
Рис. 32
Подстановка (IV. 54) в (IV. 52) приводит к третьему члену
зависимости (IV- 51).
3. Во многих случаях аналитически находить интегралы,
входящие в (IV. 50), невозможно и приходится прибегать к числен-
ным методам. Однако указанные интегралы очень неудобны для
вычислений, так как наличие в них разности t — Е заставляет
заново производить все расчеты для каждого I. Поэтому целесооб-
разно несколько видоизменить схему расчета.
Разобьем время действия нагрузки на малые участки ДЕ по-
добно тому, как это делалось при нахождении решения
в виде (IV. 50) (рис. 30) с той лишь разницей, что величина ДЕ те-
перь конечна (шаг интегрирования). Состояние системы в момент Е
полностью характеризуется величинами q (с) и q (Е).
Положение и скорость системы в момент Е -* 3 ДЕ определяются
тремя факторами: начальным для данного участка отклонением
q (Е), начальной скоростью q (Е). действием силы Q (?) в тече-
ние ДЕ. Причем по принципу наложения действие всех этих фак-
торов складывается.
141
Используем формулы (IV- 16в) и (IV- 53) и запишем
1 1уад
7(6 + АЕ) = Q (Е) ₽, + «(Е) Pi + Q(E) ₽Q -I
Здесь б и p — некоторые постоянные (при заданном Л£) коэф-
фициенты
б? = cos ХА|; бд = у- sin ХД£
й<? = 7- (1 — cos ХДЕ); Р5 = — X sin 1А|
Р;-созХД5; pQ-yslnXAj
Использование рекуррентных зависимостей (IV. 56) при за-
ранее вычисленных коэффициентах (IV. 56) дает возможность
последовательно вычислить движение системы. При стремлении
ДЕ к нулю решение обращается в точное.
4. Интегралы Дюамеля и зависимости (IV. 55) выведены путем
разложения возмущающей силы на ряд элементарных импульсов
или на ряд элементарных сил. Выражения
-JL-sinlZ и -1.(1—cosM). (IV. 57)
которые определяют структуру интегральных членов в (IV. 50)
и (IV. 51), отражают «отклик» системы на элементарный импульс
и элементарную силу. Их называют соответственно импульсной
реакцией и переходной функцией системы.
Назовем характеристикой системы функцию, выражающую
«отклик» системы на воздействие, которое принято за элементар-
ное. Ясно, что (IV. 57) является частным случаем таких характе-
ристик; поскольку они представляют собой функции времени, то
их часто называют временными характеристиками.
Очевидно, что способов разделения данного воздействия на
элементарные бесконечно много; соответственно существует
и бесконечно много характеристик данной системы.
Часто бывает целесообразно разложить периодическое возму-
щение Q (0 в ряд Фурье, а непериодическое возмущение предста-
вить интегралом Фурье и затем в качестве элементарного возму-
щения принять гармонику этого разложения или представления.
Детали такого способа состоят в следующем.
5. Рассмотрим сначала произвольное периодическое возмуще-
ние Q (f) с периодом Т в интервале времени (—“у).
142
Поскольку практически встречающиеся возмущения всегда
удовлетворяют условиям Дирихле [13], то можно записать
<2 (0 = ^2 + 01 sin + °2 sin 2to/ --------
+ cos mt + bv cos 2t»t 4------, (IV. 58)
где <o = 2л : T;
~2
ал=-^- | Q(t)s\nka>tdt,
bk = -^- j Q(Z) cos (IV. 59)
u> ?w Зы 4e> 5w 10
Рис. 33
Вместо (IV. 58) и (IV. 59) имеем аналогичные зависимости
0(0 = с. 4- Jj Q sin (*«/ + чД (IV. 60)
где _______
Q-’l'4+Й . ч» = arctg. (IV.61)
Иными словами, периодическая функция Q (/) может быть
представлена суммой гармонических функций с частотами, крат-
ными основной частоте, и с надлежащим образом подобранными
амплитудами и фазами.
Совокупность величин с* — ck (Лю) называют спектром ампли-
туд, а совокупность (Лю) — спектром фаз. Обычно
наибольший интерес представляет спектр амплитуд. который
часто называют поэтому просто слекгром.
Спектр можно представить графически (рис. 33); длины верти-
кальных отрезков представляют амплитуда! гармоник, отрезки
называются спектральными линиями.
143
Сумма (IV. 60), вообще говоря, бесконечна, однако, начиная
с некоторого k — п, амплитуды q оказываются пренебрежимо
малыми, и поэтому можно ограничиться конечным числом гармо-
ник, т. е. спектр оказывается ограниченным.
Заметим, что задание спектра амплитуд и спектра частот,
являющихся функциями частот, эквивалентно заданию Q (/),
являющейся функцией времени. Оба представления возмущения
равносильны.
6.. Действие на систему внезапно приложенной и затем остаю-
щейся постоянной силы нами уже рассмотрено. Поэтому исследуем
действие произвольной гармонической составляющей в виде
с* sin ti>kt (наличие фазы легко учитывается изменением на-
чала отсчета времени в решении).
Используя интеграл Дюамеля (IV. 50). получим
9 = J sin sinХ(/ — l)d£.
о
Если =f= к, то
= —^5- ( sin ----sin М \, (IV. 62
.__' л /
V
где Qct = — статическое перемещение под действием силы ck.
Из (IV. 62) видно, что гармоническая возмущающая сила,
приложенная в момент / — Ок неподвижной системе, вызывает,
во-первых, гармонические колебания с частотой возмущающей
силы а> и, во-вторых, гармонические колебания с собственной
частотой системы X. Последние условно называют свободными
колебаниями, хотя они не вызваны какими-то начальными возму-
щениями, и амплитуда их определяется амплитудой и частотой
силы. Если в момент приложения силы t =• 0 система имела
начальное отклонение и начальную скорость, то, кроме того,
имеют место «истинные» свободные колебания согласно формуле
(IV- 16в).
Вследствие неизбежных сопротивлений свободные колебания
с течением времени затухнут и движение будет происходить со-
гласно стационарной частя решения (установившиеся колебания)
q .. —sin ukt. (IV. 63)
I—
Л»
144
Отношение амплитуды вынужденного колебания
к статическому перемещению дст называют коэффициентом дина-
мичности р (рис. 34). При малой частоте и>к этот коэффициент
близок к единице, с ростом w он возрастает и при од = Остано-
вится равным бесконечности; дальнейшее увеличение од уменьшает
величину коэффициента р до нуля — система как бы не успевает
отзываться на быстрые изменения возмущающей силы.
Заметим, что при од > X значение р отрицательно, т. е. коле-
бания происходят в противофазе с силой; на рис. 34 правая ветвь
кривой условно нанесена выше оси абсцисс.
Рис. 35
Если = X (резонанс), то
q — J sin Х£ sinX(t — I) Xg q„(sin X/ —X/ cosXf). (IV. 64)
о
График движения, изображенный на рис. 35, доказывает, что
амплитуда не обращается сразу в бесконечность после приложе-
ния силы, а постепенно нарастает по линейному закону. Таким
образом, бесконечные амплитуды при резонансе (при отсутствии
сопротивлений) устанавливаются лишь через бесконечно большое
время.
Более подробно резонансные колебания можно исследовать
лишь учтя сопротивления (см. ниже).
7. Полученное решение позволяет сразу записать зависимость
для движения системы под действием периодического возмущения
<?<0-
Если ограничиться только установившимся режимом, то
о = — 4- -—=—с*т sin tkwi -f- q>*).
4 с Г1 (*<>) 1 '
*=' Ч X1 J
10 В. С. Чувиковскнй 1757
(IV. 65)
145
Любое гармоническое воздействие на систему вызывает также
гармонический отклик. Характеристиками системы являются
функции
k <“) = /. • (IV. 66)
Л V )
Поскольку они зависят только от частот, то их называют
частотными характеристиками, в отличие от встречавшихся ра-
нее временных характеристик.
8. Для непериодической функции Q (/) ряд Фурье может быть
обобщен.
Перепишем (IV. 58) и (IV. 59) в виде
<2 (t) sin kiot -I- fences fecof) =
= ~ (<og* sin kat -t- ©б* cos kat), (IV. 67)
где
a* =- J Q(/) smkwtdt, bk — -^- J Q(/)cosfeoM/,
Й = (IV.68)
Обозначим kw = uk, w = bu (разность двух последовательных
значений иЛ). Тогда
<2 (0 “ 4г-+ 2 («л sin ukt + b'k cos ukt). (IV. 69)
Если теперь устремить период Т к бесконечности, а основную
частоту <о = 2л : Т — к нулю, то интервалы Ди сузятся, сумма
в (IV. 69) превратится в интеграл и
со *
(«)*«/+ft(u)cos«nd«, (IV.70)
О
где
/1, j Qfflsiru/*, «.= у= f Ойсозс/Л. (IV. 71)
146
Коэффициент b0 равен нулю, если, как это бывает на практике,
функция Q (/) абсолютно интегрируема, т. е. если интегрзл
имеет конечную величину.
Зависимость (IV. 70) называется интегралом Фурье. Она по-
зволяет представить непериодическую функцию в виде суммы
бесконечного числа гармонических колебаний с бесконечно ма-
лыми амплитудами gt (и) du и g^ (и) du и бесконечно малым
интервалом du по частоте. Можно сказать, что в составе неперио-
дической функции имеются все частоты, т. е. непериодическая
функция имеет непрерывный (сплошной) спектр.
Отклик системы на элементарное гармоническое воздействие
определяется частотной характеристикой (IV. 66). Следовательно,
движение системы
9 (0 =~ } J k (“J («) + & (“) cos «Л (IV. 72)
о
9. Разложение возмущения на элементарные амплитуды или
элементарные силы с последующим использованием временных
характеристик (интеграл Дюамеля) столь же справедливо, как
и разложение его на элементарные гармонические возмущения
с использованием частотных характеристик (ряд и интеграл
Фурье). Это просто различные способы исследования одного итого
же процесса. Удобство использования того или иного способа
определяется конкретными условиями той или иной задачи.
Например, при изучении длительного воздействия на систему
периодических сил естественно применить частотный подход
и раскладывать возмущение в ряд Фурье. Это позволяет иногда
дать довольно верную картину колебаний даже без детальных
вычислений (выделить резонансные режимы, и т. п.). С другой
стороны, изучая воздействие какой-либо кратковременной на-
грузки, обычно удобнее использовать временной подход, т. е.
свести решение к интегралу Дюамеля.
Впрочем, интеграл Дюамеля может применяться и для перио-
дических функций (установившиеся колебания).
Пусть Q (t) имеет период Т, т е.
Q (t ' Т) — Q (П (IV 73)
Колебания системы также будут периодическими
«('+о*=«ю. «<<+о-«ю. (IV>74)
10*
147
Используем решение (IV. 49)
q =• Bj sin kt -| B2cos kt 4 J Q (g) sin к (t — |) df;
о
q = Btkcoskt— Bzksit\kt -i-JQ(£)cosXs(Z —£)d|
о
и рассмотрим начало и конец какого-либо периода.
Пусть началу периода соответствует t = 0, q = qD, q = q0.
Тогда q0 = Вй, q0 = Byk.
При t = T
q(T) = B, bln КГ + B,cos'П + ~ J Q (0 sin >.X (T -0 d£;
0
q (T) = BjJ.COS KT — B,l sin KT + ~ J Q (£) cos Л (Г — I) d|.
0
Условия (IV- 74) дают
В, =- В, sin КТ 4- B,cos W + -i- f <2 (0 sin >-('/ —£) dfc
0
Ba = Bxcos kT — B2 sin kT 4- J Q (§) cos k{T — |) d|.
о
Из последних двух уравнений находим
Bi---2k(cosoctg-T-)
1 / XT \ (^V. 75)
В« ^^r(C«ctg"2"+Se)
гАе т
ce-fQa)cosKtd§;
о
So —fQ(E)sinX|d|.
о
Окончательно •>.
Ч = 2Ж (с« с*8 -г-+%) “s Kl - Si (с“ -s" с*е ) *
sin U + f ° ® sl” Z ,!Е' (IV-76)
О
148
Зависимость (IV. 76) дает выражение q (/) в пределах 0—Т\
дальнейший вид q (t) периодически повторяется.
10. Интеграл Дюамеля (IV. 51) дает возможность оценить
динамическую поправку к статическому перемещению, которая
получается при медленно изменяющихся силах.
Если обозначить через Т период свободных колебаний системы
и положить, что кривая Q (£) имеет один максимум (рис. 36. а), то.
как можно показать [101,
1 — J <2 (S) со» Л (/ — Е) 2..
О
Произведение Q11I8X7': 2 является
приращением возмущающей силы за
лебаний системы.
Обозначив ее через AQmax, по-
лучим *
i-^jeocosx((-i)<is<
о
< &Qmax (IV. 77)
Таким образом, если продол-
жительность действия возмущаю-
щей силы велика по сравнению
с периодом свободных колебаний
системы, то динамическая поправ-
ка оказывается малой и силу мож-
но рассматривать как статическую.
II. Другим крайним случаем яв.г
продолжительности, когда время действия силы 1\ мало по сравне-
нию с периодом, свободных колебаний.
В этом случае максимальные отклонения системы возникают,
естественно, после окончания действия силы. Согласно (IV- 50)
имеем (для Z > 7\)
« = (1V.78)
о
или
q — I sin М [ Q (£)cos — cos Kt [ Q (£) sin dl
L о о
sinXZ j Q (|)cos dg — cosZZ J Q(|)sin-^
0 0
149
£ 7i 7.
Поскольку меньше , а по условию мало, то при-
ближенно
1 = 4- sin w f <2 (В <П - -ft- sin М. (IV. 79)
О
где / = j Q (5) d% — импульс кратковременной силы,
о
Следовательно, действие силы с малой, по сравнению с перио-
дом свободных колебаний, продолжительностью может быть
заменено действием импульса этой силы, который рассматривается
как мгновенный.
Точность формулы (IV- 79) быстро возрастает при уменьшении
отношения 7\ : Т = ₽. Так, при р ~ 0,1 погрешность (IV. 79)
не превышает 5%.
12. Уравнение вынужденных колебаний системы при наличии
сопротивлений, пропорциональных первой степени скорости,
можно получить, добавив в правую часть (IV- 31) возмущающую
силу Q (f). Сделав это, получим
aq 4- bq 4- cq = Q(/). (IV. 80)
Решение (IV- 60) нетрудно составить по аналогии с решением
(IV. 50).
Согласно решениям предыдущего параграфа свободные зату-
хающие колебания при условиях t = 0, q = 0, q = qD имеют
вид
(IV.8I)
Разбив нагрузку на ряд элементарных импульсов и суммируя
их действие, имеем
’ - IQ "”1’sin fr (' ~ al (IV- 82>
я У л2 — A2 J
Для численного определения q может быть обобщен прием,
который изложен в п. 3.
13. Для гармонической силы <2 (/) — Q0sin<oZ удобнее решать
(IV. 80) непосредственно.
Будем интересоваться пока только установившимся процес-
сом и положим
q — sin «о/ 4- с2 cos ш/. (IV. 83)
Подставив (IV. 83) в (IV. 80), наГщем
(— CjCo8 — 2с2соЛ 4- сД2 — sin о/ 4- (— с2со2 4- 2с1ыЛ 4-
4- c21e)cos<i>/ =- 0.
150
Для выполнения равенства необходимо, чтобы
— со2) — 2с2®Л — —-;
с2 (X2 — со2) 4- 2cxGift = 0.
Отсюда
C1 — a[(Z* —<о2)2 + 4<й*Л«1
2Qnv>h
Cs~ a [(Z* — (ft*)® + 4<огЛ21
(IV. 84)
где
Д- .......... с
1//. 4ю^8
г V kE 7 + **
. 2bih
(IV. 86)
График коэффициента динамичности р = А . qcr представлен
на рис. 37. Из рисунка видно, что сопротивление начинает сказы-
ваться только в областях частот, близких к резонансу; резонанс
при наличии сопротивлений не дает бесконечных амплитуд.
Максимум динамического коэффициента смещен несколько
влево от абсциссы «о : Л = 1, однако это смещение мало и практи-
чески им можно пренебрегать.
Нвличие сопротивлений приводит к некоторому запаздыванию
(сдвигу фаз) перемещений относительно возмущающей силы
151
(рис. 38). При малых частотах угол q? невелик, ио затем быстро
возрастает и обращается в при резонансе (сила максимальна,
когда перемещение равно нулю); при дальнейшем увеличении
частот он довольно быстро стремится к л, т. е. сила и перемещение
оказываются в противофазе.
Полученная картина колебаний легко объяснима физически.
В самом деле, при колебаниях система должна находиться в со-
стоянии динамического равновесия (по принципу Даламбера).
Действуют четыре обобщенные силы: возмущающая, сила упру-
гости, сила инерции, условно приложенная к самой системе,
и сила сопротивлений.
Первая имеет заданный гармонический закон ивменения во вре-
мени; вторая находится в противофазе с перемещением; третья
совпадает по фазе с перемещением; наконец, четвертвя отстает
на угол -у- от перемещения и направлена при этом против пере-
мещения.
В случае малых частот <в силы инерции и силы сопротивлений
•малы. Возмущающая сила в основном уравновешивается силами
упругости, а для этого необходимо, чтобы перемещение почти
совпадало по фазе с силой; ввиду малости сил инерции коэффи-
циент динамичности близок к единице, т. е. деформации протекают
почти статически. Часто говорят, что в области низких частот
система «управляется силами упругости».
С ростом частот происходит быстрое нарастание сил инерции
(силы сопротивления нарастают медленнее); силы инерции «вы-
читаются» из сил упругости, и чтобы остаток сил упругости мог
уравновесить возмущающую силу, необходимо резкое нарастание
амплитуд.
Сдвиг фаз между силой и перемещением меняется еще слабо,
поскольку сила сопротивления еще мала. Можно сказать, что
по мере приближения к резонансу система начинает «управляться
силами упругости и силами инерции».
Дальнейший рост частот приводит к тому, что силы инерции
начинают уже почти уравновешивать силы упругости; остаток сил
упругости оказывается очень малым и сам по себе уже не может
уравновесить возмущающей силы — происходит еще более рез-
кое нарастание амплитуд и связанное с ним заметное нарастание
сил сопротивлений.
Возмущающая сила уравновешивается разностью сил упру-
гости и сил инерции, а также силами сопротивлений; рост вли-
яния ст.! сопротивлений приводит к росту сдвига фаз. Система
управляется и силами упругости и силами инерции и силами
сопротивлений.
В момент резонанса (ш = ?-) силы инерции при гармоническом
колебании в точности уравновешивают силы упругости.
152
Возмущающая сила уравновешивается только силами сопротив-
ления, что может происходить лишь в том случае, когда амплитуды
очень велики и когда движение отстает по фазе на -g- от возму-
щающей силы. Можно сказать, что при резонансе система «управ-
ляется силами сопротивления». При отсутствии сопротивлений
происходит неограниченное нарастание амплитуд, поскольку воз-
мущающую силу просто нечем уравновесить ни при какой уста-
новившейся амплитуде.
В зарезонансной области, но еще вблизи резонанса, сила инер-
ции превышает силы упругости; возмущающая сила уравнове-
шивается разностью между силами инерции и силами упругости,
а также силами сопротивления. Система и в этом случае упра-
вляется силами инерции, силами упругости и силами сопроти-
влений.
Наконец, в зарезонансной
области вдали от резонанса
силы инерции ввиду высоких
частот существенно выше сил
упругости, а роль сил сопро-
тивлений снова становится
крайне незначительной. Си-
стема управляется силами
1
Рис. 39
инерции, причем для динами-
ческого равновесия сил инер-
ции и возмущающей силы
необходимо, чтобы перемеще-
ние было в противофазе с возмущающей силой.
14. Общий интеграл уравнения (IV. 80) в случае Q (/) =
— Qosln о»/ представляет сумму (IV- 34) и (IV- 85)
q --= е~м(qcost р —Ла 4- с2 sin ty Л8 —Ла) 4
4- A sin (<d£ —q>).
(IV. 87)
Если при t = 0 имеем q = qQ, q q0, то
, = ^,.cos< с 4-
+ sbi »<a»/ К sin' 1 — **
। A sin (to/ — q>). (VI. 88)
Характер нарастания амплитуд в случае о = X (резонанс)
при нулевых начальных условиях показан на рис. 39.
153
ГЛАВА V
КОЛЕБАНИЯ ЛИНЕЙНЫХ КОНСЕРВАТИВНЫХ СИСТЕМ
СО МНОГИМИ СТЕПЕНЯМИ СВОБОДЫ И УПРУГИХ
ТЕЛ
§ 1. СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМ С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ
1. Типичные примеры систем с двумя степенями свободы
представлены на рис. 40, а именно: а — две массы, соединенные
последовательно с двумя пружинами жесткости и cs; б —
две массы, соединенные с тремя пружинами жесткости сх, с2
и с8; в — две массы, закрепленные на невесомой балке; г—
абсолютно твердое тело с массой т и моментом инерции / этой
массы относительно центра тяжести о, закрепленное на пружинах
жесткости ct и с2> — масса tn, обладающая моментом Инерции /,
закрепленная на невесомой раме.
Из примеров виг особенно наглядно видно, что правильнее
здесь говорить о двух ‘динамических степенях свободы (см.
главу II), которые обязательно находятся методами динамики.
Кроме того, мы должны уметь рассчитывать статические деформа-
ции упругих связей, рассматриваемых уже как системы с бсско
печным числом степенен свободы. У системы в динамические
степени свободы связаны с вертикальными перемещениями масс т1
и у системы д они связаны с вертикальным перемещением
массы т и ее поворотом.
54
2. Уравнения свободных колебаний удобно составлять методом
сил.
Рассмотрим более подробно систему в (рис. 40). Обозначим:
б11 — статический прогиб балки в точке 1, где закреплена масса
mlt от действия единичной силы, приложенной в этой точке;
б12 — статический прогиб в точке 1 от действия единичной силы,
приложенной в точке 2, где закреплена масса ms; dSB — статиче-
ский прогиб в точке 2 от действия единичной силы, приложенной
в этой точке, и, наконец, б81 — статический прогиб в точке 2
от действия единичной силы, приложенной в точке 1. Величины
являются коэффициентами податливости, причем в силу теоремы
взаимности б12 =
Обозначим далее через (Z) — динамический прогиб в точке 1,
а через у2 (Z) — динамический прогиб в точке 2.
При свободных колебаниях системы массы т1 и /к2 приложат
к балке силы инерции, равные ——--ft- н -гп2
Следовательно, уравнения движения масс можно записать
в виде
т, s„ -I- т. -|- у, = О
mi + Л = О
(V. 1)
Решение совокупности (V. I) будем разыскивать в форме гар-
монических колебаний
y1 = wJsin(i/ + q>)|
У» = w2 sin (XZ + <p) I ' • >
Подставив (V. 2) в (V. I) и сократив множитель sin (XZ f <p),
получим совокупность однородных алгебраических уравнений
относительно w\ и
(1 -m,t„K‘)wk-m2t:k2X,w, = 0 j
— 4- (1 —m2622Xs) u»2 = 0 J ’
Отличные от нуля решения имеют место (т. е. колебания воз-
можны) только в том случае, когда определитель совокупности
обращается в нуль
I (1 -mAjX») — mabltkK |
I —w,61eXs (1 -/n2628XE) | = ’
Раскрывая определитель, получим квадратное уравнение отно-
сительно Xs
• т\Ш2 (бцДгг — 612) X — /712622) Х^ -j- 1=0. (V. 5)
155
Отсюда находим два значения частоты:
низшее
— У —m2622)2-b4mlm!(qs
2т1т2 (6цЬ22 — fif2)
. (V. 7)
Оба значения X вещественны.
Подстановка численного значения X в (V. 3) позволяет иайти
отношения tWj и и>2 (абсолютные значения и ш2 остаются неиз-
вестными)
/к>1 \ _ _ Я>2^12^1
\»'s Л 1 1 —zzijfiuZf ’
f Wj\ _ __ ,л2^12^2
'.«£/«п‘ ~ 1-^6,,^ •
(V.8)
Соответствующими алгебраическими преобразованиями можно
показать, что пг всегда положительно, а п2 — отрицательно.
Таким образом, решения уравнений движения (V. 1) имеют вид
yt = w\ sin (Ktt + 4>i)»
й 8in + Ф1) (V. 9)
или
yt -- u>i sin (XzZ + q>J,
% = -J- «И (M + Фа)- (V. i 0)
В силу линейности (V. I) решениями является и сумма
yt = к-1’1’ sin (X,/ 4- (pj 4- sin (X2f 4 - (p^, )
w<‘> wf> I (v-u)
У2 = — sin On* т Ф1) + — sin (M i - J
Зависимости (V. II) содержат четыре произвольные постоян-
ные — wj1», и»!2», ф<2>, которые позволяют выполнить четыре
начальных условия: при t — 0 yY = Ух.^’Уг = У2.0, У^ = yi.o,
у а — у2, о- Пнымз словамЕ, в начальник момент времени положе-
ния и скорости масс могут быть произвольными.
Совершенно аналогично можно составить и решить уравнения
движения в других случаях. Так, для системы, представленной на
рис. 40, д, достаточно вычислить следующие коэффициенты по-
156
датливости: бп — прогиб в точке 1, где закреплена масса, от
действия единичной силы, приложенной в этой точке; б18 —
прогиб в точке 1 от действия единичного момента, приложенного
в этой точке; б21 — угол поворота сечения рамы в точке 1 от дей-
ствия единичной силы, приложенной в этой точке; 6В, — угол
поворота сечения рамы в точке 1 от действия единичного момента,
приложенного в этой точке. Тогда уравнения движения примут
вид, аналогичный (V. 1),
(V. 12)
J в-0
г)
Рис. 41
Здесь 6 = 0 (/) — угол поворота сечения в точке 1.
3. Уточним физический смысл полученных аналитических
решений, причем для иллюстрации снова воспользуемся системой
рис. 40, в.
Зависимости (V. 9) — (V. II) показывают, что свободные ко-
лебания представляют сумму колебаний с частотой Хх и частотой ЛЕ,
причем каждому из слагаемых соответствует своя постоянная
форма деформации системы, которая характеризуется числами nt
и ns (рис. 41, а и б). Если систему «оттянуть» из состояния равно-
весия двумя статическими силами, приложенными в точках 1
и 2, и дать прогибам соотношение ь.'х . ujB — лх или «Jx : = л2,
а затем мгновенно «отпустить» (убрать силы) в момент t = 0, то
система будет колебаться либо по первой форме с частотой
(было дано соотношение лх), либо по второй форме с частотой Х2
(было дано соотношение и2); форма деформации будет все время
157
сохраняться. Независимые друг от друга свободные колебания
линейной консервативной системы, имеющие постоянную форму
деформации (или, как говорят, форму колебаний) и происходящие
по гармоническому закону с определенной постоянной частотой,
называют главными свободными колебаниями, а их частоты —
частотами главных свободных колебаний, или собственными ча-
стотами системы.
В рассматриваемом случае главные свободные колебания
определяются зависимостями (V. 9) и (V. 10). Колебания с более
низкой частотой называют первым тоном колебаний, а колебания
с более высокой частотой — вторым тоном.
В общем случае свободные колебания представляют сумму
главных свободных колебаний- Ввиду ' различия в собственных
частотах форма деформаций при произвольных свободных коле-
баниях не сохраняется, а каждая точка системы движется уже
не по гармоническому закону.
Интересно выяснить внутренние физические причины, которые
обусловливают постоянство форм и вполне определенные значения
частот главных свободных колебаний.
Прежде всего заметим, что, разыскивая решение в виде (V. 2),
т. е. пробуя .дайти гармонические колебания, которые удовлетво-
ряли бы (V. I), мы уже заранее могли предвидеть постоянство
форм разыскиваемых колебаний. В самом деле, на каждую тоЧну
консервативной системы при свободных колебаниях действуют
только силы инерции ее массы и силы упругости, передаваемые
соседними элементами. Отсюда ясно (см. главу IV), что если ко-
лебания гармонические, то силы упругости строго пропорцио-
нальны перемещению массы, т. е. форма деформаций конструкции
постоянна. Наоборот, если форма деформаций постоянна, то
сила упругости всегда строго пропорциональна перемещению
массы, и следовательно, свободные колебания будут гармони-
ческими.
Остается найти указанную выше постоянную форму и частоту,
входящую в (V. 2).
Пусть в любой фиксированный момент времени t масса тх
имела перемещение ух (t). Поскольку колебания, по сделанному
предположению, гармонические, то силы инерции этой массы,
передаваемые на балку, равны Fu, i = —miffa = — k^.
В тот же момент масса ms передает на балку силы инерции
F«.a^-m2yt- - —------------,
где п — неизвестное пока постоянное отношение : w2. опре-
деляющее постоянную форму.
Ясно, что отношение сил инерции, приложенных в точках 1
и 2, равно FB, I: FH. 2 — (mi : '««) Следовательно, чтобы найти п,
158
получаем уравнение
6u/ntn 4- m26J2 = п (6nmin 4- т2б22),
или, наконец,
бмтхла + (тп2б2г — тхбхх) п — /и2б12 — 0. (V. 13)
Отсюда
— (msdts — znjCn)4- К(ws6m — «16ц)14-4£/aimii>ttnis ... .
”» - ——— t v. 1ч;
(всегда положительно) и
п ___ —— <Иддц) — — я»1бц)* 4~ ^Зг1УП1б11т; .у ц..
(всегда отрицательно).
Таким образом, форму колебаний можно найти из решения
по существу статической задачи без определения частоты.
Значение Хх, соответствующее пх, и значение 12, соответствую-
щее пв, определяются из равенства величин сил инерции величи-
нам сил упругости. При колебаниях с частотой Хх в момент, когда
Hl = 1, имеем, например,
6„тЛ;+^^=1
и 1 1 щ
и, следовательно.
Аналогично
1
«I
(V. 16)
«2
(V. И)
Зависимости (V. 16), (V. 17), (V. 14), (V. 15) эквивалентны
зависимостям (V. 6) — (V. 8).
Сказанное выше относится к любым системам с двумя степенями
свободы н, в частности, к системе рис. 40, д, формы главных
свободных колебаний которой показаны на рис. 41, в и г
4. Выше мы видели, что подстановка гармонических решений
(V. 2) в уравнения движения (V. 1) сводит задачу о свободных
колебаниях механической системы с двумя степенями свободы
« исследованию системы линейных однородных алгебраических
159
уравнений (V. 3). Коэффициенты этой последней зависят от пара-
метра Л®, причем отличные от нуля решения существуют не при
всех, а только при двух значениях указанного параметра.
Напомним известные из математики 1181 определения и поло-
жения.
Система п однородных линейных алгебраических уравнений
с п неизвестными имеет ненулевые решения только в том случае,
когда определитель, составленный из ее коэффициентов, равен
нулю. Таким образом, при произвольных коэффициентах система,
как правило, не имеет отличных от нуля решений.
Если коэффициенты системы зависят от некоторого параметра,
то можно найти такие значения этого параметра, при которых
Рис. 42
определитель системы оказывается равным нулю и система полу-
чает ненулевые решения. Указанные значения параметра назы-
вают собственными числами системы.
Иными словами, исследование свободных колебаний механи-
ческой системы с двумя степенями свободы привело нас к задаче
о собственных числах системы двух линейных алгебраических
уравнений.
К подобным же задачам приводит рассмотрение устойчивости
равновесия линейных систем под действием статических сил 1121,
что заставляет предполагать некоторое родство задач о свободных
колебаниях с задачами статической устойчивости.
И действительно, всякой задаче о свободных колебаниях
можно дать каазистатическую интерпретацию, которая сведет
ее к задаче статической устойчивости.
Заметим, что при гармонических колебаниях по закону у ~
= w sin (kt 4- ф) масса т прикладывает к остальной системе
силу инерции F„ — —ту = wmk* sin (л/ -j- ф). Следовательно,
рассматривая гармонические колебания, мы можем интерпрети-
ровать массу как некую упругую связь (цружину) отрицательной
жесткости с-----я??2; величина жесткости зависит от частоты.
Таким образом, систему рис. 40, а нетрудно представить в ква-
зистатическом виде (рис. 42, а). При любых изгибах балкн и от-
клонениях точек 1 и 2 от нулевого положения пружины сТ и св
будут прикладывать силы, стремящиеся еще больше изогнуть
160
балку. Если силы упругости окажутся больше сил этих пружин,
то балка вернется в нулевое положение; если силы упругости
будут меньше сил, которые приложат пружины, то отклонения
станут увеличиваться и произойдет типичная потеря устойчи-
вости равновесия. Наконец, может быть случай безразличного
равновесия, когда силы упругости равны силам пружин и воз-
можны любые амплитуды прогиба.
Последний случай как раз и представляет аналог свободных
колебаний, когда силы инерции при любых амплитудах уравно-
вешияаются силами упругости.
Условия безразличного равновесия системы рис. 42, а имеют
вид
= У1,
С1У1^Ы 4~ C?Ps^22 — У2'
Подставив сюда значения сх и с2, приходим к системе (V. 3).
Первую форму главных свободных колебаний системы
(рис. 41, а) можно трактовать как первую эйлерову форму потери
устойчивости балки на опорах отрицательной жесткости (рис. 42, с),
а вторую форму свободных колебаний — как вторую эйлерову
форму.
Первую и вторую формы главных свободных колебаний си-
стемы, представленной на рис. 40, д, можно рассматривать как
первую и вторую эйлеровы формы потери устойчицрсти системы
рис. 42, б.
Введение каазистатических интерпретаций преследует ту же
цель, что и введение принципа Даламбера — приблизить задачи
динамики к задачам статики. Необходимо, ковечно, учитывать
большую общность принципа Даламбера, который применим
к движению по любому закону, в то время как квазистатические
интерпретации (по крайней мере в приведенной форме) — только
к установившимся гармоническим колебаниям.
5. В ряде случаев для составления уравнений свободных
колебаний целесообразно использовать метод деформаций.
Пусть для той же системы рис. 40, е мы имеем выражение
статической силы Ри приложенной в точке /, и выражение стати-
ческой силы Р2, приложенной в точке 2, через прогибы балки
и уа в эгих точках ]см. формулу (2. 45) 1
Рх — Cjjt/j CuJ/a |
Ps = J- cMys j
(V. 18)
Коэффициент жесткости ct можно интерпретиповать как силу
Plt которую нужно приложить в точке I, чтобы вызвать там еди-
ничный прогиб- Остальные точки приложения сил должны быть
закреплены. Коэффициент Сц интепретируется как реакция,
которая возникает в жесткости связи, наложенной в точке i,
11 В. С Чувнковсквй 1757
161
когда в точке / приложена сила, вызывающая там единичный
прогиб.
Если заменить и Ра силами инерции, то получим
d®» ,
dt* — ^11^1 ' С12^2
d2». ,
dt8 = ся1&1 "Ь
(V. 19)
Подставив в (V. 19) решения (V. 2), будем иметь в конечном
счете однородные уравнения
(mJ? — са) — с12ю2 — 0 |
— + ("Ж* — С22^2 = 0 J
(V. 20)
Приравнивание нулю определителя системы (V. 20) дает урав-
нение частот
(ягД2 —Сц)
С12
(т^?—см)
= 0,
(V.21)
откуда
^2 _ т1С22-^т2С11±У(т1С22~т2Сп)2 + 4т1'П2С12
Zmjtns
(V. 22)
Ясно, что частоты и формы главных свободных колебаний,
найденные методом деформаций, совпадают с частотами и формами,
найденными методом сил.
6. Общая теория свободных колебаний произвольной системы
с Двумя степенями свободы сводится к следующему.
Вблизи положения устойчивого равновесия кинетическая н по-
тенциальная энергии имеют вид
— 2 + 2fl12?l?2 + О22??)
п = + 2С12?1?2 + c8ad)
(V. 23)
где i/i и <7 а — обобщенные координаты.
Так как кинетическая энергия — положительная квадратич-
ная форма, то коэффициенты ап. оТ2 и oS2 не могут быть произ-
вольными. Аналитически показывается, что йп > 0, а22 > 0
и —<&> 0.
Аналогично П тоже положительная квадратичная форма.
Следовательно, сн > 0, с88 > 0, спс2г — Си > 0.
162
Уравнения движения в форме Лагранжа (второго рода) запи-
сываются как
dt \fyi J \ }
dt (fa J k dqt )
где L — Т—П.
Подставив сюда (V. 23), имеем
апЯ1 + aisffe 1" см?14“ сиЯг ~ |
«WZi 4 а8г<72 CiiQx 4- с22?2 — О J
Решения будем искать в виде
<7, = Wj sin (X/ 4- <р)
q2 = вуа sin (Xf 4 <р) = sin (Xi1 4 <Р)
Подстановка (V. 26) в (V. 25) дает
С11 ^цХ£ 4* п (Сщ О1гХ£) 0 |
С12 °1гХ2 4“ п (с22 ^ггХ2) = О J
(V. 24)
(V.25)
(V. 26)
(V. 27)
Условие наличия ненулевых решений приводит к частотному
уравнению
I (^ц—ai A2) (cis—I
I (с^-^Х2) fe-^A2) | ~ U- (V-
Раскрыв определитель, можно показать, что ов имеет поло-
жительные корни X® и X®. Отсюда находим дза значения
сп — апХ| еп —«lAt
ni" с -а#' с — а У? ‘
с12 “12л1 с12 “12л2
(V.29)
(V. 30)
Следовательно, главные свободные колебания
qx ’ sin (fat 4- <Pi), q2 = sin (Xxf 4- cpj
qt = sin (X2# 4- <p2), q* == sin (X2# 4- <p2)
Общее решение
= tai'1 sin (V + 4,) + uP sin (у Т Че) 1 (V '31)
q^ = sin (Xjf 4- <p1) 4- sin (X2^ 4- <p2) J
Четыре произвольные постоянные aif1’, wli\ n, позволяют
выполнить четыре начальных условия
/ = 0, qt (0) =- ф.о, qs (0) = q^,о, qr (0) = qb0, q* (0) =* q2.c-
11*
163
Иногда частотное уравнение (V. 28) имеет лишь одни (крат-
ный) корень Л? = if = Хо; это происходит, если сХ| : аи =
СИ - °12 = ^22 ' а2В = ^0-
Но тогда, как видно из (V. 29), значение п может быть произ-
вольным, т. е. форма колебаний системы произвольна.
Пример такой системы показан на рис. 43. Она может коле-
баться с частотой Лд = сх : /пх =
= сa : /л 2, имея любое соотноше-
ние амплитуд шх и cw2. В частно-
сти, возможен случай, когда ко-
леблется лишь одна из масс, а
другая неподвижна.
Рис. 43
§ 2. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ СИСТЕМ
С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ
1. Наиболее простым является случай, когда внешние силы
изменяются во времени по гармоническому закону н рассматри-
ваются только установившиеся колебания.
Рис. 44
Пусть, например, на систему рис. 40, в действует нагрузка
q (х) sin (со/ + <р) (рис. 44, а). Колебания системы будем разы-
скивать в виде у (х, /) — f (х) sin (ш/ + ф). Тоща согласно § 1
массы и zn2 будут работать как упругие опоры отрицательной
жесткости сх = —/пхш8 и с2 = —/п2сов (рис. 44, б). Задача сво-
дится к обычному статическому расчету балки на двух упругих
опорах; можно использовать теорему' пяти моментов, способ
Навье и т. л.
Если рассматривать гармонические установившиеся колебания
системы типа рис. 40, б, то квазистатическая модель сведется
164
к системе типа изображенной на рис. 44, в [сила Pt sin (со/ 4- ср)
приложена к точке /]. Методы раскрытия статической неопреде-
лимости такой системы могут быть различными. Например, если
в качестве неизвестной принять силу S в пружине 1—2 (жест-
кость с4), то уравнение для определения амплитуды S получит
вид (S положительна при сжатии пружины)
Pi_______3 _ S , S
C1 + Q <a+Cs— «* % +
Перемещение точки I (масса тх) равно sin (<ot + *f)-
Перемещение точки 2 (масса zns) равно Ca^.g sin (со/ _|_ <jp).
Таким же образом рассматривается случай, когда гармони-
ческая сила приложена к массе та.
Вместо квазистатических аналогий обычно нетрудно приме-
нить и традиционные методы механики.
Очевидно, например, что уравнения вынужденных колебаний
системы рис. 40, б [сила Pt sin (и/ 4- <р) приложена к массе ml 1
записываются в виде
«11Л sin («С+т)- Sn«>i —fl -= °:
S„P, sin (<и/ | <;) «am, — ham, —X, = о.
где Xj = Xi (/) и ха — х% (t) — перемещения масс tni и т2;
дц — коэффициенты податливости си-
' стемы.
Решения следует искать в виде
= a>i sin (tot 4- q>), х2 = ю>2 sin (at + q>).
Подставив эти выражения в уравнения движения и сократив
везде множитель sin (tot + Ч>). получим два линейных неоднород-
ных алгебраических уравнения относительно и и>8.
Такие же уравнения движения (с заменой х на у) получатся
в случае системы рис. 40, в, если колебания вызываются силой,
приложенной к массе mt.
В общем случае нагрузки q (х) sin (со/ 4- <р) уравнения дви-
жения будут
б1? q (х) sin (со/ q>) — — Й12та -^- - у, = О |
| (V. 32)
q (х) sin (со t ср f — d2imi — ys -= 0
где q (x) и • q (x) — статические прогибы в точках 1 и 2
от действия нагрузки q (х).
165
Подставив в (V. 32) уг и уг в виде
У! = wx sin (ш/ <р), f/s = ^2 sin (<о/ 4- q>), (V. 33)
снова приходим к совокупности двух неоднородных линейных
алгебраических уравнений относительно о/х и и?2.
Прогиб балки определяется действием нагрузки <?(x)sin («>/4-
+ <р) и действием сил инерции тги? sin (iot 4- <р) и теа>2 sin (u>t 4-
4- <f)- Так как сама балка безинерционна, то определение прогиба
сведено к элементарной статической задаче.
Пусть со = Лх или си = X.t, где Лх н Л8 — собственные частоты
данной системы. В таком случае определитель системы неодно-
родных уравнений, к которым сводятся уравнения движения,
оказывается равным нулю. Отсюда ясно, что корни системы равны
бесконечности (к/х = со и ш2 = со), т. е. имеет место резонанс.
Более подробно физическая природа отмеченного явления будет
проанализирована ниже.
Таким образом: а) при действии гармонических возмущающих
сил установившиеся вынужденные колебания также оказываются
гармоническими с той же частотой и фазой; б) задача о нахожде-
нии установившихся вынужденных колебаний либо сводится
к соответствующей квазистатической задаче, либо решается под-
становкой типа (V. 33) в уравненив движения, что приводит к двум
неоднородным линейным алгебраическим уравнениям; в) при
совпадении частоты возмущающей силы с одной из собствен-
ных частот системы амплитуды колебаний неограниченно ,воз-
растают.
2. При действии внешних сил, меняющихся по любому закону,
определение динамических деформаций системы усложняется.
Их определяют обычно так называемым методом главных коор-
динат.
Пусть к точке 1 системы рис. 40, в приложена сила Рх (/) —
= fi.ef (0 (рис. 45, а). Чтобы найти динамический прогиб, будем
рассуждать так.
Как видно из исследований § 1, существуют главные свобод-
ные колебания системы, формы которых определяются числами
пх и п£, равными постоянному отношению прогибов ух: уй\ изгиб
по форме главных свободных колебаний происходит под действием
сил инерции F„, i и F„.2, между которыми существует постоянное
соотношение Fa,s — FK, или FK,2=FB. iAi2 (рис. 45, б); изгиб
по каждой форме происходит совершенно независимо от изгиба
по другой форме; если система деформируется по форме первого
или второго тона главных свободных колебаний, то отношение
сил инерции остается равным Ах или Аа независимо от закона
деформирования во времени.
Представим себе, что можно разложить заданную внешнюю
нагрузку по формам сил инерции главных свободных колеба-
ний.
166
В рассматриваемом конкретном случае нужно представить
силу как сумму
P,.o = o1(l,»,)+o,(l.^), (V.34)
где йх и а 8 — неизвестные пока коэффициенты разложе-
ния;
(i, М, 0> — группа сил, показанных на рис. 45, в.
Для определения ах и аг имеем уравнения
°1+°2“Р,.О I
оЛ + = 0 J
(V. 35)
Под действием группы сил ах (1, Ах) f (/) (ряс. 45, г) система
будет все время двигаться по форме первого главного свободного
колебания.
Допустим, что это так. Тогда отношение сил инерции будет
равно Ах; внешние силы согласно принятому разложенйю отно-
сятся как ftx, следовательно, суммарные силы, действующие на
балку, тоже относятся как Ах, и, таким образом, балка действи-
тельно изгибается по первой форме свободных колебаний. При-
веденное рассуждение, на первый взгляд кажущееся порочным
кругом, вполне строго и по логической структуре напоминает
167
типичный прием решения дифференциальных уравнений: мы
полагаем решение в определенном виде, затем подставляем это
решение в дифференциальное уравнение и убеждаемся, что оно
выполняется. Ошибка в принятом решении сразу приводит к про-
тиворечию. У нас противоречия не получилось, и положение
можно считать доказанным.
Аналогично доказывается, что группа сил as (1, ks) f (f) вы-
зывает движение по форме второго тона главных свободных
колебаний.
Таким образом, движение под действием силы (f) разде-
лено на два движения по формам главных свободных колебаний.
Но любая система, движущаяся по определенной известной
заранее форме, может рассматриваться как имеющая одну
степень свободы. Иными словами, мы представили движение
системы с двумя степенями свободы как сумму двпжейий двух
систем, имеющих одну степень свободы каждая.
Расчет вынужденных колебаний системы с одной степенью
свободы производится по общим правилам, изложенным в главе I:
а) выбирают обобщенную координату; б) составляют выражения
для кинетической и потенциальной энергии системы через обоб-
щенную координату; в) находят обобщенную силу; г) составляют
уравнение Лагранжа второго рода; д) решают его каким-либо
из приведенных в главе IV методов.
Составим, например, уравнение Лагранжа для рассматривае-
мого случая, ограничившись движением по первой форме главных
свободных колебаний.
В качестве обобщенной координаты примем вертикальное
перемещение точки /.
Кинетическая энергия системы при движении по первой форме
т . «Л , ”Vi
2 2л« “ 2 ‘
где
= (mjL — m2: ni).
Потенциальная энергия может быть выражена через некото-
рые статические силы Q<‘> и приложенные в точках / и 2
и вызывающие прогиб по первой форме,
П - 4- »<?'" -I .' "1 Q'1 </,QI 4 -- Qm*i-
2 1 2 4 2 • 2 1
С другой стороны,
й = ’йп -i- А* = Q1’’ (Ai 4- Мп)
или
Q"1 - л м
дц -j- 1
168
Следовательно,
П = '=~2coS^
где
Обобщенная сила, соответствующая движению по первой
форме,
<з^л + ^ = hdhr+T^ij] р‘“>-
Заметив, что
Л,-"1-, =
л т^! £ ШуПй
и раскрывая значения пг и п2, после преобразований можно
получить
е-р. (о-
Таким образом, уравнение Лагранжа
ол+<ил-₽1(0-
Проделав аналогичные преобразования для движения по
второй форме, получим
“А + СиЛ = Pi (0.
где
о2 = (т,+т2:пг);
Заметим еще раз, что при использовании метода главных
координат нам важно установить возможность разложения на-
грузки по формам сил инерции главных свободных колебаний.
Однако проводить фактически такое разложение, как мы только
что проделали, нет надобности: составляя уравнение Лагранжа
для движения по любой форме главного свободного колебания,
можно прямо находить обобщенную силу от всей заданной внеш-
ней ншрузкл. Имсьпо поэтому в рассмотренном примере обоб-
щенная сила для обоих уравнений оказалась равной Рх (fj.
Действительно, главные свободные колебания, определяемые
силами инерции, независимы друг от друга. Но это физически
возможно лишь в случае, когда силы инерции одного главного
169
свободного колебания (или любые пропорциональные им силы)
не производят работы на перемещениях, соответствующих другому
главному свободному колебанию; в противном случае указан-
ные силы инерции давали бы добавочную обобщенную силу,
соответствующую перемещению по другой форме, и влияли бы
на перемещения по форме другого колебания. Следовательно,
при составлении работы внешней нагрузки на перемещениях,
соответствующих какому-либо главному колебанию, мы автома-
тически исключаем работу той ее состаиляющей, которая соответ-
ствует силам инерции другого колебания.
Отмеченное свойство нулевых взаимных работ сил инерции
вытекает по существу из теоремы взаимности деформаций
(см. главу И). Оно выражается условием (коэффициенты Vs
сокращены)
'М..Л., + '',г%.Л>.г = ° (V.37)
ИЛИ
<ЗД.Л, + Л1 “°- (v- 38)
где»/17—прогиб в f-й точке от /-го главного свободного колебания.
Условия типа (V. 37) называются в теории колебаний усло-
виями ортогональности — по аналогии с похожими условиями
ортогональности векторов в трехмерных и многомерных простран-
ствах.
3. Если внешнюю силу нельзя точно разложить по формам
сил инерции главных свободных колебаний, то метод главных
координат не может дать точного результата. Например, приложив
силу Pi (t) = Pi.o f (t) в произвольной промежуточной точке
балки (кроме точек / и 2), мы не можем представить ее как не-
которую комбинацию сил в точках I и 2 и, следовательно, ли-
шаемся возможности применения указанного метода.
Чтобы получить такую возможность, применим искусственный
прием: обопрем мысленно балку в точках 1 и 2 на жесткие опоры;
тогда балка под действием силы Рх (/) будет деформироваться
статически, а на опорах возникнут ревкции, закон изменения
во времени которых будет одинаков с законом изменения Рх (0.
Но в действительности опор нет. Следовательно, необходимо
убрать опоры, приложить к точкам / и 2 реакции этих опор с обрат-
ным знаком, разложить их по формам сил инерции и найти динами-
ческий прогиб балки. Искомый прогиб балки есть сумма стати-
ческого и динамического прогибов.
в 3. СВОБОДНЫЕ Н ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ СИСТЕМ
С п СТЕПЕНЯМИ СВОБОДЫ
1. Пусть qt, qt,. ... qn — обобщенные координаты системы
с и степенями свободы, точнее, динамические обобщенные коор-
динаты системы с п динамическими степенями свободы.
170
Для малых колебаний около положения устойчивого равно-
весии
т —ajk4flk> п — 2 S ^5 cik4flkf
где fl/* = fl*/, cik — с*/.
Уравнения движения записываются в виде
dt \dq/J &9J |
L = T — П. J
Подставив (V. 39) в (V. 40), получим
аоЯ\ + 4“ • • • + O-ijfln + Olffi + cia?2 +
4- ... 4- q„9„ = О
flgi?i + atsfh. “Г • • + аглЯп 4" caiO 4" c22?2 +
4- 4“ flgnfti ~ 0
flni?l + anz4* 4“ • • • *4- О-ппЧп 4“ сл1?1 + сл2?2 +
I- • • 4- = о
Решение (V. 4i) будем искать в виде
= Wi sin (X/ 4- q>), q2 = wz sin (X/ -{- <p),...
sin (U + <f).
Подстановка (V. 42) в (V. 4i) дает систему линейных однород-
ных уравнений
(О1 — анХ8) <О4- (Оз — °мЛ2)<О 4- • • • 4- (Ол —aln№)wn = 0
(Oi—о2 ,Х8) io 4- (Оз—ОзгЬ8) <О--F (Ол—я*Л2) = 0
(V. 39)
(V. 40)
(V.41)
(V.42)
(V.43)
(Оа—<*л1^2) <О + (сла — 0.2^) <0а 4---КОп—= 0
Как известно из линейной алгебры [18 J, всякая система одно-
родных уравнений имеет ненулевые решения только при равенстве
нулю ее-определителя. В данном случае должно быть
О1 — °н^2 Os—СцЛ£. Ол —«1л^2|
О1 —oii^2 Оа Ааз^2......... сйп a2n^2 |_Q (V. 44)
I сп см Otn апп^"~ I
Д(Х>) =
Уравнение (V. 44) является частотным уравнением. Оно имеет
й-ю степень относительно Xs. Решение (V. 44) позволяет найти
п частот главных свободных колебаний; методами линейной
17J
алгебры доказывается, что симметричность коэффициентов ац =
= atk и ckf = Cjk обеспечивает вещественность всех корней А?,
Л?, . . Ц.
При каждом А® можно найти вполне определенные соотноше-
ния между коэффициентами w в совокупности (V. 43), т. е. форму
fe-ro главного свободного колебания; исключение представляют
лишь редко встречающиеся случаи кратных корней (V. 44). Таким
образом, каждое fe-e главное свободное колебание выражается
зависимостями
9», * = «i, л sin (fat + <pft) )
9я, k = wir ftaa, k sin fat 4 <Рл) 1 (V. 45)
9n, a - E'j, fean, k sin fat J- <jft) J
где коэффициенты alf к — так называемые коэффициенты распре-
деления.
Величина qt< к становится обобщенной координатой Л-го коле-
бания; она определяет все движение системы в fe-м колебании;
система в Л-м колебании представляет систему с одной степенью
свободы. Естественно, что нумерация координат произвольна, и
поэтому можно определить коэффициенты распределения отно-
сительно любой координаты q.
Суммарное свободное колебание системы представляет сумму
главных свободных колебаний
9/ == 2 «/, * sin (М + (V. 46)
Произвольные постоянные w1>A и позволяют выполнить
начальные условия: t = 0, — qlt0, qa = <?2>0 . . ., qn = qn,0,
9i = 91» о> 9г = 9s, «»•••» 9л = Чп, о-
2. Пусть система имеет N точек и пусть смещения любой
s-й массы в направлении координатных осей при k-м главном
свободном колебании
„ = 4?» ™ (’»' + ч>») - 4"» л (М + *») -
= (“Г'»™'-,/ t-«f?*cosMa..s
sln 4 *») = si” +Ч’») Р..»=
2,., = гМ, sin (>.tl + %) = sin (X/ + k =
= «« sta V + Vi,c“ x?) ».. s
Здесь s — номер точки; k — номер колебания; а<°>Л и Ь^к —
амплитуды синусоидального и косинусоидального колебаний одной
из точек, обозначенной номером 1, в данном k-ы главном свободном
172
колебании (в совокупности они определяют суммарную амплитуду
и сдвиг фазы); 0S>A, ys, k — коэффициенты распределения
для s-й точки в R-м колебании, которые выражают постоянное
соотношение между данным перемещением и выбранным переме-
щением 1-й точки, являющимся обобщенной координатой fe-ro
свободного колебания.
Поскольку главные свободные колебания происходит незави-
симо Друг от Друга, то сила инерции одного колебания не должна
производить работу на перемещениях другого колебания. Отсюда
непосредственно следует условие ортогональности
2 («», i + 0s, /А, I + Ys, *Ys, i) = °- (V- 48)
Произвольное свободное колебание раскладывается на сумму
главных свободных колебаний. Следовательно, движение s-й
точки в общем виде представляется зависимостью
- 2 № + Ч?* •)" V) a, ,,
ys — 2( (<4% cos Л# + Sin м) 0s. h
z, = (gPacosM -| sin ys. k
(V. 49)
(V.50)
(V. 51)
Коэффициенты aj0)A и b^k должны быть определены из началь-
ных условий
2,(4 -Г., О. &<0)=й,«. 2.(0) = Z» О 1
i.(0) = is,«. й(0) = &,„. 2,(0) = г„„ I
Отсюда
Я*. 0 = 2( af?*as. ft. У*. О = ^2 Gl?*0s. k
zs. о = af?AYs. k
4.0= i 4.0“ 2 W4U
k=i fc=i
Для определения o|c,A умножим обе части равенств (V. 5i) на
тваь,ь и maVs,f соответственно. Затем сложим эти равен-
(V. 52)
173
ства н просуммируем аналогичные выражения для всех масс.
В силу условия ортогональности (V. 48) имеем
2 т, (*., Л.I II., tfc. I + А, «V.. /) =
или
Л
2 (*s. е«з. j + Vs. cPs. /+ *s, oYs. /)
«5 = -Hv------------------------- (V. 53)
После аналогичных преобразований с уравнениями (V. 52) по-
лучим
N
У fe. ons. i 4- Vs. cPs. f + Zt. oYs. j)
. (V. 54)
/+₽!/+y«./) > -
3. Интересно рассмотреть главные свободные колебания с чисто
аналитических позиций.
Уже неоднократно указывалось, что при любом главном сво-
бодном колебании система может рассматриваться как имеющая
одну степень свободы, а ее движение в этом колебании полностью
определяется одной обобщенной координатой 9*, например пере-
мещением вдоль одной из координатных осей одной из материаль-
ных точек системы; в частности, может быть выбрана точка, не
имеющая массы. Отсюда ясно, что кинетическая и потенциальная
энергии системы выражаются через указанную обобщенную коор-
динату в виде
г = (V-E5)
Главные свободные колебания независимы друг от друга. Сле-
довательно, кинетическая и потенциальная энергии в любом поло-
жении системы, которое может быть определено через обобщенные
координаты главных свободных колебаний, т. е. рааложено по
формам главных свободных колебаний, выражаются только через
квадраты скоростей и квадраты самих обобщенных координат
П“2тс»й- (V-S6)
Наоборот, пусть координаты qk выбраны так, что кинетическая
и потенциальная энергии системы выражаются зависимостями
174
типа (V. 56). Тогда qk представляют собой обобщенные коорди-
наты главных свободных колебаний.
В самом деле, движение системы в любом свободном колебании
будет определяться уравнениими вида
+ <''54
откуда
9* = Wi,» sin № + %). К = • (V. 58)
Зависимость (V. 58) показывает, что мы имеем дело именно
с главными свободными колебаниями, которые происходят не-
зависимо друг от друга и имеют постоянную форму.
Совокупность обобщенных координат механической системы,
прн которых кинетическая и потенциальная энергии системы вы-
ражаются только через квадраты их производных и только через
квадраты самих координат, называется совокупностью главных,
или нормальных, координат.
Из предыдущего ясно, что главные координаты всегда опре-
деляют главные свободные колебания системы; наоборот, главные
свободные колебания всегда выражаются через главные коор-
динаты.
4. Пусть внешняя динамическая нагрузка, приложенная ксиД
стеме, может быть разложена по формам сил инерции главных сво-
бодных колебаний системы. Это необходимо и достаточно для
того, чтобы движение системы могло быть представлено как сумма
движений по формам главных свободных колебаний, т. е. выражено
через главные координаты.
Уравнения движения в главных координатах имеют вид
или
Мх + chqk = Qk
(V.59)
где Qk = Qk (t) — обобщенная сила, соответствующая А-й глав-
ной координате.
Решение уравнений (V. 59) подробно рассмотрено в главе IV.
Мы представили движение системы с п степенями свободы под дей-
ствием произвольной динамической нагрузки как сумму движений
п систем с одной степенью свободы каждая.
Заметим еше раз, что если внешняя динамическая нагрузка
не может быть точно разложена по формам сил инерции главных
свободных колебаний, то н движение системы под действием этой
нагрузки ие может быть представлено как сумма движений по
формам указанных колебаний. В этом случае уравнения Лагранжа,
175
записанные через главные координаты, не дадут полного и точного
решения задачи; здесь необходимо применять искусственные при-
емы, о которых говорилось в § 2 применительно к системам с двумя
степенями свободы, где даны и соответствующие примеры.
Отмеченная неполнота решения, даваемого уравнениями Лаг-
ранжа в главных координатах, объясняется тем, что система имеет
не п обобщенных координат, а п динамических обобщенных коор-
динат, причем одни динамические координаты не могут описать
все возможные перемещения системы. Необходимо либо записать
полную систему уравнений Лагранжа, рассмотрев и те обобщен-
ные координаты, которые не дают кинетической энергии, либо
вообще определить «статические» обобщенные координаты любыми
статическими методами строительной’механики.
5. В качестве обобщенной координаты, определяющей движе-
ние системы в данном главном свободном колебании,-могут быть
приняты, как уже отмечалось, самые разнообразные величины
(перемещение одной из точек вдоль одной из координатных осей,
угол поворота сечения конструкции в данной точке и т. п.). Таким
образом, каждая данная система может иметь очень много различ-
ных, но эквивалентных совокупностей главных координат.
Ю. А. Шиманский предложил принимать в качестве главной
координаты перемещение какой-либо точки конструкции и в этом
смысле считал, что движение конструкции приводится к одной
точке (метод приведения). Такой прием является, естественно,
частным случаем метода главных координат.
6. Если на систему действует нагрузка, меняющаяся по гармо-
ническому закону, и рассматриваются только установившиеся
колебания, то обычно бывает целесообразно использовать
квазистатические аналогии, сущность которых рассмотрена
в § i и 2.
При этом каждая масса гп/ заменяется упругой опорой отри-
цательной жесткости ct~- — т^2, где <о -частота возмущающей
нагрузки. Инерция вращения масс имитируется специальными
связями, типа спиральных пружин, которые работают на пово-
ротах мест их крепления и жесткость которых равна — /уй2
(/у — момент инерции). Дальнейший расчет выполняют обычными
статическими методами строительной механики.
Рассматривая свободные колебания системы, замену масс упру-
гими связями производят точно так же, но в коэффициенты жест-
кости вместо каадрата известной частоты <о2 вводят квадрат не-
известной пока частоты свободных колебаний л3, Величина Xs
определяется из условия существования форм безразличного рав-
новесия системы, 1. с. по существу из условия потери устой-
чивости системы при определенной величине отрицательной жест-
кости упругих связей.
7. Основная трудность определения частот и форм главных
свободных колебаний системы и применения метода главных коор-
176
динат состоит в раскрытии определителя (V. 44) и последующем
определении его корней.
Существуют специальные методы для облегчения указанной
задачи. Они излагаются, например, в курсах вычислительных
методов линейкой алгебры 115].
Сам определитель может быть получен при помощи уравнений
Лагранжа, либо более частных методов (метод сил, метод деформа-
ций), как это делалось в § i.
§ 4. СВОБОДНЫЕ И ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ УПРУГИХ ТЕЛ
1. Упругие тела с равномерно распределенными массами пред-
ставляют собой снстемы с бесконечно большим числом степеней
свободы и бесконечно большим числом динамических степеней
свободы.
Сущность методов их динамического расчета удобнее всего
пояснить на примере изгибных колебаний стержней (балок), ко-
торый и сам представляет практический интерес.
Чтобы найти свободные колебания стержня, необходимо решить
(при заданных граничных условиях) дифференциальное уравнение
его,свободных колебаний. Оно представляет собой обычное уравне-
ние изгиба, где роль внешни# нагрузок играют силы инерции.
Если стержень призматический, то
о (V.60,
Здесь EI — изгибная жесткость;
w(x, f) — прогиб балки;
т0 — погонная масса балки.
Если главные свободные колебания существуют, то они, естест-
венно, имеют постоянную форму. Но тогда, как отмечалось выше,
силы упругости, действующие на любую элементарную массу,
пропорциональны отклонению, и, следовательно, движение будет
происходить по гармоническому закону.
Отсюда естественно искать решение (V. 60) в виде
и>(х, 0 = wof (х) sin (X/ + ф) (V. 61)
Подстановка (V. 61) в (V. 60) дает
ИЛ' И -тЛИ = °
ИЛИ
(V. 62)
где
м- ”>*•*
- FJ
12 В. С. Пуликовский 1757
177
Общее решение (V. 62) может быть представлено в виде суммы
его четырех линейно-независимых частных решений
f (х) = Qsin kx 4- с2cos kx 4- Cssh kx 4- c4ch kx. (V. 63)
Произвольные постоянные c{ должны быть определены из гра-
ничных условий.
Пусть, например, стержень свободно оперт (рис. 46, а). Тогда
Рис. 46
(V. 64)
Подстановка в (V. 63) граничных условий дает
CjSin 0 4- c2cos0 4- c«shO 4- c4ch0 = О
— fc^sin 0 — fc2cscos 0 4- &®c3sh0 4- Л3с4сЬ0 — О
сх sin kl са cos kl 4- cash M 4- c4cii kl = 0 '
- k2<\ sin kl — kzc2 cos kl 4- ft2c3sh kl -I- Л2слсЬ kl = 0.
Из первых двух уравнений имеем
с, 4- Q = О, F (—с, 4- cj = 0.
т. е.
са == с4 — 0.
Вторые два уравнения дают
Ci sin kl 4- cs sh kl = 0;
k2 (— ci sin kl — ся sh kl) — 0,
t. e. cs'= 0 и Ci sin kl = 0.
Поскольку Ci произвольно, то
sin kl = 0. (V. 55)
Уравнение (V. 55), содержащее лишь одну неизвестную вели-
чину k, является частотным уравнением. Оно удовлетворяется,
если kl — пл, т. е. имеет решения вида
178
или
(V»)
Выражение (V. 63) принимает вид
f„(x) = c1Sin-^. (V.68)
Первое главное свободное колебание, обладающее самой низ-
кой частотой, отвечает п — 1; стержень в этом колебании изги-
бается по одной полуволне синусоиды. Второе главное свободное
колебание отвечает п = 2; стержень изгибается по двум полувол-
нам синусоиды и т. п.
Главные свободные колебания нумеруются в порядке возраста-
ния их частоты и соответственно указанным номерам носят
названия главного свободного колебания первого тона, главного
свободного колебания второго тона и т. п. Количество форм
и частот бесконечно.
Все главные свободные колебания являются решениями (V. 60)
и происходят независимо друг от друга; каждое главное свобод-
ное колебание определяется одной обобщенной координатой (про-
гиб в любой точке, угол поворота сечения в любой точке
и т. п.); в любом главном свободном колебании стержень может
рассматриваться как система с одной степенью свободы.
Условие независимости главных колебаний выражается физи-
чески в том, что силы инерции, соответствующие Z-му колебанию,
не дают работы на перемещениях, соответствующих й-му колеба-
нию. Аналитически это выражается условием ортогональности
или (при т0 = const)
$f,WIMdx = O. (V. 69)
b
Произвольное свободное колебание может быть, вообще говоря,
представлено как сумма главных свободных колебаний, если, как
это бывает в подавляющем большинстве случаев, система функ-
ций fk является полной и может отразить любое возможное пере-
мещение системы,
(*, 0 = 5 и>0, *МА) Sin (XAt -}- Ф*)
= X (х) COS ы -J- (х) sin м. (V. 70)
Значения и определяются из начальных условий.
12*
179
Пусть при t = 0 w (х. t) = а) (х, 0), w(x, f) = w (х, О).
Согласно (V. 70)
ш(А-,0) £<,1,(4 (V. 71)
v(x.O) = fu£M,(x) (V. 72)
Умножив обе части (V. 71) и (V. 72) на /* (х), а затем интегри-
руя их в пределах от нуля до /. в силу условия ортогональности
(V. 69) получим
[ ш (х, 0)/ft (х) dx ( й (х. О) Ik (х) dx
-------; = *---7-----—. (V. 73)
J/*(*)<** ^(fl(x)dx
В данном случае
О
wg>t =. ~ [ W (X, 0) sin Js. dx_
Кинетическая и потенциальная энергии каждого главного сво-
бодного колебания выражаются через квадрат производной его
обобщенной координаты qk и через квадрат самой обобщенной
координаты qh
т =!4-°»й "
Поскольку произвольное положение системы может быть раз-
ложено по формам главных свободных колебаний, а главные сво-
бодные колебания независимы, то для всей системы
г-4’2‘,*й и п=
Повторяя рассуждения предыдущего параграфа, нетрудно по-
казать справедливость и обратною утверждения если обобщенные
координаты являются главными координатами, то они определяют
движение по формам главных свободных колебаний.
2. Аналогичным образом могут быть исследованы главные сво-
бодные колебания непризматических стержней.
180
Уравнение свободных колебаний имеет вид
0. (V.76)
оно получено из соответствующего уравнения изгиба стержней
под действием статической нагрузки путем введения сил инерции.
Граничные условия записывают, исходя из устройства опор.
Например, у свободной балки (корпус корабля)
при х = О
«W-О-о
<v-76>
Для разыскания главных свободных колебаний решение по-
прежнему следует искать в виде (V. 61). что дает возможность
напучить дифференциальное уравнение с переменными коэффи-
циентами •
- m (х) Vf (л) - . 0. (V. 77)
Граничные условия упростятся. Например, (V. 76) преобра-
зуются к виду
-о, И(х)^"=0
(V. 78)
Интегрирование (V. 77) в замкнутом виде удается лишь для
частных случаев I (х) и т (х), поэтому для определения Д (х) и
обычно используются различные приближенные методы, кото-
рые подробно рассматриваются в специальных курсах динамики
сооружений 110. 19).
Несмотря на ряд особенностей, вносимых переменностью I (х)
и т (х), все основные черты рассматриваемых явлений остаются
без изменений Обобщенные координаты, определяющие главные
свободные колебания, по-прежнему являются главными коорди-
натами системы и, наоборот, любые главные координаты опреде-
ляют главные свободные колебания. Силы инерции, возникающие
на перемещениях одного главного колебания, не совершают
1»!
работы на перемещениях другого главного колебания; это выра-
жается условием ортогональности
)'m(x)f,(JC)/t(x)dl = o (<+*)- (V.79)
о
Если, кроме распределенной массы т (х), балка несет в точ-
ках хе сосредоточенные массы Ms, обладающие моментом инер-
ции /s, то вместо (V. 79) нужно записать
J* tn \х) ft (х) fk (х) dx V MJi h ('») -I-
0 s
+E4iW/>fcM (v.80)
3. В виде специального примера рассмотрим свободные коле-
бания шарнирно опертого призматического стержня (рис. 46)
с учетом сдвига; это позволит нам в дальнейшем вскрыть неко-
торые нетривиальные случаи применения метода главных коор-
динат.
Обозначим: (х, t) — прогиб стержня от изгиба, к>8 (х, f) —
прогиб стержня от сдвига, G — модуль сдвига, О — эффектив-
., daWi г..
ная площадь поперечного сечения стержня, Л = - -£/ —пере-
резывающая сила.
Тогда можно записать следующие уравнения свободных коле-
баний:
EI^Sl -г т + "•> = О
Л* др и
«Л'1 . а1 (». + «.) о
(V 81)
Уравнения (V. 81) представляют собой обычные уравнения ста-
тических деформаций балки с учетом сдвига, в которые введены
силы инерции.
Граничными условиями будут
при х — 0 «it = 0, — 0. ж 0 J
при х I Kij -= 0, 0, w2 — 0 |
Решение будем разыскивать как
sin sin (М -1 ф„)
ю>8 - И1О12 sin sin (Knt + ф„)
(V.82)
(V.83)
182
При этом граничные условия удовлетворяются автоматически
и остается выполнить уравнения (V. 81).
После подстановки (V. 83) в (V. 82) имеем
—rnX(ttf0,j 4-а»о>а)^О ]
(V. 84)
— ОЙ —ю0> 8 + т^п (w0< л { wOt г) = О ]
Отсюда
wa. л _ El пяля _ . л*л$ i/ El .v R[..
"w^T~ GQ I* ~V’ ” P V me(l+y)’ (v-<*>)
Таким образом, форма колебаний стержня f (х) = с sin -2р-;
она складывается из формы изгибных деформаций = Ci sin
и формы сдвиговых деформаций ^ysin-^-. Деформации сдвига
увеличили податливость стержня и поэтому снизили частоты его
колебаний.
Перейдем к разложению произвольного свободного колебания
на главные свободные колебания. Представим себе, что стержню
дали первоначальный прогиб и> (х, 0) за счет некоторой стати-
ческой поперечной нагрузки, которую затем внезапно сняли;
пусть начальные скорости равны нулю. Ясно, что указанное сво-
бодное колебание разложится на сумму главных свободных коле-
баний sin —cos где определяется по формуле
k
(V. 73), а — по формуле (V. 85). Первоначальный прогиб по
форме sin у-- обусловлен соответствующей составляющей
поперечной нагрузки; он складывается из прогибов от изгиба и
сдвига, причем отношение их равно у.
Пусть теперь тот же первоначальный прогиб и) (х, 0) дали
за счет статических уравновешенных в своей совокупности изги-
бающих моментов, когда реакции опор и перерезывающие силы
по всей длине балки равны нулю. Это, очевидно, возможно, так
как, зная прогиб w (х, 0), мы всегда можем построить эпюру из-
гибающих моментов
Mx = EZuf(x,0);
произвольную эпюру моментов можно получить, прилагая к балке
распределенные и сосредоточенные моменты.
После внезапного устранения моментов начальные скорости
по-прежнему равны нулю. Очевидно, что прогиб может быть раз-
ложен по тем же формам колебаний У sin . Однако
183
свободное колебание не разложится на сумму главных свободных
колебаний с частотами согласно (V. 85), а будет происходить
по более сложному закону. Действительно, теперь первоначаль-
ный прогиб по форме sin к^х обусловлен только изгибом,
сдвиговой прогиб совершенно отсутствует и поэтому уже в момент
t = 0 на каждую элементарную массу действуют совсем другие
силы упругости, чем в первом.случае.
Мы имеем наглядный пример, когда свободное колебание упру-
гого тела не может быть разложено на сумму главных свободных
колебаний. Дело здесь снова в различии между действительным
числом степеней свободы системы и числом ее динамических сте-
пеней свободы. Силы инерции зависят от суммарного прогиба
стержня, и поэтому каждая точка балки в ее вертикальном пере-
мещении имеет одну динамическую степень свободы. В то же время
возможные перемещения системы, включающие и все возможные
ее деформации, определяются перемещением каждой точки как за
счет изгиба, так и за счет сдвига, т. е. каждая точка в вертикаль-
ном перемещении имеет две степени свободы.
Чтобы рассчитать движение стержня во втором случае, нужно
снова использовать искусственный прием. Приложим к стержню
фиктивную динамическую нагрузку, которая не давала бы изги-
бающих моментов, но полностью компенсировала перерезываю-
щие силы, возникающие при главных свободных колебаниях. Эта
фиктивная нагрузка может быть «сконструирована» как комбина-
ция поперечной нагрузки и внешних моментов; поперечная на-
грузка дает изгибающие моменты и перерезывающие силы, внеш-
ние моменты компенсируют изгибающие моменты от поперечной
нагрузки. Очевидно, что тогда движение будет происходить по
формам главных свободных колебаний стержня без учета сдвига
с частотами А.я = (п2л2 : /2) V EI: т».
Чтобы компенсировать действие фиктивной нагрузки, нужно
затем рассчитать вынужденные колебания балки с частотами
под.действием одних перерезывающих сил
N„ --- — eft*’ (~)гЕ1с<а cos К‘-
Эти перерезывающие силы вызовут только сдвиговые колеба-
ния, которые наложатся на свободные изгибные колебания; сумма
колебаний даст действительные свободные колебания балки.
4. Приведенные примеры позволяют показать общий путь ис-
следования свободных колебаний упругих тел. При этом необхо-
димо прежде всего составить дифференциальное уравнение (или
уравнения), определяющее свободные колебания, к соответствую-
щие граничные условия. Они представляют собой аналогичные
зависимости статики, куда по принципу Даламбера введены силы
инерции.
184
Решение дифференциального уравнения разыскивается в виде
произведения функции, зависящей от координат (форма колеба-
ний), и функции, зависящей от времени, которая принимается
в виде sin (X/ + <р).
Подстановка предполагаемого решения в дифференциальное
уравнение свободных колебаний и граничные условия дает возмож-
ность устранить частные производные по времени и приводит к диф-
ференциальному уравнению только относительно формы, а также
к граничным условиям, выраженным через форму.
Классический путь дальнейшего расчета таков: нужно найти
общий интеграл дифференциального уравнения свободных коле-
баний, зависящий от произвольных постоянных и частоты. Под-
становка общего интеграла в граничные условия приводит к сово-
купности однородных трансцендентных уравнений, которая имеет
ненулевое решение лишь при определенных значениях частоты.
Из этой совокупности определяется как сама частота, вернее
спектр собственных частот, так и форма свободных колебаний.
Часто вместо указанного приема применяют различные при-
ближенные методы определения собственных частот и форм сво-
бодных колебаний.
Основными свойствами главных свободных колебаний яаляются:
а) постоянство формы колебания; б) независимость колебаний
и, как следствие, ортогональность форм, т. е. условие, что
силы инерции одного из колебаний не дают работы на перемеще-
ниях другого колебания; в) связь между формами главных свобод-
ных колебаний и главными координатами системы; обобщенные
координаты, определяющие главные свободные колебания,
являются главными координатами; наоборот, всякая главная коор-
дината определяет форму главного свободного колебания.
Задачи о главных свободных колебаниях упругих тел отно-
сятся к задачам о собственных числах и собственных функциях
дифференциальных уравнений.
Известно, что однородные дифференциальные уравнения с одно-
родными граничными условиями имеют ненулевые решения лишь
при некоторых значениях определенных параметров, входящих
в уравнения и граничные условия Эти значения параметров на-
зываются собственными числами уравнения при данных условиях!
Решения, отвечающие собственным числам, находятся лишь
с точностью до произвольного сомножителя. Они называются соб-
ственными функциями.
Таким образом, частоты главных свободных колебаний могут
быть названы собственными числами, а формы главных Свободных
колебаний собственными функциями уравнений свободных коле-
баний при данных граничных условиях. Многочисленные при-
меры решения конкретных задач о свободных колебаниях балок,
пластин, оболочек и т. п. можно найти в курсах динамики соору-
жений II, 10, 11, 13, 16, 17. 19).
18
5. Исследование свободных колебаний упругих тел, а также
исследование их вынужденных установившихся колебаний можно
производить квазистатическими методами. Сосредоточенные
массы при этом имитируются упругими опорами отрицательной
жесткости, а распределенные массы — как упругие основания от-
рицательной жесткости.
Так, задачу о главных свободных колебаниях шарнирно опер-
того призматического стержня можно трактовать как задачу
о потере устойчивости стержня, лежащего на сплошном упругом
основании с отрицательными коэффициентами жесткости k -
= — m0X,2. Необходимо найти значение параметра л®, при котором
возможна потеря устойчивости по той или иной форме.
При вынужденных установившихся' колебаниях известна их
частота <о. Следовательно, известны жесткость упругих опор и
коэффициенты жесткости упругих оснований. Это позволяет при-
менить к динамическим расчетам все методы расчета деформаций
упругих тел при действии статических нагрузок.
Например, расчет неразрезной балки под действием произволь-
ной гармонической нагрузки q (х) cos (со/ 4- $) сводится к расчету
этой же балки под действием статической нагрузки q (х) при усло-
вии, что балка находится на упругом основании с коэффициентом
жесткости k = —m0o2, где т0 — погонная масса балки.
6. При расчете упругого тела ва действие произвольных дина-
мических нагрузок обычно применяют метод главных координат.
Чтобы использовать его, необходимо прежде всего убедиться,
что нагрузка может быть разложена по формам сил инерции глав-
ных свободных колебаний. Затем нужно последовательно рас-
сматривать движение тела по ‘каждой форме главного свободного
колебания в отдельности, т. е. выбрать обобщенную координату
этого колебания, выразить через нее кинетическую и потенциаль-
ную энергии, а затем составить уравнение Лагранжа — уравне-
ние движения системы с одной степенью свободы.
Увеличивая число рассмотренных таким образом движений
(число главных координат), мы неограниченно приближаемся
к точному решению.
Пусть, например, известны формы fn (х) главных свобод-
ных колебаний стержня с переменной массой т (х). Стержень
находится под действием поперечной нагрузки q (*) <j> (/).
Кинетическая энергия движения по Л-й форме
Т - 4“ Jт w Д W “Я (()dx “ т “Л-
а потенциальная энергия
186
Уравнения Лагранжа
a^>k т ck™k = Qk(t).
где
<2* ” [f «Wf* Md< ] »(0-
Отметим, что возможность разложения внешней нагрузки по
формам сил инерции реализуется далеко не всегда.
Пусть формы и частоты свободных колебаний стержня опре-
делены с учетом сдвига, а стержень загружен системой уравнове-
шенных в своей совокупности динамических изгибающих момен-
тов М (г) ф (/). которые не дают, естественно, никаких перерезы-
вающих сил. Ясно, что внешние моменты могут быть, вообще го-
воря, разложены по формам изгибающих моментов сил инерции,
но при этом силы инерции дадут добавочно перерезывающие силы
и полного разложения внешней нагрузки не происходит.
Чтобы применить здесь метод главных координат, поступим
так. Положим, что масса т (х) стержня равна нулю. Тогда стер-
жень изогнется согласно зависимости ф (х) ф (/). где ф (л) — форма
статического прогиба под действием моментов М (х). Этот же изгиб
будет и в случае т (х) = 0, но тогда, кроме изгибающих моментов,
нужно приложить фиктивную нагрузку т (х)ф (х) ф (/), которая
компенсировала бьгсилы инерции. Поскольку фиктивной нагрузки
нет, то следует к движению ф (х) ф (f) добавить движение под
действием нагрузки—т (х)ф(*) ф (/)- Последняя всегда раскла-
дывается по формам сил инерции главных свободных колебаний.
Если ф (0) 0, то при изгибе согласно зависимости ф (г) ф (/)
стержень должен мгновенно получить некоторую скорость. Чтобы
создать ее в инерционном стержне, требуется в момент t — 0 при-
ложить дополнительно бесконечный импульс, создающий свобод-
ные колебания с начальными скоростями ф (v) ф (0). Разложение
этого свободного колебания по формам главных свободных коле-
баний выполняется, как показано выше.
§ 5. КОЛЕБАНИЯ СИСТЕМ И УПРУГИХ ТЕЛ С НЕСТАЦИОНАРНЫМИ
СВЯЗЯМИ (КИНЕМАТИЧЕСКОЕ ВОЗБУЖДЕНИЕ)
1. Как уже отмечалось в главе IV, задачи о колебаниях систем
с нестационарными связями (случай так называемого кинемати-
ческого возбуждения) могут быть сведены к аналогичным задачам,
где связи стационарны. Применяемые для этого приемы покажем
на двух примерах.
Рассмотрим (рис. 47) колебания шарнирно опертого шержня
с нестационарными связями
w (0, t) = w (I, t) = h it) (V. 86)
(задано движение опор).
•187
Для решения задачи примем неинерциальную систему коор-
динат, связанную с опорами; начало координат поместим на левой
опоре, ось х направим по линии, соединяющей опоры. Тогда, со-
гласно главе I, движение стержня раскладывается на переносное
движение как абсолютно твердого тела вместе с неннерциальной
системой (вместе с опорами) и на относительное движение в неи-
нерциальной системе (изгиб стержня между опорами). Для иссле-
дования относительного движения, к стержню необходимо прило-
жить силы инерции
= (V. 87)
Кроме того, следует особо рассмотреть начальные условия.
Если движение опор начинается в момент t ---- 0, го
t = 0, w (х. 0) -- 0, w (х, 0) = f (0).
Рис. 47
Полученное решение легко интерпретировать чисто физически.
В самом деле, пусть стержень безинерционен. Тогда он будет
перемещаться вместе с опорами как абсолютно твердое тело.
Чтобы так же двигался инерционный стержень, необходимо ком-
пенсировать силы инерции, т. е. приложить фиктивную нагрузку
m(jr)"/(/). Но поскольку никакой фиктивной нагрузки нет, необ-
ходимо дополнительно рассмотреть изгиб стержня под действием
нагрузки — Кроме того, если /(0) + 0, то все точки
стержня должны мгновенно приобрести некоторые начальные ско-
рости, т. е. к стержню в момент t — Одолжен быть дополнительно
приложен распределенный мгновенный импульс интенсивности
-/n(v)/(0).
В случае, когда опоры движутся по различным законам
w (0, 0 =» fi (О. w (/, /) = fs (t),
решение остается в принципе тем же. Нужно лишь отдельно ис-
следовать колебания при перемещении левой опоры (правая не-
подвижна) и правой опоры (левая неподвижна). Сила инерции
будет распределена по треугольному закону по координате х;
так же будут распределены и начальные скорости (начальный
импульс).
При еще более произвольном перемещении опор в плоскости
чертежа нужно ввести силы инерции с учетом не только ускорений
переносного движения, но и кориолисова ускорения.
188
2. Пусть опоры стержня неподвижны (рис. 48, а), но задано
движение одной из его точек (например, к ней присоединен ка-
кой-то механизм)
ш (>».') = I (О-
Будем рассуждать по аналогии с предыдущим.
Пусть стержень безинерционен, тогда он будет деформироваться
чисто статически и его прогиб будет
иметь вид (рис. 48, б)
• W (Л, /) ^ / (/) ч> (t). (V. 88)
где ф (л) может быть определена ме-
тодами статики.
Чтобы по тому же закону (V. 88)
двигался инерционный стержень,
нужно приложить фиктивные силы
m (*) у (*)/’ (/), компенсирующие силы
инерции. Поскольку фиктивных сил
нет, то ясно, что суммарное движе-
ние стержня будет складываться из
движения по закону (V- 88) и движе-
ния под действием сил—m(v)^p(x) 7(0
(опоры и точка т0.должны полагать-
ся неподвижными, рис. 48, в).
Если f (0) =k 0, то, кроме того,
рис. 48, в нужно приложить мгновенный импульс интенснаности
tn (x)f (0>«р (х) или просто задать начальные условия
t = 0, w (х, 0) = 0, w (х, 0) =- f (0) <р (*). (V. 89)
Аналогичные приемы можно использовать и в других вариан-
тах систем, а также упругих тел с нестационарными связями.
4
Рис. 48
в момент t 0 к балке
ЛИТЕРАТУРА ‘
1. Б а ба ков И. М., Теория колебаний, ГИТТЛ, М., 1958.
2. Болотин В. В., Неконсервативные задачи теории упругой устой-
чивости, Физматгиз, М., 1961.
3. Гантмахер Ф. Р., Лекции по аналитической механике, Физмат-
гиз, М., 1960.
4. Ефи мов Н. В., Высшая геометрия, Физматгиз, М., 1961.
5. Клики, Введение в метаматематику, ИЛ, М„ 1957.
6. Л а и д а у Л. Д., Лившиц Е. М., Механика, Физматгиз, М., 1958.
7. Л у р ье А. И., Аналитическая механика, Физматгиз, М., 1961.
8. Н о в и к о в П. С., Элементы математической логики, Физматгиз, М..
1959.
9. Ньютон И., Математические начала натуральной философии, кн. 1—
3, Пг. 1915—1916.
10. Па нов ко Я. Г-. Основы прикладной теории упругих колебаний.
Машгиз, М., 1957.
11. Понамарев G Д.. Би дер ма и В. Л. и др. Расчеты на проч-
ность в машиностроении, т. III, Машгиз, М., 1959.
12. Р ж а н и ц и н А. Р. Устойчивость равновесия упругих систем, ГИТТЛ,
М. 1958.
13. С м и р н о в В. И., Курс высшей математики, ГТТИ, М., 1938 (или
любое другое издание).
14. Суслов Г. К.» Теоретическая механика, Гостехиздат, М.—Л., 1946.
15. Фадеев Д. К., Фадеева В. Н. Вычислительные методы линей-
ной алгебры, Физматгиз, М., 1960.
16. Филиппов А. П., Методы расчета сооружений на колебания. Гос-
стройиздат, М., 1941.
17, Ч у д н о в с к и й В. Г., Методы расчета колебаний и устойчивости
стержневых систем. АН УССР. Киев, 1952.
18. Шилов Г. Е., Введение в теорию линейных пространств, ГИТТЛ,
М., 1956.
19. Ш и м а н с к и й К). А., Динамический расчет судовых конструкций,
Судпромгиз, Л., 1948.
ОГЛАВЛЕНИЕ
От автора
РАЗДЕЛ ПЕРВЫЙ
ОБЩИЕ ПОЛОЖЕНИЯ ДИНАМИКИ
Глава f. Основы механики. Общие понятия и зависимости динамики мате-
риальной точки...................................................... 5
§ 1. Аксиоматический метод................................... —
§ 2. Материальная точка. Пространство и время. Скорость и уско-
рение ...................?.................................... 7
§ 3. Первая аксиома механики (закон инерции). Инерциальные
системы координат............ .................. 12
§ 4. Сила. Масса. Вторая аксиома (второй закон) механики ... *с
| 5. Третья аксиома механики (закон действия и противодействия)
§ 6. Движение в неинерциальных системах координат........
§ 7. Интегрирование уравнений движения материальной точки
§ 8. Работа сил. Силовое поле. Потенциальная и кинетическая
энергии. Закон сохранения энергии..........................
§ 9. Захон сохранения количества движения и закон сохранения
момента количества движения ...............................
Глава И. Общие понятия и зависимости динамики механических систем
§ 1. Механическая система. Уравнения движения и связей. Клас-
сификация связей ...........................................
§ 2. Обобщенные координаты. Возможные и виртуальные переме-
щения. Степени свободы......................................
§ 3. Работа. Обобщенные силы. Идеальные связи. Потенциальная
и кинетическая энергии. Закон сохранения энергии............
§ 4. Общие законы динамики: закон движения центра инерции, за-
кон количества движения и закон момента количества движе-
ния. Теорема Кенига. Относительное движение . . . - J
Глива IH. Уравнения динамики механических систем............. •
§ 1. Динамический принцип виртуальных перемещений. Уравнения
Лагранжа первого рода . , . ........- -
S 2. Статический прш.ыы bupij ь.дщ_>,х iKpc.sb щеаий Принн”11
Даламбера ....................’................... . . - -
§ 3. Понятие об устойчивости состояния равновесия системы по
Ляпунову. Теорема Дирихле. Устойчивость «в малом» И
«в большом» ..........................................
§ 4. Уравнения Лагранжа второго рода............
191
£S 8 853
РАЗДЕЛ ВТОРОЙ
ОСНОВНЫЕ ПОЛОЖЕНИЯ ДИНАМИКИ ЛИНЕЙНЫХ МЕХАНИЧЕСКИХ СИСТЕМ
Глава IV. Колебания линейных систем с одной степенью свободы . 119
§ I. Общие замечания о линеаризации системы . . —
§ 2. Свободные колебания................................ 128
§ 3. Вынужденные колебания .... ... 137
Глава V. Колебания линейных консервативных систем со многими сте-
пенями свободы и упругих тел .................................. 154
§ 1. Свободные колебания систем с двумя степенями свободы ... —
§ 2. Вынужденные колебания систем с дпумя степенями свободы 164
§ 3. Свободные и вынужденные колебания спстем с п степенями
свободы.................. - ................... 170
§ 4. Свободные и вынужденные колебания упругих тел . 177
§ 5 Колебания систем и упругих тел с нестационарными связями
(кинематическое возбуждение,............................. 187
Литература..................................................... 190