










































































































































































Автор: Яковлев А.А. Петров А.В.
Теги: электротехника радиолокация анализ радиотехника проектирование синтез радиотехнические комплексы
Год: 1984



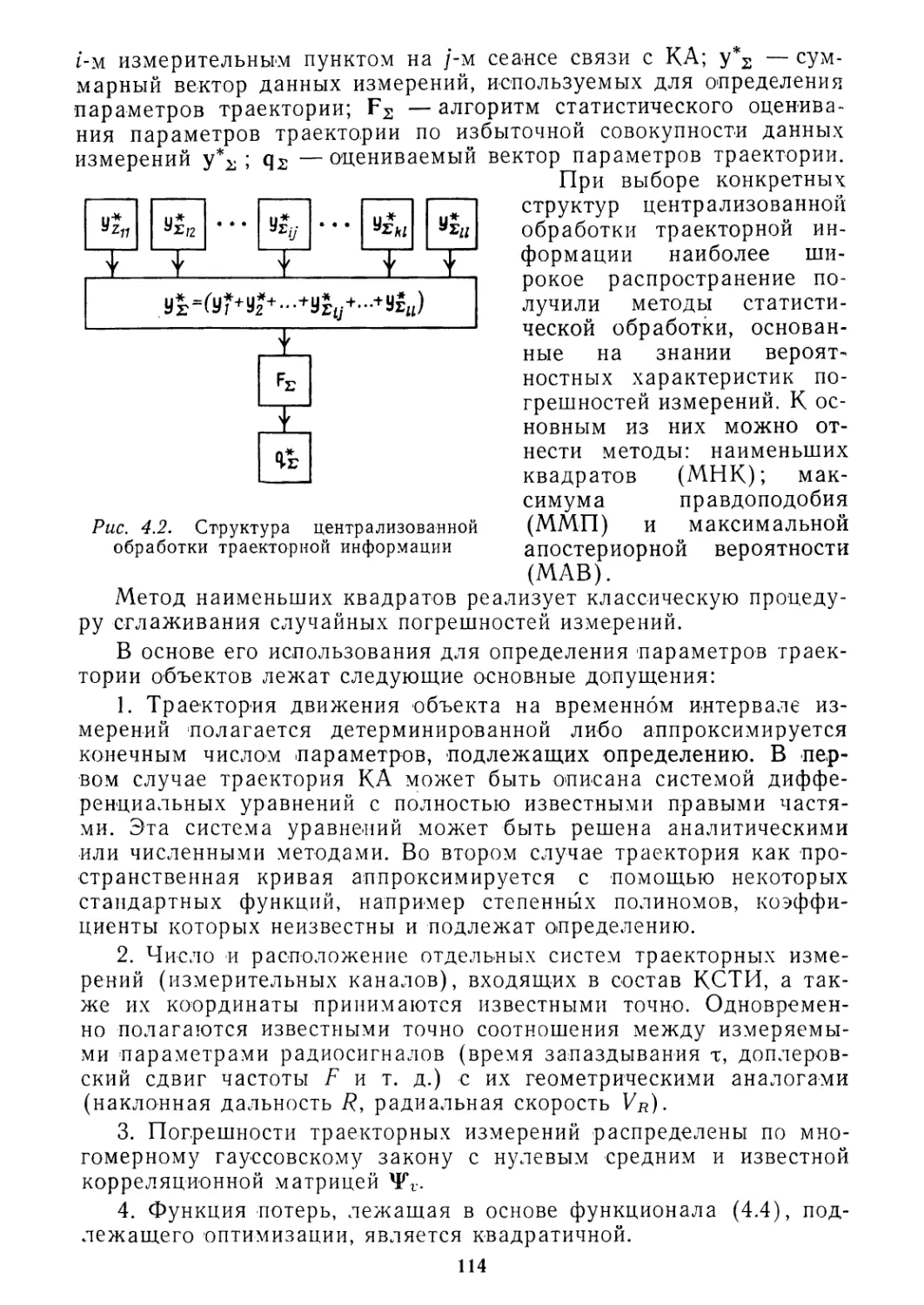
Текст
А.В.Петров, А.А.Яковлвв
АНАЛИЗ И СИНТЕЗ
РАДИОТЕХНИЧЕСКИХ
КОМПЛЕКСОВ
А.В.Петров. А.А.Яновлев
АНАЛИЗ И СИНТЕЗ
РАДИОТЕХНИЧЕСКИХ
КОМПЛЕКСОВ
Под редакцией профессора В. Е. Д у л е в и ч а
МОСКВА
•РАДИО И СВЯЗЬ*
1984
ББК 32.95
ПЗО
УДК 621.396.9.001.61
Петров А. В., Яковлев А. А.
ПЗО Анализ и синтез радиотехнических комплексов/Под
ред. В. Е. Дулевича. — М.: Радио и связь, 1984.—
248 с., ил.
В пер.: 2 р. 80 к.
Рассматриваются вопросы практического применения теории систем
для проектирования радиотехнических комплексов различного назначения
и их подсистем. Особое внимание уделяется классификации радиотехни¬
ческих комплексов, их моделированию, обоснованию показателей эффек¬
тивности и методам оптимизации. Излагаются во-просы адаптации. Книга
иллюстрируется примерами, относящимися к комплексам и радиосистемам
различного назначения.
Для научных работников, занимающихся проектированием радиотех¬
нических комплексов и систем.
Табл. 5. ил. 65, назв. библ. 92.
2402020000-184 ББК 32.95
П 14-84
046(01)-84 6Ф2.4
Рецензенты: чл.-кор. АН СССР А. Ф. Богомолов,
д-р техн, наук проф. А. П. Реутов
Редакция литературы
по конструированию и технологии РЭА
© Издательство «Радио и связь», 1984
Предисловие редактора
Ускоренное развитие радиоэлектроники за последние годье
стимулировалось главным образом двумя обстоятельствами. Во-
первых. прогресс современной наземной, авиационной, морской hi
космической техники ставил перед радиоэлектроникой все новые
и новые задачи, расширял области применения радиоэлектронных
методов при управлении объектами, получении и обработке раз¬
личного рода информации. Во-вторых, сама радиоэлектроника^
опираясь на использование новых физических принципов и явле¬
ний, революционные изменения элементной базы и освоение новых
радиочастотных диапазонов, сделала резкий скачок вперед и да¬
ла в руки конструкторов новые возможности для создания радио¬
технических комплексов (РТК) и систем, предназначенных решать
разнообразные по объему и характеру задачи.
Отличительной особенностью этого процесса является сущест¬
венное усложнение структуры и расширение функций радиотехни¬
ческих систем (РТС), а порой и объединение их в комплексы все
возрастающего масштаба. Стали формироваться РТК региональ¬
ного или даже глобального характера, например общегосударст¬
венная система управления воздушным движением.
Совершенно очевидно, что научный подход к проблемам ана¬
лиза, синтеза и практического применения такого рода РТК и?
РТС возможен только на основе широкого использования положе¬
ний современной теории систем. В отечественной и иностранной
литературе есть ряд фундаментальных работ в этой области. Од¬
нако они в большинстве случаев носят общий, основополагающий
характер и далеки от специфических вопросов теории РТК ie
РТС.
Предлагаемая вниманию читателей монография должна в оп¬
ределенной степени восполнить указанный серьезный пробел. Ав¬
торам удалось в пределах ограниченного объема развить в тес¬
ной связи с практическими проблемами теоретические положения,,
которые волнуют каждого, кто связан с разработкой и вводом r
строй РТК. При этом на страницах книги впервые нашел отра¬
жение аспект глобальности РТК и РТС.
Монография содержит результаты оригинальных исследований
авторов и обобщения материалов различных литературных ис~
з
точников. По существу многие из этих обобщений являются ито¬
гом большой творческой работы авторов и отражают их взгля¬
ды, сложившиеся в результате многолетней совместной научно¬
педагогической деятельности.
В заключение следует заметить, что значение теоретических
и прикладных вопросов, с которыми встретится читатель, безус¬
ловно, выходит за рамки проблем тех РТК и РТС, применительно
к которым ведется изложение некоторых разделов книги. Несом¬
ненно, книга окажется полезной всем интересующимся проекти¬
рованием, испытаниями и использованием РТК и РТС различного
назначения. Она даст в руки специалистов теоретические положе¬
ния, методологию и определенный аппарат, который будет им не¬
обходим на всех этапах жизненного цикла создаваемых ими ра¬
диотехнических средств.
В. Е. Дулевич
Введение
В последние годы при проектировании, создании и эксплуа¬
тации новых образцов РТК и РТС различного назначения спе¬
циалистам все чаще приходится сталкиваться с рядом принципи¬
ально новых системных проблем. Эти проблемы качественно от¬
личаются от проблем, возникавших при создании РТС первых
поколений и их отдельных устройств, для решения которых был
разработан аппарат схемотехнического анализа и синтеза, став¬
ший традиционным. Так, к настоящему времени на вооружении
радиоспециалистов имеются хорошо разработанные методы син¬
теза радиоприемных и радиопередающих устройств, измеритель¬
ных каналов радиолокационных и радионавигационных систем
[59, 60] аналоговых и цифровых устройств обработки радиосиг¬
налов, антенных устройств [10, 12, 76] и т. д.
Существенные усложнение и расширение круга целевых за¬
дач, решаемых современными РТК и РТС, привели к тому, что
схемотехнические методы оказались не пригодными при реше¬
нии задач синтеза оптимальной структуры комплекса в целом.
Следует отметить, что эти системные проблемы возникали и ранее
:при создании первых поколений РТК, однако они решались эм¬
пирически, интуитивно, на основе опыта и квалификации разра¬
ботчиков.
Одним из путей решения указанных выше проблем является
создание нового научного направления — теории систем и систе¬
мотехники. Как и любое новое развивающееся направление, си¬
стемотехника не имеет единой «узаконенной» терминологии [13, 15.
18, 19, 28, 58]. Она уже сейчас претендует на определенную си¬
стемную теорию [36, 37, 38], системную методологию [38, 62,
70], системное конструирование и системное управление. Несмот¬
ря на сравнительную молодость, системотехника уже пережила
как период «вседозволенности», связанный с крайним оптимиз¬
4
мом в оценке ее возможностей для решения задач оптимального
анализа и синтеза любых сложных систем [8, 28, 36], так и пери¬
од определенного разочарования в ней, связанный с излишним
увеличением формализованным математическим аппаратом тео¬
рии систем при весьма скудных практических результатах его
применения для решения реально возникающих задач. Об излиш¬
них издержках, связанных с увлечением теоретико-множествен¬
ными методами, весьма энергично писал академик Л. С. Понтря¬
гин в статье, опубликованной в журнале «Коммунист» [43].
Радиотехнические комплексы образуют особый класс слож¬
ных технических систем, к которому применимы все принципы и
методы общей теории систем и системотехники. Кроме того, этим
комплексам присущ целый ряд специфических качеств и свойств,
связанных с использованием электромагнитного поля для органи¬
зации информационного взаимодействия между разнесенными в
пространстве радиотехническими системами и объектами. Это об¬
стоятельство определяет и круг целевых задач, решаемых РТК,
которые прежде всего связаны с навигационным и информацион¬
ным обеспечением и извлечением информации об объектах в це¬
лях их распознавания и идентификации, управлением функциони¬
рованием таких объектов, как космические аппараты (КА), раке¬
ты, управляемые снаряды и т. д. Современная навигация, связь,
космическая и ракетная техника, геофизика и ряд других отрас¬
лей науки и техники немыслимы без использования богатого ар¬
сенала радиотехнических методов и средств.
Постоянное усложнение целевых задач РТК, повышение тре¬
бований к показателям качества функционирования (точности,
информативности, оперативности, пропускной способности и
т. д.), появление новых типов объектов информационного взаимо¬
действия привели к существенному усложнению их структуры и
процессов функционирования. Это в свою очередь вызвало воз¬
растание роли системных проблем, возникающих при решении за¬
дач анализа и синтеза РТК на различных стадиях их жизненно¬
го цикла, начиная с обоснования технических и других требова¬
ний при их проектировании, кончая модернизацией уже существу¬
ющих РТК. Одновременно усложняется структура современных
РТС, осуществляющих информационное взаимодействие с объ¬
ектами.
К основным факторам, стимулирующим повышение сложности
современных РТК и РТС, можно отнести:
постоянный рост числа объектов информационного взаимодей¬
ствия, использующих для решения своих целевых задач радиотех¬
нические методы и средства;
необходимость реализации требований непрерывности, гло¬
бальности и устойчивости информационного взаимодействия, что
привело к созданию сетей РТС различного назначения, размеща¬
емых на земле, в морях и океанах, в воздухе и космосе;
резкое увеличение информационных потоков в РТК, в част¬
ности в комплексах космической связи и космических комплек¬
5
сах получения видеоинформации, для решения различных народ¬
нохозяйственных задач (космическая метеорология, исследование
природных ресурсов Земли и г. д.);
необходимость использования высокопроизводительных ЭВМ
как для обработки больших потоков информации, поступающей
от РТС различного назначения, так и для непосредственного уп¬
равления функционированием РТК и подсистем;
создание разветвленной высокоинформативной сети передачи и
сбора информации между пространственно-разнесенными элемен¬
тами РТК;
переход от использования радиосигналов простои формы к
сложным и групповым сигналам, повышающим точность, разре¬
шающую способность, информативность, пропускную способность
и помехозащищенность РТС;
необходимость адаптации РТС к быстроменяющейся помехо¬
вой обстановке для сохранения заданных показателей функцио¬
нирования в условиях воздействия помех и нарушения электро¬
магнитной совместимости;
переход от антенн со сплошной апертурой с механическим уп¬
равлением лучом к фазированным антенным решеткам (ФАР)
с электронным управлением, реализующим оптимальную прост¬
ранственно-временную обработку высокочастотных сигналов;
революцию в элементной базе радиосистем и цифровой вычи¬
слительной техники, создание цифровых и аналоговых интеграль¬
ных микросхем и микропроцессоров, обладающих информацион¬
ной, сигнальной, функциональной и конструктивной совместимо¬
стью, а также устройств, использующих новые физические прин¬
ципы и явления и выполняющих традиционные операции более
эффективным образом.
Приведенное выше краткое перечисление некоторых черт сов¬
ременных РТК и РТС достаточно ярко показывает существенное
преобладание системотехнических проблем анализа и синтеза
РТК и РТС над традиционными схемотехническими. Современ¬
ный радиоспециалист имеет в своем распоряжении хотя и доста¬
точно сложную, но готовую элементную базу для конструирования*
отдельных устройств РТС. Он может воспользоваться любыми
вычислительными средствами или системами из унифицированно¬
го ряда единой системы ЭВМ определенного поколения с разра¬
ботанной системой общего математического обеспечения, выбрать
систему передачи данных из унифицированного ряда автоматизи¬
рованной системы связи с заданными информационными харак¬
теристиками и т. д.
Однако при этом возникают системотехнические проблемы кон¬
струирования системы в целом из готовых «черных ящиков», а
также необходимость по заданным техническим характеристикам
функционально законченных подсистем наилучшим образом син¬
тезировать систему более высокого уровня, обладающую требу¬
емыми показателями качества. Резко усилились требования к ма¬
тематической подготовке современного радиоинженера, его спо¬
6
собностям ставить и решать задачи разработки специализирован¬
ных алгоритмов обработки радиотехнической информации и уп¬
равления функционированием как отдельными подсистемами
РТС, так и системой в целом. Наконец, потребовались знания
современной вычислительной техники и микропроцессоров для
объективного анализа их возможностей при решении поставлен¬
ных задач анализа и синтеза РТК-
За последние годы интерес к системотехническим проблемам
анализа и синтеза РТК и РТС существенно возрос, о чем свиде¬
тельствует целый ряд отечественных и зарубежных публикаций
[1, 6, 24, 25, 35, 70].
В настоящей книге сделана попытка изложить основные про¬
блемы анализа и синтеза РТК с использованием концепций и
математического аппарата современной теории систем, показать
на конкретных примерах на базе оригинальных исследований и
обобщения литературных источников возможности теории систем
для решения практических задач. При написании книги авторы
стремились сначала охарактеризовать предмет исследований, за¬
тем дать общие представления о современных системных методах
анализа и синтеза РТК как сложной системы. Из-за ограничен¬
ного объема книги не ставилась задача раскрыть до конца сущ¬
ность используемых математических методов, хотя основные мето¬
ды достаточно полно раскрыты применительно к базовому приме-
РУ- В книге принята следующая последовательность изложения.
В гл. 1 рассматриваются РТК как специфический класс слож¬
ных систем. Предлагается системная классификация РТК по
базовым классификационным признакам.
Дается системная трактовка целевого назначения и уровней
иерархии РТК. Анализируются основные этапы жизненного цик¬
ла РТК и возникающие на различных этапах проблемы анализа
и синтеза РТК.
В гл. 2, носящей иллюстративный характер, дается описание
типовых современных РТК. Выбор космических РТК и РТК уп¬
равления воздушным движением и навигационного обеспечения
полетов в качестве базовых примеров обусловлен прежде всего
тем, что в этих комплексах наиболее наглядно и ярко проявляют¬
ся все свойства и качества сложных систем, разнообразие форм
и методов информационного взаимодействия с объектами.
В гл. 3 излагаются основные методы современной математиче¬
ской теории систем и дается наглядная их интерпретация приме¬
нительно к решению задач анализа и синтеза РТК и их звеньев.
Наибольшее внимание уделяется нетрадиционным методам, на¬
правленным на обеспечение возможностей анализа и синтеза
больших РТС. Указывается на существенную гибкость общеси¬
стемных определений, позволяющих преодолеть затруднения, свя¬
занные с «проклятием размерности» и расплывчатыми формули¬
ровками, неизбежными при описании РТК.
Вниманию читателя предлагается более строгий, чем в широ¬
ко используемой радиоспециалистами литературе, подход к дина-
7
мическим системам — основному звену любого РТК. Авторы на¬
деются, что предлагаемая в книге интерпретация отдельных по¬
ложений теории динамических систем позволит принять общий
подход и сделать из него необходимые практические выводы.
Указывается на различные подходы к рассмотрению сложных
систем по частям. Обращается внимание на наиболее общий под¬
ход к целенаправленным системам, что характеризует основу си¬
стемного подхода от общих целей к их реализации посредством
конкретных РТК и РТС.
В главе 4 на основе изложенных методов общей теории
систем производится подробный анализ структуры . и процессов
функционирования комплексной системы траекторных измерений
(КСТИ). В этой и последующих главах авторы решили перейти
к единому базовому примеру РТК, выбрав для этого метрическую
комплексную систему.
Заключительные главы посвящены применению системного
подхода к анализу и синтезу указанного базового примера. Так,
в гл. 5 рассматриваются показатели эффективности КСТИ. Там,
где это возможно, производится обобщение, позволяющее распро¬
странить изложенное и на другие типы РТК. Закладываются ос¬
новы нового подхода к показателям эффективности, учитывающе¬
го необходимость функционирования систем в достаточно слож¬
ных условиях. Количественная мера показателей такого рода ба¬
зируется на представлении об обобщенных потоках отказов. Уде¬
ляется существенное внимание установлению связей между тре¬
бованиями, предъявляемыми к РТК системами высшего уровня,
что отражает необходимость целенаправленного подхода «сверху
вниз». Рассмотрен анализ пропускной способности РТК на базе
сопоставления двух подходов: с позиций теории массового обслу¬
живания и на основе представления о случайных импульсных по¬
токах.
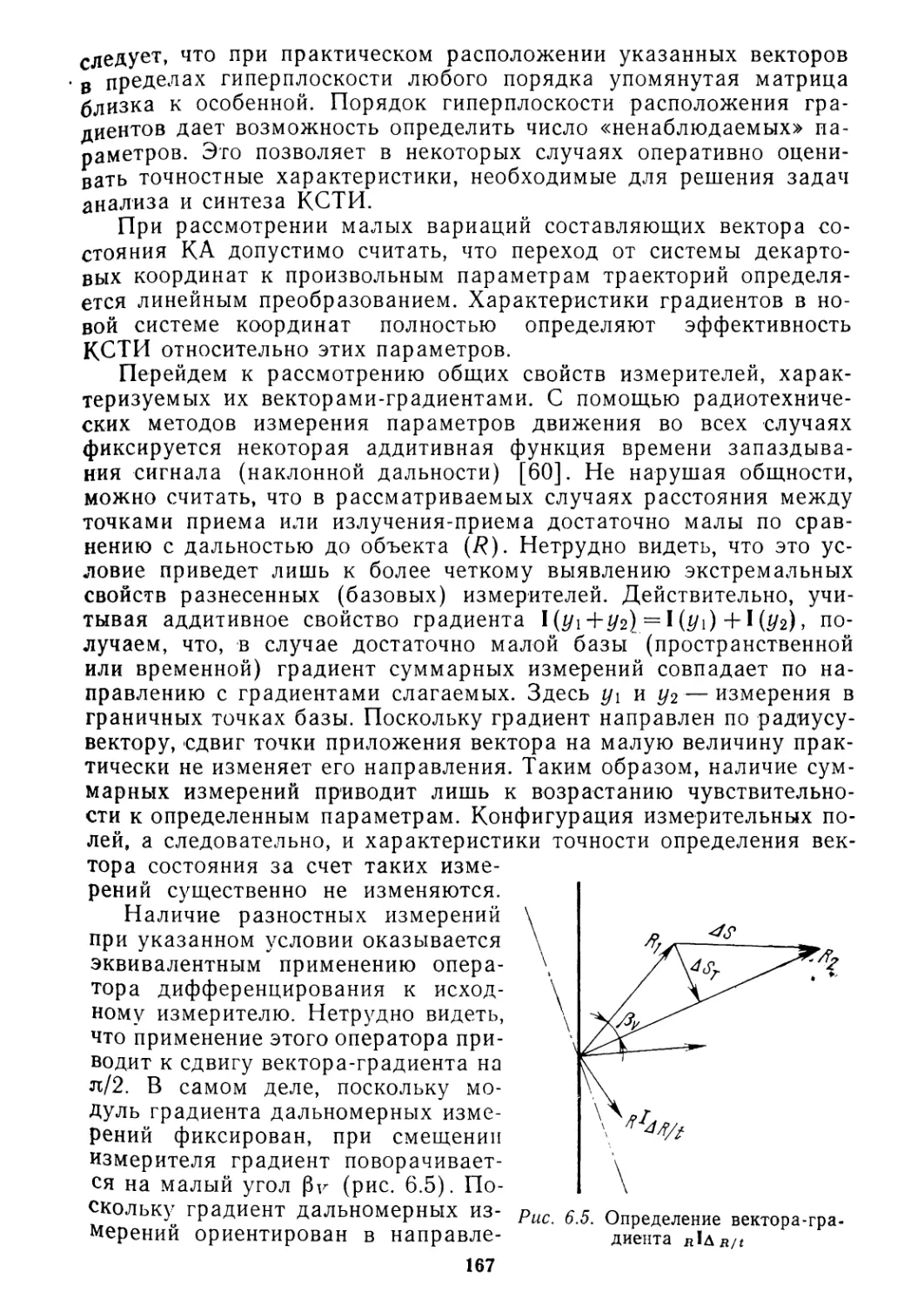
Материалы гл. 6. дают представление о показателях эффек¬
тивности на основе детализации математического описания систе¬
мы. Обосновывается целесообразность математического модели¬
рования подавляющего большинства сторон функционирования
РТК и рассматриваются наиболее рациональные пути моделиро¬
вания РТК, иллюстрируемые на базовом примере. Показана ве¬
дущая роль пакетов прикладных программ, используемых для
моделирования РТК в условиях применения высокопроизводи¬
тельных машинных комплексов. Одновременно указывается на
наиболее компактный путь моделирования РТК связанный с
многоуровневым моделированием. Обосновывается разделение на
уровни моделирования для типовых РТК. Разъясняется на базо¬
вом примере целесообразность аналитического подхода, т. е. мо¬
делирования на нулевом уровне с возможностью получения кон¬
структивных результатов. Базовый пример связан с достаточно
сложным объектом — высокоточным определением траектории ор¬
битального полета КА. Несмотря на это, оказывается возможным
получить достаточно конструктивный анализ точности орбиталь-
'8
ных определений на основе изучения вспомогательного матема¬
тического объекта — частных производных от измеряемых функ¬
ций по параметрам орбиты.
Глава 7 посвящена описанию проблем оптимального выбора
основных характеристик КСТИ. Широко используются ранее вве¬
денные представления об упрощенном математическом описании
сторон функционирования КСТИ. Обосновывается идеология оп¬
тимизации КСТИ, заключающаяся в многоуровневом решении
этой задачи. Обращено наибольшее внимание на первые этапы
решения оптимизационной задачи, где требуется наибольшая изо¬
бретательность. Приводится решение задач выбора параметров
РТС применительно к скалярному основному ограничению и це¬
левой функции упрощенного вида.
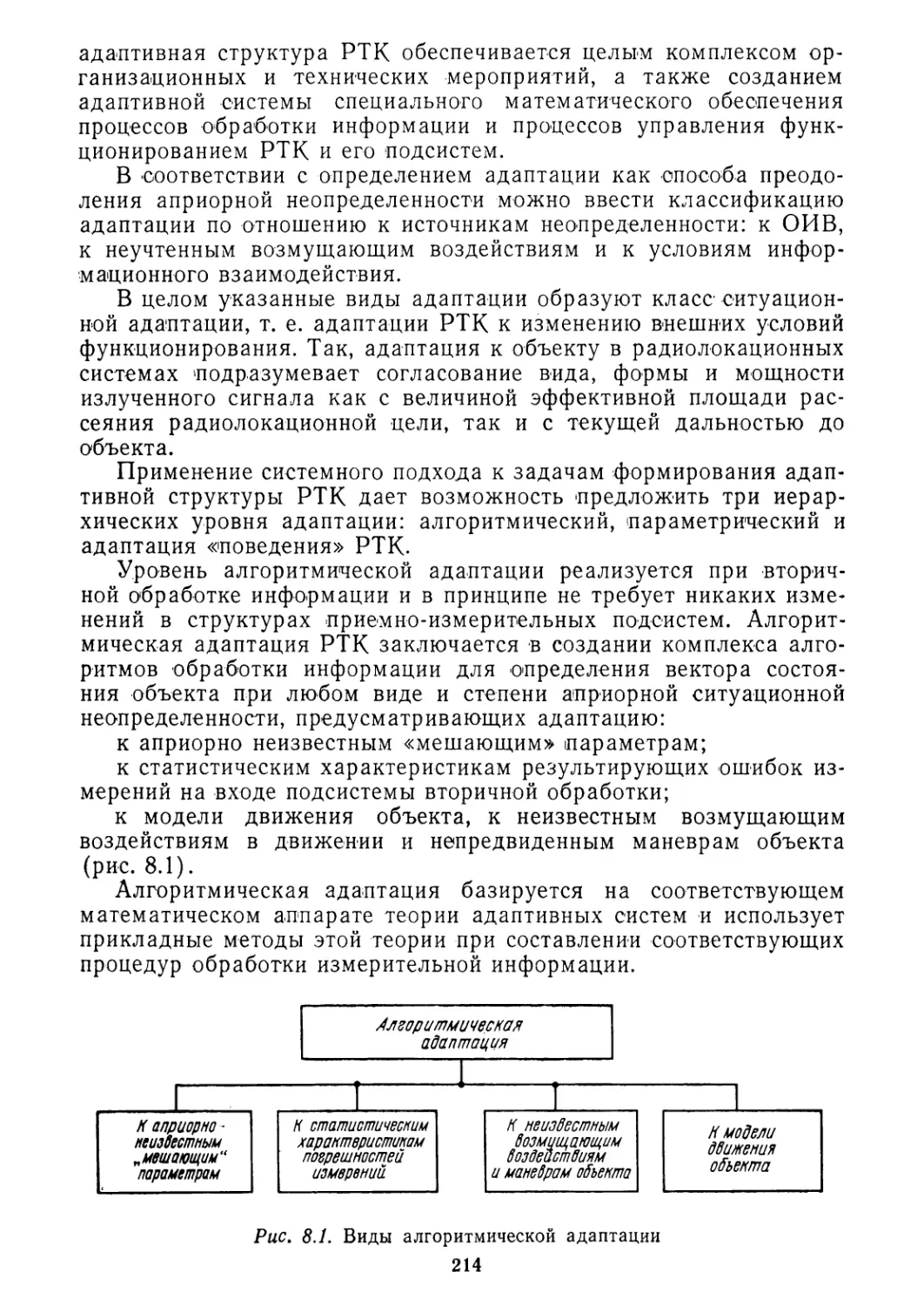
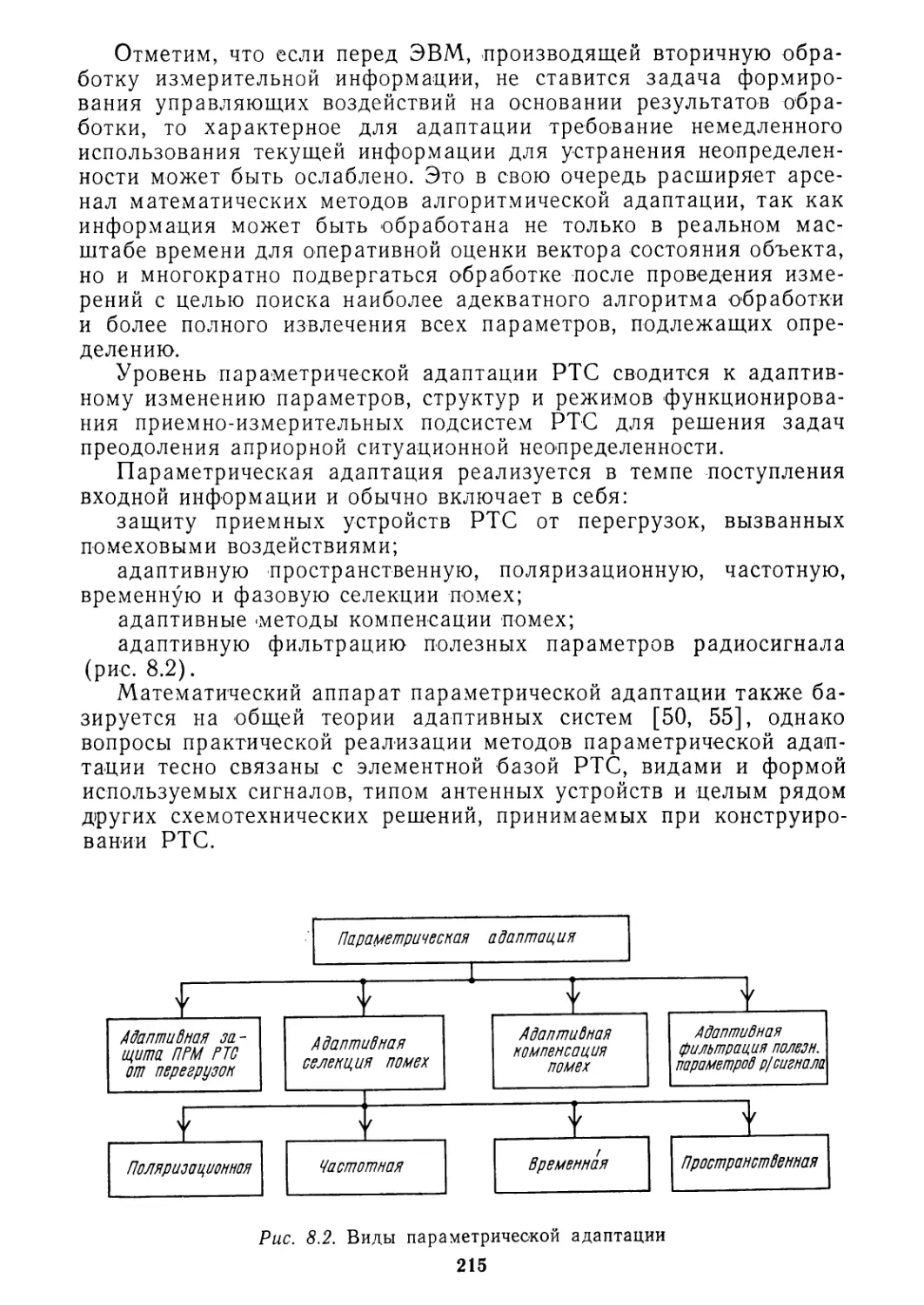
В гл. 8 рассматриваются принципы систематической адапта¬
ции РТК и РТС, функционирующих в условиях априорной неоп¬
ределенности. Вводятся три уровня адаптации: алгоритмическая,
параметрическая и адаптация «поведения» системы. Излагается
ряд методов алгоритмической адаптации на базовом примере оп¬
ределения вектора состояния объекта информационного взаимо¬
действия.
Авторы понимают и отдают себе отчет в том, что в книге за¬
тронуты далеко не все проблемы анализа и синтеза РТК и РТС.
Ряд уже написанных разделов по анализу РТС и структур сиг¬
налов, вычислительных структур РТК, к сожалению, просто не
вошел в заданный объем, а изложение этих вопросов в сокра¬
щенном варианте, очевидно, в определенной степени повторило
бы вышедшие за последние годы достаточно серьезные и глубо¬
кие работы по этим проблемам [6, 10, 24, 39, 59].
Написанию книги способствовали конструктивные замечания
проф. Л. С. Гуткина и проф. С. Д. Сильверстова при обсуждении
ее плана-проспекта. Строгая, но доброжелательная критика ре¬
цензентов чл.-кор. АН СССР А. Ф. Богомолова и проф. А. П. Реу¬
това привела к коренной переработке рукописи. Существенную
роль сыграл научный редактор проф. В. Е. Дулевич. Авторы вы¬
ражают им свою сердечную признательность.
Авторы также приносят глубокую благодарность канд. техн,
наук В. Д. Жилееву, О. А. Кожевникову, аспирантам Н. Я. Доб-
желевскому и А. А. Козлову за творческую помощь при написа¬
нии отдельных разделов книги и инженеру Н. Б. Гусевой за ак¬
тивную помощь при оформлении рукописи.
При работе над книгой усилия авторов распределились сле¬
дующим образом: д-р техн, наук проф. А. В. Петров написал
§ Е1, гл. 3, 5, 7, § 4.1, 4.2, 4.3, 6.1 и 6.4, а также приложения 1 и
2; канд. техн, наук доц. А. А. Яковлев написал введение, гл. 1, 2
и 8, а также § 4.4 и 6.3; § 6.2 написан авторами совместно.
Авторы будут благодарны читателям за все замечания и по¬
желания по содержанию книги, которые можно направлять в
адрес издательства «Радио и связь»: 101000, Москва, Почтамт,
а/я 693.
9
1
РАДИОТЕХНИЧЕСКИЕ КОМПЛЕКСЫ
КАК СЛОЖНЫЕ СИСТЕМЫ
1.1. Основные общесистемные понятия и определения
Формулировка основных определений должна производиться
с учетом целей системного подхода. Следует считать, что совокуп¬
ность рассматриваемых далее определений должна быть доста¬
точно полной для конструктивного описания основ теории систем
и ее приложения к задачам совершенствования РТК и РТС. Ис¬
пользуемые определения должны быть основой для формализо¬
ванного описания рассматриваемого класса систем. При этом не¬
обходимо учитывать, что дальнейшее описание систем не может
ограничиваться рамками строгого формального изложения, и
поэтому вводимые определения должны быть значительно более
содержательны, чем это необходимо для формализованного опи¬
сания. Наконец, необходимо установление четкой логической свя¬
зи с последующим изложением, относящимся к тем или иным кон¬
кретным приложениям. В связи с этим вводимые определения
должны быть достаточно общими для возможности широкого под¬
хода к рассматриваемым системам. В то же время эти определе¬
ния должны допускать дальнейшее развитие или ветвление, свя¬
занное с их дальнейшей конкретизацией.
Все вводимые определения могут быть разделены на две груп¬
пы. К первой группе относятся определения, связанные с общими
положениями теории систем. Их формулировки отражают неко¬
торые общие тенденции и направления, нашедшие применение в
многочисленной литературе по теории систем и ее практическим
приложениям [13, 18, 24, 38].
Вторая группа включает в себя специфические определения,
относящиеся к рассматриваемой проблеме анализа и синтеза
РТК и РТС. Разумеется, здесь будут даны лишь наиболее общие
определения. Их дальнейшая детализация производится в после¬
дующих главах.
Наиболее общим понятием, нуждающимся, однако, в дальней¬
шей конкретизации, является понятие системы. Ряд общих опре¬
делений, связанных с гносеологическими проблемами, не может
быть конкретным именно вследствие высокого уровня обобщения.
Тем не менее необходимость формулировок таких общих понятий
оказывается очевидной хотя бы с учетом последующего предмет¬
ного изложения и установления логической связности. Поэтому
следует считать наиболее целесообразной следующую формули¬
ровку понятия системы.
10
Система представляет собой целостное образование, состоя¬
щее из связанных между собой элементов. Поэтому система об¬
ладает собственными свойствами, не вытекающими непосредст¬
венно из свойств ее элементов. В этом определении главным яв¬
ляется представление о целостности системы или, иначе говоря,
ее эмерджентности. Очень часто используются определения си¬
стемы, подчеркивающие ее другие, не менее важные стороны,
такие как условия ее существования, сопоставимость с другими
системами и т. д. [8, 13]. Представляется, однако, что эти сторо¬
ны являются соподчиненными главному свойству системы — ее
законченности, которая воспринимается как целостность. Это свя¬
зано с установлением перехода, начиная с которого совокупность
разрозненных элементов, находящихся первоначально на низком
уровне в каком-то взаимодействии, перестает быть хаотическим
нагромождением и объединяется в целостное образование, пред¬
назначенное для выполнения вполне определенных функций. От¬
сюда следует, что приведенное выше определение системы долж¬
но быть дополнено некоторой расшифровкой представления о
свойствах системы.
Свойства системы прежде всего определяются ее целевым на¬
значением (целями функционирования), которое трактуется как
совокупность задач, решаемых данной системой. Цель функ¬
ционирования системы считается достигнутой, если получен оп¬
ределенный, соответствующий поставленной цели, результат. Для
получения желаемого результата необходимо совершить опреде¬
ленную совокупность операций, направленных на достижение по¬
ставленной цели и решение возникающих при этом задач. Эти
операции реализуются за счет использования некоторых ресурсов
системы.
В связи с этим развиваемые далее определения системы на
формализованном уровне содержат понятия и представления о
феноменологической и целенаправленной системах, которые, без¬
условно, находятся во внутреннем единстве. Применительно к
рассматриваемым в книге РТС цель формируется в связи с теми
или иными задачами управления. Последнее рассматривается в
наиболее общем аспекте как сознательная планомерная деятель¬
ность, приносящая полезный эффект и происходящая под воздей¬
ствием организационного начала.
Следующим по уровню общности является понятие структуры
системы. Определения структуры и системы имеют много обще¬
го. Следует считать, что представление о структуре возникло вслед¬
ствие необходимости разделения связей и способов взаимодей¬
ствия элементов на основные, определяющие и вспомогательные.
С этой точки зрения структура системы есть совокупность устой¬
чивых связей между элементами, определяющими целостность
системы и ее основные свойства. Несколько другой подход, хотя
принципиально и не отличающийся от только что упомянутого, со¬
стоит в определении структуры системы как некоторого каркаса
или скелета, на который затем наносится конкретное содержание.
11
Такое представление наиболее близко к развивающемуся" далее
понятию структуры в процессе формализованного описания.
Иногда определение структуры конкретизируется. При этом
структура рассматривается как совокупность основных связей
без указания уровней и направления ориентации взаимодействий.
Наконец, представляет интерес рассмотрение различных состав¬
ляющих (компонентов) структуры, приведенное в [24] примени¬
тельно к радиолокационным системам. Подчеркивается, что
структура отображается явным образом в виде геометрических
связей, обычно присутствующих на структурных схемах различ¬
ных систем. При этом функции самих элементов, объединяемых
структурной схемой, оказываются несущественными. Тогда в за¬
висимости от конфигурации связей можно рассматривать линей¬
ные, кольцевые, многосвязные, звездные, ступенчатые структуры,
а также структуры, полученные при их комбинировании. Указан¬
ная конкретизация приведена для иллюстрации понятия структу¬
ры. Ограничиваясь же наиболее высоким уровнем обобщения,
можно констатировать, что структура системы отражает ее наи¬
более существенные свойства.
Модель системы определяется на основе философского учения
об отражении. Здесь следует различать представления относи¬
тельно объективной и субъективной моделей. Общим в этих,
представлениях является то, что в обоих случаях модель является
отражение?^ реальной действительности. Очевидно, что субъектив¬
ная модель несет ня себе отпечаток индивидуальных качеств ис¬
следователя. С этих позиций любую модель можно считать субъ¬
ективной. Однако по мере накопления опыта, проводимого раз¬
личными исследователями (субъектами), происходит нивелиров¬
ка индивидуальных моделей, что соответствует формированию
объективной истины или в рассматриваемом случае — объектив¬
ной модели реальной системы. Поэтому понятия субъективной и
объективной моделей оказываются связанными с развиваемым
далее подходом о двух направлениях моделирования.
При моделировании конкретной системы с целью проведения
ее анализа или синтеза преобладают субъективные модели, при¬
чем уровень субъективности или индивидуализации зависит от
сложности модели. К созданию сложной модели привлекаются
большие коллективы, что способствует нивелировке индивидуаль¬
ных различий, разумеется, при отсутствии явно выраженного до¬
минирующего влияния. По мере накопления опыта, полученного
при исследовании конкретных моделей, появляется возможность
их использования для обоснования вновь создаваемых систем. При
этом такие модели по указанным причинам являются объектив¬
ными.
Модели, используемые при анализе и синтезе РТС, имеют ха¬
рактерные особенности. К ним в первую очередь относится высо¬
кий уровень связности с моделями нерадиотехнических систем.
Действительно, все радиотехнические комплексы и системы стро¬
ятся на основе необходимости решения целевых задач, поставлен-
12
них системами высшего уровня. Поэтому при построении конкрет¬
ных РТС учитываются характерные свойства общих систем, в ин¬
тересах которых функционируют эти конкретные системы. Так, в-,
системах обмена речевой информацией следует учитывать линг¬
вистические свойства передаваемых сообщений, что требует при¬
менения соответствующих моделей. В радиолокационных системах-
существенное влияние оказывают модели движения объектов ло¬
кации как объектов информационного взаимодействия.
Вторая особенность РТС, проявляющаяся при моделировании»
заключается в вероятностном характере их описания вследствие:
наличия помех в радиотехническом канале. Отсюда следует, что
модели, используемые при описании РТС, как правило, должны
быть статистическими.
Наконец, специфическими свойствами моделей РТС являются
возможность и целесообразность моделирования на различных
уровнях сложности с целью всестороннего рассмотрения системы.
Низкий уровень сложности позволяет произвести глобальное рас¬
смотрение, но с воспроизведением лишь основных свойств системы.
Напротив, высокий уровень сложности моделей, максимально при¬
ближенный к реальной ситуации, позволяет произвести деталь¬
ный анализ систем. Его применимость ограничивается сложностью
исследуемой системы.
Подводя итоги, можно констатировать, что модель представ¬
ляет собой отражение системы, ее образ, используемый для ре¬
шения задач анализа и синтеза реальной системы. В зависимости
от задач и целей моделирования оно может производиться на раз¬
личных уровнях абстракции.
Среда представляет собой совокупность специальных элемен¬
тов, не входящих в состав системы, но оказывающих на нее оп¬
ределенное воздействие. Рассмотрение системы отдельно от сре¬
ды, оказывающей воздействие на систему, является некоторой
идеализацией. Возникает вопрос: нельзя ли рассматривать среду
как элемент другой системы, взаимодействующей с исходной?
Дело в том, что среда является своеобразным элементом, облада¬
ющим ?<арактернымп свойствами. Среда представляет собой пас-
сиеный антагонистический элемент почти что для любой системы,
поскольку обычно является естественным объектом, ограничива¬
ющим действия системы. Поэтому среда в значительной степени
определяет условия функционирования системы. Отличие среды
от элемс.’па (элементов) системы, понимаемых в широком смыс¬
ле. определяется именно безразличным отношением к любой си¬
стеме, в том числе и к изучаемой. В этом отношении среда нахо¬
дится в противоречии по отношению к любой системе с учетом
введенного ранее представления о целесообразности. Характерным
свойством среды является также существенное преобладание в
ресурсах по сравнению с любой системой, взаимодействующей
с данной средой. Отметим, что ссылка на естественное происхож¬
дение среды в известной степени условна. Как известно, естест¬
13
венные системы, например биологические, зачастую оказываются
жесьма совершенными и подчас представляют собой прототипы
для технических систем. Тем не менее понятие среды формиру¬
ется очевидным образом и для указанных систем.
Сравнительно новым является представление о среде как об
активном антагонистическом элементе, возникающее в связи с
глобальностью помеховых воздействий радиотехнических комплек¬
сов и радиотехнических систем. С учетом этого следует рас¬
сматривать среду не только безразличной, но и антагонистичес¬
кой по отношению к рассматриваемой системе. Характерна гло¬
бальность целей, поставленных перед такими искусственными эле¬
ментами среды.
Поэтому анализ среды, понимаемой в указанном смысле, дол¬
жен производиться с самых общих позиций.
В РТС понятие среды обычно связывается с трассой распро¬
странения электромагнитных волн (ЭМВ). Однако наряду с этим
в понятие среды включаются все факторы, ограничивающие каче¬
ство функционирования всех трактов прохождения радиотехни¬
ческих сигналов. Кроме того, при известной условности в качест¬
ве среды следует рассматривать и всех потребителей РТС.
На основе понятия среды системы разделяются на открытые и
замкнутые или закрытые. К открытым относятся системы, взаи¬
модействующие со средой, т. е. все реальные системы. Иногда
рассматривают в качестве среды все, что не входит в данную си¬
стему, но с ней взаимодействует. Индивидуализация представле¬
ния о среде как о совокупности специальных элементов в большей
степени соответствует содержанию этого понятия, особенно для
рассматриваемого класса систем. В соответствии с этим откры¬
тая система имеет не только внутренние, но и внешние связи, од¬
на часть которых осуществляется с другими системами, а дру¬
гая— со средой. Соответствующим образом трансформируется и
представление о структуре системы, в которой теперь добавля¬
ются внешние связи. Выделение участков или точек приложения
воздействий на систему извне, так же как и соответствующих то¬
чек или участков действия системы на внешние элементы с целью
их локализации, возможно далеко не всегда. Поэтому при моде¬
лировании системы применяются определенные упрощения.
Понятие иерархии систем является центральным в системном
анализе. Иерархические системы обладают определенной струк¬
турой. Если воспользоваться ранее приведенным представлением
-о геометрических свойствах структуры, то можно считать что ие¬
рархические системы обладают ступенчатой структурой. Однако
такое определение носит сугубо формальный характер. Сущность
подхода к иерархическим системам состоит в совместном рассмо¬
трении как целей, так и структуры системы, причем движение
происходит в направлении от наиболее глобальных целей и
структур систем к более локальным. Вследствие этого создается
ряд уровней, начиная с наиболее высокого, с последующим пере¬
14
ходом к более низким уровням. На каждом уровне (за исключе¬
нием наиболее верхнего) имеется ряд систем со своими це¬
лями и свойствами. Все системы, находящиеся на одинаковом
иерархическом уровне, равноценны по сложности. Имеют место
существенные связи между системами как различных уровней,,
так и одинакового уровня.
Основное преимущество связанное с введением иерархических:
систем, состоит в возможности рационального построения ряда
моделей различной сложности. Каждый уровень сложности удоб¬
но сопоставить с соответствующим иерархическим уровнем. Та¬
ким образом, модель иерархической системы на некотором уров¬
не сложности включает в себя описание ряда систем на соответ¬
ствующем для данной сложности модели иерархическом уровне
и всех систем, находящихся на более высоких иерархических
уровнях.
Иерархическая система имеет многоуровневую структуру»
причем каждому уровню соответствует различная степень гло¬
бальности с точки зрения как характера решаемых задач, так и
сложности системы. Поэтому структура иерархической системы
имеет вид ветвящегося дерева, в вершине которого расположена
система наиболее высокого уровня, отличающаяся наиболее высо¬
кой глобальностью. С помощью этой системы все элементы иерар¬
хической системы связываются с системами, обладающими еще
более глобальными свойствами. Таким образом, на уровне иерар¬
хических систем проявляется новое свойство вложения систем»
заключающееся в возможности элементу некоторой общей систе¬
мы быть в свою очередь самостоятельной системой, отвечающей
приведенному выше содержанию.
Применение общей теории систем оказывается наиболее су¬
щественным по отношению к большим и сложным системам.
Несмотря на это, определение больших и сложных систем следу¬
ет считать не установившимся вследствие принципиально отлича¬
ющихся подходов к этим понятиям, развиваемым различными ис¬
следователями. В итоге оказывается возможным наметить неко¬
торые общие стороны, в известной степени объединяющие различ¬
ные подходы, но с сохранением существенного разброса в трак¬
товке тех или иных формулировок.
Одно из наиболее общих свойств большой системы заключа¬
ется в невозможности ее восприятия некоторым эталонным на¬
блюдателем. Это свойство более целесообразно отнести к модели
большой системы. Достаточно наглядная интерпретация указан¬
ного свойства содержится в представлении относительно «обо¬
зримости» системы, т. е. сведения ее к аналогам, допускающим
одновременное целостное представление. В этой связи большая
система является «необозримой». Некоторые развития этого пред¬
ставления проявляются как ограничения в вычислимости харак¬
теристик большой системы применительно либо к фиксированным
вычислительным средствам, либо к предельно сложным при дан¬
ном уровне развития вычислительной техники.
15
Возможность интерпретации системы зависит от разнообразия
сее элементов, внутренних и внешних связей, объема и номенкла¬
туры ресурсов, необходимых для функционирования системы.
Очевидно, что введенное ранее представление относительно обо¬
зримости системы естественным образом определяет конъюнктив¬
ный подход к только что перечисленным особенностям системы.
Иначе говоря, превышение некоторого порога ограничений, уста¬
новленного сверху, хотя бы по одному из указанных аспектов
приводит к появлению большой системы. В итоге может быть
сформулировано следующее определение. Система является боль¬
шой, если она не может быть интерпретирована наблюдателем
вследствие существенного разнообразия хотя бы одной из сторон
ее функционирования. Отсутствие указания на свойства наблюда¬
теля оказывается оправданным, поскольку при этом допускается
варьирование понятием большой системы в зависимости от цели
и уровня исследования.
Понятие сложности системы иногда принимается адекватным
представлению о большой системе. В противоположном случае
принимается, что сложные системы объединяют более обширную
группу систем, че^м большие системы, которые, таким образом, яв¬
ляются подклассо?л сложных систем. Кроме того, сложность си¬
стемы является в достаточной степени конкретным понятием. Оно
обычно связывается со структурой системы и характеризует слож¬
ность структуры некоторым числом или вектором. Так, если струк¬
тура системы описывается с помощью структурного графа [15],
то эквивалентное число разветвлений графа может определять
сложность системы. Применительно к иерархической системе ее
сложность может быть охарактеризована числом рассматривае¬
мых уровней и эквивалентной сложностью систем, находящихся
на этих уровнях.
Понятия декомпозиции и агрегирования являются основопола¬
гающими при анализе и синтезе больших и сложных систем. Де¬
композиция определяет подход к системам, приводящий к упро¬
щенному описанию. В буквальном смысле декомпозиция — проти¬
вопоставление композиции или объединению — представляет со¬
бой разъединение системы на части с последовательным самостоя¬
тельным рассмотрением отдельных частей. Очевидно, что деком¬
позиция представляет собой понятие, связанное с моделью, так
как сама система вследствие своей целостности не может быть
расчленена без нарушения ее свойств. На уровне моделирования
разрозненные связи заменяются соответствующими эквивалента¬
ми либо модель системы строится так, что разложение на отдель¬
ные части при этом оказывается естественным.
Применительно к большим и сложным системам декомпози¬
ция является мощным и практически единственным инструментом
для их исследования. При этом применяются как вертикальная,
так и горизонтальная декомпозиции. Первая соответствует раз¬
дельному рассмотрению либо только верхних, либо только
нижних уровней системы. Это соответствует разрыву как связей
16
управления, так и реакций об исполнении управляющих сигна¬
лов (обратных связей) и установлению соответствующих эквива¬
лентных сигналов. Такая операция, строго говоря, может произ¬
водиться при весьма ограниченных условиях. В практических слу¬
чаях вертикальная декомпозиция связана с идеализированным
подходом к системе. При горизонтальной декомпозиции произво¬
дится разрыв связей между системами, находящимися на одина¬
ковых иерархических уровнях, и соответствующее эквивалентиро-
вание. Проведение горизонтальной декомпозиции обычно сопро¬
вождается меньшими искажениями по сравнению с вертикальной
декомпозицией. Это объясняется тем, что системы, находящиеся
на одном уровне, имеют, как правило, индивидуальное назначе¬
ние. Поэтому взаимные связи между такими системами обуслов¬
лены их совместным функционированием в более общей иерархи¬
ческой системе.
Агрегирование систем является понятием, противоположным
декомпозиции. В процессе анализа и особенно синтеза возникает
необходимость объединения элементов системы с целью рассмот¬
рения системы с более общих позиций. Агрегирование необходимо
применять при системном изложении «сверху вниз» в соответ¬
ствии с логикой развития целей системы. Таким образом, деком¬
позиция и агрегирование представляют собой две противополож¬
ные стороны подхода к рассмотрению больших и сложных систем,
проявляющиеся в диалектическом единстве.
1.2. Общие принципы системной классификации и описания
радиотехнических комплексов
Принцип системного подхода связан с формированием целост¬
ного представления об РТК как сложной системе с учетом его
специфических связей и свойств. Одним из путей решения этой
задачи является составление системной классификации, т. е. упо¬
рядоченного представления знаний об изучаемых объектах на
основе выбранных признаков — оснований классификации.
Само составление системной классификации представляет со¬
бой достаточно сложную самостоятельную задачу, решаемую,
как правило, на эвристическом уровне. Системность проявляется
в рациональном выборе принципов классификации, позволяющей
■осуществить возможность естественной группировки классифици¬
руемых объектов.
Современные РТК могут обладать всеми свойствами и качест¬
вами сложных систем. Основные из них следующие:
четко выраженное целевое назначение, что позволяет рассмат¬
ривать РТК с позиций целенаправленных систем;
большое число, разнообразие и сложность объектов, взаимо¬
действующих с РТК, и, следовательно, разнообразие целевых за¬
дач, решаемых РТК;
большие масштабы зоны действия и контура внешних связей
с объектами, приводящие к созданию сложной разветвленной се-
17
тм радиотехнических средств (которые могут быть размещены в
различных средах на земной и водной поверхности, в воздушном
и космическом пространстве), и наличие сложной сети информа¬
ционного обмена между пространственно-разнесенными элемен¬
тами РТК:
сложность процесса обработки информации, поступающей от
радиотехнических средств, и управления функционированием
подсистемами РТК и объектами, что привело к применению в РТК
средств автоматизации, созданию многоуровневых вычислитель¬
ных структур и сетей;
многоэтапное™ жизненного цикла РТК, порождающая ряд си¬
стемных проблем на различных стадиях разработки, испытаний,
эксплуатации и модернизации РТК и их подсистем.
Следует сказать, что не все перечисленные качества обяза¬
тельны в полной мере для любого РТК.
В то же время РТК характеризуются рядом особенностей, ко¬
торые позволяют выделить их в отдельный класс сложных техни¬
ческих систем. Рассмотрим основные из этих особенностей и вы¬
явим характерные признаки, по которым различные типы РТК
можно было бы выделить в самостоятельный класс сложных техни¬
ческих систем.
1. Целевое назначение любого РТК всегда связано с решением
задач обеспечения информационного взаимодействия с объекта¬
ми на основе формирования, извлечения, передачи, приема, пре¬
образования и обработки информации, переносимой с помощью
электромагнитных и других полей через среду, разъединяющую
объекты и пространственно-разнесенные элементы РТК. Следова¬
тельно, для функционирования РТК принципиально необходимы
подсистемы генерирования и приема электромагнитных колеба¬
ний, а параметры среды должны обеспечить надежное и устой¬
чивое распространение радиоволн.
2. Инфор<мац!ио1Н1ное 'взаимодействие между пространственно-
разнесеиными элементами РТК 'и объектами осуществляется <на
основе модуляции ограниченного числа параметров радиосигнала
(его амплитуды, частоты, фазы, а также поляризационных пара¬
метров электромагнитных волн) полезными -сообщениями. Эти со¬
общения могут зарождаться как внутри самих объектов или под¬
систем РТК, так и вне их, непосредственно или в процессе информа¬
ционного взаимодействия ЭМВ с объектами. В первом случае на¬
несение полезных сообщений на радиосигнал-носитель информа¬
ции осуществляется искусственно с помощью ■■подсистемы модуля¬
ции, целенаправленно изменяющей -один или несколько его па¬
раметров. Соответственно на -приемном конце осуществляется де¬
модуляция высокочастотных сигналов для выделения полезной ин¬
формации. При этом структура и параметры демодулятора при¬
емной подсистемы должны быть полностью согласованы со струк¬
турой и параметрами модулятора передающей подсистемы.
Во втором случае при решении задач, связанных, как правило,
с извлечением • информации об объектах, полезная информация за-
18
.рождается как в процессе распространения радиоволн в среде,
так и при непосредственном их взаимодействии с объектом (отра¬
жение, 'поглощение, переизлучение). При этом осуществляется ес¬
тественная 'модуляция отдельных параметров высокочастотного
сигнала, основанная <на физических эффектах информационного
взаимодействия. Так, определение дальности до объекта основано
на измерении времени запаздывания между зондирующим и от¬
раженным от объекта сигналами ,(-модуляции <по временной за¬
держке), а радиальной скорости — на оценке доплеровского сдви¬
га частоты (частотная модуляция). Наличие естественной и, как
пр ав ил о, многой арам е три ческо й модуляции н а кл ад ы в ает о п р еде -
ленные требования на структуру демодулирующей .подсистемы.
По этой причине .целесообразно подразделить радиотехниче¬
ские системы (РТС) РТК на два больших (класса—информаци¬
онные и метрические.
В РТС первого типа осуществляется лишь информационный
обмен между разнесенными в пространстве элементами РТК с
последующими обработкой и интерпретацией принимаемой инфор¬
мации. В системах второго типа информация генерируется (зарож¬
дается) лишь в результате непосредственного информационного
взаимодействия РТС с объектом.
В большинстве практических случаев РТС являются инфор¬
мационно-метрическими системами. Это объясняется тем, что ин¬
формация, полученная метрической системой, обычно подлежит
передаче по радиоканалам для последующей ее обработки и ис¬
пользования. Введенная классификация позволяет 'более целена¬
правленно описать перечень задач, которые принципиально могут
решаться с помощью РТС.
3. Использование электромагнитных колебаний для информа¬
ционного обмена .между РТС и объектами требует энергетических
затрат на генерацию и излучение ВЧ сигналов и концентрации
излучаемой мощности в направлении на объект или группу обь-
ектов. В ли ян и е среды р аспростран е ни я электр ом агни та ы х вол н
приводит к ослаблению потока мощности на входе приемной под¬
системы до весьма малых значений. В то же время выходные уст¬
ройства'РТС (регистраторы, индикаторы и т. д.), да и сами де¬
модуляторы приемной подсистемы, требуют для 'своей нормаль¬
ной работы относительно мощных электрических 'сигналов-носите¬
лей полезной информации. Это требует существенного усиления
принимаемых сигналов по амплитуде и мощности без внесения
дополни тельных искажений как на высокочастотном (до демоду¬
лятора), так и на низкочастотном (до выходного устройства) уров¬
нях.
4. Влияние среды, в которую входит не только сама трасса
распространения электромагнитных 'волн, но и другие естествен¬
ные и искусственные системы, приводит к возникновению помех,
нар у ш а ющи х информ а ционн ое в з а имоде йстви е и п риво дящи х к
искажению или полному подавлению полезного сигнала. Необхо¬
димость борьбы с вредным воздействием помех для достижения
19
заданных показателей (качества (И-нформанионного взаимодействия
является характерной особенностью любой РТС.
В основе борьбы с .помехами лежат организационные и техни¬
ческие меры .по максимально возможному предотвращению .поме¬
ховых воздействий и подавлению их источников (например, при¬
менение охлаждаемых малошумящих усилителей на входе при-’
емных устройств, снижающих уровень внутренних шумов, экрани¬
рование источников помеховых излучений, регламентирование ча¬
стотного спектра и т. д.), а также комплекс методов, основанных
на различиях в характеристиках полезных и помеховых сигналов
и внесении статистической п структурной избыточности.
Практическая реализация различных методов борьбы с поме¬
хами привела к существенному усложнению структур РТС, осо¬
бенно подсистем фоомиоовагиич, приема и обработки сигналов, ус¬
ложнению формы самих радиосигналов, применению пространст¬
венной, коляризацвопгой, частотной, временной и кодовой селек¬
ции, а также к увеличению энергетических затрат на передачу
электромагнитных ко. с бамий для обеспечения определенного пре¬
вышения энергии поте'..что сигнала над энергией помех.
Наличие у РТК общесистемных и специфических свойств по¬
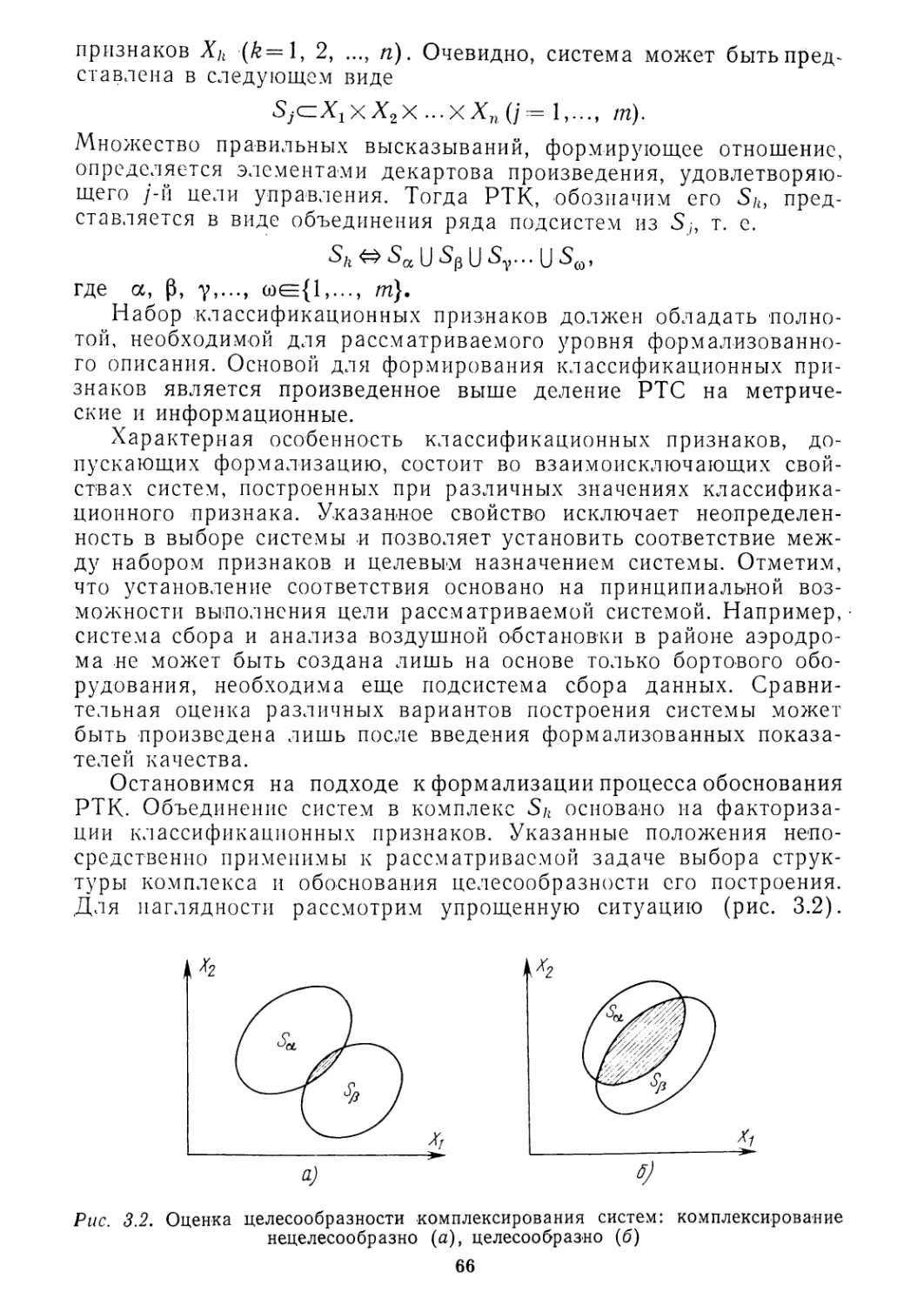
зволяет положить в основу системной классификации (рис. 1.1) и
описания РТК следующие основные признаки:
тип объектов иифопмационного взаимодействия (ОИВ);
характер информационного взаимодействия (ИВ) между РТК
и объектами;
цели ИВ и целевое назначение РТК и его подсистем;
•способы достижения целей и операции их обеспечения;
уровни иерархии РТК;
показатели эффективности функционирования и тактико-тех¬
нические характеристики РТК и его подсистем;
этапы жизненного цикла РТК.
С тс^казать, что ряд авторов [18, 48, 54] вводят для -си¬
стем и -о представления сложной системы следующие виды ее опи¬
саний: микроскопическое, функциональное, макроскопическое,,
иерао.хичеткое, процессуальное, информационное.
Атн.-;—;топическое описание системы основано на представле¬
нии системы как совокупности разнородных элементов и носит
•статистнчсс1’-чй характер, iron этом основное внимание уделяется
стрмктч-'^ системы. Ф vhi: цн он а явное описание связано с понима¬
нием спотомj-г -выпо ’Л’яюшей совокупность определенных функций'
для д сети ж сипя постапленной цели. Макроскопи-секое описание
ориентировано на анализ слстсм'иого окружения. Иерархическое
описание связа-. о анализом горизонтальных (координирующих)
и вертикальных (с' бердинирующих) связей между единицами си¬
стемной .иерархии. Процессуальное представление сложной систе¬
мы уделяет основное внимание описанию совокупности процессов,,
характеризуемой последовательностью состояний во времени. Ин¬
формационное описание характеризует информационные процессы
в системе.
20
И
unHvgodncDg ошэащ
S 5
Q? eg
сг> <
Рис. 1.1. Системная классификация радиотехнических комплексов и объектов информационного взаимодействн',
дм ипЬиспмогао
I
Естественные ХискусстЗенные
к~
CL
21
Другие авторы (47, 65, 68] 1клиосифвдируют технические си-сте-
мы по уровню 'сложности и делят их на автоматические, решаю¬
щие и самоорганизующиеся, обращая внимание на -закономерно¬
сти и свойства сложных систем: разнообразие, обилие и распрост¬
раненность, сложность, устойчивость, эмерджентность и неиден-
тичность. Делаются попытки выявить определенные -законы слож¬
ных систем [68].
Введенные авторами общие принципы классификации и опи¬
сания РТК позволяют углубить целостное единое представление
о них как об отдельном классе сложных систем, необходимое для
решения проблем их анализа и синтеза.
1.3. Объекты и характер информационного взаимодействия
Класс объектов информационного взаимодействия (ОИВ) и со¬
временных РТК достаточно обширен и включает в себя практи¬
чески все естественные, искусственные, технические, биологиче¬
ские и организационные системы различных масштабов и слож¬
ности, способные самостоятельно излучать, отражать, поглощать
или рассеивать электромагнитные колебания.
Будем различать ОИВ — источники информации и ОИВ — по¬
требители информации, получаемой в результате информационно¬
го взаимодействия РТС с объектом. При этом принципиально
важны пространственное разделение между объектами-источника¬
ми и объектами-потребителями и наличие между ними среды, че¬
рез которую могут распространяться электромапнитные волны.
В ряде случаев, особенно при решении задач исследовательского
характера, сама среда распространения радиоволн явля¬
ется объектом исследований с использованием радиотехнических
методов. В качестве ОИВ могут выступать отдельные подсистемы
РТК.
Важнейшим классификационным .признаком при рассмотрении
ОИВ как элементов пространственно-разнесенной структуры РТК
являются их взаимное расположение и место базирования. Ме¬
стом базирования объектов-источников информации, объектов-по¬
требителей и самих подсистем РТК могут служить различные уча¬
стки земной и водной поверхности, воздушно-космическое прост¬
ранство, Луна и планеты Солнечной системы, другие небесные
объекты. Взаимное расположение подсистем РТК и ОИВ оказы¬
вает влияние на параметры, характеристики и условия распрост¬
ранения радиоволн, что в свою очередь определяет показатели
качества функционирования РТК и характеристики РТС.
Примерами ОИВ могут служить самолеты, ракеты, космиче¬
ские аппараты (КА), отдельные участки земной и водной поверх¬
ности или поверхности других планет, сами планеты и другие не¬
бесные тела.
Одним из классификационных признаков РТК является соот¬
носительная сложность между ОИВ и подсистемами РТК, непо¬
средственно осуществляющими операции информационного взаи¬
22
модействия. С этой точки зрения -можно -ввести три уровня соот¬
носительности: уровень сложности объекта 'информационного вза¬
имодействия ниже уровня сложности РТК; уровень сложности
объекта информационного взаимодействия адекватен уровню слож¬
ности РТК; уровень сложности объекта выше уровня сложности
взаимодействующего с ним РТК.
Указанное разделение весьма условно, так как -сами терми¬
ны «простой объект» и «сложный объект» достаточно четко не
определены. По .мнению ряда авторов [13, 48], к простым объек¬
там и системам относятся такие системы, к которым применим
аналитико-механический подход, что дает возможность получить
достаточно полное их математическое -описание. К сложным объ¬
ектам и системам относятся системы, -формализация описания ко¬
торых аналитико-механическими методами принципиально затруд¬
нена и не дает положительных результатов. Формализованное
описание таких объектов возможно только при использовании ме¬
тодов математической теории систем.
Так, например, при -решении задачи определения параметров
движения объекта он .может быть представлен в виде материаль¬
ной точки, траектория которой описывается системой дифферен¬
циальных уравнений движения центра масс.
Отсюда для определения параметров траектории необходимо-
определить начальные условия, а в более сложном случае---неко¬
торые -параметры системы дифференциальных уравнений движе¬
ния. В данном случае уровень сложности объекта ниже уровня
сложности радиотехнического измерительного комплекса, хотя ре¬
альный объект сам по себе может быть отнесен к классу слож¬
ных (самолет, вертолет и т. д.).
В .комплексах радиосвязи уровень сложности подсистем обме¬
на информацией приблизительно одинаков. При решении задач
радиоуправления полетов летательных аппаратов (ЛА) следует
также говорить об адекватной сложности объектов управления и
компл ексов радиоупр явления.
В свою очередь для комплексов телеметрического контроля
уровень сложности объекта контроля может быть выше уровня
сложности радиотелеметрической системы.
Следующим классификационным признаком является характер
взаимодействия между РТК и объектами. С этой точки зрения
также можно выделить три типа информационного взаимодейст¬
вия: согласованное, нндиферентное, антагонистическое.
Согласованное информационное взаимодействие подразумевает-
четкое единое понимание целей и задач, возникающих при функ¬
ционировании РТК и ОИВ, а также наличие достаточно полной
априорной .информации об условиях, параметрах и характеристи¬
ках информационного взаимодействия. Это прежде всего относит¬
ся к способам представления информации, а также структурам
и параметрам электромагнитных сигналов. Так, при решении за¬
дач информационного обмена между РТК и объектом должны
быть согласованы: ф-opiM-a представления информации, язык идис-
23
1ХИ1П(ЛИ1на •ин'фар.м.а.цион|н1ого обмена, несущая частота электромаг¬
нитных колебаний, способ модуляции и кодирования передавае¬
мых сообщений, координаты расположения «подсистем РТК и объ¬
екта.
Характерной особенностью согласованного информационного
взаимодействия является принципиальная активность объекта, т.е.
установка на нем подсистем ’генерации 1электром1апн1итных коле¬
баний (радиопередающего устройства). Это обстоятельство суще¬
ственно улучшает условия радмоконтакта РТК с объектом. В ря¬
де случаев на объекте устанавливается также и подсистема при¬
ема 'Электромагнитных колебаний для организации двустороннего
взаимодействия. Характерным примером РТК согласованного ин¬
форм ационного взаимодействия являются комплексы радиосвязи
и передачи информации.
Индиф ер ен т.н о е ин форм а ци о н но е вз аи м оде йс тви е характерно
для РТК, решающих задачи исследовательского характера при
взаимодействии с естественными объектами природного проис¬
хождения (облака, метеориты, планеты и т. д.) для извлечения
информации об объекте методами дистанционного зондирования.
Дистанционное зондирование осуществляется как активными ме¬
тодами, основанными на излучении подсистемами РТК зондиру¬
ющих сигналов и анализе радиосигналов, отраженных от объек¬
тов, так и пассивными, основанными на анализе собственных из¬
лучений объектов. В том и другом .случаях сам объект остается
пассивным, а источником информации служит радиоконтраст объ¬
екта и его составных частей на фоне окружающей среды.
Индифер е нтность ин ф орм а ци о н н ого в з аим оде йстви я п р и води т
к возрастанию уровня априорной неопределенности условий функ¬
ционирования РТК по сравнению с согласованным взаимодейст¬
вием, однако источники неопределенности, как правило, носят
преднамеренный характер и связаны с выделением объекта из ок¬
ружающей среды. За устранение дополнительной априорной неоп¬
ределенности приходится расплачиваться усложнением структу¬
ры приемных подсистем РТК, устройств обзора, поиска и обнару¬
жения радиосигналов. Соответственно обработка информации в
таких РТК включает в себя методы распознавания и идентифика¬
ции.
Антагонистическое взаимодействие между РТК и объектами
специфично для РТК, решающих задачи военного характера. Для
таких РТК прежде всего характерен антагонизм целей РТК и
ОИВ, так как объекты информационного взаимодействия принад¬
лежат системе, находящейся в конфликте с системой высшего
уровня, определяющей целевое назначение РТК.
Антагонистический характер информационного взаимодейст¬
вия приводит к еще большему уровню априорной .неопределенно¬
сти условий функционирования РТК, так как противник может
преднамеренно использовать весь арсенал методов и средств, на¬
рушающих нормальный режим работы радиотехнических средств
конфликтующей стороны. Отсюда возрастает роль проблем поис¬
24
ка, обнаружения, идентификации и распознавания объектов про¬
тивника. При этом резко возрастают требования к оперативности
решения задан, поставленных перед РТК.
1.4. Целевое назначение и уровни иерархии
радиотехнических комплексов
При изложении вопросов классификации целевого назьаче-
ни я и опер а ци й о б ecu е ч ени.я и н ф о р м а ционно го в за им оде йстви я
РТК необходимо ввести и конкретизировать ряд терминов, харак¬
теризующих иерархическое описание РТК. Это описание основы¬
вается на использовании введенного выше -понятия декомпозиции
РТК на системы более низкого иерархического уровня, которые
обычно называют подсистемами или .звеньями. Каждая подсисте¬
ма в свою очередь обладает спецификой функциональной целост¬
ности и выполняет определенную системную операцию реализа¬
ции поставленной целевой задачи. Тогда РТК может быть пред¬
ставлен в виде совокупности функциональных подсистем, состав¬
ляющих системную иерархию.
Глубина описания характеризуется числом уровней иерархии
от РТК до «предельной единицы» или функционального элемента.
Эта предельная единица хотя и сохраняет некоторые черты дан¬
ной системы, но уже не может быть разделена на единицы более
низкого уровня, а только на функциональные элементы. Функцио¬
нальный элемент реализуется в виде конкретной физической
структуры на соответствующей элементной базе. При рассмотре¬
нии вопросов анализа и синтеза РТК, на наш в-згляд, достаточно
выделить /следующие уровни иерархии: 1. Радиотехнический комп¬
лекс . 2. Ком п ленена я р а ди отех ни ческ а я систем а опр е дел е иного
функционального назначения (КРТС). 3. Радиотехническая систе¬
ма (станция). 4. Функциональная подсистема (канал) РТС, вы¬
полняющая определенную операцию обеспечения. 5. Радиотехниче¬
ское устройство (функциональный элемент), являющееся в дан¬
ном случае предельной единицей иерархического описания.
1. Радиотехнические комплексы и комплексные радиотехниче¬
ские системы. Радиотехнические комплексы по терминологии тео¬
рии систем относятся к целенаправленным многоуровневым слож¬
ным системам. Это означает, что сам комплекс и любая из его
подсистем обладают четко выраженным функциональным назна¬
чением (целью функционирования), которое может быть выраже¬
но на языке определенного иерархического уровня.
Целевые задачи радиотехнических комплексов в рамках иерар¬
хии РТК можно назвать глобальными целями информационного
взаимодействия, которые задаются системой высшего уровня, в
интересах которой создается соответствующий РТК. К системам
высшего уровня (СВУ) или суперсистемам будем относить госу¬
дарства и коалиции государств, государственные учреждения (ми¬
нистерства, ведомства), реализующие комплексные целевые про¬
граммы: научные исследования, транспорт, связь, сельское хозяй¬
25
ство, и т. д. Суперси(стемы для реализации своих программ (созда¬
ют РТК, решающие определенные целевые задачи. Эти задачи,
как правило, излагаются -на вербальном уровне. Их названия
обычно не содержат терминов радиотехнического характера, а со¬
держат ключевые слова, описывающие объект и основную опера¬
цию информационного взаимодействия. К (наиболее распростра¬
ненным глобальным целям РТК можно отнести: связь и инфор¬
мационный обмен; навигационное обеспечение и управление по¬
движными объектами (самолеты, вертолеты, КА); обеспечение
летно-конструкторских испытаний новых образцов техники; ме¬
теорологии ее кое об еспеч е н и е.
Глобальность целей РТК предусматривает обычно и глобаль-
11 ость з ci I ы пнф о рм ац и они ого вз аим оде йств'ия, р азм ер ы .кото р о й
превышают размеры зоны радиовидимости, которая в основном оп¬
ределяется соотношением высот РТС и ОИВ над поверхностью
Земли. Требования глобальности информационного (взаимодейст¬
вия принципиально необходимы при решении задач УВД на меж¬
дународных трассах, управлении полетом КА, создании систем
космической связи ('через ИСЗ) и т. д.
Реализация глобальности информационного1 взаимодействия в
условиях ограниченных зон радиовидимости возможна только при
создании пространственно-разнесенной сети РТС с размещением
средств в различных точках земной поверхности, -на кораблях,
самолетах, КА и других носителях.
Цели, определяющие функциональное назначение РТК, будут
выполнены, если средства их реализации в виде отдельных под¬
систем будут осуществлять определенные операции обеспечения
информационного взаимодействия. Конкретный вид этих операций
и соответственно типы реализующих их (подсистем формулируют¬
ся и выбираются на основе горизонтальной и вертикальной де¬
композиций глобальных целей РТК.
В РТК можно выделить два контура ин формационного взаи¬
модействия. Первый контур относится непосредственно к реали¬
зации целевых задач информационного взаимодействия с объек¬
тами и является внешним по отношению к средствам РТК. Вто¬
рой контур относится к совокупности операций, обеспечивающих
•норм ал ьно е фу нкционир ов а ние, вз а имодействме и ко орд и н а цию
.пространственно-разнесенных подсистем РТК, и может быть на¬
зван внутренним контуром.
Цели функционирования РТК реализуются с помощью радио¬
технических методов, лежащих в основе организации мнформа-
ционного вз аимодействи я между прост р анственно-ра зн есенн ы.м и
объектами. Как уже говорилось, принципиальной особенностью
р а дио т е х ни ч ес ки х к о м п л е ксов я в л я етс я испо л ь з о в а ни е эл ектро -
магнитных волн для осуществления заданной цели информацион¬
ного взаимодействия. Это обстоятельство ограничивает перечень
целевых задач, решаемых радиотехническими методами в соот¬
ветствии с физическими свойствами и особенностями распростра¬
нения электромагнитных волн.
26
За годы становления и развития радиотехники была вырабо¬
тана и -стала общепринятой следующая классификация ее целе¬
вых прикладных задач: радиосвязь и передача данных, радиове¬
щание, телевидение, радиолокация «и радионавигация, радиоуп-
р а в ление, р а ди отел ем етр и я, р а дно астр о-н ом ня, p-а диоэ л ектр они а я
разведка, борьба с ради1оэлектронными средствами.
В -рамках данной книги, очевидно, нет смы-сла приводить раз¬
вернутые определения приведенных выше терминов: они доста¬
точно хорошо известны читателю. Отметим только, что в связи
с расширяющимся кругом целевых задач и их определенной спе¬
циализацией за последние годы возник рад терминов, которые не
содержат ключевого слова или приставки «радио». К таким тер¬
минам можно отнести «траекторные измерения», «дистанционное
эо н д иро в а н и е », «инф ор м а ци о н но е об е-спеч е ни е », к о тор ы е под ч ер -
кивают и -конкретизируют целевые задачи информационного взаи¬
модействия. Решение этих задач может осуществляться не только
радиотехническими, но и другими, например оптическими, мето¬
дами.
Системный анализ позволяет несколько видоизменить и упо¬
рядочить традиционную классификацию РТК и РТС. При этом
можно выделить пять основных целевых задач внешнего конту¬
ра информационного взаимодействия: обеспечение информацион¬
ного обмена; извлечение информации об объекте информацион¬
ного обмена (распознавание и идентификация); навигационное
обеспечение (определение местоположения и параметров движе¬
ния) объектов; управление функционированием объектов; наруше¬
ние информационного взаимодействия.
Данная классификация достаточно хорошо -согласуется с тра¬
диционным перечнем прикладных задач современной радиотехни¬
ки и характером информационного взаимодействия между ОИВ
и РТС.
В основе функционирования -внешнего и внутреннего контуров
РТК и КРТС лежат информационные процессы, включающие
формирование, преобразование, передачу, сбор, обработку, реги¬
страцию и отображение, хранение, поиск и воспроизведение, рас¬
пределен ие п о п о гр ебите л ям, ин терпр етаци ю, инте-гр ир о в а ин ое
представление и целевое использование информации, сигналов и
сообщений, циркулирующих в той или иной форме.
Указанные процессы определяют структуру РТК и состав не¬
обходимых подсистем, реализующих как -сами операции информа¬
ционного взаимодействия с объектами, так и операции обеспе¬
чения функционирования его внешнего и внутреннего контуров.
Независимо от конкретного типа РТК в нем можно выделить
следующие основные подсистемы: подсистему координации и уп¬
равления функционированием средствами РТК; сеть РТС, осуще¬
ствляющих непосредственное информационное взаимодействие с
•объектами; сеть средств автоматизированной обработки информа¬
ции и управления, образующих вычислительную структуру РТК;
27
сеть передачи данных и информационного обмена .между прост-
рачиственпо-ра внесенными элементами РТК.
Уровень глобальной цели РТК обычно выше какой-то одной
целевой задачи информационного взаимодействия и требует для
своей реализации одновременного решения нескольких частных
задач. Так, при решении задачи управления полетом космических
аппаратов 'необходимо реализовать операции навигационного обес¬
печения КА (траекторные измерения), информационного обмена
(передача командной информации) и извлечения информации для
технической диагностики состояния КА (телеметрия).
С этой точки зрения введем понятие «комплексная радиотех¬
ническая система», образующее второй уровень иерархии РТК.
Под КРТС будем понимать сеть радиотехнических средств оди¬
накового целевого назначения, совместно реализующих одну из
целевых подзадач функционирования РТК, а также совокупность
средств сбора и обработки информации, позволяющих получить
конечные результаты решения частной задачи в интегрированной
форме, удобной для потребителя.
В качестве примеров КРТС можно привести комплексную си¬
стему траекторных измерений (КСТИ), входящую в состав ко¬
мандно-измерительных комплексов управления космическими объ¬
ектами, а также комплексов УВД, комплексную систему телемет¬
рического контроля и т. д. [24, 26, 35].
2. Радиотехнические системы находятся на третьем иерархи¬
ческом уровне РТК, являются основными звеньями его внешнего
контура и непосредственно реализуют целевые задачи информа¬
ционного взаимодействия с объектами посредством излучения,
приема, обработки и анализа электромагнитных колебаний. РТС
представляет собой совокупность радиоэлектронной аппаратуры
(РЭА), расположенной в ограниченном пространстве или уста¬
новленной на подвижном носителе и решающей частную конкрет¬
ную задачу информационного взаимодействия. В РТС осуществля¬
ется лишь первичная обработка получаемой радиотехнической ин¬
формации на уровне выделения, отображения и регистрации по-
л езн ы х п ара метров р ад носи гн а лов. Р ежим ы ф у 11 к ционир ов а ни я
РТС задаются координатором РТК.
Основные целевые задачи РТС полностью соответствуют опи¬
санным выше задачам информационного взаимодействия. Однако
в состав РТК или КРТС могут входить различные по своему на¬
значению территориально-разнесенные РТС, часть из которых вы¬
полняет основную задачу комплекса, а остальные — реализуют
операции обеспечения основной целевой задачи. Так, в состав РТК
управления самолетами или КА должны входить не только сами
радиолокационные системы, но и не менее сложная сеть систем
передачи радиолокационной информации и управления функцио¬
нированием отдельных РЛС.
Разнообразие целевых задач и конкретных типов РТС так или
иначе связано с разделением их на два больших класса — инфор¬
мационные и метрические. Например, радиолокационные и радио¬
28
навигационные системы, измеряющие (координаты и составляющие
вектора скорости объектов, относятся к классу метрических си¬
стем (систем траекторных измерений). Задача .извлечения инфор¬
мации об объекте информационного взаимодействия в принципе
также решается (метрическими РТС на основе дистанционного
зондирования объекта, приема и анализа отраженных или пере-
,из лучен н ых р а д носигн ал ов для дальне йшего р аспознав а ни я и
идентификации сигнатурных характеристик ОИВ. Дистанцпюнное
зондирование может осуществляться с помощью как РТС, так и
.систем, работающих в оптическом диапазоне.
Обеспечение инфор м ацио иного обмена осуществи яется р а дио-
систем1ами передали (информации. При этом в роли источников со¬
общений могут выступать метрические радиосистемы, генерирую¬
щие информацию в (процессе взаимодействия с объектами.
В -целом ряде случаев информационные и метрические функ¬
ции объединяются в одной радиосистеме или радиоканале. В этом
случае РТС называется совмещенной или информационно-метри¬
ческой. Примером информационно-метрических РТС являются ра-
дпотелеметрическме системы, а также командно-измерительные
системы (КИС), используемые в комплексах управления поле¬
том [2, 25].
Системы радиоуправления функционированием объектов также
являются информационно-метрическими, так как для принятия ре¬
шения на управление объектом необходимо вначале оценить его
вектор состояния на основе полученной измерительной информа¬
ции, определить расхождение между желаемым и реальным ре¬
зультатами функционирования и сформировать управляющие воз¬
действия.
Методы реализации задач информационного взаимодействия в
РТС и их типовые структуры рассмотрены в гл. 2 и 4 при изло¬
жении конкретных примеров современных РТК и РТС.
3. Подсистемы РТС относятся к четвертому уровню иерархии
РТК и .предназначены для реализации конкретных операций обес¬
печения информационного взаимодействия (во внешнем и внут¬
реннем контурах РТК и КРТС).
Применительно к РТС операции обеспечения информационно¬
го обмена можно разбить на следующие основные классы: опера¬
ции над информацией, сообщениями и сигналами; операции уп¬
равления функционированием подсистем.
Операции над информацией, сообщениями и сигналами вклю¬
чают в себя все виды преобразования, излучения и приема, вы¬
деления и анализа полезной информации в различных звеньях
контуров информационного взаимодействия. К основным из них
можно отнести:
преобр азов а ние и нф ор м ации в эл ектр ический сиги а л;
кодирование сообщений;
генерирование ВЧ сигналов-носителей (полезной информации
и служебных обеспечивающих сигналов (синхронизация, разверт¬
ка и т. д.);
29
модуляция ВЧ сигналов;
.излучение электромагнитных колебаний;
.•ра.спростра1нен!ие электромагнитных колебаний через среду от
источника /к (потребителю;
прием электромагнитных колебаний .или пространственная об¬
работка;
демодуляция ВЧ колебаний и выделение полезных парамет¬
ров сигнала (временная и частотная обработка);
декодирование электрических сигналов;
оценка полезных параметров сигналов;
отображение и регистрация полезных параметров сипнало-в и
преобразование выходной информации в форму, удобную для по¬
требителя.
Операции управления функционированием РТС осуществляют¬
ся человеком-оператором или автоматически и включают в себя:
обзор пространства антенным лучом РТС, пространственный, вре¬
менной и частотный -поиски радиосигналов, изменения параметров
и режимов функционирования отдельных подсистем РТС и т. д.
Указанные операции по существу относятся к системным опе¬
рациям, которые складываются из определенной последователь¬
ности более простых «элементарных» операций. Эти операции
реализуют следующие основные подсистемы РТС: передающие и
приемные антенные устройства; радиопередающие и радиоприем¬
ные устройства; 'модуляторы и демодуляторы; кодирующие и де¬
кодирующие устройства; функциональные «преобразователи (уст¬
ройства аналого-цифрового и цифро-аналогового преобразования
элек три ч еоки х сиг н а лов, пр еоб р аз ов а тел и ф и зи ч ес к и х величин в
электрические сигналы и электрических сигналов в физические ве¬
личины); устройства синхронизации и формирования служебных
сигналов; устройства информ анионного обмена РТС с другими
подсистемами РТК или КРТС.
Функциональные подсистемы РТС взаимодействуют между со¬
бой на сигнальном уровне, что требует определенных мер по обес¬
печению их инфорьманионной и сигнальной совместимости при ор¬
ганизации .информационного взаимодействия в масштабе РТК.
4. Элементная база РТС замыкает пятый нижний уровень
иерархии и реализует простейшие («элементарные») операции.
Функциональные элементы являются схемотехнической основой
или элементной базой при создании РТК -n РТС.
Следует обратить особое внимание на коренную ломку тра¬
диционных взглядов, бытующих /многие годы среди радиоспециа¬
листов, на роль и место элементной базы при проектировании,
создании и эксплуатации современных РТК и РТС.
На первых этапах развития радиотехники элементная база
строилась на основе простейших неинтегрированных активных и
пассивных элементов (резисторы, конденсаторы, индуктивные ка¬
тушки, электронные лампы, транзисторы и т. д.), каждый из ко¬
торых выполнялся в виде отдельной конструкции. Выполнение
эл е мент а рн ы х опер а ци й (у си ления, пр еоб р азов ан и я, ген ер и р ов а -
30
лия) над ВЧ и НЧ сигналами производилось на основе синтеза
простейших устройств РТС (усилительный каскад, мультивибра¬
тор, блокинг-генератор, гетеродин, смеситель, усилитель ПЧ
и т. д.). Каждое из этих устройств 'приобретало конструктивно
законченную форму и служило (модулем для синтеза более слож¬
ных операций над сигналами.
Повышение уровня сложности задач, решаемых РТК и РТС,
переход >к сигналам сложной формы, фазированным антенным ре¬
шеткам (ФАР), сложным операциям кодирования и декодирова¬
ния сообщений привели .к -миниатюризации РЭА, уменьшению ее
массо-габаритных характеристик, унификации и стандартизации
подсистем, поиску новых технических решений построения эле¬
ментной базы на основе новых физических принципов.
Эта «магистральная линия развития элементной базы наряду
с существующими традиционными ■методами привела к созданию
цифровых, аналоговых и ВЧ интегральных микросхем (ИС) с раз¬
личной степенью интеграции их элементов, обладающих инфор¬
мационной, 'сигнальной, функциональной, конструктивной совме¬
стимостью, а также устройств, использующих новые физические
принципы и явления, выполняющих традиционные операции гене¬
рирования, преобразования и обработки радиосигналов более эф¬
фективным образом (устройства акусто оптической обработки ра¬
диосигналов, модуляторы оптического излучения на основе эффек¬
тов Керра и Покельса, диоды Ганна и т. д.).
Микроминиатюризация элементной базы привела к тому, что
современный функциональный элемент РТС выполняет определен¬
ную элементарную или системную операцию и сам по себе пред¬
ставляет собой функционально и конструктивно законченную
часть с стандартизованными входными и выходными сигналами.
Это обстоятельство существенно смещает центр тяжести искусст¬
ва современного радиоинженера от решения традиционных «схе¬
мотехнических» вопросов и умения рассчитывать сложные радио¬
электронные звенья и цепи к решению системотехнических проб¬
лем функционального -синтеза подсистем высшего иерархического
уровня на основе готовых микросхем. Другими словами, проекти¬
рование современных «РТС все в большей степени сводится «к обо¬
снованному выбору и согласованию готовых функционально за¬
конченных подсистем и блоков на основе четкого уяснения их
операционных возможностей и технических характеристик, пара¬
метров и структур входных и выходных сигналов. Схемотехниче¬
ские проблемы, наоборот, все больше смыкаются с технологиче¬
скими, что приводит к определенной переориентации профиля и
специализации разработчиков элементной базы на основе интег¬
ральной технологии (радиоэлектронных систем и элементов).
1.5. Жизненный цикл и основные проблемы анализа и синтеза
радиотехнических комплексов
Радиотехнические комплексы характеризуются определенными этапами свое¬
го жизненного цикла, к основным из которых можно отнести [6, 82, 84, 92]: 1. Обо¬
снование потребностей в разработке и создании РТК определенного целевого на¬
значения и формирование технических требований. 2. Проектирование РТК.
3. Создание опытного (иногда головного)образца. 4. Испытания и опытная экс¬
плуатация. 5. Штатная эксплуатация. 6. Модернизация и развитие. 7. Моральное
устаревание очередного поколения РТК и переход к созданию нового поколения
комплекса с улучшенными показателями качества.
Рассмотрим системные проблемы анализа и синтеза РТК, возникающие на
различных стадиях их жизненного цикла. Жизненный цикл РТК начинается с
этапа выявления и обоснования потребностей в его создании, формирования це¬
левых задач, определения функционального назначения и разработки технических
требований к проектируемому комплексу.
Современные РТК являются весьма дорогостоящими сложными системами и
требуют для своей разработки и эксплуатации большого числа высококвалифици¬
рованных специалистов. Кроме того, возникают проблемы выделения террито¬
рии для размещения средств РТК, прокладки коммуникаций, строительства тех¬
нических и бытовых сооружений, экологические проблемы и др. Все это требует
расхода определенных ресурсов системы высшего уровня.
Применительно к РТК и их подсистемам обоснование потребностей в их со¬
здании может диктоваться следующими основными причинами:
1. Усложнением существующих и появлением новых целевых задач, которые
не могут быть решены имеющимися средствами.
2. Открытием и практическим использованием новых физических принципов
и эффектов, позволяющих решать поставленные целевые задачи с более высо¬
кими эффективностью и качеством.
3. Моральным устареванием РТК и его подсистем, физическим износом его
элементов, необходимостью перехода к новому поколению комплекса.
Определение функционального назначения РТК и формирование технических
требований (ТТ) к проектируемому комплексу осуществляется на основе всесто¬
роннего целенаправленного изучения и уяснения целевых задач, поставленных пе¬
ред РТК системой более высокого уровня. Здесь в полном объеме проявляется
необходимость в системотехнической деятельности и координации усилий специа¬
листов различного профиля.
Формулировка глобальных целей и функционального назначения РТК, как
правило, носит качественный характер и излагается на вербальнОхМ уровне. При
этом основное место уделяется анализу роли и места РТК как сложной систе¬
мы, обеспечивающей решение целевых задач информационного взаимодействия в
системе более высокого уровня. Их определение не представляет особого труда,
если речь идет о переходе к новому поколению комплекса. Создание РТК для
решения принципиально новых задач или достижений новых качеств информаци¬
онного взаимодействия (например, обеспечения глобальности управления воз¬
душным движением [1]) требует всестороннего согласования целей СВУ и РТК
с участием заказчика, разработчиков и потребителей.
Более сложным и ответственным является этап обоснования технических тре-
32
бований к проектируемому РТК, так как он по существу связан с выоором сис¬
темы показателей эффективности комплекса и его подсистем.
При формировании технических требований всегда возникает проблема ра¬
зумного компромисса между желанием Заказчика и возможностями Разработчи¬
ка Заказчик стремится к получению максимально высоких показателей каче¬
ства. Разработчик стремится максимально использовать апробированные ранее
принципы построения и технические решения, не всегда гарантирующие дости¬
жение заданных показателей. Поэтому задаваемые технические требования и
техническое задание, как правило, формируются системотехнической группой. В ее.
состав обычно входят представители Заказчика (лидеры), Разработчика (ведо¬
мые), представители организаций, осуществляющие эксплуатацию. РТК, а также
специалисты из вневедомственных организаций — проблемных научно-исследова¬
тельских институтов и высших учебных заведений (нейтралы). Этап формиро¬
вания ТТ порой проходит довольно мучительно, с возникновением «конфликтных
ситуаций», но всегда необходимо помнить, что всесторонне обоснованные ТТ —
это залог успешного проектирования и долговременного активного жизненного
цикла любой сложной системы [82].
Этап проектирования РТК заключается в решении задач реализации техниче¬
ских заданий и складывается из следующих основных фаз [82, 84]:
анализа реализуемости ТТ на данном этапе развития радиоэлектроники;
определения основных принципов построения РТК и его иерархической струк¬
туры, формирования ТТ к подсистемам РТК низшего уровня;
разработки технических предложений по созданию отдельных подсистем РТК;
технического проектирования РТК на основе функционального синтеза его
подсистем и анализа соответствия проекта предъявляемым ТТ;
обоснования и выбора элементной базы РТК;
создания экспериментальных макетов подсистем и их лабораторных и натур¬
ных испытаний.
На этапе проектирования лидером выступает организация головного раз¬
работчика комплекса, которая взаимодействует как с Заказчиком, так и с орга¬
низациями, проектирующими отдельные подсистемы или изготавливающими го¬
товые компоненты комплекса. После получения технического задания на проек¬
тирование комплекса головной разработчик организует свою системотехническую
■группу, которая проводит детальный анализ принципиальной реализуемости за¬
данных технических требований, а также формирует различные варианты по¬
строения структуры РТК.
К основным системным проблемам при определении принципов построения
РТК можно отнести:
разработку методов решения целевых задач информационного взаимодейст¬
вия;
обоснование и выбор оптимального состава и рационального размещения
сети радиотехнических систем РТК для реализации целей информационного взаи¬
модействия;
обоснование ТТ к РТС, реализующим отдельные операции информационного
взаимодействия, системам обработки, регистрации и отображения информации, а
также к средствам управления функционированием РТК;
разработку координационного плана-графика проектирования РТК и его
основных подсистем головным разработчиком и организациями-смежниками;
согласование входов и выходов всех подсистем РТК, унификацию сигналов
2—36
33
информационного обмена, языков программирования при разработке программ
общего и специального математического обеспечения вычислительных структур
РТК.
Каждая из организаций-разработчиков подсистем РТК в свою очередь
вновь производит анализ реализуемости предъявленных ТТ. Таким образом, опи¬
санный выше перечень проблем практически сохраняется и на более низшем уров¬
не. Однако на уровне подсистем РТК основное внимание уделяется вопросам
практической реализации ТТ на соответствующей элементной базе, обоснованию
и выбору конкретных технических решений.
Технические предложения по созданию основных подсистем комплекса также
подлежат экспертной оценке, после чего начинается этап разработки техническо¬
го проекта всего РТК. На этом этапе конкретизируется иерархическая структура
комплекса, уточняются и корректируются значения показателей эффективности
РТК и его подсистем, осуществляется совместная увязка частных проектов в еди¬
ную систему с учетом всех внешних и внутренних связей. Одновременно ре¬
шаются вопросы разработки системы математического функционально-программ¬
ного обеспечения процессов информационного взаимодействия, обработки получае¬
мой информации и ее интерпретации, а также процессов управления функциони¬
рованием РТК и его подсистемами.
Основная роль при оценке показателей эффективности РТК и его подсис¬
тем на этапе разработки технического проекта принадлежит методам моделиро¬
вания процессов функционирования на ЦВМ, которые составляют важнейший
инструмент системотехники. Методы построения цифровых моделей РТК будут
рассмотрены в гл. 6.
Технический проект РТК вновь подлежит обсуждению и защите, после чего
начинается этап аппаратурной реализации принятых технических решений, .вы¬
бора элементной базы и разработки всей необходимой документации для изго¬
товления опытных образцов проектируемых систем. Эта фаза носит конструктив¬
но-технологический характер и заканчивается созданием опытных или головных
образцов подсистем РТК.
Опытные образцы подсистем РТК вначале проходят частные лабораторные
и натурные испытания, а затем осуществляется их монтаж в составе созда¬
ваемого комплекса. Разработка методологии и организация испытаний
(опытного) образца РТК представляет собой достаточно сложную самостоятель¬
ную системную проблему. Конечная цель испытаний заключается .в получении ре¬
альных показателей эффективности РТК и оценке их соответствия заданным тех¬
ническим требованиям. Испытаниям подлежат не только аппаратурные средства
РТК, но и вся система функционально-программного обеспечения процессов функ¬
ционирования комплекса и его подсистем.
Эксплуатация, целевое применение, оценка функционирования, а также мо¬
дернизация РТК являются основными этапами его жизненного цикла. В этот пе¬
риод собирается и анализируется вся информация о реальных показателях ка¬
чества функционирования комплекса, оцениваются его возможности по выполне¬
нию возникающих новых задач, выявляются «узкие места», накапливается опре¬
деленный практический опыт. Эти данные являются исходными для последующей
модернизации комплекса и проектирования нового, когда на определенном эта¬
пе процесс модернизации становится неэффективным, так как все ее возможно¬
сти исчерпываются из-за устаревания принципов построения РТК и его функ-
34
цио'нальной структуры. В этом случае одной из важнейших проблем является
определение рационального перехода от эволюционного пути развития (модерни¬
зация) К разработке и созданию комплекса нового поколения.
При решении задач анализа и синтеза РТК возникает ряд
серьезных трудностей, степень (которых возрастает по мере роста
сложности проектируемого комплекса и его подсистем. Задача
формирования системы показателей оказывается достаточно слож¬
ной, что находит отражение и при выборе критерия. Это особенно
относится к разработке и созданию многофункциональных РТК,
одновременно реализующих различные .целевые задачи информа¬
ционного взаимодействия. С одной стороны, каждый вводимый по¬
казатель качества должен достаточно четко и ясно оценивать эф¬
фективность выполнения комплексом поставленной целевой зада¬
чи. Это обстоятельство приводит к расширению размерности си¬
стемы показателей! качества функционирования с целью всесто¬
ронней оценки эффективности целевого применения РТК. С дру¬
гой стороны, повышение размерности системы показателей каче¬
ства приводит к существенному усложнению постановки и реше¬
ния задачи синтеза РТК и требует введения обобщенных крите¬
рий.
Не мен ее серьезной является проблема составления рацио¬
нального формализованного описания РТК и его подсистем, а
также процессов информационного взаимодействия при составле¬
нии глобальной и частных моделей комплекса, положенных в ос¬
нову решения задач анализа и синтеза с целью определения и
оптимизации выбранной системы показателей качества функцио¬
нирования. Здесь возникает противоречие между требованиями
адекватности разрабатываемой модели реальной проектируемой
системе, условиям информационного взаимодействия и ее пол¬
нотой для .получения оценок требуемых показателей качества с
учетом имеющихся в распоряжении специалиста вычислительных
методов и средств. Эффективное разрешение этих проблем требу¬
ет определенного опыта и искусства при проектировании
РТК [66].
Самостоятельной является проблема разработки методов реше¬
ния многомерных задач оптимизации, к каким относится прак¬
тически любая задача синтеза РТК и его подсистем [6, 13, 40].
Таким образом, на всех этапах жизненного цикла РТК и РТС
постоянно возникает целый ряд системных проблем, связанных с
решением задач анализа и синтеза комплексов и их подсистем.
На этапах проектирования и создания РТК преобладающее зна¬
чение имеют методы синтеза, а на этапах испытаний, ввода в
строй и штатной эксплуатации—методы анализа. В свою оче¬
редь проведенный выше анализ жизненного цикла РТК позволя¬
ет выявить определенную последовательность этапов системотех¬
нической деятельности специалистов, решающих проблемы анали¬
за и синтеза РТК и их подсистем на различных стадиях. К ос¬
новным из них можно отнести следующие:
анализ целевых задач, поставленных перед проектируемым
комплексом системой 'высшего уровня, формирование контуров ин¬
фо р м ацио'Н н ото в з а им одейств и я;
оооснованис и выбор системы показателей качества функцио¬
нирования проектируемого РТК, определяющих эффективность
целевого применения комплекса в интересах системы высшего
уровня, определение взаимосвязи между показателями ■качества
РТК и СВУ;
поиск и разработку вариантов построения РТК, обоснование
и выбор его структуры, уточнение внешнего и внутреннего конту¬
ров информационного взаимодействия;
разработку модели проектируемого РТК и отдельных конту¬
ров информационного взаимодействия;
разработку методов синтеза проектируемой системы, выделе¬
ние контуров ИВ, оптимизацию и субоптимизацию, решение за¬
дачи синтеза на основе выбранных моделей и системы показате¬
лей качества функционирования;
оценивание результатов синтеза и сравнение полученных пока¬
зателей качества с требуемыми;
реализацию выбранного варианта построения РТК и его под¬
систем;
планирование и организацию испытаний РТК и его подсистем,
сбор и анализ измерительной информации, получаемой в ходе ис¬
пытаний;
организацию эксплуатации и целевого применения спроекти¬
рованного РТК, управление сбором, обработкой и анализом ин¬
формации, необходимой для оценивания реальных показателей
качества функционирования и разработки предложений по- мо¬
дернизации комплекса и его подсистем.
Возрастание степени сложности и системности проблем, воз¬
никающих при решении задач анализа и синтеза РТК на различ¬
ных стадиях жизненного цикла, соответственно требует примене¬
ния новых методов, базирующихся на математической теории си¬
стем и общей методологии системотехники. Эти методы будут
рассмотрены в последующих главах книги.
2
СОВРЕМЕННЫЕ ТИПОВЫЕ
РАДИОТЕХНИЧЕСКИЕ КОМПЛЕКСЫ
Проиллюстрируем разнообразие и сложность задач, операций
и процессов информационного взаимодействия, сложность и мно-
гоуровневость структуры РТК на конкретных примерах описания
современных РТК и их подсистем. В качестве базовых примеров
рассмотрим РТК, связанные с решением задач народнохозяйст¬
вен ного применения летательных аппаратов: самолетов, вертоле¬
тов, КА и космических систем различного научного и народнохо-
36
эяйственного назначения. Это связано с тем, что эффективное ис¬
пользование ’космоса и .космической техники при проведении на¬
учных исследований и решении 'различных народнохозяйственных
задач совершенно немыслимо без широкого применения радиотех¬
нических методов и средств.
В космических РТК наиболее ярко проявляются глобальность
и разнообразие форм информационного взаимодействия, слож¬
ность структур радиосигналов информационно-метрических радио¬
систем, вычислительных структур и информационного обмена. Они
характеризуются высокой степенью автоматизации процессов по¬
лучения, сбора и обработки информации, а также управления
функционированием как космическими объектами, так и простран¬
ственно-разнесенными подсистемами РТК. Их рассмотрение убе¬
дительно показывает необходимость применения системного под¬
хода на всех этапах проектирования, разработки, целевого приме¬
нения и эксплуатации современных РТК. Подтверждением этому
служит вся история развития отечественной и зарубежной кос¬
монавтики. Описание РТК приводится на основе обобщения ряда
материалов, появившихся за последние годы в открытой печати
[1, 2, 7, 25, 26, 41, 45, 74].
2.1. Космические радиотехнические комплексы
Целевое назначение, состав и структура космических РТК оп¬
ределяются как характером целевых задач освоения и использо¬
вания космического пространства, так и спецификой запуска, ак¬
тивного функционирования КА, условиями их информ анионного
вз аимод е й с тв и я.
Объектами информационного взаимодействия в космических
комплексах являются как отдельные КА, так и их совокупность,
обладающая заданной орбитальной структурой и образующая
космическую систему определенного целевого назначения. С точ¬
ки .зрения научного и народнохозяйственного назначения косми¬
ческие системы (КС) делятся на следующие основные классы
[25, 27]:
космические системы, осуществляющие наблюдение земной по¬
верхности и околоземного пространства при использовании раз¬
личных диапазонов электромагнитных волн и реализующие функ¬
ции извлечения информации в целях обнаружения, распознавания
и идентификации объектов 'наблюдения;
космические системы, реализующие функцию обмена инфор¬
мацией и обеспечивающие связь, а также ретрансляцию данных
между различными районами земного шара;
космические системы, осуществляющие навигационное, геоде¬
зическое и топографическое обеспечение наземных, плавучих и
воздушных средств, реализующие функцию определения местопо¬
ложения и параметров движения объектов;
космические системы, обеспечивающие сближение, стыковку
пилотируемых и транспортных КА с долговременными орбиталь-
37
нъвми станциями и реализующие функции управления динамиче¬
скими операциями в космосе;
автоматические межпланетные станции (АМС), предназначен¬
ные для исследования Луны и других -планет и так же реали¬
зующие функции извлечения информации об объектах исследова¬
ний и их идентификацию.
Космические системы характеризуются о предел они ым и специ¬
фическими этапами их жизненного цикла, определяющими состав,
структуру и взаимодействие космических комплексов, реализую¬
щих обеспечение целевых задач, поставленных перед КС. К ос¬
новным из них можно отнести следующие [88]:
1) формирование целей и задач, поставленных перед КС;
2) формирование состава и структуры КС; этот этап вклю¬
чает в себя: обоснование и выбор бортовой аппаратуры, обеспе¬
чивающей выполнение поставленных целевых задач с заданными
показателями качества функционирования; обоснование и выбор
бортовых подсистем обеспечения функционирования КС; балли¬
стическое обоснование КС, т. е. выбор оптимальных орбит и гео¬
метрии расположения космических аппаратов в системе (орби¬
тальной структуры); формирование программы полета КА на
этапе активного функционирования; формирование программы уп¬
равления полетом КА; обоснование и выбор методов и средств
управления полетом; обоснование и выбор методов и средств пе¬
редачи информации, получаемой в ходе космического полета, и
формирование сети пунктов приема информации с борта КА;
3) 'Подготовку КА и 'ракеты-носителя к пуску, проведение пред¬
пусковых автономных комплексных проверок функционирования
всех бортовых подсистем КА;
4) выведение КА на заданную орбиту;
5) начальный «контрольный» этап полета для проверки каче¬
ства функционирования всех бортовых подсистем и определения
параметров реальной орбиты объекта для ввода его в состав КС;
6) этап активного функционирования КА и выполнения им
целевых задач автономно либо в составе КС; выполнение динами¬
ческих операций в космосе (стыковка КА, маневры в космосе,
расстыковка КА и т. д.);
7) спуск и посадку КА (для возвращаемых объектов).
Для АМС, предназначенных для исследования планет Солнеч¬
ной системы и глубокого космоса, сохраняются первые пять эта¬
пов жизненного цикла КА. Затем осуществляется этап перелета
с околоземной орбиты на орбиту сближения с конечной целью
полета, сопровождающийся сначала включением маршевых дви¬
гателей перехода на пролетную траекторию, а потом включени¬
ем тормозной двигательной установки (ТДУ). После включения
ТДУ АМС переходит на орбиту искусственного спутника пла¬
неты.
Для исследования планет могут применяться варианты мягкой
посадки на ее поверхность с последующим функционированием
АМС .на поверхности планеты и передачей научной информации.
38
В ряде случаев АМС может совершать обратный старт с поверх¬
ности планеты, переход на орбиту околопланетного ИСЗ и воз¬
вращение на Землю. Характерными особенностями этих опера¬
ций являются их полная автоматизация и сложная -структура ин¬
формационного взаимодействия с использованием околопланетных
КД — ретрансляторов.
Характерной особенностью КА на различных стадиях жизнен¬
ного цикла является их разноплановость как объектов информа¬
ционного взаимодействия.
С одной стороны, КА самостоятельно решает ряд целевых за¬
дач, поставленных перед его полетом, а с другой — является объ¬
ектом контроля и управления. Для радиолокационных систем на¬
блюдения в космическом пространстве КА представляет собой
радиолокационную цель с позиций извлечения информации о его
орбитальных и сигнатурных характеристиках. При выполнении
операций спуска и посадки КА рассматривается как объект на¬
вита ционн ого обеспечения.
При описании космической системы необходимо учитывать ор¬
битальную структуру ее построения, описание каждого отдельно¬
го КА, а также структуру и характер информационного взаимо¬
действия -между КА и соответствующими подсистемами косми¬
ческих комплексов.
Орбитальная структура КС выбирается исходя из соображе¬
ний рационального решения основных целевых задач и характе¬
ризуется числом КА в системе, параметрами их орбит и прост¬
ранственным разносом между отдельными КА. Так, сеть нави¬
гационных ИСЗ выбирается из соображений обеспечения гло¬
бальности решения навигационных задач неограниченным числом
потребителей, заданной точности -местоопределения потребителей и
минимальной взаимной интерференции принимаемых сигналов. Ор¬
битальная структура американской космической навигационной си¬
стемы «Навстар» содержит 24 КА. Эти аппараты размещены рав¬
номерно в трех плоскостях, наклоненных на 63° к экваториальной
плоскости и разнесенных по долготе на 120°. Орбиты всех НИСЗ
круговые со средней высотой около 20 000 км [53]. Орбитальная
структура космической метеорологической системы также состо¬
ит из нескольких КА, находящихся на синхронно-солнечных ор¬
битах, позволяющих обеспечить постоянные условия освещенно¬
сти подспутниковых районов Земли и получение информации на
одних и тех же широтах в одно и то же местное время [27].
Каждый КА можно представить в виде совокупности следу¬
ющих основных подсистем:
бортовой аппаратуры, непосредственно обеспечивающей основ¬
ные целевые задачи полета (комплекс научной аппаратуры, сред¬
ства метеонаблюдения, ретранслятор спутниковой системы связи
Й Т. Д.) ;
системы управления движением центра масс КА;
системы управления ориентацией КА;
аппаратуры жизнеобеспечения функционирования КА;
39
системы управления •функцианировапшем КА;
•бортовой телеметрической (Подсистемы;
бортовой аппаратуры траекторных измерений;
бортовой подсистем1Ы приема (коман|дно-программ-ной н нфор-
мации;
бортовой аппаратуры связи и передачи целевой .информации;
бортового эталона времени.
Конкретный состав бортовой аппаратуры определяется ‘целевы¬
ми задачами и может превышать указанный выше перечень, осо¬
бенно при осуществлении пилотируемых (полетов и динамических
операций в космосе. Так, при выполнении транспортных операций
в состав КА входят РТК сближения и стыковки, система автоном¬
ной навигации и т. д.
Реализация основных этапов жизненного цикла КС и инфор¬
мационного взаимодействия с ним осуществляется рядом косми¬
ческих комплексов, каждый из которых выполняет самостоятель¬
ную целевую задачу. Основные из них: 1) космодром; 2) комплекс
контроля вывода КА на заданную орбиту; 3) командно-измери¬
тельный комплекс (КИК) управления полетом КА; 4) комплексы
потребителей целевой информации, получаемой от космических
средств; 5) комплексы районов посадки КА.
Космодром обеспечивает подготовку к полету и осуществляет
запуск состыкованной ракетно-космической системы для вывода
КА на заданную орбиту. Космодром состоит из технической и
стартовой зон и различных служб обеспечения запуска КА. Ха¬
рактерной особенностью подготовки объекта к запуску является
проведение (всесторонних комплексных .проверок и испытаний бор¬
товой аппаратуры перед ее долговременным автономным функцио¬
нированием в (космосе [2, 32, 88]. Космодром в принципе нельзя
назвать радиотехническим комплексом, так как основные опера¬
ции производятся в основном без привлечения радиотехнических
средств, за исключением случаев, когда бортовые РТС и устрой¬
ства КА подвергаются в технической и стартовой зонах различ¬
ным автономным и комплексным проверкам. Зато остальные кос¬
мические комплексы, осуществляющие информ анионное взаимо¬
действие с КА, с (Полным основанием -можно отнести к классу
космических радиотехнических комплексов (КРТК) [25].
Так, при запуске КА процесс выведения его на заданную ор¬
биту контролируется радиотехническим измерительным комплек¬
сом, в состав (которого входят радиотехнические и оптико-элект¬
ронные (системы траекторных измерений, р адиот еле метрические си¬
стемы, аппаратура создания единой временной шкалы, а также
средства регистрации, сбора и обработки измерительной инфор-
м аци и. Средств а р а ди отехнического и змерител иного ко м п л екс а
расположены в районе активного участка полета и контролируют
работу бортовых систем и ракеты-носителя, и КА и выход на ор¬
биту [88].
После вывода объекта на заданную орбиту управление его по¬
летом в течение всего периода активного функционирования осу¬
40
ществляется средствами КИК, который несет 'наибольшую нагруз¬
ку по реализации операций информационного взаимодействия с
КА, выполняющими различные целевые задачи. При функциони¬
ровании КИК наиболее ярко проявляется разнообразие функций
•информационного взаимодействия, что приводит к целесообразно¬
сти его более детального рассмотрения в качестве базового при¬
мера [2, 88].
Прием целевой информации с борта КА (научной, метеороло¬
гической, навигационной и т. д.), а также информационный об¬
мен через КА осуществляется сетью пунктов приема целевой ин¬
формации. В качестве потребителей космической информации мо¬
гут выступать стационарные и подвижные объекты и человеко-ма¬
шинные системы (ЧМ). Полученная космическая информация об¬
рабатывается в специальных научно-вычислительных центрах,
принадлежащих )потребителям, использующим КС для решения
исследовательских и народнохозяйственных задач [25, 27, 41]. Для
экономии бортовых энергоресурсов целесообразно заранее плани¬
ровать сеансы приема целевой информации и информационного
обмена с КА и согласовывать -их с сеансами управления. Это тре¬
бует согласованного взаимодействия КИК и соответствующих
РТК — потребителей целевой информации.
При запуске возвращаемых КА возникает проблема навига¬
ционного обеспечения операций посадки, а также поиска, опасе¬
ния и эвакуации экипажа и КА при возникновении внештатных
ситуаций. Наиболее просто эта задача решается при парашют¬
ном варианте возвращения КА с помощью комплекса средств пе¬
ленгации радиоизлучений объекта на участке спуска [25].
Более подробно рассмотрим целевое назначение, структуру и
процессы функционирования КИК управления полетом КА, на¬
глядно иллюстрирующего разнообразие форм и методов инфор¬
мационного взаимодействия в современных РТК (рис. 2.1) [2,
41, 88].
Цели функционирования КИК заключаются прежде всего в вы¬
полнении намеченной программы полета КА с заданными пока¬
зателями качества. С этой точки зрения целевые задачи КИК
формируются на основе требований, поставленных системой выс¬
шего уровня. В зависимости от типа космической системы ее це¬
левые задачи можно разделить на три категории: постоянные в
течение всего полета; программно-изменяемые; оперативные за¬
дачи, появляющиеся при внештатных ситуациях.
Постоянство целевых задач характерно для космических на¬
вигационных систем, систем космической связи, космических ме¬
теорологических систем и др. Для пилотируемых орбитальных
станций с экипажем на борту обычно планируется целый комп¬
лекс целевых задач, каждая из которых выполняется в опреде¬
ленной временной последовательности. Однако учитывается воз¬
можность возникновения различных ситуаций, в ходе которых не¬
обходимо либо произвести какие-либо динамические операции в
Космосе, либо изменить запланированную последовательность вы-
41
полненмя операций на борту КА («внеплановая посадка КА, пере¬
вод стационарного ИСЗ в другой район, 1возиикновение аварий¬
ной ситуации в а борту КА и т. д.).
Основные цели функционирования КИК 'могут быть сформу¬
лированы следующим образом: поддержание орбитальной струк¬
туры 1косм'ической системы; управление в контроль выполнения
Рис. 2.1. Структурная схема командно-измерительного комплекса управления,
полетом КА:
АЖ — аппаратура жизнеобеспечения; БА — бортовая РЭА; БАС, БТВС — бортовая РЭА
связи и бортовая телевизионная система; БЭВ — бортовой эталон времени; БПЦИ — борто¬
вая аппаратура передачи целевой информации; БКРЛ — бортовая командная радиолиния;.
БТЛМС — бортовая телеметрическая система; БСТИ — бортовая система траекторных изме¬
рений; КС КРЛ — комплексная система командных радиолиний; КТЛМС — комплексная те¬
леметрическая система; КСТИ — комплексная система траекторных измерений; КСС и
КТВС — комплексная система связи и комплексная ТВ система; СБО— система баллистиче¬
ского обеспечения; СКА — система комплексного анализа; СУ — система управления; СУД —
система управления движением; СУО — система управления ориентацией; СУФ — система
управления функционированием; ТЦУ — технологический цикл управления; ЦО ТАШ — центр
обработки телеметрической информации
динамических операций в космосе; управление движением КА
вокруг центра масс; управление функционированием бортовой ап¬
паратуры КА; оценка качества 'выполнения целевых задач, по¬
ставленных перед полетом 1космичеокой системы; взаимодействие
с комплексами, осуществляющими целевое использование КА, а
также с измерительным комплексом космодрома и комплексами
р а й он ов п ос а дк и.
Целевые задачи КИК определяют перечень операций их обес¬
печения, а также структуру и состав подсистем комплекса, реа¬
лизующих функции управления полетом КА.
Структура и характер инфо»р1мацион!ного (взаимодействия с КА
помимо целевых задач существенно зависят от орбитальной струк-
42
ту/ры построения КС, .пространственного разнесения радиотехни¬
ческих средств КИК и условий информационного взаимодействия.
Условия наблюдения КА прежде всего определяются высотой его
орбиты и траекторией его подспутниковой точки относительно ра-
диотехнического средства. В связи с этим возникают существен¬
ные трудности в обеспечении глобальности и непрерывности ин¬
формационного взаимодействия с точки зрения как управления
полетом КА, так и передачи и приема целевой информации. Одним
из путей решения этой проблемы является многопунктиая рассре¬
доточенная структура КИК и комплексов приема целевой инфор¬
мации, когда сеть измерительных пунктов выбирается из сообра¬
жений надежного перекрытия их зон видимости. Ограниченность
территории государств, использующих космическую технику, при¬
вела к созданию подвижных корабельных измерительных пунк¬
тов [66, 81]. Так, в СССР созданы специальные плавучие измери¬
тельные •комплексы: суда космического флота «Космонавт Юрий
Гагарин», «Академик Сергей Королев», «Космонавт Владимир
Комаров» и др., оснащенные современными радиотехническими
средствами, системами связи и передачи информации [2, 81]. США
активно используют территории зарубежных государств для раз¬
мещения своих измерительных пунктов, также корабли слежения
(«Генерал Арнольд», «Обсервейшен Айленд» и др.) [66].
Однако, несмотря на наличие разнесенной сети 'наземных и
подвижных измерительных пунктов, возможны случаи отсутствия
прямой радиовидимости между КА и радиотехническими средст¬
вами КИК. Это обстоятельство привело к использованию прог¬
раммно-временных принципов управления полетом КА при рацио¬
нальном сочетании методов телеуправления по командам с Зем¬
ли и методов автономного управления функционированием КА в
период отсутствия информационного взаимодействия.
В основе программно-временных методов управления лежит до¬
пущение о детерм и ниров анносм характере траектории полета КА,
которое позволяет прогнозировать текущий вектор состояния объ¬
екта на заданном временном интервале с определенной степенью
точности и заранее спланировать последовательность выполнения
операций функционирования бортовых систем КА и информаци¬
онного взаимодействия
Исходными данными для планирования являются заявки по¬
требителей, в интересах которых функционируют КС, а также
результаты текущего контроля функционирования бортовых си¬
стем по данным телеметрии и траекторных измерений. Програм¬
ма полета КА реализуется на основе формирования последова¬
тельности технологических циклов управления (ТЦУ) внешними
и внутренними контурами информационного взаимодействия кос¬
мических комплексов и контроля их выполнения.
Основными составляющими ТЦУ являются программы: функ¬
ционирования бортовых систем КА; траекторных измерений; те¬
леметрического контроля функционирования бортовой аппарату¬
43
ры; фун-кциоииро'вания измерительных (пунктов КИК и функцио¬
нирования пунктов приема целевой информации.
Программа функционирования бортовых систем КА на задан¬
ном временном интервале может быть представлена пакетом про¬
граммно-командных сообщений. Пакет включает в себя как от¬
дельные разовые команды (РК), выдаваемые комплексной систе¬
мой командных радиолиний (КСКРЛ) и реализуемые на борту
КА по мере их поступления, а также временную программу (ВП),
обеспечивающую автономное управление функционированием КА
вне зон радиовидимости с наземными или плавучими средствами
КИК. Заданная программа функционирования КА ■принимается
бортовой подсистемой КСКРЛ и поступает в запоминающее уст¬
ройство бортовой системы управления КА для дальнейшей реа¬
лизации.
Для управления функционированием бортовыми системами КА
в автономном режиме и по командам с Земли необходим борто¬
вой эталон времени для синхронизации управления и временной
привязки измерительной и целевой информации. Отсюда возни¬
кает проблема периодической сверки и коррекции шкал бортово¬
го (и наземного времен, так как стабильность бортовых эталонов
времени существенно ниже наземных эталонов.
Для реализации операций управления полетом КА необходи¬
мо контролировать параметры его орбиты, а также состояние и
параметры бортовых систем. При проведении пилотируемых по¬
летов дополнительно осуществляется контроль за состоянием и
деятельностью экипажа, ведение ТВ репортажей и радиотелефон¬
ных переговоров с космонавтами.
Для (решения этих задач применяются следующие важнейшие
комплексные РТС, входящие в состав КИК:
комплексная система траекторных измерений (КСТИ);
комплексная телеметрическая система (КТЛМС);
комплексная телевизионная система (КТВС);
комплексная система радиотелефонной связи (КСС).
Назначение комплексной системы траекторных измерений за¬
ключается в реализации навигационного обеспечения КА путем
измерения .параметров его движения и обработки полученной
траекторной информации для решения задачи определения и прог¬
нозирования орбиты КА.
В состав КСТИ входят следующие основные подсистемы:
наземные радиотехнические либо оптико-электронные системы
траекторных измерений (СТИ), предназначенные для определе¬
ния текущих параметров движения КА;
бортовые системы траекторных измерений, которые взаимодей¬
ствуют с СТИ (приемоответчики) или производят автономные из¬
менения параметров движения с последующей передачей резуль¬
татов измерений на Землю;
аппаратура службы единого времени;
устройства преобразования, регистрации и первичной обработ¬
ки траекторной информации;
44
устройства передачи и сбора траекторной информации;
система обработки траекторной информации;
(подсистема 'координации и управления КСТИ.
Результаты обработки траекторной информации в виде пара¬
метров орбиты КА поступают в службу баллистического обеспе¬
чения Центра управления полетом. На их основе рассчитываются
зоны радиовидимости и решается задача указаний антенным си¬
стемам средств КИК и пунктов приема информации, определяют¬
ся исходные данные для проведения динамических операций в кос¬
мосе и т. д. Более подробное описание КСТИ как б.азовой комп¬
лексной РТС дано в гл. 4.
Комплексная телеметрическая система также состоит из сети
наземных РТС приема телеметрической информации .(ТМИ), вза¬
имодействующих с бортовыми системами информационно-телемет¬
рического обеспечения, средств первичной обработки и регистра¬
ции данных телеизмерений, средств передачи данных с наземных
пунктов в центр обработки ТМИ. Полученные по результатам об¬
работки телеметрической информации данные о состоянии эки¬
пажа и функционировании бортовых систем КА представляются
в форме, удобной для их последующего отображения, анализа и
целевого использования. Анализ телеметрической информации ве¬
дется различными специалистами Центра управления полетом по
«своим» подсистемам.
Телеметрическая информация, используемая в контуре управ¬
ления полетом КА, и результаты траекторных измерений являют¬
ся исходными данными для оценки качества выполнения задан¬
ного технологического цикла управления. При проведении пило¬
тируемых полетов используются также данные радиотелефонных
переговоров с космонавтами и ТВ репортажей с борта КА, полу¬
ченные с помощью КТВС и КСС. Служба комплексного анали¬
за Центра управления полетов на основе всей полученной инфор¬
мации и поступающих заявок на управление КА корректирует
очередной технологический цикл управления и формирует исход¬
ные данные для составления пакета программно-командных со¬
общений. Таким образом замыкается внешний контур информа¬
ционного взаимодействия КИК.
Простр анстве:нно-‘р1аз11есе1нная многопункгп ая структур а КИК
требует четкой организации и координации внутреннего конту¬
ра информационного взаимодействия при проведении сеансов ра¬
диосвязи с КА, передаче, сборе, обработке измерительной инфор¬
мации и управлении функционированием средств комплекса.
Технологический цикл управления реализуется на основе про¬
ведения сеансов связи с КА при передаче командно-программной
информ а ци и, при ем е тел еметр и ч е-ско й ин ф о р м аци и, пр ов едении
траекторных измерений и информационно го обмена с экипажем
’п,° радиотелефонным и ТВ каналам. Планы проведения сеансов
связи и их содержание для реализации соответствующего ТЦУ
рассылаются на измерительные пункты КИК. Средства измери¬
тельных пунктов на основе исходной технологической информа-
45
ци.м (дан-ны-е, рабочие частоты 'бортовой аппаратуры -и т. д.) го¬
товятся к проведению запланированных сеансов связи с КА. При
входе КА (в зону радиовидимости осуществляется поиск и захват
сигналов бортовой аппаратуры и переход в режим устойчивого
сопровождения для проведения информационного обмена с КА.
Если по каким-либо причинам сеанс связи с КА не состоялся
или был реализован частично, то необходимо осуществить опера¬
тивное перепланирование работы средств КИК. Отсюда возни¬
кает 'необходимость наличия определенного резерва сеансов свя¬
зи с КА для надежной реализации ТЦУ при возникновении вне¬
штатных ситуаций. По окончании сеансов связи измерительные
пункты выдают в центр КИК информацию, полученную в резуль¬
тате работы радиотехнических средств пункта, и характеристику
условий информационного взаимодействия. Таким образом замы¬
кается внутренний контур информационного взаимодействия КИК.
Командно-измерительный комплекс также осуществляет ин¬
формационное взаимодействие с космодромом и его- измеритель¬
ным комплексом, комплексами потребителей целевой информации
и комплексами посадки КА.
2.2. Радиотехнические компексы управления
воздушным движением и навигационного обеспечения полетов
Другим наглядным примером больших РТС являются РТК управления воз¬
душным движением и навигационного обеспечения полетов самолетов и вертоле¬
тов (РТК УВД и НО) [1,5, 89]. Сложность РТК УВД и НО не уступает сложности
космических РТК. Это связано прежде всего с необходимостью обеспечения по¬
летов большого числа различных типов самолетов и вертолетов по внутренним
и «международным трассам, наличием густой сети аэродромов и выполнением
жестких требований обеспечения полной безопасности полетов и максимальной
эффективности использования авиационной техники.
Так как объектами информационного взаимодействия для РТК УВД и НО
являются объекты авиационной техники, т. е. самолеты и вертолеты, то целевое
назначение и этапы функционирования этих объектов определяют назначение,
структуру и процессы функционирования РТК УВД и НО.
Основное целевое назначение самолетов и вертолетов сводится к перемеще¬
нию людей и грузов из одной точки земного шара в другую и в доставке гру¬
зов и почты в труднодоступные районы путем их сбрасывания без совершения
посадки (например, доставка грузов геологическим экспедициям, полярным стан¬
циям и т. д.).
Эти задачи выполняются поэтапно. Полет самолета при совмещении опера¬
ций перемещения людей и грузов из одной точки в другую и сбрасывания гру¬
за в труднодоступный район складывается из следующих фаз: получения целевой
задачи полета и ее уяснения; предполетной подготовки самолета и согласования
.маршрута полета; выруливания самолета на взлетно-посадочную полосу (ВПП)
аэродрома; взлета; набора высоты и выхода на заданный маршрут полета;
полета по маршруту «аэродром взлета — район сброса груза»; маневра сниже¬
ния для сброса груза в заданном районе; сброса груза; повторного набора высо¬
ты и выхода на маршрут «район сброса — аэродром посадки»; снижения; выпол¬
46
нения посадочного маневра; посадки; выруливания самолета на место стоянки и
эГо разгрузки; послеполетного осмотра.
Выполнение полета даже одним самолетом в пределах определенного регио¬
на при отсутствии других ЛА требует проведения ряда мероприятий по обеспе¬
чению всех его этапов с использованием комплекса радиотехнических средств
различного назначения. При этом основной задачей РТК является навигацион¬
ное обеспечение.
Однако в пределах одного региона, не говоря уже о масштабах более высо¬
кого иерархического уровня, на земле и в воздухе одновременно находится весь¬
ма значительное количество самолетов и вертолетов, что связано с большим объ¬
емом работ по выполнению государственных планов авиаперевозок и других на¬
роднохозяйственных работ. Все возрастающая интенсивность воздушного движе¬
ния ставит перед РТК не только задачи навигационного обеспечения большого
числа летательных аппаратов, но и в первую очередь задачи выполнения требо¬
ваний по безопасности воздушного движения и регулярности полетов. Отсюда
возникает проблема управления воздушным движением, которая по уровню
иерархии выше проблемы навигационного обеспечения. Это привело к тому, что
созданные на первых этапах развития авиационной техники РТК НО по сущест¬
ву превратились в автоматизированные комплексы управления воздушным дви¬
жением fl, 89].
В отличие от задач управления полетом КА, где функции информационного
и навигационного обеспечения имеют одинаковый уровень иерархии, при решении
задач управления воздушным движением основную роль играет навигационная
информация. Поэтому термин «РТК управления воздушным движением и нави¬
гационного обеспечения», с одной стороны, подчеркивает возрастание уровня
■иерархии целевых задач обеспечения полетов, а с другой — сохраняет основное
целевое назначение комплекса.
С точки зрения целевых задач РТК УВД и НО средой информационного
взаимодействия служит воздушное пространство, обладающее собственной иерар¬
хической структурой.
Под воздушным пространством понимается все пространство над террито¬
рией земного шара в диапазоне допустимых высот полетов средств авиационной
техники. В масштабе страны воздушное пространство ограничивается государст¬
венной границей, а также территориальными водами, омывающими побережье
сухопутной территории.
Если воздушное движение организовано внутри страны, то ее воздушное
пространство можно разделить на следующие иерархические уровни: зоны УВД,
включающие определенные регионы страны, в которых осуществляется воздуш¬
ное движение; районы УВД, охватывающие ограниченные области воздушного
пространства с высокой интенсивностью воздушного движения; районы аэроуз¬
лов при близком расположении нескольких аэродромов, что характерно для
крупных населенных пунктов; районы аэродромов.
В особую группу элементов воздушного пространства следует выделить
основные воздушные трассы и зоны специальных полетов для выполнения спе¬
цифических или периодически возникающих задач типа испытаний авиационной
техники, обеспечения летных экспериментов и связанные с ними внеплановые
воздушные трассы [1].
Внутри района аэродрома можно выделить еще три равноценные подсис¬
темы воздушного пространства: ВК — воздушный коридор, составляющий часть
47
воздушного пространства, в котором самолеты снижаются и набирают высоту;
ЗВП — зона взлета и посадки, определяемая границами выполнения взлетнс-
посадочных маневров самолетов .различного класса и зоной действия средств
ближней навигации; 30 — зона ожидания, выделяемая для нахождения само¬
летов до получения разрешения на посадку в случае занятости зоны взлета и
посадки.
Наконец, в зоне полета и посадки следует особо выделить предпосадочную
прямую, ориентированную 'вдоль продолжения оси ВПП.
Целевое назначение РТК УВД и НО заключается в своевременном вы¬
полнении доставленных системой высшего уровня плановых задач авиаперевозок
и доставки грузов имеющимся числом самолетов и вертолетов .в заданной об¬
ласти воздушного пространства с учетом требований безопасности, регулярно¬
сти и экономичности воздушного движения.
С этой точки зрения РТК УВД и НО относится к классу систем массового
обслуживания с выраженной иерархической структурой. Специфика РТК УВД
и НО как системы массового обслуживания объектов многоэтапного функцио¬
нирования позволяет выделить следующие основные операции:
1. Планирование полетов: а) долгосрочное (составление расписания); б)
оперативное (при составлении суточных планов с учетом реально складываю¬
щейся обстановки) и в) текущее в ходе выполнения полетов при возникнове¬
нии внештатных ситуаций.
2. Управление воздушным движением: а) при взлете и посадке в районе
аэродрома; б) на маршрутах; .в) при маневрах одиночных самолетов и групп
самолетов.
3. Навигационное обеспечение полетов: а) при взлете и выходе на >мар-
шрут; б) при самолетовождении на маршруте с учетом проведения маневров;
в) при заходе на посадку; г) при посадке самолета на ВПП.
4. Обеспечение информационного обмена между средствами РТК УВД и НО
и ЛА, между отдельными ЛА, а также между отдельными подсистемами комп¬
лекса.
5. Метеорологическое обеспечение полетов.
6. Отображение и регистрация навигационной, ^метеорологической, радиоло¬
кационной и служебной информации о воздушной обстановке на различных
иерархических уровнях РТК.
7. Анализ информации и принятие решения.
Необходимость выполнения указанных операций определяет структуру РТК
УВД и НО и алгоритмы их функционирования.
В соответствии с распределением операций по .выполнению целевых задач в
структуре РТК УВД и НО его функционирование осуществляется следующим
образом [], 89]. На основе народнохозяйственных планов по применению ави¬
ации для организации авиаперевозок и доставки грузов, заявок других ведомств,
регулярно использующих авиационную технику, формируются планы-заявки на
проведение полетов. Они поступают в Главный центр УВД (ГЦ УВД), который
является координационной системой в масштабе .всего комплекса. Главный центр
УВД на основе сопоставления планов-заявок с имеющимися ресурсами авиацион¬
ной техники, пропускной способностью аэродромов, техническими средствами УВД
и НО решает задачу долгосрочного планирования. В результате решения этой
задачи составляется расписание полетов, являющееся основой для обеспечения
регулярных авиаперевозок в масштабе всей страны.
48
Полное расписание полетов всех самолетов разбивается на отдельные под¬
расписания, рассылаемые в зональные центры УВД (ЗЦ УВД), охватывающие
несколько районов УВД. В свою очередь ЗЦ УВД рассылают на каждый аэро¬
дром постоянно действующие расписания, содержащие сведения о .времени вы¬
лета и посадки самолетов по каждому из рейсов, трассе полетов, режиме поле¬
тов и другую необходимую технологическую информацию. Зональные центры
УВД на основе имеющихся планов и информации о реальных условиях выпол¬
нения постоянно действующего расписания ведут оперативное перепланирование
для разрешения возникающих конфликтных ситуаций.
Оперативные планы рассылаются на аэродромы взлета и посадки (АЭ), а
также в районные центры управления воздушным движением (РЦ УВД), осу¬
ществляющие контроль за выполнением полетов по маршруту вне зон аэродро¬
мов. На авиатрассах большой протяженности для каждого РЦ УВД выделяются
свои зоны ответственности, в пределах которых ведется полный контроль за
движением самолетов. Таким образом, в течение полета по трассе самолет может
последовательно находиться в зонах ответственности нескольких РЦ УВД.
Для УВД и НО на всех этапах самолетовождения используются радиотехни¬
ческие средства, которые можно объединить по целевому назначению в следую¬
щие основные комплексные системы, входящие ,в состав РТК УВД и НО
(рис. 2.2):
система навигационного обеспечения (КРТС НО);
система радиолокационного контроля воздушной обстановки и обстановки
на летном поле (КРТС РЛК);
2.2. Структурная схема радиотехнического комплекса управления воздуш¬
ным движением и навигационного обеспечения
49
система обеспечения информационного обмена (КРТС ИО);
система мегеообеспечения (КСМО).
Информация, поступающая от наземных и бортовых средств УВД и НО, ото¬
бражается, регистрируется и обрабатывается в специальных подсистемах отобра¬
жения, документирования и обработки. При этом иерархический уровень опера-
ций отображения, регистрации и обработки информации, необходимой для ана¬
лиза воздушной обстановки и принятия решения, зависит от иерархического
уровня подсистем РТК. Так, на уровне аэродромов и РЦ осуществляется интег¬
рация выходной информации, поступающей от отдельных систем УВД и НО.
На уровне ЗЦ уровень интеграции обработки и отображения информации
повышается, так как необходимо знание воздушной обстановки - во всей зоне
УВД для составления оперативных планов.
Соответственно в ГЦ УВД поступает интегрированная информация после ее
обработки в АСУ зональных центров для контроля за воздушной обстановкой в
масштабе всей страны. Обычно для штатных ситуаций сохраняется достаточно
высокий уровень децентрализации УВД в масштабе ЗЦ. Однако при возникнове¬
нии нештатных ситуаций, таких как резкое ухудшение метеообстановки в отдель¬
ных зонах возникновения аварийных режимов полета и т. д., оперативный кон¬
тур управления самолетовождением может замыкаться непосредственно на ГЦ
УВД.
Рассмотрим более подробно последовательность выполнения всех этапов по¬
лета самолета при совместном использовании бортовых и наземных радиотех¬
нических средств комплекса [1, 89].
Планы полетов согласовываются со службой аэродромно-диспетчерского
пункта (АДП), которая выдает разрешение на проведение взлета в заданный
момент времени.
В запланированное время перед вылетом самолет выруливает на ВПП. Опера¬
ция выруливания находится под постоянным контролем службы диспетчерского
пункта руления (ДПР), использующей данные радиолокационной подсистемы об¬
зора летного поля (РЛС ОЛП). При занятии исходного положения на ВПП и
выполнении операций взлета самолет переходит под контроль службы диспетчер¬
ского пункта круга (ДПК), которая использует данные подсистемы обзорных
РЛС, обзорных диспетчерских радиолокаторов (ОД РЛ), а также данные, по¬
лучаемые бортовыми подсистемами радиолокационного и навигационного обеспе¬
чения (БРЛС и БНС).
На выходе из зоны взлета и посадки в районе аэродрома самолетом управля¬
ет экипаж с помощью комплекса средств самолетовождения и полет контроли¬
руется службой диспетчерского подхода (ДПП) для обеспечения безопасности
воздушного движения в этой наиболее насыщенной самолетами зоне.
После выхода самолета на заданный маршрут полета служба аэродрома
передает самолет под контроль диспетчерской службы одного из районных цент¬
ров УВД, находящегося в границах трассы. На этом этапе самолетовождение
осуществляется как экипажем с помощью бортовых систем НО, так и комплек¬
сом наземных средств, входящих в КРТС НО. Различают следующие виды бор¬
товых систем НО: системы автономной навигации; системы, использующие сигна¬
лы наземных систем НО; бортовые приемоответчики наземных систем НО.
Наземные системы НО полетов по маршруту, входящие в состав КРТС НО,
включают в себя следующие основные подсистемы: РТС дальней навигации
50
(рТС ДН), РТС ближней навигации (РТС БН) и радиолокационные системы
контроля воздушной обстановки в районе (РЛС КВО).
В состав каждой системы входят подсистемы низшего иерархического уров¬
ня (каналы), выполняющие отдельные операции НО. Так, в состав бортовых
систем навигации могут входить: радиовысотомеры (РВ); доплеровские изме¬
рители угла сноса и путевой скорости (ДИС); радиолокационные системы об¬
зора земной поверхности (РЛС ОЗП).
В процессе полета по маршруту самолет переходит под контроль
го PH :К Другому, о чем уведомляются его экипаж и диспетчерская
рЦ. При этом диспетчерская служба РЦ в целях безопасности полетов
но контролирует выдерживание самолетами определенных интервалов
от одно-
служба
постоян-
эшелони-
рования и заданных трасс.
Наиболее сложной подсистемой РТК УВД и НО являются РТС, обеспе¬
чивающие операции захода на посадку и посадку самолета. Управление опе¬
рациями посадки начинается с получения разрешения на снижение самолета
для выхода в район аэродрома посадки, относящегося к определенной зоне
УВД. Разрешение на снижение и посадку поступает от диспетчерской службы
РЦ территориально близкого к аэродрому посадки, и полностью согласуется
с соответствующими службами аэродрома при уточнении воздушной и метео¬
обстановки. Диспетчер РЦ определяет условия выхода на аэродром посадки.
При выходе в зону аэродрома самолет переходит под контроль его
служб, которые на основе оценки воздушной обстановки в районе аэродрома
управляют операциями посадки и передают экипажу необходимую информа¬
цию.
Операции снижения и захода на посадку обеспечивают следующие основ¬
ные наземные подсистемы: дальние и ближние приводные радиостанции, а так¬
же приводные радиостанции, маркирующие особые точки района аэродрома
при выполнении захода на посадку; обзорные радиолокационные системы; ра¬
диотехнические системы ближней навигации.
Для выполнения заключительных операций посадки управление ими осу¬
ществляется диспетчерским пунктом посадки ДПП с использованием радиомаяч-
ных систем посадки и радиолокаторов, контролирующих операции посадки.
В свою очередь радиомаячные системы посадки включают в себя курсо¬
вые, глиссадные и маркерные маяки.
Операция посадки на ВПП одновременно контролируется службами АДП
и ДПР с использованием РЛС обзора летного поля. По окончании пробега са¬
молета по ВПП он выруливает на стоянку, разгружается и переходит в рас¬
поряжение технических служб аэродрома.
При анализе структуры РТК УВД и НО следует отметить также развитую
сеть информационного обмена между отдельными подсистемами комплекса с ис¬
пользованием различных диапазонов волн, наземных, воздушных и спутнико¬
вых линий связи, а также разветвленную систему метеорологического обеспече¬
ния полетов. В качестве основных РТС, входящих в КСМО, используются: ра¬
диолокационные метеорологические станции для оценки обстановки в районе
увд
или аэродрома (МРЛ); станции приема метеорологической информации с
борта космических метеорологических систем и специальных шаров-зондов.
Таким образом, анализ типовых и современных РТК показы¬
вает, что в каждом из них реализуются практически вое основные
51
операции информационного 'взаимодействия. Комплексы характе¬
ризуются высоким уровнем автоматизации процессов получения,
сбора и обработки информации, а также процессов управления
внешним и внутренними контурами информационного взаимодей-
ств и я, бол ьши ми ин фор м ацио нн ым и п ото к ам и, с л о ж но й мн ого -
уровневой иерархической структурой. Все это требует системного
подхода к решению задач их анализа и синтеза, без которого не¬
возможна оптимизация процессов их проектирования, целевого
применения и эксплуатации.
3
ПОЛОЖЕНИЯ МАТЕМАТИЧЕСКОЙ ТЕОРИИ СИСТЕМ,
ИСПОЛЬЗУЕМЫЕ В РАДИОТЕХНИЧЕСКИХ КОМПЛЕКСАХ
Проведенное в гл. 1 общее рассмотрение РТК и РТС позво¬
ляет выявить направления математической теории систем, исполь¬
зуемые при решении задач анализа и синтеза РТК. С одной
стороны, можно констатировать, что общие структуры РТК и РТС
могут быть определены без применения математического аппара¬
та, т. е. на вербальном уровне. Это связано с высокой сложностью
таких объектов и соответственно с отсутствием или недостаточной
гибкостью математических конструкций, адекватных подобным
объектам. Такая особенность описаний сложных систем является
закономерностью [37].
С другой стороны, следует иметь в виду, что описание систем
лишь на вербальном уровне дает весьма ограниченные результа¬
ты. Действительно, такое описание по существу сводится к ис¬
пользованию предшествующего опыта, что не гарантирует от
ошибочных выводов. Поэтому применение только вербального
подхода допустимо в гуманитарных дисциплинах, где каждый
вывод проверяется опытным путем, что обеспечивает правомер¬
ность полученных результатов. Для технических дисциплин такой
путь неприемлем, так как получение нужных результатов должно
быть достигнуто более компактным путем. Поэтому весьма суще¬
ственным оказывается рассмотрение специальных математических
методов, приспособленных для решения системных задач. Послед¬
ние сильно отличаются от методов решения классических неси¬
стемных задач, которые преимущественно связаны с традицион¬
ными приемами математического анализа. Так, дальнейшее раз¬
витие определений, приведенных в гл. 1, требует высокого уровня
обобщения, который достигается при использовании математиче¬
ских структур.
В соответствии с этим само математическое определение систе¬
мы связывается с теоретико-множественными представлениями.
В связи с указанным следует остановиться на проблемах методо¬
логического характера. Прежде всего теория систем устанавли¬
вает необходимость подхода, основывающегося на целях системы.
52
Предпочтительно начинать анализ и синтез с систем наиболее
высокого уровня с последующим снижением по иерархической
лестнице. Путеводной нитью этого направления является подход'
с позиции целенаправленных систем, рассматриваемый в этой главе.
Следует иметь в виду, что упомянутый подход требует уста¬
новления верхнего рубежа, ограничивающего рассмотрение систем
излишне высокого уровня. Введенная ранее классификация РТК
и РТС позволяет найти необходимый иерархический уровень.
Возникает также необходимость получения достаточно конст-
руктив-ных результатов в условиях нечеткой формулировки как
целей системы, так и ее потенциальной «структуры. Стремление к
формализованному описанию вступает в противоречие с реаль¬
ными данными о системе, имеющимися у исследователя. На пути
разрешения этого противоречия существуют различные возмож¬
ности. Одна из них заключается в использовании методов мате¬
матической лингвистики при описании системы высказываний.
Следует отметить, что само математическое определение системы
дает ключ к реализации указанной возможности.
В связи с существенной сложностью современных РТК и РТС
необходимо рассматривать разветвленные структуры с различны¬
ми уровнями соподчиненности. Их анализ основывается на исполь¬
зовании различных подходов, развитых в общей теории систем.
Сравнительная оценка этих подходов и выбор рационального в
конкретной ситуации является крайне важной, но до настоящего
времени неполностью решенной задачей.
Следует иметь в виду, что ряд специфических задач, свойст¬
венных преимущественно РТС, по сути дела является системо¬
техническими. Рассмотрение таких задач в общем контексте со
специальными задачами позволяет оценить их общность и универ¬
сальность и наметить пути расширения области их приложений.
К этому направлению следует отнести оценку пропускной способ¬
ности каналов связи и задачи, связанные с кодированием инфор¬
мации.
Общие принципы построения ряда РТС в значительной степени
базируются .на теории пространственно-временной обработки сиг¬
налов. Сущность этой теории может быть положена в основу
системотехнического описания многих РТС, а применительно к
временной обработке может использоваться и для решения задачи
синтеза. Наконец, рассмотрение системотехнических аспектов тео¬
рии автоматов, рассматриваемых как управляющие системы [24],
позволяет проанализировать гибкость системы при выполнении ею
своих функций в различных ситуациях.
3.1. Математическое определение системы
Общие определения. Основы математических определений об-
^ей теории систем возникли в связи с конкретной ситуацией, ко¬
торая сложилась к моменту появления теории систем как само¬
деятельной науки. Многообразные варианты описаний систем.,
53
особенно больших и сложных, выполненные на эвристическом
уровне, подчас приводили к существенным противоречиям. Это в
■свою очередь вызывало необходимость четкого и строгого изложе¬
ния. Соответственно математический аппарат теории систем со¬
стоит из определений, аксиом, теорем, следствий и заключений,
причем все свойства систем устанавливаются самым строгим- спо¬
собом. Наряду с этим математическая теория систем предусмат¬
ривает изучение логических следствий из найденных в ходе ана¬
лиза свойств системы.
Математическое описание больших и сложных систем имеет
характерные особенности. Если в простейшем случае отождест¬
вить усложнение описания с ростом числа переменных и взаимо¬
связей между ними, то становится очевидным, что при этом усло¬
вии следует обращаться к более абстрактным математическим
объектам. Действительно, возрастание размерности и усложнение
структуры системы не позволяют получать и интерпретировать
результаты ценой увеличения объема вычислений. Поэтому ма¬
тематическое описание должно строиться на принципиально новой
основе. Так, описание системы с помощью дифференциальных-
уравнений при использовании классических методов приближен¬
ного анализа можно упростить понижением порядка уравнений,
т. е. снижением размерности. Этот классический испытанный путь
оказывается неконструктивным. Поэтому переход к общему изло¬
жению требует обобщения и математического аппарата, в част¬
ности перехода к математическим структурам. Тогда упрощение
может достигаться не только снижением размерности, но и за счет
отказа от конкретизации связей между переменными. Разумеется,
в этом случае каждый раз возникают вопросы о конструктивности
абстрактного изложения. Ответы на них авторы постараются дать
в ходе дальнейшего изложения. Здесь следует лишь отметить, что
получение даже ранее известных результатов лишь на основе общей
теории без обращения к накопленному опыту свидетельствует о
плодотворности развиваемого подхода.
Основа математического определения системы заключается в
формализации. Это означает, что на основе словесного описания,
заданного на интуитивном уровне, дается математическое опреде¬
ление, обладающее в некоторой степени минимальной математи¬
ческой структурой, например характеризующее минимум аксиом,
достаточных для правильной интерпретации .[38]. Формализацию
рекомендуется проводить в теоретико-множественных терминах.
Тогда система S очевидным образом определяется при помощи
семейства множеств (см. п. 1 приложения 1): где
I—множество индексов.
Непосредственное определение системы S, заданной на семей¬
стве Л', заключается в том, что система есть подмножество декар¬
това произведения множеств (см. п. 2 приложения 1). Часто мож¬
но принять, что семейство множеств конечно, и тогда
SczXj XХ2 X ... X Х71.
54
(3.1)
Определение (3.1) может быть обосновано следующим обра¬
зом. Математическое определение системы, безусловно, представ¬
ляет собой математическую абстракцию. Нетрудно проследить
процесс абстрагирования различных видов описаний. В простей¬
шем и в то время наиболее общем случае понятие системы со¬
стоит из совокупности лингвистических формулировок. Для его
формализации следует ввести некоторые вспомогательные поня¬
тия. Любые высказывания производятся на некотором языке L.
Такой язык может быть разговорным, машинным или выработан¬
ным автоматом. Высказывание F на языке L есть фраза (предло¬
жение), составленная по правилам грамматики этого языка. По¬
лагаем, что предложение может быть истинным либо ложным.
(Это и является основой для формализации.) Высказывание мож¬
но также рассматривать как формулу, содержащую некоторые
переменные. Высказывание может оказаться истинным для неко¬
торых значений этих переменных.
Примером такого языка является система логических выска¬
зываний. В связи с необходимостью использования элементов ло¬
гики в дальнейшем остановимся на этом примере. Фразы или
предложения основаны на союзах «и», «или», «если ... то...», «тог¬
да и только тогда», «когда», «не». В качестве переменных прини¬
маются некоторые элементарные высказывания а, Ь, с... Тогда
фразы языка относительно двух переменных определяются соот¬
ветственно: логическим произведением (конъюнкцией), т. е. а ЛЬ;
логической суммой (дизъюнкцией), т. е. а\/Ь; импликацией с по¬
сылкой а и заключением Ь, т. е. а-+Ь. Следующий вид высказы¬
ваний представляет собой эквивалентность и обозначается как
Ь. Наконец, последнее высказывание является отрицанием и
обозначается как а. Читатель без труда установит, что конъюнк¬
ция истинна только тогда, когда оба ее сомножителя истинны,
дизъюнкция инстинна, когда хотя бы одно из ее слагаемых ис¬
тинно, импликация ложна, когда ее заключение ложно, в то время
как посылка истинна. Во всех остальных случаях импликация
истинна. Эквивалентность истинна, когда высказывания а и b либо
оба истинны, либо оба ложны, т. е. имеют место одинаковые ло¬
гические значения. В приведенных формулировках грамматики
языка логических высказываний везде предполагается, что в не¬
оговоренных случаях имеет место противоположное высказывание.
Отметим еще, что эквивалентность можно рассматривать как
конъюнкцию импликаций, т. е. (а-+Ь) /\(Ь-+а).
Это обстоятельство широко используется при формулировке
Условий необходимости и достаточности.
Таким образом, в языке логических высказываний истинность
Или ложность того или иного предложения зависит ,не от истин¬
ности или ложности исходных предложений, а от их комбинации.
Это обстоятельство свидетельствует о том, что этот язык нельзя
использовать в качестве определения системы, хотя он и имеет
все необходимые атрибуты. В этом смысле он является вырож¬
денным.
55
Переходя вновь к общей лингвистической формулировке аб¬
страктной системы, отмечаем, что в множестве /< всевозможных
высказываний можно выделить подмножество Afcz/C истинных
высказываний, причем М— не пустое, т. е. М^= 0. При этом ос¬
тальная часть высказываний остается неопределенной. Предпола¬
гается еще, что эти высказывания из М таковы, что переменные
а, Ь, с образуют формальные объекты. Такие высказывания можно
считать правильными. Тогда лингвистическое определение системы
формулируется следующим образом.
Система представляет собой множество правильных высказы¬
ваний. Теперь нетрудно установить, что эта формулировка сво¬
дится к (3.1). В самом деле, как было показано, в каждом выска¬
зывании содержатся две категории: объекты рассмотрения (дено¬
таты) и формы связи между ними (функторы). Подмножество
правильных утверждений S принадлежит декартову произведению
множеств, образуемых денотатами X и функторами У. Поэтому
система может быть определена как отношение (см. п. 3 прило¬
жения 1), отнесенное к декартову произведению множеств.
Рассмотренное определение дополняется алгебраической струк¬
турой. К объектам системы V применяется операция сочленения,
так что результат этой операции принадлежит вновь V, что сим¬
волически обозначается как /?:УхК где R—операция отно¬
шения.
При формировании декартова произведения предполагается,
что исходные элементы-символы выбираются из алфавита симво¬
лов W^V. В результате применения операции отношения полу¬
чаем слова как последовательности элементов. Такое определение
в большей степени сближает лингвистическую формулировку с
(3.1). В более конкретных случаях, когда система задается опре¬
деленным математическим описанием, оно также определяет от¬
ношение над множествами, т. е. отношение представляет собой
множество, состоящее из совокупности всех правильных комбина¬
ций его компонентов. Необходимо подчеркнуть, что любая мате¬
матическая формула или последовательность формул представляет
собой символическую запись некоторых высказываний, сформули¬
рованных на математическом языке, т. е. образует метавысказы¬
вания [23]. Существенно, что первым шагом на пути конкрети¬
зации (3.1) является переход от отношения к функции (см. п. 4
приложения 1). Для этого следует определить систему с двумя
объектами входным X и выходным У. Тогда система S представ¬
ляет собой отношение над декартовым произведением двух мно¬
жеств. т. е.
SczXxK. (3.2)
В частности, вместо отношения используется отображение или
функция. Если система описывается функцией, то такая система
является функциональной и обозначается как
S:X-+Y.
56
(3.3)
Перейдем к содержательной стороне соотношений (3.2) и (3.3).
j-ja первый взгляд может показаться, что определение функции
достаточно общее и все реальные системы могут быть заданы
функционально. В действительности представления (3.2) и (3.3)
отражают различные подходы к определению системы. Соотно¬
шение (3.2) характерно для определения систем путем их отбора
на множестве ХХУ с помощью некоторых правил (например, ис¬
тинности, понимаемой в определенном смысле). Иначе говоря,,
каждый элемент множества XxY может принадлежать или не
принадлежать S в соответствии с установленными правилами. Ос¬
новными видами отношений, используемыми в дальнейшем, явля¬
ются отношения эквивалентности и порядка (см. п. 5 приложе¬
ния 1).
В противоположность изложенному функциональное определе¬
ние системы предполагает более существенную конкретизацию, не
требующую одновременного рассмотрения XxY в целом. Опреде¬
ление (3.3) предполагает, что система определяет правила полу¬
чения из любого х^Х некоторого y^Y. В качестве примера си¬
стемы, заданной (3.3), предположим, что ее описание определяется
дифференциальным уравнением (ДУ). Тогда функциональное опи¬
сание эквивалентно заданию интеграла ДУ, т. е. зависимости вы¬
хода Y от входной переменной х. Графической интерпретацией
системы является семейство интегральных линий ДУ. При этом,,
как известно, каждая из интегральных линий нуждается в задании
начальных условий интегрирования ДУ. Из описания следует,
что множества XxY должны быть заданы на некоторых исходных
множествах, например множестве моментов времени /е[0, оо).
Отметим, что множество начальных условий может быть допол¬
нительно включено в определение системы путем рассмотрения
семейства множеств, т. е.
S=UStt:X->y, (3.4)
аеД
где а — конкретные начальные условия ДУ; А—множество на¬
чальных условий; U — символ семейства множеств (см. прило-
ае А
жение 1).
Открытые и замкнутые системы. Деление систем на открытые
и замкнутые связано с их характерным признаком: возможностью
сохранения свойств при наличии внешних воздействий. Если си¬
стема не чувствительна к внешним воздействиям, ее можно счи¬
тать замкнутой, в противоположном случае имеем дело с откры¬
тыми системами. Разумеется, замкнутые системы представляют
собой некоторую абстракцию реальной ситуации, так как, строго
гово-ря, изолированных систем не существует. Однако очевидно
также, что упрощение описания системы, заключающееся в отказе
от внешних связей, может привести к полезным результатам.
В соответствии с указанным рассмотрим задачу формализо¬
ванного описания замкнутой системы, подчеркивающего ее харак¬
терную особенность. Несомненно, главным свойством замкнутой
57
системы является повторяемость результатов, получаемых при ее
многократном рассмотрении. В качестве способа рассмотрения си¬
стемы предлагается ее описание с помощью классификации по
различным признакам. Если эта классификация приводит к един¬
ственному решению, то это решение отождествляется с эффектив¬
ным процессом идентификации, причем под идентификацией пони¬
мается выделение единственного элемента из всех возможных ком¬
бинаций значений составляющих рассматриваемой системы.
Перейдем к сущности формализованного описания замкнутой
системы. Ограничимся случаем, когда множества Х2, ..., Хп,
входящие в (3.1), — числовые. Тогда система S есть совокупность
наборов из п чисел. Каждый конкретный набор этих чисел, явля¬
ющийся элементом множества S, назовем экземпляром. Эффек¬
тивный процесс идентификации состоит в таком разбиении систе¬
мы S на классы, что после конечного ряда разбиений любой
экземпляр Xi<=S оказывается единственным в своем классе раз¬
биений. Суть процедуры заключается в следующем. Предполо¬
жим. что задан экземпляр xt. Введем отношение эквивалентности
Li, которое позволяет определить некоторое подмножество Xs.(Li),
содержащее заданный экземпляр: Xi^XS{ (Ai) • Предположим, что
существует такая конечная последовательность отношений экви¬
валентности L1, ..., Lm, что множество Xst (Lb ^2, ^тп) состоит
из единственного Xi. Иначе говоря, последовательность отношений
..., Lm однозначно определяет элемент Хг, поскольку он оказы¬
вается единственным элементом множества Xs£. (Lb ..., Lm). Такая
последовательность отношений называется эффективным процес¬
сом идентификации.
Соответственно систему Xis можно считать замкнутой тогда и
только тогда, если для каждого х^Х18 существует эффективный
процесс идентификации, где X^czS для Vj=l, 2, ..., k [6]. Таким
образом, используя подходящий процесс идентификации, конкрет¬
ную замкнутую систему Xis можно отличить от любой другой си¬
стемы XzsczS. Если же в системе существует, по крайней мере,
единственный набор (экземпляр), для которого не существует
эффективного процесса идентификации, то такая система назы¬
вается открытой [361. Открытую систему нельзя отличить от ка¬
кой-либо другой системы, т. е. имеют место неопределенности в
выборе единственного варианта системы. Система становится от¬
крытой, если в ходе ее функционирования возникают какие-либо
неопределенности. Последние могут, например, иметь место в сле¬
дующих случаях:
1. Система неполностью изолирована от внешней среды, вно¬
сящей неопределенность.
2. Система реагирует на пробные экспериментальные воздей¬
ствия так, что это вызывает существенные изменения в ее опи¬
сании.
3. Системы не только испытывают воздействие со стороны
внешней среды, но и оказывают обратное действие на окружаю-
58
тую среду. Примером такой системы является замкнутая система
массового обслуживания, .рассмотренная в § 5.4.
Модель замкнутой системы может стать эквивалентной откры¬
той системе, если при формальном описании ее свойств допущены
некорректные формулировки.
Отметим, что задача учета неопределенностей, возникающих в
ходе функционирования, становится наиболее актуальной при ана¬
лизе РТС, действующих при наличии помех.
Структура системы. Абстрагирование понятия структуры систе¬
мы приводит к необходимости детального рассмотрения свойств
отношений. Дело в том, что для задания конкретной системы об¬
щая формулировка отношения, свойственного системе, должна
быть конкретизирована. Иначе говоря, отношение /?, определяю¬
щее систему, должно иметь, по крайней мере, одну составляющую,
значение которой должно быть зафиксировано. При отсутствии
такой фиксации имеют место неопределенные составляющие, при¬
надлежащие некоторому множеству. Наряду с этим существует
более общее отношение, не подлежащее конкретизации. В связи с
этим можно считать, что отношение /?, определяющее систему,
включает в себя более общее отношение D и конкретные значения
неопределенной составляющей g, представляющей собой консти¬
туэнту (см. п. 7 приложения 1) отношения.
Таким образом, R = (D, £). Введенное здесь общее (не конкре¬
тизируемое) отношение представляет собой структуру системы,
которая получается как обобщение отношения, описывающего си¬
стему, т. е. если положить конституэнты этого отношения неопре¬
деленными. Определение структуры системы может быть пояснено
элементарным примером системы с одним входом и выходом,
описываемой уравнением свертки, т. е.
У (0 = j/i(T)x(Z—т)йт,
— оо
что в сокращенном виде записывается как yRx. Отношение этой
системы может быть описано различными способами. Так, консти-
туэнтой можно, например, считать импульсную характеристику
Л(т). Тогда отношение, характеризующее систему, имеет вид R =
= [С, й(т)], где С — алгебраическое преобразование типа свертки.
Следовательно, можно принять D = C\ £ = Л(т).
В другом случае структуру можно определить, считая, что не¬
определенными являются числовые параметры импульсной харак¬
теристики. Например, в состав системы, описываемой дифферен¬
циальным уравнением I порядка, входят интегратор, устройства
Умножения и сложения. При этом структура системы в сущности
оказывается сходной с обычно используемым понятием структур¬
ной схемы, а в рассматриваемом случае — функциональной схемы.
В этом случае конституэнтами являются такие параметры, как
постоянная времени и коэффициент передачи. Разумеется, второе
определение оказывается менее общим, чем первое.
59
Рис. 3.1. Генератор псев¬
дошумовых сигналов
Другой пример структуры может быть получен из рассмотре¬
ния генератора псевдошумовых (ПШ) сигналов, основанного на
генерировании ^-последовательности. Как известно [26], такой
генератор содержит регистр сдвига, сумматор по модулю два и
формирователь кода (рис. 3.1). Изображенная на рисунке схема
может быть отождествлена со структурой генератора, так как код
не конкретизирован. Поэтому конституэнта¬
ми отношения D являются номера отводов
регистра сдвига, подключаемые к суммато¬
ру по модулю два. Конкретизация этих от¬
водов эквивалентна заданию кода. Поэтому
система определяется двоичной последова¬
тельностью из п символов по числу разря¬
дов регистра сдвига. Единица соответствует
наличию отвода с f-ro разряда (i=l, ft),
а нуль — его отсутствию.
Существенно, что понятие структуры оп¬
ределяет систему с точностью до неопреде¬
ленных коэффициентов. Поэтому в случае
больших и сложных систем наиболее абст¬
рактное отношение вводится априори (на
основе накопленного опыта). Тогда для пол¬
ного определения системы по заданной
структуре можно применить эффективную
процедуру оптимизации, связанную с получением конкретных зна¬
чений неопределенных коэффициентов. При этом выбор самой
структуры, т. е. соответствующего множества отношений (в общем
случае), производится только эвристически.
Заслуживает также внимания более общее определение струк¬
туры, когда последняя характеризуется заданием отношения или
отношений на множестве элементов системы, удовлетворяющем
некоторому набору аксиом, пополнение которого, так же как и
введение дополнительных отношений, приводит к одному из ма¬
тематических представлений конкретной системы. Из приведен¬
ного определения, так же как и в неявном виде из ранее рас¬
смотренных определений, следует, что конкретизация системы про¬
водится не только по пути уточнения неопределенных коэффи-
циегов. но посредством конкретизации отношений. Это обстоя¬
тельство обосновывает введение понятия конституэнт и, очевидно,
является дополнительным усложнением при проведении оптими¬
зации. Однако усложнение компенсируется возможностью рас¬
смотрения больших систем, где процесс оптимизации, естественно,
оказывается более сложным.
Отметим, что очень часто в качестве структуры принимают
лишь способ включения элементов системы с указанием ориенти¬
рованности взаимодействий [24]. С учетом рассмотренных здесь
определений следует считать, что подобное представление являет¬
ся частным случаем определения структуры, когда множество D
характеризует связи между элементами. В рассмотренном ранее
60
примере генератора ПШ сигналов конкретизация структуры, на¬
против, производится заданием способа включения элементов.
Целенаправленные системы. Рассмотренный до этого подход
основывался на предположении о наличии определенной причинно-
следственной связи. При этом независимо от характера используе¬
мых отношений в конечном итоге предусматривается определение
некоторого подмножества (3.1), отвечающего конкретным предпо¬
ложениям. В простейшем случае систем «вход—выход» множество
входов характеризуют причину, а множество выходов — результат.
С этой точки зрения описание системы устанавливает соответ¬
ствие между ее входным и выходным воздействиями. Такое опи¬
сание определяет текущее состояние системы и поэтому может
быть названо феноменологическим. При подобном описании яв¬
ным образом не прослеживается связь поведения системы с ее
характеристиками, представляющими непосредственный инте¬
рес для потребителя. В соответствии с иерархической структурой
системы потребителем является система высшего уровня. Поэтому
феноменологическое описание системы должно быть дополнено
-определением, отражающим меру полезности системы или, иначе
говоря, приспособленности ее для решения задач, поставленных
системой высшего уровня. Такое определение, очевидно, должно
явиться первым шагом на пути решения глобальной задачи проек¬
тирования иерархической системы.
Целесообразно искать определение системы также в форме
(3.1). Связь между поставленной задачей и приведенным выше
феноменологическим определением осуществляется через понятие
системы принятия решений.
Последняя представляет собой структуру SczXxT, определен¬
ную так, что пара ху принадлежит S тогда и только тогда, если у
является решением определенной задачи, конкретизация которой
производится посредством задания х. При этом обычно можно
предполагать, что система является функциональной. Это означает,
что система содержит алгоритм решения.
Таким образом, система является решающей, если заданы се¬
мейство задач <2)х, х<=Х, с множеством решений Z и отображение
Tq:Z~^Y. Для \гх<=Х и Vy<=Y пара (%, yj^S&z-^y, т. е. zt=Z
является решением задачи 3)х и To(z)=y. Отметим, что в прос¬
тейших случаях выход представляет решение поставленной задачи
и z=y, а То — тождественное преобразование.
Применительно к рассматриваемому здесь определению систем
семейство задач связано с поиском наиболее рациональных путей
построения системы. Поскольку структура системы, как уже было
Установлено, определяется на основе эвристических соображений,
поиск сводится к определению числовых значений параметров,
Характеризующих показатели качества системы.
Для конкретизации рассмотрим два вида решаемых задач: оп¬
тимизацию и отыскание удовлетворительных решений (сатисфак-
Ционная задача). Формулировка задачи оптимизации заключается
и следующем. Пусть g : X-+V — функция, отображающая множе¬
61
ство X в V, в котором введено отношение порядка. Тогда среди
элементов подмножества Хдс=Х следует найти такое х'еХд, что
для УхееЛд имеет место
(3-5)
Множество X представляет собой множество всех решений, а
Хд — множество допустимых решений. Функция g называется це¬
левой функцией, множество V — множеством потерь. Таким обра¬
зом, задача оптимизации определяется парой (g; Хд). Элемент
х*^Хд, удовлетворяющий (3.5), есть решение задачи (g-.Хд).
Целевая функция в простейшем случае является скалярной
и определяет зависимость наиболее существенного показателя си¬
стемы от некоторых параметров, найденных в том числе и посред¬
ством феноменологического описания. При переходе к векторной
форме представления целевой функции учитывается несколько
показателей системы. В итоге ряда вспомогательных операций
производится переход к скалярному показателю, который в этом
случае оказывается обобщенным. Более детально многокритери¬
альная система рассматривается в § 3.4.
В более сложном случае решения, принимаемые в результате
оптимизации, влияют на некоторый процесс, выход которого в
свою очередь влияет на целевую функцию. В этих условиях вво¬
дится дополнительно выходная функция Р : X-+Y, а целевая функ¬
ция формируется как G : XxY-^V. При этом g(x) = G[x, Р(х)].
Такая структура оптимизационной задачи соответствует про¬
цессу оптимального управления, поскольку указанная процедура
эквивалентна замыканию цепи обратной связи.
Переходя к сатисфакционной задаче, устанавливаем, кроме рас¬
сматриваемого ранее множества X, еще множество неопределен¬
ностей Q. На декартовом произведении ХХЙ по-прежнему вво¬
дится множество V, частично или полностью упорядоченное отно¬
шением т. е. g :XxQ->V. Кроме того, на множестве неопре¬
деленностей вводится функция допустимости д, переводящая Q
в V. Таким образом, вводится отображение д : Q->V. Задача на¬
хождения удовлетворительных решений устанавливает, что среди
допустимых значений ХдсеХ требуется найти такое х*, что для
VcdgeQ
g(x*> со) < а (со). (з.б)
Следовательно, задача характеризуется совокупностью (g, д,
Хл, Q). При этом в качестве решения принимается любое x:;:c=XA,
для которого удовлетворяется неравенство (3.6).
Множество неопределенностей Q может рассматриваться как
множество возмущений, поскольку при его формировании учиты¬
ваются все факторы, могущие повлиять на характеристики си¬
стемы.
Если целевая функция g зависит не только от входа, но и от
выхода системы, т. е. по-прежнему вводятся выходная функция
Р:ЛГХЙ->К и оценочная функция G:Xx£2XY-+V, то g(x, со) =
62
^G(x, co, P(x, co)). Отметим, что множество Q охватывает также
параметрические и структурные неопределенности, а функция д
определяет максимально допустимое значение выходной функции.
В качестве примера рассмотрим .классическую задачу статис¬
тического выбора решающей функции для канала связи с поме¬
хами. Предположим, например, что А = {а\,а2}—множество сооб¬
щений отправителя; В={Ь[, Ь2, bi}—множество принимаемых
сообщений, искаженных помехами. Пусть задача выбора состоит
в построении функции т: В^А такой, что при получении bi в
качестве отправленного сообщения принимается т. е. aj = m(bi).
Предположим, что объем априорной информации достаточен
для применения байесовского подхода. Пусть p(aj)— априорная
вероятность сообщения Допустим, p(ai)=co, а р(а2) = 1—со
соответственно. Примем, что p(bi\aj)—условная вероятность по¬
лучения bi при условии, что было передано сообщение aj. Допус¬
тим также, что in — отрицание результата отождествления, т. е.
если m(bi)=a\, то in(bi)=a2, и наоборот. Соответственно вероят¬
ность вынесения неправильного решения — р[т(М1- Согласно
теореме Байеса условная вероятность принятия неправильного ре¬
шения, если принять сообщение bi, составляет
р[^1(Ь^\Ь^ со]
р(т(ЬР) p(bj\mbj}
(£>Р (bi | di) + (1 — со) р (bi | а2)
(3.7)
При этом функция потерь
g(m, (»)=~'£tp[in(bi)\bi; со]ау(т(6г)),
1=1
где w : А-+г — штраф за ошибку.
Следовательно, по заданной априорной вероятности со требуется
найти т* из М, минимизирующую функцию потерь. Можно до¬
пустить, что априорные вероятности точно известны, но co = p(ai)
лежит в некотором диапазоне, т. е. принадлежит отрезку Q =
= (ci, с2). Зададим постоянное число е. Тогда удовлетворительные
решения находятся на основе неравенства
£(w*, со) <8. (3.8)
Неравенство (3.8) устанавливает допустимые потери. Очевид¬
но, что порог е должен быть выбран рациональным образом с
тем, чтобы множество решений не оказалось пустым.
Отметим, что в общем случае отношение порядка может быть
заменено произвольным отношением относительно декартова про¬
изведения потерь, т. е. вводится отношение
Указанная ситуация, в частности, имеет место в многокрите¬
риальных задачах, детально рассмотренных в § 3.4. Отметим здесь,
что в общем случае для VcoeQ определяется х*с=Лд, удовлетво¬
ряющее R, т. е. g(x*, со)/? д (со).
В теории систем предусматривается описание решающей систе¬
мы в виде совокупности уравнений. Такое описание наиболее удоб-
63
•но, если можно построить алгоритм решения задачи. Однако ре¬
шающая система -считается заданной и при отсутствии алгоритма,
необходима лишь корректная постановка задачи.
Определение систем на основе категорий и функторов. Приве¬
денные здесь определения систем отличаются достаточной общно¬
стью и, как будет показано ниже, открывают путь для развития
теории систем и ее практических приложений. Наряду с этим рас¬
пространена точка зрения [8], согласно которой введение слиш¬
ком общих объектов приводит к снижению содержательности тео¬
рии, основанной на подобных определениях. Сущность подобной
точки зрения требует уточнения задач, решаемых на основе гой
или иной абстрактной теории. В связи с очевидной правомерно¬
стью высказываний подобного рода обсудим кратко упомянутую
точку зрения. Согласно [8] любую систему S можно представить
как множество состояний, особенностей, уровней, альтернатив, ха¬
рактеризующих систему, и множество отношений между эле¬
ментами системы. Описание системы ориентируется на другие, бо¬
лее изученные системы. Можно полагать, что независимо от уров¬
ня соотносительности существует некоторая исходная система М,
также состоящая из множества элементов и отношений между
ними. При переходе от S к Л4 все существенные отношения долж¬
ны сохраниться (это обстоятельство, как будет показано ниже,
положено в основу принципа эквивалентности при моделирова¬
нии). Соответствие F между S и 7И представляет собой фактори¬
зацию. Если М — математическая модель, дальнейшие преобра¬
зования в другие формы производится с использованием методов
и средств математики. Принимается, что факторизация как реаль¬
ных, так и абстрактных систем на математические модели и яв¬
ляется задачей теории систем. Тогда дальнейшее обобщение зак¬
лючается в универсальности понятия категорий для описания си¬
стем. Одно из основных преимуществ рассмотрения с позиций
теории категорий состоит в акцентировании морфизма между раз¬
личными моделями, т. е. их соответствия.
Указанное обстоятельство приводит к необходимости краткого
изложения аппарата теории категорий применительно к матема¬
тической теории систем [38]. Пусть имеются некоторые объекты
X, Y, которые вместе с двумя функциями образуют класс объек¬
тов X.
Первая функция ставит в соответствие каждой паре X, Y
объектов из X множество М-ог(Х, У), элементы которого
feMor(X, У) представляют собой морфизмы f:X-+Y из класса X
с областями X и У.
Вторая функция устанавливает соответствие между тройкой
объектов (X, У, Z) класса X (см. функцию):
Мог (Г, Z)xMor(X, У)->Мог(Х, Z).
В символической записи отображений g: У-^Z и f: X-+Y эта
функция записывается как (g, f)-+gf, а морфизм gf:X-+Z пред¬
ставляет собой композицию морфизмов g и f. Класс X вместе с
64
этими двумя функциями называется категорией, если для него
выполняются аксиомы ассоциативности и существования единицы.
Первая из них в соответствии с определением ассоциативности
устанавливает, что если h:Z^-W, a g:Y-^Z и f : X-+-Y есть мор¬
физмы из X, то h(gf) = (Jig) f.
Вторая аксиома определяет существование морфизма : У->У,
что Evf = f для f: X-+-Y; gEy = g для g : Y^Z.
Соответствие между двумя категориями устанавливается с по¬
мощью функторов. Последний, обозначаемый F: Х-+Х', представ¬
ляет собой пару отображений. Первое отображение ставит в соот¬
ветствие каждому объекту X первой категории объект F (X) кате¬
гории X'. Второе отображение определяет соответствие между
морфизмами первой и второй категорий, т. е. каждому морфизму
f-X-^Y первой категории-Сопоставляется морфизм F(f)j
_+.F(Y) второй категории X'. При этом отображение в X' также
удовлетворяет упомянутым условиям ассоциативности и сущест¬
вования единицы.
Между двумя функторами F и G устанавливается каноничес¬
кое преобразование %: F-+G, если каждому объекту X из класса
X ставится -в соответствие морфизм %(Х): F(X)-+G (X) из X', пе¬
реводящий функтор F в функтор G так, что диаграмма
ш)
коммутативна (см. п. 9 приложения 1).
Приведенные определения отличаются достаточно высокой
строгостью. Однако они полностью адекватны рассмотренной вы¬
ше точки зрения, согласно которой существенные определения тео¬
рии систем связаны с установлением соответствия между различ¬
ными моделями. Отметим, что представления, связанные с комму¬
тативными диаграммами, весьма конструктивны и поэтому будут
встречаться на страницах этой книги.
Принципы классификации радиотехнических комплексов и си¬
стем. Классификация РТС явно связана с их общим определе¬
нием. В соответствии с введенным в § 1.1 понятием управления в
Широком смысле конкретизируем его цели. Ограничимся при этом
Целями управления, достигаемыми с помощью РТК и РТС. В со¬
ответствии с общим определением РТК и РТС их использование
связано с задачами получения информации и информационного
обмена между территориально разнесенными объектами. Предпо¬
ложим теперь, что система Sj описывается посредством п класси¬
фикационных признаков. Образуем множество классификационных
3—36 65
признаков Xh (k=l, 2, /г). Очевидно, система может быть пред¬
ставлена в следующем виде
S^gzA^xX^X ...xXn(j = 1,..., т).
Множество правильных высказываний, формирующее отношение,
определяется элементами декартова произведения, удовлетворяю¬
щего /-и цели управления. Тогда РТК, обозначим его S/i} пред¬
ставляется в виде объединения ряда подсистем из S,, т. е.
S<=> Sa [J Sр (J Sv... (J Sco,
где р, у,..., со(={1т}.
Набор классификационных признаков должен обладать полно¬
той, необходимой для рассматриваемого уровня формализованно¬
го описания. Основой для формирования классификационных при¬
знаков является произведенное выше деление РТС на метриче¬
ские и информационные.
Характерная особенность классификационных признаков, до¬
пускающих формализацию, состоит во взаимоисключающих свой¬
ствах систем, построенных при различных значениях классифика¬
ционного признака. Указанное свойство исключает неопределен¬
ность в выборе системы и позволяет установить соответствие меж¬
ду набором признаков и целевым назначением системы. Отметим,
что установление соответствия основано на принципиальной воз¬
можности выполнения цели рассматриваемой системой. Например,
система сбора и анализа воздушной обстановки в районе аэродро¬
ма не может быть создана лишь на основе только бортового обо¬
рудования, необходима еще подсистема сбора данных. Сравни¬
тельная оценка различных вариантов построения системы может
быть произведена лишь после введения формализованных показа¬
телей качества.
Остановимся на подходе к формализации процесса обоснования
РТК. Объединение систем в комплекс S/t основано на факториза¬
ции классификационных признаков. Указанные положения непо¬
средственно применимы к рассматриваемой задаче выбора струк¬
туры комплекса и обоснования целесообразности его построения.
Для наглядности рассмотрим упрощенную ситуацию (рис. 3.2).
Рис. 3.2. Оценка целесообразности комплексирования систем: комплексирование
нецелесообразно (а), целесообразно (б)
66
Пусть рассматриваются возможность и целесообразность комплек-
сирования систем Sa и S/з, каждая из которых принципиально мо¬
жет быть построена на соответствующих подмножествах множе¬
ства классификационных признаков (на рис. 3.2 предполагается,
чт0 k = 2). Очевидно, что комплексирование целесообразно при
условии существенной меры подмножества пересечения Sa и Sp>
т. е. San^3- Очевидно, что отношение мер пересечения подмно¬
жеств, предназначенных для построения комплекса, к объедине¬
нию этих подмножеств и определит целесообразность, комплекси-
рования. Однако вследствие разнородности классификационных
признаков установление указанных мер в явном виде не представ¬
ляется возможным. Поэтому переход к факторизованным перемен¬
ным должен производиться с учетом эквивалентирования мер под¬
множеств Sa, S3, ... Отметим, что указанное построение устанав¬
ливает лишь принципиальную возможность комплексирования си¬
стем. В частности, указанный подход совершенно не учитывает
нового свойства, заключающегося в необходимости совместимости
комплекса при выполнении им задач, присущих составляющим
его системам.
3.2. Динамические системы
Общее определение. Важным классом теории систем явля¬
ются динамические системы. Введение таких систем наиболее
удобно при рассмотрении РТС и комплексных подсистем. Это свя¬
зано с тем, что их входные и выходные объекты задаются на мно¬
жестве моментов времени. Рассматриваемое далее понятие состоя¬
ния динамической системы позволяет описать их поведение прак¬
тически для любого класса систем, функционирующих в реальном
масштабе времени. Наконец, на основе состояния динамической
системы производится весьма конструктивный переход от описания
внешних условий функционирования РТС к всестороннему описа¬
нию системы. В соответствии с указанным детализируем данное
в § 3.1 феноменологическое определение системы, задав общий
•класс временных систем. Для этого следует рассмотреть некото¬
рый объект V, порождающий семейство функций v^V.
Пусть, например, зафиксировано отображение
v:Tv-^Av. (3.9)
Если каждая функция v является отображением Т в А, то
индекс v в (3.9) можно опустить. Тогда Т можно рассматривать
как индексирующее множество для V, а А — алфавит объекта V.
Если, кроме того, множество Т линейно упорядочено, то его мож¬
но рассматривать как множество моментов времени. Таким обра¬
зом, единственным свойством, присущим множеству Г, является
следование его элементов в определенном порядке. Такое опре¬
деление соответствует общесистемному принципу придания опре¬
делениям минимальных свойств с тем, чтобы не ограничивать об¬
щности применения употребляемых понятий. Функции, определен¬
ные на Т, при этом называются абстрактными функциями време¬
ни. Объект, элементами которого являются временные функции,
представляет собой временной объект; системы, определенные на
временных объектах, являются временными системами. Очевидно,
любой абстрактный объект является отражением некоторого ре¬
ального объекта. Поскольку временные функции объекта и систе¬
мы в конечном итоге отражают развитие некоторого процесса в
реальном масштабе времени, представляется целесообразным вве¬
сти обобщение множества Т. Это обобщение должно явиться аб¬
страктной моделью пространственно-временного многообразия,
поскольку при этом изменяется лишь структура множества Т,
элементы которого становятся векторными и содержат теперь че¬
тыре компонента (х, у, z, t). Действительно, введенные ранее оп¬
ределения не регламетируют структуру, индексирующего множе¬
ства. В соответствии с этим наряду с временными системами бу¬
дем в дальнейшем там, где это необходимо, рассматривать про¬
странственно-временные системы. Соответствующее таким систе¬
мам множество будем в дальнейшем обозначать TR. Переход к
указанному обобщению оказывается весьма существенным с точ¬
ки зрения рассмотрения широкого класса РТК и РТС.
Перейдем теперь к общему определению системы в виде (3.2).
Очень часто его входной X и выходной У объекты определены на
одном и том же множестве T(TR). Тогда Хс=Лт и Ус:Вт, а систе¬
ма представляет собой отношение
S<=ATxBT. (3.10)
Дальнейший переход к определению динамической системы ос¬
новывается на введении фундаментального понятия состояния.
Введем для системы S некоторое произвольное множество С и
функцию R : (СхХ)->У такую, что
(х, z/)ge S (Зс) [7? (с, х)~у\. (3.11)
Здесь С —множество или объект состояний, элементы множест¬
ва С являются состояниями системы; R — функция, определяю¬
щая реакцию системы. (При рассмотрении комплексов иногда
употребляются понятия «глобальное состояние» и «глобальная
реакция».)
Введенное определение означает, что кроме множеств вход
и выход в системе следует рассматривать третье множество со¬
стояний, позволяющее определить выход системы без непосред¬
ственного обращения к входному воздействию. Целесообразность
такого дополнительного определения очевидна. Однако возникает
вопрос: всегда ли можно выражать реакцию системы через ее
состояние? Ответ на этот вопрос дает следующая теорема. Каж¬
дой системе соответствует некоторая глобальная реакция, и эта
функция R не является частичной, т. е. R\CxX-+Y. (Частично
определенная функция не обязательно определена для любого
значения аргумента, в данном случае СхХ). Доказательство тео¬
ремы приведено в [38]. Ограничимся здесь ее интерпретацией.
68
Как видно из формулировки теоремы, ни на С, ни на 7? не на¬
кладывается никаких дополнительных условий. Однако при на¬
личии таких условий, например, вытекающих из физического
смысла задачи, У? может стать частичной функцией, т. е. неопре¬
деленной на некотором подмножестве СхХ. Это имеет место, в
частности, при наложении причинно-следственных ограничений.
Детализацией понятия реакции системы является либо реак¬
ция, отнесенная к начальному состоянию — начальная реакция
ро : CoXX—XY, где
(х, z/)eeS<s>(3c)(p0(c, (3.12)
либо реакция, отнесенная к состоянию в текущий момент вре¬
мени. Соответственно получаем
(х, y)e=Sttt(3c)[pt(c, x)=yt]. (3.13)
Различие соотношений (3.11) — (3.13) состоит в том, что для
реакции р рассматривается либо начальное состояние (3.12), ли¬
бо сужение системы St (см. п. 10 приложения 1). Соответственно
р — семейство реакций, а множество С= {ct : t^T} — семейство
объектов состояний.
Эти предварительные определения положены в основу поня¬
тия динамической системы, которая согласно [38] существует
тогда и только тогда, когда существуют два семейства отображе¬
ний. Первое из них представляет собой семейство реакций си¬
стемы
р^р^хХ,-^, t^T}. (3.14)
Второе семейство определяет функции перехода состояний
Ф = {ф//*• С(хХц*-+ С/*}. (3.15)
Функция перехода состояний определена на некотором интерва¬
ле //*, в котором определено входное воздействие. Таким обра¬
зом, соотношение (3.15) указывает на возможность определения
-состояния системы в произвольный последующий момент времени
по состоянию в предшествующий момент и интервалу входного
воздействия.
Остановимся на интерпретации понятия состояния системы.
Выходное воздействие зависит не только от текущего входного
воздействия, но и от его предыстории. В связи с этим нецелесо¬
образно различать предшествующее и текущее входные воздей¬
ствия системы. Отсюда с интуитивной точки зрения очевидна
необходимость введения дополнительного понятия состояния для
Учета прошлого и настоящего входных воздействий системы. Со¬
стояние системы позволяет, таким образом, определить настоя¬
щее и будущее выходные воздействия, являясь своеобразным за¬
поминающим устройством или накопителем входных воздействий.
Если теперь перейти от этой весьма общей интерпретации на
вербальном уровне к более формальным определениям, становит¬
ся ясным, что знание состояния с(6), т. е. в момент времени Л и
69
отрезка входного воздействия на интервале (/ь /2), т. е. х[/ь t2]
должно быть необходимым и достаточным условием для опреде¬
ления с(/2) при условии, что Последнее верно лишь для
детерминированных систем. В случае стохастических систем мож¬
но говорить лишь о вероятностных характеристиках с(/2), т. е.
определить распределение вероятностей p2[/i, /2, с (Л), x(th /2)].
Динамическая система полностью описывается семейств мн
отображений (3.14) и (3.15). При этом семейство функций пере¬
хода состояний согласовано с семейством реакций. Это означает,
что' если состояния системы в любой ‘момент времени обусловли¬
вают одинаковое поведение систе.мы в будущем, то их следует
отождествить. Дальнейшая детализация понятия состояния заклю¬
чается в установлении соотносительности между состояниями си¬
стемы в различные моменты времени. Последнее приводит к не¬
обходимости введения понятия пространства состояний. Оно опре¬
деляется с помощью семейства отображений /(3.14) и (3.15), если
одновременно выполняются следующие условия: а) функция пе¬
рехода состояний для того же момента времени преобразуется
к исходному состоянию; б) функции перехода состояний могут
быть пересчитаны на произвольный интервал времени; в) реак¬
ция системы в произвольный момент I порождает реакцию в по¬
следующий момент /*.
Изложенное определение динамической системы, несмотря на
представляющуюся абстрактность, (может служить основой для
рассмотрения конкретных систем, что будет показано далее. На¬
ряду с этим следует рассмотреть определение динамической си¬
стемы, приведенное в [20]. Это определение предусматривает за¬
дание множеств моментов времени, состояний, мгновенных значе¬
ний входных воздействий и мгновенных значений выходных вели¬
чин. Дополнительным элементом, включаемым в определение, яв¬
ляется 'множество допустимых входных воздействий Q =
= {q : Т-+Х}*. Это множество определяет ограничения на входное
воздействие. В частности, если описываемая система представля¬
ет собой совокупность дифференциальных уравнений свободного
движения, то единственные силы, действующие на систему, опре¬
деляются гравитацией и, следовательно, зависят лишь от состоя¬
ния системы, т. е. от взаимного расположения притягив'ающих
тел. В этом смысле -и саму систему следует считать свободной.
Таким образом, введение множества Q допускает дополнитель¬
ную возможность классификации. В принципе дополнительные ог¬
раничения накладываются и на допустимые выходные воздейст¬
вия Г {у : T-+Y}, однако эти ограничения, как правило, значитель¬
но слабее, чем ограничения на входные воздействия.
3 а иск л юч енмем у к аз ан и о го от ли ч и я, опр ед ел ей и я дин а миче-
ской системы в [20] и [38] во многом совпадают. Это относится и
* Ограничения входных воздействий, так же как и далее рассматриваемых
выходных воздействий, практически задаются из условия, что мгновенные зна¬
чения выбираются как q^Q.
70
к функции перехода состояний. Однако (введение множества Q не¬
сколько трансформирует формализованную запись этого понятия.
Так, функция перехода состояния ср задается на декартовом про¬
изведении четырех множеств, т. е.
(3.16)
Соотношение (3.16) позволяет определить текущее состояние
с(/)=ф(/, to, Со, q)^C, в котором оказывается система в момент
(времени t^T, если в начальный момент времени /0 система была
в начальном состоянии Co = Co(to)^C и на нее действовало вход¬
ное воздействие q^Q.
Вместо реакции системы вводится выходное отображение
т]:ТхС-И7, определяющее выходные величин Ы У (t) =пГ с(/)].
Однако введение такого понятия 'без явной ссылки на входное
воздействие, очевидно, является недостаточным. Поэтому в [20]
вводится также уточняющее определение, включающее в себя
связь с входным (воздействием. Это определение, по сути дела,
аналогично реакции системы, хотя в явном виде эта аналогия в
[20] не устанавливается.
Значительно больший интерес представляет введение более со¬
держательной терминологии, с помощью которой производится пе¬
реход на язык теории управления. Пару (т, с), где с^С
называют событием или фазой системы, а множество ТхС обра¬
зует пространство событий или фазовое пространство системы 5.
Функция перехода состояний или ее прафик в пространстве собы¬
тий представляются в зависимости от направления конкретиза¬
ции траекторией, движением, потоком, решением (например, диф¬
ференциального уравнения) (И т. д. Можно также считать, что
входное воздействие или управление q переносит, переводит, из¬
меняет состояние со в состояние с с помощью функции ф. При
этом выходное отображение реализует цель управления.
Изложенное выше определение динамической системы оказы¬
вается достаточно общим и в связи с этим представляет в основ¬
ном методологический интерес. Поэтому целесообразно распрост¬
ранить рассмотренный подход на более частные случаи, допуска¬
ющие получение конструктивных результатов.
Стационарные системы. Существенный подкласс динамических
систем включает в себя стационарные системы. Будем понимать
под стационарной системой такую, корда ее реакция на отрезок
входного воздействия не зависит от расположения промежутка
приложения этого воздействия на множестве Т. При этом уста¬
навливается, что система в обоих случаях находились в одинако¬
вом состоянии. Другими словами, отношения, описывающие си¬
стему, не изменяются во времени. Соответствующее статистиче¬
ское определение стационарной системы (Предусматривает, что
Указанное свойство справедливо для любых статистических ха¬
рактеристик.
71
Перейдя ;к формализованному языку, установим, что множе¬
ство Q замкнуто относительно оператора сдвига, т. е.
q(f)=sq(t + x) для V т, t<=T;
<₽(/, т, с, = т-фА, с, z*q).
Здесь гд —оператор сдвига. Его действие состоит в том1, что он
только сдвигает заданную функцию времени на интервал, указан-
■ный в верхнем индексе оператора, и не изменяет ее в других от¬
ношениях.
Отметим, что (наряду с понятием стационарности используется
также понятие полной стационарности. Оно соответствует систе¬
ме, у которой оператор сдвига (может быть отнесен не только к
входу, но и (к выходу системы (рис. 3.3). При этом имеет место
соотношение
V/ [t<=T=>z* (s) = st]; (3.17)
(xt, У()=2л(х, У).
Для вполне стационарной системы ее эволюция, начиная с лю¬
бого заданного 'момента времени в будущем, оказывается одина¬
ковой с 'точностью до сдвига на определенный момент вре¬
мени Д.
Наряду с понятием стационарной системы используется доста¬
точно близкое представление об -инв-ариантной во времени дина¬
мической (системе. Такая система обладает взаимно-однозначны1М
соответствием между cQ и ct, т. е. начальными и текущими' со¬
стояниями системы. Для существования 1ин!вариант.ной во времени
системы нужно, чтобы ее семейство реакций было инвариантно
во времени. Последнее означает, что для любого состояния в лю¬
бой момент времени выход 'системы (можно получить из началь¬
ных реакций с помощью подходящего оператора сдвига (рис. 3.4)»
Кроме того, необходимо, чтобы для любого промежутка времени
функцию перехода состояний можно 'было получить из начальной
функции перехода состояний, определенной для аналогичного про¬
га входными данными стационарных
систем
1 При дальнейшем изложении входное воздействие вновь обозначается как
х.
72
межутка времени. Очевидно, что всякая инва-риантная во време¬
ни динамическая система является стационарной. Отметим, что
введенные здесь определения будут широко попользоваться в даль¬
нейшем.
Линейные системы являются простейшим классом динамиче¬
ских еистем, весьма широко используемым в РТК и РТС. Дейст¬
вительно, устройства оценивания параметров и оптимальной
фильтрации строятся обычно на основе предположения о гауссов¬
ском законе распределения принимаемой совокупности сигналов
и шумов. Известно, что при этом условии оптимальная фильтра¬
ция оказывается линейной [60]. Поэтому конкретные линейные си¬
стемы и устройства широко применяются в РТК и РТС любого
назначения. Это, в частности, устройства оценки параметров по¬
ложения и движения цели в РЛС сопровождения и наведения,
оптимальные фильтры связных сигналов, построенные на -базе
байесовских оценок, т. е. учитывающие априорную информацию
о свойствах передаваемых сообщений, многомерные оптимальные
фильтры, используемые в навигационных системах КА, основан¬
ные на совместной обработке различных видов навигационной ин¬
формации, и т. д.
Системное понятие линейности имеет х ар актерн ые особенно-
ста, связанные с введенными ранее определениями. Наиболее су¬
щественная часть описания линейной системы заключается в воз¬
можности использования линейных векторных пространств. Соот¬
ветственно в качестве определений системы используются:
(Vs) (Vs') [s&S, s'&S => s + s' eS];
(Vs) (V a) [a еЛ, seS =>as e S],
где A — скалярное поле'(см. п. И приложения 1).
Аналогичные соотношения применяются и для описаний вре¬
менных 'И пространственно-временных систем. Так, в частности,
для множества X имеем:
х" = х + х'& (Vt) [х" (0 = %(/) + х' (/)];
х' = фф (V t) [%' (/) = a%(/)].
Соответствующие соотношения имеют место и для множе¬
ства У. _
Отметим, что реакцию линейной системы р можно разделить
на две составляющие — реакцию на входное воздействие р2 и ре¬
акцию на состояние рь В связи с этим -особый -интерес представ¬
ляет -случай, (когда входное воздействие тождественно равно
нулю, т. е. %t = 0. Тогда система реагирует только на состояние,
т. е. с некоторого момента t' реакция системы на пару (с6 0) со¬
впадет с yt. Если же рассмотреть реакцию системы на входное
воздействие, т. е. перейти к рг, то следует рассмотреть поведение
системы при о = 0 и хи» =0. При этом получаем условие согла¬
сованности реакций на входное воздействие. Оно устанавливает,
что -при нулевых входе и состоянии выход системы зависит лишь
73
от возобновленного воздействия. Для нелинейных систем этот вы¬
вод несправедлив.
Можно показать [38], что приведенные здесь словесные форму¬
лировки эквивалентны следующим соотношениям:
№о) (Vxz)3 (ct) [plf (ct) = p10 (c0) -|- p2 (x* -0)]; (3.18)
(Vc0) (Vxz) (Vxt) (3cf) [pn (ct) + p2< (xt) = p10 (c0) + p20 (x* -xz)],
где XfO — воздействие, равное нулю, начиная с t'\ х\ xt — интер¬
валы входного воздействия, соответствующие временным интерва¬
лам tf<Zt и
Основное преимущество линейной системы заключается в воз¬
можности удобного построения объектов состояния системы и дру¬
гих вспомогательных функций. В частности, для линейной вре¬
менной системы s существует начальная линейная реакция
ро:СохХ-^У, что р]0(с0, х) = р10(с0) + р20(х), (3.19)
рю=#, а реакция р2о — линейна [38].
Тогда для построегния пространства состояний, а также, как
следствие, и других вспомогательных функций -может быть пред¬
ложена конструктивная процедура. При этом в качестве исход¬
ного нулевого состояния системы с0 принимается s°t = {(0, у) esJ,
т. е. система с нулевым входом; величина s°t иногда называется
алгебраическим ядром системы. Следовательно, на первом этапе
принимается, что c0 = sQ. На втором этапе производится сужение
системы на V/. Тем самым выбирается ядро соответствующего'
сужения системы, т. е. ct = s°t, где s°/={0, yt: 0, yt<=St}. На треть¬
ем этапе вводится семейство множеств состояний
£ U С/»
после чего С определяется с помощью отношения эквивалентно¬
сти Ет, и тогда пространство состояний определяется как фак¬
тор-множество С = С!Е1и (см. п. 12 приложения 1).
Условия, гарантирующие возможность применения такой про¬
цедуры, заключаются в следующем. Основное различие между
процедурами построения пространства состояний для любой вре¬
менной системы и для линейной системы заключается в выборе
объектов состояний. В общем случае объект начальных состоя¬
ний выбирается в известной мере произвольно так, чтобы наи¬
лучшим образом отразить начальную 'информацию. Для линей¬
ных же систем объект начальных состояний определяется самой
системой. То же относится к выбору состояний и для других мо¬
ментов времени. Наконец, еще одно отличие заключается в том,
что для общих временных систем состояния определяются по от¬
ношению к прошлому, а для линейных систем —по отношению к
будущему. Как будет показано ниже, рассмотренная здесь про¬
цедура наиболее удобна для стационарных временных си¬
стем .
74
Здесь же можно установить, какие ограничения /накладывают¬
ся на выбор реакции системы. Если не накладывать ограничений
на физическую реализуемость системы, т. е. не требовать, чтобы
система была неупреждаемой, то в качестве р2о можно выбрать
любую функцию удовлетворяющую условию х, f(x)<=S
при Vx 1и требованию линейности, причем это можно делать не¬
зависимо от выбора рю. В этом, по сути дела и определена вся
свобода выбора, все остальное предопределено самой системой.
В этих условиях семейство функций перехода состояний выби¬
рается однозначно, когда определено семейство реакций.
Выбор о тн о ш ени я эквив а лент н ости, по рож, да ю ще го простр ан -
ство состояний, также является специфическим. Здесь необходи¬
мо, чтобы фактор-.множество С!Ет было бы линейным простран¬
ством. Для этого нужно, чтобы отношение эквивалентности было
бы и отношением •конгруэнтности. Последнее возможно тогда и
только тогда, если
(Ср c^)efm&(cp CpjeEn^fCf+c'p ct,-\-c't,'y=Em\
(Cj, Ct')<=E=ф-((JCp PCp\^Em,
т. e. выполняются обычные условия принадлежности к линейно¬
му (Пространству.
Более конструктивные результаты могут быть получены при
допущении возможности дифференцирования (всех рассмотренных
функций. Для этого' необходимо .знать, насколько гладко во вре¬
мени происходят переходы в пространстве состояний. Поэтому
необходимо определение 'гладкости динамической системы. Дина¬
мическая система называется гладкой, когда Т есть .множество
вещественных чисел, что всегда выполняется для реального вре¬
мени, С и X есть топологические пространства (см. п. 13 прило¬
жения 1), функция перехода состояний q \ ТхТхСхХ-+С явля¬
ется непрер1ывной. При этом в случае выполнения некоторых до-
пол иительных предположелий поведение гладкой динамической
системы описывается дифференциальными уравнениями. Если же,
кроме того, система линейная, то она может быть описана ли¬
не йтI ыми ди ф фе реаци а л ьн ыми у рави гени ями.
В связи с указанными определениями .представляет интерес
распространение понятия общих динамических систем на систе¬
мы, описываемые обыкновенными дифференциальными уравнения¬
ми с постоянными коэффициентами. Эти системы вследствие их
существенной простоты наиболее часто используются для реше¬
ния практических задач. Кроме того, именно подобным системам
отводится главная роль в традиционной теории линейных систем.
Такие динамические системы описываются системой линейных
обык1 говенн ы х диффе р енци а л ьны х у р abii-i е ни й с постоянн ыми ко¬
эффициентам и:
dc/dt = Fc + Gx;
У = Нс,
75
(3.20)
где F, G, H — матрицы (постоянных коэффициентов; х, у, с —век¬
тор-функции.
Установление таких связей достаточно ярко иллюстрирует
общность математической теории систем. Соответственно покажем,
что описание систем (3.20) (может быть получено на аксиомати¬
ческой основе, исходя из общего определения линейной времен¬
ной системы (3.10). В соответствии с предлагаемым подходом вве¬
дем в рассмотрение следующие аксиомы:
1. Входной и (выходной алфавиты системы А и В определяют¬
ся отношениями эквивалентности Ет и Ег соответственно, мно¬
жество моментов времени Т=/?+, т. е. представляет собой мно¬
жество неотрицательных вещественных чисел, поле (необходи¬
мое для определения линейной системы, р-авно 7?+-, а X —
= L2(0, оо), т. е. образует гильбертово пространство (см. п. 14
приложения 1).
2. Система S стационарна и является предопределенной1.
3. Система S, (начиная с некоторого f, полностью описывается
ее состоянием, принадлежащим некоторому конечномерному про¬
странству состояний С.
4. Выходная реакция системы дифференцируема, причем отоб¬
ражения ри и p2f непрерывны. Кроме того, функции с^С явля¬
ются (аналитическими (см. п. 15 .приложения 1).
Нетрудно видеть, что для систем уравнений, описываемых
(3.20), все четыре аксиомы справедливы. Кроме того, эти урав¬
нения -могут быть выведены из сформулированных аксиом. Идея
доказательства, детально рассматриваемого в [38], основывается
на записи выражения для выходной реакции системы посредством
несобственного интеграла вида р2о(я)(^)= j т)х(т)йт, где
о
IF(/)^L2(0, оо)—элемент гильбертова 'пространства. Существо¬
вание IF(/) следует из принадлежности х к гильбертову прост¬
ранству. При этом IF (7, t) = IF(/)(t) : Em-+Er — некоторая матри¬
ца, являющаяся по сути дела весовой «матрицей. Тогда с учетом
условий пеун рождаемости, характерных для предопределенной си¬
стемы, получаем
Рго (*) (0 = (t—*) х (т) d т,
где W0(t—т) =F(r—t, 0).
Такая запись выходной реакции системы соответствует клас-
си'Ч е оком у п ре дот а в л ени ю о ли не ином фи л ьтре. Исп о л ьзо в ание,
кроме того, условий дифференцированности и непрерывности со¬
ответствующих отображений позволяет осуществить переход к си¬
1 Предопределенность системы означает существование такого f, что для
V7>f будущая эволюция системы определяется только прошлым описанием.
Иначе говоря, отсутствует необходимость обращения к каким-либо вспомога¬
тельным данным, например к начальным состояниям.
76
стеме (3.20). Следовательно, подход с позиций общей теории си¬
стем является наиболее конструктивным и плодотворным.
Реализуемость динамических систем. Понятие реализации динамической сис¬
темы заключается в следующем. Временная система (3.10) должна определять¬
ся некоторой функцией. Чаще всего функция принадлежит семейству реакций
системы, которое ранее было обозначено как р. Весьма существенным являет¬
ся вопрос о том, существует ли динамическая система, для которой задано
определенное семейство функций р. Ответ на этот вопрос может быть получен
в два этапа:
1. Если задано семейство р, существует ли система S, для которой р со¬
гласуется с S.
2. Если известно, что р является семейством реакций для некоторой сис¬
темы S, то существует ли такое семейство функций перехода состояний ср, что
(р, ср) образуют динамическое представление системы S.
Рассмотрим эти вопросы последовательно. В [38] показывается, что согла¬
сованность р с S имеет место тогда и только тогда, когда для любого t^T вы¬
полняются следующие условия:
(Veo) (V*0 (V*() (3 Ct) [Pi (Ct, Xt) = ро(сох* xt)\Tt]; (3.21)
(\fct) (V*f) (3 Co) (3 x{) [P( (ct, x() = Po(co, X*, xpiTi], (3.22)
где Xt-x*— сочленение интервалов входных воздействий (см. п. 16 приложе¬
ния 1).
Содержательный смысл условий (3.21) и (3.22) заключается в том, что
первое соотношение можно рассматривать как утверждение о том, что текущее
состояние ct связывает определенным образом предысторию системы, представ¬
ленную парой (с0, xf)» с ее будущей реакцией на Xt таким образом, что выход
системы, начиная с состояния cit т. е. с yt = pt(ct, xt), совпадает с остатком
начального выхода, трансформированного на xt, т. е. #о|Л = Ро(со, xlxt) |Tt—yt,
или, иначе говоря, (3.21) преобразуется к следующему виду: (V (с0, xf)(Vx/)X
X (Scf) [pf (ctt xf)=po(co, х1Х1)\Т^.
Такая формулировка означает, что для новой предыстории системы (с0,
х*) и для любого ее будущего входа xt всегда найдется такое состояние ct,
которое должным образом свяжет прошлое и будущее.
Соответственно условие (3.22) можно представить в виде (V(ct, Xt))X
Х(Я(с0, xf))[pf(cz, xz)=p0(c0, xf, xt)\Tt].
Указанная запись означает, что для любых (ct, xL), т. е. для любого по¬
ведения системы в будущем, найдется такая ее предыстория или такое началь¬
ное состояние с0 и начальный отрезок входного воздействия х*, что эта пре¬
дыстория приведет к состоянию сг, что в свою очередь свяжет эту предысто¬
рию с будущим входным воздействием xt.
Перейдем к рассмотрению возможности конструирования семейства ср, т. е. к
реализуемости р. Оказывается, что семейство р реализуемо, когда для него най¬
дется такое семейство функций перехода состояний ср, что пара (р, ср) будет
динамическим представлением некоторой временной системы S. При этом для
t, и должны выполняться следующие условия:
(Vct)(VM(3 <7')(VM[P/' xt') = Pt(ct> xtt’xt’)\Tt']- (3.23)
77
Аналогичное условие формулируется и для начального состояния и началь¬
ной реакции системы соответственно.
Содержательный смысл условия (3.23) состоит в следующем.
Для любой пары «состояние, отрезок входного воздействия», т. е. (ct,
Хи'}, найдется такое состояние с/ в произвольный момент времени t'^t, что
■будущая эволюция системы во времени, в том числе и реакция системы, ока¬
жется согласованной с указанной парой Поэтому состояние системы
d' объединяет предшествующий и последующий отрезки xtt' и xt', т. е. полу¬
ченное с/ обеспечивает заранее заданную реакцию системы.
Отметим, что иногда [20] реализуемость системы рассматривается как 'воз¬
можность конструирования состояния не по заданной реакции системы, а по
заданию самой системы .в виде некоторого отображения, а точнее, семейства
функций
S= {sa: TXC-+Y, аеЛ},
где А — индексирующее семейство функций.
Очевидно, такая трактовка ведет к некоторой потере общности, так как
понятие отношения заменяется более узким понятием семейства функций. Это
косвенным образом констатируют и авторы {20]. Они указывают на то, что
множество А, являясь подмножеством ТхС, может оказаться недостаточно
полным. Для его расширения предлагается несколько искусственный путь фор¬
мального включения в А всех дополнительных элементов, приводящих к пол¬
ноте семейства множеств состояний С. Однако даже и этот путь в конечном
итоге требует дополнительного предположения о стационарности системы.
Дальнейшее развитие понятия реализуемости систем приводит к канониче¬
скому представлению динамической системы, что связано с декомпозицией ди¬
намической системы и поэтому будет рассмотрено в § 3.3. В заключение отме¬
тим, что общий подход к динамическим системам при его дальнейшем разви¬
тии приводит к общим принципам управляемости и фильтрации. Это, по край¬
ней мере, достаточно очевидно для линейных стационарных систем. Связь об¬
щей теории систем с управляемостью рассматривается в § 3.4.
3.3. Декомпозиция систем
Понятие декомпозиции и гметоды, !построен!ные <н«а его основе,
являются одним из наиболее мощных инструментов, используе¬
мых 'при решении различных системных :за;дач. Это положение
находит свое отражение и >в математической теории систем. В свя¬
зи с существенно различи-!ыми аспектами проблемы декомпозиции
рассмотрение ;в рамках одного подраздела представляется неце¬
лесообразным. Поэтому некоторые воцросы, по существу относя¬
щиеся к проблеме декомпозиции, будут изложены в дальнейшем.
Подходы, связанные с использованием декомпозиции систем,
могут 'быть -классифицированы. Это прежде всего классическое
представление о декомпозиции систем, связанное с декомпозицией
отношений и отображений. Ои-ю явно следует из приведенного оп¬
ределения системы, рассматриваемой как отношение над декар¬
товым произведением множеств. Такой подход в известной мере
является основой для последующих подходов, приводящих, как
78
правило, к более конструктивным выводам по сравнению «с клас¬
сическим подходом.
Декомпозиция (находит наиболее 'существенное развитие при
канояическОхМ разложении различных отношений '.и функций, опи¬
сывающих 'Систему. К этому представлению примыкает диакопти¬
ка, рассматриваемая в (следующем смысле [31]*. Диакоптика от¬
носится к системе с большим числом переменных, которая по оп¬
ределенным правилам разделяется на 'малые подсистемы с их по¬
следующим рассмотрением как изолированных. В процессе диа¬
коптики производится учет физических свойств рассматриваемой
системы, что, очевидно, несколько ограничивает общность приме¬
няемых методов.
Основой разделения на подсистемы являются такие характер¬
ные особенности, как симметрия, тождественные элементарные
конструкции и т. д. Особенность диакоптики—объединение дис¬
кретного анализа, базирующегося на представлении о графах си¬
стемы, с непрерывным. В частности, производится совместное рас¬
смотрение как релейных систем, так и линейных цепей в рамках
единых моделей. В целом можно считать, что аппарат диакопти¬
ки находится на -стыке математических и эвристических методов
теории систем.
Наконец, заслуживают внимания методы декомпозиции, свя¬
занные с -необходимостью решения задачи синтеза систем. Боль¬
шинство рассматриваемых ранее определений относилось к описа¬
нию функционирования систем. На основе таких определений до¬
статочно широко развиваются методы анализа систем. Между
тем при (необходимости (решения задачи -синтеза в соответствии с
ранее определенным подходом от -высшего к низшему (исходными
(априори заданными) являются -общие свойства -системы. Поэто¬
му существенным оказывается процесс членения общего на эле¬
менты. Адекватный этому процессу математический аппарат дол¬
жен в (известной степени быть обратным относительно представ¬
лений, связанных с анализом систем. Соответствующие математи¬
ческие определения, их развитие и интерпретация применительно
к конечномерным системам детально излагаются в [15]. Рассмот¬
рим указанные подходы последовательно.
1. Классическая декомпозиция. Наиболее общий подход дол¬
жен, очевидно, опираться на определение системы (3.1) и (3.2).
Тогда определение декомпозиции можно получить с использова¬
нием операции умножения отношений. Назовем отношение про¬
изведением отношений /?1 и /?2, если выполняется условие
(W)#[(%W(W (3.24)
В соответствии с (3.24) общий метод декомпозиции состоит
в представлении отношения 7?, определяющего -систему S, в виде
произведения двух других отношений: и /?2. Если такие отно¬
* Иногда диакоптика рассматривается как синоним декомпозиции.
79
шения найдены, то систему можно представить в виде эквивалент¬
ной совокупности двух подсистем (рис. 3.5):
S1cz[X1xX2x ...xXjXZ];
S2az[ZxX}+1X...xXn].
В условиях функционирования РТК и комплексных РТС вы¬
бор исходных множеств Хь Х2, ..., Хп диктуется соображениями
наибольшей компактности формализованного описания, а также
спецификой исследуемой системы. Общее требование к содержа-
Рис. 3.5. Классическая декомпозиция:
система до декомпозиции (а), после де¬
композиции (б)
со-
индексации
декартова
переменные,
следующие
условия
тельности вводимой струк¬
туры состоит в наиболь¬
шей независимости ком¬
понентов декартова про¬
изведения множеств. В част¬
ности, должны четко раз¬
деляться с помощью
ответствующей
сомножителей
произведения
отображающие
процессы.:
объективные
существования объекта ин¬
формационного взаимодей¬
ствия (например, дифференциальные уравнения движения цент¬
ра масс КА);
внутренние условия функционирования юистем (энергетический
потенциал радио линий, степень загрузки (радиоканала информа-
ЦИОПГН1ЫМ1И сигналами, уровень внутренних шумов);
содержательность и качество управляющих сигналов (степень
воспроизведения управляющими сигналами условий функциони¬
рования системы);
внешние условия функционирования систем, отражающие ха¬
рактеристики .мешающих воздействий и степень их воздействия на
систему;
характеристики обмена информацией со смежными систе¬
мами;
параметры, характеризующие условия эксплуатации систем.
Установим теперь наименьшее число сомножителей декартова
произведения множеств при условии, что исходная система допи¬
сывается с помощью декартова произведения п множеств. Назо¬
вем это число сомножителей порядком систем1Ы. Оказывается, что
систему n-го порядка можно представить в виде п—2 систем 3-го
порядка. Действительно, исходную систему, пусть .заданную отно¬
шением R, можно представить в виде произведения двух систем,
заданных отношениями и J?2- При этом вводится новое мно¬
жество Zi. Следовательно, система S записывается в следующем
эквивалентном виде:
[^(21. х2, Хз)]П[/?2(Х1( zt, XХп)].
80
Затем система, задаваемая отношением /?2, разбивается с учетом
представления R2 (В виде .произведения отношений /?3 и Т?4. Тог¬
да система представляется в виде конъюнкции трех отношений:
Х2, Х3)] nfl3[(z2, zx, Х4)] n [/?4(Z2, хп х5,..., Хп)].
Этот процесс, очевидно, можно продолжить. Тогда на k—1 шаге
получим
^2(к~1) = ^2 (к—1)4-1 ^2 и—1)4-2’ П 3.
При этом получаем разложение на отношения 3-го порядка, об¬
щее число которых составляет п—2:
Х2, Х3)]П№(22, Z1( Х4)]П...П[/?2<п-4)+1,Х
X(Zn_3, Zn—4, Xn—2)] А [^?2 (п—4)4-2 3’ ^1’
Можно показать [36], что дальнейшее разложение, т. е. <пред¬
ела® лени е сложной системы в виде совокупности систем типа
вход—выход, возможно лишь при условии наложения дополни¬
тельных ограничений на вспомогательные 'множества Zj. Отсюда,
в частности, следует, что любая система вход—выход должна хо¬
тя бы в неявной форме содержать еще дополнительное множе¬
ство, которое, как было показано в (предыдущем подразделе при¬
менительно к динам и ческой (системе, является (множеством состоя¬
ний системы. Таким образом, понятие «состояние (системы» здесь
является следствием общего представления о декомпозиции си¬
стемы.
Описанный здесь способ декомпозиции, основанный на введе¬
нии произведения отношений, (может быть интерпретирован при¬
менительно к РТК следующим образом. Разбиение отношений
экви в ал ентн о (конкретизации п еременн ых, з аф иксир ов анн ы х при
формализованном описании подсистем. Одновременно вводятся
новые переменные, (необходимые для связи между вновь образо¬
ванными 1подсистем1ам1И. Пусть, например, производится радиоло¬
кационное (наблюдение КА при наличии флуктуаций отраженных
си’гн.а лов. 3 ависимость интенси внести отр а ж е нны х сипи а лов от
времени определяется как дифференциальными уравнениями дви¬
жения центра масс, так и характеристиками углового движе¬
ния. Движение центра (масс характеризует регулярную составля¬
ющую интенсивности отраженного (сигнала, а угловое .движение
КА, точнее динамические свойства этого движения, характеризу¬
ет флуктуационную составляющую. Общее число параметров дви¬
жения равно 12 (трехмерные составляющие положения и скоро¬
сти как для поступательного, так и для вращательного движения).
С пом ощь ю д еко мп оз и ции ока з ы в а етс я в оэм ожн ы м р асе мотр еть
две .подсистемы поступательного и вращательного движения, в
каждой из которых содержится по шесть основных переменных.
Однако теперь в описание обеих подсистем должны быть вклю¬
чены согласно (3.24) переменные связи. В -качестве таковых мо¬
гут рассматриваться аэродинамические характеристики, связан-
81
•ные (С формой КА, или параметры, определяющие асимметрию в
работе двигателей в полете [87].
Рассмотренное разложение определяет принципиальную воз¬
можность декомпозиции системы и позволяет оценить максималь¬
но возможный уровень декомпозиции. Вопросы же практической
реализуемости такого разложения, а также его целесообразности
(может оказаться, что введение дополнительных переменных при¬
водит к усложнению описания системы) остаются открытыми.
Рассмотрепи!ый способ декомпозиции по существу относится
лишь «к уменьшению порядка используемых декартовых произве¬
дений, т. е. связан с переходом к отношениям меньшей арности
(см. п. 17 приложения 1). При этом взаимное расположение под¬
систем не оговаривалось. Последнее эквивалентно предположению
о расположении подсистем, подвергающихся декомпозиции, в один
ряд. Тогда выпадают из рассмотрения иерархические структуры.
Для их анализа должны (быть введены дополните л иные пред¬
положения. Допустим из соображений простоты, что имеет место
двухуровневая иерархическая система, структура которой иллю¬
стрируется рис. 3.6. Промежуточные элементы представляют со¬
бой подсистемы нижнего уровня, управляемые подсистемой выс¬
шего уровня So. В свою очередь, подсистемы Si, ..., Sn являются
управляющими относительно управляемого процесса Р [37].
Рис. 3.6. Двухуровневая система с п нижестоящими управляющими системами
и одной вышестоящей
Такая структура системы достаточно близка к структуре ре¬
ального РТК, решающего глобальные задачи, Тогда подсистемы
представляют собой территориально сосредоточенные в одном ме¬
сте пункты связи с объектами, а координирующая подсистема
высшего уровня So — центр управления (координационно-вычис¬
лительный центр), осуществляющий сбор, обработку данных с пе¬
риферийных пунктов и подготавливающий все необходимые дан¬
ные для принятия решений [25].
Управляемый процесс представляет собой процесс функциони¬
рования системы ОИВ. Характеристики процесса должны удовле-
твер ять тр е бов а и и ям, опр еде л я ем ы м ус л о ви я м и ф у н к циоя гир о в а -
кия суперсистемы (СВУ).
82
Фуи1кцио1нированн<е сйсТёлгЫ .связано 'С получением информаци¬
онных сигналов о состоянии процесса.-.Эти сигналы в соответст¬
вии -с принятой терминологией •представляю'!’ -СР'&ой входы систе¬
мы. Входные воздействия, трансформированные элементам!;
S2, • ••, Sn, поступают на вышестоящую систему So, являющуюся
координатором. Выходные сигналы системы являются командами
или управляющими воздействиями. В таких условиях можно счи¬
тать, что система является функциональной, т. е. все ее элементы
представляют собой отображения.
Следовательно, управляемый процесс Р представляет собой
функциональную систему, к которой поступают воздействия от си¬
стем управления нижнего уровня Sb ..., Sn. Входами .процесса Р
служат управляющие сигналы т<=М, где М—множество управ¬
ляющих сигналов. Кроме того, в качестве входов следует также
рассматривать внешние возмущения co^Q, .поступающие из окру¬
жающей среды.
Пусть у—выход'Процесса Р и соответственно У является мно¬
жеством выходов этого процесса. Поэтому процесс Р можно-пред¬
ставить в виде отображения Р :Л1Х£2-^К
Поскольку имеется п нижестоящих управляющих систем
51, ..., Sn, удобно рассматривать (множество управляющих сигна¬
лов как декартово произведение локальных управляющих воздей¬
ствий: M = MiX ... ХМп.
Каждая частная система управления S7- может считаться отоб-
р а жен1ие1м, з а дани ым н а мно ж еств а х коорд ини р у ю щи х си.гн ал о в
Г(уеГ) (■воздействие сверху) и информационных сигналов
1 (воздействие снизу). Следовательно, системой S\- реа¬
лизуется отображение S; : VXZr+Mi.
Отметим, что применительно к схеме рис. 3.6 целесообразно
принять, что элементы 'множества координирующих сигналов пред¬
ставляют собой п-мерные векторы ,(уь ..., уп), определенные та¬
ким образом, что на вход системы S; поступает лишь i-й управ¬
ляющий компонент. Это условие по сути дела означает задание
способа распределения глобального управляющего сигнала .по ни¬
жестоящим системам Si, ..., Sn. Для полного описания координи¬
рующей системы So следует дополнительно задать отображение
So : №->Г, где W — множество информационных сигналов,
причем элементы его также представляют собой /г-мерные
векторы (wj, ..., wn). Кроме того, необходимо конкретизиро¬
вать содержание информационных сигналов. Можно считать, что
информационные сигналы низшего уровня задаются отображени¬
ем f i : М X Q X Y^Z i, а и 11ф орм а ционн ые си пн алы в ыс ш е го у р си в -
ня—глобальным отображением f0: VxZxM^W, где Z = Z{X
... XZn, т. е. как и множество управляющих воздействий.
Существенно, что это описание не устанавливает, каков уро¬
вень «независимости» подсистем Si, ..., Sn, иначе говоря, игнори¬
руется соотношение между автономностью и координируемостью
подсистем низшего уровня. Этот вопрос, требующий самостоятель¬
ного рассмотрения, детально анализируется в [37].
83
Перейдем теперь непосредствРзтИ|'о'’~к' декомпозиции двухуров¬
невой системы. Очевидна декомпозицию нужно начинать с низ¬
шего звен<р /таяс ;тсДк характер взаимодействия всех вышестоя¬
щих'нэ ле ментов определяется в конечном 'итоге качеством управ¬
ляемого процесса. В связи с этим предположим, что процесс Рг
входами которого являются т и со, а выходом — у, можно пред¬
ставить как совокупность п процессов, каждый из которых управ¬
ляется отдельной .подсистемой (рис. 3.7). Тогда каждый из под¬
процессов можно рассматривать как отображение
(3.25)
При этом множество Ui служит эквивалентом реально имеющих¬
ся связей между подпроцессами. Представление (3.25) эквива¬
лентно утверждению, что на каждый подпроцесс действует, так
же как и раньше, возмущение <о из Q. Оно трансформируется для
каждого процесса в соответствии со значениями u^Ui. Соответ¬
ственно для каждого подпроцесса щ определяется как образ ото¬
бражения Hi: МX Y-+Ui. Здесь важно, что М и Y определяются
по результирующим управляющему сигналу и выходу процесса
соответственно.
Теперь .можно установить соответствие между процессом Р и
его подпроцессом Р^ Введем U как декартово произведение мно¬
жеств Uт. е. U = U \Х ... XUn-
Рис. 3.7. Декомпозиция процес- Рис. 3.8. Взаимосвязь между ио
са Р ходным процессом и его анало¬
гом, имеющим независимые под¬
процессы (блок Р)
Определим соответственно глобальную связующую функцию
Н(т, у) = Н1(т9 у),..., Нп(т, у)
на множестве MxY и разделенный подпроцесс Р%, состоящий из
несвязанных подпроцессов Pi, ..., Рп, т. е.
P?l(^l> ^1» ф) = [Р 1> (^1, ^1» ^)* • п (jTlni ®)1*
При этом 'компонентами Р^ являются не связанные между со¬
бой подпроцессы, соединение которых осуществляется функцией Н.
Эквивалентность процессов Р% и Р определяется тождественно¬
стью их выходов, т. е.
У = Рк[т, Н (т, у), ы]&у-=Р(т, со).
84
(3.26}
Соотношение (3.26) выполняется для V (т, у, со) в Л1ХУХЙ,
что свидетельствует о существова1Н1ии решения системы уравне¬
ний
у = Рк(т, и, со);
и = Н (т, у)
для Vm<=7W и Vco^Q, обеспечивающего у = Р(т, со).
Очевидно также, что глобальное множество связующих сигна¬
лов функционально связано с множествОхМ входов процесса Р.
т. е. с М и Q. Иначе говоря, имеет место отображение /(:Л1Х
ХЙ->[/, где К — функция взаимодействия подпроцессов.
Отсюда следует, что отображение К определяется из соотно¬
шения
Р{т, (o) = Px[m, /С(т, со), со],
иллюстрируемого рис. 3.8.
Подводя итоги произведенному рассмотрению, устанавливаем,,
что каждая подсистема (i=l, п) связана с каким-либо ас¬
пектом процесса. Это позволяет разделить выход процесса на ком¬
поненты yi (г=1, /г). Тогда наиболее существенна связь меж¬
ду управляющим сигналом mt и компонентом yt. Связующие функ¬
ции подпроцессов следует выбирать наиболее простыми. Это мо¬
жет быть достигнуто предварительным анализом связей между
подпроцессами на вербальном уровне. Наконец, отметим, что де¬
композиция может осуществляться двумя путями: установлением
функции взаимодействия подпроцессов (общий подход) и после¬
довательным отысканием (множеств связующих функций. В боль¬
шинстве случаев первый подход приводит к более конструктивным
результатам.
Каноническое представление систем. Принцип канонического представле¬
ния проиллюстрируем на примере динамических систем. Введем дополнительные
определения по отношению к рассмотренным ib § 3.2. Так, для более эффектив¬
ного описания реакции системы вводится функция, позволяющая определять
выход системы y(t) для любого момента времени по отрезку входного воздей¬
ствия и состоянию системы. В соответствии с этим функция : C/XXt/->
представляет собой производящую функцию <выхода. Несмотря на то,
что отношение р,// существует и вполне определено для любой временной си¬
стемы, условие существования производящей функции выхода требует выпол¬
нения некоторых дополнительных условий.
Следующее определение относится к эволюции динамической системы и
связывает изменение состояний с изменением выхода системы. Функция Xt оп¬
ределяет отображение %t : CtXX(t)-+Y(t).
При этом получаем выходную функцию 1 для момента времени t, а Х =
== {Xf : t(= Т} — .выходное семейство системы. Так же, как и в предыдущем слу-
Отличие выходной функции от реакции системы состоит в том, что по¬
следняя определена лишь для текущих значений тогда как у выходной функ¬
ции рассматриваются произвольные интервалы X(t) и УСО-
85
чае, определение kt как отношения корректно и всегда возможно. Условия же
существования выходной функции должны быть дополнительно сформулирова¬
ны.
Условия существования обеих введенных функций связаны с понятием не¬
упреждаемости. Последнее означает, что в .неупреждающей системе изменения
выходной величины не могут прогнозировать и упреждать изменения входно¬
го воздействия. Отсюда следует, что неупреждаемость аналогична понятию фи¬
зической реализуемости. Иногда понятие неупреждаемости можно несколько
усилить. В соответствии с этим вводится понятие полной неупреждаемости, ко¬
торое дополнительно к предыдущему включает в себя условие независимости
выхода от y(t) не только от предыдущего, но и от текущего входного воздей¬
ствия д(/). Оказывается, что понятие производящих и выходных функций оп¬
ределено лишь для неупреждающих и сильно неупреждающих систем.
Перейдем непосредственно к каноническому представлению временной сис¬
темы. Пусть в некоторой динамической системе S определены семейства про¬
изводящих функций выхода pi = {pi//: t, t'^T} и выходных функций Х =
= {л, : t<=T}. Пара семейств функций «перехода состояний ф и X, т. е. (ср, Х)„ яз-
ляется каноническим представлением системы тогда и только тогда, когда для
\t,t'<=T диаграмма (см. п. 9 приложения 1)
коммутативна. При этом вводится дополнительное согласующее преобразование
У?/,, обеспечивающее выполнение равенства
Для существования канонического представления любой временной системы
необходимо и достаточно, чтобы она была неупреждающей [38]. Наличие кано¬
нического представления означает возможность декомпозиции системы таким
образом, чтобы выделить ее инерционную и безынерционную части (рис. 3.9).
Рис. 3.9. Декомпозиция системы
на основе канонического пред¬
ставления:
/ — инерционная часть; 2 — выходная
статическая часть; 3 — внутренняя ста¬
тическая часть
Это, вообще говоря, не является очевидным. Использование указанных опреде¬
лений и доказательств, приведенных положений позволяет обосновать указан¬
ную декомпозицию. Действительно, подсистема ср// полностью отражает дина¬
мику поведения системы. Две остальные подсистемы и /?/ определяют лишь
как ее текущее состояние, и значения входных воздействий преобразуются в
значения выходной величины.
86
Если же система удовлетворяет условиям сильной неупреждаемости, то
диаграмма, аналогичная предыдущей, не требует дополнительного преобразова¬
ния Rt'- Поэтому условие сильной неупреждаемости эквивалентно коммутатив¬
ности диаграммы вида
Этот результат соответствует структурной схеме системы, изображенной на
рис. 3.10. Из рассмотрения схемы следует, что при канонической • декомпози¬
ции в условиях сильной неупреждаемости динамическую систему можно пред¬
ставить в виде последовательного соединения инерционной и статической частей.
Значения выходной величины зависят от текущего состояния и в явном виде
не определяются входным воздействием.
Рис. 3.10. Декомпозиция сильно
неупреждающей системы:
1 — инерционная часть; 2 — статическая
часть
у
Ct
S.
о
/
6
Рассмотренный способ декомпозиции связан с введением дополнительных
функций, описывающих поведение временной системы. Применение этого спосо¬
ба в значительной степени обусловлено введением представления о состоянии
системы. Наряду с этим декомпозиция временных систем может быть получена
посредством устранения перекрестных связей между различными подсистемами.
Эта задача наиболее эффективно решается в случае линейных систем. Приме¬
нение ее к нелинейным системам требует построения эффективного процесса
линеаризации. Предположим для конкретизации, что рассматривается задача
оценивания некоторого вектора q по результатам косвенных измерений, задан¬
ных вектором у. Пусть размерности этих векторов соответственно т и /?, при¬
чем, очевидно, т<,п. Такая задача, как известно, решается методом наимень¬
ших квадратов [33]. Если не рассматривать аспекты, связанные с нелиней¬
ностью системы, можно считать, что система оценивания представляет собой
многомерный линейный фильтр, входом которого является вектор оценки вход¬
ных сигналов у*, а выходом — вектор оцениваемых параметров q* (см. § 4.4).
Полагая, что у* = у° + Ду* и q* = q° + Aq*, получаем, что функционирование
системы производится согласно отношению
q*_qO = (jt qr 1 j)-l jt ^.-1 (у*_уо).
где J — градиентная матрица вектора у в линейном пространстве Qhl размер¬
ности т\ Tj/ — корреляционная матрица измерений составляющих вектора у.
Эквивалентная структурная схема системы изображена на рис. 3.11. Из рас¬
смотрения схемы видно, что в случае матрицы Н = J74]7-1 ,yJ произвольного вида
в системе имеется большое число перекрестных связей. Декомпозиция такой
системы означает замену многомерного фильтра с перекрестными связями со¬
вокупностью т изолированных фильтров, каждый из которых настроен па оп¬
ределенное значение q Такая замена может быть произведена при
87
представлении матрицы Н ib собственном базисе. Поэтому алгоритм функциони¬
рования системы преобразуется к виду
q*_4o==A-1 JT4'“1 (у* — у»), (3.27)
где Лд — диагональная матрица, элементы которой определяются из решения
характеристического уравнения лЕ = 0.
Ду*
Я
Рис. 3.11. Фильтр оценки параметров траектории:
Ф — входной фильтр; П — преобразователь; S — сумматор
Замена q на q в соотношении (3.27) определяет переход к собственному
базису.
Содержательная сторона перехода от матрицы А к матрице Лд определя¬
ется функциональной зависимостью y = y(q), т. е. в рассматриваемом линейном
случае матрицей J, и корреляционными свойствами совокупности измерений.
Формулу (3.27) наиболее целесообразно использовать при условии независи¬
мости погрешностей измерений вектора у*. Тогда учет корреляционных свойств
заключается лишь в весовом суммировании, что явным образом не изменяет
структуры фильтра. В случае же зависимых измерений дополнительные пере¬
крестные связи обусловлены недиагональностыо весовой матрицы Py = 4f-1. В
связи с этим целесообразно предварительно представить результаты измерений
в собственном базисе у*. Следует иметь в виду, что преобразование к собст¬
венному базису в общем случае является достаточно сложной процедурой. По¬
этому затраты, связанные с отысканием собственного базиса, могут свести на
нет преимущества, достигаемые за счет декомпозиции. Однако в отдельных
случаях собственный базис может быть построен естественным путем исходя
из сути решаемой задачи. Отметим также, что рассмотренный алгоритм не оп¬
ределяет структуры системы, а характеризует лишь ее общие свойства. В част¬
ности, такая система может быть как временной, так и пространственной либо
пространственно-временной, последовательного или параллельного действия,
аналоговой или цифровой и т. д.
Существенным оказывается подход к задачам декомпозиции с учетом не¬
обходимости решения задачи синтеза систем. Рассмотрим некоторую систему
88
S, содержащую компоненты, принадлежащие множествам Х2,...,Хп. Про¬
цесс композиции системы может рассматриваться как последовательное опре¬
деление ее элемента хь, где &={1, 2,..., п} на основании х2,..., Xk-i.
Таким образом, задачу композиции можно рассматривать как определение
функционирования целого по функционированию его частей. Если же функцио¬
нирование целого задано, как это имеет место при синтезе, и необходимо опре¬
делить функционирование частей системы, то следует производить обратную
операцию, т. е. декомпозицию системы.
о графах, задающих час-
может быть пояснен с
исходной системы долж-
При этом результат декомпозиции оказывается неоднозначным, когда ре¬
зультат композиции строго однозначен. Указанный вид декомпозиции наиболее
широко используется при проектировании логических схем из набора функцио¬
нальных элементов. Тогда применяется представление
тично упорядоченное отношение.
Принцип декомпозиции с использованием графов
помощью рис. 3.12. Как видно из рисунка, ветвление
но приводить в конечном итоге к сужению дерева. Таким образом, вместо ис¬
ходной функции от пяти переменных (основание графа) приходим к функциям
меньшей размерности: тремя функциями от трех переменных,
от двух переменных и двумя функ¬
циями от одной переменной. Такое
представление существенно уменьша¬
ет трудоемкость исследования систе¬
мы. Обращает на себя внимание внут¬
реннее сходство подходов к декомпо¬
зиции графов и общего представления
о декомпозиции, изложенного в нача¬
ле настоящего параграфа.
Можно показать [15], что задача
конструирования системы с помощью
графа на рис. 3.12 может быть све¬
дена к применению операций дизъюнк¬
ции и отрицания. При этом рассмот¬
ренная выше задача синтеза графа рис $ Граф
необходимого вида сводится к систе¬
ме структурных уравнений относи¬
тельно этих операций. По сути дела, применение этих операций уменьшает
ность графа и, следовательно, приводит к декомпозиции.
одной функцией
иллюстрирующий
композицию
де-
связ-
Весьма существенной оказывается декомпозиция, применяемая к оптими¬
зационным задачам большой размерности. В этом направлении накоплен су¬
щественный опыт, причем некоторые приемы в настоящее время стали класси¬
ческими [71]. Основной смысл всех указанных способов состоит в сведении
многомерной задачи к некоторой комбинации задач меньшей размерности. Ог¬
раничимся здесь перечислением основных направлений в решении этой пробле¬
мы.
Исторически первой является декомпозиция Данцига-Вулфа, разработанная
применительно к линейному программированию. Сущность декомпозиции заклю¬
чается в том, что исходная задача линейного программирования (ЛП) заменя¬
ется переходом к новой так называемой 2-задаче ЛП с существенно меньшим
89
числом ограничений по сравнению с исходной. Это достигается посредством не¬
которой вспомогательной задачи ЛП.
Существенное значение имеет декомпозиция, основанная на разделении пе¬
ременных. Реализация ее базируется на временном отбрасывании части пере¬
менных (релаксации). Этот способ особенно эффективен, когда заранее известно,
что в оптимальной точке существенно лишь небольшое количество ограничений.
Параметрическая декомпозиция основана на введении специальных пере¬
менных — параметров. Решение такой задачи производится с помощью искусст¬
венно построенной двухуровневой схемы. Координирующая задача построена
таким образом, чтобы обеспечить рациональную схему решения более объемной
задачи низшего уровня, т. е. координируемой.
Наконец, декомпозиция может быть построена на основе введения объеди¬
ненных переменных (макропеременных). При этом макропеременные являются
либо суммами, либо взвешенными суммами либо могут вводиться искусствен¬
ным путем. Введение макропеременных позволяет сформулировать промежуточ¬
ную задачу, содержащую меньшее число неизвестных по сравнению с исходной.
Перечень декомпозиционных задач, связанных с оптимизацией, можно продол¬
жить, упомянув об использовании блочно-диагональной структуры исходной
задачи ЛП, применении принципа динамического программирования, использо¬
вании градиентных методов, методов случайного поиска и т. д. Очевидно, что
упомянутые методы, детально рассмотренные в [71], могут найти широкое при¬
менение при декомпозиции больших и сложных систем.
3.4. Основные свойства целенаправленных систем
Общая хар.актер1исти1ка целенаправленных систем приведена в
§ 3.1. Дальнейшее рассмотрение свойств целенаправленных си¬
стем связано с конкретизацией их критериальных показателей.
Как уже указывалось, свойства системы, определяющие сте¬
пень ее приспособ л ei шести к решению целевых задач, характери¬
зуются оценочной функцией или показателем качества. В связи
с этим наряду с классическим определением системы вида «вход—
выход» SgzXxK задается оценочная функция в виде некоторого
отображения G : XX У—>К.
При этом целесообразно представить систему также в виде не¬
которого отображения S : MxU-^Y.
По аналогии с раосмотревны1М в § 3.3 можно принять, что
Л1 — множество управляющих воздействий, a U — множество
внешних условий, ограничивающих возможности функционирова¬
ния системы. В состав этого множества -могут включаться так¬
же ограничения, связанные с реализуемостью тех или иных уп¬
равляющих воздействий.
Тогда оценочная функция для такого отображения принимает
вид G : MxUxY-+V.
Если обозначить композицию отображений S и G как g:Mx
XU-^V, то для V(m, u)(=MxU имеем
g-(m, u) = G(m, и, s(m, и)).
90
В связи с этим определением «могут быть «введены следующие
понятия. Пусть имеется некоторое подмножество оценочной функ¬
ции V'czK Его можно считать воспроизводимым (достижимым,
доступным) относительно g тогда и только тогда, если
Vv [v^V' => (3 (m, u)g(m, u) = v)].
Соответственно множество V'czV считается вполне управляе¬
мым относительно g тогда и только тогда, если
=> &u<=U =>3 m(g (т, u) = v)].
Указанные определения постулируют существование подклас¬
са множества оценочных функций, обеспечивающих соответству¬
ющую композицию отображений. Иногда оказывается, что послед¬
нее условие оказывается слишком узким для некоторых практи¬
ческих приложений. Может оказаться, что достаточно обеспечить
качество, принадлежащее некоторому V' при Nu^U, и не требо¬
вать, чтобы это качество принимало фиксированное значение.
Тогда предыдущее условие принимает следующий вид:
У/и[и(=и =>(3m) g(m,
Более конструктивное понятие определяется для случая, ког¬
да оценочная функция оказывается векторной, т. е. V=ViX ...
... Х14.
При этом, очевидно, получаем ■многокритериальную систему
(в этом случае вместо V используем символ Е\где/г определяет
число компонентов в V). Оказывается, что многокритериальная
система имеет некоторые общие свойства. Для их установления
введем отображение проектирования pt : Vh-+Vi, т. е. обозначим
в качестве pi (и) i-й компонент оценки v. Тогда следует считать
подмножество V7^Vk декартовым тогда и только тогда, если
т. е. когда V' совпадает с декартовым произведением своих про¬
екций. Очевидно, что для любого Vfcz Vk (можно определить де¬
картово множество V7 = p\\V7)X ... Хр/ДЕ').
Поэтому подмножество V' является декартовым лишь при V' =
= У'.
После этих вспомогательных определений введем понятие скле¬
енного множества при заданных S и G. Последнее, существует
тогда и только тогда, если декартово множество Vх, порожденное
Vх, не воспроизводимо. Иначе говоря, Vх является склеенным лишь
в том случае, если (т, и) \ (g{m,
Если же это условие не выполняется, то V7 является несклеен-
«ньвм.
Остановимся на содержательном смысле введенных понятий.
Любой элемент воспроизводимого множества можно получить в
случае 'необходимости. Управляемость представляет собой более
сильное свойство, гарантирующее возможность достижения за¬
данной оценки u<=V7 при любых внешних условиях, т. е. при
91
Vu^U. Наконец, склеенность есть специфическое свойство, отно¬
сящееся к системам, оцениваемым по векторному критерию. Си¬
стема оказывается склеенной, если не все возможные комбинации
компонентов ее оценки можно (реализовать одновременно, т. е. ес¬
ли некоторое заданное значение одного из компонентов можно
реализовать в сочетании лишь с некоторыми, а не со всеми зна¬
чениями остальных компонентов. Это означает, что -между раз¬
личными компонентами оценочной функции существует некоторая
взаимосвязь, что и определяет введенный термин. Отметим, что
большинство практических систем является склеенным.
Оказывается, что если множество У' склеенное, то существует
не три ви альное от нош ение
ipcpi(V')x...Xpft (К)
такое, что
¥ = (!»„..., u)[g(m, u) = v].
При этом получаем отношение склейки. Если же ф — функция,
то получаем функцию склейки, а соответствующее множество ока¬
зывается функционально склеенным. Иными словами, совокупность
определенных множеством ф показателей качества достигается
лишь при некоторых значениях входных воздействий.
Определим показатели качества РТК, КРТС и РТС. На ос¬
новании изложенного можно заключить, что система показателей
качества является иерархической. Для системы наиболее высо-'
кого уровня, т. е. РТК, показатели качества формируются с уче¬
том требований системы более высокого уровня, представляющей
собой глобальную систему управления. Наиболее общая оценка
качества системы управления предусматривает, очевидно, харак¬
теристику степени выполнения системой своих функциональных за¬
дач. В связи со статистическим характером 'процесса управления,
а также с учетом его глобальности в качестве общей характери¬
стики качества РТК представляется наиболее целесообразным
принять -математическое ожидание потерь информации -при функ¬
ционировании РТК. Указанный показатель отражает информаци¬
онный характер РТК. Очевидно, что для конкретных КРТС, вхо¬
дящих в состав РТК, этот показатель интерпретируется соответ¬
ствующим образом. Так, для метрической системы измерения па¬
раметров движения показатель качества связан с мерой точно¬
сти определения вектора состояния КА. Метрическая система рас¬
познавания оценивается средним числом потерь в распознавании
образов с учетом их значимости, т. е. суммарным средним рис¬
ком. Соответственно система радиосвязи оценивается средними
потерями при передаче информации, глобальная навигационная
система — средним числом необслуженных объектов и т. д.
Отсюда следует, что потери РТК слагаются из потерь, вхо¬
дящих в его состав комплексных систем. Нетрудно видеть, что
показатели качества каждой из них могут быть представлены в
единицах суммарного среднего риска. Это обстоятельство явля¬
92
ется чрезвычайно удобным с точки зрения общей характеристики
качества РТК в связи с аддитивностью рассматриваемого пока¬
зателя. В то же время такая 'мера, как средний риск, является
достаточно гибкой характеристикой, позволяющей учитывать от¬
носительную значимость той или иной комплексной системы.
Оценка качества системы должна производиться с учетом со¬
вокупности внешних и внутренних условий ее функционирования.
Применительно к РТС эти условия определяются в первую оче¬
редь особенностями р аспространения электромагнитных волн.
Возможность создания помех, воздействующих на радиоканал,
приводит к необходимости определения специфического качества
РТС — помехоустойчивости. Не останавливаясь детально на проб¬
леме помехоустойчивости, достаточно полно освещенной в литера¬
туре, отметим лишь, что учет воздействия помех может рассмат¬
риваться с системных позиций как нарушение радиообмена на не¬
которые случайные по продолжительности интервалы времени.
Поскольку моменты возникновения этих интервалов также слу¬
чайны, то воздействие помех может быть интерпретировано как
случайный поток отказов. Очевидно, что использование в каче¬
стве показателей качества помехозащищенности параметров этого
потока отказов не является исчерпывающей характеристикой,
Действительно, в предыдущих (рассуждениях предполагалось, что
установление факта наличия отказа .представляет собой досто¬
верное событие. В реальных условиях следует учитывать конеч¬
ные вероятности невыявления отказов, т. е. принятия ложного ре¬
шения о нормальном функционировании РТС. Необходимость это¬
го обстоятельства зависит от конкретного назначения системы.
Очевидно, что надежность функционирования РТС также мож¬
но охарактеризовать через случайный поток отказов. Интенсив¬
ность потока отказов определяется эффективностью и функцио¬
нальной надежностью элементов, а также схемой их включения.
Продолжительность интервалов отказов зависит от диагностиро¬
вания аппаратуры, оперативности переключения на резервируе¬
мый капал и т. д. Вероятность выявления отказов определяется
эффективностью аппаратуры контроля качества функционирова¬
ния.
Отметим также, что вследствие существенной концентрации
радиоэлектронных средств целесообразно рассматривать специ¬
фический показатель — электромагнитную совместимость.
Рассмотрим теперь систему, активно взаимодействующую с
рядом объектов. Вследствие ограниченного числа каналов связи
и обработки возможны отказы в обслуживании некоторых объек¬
тов, что эквивалентно для этих объектов случайному потоку от¬
казов. Показатели качества таких РТК и РТС целесообразно ана¬
лизировать на основе положений теории массового обслужива¬
ния. Этот вопрос детально рассматривается в гл. 5. Отметим
здесь общность подхода к различным сторонам функционирова¬
ния системы, связанного с представлением о случайном потоке
отказов. Существенно также, что такой определяющий параметр
93
потока отказов, как интенсивность, обладает свойством аддитив¬
ности, что важно с точки зрения общего подхода к -системе.
Третья группа связана с расходом ресурсов, необходимых для
функционирования и развития систем. Общий анализ ресурсной
эффективности производится в гл. 5. Отметим, что показатели,
связанные с затратами ресурсов, являются оппозиционными по
отнош ен и ю к пок азател ям качеств а фун кци о-ниров ани я систем.
Характерная особенность этой группы показателей качества со¬
стоит также в том, что зависимость расхода ресурсов от па¬
раметров системы определяется практически лишь опытным пу¬
тем.
Выявление доли ресурсов, расходуемых отдельными комплекс¬
ными системами, также оказывается достаточно затруднитель¬
ным, что ограничивает проведение вертикальной декомпозиции.
РТК.
В заключение остановимся на склееннюсти показателей качест¬
ва РТК и РТС. Нетрудно установить, что совокупность этих по¬
казателей оказывается склеенной. Это особенно наглядно видно
при совместном рассмотрении показателей функциональной и ре¬
сурсной эффективности. Степень склеенности системы показателей
свидетельствует о рациональности их выбора. Действительно, от¬
сутствие зависимости между значениями показателей качества
первой и третьей групп свидетельствует о неадекватности описа¬
ния системы с учетом выбранных показателей. Поэтому следует
полагать, что достижение экстремальных значений функции склей¬
ки в -зависимости от выбора системы показателей можно рассмат¬
ривать как условие их рационального выбора.
Взаимосвязь между тремя введенными понятиями (управляе¬
мое т ь, востро изво димост ь, ск л е е н нос т ь) у ст ан а в л ив а е тс я поср еде т-
во1м следующих положений.
Если множество V' вполне управляемо, то оно воспроизводи¬
мо, причем обратное утверждение неверно. Кроме того, если мно¬
жество V' несклеенное, то оно воспроизводимо. Несколько более
сложной оказывается взаимосвязь между понятиями полной уп¬
равляемости и склеенности. Столь очевидная связь, как в двух
предыдущих предложениях, между этими понятиями отсутствует.
Можно, однако, констатировать, что если V'czV*— некоторое де¬
картово подмножество и, кроме того, V' склеено, то оно не может
быть вполне управляемым. Указанное свойство удобно исполь¬
зовать в различных практических приложениях. Соответственно
можно показать [38], что множество V' вполне управляемо отно¬
сительно v' тогда и только тогда, когда V' является пес клеенным
для Му^{и} для Nu(=U'.
Отметим, что в случае многокритериальных систем оказывает¬
ся возможным сформулировать общие условия управляемости, от¬
ражающие взаимосвязь между различными компонентами оцен¬
ки. Для иллюстрации этого положения рассмотрим многокрите¬
риальную систему g. Ее управляемость существенно зависит от
взаимосвязей между различными компонентами оценки, что поз-
94
•воляет рассматривать алгебраическую или структурную управляе¬
мость. Применительно к такой системе
g:MxU-+Vk
оказывается, что если существует некоторое положительное /С
<Zk .и задана некоторая функция F: V-j-^Vh такая, что соответст¬
вующая диаграмма
коммутирована, а множество p(k~^g(Mx U) непусто .и содержит
более одного элемента, то рассматриваемая ' система является
склеивающей. Здесь VJ=V\X ... XVj, a pj и pk~j— операторы
проектирования Vk в V-j и в ... XVu соответственно. Отсю¬
да следует, что множество g(MxU) не может быть вполне уп¬
равляемым.
Остановимся на содержательном смысле рассмотренных поло¬
жений. Наличие функции F : V^Vk означает существование оп¬
ределенных взаимосвязей (между компонентами V}{. Иначе гово¬
ря, если зафиксировано / компонентов, то значения остальных
k—j компонентов будут определены функцией F. В связи с этим
для доказательства неуправляемости требуется установить лишь
существование функций F[, Ff{, а конкретный вид этих функ¬
ций является несущественным. В этом случае отображение F иг¬
рает в теории управляемости такую же роль, как и функции Ля¬
пунова в теории устойчивости. При этом для заданной системы
S характер функции F полностью определяется функцией G.
Процессы, протекающие в многокритериальных системах уп¬
равления и наблюдения, существенным образом определяются
ур ов нем учета возн икаю щи х н еопр еде лени осте й. Кл асси чески й
байесовский подход предполагает наличие полных статистических
сведений о неопределенности ситуации, что в простейшем случае
метрических систем сводится к знанию статистических характе¬
ристик погрешностей измерений. В этих условиях рассмотрение
систем, .функционирующих при наличии априорной неопределен¬
ности, заменяется детерминированным подходом, но уже относи¬
тельно статистических характеристик этих неопределенностей [78].
Поэтому наибольший интерес представляют подходы, основанные
на существенной априорной неопределенности.
В .настоящее время находят широкое распространение методы
оценки параметров, не чувствительные к отклонению статистиче¬
ских характеристик реальных распределений от априорных. Сущ¬
ность указанных методов основана на представлении апостериор¬
ного распределения погрешности в виде суммы двух составляю¬
щих, одна из которых является определяющей, а другая — пред¬
ставляет собой засоряющее воздействие. Методы оценивания ос-
95
нованы на выявлении засоряющего воздействия и исключении со¬
ответствующих результатов из рассмотрения или их компенса¬
ции:
Рассмотрим детально частный подход, сводящийся к минимаксным оцен¬
кам [30], что позволяет оценить поведение системы в конфликтных ситуациях.
Как известно, в большинстве практических случаев действительные значе¬
ния статистических характеристик не совпадают с априорными данными, при¬
нимаемыми в качестве исходных при статистической обработке.
Из-за неточности или частичного отсутствия априорных данных возникают
дополнительные погрешности вектора оцениваемых параметров, которые часто
становятся определяющими. Применительно к решению задачи управления ока¬
зывается, что отображение в область V', определяющую, например, допустимое
управление, не может быть достигнуто. В этих условиях задается некоторое
множество Л4, которому могут принадлежать определенные характеристики по¬
грешности измерений, т. е.
Дети. (3.28)
Очевидно, что в простейшем случае могут быть наложены ограничения на
максимальное значение погрешности. Пусть результирующий эффект, связан¬
ный с Д, представляет собой линейный функционал б = /(Д).
Ставится задача отыскания наихудших характеристик точности при выпол¬
нении условия (3.28). Это, очевидно, соответствует максимизации (или миними¬
зации) функционала б. Ограничимся в дальнейшем рассмотрением лишь мак¬
симизации, что не нарушает общности подхода. В этом случае в качестве кри¬
терия оптимальности принимается условие L = minmax6.
АСЛ1
При этом получаем минимаксный подход, существенно отличающийся от
статистических оценок, соответствующих байесовской процедуре. Представляет
интерес интерпретация минимаксного подхода, предлагаемая в [30], где рас¬
сматривается процесс наблюдения с ошибками как некоторая игра. Подход с
позиции теории игр устанавливает характеристики, связанные с выигрышем и
проигрышем игроков. Каждой из допустимых стратегий игроков может быть со¬
поставлен определенный выигрыш (проигрыш). При наличии двух игроков зада¬
ча первого — максимизировать £, а второго — соответственно минимизировать
причегл | сопоставляется с запасами стратегий а и 0, т. е. §[а, Р]. Пусть второй
игрок выбором Р стремится уменьшить свой проигрыш Предположим, что
им выбрана стратегия Р = Рг- Тогда в самом неблагоприятном для него случае
первый игрок выберет стратегию a = cii, для которой £(аь р2) =max £[аф2] =
a
= %[р2] по всем ae{a}. Это соответствует наибольшему проигрышу второго
игрока, от которого он не застрахован вследствие произвольного выбора стра¬
тегии первым игроком. Для предельного уменьшения потенциального проигры¬
ша второй игрок должен искать такую стратегию р°, для которой х(Р°) =
= min%(p) по всем ре{р}. Следовательно, второй игрок должен выбрать
стратегию р° из условия min max 5 [а, Р]=х[Р°].
Р а
Таким образом, минимаксная стратегия, обеспечивает некоторый гаранти¬
рованный результат. Однако потери, вызванные практическим отсутствием све¬
дений о статистических характеристиках, могут оказаться весьма существенны-
96
ми. Поэтому оценки, полученные при использовании минимаксного критерия, как
правило, являются пессимистическими.
В качестве примера рассмотрим задачу выбора оптимального алгоритма
фильтрации, обеспечивающего получение оценки /71-мерного вектора q, т. е. q*
по измеренному значению /г-мер.ного вектора у*. При этом имеют место линей¬
ные или линеаризованные зависимости.
Пусть результаты измерений у* сопровождаются погрешностями, ограни¬
ченными по модулю. При этом оказывается [78], что среди всех линейных
оценок, удовлетворяющих условию несмещенности, может быть найдена по
крайней мере, одна оптимальная оценка q*opt, полученная в результате реше¬
ния систем т линейных уравнений вида ym = Gmqm, где у™— некоторая до¬
статочная совокупность измерений, выбираемая оптимальным образом из со¬
ставляющих /г-мерного вектора у, a G — квадратная [/пХ/и] матрица, состав¬
ленная из т строк, соответствующая градиентам выбранных измерений у{, ...
..., ут. (Проблема оценки параметров по результатам измерений детально рас¬
сматривается в гл. 4.) Это свойство одновременно решает вопрос как о выборе
оптимального алгоритма фильтрации при указанных предположениях, так и об
оптимальном составе используемых измерений, так как все составляющие век-'
тора у, не входящие в у™, могут быть исключены из дальнейшего рассмотре¬
ния без ухудшения качества получаемых оценок. Кроме того, оказывается, что*
выбор оптимального в указанном смысле состава измерений может быть реа¬
лизован посредством решения специально сформулированной задачи линейного
программирования.
В заключение отметим, что минимаксный подход к задачам наблюдения и
управления наиболее целесообразен при анализе и синтезе систем, функциони¬
рующих в конфликтных ситуациях.
4
КОМПЛЕКСНАЯ СИСТЕМА ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ
КАК БАЗОВАЯ СИСТЕМА
Общин подход к РТК 'И РТС, .развиваемый в гл. 1—3, может
быть использован при а.'нализе и синтезе конкретных систем.
Большое многообразие таких систем и их индивидуальных осо¬
бенностей затрудняет рассмотрение .различных РТК и РТС в рам¬
ках одной книги. В соответствии с этим дальнейшее изложение
проводится применительно к наиболее характерному базовому
примеру. В качестве такого примера целесообразно выбрать одну
из комплексных РТС. Это связано с тем, что в КРТС, с одной
стороны, достаточно полно проявляются системные свойства, что
позволяет иллюстрировать рассмотренные ранее положения, а с
другой — радиотехническая специфика находит большее отраже¬
ние, чем в РТК.
Среди комплексных систем наибольший интерес представляют
метрические системы вследствие разнообразия принципов, поло¬
женных в основу их функционирования, и сильной зависимости
свойств систем от пространственно-временных характеристик сиг-
4-36 97
<налов и полей. В частности, разнос между .пунктами передачи и
приема (фазовыми центрами антенн) для информационных систем
■существен лишь с точки .зрения дальности радиосвязи. Между
тем у метрических систем пространственные характеристики име¬
ют принципиальное значение, определяя их основные свойства.
Кроме того, такие показатели систем любого типа, как помехо-
з а щищенность и электро м атн и тн а я сов м ести м ость, опр едел я ются
на основе их 'анализа с позиций метрических систем.
В дальнейшем будут 'рассматриваться комплексные метриче¬
ские системы, входящие в состав командно-измерительного комп¬
лекса КА. В гл. 2 показано, что такие системы представляют со¬
бой комплексные системы траекторных измерений (КСТИ). Вы¬
бор подобных систем в качестве базовых диктуется их сложно¬
стью, глобальностью космического радиотехнического комплекса
и, как следствие, многоуровневой структурой.
4.1. Общая характеристика КСТИ
Комплексная система траекторных -измерений КА включает в
себя РТС траекторных измерений, средства связи, обработки дан¬
ных измерений и подсистему управления и 'координации работы
всех систем КСТИ. Характерная особенность современных и перс¬
пективных КСТИ заключается в том, что все элементы системы
функционируют в совокупности с другими элементами РТК, обес¬
печивая решение всех задач управления полетом КА и систем
КА. Таким образом, приведенное выше определение КСТИ пред¬
ставляет собой абстракцию, ибо в самом комплексе подчас ре¬
ально невозможно выделить его конкретную часть, образующую
КСТИ. Тем не менее с точки зрения решения задач анализа и
синтеза такая абстракция оказывается полезной, несмотря на не¬
которую неадекватность реальным условиям. Дело заключается
в том, что КСТИ как метрическая система имеет специальные це¬
ли и задачи, которые могут рассматриваться отдельно [26].
Анализ с позиций целенаправленных систем должен произво¬
диться по функциональному признаку, т. е. КСТИ можно рас¬
сматривать отдельно без учета действия других подсистем. Од¬
нако реальная работа систем в составе единого комплекса накла¬
дывает определенные ограничения на условия их функционирова¬
ния. Это проявляется во всех аспектах функционирования КСТИ.
Так, РТС, осуществляющие радиообмен с КА, являются инфор¬
мационно-метрическими. Ряд их показателей, например такие, как
пропускная способность каналов связи, качество передачи команд
по каналу управления, интенсивность информационных потоков,
подчас не определяется метрическими свойствами. Характеристи¬
ки линий связи, предназначенных для обмена .между территори¬
ально разнесенными пунктами, показатели качества подсистемы
у пр а в л е ни я ф у нк ц и он и р о в ан и ем комп л екс а также м о гут выби¬
раться на основе требований, предъявляемых информационными
комплексными системами. Однако и в этих условиях разделение
98
по целевому признаку оказывается оправданным. Отдельное рас¬
смотрение систем, функционирующих в комплексе, базируется на
принципах вертикальной декомпозиции. Поскольку ранее это по¬
нятие лишь упоминалось, остановимся более подробно ла его.
сущности и возможностях формализации.
Пусть система, подлежащая вертикальной декомпозиции, опи¬
сывается как отношение над декартовым произведением п мно¬
жеств, что согласно (3.1) определяется как SczXiХХ2Х ... X Хп-
Представим систему S в виде раздельно функционирующих
систем Si, S2, ..., S/t, где k— число систем, определяющееся де¬
композицией целей, формулируемой естественным образом. По¬
этому для VSj (/=1, 2, ..., /г) .необходимо рассматривать лишь
цели, связанные с совместным функ(ционированием систем в комп¬
лексе. Теперь, пользуясь спреде лепи жми § 3.4, рассмотрим VSj
как систему «вход—выход». Тогда SjtzXjX Yj, где Xj и Y— вход¬
ные и выходные множества Sj.
При разделении входа X, пга два множества: внутренних уп¬
равляющих воздействий и внешних воздействий Uj— примем,
что воздействия помимо ранее рассмотренных определяются и
необходимостью фу нкцион нр ов а ни я систем ы в составе ком п л ек-
са. Соответственно и целевая функция системы G : MxUxY-^V,
определяющая оценку качества, должна учитывать возможность
функционирования системы S, в комплексе S без нарушения или
с допустимым нарушением условий функционирования остальных
систем.
Более сложным образом производится декомпозиция показа¬
теля качества, связанного с расходом ресурсов. Рациональное
комп ле ксир о в ание систем сопровождается сокр а щен нем о б щего
расхода ресурсов. Поэтому расход ресурсов каждой системы, вхо¬
дящей в комплекс, оказывается меньшим, нем при ее независи¬
мом функционировании. Следовательно, декомпозиция этого по¬
казателя не может быть осуществлена, так как для этого отсут¬
ствуют какие-либо реальные основания.
Более конструктивный путь состоит в установлении приорите¬
тов. Суть заключается в том, что системы S7- ранжируются по сте¬
пени их значимости, так что перечисление i, 2, ..., k оказывается
упорядоченным. При этом номер системы отождествляется с уров¬
нем ее значимости. Тогда можно считать, что ресурс Cj опреде¬
ляется как дополнительный, необходимый для функционирования
системы т. е. следует принять, что функционирование систем
/—1
S2, ...,Sj_i уже обеспечено выделением ресурса С’/_к2)= 2 С/-
1=1
Такой путь, естественно, предполагает, что общий ресурс С =
k
= S Cj неограничен. В реальных условиях должны устанавли-
/=1
ваться ограничения на расход ресурсов для системы Sj. Эти ог¬
раничения также осуществляются с учетом приоритетности си¬
стем, входящих в комплекс, и определяют по существу выбор це-
4* 99
левой функции. Действительно, если 'ресурсный показатель пред¬
ставляется как ограничение, то целевая функция определяется
обобщенным показателем качества функционирования. Таким об¬
разом, /последнее ограничение влияет лишь на формулировку за¬
дачи оптимизации.
Перейдем теперь к общей характеристике КСТИ на вербаль¬
ном уровне. Некоторые свойства КСТИ определяются ее назна¬
чением и условиями функционирования в составе РТК, рассмот¬
ренными в гл. 2. Так, можно установить, что объектом информа¬
ционного взаимодействия (ОИВ) является КА. Исчерпывающей
характеристикой движения КА приним'ается его траектория, т. е.
зависимость 'положения центра масс и вектора скорости КА от
времени. Таким образом, угловое движение КА не используется
при описании ОИВ. Характерная особенность траекторий КА при
свободном полете заключается в 'наличии опорного движения, ко¬
торое можно считать кеплеровым, и в оз му ще иного движения.
В векторной форме результирующее движение
X (/) = хОп (0+хВОз(/).
Интенсивность составляющей возмущенного движения значи-
тельио меньше, чем опорного, что является существенным огра¬
ничением при выявлении характеристик, определяющих хвоз (0.
Аналитические выражения для опорного движения КА представ¬
ляются в различных формах [77]. Наиболее распространенными
являются задание декартовых .прямоугольных координат некото¬
рой характерной точки, а также их производных, например пере¬
сечения трассой полета КА экваториальной плоскости на первом
витке орбиты. При таком способе задания движения фиксируют¬
ся пять геометрических параметров и один временной. Кроме то¬
го, широко используется способ описания движения на основе
кеплеровых элементов орбиты, таких как большая полуось а, экс¬
центриситет еу аргумент перигея со, временной параметр tOy на¬
клонение орбиты I и долгота восходящего узла Q. При малых
значениях эксцентриситета вместо параметров е и <о используют¬
ся g = ecosco и p = esinco. Способ задания орбит посредством кеп¬
леровых элементов детально рассматривается в гл. 6.
Результирующее движение КА, являющееся суммой опорного
и возмущенного движения, определяется на основе решения си¬
стемы дифференциальных уравнений. Интегрирование этой систе¬
мы может быть выполнено аналитически лишь при решении за¬
дачи двух тел, т. е. при учете центрального поля тяготения Зем¬
ли [77]. В отдельных случаях решение находится в замкнутой
форме при учете песферичности Земли посредством замены сфе¬
роида эллипсоидом вращения. Кроме того, последняя модель поз¬
воляет также учитывать действие атмосферы, проявляющееся как
затухание большой полуоси орбиты с постоянной скоростью.
В большинстве практических случаев движение КА описывает¬
ся посредством системы дифференциальных уравнений, не интег¬
рируемых в квадратурах. Тогда для решения системы использу-
100
ютоя численные методы. Общее р-ешен1ие находят б форме Коши.
Поэтому -параметры траектории представляют собой начальные
условия, которые в дальнейшем обозначаются -как q. В отдель¬
ных случаях молено использовать линеаризованную .модель дви¬
жения КА. Тогда применительно <к свободному движению вво¬
дится фундаментальная М1атрица перехода состояния Ф(/, /0) •
Предположим, что начальные условия движения определены
ка:к начальный «вектор состояния траектории q0(/o), отнесенный к
начальному моменту /времени t0. Тогда, очевидно, состояние тра¬
ектории на произвольный 'момент 'Времени t может быть задано
матрицей
{dXi(t)/dq0}(t0)}, 6; 6,
которая и ■представляет собой матрицу перехода состояний.
Задание траекторий маневрирующих КА — более сложная за¬
дача. Однако в ■большинстве практических случаев функциониро¬
вание КСТИ связано с оценкой импульсного (маневра. При этом
траекторные измерения проводятся до и после совершения манев¬
ра и по результатам совместной обработки полученных данных
проводится оценка 'качества маневра. Следует отметить, что за¬
дача по-прежнему сводится к определению компонентов векторов
параметров траекторий до и после маневра q~ и q С
По сути дела, эта задача эквивалентна оцениванию разностно¬
го вектора q^—q_, который явно связан с параметрами импульс¬
ного маневра, подлежащими определению.
Отметим, ’что в частном случае допустимости использования
линейных дифференциальных уравнений для описания движения
маневрирующего КА общее решение системы находится пак сум¬
ма общего (решения однородного уравнения и частного решения
неоднородного уравнения. При этом -однородное уравнение -соот¬
ветствует свободному движению в поле гравитационных -сил. Тог¬
да вектор состояния КА определяется из соотношений:
Хсв(^)~Ф(^> УШ
ХуПр(0 = Ф(/, ^о) J®-1 (6, /o)u(0)de,
t о
где Ф-1(0, /о)—матрица, обратная по отношению к Ф(/, /о);
и(0, 0, 0, их, иУ) uz)—вектор-столбец управляющих воздействий;
хсв(/), хупР(0 и х(/)—векторы-столбцы свободного вынужденно¬
го и результирующего движения соответственно, причем
х(0=хсв(/)4-хупр(0.
Перейдем к характеристике собственно КСТИ. На основании
изложенного можно заключить, что КСТИ представляет собой си¬
стему наблюдения за траекторией КА. Поэтому ее главное свой¬
ство определяется необходимостью воспроизведения траектории
на основе использования радиотехнических методов определения
текущего положения и вектора скорости КА. Воспроизведение тра¬
ектории посредством КСТИ представляется как последователь-
101
Рис. 4.1. Обобщенная структурная схема КСТИ:
/ — пространственная обработка электромагнитного поля; 2 — временная обработка сигнала;
3 — преобразователь (параметр сигнала — геометрический аналог); 4 — предварительная об¬
работка результатов измерений; 5 — децентрализованная обработка; 6 — централизованная
обработка
пость, состоящая из (ряда этапов. Обобщенная структурная схема
КСТИ изображена н»а рис. 4.1.
Параметры движения КА первоначально оказываются закоди¬
рованными в радиотехническом сигнале как в результате зонди¬
рования пространства, так и на основе направленного приема. По¬
скольку .первоначально эта информация сосредоточена в парамет¬
рах электромагнитной волны, первичным для КСТИ является ана¬
лиз электромагнитных полей. Уже на этом этапе возможна зна¬
чите л ьн а я не ад екв а тность результатов ан ал из а ф а ктическим х а-
рактеристикам, проявляющаяся в возникновении ложных направ¬
лений, искажениях формы результирующих колебаний за счет
влияния среды и т. д.
В целом можно считать, что на первом этапе функционирова¬
ния КСТИ производится переход от характеристик электромаг¬
нитных полей, являющихся функциями пространственных коорди¬
нат и времени, к радиотехническому сигналу, зависящему только
от времени. Таким образом, КСТИ на первом этапе представляет
собой систему «вход—выход» вида ^:Е(Н)(х, у, г, /)->$(/), где
Е(Н) —напряженность электромагнитного поля в зоне приема
сигнала; s(t)—выходной сигнал антенной системы; g — отобра¬
жение, осуществляемое на основе законов электродинамики.
Состояние такой системы принято представлять в виде пара¬
болического закона движения [60]
X (/) = Хо + х0 (Z) -L х t2/2, (4.1)
где %(/)—обобщенная координата. Отметим, что иногда вторая
производная не учитывается.
Физическим аналогом состояния является оценка разности рас¬
стояний, интерпретируемая как угловая координата а [60]*. Чув¬
* Здесь и в дальнейшем состояние системы рассматривается как оценка
некоторых характеристик траектории, что соответствует существу рассматривае¬
мого вопроса.
102
ствительность системы определяется наклоном фазовой характе¬
ристики антенны, связанным с размерами апертуры. Таким об¬
разом, на первом этапе оцениваются пространственные параметры
сигнала.
На втором этапе производится анализ выходного сигнала 'ан¬
тенной системы для оценки временных параметров, таких как вре¬
мя запаздывания т и доплеровский сдвиг частоты F. Состояние
системы, соответствующее этому этапу, по-прежнему описывает¬
ся соотношением (4.1), где в качестве переменной х может рас¬
сматриваться т или F. Характерная особенность таких оценок за¬
ключается в их зависимости от свойств сигнала.
Периодичность сигнала, рассматриваемого как функция вре¬
мени, вызывает появление неоднозначности в оценке времени за¬
паздывания, причем интервал однозначного отсчета равен эквива¬
лентному периоду сигнала Тэ. Это обстоятельство не позволяет
производить оценку т непосредственно по высокочастотному сиг¬
налу. Поэтому измерения т осуществляются на частоте модуля¬
ции. Тогда период Тэ можно выбрать из условия получения од¬
нозначного отсчета в заданном временном интервале. Возникаю¬
щее при этом противоречие между высокой чувствительностью
и однозначностью отсчета вызывает переход к многошкальным
измерениям.
Необходимость измерения т на частоте модуляции сигнала при¬
водит к существенным различиям в свойствах оценок т и F. Оцен¬
ка доплеровского сдвига частоты обычно является однозначной
(исключение составляет 'мало распространенный случай оценки по
•импульсному сигналу) и поэтому производится на несущей ча¬
стоте. Соответственно чувствительность доплеровских измерений
к ее геометрическому аналогу радиальной скорости или, точнее,
к приращению дальности за фиксированный интервал времени зна¬
чительно выше, чем при измерении т. Это позволяет считать из¬
мерения т и F независимыми.
Существе иным элементом КСТИ является следящий измери¬
тель, используемый как на первом, так и на втором этапах вос¬
произведения траектории. ФуН|Кционированпе следящего измерите¬
ля основывается на сравнении усредненного v* и текущего v зна¬
чений параметров сигнала. При малой разности v—v* следящий
измеритель можно считать функционирующим в линейном режи¬
ме, что и привело к его рассмотрению как линейной системы. По¬
добный анализ представляет собой идеализированное описание,
позволяющее получить лишь первое приближение, используемое
при ориентировочной оценке.
Следующий этап сводится к переходу от параметров сигнала
к их геометрическим аналогам у*. Этот переход требует знания
опорных значений пространственных и временных параметров, что
вызывает необходимость использования геодезических сетей и эта¬
лонов времени (частоты). Характерная особенность КСТИ состо¬
ит в том, что она является системой высокого класса точности.
Поэтому ее инструментальные погрешности в значительной сте¬
103
пени определяются погрешностями, соп;ровож,дающими указанный
переход от параметров сигнала к их геометрическим аналогам.
Необходимыми элементами системы, реализующей указанный
этап, являются устройства пространственно-временной привязки
результатов наблюдений. Последние обычно объединяются в юс-
тир овонп I ы й комп леке, .пр ед уема тр ив а ющи й для соврем е нн ы х и
перспективных систем автоматическую коррекцию результатов юс¬
тировки. В процессе перехода к геометрическим параметрам учи¬
тываются характеристики атмосферы, что позволяет производить
•компенсацию регулярных составляющих рефракционных погреш¬
ностей.
Следующие этапы воспроизведения траекторий реализуются
системами, на вход которых поступают данные измерений, привя¬
занные к моментам времени их проведения. Характерной особен¬
ностью этих этапов является переход от реального времени к фик¬
сированным временным интервалам.
В качестве дополнительных входов таких систем могут рас¬
сматриваться данные о статистических характеристиках погрешно¬
стей измерений. Такие данные используются для оптимизации по¬
следующей обработки. Состояние системы определяется диффе¬
ренциальными уравнениями движения. На /разных этапах указан¬
ной обработки, называемой обычно вторичной, используются раз¬
личные формы решений системы ДУ движения. При малых вре¬
менных интервалах используются решения в виде рядов относи¬
тельно времени с ограничением членов ряда на основе требуемой
точности получения 'результатов. При более длительных интерва¬
лах обработки используются численные методы решения систем
ДУ. Так как входами служат результаты измерений параметров
положения и .движения КА, привязанные к земному эллипсоиду и
времени, необходимо переходить от этих результатов к гео¬
центрическим координатам. Это требует дополнительно трудо¬
емкой вычислнтелыной процедуры: определения частных произ¬
водных от измеряемых параметров по геоцентрическим координа¬
там, а затем и параметрам орбиты. Существенно, что в ходе оце¬
нивания выходных параметров применяются методы линеариза¬
ции, основанные на разложении в степенной ряд с удержанием
лишь линейных членов. Последнее, очевидно, приводит к итера¬
ционным методам.
Выходом систем вторичной обработки являются либо проме¬
жуточные параметры используемые в дальнейшем в ка¬
честве входов системы, реализующей последующий этап, либо
выходные данные о параметрах орбиты. Различные методы вто¬
ричной обработки результатов измерений детально рассмотрены
в § 4.4. Отметим, что помимо ранее указанных систем «вход —
выход» имеются системы с обратными 'связями, которые исполь¬
зуются для повышения чувствительности к результатам последу¬
ющих этапов. Характерная особенность систем вторичной обра¬
ботки состоит в осуществлении в каждой из них узкополосной
фильтрации. Действительно, размерность выходного вектора си¬
104
стемы вторичной обработки ниже размерности входного векто¬
ра. Если система функционирует в соответствии с оптимальными
или подои ти мал ьными алгоритмами, то снижение размерности эк¬
вивалентно усреднению входных данных.
На основании изложенного можно заключить, что КСТИ пред¬
ставляет собой иерархическую многоуровневую систему. Общая
структура КСТИ сложилась в известной степени на основе ло¬
кально оптимальных решений. Если .каждая из систем КСТИ по¬
строена с учетом частных критериев оптимизации, то это нельзя
отнести к выбору числа этапов воапроизведения траекторий и рас¬
пределения задач между этапами. Последнее в наибольшей сте¬
пени относится к системам вторичной обработки.
4.2. Комплексная система траекторных измерений
как динамическая система
На основании изложенного можно установить, что как КСТИ
в целом, так и входящие в нее системы относятся к классу ди¬
намических систем. В обычно рассматриваемых динамических си¬
стемах состояние и соответственно функция перехода состояний
определяются дифференциальными уравнениями или системой ДУ,
в том числе и стохастических. В системах, входящих в состав
КСТИ, входными объектами являются оценки процесса. Это озна¬
чает, что помимо системы ДУ на характеристики системы ока¬
зывает влияние решающее правило m(xi, х2, ..., хп), где (хь х2, ...
..., Хи) — вектор входных воздействий.
В более общем случае следует рассматривать множество X,
элемент которого х^Х определяется аддитивной или мультипли¬
кативной комбинацией х = Хд®п входного элемента динамической
системы ОИВ, траектория которого воспроизводится хд, и элемен¬
та помехи n^N, где N — множество помех. Структура последнего
определяется этапом функционирования системы SczS/г, где Sit —
абстрактная систем'а, эквивалентная КСТИ.
Таким образом, можно определить входное множество произ¬
вольной системы S как Хс=ХдХМ.
Отсюда следует, что способ описания рассматриваемых систем
оказывается сложнее, чем адекватных им простых динамических
систем. Это и приводит к упрощенному описанию рассматривае¬
мой системы, особенно на первых этапах функционирования
КСТИ.
Отметим также, что мультипликативное взаимодействие по¬
лезных сигналов и помех имеет место лишь на первых трех этапах
функционирования КСТИ. Действительно, на этих этапах проис¬
ходит выделение параметров сигнала, нелинейно связанных с са¬
мим сигналом, что и допускает произвольную форму образова¬
ния множества X.
Следовательно, функционирование системы определяется ха¬
рактером помеховых воздействий. В |Цростейшем случае, когда
параметры помехи и (сигнала не совпадают, удовлетворительные
105
результаты (могут 'быть 1получены •пространственной и временной
селекцией сигнала. Однако -пю1вы.шение интервала селекции мо¬
жет вызвать потерю полезного сигнала. Поэтому устройства се¬
лекции должны создаваться с учетом статистических свойств по¬
меховых воздействий.
Перейдем к описанию процесса функционирования динамиче¬
ской системы S. В связи с общим характером рассматриваемых
здесь вопросов описание оказывается свойственным любой систе¬
ме, в том числе и КСТИ в целом. Основой функционирования си¬
стемы является решающее правило, посредством которого произ¬
водится выбор совокупности выходных данных Y на основе ана¬
лиза элементов множества X. Большинство этапов функциониро¬
вания КСТИ связано с рассмотрением элементов множества про¬
странственно-временных параметров, имеющих, как правило, раз¬
личную размерность. Отметим, что в случае достаточно полной
априорной информации о помехах алгоритмы функционирования
систем КСТИ определяются достаточно просто на основе исполь-
301Вания решающих правил байесовской статистики. При этом
обычно делаются предположения о линейности используемых пре¬
образований. Однако и в такой сравнительно простой ситуации
остается неопределенность в выборе соотношений между динами¬
ческой и флуктуационной погрешностями. Последнее связано с
противоречием между необходимостью воспроизведения динами¬
ческих свойств КА и сглаживания флуктуационных погрешностей,
т. е. компенсации действия шумов. В этом смысле оказывается
целесообразным раздельное рассмотрение реакции линейной си¬
стемы на входное воздействие pi и на состояние р2 так, как это
рассмотрено в гл. 3. Тогда реакция системы на входное воздей¬
ствие эквивалентна сглаживанию флуктуационных погрешностей,,
а учет динамических свойств определяется реакцией на состояние
системы. Правомерность указанного подхода подтверждается воз¬
можностью декомпозиции на основе канонических разложений,,
что' обосновывается в § 3.3.
В более сложных случаях систему нельзя считать линейной,
что характерно, например, для измерителя частоты Доплера,.,
построенного на б азе устройств а ф азов о й автоподстройки.
(ФАП). Учет 'нелинейных свойств вызывает необходимость подхо¬
да к системе на основе .математической теории марковских про¬
цессов. Однако и эта теория может быть использована лишь для
решения ограниченного круга задач, что вызывает 'необходимость
обращения к общей теории динамических систем. Фрагменты этой
теории, изложенные в § 3.2, дают возможность классифицировать-
динамические системы рассматриваемого класса. Прежде всего
подход с позиций динамических систем позволяет избежать деле¬
ния на системы с дискретным и непрерывньим временем с прису¬
щими каждой из перечисленных групп систем специальными ме¬
тодами математического анализа. Основой рассмотрения динами¬
ческих систем является переход от общего неконкретизируемого*
описания в виде отношения к паре отображений (3.14) и (3.15)
106
что эквивалентно формулировке алгоритма функционирования юи-
crreiM ы.
Несмотря на отсутствие конкретных рекомендаций о сущест¬
ве выполняемых преобразований ib случае общего описания ди¬
намической -системы, сама принципиальная возможность и ука¬
зываемое направление имеют большое значение. Как уже отме¬
чалось, элемент неопределенности связан с необходимостью при¬
нятия решения о структуре и характеристиках системы, когда
входные воздействия обусловлены действием помех. Статистиче¬
ские характеристики помех в общем случае неизвестны.
Дополнительные возможности открываются при использова¬
нии стационарных моделей, причем в (рассматриваемом случае
речь идет о стационарности, понимаемой в статистическом смыс¬
ле. Как .известно, класс стационарных систем может быть рас¬
ширен путем использования представлений о стационарных пер¬
вых, вторых и так далее приращений.
Обобщая этот подход, ‘можно отметить, что модель стационар¬
ной системы может быть построена применительно к воспроиз¬
ведению траектории, не имеющей регулярной составляющей. Вы¬
деление таких составляющих траектории оказывается возможным
при развитии методов декомпозиции, рассмотренных в § 3.3.
Следует также иметь в виду, что анализ систем, функциони¬
рующих в условиях априорной неопределенности, в настоящее вре¬
мя производится на основе применения ряда специальных при¬
емов. Обобщение этих приемов и общее (математическое описание
таких систем являются также прерогативой .математической тео¬
рии систем. Использование методов этой теории позволит ликви¬
дировать брешь между оценками, полученными на основе корре¬
ляционной теории, и минимаксными представлениями, описанны¬
ми в § 3.4.
4.3. Комплексная система траекторных измерений
как целенаправленная система
Как уже указывалось, описание системы как целенаправлен¬
ной, основывается на развитии феноменологического описания.
.Действительно, такое описание завершается составлением алго¬
ритма функционирования системы (совокупности решающих пра¬
вил) и .позволяет определить систему показателей качества. Для
этого, -как указывается в § 3.4, необходимо задать внешние и
в н утрен ни е услови я ф у н кци о пирования с истомы. В озм ожность
описания системы как целенаправленной требует определения це¬
ли как КСТИ в целом, так и входящих в нее систем. Цели си¬
стемы должны формулироваться с учетом их иерархии, опреде¬
ляемой в (каждом конкретном случае на основе требований, предъ¬
являемых системой более высокого уровня (СВУ). При таком под¬
ходе (некоторые показатели оказываются свободными, т. е. явным
образом не связанными с целями СВУ. Такие показатели обычно
должны удовлетворять неравенствам или системе неравенств, ин¬
107
терпретируемых как ограничения, связанные с реализуемостью
системы. Сюда, ib частности, можно отнести ограничения, обуслов¬
ленные фу1Н1КЦ)ИОНИ|'ро1ва'Н1ие.хМ систем в составе РТК. Структура
КСТИ :в основном и определяется такими ограничениями.
Каждый из ранее рассмотренных этапов функционирования
КСТИ связан с реализацией определенных физических принципов.
Для (.преобразования электромагнитного поля в сигнал s(t) необ¬
ходимы элементы антенной техники, для определения параметра
т — широкополосные системы, а для выделения частоты Допле¬
ра— весьма тонжие анализаторы частоты и т. д. После представ¬
ления результатов измерений в цифровом коде выбор этапов и
алгоритмов работы каждой из систем определяется соотношением
между числом входных и выходных данных, а также уровнем
учета статистических характеристик погрешностей измерений. Од¬
нако 'и здесь распределение этапов обработки связано с объек¬
тивными условиями функционирования КСТИ, такими как терри¬
ториальный разнос между пунктами и временной интервал, за¬
нимаемый измерениями, который для малых высот КА опреде¬
ляется условиями примой видимости и др. Поэтому наиболее су¬
щественная задача анализа систем, входящих в КСТИ, состоит
в выявлении рационального алгоритма их функционирования, со¬
ставленного с учетом реальных ограничений. Конкретизация це¬
лей каждой из систем 'может быть (произведена на основе исполь¬
зования декомпозиции целей. Принцип такой декомпозиции обос¬
нован в § 3.3 на примере двухуровневой системы.
В связи с изложенным следует считать, что наибольший инте¬
рес представляет рассмотрение целенаправленных свойств КСТИ,
поскольку такой анализ позволяет (выявить системные свойства и
сформулировать задачу оптимизации. Вследствие достаточной
сложности решения этой задачи в общей постановке ограничимся
случаем заданного алгоритма функционирования КСТИ. Для кон¬
кретности предположим, что погрешности (измерений параметров
движения некоррелированы и распределены по гауссовскому за¬
кону со средним значением, отличным от нуля. Предположим так¬
же, что обработка измерений производится методом наименьших
квадратов (см. § 4.4). Выходными данными системы являются
оценки параметров траектории. Вектор параметров траектории
6-;мерный и представляет собой либо набор кеплеровских элемен¬
тов, либо совокупность начальных условий движения, описанных
в геоцентрической системе координат. Таким образом, рассмот¬
рению подлежит двухуровневая система, причем задачей систем
низшего уровня является получение текущих оценок параметров
движения либо результатов предварительного сглаживания, на¬
пример, посредством полиномиального усреднения.
Указанные условия конкретизируют структуру КСТИ и позво¬
ляют охарактеризовать взаимодействие подсистем низшего уровня
с координирующей системой. Сущность этого взаимодействия со¬
стоит в получении информации о траектории от систем низшего
уровня и сборе этой информации системой высшего уровня с по¬
108
следующей обработкой для .получения оценок /параметров траек¬
тории. Управляющие воздействия от координирующей системы в
основном сводятся к установлению режимов работы системы и пе¬
редаче целеуказаний по углам и частоте, облегчающих условия
вхождения в связь и обеспечивающих снижение динамических по¬
грешностей слежения за КА.
Перейдем к формализованному описанию КСТИ как целена¬
правленной системы. Первоначальная /задача состоит в выборе
совокупности множеств, адекватно воспроизводящих условия
функционирования КСТИ. Сама КСТИ как абстрактная система
может быть охарактеризована рядом отображений, поскольку при
ранее сделанных допущениях как алгоритм функционирования,
так и показатели качества могут быть однозначно определены с
точностью до некоторых констант.
Система .показателей качества связана главным образом с ее
метрическими свойствами. Отсюда следует, что наиболее суще¬
ственные показатели КСТИ определяются ее пространственными
и временными характеристиками. Поскольку КСТИ в общем слу¬
чае представляет собой пространственно-разнесенную систему, вве¬
дем множество N, описывающее 'Пространственные характеристи¬
ки КСТИ. Временные характеристики могут быть отождествляе¬
мы, с планом или программой измерений, отражающей степень
загрузки имеющихся средств. Поэтому определим второе множе¬
ство Р как 'множество планов, характеризующих временные свой¬
ства /системы при работе ее по различным объектам.
Поскольку КСТИ рассматривается как двухуровневая систе¬
ма, введем третье множество выходных характеристик систем низ¬
шего уровня, которое обозначим как 2. Тогда все показатели ка¬
чества КСТИ могут быть определены на декартовом произведении
указанных множеств, т. е. на АХРХ2-
Действительно, отображение, определяющее показатели каче¬
ства КСТИ, может быть конкретизировано заданием вектора па¬
раметров траектории. Тогда /полностью определяются условия на¬
блюдения за КА, и, следовательно, в рамках указанной модели
находятся показатели эффективности функционирования (вектор
Э) и прочие показатели, рассматриваемые как ограничения (век¬
тор Е). Таким образом, имеем e(q): NxPx J ->
Конкурирующим показателем по отношению к эффективности
функционирования является показатель ресурсной эффективности.
В простейшем ресурсы — это затраты на создание и функциони¬
рование системы. В некоторых случаях, например при наблюде¬
нии за КА с около круговым и орбитами с 'малой вариацией, этот
показатель в первом приближении можно считать не зависящим
от вектора параметров траектории. Итак, получаем отображение
ес : /v ХРХ
Следует иметь в виду, что определение ресурсов, расходуемых
.на комплексную систему, входящую в состав РТК, затруднитель¬
но. Поэтому при формировании отображения вс используются мо-
109
дели, основанные, -в частности, на аналогиях с примерами пз дру¬
гих областей техники.
Остановимся на интерпретации сформулированных показателей
качества. Очевидно, что пространственный разнос, увеличивающий
эквивалентную базу системы, приводит к повышению эффектив¬
ности функционирования. Это связано с большой чувствительно¬
стью системы измерений к отклонению параметров траектории.
Безусловно, это относится и к увеличению времени, отводимого
на измерения. Действительно, увеличение времени сопровождает¬
ся улучшением энергетических характеристик и позволяет проиЗ'
вести более тщательный анализ свойств траектории. Повышение
качества измерительной информации, характеризуемое -элемента¬
ми множеств 2, также 'приводит к повышению показателей эффек¬
тивности определения орбит. Однако рост показателей качества
сопровождается дополнительными затратами ресурсов. Это связано
с необходимостью сбора информации и дополнительными усилия¬
ми по синхронизации линий связи при большем пространственном
разносе между элементами КСТИ. Существенна также потеря в
оперативности получения результатов. Увеличение времени прове¬
дения измерений сопровождается временным и энергетическим
расходом ресурсов. Повышение точности и помехозащищенности
измерений также влечет за собой дополнительные затраты ре¬
сурсов.
Перейдем к формулировке задачи оптимизации. Из соображе¬
ний простоты ограничимся рассмотрением оптимизации по ска¬
лярному критерию.
В качестве целевой функции могут быть приняты либо обоб¬
щенный показатель эффективности функционирования, либо ха¬
рактеристика расхода ресурсов С. В первом случае имеем опти¬
мизационную задачу 3O6->sup, СсгСДОп, EczEAon, а во втором —
Эс:Эдоп, £'с=ЕДоп, C-Hnf, где Сдоп, Эдоп, Вдоп — области допусти¬
мых значений показателей ресурсной, функциональной эффектив¬
ности и ограничений.
Обе задачи соответствуют традиционному подходу «эффектив¬
ность—стоимость», характерному для больших систем. Первая за¬
дача эквивалентна достижению наивысшей границы для обобщен¬
ного показателя эффективности, а вторая задача приводит к до¬
стижению нижней границы для количества ресурсов при нахож¬
дении показателей функциональной эффективности и других огра¬
ничивающих условий в допустимых пределах. Формулировку вто¬
рой задачи следует считать более адекватной условиям функцио¬
нирования КСТИ, поскольку для этого случая ресурсы можно при¬
нять неограниченными.
Рассмотрим общий подход к решению задачи оптимизации
КСТИ. При формулировке отображений вводится зависимость по¬
казателей эффективности от некоторых параметров, значения ко¬
торых остаются пока неопределенными. Эти параметры образуют
вектор z, компоненты которого и подлежат определению при ре¬
шении задачи оптимизации. Сильная зависимость показателей
ио
качества от большого числа параметров значительно увеличивает
размерность вектора оптимизируемых переменных z. (В процессе
оптимизации компоненты вектора z рассматриваются как пере¬
менные.) Кроме того, некоторые компоненты z принимают дис¬
кретные значения, тогда как большинство переменных оказывает¬
ся континуальным. Указанные обстоятельства приводят к целесо¬
образности проведения частичной оптимизации. Суть ее состоит
в том, что оптимизация проводится одновременно лишь по тем
компонентам вектора z, которые принадлежат одному из мно¬
жеств TV, Р или S. Затем решается задача оптимизации примени¬
тельно к элементам другого множества и т. д. Полученные при
этом частные решения сопоставляются. Таким образом, процедура
оптимизации становится итерационной. Следовательно, если при
каждой частной оптимизации получено решение С—nnf, то резуль¬
тат, полученный после применения всей процедуры, представляет
собой глобальную нижнюю границу С->infinf. Детально оптими¬
зация КСТИ освещается в гл. 7.
Отметим, что здесь рассматривается оптимизация незамкну¬
той системы. Если система замкнута, при оптимизации или отыс¬
кании сатисфакционных решений следует пользоваться рекомен¬
дациями, приведенными в § 3.1.
4.4. Анализ вычислительных структур алгоритмов
обработки информации в КСТИ
Эффективность функционирования КСТИ зависит как от
свойств самих измерителей и их расположения, так и от харак¬
теристик алгоритмов вторичной обработки и их вычислительной
структуры. Задачи определения параметров траектории КА тре¬
буют для своего решения введения целого ряда допущений и уп¬
рощений, позволяющих получить конкретную структуру алгорит¬
мов обработки.
Рассмотрим общую постановку задачи определения параметров
траектории КА. Траектория движения КА представляется в виде
последовательности отсчетов составляющих вектора текущего со¬
стояния х(Л-) на временном интервале {0, Ти}. Ее форма как про¬
странственно-временной функции зависит от вида и характера
сил, действующих на КА в полете. В общем случае можно исполь¬
зовать форму записи текущего вектора состояния КА [88, 91]:
х(0 = f [q, dL, /] + G[x(/, т), Л w(Z)], (4.2)
где q— параметры траектории КА; di — совокупность параметров,
характеризующих условия движения КА (например, коэффициен¬
ты разложения гравитационного поля Земли, баллистический ко-
эффициет и т. д.); f [/] — известная функция, связывающая теку¬
щий вектор состояния КА с начальными параметрами траектории
q и вектором dj; w(Z)—вектор возмущающих воздействий; т—
интервал корреляции случайного возмущающего воздействия;
G[ ] — известная функция возмущений.
111
Процесс траекторных измерений может быть представлен урав¬
ненном
y*(Z)-h[x(Z), d2, t] ®v(Z), (4.3)
где y*(Z) —текущий вектор наблюдения вектора состояния дина¬
мической системы (вектор траекторных измерений, размерность
которого определяется числом одновременно измеряемых парамет¬
ров движения); d2—совокупность параметров, характеризующих
условия наблюдения (координаты фазовых центров антенных под¬
систем РТС, характеристики условий распространения радиоволн
на трассе и т. д.); v(Z) —/г-мерный вектор погрешностей, траектор¬
ных измерений; h[] — известная функция наблюдения, связываю¬
щая вектор измеряемых параметров y*(Z) с текущим вектором
состояния КА.
В уравнения состояния объекта и уравнения наблюдения вхо¬
дят случайные величины w(Zj и v(Z), характеризующие неучтен¬
ные возмущения в движении КА и погрешности траекторных изме¬
рений. Для повышения точности определения траектории КА в
измерения вводится избыточность, т. е. число отсчетов измеряемых
параметров движения, как правило, превышает число определяе¬
мых параметров траектории q, т. е. п^>т. Это приводит к широ¬
кому использованию в практике обработки траекторной информа¬
ции статистических методов.
При решении задач статистической обработки необходимо за¬
даться вероятностными характеристиками возмущений в движении
КА w(Z) и погрешностей траекторных измерений v(Z). В большин¬
стве практических случаев допустимо предположение о том, что
статистические характеристики возмущений и погрешностей изме¬
рений подчиняются гауссовскому закону распределения с нулевы¬
ми средними и известными ковариационными матрицами возму¬
щений и погрешностей измерений Тг, т. е.
E[w(/)] = 0; cov{w(Z), w(Z—т)} =4cQy(Z)б(Z—т);
Е [v (01 = 0; cov{v(Z), v(Z—т)} = Чга(/) 6(Z—т).
Важным этапом синтеза алгоритма статистической оптимиза¬
ции является выбор критерия оптимизации '[48]. С общих пози¬
ций теории систем в качестве критерия оптимизации может быть
выбран функционал в области измерения вектора состояния КА
Ф(ху), минимизирующий функцию потерь r(qy):
Ф(чу)= f '’(qy)W(y)dy = £y{r(qy)}. (4.4)
yeQy
Отсюда задача статистической оптимизации сводится к задаче
минимизации функционала <D(qy), т. е.
В = [Ф (q у) -> min qc= Qq]. (4.5)
Вид функционала, подлежащего минимизации, помимо вероят¬
ностных характеристик погрешностей траекторных измерений за¬
висит от вида выбираемой функции потерь r(qy). Наиболее часто
112
используются три типа функции потерь: простая, квадратичная,
модульная.
Задача оптимизации В может быть решена различными алго¬
ритмами оптимизации А, принадлежащими множеству реализуе¬
мых алгоритмов Выбор конкретного алгоритма статистической
обработки траекторной информации также представляет собой за¬
дачу оптимизации, которая в общем виде может быть записана
следующим образом:
*
[G (В, X)->mir, W(q)}, (4.6)
где G(B, Л) — функция потерь алгоритмического обеспечения ста¬
тистической обработки, зависящая от допустимых требований к
точности и оперативности определения параметров траектории и
целого ряда других факторов; G—допустимые значения функции
* *
потерь; {q, W(q)}—вектор оцениваемых параметров траектории
и статистические характеристики точности его определения на вы-
ходе алгоритма обработки А.
Существенное влияние на выбор конкретного алгоритма траек¬
торной информации оказывает вычислительная структура РТК, а
также требования к оперативности определения параметров траек¬
тории, учитываемые при формировании функции потерь.
С этой точки зрения можно выделить три класса методов и
алгоритмов обработки траекторной информации, характеризующих
вычислительную структуру РТК. К ним можно отнести алгоритмы
централизованной, децентрализованной обработки и последовате¬
льной обработки информации в реальном масштабе времени.
Каждый из этих классов характеризуется своей вычислитель¬
ной структурой, последовательностью операций по определению
параметров траектории и особенностями их практической реали¬
зации. Дадим краткую характеристику и сравнительную оценку
эффективности использования различных методов вторичной обра¬
ботки траекторной информации с позиций системного анализа их
влияния на показатели качества функционирования КСТИ.
Алгоритмы централизованной обработки траекторной информа¬
ции. При централизованной структуре обработки информации на
периферийных измерительных пунктах производится лишь первич¬
ная (предварительная) обработка данных траекторных измерений
[26]. Она обычно включает в себя преобразование измерительной
информации в цифровую форму, проведение простейших опера¬
ций по сжатию данных траекторных измерений, например линей¬
ное или полиномиальное усреднение, привязка данных к шкале
единого времени, формирование и кодирование посылок («кад¬
ров») траекторной информации для их передачи по каналам связи.
Определение параметров траектории производится после сбора
всех данных измерений. Структурная схема централизованной об¬
работки траекторной информации показана на рис. 4.2 [26]. Здесь:
У*Ъ11 —совокупность данных траекторных измерений, полученная
113
измерений у*^ ; —оцениваемый
Рис. 4.2. Структура централизованной
обработки траекторной информации
f-м измерительным пунктом на /-м сеансе связи с КА; у*2 — сум¬
марный вектор данных измерений, используемых для определения
параметров траектории; F2 — алгоритм статистического оценива¬
ния параметров траектории по избыточной совокупности данных
измерений у*^ ; q^ — оцениваемый вектор параметров траектории.
При выборе конкретных
структур централизованной
обработки траекторной ин¬
формации наиболее ши¬
рокое распространение по¬
лучили методы статисти¬
ческой обработки, основан¬
ные на знании вероят¬
ностных характеристик по¬
грешностей измерений. К ос¬
новным
нести методы:
квадратов
симума
(ММП) и
апостериорной вероятности
(МАВ).
Метод наименьших квадратов реализует классическую процеду¬
ру сглаживания случайных погрешностей измерений.
ИЗ них можно от-
наименьших
(МНК); мак-
правдоподобия
максимальной
В основе его использования для определения параметров траек¬
тории объектов лежат следующие основные допущения:
1. Траектория движения объекта на временном интервале из¬
мерений полагается детерминированной либо аппроксимируется
конечным числом параметров, подлежащих определению. В пер¬
вом случае траектория КА может быть описана системой диффе¬
ренциальных уравнений с полностью известными правыми частя¬
ми. Эта система уравнений может быть решена аналитическими
или численными методами. Во втором случае траектория как про¬
странственная кривая аппроксимируется с помощью некоторых
стандартных функций, например степенных полиномов, коэффи¬
циенты которых неизвестны и подлежат определению.
2. Число и расположение отдельных систем траекторных изме¬
рений (измерительных каналов), входящих в состав КСТИ, а так¬
же их координаты принимаются известными точно. Одновремен¬
но полагаются известными точно соотношения между измеряемы¬
ми параметрами радиосигналов (время запаздывания т, доплеров¬
ский сдвиг частоты Рит. д.) с их геометрическими аналогами
(наклонная дальность R, радиальная скорость VR).
3. Погрешности траекторных измерений распределены по мно¬
гомерному гауссовскому закону с нулевым средним и известной
корреляционной матрицей Тг.
4. Функция потерь, лежащая в основе функционала (4.4), под¬
лежащего оптимизации, является квадратичной.
114
Указанные допущения позволяют представить функционал Ф в
виде квадратичной формы:
®(qy) = [y*—y(q)]T'ift-_1[y*—y(q)b (4.7)
где У (я)—вектор расчетных значении измеряемых параметров,
соответствующий некоторому наберу параметров траектории q.
Минимизация квадратичной формы затруднительна из-за нели¬
нейных связей между определяемыми параметрами траектории и
расчетными значениями измеряемых параметров. Традиционным
способом решения нелинейных задач является их линеаризация,
которая требует для данного случая наличия априорно известных
параметров траектории q0 (начальных условий движения), лежа¬
щих в окрестности истинных значений.
Наличие априорной информации позволяет перейти от задачи
определения 'параметров траектории q к задаче определения по¬
правок Aq к их априорно известным значениям, что дает возмож¬
ность заменить нелинейный функционал (4.7) линейной квадра¬
тичной формой:
{[у*—У (Чо)1— JAq}T4r7I{[y*—y(q0)l—J Aq}. (4.8)
где J — матрица частных производных от расчетных значений из¬
меряемых параметров по априорно известным параметрам траек¬
тории q0. Она образуется при разложении расчетных значений
измеряемых параметров y(q) в ряд Тейлора относительно априор¬
но известных параметров траектории:
y(q) = y(qo)+J(q—q0)+- (4.9)
Линеаризованный относительно q0 функционал (4.8) легко под¬
дается векторному дифференцированию, что приводит к системе
уравнений вида
2ГТЛ [у—у (q0)l—2 JT Т71 JAq = 0.
Эта система может 'быть приведена к стандартной форме запи¬
си в виде нормальных уравнений
A2Aq = B2, (4.10)
где A2=JTTr_1J — матрица левой части системы; В2 =
^РЧГ^бу* — вектор-столбец правой части.
Решением системы нормальных уравнений является искомый
вектор поправок к априорно известным параметрам траектории,
определяемый по формуле
Ач = дЛВ. (4.11)
Соответственно система линейных уравнений имеет единствен¬
ное решение, когда матрица Av —неособенная, т. е. ее опреде¬
литель
det Az 0.
115
(4.12)
Это условие обычно называется условием наблюдаемости и яв¬
ляется принципиально необходимым для однозначного определе¬
ния параметров траектории по данным измерений. Как будет по¬
казано в последующих главах, для выполнения условия наблюдае¬
мости необходимо соответствующим образом выбрать состав изме¬
ряемых параметров, расположение СТИ и временные интервалы
измерений.
Сложность вычислительной структуры МНК и его модифика¬
ций прежде всего определяется видом корреляционной матрицы
4% и способом вычисления матрицы частных производных J. Если
погрешности измерений некоррелированы, то матрица ЧС являет¬
ся диагональной и легко обратимой. Кроме того, предположение
о диагональности матрицы позволяет существенно упростить
операции формирования матриц левой и правой частей системы
нормальных уравнений при замене громоздких операций векторно¬
матричного умножения на операции сложения.
Если же погрешности измерений коррелированы, го в матрице
Tt появляются внедиагональные члены, усложняющие операцию
ее обращения, что весьма существенно при большом числе изме¬
рений. При этом метод наименьших квадратов переходит в метод
максимума правдоподобия (ММП), хотя сама форма системы
нормальных уравнений (4.10) сохраняется той же. Меняется толь¬
ко ее внутреннее содержание, существенно усложняющее вычис¬
лительную структуру метода. Поэтому в практике траекторных из¬
мерений ММП применяется сравнительно редко [26]. Даже при
явной корреляции ошибок измерений для решения задачи опре¬
деления параметров траектории используют обычный алгоритм
наименьших квадратов, несмотря на некоторый отход от оптималь¬
ности оценивания.
Метод максимальной апостериорной вероятности основывается
на использовании априорной информации о точности априорно
известных параметров траектории. Обычно полагают, что априор¬
ная оценка параметров траектории q0 также распределена по мно¬
гомерному гауссовскому закону с математическим ожиданием,
*
равным самой оценке qo и ковариационной матрицей В этом
случае общая форма записи системы нормальных уравнений со¬
храняется, но сами матрицы левой и правой частей определяются
несколько иначе:
As = 4f“1 + JT'F71 J; (4.13а)
Qo
В2 = ГТГ'бу2. (4.136)
Если все указанные выше допущения выполняются достаточно
строго, то МНК, ММП и МАВ обеспечивают получение статисти¬
чески оптимальной оценки параметров траектории. Получаемая
оценка также распределена по многомерному гауссовскому закону
и является несмещенной, а погрешности определения параметров
траектории характеризуются корреляционной матрицей Тб/0, кото¬
116
рая связана с матрицей левой части 'Системы нормальных уравне¬
ний достаточно простым соотношением
Т9о = А7'. (4.14)
Геометрической интерпретацией ковариационной матрицы пог¬
решностей Чг7о является многомерный эллипсоид погрешностей в
пространстве определяемых параметров траектории. По аналогии
с потенциальной точностью оценивания параметров радиосигналов
матрица характеризует потенциальную точность определения
параметров траектории при заданном составе и статистических
характеристиках траекторных измерений. Это понятие будет ши¬
роко использоваться при дальнейшем изложении.
При рассмотрении вычислительной структуры алгоритмов цент¬
рализованной обработки траекторной информации предполага¬
лось, что априорно известные значения параметров траектории на¬
ходятся в окрестностях истинных значений. В большинстве прак¬
тических случаев разложение (4.9) выполняется весьма прибли¬
женно, что приводит к необходимости организации итерационно¬
го процесса для достижения сходимости решения задачи к гло¬
бальному экстремуму методами последовательных приближений.
Это еще одна плата за решение нелинейной задачи методами ее
линеаризации. Отсюда помимо решения задачи обеспечения необ¬
ходимой точности определения параметров траектории возникает
проблема устойчивости решения задачи минимизации функциона¬
ла (4.7). Наиболее эффективный путь решения этой проблемы зак¬
лючается в предварительном сужении области априорной неопре¬
деленности начальных условий на основе использования ограни¬
ченного количества наиболее информативных измерений [26].
Децентрализованная обработка информации в КСТИ [14, 91].
Для рассмотренной выше централизованной структуры обработки
данных траекторных измерений характерны следующие основные
недостатки [26]:
необходимость передачи с измерительных пунктов в Центр об¬
работки всего объема получаемой информации, что при ограни¬
ченной пропускной способности каналов передачи данных сущест¬
венно увеличивает время передачи и сбора данных и, следователь¬
но, снижает оперативность определения параметров траектории
КА;
большой объем вычислительных операций при реализации алго¬
ритма определения параметров траектории на ЭВМ Центра обра¬
ботки, необходимость запоминания и сравнительно длительного
хранения большого массива «сырых» данных измерений для мно¬
гократного обращения к ним при использовании итерационных
методов решения задачи минимизации функционала;
отсутствие возможности одновременного расчета параметров
траектории нескольких объектов при обслуживании большого чис¬
ла КА.
Переход к многомашинной вычислительной структуре при не¬
посредственном сопряжении ЭВМ с каждой СТИ позволяет осу-
117
Рис. 4.3. Структура децентрализованной
обработки траекторной информации
ществпть децентрализацию
и рациональное распреде¬
ление отдельных этапов об¬
работки траекторной ин¬
формации, а также макси¬
мально сократить объем
данных измерений, подле¬
жащих передаче с измери¬
тельных периферийных пун¬
ктов в Центр обработки.
В общем случае децен¬
трализация обработки дан¬
ных траекторных измерений
заключается в том, что весь
алгоритм определения пара¬
метров траектории КА раз¬
бивается на ряд этапов,
каждый из которых реализуется на одной из ЭВМ многомашинно¬
го вычислительного комплекса.
Тогда обработка данных на измерительном периферийном пунк¬
те сводится к использованию некоторых промежуточных алгорит¬
мов обработки Fj, преобразующих каждую отдельную совокуп¬
ность измерений у;- в некоторый набор промежуточных парамет¬
ров а>, который подлежит передаче с измерительного пункта в
Центр обработки. Переданная совокупность промежуточных пара¬
метров объединяется в Центре обработки в суммарный вектор а2,
который затем с помощью суммарного алгоритма обработки F22
преобразуется в вектор определяемых параметров траектории q22
(рис. 4.3).
Рассмотренная обобщенная структурная схема децентрализо¬
ванной обработки траекторной информации допускает множество
различных конкретных реализаций алгоритмов обработки. Основ¬
ным фактором, влияющим на конкретную структуру алгоритма
децентрализованной обработки данных, является состав измеряе¬
мых параметров в системе траекторных измерений.
Характерной особенностью много-параметрических систем явля¬
ется выполнение условия наблюдаемости (4.12) на каждОхМ от¬
дельном сеансе связи с КА, что позволяет получить достаточно
простую структуру децентрализованной обработки траекторной ин¬
формации (рис. 4.4).
Первый этап децентрализованной обработки реализуется непо¬
средственно на измерительном пункте и заключается в самостоя-
*
тельном определении отдельных оценок параметров траектории q?
по каждой из совокупностей у*При этом применяется алгоритм
наименьших квадратов, используемый при централизованной обра¬
ботке. Все отдельные оценки параметров траектории q, представ¬
ляются в единой форме записи и привязаны к одному моменту
времени tQ.
118
Для оптимального статистического согласования оценок, т. е..
для формирования оператора суммарной обработки F22, помимо
самих оценок q; необходимо иметь их статистические характери¬
стики. При указанных выше допущениях о характере погрешности
измерений исчерпывающей статистической характеристикой каж-
Рис. 4.4. Структура децентрализованной обработки траекторной информации для
многопараметрических систем
дой оценки параметров траектории является ее ковариационная
матрица определяемая соотношением (4.14). Тогда оператор
суммарной обработки данных F22 сводится к выполнению прос¬
тейшей операции статистического согласования
(т,;1 +... +47/ +... + Yg-/)-1 X
х (ч^1 ч,+ ... +Т7/ q,- +... +^g-L* qj, (4.15)'
где L — число отдельных оценок параметров траектории.
Возможны и некоторые модификации алгоритма суммарной об¬
работки, упрощающие в целом структуру комплексного алгоритма.
Одна из них показана на рис. 4.5. Она характерна для согласова¬
ния оценок параметров траектории при существенном разнесении
во времени отдельных сеансов связи с КА. В этом случае на каж¬
дом измерительном пункте с точки зрения рациональности струк¬
туры алгоритма обработки целесообразно приводить каждую от¬
дельную оценку к «своему» моменту времени th, близкому к мо¬
менту сеанса связи. Соответственно при этом усложняется алго¬
ритм статистического согласования оценок в Центре обработки,
так как при этом суммарная оценка параметров траектории долж¬
на быть приведена к единому моменту времени. Наиболее удоб¬
ным является приведение всех оценок ко времени самого послед¬
него сеанса связи.
119
Так, при согласовании параметров траектории и qf2, полу¬
ченных на различных сеансах связи с КА и приведенных к соот¬
ветствующим моментам времени Ц и /2, вначале необходимо произ-
*
вести операцию экстраполяции оценки q^ на момент t2. Экстра¬
поляция осуществляется путем интегрирования системы диффе-
Рис. 4.5. Структура алгоритма согласования оценок параметров траектории,
полученных различными системами траекторных измерений
ренциальных уравнений движения объекта с момента t\ до мо¬
мента t2 по начальным условиям q^. Кроме экстраполяции самой
оценки необходимо произвести экстраполяцию ее ковариационной
матрицы 4%/, на тот же момент времени t2. Экстраполяция про¬
водится путем линейного преобразования:
(4.16)
где
— матрица изохронных частных производ¬
ных.
Алгоритм согласования оценок имеет вид
Ф,Е= (ЪЩ'ГЙГ'х (4.17)
Более сложным оказывается нахождение оптимальной струк¬
туры комплексного алгоритма децентрализованной обработки для
малопараметрических систем. Для этих систем состав траекторных
измерений на каждом отдельном сеансе связи не удовлетворяет
условию наблюдаемости (4.12), так как при составлении системы
-нормальных уравнений типа (4.10) на каждом отдельном сеансе
связи образуется матрица А;^, детерминант которой или непосред¬
ственно равен нулю, или очень близок к нему. Это приводит или
к полной невозможности получения единственного решения систе¬
мы нормальных уравнений, или к потере устойчивости решения.
120
Дадим более общую геометрическую трактовку особенностей
определения параметров траектории для малопараметрических и
многопараметрических систем. Вернемся к задаче оценивания па¬
раметров траектории как к задаче минимизации функционала ви-
да (4.7).
Совокупность различных значений функционала, соответствую¬
щих некоторой области параметров траектории S(q), образует
гиперповерхность A(q), условный вид которой для двумерного
случая показан на рис. 4.6. Форма этой гиперповерхности сущест¬
венно зависит от состава и точности траекторных измерений.
Для многопараметрических систем гиперповерхность L(q)
имеет ярко выраженный глобальный экстремум, что позволяет
получить единственное решение системы нормальных уравнений В'
виде оценки q, минимизирующей функционал Фь При наличии
малопараметрической системы глобальный экстремум носит слабо
■выраженный характер или вообще отсутствует (рис. 4.6). Таким
образом, задача получения единственного решения затруднена или
принципиально невозможна,
ний T(q), минимизирующих
исходный функционал Фг.
Для получения единствен¬
ного решения необходимо
изменить вид гиперповерх¬
ности, что достигается сум¬
мированием данных измере¬
ний малопараметрических
систем, полученных на раз¬
личных сеансах связи с
объектом.
Отсюда прямое исполь¬
зование комплексного алго¬
ритма обработки типа (4.15),
характерного для многопа¬
раметрических систем, ока¬
зывается совершенно не¬
пригодным для большого
класса малопараметричес¬
ких систем траекторных измерений^ Это требует поисков других
структур децентрализованной обработки данных.
Можно выделить два пути создания комплексных алгоритмов
Децентрализованной обработки для малопараметрических систем
траекторных измерений.
Первый путь является наиболее традиционным и заключается
В полном отказе от решения задачи определения параметров траек¬
тории на каждом сеансе связи с КА. В этом случае задача обра¬
ботки данных сводится к нахождению наиболее стандартной алге¬
браической или тригонометрической функции, достаточно хорошо
аппроксимирующей измерения каждого отдельного параметра дви-
121
так как имеется множество значе-
функционала (4.4) для малопараметри¬
ческих систем
жен и я объекта на всем временном интервале измерений или, по
крайней мере, на его отдельных участках. В качестве таких ап¬
проксимирующих функций могут быть использованы степенные
полиномы, полиномы Чебышева, Лежандра и т. д. [26], для кото¬
рых имеются достаточно хорошо разработанные машинные мето¬
ды и алгоритмы аппроксимации.
Однако основной недостаток всех методов аппроксимации дан¬
ных траекторных измерений стандартными функциями заключает¬
ся в том, что выбор вида и числа параметров этих функций в силь¬
ной степени зависит как от вида измеряемого параметра, так и от
типа траектории и самих условий траекторных измерений. Хотя
увеличение числа параметров аппроксимирующей функции в -прин¬
ципе приводит к увеличению точности аппроксимации, при этом
сразу же возрастают трудности, связанные с точностью вычисле¬
ний при ограниченной разрядной сетке ЭВМ. Одновременно уве¬
личение числа параметров аппроксимации приводит к отходу от
оптимального сжатия объема данных траекторных измерений, .под¬
лежащих передаче с измерительных пунктов в Центр обработки,
усложняет алгоритмы восстановления данных и требует проведе¬
ния полной обработки «восстановленных» данных траекторных из¬
мерений.
Более предпочтительным является второй путь децентрализа¬
ции обработки в малопараметрических системах, основанный на
использовании в качестве аппроксимирующих функций самих па¬
раметров траектории. Обычно при 'минимизации функционала
(4.4) одновременно решаются две задачи: нахождение оптималь¬
ной оценки параметров траектории и аппроксимация данных
траекторных измерений некоторым набором расчетных значений
*
измеряемых параметров y(q).
В случае малопараметрической системы минимум функциона¬
ла Ф реализуется на множестве значений Г (q<)» заполняющих не¬
которую область T(q). В двумерном случае, который показан на
рис. 4.6, это множество заполняет некоторую прямую линию d]d2.
Неединственность решения порождает ряд вычислительных
трудностей, которые усугубляются тем, что практически матрица
системы нормальных уравнений (4.10) не является строго вырож¬
денной (особенной), а лишь лежит в малой окрестности строго
вырожденной матрицы.
При этом из всего множества возможных решений, принадле¬
жащих области T(q), достаточно лишь выбрать один набор пара-
*
метров траектории qn, который в пределах области решения может
сколь угодно отличаться от истинных значений параметров траек¬
тории, но приводит к минимизации функционала (4.4).
Для получения какого-то одного решения задачи минимизации
из множества возможных необходимо искусственно изменить фор¬
му гиперповерхности, добиваясь наличия одного ярко выражен¬
ного экстремума, соответствующего некоторой точке qm, принад¬
лежащей области решений T(q). Одним из возможных путей ре¬
122
доения этой задачи является метод введения регулязирующего
функционала, основы которого разработаны А. Н. Тихоновым [61].
С этой целью построим новый функционал Р, который обла¬
дает единственным минимумом, принадлежащим области II(q).
Он образуется как сумма полученного ранее функционала Ф и
некоторого вспомогательного функционала Q:
(4.18)’
На выбор вспомогательного функционала Q накладывается ряд
ограничений для получения единственного решения. Прежде всего
в состав функционала Q должны входить некоторые вспомога¬
тельные функции e(q), связанные определенными соотношениями
с параметрами траектории. Вспомогательный функционал может
быть записан в виде
<2 = I е (q) — е (qon)]T'Fe 1 [е (q)—е (qOn)J,
(4.19)
где qOn — некоторые «опорные» значения параметров траектории,
Tg — положительно полуопределенная квадратная матрица.
Процесс отыскания минимума функционала Р также осущест¬
вляется путем последовательных приближений. Однако чтобы ко¬
нечное решение, соответствующее минимуму нового функционала
Р, находилось в области минимума функционала Ф, на вспомо¬
гательный функционал Q налагается дополнительное условие. Оно
заключается в том, что в качестве «опорных» значений -парамет¬
ров траектории в каждом k-ул сближении необходимо использо¬
вать параметры траектории, полученные на предыдущем сближе¬
нии. В самом первом итерационном цикле в качестве опорных
параметров используют априорно известные параметры траекто¬
рии q0. В этом случае предполагается, что
Q[e(qA), q*] = 0.
Наконец, вид вспомогательных функций, образующих вспомо¬
гательный функционал Q, должен быть таким, чтобы новый функ¬
ционал Р имел один глобальный экстремум.
При минимизации функционала Р в каждом итерационном
Цикле составляется и решается стандартная система нормальных
уравнений, аналогичная (4.10):
А^с A q — Ь^. (4.20)
Однако структура левой и правой частей отличается от (4.10)
введением дополнительных членов, т. е.
А^ = А2 (у) + Ае (е); bvE =-* b2 (у) + b2 (я);
AE(y) = J}T„-'J7; A2(e)=Jj/Y8-1J8/> (4.21)
где Jej — матрица частных производных от вспомогательных па¬
раметров г по этим же параметрам траектории.
123
В сипу введенных ранее предположений в каждом итерацион¬
ном цикле вектор-столбец правой части системы нормальных урав¬
нений определяется соотношением
bxs = b2 (у) = J/ Ч'Д1У;-у,. (q0)J, (4.22)
так как Ь2 (е) всегда равен нулю.
Конкретный вид параметров e(q) существенно зависит от типа
измеряемого параметра в системе траекторных измерений. В прин¬
ципе наиболее универсальными вспомогательными параметрами
e(q) являются сами параметры траектории q. Тогда в качестве
начальных (опорных) значений можно использовать априорно из¬
вестные параметры траектории q, а в качестве матрицы —
ковариационную матрицу Ч^.
Наиболее удачным видом вспомогательных функций является
введение фиктивных измеряемых параметров, дополняющих мало¬
параметрическую систему до многопараметрической.
Так, при аппроксимации данных системы измерения наклонной
дальности в качестве вспомогательных параметров целесообразно
использовать расчетные значения угловых координат, а при ап¬
проксимации данных системы измерения радиальной скорости —
расчетные значения угловых скоростей, соответствующие априорно
известным параметрам траектории.
Рис. 4.7. Структура алгоритма согласования параметров траектории при обра¬
ботке данных малопараметрических систем
В качестве примера рассмотрим структуру алгоритма децен¬
трализованной обработки для двух малопараметрических систем
(рис. 4.7). Вначале на измерительных пунктах производится ап¬
проксимация данных измерений некоторьш набором параметров
* де¬
траектории qio , q2<D или каждый из которых удовлетворяет ус¬
ловиям минимизации функционалов Ф1 и Ф2.
124
* *
Полученные оценки qio и q2(I> не могут быть непосредственно
использованы для оптимального статистического согласования по
формуле (4.19), так как они принадлежат различным точкам об¬
ласти F(q), поэтому необходимо осуществить операцию восста¬
новления полученных данных траекторных измерений путем фор¬
мирования расчетных значений измеряемых параметров, соответ¬
ствующих каждой отдельной оценке. Восстановленные данные
измерений объединяются в суммарный вектор, и вся полученная
совокупность данных обрабатывается обычным методом наимень¬
ших квадратов для получения оценки определяемых параметров
траектории qrB.
Достоинством такого комплексного алгоритма децентрализо¬
ванной обработки является полная стандартизация и унификация
его отдельных субблоков на различных этапах для всех типов си¬
стем траекторных измерений. При этом независимо от вида и
■объема данных на каждом сеансе связи конечным результатом ап¬
проксимации всегда являются шесть начальных параметров тра¬
ектории. С этой точки зрения методы аппроксимации с исполь¬
зованием фиктивных параметров траектории являются наиболее
предпочтительными.
Особенности обработки траекторной информации в реальном
масштабе времени. Ряд целевых задач, поставленных перед КСТИ,
характеризуется повышенными требованиями к оперативности оп¬
ределения параметров траектории. Рассмотренные выше алгорит¬
мы централизованной и децентрализованной обработки не удовле¬
творяют требованиям оперативности, так как обработка прово¬
дится только после сбора всей траекторной информации. Кроме
того, добавление хотя бы одного нового измерения требует пов¬
торения всех процессов в процедуре МНК. Этот факт оказался
отправной точкой для поиска алгоритмов обработки, позволяющих
обрабатывать данные измерений по мере их поступления.
Наиболее удачным методом последовательной обработки дан¬
ных являются метод калмановской фильтрации [20, 54] и его по¬
следующие модификации. Основное достоинство фильтра Калма-
на заключается в том, что метод последовательного оценивания
по критерию минимума дисперсии использует понятия перемен¬
ных состояний, естественных для динамических систем. С этой
точки зрения при решении большинства практических задач филь¬
тры Калмана буквально вытеснили более громоздкие по вычис¬
лительной структуре матричные фильтры Винера, оперирующие
в частотной области [57].
При анализе вычислительной структуры алгоритма калманов¬
ской фильтрации в задачах обработки траекторной информации
сохраним введенные выше допущения о характере траектории и
статистических характеристиках погрешностей измерений. Кроме
того, будем полагать, что в некоторый момент времени ti, пред¬
шествующий получению данных траекторных измерений уф+1]
в момент Zj-j-i, получена оценка текущего вектора состояния
125
КА х[г]. Считаем, что полученная оценка х [£] не коррелировала
с результатами траекторных измерений у* U+ Л , является несме¬
щенной и распределена по гауссовскому закону с известной кор¬
реляционной матрицей 4^(7].
При указанных допущениях на каждом шаге возможна сов¬
местная обработка реальных данных измерений y*[i4-l] и полу¬
ченной ранее оценки текущих параметров движения x[i] с ис¬
пользованием ММП или его упрощенной модификации — МНК-
Для удобства обработки приведем оценку текущих параметров
движения на момент получения реальных данных измерений ^+1в
Приведение (экстраполяция) оценки осуществляется интегри¬
рованием системы дифференциальных уравнений движения объек¬
та от момента ti на момент Z;+i.
Одновременно с экстраполяцией оценки необходимо также про¬
извести экстраполяцию ее корреляционной матрицы. Экстраполя¬
ция осуществляется с помощью стандартного линейного преоб¬
разования:
Фх[/ + 1//] = ф[/+1, ijТх[г] Фт [/+ 1, /],
где f] =dx[Z< l/f]/dx[f]—матрица изохронных частных
производных от экстраполированных параметров движения
х<[/+ 1/Z] по самой оценке х[7].
Будем полагать, что значения экстраполированной оценки • и
реальные данные измерений образуют обобщенный вектор траек¬
торных измерений
to+uii=
y*U'+ 1]
х [г 4~ 1/Л
Размерность вектора у*Е [i+ 1] равна /4-6, где /— число одно¬
временно измеряемых параметров движения.
Для линеаризации систем нормальных уравнений необходимо
иметь приближенную оценку х[/4-1], получить матрицу частных
производных Нх [/4-1] от измеряемых параметров у*[/+1] по ап¬
риорно известной оценке х[/4- 1//], а также знать корреляцион¬
ную матрицу погрешностей обобщенных измерений Ч^х [/4-1].
Тогда уточненная оценка текущих параметров движения КА
определяется по формуле, аналогичной (4.11):
х [/+ 1] = х [/4-1 ] +As [/4* Ч [/4“ 1L (4.23)
где А£[/-И]=НТ^ [1+ 1]Hz [/4-1] — суммарная мат¬
рица левой части системы уравнений правдоподобия; Ьх[/-г1] =
= НТ[/4-1]^-1^ [i’4- l]6y* [/ + 1] —вектор-столбец правой части
системы уравнений правдоподобия.
Так как погрешности измерений и текущих параметров движе¬
ния некоррелированы, то ковариационная матрица погрешностей
обобщенного вектора измерений Ч^х состоит из двух симметри¬
ческих клеточных матриц:
126
ЧМЛ-1]
0
0
4,‘;[i+ 1/Л
В качестве начального приближения удобно использовать са¬
му экстраполированную оценку текущих параметров движения
x[f + 1/Z].
Тогда обобщенная матрица частных производных принимает
вид
В + 1] —
H[f+U
1 [i 4" 1/Л
(4.24)
Нижняя подматрица выражения (4.24) представляет собой
(6X6)-единичную матрицу. Отсюда, учитывая характер матрицы
суммарная матрица левой части системы нормальных урав¬
нений принимает вид
А^ [/4“ 1]= I/4* 1/^.14~ Н 4” 1 ] Н [i-|“ Ч) > (4.25)
где в общем случае с учетом известных статистических характе¬
ристик возмущений в движении объекта
1/Л = Ф[/+ h ^Х[/]ФТ[Н1, *14-
+ Г[/+1, Ш’]ГТН1, i]- (4.26)
Матрица представляет собой известную ковариационную
матрицу возмущений.
Аналогично вектор-столбец правой части системы нормальных
уравнений записывается следующим образом:
Ъ2 [Z + I ] = нт [г + 11 ЧТ1 [i + 1J {у + 1 ] - у (X [г + 1/»])}. (4.27)
Отсюда уточненная оценка текущих параметров движения, по¬
лученная в результате совместной обработки имеющейся ранее
оценки x[Z] и новых данных измерений y*l[i4-1], определяется по
формуле
х [г + 1 ] = X [г г 1 /I] + (ЧТ1 [г + 1 /Л + Нт [г + 1 ] ЧТ1 [i + 1 ] Н [i + 1 ])“’ X
X Нт [/ + 1 ] ЧТ* [/ + 11 {У* [i + 11 - У (х [i + 1 /Л)}- (4.28)
Выражение (4.28) является рекуррентным и представляет со¬
бой уравнение динамической фильтрации.
Рассмотрим вычислительную структуру алгоритма динамиче¬
ской фильтрации при его реализации на ЭВМ (рис. 4.8).
При поступлении данных на вход ЭВМ прежде всего произво¬
дится экстраполяция полученных ранее текущих параметров дви¬
жения объекта x[f] на момент измерений tw. Экстраполяция
осуществляется в блоке интегрирования систем дифференциаль¬
ных уравнений, описывающих силы, которые действуют на объ¬
ект. Одновременно происходит расчет изохронных частных про¬
изводных Ф[i4-1 /П и экстраполяция ковариационной матрицы
127
Затем ЭВМ определяет расчетные значения измеряемых пара¬
метров, соответствующих экстраполированной оценке, т. е. у(х[['д-
+ 1/i]). Одновременно вычисляются частные производные от рас¬
четных значений измеряемых параметров по экстраполированной
оценке x[f-H/f] и формируются матрицы А^ [i-Н] и b2'[i+l].
Рис. 4.8. Структура алгоритма динамической фильтрации
Для получения уточненной оценки текущих параметров дви¬
жения ЭВМ сравнивает реальные данные измерений и расчетные
значения измеряемых параметров.
Полученная разность dy*'[r+1] поступает в блок получения
уточненной оценки. По существу уточнение оценки параметров
движения объекта методом динамической фильтрации представ¬
ляет собой операцию оптимального взвешенного усреднения. Оп¬
тимальные весовые коэффициенты выбираются путем перемноже¬
ния матриц A-1 v [i+1] =Тт[/-г 1]НТ[/+1] и 1], которые
образуют «весовую» матрицу y[f+l] коэффициента усиления
калмановского фильтра.
*
Матрица Tx[f-rl] характеризует потенциальную точность оп¬
ределения текущего вектора состояния объекта с учетом обрабо¬
танной измерительной информации, матрица характе¬
ризует погрешности траекторных измерений, а матрица частных
производных НП+ 1] играет роль матрицы перехода.
*
Отметим, что знание элементов матрицы Тх позволяет полу¬
чить ковариационную матрицу
[Z + 1Ц] = Н [/ + 1 ] Т + 1 //] Нт [i + 1 ].
128
(4.29)
Матрица [i+ 1/Z] является матрицей ошибок экстраполяции
расчетных значений измеряемых параметров у(х‘[г+1/Z]). Она
может быть использована как для реализации адаптивного уп¬
равляемого стробирования принимаемых сигналов, так и для от¬
браковки поступающей информации. В самом деле, диагональные
элементы матрицы представляют собой дисперсии ошибок опре¬
деления расчетных (априорных) значений измеряемых парамет¬
ров, на основе которых могут быть рассчитаны размеры стробов
для каждого измеряемого параметра соответственно. Размеры
стробов выбираются из условия обеспечения заданной веро¬
ятности попадания в него соответствующих элементов разности
ёу *[t + 1 ] = У +1 ]—У (x[i + 1 /i]).
Эквивалентный размер стробов определяется по формуле
АЛД/Д 1] =₽;о2 /l{i + 1], (4.30)
где /— условный номер измеряемого параметра; (AjjjIj+I]—
диагональный элемент матрицы Ф?/, — нормирующий множи¬
тель.
Совокупность коэффициентов р;-, где / = 1, ...» Z, выбирается на
основе заданной вероятности попадания совокупности размерно¬
стей в виде /-мерного вектора 6у*[/-г1] в многомерный строб
AL[f+l], представляющий собой совокупность отдельных пока-
нальных стробов. Устройство обработки отбирает те значения
6у*[/+1], которые попадают в этот «дисперсионный» строб.
Анализ вычислительной структуры алгоритма динамической
фильтрации позволяет записать этот алгоритм в несколько иной,
более компактной форме записи:
х[/+ 1] =i[/+ 1/Z] + ?[/+ 1] {у* [/ + 1]-у (i[/ + 1//])}, (4.31)
где VI7+1]—матричный коэффициент усиления калмановского
фильтра.
Соответственно структурная схема устройства, реализующего
алгоритм динамической фильтрации, может быть преобразована
так, как показано на рис. 4.9. Наибольшую сложность представ¬
ляет алгоритмическая структура блока расчета элементов коэф¬
фициента усиления — БРКУ (рис. 4.10).
Уточнение оценки параметров движения методом динамиче¬
ской фильтрации представляет собой операцию оптимального
«взвешенного» усреднения. Выбор оптимальных коэффициентов
зависит от значения статистических характеристик возмущений
и помех. По мере накопления информации и оценки текущих па¬
раметров движения каждое новое измерение влияет на точность
получения оценки в меньшей степени, чем полученное ранее из¬
мерение (при сохранении точностных характеристик СТИ). От¬
ход реальных статистических характеристик возмущений и по¬
мех от их значений, принятых в алгоритме обработки, естествен-
5—36 ' 129
но, приводит к потере оптимальности и возрастающим со време¬
нем смещениям в оценке текущих параметров движения КА. Мето¬
ды адаптивной обработки траекторной информации, позволяю¬
щие в какой-то степени скомпенсировать несоответствие между
реальными и априорно известными статистическими характерис¬
тиками, будут рассмотрены в гл. 8.
Рис. 4.9. Упрощенная
структурная схема ал¬
горитма динамической
фильтрации:
ЬД — блок дискриминаторов,
реализующих разность меж¬
ду измеренным и расчетным
значениями параметров;
БР1\У — блок расчета эле¬
ментов коэффициента усиле¬
ния; БЭ — блок экстраполя¬
ции; БРМ.ЧП — блок расче¬
та матрицы частных произ¬
водных; БС — блок суммиро¬
вания для получения уточ¬
ненного значения парамет¬
ров траектории объекта
Рис. 4.10. Последовательность вычислений коэффициента усиления калмановско-
го фильтра
130
5
ПОКАЗАТЕЛИ КАЧЕСТВА
РАДИОТЕХНИЧЕСКОГО КОМПЛЕКСА
В этой главе, как и в двух последующих, посвященных моделированию и
системной оптимизации, общий подход излагается применительно к произволь¬
ному РТК. Когда необходима конкретизация, она осуществляется применитель¬
но к КСТИ по указанным выше причинам. При этом рассмотрение ведется так,
чтобы переход к любому РТК мог быть выполнен без особых затруднений.
5.1. Общая характеристика показателей качества
радиотехнических комплексов
Система используемых показателей качества существенным
образом зависит от характера решаемых задач. Так, при опти¬
мизации систем применяются более упрощенные показатели ка¬
чества, чем при оценке эффективности конкретных образцов РТК
или РТС при испытаниях пли в ходе проектирования. В то же вре¬
мя показатели качества, используемые при оптимизации, долж¬
ны сопрягаться с более полной системой показателей, предназна¬
ченных для полной оценки эффективности. С учетом данного об¬
стоятельства рассмотрим некоторые требования, предъявляемые к
совокупности показателей качества. Так, требование полноты ин¬
терпретируется как необходимое условие для конструирования
модели системы. Иными словами, система критериев, основанная
на совокупности показателей качества и примененная к абстракт¬
ной модели системы, должна обеспечивать в случае корректной
формализации задачи получения однозначного решения. Кроме
того, никакой дополнительный показатель не может привести к
получению нового решения, отличающегося от предыдущего. Ана¬
логичным образом интерпретируются и остальные требования. В
частности, устойчивость системы показателей относительно опти¬
мизируемых переменных устанавливает взаимосвязь между ва¬
риациями числовых характеристик критериальных показателей и
выходных переменных, с помощью которых описываются состоя¬
ние и поведение системы. Необходимо, чтобы малым вариациям
указанных числовых значений показателей соответствовали также
малые отклонения оптимизируемых параметров.
Перейдем к конкретному примеру—КСТИ. При дальнейшем
рассмотрении будем полагать, что решается задача определения
вектора состояния центра масс объекта. Тогда необходимо най¬
ти соотношения, определяющие переход от характеристик эффек¬
тивности функционирования системы высшего уровня (СВУ) к
некоторой мере точности оценивания вектора состояния центра
масс объекта. Таким образом, основной критерий эффективности
КСТИ заключается в необходимости обеспечения заданных точ¬
ностных характеристик радиуса-ректора и вектора скорости КА
5* 131
в произвольные моменты времени. При нормальном законе рас¬
пределения ошибок задача сводится к обеспечению заданных ве¬
личин вторых начальных моментов погрешностей указанных ком¬
понентов вектора состояния объекта.
Следует иметь в виду, что критерий точности определения па¬
раметров траекторий или компонентов вектора состояния КА не¬
полностью характеризует возможность определения траекторий
при нормальных условиях. Вследствие существенной нелинейнос¬
ти функций, связывающих параметры траекторий с геометричес¬
кими величинами и их производными, измеряемыми радиотехни¬
ческими методами, процесс отыскания искомых параметров ока¬
зывается итерационным. В связи с этим величина допустимого на¬
чального рассогласования между расчетными и истинными зна¬
чениями параметров траекторий, существенно зависящая от про¬
граммы измерений, технологии использования средств и алгорит¬
ма вторичной обработки данных траекторных измерений, непос¬
редственно связана с характеристиками сходимости итерационно¬
го процесса.
Следовательно, указанные характеристики в некоторой
степени определяют требования к КСТИ. Можно, однако, по¬
казать, что для уменьшения начального рассогласования между
параметрами траекторий могут быть использованы либо резуль¬
таты измерений на ограниченном (начальном) участке сеанса
связи, либо данные измерений дополнительного (служебного) ка¬
нала, характеризующиеся пониженной точностью. Учитывая так¬
же наличие методов оценки параметров траекторий по минималь¬
ному количеству данных [79], можно считать, что при номиналь¬
ных условиях обеспечение заданного начального рассогласования
достигается ценой незначительного увеличения ресурсов, которое
в первом приближении можно не учитывать1. Заметим, что тре¬
бование обеспечения сходимости итерационного процесса за огра¬
ниченный интервал времени оказывается наиболее критичным в
условиях воздействия помех. При этом имеет место конечная ве¬
роятность ложного уточнения начального рассогласования, что
приводит к расходимости итерационного процесса. Существенно,
что итерационный процесс в известной мере аналогичен поиску и
обнаружению сигналов. Действительно, непосредственно итера¬
ционный процесс можно отождествить с поиском сигналов,
сходимость к ложному решению соответствует ложной тревоге, а
расходимость интерпретируется как необнаружение сигналов.
Рассмотренная здесь первая группа показателей связана с
мерой эффективности решения целевой задачи СВУ. Существенно,
что и остальным РТК свойственно разделение основной функцио¬
нальной задачи на две подгруппы. Первая подгруппа связана с
получением заданных результатов линейной системой, а вторая —
1 Практически быстрота сходимости итерационного процесса определяет
объем вычислительных операций, что должно учитываться при анализе и син¬
тезе вычислительной системы (ВС).
132
учитывает нелинейные эффекты. Такое разбиение по существу оз¬
начает декомпозицию целей.
Вторая группа показателей характеризует возможность функ¬
ционирования РТК при дополнительных отягчающих условиях,
т. е. устанавливает степень устойчивости системы по отношению
к возмущающим воздействиям. Оценивается возможность полу¬
чения качественных результатов с точки зрения показателей пер¬
вой группы, например при воздействии помех по радиоканалу.
Наиболее важной является формулировка показателей приме¬
нительно к конечному результату. Числовые показатели этой
группы реагируют на существенные изменения в системе, в част¬
ности на характеристики структурной и пространственно-времен¬
ной избыточности. Соответственно и сами показатели качества
должны быть укрупненными для возможности конструктивного
описания РТК и его оптимизации. На основе ранее приведенных
формулировок показателей качества, связанных с указанными
свойствами, можно сделать вывод о наиболее целесообразной
структуре рассматриваемой группы показателей.
Ограничение общего времени, отводимого на решение целевой
задачи РТК, устанавливает общий временной баланс системы.
Если процессы радиообмена, сбора и обработки данных протека¬
ют последовательно, то общее время решения задачи 7’2=7,Об-1-
4-Тсб + Тобр, где Тоб — время радиообмена; ТСб — время сбора;
ТобР — время обработки данных.
Переход к высокостабильным линиям связи и быстродейству¬
ющим ВС позволяет значительно сократить время Т%. Однако ос¬
новная возможность этого связана применительно к КСТИ с ис¬
пользованием пространственно-временных многопараметрических
измерительных систем. При этом применение метода обработки
данных в реальном масштабе времени приводит к качественным
изменениям как в структуре систем обработки, так и во времен¬
ных характеристиках системы.
Третья группа показателей, как уже указывалось, связана с
расходом ресурсов, необходимых для создания и функционирова¬
ния РТК. Детализация указанных показателей может произво¬
диться в различных формах. В общем случае следует рассматри¬
вать приращение ресурсов, приводящее к более качественным по¬
казателям по сравнению с результатами, достигнутыми ранее.
Наиболее сложной оказывается формулировка показателей рас¬
хода ресурсов при определении целесообразности использования
существующих средств с проведением их модернизации или раз¬
работки и изготовления аппаратуры, построенной на использова¬
нии новых принципов. В этих случаях решение принимается на
основе использования методов прогнозирования научно-техниче¬
ского потенциала. Наконец, в связи с показателем расхода ресур¬
сов может быть выбран унифицированный ряд аппаратуры. При
наличии корректных данных использование показателей, опреде¬
ляющих унификацию аппаратуры, оказывается весьма целесооб¬
разным.
133
5.2. Связь между критериями эффективности функционирования
СВУ и КСТИ
Рассмотрим в качестве СВУ группу целевых КА, осуществля¬
ющих взаимодействие с рядом корреспондентов, расположенных
на поверхности Земли. Примером подобной системы может быть
совокупность КА ретрансляторов, позволяющих существенно рас¬
ширить зону действия системы вещательной связи в метровом
или телевидения. В случаях малых высот полета КА
интервал
диапазоне
временной
г
Г"
г
д I
I
I
1 1 . -
■ il\
Рис. 5.1. Характер взаимодействие
КА с 'наземными корреспондентами
взаимодействия с каждым наземным коррес¬
пондентом может быть пред¬
ставлен в виде б-функции на
оси времени (рис. 5.1). Пусть
I — общее число корреспонден¬
тов, а относительная их значи¬
мость определяется потерями
(риском), которые имеют ме¬
сто в случае потери связи или
некачественной связи с i-м кор¬
респондентом. Обозначим эти
потери как гг*. Тогда обратимся
вновь с целью конкретизации к КСТИ. Очевидно, что г г зависит от
вектора ошибок определения параметров траектории Aq, т. е.
должна быть задана функция
л=А (Дч).
1 = 1,..., Z.
Поскольку потери оказываются случайными, то в качестве по¬
казателя эффективности функционирования СВУ следует принять
суммарный средний риск .
На основании правила определения среднего значения суммы
i
случайных величин получаем r^= S гг-.
i=i
В свою очередь средний риск для каждого корреспондента
определяется соотношением
rt = J... Jr; (Л я) № (Л q) d q, (5.1)
где U/(Aq) —совместная многомерная плотность вероятностей
отклонений параметров траектории; dq— многомерный дифферен¬
циал параметров траектории.
В соответствии с рассмотренным примем в качестве критерия
эффективности функционирования СВУ условие =Cr2A0n, где
г2доп — допустимое значение суммарного среднего риска. Чтобы
получить аналитические соотношения, примем ряд упрощений,
т. е. предположим, что:
а) Потери зависят лишь от составляющей погрешности, на¬
правленной вдоль вектора скорости КА (это допущение справед¬
ливо для систем с длительным интервалом прогнозирования
[60]). В этом случае потери определяются единственным пара¬
134
метром траектории — величиной большой полуоси а. Поэтому ин¬
тегрирование в (5.1) производится лишь по этому параметру.
Связь между отклонениями вдоль пути AS и погрешностями боль¬
шой полуоси определяется соотношением
A S = 1,5 со /пр А а, (5.2)
где со — угловая скорость вращения КА; Znp — интервал прогнози¬
рования движения.
б) Погрешности определения параметра траектории а распре¬
делены по гауссовскому закону с нулевым средним значением и
средним квадратическим отклонением (CKO) о (а).
в) Функция потерь является одинаковой для всех корреспон¬
дентов, ступенчатой с порогом ASmax и принимает значение g при
| AS | >ASmax (рис. 5.2).
Рис. 5.3. Зависимость ошибки AS от
времени прогноза
г
9
^тах
Рис. 5.2. Зависимость функции
потерь от погрешности прогно¬
за
г) Корреспонденты распределены равномерно на временной
оси относительно КА, и число их п достаточно велико.
Зависимость погрешности AS от времени прогноза иллюстри¬
руется рис. 5.3, где — длительность цикла прогнозирования
(поскольку процесс циклический, достаточно рассмотреть ситуа¬
цию в пределах одного цикла). Очевидно корреспонденты, нахо¬
дящиеся в интервале бг ... Гц, не будут обслужены системой.
Пусть моменту th соответствует k корреспондентов. Тогда
~ g(n—k)=gn(l—k/ri),
a k/n = A Smax/A Sh = (5.3)
Перейдем к определению величины г2. Поменяв местами сум¬
мирование и интегрирование, вычислим интеграл (5.1) относи¬
тельно /%. Произведя нормировку AS в конце интервала прогно¬
зирования относительно CKO a(S/0, получим
X A SjJ(J (S^) И -^щах
гДе a(Sfc) = 1,5соТцСг(а).
С учетом (5.1) и (5.3), а также предположения о гауссовском
законе распределения погрешностей найдем
- _ 2gn
2 “|/2л
оо
j exp
xmax
(
Xmax
x
dx.
(5.4)
135
Интеграл (5.4) распадается на два. Первый дополняет до
единицы табулированный интеграл Лапласа
Второй интеграл вида j— exp
X
ной из условия представляется
dx после замены перемен-
как 1/2 f— ехр(—u)dx. По-
и
лученный интеграл также табулирован. Он обозначается
О° 1
Е (—*/) = f —ехр(—и) du [80].
у и
Таким образом,
1 Ф (хтах)
хтах £
1/2Т
Хтах \
~2 /
(5.5)
Проанализируем найденную зависимость от %тах. При ориен¬
тировочной оценке можно принять, что третий член выражения
(5.5) мало зависит от %тах. Поэтому получаем убывающую функ¬
цию, изменяющуюся по закону, близкому к интегралу Лапласа
(рис. 5.4), что соответствует также смыслу решаемой задачи.
Значение Гудоп определяет абсциссу Хтахдоп. Все значения
Хтах>Хтах доп удовлетворяют введенному критерию эффективнос¬
ти СВУ.
По найденному значению Ятахдоп можно определить допус¬
тимую величину СКО большой полуоси траектории оДОп(я). По¬
скольку Хтах доп' =ASmax/1,5(оТцсГдоп(а), a ASmax определяется ус¬
ловиями работы бортовой аппаратуры КА, то
О'доп (я) = 0,67 A Smax/co Т ц ^vmax доп.
Таким образом, критерий эффективности функционирования
КСТИ характеризуется неравенством о(а) ^оДОп(я) •
Покажем, что связь между показателями эффективности
функционирования СВУ и РТК может быть установлена и при
более общих предположениях относительно свойств рассматрива¬
емых функций. В частности, рассмотрим двухпороговую ситуа¬
цию, когда после достижения первого порога А5НОМ потери либо
оказываются постоянными, либо линейно зависят от разности
между фактическим значением погрешности и ASH0M. Превыше¬
ние значения модуля погрешности AS второго порога ASmax по-
прежнему приводит к полному нарушению информационных свя¬
зей.
Следовательно, гг=0 при |AS|^ASH0M; ri = ki или (| AS | —
—AShom) При AShom< I AS I <ASmax; 1\ = Ц при |AS|>ASmax, где
ki и Ц — коэффициенты, зависящие от времени.
Отметим общие свойства коэффициентов kt и определяю¬
щих re=fs\ AS|: 1) для большинства случаев 2) l^ki или
136
{.^ki AS max', 3) ki и It являются существенно положительными ве¬
личинами.
Ограничимся первоначально ситуацией, когда k и I являются
одинаковыми величинами для всех объектов, которые распреде¬
лены равномерно на оси времени и, кроме того, r = const при
AShom< | AS | <ASmax. При этих условиях зависимость rx. =f(AS),
=f(AShom, ASmax) с учетом приведенных соотношений, нахо¬
дится элементарно.
Рис. 5.4. Зависимость суммарного сред- Рис. 5.5. К определению риска при
него риска системы от величины Хтах двухпороговой функции потерь
Полагая, что объекты, начиная с m-го, имеют риск k, а начи¬
ная с р-го,— I (рис. 5.5), и производя нормировку, получаем со¬
отношение, аналогичное (5.4):
2kn AS™ax f !_ДХм
1/2л
■ 5 О
AS 4
ном
f b
AS'
max
А 5'тах
(5.6)
t
место линейное изменение
при сохранении остальных
Допустим теперь, что имеет
на участке ASHOm< | AS | <ASmax
положений. Величина погрешности вдоль пути для произвольного
/-го объекта связана с AS соотношениями: AS*/AS = i)п; ASzHOm =
ASuom/сТц', ASZmax = ASmax/сТц.
Суммарный риск, соответствующий данному участку, составляет
У] * (Р /и -f- 1) A SH0M .
i~tn
риска
пред-
MS
Гу —
^mp n
При выполнении суммирования можно принять, что р—пг +
+ 1^р—т. Тогда при р = п получаем г ltnn =kn(AS—ASHOm). Если
Же р<п, то =P/tASmax/AS(ASmax—AShom). Учитывая приве-
137
денные соотношения и интегрируя, получаем формулу для сред-
него риска
+
Г22
_ 2 knc Тц
1/ 2л;
as'
max
J (/-Д5ном)еХР
AS'
ном
2ln_ J
йд5тах
A\nax
t
2 ^max
V^^^ax-As;OM)
J r'expf-А'И.
AS' 4 '
max
(5.7)
В (5.7) содержатся такие же интегралы, как и в предыду¬
щих формулах, за исключением первого слагаемого в первом ин¬
теграле. Этот интеграл в свою очередь после замены переменной
u = Z2/2 приводится к виду J ехр(—u)du. Таким образом, по-
прежнему выражается через табулированные функции. Выполнив
преобразования, аналогичные ранее приведенным, получим
В общем случае имеет место функциональная зависимость
k(t) и /(/). Тогда на участке линейного изменения риска найдем
Г£=— S ^-Д5номУ kt.
п i=m i=-m
При достаточно большой величине р—т суммы могут быть
заменены интегралами. Наиболее рационально аппроксимировать
зависимости k(t) и /(/) полиномами (вычисление 2/г не приво¬
дит к каким-либо существенным особенностям). При недопусти¬
мости замены сумм интегралами можно воспользоваться выра¬
жениями для сумм целых степеней натуральных чисел, приводи¬
мыми, например, в [16]. Поскольку суммы или интегралы распа¬
даются на ряд выражений, каждому из которых соответствует
определенная степень аргумента, достаточно рассмотреть харак¬
тер соотношений для произвольной степени q. Пусть, например,
допустима квадратичная аппроксимация, т. е. ki = ai2. В случае
возможности замены суммы интегралом получаем
г- = — а а —— (р3— /и3).
п 4 з г
Если
найдено
р = п, то выражение пя—тя при любом q может быть
с помощью подстановки (m/n)(?= (ASHOm/AS)^. При этом
138
Покажем, что эти интегралы выражаются через табулированные
функции. В случае, когда q является нечетным числом, с помощью
указанной выше подстановки исходный интеграл приводится к
виду J-уг ехР(—и) du. Последний посредством последовательно¬
го понижения степени п приводится к Е(—х).
Если q — четное число, то также возможно интегрирование по
частям. Введем обозначения: ц = ехр(—Z2/2); dv = t~4dt. Тогда,
применяя соотношение ^udv = uv—^vdu, получаем
т. е. последовательно
понижая степень знаменателя, приходим к интегралу вероят¬
ности.
Решение для случая р<п получается в аналогичном виде.
Отметим, что рассмотренный подход является наиболее об¬
щим. В частном случае (/=1) получаем обычно используемый
способ оценки по допустимой вероятности превышения заданного
порога.
5.3. Векторный критерий эффективности функционирования
радиотехнических комплексов
В § 5.2 был обоснован переход к критерию эффективности функционирова¬
ния РТС на основе требований, предъявляемых к СВУ. В общем случае реше¬
ние этой задачи позволяет задать требуемую корреляционную матрицу оценок
рассматриваемых параметров Чгс/т. (Описываемый здесь и в § 5.2 подход от¬
носится к любой РТС, посредством которой оценивается совокупность распреде¬
ленных по гауссовскому закону случайных величин).
Найдем наиболее удобную форму представления характеристик точности
определения оцениваемых параметров. Непосредственное использование корре¬
ляционной матрицы затруднительно, так как она оказывается обратной матрице
коэффициентов системы нормальных уравнений А7 [32]. Последняя матрица
естественным образом формируется в зависимости от параметров, связанных
с условиями наблюдений.
Поэтому при решении задач оптимизации, когда приходится многократно
варьировать условиями наблюдений, необходимо на каждом шаге варьирования
производить обращение матрицы Ад для сопоставления с корреляционной мат¬
рицей. Выход из этого затруднения состоит во введении эквивалентной матри¬
цы коэффициентов системы нормальных уравнений AqT = Чг_1(7т. Таким обра¬
зом, матрица АдТ также полностью определяет требования к точности отыс¬
кания параметров траекторий. Точность каждого конкретного варианта построе¬
ния измерительной системы характеризуется аналогичной по структуре матри¬
цей Адр = 4f-Il7P. Этой матрице соответствует многомерное нормальное распре¬
деление и, следовательно, семейство корреляционных эллипсоидов. На основа¬
нии сравнения матриц соответствующих заданным и реализуемым точност¬
ным характеристикам, может быть сделано суждение об удовлетворении тре-
139
Рис. 5.6. Соотношение между за¬
данным ;и фактическим реализуе¬
мым рассеянием совокупности
оцениваемых параметров
бований по точности. Действительно, эллипсоид рассеяния, характеризующий за¬
данные требования, должен включать в себя соответствующий эллипсоид, по¬
строенный .применительно к конкретному варианту структуры измерительной
системы (рис. 5.6). При дальнейшем рассмотрении целесообразно исключить
случай касания эллипсоидов. Это всегда можно сделать, увеличив оси задан¬
ного корреляционного эллипсоида (рассея¬
ния) на сколь угодно малую величину, что
с практической точки зрения не приводит
к каким-либо изменениям. Рассмотрим те¬
перь систему уравнений;
AqTAQ7.Aq= 1; (5.9)
AqTA9PAq=l,
каждое из которых является уравнением
корреляционной поверхности. С учетом
принятого допущения необходимое ус¬
ловие выполнения заданных требова¬
ний заключается в несовместности си¬
стем уравнений (5.9), т. е. в отсутствии у
рассматриваемых эллипсоидов общих то¬
чек. Таким образом, любые значения
удовлетворять обоим уравнениям (5.9).
Обозначив Pqr = AqTAqrAq; Dqp = AqTAgpA^, получим запись условия несов¬
местимости уравнений
Dqp DqT. (5.10)
Нетрудно убедиться, что различным знакам неравенств в (5.10) соответ¬
ствуют большие или меньшие размеры заданного эллипсоида по сравнению с
реализуемым измерительной системой.
В рассматриваемом случае необходимо выполнить неравенство Dqp>DqT.
Отсюда следует, что
D'q = Dqp DqT^0. (5.11)
Таким образом, квадратичная форма Dqp—DqT должна быть положительно
определенной. Как известно [11], для положительной определенности квадра¬
тичной формы необходимо и достаточно, чтобы все определители матрицы фор¬
мы, опирающиеся на главную диагональ, были бы положительны, т. е. последо¬
вательность миноров вида
вектооа q не должны
Л
II
G1 1 а12
л 1 all- -a'lm
= а'и;
а21 а22
] ат1' ’ -атт
удовлетворяла системе неравенств Л1>0, Л2>0,..., Лт>0. (Предполагается, что
число определяемых параметров траектории равно т.)
В рассматриваемом случае матрица исследуемой квадратичной формы Azg =
= Agp AqT.
Отметим, что указанные условия по форме записи аналогичны критерию ус¬
тойчивости системы автоматического регулирования при анализе устойчивости
непосредственно по характеристическому уравнению системы.
140
в рассматриваемом случае достаточно лишь установить положительность всех
диагональных элементов матрицы А'д, а также проверить выполнение условия
[Д'д|>0, где |А'д | — определитель матрицы A'q. Такая ограниченная проверка
условий положительности квадратичной формы AqTAzgAq следует из того, что
А'д обладает некоторыми свойствами матрицы, составленной из скалярных про¬
изведений векторов. Тогда невыполнение условия положительности | А'д| в из¬
вестной мере эквивалентно наличию линейной зависимости указанных векторов.
Отметим, что указанные соотношения целесообразно использовать при получе¬
нии аналитических оценок. При использовании численных методов необходимо
■непосредственно сравнивать собственные числа матрицы. Этот способ детально
рассматривается в гл. 7. Следует считать, что изложенный подход является
обобщением представления о наблюдаемости [49]. Действительно, в отличие от
заключения о принципиальной возможности оценки параметров, производимого
при оценке наблюдаемости, рассматривается возможность определения траекто¬
рий при заданном уровне точности.
Покажем теперь, что изложенный подход 'можно распространить на более
общий случай смещения оценок при условии, что обработка измерений по-преж¬
нему производится методом наименьших квадратов. Известно, что погрешности,
проявляющиеся как систематические, существенным образом сказываются на
точности определения траектории.
Функциональные связи между систематическими погрешностями измерений
и смещениями оценок параметров траекторий могут быть найдены на основе
общего выражения для оценки величин, найденных с помощью метода макси¬
мального правдоподобия [.33].
Имеем
A q = ( JT Р j)~‘JT Р А у, (5.12)
где J—лХ/и-матрица частных производных от измеряемых величин по опреде¬
ляемым параметрам; п — общее число измерений; т — число параметров траек¬
торий; Р — весовая матрица измерений; Aq и Ау—т- и л-мерпые векторы по¬
правок траектории и измеряемых величин соответственно.
Пусть исходный вектор поправок к измерениям характеризуется смещени¬
ем Ау. Тогда, используя общие правила определения математического ожидания
линейной комбинации случайных величин, получаем
Aq = CAy, (5.13)
где C=(JTPJ) !JTP.
Таким образом, непосредственное определение смещения оценок при до¬
статочно большой размерности вектора отыскиваемых параметров приводит к
громоздким вычислениям. В то же время для получения практических резуль¬
татов смещение оценок следует определять многократно. Это связано с тем, что
закон изменения систематических погрешностей на интервале наблюдения ока¬
зывается произвольным. При решении экстремальных задач нужно найти наи¬
более неблагоприятное воздействие при заданных составе измерений и харак¬
теристиках случайных погрешностей. Кроме того, в реальных условиях система¬
тические погрешности известны лишь с точностью до знака. Такие погрешности,
которые следует считать квазисистематическими, могут быть представлены в
виде произведения 7CS(/), где S(/)—детерминированная функция времени, а
К — случайная величина, принимающая значения +1 и —4 с равными вероятно¬
141
стями. Поскольку знаки рассматриваемых квазисистематических погрешностей
для различных групп измерений можно считать независимыми, общее число
возможных комбинаций погрешностей при учете только знаков составляет 2Z,
где I — число групп измерений, участвующих в процессе определения траекто¬
рий. С учетом указанного вектор смещения оценок является дискретной слу¬
чайной величиной, с равной вероятностью находящейся в одном из 21 состоя¬
ний.
Следовательно, при оценке характеристик точности определения траекторий
необходимо рассматривать две составляющие погрешности, одна из которых
обусловлена действием случайных, а другая — квазисистематических погрешно¬
стей1. Если же в алгоритме обработки данных предусматривается компенсация
систематических погрешностей, то это приводит к росту случайной составляю¬
щей погрешности. В связи с этим при обосновании алгоритма обработки необ¬
ходимо располагать данными о воздействии обоих .видов погрешностей.
Существенно, что на основе анализа приведенных отношений могут быть
сделаны выводы о преимущественной ориентации вектора Aq. Для этого пред¬
ставим уравнение (5ЛЗ) в каноническом виде. Полагая, как и ранее, что Р —
диагональная матрица, а также что Ау/сг не зависит от i, находим
Ц(ду/ддл)р^
. - Л у i=i 1
Д % = , (5.14)
У} (dytldq^Pi
?—1 3
&qK.— ориентация /-й собственной оси.
Отсюда можно видеть, что вектор Aq ориентируется в направлении той
собственной оси, рассеяние по которой максимально.
Остановимся на влиянии зависимости Ау(/) на эффективность оценок па¬
раметров траектории. При этом рассмотрим два крайних случая. В первом
случае предположим, что имеется измеритель с преимущественным откликом на
некоторый параметр траектории. Будем полагать также, что заданы две функ¬
ции непрерывного аргумента: dy(t)/dqi(t) и &y(t). Нетрудно видеть, что систе¬
матические погрешности оказывают наибольшее влияние, если указанные функ¬
ции близки к линейно-зависимым, т. е.
| т _ I / /' т т _
f (ду/dqi( Д y(l) dt\ I f (ду / dq J2 di f [Д у (z)l2 dt « 1,
|б I/ ’ б б
где Т — интервал наблюдений.
Это условие, очевидно, выполняется, если рассматриваемые функции подоб¬
ны, т. е. dy{t)ldqi (t) = K&y(t).
В общем случае можно считать определенным скалярное произведение
dy(t)/dqi(t) и AZ/(Z), заданных на интервале [О, Г]. Обозначим это скалярное
произведение (dy/dqi(t)Ay[t)). Мерой влияния систематических погрешностей
является эквивалентный направляющий косинус между рассматриваемыми век¬
1 В дальнейшем для простоты термин «квазисистематические» заменяется
на «систематические».
142
торами, преобразуемый посредством множителя, равного отношению норм обо¬
их векторов.
Соотношение для направляющего косинуса получено в предположении о не¬
зависимости р от времени. Если это условие не выполняется, то следует обра¬
зовать скалярное произведение функций (ду,/дqi)р'/2 и \урЧ2. Подобное пред¬
ставление может быть распространено на случай произвольной матрицы Ар.
При этом скалярное произведение характеризует степень влияния систематиче¬
ских погрешностей на точность определения параметра qt.
Во втором случае имеются измерители с близкими величинами S (дуг^^Х
1=1
Хр?/2 для всех групп измерений и, кроме того, значения Др одинаковы с точ¬
ностью до знака. Знак Др изменяется случайным образом от одной группы
измерений к другой. Подобная модель достаточно близка к реальным услови¬
ям и соответствует наличию упомянутых систематических погрешностей. При
достаточном числе групп (каждая группа соответствует измерениям одного ви¬
да, проводимым на одной РТС) систематические погрешности нормализуются.
При этом вектор Aq также представляет собой совокупность нормально распре¬
деленных случайных величин. Поэтому для отыскания характеристик точности
определения вектора Aq с учетом систематических погрешностей достаточно
найти .матрицу вторых моментов соответствующих погрешностей.
Обозначим систематическую погрешность измеряемого параметра как
Д//р. Используя предположение о равновероятных положительном и отрица¬
тельном знаках погрешностей, получаем, что дисперсия этой погрешности Ду2Р.
При формировании вектора-столбца правой части системы уравнений МНК эта
погрешность умножается на коэффициент
где i'ir — число измерений, проведенное /-й РТС на r-м сеансе связи.
После выполнения суммирования по s РТС и сеансам связи получим Dp =
s и
= 2 S dplr.
/=1 Г=1
Соответственно погрешности вектора-столбца правых частей системы урав-
с
нений МНК составляют ДЬ= S DpAyp> где с — число измеряемых параметров.
р=1
Следовательно, вектор ДЬ формируется с помощью матрицы D размер¬
ностью тХс. Корреляционная матрица вектора ДЬ легко может быть найдена
на основе предположения о взаимной независимости составляющих системати¬
ческих погрешностей. Выполнив соответствующие действия, получим
(Д Ь, ДЬ;) = 2 D‘-P D/P Д Ур ’ (5.16)
Р=1
На основании (5.16) нетрудно перейти к корреляционной матрице выход¬
ных параметров РТК. Следует лишь воспользоваться известным соотношением
[33], связывающим корреляционные матрицы входных и выходных векторов
после линейного преобразования. При линейном преобразовании векторов у =
= Вх. Корреляционная 'Матрица векторов у и х связана соотношением
= BVXBT.
143
Соответственно с учетом симметричности .матрицы А получаем соотношение
для корреляционных матриц
'F3kc = A-1 Ч'ьксА-1 , <5-17>
где индекс кс указывает на то, что рассматривается влияние квазисистематиче-
ских погрешностей. Поэтому = А-1+ ЧГ<7 Кс. Полученное соотношение позво¬
ляет оценить результирующую погрешность оценки вектора q с учетом дейст-
ния квазисистематических погрешностей.
5.4. Пропускная способность
радиотехнических комплексов
Полная оценка •.пропускной способности РТК сопровождается
применен нем достаточно громоздких соотношений. Приведем ме¬
тоды предварительной оценки возможностей системы при уточне¬
нии ее структуры. Результаты, которые могут быть получены при
использовании предлагаемых методов, служат лишь для выбора
принципов построения системы с учетом обеспечения заданной
uponускной спосо-б пости.
Для конкретизации предположим, что наземная система со¬
держит сеть измерительных пунктов (ИП), средства связи, обра¬
ботки информации и управления системой. Космические аппара¬
ты характеризуются квазидетерминированными траекториями из-
за вариаций периода обращения, поэтому участки прямой види¬
мости КА 1и ИП располагаются случайным образом на шкале вре¬
мени.
Анализ пропускной способности возможен как (при детерми¬
нированном, так и случайном описании взаимодействия РТК с
КА. Детерминированный подход, хотя и позволяет получить при
определенных условиях достаточно точные результаты, в то же
время обл ад нет существе! иной огр ани четностью. Общие выводы
могут быть получены лишь при использовании случайных моде¬
лей. В связи с этим будем в дальнейшем пользоваться представ¬
лениями теории систем массового обслуживания (СМО).
Описание функционирования СМО должно производиться с
учетом целевого назначения оистем. В этой связи могут рассмат¬
риваться единые (универсальные) и специализированные СМО.
Математический аппарат теории СМО в наибольшей степени при-
спосоолен для описания единых СМО. Последние отмечаются
оольшим 'числом обслуживаемых объектов и отсутствием связей
между требованиями для различных КА. Однако наличие неод¬
нородных объектов усложняет анализ единой СМО.
Зависимость показателей работы системы от свойств входя¬
щих в нее элементов также определяет структуру модели. Если
в системе есть доминирующий элемент, она может считаться не-
Р аз ветвлен ной. В противном случае имеет место сеть обслужива¬
ния. Наконец, важной характеристикой является число РТС, вза¬
имодействующих с одним КА. По этому признаку система может
осуществлять одноразовое или многоразовое обслуживание.
144
•Следует 'считать, что аналитические «модели целесообразны
для систем, характеризующихюя однородностью обслуживаем ых
объектов, т. е. КА, и обслуживающих объектов, т. е. РТС, ‘отсут¬
ствием «приоритетности и неразветвленностью, (когда пропускная
способность определяется лишь РТС. Относительно других пока¬
зателей стратегии обслуживания (могут быть сделаны различные
предположения. Однако во .всех 'случаях аналитические «модели
соответствуют применению в системе простейших планов.
Пропускную способность «можно характеризовать числом «об¬
служиваемых объектов М (при фиксированной «вероятности отказа
в обслуживании Рот или величиной Рот при фиксиров«а(нно1М М.
Учитывая трудности априорного задания 7W, следует считать пер¬
вую характеристику (пропускной способности (более предпочтитель¬
ной. Таким образом, задача оценки пропускной способности сво¬
дится к отысканию зависимости Рот от числа обслуживающих
объектов «и уч1итыв«ае'мых характеристик СМО.
В рамках аналитического рассмотрения целесообразно исполь¬
зовать две (модели.
Первая модель основана на предположении «о стохастическом
потоке требований на обслуживание. Как интервалы между смеж¬
ными требованиями, так и длительности обслуживания распреде¬
лены по .показательному закону со 'средними значениями Х_1о и
Тоб соответственно. Время обслуживания тОб включает в себя как
сеансы связи, так и интервалы (между ними. Принимается также,
что обслуживание циклическое с (максимально допустимьвм интер¬
валом между смежными обслужи в ан и ими Тц.о. Тогда % = АгТц.0“1,
где N — число РТС в СМО. При обслуживании КА несколькими
РТС средняя частота выполненных системой требований в случае
непрерывной загрузки составляет щу = МгОб-1. Среднее относитель¬
ное время загрузки системы
сро ~ Нм = тОб N 1 Тц.о.
В «системах с высокой пропускной способностью необходимо
выполнение условия РОТ<С1. Отсюда следует, что и фо также дол¬
жно быть много меньше единицы, т. е. система должна большую
часть времени находиться в состоянии готовности. Дополнитель¬
ное предположение заключается в том, что М»1. Это позволяет
считать СМО разомкнутой, т. е. имеющей бесконечно большое
число обслуживаемых объектов.
Принятые 'Предположения позволяют оценить пропускную спо¬
собность на основе представления о классической разомкнутой
СМО с рядом обслуживающих приборов [29]. Однако рассматри¬
ваемая система отличается от классической отсутствием в явном
виде накопителя, содержащего объекты, ожидающие обслужива¬
ние. Рациональное предположение о стратегии обслуживания за-
кл ючается в дин амическом цикле обслужив ания. Длительность
реального цикла обслуживания находится в пределах Тцтш^
^Т'ц^Гц.о, где интервал Тцты связан с перегрузкой СМО. Та¬
ким образом, «в системе вводится интервал ожидания тож, причем
145
тОжтт = 0, а Тожтах = ^ц.о—7\min. Тогда отказ в оболуживании на¬
ступает, когда интервал ожидания тож, гири котором вое приборы
(РТС) оказываются занятыми, превысит тОжтах. Указанное пред¬
положение существенно отличается от «классического представле¬
ния. Однако если принять предположение о наличии некоторой
дисциплины обслуживания, .заключающееся в преимущественном
обслуживании таких объектов, которые 'наиболее долго находят¬
ся в ожидании, то «можно в первом приближении (использовать со¬
отношения, (принятые в [29] .Очевидно также, что за счет введе¬
ния Тож интенсивность потока требований возрастает и состав¬
ляет
— 40 Тож/Тц.о)
где Тож — ■ среднее значение интервала ожидания.
Найдем теперь вероятность события тож>Тожтах. Учитывая
принятое предположение об отказе в обслуживании, определяем:
/3от = ^(%ж>%жтах) = (Л,"^Л,/№(1— Ж ехр[ — (pw —4%жтах1
— 1
А) =
1=0
(5.18)
5
хр — Хц №1, цдг — суммарная интенсивность источника.
Экспоненциальный множитель в выражении (5.18) характери¬
зует уменьшение вероятности Рот вследствие введения интервала
ожидания.
Вторая модель основана на использовании элементов теории
импульсных потоков. Пусть требования на обслуживание по-преж¬
нему поступают циклически с максимальным периодом Тц.о. Ин¬
тервал обслуживания включает (в себя несколько сеансов связи,
разделенных подынтервалами. Таким образом, время обслужива¬
ния тОб, являющееся случайным, характеризуется средним значе¬
нием: Тоб = с (т+тпр), где с — число требований, приходящееся на
КА; т и тпр — средние длительности сеанса связи и интервала
между смежными сеансами соответственно.
Если k обслуживаемых объектов следуют один за другим, то
они отказа в обслуживании не получают (рис. 5.7). При этом
можно считать, что имеет место элементарный случайный им¬
пульсный поток с интенсивностью 'k = ckT}X,0~x и средней длитель7
ностью т. При N РТС Лл’ = лА-1. Остальные характеристики мож¬
но полагать ле зависимыми от N. Предположим также, что про¬
Рис. 5.7. Многосеансное обслуживание КА
146
исходит суммирование п элементарных случайных потоков. При
этом общее число обслужив-аемых объектов N = nk. Данная мо¬
дель СМО предусматривает наличие частично опт!И1М,алы-1ото пла¬
на. План 'можно считать оптимальным для обслуживания k объ¬
ектов, если требования обр-азуют элементарный поток. Планиро¬
вание не распространяется на композицию элементарных потоков
и поэтому в целом не является оптимальным.
Совпадение, по крайней 'мере, двух импульсов суммарного по¬
тока приводит к отказу >в обслуживании. В случае стационарных
ПОТОКОВ МОЖНО считать, ЧТО Л>т = Xm,r An,r, НДС %т,т И Fm>r—МВТе-
матическое 'ожидание длительности .импульсов и частоты следова¬
ния потоков совпадений, образованных .в результате перекрытия
во 'времени не менее чем г импульсов. В частности, при г = 2 по¬
лучим:
Fm,r = n(n—1) (|л)2т (1 —р.т)п 2;
1 1 1 [(1 Ц Т )п + П |Ы т (1 — р т ),г~1 ]
Ц?(1—^7)П“2
(5.19)
(5.20)
Отметим, что использование соотношений (5.19) и (5.20) так¬
же приводит к достаточно приближенным результатам, так как
требуется унификация параметров элементарных потоков. Чтобы
сравнить оба метода оценки пропускной способности, необходимо
сопоставить исходные данные, используемые при расчетах по фор¬
муле (5.18) и по формулам (5.19), (5.20). Это целесообразно сде¬
лать для простейшего случая ?V=1.
Рассмотрим сначала первый -метод. Положив в (5.18) М=1,
получим, что вероятность отказа в обслуживании
от= 1 exp [ (р X) тож тах]• (5.21)
Ввиду малости отношения Тож'/^ц.о примем, что
К = Хо (1 -J- tojk/7\j 0) = £Л4Тц.о (1 4- тож/Тц.о) •
Из приведенных соотношений видно, что имеется оптимум по
времени ожидания. Для его отыскания предположим, что значе¬
ния Т0;:< II Тож max ПрОПОрЦИОНаЛЬНЫ, Т. С. Тож max =/^Дож, ГДС k\ > 1 .
После указанной замены можно найти 'минимальное значение/4)Т
дифференцированием (5.22) по тож и приравниванием полученно¬
го выражения нулю. Выполнив эти действия, получим
^ОЖ Opt
1
Фо
(5.23)
где (ро = А-о/р. _
Подстановка в (5.21) тОЖо1Я из (5.23) позволяет получить со¬
отношение, зависящее лишь от интенсивностей потока требований
на обслуживание и потока на выходе СМО.
Для анализа соотношения, относящегося ко второму методу и
характеризующего вероятность отказа из-за совпадения случайных
147
импульсных потоков Р20Т, установим, что P20T является функцией
произведения р = р,т. Действительно, перемножив правые части
(5.19) и (5.20), определим 1—Ргот=(1—р)™-1,^—р + тр). Изфор-
мулы видно, что, как и 'следовало ожидать, при п=\ вероятность
^>2от==0- _
Полагая, 'как и раньше, Af=l, -находим ц^ (т + тпр)-1 и, следо¬
вательно, р<1. Здесь тПр—«интервал между смежными сеансами
связи, определяемый из условия с(т + тпр) ~тОб. Поскольку k =
= Гц.о/тОб, величина п может быть представлена в виде п =
= оМТ~\.о (т + Тпр) .
Таким образом, соотношение, определяющее Ргот, зависит от
тех же исходных величин, что и Рют. Дополнительной величиной,
задаваемой при отыскании Ргот, является тпр. Указанный подход
может быть применен и к случаю произвольного' N.
Следовательно, использование аналитических моделей позво¬
ляет дать ориентировочную оценку пропускной способности РТК
для различных ситуаций.
5.5. Характеристика ресурсной эффективности
радиотехнических комплексов
Как указано в § 5.1, показатели расхода ресурсов являются
конкурирующими относительно показателей эффективности функ¬
ционирования. В ряде случаев рациональный вариант -построения
РТК определяется заданием характеристик расхода ресурсов раз¬
личных видов. Так, при одной и той же результирующей стоимо¬
сти РТК за счет перераспределения, видов расхода ресурсов мож¬
но получить существенный выигрыш в -показателях -качества си¬
стемы. В соответствии с этим рассмотрим различные виды ресур¬
сов, расход которых характерен для РТК. Ресурсы -включают в
себя как различные материальные ценности, которые могут быть
количественно оценены в эквивалентном стоимостном выражении,
так и виды ресурсов, не имеющие явной стоимостной трактовки.
Последние выражаются косвенно через стоимостные эквиваленты,
связанные с мерой создаваемых полезных эффектов. Любое уве¬
личение качественных показателей системы сопряжено с допол¬
нительным расходом ресурсов. Поэтому целесообразно рассмат¬
ривать различные виды ресурсов, расходуемые в РТК, примени¬
тельно к конкретным показателям системы. Наиболее просто уста¬
новить .связь энергетических ресурсов с энер1гетическими парамет¬
рами радиолиний, которые, в частности, определяют потенциаль¬
ную точность измерения параметров движения КА.
Следующий -вид ресурсов связан с созданием и сохранением
интервалов пространственной и временной когерентностей. В ча¬
стности, большой пространственный разнос между РТС, привле¬
каемыми к -измерениям по КА, позволяет повысить эффективность
функционирования РТК и осуществить маневр разнесенными РТС»
148
Временной разнос .между РТС приводит к .повышению качествен¬
ных показателей при мало/м расходе ресурсов. Однако при этом
снижается оперативность определения траекторий.
Специфический вид ресурсов расходуется при геодезической
привязке фазовых центров антенн измерителей. Расход ресурсов
этого вида существенно зависит от (Классов геодезической сети в
районе (проведения измерений и наиболее велик для мобильных
(подви жн ы х) И)3 мер и т е л е й.
Особую группу образуют ресурсы, затрачиваемые на повыше¬
ние устойчивости системы к внешним и внутренним нарушениям
условий функционирования. Основой для повышения устойчивости
функционирования системы являются различные виды избыточно¬
сти, вводимые в структуру РТК, РТС или сигналов. Повышение
избыточности сопровождается дополнительным расходом ресурсов.
В общем (целенаправленный (расход ресурсов в РТК повыша¬
ет качество функционирования за счет улучшения .пространствен¬
но-временных свойств РТС, энергетических характеристик радио¬
линий, а также благодаря возрастанию инструментальной точно¬
сти РТС и точности привязки измерений в пространстве и вре¬
мени.
Установим /связь затрачиваемых ресурсов с конкретными ис¬
точниками их расхода. Введем понятие операции, представляю¬
щей собой совокупность мероприятий, необходимых для обеспе¬
чения функционирования системы. В зависимости от вида опера¬
ций различают степени периодичности расхода ресурсов. Приме¬
рами операций являются:
1. Обеспечение принципиальной возможности повышения ка¬
чественных показателей в результате выполнения поисковых ис¬
следований (См) *.
2. Разработка и изготовление образца аппаратуры РТС и ее
элементов с учетом серийноспособности, стандартизации и уни¬
фикации аппаратуры и сигналов (Спн). Для наземной аппарату¬
ры периодичность .расхода (ресурсов определяется средним време¬
нем работы, (которое зависит от морального или естественного из¬
носа. Применительно к бортовой аппаратуре (СПб) периодичность
характеризуется эквивалентным периодом функционирования КА,
зависящим от его целевого назначения.
3. Функционирование наземной системы, (расход энергии и ре¬
сурсов обеспечивающих устройств (Сэн). Периодичность опреде¬
ляется циклом обслуживания.
4. Выведение на заданную траекторию бортовой аппаратуры
РТС и обслуживающих устройств (Св). Периодичность совпадает
с периодом запуска КА.
При определении результирующей стоимости (следует учиты¬
вать периодичность операций. Если за основу принять период об¬
новления наземной РЭА системы и обозначить как Т с соответст-
* Буквой С с соответствующим индексом обозначим расходы ресурсов при;
выполнении операции.
149
вующим индексом «периоды других операций, т. е. Тм, Тэи, ТЛб, Тв,
то расход ресурсов КСТИ за время ГПц
С г — ^пн с 4- С -k С Тпи -L АА \ С Тпн ' С Ттш \
гр ипн I сэн „ I М I Спб I кв ,
пн Тм 'этт \ Лгб 'в /
где М—(Среднее число одновременно функционирующих КА.
Удобно представить 'соотношения 'между источникасми расхода
ресурсов и операциями в .виде матрицы ресурсов, на пересечении
строи и столбцов которой фиксируется расход ресурсов заданно¬
го источника расхода (строки матрицы) и конкретной операции
(столбцы матрицы). Общий расход ресурсов равен -сумме всех
элементов матрицы. В табл. 5.1 в качестве иллюстрации приве¬
дена матрица ресурсов применительно к КСТИ. Элементами мат¬
рицы являются двоичные числа, определяющие наличие (1) или
отсутствие (0) расхода ресурсов. Конкретные значения элементов
матрицы ресурсов в реальных условиях определяются ла основе
анализа процессов проектирования, изготовления и эксплуатации
РТК и РТС.
Рассмотренное представление о расходе ресурсов широко ис¬
пользуется при оптимизации (см. гл. 7).
Таблица 5.1
Виды ресурсов, связанные с улучшением
показателей КСТИ
Операции, при которых
расходуются ресурсы
А
-Б
в
г
Пространственно-временные характеристики измери¬
телей
1
1
1
1
Пространственно-временной разнос между группами
измерений
0
0
1
0
Инструментальная точность измерителей
1
1
1
1
'Пространственно-временная привязка к опорным се¬
тям
1
0
1
1
П р п меча п и е: Л — обеспечение принципиальной возможности повышения качест¬
венных показателей: 15 — разработка и изготовление образцов РЭА системы; 13 — обеспече¬
ние функционирования РЭА; Г — обеспечение вывода па траекторию бортовой РЭА ц об-
елмжпвахлцнх устройств.
6
МОДЕЛИРОВАНИЕ РАДИОТЕХНИЧЕСКИХ КОМПЛЕКСОВ
6.1. Основы общего подхода к моделированию систем
Как уже указывалось, процесс создания сложных систем со¬
стоит из ряда этапов. Часть из них связана с эвристическими
представлениями и соответственно не 'поддается математическому
-описанию. Так, структура системы воспроизводится на интуитив¬
но
.ном или ‘полу'и.нтуити.в'ном уровне, конкретные параметры, «позво¬
ляющие ’Перейти от «структуры к «системе, выбираются с .помощью
математических 'методов. Однако уровень детализации, соответ¬
ствующий переходу от эвристических методов -к -математическим,
определяется в том числе и самой РТС, в частности ее сложно¬
стью. Это, очевидно, не единственный признак, определяющий
место перехода к формальному описанию. Достаточно сказать, что
уровень автоматизации системы, роль человека-оператора в ее
функционировании существенно определяет возможности матема¬
тического описания. Многообразие подходов к проблеме матема¬
тического описания вызывает необходимость рассмотрения «проме¬
жуточной области описания систем, где ла равных основаниях
правомерно использовать «как эв«рнстический, так и формально¬
логический подходы. Следует учитывать, также распространение
математических методов на ситуации, ранее не поддающиеся фор¬
мальному рассмотрению, в частности вследствие развития пред¬
ставлений о нечетких множествах.
В этой связи весьма важным оказывается вопрос соотноси¬
тельности моделей и исследуемых систем. При моделировании
копир етн о й систе м ы и екоторо й совокупи остью модел е й в а жн ым
оказывается лишь соответствие 'между исходным образцом—ре¬
альной системой и его отражением. При этом имеет место прин¬
цип эквивалентности моделирования, заключающийся в том, что
каждая последующая модель должна быть проще предыдущей во
всех аспектах, за исключением исследуемого. Это, конечно, отно¬
сится и к модели, 'наиболее близкой к прототипу.
Из приведенного рассуждения можно сделать следующие вы¬
воды.
Анализ конкретной системы производится индуктивн«ым мето¬
дом. В ходе моделирования реализуются более простые модели
исключением второстепенных деталей. Вследствие этого дости¬
гается больший уровень общности. При этом каждая последую¬
щая модель ряда становится более абстрактной и, следовательно,
в большей степени поддается формализации.
Очевидно, указанный путь далеко не единственный. Накопле¬
ние и обобщение, являющиеся отражениями некоторых конкрет¬
ных «систем, позволяют построить обратный процесс. Суть его со¬
стоит в том, что общие модели принимаются за основу при созда¬
нии новых систем или проверке существующих. Соответственно
ранее рассмотренный процесс приводит к номиналистическим,или
Н-моделям, переход от общих моделей к частным «соответствует
реалистическим, или Р-моделям [8]. При этом естественно рассмат¬
ривать различные уровни абстрактности моделей, где большему
порядковому номеру соответствует более высокая степень абст¬
ракции. Тогда указанную индексацию можно рассматривать как
некоторую степень системности одной «модели относительно дру¬
гой. Процесс 1мюделироВ1ания систем на 'различных уровнях и с
различными целями иллюстрируется рис. 6.1, где Sact — исход¬
ная система степени а, функционирующая в момент t. Очевидно,
151
что модель всегда -можно рассматривать как систему. Модель
.Sact реализует некоторый «выходной эффект yact, который приво¬
дит к цели Vact- Полученная (ветвь диаграммы (левая часть ри¬
сунка) ^соответствует анализу, т. е. движению от систем к целям.
С помощью проектирования «можно перейти к другим целям
вообще говоря, на другом уровне системности. Соответственно в
средней части диаграммы проходится в обратном порядке путь от
целей к системе, т. е. решается задача синтеза. При этом в той
или мной степени используется опыт, закрепленный в р-анее реа¬
лизованных системах S^p с соответствующими выходными функ¬
циями уур и целями VYp. Двусторонние связи определяют процесс
обучения, так как опыт, накопленный в системе (SYP, у^р, Vvp),
обогащается за счет новых
данных. Указанное символизируется
правой и средней частями диаграм¬
мы на рис. 6.1. Рассмотренный
подход, не нуждается в специаль¬
ном выделении понятия формали¬
зации. При установленном прави¬
ле индексации степени системности
неформализованных описаний долж¬
ны быть лишь установлены правила
некоторого языка. Если его предло¬
жения не будут противоречивыми, то
они могут быть положены в основу
описания, которое согласно изло¬
женному в [8] следует считать фор¬
мализованным.
Обобщенная
структур-
систем
Рис. 6.1.
ная схема моделирования
Следует также обратить внимание на возможность достаточно
простого перехода к иерархическим системам при использовании
указанных представлений. Действительно, ’более высокая степень
системности обеспечивает переход к описанию на более высоком
иерархическом уровне за счет объединения систем. Поэтому есте¬
ственный путь развития представлений о степени системности свя¬
зан с расширением объема описываемой системы.
Характерной особенностью моделирования является также мо¬
дульный принцип построения модели. Он следует из определения
P-моделей и свойств моделирования ’(ом. диаграмму рис. 6.1).
В самом деле, накопление опыта приводит к многократному по¬
вторению аналогичных ситуаций. Последнее в свою очередь при¬
водит к мысли о неизбежности сокращения объема выполняемых
действий с помощью «обращения к подпрограмме». Таким обра¬
зом, модульный принцип моделирования (свойствен высокому
уровню системности и наиболее целесообразен для больших си¬
стем.
Рассмотрим теперь в качестве иллюстрации одну из задач мо¬
делирования, связанную с оценкой общих свойств системы, таких,
как сложность, эквивалентная стоимость, характеристика целост¬
ности и др. [15]. Указанная задача может быть сформулирована
применительно к системе, описываемой бинарными отношениями,
152
т.'е. к системе, элементы которой представляют собой подсистемы
«вход—выход» (При наличии дискретного представления всех ис-
пользуемых переменных. Однако приводимые далее определения
имеют 'более широкую область применения. При некоторой моди¬
фикации определения могут относиться практически к любой си¬
стеме.
Для возможности конструктивного описания введем некоторые
вспомогательные определения. Определим предикаты Р2, •••> Рп
как объекты математической логики. Если ограничиться классиче¬
ской логикой, то множество истинности 'состоит лишь из двух эле¬
ментов, один из которых является истиной, а другой — ложью,
которые обозначим как 1 и 0. Введем произвольное множество М.
Пусть на этом множестве определена п-арная функция со значе¬
ниями на множестве {0, 1}. Тогда эта функция называется и-ар-
ным предикатом на М [34]. Совокупность последовательностей
{mb т2, ..., mn}, для которых Р(т\, т2, ..., mn) = l, называется
п-арным отношением на тИ, отвечающем предикату. Справедливо
и обратное предположение. Если задано и-ар ное отношение, то,
определив для него истинные и ложные последовательности, по¬
лучим п-арный предикат, отвечающий соответствующему отноше¬
нию. Таким образом, n-арные предикаты и /г-арные отношения
находятся во взаимно-однозначном соответствии.
Моделью ф называется совокупность множества М с задан¬
ными в нем предикатами. Множество М 'представляет собой но¬
ситель модели, а предикаты Р2у ...у Рп являются структурой
модели.
Для оценки свойств системы рассматриваются две модели: фа
и фь. Первая из этих 'моделей определяет свойства исследуемой
системы при ее внешнем рассмотрении, т. е. в виде «черного ящи¬
ка». Вторая модель характеризует строение системы при ее внут¬
реннем рассмотрении. Для описания 'системы должно быть зада¬
но взаимно-однозначное соответствие между элементами носите¬
лей моделей фа и фь. Поэтому вводится представление
о специальном предикате Р0(фа, фь), который равен еди¬
нице, если преобразование фа-^ф& имеет указанное соответст¬
вие, и нулю в противоположном случае. Это определяет функцио¬
нальную целостность (эмерджентность) системы. Содержательная
сторона указанного представления состоит в том, что объединение
обе их моделей по ср е дств ом уст ан ов л ени я вз а им н о - о д н озн а чн ого
соответствия между элементами носителя связывается с интерпре¬
тацией системы и поэтому может рассматриваться как семанти¬
ческая '.категория. Иначе говоря, взаимная интерпретация меж¬
ду компонентами двух моделей означает проектирование одной
модели в другую1. Преобразование моделей фа->фб состоит из
последовательности эквивалентных преобразований фа-^фа!-^
1 Приведенное здесь определение модели заимствовано из теории алгебраи¬
ческих систем и имеет несколько другой смысл по сравнению с используемым в
начале настоящего параграфа.
153
••• ->ф&. На каждом из этих этапов -про исходит эквива-
лентирование системы, 'что -означает, что система S с семантиче¬
ской моделью ips=(4'a, фд, Ро} заменяется системой S с семанти¬
ческой моделью ips, элементы которой связываются с исходными
системой согласующих ф'унжтхий. Поэтому трудности (эквиваленти-
рования определяются -сложностью реализации согласующих функ¬
ций. ~Целью эквивалентирования является получение новой систе¬
мы S, либо более изученной, либо имеющей простую реализацию.
Одним из примеров экви в ал оптирован и я является переход к ис¬
следованию систем по частям, реализуемый в ранее упоминавшей¬
ся диакоптике.
Рассматриваемое здесь семантическое эквивалентирование со¬
ответствует наиболее высокому уровню описания системы и этим
отличается от эвристического и синтаксического эквивалентирова¬
ния. Первое является неопределенным, так как при его реализа¬
ции отсутствует полная система аксиом и, следовательно, полу¬
чаемые решения объективно не оцениваются. Синтаксическое эк¬
вивалентирование связано с использованием полной системы ак¬
сиом и поэтому сводится к выполнению тождественных алгебраи¬
ческих преобразований. Его особенностью является наличие ту¬
пиковых решений, каждое -из которых ведет к логическому про¬
тиворечию. Это означает, что задача эквивалентирования не может
быть решена. Семантическое эквивалентирование позволяет полу¬
чить результат за счет выявления запрещенных фигур, -наличие
которых в модели фа делает ее неинтерпретируемой в терминах
модели фъ. Соответственно запрещенная фигура преобразования
есть подмодель фазс=фа такая, что Р0(фа3, фь)=0, а при
удалении из ф«3 хотя бы одного элемента оказывается, что
Ро (К> ы = 1 •
В указанной ситуации, т. е. при осуществлении семантическо¬
го эквивалентирования можно ввести понятие обобщенной стои¬
мости системы C(S), под которой следует понимать мощность
или кардинальное число Мь носителя фь, т. е. C(S) = |МЬ|, где
фл = <^Ь, Pbli Р • ••> РЪтУ •
При построении системы по критерию минимальной стоимости
следует использовать лишь семантическое эквивалентирование.
При эвристическом эквивалентпровании эта задача в принципе не
может быть решена, а при синтаксическом эквивалентировании
необходимо выполнить (полный перебор всех возможных решений.
При семантическом же эквивалентировании можно организо¬
вать эффективный вычислительный .процесс путем обхода запре¬
щенных фигур. Процесс эквивалентирования может быть иллю¬
стрирован с помощью дерева решений (рис. 6.2). Как видно из ри¬
сунка, дерево состоит из двух звезд: первая соответствует преоб¬
разованию фа->фа, вторая — фа~^фь- При этом перебор остается
лишь )В преобразовании ф«-^фс/. Однако значение семантики пре¬
образования позволяет произвести перебор на более раннем уров-
154
де, что исключает необходимость фактического построения эюви-
в а ленты ых систем.
Существенно также, что 'рассматриваемое (представлеиие поз¬
воляет получить количественное определение простых и сложных
систем. Систему можно считать сложной, если не существует вза-
Рис. 6.2. Структура дерева решений при эквивалентировании систем
имно-однозначного соответствия (между носителями фа и ф^, при
которых предикат Р0(фа, ф&) истинен. В противоположном слу¬
чае система является простой. Тогда преобразование фа->фа, где
Л) (фа, фь) = 1, называется упрощением системы. Тогда сложность
системы L(S) характеризует удаленность системы S от класса
простых систем. Сложность системы численно определяется ми¬
нимальной 'мощностью расширения носителя | ЛМа | или сужения
сигнатуры (модели фа. Поэтому стоимость C(S) и сложность
L(S) системы связаны соотношением C(S) =L(C) + |ЛЛ4а|.
Для установления связи рассмотренных .представлений с оп¬
ределением системы, приведенным в § 3.1, обратимся к лингви¬
стическому определению системы. Пусть имеется множество вы¬
сказываний, построенных в соответствии с правилами грамматики
некоторого языка. Если некоторое подмножество MczK считает¬
ся истинным, то оно определяет теорию относительно.
Рассмотрим, к каким конструктивным результатам могут при¬
вести изложенные здесь представления. Очевидно, приведенные
здесь соображения о Н- и Р-моделях представляют в основном
методологический интерес, устанавливая единство процессов обоб¬
щения и детализации при моделировании системы.
Существенно, что на начальном уровне рассмотрения идеоло¬
гии 'моделирования возникает представление о формализованном
описании как о непротиворечивом описании. Более тщательное
изучение показывает, что формальные конструкции, не содержа¬
щие обращения к содержательной стороне, т. е. к практике, ока¬
зываются противоречивыми. Этот вывод можно рассматривать как
диалектическое обобщение дискуссии о формализации.
155
Дальнейшее развитие этих положений состоит в 'представлении
о сем-а(Нтическом, синтаксическом <и эвристическом эививалентиро-
•вании. Этим 1представлением подтверждается рациональность се¬
мантического .подхода, опирающегося на содержательную сторо¬
ну. Важно отметить, что развитие 'представления об эквиваленти-
ровании позволяет дать общие математические определения та¬
ких (понятий, пак сложность и минимальная стоимость. Такого
рода определения существенны с точки зрения решения практи¬
ческих задач моделирования ’конкретных систем.
В целом следует считать, что изложенный общий подход к ос¬
новам моделирования систем должен широко исоользоватьоя на
различных этапах конструирования моделей.
6.2. Особенности цифрового моделирования
радиотехнических комплексов и систем
Рассмотренные выше общие принципы моделирования систем
находят широкое применение при построении моделей РТК и РТС.
При этом представление о семантическом эквивалентировании
приводит к иерархическому многоуровневому моделированию. Ма¬
тематическое описание элементов и устройств, используемых в
РТС, обычно не вызывает затруднений. Во-первых, это связано с
тем, что приборы, построенные на новых физических принципах,
проходят ряд этапов, предшествующих их практическому приме¬
нению. Это позволяет достаточно полно отшлифовать их содержа¬
тельную сторону и соответственно уточнить детали математическо¬
го описания. Во-вторых, многие устройства построены на цифровой
элементной базе, и, следовательно, способы их описания не вызы¬
вают затруднений. Наконец, уровень детализации описания эле¬
ментов низших иерархических уровней не должен быть достаточ¬
но высоким при решении большинства задач анализа и синтеза
РТК и РТС. Действительно, этап перехода от элементов к устрой¬
ствам обычно реализуется на эвристическом уровне методом экс¬
периментального подбора. В этом заключается специфика созда¬
ния радиотехнических устройств, т. е. элементов четвертого иерар¬
хического уровня.
Основные затруднения возникают при синтезе РТК и РТС на
высоких иерархических уровнях. Некоторое представление об этих
трудностях может быть получено при анализе типовых ошибок,
допускаемых при моделировании РТК и РТС. В частности, ис¬
пользование отдельных частных моделей РТК без необходимой их
координации и согласования существенно ограничивает возмож¬
ности употребления ЭВМ при решении глобальных проблем ана¬
лиза и синтеза РТК. Это обстоятельство значительно снижает эф¬
фективность целевого использования многообразия некоординиру-
емых частных моделей.
Ряд специалистов в области системотехники '[13, 58] отмечают,
что математическое моделирование сложных систем превратилось
в автокаталитический процесс. Это связано с тем, что когда у раз-
156
работника модели имеется достаточно доступный для понимания и
хорошо разработанный математический аппарат для описания
структуры отдельных подсистем и процессов ее функционирования,
то эти части системы моделируются весьма детально и точно. В
тех случаях, когда математическое описание подсистем трудно
формализуемо, оно зачастую недопустимо упрощается. Иногда де¬
тали и факторы, на первый взгляд не служащие непосредственно
цели исследований (с точки зрения разработчика), воспринимают¬
ся как мешающие параметры, и от их моделирования вообще отка¬
зываются.
На практике такое неравноценное отношение к уровням и де¬
тальности описания отдельных подсистем при разработке архитек¬
туры модели приводит к весьма неожиданным для разработчиков
РТК сюрпризам, проявляющимся уже на стадии испытаний и экс¬
плуатации комплексов.
Выход из создавшегося положения заключается в подходе к
многоуровневому моделированию на различных уровнях системно¬
сти. В соответствии с принципом превалирования целенаправлен¬
ных аспектов системы предпочтение должно отдаваться моделиро¬
ванию на высоком уровне системности. Только таким путем могут
быть корректно выбраны показатели качества, реализация значе¬
ний которых должна быть положена в основу алгоритмов модели¬
рования. Однако для РТС характерно большое число ограничений,
связанных с условиями физической реализуемости. Анализ этих
ограничений требует частных подходов, учитывающих особенности
построения систем более низких иерархических уровней. Таким
образом, возникает противоречие между дедуктивным и индуктив¬
ным подходами при моделировании. Это противоречие может быть
разрешено на основе ранее введенных представлений о Н- и Р-
моделях. Конкретизация этих представлений заключается во вве¬
дении ряда уровней моделирования. Первоначально .должны соз¬
даваться модели более высокого уровня. При их реализации сле¬
дует учитывать потенциальные возможности системы.
Рассмотрим уровни моделирования, характерные для РТК и
РТС. На первом уровне должна создаваться упрощенная модель
РТК, предназначенная для оценки потенциальных возможностей
системы. Упрощение, состоит в известной идеализации внешних
воздействий (нормальный закон распределения ошибок измере¬
ний, пуассоновский поток отказов и др.). По возможности произво¬
дится декомпозиция на системы, в которых существенны линейные
и нелинейные эффекты. Упрощенное представление позволяет ори¬
ентировочно оценивать возможности системы, значительно умень¬
шить уровень априорной неопределенности, что важно для даль¬
нейшего, более детального рассмотрения. В отдельных случаях уп¬
рощение приводит к возможности использования аналитических
соотношений, что позволяет перейти к модели нулевого уровня, об¬
ладающей наиболее высоким порядком системности. Подход, при¬
водящий к таким моделям, развивается в § 6.4 для частного слу¬
чая КРТС.
157
Модель второго уровня предназначена для более полного ста¬
ти стиче с кого "учёта возникающих неопределенностей. Однако и в
ней сохраняется принцип раздельного учета линейных и нелиней¬
ных эффектов. Учет линейных эффектов производится посредством
моделирования системы в отклонениях, а учет нелинейных эффек¬
тов основывается на упрощенных предположениях о нелинейности.
Модель третьего уровня представляет собой полную статистиче¬
скую модель РТК (КРТС) . Эта модель наиболее полно отражает
реальные свойства моделируемой системы и, как правило, содержит
две различные модели. Первая включает в себя среду и объект ин¬
формационного взаимодействия, вторая — непосредственно модели¬
руемую систему. Время моделирования каждого набора исходных
данных обычно на порядок выше, чем у моделей второго и первого
уровней.
Отметим, что в ходе моделирования допускается возврат к мо¬
делям первого и второго уровней, сопровождающийся коррекцией
алгоритмов модели, а иногда даже и ее структуры. В этом прояв¬
ляются адаптивные свойства моделей РТК и РТС. В целом при та¬
ком моделировании наиболее полно используется принцип эквива¬
лентности, сформулированный в § 6.1.
Остановимся на вопросах практической реализации моделей
РТК и РТС. Современный уровень развития ЦВМ, их программно¬
го обеспечения, разработка аналитических и численных методов
для исследования процессов информационного взаимодействия в
РТК позволяют считать методы цифрового моделирования наиболее
целесообразными при решении задач анализа и синтеза радиотех¬
нических комплексов и их подсистем.
При решении задач анализа и синтеза радиосистем и их от¬
дельных звеньев методы натурных экспериментов, особенно при
исследовании процессов информационного взаимодействия и обра¬
ботки информации на уровне электромагнитных полей и высоко¬
частотных сигналов, в какой-то мере могут конкурировать с мето¬
дами вычислительных экспериментов на ЭВМ. В некоторых слу¬
чаях, например при исследовании радиолокационных характерис¬
тик рассеяния объектов, натурный эксперимент является пред¬
почтительным. Для этих целей могут, в частности, применяться
специальные безэховые камеры, использующие методы масштаб¬
ного аналогового моделирования при работе с макетами радиоло¬
кационных целей, и даже целые радиолокационные полигоны,
обеспечивающие измерение характеристик рассеяния объектов в
реальных условиях. Однако обработка полученной измерительной
информации также осуществляется на ЦВМ, непосредственно
сопряженных с выходными устройствами измерительных систем
безэховых камер или РЛС [94].
Для исследования систем более высокого уровня, таких как
КРТС и РТК с собственной вычислительной подсистемой и доста¬
точно мощным алгоритмическим обеспечением, цифровое модели¬
рование является единственным методом их системного анализа.
158
Необходимость цифрового моделирования РТС на этапе проек¬
тирования вызывается еще и тем, что разработку РЭА и функцио¬
нально-программного обеспечения (ФПО) необходимо вести па¬
раллельно. Это заставляет разработчиков ФПО создавать свои
математические модели ОИВ и проектируемой РТС, не дожидаясь
создания опытных образцов. Эти математические модели вначале
используются для оценки эффективности разрабатываемой подсис¬
темы ФПО, а на этапе испытаний и эксплуатации РТК входят в
разработанный комплекс алгоритмов и программ в качестве рабо¬
чих имитационных модулей для автономных проверок ФПО.
Процесс построения цифровых моделей РТК обычно предпола¬
гает следующие основные этапы, характерные для проведения вы¬
числительных экспериментов при анализе и синтезе любой слож¬
ной системы (рис. 6.3):
Рис. 6.3. Основные этапы моделирования РТК
1. Обоснование, выбор и формулировка математической модели
процессов функционирования РТК или его подсистем на соответ¬
ствующем иерархическом уровне с учетом необходимой адекватно¬
сти ее физического приближения к реальным процессам информа¬
ционного взаимодействия и поставленным целям моделирования и
разработки структуры цифровой модели.
2. Разработка комплекса программ, реализующих вычислитель¬
ные алгоритмы модели функционирования РТК на различных
иерархических уровнях, их согласование и координация; выбор
159
языка программирования и аппаратурных средств вычислитель¬
ной техники для реализации комплекса программ.
3. Формирование исходных данных и условий вычислительно¬
го эксперимента для имитации процессов функционирования РТК
в соответствии с поставленной целевой задачей моделирования,
проведение расчетов, обработка полученной информации и вы¬
дача результатов моделирования.
4. Анализ результатов моделирования, интерпретация и целе¬
вое использование полученных данных для решения конкретных
задач анализа и синтеза РТК.
Анализ задач цифрового моделирования позволяет высказать
ряд практических рекомендаций по реализации моделирования
процессов функционирования РТК. К основным из них можно
отнести рекомендации, связанные с организацией процесса созда¬
ния модели и касающиеся структуры модели.
Успешная разработка и эффективное использование цифро¬
вой модели РТК возможны при четкой организации системотех¬
нической деятельности и совместной работы группы специалистов
различного профиля. В ее состав должны входить как специалис-
ты-комплексники радиотехнического профиля, непосредственно
решающие проблемы анализа и синтеза РТК, так и специалисты
в области программирования и вычислительной техники.
Основная задача специалистов-комплексников заключается в
умении ставить и формализовать задачи как разработчикам част¬
ных моделей РТК и его отдельных подсистем, так и програм¬
мистам, непосредственно реализующим цифровую модель с по¬
мощью комплекса аппаратных и программных вычислительных
средств. Очень важен уровень взаимопонимания между специалис-
тами-комплексниками и программистами современных вычислитель¬
ных центров, которые, как правило, ориентированы на общесис¬
темный характер применения ЭВМ и ее математического обеспе¬
чения.
За последние годы возникло противоречие между специфиче¬
скими требованиями специалистов-прикладников, т. е. пользова¬
телей ЭВМ, и общесистемным характером штатных средств про¬
граммного обеспечения. Это противоречие разрешается при пере¬
ходе к созданию пакетов прикладных программ как одной из ос¬
новных форм специализированного программного обеспечения,
удовлетворяющих как целенаправленных пользователей-прикладни¬
ков, так и специалистов в области вычислительной техники про¬
граммирования.
При практической реализации моделей функционирования РТК
и их подсистем всегда приходится идти на компромисс между
сложностью реального комплекса и сложностью его отображения
при ограниченных вычислительных и временных ресурсах. При
этом всегда имеет место относительная условность в выборе уров¬
ня моделирования. С этой точки зрения необходимо предусмот¬
реть определенную гибкость и адаптивность модели, способность
к расширению, вводу и восприятию новой информации.
160
к характерным особенностям реализации цифровых моделей
различного уровня относятся:
И 1. Модульный принцип и иерархическая структура цифровых
моделей РТК.
2. Универсальность и гибкость цифровой модели за счет адап*
тивной перестройки ее структуры, уровня и детальности матема*
тического описания объектов отдельных подсистем РТК и про*
цессов информационного взаимодействия, характера и поведения
внешней среды.
3. Предварительное согласование всех видов системного опи¬
сания РТК при создании формализованных модулей на различных
иерархических уровнях с учетом физической и программной реа¬
лизуемости каждого вида математического описания на ЭВМ.
4. Использование единого языка программирования с четкой
фиксацией и согласованием всех вводимых обозначений перемен¬
ных, массивов и процедур с целью последовательного наращива¬
ния пакета прикладных программ по мере разработки новых ме¬
тодов математического описания, алгоритмов обработки инфор¬
мации и управления функционированием.
5. Классификация всех модулей пакета, сопровождающаяся
указанием их условных обозначений, реализуемых операций, па¬
раметров и форм представления входных и выходных величин,
иерархического уровня и степени детальности математического
описания с целью их последующей координации.
6. Рациональное сочетание результатов натурного моделирова¬
ния и реального функционирования радиосистем при анализе про¬
цессов информационного взаимодействия на уровне электромаг¬
нитного поля и высокочастотных радиосигналов с цифровыми мо¬
дулями. Это особенно важно, когда цифровое моделирование
«тонкой» структуры информационного взаимодействия требует
больших вычислительных затрат, приводит к громоздким алгорит¬
мам и с успехом может быть заменено физическим экспериментов
на макете, в лабораторных условиях или в процессе испытаний ш
эксплуатации радиосистемы.
7. Согласование принципов обработки, способов представления
и анализа результатов моделирования процессов функционирова¬
ния РТК и его подсистем с поставленными целями анализа и син¬
теза и выбранными показателями эффективности функционирова¬
ния, подлежащими оцениванию при проведении вычислительного
эксперимента.
8. Разработка принципов координации и управления, а также
информационного обеспечения унифицированной модульной струк¬
туры цифровой модели на основе языков высокого уровня, удоб¬
ных для специалистов-пользователей.
6—36
161
6.3. Пакет прикладных программ
для системно-структурного моделирования
комплексной системы траекторных измерений
Проиллюстрируем применение изложенных выше принципов цифрового мо¬
делирования РТК на базовом примере разработки пакета прикладных про¬
грамм для построения модели комплексной системы траекторных измерений.
Его функциональное наполнение ориентировано на широкий класс задач, свя¬
занных с определением параметров траекторий различных типов КА по данным
радиотехнических (радиолокационных и радионавигационных), оптических и
светолокационных систем в различных условиях складывающейся обстановки
(рис. 6.4).
В соответствии с системным описанием КСТИ, приведенным в гл. 4, пакет
прикладных программ, образующий ее реальную цифровую модель, составляют
следующие основные модули:
•модуль имитации процессов функционирования ОИВ;
•модуль имитации процессов информационного взаимодействия между КСТИ
и объектами:
модуль имитации процессов функционирования систем траекторных изме¬
рений;
модуль алгоритмов обработки траекторной информации;
модуль расчета требуемых показателей эффективности КСТИ и получения
необходимых результатов моделирования;
модуль управления и координации;
модуль программ общего математического обеспечения (модуль стандарт¬
ных подпрограмм).
)В свою очередь каждый из модулей имеет иерархическую структуру и со¬
стоит из ряда подмодулей различного уровня детальности описания соответст¬
вующей подсистемы ОИВ, КСТИ или отдельного этапа получения и обработ¬
ки траекторной информации. Каждый подмодуль представляет собой функцио¬
нально законченную процедуру, составленную в соответствии с изложенными вы¬
ше рекомендациями. В качестве языка программирования использован доста¬
точно универсальный и гибкий язык ПЛ/1, широко применяемый в унифициро¬
ванном ряде вычислительных машин 3-го поколения (ЕС ЭВМ).
Использование единого языка программирования и принятых правил со¬
ставления п унификации процедур позволяет хранить и накапливать програм¬
мный фонд прикладного пакета, самостоятельно отлаживать и видоизменять
.каждый отдельный модуль, не прибегая к изменению модели в целом. Задача
пользователя заключается лишь в составлении иерархической структуры цифро¬
вой модели КСТИ в зависимости от поставленной целевой задачи, выборе
исходных данных для проведения вычислительного эксперимента, определении
необходимых показателей качества функционирования КСТИ и методов их по¬
лучения и вводе этой информации в модуль управления и координации. Па¬
кет допускает диалоговый режим общения оператора-пользователя с ЭВМ,
■что дает возможность в ходе выполнения эксперимента изменять его условия,
корректировать исходные данные и выводить на печать или на дисплей любые
промежуточные и конечные результаты.
Гибкая структура пакета прикладных программ позволяет решить целый
комплекс разнообразных задач, возникающих на различных этапах анализа и
162
| Стандартные подпрограммы: I
I
$
1
I
t
t
I
p
i§
§•§
It*
5^
s
1
1
i
I
i
I?
*3
i
51
JP
§1
IP
wgp пдшоподшзд nufigon awuHnodzodu
апнт'анд ai4ngonog
V v
niffigongou amuHwodaodu нпиаь
ai4unngodnanirvn‘nduo -аиашшт*
nifngojy
6*
163
синтеза комплексной системы траекторных измерений, а также РТК управления
полетом КА. Наиболее часто методами цифрового моделирования приходится
решать следующие основные задачи:
априорное оценивание точности определения и прогнозирования движения
КА при заданной форме и характере траектории, расположении систем траек¬
торных измерений, составе и точности измеряемых параметров, а также тех¬
нологическом цикле измерений.
оценивание помехозащищенности РТС и комплексов навигационного обес¬
печения при воздействии помех различного происхождения;
оценка эффективности новых алгоритмов обработки траекторной инфор¬
мации и выдача рекомендаций по их использованию при. разработке ФПО
РТК;
Целевая задача моделирования определяет обоснование и выбор архитек¬
туры цифровой модели при проведении эксперимента. Рациональный выбор
архитектуры модели определяется как уровнем ее функционального наполне¬
ния, так и искусством разработчика модели, желающего получить максималь¬
ный эффект при минимальных вычислительных затратах. Наиболее трудной про¬
блемой рационального выбора архитектуры модели является обоснование тре¬
буемой степени детальности моделирования процессов функционирования той
или иной подсистемы или подпроцесса информационного взаимодействия. Од¬
нако когда .все основные модули обладают достаточно глубокой функциональ¬
но-иерархической структурой и различной степенью детальности математиче¬
ского описания прикладных программ имитации функционирования КСТИ,
то рациональный выбор архитектуры цифровой модели может базироваться на
учете следующих основных соображений:
1. Когда решаются задачи оценивания точности определения параметров
траектории объекта, например орбиты неманеврирующего КА, то информаци¬
онное взаимодействие СТИ с объектом моделируется на уровне получения гео¬
метрических аналогов измеряемых параметров движения (дальности, радиальной
скорости и т. д.). Влияние погрешностей измерения параметров радиосигнала
на точность имитируется с помощью подпрограмм формирования случайных
величин с заданными законами распределения. Выбор закона и параметров
распределения определяется экспериментатором. При этом могут быть исполь¬
зованы достаточно простые аналитические модели движения КА как в модуле
имитации функционирования объекта, так и в модуле вторичной обработки.
Так как конечная оценка точности определения параметров траектории может
быть получена после вторичной обработки траекторной информации, то ал¬
горитм вторичной обработки (например, алгоритм наименьших квадратов или
динамической фильтрации) моделируется более детально. В ряде случаев до¬
статочно получить значения частных производных от измеряемых параметров
по определяемым параметрам траектории, что дополнительно упрощает расчеты.
2. При обосновании и выборе технологического цикла траекторных измере¬
ний модель траектории должна наиболее полно отражать реальные условия
движения объекта. В связи с этим необходимо вместо аналитических методов
использовать численные методы интегрирования системы дифференциальных урав¬
нений движения в заданном поле сил, что приводит к дополнительному расходу
машинного времени. Детально моделирование радиотракта также не произ¬
водят.
3. При оценивании помехозащищенности РТК можно пойти двумя путями.
164
Первый заключается в использовании результатов натурных испытаний РТС, из
которых можно получить зависимости точностных характеристик измерительных
каналов РТС от отношения сигнал-помеха на входе приемного устройства.
Если такие данные отсутствуют, то из пакета программ вызываются мо¬
дули детального моделирования соответствующего приемно-измерительного ка¬
нала РТС, а зависимости точностных характеристик от отношения сигнал-по¬
меха получаются на основе статистического моделирования с последующим оп¬
ределением параметров распределения результирующих погрешностей траектор¬
ных измерений.
Полученные как в первом, так и во втором случаях результирующие погреш¬
ности траекторных измерений используются в модуле вторичной обработки для
оценивания точности определения параметров траектории. При этом алгоритмы
вторичной обработки, как правило, моделируются в полном объеме.
4. При оценке эффективности новых или модифицированных алгоритмов об¬
работки траекторной информации помимо традиционных вопросов оценки точност¬
ных характеристик возникают проблемы оценивания устойчивости при 'большой
неопределенноеги априорно известных начальных условий движения КА. Ее про¬
ведение возможно только при использовании статистического моделирования на
уровне вторичной обработки.
Таким образом, даже краткий анализ возможностей цифровой модели
КСТИ на основе пакета прикладных программ показывает, что современные
методы системно-структурного моделирования являются весьма универсальным
и гибким инструментом анализа и синтеза РТК и РТС.
Как указывалось в § 6.2, при моделировании наибольшее значение имеет
способ построения модели нулевого или первого уровня, основывающийся на
максимальном использовании аналитических соотношений. В соответствии с этим
в § 6.4 развивается аналитический подход. Последний, с одной стороны, позво¬
ляет получить качественное представление о системе без проведения громоздких
расчетов, а с другой — открывает путь для получения достаточно простых соот¬
ношений, значительно сокращающий объем вычислительных операций.
6.4. Модели КСТИ, используемые при оптимизации
и ориентировочной оценке эффективности функционирования
Общая характеристика градиентов радиотехнических измерите¬
лей положения и движения КА. При моделировании КСТИ необ¬
ходимо определить математический объект, явно связанный как с
процессом измерений, так и с его конечным результатом — опреде¬
лением траекторий.
Вследствие существенной многомерности рассматриваемой за¬
дачи результат каждого измерения должен рассматриваться как
вектор в многомерном пространстве параметров траектории. В
этой связи наиболее рационально характеризовать измерения по¬
средством градиента функционала. Согласно определению, приво¬
димому в [67], некоторый, в общем случае нелинейный, функцио¬
нал r/(q) должен быть определен в вещественном евклидовом про¬
странстве Rm и принимать вещественные значения. Функционал
предполагается дифференцируемым, для чего достаточно потребо¬
вать, чтобы функция y(<7i,..., qm) имела непрерывные частные про¬
165
изводные по всем параметрам. Если задан произвольный вектор 1
единичной длины, то частная производная от функционала у в
точке q по направлению 1
д У (q)/d 1 = lim [(у (q + i] 1) — у (q))/q]
Г|—>0
характеризует скорость изменения функционала при изменении
«аргумента» в направлении вектора 1 и численно равна скалярно¬
му произведению некоторого вектора I на 1, т. е.
д у (ч)
01
ду
dqx
11+ ••• + 1т = (М)«
дУт
Вектор I, имеющий координаты dy!dq{ ... dyjdqm, представляет со¬
бой градиент функционала у+f), т. е. конкретного измерения, при¬
чем ду(ц)/д\= 11 |cos(I, 1), т. е. градиент ориентирован в направле¬
нии наибольшей скорости роста функционала.
Переходя непосредственно к задаче анализа эффективности
КСТИ, будем иметь в виду, что каждому вектору q из Rm может
быть сопоставлено некоторое значение измеряемой величины yj =
=У1(ц; Л г), где t — эквивалентный момент времени проведения
измерений; г — радиус-вектор, характеризующий положение изме¬
рителя.
Таким образом, у$ может рассматриваться как функционал. Оче¬
видно, 11г] 2 при использовании ортогональной сис¬
темы прямолинейных координат.
В направлениях, коллинеарных векторам-градиентам, обеспечи¬
вается максимальная точность определения компонентов траекто¬
рии, а вдоль касательной плоскости к гиперповерхности уровня
фиксированного значения функционала отклик измерений на пара¬
метры траектории равен нулю.
Задание весов в случае некоррелированных измерений эквива¬
лентно изменению лишь модулей векторов градиентов, так как =
= р"21г.
При коррелированных измерениях задание корреляционной мат¬
рицы в первом приближении эквивалентно усреднению частных
производных за интервал корреляции, т. е. {dyijdq^ =
=— С —, где p/i — интервал корреляции.
Pk t l д
Характерной особенностью векторов-градиентов является воз¬
можность оценки точностных характеристик без обращения к бо¬
лее сложным матричным формам оценки точности. Действительно,
одной из основных характеристик точности определения парамет¬
ров в многомерных системах является степень обусловленности
матрицы коэффициентов системы уравнений, характеризующих
процесс измерения. Аналогичные суждения могут быть сделаны из
рассмотрения условий линейной независимости совокупности век¬
торов-градиентов. Действительно, из геометрических соображений
166
следует, что при практическом расположении указанных векторов
в пределах гиперплоскости любого порядка упомянутая матрица
близка к особенной. Порядок гиперплоскости расположения гра¬
диентов дает возможность определить число «ненаблюдаемых» па¬
раметров. Это позволяет в некоторых случаях оперативно оцени¬
вать точностные характеристики, необходимые для решения задач
анализа и синтеза КСТИ.
При рассмотрении малых вариаций составляющих вектора со¬
стояния КА допустимо считать, что переход от системы декарто¬
вых координат к произвольным параметрам траекторий определя¬
ется линейным преобразованием. Характеристики градиентов в но¬
вой системе координат полностью определяют эффективность
КСТИ относительно этих параметров.
Перейдем к рассмотрению общих свойств измерителей, харак¬
теризуемых их векторами-градиентами. С помощью радиотехниче¬
ских методов измерения параметров движения во всех случаях
фиксируется некоторая аддитивная функция времени запаздыва¬
ния сигнала (наклонной дальности) [60]. Не нарушая общности,
можно считать, что в рассматриваемых случаях расстояния между
точками приема или излучения-приема достаточно малы по срав¬
нению с дальностью до объекта (/?). Нетрудно видеть, что это ус¬
ловие приведет лишь к более четкому выявлению экстремальных
свойств разнесенных (базовых) измерителей. Действительно, учи¬
тывая аддитивное свойство градиента I +//2) = I (У\) +1 (#2), по¬
лучаем, что, в случае достаточно малой базы (пространственной
или временной) градиент суммарных измерений совпадает по на¬
правлению с градиентами слагаемых. Здесь z/i и у2—измерения в
граничных точках базы. Поскольку градиент направлен по радиусу-
вектору, сдвиг точки приложения вектора на малую величину прак¬
тически не изменяет его направления. Таким образом, наличие сум¬
марных измерений приводит лишь к возрастанию чувствительно¬
сти к определенным параметрам. Конфигурация измерительных по¬
лей, а следовательно, и характеристики точности определения век¬
тора состояния за счет таких изме¬
рений существенно не изменяются.
Наличие разностных измерений \
при указанном условии оказывается \
эквивалентным применению опера- \
тора дифференцирования к исход- \
ному измерителю. Нетрудно видеть, \
что применение этого оператора при-
водит к сдвигу вектора-градиента на
л/2. В самом деле, поскольку мо¬
дуль градиента дальномерных изме¬
рений фиксирован, при смещении
измерителя градиент поворачивает¬
ся на малый угол Pv (рис. 6.5). По¬
скольку градиент дальномерных из- рис 6
Мерений ориентирован в направле¬
167
.5. Определение вектора-гра¬
диента л1длл
нии радиуса-вектора РТС КА, градиент разностных измерений рас¬
положен в плоскости, содержащей радиальное направление и базу.
Свойства градиентов измерителей в пространстве /?3. Остано¬
вимся на некоторых общих свойствах разностных измерений. При
этом ограничимся первоначально трехмерным евклидовым прост¬
ранством /?з. Очевидно, измерение приращения фазы за фиксиро¬
ванный интервал времени при определении среднего значения
частоты Доплера (радиальной скорости) может рассматриваться
как отсчет разности наклонных дальностей, обусловленных движе¬
нием КА относительно ИП. Исходя из этих соображений вектор-
градиент Л1 д R/t (передний индекс R свидетельствует об определе¬
нии в пространстве /?3) находится как разность векторов-градиен¬
тов наклонных дальностей, найденных на моменты времени t\ и t2.
Из рис. 6.5 видно, что градиент н1дкд расположен в плоскости, со¬
держащей векторы R и V. Поскольку л1дДд_1_К, то его направле¬
ние совпадает с тангенциальной составляющей вектора скорости
VT. Приведенные соображения позволяют также определить
|л1днд|. Действительно, |Л1 д R/t | = ₽v, где — угол между ра¬
диальными направлениями в моменты времени t\ и t2. Таким об¬
разом,
I/? 1ая//1 = A tVi!R = A ЗД, (6.1)
где ДЗТ — смещение объекта по перпендикуляру к направлению R
за время измерений.
Из соотношения (6.1), а также из ранее приведенных сообра¬
жений следует, что доплеровские измерения применительно к про¬
странству /?з имеют смысл угломерных. Из сравнения соответст¬
вующих выражений для градиентов угломерных (базовых) и доп¬
леровских измерителей [26] следует их тождественность с точ¬
ностью до знака. Различие в знаках обусловлено исходным век¬
торным соотношением, справедливым для наземных измерений,
R = r-rn, (6.2)
где г — радиус-вектор КА; гп — радиус-вектор фазового центра
антенны ИП.
Роль базового вектора (гП2—гП1) =—b при доплеровских изме¬
рениях играет вектор скорости V. Отсюда видно фактическое от¬
личие от угломерных измерений, заключающееся в значительно
меньших возможностях точного определения b по сравнению с V.
Существенно, что непосредственно вблизи пролета траверза
доплеровский измеритель наиболее близок к угломерному. Чувст¬
вительность такого измерителя определяется длиной пути, прой¬
денного КА в плоскости, перпендикулярной радиальному направ¬
лению за время измерения. Сравнивая (6.1) с известной форму¬
лой для модуля градиента 11 дг/ь| = (Ь sin 0)//?, 0 — направляющий
угол, убеждаемся, что указанный отрезок пути является эквива¬
лентной базой (раскрывом). Данные соображения подтверждают¬
ся эффектом сжатия диаграммы направленности (ДН) антенны
бортового измерителя при относительном движении РЛС и объек¬
168
та с известной скоростью V ,[60]. Настоящий анализ показывает,
чт0 такой эффект и ему подобные могут быть объяснены рассмот¬
рением геометрических соотношений. Заметим, что при значитель¬
ных удалениях от траверза и при малых углах места V~Vr, и,
следовательно, с помощью доплеровского измерителя определяет¬
ся лишь приращение дальности за время измерений.
Вопросы использования доплеровских измерений для определе¬
ния угловых координат детально рассмотрены в [25]. Наибольшая
точность этих измерений обеспечивается при ориентации ДН пер¬
пендикулярно продольной оси носителя (вдоль вектора VT). На¬
личие смещенного луча приводит к снижению чувствительности эк¬
вивалентных угловых измерений, что характеризуется соотноше¬
ниями между VR и VT.
Перейдем к рассмотрению свойств градиентов измерений вто¬
ричных разностей в пространстве /?3. Остановимся первоначально
на особенностях метода измерения вторичных разностей, получен¬
ных за счет наличия как пространственной, так и временной баз
(Д2/?Рд). (В дальнейшем при рассмотрении данных измерений ин¬
дексы b и t будут опущены.) Соотношения для н1дгЛ могут быть по¬
лучены повторным применением оператора Д к вектору-градиенту
угломерных базовых измерений 1дн/ь или к д1дяд. Однако вследст¬
вие произвольной ориентации трех определяющих векторов R, b и
V градиент этих измерений в пространстве 7?3 не может быть най¬
ден из элементарных соображений. В частном случае, когда
все эти векторы компланарны, получаем |д1Д2й| [ (Rxb) V = 0] =
= (bAS sin 0)/7?2, где AS — перемещение объекта за время проведе¬
ния измерений.
Вектор в1д2д ориентирован в симметричном относительно пер¬
пендикуляра к V направлении, где ось симметрии совпадает с VT
(см. рис. 6.5). Таким образом, при выполнении условия VR = 0 или
VT = 0 вектор д1д2д оказывается перпендикулярным V, а при
Vr = Vt — коллинеарным V. Во всех промежуточных случаях ори¬
ентация рассматриваемых векторов занимает промежуточное по¬
ложение между указанными крайними случаями. (При компланар¬
ности векторов R, b и V вектор я1Д2В также расположен в этой же
плоскости.)
Таким образом, измерение угловой скорости (разности допле¬
ровских частот в двух разнесенных точках) позволяет уточнить
местоположение объекта. Однако чувствительность таких измере¬
ний на два порядка (каждый порядок соответствует углу, под ко¬
торым «видна» база) меньше, чем у абсолютных измерений (на¬
клонной дальности или сумм дальностей). Чтобы использовать эти
измерения для определения положения объекта, необходимо за¬
дать векторы b и V.
Рассмотрим теперь общие свойства векторов-градиентов при оп¬
ределении компонентов V радиотехническими методами. В связи
с этим образуем новое пространство У3 из следующих соображе¬
ний. Каждой паре точек пространства /?3 сопоставим направлен¬
ный отрезок. Образуемый таким образом вектор представляет со¬
169
бой элемент пространства К3. Нетрудно видеть, что полученное
пространство является евклидовым. Метрика V3 определяется мет¬
рикой с точностью до постоянного множителя. Пространство V3
характеризуется тем, что его элементы соответствуют сдвигу ис¬
ходного вектора R вследствие движения объекта. Отказ от этого
предположения, характеризующего причинную связь определенного
вида, приводит к образованию пространства А/?3 посредством при¬
менения разностного оператора А к исходному пространству 7?3.
Пространство А/?3, являющееся обобщением У3, включает в себя
также разности, обусловленные наличием вектора Ь. В последнем
случае должно быть учтено различие знаков векторов V и Ь, опре¬
деляющееся векторным соотношением (6.2). Аналогичным обра¬
зом может быть введено пространство разности произвольного по¬
рядка А7?з(п).
Перейдем непосредственно к векторам-градиентам. Предполо¬
жим первоначально, что в пространстве /?3 определено поле неко¬
торой скалярной величины у. В результате применения разност¬
ного оператора получена скалярная величина Az/. Тогда очевидно,
что я!(у)= дн! (Az/) вследствие одинакового преобразования измеря¬
емой величины и рассматриваемого пространства. Ограничиваясь
пространством У3, получаем, что (у) = у! (Az/). Основная особен¬
ность задания векторов в пространстве V3 заключается в зависи¬
мости от первообразных координат, задаваемых в /?3. Поэтому
полное определение вектора V требует отыскания дополнительных’
компонентов А/?;. Указанное свойство векторов-градиентов может
быть отнесено к пространству разностей любого порядка. Таким
образом, справедливо следующее положение: градиент некоторого
функционала в пространстве А7?3(п) равен градиенту функ¬
ционала Д(п~1)/? в пространстве /?3(л_1\ Указанное свойство по су¬
ществу определяет рекуррентное соотношение для отыскания век¬
торов-градиентов разностных измерений в разностном пространст¬
ве произвольной кратности.
Из анализа приведенных соотношений можно заключить, что
в достаточно широких пределах изменения векторов V и b можно
использовать формулы, основанные на применении оператора
дифференцирования. Сравнительная характеристика свойств гра¬
диентов различных измерителей иллюстрируется табл. 6.1.
Аналитические соотношения для оценки частных производных
от измеряемых величин по параметрам траектории околокруго-
вых КА. В случае детерминированного движения КА только что
рассмотренные свойства градиентов измерителей трансформиру¬
ются с учетом детерминированности движения. Переход к детер¬
минированным траекториям прежде всего приводит к существен¬
ному увеличению мерности рассматриваемых пространств, что
сопровождается значительной потерей наглядности. Вследствие
необходимости рассмотрения отклика измерений на несущественно
отличающиеся друг от друга параметры траектории (их совокуп¬
ность обозначим как q) следует анализировать градиентную мат¬
рицу.
170
Таблица 6.1
Измерители
Характеристика градиентов
Модуль
Ориентация
Дальномер (R)
2
R
Измеритель радиальной скорости уД₽//
1 или 2
R
То же RbR/t
ДЯТ
R
VT
Угломер AR/b
b sin 6
R
R„ = RX(bXR)
Измеритель угловой скорости r\2R
b&S sin 0
R2
—
Характерная особенность структуры градиентной матрицы в
рассматриваемом случае связана с необходимостью введения не¬
которой системы промежуточных координат (например, геоцент¬
рических или топоцентрических).
Поэтому градиентная матрица определяется как произведение
матриц [78]:
1 = ГФ, (6.3)
где J — градиентная (пХ/п) матрица; п — суммарное число из¬
мерений; т — число определяемых параметров; Г—первичная
градиентная (nXm) матрица вида dyifdxj\ Ф — фундаментальная
матрица вида dxjdqj.
Соотношение (6.3) устанавливает возможность непосредствен¬
ного использования результатов, полученных в предыдущем
пункте, поскольку первичная градиентная матрица характеризует
свойства измерителей и не зависит от дальнейшего использования
полученных данных. Это не позволяет, однако, раздельно рассма¬
тривать матрицы Гиф при анализе свойств различных измери¬
телей.
Укажем на некоторые особенности соотношения (6.3). Каж¬
дая строка матрицы J определяет m-мерный вектор-градиент
q\Vi, заданный в пространстве параметров траектории Q. В соот¬
ветствии с этим фиксированному значению измеряемой величины
соответствует гиперповерхность уровня. Вектор qly. оказывается
нормальным к указанной поверхности. При использовании конеч¬
ных методов оценки параметров вектор оценки q* определяется
как точка пересечения гиперповерхностей уровня. При наличии
избыточной информации, т. е. в условиях статистической обработ¬
ки результатов измерений, оценка q* при использовании метода
максимального правдоподобия находится из условия равенства
нулю взвешенных сумм векторных отклонений относительно всех
гиперповерхностей уровня.
171
Рис. 6.6. Определение ориентации сопро¬
вождающего трехгранника при полете око¬
локруговых КА
Рассмотрим возможность получения аналитических соотноше¬
ний для градиентной матрицы J применительно к определению
околокруговых орбит КА. Для их описания наиболее удобно при¬
менить обычно используемые кеплеровы элементы орбит а,
Q, /о с заменой е и со на g = ecosco и q = e sin<o [77]. При этом,
как известно, оказывается возможным использовать некоторые
соотношения, полученные для круговых орбит. Допустим также,
что выполняется условие Я<^7?3. Это обстоятельство позволяет в
первом приближении не учитывать эффектов, связанных с вра¬
щением Земли, за время одного сеанса связи.
В рассматриваемом случае вектор состояния КА Дх целесооб¬
разно определять в системе координат сопровождающего трех¬
гранника, оси которого ориентируются по радиусу-вектору КА,
проведенному из притягивающего центра и нормали к нему в
плоскости орбиты, направленной в сторону движения КА t (рис.
6.6). Третья ось дополняет систему координат до правой. В связи
с этим первичная градиент¬
ная матрица и соответствую¬
щая ей система декартовых
координат должны выби¬
раться исходя из требований
наиболее компактной формы
записи выражений для фун¬
даментальной матрицы Ф. В
[3] показано, что наиболее
рационально использовать
указанную выше систему
координат, связанную е со¬
провождающим трехгранни¬
ком. При этом наиболее
полно выявляются динами¬
ческие и кинематические
особенности движения КА.
Там же приводятся выра¬
жения для элементов фун¬
даментальной матрицы изохронных производных, когда в качест¬
ве исходной выбирается система координат сопровождающего
трехгранника.
Из анализа приведенных соотношений следует, что эти произ¬
водные представляют собой медленно изменяющиеся функции по¬
лярного угла (времени). В то же время из рассмотрения харак¬
тера производных вида dyildq^y'i, где q — вектор кеплеровых
элементов орбиты (рис. 6.7), видно, что эти производные сущест¬
венно изменяются на мерной части витка орбиты КА (здесь и в
дальнейшем в целях конкретизации будет рассматриваться орби¬
тальное движение КА). Очевидно, эти изменения вызываются
свойствами первичной градиентной матрицы Г. Можно показать,
что некоторые свойства функций у\, в значительной степени оп¬
ределяющиеся свойствами матрицы Г, могут быть найдены из
172
качественного рассмотрения. Действительно, допустим, что выпол¬
няются условия Тогда изменение составляющих векторов-
градиентов измерителей (1у. ) в пределах мерной части витка ор¬
биты будет в основном определяться ориентацией этих векторов-
и частично изменением модулей 1^. в зависимости от текущего
значения аргумента.
Как уже было показано ранее, ориентация вектора 1У/ боль¬
шинства измерителей связана с радиальным направлением. Ско¬
рость перемещения топоцентрического радиуса-вектора 7? ориен¬
тировочно в (7?з + Я)/7? раз больше, чем у геоцентрического ра¬
диуса-вектора. Следовательно, характер изменения частных про¬
изводных, образующих элементы матрицы J, определяется в ос¬
новном матрицей Г. Для однопозиционных измерителей наличие
фундаментальной матрицы Ф приводит лишь к асимметрии функ¬
ции y't. Величина асимметрии определяется относительной значи¬
мостью элементов матриц Г и Ф, участвующих в формировании
функций у\. Можно, таким образом, полагать, что низкочастотные
составляющие спектра частных производных у\ определяются
элементами фундаментальной матрицы, т. е. зависят лишь от ди¬
намических свойств КА и, следовательно, проявляются одинако¬
вым образом для однопозиционных измерителей.
Для базовых измерителей (измерение углов и угловых скоро¬
стей) имеет место асимметрия, зависящая от ориентации базы от¬
носительно плоскости орбиты КА. Соображения о влиянии матри¬
цы Ф лишь на низкочастотную часть спектра частных производ¬
ных остаются справедливыми и в этом случае. Большинство при¬
веденных соображений подтверждается при рассмотрении зави¬
симостей y'tkt') (см. рис. 6.7) (индексы «м» и «ш» определяют
ориентацию базы: меридианальную и широтную соответственно).
Перейдем к выводу расчетных соотношений, определяющих
Функции y'i(ty Основой для вычисления элементов матрицы Г
могут служить приведенные выше выражения. При этом соотно¬
шение векторов-градиентов целесообразно представить в системе
координат сопровождающего трехгранника: dyi/dXj=\\V[.\lj1 где
дуг/дх] — искомые составляющие векторов-градиентов (/=Г>
2, 3); lj — направляющий косинус.
Указанные представления позволяют, как будет показано ни¬
же, получить выражения для частных производных в компактной
форме. Поскольку соотношения для модулей большинства векто¬
ров 1,л. были получены ранее, необходимо дополнительно опреде¬
лить направляющие косинусы в системе координат сопровожда¬
ющего трехгранника.
Конкретизируем общую постановку решаемой задачи. Пусть
имеет место околокруговое движение ИСЗ, описываемое систе¬
мой указанных параметров траектории. Полагая, что постоянная
интеграла энергии определяется лишь круговым движением, а
также принимая, что параметры g и т] удовлетворяют условию
173
к. Х\Х>
—\ 0R/1)
X»
\ по >
,/тах
X \
W Ъ<
\\ /
\ \
\
Vх /
л/Д /х\ /
z
У! -
\
\
и“ \ / X * j
\Y \\ /
у\ \х
0?К \ А ч
S V
V
\
"f\ \ /\ X •
/ \ ¥ v
/ у\ \
100 -5
0 /
\ /\ \А
\/ \/v
-ппк! \J X
\/“/тр> С
\ я>^.
ц/у /\/Х
Л //х
. X'
-ш/ \
К
^7Z \
# 4
fftn
X
Т*- —=
’ и,о
-/
174
Su^/dqj mi)
1
-1
Sum/Stu/(3ua/dqj)mBX.
г)
175
ПИК
по!
/ !\
-ЦО/ -/ A* \
А//Д$№
/ X//
/ /М/й\\
p/z /V / х\
ЦЧ- t vi
//А
0.2111\
ЧОО
7 Л/'// \
/ /l/// \
>5^
>Х
-о / /
\ / -П? I
III \ 5
0 ,
л /
\\ ц1
%\ 1
п Л /
у 1
ць\ j-
\ а/
по \ /
U,0 у J
-1
д)
-I
Рис. 6.7. Зависимости производной дуt/dqi от времени:
а)
д R д диш дим . диш
dqj * ' dqj ' в' dqj ’ г' dqj ' dqj' dqj
176
0(g2), 0(л2)> и используя
приведенные в «[3], после
dyi 3(/—Ш !
соотношения для элементов матрицы Ф,
преобразований получаем:
И д yt \\dyi 1_
а2 дУг/ дг 2 а
(6.4)
%=-М2!-+Уг;НЯ:
di sin i \ dn dVn J
(6.5)
dji
dig
= Rivi
V—
И dyj = у f dy.i — n dyi \ .
a2 dVr \ds dVri'
^’=(rx
(6.6)
(6.7)
— = —a (— cos и—2 — sin u') +
di \dr ds )
cosu +(Vxvbj sin a ; (6.8)
d Vs
= —a sinu —2(1—cosu)^] +
dn Lar v ds J
+ V — sin« + (Vxу 1^,.) n(2 — cosu), (6.9)
Ле *'
где r, s, n — прямоугольные координаты системы сопровождающе¬
го трехгранника; х, у, z — координаты абсолютной геоцентричес¬
кой системы (составляющие скорости в этой системе имеют индек¬
сы, определяющие принадлежность к соответствующей координат¬
ной оси); р, = 3,986 • 1014 м3-с~2 — гравитационная постоянная; /г =
= (i1/2a_3/2 — среднее движение КА; и — угол между направления¬
ми на восходящий узел и текущее положение КА; v — скорость
движения (и=У [i/a); t — время проведения измерений; z =
= asinusiru; y2 = ucosusinf.
Выбор параметра /0 является специфическим в рассматривае¬
мой задаче. Как будет показано далее, для повышения обуслов¬
ленности матрицы коэффициентов системы нормальных уравнений
целесообразно выбрать /0 вблизи середины общего временного
интервала, занимаемого измерениями.
Особый интерес представляет зависимость ду^да. Как и сле¬
довало ожидать из простых соображений, вековой член присутст¬
вует лишь в выражениях для производных от измеряемых вели¬
чин по большой полуоси орбиты. Из формулы видно, как могут
быть снижены требования к точности различных параметров за
счет пространственного разноса. (Точность определения а, как
известно, является определяющей для КА с прогнозированием.)
В выражении ду^да присутствуют два слагаемых: первое таким
образом связано с уточнением периода обращения (зависит от
t—/о), а второе — с непосредственным определением а. Чувстви¬
тельность скоростных измерителей определяется вектором-гради¬
ентом так как оказывает в п раз меньшее влияние на
определение а. Производная по /0 имеет такой же вид, как и
177
сомножитель при вековом члене в ду!да. Из найденных формул
видно, что они оказываются весьма простыми.
Для получения расчетных соотношений необходимо найти
матрицу преобразования координат между системой сопровож¬
дающего трехгранника г, s, и и R, Ь, а также связанными с ними
векторами. Так как рассматриваются частные производные, рас¬
положение начала координат не имеет значения. Следует также
найти составляющие векторных произведений в (6.7) — (6.9).
Расчетные формулы для различных измерителей можно вывес¬
ти после предварительного определения направляющих косину¬
сов осей сопровождающего трехгранника относительно .вектора
R. Рассмотрим сферический треугольник, расположенный на по¬
верхности Земли с вершинами в точке стояния ИП (точка О на
рис. 6.8), на пересечении радиусов-векторов КА в точке траверза
Рис. 6.8. Геометрические соотношения, определяющие направляющие косинусы
вектора R относительно осей сопровождающего трехгранника
D и текущего положения КА Cz. Стороны треугольника обозна¬
чим до, д и 0, причем 0 отсчитывается в направлении движения
КА. (Расположение объекта и РТС относительно центра Земли
иллюстрируется рис. 6.8.) Полагая, что г^а, и находя скалярное
произведение r-R, получаем
cos (г, R) = Zx g_^3cos6 А + — (1 — cos 60 cos 0) ,
71 a R R R V 0 7
где R3 и И — радиус Земли и высота полета КА.
Выражение для cos(s, R) может быть получено дифференци¬
рованием выражения /?=К^2з4-г2—2rR3 cos б0 cos 0, которое сле¬
дует из рассмотрения рис. 6.8. Учитывая, что vr<^vSi имеем
cos(s, R) = Z2 ~R3R} cos do sin 0.
Для определения cos(n, R) заметим, что cos(n, R) =
= (г—гп)еп/?"1 = —гпеп/?-1, где гп — радиус-вектор РТС в геоцент¬
рической системе координат, а еп — орт нормали к плоскости ор¬
биты. Нетрудно видеть, что гп и еп не зависят от положения КА
178
на траектории (в данном случае от 0). Для определения этой по¬
стоянной установим, что в момент прохождения траверза cos(n,
R)Tp = ±sin(r, R), причем знак минус соответствует движению
КА против часовой стрелки для наблюдателя, находящегося на ИП.
Таким образом,
cos (n, R) = Z3 = —- = cos (п, Rmin) R ~ sfri (г, Rmjn) Z?mjn/7?,
к
где К — величина, не зависящая от 0; Rmm—минимальная даль¬
ность до КА.
Учитывая геометрические соотношения, непосредственно сле¬
дующие из рис. 6.8, получаем = sin 6q/R.
Характер зависимостей /ь /2, /з от 0 показан на рис. 6.9.
Из рассмотрения соотношений для /2, h и соответствующих
рисунков видно, что /1 и /3 являются четными функциями относи¬
тельно траверзного удаления, а /2 — нечетной функцией. Во всех
поскольку измерения про-
случаях выполняется неравенство
водятся при угле места р>0. Величина
ем РТС от плоскости орбиты, а знак—
стороной этого уклонения. Зависимо¬
сти /1, /2, /з от 0 оказываются весьма
существенными, так как они в значи¬
тельной степени определяют вид функ¬
ций у\ для однопозиционных измери¬
телей. На основе приведенных соотно¬
шений выведены формулы для у'(t)
применительно к используемым изме¬
рителям. Эти формулы сведены в таб¬
лицы (табл. 6.2, 6.3).
Произведем анализ приведенных
соотношений. При их использовании
можно в достаточно простой форме
аналитически описать характеристики
чувствительности различных методов
измерения параметров движения к эле¬
ментам околокруговых орбит. Суще-
Рис. 6.9. Зависимость направ¬
ляющих косинусов вектора R
от полярного угла орбиты .в зо¬
не сеанса связи с КА
ственно, что, несмотря на ряд прибли¬
жений, используемых при выводе приведенных соотношений, имеет
место достаточно хорошее соответствие с результатами, получен¬
ными по точным формулам.
Таким образом, возникает возможность применения указанных
соотношений для анализа информативности совокупности изме¬
рений при различных исходных данных. Могут также оказаться
полезными некоторые выводы, которые непосредственно следу¬
ют из рассмотрения табл. 6.2 и 6.3. Так, в частности, оказывает¬
ся, что положение перигея орбиты не оказывает при малых экс¬
центриситетах влияния на характеристики точности определения
орбит. Для орбит со значительными наклонениями точность оп¬
ределения углового положения плоскости орбиты (величина, об-
179
Таблица 6.2
d«i
dqj
R
VR
а
(^ ^о) П^2 + ^1
a (2l2 sin и— cos и)
V Z2 cos и ( 1± + 1) +
/2а \ 1
+<^- (/2i+/%)—^sin«j
п
а [2/2 (1 — cos и) — /х sin и]
Vp2sin«(-^Z1+1) —
— cosM[2y(Z31+Z%)-Z1] +
^0
Vl2=VR
i
a sin ul3
Vl3 ^cos и— l2 sin
Й
a (l2 cos i —l3 cos и sin i)
F{cos '■["^(/21 + /23)—Z1J +
+ l3 sin i Z2 cos « + sin «) j
ратная линейной мере погрешности) пропорциональна удалению
РТС от орбиты (характеризуемому углом до). Возможность оп¬
ределения плоскости на основе измерений угловых координат за¬
висит (при Z, близких к л/2) от величины проекции вектора s на
перпендикуляр к плоскости орбиты. Последнее обстоятельство по¬
зволяет определить рациональную ориентацию b в зависимости
от наклонения орбит.
Приведенные соотношения позволяют также найти параметры,
влияющие на точность определения орбит для каждого сеанса
связи. Из анализа табл. 6.2 и 6.3 можно заключить, что такими
параметрами являются Я, f, uTp, до, с^, где uTp — полярный угол
орбиты в точке траверза; а& — угол, определяющий ориентацию
вектора Ь.
Относительно малое число существенных параметров и ограни¬
ченный диапазон их изменений позволяют находить экстремаль¬
ные значения характеристик точности определения орбит вариа-
180
Таблица 6.3
дУ,
dqj
и
и
а
ь г
— [—G1“&—«1) +
3 1
+ «(t — to) UzUb—rnt) J
bV f 3 / 1
—(*—Л)" «b(3/22—1)] +
1 \ 1
+ (mi—/j^b) > D l^(mi 3ubl1)-j~l1fn2]—
a / a
—h(m*-l*ub)}
1
— —т-[2(/2«ь — т2) sin и —
1\
— Uiub—mi) cos u]
bV ( a
~~R~ 1 < /2 <mi —3“b/i) + Zim21 cos “—
— 2 sin и [2/2m2 — ub (3/22—1)]> +
+ [(m2 — l2ub) cos u 4- (ZjUb — mJ sin u] j
п
ab
— [—2(/2ub—m2)(l—cosu)+
+ Gi“b — mi) sin «]
bV f a
— ( — <[/2 (г^ — ЗиМ + Zi/Ha] sin u —
— 2 (1 — cos u) [2l2m2 — ub (3l22— 1)]> +
+ sin и (m2 — l2ub) + (Zi«b — ^i) (2—cos u) j
<0
bV
— — (1гиъ — тг)
К
iV2 ( 1
- — 1 — [2l2m2 — ub (3/22 — 1)] +
+ -y («1 — /l“b) j
i
ab
(l3ub — m3) sin и
Л\
bV [
—— ! COS u (m3 — l3ub) —
a ]
— — sin и [l2(m3—3ubl3) + m2l3] j
A J
Q
ab
—— [— cost (l2ub— m2) +
A
+ cos и sin i (l3ub— m3)]
bV f a
— | — <P2 (m3—3ubl3)+m2i3] cos и sin i—
— [2l2m2— ub (3l22— 1)] cosi> +
+ (тз—ubl3) sin usin i + (liUb — mJ cos i j
Примечание. Wft = ZiWi + Z2?n2 + Z3^i3; mi, т2, т3 — направляющие косинусы вектора Ь-
по сопровождающему трехграннику.
181
дней значений этих параметров. Однако могут быть предложены
и более компактные методы приближенной оценки точностных ха¬
рактеристик, которые целесообразно использовать при получении
опорных решений в задачах оптимизации КСТИ.
4. Качественная оценка характеристик точности определения орбит КА.
Рассмотренные соотношения оказываются достаточными для количественной
оценки коэффициентов систем нормальных уравнений. Качественно же характе¬
ризовать точность определения траекторий можно на основе анализа диагональ¬
ных и приведенных внедиагональных элементов матрицы Ар. Последние опре¬
деляются из соотношения рц = ац1 ]/~аца^ где ац— внедиагональный эле¬
мент матрицы Ар; ац— соответствующие диагональные элементы.
При этом, очевидно, можно воспользоваться свойствами изохронных част¬
ных производных, которые могут быть найдены из рассмотрения табл. 6.2 и 6.3.
Так, степень линейной зависимости между частными производными по различ¬
ным параметрам определяет величины приведенных внедиагональных элементов
Pij. Зависимость частных производных от времени может быть представлена в
виде суммы произведений коэффициентов или медленно изменяющихся вели¬
чин на функции, существенно зависящие от времени. Последние в основном оп¬
ределяются проекциями векторов-градиентов исходных измерителей на направ-
. ления сопровождающего трехгранника. Число этих функций не превышает трех,
что очевидно для координатных измерителей. Скоростные измерители харак¬
теризуются векторами и , т. е. зависят от шести скалярных функций.
Однако в большинстве случаев определяющими являются проекции вектора
Л1У.. Кроме того, составляющие обоих векторов-градиентов входят одинако¬
вым образом в выражения, приведенные в табл. 6.2 и 6.3. Следовательно, част¬
ные производные всех рассмотренных измерителей по шести параметрам орбиты
формируются умножением трех независимых функций на медленно изменяющие¬
ся величины, характеризуемые главным образом зависимостью полярного угла
орбиты от времени u(t). Полагая u = const, получаем линейную зависимость, по
крайней мере, между тремя частными производными. Нетрудно установить, что
вследствие одинакового принципа формирования частных производных линей¬
ная зависимость сохраняется даже при использовании 6-параметрической из¬
мерительной системы. Наличие дополнительной несущественной зависимости от
параметра и приводит к незначительному отклонению от линейной зависимости,
т. е. |ptj|«l для многих элементов. У однопозиционных измерителей указан¬
ное положение усугубляется одинаковым характером изменения функций /Д/)
и /3(0, которые для этих измерителей являются определяющими
если Таким образом, при достаточно общих условиях можно заклю¬
чить, что использование односеансных однопроходных измерений не позволяет
получить высокую точность определения детерминированных траекторий при
любом составе измеряемых параметров. Применение же лишь однопозиционных
измерителей при однопроходных оценках не позволяет получить сколько-нибудь
приемлемые результаты.
Перейдем к конкретным примерам, иллюстрирующим приведенные положе¬
ния. Допустим, например, что иТр = 90°. Тогда вследствие малых значений cos и
некоторые частные производные оказываются линейно-зависимыми. Это в пер¬
вую очередь может быть отнесено к элементу р24. (Действительно, как видно из
табл. 6.2 и 6.3, частные производные по элементам £ и tQ определяются теперь
182
одними и теми же функциями для всех измерителей: /2 для R, (4—/22)/Я—/i/a
для Уд-) Аналогичным образом может быть установлена тождественность вы¬
ражений для производных дуi/dql и dy^dq^ а также dyijdq2 и dytldq^. Отсюда
непосредственно следует, что р24, pJ3, р26 и р46 оказываются по модулю доста¬
точно близкими к единице. Кроме того, имеются элементы рг-3, обладающие та¬
кими же свойствами, но у которых линейная зависимость не выражается таким
явным образом. Наблюдается лишь частичное совпадение отдельных слагаемых
в выражениях для частных производных. Однако детальный анализ показыва¬
ет, что совпадение имеет место для обеих сравниваемых частных производных
у превалирующих функций. Такие функции образуют пары pi2, ри; pi6, р36;
р2з и р34. Следовательно, все внедиагональные элементы за исключением р5з, ока¬
зываются существенными. Малая линейная связь производных по i с остальными
объясняется тем, что dy'ijdqi зависят лишь от составляющей векторов-гради¬
ентов в направлении перпендикуляра к плоскости орбиты. Остальные произ¬
водные не содержат составляющих, ориентированных в этом направлении.
Из анализа формул табл. 6.2 и 6.3 может быть сделан ряд дополнительных
существенных выводов. Так, с увеличением высоты полета Н абсолютные зна¬
чения pij уменьшаются. Это вызывается большой значимостью функции А (■/),.
которая зависит от Н практически линейно. Поэтому определяющими становят¬
ся, по крайней мере, две функции, что приводит к большим различиям в функ¬
циях dyifdqj и dyi/dqh. Кроме того, значительная длительность сеанса связи
при больших высотах Н приводит к нарушению ранее принятых аппроксима¬
ций.
Величина |pij| значительно уменьшается при переходе от односеансных к
многосеансным измерениям. Это объясняется большим различием между услови¬
ями формирования dy-tldqj для различных измерителей, но при неизменном угле
wTp и при различных иТр с сохранением состава измерений. Во втором случае-
из-за явной зависимости большинства частных производных от и происходит
изменение коэффициентов у быстроизменяющихся функций. Это и приводит к
уменьшению линейной зависимости между частными производными. Следователь¬
но, увеличение точности при многосеансных измерениях достигается за счет по¬
вышения обусловленности матрицы Ар. Отсюда следует, что разнос ьмежду
пунктами (сеансами) должен приводить к существенным изменениям sin и и
cos и. Только при этом условии может быть достигнуто заметное увеличение
точности определения траекторий. Следовательно, минимальный разнос между
пунктами Лптр min можно определить из формул табл. 6.2 и 6.3.
Рациональный выбор параметра tQ позволяет получить компактную запись
соотношений, определяющих коэффициенты системы нормальных уравнений. Из
рассмотрения табл. 6.2 и 6.3 можно заключить, что при этом в выражениях для
dyddqj уменьшается слагаемое, зависящее от /0, что приводит к резкому сниже¬
нию элементов раз.
При качественной оценке величин диагональных элементов матрицы Ар не¬
обходимо определить характер изменения частных производных в зависимости от
времени. Затем по форме кривой dyildqj{t) по известным правилам можно най¬
ти ее прямоугольный эквивалент. Это позволяет сразу же получить оценку эле¬
ментов ajj. Очевидно, наиболее существенной операцией является определение
формы кривой по заданной аналитической зависимости.
Явная зависимость функций dytldqj от наклонной дальности /?min дает ос¬
183
нования считать, что значения ац в большей степени характеризуются парамет¬
рами Ни |б0|. Увеличение этих параметров приводит к соответствующему сни¬
жению величины элементов ац, которое можно оценить из формул табл. 6.2 и
6.3. Важно также, что вид нормированных функций позволяет судить о вели¬
чине элементов рг-3-. Это наглядно иллюстрируется на рис. 6.7.
На основании общих свойств кривых 2-го порядка в многомерном простран¬
стве '[75] может быть сделан вывод об инвариантности |АР| относительно
координатных преобразований. Действительно, коэффициенты систем нормаль¬
ных уравнений определяют уравнение m-мерного корреляционного эллипсоида.
Поэтому величина |АР|, обратная объему эллипсоида рассеяния, является од¬
ним из инвариантов уравнения поверхности этого эллипсоида. Отсюда следует,
что вариации таких параметров, как мТр и i, которые ранее рассматривались
как существенные, не приводят к изменению величины |АР|. Это обстоятель¬
ство оказывается чрезвычайно важным с точки зрения выбора скалярной ха¬
рактеристики точности определения параметров траекторий. В рассматриваемой
задаче понятие инвариантности оказывается более широким, чем для классиче¬
ского трехмерного пространства. Так, параметр /0, определяющий dyijda, оче¬
видно, является сугубо координатным, следовательно, его величина не изменяет
| Ар|. Направление отсчета угла 60, определяющее его знак, также зависит от
выбора координатной системы (правого или левого вращения). Поэтому матри¬
ца |АР| характеризуется лишь углом |д0|. Следовательно, при использовании
|АР| в качестве скалярной характеристики точности определения траекторий
число существенных геометрических параметров уменьшается до трех: Я, |б0|
и угол между следом орбиты и вектором Ь. Фиксируя изменение |Ар.|, можно
выявить ошибки в расчетах и формульных соотношениях, возникающие при
формировании систем нормальных уравнений. Так, любое изменение |АР| при
координатных преобразованиях свидетельствует о наличии ошибок. Следова¬
тельно, на основе сравнения |АР|, полученных при различных вариантах рас¬
чета, может быть произведен контроль качества вычислений и правильности
ввода исходных данных.
Таким образом, полученные результаты позволяют сделать качественный, а
иногда и количественный анализ свойств КСТИ как метрической системы. Не¬
смотря на трудности, лежащие на пути аналитического учета особенностей вто¬
ричной обработки, можно установить ряд общих закономерностей, связывающих
условия проведения измерений с оценкой орбит КА. Это в первую очередь от¬
носится к рассмотренным частным производным от измеряемых параметров дви¬
жения по элементам орбиты. Использование полученных аналитических соотно¬
шений дает возможность оценить чувствительность различных измерений к оце¬
ниваемым параметрам орбиты. Применение упрощенных выражений для оценки
коэффициентов систем нормальных уравнений позволяет в простейших случаях
найти выражения для аналитической оценки точности определения орбит. На¬
конец, использование приведенных соотношений дает возможность оценить об¬
щий вклад конкретных измерений в оценку параметров орбит.
Полученные соотношения могут быть использованы на всех последующих
этапах моделирования КСТИ, а также на первом этапе составления плана ра¬
боты КСТИ по различным КА. Как уже указывалось, аналитические соотноше¬
ния находят наибольшее применение при решении задачи оптимизации КСТИ,
что рассматривается в гл. 7.
184
7
ОПТИМИЗАЦИЯ КОМПЛЕКСНЫХ СИСТЕМ
ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ
7.1. Общая характеристика методов оптимизации КСТИ
Приведенное в гл. 4 формализованное описание КСТИ может
быть положено в основу решения задачи оптимизации. При опти¬
мизации должны быть учтены особенности КСТИ, рассматривае¬
мой как целенаправленная система. Поэтому в соответствии с
изложенным в гл. 5 следует считать, что наиболее серьезным яв¬
ляется ограничение по величине суммарного среднего риска
Г2^Г2доп- (7.1)
Если принять в качестве целевой функции меру приращения
ресурсов, расходуемых при создании и функционировании систе¬
мы ДС, то общая формализованная запись условий задачи опти¬
мизации КСТИ может быть представлена в виде
Э cz Эд, Е с £д, Д С = inf. (7.2)
Условия (7.2) означают, что необходимо определить нижнюю
границу ДС в области, где элементы множеств Э и Е находятся
в допустимых пределах. В состав вектора оптимизируемых пере¬
менных z входят элементы указанных ранее множеств, характе¬
ризующих взаимное расположение РТС (множество JV), програм¬
му или план измерений (множество Р) и характеристики систем
низшего уровня, т. е. РТС (множество S). Несмотря на примене¬
ние частичной оптимизации, задача выбора значений вектора z,
соответствующего одной из указанных групп оптимизируемых пе¬
ременных, оказывается сложной. Поэтому наряду с постанов¬
кой и решением конкретных задач математического програм¬
мирования, используемых при частичной оптимизации КСТИ, не
менее существенными оказываются подходы, связанные с каче¬
ственным рассмотрением свойств системы. Развитие таких под¬
ходов позволяет в ряде случаев построить эффективный процесс
оптимизации, который может быть отнесен к классу задач эври¬
стического программирования. Обоснование таких задач содер¬
жится в предыдущих главах. Полученные при этом решения за¬
частую оказываются приближенными. Их основное преимуще¬
ство заключается в возможности уменьшения размеров области
допустимых решений. Вследствие этого процесс оптимизации сле¬
дует рассматривать как многошаговый, причем каждый шаг со¬
ответствует модели определенного уровня сложности. Каждому
последующему шагу оптимизации сопоставляется модель повы¬
шенной сложности.
В этой связи рассмотрим основные характеристики оптимиза¬
ционных задач, определяющие качество получаемых решений и
185
скорость процесса оптимизации. Весьма существенны размеры об¬
ласти существования определяемых переменных и ее конфигура¬
ции. Количественной мерой объема этой области является общее
число вариантов решений Кд, которое в случае гиперкубической
области составляет KA=Nm, где N — число возможных значений
составляющей вектора оптимизируемых тгеременных; т — размер¬
ность этого вектора. Величина N представляет собой отношение
интервала изменения рассматриваемой составляющей к допусти¬
мой вариации этой переменной с точки зрения получения точного
решения оптимизационной задачи. Она зависит в основном от
характеристик итерационного процесса поиска решения. На нуле¬
вом и первом циклах итерации оказывается наибольшим, по-
этому-то алгоритмы поиска решения на таких этапах должны
быть наиболее простыми.
Перечислим оптимизационные задачи, связанные с выбором
параметров КСТИ. Содержание таких задач, с одной стороны, оп¬
ределяется характером модели движения КА, используемой при
оптимизации. С другой стороны, важен класс оцениваемых па¬
раметров, что эквивалентно конкретизации одного из множеств
N, Р или 2, элементы которого определяются в итоге частичной
оптимизации.
Модели траектории можно разделить на модели пассивного и
активного участков полета. Описание траекторий пассивного или
свободного полета приведено выше. Модели активного полета
описывают движение КА на участке вывода на орбиту. При этом
траектория задается как последовательность точек, отстоящих
одна от другой на фиксированные интервалы времени. Поэтому
применительно к активному участку полета следует рассматри¬
вать характеристики точности определения вектора состояния
объекта в различных точках пространства. В связи с этим в даль¬
нейшем уделяется внимание задачам оптимизации измерений
применительно к оценкам состояния объекта в одной точке.
Таким образом, оптимизация КСТИ, предназначенной для на¬
блюдения на пассивном участке полета, представляет собой наи¬
более сложную задачу. Поэтому используемые при этом методы
должны отличаться наибольшей общностью. Указанное в основ¬
ном относится к задаче выбора характеристик РТС вследствие
того, что основное ограничение связано с проверкой выполнения
заданных требований к точности определения параметров траек¬
торий. Характеристики точности определения этих параметров
представляют собой нелинейные функции от используемых опти¬
мизируемых переменных, т. е. характеристик РТС. Это обстоя¬
тельство приводит к необходимости применения методов случай¬
ного поиска экстремума [46].
При упрощенном подходе, например при скалярном характе¬
ре основного ограничения, допустимо использование более кон¬
структивных методов. Последние при определенных условиях га¬
рантируют получение единственного решения. Детальный анализ
указанного метода оптимизации приводится в § 7.3.
186
Результаты решения задачи определения основных характе¬
ристик РТС являются также основой для выбора унифицирован¬
ного ряда РТС, обеспечивающих наблюдение за различными КА.
При этом следует определить вариации компонентов параметров
траектории q и основных ограничений, не приводящие к значи¬
тельному изменению оптимизируемых переменных. При этом по¬
лучаем набор входных данных, необходимых для решения рас¬
сматриваемой задачи. Каждому значению выбранных векторов
qi(t= 1, N) можно сопоставить совокупность частных решений
оптимизационной задачи. Произведя квантование по величине
компонентов вектора оптимизируемых переменных z, можно оп¬
ределить общее число вариантов построения КСТИ, которое обо¬
значим как п. Варианты построения КСТИ в основном характе¬
ризуются числом используемых сеансов связи, составом и харак¬
теристиками точности измерителей. Для каждого из этих вариан¬
тов проверяется выполнение основного ограничения. Результаты
проверки могут быть представлены в виде бинарной последова¬
тельности. В результате формируется NХя-матрица трансформи¬
рованных ограничений, состоящая из двоичных символов. При
этом возможно построить алгоритм, обеспечивающий получение
нижней границы аддитивного функционала АС, причем каждому
варианту построения КСТИ приписывается определенная мера
расхода ресурсов.
Задача планирования работы РТС (выбор элементов множе¬
ства Р) намного проще предыдущей, так как рассматривается
лишь одноуровневая система. Некоторые затруднения обусловле¬
ны дискретным характером этой задачи. Однако специальными
приемами можно свести ее к одной из задач вариационного ис¬
числения (применительно к отысканию верхней границы эффек¬
тивности функционирования). Иногда задача планирования в
постановке, определяемой (7.1) и (7.2), сводится к линейному и
квадратичному программированию. Наконец, задача выбора ха¬
рактеристик взаимного положения РТС и траектории (элементы
множества N) не представляет практического интереса из-за слу¬
чайного смещения РТС относительно плоскости орбиты. Послед¬
нее вызвано несинхронностью вращения Земли и периода обра¬
щения КА.
Перейдем к характеристике оптимизационных задач, связан¬
ных с построением систем наблюдения за активным участком по¬
лета объекта. Здесь имеет место достаточно простая связь меж¬
ду показателями качества системы и оптимизируемыми перемен¬
ными. Это, как уже указывалось, обусловлено допустимостью
представления траектории в виде совокупности изолированных
точек. Наиболее сложной оказывается задача, связанная с опре¬
делением координат РТС. Эта задача требует для решения пред¬
варительного определения конфигураций зон равной точности.
Введение ограничений по допустимой области расположения РТС
приводит к наличию нелинейных зависимостей при проверке вы¬
полнения соответствующих ограничений. Здесь могут широко ис¬
187
пользоваться свойства градиентов измерителей. Число вариантов
решений в таких задачах обычно не превышает 104. Поэтому
число используемых итераций оказывается незначительным. Из¬
менение места расположения РТС в небольших пределах не
приводит к заметным вариациям характеристик точности опреде¬
ления вектора состояния объекта вследствие свойств совокупно¬
сти векторов градиентов. Дополнительной особенностью задачи
является моноэкстремальность целевой функции, что приводит к
целесообразности использования градиентных методов [21].
Применению градиентных методов должен предшествовать по¬
иск опорного решения. Это решение может быть получено на ос¬
нове использования приближенных соотношений, связывающих
характеристики точности определения вектора состояния объекта
и результатов измерений. Способы получения опорных решений
рассматриваются в § 7.2.
Если взаимное расположение РТС и объекта зафиксировано,
обоснование характеристик точности измерений может быть вы¬
полнено на основе простых соотношений. Подход к решению та¬
ких задач иллюстрируется примерами, приведенными в § 7.2.
Классификация методов, используемых при оптимизации
КСТИ, иллюстрируется табл. 7.1 [87].
На основании изложенного можно заключить, что ряд задач
оптимизации КСТИ требует применения специфических методов
математического программирования, которые и должны рассмат¬
риваться наряду с хорошо известными методами [21, 40, 46]. Об¬
щим для большинства задач оптимизации КСТИ является необхо¬
димость использования приближенных соотношений для оценки
выполнения заданных требований к точности определения тра¬
екторий. При этом могут использоваться соотношения, приведен¬
ные в гл. 6.
Таблица 7.1
Вид траектории
Характеристики
пространственные
временные
систем низшего
уровня (РТС)
Пассивный полет (де-
т ермин ир ов а н-н а я
траектория)
—
Линейное и квад-
р а ТИ1Ч.Н о е >п рюгр а.м -
миров а-ние
Случайный
экстремума
поиск
Активный полет
Градиентный ме¬
тод
Простой
экстремума
поиск
7.2. Выбор рационального состава измерений
и взаимного расположения РТС при определении
места объекта в пространстве
Рассмотрим задачу (выбора (параметров системы применитель¬
но ж оценке траектории объекта, состоящей из совокупности дис¬
кретных точек. При этом оптимизируемыми переменными явля¬
188
ются средние квадратические погрешности «измерений и характе¬
ристики взаимного расположения РТС. В качестве .мер точности
определения места объекта могут -быть приняты такие хорошо из¬
вестные величины, как параметры эллипсоида рассеяния, второй
начальный момент вектора погрешности местоопределе|ни1Я и др.
[26]. Такая задача оптимизации может «быть сформулирована сле¬
дующим образом. Допустим, что в некоторой области Q прост¬
ранства задана мера точности м-естоапредёления A7?2Tp(*i, *2, *з)
в виде второго начального момента модуля ошибки. Пусть далее
каждому варианту построения измерительной системы сопостав¬
ляется скаляр C(Iip, hp, Up), где IiP, I2p, Up—векторы-градиен¬
ты используемых измерителей. Значок р свидетельствует об уче¬
те весового множителя.
В соответствии с принципами оптимизации, сформулированны¬
ми в гл. 4, следует определить нижнюю границу
С (11Р> 1гр> 1зр) = inf (7.3)
при соблюдении неравенства
Д/?р (11Р, 12р, 1зр> г с )^А ^?т(гс),Гс^£2, (7.4)
где г с — текущий радиус-вектор объекта.
Для решения с формулированной задачи необходимо распола¬
гать зависимостями Д7?2Р от радиуса-вектора объекта при различ¬
ных соотношениях между средними квадратическими погрешностя¬
ми измерений.
Предположим первоначально, что определяется место на пло¬
скости с помощью РТС, которая может состоять либо из двух
р азн есенны х дал ьнюмер ов, либо пр едстав л ять собой измерите л ь
дальности и угла. Необходимо выбрать один из двух методов из¬
мерений и оценить целесообразность его использования при раз¬
личных относительных погрешностях дальности и углов. Предпо¬
ложим для простоты, что
требуемая характеристика
точности А7?2Т является
постоянной величиной в
пределах некоторой обла¬
сти, симметричной отно¬
сительно прямой O'iO's
(рис. 7.1) и ограниченной
по углам раствором 2<р, а
по дальности минимальным
(^min) расстоянием от цен¬
тра симметрии О. При дан¬
ной зоне точности дально¬
мерно-угломерная система
должна располагаться в точ¬
ке О, а база дальномерной
системы — совпадать с пря¬
мой 0'10'2.
Рис. 7.1. Выбор рационального метода оп¬
ределения места на плоскости
1К9
Точность дальномерной системы, очевидно, зависит лишь от уг¬
ла 'пересечения между радиусами-векторам и у 'И СКО погрешно¬
стей измерения дальности oi(/?). Погрешность местоо пределения
описывается вторым начальным моментом модуля ошибки ме¬
ста [26]
\R22R = 2a2(R)/sin2y. (7.5)
Соответствующая характеристика точности да льномерно-угломер¬
ного метода
bR2R,a = c2(R) + R2<j2(a).
Допустим сначала, что дисперсия угломерных измерений име¬
ет значение, обеспечивающее -одинаковую точность обоих методов
на окружности радиусом Ь/2, т. е. на линии ■максимальной точ¬
ности дальномерного метода. Это, очевидно, соответствует усло¬
вию 0,25/?2о2 (а) =о2(7?). При этом погрешность дальномерно-угло¬
мерного метода
A^,a = a2(W+(2Wl-
(7.6)
Соотношение (7.5) с учетом элементарных преобразований мож¬
но представить в виде функции наклонной дальности и угла а
= 2 а2 (7?)
7?2 b2 sin2a+ (/?2 —62/4)
R2 b2 sin2 а
При рациональном выборе измерительной системы с указанной
зоной точности необходимо определить линию, соответствующую
одинаковой точности обоих методов местоопределения. На осно¬
вании (7.6) и (7.7) получаем
R2 b2 sin2 a 2
R2 b2 sin2 a + (R2 — b2/4) ~~ 1 + (2 R/b)2 ' ’ '
Таким образом, (7.8) определяет уравнение линии равной точ¬
ности. Ее конфигурация легко может 'быть (найдена из приведен¬
ного уравнения. Нетрудно (видеть, что при значительном удалении
объекта от базы дальномерных станций указанная линия асимп¬
тотически приближается к прямой, наклоненной к оси О'^О'ъ на
угол a = 45°. Следовательно, если угол 2<р, определяемый требуе¬
мой зоной точности, меньше Л(/2, предпочтительным является даль¬
номерный метод.
В общем случае между погрешностями измерения дальности
и углов могут быть произвольные соотношения. Введем обозна¬
чение о(/?)|/0,5Ь = (Уо(а). Тогда погрешность угловых измерений
можно охарактеризовать коэффициентом К = , который вы-
ao(a)
бирается из у слови я наименьшего расхода ресурсов, а выражение
для 2-го начального момента модуля погрешности ■местоопреде¬
ления приобретет вид А/?2/?, =о2(/?)[1 4- (Д7?/0,5Ь)2].
190
Характер линии равной точности обоих методов остается та¬
ким же, как и в случае К—1. Однако наклон асимптоты кривой
равной точности .зависит от значения К. Предполагая выполнение
условия К7?/0,5Ь>» 1, получаем выражение
(7.9)
из которого видно, что дальномерный 'метод целесообразно и-с-
ЛОЛЬЗОВ-аТЬ при Amin ~ 0,7. Линии равной точности при раз¬
личных значениях /С -показаны на рис. 7.1. Существенно, что раз¬
меры базы однозначно определяются заданием /?тш с учетом ус¬
ловия Rmin^b/2. Таким образом, для любых зон требуемой точ¬
ности, заданных величинами 2<р и 7?min, «можно сразу же (выбрать
метод 'местоопределения при любых соотношениях между -погреш¬
ностями дальности и углов.
Во втором примере рассмотрим задачу определения положе¬
ния КА на участке параболической траектории. Допустим, что в
зависимости от комплектации измерительных -средств могут ис¬
пользоваться методы: дальномерный1, дальномерно-угломерньгй с
измерением азимута и угла места, дальномерно-угломерный с из¬
мерением направляющих косинусов -на взаимно перпендикуляр¬
ных базах.
Для дальнейшей формализации -указанной задачи следует оп¬
ределить число оптимизируемых переменных. Для получения -на¬
глядных характеристик примем упрощающие предположения, не
противоречащие смыслу задачи: 1. Погрешности измерений всех
параметров -положения и движения характеризуются гауссовским
законом распределения с нулевыми средними значениями. 2. Сред¬
ние -квадратические погрешности измерения дальности -одинаковы
у всех дальномеров. 3. Средние квадратические погрешности из¬
мерения обеих угловых координат для каждого дальномерно-уг¬
ломерного метода одинаковы.
-При этих условиях оптимизируемыми переменными (вектор z)
являются: 1. Расстояние между РТС. 2. Отношение средних квад¬
ратических погрешностей измерения углов (азимута и угла ме¬
ста) к величине о(/?)—Ка. 3. Отношение средних квадратических
погрешностей измерения направляющих -косинусов к о(/?)—Ки.
Величина o(R) при таком определении не входит в число оп¬
тимизируемых переменных. Таким образом, введение упрощаю¬
щих /предположений позволило существенно уменьшить размер¬
ность вектора z. Задача оптимизации -в рассматриваемом случае
упрощается также тем, что в качестве альтернативы выступает
требование применения лишь одного из трех предлагаемых мето¬
дов. В связи с этим целесообразно решать указанную задачу по¬
следовательно для каждого из этих методов. При этом имеют
1 Зависимость Pr= (&R2pr)~1 от высоты и горизонтальной дальности tn до
объекта для дальномерного метода изображена на рис. 7.2. Предполагается, что
дальномеры размещены в вершинах .равностороннего треугольника со стороной
а. Начало координат расположено в центре симметрии треугольника.
191
место оценки «стоимости Ct (7=1, 2, 3), определяемые исходя из
необходимости выполнения условия (7.4). Теперь задача «сводит¬
ся лишь к выбору 1наи1меньшего значения СР Основной этап за¬
ключается, таким образом, в отыскании зависимости характери¬
стик точности местоопределен и я от гс и последовательном их
сравнении для различных методов.
Рис. 7.2. Зависимость (А/?2)-1 на
плоскости для дальномерного ме¬
тода
Рис. 7.3. Зависимость точности опре¬
деления места объекта (А/?2)1/2 от
его положения на параболической
траектории для различных методов
местоопределения
Допустим, в частности, что средние 1квадратические погреш¬
ности измерения обеих угловых координат имеют значения, обес¬
печивающие одинаковую точность местоопределения для всех ме¬
тодов в некоторой фиксированной точке пространства. Пусть эта
точка соответствует наибольшей точности местоопределения для
дальномерного (метода. При сравнении различных методов целе¬
сообразно пользоваться отношением 6 (A7?)i/d (AT?) о, где б(АТ?) =
= VAR2 — соответствующая погрешность в выбранной точке про¬
странства, причем
б(А Т?)0 = ]/За(Т?). (7.10)
Примем также, что уравнение траектории определяется из ус¬
ловия прохождения ее через точку расположения РТС и фикси¬
рованную точку, характеризующуюся (7.10).
На рис. 7.3 приведены зависимости погрешности б (АТ?)/б (.АТ?) о
от приведенных горизонтальной (та = т/а) и наклонной (Ra —
= R/a) дальностей до текущей точки траектории (на указанных
рисунках индекс R соответствует дальномерному методу; и и а,
Р — да л ьн омерн о -углом ерн ым методам).
Предположим далее, что AT?2T=const, т. е. требования «к точ¬
ности одинаковы на выбранном участке рассматриваемой траек¬
тории. Тогда, как нетрудно видеть, ресурсы, затрачиваемые при
реализации каждого из .методов, определяются наиболее небла¬
гоприятными соотношениями для \R2P в рассматриваемом участ¬
ке траектории. Так, для дальномерно-угломерных методов необ¬
ходимо определить количество ресурсов, расходуемых в наибо¬
лее удаленной точке траектории.
192
Далее (необходимо задать зависимости С от оптимизируемых
•переменных. Предположим, что количество 'ресурсов, (расходуемое
при реализации измерений некоторого параметра, обратно пропор¬
ционально дисперсии погрешности измерений. Таким образом, для
решения задачи оптимизации должны быть заданы коэффициен¬
ты пропорциональности CR, Са, CXi между количеством ресурсов
и дисперсиями погрешности измерений. Зависимость от расстоя¬
ния между РТС целесообразно считать линейной либо принять
предположение о независимости С от а. С учетом указанного и
полагая, что общие затраты на проведение измерений дальностей
и углов отсутствуют, получаем:
а) для дальномерного метода
CR = 3CR /а2 (R) + Са а, или CR = 3CR /а2 (R) + CaR; (7.11)
б) для дальномерно-угломерного метода с измерением азиму¬
та и угла .места или направляющих косинусов соответственно:
Ca = CR /о2 (R) + 2 Са /о2 (а);
Cu = Cr/<j2(R) + 2Cu/q2(u). (7.12)
Очевидно, соотношения между коэффициента/ми Са и Си оп¬
ределяются относительными возможностями реализации дискрет¬
ной апертуры в случае измерения направляющих косинусов и
раскрыва управляемой антенны при измерении азимута и угла
места. Пусть отношение коэффициентов Си /Са <1. Тогда, оче¬
видно, при достаточно больших R зависимости 6 (А/?) от дально¬
сти для дальномерно-угломерного (метода, соответствующие ус¬
ловию Са=Си, можно получить при умножении 6(А7?)и на коэф¬
фициент \сгх /Са).
Таким образом, если для достаточно больших R выполняется
■неравенство
(С,/Са)26э(А/?).<6э(А/?)а,
где бэ(А/?)и и 6э(А/?)а — погрешности, соответствующие одинако¬
вой точности измерения угловых координат для обоих методов,
то -более целесообразно производить измерения направляющих ко¬
синусов.
Полученные решения сравниваются между собой с использо¬
ванием (7.11), (7.12), так как дисперсии оценок параметров дви¬
жения объектов оказываются определенными ранее. Действитель¬
но, в ходе проводившегося ранее сравнения отдельных методов
использовалось равенство АА?2Тр=А/?2р для указанных -ранее то¬
чек траектории.
Таким образом, задача выбора рационального метода измере¬
ния и точности определения параметров движения решается до¬
статочно просто при наличии введенных упрощений. Решение за¬
дачи в основном сводится -к получению точностных характеристик
для исследуемых (методов местоопределения и последующему
варьированию стоимостных 1коэффициентов. При этом целесооб¬
разно сравнивать методы делением их на однородные группы.
7—36 193
Рассмотрим теперь задачу выбора -положения, ориентации ц
размеров равнобедренного треугольника расположения РТС при
дальномерном методе местоопределения, а также выбор величи¬
ны c(R). Предположим, что зона, -внутри которой определяется
положение объекта, представляет собой прямоугольный паралле¬
лепипед, причем A/?2T=iconst. Тогда, очевидно, плоскость треуголь¬
ника расположения -РТС должна быть параллельна нижней гра¬
ни параллелепипеда; центр симметрии треугольника должен рас¬
полагаться на-нормали к нижней грани, проходящей через центр
симметр ии пар а л ле л епипеда.
Для получения -количественных результатов -выведем расчет¬
ные соотношения для определения А/?2 применительно к данной
задаче.
Для этого преобразуем общее соотношение для второго на¬
чального -момента модуля вектора погрешности [60] при отсутст¬
вии избыточных измерений
о2(/г), (7.13)
1=1
где о2(/г) = о2(//г)/| I-i|2 cos(enz, et)—дисперсия линейной погреш¬
ности; O)(r/-i) и 11; | —дисперсия погрешности и модуль градиента
i-й измеряемой величины; .(еП£ вг) у-гол между нормалью и на¬
правлением местоопределения.
Формула (7.13) может быть также представлена в следую¬
щем эквивалентном виде:
Д/Г2 = [<е°! X е°2) е°3]-2 £ xe„.w|2, (7.14)
1=1
где е°П1, е°П2, е°пз— единичные векторы, направленные по норма-
Рис. 7.4. Расположение дальноме¬
ров на горизонтальной плоскости
Рис. 7.5. Зависимость точности оп¬
ределения -места от формы треуголь¬
ника расположения РТС
194
ля*м -к поверхностям положения, причем ■предусматривается цик¬
лическая .'перестановка индексов.
Выражение (7.14) применительно к дальномерному методуме-
(доопределен-ия приобретает вид
& R2 __ Ieni X en212 + Ieni X епз 12 Т~ Ien2 X епз|2 . (7.15)
tf2 (Я) l(eni X еп2) епз12
Пусть а — радиус окруж(ности, описывающей треугольник рас¬
положения РТС, а ср—угол, характеризующий форму треуголь¬
ника (рис. 7.4). В дальнейшем все линейные величины удобно
выражать в долях а. Преобразованные таким образом координа¬
ты КА и наклонные дальности до РТС обозначим как xcaj и Rca.
Для определения единичных векторов-градиентов, совпадаю¬
щих ic наврав лени ими РТС — объект, используем выражения для
-направляющих косинусов этих прямых. Проекции таких векторов
на координатные оси:
л Meal —COS ф
П2 \ Р
\ ACq2
л (хса1 — СОЭф
епЭ I р
\ ^саз
хса2
хсаз \
tfcai/ 1
хса2 + Sin Ф
хсаз \ .
Rca2
Rea 2 /
хса2— sin ф
хсаз
%саз
Rca3
Опуская промежуточные выкладки, приводим выражения для
квадратов модулей векторных произведений двух единичных век¬
торов :•
. [Xcai sin ф + xcfl2 (1 + COS ф)]2 + 2x2a3 (1 + cos ф) +
|e„i Xen2|2 = - - >
К cal Kca2
+ 2 xcal sin2 Ф + 2 xca2 Sin ф (1 + cos ф) + sin2 ф
, ,, [«caisin<p—^ca2sin<p(l + cos<p]2 + 2x’3(l+cos<p)+
I eni X en312— -
К cal *ca3
, +2 xcal sin2 ф — 2 xcfl2 sin ф (1 + cos ф) + sin2 ф
j ;
|е„3хе„,|^451пф^'+^-2;-гС“- + “>,ф
Квадрат смешанного произведения составляет
4 sin2 ф х2 о (1 + cos ф)2
l(eniхеп2)еп3]2 = 2 - ---- .
Dz Dz
Кса1 Кса2 ^саЗ
(7.16)
Из анализа (7.16) следует, что место объекта невозможно оп¬
ределить при его расположении в плоскости размещения РТС,
7* 195
или если РТС располагаются на одной прямой, а также в три¬
виальной ситуации бесконечного удаления объекта ют РТС.
Всесторонний анализ точности на основе формулы (7.14) за¬
труднителен, поэтому ограничимся рассмотрением частных слу¬
чаев.
Дальняя зона /?С(1^>1. В этом случае можно принять,
ЧТО Rea\ ^Rca2 ~ Rca3 ~ Rea- Тогда
Д R2 = р2 Г 3 pci V 1 . 1 / ХС2 \2 1 .
о2 (/?) са _ 2 \хсз ) (1 + cos (р)2 2 \хсз ) sin2 ф
I 1 + cos <р + si п2 <р I
sin2 ф (1 + cos ф)2 J
(7.17)
Полученное выражение содержит слагаемое, не зависящее от
координат объекта (обозначим его £ф). Эта величина представ¬
ляет .зависимость погрешности местоопределения от формы тре¬
угольника .расположения РТС. Из рис. 7.5 /следует, что оптималь¬
ное значение ср соответствует, как и предполагалось, равпосторон¬
нему треугольнику. Полученный оптимум оказывается достаточно
некритичным.
Остальные слагаемые формулы (7.17) характеризуют зависи¬
мость погрешности от смещения объекта относительно центра
симметрии треугольника размещении РТС, выраженного в долях
высоты.
Так, из формулы (7.17) видно, что при расположении объек¬
та в плоскости и значительных отношениях хС1/*сз целесооб¬
разно выполнение условия <р<<pOpt = 60°. При боковом смещении
объекта относительно оси симметрии ОХ следует, напротив, вы¬
бирать ф>форь Если второе слагаемое в (7.17) является прева¬
лирующим, целесообразно использовать прямоугольный треуголь¬
ник расположения РТС.
Ближняя зона. Совместно выполняются три неравенства:
ХсаЛ 1, ^саЗ*^ 1.
Тогда: Rca[ ж 1 + %Crt; Rca2~ 1 +хс«2 sin ср—xcai <oos <р; RCa3~ 1 —
(-^са.2 Sin Ср + -^cal COS ф) .
При этом всюду, кроме очень малых ср, справедливо
2 хса1 (1 — cos ср) (1 — 2 cos ф) (1 + 2 cos2 <р)
2 Ааз (1 + cos ф)2
А 7?пр
(7.18)
где Д/?2пр = Д/?2|/о2(/?).
Полученный результат оказывается показательным. Смещение
по горизонтали перпендикулярно оси симметрии O1O2O3 не влияет
на погрешность. При наличии нескольких осей симметрии, т. е.
в случае равностороннего треугольника OiO2O3 (cp = cpopt), погреш¬
ность не зависит также и от xCfti. Таким образом,
Д 7?Пр 1/3 ХСа 3 •
Следовательно, линейные погрешности при малых значениях
приведенных высот (см. р*анее приведенный пример) обратно про¬
порциональны Хса-
196
Из рассмотренных соотношений следует, что ;может быть по¬
лучена (простая формула в более общем случае: ;при выполнении
.неравенств xca<^Zca, yea<^zCa. Тогда
ЛС~(-^з+ 1)
1 + cos ср + sin2 (р 1+2 cos2 (р
sin2 ф (1 + cos Ф)2 + 2х2а3 (1 + cos ф)2
(7.19)
Область действия соотношения (7.19) представляет собой ко¬
нус с углом >при вершине около 30° (при (погрешности в расчетах
около 10%). Таким образом, внутри конуса смещения по Xi и Х2
практически не увеличивают AR2.
Таким образом, при малых размерах треугольника могут ока¬
заться значительными погрешности в дальней зоне, при боль¬
ших— погрешности удаленных точек. Определение рациональных
значений а, р, а также и о(/?) 'может быть без труда выполнено
на основе соотношений (7.13) — (7.19). Усложнение конфигурации
зоны требует проверки выполнения условий по точности для боль¬
шого числа точек. Важно, что указанный подход остается спра¬
ведливым для произвольного состава измеряемых параметров.
Как уже указывалось, рассмотренные здесь -методы целесооб¬
разно 'использовать при получении опорного решения задачи опти¬
мизации, Последующий этап связан с переходом к более общей
постановке задачи. В .процессе ее решения могут использоваться
классические методы отыскания экстремальных решений. В част¬
ности, для класса задач, рассматриваемых в настоящем подраз¬
деле, 'наиболее широко используются градиентные .методы.
Проиллюстрируем указанные соображения посредством некоторого обобще¬
ния только что приведенного примера. Пусть в некоторой области пространст¬
ва W необходимо определить местоположение объекта на основе совокупности
измерений дальностей. Число используемых дальномеров считаем фиксирован¬
ным. Очевидно, указанная задача соответствует избыточности измерений в свя¬
зи с целесообразностью использования дальномеров, число которых превышает
минимально необходимое. При этом использование лишь необходимого числа
дальномеров, т, е. трех, приводит к соответствующему повышению точности из¬
мерений каждого из дальномеров. (Из соображений унификации предполагаем,
что дальномеры однотипные.) Указанные условия означают, что в качестве ме¬
ры точности следует принять весовую матрицу оценки места объекта по сово¬
купности измерений A = JTPyJ, где J—[пХЗ]-градиентная матрица измерений;
п — число используемых дальномеров; Pv = Е/сг2(/?)—весовая матрица дально¬
мерных измерений.
В качестве целевой функции следует принять какую-либо меру, связанную с
расходом ресурсов. В отличие от предыдущего, примем условие, согласно кото¬
рому превышение меры точности, реализуемой рассматриваемой системой отно¬
сительно заданной, было бы минимально в среднем квадратическом смысле. При
этом приходим к функционалу
Ф — j J j (Ах р — Ах т)2 dxi ^х2 dx3»
W
где Ахр и Аят — реализуемые и требуемые скалярные меры точности.
а°—36 197
(7.20)
Тогда задача оптимизации сводится к минимизации функционала Ф при вы¬
полнении ограничения
Ахр т Для V х](= W. (7.21)
Сформулированная задача решается градиентным методом. Характерная осо¬
бенность задач рассматриваемого класса заключается в моноэкстремальности це-
цевой функции. Поэтому глобальный экстремум может быть обычно достигнут за
ограниченное число шагов. Для сокращения длительности вычислительного про¬
цесса следует разделить область W на участки, соответствующие малым вариаци¬
ям Ах. При этом интегрирование в (7.20) заменяется суммированием.
Ранее полученные результаты могут служить опорным решением следую¬
щим образом. Всю область W следует разделить на участки, в каждом из кото¬
рых оценка с требуемой точностью обеспечивается в основном за счет тройки
дальномеров. Все имеющиеся п дальномеров могут быть сгруппированы в тройки,
для каждой из них могут быть найдены наиболее рациональные характеристики
взаимного положения с учетом ранее приведенных соотношений. Поскольку ре¬
альная точность определяется всеми дальномерами, полученные в ходе пред¬
варительного рассмотрения оценки в действительности оказываются пессимисти¬
ческими. При этом получаем известный запас с точки зрения неравенства (7.21),
что свидетельствует о возможности получения опорного решения на основе ра¬
нее приведенных соотношений. Отметим, что путем сравнительно небольшой мо¬
дификации метод .может быть применен к задаче выбора п при фиксированном
а (7?). Реальное определение градиента функционала Ф, необходимого для ис¬
пользования градиентного метода ;[21], может быть выполнено на основе чис¬
ленных методов дифференцирования Ф по координатам расположения дально¬
мерных РТС. Указанный подход без труда распространяется на произвольный
состав измеряемых параметров, а также на случай совместной оценки места
объекта и его вектора скорости.
7.3. Оптимизация основных характеристик РТС
при определении детерминированных траекторий
Ранее было установлено, что в состав оптимизируемых пере¬
менных при выборе основных характеристик РТС должны входить
средние квадратические погрешности измерителей и статистиче¬
ские характеристики интенсивностей потоков отказов. При отыска¬
нии взаимосвязи приращения количества ресурсов с характери¬
стиками погрешностей измерений и другими перемениыми следу¬
ет учитывать достаточно сложный характер этих зависимостей.
Это, с одной стороны, требует специальных исследований в дан¬
ном направлении, а с другой — допускает на этапе получения
опорных решений использование целевых функций простого вида.
В частности, взаимосвязь между компонентами вектора z можно
полагать линейной. Тогда целевая функция определится квадра¬
тичной формой относительно z. При этом C = zTBz = inf, где В —
матрица квадратичной формы, которую исходя из смысла зада¬
чи следует считать симметрической.
Детальный анализ показывает, что недостаточность априор¬
ных данных приводит к затруднениям при задании внедиагональ-
198
них элементов матрицы В. В связи с этим можно принять пред¬
положение о диагональности матрицы В, что соответствует пере¬
ходу |0Т квадратичной формы к линейной.
При установлении соответствия <между 1ком1понентами вектора
z и характеристиками .погрешностей измерений результаты реше¬
ния задачи оптимизации оказываются не критичными к форме за¬
дания оптимизируемых переменных.
В то же время, как уже указывалось, наиболее рационально,
по аналогии с известными видами стоимостных функций, принять
квадратичную зависимость от о(у>), т. е. считать оптимизируемы¬
ми переменными веса измерений. Поэтому выражение для целе¬
вой функции записывается в виде
ДС= £ aiPi, (7.22)
1=1
где pt=
Оптимизация характеристик РТС при скалярном ограничении.
В простейшем случае можно считать ограничение по точности оп¬
ределения параметров траектории скалярным. Действительно, для
КА с длительным прогнозированием определяющей является сред¬
няя ква др этическая погрешность определения большой полуоси
орбиты о (а). В этом случае может 'быть предложен нетривиаль¬
ный метод оптимизации. Для его обоснования будем варьировать
СКО одного измеряемого параметра при фиксированных значе¬
ниях СКО остальных. Тогда можно считать, что функция о(а) =
=Р(ъ(Уз) |<НУ1), .... о(^-1), o(yk) =const является мо-
нотонной и возрастающей относительно o(z/j). Здесь: k — число
измеряемых параметров; F — функция cr(z/i), ..., о(//а)г т. е. СКО
всех измерителей.
Таким образом, в состав вектора оптимизируемых переменных
входят лишь средние квадратические погрешности (веса) измере¬
ний. При указанных условиях .можно построить многошаговый
процесс поел ед ов а те л ьного ум ен ыи ен ия мин им и з и р у емого ф ун к-
циюнала АС, который при определенных условиях приводит к оп¬
тимальному решению. Прежде всего установим, что наименьшее
значение АС находится на границе области допустимых решений.
(В дальнейшем для простоты АС заменяется С.) Это непосред¬
ственно следует из существования монотонной зависимости о (а),
от оптимизируемых переменных. При этих условиях можно опре¬
делить интервал o(z/j) изменения переменной cr(r/j), в пределах
которого сохраняется зависимость функции F от остальных -пере¬
менных.
Назовем его интервалом сепарабельности функции Fj\a(t/j)]
по переменной o(z/7). В этом интервале зависимость о (а) от
можно считать линейной. Применительно к рассматривае¬
мым гладким функциям имеет место монотонная зависимость
•между первой производной и производными высших порядков.
В соответствии с этим можно сформулировать следующее свой¬
ство. Интервал сепарабельности функции Fj[a(yj)] оказывается
8°* 199
наибольшим по такой перем емкой о (//>•), для которой при одном
и том же изменении остальных переметных приращение функции
ЛГП(//)] оказывается наименьшим.
Перейдем теперь непосредственно к сущности метода. Пусть
Задано начальное значение вектора оптимизируемых переменных
z°, которому соответствует некоторое значение о0(а). Перейдем
к допустимому значению о(а)ДОп с помощью ряда шагов. Каж¬
дый шаг сопровождается увеличением о (а) на фиксированную ве¬
личину и соответствующим уменьшением С. В пределах каждого
шага изменяется одна перемеиная, для которой абсолютная ве¬
личина приращения минимизируемой функции оказывается наи¬
большей. Последовательность операций на каждом шаге оптими¬
зации заключается в определении интервала сепарабельности для
всех переменных, выборе наименьшего приращения Да(а) и отыс¬
кании приращений АС], ДС2, АбД, соответствующих выбранно¬
му Ао(а). Затем изменяют переменную, для которой |ACj| наи¬
большее. Таким образом, на интервале Ао(а) осуществл-яется ло-
кально-оптим а льное изменение С. Нетрудно установить условия
оптимальности предлагаемого алгоритма при условии, что про¬
цедура одинакова для всех шагов вплоть до достижения значе¬
ния о (а) доп. Пусть при заданном z° последовательность измене¬
ния вектора z отличается от предписанной указанной процедурой.
В этом случае переменная о(у;), соответствующая в первоначаль¬
ной ситуации наибольшему |АС|, будет изменяться при больших
значениях остальных о (у). Если частная производная до(a)i/do(z/j)
является монотонно возрастающей функцией остальных перемен¬
ных, то фиксированному Ао(я) при изменении алгоритма относи¬
тельно указанного соответствует меньшее Ao(yj) для сепарабель¬
ных функций, к которым и относится C(z). Таким образом, для
фиксированного z° метод является оптимальным при указанном
условии монотонно возрастающей зависимости до (а) /до (уj) от
остальных переменных. Из элементарных соображений следует,
-что это условие в большинстве случаев выполняется. На основа¬
нии этого свойства «могут быть также даны рекомендации о вы¬
боре вектора z°. Поскольку первые шаги процесса оптимизации
целесообразно производить при малых o(z/j), начальные значе¬
ния компонентов вектора z следует выбирать наибольшими.
Предлагаемый метод оптимизации вектора z при сепарабель¬
ной целевой функции и локально-сепарабельном скалярном ос¬
новном ограничении оказывается весьма полезным при оценке
влияния коэффициентов линейной формы (7.22) па составляющие
вектора zopt. Действительно, пусть исходная функция F[o(y)] та¬
булирована. Тогда z0Pt 'может быть определен при использовании
простейших аналитических соотношений. Полагая, что на доста¬
точно малом интервале До (а) функцию ЕДо (//;)] можно считать
.линейной, получаем выражение для отношения приращений функ¬
ции С при изменении о (а) за счет варьирования одной перемен¬
кой (o(yi) или ст (Уз)):
200
,о = 2^Z> + Ag>-° б(° °/(Z) <g> + W(/)
Д С; aj 2ojZ)-j-Aaj-Z) F'l1'* (j2<z) (07 + Ac>/)2(Z)
1?/ do (a) r?/ do (a) .
г i = ~—— и г j=- , а индекс l соответствует результа¬
та (yi) do (yj) r J
там, получен11ьпм после /-го шага процесса оптимизации.
Очевидно, при щ7-(/)> 1 значение С должно изменяться за счет
/-й переменной. Из рассмотрения соотношения (7.23) становит¬
ся очевидным влияние 'коэффициентов линейной формы относи¬
тельной стоимости на характер изменения вектора z при z->zopt-
Отметим, что развитие предлагаемого способа приводит к воз¬
можности аналитических методов решения задач оптимизации.
Действительно, из условия
Fz (z) = о (а)Доп (7.24)
может быть введена функция Лагранжа
F (z) = С (z) + Н (О (z)—а (а)допЬ
Отсюда получаем систему й+1 уравнений aj + \xdFz/dZj = Q>
(/=1, ..., k) и (7.24), на основе решения которой в принципе оп¬
ределяется zopt. Однако в связи с неявным заданием Fz(z) реше¬
ние данной системы уравнений затруднительно. Практическое при¬
менение метода Лагранжа возможно лишь при аппроксимации
функции Fz(z)_, допускающей применение аналитических мето¬
дов.
При практическом применении предлагаемого метода оптими¬
зации должны широко использоваться результаты моделирования.
Это позволяет, во-первых, рациональным образом выбрать харак¬
теристики начального приближения (вектор z°), а во-вторых,ог¬
раничить число используемых вариантов. Как уже указывалось,
при определении характеристик РТС в качестве исходных данных
должны задаваться план измерений и взаимное расположение
РТС. При плакировании измерений конкретизируются составы из¬
меряемых параметров и число сеансов связи.
Рациональный состав измерений -может быть найден и в про¬
цессе оптимизации, поскольку решение, соответствующее весам,,
близким к нулевым для некоторых измерителей, свидетельствует
о нецелесообразности их использования. Однако исходное пред¬
положение о полном составе измеряемых параметров приводит к
необходимости большого объема вычислений. В связи с этим бо¬
лее целесообразно рассматривать конкретные составы измеряе¬
мых параметров. Поскольку в КСТИ целесообразно использовать
многопараметрические РТС, следует -считать правомерным предпо¬
ложение о проведении одного или двух сеансов связи. При реше¬
нии вопроса о рациональном взаимном расположении РТС целе¬
сообразно считать, что сеансы связи проводятся при малых уда¬
лениях РТС относительно плоскости орбиты, составляющих еди¬
ницы градусов дуги большого круга. Взаимный разнос РТС, от¬
считываемый в плоскости орбиты, следует выбирать на основе ре-
201
жомендаций, полученных при /моделировании КСТИ на нулевом
уровне.
Указанные исходные данные в основном определяют струк¬
туру гипотетической системы, принимаемую .за исходную в про¬
цессе оптимизации. В качестве рациональных -составов измерений
с учетом данных моделирования желательно принять «координат¬
ный» (/?, «1,^2), «скоростной» (Ул, й\, й2) и неполный «коорди¬
натно-скоростной» (/?, VR) й\у й2) составы. Таким образом, основ¬
ные характеристики процесса оптимизации, такие как возмож¬
ность получения оптимального решения за конечное число шагов
и среднее время перехода к оптимальному (решению, очевидным
образом зависят от начального приближения (вектор z°) и вида
частных функций о (a) = /7j(a(yj)). Графики указанных функций
для некоторых значений остальных o(z/j) показаны на рис. 7.6*.
Расчеты производились применительно к указанным составам из¬
мерений. Траверзные удаления 60 принимались равными 2,5°. Раз¬
нос между траверзными -полярными углами для случаев двухсе-
ансных измерений AuTp = 60°. Пороговое значение о(а)Доп=10 м,
что соответствует СКО прогнозирования вдоль орбиты около
1,6км. В процессе решения задачи оптимизации выявлены харак¬
терные особенности совокупности оптимальных решений.
С целью наглядной иллюстрации решения оптимизационной за¬
дачи по выбору (рационального состава траекторных измерений-
было проведено математическое моделирование процессов опре¬
деления орбит околокруговых КА в диапазоне высот 200—700 км.
Моделирование производилось на основе указанных выше исход¬
ных данных с учетам условий получения наибольшей чувствитель¬
ности к СКО измерений. Результаты моделирования позволят «сде¬
лать следующие основные выводы [93, 94].
Состав VR, й\, й2. При /малых высотах полета (/7 = 200 км)
влияние изменений о(й) оказывается на порядок более сущест¬
венным, нем изменение о (Кд). Переход к высоте /7 = 450 км со¬
провождается снижением требований к точности измерения й ори¬
ентировочно в 3 раза. Большим значениям высоты полета соот¬
ветствует повышение требований как к о(ц), так и к о (Кв). Та¬
ким образом, имеется «оптимальное» значение Н, соответствую¬
щее наиболее низким требованиям к СКО измерений. Наличие
«оптимума» объясняется двумя конкурирующими факторами: уве¬
личением длительности сеанса связи и ростом наклонной дально¬
сти из-за увеличения Н.
Состав 7?, Wi, и2. Малым высотам полета соответствуют наи¬
более жесткие требования к точности измерения координат. При
этом о (а) наиболее чувствительна к изменению о (и). При пере¬
ходе к Н»450 км допустимые СКО возрастают в 4—5 раз. Уве¬
личение Н до 700 км вызывает небольшое повышение требований
к СКО измерений ориентировочно в 1,5—2 раза. Следовательно,
* Где это не оговаривается, результаты относятся к двухсеансным измерениям.
202
if при этом составе имеется «оптимальная» высота полета КА
[93, 94].
С о с т ав VR, й2.
Двухпроходные оценки. При малых Н дополнительные изме¬
рения по сравнению с составом VR, й2 не (приводят к повы-
г)
Рис. 7.6. Зависимость СКО
определения большой полу¬
оси орбиты от СКО изме¬
ряемого параметра для раз¬
личных условий наблюде¬
ния за КА:
а) а(а)=Н<т(Я)1; б)
а(а)=На(и)], <т(а) =
=f[a(VB)]; в) а(а) =
=/|[а(й)], 77 = 460 км;
г) а (а) =/![<*(“)].
= 700 км
203
шению точности определения траекторий. При значительных вы¬
сотах полета высокоточные измерения У? приводят к практиче¬
ской независимости от Следовательно, имеется эф¬
фект эквивалентного замещения ’различных измерений. Он состо¬
ит и том, -что появление дополнительного измеряемого параметра
приводит к инвариантности конечных результатов относительно
СКО ранее использовавшегося параметра, если оба измерителя
уточняют одну и ту же группу параметров траекторий. В данном
случае как R, так и VR характеризуют положение КА в плоско¬
сти траектории. Важно, что наличие измерений R сопровождает¬
ся некоторым уменьшением требований к о (и).
Однопроходные оценки. Переход от двухпроходных к однопро¬
ходным оценкам вызывает возрастание требований к значениям
о (7?) и о(й). При фиксированных СКО измерений о (а) для од¬
нопроходных оценок оказывается в 2—2,3 раза больше, чем у
дв у хпр о ходи ы х оцен о к.
При оптимизации производилось варьирование коэффициента¬
ми аг-, что эквивалентно изменению относительной стоимости СКО
погрешностей различных измерителей. Это связано с тем, что от¬
сутствие априорной информации о реальных значениях at требу¬
ет рассмотрения их в качестве переменных. При отсутствии из¬
быточности в составах измерений, что характерно для составов
йх, U2 или /?, U\, U2, изменение сц на порядок не приводит к
большим изменениям zont. Для состава R, VRf й\, й,2 относитель¬
ное изменение коэффициентов а\ и а2 в а\)а2 = К раз приводитк
аналогичному изменению Ziont и z2opt, т. е. z2opt/ziopt~К. Указан¬
ные свойства позволяют получить решения, близкие к оптималь¬
ным при произвольных соотношениях между коэффициентами (ц.
Таким образом, зависимость от взаимной стоимости различных
измерений проявляется лишь в случае возникновения избыточно¬
сти в составе измерений. При переходе от односеансных к двух-
сеансным измерениям резко снижаются требования к точности из¬
мерения параметров движения КА. Последнее можно рассмат¬
ривать как снижение затрат ресурсов за счет ухудшения опера¬
тивности определения орбит.
Оптимизация характеристик РТС при расширенном векторе
оптимизируемых переменных и векторных ограничениях. Предпо¬
ложение о значимости лишь единственного параметра траектории
не всегда оправдано. Поэтому в общем случае следует произ¬
водить оптимизацию с учетом векторных ограничений по точно¬
сти. Кроме того, при включении в состав оптимизируемых пере¬
менных лишь характеристик точности РТС не учитываются такие
важные характеристики системы, как помехозащищенность, на¬
дежность, пропускная способность. В самом деле, в гл. 5 было
показано, что такие характеристики могут определяться посредст¬
вом интенсивностей некоторых эквивалентных потоков отказов.
Поэтому в состав оптимизируемых переменных должны вклю¬
чаться параметры, определяющие потоки отказов. Здесь можно
принять обычно используемое предположение относительно обрат¬
204
ной зависимости С ют средней интенсивности (потока отказов Л.
Следовательно, в .качестве соответствующих оптимизируемых пе¬
ременных для сохранения линейности целевой функции следует
принять средний период между отказами Т%=А~\ При таком
предположении целевая функция представляется в виде
п m
c=s aipi+^ (7-25)
1=1 1=1
где ai имеет тот же смысл, что и в (7.22); a,j—стоимость усилий,
необходимых для достижения единичного значения среднего пе¬
риода между отказами.
Существенно, что и оптимизируемые переменные, связанные с
первой суммой, нуждаются >в детализации.
В качестве независимых оптимизируемых переменных необхо¬
димо рассматривать характеристики как инструментальных по¬
грешностей измерителей, так и погрешностей, возникающих в про¬
цессе привязки результатов измерений в пространстве и времени.
Соответственно перемениые, свя заниые с интенсивиюстями пото¬
ков отказов, должны учитывать прекращение измерений из-за на¬
личия помех, действующих по запросному и ответному каналам,
и т. д. Однако детализация параметров этой группы вектора z
представляется нецелесообразной из-за отсутствия априорных дан¬
ных о характеристиках потоков отказов в измерениях.
Перейдем к выбору .компонентов вектора z, используемых за¬
тем в рабочих алгоритмах. Следует учитывать наглядность ин¬
терпретации получаемых результатов. С этой точки зрения раз¬
мерность вектора z должна быть по возможности минимальной.
Кроме того, отсутствие подробной информации о .зависимости ко¬
личества ресурсов от вводимых оптимизируемых переменных так¬
же приводит к необходимости уменьшения их общего числа при
решении конкретных задач оптимизации. В соответствии с этим
следует считать, что числю оптимизируемых переменных должно
быть примерно 10. Четыре переменные 2] ... 24 явным образом
должны соответствовать весам инструментальных погрешностей
измерителей R, VR, и, й. Соответственно переменная Z5определя¬
ется эквивалентным весом погрешностей привязки результатов из¬
мерений в пространстве и времени и характеризует соответству¬
ющие погрешности измерения .параметра й. Для перехода к по¬
грешностям измерений произвольного параметра г/?- введем коэф¬
фициенты kVi пр ИСХОДЯ ИЗ СООТНОШеНИЯ СУ (l/j) np = Or(zi) ntf/ky jnp.
Предусматривалась также возможность оптимизации по пара¬
метрам погрешностей привязки всех измерителей. В этом случае
вводятся четыре переменные (г7, 2g, 29, 2ю), аналогичные пере¬
менным 21 ... 24. Переменная 26 характеризует суммарный поток
отказов, причем 26 = Л_12, где Л2 — суммарный поток отказов, оп¬
ределяющийся указанными причинами. Интенсивности потоков об¬
ладают свойством аддитивности Л2 = 2Лг-, где Л;— элементар-
i=l
205
ный поток отказов, вызванный конкретной причиной. Поэтому вве¬
дение переменной представляется целесообразным.
Таким образом, при оптимизации полной 6-параметрической
системы и неучете характеристик потоков отказов в состав век¬
тора z входят переменные z\ ... z$, если рассматривается общий
источник погрешности привязки с индивидуальными коэффициен¬
тами для каждого 'измерителя. При неполном составе измерений
уменьшается соответственно размерность вектора z. Эти составы
переменных целесообразно выбрать в качестве основных при рас¬
четах. При независимых источниках погрешностей привязки ре¬
зультатов измерений в состав оптимизируемых переменных для
6-параметрической системы входят Z\ ... z4, z7 ... z10. В алгоритме
должно учитываться наличие методических погрешностей измере¬
ний, не зависящих от количества затрачиваемых ресурсов. По¬
скольку предполагается, что все составляющие погрешностей не¬
зависимы, результирующий вес каждого измерителя, используе¬
мый при формировании системы нормальных уравнений, равен
Р>х=(Р^1 *Н-РГпр+/’м). (7-26)
где —веса методических погрешностей, не зависящих от за¬
трат ресурсов, a pjnp и pjk — веса погрешностей привязки и инст¬
рументальных погрешностей соответственно.
Алгоритм оптимизации сильно зависит от наличия или отсут¬
ствия переменной z6, устанавливающей связь с -параметрами по¬
тока отказов. При этом переменная zQ приводит к наращиванию
алгоритма, построенного без учета влияния потока отказов. По¬
этому алгоритм и программа расчета должны состоять из двух
частей. Первая часть построена применительно к оптимизации по
переменным zi ... z5, z7 ... z10. При -проведении оптимизации ис¬
пользовался (метод случайного поиска экстремума1. Первоначаль¬
но задается начальный вектор оптимизируемых переменных zu,
принадлежащий области допустимых решений. Очевидно, целесо¬
образно выбирать z близким к ожидаемому решению. Последнее
вызыв-ает трудности, связанные с заданием z° в области допусти¬
мых решений. Это привело к некоторой трансформации основного
критерия, обоснованного в гл. 5. Так, было установлено, что струк¬
тура внедиагональных элементов матрицы Ат, обратной корреля¬
ционной матрице заданных требований, оказывается ,в значитель¬
ной степени неопределенной. В связи с этим представляется пра¬
вомерным использовать предположение о том, что собственные
векторы матрицы Ар являются также и собственными векторами
матрицы Ат. Тогда заданные требования к точности определения
траекторий обеспечиваются при соблюдении системы неравенств
^•р—Xn>O(t= 1,... ,т), (7.27)
где XjP и Хгт — собственные числа матриц Ар и Ат ©оответот-
венно.
1 Характеристика алгоритма случайного поиска экстремума дана в прило¬
жении 2 к книге.
206
Критерий (7.27) легко реализовать на ЭВМ при использова¬
нии стандартных процедур. В качестве исходных точностных ха¬
рактеристик задается вектор кт собственных чисел матрицы Ат.
Таким образом, на каждом шаге процесса проверяется выпол¬
нение ограничений (7.27) и условий положительности оптимизи¬
руемых переменных. Процесс оптимизации прекращается, если при
заранее определенном числе шагов ни разу не будет зафиксирова¬
но уменьшение минимизируемого функционала
с= 3 ahmkzk, (7.28)
k=\
где ак — коэффициент линейной формы; mh— признак наличия
оптимизируемой переменной, принимающей значение 0 или 1.
При включении Zq в число оптимизируемых переменных основ¬
ная часть ранее указанного алгоритма сохраняется. Дополнитель¬
но для каждого значения Л2 определяются вероятности Р(К) по¬
явления К интервалов отсутствия измерений для /С=0,1 ..., Ктах.
При отыскании вероят¬
ностей Р(К) предполага¬
лось, что в пределах сеанса
связи длительностью Тн дей¬
ствует пуассоновский поток
б-импульсов. Первый им¬
пульс потока приводит к
возникновению фиксирован¬
ного интервала отсутствия
измерений длительностью т.
Импульсы исходного потока
при их появлении в преде¬
лах этого интервала не ока¬
зывают воздействия на си¬
стему, которая оказывается
чувствительной к б-импуль-
сам потока лишь после за¬
вершения интервала. Таким
образом, первый импульс пу-
асоновского потока, при¬
шедший после возобновле¬
ния измерений, вновь пре¬
кращает измерения на фиксированный интервал и т. д. Для ука¬
занных условий Р(К) находится на основании свойств потока Эр¬
ланга и составляет
Р (К) = ехр {—Л2 [Гн —(7< — 1) т}[ ехр(Л2 т) х
л^Тн—/<т) л4[Тн—(К— 1)т]'
Распределение вероятности
числа пропусков Р(К) при различных
интенсивностях потоков отказов
/=о
У
1=0
/!
Зависимости Р(/С) от К 'При Тн = 200 с изображены на рис. 7.7.
207
Для -каждого значения выбирается (некоторое число ©ариан¬
тов расположения исключаемых участков на временной оси с уче¬
том их относительной значимости. Затем проверяется выполнение
системы неравенств (7.27) для всех выбранных вариантов исклю¬
чения измерений при различных /С. Пусть число невыполнения ус¬
ловий (7.27) для K=j составляет qj. Тогда .можно приближенно
оценить вероятность невыполнения заданных требований Рхи при
значении суммарного потока отказов Л2: Р | Л = Л2 | =
^тах
= s—1 2 qjP (/), где s — число вариантов для каждого значения Л»
/=о
Далее проверяется выполнение неравенства Р 2н^РДоп, где
РДОп —допустимая вероятность невыполнения заданных требова¬
ний. Если указанное условие не выполняется, то интенсивность
суммарного потока отказов должна быть уменьшена. Оптимиза¬
ция по остальным переменным производится указанным выше спо¬
собом.
Числовые результаты получались в основном для тех же ис¬
ходных данных, что и в п. с. 199. Дополнительно задавались собствен¬
ные числа матрицы Ат применительно к ранее рассмотренному со¬
ставу параметров околокруговых орбит1 й, £, ц, u0, h Q, где а =
= б/1010; uq — начальный полярный угол. Конкретные значения
собственных чисел Хтг выбирались из условия получения суточ¬
ной погрешности прогнозирования около 1,6 -км, т. е. такой же,
как -и в предыдущем случае. Как и следовало ожидать, вследст¬
вие большого числа локальных экстремумов результаты оптими¬
зации зависят от z°, а также от величины 'шага при случайном
поиске. Это подтверждает правомерность ранее приведенного со¬
ображения о необходимости оптимизации на различных уровнях
моделирования.
В процессе решения задачи оптимизации дополнительно про¬
верялась правомерность ранее принятых предположений примени¬
тельно к новой постановке этой задачи. В частности, оказалось,
что разнос между пунктами, отсчитываемый вдоль орбиты Дцтр
не влияет на характеристики точности при выполнении условия
AwTp>Awopt о^ЗО ... 40 .
Установлены пределы отклонений результатов, полученных -при
решении задачи оптимизации. Оказывается, что эти колебания в
зависимости ют вариаций z° и величины шага при поиске экстре¬
мума приводят и колебаниям zopt, соответствующим отклонениям
весов измерений в 3—4 раза. Было установлено также, что вве¬
дение индивидуальных составляющих погрешностей привязки из¬
мерений не приводит к существенному изменению zopt.
При варьировании (коэффициентами линейной формы в (7.28)
получается, как в предыдущем случае, что при отсутствии избы¬
точности в составах измерений изменение 'относительной стоимо¬
сти весов различимых измерителей на один-два десятичных по¬
1 Масштаб по параметру а изменен для «выравнивания» элементов матри¬
цы А.
208
рядка не приводят к заметным изменениям -составляющих zopt.
Напротив, при появлении избыточности в измерениях относитель¬
ное .изменение коэффициентов линейной формы (7.28) в К раз со¬
провождается ориентировочно соответствующим изменением ком¬
понентов z, т. е. ai/tz^^^opt/^iopt^K.
Приведенные результаты относятся к случаю включения в со¬
став вектора z лишь весов измерений. Проверка возможности
включения .переменной г6 = Л_12 в состав вектора z проведена при¬
менительно к составу измерений VR, й\, п2 при условии, что вы¬
сота Н = 200 км. Оказалось, что и при этом имеет место эффек¬
тивный процесс оптимизации. Установлено также, что существует
явная зависимость z6oPt от коэффициента соответствующей линей¬
ной формы, т. е. от стоимости (рис. 7.8). Такой результат являет-
Рис. 7.8. Зависимость опти¬
мальной интенсивности суммар¬
ного потока отказов от вели¬
чины соответствующего коэф¬
фициента линейной формы
ся достаточно очевидным, так как допустимые характеристики
точности определения орбит -могут быть достигнуты за счет как
ужесточения требований к точности измерений параметров дви¬
жения, так и снижения интенсивности потока отказов (дублиро¬
вание РТС и их элементов, повышение помехозащищенности
И др.).
Включение в состав вектора z не только весов измерений, но
и интенсивностей потоков отказов соответствует более высокому
уровню обобщения. Действительно, в такой постановке устанав¬
ливается внутренняя связь между разнородными характеристика¬
ми на основе получения необходимого результата наиболее эко¬
номичным путем. Разумеется, указанный подход приводит к ус¬
ложнению модели, поскольку сопровождается усреднением по раз¬
личным реализациям отказов. Это в известной мере эквивалентно
учету нестационарности отказов. Отметим, что последнее харак¬
терно лишь для метрической системы.
В заключение сравним быстродействие -методов оптимизации
характеристик РТС. Отношение времени расчета одного вариан¬
та задачи оптимизации для методов, изложенных в пп. 1 и 2, ле¬
жит в пределах 50 ... 100 для ЭВ7Ч средней производительности.
При этом алгоритм случайного поиска не гарантирует получения
результата. Сравнение свидетельствует о преимуществе метода,
основанного на использовании локально-сепарабельного основного
ограничения.
209
8
ПРИНЦИПЫ СИСТЕМОТЕХНИЧЕСКОЙ АДАПТАЦИИ
РАДИОТЕХНИЧЕСКИХ КОМПЛЕКСОВ
8.1. Источники неопределенности
информационного взаимодействия
Решение задач анализа и (синтеза РТК на различных иерар¬
хических уровнях основывается на определенных допущениях и
упрощениях, что позволяет оптимизировать показатели качества
РТК и его подсистем. Однако в реальных условиях функциониро¬
вания РТК при информационном взаимодействии как с объекта¬
ми, так и 1между отдельными подсистемами комплекса часто на¬
блюдается отход от априорно принятых допущений, особенно при
индиферентном и антагонистическом взаимодействии. Несоответ¬
ствие реальных условий функционирования РТК характеристикам
и параметрам, используемым при статистическом синтезе комплек¬
са и его подсистем, приводит к возникновению ситуационной не¬
определенности, уровень которой может меняться в весьма широ¬
ких пределах.
Классифицируем источники ситуационной неопределенности на
примере задачи оценивания вектора состояния объекта информа¬
ционного взаимодействия по данным измерений. Эта задача ха¬
рактерна как при определении параметров траектории КА, так и
при решении задач обработки телеметрической информации, оцен¬
ки параметров принимаемых сообщений и т. д. В качестве урав¬
нений состояния и наблюдения объекта как динамической систе¬
мы используем уравнения (4.2), (4.3).
При известных параметрах и статистических характеристиках
возмущений вектора состояния объекта и помех в уравнении на¬
блюдения имеется возможность получить конкретную форму за¬
писи функционала (4.4) для решения задачи оценивания векто¬
ра состояния объекта на различных стадиях многозвенной обра¬
ботки измерительной информации. Таким образом, может быть
синтезирована оптимальная структура приемно-измерительной
подсистемы РТС, следящих измерителей, подсистемы первичной
обработки полезных параметров радиосигнала, выбран рациональ¬
ный алгоритм вторичной обработки данных измерений и т. д.
Ситуационная неопределенность, возникающая при оценивании
вектора состояния объекта информационного взаимодействия как
динамической системы, может быть разделена на две большие
группы: неопределенность, возникающая при составлении мате¬
матического описания уравнений состояния объекта; неопреде¬
ленность, возникающая при описании уравнений наблюдения объ¬
екта.
Для уравнений состояния объекта характерны следующие про¬
явления ситуационной неопределенности:
1. Неопределенность в знании параметров переходной матри¬
210
цы динамической системы Ф[/+1, fl, вызванная (несоответствием;
реальной траектории объекта в пространстве состояний и ее ма¬
тематическому описанию при составлении .модели объекта в урав¬
нениях оценивания. Эта неопределенность вызвана неполным зна¬
нием параметров вектора db определяющего основные факторы,,
влияющие на характер траектории (например, составляющие век¬
тора сил, действующих на КА).
2. Неопределенность в знании статистических характеристик
случайных возмущений, действующих на объект, приводящая к
неточному знанию параметров ковариационной матрицы возмуще¬
ний и параметров переходной матрицы возмущений Г|7+1, fl.
3. Неопределенность, возникающая при непредвиденном для
наблюдателя изменении траектории объекта. Такая ситуация воз¬
никает при априорно неизвестном для наблюдателя маневре ле¬
тательного аппарата, когда заранее неизвестны ни параметры им¬
пульса маневра, ни время его совершения.
В свою очередь в уравнениях наблюдения возникают следую¬
щие виды неопределенностей:
1. Неопределенность в знании условий наблюдения db приво¬
дящая к неточному описанию параметров 'матрицы частных про¬
изводных Н.
2. Неопределенность в знании статистических характеристик
погрешностей измерений, вызванная воздействием помех и внут¬
ренних шумов приемно-измерительных подсистем РТС. Уровень
неопределенности в основном зависит от отношения мощности по¬
мех к мощности полезного сигнала и в реальных условиях может
меняться в широких пределах, особенно при антагонистическом
информационном воздействии, когда конфликтная сторона может
применять преднамеренные помехи. Эта неопределенность приво¬
дит к неточному о пи санию параметров ковариационной матрицы
погрешностей измерений Ч^у.
3. Неопределенность, связанная с изменением условий распро¬
странения радиоволн на участке РТС — ОИВ. Она может приве¬
сти как к неточному описанию параметров (матрицы частных про¬
изводных Н, так и к неточному описанию параметров ковариаци¬
онной матрицы Ту. Кроме того, (изменение условий распростра¬
нения радиоволн приводит к появлению неучтенных систематиче¬
ских и квазисистем атических составляющих погрешностей изме¬
рений.
При описании процессов функционирования РТК помимо ис¬
точников неопределенности необходимо классифицировать и сте¬
пень априорной неопределенности, которая (может меняться в ши¬
роких пределах в зависимости от ситуации, сложившейся при
функционировании системы и воздействии среды.
Самым сложным, по-видимому, является случай полной апри¬
орной неопределенности, (когда относительно параметров, входя¬
щих в уравнения объекта и наблюдения, ничего неизвестно, т. е.
неясно, являются ли эти параметры случайными или неслучайны¬
ми величинами, можно ли для их описания использовать опреде-
211
.ленные законы распределения, а если можно, то какие параметры
распределения необходимо использовать.
К счастью, такая ситуация, как правило, носит гипотетиче¬
ский характер, так как .при конкретной постановке и анализе це¬
левых задач, выполняемых РТС, область априорной не определен¬
ности /может быть сужена. Кроме того, появляется возможность
выдвижения некоторых гипотез об источниках неопределенности
и характере параметров априорных распределений для исходных
ситуаций и уравнений объекта и наблюдения. Например, на осно¬
ве анализа класса КА, используемых в качестве ОИВ, можно оп¬
ределить возможный характер движения КА, использовать основ¬
ные закономерности для параметрического описания его траекто¬
рии и оценить допустимые пределы отклонений объекта при ма¬
невре. Одновременно анализ условий измерений позволяет в ка¬
кой-то степени оценить границы изменения условий распростране¬
ния радиоволн, возможные источники помех и типовые законы
распределения помеховых сигналов. При этом уже -можно сказать,
что параметры уравнений состояния объекта и наблюдений явля¬
ются случайными величинами (или процессами) и подчиняются
некоторому классу законов распределения, однако конкретный вид
распределения неизвестен. Таким образом, степень априорной не¬
определенности уменьшается, и она может быть условно названа
частичной априорной неопределенностью.
Наконец, более детальный и внимательный анализ функциони¬
рования РТС позволяет довести степень априорной неопределен¬
ности до параметрической. При этом выдвигается гипотеза, что
параметры, входящие в уравнения объекта и наблюдения,—суть
случайные величины, закон распределения -которых полагается из¬
вестным, так что неизвестными являются только параметры вы¬
бранного распределения. Следует отметить, что параметрическое
описание неопределенности является универсальным средством
учета ограниченных априорных сведений. Однако и при парамет-
р и чес ком оп'И са н ни неопр ед ел ени ости необходи м о и а йти компр о-
мисс между противоречивыми требованиями. С одной стороны,
для то-то чтобы принятая гипотеза о виде закона распределения
б ыл а м аксп'м а л ьно адекватн а сложившейся ситуации, описание
должно качественно правильно и по возможности количественно
точно отражать имеющиеся ограниченные априорные знания.
С другой стороны, нельзя увлекаться включением в параметры
распределения большого числа характеристик, так как эти харак¬
теристики придется определять по имеющейся в распоряжении ог¬
раниченной совокупности данных измерений. Это обстоятельство
приведет либо к усложнению алгоритма оценивания, либо к сни¬
жению качества решения основной задачи оценки вектора состоя¬
ния объекта наблюдения из-за перераспределения точностных ха¬
рактеристик при увеличении числа оцениваемых параметров.
212
8.2. Виды, методы и уровни системотехнической адаптации
радиотехнических комплексов
Заданные показатели качества функционирования РТК при
наличии ситуационной неопределенности можно обеспечить на
основе методов его адаптации к условиям информационного взаи¬
модействия и использования принципов обучения, позволяющих
достичь поставленную цель по мере получения, обработки и ана¬
лиза поступающей информации.
Следует вообще отметить, что термины «адаптация» и «обу¬
чение», успешно применяемые в биологии и психологии, при их
перенесении в область техники оказались недостаточно точными
и полными, а в ряде случаев вызвали ряд оживленных споров и
дискуссий [18, 50]. Уточнению смысла этих понятий предшество¬
вал длительный путь поисков решения новых, более сложных за¬
дач теории статистических решений, современной теории управ¬
ления, а также разработка и создание математической теории
адаптивных и самообучающихся систем [72, 73], которая пока
делает лишь первые шаги.
На первых этапах становления теории адаптации наметилась
тенденция к отождествлению адаптации с настройкой и само¬
настройкой [52]. При этом основное внимание обращалось на
нестационарные условия функционирования системы. Позже мно¬
гими исследователями было замечено, что помимо нестационар¬
ное™ условий существенной особенностью адаптации является ис¬
ходная неопределенность, вызванная как недостаточной априорной
информацией, так и влиянием случайных возмущений и помех.
Наиболее плодотворным, на наш взгляд, является обобщенное
определение адаптации, данное Я. 3. Цыпкиным: «Адаптацией
будем называть процесс изменения параметров и структуры си¬
стемы, а возможно, и управляющих воздействий на основе теку¬
щей информации с целью достижения определенного, обычно оп¬
тимального состояния еистемы, при начальной неопределенности
и изменяющихся условиях работы» [72]. Автор обращает особое
внимание на то, что «наиболее характерная часть адаптации со¬
стоит в накоплении и немедленном использовании текущей инфор¬
мации для устранения неопределенности...» и для улучшения по¬
казателей качества функционирования системы. Данное определе¬
ние, на наш взгляд; удачно вскрывает механизм адаптации и мо¬
жет быть полностью использовано для определения адаптации
РТК.
Под адаптацией РТК будем понимать способность комплекса
обеспечить требуемые показатели качества функционирования, не¬
обходимые для выполнения целевой задачи в широком диапазоне
изменения внешних условий, влияющих на качество функциони¬
рования комплекса в целом и его подсистем.
Сложность и многоуровневость современных РТК приводят
к необходимости введения специфической классификации различ¬
ных видов, уровней и методов адаптации. Это связано с тем, что
213
адаптивная структура РТК обеспечивается целым комплексом ор¬
ганизационных и технических мероприятий, а также созданием
адаптивной системы специального математического обеспечения
процессов обработки информации и процессов управления функ¬
ционированием РТК и его подсистем.
В •соответствии с определением адаптации как способа преодо¬
ления априорной неопределенности можно ввести классификацию
адаптации по отношению к источникам неопределенности: к ОИВ,
к неучтенным возмущающим воздействиям и к условиям инфор¬
мационного взаимодействия.
В целом указанные виды адаптации образуют класс ситуацион¬
ной адаптации, т. е. адаптации РТК к изменению внешних условий
функционирования. Так, адаптация к объекту в радиолокационных
системах 'подразумевает согласование вида, формы и мощности
излученного сигнала как с величиной эффективной площади рас¬
сеяния радиолокационной цели, так и с текущей дальностью до
объекта.
Применение системного подхода к задачам формирования адап¬
тивной структуры РТК дает возможность 'Предложить три иерар¬
хических уровня адаптации: алгоритмический, параметрический и
адаптация «поведения» РТК.
Уровень алгоритмической адаптации реализуется при вторич¬
ной обработке информации и в принципе не требует никаких изме¬
нений в структурах приемно-измерительных подсистем. Алгорит¬
мическая адаптация РТК заключается в создании комплекса алго¬
ритмов обработки информации для определения вектора состоя¬
ния объекта при любом виде и степени априорной ситуационной
неопределенности, предусматривающих адаптацию:
к априорно неизвестным «мешающим» параметрам;
к статистическим характеристикам результирующих ошибок из¬
мерений на входе подсистемы вторичной обработки;
к модели движения объекта, к неизвестным возмущающим
воздействиям в движении и непредвиденным маневрам объекта
(рис. 8.1).
Алгоритмическая адаптация базируется на соответствующем
математическом аппарате теории адаптивных систем и использует
прикладные методы этой теории при составлении соответствующих
процедур обработки измерительной информации.
Рис. 8.1. Виды алгоритмической адаптации
214
Отметим, что если перед ЭВМ, производящей вторичную обра¬
ботку измерительной информации, не ставится задача формиро¬
вания управляющих воздействий на основании результатов обра¬
ботки, то характерное для адаптации требование немедленного
использования текущей информации для устранения неопределен¬
ности может быть ослаблено. Это в свою очередь расширяет арсе¬
нал математических методов алгоритмической адаптации, так как
информация может быть обработана не только в реальном мас¬
штабе времени для оперативной оценки вектора состояния объекта,
но и многократно подвергаться обработке после проведения изме¬
рений с целью поиска наиболее адекватного алгоритма обработки
и более полного извлечения всех параметров, подлежащих опре¬
делению.
Уровень параметрической адаптации РТС сводится к адаптив¬
ному изменению параметров, структур и режимов функционирова¬
ния приемно-измерительных подсистем РТС для решения задач
преодоления априорной ситуационной неопределенности.
Параметрическая адаптация реализуется в темпе поступления
входной информации и обычно включает в себя:
защиту приемных устройств РТС от перегрузок, вызванных
помеховыми воздействиями;
адаптивную пространственную, поляризационную, частотную,
временную и фазовую селекции помех;
адаптивные -методы компенсации помех;
адаптивную фильтрацию полезных параметров радиосигнала
(рис. 8.2).
Математический аппарат параметрической адаптации также ба¬
зируется на общей теории адаптивных систем [50, 55], однако
вопросы практической реализации методов параметрической адап¬
тации тесно связаны с элементной базой РТС, видами и формой
используемых сигналов, типом антенных устройств и целым рядом
других схемотехнических решений, принимаемых при конструиро¬
вании РТС.
Рис. 8.2. Виды параметрической адаптации
215
Следует также отметить, что параметрическая адаптация мо¬
жет использовать и результаты алгоритмической адаптации, осу¬
ществляемой подсистемой вторичной обработки.
Адаптация поведения РТК, или адаптивное управление функ¬
ционированием РТК и его подсистемами, представляет собой наи¬
более высокий иерархический уровень адаптации. Она включает в
себя описанные выше уровни алгоритмической и параметрической
адаптации, однако особенностью адаптации поведения является то,
что сам РТК рассматривается как объект управления. Реализа¬
ция адаптации поведения, как правило, возможна при включении
ЭВМ в контур управления процессами функционирования РТК в
реальном масштабе времени.
Сам процесс управления состоит из ряда этапов (рис. 8.3), из
которых -можно выделить основные:
1. Получение информации об изменении условий функциониро¬
вания РТС в объеме, необходимом для (проведения анализа и при¬
нятия обоснованного решения.
Подсистемы:
Рис. 8.3. Основные этапы управления функционированием РТС
2. Обработка и анализ полученной информации для иденти¬
фикации конкретно сложившейся ситуации и выдача данных об¬
работки в форме, обеспечивающей принятие решения.
3. Выработка оптимальной стратегии поведения РТС и кон¬
кретных мер по ее параметрической и алгоритмической адаптации
в заданной обстановке и формирование управляющих воздейст¬
вий для реализации выработанной стратегии поведения.
216
4. Реализация выработанной стратегии поведения: целенаправ¬
ленное изменение параметров и структуры РТС.
5. Оценка эффективности принятой стратегии поведения и ее
коррекция на основе вновь поступившей информации.
Математической основой адаптивного управления функциони¬
рованием РТС (адаптация поведения РТС) являются методы об¬
щей теории адаптивных систем [72], современной теории стохас¬
тического управления [48, 52], а также наиболее адекватные для
описания конфликтной ситуации, в которой фигурирует РТС или
РТК, методы теории игр [68].
8.3. Алгоритмическая адаптация
радиотехнических комплексов
Общие принципы алгоритмической адаптации. Как уже указы
валось выше, алгоритмическая адаптация РТК связана в основ¬
ном с преодолением априорной неопределенности при вторичной
обработке информации на ЭВМ. Обычно используемые алгоритмы
обработки измерительной информации, описанные в гл. 4, бази¬
руются на точном знании априорных данных о статистических ха¬
рактеристиках возмущений в описании вектора состояния объекта
наблюдения и погрешностей измерений. Это обстоятельство позво¬
ляет получать конкретную аналитическую запись для функциона¬
ла Ф(х, у), подлежащего минимизации, и соответственно синте¬
зировать реализуемую вычислительную структуру того или иного
алгоритма данных.
Решение задачи минимизации функционала (4.4) в случае ain
риорной неопределенности наталкивается на ряд трудностей вы¬
числительного и структурного характера. Дело в том, что функ¬
ционал Ф(х, у) в условиях неопределенности того или иного вида,
т. е. при неполной информации о параметрах уравнения состоя¬
ния (4.2) и наблюдения (4.3), не может быть записан в явной
форме.
Неявность функционала Ф(х, у) подразумевает как наличие
функциональной неопределенности в уравнениях состояния и наб¬
людения объекта (неточное знание функций /ф ] и йф]), так и
неопределенность в знании параметров db d2, bi и b2 статистичес¬
ких характеристик возмущений состояния объекта (jiiw,^, Г[])
и погрешностей измерений (цу, ^v).
В этих условиях проблема определения вектора состояния
объекта существенно усложняется и в условиях отсутствия доста¬
точной априорной информации наиболее эффективно может быть
решена с помощью методов адаптивного оценивания.
Напомним, что в самом общем случае процесс адаптации дол¬
жен быть построен на получении и обработке соответствующей
измерительной информации, которая бы позволила частично или
полностью устранить имеющуюся неопределенность и по мере на¬
копления информации получать все более точную оценку вектора
состояния объекта по данным измерений.
9—36 217
Различные подходы к определению понятия «адаптация» при¬
вели к созданию целой гаммы адаптивных методов, решающих за¬
дачу оценивания вектора состояния объекта в условиях априорной
неопределенности.
Анализ различных путей решения задач адаптивного оценива¬
ния вектора состояния в условиях априорной неопределенности
позволяет дать следующую классификацию методов алгоритмичес¬
кой адаптации:
1. Методы параметрической идентификации, связанные с рас¬
ширением вектора состояния и включением в него дополнительных
величин с использованием параметрического описания вектора со¬
стояния объекта и вектора измерений.
2. Методы, основанные на использовании «эмпирических» оце¬
нок статистических характеристик случайных величин, входящих
в уравнения состояния и уравнения наблюдений.
3. Методы многоканальной параллельной обработки данных
измерений совокупностью неадаптивных фильтров, настроенных на
различные конкретные значения параметров уравнений состояния
и наблюдения в ожидаемой области их априорно известных зна¬
чений с последующим селектированном максимально правдоподоб¬
ной оценки вектора состояния x(Z).
4. Методы, связанные с использованием принципов обучения,
самообучения и самоорганизации.
5. Вероятностные итеративные методы, использующие принци¬
пы стохастической аппроксимации.
6. «Осторожные» минимаксные методы, гарантирующие полу¬
чение оценки вектора состояния в заданной области пространства
состояний динамической системы.
7. Методы получения инвариантных оценок по отношению к
априорно неизвестным «мешающим» параметрам.
Подробный анализ всего арсенала алгоритмической адаптации,
на наш взгляд, является самостоятельной задачей, выходящей за
рамки данной книги, и нуждается в отдельном рассмотрении. По¬
этому приведем лишь несколько примеров синтеза алгоритмов
адаптивного оценивания параметров вектора состояния на основе
методов калмановской фильтрации.
Алгоритм последовательного оценивания с адаптивным «отсле¬
живанием» неучтенных возмущений в уравнениях состояния объек¬
та. Вернемся к уравнениям состояния и наблюдения динамичес¬
кой системы, записав их в линеаризованной форме:
х [/+ 1] = Ф [i+ 1, /] х [/] + Г [i+ 1 ,/] w[f]; (8.1)
у* [i+ 1] = Н [i + 1]х [i+ 1] + v [/+ 1]. (8.2)
В ряде практических случаев статистические характеристики
возмущений, действующих на объект, могут быть неизвестны. Это
относится как к знанию элементов ковариационной матрицы Tw
так и переходной матрицы возмущений Г[г+ 1, I].
Использование в этой ситуации стандартного алгоритма кал¬
мановской фильтрации (4.28) для обработки данных измерений
218
при неизвестных значениях Tw и Г[£+1, /] явно приведет к ухуд¬
шению точности оценки вектора состояния объекта.
В целях компенсации влияния априорной неопределенности
сделаем предположение, что неучтенные возмущения в уравнениях
состояния объекта (8.1) носят относительно «низкочастотный» ха¬
рактер, что соответствует, например, реальным условиям движе¬
ния КА в плотных слоях атмосферы, формированию управляющих
воздействий с помощью двигателей малой тяги и т. д.
Это допущение позволяет записать рекуррентное выражение
для возмущающего воздействия в виде полинома первой степени
w [/ 1 ] = и [/ 1 ] = u [Z] и [/] т • (8*3)
В принципе значение степени полинома можно повысить, но
это усложнение приводит лишь к незначительному увеличению
точности оценки. Коэффициент u[f] в уравнении (8.3) представ¬
ляется как константа, подлежащая оценке.
Проведенная аппроксимация возмущающих воздействий поз¬
воляет включить их в определяемые параметры наряду с оцени¬
ванием вектора состояния системы, т. е. использовать расширен¬
ный адаптивный калмановский фильтр. Объединение х и и позво¬
ляет представить обобщенный вектор состояния динамической си¬
стемы в форме
х2 =
X
11
U
Соответственно переходная матрица обобщенного вектора со¬
стояния имеет вид
ф
Fu
F
U
0
1
Т
0
0
1
Здесь матрицы Fu= — ; F- = ^г представляют собой мат-
du u du
рицы чувствительности.
Корреляционная матрица оценки обобщенного вектора состоя¬
ния, необходимая для расчета «коэффициента усиления» расши¬
ренного калмайовского фильтра, состоит из следующих клеточных
матриц:
'Fx
'Fxu
т
хи
ш —
ии
т
их
Чг.
uu
При формировании матрицы полагаем, что =4^ =*
= const, т. е. искусственно поддерживаем неопределенность в
возмущающих воздействиях для их адаптивного отслеживания.
9* 219
Одновременно задаемся определенными значениями для на¬
чального вектора состояния оцениваемой динамической системы
х[0], Тх[0], Ти [0],Ти[0],
полагая, что для любого момента времени
^u = Tuu = Tu==0.
Для начального момента времени также считаем, что
u[0] = u[0] = 0.
При указанных допущениях оценка обобщенного вектора состоя¬
ния определяется уравнением расширенного калмановского фильт¬
ра
х [/ + 1] = х [Z + 1, /] + 72 U + 1 ] {у* Р’ + 1 ] — у (х [/ + 1 //])}, (8.4)
где коэффициент усиления фильтра запишется следующим обра¬
зом,;
7еР’ + 1] = Ф2 [Z+ 1, Л *rxs[z] <DTZ [z + 1, Z] [z+ 1] Q-4*+ U,
где
£2 [t 4-1 ] = {Hz [/ + 1 ] Txs [/ + 1//] [/ + 1 ] + Tv [t + 1 ]}.
Таким образом, использование адаптивного расширенного кал¬
мановского фильтра (АРКФ) позволяет при определенных допу-,
щениях достаточно просто обойти трудности, связанные с незна¬
нием статистических характеристик возмущений в движении при
обработке данных измерений. Вычислительная структура АРКФ
приведена на рис. 8.4.
Адаптивный алгоритм последовательной обработки с иденти¬
фикацией корреляционной матрицы погрешностей измерений. При
воздействии помех на РТС статистические характеристики резуль¬
тирующих ошибок измерений априорно неизвестны. Это обстоя¬
тельство также приводит к дополнительным потерям в точности
определения вектора состояния объекта при использовании стан¬
дартного калмановского фильтра (4.28) для обработки данных
измерений.
Для повышения точности оценки вектора состояния объекта
при воздействии помех рассмотрим адаптивную модификацию
АКФ с последовательным обучением априорно неизвестной корре¬
ляционной матрицы результирующих погрешностей измерений Ту
При построении вычислительной структуры алгоритма будем счи¬
тать, что возмущениями в уравнениях состояния объекта можно
пренебречь. Также предположим, что при воздействии помех на
РТС результирующая корреляционная матрица ошибок ТУ хотя
и априорно неизвестна, но постоянна в течение некоторого интер¬
вала измерений.
Полагаем, что погрешности измерений распределены по мно¬
гомерному гауссовскому закону с нулевым средним и приближен¬
но известными дисперсиями, а также что между измерениями от¬
220
сутствуют корреляционные связи по времени. Таким образом, v —
некоррелированная гауссовская последовательность типа белого
шума размерности (Nxi) со статистическими характеристиками,
определяемыми выражениями:
E{v[i]} = 0 ; cov {v[t] vT [/]} = TVA [t —jj,
Рис. 8.4. Структурная схема адаптивного расширенного калмановского фильтра
Ъ1‘+П
где A (Z—/) —дельта-функция Кронекера; Тv — диагональная мат¬
рица погрешностей измерений.
Воспользуемся алгоритмом адаптации, позволяющим оценивать
и от шага к шагу уточнять значение дисперсии. Для данного од¬
номерного случая этот алгоритм имеет вид
^{О‘]-Уп(хЮ}2, (8-5)
где y{x[Z]} —вектор расчетных значений измеряемых параметров,
соответствующих текущему вектору состояния объекта x[f], п =
= 1, 2, 3, ..., Z, I — число одновременно измеряемых параметров.
Для матрицы 4rv'[Z] можно получить выражение, аналогичное
221
(8.5). Для этого введем оператор 'преобразующий вектор
{ysl‘ [Z]—y(x[t])} в диагональную матрицу:
Л {у*Ш—у(х [/])} =
[У* [гТ-Hi [x[i])J
(8.6)
Обозначим матрицу (8.6) через L[z], Тогда алгоритм обучения
для матрицы 'Fv[tJ будет иметь вид
Tv[zJ = Tv[z-l] CFv[i- 1] —L2 (ij), (8.7)
I
так как согласно выражению (8.6) матрица может быть вычисле¬
на только после нахождения оценки вектора x[i] на i-м шаге и
использована только на следующем (/+ 1)-м шаге процесса оцен¬
ки вектора состояния.
Можно пойти по иному пути: сначала определить TvUL а за"
тем совокупность оценок параметров вектора состояния х[ф
В этом случае для формирования L[f] вектор У(x.«[Z]) уже не мо¬
жет быть использован. Поэтому вместо него будем использовать
вектор у(x[Z/Z—1]). Тогда матрица L[f] вычисляется следующим
образом:
L [/] = Л {6 у* [/]} = Л {у* [«]—у (х [i/i — 1])}. (8.8)
Алгоритм обучения для матрицы будет по-прежнему иметь,
вид (8.7), но для ее вычисления теперь не требуется получать
оценку вектора х[г]. В этом случае уравнения адаптивного оце¬
нивания принимают следующий вид:
х[zн- 1] = X[Z’+ 1/*] + у[< + 1]{у*[»+ 1]—у(х[г’+ !/«])} ; (8.9)
Y [z + 1 ] = (Ч'Г1 (/ + 1 Ц\ + Нт [z + 1] Y71 [* + 1 ]H[i + l)-1 X
(8.10)
ЧГУ [» + !] = ЧМЛ-
(ТУИ —L2U+>])
i + 1
(8.П)
■Объединяя выражения (8.9) — (8.11), получаем общее выраже¬
ние для АКФ с адаптацией к неизвестной дисперсии ошибок изме¬
ряемых параметров
х [z + 1] = х [z + 1/z] + {ТГ1 [t + 1 A] + Нт [z + 1 ] (Yv [z] -
- у. H[.+ 1]j-
X + (8.12)
Для увеличения точности и повышения сходимости АКФ целе¬
сообразно на каждом шаге измерений проводить итерационную
оценку параметров вектора состояния динамической системы. Вве¬
222
дение итерационного цикла на каждом шаге может повысить эф¬
фективность АКФ, но количество возможных итераций ограничи¬
вается вычислительными возможностями ЭВМ и шагом измерений.
Вычислительная структура алгоритма адаптивной оценки вектора
состояния x(Z) с последовательной идентификацией корреляцион¬
ной матрицы ошибок измерений Tv изображена на рис. 8.5.
Рис. 8.5. Структурная схема АРКФ с идентификацией корреляционной матрицы
погрешностей
Метод алгоритмической адаптации с использованием «эмпири¬
ческих» значений корреляционных матриц и средних значений
возмущений и помех. Рассмотренный случай, когда предполагает¬
ся неизвестной лишь корреляционная матрица результирующих
погрешностей измерений, носит несколько идеализированный ха¬
рактер. Это связано с тем, что в реальных условиях функциони¬
рования РТС, как правило, неизвестны не только корреляционная
матрица погрешностей измерений Т¥, но и корреляционная мат¬
рица возмущений Tw, а также средние значения возмущений juiw
и ошибок измерений цУ.
Таким образом, наряду с определением вектора состояния воз¬
никает задача одновременной идентификации параметров матриц
Tv и 'Fw, а также средних значений векторов возмущений и помех.
Решение такой задачи путем расширения вектора состояния
вызывает существенные трудности, особенно при небольшом объе¬
ме данных измерений. Поэтому на практике обычно прибегают к
различным субоптимальным схемам адаптивной оценки, которые
позволяют наряду с вектором состояния х(/) оценить один или не¬
сколько дополнительных параметров, входящих в уравнение со¬
стояния или наблюдения.
Идея заключается в последовательном определении значений
корреляционных матриц и средних значений вначале для парамет-
223
ров уравнения наблюдения, а затем для параметров уравнения
состояния.
Истинный вектор состояния x(Z) неизвестен, поэтому непосред¬
ственное определение величины цу не представляется возможным.
Однако для оценки статистических характеристик ошибок измере¬
ний, по крайней мере для эмпирического определения корреля¬
ционной матрицы Ч'у, вектор v.[/+ 1] может быть заменен на век¬
тор разности v[f+1]=>e[t+1] = y*[f+l]—y{x[f+ 1]}, где e[Z+ 1] —
выборочное значение шумов в наблюдениях.
Предположим, что на интервале оценки значения e[f+l] не¬
зависимы, а параметры распределения це и Те постоянны. Тогда
выборочные значения вектора разности e[j] можно рассматривать
как отображения v.[/], которые также являются независимыми и
тождественно распределенными. Эти допущения позволяют суще¬
ственно упростить задачу определения статистических характери¬
стик ошибок измерений по выборочным данным.
Введем в пространство выборок ц случайную переменную е,
для которой получены данные е[/], /= 1, ..., N. Основываясь на
этих эмпирических измерениях, необходимо оценивать известное
распределение е, характеризуемое средним це и ковариационной
матрицей Те.
Тогда несмещенная оценка для цс определяется по формуле
р.Е= ж 2 е[г4 1]; fiE=>jxv. (8.13)'
V 1=1
Для получения несмещенной оценки первоначально полу¬
чим эмпирическую оценку корреляционной матрицы Ч'е :
(е[*+ 1]-Ae)(e[i+ 1] -Де)л (8.14)
N~l "i
Математическое ожидание этой величины определяется выра-
жением
£{Те}=Ц-2 (H[i+1J Tx[z+l]H4/+lj + Yv, (8.15)
N 1=1
где YX[Z+1] входит в алгоритм калмановской фильтрации (4.28).
Отсюда эмпирическая оценка для корреляционной матрицы
ошибок измерений определяется соотношением
f {(8[»+1]-Це)(8[1+1]-ре)т-
-(^=Г)Н[/+1] Тх[/+1]Нф-+1]} . (8.16)
Полученные значения ц.У и Ту подставляются в уравнения кал-
мановского фильтра (4.28) для дальнейшей оценки вектора со¬
стояния x[f+ 1] объекта.
224
Для определения среднего значения pw и корреляционной мат¬
рицы возмущающих воздействий Tw поступают аналогичным об¬
разом.
Вернемся к уравнению состояния оцениваемой системы
х[г' + 1] = Ф[г+ l,i]x[j] + w[i+ 1].
Также полагаем, что вектор возмущений распределен по нор¬
мальному закону со средним значением p,wH корреляционной мат¬
рицей Т»:
Е {w [/]} = gw; cov {(w[i] —gw)(w[f]—,uw)}T=4rw. (8.17)'
Истинные значения gw неизвестны, так что сразу определить
Tw не представляется возможным. Вместо этого сформируем век¬
тор разности
W[/ + 1]=^§ [/+ 1] siHll-Xli+1/Ф
где §[/4-1] аппроксимирует возмущение, действующее на момент
/г-+1. Предположив, что величины w[j] для /=1, ..., N независимы
и параметры p,w и постоянны, будем считать, что величины
![/] как отображение w[j] также независимы и распределены
тождественно. Тогда по аналогии введем случайную переменную §
в пространстве выборок для которой определены значения §.
Основываясь на результатах расчета х,[/] и данных измерений
у*[/Ь необходимо оценить неизвестные параметры выборки ц §
и 4%.
Несмещенная оценка определяется стандартным выраже¬
нием
<818)
Для получения эмпирической оценки корреляционной матрицы
возмущений Tw получим вначале выражение для оценки матри¬
цы :
ттЦ- f a[z + H-^)(|[i+l]-^)T. (8.19)
77—1 ;-=i
Отсюда оценка корреляционной матрицы возмущений запишет¬
ся следующим образом:
*w= -Ц- f {(£[*+ij-i4)(i [Ы- ij-f4)T-
N—1 ё1
(Ф[г + 1Д’1^х[Л Фт [1+1,1]-С [<+!])} .
(8.20)
Полученные значения |nw и 4е w подставляются в выражения
калмановской фильтрации (4.28) для дальнейшего использования.
Таким образом, если предположить, что статистические харак¬
теристики возмущений динамической системы и ошибок измерений
225
постоянны, то их уточнение можно производить периодически на
некоторых контрольных временных интервалах — «окнах», а затем
использовать эмпирически полученные величины в уравнениях стан¬
дартного калмановского фильтра. Следует также отметить, что
для уточнения статистических характеристик возмущений и помех
необходимо организовать итерационный процесс попарного их оп¬
ределения в каждом контрольном интервале.
8.4. Параметрическая адаптация РТС
Уровень параметрической адаптации РТС сводится к измене¬
нию как параметров, так и структур ее подсистем в зависимости
от складывающейся радиоэлектронной обстановки. Основными
объектами параметрической адаптации являются подсистема ан¬
тенных устройств и приемно-измерительная подсистема. Наиболее
характерным примером эффективного использования методов па¬
раметрической адаптации является переход от антенных систем
со сплошной апертурой вначале к фазированным, а затем к адап¬
тивным фазированным антенным решеткам (АФАР). Вопросам
построения АФАР за последние годы посвящен целый ряд работ
[9, 42, 63]. Интерес к ним не случаен, так как АФАР можно рас¬
сматривать как адаптивный пространственно-временной фильтр,
параметры и характеристики которого изменяются на основе ана¬
лиза текущих входных сигналов и помех с целью оптимизации
функционирования РТС в условиях априорной неопределенности в
знании радиоэлектронной обстановки. Поэтому в рамках ограни¬
ченного объема книги проиллюстрируем методы параметрической
адаптации на примерах синтеза АФАР.
В общем случае АФАР может состоять из решетки излучаю¬
щих и приемных элементов, управляемых «весовых» каналов, сум¬
матора и адаптивного процессора, осуществляющего оптимальное
управление «весовыми» каналами на основе априорной и текущей
информации. Обобщенная структурная схема АФАР изображена
на рис. 8.6.
Будем 'Считать, что сигналы в каналах АФАР обусловлены
только наличием источников направленных помех и собственными
шумами антенной решетки. Рассмотрим вектор Е, элементы кото¬
рого представляют собой напряжения в каждом канале АФАР,
вызванные источниками шума. Корреляционная матрица шумов
Мш характеризует окружающую помеховую обстановку.
Как и при алгоритмической адаптации, задача выбора опти¬
мальных весовых коэффициентов АФАР для обеспечения наилуч¬
шего выделения полезных параметров сигнала в условиях воздей¬
ствия помех относится к классу оптимизационных задач. Исход¬
ными данными для ее постановки и решения являются: априорная
информация о статистических характеристиках полезного и поме¬
ховых сигналов; реально сложившаяся помеховая обстановка и
взаимная геометрия источников полезного сигнала и помех по
226
отношению к апертуре АФАР; заданная конфигурация элементов
афар.
После формирования на основе априорных данных соответст¬
вующих моделей необходимо выбрать и сформировать наиболее
Рис. 8.6. Структурная схема АФАР:
Xt-—вектор-столбец входных сигналов в г-й момент времени; —вектор-столбец адаптивно
регулируемых весовых коэффициентов; Y- — г-я выборка выходного сигнала
адекватный задаче обработки сигналов критерий оптимизации
O(W, X), составить задачу оптимизации
W{<D(W, X)+min ]^Wopt)
k max J p
а также выбрать конкретный алгоритм решения оптимизацион¬
ной задачи
Л {W + Wopt}=>^*.
Структура задачи оптимизации весовых коэффициентов АФАР
показана на рис. 8.7.
При решении задачи определения оптимального вектора весо¬
вых коэффициентов важным этапом синтеза АФАР является вы¬
бор критерия оптимизации. Применительно к АФАР среди возмож¬
ных критериев, лежащих в основе построения адаптивных фильт¬
ров, наибольшее распространение получили критерий минимума
■средней квадратической погрешности (СКО) отклонения реального
полезного сигнала от опорного полезного сигнала, предполагаемо¬
го известным, и критерий максимума отношения мощности полез¬
ного сигнала к мощности шума (сигнал-шум).
В фильтре, реализующем критерий минимума СКО, предпо¬
лагается известной копия полезного сигнала — опорный сигнал^,
227
который в идеальном случае полностью совпадает с реальным
полезным сигналом. Фильтр выделяет сигнал, наилучшим образом
совпадающий с d. Таким образом, любой сигнал, не входящий в и,
воспринимается как мешающий, и в направлении на его источник
формируется минимум ДН, т. е. он подавляется. Если же приня¬
тый сигнал входит в d, то адаптивный процессор сохраняет его
Рис. 8.7. Структура задачи оптимизации весовых коэффициентов АФАР
в выходном сигнале. Трудность реализации данного критерия со¬
стоит в том, что не всегда можно получить точную копию полез¬
ного сигнала, а лишь каким-либо образом описать его возмож¬
ный вид [9].
Определим зависимость СКО от весовых коэффициентов АФАР:
о2 - М [{d - У}2] - М [ {d — Хт W}2] = М [rf2] - 2 М [d Хт] W +
+ WM[XXT]WT. (8.21)
Минимум СКО достигается при таком значении веса, когда гра¬
диент от о равен нулю, т. е.
— =-2Rdx + 2RxxW = 0. (8.22)
dw
Уравнение (8.22) определяет значение оптимального вектора
весовых коэффициентов АФАР:
Wopt = R-1R(fx> (8-23)
где Rxx=M[XXT] — корреляционная матрица входных сигналов;
Rdx=M[dX] — вектор взаимной корреляции между входными сиг¬
налами X и опорным сигналом d.
228
Критерий максимума отношения сигнал-шум широко применя¬
ется, когда полезный сигнал S известен, но неизвестны его па¬
раметры. В отличие от АФАР, построенных по предыдущему кри¬
терию, здесь опорный сигнал S вводится в каждый канал решетки»
Таким образом, в направлении лрихода полезного сигнала выстав¬
ляется основной лепесток ДН.
Для определения оптимальных значений весовых коэффициен¬
тов необходимо максимизировать функцию отношения сигнал-шум
от весов:
(W) = —!-WT.sl2- . . (8.24)
Рш WT MmW
Можно показать [42], что максимальное отношение сигнал-шум
достигается при значении весов, определяемых выражением
Wopt^HM-JS*, (8.25)
где ji — произвольная постоянная, имеющая размерность мощнос¬
ти; S* — вектор, сопряженный с вектором полезного сигнала; Мш —
ковариационная матрица шумов в отсутствие полезного сигнала
на входе АФАР.
В особую группу, занимающую промежуточное положение меж¬
ду АФАР, реализующими рассмотренные выше критерии, целесо¬
образно выделить антенные решетки, построенные по критерию
оптимизации выходной мощности. Наиболее часто перед процессо¬
ром АФАР ставится задача так: подобрать весовые коэффициенты
в каналах решетки, чтобы мощность помехового сигнала на вы¬
ходе АФАР в общем случае была минимальной. В результате та¬
кого выбора весовых коэффициентов достигается минимизация
выходного шума, что эквивалентно как уменьшению искажений
полезного сигнала, так и максимизации отношения сигнал-шум
[51].
Широкое распространение получили три основных способа на¬
хождения оптимальных весовых коэффициентов: метод непосред¬
ственного вычисления обратных матриц М_1ш и R-1^; градиент¬
ный метод поиска значений Wopt; метод случайного поиска [9,
12, 42, 90].
Если рассмотреть значения мощности выходного сигнала
АФАР в соответствии с выбранным критерием оптимизации при
произвольных значениях весов, то пространственная форма этой
функции, называемая характеристической поверхностью АФАР,
представляет собой некоторую 'поверхность, которая в общем слу¬
чае может иметь несколько локальных и один глобальный экстре¬
мум. Координаты этого глобального экстремума соответствуют
оптимальным значениям весовых коэффициентов. Рассмотрим бо¬
лее подробно вид характеристической поверхности АФАР для кри¬
терия минимума СКО (рис. 8.8).
Можно заметить, что в этом случае характеристическая поверх¬
ность АФАР представляет собой поверхность, описываемую по
229
квадратичному закону. Это означает, что существует единствен¬
ный минимум на дне «чаши» и координаты этого минимума есть
теоретические оптимальные веса. Начальное значение веса соот¬
ветствует определенной точке на характеристической поверхности
АФАР. Нахождение оптимальных весовых коэффициентов проис¬
ходит в зависимости от выбранного способа.
Рис. 8.8. Характеристическая поверхность АФАР для критерия минимума СКО
Дадим классификацию алгоритмов адаптации АФАР, положив
в качестве классификационных признаков критерий функциониро¬
вания и метод его'реализации (рис. 8.9) [86].
Следует подчеркнуть, что все приводимые алгоритмы разли¬
чаются в основном методами оптимизации нелинейного функцио¬
нала Q(W, X), наличием тех или иных априорных данных о ха¬
рактеристиках помех и полезных сигналах и необходимостью учи¬
тывания размерности АФАР, увеличение которой приводит иногда
к весьма существенному росту вычислительных затрат.
Рассмотрение начнем с алгоритмов, реализующих непосред¬
ственный метод определения оптимальных весовых коэффициен¬
тов АФАР.
Поскольку данный метод предполагает определение значений
непосредственно по формулам (8.23) и (8.25), то разнообразие
алгоритмов, реализующих данный метод, обусловлено различны¬
ми математическими возможностями решения этой задачи.
Наибольшую сложность при вычислениях по выражениям пред¬
ставляет получение обратной матрицы Это значение можно
получить как непосредственным обращением матрицы, так и с
помощью рекуррентных матричных процедур, не связанных с не¬
посредственным обращением матриц [67].
230
231
В алгоритме ортогонального проектирования исходная матри¬
ца входных сигналов заменяется матрицей, составленной из наи¬
больших собственных векторов данной матрицы, соответствующих
наиболее мощным источникам входных сигналов. Тем самым
уменьшается размерность матрицы Мш и упрощается процесс даль¬
нейших вычислений.
Следует заметить, что значение обратной матрицы М_1ш мо¬
жет быть получено и другими методами обращения (например,
методом Жордано—Гаусса).
Примером алгоритмов, не предполагающих непосредственного
обращения матриц, является алгоритм рекурсивной оценки мат¬
рицы Мчш [67]. Данный алгоритм предусматривает рекурсивную
оценку однажды полученного значения обратной матрицы для
каждого последующего шага адаптации согласно правилу
— 1
t—1 —
х*) (хтм~],)
(1— а) + аХтМтД X*
(8.26)
1
1 —а
где а — вес, с которым берется текущая выборка.
Другим примером алгоритмов, позволяющих избежать обра¬
щения матриц, является алгоритм с использованием линейных
уравнений для расчета установившегося режима АФАР [64].
Алгоритм градиента среднего квадрата погрешности [63] реа¬
лизует собственно наискорейший спуск: вычисляется градиент
среднего квадрата ошибки и делается изменение весов в сторону,
противоположную направлению градиента V:
W/+1 = W, + fi(-v). (8.27)
Учитывая (8.22), получаем
Wi+1 = W; + 2 И (Rds- Rxx Wf). (8.28)
Основную трудность при реализации данного алгоритма пред¬
ставляет необходимость получения точного значения матриц Rdx
И Rxv
Поэтому существует несколько алгоритмов, основанных на этом
методе, позволяющих избежать указанных трудностей.
Алгоритм градиента мгновенного квадрата ошибки [64] полу¬
чается из алгоритма (8.28) путем замены средних величин Rjx и
Rxx их мгновенными значениями:
Wi+1 = W, + 2 И (d; X,— X, XT W;). (8.29)
Важнейшим преимуществом данного алгоритма является от¬
сутствие необходимости в априорной информации о статистичес¬
ких характеристиках помех.
В том случае, когда не всегда существует возможность полу¬
чить опорный сигнал d на каждом шаге адаптации, выборочную
оценку матрицы RdX можно заменить ее средним значением
d,X£
232
При этом предполагается, что помехи и опорный сигнал не кор-
релированы между собой. Тогда уравнение алгоритма с исполь¬
зованием вектора взаимной корреляции опорного и полезного
сигналов можно представить в следующем виде:
Wz+1 = Wz + 2 р [Rds-Yt XJ, (8.30)
т. e. алгоритм использует комбинацию мгновенных и средних ве¬
личин [17].
К достоинству данного алгоритма следует отнести тот факт,
что все входящие в него величины либо известны заранее (вектор
взаимной корреляции Rds), либо получаются в результате прямых
измерений (входной и выходной сигналы АФАР X; и У;).
В алгоритме минимума выходной мощности с ограничениями
задается форма частотной характеристики АФАР в направлении
прихода полезного сигнала, которое полагается известным. Она
фиксируется ограничениями, накладываемыми на веса, и далее
минимизируется мощность выходного шума. Алгоритм имеет сле¬
дующий вид [69]:
W/+1 = Р [Wf - ц Yt Xf] + W (0), (8.31)
где W(0)=F— начальное значение весов, соответствующее огра¬
ничению F; Р — матрица, учитывающая ограничения, накладывае¬
мые на веса и служащая для коррекции ошибок вычислений.
Дальнейшей разработкой указанного алгоритма является алго¬
ритм минимума выходной мощности с коррекцией «нуля» ДН
АФАР. Кроме условия минимизации выходной мощности шума,
существующего в рассмотренном выше алгоритме Y(unOM)=0, где
Ипом — угловая координата источника помехового сигнала, которое
обеспечивает формирование узкого минимума ДН по отношению
к помехе, здесь вводится дополнительное условие — Y (rz) =
I du JH=«noM
= 0 и в направлении на помеху образуется плоский минимум. Так
как ДН антенны зависит от длины волны принимаемого сигнала,
то за счет полученного плоского нуля при рассмотрении ДН для
отдельных спектральных составляющих принимаемого сигнала бу¬
дет сохраняться область минимальной чувствительности ДН для
всей ширины его полосы. Поэтому данный алгоритм предназначен
для подавления широкополосной помехи.
Уравнение алгоритма имеет вид
Wi+1 = Р [W; - И {Х; Yt + X, rj] + W (0) , (8.32)
где $ — константа, определяющая скорость сходимости алгорит¬
ма; X, У — производные входного и выходного сигналов АФАР.
В реальных условиях возможны случаи, когда неизвестен ни
опорный сигнал d, ни управляющий вектор S, а известно лишь
соотношение между мощностью сигнала Рс и мощностью помехи
Рп. Тогда возможно построение схем антенных решеток на основе
алгоритма оптимизации мощности в зависимости от соотношения
Рс и Рп. Такие АФАР либо минимизируют выходную мощность
233
Рвых, если Рп>Рс, либо максимизируют Рвых, если Рс>Рп при
ограничениях, накладываемых на веса, препятствующих самозапи-
ранию решетки [51].
Алгоритм оптимизации выходной мощности может быть пред¬
ставлен в следующей форме:
(8.33)
где К — константа, определяющая скорость сходимости алгорит¬
ма; ТОО для РС>РП; К<0 для РС<РП.
Преимуществом данного алгоритма является отсутствие необ¬
ходимости использования априорной информации о полезном сиг¬
нале и о помехах. Однако в системе обработки невозможно раз¬
личить полезные и мешающие сигналы.
В отличие от градиента СКО (8.28), градиент от отношения
сигнал-шум является нелинейной функцией от весов, поэтому в
алгоритме линеаризации градиента отношения сигнал-шум весов
используется линеаризация этой зависимости путем замены нели¬
нейных коэффициентов их предельными значениями.
Алгоритм можно записать следующим образом:
Wz+1 = Wf + ц a (S* —a* WJ. (8.34)
Таким образом, в процессе вычисления оптимальных весовых
коэффициентов получают реальный выходной сигнал a*M;Wi,
сравнивают его с известным сигналом S* и минимизируют раз¬
ность.
Среди алгоритмов, построенных на других методах отыскания
экстремальной точки характеристической поверхности АФАР, сле¬
дует отметить алгоритм с использованием фильтра Калмана и
алгоритм с использованием оценки обратной матрицы входных
сигналов [42].
Наиболее простыми с точки зрения их реализации являются
алгоритмы случайного поиска. Алгоритм естественного отбора реа¬
лизует общую идею, заложенную в методе случайного поиска:
вектор веса подвергается случайному изменению и измеряется СКО
до и после этого изменения a(Wf) и a(Wi + Vf), где — случай¬
ный вектор. Далее находится разность
z={a(Wf)-a(Wl- + Vi)}.
Уравнение алгоритма можно представить как
Wz+1 = Wz + 0,5[l+sgn{z}]Vf,
(8.35)
— 1, z<0.
1, г>0;
Если разность оценок СКО больше нуля (погрешность умень¬
шается), то изменение веса принимается. Если разность меньше
нуля, то изменение веса в дальнейшем не учитывается.
Линейный алгоритм случайного поиска является модификацией
алгоритма естественного отбора и отличается от него введением
234
элемента обучения: неудачный шаг в последующем не отбрасы¬
вается, а учитывается. Алгоритм называется линейным, так как
изменения весового вектора пропорциональны изменениям СКО.
Методы адаптации можно сравнивать по скорости сходимости
весов к оптимальному значению, эффективности подавления по¬
мех, требуемому объему вычислений.
Самой высокой скоростью сходимости обладают алгоритмы,
относящиеся к непосредственному методу, а впрочем, сходимость
в этом случае не зависит от пространственного распределения ис¬
точников помех. Однако скорость сходимости непосредственных
алгоритмов в значительной степени определяется скоростью изме¬
нения входных данных и начальными условиями. На рис. 8.10
изображена зависимость коэффициента эффективности подавления
помех Лп от числа выборок входных сигналов. Из рисунка видно,
что число потребных выборок входных сигналов при условии оди¬
наковой эффективности подавления помех у непосредственных ал¬
горитмов примерно в 10—20 раз меньше, чем у градиентных.
Рис. 8.10. Зависимость коэффициента эффективности подавления помех от коли¬
чества выборок входных сигналов:
а — алгоритм обращения оценки матрицы Мш; б—алгоритм обращения оцен¬
ки матрицы Мш; в — алгоритм линеаризации функции градиента от весов
Градиентные алгоритмы обладают асимптотической сходимо¬
стью, скорость которой зависит от распределения источников по¬
мех или мощности помеховых сигналов.
При квадратичной характеристической поверхности АФАР слу¬
чайные алгоритмы обладают самой медленной скоростью сходи¬
мости. На рис. 8.11 изображена зависимость скорости сходимости
различных алгоритмов от количества выборок входных сигналов.
Отсюда следует, что по скорости сходимости случайные алгорит¬
мы уступают градиентным алгоритмам примерно в 2 раза.
Однако данные алгоритмы могут быть более эффективными,
чем градиентные, тогда, когда характеристическая поверхность
235
АФАР кро-ме одного глобального имеет еще несколько локальных
минимумов.
Наибольшей эффективностью подавления помех при одинако¬
вом объеме выборок входных сигналов обладают непосредствен¬
ные алгоритмы. Кроме того, повышение эффективности подавле¬
ния помех для градиентных и случайных алгоритмов сопровож¬
дается уменьшением их скорости сходимости.
Рис. 8.11. Зависимость скорости сходимости алгоритмов адаптации АФАР от
количества выборок входных сигналов:
а — алгоритм градиента мгновенного квадрата ошибки (теоретическое значение
/гп = 108 дБ); б — алгоритм случайного поиска (теоретическое значение kn =
= 125 дБ)
Недостатками непосредственных алгоритмов являются большой
объем вычислений (число арифметических операций равно NL,
где L — объем выборок входных сигналов) и необходимость высо¬
кой точности выполнения арифметических операций, число кото¬
рых резко возрастает по мере увеличения числа элементов АФАР.
Это является своеобразной платой за скорость сходимости и ка¬
чество подавления помех.
Достоинством градиентных алгоритмов и алгоритмов случай¬
ного поиска является то, что число арифметических операций
пропорционально числу каналов АФАР, и при этом не требуется
высокой точности вычислений, поскольку шаг в сторону от опти¬
мального направления незначительно продлевает процесс сходи¬
мости. Кроме того, алгоритмы имеют простую реализацию и при¬
менение их предпочтительно, когда число элементов АФАР дости¬
гает нескольких тысяч.
Таким образом, проведение краткого анализа алгоритмов
функционирования АФАР, не охватывающего всех возможных ме¬
тодов параметрической адаптации, позволило отразить многообра¬
зие способов реализации адаптивных подсистем РТС на наиболее
ярком примере. Следует также отметить, что методы синтеза
АФАР включают в себя не только параметрическую адаптацию,
но и алгоритмическую адаптацию, реализуемую в процессоре ре¬
шетки, а также адаптивное управление ДН. Интенсивному разви¬
236
тию адаптивных методов способствует широкое внедрение в РТС
микропроцессорной техники, устройств формирования и обработки
сложных радиосигналов, построенных на новых физических прин-
ципах.
ПРИЛОЖЕНИЕ f
Перечень используемых в книге математических терминов,
определений и символов
1. Семейство множеств определяется посредством двух множеств А и X,.
причем множество А — непустое. Пусть а^Л, т. е. является элементом А. Тогда
если для каждого а может быть установлено соответствие а->х(а), сопостав¬
ляющее а некоторое подмножество X, то имеет место семейство Л в X. Во всех
случаях, встречающихся в этой книге, вместо х(а) вводится обозначение {ха;
аеЛ}. Это соответствует простейшему случаю, когда область определения Л
наделяется лишь теоретико-множественной структурой. Частный случай семей¬
ства, достаточно хорошо известный, — последовательность {xn:/2G^, где W
обозначает множество всех натуральных чисел. Иногда вместо п и N применя¬
ются индексы i и /, что и сделано в формуле, приведенной в книге. Для объ¬
единения множеств семейства в книге используется символ U Х„ •
асл а
2. Декартово произведение множеств X и У представляет собой множество
всех упорядоченных пар (х, у), где х^Х и y^Y. Такое задание множества од¬
нозначно, откуда следует, что декартово произведение определяется однозначно
и обозначается как ХхУ. Для декартова произведения часто применяется гео¬
метрический язык: элементы множества ХхУ называют точками, множества X
и У— осями координат. Обозначим конкретную пару х и у, т. е. конкретный
элемент декартова произведения как <х, y) = z. При этом х представляет со¬
бой абсциссу, а у — ординату точки г. Например, множество точек плоскости
Т?(2) представляет собой декартово произведение T?iX/?2, где R\ и /?2— множест¬
ва вещественных чисел.
Понятие декартова произведения допускает обобщение. По аналогии с по¬
нятием /i-мерного пространства возможно декартово произведение п множеств
XiXX2X ... \Хп. Такое декартово произведение представляет собой множество,
составленное из набора или кортежа п упорядоченных элементов.
3. Отношение. Понятие отношения тесно связано с декартовым произведе¬
нием. Подмножества декартовых произведений двух множеств, т. е. множества
упорядоченных пар, называются двухместными, или бинарными, отношениями.
Принято обозначать отношения символом R (без указания индекса). Помимо
используемого широко в тексте обозначения отношения как подмножества, на¬
пример 5сХхУ, применяется также следующее обозначение отношения aRb.
которое следует понимать так: а находится в отношении R к b или отношение
R имеет место между а и Ь. Левой областью отношения R называется множе¬
ство первых элементов пар, принадлежащих R, правой областью — множество
вторых элементов этих пар. На геометрическом языке это означает, что левая
область есть проекция множества R на ось X, а правая область — проекция на
ось У.
Вводится понятие суперпозиции (композиции) отношений R и S. Композиция
отношений имеет место при совместном рассмотрении этих отношений в обрат¬
ном порядке, т. е. xSzQzRy, где П — символ логического умножения. Компози¬
ция отношений обозначается как ROS.
Важным и часто встречающимся типом отношения является эквивалент¬
ность. Так называется каждое отношение R, удовлетворяющее трем условиям:
xRx —рефлексивность;
xRy-^yRx — симметричность;
xRy[\yRz-+xRz — транзитивность.
237
Примером отношения эквивалентности является отношение 'параллельности для
прямых на плоскости.
Бинарное отношение, определенное на конечных множествах, интерпретиру¬
ется как граф. Если изобразить элементы конечного множества хг- точками на
плоскости, то при наличии отношения XiRxj проводится стрелка от Хг к х$.
Если же XiRxi, то у точки Xi присутствует петля, выходящая из Xi и вновь
входящая в Хг,
Важным видом отношения является порядок, представляющий собой би¬
нарное отношение R на X, обычно обозначаемое которое рефлексивно, тран¬
зитивно и антисимметрично, т. е. х^у и у^х влечет за собой х = у. Множест¬
во X, наделенное порядком, называется упорядоченным.
Содержательный смысл бинарного отношения состоит в том, что выбор
подмножества декартова произведения множеств определяет, какие именно па¬
ры находятся в отношении R. Кроме бинарного определены также трехместные,
четырехместные, а в общем случае п-арные отношения (см. п. 117).
4. Функция или отображение является частным случаем отношения, удов¬
летворяющим условию
X Ry, Л X R у2 (у, = у2),
которое определяет отображение как отношение, приводящее к одинаковым у,
если элементы левой области равны. Общее обозначение отображения f: Л->У.
Отображение является взаимно-однозначным (1:1) или инъективным, если
Hxi)=f(^2) влечет за собой Xj = x2. Отображение называется сюръективным,
если f(X) = y. Это высказывание можно трактовать как свойство полного за¬
полнения У в случае применения f к X. Если же отображение одновременно
инъективно и сюръективно, то оно биективно.
5. Отношения эквивалентности и порядка (см. п. 3).
6. Кванторы существования и всеобщности введены в связи с высказыва-
тельными функциями. Последние представляют собой выражения, содержащие
предметные переменные и превращающиеся в высказывания, если на место этих
переменных подставить названия произвольных элементов. Примерами высказы-
вательной функции является х>0 или х — непустое множество, а соответствую¬
щими высказываниями, полученными из этих функций: >1 >0, множество простых
чисел — непустое множество. Объект а удовлетворяет высказывательной функции
Ф(х), если высказывание, полученное при подстановке вместо аргумента х назва¬
ния объекта а, оказывается истинным. Очень часто область область определения
высказывательной функции ограничена (множеством А. Тогда если каждый эле¬
мент множества А удовлетворяет высказывательной функции Ф(х), то это за¬
писывается с помощью выражения УхеД:Ф(х), которое читается так: для
каждого хеД имеет место Ф(х) (квантор всеобщности).
Соответственно выражение х^ДЯ(х) : Ф(х) читается так: для некоторого
хееА существует такое х, что имеет место Ф(х). Таким образом, кванторы яв¬
ляются логическими операторами, позволяющими из высказывательной функ¬
ции от одной переменной образовать высказывания.
7. Конституента. В теории множеств часто рассматриваются лишь множест¬
ва, содержащиеся в некотором фиксированном множестве, которое называется
пространством или универсумом и обозначается символом /. Образуем п про¬
извольных подмножеств пространства /, которые обозначим как Дь ... ,ДП. Пусть
ДЧ = /—А{, т. е. дополнение множества Аг, а Д°г = Дг- (i=l, 2,... ,ri). Тогда мно¬
жества вида
Д^ПД.у’П. . (]Д^п, где 7/. = 0 или f/.---1 для /? = 1,.. . , п,
называются конституантами.
Конституенты характеризуются следующими свойствами:
1. Различные конституенты не пересекаются.
2. Сумма всех конституент равна /.
3. Если множества Дь... ,Ап не пересекаются, то число различных консти¬
туент равно 2п. В противоположном случае количество конституент меньше
2П.
Из этих свойств следует содержательность понятия конституенты. С по¬
мощью конституент можно заполнить пространство I непересекающимися мно¬
238
жествами по заданной структуре, состоящей из произвольных п множеств,,
принадлежащих пространству 1.
8. Морфизм в общем случае означает соответствие. Более строго морфизм
представляет собой правило, по которому каждому элементу пространства К'
ставится в соответствие элемент другого пространства R". Если морфизм ото¬
бражает пространство К' на все пространство К", то он называется эпиморфиз¬
мом. В том случае, когда морфизм отображает пространство К' хотя бы и не
на .все К", но взаимно-однозначно, то он представляет собой мономорфизм. Если
же морфизм отображает пространство К' взаимно-однозначно на все Kz/, т. е.
является одновременно моно- и эпиморфизмом, он называется изоморфизмом,
а сами пространства К' и К" называются изоморфными.
Обычно морфизм обозначается как
9. Коммутативная диаграмма определена в том случае, когда рассматривает¬
ся суперпозиция отображений. Пусть задана совокупность отображений f : Х->
->У, g:X-+Z, 4-.Y-+T, ^:Z-+T.
Эти символы эквивалентны утверждению, что существуют композиции ото¬
бражений фО/ и фО^, содержащиеся в Т. Если, кроме того, оказывается, что
фО/ = фО^, то это означает, что диаграмма
X—
| <Р
Z —> Т
ф
коммутативна. Наличие коммутативных диаграмм приводит к ряду удобств при
описании систем. В частности, оказывается, что использование свойства комму¬
тативности диаграмм позволяет произвести декомпозицию систем. С практиче¬
ской точки зрения коммутативная диаграмма показывает, что от элемента х<=Х
можно «дойти» до элемента фО/(х) =фО^(х)еГ двумя путями: через элемент
множества Y и через элемент множества Z.
10. Сужение функции определено в том случае, когда заданы отображение
f : X-+Y и подмножества Аа:Х. Тогда отображение g : Л->У, определяемое фор¬
мулой g(x)=f(x) при х^А, называется сужением f на А и обозначается
Соответственно f называется продолжением g.
11. Скалярное поле. Полем называется всякое множество элементов, над
которым можно производить сложение и умножение, подчиняющееся законам:
а) коммутативности: a+b = b+a, ab = ba\
б) ассоциативности: а+ (b + c) = (a+b) + с, a(bc) = (ab)c;
в) 30— элемент: а + 0 = а, т. е. для УаЯ (—а), так что а—а = 0, что экви¬
валентно возможности вычитания;
г) Зе, т. е. единица, для которой справедливо ае = а, т. е. За-1 при
что обосновывает возможность деления;
д) дистрибутивности: a(bA-c) = ab + ac.
Примерами полей являются поля рациональных чисел, действительных чисел
и комплексных чисел.
12. Фактор-множество определено в том случае, когда задано отношение
эквивалентности (ом. п. 3) на множестве X. Тогда множество классов эквива¬
лентности по 7? называется фактор-множеством и обозначается Х/7?. Отображе¬
ние х->х, которое VхеХ ставит в соответствие его класс эквивалентности х, на¬
зывается каноническим или фактор-отображеиием X на X/R.
13. Топологическое пространство (ТП) определяется посредством предель¬
ных соотношений, относящихся ко множеству X. Эти соотношения состоят в том,
что для УАсХ определено его замыкание, т. е. множество <[Д], содержащее все
элементы множества А и предельные точки этого множества. Предельные со¬
отношения определяются аксиомами ТП. Примерами видов аксиом являются
аксиомы замыкания и отделимости. В частности, с помощью аксиом отделимо¬
сти классифицируются типы ТП. Так ТП, называемое То, имеет место в том
случае, если для любых двух точек, по крайней мере, одна имеет окрестность,,
не содержащую другой точки. На развитии этого понятия основаны простран¬
ства Ti и Т2.
239
14. Гильбертово пространство (ГП) £2 состоит из интегрируемых функций,
b
заданных на некотором промежутке (а, Ь), для которых Я J f2(x)dx. В ГП on-
fl
ределены скалярное произведение (f, gj = f(x)g(x)dx и норма ||/|| = УТОГ
В связи с этим в ГП может быть построена система ортогональных функций, по
которой может быть разложен любой элемент ГП. В более общем случае
скалярное произведение определено с дополнительным .включением в подын¬
тегральное выражение весовой функции р(х), где р(х)^0. Такое обобщение
существенно расширяет возможности описания различных функций с помощью
ГП.
15. Аналитические функции характерны тем, что они могут быть представ¬
лены степенными рядами. Фактическое представление АФ может быть произ¬
вольным, необходимо лишь, чтобы функция могла быть разложена в степенной
ряд. Из этой формулировки следует, что АФ всегда дифференцируемые.
16. Сочленение элементов определено тогда, если заданы некоторые раз¬
личные функции аргумента te(—со, +оо), принадлежащие одному множеству.
Пусть, например, хеАт и х*еАт. Тогда для V/ можно определить новый эле¬
мент х из Ат, положив
[х(т), если
I х* (т), если т t.
Такая операция называется сочленением элементов х* и x*t и обозначается
17. Отношения произвольной арности. Под гг-арным (n-местным) отноше¬
нием понимается обобщение бинарного отношения на случай подмножества де¬
картова произведения п множеств (см. п. 2). Большинство характеристик би¬
нарных отношений непосредственно обобщается на случай произвольной арно¬
сти. Так, если множества Хь Х2; •••, Хп конечны, то отношение R может быть
представлено в виде матрицы кортежей размерностью /Х/г, где I — число кор¬
тежей, выписываемых как строки матрицы. Аналогично естественным образом
обобщается и правило композиции отношений.
ПРИЛОЖЕНИЕ 2
Алгоритм решения задачи оптимизации
основных характеристик РТС
методом случайного поиска экстремума
Общее описание данного алгоритма приведено в § 7.3. В связи с этим ос¬
тановимся на особенностях применения метода случайного поиска. При доста¬
точно общих предположениях необходимо определить наименьшее значение
функции C(z), где z — вектор, принадлежащий области, задаваемой системой
неравенств (z) 0 (/г = 1,..., т,...). Описываемый ниже алгоритм является
алгоритмом случайного поиска с самообучением (адаптацией).
Самообучение данного алгоритма поиска достигается введением так назы¬
ваемого вектора памяти w, определяющего направление движения на произ¬
вольном W-im шаге процесса оптимизации. При формировании этого вектора
учитываются как предыстория процесса, так и результаты последнего (пред¬
шествующего) шага. Поэтому
— ₽
дс<"-”
Az'""1’ ,
240
где Д z<A') = zW —
дс<л'> = с[ Z<A!)J—cl z('v_1)J;
а — коэффициент забывания (0<а^1); р — параметр скорости обучения (|3>
>0).
Рассматриваемый вектор w^v) является основой для построения гиперэллип¬
соида вращения, в пределах которого выбирается направление случайного векто¬
ра при очередном шаге',[46].
После того, как направление движения выбрано, положение вектора опти¬
мизирующих переменных находится из соотношения
Z*'V) = Zi + X, Ло игi (i = 1,..., р),
где Zi — значение переменной, полученное при последнем удачном шаге; м —
индивидуальный масштаб поиска по соответствующей переменной; Ло — гло¬
бальный масштаб поиска; uzi — составляющая выбранного случайного единично¬
го вектора; р — размерность вектора z.
Необходимость введения индивидуальных масштабов вызывается как раз¬
личной размерностью составляющих вектора z, так и неодинаковым их влияни¬
ем на величину минимизируемой функции. Поэтому X; выбираются так, чтобы
в пределах области допустимых значений переменных одинаковым приращени¬
ям составляющих z соответствовали бы близкие друг к другу соответствующие
приращения минимизируемой функции. Из этого усло,вия следует, что в характер¬
ных точках
Xj дС/д — Х2 дС/ д?2 — • • • — hp дС/dzp.
В алгоритме предусмотрено автоматическое изменение глобального масшта¬
ба времени. После удачной попытки происходит увеличение Л, а после неудач¬
ной попытки — уменьшение посредством умножения на заранее выбранные ко¬
эффициенты. Достижение заданной величины отношения числа удачных шагов-
к общему их количеству является условием прекращения поиска.
Список литературы
1. Автоматизация самолетовождения и управление воздушным движением/
П. А. Агаджанов, В. Г. Воробьев, А. А. Кузнецов и др. — М.: Транспорт,
1980. — 357 с.
2. Агаджанов П. А. Командно-измерительный комплекс. — М.: Знание,
1979. — 62 с.
3. Аким Э. Л., Энеев Т. М. Определение параметров движения космических
летательных аппаратов по данным траекторных измерений. — Космические
исследования, 1963, т. I, вып. 1, с. 5—50.
4. Амиантов И. Н. Избранные вопросы статистической теории связи. — М.:
Сов. радио, 1971. — 416 с.
5. Астафьев Г. П., Шебшаевич В. С., Юрков Ю. А. Радиотехнические средства
навигации летательных аппаратов. — М.: Сов. радио, 1962. — 961 с.
6. Березин Л. В., Вейцель В. А. Теория и проектирование радиосистем. — М.:
Сов. радио, 1977. — 448 с.
7. Большой А. А. Управление космическими кораблями в полете. — М.: Зна¬
ние, 1976. •— 45 с.
8. Брусиловский Б. Я. Теория систем и система теорий. — Киев: Вища школа,
1977. — 192 с.
9. Бураков В. А., Зорин Л. А. и др. Адаптивная обработка сигналов в антен¬
ных решетках: Обзор. — Зарубежная радиоэлектроника, 1976, № 8,
с. 10.
10. Варакин Л. Е. Теория сложных сигналов. — М.: Сов. радио, 1970. — 367 с.
11. Гантмахер Ф. Р. Теория матриц. — М.: Наука, 1967. — 576 с.
12. Гейбриел. Введение в теорию адаптивных антенных решеток. — ТИИЭР,
1976, № 2, с. 55—95.
13. Гиг Дж. Прикладная общая теория систем: В 2-х т.: Пер. с англ./Под ред.
Б. Г. Сушкова и В. С. Тюхтина. — М.: Мир, 1981. — 1069 с.
14. Голубев-Новожилов Ю. С. Многомашинные комплексы вычислительных
средств. — М.: Сов. радио, 1967. — 424 с.
15. Горбатов В. А. Теория частично упорядоченных систем. — М.: Сов. радио,
1976. — 336 с.
16. Градштейн И. С., Рыжик И. М. Таблицы интегралов, сумм, рядов и произ¬
ведений. — М.: Физматгиз, 1962. — 1100 с.
17. Гриффитс Л. Простой адаптивный алгоритм для обработки сигналов в ан¬
тенной решетке в реальном масштабе времени. — ТИИЭР, 1969, № 10,
с. 6—16.
18. Дружинин В. В., Конторов Д. С. Проблемы системотологии. — М.: Сов.
радио, 1976. — 296 с.
19. Дружинин В. В., Конторов Д. С. Вопросы военной системотехники. — М.:
Воениздат, 1976. — 224 с.
20. Калман Р., Фалб П., Арбиб М. Очерки по математической теории систем. —
М.: Мир, 1971. — 400 с.
242
21. Карманов В. Г. Математическое программирование. — М.: Наука, 1980. —
256 с.
22. Клейнрок Л. Коммутационные сети. — М.: Наука, 1970. — 334 с.
23. Клини С. К. Введение в метаматематику. — М.: НИЛ, 1957. — 526 с.
24. Конторов Д. С., Голубев-Новожилов Ю. С. Введение в радиолокационную
системотехнику. — М.: Сов. радио, 1971. — 368 с.
25. Космические радиотехнические комплексы/С. И. Бычков, Д. П. Лукьянов,.
Е. Н. Назимок и др.; Под ред. С. И. Бычкова. — М.: Сов. радио, 1967. —
582 с.
26. Космические траекторные измерения/П. А. Агаджанов, Н. М. Барабанов,.
Н. И. Буренин и др.; Под ред. П. А. Агаджанова, В. Е. Дулевича, А. А. Ко¬
ростелева. — М.: Сов.радио, 1969. — 504 с.
27. Космос—Земле/A. А. Большой, С. Д. Сильверстов, А. В. Цепелев и др. —
М.: Наука, 1989. — 152 с.
28. Коутиньо Дж. Управление разработками перспективных систем: Пер. с англ./
Под ред. О. Л. Смирнова. — М.: Машиностроение, 1982. — 432 с.
29. Кофман А., Крюон Р. Массовое обслуживание (теория и приложения). —
М.: Мир, 1965. — 302 с.
30. Красовский Н. Н. Теория управления движением. — М.: Наука, 1968.—
476 с.
31. Крон Г. Исследование сложных систем по частям — диакоптика. — М.:
Наука, 1972. — 544 с.
32. Летные испытания ракет и космических аппаратов/Е. И. Кринецкий, Л. Н.
Александровская, А. В. Шарапов и др.; Под ред. Е. И. Кринецкого. — М.:
Машиностроение, 1979. — 464 с.
33. Линник Ю. В. Метод наименьших квадратов и основы математико-статиче-
ких теорий обработки. — М.: Гостехиздат, 1960. — 349 с.
34. Мальцев А. И. Алгебраические системы. — М.: Наука, 1970. — 392 с.
35. Мановцев А. П. Основы теории радиотелеметрии. — М.: Энергия, 1973. —
320 с.
36. Месарович М. Основания общей теории систем. — В кн.: Общая теория
систем. — М.: Мир, 1966, с. 15—48.
37. Месарович М., Мако Д., Такахара И. Теория иерархических многоуровне¬
вых систем. — М.: Мир, 1973. — 344 с.
38. Месарович М., Такахара Я. Общая теория систем: математические основы.—
М.: Мир, 1978. — 312 с.
,39. Моделирование в радиолокации/А. И. Леонов, В. Н. Васенков и др.; Под.
ред. А. И. Леонова. — М.: Сов. радио, 1979. — 264 с.
40. Моисеев Н. Н., Иванилов Ю. П., Столярова Е. М. Методы оптимизации.—
М.: Наука, 1978. — 351 с.
41. Отображение информации в центре управления космическими полетами/
А. В. Милицын, В. К. Самсонов, В. А. Ходак и др. — М.: Радио и связь,
1982. — 192 с.
42. Пономарева В. Д., Комаров В. М. Адаптивные антенные решетки: Обзор. •—
Зарубежная радиоэлектроника, 1977, № 8, с. 33—66.
43. Понтрягин Л. С. О математике и качестве ее преподавания. — Коммунист,
1980, № 14, с. 99—112.
44. Прагер Э., Шимек Б., Дмитриев В. П. Цифровая техника в связи. — Мл
Радио и связь, 1981. — 280 с.
45. Радиотехнические системы в ракетной технике/Под ред. В. И. Гал¬
кина, И. И. Захарченко, Л. В. Михайлова. — М.: Воениздат, 1974.—
340 с.
46. Растригин Л. А. Статистические методы поиска. — М.: Наука, 1968. —
376 с.
243
47. Растригин Л. А., Маджаров Н. Е. Введение в идентификацию объектов
управления. — М.: Энергия, 1977. — 240 с.
48. Растригин Л. А. Современные принципы управления сложными объектами. —
М.: Сов. радио, 1980. — 232 с.
49. Резников Б. А. О параметрической наблюдаемости КА. — Космические ис¬
следования, 1968, т. 6, вып. 3, с. 338—351.
50. Репин В. Г., Тартаковский Г. П. Статистический синтез при априорной не¬
определенности и адаптация информационных систем. — М.: Сов. радио,
1977. — 432 с.
51. Риглер Р., Комптон Р. Адаптивная антенная решетка для подавления по¬
мех. — ТИИЭР, 1973, № 6, с. 75—87.
52. Саридис Дж. Самоорганизующиеся стохастические системы управления: Пер-
с англ./Под рсд. Я. 3. Цыпкина. — М.: Наука, 1980. — 400 с.
53. Сетевые спутниковые системы/В. С. Шебшаевич, П. П. Дмитриев, Н. В. Иван-
цевич и др.; Под. ред. П. П. Дмитриева и В. С. Шебшаевича.' — М.: Радио
и связь, 1982. — 272 с.
54. Солодов А. В. Методы теории систем в задаче непрерывной линейной филь¬
трации. — М.: Наука, 1976. — 264 с.
55. Стратонович Р. Л. Принципы адаптивного приема. — М.: Сов. радио, 1973.—
144 с.
56. Стюарт Я. Концепции современной математики: Пер. с англ./Пер. Н. И.
Плужникова и Г. М. Цукерман. — Минск: Вышейшая школа, 1980. — 384 с.
57. Сэйдж Э. П., Мелса Дж. Теория оценивания и ее применение в связи и уп¬
равлении: Пер. с англ./Под ред. Б. Р. Левина. — М.: Связь, 1976. — (Ста¬
тистическая теория связи, вып. 6). — 496 с.
58. Сэйдж Э. Системотехника: Фундаментальные ограничения и перспективы.—
ТИИЭР, 1981, № 2, с. 18—30.
59. Теоретические основы радиолокации/Я. Д. Ширман, В. Н. Голиков, И. Н.
Бусыгин и др.; Под ред. Я. Д. Ширмана. — М.: Сов. радио, 1970.
60. Теоретические основы радиолокации/А. А. Коростелев, Н. Ф. Клюев, Ю. А.
Мельник и др.; Под ред. В. Е. Дулевича. — М.: Сов. радио, 1978. — 608 с.
61. Тихонов А. Н. Методы регуляризации некорректно поставленных задач. —
М.: Наука, 1977. — 248 с.
62. Уемов А. И. Системный подход и общая теория систем. — М.: Мысль,
1978. — 272 с.
63. Уидроу, Мантей, Гриффитс, Гуд. Адаптивные антенные решетки. — ТИИЭР,
1967, № 12, с. 78—96.
64. Уидроу Б., Маккул Д. М. и др. Стационарные и нестационарные характе*
ристпки обучения адаптивных фильтров, использующих критерии минимума
СКО. — ТИИЭР, 1976, № 8, с. 37—51.
65. Уилсон А., Уилсон М. Управление и творчество при проектировании сис¬
тем. — М.: Сов. радио, 1976. — 256 с.
66. Устинов Н. Г. Корабли слежения за космосом. — М.: Воениздат, 1969. —
160 с,
67. Фадеев Д. К., Фадеева В. Н. Вычислительные методы линейной алгебры. —
М.: Физматгиз, 1960. — 656 с.
68. Флейшман Б. С. Основы системологии. — М.: Радио и связь, 1982. — 368 с.
69. Фрост. Алгоритм линейно-ограниченной обработки сигналов в адаптивной
решетке. — ТИИЭР, 1972, № 8, с. 5—16.
70. Холл А. Д. Опыт методологии для системотехники: Пер. с англ./Под ред.
Г. И. Поварова. — М.: Сов. радио, 1968. — 448 с.
71. Цурков В. И. Декомпозиция в задачах большой размерности. — М.: Наука,
1981. — 352 с.
72. Цыпкин Я. 3. Адаптация и обучение в автоматических системах. — М.: Нау¬
ка, 1968. — 400 с.
73. Цыпкин Я. 3. Основы теории обучающихся систем. — М.: Наука, 1970. —
252 с.
74. Чембровский О. А., Топчеев Ю. И., Самойлович Г. В. Общие принципы
проектирования систем управления. — М.: Машиностроение, 1972. — 416 с.
75. Шилов Г. Е. Математический анализ. Конечномерные линейные простран¬
ства. — М.: Наука, 1969. — 432 с.
244
76. Ширман Я. Д., Манжос В. Н. Теория и техника обработки радиолокацион¬
ной информации на фоне помех. — М.: Радио и связь, 1981. — 416 с
77. Эльясберг П. Е. Теория полета ИСЗ. — М.: Наука, 1965. — 540 с.
78. Эльясберг П. Е. Определение движения по результатам измерений. — М •
Наука, 1976. — 416 с.
79. Эскобал П. Методы определения орбит. — М.: Мир, 1970. — 472 с.
80. Янке Е., Эмде Ф. Таблицы функций с формулами и кривыми. — М.: Фнз-
матгнз, 1959. — 420 с.
81. Безбородов В. Г., Жаков А. М. Суда космической службы. — Ленинград:
Судостроение, 1980. — 248 с.
82. Горохов В. Г. Методологический анализ системотехники. — М.: Радио и
связь, 1982. — 160 с.
83. Гриценко Н. С., Гусаров А. И. Адаптивное оценивание. Ч. I. — Зарубежная
радиоэлектроника, 1983, № 7, с. 3—27.
84. Гуткин Л. С. Современная радиоэлектроника и ее проблемы. — М.: Сов.
.. радио, 1980. —- 193 с.
85. Жданюк Б. Ф. Основы статистической обработки траекторных измерений. —
М.: Сов. радио, 1978. — 384 с.
86. Жибуртович Н. Ю. Возможности компенсации помеховых сигналов, прини¬
маемых по боковым лепесткам диаграммы направленности фазированных
антенных решеток. — Радиотехника, 1980, т. 35, № 10, с. 15—27.
87. Космическая навигация/И. К. Бажинов, В. И. Алешин, В. Н. Почукаев
и др. — М.: Машиностроение, 1975. — 352 с.
88. Кравец В. Г., Любинский В. Е. Основы управления космическими полета¬
ми. — М.: Машиностроение, 1983. — 224 с.
89. Кузнецов А. А., Дубровский В. И. Эксплуатация радиооборудования аэро¬
дромов и трасс. — М.: Транспорт, 1981. — 224 с.
90. Обработка сигналов в многоканальных РЛС/А. П. Лукошин, С. С. Карин
ский, А. А. Шаталов и др.; Под ред. А. П. Лукошкина. — М.: Радио и связь,
1983. — 328 с.
91. Сильвестров С. Д., Васильев В. В. Структура космических измерительных
систем. — М.: Сов. радио, 1979. — 224 с.
92. Шаракшанэ А. С., Железнов И. Г., Ивницкий В. А. Сложные системы. —
М.: Высшая школа, 1977. — 247 с.
93. Точность измерения параметров движения космических аппаратов/С. Д. Силь¬
вестров, В. М. Лазарев, А. И. Корниенко, М. И. Паншин. — М.: Сов. ра¬
дио, 1970, с. 12, 13.
94. Бартон К., Вард Г. Справочник по радиолокационным измерениям. — М.:
Сов. радио, 1976.
Оглавление
Предисловие редактора . 3
Введение .... 4
1. Радиотехнические комплексы как сложные системы 10
1.1. Основные общесистемные понятия и определения 10
1.2. Общие принципы системной классификации и описания радиотех¬
нических комплексов 17
1.3. Объекты и характер информационного взаимодействия .... 22
1.4. Целевое назначение и уровни иерархии радиотехнических комп¬
лексов 25
1.5. Жизненный цикл и основные проблемы анализа и синтеза радио¬
технических комплексов 32
2. Современные типовые радиотехнические комплексы . . . .36
2.1. Космические радиотехнические комплексы 37
2.2. Радиотехнические комплексы управления воздушным движением
и навигационного обеспечения полетов 46
3. Положения математической теории систем, используемые в радиотех¬
нических комплексах 52
3.1. Математическое определение системы ... 53
32.. Динамические системы 67
3.3. Декомпозиция систем 78
3.4. Основные свойства целенаправленных систем 90
4. Комплексная система траекторных измерений как базовая система . 97
41. Общая характеристика КСТИ 98
4.2. Комплексная система траекторных измерений как динамическая
система 105
4.3. Комплексная система траекторных измерений как целенаправлен¬
ная система 107
4.4. Анализ вычислительных структур алгоритмов обработки информа¬
ции в КСТИ 111
5. Показатели качества радиотехнического комплекса 131
5.1. Общая характеристика показателей качества радиотехнических ком¬
плексов 131
5.2. Связь между критериями эффективности функционирования СВУ
и КСТИ 134
5.3. Векторный критерий эффективности функционирования радиотех¬
нических комплексов 139
5.4. Пропускная способность радиотехнических комплексов . . . . 144
5.5. Характеристика ресурсной эффективности радиотехнических комп¬
лексов 148
6. Моделирование радиотехнического комплекса . . 150
6.1. Основы общего подхода к моделированию систем .... 150
6.2. Особенности цифрового моделирования радиотехнических комп¬
лексов и систем 156
6.3. Пакет прикладных программ для системно-структурного моделирова¬
ния комплексной системы траекторных измерений .... 162
6.4. Модели КСТИ, используемые при оптимизации и ориентировочной
оценке эффективности функционирования 165
7. Оптимизация комплексных систем траекторных измерений . 185
7.1. Общая характеристика методов оптимизации КСТИ . . . . Г85
7.2. Выбор рационального состава измерений и взаимного расположе¬
ния РТС при определении места объекта в пространстве . . . 188
7.3. Оптимизация основных характеристик РТС при определении детер¬
минированных траекторий 198
Принципы системотехнической адаптации радиотехнических комплек¬
сов 210
8.1. Источники неопределенности информационного взаимодействия . 210
8.2. Виды, методы и уровни системотехнической адаптации радиотех¬
нических комплексов 213
8.3. Алгоритмическая адаптация радиотехнических комплексов . . 217
8.4. Параметрическая адаптация РТС 226
Прил ожение 1. Перечень используемых в книге математических тер¬
минов, определений и символов 237
Приложение 2. Алгоритм решения задачи оптимизации основных ха¬
рактеристик РТС методом случайного поиска экстре¬
мума 240
Список литературы 242
Андрей Владимирович Петров,
Анатолий Александрович Яковлев
АНАЛИЗ И СИНТЕЗ
РАДИОТЕХНИЧЕСКИХ КОМПЛЕКСОВ
Редактор IO. И. Суханов
Художник И. А. Игнатьев
Художественный редактор Н. С. Шеин
Технический редактор Г. И. Колосова
Корректор Т. В. Дземидович
ИБ № 824
Сдано в набор 13.04.84 Подписано в печать 17.07-t
Т-15078 Формат 60х90/1б Бумага кн.-журнальная Гарнитура литературна
Печать высокая Усл. печ. л. 15,5 Усл. кр.-отт. 15,5 Уч.-изд. л. 17/
Тираж 4900 экз. Изд. № 19706 Зак. № 36 Цена 2 р. 80 к.
Издательство «Радио и связь». 101000 Москва, Почтамт, а/я 693
1
Московская типография № 5 ВГО «Союзучетиздат»
101000 Москва, ул. Кирова, д. 40 |