



























































































































































































































































































































































































































































































Текст
П. АППЕЛЬ
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
ТОМ ВТОРОЙ
ДИНАМИКА СИСТЕМЫ
АНАЛИТИЧЕСКАЯ МЕХАНИКА
ПЕРЕВОД С ШЕСТОГО ФРАНЦУЗСКОГО ИЗДАНИЯ
И. Г. МАЛКИНА
ГОСУДАРСТВЕННОЕ ИЗДАТЕЛЬСТВО
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
МОСКВА I960
COURS DE MECANIQUE DE LA FACULTE DES SCIENCES
TRAITE
DE
MECANIQUE RATIONNELLE
PAR
Paul APPELL
MEMBRE DE L'INSTITUT
RECTEUR HONORAIRE DE L'UNIVERSITE DE PARIS
SIXIEME EDITION, ENTIEREMENT REFONDUE
TOME DEUXIEME
DYNAMIQUE DES SYSTEMES
MECANIQUE ANALYTIQUE
PARIS
OAUTHIER-VILLARS, ED1TEUR
1953
ОГЛАВЛЕНИЕ
ДИНАМИКА СИСТЕМЫ
От издательства 13
Глава XVII. Моменты инерции 15
313. Геометрия масс 15
I. Определения и примеры 15
314. Определение моментов инерции 15
315. Сплошные системы 16
316. Примеры 17
II. Общие теоремы 19
317. Изменение момента инерции системы относительно оси, пере-
мещающейся параллельно самой себе 19
318. Изменение момента инерции относительно осей, проходящих
через одну и ту же точку. Эллипсоид инерции (Пуансо) .... 20
319. Условия, при которых ось Ог является главной для точки О . . 21
320. Замечание 22
321. Задача Бине 23
322. Геометрическое место точек О', для которых момент инерции
относительно одной из главных осей в точке О' имеет заданное
значение Мр2 25
323. Экспериментальное определение моментов инерции 25
Упражнения к главе XVII 25
Глава XVIII. Общие теоремы о движении системы. Семь уни-
версальных уравнений движения 29
324. Указание метода 29
I. Теоремы проекций и моментов количеств движения 29
325. Силы внутренние и внешние 29
326. Доказательство теоремы количества движения 30
327. Примеры .' 31
328. Доказательство теоремы моментов количеств движения или
кинетических моментов 34
329. Теорема площадей 34
I*
4 ОГЛАВЛЕНИЕ
330. Геометрическая интерпретация обеих теорем 36
331. Частный случай, когда главный момент внешних сил относи-
тельно точки О равен нулю. Плоскость максимума площадей . . 37
332. Сумма моментов количеств движения точек твердого тела отно-
сительно оси, вокруг которой тело вращается 37
333. Примеры 38
334. Движение относительно системы осей, совершающих прямо-
линейное и равномерное переносное движение 41
335. Общий случай, когда теоремы проекций и моментов количеств
движения дают первый интеграл 42
II. Теорема кинетической энергии 43
336. Доказательство 43
337. Примечание о твердом теле 44
338. Случай, когда взаимодействие двух точек системы зависит
только от расстояния между ними 44
339. Случай, когда теорема кинетической энергии дает первый инте-
грал 45
340. Размерности 45
341. Пример 46
342. Деление сил на силы задаваемые и реакции связей 46
343. Важный частный случай, когда работа реакций связей равна
нулю 46
344. Приложение. Однородная тяжелая цепь, скользящая без трения
по неподвижной кривой 47
345. 1°. Приложение к движению болта в неподвижной гайке без трения 51
2°. Приложение к задаче трех тел 53
346. Семь общих уравнений движения 53
III. Теоремы кинематики для вычисления моментов количеств движе-
ния и кинетической энергии 54
347. Определение относительного движения системы вокруг ее
центра тяжести 54
348. Вычисление суммы моментов количеств движения относительно
неподвижной оси 54
349. Вычисление кинетической энергии 56
IV. Теоремы моментов и кинетической энергии в относительном движе-
нии вокруг центра тяжести 57
350. Теорема моментов количеств движения в относительном движе-
нии вокруг центра тяжести 57
351. Теорема кинетической энергии в относительном движении во-
круг центра тяжести 61
352. Наибольшее число независимых общих уравнений 63
ОГЛАВЛЕНИЕ О
353. Произвольная часть системы 64
354. Примеры 64
V. Энергия 68
355. Консервативная система 68
356. Потенциальная энергия. Механический смысл 69
357. Сохранение энергии 70
358. Механический смысл полной энергии 71
Упражнения к главе XVIII 78
Глава XIX. Динамика твердого тела. Движения, параллельные
плоскости 81
I. Вращение твердого тела вокруг неподвижной оси 81
359. Уравнение движения 81
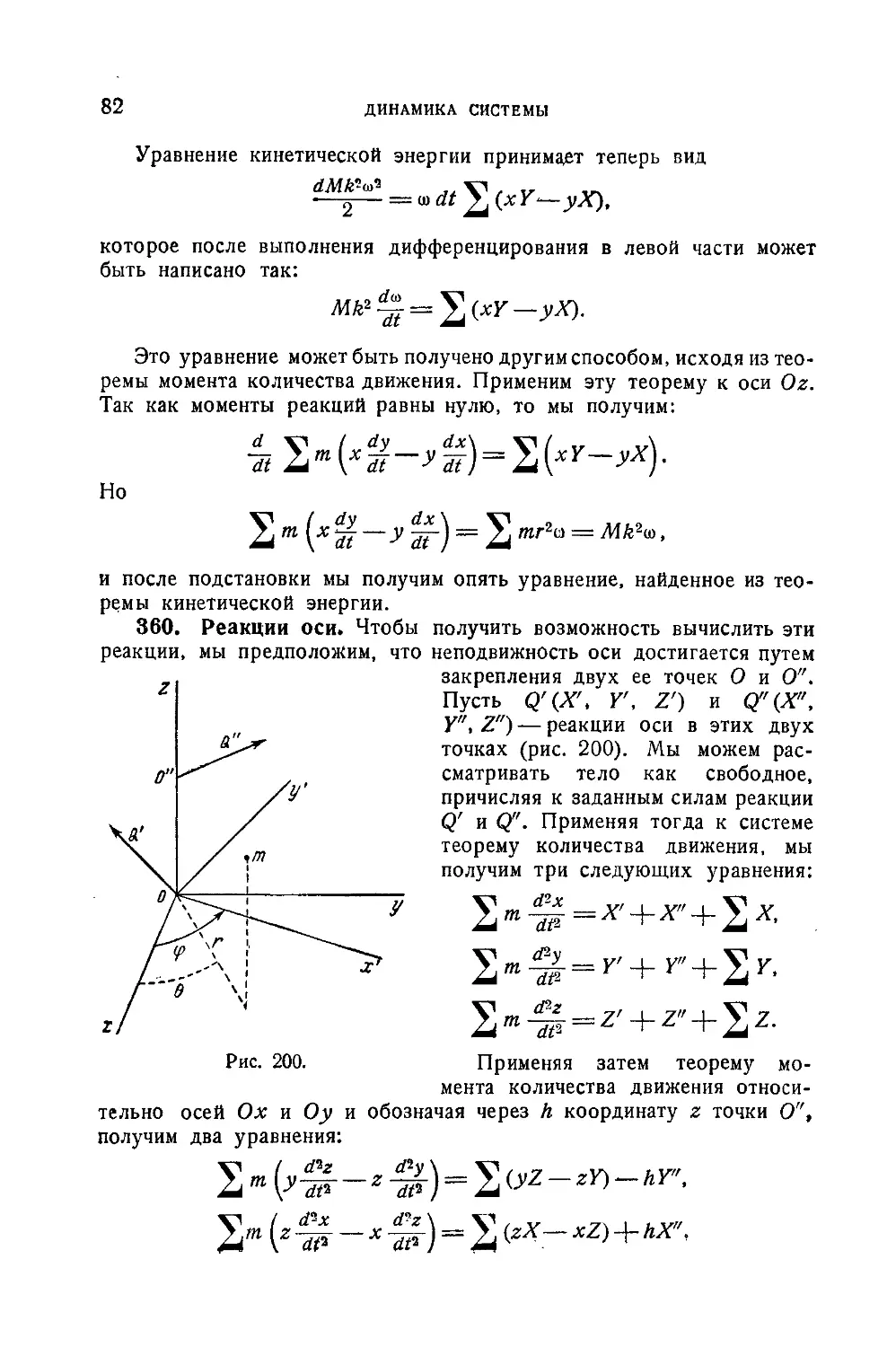
360. Реакции оси 82
361. Постоянные и свободные оси вращения 85
362. Физический маятник 86
363. Исследование изменения длины синхронного математического
•маятника при перемещении оси подвеса заданного тела .... 90
364. Машина Атвуда 91
II. Движение твердого тела параллельно неподвижной плоскости ... 93
365. Общие положения 93
366. Примеры 95
III. Трение скольжения и сопротивление среды 105
367. Общие соображения 105
368. Трение скольжения 106
369. Возможные разрывы в уравнениях движения 107
370. Пример 108
371. Примеры 109
372. Трение цапф в подшипниках 114
373. Регулятор с лопатками 115
374. Самоторможение 116
375. О трудностях, возникающих при приложении обычно принимае-
мых эмпирических законов трения.' Исследования Пенлёве ... 117
IV. Трение качения 120
376. Общие положения 120
377. Качение 121
378. Примеры 121
379. О стремлении материальных систем избегать трения 124
Упражнения к главе XIX . 126
6 ОГЛАВЛЕНИЕ
Глава XX. Движение твердого тела вокруг неподвижной точки 136
380. Историческая справка 136
I. Общие уравнения 137
381. Вспомогательные сведения из геометрии. Переменные, опре-
деляющие положение подвижного триэдра относительно непо-
движного триэдра с той же вершиной 137
382. Вспомогательные сведения из кинетики. Мгновенное вращение
подвижного триэдра 139
383. Твердое тело, движущееся вокруг неподвижной точки; приме-
нение триэдра, неизменно связанного с телом 141
384. Уравнения Эйлера 144
385. Реакция неподвижной точки 145
386. Применение осей, движущихся в теле 146
II. Первое приложение уравнений Эйлера к случаю, когда внешние
силы приводятся к одной равнодействующей, проходящей через не-
подвижную точку 148
387. Первые интегралы 148
388. Исследование движения. Интегрирование при помощи эллипти-
ческих функций 150
389. Частные случаи 154
390. Случай, когда эллипсоид инерции является эллипсоидом вра-
щения 156
391. Краткие указания к вычислению девяти косинусов в функции
времени 157
392. Геометрическое представление движения по Пуансо 160
393. Уравнение герполодии 169
III. Движение тяжелого твердого тела вокруг неподвижной точки . . . 174
394. Интегралы, получаемые из общих теорем 174
395. Случай Лагранжа и Пуассона 176
396. Частный случай 181
397. Интегрирование в эллиптических функциях 185
398. Кинематическая картина движения 186
399. Случай интегрируемости Ковалевской 186
IV. Другие задачи; применение осей, движущихся относительно тела
и относительно пространства; трение и сопротивление среды . . 189
400. Пример применения осей, движущихся относительно тела и от-
носительно пространства, для вывода общих уравнений движе-
ния тела вращения, закрепленного в точке своей оси 189
401. О некоторых свойствах быстро вращающихся тея вращения , , 191
ОГЛАВЛЕНИЕ 7
402. Трение 194
403. Сопротивление среды , . 198
Упражнения к главе XX 199
Глава XXI. Свободное твердое тело 208
I. Общие сведения ...-.- 208
404. Уравнения движения 208
405. Движение нескольких твердых тел 210
II. Тяжелое тело, соприкасающееся с горизонтальной плоскостью . . . 210
406. Историческая справка 210
407. Тяжелое тело вращения, скользящее без трения по неподвиж-
ной горизонтальной плоскости 211
408. Замечание Томсона 216
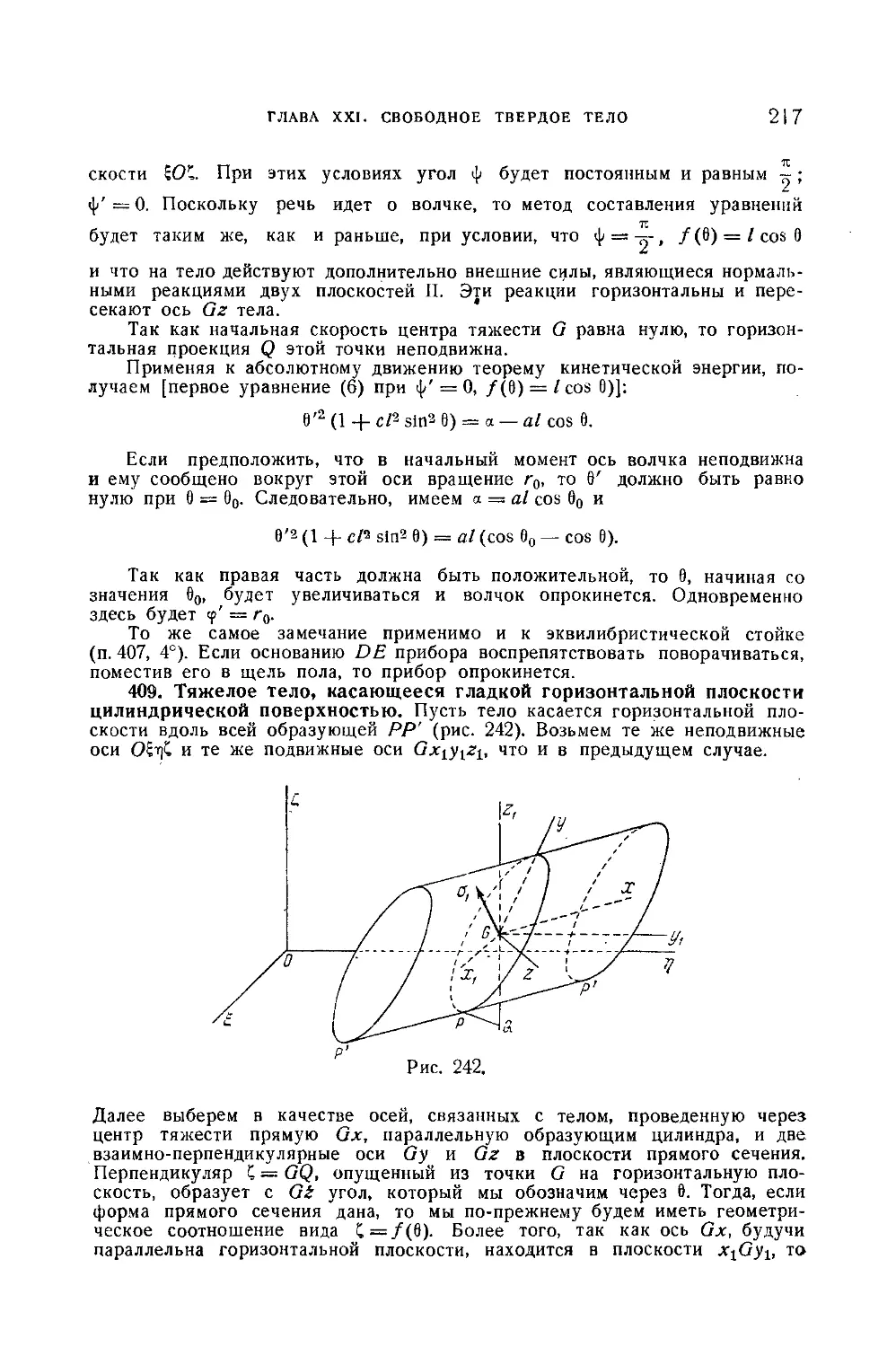
409. Тяжелое тело, касающееся гладкой горизонтальной плоскости
цилиндрической поверхностью 217
410. Движение с трением однородного тяжелого шара по горизон-
тальной плоскости (бильярдный шар) 219
411. Обруч 222
412. Координаты твердого тела по Штуди 227
Упражнения к главе XXI 227
Глава XXII. Относительное движение 234
I. Общие теоремы 234
413. Уравнения относительного движения точки 234
414. Кинетическая энергия в относительном движении 236
415. Относительное равновесие 236
416. Относительное движение по отношению к осям, совершающим
поступательное движение 239
417. Упражнение. Относительное движение тяжелой точки, находя-
щейся на идеально гладкой наклонной плоскости Р, ко-
торая вращается с постоянной угловой скоростью w вокруг
вертикали 240
II. Относительное движение и равновесие системы 241
418. Общие сведения 241
419. Движение системы вокруг своего центра тяжести. Теорема мо-
ментов и теорема кинетической энергии 241
420. Пример относительного движения 242
421. Твердое тело. Частный случай, когда переносные силы инерции
имеют равнодействующую 243
422. Велосипед 244
8 ОГЛАВЛЕНИЕ
III. Относительное равновесие и относительное движение на поверх-
ности Земли 248
423. Историческая споавка • 248
424. Относительное равновесие на поверхности Земли 249
425. Относительное движение нл повг >хности Земли 251
426. Свободное падение тяжелой точки , 253
427. Маятник Фуко 254
428. Гироскоп 257
Упражнения к главе XXII 259
Глава XXIII. Принцип Даламбера 262
I. Общее уравнение динамики 262
429. Формулировка принципа 262
430. Случай системы со связями 263
431. Общее уравнение динамики для системы со связями без трения 263
432. Задачи 264
433. Приведение уравнений движения к наименьшему числу .... 266
434. Голономные системы; координаты голономной системы 267
435. Метод множителей Лагранжа для голономной системы 269
II. Теоремы, выводимые из принципа Даламбера 271
436. Частный случай теоремы проекций количеств движения .... 271
437. Частный случай теоремы моментов 272
438. Частный случай теоремы кинетической энергии 273
III. Приложение принципа Даламбера к случаю трения скольжения . . 273
439. Метод и пример 273
Упражнения к главе ХХШ 275
Глава XXIV. Общие уравнения аналитической динамики .... 277
440. Содержание главы 277
I. Голономные системы. Уравнения Лагранжа 278
441. Приведение уравнений движения к наименьшему числу в систе-
мах без трения 278
442. Первый пример. ¦. 282
443. Уравнения Эйлера 282
444. Пример связей, зависящих от времени 283
II. Приложения уравнений Лагранжа 284
445. Интеграл энергии 284
446. Задача • 286
ОГЛАВЛЕНИЕ 9
447. Тяжелое тело вращения, скользящее без трения по горизон-
тальной плоскости 287
448. Интеграл Пенлеве, аналогичный интегралу энергии в некоторых
случаях связей, зависящих от времени 288
III. Малые колебания голономных систем около положения устойчивого
равновесия 289
449. Устойчивость равновесия 289
450. Малые колебания . . ¦ 292
451. Малые колебания, вызванные периодической возмущающей силой 304
IV. Колебания около устойчивого движения 306
452. Общий метод 306
453. Пример 307
V. Приложение уравнений Лагранжа к относительному движению . . . 309
454. Первый способ, не связанный с теорией относительного дви-
жения 309
455. Пример 310
456. Второй способ, основанный на теории относительного движения 312
457. Смешанный метод Жильбера 312
458. Приложение к относительному движению тяжелой системы по
отношению к Земле, принимая во внимание также вращение
Земли 315
459. Пример 317
460. Гироскопический компас Фуко 319
461. Барогироскоп Жильбера 320
VI. Системы неголономные 322
462. Формы уравнений связей в неголономных системах 322
463. Применение уравнений Лагранжа в сочетании с методом мно-
жителей 325
464. Невозможность прямого применения уравнений Лагранжа
к минимальному числу параметров 327
465. Общая форма уравнений движения, пригодная как для голоном-
ных, так и для неголономных систем 332
466. Примеры 336
467. Теорема, аналогичная теореме Кёнига. Приложение к обручу . 339
468. Уравнения движения, получаемые путем нахождения минимума
функции второй степени 341
469. О невозможности охарактеризовать неголономную систему одной
только функцией Т 342
VII. Системы, содержащие сервосвязи 344
470. Сервосвязи 344
Упражнения к главе XXIV 356
10 ОГЛАВЛЕНИЕ
Глава XXV. Канонические уравнения. Теоремы Якоби и Пуас-
сона. Принципы Гамильтона, наименьшего действия и наимень-
шего принуждения 364
I. Канонические уравнения 364
471. Преобразование Пуассона и Гамильтона 364
II. Теорема Якоби и ее приложения 367
472. Теорема Якоби 367
473. Частный случай, когда t не содержится в коэффициентах урав-
нения Якоби 368
474. Примеры 369
475. Теорема Лиувилля 374
476. Теорема Штеккеля 375
477. Приложение преобразования Лежандра к уравнению Якоби . . 376
III. Теорема Пуассона 378
478. Некоторые общие сведения о дифференциальных уравнениях . . 378
479. Условие, при котором /=С есть первый интеграл; скобки
Пуассона . . . 379
480. Тождество Пуассона 380
481. Теорема Пуассона 382
482. Случай, когда Н не содержит t Замечание об интеграле энергии 383
483. Пример 384
IV. Принцип Гамильтона. Принцип наименьшего действия 386
484. Принцип Гамильтона 386
485. Вывод уравнений Лагранжа из принципа Гамильтона 387
486. Принцип наименьшего действия 388
487. Геодезические линии 392
488. Вычисление действия вдоль траектории 392
489. Геометрические свойства траекторий 394
490. Расширение понятия силовой функции. Силовая функция, завися-
щая от времени и от скоростей 395
491. Задача Майера для случая внутренних сил 396
V. Множитель Якоби 397
492. Определение множителя 397
493. Уравнение множителя 398
494. Инвариантность множителя 400
495. Использование множителя 402
4S6. Последний множитель 402
497. Пример 403
498. Приложение к каноническим уравнениям 405
499. Приложение. Задача Бруна ,...,.. 407
ОГЛАВЛЕНИЕ 1 1
VI Свойства интегралов. Интегральные инварианты 409
500. Интегралы 409
501. Теорема Кёнигса 410
502. Теорема Пуассона 413
503. Интегральные инварианты 415
VII. Принцип наименьшего принуждения Гаусса 420
504. Формулировка принципа 420
Упражнения к главе XXV 426
Глава XXVI. Удар 431
I. Удар, приложенный к материальной точке 431
505. Определения ..¦..• 431
506. Удар, приложенный к одной материальной точке . 431
507. Эффект действия обыкновенных сил, таких, как сила тяжести,
за время удара равен нулю 434
508. Выводы. Теоремы для одной материальной точки 434
II. Удары, приложенные к системе 435
509. Общие теоремы 435
III. Приложение общих теорем 437
510. Прямой удар двух шаров 437
511. Удары, приложенные к телу, вращающемуся вокруг неподвиж-
ной оси Ог 441
512. Случай, когда действует один удар. Центр удара 442
513. Баллистический маятник 445
514. Твердое тело, движущееся вокруг неподвижной точки 446
515. Свободное твердое тело 447
IV. Общее уравнение теории удара. Теорема Карно 448
516. Общее уравнение 448
517. О связях, существующих в момент удара 450
518. Следствия из общего уравнения 451
519. Теорема Карно 452
520. Распространение теоремы Карно на случай, когда имеются
заданные удары 455
521. Теорема Г. Робена 456
V. Применение уравнений Лагранжа в теории удара 457
522. Уравнения 457
523. Замечания о неголономных системах 461
Упражнения к главе XXVI 162
12 ОГЛАВЛЕНИЕ
Глава XXVII. Понятие о машинах. Подобие 468
1. Общие сведения. Маховики. Регуляторы 463
524. Определения 463
525. Приложение теоремы кинетической энергии к машинам .... 463
526. Аналитическое выражение кинетической энергии 465
527. Движение машины 466
528. Причины нарушения равномерности хода при установившемся
движении 467
529. Приближенное выражение работы 468
530. Маховики 470
531. Регуляторы '. 474
И. Подобие в механике. Модели 476
532. Подобие 476
Именной указатель 482
Предметный указатель 484
ОТ ИЗДАТЕЛЬСТВА
Многотомный «Трактат по теоретической механике» выдающегося
французского ученого П. Аппеля A855—1930), над созданием кото-
рого автор работал на протяжении нескольких десятков лет, поль-
зуется во всех странах широкой известностью среди специалистов,
работающих в области механики. По обилию материала, полноте и
строгости изложения этот капитальный труд далеко выходит за рамки
обычного учебника и представляет собою по существу энциклопедию
знаний в области классической механики, отражающую уровень раз-
вития этой науки к концу XVIII — началу XIX столетий. Естественно,
что при дальнейшем развитии науки и техники некоторые области
исследований в механике значительно расширились, а трактовка многих
вопросов изменилась. Однако, фундаментальный курс Аппеля не утра-
тил своей ценности и в наши дни.
Первые 3 тома трактата Аппеля были изданы в переводе на рус-
ский язык (с 3-го французского издания) еще в 1911 г. и давно
уже стали библиографической редкостью. Настоящее издание пред-
ставляет собою новый перевод (с 5 и 6 французских изданий)
первых двух томов этого трактата, содержащих законченное изло-
жение классической механики точки, системы материальных точек
и твердого тела. При переводе лишь в некоторых местах (иногда
без особых оговорок) были изменены устаревшие или не поддающиеся
буквальному переводу термины и сняты некоторые рекомендации
литературы. В основном же текст перевода полностью следует ори-
гиналу.
В связи с безвременной кончиной И. Г. Малкина научную редак-
цию текста перевода как первого, так и второго тома осуществил
С М. Тарг.
Книга может служить хорошим пособием для студентов и аспи-
рантов механико-математических факультетов университетов и ценным
руководством для научных'работников, преподавателей и инженеров,
работающих в области теоретической механики или пользующихся
этой наукой при технических исследованиях.
ДИНАМИКА СИСТЕМЫ
ГЛАВА XVII
МОМЕНТЫ ИНЕРЦИИ
313. Геометрия масс. Теория моментов инерции, теория центра
тяжести *), а также теория притяжения заимствуют из механики только
понятие массы. Вследствие этого некоторые авторы, в частности Карно
(Carnot, Geometrie de position) и Шаль (Chasles, Apercu historique),
предлагают относить эти теории к геометрии. Но в настоящее время
эти теории относят к специальной главе механики, которую называют
геометрией масс (см. Haton de la Goupilliere, Journal de l'Ecole Po-
lytechnique, XXXVII cahier и Revue generate des Sciences pures et
appliquees, 4-e annee, 1893, стр. 337).
Все теории, составляющие геометрию масс, имеют своим предме-
том исследование сумм вида 2OT/(X> У< 2)> распространенных на
совокупности материальных точек с массами т и координатами х, у, г.
Например, в теории центра тяжести встречаются суммы, которые
получаются в предположении, что f(x, у, г) есть линейная функция
координат, и которые приводятся к трем суммам 2 тх> 2 тУ> 2 mz-
Теория моментов инерции, созданная Гюйгенсом, относится к сум-
мам, получающимся в предположении, что f(x, у, г) является целой
функцией второй степени относительно координат, и приводящимся
к шести суммам вида 2 тхг, 2 му2> 2 mz2> 2 тУ%< 2 "*гх, 2 fix у.
I. Определения и примеры
314. Определение моментов инерции. Так как в приложениях
встречаются только моменты инерции относительно осей, то полезно
ввести следующие определения. Если задана произвольная система
материальных точек, то:
1°. Моментом инерции этой системы относительно плоско-
сти называется сумма 2 т^г произведений массы т каждой отдель-
ной точки на квадрат ее расстояния 8 от плоскости.
*) Автор всюду пользуется термином «центр тяжести> вместо центра
инерции или центра масс. (Прим. перев.)
16 ДИНАМИКА СИСТЕМЫ
2°. Моментом инерции системы относительно оси называется
сумма 2 тг2 произведений массы т каждой отдельной точки на квй-
драт ее расстояния г до оси. Этот момент обычно обозначают через Mh2,
где М — вся масса системы; к называют тогда радиусом инерции
системы относительно оси.
3°. Моментом инерции относительно точка называется сумма
произведений массы каждой точки на квадрат ее расстояния до точки.
Проведем через некоторую точку О три прямоугольные оси х, у, г.
Тогда моменты инерции относительно трех координатных плоскостей
равны 2 tnx2, 2 тУ2< 2 mz2' моменты инерции относительно осей
равны 2 rn{y2-\-z2), 2 m(z2-\-х2), 2'ге(*2 + У2) и момент инер-
ции относительно точки О равен S tn (xz —t— у2 —j— z2).
Из написанных выражений получаются следующие теоремы:
а) Момент инерции относительно оси равен сумме моментов
инерции относительно двух взаимно-перпендикулярных плоско-
стей, проходящих через эту ось.
б) Момент инерции относительно точки равен сумме момен-
тов инерции относительно трех взаимно-перпендикулярных пло-
скостей, проходящих через эту точку, или сумме моментов
инерции относительно плоскости и перпендикулярной к ней оси,
проходящих через эту точку.
4°. Произведения инерции, или центробежные моменты инер-
ции. Так называются суммы вида 2 туг, 2 тгх, 2 тхУ< которые
непосредственно приводятся к моментам инерции относительно пло-
скостей. В самом деле, проведем плоскости Р и Р', делящие пополам
двугранные углы, образованные плоскостями zOx и гОу. Эти пло-
скости имеют уравнения х-\-у = 0 и х — у — О. Обозначим далее
через 8 и 8' расстояния от точки массы т с координатами х, у, z до
этих плоскостей. Тогда имеем:
В полученном соотношении оба члена правой части являются момен-
тами инерции относительно плоскостей.
315. Сплошные системы. Для вычисления моментов инерции
сплошного тела, например, какой-нибудь металлической массы, его пред-
полагают разбитым на элементарные объемы dv, каждый из которых
имеет координаты х, у, z и массу m = pdv, где р — плотность эле-
ментарного объема dv. Тогда суммы вида 2mx2 или 2m.V2 превра-
тятся в тройные интегралы fCCpx2dv или Г Г Г pyzdv, распро-
страненные на рассматриваемый объем.
ГЛАВА XVII. МОМЕНТЫ ИНЕРЦИИ
17
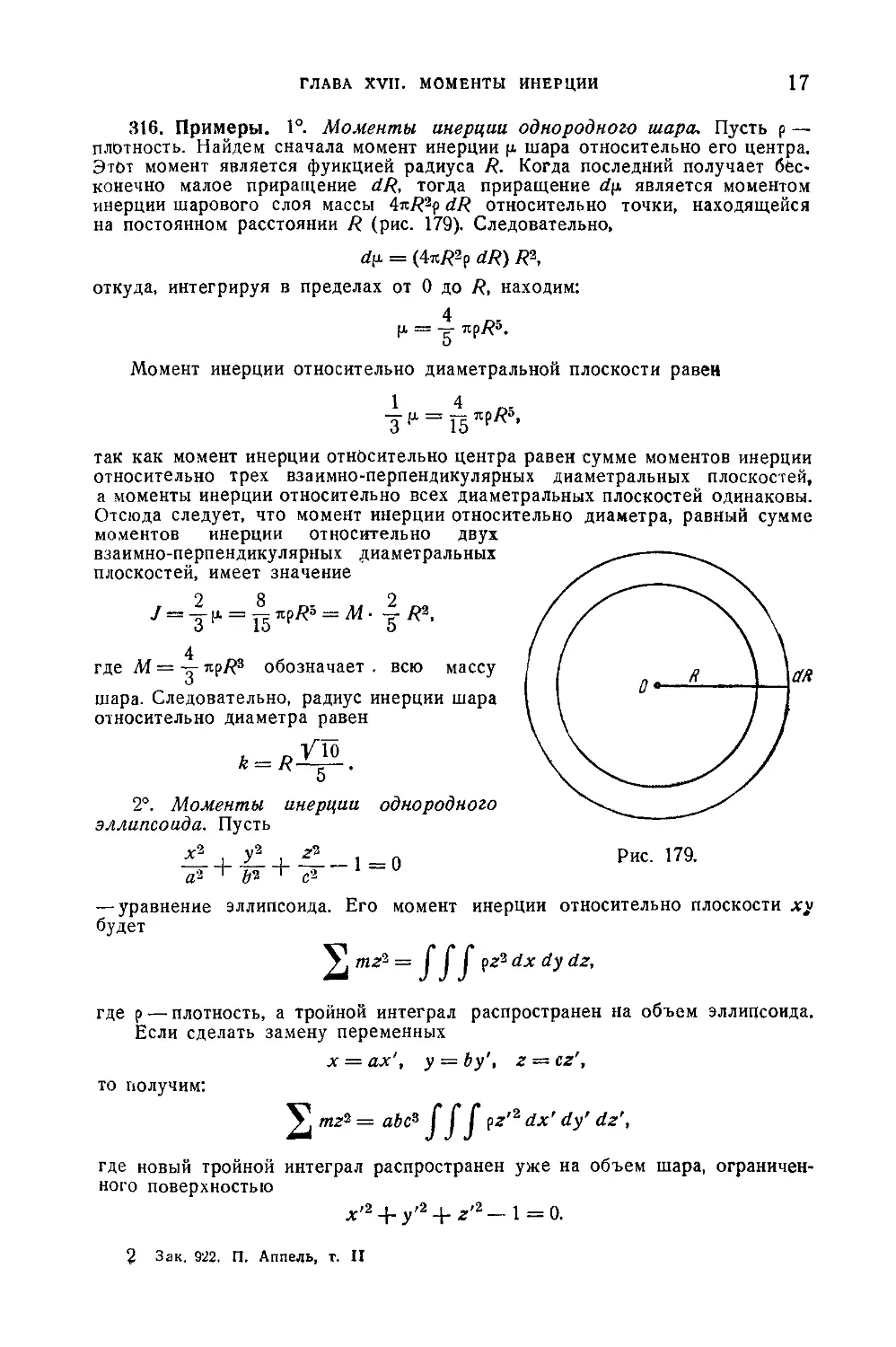
316. Примеры. 1°. Моменты инерции однородного шара. Пусть р —
плотность. Найдем сначала момент инерции ц шара относительно его центра.
Этот момент является функцией радиуса R. Когда последний получает бес-
конечно малое приращение dR, тогда приращение d\i является моментом
инерции шарового слоя массы 4я/?2р dR относительно точки, находящейся
на постоянном расстоянии R (рис. 179). Следовательно,
dp = Dя/?2р dR) tf2,
откуда, интегрируя в пределах от 0 до R, находим:
4
ц, = -g- тср/?5.
Момент инерции относительно диаметральной плоскости равен
/?5
так как момент инерции относительно центра равен сумме моментов инерции
относительно трех взаимно-перпендикулярных диаметральных плоскостей,
а моменты инерции относительно всех диаметральных плоскостей одинаковы.
Отсюда следует, что момент инерции относительно диаметра, равный сумме
моментов инерции относительно двух
взаимно-перпендикулярных диаметральных
плоскостей, имеет значение
2 8 . 2
3 15 5
где М — -=- тер/?3
обозначает . всю
массу
шара. Следовательно, радиус инерции шара
относительно диаметра равен
2°. Моменты инерции однородного
эллипсоида. Пусть
?1 . 11
«2 "Г Ь1
?-1-0
Рис. 179.
— уравнение эллипсоида. Его момент инерции относительно плоскости ху
будет
тг"- = С С С р*з dx dy dz.
где р — плотность, а тройной интеграл распространен на объем эллипсоида.
Если сделать замену переменных
х = ах', у = by', г ~ сг',
то получим:
^ mzs = abc* J J J* Рг'2 dx' dy' dz',
где новый тройной интеграл распространен уже на объем шара, ограничен-
ного поверхностью
2 Зак. 922. П. Аппедь, т. II
18
ДИНАМИКА СИСТЕМЫ
Он представляет собою момент инерции шара радиуса 1 относительно
диаметральной плоскости и, следовательно, равен ^яр. Таким образом,
имеем:
Эта величина может быть окончательно написана в виде
Z
так как масса М эллипсоида
4
равна -5- праос.
о
Точно так же моменты
инерции эллипсоида от-
носительно плоскостей хг
и уг равны соответствен-
.. ft9 ,. а? и
но Af-F- и М—^-. Вслед-
о о
ствие этого моменты инер-
ции относительно осей Ох.
Оу, Ог суть
М
М-
М
Рис. 180.
и момент инерции относи-
тельно центра равен
М
3°. Момент инерции однородного тела вращения, ограниченного пло-
скостями двух параллелей, относительно его оси. Рассмотрим сначала
случай кругового цилиндра высоты h и радиуса R. Так же как и в случае
шара, если радиусу дать приращение dR, то момент инерции цилиндра от-
носительно его оси получит приращение
так как все точки цилиндрического слоя, на который увеличится тело, нахо-
дятся на расстоянии R от оси и приращение массы равно 2я/?Ар dR.
Интегрируя последнее равенство, получим:
(а = 2"
что можно написать в виде
и следовательно, радиус инерции цилиндра равен R —^—
Пусть теперь в общем случае z = <f{x) есть уравнение меридиана по-
верхности вращения вокруг дси О? (рис. 180). Разобьем тело плоскостями,
ГЛАВА XVII. МОМЕНТЫ ИНЕРЦИИ 19
перпендикулярными к оси, на элементарные цилиндры. Момент инерции каж-
дого такого цилиндра радиуса г и высоты dz равен, по предыдущему,
-Tj- icHp dz,
и если z0 и zt—значения координаты z для крайних параллельных плоско-
стей, то для момента инерции всего тела получим выражение
-тг/'
r*dz,
* J
где г связано с г соотношением
z = V (П.
Таким образом, в рассматриваемом случае момент инерции вычисляется
с помощью простого интеграла.
II. Общие теоремы
317. Изменение момента инерции системы относительно оси,
перемещающейся параллельно самой себе. Это изменение опреде-
ляется следующей теоремой:
Момент инерции системы относительно данной оси равен ее
моменту инерции относительно оси, параллельной данной и про-
ходящей через центр тяжести системы, увеличенному на произ-
ведение всей массы на квадрат расстояния между обеими осями.
Пусть АВ—произвольно заданная ось. Примем параллельную
ось Сг, проходящую через центр тяжести, за ось z и пусть х = а,
у = Ь — уравнения заданной оси АВ. Момент инерции относительно
оси АВ равен
что может быть написано в виде
2 т О2 + уг) -f (а2 + Ь2) 2 т — 2а 2 тх — ЧЪ 2 ту.
Но 2/гел; и 2/к.У равны нулю, так как центр тяжести лежит на оси г;
таким образом, для момента инерции относительно АВ остается вы-
ражение
2 т (х2 -+- у2) + (а2 + Р) 2 т.
что и доказывает предложение, так как 2т (х2Н~ У2) есть момент
инерции относительно оси С г, а а24"^2 есть' квадрат расстояния
между обеими осями. Следовательно, если У есть момент инерции
относительно оси АВ, Ja — момент инерции относительно параллель-
ной оси, проходящей через центр тяжести О, и d — расстояние между
этими двумя осями, то J—Je-^Md1. Пусть / — момент инерции
20
ДИНАМИКА СИСТЕМЫ
относительно оси, имеющей то же направление, но находящейся на pat-
стоянии а" от центра тяжести. Тогда У = JG -f- Md'2 и, следовательно,
У— f = M(d* — d'2).
Эта формула позволяет вычислить /, если известны У и положение
центра тяжести.
Из теоремы J=Je-\-Md2 вытекает, что из всех моментов инер-
ции относительно осей, имеющих одинаковое направление, наименьший
будет относительно той оси, которая проходит через центр тяжести.
Все оси заданного направления, относительно которых момент инер-
ции имеет одинаковое значение, образуют круговой цилиндр, ось
которого проходит через центр тяжести.
Точно так же можно доказать, что:
Момент инерции системы относительно плоскости равен
моменту инерции относительно параллельной плоскости, про-
ходящей через центр тяжести, увеличенному на произведение
всей массы на квадрат расстояния между обеими плоскостями.
Момент инерции системы относительно точки О равен мо-
менту инерции относительно центра тяжести G, увеличенному
на произведение всей массы
на квадрат расстояния
между обеими точками.
318. Изменение момен-
та инерции относительно
осей, проходящих через
одну и ту же точку. Эллип-
соид инерции (Пуансо).
Исследуем теперь изменение
моментов инерции относи-
тельно различных осей, вы-
ходящих из точки О
(рис. 181). Примем эту точку
за начало координат и пусть а, р, f — направляющие косинусы некото-
рой прямой ОЗ. Квадрат расстояния тр от точки с координатами л;,
у, z до этой прямой имеет значение От2 — Ор2, т. е.
Г» = Х2 _|_ у2 _|_
что можно представить в виде
г2 = (х2 + У2 + *2) (
или в развернутом виде
г2 = а* (у2 + z2) + р B2 -f *2) + Т2 (*а + У*)—
откуда для момента инерции получается значение
5] т г2 = <* У1т(у2 + 22) + р2 2 т (z* + jc2) + f2 2 « (х2 + У2) —
2оф 2 тху.
Рис. 181.
— 2^7 21 тУг — 2^я
ГЛАВА XVII. МОМЕНТЫ ИНЕРЦИИ 21
Обозначая входящие в эту формулу постоянные суммы через А,
В, С, D, Е, F, получим:
2 тг2 = Ла2 + Вр2 -(- Cf — 2D$~[ — 2?та — 2/=ар. A)
Постоянные А, В, С являются моментами инерции относительно
осей координат, a D, E, F суть произведения инерции или, что то же,
центробежные моменты инерции.
Для геометрической интерпретации результата, к которому мы
пришли, отложим на каждой прямой 08 по обе стороны от точки О
отрезки такой длины ОР, что -^р- = ' 2 тг2> и найдем геометриче-
ское место точек Р(Х, Y, Z). Прежде всего имеем:
х n Y z I
и, подставляя эти значения в равенство A), получим:
1 = АХ2 -\-BY2-\-CZ2 — 2DYZ — 2EZX— 2FXY, B)
т. е. уравнение поверхности второго порядка. Эта поверхность, имею-
щая в начале координат центр, будет эллипсоидом. Действительно,
радиус-вектор ОР будет всегда вещественным и конечным, так как
он имеет значение l/У ^жг2, а момент инерции всегда положителен.
Исключение представляется лишь в том случае, когда все материаль-
ные точки системы лежат на одной прямой, проходящей через О.
В этом случае момент инерции относительно этой прямой равен нулю
и эллипсоид обращается в цилиндр вращения вокруг этой прямой.
Эллипсоид, уравнение которого мы только что получили, носит
название эллипсоида инерции для точки О; его плоскости и оси
симметрии называются главными плоскостями и главными осями
инерции относительно рассматриваемой точки. Эллипсоид инерции
для центра тяжести называется центральным эллипсоидом инерции.
В общем случае в каждой точке имеются только три главные оси
инерции; если эллипсоид инерции для данной точки является эллип-
соидом вращения, то имеется бесчисленное множество главных осей
инерции, и все они лежат в его экваториальной плоскости; наконец,
если эллипсоид обращается в сферу, то все оси, проходящие через
точку, являются для нее главными.
Если эллипсоид инерции для точки О построен, то момент инер-
ции относительно какой-нибудь оси OS равен 1/ОР2, где Р обозна-
чает точку пересечения оси 08 с эллипсоидом. Из всех осей, про-
веденных через точку О, наименьший момент инерции получится для
той, которая совпадает с большой осью эллипсоида.
319. Условия, при которых ось Oz является главной для
точки О. Найдем условия, при которых одна из осей координат, на-
пример, Ог является главной осью инерции для точки О. Для этого
22
ДИНАМИКА СИСТЕМЫ
необходимо, чтобы уравнение эллипсоида инерции, построенного
в точке О, не содержало членов с первой степенью г, т. е. чтобы
или
2 туг = О, 2 тхг = 0. C)
Ось г, будучи главной осью инерции для точки О, не будет,
вообще говоря, главной осью того же направления для другой точки О',
лежащей на расстоянии 00' = h от О (рис. 182). Чтобы выразить,
что Ог является главной осью также и для точки О', необходимо,
согласно предыдущему, при-
соединить к уравнениям C)
новые условия
Щ = 0, D)
которые получаются, если
перенести начало в точку О'.
Комбинируя эти условия с пре-
дыдущими, мы приведем их
к виду
Рис. 182.
который выражает, что ось Ог
проходит через центр тяжести.
Если это геометрическое условие выполняется, то ось г будет главной
осью инерции для любой своей точки, и в частности, для центра
тяжести, так как условия, которые мы только что установили, будут
тогда выполняться при любом h.
Теорема. Главная ось инерции, проходящая через центр
тяжести, является главной осью инерции для любой своей точки.
Наоборот, если какая-нибудь ось является главной для двух своих
точек, то она будет главной для всех своих точек и будет про-
ходить через центр тяжести.
Очевидно, что если тело имеет плоскость симметрии, то эта
плоскость будет главной для каждой своей точки, так как если ее
принять за плоскость ху, то каково бы ни было начало координат,
будем иметь: _ _
2j тхг = 0, 2и туг = 0,
поскольку г принимает значения, попарно равные и противоположные
по внаку.
320. Замечание. Произвольный эллипсоид не всегда можно рас-
сматривать как эллипсоид инерции. Действительно, если отнести эллип-
соид инерции к главным осям, то его уравнение примет вид
ГЛАВА XVII. МОМЕНТЫ ИНЕРЦИИ 23
где
являются моментами инерции относительно осей координат. Отсюда
сразу видно, что никакой из этих моментов не может превосходить
сумму двух других. Например, если эллипсоид инерции является
эллипсоидом вращения вокруг малой оси (вытянутый эллипсоид вра-
щения), то большая ось может быть сколь угодно большой. Но если
он является эллипсоидом вращения вокруг большой оси (сжатый
У—1
эллипсоид вращения), то его сжатость не может превышать -—j=—.
Если тело является пластинкой бесконечно малой толщины, лежа-
щей в плоскости ху, то одной из главных осей эллипсоида вследствие
симметрии является ось Oz. Допустим, что двумя другими главными
осями являются Ох и Оу. Тогда в силу того, что 2 = 0, имеем
С — А-\- В.
Мы увидим (см. упражнения), что для того, чтобы в какой-нибудь
точке пространства эллипсоид инерции мог обратиться в сферу, необходимо,
чтобы эллипсоид инерции относительно центра тяжести был сжатым эллип-
соидом вращения. Тогда на оси вращения будут существовать две точки,
расположенные симметрично относительно центра тяжести, для которых будет
выполнено указанное условие.
321. Задача Бине. Найти огибающую плоскостей, относительно
которых момент инерции имеет заданное значение Mk2.
Отнесем систему к главным осям инерции Gx, Gy, Gz центрального
эллипсоида, т. е. эллипсоида инерции, построенного в центре тяжести, и пусть
Ma2, Mb2, Me — моменты инерции относительно координатных плоскостей.
Момент инерции относительно плоскости
их -\- vy -\- wz -f-1 = 0
имеет значение
S _ V m(ux-\-vy-\-wz-\-\f
Развертывая это выражение и замечая, что согласно выбору осей коор-
динат шесть сумм 2 тх> 2 тУ< 2 тг> 2 тУг< 2 тгх> 2 тхУ> Равны
нулю, получим соотношение
_ иШа2 + vMV- + w"-Me- + М
из которого вытекает
и"- (а3 — k2) + v2 F2 _ k2) + w"- (с2 — k2) + 1 = 0.
Это — тангенциальное уравнение поверхности второго порядка
При изменении параметра k поверхности, представляемые этим уравне-
нием, остаются софокусными. Так как они должны оставаться вещественными,
то необходимо, чтобы № было меньше наименьшей из величин а2, Ъ2, с\
например с2. Отсюда следует, что плоскостью, относительно которой момент
инерции имеет наименьшее значение, является плоскость ху.
24 ДИНАМИКА СИСТЕМЫ
Через точку О' (х', у', г') пространства проходят три из указанных по-
верхностей. Соответствующие им значения параметра к2 являются кор-
нями a2, $i, f2 уравнения третьей степени
+1=а
Эти три софокусные поверхности, проходящие через точку О' (х', у', г'),
пересекаются под прямыми углами. Имеет место следующая теорема:
Три главные плоскости относительно точки О' являются касатель-
ными плоскостями к трем софокусным поверхностям A), проходящим
через эту точку, и моменты инерции относительно этих трех главных
плоскостей суть Ма2, М$2, М^, где а2, (Р, f2 означают корни уравне-
ния B).
Доказательство вытекает из сопоставления следующих двух положений.
1°. Огибающая плоскостей, проходящих через О', относительно которых
момент инерции. имеет заданное значение М№, есть конус с вершиной
в точке О', описанный около поверхности A). Эта огибающая является дей-
ствительно конусом, если поверхность A) не проходит через О', т. е. если k2
не совпадает ни с одной из величин а2, [З2, у2. Но если k2 имеет одно из ука-
занных значений, то поверхность A) будет проходить через точку О' и опи-
санный конус с вершиной в О' обратится в двойную плоскость, совпадающую
с касательной плоскостью к этой поверхности в точке О'.
2°. Найдем непосредственно огибающую тех же плоскостей, приняв О'
за начало, а главные оси инерции относительно точки О' за оси координат
O'b Пусть хъ уъ гх — координаты какой-нибудь точки системы и
— моменты инерции относительно трех главных плоскостей в точке О'. Мо-
мент инерции системы относительно плоскости ихх -j- vy± -\- wzx = 0, прохо-
дящей через точку О', равен
(и
1
М (а.у
Если k2 должно оставаться постоянным, то имеем:
а2 (,* - А3) + t,2 $ - fts) + w* (rf - A2) = 0.
Тогда рассматриваемые плоскости огибают конус, уравнение которого имеет
вид
Это будет действительно уравнением конуса, если № отлично от каждого
из значений а\, pj, f\. Если же, например, k* = а\, то конус обращается
в двойную плоскость х\ = 0, т. е. в одну из главных плоскостей относи-
тельно точки О'.
Точно так же при k2 = $\ и k2 = fj получаются две другие главные пло-
скости относительно (У.
Но так как из предыдущего рассуждения мы установили, что тот же
самый конус обращается в двойные плоскости только при k2, равном а2 или ^3,
или -у2, то необходимо, чтобы а\, $\, ~Ц совпадали с a2, fi2, y2- Так как мы,
Кроме того, нашли, что эти двойные плоскости совпадают с касательными
ГЛАВА XVII. МОМЕНТЫ ИНЕРЦИИ 25
плоскостями к трем софокусным поверхностям, проходящим через О', то
необходимо, чтобы эти касательные плоскости совпадали с главными плоско-
стями инерции относительно О', т. е. с хх = О, уг =0, г^ =0.
Таким образом, теорема доказана.
322. Геометрическое место точек О', для которых момент инерции
относительно одной из главных осей в точке О' имеет заданное зна-
чение Мрг. Допустим, что момент инерции относительно главной оси О'г
имеет значение Мр2. Тогда
Ма2 + Af?2 = Мр\
Но а2, р3, f2 суть корни уравнения B); освободившись в нем от знаме-
нателей, мы получим для суммы корней
а2 4- pa 4- f = х'г + у'2 -f г'2 + <?- + *2 + с2.
Отсюда, так как
найдем:
Выражая, что f2 является корнем уравнения B), получим уравнение гео-
метрического места
jc'2 у'2 zn
Это — поверхность четвертого порядка, пересекаемая координатными пло-
скостями по коническим сечениям. Она идентична волновой поверхности
Френеля (см. С 1 е b s с h, Journal de Crelle, т. 57; Hess e, Vorlesungen fiber
anafytische Geometrie des Raumes; Darboux, Note a la Mecanique de Despey-
rous).
323. Экспериментальное определение моментов инерции. Мы увидим
ниже, как теория физического маятника позволяет экспериментально опре-
делить момент инерции. Ограничимся указанием, что Брассин (В г a s s i n e,
Comptes Rendus, т. XCV, стр. 446), Депрец (Marcel D eprez, ibid., т. LXXIII,
стр. 785), Жуковский (Bulletin de l'Association franchise pour l'avancement
des Sciences, 1889, стр. 23) предложили различные приборы для такого опре-
деления. Можно вычислить моменты инерции также при помощи механиче-
ских интеграторов, как это показано в научном труде о графической статике
Мориса Леви (Traite de Statique graphique de M. Morice Levy).
Хаффнер (Haffner) изобрел прибор, позволяющий узнавать, будет ли
заданная ось главной осью инерции для центра тяжести (см. А п п е л ь, Ma-
chine a determiner les balourds, Journal de l'Ecole Polytechnique, 2-е semestre,
9-e Cahier, 1904).
УПРАЖНЕНИЯ
1. Вычислить моменты инерции однородного прямоугольного параллеле-
пипеда со сторонами а, Ь, с относительно прямых, проходящих через центг.
и параллельных ребрам.
Ответ:
2. Рассматривается объем, заключенный между двумя цилиндрами вра-
щения вокруг общей оси, имеющими радиусы R \\ R' а одинаковую высоту h.
Предполагая этот объем однородным, вычислить его моменты инерции
26 ДИНАМИКА СИСТЕМЫ
относительно оси вращения и относительно прямой ее пересекающей, к ней
перпендикулярной и одинаково удаленной от оснований.
Ответ. Если М — масса объема, то получится
2
3. Для изображения изменения моментов инерции относительно осей,
параллельных АВ, можно откладывать на каждой такой оси от точки А,
в которой она пересекает фиксированную, перпендикулярную к осям пло-
скость, отрезок А/, равный соответствующему моменту инерции. Найти гео-
метрическое место точек / (параболоид вращения).
4. Если тело имеет плоскость материальной симметрии, то последняя
является главной плоскостью для каждой своей точки.
Если тело имеет ось материальной симметрии, то последняя является
главной осью для каждой своей точки.
Симметрия является материальной, когда каждый элемент имеет такую же
массу, как и элемент, ему симметричный.
5. В правильном однородном тетраэдре центральный эллипсоид инерции
является сферой. (Это вытекает из расположения плоскостей симметрии.)
6. Найти условия, при которых ось Ог является главной для какой-ни-
будь одной из своих точек М.
Ответ:
"" 2тУг
(Общее значение этих отношений определяет расстояние Л от О до точки М.)
7. Главные оси инерции для точки, лежащей на главной центральной
оси инерции, параллельны главным центральным осям. (Доказать также
обратное предложение.)
8. Дан прямой однородный цилиндр высоты Л, основание которого Q
лежит в плоскости хОу, а образующие параллельны оси Ог. Пусть Jx, Jyt
Js—его моменты инерции относительно осей Ох, Оу, Ог. Вывести формулы
Jx =
Jx T Jy ~ Jz H g~~ ">
где интегрирование распространено на прямое сечение. Плотность равна 1.
[R e s а 1 (Резаль), Cours de l'Ecole Polytechnique.]
9. Дана плоская фигура, лежащая в плоскости ху и рассматриваемая
как совокупность элементов, для которых координата г равна нулю. Доказать:
1° что каждая ось, лежащая в плоскости фигуры, является главной для
одной из своих точек, и вычислить координаты этой точки;
2° что момент инерции относительно оси Ог равен сумме моментов
инерции относительно осей Ох и Оу.
10. Моменты инерции поверхностей вращения относительно их осей*
Если y=f(x) есть уравнение меридианной кривой, проведенной в плоско-
сти ху и если осью вращения является ось х, то момент инерции описанной
поверхности относительно этой оси определяется формулой
С y3ds,
ГЛАВА XVII. МОМЕНТЫ ИНЕРЦИИ 27
гДе е — постоянная толщина материальной поверхности, предполагаемой бес-
конечно тонкой, ар — постоянная плотность слоя.
Боковая поверхность усеченного конуса. Если гаг' — радиусы осно-
ваний конуса, то
Сферический сегмент радиуса R и высоты Н:
11. Моменты инерции однородных тел вращения относительно их
оси. Усеченный конус. Пусть гиг' — радиусы обоих оснований конуса.
Тогда
, 3 ..п — г'ъ
J= — М -•.
10 /-з-/-'3
Сферический слой. Пусть г и г' — радиусы обоих оснований слоя,
Я—его высота и R — радиус сферы. Тогда
J=ш ^H[20R2Hi+15 ^+г'2J
[Dostor (Достор), Archiv. de Grunert].
12. Рассмотрим неподвижную точку О и переменную ось 08, проходящую
через эту точку. Проведем плоскость Р, перпендикулярную к оси ОЬ, на рас-
стоянии от О, равном радиусу инерции материальной системы относительно 08.
Найти огибающую плоскостей Р. [Эта огибающая является эллипсоидом.
Clebsch (Клебш), Crelle, т. 57.]
13. Пусть
/(*)=(*-*г)(*-2Г8)... (*-*„) = О
— уравнение степени р относительно комплексной переменной z, a zlt z^,...
..., zp — его корни. Изобразим эти корни по методу Коши в виде точек
на плоскости и будем затем рассматривать эти точки как материальные с мас-
сой, равной единице. Условимся, наконец, называть центральными точками
порядка 1, 2, 3,... корни последовательных производных /' (г), f" (z), ...
Тогда имеют место следующие теоремы:
Центральная точка порядка р — 1 есть центр тяжести заданной системы.
Прямая, соединяющая центральные точки порядка р — 2, направлена по
большой оси центрального эллипсоида инерции системы.
Если через А и В обозначить радиусы инерции относительно главных
центральных осей инерции, лежащих в плоскости системы, то разность Л2 — В2
равна помноженному на р — 1 квадрату половины расстояния между централь-
ными точками (р — 2)-го порядка.
Чтобы выполнялось условие А = В, необходимо и достаточно, чтобы две
последние точки совпадали (Lucas, Bulletin de la Societe mathematique,
т. XX, стр. 10 и 17).
14. Какую форму следует придать однородной массе заданной величины М,
чтобы ее момент инерции относительно заданной точки О имел минимум?
Ответ. Форму шара с центром в точке О.
15. Для заданной системы точек исследовать комплекс, образованный
осями, относительно которых момент инерции имеет заданное значение Mq\
28 ДИНАМИКА СИСТЕМЫ
Ответ. Приняв обозначения пункта 321, получим комплекс второго по-
рядка, образованный прямыми, через которые можно провести к поверхности
х2 у? г2
Ж* лГ> ^Г+J =0
взаимно-перпендикулярные касательные плоскости.
16. Исследовать также комплекс, образованный совокупностью главных
осей относительно различных точек пространства.
(Комплекс образован нормалями к семейству софокусных поверхностей
второго порядка.)
17. Прямые предыдущего комплекса, проходящие через точку О', обра-
зуют конус. Найти геометрическое место точек, для которых образующие
этого конуса являются главными осями (геометрическое место оснований
нормалей, проведенных из точки О' к софокусным поверхностям).
18. Найти геометрическое место точек, для которых эллипсоид инерции
является эллипсоидом вращения.
[Необходимо, чтобы уравнение B), стр. 24 имело два одинаковых корня;
получаются эллипс и гипербола, лежащие в двух главных плоскостях отно-
сительно центра тяжести.)
19. В эллипсоиде инерции наименьшая полуось больше или равна рас-
стоянию от центра до прямой, соединяющей концы двух других полуосей.
20. В плоскости хОу дана фигура, ограниченная замкнутой кривой С.
Показать, что вычисление следующих элементов: 1) площади фигуры; 2) орди-
наты центра тяжести площади; 3) момента инерции этой площади относи-
тельно оси Ох; 4) момента инерции однородного тела, образованного враще-
нием фигуры вокруг оси Ох, приводится к вычислению интегралов:
1) j ydx; 2) J y"-dx; 3) J y^dx; 4) j y*dx,
взятых вдоль кривой С (См. Ann ель, Analyse mathematique, Paris, Gaut-
hier-Villars).
ГЛАВА XVIII
ОБЩИЕ ТЕОРЕМЫ О ДВИЖЕНИИ СИСТЕМЫ.
СЕМЬ УНИВЕРСАЛЬНЫХ УРАВНЕНИЙ ДВИЖЕНИЯ
324. Указание метода. Как мы уже делали в статике, мы будем
рассматривать произвольную материальную систему, образованную
твердыми телами, жидкостями, газами, как состоящую из большого
числа материальных точек, подчиненных некоторым связям. Твердое
тело, например, есть совокупность точек, находящихся на постоян-
ном расстоянии между собой.
Общие теоремы получаются, если написать уравнения движения
точек системы и составить из этих уравнений соответствующие
сочетания.
I. Теоремы проекций и моментов количеств движения
325. Силы внутренние и внешние. Внутренними силами си-
стемы называются силы взаимодействия между ее точками. Согласно
закону равенства действия и противодействия эти силы попарно
равны и противоположно направлены. Например, если точка М
системы притягивает другую ее точку М' с некоторой силой, то
точка М' притягивает точку М с силой, равной и противоположной
первой.
Силы, отличные от внутренних сил, называются внешними си-
лама.
Пусть xlt yv ги х2, у2, гг хп, уп, гп — координаты раз-
личных точек Mv Mz Мп системы, массы которых mv tn2 ....
.... тп. Если мы рассмотрим какую-нибудь из этих точек, имею-
щую массу т и координаты х, у, г, то все действующие на нее
силы мы сможем разделить на две категории:
1) одну, которая содержит внутренние силы Fit действующие
на точку М; проекции силы Ft мы обозначим через Xit Yit Zf,
2) другую, которая содержит внешние силы Fe, действующие на
ту же точку; проекции силы Fe мы обозначим через Х9, Ке, Zt.
30 ДИНАМИКА СИСТЕМЫ
Тогда уравнения движения точки М, радиус-вектор которой обозна-
чим через М будут:
или
d4-x
— Zi*i + LX"
m —ф- —
d"-z
m
dt°-
326. Доказательство теоремы количества движения. Допустим,
что уравнения A) написаны для всех точек системы. Сложим по-
членно все эти уравнения. Получим:
где знак 22 указывает, что суммирование распространено на все
силы, действующие на каждую точку системы. Но в силу закона
равенства действия и противодействия внутренние силы попарно
равны и противоположно направлены. Следовательно, сумма 22^1
равна нулю и предыдущие уравнения приводятся к виду
2miSL=22/>
или
Sd*x vi vi у
Эти уравнения можно написать также в виде
или
Они выражают теорему количества движения системы и теорему о
проекциях • количества движения.
Теорема. Производная по времени от суммы количеств
д9ижений точек системы равна сумме внешних сил.
ГЛАВА XVIII. ОБЩИЕ ТЕОРЕМЫ О ДВИЖЕНИИ СИСТЕМЫ 31
Теорема. Производная по времена от суммы проекций коли-
честв движений точек системы на какую-нибудь неподвижную
ось равна сумме проекций внешних сил на ту оке ось.
Отсюда следует, что если, например, 2S^e = "' T0
dx
Sdx
m-jf = const.
Уравнения B) допускают еще другое толкование. Обозначив через Ш
всю массу 2 /га и через |, к), С—координаты центра тяжести си-
стемы, получим:
аде=2 тх> Шч = 2 ту. те;=2 т2.
' / i "Z- JJO > -'-'v j^e / i "*¦ j >2 *
Уравнения B) напишутся теперь в форме
В этой форме они выражают следующее свойство:
Теорема. Центр тяжести системы, движется как мате-
риальная точка, масса которой равна всей массе системы
и к которой приложены силы, равные и параллельные внешним
силам системы.
Эта теорема, которой мы уже пользовались, интересна кроме
прочего и в том отношении, что она придает реальное значение
теории движения материальной точки. Она получила наименование
теоремы движения центра тяжести. Эта теорема указана была
Ньютоном для частных случаев.
327. Примеры. 1°. Отсутствие внешних сил. Наиболее про-
стое предположение, которое мы можем сделать, это то, что на
систему не действуют никакие внешние силы. Тогда центр тяжести
системы будет совершать прямолинейное и равномерное движение.
Если, например, считать, что действия звезд на солнечную систему
равны нулю, то центр тяжести этой системы, который расположен
весьма близко от Солнца, будет совершать прямолинейное и равно-
мерное движение.
2°. Тяжелая система в пустоте. Рассмотрим теперь систему
тяжелых точек, брошенных в пустоте. Каковы бы ни были дефор-
мации и внутренние связи системы, ее центр тяжести будет описы-
вать параболу с вертикальной осью. Действительно, различные внеш-
ние силы вертикальны; если их перенести в центр тяжести, то они
будут иметь равнодействующую ^mg—ffi-g; следовательно, центр
тяжести будет двигаться как тяжелая точка массь1 Ж. Например,
если в пустоте брошена бомба и она в некоторый момент времени
32 ДИНАМИКА СИСТЕМЫ
взрывается, то центр тяжести осколков будет продолжать описывать
ту же самую параболу, так как силы, возникающие при взрыве,
являются внутренними. Точно так же, если живое существо движется
в пустоте под действием только веса, то его центр тяжести будет
описывать параболу и мышечные усилия, которые оно будет произ-
водить, не изменят траектории его центра тяжести, так как эти
усилия являются внутренними силами.
3°. Притяжение, пропорциональное расстоянию. Возьмем еще
систему материальных точек, притягиваемых неподвижным центром О
пропорционально массам и расстояниям г. Внешние силы суть цен-
тральные силы притяжения fmr. Перенесем эти силы в центр тя-
жести О. Тогда, как мы видели в статике, их равнодействующая
будет направлена вдоль GO и будет иметь значение fMGO. Сле-
довательно, центр тяжести перемещается как материальная точка,
притягиваемая точкой О пропорционально расстоянию; она описы-
вает эллипс с центром в точке О.
Примечание. В двух предыдущих примерах мы смогли опре-
делить движение центра тяжести, ничего не зная ни о связях, ни
о внутренних силах. Это оказалось возможным вследствие того, что
в указанных случаях правые части уравнений C) зависят только
от |, т), С. Тогда можно выполнить интегрирование этих уравнений,
не зная других уравнений движения. В общем случае так получаться
не будет. Правые части уравнений C) будут зависеть от координат
всех точек системы, и эти уравнения дадут лишь только некоторое
представление о движении. Такой случай имеет место, например,
в задаче о движении двух точек, притягивающих друг друга и притя-
гиваемых неподвижным центром по закону Ньютона. Равнодействую-
щая внешних сил, перенесенных в центр тяжести, зависит в этом
случае не только от координат центра тяжести, но и от координат
самих точек.
4°. Ходьба (Делоне, Механика — Delaunay, Mecanique). Как мы
уже указывали на примере, теорема о движении центра тяжести распро-
страняется и на живые существа. Возникающие при сокращении мышц мус-
кульные усилия являются внутренними силами, попарно равными и прямо
противоположными; следовательно, они не оказывают никакого влияния на
движение центра тяжести. Поэтому только при помощи внешних тел живое
существо может изменить движение своего центра тяжести. Вообразим,
например, наблюдателя, стоящего на идеально отполированной горизонталь-
ной плоскости. Все внешние силы, действующие на тело наблюдателя, — вес
и нормальные реакции плоскости, вертикальны. Если наблюдатель был вна-
чале неподвижным, а затем пожелал двигаться, то его центр тяжести дви-
жется как материальная точка, вначале неподвижная и находящаяся под
действием вертикальной силы. Эта точка описывает неподвижную верти-
кальную прямую, и следовательно, мускульные усилия не изменяют поло-
жения горизонтальной проекции центра тяжести, который может лишь
подниматься или опускаться. Ходьба в этом случае невозможна. Она стано-
вится возможной лишь благодаря трению. Если на негладком грунте чело-
век, сначала неподвижный, заносит вперед одну ногу, то вторая нога стре-
мится отодвинуться назад для того, чтобы горизонтальная проекция центра
ГЛАВА XVIII. ОБЩИЕ ТЕОРЕМЫ О ДВИЖЕНИИ СИСТЕМЫ 33
тяжести не изменилась. Но вторая нога не может отодвинуться назад иначе,
как скользя по грунту. Благодаря этому возникает реакция, отклоненная
от вертикали вследствие трения о грунт и направленная вперед. Эта реак-
ция, «перенесенная параллельно самой себе в центр тяжести, определяет
его движение вперед.
5°. Отдача огнестрельного оружия. Рассмотрим направленное горизой-
тально орудие массы М. Пусть т — масса снаряда и ;х — масса частицы
пороха. До сгорания пороха скорость центра тяжести равна нулю. Она должна
оставаться такой же и непосредственно после сгорания пороха, так как
единственными развивающимися силами будут внутренние, поскольку дей-
ствие веса и пассивных сопротивлений в течение весьма короткого периода
горения можно считать равным нулю. Следовательно, обозначив через V,
v и w абсолютные значения начальных скоростей орудия, снаряда и ча-
стицы [а, получим:
MV— mv — 2fW =0,
так как знаки скоростей снаряда и частиц пороха, очевидно, противопо-
ложны знаку скорости орудия. Знак 2 обозначает суммирование, распро-
страненное на все частицы заряда. Так как скорость w неизвестна и масса
т' = ^ V- заряда не достигает четверти массы т, то можно приближенно
принять w равным среднему алгебраическому —=—. Таким путем полу-
чаем уравнение
VBM +m') = v Bm + т'),
определяющее отношение скоростей V и к.
6°. Упражнение. На идеально отполированную горизонтальную пло-
скость положена прямолинейная соломинка АВ длины 21 и массы т (рис. 183).
О й М 6 С в
Рис. 183.
Насекомое М той же массы, рассматриваемое как точка, находилось вна-
чале неподвижно на конце А. В момент t = 0 оно начало перемещаться от А к В,
совершая вдоль АВ равноускоренное движение {AM = afi). Каково движе-
ние системы?
Так как единственными внешними силами являются вес и нормальные
реакции горизонтальной плоскости, то горизонтальная проекция центра тя-
жести остается неподвижной. Более того, из соображений симметрии оче-
видно, что соломинка АВ будет перемещаться только вдоль своего перво-
начального направления. Примем это направление за ось Ох, обозначим
через х и х' координату середины С отрезка АВ и координату точки М
и пусть х0, х0 — значения этих координат в момент t = 0. Имеем:
х + х' = х0 + х'о.
Так как
х' = х — / + а*2> х'о = хй — /,
то, следовательно, получим:
at% ,' / j_ aP
х —
3 Зак. 922. П. Аппель, т. II
34 ДИНАМИКА СИСТЕМЫ
Реакция соломинки на насекомое получается сразу; обозначив эту реак-
цию через X и написав уравнение движения точки М, получим:
d*x' v v
X, Х= та.
т ...
at*
328. Доказательство теоремы моментов количеств движения
или кинетических моментов. Вернемся к уравнениям A). Умножим
первое из них на —у, второе на х и сложим; тогда получим:
т
что можно написать также в виде
Допустим, что аналогичные уравнения написаны для всех точек си-
стемы. Складывая их почленно, придем к уравнению
Но 22(^^ — УХ?) представляет собой сумму моментов всех внут-
ренних сил относительно оси Ог. Это выражение обращается в нуль,
так как эти силы попарно равны и прямопротивоположны. Мы по-
лучаем, таким образом, уравнение
at
и можем сформулировать следующую теорему:
Теорема. Производная по времени от суммы моментов
количеств движения точек системы относительно произвольной
неподвижной оси равна сумме моментов внешних сил относи-
тельно этой оси.
329. Теорема площадей. Допустим, что сумма моментов внеш-
них сил относительно некоторой оси равна постоянно нулю. Приняв
эту ось за ось г, из предыдущей теоремы получим:
т. е. сумма моментов количеств движения относительно этой оси
будет тогда постоянной. Говорят также, что для проекции движения
на плоскость, перпендикулярную к этой оси, справедлива теорема
площадей.
ГЛАВА XVIII. ОБЩИЕ ТЕОРЕМЫ О ДВИЖЕНИИ СИСТЕМЫ
35
Спроектируем (рис. 184) движущиеся точки Мо Мг М, ...
на плоскость хОу, перпендикулярную к оси. Получим точки pv р2, ...
_.., р, ... Обозначим через Alt А2, ..., А, ... площади, описы-
ваемые радиусами-векторами Opv Ор2 Ор, ... Имеем:
2 dA = x dy — у dx,
и поэтому
dA
dt
Уравнение D) напишется теперь так:
После интегрирования имеем:
Следовательно, сумма произведений описываемых площадей на
соответствующие массы изменяется пропорционально времени. Постоян-
ная площадей С представляет
собой удвоенное изменение
величины 2 тА за единицу
времени.
Если, в частности, на
систему не действуют никакие
внешние силы, то закон пло-
щадей можно применить к про-
екции движения на любую пло-
скость, причем относительно
любой точки этой плоскости.
Это имеет место для солнеч-
ной системы, если пренебречь
действием звезд.
Теорема площадей, не-
смотря на то, что она является Рис- 184-
непосредственным следствием
законов Ньютона, была сформулирована значительно позднее Эйле-
ром, Дарси и Даниилом Бернулли A746).
Приложение к живым существам. Если предыдущую теорему
приложить к наблюдателю, стоящему на гладкой горизонтальной
плоскости, то можно видеть, что закон площадей имеет место относи-
тельно любой точки этой плоскости. В самом деле,- внешние силы—-
вес и реакции плоскости, действующие на наблюдателя, все верти-
кальны и сумма их моментов относительно любой вертикальной оси Ог
равна нулю; следовательно, уравнение D) имеет место, какова бы ни
была точка О на горизонтальной плоскости. Если наблюдатель был
3*
36
ДИНАМИКА СИСТЕМЫ
вначале неподвижным, то величины -~ и ~- равны вначале нулю
и С = 0. Если затем наблюдатель пожелает двигаться, то вследствие
равенства постоянной С нулю ни одна часть его тела не сможет
повернуться в каком-нибудь направлении без того, чтобы какая-
нибудь другая часть не повернулась в обратном направлении (Делоне).
Но следует отметить, что, несмотря на это условие, наблюдатель,
вначале неподвижный на плоскости, может при помощи последова-
тельных движений различных частей своего тела оказаться в конечном
положении, получаемом из начального, поворотом всего тела вокруг
вертикали, проходящей через его центр тяжести. Возможность таких
движений вытекает из примеров, которые мы рассмотрим ниже,
а именно из примеров 3° и 4° пункта 333.
330. Геометрическая интерпретация обеих теорем. Обе дока-
занные нами теоремы допускают очень простое геометрическое пред-
ставление.
Проведем через каждую точку М системы вектор, представляю-
щий количество движения mV этой точки. Все эти векторы mV имеют
главный вектор Ор, равносильный вектору
dM
ти
, т
dt
(Р)
и главный момент Оа относи-
тельно начала О, имеющий про-
екции (рис. 185):
V / dy dx\
^=lim\x-df-y-dt)-
Вектор Оа равносилен вектору
у /rt,., dM
Рис. 185.
Рассмотрим теперь внешние силы. Их главный вектор ОТ? имеет
проекции
а их главный момент 05 относительно точки О имеет проекции
Тогда по теореме количеств движения имеем
dM ~*
di
т.
dt
¦¦ OR, или
dt
ГЛАВА XVIII. ОБЩИЕ ТЕОРЕМЫ 9 ДВИЖЕНИИ СИСТЕМЫ 37
и по теореме моментов количеств движения имеем
d V ЯТаку dM /то й&а ^о
Эти уравнения выражают, что скорости геометрических точек р
и а в каждый момент времени соответственно равны и парал-
лельны векторам OR и OS.
Векторы Ор и Оа называются соответственно главным вектором
количеств движения *) и кинетическим моментом системы.
331. Частный случай, когда главный момент внешних сил
относительно точки О равен нулю. Плоскость максимума пло-
щадей. В этом случае вектор 05 равен нулю. Точка о остается непо-
движной и величины X, р, v постоянны, каковы бы ни были направ-
ления осей в точке О. Вследствие этого закон площадей применим
к проекции движения на любую плоскость Р, проходящую через О.
Чтобы найти значение постоянной площадей на этой плоскости,
примем ее за плоскость ху. Имеем:
m (x lit - у 4t)=v =const-
Постоянная v есть проекция вектора Оа на ось z, т. е. на нор-
маль к плоскости Р. Таким образом, постоянная площадей на какой-
нибудь плоскости, проходящую через точку О, равна проекции Оо
на нормаль к этой плоскости. Отсюда следует, что из всех плоскостей,
проходящих через О, наибольшим значением постоянной площадей
—>
будет обладать та, которая перпендикулярна к Оа. Ее называют
плоскостью максимума площадей. Для всех плоскостей, прохо-
дящих через Об, постоянная площадей равна нулю.
332. Сумма моментов количеств движения точек твердого
тела относительно оси, вокруг которой тело вращается. Рассмот-
рим твердое тело, вращающееся вокруг оси Oz с угловой скоростью ш.
Пусть г и 9 — полярные координаты проекции точки т (х, у, z) тела
на плоскость ху. Имеем:
I dy dx\ , db
т (х -if- у -ж) = тг иг=тг ш-
Обозначая через М№ момент инерции тела относительно оси вра-
щения, получим для суммы моментов количеств движения всех точек
относительно этой оси значение
т. е. произведение момента инерции на угловую скорость.
*) Автор употребляет не применяемый у нас термин «кинетическая равно-
действующая». (Прим. перев.)
38
ДИНАМИКА СИСТЕМЫ
333. Примеры. 1°. Концы материальной однородной прямой АВ (рнс. 186)
массы т и длины 2а могут скользить без трения по горизонтальной окруж-
ности радиуса R. Насекомое той же массы т помещено в середине прямой,
предполагаемой неподвижной. В момент t = 0 насекомое начинает двигаться
вдоль прямой АВ от С к В, пробегая в равные промежутки времени рав-
ные отрезки этой прямой. Найти движение системы и вычислить угол,
на который повернется прямая от своего исходного положения, когда насе-
комое достигнет конца В.
[Обозначить через 6 угол, который образует с неподвижной осью радиус-
вектор, соединяющий середину С прямой с центром О, через г — расстоя-
ние СМ от насекомого М до
точки С, причем г = vt {v— по-
стоянная)] (Лиценциатская, июль
1891).
Внешние силы, приложенные
к системе, образованной прямой
и насекомым, суть: 1° вес; 2°
нормальные реакции окружности
на концы А и В прямой. Моменты
всех этих сил относительно верти-
кали Ог равны нулю, так как силы
веса параллельны оси Ог, а нор-
мальные реакции лежат в плоско-
стях. нормальных к окружности
в точках А и В и, следовательно,
содержащих Ог. Сумма моментов
количеств движения относитель-
но Ог является поэтому постоян-
ной и поскольку она была вна-
чале равна нулю, так как прямая
и насекомое были неподвижны,
то она останется равной нулю
постоянно. Вычислим эту сумму,
которая состоит:
а) из суммы моментов количеств движения всех точек прямой относи-
тельно Ог; так как эта прямая является твердым телом, вращающимся
вокруг Ог с угловой скоростью -тг , то эта сумма равна т№ -^ , где
mfe2 — момент инерции прямой относительно Ог;
б) из момента количества движения насекомого М; так как полярные
координаты насекомого М суть ри« = хОМ, то этот момент равен отр2 -^ .
Имеем, следовательно,
Рис. 186.
Но из прямоугольного треугольника СОМ непосредственно находим:
г . vt
о = у R2 — а2 -4- v42, а = в -j- arctg - .
у Яг— а2
Подставляя в предыдущее уравнение, после приведения получим:
v YR2 — я2
dt
fl п г
, arctg
vt
ГЛАВА XVIII. ОБЩИЕ ТЕОРЕМЫ О ДВИЖЕНИИ СИСТЕМЫ
где 60 — значение 6 в момент t = 0. Остальные уравнения, написанные выше,
определяют р и а в функции t. Когда насекомое достигает точки В, имеем
vt = а, откуда находим искомое значение 8 — в0.
Определим значение №. Если через |i. обозначить линейную плот-
ность (массу единицы длины) и через г расстояние от элемента dr до центра,
то момент инерции прямой АВ относительно ее центра тяжести С равен
величине
= т
Момент инерции mk2 относительно оси Ог или относительно точки О
равен (п. 317)
Следовательно,
О
Если в какой-нибудь момент времени насекомое остановится на прямой,
то и вся система остановится, так как в противном случае сумма моментов
количеств движения не будет равна нулю.
2°. Листок бумаги положен на совершенно гладкую горизонтальную
плоскость, по которой он может скользить без трения. Одна точка О этого
листка неподвижна, так что листок может только вращаться вокруг
точки О, оставаясь на плоскости. Так, например, получится, если листок
приколот в точке О булавкой к горизонтальной плоскости. На листке начер-
чена окружность радиуса а, проходящая через О (рис. 187, / и //).
Бумага была вначале в покое и на нее, в точке А, диаметрально про-
тивоположной точке О окружности было положено без начальной ско-
0
Рис. 187.
рости насекомое. В момент t = 0 насекомое начало двигаться по окружности
с постоянной относительно бумаги скоростью к. Найти движение системы
(Routh (Раус), Rigid dynamics).
Выберем в плоскости в качестве неподвижных осей ось Ох, совпадаю-
щую с начальным положением диаметра ОА (положение ¦/), и ось Оу, к ней
перпендикулярную. Внешние силы, приложенные к системе (бумага и насе-
комое), суть силы веса, нормальные реакции плоскости и реакция иглы на
бумагу в точке О. Моменты всех этих сил относительно оси Ог, перпенди-
кулярной к плоскости хОу в точке О, равны нулю. Следовательно, сумма
моментов количеств движения относительно оси Ог постоянна. Теорема
40 ДИНАМИКА СИСТЕМЫ
площадей применима к движению системы в плоскости хОу, и так как
система была вначале в покое, то постоянная площадей равна нулю. Таким
образом:
Если насекомое вращается в каком-нибудь направлении вокруг
точки О, то бумага должна поворачиваться в противоположном направле-
нии. Подсчитаем сумму моментов количеств движения. Пусть в момент t
(рис. 187, //) насекомое находится в точке М. Обозначим через г и в его
полярные координаты, причем в предполагается положительным. В тот же
момент времени диаметр, выходящий из точки О, занимает положение О А',
образующее с Ох отрицательный угол, который мы обозначим через —а,
так что о обозначает абсолютное значение угла хОА'. Момент количества
dQ
движения насекомого равен тг^—гг, а сумма моментов количеств движения
различных точек бумаги равна —J-гг > где /—момент инерции бумаги
ал
da
относительно Ог и -г,— угловая скорость бумаги.
Имеем уравнение
db da ...
mr"w-J-w=0- A)
Надо выразить, что дуга А'М окружности, которую пробежало
насекомое, равна vt. Таким путем, так как А'ОМ=Ь +«, получаем:
2« (в -f о) = vt, 6 + а = It, B)
где положено для краткости X = ^—. С другой стороны, из треуголь-
ника А'ОМ имеем:
г = la cos (в + а) = la cos \t. C)
Заменяя в равенстве A) г этим значением и а. через W — 6, получим:
JO к dt
Написав это в виде
,,„__ dtglt
и выполнив интегрирование, получим:
arctg|-7^=l D)
причем постоянную присоединять не нужно, так как при t = 0 должно
быть 6 = 0. Таким образом, в выражено в функции t. Обращаясь к уравне-
ниям C) и B), найдем г и а тоже в функции t. Таким образом, движение
найдено.
Найдем время Т, необходимое насекомому для достижения точки О,
и соответствующие значения углов 6 и а. На основании равенств B) и D) имеем:
L
Если насекомое будет продолжать перемещаться по окружности,
ю бумага будет продолжать поворачиваться в противоположном направлении.
ГЛАВА XVIII. ОБЩИЕ ТЕОРЕМЫ О ДВИЖЕНИИ СИСТЕМЫ
41
3°. В предыдущем примере точка О бумаги закреплена неподвижно.
Но можно осуществить вращательное движение указанного рода, не за-
крепляя никакой точки, следующим образом. Предположим, что лист бумаги,
имеющий центр тяжести в точке О, может скользить без трения по горизон-
тальной плоскости, и начертим на этом листке две одинаковые окружности,
касающиеся в точке О (рис. 188). Вообразим теперь двух насекомых
одинаковой массы ^-, находящихся вначале в покое в точках А и А^, диа-
метрально противоположных относительно точки О и начинающих затем
перемещаться по обеим окруж-
ностям с одинаковой скоростью v
и в одинаковом направлении вра-
щения таким образом, что в про-
извольный момент времени они
занимают симметричные относи-
тельно О положения М и М\.
Согласно теореме движения
центра тяжести точка О, являю-
щаяся центром тяжести всей
системы, остается неподвижной,
так как все начальные скорости
равны нулю. Тогда листок бумаги
будет вращаться вокруг непо- Рис 188.
движной точки О в сторону, про-
тивоположную вращательному движению обоих насекомых, и уравнения дви-
жения будут идентичными с предыдущими, если предположить, как мы это
сделали, что каждое из насекомых имеет половину массы насекомого из пре-
дыдущего примера.
Аналогичным образом наблюдатель, стоящий на идеально отполирован-
ной горизонтальной плоскости, может заставить себя вращаться. Для этого
ему достаточно поднять оба кулака, расположив их симметрично относи-
тельно вертикали Ог, проходящей через центр тяжести и затем описывать
ими две окружности в одном и том же направлении, сохраняя все время
симметрию относительно оси Ог. Тогда корпус будет поворачиваться в про-
тивоположном направлении и по истечении некоторого промежутка времени
может совершить полный оборот.
4°. Вообразим наблюдателя, стоящего неподвижно на идеально гладкой
горизонтальной плоскости, с надетым на него поясом в виде желоба, в кото-
ром лежат два тяжелых шара, вначале неподвижных. Если наблюдатель при
помощи рук заставит шары перекатываться по желобу таким образом,
чтобы они вращались вокруг его корпуса в каком-нибудь определенном
направлении, то центр тяжести системы останется на неподвижной верти-
кали, а корпус будет вращаться вокруг этой вертикали в противоположном
направлении.
Задачи того вида, какой мы сейчас изложили, рассмотрены в различных
заметках Гюйу (Ouyou), Мориса Леви (Maurice Levy), Марселя Депре (Mar-
cel Deprez), Пнкара (Picard), Аппеля, Лекорню (L е с о г n u, Comptes ren-
dus, 2-е semestre 1894 и Bulletin de la Societe mathematique, novembre 1894)
и в заметке Сен-Жермена. (Sain t-0 e г га a i n, Nouvelles Annales de Mathe-
matique, 1895), в которой подробно изложен четвертый из рассмотренных
примеров.
334. Движение относительно системы осей, совершающих
прямолинейное и равномерное переносное движение. Пусть
О'х'у'г' — система подвижных осей, параллельных неподвижным осям.
Подвижное начало О' имеет координаты а, Ь, с. Обозначим через х', у', г'
42 ДИНАМИКА СИСТЕМЫ
координаты какой-нибудь точки системы относительно этих осей,
а через х, у, г — ее абсолютные координаты. Имеем:
х = а-\-х', y = b-\-y', z = c-\-z'.
Если точка О' совершает прямолинейное а равномерное дви-
жение, то
d"-y __ dy d°-z
~ ~W
Но проекции сил на подвижные оси будут такие же, как и на непо-
движные. Следовательно, уравнения движения каждой точки, а поэтому
и уравнения движения всей системы имеют тот оке вид, как
если бы оси O'x'y'z' были неподвижны.
335. Общий случай, когда теоремы проекций и моментов количеств
движения дают первый интеграл. Теорема, указанная Пеннакьетти (Реп-
nachietti) для случая нитей и движения свободной точки, обобщена Котель-
никовым на случай системы (Comptes rendus, т. XCVIII, стр. 129). Уравне-
ния, выражающие эти теоремы для абсолютного движения, суть
dt Lk
dx V V v d \\ dy
m-d7 = ZiZix" It
A)
Допустим, что существуют два постоянных вектора с проекциями а, Ь,
с и р, q, r, причем таких, что внешние силы удовлетворяют условию
22*H2№-y*e)=о.
Тогда имеем интеграл
dx dz\ . \\ I dy
7-x7) + r±m{x
так как производная левой части этого равенства обращается в нуль в силу
соотношений A) и принятого условия B).
Соотношения B) и C) показывают, что если относительный момент (п. 28)
системы внешних сил и системы некоторых двух постоянных векторов равен
все время нулю, то относительный момент количеств движения и той же
системы постоянных векторов остается постоянным.
ГЛАВА XVIII. ОБЩИЕ ТЕОРЕМЫ О ДВИЖЕНИИ СИСТЕМЫ
43
П. Теорема кинетической энергии
336. Доказательство. Теорема кинетической энергии применя-
лась впервые Гюйгенсом; в общем виде она была высказана Иваном
и Даниилом Бернулли. Чтобы ее доказать, будем снова исходить из
уравнений движений одной точки М системы
<Рх _
fit ' , ,а —-—
т
Li e'
dt* ~~
т ~dP-~
Применяя к этой точке теорему кинетической энергии, мы имеем:
d -^- = V (Xfdx-f- Yidy-\-Z{ dz)-(- У, (Xe dx-\-Yedy-\-Zedz).
Суммируя затем все аналогичные уравнения, получим:
dz). A)
Сумма V ^s- кинетических энергий всех точек системы назы-
вается кинетической энергией системы *). Имеем, следовательно,
теорему:
Дифференциал кинетической энергии системы равен сумме
элементарных работ всех сил, как внешних, так и внутренних.
Важно отметить, что работы внут-
ренних сил не пропадают. В этом можно
убедиться непосредственно. Действи-
тельно, рассмотрим две точки М и М'
(рис. 189), расположенные на расстоя-
нии г друг от друга. Действие М на
М' представляет собой некоторую силу,
направленную вдоль ММ', и наоборот,
действие М! на М есть сила, равная
и прямо противоположная первой.
Согласно уже высказанному ранее уело-
вию (88) мы называем силой взаимо-
действия F двух точек общее значение обеих сил, взятое со знаком
плюс или минус в зависимости от того, будут ли точки отталкиваться
'V
Рис. 189.
*) В оригинале: «Сумма ^mv2 живых сил различных точек называется
полной живой силой (Лейбниц)». {Прим. перев.)
44 ДИНАМИКА СИСТЕМЫ
или притягиваться. Если обе точки совершают произвольное бесконечно
малое перемещение, то расстояние между ними изменяется на вели-
чину dr и сумма работ обеих сил, приложенных к рассматривае-
мым точкам, равна (88)
Fdr.
Мы будем для краткости говорить, что это — элементарная работа
силы взаимодействия двух точек.
Отсюда следует, что если через Fjk обозначить силу взаимодейст-
вия двух точек Mj и Мк, находящихся на расстоянии rjk друг от
друга, то сумма элементарных работ внутренних сил равна
2 2 (*i dx.+ Yt dy + Z, dz) = 2 Fjk drjk,
j.k
где суммирование распространено на все парные комбинации точек
системы.
Теорема кинетической энергии может быть теперь написана сле-
дующим образом:
B)
Рассмотрим движение системы за конечный промежуток времени
t —t0. В этом движении все величины, входящие в соотношение A)
или B), суть функции времени. Следовательно, интегрируя от t0
до t, получим:
t
J 2
Fik drjk.
Таким образом, изменение кинетической энергии за промежу-
ток времени t —10 равно сумме работ всех приложенных к си-
стеме сил, как внешних, так а внутренних.
337. Примечание о твердом теле. Если система является твер-
дым телом в смысле, установленном в теоретической механике, т. е.
является такой системой, все точки которой находятся на неизмен-
ных расстояниях друг от друга, то сумма элементарных работ
всех внутренних сил равна нулю. Действительно, в этом случае
расстояния rjk постоянны и поэтому
<*0* = ° и ?&Fjkdrjk^Q.
jk
Следовательно, для твердого тела дифференциал кинетической
энергии равен сумме элементарных работ только внешних сил.
338. Случай, когда взаимодействие двух точек системы за-
висит только от расстояния между ними. Если допустить, что
сила взаимодействия Fjk двух произвольных точек Mj и Mh есть
ГЛАВА XVIII. ОБЩИЕ ТЕОРЕМЫ О ДВИЖЕНИИ СИСТЕМЫ 45
функция только расстояния т^ между ними, то сумма элементар-
ных работ внутренних сил будет полним дифференциалом не-
которой функции взаимных расстояний. Действительно,- в этом слу-
чае мы имеем:
= <Р
drjle — d J <p (rjk)
и каждый член суммы J^ F^ dr^ элементарных работ внутренних
сил, а следовательно, и вся сумма будет полным дифференциалом.
339. Случай, когда теорема кинетической энергии дает пер-
вый интеграл. Если сумма элементарных работ всех сил, как внеш-
них, так и внутренних, при действительном перемещении системы
является полным дифференциалом некоторой функции U (хи yv
zv .... хп, уп, гп) от координат точек системы, то
где h — произвольная постоянная, называемая постоянной энер-
гии. Полученный таким образом первый интеграл есть интеграл
энергии.
Такой случай имеет место, например, когда внутренние и внеш-
ние силы зависят только от положений точек, но не от их скоростей
и имеют силовую функцию U(xt, yt, ги .... хп, уп, zn).
Однако это может случиться и тогда, когда некоторые силы зависят
от скоростей и времени, но сумма работ этих некоторых сил
обращается в нуль при действительном перемещении, а сумма работ
остальных сил является полным дифференциалом некоторой функ-
ции U от координат.
340. Размерности. Пусть в качестве основных единиц приняты
единицы длины, времени и массы. Тогда, как известно, если единицу
длины уменьшить в X раз, единицу времени в т: раз и единицу
массы в |а раз, то выражение какой-нибудь длины умножится на X,
выражение массы умножится на (х и скорости — на —. Следовательно,
-п- умножится на '-д-. С другой стороны,
выражение силы умножится на !-^, и поэтому выражение работы
(произведение силы на длину) умножится на =-g-. .Следовательно,
равенство B), выражающее теорему кинетической энергии однородно
(п. 76); обе его части имеют одинаковые размерности. Если, например,
работа выражена в килограммометрах, то кинетическая энергия будет
также некоторым числом килограммометров. Если работа выражена
в эргах {эрг— единица работы в системе CGS), то в тех же единицах
будет выражена и кинетическая энергия.
46 ДИНАМИКА СИСТЕМЫ
341. Пример. Приложим теорему кинетической энергии к движению
двух свободных материальных точек с массами /я и /и' (рис. 190), взаимно
притягивающихся по закону Ньютона и притягиваемых по тому же закону
неподвижным центром М с массой fi.
Движущаяся система состоит здесь из двух точек. Внутренними силами
являются силы взаимного притяжения обеих точек. Если через г обозначить
расстояние между ними, то алгебраическое значение силы взаимодействия
между /и и /и' будет F = —-——, а элементарная работа этой силы будет
F dr = — а dr. Внешними силами являются силы притяжения Р и Р'
точкой М. Если расстояния Mm и
Mm' обозначить через р и р', то
>/7!' алгебраические значения этих сил
притяжения, согласно принятому
в теории центральных сил условию,
fu.m fu.m'
равны—-^~ и —-^tj-, а их эле-
ментарные работы будут sL- dp
Рис. 190. f\4n' ,
Р'2 .
Следовательно, если через v и v' обозначить обе скорости, то по тео-
реме кинетической энергии получим:
d =_ dr_^d?_??d9
Мы имеем как раз случай, указанный в предыдущем пункте: правая
часть этого равенства есть полный дифференциал, и поэтому существует
mw3 . m'v'2 fmm' . fnm , fu.m' . .
интеграл энергии -=—| =— = - 1- — 1- J-^—-r 1- h.
342. Деление сил на силы задаваемые и реакции связей.
В предыдущем мы разделили совокупность всех сил, приложенных
к системе, на две категории: на силы внешние и силы внутренние.
Такое деление, как мы это увидим в разделе V, особенно важно
в теории энергии. Но во многих вопросах теоретической механики,
и особенно в аналитической механике, целесообразно делить все
силы, действующие на систему, на две категории: на реакции связей,
вызванные связями, наложенными на систему, и на силы задаваемые,
характеризующие все другие воздействия на систему. Именно так клас-
сифицируют силы, когда ищут условия равновесия при помощи прин-
ципа возможных перемещений (п. 157).
Мы можем теперь выразить теорему кинетической энергии сле-
дующим образом:
Дифференциал кинетической энергии системы равен сумме
элементарных работ всех приложенных к системе сил, как за-
данных, так и реакций связей.
343. Важный частный случай, когда работа реакций связей
равна нулю. Если связи не зависят от времени, т. е. если они, как
в п. 176, выражаются уравнениями, в которых имеются только коорди-
наты точек системы, но не время, и если, кроме того, связи идеальные.
ГЛАВА XVIII. ОБЩИЕ ТЕОРЕМЫ О ДВИЖЕНИИ СИСТЕМЫ
47
т. е. осуществляются без трения1), то сумма элементарных работ
реакций связей на действительном перемещении, совершаемом систе-
мой за промежуток времени dt, равна нулю. В самом деле, при
указанных условиях действительное перемещение системы будет, оче-
видно, допускаться связями и сумма работ реакций связей будет равна
нулю (п. 162). Имеем, следовательно, теорему: Если связи не зависят
от времени и отсутствует трение, то дифференциал кинети-
ческой анергии равен сумме элементарных работ заданных сил.
Может оказаться в рассматриваемом частном случае, что сумма
элементарных работ заданных сил на действительном перемещении есть
полный дифференциал некоторой функции U от координат точек
системы. Тогда теорема кинетической энергии приводит к уравнениям:
из которых второе является интегралом энергии.
Примечание I. Для системы с полными связями (п. 168), не
зависящими от времени и без трения, теорема кинетической энергии
непосредственно дает единственное уравнение движения. В самом
деле, положение системы зависит тогда только от одного параметра
и по теореме кинетической энергии можно составить уравнение,
в которое входят только заданные силы и которое позволяет вычи-
слить единственный параметр в функции времени t.
Примечание П. Если
некоторые из связей зависят г
от времени, то работа соответ-
ствующих реакций связей на
действительном перемещении
будет, вообще говоря, отлична
от нуля. Простым примером
этого является движение точки,
которая скользит без трения по
движущейся кривой. Работа
реакции связи на действитель-
ном перемещении будет отлична
от нуля (п. 258). о
344. Приложение. Однород- Рис. 191.
пая тяжелая цепь, скользящая
без трения по неподвижной кривой. Пусть 11 — длина цепи АВ, р — масса
единицы длины и, следовательно, 2/р — вся масса.
Примем за ось Ог (рис. 191) вертикаль, направленную вверх. Обозначим
через s длину дуги неподвижной кривой, по которой скользит цепь, отсчи-
!) Под связями без трения здесь надо понимать связи, не оказывающие
сопротивления движению, например не только гладкие, но и' шероховатые
поверхности, если по ним происходит качение без скольжения (см. т. I,
п. п. 162—164). (Прим. перев.)
48 ДИНАМИКА СИСТЕМЫ
тываемую от некоторой неподвижной точки О' до точки кривой с ордина-
той г. Так как кривая задана, то всегда можно выразить г в функции s:
A)
Имея это уравнение, обозначим через о дугу О'М от точки О' до сере-
дины М цепи, которая однако не является ее центром тяжести. Очевидно,
что положение цепи известно, если известна дуга а. Цепь на кривой образует,
следовательно, систему с полными связями (п. 168). Цепь, предполагаемая
нерастяжимой, может быть рассматриваема как совокупность материальных
точек, связанных таким образом, что каждая из них находится на постоян-
ных расстояниях от предшествующей и от последующей точек.
Силы, приложенные к системе, суть: 1° веса mg точек (заданные силы);
2° нормальные реакции кривой (реакции связей); 3° взаимодействия после-
довательных точек (реакции связей). Если бы мы пожелали принять де-
ление сил на внешние и внутренние, то силы взаимодействия последователь-
ных точек были бы силами внутренними, а веса и реакции силами внешними.
Когда цепь скользит по кривой, работы реакций связей равны нулю.
Это легко проверить: реакции нормальны к перемещениям точек, а работа
силы F взаимодействия между двумя последовательными точками равна нулю,
так как расстояние между ними не изменяется. Таким образом, сущест-
вуют только работы сил тяжести. Чтобы вычислить их, рассмотрим в точке т
цепи элемент длины 8Х, расстояние Mm которого от точки М вдоль цепи
равно X, причем X считается положительным в направлении АВ, так что мы
получим все элементы цепи, если будем изменять X от — /до + /. Коор-
дината г элемента ВХ есть
так как дуга О'т есть s = a -j- X. Если цепь переместить на da так,
чтобы она перешла из положения АВ в положение А'В', то координата г
элемента ВХ увеличится на
dz = <?' (а + X) da,
и элементарная работа веса gp ВХ этого элемента будет равна
— 8р 8Х dz = — gf Ы f'(a -f X) da.
Сумма элементарных работ весов всех элементов есть сумма выраже-
ний предыдущего вида, когда X изменяется от — /до + /. Следовательно,
+1
— gfda J tp' (a + X) 5Х = — gf da [<f (о + 0 — ? (<з — О].
Это выражение можно записать в виде
— ?g da (*t — z0),
где г0 и Zi суть значения координаты z концов А и В цепи. Отсюда видно,
что работа бу^дет такой же, как если бы был перемещен из одного конца
цепи в другой только один ее элемент АА' =» da, а остальная ее часть оста-
валась бы неподвижной.
С другой стороны, при движении цепи все ее точки т имеют одинако-
ва
вую скорость v = —тт, и следовательно, ее кинетическая энергия равна
) /()
ГЛАВА XVIII. ОБЩИЕ ТЕОРЕМЫ О ДВИЖЕНИИ СИСТЕМЫ 49
Уравнение кинетической энергии теперь имеет вид
48 ?(а + /)_?(а_0].
Уравнение показывает, что t может быть выражено в функции о при помощи
только двух квадратур. Если обе части разделить на dt и выполнить ука-
занные дифференцирования, то получится уравнение
~ ё
dfl ~ ё 21 ' (Z)
аналогичное уравнению прямолинейного движения точки под действием силы,
зависящей только от положения. В качестве проверки можно перейти к пре-
делу, когда длина I цепи стремится к нулю. Тогда правая часть будет иметь
пределом — gy' (о) и вновь получится уравнение движения тяжелой точки
по неподвижной кривой:
Р
Так как уравнение движения цепи зависит только от функции tp, то дви-
жение не изменится, если цилиндр, проектирующий заданную кривую на
горизонтальную плоскость, развернуть на одну из его касательных плоско-
стей.
Имеются два случая, когда движение середины цепи не зависит от ее
длины:
1°. Заданная кривая является винтовой линией, проведенной на верти-
кальном цилиндре. В этом случае
as,
где а — постоянная, и уравнение B) приводится к уравнению вида
сРа
не зависящему от I.
2°. Заданная кривая является циклоидой с вертикальной осью или полу-
чается навертыванием этой циклоиды на вертикальный цилиндр. Известно
B50), что в этом случае
и поэтому уравнение движения середины М цепи имеет вид
В обоих этих случаях середина М перемещается как изолированная
тяжелая материальная точка по неподвижной кривой (Р u i s e и х, Journal
de Liouville, т. VIII).
Оба вида функции », которые мы только что привели, являются, впро-
чем, единственными, обладающими таким свойством. В самом деле, если
уравнение движения не должно зависеть от /, то должно быть
Освободившись от знаменателя, продифференцируем обе части по / два раза.
Получим:
<р"(а +/) — <f"(a — 0 = 0,
4 Зак. 922. П Аппель, г. II
50
динамика Системы
каковы бы ни были аи/. Отсюда следует, что функция <р" (¦*) не должна
зависеть от s:
Если я равно нулю, то
9 (S) = a (S — s0).
Это — случай винтовой линии.
Если k Ф О, то получается уравнение
выражающее циклоиду.
Кривая, по которой перемещается цепь, может состоять из нескольких
различных частей. Предположим, что она образована горизонталью Ох и
, направленной вниз вертикалью Ob.
>z Мы видели, что уравнение движе-
ния может быть записано так:
М
ЧР"
¦~g
21
Если цепь целиком находится на
горизонтальной части, то ее движе-
и ние будет равномерным, поскольку
г± = zQ = 0 (рис. 192) и, следовательно,
= 0.
Рис. 192. Если один из концов цепи уже
перешел через точку О на отрезок
ОВ = и, то, отсчитывая а от О в направлении АОВ, получим:
20 — 0, Zt — — U, Q = U — /,
и поэтому
d%u s
Ж= 2Г"-
Следовательно, конец В перемещается так, как если бы он отталкивался
от О пропорционально расстоянию. Это последнее уравнение справедливо
лишь до тех пор, пока А еще лежит на горизонтальной части. Когда конец А
достигнет точки О, цепь начнет свободно падать и ее движение будет
равноускоренным.
Вычисление натяжения. Рассмотрим часть Am цепи, оканчивающуюся
в точке т, для которой дуга Mm = X. Ее можно рассматривать как систему,
движущуюся под действием сил тяжести ее отдельных элементов, реакций
кривой и натяжения Т в точке т, считаемого положительным в направле-
нии АВ (см. рис. 191).
Если применить теорему кинетической энергии к движению этой части Am
цепи, то получится:
так как работа силы Т равна Т da, а работа сил тяжести подсчитывается
как и раньше, причем г' обозначает ординату точки т.
Разделим на dt и выполним дифференцирования. После сокращения
dz
на — получим:
[<Р С"-W) - ? (° - >
ГЛАВА XVIII. ОБЩИЕ ТЕОРЕМЫ О ДВИЖЕНИИ СИСТЕМЫ 51
Заменив —^ его значением и выполнив преобразования, найдем
Если эту формулу применить к случаю винтовой линии, то сразу видно,
что Т всюду равно нулю. Поэтому каждая из точек цепи движется так, как
если бы она была изолирована. Может случиться, что для Т получится
отрицательное значение. В этом случае элемент 5Х будет испытывать сжа-
тие, а не растяжение. Для того чтобы движение было осуществимо во всех
случаях, необходимо предположить, что цепь образована маленькими сфе-
рическими бусинками, нанизанными на гибкую нить и скользящими в трубке
того же радиуса. Тогда, если Т в какой-нибудь точке положительно, то
нить будет натянута; если Т отрицательно, то соприкасающиеся шарики
будут давить друг на друга. Можно убедиться, что в случае циклоиды везде
получается сжатие.
Вопрос о движении тяжелой цепи по неподвижной кривой послужил
Миллеру основанием для интересного приложения теории интегральных
уравнений (М у 11 е г, Nouvelles Annales de Mathematiques, juillet, 1909).
345. 1°. Приложение к движению болта в неподвижной гайке без
трения. В этом движении все точки движущегося твердого тела описывают
винтовые линии одного и того же шага h, перемещаясь параллельно оси
на отрезок -=— в, когда болт поворачивается на угол 8.
Так как система имеет полные связи, то теорема кинетической энер-
гии вполне определяет движение.
Примем ось болта за ось г. Система, образованная болтом, находится
под действием заданных сил Fy F& ..., Fn и реакций гайки, которые везде
нормальны к поверхности болта, так как трение отсутствует.
Пусть г, 8, г — цилиндрические координаты произвольной точки системы
и z0 — значение ее координаты г, когда угол 6 равен нулю. Декартовы коор-
динаты этой точки в некоторый момент времени будут:
х = г cos 8, у = г sin в, z = z0 -f- -к— в.
Скорость этой точки имеет, следовательно, проекции
их . . db dy . db dz h db
_ = _rsin9_, —^rcosB-, _ =ъ- —,
rf8
что можно написать, если ввести угловую скорость to = —rr , в виде
dx _ dy _ dz _ h
dt dt ' dt 2tc
Отсюда для квадрата скорости получаем:
Умножая на т и складывая такие выражения, составленные для всех
точек системы, получим полную кинетическую энергию в виде
2
4*
52 ДИНАМИКА СИСТЕМЫ
или, обозначая через k радиус инерции, а через М — массу:
Таким образом, уравнение кинетической энергии имеет вид
где знак 2 относится к заданным силам Fu Fb ..., Fn, так как работы
сил реакций равны нулю. Подставляя в правую часть найденные выше вы-
dx dy dz
ражения для —т-, —?~, — , приведем ее к виду
Ho 2j{xY—уХ) представляет собой сумму моментов заданных сил отно-
сительно оси Ог; она равна проекции N на эту ось момента результирую-
щей пары, получающейся после приведения заданных сил к началу коорди-
нат. Что касается 2 Z, то это — проекция Jjf главного вектора этих сил
на ту же ось и уравнение кинетической энергии может быть написано так:
JL
dt
Выполнив дифференцирование, получим
Если внешние силы F удовлетворяют соотношению
то предыдущее уравнение принимает вид
dt
и движение будет равномерным.
В общем случае силы могут быть приведены к динаме, т. е. к одной
силе AR и к одной паре с вектором момента AG, направленным по той же
прямой, что и AR. При этом R — величина силы, а /» = -=- — параметр ди-
намы. Обозначим через Ь кратчайшее расстояние между прямыми R и Ог,
а через а — угол между ними. Тогда, выполняя приведение к началу коор-
динат, получим:
X = R COS а, N = Q COS а -|- R & Sin a,
так как N должен быть суммой моментов относительно Ог силы R и двух
сил, составляющих пару G.
Движение болта приводится к поступательному перемещению вдоль
оси Ог и к вращению вокруг нее и образует то, что по Боллу (Ball) можно
ГЛАВА XVIII. ОБЩИЕ ТЕОРЕМЫ О ДВИЖЕНИИ СИСТЕМЫ 53
назвать винтом с амплитудой ш и с параметром р' — -*—. При этих
обозначениях уравнение A) кинетической энергии принимает вид
dj \м {к? + -|~2 \ <А =¦ /?<¦> [(р + р') cos а + 8 sin a] dt.
Из уравнения видно, что выражение суммы элементарных работ заданных
сил симметрично относительно динамы и винта.
2°. Приложение к задаче трех тел. Приложим общие теоремы к сле-
дующей задаче: найти движение трех совершенно свободных материальных
точек, взаимно притягивающихся по закону Ньютона.
Обозначим через r& /3. г& расстояния между заданными точками Ми
М%, М$. Силы взаимодействия между этими точками имеют соответственно
значения
Г
.2 ' _2 -.2
12 Г28 Г31
Так как на систему не действуют никакие внешние силы, то движение ее
центра тяжести будет прямолинейным и равномерным, что дает три конеч-
ных уравнения движения. По тем же соображениям можно применить тео-
рему площадей относительно трех координатных плоскостей, что дает три
первых интеграла. Можно, наконец, получить еще один интеграл при помощи
теоремы кинетической энергии.
В самом деле, кинетическая энергия системы равна
"о (mivi
С другой стороны, сумма элементарных работ сил взаимодействия, равная,
как мы видели,
fmxm% fm%m% /щтг
t~ drlt г drw - —2— drn,
есть полный дифференциал функции
- | - (
Имеем, следовательно, интеграл энергии
Брунс доказал (В г u n s, Acta mathematica, т. XI), что полученные таким
образом интегралы являются единственными. Они будут алгебраическими
относительно координат тел и их первых производных. Пуанкаре (там же,
т. XIII) показал, что задача трех тел не допускает никаких аналитических
и однозначных интегралов, кроме вышеуказанных. Наконец, Пенлеве (Р a i n-
1 е v 6, Coraptes rendus, 17 decembre, 1894, премированная работа) доказал,
что не существует других интегралов, которые были бы алгебраическими
только относительно первых производных.
346. Семь общих уравнений движения. Из изложенного следует, что
для любой системы можно составить семь уравнений движения:
три уравнения, выражающих теорему проекций количеств движения (или
теорему движения центра тяжести),
54
ДИНАМИКА СИСТЕМЫ
три уравнения, выражающих теорему моментов количества движения,
и одно уравнение, выражающее теорему кинетической энергии.
Это будут семь общих уравнений движения, применимых к произвольной
механической системе. Шесть первых уравнений содержат только внешние
силы. Седьмое уравнение, уравнение кинетической энергии, содержит в об-
щем случае и внешние и внутренние силы.
III. Теоремы кинематики для вычисления моментов
количеств движения и кинетической энергии
347. Определение относительного движения системы вокруг
ее центра тяжести. Рассмотрим систему, движущуюся относи-
тельно неподвижных осей Oxyz. Проведем через центр тяжести G
этой системы оси Gx'y'z', параллельные неподвижным осям (рис. 193).
Относительное движение системы по отношению к осям Gx'y'z' на-
зывается относительным дви-
z> жением системы вокруг
ее центра тяжести.
348. Вычисление суммы
моментов количеств движе-
ния относительно неподвиж-
ной оси. Вводя это относи-
тельное движение, можно вы-
сказать следующую теорему:
Теорема. Сумма мо-
ментов количеств движения
относительно какой-нибудь
неподвижной оси равна мо-
менту количества движения
всей массы системы, пред-
полагаемой сосредоточенной
в центре тяжести, увели-
ченной на сумму моментов количеств движения относительно
оси, параллельной первой и проходящей через центр тяжести,
причем последняя сумма вычисляется для относительного дви-
жения вокруг центра тяжести.
Доказательство непосредственно вытекает из элементарных фор-
мул, касающихся преобразования осей координат.
Обозначим через х, у, z координаты какой-нибудь точки системы
относительно неподвижных осей, через х', у', z' — координаты той
же точки относительно осей Gx', Gy', Gz', проведенных через центр
тяжести параллельно неподвижным осям, и через ?, щ, С — коорди-
наты центра тяжести. Тогда, согласно формулам преобразования
осей, имеем:
Рис. 19а
ГЛАВА XVIII. ОБЩИЕ ТЕОРЕМЫ О ДВИЖЕНИИ СИСТЕМЫ 55
Вычислим, например, сумму моментов количеств движения точек
системы относительно оси Ог. Получим:
dy dx
Но центр тяжести является началом подвижных осей. Следова-
тельно,
Кроме того,
так как величины ^тх' и ^ту' равны нулю и, следовательно, их
производные тоже равны нулю.
Ввиду этих соотношений и ввиду того, что в первой сумме
правой части можно вынести за скобку множитель (? ——'г\
причем 2 т — 2Я> мы получим уравнение
Это последнее уравнение выражает теорему, которую нужно было
доказать, так как первый член 9й(?-уТ—'Ч'йт) есть момент коли-
чества движения относительно оси Oz всей массы, сосредоточенной
в центре тяжести G, а второй член V т (х' -^- у' -тЛ есть
сумма моментов количеств движения относительно оси Qz', парал^-
лельной оси Oz, вычисленных для относительного движения вокруг О.
Ту же теорему можно выразить в следующей форме:
Кинетический момент системы относительно точки О равен кине-
тическому моменту относительно точки О всей массы в предположе-
нии, что она сосредоточена в центре тяжести, сложенному с кине-
тическим моментом системы в ее относительном движении вокруг
центра тяжести, взятым относительно этого центра тяжести.
56 ДИНАМИКА СИСТЕМЫ
В этом можно убвдитьея, написав
dOM \i t7r* ут*ч (dOO , dGM\
и заметив, что
V mGM — 0 и У.т —-г,— = 0.
349. Вычисление кинетической энергии. Для вычисления кине-
тической энергии существует теорема, аналогичная предыдущей.
Теорема Кёнига. Кинетическая энергия системы равна ки-
нетической энергии, которою будет обладать вся масса, сосре-
доточенная в центре тяжести, сложенной с кинетической энер-
гией системы в ее относительном движении по отношению
к осям постоянного направления, проведенным через центр тя-
жести.
Воспользуемся теми же обозначениями, что и в предыдущем
пункте. Напишем формулы преобразования координат:
Для квадрата абсолютной скорости точки получим
\dt)^\dtj^\dt) \
dt ) ~*~\ dt
rf5rf?l Л,й/ rfCd^
•^ Л Л ' dt dt ~T~ dt dt '
откуда, обозначая через V скорость центра тяжести и через v' от-
носительную скорость точки М, получим
Умножим это уравнение на — и сложим почленно аналогичные урав-
нения для всех точек. Тогда
Коэффициенты при -jt, ^, ^ равны нулю в силу равенств
лиг'
0, 2 тУ =" °. 2 тг' — 0.
ГЛАВА XVIII. ОБЩИЕ ТЕОРЕМЫ О ДВИЖЕНИИ СИСТЕМЫ 57
выражающих, что начало подвижных осей находится в центре тя-
жести. Мы приходим, таким образом, к уравнению
¦к- ?,mv'\
которое и докиывает теорему.
В векторных обозначениях находим сразу:
так как
IV. Теоремы моментов и кинетической энергии в относительном
движении вокруг центра тяжести
350. Теорема моментов количеств движения в относительном
движении вокруг центра тяжести. Теорема моментов количеств
движения может быть приложена, по доказанному, к движению
системы относительно неподвижных осей или осей с постоянными
направлениями, совершающих прямолинейное и равномерное пере-
носное движение C34). Если мы желаем исследовать относительное
движение системы по отношению к осям, движущимся произвольным
образом, то нельзя будет применить эту теорему, не изменяя ее
путем добавления некоторых поправочных членов, которые будут
определены в теории относительного движения. Но существует такая
частная система подвижных осей, что если изучать движения
системы относительно этих осей, та можно будет применить теорему
моментов количеств движения без всякого изменения. Этими частными
осями являются оси, имеющие постоянное направление и проходящие
через центр тяжести. Это обстоятельство выражают, говоря, что
теорема моментов количеств движения может быть приложена
к относительному. движению системы по отношению к осям
постоянного направления, проходящим через ее центр тяжести.
Это можно доказать, комбинируя уравнения движения центра
тяжести с уравнениями моментов в абсолютном движении. Одновре-
менно это показывает, что новые уравнения, которые получатся, не
будут независимыми от шести первых общих уравнений, установлен-
ных в разделе I.
Рассмотрим, как и выше (пп. 347 и 348), систему осей Qx'y'z'',
параллельных неподвижным осям и имеющих начало в центре тя-
жести. Будем исходить из уравнения моментов относительно точки О:
^. A)
58
ДИНАМИКА СИСТЕМЫ
Сделаем в этом уравнении преобразование координат
ОМ= OG-\-G~M.
Мы видели C48), что тогда левая часть приводится к виду
Правая часть равенства A) напишется так:
оо
Замечая, что
d_
dt
^
и принимая во внимание уравнение движения центра тяжести
dt9- ~~ ZiZi e>
мы приведем, наконец, уравнение A) к виду
F,. B)
Таким образом, теорема доказана. Полученное уравнение B) имеет
тот же вид, что и уравнение A), с той лишь разницей, что абсо-
лютные координаты заменены
координатами относительными.
Доказательство, основан-
ное на теории относитель-
ного движения. К тому же
результату можно прийти быст-
рее, исходя из теории относи-
тельного движения, что мы
увидим в разделе И гла-
вы XXII.
Геометрическая интер-
претация. Так же как и в слу-
чае абсолютного движения
(п. 330) имеется простая гео-
метрическая интерпретация этой
теоремы. Пусть Оа' (рис. 194)—
главный момент относитель-
Рис. 194. но центра тяжести О векто-
ров, изображающих количества
относительного движения тV, и GS' — главный момент внешних сил.
Теорема выражает, что относительная скорость по отношению
к осям Gx'y'z' конца а' первого момента равна и параллельна вто-
рому моменту GS''.
ГЛАВА XVIII. ОБЩИЕ ТЕОРЕМЫ О ДВИЖЕНИИ СИСТЕМЫ 59
Приложения. 1°. Теорема площадей. Если сумма моментов
внешних сил относительно некоторой оси постоянного направления,
проведенной через центр тяжести, например оси Gz', равна нулю, то
В этом случае теорема площадей применима к проекции относи-
тельного движения на плоскость x'Gy'', причем центром площадей
является точка G.
2°. Главный момент внешних сил относительно точки G
равен нулю. Если нет внешних сил, или если суммы моментов этих
сил относительно осей Qxf, Qy', Gz' равны постоянно нулю, то
будет существовать интеграл C) и два других аналогичных интеграла
D)
В этом случае вектор GS' равен нулю, относительная скорость
точки о' тоже равна нулю и вектор Go' постоянен по величине
и направлению. Его проекции на три оси Gx', Gy', Gz' суть по-
стоянные А, В, С. Теорема площадей применима теперь к проекции
относительного движения на любую плоскость Р постоянного на-
правления, проходящую через центр тяжести, так как такую пло-
скость можно всегда принять за плоскость x'Gy'. Постоянная пло-
щадей на этой плоскости Р есть проекция вектора Ga' на пря-
мую Gn, перпендикулярную к этой плоскости. Следовательно, эта
постоянная имеет наибольшее значение на плоскости П, перпенди-
кулярной к вектору Go'. Эта плоскость называется плоскостью
максимума площадей. На плоскости, проходящей через вектор Ga',
постоянная площадей равна нулю.
3°. Приложение к солнечной системе. Неизменяемая пло-
скость Лапласа. Если пренебречь действием звезд, то система,
образованная Солнцем, планетами и их спутниками, не подвергается
действию никаких внешних сил. Следовательно, если взять оси с по-
стоянными направлениями, проведенными из центра тяжести G си-
стемы, который расположен весьма близко к Солнцу, то главный
момент Go' относительно точки G количеств движений, вычислен-
ных по отношению к этим осям, является постоянным по вели-
чине и направлению. Можно вычислить для какого-нибудь момента
времени проекции А, В, С этого вектора на оси, подсчитав суммы
моментов количеств движения относительно этих осей всех тел
системы.
Плоскость П, перпендикулярная к определенному таким образом
вектору Go', сохраняет постоянное направление. Это — плоскость
максимума площадей. Мы имеем, таким образом, указанную Лапласом
60
ДИНАМИКА СИСТЕМЫ
возможность получения для солнечной системы неизменяемой
плоскости. Лаплас, определив эту неизменяемую плоскость, вы-
числил величины А, В, С в предположении, что планеты заменены точ-
ками, находящимися в их центрах тяжести. Пуансо дополнил вычи-
сления Лапласа, добавив члены, вызванные вращениями планет вокруг
своих собственных осей. Впрочем, эти члены имеют малое влияние
на окончательный результат (см. Р о i n s о t, Elements de Statistique,
5-e edition, note).
Эти выводы сохраняются и в том случае, если не пренебрегать
действием звезд. В самом деле, расстояния звезд от различных то-
чек, образующих солнечную систему, настолько велики по сравне-
нию с размерами системы, что силы притяжения звездами различных
точек системы почти параллельны между собой и пропорциональны
массам этих точек. Вследствие этого указанные силы притяжения
образуют систему векторов, экви-
валентную одному вектору, при-
ложенному в центре тяжести G
системы, и их главный момент
относительно О равен нулю. Сле-
довательно, главный момент Оаг
относительно О количеств отно-
сительных движений остается по-
стоянным по величине и направ-
'.?' лению.
4°. Движение тяжелого стерж-
ня в пустоте. Пусть тяжелый стер-
жень АВ (рис. 195), рассматриваемый
как материальная прямая, брошен
в пустоте. Центр тяжести G описы-
вает параболу. Если через эту точку
провести оси Qx', Gy', Qz' постоян-
ного направления, то сумма моментов
внешних сил относительно каждой из
них равна нулю, так как внешними
силами являются веса, которые имеют равнодействующую, приложенную в G.
Следовательно, для относительного движения по отношению к осям х', у', г'
можно написать три интеграла C) и D). Пусть р — точка стержня, распо-
ложенная на расстоянии, равном единице, от точки О в каком-нибудь опре-
деленном направлении, а, Ь, с — ее координаты относительно осей Gx'y г',
т — точка, находящаяся на расстоянии г от О, причем г положителен или
отрицателен в зависимости от того, имеет ли Gm тот же знак, что Gp или
противоположный. Координатами точки т являются
х' = га, у' = rb, г' — re,
Рис. 195.
dx'
da
df
Ж
db dz'
dc
df
~dt~rd7'
Следовательно, из интеграла C) получаем:
db t<
ГЛАВА XVIII. ОБЩИЕ ТЕОРЕМЫ О ДВИЖЕНИИ СИСТЕМЫ 61
где сумма 2 тг^> распространенная на все точки стержня, есть момент
инерции относительно точки G.
Точно так же два интеграла D) приводятся к виду
dc db
ж-с
da
Умножая на с, а, Ь и складывая, получим уравнение
Аа + ВЬ + Сс — О,
показывающее, что точка р остается в неподвижной относительно осей Gx'y'z' •
плоскости 11, перпендикулярной к вектору Ga', имеющему проекции А, В, С.
Это — плоскость максимума площадей. Точка р и все остальные точки
стержня описывают окружности с центром в G. Так как закон площадей
применим также и к плоскости П, то стержень вращается в этой плоскости
вокруг G с постоянной угловой скоростью.
5°. Тяжелая изменяемая система. Если произвольную тяжелую систему
бросить в пустоте, то ее центр тяжести будет описывать параболу. Если
через этот центр G провести оси постоянного направления, то суммы мо-
ментов внешних сил относительно этих осей будут равны нулю. Поэтому
сумма моментов количеств относительного движения будет оставаться по-
стоянной относительно любой оси, проведенной через G, и закон площадей
будет применим относительно точки G для проекции относительного дви-
жения на любую плоскость с постоянным направлением, проведенную через G.
Вектор Ga' будет постоянным по величине и по направлению.
Если, например, человек делает сальто, то он вначале сообщает себе
некоторую угловую скорость относительно горизонтальной оси Gz', про-
веденной через его центр тяжести. Если бы тело было твердым, то эта
угловая скорость сохранялась бы и дальше и была бы недостаточна
для сообщения телу полного оборота на 360° до того, как оно опу-
стится на пол. Но после прыжка человек сжимает свое тело, его мо-
мент инерции относительно оси Gz' уменьшается, и так как сумма моментов
количеств движения 2итг*~М должна оставаться постоянной, то угловая
скорость увеличивается и становится достаточной для того, чтобы стал
возможным полный оборот до падения.
В этом примере человек обладает начальной угловой скоростью, кото-
рую он увеличивает при помощи внутренних сил. Но он мог бы, прыгнув
без начальной угловой скорости, тоже заставить себя повернуться на неко-
торый угол в пространстве. В этом можно убедиться из примеров, рас-
смотренных в пункте 333. Так, человек, которому сообщили в пустоте
поступательное движение, может повернуться при помощи действий, ана-
логичных указанным в конце пункта 333 действиям наблюдателя, стоящего
на идеально гладкой горизонтальной плоскости. Именно эти рассуждения
объясняют, как кошка поворачивается при падении без всякой внешней
помощи.
351. Теорема кинетической энергии в относительном движе-
нии вокруг центра тяжести. Теорема кинетической энергии уста-
новлена нами для абсолютного движения системы. Она остается Спра-
ведливой и для движения по отношению к осям, которые совершают
прямолинейное равномерное движение. Но ее нельзя без изменения
применять к движению относительно осей, совершающих произвольное
62 ДИНАМИКА СИСТЕМЫ
движение. Однако всегда существует специальная система по-
движных осей, по отношению к которым теорема сохраняется без вся-
кого изменения формулировки. Это — оси постоянного направления,
проведенные через центр тяжести. Справедлива таким образом сле-
дующая теорема:
Так же как и теорема моментов количеств движения, тео-
рема кинетической энергии применима к относительному дви-
жению системы по отношению к осям постоянного напра-
вления, проходящим через центр тяжести.
Мы докажем эту теорему при помощи совместного применения
уравнений движения центра тяжести и уравнения кинетической энергии
в абсолютном движении. Поэтому уравнение, которое получится, будет
следствием общих уравнений, установленных в разделах I и II.
Уравнение кинетической энергии в абсолютном движении имеет
вид
¦+%'2l(Xidx-t-Ytdy + Zidz). E)
Сделаем в нем преобразование координат
х=%-\-х', у =
Мы видели, что если обозначить через V скорость центра тяжести G,
а через v' относительную скорость частицы т по отношению к осям
Gx'y'z', то по теореме Кёнига (п. 349),
С другой стороны,
dx — d\-\-dx', dy
Следовательно, уравнение E) принимает вид
Но суммы 22-^i» 2 2 ^»> 22^i равны нулю в силу закона
равенства действия и противодействия. Далее, имеем:
d —,
ГЛАВА XVIII. ОБЩИЕ ТЕОРЕМЫ О ДВИЖЕНИИ СИСТЕМЫ 63
Это уравнение получается, если из уравнений движения центра тяжести
вывести теорему кинетической энергии. Следовательно, после при-
ведений получаем:
Это уравнение составлено из относительных скоростей и пере-
мещений совершенно так же, как уравнение кинетической энергии
составлено из скоростей и перемещений абсолютных. Таким образом,
теорема доказана.
Замечание о работах внешних сил. Сумма элементарных работ
внутренних сил зависит только от изменений взаимных расстояний
между точками и будет одинаковой в обоих уравнениях. Но сумма
работ внешних сил не будет одинаковой в обоих уравнениях.
Это вытекает из предыдущих вычислений. В самом деле, мы
нашли, что
S 2 (*« dx + Yt dy + Z« dz) = S 2 № <**' + K4 dy' + Z, d*0.
а это и показывает, что суммы элементарных работ внутренних сил
одинаковы как для абсолютных перемещений, так и для перемеще-
ний относительно рассматриваемых осей. В то же время мы полу-
чили соотношение
e dy~\-Ze dz) =
которое показывает, что суммы работ внешних сил не будут одина-
ковыми для этих двух видов перемещений. Так, если некоторые тела
системы связаны без трения с неподвижными телами, то соответ-
ствующие реакции связей будут для системы внешними. Элементарная
работа этих сил равна нулю, как это было установлено при выводе
принципа возможных перемещений. Этого не будет в общем случае
для относительных перемещений по отношению к осям Gx'y'z' (см.
пример III, который будет рассматриваться в п. 354).
Доказательство, основанное на теории относительного дви-
жения. В главе XXII будет дано простое доказательство теоремы,
основанное на теории относительного движения.
352. Наибольшее число независимых общих уравнений.
Для абсолютного движения мы получили семь общих уравнений: три
для проекций количеств движения, три для моментов количеств
движения и одно для кинетической энергии. Применяя теоремы
моментов и кинетической энергии для относительного движения
вокруг центра тяжести, мы получим еще четыре уравнения. Но эти
64 ДИНАМИКА СИСТЕМЫ
уравнения не будут независимыми от семи общих уравнений,
а будут, как мы это отмечали, их следствиями. В различных слу-
чаях бывает удобнее пользоваться то уравнениями моментов и кине-
тической энергии для абсолютного движения, то этими уравнениями
для относительного движения вокруг центра тяжести.
353. Произвольная часть системы. Выделяя мысленно в мате-
риальной системе S определенную часть Р, образованную вполне
определенными материальными точками, можно применить к этой
части Р семь общих уравнений, если рассматривать как внешние по
отношению к части Р силы, с которыми на нее действует остальная
часть S—Р системы.
Такое рассмотрение часто полезно для нахождения взаимных
действий и противодействий обеих частей 5—Р и Р.
354. Пример I. Тяжелая система в пустоте. Если бросить в пустоте
произвольную свободную тяжелую систему, то ее центр тяжести будет опи-
сывать парабо^лу. Проведем через центр тяжести оси с постоянными напра-
влениями, причем ось Gz' направим по вертикали вверх. К относительному
движению системы по отношению к этим осям можно применить теорему
кинетической энергии. Единственными внешними силами будут силы веса,
причем проекции веса точки т на подвижные оси равны 0, 0, —mg. Имеем:
У.
mv'2
mg dz'
Но так как начало находится в центре тяжести, то суммы 2 т*', л_
равны нулю и, следовательно,
У. mv'2 v,
d ^L-^— = 2j Fjk drjk.
Таким образом, кинетическая энергия в относительном движении по отно-
шению к осям Gx'y'z' изменяется только вследствие действия внутренних
сил. Если система является твердым телом, то относительная кинетическая
энергия остается постоянной.
Пример II. Исследовать движение в пустоте двух тяжелых точек А
и В одинаковой массы т, связанных друг с другом невесомой и упругой
нитью. Пусть длина нерастянутой нити равна 21, и допустим, что когда
она вытягивается до длины 2г, ее натяжение пропорционально ее удлине-
нию 2 (г — I):
¦-о-
Когда нить растянута до длины 2го > 21, обе точки брошены в пустоте.
Тогда центр тяжести О, совпадающий с серединой Аа, будет описывать
параболу как тяжелая точка.
В относительном движении по.отношению к осям Gx'y'z' постоян-
ного направления, проведенным через G, главный момент Ga' относи-
тельно точки G количеств относительных движений остается постоянным
по величине и направлению (п. 350, пример 5°) н теорема площадей при-
менима к проекциям движения на каждую из трех координатных плоскостей.
ГЛАВА XVIII. ОБЩИЕ ТЕОРЕМЫ О ДВИЖЕНИИ СИСТЕМЫ 65
Если через х', у', г' обозначить координаты точки А, то координаты
точки В будут —х', —у', —г' и теорема площадей выразится тремя урав-
нениями:
Отсюда находим
Это показывает, что прямая АВ все время остается в некоторой плоскости П
постоянного направления, проходящей через G. Эта плоскость, перпенди-
кулярная к Gq', является для относительного движения плоскостью макси-
мума площадей. При этом указанное свойство не зависит от внутренних
сил, т. е. от взаимодействия обеих точек.
Примем в таком случае эту плоскость П за плоскость x'Gy' и выберем
в ней две осн Gx', Gy' с постоянными направлениями. Обозначим через г
и в полярные координаты точки А в этой плоскости. Координатами точки В
будут г и 8 + jc. Уравнение площадей имеет вид
Применим теорему кинетической энергии в относительном движении
вокруг центра тяжести. Элементарные работы сил веса равны нулю (при-
мер I). Следовательно, достаточно вычислить работу обеих сил натяжения
нити, действующих на точки А н В. Эти натяжения играют роль взаимного
притяжения обеих точек и имеют алгебраическое значение —т№(г — I).
Обе точки вследствие симметрии имеют, очевидно, одну и ту же относи-
тельную скорость v' по отношению к осям Gx'y'. Следовательно,
2mvpi
d —g— = —/я*2 (г — 0 dBr),
так как расстояние между точками равно 2г. Интегрируя, получаем:
/2
или, наконец, заменяя v его выражением в полярных координатах, получим:
Оба уравнения A) и B) определяют г и в в функции L Если жела-
тельно найти относительную траекторию одной из этих точек в плоскости П,
то достаточно будет исключить из этих уравнений dt. Таким путем получается
дифференциальное уравнение траектории
r
г Укг* — ftV> (r — О* — С*
где нужно взять знак -\- или — в зависимости от того, будет ли с возра-
станием в величина г также увеличиваться или, наоборот, уменьшаться.
При начальном значении го> I многочлен, стоящий под корнем, положи-
телен. Так как при г = 0 и при г = оо этот многочлен отрицателен, то
5 Зак, 922, П. Аппель, т. II
66
ДИНАМИКА СИСТЕМЫ
В
очевидно, что г должен заключаться между двумя корнями я и ри может
изменяться только от одного из них до другого. Согласно уравнению A)
b всегда изменяется в одном направлении и кривая аналогична той, которую
описывает горизонтальная проекция сферического маятника (п. 227, рис. 170).
Необходимо, однако, заметить, что в наших формулах существенно
предполагается, что г все время больше, чем /. Если г в какой-нибудь
момент времени делается равным /, а затем становится меньше I, то нить
не будет натянута, сила Т исчезнет, как если бы k обратился в нуль,
обе тяжелые точки станут независимыми и, начиная с этого момента,
относительные траектории в плоскости П обратятся в отрезки прямых
до того момента, пока нить снова не
натянется и вновь не возникнет
У сила Т. В этом случае относительная
траектория будет попеременно скла-
Z\ у j/A дываться из дуг кривой C), когда
г > /, и из отрезков прямых, соеди-
няющих эти дуги, когда г < I. Для
г У' того чтобы такой случай мог пред-
шд ставиться, необходимо и достаточно,
чтобы величина I заключалась между
корнями а и р многочлена, между
р которыми изменяется г.
Пример III. Найти движение
двух тяжелых материальных то-
чек А и В одинаковой массы т,
связанных прямым невесомым
] тд стержнем длины 21 и вынужден-
ных скользить без трения, одна
А — по неподвижной вертикальной
оси Ох, а другая В — по неподвиж-
ной горизонтальной оси Оу. Внеш-
ними силами, приложенными к си-
стеме, являются веса mg обеих точек и нормальные реакции Р и Q обеих
осей (рис. 196). Так как система имеет полные связи, не зависящие от времени,
то достаточно применить теорему кннетической энергии в абсолютном движе-
нии. Центр тяжести G системы является серединой АВ, расстояние OG = I
и угол xOG имеет некоторое переменное значение 6. Координата точки А
будет х = 21 cos в, точки В — у = 21 sin в, и кинетическая энергия системы
равна 2/и/2 f-^т") . Элементарная работа веса mg точки А равна mgdx или
— 2mgl sin 8d6, а элементарная работа веса точки В равна нулю. Следова-
тельно, уравнение кинетической энергии будет
х'
Рис. 196.
d\2mP (Ц-J] = - 2mgl sin bdb,
что после интегрирования и деления на 2ml2 принимает вид
= JL (cos 6 + А),
D)
где ft — постоянная. Это уравнение идентично уравнению движения матема-
тического маятника длины 21. Движение будет колебательным или круговым
в зависимости от того, будет ли h заключено между —1 и +1 или больше 1.
Примечание. Можно также воспользоваться теоремой кинетической
энергии в относительном движении вокруг точки G. Кинетическая энергия
ГЛАВА XVIII. ОБЩИЕ ТЕОРЕМЫ О ДВИЖЕНИИ СИСТЕМЫ 67
относительного движения по отношению к осям Gx'y' постоянного напра-
вления, проведенным из точки G, равна 2от/2( —) . Сумма элементарных
работ весов обеих точек А и В на относительном перемещении относи-
тельно этих осей равна нулю, но работа нормальных реакций Р и Q на
этом относительном перемещении будет, наоборот, отлична от нуля,
так как относительные элементарные перемещения точек А и В для на-
блюдателя, связанного с осями Gx'y', являются дугами окружностей, описан-
ными из G как центра радиусами GA и GB и эти дуги не перпендикулярны
к силам Р и Q. Следовательно, если написать уравнение кинетической энер-
гии для относительного движения по отношению к осям Gx' и Gy', то оно
будет содержать Р и Q. Замечая, что точка А имеет относительно этих
осей координаты
х' = / cos 6, у' = — / sin 6, (А)
а точка В — координаты —х' н у' и что силы Р и Q имеют проекции (О, Р)
и (Q, 0), получим для элементарных работ этих сил величину
Pdy' + Qd( — x').
y + Q( )
Искомое уравнение кинетической энергии будет
d \тР ( ^f] = / (Q sin 8 — Р cos й) rf6.
Реакции Р и Q входят в это уравнение, которое может быть исполь-
зовано совместно с другим для их определения. Но проще вычислить Р и Q
непосредственно, написав уравнение абсолютного движения центра тяжести G
в проекциях на оси Ох и Оу. Таким путем получаются уравнения:
где
5 = / cos в, т) = / sin в.
Вычислив вторые производные по < от t и i) и заменив (-зт-1 и -j-j-
их значениями, взятыми из равенства D), получим Р и Q в функции в.
Знаки реакций Р и Q определяют направления этих реакций, которые
на рис. 196 изображены так, как если бы они обе были положительными.
После вычисления -—^ и -—-получим:
dt* dt2
Q = 2ml [ - U sin 8 - (|iy cos б] - 2m?,
'-**[?-•-(#?-•]•
Но уравнение D) после дифференцирования по ? н сокращения на мно-
йГ8
житель -J— принимает вид
|1—х„„, m
Подставляя выражения D) и E) в формулы для Q и Р, найдем:
Q = — mg cos 6 C cos 6 + 2ft) — /Я?,
Р = — mg sin 6 C cos 8 -f 2ft).
5*
68 ДИНАМИКА СИСТЕМЫ
Натяжение стержня. Обозначим через Т натяжение стержня. На
точку А действуют три силы: ее вес, реакция Р и сила Т, считаемая поло-
жительной от А к В. Написав уравнение движения точки А в проекции на
ось Оу, получим:
О = Т sin 8 + Р,
так как проекция ускорения точки А равна нулю. Отсюда
Т — mg Ccos 6 + 2А).
V. Энергия
355. Консервативная система. Рассмотрим систему, в которой
внутренние силы (Xit Yit Z$) зависят только от положений точек
и имеют силовую функцию Ui(xx, yv zv х2, у2, z% хп, уп, гп),
которую мы будем предполагать однозначной.
Тогда имеем тождественно
2 2 (Xt dx + Y{ dy + Zi dz) = dUi.
Такой случай встретится, например, когда сила взаимодействия
между двумя какими-нибудь точками системы зависит только от
расстояния между ними C8).
Если такая функция t/f существует, то система называется кон-
сервативной.
Такая система характеризуется тем свойством, что когда она
переходит из какого-нибудь положения (Сх) в другое положение (С2),
то полная работа внутренних сил не зависит от способа перехода
системы из первого положения во второе.
В самом деле, если Ui существует, то сумма работ внутренних
сил при переходе из одного положения в другое будет:
(Са)
2
= f
(С,)
где (UiJ и (t/j)! — значения функции 0^ в соответствующих поло-
жениях. Следовательно, работа внутренних сил зависит только от
начального и конечного положений (CJ и (С2).
Наоборот, если работа внутренних сил зависит только от началь-
ного и конечного положений, то система консервативна и функция t/j
существует. В самом деле, возьмем какое-нибудь постоянное поло-
жение (Со) и пусть (С)—произвольное положение. По предположению
работа oTi внутренних сил при переходе системы из (Со) в (С) за-
висит только от положений (Со) и (С). Работа |Г{ изменяется только
в зависимости от выбора конечного положения (С) и является функ-
цией координат хи yv zv х2, уг, г2, ..., хп, уп, zn точек системы
в этом положении:
®i = f(.xv yv zv хг, уг, гг хп, уп, гп).
ГЛАВА XVIII. ОБЩИЕ ТЕОРЕМЫ О ДВИЖЕНИИ СИСТЕМЫ 69
Если перевести систему из положения (С) в бесконечно близкое
положение, соответствующее координатам xx-{-dxv yi~\-dyY,...
.... zn~\-dzn, то работа §i внутренних сил увеличится на величину
d|-j = 22 № dx + Yi dy + Zi dz).
Следовательно, сумма элементарных работ внутренних сил есть пол-
ный дифференциал некоторой функции Si от координат. Система
консервативна.
356. Потенциальная энергия. Механический смысл. Функция
координат Щ*!, ylt zv, х2, уг, гг хп, уп, zn) = — t/i-j-const
называется потенциальной энергией системы. Эта функция опре-
деляется только с точностью до постоянной. Мы будем предполагать,
что эта постоянная выбрана так, что потенциальная энергия обра-
щается в нуль в определенном положении (Со). Тогда значение
потенциальной энергии П системы в произвольном положении (С)
равно сумме работ внутренних сил при переходе системы из
рассматриваемого положения (С) в то особое положение (Со),
в котором П равно нулю.
В самом деле, при бесконечно малом перемещении системы
сумма d§i элементарных работ внутренних сил будет
откуда, обозначая через ^ работу внутренних сил при переходе из
рассматриваемого положения (С) в положение (Со), получим:
<с„)
ffi-s— f <Л1 = П — П0 = П,
(С)
так как по предположению По равно нулю. Это и доказывает пред-
ложение.
Выбор положения (Со), для которого потенциальная энергия
условно считается равной нулю, совершенно произволен. Когда
среди всевозможных положений системы имеется такое, для кото-
рого t/4 обращается в максимум, вследствие чегоП = —t/^-f-const
обращается в минимум, то обычно это особое положение принимают
за положение (Со), для которого П обращается в нуль. Тогда для
всех остальных положений энергия П положительна. В этом случае
положение (Со), которому соответствует максимум силовой функ-
ции U{, является положением устойчивого равновесия системы при
предположении, что на нее действуют только внутренние силы. Это
вытекает из теоремы, которую мы докажем ниже.
Если иг имеет несколько максимумов, то за положение (Со) вы-
бирают то, в котором функция t/j имеет наибольший максимум.
70 ДИНАМИКА СИСТЕМЫ
357. Сохранение энергии. На основании сказанного в предыду-
щем пункте уравнение, выражающее теорему кинетической энергии,
если заменить сумму
ее значением йИл или —dll, может быть написана в виде (п. 336)
e^ + 4^). A)
Выражение ¦ 9 [-П есть полная энергия системы. Оба ее
Ути*
составляющие члены имеют разную природу. Первый член -=-—
зависит только от скоростей различных точек и не зависит от их
положения. Это — кинетическая энергия системы. Второй член И
зависит только от положения системы, но не зависит от скоростей.
Это — потенциальная энергия. Уравнение A) выражает следующее:
бесконечно малое изменение полной энергии равно сумме эле'
ментарных работ внешних сил.
Если обе части уравнения A) проинтегрировать от момента tx
до момента t, то получится
V /
что мы запишем в виде
$ — §! = !Ге.
Изменение энергии системы в течение конечного промежутка
времени равно сумме работ внешних сил за этот промежуток
времени.
В частности, если на систему не действуют никакие внешние
силы, то ее энергия остается постоянной:
( У.
Это — закон сохранения энергии. Таким образом, если система
перемещается без воздействия внешних сил, то ее кинетическая и
потенциальная энергии изменяются, но их сумма остается постоян-
ной. Эти два вида энергии, несмотря на их различную природу,
преобразуются одна в другую.
Примечание. Допустим, что за единицу работы принят кило-
граммометр. Тогда потенциальная энергия, будучи работой (п. 340),
выразится некоторым числом килограммометров. Кинетическая энергия
H2
—2—~ также выразится некоторым числом килограммометров. Сле-
довательно, полная энергия есть некоторое число килограммометров,
ГЛАВА XVIII. ОБЩИЕ ТЕОРЕМЫ О ДВИЖЕНИИ СИСТЕМЫ
71
368. Механический смысл полной энергии. Пусть St— энергия
системы в момент tv Если к системе не приложено никакой внеш-
ней силы, то она все время будет сохранять свою энергию §v
Приложим теперь к ней внешние силы (Хе, Ye, Ze) таким образом,
чтобы она перешла из рассматриваемого состояния в конечное со-
стояние, для которого энергия $ равна нулю. Формула B) пред-
ставится теперь в виде _ ет
©! = — а)е.
Следовательно, полная энергия системы равна по величине
и противоположна по знаку той работе внешних сил, которую
они должны произвести, чтобы перенести систему из рассма-
триваемого состояния в особое состоя-
ние, для которого полная энергия
равна нулю.
Это особое состояние является состоя-
нием покоя (^=0) в особом положе-
нии (Со), где П равно нулю.
Так как gt положительно, то работа §е
внешних сил, необходимых для осущест-
вления указанного преобразования, отри-
цательна, т. е. система потребляет работу
от внешних тел. Для большей ясности
выведем сначала одно непосредственное
следствие из уравнения B).
Допустим, что система испытывает
внешние воздействия только через по-
средство твердых тел, соприкасаю-
щихся с системой в одних и тех же
точках или связанных с ней жесткими
связями. Тогда внешними силами, приложенными к системе,
являются действия (Хе, Ye, Ze) на нее этих твердых тел. Очевидно,
4io система действует при этом на внешние твердые тела с силами
(— Хе, —Ке,— Ze), равными и прямо противоположными силам,
действующим на систему. Например, если твердое тело (А) (рис. 197)
находится в соприкосновении с системой (S) в точке М, то на систему
действует внешняя сила Fe, и наоборот, система оказывает на тело
равное и прямо противоположное действие F'g. Когда система переме-
щается, обе равные и прямо противоположные силы Fe и F'e, при-
ложенные к материальным точкам, находящимся в Ж и получающим
одинаковые перемещения, совершают равные и противоположные по
знаку работы. Следовательно, сумма §е работ всех внешних сил,
приложенных к системе, будет равна и противоположна по знаку
сумме $'е работ сил, с которыми система действует на находящиеся
с нею в соприкосновении твердые тела:
Рис. 197.
72 ДИНАМИКА СИСТЕМЫ
Работа §'е сил, с которыми система действует на соприкасаю-
щиеся с нею внешние тела, есть внешняя работа, совершенная или
выполненная системой, и эта работа может быть, вообще говоря,
как положительной, так и отрицательной.
Рассматривая движение системы с момента tx до момента t, мы
нашли, что изменение Ш — S, энергии равно сумме §е работ внеш-
них сил. Следовательно, имеем также
©1 © = &е.
Таким образом, если система связана механически с внешней
средой только посредством соприкасающихся с системой или
связанных с ней жесткими связями твердых тел, то потерян-
ная энергия равна работе, совершенной системой над внешними
телами.
В частности, допустим, что система переходит из рассматривае-
мого состояния, где ее полная энергия равна $и в то конечное
состояние, в котором ее полная энергия равна нулю, т. е. в состоя-
ние, в котором она неподвижна и занимает особое положение (Со),
где П = 0. Тогда предыдущее уравнение примет вид:
Следовательно, энергия, которою обладает система, равна внеш-
ней работе, которую она может совершить указанным выше способом,
при переходе в состояние, в котором ее энергия равна нулю. Так как
У. mv* '
энергия -=— |-П существенно положительна и имеет минимумом
нуль, то внешняя работа, которую может совершить система, при
переходе из рассматриваемого состояния в состояние, где ее энер-
гия равна нулю, является наибольшей из всех, которые она может
совершить.
Вследствие этого можно высказать следующие предложения, ко-
торые мы заимствуем из статьи Мориса Леви (Maurice Levy, Sur
le principe de l'energie, Gauthier-Villars, 1888):
Полная энергия системы в произвольный момент есть наи-
большая полезная работа, которую можно получить, использовав
приобретенные скорости и внутренние силы системы.
В этой формулировке предполагается, конечно, как мы это счи-
тали выше, что минимум функции П равен нулю.
Кинетическая энергия системы в какой-нибудь момент ере-
мени есть наибольшая полезная работа, которую можно полу-
чить, использовав только приобретенные к этому моменту раз-
личными точками скорости, без использования каких-нибудь
действующих на систему внутренних сил.
Потенциальная энергия в какой-нибудь момент времени
есть наибольшая полезная работа, которую можно получить,
ГЛАВА XVIII. ОБЩИЕ ТЕОРЕМЫ О ДВИЖЕНИЯ СИСТЕМЫ 73
использовав только внутренние силы системы, без использования
приобретенными ее точками скоростей.
Когда на систему действуют внешние силы, то говорят, что они
являются движущими, если они увеличивают ее энергию, и сопро-
тивлениями, если они уменьшают ее энергию.
Примеры. 1°. Материальные точки, притягивающиеся пропорцио-
нально расстоянию. Рассмотрим систему, состоящую из двух свободных
точек с массами т и т', притягивающихся пропорционально расстоянию г
между ними. Сила их взаимодействия равна —jxr, где (л > 0, и элементарная
работа этой силы есть
Следовательно, для рассматриваемого случая
Эта функция всегда отрицательна, и только при г = О она обращается в
нуль и поэтому имеет максимум. Примем, тогда
Эта потенциальная энергия везде положительна, за исключением поло-
жения, в котором г = 0.
Особым положением (Со) в рассматриваемом случае является, следова-
тельно, то, при котором обе точки находятся в соприкосновении. Кинетиче-
ская энергия равна
отр2 + т'у'%
2
и полная энергия есть
Предположим, что в момент, t = 0 обе точки были неподвижны и нахо-
дились в соприкосновении. Тогда g0 = 0. Такое состояние будет продол-
жаться бесконечно, если не приложить внешних сил. Возьмем теперь обе
точки в рукн и разведем их на расстояние гь сохранив их неподвижными.
Для этого необходимо будет затратить некоторую работу J". Потенциальная
энергия станет тогда равной —=—, кинетическая энергия будет равна нулю,
и приращение —^— полной энергии будет равно затраченной внешней ра-
боте. Сообщим далее обеим точкам начальные скорости уг и vv Для этого
потребуется затратить некоторую работу J"", потенциальная энергия сохра-
ннт свое значение -=—, а кинетическая энергия станет равной ¦ д .
о / /2
mvl m vi
Полная энергия увеличится на величину —^ 1 к— • равную затраченной
74
ДИНАМИКА СИСТЕМЫ
работе tfn. Если после этого система будет предоставлена самой себе, то
будет постоянно удовлетворяться равенство
mv -\-m v fxr mvi -\- m v. р.гх
2 "•" 2 — 2 2 —
Полная энергия будет оставаться постоянной и ее нельзя будет изменить
иначе, как приложив внешние силы. Эту полную энергию можно будет ис-
пользовать, заставив систему производить внешнюю работу до момента,
когда обе точки системы вновь будут находиться в соприкосновении и ока-
жутся неподвижными. В этот момент полная энергия обратится в нуль.
Работа, которую система может таким образом совершить, равна той энер-
гии, т. е. той работе J" + tf", которая была затрачена вначале для сооб-
щения системе ее энергии.
2°. Маятник. Рассмотрим систему, образованную Землей, предполагае-
мой неподвижной, н математическим маятником массы т. Обозначим через г
высоту груза маятника над наинизшей точкой окружности, которую он описы-
вает. Внутренними силами системы, образованной Землей и маятником, яв-
ляются сила притяжения mg маятника Землей и сила, равная и противополож-
ная ей, приложенная к центру
Земли. Если маятник подни-
мается на dz, то работа силы
притяжения mg равна —mg dz,
а работа силы, приложенной
к центру Земли, равна нулю,
так как эта точка неподвижна.
Следовательно, сумма элемен-
тарных работ внутренних сил
равна
— mg dz — — d (mgz).
Имеем
U1 = — mgz
Рис. 198. и „
П = mgz,
так что эта функция П положительна при .всех положениях маятника и об-
ращается в нуль в точке А (рис. 198), являющейся положением устойчивого
равновесия. Если предположить, что в этом положении маятник сначала не-
подвижен, то полная энергия его в этот момент равна нулю. Чтобы поднять
его отсюда на высоту гх, надо затратить некоторую внешнюю работу J".
Чтобы после этого сообщить маятнику скорость vx, надо затратить еще ра-
боту rf". Если затем предоставить систему самой себе, не прикладывая к ней
никаких внешних сил, то ее энергия
mv
- + mgz = •
mgzx = J" + 3"'
будет оставаться постоянной. Эта энергия может быть использована для
получения внешней работы путем приведения маятника обратно в его
положение равновесия, в котором его скорость в самом начале была
равна нулю.
3°. Колебания упругой пластинки. Рассмотрим упругую пластинку,
конец которой А зажат неподвижно (рис. 199). Если на систему не действует
никакая внешняя сила, то пластинка занимает положение устойчивого равно-
ГЛАВА XVIH. ОБЩИЕ ТЕОРЕМЫ О ДВИЖЕНИИ СИСТЕМЫ 75
весия АВ. Примем это положение за особое положение, в котором П равно
нулю. С другой стороны, так как пластинка в этом положении неподвижна,
то ее полная энергия будет также равна нулю.
Возьмем теперь конец В в руку и, сгибая пластинку, приведем ее в по-
ложение АВ' и в этом положении будем держать ее неподвижной. Для этого
необходимо, чтобы сила давления руки совершила некоторую работу. Потен-
циальная энергия, которая вначале равнялась нулю, будет иметь в положе-
нии АВ' значение Щ, равное затраченной работе. Если теперь предоставить
пластинку самой себе, то она придет в движение. По мере того как она будет
приближаться к положению равновесия АВ, ее потенциальная энергия будет
уменьшаться, но ее кинетическая энергия будет увеличиваться, причем так,
что ее полная энергия постоянно остается равной Щ. Когда пластинка про-
ходит через положение равновесия АВ, ее потенциальная энергия равна
нулю, но кинетическая энергия в этот момент максимальная и равна U^.
После перехода через положение АВ потенциальная энергия будет увели-
чиваться, а кинетическая энергия будет уменьшаться, и это будет происхо-
дить до тех пор, пока пластинка не займет положение АВ'', симметричное
Рис. 199.
с АВ', где кинетическая энергия опять обратится в нуль. После этого про-
цесс повторяется.
Когда пластинка при помощи руки приведена в положение АВ', ее
можно, очевидно, заставить производить внешнюю работу, например, ее
можно использовать для поднятия тяжести.
4°. Часы. Отметим еще следующие простые примеры.
Заводя часы с гирями, мы увеличиваем потенциальную энергию системы,
образованную часами и Землей. Толкнув затем маятник, мы увеличиваем
в первое мгновение кинетическую энергию, которая вначале была равна
нулю. Сообщенная таким образом полная энергия постепенно расходуется.
Она расходуется на преодоление пассивных сопротивлений, и когда гиря
снова опустится, часы остановятся: сообщенная энергия израсходуется вся.
Точно так же, заводя часы с пружиной, мы затрачиваем некоторую ра-
боту, которая увеличивает потенциальную энергию системы. Эта энергия
затем расходуется на преодоление пассивных сопротивлений.
Система, на которую действуют внутренние силы, зависящие
только от положения точек, обязательно консервативна. Можно дока-
зать это предложение, считая очевидным, что невозможно создавать работу
без всяких затрат.
В самом деле, рассмотрим систему, на которую действуют внутренние
силы, зависящие только от положения точек системы. Переведем ее из неко-
торого положения (Со) в некоторое положение (С) через последовательность
промежуточных положений, которую мы назовем множеством (Р). Мы
предполагаем при этом, что система выходит из положения (Со) и при-
ходит в положение (С), имея и в том и в другом положении скорости, рав-
ные нулю. Тогда изменение кинетической энергии равно нулю и, согласно
общей теореме кинетической энергии (п. 336), сумма работ как внутренних,
76 ДИНАМИКА СИСТЕМЫ
так и внешних сил равна нулю:
Здесь J'i — работа внутренних сил, а/, — работа внешних сил. Допустим
для определенности, что работа J^ отрицательна. Тогда работа J'е положи-
тельна, т. е. необходимо затратить некоторую внешнюю работу для осуще-
ствления рассматриваемого перемещения.
Переведем теперь систему из того же положения (Со) в то же положе-
ние (С) через другую последовательность (Р'п) промежуточных положений,
предполагая по-прежнему, что в (Со) и в (С) система не имеет скоростей.
Тогда, обозначая через J*^ и J^1' работу внешних и внутренних сил, по-
прежнему имеем:
Если система возвращается из (С) в (Со) через последовательность по-
ложений (Р*1')' то работа внутренних сил будет — J^4 так как положения
системы и внутренние силы будут теми же, а перемещения будут равны,
но направлены противоположно предыдущим. Следовательно, получим
также —J'W для работы внешних сил, когда система возвращается из (С)
в (Cj) через последовательность положений (РA0.
Было бы абсурдным предположить, что J"y и J"t различны. В самом
деле, допустим, например, что J^1' < J^. Тогда J^ > J"g. Следовательно,
переводя систему сначала из (Со) в (С) через последовательность положе-
ний (Р), необходимо затратить работу J*e, а затем, переводя ее обратно
из (С) в (Со) через последовательность положений (Р^О, надо затратить
работу —J'M. Отсюда видно, что система способна отдать внешним твердым
телам, находящимся с ней в соприкосновении, работу J'g, которая больше
затраченной работы J"e. Таким образом, при возвращении системы в ис-
ходное положение была бы создана работа, которая при повторении этих
операций неограниченно возрастала бы, что является невозможным. Следо-
вательно, J}1) = J^, каковы бы ни были последовательности положений,
через которые проходит система при переводе ее из одного положения
в другое, и система является консервативной. Ее полная энергия может
быть изменена только внешними действиями. В математической физике
предполагают, что взаимодействия молекул зависят только от их положений
и расстояний. Следовательно, в природе все системы должны быть консер-
вативными.
О трении и сопротивлениях. На первый взгляд может показаться,
что материальные системы не являются консервативными. Может казаться,
что внешняя работа, необходимая для того, чтобы заставить систему перейти
без заметных начальной и конечной скоростей из одного положения в дру-
гое, не будет равна работе возвращаемой системой при обратном переходе
из второго положения в первое. Так, если рукой сжать спиральную пру-
жину, причем сжатие превзойдет некоторый предел, то пружина не вернется
вполне в свое первоначальное состояние. Она, следовательно, вернет только
часть затраченной внешней работы. Для того чтобы вернуть пружину в пер-
воначальное состояние, надо будет приложить к ней натяжение, т. е. затра-
тить новую работу.
В других случаях система, находящаяся в движении, на которую не дей-
ствуют никакие внешние силы, кончает тем, что останавливается в положе-
нии устойчивого равновесия, для которого П равно нулю, так что ее полная
энергия обращается в нуль и не остается, как кажется, постоянной.
ГЛАВА XVIII. ОБЩИЕ ТЕОРЕМЫ О ДВИЖЕНИИ СИСТЕМЫ 77
Таким будет случай колебаний маятника в пустоте, который в конце кон-
цов останавливается, несмотря на то, что на систему, образованную маятни-
ком и Землей, не действуют никакие внешние силы.
Таким образом, имеется кажущаяся потеря энергии. Эта кажущаяся
потеря вызывается в машинах трением, вязкостью жидкостей, несовершен-
ной упругостью твердых тел, сопротивлениями, происходящими от электри-
ческой индукции и намагничивания. Но эта потеря энергии является чисто
кажущейся, так как кроме видимых движений, которыми занимается теоре-
тическая механика, существуют невидимые колебания молекул, изучение ко-
торых является предметом физики и которые создают теплоту, свет, электри-
чество и т. д.
Например, любое трение создает тепло и опыты Джоуля показали, что
отношение исчезающей энергии к количеству возникающего тепла есть вели-
чина постоянная. Эта постоянная называется механическим эквивалентом
теплоты н равна приблизительно 424 кгм, т. е. одна калория способна
произвести 424 килограммометра работы.
В некоторых случаях сопротивления, недостаточная упругость и т. д.
вырабатывают электричество, создают свет и т. д. Тогда закон сохранения
энергии нужно понимать следующим образом:
В изолированной системе, которая не подвергается никаким внешним
воздействиям, ни механическим, ни тепловым и т. д. полная энергия
неизменна при условии, что к кинетической энергии причисляется не
только та, которая вызвана видимыми скоростями точек системы, но
и та, которая происходит от невидимых или стационарных движений,
вызванных теплотой, электрическими токами, а также быть может
магнетизмом или статическим электричеством, при условии также,
что к потенциальной энергии причисляется не только энергия, проис-
ходящая от ощутимых механических действий, которые обычно рас-
сматриваются в механике, но также и та, которая может быть вы-
звана электрическими напряжениями, химическим сродством и т. д. *)
Вообще имеется некоторая неопределенность при классификации энер-
гий, имеющих немеханическое происхождение, а также тех, которые имеют
происхождение механическое. Так, согласно кинетической теории газов,
молекулы газа, даже находящегося в кажущемся покое, обладают весьма
быстрыми стационарными движениями, вследствие которых происходят повто-
ряющиеся столкновения молекул между собой и со стенками сосуда. То, что
нам представляется как статическое давление, является результатом этих
столкновений. Вследствие этого энергия, вызванная давлением газа, не будет
по существу потенциальной, а будет кинетической. Точно так же энергию
магнита, если допустить теорию Ампера, необходимо рассматривать как
кинетическую, а если допустить теорию Максвелла, — то как потенциальную.
Эта неопределенность, относящаяся к качеству различных энергий, не
создает затруднений на практике, так как энергия, будь она потенциальной или
кинетической, всегда выражается некоторым числом килограммометров, и мы
видели, что оба эти вида энергии могут превращаться один в другой без всякой
потери (см. Морис Л е в и, Sur le principe de l'energie, GauthierVillars, 1888).
Мы не останавливаемся больше на этих рассуждениях, лежащих, в част-
ности, в основании механической теории теплоты. Мы отсылаем для подроб-
ностей к статье Мориса Леви, к статье Гельмгольца (Н е 1 m h о 11 z, Ueber
die Erhaltung der Kraft, 1847), переизданной в Лейпциге в 1889 году, к сочи-
нению Тэта и Томсона, к Механике Буссинеска (Boussinesq) и др.
*) Излагаемая здесь и выше трактовка близка к трактовке Гельмгольца.
Важно в ней, как известно, не попытка свести все физические явления к меха-
ническим, что давно опровергнуто, а установление того, что всеобщий закон
сохранения и превращения энергии существует и что для каждого физиче-
ского процесса можно найти меру, входящую в этот закон. (Прим. перев).
78 ДИНАМИКА СИСТЕМЫ
УПРАЖНЕНИЯ
1. Обобщение теоремы Кёкига а теоремы кинетической энергии
относительно осей постоянного направления, проведенных из центра
тяжести. Пусть Ох, Оу, Ог — три неподвижные, прямоугольные оси, к кото-
рым отнесена произвольная материальная система; Ох', О'у'. О'г' — три
оси, которые остаются параллельными предыдущим, но начало которых О'
совершает произвольное движение.
1. Для того чтобы уравнение кинетической энергии было применимо
к относительному движению по отношению к подвижным осям, необходимо,
чтобы проекции скорости точки О' и абсолютной скорости центра тяжести
на направление ускорения точки О' были одинаковы.
II. Условие того, чтобы кинетическая энергия системы была равна кине-
тической энергии всей массы, сосредоточенной в подвижном начале О', уве-
личенной на кинетическую энергию относительного движения по отношению
к подвижным осям, заключается в том, что скорость v0, этого начала должна
равняться проекции абсолютной скорости центра тяжести на направле-
ние скорости начала v0, (Bonnet, Memoires de l'Academie de Montpellier,
section des Sciences, т. 1, стр. 142).
Следствие для случая, когда система является твердым телом.
Если в какой-нибудь произвольный момент движения твердого тела описать
прямой круговой цилиндр, образующие которого параллельны мгновенной
винтовой оси, а прямое сечение которого имеет диаметром перпендикуляр,
опущенный из центра тяжести на эту ось, то каждая точка А, взятая на
этой цилиндрической поверхности, обладает свойством, высказанным в тео-
реме Кёнига: кинетическая энергия тела в рассматриваемый момент равна
сумме кинетической энергии, которую будет иметь вся масса, сосредоточен-
ная в точке А, и кинетической энергии тела в его движении вокруг точки А.
Не существует другой точки тела, обладающей этим свойством (С а и с h у,
Anciens Exercices, стр. 104, 1827; Bonnet loc. cit.; Gilbert, Comptes rendus,
т. CI, стр. 1054 и 1140).
2. При перемещении произвольной материальной системы, как изменяе-
мой, так и неизменяемой, сумма произведений массы каждой точки на квад-
рат ее перемещения равна произведению всей массы системы на квадрат
проекции перемещения центра тяжести на произвольное направление АВ,
увеличенному на сумму произведений массы каждой точки на квадрат
перемещения, которое ей нужно сообщить, чтобы привести ее в конечное
положение, после того как ей было сообщено перемещение в направле-
нии АВ, равное проекции перемещения центра тяжести на это направление
(Fouret, Bulletin de la Societe mathematique, т. XIV, стр. 142).
3. Каковы точки А движущегося твердого тела S, обладающие, так же
как и центр тяжести, следующим свойством: момент количества движения
тела S относительно неподвижной прямой Ог в данное мгновение равен
моменту количества движения всей массы, предполагаемой сосредоточенной
в точке А, увеличенному на момент количества движения тела относительно
прямой Аг', параллельной Ог, если рассматривать относительное движение
по отношению к осям, имеющим постоянное направление и пересекающимся
в точке А? (Геометрическое место точек А есть гиперболоид.) (De Saint-
Germain, Comptes rendus, т. CVII.)
4. Рассматривается система, образованная твердым телом, совершающим
поступательное прямолинейное равномерное движение со скоростью v и мате-
риальной точкой массы т, вначале неподвижной. Предполагается, что тело
сталкивается с этой точкой т и начинает двигаться вместе с нею, не изменяя
скорости, что можно осуществить приложением внешних сил. Доказать, что
полная энергия системы увеличится на mifi (Marcel Deprez — Марсель Депре).
5. Дана система, состоящая из двух свободных материальных точек,
притягивающихся по произвольному закону. Теорема площадей применима
ГЛАВА XVIII. ОБЩИЕ ТЕОРЕМЫ О ДВИЖЕНИИ СИСТЕМЫ 79
к проекциям движения на три координатные плоскости. Если через центр
тяжести системы и касательные к траекториям каждой точки провести
плоскости, то обе эти плоскости пересекутся по прямой, лежащей в неиз-
меняемой плоскости (т. е. перпендикулярной к Ga', п. 350) (Пуансо). Якоби
использовал это свойство в задаче трех тел (Journal de Crelle, т. 26, стр. 115)
(Журнал Крелля).
6. Однородный круглый диск, который может скользить без трения по
горизонтальной плоскости, вращается вокруг своего центра О. На окруж-
ности диска в двух диаметрально противоположных точках А и В помещены
два насекомых одинаковой массы. Когда оба насекомых находились в покое,
диску было сообщено вращение вокруг О с начальной угловой скоростью а>0.
Эта угловая скорость сохранится, если насекомые останутся неподвижными
на окружности диска. Спрашивается, как изменится угловая скорость диска,
когда оба насекомых, оставаясь диаметрально противоположными, начнут
в момент t = 0 описывать окружность с относительной скоростью V, изме-
няющейся пропорционально времени: v = ft.
7. Найти движение тяжелой неоднородной цепи, скользящей без трения
по неподвижной кривой. Поступать так же, как в тексте (п. 344), приняв
плотность р = /(X), где X обозначает расстояние, измеряемое по кривой от
какой-нибудь точки цепи до ее середины. Вычислить натяжение.
Если обозначить через М всю массу, то получится уравнение
+1
f
-г
где г = <р (а) есть соотношение между г и дугой s точки кривой. Если кри-
вая является циклоидой, то движение будет таутохронным.
8. Найти движение двух свободных точек, притягивающихся пропор-
ционально их расстоянию.
9. Материальная точка вынуждена скользить без трения по оси Ох;
другая материальная точка совершенно свободна. Найти движение системы,
предполагая, что обе точки притягиваются пропорционально расстоянию, и
вычислить реакцию оси Ох. (Достаточно написать уравнения движения
обеих точек. Задача приводится к легкому интегрированию.)
10. Две материальные точки М и М' одинаковой массы т, движущиеся
в горизонтальной плоскости, связаны друг с другом нерастяжимой и невесо-
мой нитью длины 21. Точка М притягивается неподвижной точкой А, а точка
М' — неподвижной точкой А' пропорционально расстоянию. Найти движение
системы. Принять прямую А'А за ось х и середину А'А за начало; обо-
значить через 2а расстояние А'А, через ? и тг) — координаты середины О
отрезка ММ', через 8 — угол, образованный прямой GM с осью Ох, и, на-
конец, через цтАМ и \хтА'М' — абсолютные значения притяжений к точ-
кам А и А' (Лиценциатская, Париж).
11. Две материальные точки М и Mi с массами т и ть связанные
нерастяжимой и невесомой нитью длины /, скользят без трения по горизон-
тальной плоскости X0Y. На эти точки действуют силы г и Fb направлен-
ные к оси OY перпендикулярно к ней, пропорциональные массам этих точек
и их расстояниям от этой оси. Найти движение системы.
Обозначив через х и х^ абсциссы обеих точек, положить, что проекции
сил F и Рх на ось ОХ суть —k2mx и — №т\Хх. Обозначить через 5 и г)
координаты центра тяжести G системы и через 6 угол, образованный пря-
мой М±М с осью ОХ (Лиценциатская, Париж).
12. Две материальные точки одинаковой массы скользят без трения одна
по оси Ох, а другая — по перпендикулярной к ней оси Оу. Эти точки
80 ДИНАМИКА СИСТЕМЫ
притягиваются по закону обратной пропорциональности квадрату расстояния
между ними. Найти движение. Найти, в частности, кривую, описываемую
центром тяжести обеих точек (коническое сеченне с фокусом О, описываемое
по закону площадей) (Лиценциатская, Париж).
13. Две точки одинаковой массы, связанные невесомой и нерастяжимой
нитью, скользят без трения одна по горизонтальной оси Ох, а другая по
вертикальной оси Оу. Найти движение системы [Dorпа (Дорна), Memoires
de l'Academie de Turin, т. XXXI].
14. Найти движение трех точек, описывающих одну и ту же неподвиж-
ную прямую и притягивающихся друг к другу пропорционально массам и
обратно пропорционально кубу расстояний. (Я к о б и, Oesammelte Werke,
т. IV, стр. 533-539).
15. Та же задача в предположении, что, кроме того, каждая точка при-
тягивается неподвижным центром пропорционально расстоянию.
(Мещерский показал, что задача приводится к предыдущей заменой пере-
менных, выполненной для времени н координат. См. Bulletin des Sciences
mathematique, 1894, Melanges.)
ГЛАВА XIX
ДИНАМИКА ТВЕРДОГО ТЕЛА. ДВИЖЕНИЯ,
ПАРАЛЛЕЛЬНЫЕ ПЛОСКОСТИ
I. Вращение твердого тела вокруг неподвижной оси
359. Уравнение движения. Твердое тело, вращающееся вокруг
неподвижной оси, представляет собой систему с полными связями,
так как его положение зависит только от одного параметра, а именно
от угла, на который тело поворачивается от какого-нибудь опре-
деленного положения.
Если мы допустим, что связи осуществлены без трения, то един-
ственным уравнением, определяющим движение тела, будет уравне-
ние, получаемое из теоремы кинетической энергии, так как работа
реакций связей в этом случае равна нулю. Предположим, что на
тело действуют заданные силы Fv F2, • ¦ •, Fn, и будем обозначать
через X, Y, Z проекции какой-нибудь из этих сил на оси.
Примем ось вращения за ось z и пусть ш — угловая скорость
в момент t, a M — вся масса тела. Кинетическая энергия системы
будет:
1 ^ mv* = -i
т. е. кинетическая энергия тела равна квадрату угловой скоро-
сти, умноженному на половину момента инерции тела относи-
тельно оси вращения.
Теорема кинетической энергии выражается теперь уравнением
в которое входят только заданные силы. Если через г, 0, z обозна-
чить цилиндрические координаты точки х, у, z тела, то
Когда тело вращается, меняется только 0 и тогда
dx = — г sin 0 u?6 = —у ев dt,
dy = r cos 6 dQ = x u) dt,
dz=0.
6 Зак, 922, П. Аппель, т, II
82 ДИНАМИКА СИСТЕМЫ
Уравнение кинетической энергии принимает теперь вид
которое после выполнения дифференцирования в левой части может
быть написано так:
,,,„ dm
Mk2Ht =
Это уравнение может быть получено другим способом, исходя из тео-
ремы момента количества движения. Применим эту теорему к оси Oz.
Так как моменты реакций равны нулю, то мы получим:
Но
и после подстановки мы получим опять уравнение, найденное из тео-
ремы кинетической энергии.
360. Реакции оси. Чтобы получить возможность вычислить эти
реакции, мы предположим, что неподвижность оси достигается путем
закрепления двух ее точек О и О".
Пусть Q'(X', Г, Z') и С?'(Х",
Y", Z") — реакции оси в этих двух
точках (рис. 200). Мы можем рас-
сматривать тело как свободное,
У' причисляя к заданным силам реакции
Q' и Q". Применяя тогда к системе
теорему количества движения, мы
получим три следующих уравнения:
Рис. 200. Применяя затем теорему мо-
мента количества движения относи-
тельно осей Ох и Оу и обозначая через h координату z точки О",
получим два уравнения:
{>?-%)-2о*-«>-.
«
ГЛАВА XIX. ДИНАМИКА ТВЕРДОГО ТЕЛА 83
Эти два последних уравнения определяют X" и Y". Два первых
из предыдущей группы определяют X' и У, а третье — сумму Z' -\-Z".
Здесь мы встречаемся с той же особенностью, что и при равновесии,
особенностью, которую мы изучили в статике. Если предполагать
тело абсолютно твердым, то можно найти только Z'-\-Z". Опре-
делить отдельно Z' и Z" можно только, принимая во внимание упру-
гие деформации тела (п. 110). Эта неопределенность вызвана тем,
что если тело является твердым, то, не изменяя его состояния, можно
приложить в точках О и О" две произвольные силы /и —/, равные
и прямопротивоположные. Составляющие Z' и Z" реакций станут тогда
равными Z'-\-f и Z"— / и одна из них при подходящем выборе /
может принять какое угодно значение, например нуль.
Мы развернем теперь предыдущие уравнения, заменив вторые
производные координат их значениями в функции ш. Мы уже получили
dx dy dz r,
¦&=-*"• 7e = Xtt>- If-0'
откуда выводим
и формулы принимают вид
S W — Tt Е mxz=
mxz — J 2 тУ* = 2 ^zX~ xZ) + hX"-
A)
Входящие в эти формулы суммы изменяются со временем. На-
пример, 2 тх имеет значение МЧ, где \ — абсцисса центра тяжести.
Для вычисления других сумм введем систему осей Ox'y'z', вращаю-
щуюся вместе С телом, причем Oz' совпадает с Oz, а угол хОх'
равен ср. Формулы преобразования будут:
х = х' cos cp — у' sin cp,
у = х' sin ср -\- У cos ср,
откуда выводим
2 myz = sin ср 2 mx'z' -)- cos cp 2 my'z',
2 mxz = cos cp 2 mx'z' — sin cp 2 my'z',
где суммы, входящие во вторые части, не зависят от времени.
е
,*
84
ДИНАМИКА СИСТЕМЫ
Частный случай. Формулы упрощаются, когда ось вращения
является главной центральной осью инерции. Действительно, в этом
случае имеем:
2. ^ = 0, ^туг = 0,
и уравнения, определяющие реакции, принимают теперь вид
— zY) — hY" =
Эти уравнения совпадают с первыми пять» условиями равновесия
(п. 110). Последнее условие равновесия не выполняется, так как
— уХ) не равно нулю. Эта
Рис. 201.
N —
величина равна ^
Чтобы пояснить найденный резуль-
тат (рис. 201), приведем к началу коор-
динат внешние силы F(X, Y, Z), дейст-
вующие на тело. Получим главный вектор
R B X, 2 У> 2 Z) и паРУ с вектором
момента ОН. Разложим эту пару .на две,
из которых одна имеет момент ON,
направленный вдоль Oz, а другая —
момент ОК., перпендикулярный к Oz.
Если отбросить пару ON, сохранив лишь действие на тело резуль-
тирующей силы R и пары с моментом ОК, то это тело, если оно
было неподвижно, будет оставаться в равновесии и реакции оси
будут иметь некоторые значения О/ и Q". Если теперь телу сооб-
щить некоторую начальную угловую скорость и приложить к нему
пару ON, то тело будет вращаться, но реакции оси останутся те же,
какие были при равновесии.
Примечание. Формулы A) показывают насколько важно, чтобы
в машинах вращающиеся части, такие, как маховое колесо, враща-
лись вокруг главной оси инерции относительно центра тяжести.
В противном случае в значения реакций будут входить квадраты
угловой скорости и вследствие этого, если угловая скорость станет
большой, реакции и вместе с ними давления на ось станут очень
большими и могут вызвать поломку или разрыв оси.
— со2 2 »**.г =
ГЛАВА XIX. ДИНАМИКА ТВЕРДОГО ТЕЛА 85
361. Постоянные и свободные оси вращения. Вернемся теперь
к случаю, когда ось вращения произвольна, и допустим сначала,
что заданные силы имеют равнодействующую, проходящую через
точку О. Тогда
2 (yZ — zY) = 2 (zX—xZ) == 2 (xY — yX) = О,
и уравнения примут вид
— со2 2 тх = 2 Х+Х'
B)
где (в — угловая скорость вращения, которая в рассматриваемом слу-
чае постоянна, так как -? = 0.
Исследуем^ может ли получиться, чтобы при указанных условиях
реакция в точке О" обратилась в нуль. Для этого необходимо,
чтобы было
X" = О, Y" = О, Z" = О,
т. е.
2 туг — О, 2 mxz = 0.
или чтобы ось вращения была главной осью инерции относительно
точки О. Допустим, что эти условия выполнены. Тогда реакция
в точке О" будет равна нулю и эта точка не будет оказывать ника-
кого действия на тело. Ее можно в таком случае отбросить, т. е.
сделать тело свободным в точке О", ничего не меняя в характере
движения. Можно, следовательно, высказать такую теорему:
I. Если твердое тело, движущееся вокруг неподвижной точки,
подвергается действию внешних сил, имеющих равнодействую-
щую, проходящую через эту точку, и если тело начинает вра-
щаться вокруг оси инерции главной для закрепленной точки,
то оно будет продолжать неограниченно вращаться вокруг этой
оси с постоянной угловой скоростью.
Вследствие такого свойства главных осей инерции их иногда
называют постоянными осями вращения.
Допустим теперь, что к телу не приложено никаких заданных
сил. В вышенаписанных уравнениях B) будет
Может ли случиться, чтобы реакция в точке О обращалась в нуль
одновременно с реакцией в точке О"? Чтобы это осуществить,
86 ДИНАМИКА СИСТЕМЫ
необходимо к предыдущим условиям добавить уравнения
S
тх
= 0, 2 ту = 0.
Тогда ось вращения будет главной центральной осью инерции (п. 319).
Мы можем, следовательно, высказать следующее предложение:
И. Если совершенно свободное твердое тело, на которое не
действуют никакие внешние силы, начнет вращаться вокруг
одной из главных центральных осей инерции, то оно будет про-
должать вращаться вокруг этой оси и притом равномерно.
Благодаря этому свойству главным центральным осям инерции
дано наименование свободных осей вращения.
Примечание. Предыдущие результаты могут быть обобщены сле-
дующим образом:
Г. Допустим, что задаваемые силы приводятся к силе проходящей
через точку О, и к паре, вектор момента которой направлен по оси Ог.
Тогда угловая скорость ш не будет постоянной и для определения реакций
нужно будет обратиться к уравнениям A), положив в них
Опять необходимыми и достаточными условиями равенства нулю реакции
в точке О" будут равенства:
2 тхг = О, 2 тУг = ®'
В самом деле, эти условия будут:
= 0,
т. е. будут линейными однородными уравнениями относительно 2 тУг- 2 тхг>
определитель которых т4+(;зг) отличен от нуля, если только тело на-
ходится в движении. Следовательно, для 2 тУг и 2 тхг полУчаются зна"
чения, равные нулю.
2°. Точно так же, если предположить, что заданные силы, приложенные
к телу, приводятся к одной паре с вектором момента, параллельным оси Ог,
то для того, чтобы обе реакции в точках О и О" равнялись нулю, необ-
ходимо и достаточно, чтобы ось Ог была главной центральной осью инерции.
362. Физический маятник. Физический маятник — это тяжелое
твердое тело массы М, которое может вращаться вокруг непо-
движной горизонтальной оси.
Примем за ось г ось подвеса, вокруг которой может вращаться
тело, а за плоскость ху — вертикальную плоскость, содержащую ок-
ружность, описываемую центром тяжести О, причем осью Ох является
вертикаль, направленная вниз (рис. 202).
ГЛАВА XIX. ДИНАМИКА ТВЕРДОГО ТЕЛА
87
Пусть 6 — угол, образуемый к моменту t прямой OG с верти-
калью Ох. Угловая скорость в этот момент будет
и уравнение движения будет
Правая часть, представляющая собой сумму моментов сил тяжести
относительно оси Ог, равна моменту—MglsinO полного веса, при-
ложенного в центре тяжести, ордината которого есть _у —ZsinO.
db
Заменяя ш через -г,, получим
уравнение
d^b pi . д
Сравним это уравнение с уравне-
нием движения математического маят-
ника длины V, а именно с уравнением
^2= —^fsin8. Рис.202.
Мы видим, что движение физического маятника будет таким же,
как и движение математического маятника, длина которого
Этот математический маятник называется синхронным маятником
для рассматриваемого физического *).
Если на прямой OG отложить отрезок 00' = 1', то частица О'
твердого тела колеблется так, как если бы она была отделена от
тела и связана с точкой О невесомой нитью. Обозначим через р
радиус инерции тела относительно оси, параллельной оси Ог и про-
ходящей через центр тяжести. Получим (п. 317):
откуда вычисляем А2 и подставляем в значение V:
Отсюда следует, что 00' всегда больше, чем OQ, и что расстоя-
ния 00 и O'G, имеющие соответственно значения / и у, связаны
соотношением
*) Длину V называют также приведенной длиной физического маятника,
{Прим, перев.)
88 ДИНАМИКА СИСТЕМЫ
Ось, проведенная через О' параллельно оси подвеса, получила по
Гюйгенсу наименование оса качания. Все точки этой оси колеб-
лются так, как если бы они были отделены от тела и связаны не-
весомыми нитями с осью подвеса. Предыдущая формула показывает,
что ось качания и ось подвеса взаимно обратимы, так что если под-
весить тело за ось качания, то прежняя ось подвеса станет теперь
осью качания.
Теорема Гюйгенса. Если в плоскости, проходящей через
центр тяжести, по ту и другую сторону от него проведены на
неодинаковых расстояниях две параллельные оси, для которых
длины синхронных математических маятников одинаковы, то
эти длины в точности равны расстоянию между обеими
осями.
В самом деле, если I и lt суть расстояния от центра тяжести
до двух осей, проведенных через О и Olt a Z' — общая длина син-
хронного маятника, то
Г = / + ? и l' = h + %.
Сравнивая эти два равенства, находим:
! + <?-!.+?.
откуда, отбрасывая решение 1 = 1Х, получаем:
и следовательно, расстояние 1-\-1у между осями действительно равно
длине 1-\-у синхронного маятника. Если одну из осей принять за
ось подвеса, то другая будет осью качания.
На этом принципе устроен обратный маятник Катера (Kater), при-
меняемый в геодезии. Этот маятник является телом вращения, об-
разованным двумя сплющенными цилиндрами, соединенными стержнем.
Перпендикулярно к этому стержню и симметрично относительно его
середины укреплены два агатовых ножа, вокруг которых система
может попеременно качаться. Один из цилиндров полый, а другой
заполнен свинцом, так что центр тяжести расположен ближе к одному
ножу, чем к другому. По теореме Гюйгенса массы можно подобрать
так, чтобы периоды колебаний вокруг обеих осей были одинаковы,
и этот общий период будет периодом колебаний математического
маятника, длина которого равна расстоянию между ребрами ножей.
Маятнику придают внешнюю форму, симметричную относительно
середины стержня для того, чтобы сопротивление воздуха было
одинаково при колебаниях маятника вокруг обоих ножей. При этих
условиях, если периоды колебаний в воздухе вокруг обоих ножей
одинаковы, то они будут одинаковыми также и при колебаниях
ГЛАВА XIX. ДИНАМИКА ТВЕРДОГО ТЕЛА
89
в пустоте. Но общий период колебаний в пустоте будет несколько
меньше, чем в воздухе, как мы это уже видели для математического
маятника (п. 249).
Реакции оси при движении физического маятника. Рассмотрим
частный случай, когда физический маятник симметричен относительно пло-
скости хОу, в которой колеблется его центр тяжести. Ось подвеса будет
тогда главной осью инерции для точки О,
так как плоскость хОу будет пло-
скостью симметрии для эллипсоида
инерции в точке О. Следовательно,
имеем:
2 тхг = 0, 2тУг==о*
Из соображений симметрии можно
предвидеть, что реакция оси подвеса
на маятник может быть тогда приведена
к единственной силе Q', приложенной в
точке О и лежащей в плоскости хОу.
В этом можно легко убедиться, приме-
няя предыдущие общие формулы A).
В самом деле, допустим, что реакция
состоит из силы Q' (Л', Y', Z'), приложен-
ной в точке О, и силы Q"(X", Y", Z"),
приложенной в точке О" оси Ог
на расстоянии А от точки О. Так как
единственной силой, непосредственно
действующей, является вес Mg, при-
ложенный в точке G, то в рассматриваемом случае (рис. 203)
Рис. 203.
где последние две формулы очевидны, так как вес Mg лежит в плоско-
сти хОу. Тогда формулы A) после замены 2 тх через Mi и 2 тУ через Мт\
приводятся к виду
C)
0 = Z' + Z",
0 == — KY", 0 = hX".
Два последних равенства показывают, что X" и Y" равны нулю; две
составляющие Z' и Z", направленные по оси Ог, сумма которых равна
нулю, равны и прямо противоположны и могут быть отброшены, что
соответствует предположению, что Z' — 0, Z" = 0. Тогда реакция Q* равна
нулю, а реакция Q' находится в плоскости хОу, где ее компоненты по
осям Ох и Оу суть величины
X' = —
— ^ Мц — Mg,
D)
90 ДИНАМИКА СИСТЕМЫ
Вычислим составляющие Хх и У\ реакции Q' по направлению OQ и по
перпендикулярному к нему направлению ОР в плоскости хОу (рис. 203).
Имеем:
X] = X' cos 6 + Y' sin 8,
Yt = Л7 sin 6 — У cos в.
С другой стороны, так как
/ = ? cos в + *l sin в,
О = ? sin в — -г] cos в,
то из формул D) получим:
Xv = — Mufll — Mg cos 9,
Но на основании уравнения движения
г—If-
и согласно теореме кинетической энергии (предоставляющей первый интеграл
этого уравнения) имеем:
«» = Щ cos 6+ С.
Окончательно
Ai = - Mg (|f + l) cos 8 - MC7,
Так как Р — k2 — р2, то составляющая У\ по ОР имеет всегда знак,
противоположный sin в; она будет равна нулю, если тело сжать в точку,
т. е. если маятник превратить в математический, так как в этом случае
Р — k2. Этот последний результат очевиден, так как для математического
маятника реакция точки подвеса равна и противоположна натяжению нити.
363. Исследование изменения длины синхронного математи-
ческого маятника при перемещении оси подвеса заданного тела.
Формула I'==1-\- -у позволяет прежде всего исследовать изменение
длины синхронного маятника, когда ось подвеса перемещается в теле
параллельно самой себе. Само выражение этой длины показывает,
что /' имеет минимум, когда оба члена I и j равны между собой,
т. е. когда ось подвеса находится на расстоянии, равном радиусу
инерции р от центра тяжести. Тогда это минимальное значение
равно 2р. Если задаться длиной /', большей чем 2р, то существуют
два соответствующих значения I. Следовательно, оси подвеса, парал-
лельные заданному направлению, для которых синхронный матема-
тический маятник имеет одну и ту же длину V', образуют два круго-
вых цилиндра, общая ось которых проходит через центр тяжести.
ГЛАВА XIX. ДИНАМИКА ТВЕРДОГО ТЕЛА
91
Возьмем теперь произвольные оси подвеса. Для того чтобы уви-
деть, как изменяется длина /' синхронного математического маят-
ника, отнесем тело к главным осям центрального эллипсоида инерции.
Уравнение этого эллипсоида имеет вид
Обозначим через а, р, f направляющие косинусы оси подвеса Д
и через / ее расстояние от центра тяжести, т. е. от выбранного
начала координат. Момент инерции ЛТр2 системы относительно оси Д',
проведенной через центр тяжести параллельно оси подвеса, равен
(п. 318)
Следовательно, для длины син-
хронного математического маят-
ника получаем:
ш •
При помощи этой формулы
можно исследовать комплекс,
образованный осями, для которых
синхронный математический маят-
ник имеет заданную длину. Это
исследование выполнено в статье
Бёклён (В Ok I en, Crelle, т. 93),
в которой содержатся некоторые
важные результаты, указанные
в упражнении 5 в конце главы.
т
V 0
X
trig
s
'
i
\
Я' \
r J У
/
r
m'
m'g
Рис. 204.
364. Машина Атвуда. На каждое из двух колес однородного ворота,
вращающегося вокруг горизонтальной оси, намотана в противоположных
направлениях невесомая гибкая нить. Нити несут грузы, массы которых
/пит' (рис. 204). Исследовать движение этой системы.
Заданные силы суть веса mg, m'g и Mg грузов и ворота. Реакциями
связей являются натяжения Т и — Т нити Am и натяжения Т' и — Т' нити
А'т'. Кроме того, имеются реакции оси.
Будем считать положительным вращение от направленной вертикально
вниз оси Ох к оси Оу и обозначим через « угловую скорость, через х
их' — расстояния Am и А'т' и через R и R' — радиусы О А и О А'.
Система имеет полные связи, так как ее положение зависит только от
угла поворота ворота. Предполагается, кроме того, что трение отсутствует.
Поэтому уравнение движения может быть получено из теоремы кинетической
энергии в форме, указанной в п. 343.
Кинетическая энергия системы состоит из кинетической энергии -~-M№u>i
ворота и кинетических энергий-^ т (-&) и -n-m\'w) Т0чект и/я'. С дру-
гой стороны, работы весов обеих точек /пит' равны mgdx и m'gdx',
92 ДИНАМИКА СИСТЕМЫ
работа веса ворота равна нулю, так как его центр тяжести неподвижен.
Сумма работ реакций связей равна нулю. Следовательно, имеем:
L [а«»«.1 + т Щ^ + т> (^J] = mgdx + m'gdx'.
Но скорости точек шит' равны соответственно скоростям точек А
и А' ворота; следовательно,
dx dx' ,
Подставляя эти значения производных в предыдущее равенство, полу-
чим хравнение движения.
Это же уравнение можно получить, применяя теорему моментов коли-
честв движения относительно оси ворота. Сумма моментов сил приводится
к сумме моментов
mgR—m'gR'
весов mg и m'g; моменты всех остальных сил равны нулю.
С другой стороны, сумма моментов количеств движения точек ворота
равна М№<л, а точек т и т! равна
п dx , n, dx'
mRmR
Таким образом, имеем уравнение
~ [м&* + mR~
dx dx
-?г и —г
~ [м&* + mR~- m'R' ^) = mgR - m'gR',
dx dx' n „,
которое после замены -?г и —гг через дай — R <о приводится к виду
~ (м& + mR? -f m'R'2) = mgR — m'gR',
at \ I
откуда получается для -гг постоянное значение
Ао _ а mR — m'R'
dl~ "
Ускорения R -jt и —R' -rr точек mum' будут, следовательно, посто-
янными, и движения этих точек будут равнопеременными. При этом сразу
видно, что эти ускорения будут меньше чем g.
Для вычисления натяжения Т нити Am напишем уравнение движения
точки т:
из которого получаем:
Точно так же находим:
-»'(*+*'?)•
ГЛАВА XIX. ДИНАМИКА ТВЕРДОГО ТЕЛА
93
Найдем, наконец, реакции оси ворота. Можно допустить вследствие
симметрии, что реакции оси приводятся к одной силе Q, приложенной
в точке О и нормальной к оси. Применим к вороту теорему движения
центра тяжести. Так как эта точка остается неподвижной, то необходимо,
чтобы приложенные к вороту внешние силы Q, Mg, T и 7", перенесенные
в точку О, находились в равновесии. Отсюда следует, что реакция опоры
на ось вертикальна, направлена кверху и имеет значение
т. е.
_ ... . . ,.
О = (Мg -\-m-\-m)g
(mR
Эта реакция всегда меньше суммы трех весов и может ей равняться не
иначе, как при выполнении условия
mR — m'R',
при котором движение будет равномерным, так как в этом случае —тт = 0.
Заметим, что в рассматриваемой задаче ворот вращается вокруг главной
центральной оси инерции. Отсюда следует, как мы это видели раньше, что
реакция опоры определяется из формул, которые получаются, если прене-
бречь парой с вектором моментов, параллельным оси вращения, что сразу
позволяет найти значение Q.
II. Движение твердого тела параллельно
неподвижной плоскости
365. Общие положения. В предыдущих примерах было рассмо-
трено движение твердых тел, точки которых могли перемещаться
только параллельно неподвижной плоскости. Рассмотрим теперь
такое же движение в общем виде. Возьмем, например, цилиндр, лежа-
щий своим основанием на неподвижной плоскости; каждая точка тела
будет тогда описывать траекторию, лежащую в неподвижной пло-
скости, параллельной заданной неподвижной плоскости. В частности,
если через центр тяжести в его' начальном положении провести
плоскость хОу, параллельную
неподвижной плоскости, то центр У
тяжести будет оставаться в этой
плоскости. То же самое будет
для всех точек тела, лежащих
в начальный момент в этой пло-
скости. Рассмотрим сечение 5
тела плоскостью хОу. Для опре-
деления положения тела доста-
точно, очевидно, знать положение I
этого сечения S, т. е. коорди-
наты ? и т) центра тяжести О
(рис. 205) относительно неподвижных осей Ох и Оу и угол 8, обра-
зуемый осью Ох и каким-нибудь радиусом Gm, неизменно связанным
с телом.
Рис, 205.
94 ДИНАМИКА СИСТЕМЫ
Если предположить, что на тело действуют внешние силы, проек-
ции которых на оси Ох и Оу мы обозначим через Xv Yv X2, K2
то составим сначала два уравнения по теореме движения центра
тяжести:
где суммы 2 распространены на все внешние силы.
Проведем через центр тяжести G оси Gx' и Gy', параллельные
неподвижным осям, и обозначим через х'', у' координаты точки тела
относительно этих осей, а через Mk2— момент инерции тела относи-
тельно оси Gz', перпендикулярной к плоскости x'Gy''.
Относительное движение тела по отношению к осям Gx'у'г' есть
«Л
вращение с угловой скоростью -тт вокруг оси Gz'. Так как для
движения вокруг оси Gz' применима теорема момента количества
движения, то имеем уравнение
Последнее можно получить так же, как в п. 359, применяя теорему
кинетической энергии в относительном движении вокруг центра
тяжести.
Таковы три уравнения, определяющие %, % 8 в функции t.
Из комбинаций этих уравнений, которые могут заменить одно или
другое из них, упомянем следующие:
1°. Уравнение, получаемое применением теоремы момента коли-
чества движения относительно неподвижной оси Oz перпендикуляр-
ной к плоскости хОу. Согласно доказанной нами теореме сумма
моментов количеств движения различных точек тела относительно
оси Oz равна моменту количества движения Mu-J -ц — 1 всей
массы, предполагаемой сосредоточенной в центре тяжести, сло-
женной с моментом количеств движения Mk2 -тг в относительном
движении вокруг оси Gz'. Имеем уравнение
1М ?#) ?Ы>
2°. Уравнение, получаемое применением теоремы кинетической энер-
гии к абсолютному движению. Согласно теореме Кёнига (п. 349)
кинетическая энергия системы равна
Имеем поэтому уравнение
ГЛАВА XIX. ДИНАМИКА ТВЕРДОГО ТЕЛА
95
В скобках правой части третье слагаемое отсутствует, так как dz
для всех точек равно нулю.
Если обозначить через J момент инерции тела относительно оси,
перпендикулярной к плоскости хОу и проходящей через мгновен-
ный центр вращения плоской фигуры 5, то кинетическая энергия
тела будет -^Jy-jr) > так как скорости будут такими же, как если бы
тело вращалось вокруг этой мгновенной оси. Но так как рассматри-
ваемая ось перемещается в теле, то величина J является переменной.
Примечание. У тела могут быть и другие связи, кроме тех, кото-
рые заставляют его перемещаться параллельно неподвижной пло-
скости хОу. Тогда реакции, развиваемые этими связями, будут вхо-
дить в правые части некоторых из предыдущих уравнений и необ-
ходимо будет их исключить. Если, однако, эти связи не зависят от
времени и осуществляются без трения, то реакции связей не войдут
в уравнение кинетической энергии E).
Если имеется несколько твердых тел, движущихся параллельно
неподвижной плоскости, то можно применить к каждому из них
предыдущие уравнения и исключить
затем взаимные реакции тел или
можно применить общие теоремы
к совокупности этих тел. Из ниже-
следующих примеров будет вид-
но, как можно решать такого рода
задачи.
366. Пример I. Материальный стер-
жень длины 21 (рис. 206) и массы М
скользит без трения по горизонталь-
ной плоскости. Элементы стержня
притягиваются неподвижной осью Ох
пропорционально массам и расстоя- Рис. 206.
ниям.
Пусть ё, tj — координаты центра тяжести G стержня АВ, у — орди-
ната тр элемента массы т. Сила F, действующая на этот элемент, напра-
влена по тр и пропорциональна этому расстоянию и массе т. Следова-
тельно,
Поэтому дифференциальные уравнения движения центра тяжести будут:
Интегрируя их, найдем
5 = at + b, -г) =» Л sin (// + а).
Исключая ^, получим для траектории точки G уравнение
ifi = A sin (хе + еО.
где X и [л. — постоянные. Эта кривая имеет форму синусоиды.
96 ДИНАМИКА СИСТЕМЫ
Пусть Qx' и Gy' — оси, проведенные из точки G параллельно осям Ох
и Оу, 8— угол x'GB и г — радиус Gm, который считается положительным
в направлении от G к В и отрицательным в направлении от G к А.
Обозначая через х' и у' новые координаты точки т, получаем:
Уравнение теоремы момента количества движения, примененной к отно-
сительному движению вокруг центра тяжести, будет
где М№ — мрмент инерции стержня относительно точки G. Разделяя послед-
нюю сумму на две части, мы видим, что первая 2 ™х'т\ = 12 тх> Равна
нулю, так как подвижное начало совпадает с центром тяжести, а вторая
после перехода к полярным координатам
х' = г cos в, у' = г sin в
принимает вид
2 тх'у' = 2 mr2 sin 8 cos 8 = М№ sin 8 cos в.
После деления на М/с* уравнение обращается в следующее:
^i = _/a sin в cos в. F)
Интегрирование и анализ этого уравнения аналогичны интегрированию
и анализу уравнения математического маятника, как это видно, если по-
ложить 26 = <р.
•о
Умножая обе части уравнения движения на 2 -гг и интегрируя, получим:
где <¦> — значение угловой скорости при 8 = 0. Если о2 меньше, чем Р, то
будут получаться колебания по одну и другую сторону от Gx', если же <¦>*
больше, чем /2, то будет происходить полное вращение. При afl =/? имеем
—гг = / cos 6, tf = In i
если отсчитывать t от момента, когда 8 равно нулю. В этом случае стержень
стремится занять положение, перпендикулярное оси Ох, но он никогда не
достигнет его, так как 8 стремится к -^ , когда t неограниченно увеличи-
вается.
Колебания, определяемые уравнением F), названы Тэтом и Томсоном
(Natural Philosophy, § 322) квадрантными.
Пример II. Движение однородного тяжелого круга, который катится
без скольжения по прямой, оставаясь все время в вертикальной плоскости,
проходящей через эту прямую. Примем за ось Ох заданную прямую,
а перпендикуляр к ней, лежащий в вертикальной плоскости и направленный
вверх, — за ось Оу (рис. 207). Обозначим через а угол, образуемый
осью Ох с горизонтом. Система, состоящая из движущего диска, имеет
полные связи. Ее положение зависит только от одного параметра, а именно
от угла АСВ = 8, на который поворачивается диск, или от абсциссы О А = х
его центра.
Условие качения без скольжения можно осуществить или при помощи
нити, натянутой по Ох и намотанной на диск, или снабдив диск и непо-
ГЛАВА XIX. ДИНАМИКА ТВЕРДОГО ТЕЛА
97
движную прямую очень малыми зубцами. В некоторых руководствах для
того, чтобы выразить, что диск может только катиться по прямой без
скольжения, говорят, что прямая является абсолютно шероховатой.
Если мы предположим, что вначале точка В совпадает с точкой О,
то согласно предыдущему абсцисса х будет иметь значение
Силы, .действующие на диск, суть вес Mg, приложенный в его центре С,
и наклонная реакция Q прямой. Уравнение движения мы составим по тео-
реме кинетической энергии. Полная кинетическая энергия равна кинети-
ческой энергии -д- М[—jT-J всей массы, сосредоточенной в центре тяжести С,
сложенной с кинетической энергией -=- М№ \—гг\ в относительном вращении
Рис, 207.
вокруг центра тяжести с угловой скоростью —гг. Мы уже видели (п. 162),
что работа реакции равна нулю. Что касается элементарной работы веса,
то она равна Mg dx sin а. Имеем, следовательно,
1 Г / dx \2 I db \21
2 I \ at / ' \dt ) J
Заменим в его значением -ц-, разделим на М и выполним дифференцирова-
ние, указанное в левой части. Тогда, разрешая уравнение относительно —щ ,
получим:
d~lx sin а
Следовательно, центр диска движется равиоускоренно по прямой, парал-
лельной оси х. При этом полученное выражение показывает, что ускорение
всегда меньше, чем g и даже тогда, когда прямая вертикальна. Во всех
предыдущих рассуждениях мы не предполагали, что диск однороден, а пред-
полагали только, что его центр тяжести совпадает с центром фигуры.
7 Зак. 922. П. Аппель, т. II
98
ДИНАМИКА СИСТЕМЫ
Раньше, предполагая диск однородным, мы получили для № значение
Тогда уравнение движения будет следующее:
d"-x 2
!
Для вычисления проекций —F л N реакции Q на оси Ох и Оу напишем
уравнения движения центра тяжести:
М —тм = Mg sin а — F, М -~ = — Mg cos а -\- N.
Заменяя
<Г*х
его значением и замечая, что
d"-y
равно нулю, получим:
—ir Mg sin а, N = Mg cos а.
о
Следовательно, реакция постоянна.
Пример III. Движение по наклонной плоскости двойного конуса,
кажущегося поднимающимся, хотя в действительности он опускается
(R e s a I, Comptes rendus, т. CXI, стр. 547). Даны две прямые OD и OD',
одинаково наклоненные к горизонту и образующие между собой угол 2ср,
вершина которого находится внизу. На эти прямые положено тело, образован-
ное двумя однородными, одинаковыми конусами, соединенными основа-
ниями таким образом, что плоскость оснований совпадает с вертикальной
плоскостью 50' (рис. 208), проведенной через биссектрису Ох угла D0D'.
Рис. 208.
Требуется найти движение двойного конуса в предположении, что он может
катиться без скольжения по обеим прямым OD и OD'. Примем плоскость
фигуры за вертикальную плоскость, проведенную через биссектрису Ох
угла DOD', и выберем ось О~ по вертикали вверх и ось OZ горизонтально.
Обе прямые OD и OD', служащие направляющими для двойного конуса,
проектируются на плоскость чертежа по оси Ох; обе точки, в которых конус
касается этих направляющих, проектируются в точку Т; наконец, вершины
обоих конусов проектируются на ту же плоскость в одну точку С, так как
весь прибор симметричен относительно плоскости ?О?.
Касательные плоскости к обоим конусам, проведенные соответственно
через направляющие OD и OD', образуют с горизонтальной плоскостью
постоянные углы и вследствие этого неподвижны. Эти две плоскости пере-
секаются по неподвижной прямой От. Чтобы двойной конус казался под-
ГЛАВА XIX. ДИНАМИКА ТВЕРДОГО ТЕЛА 99
нимающимся, когда он предоставлен самому себе без начальной скорости,
необходимо, чтобы прямая От была расположена под прямой О? (как на
чертеже). Мы обозначим через / угол, который образует эта прямая с гори-
зонтом. Основание обоих конусов является окружностью, постоянно касаю-
щейся прямой От. Центр С этого основания, который одновременно является
центром тяжести прибора, описывает прямую O'S, параллельную От.
Если рассматривать плоскую фигуру, образованную основанием, движу-
щуюся в плоскости 6ОС, то ее мгновенный центр вращения находится
в точке Т, так как тело катится по обоим направляющим. Прямая ТС,
длину которой мы обозначим через г, является, следовательно, нормалью
к траектории точки С, т. е. к прямой O'S. Обозначим через s длину О'С,
через в — угол, на который конус повернулся от некоторого определенного
dH
положения. Тогда угловая скорость вращения системы равна —гг, а ско-
рость точки С будет такой, как если бы система вращалась с этой угловой
скоростью вокруг мгновенного центра Т, а именно:
За промежуток времени dt точка С приходит в С, а Г в V'. Прямые ТС
и Т'С параллельны, так как они нормальны к прямой O'S. CC равно ds.
Если через С провести прямую СЕ, параллельную Ох, то СЕ будет
равно СТ—СТ', т. е. — dr. Следовательно, в прямоугольном треуголь-
нике СС'Е угол при вершине С" постоянен и равен углу хОт. Обозначим его
через X, имеем:
CC = ds = г rf6 = — dr ctg X. B)
Установив эти геометрические соотношения, применим теорему кинети-
ческой энергии. На основании теоремы Кёнига кинетическая энергия равна
где М№ — момент инерции конусов относительно их оси. Имеем, следо-
вательно,
d [**- (г2 + *«) (^)\ = - Mg dr sin I ctg X,
так как сумма элементарных работ реакций связей равна нулю, а элемен-
тарная работа веса Mg на основании равенства B) есть
Mg C~C' sin / = — Mg dr sin / ctg X.
Обозначим через rQ начальное значение г и проинтегрируем обе части,
db
предполагая, что начальная скорость, т. е. начальное значение —гг, равно
нулю. Мы получим:
Ж) =2?(ro-r)si.WctgX. C)
Наконец, заменяя d§ его значением — ctg X, полученным из равенства B),
и обозначая через (л. постоянную Y%g sin I 'g ^> напишем
+ dr
t V ro-r
100
ДИНАМИКА СИСТЕМЫ
Так как г, начиная с г0, должно уменьшаться, как это очевидно геометри-
чески и как это видно из того, что подкоренное количество должно быть
положительным, то нужно брать знак минус. Окончательно
'=- /-f
го~г
D)
Таким образом, t выражено через г при помощи эллиптического интеграла.
Когда г стремится к нулю, t неограниченно возрастает. Центр тяжести стре-
мится к предельному положению А, никогда его не достигая. На основании
соотношений B) имеем:
где через 6 обозначен угол поворота тела, отсчитываемый от начального
положения. Далее из равенства B) получаем:
s — so = (r — r0) ctg А..
Эта последняя формула позволяет преобразовать соотношение D) в зависи-
мость между s. и i. Таким путем получится формула, определяющая движе-
ние центра тяжести С по прямой O'S.
Скорость V центра тяжести определяется, как это видно из равенства C),
соотношением
Эта скорость обращается в нуль в начальном положении при г = г0 и в ко-
нечном положении при г = 0. Следовательно, в этом промежутке она про-
ходит через максимум, который легко вычислить.
Движение основания конусов в плоскости ?05 можно получить, заставляя
катиться логарифмическую спираль г = roe~it&x по прямой Ох. Это выте-
кает из предыдущих уравнений. См.
статью Мангейма (Mannheim, Comp-
tes rendus, 3 ноября 1890), статью Сен-
Жермена (Saint-Germain, Comptes
rendus, 1891) и статью Флёри (F 1 е u r у,
Nouvelles Annales июнь 1854).
В упражнении 10 можио будет найти
указания для решения аналогичной за-
дачи, в которой двойной конус будет
заменен шаром.
Пример IV. Эллиптический маят-
ник. Так называется система двух тяже-
лых точек М и Мх, связанных между
собой неизменяемым невесомым стерж-
нем, из которых одна, М, движется без
скольжения по горизонтальной пря-
мой Ох, а другая, Мь должна оставаться
в вертикальной плоскости хОу (рис. 209).
Примем за ось у какую-нибудь вер-
тикаль, направленную вниз.
Силами, действующими на точку М, являются: ее вес mg, нормальная
реакция N оси Ох и натяжение Т стержня MMf, на точку М^ действуют
натяжение — 7" и вес m^g. Эти силы можно разделить на внутренние силы Т
и — Т и внешние N, mg и m^g или также на заданные силы mg,
и на реакции связзй N, Т, — Т.
м'
о
\
щ
\
К
\
11
х
г
IT
iff
Рис. 209.
ГЛАВА XIX. ДИНАМИКА ТВЕРДОГО ТЕЛА 101
Положение системы зависит только от двух параметров: от абсциссы х
точки М и от угла в между ММ1 и вертикалью. Следовательно, для опре-
деления движения достаточно двух уравнений, не содержащих реакций связей.
Первое из этих уравнений мы составим по теореме движения центра
тяжести G: сумма проекций внешних сил на ось х равна иулю. Следовательно,
(m + «i)^i = Q. О)
Таким образом, движение проекции центра тяжести G на ось Ох происходит
равномерно, что дает первое уравнение
тх + m^xi = ct + с'. B)
Так как связи не зависят от времени и осуществляются без трения, то
по теореме кинетической энергии, принимая во внимание, что работа веса nig
равна нулю, имеем:
/ni/2 -j- nijV^
d ^
Легко проверить, что сумма работ реакций связей равна нулю. Дей-
ствительно, сила N остается нормальной к перемещению ее точки прило-
жения, а сумма работ сил натяжений 7" и — Т равна нулю вследствие усло-
вия, что точки М и Mi должны оставаться на неизменном расстоянии.
Если проинтегрировать предыдущее уравнение, то получатся
mxv\ = 2mlg (yx + А). C)
Уравнения B) и C) определяют движение.
Исследуем подробно случай, когда начальная скорость центра тяжести
вертикальна или равна нулю. Уравнение A) показывает, что эта точка опи-
шет тогда вертикаль. Приняв ее за ось у, найдем, что 5 = 0. Тогда движение
геометрически описывается следующим образом: точки М, G и М± остаются
на неизменных расстояниях; две из них, G и М, описывают две взаимно-
перпендикулярные прямые Ох и Оу; следовательно, третья точка М1 пере-
мещается по эллипсу, для которого эти прямые являются осями. Полагая
MtM = I, yGMx = 8,
получим:
MG=—r^—. M,G =
m-\- ni
Следовательно, координатами точек М и М^ являются
х = ^А— sin 8, у = 0, Xi = 1>П sin 6, yt = I cos 6.
m + ni J m-\-ml
Чтобы вычислить 8 в функции t, достаточно внести эти значения
в уравнение C), где
Таким образом, после некоторых приведений получится:.
(m + mi sin* 8) (~J = Ц(т+ m,) (cos 6 + k),
где k — -j-. Отсюда найдется t в функции в при помощи одной квадратуры.
102 ДИНАМИКА СИСТЕМЫ
Начальные условия влияют только на величину k. Выражение для —п
показывает, что нужно рассмотреть два случая в зависимости от того, будет ли
коэффициент k больше или меньше+1. Но он всегда больше, чем —cos 60,
так как — в начальный момент будет обязательно вещественным.
В первом случае (?]>1)8 может изменяться от 0 до 2я и движущаяся
точка Mi будет периодически описывать полный эллипс. Во втором случае
(k < 1) эта точка будет колебаться между положениями, соответствующими
значениям в, обращающим в нуль величину cos 6 -\- k. Особый случай имеет
место при k — -\- 1. Тогда стержень ММЬ выходя из некоторого начального
положения, перемещается, стремясь к вертикали, направленной в сторону
отрицательных у, но никогда ее не достигает (рассуждения такие же, как для
математического маятника).
Вернемся к общему случаю, когда проекция скорости центра тяжести
на ось х есть величина постоянная, отличная от нуля, и исследуем отно-
сительное движение по отношению к осям хО'у', из которых ось О'у' все
время проходит через центр тяжести G, вследствие чего эта система осей
совершает равномерное поступательное движение параллельно оси Ох. От-
носительное движение будет таким же, как если бы оси у'О'х были непо-
движны (п. 334) и центр тяжести G имел вертикальную скорость. Это дви-
жение мы только что изучили (рис. 209).
Чтобы закончить исследование, надо вычислить еще натяжения 7* и — 7"
стержня, а также реакцию N неподвижной оси Ох.
Одно из уравнений движения точки М^ есть
щ 1& = ~т cos
Но мы имеем:
Кроме того, по теореме кинетической энергии мы имели уравнение
После дифференцирования по t оно превращается в следующее:
/are \а й«9 &ул
Подставляя значения \-гг) и -^ в -~ , получим:
dtyx /slnfl <f' F) , а ...
^- = Ш._/со80?(в).
Тогда на основании уравнения D) найдем:
Т = /И]/ !f (8) + »«i ту (g e ?'(e) H
ГЛАВА XIX. ДИНАМИКА ТВЕРДОГО ТЕЛА
103
Зная Т, найдем сразу же TV из условия того, что точка М движется по
оси Ох:
Отсюда
mg — N + Т cos 6 = m ^ = 0.
N = mg + T cos 8.
Пример V. Задача. Найти движение системы, образованной двумя
однородными тяжелыми стержнями АВ и А'В' одинаковой длины
и одинаковой массы, связанных невесомыми нитями одинаковой длины,
причем стержень АВ вращается
вокруг своей середины О, а вся си-
стема движется в неподвижной
вертикальной плоскости (рис. 210).
Положение системы зависит от
двух параметров: от угла наклона <р
стержня АВ относительно верти-
кали Ох и от угла 6, который обра-
зует прямая 00', соединяющая сере-
дины обоих стержней с этой верти-
калью. Система находится под
действием весов обоих стержней,
натяжений 7* и Т' нитей и реакции
неподвижной точки О- Для определе-
ния движения необходимы два урав-
нения, не содержащие реакций свя-
зей. Эти уравнения получатся из
теоремы кинетической энергии и тео-
ремы момента количества движения
относительно нормали к плоскости
фигуры в точке О-
Применим сначала теорем-у кинетической энергии. Так как длина нитей
предполагается неизменной, то работы натяжений попарно уничтожаются;
работа веса стержня АВ, так же как и реакции точки О, равна нулю; что
касается элементарной работы веса стержня А'В', то она имеет значе-
ние
— Mgi sin e rfe.
Рис. 210.
С другой стороны, кинетическая энергия стержня АВ равна
а кинетическая энергия стержня А'В' равна его кинетической энергии
1Г^2(<#) в относительном Движении вокруг центра тяжести О', увели-
ченной на кинетическую энергию его массы М, сосредоточенной в точке О',
т. е. на yr Mi2 I -r \ . Следовательно, имеем:
'* №Y + МР- (^f) = — Mgl sin e rf8.
Разделив на dt И выполнив дифференцирование, получим:
A)
Переходим теперь к теореме момента количества движения, примененной
ко всей системе. С помощью вычислений, аналогичных предыдущим, получим
104 ДИНАМИКА СИСТЕМЫ
для суммы моментов количеств движения относительно оси Ог, нормальной
к плоскости, значение
Сумма же моментов сил равна —Mgl sin Ь, и мы имеем:
d
-Л ,-"»«?+М»?) = -Л^/sin 0.
что мы напишем в виде
Умножим это уравнение на —-j и сложим с уравнением A) кинети-
ческой энергии. Получим:
du db
Величина —j- — -г не может быть постоянно равна нулю, так как в на-
чале движения она имеет произвольное значение и, следовательно,
Стержень АВ вращается равномерно. Из уравнения (II) получаем теперь
т. е. получаем уравнение движения математического маятника. Точка О'
движется, следовательно, так, как если бы не существовало стержня А'В'
и она была бы непосредственно связана с точкой О невесомой нитью.
Для вычисления реакций связей применим сначала теорему момента ко-
личества движения к стержню АВ, беря моменты относительно той же оси,
что и раньше. Это нам даст
Mk2 -rj- = моменту Т' -j- момент Т.
Так как -~ равно нулю, а натяжения Т и Т' параллельны, одинаково на-
правлены и находятся на одинаковых расстояниях по ту и другую сторону
от начала координат, то они должны быть равны между собой:
Т=Г.
Применим теперь теорему движения центра тяжести к стержню А'В'. Его
середина О' перемещается так, как если бы на нее непосредственно дей-
ствовала сила Mg веса стержня н два одинаковых натяжения Т и Т', пере-
несенных в эту точку. С другой стороны, движение этой точки такое же,
как если бы она имела массу М и была связана с точкой О невесомой нитью.
Следовательно, сумма 27" сил натяжения должна равняться реакции нити при
движении математического маятника длины / и массы М, так что
2Г=^Bа —3/cos6),
где а — постоянная, зависящая от начальных условий.
ГЛАВА XIX. ДИНАМИКА ТВЕРДОГО ТЕЛА
105
Теперь, зная натяжение Т, мы найдем реакцию точки О, написав, что эта
точка, рассматриваемая как центр тяжести стержня АВ, остается неподвиж-
ной. Тогда получится, что реакция Q должна находиться в равновесии
с равнодействующей Mg веса и с направленной вдоль 00' суммой обоих
натяжений, приложенных в точках А и В.
III. Трение скольжения и сопротивление среды
367. Общие соображения. В первом томе (гл. IX) мы указывали
на условия, которые имеют место, когда два тела А и В, сопри-
касающихся в одной точке, находятся одно по отношению к другому
п относительном покое или в относительном движении. Мы видели,
что силы взаимодействия обоих тел будут
следующие. Пусть в теле А материальной
точкой, в которой его касается тело В,
является точка т. Силами действия тела В
на тело А являются (рис. 211):
1°. Сила N, приложенная к телу А
в точке т и направленная нормально к сопри-
касающимся поверхностям; эта сила есть
нормальная реакция, препятствующая телу Л
проникать в тело В.
2°. Сила F, приложенная в той же
точке т и расположенная в общей касатель-
ной плоскости к соприкасающимся в точке т
поверхностям; эта сила есть трение сколь-
жения, препятствующее скольжению.
3°. Пара с вектором-моментом G, нор-
мальным к соприкасающимся поверхностям;
эта пара есть пара трения верчения, пре-
пятствующая верчению.
4°. Пара с вектором-моментом Н, лежащим в общей касательной
плоскости соприкасающихся поверхностей; эта пара есть пара тре-
ния качения, препятствующая качению.
Действия тела А на тело В выражаются силами и парами, соот-
ветственно равными и противоположными предыдущим. В общем
случае пары G и Н влияют на движение значительно меньше, чем
силы N к F. Мы начнем с рассмотрения случаев, когда этими парами
можно пренебречь, оставляя до следующего параграфа специальное
исследование трения качения и верчения.
Мы предположили, что оба тела А и В соприкасаются по очень
маленькой площадке, которую можно рассматривать как точку.
В некоторых случаях оба тела могут иметь бесчисленное мно-
жество геометрических точек касания. Это, например, будет иметь
место для цилиндра, поставленного на плоскость. В таких случаях
нужно будет применить предыдущие рассуждения ко всем геометри-
ческим точкам касания.
Рис. 211.
106
ДИНАМИКА СИСТЕМЫ
Примечание. Не следует думать, что трение является силой,
только препятствующей движению, а не способствующей ему. Дей-
ствительно, трение может, например, служить для переноса части
движения с тела А на тело В. Так, если ремень, находящийся
в быстром движении, соприкоснется с первоначально покоившимся
шкивом, то он будет сначала скользить по нему и лишь постепенно
будет сообщат ему движение. Сила, которая действует здесь как
увлекающая, стремящаяся сообщить точкам окружности шкива,
имеющим нулевые скорости, скорость рем:™, есть трение. Оно ока-
зывает сопротивление движению ремня, но в то же время ускоряет
вращение шкива (см. Re ц lea их,
Cinematique, Notes, стр. 633).
368. Трение скольжения. В первом
томе мы указали на обычно принимаемые
эмпирические законы трения скольже-
ния в состоянии покоя и в состоянии
движения и те ограничения, которые
следует в них внести на основании
опытов Гирна (Him).
Вообразим тело А (рис. 212), кото-
рое движется, скользя по телу В.
Пусть т — материальная точка тела А,
находящаяся в соприкосновении с В,
и N — нормальная реакция тела В на
тело А в этой точке. Сила трения при-
ложена в точке т, направлена в сто-
рону, противоположную относительной скорости этой точки по отно-
шению к В, и равна /Л/, где / — коэффициент трения. Этот закон
применим пока происходит скольжение, т. е. пока относительная
скорость точки т по отношению к телу В не равна нулю. Допустим,
что эта скорость становится равной нулю и такой остается.
Тогда может представиться несколько случаев:
1°. Тело А остается неподвижным по отношению к телу В;
в этом случае реакция В на А следует закону трения в состоянии
покоя.
2°. Относительным движением тела А по отношению к телу В
является качение и верчение; это будет более общим случаем. Тогда не
будет больше скольжения, и законы трения скольжения в состоянии
движения не будут больше применимы. Допускается, что в этом
случае применимы законы трения скольжения в состоянии покоя,
т. е. что можно рассматривать полную реакцию тела В на тело А,
как образованную из нормальной составляющей N и касательной
составляющей F</7V. В этом параграфе мы, разумеется, предпо-
лагаем, что можно пренебречь трениями качения и верчения. В про-
тивном случае необходимо было бы присоединить две пары, пред-
ставляющие собой эти трения.
Рис. 212.
ГЛАВА XIX. ДИНАМИКА ТВЕРДОГО ТЕЛА 107
3°. В исключительных случаях может оказаться, что тело А за-
канчивается острием т, которым оно скользит по телу В наподобие
волчка, скользящего по плоскости. В этом случае тело А всегда
касается тела В одной и той же точкой т, и если относительная
скорость точки т по отношению к В становится равной нулю и та-
кой остается, то в этом случае применимы законы трения скольже-
ния в состоянии покоя, и движение тела А относительно тела В
есть движение твердого тела вокруг неподвижной точки.
Мы будем в дальнейшем рассматривать коэффициент /0 трения
скольжения в покое, как равный коэффициенту / трения скольже-
ния при движении, несмотря на то, что в действительности /0 не-
много больше, чем /.
Ниже (п. 375) на примере мы покажем, что эти эмпирические
законы трения скольжения являются не только грубо приближенными
с точки зрения экспериментальной, но, как показал Пенлёве (Pain-
leve) в своих Lemons sur le frottement (Hermann, 1895)*), они могут
привести к математическим противоречиям, если их строго применять
к прижатым один к другому абсолютно твердым телам.
369. Возможные разрывы в уравнениях движения. 1°. Пусть Vr —
относительная скорость по отношению к телу В находящейся с ним
в соприкосновении материальной точки т тела А. До тех пор, пока Vr
отлично от нуля, происходит скольжение. Если Vr=0, то имеют
место качение и верчение тела А на теле В и тела В на теле А.
Допустим, что в начальный момент ^0 скорость Vr = 0. Нужно
узнать, будут ли в следующие моменты / > t0 оба тела катиться
и вертеться или они будут скользить одно по другому. Чтобы от-
ветить на этот вопрос, поступаем следующим образом. Предполагаем,
что имеют место качение и верчение, т. е. что скорость Vr остается
равной нулю. Тогда реакция тела В на тело А на основании принятых
нами законов будет состоять из нормальной реакции N и касательной
реакции F, причем F <C fN и направление силы F неопределенно. При
этих условиях составляем уравнения задачи и вычисляем нормальную
реакцию N и касательную реакцию F. Если найденное значение F
окажется меньше, чем fN, то сделанное предположение будет правиль-
ным, а именно: движение тела А по телу В будет качением и верчением.
Это движение будет продолжаться до тех пор, пока сила F не сде-
лается больше, чем fN. Начиная с этого момента, будут одновре-
менно происходить скольжение, качение и верчение и уравнения
нужно будет изменить. Если, наоборот, найденное значение F будет
с самого начала больше, чем fN, то движение качения и верчения
без скольжения будет невозможно. С самого начала будет происхо-
дить скольжение и нужно будет написать уравнения движения, приме-
няя законы трения скольжения при движении. Это движение
*) Имеется русский перевод: Пенлёве П., Лекции о трении, ГИТТЛ,
М., 1954. (Прим. перев.)
108 ДИНАМИКА СИСТЕМЫ
скольжения будет происходить до тех пор, пока из уравнений, предпо-
лагаемых проинтегрированными, будут получаться для Vr значения,
отличные от нуля. Если в некоторый момент tt выражение Vr обра-
тится в нуль, то возникнет вопрос о том, будет ли скорость Vr,
начиная с этого момента, оставаться равной нулю или нет. Тогда
перед нами опять возникнет задача, решение которой мы только что
указали.
2Э. Если тело А касается тела В острием т. и если в некоторый
момент t0 относительная скорость Vr этой точки по отношению
к телу В равна нулю, то возникнет вопрос о том, будет ли ско-
рость Vr в момент t > t0 оставаться равной нулю или будет отлич-
ной от нуля, т. е. будет ли точка т оставаться по отношению
к телу В неподвижной или нет. Для этого поступаем как в преды-
дущем общем случае: последовательно делаем оба предположения
и выясняем, на каком из них нужно остановиться.
3°. Рассмотрим еще один вид разрывности в уравнениях, который
важно отметить. Вне зависимости от того, имеет ли место скольже-
ние или качение, может случиться, что алгебраическое значение реак-
ции N, вначале положительное, обращается в некоторый момент t в
нуль, а зятем становится отрицательным. Тогда, если тела могут отде-
литься друг от друга, то в момент t они отделятся. Если тела не
могут отделиться друг от друга, то нормальная реакция изменит
знак. Так как сила трения существенно положительна, то вследст-
вие того, что реакция Л/ отрицательна, силу трения нужно будет
в случае скольжения принять равной —/Л/', а в случае качения при-
нять меньшей, чем —/А/.
Следовательно, начиная с момента t, необходимо будет изменить
уравнения движения, заменив / коэффициентом —/. Если не
соблюсти эту предосторожность, то, начиная с момента t, уравнения
будут представлять движение, в котором касательное воздействие В
на А стремится увеличить относительную скорость точки т тела А
по отношению к телу В, что абсурдно.
370. Примгр I. Однородный круглый тяжелый диск, находящийся в вер-
тикальной плоскости (рис. 207), поставлен на неподвижную прямую Ох, на-
клоненную к горизонту под углом а, и предоставлен самому себе без на-
чальной скорости. Предполагается, что имеется трение и спрашивается, будет
ли диск катиться или скользить.
Допустим, чте имеется качение. Тогда нужно будет разрешить вторую
задачу п. 366, где, как мы видели, нормальная реакция прямой на диск ока-
залась рлвной N = Мg cos а, а касательная реакция была равна -гг Mg sin a.
Для того чтобы качение было возможно, необходимо, чтобы эта касатель-
ная реакция была меньше, чем fN, т. е. чтобы
aa, tga<3/.
где /—коэффициент трения. Если это условие не выполняется, то качение
без скольжения невозможно; диск будет скользить, одновременно вращаясь.
ГЛАВА XIX. ДИНАМИКА ТВЕРДОГО ТЕЛА 109
Исследуем задачу при этом новом предположении. Теперь реакция пря-
мой на диск имеет нормальную составляющую N и касательную составляю-
щую /Т = /Лг, направленную вдоль АО. Угол АСВ = 8 и абсцисса О А = х
центра тяжести (рис. 207) не связаны больше никаким геометрическим соотно-
шением, так как движение не является чистым качением. Уравнения движения
центра тяжести имеют вид
dlx
М -тр; = Mg Sin а — fN, 0 = — Mg COS а-\- N.
Следовательно, нормальная реакция постоянна. Подставляя ее значение
N = Mg cos а в первое уравнение, получим:
-^ — g(s\na — /cos a).
Правая часть имеет значение постоянное и положительное в силу предпо-
ложения, что tg 1 > 3/. Так как по условию диск вначале находится в по-
кое, то
X = Щу- (sin a —/COS о).
Применим теперь теорему моментов к относительному движению вокруг
центра тяжести. Мы имеем:
Так как k- = -=- и диск вначале покоится, то отсюда получаем:
f*2 cos a
R
Для проверки обозначим через и скорость точки диска, находящейся
в А. Эта скорость является результирующей скорости от вращения вокруг
центра тяжести и скорости поступательного движения вместе с ним:
dx db
На основании предыдущих уравнений находим:
и = gt (sin a — 3/cos a).
Эта скорость в силу условия tga > 3/ положительна и никогда не обра-
щается в нуль. Скольжение будет происходить все время.
Если нет трения, то диск, предоставленный самому себе, будет сколь-
зить без качения.
371. Пример II. Движение с трением вертикального колеса по гори-
зонтальной, прямой. Рассмотрим однородное колесо радиуса R и массы М,
поставленное вертикально на горизонтальную плоскость и начинающее ка-
титься в вертикальной плоскости. Из соображений симметрии очевидно, что
колесо останется в начальной вертикальной плоскости, которую мы примем
за плоскость чертежа хОу. Пусть (рис. 213)
С — центр колеса,
В — точка, в которой колесо касается горизонтальной плоскости Ох,
х — абсцисса ОВ центра С,
в — угол, на который колесо повернуто в положительном направлении
от оси Ох к оси Оу, отсчитываемый от начального положения.
по
ДИНАМИКА СИСТЕМЫ
Первая фаза. Центр С имеет горизонтальную скорость v. алгебраиче-
dx n
ское значение которой равно -т-. В то же время колесо вращается вокруг
dQ т о
своего центра с угловой скоростью ш = т>- Точка колеса, находящаяся в В,
имеет скорость и, которая является результирующей скорости v перемеще-
ния центра и скорости R -г вращения вокруг центра:
dx
О)
Допустим для определенности, что в момент t = 0 абсцисса х равна
нулю, а скорость и положительна. Тогда наиболее низкая точка колеса
скользит по Ох в положи-
ла тельном направлении и сила
У /* л ~"~"\ трения будет, следователь-
но, направлена в противо-
положную сторону. Силы,
приложенные к твердому
телу, суть вес Mg, нормаль-
ная реакция N грунта и
сила трения fN.
Теорема движения цент-
ра тяжести в проекции на
х ось Оу выражается здесь
уравнением
В
Рис. 213.
так как координата у точки С постоянна. Имеем, следовательно, N = Mg.
Теорема движения центра тяжести в проекции на ось Ох выражается урав-
нением
Наконец, если обозначить через МК1 момент инерции колеса относи-
тельно оси, проведенной через С перпендикулярно к его плоскости, то по
теореме момента количества движения, примененной к движению относи-
тельно центра тяжести, имеем:
так как момент силы трения относительно точки С равен —/Л/7?.
На основании этих формул центр С совершает прямолинейное равно-
замедленное движение. Действительно, из уравнения B) имеем:
V . ' " I at f {Л\
где v0 — начальное значение скорости v. Угловая скорость уменьшается
также пропорционально времени:
ИГ—Wt + I
E)
где <i>0 — начальное значение угловой скорости. Выражение A) для и будет
теперь такое:
F)
ГЛАВА XIX. ДИНАМИКА ТВЕРДОГО ТЕЛА 1 1 1
где «0 равно и0 4- /?ш0. Эта скорость и уменьшается пропорционально вре-
мени t и обращается в нуль по истечении времени
т= "о
"(¦+?)'
Вторая фаза. В момент t = Т точка колеса, находящаяся в соприкосно-
вении в В, имеет скорость, равную нулю. Теперь нужно узнать, будет ли
последующее движение скольжением или качением. Можно предвидеть, что
оно будет качением, т. е. что скорость и точки касания останется равной
нулю. В самом деле, если она примет значение, отличное от нуля, то как бы
это значение ни было мало, система будет вновь находиться в условиях,
аналогичных начальным условиям, и сила трения скольжения fN снова при-
ведет скорость и к нулю. Следовательно, начиная с момента Т будет про-
исходить качение.
Если пренебречь трением качения, то касательная реакция F горизон-
тальной плоскости будет тогда следовать закону трения скольжения в со-
стоянии покоя, т. е. будет неизвестной силой, меньшей чем fN. Мы проверим
это свойство, показав, что F = 0. Так как имеет место качение, то работы
сил F, N и веса будут, очевидно, равны нулю и движение качения будет
равномерным. Имеем:
сРх
и уравнение движения центра тяжести M—Tp= — F показывает, что F—0.
dx db
Следовательно, в этой второй фазе движения —тг и -уг остаются постоян-
ными, начиная с момента времени Т и равными значениям V и 2, которыми
они в этот момент обладают и которые легко вычисляются из предыдущих
формул. Наконец, и остается все время равным нулю, так что
Мы указали сейчас способ вычисления конечного значения скорости
центра как функции начальных данных. Можно заранее найти эту скорость,
если воспользоваться следующим приемом.
Исключая / из уравнений B) и C), получаем
d"-x fea rf28 _
dt* R dt* '
откуда, интегрируя, получаем
dx /fe2 rf8 k9-
V G)
Величина G) остается, следовательно, постоянной в- течение первой и
второй фазы движения, так как уравнение G), полученное исключением /,
будет иметь место, каков бы ни был закон касательной реакции. В конечной
фазе
dx -V rf6_D_ V
ЧГ - ' dt ~ R-
Следовательно, подставляя эти значения в равенство G), получим:
i + T^j^o-ir^o. (8)
1 1 2 ДИНАМИКА СИСТЕМЫ
откуда находим V. Например, если при v0 положительном мы будем иметь
v0 jp- ш0 < 0, то конечное движение при качении будет таким, что V < 0;
оно будет происходить в сторону, противоположную начальному движению
центра С.
Это легко осуществить, бросив колесо вперед (г/0 > 0) после того, как
ему было сообщено сильное вращательное движение 1<о0 > -^-J. Тогда ко-
лесо сначала удалится, а потом прикатится обратно.
Уравнение G) обозначает, что в течение всей продолжительности дви-
жения материальная точка колеса, находящаяся в каждый момент над цент-
ром на расстоянии -=- от него, имеет постоянную абсолютную скорость. Если
колесо является настолько тонким, что
у Vn' его можно отождествить с материальной
окружностью, то k = R, и точкой, ско-
В \—*-N' рость которой постоянна, является мате-
риальная точка, проходящая через наи-
высшую точку А.
Пример III. Лестница АВ (рис. 214)
массы т опирается на горизонтальный
пол Ох и на вертикальную стену Оу.
Средняя линия лестницы предполагается
расположенной в плоскости, перпенди-
кулярной к стене и полу, которую мы
примем за плоскость чертежа. Лестнице
сообщена начальная скорость, причем
так, что точка В приближается к точке О.
Найти движение, допуская, что имеется
треиие на стене и на полу и что коэф-
фициент трения равен на обоих концах
единице (/=1).
Заметим прежде всего, что так как коэффициент трения равен 1, то
лестница в любом положении будет в равновесии. В самом деле, центр
тяжести G находится на середине лестницы АВ (рис. 214). Если в точках А
и В провести две прямые, образующие с нормалями к стенке и полу углы
по 45° (угол трения в рассматриваемом случае), то точка пересечения этих
прямых будет всегда находиться слева от вертикали, проходящей через
точку G, и вследствие этого при любом наклоне лестницы будет существо-
вать равновесие (п. 193). Заметим еще раз, что в рассматриваемом случае
точка G есть середина отрезка АВ.
После того как лестнице сообщен толчок, на нее будут действовать
следующие силы: вес mg, приложенный в точке G, нормальная реакция N
пола в точке А и сила трения в той же точке А, направленная от А к О
и равная N, так как /= 1, наконец, нормальная реакция N' стены в точке В
и сила трения N' в той же точке В, направленная по ОВ. Обозначим через а
угол между лестницей и стеной, через 21— длину лестницы и через mk2 —
ее момент инерции относительно оси, перпендикулярной к плоскости чертежа
в точке G. Уравнения движения центра тяжести (,?, г\) имеют вид
d4 ж„ „ ...dS . ,r, + K A)
Применим теперь теорему моментов к относительному движению вокруг
центра тяжести G. Это относительное движение является вращением с угло-
ГЛАВА XIX. ДИНАМИКА ТВЕРДОГО ТЕЛА 113
вой скоростью —тг вокруг оси, проведенной через G перпендикулярно к пло-
скости чертежа. Следовательно, имеем:
mk4- -^L = t{N — N') sin a — / (JV + JV') cos a, B)
как это видно из непосредственного геометрического вычисления моментов
сил относительно точки О. Из уравнений A) определяем N' — N и N' -\-N
и вносим эти величины в уравнение B). Получаем:
d'-a
~W
Но
? = I Sin a, 7) = / COS a,
Ра
D)
Подставляя производные D) в равенство C), получим окончательно уравне-
ние движения
Это уравнение аналогично уравнению движения математического маятника,
подверженного сопротивлению среды, пропорциональному квадрату скорости
(п. 249).
Для интегрирования положим
da _ , <Ра_ _ da!_ _ da' da_ _ 1_ da'2 J^ _ X ?/ _ ft
~di ~a ' ~d~W ~ ~dt da dt ~ 2 rfa ' IF " ' "P" ~~ ~2 '
Тогда уравнение примет вид линейного уравнения относительно а'2:
da'2 , ,,
—— = Аа * — ft COS а. F)
Общий интеграл этого уравнения
а'2 = Се^ — д ^ Х2 (sin а — X cos а). G)
Если дана начальная угловая скорость а0, соответствующая значению
a = а0, то
C=^-Xa»[«^ + T-^(sina0-XcoSa0)]. (8)
Формулы A) позволяют вычислить N и N' в функции а и а' и, следо-
вательно, в функции толбко а. Предыдущие вычисления справедливы лишь
до тех пор, пока N и N' положительны. Если одна из этих реакций обра-
щается в нуль, становясь потом отрицательной, то соответствующий конец
честницы освобождается и уравнения движения должны быть изменены.
, / м- cqs о0 . da'2
Щ / ^ " **«Л ГЧШ^Г\тя ППЛП1Т1П
Если а0 больше, чем 1/ ——г—~-to производная согласно равен-
ству F) будет вначале положительна, а'2 будет постоянно возрастать и лест«
ница будет скользить с возрастающей'скороетъю.
8 Зак, 922. П. Аппель, т. II
114
ДИНАМИКА СИСТЕМЫ
Если а'о меньше, чем
то а'2 будет вначале уменьшаться.
(л cos a0
__ .
В этом случае может оказаться, что при некотором значении ос величина а'г
обратится в нуль. Тогда лестница в соответствующем положении остановится,
так как она в любом положении находится в равновесии.
Можно также исследовать случай, когда коэффициент трения / имеет
произвольное значение.
372. Трение цапф в подшипниках. Для того чтобы заставить тело
вращаться вокруг оси, с ним связывают Два одинаковых круглых прямых
цилиндра Тх и Г2 (рис. 215), размещенных так, что один является продол-
жением другого. Это — цапфы. Цапфы опираются на две поверхности,
имеющие форму круговых цилиндров с ^
общей осью, параллельной оси цапф. Эти s
поверхности называются подшипниками.
На рис. 216 изображено прямое сечение
лежащей в подшипнике Сх цапфы Тх
с преувеличенной разностью радиусов.
Рис. 215.
Допустим, что снабженное цапфами и приведенное выдвижение твердое
тело имеет центр тяжести на оси цапф и находится под действием сил, приво-
дящихся к паре с моментом Н, лежащей в плоскости, перпендикулярной
к оси цапфы, и к одной силе Р постоянного направления, перпендикулярного
к оси. Можно всегда предполагать, что эта сила пересекает ось, изменив
подходящим образом пару Н. На чертеже ось предположена горизонтальной,
а сила Р вертикальной. Посмотрим, что происходит на одном из концов.
Цапфа, вращаясь в направлении стрелки В, трется о дно подшипника. Сна-
чала цапфа по нему катится и ее центр останавливается в положении Ох,
причем точка касания находится в точке А±. После этого цапфа вращается
вокруг своей оси Ot и трется о подшипник в точке А\. Следовательно,
реакция подшипника будет состоять из нормальной реакции Nb пересекающей
ось, и касательной силы /Л^. Обозначим через <р угол, образованный реак-
цией Nt с направлением Р. На втором конце будет происходить то же самое:
силами, приложенными к цапфе, будут JV2 и fN2; угол <р будет такой же,
так как подшипники удерживают ось в горизонтальном положении. Тело
будет тогда вращаться вокруг неподвижной оси, а именно, оси цапфы. Его
центр тяжести будет неподвижным, и поэтому сумма проекций внешних сил
на любое направление будет равна нулю. Спроектируем силы последовательно
на направление Р и на направление, перпендикулярное к Р и к оси, заме-
чая, что пара Н проекций не имеет:
р _
N2) cos f—f(Nx + N2) sin <p = 0,
N2) sin <f—f(Nx + N,J cos ;p = 0.
ГЛАВА XIX. ДИНАМИКА ТВЕРДОГО ТЕЛА 115
Из второго уравнения находим tg <p = /. Следовательно, <р равен углу
трения. После этого, заменяя в первом уравнении / через tg <р, получим:
ЛГХ + N2 = P cos у.
Чтобы получить теперь уравнение движения, применим теорему момен-
тов относительно оси цапфы. Обозначив через MW1 момент инерции отно-
сительно этой оси, через ш—угловую скорость и через р — радиус О^А^
цапфы, получим
или окончательно
При составлении этого уравнения надо было иметь в виду, что сумм1
моментов обеих сил, составляющих пару, относительно оси в точности равна
моменту Н, так как, по предположению, пара перпендикулярна к оси.
373. Регулятор с лопатками. Рассмотрим ворот массы М и радиуса R,
вращающийся вокруг горизонтальной оси при помощи двух цапф радиуса р.
На ворот навернута веревка, массой которой пренебрегаем и которая све-
шивается вертикально, так как к ее концу привязан груз массы т. На
поверхности ворота смонтированы одинаковые плоские лопатки, плоскости
которых проходят через ось ворота. Эти лопатки попарно диаметрально
противоположны, так что общее их число п четно. Когда ворот вращается,
лопатки ударяют о воздух. Вследствие этого на каждой лопатке возникает
нормальное давление, направленное в сторону, противоположную вращению.
Так как все лопатки одинаковы и попарно диаметрально противоположны,
то все эти давления равны, попарно прямо противоположны и приводятся
к одной паре, вектор момента которой параллелен оси ворота. Вычислим
сумму моментов этих давлений относительно оси. Допускается, что давле-
ние р воздуха на элемент поверхности da пропорционально площади этого
элемента и квадрату его скорости. Если через г обозначить расстояние от
элемента лопатки до оси, а через ш — угловую скорость ворота, то получим
р = hvP-г*- da.
Момент этого элементарного давления относительно оси
рг = Лш2г3 da,
а результирующий момент для одной лопатки будет
шЗ Г
где (л. — некоторая постоянная. Результирующий момент всех лопаток равен
л-кратному значению этой величины.
На ворот действуют его вес Mg, приложенный на оси, натяжение Т
веревки, несущей груз, давления на лопатки и, наконец, касательные и нор-
мальные реакции подшипников на цапфы. Мы можем перенести на ось силу Т
параллельно самой себе, оставляя ее в плоскости, нормальной к оси, при-
соединив при этом пару с моментом TR, возникающую от этого переноса.
Эта пара увеличивает угловую скорость а>. В результате имеем вертикаль-
ную силу
Р = Т + Mg,
приложенную к оси, пару с моментом
и реакции подшипников.
8*
116 ДИНАМИКА СИСТЕМЫ
На основании формулы предыдущего пункта, обозначив через <р угол
трения в подшипниках, получаем уравнение движения
М№ -^- = TR — лци>2 — р (Т + Mg) sin <f.
С другой стороны, скорость груза пг, подвешенного к веревке, равна Ru> и
уравнение движения этого тела, подверженного действию его веса и натяже-
ния Г, будет:
mR~ =
Исключая из этих двух уравнений Т, получаем уравнение движения в форме
X = ..,„ , ^ п , а = -Л- [mR — р (М + m) sin о)
Mk2 + от/?2 _ mRp sin 9 П(х l r v ' Tl
где
— постоянные.
Первая постоянная X существенно положительна, так как р < R. Вторая
постоянная а может быть положительной, отрицательной или равной нулю.
1°. а > 0. Допустим, что ворот предоставлен самому себе без начальной
т, da
скорости. Тогда производная ——- будет вначале положительной и угловая
скорость ш будет постоянно возрастать до тех пор, пока она не станет рав-
ной \г а. Когда <о стремится к ]/" а, тогда
¦-1 /¦-
~ X ./ a ¦
неограниченно возрастает. Следовательно, угловая скорость будет возрастать
и стремиться к Yа [рассуждения такие же, как и при падении тяжелого
тела в сопротивляющейся среде (п. 213)].
2°. а. <; 0. Полагая по-прежнему, что начальное значение ш равно нулю,
й
получим —7т- < 0. Следовательно, согласно уравнению ворот стремится вра-
at
щаться в сторону, противоположную той, в которую его тянет вес mg.
Это — абсурд. В этом случае вес mg недостаточен чтобы преодолеть тре-
ние в начале движения, и ворот остается в равновесии. Уравнения, получен-
ные в предположении движения, неприменимы. Полное исследование случая,
когда ш0 > 0, аналогично исследованию восходящего движения груза в сопро-
тивляющейся среде.
Случай «<0 не может иметь места, когда отсутствует трение. Действи-
тельно, если у = 0, то а положительно.
374- Самоторможение. Может случиться, что трение совершенно
препятствует некоторым движениям, которые при отсутствии трения
геометрически возможны. В этом случае говорят, что имеется само-
торможение. Такой случай можно определить по уравнениям как
результат того, что равновесие продолжает сохраняться при сколь
угодно больших значениях движущих сил.
ГЛАВА XIX. ДИНАМИКА ТВЕРДОГО ТЕЛА
117
Рассмотрим, например, тяжелое тело, положенное на шерохова-
тую плоскость, наклоненную к горизонту под углом, меньшим угла
трения. Если на это тело оказывать давление с силой, направленной
вертикально вниз, то оно не будет двигаться, как бы велика ни
была эта сила.
375. О трудностях, возникающих при приложении обычно прини-
маемых эмпирических законов трения. Исследования Пенлёве. В двух
первых примерах, которые мы рассмотрели (пп. 370 и 371), нормальная со-
ставляющая реакции обоих соприкасающихся тел, выраженная в функции пере-
менных, определяющих положения и скорости точек системы, имеет такое же
выражение, как если бы трение отсутствовало. Другими словами, это выра-
жение не зависит от коэффициента /. Задачи, в которых такое явление имеет
место, должны рассматриваться как наиболее частные и вместе с тем наи-
более простые.
В более общих случаях, наоборот, выражения нормальных реакций
в функции переменных, определяющих скорости и положения точек системы,
зависят от коэффициента трения /. В этих случаях как при трении во
время движения, так и при трении в начале движения могут представиться
некоторые особые обстоятельства, которые приводят или к неопределенно-
стям, или к невозможности задачи. Эти особые обстоятельства были впер-
вые указаны Пенлёве в его Lecon stir le frottement (Hermann, 1895) и в за-
метке, представленной Академии наук (Comptes rendus, т. СХХ1, 1895,
стр. 112). Не следует думать, что только в исключительных случаях могут
оказаться возможными такие трудности. Наоборот, они возникают в наиболее
общих случаях, по крайней мере при
достаточно больших значениях эмпи-
рического коэффициента трения /.
Поэтому необходимы новые экспе-
рименты для нахождения законов
трения, не приводящих более к этим о
затруднениям. Мы не можем здесь
входить в подробности изысканий
Пенлёве. Мы удовлетворимся, пока-
зав лишь на одном из многих при-
веденных в Lecons sur le frottement
примеров, каковы те трудности, кото-
рые могут представиться при при-
менении обычных законов трения.
Другие примеры можно найти в ин-
тересной статье Майера (Mayer)
Zur Theorie der gleitenden Reibung
(Berichte der K6nigl. Sachsischen
Oesellschaft der Wissenschaften zu
Leipzig, 3 jufn 1901).
Рассмотрим две материальные У
точки М и Мх массы 1, связанные не-
весомым твердым стержнем ММ±
длины г. Точка М скользит с трением
по неподвижной горизонтальной прямой Ох, с которой она не может сойти, и
система ММ\ движется в вертикальной плоскости хОу, проходящей через Ох.
Найти движение, предполагая, что система находится под действием только
силы тяжести (Пенлёве, Lecons, стр. 98).
Обозначим через 8 угол хМм^ (рис. 217), через х — абсциссу точки М
и через х1ч у± — координаты точки Afj.
{
т
д
\
гд.
У
а.
\
у,
i
X
X
Рис. 217.
118 ДИНАМИКА СИСТЕМЫ
Внешними силами, действующими на систему ММи являются полный
вес 2^, приложенный в центре тяжести G, находящемся на середине от-
резка ММ1: и реакция R оси Ох, составляющие которой по осям Ох и Оу
мы обозначим через Rx и Ry.
Уравнения движения центра тяжести, если обозначить штрихами произ-
водные по времени, получаются непосредственно в виде
x"+x" = Rx, y'; = Ry + 2g. A)
По теореме моментов для движения относительно осей Gx'y', проходя-
щих через точку G, получаем:
— 8" = - L (Ry cos 8 - Rx sin 6), B)
г2
так как момент инерции относительно центра тяжести G равен -у, а коор-
динаты точки М в системе Gx'y' равны —=- cos 6 и —=• sin 6.
Из геометрических связей непосредственно получаем:
xt — х -f- r cos 8, yj = г sin 8
и, подставляя в уравнения A), находим:
2х" — г sin 6 6" — г cos 8 б'2 = Rx<
C)
r CoS 6 6" — г sin 6 б'2 = 2g+Ry.
Внося значения Rx и Ry, выводимые из этих уравнений, в уравнение B),
получаем:
х" sin 8 — гв" + g cos 8 = 0. D)
Применим теперь эмпирические законы трения. Полную реакцию оси Ох
в точке М мы обозначим опять через R. Абсолютное значение нормальной
составляющей есть абсолютное значение величины Ry; касательная соста-
вляющая по абсолютному значению равна абсолютному значению вели-
чины Rx. Касательная составляющая имеет знак, противоположный знаку
скорости точки М, и равна абсолютному значению fRy, где /— коэффициент
трения. Имеем, следовательно, в зависимости от обстоятельств
Rx=± fRy.
Мы напишем
Rx = - *fRy, E)
где е = + 1. Рассматривая последовательно различные возможные случаи,
мы увидим, что нужно брать следующие знаки:
если Ry > 0, х' > 0, то нужно брать Rx < 0, е > 0;
если Ry > 0, х' < 0, то нужно брать Rx > 0, е < 0;
если Ry < 0, х' > 0, то нужно брать Rx < 0, t < 0;
если Ry < 0, х' < 0, то нужно брать Rx > 0, е > 0.
Резюмируя сказанное, нужно выбирать г таким образом, чтобы
tx'Ry > 0 (е = ± 1). F)
Заменим теперь в равенстве C) Rx его выражением — zfRy и разрешим
уравнения C) и D) относительно трех величин Ry, x" и 8". Полагая
D = 1 -f cos2 8 + ?/ sin 8 cos 8, G)
ГЛАВА XIX. ДИНАМИКА ТВЕРДОГО ТЕЛА 119
получим:
= (r6'a sin 6+ 2^) (cos 6 +г/sin 6), \
Dx" = r8'2 (cos 8 + e/sin 6) -f g [cos 8 sin 8 -f e/(l + sin* 6)]. J
Установив это, покажем сначала, что трудности, на которые указал
Пенлёве, представятся при достаточно большом /.
Поместим систему в начальное положение, получающееся, если коорди-
нате х придать произвольное значение х0, а углу в — произвольное значе-
ние 60, заключенное между Он—. Далее сообщим системе скорости, харак-
теризуемые значениями х0 и 8^ производных х и б'. Наконец, допустим,
что / настолько велико, что
1 + cos*.60 — / sin 80 cos 80 < 0. (9)
Мы сейчас увидим, что если х0 положительно, то невозможно удовле-
творить соотношению F) подходящим выбором е, а если х0 отрицателен, то
подходят оба значения е = ± 1. В первом случае невозможно никакое дви-
жение, а во втором случае возможны два различных движения.
В самом деле, если х0 > 0 и если принять е = -|-1, то, как мы видим,
начальное значение D будет положительным и из первого соотношения (8)
получается, что начальное значение Ry отрицательно. Следовательно, про-
изведение гх'Ry будет отрицательным и соотношение F) не будет выпол-
няться. Если по-прежнему положить х0 > 0 и принять е = — 1, то мы увидим
на основании неравенства (9), что начальное значение D отрицательно и на
основании первого соотношения (8), что начальное значение Ry положительно.
Следовательно, произведение гх Ry будет по-прежнему отрицательным и
условие F) не будет выполняться.
Формулы показывают, что при х0 > 0 никакое движение несовместимо
с эмпирическими законами трения.
Если, наоборот, предположить, что х0 < 0, то таким же образом увидим,
что оба предположения, е == —J— 1 и е = — 1, одинаково допустимы: формулы,
не позволяют сделать выбор между двумя соответствующими движениями.
Эти трудности исчезают, если / достаточно мало. Например, если в рас-
сматриваемой задаче /< 1, то величина D будет положительной, каков бы
ни был знак е. Тогда если сохранить те же начальные условия, 0 < 80 < —,
то первое соотношение (8) показывает, что проекция Ry отрицательна. Сле-
довательно, если х'о > 0, то необходимо принять е = — 1, и если х0 < 0, то
нужно взять е = —|— 1. В обоих случаях формулы определяют единственное
движение, начиная с начального момента, и это движение может быть найдено
для произвольного промежутка времени интегрированием уравнений (8).
Если х'о = 0, то возникает предварительная задача: нужно узнать, будет ли
точка М оставаться неподвижной, т. е. будет ли х' оставаться равным нулю,
или х', будучи равен нулю при t = t0, уже не будет равен нулю в последующие
моменты. Чтобы разрешить этот вопрос, нужно, как мы это излагали в общем
виде в п. 369, сделать последовательно два следующих предположения:
Г предположить, что х' = 0, т. е. что точка М неподвижна, н составить
уравнения задачи, прилагая законы трения в покое; 2° предположить, что х'
отлично от нуля, и применить формулы (8), замечая, что если х', будучи
120 ДИНАМИКА СИСТЕМЫ
равен нулю, становится положительным, то его производная х" положи-
тельна, а если он становится отрицательным, то х" отрицательна. После
этого видно, какое предположение не приводит к противоречиям. На этом
предположении и нужно остановиться. Например, если угол 60 очень близок
к -j, а 60 очень мало, то х' остается равным нулю, если было равно
нулю х0. В самом деле, предположим, что х' > 0; тогда х" должен быть
положительным. Но так как Ry < 0, то необходимо принять е = — 1 и из
третьей формулы (8) находим х" < 0. Получается, следовательно, противо-
речие. Точно так же, полагая х' < 0, получим, что х" должен стать отри-
цательным. Но так как R,, < 0,' то нужно принять е = + 1 и из третьей
формулы (8) находим х" > 0. Снова получается противоречие. Остается,
таким образом, принять х' = 0, х = х0 и применить к точке М закон тре-
ния в покое. Движение будет тогда подобно движению маятника.
Недостаток места не позволяет нам войти в большие подробности. Мы
отсылаем читателя за полным анализом к «Lecons» Пенлёве. В результате
этих теоретических исследований эксперименты по трению были предприняты
Шома (С h a u m a t, Comptes rendus, ler semestre, 1903).
Различные авторы *) пытались устранить эти противоречия, допуская,
что связи имеют зазор и принимая в расчет упругость. Но когда / доста-
точно велико, движения, полученные при разных начальных условиях, могут
как раз зависеть от предположений, сделанных о характере связей, и от
зазора, которым они обладают, в то время как при / достаточно малом этой
трудности не возникнет.
IV. Трение качения
376. Общие положения. В предыдущем разделе мы пренебре-
гали трением качения и верчения. Мы рассмотрим теперь несколько
примеров, в которых мы примем в расчет трение качения, оставляя
в стороне трение верчения.
Напомним вкратце определение трения качения, данное в первом
томе (п. 196). Рассмотрим прямой цилиндр с круглым основанием,
который может катиться по горизонтальной плоскости. Если принять
во внимание трение качения, то надо допустить, что реакция пло-
скости состоит:
1° из нормальной реакции N, приложенной в геометрической
точке касания т.;
2° из касательной реакции F, противодействующей скольжению;
3° из пары с вектором-моментом Н, параллельным образующим
цилиндра, которая противодействует качению.
Нужно различать три случая:
Равновесие. Если имеет место равновесие, то
F < /Л/, Н < Л/8,
*) См. Lecornu, Comptes rendus, т. CXL, 1905, стр. 635 и de Spar re,
т. CXLI, 1905, стр. 310; далее Zeitschrift f(ir Mathematik und Physik, т. 58,
1910, различные статьи Ф. Клейна (F. Klein), Мизеса (Mises), Гамеля (Oeorg
Hamel), Прандтля (Prandtl),'Пфейффера (Pfeiffer). См. также В eg h in, Nou-
velles Annales, 1923, стр. 305; 1924, стр. 343 [почти все эти статьи даны в
дополнении к русскому переводу «Лекции» Пенлёве, см. сноску на стр. 107.
(Прим. перев.))
ГЛАВА XIX. ДИНАМИКА ТВЕРДОГО ТЕЛА
121
где /—коэффициент трения скольжения, а 8— линейный коэффи-
циент, называемый коэффициентом трения качения. Этот коэф-
фициент является постоянной, зависящей от радиуса цилиндра и от
природы соприкасающихся тел.
Качение. Если имеется качение без скольжения, то
Скольжение. Если имеет место скольжение без вращения, то
F=fN.
Естественно, что в этом случае нужно принять
Но так как пара Н создает сопротивление очень малое по сравнению
с трением скольжения, то можно ею пренебречь и принять Н—0.
Скольжение и вращение. Тогда имеем:
F=fN. H=Nl.
Парой Н обычно пренебрегают.
377. Качение. Рассмотрим более подробно случай качения. Тогда
момент Н пары равен Nb. Эту пару можно сложить с нормальной реак-
цией N, приложенной в геометри-
ческой точке касания т. Резуль-
тирующая силы N и пары Н есть
сила N', равная и параллельная
силе N и перенесенная вперед от N
на расстояние 8 (рис. 218). Следо-
вательно, можно также принять
в расчет трение качения во время
качения, допуская, что нормаль-
ная реакция плоскости вместо
того, чтобы быть приложенной F т
в точке геометрического каса- Рис 218.
ния т, приложена впереди этой
точки на некотором расстоянии 8 от нормали в точке т'. Касательная
реакция всегда является силой F, которая меньше, чем fN. В со-
стоянии покоя всегда будет Н < Nb, и тогда нормальная реакция
будет перенесена вперед на расстояние е, меньшее, чем 8.
Именно в этой форме мы будем вводить трение качения в ниже-
следующих приложениях.
378. Пример I. Качение однородного тяжелого круглого цилиндра
по горизонтальной плоскости (рис. 219). Допустим сначала, что цилиндр
неподвижен и найдем горизонтальную силу Ф, которую нужно приложить
к цилиндру параллельно плоскости и перпендикулярно его образующим, чтобы
заставить его катиться.
122
ДИНАМИКА СИСТЕМЫ
Обозначим через h расстояние силы Ф от плоскости, а через Р вес ци-
линдра. Определим сначала силу Ф таким образом, чтобы было равновесие.
При таком предположении силами, приложенными к цилиндру, будут сила Ф,
вес Р и нормальная реакция N, перенесенная вперед в т! на расстояние г
от нормали, меньшее чем 8, и, наконец, касательная реакция F, меньшая
чем /JV.
Напишем, что суммы проекции всех этих сил на вертикаль и на гори-
зонталь равны нулю:
N = P, Г=Ф.
Напишем, что сумма их моментов относительно точки геометрического ка-
сания т равна нулю. Так как моменты сил F и Р равны нулю, то получим
¦ ФЛ — Ыг = 0.
Напишем, что F < fN, e < В; получим
Ф < Pf, Ф <
РЬ
h '
A)
Если эти оба условия выполняются, то будет равновесие.
Но если хотя бы одно из них не будет выполнено, то равновесия не
будет. Случаи, когда то или другое из этих неравенств не удовлетворяется,
могут быть разные.
Допустим сначала, что
Тогда силе Ф можно придать такое значение, что
Равновесие нарушено; имеет место качение, так как сила Ф меньше того
значения силы трения скольжения //>, какое она имеет в начале движения,
и поэтому скольжение не может на-
чаться.
Допустим, наоборот, что
( 1
F
Г
V
т
а
Рис. 219.
f <
h '
Тогда можно взять
В этом случае произойдет скольжение.
Для примера предположим, что
h>±,
Цилиндр будет катиться, и к мо-
менту t он приобретет некоторую скорость. Найдем, какое значение нужно
придать, начиная с этого момента, горизонтальной силе Ф, приложен-
ной на высоте h, чтобы движение качения оставалось после этого равно-
мерным'}
Для этого необходимо и достаточно, чтобы силы, приложенные к ци-
линдру, находились во время качения в равновесии. Действительно, так как
ГЛАВА XIX. ДИНАМИКА ТВЕРДОГО ТЕЛА 123
центр тяжести должен двигаться прямолинейно и равномерно, то главный
вектор всех сил, приложенных к телу, должен равняться нулю. Далее, так
как относительное движение тела вокруг центра тяжести должно быть вра-
щением с постоянной угловой скоростью вокруг оси постоянного направле-
ния, то главный момент этих сил должен равняться нулю. Следовательно,
силы должны находиться в равновесии. И наоборот, если силы, действующие
на цилиндр, находятся в равновесии и цилиндр приведен в движение, то
его центр тяжести будет равномерно двигаться по прямой.
Проектируя еще раз все силы на горизонталь и вертикаль, получим
N — Р, F—Ф, откуда Ф < Pf,
так как отсутствует скольжение.
Возьмем после этого моменты относительно точки геометрического ка-
сания т, замечая, что сумма моментов должна равняться нулю и что рас-
стояние от реакции N до точки т при качении равно 5. Получим:
Таким образом для того чтобы привести цилиндр в движение, заставив его
РЬ
катиться, нужно приложить силу Ф, превосходящую -^, но меньшую,
чем fP. Затем, после того как его центр тяжести приобретет нужную ско-
пость надо для того, чтобы поддерживать эту скорость качения, внезапно
* РЪ
придать силе Ф значение —г-.
Пример II. Применение каткое для перемещения грузов по гори-
зонтальной плоскости. Допустим, что тяжелое тело Р, имеющее форму
прямоугольного параллелепипеда, поддерживается двумя катками Ох и О3
одинаковых диаметров и с параллельными осями. Катки положены на гори-
зонтальную плоскость (рис. 220). Найдем, какую горизонтальную силу Ф
т\Ь' J f,
. \H>
Бг fig Of Mf
Рис. 220.
нужно приложить к телу Р перпендикулярно к осям катков для того, чтобы
привести его в равномерное движение и чтобы катки при этом одновременно
катились как по телу, так и по плоскости. Силы, приложенные к телу, сле-
дующие: горизонтальная сила Ф, вес этого тела Р, касательные реакции Ft
и F2 катков и, наконец, нормальные реакции Ny и N2 катков. Силы, прило-
женные к катку Оь следующие: вес р этого катка, силы F1 и Nv равные
и прямо противоположные силам Fx и Nv и, наконец, касательная и нормаль-
ная реакции Gx и Мх плоскости.
На основании законов трения качения реакция Му плоскости приложена
на расстоянии 8 от точки геометрического касания At в направлении качения
по плоскости, а реакция N\ детали на каток приложена на расстоянии 3'
124 ДИНАМИКА СИСТЕМЫ
от точки геометрического касания Bt в направлении качения катка по телу.
То же самое происходит и со вторым катком, причем 8 и 8' будут одина-
ковые, а реакции будут отмечаться значком 2. Из соображений симметрии
мы будем рассматривать все силы, как лежащие в одной и той же плоско-
сти, нормальной к осям катков.
Так как тело должно совершать равномерное поступательное движение,
то приложенные к нему силы должны находиться в равновесии. Проектируя
эти силы на вертикаль и горизонталь, получим два уравнения:
Ф = Ft -f F2, p^N^No. B)
К этим уравнениям нужно добавить также уравнение, выражающее, что
сумма моментов сил, приложенных к телу, относительно какой-нибудь
точки в плоскости этих сил равна нулю; но это соотношение, которое по-
зволит вычислить Ni и No, не потребуется для дальнейшего.
Каток Ох должен катиться равномерно, и поэтому приложенные к нему
силы должны находиться в равновесии. Следовательно, проектируя на вер-
тикаль и горизонталь и беря моменты относительно точки А^, будем по-
следовательно иметь
2RF[ — Mfi — N'y — 0.
Так как Mt = Nt и F1 = Fv то, исключая М± находим:
_pb +
1 ~ 2R
Точно так же
Окончательно на основании уравнений B) имеем:
_ 2рЬ + Р(Ь + Ь')
27? •
Можно пренебречь величиной р по сравнению с Я и привести эту фор-
мулу к виду
2R ¦
Если тело непосредственно скользит по плоскости, то сила, необходимая для
сообщения ему равномерного движения, будет иметь значение fP, превос-
ходящее предыдущее.
379. О стремлгнии материальных систем избегать трения. Во
многих случаях движение системы с трением происходит таким образом, что
работа сил трения все более и более уменьшается по абсолютной величине.
Другими словами, система стремится избежать воздействия на нее сил трения.
Так, скользящие колесо или шар заканчивают движение качением, круглый
волчок, запущенный на горизонтальной плоскости, выпрямляется таким обра-
зом, чтобы сила трения была приложена к все меньшей и меньшей параллели
его конической оси и т. д.
Это свойство может быть объяснено такими общими рассуждениями *).
Вообразим материальную систему, обладающую следующими свойствами,
которые встречаются в большинстве обычных систем:
*) Ann ель, Journal fur Mathematik, т. 133, тетрадь 2; Bulletin de la
Societe mathematique, т. XXXV, 1907, стр. 131.
ГЛАВА XIX. ДИНАМИКА ТВЕРДОГО ТЕЛА 125
1° рассматриваемая система подчинена вначале некоторым связям без
треиия, ие зависящим от времени;
2е она подвержена действию внутренних сил с потенциалом П, который
положителен или равен нулю во всех возможных положениях системы, причем
в нуль обращается в особом положении, являющемся положением устойчи-
вого равновесия системы под действием одних только внутренних сил;
3 система содержит твердые тела или точки, скользящие с трением друг
по другу или по неподвижным телам;
4° она находится, наконец, под действием других внешних сил, имеющих
силовую функцию U, которая остается меньше некоторого определенного
предела L при всех возможных положениях системы, при которых осуще-
ствляется по крайней мере одно касание, дающее трение.
Для определенной таким образом системы уравнение кинетической энер-
гии будет:
- ... -fpNpvpdt, A)
где Т — кинетическая энергия, fx, /2, ...,fp — коэффициенты трения,
Л^, Nb ..., Np— абсолютные значения нормальных реакций, щ, vb ..., vp —
значения относительных скоростей скольжения материальных точек сопри-
касания различных попарно соединенных тел.
Если мы положим для сокращения
® = fiNlvl+fiN2v2 + ... + W> B)
то мы увидим, что эта величина Ф, являющаяся суммой положительных или
равных нулю членов, существенно положительна и может обратиться в нуль
только тогда, когда все ее члены одновременно равны нулю.
Уравнение кинетической энергии
d{T + n — U) = -$dt C)
показывает, что величина Ф имеет нижним пределом нуль.
В самом деле, абсурдно предполагать, что величина Ф в течение всего
времени движения остается больше некоторого определенного предела X,
большего нуля, ибо если
Ф > X > О,
то из уравнения кинетической энергии получится:
±(Т + п-Ц)<--к.
откуда, интегрируя, найдем:
Г + П — U<—lt+C, D)
где С—некоторая постоянная. Так как U имеет предел U < L, то отсюда
выводим
Т + П < — It + С + L. E)
Когда t неограниченно возрастает, правая часть принимает все более
возрастающие по абсолютной величине отрицательные значения. Следова-
тельно, энергия Т -f- П должна становиться все меньше и меньше и ее ве-
личина, состоящая из двух слагаемых, положительных в начальный момент,
должна обратиться в нуль по истечении конечного промежутка времени.
Начиная с этого момента, потенциал II и кинетическая энергия Т будут равны
каждая порознь нулю. Следовательно, при таком положении, при котором
потенциал II равен нулю, все скорости по истечении конечного проме-
жутка времени обратятся в нули.
126 ДИНАМИКА СИСТЕМЫ
Но этот вывод противоречит сделанному предположению, что
Ф > X > О,
так как если все скорости обращаются в нули, а реакции предполагаются
конечными, то Ф тоже обратится в нуль и не может быть больше X.
Таким образом, доказано, что при возрастании t величина Ф стремится
к нулю. Следовательно, различные члены
составляющие величину Ф, стремятся все к нулю. Тогда некоторые реакции,
например, Л^, ЛГ2, ..., Nh, тоже стремятся к нулю. Система стремится осво-
бодиться от вызывающих эти реакции связей с трением. В то же время
стремятся к нулю скорости t»*+i, v^+2, ...,vp остальных точек, в которых
происходит трение, и соответствующие скольжения стремятся- исчезнуть.
Таким образом, система в совокупности стремится избежать трения.
Мы приняли для простоты обычные законы трения скольжения. Но
те же выводы остаются верными, если принять следующий общий закон:
сила трения скольжения твердого тела А по твердому телу В, рассматри-
ваемому как неподвижное, есть существенно положительная сила F, направ-
ленная в сторону, противоположную скорости v точки касания, и обращаю-
щаяся в нуль только тогда, когда равна нулю нормальная реакция. Действи-
тельно, при этих условиях элементарная работа силы F, равная — Fv dt,
является существенно отрицательной величиной, обращающейся в нуль только
тогда, когда равна нулю или нормальная реакция или скорость сколь-
жения.
Те же рассуждения распространяются и на случаи трения качения и
трения верчения. Чтобы в этом убедиться, достаточно заметить, что для
трения, например, качения элементарная работа силы, вызванной трением
качения, имеет вид —К dt, где К — положительная величина, обращающаяся
в нуль только тогда, когда либо прекращается качение, либо когда оба
катящихся друг по другу тела разделяются.
Достаточно общий пример можно найти в двух статьях Лекорню (Сотр-
tes rendus, 2e semestre, 1906, стр. 1132; Bulletin de la Societe mathematique,
т. XXXV, 1907, стр. З). Можно также указать на посвященную этой теме
статью Е. Даниэля (Е. D a n i е 1 е, Nuovo Cimento, serie V, т. XV,
июнь 1908).
Аналогичные рассуждения можно применить и к сопротивлению среды.
(См. статью Аппеля в сборнике: Hommage a Louis. Olliyier, Imprimerie
Maretheux, 1911.)
УПРАЖНЕНИЯ
1. Маятник с двумя грузами (метроном). Рассмотрим физический
маятник, образованный однородным стержнем, вращающимся в вертикаль-
ной плоскости вокруг оси О, перпендикулярной к этой плоскости. Часть этого
стержня, расположенная ниже оси О, очень коротка и имеет на конце
достаточно тяжелый груз, являющийся движущим грузом. Часть стержня,
расположенная над осью О, длиннее и несет маленький грузик, который
может скользить вдоль стержня и может быть закреплен в любом месте
его. Он является регулирующим грузом.
Исследовать период малых колебаний в зависимости от положения
регулирующего груза.
[Достаточно применить теорию физического маятника, замечая, что
момент инерции изменяется с положением регулирующего груза (Н i r п,
Comptes rendus, т. CV, стр. 40).J
ГЛАВА XIX. ДИНАМИКА ТВЕРДОГО ТЕЛА 127
2. Однородная дверь закреплена при помощи двух петрль на оси,
образующей заданный угол с вертикалью. Найти движение и давление
на петли (R о u t h, Rigid Dynamics, т. I, стр. 97').
3. Твердое тело вращается вокруг неподвижной оси Oz под действием
сил, расположенных симметрично относительно плоскости окружности, опи-
сываемой центром тяжести. Тело само также симметрично относительно
этой плоскости. Найти давления на ось.
Ответ. Очевидно, что в этом случае давления на ось могут быть при-
ведены к одной-единственной силе, приложенной в точке пересечения оси
с плоскостью симметрии и лежащей в этой плоскости. Общие формулы
определяют эту силу.
4. Рассматривается определенная однородная масса, имеющая форму
цилиндра заданной высоты, которую заставляют колебаться вокруг парал-
лели к образующим. Какую форму должно иметь основание и как должна
быть выбрана ось подвеса, чтобы длина синхронного математического
маятника была минимальной?
Ответ. Основание должно быть кругом, а ось должна проходить через
середины сторон вписанного квадрата (De S a i n t-0 e r m a i n, Bulletin
de la Societe mathematique de France, т. II, стр. 54).
5. Оси подвеса физического маятника, для которых длина синхрон-
ного математического , маятника имеет заданную величину. Рассмотрим
определенное твердое тело. Если это тело подвесить к прямой Д, неизменно
связанной с ним, то длина синхронного математического маятника будет
иметь некоторое значение /. Назовем точкой подвеса проекцию J центра
тяжести G твердого тела на ось Д. Тогда через каждую точку подвеса J
проходит бесчисленное множество осей подвеса Д, перпендикулярных к QJ.
Этим осям соответствуют, вообще говоря, различные длины / синхронных
математических маятников.
Все точки подвеса, через которые проходит по крайней мере одна
ось Д, причем такая, что / имеет заданную величину k, лежат между двумя
центральными поверхностями с центром в точке G, или на одной из этих
поверхностей. Через точки подвеса, лежащие на одной из поверхностей, про-
ходит только одна ось подвеса Д, удовлетворяющая условию / = k. Через
точки подвеса, лежащие между обеими поверхностями, проходят две такие
оси. Если поверхности имеют конические точки (что будет, когда централь-
ный эллипсоид инерции тела является эллипсоидом вращения), то через
каждую из этих точек, принятых за точку подвеса, пройдет бесчисленное
множество осей (Bocklen, Journal de Crelle, т. 93).
6. Два материальных однородных одинаковых стержня АВ и АВ'
длины 2/ и массы М шарнирно соединены друг с другом концами А. Тре-
буется определить движение этих стержней, предполагая, что они скользят
без трения в горизонтальной плоскости.
Обозначить через 5, i\ координаты центра тяжести G системы, через 6
угол прямой GA с осью ОХ, через 2а — угол ВАВ' между обеими стерж-
нями и через Mk- — момент инерции каждого стержня относительно его
середины (Лиценциатская, Париж, 1885).
7. Прямолинейная однородная трубка АВ бесконечно малого сечения
и длины 2а скользит без трения по горизонтальной плоскости. Материальная
точка М, масса которой равна массе трубки, движется без трения внутри
нее. Найти движение системы и давление точки М на трубку.
Обозначить через 8 угол АВ с неподвижной осью ОХ и через 2г—отре-
зок СМ, отсчитываемый от центра трубки. Исследовать, в частности, случай,
когда начальная скорость центра тяжести системы и начальное значение
величины —тг равны нулю. Указать в этом случае форму траектории точки М
(Лиценциатская, Париж, 1887).
128 ДИНАМИКА СИСТЕМЫ
Результаты:
Ydi) +(r +-2-
dt
!\2
г выражается как однозначная функция от 0 через эллиптическую функцию
(см. О г е е n h i 11, Fonctions elliptiques et leurs applications, стр. 107, n° 86).
8. По горизонтальной плоскости скользит без трения твердая трубка
бесконечно малого сечения. Эта трубка выполнена в форме кривой, которая,
если ее отнести к ее центру тяжести С как к началу и к некоторой оси СА,
неизменно связанной с трубкой, как к полярной оси, имеет заданное урав-
нение 6=/(г). Внутри трубки скользит без трения точка т той же массы,
что и трубка. Найти движение системы при произвольных начальных
условиях
Ответ. Центр тяжести G, являющийся серединой отрезка Cm, движется
прямолинейно и равномерно. Отнесем движение к осям Gx', Gy', проведен-
ным через точку G и имеющим постоянные направления. Тогда положение
системы определяется полярными координатами Gm = -^, mGx' = а точки т
и углом р между СА и Gx', По теореме кинетической энергии имеем
а по теореме моментов —
г2а'+2А2р'= const.
Но 9 = АСМ = а —13 = /(/-), откуда я, р и г определяются в функции t.
9. Прямолинейная однородная трубка АВ бесконечно малого сечения
и массы т вращается в горизонтальной плоскости хОу вокруг своей не-
подвижной середины О. Материальная точка М массы т скользит без тре-
ния в трубке и притягивается точкой О пропорционально расстоянию Найти
движение системы.
Обозначить через mk2 момент инерции трубки относительно точки О,
через 6 — угол хОА, через г — расстояние ОМ и через \xrnr — абсолютное
значение силы притяжения точки М точкой О.
Исследовать, в частности, движение, предположив, что в начальный
момент t = 0
dr n dO
В каком случае траектория будет окружностью с центром в точке О?
(Лиценциатская, Париж).
Результаты. 1°. Сумма моментов количеств движения относительно
точки О постоянна. Следовательно,
2°. По теореме кинетической энергии имеем:
где h — произвольная постоянная. Таким образом, получаем гиб.
м
.Исключая -у?, определим t через г при помощи квадратуры.
ГЛАВА XIX. ДИНАМИКА ТВЕРДОГО ТЕЛА
129
10. В примере III п. 366 двойной конус заменяется шаром, имеющим
центр в вертикальной плоскости ?ОС, проведенной через биссектрису Ох
угла DOD' и катящимся без трения по направляющим OD и OD'.
Найти движение этого шара (бильярдный шар, катящийся между двумя
киями, образующими угол).
Результаты. Легко проверить, что центр С шара описывает в верти-
кальной плоскости уОх, проведенной через биссектрису Ох угла между
р
направляющими, эллипс ВС А с полуосями а = — , Ь = R, где <f — поло-
вина угла между направляющими (рис. 221).
Так как шар катится по обеим направляющим, то мгновенной осью
вращения шара является прямая, соединяющая обе точки касания с Напра-
вляющими. Точка 7", в которой эта ось пересекает ось Ох, есть мгновенный
центр вращения в плоскости
уОх и СТ есть нормаль к эл-
липсу, проведенная из точки С.
Обозначим через г длину этой
нормали, через 8 — угол, на
который повернулся шар от
своего начального положения,
через ds — элемент дуги эл-
липса.
Скорость V точки С, со-
гласно основному свойству
мгновенного центра вращения,
есть
dt~ dt
( '
Рис. 221.
Если обозначить через и эксцентрическую аномалию точки С эллипса,
то координаты этой точки х и у будут:
х — a cos и, у — b sin а.
Для длины нормали СТ легко получается:
г2 = \ (a2 sin2 u-\-b2 cosa и),
а для линейного элемента эллипса
ds2 = (a2 sin2 a -(-1
cos2 и) d«2 =-щ-
Внося это значение в равенство A), получим:
4- du = db.
о
Наконец, высота С центра тяжести С над горизонталью 05 равна
С = х sin / + у cos / = a sin / cos и + Ъ cos / sin и,
где I — угол хО?.
Кинетическая энергия шара по теореме Кёнига равна
B)
C)
где Mk2 т- момент инерции шара относительно диаметра. Следовательно,
применяя теорему кинетической энергии и предполагая, что шар выходит
9 Зак. 922. П. Аппель. т. II
130 ДИНАМИКА СИСТЕМЫ
без начальной скорости из положения, для которого и = и0, получим,
принимая во внимание равенство B):
= 2g [a sin / (cos и0 — cos и) + b cos / (sin иа — sin и)]. D)
Эта формула определяет t в функции и при помощи квадратуры. Таким
образом, можно изучить движение. Для того чтобы казалось, что шар подни-
мается, необходимо и достаточно, чтобы при этом движении его центр
тяжести опускался.
Можно показать, что с кинематической точки зрения движение шара
получится, если заставить катиться по оси Ох эпициклоиду (Mannheim,
Journal de Liouville, 1859; Comptes rendus, 3 ноября 1890).
11. Однородная круглая трубка массы М бесконечно малого попереч-
ного сечения вращается без трения в горизонтальной плоскости вокруг
одной из своих точек О, закрепленной неподвижно. Материальная точка
массы т движется без трения внутри трубки и отталкивается точкой О
пропорционально расстоянию.
Найти движение системы, предполагая, что она предоставлена самой
себе без начальной скорости.
Обозначить через R радиус сечения трубки, через Mk2 — ее момент
инерции относительно точки О, через в — угол, который образует диаметр О А
с неподвижной осью Ох, и через а — угол между радиусом-вектором От и
диаметром О А (Лиценциатская).
12. Рассмотреть колесо, вращающееся вокруг вертикальной 'оси. Спицы
этого колеса полые. В каждой из них находится шарик массы т. Центры
этих шариков в начальный момент находятся на одинаковых расстояниях с
от оси колеса.
Колесо приводят в движение, сообщив ему начальную угловую ско-
рость п. Найти движение шариков.
Центр каждого шарика описывает кривую, уравнение которой имеет
виц гсп6 = с (Oreenhill, Fonctions elliptiques, n° 88).
13. Дана четверть окружности радиуса R, ограниченная с одной стороны
вертикальным радиусом Оу. Однородный тяжелый стержень АВ длины 21
скользит без трения по этой четверти окружности, причем так, что его ко-
нец А перемещается (тоже без трения) по вертикальному радиусу Оу.
1°. Найти положение равновесия стержня.
2°. Найти движение стержня, если он вначале был горизонтален и был
предоставлен самому себе без начальной скорости.
Обозначив через а угол ст.ержня с горизонталью Ох, показать, что
в частном случае, когда R = I , значение угла а колеблется между Ои^-
о о
(Лиценциатская, Париж).
14. Однородный тяжелый стержень АВ привязан за свою среднюю
точку С к неподвижной точке О при помощи нерастяжимой и невесомой
нити ОС. Стержень остается все время в вертикальной плоскости. Найти
движение стержня и натяжение нити.
Обозначить через / длину нити, М — массу стержня, 6 — угол между
нитью ОС и вертикалью Ох и через а — угол, образуемый стержнем АВ
с этой же вертикалью.
15. Рассмотреть однородный стержень ОА массы М и длины /, лежащий
в горизонтальной плоскости уОх и вращающийся вокруг своего неподвиж-
ного конца О. Другой стержень АВ той же массы М, но длины 21 соединен
шарнирно с первым своим концом А. Середина С этого второго стержня
притягивается точкой О обратно пропорционально кубу расстояния.
Найти движение системы.
ГЛАВА XIX. ДИНАМИКА ТВЕРДОГО ТЕЛА
131
Обозначить через 6 угол хОА между ОА и неподвижной осью Ох,
через f — угол СО А и через — абсолютное значение силы притяжения
к точке О. Считать, что система выходит из состояния покоя и что
в начальном положении 6 = 0, <р = — (Лиценциатская, Париж).
16.. Материальный однородный квадрат бесконечно малой толщины
со стороной 2а и массой т может скользить без трения по горизонтальной
плоскости. Насекомое той же массы, рассматриваемое как точка, находится
вначале на середине одной из сторон квадрата в точке А, и вся система
неподвижна. В момент t = 0 насекомое начинает двигаться вдоль этой сто-
роны, причем путь, пробегаемый по ней насекомым, пропорционален вре-
мени. Найти движение системы.
Ответ. Центр тяжести О остается неподвижным. Примем эту точку О
за начало, а за оси Ох и Оу — прямые, параллельные сторонам квадрата
в начальный момент
(рис. 222). В момент t
насекомое будет нахо-
диться в точке М, центр
квадрата — в точке С,
точка А, середина сто-
роны, в А' и по предпо-
ложению А'М = vt, где
v—постоянная. При этом,
так как массы насекомого
и квадрата одинаковы,
то точка О является се-
рединой СМ (рис. 222).
У
С 0
Я X
Рис. 222.
Пусть а —• угол, на который повернулся квадрат в отрицательном на-
правлении, т. е. угол между С А' и Ох, а г и 6 — полярные координаты
точки М. Тогда
f = arctg ¦
vt
Полярными координатами точки С являются г и в -|- я.
Сумма моментов количеств движения относительно точки О равна нулю,
так как эта сумма постоянна, а в начальный момент она равнялась нулю.
Имеем, следовательно, уравнение
— №*' = 0,
в котором тК1 есть момент инерции квадрата относительно его центра.
Из этого уравнения и из двух предыдущих, решая их совместно, опреде-
ляем г, 6 и а в функции t.
17. Та же задача с заменой квадратной пластинки пластинкой произ-
вольной формы при следующих условиях. Пусть С—центр тяжести пла-
стинки, А — фиксированная точка на ее контуре, М-—переменная точка
контура, положение которой определяется дугой, причем AM = s; тогда
CM=f(s),
Ответ. Если насекомое выходит из точки А и, двигаясь равномерно,
описывает дугу s = vt, то при обозначениях предыдущего упражнения имеем
соотношения:
132 ДИНАМИКА СИСТЕМЫ
которые вместе с соотношением, выведенным в теореме моментов, позво-
ляют определить г, в и а в функции t.
18. Для разобранного в примере IV п. 366 эллиптического маятника
вычислить период бесконечно малых колебаний маятника. Каким становится
этот период при неограниченном возрастании т?
Ответ. Обозначив через а угол начального отклонения, имеем k = — cos a.
Так как бия очень малы, то можно считать
sin е = е, cos е = i — ~, cos«= 1 -*- у.
Тогда имеем:
\dt) -
Разлагая последний множитель в ряд по степеням Ь'1 и отбрасывая сте-
пени выше второй и произведение а262, получим:
откуда
Т=пЛ/ -
т + тх
Если т будет неограниченно возрастать, то в пределе получится период
колебаний математического маятника, что можно было видеть заранее, так
как тбгда масса т не будет больше перемещаться.
19. Тяжелый прямоугольный треугольник, лежащий в вертикальной пло-
скости, может скользить без трения по горизонтальной оси Ох, на которую
он опирается катетом. По гипотенузе катится вертикальный однородный
тяжелый диск, оставаясь в вертикальной плоскости треугольника. Найти
движение системы (Лиценциатская).
Ответ. Положение системы зависит от двух параметров: абсциссы ка-
кой-нибудь точки треугольника и угла поворота диска. Теорема количества
движения в проекциях на ось Ох и теорема кинетической энергии позво-
ляют составить два уравнения движения.
20. Однородный тяжелый диск, лежащий в вертикальной плоскости,
катится без скольжения по неподвижной прямой Ох этой плоскости. Центр
диска притягивается к неподвижной точке О этой прямой с силой, пропорцио-
нальной расстоянию. Найти движение диска.
Ответ. Так как система имеет полные связи и сопротивление качению
отсутствует, то достаточно применить теорему кинетической энергии. Движе-
ние является таутохронным.
21. Четыре материальные точки одинаковой массы находятся в заданной
неподвижной абсолютно гладкой плоскости и образуют вершины шарнирного
ромба, сторонами которого являются четыре твердых стержня пренебрежимо
малой массы.
Системе сообщается в заданной плоскости известное движение. Предла-
гается найти последующее движение, допуская, что внешних сил нет и тре-
ние в шарнирах отсутствует.
Для определения движения, которое получится после того как две точки
столкнутся, нужно рассматривать эти точки как тела, абсолютно лишенные
упругости.
Исследовать, в частности, случай, когда в начальный момент середины
двух противолежащих сторон ромба имеют скорости, равные нулю (Лицен-
циатская, Каена).
ГЛАВА XIX. ДИНАМИКА ТВЕРДОГО ТЕЛА 133
22. Определить движение машины Атвуда в воздухе, считая, что воздух
оказывает движению грузов, привязанных к нити, сопротивление, пропор-
циональное скорости (Лиценциатская, Клермон).
23. Однородный стержень ВС скользит по неподвижной прямой х'х.
Все элементы стержня притягиваются неподвижным центром А с силами,
пропорциональными массам этих элементов и их расстояниям от центра А.
Притяжение точкой А элемента стержня, равного единице длины, на расстоя-
нии, равном единице, выражается силой, равной единице. В начальный момент
стержень ВС неподвижен. Если из точки А опустить на х'х перпендику-
ляр АО, то длина АО равна 2а и расстояние от О до середины стержня ВС
равно в начальный момент Та. Найти движение ВС.
1°. Считать, что стержень ВС скользит по х'х без трения.
2°. Считать прямую х'х шероховатой, и коэффициент трения стержня ВС
о прямую х'х равным 1. Найти в этом случае промежуток времени, по
истечении которого стержень ВС остановится и положение, которое к этому
времени займет стержень (Лиценциатская, Марсель, 1884).
24. Однородный тяжелый шар положен на шероховатую наклонную
плоскость с коэффициентом трения /. Будет ли шар катиться без скольжения
или скользить?
[Если обозначить через а угол наклона плоскости к горизонту, то при
2
/>-=-tga шар будет катиться (Routh, Rigid Dynamics, т. I, п. 161),]
25. Однородный шар, вращающийся с угловой скоростью Q вокруг своего
горизонтального диаметра, положен на горизонтальную шероховатую пло-
скость. Найти движение.
[Задача, аналогичная задаче о колесе в п. 371. До момента времени
9 aQ
tx — -=- j- , где а — радиус, будет происходить скольжение. После этого будет
равномерное качение, если пренебречь трением качения (Раус, п. 162).]
26. Однородный тяжелый стержень АВ имеет на концах два колечка,
при помощи которых он скользит с трением вдоль двух горизонтальных
взаимно-перпендикулярных прямых Ох и Оу. В положении, бесконечно близ-
ком к Ох, стержню сообщена мгновенная угловая скорость 2. Найти дви-
жение.
[Нужно различать два случая в зависимости от того, будет ли /больше
или меньше чем У 2 (Раус, там же, п. 166).]
27. Однородный тяжелый круг может скользить без трения по горизон-
тальной плоскости. Когда круг находился в покое, на него в точке т0 была
положена материальная точка такой же' массы, как и круг. Точке сооб-
щена начальная горизонтальная скорость v0, перпендикулярная к радиусу,
проходящему через т0. Определить движение системы, зная, что между
точкой и окружностью имеется трение с коэффициентом /.
28. Точка т эллиптического маятника (п. 366) может скользить с тре-
нием по оси Ох. Маятник был отклонен на угол а от вертикали и отпущен
без начальной скорости. Каким должен быть этот угол а, чтобы точка т
осталась неподвижной? (См. конец п. 375.)
29. Изохронный маятник Филлипса (Phillips). Дан маятник, ось вра-
щения которого проектируется в точку О и центр тяжести которого нахо-
дится в некоторый момент времени в точке G (рис. 223). Маленькая сталь-
ная пластинка DBE заделана концом D, где ее касательная горизонтальна
и перпендикулярна к оси О. Конец Е пластинки свободен и немного пере-
ходит за вертикаль OV. Пластинка связана с маятником при помощи
тяги АВ малого сечения и очень малой массы. Тяга соединена шарнирно
с одной стороны с маятником в точке А и с другой стороны с пластинкой
в точке В. В положении равновесия точка В находится в положении С на
вертикали OV, так что ОС = О А -\- АВ. Кроме того, дано О А = АВ.
134
ДИНАМИКА СИСТЕМЫ
Прибор можно отрегулировать таким образом, что если написать его
уравнение движения
Рис. 223.
то правая часть, разложенная по возрастающим степеням а, будет содержать
член с <* и затем член с а5, а промежуточные члены будут отсутствовать. Дви-
жение будет тогда изохронным при малых
колебаниях (Comptes rendus, 26 января 1891).
30. В вертикальной плоскости закре-
плен неподвижно круглый диск А, окруж-
ность которого шероховата.
I. Тяжелая точка Р положена без
начальной скорости на окружность диска А
вблизи его наивысшей точки.
1°. Требуется определить наименьший
угол а между радиусом, проходящим
через Р, и направленной вверх вертикалью,
при котором равновесие нарушится.
2°. Если точка Р положена без началь-
ной скорости на диск таким образом, чтобы
радиус, проходящий через Р, образовывал
с вертикалью угол, несколько больший
чем а, то точка Р будет сначала скользить
по диску, а затем покинет его. Требуется
составить уравнение, определяющее угол
между радиусом, проходящим через точ-
ку Р, и вертикалью, когда Р отрывается от
диска и начинает падать.
II. На круглый диск А в его плоскости кладется второй однородный
тяжелый круглый диск В, радиус которого составляет половину радиуса
диска А. Окружность диска В шероховата, так что между обоими дисками,
имеет место трение. Сопротивлением качению пренебречь.
В начале диск В не имеет скорости и радиус диска А, оканчивающийся
в точке касания обоих дисков, образует с направленной вверх вертикалью
острый угол р.
Между какими пределами должен заключаться угол р для того, чтобы
диск В сначала катился без скольжения по диску А}
Допуская, что движение диска В начинается с качения, исследовать это
движение и составить уравнения, определяющие:
1° угол, который образует с направленной вверх вертикалью радиус
диска А, проходящий через центр диска В, в момент, когда прекращается
простое качение без скольжения;
2° аналогичный угол в момент, когда диск В отделяется от диска А.
В обоих вопросах коэффициент трения скольжения равен /.
31. Равносторонний материальный треугольник ОАВ, который может
скользить по неподвижной горизонтальной плоскости хОу, вращается вокруг
своей закрепленной вершины О- По стороне АВ скользит материальная
точка М массы 1, прикрепленная к вершине О упругой невесомой нитью ОМ,
длина которой в нерастянутом состоянии равна высоте ОН= а треугольника.
Натяжение нити пропорционально ее удлинению, так что, когда нить имеет
длину ОМ = г, ее натяжение равно 2k (г — а), где k — некоторая положи-
тельная постоянная. Найти движение системы, предполагая, что связи осу-
ществлены без трения.
Обозначения и. начальные условия. Расстояние ОМ обозначим через г,
угол НОМ — через а, угол хОН—через <?> момент инерции треугольника
относительно вершины О — через /; при этом нужно заметить, что cos а = —.
ГЛАВА XIX. ДИНАМИКА ТВЕРДОГО ТЕЛА 135
В качестве независимых параметров примем г и <р и допустим, что
в начальный момент система выходит из покоя и точка т находится в вер-
шине А (Лиценциатская, 1902).
Ответ. Можно применить теорему моментов количеств движения отно-
сительно точки О и теорему кинетической энергии. Таким путем получатся
два уравнения:
где постоянная h кинетической энергии на основании начальных условий
имеет значение
3
После исключения а и if получится окончательно для г уравнение вида
где ЧГ (г) — положительно при всех значениях г, удовлетворяющих условию
г > а. Необходимо, чтобы правая часть была также положительна, для чего
2а
требуется, чтобы г < .
Можно найти в замкнутой форме соотношение между г и f.
32. Однородная пластинка имеет форму пятиугольника ABCDE, образо-
ванного соединением прямоугольника АВСЕ и равнобедренного треуголь-
ника CDE с вершиной D. Сторона АВ имеет длину 3 м, сторона ВС—
длину 4 м и высота DH треугольника имеет длину 2 м. Масса пластинки
равна 10 г.
1°. Определить эллипсоид инерции этой пластинки относительно точки О
пересечения диагоналей АС и BE прямоугольника АВСЕ (коэффициенты
написать в единицах COS).
2°. Пластинка, предполагаемая весомой, начинает колебаться вокруг за-
крепленной горизонтальной прямой АС. Определить период бесконечно малых
колебаний.
Ответ. Полагая АВ = 2а, ВС = 26 и обозначая через т всю массу,
т = 5ра6, где р — масса единицы площади, имеем а = -j- b. Моменты инер-
ции относительно осей Ох (параллельной АВ) и Оу имеют значения
19 27 84
тЬг и B—?f:mb2, а относительно оси ОС — J=7Wr.mbK Тогда
- о ,/~420
= 2%У 981
= 4 сек.
ГЛАВА XX
ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ
НЕПОДВИЖНОЙ ТОЧКИ
380. Историческая справка. Задача о движении твердого тела
вокруг неподвижной точки была впервые затронута Даламбером в его
работе Precessions des equinoxes (Предварение равноденствий), опубли-
кованной в 1749 г. Тогда еще не были известны шесть общих урав-
нений равновесия свободного твердого тела; были известны лишь
три первых уравнения, согласно которым суммы проекций сил на
каждую из осей координат равны нулю,* но не были известны три
остальных уравнения, выражающих, что суммы моментов относи-
тельно каждой из осей координат равны нулю, т. е. именно те, кото-
рые нужны для решения задачи о движении тела вокруг неподвиж-
кой точки. Эти уравнения и вывел впервые Даламбер в упомянутой
работе. Они играли в ней существенную роль. От них Даламбер
перешел при помощи своего принципа (Traite de Dynamique, опубли-
кованное в 1743 г.) к уравнениям движения, так что составление
уравнений задачи всецело принадлежит ему.
После Даламбера Эйлер представил в окончательном виде урав-
нения движения твердого тела вокруг неподвижной точки *). Он же
первый нашел точные интегралы в случае, когда внешние силы
равны нулю, или имеют равнодействующую, проходящую через
неподвижную точку. (См. Мемуары Берлинской Академии за 1758 г.)
Лагранж, Лаплас и Пуассон продолжали исследование этих вопро-
сов и решили новые задачи или улучшили решения старых. Лагранж
впервые решил задачу о движении тяжелого тела вращения, закре-
пленного в одной из точек своей оси (Аналитическая механика,
раздел IX). Эта же задача была позже исследована Пуассоном
как совершенно новая. Решение, которое он дал, без всякой ссылки
на Лагранжа помещено в Journal de l'Ecole Polytechnique, XVIе
Cahier, 1815.
Пуансо, вернувшись к частному, изученному Эйлером, случаю,
когда внешние силы равны нулю, выполнил глубокое синтетическое
исследование (Journal de Liouville, lre serie, т. XVI); он пришел
к исключительно изящной геометрической интерпретации движения.
*) См. статью Лиувилля (Journal de Liouville, 2е serie, т. 111).
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 137
Якоби (Crelle, т. 39) дал окончательное решение задачи Эйлера
при помощи эллиптических функций, выразив девять направляющих
косинусов главных осей инерции тела относительно неподвижных
осей как однозначные функции времени. В 1883 г. Эрмит в своей
работе «Sur quelques applications des fonctions elliptiques» привел
вычисление этих девяти косинусов к интегрированию уравнения Ляме
и определил аналитически все элементы решения Пуансо.
Наконец, Ковалевская в работе, премированной Академией наук
(Acta mathematica, т. XII), нашла еще один случай интегрируемости
уравнений движения твердого тела вокруг неподвижной точки.
При изложении этой главы мы будем указывать на усовершен-
ствования, внесенные в эти общие теории различными авторами.
I. Общие уравнения
381. Вспомогательные сведения из геометрии. Переменные,
определяющие положение подвижного триэдра относительно
неподвижного триэдра с той же вершиной. Рассмотрим прямоуголь-
ный неподвижный триэдр Ox1y1z1 и прямоугольный подвижный
триэдр Oxyz, ориентированный так же, как неподвижный. Мы будем
предполагать, что в обоих триэдрах вращение на 90° в положительном
направлении вокруг оси г переводит ось х в ось у. В аналитической
геометрии положение триэдра Oxyz определяют обычно девятью
косинусами углов, которые образуют оси Oxyz с осями Ох^у^{.
a =cos(jc, jq), р =cos(;t, yj, 7 = cos(x, 2X),
a' = cos(y, xj. P' = cos(.y. j/j). f =cos(y, zt),
a." = cos(z, jq), P" = cos(.z, yt), 7" = cos B, zx).
Между этими девятью косинусами существуют шесть известных
соотношений, так что три из косинусов, подходящим образом выбран-
ных, могут рассматриваться как произвольные. Отсюда ясно, что
эти девять косинусов можно выразить в функции трех независимых
параметров.
Наиболее употребительными переменными в механике являются
углы Эйлера, а в современной геометрии — параметры Олинда Род-
рига (Olinde Rodrigues) и те, которые из них вытекают.
Углы Эйлера. Пусть 01 (рис. 224) есть линия пересечения пло-
скости ху с плоскостью х1у1. Выберем произвольно на этой прямой
положительное направление 01 и обозначим через ф угол между ним
и направлением Oxv причем этот угол будем считать положительным
в сторону положительного вращения от Охх к 01 вокруг Ozv Пря-
мая 01 перпендикулярна к плоскости zOzv Пусть 6 — угол между
Ozx и Oz, считаемый положительными от Ozy к Oz в сторону поло-
жительного вращения вокруг 01. Ось Oz перпендикулярна к пло-
скости Юх. Пусть ср — угол, на который нужно повернуть прямую 01
138
ДИНАМИКА СИСТЕМЫ
в положительном направлении вокруг Ог, чтобы совместить ее с Ох.
Угол Юу будет тогда равен 9 + -S-.
Три угла б, <р, ф, очевидно, не зависят друг от друга и могут
быть выбраны совершенно произвольно. Каждой системе значений
этих углов соответствует
одно и только одно по-
ложение подвижного три-
эдра Охуг.
Пользуясь терминами,
употребляемыми в астроно-
мии, прямую Of иногда
называют линией узлов,
угол ф — углом прецессии,
угол Q — углом нутации и
tp — углом собственного вра-
щения. Эти выражения всегда
употребляются в случае,
когда оси Охуг связаны
с телом вращения вокруг
оси Ог.
Формулы Олинда Род-
Рис. 224. рига. Легко выразить девять
косинусов в функции углов 6,
tp, ф. Мы не останавливаемся здесь на выводе этих формул, которые можно
найти во всех курсах аналитической геометрии. Мы ограничимся лишь их
написанием:
COS (X, Х() = COS tp COS ф — Sin tp Sin ф COS 9,
cos (x, yj) = cos tp sin ф -f- sin tp cos ф cos 6,
cos (x, Zj) = sin tp sin 9;
COS (y, Xi) = — Sin if COS ф — COS tp Sin ф COS 6,
cos (y, yt) = — sin tp sin ф -f- cos tp cos ф cos 6,
cos (y, zj) = cos tp sin 6;
cos (z, x±) = sin ф sin 6,
cos (z, yx) = — cos ф sin 6,
cos (z, zt) — cos 6.
Если положить
X
6 ф — t
sU
то непосредственно эти четыре отношения окажутся связанными зависи-
мостью
Х2 + у? 4- V2 + Р2 = Х2.
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 139
Выражая теперь девять косинусов в функции четырех отношений и
исключая затем г2 при помощи последнего соотношения, получим формулы
Родрига
X222 + 2
(x yi)__ 2(Х(л--
2 (Xv + pip)
cos (д:, г^^) = - .'_!_r/
и шесть остальных аналогичных формул, определяющих девять косинусов
в виде рациональных функций трех параметров, являющихся тремя отноше-
ниями трех из величин X, ;а, у, р к четвертой.
Но можно идти еще дальше и еще более упростить классические фор-
мулы, выражающие координаты xv yt, Z\ точки относительно неподвижных
осей Ox1ylzl через координаты х, у, z той же точки относительно осей Oxyz.
Для этого вводят четыре величины
. ср -4- >Ь . <р — ф
а = е cos -^-, Ь — le * sin -=-,
*^ е „ -<2±* 9
с = /е sin н-. rf = e cos -»-,
связанные соотношением
ad— be = 1.
Тогда можно показать, что формулы преобразования координат приводятся
к одной и той же линейной подстановке
_ аи -\-b i _ аи' -\- b
% ~~ cu + d ' "х - cu'+d '
выполняемой одновременно для двух величин и и и'.
Относительно формул Олинда Родрига мы отсылаем читателя к Lecons
de Cinematique Кёнигса (Koenigs) и, в частности, к заметке Дарбу, поме-
щенной в конце этой книги; далее относительно приведения формул пре-
образования координат к линейной подстановке мы отсылаем к той же книге
Кёнигса, стр. 337, к сочинению Клейна (Klein) и Зоммерфельда (Somraet-
feld, Ueber die Theorie des Kreisels, гл. I) и к заметке Лакура (L. а с о и г,
Nouvelles Annales de Mathematique, 3 serie, т. XVIII, декабрь 1899).
382. Вспомогательные сведения из кинематики. Мгновенное
вращение подвижного триэдра. Рассмотрим триэдр Oxyz, движу-
щийся вокруг неподвижной точки О относительно триэдра Ох^у^,
рассматриваемого как неподвижный. Для определения этого движения
углы Эйлера 6, ср, ф должны быть заданы в виде непрерывных функ-
ций времени.
Мы видели в кинематике, что распределение скоростей в момент
времени t в твердом теле, движущемся вокруг закрепленной точки,
будет таким же, как если бы это тело совершало вращение с угло-
вой скоростью и) вокруг оси, проходящей через неподвижную точку.
140 ДИНАМИКА СИСТЕМЫ
Эта угловая скорость ш называется мгновенной угловой скоростью
вращения в момент t и представляется, как мы Это указывали (п. 43),
некоторым вектором. Обозначим через р, q, r проекции вектора
мгновенной угловой скорости вращения подвижного триэдра на
подвижные оси Ox, Оу, Oz. Мы выразили р, q, r в функции де-
вяти косинусов и их производных по времени (п. 51). Сейчас мы
займемся вычислением р, q, r в функции 6, ср, фи их производ-
ных 8', ср', ф' по t.
Чтобы перевести триэдр из положения, которое он занимает
в момент времени t и которое соответствует значениям 6, ср, ф трех
углов, в положение, бесконечно близкое, которое он занимает
в момент t-\-d и которое соответствует углам b-\-db, cp + rfcp,
ф, можно поступить следующим образом.
Сначала нужно повернуть триэдр на угол йф вокруг оси Oz^,
тогда ф увеличится на d~\>, а ср и б не изменятся. Вокруг нового
положения линии Of нужно повернуть триэдр на угол d8. Наконец,
вокруг нового положения оси Oz нужно повернуть его на угол d<?.
Если предполагать, что эти три угловых перемещения делаются
в пространстве в течение промежутка времени dt, то соответствующие
угловые скорости вращений будут ф', 8' и ср'.
Можно сказать, что мгновенное вращение триэдра с угловой
скоростью ш является результирующим трех вращений вокруг
осей Ozlt 01 и Oz с угловыми скоростями ф', 8', ср'. Эти три соста-
вляющие вращения представляются векторами, равными ф'р б', ср' и
лежащими на осях Ozv 01 и Oz (рис. 224). Результирующий вектор «>
является геометрической суммой этих трех векторов. Его проекция
на произвольную ось равна сумме проекций составляющих векто-
ров ф', 8' и ср' на ту же ось.
Мы найдем сначала проекции мгновенного вектора ш подвижного
триэдра на взаимно-перпендикулярные оси 01, OJ, Oz, где ось OJ
лежит в плоскости хОу и образует с осью 01 угол -f--n-. Обозна-
чим через <0j, u>j, ш2 эти три проекции, из которых третья равна г.
Чтобы их найти, достаточно заметить, что вектор ф', лежащий в пло-
скости zOJ, может быть разложен на его две проекции ф' и ф^ на
оси OJ и Oz, так что
Тогда три составляющие вектора ш по осям 01, OJ, Oz будут
ш4 —8', <о> = ф'8т9, г = ф' cos 8 -f- cp'. A)
Чтобы найти теперь р и q, достаточно взять суммы проекций и>г
и ioj на оси Ох и Оу. Так как взаимно-перпендикулярные оси IOJ
лежат в плоскости хОу и ось Ох образует с осью 01 угол ср, то
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 141
непосредственно получаем
р = щ cos ср -f- со^ sin cp,
q = и>{ cos (?+¦§-) + «V cos cp,
откуда находим окончательные формулы, определяющие р, д и г:
p — ysinQ sin cp-f- 9'cos cp, j
q = у sin 9 cos cp — 6'sin<p, I B)
r = у cos 6 + cp'. j
Примечание. В этих формулах первые члены каждой из трех
правых частей представляют собой три проекции соответственно на
оси Ох, Оу и Oz вектора у, направленного по оси Ozv Отсюда
получаются косинусы f, f', -j" углов, которые образует ось Oz
с осями Ох, 0_у, Oz:
Y = sin 6 sin cp, •(¦' = sin 9 cos cp, ^" = cosb, C)
что мы уже видели в предыдущем пункте.
Обратная задача. Мы только что видели, как, зная движение
триэдра Oxyz, т. е. выражения 9, ср, ф или девяти косинусов a, fi, -j, .. .
в функции t, можно вычислить проекции р, q, r мгновенной угло-
вой скорости вращения триэдра в функции t.
Обратно, допустим, что известны р, q, r в функции t и что
требуется вычислить 9, ср, ф или девять косинусов а, р, -\, ...
в функции t. Тогда надо будет проинтегрировать уравнения B)
первого порядка относительно 9, ср, ф. Можно показать, что эта
задача приводится к интегрированию одного уравнения Риккати с ком-
плексными коэффициентами. [См. Darboux, Lemons sur la theorie
generate des surfaces, т. I, глава II; Mayer, Simmetrische L6sung, ...
(Berichte der Konigl. sSchs. Geselschaft der Wissenschaften zu Leipzig,
2 марта 1902) и курсы анализа, например, Гурса.]
383. Твердое тело, движущееся вокруг неподвижной точки;
применение триэдра, неизменно связанного с телом. Рассмотрим
материальное твердое тело, движущееся вокруг неподвижной точки О.
Для определения положения этого тела относительно неподвижных
осей Oxxyxzx достаточно рассмотреть прямоугольный триэдр Oxyz,
неизменно связанный с телом. Тогда положение тела будет в каж-
дый момент определяться положением этого триэдра, т. е. нужно
будет знать три угла Эйлера 9, ср, ф в функции времени.
Мгновенное вращение с угловой скоростью ш твердого тела
будет тогда тождественно с мгновенным вращением триэдра и его
составляющие р, q, r по подвижным осям Oxyz определяются выше-
приведенными формулами B). Мы займемся сейчас вычислением кине-
тической энергии тела и главного момента количества движения
различных точек тела относительно неподвижной точки О.
142 ДИНАМИКА СИСТЕМЫ
Кинетическая энергия тела. Пусть v — скорость какой-нибудь
точки т тела, имеющей координаты х, у, z относительно подвижных
осей Oxyz, связанных с телом. Так как проекции угловой скорости со
на оси Oxyz суть р, q, r, то проекции vx, vy, vz скорости v на эти
оси будут (п. 44)
vx = qz — ry, vy = rx — pz, vz=py — qx,
откуда
+ г2 (х2 + у2) — 2qryz — Irpzx — Ipqxy.
Воспользуемся обозначениями, принятыми в п. 318:
2т(у2 + z2) = А, 2тB! + ^) = й. 2 тО2 + Уг) = с<
где А, В, С—моменты инерции тела относительно осей Ox, Oy, Oz,
a D, E, F — центробежные моменты инерции. Тогда, вычисляя полную
кинетическую энергию тела -^ V mv2 и обозначая ее через Т, получим
Т = ~ (Ар2 + Bq2 -4- Сг2 — 2Dqr — 2Erp — 2Fpq).
Если, в частности, за оси Ох_у,г, связанные с телом, принять
главные оси инерции в точке О, то коэффициенты D, E, F будут
равны нулю и кинетическая энергия примет вид
= Т = I (Ар2 + Bq2 -f- Cr2).
Это же выражение кинетической энергии может быть получено следую-
щим образом. Обозначим через Mk2 момент инерции тела относительно
мгновенной оси и через а, Ь, с — направляющие косинусы этой оси относи-
тельно осей Oxyz. Получим (п. 318)
Mk°- = Аа2 + ВЪ2 + Сс2 — 2Dbc — 1Еса — IFab.
Так как угловая скорость вращения равна », то кинетическая энергия
равна -н- М№аё\ . с другой стороны, проекции р, q, r вектора «> на оси
равны а«>, Ь®, сш. Составив произведение -н- Mk-a>2, получим найденное уже
выражение.
Моменты количеств движения. Главный момент. Построим
для момента времени t главный момент Оо количеств движения всех
точек тела относительно точки О. Проекции вектора Оа на подвиж-
ные оси равны ах, ay, ог. Каждая из этих проекций есть сумма
моментов количеств движения относительно осей Ох, Оу и Oz.
Проекции количества движения точки т на оси Ox, Oy, Oz равны
mvx, mvy, mvz.
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
143
Следовательно, сумма ах моментов количеств движения относи-
тельно оси Ох всех точек тела будет
°а> — 2 т (У"г — zvy) = 2 гп [р (у2 -)- z2) — qxy — rxz],
или, располагая члены по порядку букв р, q, r, получим
ах = Ар —¦ Fq —- Ег. D)
Это выражение при сравнении с выражением кинетической энер-
т- дТ _,
гии / показывает, что ох-=-^-. Точно так же получим суммы <зу
и az моментов количеств движения относи- %.!*
тельно осей Оу и Oz:
дТ
дг
рис 225
моментов количества
Если за оси Oxyz принять главные оси
инерции тела в точке О, то выражения для
°х> ау az упростятся и превратятся в сле-
дующие:
ах = Ар, ay = Bq, as = Cr. E)
Уравнения движения. Переходим теперь
к задаче механики. На твердое тело дейст-
вуют заданные силы Ft, F2 Fn и реак-
ция Q неподвижной точки О. Для вывода
уравнений движения мы применим теорему
движения.
Пусть L, М, N — суммы моментов заданных сил относительно
осей Ох, Оу, Oz. Если построить главный момент этих сил отно-
сительно точки О, то получится вектор 05, проекции которого на
оси Oxyz как раз равны L, М, N. Это — вектор главного момента
относительно точки О всех внешних сил, так как этот момент
состоит из суммы моментов заданных сил, которая равна 05, и момента
силы Q, который равен нулю (рис. 225).
Мы видели, что теорема момента количества движения выражается
геометрически следующим образом: в каждый момент времени абсо-
лютная скорость а точки а равна и параллельна вектору 05. Следова-
тельно, проекции этой скорости равны проекциям L, М, N вектора OS.
Но точка а имеет в системе подвижных осей координаты ах, ау, oz.
Когда t изменяется, изменяются и ах, ау, аг. Точка а перемещается
относительно подвижных осей Oxyz с относительной скоростью,
проекции которой на оси Ох, Оу, Oz равны соответственно
"у
dt •
dt
144 ДИНАМИКА СИСТЕМЫ
Переносная скорость точки о при движении осей имеет на эти же
оси проекции
<7а2 — гау гах—Раг> Рау^Яах-
Следовательно, абсолютная скорость а точки а, будучи геоме-
трической суммой относительной и переносной скоростей, имеет
проекции
d°v х .. „. Л«
dt ' н s у dt
По теореме моментов количеств движения эти проекции равны
L, М, N. Следовательно, имеем уравнения движения
— го.. == L, ~-п—г" га™ — по. = М,
у > fa i х у z
F)
в которых Зд,, ау, <sz должны быть заменены их найденными выше
выражениями в функции р, q, r.
384. Уравнения Эйлера. Обычно за оси Oxyz, связанные с телом,
принимают главные оси инерции относительно точки О. Тогда
Внесем эти выражения в только что полученные уравнения. Они
примут вид
G)
Это — уравнения Эйлера. Присоединив их к группе уравнений B),
определяющих р, q, r, мы получим шесть дифференциальных уравне-
ний первого порядка для определения шести неизвестных/), q, г, 6, ср, ф
в- функции t.
Правые части L, М, N этих уравнений являются функциями пере-
менных 9, ср, ф, если заданные силы зависят только от положения
тела, и они будут функциями переменных 8, ср, ф, р, q, r, если эти
силы зависят также и от скоростей. Если бы потребовалось вычислить
непосредственно б, ср, ф, то исключение р, q, r приведет к трем
уравнениям второго порядка относительно 9, ср, <|>. Общие интегралы
будут содержать шесть постоянных, которые можно определить, зная
начальное положение тела и начальную мгновенную угловую скорость
вращения, т. е. зная 90, ср0> ф0, р0, q0 к г0.
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
145
385. Реакция неподвижной точки. Для вычисления проекций
этой реакции (Q^, Qy, Qz) мы воспользуемся теоремой проекций коли-
чества движения и ее геометрической интерпретацией. Конец р глав-
ного вектора количества движения имеет абсолютную скорость,
равную по величине и направлению главному вектору внешних сил,
проекции которого на подвижные оси равны
где. ^ X, 2 ^> 2 ¦?— суммы проекций заданных сил.
На основании рассуждений, аналогичных предыдущим, если
через а, Ь, с обозначить координаты точки р в подвижных осях,
получим
(8)
где левые части представляют собой проекции на подвижные оси
абсолютной скорости точки р. Кроме того, мы имеем для а значе-
ние 2 mvx> т> е-
ГУ) — Ч 2 тг — г 2 тУ-
а —
т
Вводя координаты \, tj, С центра тяжести относительно подвиж-
ных осей и замечая, что 2 тх = ^ мы напишем
Таким же образом получим
b — $R(rl— jpC), e = Tt(pti — q\).
Внесем эти значения а, Ь, с в уравнения (8). Тогда окончательно
получим
r dq „ dr
,_^+2у
d_p_
dt
так как \, tj, С — постоянные.
Если твердое тело закреплено в своем центре тяжести, то левые
части предыдущих уравнений будут равны нулю и уравнения, опре-
10 Зак. 922. П. Аллель, т. И
146 ДИНАМИКА СИСТЕМЫ
деляющие реакцию, приведутся к следующим:
Реакция Q будет тогда равна и противоположна главному век-
тору R заданных сил. Этот результат очевиден на основании теоремы
движения центра тяжести.
388. Применение осей, движущихся в теле. В предыдущем
мы предполагали, что оси Охуг неизменно связаны с твердым телом.
Представим себе, что мы относим движение тела к триэдру Охуг,
вершина которого совпадает с неподвижной точкой О и который
совершает в пространстве известное движение. Обозначим через Obi
мгновенную угловую скорость вращения этого триэдра и через
Р, Q, R — ее составляющие по подвижным осям Охуг. С другой
стороны, пусть Ош —мгновенная угловая скорость вращения твер-
дого тела, а р, q, r — ее составляющие по тем же осям. Так как
триэдр Охуг не связан более с телом, то Ош отлично от 02. При-
держиваясь того же пути, что и раньше, мы получим следующие
результаты.
Абсолютная скорость точки тела. Пусть v — абсолютная ско-
рость точки т тела, имеющей относительно осей Охуг коорди-
наты х, у, г. Эта скорость, являясь моментом вектора ш(р, q, r)
относительно точки т, имеет следующие проекции на три оси:
^х = Ч* — ГУ,
vv = rx —pz,
vz =py — qx.
Кинетическая энергия тела. Кинетическая энергия Т опре-
деляется формулой
2Г = 2 mi* = 2 m Mz ~ r-)
Полагая, как и выше,
A = '2lm(y2-\-z*), В = 2 m (^ + л:2), С =
D = 2 туг, Е = 2 mzx, F = 2 тху,
по-прежнему получим
2 Г = Ар2 + Bq2 + О2 — 2Dqr — 2Erp — IFpq.
В этих формулах А, В, С обозначают моменты инерции тела
относительно осей Охуг в момент времени t, a D, E, F — центро-
бежные моменты относительно этих же осей. Так как триэдр Охуг,
по предположению, движется как в пространстве, так и относительно
тела, то эти шесть величин с течением времени изменяются.
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
147
Главный момент количеств движения. Главный момент Ос
количества движения всех точек тела относительно неподвижной
точки О является вектором, проекции которого на оси Охуг имеют
величину
'2 '2
Заменяя vx, vy, vz их выражениями, написанными выше, получим
дТ
dq>
дТ
(9)
Главный момент сил. Пусть 05 — главный момент сил, при-
ложенных к телу, относительно точки О. Мы обозначим через Sx, Sy,Sz
проекции этого вектора на оси Охуг, т. е. суммы моментов сил
относительно этих осей.
Уравнения движения. Нам нужно написать, что абсолютная
скорость а точки а равна и параллельна вектору 05 (рис. 225).
Для этого мы напишем, что проекции абсолютной скорости и точки о
на три оси Охуг равны проекциям Sx, Sy, Sz на эти оси вектора 05.
Так как точка а имеет в подвижных осях Охуг координаты ах,
су, az, то проекции на эти оси вектора ее относительной скорости
по отношению к этим же осям равны
rfa.
rfa.
V
dt
dt
dt
Так как система осей Охуг совершает мгновенное вращение с угло-
вой скоростью 02, имеющей компоненты Р, Q, R, то точка а имеет
переносную скорость от движения этих осей, выражаемую вектором
с проекциями на эти оси, равными
Qaz — Ray, Rax — Paz, Pay—Qax.
Проекции абсолютной скорости точки о равны суммам проекций
ее относительной и переносной скоростей, и мы имеем поэтому урав-
нения движения:
dt
A0)
10*
148 ДИНАМИКА СИСТЕМЫ
В этих общих уравнениях проекции ах, <зу, oz имеют значения, выра-
женные в равенствах (9). Необходимо отметить, что при вычислении
производных ——, ... нужно помнить, что коэффициенты А, В, ...
в общем случае зависят от t.
Частные случаи. 1°. Трехгранник Охуг жестко связан с
телом. В этом случае мгновенная угловая скорость вращения Q
триэдра совпадает с мгновенной угловой скоростью вращения о>
тела. Тогда
Р=р. Q = q, R = r.
Кроме того, А, В, С, D, E, F являются постоянными. Мы вновь
получаем уравнения п. 383.
2°. Триэдр отсчета Охуг неподвижен в пространстве. Тогда
->-
угловая скорость вращения Q равна нулю и Р, Q, R тоже равны
нулю.
П. Первое приложение уравнений Эйлера к случаю, когда
внешние силы приводятся к одной равнодействующей,
проходящей через неподвижную точку
387. Первые интегралы. Наиболее простым случаем, который
может представиться, будет тот, когда все внешние силы при-
водятся к равнодействующей, проходящей через неподвижную точку,
например, когда тяжелое тело закреплено в своем центре тяжести.
В этом случае тело, предоставленное самому себе без всякой началь-
ной скорости, будет в равновесии при всех положениях, которые оно
может занимать вокруг точки О.
Главный момент внешних сил относительно точки О будет тогда
равен нулю. Величины L, М, N (п. 383) равны нулю, и если в каче-
стве осей, связанных с телом, принять его главные оси инерции Охуг
в точке О, то уравнения Эйлера (п. 384) примут вид
(И)
dr
Так как эти уравнения содержат только р, q, r и не содержат
9, ср, ([), то интегрирование уравнений движения разделяется на две
части: сначала нужно проинтегрировать уравнения A1) Эйлера, опре-
делив р, q, г в функции t, а затем уже нужно вычислить 9, ср, ф в
функции t.
Система A1) допускает два первых интеграла, которые легко
составить. Умножая первое из этих уравнений на р, второе на q.
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 149
третье на г и складывая, получим соотношение
или, интегрируя и обозначая через h произвольную постоянную,
Ap2 + Bq2-\-Cr2 = h. A2)
Умножим те же уравнения на Ар, Bq, Cr; складывая их, получим:
или, интегрируя и обозначая через I2 произвольную постоянную,
Эти два интеграла имеют простой смысл и непосредственно вы-
текают из общих теорем. Действительно, кинетическая энергия тела
равна -^(Ар2-\-Bq2-\-Cr2). Следовательно, равенство A2) выражает,
что кинетическая энергия системы остается постоянной. Это и оче-
видно, так как заданные силы приводятся к одной равнодействующей,
проходящей через неподвижную точку, и, следовательно, ее работа
равна нулю.
Для интерпретации уравнения A3) вспомним, что проекции глав-
ного момента Оа количеств движения на подвижные оси равны Арг
Bq, Cr. Уравнение A3) выражает, следовательно, что его величина
остается постоянной, что вытекает также из общих теорем, ибо
в рассматриваемом случае L, М, N равны нулю, 05 равен нулю,
точка о, имея скорость, равную нулю, будет неподвижной и величина Оа
будет оставаться постоянной, равной /. Теорема площадей применима
к проекции движения на произвольную плоскость, проходящую
через О. Плоскость, перпендикулярная к Оа, является плоскостью
максимума площадей.
Умножая равенства A2) и A3) соответственно на I2 и h и вычи-
тая одно из другого, получим
A {Ah — 12)р2 -\-B(Bh — P) q2 + C (Ch — I2) r2 = 0.
Так как уравнениями мгновенной оси вращения относительно дви-
х v z
жущихся осей будут — = — = —, то отсюда видно, что эта ось
описывает в теле конус второго порядка
A (Ah — I2) х2 + В (Bh — I2) f- + С (Ch — I2) г2 = 0.
Он будет исследован позже.
Из предыдущих уравнений непосредственно вытекает, что проек-
ция мгновенной угловой скорости вращения на неподвижное на-
правление Оа главного момента количеств движения постоянна
150 ДИНАМИКА СИСТЕМЫ
(Пуансо). В самом деле, косинус угла между мгновенной угловой
скоростью со и вектором Оа равен
, -~ . рАр + два + гСг
cos (со, а) = r r ' ч , ,
откуда
со COS (со, а) =—
является постоянной величиной.
Чтобы сделать все размерности очевидными, мы положим, как
это делает Гринхилл (Fonctions elliptiques, стр. 147),
- = D. A4)
•откуда
h =
Произвольная постоянная \i, являющаяся проекцией вектора о> на Оа,
будет тогда иметь размерность угловой скорости, а произвольная
постоянная D будет величиной той же размерности, что и А, В, С.
388. Исследование движения. Интегрирование при помощи
эллиптических функций. Допустим, что А > В > С и что произ-
вольная постоянная D не равна ни одной из величин А, В или С.
Проекции р, q, r мгновенной угловой скорости вращения находятся
как функции времени из трех уравнений
-f- Bq2 -±r Сг2 = Д.*2,
с V2 = D2,u.2, A5)
Определяя из первых двух уравнений риги подставляя их
ъ третье уравнение, мы получим дифференциальное уравнение первого
порядка относительно q. Исключив сначала г из первых двух урав-
нений, получим
Ар2 (A — Q-\-Bq2(B — C) = D(D— C)y.K
Из сопоставления величин А, В, С вытекает, что разность D — С
•существенно положительна. Она может обратиться в нуль только
в том случае, когда р0 и q0 одновременно равны нулю, т. е. в слу-
чае, когда в начальный момент тело будет вращаться вокруг оси Ог.
Этот случай будет рассмотрен отдельно. Далее из последнего урав-
иения найдем
2 — В (В—С) . ,2 2,
р — А(А-С) и qh
где положено
1 ~^ В(В-С, '
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 151
Вычисляя аналогично, получим:
BI _ _ D(A-D)
C)(g чи g~^B(A B)'
где двучлен А — D существенно положителен и не может обратиться
в нуль иначе, как при qQ и ?о> равных нулю.
Так как риг должны быть вещественными, то необходимо,
чтобы q2 было меньше наименьшей из величин /2 и g2. Чтобы узнать
эту величину, составим разность g2— /2:
„2_ f2 _ а2 Р(А-С)(В-Р)
g J ~' В(В — С)(А — В)'
Знак g2—/2 совпадает со знаком В — D, который известен по
начальным условиям.
Допустим для определенности, что
В — D>0, g2>P.
Тогда переменная q должна будет изменяться между —/и -(-/.
Следовательно, г никогда не обратится в нуль и будет сохранять
один и тот же знак, который будет известен по начальному значе-
нию г0. Допустим, что г >• 0. Напротив, р обращается в нуль вся-
кий раз, когда q=i.f. Если q увеличивается, то производная -~
будет положительной, и третье из уравнений A5) показывает, что р
будет тогда отрицательным; когда q уменьшается, тогда р будет
положительным. Эти рассуждения устанавливают в каждый момент
времени знаки, которые нужно брать перед радикалами, выражаю-
щими р и г в функции q.
Наконец, подставляя найденные значения р и г в третье из урав-
нений A5), получим
Перед радикалом нужно брать знак -|— пока Ч возрастает, и так до
момента, когда q достигнет значения -(-/. После этого q бу-
дет уменьшаться от -(-/до —/ и перед радикалом нужно брать
знак — и т. д.
Мы видим, что t определяется в функции q при помощи эллипти-
ческого интеграла, который мы приведем к нормальному виду, полагая
q—jb, я — g2 {B_C)(A__D) . u°;
Таким путем, разрешая относительно dt и интегрируя, мы получим
152 ДИНАМИКА СИСТЕМЫ
где п обозначает положительную постоянную
¦v-y
D(A-D)(B-Cl
ABC
и t0—новая произвольная постоянная, представляющая собой тот
момент времени, когда q, возрастая, обращается в нуль. Модуль №
меньше единицы, так как g2^>f2; он равен ангармоническому отно-
шению величин А, С, В, D.
Полученные выше формулы определяют р, q и г как однозначные
функции времени. В самом деле, если для краткости положить
то обращение эллиптического интеграла дает
,,/ В (В—С) ,/--. т~ , -.ГЪф—С)
D(A D)
l] dnx,
C(A-C)
где а положительно и s, e', s" равны +1.
На основании элементарных свойств функций sn, en, dn эти фор-
мулы показывают, что р и q обращаются периодически в нуль, в то
время как г никогда в нуль не обращается.
Если, как и раньше, мы предположим, что г0 > 0, то г будет
оставаться все время положительным и нужно будет принять s" = -f-1.
Тогда на основании первого уравнения Эйлера непосредственно
dp
видно, что ——¦ и q должны иметь одинаковые знаки, а это на осно-
ва '
вании известной формулы
den т
rfx
= — snxdnx
показывает, что ее' — — 1. Мы примем е' = —1 и е == —|— 1.
Величины р, q, r являются периодическими функциями времени t
и имеют период
¦-1К — 1 f
~~ п ~ п J Уп_S2
Когда время увеличивается на эту величину, р, q, r принимают
прежние значения. В эти моменты мгновенная ось вращения занимает
свое первоначальное положение в теле, но не в пространстве, как
мы это увидим дальше.
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
153.
Теперь надо вычислить три угла Эйлера в функции времени. Для уп-
рощения вычислений мы предположим, что в качестве оси zt (рис. 226)
выбрано неизменное направление главного момента количеств движе-
—»¦
ния Оа, известного из начальных условий. Напишем, что проекции
вектора Оа на подвижные оси равны соответственно Ар, Bq, Cr:
/sin 9 sin cp = Ар,
I sin 9 cos cp = Bq, B0)
/cos 6 = Cr, .
так как косинусы f, f'> ~\" углов, образованных осями Ox, Oy, Oz
с осью Ozx, суть sin 8 sin cp, sin 9 cos ср и cos 9; I есть модуль век-
тора Оа. Из этих уравнений без интегрирования получаем 9 и ср в
функции р, q, r. Уравнения эти совместны на основании равенства A3).
Чтобы вычислить ф, обратимся к двум ранее полученным уравнениям;
р = у sin 9 sin cp -f- 9' cos cp,
q = у sin 9 cos cp—-9' sin ср. ;
Исключая 9', мы из них получим
, р sin tp -|- q cos <p
4* sin в '
Но из уравнений B0) имеем
Ар4- + Bq"*
p^ ;
и следовательно,
принимает вид
выражение для
h — Cr2
B1)
Рис. 226.
в ц->- ~ р—
Так как ф' положительно, то угол ф будет все время возрастать
и плоскость zfiz будет все время поворачиваться в положительном
направлении вокруг Ozx, т. е. вокруг Оа. Заменяя р и q или г их
значениями в функции t, мы получим ф в функции t через квадра-
туру, выполненную над эллиптической функцией! Мы покажем ниже
(п. 391), как можно, выполнив эту квадратуру, выразить ф и вместе
с ним девять косинусов а, [3, f, а', C', ¦[', а", ф", -j" в функции
времени.
Полученные формулы позволяют определить основные особенности
движения. Когда t увеличивается на период Г, величины р, q и г
принимают первоначальные значения. Как видно из формул B0), 9
также принимает первоначальное значение, так как cos 9 и sin 9 зз
период Т не обращаются в нуль, а <р увеличивается на 2тг. В самом
деле, следя за изменением ср или вычисляя ср-', мы видим, что f
154 ДИНАМИКА СИСТЕМЫ
постоянно увеличивается, если г > 0. Что касается угла ф, то он за
период Т увеличивается на некоторую постоянную величину. В самом
деле, обозначая через ф (t) выражение угла ф в функции времени, по-
дучающееся из уравнения B1), имеем
Y(t+T) = Y(f),
так как ф' есть функция времени t, имеющая период Т.
Следовательно, интегрируя, получим
где й\ обозначает некоторый постоянный угол.
389. Частные случаи. Мы предположили, что ни один из дву-
членов А — D, B — D, С — D не равен нулю. Совершенно различ-
ные виды движения представятся в зависимости от того, будет ли
равняться нулю средний двучлен или один из крайних.
1°. Пусть сначала С — D — 0. Мы видели (п. 388), что это усло-
вие может быть выполнено только, если начальные значения р0 и q0
равны нулю. Тогда уравнение
Ар2 (А — С)+ВдЦВ — C) = \>?D(D — C) = 0
показывает, что постоянно должны выполняться условия р — 0, q — Q.
Мгновенная ось вращения совпадает, следовательно, с осью Oz
в течение всего времени движения и сохраняет в теле постоянное
положение; но она неподвижна также и в пространстве, так как два
первых уравнения B0) Ар = I sin 9 sin ср и Bq = l sin 6 cos <p показывают,
что если р и q равны нулю, то угол 9 тоже равен нулю. Мгновен-
ная ось Oz совпадает, следовательно, с осью Ог1з неподвижной в про-
странстве. Тогда движение будет вращением вокруг неподвижной
оси. На основании уравнения Cr~l cos 9 угловая скорость этого
вращения равна
I (J.D
Г=Г = = = |1
Мы вновь приходим здесь к свойству постоянных осей вращения.
Тело, которому в начальный момент сообщено вращение вокруг оси Oz,
являющейся главной осью инерции для неподвижной точки О, будет
продолжать вращаться вокруг этой оси сколь угодно долго.
2°. Если А — D = 0, то необходимо должно быть q0 = г0 = 0.
Тогда получится q = г = 0. Мгновенная ось вращения, неподвижная
в теле, направлена по Ох. В пространстве она также неподвижна и
направлена по Огх, так как вследствие равенства нулю величин q и г
из уравнений B0) получаем 9=-^, ср =-5-. Следовательно, движение
будет, как и в предыдущем случае, вращением вокруг неподвижной
оси с постоянной угловой скоростью р —Ро = -т = [>¦•
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 155
То обстоятельство, что в обоих случаях ось вращения совпадает
с осью Ozlt является следствием того, что в качестве оси Огг выбран
главный момент количеств движения Оо. То обстоятельство, что
в обоих случаях угловая скорость есть ;х, является следствием того,
что а в общем случае обозначает проекцию мгновенной угловой ско-
рости вращения ш на Оа, а в рассматриваемых случаях ш совпадает
по направлению с Оо.
3°. Пусть, наконец, В— D —0. Исключая q из двух первых
уравнений A5), имеем
АрЦА — В) — СгЦВ — C) = \lW(D — В) = 0. B2)
Следовательно, для того, чтобы имел место рассматриваемый слу-
чай, необходимо и достаточно, чтобы в начале движения было
т. е. чтобы
Ро=±гоу А(А_В)-
Если это условие выполнено, то на основании равенства B2) будет
постоянно
?. — + Л/~С(В-С) __ л_
г ~~ - V А(А — В)~~г0-
А (А — В)
Это показывает, что геометрическое место мгновенных осей в теле
рп
вырождается в плоскость х ==— z, проходящую через среднюю ось.
В рассматриваемом нами случае g^/—[а, и модуль &2 = —g-
5
обращается в единицу, а все интегрирования могут быть выполнены
в элементарных функциях. Действительно, дифференциальное уравне-
ние для s принимает вид
|^=±яA—**). B3)
откуда, интегрируя и беря знак -(-, получаем:
Полагая, как и раньше, i = n(t —10), находим:
1 + s I—s 2s _ 2 _1/-1
156 ДИНАМИКА СИСТЕМЫ
Так как g = / — р, то р, q и г принимают значения
НА —С)
¦ -= у. \ГВ (А ~ В) \П ? = d'y.
V С (А — С)
С) - B4)
С {А —С) е* + е~* '
где s, е', в" по-прежнему равны ±1. Мы поставили перед q мно-
житель s, так как, в зависимости от того, будем ли мы брать
в равенстве B3) знак -4- или —, мы получим для q значение с тем
или иным знаком. Если, например, г0 считать положительным, а
р0 — отрицательным, то нужно принять e" = -f-l и е' = —1. Тогда
первое уравнение Эйлера потребует, чтобы было е = + 1- Такое опре-
деление знаков мы и примем. Когда t неограниченно увеличивается,
то q, как мы видим, стремится к пределу р, в то время как р и г имеют
пределом нуль. Поэтому мгновенная ось вращения стремится занять
в теле предельное положение, совпадающее со средней осью эллип-
соида инерции. В пространстве эта ось стремится к направлению Ozx
или к направлению главного момента количеств движения Оо, так
как уравнения B0) показывают, что 6 должно стремиться к -? , а ср —
к нулю. Следовательно, предельное положение Оу есть действи-
тельно Ozv Таким образом, движение стремится к равномерному
вращению с угловой скоростью [i вокруг неподвижной оси.
Если р и г в начальный момент времени ? = 0 равны нулю, то
в уравнениях B4) нужно будет положить постоянную @ равной + оо.
Тогда риг будут постоянно равны нулю, a q будет постоянно
равно [а. В этом случае тело начнет вращаться вокруг главной оси
инерции Оу, и это движение будет все время продолжаться.
390. Случай, когда эллипсоид инерции является эллипсоидом
вращения. Допустим, что эллипсоид инерции является эллипсоидом
вращения вокруг, например, оси Oz, вследствие чего
С будет больше А и В, если эллипсоид является сжатым, и будет
меньше этих величин, если он вытянутый.
Модуль k2 будет тогда равен нулю, и эллиптические функции
обратятся в круговые. Прежде всего третье уравнение Эйлера
C^ + (B — A)pq = l
приводится к виду
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
и последнее из уравнений B0)
157
показывает, что 9 должно оставаться постоянным:
6 = 6О> /cos % = CrQ.
Что касается ф, то из выведенной ранее формулы
dbj __ I (Ар4- +
dt~~ "" " '
здесь получаем
~df~ A '
Следовательно, <р изменяется пропорционально времени. После этого
из формулы
г = Y cos 9 -\- ср'
получаем:
Ф(_ dty_ g „/, С"
¦('-*)•
Следовательно, ср изменяется пропорционально
времени f'
Наконец, два первых из уравнений B0) опре-
делят р и г в функции t при помощи формул
Л/? = Z sin 90 sin cp, A7 = /sin90coscp.
Рис. 227.
Мы видели раньше (п. 382), что мгновенная угловая скорость
вращения w есть геометрическая сумма трех угловых скоростей 9',
ср' и <]/, направленных соответственно вдоль 01, Oz и Ozv В рас-
сматриваемом случае угол zOz^ постоянен, 9' равно нулю, ср' и ф'
тоже постоянны (рис. 227). Мгновенная угловая скорость вращения w
есть диагональ параллелограмма, построенного на t]/ и ср'. Этот парал-
лелограмм не меняется в течение всего времени движения. Геометри-
ческое место мгновенных осей вращения ш в теле есть, следовательно,
круговой конус с осью Oz; геометрическое место мгновенных осей
в пространстве есть круговой конус с осью Огх. Движение тела
получается как результат равномерного качения одного конуса по
другому.
391. Краткие указания к вычислению девяти косинусов в функции
времени. Выражения девяти косинусов, данные Якоби (Journal de Crelle,
т. 39) могут быть вычислены следующим, непосредственно представляющимся,
элементарным путем, лишь незначительно отличающимся от пути, которому
следовал Сомов (Journal de Crelle, т. 42). Мы уже получили 6 и у в функции
158 ДИНАМИКА СИСТЕМЫ
времени с помощью формул B0). Теперь вычислим ф. Мы нашли
dt ^ А*
di>
Положим, как и выше, x = n(t — t0); заменим в выражении ¦— пара-
метры р и q их значениями A9) и сп2т через 1 — sn2 т. Получим
dt ~~ п А (В — С) — С (В — A) sn2
что можно также, выполнив деление, написать в виде
dfy = fvD ^?> (С — А) (В — С)
dt ~ пС+ пС А{В—С)—С(В — А)sn2 т "
Чтобы узнать полюсы двоякопериодической функции, стоящей в правой
части, определим постоянный аргумент ie, удовлетворяющий соотношению
sn 1е~ С (В-А) •
Так как А > В, то значение sn /с будет чисто мнимым; следовательно, для
аргумента 1с можно взять чисто мнимое значение и поэтому для с — значе-
ние вещественное. Тогда мы можем написать:
dx nC^nC С (В —A)
Из равенства B5) на основании элементарных соотношений, связывающих
функции sn, en, dn одного и того же аргумента, получаем:
спЧс - В(А-С) _ Р(А-С)
СП 1С- С {А-В)' dn 1С~ C(A-D)-
Извлекая квадратные корни и принимая во внимание значение п, найдем
Перед правой частью надо было бы взять два знака, но так как можно
изменить знак 1с без изменения предшествующих соотношений, то перед
правой частью можно всегда брать знак +. Тогда уравнение, определяю-
di
di>
щее -~, напишется так:
I sn ic en ic dn tc ™v
Sn2 т - ( '
Это выражение легко теперь проинтегрировать. В самом деле, каковы бы
ни были аргументы и и v, существует тождество [см., например, Врио и
Буке (В г i о t et Bouquet, Fonctions elliptiques, стр. 494)]
из которого, если взять логарифмические производные по и, получается
dna _ 8'(ц) H'(u-v) H'(u + v)
°*v ~ 9(«) H(u — v) + H(u + v) '
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 159
Полагая и = lc, v = х и обозначая через X вещественную постоянную
u.D 6' (lc)
~* —I в,. > , имеем
пС 6 (/с)
rfx +2 H(tc--z) ^2
Интегрируя и предполагая оси выбранными таким образом, чтобы угол
обращался в нуль вместе с х, наконец, найдем
Таким образом, три угла в, <р, ф выражены в функции времени и теперь
можно определить положение тела в произвольный момент. Синусы и коси-
нусы этих трех углов выражаются функциями времени, которые либо одно-
значны, либо являются квадратными корнями от однозначных функций. Но
замечательно, что девять косинусов а, р, -(, а', р', у', а", р", f" являются одно-
значными функциями времени. Этот результат, принадлежащий Якоби, может
быть установлен следующим образом. Из формул B0) получаются уже у, к'.
ч" как однозначные функции времени. Из них выводим
или, заменяя ра и д2 их значениями,
— B){D~C) _/ I ^4(i5 —С)
-с)(д-с) К sn2T-W
Введя аргумент fc, определенный соотношением B5), принимая затем
во внимание тождество B7), в котором следует положить и — х, v = 1с, мы
найдем для sin 6 выражение вида
8(т)
где •< — некоторая постоянная, значение которой нет надобности выписывать.
Мы видим, таким образом, что sin 6 является квадратным корнем от одно-
значной функции. Вычисляя е^, cos фи sin ф по формуле B8), найдем, что
эти функции зависят от той же иррациональности, что и sin 8. Эта иррацио-
нальность исчезает в дальнейшем из комбинаций, дающих а, а', а", р, р', р".
Можно придти к тому же выводу, вычисляя непосредственно как функ-
цию времени t величину
w = e^ sin 8.
Дифференцируя, получаем
w dt dt ъ dt
Заменяя ¦—- его значением B1), а 8 и —тт заменяя значениями, которые
„ г, 1 dw
можно вывести из равенства / cos 8 = Сг, получим для ^- эллиптическую
функцию переменного /, из которой при помощи квадратуры определим w
в виде однозначной функции времени.
160 ДИНАМИКА СИСТЕМЫ
Если мы захотим сравнить предыдущие вычисления с вычислениями
Сомова (Journal Crelle, т. 42), то достаточно будет заметить, что аргумент,
обозначенный Якоби и Сомовым через la, связан с 1с соотношением
^ IK'.
Рамки этой книги не позволяют нам излагать подробнее эти вычисления.
Мы отсылаем за подробностями к работе Эрмита «Sur quelques applications
des fonctions elliptiques» (К некоторым приложениям эллиптических функ-
ций), в которой изложены два различных метода для непосредственного
вычисления девяти косинусов и сделаны ссылки на работы Брилля (Brill),
Челини (Chelini), Сиачи (Siacci) и на сочинение Гальфена (Traite de Halphen,
т. II).
Когда D — В (п. 389, 3°), тогда модуль k равен 1 и углы 8, <р, ф, а также
девять косинусов выражаются элементарными функциями. В этом случае на
основании соотношений B4) функция s = sn x обратится в _т или
е -\- е
в — / tg lx и функции сп т и dn t обратятся в Y^ — s2 или в —— . Вводя
чисто мнимый аргумент ic, определенный соотношением B5), т. е.
.-,,._ Л (Я-С) 1 _В{А-О
8 С(А— В)' cos2C ~~С(А — В) '
мы представим формулу B6) в виде
dif ^ \з.В . tg с 1
dx пС ' cos^c tga с — tg2 H '
Из последнего равенства после интегрирования получаем
. I . sin(c + /-c)
ф = At к In ——)—¦—-А:,
т 2 sin (с — /т)
где X обозначает постоянную ^-p. + tgc.
Отсюда выводятся .выражения девяти косинусов.
Когда А = В (п. 390), модуль равен нулю и sn т приводится к sin x. Для
этого случая выражения в, <р, ф были даны раньше.
392. Геометрическое представление движения по Пуансо.
В работе, помещенной в т. XVI Journal de Liouville, Пуансо дал
геометрическое представление движения, основанное на следующих
теоремах кинематики, которые остаются справедливыми в любом слу-
чае движения твердого тела вокруг неподвижной точки.
Рассмотрим эллипсоид инерции тела, построенный в неподвижной
точке О и пусть Ох, Оу, Ог — главные оси инерции этого эллипсоида.
В некоторый момент времени мгновенная ось вращения Ota пересекает
поверхность эллипсоида в некоторой точке т, которую Пуансо на-
зывает полюсом.
Теорема I. Кинетическая анергия тела равна -?г=-.
1 От2
В самом деле, на основании самого определения эллипсоида
инерции момент инерции тела относительно оси Ош равен =-,
От*
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 161
и так как скорости точек тела будут такими, как если бы тело
вращалось с угловой скоростью ш вокруг Ош, то кинетическая
энергия -g- V mv2 равна половине произведения момента инерции на
1 0K
квадрат угловой скорости (п. 359) -я- -=-.
* Onfl
Теорема II. В каждый момент времени касательная
плоскость к эллипсоиду инерции в полюсе т перпендикулярна
к главному моменту Оа количеств движения.
В самом деле, эллипсоид инерции, отнесенный к осям Oxyz,
имеет уравнение
Направляющие косинусы вектора Ош равны — , — , — и коорди-
наты х, у, г полюса т относительно тех же осей можно представить
в виде
х = 0т?-, у=~0т-2-, г = 0т — .
A) ^ A) О)
Следовательно, уравнение касательной плоскости в точке т{х, у, г)
принимает вид
Эта плоскость перпендикулярна к вектору Оа, проекции которого
равны Ар, Bq и Сг.
Теорема III. Расстояние от неподвижной точки до пло-
скости, касательной к эллипсоиду инерции в полюсе, равно
квадратному корню из удвоенной кинетической энергии, делен-
ной на главный момент количеств движения.
В самом деле, расстояние от точки О до касательной плоскости
1
8=^=
От
что и доказывает теорему.
Применим теперь эти три теоремы к частному случаю, когда
силы, приложенные к твердому телу, приводятся к одной равнодей-
ствующей, проходящей через неподвижную точку. Тогда:
1°. Кинетическая энергия будет постоянной и равной h или Djx2.
Следовательно, имеем
О~т
2°. Главный момент Оа количеств движения имеет фиксированное
•направление: плоскость, касательная к эллипсоиду в точке т, будет
также иметь фиксированное направление, перпендикулярное к Оа.
И Зак. 922. П. Аппель, т. II
162
ДИНАМИКА СИСТЕМЫ
3°. Главный момент Оа имеет постоянную величину / или \>D, и по-
этому расстояние от точки О до касательной плоскости в точке т,
равное
будет также постоянным.
В результате плоскость П, касательная в точке т, будет непо-
движна, так как она имеет постоянное направление и находится на
постоянном расстоянии от неподвижной точки О.
Мы пришли, следовательно, к выводу, что эллипсоид инерции
постоянно касается неподвижной плоскости П. Точка касания т
является полюсом, прямая От— мгновенной осью, а мгновенная
угловая скорость ш, равная ОтУ^п, пропорциональна От. Пуансо
называет полодией кривую, описываемую полюсом т на поверхности
эллипсоида, и герполодией — кривую, описываемую полюсом на не-
подвижной плоскости II (рис. 228). Конус, являющийся геоме-
трическим местом мгновенных осей в теле, имеет вершину
Рис. 228,
в точке О, и в качестве направляющей — полодию; конус, являю-
щийся геометрическим местом мгновенных осей в пространстве, имеет
вершину тоже в точке О, а в качестве основания — герполодию. Для полу-
чения движения нужно заставить первый конус катиться по второму
таким образом, чтобы мгновгнная угловая скорость ш была в каждый
момент пропорциональна От, так как
Так как точка эллипсоида, которая находится в соприкосновении
с плоскостью П, имеет в каждый момент скорость, равную нулю,
поскольку она находится на мгновенной оси, то можно также ска-
зать, что движение получится, если заставить эллипсоид инерции
катиться и вертеться (без скольжения) по неподвижной плоскости П.
Положение этой неподвижной плоскости известно из начальных
условий.
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
163
Можно еще иначе представить себе движение, допустив, что ма-
териально осуществлена поверхность катящегося конуса, ограничен-
ная полодией: образованное таким образом тело катится по пло-
скости П, и его следом является герполодия (рис. 228а). Так как
полодия катится по герполодии без скольжения, то соответствующие
дуги обеих кривых имеют одинаковые длины.
Рис. 228а.
Полодия. Найдем уравнение полодии. С этой целью отнесем
эллипсоид инерции к его осям. Мы можем определить полодию как
геометрическое место точек т (х, у, г) эллипсоида, в каждой из ко-
торых касательная плоскость
AxX + ByY-\-CzZ=\
находится на постоянном расстоянии В:
Это условие выражается уравнением
'Yd
от начала координат.
A2x2 + В2 у2 -f C2z2 = D.
Это уравнение совместно с уравнением эллипсоида
B9)
= 1 C0)
определяет полодию, которая является, таким образом, алгебраи-
ческой кривой четвертого порядка. Можно себе представить вид этой
кривой, если рассматривать ее как пересечение эллипсоида и конуса,
являющегося геометрическим местом мгновенных осей вращения От
в теле или, что то же, являющегося катящимся конусом. Уравнение
этого конуса получится путем исключения правых частей из равенств
B9) и C0), что приводит к уравнению
А (А — D) х2 + В (В — D) у2 + С (С—D) г2 = 0.
Для того чтобы этот конус был вещественным, необходимо,
чтобы
А > D > С.
Это — очевидное условие того, что расстояние —==. от касательной
плоскости до начала координат должно быть меньше, чем наибольшая
11*
164
ДИНАМИКА СИСТЕМУ
полуось —==., и больше, чем наименьшая полуось -==. Конус вы-
\С У А
плоскости, т. е. в прямую, совпадающую
Ог, когда D = А или D = С. Это легко
поскольку концы с к с' большой оси
являются единственными вещественными
касательная плоскость имеет максимальное или
минимальное расстояние от начала.
Полодия будет тогда состоять из
двух точек с а с' или ana'
(рис. 229). При D — B конус
распадается на две вещественные
плоскости, проходящие через сред-
нюю ось
рождается в две мнимые
с осью Ох или с осью
объяснить геометрически,
и концы ana' малой оси
точками, в которых
с
X = It,
С(В-С)
А {А —В)
Это как раз те самые пло-
скости, с которыми мы встреча-
лись при аналитическом исследо-
вании задачи. В этом случае поло-
дии состоят из двух эллипсов е
и е', пересекающихся на двух
концах b и Ь' средней оси.
Таким образом, полодия яв-
ляется пересечением эллипсоида
инерции и конуса второго по-
рядка, имеющего те же плоскости
симметрии. Она состоит из двух
различных замкнутых ветвей, сим-
метричных друг к другу относи-
тельно центра и одной из главных
Каждая ветвь имеет в качестве плоскостей
плоскости эллипсоида (рис. 229)
1, 2, /, 2, для которых радиус-
выходящий из центра, имеет максимум или минимум.
При движении одна из ветвей полодии катится по неподвижной
плоскости П. Эта ветвь — единственная используемая; вторая ветвь
катится по плоскости, симметричной к П относительно точки О.
Важно дать себе отчет о различных формах, которые принимает
полодия, в зависимости от начальных условий. Представим себе эл-
липсоид инерции (рис. 229). Так как мы предполагаем, что А >
]> В > С, то ось Ох является малой осью, а Ог — большой. Обо-
значим через а, а', Ь, Ь', с, с' вершины поверхности. В зависимости
от начальных условий постоянная D изменяется между А к С. При
D— А конус, который является геометрическим местом мгновенных
плоскостей
симметрии
и обладает
вектор От
эллипсоида.
две другие главные
четырьмя вершинами
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 165
осей вращения в теле, вырождается в ось Ох и полодия — пересе-
чение этого конуса и эллипсоида — вырождается в точку айв сим-
метричную точку а'. Когда D немного уменьшится, полодия будет
состоять из маленькой замкнутой кривой /, окружающей а, и из
симметричной кривой /', окружающей а'. Если D будет продолжать
уменьшаться, то кривые / и. /' будут удаляться от а и а'
и при D — В эти кривые соединятся в точках Ъ и Ъ' и распадутся
на два эллипса е и е'. Точно так же при D = C полодия выродится
в две вершины с и с'. При увеличении D полодия будет вначале
состоять из двух маленьких симметричных замкнутых кривых g и g',
окружающих эти вершины; затем эти кривые будут увеличиваться,
и при D = B они опять обратятся в эллипсы е и е'.
Таким образом, имеются два вида полодий. Одни из них окру-
жают вершины малой оси, а другие вершины большой оси. Эти
два вида полодий разделяются особой полодией, соответствующей
D — B и образованной двумя эллипсами е и е'. Через каждую точку
поверхности эллипсоида проходит одна и только одна полодия.
Когда все эти кривые уже начерчены, то чтобы, узнать, какая
полодия соответствует заданным начальным условиям, достаточно
знать точку т0, в которой ось начального мгновенного вращения
пересекает эллипсоид. Искомой полодией будет та, которая проходит
через т0. Что касается соответствующей неподвижной плоскости И,
то это — плоскость, касающаяся в т0 эллипсоида в его начальном
положении.
Герполодия. Если опустить из неподвижной точки перпендикуляр
ОР на плоскость П (рис. 228), то длина ОР равна -=. Радиус-
вектор Рт =р кавой-нибудь точки герполодии имеет длину
Мы видели, на основания формы полодии, что расстояние. От от
полюса до центра изменяется между его минимумом и максимумом.
Следовательно, р также изменяется между соответствующими мини-
мумом и максимумом pt и р2. Герполодия заключена поэтому между
двумя концентрическими окружностями радиусов pt и р2, которых
она последовательно касается в точках, таких, как т1 и т2. Она
имеет форму, указанную на рис. 228. Это — кривая, обращенная
всегда вогнутостью к точке Р и не имеющая точек перегиба. Это
обстоятельство, впервые замеченное Гессом (диссертация, Мюнхен,
1880; Math. Annalen, т. XXVII) и вновь открытое де Спарром (de
Sparre, Comptes rendus, 1884), заслуживает быть отмеченным, так
как Пуансо в своей работе неточно изобразил герполоиду, приг
дав ей синусообразную форму. Доказательство можно найти в статье
Паде (Pade, Nouvelles Annales, 4 serie, т. VI, июль 1906).
166
ДИНАМИКА СИСТЕМЫ
Дуга т1т2 герполодии есть четверть дуги /, 2 полодии (рис. 228).
Когда все точки полодии соприкоснутся последовательно с пло-
скостью, полюс т займет в эллипсоиде первоначальное положение,
но в плоскости II радиус-вектор Рт повернется на угол, равный
АтхРт2, поскольку на полодии имеются четыре вершины. Если этот
угол тхРт2 несоизмерим с тг, то герполодия не будет замкнутой:
полюс никогда не займет одновременно точно то же самое положе-
ние на эллипсоиде и на плоскости, которое он занимает в данный
момент. Если же этот угол соизмерим с тс, то герполодия будет зам-
кнутой и по истечении неко-
торого промежутка времени
полюс займет опять прежнее
положение и на эллипсоиде
и на плоскости.
Частные случаи. Если
D — A или D = C, то по-
лодия и герполодия обра-
тятся в точки. Эллипсоид
будет вертеться, оставаясь
в соприкосновении с пло-
скостью своей вершиной на
большой или малой оси.
Если D — В, то полодия
обратится в два эллипса е
и е', проходящих через сред-
нюю ось. Малая ось одного
из этих эллипсов, как это
легко проверить, равна сред-
Рис. 230. v 1 у v
ней оси —==. Движение в
У в
этом случае получится, если заставить один из эллипсов, центр кото-
рого неподвижрн, катиться по плоскости II. Так как эта плоскость нахо-
дится от центра на расстоянии, равном -==., то минимум р2 радиуса
у В
р = Рт герполодии равен нулю; максимум имеет некоторое значе-
ние р!„Герполодия будет тогда иметь форму двойной спирали (рис. 230),
Имеющей вершину Т, соответствующую максимуму р и состоящую из
двух симметричных относительно РТ ветвей, приближающихся асимпто-
тически к точке Р. Только одна часть этой герполодии будет в действи-
тельности описываться; это та ее часть, которая идет от началь-
ного положения т0 полюса до точки Р в том или другом
направлении. Время, нужное для того, чтобы полюс пришел в по-
ложение Р, бесконечно, несмотря на то, что длина спирали конечна,
так как она равна периметру катящегося эллипса.
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 167
Когда эллипсоид является эллипсоидом вращения, полодия и гер-
полодия будут окружностями. Если он является сферой, то.полодия
и герполодия будут всегда точками.
Устойчивость вращения вокруг главных осей. В частных слу-
чаях, когда тело начинает вращаться вокруг одной из главных осей
инерции, такое вращательное движение продолжается неопределенно
долго; мгновенная ось будет неподвижной в теле и в пространстве.
Легко видеть, что это единственные случаи, когда мгновенная ось
остается неподвижной в теле. В самом деле, полагая мгновенную ось
неподвижной в теле и обозначая через а, Ь, с её направляющие ко-
синусы относительно координатных осей Oxyz, имеем:
р = аш, q==b(a, г = си>,
где а, Ь, с — постоянные. Тогда интеграл кинетической энергии A2)
показывает, что ш постоянна. Следовательно, три составляющие р, q, r
будут постоянными и уравнения Эйлера будут иметь вид
(С — B)qr = Q, (Л — C)rp = O, (B — A)pq = O.
Если эллипсоид инерции не является эллипсоидом вращения, то
из этих уравнений вытекает, что две из величин р, q, r равны нулю,
т. е. что тело вращается вокруг главной оси инерции. Если эллип-
соид является эллипсоидом вращения вокруг оси • Oz, то А = В
и либо г = О и тело вращается вокруг оси, лежашей в плоскости
экватора, т. е. вокруг главной оси инерции, либо р = q — О и тело
вращается вокруг главной оси Oz. Наконец, в случае А = В = С
тело вращается вокруг главной оси инерции, так как все оси являются
главными.
Теперь возникает вопрос, будет ли вращение тела вокруг одной
из этих главных осей инерции устойчивым движением или нет;
При этом вообще говорят, что движение является устойчивым, если
произвольным бесконечно малым изменениям начальных условий со-
ответствует бесконечно малое изменение самого движения. Движение
называется неустойчивым, если некоторое бесконечно малое изменение
начальных условий влечет за собой конечное изменение движения.
Если А > В > С, то вращения, вокруг большой и малой осей эл-
липсоида инерции являются устойчивыми, а вращение вокруг средней
оси неустойчиво. В самом, деле, сообщим телу начальное вращение
вокруг малой оси. Тогда эта ось останется неподвижной, полюс вра-
щения -совпадет с вершиной ав, касательная плоскость По в точке а0
будет неподвижной. Если теперь изменить бесконечно мало начальные
условия, сообщив телу начальное вращение вокруг оси, бесконечно
близкой к Оа0, то полодия обратится в малую замкнутую кривую,
бесконечно близкую к вершине малой оси. Следовательно, мгновенная
ось опишет в теле вокруг своего первоначального положения конус
с бесконечно малым углом раствора. Неподвижная плоскость П,
168 ДИНАМИКА СИСТЕМЫ
которой эллипсоид будет касаться в новом движении, будет беско-
нечно близкой к По и перпендикуляр ОР, опущенный из О на эту
плоскость, будет бесконечно близким по величине и по положению
к ОД,. Радиус-вектор От герполодии, имея длину, бесконечно близ-
кую к Оа0, отклонится бесконечно мало от перпендикуляра ОР, т. е.
©т Оа0. Следовательно, мгновенная ось опишет также и в простран-
стве конус, бесконечно близкий к своему первоначальному положению.
Таким образом, рассматриваемое вращение устойчиво. То же будет и
в случае вращения вокруг большой оси.
Но если тбло начнет вначале вращаться вокруг средней оси, то
бесконечно малое изменение начальных условий приведет полюс в по-
ложение т0, начиная от которого он будет описывать полодию,
окружающую либо вершину а, либо вершину с. Тогда ось отклонится
от своего первоначального положения на конечную величину; враще-
ние будет неустойчивое.
Эллипсы ее и е'е' (рис. 229) разделяют эллипсоид на четыре части:
две, содержащие вершины а к а', и две другие, содержащие вер-
шины с и с'.
Следуя замечанию Бура (Bour), естественно принять за меру
устойчивости вращения вокруг оси Оа отношение площади части,
содержащей а, к половине площади эллипсоида инерции. Действи-
тельно, если начальные условия изменяются так, что полюс находится
в этой части, то мгновенная ось описывает в теле конус вокруг
своего первоначального положения Оа. Точно так же устойчивость
вращения вокруг Ос измеряется площадью части, содержащей эту ось.
Например, если эллипсоид очень близок к эллипсоиду вращении
вокруг Oz, т. е. если А — В очень мало, то часть, содержащая а,
будет очень мала, так что устойчивость вращения вокруг Оа будет
слабой, так как маленькое смещение оси может вывести полюс из
этой части и заставить вращаться вокруг Ос.
Если эллипсоид будет точно эллипсоидом вращения (продолгова-
тые снаряды), то устойчивыми будут вращения только вокруг оси
симметрии. В самом деле, если тело вращается вокруг одной из глав-
ных осей в плоскости экватора и если в каком-нибудь случае по-
люс т будет немного отклонен от этой плоскости, то он будет опи-
сывать на поверхности эллипсоида круг, параллельный экватору и
почти совпадающий с ним. Следовательно, ось в теле сильно откло-
нится от своего первоначального положения. Интересно отметить,
что в пространстве ось, напротив, останется очень близкой к своему
первоначальному положению, так как длина От мало отличается от
экваториального радиуса.
Если эллипсоид инерции является сферой, то все его оси будут
одинаково устойчивыми или скорее безразличными, так как мгновен-
ная ось, если она будет смещена со своего места в другое, снова
станет неподвижной и в теле и в пространстве (см. Bour, Dyna-
raique, стр. 165).
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 169
393. Уравнение герполодии. Пуансо получил дифференциальное урав-
нение герполодии. заметив, что выражение дуги этой кривой 8 функции ра-
диуса От идентично выражению дуги полодии в функции того же радиуса,
так как обе кривые катятся одна по другой. Мы применим другой метод,
приводящий к несколько более коротким вычислениям, который мы заимст-
вуем из заметки Дарбу к «Механике» Депейру (Despeyrous).
Пусть, как и выше, х, у, г — координаты полюса т относительно главных
осей инерции Охуг. Так как отношение -=— постоянно и равно vT, то
(jm
Так как р, q, r являются эллиптическими функциями времени t A9), то
такими же будут^и х, у, г. Уравнения Эйлера, если в них заменить р, q, r
через лсУТ, yVft, zYh, приводятся к виду
^ -В) уг = 0, В^.+УТ(А-С)гх = о. C2)
Обозначим, как и выше, через Р проекцию точки О на неподвижную
плоскость II, которая содержит герполодию, и обозначим через р hj поляр-
ные координаты точки т кривой, отнесенной к точке Р. Так как
Yd
то имеем следующие уравнения:
Ах* + By*- + Сг2 = 1,
= D,
из которых первое выражает, что Omz — Рп? -\- ОР2, а последние суть урав-
нения полодии.
Разрешая эти уравнения относительно Jt2, у2, г2 и полагая
Д = (А — В) (В — С) (С — А),
(В-Р)(С-Р) и__ (С-Р)(А-Р)
BCD ' CAP
М-Р) (Д-Р)
с ~ АВР
получим:
C4)
Мы предположили, что А > В > С и что D заключено между В и С.
Тогда Д является отрицательным, и мы имеем а > 0, b > 0, с < 0. Следова-
тельно, г2 существенно положительно и никогда ие обращается в нуль. Это
находится в соответствии с тем,, что г никогда не обращается в нуль. Для
того чтобы х2 н у2 были положительны, необходимо, чтобы р2 — а было по-
ложительно, ар2 — * отрицательно. Следовательно, р3 колеблется между а и Ъ.
Таким образом, мы опять пришли к тому результату, что радиус-вектор
170 ДИНАМИКА СИСТЕМЫ
герполодии колеблется между минимумом У а и максимумом Yb. Диффе-
ренцируя перзое из уравнений C3), получим:
dp _ _ dx . dy . dz
или, принимая во внимание уравнения C2),
d? лГт iB—C , С— А . А — В\ ЬЛ[~йхуг
\
AST
Это уравнение, если заменить в нем х, у, г через их значения C4) и У~И
через [х \ D, принимает вид
Р ~ = V- YD У_(р2_а)(рЗ_*)(р2_с). C5)
Полученное уравнение позволяет найти р2 в функции t через эллиптическую
функцию. Это выражение р2 в функции t нам уже известно, так как х, у, г
являются эллиптическими функциями времени t.
Чтобы найти другое выражение, содержащее полярный угол /
точки герполодии, нужно исходить из следующего замечания: если от и да
являются двумя бесконечно близкими положениями (х,у,'г) и (х -\- dx,
у-\- dy, г-\- dz) полюса в теле, то плоскость элементарного треугольника тОт'
касательна к конусу мгновенных осей вращения в теле и проекции Sx, Sy, Se
площади S этого треугольника на главные плоскости эллипсоида равны
2SX = y dz — zdy, 2Sy = z dx —- x dz, 2Sz = xdy^y dx.
С другой стороны, так как конус мгновенных осей От в теле катится
по неподвижному конусу с вершиной в точке О и с герполодией в качестве
основания, то плоскость тОт' касается также и неподвижного конуса, и эле-
ментарная площадь S равна также площади между двумя соответствующими
бесконечно близкими образующими неподвижного конуса. Тогда проекция
площади S на плоскость II, содержащую герполодию, есть элементарный сек-
тор этой кривой -у- р2 dx-
Так как плоскости хОу, yOz, zOx образуют с плоскостью П, перпенди-
кулярной к Оа, углы с косинусами у, т'> т". т0
y C6)
Вычислим правую часть. Сначала находим
Ap_AY± X^YJLX Ш)
Т - — - t х - А х,... F/)
Далее, в силу уравнений, выводимых из уравнений Эйлера, н в силу
уравнений C2) получаем:
Величина, заключенная в скобках, равна А — D, как это видно после исклю-
чения х2 из двух последних уравнений C3). Следовательно,
2S - ^У^(А~Р)
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 171
Аналогичные выражения найдем путем перестановки букв для Sp и Sz.
Подставляя найденные выражения в равенство C6), получим после замены УЪ
величиной УТ
Заменим, наконец, в этом равен§тве х2, у2, <Р их значениями C4) в
функции р2, и мы получим после сокращений соотношение вида
Р2^ = (*(р2 + ?). C8)
где Е обозначает постоянную лвгп • т- е> ~~V—abcD.
ABL D
Соотношения C5) и C8) определяют р иц в функции времени. Исключая
из ннх dt, получим уравнение герполодин
dy = ^ + Е)«? , C9)
¦ /?>/B)Bft)B)
которое позволяет найти х через квадратуру.
Таким образом, можно построить герполодию и проверить, что она не
имеет точек перегиба, для чего нужно вычислить радиус кривизны в функ-
ции р и доказать, что он никогда не обращается в бесконечность. Этот ре-
зультат вытекает нз неравенства А < В -\- С, связывающего три момента
инерции. Кроме того, мы видим, что герполодия не имеет точек возврата, так
dy
как —^- не обращается в нуль при значениях р2, лежащих между а и Ь.
Если эллипсоид инерции заменить произвольным эллипсоидом или гипербо-
лоидом, который заставляли бы катиться и вертеться по неподвижной пло-
скости П, то соответствующая герполодия может иметь точки перегиба или
возврата. Может также случиться, что радиус-вектор Рт не будет все время
вращаться в одном и том же направлении. Мы отсылаем за более подробным
рассмотрением этого вопроса геометрии к заметке Дарбу (Mecanique de De-
speyrous) н к работе Гесса, а по поводу выражения \ в функции времени
к Traite Гринхнлла (гл. III).
В частном случае, когда В = D, тогда Е, а н с обращаются в нуль, и
квадратура, определяющая х> может быть выполнена в элементарных функ-
циях. В этом случае
. dp 1 P
dx = ¦ —
p у~в Уь — f- Yeb
-ТГ— 1
и, полагая у Bb = А., получим
VT=
P 2
Это — уравнение спирали, изображенной на рнс. 230.
Уравнения C5) и C8) можно получить, исходя также нз замечания, что
абсолютная скорость, с которой полюс т описывает герполодию, равна в каж-
дый момент времени относительной скорости по отношению к осям Oxyz,
с которой точка М описывает полодию. Это вытекает из того, что соответ-
ствующие дуги обеих кривых одинаковы. Тогда получаются два уравнения,
если написать, что равны проекции этих двух скоростей на Рт и что равны
моменты этих двух скоростей относительно ОР.
172
ДИНАМИКА СИСТЕМЫ
-/П
Герполддиограф Дарбу и Кёнигса. Картина движения, которую
дал Пуансо, обладает тем недостатком, что в ней не представлено время.
Действительно, если материально осуществить оба конуса, имеющих вер-
шины в точке О, а основаниями полодию и герполодию н если при помощи
какого-нибудь сцепления заставить один из ннх катиться по другому, то еще
не будет получаться полное представление движения, так как, кроме того,
необходимо катящемуся конусу сообщить мгновенную угловую скорость, ко-
торая в каждое мгновение пропорциональна От. Дарбу доказал (заметка
в Mecanique de Despeyrous), что можно построить прибор, выполняющий это
условие, если к предыдущему представлению движения присоединить другое
представление, также принадлежащее Пуансо.
Пусть, как и раньше, т есть точка касания эллипсоида инерции с пло-
скостью Н, а Р— проекция центра О на плоскость П. Проведем через центр О
(рис. 231) эллипсоида плоскость П', параллельную неподвижной плоскости П,
и обозначим через т' про-
екцию точки т на пло-
скость IT. Мгновенную угло-
вую скорость вращения
«о = От \^h, направленную
вдоль От, можно разложить
на две, из которых одна, на-
правленная по ОР , имеет
постоянное значение (* =
=ОЯУ?, а другая, на-
правленная по От', равна
От' Y~h. Если сообщить
плоскости П' постоянное
вращение с угловой ско-
ростью (х вокруг ОР, то
движение эллипсоида отно-
сительно плоскости П', ко-
торая станет, таким обра-
зом, подвижной, приведется в каждый момент к одному вращению вокруг От'.
Во время движения положение прямой От' меняется как в теле, так н в про-
странстве. В теле оно описывает конус (С) второго порядка, а в простран-
стве оно описывает плоскость П'. Относительное движение эллипсоида по
отношению к плоскости П', которая становится подвижной, приводится, сле-
довательно, к качению конуса (С) по этой плоскости, причем относительная
угловая скорость качения постоянно равна От' Y~h.
Следовательно, движение тела представляется качением конуса (С),
неизменно связанного с телом, по плоскости П', причем это качение осу-
ществляется с мгновенной угловой скоростью От' У"Л, в то время как
плоскость вращается с постоянной угловой скоростью у. вокруг своей
нормали ОР.
Проверим теперь, будет ли действительно конус (С) поверхностью вто-
рого порядка. Для составления уравнения этого конуса будем искать геомет-
рическое место различных, положений точки т' относительно осей Охуг эл-
липсоида. Так как точка т' (х', у', г') лежит на нормали к эллипсоиду инер-
ции в полюсе т (х, у, г), то
Рис. 231.
X — X _ у — у __Z — 2Г_.
~Ах "" By Сг '
D0)
и так как эта точка лежит в плоскости П', параллельной касательной пло-
скости к эллипсоиду в точке т, то имеем также
Ахх' -f By у' + Сгг' = 0.
D1)
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 173
Мы обозначили' через I общее значение отношений D0). Определим из них
х', у', г' и подставим в равенство D1). Получим
Ах*- + Вуг 4- Сг? + X (А*х* + В*у* + &z9-) = 0.
На основании уравнений B9) и C0) полодин, первый член этого отно-
шения равен 1, а второй равен Ш. Следовательно,
и из соотношений D0) получаем для координат точки т' значения
D — А , D — B , D — C
х =*—ц~> У =у—о— • г==г—Ъ~-
Таким путем можно определить геометрическое место точек т', зная геоме-
трические места точек т. Так как полодия, геометрическое место точек т,
лежит на конусе
Ах4- (А — D) + By9- (В — D) + Cz4- (С— ?>) = 0,
то геометрическое место точек т' лежит на конусе (С), определяемом
уравнением
Ах2 ВФ Г>2
A-D+B—D+C—D~K '
Таково уравнение конуса (С), геометрического места прямых От' в теле.
Оно действительно второго порядка.
Установив это, вернемся к движению. Сопоставляя оба способа воспро-
изведения движения, данных Пуансо, мы видим, что, в то время как цен-
тральный эллипсоид катится по неподвижной плоскости П', конус (С), не-
изменно связанный с телом, катится по плоскости П, а последняя вращается
с постоянной угловой скоростью (л вокруг ОР.
Допустим теперь, что конус (С) с неподвижной вершиной в точке О
и плоскость П' осуществлены материально, причем плоскость П' может
вращаться вокруг ОР, а конус (С) при помощи зубчатого зацепления вы-
нужден катиться по плоскости ГГ. Предположим, с другой стороны, что
полодия, материально осуществленная на эллипсоиде, вынуждена при помощи
зубчатого зацепления или достаточно большого трения катиться по пло-
скости П. Наконец, вообразим, что тело совершает свое движение. Тогда
оно увлекает конус (С), который, катясь по плоскости П', заставляет ее
вращаться с постоянной угловой скоростью. Наоборот, если при помощи
часового механизма заставить плоскость П' вращаться вокруг ОР с по-
стоянной угловой скоростью, то эта плоскость увлечет конус (С), который
в свою очередь заставит полодию катиться по плоскости П в соответствии
с законом движения. Именно по этому принципу Дарбу и Кённгс скон-
струировали прибор «герполоднограф», который позволяет вопроизводнть всю
кинематику движения твердого тела. Мы не входим здесь в подробности кон-
струкции этого прибора, описание которого можно найти в статье Кбнигса
(К о е n i g s, Revue generale des Sciences, 30 апреля 1891). Закончим замечанием,
принадлежащим Кёнигсу (Bulletin de la Societe mathematique de France, т. XVIII,
стр. 163 и 131). Главной целью прибора является демонстрация закона измене-
ния скоростей, и поэтому желательно, чтобы это изменение было достаточно
заметно и бросалось в глаза. К сожалению, в этом отношении приходится
быть весьма ограниченным. Если по неподвижной плоскости заставить ка-
титься произвольный вллипсоид с закрепленным центром при соблюдении
закона Пуансо, т. е. с угловой скоростью, пропорциональной диаметру точки
касания, то отношение наименьшего значения угловой скорости к Наиболь-
шему ее значению может принимать любые желательные значения между 0
174 ДИНАМИКА СИСТЕМЫ
и 1. Для этого достаточно подходящим образом выбрать эллипсоид и пло-
скость, по которой он катится. Этим путем можно получить легко заметные
изменения угловой скорости, так как она удваивается или увеличивается
в пять раз. Но в случае движения твердого тела катящийся эллипсоид
является эллипсоидом инерции, и для него А < В -\- С. Это неравенство
ограничивает выбор катящегося эллипсоида и приводит к тому, что отно-
шение наименьшего значения угловой скорости к ее наибольшему значе-
нию будет обязательно заключено между 1 и . Это будет доказано
в упражнениях. Можно, наконец, осуществить условия, при которых ука-
занное отношение будет сколь угодно близко к этий двум пределам. Изме-
нение будет, таким образом, очень слабым н поневоле потребует большого
внимания, чтобы быть замеченным. Следовательно, неравенство А < В + С,
приводит, с одной стороны, к отсутствию точек перегиба у герполодии,
а с другой —к некоторой устойчивости значения угловой скорости.
Исследования Альфена и Гринхилла. Гринхилл, интересные исследо-
вания которого о случае, когда задача о сферическом маятнике приводится
к псевдоэллиптическому интегралу, мы уже цитировали, указал также случай,
когда и задача Пуансо приводится к псевдоэллиптическому интегралу. Эти
исследования изложены в его <Эллиптических функциях» (Fonctions ellip-
tiques) и в работе «On pseudo-elliptic integrals and their dynamical applications
(Proceedings of the London Mathematical Society, т. XXV). Наиболее про-
стой случай, приводящий к алгебраической герполоднн четвертого порядка,
отмечен впервые Гальфеном (Halphen). В этих исследованиях, имеющих
исключительно геометрический и аналитический характер, Гальфен и
Гринхилл предполагают, что по неподвижной плоскости П катится произ-
вольная центральная поверхность второго порядка, так что в уравнении
этой поверхности
Ах9- + Вуч- 4- СгГ- = 1 D3)
коэффициенты произвольны и могут быть отрицательными (см. Halphen,
Fonctions elliptiques, т. II, стр. 282).
Теорема Сильвестра. Сильвестр показал, что оба способа воспроизведе-
ния движения, предложенные Пуансо, являются частными случаями бесконеч-
ного множества других, которые могут быть получены следующим образом:
построим поверхность второго порядка, подобную поверхности второго
порядка, софокусной с эллипсоидом инерции, и заставим ее катиться и вер-
теться по плоскости П', параллельной неподвижной плоскости П, находящейся
на постоянном расстоянии ОР' от центра и совершающей равномерное
вращение вокруг OP' (Philosophical Transactions, 1866). Мы ограничиваемся
лишь формулировкой этого предложения, которое читатель может дока-
зать в виде упражнения и доказательство которого было указано Дарбу
(примечание к Mecanique de Despeyrous).
III. Движение тяжелого твердого тела
вокруг неподвижной точки
394. Интегралы, получаемые из общих теорем. Рассмотрим
тяжелое твердое тело, движущееся вокруг неподвижной точки О.
Примем в качестве неподвижных осей три оси Oxlt Oy., Ozt, из
которых ось Ozt направлена вертикально вверх; в качестве по-
движных осей Ox, Oy, Oz, связанных с телом, примем три глав-
ные оси инерции в точке О с теми же обозначениями, что и
раньше. Обозначим через М всю массу тела, через ?,, ч\х, r-i —
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 175
координаты его центра тяжести О относительно неподвижных осей
и через L т), С — координаты той же точки О относительно по-
движных осей. Совершенно очевидно, что координаты ?, ч\, С посто-
янны. Тогда можно написать два следующих первых интеграла:
1°. Интеграл кинетической энергии. Так как кинетическая
энергия тела равна -у (Ар2 ~\- Bq2 -\- Сг2) и единственной силой, дей-
ствующей на тело, является его вес Mg, приложенный в точке О,
то
d I (Ар2 + Bq2 + СП) = -Mg d:v )
Ар2 + Bq2 + Cr2 = — 2Mg^ + h. .j
2°. Интеграл площадей. Внешними силами, действующими на
тело, являются реакция неподвижной точки, пересекающая ось Ozu
и сила тяжести Mg, параллельная этой оси. Сумма их моментов
относительно оси Ozt равна нулю; следовательно, сумма моментов
количеств движения относительно оси Ozl постоянна; теорема пло-
щадей применима к проекции движения на плоскость xy0yv Мы
видели, что проекции главного момента количеств движения Оа на
оси Ox, Oy, Oz равны Ар, Bq, Сг. Поэтому его проекция на ось Ozt
равна
+ Crf.
Так как эта проекция постоянна, то мы имеем второй интеграл
= K. D5)
Если тело произвольно И расположение в нем центра тяжести
также произвольно, то нет других интегралов, кроме двух указан-
ных. Только при некоторых частных предположениях о форме
тела и о расположении в нем центра тяжести можно найти третий
интеграл. Такими частными случаями, уже получившими решение,
являются следующие:
1°. Случай Эйлера и Пуансо. Тело произвольно, но его центр
тяжести находится в неподвижной точке О. Это — случай, иссле-
дованный в предыдущем разделе.
2°. Случай Лагранжа и Пуассона. Эллипсоид инерции, построен-
ный в неподвижной точке, является' эллипсоидом вращения, и центр
тяжести находится на оси вращения.
3°. Случай Ковалевской. Эллипсоид инерции, построенный в
неподвижной точке, является эллипсоидом вращения вокруг, например,
оси Oz, центр тяжести находится в плоскости экватора (С = 0) и вы-
полняется соотношение
А = В = 2С.
176 ДИНАМИКА СИСТЕМЫ
Мы рассмотрим наиболее простой случай, & именно случай Ла-
гранжа и Пуассона. Эллипсоид инерции в точке О предполагается
эллипсоидом вращения, и центр тяжести находится на оси вра-
щения.
395. Случай Лагранжа и Пуассона. Примем за ось Ог ось
вращения эллипсоида инерции относительно точки О, а за положи-
тельное направление на этой оси возьмем направление OQ, идущее
от начала координат к центру тяжести О. Тогда А —В, ? = т] = 0,
С > 0. Кроме того, Cj = С cos 6, так как 6 есть угол между осями Ог
и Ozv Посмотрим сначала, во что обратятся оба интеграла D4)
и D5), которые существуют всегда. Прежде всего по теореме кине-
тической энергии имеем:
А О?2 + q2) АГСгг = — 2Mg^ + h = — 2Mg', cos 9 -f h. D6)
Далее, написав, что проекция главного момента количеств дви-
жения Оа на ось zl есть постоянная К, и вспоминая выражения ft
¦у', -{' в функции в и ср, получим на основании равенства D5):
Ар sin 9 sin ср -f- Aq sin 9 cos «p -f- Cr cos 6 — K. D7)
К этим двум интегралам мы присоединим уравнение Эйлера
которое в данном случае принимает вид
^ = 0 или г — г0. D8)
так как В — А и N равны нулю. Эти три уравнения можно написать
следующим образом:
= а — а сой в,
sin 9 (р sin ср -)- q cos ер) = C — br0 cos 6,
где a, b — положительные постоянные коэффициенты, соответственно
2Afet С а
равные —-f— и -х. а а и р — произвольные постоянные интегриро-
вания.
Мы будем в дальнейшем предполагать, что г0 отлично от нуля.
Если г0 — 0, то движение оси Oz тела будет тождественно с дви-
жением нити сферического маятника (п. 277).
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 177
Углы <р, 9, i|> связаны с р, q, r отношениями:
9 ^sm6coscp
Подставляя эти значения в вышенаписанные уравнения, мы при-
ведем их к виду
D9)
Исключая -ji из первых двух, получим уравнение для 8:
(Р — bro cos б)г + sin2 9 (QY ж* sin2 9 (a — a cos 9).
Полагая в нем cos 9 = и, получим:
(згK = («—e«)(l— «2) — (P — ftro«)» = /(e). E0)
Второе из уравнений D9) примет теперь вид
а третье
Многочлен /(и) отрицателен при значениях а, равных — оо, —1
и -f-1, и положителен при a = -f-°° и ПРИ начальном значении и,
равном и0. (Кроме того, при и = и0 величина -^- будет веществен-
ной.) Следовательно, многочлен имеет три вещественных корня alt
и2, и', заключенных соответственно в промежутках
(—1, а0), (а0. +1). и (+1. +оо).
Мы можем поэтому написать:
= а(и — и1)(и2 —«)(«' —и).
где последний множитель существенно положителен, так как и,
будучи косинусом, всегда заключен между —1 и -f-1. Величина а,
начиная с и0, должна все время оставаться в промежутке между ut
12 Зак. 922, П. Аппель, т. II
178
ДИНАМИКА СИСТЕМЫ
и и2 для того, чтобы /(и) оставалось положительным. Отсюда сле-
дует, что угол 6 колеблется между двумя предельными углами 9t
и 62 (В1 > 92), косинусы которых равны иг и и2. Когда и возрастает
от at до и2, надо брать
При уменьшении и от и2 до их нужно брать знак —.
Если описать вокруг оси Oz1 (рис. 232) два круговых конуса Ct
и С2 с вершиной в точке О и с углами при вершине 2ЬХ и 282, то
ось Oz будет постоянно заключена между этими двумя конусами.
Для изображения опишем из точки О как из центра сферу единич-
ного радиуса, которая пересечет оба конуса Ct и С2 по параллелям СХСХ
III
и С2С2 с общим полюсом zv где буквой zt обозначена точка пере-
сечения сферы с осью Ozv Точка z, в которой ось вращения Oz
пересекает сферу, характеризуется величиной а. Она всегда заклю-
чена между двумя параллелями и описывает кривую, идущую от
одной из них к другой. Когда эти две параллели очень близки
между собой, ось тела описывает приближенно круговой конус вокруг
оси Ozv Когда начальные условия таковы, что обе эти параллели
совпадают (at = и2), то ось Oz описывает совершенно точно круго-
вой конус с осью Ozv В общем случае кривая, описываемая точкой z,
касается обеих окружностей Ct и С2. В самом деле, определим по-
ложение точки z на сфере с помощью дуги zxz — 6 и полярного
угла xiz1z = %, образуемого дугой zxz и меридианом zxxv Этот угол
измеряется дугой ххп большого круга с полюсом zv Так как пря-
мая 01, которая образует с осью Охх угол ф, перпендикулярна
к плоскости zfiz, то дуга я/ равна -* и
E3)
Так как
dt
dt—dt
— Р ~ br°u
i _ М2 ¦
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 179
то, исключая dt, находим
d ®-brou)du_^ 5
A-«»)//(«)
Это — дифференциальное уравнение кривой, представляющей собой
геометрическое место точек г. Из этого уравнения при помощи одной
квадратуры получаем у в функции и и, следовательно, в функции 8.
Угол V, который образует касательная к геометрическому месту
точек z с меридианной дугой гуг, определяется формулой
, ,, sin в di
что непосредственно видно из прямоугольного треугольника zmz',
образованного бесконечно малой дугой кривой zz', дугой парал-
лели zm и дугой меридиана mz'. В этом треугольнике угол в точке z
есть V, дуга mz' равна dft и дуга mz равча sin 6 dy, поскольку радиус
этой дуги равен sin 6 (рис. 232, /). Так как мы положили cos 6 = а,
то имеем:
du
или на основании E4)
tgv = -l=fe. E5)
±У/(в)
Угол V делается прямым всякий раз, когда и принимает одно
из значений ах или и2, обращающих /(и) в нуль. Кривая действи-
тельно касается обеих параллелей (рис. 232, / и ///). Исключение
будет лишь в том частном случае, когда один из пределов и1 и и2
обращает в нуль числитель C — brou. Тогда на соответствующей па-
раллели tg V обратится в нуль и кривая будет иметь на этой парал-
лели точку возврата (рис. 232, //). Ниже мы покажем, что такое
обстоятельство может случиться только на верхней параллели С2.
Чтобы увидеть, какие различные формы может иметь эта кривая,
посмотрим, в какую сторону может вращаться на сфере дуговой
радиус-вектор ztz.
На основании соотношения
dy di/ C — brou
dt~~di~ \ — Ф~
dy p
величина -jt сохраняет один и тот же знак, если значение ~- ,
обращающее в нуль числитель, не заключено между ах и az. Тогда
дуга z-^z будет вращаться все время в одну и ту же сторону и кри-
о
вая будет иметь форму / (рис. 232). Если -?- заключено между их
dt
и а2, то -jj то положительно, то отрицательно, и дуга zxz повора-
чивается то в одну, то в другую сторону. Кривая имеет форму ///
12*
180 ДИНАМИКА СИСТЕМЫ
(рис. 232). Если j- равно одному из пределов, то ~ опять будет
сохранять знак, но тогда кривая имеет точки возврата на параллели,
соответствующей этому пределу (рис. 232, //).
Эти три случая легко различаются по начальным условиям. Если
о
J— по абсолютному значению превосходит 1, то оно не может за-
о/"о
q
ключаться между их и и2. Если абсолютное значение величины у-
меньше 1, то выражение
которое получается после подстановки этой величины в /(и), имеет
тот же знак, что а—~. В зависимости от того, будет ли этот мно-
житель положительным или отрицательным, величина -г— в первом
случае будет заключена между пределами и1 и и2, а во втором — не
будет заключаться между ними. В промежуточном случае величина
вЗ 8
а — тг- может равняться нулю. Тогда -г- равно одному из пределов
«""о "го
а1 или и2. Легко видеть, что оно всегда будет и2. В самом деле,
положим
^ br0 ^ br0
Тогда /(и), если заменить а этим значением, обратится в следующее:
Один из корней, заключенных между —1 и -j-1, очевиден; дру-
гой должен обратить в нуль выражение в квадратных скобках; сле-
в
довательно, он делает ¦-¦ и положительным, и потому он меньше
ого
а а
чем ~. Таким образом, значение -J— может иметь лишь больший
br0 r br0
корень и2, и поэтому точки возврата могут находиться лишь на
верхней параллели С2. Этот последний случай возникает при легко
осуществимых начальных условиях, которые будут изложены в сле-
дующем пункте.
В случае формы III (рис. 232) при изображении на чертеже пред-
положено, что полное изменение ф, соответствующее периоду полного
колебания и от и1 до и2 и от и2 до их, отлично от нуля и имеет
тот же знак, что и элементарное изменение этого угла в момент,
когда и достигает своего наименьшего значения ах. Строгое доказа-
тельство этого свойства завело бы нас слишком далеко; оно может
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 181
быть найдено в заметке Адамара (Н a d a m a r d, Bulletin des Sciences
mathematiques, 1895, 1-я часть, стр. 228).
Может случиться, что наибольший корень а2 равен 1. Тогда верх-
няя параллель выродится в полюс zx сферы. Этот случай предста-
вится, в частности, тогда, когда ось Oz в начальный момент совпа-
дает с направленной вверх вертикалью.
396. Частный случай. Рассмотрим волчок, движущийся вокруг
закрепленной точки О своей оси. Удерживая конец z оси волчка рукой,
расположим ось так, чтобы она образовала с вертикалью угол 90,
отличный от 0 и от я. После этого сообщим волчку при помощи,
например, навернутой на него нити очень большую угловую ско-
рость г0 вокруг оси Oz. Пока конец г оси волчка удерживается
рукой, волчок представляет собой твердое тело, вращающееся
вокруг своей главной оси Oz; угловая скорость г0 сохраняется,
и давления в точке О и на пальцы будут такими же, как если бы
волчок не вращался (п. 360, частный случай). Что произойдет, если
отпустить конец г? Волчок будет тогда двигаться вокруг точки О,
и движение будет происходить согласно предыдущим законам. В рас-
сматриваемом случае волчок вращается сначала вокруг оси Ог; сле-
довательно, начальные значения р0 и q0 величин р и q равны нулю.
Мы положили cos9 = и и уравнения п. 395
рг -\- qz = а — аи, sin 9 (р sin ср -f- q cos ср) = р — brou
показывают тогда, что в начальный момент
а — аяо=0, Р — Ьгоао~0,
где и0 равно cos 90. Заменим постоянные аир этими значениями.
Имеем:
(%Pfa*)-b*rl(a0-u)]. E6)
Для того чтобы 1-тт) оставалось положительным, и должно ко-
лебаться между значением и0 и некоторым значением av содержа-
щимся между —1 и -f-1, и обращающим в нуль величину, заклю-
ченную в квадратных скобках, для которой, следовательно,
в 0 —D—
Отсюда находим
Таким образом, и0 — мг положительно и второй предел меньше пер-
вого. Следовательно, а0 является самым большим корнем, который
мы в общем случае обозначили через и2. Поэтому предельный круг С,,
соответствующий корню uv расположен под кругом С2, соответ-
182 ДИНАМИКА СИСТЕМЫ
ствующим корню и0. Кривая, описываемая на сфере точкой z, будет
касаться первого круга. Однако на основании того, что мы сейчас
видели, она будет нормальна ко второму кругу, так как м0 обра-
щает в нуль величину р — brou (рис. 232, //).
Выражение -^ в рассматриваемом частном случае принимает вид
d^__ br0 (u0 —и)
dt \ — Ф
Следовательно, ~ сохраняет постоянный знак, совпадающий со зна-
ком г0. Отсюда следует, что вращение плоскости zx0z вокруг оси Ozx
происходит все время в одном и том же направлении, которое сов-
падает с направлением начального вращения вокруг оси Oz или 00,
так как OG выбрано в качестве положительного направления оси
вращения.
Предположим, кроме того, что начальное вращение г0 весьма
велико. Тогда равенство
«A - «¦)
показывает, что и0 будет мало отличаться от и,. Конус, который
представляет собой геометрическое место осей Oz, будет заключен
между двумя очень близкими круговыми конусами. При этом вра-
щательное движение плоскости zfiz будет происходить весьма мед-
ленно. Действительно, мы имеем:
dji __ bro(u0— и)
dt I — и"- '
и так как ио—и остается меньше, чем н0 — их, т. е. меньше, чем
——5~2— , то получаем по абсолютному значению
Ь~г0
d-b
df
1-е?
1
Здесь множитель -j т-% остается очень близким к единице, так как
db
и очень близко к и,. Поэтому -г- остается очень малой величиной
порядка —. Итак, сети тело заставить быстро вращаться вокруг
оси Oz и затем предоставить его самому себе, то оно будет казаться
продолжающим вращение вокруг этой оси, которая в свою очередь
покажется вовлеченной в медленное вращательное движение вокруг
оси Oz, и эти вращения будут совершаться либо оба в положитель-
ном направлении, либо оба в отрицательном направлении вокруг
соответствующих осей Ozx и OG.
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
183
Эти свойства хорошо видны на гироскопических весах. При-
бор состоит из двух тяжелых тел вращения М и т (рис. 233),
насаженных на один и тот же стержень АОА', который движется
вокруг точки О при помощи, например, подвеса Кардана. Перемещая
массу т вдоль стержня, можно привести центр тяжести системы на
ту или другую из полупрямых ОА или ОА'. Если мы сообщим си-
стеме быстрое вращение вокруг ОА в положительном направлений и
предоставим ее самой себе, то мы увидим, что ось ОА начнет вра-
щаться вокруг вверх направленной вертикали в положительном на-
правлении, если центр тяжести находится на ОА, и в противополож-
ном направлении, если центр тяжести находится на ОА'. В частном
случае, когда центр тяжести
находится в точке подвеса,
вращение будет продолжаться
только вокруг оси ОА, которая
останется неподвижной. Пря-
мая ОА будет в этом случае
постоянной осью вращения.
В этой теории мы впервые
встречаемся с неожиданным ре-
зультатом, который обычно
имеет место для тел враще-
ния, находящихся в быстром
вращательном движении во-
круг своих осей. Если ось OGA
волчка держать рукой неподвижно, пока волчку сообщается очень
быстрое вращение г0 вокруг этой оси, и затем предоставить тело
самому себе, то, казалось бы, ось волчка под действием веса должна
начать перемещаться в вертикальной плоскости zx0A. В действитель-
ности же эта ось, после того как она несколько наклонится вниз,
выйдет из этой плоскости в направлении, почти перпендикуляр-
ном к ней, и заметно опишет круговой конус вокруг оси Ozv
При рассматриваемых начальных условиях, опираясь на то, что г0 очень
велико, легко получить приближенные значения для в, <р> ф.
Так как «о — ц. т. е. cos 90 — cos 6 есть величина порядка —^, то того же
порядка будет и величина 8 — 60, вследствие чего можно положить
6 = Go -j- -5 » где 1) — величина конечная. Тогда, разлагая cos | 60 + -^ j
в ряд и беря только первые два члена разложения, получим
и = cos в = cos в0 — — sin 80 = а0 -z sin в0.
го го
Внесем это выражение в равенство E6), разложим его правую часть таким же
Рис. 233.
184 ДИНАМИКА СИСТЕМЫ
•образом по возрастающим степеням — и удержим только первый член.
Получим:
I©'-„„„„,.-».,,
Решая это уравнение, найдем:
~cos brA e = 9°+^W"A ~cos br°ty'
Точно так же, заменяя в производных ~ и -т— величину и через
и ограничиваясь лишь первыми членами разложений по возра-
1
стающим степеням -я, получим:
4
a
откуда, интегрируя и полагая, что } и ф обращаются в нуль при t = О, най-
дем:
- g Л
~ 2Аг0 V
Значения 8 и ф определяют движение оси Ог. Если в иих пренебречь
периодическими членами, то они определят прямую линию, образующую
с Oz± постоянный угол и вращающуюся вокруг этой оси с постоянной угло-
а
ВОИ СКОРОСТЬЮ ттт—.
2ого
Спящий волчок. В рассмотренном сейчас частном случае мы предполо-
жили, что Ро — Яо = 0, но что 0 < в0 < я. Посмотрим, что происходит в слу-
чае, когда 60 равно 0 или я.
Возьмем, например, случай, когда во = О, щ=\. Тогда в начальный
момент ось волчка вертикальна, центр тяжести находится над точкой опоры
и волчок вращается вокруг своей оси с угловой скоростью г0. При этих
условиях в предыдущей формуле E6) надо положить и0 = 1. Таким образом
получится:
(gy &24 E7)
В этом случае многочлен /(и), стоящий в правой части этого равен-
ства, допускает двойной корень, равный 1, и простой корень, который больше
чем —1.
При этих условиях ось волчка остается вертикальной. Действительно,
и, являясь косинусом и будучи в начале равным 1, может либо оставаться
постоянным, либо уменьшаться. Следовательно, при извлечении квадратного
кория из обеих частей равенства E7) нужно будет взять отрицательное зна-
чение для -—, Тогда время, нужное для того, чтобы и достигло какого-ни-
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 185
будь значения, отличного от 1, определяется интегралом
и
du
t
/<т^
который равен бесконечности, так как подынтегральное выражение содержит
в знаменателе множитель 1 — и. Следовательно, и не может приобрести
никакого значения, отличного от 1, и ось волчка остается вертикальной. Мы
имеем так называемый спящий волчок. Остается исследовать, в каком слу-
чае полученное таким образом движение устойчиво.
Допустим, что волчок приводится во вращение вокруг своей оси сим-
метрии каждый раз с одной и той же угловой скоростью г0, но что в началь-
ный момент угол 60 вместо того, чтобы быть в точности равным нулю, будет
лишь очень мал, т. е. что «0 очень близко к 1. Исследуемое движение
будет устойчиво, если в последующем движении и также близко к 1 и не-
устойчиво в противном случае. Но на основании предыдущего и заключено
между «о и другим корнем ut многочлена f(u), находящемся между —1 и +1.
Следовательно, для устойчивости нужно, чтобы «х, так же как и и0> было
очень близко к 1. Другими словами, необходимо, чтобы угловая скорость
вращения г0 была такой, чтобы в многочлене относительно и
корень иь заключенный между —1 и +1, был очень близок к 1 одновре-
менно с uq. Это условие будет выполняться, если г$ достаточно велико. По
этому поводу можно сослаться на заметку Клейна, французский перевод
которой имеется в Nouvelles Annales de Mathematiques за 1897 г.
397. Интегрирование в эллиптических функциях. Уравнение
. du du
однозначно определяет и через эллиптическую функцию от переменного t.
Чтобы выполнить это преобразование, достаточно применить метод, который
был использован в задаче о сферическом маятнике (п. 277), заставив корни
«!, и2, и' играть ту же роль, какую играли корни- о, р, f в задаче о маят-
нике. Эта аналогия отнюдь не является неожиданной и может быть доведена
до полного совпадения, так как задача о сферическом маятнике является
лишь частным случаем рассматриваемой задачи — случаем, когда тяжелое
тело состоит из одной точки, помещенной в центре тяжести.
После того как а или, что то же, cos в будет выражено в функции t,
можно определить f и ^в функции t из уравнений
dii _ р — brou rf<p _ fi — brQu
Ш~ 1—«2 ' dt~ °~~U 1— U°-
в виде квадратур над эллиптическими функциями, которые могут быть вы-
полнены при помощи функций Якоби 9 иЯ. Величина и является эллипти-
ческой функцией переменного t с вещественным периодом Т, причем
т =
и,
du
Y7W)
По истечении времени Т величины и, ¦—-, —г и, следовательно, б принимают
первоначальное значение. Функции ф и ? увеличиваются каждая на постоянную
186 ДИНАМИКА СИСТЕМЫ
величину. Мы не приводим выкладок. Для их выполнения мы отсылаем
читателя к мемуару Лоттнера (Lottner, Journal de Crelle, т. 50), к сочине-
ниям Альфена (Halphen) и Гринхилла (Oreenhill), к сочинению Аппеля и Ла-
кура, «Основы теории аналитических функций) (Principes de la Theorie
des Fonctions elliptiques), к сочинению Клейна и Зоммерфельда (Ueber die
Theorie des Kreisels) и к заметке Лакура (NouveHes Annales de Mathemati-
ques, 3e serie, т. XVIII, 18Э9).
В уже цитированной работе Гринхилла (Proceedings of the London Mathe-
matical Society, т. XXV) содержатся интересные примеры приведения эллип-
тических интегралов, входящих в общее решение, к интегралам псевдоэллип-
тическим. Несколько особенно изящных примеров мы укажем в упражнениях.
398. Кинематическая картина движения. Во втором томе нового
издания трудов Якоби были впервые напечатаны фрагменты одной работы,
в которой знаменитый геометр занимается движением тяжелого твердого тела
вращения, закрепленного в одной из точек своей оси. Якоби доказал заме-
чательную теорему о том, что движение тела может быть осуществлено нало-
жением двух движений Пуансо. Альфен в заметке, помещенной в Comptes
rendus, т. С, придал этой теореме другой вид и получил несколько новых
результатов. Дарбу посвятил этому вопросу одну важную статью (Journal de
Mathematiques, 1885) и несколько заметок, помещенных в конце Механики
Депейру. А. де Сен-Жермен (Saint-Germain) изложил эти результаты в Крат-
ком курсе теории движения твердого тела вокруг неподвижной точки (изд.
Готье-Вилляр) [Resume de la theorie du mouvement d'un corps solide autour
d'un point fixe (Librairie Oauthier-Villars, 1887)].
Наконец, Гринхилл изложил эту теорию с точки зрения ее отношения
к теории эллиптических функций в заметке, помещенной в конце Матема-
тического ежегодника издания 1902 г. (l'Annuaire de Mathematiciens, издание
Carre et Naud, 1902). Рамки нашей книги не позволяют изложить эти пред-
ложения подробно. Мы отметим наиболее существенные моменты в упраж-
нениях в конце главы, указав вкратце доказательства (упражнения 16 и сле-
дующие за ним).
ЗЭ9. Случай интегрируемости Ковалевской. В работе, премированной
в 1888 г. Парижской Академией наук и помещенной в т. XII Acta mathema-
tica, Ковалевская рассмотрела новый случай интегрируемости уравнений
движения тяжелого твердого тела вокруг неподвижной точки. Приведем сна-
чала форму уравнений движения, из которой исходила Ковалевская.
Обозначим, как и ра-ньше, через y. т'> Y' косинусы углов, которые обра-
зуют связанные с телом оси Oxyz с направленной вертикально вверх непо-
движной осью Ozb а через ?, т\, С — постоянные значения координат центра
тяжести G относительно этих осей. Проекции веса Р на подвижные оси Oxyz
равны
— Pi, —Pf, — Pf
и моменты его относительно тех же осей
L = — Р(щ" — Г?'), М = — Р (Jv — ?т"). N =
Три уравнения Эйлера принимают вид
-B)qr = P Г,?' -
~L
- 6т
6т')-
E8)
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 187
К этим уравнениям присоединим три других, указанных уже Пуассо-
ном. Если на оси Ozv отложить отрезок ОН, равный единице, то конец Н
этого отрезка будет иметь относительно подвижных осей Oxyz координаты f,
•у', i'. Проекции на эти оси относительной скорости Vr точки Н относи-
тельно подвижных осей равны
dr\ d-[' di'
~dt' ~dT' ~W'
Проекции на подвижные оси переносной скорости Ve той же точки в си-
стеме подвижных осей равны
ЧЛ" — П', п — pf, pi — q-j.
Проекции на подвижные оси абсолютной скорости этой точки равны суммам
проекций относительной скорости Vr и переносной скорости Ve (п. 45). Но
так как точка Н неподвижна, то ее абсолютная скорость равна нулю. Сле-
довательно, имеем
E9)
di'
Эти уравнения, присоединенные к уравнениям E8), образуют систему
шести уравнений первого порядка, Определяющих р, q, r, f, i, ¦(" в функ-
ции /.
Для этой системы известны из общих теорем два интеграла, алгебраи-
ческих относительно р, q, r, i, i, i'. Это — интеграл энергии (п. 394) и ин-
теграл площадей В горизонтальной плоскости хх0ух. К этим интегралам
мы можем присоединить очевидное соотношение
Вопрос сводится к нахождению нового интеграла. В случае Лагранжа и
Пуассона (А — В, € == т) = 0) этим новым интегралом является г = г0. В слу-
чае Ковалевской также предполагается, что эллипсоид инерции является
поверхностью вращения, но к этому добавляется более сильное требование,
чтобы
А = В = 1С.
Кроме того, предполагается, что центр тяжести G лежит в экваториальной
плоскости, так что С = 0. В этом случае можно всегда выбрать в качестве
связанной с телом оси Ох ось OG, расположенную в плоскости экватора и
тем самым сделать так, что т\ = 0. Тогда три уравнения E8), если положить
-?- = е, примут вид
Умножая второе на / и складывая с первым, получим
2 W
188 ДИНАМИКА СИСТЕМЫ
Точно так же, умножая второе из уравнений E9) на i и складывая с пер-
вым, получим
-жг (Т + lt') —¦— rl (•/ -\- If) + ¦("/ (р -\- lq).
Исключая ¦(' из этих двух уравнений, приходим к следующему:
¦ft [(Р + lqJ - в'G + *Т'I =-П Цр + tqJ - с G + if)}
или
dt ~ "•
Меняя l на —/, получим второе соотношение такой же формы. Складывая
это второе соотношение с первым, получаем
dt + dt
откуда, интегрируя и потенцируя, находим
[0> + iqf -0A + if)} Цр - iq)* - С (i - if)} = const.
Мы имеем таким образом новый алгебраический интеграл. Задача, как это
показано в работе Ковалевской, может быть теперь закончена п-ри помощи
квадратур. Наиболее простые способы приведения к квадратурам даны Кёт-
тером (К 011 е г, Acta math., т. XVII) и Колосовым (Math. Annalen, т. LVI).
Общий случай. Хюссон (Husson) доказал, что кроме рассмотренных нами
трех случаев (случай Эйлера н Пуансо, случай Лагранжа и Пуассона, случай
Ковалевской) нельзя получить для движения тяжелого тела с закрепленной
точкой при произвольных начальных условиях третий алгебраический инте-
грал, отличный от интеграла энергии и интеграла моментов (см. Husson,
Recherche des integrates algebriques dan9 le mouvement d'un solide pesant au-
tour d'un point fixe. These, Annales de la Faculte des Sciences de Toulouse,
2-е serie, т. VIII, 1906; Sur un theoreme de M. Poincare relativement au mou-
vement d'un solide pesant, Acta mathematica, т. XXXI, 1908).
Можно также указать на две статьи Штекеля (Paul S t а с k e I, Ausge-
zeichnete Bewegungen des schweren unsymetrischen Kreisels, Mathematische
Annalen, т. LXV, 1908; Die reduzierten Differentialgleichungen der Bewe-
gung ..., там же, т. LX.VII, 1909).
Частные начальные условия *). Частные начальные условия позволяют
выполнить интегрирование в случаях, отличных от трех классических. Так,
для частного случая, характеризуемого условиями С = 0, А — В = 4С, можно
привести интегрирование к квадратурам, если постоянная площадей на гори-
зонтальной плоскости равна нулю. См. статью Колосова Sur le cas de M. Oo-
riatchoff de la rotation d'un corps pesant autour d'un point fixe (Rendiconti del
Circolo di Palermo, 10 августа 1902) с последующими заключениями Марко-
лонго.
Другой частный случай указан в статье Николая Ковалевского Eine neue
particulare Losung (Math. Annalen, т. LXV, 1908).
*) Имеются и другие случаи интегрируемости при частных начальных
условиях. Изложение их см. в книге: Суслов, Теоретическая механика.
(Прим. пер.)
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
189
IV. Другие задачи; применение осей, движущихся
относительно тела и относительно пространства;
трение и сопротивление среды
400. Пример применения осей, движущихся относительно
тела и относительно пространства, для вывода общих уравне-
ний движения тела вращения, закрепленного в точке своей оси.
¦В п.- 386 мы указали общий метод составления уравнений движения,
когда пользуются осями, движущимися в теле и в пространстве. Мы
дадим сейчас приложение этого метода, рассматривая такой частный
случай физического тела, эллипсоид инерции которого относительно
неподвижной точки О является эллипсоидом вращения. Уравнения, ко-
торые мы таким образом установим, бы-
ли использованы Пюизё (Puiseux) в тео-
рии вращения Земли вокруг своего цент-
ра, а также Рёзалем и Слессером (Re-
sal et Slesser, Quarterly Journal, 1861).
Обозначая неподвижные оси через
Oxxyxzx и считая, что эллипсоид инер-
ции относительно точки О является
эллипсоидом вращения, выберем сле-
дующие подвижные оси (рис. 234): ось
Oz направляем вдоль оси вращения
эллипсоида, ось Ох — перпендикулярно
к плоскости zx0z, а ось О у — перпен-
дикулярно к плоскости хОг, причем
ориентация триэдра Oxyz должна быть Рис 2з4
такой же, как и ориентация три-
эдра Ox1ylz1 (рис. 234).
При «тих условиях ось Ох лежит в плоскости XiOyt и положе-
ние подвижного триэдра определяется углом ф = хх0х, который считаем
положительным в положительном направлении вращения вокруг Ozt,
и углом в — ZiOz, который считаем положительным в положительном
направлении вращения вокруг Ох. Для определения мгновенной угло-
вой скорости О вращения триэдра Oxyz заметим, что этот триэдр
может быть приведен из заданного положения в положение, бесконечно
близкое, поворотом на угол db вокруг Ох, а затем поворотом на
угол dif вокруг Ozl. Следовательно, угловая скорость Q вращения
триэдра есть результирующая двух угловых скоростей: ф = —jj- вра-
•л
щения вокруг Огх и б' = —г- — вокруг Ох. Ее составляющие Р, Q, R
по осям Oxyz имеют значения
= f cos
(Q)
190 ДИНАМИКА СИСТЕМЫ
Что касается мгновенной угловой скорости со вращения твердого
тела, то она может быть получена следующим образом. Если ty и 9
известны, то известно положение триэдра Oxyz и остается только
определить положение тела относительно этого триэдра. Для этого
достаточно знать угол <р, который образует с осью Ох какая-нибудь
прямая ОА в плоскости хОу, неизменно связанная с телом, считая
этот угол положительным в сторону положительного вращения во-
круг оси Oz.
Тогда тело можно переместить из какого-нибудь одного положе-
ния в другое бесконечно близкое к нему положение, повернув его
на углы d'\>, d%, dy вокруг осей Ozx, Ox, Oz. Мгновенная угловая
скорость (о вращения тела есть результирующая угловых скоростей \',
в', tp' вращения вокруг тех же трех осей, и мы получаем для со-
ставляющих этой угловой скорости
р=.%', g = '^r sin 6, г = <j/cos6-f f'• (ш)
Главный момент количеств движения. Так как эллипсоид
инерции в точке О есть эллипсоид вращения вокруг Oz, то оси Ох,
Оу, Oz являются главными осями инерции и моменты инерции отно-
сительно Ох и Оу равны одной и той же постоянной А, несмотря
на то, что эти оси перемещаются в теле. Конец а главного момента
количеств движения Ос относительно точки О имеет относительно
подвижных осей координаты
ох~Ар, ву = Ад, as=Cr. F0)
Уравнения движения. Обозначим через 05 главный момент сил
относительно точки О и через
его проекции на оси Ох, Оу, Oz. Чтобы получить уравнения дви-
жения, нужно написать (п. 383), что абсолютная скорость точки а
—у
равна и параллельна OS. Таким путем получаются три общих уравне-
ния, указанных в п. 386:
В рассматриваемом случае ах, оу, аг имеют вышенаписанные зна-
чения F0). С другой стороны,
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Поэтому уравнения движения принимают вид
A% + {Cr — Aqctgb)q = Sx,
19!
r dr
-Aqctgb)p — ,
Заменяя здесь р, q, г их вышенаписанными выражениями,
значая штрихами производные по / и сокращая, получим:
Л9" — Ay% sin 9 cos 9 + Crf sin 9 = Sx,
A<)/' sin 9 -|- 2Лф/9/ cos 9 —
.-, dr p d (<p' -(- ф'
Crb' = Sy,
F1)
обо-
F2)
Эти уравнения особенно полезны, когда Sz равно нулю, a Sx и Sy
не зависят от ср, т. е. от угла, на который повернулось тело во-
круг своей оси. Тогда г постоянно и первые два уравнения опреде-
ляют 9 и ф в функции /. Это как раз имеет место в методе Пюизё
для движения Земли вокруг ее центра тяжести.
Можно заметить, что если умножить первое уравнение на d9,
второе на sin 9 йф и третье на г dt и сложить, то получится уравне-
ние кинетической энергии. Таким путем получается:
dj[A(8/<! + <К2sin2 9) + О2] — Sxdb-\-StJsin 9 dЬ + Szr dt.
401. О некоторых свойствах быстро вращающихся тел вращения.
Когда твердое тело вращения закреплено в одной из точек своей оси и
быстро вращается вокруг нее, то при попытке изменить направление этой
оси в пространстве путем приложения к ней сил возникают некоторые свое-
образные явления, которые мы вкратце разберем.
Допустим, что тело вращения, закрепленное в точке О своей оси Oz,
находится под действием таких сил, что сумма их моментов относительно
оси вращения Oz равна постоянно нулю. Чтобы легче представить себе
совокупность этих сил, их можно привести, как мы это сейчас покажем,
к одной силе F, перпендикулярной к оси Oz и приложенной в определен-
ной точке Н, взятой на этой оси, и к другой силе F", приложенной в точке О.
Действительно, известно, что систему сил, приложенных к твердому телу,
можно привести к одной силе Ф, приложенной в точке О, и к паре, вектор
момента которой OS совпадает с главным моментом сил относительно точки О.
Так как в рассматриваемом случае сумма моментов сил относительно Oz
равна нулю, то проекция S2 вектора OS на ось Oz тоже равна нулю. Сле-
довательно, вектор 05 момента пары перпендикулярен к оси Oz, и так как
пару можно как угодно изменять в своей плоскости при условии сохранения
ее момента, то в качестве плеча пары можно взять отрезок ОН оси. Тогда
пара будет состоять из силы F, приложенной в Я и перпендикулярной к оси,
и из равной ей и противоположной силы — F, приложенной в точке О.
Силы Фи — F можно сложить и получить одну силу F", приложенную
в точке О. Таким образом, намеченное в начале приведение выполнено.
192 ДИНАМИКА СИСТЕМЫ
Сила F' уничтожается сопротивлением неподвижной точки О. Она не
имеет никакого влияния на характер движения и имеет значение только при
вычислении давления на точку О. Следовательно, движение происходит под
действием только силы F. Мы видим, таким образом, что сформулированная
общая задача всегда сводится к простому случаю; это случай, когда к оси
вращения приложена только одна, перпендикулярная к ней, сила F.
Исследуем теперь эту задачу.
Возьмем подвижные оси предыдущего пункта, так что ось Ох перпен-
дикулярна к плоскости zx0z (рис. 234), а ось Оу перпендикулярна к пло-
скости гОх.
"Обозначим через X, Y, О составляющие силы F по этим трем осям и
через г = h координату г точки Н приложения этой силы. Моменты силы F
относительно осей Oxyz суть
Третье из уравнений F1) предыдущего пункта теперь будет
а два остальных принимают вид
А^- + (Сг0-
F3)
Допустим, что в начальный момент тело приведено во вращение вокруг
оси Ог (/?0 = д0 — 0, г0 Ф 0) и что никакая сила не действует (X = Y = 0).
Тогда это вращательное движение будет продолжаться сколь угодно долго,
ось Oz будет сохранять свое направление в пространстве, р и q будут все
время равны нулю. Это вытекает из элементарных свойств главных осей
инерции (п. 361).
Определение силы F, которую нужно приложить в точке Н, чтобы
сообщить оси Oz заданное движение. Пусть тело находится в состоянии
устойчивого вращения, о котором мы только что говорили. Воздействуем
на точку Н силой F(X, Y, О) таким образом, чтобы изменить направление
оси, заставив точку Н описывать по заданному закону заданную кривую,
которая обязательно будет лежать на сфере радиуса ОН с центром в точке О.
Для аналитического определеш!я движения, которое мы желаем сообщить
точке Н оси Ог, достаточно задать 6 и ^ в функции t, так как эти два угла
определяют направление оси Ог. Мы предполагаем, что движение, которое
сообщается точке Н, удовлетворяет обычным условиям, т. е. что скорость и
ускорение точки Н остаются меньше некоторого определенного предела или,
что то же, 9 и ф. которые являются функциями времени t, а также их произ-
водные 6', ij/, 8", ф" первого и второго порядков не превосходят по абсОг
лютиым значениям некоторого определенного предела X. При этих условиях
величины
р=в', q**i>' sin б, /tyctg6 = <|/8' cos 6, 92 ctg 9 »= Ф'2 sin 6 cos 8
и их производные ~-, ~±- также остаются по абсолютным значениям
at dt
меньше некоторого определенного предела X.
Если г0 равно нулю, то сила, необходимая для того, чтобы произвести
это движение, имеет некоторое значение F0{X0, Yo, 0), получаемое в каждый
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 193
момент времени из формул F3), в которых г0 = 0.
F4)
Абсолютное значение этой силы будет иметь тот же порядок, что и величины
8'ф', ф'2, в", у.
Допустим, наоборот, что г0 весьма велико по сравнению с пределом X
(весьма быстрое начальное вращение вокруг оси Ог). Тогда сила F, способ-
ная сообщить точке Н такое же движение, получается из формул F3).
Сравнивая с выражениями для Хй и Yo, имеем
С_
h
Хо — рга,
F5)
Следовательно, когда р и q не слишком малы, сила F очень сильно
отличается от силы F& которая вызывала бы такое же движение
точки Н при г0 = 0. Таким образом получается объяснение того факта,
что при попытке изменения рукой направления оси ощущается неожиданное
сопротивление, тем большее, чем больше г0. Более того, можно еще пока-
зать, что в каждый момент времени сила F приблизительно перпендикулярна
к элементарному перемещению, сообщаемому точке Н в этот момент.
Точнее говоря, вектор, имеющий проекции X — Хо, Y — Ко, 0, т. е. вектор
геометрической разности F—Fo, перпендикулярен к элементарному пере-
мещению точки и очень мало отличается по направлению от вектора F, так
как вектор Fo очень мал по сравнению с вектором F. Действительно, заме-
тим, что абсолютная скорость © точки Н оси Ог имеет на оси Охуг проекции
vx = qh, vy = — ph, vz — 0. F6)
Заменяя в уравнениях F5) р и q их выражениями в функции vx и vy,
получим
у у — ?l^ „ v v — ^r-° it
Л — Ло j^ Vy, Г — Г о — ~~ ffi VX-
Эти формулы показывают, что вектор F—Fo с проекциями X—Хо, К—Ко,
0 и скорость v точки Н с проекциями vx, vy, 0 взаимно-перпендикулярны.
Кроме того, мы видим, что модуль вектора F—Fo равен модулю вектора V,
умноженному на очень большой множитель -~ ¦ Резюмируя изложенное,
мы можем высказать следующее предложение, позволяющее определить
величину и направление вектора F—Fo, когда задан вектор ©:
Пусть и — скорость, которою обладает конец вектора V, приложен-
ного в точке Н, когда этот вектор вращается вокруг оси Ог с угло-
вой скоростью г0. Тогда вектор F—Fo no величине и направлению равен
и противоположен вектору и, умноженному на множитель -^.
В самом деле, конец вектора V, приложенного в точке Н, имеет коор-
динаты
vx, Vy, h.
13 Зак. 922. П. Аппель, т. II
194
ДИНАМИКА СИСТЕМЫ
Если эта точка Н будет вращаться вокруг оси Oz со скоростью г0, то она
приобретет скорость и, имеющую проекции
их = — rQvy, иу = rovx, иг = 0.
Тогда предыдущие формулы принимают вид
X — Хо — ¦
u~, Y — Г n = —
что и доказывает теорему.
Наоборот, если к точке Н приложить силу F (X, К, 0) по величине
порядка Го и если при движении, которое эта сила сообщит точке Н, ско-
рость и ускорение последней будут по абсолютному значению очень малы
по сравнению с г0, то скорость точки Н в каждый момент времени будет
почти перпендикулярна к направлению силы F.
В самом деле, из уравнений F3), в которых в членах гор и roq вели-
чины р и q заменяются их значениями F6) в функции vx и vy, можно найти
В каждом из этих уравнений второй член в правой части очень мал.
Следовательно, vx и vy почти пропорциональны величинам — Y и X, что
и доказывает теорему. Направление скорости v вытекает из предыдущего
предложения.
Указания на многочисленные интересные опыты, иллюстрирующие эти
свойства, можно найти в книге Грюэ (Qruey) «Элементарная теория гиро-
скопа» (Theorie elementaire des Gyroscopes, Clermont-Ferrand, librairie Fer-
dinand Thibault, 1879), а также в брошюре того же автора Sur le Strephos-
соре universel, ou Boite gyroscopique, изданной типографией Ше (Chaix)
в 1883 г.
Вопрос о сопротивлении, испытываемом при попытке измененить на-
правление оси быстро вращающегося тела, рассмотрен также в конце
,2 первого тома Theorie des
_Z Kreisels Клейна и Зом-
мерфельда.
402. Трение. В ка-
честве примера движения
твердого тела с трением
мы рассмотрим следую-
щую задачу.
Однородная тяжелая
бесконечно тонкая пла-
стинка, имеющая фор-
му равностороннего тре-
угольника АхАоА^ со
стороной а, положена
вершиной Ах на горизон-
тальную плоскость Р, по
которой она скользит
с трением, в то время
как сторона АгАъ скользит без трения по горизонтальной плоскости Р',
расположенной над первой (рис. 235). В центре тяжести G треугольника
просверлено бесконечно малое отверстие, через которое проходит непо-
движный вертикальный, идеально отполированный стержень 00 . Реакцией
этого стержня, действующей на-треугольник, является горизонтальная сила,
Рис. 235.
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
195
приложенная в G. Наконец, предполагается, что плоскость треугольника
наклонена к вертикали под углом 45°.
В момент t = О треугольнику сообщается угловая скорость а>0 вокруг
оси 00' в направлении положительного вращения. Требуется найти движе-
ние системы и вычислить нормальные реакции плоскостей Р и Р' на тре-
угольник. При этом нужно:
1°. Показать, что если начальная угловая скорость а>0 имеет некоторое
значение (л, то давление плоскости Р на вершину А± равно нулю.
2°. Указать, что будет происходить в зависимости от того, будет ли а>0
меньше или больше (*, и в зависимости от того, может или не может вер-
шина Ах подниматься над плоскостью Р. (Кандидатский экзамен, 1894.)
Обозначим через Nt нормальную реакцию плоскости Р на вершину Ах
и заметим, что нормальные реакции плоскости Р' на сторону А2А9 можно
привести к двум вертикальным силам N2 и Nb, приложенным в точках A-i
и АЛ. Эти реакции будем считать положительными при направлении вверх.
Примем в качестве осей, связанных с движущимся телом, ось Gx, направлен-
ную по GAy ось Gy, параллельную .Л3.Лз> и ось Gz, нормальную к плоскости
треугольника и направленную вверх. Тогда уравнение эллипсоида инерции
относительно точки G имеет вид
А (х* + у*) + 2Az* = L
Действительно, прежде всего вследствие симметрии плоскость треуголь-
ника есть главная плоскость инерции для точки G. Далее, каждая из пло-
скостей, проведенных через ось Oz и одну из высот треугольника, является
плоскостью симметрии тела, т. е. является также главной плоскостью инер-
ции для точки G. Следовательно, имеются три главные плоскости инерции,
проходящие через ось Gz, что возможно только тогда, когда эллипсоид
инерции, построенный в точке G, является эллипсоидом вращения вокруг
оси Gz. Таким образом, моменты инерции А я В равны между собой. Более
того, момент инерции С относительно Gz равен А-\- В или 2А, так как
координаты z всех точек равны нулю, и поэтому
'% ^ С = jg т <*2 + Уа>-
Легко, кроме того, проверить, что если массу треугольника обозначить
через М, то
Точка At описывает окружность с центром в точке О в сторону поло»
жительного вращения вокруг 00'. Тогда сила трения будет приложена
в точке Аг, будет равна fNt и будет направлена в сторону, противополож-
ную скорости точки Аь т. е. параллельно отрицательному направлению оси Gy.
Пусть I — одна треть длины медианы, т. е. / =—-х—. Координаты точек
А^, А9, А$ относительно осей Gxyz и проекции сил Nb N.2, Ns, fN± на эти
оси суть
у = О, А3
z=0,
у = у. А
Л. =3 ¦
= iVi-
2 '
М>
2 '
= — N.
Z = Nf
Y2
3~'
У2"
Х =
2 '
2 '
= o.
13*
196 ДИНАМИКА СИСТЕМЫ
Так как уравнение эллипсоида инерции имеет вид
то момент инерции относительно оси, образующей с осями Gxyz углы
с косинусами a, fi, i, равен
Следовательно, момент инерции относительно оси 00' (<* = — ^- , р = 0,
т = V- Равен
Тело вращается вокруг оси ОО± с угловой скоростью <о, составляющие кото-
рой по осям Охуг суть _
1 У
— °« г=
Так как центр тяжести неподвижен, то, проектируя движение центра
тяжести на ось ОО\ прежде всего имеем
Применим теперь теорему моментов количеств движения относительно
оси 00'. Так как тело вращается вокруг этой оси с угловой скоростью <о,
то сумма моментов количеств движения относительно этой оси есть
Mk2a> — -~- А<л. С другой стороны, только момент силы трения отличен от
нуля и равен — lfNt У2 . Следовательно, имеем
Й B)
Наконец, уравнение Эйлера относительно оси Оу
В lit + {А ~ С)рГ = 2 {гХ ~ xZ)
вследствие написанных ранее значений р, q, r приводится к виду
1
Исключая N2-\-N9 из уравнений A) и C), получим
ШХУ2 =^.(^«_»«), D)
Mgiyi „ ,
где fi2 обозначает величину —^—^—, которая в силу значении I и А при-
водится к виду 4 — |/"б, Заменяя в уравнении B) lNt его значением D),
получим в качестве уравнения движения:
E)
2/
где через X обозначена постоянная -—. Это уравнение непосредственно
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 197
определяет <о через показательные функции аргумента t. При его исследо-
вании нужно различать три случая:
1°. Пусть <о0 < (х. Тогда реакция Nx положительна. При этом, так
как — все время отрицательно, то <о постоянно уменьшается и обращается
в нуль по истечении промежутка времени
и
т = - 1 '" dw
Г dca
J у.г—0,2
В этот момент треугольник остановится и будет находиться в таких же
условиях, как если бы он был предоставлен самому себе без начальной
скорости. Он останется неподвижным.
2°. Пусть <о0 = (л. Тогда Л^ = О, — = О, со = а>0. Вращение будет равно-
мерным и треугольник не будет оказывать давления на нижнюю плоскость.
3°. Пусть <1>0 > (д.. Тогда Nx будет вначале отрицательным. Это означает,
что вершина Ах стремится приподняться. Если эта вершина просто положена
на плоскость, то она действительно приподнимется и станет свободной.
Тогда мы имеем дело с другой задачей. Можно, однако, нр дать вершине Ах
приподниматься над плоскостью, прорезав, например, в плоскости круглое
отверстие и изогнув слегка вершину Ах так, чтобы точка соприкасания была
под плоскостью. Тогда реакция Nx будет направлена вниз и ее величина полу-
чится из предыдущих уравнений, в которых Nx надо заменить через — Nx.
Абсолютное значение силы трения будет —/N^, и уравнение моментов B)
принимает вид
откуда
т da
Так как <о0 > (л, то -тг вначале отрицательно, и когда <о, уменьшаясь,
стремится к (л, время t неограниченно возрастает. Движение стремится
превратиться в равномерное вращение с угловой скоростью [а.
Что касается реакций М, и N2, то мы уже получили сумму N3-\-N2,
а для вычисления N%—N2 следует написать уравнение Эйлера для оси Gx.
Примечание. Момент инерции С можно вычислить без интегриро-
вания, если заметить, что вследствие однородности для момента инерции
равностороннего треугольника со стороной с и массой m относительно его
центра должно получиться выражение вида kmc%, где число k подлежит
определению. Разобьем треугольник со стороной а и массой М на четыре
треугольника с массой — и стороной -^, соединив середины его сторон.
Тогда расстояния центров тяжести трех из этих треугольников от центра G
будут одинаковыми и равными —^—. Написав, что момент инерции боль-
шого треугольника относительно центра тяжести G равен сумме моментов
инерции четырех маленьких треугольников, получим
откуда
198 ДИНАМИКА СИСТЕМЫ
403. Сопротивление среды. Рассмотрим однородную сферу, движущуюся
вокруг своего центра О. Плоская лопатка произвольной формы, но ничтожно
малой массы, плоскость которой проходит через центр, О, неизменяемо свя-
зана со сферой. Найти движение сферы в воздухе, полагая, что сила со-
противления воздуха, действующая на каждый элемент лопатки, пропор-
циональна нормальной составляющей скорости этого элемента и направлен!
по нормали к лопатке.
Примем плоскость лопатки за плоскость уг и перпендикулярный к ней
диаметр за ось Ох. Оси Oxyz движутся вместе со сферой. Они являются
главными осями инерции. Если через р, q, r обозначить составляющие мгно-
венной угловой скорости вращения, то элемент rfs лопатки с координатами
0, у, г будет иметь скорость с проекциями
Составляющая этой скорости по нормали к элементу da, т. е. к плоско-
сти yOz, есть vx. Следовательно, сила сопротивления воздуха, действующая
на этот элемент, имеет проекции
X = — kvxda, Y = О, Z = О,
где k — положительная постоянная.
Можно всегда предположить, что в качестве осей Oz и Оу приняты
главные оси инерции лопатки относительно точки О, так что если da обо-
значает элемент площади лопатки, то
yz da = 0.
При таком предположении сумма L моментов сил X, Y, Z сопротивления
относительно оси Ох равна нулю. Сумма моментов этих сил относительно
оси Оу есть
—xZ) = — k Г (qz — ry) zda = — aq,
где
— положительная постоянная.
Точно так же сумма моментов относительно оси Oz будет
N = ^] (xY — уХ) = k J (qz—ry) у da = —br,
где* — величина положительная. Тогда уравнения Эйлера, так как А = В = С,
будут
A dP _ n AdO „ Л dJL _ _ *,
ъ a b „
Отсюда, полагая — = о, — = p, получаем
р—рй, q— q^e-**, r = ro?-p*.
Так как о и р положительны, то q и г стремятся к нулю, когда t уве-
личивается. Движение стремится к вращению вокруг оси Ох, перпендику-
лярной к лопатке, т. е. система стремится избежать действия на нее сил
сопротивления.
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 199
УПРАЖНЕНИЯ
1. Кинетическая энергия тела, движущегося вокруг неподвижной точки,
равна скалярному произведению главного момента количеств движения на
мгновенную угловую скорость вращения соа cos (а>, а) (Резаль).
2. Доказать, что проекции рь qb r, мгновенной угловой скорости вра-
щения (о на неподвижные оси имеют выражения:
рх = 6' cos ф + у' sin 6 sin ф,
q\ = 6' sin ф ¦— f' sin 6 cos ф,
гх = ф' -f <р' cos 6.
3. Устойчивость вращения вокруг главных осей инерции. Уравнения
Эйлера удовлетворяются при q = О, г = 0. Чтобы узнать, будет ли соответ-
ствующее вращение устойчиво, достаточно узнать, будут ли q и г оставаться
очень малыми, если они были малыми в начальный момент. При предполо-
жении малости q и г произведением qr можно пренебречь. Тогда первое
уравнение Эйлера будет -— = 0, откуда р = р0, а два других принимают
вид
в^ = (С-А)Рог, C~ = (A-B)Poq, A)
откуда
аЦ _ (А~С)(А-В) 2 ,
м>- - вс p°q - nq>
где п — постоянная. Отсюда находим:
q = q0 cos nt + (C~/^)/V"° sin nt,
так как q = q0 при / = 0и согласно уравнениям A)
dq С —А
dt В
¦ Р(/о-
Таким же путем находится и г, и мы видим, что q a r остаются очень
малыми. Вращение устойчиво. Такой же результат получается и в случае
вращения вокруг большой оси Oz.
Но для средней оси, полагая р и г вначале очень малыми и пренебре-
гая произведением рг, получим q = д0 и затем получим уравнение
rf2p
вида -г~ == + п?р. Интегрируя, найдем, что р будет функцией вида aent -\- be~nt,
которая неограниченно возрастает вместе с t. Таким образом, предположение,
что р и г остаются очень малыми, неприемлемо. Вращение вокруг средней
оси неустойчиво. Обоснования этому методу исследования дают теоремы
Пуанкаре о приближенном интегрировании дифференциальных уравнений.
4. Другой метод получения уравнения герполодии. Так как точка т
и конец вектора <•> мгновенной угловой скорости вращения лежат на одной
прямой с точкой 0 и а> = От ~\[h, то геометрическое место точек т подобно
геометрическому месту точек а>.
Относительные координаты точки <о по отношению к движущимся осям
суть р, q, r. В абсолютном пространстве точка « описывает плоскую кривую
в плоскости, параллельной плоскости П, т. е. плоскости Х]Оух, так как Ozt
направлено по Оа. Следовательно, кривая, которая является геометрическим
290 ДИНАМИКА СИСТЕМЫ
местом точек «, спроектируется на плоскость х±Оу\ в натуральную величину.
Но <•> есть результирующая трех угловых скоростей 6', <р', ф', направленных
как было указано выше (п. 382).
Проекция а>х вектора <•> на плоскость х^Оу± имеет абсолютные коорди-
наты Рх и qt, которые можно легко вычислить, если заметить, например,
что Pi есть сумма трех проекций б', <р', ф' на ось Ох±. В результате полу-
чаются значения, приведенные в упражнении 2. Определенная таким образом
на плоскости .х^Оуу точка o)t (рь qv) описывает кривую, подобную герполо-
дии. Если через pt и Xi обозначить ее полярные координаты, то
Л + iqi = р/ь = (в' - W sin 0) е**.
На основании формул B0) п. 388, определяющих 6 и <р. и формулы B1),
определяющей ф, мы получаем р± и q^ как однозначные функции времени.
5. Доказательство де Сен-Жермена несуществования точек пере-
гиба на герполодии. Пусть R и R1— радиусы кривизны конусов, имеющих
основаниями полодию и герполодию, в какой-нибудь точке их общей обра-
аующей. В кинематике устанавливается соотношение вида
где ds — элемент дуги кривой, являющейся траекторией конца вектора ак
Если существует точка перегиба, то Rx обратится в бесконечность и Ra> dt — ds.
Но уравнения движения Пуансо показывают, что это невозможно, каков бы
ни был знак D — В. (Comptes rendus de l'Academie des Sciences, 26 апреля
1885.)
6. Дан невесомый тетраэдр ОАВС, в котором трехгранный угол О
является прямоугольным и ребра которого ОА, ОВ, ОС равны соответ-
ственно а, Ь, с.
1°. Определить главные оси центрального эллипсоида инерции, т. е.
эллипсоида инерции, построенного в центре тяжести G тетраэдра при сле-
дующих предположениях:
УТ Ь = \, с
2°. В начальный момент тетраэдру сообщают вращение вокруг произ-
вольного диаметра GD центрального эллипсоида инерции. Требуется опре-
делить движение этого тетраэдра вокруг его центра тяжести G. Надо опре-
делить положение тетраэдра в пространстве в произвольный момент.
Составляющие />о> 9о> го начальной угловой скорости вращения относи-
тельно большой, средней и малой осей центрального эллипсоида инерции
имеют соответственно значения
. <7o=O, ro = V&
(Кандидатский экзамен, 1890.)
Ответ. Так как центр тяжести был в начальный момент неподвижен,
то он и останется неподвижным. Следовательно, тело вращается вокруг
неподвижной точки и на него не действуют никакие силы. Оно соеершает
движение Пуансо. Нужно подсчитать численно А, В, С, h и / или ц и D.
Получается
л. = 6—i^g; в = 6, с = ь + У1>.
Заданные начальные значения соответствуют особому случаю, когда
полодия является эллипсом, проходящим через среднюю ось эллипсоида
инерции. (Де Сен-Жермен, Nouvelles Annales, т. IX, 1890.)
7. Любая геодезическая линия, проведенная на удлиненном эллипсоиде
вращения, проектируется на плоскость экватора в виде герполодии, которая
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 201
может быть образована эллипсом с неподвижным центром, катящимся по
этой плоскости. (А л ь ф е н, Comptes rendus, 5 октября 1887; Traite des
fonctions elliptiques, т. II, стр. 249.)
8. Любая геодезическая линия, проведенная на параболоиде вращения
с вертикальной осью и с вогнутостью, направленной вверх, проектируется
горизонтально в герполодию, получаемую при качении некоторого опреде-
ленного эллипса. (Floquet, Bulletin des seances de la societe des Sciences
de Nancy, seance du ler juil let 1889.)
9. Герполодия есть кривая, описываемая точкой, секториальная ско-
dy
рость которой р2 -~, есть линейная функция р2, а полная скорость есть
функция второй степени относительно р2, в которой коэффициент при р*
отрицателен. (Дарбу, заметка к Mecanique Депейру.)
10. Если заставить катиться и вертеться без скольжения по неподвиж-
ной плоскости II произвольную поверхность второго порядка с неподвижным
центром О, то геометрическим местом точек касания от на неподвижной
плоскости будет обобщенная герполодия. Радиус-вектор герполодии, прове-
денный из основания Р перпендикуляра ОР к плоскости П, и касательная
к этой кривой в от будут двумя сопряженными касательными катящейся
поверхности. Для того чтобы радиус-вектор Рот не вращался все время
в одном направлении или чтобы кривая имела точки возврата, необходимо,
чтобы радиус-вектор мог совпадать с касательной. Эти два сопряженных,
направления могут совпадать лишь тогда, когда поверхность второго по-
рядка имеет противоположные кривизны, т. е. когда она является однопо-
лостным гиперболоидом (Дарбу, там же).
П. Во втором представлении движения по Пуансо (п. 393) определить
след, оставляемый точкой от' на вращающейся плоскости И'.
Ответ. Радиус-вектор От' равен радиусу-вектору Рт = р герполодии
(рис. 231). Если обозначить через х' угол, образуемый радиусом-вектором От'
с некоторой прямой OU, лежащей в плоскости II' и движущейся вместе
с ней, то XxOU—pt, так как ГГ вращается со скоростью ц; х' — Х— f1^.
так как От' и Рт параллельны. Заменим в уравнении герполодии дифферен-
циал а"х значением dx' -\- С- dt. Тогда получатся уравнения
пределяющие координаты р и х' точки от' на плоскости Н' в функции t.
Следовательно, площадь, описываемая радиусом От' на плоскости И',
пропорциональна времени.
Движение, определяемое уравнениями A), будет таким же, как у матери-
альной точки, находящейся под действием центральной силы, исходящей
из точки О и имеющей выражение вида «р 4" Рр3- (D a r b о u x, Mecanique
de Despeyrous, Note 17, Pinczon, Comptes rendus, апрель 1887.)
12. Теорема Джебиа (Qebbia) *). Движение твердого тела вокруг непо-
движной точки О в случае, когда отсутствуют внешние силы, может быть
получено качением и верчением поверхности второго порядка с центром
в точке О, имеющей те же круговые сечения, что и эллипсоид инерции,
по поверхности вращения вокруг оси Ог. (S i а с с i, In memoriam Dominici
Chelini, Collectanea mathematica, 1881; Greenhill, Fonctions elliptiques, гл. VII.)
13. Теорема Мак Куллага (Mac Cullagh). Если теоремы Пуансо пре-
образовать при помощи взаимных поляр относительно сферы с центром О,
*) Теорему приписывают Сиаччи, который доказал ее в частном случае.
Джебиа доказал ее в общей форме (R. Accademia de Lincei, 1885).
202 ДИНАМИКА СИСТЕМЫ
то окажется, что движущийся вместе с телом эллипсоид —г -f- ^к ~\~ ~r = ^
А. а С
(называемый гирационным эллипсоидом) все время проходит через две
неподвижные точки, расположенные на главном моменте количеств движе-
ния Оа симметрично относительно О.
14. Теорема Джебиа. Преобразуя точно так же теорему Сиаччи A2),
найдем, что поверхности, софокусные с гирационным эллипсоидом, сколь-
зят по неподвижным поверхностям вращения второго порядка.
15. Мы видели, что при движении тяжелого тела вращения, закреплен-
ного в какой-нибудь точке его оси, величина и = cos 6 изменяется между
двумя значениями их и м2. Указать, каковы должны быть начальные условия
для того, чтобы эти два значения были равны между собой. Тогда ось тела
опишет точный конус вращения вокруг Oz± и общее значение % и м2 будет
обязательно равно и0.
Ответ. Достаточно определить аир так, чтобы полином f{u) имел
наперед заданный двойной корень ц0-
16. В задаче Лагранжа и Пуассона доказать:
1° что конец (о вектора мгновенной угловой скорости постоянно остается
в неподвижной относительно тела плоскости, перпендикулярной к оси Ог
тела, и описывает в этой плоскости некоторую герполодию Н;
2° что в пространстве та же точка ш описывает кривую, лежащую на
сфере S;
3° что движение может быть получено качением герполодии Н, рас-
сматриваемой как неизменно связанной с телом, по неподвижной сфере S.
(Якоб и, Gesammelte Werke, т. II; А л ь ф е н, Comptes rendus, т. С;
Дарбу, Journal de Mathematiques, 1885 и заметка XIX к Mecanique de Des-
peyrour; де Сен-Жермен, Resume de la theorie du mouvement d'un
solide autour d'un point fixe, Gauthier-Villars, 1887.)
Указания к решению:
1°. Геометрическое место концов ш мгновенных осей вращения в теле
есть герполодия. Координаты точки и, относительно подвижных осей суть р,
q, г. Так как г = г0, то точка о> находится в плоскости П, перпендикулярной
к оси Qz и неизменно связанной с телом. В этой плоскости точка ш описы-
вает кривую Н, которая проектируется в натуральную величину на пло-
скость ху. Декартовы координаты точки ш, отнесенной к осям Ох и Оу,
суть р и q, причем
р = у sin 6 sin <f ~\- 6' cos <f,
q = Y sin G cos <f — 6' sin tf.
Обозначим через р и х ее полярные координаты. Прежде всего
р2 — р2 _j_ q2 — а — a cos 0 = а — аи.
_. а—р2
Отсюда и = — и, подставляя в соотношение
а
получим уравнение
которое действительно является уравнением вида, указанного для герполодии,
так как подкоренной многочлен начинается с — р6. С другой стороны,
У sin 8
q 6' gCp t J/sine
F 1 + -*-—jp— tg ?
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 203
Так как мы положили cos В = и, то
sine \ — и°- 1 —и2 $
t
= == , ф = . _ у == arct? . Ф
в' du Y~f{") 1 —и2 У/(«)
dt
Дифференцируя по t и заменяя — выражением yf(u), a 9' — найденным
В — Ьгм
раньше значением г о — и -?-= ~-, после приведения получим
. . dy ro(b 2) broa
(« — аи) -± = -AL_ -' (« _ аи) +
или, так как a — аи = p2, то
Уравнения A) и B) имеют характерную форму уравнений герполодии,
так как во втором уравнении постоянный член -=¦ (broa — pa) равен
^
± -^ V —F@). Следовательно, теорема доказана. Конус (С), представляющий
собой геометрическое место мгновенных осей О« в теле, является конусом,
имеющим основанием эту герполодию Н.
2°. Геометрическое место точек о> в абсолютном пространстве еспи
сферическая кривая Hv Если обозначить через рь qu rx составляющие мгно-
венной угловой скорости (о по неподвижным осям Охь yv гх, то эти три
величины могут быть найдены тем же методом, что и р, q, r.
Так как угловая скорость а есть результирующая трех угловых скоро-
стей 6', <р\ J/, направленных по осям 01, Ог, Ozt (рис. 224), то рх равно
сумме проекций этих трех последних угловых скоростей на ось Охь а дг
и Г( равны соответственно суммам их проекций на оси Оух и 0^. Таким
образом получаем
Pl = 6' cos if + tp' sin 6 sin ib, 1
^¦t = 6' sin if — tf' sin 6 cos if, ) C)
rt = if' + ?' cos 6. J
Таковы координаты точки о> относительно неподвижных осей. Подставляя
сюда найденные раньше значения if' и <р', получим г1 в функции от cos 9
или, что то же, от и:
Далее, так как мы имеем очевидное равенство
то на основании выражения р2 -(- q2 как функции и получаем
Pi + Ял + ri = a — аи + 4
Исключив м из двух предыдущих соотношений, найдем
A - Ь) г0 (р\ + q\ + г2) + аг, = A - *) г„ (<. + г*) + a?. (S)
204 ДИНАМИКА СИСТЕМЫ
Это уравнение, в котором р{, qlt r\ рассматриваются как текущие коор-
динаты, показывает, что точка ш постоянно лежит на сфере S с центром на
оси Ozx- Точка ш описывает, следовательно, в абсолютном пространстве сфе-
рическую кривую Hi. Для определения этой кривой необходимо обратиться
к уравнениям C) и вывести из них дифференциальное уравнение проекции
кривой Н^ на одну из координатных плоскостей. Но тогда движение можно
представить следующим образом:
Движение получается качением герполодии Н, неизменно связанной
с телом, по неподвижной сфере S. Действительно, движение получается,
если заставить конус С, связанный с телом и имеющий основанием герполо-
дию Н, катиться по неподвижному конусу С\, имеющему основанием сфери-
ческую кривую Нх. В этом движении кривая Н катится по Hv т. е. по
сфере Si, содержащей Нь
В частном случае, когда b = 1, имеем А = В = С и эллипсоид инерции
для точки О является сферой. В этом случае сфера S обратится в непо-
движную плоскость Щ, перпендикулярную к Ozi, и движение получится ка-
чением герполодии Н по неподвижной плоскости IIt.
Тогда кривая Нь являющаяся геометрическим местом точек о> в про-
странстве, лежит в плоскости Щ. Составляя ее дифференциальное уравне-
ние в полярных координатах, можно убедиться, что она является также
герполодией, описываемой точкой о> по закону Пуансо.
17. Доказать, что сферическая кривая Ht предыдущего упражнения,
описываемая концом ш мгновенной угловой скорости в абсолютном простран-
стве, может быть образована следующим образом:
Если три точки лежат на неизменяемой прямой, причем две первые
должны оставаться на двух различных сферах, а третья на плоскости^
перпендикулярной к линии центров обеих сфер, и если, кроме того, прямая
должна перемещаться таким образом, чтобы оставаться нормальной
к траектории одной из своих точек, что полностью определяет ее дви-
жение, начиная с некоторого заданного положения, то точка прямой,
которая должна оставаться в плоскости, опишет герполодию, а две дру-
гие точки опишут сферические кривые, являющиеся кривыми //(, описы-
ваемыми в пространстве концом <а мгновенной угловой скорости. (D а г-
b о и х, Journal de Mathematiques, 4е serie, т. I, Fasc. IV, 1885.)
58. Псевдоэллиптические интегралы Гринхилла для движения тяже-
лого тела вращения, закрепленного в одной из точек его оси. Допустим,
что волчок приведен вначале во вращение вокруг своей оси как в исследо-
ванном случае (п. 396), а затем предоставлен самому себе. Обозначим через
и0 начальное значение cos 8. Мы видели, что какая-нибудь точка г, взятая
на оси волчка, будет описывать сферическую кривую, имеющую точки воз-
врата на окружности и — и0 и касающуюся некоторой окружности, располо-
женной под первой и соответствующей корню ult определяемому уравнением
Допустим, что величина начального вращения г0 определена таким обра-
зом, что значение % равно нулю, так что
Тогда сферическая кривая будет касаться большого горизонтального'
круга сферы и некоторые интегралы окажутся псевдоэллиптическими.
В самом деле, в этом случае выражение 1-зг) примет вид
\dt)
(
ж] = *vo" (м° ~к) С1 ~~
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 205
и мы имеем
Отсчитывая время t от того момента, когда и = «0, и полагая, что ф
обращается в нуль одновременно с t, получим интеграл
ф) * = /1 — мм0 — /Ум(м0 —м), («)
в котором s обозначает постоянную —^ , а /— комплексную единицу У*— 1.
В этом легко убедиться, взяв логарифмические производные от обеих частей
du ФЪ . „
и заменив затем —г и — их значениями в функции и. Тогда вещественные
at at
части и коэффициенты при / справа и слева будут тождественны. Интеграл
(я), если в нем приравнять вещественные и мнимые части, предварительно
заменив и его значением cos 8, распадается на два уравнения:
sin 8 cos (st — 6) = у 1 — u0 cos 8,
sin 8 sin (st — <!:) = — Y(u0— cos 8) cos 8.
Эти два уравнения приводятся к одному, в чем можно убедиться, если воз-
вести их в квадрат и сложить.
Можно также показать, что при соответствующих начальных условиях
получается интеграл вида
-"'> *
= (и — D) /(и' —и)(и3—м) -f I (Ей? — Fu) Y" —
в котором п, D, E, F являются надлежащим образом подобранными веще-
ственными постоянными.
Можно также добиться исчезновения векового члена nt при помощи
еще более частного подбора постоянных задачи. Тогда сферическая кривая,
представляющая собой геометрическое место точек г, будет замкнутой.
В частном случае сферического маятника нельзя добиться исчезновения
векового члена nt.
При другом выборе постоянных задачи получается интеграл вида
sin3 Ъе* (ф- "*> * = (и2 — Du + ?>') У (и' - и) (и — и{) +
+ I(Ей4- — Fu
где D, D', E, F, F' — вещественные постоянные. Можно также и здесь
добиться исчезновения векового члена nt.
Вообще, если ц обозначает целое число, то можно найти такие частные
случаи, при которых sin1* 8^ <Ф~"*)* дается формулой, принадлежащей пер-
вому или второму типу в зависимости от того, будет ли (а четным или не-
четным, в которой перед радикалами стоят многочлены степени (л — 1.
(Green hill, Proceedings of the London Mathematical Society, т. XXV et
Fonctions elliptiques, traduction de Oriess.)
19. Твердое тело, движущееся вокруг неподвижной точки, находится
под действием пары, вектор момента которой все время параллелен главному
моменту количеств движения и по модулю равен модулю последнего, умно-
женному на постоянную X. Найти движение тела.
Ответ. Уравнения движения суть
Ad? + (C
206 ДИНАМИКА СИСТЕМЫ
Если положить р = е~ир'', ..., \1' = 1—е-'*, то эти уравнения приве-
дутся к виду
так что р', q', г' будут такими же функциями от t', какими функциями от t
являются р, q и г в случае отсутствия внешних сил. (См. О г е е n h i 11, Fon-
ctions elliptiques и Padova (Падуя), Atti dell'Accademia di Torino, т. XVI,
1885—1886.)
20. Найти движение однородной сферы, движущейся вокруг своего центра
в сопротивляющейся среде. Эта сфера снабжена на своей поверхности произ
вольным числом плоских лопаток произвольной формы, плоскости которых
проходят через центр. Найти движение, пренебрегая массами лопаток и пред-
полагая, что закон сопротивления является таким же, как в примере
п. 403.
Ответ. Уравнения Эйлера являются в этом случае системой линейных
уравнений с постоянными коэффициентами.
21. Невесомое тело, на которое не действуют никакие силы, может дви-
гаться вокруг неподвижной точки. В момент t, когда тело неподвижно, к нему
прикладывается сила F, величина и линия действия которой заданы. Какими
будут в момент t + dt угловая скорость и положение мгновенной оси вра-
щения?
Тот же вопрос, если приложить несколько сил. (Steichen, Crelle,
т. 43, стр. 161.)
22. Тяжелый стержень бесконечно малой толщины движется вокруг
одной из своих точек, закрепленной неподвижно. Найти движение.
(На стержне существует точка, которая движется как конический маят-
ник.) (Т is sot, These, Journal de Liouville, т. XVII, 1852.)
23. Когда тело вращается вокруг неподвижной точки под действием сил,
момент которых относительно мгновенной оси вращения равен постоянно
нулю, то скорость вращения пропорциональна радиусу-вектору эллипсоида
инерции, направленному по этой оси. Справедливо и обратное.
Прямое предложение прилагается, в частности, к движению тела, вра-
щающемуся вокруг неподвижной точки и вынужденному все время касаться
неподвижной поверхности, причем на тело не действуют никакие другие
силы, кроме нормальной реакции поверхности. (Flye S a i n t e-M a r i e.
Journal de Liouville, т. HI, 1877.)
24. Найти движение однородного тяжелого тела вращения, закрепленного
в одной из точек его оси и опирающегося на неподвижный круг, ось кото-
рого проходит через точку закрепления:
1° пренебрегая сопротивлениями;
2° принимая во внимание трение скольжения поверхности тела о непо-
движную окружность и предполагая, что нормальная реакция круга напра-
влена перпендикулярно к прямой, соединяющей неподвижную точку с точкой
опоры. (A s t о г, Nouvelles Annales de Mathematiques, 1894, стр. 442.)
25. На неподвижной плоскости находится однородная материальная
окружность массы т. Частицы последней притягивают к себе по закону
Ньютона частицы твердого тела, центр тяжести которого закреплен
неподвижно в центре окружности. Найти движение тела, предполагая,
что его размеры очень малы по сравнению с радиусом окружности.
Решение задачи при помощи 6-функций двух аргументов вместе с много
численными библиографическими указаниями можно найти во вступительной
диссертации Оскара Перрона (Oscar Perron), представленной Мюнхенскому
университету в 1902 г. (изд. Wolf und Sohn).
Эта задача тесно связана с задачей движения Земли вокруг своего
центра тяжести. В этой последней задаче обычно предполагают, что цен-
тральный эллипсоид инерции является эллипсоидом вращения.
ГЛАВА XX. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 207
26. Интерпретация мнимого периода в движении по Пуанео. Под-
ходящим выбором начальных условий можно так соединить попарно движе-
ния, чтобы вещественный период одного движения равнялся мнимому периоду
другого движения, деленному на /. (А п п е л ь, Bulletin de la Societe Mathe-
matique de France, т. XXVI, 1898, стр. 98.)
27. Проинтегрировать уравнения движения твердого тела вокруг непо-
движной точки в случае, когда эти уравнения имеют вид
где a, b, с — постоянные. Можно найти два первых интеграла
Ар9- + Bq4- + Cr9- = 2/i,
(Ар + а)« + (Bq + 6J + (Cr + С)9- = k9-
и привести интегрирование к квадратурам. (Vito Volterra, Atti della
R. Accademia delle Scienzedi Torino, т. XXX, mars 1895.)
28. При движении тяжелого твердого тела вращения вокруг неподвиж-
ной точки, взятой на его оси, траектория какой-нибудь точки его оси зави-
Р „
сит от их и и3 и, кроме того, еще от величины -—-. Если положить
brot = т, то исследуемому движению будет соответствовать движение такого
типа, для которого bro=l. (Drach, Comptes rendus, т. 170, стр. 1156,
17 мая 1921.)
ГЛАВА XXI
СВОБОДНОЕ ТВЕРДОЕ ТЕЛО
I. Общие сведения
404. Уравнения движения. Для того чтобы знать движение
свободного твердого тела, достаточно знать движение какой-нибудь
точки тела, например, центра тяжести и движение тела вокруг этой
точки.
Представим себе три неподвижные прямоугольные оси 0%, От\, Ог,
(рис. 236) и обозначим через $, к), ? координаты центра тяжести О
относительно этих осей. Если обозначить через М массу тела, то
уравнения движения центра тяжести
дадут
м —' =
2
A)
Рис. 236.
где в правых частях стоят суммы
Я проекций сил, приложенных к телу,
на три оси 0%rf,.
Проведем теперь через центр тя-
жести О три оси Ох1г Gyv Gzx по-
стоянного направления, например, па-
раллельные неподвижным осям O\i\\.
Движение тела относительно осей Qxxyvzx является движением
тела вокруг неподвижной точки. Если ввести три оси Oxyz, неиз-
менно связанные с телом, то положение тела относительно осей
®х\У\г\ будет определяться тремя углами Эйлера 6, ср, ф, которые
оси Oxyz образуют с осями Gx^z^ Раньше мы получили уравнения
движения твердого тела вокруг неподвижной точки, применяя теорему
моментов количеств движения. Но эта теорема применена также и для
относительного движения вокруг центра тяжести (п. 350). Следова-
тельно, к этому движению могут быть приложены все уравнения,
установленные ранее для движения тела вокруг неподвижной точки.
ГЛАВА XXI. СВОБОДНОЕ ТВЕРДОЕ ТЕЛО 209
Приложим, в частности, уравнения Эйлера. Примем за оси Охуг,
связанные с телом, главные оси инерции в точке О и обозначим
через А, В, С три главных момента инерции. В каждый момент вре-
мени скорости точек тела относительно осей Gxlylzl будут такими же,
как если бы тело совершало мгновенное вращение с угловой ско-
ростью w, составляющие которой по осям Охуг равны р, q, r.
Главный момент относительно точки О количеств относительных
движений есть вектор Ooj, имеющий проекции Ар, Bq, Cr на
оси Gxyz. Тогда, обозначая через L, М, N суммы моментов сил,
приложенных к телу, относительно тех же осей, получим уравнения
Эйлера:
B)
Таким образом, мы имеем шесть уравнений A) и B), определяю-
щих шесть параметров \, т\. С, 9, <р, <]> в функции t. В общем случае
правые части этих уравнений зависят от шести параметров, а также
и от их первых производных, если силы зависят от скоростей, так
что приходится рассматривать совместно все шесть уравнений.
В случае, когда твердое тело не вполне свободно, шесть пере-
численных параметров связаны некоторыми соотношениями. Но тогда
в уравнения движения войдут неизвестные реакции.
Если оси Охуг являются главными осями инерции для точки О,
то кинетическая энергия тела в его относительном движении
вокруг центра тяжести будет
Простейшие примеры. В трех следующих примерах можно проин-
тегрировать раздельно сначала уравнения A), а затем уравнения B).
1°. Тяжелое тело в пустоте. Центр тяжести тела будет двигаться как
тяжелая материальная точка, т. е. будет описывать параболу. Далее, так как
внешние силы — веса отдельных точек, имеют равнодействующую, прило-
женную в центре тяжести G, то величины L, М, N равны нулю. Движение
тела вокруг точки G идентично с движением твердого тела вокруг непо-
движной точки в случае, когда силы имеют равнодействующую, проходящую
через неподвижную точку. Это движение будет такое же, как в случае
Эйлера — Пуансо.
2°. Твердое тело, частицы которого притягиваются неподвижным
центром О пропорционально массе и расстоянию. Притяжения имеют
равнодействующую, приложенную в центре тяжести G и равную притяже-
нию, которое вызывала бы точка О, если бы вся масса была сосредоточена
в точке G. Следовательно, точка G описывает эллипс с центром в точке О
(п. 223) и движение вокруг точки G является движением по Пуансо.
]4 Зак. 922. П. Аппель. т. II
210 ДИНАМИКА СИСТЕМЫ
3°. Планета, которая п pea полагаете я состоящей из концентрических
однородных сферических слоев. В теории притяжения доказывается, что
если планета является твердым телом, образованным из концентрических од-
нородных сферических слоев, то ньютоновские силы, с которыми какая-нибудь
внешняя точка f. притягивает к себе элементы планеты, имеют равнодей-
ствующую, приложенную в центре тяжести G и равную, притяжению точкой \х
всей массы планеты, если предполагать ее сосредоточенной в точке G. Тогда,
каково бы ни было число притягивающих точек р., результирующая сил
притяжений, действующих на планету, будет приложена в точке О и будет
такой же, как если бы вся масса планеты была сосредоточена в этой точке.
Движение планеты вокруг своего центра тяжести будет тогда таким же, как
движение твердого тела вокруг неподвижной точки О, когда силы имеют
равнодействующую, проходящую через эту точку. Но в данном случае эл-
липсоид инерции для точки G будет, очевидно, сферой и любая ось, про-
ходящая через точку G, будет главной. Следовательно, движение вокруг
точки G будет представлять собой вращение вокруг оси, сохраняющей по-
стоянное направление в пространстве и в теле. Явлений прецессии и нута-
ции не будет.
495. Движение нескольких твердых тел. Когда рассматривается
несколько твердых тел, то их взаимные реакции будут внутренними
силами системы. В некоторых случаях бывает целесообразным рас-
сматривать одно из тел как изолированное. Тогда нужно будет рас-
сматривать как внешние относительно этого тела все заданные силы
и все силы действия на него других тел системы.
II. Тяжелое тело, соприкасающееся с горизонтальной плоскостью
406. Историяеская справка. Движение тяжелого тела, касающегося
неподвижной плоскости, было изучено впервые Пуассоном. В томах 5 и 8
журнала СгеП'я Курно (Cournot) вновь воспользовался уравнениями Пуас-
сона и применил их к случаю, когда принимается во внимание трение. Част-
ный случай движения шара с трением по горизонтальной плоскости (бильярд)
исследован Кориолисом в работе, опубликованной в 1835 г. Пюизё (Puiseux,
Journal de Liouville, т. XIII и XVII, 1848 и 1852) приложил уравнения Пуас-
сона к движению тяжелого тела вращения по идеально отполированной го-
ризонтальной плоскости, изучив главным образом изменение угла, который
образует ось вращения с вертикалью. Слессер (S lesser, Quarterly Jour-
nal of Mathematics, т. IV, 1861) составил уравнения движения тяжелого тела
вращения, которое вертится на горизонтальной плоскости и всегда катится
по ней без скольжения. Это равносильно предположению, что коэффициент
трения скольжения равен бесконечности. Для решения задачи он применил
оси, движущиеся в теле. Тому же методу следовал Раус (Rigid, Dynamics,
т. II). Задача о качении с верчением тяжелого тела на плоскости исследована
также Нейманом (Neumann, Mathem. Annalen, т. XXVII, 1886). Сошлемся,
наконец, на статью Скаутена (S с h о u t e n, Proprietes generates du roulement
exact d' un corps de revolution sur un plan horizontal appliquees аи mouvement
d'un corps de revolution autour d'un point fixe de son axe (Verlagen der
Konink lijke Akademie von Wetenschappen te Amsterdam, V, 1889). Все эти
общие методы применимы, в частности, к случаю обруча. Этот случай был
исследован Ферре (Ferres, Quarterly Journal, 1872) и Карвалло (Carvallo,
Journal de Г Ecole Polytechnique, 2-е serie, Cahiers V, VI, 1900, 1901),
а также Кортевегом (Korteweg) и Аппелем (Niew Archief voor Wis-
kunde, 2-е serie, т. IV, июль 1899; Rendiconti del Circolo matematico di
ГЛАВА XXI. СВОБОДНОЕ ТВЕРДОЕ ТЕЛО
211
Рис. 237.
Palermo, август 1899; Les mouvements de roulement en Dynamique, Collec-
tion Scientia, 1899, n°4).
Мы вернемся к этим вопросам в аналитической механике.
407. Тяжелое тело вращения, скользящее без трения по неподвиж-
ной горизонтальной плоскости. Вообразим тяжелое твердое тело, подчи-
ненное следующим условиям: Iе эллипсоид инерции для центра тяжести G
является эллипсоидом вращения вокруг оси Gz; 2° тело, ограниченное поверх-
ностью вращения вокруг той же оси, касается не-
подвижной горизонтальной плоскости. Эти уело- /Z
вия выполняются, в частности, для однородного
тяжелого тела вращения.
Рассмотрим меридиан поверхности вращения,
по которому тело касается неподвижной плоскости
(рис. 237). Касательная плоскость в точке Р этого
меридиана перпендикулярна к плоскости мери-
диана zGP, с которой она пересекается по ли-
нии РТ. Пусть С — расстояние GQ от центра
тяжести до касательной плоскости ив — угол,
который образует этот перпендикуляр с Gz;
t, является функцией 6:
С =/F),
которая вполне определена, поскольку меридиан
задан. Можно, наоборот, заранее задать соотно-
шение этого вида, и тогда соответствующая по-
верхность будет иметь меридианом кривую, являю-
щуюся огибающей прямых РТ, удовлетворяющих
указанным условиям. С другой стороны, очевидно,
что если меридиан задан, то расстояние QP, кото-
рое мы обозначим через р, будет также известной
функцией 6. Для определения этой функции заметим, что касательная РТ
имеет относительно осей Gx и Gz, лежащих в плоскости меридиана, уравнение
х sin 6 — z cos в =/F).
Так как меридиан является огибающей семейства прямых, почучающегося
при изменении 6, то для нахождения координат точки касания Р нужно
к этому уравнению присоединить его производную по в:
х cos 8 + z sin 6 = /' F).
Это есть уравнение нормали PR, проходящей через точку Р. Ее рас-
стояние от точки G равно QP. Поэтому имеем
Р = ± /' @).
Установив это, рассмотрим тело, лежащее на неподвижной горизонтальной
плоскости ЕОт), и пусть Р ¦— точка касания поверхности вращения, ограничи-
вающей тело, с плоскостью (рис. 238). Выберем в неподвижной плоскости
две перпендикулярные оси О?, Оц и примем в качестве оси ОС вертикаль,
направленную вверх. Пусть 5, *), С — координаты центра тяжести G; 8, ср, ф —
углы Эйлера, определяющие положение главных осей инерции Gxyz тела
относительно осей Gx-^y^z^, параллельных неподвижным осям О5^С; ось Gz
направлена по оси вращения, и поэтому главные моменты инерции относи-
тельно осей Gx и Gy одинаковы, так что А = В.
Как видно из чертежа, С есть расстояние GQ от центра тяжести G до ка-
сательной плоскости Юц, а прямая GQ образует с осью Gz поверхности
как раз угол 6. Поэтому имеем
С =/F), A)
14*
212
ДИНАМИКА СИСТЕМЫ
где /(В) — известная функция. Соотношение A) как раз и выражает, что
тело касается горизонтальной плоскости.
Если через М обозначить массу тела, то действующие на него силы суть
вес Mg, приложенный в G, и нормальная реакция R плоскости, приложен-
ная в Р.
Так как обе эти силы вертикальны, то два уравнения движения центра
тяжести имеют вид
м-
^-=0.
B)
Следовательно, точка Q, которая является горизонтальной проекцией
центра тяжести, совершает прямолинейное и равномерное движение.
1°. Горизонтальная проекция точки G неподвижна. Допустим сначала
для простоты, что начальная скорость, сообщаемая центру тяжести, равна
нулю либо вертикальна. Тогда ее
горизонтальная проекция будет вна-
чале равна нулю, и так как эта
проекция остается постоянной, то
она будет равна нулю все время.
В этом случае точка Q будет непо-
движна и центр тяжести может лишь
колебаться по вертикали, проходя-
щей через эту точку.
Применим теорему кинетической
энергии для абсолютного движения.
Полная кинетическая энергия равна
кинетической энергии
~м
(ST
всей массы, сосредоточенной в центре
тяжести G, сложенной с кинетической
энергией -к [А{р^ + <р) + О3] в отно-
Рис. 238.
сительном движении вокруг точки G.
Работа нормальной реакции пло-
скости равна нулю, а элементарная работа силы тяжести равна —MgaX,.
Следовательно, интеграл энергии имеет вид
М
Сг* = -
h.
C)
Заметим теперь, что моменты относительно оси Gz\ сил, приложенных
к телу, каковыми являются реакция плоскости и eeG, равны нулю.
Так как теорема моментов применима к относительному движению во-
круг центра тяжести, то отсюда видно, что в относительном движении
сумма моментов количеств движения относительно оси Gz\ постоянна. Сле-
довательно, проекция на Gz^ главного момента количеств относительного
движения Q<sx постоянна, и так как проекции вектора Gaj на оси G*yz
равны Ар, Aq, Cr, то
Ар sin в sin tp -\- Aq sin b cos tp -|- Cr cos 8 = K- D)
Наконец, обе приложенные к телу силы — реакция и вес — пересекают
ось вращения Gz. Следовательно, N — 0, и так как А = В, то третье урав-
нение Эйлера принимает вид
dt
= 0, г=г0.
E)
ГЛАВА XXI. СВОБОДНОЕ ТВЕРДОЕ ТЕЛО 213
В уравнениях C) и D) заменим г через Го> р и q через их значения
в функции производных 6', ср', ф' (п. 382), С через /(8) и -~ через f F) О'.
Тогда эти уравнения примут вид
ф' slnSfl = р — br0cos 8, j ( }
где а и р — произвольные постоянные, в то время как а, Ь и с — постоянные,
имеющие вполне определенные значения:
о М , С М
Два уравнения F) определяют 8 и ф в функции времени. После этого <р
находятся из соотношения
г0 = <р' + Ф' cos 8. G)
Исключая if' из обоих уравнений F), получим
{it) t1 + с/'2 (в)! sin2 8 = [а — а/(в)] sin^e — О - &r0 cos 8J, (8)
откуда ^ выражается через 8 при помощи квадратуры. Если /F) является
рациональной функцией от sin 8 и cos 8, то эта квадратура будет гиперэл-
липтической, если принять за независимую переменную tg -^-. Угол 8 на-
чиная со значений 80 может принимать только такие значения, при кото-
рых правая часть равенства
Ф (8) = [а — а/F)] sin2 в — (р — br0 cos 8J
положительна.
Заметим, что так как /(в) обозначает расстояние от центра тяжести до
неподвижной плоскости, то эта функция остается всегда конечной. Подста-
вим в функцию Ф(8) вместо 8 значения О, 8О, %. Тогда для функции Ф(8) мы
получим знаки —, +, —, так как начальное значение 80 дает очевидно
для 8' вещественное значение. Следовательно, значениие 60 заключено
между двумя вещественными корнями 8г и 62 функции Ф (8) ив может ко-
лебаться лишь между этими корнями. Таким образом, анализ задачи анало-
гичен проделанному нами в предыдущей главе подробному анализу для дви-
жения тяжелого тела вращения вокруг одной из точек своей оси. Исклю-
чение dt позволяет определить также ф и у в функции 8 при помощи
квадратур.
Кривая, описываемая на плоскости точкой касания. Так как точка Q
предполагается неподвижной, то мы можем принять ее за начало полярной
системы координат, у которой полярная ось QX параллельна оси Gxj.
Радиус-вектор QP = р является известной функцией от 6:
Р=±/'F)-
Она определяется формой поверхности вращения, по которой тело касается
плоскости. Полярный угол х = ХОР равен ф -\- -у. Действительно, пло-
скость GQP совпадает с плоскостью, проектирующей на горизонталь ось вра-
щения, т. е. с плоскостью z^Gz. Но нормаль GI к этой плоскости образует
С осью Gx-l угол ф. Следовательно, нормаль QH к радиусу-вектору QP
214 ДИНАМИКА СИСТЕМЫ
в горизонтальной плоскости образует с QX угол, равный ф, и угол XQP = ¦
действительно равен ф + ~п • Имеем, следовательно,
3 — br0 cos в
It
~di'
(9)
Исключая dt из этого уравнения и из уравнения (8), мы можем при
помощи квадратуры получить х в функции 6, а так как р связано с 6 из-
вестным уравнением р = ± /' F), то при помощи еще одной квадратуры мы
можем получить j( также в функции р.
2°. Общий случай. Мы предположили, что точка Q неподвижна. В общем
случае эта точка совершает прямолинейное равномерное движение. Тогда
изучают движение тела относительно осей Q, X, Y, zb имеющих постоянное
направление и начало в точке Q. Эти оси совершают прямолинейное и рав-
номерное переносное движение; следовательно, относительное движение тела
выражается теми же уравнениями, что и абсолютное движение (п. 334). Так
как в этом относительном движении горизонтальная проекция Q центра
тяжести все время находится в начале координат, то задача приводится
к случаю, только что рассмотренному.
Примеры. 1°. Волчок. Волчок является тяжелым телом вращения,
опирающимся одной из своих точек, например Р, на неподвижную горизон-
тальную плоскость. Эту точку можно рассматривать как сферу бесконечно
малого радиуса с центром в точке Р (рис. 239, а). Тогда тяжелое тело
касается горизонтальной плоскости этой сферой. Расстояние С = GQ опреде-
ляется здесь формулой
с = / cos e,
где / — длина GP. Далее, p = QP=/sin6. Ввиду этого в предыдущих фор-
мулах надо положить /F) = /cos 6, р = 1 sin 6. Тогда правая часть урав-
нения (8) обратится в многочлен третьей степени относительно cos 8, сов-
падающий с тем, который встречается в задаче Лагранжа и Пуассона.
2°. Монета. Монета радиуса /, скользящая без трения по неподвижной
горизонтальной плоскости, представляет собой тело вращения, касающееся
плоскости по поверхности, вырождающейся в окружность (рис. 239, Ь). Осью
поверхности является нормаль Gz к плоскости монеты, меридианом—точка
окружности. В рассматриваемом случае имеем:
GQ = С = / sin 6, PQ = р == / cos 0.
ГЛАВА XXI. СВОБОДНОЕ ТВЕРДОЕ ТЕЛО 215
3°. Тело касается плоскости по тору с осью Gz. Тогда
С = a cos 0 + Ъ sin 6 -f с.
4°. Замечание Пюизё (Puiseux, Journal de Liouville, т. XIII). Какова
бы ни была форма поверхности вращения, можно взять г0 настолько боль-
шим, что угол 8 будет оставаться сколь угодно близким к своему началь-
ному значению 80. В самом деле, на основании, уравнения (8) необходимо,
чтобы в течение всего движения функция
Ф (8) = [а — af (8)] sin3 6 — (р — br0 cos 8J
оставалась положительной. Возьмем такие начальные условия: сообщим телу
достаточно большую угловую скорость г0 вокруг оси Gz фигуры и затем по-
ложим его на плоскость, не сообщая никакой скорости центру тяжести. Тогда
di dri rfC , „ _
р, q, -=-,, -?', -г, будут в начальныи момент равны нулю. Отсюда на осно-
(Xt (Xt (XT
вании выражений р и q в функции ф' и 8' вытекает, что f и в' также
равны нулю в начальный момент, т. е. при 6 =^ 60. Следовательно, на осно-
вании формул F) имеем:
a — af F0), р = br0 cos 80,
и функция Ф принимает вид
Ф (8) = а [/F„) — /(8)] sin20 — №r\ (cos 0о — cos Ъ)\
в котором корень 60 выделен явно. Допустим, что -угол в сначала возрас-
тает. Он не может возрастать до значения %, так как при 8 = % функция Ф(9)
становится отрицательной. Следовательно, 8 колеблется между 80 и значе-
нием bv являющимся ближайшим к 60 корнем функции Ф (8), но меньшим,
чем я. Покажем, что г0 можно выбрать настолько большим, чтобы 6Х было
сколь угодно близко к 60. Написав, что 0± обращает в нуль Ф (8), получим
(cos 80 — cos 8tJ = f_!Hll_l [/F0) —/F,)].
*2/"о
Пусть D — наибольшее из расстояний от центра тяжести тела до пло-
скости, которой он касается, при любом возможном положении. Тогда
/Со)— /Ci) будет меньше, чем 2D, и так как sin2 6^ < 1, то
(cos в0 —cosOja <
Таким образом, можно выбрать го настолько большим, что 8j и, следо-
вательно, 6 будут отличаться от 80 сколь угодно мало.
5°. Теория эквилибристической стойки, или гироскопа Жерва (Qervat).
Предыдущие вычисления могут быть приложены к движению твердого тела
вращения, подчиненного связям без трения, выражаемым аналитически урав-
нением вида С = /(8), где С—высота центра тяжести над неподвижной
плоскостью и 8 — угол, образуемый осью вращения с вертикалью. Это как
раз имеет место в описываемом ниже приборе, который подчинен связям,
имеющим на первый взгляд совершенно другую природу, чем рассмотрен-
ные выше.
Гироскоп Жерва ABCDE (рис. 240) образован металлической проволокой
диаметра примерно 1,5 мм. Он состоит из части ABC, имеющей приблизи-
тельно форму полукруга, расположенного вертикально выпуклостью вниз, и из
ножки BDE, часть которой DE прямолинейна и перпендикулярна к плоскости
круга ABC. Ножка служит для того, чтобы прибор можно было поставить
на горизонтальную плоскость. В Л и С проволока изогнута таким образом,
216
ДИНАМИКА СИСТЕМЫ
что образуются два подшипника, в которых лежат концы оси гироско-
пического волчка. При этом средняя плоскость ротора волчка проходит
через DE. Центр тяжести волчка находится на его оси в плоскости, про-
ходящей через DE перпендикулярно к оси АС.
Если волчок не вращается, то равновесие неустойчиво. Прибор ка-
чается вокруг DE. Но если волчок вращается вокруг своей оси с большой угло-
вой скоростью (приблизительно 50 оборотов в се-
кунду), то кажется, что система находится в поло-
жении устойчивого равновесия, когда плоскость DBE
вертикальна. Отсюда наименование эквилибристи-
ческая стойка, данное этой игрушке ее изобрета-
телем. В действительности прибор совершает вокруг
кажущегося положения равновесия колебания, обна-
руживаемые звуком.
Так как масса волчка велика по сравнению
с массами оправы и ножки, то последними можно
вполне пренебречь. Тогда оправа и ножка, имеющие
массы, равные нулю, будут служить лишь для устано-
вления между волчком и осью геометрической связи,
которая выражается следующим образом. Обозначим
через С расстояние от центра тяжести G волчка до гори-
зонтальной плоскости, через / — длину перпенди-
куляра, опущенного из этой точки G на DE. Когда
прибор поворачивается вокруг DE, то ось волчка
образует с направленной вверх вертикалью угол 8 и
С = / sin в. Это соотношение тождественно с тем,
которое встречается в задаче о движении монеты по горизонтальнй пло-
скости, и уравнения движения в рассматриваемом случае выводятся из пре-
дыдущих общих уравнений, если положить/F)=/ sin 8. При этом применимо за-
мечание Пюизё, и если предположить Го достаточно
большим, то 0 останется сколь угодно близким к 60.
В частном случае, когда ось АС вначале
горизонтальна и находится в покое, начальное
значение 6 будет -=¦ , а начальные значения в'
и ф' равны нулю. Тогда общие уравнения показы-
вают, что 8 остается равным •=-, р = 0, ф' = 0 и
ф = const.
Подобное исследование можно найти в статье
Карвалло (Carvallo, Bulletin de la Societe mathe-
matique, XXI, 1893).
408. Замечание Томсона. Мы только что
видели, что если тело, быстро вращающееся вокруг
своей оси, положить на плоскость так, чтобы не
сообщить его центру тяжести никакой скорости,
то движение будет устойчиво в том смысле, что
угол между осью вращения и вертикалью будет
почти постоянным. Весьма примечательно, что если на тело наложить до-
полнительные связи, то они вместо того, чтобы усилить устойчивость, мо-
гут ее нарушить.
Возьмем, например, волчок (рис.241), боковая поверхность которого
является частью кругового цилиндра, и поместим его между двумя иде-
ально гладкими неподвижными вертикальными плоскостями II, параллельными
плоскости Юъ (см. рис. 239), причем так, чтобы ось Gz волчка была тоже вы-
нуждена все время оставаться в неподвижной плоскости, параллельной пло-
JT
ГЛАВА XXI. СВОБОДНОЕ ТВЕРДОЕ ТЕЛО
217
скости Ю1. При этих условиях угол ф будет постоянным и равным ^;
ф' = 0. Поскольку речь идет о волчке, то метод составления уравнений
будет таким же, как и раньше, при условии, что ф == -g-, /F) =/cos 9
и что на тело действуют дополнительно внешние силы, являющиеся нормаль-
ными реакциями двух плоскостей II. Эти реакции горизонтальны и пере-
секают ось Gz тела.
Так как начальная скорость центра тяжести G равна нулю, то горизон-
тальная проекция Q этой точки неподвижна.
Применяя к абсолютному движению теорему кинетической энергии, по-
лучаем [первое уравнение F) при ф' = 0, /(8) =/cos 8)]:
8'2 A + с/3 sins 6) = а — a/ cos 6.
Если предположить, что в начальный момент ось волчка неподвижна
и ему сообщено вокруг этой оси вращение г0, то 6' должно быть равно
нулю при 8 = 60. Следовательно, имеем а = al cos 80 и
6'2 A
sin2 6) = al (cos 60 — cos 6).
Так как правая часть должна быть положительной, то 6, начиная со
значения 60, будет увеличиваться и волчок опрокинется. Одновременно
здесь будет ?' = г0.
То же самое замечание применимо и к эквилибристической стойке
(п. 407, 4°). Если основанию DE прибора воспрепятствовать поворачиваться,
поместив его в щель пола, то прибор опрокинется.
409. Тяжелое тело, касающееся гладкой горизонтальной плоскости
цилиндрической поверхностью. Пусть тело касается горизонтальной пло-
скости вдоль всей образующей РР' (рис. 242). Возьмем те же неподвижные
оси О??|С и те же подвижные оси йх^у^г^, что и в предыдущем случае.
Рис. 242.
Далее выберем в качестве осей, связанных с телом, проведенную через
центр тяжести прямую Gx, параллельную образующим цилиндра, и две
взаимно-перпендикулярные оси Gy и Gz в плоскости прямого сечения.
Перпендикуляр С = GQ, опущенный из точки G на горизонтальную пло-
скость, образует с Gz угол, который мы обозначим через 6. Тогда, если
форма прямого сечения дана, то мы по-прежнему будем иметь геометри-
ческое соотношение вида С = /(в). Более того, так как ось Gx, будучи
параллельна горизонтальной плоскости, находится в плоскости x^Gyi, то
218 ДИНАМИКА СИСТЕМЫ
угол Эйлера <р равен нулю. Следовательно, выражения для р, q и г прини-
мают вид
р = д', q — ty'slnd, r = ф' cos 6. A0)
Горизонтальная проекция Q центра тяжести по-прежнему совершает
прямолинейное и равномерное движение, так как единственные внешние
силы — вес и нормальные реакции плоскости, вертикальны. Общий случай
может быть приведен к частному, когда точка Q неподвижна.
Так как в рассматриваемом случае оси Gxyz не являются главными,
то кинетическая энергия тела в его движении вокруг центра тяжести будет
2Г = Ар9- + Bq>- + Cr"- — 2Dqr — 2Erp — 2Fpq,
и проекции главного момента 0^ количеств относительного движения на
оси Gxyz будут
дТ дТ дТ
dp ' dq ' дг
Следовательно, применяя теорему кинетической энергии к абсолютному
движению, согласно теореме Кёнига и значениям р, q, г, получим
[А + Mf'2 (8)] 8'2 + (В sin2 6 + С cos2 е _ 2D sin 6 cos 9) ф'2 —
— 2(/?sm6 + ?coseN4'= — 2Mgf(b) + h. A1)
С другой стороны, сумма моментов сил относительно оси Gz^ равна
нулю и, следовательно, проекция главного момента Gaj количеств относи-
тельного движения на Gz^ постоянна. Отсюда получаем
«Г , , дТ . ,. дТ ..
Так как в рассматриваемом случае <j> = 0, то три косинуса т> т'« f" имеют
значения: f = 0, f' = sin в, f = cos 8, и мы имеем
sin в (Bq — Fp— Dr) + cos 6 (Cr — Dq — Ep) = K,
или, наконец,
(S sin26 -f С cos2 в — 2?> sin в cos 6) ф' — (F sin 8 + E cos 8) 6' = K- A2)
Эти два уравнения определяют 8 и ф в функции t. Исключение ф' при-
водит к уравнению вида
откуда определяем —т- в функции 8, а затем при помощи квадратуры опре-
деляем t в функции 8. После этого ф получается в функции в при помощи
другой квадратуры. Угол 6 может принимать лишь такие значения, при
которых величина W (8) положительна. Мы предоставляем читателю самому
произвести более подробный анализ и найти, как и раньше, геометрическое
место проекций Р центра тяжести на соприкасающуюся образующую.
Если тело является призмой, положенной на плоскость по ребру РР\
то можно принять плоскость GPP' за плоскость xz. Тогда GQ = С = / cos 8,
где / есть длина отрезка GP.
Примечание. Допустим, что тело предоставлено самому себе без
начальной скорости. Исследуем, может ли образующая, по которой проис-
ходит касание, перемещаться параллельно самой себе. (Кандидатский экза-
мен, 1893.) При этом предположении начальные значения 6' и ф/ равны
ГЛАВА XXI. СВОБОДНОЕ ТВЕРДОЕ ТЕЛО
219
нулю и нужно узнать, будет ли ф' оставаться равным нулю в течение всего
времени движения. Имеем, следовательно, К = 0. Так как 9' не равно нулю,
то уравнение A2) показывает, что для того, чтобы ф' было все время равно
нулю, необходимо и достаточно, чтобы было Е = 6 и F = 0. Это означает,
что плоскость прямого сечения yGz, проведенная через G, должна быть
главной плоскостью инерции для точки О.
410. Движение с трением однородного тяжелого шара по горизо -
тальной плоскости (бильярдный шар). Возьмем в горизонтальной пло-
скости, по которой движется шар, две неподвижные оси О? и Of] (рис. 243);
в качестве оси С примем направленную вверх вертикаль. На шар действуют
две силы: его вес Mg, приложенный в его центре G, и реакция плоскости,
приложенная в точке касания А. Эта реакция имеет вертикальную соста-
вляющую N и горизонтальную составляющую F. Проекции последней
составляющей на оси О? и
Oi суть X и Y. \2
Таким образом, уравне- ?
ния движения центра тя-
жести получатся следующие:
М =
_ у
~Г'
М 44 = — .
dt*
N.
0)
рИС- 243.
Так как С остается постоян-
ной, то из последнего урав-
нения имеем:
N = Mg.
Следовательно, нормальная составляющая реакции всегда равна весу шара.
Тогда законы трения скольжения показывают, что касательная составляю-
щая F равна постоянной величине
Для наблюдателя, совершающего переносное движение вместе с центром
тяжести, кажется, что шар вращается вокруг этой точки. Пусть <о — мгно-
венная угловая скорость в момент t. Мы обозначим через р, q, r ее соста-
вляющие по трем осям Gxyz, параллельным неподвижным осям и прове-
денным через центр шара. Применим к этому относительному движению
теорему моментов количеств движения относительно осей х, у, г. Так как
относительная скорость какой-нибудь точки т (х, у, г) имеет проекции
то момент количества движения этой точки относительно оси Gz будет:
т (xVy — yVx) = rm (x% + у2) — pmxz — qtnyz.
Составим сумму всех аналогичных величин для различных точек шара.
Получим
^mixVy— yVx) = МК?г,
так как суммы 2 mxz, ~^myz равны нулю, а сумма 2 т (ж3 4" у2) есть
момент инерции МК? шара относительно диаметра. Все силы, приложенные
220 ДИНАМИКА СИСТЕМЫ
к шару, пересекают ось Ог. Поэтому имеем уравнение
которое показывает, что вертикальная составляющая вращения остается
постоянной.
Аналогичными вычислениями получим для осей Gx и Gy уравнения
МК* ^?- = RY, МК? ^L = -RX, B)
в которых правые части суть моменты силы F относительно осей Gx и Gy.
Применим теперь второй закон трения, согласно которому направление
силы Fпротивоположно направлению скорости точки на поверхности шара, за-
нимающей положение А. Абсолютная скорость этой точки есть результирую-
щая переносной скорости I —тт , —г-. —тг I и относительной скорости Vx = — qR,
Vy = pR, Vz = 0. Если мы обозначим через м и v проекции искомой ско-
рости на 05 и От\, то сможем написать:
d% _ d
Нам нужно выразить, что X и Y пропорциональны и и v:
и__Х_
v ~ Y '
Мы сейчас покажем, что скорость (и, v) точки, находящейся в А, имеет
постоянное направление. Действительно, дифференцируя последние уравне-
ния, находим
dt ~ dfi K dt ' dt — dt* +H~df'
d4 rf2r] dp dq
Заменяя в этих уравнениях —г^-, —~, —fr. -~пт значениями, которые по-
лучаются из уравнений A) и B), имеем:
dt ~ M ^ MKn- dt ~~ М "•" МК?
Разделив одно равенство на другое, получим
du X
и поэтому
или, интегрируя,
Таким образом, сила трения постоянна по величине и направлению.
Так как движение точки G происходит под действием только этой силы, то
траектория этой точки является пара'болой.
Так как составляющие X, Y силы трения являются постоянными, то
проекции и и v скорости точки, находящейся в А, будут на основании
dv
du
и
V ~
Y '
и
¦¦ const.
ГЛАВА XXI. СВОБОДНОЕ ТВЕРДОЕ ТЕЛО 221
уравнений C) линейными функциями времени. Эти величины уменьшаются
по абсолютному значению. Если мы, например, предположим, что и поло-
жительно, то X будет обязательно отрицательным на основании законов
трения. То же самое будет тогда и для —гг и и уменьшается. При этом v
обязательно достигнет по истечении конечного промежутка времени Т зна-
чения, равного нулю, так как эта величина является линейной функцией
времени. Если и отрицательно, то X будет положительным и и будет при-
ближаться к нулю, увеличиваясь. Так как отношение —• постоянно, то обе
составляющие скорости обратятся в нуль в один и тот же момент. Начиная
с этого момента Т, скольжение прекратится, а получающееся после этого
качение совместно с верчением будет устойчиво, так как, если повлиять на
катящийся шар, сообщив ему небольшое скольжение, то согласно преды-
дущему это скольжение исчезнет по истечении очень короткого промежутка
времени.
Следовательно, начиная с момента Т, движение будет качением с вер-
чением. Касательная реакция F плоскости будет тогда силой неизвестного
направления, подчиненной условию F < fN. Мы сейчас покажем, что если
пренебречь трением качения и верчения, то, начиная с момента Т, движение
центра тяжести G обратится в прямолинейное и равномерное и сила F
станет равной нулю. В самом деле, если мы будем продолжать обозначать
через X и Y проекции силы F в этой второй фазе, то уравнения A) и B)
-останутся по-прежнему справедливыми в той же форме. Исключая из этих
уравнений X и Y, получим
dft ^ R dt ' dP R dt K '
Так как в этой новой фазе имеет место качение с верчением, то вели-
чины и и v равны нулю, и мы имеем
Внося получающиеся отсюда значения величии р и q в уравнение D),
найдем
Следовательно, движение точки G прямолинейно и равномерно и урав-
нения A) показывают, что X и Y, а следовательно и сила F, равны нулю.
Согласно замечанию Кориолиса, так как уравнения D) получаются
исключением X и Y, то они будут иметь место, какова бы ни была каса-
тельная реакция плоскости. Следовательно, они имеют силу в течение всего
времени движения как в его первой фазе, так и. во второй. Но эти уравне-
ния непосредственно интегрируются и получается
dl К2 d-q К2 . .,.
4t+-Rqz=a' -df—R-p = b- E>
Чтобы истолковать эти формулы, возьмем точку Н, расположенную над
К? 2
центром на расстоянии GH = —^- =-=-R. Ее координаты относительно си-
К о
К2
стемы Gxyz будут 0, 0, —^-, Отсюда следует, что левые части предыдущих
К
уравнений суть проекции на оси 01 и Оу\ абсолютной скорости точки шара,
находящейся в рассматриваемый момент в Н. Мы видим, что эта скорость
222 ДИНАМИКА СИСТЕМЫ
постоянна по величине и направлению. Ее можно рассматривать как задан-
ную ее значением в начале движения, и она не зависит от любого предпо-
ложения относительно закона касательной силы F. В частности, когда
устанавливается чистое качение (вторая фаза), и и и равны нулю и мы имеем
Внося эти значения р и q в уравнения E), приведем их к виду
К* 2
и так как -=j- = — , то составляющие конечной скорости центра тяжести
суть к~ 5
di 5 drj 5 ,
Таким образом, эти составляющие известны как функции начальных усло-
вий, которые на основании равенств E) позволяют вычислить а и Ь.
Может, например, случиться, что в уравнениях E) начальные значе-
di di\ ¦ „
ния ——, —77- положительны, но начальные значения р и q выбраны таким
образом, что а и b отрицательны. Тогда вначале центр тяжести, если пред-
положить, что он находился внутри положительного угла Ют\, будет удаляться
„ „ , dk di\
от точки О, но во второй фазе —, -jj- станут отрицательными и шар
будет возвращаться обратно, катясь и вертясь таким образом, что он будет
приближаться к точке О.
Трение качения. Эффект трения качения на шар исследован Аппелем
(Journal de Jordan, 6е serie, т. VII, 1911).
411. Обруч. Представим себе тяжелое твердое тело, для которого вы-
полняются следующие условия: Г тело оканчивается ребром, имеющим форму
окружности К радиуса а; 2° центр тяжести тела G совпадает с центром
окружности К', 3° эллипсоид инерции относительно центра тяжести G яв-
ляется эллипсоидом вращения вокруг перпендикуляра Gz к плоскости окруж-
ности.
Допустим далее, что это тело заставляют катиться без скольжения по
неподвижной горизонтальной плоскости П.
Интегрирование этой задачи механики может быть приведено к квадра-
турам, если ввести в качестве аналитического элемента гипергеометрическую
функцию Гаусса. Это обстоятельство имеет, в частности, место для движения
обруча *).
Пусть Н—точка касания окружности К с неподвижной плоскостью
(рис. 244). Для изучения движения тела вокруг своего центра тяжести G
возьмем сначала три оси Gxit Gy1 и Gz^ постоянного направления, причем
ось Gzx направим по вертикали вверх. Далее возьмем три подвижные оси
следующим образом: 1° ось Gz — нормаль к плоскости окружности ^С;
2° ось Gx — перпендикуляр к плоскости zGz^, 3° ось Gy — перпендикуляр
к двум первым.
Ось Gx является горизонтальным диаметром окружности ^С; ось Gy
является линией наибольшего восходящего уклона плоскости окружности;
точка Н находится на отрицательной части оси Gy.
Эти подвижные оси тождественны с теми, которыми мы пользовались
в п. 400 для изучения движения тела вращения, закрепленного в одной из
*) См. Кортевег и Аппель, Rendiconti del Circolo matematico
di Palermo, август 1899, т. XIV, стр. 1—7.
ГЛАВА XXI. СВОБОДНОЕ ТВЕРДОЕ ТЕЛО
223
точек своей оси. Так же как и в том пункте, мы обозначим через 6 и <\/
углы zxGz и xxGx и через Р, Q, R— составляющие по осям Gx, Gy, Gz
мгновенной угловой скорости вращения Q триэдра Gxyz:
Р = 6', Q = ф' sin 8, R = Y cos 8. (Q)
Если положение триэдра Gxyz известно, то, для того чтобы узнать по-
ложение тела, достаточно будет знать еще угол ср, который образует ра-
диус GM окружности К, неизменно с ней связанный, с осью Gx. Мгновенная
угловая скорость to тела будет тогда результирующей угловой скорости Q
триэдра Gxyz и угловой скорости ср' вокруг оси Gz. Следовательно, соста-
вляющие р, q, r этого вращения будут (п. 400):
р = Р=Ъ', gr = Q = <]/sin в, r=/? + <f'. (<o)
Обозначим через и, v, w проекции абсолютной скорости центра тяжести
на подвижные оси Gxyz. Так как эти оси совершают мгновенное вращение
Z,
П
Рис. 244.
с угловой скоростью Q, то проекции абсолютного ускорения j точки G на
те же оси на основании известных формул (т. 1, п. 61) будут:
~ + Qw-Rv,
Силы. Положим для простоты, что масса тела равна единице. Силы, дей-
ствующие на тело, следующие:
1° вес g, приложенный в точке G, с проекциями на оси Gx, Gy, Gz,
Равными 0, — ^ sin 6, -^cosB;
2° реакция плоскости, приложенная в точке Я и имеющая проекции
X, Y, Z.
Уравнения движения могут быть составлены следующим образом.
Уравнения движения центра тяжести. Проекция ускорения j точки G
на каждую из осей Gxyz равна сумме проекций внешних сил на ту же ось.
Таким образом, получаются три уравнения:
—7т + Ru — Pw — Y — g sin 8,
dw
~dt
Pv — Qu = Z — g cos 8,
F)
224 ДИНАМИКА СИСТЕМЫ
в которых нужно положить
Уравнения движения вокруг центра тяжести. Обозначим через А, В, С
моменты инерции обруча относительно осей Gxyz. Пусть в относительном
движении вокруг точки G вектор Оч представляет собой главный момент
количеств движения относительно точки G. Этот вектор Ga имеет на оси Gxyz
проекции
Оа, = Ар, чу — Aq, аг = Сг.
С другой стороны, главный момент GS внешних сил относительно G
состоит из момента веса, равного нулю, и момента реакции (X, Y, Z), приложен-
ной в точке Н с координатами @, — я, 0). Следовательно, главный момент GS
имеет проекциями моменты реакции относительно осей Gxyz:
Sx = — aZ, Sy = 0, Sz = aX.
Для того чтобы выразить теорему моментов в относительном движении
вокруг точки G, напишем, что относительная скорость точки а по отноше-
нию к осям Gx-^y^Zi постоянного направления, проведенным через точку G,
равна вектору GS. Таким путем получаются уравнения (п. 386):
dt "¦" ^°г ~~ °у ~ х'
ияи, так как Р = р, Q=q, R — q ctg в,
G)
dr
Геометрические условия. Чтобы выразить, что окружность К. катится
по плоскости, нужно написать, что скорость материальной точки касания Н
равна нулю. Эта скорость является геометрической суммой скорости (u, v, w)
поступательного движения осей Gxxyxzb равной и параллельной скорости
точки G, и скорости, вызванной вращением to вокруг точки G. Эта последняя
скорость имеет составляющие по осям Gxyz, равные qz — гу, ..., где х, у, г
суть координаты точки Н@, — а, 0). Записав, что проекции скорости мате-
риальной точки Н на оси Gxyz равны нулю, получим таким образом урав-
нения
и -f- аг — 0, v = 0, w — ар = 0. (8)
Находя из этих равенств и, v и w и подставляя их в уравнения F), полу-
чим систему шести уравнений F) и G), определяющих 6, ср, ф, X, У, Z.
Исключая из них X, Y, Z, получим три уравнения, определяющих 6, ср, ф
в функции t.
Чтооы закончить вычисления, можно поступить следующим образом.
ГЛАВА XXI. СВОБОДНОЕ ТВЕРДОЕ ТЕЛО 225
Исключим X из первого уравнения F) и из последнего уравнения G).
Получим
du , t . С dr
или, заменяя и, v, w их значениями из уравнений (8),
(С+а2)|?-а2М = 0. (9)
Присоединим к этому уравнению второе из уравнений G):
^L O. A0)
Мы получим таким образом два уравнения, которые могут служить для
определения q и г в функции 8. В самом деле, заменим в них р через —-;
тогда множитель dt исчезнет и получатся два уравнения
<")
образующих систему линейных однородных уравнений, определяющих q и г
в функции 6. Найдя из первого уравнения q и внеся во второе, получим
для определения г уравнение второго порядка
Из этого уравнения г определяется в функции 8. Первое из уравне-
ний A1) служит для определения q. Присоединяя к нему уравнение энергии
и2 + г>2 + и>2 + А (р2 + qz) + сгъ = — 2ga sin 6 + h,
получим 6 в функции t при помощи квадратуры. Правая часть этого урав-
нения есть удвоенная работа веса — gti, где С обозначает координату a sin 8
точки G.
Интегрирование уравнения A2). При помощи подстановки
cos2 6 = s
уравнение A2) приводится к виду
1 3 \ dr Cat
Это уравнение гипергеометрического ряда Гаусса, в котором
1 , а 1 о Са?
Известно, что общий интеграл уравнения Гаусса (Собрание сочинений,
т. IHV стр. 210) есть
XF(a, р, т, х)+ vxl-lF(a + 1 - Ъ $ + 1 - 7, 2 - Т, х),
15 Зак. 922. П. Апсель, т. II
226 ДИНАМИКА СИСТЕМЫ
где X и (д. обозначают две произвольные постоянные. Следовательно,
p, ^-.cossej + jxcose/^a+l, р + 1 , -|
После этого получаем:
что выражает д в виде гипергеометрического ряда. Наконец, из уравнения
энергии, в котором /? = -—т-, определяется г в функции 8 при помощи ква-
дратуры.
Для интегрирования уравнения A2) можно использовать также подста-
новку, указанную Кортевегом (Korteweg, Rendiconti del Circolo di Palermo,
т. XIV, стр. 7). Действительно, это уравнение при помощи подстановки
cos 6 = х
преобразуется в следующее:
Новые подстановки
х = ±A — It)
приводят его к виду
В этой форме уравнение отождествится с уравнением гипергеометриче-
ского ряда, если положить
Следовательно, оно допускает частный интеграл
F{*', p'. I, t).
Полагая последовательно в этом интеграле
*=i(l±JC),
получим общий интеграл уравнения A0) в виде
] (лг = С08б). A5)
Это решение имеет преимущества в двух частных случаях: когда В может
достигать значения 0° или 180° и когда 8 к такому значению неограниченно
приближается.
Во-первых, оно показывает, что в одном и том же движении угол 8 не
может принимать оба значения, если только г не равняется все время нулю.
В самом деле, подстановка х = 1 в случае, когда V отлично от нуля,
и подстановка х = —1 в случае, когда fi' отлично от нуля, приведут к бес-
конечному значению для г, ибо тогда аргумент ряда обратится в положитель-
ную единицу, в то время как «' + р' — т' будет равно нулю. Очевидно, что
бесконечному значению г будет отвечать бесконечное значение кинетической
анергии, а последняя такого значения принимать не может.
ГЛАВА XXI. СВОБОДНОЕ ТВЕРДОЕ ТЕЛО 227
Во-вторых, оно показывает, что для того, чтобы 6 могло принимать,
например, значение 0 = 0е, постоянная V должна равняться нулю.
Следовательно, в этом случае выражение для г примет более простую
форму, а именно:
2
Очевидно, что движение, в котором угол 6 принимает значение, равное 0°,
может осуществляться лишь в тех случаях, когда, как для обруча, вся масса
тела сосредоточена в одной плоскости (Кортевег, loc. cit.).
412. Координаты твердого тела по Штуди (Study). Во всех преды-
дущих приложениях мы определяли положение тела в пространстве шестью
независимыми координатами S, ц, ?, в, ср, ф. В 1891 г. Штуди (Mathematische
Annalen, т. XXXIX) указал для определения положения тела систему восьми
однородных координат, связанных билинейным соотношением, представляю-
щих замечательную аналогию с шестью плюкеровыми координатами прямой,
связанными одним билинейным соотношением. Штуди вновь вернулся к этой
теории в своей книге «Геометрия динамы) (Oeometrie der Dynamen, 1903,
стр. 580—583). Сведения об этой системе координат можно найти также
в статье Бри'кара (Bricard, Sur la Oeometrie des feuillets de M. Rene de
Saussure, etude analytique, Nouvelles Annales de Mathematiques, январь 1910).
Штуди вычислил в своей системе координат кинетическую энергию
твердого тела. См. статью, помещенную в журнале Жордана (Journal
de M. Jordan, т. VII, 1911).
УПРАЖНЕНИЯ
1. Может ли при движении тяжелого тела вращения, скользящего без
трения по горизонтальной плоскости, его ось вращения пройти через верти-
каль? Каковы должны быть для этого начальные условия?
2. 1°. Тяжелая пластинка ABC, периметр которой имеет прямолинейный
отрезок АВ, опирается ребром АВ на горизонтальную плоскость, по которой
это ребро скользит без трения. Пластинка, будучи в начальный момент не-
подвижной, предоставлена действию силы тяжести.
Требуется узнать необходимые и достаточные условия для того, чтобы
во время движения ребро АВ перемещалось параллельно своему начальному
положению.
2°. Искомое условие будет, в частности, удовлетворено для однородной
пластинки, периметр которой является полуокружностью.
Рассмотреть однородную пластинку, представляющую собой половину
круга радиуса 1 м. Допустить, кроме того, что в начальный момент пла-
стинка неподвижна и образует с горизонтальной плоскостью угол 30°. Тре-
буется при этих частных предположениях найти верхний и нижний пределы
для времени, которое истечет от начального момента до того момента, когда
пластинка сольется с горизонтальной плоскостью.
3. Уравнения движения тяжелого тела на совершенно гладкой гори-
зонтальной плоскости. Предполагается, что тело ограничено произвольной
выпуклой поверхностью S, определяемой следующим образом. Пусть
Gxyz — главные оси инерции для центра тяжести тела. Проведем каса-
тельную плоскость Р к поверхности S и обозначим через у, y', Y' косинусы
углов, которые образует нормаль Gzx к плоскости Р с осями Gxyz. Рас-
стояние ? от точки G до касательной плоскости Р, а также координаты х,
у, z точки касания суть известные функции косинусов у, Y> T1'- Например,
если S есть эллипсоид с осями а, Ь, с, направленными по Gxyz, то для С
получается значение у я2?2 -\- Ь^'г + c3y.
15*
228 ДИНАМИКА СИСТЕМЫ
Допустим теперь, что тело положено на неподвижную горизонтальную
плоскость П, и возьмем те же неподвижные оси (??т]?, что и в случае,
когда S является поверхностью вращения (п. 407). Обозначим через в, ср, <ji
углы Эйлера между триэдром Gxyz и триэдром Ох^у^г^, параллельным йе-
подвижным осям. Так как тело касается горизонтальной плоскости, то вер-
тикаль Gzi перпендикулярна к касательной плоскости и координата С центра
тяжести является известной функцией косинусов у, i', y"> имеющих значения
sin в sin cp, sin 6 cos <p, cos 8. Следовательно, имеем:
Более того, координаты х, у, г точки касания относительно осей Gxyz суть
также известные функции 6 и ср.
Следовательно, положение тела зависит от пяти параметров 5, -ц, 6, ср, ф.
Единственными внешними силами являются вес и нормальная реакция R,
направленная параллельно Gz^. Имеем сначала (движение центра тяжести)
После этого нужно использовать уравнения Эйлера для относительного
движения вокруг точки G. Правые части L, М, N этих уравнений суть мо-
менты реакции R относительно осей Gx, Gy, Gz. Проекции реакции R на
эти оси равны Ri, R-f, Rf. Приложена реакция R в точке касания, имею-
щей координаты х, у, г. Следовательно, L, М, N имеют значения R (y-f'—zf),
R(z-j — x-f'), R(xi' — yi), где все три скобки, на которые умножается R,
являются известными функциями 6 и ср. Таким образом, получаются шесть
уравнений для определения S, т), G, ср, ф, R в функции времени. Горизонталь-
ная проекция точки G совершает прямолинейное и равномерное движение.
Эти уравнения имеют два первых интеграла, получающихся из общих
теорем: 1° интеграл энергии
Ж'2 + Ар* + В? +-Сг2 = — 2Mg>: + Л;
2° в относительном движении вокруг центра тяжести G сумма моментов ко-
личеств движения относительно Gz-^ постоянна:
Ар sin 6 sin ср -|- Bg sin 6 cos ср -)- Cr cos 8 = k.
4. Как следует изменить вид формул предыдущего упражнения в случае,
когда тяжелое тело ограничено частью развертывающейся поверхности и
касается плоскости вдоль образующей этой поверхности?
5. Найти движение тяжелого однородного прямого конуса вращения,
скользящего без трения по горизонтальной плоскости.
Конус будет касаться плоскости вдоль образующей. Так как центр тя-
жести находится на оси конуса, то эту ось можно принять за ось Gz. Гео-
метрия показывает, что Сив постоянны. Кроме того, А = В. Все реакции
плоскости пересекают ось Gz конуса, поэтому г = г0. Тогда теоремы момен-.
тов и кинетической энергии показывают, что ср' и у постоянны, и, следо-
вательно, углы ср и ф изменяются пропорционально времени.
6. Найти движение конуса предыдущего упражнения, предполагая, что
к основанию конуса прикреплены неподвижно две диаметриально противо-
положные материальные точки.
Теперь А и В не равны. Можно получить четыре первых интеграла,
прилагая теорему движения центра тяжести G, теорему кинетической энер-
гии и теорему моментов относительно оси Gzt.
7. Тяжелая, однородная, полая сфера скользит без трения по горизон-
тальной плоскости. По внутренней поверхности сферы скользит без трения
тяжелая материальная точка М. Найти движение системы.
ГЛАВА XXI. СВОБОДНОЕ ТВЕРДОЕ ТЕЛв 229
Ответ. Движение системы зависит от семи параметров: двух — для
фиксирования положения центра сферы, трех — для фиксирования положе-
ния сферы вокруг своего центра и двух — для фиксирования положения дви-
жущейся точки на сфере.
Заметим прежде всего, что непосредственно известно движение сферы
вокруг своего центра С, являющегося ее центром тяжести. Действительно,
силы, действующие на сферу, рассматриваемую как изолированная система,
суть вес, реакция плоскости и реакция движущейся точки. Все эти силы
проходят через центр С. По обобщенной теореме о моментах количеств
движения полный момент количеств движения относительно центра С будет,
следовательно, постоянным и движение сферы вокруг своего центра будет
равномерным вращением вокруг оси, проходящей через центр С и имеющей
постоянное направление как относительно сферы, так и в пространстве.
После этого для окончательного определения движения достаточно будет
четырех интегралов. Два интеграла вытекают из теоремы движения центра
тяжести, показывающей, что горизонтальная проекция центра тяжести совер-
шает прямолинейное и равномерное движение.
Отнесем теперь систему к трем осям постоянного направления с нача-
лом в точке g, которая является проекцией центра тяжести G системы на
горизонтальную плоскость, проходящую через центр сферы. Пусть эти оси
будут gxb gyb gzi, причем ось gzt вертикальна. Для изучения движения
относительно этих новых осей не нужно менять внешних сил, приложенных
к системе, так как новый триэдр совершает по отношению к старому триэдру
поступательное прямолинейное и равномерное движение.
Пусть т' — масса сферы, а т — масса точки. Обозначив через R радиус
сферы, имеем:
RMG y. = —/^—R.
CG = l = R,
т -\-т
Положение обеих точек М и G определяется углом 8 между горизон-
тальной проекцией CG и осью gx± и углом tp, образованным той же проек-
цией CG с осью gzi. Движение точки С будет таким же, как если бы эта
точка была материальной точкой с массой т', к которой были бы приложены
все действующие на сферу внешние силы (вес, нормальная реакция гори-
зонтальной плоскости и реакция точки М на сферу, направленная по МС).
Если применить к системе теорему моментов количеств движения относи-
тельно оси gzi и теорему кинетической энергии, то получатся два первых
интеграла, определяющих 6 и у в функции t:
sln2<f0' = const,
(/й'Х2 4- m^i) sin2 ?fl/2 _|_ [(m'^2 _|_ mv%) COS2 ? -f mR1, Sln2 tp] tp'2 =
= — 2mgR cos tp -f- const.
Если из этих двух уравнений исключить 6', то получится выражение t
через tp при помощи квадратуры. (Р a i n I e v ё, Lecons sur I'integration des
equations de la Mecanique.)
8. Найти движение однородного тяжелого шара, скользящего без
трения по поверхности, являющейся эллипсоидом вращения вокруг вер-
тикальной оси Ог.
Ответ. Внешними силами, приложенными к шару, являются вес и реак-
ция эллипсоида (нормальная к поверхности). Так как силы проходят через
центр С шара, то движение шара вокруг этой точки является равномер-
ным вращением вокруг оси, неподвижной в пространстве и в шаре.
Что касается движения центра тяжести С, то это —движение тяжелой
точки по поверхности вращения, параллельной заданному эллипсоиду (п. 276).
На основании теоремы кинетической энергии и теоремы моментов относи-
тельно оси Ог получим два первых интеграла, определяющих движение
(П е н л е в е, там же, стр. 31).
230 ДИНАМИКА СИСТЕМЫ
9. Тяжелое однородное твердое тело имеет ось симметрии. Эта ось
имеет неподвижную точку О и скользит без трения по горизонтальной не-
подвижной окружности, центр которой находится на вертикали, проходящей
через точку О. Найти движение системы.
Ось симметрии Oz является главной осью инерции для точки О.
Пусть Ох и Оу — две другие главные оси инерции для той же точки О,
Ozi — вертикаль точки О, Ох1 и Оу± — две неподвижные взаимно-перпенди-
кулярные горизонтальные оси, 01—пересечение плоскостей уОх и yiOxb
Угол zt0z остается постоянным вследствие наложенных связей. Следо-
вательно, положение тела зависит от двух параметров:
jqO/ = i/, iox, — ч.
Центр тяжести G тела находится на оси Oz; его координата г^ постоянна,
и поэтому работа силы тяжести равна нулю.
По теореме кинетической энергии и по теореме моментов относительно
оси Ozx, которую реакция пересекает в точке О и которая параллельна
силе тяжести, получаем два первых интеграла:
Ар* + Bq* + Сг2 = Л, Ар sin 60 sin <р + Bq sin 60 cos <? + Cr cos 90 == /С
Кроме того, имеем
р = у sin 80 sin f, q = У sin 0О cos ср, г— у cos 60 + ср'.
Подставляя эти значения в предыдущие равенства и исключая у, получим t
в функции <f при помощи квадратуры. (Пен леве, там же, стр. 32.)
10. Вдоль оси тяжелого однородного тела вращения продета неизменно
связанная с ним спица постоянной длины АВ, концы которой скользят без
трения по двум линейкам L и L', не параллельным между собой. Найти
движение этого тела.
Ответ. Положение системы зависит от двух параметров: одного, опре-
деляющего положение спицы, и другого, определяющего ориентацию тела
вокруг этой прямой.
Теорема о кинетической энергии дает один первый интеграл.
С другой стороны, моменты относительно оси вращения АВ внешних
сил, каковыми являются вес и реакции линеек, равны 0. Поэтому если иссле-
довать движение тела вокруг своего центра тяжести G, для которого АВ
является главной осью инерции, то одно из уравнений Эйлера покажет, что
в этом движении составляющая г по оси АВ мгновенной угловой скорости
вращения тела постоянна. Отсюда еще один первый интеграл.
Таким образом, движение зависит от двух параметров и имеются два
первых интеграла.
Чтобы произвести вычисления, примем за ось z общий перпендикуляр
к обеим прямым L и L', за начало координат примем середину кратчайшего
расстояния между ними, за плоскость ху — плоскость, перпендикулярную
к Ог, и за оси хну — биссектрисы углов между проекциями L и U на эту
плоскость.
Обозначим через 6 угол, образуемый с осью Ох проекцией спицы на
плоскость ху; через ф обозначим угол между плоскостью, проходящей через
спицу и неизменно связанной с телом, и плоскостью, проектирующей эту
спицу на плоскость ху. Тогда получатся выражения вида
С , Г a cos 20 + Ь sin 26 + с ...
t=J V a'cos 0+ 6'sin 8 +С rf6' + + ec°s«
где X и [j. — постоянные, а а — постоянный угол между спицей и осью Oz.
ГЛАВА XXI. СВОБОДНОЕ ТВЕРДОЕ ТЕЛО 231
Все вышесказанное применимо и к случаю, когда обе линейки пересе-
каются. Нужно отдельно рассмотреть частный случай, когда обе прямые
параллельны. (Пен леве, там же, стр. 36.)
П. Две точки А и В тяжелого твердого тела скользят без трения
по двум неподвижным параллельным прямым L и L'. Найти движение
системы.
Центр тяжести G тела не находится, вообще, на прямой АВ. Пусть Р —
основание перпендикуляра, опущенного из G на АВ. Точка Р описывает
параллельную линиям L и L' прямую, которую мы примем за ось г. Ось Ох
есть перпендикуляр к L и L', проведенный в плоскости этих прямых.
Двумя параметрами, определяющими положение системы, являются
величина С, которая служит координатой г точки G, и угол ф между полу-
плоскостями ABG и ABz, отсчитываемый положительно справа налево
вокруг направления АВ.
Из теоремы о движении центра тяжести в проекции на ось Ог полу-
чим первый интеграл уравнений движения. Действительно, так как реакции
в точках" А и В нормальны к L и L', то
где через а, р, f обозначены составляющие по осям Ох, Оу, Ог ускорения
силы тяжести. Следовательно,
Из теоремы кинетической энергии получим другой интеграл, содержа-
щий- ф, ф', ? и С'. Если подставить в него С и С, выраженные в функции t,
то t исключится. Тогда можно будет найти ф в зависимости от t через
квадратуру. Получится:
ф'2 [А + cos2 ф] = В cos ф + С sin ф + h,
где А, В, С—постоянные. (П е н л е в е, там же, стр. 38.)
12. Концы А и А' однородного тяжелого стержня длины 2/ и массы М
скользят без трения по двум неподвижным горизонтальным плоскостям,
имеющим уравнения г — ±а. Каждый элемент стержня притягивается нача-
лом О пропорционально его массе и расстоянию. Найти движение стержня
и реакции плоскости.
Обозначить через ? и т) координаты центра тяжести G стержня в пло-
скости хОу, через 6 — постоянный угол, образуемый стержнем с вертикалью,
и через ср — угол, который образует проекция стержня на плоскость хОу
с осью Ох, через ;i — притяжение точки О, действующее на единицу массы
на расстоянии, равном единице.
Найти поверхность, описываемую стержнем, когда начальное значе-
Aц>
ние —~ численно равно (л. (В некоторых частных случаях эта поверхность
является гиперболоидом.)
13. Тяжелое твердое тело S имеет форму прямого конуса, радиус осно-
вания которого равен R. Центр тяжести этого тела находится в точке О
оси вращения конуса на расстоянии R от основания. Эллипсоид инерции
тела S для центра тяжести О является сферой.
Конус S движется вокруг своего неподвижно закрепленного центра
тяжести О и окружность его основания касается неподвижной горизонталь-
ной плоскости II, расположенной под точкой О на расстоянии R от нее.
Исследовать движение тела S, предполагая, что окружность основания
конуса скользит с трением по плоскости П.
Вычислить реакции плоскости П и неподвижной точки О.
232 ДИНАМИКА СИСТЕМЫ
Начальные условия. Пусть 00' — перпендикуляр, опущенный из точки О
на плоскость П, и ОС — первоначальное положение перпендикуляра, опу-
щенного из точки О на основание конуса. В момент t = 0 мгновенная ось
вращения проходит внутри угла СОО' и направление вращения выбрано
таким образом, что тело S опирается на плоскость П. (Кандидатский экзамен,
1895.)
14. Рассмотрим тяжелое тело, для которого выполняются следующие
условия:
1° тело ограничено ребром, имеющим форму окружности К радиуса а
с центром к точке Н;
2° центр тяжести G тела находится на перпендикуляре Hz, восставлен-
ном в центре Н к плоскости круга К',
3° эллипсоид инерции для центра тяжести G является эллипсоидом
вращения вокруг этого перпендикуляра HGz.
Допустим теперь, что такое тело катится без скольжения по непо-
движной горизонтальной плоскости, и найдем уравнения движения.
Пусть Р—точка касания круга К с неподвижной плоскостью. Примем
за подвижное начало точку G и за подвижный триэдр отсчета следующие
оси: 1° прямую Gy, параллельную прямой РН, соединяющей центр круга К.
с точкой касания Р; 2° прямую HGz, нормальную к плоскости круга К',
3° прямую Gx, перпендикулярную к плоскости гйу.
Обозначим через 8 угол между Gz и направленной вверх вертикалью Gzh a
через ф — угол между осью Gx и какой-нибудь неподвижной вертикальной
прямой. Эти два угла определяют положение триэдра.
Чтобы найти положение тела относительно триэдра Gxyz, доста-
точно найти угол ср между радиусом круга К, неизменно связанным с телом,
и осью Gy. Мгновенная угловая скорость Q триэдра и мгновенная угловая
скорость to тела определяются теми же формулами, что и для обруча (п. 411).
Прилагая такой же метод, как и в указанном пункте, и полагая HG = с,
найдем, что q и г определяются в функции 6 из двух совместных линейных
однородных уравнений первого порядка. Исключение из этих уравнений q
приводит к линейному уравнению
из которого можно определить г в функции б. После этого можно найти
уже q тоже в функции 8.
Если затем взять уравнение энергии
иа + с2 + w2 + A (pi + q*) -f Cr2 = — 1g (a sin 6 + cos 6) + h,
io найдем 8 в функции t при помощи квадратуры. (Аппель, Rendiconti
del Circolo Matematico di Palermo, август 1899.)
Можно аналогичным методом исследовать движение тяжелого тела
вращения, катящегося без скольжения по неподвижной горизонтальной
плоскости. Мы вернемся к этой задаче в аналитической механике как
к примеру неголономной системы. Детальное исследование этой задачи
можно найти в небольшой монографии под названием «Движения качения
в динамике» [Les mouvements de roulement en Dynamique (Collection Scien-
tia, Gauthier-Villars, editeurs)].
15. Качение шара по поверхности (Routh, Advanced part of a
Treatise on the Dynamics of a system of Rigid Bodies, 1884). Однородный
шар радиуса а и массы 1, который может вертеться и катиться без сколь-
жения по данной поверхности, находится под действием сил, приводящихся
к одной равнодействующей, проходящей через его центр.
Пусть G — центр шара. Примем за ось Gz прямую, соединяющую
точку G с точкой касания шара с поверхностью, а за оси Gx и Gy—две
ГЛАВА XXI. СВОБОДНОЕ ТВЕРДОЕ ТЕЛО 233
произвольные перпендикулярные оси; тогда плоскость хGy будет параллельна
касательной плоскости к поверхности в точке касания с шаром.
Обозначим через V абсолютную скорость точки G и через и, v, w — ее
проекции на подвижные оси. Так как скорость V параллельна общей каса-
тельной плоскости к шару и к поверхности, по которой он катится, то
w = 0. Пусть, как и выше, Q — мгновенная угловая скорость триэдра Gxyz
и Р, Q, R — ее составляющие, а о> — мгновенная угловая скорость сферы
и р, q, r — ее составляющие.
Пусть X, Y, Z — составляющие по осям Gx, Gy, Gz равнодействующей
всех приложенных сил. Реакция поверхности складывается из нормальной
силы N, направленной по Gz, и касательной силы, составляющие которой
по Gx и Gy мы обозначим через F и F'. Обозначим также через k радиус
У"
инерции шара относительно диаметра, т. е.
Уравнения движения будут:
du я2
dv . п cfl v , k"- n
+Ru Y+-w+waQr-
Эти уравнения показывают, что центр тяжести движется как центр
тяжести такого же шара, катящегося без трения по той же поверхности и
находящегося под действием: 1° силы, приложенной к центру G и имеющей
/fe3 &2
составляющие по Gx и Gy, равные —„ , . „ аРг и аОг, 2° силы,
а2 -\- я2 а2 -\- я2
а2
равной приложенной силе (X, Y), умноженной на —2 _, ,3 .
16. Примеры. Если неподвижная поверхность, по которой катится шар,
является плоскостью, то Р и Q равны нулю. Следовательно, если одно-
родный шар вертится на неподвижной плоскости и катится по ней
под действием сил, имеющих равнодействующую, проходящую через ее
центр, то движение центра будет таким же, как если бы плоскость
была идеально отполирована, а приложенные силы составляли -=- их
значений. (Раус, там же, стр. 126.)
Относительно других примеров мы отошлем к сочинению Рауса, содер-
жащему большое число изящных упражнений, в частности примеров каче-
ния шара по сфере, по цилиндру, по конусу и малых колебаний около
положения устойчивого равновесия или устойчивого движения.
17. Обобщение задачи об обруче. См. работу киевского ученого Воро-
нец «Ueber die rollende Bewegung einer Kreisscheibe auf einer Beliebigen
Flache...», Mathem. Annalen, T. LXVH, 1909.
18. Движение твердого тела, внутри которого имеют место задан-
ные стационарные циклические движения. См. статью Сильвио Эна
(Silvio En a, Memorie della R. Accademia de Lincei, 5 ser., VII, 1909).
ГЛАВА XXII
ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
I. Общие теоремы
413. Уравнения относительного движения точки. Уравнения
Лагранжа позволяют, как мы видели, найти относительное движение
точки по отношению к системе, совершающей известное нам дви-
жение (пп. 259, 263, 282). Мы увидим дальше, что те же урав-
нения применимы и к относительному движению голономных систем.
Следовательно, нет необходимости в построении специальной теории
относительного движения. Тем не менее ввиду важности вопроса
мы изучим его непосредственно.
Задача заключается в следующем: пусть даны неизменяемая си-
стема S, совершающая известное движение, и материальная точка т,
находящаяся под действием некоторых сил. Нужно найти относи-
тельное движение этой точки по отношению к системе S, которая
называется подвижной системой отсчета. Для определения движе-
ния системы S отсчета достаточно, как мы видели в кинематике (п. 45),
определить движение трех осей Ox, Оу, Oz, неизменно связанных
с этой системой. Точка т обладает в каждый момент времени абсо-
лютной скоростью Va, относительной скоростью Vr по отношению
к системе S отсчета и переносной скоростью Ve. Между этими
тремя скоростями имеет место векторное соотношение
V ~ V -4- V
Для ускорения мы имеем аналогичную формулу с добавочным
членом.
Пусть ./о—абсолютное ускорение, jr — относительное ускоре-
ние, je — переносное ускорение и j' — некоторый вектор, называе-
мый добабочным ускорением. Имеем векторное равенство
h = Jr+Je+f- A)
Напомнив эти результаты, обратимся к интересующей нас задаче.
Равнодействующая F сил, действующих на точку т, равна абсолют-
ному ускорению ja, умноженному на массу точки т. Следовательно,
ГЛАВА XXII. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ 235
на основании равенства A) имеем новое векторное равенство:
откуда
• р т • .„ it /о\
Это векторное равенство переходит в три алгебраических урав-
нения, получающихся при проектировании рассматриваемых векторов
на подвижные оси. Таким путем получаются так называемые урав-
нения относительного движения. Проекции Jr на подвижные
оси Охуг равны -г^, -~, -т?. Мы обозначим через X, Y, Z про-
екции силы F, через {je)x, (Je)y (Л)г — проекции переносного
ускорения и через j'x, f, j'g— проекции добавочного ускорения.
Тогда имеем три уравнения:
сРх _ у . .,
тШ>=у — т Ши — mfy D)
т — — Z— С — "
d№ ^ e'z г'
Проекции ускорений je и j' известны, так как известно движе-
ние системы S отсчета или, что то же, переносное движение.
Интегрированием дифференциальных уравнений D) мы получим
х, у, г в функции t, т. е. уравнения относительного движения
в конечной форме.
Векторам —mje и —mj', проекции которых содержатся в урав-
нениях D), дают следующие специальные наименования: вектор — mje,
равный и противоположный произведению массы на переносное уско-
рение, называют переносной силой инерции, а в случае, когда дви-
жение системы S является равномерным вращением вокруг непо-
движной оси — центробежной силой; вектор —mf, равный и про-
тивоположный произведению массы на добавочное ускорение, называют
кориолисовой силой инерции.
Мы приходим к следующему выводу: Относительное движение
точки по отношению к движущимся реям Охуг будет таким же,
как если бы эти оси были неподвижны, а к силам, которые
действуют на движущуюся точку, была присоединены две
фиктивные силы, из которых одна является переНоЫой силой
инерции, а другая — кориолисовой силой инерции.
Геометрическое определение кориолисовой силы инерции —mf
непосредственно вытекает из определения вектора f. Проекции
— mJL' — mJ'i,' — mi', этой силы на основании данных в п. 59
236 ДИНАМИКА СИСТЕМЫ
значений проекций fx, j'y, fz суть
dz
где p, q, r — проекции на оси Oxyz мгновенной угловой скорости а>
подвижной системы отсчета.
414. Кинетическая энергия в относительном движении. С урав-
нениями D) можно, очевидно, проделать все аналитические преоб-
разования, которые делались при изучении абсолютного движения.
Например, умножая уравнения D) соответственно на dx, dy, dz
и складывая их, можно получить результат, аналогичный тому,
который приводит к теореме кинетической энергии. В этом резуль-
тате члены, происходящие от кориолисовой силы инерции, исчезают,
как это вытекает из выражений E), и получается уравнение
dmVl
—g— = X dx -Ь У dy + Z dz — m {je)x dx — m (je\ dy — m (je% dz.
Следовательно, дифференциал кинетической энергии точки
в относительном движении равен элементарной работе силы,
действительно приложенной к точке, и переносной силы инерции.
То, что работа кориолисовой силы инерции равна нулю, вытекает
геометрически из того обстоятельства, что эта сила, будучи нор-
мальной к относительной скорости Vr, нормальна также к относи-
тельному перемещению dx, dy, dz.
415. Относительное равновесие. Чтобы получить уравнения
относительного равновесия, нужно в предыдущих уравнениях поло-
d*x d2y d*-z dx dy dz u
ЖИТЬ d?2' d&' "Ш' a Также Tt' dl' It Равньши НУЛЮ- Как
следствие, j' будет также равно нулю, и мы получим:
*— т Ue)a> = 0, Y — m Ue)y = 0, Z — m {je\ = 0.
Следовательно, для составления уравнений относительного равновесия
нужно написать, что сила F уравновешивается центробежной силой.
Точка, координаты которой х, у, z удовлетворяют этим трем
уравнениям, будет определять положение относительного равновесия,
так как если в это положение привести движущуюся точку, не сообщив
ей начальной относительной скорости, то из трех сил, которые могут
заставить точку совершать относительное движение, одна, а именно,
кориолисова сила инерции обращается в нуль, так как нулю равна
относительная скорость, а две другие уравновешиваются. Следова-
тельно, точка останется в относительном покое.
ГЛАВА XXII. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
237
Приложение. Найти положение относительного равновесия тяжелой
точки, которая может скользить без трения по плоской кривой С, вращаю-
щейся с постоянной угловой скоростью ш вокруг вертикальной оси Ог,
находящейся в плоскости этой кривой (рис. 245).
Для г будем считать положительным направление снизу вверх.
Силами, действительно действующими на рассматриваемую точку т.,
являются ее вес mg и нормальная реакция N. Чтобы получить условия
~*/t
относительного равновесия, мы можем рассматривать кривую С как непо-
движную и написать, что имеет место равновесие между этими двумя силами
и переносной силой инерции Ф.
Для вычисления этой последней рассмотрим геометрическую точку, при-
надлежащую подвижной системе отсчета, т. е. кривой С, совпадающую
с точкой т. В переносном движении эта точка описывает параллель ра-
диуса р = Рт, и поэтому ее ускорение равно «гр и направлено от т к Р.
Следовательно, сила Ф, которая является в данном случае центробежной си-
лой, имеет значение »ztosp и направлена по продолжению Рт. Для того
чтобы имело место равновесие, необходимо и достаточно, чтобы силы Ф
238 ДИНАМИКА СИСТЕМЫ
и trig имели равнодействующую R, нормальную к кривой. Из подобных
треугольников mPQ и тФЛ имеем:
V — Ф со2
Следовательно, положениями равновесия являются те точки кривой,
в которых поднормаль PQ равна -Ц? > причем точка Q пересечения нормали
с осью г должна быть расположена над точкой Р. Если в точке А, где р = О,
касательная горизонтальна, то эта точка будет положением равновесия при
любой скорости вращения.
Допустим, например, что заданная кривая является параболой с верти-
кальной осью, вращающейся вокруг этой оси. Тогда вершина будет един-
ственным положением равновесия, кроме как в случае, когда параметр пара-
болы равен 4г- В последнем случае все точки параболы удовлетворяют
условиям задачи. Отсюда следует, что свободная поверхность жидкости,
совершающей равномерное вращательное движение вокруг вертикальной
оси, является параболоидом вращения, так как каждую частицу жидкости,
лежащую на поверхности, можно уподобить тяжелой материальной точке,
которая может скользить без трения по меридиану.
Если заданная кривая является окружностью радиуса R (рис. 245, //),
центр которой Q лежит на оси вращения, то условия равновесия принимают
вид
Следовательно, для того, чтобы существовало положение равновесия,
отличное от А, необходимо, чтобы ш было больше чем Л/ ^г. Когда соуве-
п _
личивается, а постоянно возрастает и стремится к —. Эти результаты слу-
жат основой теории регулятора Уатта (Watt) для паровых машин.
Если заданная кривая является окружностью радиуса R, центр С кото-
рой не находится на оси вращения, то могут быть два или четыре поло-
жения равновесия. Предлагая аналитическое решение в качестве упражнения,
ограничимся следующим замечанием (рис. 245,111). Пусть т — положение
равновесия, QP — соответствующая поднормаль, равная Ц^, О — проекция
центра С на ось вращения Ог. Проведем прямую ОЕ, равную и парал-
лельную Qm, и возьмем OD = QC, DE=Cm = R. Ось EF, проведенная
через Е перпендикулярно к Ог, займет известное положение, так как OF —
= QP = -^. Ось CDH займет также известное положение, так как она
параллельна оси Oz. Кроме того, DE = R. Прямая DE, равная R, будет
проходить через заданную точку О. Ее концы Е и D опираются на две
заданные перпендикулярные оси СН и FE, и нахождение положения равно-
весия приводится к задаче геометрии: через точку О провести прямую, на
которой две фиксированные оси СН и FE отсекают ^отрезок длины R. Тогда
радиус Cm будет параллелен этой прямой. Известно, что эта геометрическая
задача имеет два или четыре решения в зависимости от того, будет ли точка
О находиться вне или внутри эпициклоиды, являющейся огибающей отрезков
длины R, концы которой скользят по двум осям СН и FE. Этот результат
был получен Жильбером из уравнений равновесия. (Gilbert, Application
des equations de Lagrange au mouvement relatif, Annales de la Societe scien-
tifique de Bruxelles, 1883.)
ГЛАВА XXII. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ 239
Примечание. Если надо найти движение точки пе воащаю'цэйея
кривой С (рис. 245, /), то достаточно применить теорему кинетической анер'
гии к относительному движению, замечая, что элементарная работа веса
равна — mg dz, элементарная работа центробежной силы Ф равна m<oap dp,
а работа кориолисовой силы инерции равна нулю. Интеграл энергии получим
тогда в виде
Чтобы получить положение относительного равновесия, надо найти такие
положения движущейся точки, для которых стоящая в правой части сило-
вая функция имеет максимум или минимум. Максимуму этой функции отве-
чает положение устойчивого равновесия. Таким образом, можно проверить,
что в случае окружности, вращающейся вокруг оси, проходящей через ее
центр, положение равновесия в точке А будет устойчиво (рис. 245, //), если
существует только такое положение. Но это же положение будет неустой-
чиво, если точка может занимать другое положение равновесия т. Тогда
устойчивым будет это последнее положение.
416. Относительное движение по отношению к осям, совер-
шающим поступательное движение. Когда система подвижных
осей Охуг совершает поступательное движение, тогда мгновенная
угловая скорость а> этой системы равна нулю, кориолисова сила инер-
ции также равна нулю, и для того, чтобы написать уравнения отно-
сительного движения, достаточно добавить к действующим на точку
силам только переносную силу инерции. Для определения этой послед-
ней заметим, что все точки подвижной системы отсчета имеют оди-
наковые ускорения. Следовательно, переносное ускорение равно уско-
рению j начала координат, каково бы ни было положение движущейся
точки. Если поступатель-
ное движение подвижных
осей является прямо-
линейным и равномерным,
то переносная сила инер-
ции также равна нулю,
так как j= 0.
Пример. Движение
планеты вокруг Солнца. D
Пусть S (рис. 246) и кис-
Р—Солнце и планета, М
и т — их массы, г —• расстояние между ними. Сила притяжения обоих тел
F — F'— —2~- • Найдем движение планеты по отношению к осям Sxyz
постоянного направления, проведенным через 5. Так как эти оси движутся
поступательно, то переносное ускорение je планеты Р равно в каждый момент
времени ускорению подвижного начала S. Следовательно, величина ускоре-
, F fm or> ii
ния je равна -г; ="—§- и его направление является продолжением SP. Цен-
тробежная сила Ф, которую нужно присоединить к силе притяжения f
240
ДИНАМИКА СИСТЕМЫ
точки Р точкою S, направлена по PS и равна ^-. Складывая эту силу
Ф с силой f, получаем равнодействующую
/Mm //и2 _fm(M + m)
/•2 Т Г2 ~" Г2
Следовательно, относительное движение будет таким же, как если бы
Солнце S было неподвижно, но имело бы массу, равную М + т (п. 235).
417. Упражнение. Относительное движение тяжелой точки, на-
ходящейся на идеально гладкой наклонной плоскости Р, которая вра-
щается с постоянной угловой скоростью со вокруг вертикали. Примем
за ось z направленную вверх ось вращения (рис. 247), за начало О — точку,
в которой эта ось пересекает плоскость, за
ось Ох — горизонталь плоскости и за ось
Оу — перпендикуляр к плоскости хОг. Следо-
вательно, триэдр Oxyz вращается вокруг Oz
с угловой скоростью to и ее проекции р, q, r
имеют значения 0, 0, <а. Если через р обозна-
чить расстояние движущиейся точки от оси Oz,
то центробежная сила будет равна /исо2р, а ее
проекции на оси Oxyz равны т<$-х, та>ъу, 0.
Пусть / — угол наклона плоскости к гори-
зонту, mN — нормальная реакция плоскости,
считаемая положительной, когда она располо-
жена над плоскостью. Тогда, обозначая штри-
хами производные по t, будем иметь следую-
щие уравнения относительного движения:
X" = со2* + 2со/,
Рис 247
Sin / — 2<ох',
г" = ATcos l — g.
Исключим N и заменим z через yigl
(уравнение плоскости Р). Получим
у" = соау cos2 / -j- S sin'cos ' — 2@.*' cos 21.
Следовательно, переменные х и у определяются в функции t двумя ли-
нейными уравнениями с постоянными коэффициентами. Эти уравнения можно
проинтегрировать, положив
где А — произвольная постоянная, a k и X удовлетворяют условиям
\ = fe2~~"'2 , k* — A — 3 C0S2 А ?2Щ2 _J_ 0L COS2 / _ 0.
Это уравнение имеет четыре корня ± а и ± р, попарно равных, но
противоположных по знаку; /fe* будет вещественным, когда cos2 / < —.
Тогда интегралы будут иметь вид:
х
У
Ае°*
, +
- V-') +
в*-»).
ГЛАВА XXII. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
241
За подробностями отсылаем к задачнику де Сен-Жермена (Saint-
Germain, Recueil d'Exercices sur la Mecanique rationnelle, Gauthier-
Villars). Точка x = 0, <^y cos / = —gsinl является положением относи-
тельного равновесия.
II. Относительное движение и равновесие системы
418. Общие сведения. Чтобы получить уравнения относительного
движения системы по отношению к осям Охуг, совершающим изве-
стное движение, можно на основании предыдущего рассматривать
оси как неподвижные при условии добавления к силам, действующим
на каждую точку т системы, переносной силы инерции — mje и
кориолисовой силы инерции —mf. При применении теоремы кинети-
ческой энергии к этому
относительному движению
работа кориолисовых сил
инерции будет равна
нулю.
г
419. Движение систе-
мы вокруг своего центра
тяжести. Теорема момен-
тов и теорема кинетиче-
ской энергии. Рассмотрим
движущуюся систему, в
которой центр тяжести G
имеет ускорение j (рис. 248).
Исследуем движение си-
стемы относительно осей Gx', Gy', Gz', проведенных через центр тя-
жести и имеющих постоянные направления. Все точки, неизменно связанные
с движущимися осями, имеют в каждый момент времени одно и то же перенос-
ное ускорение, равное /. Обозначим через а, Ь, с проекции j на подвижные
оси. Для изучения относительного движения можно вти оси рассматривать
как неподвижные при условии добавления к внешним и внутренним силам,
действующим на каждую отдельную точку т системы, только переносной
силы —mj с проекциями —та, —mb, —тс. Кориолисова сила инерции
равна в этом случае нулю (п. 416). Тогда, применяя к относительному дви-
жению теорему моментов количеств движения и употребляя обозначения,
принятые в п. 350, имеем:
Рис. 248.
Так как центр тяжести находится в подвижном начале, то последняя сумма
равна нулю, ибо, например, ^ т^х' = * 2j тх' ~ ^" Следовательно, теорема
моментов количеств движения справедлива для относительного движения
вокруг центра тяжести, как это было доказано другим путем (п. 350). Точно
так же применим к относительному движению по отношению к осям Gx'y'z'
теорему кинетической энергии, рассматривая эти оси как неподвижные
и вводя переносные силы инерции. Имеем:
^ = Ъ Z {Xidx'
Ъ Zi
') ~2 {п dX'
16 Зак. 922. П. Аппель, т. II
242
ДИНАМИКА СИСТЕМЫ
Последняя сумма опять равна нулю, так как ^ т dx', 2 т dy', 2 т dz'
равны нулю. Таким образом, мы видим, что можно применить к относи-
тельному движению вокруг точки Q теорему кинетической энергии, не вводя
фиктивных сил. Это мы уже доказали ранее (п. 351).
420. Пример относительного движения. Концы однородного тяжелого
стержня длины 2/ скользят без трения, один А — по горизонтальной оси Ох,
а Другой В — по вертикали Оу (рис. 249). Найти движение стержня, предпо-
лагая, что система хОу вращается вокруг Оу с постоянной угловой ско-
ростью о. (R о u t h, Rigid Dynamics, Elementary Part, стр. 343.)
Силы, приложенные к стержню, суть вес Mg, приложенный в середине О,
и нормальные реакции осей Ох и Оу. Чтобы найти относительное движение
по отношению к этим осям, можно рассматривать их как неподвижные при
условии, что в каждой точке т стержня прикладываются центробежная
сила Ф и кориолисова сила Ф'. После этого применим к относительному
движению теорему кинетической энергии, вспомнив, что работа корио-
лисовых сил инерции равна
нулю, и заметив, что работа
реакций на относительном пе-
ремещении также равна нулю.
Обозначим через М№ мо-
мент инерции стержня отно-
сительно точки О и через
в — угол, который он образует
с осью Ох, так что коорди-
наты 5 и к) центра тяжести
суть /cos 6 и /sin в. По
теореме Кёнига кинетиче-
л
и
В
ч
V
¦ч
У" \
У
А
Мд
ская энергия
стержня равна
, где 0'
Рис. 249. обозначает производную от 0
по t. Элементарная работа силы
тяжести равна Mg dt\, т. е. Mgl cos 6 d6. Наконец, центробежная сила Ф, при-
ложенная к точке т с абсциссой х, параллельна оси Ох и имеет
значение та&х. Ее элементарная работа равна т<*2х dx. Если обозначить
через р расстояние Вт, то х = р cos 0, и когда стержень скользит, тогда
dx — — р sin 6 dd. Отсюда для та>2х dx получается значение —т<л2р sin 0 cos 0d%.
На основании этого сумма элементарных работ центробежных сил есть
— ^ /ир2а>2 sin 6 cos 0 db. Так как 2 МР2 есть момент инерции стержня отно-
сительно точки В, равный Mk2 -\- MP, то для суммы работ центробеж-
ных сил получаем —М (k2 -|- I2) a>2 sin 8 cos 6 d%. Заметив, что для однород-
на
ного стержня k2 = -=-, и разделив уравнение кинетической энергии на М,
о
получим
О/2 4/2
d %г 0'2 = gt cos в d0 — 3- со2 sin 6 cos 0 db,
о о
A)
что непосредственно определяет 6' в функции 6 при помощи одной квадра-
туры. Предполагая для упрощения, что 6' = 0 при 0 = 60, получим
Ь'г = 0J (Sln в — Sin в0)
Ш^-
Sin 0 — Sin
B)
Отсюда можно выразить t в функции sin 6 при помощи эллиптического
интеграла первого рода и sin б как эллиптическую функцию переменного t.
ГЛАВА XXII. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ 243
При анализе решения нужно иметь в виду, что sin В может принимать только
такие значения, при которых правая часть положительна.
Относительное равновесие. Разделив уравнение A) на dt и выполнив
дифференцирование, получим
~ = Щ- cos 9 — шз sin 6 cos 8. C)
dt2 4/
Для нахождения положения относительного равновесия нужно правую часть
приравнять нулю. Тогда получается cos 6 = 0, что дает вертикальное поло-
жение, и далее
sin б = 3^,
откуда получаем некоторое значение для 6, если ш достаточно велико.
Чтобы рассмотреть вопрос об устойчивости, обозначим через а значение 6,
соответствующее одному из этих двух положений, и положим 6 = a. -J- ср, где ср
очень мало. Тогда, подставляя это значение 6 в равенство C) и разлагая
правую часть по степеням ср, мы получим, пренебрегая высшими степенями,
Если величина
* ¦*,.+ .«со. 2.). D)
п = -S- sin а + *>"* cos 2а
положительна, то положение равновесия, соответствующее 9 = а, устойчиво
и период бесконечно малых колебаний вокруг этого положения равен —==..
\п
Если эта величина отрицательна, то равновесие неустойчиво. Можно про-
верить, что если существует только вертикальное положение равновесия
I a = -=-), то оно устойчиво. Если существует кроме него также наклонное
положение равновесия, то устойчивым будет последнее, а вертикальное бу-
дет неустойчиво.
Промежуточный случай, когда -rf^= 1. заслуживает особого внимания.
Тогда оба положения равновесия совпадают с вертикальным. Если по-преж-
нему положить 0 =^ -=—J— ср, где ср бесконечно мало, то ср исчезнет и, рас-
сматривая только первый член, получим
Следовательно, равновесие будет устойчивым, так как <р стремится
уменьшаться по абсолютному значению. Угол ср определяется тогда в функ-
ции t при помощи эллиптической функции.
Если стержень предоставлен самому себе без начальной скорости в
положении, соответствующем ср = ср0 (ср0 бесконечно мало), то легко убедиться,
что время, необходимое для возвращения стержня в вертикальное поло-
жение, обратно пропорционально амплитуде ср0.
421О Твердое тело. Частный случай, когда переносные силы инерции
имеют равнодействующую. Когда движущаяся система является твердым
телом, то переносные силы инерции приводятся в общем случае к силе и
паре. То же справедливо и для кориолисовых сил инерции. Резаль (Annales
des Mines, 1853) и Жильбер (Annales de la Societe scientiSiques de Bruxelles, 1878)
16*
244
ДИНАМИКА СИСТЕМЫ
указали различные теоремы для приведения этих сил. Вот один из случаев,
когда переносные силы инерции приводятся к одной равнодействующей.
Допустим, что движение осей Охуг, по отношению к которым надо
исследовать относительное движение твердого тела, является вращением
с постоянной угловой скоростью о вокруг неподвижной оси АВ. Допустим,
кроме того, что ось Gz', проведенная через центр тяжести G параллельно
оси вращения, является главной осью инерции для точки G. Тогда пере-
носные силы инерции приведутся к одной равнодействующей, равной центро-
бежной силе, которой обладала бы вся масса, если бы она была сосре-
доточена в центре тяжести G.
В самом деле, примем за оси прямую Gz' и два перпендикуляра к ней Gx'
и Gy' (рис. 250). Пусть х' = а, у' = Ь являются уравнениями оси АВ.
Для центробежной силы Ф,
приложенной в точке т, имеем
где тр — расстояние от точки
до оси АВ. Ее проекции суть
т «в2 {х' — а),
Следовательно, проекции
главного вектора всех этих,сил
равны
2 та* (/-6). 0
или
Рис. 250.
0,
так как 2тх' и 2 тУ' Равны нулю. Проекциями главного момента всех
этих сил будут:
Все они равны нулю, так как ось Gz' является главной осью инерции
п точке G. Следовательно, центробежные силы имеют равнодействующую,
приложенную в точке G, проекции которой равны
—Mata, —Mufib, 0.
Сама сила равна М^ЮС и направлена по GG', где через G' обозна-
чена проекция точки G на ось АВ.
422. Велосипед. Мы заимствуем из интересного сочинения Бурле
(В о и г 1 е t, Traite des bicycles et bicyclettes, Oauthier-Villars) следующее
приложение теории относительного равновесия. Главной деталью велосипеда,
к которой крепятся все остальные, является рама, выполненная обычно
в форме жесткого пятиугольника RQEIS (рис. 251). Позади рамы в точке R
закреплена ось колеса F. Впереди рама снабжена втулкой El, через кото-
рую проходит руль. Руль снабжен внизу вилкой ЕВ', через которую про-
ходит ведущее колесо D. Его ось скреплена с вилкой в точке В'. Руль
сверху представляет собой почти горизонтальную трубку G, оканчиваю-
щуюся двумя ручками, которые велосипедист держит в руках. Велосипедист
сидит в седле S, закрепленном в верхней части середины рамы. Рама ма-
шины представляет собой плоскость симметрии, содержащую втулку Е/,
ГЛАВА XXII. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
245
Рис. 251.
центр седла S и центр R колеса F. Эта плоскость называется средней пло-
скостью. Назовем плоскостью колеса плоскость, перпендикулярную к оси
этого колеса в ее середине. Плоскость заднего колеса всегда совпадает со
средней плоскостью, а плоскость направляющего колеса меняет свое поло-
жение относительно средней плоскости, и когда она с ней совпадает, обе
ручки руля находятся на одина-
ковых расстояниях от средней
плоскости, которая является
тогда плоскостью симметрии
велосипеда, поскольку массами
цепи и педалей можно в первом
приближении пренебречь.
Обозначим через А к В
точки касания обоих колес с
грунтом. Мы будем предпола-
гать, что ось ху рулевой трубки
проходит через точку касания В
направляющего колеса. Тогда
точка В будет фиксированной
точкой средней плоскости и
прямая АВ будет иметь по-
стоянную длину, не зависящую
от положения направляющего
колеса. Эта прямая АВ ка-
сается заднего колеса и яв-
ляется пересечением средней
плоскости с грунтом, который
предполагается плоским. Мы
будем также предполагать, что
велосипедист не производит
своим телом никаких движений
и сидит так, что плоскость сим-
метрии его тела совпадает со
средней плоскостью. При таких
условиях центр тяжести G
велосипедиста и велосипеда
(рис. 251а) почти точно яв-
ляется некоторой фиксирован-
ной точкой средней плоскости.
Следовательно, основание С
перпендикуляра, опущенного
из центра тяжести на пря-
мую АВ, является фиксирован*
ной точкой этой прямой.
Найдем сначала, каковы будут следы колес на грунте, если предполо-
жить, что направляющее колесо образует со средней плоскостью постоян-
ный угол. Будем считать грунт плоским и примем его за плоскость чертежа.
Пусть А и В — точки касания заднего и направляющего колес, a AR
и BR' — прямые пересечения плоскостей обоих колес с грунтом; при этом AR
совпадает по направлению с АВ (рис. 252).
Угол 9 между BR' и АВ постоянный, если постоянным остается наклон
средней плоскости к вертикали. Прямые AR и BR' очень мало отличаются
от касательных к следам Т и 7" колес на грунте. Легко тогда видеть, что
эти следы будут двумя окружностями, имеющими общий центр в точке »
пересечения нормалей к обоим следам в точках А и В. В самом деле, обо-
значим через х, у координаты точки А, через Ь — длину АВ, через а — угол
касательной АВ к Т с неподвижной осью Ох и, следовательно, через а -f- 6 —
Рис. 251а.
246
ДИНАМИКА СИСТЕМЫ
\
\
угол между той же осью и касательной BR' к Т'. Тогда для координат
точки В (х\ у') имеем:
х' = х + Ъ cos а, у' = у 4- Ь sin а.
Обозначим через s и s' дуги обеих кривых Г и 7" и продифференци-
руем эти равенства, прини-
мая во внимание известные
7-'| /Л' соотношения:
dx = ds cos a, dy = ds sin а
и
d*' = ds' cos (а + 6), ...
Получим
rfs' COS (а + 6) =
= ds cos a — b sin a da,
ds' sin (a + 6) =
Рис. 252.
= ds sin a -f- 6 cos a
Раскрывая cosinus и sinus суммы двух углов по формулам тригонометрии
и разрешая эти уравнения относительно
ds' cos в и ds' sin в,
получим для этих величин значения ds и Ь da. Следовательно, радиусы кри-
ds ds'
визны р и р обоих следов, имеющих значения — и ——, определяются фор-
йа аа
мулами
р' cos в = р, р' sin 6 = Ь
и являются постоянными.
На рисунке видно, что в тре-
угольнике АаВ:
р = Аа>, р' = Вч>.
Следовательно, следы явля-
ются окружностями с общим
центром и при движении
прямая АВ (рис. 253) пово-
рачивается вокруг верти-
кали шо/ с угловой ско-
ростью, которая постоянна,
если постоянна скорость
велосипеда. Выберем теперь
систему трех перпенди'
кулярных осей, связанных
с АВ, следующим образом:
начало С является проекцией центра тяжести на АВ, ось Сг есть пря-
мая АВ, ось Су — вертикаль, проходящая через точку С, ось Сх — пер-
пендикуляр к плоскости уСг. Следовательно, плоскость хСу перпенди-
кулярна к средней плоскости, которую она пересекает по прямой СМ, обра-
зующей с вертикалью угол р.
Для того чтобы велосипед не опрокидывался н чтобы угол E оставался
постоянным, необходимо и достаточно, чтобы по отношению к системе
Рис. 253.
ГЛАВА XXII. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
247
осей Схуг имело место относительное равновесие. Но движение этих осей
является вращением с постоянной угловой скоростью ю вокруг вертикали оно'.
Будем считать равной нулю массу колес, которая весьма мала по сравнению
со всей массой. Пренебрежем также движением ног, которые мы будем по-
лагать неподвижными в некотором среднем положении. Чт^бы выразить,
что имеет место относительное равновесие, нужно написать, что существует
равновесие между реакциями грунта, силами тяжести и центробежными
силами.
Силы тяжести имеют равнодействующую, равную весу GP = Mg (рис. 254).
Центробежные силы имеют приближенно равнодействующую GF, прило-
женную в точке ?7,^направленную по перпендикуляру G'G к оси вращения ш'
и равную MaPGG', или —^- ,где V обозначает скорость точки G, а/? —ра-
диус GG' окружности описываемой' этой точкой. Бурле обосновывает это
приближение, исходя из заме-
чания, сделанного в п. 421:
ось GC из соображений сим-
метрии является приближенно
главной осью инерции для
центра тяжести; угол C, кото-
рый образует вертикаль, про-
ходящая через точку G, с
осью GC, обычно мал, и эта
вертикаль почти совпадает
с главной осью инерции. Следо-
вательно, можно считать, что
линия, проведенная из точки G
параллельно оси вращения ш»',
является приближенно главной
осью инерции для точки G, что
позволяет применить замеча-
Рис. 254.
ние, сделанное в п. 421.
После этого для исключе-
ния реакций грунта напишем,
что сумма моментов сил F и Р относительно оси АВ равна нулю. Для этого,
согласно самому опргделению моментов, достаточно спроектировать силы Р
и F на плоскость хСу, перпендикулярную к АВ, и взять моменты этих про-
екций относительно точки С. Проекция силы тяжести Р равна величине
всей силы; проекцией силы F является горизонтальная сила Fb равная F cos ip,
где через ф обозначен угол FGFlt который образует прямая FGQ' со своей
проекцией FXGG" на плоскость уСх. Тогда условие равновесия будет
Проекция на горизонтальную плоскость треугольника GG'G" равна такому же
треугольнику Du>E; Do> равно R к а>Е равно АС, т. е. известной постоянной
с
длине с. Тогда для sin ф получаем значение -^- и уравнение равновесия,
MV2
если в нем заменить F и Р их значениями -^— и Al?, примет вид
248 ДИНАМИКА СИСТЕМЫ
В общем случае R можно считать настолько большим по сравнению
с размерами машины, что величиной -jr- можно пренебречь. Тогда
К
Если допустить, что радиус R настолько велик, что указанные прибли-
жения допустимы, то полученное таким образом относительное равновесие
будет неустойчивым. Действительно, если велосипед наклонится к земле, то
угол р увеличится, момент веса увеличится, момент силы F уменьшится,
первый момент будет больше второго и угол р будет увеличиваться еще
больше. Чтобы не упасть, велосипедист должен будет повернуть направляю-
щее колесо в сторону, в которую он падает, для того, чтобы увеличить
угол 6. Тогда точка ш переместится, Аа>, Ва> и R уменьшатся, центробежная
сила F = —-гт- увеличится и преодолеет силы тяжести. Если р уменьшается,
то происходит обратное явление.
Найденное условие относительного равновесия будет достаточным, если
трение скольжения по грунту в поперечном направлении неограниченно. Но
пусть коэффициент трения имеет определенное значение /. В относительном
равновесии равнодействующая сил Р и F\ пересекает ось АВ, образуя с вер-
тикалью угол р. Для того чтобы не было скольжения, необходимо, чтобы
tgp</, V»<fgR.
Это неравенство показывает, что при заданной скорости нельзя описать
окружность радиусом меньшим, чем —j-. При скользком грунте, для того,
чтобы описать окружность заданного радиуса R, нужно достаточно замед-
лить движение, чтобы удовлетворялось предыдущее неравенство (В о и г 1 е t,
loc. cit., стр. 26—27).
Для ознакомления с теорией велосипеда можно рекомендовать также
премированную работу Бурле (Bulletin de la Societe mathematique, 1899),
работу Карвалло (С a r v a 11 о, Journal de I'Ecole Polytechnique, Vе et VIе.
Cahiers, 1900), работу Буссинеска (Boussinesq, Journal de Mathematiques
de Jordan, 1899) и статью Рауса (Messenger of Mathematics, 1898—1899).
III. Относительное равновесие и относительное движение
на поверхности Земли
423. Историческая справка. Ньютон, по-видимому, является первым,
обратившим внимание на влияние вращения Земли на движение тел на ее
поверхности. Он заметил, что тело, сброшенное с высокой башни, должно
при падении сохранять нормальную к меридиану скорость, равную скорости
вершины башни во вращательном движении Земли. Но так как эта скорость
несколько больше скорости основания башни, то тело должно упасть не-
много впереди башни, в сторону вращения Земли, т. е. отклониться к вос-
току. Многие наблюдатели старались обнаружить на опыте это обстоятель-
ство, но только в 1831 г. Рейх произвел достаточно убедительные опыты
в рудниках Фрейберга. Однако и в этих опытах все еще остаются некото-
рые сомнительные места, и было бы желательно, чтобы такие опыты были
предприняты вновь. Гораздо отчетливее удалось доказать суточное движе-
ние Земли физику Фуко. Последний понял, что вращение Земли должно
отразиться на вращении плоскости колебания математического маятника
вокруг вертикали места, в сторону суточного движения, и подтвердил свое
предположение знаменитым опытом в Пантеоне.
ГЛАВА XXII. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ 249
Опыт Фуко по сравнению с наблюдением отклонения тел, падающих с
большой высоты, обладает тем преимуществом, что он накопляет в тече-
ние довольно продолжительного времени весьма малые действия, кото-
рые производит вращение земного шара на видимое движение тел,
вследствие чего результаты этих действий становятся заметными. Опыт
Фуко был позднее повторен голландским-ученым Каъгерлингом Оннесом (Ка-
merlingh Onnes) в Гронингене с маятником длиной ллшь 1,2 М, качавшимся
в пустоте. Равным образом Берже (Berget, Comptes rendus, т. CXXXI,
1900) сделал наглядным вращение Земли при помощи маятника длиной 1 м.
Простой и практичный прибор, принадлежащий Каннуэлю (Kannwel), был
представлен в Академию д'Арсонвалем (d'Arsonval) на заседании 17 ноября
1902 г.
Возмущающие влияния вращения земного шара на движущиеся на его
поверхности тела тем заметнее, чем их скорость больше. Но на такие тела,
находящиеся в быстром движении, например, на ружейную пулю, действует,
вообще, множество других возмущающих причин, и наблюдение почти невоз-
можно. Однако гении Фуко преодолел и это затруднение. Он воспользо-
вался свойствами движения тяжелого тела, подвешенного в своем центре
тяжести и быстро вращающегося вокруг оси симметрии, и показал, что ось
такого тела должна сохранять постоянное направление, а потому, если она
направлена на звезду, то она должна следовать за этой звездой в ее суточ-
ном движении. Этот прибор Фуко получил название гироскопа. Другие при-
боры того же рода построили Сир (Sire) и Жильбер. Дальше мы приведем
теорию одного из этих приборов, называемого барогироскопом, как прило-
жение уравнений Лагранжа.
За большими подробностями мы отсылаем к прекрасной заметке Жиль-
бера «Механические признаки вращения Земли» (Les preuves mecaniques de
la rotation de la Terre, Oauthier-Villars, 1883; Extrait du Bulletin des Sciences
mathematiques, 1882).
Руководимый другой идеей, Пуансо предложил сделать наглядным вра-
щение Земли при помощи системы, подвергающейся внутренним изменениям
(Comptes rendus, 1851). Воспользовавшись этой идеей, Андрад изобрел при-
бор, увеличивающий отклонение падающего тела к востоку, чтобы это
отклонение можно было заметить в течение опыта. (Comptes rendus, 10 июня
и 14 октября 1895.)
424. Относительное равновесие на поверхности Земли- Мы
рассматриваем Землю как твердое тело, вращающееся с постоянной
угловой скоростью и вокруг линии полюсов РР', и пренебрегаем
тем влиянием, которое может иметь на равновесие или движение
отдельных точек, находящихся на Земле, движение самой Земли
вокруг Солнца. Если принять за единицу времени секунду звездного
1%
времени, то угловая скорость ш имеет значение ¦„ и выражается,
следовательно, весьма малым числом.
Пусть Р—северный полюс и ЕЕ'— плоскость экватора (рис. 255).
Для определенности будем искать положение относительного равно-
весия отвесной нити ОМ, подвешенной в некоторой точке О,
неизменно связанной с Землей. Положение равновесия ОМ, которое
займет нить, является, по определению, вертикалью, проходящей
через точку М. Угол X, который образует эта нить с плоскостью
экватора, есть широта точки М. Мы обозначим через р рас-
стояние MQ от точки до оси РР' Земли. Все эти элементы опре-
деляются из наблюдений.
250
ДИНАМИКА СИСТЕМЫ
Силами, действующими на точку М, являются притяжение А Земли
и натяжение Т нити. Эти две силы не уравновешиваются, так как
точка М не совершает абсолютного прямолинейного и равномерного
движения. Сила Т по абсолютной величине равна, а по направлению
противоположна той силе, которую мы называем силой тяжести
(весом) mg материальной точки. Угол а, который образует напра-
вление ОМ отвесной нити с силой притяжения А, есть то, что на-
зывают девиацией (отклонением) вертикали вследствие вращения
Земли. Если бы Земля не вращалась, то силы А и T = mg были бы
уравновешены. Тогда они были бы равны и противоположно направлены,
и угол а был бы равен нулю.
Для нахождения условий относительного равновесия мы можем
рассматривать Землю как неподвижную при условии добавления
к силам А и Т, действующим на
точку, центробежной силы Ф. Так как
движение Земли является равномер-
ным вращением вокруг РР', то сила Ф
равна тш2р и направлена по про-
должению QM радиуса параллели
точки М. Если мы допустим, что
вертикаль ОМ находится в пло-
скости РМР', то угол между Ф и ОМ
будет равен широте X точки М. Три
силы А, Т и Ф, находящиеся в равно-
весии, лежат в одной плоскости -—
в плоскости Т и Ф, известной
в каждой точке М Земли. Каждая из
этих сил равна и противоположна
равнодействующей двух других. Следовательно, сила тяжести, равная
и противоположная силе Т, является равнодействующей притяжения
и центробежной силы.
В плоскости трех сил А, Г и Ф сумма их проекций на два
каких-нибудь направления равна нулю. Будем проектировать их на
вертикаль MQ и на горизонталь. Тогда, обозначая через А абсолют-
ную величину силы А, получим два уравнения:
Л cos а—mg — тш2р cos X = 0, A)
Л sin а — отш2р sin X = 0, B)
определяющих A cos а и Л sin а и позволяющих поэтому вычислить А
и а в каждой точке Земли. Эти величины изменяются вместе с ши-
ротой.
На экваторе X, а поэтому и угол а равны нулю. Обозначая через
А>> ?>о> Ро соответствующие значения величин A, g, р, получим на
основании равенства A)
ГЛАВА XXII. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ 251
Вычислив из этого равенства Ло, мы найдем, что дробь, стоящая
в скобках, равна приблизительно У289 или */п2- Имеем, следовательно.
Отсюда видно, что если бы Земля вращалась в 17 раз быстрее,
то тела, находящиеся на экваторе, стали бы невесомыми.
На полюсе р = 0, Х=90°, угол а на основании равенства B)
по-прежнему равен нулю, a mg на основании равенства A) равно А.
Следовательно, все происходит так, как если бы Земля не враща-
лась. Это — очевидно, так как место наблюдения находится на оси
вращения.
Во всем предыдущем мы не делали никаких предположений
о форме Земли. Мы предположили только, что вертикаль РМ нахо-
дится в плоскости РМР'. Посмотрим, во что обратятся полученные
формулы, если принять следующие предположения, дающие лишь
первое приближение. Предположим, что Земля имеет форму шара,
и допустим, что сила притяжения А направлена к центру С и имеет
одинаковую величину А = А0 во всех точках Земли. Тогда, обо-
значая через р0 радиус Земли, имеем в треугольнике CMQ р =
— p0cos(X— а), и из формулы B) получаем:
sin а = та>.?0 cos (X — а) sin X = 7г5?г cos (X — а) sin X.
An /оУ
Разложим обе части этого равенства в ряды по возрастающим
степеням а, и так как угол а весьма мал, то пренебрежем членами,
содержащими а в квадрате и произведение -гщ-а- Тогда получим
следующую приближенную формулу:
1
Эта формула показывает, что отклонение вертикали будет макси-
мальным на широте 45°.
Возвращаясь к равенству A) и принимая при этом во внимание,
что p = p0cos(X — а), мы получим при тех же приближениях
mg=A0[cosa. — -^cosCX — a)cosXJ —Л0П — 2gg-cos2Xj.
426. Относительное движение на поверхности Земли. Пусть
О — точка, связанная с Землей в месте наблюдения. Примем за
ось z подвижного триэдра вертикаль рассматриваемого места, напра-
вленную вниз, за ось у — касательную к параллели, направленную
на восток, и за ось х — перпендикуляр к этим двум прямым, каса-
тельный к меридиану и направленный на север (рис. 256).
Движущаяся точка М подвержена действию двух реальных сил:
силы притяжения А Земли и равнодействующей F(X, Y, Z) других
252
ДИНАМИКА СИСТЕМЫ
действующих на нее сил. Чтобы найти относительное движение, пред-
положим, что Земля неподвижна, и приложим к точке М центро-
бежную силу Ф и кориолисову силу инерции Ф'. Равнодействую-
щая силы притяжения Земли и центробежной силы Ф равна весу mg
тела и направлена по вертикали (п. 424), следовательно, нам доста-
точно вычислить только кориолисову силу Ф'. Для этого найдем
составляющие р, q, r по движущимся
осям мгновенной угловой скорости вра-
щения ш. Непосредственно видно, что
вектор Ош, представляющий мгновен-
ную угловую скорость, параллелен
линии полюсов и должен быть направ-
лен к северу, так как Земля вращается
с запада на восток. Этот вектор Ош
имеет проекции
р — ш cos (шОх) = ш cos X,
г = —ш sin X.
Тогда проекции сложной центробежной силы, согласно общим
формулам п. 413, равны
и уравнения относительного движения будут
т
—Г75- = Х — 2яю) sin X -? ,
dt* at
2mu)cosX
dy_
dt
Разумеется, эти уравнения справедливы лишь до тех пор, пока
движущаяся точка остается достаточно близкой к точке О, чтобы
силу тяжести можно было рассматривать как силу, параллельную
оси' Ог и равную mg.
Если выполнить над этими уравнениями преобразования, приводящие
к теореме кинетической энергии, то члены с о> исчезнут и получится
= X dx -j- Y dy + Z dz -f- mg dz.
ГЛАВА XXII. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
253
Если сила (X, Y, Z) имеет силовую функцию U, то будет суще-
ствовать первый интеграл
426. Свободное падение тяжелой точки. Предположим, что падение
происходит в пустоте. Тогда X,Y,Z равны иутЪ и уравнения движения
имеют вид
A)
*-,-*.«!§.
Допустим, что движущаяся точка выходит из начала без относительной
начальной скорости. Правые части уравнений движения являются точными
производными; интегрируя один раз и принимая во внимание начальные усло-
вия, имеем:
dX- = —2<о у sin X,
dt
dv
—i- = 2ш (x sin X -|- г cos X),
—rr — gt — 2<oy cos X.
B)
Чтобы закончить интегрирование, можно во втором из уравнений A),
d°-y dx dz
определяющем —r^, заменить —j и — их значениями, после чего полу-
чится линейное уравнение второго порядка
—ф- -|- 4о>2у = 2о> cos X gt.
которое может быть проинтегрировано до конца.
Но так как о> очень мало, то получается вполне достаточное приближе-
ние, если разложить х, у, г в ряды по возрастающим степеням о> и ограни-
читься лишь членами первого порядка.
Попробуем удовлетворить уравнениям B) рядами
У = Уо + '
Z = Zn —г~ '
:::: 1
C)
в которых х0, у0, zQ, хь ylt zt и т. д. суть функции аргумента t, равные
вместе с их первыми производными нулю при t = 0. Подставляя эти разло-
жения в уравнения B) и приравнивая коэффициенты при одних и тех же
степенях а, мы получим сначала
dx0
dt
= 0,
dt
= 0,
dt
254 ДИНАМИКА СИСТЕМЫ
Отсюда, интегрируя, получим
После этого находим
хх — 0, У1 = J^- cos X, гг = О
и т. д. Таким образом, если пренебречь в разложениях C) членами с
то для приближенных значений х, у, г получится
г = ¦
Следовательно, точка остается в плоскости уг, но вместо того, чтобы
падать по вертикали, как это было бы, если бы Земля не вращалась, она
слегка отклоняется к востоку, так как у положительно. В плоскости уг
точка описывает полукубическую параболу
W2 cosX.
Это уравнение позволяет вычислить отклонение к востоку при заданной
высоте падения г.
Чтобы получить скорость движущейся точки, достаточно применить
теорему кинетической энергии, из которой для скорости непосредственно
получается значение \~2gz-
Чтобы довести приближение до членов с о>а, нужно, как показал де Спарр,
принять во внимание изменение g (de S р а г г е, Bulletin de la Societe raathe-
matique de France, т. XXXIII). Но тогда, согласно Рудцкому (Rudzki, там же,
т. XXXIV), надо ввести притяжение Луны.
427. Маятник Фуко. Перейдем к изучению движения сферического
маятника длины /, принимая во внимание вращательное движение Земли.
Сохраним те же оси, что и в предыдущей задаче, взяв начало в точке подвеса
маятника. По сравнению с предыдущей задачей к силам, действующим на дви-
жущуюся точку, надо добавить только натяжение нити, которое мы обозначим
х у z
через mN. Так как проекции этой силы равны —mN—г , —mN 4- , —mN у ,
то уравнения относительного движения будут:
d'*x
dfi
d4-y
df-
tPz
M
\r
&
X
I
У
I
N-
+
z
1
- 2«> sin X -
2Ш(з.пХ
— 2a> COS
dy
dt '
dx
cos X dZ
C0S Л dt
)¦
A!
Интегрирование этих уравнений сложное. Можно пытаться это сделать
при помощи последовательных приближений, оперируя так же, как и в пре-
дыдущей задаче. Опуская общий случай, займемся тем частным случаем,
когда колебания имеют очень малую амплитуду. Приближение будет заклю-
ГЛАВА XXII. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ 255
X У
чаться в том, что мы будем рассматривать, с одной стороны, -у", — и их про-
изводные, а с другой, — (л как малые величины первого порядка и будем пре-
небрегать их квадратами и произведениями по сравнению с конечными ве-
личинами. При таком порядке приближения постоянно будет z = /. В самом
деле, так как уравнение сферы, по которой движется точка, имеет вид
z — I 1 —
X2 V2
то, пренебрегая величинами — и ~^-, получим z == I.
Тогда из третьего уравнения движения имеем N' — g. Подставляя это
значение и значение г = / в два первых уравнения, приведем их к виду
B)
dt
Эти два уравнения определяют движение маятника, которое приближенно
происходит в плоскости, касательной к сфере в ее самой низкой точке, как
это вытекает из равенства z = /.
Уравнения B) являются линейными с постоянными коэффициентами и их
можно точно проинтегрировать при помощи квадратур. Мы применим, однако,
другой метод. Из равенств B) составим равенство, соответствующее теореме
кинетической энергии
^ _ ё
и проинтегрируем его, обозначив через гиб полярные координаты проекции
маятника на плоскость ху. Имеем
Составим теперь равенство, аналогичное теореме моментов, умножив
уравнения B) соответственно на —у и х и сложив их. Получим интегри-
руемое уравнение
d I dy dx \ „ , , / dx .
которое, если положить ш sin X = о>', и перейти к полярным координатам,
приводится к виду
r2lF = O)V2 + C D)
Частный случай. Исследуем сначала частный случай: маятник в началь-
ный момент находится в равновесии и ему сообщают небольшой толчок,
после чего он начинает колебаться. Тогда в начальный момент г = 0 и урав-
нение D) показывает, что постоянная С должна быть тоже равна нулю. Это
уравнение принимает вид
256
ДИНАМИКА СИСТЕМЫ
Следовательно, будет казаться, что маятник колеблется в плоскости,
которая равномерно поворачивается вокруг вертикали Ог с угловой скоро-
стью «в' в положительном направлении. Эта плоскость сделает полный обо-
У\
2л
24е
рот за время —у или ——г- (звезд-
ш sin к
ное время). В Париже время полного
оборота плоскости равно 32 .
Общий случай. Вернемся теперь
к общему случаю малых колебаний.
Уравнение D) напишется так:
Рис. 257.
Если обозначить через ер угол
О — a't, то получится уравнение
г2 -гт = С, E)
аналогичное уравнению площадей.
Величины г и if являются относительными полярными координатами гори-
зонтальной проекции точки М по отношению к системе осей Ох\у-±,
вращающихся вокруг вертикали Ог в положительном направлении с постоян-
ной угловой скоростью «>', ибо если угол х'Ох принять равным m't, то
угол x-iOM будет равен 6 — <a't или ер (рис. 257).
В новых переменных уравнение C) принимает вид
' 1 8
h.
Заменяя в последнем слагаемом левой части величину г2 ~- значением
С и пренебрегая членом четвертого порядка <o'2rs по сравнению с членом
второго порядка, получим
dt
I
F)
где h' — новая постоянная.
Уравнения E) и F) тождественно совпадают с уравнениями площадей
и кинетической энергии в задаче о движении точки, притягиваемой неподвиж-
ным центром О пропорционально расстоянию. Следовательно, движение
точки М относительно осей xl0yl тождественно с абсолютным движением
точки М, притягиваемой неподвижной точкой О пропорционально расстоянию.
На основании установленного в п. 223 точка М описывает относительно
осей х^Оух эллипс с центром в точке О, причем период обращения точки
по эллипсу равен Тх = i
Так как оси хх0у± вращаются в горизонтальной плоскости, то мы видим,
что точка М описывает маленький горизонтальный эллипс с центром
в точке О, который вращается в отрицательном направлении вокруг своего
центра с угловой скоростью ч>', совершая полный оборот за время Т = —т ,
равное для Парижа 32h.
Опыт Фуко (Foucault). В знаменитом опыте, произведенном в Пантеоне,
маятник был отклонен от своего начального положения и привязан к стене
при помощи нити. Таким образом, маятник был неподвижен по отношению
ГЛАВА XXII. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ 257
к Земле. После этого нить пережгли и маятник пришел в движение. При
этих условиях начальная скорость маятника относительно осей Охуг, свя-
Q dr dd
занных с Землей, равна нулю и начальные значения -—г и — тоже равны
нулю. Начальное значение г, которое мы обозначим через а, будет полу-
осью эллипса, так как это начальное значение будет максимумом или мини-
мумом, поскольку начальное значение —тт равно нулю. Соотношение D),
если положить в нем г — а и — = 0, приводится к виду С= — а^ш'. На-
чальное значение -—¦ отрицательно и равно — о/. Следовательно, в опыте
Фуко маятник описывает эллипс в отрицательном направлении вращений
вокруг оси Ог, в то время как сам эллипс вращается вокруг той же оси
в положительном направлении. Таким образом, /явление будет совершенно
отличным от того, которое имело бы место для сферического маятника,
если пренебречь влиянием вращения Земли. В этом последнем случае, как
показывают более точные подсчеты, конец маятника движется так, как будто
он описывает маленький эллипс, который вращается в ту же сторону,
в которую его описывает маятник.
Теорема Шевиллье (Chevilliet). В предыдущих уравнениях С обозначает
постоянную площадей для движения точки, описывающей относительно-
осей XiOy маленький эллипс. Пусть а и b — полуоси этого эллипса, а Г] —
период обращения точки по эллипсу. С имеет значение —=—. С другой
стороны, мы нашлн, что С = — а'со'. Приравнивая эти два выражения, по-
лучим
b 7\'
где Т, как и выше, обозначает период обращения эллипса вокруг своего
центра.
Таким образом, оси движущегося эллипса относятся между собой
как период полного колебания к периоду обращения эллипса. При опыте
в Пантеоне было / = 67 м, а = 3 м, 7^ = 16 сек, Т = 32 часа, — =^Я7-
а 7200
Следовательно, эллипс был очень сильно вытянутым.
Для более глубокого изучения маятника Фуко мы отсылаем к работай
де Спарра (Savants etrangers, 1891; Annales de la Societe Scientifique de Bru-
xelles, 14е annee, 1890—1891) и к работе Эмиля Коттона (Ё m i I e Cotton,
Annales de la Faculte des Sciences de Grenoble, т. XXI, n° 1, 1909).
428. Гироскоп. Гироскоп Фуко представляет собой тяжелое тело вра-
щения, центр тяжести которого закреплен неподвижно и которое может как
угодно поворачиваться вокруг этого центра.
Изучение движения гироскопа Фуко явилось предметом многих научных
работ, полный анализ которых дан в интересной заметке Жильбера «Исто-
рическое и ,критическое исследование задачи о вращении твердого тела»
(Gilbert, Etude historique et critique du probleme de la rotation d'un corps
solide, Annales de la Societe scientifique de Bruxelles, 2e annee, 1878). Как за-
мечает Жильбер, авторы этих работ исходят из двух различных точек зре-
ния для трактовки задачи. Одни, среди которых Бур (В о u r, Journal de
Liouvilie, 1863) и Лоттнер (Lottner), предполагают, что притяжение Земли
постоянно во всем пространстве, занимаемом телом; другие, среди которых
Кэ (Quet, там же, 1853), Резаль и позднее Жильбер, предполагают, что по-
стоянным является кажущийся вес, т. е. равнодействующая притяжения
Земли и центробежной силы. Если заботиться лишь о том, чтобы доказать
17 Зак. 922. П. Аппель, т. II
258
ДИНАМИКА СИСТЕМЫ
вращение Земли путем согласования результатов теории и опыта, то оба
предположения одинаково приемлемы, так как уравнения, к которым они
приводят, отличаются лишь членами, зависящими от квадрата угловой ско-
рости суточного вращения, а этими членами можно, конечно, пренебречь.
Но первое предположение представляет, по крайней мере, ту выгоду, что
оно приводит к более простому решению, потому что Бур получил его при
помощи круговых функций, в то время как второе предположение приводит
к эллиптическим функциям.
Предположение, что притяжение Земли постоянно, представляет еще и
другую выгоду, не менее ценную для задач такого рода. Оно приводит к
строгому решению при помощи элементарных рассуждений всего лишь
в несколько строк, которые мы заимствуем, так же как и предыдущие
замечания, из заметки Гюйу (Ouyou, Comp-
tes rendus, 16 апреля 1888).
Рассмотрим однородное тяжелое тело
вращения, центр тяжести G которого за-
креплен неподвижно относительно Земли.
Силами, действующими на тело, являются
притяжение Земли и реакция Q точки
подвеса G Размеры прибора настолько
малы, что силы притяжения Землею от-
дельных частиц тела можно считать па-
раллельными и пропорциональными их
массам. Эти силы имеют равнодействую-
щую А, приложенную в центре тяжести G.
Последний не будет абсолютно неподвиж-
ным, так как центр тяжести участвует
в движении Земли. Обозначим через j уско-
рение, каким обладает в каждый момент
эта точка G. Исследуем движение тела
относительно осей Gx'y'z' с абсолютно
неизменными направлениями и с началом
в точке G. Мы можем рассматривать эти
оси как неподвижные при условии при-
соединения к реально действующим на различные точки системы силам только
переносных сил инерции. Эти последние, равные — mj, параллельны между
собой и пропорциональны массам. Они имеют равнодействующую Ф, прило-
женную в центре тяжести G. Движение тела относительно осей Gx'y'z'
будет совпадать с движением тела вращения, закрепленного в абсолютно
неподвижной точке G своей оси и находящегося под действием сил, имеющих
равнодействующую, проходящую через неподвижную точку. Но это дви-
жение было подробно изучено. Ось Go плоскости максимума площадей не-
изменна, т. е. направлена все время на одну и ту же звезду, а ось вращения
ротора гироскопа описывает равномерным движением круговой конус вокруг
этого направления. Наконец, движение относительно Земли есть результат
наложения суточного вращения на это простое движение.
Если, например, начальные условия таковы, что ротор начинает вра-
щаться вокруг своей оси вращения (главной оси инерции для точки G), то
это вращательное движение будет продолжаться сколь угодно долго и ось
будет сохранять абсолютно неподвижное направление в пространстве.
Следовательно, в этом случае ось ротора будет оставаться направленной
на одну и ту же звезду и для наблюдателя, находящегося на Земле,
она будет следовать за звездой в ее суточном движении. Этот способ рас-
суждений приводит к тем же результатам, что и анализ Бура (Journal
de Liouville, 1863).
Если вместо тела вращения рассматривать произвольное тело, закреп-
ленное в своем центре тяжести, то движение тела относительно осей Gx'y'z'
Рис. 258.
ГЛАВА XXII. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ 259
с неподвижными направлениями будет движением Пуансо и движение тела
относительно Земли получится путем сочетания движения Пуансо и суточног»
вращения. Такой результат получил бы Бур, если бы он довел до конца
анализ, который он для этого общего случая лишь указал (Ouyou, loc. cit).
Прием, который применил Фуко, чтобы сделать центр тяжести ротора
неподвижным, заключается в следующем. Берутся два кольца. Первое кольцо
имеет неподвижную вертикальную ось СС (рис. 258), второе кольцо может
вращаться вокруг оси ВВ', совпадающей с диаметром первого кольца, пер-
пендикулярным к СС; наконец, сам тор может вращаться вокруг оси AGA',
совпадающей с диаметром второго кольца, перпендикулярным к ВВ'.
УПРАЖНЕНИЯ
1. Найти относительное движение тяжелой точки по горизонтальной
плоскости, принимая во внимание вращение Земли.
Ответ. Взяв оси, как в п. 425, увидим, что точка останется в плоско-
сти ху, причем г = 0. Единственной приложенной силой кроме притяжения
будет нормальная реакция N плоскости. Тогда уравнения движения будут;
-^- = -2cosinX-g-, -g- = 2o>sinX^-, 0 =s mg-N-2m «, cosl-^.
Из последнего уравнения получаем реакцию, которая немного отличается1
от веса тела вследствие того, что имеется член с и. Два первых уравнения
определяют движение в плоскости ху. Применяя теорему кинетической энер-
гии, найдем, что относительная скорость v точки постоянна и равна v0. Обо-
значая через а угол между скоростью и осью Ох, имеем —гг = vn cos а, —?- =
dt dt
= i/osina. После подстановки этих выражений в уравнения движения полу-
чим — = 2и sin А. Так как —— = v0, где s — дуга траектории, то
ds v0
da 2м sin A
Следовательно, радиус кривизны р постоянен и траектория будет дугой
окружности очень большого радиуса.
2. Исследовать непосредственно при помощи теории относительного
движения следующие задачи, рассмотренные в первом томе и решенные
методом Лагранжа: п. 260; п. 261, задачи 22 и 23; п. 264, задача 2.
3. Найти относительное движение тяжелой точки, скользящей по пря-
мой, равномерно вращающейся вокруг вертикальной оси Ог, с которой она
не пересекается.
Пусть ОС — общий перпендикуляр к оси Ог и к прямой, СМ — г — рас-
стояние от движущейся точки до точки Сна — угол между прямой и осью.
Уравнение движения будет
d">r
-— aflr Sin2 a = —g COS a.
Это — линейное уравнение с постоянными коэффициентами и с постоянной
правой частью.
Точка движется так, как если бы прямая была неподвижна и точка отталки-
валась от положения относительного равновесия пропорционально расстоянию.
4. Если на всем протяжении траектории тяжелой точки в пустоте на
поверхности Земли рассматривать притяжение как постоянное по величине
и направлению, то будет казаться, что точка описывает относительно Земли
параболу, которая равномерно поворачивается вокруг некоторой оси. [Бур
(формулы, данные Резалем в Nouvelles Annales, 1872, приводят в точности
к этому результату).]
17*
260 ДИНАМИКА СИСТЕМЫ
5. Найти движение тяжелой точки, падающей в пустоте, рассматривая
Землю как однородный сжатый эллипсоид вращений. (De Sain t-Q е г га a i n.
Nouvelles Annales, 3е serie, т. II, 1883.)
6. Однородный тяжелый тор V вращается вокруг горизонтального эквато-
риального диаметра ЮЧ'; этот диаметр совершает равномерное вращение
с угловой скоростью ш вокруг вертикали, проведенной из центра О. В точке М
экваториального диаметра, перпендикулярного к 50?', помещен дополнительный
груз т. Найти движение тора вокруг диаметра ЮХ' *). (Кандидатский
экзамен, 1874.)
Пусть ОМ = d, А и С—моменты инерции тора относительно эквато-
риального диаметра и относительно оси вращения. Движение будет опреде-
ляться углом 6 между ОМ и направленной вниз вертикалью.
Уравнение движения будет
{А + тсГ*) 6" — <о2 (С — А + md*) sin 8 cos 6 = — mg d sin 6.
7. Дана поверхность 5, уравнение которой относительно трех взаимно-
перпендикулярных осей Ох, Оу, Ог имеет вид
где е — основание натуральных логарифмов. Материальная точка М, масса
которой принята за единицу, движется по поверхности 5 и находится под.
действием заданных внешних сил. Поверхность 5 вращается с постоянной
угловой скоростью со вокруг прямой ОА, имеющей относительно осей Охуг
уравнения
х = у = г.
1°. Составить дифференциальные уравнения относительного движения
точки М по подвижной поверхности S.
2°. Вычислить реакцию этой поверхности.
3°. Исследовать относительное движение, предположив, что точка М
лритягивается к точке О с силой F, пропорциональной расстоянию МО, и к пло-
скости Р, проведенной через точку О перпендикулярно к прямой ОА,
с силой Fi, пропорциональной расстоянию Mm от точки М до плоскости Р.
Силы F и Fi на расстоянии, равном единице, имеют соответственно зна-
чения со2 И Зш2.
В начальный момент точка М имеет координаты х = у = 0, г = 1. Кроме
того, также в начальный момент
dx __ 2со dy 2со
~dJ ~ ~~ уз" ' ~~dt~ у"з '
(Кандидатский экзамен.)
8. Окружность радиуса R вращается с постоянной угловой скоростью со
вокруг одного из своих диаметров Ох, который предполагается вертикальным.
Найти движение однородного тяжелого стержня АВ, концы которого скользят
без трения по окружности.
Пусть С — середина стержня, ОС = а и 8—угол между ОС и напра-
вленный вниз вертикалью Ох, М№ — момент инерции стержня относительно
точки С. Применяем теорему кинетической энергии к относительному дви-
жению
М (*а + л2) (~J = IMga cos 8 + со2 ^ тгг + h.
*) Gilbert, Memoire sur l'application de la methode de Lagrange a divers
problems de mouvement relatif, стр. 276.
ГЛАВА XXII. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ 261
где г обозначает расстояние от точки т стержня до диаметра Ох. Легко
найти, что
2 mr2 = Ma*- sitJ 6 + MW- cos? 6.
После подстановки получится уравнение движения. При помощи эллипти-
ческой функции можно выразить cos 6 в функции t.
Если а2 = №, то движение будет такое же, как движение маятника.
Положения относительного равновесия получатся, если —— приравнять
нулю (Лиценциатская).
9. Устойчивость относительного равновесия точки. Важно заметить,
что если кориолисова сила инерции не входит в искомое уравнение отно-
сительного равновесия, то она появляется, как только точка начинает дви-
гаться, и должна быть принята во внимание при исследовании устойчивости.
Но в одном часто встречающемся частном случае вопрос об устойчивости
можно исследовать не вводя кориолисову силу в уравнение. Допустим, что
приложенная к точке т. заданная сила F и переносная сила инерции — mje
обе вместе имеют силовую функцию, так что
v i i \ dU
Л — т (Je)x = -5—, ...,
где U — функция от х, у, г. При этих условиях, если искать возможные
положения точки, обращающие функцию U в максимум или минимум,
можно найти положения относительного равновесия точки т. как в случае,
когда она свободна, так и в случае, когда она движется по кривой или по
поверхности, неизменно связанной с осями Oxyz. Если в некотором положе-
нии функция U имеет максимум, то это будет положением устойчивого
равновесия. Действительно, если, отклонив точку от ее положения равновесия
и сообщив ей малую относительную .скорость, привести ее в движение, то
нужно будет присоединить к другим силам кориолисову силу инерции. Но
так как работа этой силы равна нулю, то будет иметь место интеграл
энергии
К нему можно приложить все рассуждения, сделанные при исследовании
устойчивости абсолютного равновесия (пп. 208, 245, 267), так как эти рас-
суждения основаны только на существовании интеграла энергии. Так, в при-
мере п. 415 (относительное равновесие тяжелой точки на плоской кривой,
вращающейся вокруг вертикали своей плоскости) существует силовая функция
U = — mgz -\- -f- m<o2p2.
Тогда при помощи этого метода можно убедиться, что для вращающегося
е
круга положение равновесия, определяемое равенством cos а = —?—, если
только оно существует, является устойчивым.
Те же замечания справедливы и для относительного равновесия системы.
ГЛАВА XXIII
ПРИНЦИП ДАЛАМБЕРА
I. Общее уравнение динамики
429. Формулировка принципа. Мы уже сформулировали прин-
цип Даламбера для материальной точки (п. 288). Если рассматри-
вать, с одной стороны, вектор, представляющий собой силы, при-
ложенные к точке массы т, а с другой стороны, приложенный
к точке вектор /, равный и противоположный произведению ускоре-
ния на массу, то уравнения движения можно интерпретировать сле-
дующим образом: в каждый момент времени существует равновесие
между действующими силами и вектором /, называемым силой инер-
ции. Проекции этого вектора / на оси координат равны
_m__, -тж, -rn-^г.
где х, у, г обозначают координаты точки т.
Пусть теперь дана система и движущихся точек с массами
mv т2 тп. Можно сказать, что в каждый момент времени
существует равновесие между всеми силами, действующими на эти
точки, и силами инерции /„, /2, ..., 1п этих точек.
При помощи этого принципа можно свести составление уравне-
ний какой-нибудь задачи динамики к составлению уравнений неко-
торой вспомогательной задачи статики.
Первое приложение. Теоремы проекций количеств дви-
жения и моментов количеств движения (кинетических моментов).
Мы видели (п. 94), что для того, чтобы произвольная система была
в равновесии, необходимо, чтобы суммы проекций всех внешних сил
на каждую из трех осей были равны нулю и чтобы суммы моментов
тех же сил относительно каждой из этих осей тоже равнялись
нулю. Отсюда на основании принципа Даламбера непосредственно
вытекает, что при движении системы суммы проекций всех внешних
сил и сил инерции на каждую из трех осей равны нулю
ГЛАВА XXIII. ПРИНЦИП ДАЛАМБЕРА 263
и что суммы моментов сил инерции и внешних сил относительно
каждой из этих осей также равны нулю
Полученные таким образом шесть уравнений выражают теоремы
проекций количеств движений и моментов количеств движения
(пп. 326 и 328).
430. Случай системы со связями. Пусть дана система мате-
риальных точек, находящихся под действием заданных сил и подчи-
ненных некоторым заданным связям, которые могут изменяться со
временем по заданному закону. Каждая точка системы может быть
рассмотрена как свободная, находящаяся под действием заданных
сил и реакций связей. Согласно принципу Даламбера в каждый
момент времени существует равновесие между заданными
силами, реакциями связей и силами инерции. Иногда это утвер-
ждение формулируют следующим образом:
В каждый момент времени, в силу существующих в данный
момент связей, имеется равновесие между заданными силами и
силами инерции.
Пример. Движение твердого тела вокруг неподвижной оси.
Вспомним, что для того, чтобы твердое тело, движущееся вокруг
неподвижной оси Oz, было в равновесии, необходимо и достаточно,
чтобы сумма моментов сил относительно оси равнялась нулю. На осно-
вании этого для того, чтобы написать уравнение движения тела
вокруг оси Oz, нужно написать, что заданные силы и силы инерции
находятся в равновесии в силу имеющейся связи, т. е. что сумма
моментов этих сил относительно оси Oz равна нулю
Это, как легко проверить, представляет собою уравнение, выве-
денное в п. 359.
431. Общее уравнение динамики для системы со связями без
трения. Пусть дана система п точек с массами т1, т2 тп
и координатами хи yv zu x2, y2, z2 ¦ ¦ ¦, подчиненная заданным свя-
зям, осуществляющимся без трения. Эти связи могут, однако, зави-
сеть от времени. На точки действуют заданные силы, и мы обозна-
чим через (X^YVZ^) проекции равнодействующей /•"„ заданных сил,
приложенных в точке от„.
По принципу Даламбер-а в каждый момент времени имеет место
равновесие между заданными силами /•"„, силами инерции и реакциями
связей. Следовательно, если системе сообщить произвольное воз-
можное перемещение, то сумма работ заданных сил, сил инерции и
реакций связей будет равна нулю. Но если возможное перемещение
будет допускаться связями, имеющими место в момент t, то
264
ДИНАМИКА СИСТЕМЫ
сумма работ реакций связей будет сама по себе равна нулю (п. 162). Сле-
довательно, сумма работ сил инерции и заданных сил равна нулю.
Обозначим через Sxv, §_yv, §2V составляющие возможного пере-
мещения точки »zv, допускаемого связями, имеющими, место
в момент t. Так как проекции силы инерции /„ точки mv равны
— т„
то имеем уравнение
dfi '
-т„
dfi
dfi
которое будет иметь место для всех возможных перемещений,
допускаемых связями, существующими в момент t. Это уравнение
является общим уравнепием динамики системы для связей без трения.
Его можно написать в виде
•-\-ьмч = о.
где М.,— радиус-вектор, a 8AIV—возможное перемещение точки Ж,,
обладающей массой mv. Урав-
нение A) отличается от обще-
го уравнения статики (п. 170)
2v)=0
только имеющимися в нем
силами инерции.
Мы начнем с двух прило-
*5 жений этого метода к простым
задачам.
432. Задача I. Даны две
прямые АО и ВО (рис. 259),
лежащие в вертикальной пло-
скости и образующие с гори-
зонталью углы а и {3. По этим
прямым скользят без трения
тяжелые материальные точки ть т.ь т3, т±, связанные между собой
гибкой нерастяжимой и невесомой нитью, проходящей в точке О через
бесконечно малый блок. Нужно найти движение системы.
Сила инерции точки тг есть вектор, направленный по О А. Этот вектор,
если считать его положительным от О к Л, имеет значение
d?x
Рис. 259.
где через х обозначено расстояние Omt. Так как при движении все точки
совершают одинаковые перемещения, то силы инерции точек /и2, т3, т.±
будут векторами, величины которых соответственно равны
d2x d2x d2x
-т2-^, -т3-^-, _m4__.
ГЛАВА XXIII. ПРИНЦИП Д\ЛАМБЕРА 265
Из них первый направлен по ОА, а два других по ВО. При этом положи-
тельным направлением по ВО принято направление от В к О и, следова-
тельно, по обеим сторонам положительным будет направление BOA.
Нужно написать, что система находится в равновесии под действием
этих сил инерции и весов tn^g, m2g, mzg, tn^g точек mt, m2, тя, /п4. Един-
ственным допускаемым возможным перемещением является "действительное
перемещение, т. е. перемещение Ьх системы. Возможная работа сил инерции
на этом перемещении, очевидно, равна
сР-х „ (fix . сР-х , сРх „
— mi ~Wох ~ Ота ~Ш ~ щ ~Ж ~~ mi ~Wох'
Что касается работы сил тяжести, то она будет равна
mLg Ьх sin a -\- m2g Ьх sin а —• m3g Ьх sin р — m±g Ьх sin p.
Написав, что сумма этих работ равна нулю, мы получим уравнение
движения
d2x
ти4) -^- = ^ + т%) g sin a — (m3 + «*) S sin p.
Отсюда видим, что есть величина постоянная и, следовательно, дви-
жение будет равноускоренным, за исключением случая, когда величина
(т1 -f- т2) g sin a — (тъ -4- m4) g sin p
равна нулю, что является условием равновесия. В этом случае движение
будет равномерным. Когда одна из точек пройдет через 0, то уравнение
должно быть изменено.
Задача II. Движение однородной тяжелой цепочки по неподвижной
кривой. Мы видели в статике (п. 169, пример 7), что условием равновесия
цепочки является равенство нулю суммы касательных составляющих всех
сил. Отсюда следует, что мы получим уравнение движения, если приравняем
нулю сумму касательных составляющих сил инерции и сил тяжести.
Пусть Ог — направленная вверх вертикаль и г = ф (s) — соотношение
между ординатой и дугой. Косинус угла между положительным направле-
нием касательной и вертикалью равен ф' (s). Сохраняя обозначения, кото-
рыми мы уже пользовались в этой задаче (п. 344), мы получим для каса-
тельной составляющей веса элемента 8Х значение
(mg)t = — 9g? (a + *•) &)-
Складывая эти составляющие, получим:
+1
-г
Так как касательная составляющая ускорения равна , то касатель-
ная составляющая Ф4 силы инерции того же самого элемента Ьк есть —т'77Г
или
266
ДИНАМИКА СИСТЕМЫ
d3a VI
Сумма этих составляющих равна -^ V т или
Написав, что сумма всех составляющих (mg)f и
найдем составленное ранее уравнение
равна нулю, мы вновь
¦01-
433. Приведение уравнений движения к наименьшему числу.
В каждой данной системе для получения наиболее общего возмож-
ного перемещения, допускаемого существующим в момент t свя-
зями, необходимо и достаточно сообщить k параметрами qlt q2 дк
произвольные вариации 8^, Ьд2, .. ., bqk. Тогда говорят, как мы
это уже делали в статике (п. 171), что рассматриваемая система
обладает k степенями свободы. В таком случае мы можем
получить уравнения движения, следуя по тому же пути, что и в ста-
тике (п. 171). Так как наиболее общее возможное перемещение
системы в момент t определяется произвольными вариациями
bqx, bq2 bqh, то вариации bxv byv bzt, ox2, 8_y2, 8i2, . .. коор-
динат различных точек системы являются определенными, если
выбраны bqx, bq2 bqk. Следовательно, для вариаций координат
имеем выражения вида
j = ап bql
82, = c
+ bllc lqh,
c12
clJc
8xs = avl bqi + av2 oq2
bi = *vi S?i 4- *v2 3<72
8zv — cvl 8^ + cv2 bq,
... -f avft bqk,
B)
., i
в которых нужно полагать
v=l. 2 ft.
Если внести эти значения в общее уравнение A) динамики:
то получится уравнение вида
(Qi — -Pi)8?: + (Яг —
+ • • • 4- (Q* — Я*) 8% = 0, C)
ГЛАВА ХХШ. ПРИНЦИП ДАЛАМБЕРА 267
где величины Qt и Рг имеют вид:
D)
dfi vl ' d& vl ' dV
причем 1 о и
г I = 1, Z, . . . , «.
Так как уравнение C) должно удовлетворяться, каковы бы ни
были возможные перемещения, допускаемые связями в момент t,
то оно должно удовлетворяться при любых вариациях S^, bq2, . . ., bqk.
Следовательно, мы должны иметь
Таким образом, мы получили уравнения движения системы. Число
этих уравнений в точности равно числу к степеней свободы системы.
Именно таким образом в п. 288 мы последовательно получили урав-
нения движения свободной точки, точки, скользящей по заданной
неподвижной или движущейся поверхности, и точки, скользящей по
заданной неподвижной или движущейся кривой.
Мы вернемся к этим общим уравнениям в следующей главе.
Системы голономные и неголономные. С точки зрения аналити-
ческого выражения связей существующие системы делятся на две
категории: на системы голономные, в которых все связи могут быть
выражены уравнениями с конечными членами, и на системы неголо-
номные, такие, как, например, обруч, велосипед, в которых неко-
торые из связей (условие качения колес по неподвижной поверхности)
выражаются дифференциальными соотношениями.
Мы подробно изучили случай обруча (статика, пп. 171 и 172
и динамика, п. 411).
Уравнения, которые мы сейчас установили, справедливы во всех
случаях.
434. Голономные системы; координаты голономной системы.
Согласно определению, данному немецким физиком Герцем (п. 172),
система называется голономной, когда наложенные на нее ¦ связи
могут быть выражены соотношениями в конечной форме между коор-
динатами точек системы и временем. Пусть хх, yv zx, x2, у2,
22, .... хп, уп, zn — координаты точек системы. Чтобы система
была голономной, необходимо и достаточно, чтобы все связи могли
быть выражены системой независимых уравнений вида
/г(*1. Ук г., х2, у2, г2 хп, y,t, гп, t) =
i> У и zv x2, y2, z2 xn. yn, zn,
F)
268 ДИНАМИКА СИСТЕМЫ
Эти уравнения называются уравнениями связей голономнои си-
стемы. Если ни одно из этих уравнений не содержит времени t,
то связи называются не зависящими от времени. Если некоторые
уравнения связей содержат t, то связи зависят от времени.
Мы получим пример связей, зависящих от времени, если пред-
ставить себе, что некоторые из точек системы скользят по кривым
или поверхностям, совершающим наперед заданные движения, т. е.
по кривым или поверхностям, уравнения которых содержат время.
Число h уравнений связей должно быть обязательно меньше
числа Ъп координат. В самом деле, если h будет равно Ъп, то дви-
жение системы будет предопределено уравнениями связей, так как
эти уравнения определят Зга координат в функции времени. Можно,
следовательно, положить
к = Ъп— k,
где k — целое положительное число. Мы сейчас увидим, что система
обладает в этом случае k степенями свободы.
Координаты системы. В каждый момент времени t, для того
чтобы знать положение системы, достаточно знать численные значе-
ния k координат, выбранных подходящим образом из всех Ъп коор-
динат системы. В самом деле, значения Н = Ъп—-k остальных коор-
динат можно тогда определить из h уравнений связей F).
Вообще, чтобы знать положение системы в какой-нибудь момент t,
достаточно знать численные значения k параметров qv q2, ¦¦¦, qk,'
связанных с координатами системы k заданными соотношениями:
/й+iOi. Л- ги х2, у2, z2 хп, уп, zn, t) = qv \
/ft+aOi' У\> 2i> *2> Уг< Ч • хп, уп, гп, f) = qz, \
!
fn+k(xu Уи ги хг> Уг> гг хп. Уп- гп, t) =
В самом деле, если t дано и если величинам qit q2, . . ., qk дать
некоторые численные значения, то уравнения F) и G) образуют
систему Л-)-&=3/г уравнений, определяющих Ъп координат:
*i. Уи ги х2, у2, г2 хп, уп, гп.
Если решить эту систему, то для Ъп координат получатся выра-
жения вида
Чг- ¦¦¦' Яи> t).
q2 qk, t),
(8)
где v=l, 2, .... п. Из этих формул ясно видно, что в каждый
момент времени t численные значения параметров qlt q2, . .., дк
определяют положение системы. Параметры qv q2, . .., qk могут быть
названы координатами голономнои системы.
ГЛАВА XXIII. ПРИНЦИП Д\ЛАМБЕРА 269
Примеры. Положение твердого тела, имеющего неподвижную
точку, определено, если известны численные значения трех углов
Эйлера 9, ф, <р- Эти углы представляют собой координаты тела
Положение волчка на неподвижной горизонтальной плоскости
(п. 407) определено, если известны горизонтальные координаты е, tj
центра тяжести и три угла Эйлера 6, ф, <р, определяющие положе-
ние волчка относительно центра тяжести. Пять величин е, т), 9, <р, ф
являются координатами волчка (k =5).
Степени свободы системы. Чтобы получить«наиболее общее, сов-
местимое со связями в момент времени t, перемещение системы, доста-
точно задать соответствующее численное значение t и заменить коор-
динаты qlt <72, . .., qk бесконечно малыми произвольными величинами
bqv bq2 bqk. Тогда из формул (8) можно найти соответствующие
вариации координат, т. е. допускаемые связями возможные пере-
мещения:
5. дх., j, . дх^ s . , дх.. s,
82, = -3-— So, + -H- 8?o + ... + -p
где v=l, 2,..., /г. Так как 8^, 8^2 bqk произвольны, то
система обладает k степенями свободы Формулы (9) являются
частным случаем формул B), определяющих наиболее общее до-
пускаемое связями возможное перемещение. Они 1вляются частными,
так как в рассматриваемом случае правые части выражений 8xv,
8_уч, 8zv суть полные дифференциалы функций от qv q2 qk, что
в общем случае не имеет места.
Подставляя выражения 8xv, 8_yv, bzw в общее уравнение дина-
мики A) и приравнивая нулю коэффициенты при 817,, 8<72- •¦•¦ ^Як-
мы получим, как это уже было показано в п. 433, k уравнений
движения системы.
В следующей главе мы покажем, как эти уравнения можно при-
вести к виду, более удобному для приложений.
435. Метод множителей Лагранжа для голономной системы.
Пусть дана голономная система, подчиненная связям, выраженным
равенствами F) предыдущего пункта.
Чтобы определить возможное перемещение, допускаемое наложен-
ными связями в момент t, необходимо дать времени t фиксированное
численное значение и сообщить координатам такие вариации Sjq, Ьуи
bzv ..., Ьхп, Ьуп, Ьгп, чтобы функции /,, /2, ..., Д от приращенных
координат были равны нулю, т. е. такие, чтобы нулю были равны
270
ДИНАМИКА СИСТЕМЫ
полные вариации функций fv /2, .... fh. Таким образом, получаются
следующие уравнения, которым при возможном перемещении системы
должны удовлетворять все 8xv, 8_yv
8zv:
дх.
A0)
M,
Нужно заметить, что когда связи зависят от времени, действи-
тельное перемещение системы не входит в число рассматриваемых
здесь возможных перемещений. Например, при движении точки М,
перемещающейся по некото-
рой кривой С (рис. 260),
которая в свою очередь
совершает заданное движе-
ние, единственным возмож-
ным перемещением, допу-
скаемым связями в момент t,
является перемещение ММ',
совершаемое по кривой С
в положении, которое эта
кривая занимает в момент t.
Но в момент t -f- dt кривая С перейдет в положение С и движущаяся
точка будет находиться в точке Мх этой кривой. Следовательно,
действительное перемещение ММ1 не будет в общем случае совпадать
с возможным перемещением. Вообще действительное перемещение
dxv dyu dzv . .., dxn, dyn, dzn системы удовлетворяет соотношениям:
dfo , , dff , . dfi , _. dfi ! dfi n
дхг i ' dyt -^1'dzl i i • • • i QZn г
(i=l, 2 h).
Рис. 260.
_
dt
Оно, следовательно, не заключено среди рассматриваемых воз-
можных перемещений, которые должны удовлетворять условиям A0),
dh
если только не все выражения -—- равны нулю, что имеет место,
когда связи не зависят от времени.
Как мы уже говорили, уравнения A0) показывают, что среди Зга
вариаций Sxv, 8jyv, 8zv только k вариаций будут независимыми,
а остальные h будут выражены линейно из уравнений A0) в функ-
ции этих k независимых вариаций. Мы могли бы подставить получен-
ные таким образом значения в общее уравнение динамики A), ко-
торое должно было бы после этого удовлетворяться при любых
значениях произвольных вариаций. Будет, однако, проще применить
метод множителей Лагранжа. Тогда при помощи вычислений, ана-
логичных тем, которые мы уже делали в случае равновесия (п. 177),
ГЛАВА XXIII. ПРИНЦИП ДАЛАМБЕРА
271
можно получить уравнения:
дх.
df-
если в уравнениях равновесия заменить величины
чинами:
Й1к
дх., '
д}\ dfh
11г;—г ••• +/-й'^7>
(П)
Kv, Zv вели-
-яг„
dfi
Мы получим, таким образом, по три уравнения для каждой точки
системы, а всего Ъп уравнений, которые совместно с h уравне-
ниями связей позволяют определить Ъп координат и h параметров \
в функции времени. Механическая интерпретация параметров X будет
такой же, как и в случае равновесия: реакция связи, наложенной на
точку массы /и„ и выраженной уравнением fx — 0, имеет проекции.
X
1
, dfx ¦, dfx
Этот метод практически удобен лишь в том случае, когда число-
точек системы незначительно. В противном случае надо постараться
привести решение задачи к интегрированию возможно меньшего числа
уравнений, выражая, как мы это делали, Зл координат в функции k
параметров qy, <у2, . . ., дк и времени t.
Мы ограничимся сейчас несколькими непосредственными приложе-
ниями принципа Даламбера.
II. Теоремы, выводимые из принципа Даламбера
436. Частный случай теоремы проекций количеств движения.
Мы можем написать общее уравнение динамики, вытекающее из
принципа Даламбера в виде
i d-z-* *
где в левой части суммирование распространяется на все точки си-
стемы, а в правой части только на те точки, к которым приложены
заданные силы.
Делая некоторые частные предположения о характере наложенных
связей, мы можем получить некоторые очень полезные результаты.
272 ДИНАМИКА СИСТЕМЫ
Допустим сначала, что связи позволяют системе совершать по-
ступательное движение, параллельное оси Ох. Для такого перемеще-
ния имеем:
8хх = ох2 = . . . = 8хп,
и уравнение A2) примет вид
что выражает следующую теорему:
Если связи допускают в каждый момент времени перемеще-
ние всей системы параллельно неподвижной оси, то производная
по времени от суммы проекций количеств движения на эту ось
равна сумме проекций заданных сил на ту же ось.
Эта теорема является частным случаем теоремы проекций коли-
честв движения. Производная по времени от суммы проекций коли-
честв движения на какую-нибудь ось всегда равна сумме проекций
внешних сил на ту же ось. Но в общем случае проекции внешних
сил содержат одновременно проекции заданных сил и реакций связей.
Рассматриваемая здесь теорема применима к такой категории задач,
в которых проекции внешних сил на ось не содержат реакций
связей.
Например, если рассматривается движение тяжелого стержня, концы
которого скользят по двум неподвижным поверхностям S и S', то общая
теорема применима к проекции движения на произвольную ось Ох. Но,
проектируя внешние силы, необходимо брать также реакции обеих поверх-
ностей S и S', и рассматриваемая сейчас теорема неприменима, если поверх-
ности выбраны произвольно.
Она может быть применима лишь в том случае, когда обе поверх-
ности S и S' являются цилиндрами с образующими параллельными оси Ох,
так как тогда связи будут допускать перемещение всего стержня параллельно
этой оси. В этом случае проекции нормальных реакций на ось Ох равны
нулю.
В общем случае можно видеть, что система допускает поступа-
тельное перемещение, параллельное оси Ох, если абсциссы х„ вхо-
дят в уравнения связей только в виде равностей.
437. Частный случай теоремы моментов. Допустим теперь, что
связи допускают вращение всей системы вокруг оси г. Если обо-
значить через 89 это элементарное вращение, то, как известно, будет
Тогда общее уравнение A2) примет вид
ГЛАВА XXIII. ПРИНЦИП ДАЛАМБЕРА 273
Если связи допускают в каждый момент времени вращатель-
ное движение системы вокруг неподвижной оси, то производная
по времени от суммы моментов количеств движения относи-
тельно этой оси равна сумме моментов заданных сил относи-
тельно той же оси.
Заметим, что эта теорема является частным случаем теоремы мо-
ментов количеств движения, причем таким, когда в ее выражение
вместо всех внешних сил, входят силы только заданные.
438. Частный случай теоремы кинетической энергии. Допу-
стим, наконец, что связи не зависят от времени. Тогда среди
перемещений, допускаемых связями, находится действительное
перемещение dxv, dy^, dzv и в уравнении A2) можно заменить bxv,
Ъуч, §2V через dxv, dy^, dz^.
Таким путем мы получим
Следовательно:
Если связи являются не зависящими от времени, то диф-
ференциал кинетической энергии системы равен сумме элемен-
тарных работ заданных сил.
Это — частный случай теоремы кинетической энергии (п. 336).
Эту теорему можно проверить, исходя из уравнений движения, получен-
ных методом множителей Лагранжа [уравнения A1) п. 435].
Составим из этих уравнений уравнение кинетической энергии. Тогда,
располагая члены в порядке множителей X, получим:
Zv dz,)
и если уравнения ft — 0, /2 = 0 /й = 0 не содержат явно времени t, то
коэффициенты при X равны нулю. Если Д содержит t, то коэффициент при Хх
будет равен не нулю, а ^i- dt.
III. Приложение принципа Даламбера к случаю
трения скольжения
439. Метод и пример. Рассмотрим систему, на которую наложены связи
двух видов:
Г. Связи L без трения, зависящие или не зависящие от времени.
2°. Связи L'', заключающиеся в том, что некоторые точки ть т2, ..., тр
вынуждены скользить с трением по заданным поверхностям Sx, Sg, ..., Sp.
18 Зак. 922. П. Аппель, т. II
274 ДИНАМИКА СИСТЕМЫ
Полная реакция Rx поверхности Slt действующая на точку ть является
равнодействующей нормальной силы N± и касательной силы (трение), на-
правленной в сторону, противоположную скорости точки и равной fiN^, где
Д — коэффициент трения по поверхности Sy. Точно так же получаются
полные реакции /?2, ..., Rv других поверхностей на другие точки /я2, ..., тр.
По принципу Даламбера в каждый момент существует равновесие между
силами инерции, заданными силами, реакциями связей L без трения и реак-
циями /?!, ..., Rp связей V.
Если, следовательно, системе сообщить произвольное возможное пере-
мещение, то сумма работ всех сил, включая реакции связей, равна нулю. Но
если, в частности, сообщить системе произвольное перемещение, допускае-
мое связями L без трения и такое, что каждая точка тъ ..., тр вынуждена
перемещаться нормально к соответствующей полной реакции /?j Rp, то
сумма работ реакций связей L и сил R^, R2, ..., Rp будет отдельно равна
нулю, и поэтому будет равна нулю также сумма работ заданных сил и сил-
инерции. Следовательно, уравнения движения получатся, если написать, что
для всех возможных перемещений, которые допускаются связями Айв ко-
торых каждая точка т-у, т^ тр перемещается нормально к соответ-
ствующей полной реакции R4, сумма работ заданных сил и сил инерции
равна нулю. (А п п е л ь, Comptes rendus, т. CX1V, 1892, стр. 331.)
Пример. С этой точки зрения рассмотрим еще раз задачу III п. 371
(рис. 214). В йтой задаче точки А и В скользят с трением по осям Ох и Оу.
Полная реакция R оси Ох, действующая на точку А, является биссектрисой
угла NAN, а полная реакция R' оси Оу, действующая на точку В, является
биссектрисой угла N'BN'.
Чтобы получить возможное перемещение лестницы, при котором работы
реакций R и R' равны нулю, нужно сообщить ей такое возможное пере-
мещение, при котором А и В перемещаются нормально к реакциям R и /?'.
По свойству мгновенного центра вращения это приводится к тому, чтобы
повернуть лестницу на бесконечно малый угол вокруг точки / пересечения
реакций R и R'. Так как уравнения прямых, вдоль которых направлены
эти реакции, суть
X — 11 Sin а + у = О, X — у + 21 COS а = О,
то для координат точки / имеем:
Хг = I (sin а — COS а), уг = / (sin a -}- cos a).
Теперь нужно выразить, что при возможном перемещении, которое
получится, если прямую АВ повернуть вокруг точки / на бесконечно малый
угол, сумма работ веса и сил инерции равна нулю. Это означает, что равна
нулю сумма моментов относительно точки / веса и сил инерции. Если обо-
значить через т всю массу лестницы и через \х массу точки лестницы
с координатами х и у, то получим
(? — xt) mg + 2j f*1 {x — xt) -^ — (y — yt) -^ I = 0,
(Px
где сумма распространена на все точки. Замечая, что величины
df-
Sd?-y V I d У dx \ d4
w. —т4г и > f* I x ——5 у ) равны соответственно величинам т -^-г-,
dt* Л* \ dt* dtl ) dfi
m -—$- и — m (fe2 -\- Щ —5- , и заменяя хь ?, rj их значениями, мы получим
после сокращений уравнение E) п. 371 (пример III).
ГЛАВА XXIII. ПРИНЦИП ДАЛАМБЕРА 275
УПРАЖНЕНИЯ
1. Твердое тело вращается вокруг оси О г с переменной угловой ско-
ростью о). Вычислить для момента t главный вектор сил инерции и главный
момент этих сил относительно точки О.
Ответ. Согласно вычислениям п. 360 для проекций главного вектора
сил инерции получаются формулы:
Y± = «2 2 ту — о)' 2 «¦*. ^1 = 0,
а для проекции главного момента сил инерции—формулы:
где со' — производная от (о по ^.
2. Найти условия, при которых силы инерции твердого тела, вращаю-
щегося вокруг неподвижной оси, приводятся к одной равнодействующей.
Ответ. Необходимо, чтобы центр тяжести не лежал на оси и чтобы
Х\ -j- Y\ не было равно нулю; кроме того, нужно, чтобы
L^ + MJ. + N.Z^O,
т. е. чтобы
(щз _|_ о/*) (^ тх ^ туг - 2 ту У, mxz) = 0.
Так как первый множитель не равен нулю, то нулю должен быть равен
второй множитель. Равенство нулю этого второго множителя выражает, что
ось вращения является главной осью инерции для одной из своих точек.
3. Найти условия, при которых силы инерции точек твердого тела,
вращающегося вокруг неподвижной оси, приводятся к одной паре.
Ответ. Необходимо и достаточно, чтобы было Хх =0, Yx — 0, откуда
2 тх = 0, 2 тУ = 0- Центр тяжести должен лежать на оси.
4. Вывести из принципа Даламбера уравнения движения нити.
Пусть ds — элемент дуги нити, jj. —его линейная плотность, х, у, г —
его координаты. Если дугу s отсчитывать, например, от конца нити, то
координаты элемента ds при движении будут функциями независимых пере-
менных s и t.
Уравнения равновесия суть
Tdx\
ds\ ds)"
где X, Y, Z—проекции внешней силы, отнесенной к единице длины. Про-
екции силы инерции элемента ds с массой \x.ds равны
Следовательно, проекции силы инерции, приходящейся на единицу длины,
равны
ffbc
18*
276 ДИНАМИКА СИСТЕМЫ
Написав, что имеет место равновесие между действительно приложенными
силами X, Y, Z и силами инерции, получим:
где мы пишем круглое д, чтобы отметить, что речь идет о частных произ-
„ (дх\я , (ду\2 , (дг\*
водных. Эти три уравнения совместно с уравнением 1з~) ~Н^~) Н~(з~) ==
= 1 определяют х, у, г, в функции sat. Величина jj. является заданной
функцией s.
Если М есть радиус-вектор точки с координатами х, у, г и F— сила
с проекциями X, Y, Z, то можно также написать:
ГЛАВА XXIV
ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ
440. Содержание главы. Для определения движения системы без;
трения с k степенями свободы, находящейся под действием задан-
ных сил, необходимо проинтегрировать систему дифференциальных
уравнений, общий вид которых был указан в предыдущей главе
(пп. 433 и 434).
В настоящей главе мы рассмотрим более простые методы состав-
ления уравнений движения. Эти методы будут различными в зависи-
мости от того, будет ли система голономной или нет.
Мы исследуем сначала голономные системы как наиболее про-
стые. Для движения этих систем мы укажем форму уравнений, дан-
ную Лагранжем. Пусть qy, q2, ..., дк—координаты голономной си-
стемы и q'v q'9, ..., q'u — их производные по времени при ее дви-
жении. Мы покажем, по Лагранжу, что можно написать уравнения
движения, если известно выражение кинетической энергии или
энергии скоростей
в функции переменных qv q2, .... qk, q'v q'^ q'k и t.
Мы увидим дальше, что для системы неголономной знания кине-
тической энергии недостаточно для определения уравнений движения.
Пусть qv qz ^ — параметры, произвольные вариации которых
bqt, bq2, .. .,, bqk определяют наиболее общее возможное перемеще-
ние системы, q'v q'4 q'k и q", q2 q"k — их первые и вто-
рые производные по времени при движении системы, j—ускорение
точки массы т. Мы покажем, что можно написать уравнения дви-
жения, если известно выражение величины
° — ~о~ ^j mJ
в функции переменных qv q2, .... qk, q[, q'2 q'k, q'[, q, . . ., q"k
и t. Эта функция 5, образованная из ускорений, так же как функция Т
из скоростей, может быть названа энергией ускорений системы.
278 ДИНАМИКА СИСТЕМЫ
I. Голономные системы. Уравнения Лагранжа
441. Приведение уравнений движения к наименьшему числу
в системах без трения. Рассмотрим, как и прежде, систему из п
точек, подчиненную таким связям, что с геометрической точки зрения
положение системы в любой момент времени определяется k геоме-
трически независимыми между собой параметрами qv q2, . . ., qk.
Тогда координаты каждой точки системы можно выразить в функции
этих параметров. В общем случае, когда связи содержат время,
координаты различных точек, выраженные в функции qv, q2, . .., qk,
содержат время t:
х, = <pv (Яи Яг< ¦¦ ¦' Як> 0- 1
У, = ^ЛЯи Яг Як, t), A)
г, = ч>ЛЯх, Яг Як^ 0- >
Пусть связи выражаются уравнениями такого вида, как уравнения
F) в п. 434. Тогда соотношения A) считаются такими, что если
определяемые ими значения координат xv, у„ z, подставить в урав-
нения связей, то последние удовлетворяются тождественно при любых
значениях переменных qx, q2 qk, t.
Если величинам qlt q2, . . ., qk сообщить произвольные беско-
нечно малые приращения 8^, 8<72> . . ., bqk, то получится наиболее общее
возможное перемещение системы, допускаемое связями в момент t:
и две аналогичные формулы для 8_yv и 8zv. Подставляя эти значения
в общее уравнение динамики (п. 431), получим уравнение вида
— Q2) 8^2 + • ¦ • + (Р* — Qk) %¦ = 0, B)
где для краткости положено:
р _Vm /oPx, дх, d2y, ду, (Рг, дгл
* JLi ->\ df- dqa ^~ df>- dq^ df- dqj '
дх*ЛУ ду> U 7 dzA
Уравнение B) должно иметь место, каковы бы ни были 8^, 8^2, ...
.. ., bqk, поскольку оно справедливо для всех возможных переме-
щений, допускаемых связями. Оно распадается поэтому на k урав-
нений:
Q1_P1 = 0. Q2 —Р2 = 0. .... Q/? — Pft = 0. C)
Выражения Ра можно преобразовать так же, как мы это делали
для одной материальной точки (п. 282).
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 279
Опуская для сокращения письма индекс v, мы можем написать-
~ dt Zl \dt dqa ^ dt dqa ^ dt dq
d~ d^- d—
—¦ 4^"+dz dqA
-4-^—
dt, -rat dt
х', у', z'
то выражение Ра примет вид
Если мы обозначим через х', у', z' производные ~, d^-> —,
Считая все дл функциями времени, обозначим через q1, q'2 q'
производные от qv q2 qk, no времени t. Дифференцируя уравне-
ния A), получим
/ дх , , дх , . дх , . дх
Off, dq9 da,, dt
Если рассматривать х' как функции от q, q' и t, то непосредственно
найдем:
дх' дх
Точно так же имеем:
ду' ду дг' дг
dqn dq' dq' dq'
*a ^a va ia
Выражение Ра примет теперь вид
d V I i дх' ,ду' , дг'\
* mix —7 -f- у ^7 -j- z ¦—71 —
Для преобразования второй скобки заметим, что
дх
дйа д^х i д"х , dfix / д^х
dt dq dq^ i ^^ dq dq.<, l ^^ ' ' ' ~~^ dq dq^ "к dq dt '
дх , ,,
так как -ч— есть функция переменных qv q2, .... qk, t, Непосред-
ственная проверка показывает, что это выражение тождественна
280 ДИНАМИКА СИСТЕМЫ
с производной от х' по qa:
Wa _дх'
dt dq
,и аналогично получается
дЧа = ду' дЧа _ дг'
dt dq^' dt ~~dq '
Тогда имеем
n d \л I .дх' . ду' ,дг'\
I dqa dqa dqal
Пусть теперь Т — полная кинетическая энергия системы:
Рассматривая Т как функцию переменных qv qv ..., qk, q'v ...
..., q'k, t, мы видим, что суммы, входящие в выражение для Ра,
дТ дТ „
равны соответственно —-, и —. Следовательно, имеем
д9 дЯ
' dt
и уравнения движения принимают вид
d (дТ\ дТ _ , , о ,.
T7)~J~==^ (a=l, 2, .... А).
Эти уравнения и называются уравнениями Лагранжа.
Здесь Т есть функция второй степени относительно q'v q'v ...
.... q'k. Поэтому полученные уравнения являются уравнениями вто-
рого порядка. Они определяют qv q2, ..., qk в функции времени
и 2k произвольных постоянных. Заметим, что в случае, когда связи
не зависят от времени, можно сделать так, чтобы выражения A)
для координат не содержали явно времени. Тогда функция Т
будет однородной и второй степени относительно q'v qr2 q'k.
Кроме того, это — величина, существенно положительная по самому
своему определению. Следовательно, Т будет тогда определен-
ной положительной квадратичной формой относительно q'v. .., q'k.
Чтобы вычислить все Qa, надо в общем случае составить вы-
ражение суммы возможных работ заданных сил для наиболее общего
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 281
перемещения, допускаемого связями в момент t. Эта сумма, как мы
только что видели, равна Qibql-^- ... H-Q^S^- Если нужно найти
какое-нибудь одно Qa, то достаточно рассмотреть возможное переме-
щение, которое получится, если оставить постоянными t и все q,
кроме qa, которое нужно изменить на bqa. Тогда сумма работ за-
данных сил будет равна Qa bqa.
Величины Qj, принимают замечательный вид, когда заданные силы
имеют силовую функцию. Эта функция U(хи yv zv .. ., хп, уп, гп)
может быть выражена через qt, q2, . . ., qk, t, и тогда будет
dU __ у /dU dx., dU ду, . дЦ дгч\
dqa '— Zi \dx.t dq^ + dyv dqa "•" дгч dqj '
n v v -7 dU dU dU ,,
По условию величины л„, /v, Zv равны -г—, j-, ^—. Имеем, сле-
довательно,
ш ~
'a
и уравнения Лагранжа принимают вид
А (дЦ\ дТ ди
W
Эта же форма сохранится и тогда, когда Хч, У„, Zv будут
частными производными по х.,, у,, г, функции U(xv yv zx, ...
. . ., хп, уп, zn, t), явно содержащей время. В этом можно убе-
диться, производя такие же вычисления.
Замечание. Вычисления, которые были сделаны для нахождения вы-
ражения Ра при помощи функции Т, не предполагают, что параметры q не-
зависимы. Эти вычисления не изменятся, если ввести новые связи, выра-
жаемые соотношениями
gi @i. 02 Чь 0 = 0, j
go @L 02, •••, Чк' 0=0, |
?,,@1. 02- •••¦ 0ъ 0 = 0. J
Действительно, предположение о независимости параметров было сделано
лишь для вывода из уравнения B) формул
Число (х новых условий должно быть, очевидно, меньше к. Тогда вариа-
ции параметров будут связаны между собой соотношениями
dqk
282 ДИНАМИКА СИСТЕМЫ
которые показывают, что независимыми будут к — jj. вариаций. Чтобы вы-
разить, что уравнение
удовлетворяется при любых произвольных k — (j. вариациях, можно вос-
пользоваться методом неопределенных множителей, при помощи которого
мы получим уравнения движения в виде
или, заменяя Р его значением,
d (дТ\ df _„ , , dgx , , dg^ j_, ^e0
(a = l, 2 k).
Эти k уравнений совместно с (х уравнениями связей определяют k -\- ft
неизвестных qlt q% 9to ^-i> ^2 V в функции времени.
442. Первый пример. Задача. Найти движение системы, состоящей
из двух одинаковых однородных тяжелых стержней АВ и А'В', связанных
невесомой нитью такой же длины, как стержни. При этом прямая АВ вра-
щается вокруг своей середины О, а вся система остается в неподвижной
вертикальной плоскости.
Эта задача рассмотрена в п. 366 (пример V). Применяя использованные
там обозначения, имеем
Заданные силы имеют здесь силовую функцию
U—Mgl = Mgl cos 9,
где через 5 обозначена высота центра тяжести О' стержня А'В'. Это сле-
дует из того, что сумма элементарных работ заданных сил приводится к
работе Mg di веса стержня А'В'.
Тогда уравнения Лагранжа относительно параметров if и 9 будут
~ BЛШ<р') = 0, -? (М1Ч') = — Mgl sin 8.
Ctt CLt
Они совпадают с уравнениями, найденными непосредственно.
443. Уравнения Эйлера. Уравнения Лагранжа позволяют легко полу-
чить уравнения Эйлера для движения твердого тела вокруг неподвижной точки.
Используя прежние обозначения (п. 383), мы видим, что положение
тела зависит от трех независимых параметров ф, 8, <р, а его кинетическая
энергия выражается в виде
Т= ~{Ар^-\-Вср + С^),
где р, q, r выражаются через функции ф, 8, ср следующим образом;
р = <{/sln 8 sin ср -f- 6' cos cp,
q = J/sin 8 cos <f — 9' sin 9,
r — cp' -f- 4/ cos 8.
Что касается суммы работ заданных сил
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 285
то она принимает вид
Напишем уравнение Лагранжа по переменной tp:
Л\д~<.
Но
дТ^дТдр^ dTdq^ ty dq
dtp dp dtp dq dtp F dy ~ ч dtp'
и согласно выражениям р и q имеем
J- = <J/ cos tp sin 8 — 6' sin tp = o, -^ = — p.
dtp T T T ' ^ *
Следовательно,
и уравнение принимает вид
Остается показать, что Ф есть сумма N моментов заданных сил отно-
сительно оси Oz. В самом деле, Фоср есть сумма возможных работ заданных
сил на элементарном перемещении, получающемся при постоянных значе-
ниях ti и 9, т. е. при повороте на угол 5ср вокруг оси О г. Но мы видели
(п. 181), что если тело поворачивается на угол 5ср вокруг оси Oz, то для
суммы работ заданных сил имеем:
Ф 5<f = 2 (*, Ьхч + У-, &УЧ + Z4 5г.,) = ^ (*, У, - у,Х,) Н
откуда
Мы имеем таким образом одно из уравнений Эйлера:
Но в рассматриваемом вопросе р, q, r играют совершенно одинаковую роль
и только что написанное уравнение не содержит явно углов i>, 6, tp. Отсюда
на основании симметрии следует, что мы можем написать два других
уравнения".
Эти уравнения можно было бы вывести и из .уравнений Лагранжа
по переменным 8 и <|/. Но вычисления будут более сложными, чем для пере-
менной tp, и ненужными.
444. Пример связей, зависящих от времени. Для рассмотрения при-
мера, в котором связи зависят от времени, возьмем из п. 333 задачу о на-
секомом, движущемся по стержню.
284 ДИНАМИКА СИСТЕМЫ
Положение системы в момент t зависит от одного параметра — угла 6.
Связи зависят от времени, так как движение насекомого по прямой задано
наперед. Пользуясь обозначениями п. 333, получим для полной кинетической
энергии, равной сумме кинетических энергий насекомого и стержня, формулу
2Т = mm'2 + m (p'2 + f-a'2).
Выражения р и а показывают, что
Р ?'
Подставляя р' и а' в выражение для Т, получим:
2;г = /ге*26<2+^4
где р — функция только времени t:
Так как работа сил, отличных от реакций связей, т. е. сил тяжести, равна
нулю, то правые части уравнения Лагранжа также равны нулю. В рассматри-
ваемом случае имеется только один параметр в и, следовательно, единствен-
ным уравнением движения будет
ЦдТ\_дТ_
it\dO'j C9
dt
или, так как Т не содержит 6, то -™т" = const,
Постоянная с должна быть определена из начальных условий. Для на-
чальных условий, указанных в п. 333, нужно принять с = 0, после чего вновь
лолучится уравнение, выведенное непосредственно.
II. Приложения уравнений Лагранжа
445. Интеграл энергии. Если связи не зависят от времени
и осуществляются без трения, то теорема кинетической энергии вы-
ражается уравнением
dT = 2 {Xdx + К dy + Z dz),
в которое входят элементарные работы только заданных сил.
В частности, если эти силы имеют силовую функцию U, то суще-
ствует интеграл энергии Т=.U'-\- h. Эти теоремы легко установить
вновь, исходя из уравнений Лагранжа.
Когда связи не зависят от времени, можно всегда выбрать па-
раметры qx, <72 qk таким образом, чтобы координаты х, у, z,
выраженные через эти параметры, не содержали явно времени t.
При этих условиях имеем:
, дх , . . дх л
dx dqi-i- ... +Wkdgk, ...
z) = Qldql + Qtdq2-\- ... + Qkdqk.
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 285
Следовательно, уравнение кинетической энергии напишется так:
Это равенство, будучи следствием принципа Даламбера, должно
быть также следствием уравнений Лагранжа. В этом можно легко
убедиться следующим образом. В рассматриваемом случае Т является
однородным многочленом второй степени относительно q'. Вычисляя
на основании уравнений Лагранжа величину Q^-^-Q2q'2-\- . . . -\-Qkq'k,
получим
„, d дТ , , „, d дТ _ , д]^ , дТ _
и дТ „ дТ
В силу теоремы Эйлера об однородных функциях выражение
Ч\ Т г Я о, т~7 г • • ¦ Ч
dq dq
Т7 г Я о, т7 г • • ¦ т Чъ г
dq, dq2 dqk
равно 27". С другой стороны, так как Т не содержит явно t, то
Поэтому
dt df~ df
что и является уравнением кинетической энергии.
Первый интеграл этого уравнения получается каждый раз, когда
0.\&Ч\Л~ ¦¦¦ ~\~О.к^Як является полным дифференциалом функции U
от q1 qk. Тогда имеем
Такой результат получится, как мы видели, в том случае, когда
заданные силы имеют силовую функцию
U(xlt ylt z, хп, уп, zn).
Так как интеграл энергии является следствием уравнений Лагранжа,
то можно упростить интегрирование последних, заменив наиболее
сложное из них интегралом энергии.
Приведенные выше вычисления были выполнены при существен-
ном предположении, что связи не зависят от времени. В противном
286
ДИНАМИКА СИСТЕМЫ
случае в уравнение изменения кинетической энергии вошла бы ра-
бота реакций, так как тогда нельзя более полагать, что коорди-
наты х, у, г, выраженные через qlt ..., qk, не содержат явно времени t.
446. Задача. Два одинаковых однородных тяжелых стержня АВ и АВ',
связанных концами А, шарнирно скользят без трения по горизонтальной
плоскости (рис. 261). Найти движение системы (Лиценциатская).
Положение обоих стержней, соединенных вместе, зависит от четырех
параметров. Мы определим положение стержней: 1° координатами \, -^
центра тяжести G, который находится на середине прямой СС, соединяющей
середины обоих стержней; 2° углом 6, который образует прямая GA
с осью х; 3° полууглом а между обоими стержнями. Легко убедиться, что
этих четырех параметров достаточно, чтобы вполне определить положение
системы. Действительно, поместив
где-нибудь центр тяжести G, прове-
дем прямую GA, положение которой
известно по углу 6; На этой прямой
отложим GA = / cos а, где 11 — длина
каждого из стержней. Отложив затем
в точке А по ту или другую сторону
от отрезка AG угол а, получим по-
ложения обоих стержней.
Найдем сначала выражение пол-
ной кинетической энергии. Она скла-
дывается из кинетической энергии
М (S'2 + V2)
массы 2М, сосредоточенной в центре
тяжести, где М — масса каждого из
стержней, и из кинетической энергии
относительного движения системы
вокруг центра тяжести. Чтобы найти
кинетическую энергию одного из
стержней, например АВ, в его относительном движении относительно
осей ххуь параллельных осям ху и проходящих через точку G, мы вос-
пользуемся той же теоремой. Эта кинетическая энергия равна кинетической
энергии массы М, помещенной в точке С, т. е. -^ М I -т-1 -\-r \~тт) >
X
Рис. 261.
-1 M (Pa'2 COS= a + 1Ч'2 Sin2 <>¦),
так как GC = г = /sin a, x^GC = 6 -\- -^ , увеличенной на кинетическую
энергию стержня АВ в его вращательном движении вокруг точки С. Но
эта последняя кинетическая энергия имеет выражение -=-Л1?21 — ) ='
= -^- М№ F' — а'J, так как угол ш между стержнем и прямой Сх% равен 8 — а.
Кинетическая энергия стержня АВ' в его движении вокруг G получится,
если заменить угол а углом — а. Складывая, найдем для полной кинети-
ческой энергии выражение
Т = М U'2 + V2 + С2 COS2 а _|_ ?2) я'2 _J_ (/2 sin2 а + ?3) б'2].
В рассматриваемом случае единственными заданными силами являются
силы тяжести, работа которых равна нулю. Следовательно, силовая функ-
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 287
ция есть [/=0 и правые части уравнений Лагранжа равны нулю. Если мы
напишем уравнение для координаты 5, то получим — = О, откуда V — ?q. Точно
так же из уравнения для ч\ имеем i\' = т]0. Следовательно, движение центра
тяжести является -прямолинейным и равномерным, что непосредственно
вытекает и из теоремы о движении центра, тяжести. Уравнение для 9
d/dT\ дТ_дЦ
dt\W) дЬ ~~ дЬ
приводится к виду — I Зд7 ] = 0, так как Т и U не содержат 6. Непосредственно
дТ
интегрируя, получим -Гд7 = const или
\Г- sin2 я + ?2) 6' = С. (I)
Мы могли бы написать также и уравнение для а, но оно будет
очень сложным. Мы заменим его интегралом энергии, который здесь
имеет вид Т = const, т. е.
{Г- COS2 я + k'*) a'2 + (/2 sin2 а + Щ б'2 = А\ (II)
поскольку ?' и т)' постоянны. Мы можем написать в правой части сущест-
венно положительную постоянную, так как левая часть является суммой
квадратов. Уравнение (I) показывает, что знак 6' не меняется, так что
прямая GA поворачивается вокруг G все время в одном и том же напра-
влении. Кроме того, угловая скорость этого движения заключена обязательно
С С
между — и . Подставляя значение в', найденное из уравнения (I),
в уравнение (II), получим:
а'2 (/» coss <x -f ?2) (/з stn^ а + ?2) = AW sln2 a + AW* — С\
Так как левая часть все время положительна, то и правая часть должна
быть положительной. Если О—А*~№ отрицательно, то а может, очевидно,
принимать какие угодно значения, и стержни в зависимости от того, будет
ли а' положительным или отрицательным, будут либо раздвигаться, либо
сближаться до тех пор, пока не произойдет столкновение (а = 0 или а = к):
Если С2 — А^ положительно, то можно приравнять эту разность величине
.A*/asln3|J, где C — вещественная постоянная. В самом деле, С2—A'-k"* всегда
меньше, чем А"Р, так как в начальный момент, когда а = а0, величина я'
вещественна, и поэтому АЧ* sin2 <z0 > С2 — A^k\ Таким образом, условие,
которому должен удовлетворять угол я, приводится к следующему:
sin2 a > sin2 p,
так что а изменяется между |3 и % — р и движение каждого стержня отно-
сительно GA будет теперь колебательным.
Если, наконец, С2 — Л.2?2 = 0, то а может принимать любые значения,
но когда а будет стремиться к гс или к нулю, тогда t будет стремиться
к бесконечности; обе прямые будут стремиться совпасть, но никогда этого
не достигнут.
447. Тяжелое тело вращения, скользящее без трения по горизон-
тальной плоскости. Пользуясь обозначениями п. 407, получим для кинети-
ческой энергии
2Т = М («'2 + г)'2) + [Mf2 F) + А] б'2 + А'У2 sin2 6 + С (ср' + <!/ cos 6Jl
и для силовой функции
288 ДИНАМИКА СИСТЕМЫ
Пять параметров, от которых зависит положение тела, суть ?, i\, 6, ср, <!>.
Чтобы получить уравнения движения, напишем сначала уравнения Лагранжа
для четырех параметров ?, tj, cp,.ik Так как ни Т, ни U не содержат этих
параметров, то соответствующие уравнения Лагранжа будут:
d (дт\-о d(dT\-o
d (дт
дТ дТ дТ дТ
Отсюда, приравнивая -~j > з~т> ~л~? • 'ли постоянным, непосредственно
получим четыре первых интеграла. Таким образом, имеем интегралы:
А'Ь' sin^ 6 + С (<р' + <!/ cos 6) cos 6 = К-
Остается написать последнее уравнение Лагранжа, соответствующее
параметру i), но его можно заменить интегралом энергии Т = U'-{- h. "
Таким образом получаются уравнения, непосредственно найденные
в п. 407.
448. Интеграл Пенлеве, аналогичный интегралу энергии в некоторых
случаях связей, зависящих от времени. В некоторых случаях можно
образовать интеграл, аналогичный интегралу энергии, для связей, зависящих
от времени. Для таких связей выражения х, у, г через qv g2, ..., Ik
содержат t и кинетическая энергия Т в этом случае не будет однородной
относительно qv q'2 q'k. Мы можем написать ее в виде Г = Г2+ 7\ + Та,
где Т2 обозначает совокупность членов второй степени относительно qx ,
qv .... qj{, 7"i — совокупность членов первой степени относительно этих же
величин и То — совокупность членов, не зависящих от этих величин. С по-
мощью вычислений, аналогичных предыдущим (п. 445), по-прежнему имеем:
Но, с одной стороны, по теореме об однородных функциях
а с другой стороны,
/дТ , дТ
так как Т зависит от t и непосредственно и через qa, q'a.
После сокращения имеем:
-\ гр
Если окажется, что величина Qfli + ••• + ЯиЯк ~лГ равна
Ж
— V(qb ..., q!c, t), то окончательно получим
5-Гп= V+h.
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 289
, дТ
Это, например, будет иметь место, если -^г зависит только от t,
a Qx dqi + ... -\-Qkd4k будет полным дифференциалом dU (q± q^)
некоторой функции, не зависящей от t. Интеграл в этом случае запишется
в виде
где положено — =/•"' (t). (См. Р a i n I e v ё (Пенлеве), Lecons sur I'integra-
flon des equations de la Mecanique, стр. 89.)
III. Малые колебания голономных систем около положения
устойчивого равновесия
449. Устойчивость равновесия. Как мы знаем (п. 173), если
связи голономной системы не зависят от времени и если заданные
силы имеют силовую функцию U, то необходимыми и достаточ-
ными условиями равновесия будут
ди о ди п ди п
¦s— = U, -^— = и -^— = и,
dq\ dq$ dqk
где qv q2, ¦ ¦ ¦, % обозначают k независимых параметров, опреде-
ляющих положение системы. Эти равенства являются необходимыми,
но недостаточными условиями того, чтобы функция U имела макси-
мум или минимум. Если в каком-нибудь положении системы
функция U имеет максимум, то это положение является поло-
жением устойчивого равновесия. Эта теорема, высказанная еще
Лагранжем, была доказана Лежен-Дирихле (Journal de Liouville)
следующим образом.
Мы можем всегда предполагать, что значения параметров, соот-
ветствующих положению равновесия, суть <7i —0. ^2 = 0 <7*—-0
и что для этих значений U = 0, так как U определяется лишь
с точностью до постоянной. Равновесие будет устойчивым, если,
отклонив систему произвольным образом, но очень мало от ее поло-
жения равновесия и сообщив различным точкам очень малые началь-
ные скорости, мы приведем систему в движение, при котором она очень
М1ло будет отклоняться от этого положения равновесия. Скажем более
точно. Пусть s — сколь угодно, малое наперед заданное положитель-
ное число; указанное положение равновесия будет устойчивым, когда
при данном s можно найти такое достаточно малое положительное
число т), что если начальные значения параметров qv q2, ..., qk и
скоростей различных точек системы будут по абсолютному значению
меньше т|, то в течение всего времени движения абсолютные зна-
чения ql <7ft будут меньше, чем г.
Напомнив это определение, допустим, что при <7i — Яг— • • •
... — <7Й = 0 функция U имеет максимум и равна нулю. Нужно
доказать, что равновесие устойчиво. Так как U имеет максимум, то
можно найти такое достаточно малое положительное число е, что
для всех систем значений qv q2, .... qk, заключенных между — е
19 Зак. 922. П. Лппель. т. II
290 ДИНАМИКА СИСТЕМЫ
и -j-e или равных этим пределам, функция U отрицапельна,
за исключением единственных значений <7i —<72= ••• ==<7а:=::: 0, ПРИ
которых функция U равна нулю. Придадим, в частности, одной из
переменных <7„ предельные значения + е, а всем остальным перемен-
ным <7i 1ч-1> 1-i+i' •••> Ik дадим все возможные системы зна-
чений, заключенные между -)-е и —е или равные этим пределам.
Пусть Р., — наибольшее значение функции U при таких значениях пара-
метров. P.t будет положительным, отличным от нуля числом, так как
при <7,, равном ± е, функция U не может обращаться в.нуль, каковы бы
ни были значения остальных параметров в указанных пределах. Делая
последовательно qt, q2 qk равными + е, мы получим таким
образом k положительных чисел Рх, Рг Рк. Обозначим наимень-
шее из них через Р. Тогда если один из параметров станет рав-
ным ± е, а остальные останутся заключенными между ± е, то обя-
зательно будем иметь
?/¦<— Р, U-+-P4^.O.
Установив это, отклоним систему от положения равновесия, при-
дав параметрам какие-нибудь значения q°v q% q\, заключенные
между ± е, и сообщив различным точкам начальные скорости v\,
vl' • • ¦' v°n' Применяя к возникшему после этого движению теорему
кинетической энергии, получаем
-J-—U-
2
-g Uo положи-
тельна. Кроме того, она может быть сделана сколь угодно малой,
так как она непрерывна и обращается в нуль, когда все начальные
значения параметров и все начальные скорости равны нулю. Точнее,
можно всегда найти число г\, меньшее е и настолько малое, что
если q^, <7° q°k и iij, v?,, ..., v° взяты по абсолютному значению
меньше чем т|, то
Тогда из теоремы кинетической энергии получим:
Если начальные значения параметров заключены между -f-s и —г, то
во время движения ни один из них не может достигнуть этих пре-
делов, так как, если они будут достигнуты хотя бы одним пара-
метром, то U-\-P станет отрицательным и тогда отрицательной
станет также и кинетическая энергия, что невозможно. Тем самым
теорема доказана.
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 291
Пределы скоростей. Можно также указать и высшие пределы
скоростей в течение всего времени движения. В самом деле, так
как U отрицательно, вследствие того, что параметры остаются
заключенными между + г, то
2 fnv2 < IP.
Если обозначить через v-t скорость точки массы да;, то получим
Если 8 очень мало, то очень малым будет и этот предел, так
как при г, стремящемся к нулю, Р также стремится к нулю.
Можно получить более узкие пределы для скоростей, если заме-
тить, что 2mv* является положительной квадратичной формой 27"
относительно q'v q'2, .... q'k. Так как при этом 27"должно оставаться
меньше чем 2Р, то отсюда вытекает, что q'v q'v . . ., q'k остаются
по абсолютным значениям меньше некоторой величины, которую
в каждом отдельном случае можно установить.
Примечание I. Доказательство основано на существенном предпо-
ложении, что функция U зависит от всех параметров qlt q-2, ..., qu- Если
бы функция U зависела только от некоторых из них, например от <7i> Яъ, Яъ
причем имела бы максимум и обращалась бы в нуль при qx — q2 — <7з = 0>
то положение, соответствующее значениям iji = 0, я% = 0, Яг = О, Я± = #4> • ¦ •
...? q^ = ajc, где а±, а5, ..., а-к — произвольные постоянные, было бы положе-
нием равновесия, но это равновесие не было бы устойчивым. Если в этом случае
немного отклонить систему от положения равновесия и сообщить ее точкам
очень малые скорости, то получится движение, при котором qb q2, q3
останутся очень близкими к нулю, но остальные параметры q±, qb, ..., Як
уже не будут близкими к а4, а& ..., а%. Однако скорости останутся по-преж-
нему очень малыми. Представим себе, например, тяжелое тело вращения,
закрепленное в какой-нибудь точке его оси, и воспользуемся обозначениями
п. 395. В этом случае существует силовая функция
U = — MgZ, cos 8,
которая зависит тольке от 6, в то время как положение тела зависит от
трех углов Эйлера 6, <р, <i. Функция if имеет максимум при в = п. Соответ-
ствующие положения тела, которых будет бесчисленное множество, являются
положениями равновесия, что видно также непосредственно, так как ось
вертикальна и центр тяжести находится под точкой подвеса. Но эти поло-
жения не будут устойчивыми в строгом смысле этого слова, так как если
сообщить телу сколь угодно малое начальное вращение вокруг вертикали,
то получится движение, при котором точки будут удаляться на конечные
величины от их положений равновесия.
Примечание II. Обращение теоремы Лежен-Дирихле. Рассмотрим
dU dU
положение равновесия системы, при котором все производные ^—, -j—, ...
..., -3— равны нулю, но U не имеет максимума. Представляется вероятным,
"Як
что соответствующее положение равновесия неустойчиво. Однако это
19*
292 ДИНАМИКА СИСТЕМЫ
предложение строго доказано лишь при некоторых ограничениях. [См.
Ляпунов, Общая задача об устойчивости; Journal de mathematique de
Jordan, 1896 *); Hadamard, работа, представленная Академии в 1896 г. и опу-
бликованная в том же журнале в 1897 г.; Painleve, Comptes rendus,
т. CXXV, стр. 1021; Н a m e I, Mathematische Annalen, т. LVII, стр. 541;
L. Si Па, Rendiconti della R. Accaiemia dei Lincei, 5, т. XVII, 1903 **).]
Другие авторы, как Fejer (Crelle, т. 131) и Rethy (там же, т. 133), рас-
сматривали устойчивость в сопротивляющейся среде.
450. Малые колебания. Рассмотрим, как и выше, систему с не
зависящими от времени связями, положение которой Зависит or k
геометрических параметров qv q2 qk. Допустим, что приложен-
ные силы имеют силовую функцию U(q1, q2, ..., qk), зависящую от
всех переменных q,t, и что эта функция равна нулю и имеет макси-
мум, когда все переменные ^v(v=:l, 2 А) обращаются в нуль.
Соответствующее положение равновесия будет устойчиво. Мы ставим
себе задачей изучить малые движения системы около этого поло-
жения. В этих малых движениях величины qv q2, ..., qk, а также
и скорости остаются очень малыми. Следовательно, остаются очень
малыми и производные q[, q'2 q'k, тад как кинетическая энер-
гия является существенно положительной однородной функцией вто-
рой степени относительно производных q\ Мы начнем с простей-
шего случая, когда система имеет полные связи.
1°. Система с полными связями. Положение системы в разби-
раемом случае зависит от одного параметра q, который, по пред-
положению, равен нулю в положении равновесия. Число k равно 1.
Кинетическая энергия Т, будучи однородной функцией второй сте-
пени переменной q', имеет вид
где предположено, что функция f(q) раскладывается в ряд Макло-
рена. Допустим, что первый член разложения /@) не равен нулю.
Тогда этот первый член /@) будет обязательно положительным, так
как при очень малом q кинетическая энергия Т, которая существенно
положительна, имеет знак первого члена /@). Полагая /@) —я, на-
пишем:
T=aq'i-\-Tl,
где Г, очень мало по сравнению с первым членом, так как оно со-
держит множителем qq'1.
Рассмотрим теперь силовую функцию U. По предположению,
это — функция от q, обращающаяся в нуль и имеющая максимум
*) Русский перевод этой статьи помещен впервые во втором издании
«Общей задачи» (Гостехиздат). (Прим. пер.)
**) Наиболее общие случаи рассмотрены в книге: Ч е т а е в Н. Г.,
Устойчивость движения, Гостехиздат, 1946. (Прим. пер.)
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 291
при q — О. Если, следовательно, положить U = F (q) и если F (q)
разложить в ряд Маклорена, то F@) и F' @) будут равны нулю,
a F" @), в общем случае, будет отрицательно. Полагая —/="'@) =
= — а, а > 0, можем написать
где t/j — сумма последующих членов в разложении Маклорена. Сле-
довательно, Ul очень мало по сравнению с членом —aq2, так как
оно содержит множителем qi.
Для изучения малых колебаний можно пренебречь величинами 7\
и t/, и принять
T=aq'\ U = —*tf.
Тогда уравнение движения по Лагранжу
dt \dq') dq dq '
так как ^- равно нулю, обратится в следующее:
где положено — = г2. Интеграл этого уравнения будет
где X и р обозначают две произвольные постоянные, определяемые
начальным положением, т. е. величиной q0, и начальной скоростью ^о-
Период колебания системы равен — . Постоянная г, имеющая опре-
деленный физический смысл, не будет, очевидно, зависет-ь от выбора
параметра q.
Если начальные значения q и q'. при t = 0 суть ах и bv то
q — ax cos rt-\-~ sin rt.
Если в другом случае начальные значения q и q' будут а2 и Ь2,
то для того же движения имеем:
q — a2 cos rt-{- — sin rt.
Если, наконец, в третьем случае начальные значения q и q'
будут равны aj-j-йг и Ьх-\-Ъг, то соответствующее выражение для q
будет
q = {ах + с2) cos г/ + (*1 + *й) sin rf,
т. е. будет суммой двух предыдущих. Это свойство, являющееся
следствием линейности уравнения движения, составляет то, что на-
зывают наложением малых колебаний.
294
ДИНАМИКА СИСТЕМЫ
Пример. В двух неподвижных точках А и А' (рис. 262), лежащих на
горизонтальной оси Ох на одинаковых расстояниях О А = О А' — а от на-
чала О, привязаны две невесомые нити AM и А'М' одинаковой длины /,
несущие однородный тяжелый стержень ММ' длины 2а, равной АА''. Этот
стержень имеет в середине G бесконечно малое отверстие, через которое
проходит ось Ог, направленная вертикально вверх. Система слегка откло-
няется от своего положения равновесия AfjAfj и предоставляется самой себе
без начальной скорости. Исследуем малые колебания.
Обозначим через 6 угол, образуемый в произвольный момент нитью AM
с осью Ог, а через а — угол между осью Ох и проекцией РР' стержня ММ'
на плоскость хОу. Равнобедрен-
р, ный треугольник АОР и прямо-
—" угольный треугольник AMP дают
соотношение
/ sin 8 = 'la sin -^-.
Положение системы зависит
от единственного параметра 6,
равного нулю в положении равно-
весия. Так как единственной за-
данной силой является вес, то,
обозначая через С координату
O~G = / cos 8 центра тяжести G,
получим:
U = Mgt (cos Ь — 1),
Рис. 262. где постоянная определена таким
образом, чтобы U обращалось
: 0. Очевидно, что при этом значении 8 функция U имеет
в нуль при
максимум. Разложим U по формуле Маклорена:
Порядок функции Ui относительно 8 больше двух. Вычислим Т по теореме
Кёнига. Так как момент инерции М№ однородного стержня длины 2а от-
носительно центра равен -^ Ма2, то
о
Т=
I-Af(C + /fe2a)= IW/26sin2 6+i- а2а'Л.
Из написанного выше геометрического соотношения определим угол а;
а = 2 arcsln (=— sin 61.
Дифференцируя, найдем а', после чего получим
J ~ 2mY + 3 4a°--Psm
Для колебаний конечных уравнение движения можно найти по теореме
кинетической энергии Т = U -\-h. Но для бесконечно малых колебаний мы
ГЛЛВЛ XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 295
можем коэффициент при б'2 в полученном выражении для Т приравнять его
значению при 6 = 0 и приближенно принять
' 6
Тогда уравнение движения на основании уравнения Лагранжа будет
Период малых колебаний равен 2я 1/ — ,
Примечание. Выше мы предполагали, что если Т имеет вид q'2 f(q),
то /@) не равно нулю. Если это условие не выполняется, то его можно
осуществить преобразованием переменной. Допустим, в самом деле, что при
малых значениях q будет
где -f @) не равно нулю. Сделаем тогда подстановку
где s — новая переменная. Имеем:
и коэффициент при s'2 уже не обращается в нуль при s = 0.
Мы предполагали также, что если коэффициент при q'2 в выражении,
полученном для Т, не обращается в нуль при q = 0, то разложение U (?)
по формуле Маклорена начинается с члена q2. Но может случиться, что
если U (q) имеет максимум при q = 0, то обращаются в нуль все производ-
ные от U до какого-нибудь нечетного порядка, выше первого, и первая не-
равная нулю производная будет четного порядка и отрицательная. Например,
в простейшем случае так может получиться, когда
где U] содержит множителем q'a, а коэффициент а положительный. Тогда,
приводя Т к виду ад'2 и пренебрегая членом Ub получим .уравнение- дви-
жения в виде
aq" = — aq\ B)
В этом случае имеет место особое обстоятельство, которое не зависит
от выбора переменной: период малых колебаний около положения равно-
весия изменяется вместе с амплитудой. В самом деле, поместим систему
в положение, соответствующее <7о> и предоставим ее.самой.себе без началь-
ной скорости. Интегрируя равенство B), получим
откуда определим t в функции q через эллиптическую квадратуру. Вели-
чина q колеблется между —q0 и +#о> и продолжительность четверти
296 ДИНАМИКА СИСТЕМЫ
периода колебания равна
T /" dq _ 1 уГ а Г ds
где положено q = sq0. Следовательно, этот период обратно пропорциона-
лен q0 и становится бесконечно большим, когда q0 стремится к нулк>.
2°. Система с двумя степенями свободы. Представим себе си-
стему с не зависящими от времени связями, положение которой опре-
деляется двумя параметрами: qx и q2- Имеем:
где А, В, С — функции от qt и q2.
Мы будем предполагать, что параметры выбраны таким образом,
что дискриминант АС—В2 не обращается в нуль при qt = qz = O.
Тогда, разлагая коэффициенты А, В, С в ряд Маклорена и обозна-
чая через а, Ь, с значения этих коэффициентов при 9i—<72 = 0,
получим:
где 7\ есть величина третьего порядка относительно qlt q2, q'v q'9t
причем она обращается в нуль при 9i = <72==0. Следовательно, при
<7i и q2, очень малых, Т имеет знак трехчлена, стоящего перед 7\,
и так как Т существенно положительно, каковы бы ни были q'x
и q'v то
а>0, с>0, Ьг — ас<0.
Рассмотрим теперь силовую функцию U(qlt q2). При q\ — 4i~Q
эта функция обращается в нуль и имеет максимум; поэтому, разла-
гая ее в ряд Маклорена, получим:
U = - (щ
где U\ есть величина третьего порядка относительно qt и q2. Так
как U должно быть отрицательно при любых достаточно малых-
значениях <7х и ?2- то
Чтобы получить малые колебания около положения равновесия,
мы пренебрежем функциями 7\ и Uv приняв
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 297
Тогда оба уравнения Лагранжа обратятся в линейные уравнения с по-
стоянными коэффициентами
Для интегрирования этих уравнений положим
ft = \ cos (rt 4- р). ft- = h cos (rt -f p). D)
где Xj, Xj, л, р — постоянные. Подставляя эти значения в равенства C)
и сокращая на cos(rt-j-p)> получим
r» —Т) = о. E)
Отсюда, исключая Хг и \, получим биквадратное уравнение
(аг2 — а) (ел2— ?) — (йл2 — РJ = 0, F)
имеющее для л2 два вещественных и положительных значения, так
как левая часть равенства (б) положительна при г2 равном 0 и -f-°°>
и отрицательна, когда г2 равняется — и —. Можно всегда считать г
положительным, так как решение D) не изменяется при изменении
знаков у л и р. Мы можем поэтому взять для гх и г2 два положи-
тельных корня уравнения F).
Если в уравнениях E) заменить г одним из этих корней, то они
приведутся к одному уравнению, например, к первому. Тогда, пола-
гая r — rlt получим:
К Х
где р., — произвольная
решение
ft = Ъ {Ьг\ —
постоянная
('i' + Pi). Ч
аг\ "'
Таким
2 = Р-1 (а
образом
arfj cos (rxt
получается
+ Pi)-
Второй корень гг дает аналогичное решение с другими постоян-
ными [ij и р2, и мы получаем окончательно общие интегралы урав-
нений движения:
ft = Ъ {br\ — Р) cos (/ч* 4- Pi) -+- Ъ {br\ — р) cos {r4 4- Р2).
Чг = Pi (а — <w?) cos (rtf 4- Pi) +1*2 (a — arl) cos (r2f 4" Рг).
G)
содержащие четыре произвольные постоянные {i1( [i2, p! и р2, кото-
рые определятся, если будут известны начальные ' значения парамет-
ров ft и ft и их производных q'x и q'r
Мы видим, таким образом, что движение около положения равно-
весия есть результирующее движение двух колебаний, периоды
298 ДИНАМИКА СИСТЕМЫ
которых равны соответственно— и —. Если эти периоды соизмеримы
'1 ri
между собой, то движение будет периодическим. В противном слу-
чае система никогда не пройдет вторично через то же положение.
Мы уже видели подобный пример, в п. 272.
Величины /"i и г2, имея, таким образом, определенный физический
смысл, не зависят, очевидно, от выбора параметров qt и q2. Они
являются инвариантами задачи.
Частный случай. Когда мы доказывали, что уравнение F) отно-
сительно гг имеет два положительных корня, мы допускали, что,
подставляя в левую часть уравнения — и —, мы получаем для нее,
по крайней мере, один раз отрицательное значение. Это не будет
иметь места, если
а — Ь — с —Kt
где k2 — положительная постоянная. Тогда уравнение (б) будет
и у него будут два равных между собой корня. Тем не менее об-
щий интеграл не будет содержать t вне знаков синуса и косинуса.
В самом деле, при рассматриваемых условиях уравнения движе-
ния C) принимают вид
и так как № — ас положительно, то эти уравнения приводятся
к следующим:
Отсюда для общего интеграла получаем:
<7i = H cos (kt + Pi). q2 = fts cos (kt + p2).
Теперь имеется только один период — для любого колебания.
Другой метод. Эти результаты могут быть лолучены другим путем,
если воспользоваться свойствами квадратичных форм. Рассмотрим две ква-
дратичные формы
S = aq\ + 2bqxq% + cq% U = - (a^ + 2p9l9.2 + cqf) ,
при помощи которых уравнения движения можно написать в таком виде:
di* \dqj ~ dqt' dP \dq2) ~ dq%'
Сделаем линейную подстановку
qx —
где Sj и s2—новые параметры, a k\, hlt k2 и Л2— постоянные.
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ
299
Можно определить коэффициенты подстановки таким образом, чтобы при-
вести одновременно обе формы к суммам квадратов. Если рассматривать qt
и <7з как декартовы координаты, то это все равно, что принять в качестве
осей прямые, одновременно сопряженные с парами прямых S = О, U = 0.
Таким путем получается
— Sj -f- S2,
It— (r2S2
lsl
Кинетическая энергия обращается теперь в
жения принимают вид
п 2 п
'2 ,2
= s, -j- s2 , и уравнения дви-
откуда, интегрируя, находим:
Sj = (Xt COS (rji -)- pj), S2 = fJ-з COS {r^t -f- p2).
Можно заметить, что биквадратное уравнение для гп* получается, если
приравнять нулю дискриминант формы Lf-{-r2S.
Переменные st и s2 называются главными переменными *).
Приложение. Рассмотрим однородный тяжелый стержень АВ дли-
ны 2а, подвешенный с помощью нити длины I к неподвижной точке О
(рис. 263). Система перемещается
в вертикальной плоскости хОу. д
Требуется найти бесконечно малые
колебания около вертикали, которая
является положением равновесия.
Положение системы зависит от
двух углов 0 и ср, которые образует
вертикаль Ох с направлениями нити
и стержня. Эти параметры действи-
тельно обращаются в нуль в положе-
нии равновесия. Здесь существует
силовая функция
U = Mgl + С,
где ? — абсцисса центра тяжести G.
Постоянной С, согласно предыдущей
теории, нужно распорядиться таким Рис. 263.
образом, чтобы U обращалось в нуль
в положении равновесия. Так как координатами центра тяжести являются
S = / cos в -j- a cos ср, т] = / sin в -\- a sin ср,
то силовая функция будет
U = Mg[l (cos 6 — 1) + a (cos <p — 1)].
Вычислим теперь кинетическую энергию Т. Кинетическая энергия
массы М, сосредоточенной в центре тяжести G, равна
iM®
у cos (8 - <
Зная выражение момента инерции однородного стержня относительно
его центра, получаем для кинетической энергии во вращательном движении
*) Более распространенным для переменных st и s2 является название
главные или нормальные координаты. {Прим. пер.)
300 ДИНАМИКА СИСТЕМЫ
вокруг центра тяжести значение -jrMa?<f'2. Теперь полная кинетическая
энергия будет
т ^ тг \т'г+тa2tp'2+2а/6 vcos F—
Для нахождения бесконечно малых колебаний достаточно взять в выра-
жениях для U и Т только члены второго порядка:
Тогда уравнения Лагранжа будут
14" + alf = — ?/6, 4"
о
Для интегрирования этих уравнений полагаем
6 = Xt cos (rt + р), у — Х2 cos (rt -\- p).
Постоянные Xj^ и Х2 должны удовлетворять условиям
r*h = 0, /r% + A ar* - ^ X2 = 0
и, следовательно, для г2 получается уравнение
-g)- <Ч<* = 0.
Это квадратное уравнение относительно г2 имеет дца вещественных поло-
жительных корня, каждому из которых отвечает система частных решений.
Складывая эти решения, получим общие интегралы
в = ar\y.l cos (/у + Pi) + вг§ц2 cos (r2< + Р2).
4 = (g— lrl) Fi cos (/у + Pl) + (^ — /r|) (x^ cos (r2^ + p2),
содержащие четыре постоянные |xlF jj.2, Pi, p2.
Например, если положить а = -j l, то для г\ и г2 получатся значения
—^B + ^3), -~ B —1^3), откуда непосредственно получаются периоды
—, — обоих колебаний, из которых складываются малые движения.
Примечание. В предыдущей теории мы предполагали, что ас — б3
не равно нулю. Если же этот дискриминант равен нулю, то надо выбрать
параметры иначе, а именно так, чтобы новое приближенное выражение энер-
гии Т имело дискриминант, не равный нулю. Например, если взять точку,
движущуюся на плоскости и имеющую в начале координат положение устой-
чивого равновесия, то в полярных координатах гиб получим дли Т выра-
жение
ГЛАВА XXIV. ОКШ.ИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 301
дискрчминант которого г3 обращается в нуль в положении равновесия.
Взяв декартовы координаты, получим новое выражение
дискриминант которого не равен нулю.
Мы предполагали также, что разложение силовой функции U начинается
с членов второго порядка относительно q\ и q%. Может случиться, что раз-
ложение функции U начинается с членов четного порядка (так как U — О
является максимумом), но более высокого, например четвертого, так что
В этом случае изучение малых колебаний будет сложнее, так как урав-
нения, которые получатся, если пренебречь членом Ui, не будут больше
линейными. Общее движение не будет больше результирующим двух осо-
бых колебаний, каждое из которых имеет определенный период.
3°. Общий случай. Рассмотрим систему, подчиненную не завися-
щим от времени связям и находящуюся под действием сил, имею-
щих силовую функцию U. Будем предполагать, что существует
такое положение устойчивого равновесия системы, для которого функ-
ция U обращается в максимум. Пусть qv q2, ..., qk — параметры,
определяющие положение системы. Мы допустим, что они, так же
как и U, равны нулю в положении равновесия. Так как положение
равновесия устойчиво, то если систему отклонить от положения
равновесия и предоставить самой себе, то в течение всего времени
движения параметры qv q2 % и их производные останутся
весьма малыми. Мы будем рассматривать все эти величины как малые
величины первого порядка. Полная кинетическая энергия является
квадратичной однородной функцией от всех q'\
Каждый из коэффициентов Ац является функцией параметров q,
обращающейся в а^, когда все эти параметры равны нулю. Следо-
вательно, можно написать:
/= 1, 2, .... к
где Г, есть сумма малых величин, порядка выше второго.
С другой стороны, мы знаем, что нуль является максимумом
функции U. Мы можем поэтому написать
где Ul имеет порядок выше второго. Заметим, что так как знак
выражений Т и 0 определяется знаком членов наинизшего порядка,
то суммы, составляющие члены второго порядка, должны оставаться
302 ДИНАМИКА СИСТЕМЫ
постоянно положительными в выражениях как для Т, так и для LJ
(знак выражения U вынесен за скобку).
Наше приближение заключается в отбрасывании членов U1 и Т1.
Уравнения Лагранжа
d (JT\ дТ dU
[ j
принимают тогда вид
flX+aX+ ¦¦¦ +fl.X = —(Mi+ ••• +*,*?*)
0=1, 2 k).
Полученные нами k совместных дифференциальных уравнений
являются линейными уравнениями второго порядка с постоянными
коэффициентами. Мы можем проинтегрировать их, положив
^1 = X1cos(^ + p) ?ft = Xftcos(r/ + P)- (8)
Эти значения будут удовлетворять уравнениям Лагранжа, если
будут выполняться равенства
\ (hi — r2akl) + X2 (bki — r2ak2) -f- ... -f- Xk (bkk — r2akk) = 0.
Для того чтобы не все X равнялись нулю, необходимо, чтобы
определитель этих линейных однородных уравнений равнялся нулю:
^11 — Г2#]д b^i — Г3#12 • • • bih — f2O-ik
=0. (9)
"к\ — *"^пк1 ^к% — Г^пк2 . ¦. Ькк -—- r^&iiii
Это равенство, рассматриваемое как уравнение относительно г2,
определяет в общем случае для этой неизвестной k значений, а для
неизвестной г определяет 2k попарно равных и противоположных
по знаку значений. Но можно всегда считать г положительным, так
как решение (8) не изменяется, когда г и р меняют знаки. Положив г
равным одному из этих k значений, например rv, можно будет опре-
делить все X в функции одной произвольной постоянной \\ и полу-
чить систему решений (8), содержащую кроме [av еще произвольную
постоянную pv. Таким путем получится k систем частных решений
дифференциальных уравнений, а их сумма есть общее решение, ко-
торое содержит, как и должно быть, 2k произвольных постоянных.
Таким образом, общее колебание является результирующим дви-
жением k частных колебаний, имеющих соответственно периоды
——, ..., ——. Корни rlt r2, ¦¦¦< гк являются инвариантами: их зна-
чения не зависят от выбора параметров.
Уравнения являются линейными. Поэтому, если имеются две
системы частных решений <7v — /v(X) и 9\ —?v@' т0 функции
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 303
9, =/v(O + tPv @ будут также решением. Получается, таким обра-
зом, то, что называют наложением малых колебаний.
Не ссылаясь на теорию квадратичных форм, можно доказать,
что корни уравнения для г вещественны. В самом деле, если бы
уравнение допускало мнимый корень a-\-ib, то оно допускало бы и
сопряженный корень а — ib. Соответствующие значения \ были бы так-
же комплексно сопряженными. Тогда для параметров q^ была бы
найдена система частных вещественных решений вида
9v = (А, + iBw) cos (a -\-ib)t-\- (A, — /Bv) cos (a — ib) t,
или, в вещественной форме,
q4 = д, (еы -\-е~ы) cos at -f- Bv {еы — е~ы) sin at.
Таким образом, существовало бы движение системы, в котором вели-
чины <7v и их производные, будучи сколь угодно малыми в началь-
ный момент, становились бы с течением времени сколь угодно боль-
шими, что противоречит условию устойчивости равновесия.
Из аналогичных рассуждений видно, что если уравнение для г
имеет кратные корни, то время не может содержаться вне знаков
синуса и косинуса, так как выражение вида
\it cos (rt -J- p)
становится бесконечно большим вместе с t.
К тем же результатам приводит и теория квадратичных форм. Если
положить
то при любых значениях переменных форма 5 будет существенно положи-
тельной, а форма U существенно отрицательной и обе эти формы могут
обратиться в нуль только при равенстве нулю всех переменных. Уравнения
малых колебаний могут быть записаны в виде
dt* \ dq, ) ~ dq, '
и уравнение (9), определяющее г2, получится, если приравнять нулю дискри-
минант формы U-\-r*S. Всегда можно при помощи линейной подстановки
с постоянными коэффициентами, преобразующей старые переменные дь
?2> •••>?? в новые переменные sv s2, ..., sft, привести обе квадратичные
формы к суммам квадратов:
s = si+si+ ... +4. и=-(^1 + ^1+ ... +44)
Тогда кинетическая энергия будет
Уравнения малых колебаний обратятся в следующие:
dfi \ds.,)~ ds, '
304 ДИНАМИКА СИСТЕМЫ
Отсюда
¦^Г = - r% sv - (х, cos (rj + ?„)•
Таким образом, мы непосредственно получаем уравнения малых колеба-
ний в конечной форме с 2k произвольными постоянными (xv и pv. Перемен-
ные Sj, s2, ..., Sfc, которые нужно выбрать для приведения Т и S к суммам
квадратов, называются, как указывалось выше, главными координатами.
Заканчивая, укажем на три заметки Бета (Beth), помещенные в Comptes
rendus de l'Academie royale des Sciences d'Amsterdam, и на статью Хорна
(Horn) в Journal de Crelie, т. 131, стр. 224.
Примечание. Мы предполагали, что определитель величин ау,
являющийся дискриминантом формы S, отличен от нуля. В противном слу-
чае нужно будет сделать другой выбор системы параметров. Мы предпола-
гали также, что разложение U по степеням q , q2 qk начинается с чле-
нов второго порядка. Если это разложение начинается с членов более
высокого порядка, например четвертого или шестого, то уравнения малых
колебаний не будут линейными.
451. Малые колебания, вызванные периодической возмущающей
силой. Рассмотрим такую же систему, как и та, для которой мы только что
исследовали малые колебания около положения устойчивого равновесия,
соответствующего
Предположим, что к основным силам системы, имеющим силовую
функцию U, которая в положении равновесия обращается в равный нулю
максимум, прибавляются во время движения очень малые возмущающие
силы, являющиеся функциями времени и в общем случае также функциями
параметров qv q2, .... qk и их производных.
Обозначим через X, Y, Z ту силу, которая действует на точку с коорди-
натами х, у, г. Тогда на основании общей теории уравнений Лагранжа,
если положить
уравнения движения будут
— (-^т-\ — — = — + R-, (ч = 1.2 k). A0)
dt \ d<7v J ctyv dq^
Мы предположим, что 7" и U приведены к тем же квадратичным фор-
мам; что и выше.
Возмущающие силы, будучи независимыми от тех, которые определяют
равновесие, не будут в общем случае обращаться в нуль в положении
равновесия, и поэтому разложение R,, по степеням q q2,..., qk и их
производных будет содержать член, не зависящий от этих переменных,
по отношению к которому последующие члены могут рассматриваться как
малые величины, которыми можно пренебречь. Величины /?„ будут тогда
функциями только времени. Мы будем их предполагать периодическими.
Уравнения движения A0) не будут, как прежде, линейными без правых
частей^ а будут теперь иметь в качестве правых частей периодические
функции R^. Эти функции могут быть разложены в ряд по синусам и
косинусам
R., = 2А, cos (at + а) -\- 26., cos (bt + $)+ ... + 2L, cos (It + л),
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 305
где А„ В., а, Ь а, р, ... —постоянные. Мы будем говорить, что
каждый член в R., представляет собой простую возмущающую силу: пер-
вый — возмущающую силу с периодом — , второй — возмущающую силу
с периодом -г- и т. д>.
о
Допустим для простоты, что в качестве qv qr .... qk выбраны главные
координаты. Тогда, как мы видели, приближенные значения для Т и U будут
1 — 9i + Я2 + ¦ ¦ ¦ + Як - u = ~ .
и уравнения возмущенного движения будут иметь вид
я" + r\q, = A, cos (at + а) + Bv cos (bt + p) + ... +Z.scos(/^ + X) A1)
(v=l, 2, ..., k).
Общие интегралы этих уравнений будут иметь различную аналитическую
форму в зависимости от того, будет ли одна из величин а, Ь, ,.., / равна г,
или нет.
Допустим сначала, что ни одна из величин а, Ь, ..., /не равна ни одному
из корней г у г2 rft. Тогда общие интегралы уравнений A1) будут
иметь вид
?, = fA, cos (r,t + р,) + v cos (at + «) + ¦¦/',.- cos (W + P) +...
r\-a~ rt-b'
... + A'; cos(/^ + X) (v = l, .... A), A2)
где (х,( и pv — произвольные постоянные. Следовательно, в этом случае
простая возмущающая сила, соответствующая слагаемому
2А( cos (at + a)
в выражении 7?v, вводит в систему вынужденное колебание
А,
rl-a'
¦ cos (at + я),
период которого равен периоду силы, а амплитуда не зависит от начальных
условий, которые влияют только на постоянные щ и р.(. Если а близко к г„,
т. е. если период —- простой возмущающей силы близок к периоду —-
а гч
одного' из собственных колебаний системы, предоставленной самой себе,
А
то коэффициент —;—:!—т- становится большим числом и амплитуда колебания,
вводимого этой возмущающей силой, становится значительной. Это замеча-
ние дает возможность предугадать, что произойдет, когда одна из величин
а, Ь, ..., I будет равна одному из корней гч.
Допустим, например, что в равно rlt но отлично от гг, гу ..., гк н ни
одна из величин Ь, ..., I не равна ни одному из корней rv r2 гК Тогда
общие интегралы уравнений A1) для г = 2, 3 k сохранят найденную
выше форму A2), но первое уравнение
20 Зак. 922. П. Аппель, т. II
306 ДИНАМИКА СИСТЕМЫ
в котором а = Г\, будет иметь интегралом
ft = Щ COS (rtt + Pl) + -?- sin (rt* + a) +
Следовательно, в члене интеграла, соответствующем возмущающей силе
период которой — равен периоду одного из собственных колебаний
системы, время t имеется в качестве множителя. Таким образом, когда
период одной из возмущающих сил стремится к периоду одного из про-
стых собственных колебаний системы, амплитуда вынужденного коле-
бания становится все больше и больше. В пределе вынужденное колеба-
ние сливается с соответствующим собственным, а амплитуда колебаний,
пропорциональная t, неограниченно возрастает или, по крайней мере,
выходит за пределы, в которых линейное приближение уравнений можно
считать достаточным.
Эта теорема объясняет многие явления, называемые резонансом, напри-
мер: возбуждение колебаний струны, когда воздух колеблется в унисон;
избирательное поглощение световых и тепловых лучей средой, способной вос-
производить лучи, имеющие волну той же длины, и т. д.
Другое важное приложение встречается в возмущениях движения локо-
мотивов. Масса машины, которую несут рессоры, образует систему, подвержен-
ную колебаниям определенного периода т. Возмущающие силы, происходящие
от инерции движущихся частей, поршней, шатунов, кривошипов, дают сумму
проекций или моментов, имеющих главным периодом продолжительность
одного оборота колеса. Поэтому соответствующие возмущения должны
проходить через максимум амплитуды, когда скорость локомотива такова,
что его колеса делают один оборот за промежуток времени, равный пе-
риоду т колебания. (Vicaire, Comptes rendus, т. СХН, стр. 82.)
IV. Колебания около устойчивого движения
452. Общий метод. Уравнения Лагранжа позволяют изучить также
малые колебания системы около состояния устойчивого движения.
Следуя методу, подобному тому, который был применен при изучении
малых колебаний около положения устойчивого равновесия, мы опять
придем к интегрированию линейных уравнений, но эти уравнения
уже не будут уравнениями с постоянными коэффициентами.
Пусть дана система, в которой связи могут зависеть от времени
и положение которой определяется k геометрически независимыми
параметрами. Уравнения движения будут
dt \ d J d
Допустим, что найдено частное решение
этих уравнений, в которых постоянные интегрирования имеют опре-
деленные значения. Тогда мы имеем частное движение, которое
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 307
будет совершать система, когда в момент t = 0 параметры qx,
q2 qk принимают значения ^(О), /2@) Л@), а производ-
ные q[, q'2 ^ — значения /[@), /?@) /*@)- В этом слу-
чае говорят, что движение устойчиво, если система при произвольных
начальных условиях, бесконечно близких к предыдущим, будет
совершать движение, бесконечно близкое к рассматриваемому частному
движению. Можно узнать, будет ли рассматриваемое движение устой-
чиво, и одновременно найти бесконечно близкие движения, применяя
следующий метод. Заменим параметры qv q2, ..., qk новыми пара-
метрами su s2 sk, определяемыми из соотношений
Уравнения движения Лагранжа примут вид
dt \ ds[ J dsv
где Т и S., — функции от slt s2, . . ., sk и от s'v s'2, . . ., s'k.
В этих новых параметрах частное движение, устойчивость кото-
рого мы желаем изучить, определяется равенствами
S] =-— 0, s2 = О, .... sk = 0.
Оно получится, если предположить, что в момент t = 0 параметры s.t
и их производные s'^ имеют значения, равные нулю. Придадим в на-
чальный момент этим параметрам и их производным произвольные
бесконечно малые значения. Требуется узнать, будет ли получающееся
при этом движение бесконечно близким к предыдущему, т. е. таким,
при котором величины sv s2, ..., sk и s[, s'2, s'k остаются беско-
нечно малыми.
Предположив, что это будет так, и допустив, что Т, Sx, S2,...,Sk
разлагаются в ряд по возрастающим положительным степеням s,, s2 sk
и s'v s'o s'k, мы, сохранив в обеих частях уравнений только члены
первого порядка относительно этих величин и величин s", s'2',. . ., s'^,
найдем искомые уравнения. Так как полученные таким образом урав-
нения должны, по предположению, удовлетворяться при
то они будут линейными и однородными относительно неизвестных sv
и их первых и вторых производных.
453. Пример. Рассмотрим точку массы 1, притягиваемую неподвижным
центром О пропорционально n-й степени расстояния:
20*
308 ДИНАМИКА СИСТЕМЫ
Если обозначить через гиб полярные координаты и применить уравнения
Лагранжа, то уравнения движения будут
г» _ ге/2 == — цгп, ~ (гП1) =±= 0. B)
Они допускают частное решение
г = г0, e'-l^p". е = /^р*. C)
Как видно, траектория этого движения является окружностью с центром
в точке О, описываемой с постоянной угловой скоростью. Выясним, будет ли
это частное движение устойчивым. Положим с этой целью
6 = V ИГ»* + Т) D)
и посмотрим, будут ли е и 1] оставаться очень малыми, если они и их
производные г' и т)' были очень малыми в начальный момент. При таком
предположении будем рассматривать е и г\ и их производные как малые
величины первого порядка и будем пренебрегать их квадратами и произ-
ведениями. Подставляя значения D) в уравнения движения B) и обозначая
через w постоянную величину у I*''" > получим
г" — Ш3е _ ггоои)'= — лм'е, roif + 2ше' = 0. E)
Правая часть первого уравнения является членом с первой степенью е
в разложении функции (х (r0 -f- e)n. Интегрируя второе из этих уравнений,
получим
Го1»)' + 2юе =« аи, F)
где а — произвольная постоянная, которая очень мала, так как е и i\' очень
малы при t = 0. Исключая из уравнений E) и F) т\ , получим линейное урав-
нение с постоянными коэффициентами:
е" + (л + 3) @% = 2аЛ
Если п + 3 отрицательно или равно нулю, то общий интеграл этого уравне-
ния будет содержать члены с показательными или алгебраическими функ-
циями, неограниченно возрастающими вместе с t, и рассматриваемое круго-
вое движение не будет устойчивым. Допустим, следовательно, что п -\- 3
положительно. Тогда
e = ftCOs(<*/yTT3+«) + -TTo,
и —J— о
где бия — произвольные постоянные, из которых первая очень мала. Сле-
довательно, с остается очень малым, и поэтому г = r° -|- e остается близким
к г0- Рассмотрим теперь уравнение F). Заменяя в нем г только что найден-
ным значением и интегрируя, получим
/V) = - -tJL=~ sin (^/пТЗ + «) + 2—1- a*t 4- с, G)
V п + З 43
где с — очень малая постоянная. Мы видим, что к) содержит член с t. Сле-
довательно, к) неограниченно возрастает вместе с ( и круговое движение не
будет устойчивым. Исключение представится лишь в том случае, когда л «= 1,
так как тогда член с t исчезает. Если л отлично от 1, то для того, чтобы i\
оставалось очень малым, необходимо будет подобрать начальные условия
таким образом, чтобы а равнялось нулю. Это условие означает, что в воз-
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 309
мущенном движении постоянная площадей должна иметь такое же значе-
ние wr\, как и в круговом движении. В самом деле, если для возмущен-
ного движения мы напишем интеграл площадей
(г0+«>(» +V) = С,
то, пренебрегая в нем величинами ва и ет)'> получим уравнение
rQri -p- 2e <i> = i
совпадающее с уравнением F). Следовательно, для того чтобы а было равно
нулю, необходимо, чтобы С = <e/-g. Резюмируя, мы можем сказать, что за
исключением случая, когда л=1, круговое движение не будет устойчивым.
Но оно становится устойчивым при п -\- 3 положительном, если очень мало
изменять начальные условия таким образом, чтобы не изменялась постоян-
ная площадей.
Ралки этой книги не позволяют нам останавливаться далее на
вопросе об устойчивости движения. За более глубоким исследованием мы
отсылаем к Механике Рауса *) (advanced Part, гл. III).
V. Приложение уравнений Лагранжа
к относительному движению
454. Первый способ, не связанный с теорией относительного
движения. Для нахождения относительного движения системы по
отношению к осям Oxyz, совершающим известное движение, доста-
точно применить уравнения Лагранжа к абсолютному движению,
выбирая в качестве параметров переменные qlt q2, .... qk, опреде-
ляющие положение системы относительно подвижных осей. Эти же
параметры определяют, очевидно, положение системы и относительно
неподвижных осей O0x0y0z0, так как движение осей Oxyz известно.
Абсолютная кинетическая энергия Та системы будет функцией
от qv q2 qh, q[, q'r . .,, q'k и, быть может, также от t. С дру-
гой стороны, если сообщить системе возможное перемещение, допу-
скаемое связями, имеющими место в момент t, т. е. перемещение,
которое получится, если, оставляя t постоянным, .сообщить пара-
метрам <7i> Чг ' Ян бесконечно малые произвольные приращения
8<7,, о<72. ¦ • ¦, bqk, то сумма работ приложенных сил, кроме реакций
связей, будет выражаться следующим образом: Qxbqx-\-Q2bq2-\-...
.. . -\-Qklqk. Тогда уравнения движения будут
d (дТа
^ \ dq[
*)¦
'*) См. Ляпунов, Общая задача об устойчивости движения, Харьков,
1892. 3-е изд., Гостехиздат, 1950, а также Собрание сочинений, т. II, Изд-во
Академии наук СССР, 1956. В этом сочинении дана общая постановка задачи
устойчивости движения и разработаны основные приемы ее решения. В на-
стоящее время этой задаче посвящена огромная литература, в том числе
много учебников и монографий. (Прим. перев.)
310
ДИНАМИКА СИСТЕМЫ
Если заданные силы имеют силовую функцию U, то вели-
чины Qv будут равны ^—.
Для вычисления Та не обязательно составлять выражения абсолютных
координат в функции <?t Чк и t. Абсолютная скорость va точки m
есть результирующая ее относительной скорости vr по отношению к дви-
жущимся осям Oxyz и ее переносной скорости ve при движении вместе
с этими осями. Если обозначить через х, у, г координаты точки m и штри-
хами — производные по времени, то проекции скорости vr на Oxyz будут
х', у', г'. Что касается переносной скорости ve, то это будет скорость,
которой обладала бы точка /и, если бы она была связана с осями Oxyz.
Она является, следовательно, результирующей двух скоростей: поступатель-
ной скорости V", равной и параллельной скорости точки О, и скорости,
вызванной вращением с угловой скоростью о> вокруг некоторой оси, про-
ходящей через точку О. Обозначая через V?, K°, V" проекции скорости V"
и через р, q, г — проекции угловой скорости о> на подвижные оси, мы полу-
чим для проекции переносной скорости ve на те же оси (п. 51) выражения
V°, -j- qz — ry, ... Следовательно, проекции абсолютной скорости va точки m
на подвижные оси Oxyz равны х' -f- V°x -\- qz — ry и мы имеем:
+ (у ' + К +rx - pzT + (г' + К + ру - я*У\ ¦
Это выражение позволяет вычислить Та в функции qh q2, ..., qk,
qv q2, ..., qk и t, так как координаты х, у, z различных точек суть функ-
ции параметров ^i> Я%< • • ¦ > Чк и> быть
может, времени t, a V^, V°y, V\, p,
q, r являются известными функциями
времени.
455. Пример. Рассмотрим непо-
движную вертикальную ось Оу и пло-
скость Р, проходящую через эту ось
и вращающуюся вокруг нее с постоян-
ной угловой скоростью ш. Найти движе-
ние однородного тяжелого стержня,
скольяящего без трения по этой пло-
скости (рис. 264).
Требуется найти относительное дви-
жение стержня по отношению к осям
Ох и Оу, проведенным в движущейся
плоскости Р. Положение стержня отно-
сительно этих осей определяется тремя
независимыми параметрами: координа-
тами 5, г) центра тяжести G и углом 8
между стержнем АВ и линией Gxt,
параллельной оси Ох. Абсолютная скорость va какой-нибудь точки m стержня
есть результирующая ее относительной скорости vr, лежащей в пло-
скости хОу, и ее переносной скорости ve. Эта последняя является ско-
ростью, которой обладала бы точка т, если бы она была неизменно
связана с движущейся плоскостью. Следовательно, она равна ах, где А' —
абсцисса точки т, и перпендикулярна к плоскости хОу. Таким образом,
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 311
переносная и относительная скорости взаимно-перпендикулярны, и мы имеем
В таком случае для абсолютной кинетической энергии Та имеем
Вычислим оба члена отдельно. Относительное движение стержня является
движением в плоскости хОу; кинетическая энергия в этом движении по тео-
реме Кёнига будет
где М№ — момент инерции Стержня относительно его центра G. С другой
стороны, 2 mvt = ffl2 2 mx2> сУмма 2 mx% есть момент инерции относи-
тельно оси Оу, который равен моменту инерции 2 tnx\ относительно парал-
лельной оси Gyb увеличенному на произведение всей массы на квадрат
расстояния между осями Оу и Gy^, т. е. увеличенному на Mi2. Если через г
обозначить расстояние mG, то расстояние xL от какой-нибудь точки m до
оси Gy1 есть х± = ± г cos в и сумма 2 тх\ равна cos2 Q^jjmr2 или
Mk2 cos2 6. Следовательно,
2 mv2e^M^(k2 cos2 8+?2)
и абсолютная кинетическая энергия окончательно принимает вид
Та = 1 М (S'3 + Г)'2 + fe26'2 + OJ?2 COS2 6 + 0J52).
Так как единственной заданной силой является вес Mg, приложенный
в G, то существует силовая функция U = Mgr\. Применяя последовательно
уравнения Лагранжа к параметрам 5, т\, 6 и сокращая на М, получим три
уравнения движения:
4т (?') — ш2« = 0, 4т <i') = S> -ir i.k4') + fe2w2 sin 6 cos 8 = 0,
определяющие 5, r,, 9 в функции /. Сначала имеем
Эти уравнения определяют относительное движение центра тяжести. Третье
уравнение, которое определяет 8 в функции t, уже встречалось у нас в задаче,
рассмотренной в п. 366.
Следует отметить, что здесь Та не будет однородным относительно ?',
i\', 8'. Это объясняется тем, что связи, наложенные на систему,, зависят от
времени: стержень скользит в плоскости, . совершающей заданное движение.
Примечание. В предыдущем мы предполагали стержень свободным
во вращающейся плоскости. Допустим, что два его конца А и В должны
скользить по осям Ох и Оу, как в задаче п. 420. Тогда 5, ч\, 8 не будут
независимыми и, обозначив через 21 длину стержня, получим
? = / cos 6, 1) = / sin 8, fe2 = -^ /a.
312 ДИНАМИКА СИСТЕМЫ
Теперь надо выразить Та и U через единственный независимый пара-
метр 6, для чего достаточно в найденных выше выражениях заменить коор-
динаты S и т| их полученными здесь значениями. Тогда
Та=\ МР (б'2 + 0J COS* 6), U = Mgl Sin 6,
о
и уравнение движения будет
У Ш'/2 Sin 9 cos 6 = S' cos 8,
что совпадает с уравнением, найденным ранее другим путем (п. 420).
456. Второй способ, основанный на теории относительного движе-
ния. Допустим, что требуется найти движение системы, по отношению к
осям Охуг, перемещающимся известным нам образом. Положение системы
относительно этих осей зависит от некоторого числа геометрически незави-
симых параметров q±, q%, ..., qk. С другой стороны, система находится под
действием заданных сил, и если, дав параметрам приращения bqt, bq2, .. ., bqk,
сообщить системе возможное перемещение, допускаемое связями, то сумма
элементарных работ этих сил будет иметь вид
Мы можем рассматривать движущиеся оси как неподвижные при усло-
вии присоединения к силам, действительно действующим на каждую точку
массы т, переносных и кориолисовых сил инерции. Пусть
— сумма возможных работ этих фиктивных сил на перемещении 6^, bq2, ...
..., bq^. Тогда можно будет применить уравнения Лагранжа к движению
системы относительно осей Охуг, рассматриваемых как неподвижные. Для
зтого нужно будет составить выражение Тг кинетической энергии системы
в ее движении относительно этих осей; это выражение будет функцией от
qv <7„ ..., qk, qv q2, ..., qk и, может быть, времени t; уравнения Движения
будут
dt
Легко применить этот метод ко всем задачам, рассмотренным ранее
в теории относительного движения.
457. Смешанный метод Жильбера. Опираясь частично на тео-
рию относительного движения, Жильбер использовал следующий
метод. (Gilbert, Application de la methode de Lagrange a divers
problemes de mouvement relatif, Annales de la Societe scientifique de
Bruxelles, 1883.)
Пусть, как и раньше, требуется найти движение системы отно-
сительно осей 0x^2, совершающих известное движение. Предпола-
гается, что положение системы относительно этих осей зависит от k
геометрически независимых параметров qv q2, . . ., qk и сумма воз-
можных работ приложенных сил на перемещении bqv bq2 Zqk
предполагается по-прежнему равной
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 313
Проведем через подвижное начало О вспомогательные оси Oxlylz1,
параллельные неподвижным осям O0x0y0z0 (рис. 265).
Можно рассматривать оси Oxly1zl как неподвижные при усло-
вии добавления к действительно приложенным силам только пере-
носных сил инерции, так как оси Oxly1zl движутся поступательно
(п. 416). Если мы обозначим ускорение подвижного начала О через j,
то переносная сила, которую нужно приложить в каждой точке,
будет — mj. Обозначим через jx, jy, jz проекции ускорения j на
оси Охуг. Тогда проекции переносной силы — mj на те же оси будут
— mjx, — mjy, — mjz
и сумма работ этих сил на возможном перемещении, сообщенном
системе, будет равна
— 2 я1 Ux ^x Ч~ Ju <>y -Ь iz ^z)>
где сумма распространена на все
точки. Величины jx, jy, jz являются
известными функциями времени t.
Полагая
К= — 2
мы видим, что сумма возможных
работ переносных сил равна 8/С. рис 265
При этом второе выражение для
функции К получилось путем введения всей массы М системы и
координат ?, ¦»],* С центра тяжести G относительно осей Охуг. Из
него еще следует, что
К = — Mj ¦ 00 cos jOO.
Благодаря введению этих переносных сил мы можем рассма-
тривать оси Ox1y1z1 как неподвижные и применить уравнения Ла-
гранжа к движению относительно этих осей, как если бы это движе-
ние было абсолютным. Обозначим через Т кинетическую энергию
системы в движении относительно осей Ох^у^. Уравнения движе-
ния будут
dt
dq,
ак
Член ~- появляется вследствие добавления переносных сил инерции.
Действительно, возможная работа этих сил, равная о/С, если выра-
зить ее в функции переменных qx, q2, .... qk, имеет вид
дК
дК *
314 ДИНАМИКА СИСТЕМЫ
Если заданные силы имеют силовую функцию U, то
и правые части уравнений движения можно написать в виде
d (U 4- К)
dq., •
Вычисление величины Т. Скорость vt точки т относительно
осей Ox^y^Zx, рассматриваемых как неподвижные, есть результирую-
щая ее относительной скорости vr по отношению к осям Oxyz и ее
переносной скорости ч>'е вместе с этими осями.
Проекции относительной скорости vr на оси Охуг равны произ-
водным х', у', г'; проекции v'e на те же оси равны qz— ту,
гх—pz, ру — qx, так как при движении триэдра Oxyz относительно
осей Ox1y1zl начало О неподвижно; здесь, как и раньше, р, q, r
обозначают составляющие по осям Oxyz мгновенной угловой ско-
рости вращения со подвижного триэдра Oxyz.
Следовательно, имеем:
Т = 1 2 m [(х' + 4Z - гуJ + {У' + гх ~рг)~ +B' +РУ — 4xf\-
Положим:
После этого можно написать
Величина Тг есть кинетическая энергия системы в ее относительном
движении относительно осей Oxyz; она непосредственно выражается
через переменные qw и их производные q'.
Величина Те представляет собой кинетическую энергию системы,
вызванную ее переносным вращением вокруг мгновенной оси Оа>
триэдра Oxyz; она имеет, следовательно, выражение
где Н—момент инерции материальной системы относительно оси От
в момент t.
Наконец, для Т* можно написать
Г =p^m {у г' — г у') + q 2 m (гх' — xz') -f- r 2 m (xy' - ух'),
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ
315
Вектор а, проекции которого на подвижные оси равны
^т(уг' — zy'), ^m(zx'— xz'), ^т(ху'— ух'),
есть главный момент относительно точки О количеств относитель-
ного движения, и мы непосредственно имеем:
Т* =.ша cos ша.
Преимущество геометрических форм, которые мы дали вели-
чинам К, Tr, Te, T*, заключается в том, что в каждой конкрет-
ной задаче они непосредственно выражают эти величины в функции
<7V и Q1' и нет необходимости прибе-
гать к преобразованию координат.
458. Приложение к относитель-
ному движению тяжелой системы по
отношению к Земле, принимая во
внимание также вращение Земли.
Представим себе в некоторой точке О
земной поверхности тяжелую систему S,
подчиненную заданным связям. Мы ста-
вим себе задачей изучить ее отно-
сительное движение по отношению
к осям Охуг, связанным с Землей и увле-
каемым ею в ее вращательном дви-
жении вокруг линии полюсов РР'
(рис. 266). Если по методу Жильбера
мы проведем через точку О оси Ох^у^г^,
имеющие постоянное направление в про-
странстве, то движение триэдра Охуг относительно этих
вращательным с угловой скоостью ш, равной угловой скорости
осей будет
Земли. Оно
будет происходить
на север.
Величины Т,
вокруг оси Ow, параллельной направлению Р'Р, с юга
¦ r, Te, T" вычисляются так, как было указано выше. В част-
ности, Те равно •=- Ни>2, где Н— момент инерции материальной системы S
относительно оси Оь> в момент t. Вычислим К. и силовую функцию U дей-
ствительно приложенных сил (притяжение Земли). Мы знаем, что вес mg
произвольной точки системы S есть равнодействующая притяжения и цен-
тробежной, силы Ф = /иш2р (п. 424). Применяя точку зрения Жильбера, ми
будем рассматривать ускорение g как постоянное по величине и напра-
влению относительно Земли во всем объеме системы S, размеры которой
мы будем предполагать очень малыми. Постоянное направление g совпадает
с нисходящей вертикалью О V точки О. Силами, действительно приложен-
ными, являются силы притяжения А Землей различных точек т системы S.
Но так как mg есть геометрическая сумма сил А и Ф, то А есть геоме-
трическая разность сил mg и Ф. При любом перемещении, сообщаемом
точке т, работа силы А равна разности работ сил mg и Ф. Следовательно,
окончательно, силовая функция U действительно приложенных сил А равна
разности силовой функции сил веса и силовой функции сил Ф, а так как
высота центра тяжести О над горизонтальной плоскостью в точке О равна
OG cos OGV, то силовая функция для сил тяжести равна MgOG cos GOV, где
М — вся масса системы.
.316 ДИНАМИКА СИСТЕМЫ
Силы Ф нормальны к земной оси РР'. Поэтому, обозначая через р
расстояние от точки т. до этой оси, мы получим для элементарной работы
одной из сил Ф значение
тяш2р dp = d
Совокупность этих сил имеет силовую функцию
где Ht — момент инерции 2тР" системы относительно оси Земли РР'-
Отсюда для функции U, равной разности двух предыдущих функций, получаем
и=Mgoa cos 6ov—y я1йJ.
Но мы можем вычислить момент инерции Нх относительно оси РР'
через момент инерции Н относительно оси Ош, параллельной оси РР':
В самом деле, если через dx и d обозначить расстояния GQi и GQ от центра
тяжести О до параллельных осей РР' и 0<л, то по известной теореме
(п. 317)
С другой стороны, из треугольника GQQb обозначая через 8 расстояние
очевидно, равное расстоянию ОЙ от точки О до земной оси, имеем
d\ — di = 52 — Id 8 cos GQQi-
Величина cf cos GQQi есть проекция QG на QQi- Она равна проекции OG
на QQi или на параллельную ей прямую OR, т. е. она равна OG cos GOR.
Следовательно,
Ht = Н-\- М E2 _ 2 500 cos 60R).
Поэтому
U = MgOG cos GOV— -i- Яш2 + M«2 BOG cos GO)? — у шШ 82.
Для того чтобы нолучить значение /\< заметим, что начало О системы
отсчета Охуг вследствие вращения планеты описывает вокруг РР' окруж-
ность радиуса 5 с постоянной угловой скоростью ш. Следовательно, уско-
рение j имеет значение ш2В и оно направлено от О к R. Отсюда на осно-
вании того, что общее выражение К есть — Mj • OG cos JOG, имеем
К — — Afo>2 50G"cos GOR.
Наконец, находим
Я2
где последний член есть постоянная, которая при дифференцировании
пропадает. Кроме того, на основании найденного значения Те имеем
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ
317
Если теперь обозначить через qv q~, ...,?4 параметры, определяющие поло-
жение системы относительно осей Охуг, то уравнения относительного дви-
жения будут
dt
дТ d(U+K)
= 1, 2 k).
(а)
Если заменить Т и U-\-К их значениями, то дополнительно получатся
важные сокращения. Преиаде всего величина Ге = —- Нч>- зависит только
от рассматриваемого положения точек, но не зависит от их скоростей. Сле-
> / / дТР
довательно, эта величина не содержит qv q2 qk и —~- равно нулю.
Далее член —
дТ"
dq.,
в левой части равенства (а) равен члену
1
в правой части. Остаются, следовательно, уравнения
й д(Тг+Т*) — "
dt dq[
2
Это и будут уравнения, определяющие относительное движение тяжелой
системы на поверхности Земли. Мы видим, что для их составления доста-
точно вычислить Тг, Т* и OG cos 00 V.
459. Пример. Однородное тяжелое тело вращения подвешено
в точке О своей оси симметрии 0Z- Кроме того, эта ось должна оста-
ваться в некоторой плоскости, неподвижной относительно Земли.
Найти движение тела относи-
тельно земных предметов, прини-
мая во внимание вращение Земли.
Пусть OXYZ (рис. 267) — связан-
ные с телом его главные оси инер-
ции для точки О и пусть Охуг —
связанные с Землей оси, относи-
тельно которых надо найти дви-
жение. Выберем в качестве пло-
скости ху ту плоскость, в которой
движется 0Z и в качестве оси
Ох — проекцию на эту плоскость
вектора Ош, равного вектору угло-
вой скорости вращения Земли (ось
Ow параллельна земной оси и на-
правлена с юга на север). Выберем
направление оси Ог относительно
плоскости хОу в ту же сторону,
куда направлена ось О». Центр тяжести G предполагается лежащим на
положительной части оси 0Z на расстоянии 0G = I от неподвижной точки.
Положение тела относительно осей Охуг зависит от двух параметров,
например, от углов Эйлера 'f и i. образуемых осями X, Y, Z с осями х, у, г.
Третий угол Эйлера 6 в рассматриваемом случае равен -=-, так как
Рис 267.
Вычислим Тг и Т*. Величина Тг есть кинетическая энергия тела в его
движении относительно осей Охуг. Движение тела относительно этих осей
318 ДИНАМИКА СИСТЕМЫ
является движением твердого тела вокруг неподвижной точки. Следовательно,
если обозначить через Р, Q, R составляющие по главным осям OXYZ
мгновенной угловой скорости Q тела относительно осей Охуг, то согласно
общим формулам (п. 382) мы имеем
sin 6=1, Р = у sin <p, Q = <К cos <f, R = if'.
1Tr = Л (Р2 + Q°-) + CR9- = AY2 + O/2.
Вычислим также Т*. Обозначив через а величину главного момента я
относительно точки О количеств относительного движения по отношению
к осям Охуг, получим:
Т* — @3 COS w, Я.
Проведем прямую 01 пересечения плоскости X0Y с плоскостью хОу.
Тогда
х~О1 = if, IOX = <f.
Вектор я имеет по осям OXYZ составляющие АР, AQ, CR. На основании
значений Р, Q и R, полученных выше, его проекция А (Р cos ср — Q sin -f)
на ось 01 равна нулю, а его проекция А {Р sin <p -\- Q cos <p) на ось OZ
равна Aif'. Следовательно, вектор я есть сумма двух векторов, из которых
один равен Л<{/ и лежит на оси Ог, а другой равен CR или Су' и лежит
иа оси OZ. Обозначив через а постоянный угол шОх, найдем проекцию
вектора я на ось Ош;
a COS ш, а = Aif' Sin я -\- Сер' COS а sin if.
Поэтому Т* равно произведению этой величины на ш.
Следовательно, для выражения величины Тг + Т"', которую мы для крат-
кости обозначим через в, имеем:
в = Г, + Г: = -1 (Ay2 + Cif'2) + <° {Ay sin a + <y cos a sin <J0.
С другой стороны, обозначим через я, Ь, с косинусы постоянных углов,
которые образует направленная вниз вертикаль OV с осями Охуг, и заме-
тим, что координата С центра тяжести G равна нулю, так как эта точка
находится на оси вращения OZ, которая лежит в плоскости хОу. Тогда
проекция отрезка OG на вертикаль О Убудет
Ой cos G0V = а\ + bri = l (a sin if — b cos if),
так как в плоскости хОу ось OGZ образует с осью Ох угол if — -^-,
а длина OG обозначена через / и, следовательно, координаты 5 и у\ равны
/ sin if и —• / cos if. Если заметить, что ни в, ни OG cos GO V не содержат <f,
то на основании равенства (Ь) получаем два уравнения движения:
Можно получить два первых интеграла этих уравнений. Прежде всего
непосредственно имеем -5—r = const, т. е.
if' -f- w COS a Sin if — k. B)
Далее в уравнениях A) можно выполнить преобразования, приводящие
к обобщенному интегралу энергии Пенлеве (п. 418). Для этого умножим
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 319
первое уравнение на tf', второе на <\>' и сложим. Таким путем получится
соотношение, которое можно написать в виде
дв . ,, дВ\ I „ дв , ,„ дв , , дв , ,, дв
= Mgl (a cos <\> + b sin ф) V. C)
Так как в не содержит /, то последняя группа членов в левой части
равна —jr-. С другой стороны, выделяя в 0 часть О2 второго порядка отно-
сительно <р' и V и часть et первого порядка, имеем
и уравнение C) напишется в виде
*- Bв2 + 90 - ±. (вя + в,) = Ai^ (a cos <|» +
откуда, интегрируя, получим
в2 = Л4^/ (a sin ф — 6 cos i{/) + const,
т. е.
Л^'2 + Q'2 = 2^/ (а sin <{/— 6 cos ф) + h. D)
Этот первый интеграл может быть, очевидно, получен независимо
от метода Жильбера. Это интеграл энергии в применении к относительному
движению по отношению к осям Охуг.
Мы приложим найденные формулы к двум простым частным случаям.
460. Гироскопический компас Фуко. Допустим, что тело закреплено
в своем центре тяжести. Тогда OG = / = 0 и оба интеграла примут вид
<f' + <¦> cos я sin ф = k, А у2 4- С1?'2 = h.
Эти уравнения интегрируются в эллиптических квадратурах. Так как угло-
вая скорость Земли очень мала, то можно пренебречь величиной а>2. Тогда,
подставляя во второе уравнение значение <р', найденное из первого уравнения,
и пренебрегая членом с ufl, получим
А 4>'2 — 2Ck (о cos a sin <!» = /, E)
где /— новая постоянная. Мы можем всегда предполагать, что положитель-
ное направление на оси OZ тела выбрано так, что начальное значение Ro
или if о вращения тела вокруг OZ положительно. Тогда уравнение E) непосред-
ственно приведется к уравнению движения математического маятника. Дей-
ствительно, обозначив через и угол xOZ, найдем ф = и -{- -=-, и уравнение E)
примет вид
,о 2СЫ . /
U = —;;— COS a COS U 4- 4- ,
А А'
совпадающий с уравнением движения математического маятника, в кото-
ром и — угол отклонения от вертикали.
Следовательно, ось OZ гироскопа совершает вокруг оси Ох колебатель-
ное движение. В действительности же вследствие сопротивления воздуха и
трения ось OZ остановится по истечении некоторого промежутка времени
на оси Ох, т. е. по направлению, параллельному проекции земной оси
на неподвижную плоскость хОу.
320 ДИНАМИКА СИСТЕМЫ
Вследствие этого свойства прибору дано название гироскопического
компаса. Если плоскость хОу, в которой должна оставаться ось гироскопа
является горизонтальной плоскостью места наблюдения, то положение отно-
сительного равновесия оси OZ совпадает с направлением меридиана. Прибор
может тогда служить компасом. Если плоскость хОу совпадает с плоскостью
меридиана, то ось гироскопа займет положение Оа, которое будет тогда
совпадать с осью Ох, и прибор будет служить указателем широты.
Резюмируя изложенное, можно сказать, что ось такого гироскопического
прибора стремится составить возможно меньший угол с осью Земли.
461. Барогироскоп Жильбера. В гироскопическом компасе Фуко, кото-
рый мы только что рассмотрели, предполагается, что центр тяжести тела
вращения находится в точке подвеса О, и ось OZ тела должна оставаться
Рис. 268.
в плоскости, связанной с Землей и проходящей через точку О. Условие, чтобы
центр тяжести находился в точке О, очень трудно осуществить практически.
Поэтому Жильбер исследовал влияние вращения Земли на движение тяже-
лого тела вращения, закрепленного в какой-нибудь точке О своей оси OZ,
когда эта ось 07. движется в вертикальной плоскости, связанной с Зем-
лей, причем центр тяжести G не находится в точке О. Жильбер прак-
тически осуществил только что указанные условия на следующем приборе,
названном барогироскопом.
Представим себе бронзовый тор D (рис. 268), стальная ось а которого
свободно вращается в двух конических углублениях, вь.т ученных в стальных
винтах v и v', проходящих через стальную рамку СС. Эта рамка опирается
двумя ножами А и А' на цилиндрические подушки из закаленной стали.
Система строго симметрична относительно плоскости, проходящей через ось
тора и лезвия ножей, и ее подвижность вокруг последних такова, что доста-
точно легкого дуновения, чтобы вызвать колебания.
После того, как с помощью регулировочных винтов V, V, V" ось под-
веса АА' будет установлена горизонтально, тор будет представлять собой
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ
321
твердое тело вращения, движущееся вокруг неподвижной точки О, находя-
щейся на пересечении его оси вращения vv' и оси подвеса АА'. Кроме
того, ось вращения vv' не может двигаться иначе, как в неподвижной отно-
сительно Земли вертикальной плоскости.
С помощью винтов v и v', винтов и и и' и противовеса р, скользящего
с сильным трением по игле, которая служит продолжением оси vv' тора,
можно добиться того, что центр тяжести 6 подвижной системы распо-
ложится на оси vv' тора немного ниже точки О. Если тор не вращается, то
получится при этом физический маятник, подвешенный на оси АА'. Этот
маятник находится в положении устойчивого равновесия, когда игла v'p,
т. е. ось тора, вертикальна. Теперь, сообщив тору при помощи какого-
либо механизма очень быстрое вращение вокруг его оси, надо опять
положить рамку на ее опору, управляя вилками F и F' так, чтобы лез-
вия ножей А и А' в точности заняли предназначенные им горизонтальные
положения. С этого момента и начнут развиваться слабые, но вполне за-
метные явления, обнаруживающие вращение Земли. Система примет новое
кажущееся положение устойчивого равновесия, при котором ось тора не
будет уже вертикальной, а будет образовывать с вертикалью малый угол Е,
который будет тем больше при одной и той же скорости, чем ближе будет
вертикальная плоскость, в которой движется ось тора, к плоскости меридиана.
При наиболее благоприятных условиях, когда вертикальная плоскость, в кото-
рой движется ось тора, установлена в плоскости меридиана, угол отклоне-
ния Е оси тора от вертикали заметен очень отчетливо. Он будет тем больше,
чем больше собственное вращение тора и чем меньше расстояние OG от
центра тяжести до оси АА'. Отклонение Е будет происходить к северу
или к югу в зависимости от направления вращения тора. Это легко объяснить,
применяя к рассматриваемому случаю установлен-
ные выше общие формулы.
Плоскость, в которой движется ось Ог тела
(рис. 269), является в данном случае плоскостью POP"
меридиана, проходящего через точку О- Для примене-
ния общих формул мы должны принять эту плоскость
за плоскость ху и в качестве оси х взять проекцию
на плоскость хОу вектора О» угловой скорости,
равной и параллельной угловой скорости Земли.
В рассматриваемом случае От совпадает с Ох.
Отметим направленную вниз вертикаль OV. Она
будет находиться в плоскости уОх и будет состав-
лять с осью Ох угол
являющийся дополнением широты X точки О.
Косинусы а, Ь, с углов, которые образует верти-
каль О К с осями Охуг, будут
а = — sin X, b = cos X, с = О,
и член л sin 6 — Ъ cos 6, входящий в интеграл D),
имеет значение
— cos (X — <}).
рис 269
Следовательно, так как угол я равен нулю, то два полученных выше
первых интеграла B) и D) будут теперь:
ср' -)- ш sin i> = k = п + о sin ф0,
А У2 + С ф'2 = — 2Mgl cos (X — <
i+A,
F)
21 Зак. 922. П. Аппель, т. II
322 ДИНАМИКА СИСТЕМЫ
где п — начальное значение <р', т. е. начальное значение угловой скорости
тора.
Исключим из уравнений F) <р' и пренебрежем малой величиной «2; тогда
для нахождения ф получим уравнение
А Уг — 2лСш sin i, = — 2Mgl cos (X — <]>) + f, G)
где /— новая постоянная.
Введем вместо ф угол Е, образованный осью гироскопа с вертикалью.
Так как этот угол считается положительным от Ох к Оу, то
?= ZOZ— xbv= ф — X — п.
Уравнение принимает вид
А (~У = — 2пС<* sin (Е + Х) -Ь 2Л1^/ cos E+f.
Это уравнение при помощи нового изменения начала отсчета углов можно
легко привести к совпадению с уравнением движения математического маят-
ника. Ограничимся определением положения равновесия оси. Мы найдем это
положение, разыскивая значения Е, обращающие в нуль . , т. е. произ-
водную правой части. Таким путем получим
пС ы cos (Е + X) + Mgl sin E = О,
пи>С cos X
n*CsinX
(8)
Мы определили угол Е, который получается между осью тора и вертикалью
после нескольких колебаний по ту и другую сторону от направления, определяе-
мого осью тора.
Так как ш очень мало, то знак знаменателя совпадает со знаком Mgl,
т. е. знаменатель имеет знак +. Следовательно, tg E имеет тот же знак, что
и величина —л. Если п положительно, т. е. тор вращается в положительном
направлении вокруг оси OG, то отклонение произойдет к северу, так как угол Е
отрицателен. Если п отрицательно, то отклонение произойдет к югу. Мы
видим, что при равных по абсолютному значению угловых скоростях вращения
отклонение получается более сильное, когда п положительно.
VI. Системы неголономные
462. Формы уравнений связей в неголономных системах. Мы
уже говорили, что система называется него лоно мной, если некоторые
из наложенных на нее связей не могут быть выражены в конечной
форме, но выражаются аналитически дифференциальными соотно-
шениями.
Такие случаи имеют место каждый раз, когда твердое тело
должно вертеться на неподвижной поверхности и катиться по ней (на-
пример, обруч, велосипед). Действительно, положение совершенно сво-
бодного твердого тела зависит от шести координат, которыми являются,
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 323
например, три координаты центра тяжести и три угла Эйлера. Чтобы
выразить, что тело вертится на неподвижной поверхности и катится
по ней, надо написать, что скорость частицы, которая касается поверх-
ности, равна нулю. Если обозначить через qu q2, q3, qit qb, qB шесть
координат, то это условие выразится соотношением вида
Axdqx + A2dqz ¦+-. .. -j- A&dq& = О,
в котором коэффициенты суть функции координат qv q.2,... , qe, но
в котором левая часть не будет в общем случае полным диф-
ференциалом и не имеет интегрирующего множителя.
Следовательно, связь, наложенная на тело, не может быть выра-
жена в виде соотношения в конечной форме между координатами.
Вследствие этого при приложении общих теорем аналитической
механики возникают особые трудности, из которых наиболее суще-
ственной является невозможность применения уравнений Лаг-
ранжа, если при преобразовании выражения кинетической энергии
Т приходится принимать в расчет такие связи.
Трудности, возникающие с этой точки зрения от такого рода
связей, были отмечены и изучены К. Нейманом (С. Neumann,
Grundziige der. Analytischen Mechanik, Berichte der kunigl. sachs.
Gesellschaft der Wissenschaften zu Leipzig, 1888), Фиркандтом
(Vierkandt, Ueber gleitende und rollende Bewegung Monatsheft
fur MathematiK und Physik, т. Ill, 1892), Адамаром (Hadamard,
Sur les mouvements de roulement, Societe des Sciences de Bordeaux,
1895), Карвалло (Carvallo) в работе, помещенной в Journal de
l'Ecole Polytechnique, 1900, и Кортевегом (Korteweg, Nieuw Archief,
1899) *).
Первый пример. Рассмотрим однородную сферу радиуса а,
катящуюся по неподвижной плоскости. Примем за неподвижные оси
две оси Ог, От\ в плоскости и ось О', перпендикулярную к плос-
кости и направленную в сторону, где находится сфера. Пусть \, -q,
С — координаты центра G сферы относительно этих осей (? = а).
Проведем через G три оси Gx^z^ параллельные 0%tf.., и обозна-
чим через pv qv r, составляющие мгновенной угловой скорости
вращения сферы по этим осям. Выражая, что находящаяся в сопри-
косновении точка сферы имеет скорость, равную нулю, имеем
f-aq^O. g+^ = 0, § = 0. A)
С другой стороны, если обозначить через 9, ср, ф углы Эйлера
между осями Gxyz, связанными с телом, и осями Gx^y^, то
*) См. также С. А. Чаплыгин, Исследования по динамике неголоном-
ных систем, Гостехиздат, 1949. (Прим. перев.)
21*
324 ДИНАМИКА СИСТЕМЫ
по легко устанавливаемым формулам (п. 382) получим:
р1 = 6' cos Ц> —J— cp' sin 9 sin ф,
q1=B'sinif — 9'sin 6 cos ф,
B)
о, , ,, , df) dv db
где через (г, <р', ф обозначены производные -gr> -—> —к. Тогда соотно-
шения A), выражающие, что действительное перемещение является
качением, напишутся в виде
d\ — a sin ф db -f- a sin 9 cos ф cfcp = О,
C)
dt\ -\- a cos t|> db -\- a sin 6 sin ф dcp = 0.
Точно так же возможные перемещения, допускаемые связями,
характеризуются соотношениями:
8? — a sin (]) 89 -\- a sin 9 cos ф 8ср = О,
D)
от] -(- a cos ф 88 -(- a sin 9 sin ф 8cp = 0. J
Так как координата С постоянна, то положение системы зависит
от пяти параметров %, ч\, 9, <р, ф, связанных соотношениями D),
левые части которых не являются полными дифференциалами
и не могут быть проинтегрированы. Система имеет три степени
свободы, так как 89, 8^, Щ остаются произвольными, а 8? и 8тг)
определяются соотношениями D).
Второй пример. Обруч. Рассмотрим обруч радиуса а, кото-
рый катится и вертится по неподвижной горизонтальной плоскости
П, как в п. 411;
Выберем неподвижные оси Oi, Ot\ в плоскости, а неподвижную
ось OZ, направим вертикально вверх. Обозначим через %, т\, С
координаты центра тяжести G обруча относительно этих осей и через
6, <р, ij) — углы Эйлера, как в п. 411, определяющие положение обруча
относительно осей Gxxyxzx, параллельных неподвижным осям
Проекции скорости V центра тяжести G на неподвижные оси
а также и на параллельные им оси Gxxyxzx равны
Л <Ц &
dt dt dt
С другой стороны, точка касания Н обруча с плоскостью П
(рис. 244) имеет относительно осей Gxly1zx координаты
хх — a cos 9 sin ф, ух = —a cos 9 cos ф, zx = —a sin 9. E)
Для того чтобы выразить, что обруч катится и вертится по
плоскости П, нужно написать, что скорость материальной точки,
находящейся в Н, равна нулю. Обозначим через pxqxrx составляющие
по осям Gxxyxzx мгновенной угловой скорости (о обруча и заметим.
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 325
что скорость материальной точки, находящейся в Н, есть результи-
рующая скорости, вызванной переносным движением осей Gx^y^,
и скорости, вызванной вращением вокруг точки G с угловой скоро-
стью (о. Следовательно, выразив, что три проекции скорости мате-
риальной точки Н равны нулю, имеем:
F)
На основании написанных выше выражений B) для pv qv rt
и значений E) для xv уи Zj мы видим, что предыдущие условия F)
после очевидных преобразований приводятся к виду
d\ — a sin ф sin 9 db -\- a cos ф cos 6 dty + a cos ф dcp = 0,
dt\ -\- a cos ф sin 9 db -j- a sin ф cos 9 dty -\- a sin ф rfcp == 0,
dC —acos9d6 =0.
G)
Эти соотношения выражают, что действительное перемещение
является качением.
Точно так же, выражая, что возможные перемещения, допускаемые
связями, суть качения обруча по плоскости, мы получим для диф-
ференциалов 8?, 8т), SC, 89, 8ср, ёф, определяющих эти перемещения,
уравнения:
Ы — a sin ф sin 6 S9 -f- a cos ф cos б 8ф -\- a cos ф 8ср == 0,
8т]-(-асо5фзт 6 89-(-a sin ф cos 6 8ф-)-fl sin ф 8<р = 0, (8)
ВС — acos 0 В6 =0. ,
Последнее из соотношений G) или (8) эквивалентно конечному
соотношению
', = a sin 6,
которое очевидно и геометрически, если вычислить расстояние С от
точки О до плоскости П. Но два первых соотношения (8) не могут
быть проинтегрированы и написаны в конечной форме. Мы видим,
следовательно, что рассматриваемая система не будет голономной.
Эта система имеет три степени свободы, так как наиболее общее
возможное перемещение, допускаемое связями, получится, если задать
перемещениям 86, 8ср, 8ф произвольные значения; после этого 85, Ьт\, 8С
определятся из соотношений (8).
463. Применение уравнений Лагранжа в сочетании с методом
множителей. Рассмотрим некоторую систему, подчиненную сначала свя-
зям, выражаемым конечными соотношениями между координа-
тами различных точек системы. Пусть при этих связях положение
326 ДИНАМИКА СИСТЕМЫ
системы определяется k независимыми параметрами qx, q2 qk.
Полагая, что связи не зависят от времени, мы будем для координат
произвольной точки системы иметь:
* =/(?i. Яг ft). 1
У = <?(Яг- Яг ft). (9)
г=-'ИЧи Яг ft)- >
Сообщая параметрам qu q2, .... qk вариации 8^t, 8<72 bqk,
мы получим перемещение, допускаемое этими связями, и общее урав-
нение динамики примет вид (п. 441)
где
Р =А ' дт \ дТ
Если никаких других связей нет, то 8^, 8<72 bq4 будут произ-
вольными и из уравнений A0) получим k уравнений, которые будут
уравнениями Лагранжа.
Допустим теперь, что к предыдущим связям присоединены
новые, не зависящие от времени связи, выражаемые неинтегрируе-
мыми дифференциальными соотношениями между параметрами
qv q2, . . ., qk. Для возможного перемещения, допускаемого этими
связями, имеем р уравнений:
L,89l + iL2Sg2+ ... -f-Lft8^ = 0. J
в которых левые части не являются полными дифференциалами
и не допускают интегрируемых комбинаций.
При этих условиях уравнение A0) должно иметь место для всех
перемещений 8^,, 8^2 bqk, удовлетворяющих соотношениям A1).
Тогда по методу множителей Лагранжа уравнения движения будут:
^2+ •• +^2> J. A2)
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 327
где все Ра выражаются теми же равенствами, что и выше. Эти урав-
нения вместе с р следующими уравнениями:
Л, dqt -\-A2dq2 + ... + Ак dqk = 0, )
Lx dqt+L2 dq2 + ... + Lk dqk = 0, J
выражающими, что действительное перемещение тоже допускается
наложенными связями, определяют qu q2 qk и X,, \ \р.
Такой метод был использован Раусом (Advanced rigid Dynamics)
и Фиркандтом (loc. cit. стр. 47—50).
464. Невозможность прямого применения уравнений Лагранжа
к минимальному числу параметров*). Мы только что видели, как
можно при помощи метода множителей использовать уравнения Лаг-
ранжа для связей, определяемых соотношениями A1).
Но можно было бы попытаться привести число параметров к воз-
можно меньшему числу, воспользовавшись соотношениями A1), чтобы
получить наименьшее число параметров в выражении возможного
перемещения, и воспользовавшись соотношениями A3), чтобы полу-
чить наименьшее число параметров в выражении кинетической энергии
Однако после таких преобразований уже нельзя будет приме-
нить уравнения Лагранжа. Сейчас мы это докажем.
Возможное перемещение, допускаемое всеми связями, наложенными
на систему, определяется для точки х, у, г равенствами:
» дх ъ . дх - , дх *
8 8 + 8+ +8%
dq2 Ч2~ ~ dqk
в которых 8^, 8^2, ..., bqk связаны р соотношениями (И). Опре-
делим из этих соотношений р вариаций bqk, $qk-i< •••> ^fc-p+i как
однородные линейные функции остальных. Подставляя найденные
значения вариаций в Ьх, Ъу, 8z и полагая n = k—р, получим:
8^ = ^8^+^892-1- ... +anbqn,
by = bx bq, + b2 lq2 + . . . + bnbqn,
{- ... -\-cnbqn%
A4)
*) Ann ель, Les mouvements de roulement en Dynamique (Collection
Scientia, Oauthier-Villar).
328 ДИНАМИКА СИСТЕМЫ
где bqu bq2 bqn теперь уже произвольны. Внося значения Ьх,
оу, Ьг в общее уравнение динамики, мы получим соотношение, в ко-
тором коэффициенты при bqv bq2 bqn должны быть равны нулю.
Таким путем получаются уравнения движения (п. 433):
. (a=l, 2 я),
где буквами Qa обозначены правые части.
Кроме того, так как в рассматриваемом случае действительное
перемещение допускается связями, то на основании равенств A4)
dx — aldql-\-a2dq2~+- ... -\-andqn,
или, пользуясь для производных обозначениями Лагранжа,
у' = b а' —I— b а —I— . . . -4- Ь„а'.
Попытаемся для первого уравнения A5) следовать методу, кото-
рый приводит к уравнениям Лагранжа. Мы допустим для упроще-
ния, что коэффициенты at, bu ct, ..., a2, b2, c2, ..., an, bn, cn
зависят только от qlt q2, • ¦ ., qn- Тогда первое из уравнений A5)
(a= 1) можно написать в виде
§[^l'-{-biy-\-clz') — Rl = Ql. A6)
где
¦, , дх' ду' дг'
по так как alt olt ct равны, очевидно, —;-, —^у, —Т, то пер-
dq1 dq1 dqt
вый член уравнения A6) равен
dt
так же, как и в уравнениях Лагранжа. Но второй член Rl не будет,
вообще говоря, равен -т—. Действительно, имеем
авен
дТ
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 329
Следовательно,
Но так как, по предположению, коэффициенты ах, bx, ... являются
функциями параметров qx, q2 qn, то
dax _ дах , дщ , daj ,
dt ~~ dqiqi~T~ dq,q*'f~ ¦ •• ^WJ"'
Дифференцируя по tft написанное ранее выражение для х', получим
дх'
Следовательно, коэффициент при х' в разности Rx
равен
заменить
В общем случае он отличен от нуля. Коэффициенты при у' и г'
имеют аналогичную форму. Следовательно, разность Rx -3— , если
в ней х', у', г' их выражениями через переменные
, будет в общем случае квадратичной формой от q'x,
q'r ..., q'. Для того, чтобы Rt равнялось -з—, т. е. чтобы к пара-
метру qx было применимо уравнение Лагранжа, необходимо и доста-
точно, чтобы эта квадратичная форма была тождественно равна нулю,
каковы бы ни были q и q'.
Частные случаи. 1°. Если выражения A4) для их, 8_у, Ьг являются
полными дифференциалами, то все величины вида
dci дс,
да.,
db,,
равны нулю. Тогда будут равны нулю также выражения вида A7)
и для всех параметров будут применимы уравнения Лагранжа. В этом
случае можно будет проинтегрировать равенства A4) и выразить х,
у, г в конечной форме через qx, q2 qn- Система будет голо-
номной.
2°. Случай, когда уравнение Лагранжа применимо к параметру qv
Допустим, что для всех точек справедливы соотношения:
it' " ~~
dq2
dbi
dq2
дсх
dqo
dqx '
db2
<tyi '
дсч
~ d4i '
dbx
dq3
dcx
dq$
dqx
dbn
~7
dcn
A9)
330
ДИНАМИКА СИСТЕМЫ
Тогда величины вида A8), являющиеся коэффициентами при х',
у', г в выражении Rx ^—, равны нулю и Rt равно -*—. Сле-
довательно, к параметру qx применимо уравнение Лагранжа. Этот
случай может быть охарактеризован иначе. Предполагая, что выпол-
нены условия A9), определим функции Uu Vx, Wx от qx, q2, .. ., qn
соотношениями:
Qi g, Qi
Ul= fa, dqlt Vx = f bx dqv W,= f c, dqv
«s «; «;
где 9° — произвольная постоянная и интегрирование производится
ио qv На основании условий A9) непосредственно находим
где
величина, в которую обращается а2 при замене ^i постоян-
ной q°v Точно так же
Аналогичные соотношения получаются для Vt и Wv Мы можем
тогда написать:
by ^
+ • • •
l ЬЯп, |
bqn. J
B0)
Таким образом, уравнение Лагранжа применимо к параметру qv
если для произвольной точки системы можно представить Ьх, оу, Зг
как суммы полных дифференциалов некоторых функций от
qit q2 qn и дифференциальных выражений, не содержащих q{.
Например, при движении обруча уравнение Лагранжа может быть
применено, как это уже отметил Ферре (Ferres, Quarterly Journal
of Mathematics, 1871 —1873), к параметру 6. Действительно, если поло-
жение обруча относительно его своего центра тяжести О опреде-
ляется значениями углов 6, <р, ф, то координаты xv yu гх какой-
нибудь точки обруча относительно осей Gxlyiz1 будут функциями
от 0, ср, ф:
«,==/F. ср, ф), л=Д(в. ср, ф), zt =
р, ф).
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 331
Абсолютные координаты х, у, г той же точки относительно не-
подвижных осей Olrf. будут иметь вид
<р, ф).
<р. ф),
2 = С+/2(9, <р. ф).
Сообщим системе возможное перемещение, допускаемое связями.
Имеем:
где 8$, 8т), 8' нужно заменить их значениями (8). Но мы непосред-
ственно видим, что эти значения могут быть представлены в виде
8? = о (— a sin ф cos б) — a cos ф сер,
8т] = о (a cos ф cos 6) — a sin ф 8<р,
8: = 8 (а sin 0).
Следовательно, для ex, 8_у, 8,г окончательно имеем выражения:
8х = 8(— a sin ф cos 9 -)-/) — асовфоср,
Ьу = 8 (а cos ф cos 0 -(- /х) — а sin ф Вер,
82 = 8 (а sin 64-/2).
которые имеют вид уравнений B0). В самом деле, в рассматриваемом
случае мы имеем три независимые вариации 80, 8ср, 8ф, и мы видим,
что каждая из величин 8х, Ьу, 8г может быть представлена как сумма
полного дифференциала и дифференциального выражения, не со-
держащего 6. Следовательно, для параметра 6 можно написать урав-
нение Лагранжа.
Кинетическая энергия обруча, если его массу принять за единицу
и пользоваться обозначениями п. 411, будет
2 Т = Ф -f v2 + ¦о'2 + Л (р2 4- <72) + С г2,
или, так как и = — ar, v = 0, w = ap, то
IT = (A 4- а*)р2 4- Л?2 4- (С4- а2) г2.
Это выражение можно было написать заранее, замечая, что скорость
частицы Н, находящейся в соприкасании с поверхностью, равна нулю
и, следовательно, скорости различных точек обруча будут такими,
как если бы обруч вращался с угловой скоростью w вокруг мгно-
венной оси, проходящей через Н. В этом выражении для 27
нужно заменить р, q, r их значениями (п. 411):
р=Ь', 9 = 4''sin 9, г == ф'cos 9 4-?'•
С другой стороны, существует силовая функция
U — — gr, = — ga sin 6.
332 ДИНАМИКА СИСТЕМЫ
Мы только что видели, что одним из уравнений движения обруча
является уравнение Лагранжа относительно 0:
dU
d_ (jW\ _^L_
dt \ дЬ' ) дд ~ ~М
Так как только р содержит 0', то
и так как q и г зависят от 0, то
^ = AqY cos 8 — (С + а2) п|/ sin 6.
Таким образом, имеем уравнение
(Л-j- cP)-jz AqY cos б -\-(С ~\~ a2) r<|/ sin 0 = — ga cos 0,
которое представляет собой не что иное, как уравнение, получаемое
исключением Z из третьего уравнения F) и первого уравнения G)
п. 411.
К этому уравнению можно присоединить уравнение энергии
поскольку связи не зависят от времени. Однако мы не имеем права
писать уравнения Лагранжа относительно ср и ф.
465. Общая форма уравнений движения, пригодная как для
голономных, так и для неголономных систем •). Рассмотрим си-
стему, подчиненную таким связям, что для получения наиболее общего
перемещения, допускаемого связями в момент t, достаточно сооб-
щить k параметрам qx, q2 qk произвольные вариации 8^,, 8<72,. .., bqk.
Если мы обозначим через х, у, г координаты произвольной точки
системы относительно неподвижных осей, то проекции возможного
перемещения этой точки системы на эти оси будут следующие:
Ьх-
(О
где bqlt bq2 bqk произвольны. В этих формулах коэффициенты аи
а2 ск могут зависеть от времени t, от параметров qlt q2 qk
*) А п п е л ь, Comptes rendus, 7 август 1899; Crelle, т. 121; Journal
de Jordan, т. VI, 1900.
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ
333
и от других параметров qk+1, qk+2 Як+р< вариации которых
связаны с вариациями параметров qv q2 qk зависимостями вида
B)
в которых коэффициенты а,, а2, . . ., Хк также зависят от t и от
совокупности параметров qu q2, ..., qk, qk+l Як+Р- При этих
условиях действительное перемещение системы за время dt опреде-
ляется соотношениями вида
dx = аг dqt 4 а2 dq2 4"
dy=bldqy-\rb2dq2-\-
совместно с соотношениями
.dqk-\-adt,
-\-ckdqk-\-cdt'
¦¦ +akdqk + zdt, )
C)
D)
в которых коэффициенты ait bit ch a^, ^ X{ те же, что и в урав-
нениях A) и B). Коэффициенты а, Ь, с, ,.., а, р X при dt,
если связи не зависят от времени, равны нулю.
Уравнения движения могут быть получены теперь следующим
образом.
Общее уравнение динамики, выведенное кз принципа Даламбера
и принципа возможных работ, имеет вид
,m
(х" Ьх + у" by -f г" Ьг) = 2 (хЬх + Y ЬУ + Z Ьг),
E)
где х", у", г" — вторые произ.юдные от координат по времени,
а X, Y, Z — проекции какой-нибудь заданной силы (п. 431).
Это уравнение должно иметь место при любых перемещениях A),
допускаемых связами; следовательно, оно распадается на к следую-
щих уравнений:
F)
2 т (хГах + /'*, + г" с,) = 2 (Хах + Yb, + Zct), \
2 т (х"а2 + у"Ьг + г"с2) = 2 (*«2 + Yb2 + Zc2),
2 т (х"ак + У'Ък 4 г"ск) - 2 №* 4 Ybk 4 Zck).
334
ДИНАМИКА СИСТЕМЫ
В этих уравнениях правые части вычисляются, как в уравнениях
Лагранжа, а именно, заменяя Ьх, §_у, Ьг их значениями A), получим
для суммы возможных работ приложенных сил
Величины Qu Q2, . .., Qk и являются правыми частями уравне-
ний F):
Для вычисления левых частей разделим соотношения C), опре-
деляющие действительное перемещение, на dt и обозначим через х',
f/ii i dx dy dz dq, dq^ dq\
y<z-4v<l* ?k производные -^, -±, _, -^, — —.
Имеем:
G)
Взяв еще раз производные обеих частей по t, получим:
(8)
Ненаписанные члены не содержат q"x, q^, .... q"k. Но тогда, очевидно,
имеем:
дх" , ду" dz"
ul ^Г If i V\ ~7 IT > ^1 ~Z IF f
oq. oq. oq.
dx" , dy" dz"
Следовательно, уравнения движения напишутся так:
2 т I v» ^?l_j_ „" дУ" _l vi?l\ _
л дх" . „ dy" „ dz"
г)-
Рассмотрим теперь функцию
(9)
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 335
где j—абсолютное ускорение точки т. Тогда уравнения аримут вид
gr = Q» Jrr = Q* -ji = Q,- 00)
dq1 dq2 dqk
Мы видим, что для того, чтобы написать уравнения движения,
достаточно вычислить только функцию S и выразить ее таким обра-
зом, чтобы она содержала вторые производные только от параме-
тров qv q2 Цъ вариации которых рассматриваются как произ-
вольные. Может случиться, что эта функция S, выраженная через qlt
q2 Ук+р> будет содержать их производные первого порядка q'v
q'2 ч'к+v и их производные второго порядка q", q, ..., q"k+ •
Тогда, деля обе части соотношения D) на dt, получим д'к+1, q'k+2 q'k+
в виде линейных функций от q'v q'% q'k, дифференцируя которые
по времени мы получим q"k+v q'k+2> • • • ¦ ч"к+р также в виДе линейных
функций от д", q q"r Можно, следовательно, всегда сделать
так, чтобы функция S не содержала никаких других вторых произ-
водных, кроме q"lt q q'k. При этом она будет содержать эти
величины во второй степени. Как только функция S будет таким
образом преобразована, можно будет составить уравнения A0). Эти урав-
нения совместно с условиями D) образуют систему k -\-p уравнений,
определяющих qu q2, • • •, qic+p B функции времени.
Следовательно, чтобы охарактеризовать движение, достаточно
знать функцию S, которую называют энергией ускорения системы *),
и величины Qt, Q2> .. ., Qk, вычисляемые, как в уравнениях Лагранжа.
Функция S будет второй степени относительно q"v, q'2 q"j(.
Очевидно, что достаточно подсчитать лишь те члены функции S, ко-
торые содержат вторые производные от параметров, так как осталь-
ные члены при вычислении частных производных по q'[, q'2' q"k
ничего не дают.
Можно заметить на основании формул G) и (8), что если соста-
вить выражение кинетической энергии
то коэффициенты при вторых степенях величин q[, q'2, ...,q'k
в выражении для Т будут идентичны с коэффициентами при вторых
степенях величин д", q" q"k в выражении для 5. В этой функ-
ции 5 коэффициенты при вторых степенях величин д", q, ...,q"h
зависят от параметров qx, q2 Яч+р и от времени; коэффициенты
же при первых степенях величин q"v q, ..., q"k содержат, кроме
того, вторые степени величин q'vq'2 я'и+р'
*) Это наименование предложено А. де Сен-Жерменом (Comptes rendus,
т. СХХХ). [Уравнения A0) называют уравнениями Аппеля (Прим. перев.).]
336 ДИНАМИКА СИСТЕМЫ
466. Примеры. Первое приложение. Плоское движение мате-
риальной точки в молярных координатах. Пусть г и 6 — полярные коор-
динаты точки (х, у) массы т. Имеем:
X = Г COS 6, у = Г Sit) в,
S = Е. (у2 + /'2) = UL [(г" _ гв'2J + И" + 2г'в'J].
Обозначая через Р составляющую приложенной силы X, Y по перпендиг
куляру к радиусу-вектору и через R—ее составляющую по радиусу-вектору,
непосредственно видим, что элементарная работа ХЬх-\- Yby силы равна
Рг 56 + R Ьг.
Следовательно, уравнения движения будут
™-Pr H-R
дв" ~ ' дг" ~ к
или
6') = Ял т (г" — гб'2) = /?.
Примечание. В выражении для S величина
представляет собой с точностью до множителя г производную от г?6'. Вве-
дем теперь вместо 6 параметр X, дифференциал которого определяется соот-
ношением
dk = \
а возможная вариация — соотношением
Имеем:
X' = г26', X" = г
следовательно,
ХЬх+ Y Sy = —
г
и уравнения движения будут
dS__ dS _ Р
дг" ~ ' дУ' ~ г '
Второе уравнение имеет вид
ml" = Рг.
Если Р равно нулю, то X' будет постоянной, что дает теорему площадей.
Второе приложение. Твердое тело, движущееся вокруг непо-
движной точки. Рассмотрим твердое тело, движущееся вокруг неподвижной
точки О, и вычислим энергию ускорений S, относя движение к системе
осей Охуг, движущихся одновременно как относительно тела, так и в про-
странстве. Обозначим через Q мгновенную угловую скорость вращения
триедра Охуг и через Р, Q, R—его составляющие по осям, через <о — мгно-
венную угловую скорость вращения тела и через р, q, г —• ее составляющие.
Частица т тела с координатами х, у, г обладает абсолютной скоростью v
с проекциями
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 337
Абсолютное ускорение / этой частицы имеет проекции
Jx = -^Va,+ Qve — Rvy (П)
как это вытекает аз того, что j есть абсолютная скорость точки с коорди-
натами vx, Vy, vz. Обозначая через р'', д', г' производные от р, q, r по вре-
мени, имеем:
dvT dz dy . , ,
-—— = о г —-—I- za — vr .
dt Ч dt dt ' ч у ' ¦ ¦ ¦
,, dx dy dz
Но —гг , —jj-, -п — проекции относительной скорости частицы в ее движении
по отношению к осям Oxyz. Так как эта относительная скорость есть геоме-
трическая разность абсолютной и переносной скоростей, то
*?. = qz-ry-(Qz--Ry).
На основании этого имеем следующее выражение для jx, которое мы рас-
полагаем по х, у, г:
}. A2)
Аналогичные выражения получаем для jy и js и тогда
Вычисление этой суммы не представляет уже трудностей. Мы видим,
что в результат войдут величины ^ тх^ 2 т^' ^J mz<*' 2 тУг' 2 тгх'
"S^mxy, легко выражаемые через коэффициенты А, В, С, D, E, F эллипсоида
инерции в точке О, отнесенные к осям Oxyz.
Для простоты мы напишем здесь эту сумму, предполагая, что оси Oxyz
суть главные оси инерции в точке О и обозначая через А, В, С моменты
инерции относительно этих осей. Тогда, ограничиваясь членами с р', q', г',
имеем
2S = Ар'2 + Bq'2 + О'2 + 2 [(С - В) qr + A (rQ - qR)] p' +
+ 2[(A-C)rp+B(pR-rP)]q' +
+ 2[(B-A)pq+C(qP-pQ)]r'+ ... A3)
Уравнения Эйлера. Примем в качестве подвижных осей три оси, неиз-
менно связанные с телом и совпадающие с тремя главными осями инерции.
Тогда имеем
Р = р, Q = q, R = r,
2S = Ар'2 + Bqfi + Cr'2 + 2 (С - В) qrp' +
+ 2(A-C)rpq' +2(B-A)pqr' + ...
Обозначим через L, M, N суммы моментов приложенных сил относи-
тельно этих осей и через 8Х, Ьц, Ьч — элементарные углы, на которые нужно
повернуть тело вокруг этих осей, чтобы перевести его из заданного положе-
ния в положение, бесконечно близкое. Пусть величины I, ц, ч играют роль
параметров qv q2 qv Имеем, с одной стороны,
2 {X Ьх + Y by + Z bz) = L Ы + М 5ц + N Ьч.
22 Зак. 922. П. Аппель, т. И
338 ДИНАМИКА СИСТЕМЫ
С другой стороны, так как составляющие мгновенной угловой скорости врат
щения тела равны
то функция S будет
S=±-UX + Bf/'2 + Cv) +
+ (С — В) [iVX" 4- (А — С) v'X'jj." -)- (В — Л) Х>'v" + ,..,
где ненаписанные члены не содержат X", ц", •/'. Следовательно, уравнения
движения имеют вид
В частности, например, первое из них напишется так:
АХ" + (C — B)i>.'Y =L,
что на основании значений р, q, r в точности совпадает с одним из уравнений
Эйлера.
Тело вращения, подвешенное в точке О своей оси. Проведем через
точку О неподвижную ось Oz^ и примем как в п. 400 (рис. 234) за ось Oz
ось вращения, за ось Ох—перпендикуляр к плоскости zOz^ и за ось Оу —
перпендикуляр к плоскости xOz. Если положение триэдра Oxyz будет из-
вестно, то для того, чтобы найти положение тела, достаточно будет знать
угол <р, который образует с осью Ох неизменно связанный с телом отре-
зок ОА, выходящий из точки О и лежащий в плоскости ху. Производная <р'
этого угла по времени представляет собой угловую скорость собственного
вращения тела вокруг оси Oz. Угловая скорость <о тела будет тогда равна
сумме угловой скорости Q триэдра и угловой скорости <р'- Имеем, следова-
тельно,
р = Р, q = Q, r=R + y'.
Тогда, так как А = В, то функция S, определяемая выражением A3) об-
ратится в следующую:
2S = А (р'2 + q'2) + Cr'2 + 2(AR- Cr) (pq1 -qp')+ ... A4)
Пусть по-прежнему Ь\, tyi, Sv — элементарные углы, на которые нужно
повернуть тело вокруг осей Ох, Оу, Oz, чтобы перевести его из какого-
нибудь положения в положение, бесконечно близкое, и L, М, N — моменты
сил относительно осей Oxyz. Как и выше, будем иметь
р' = X", q' = ц", г' = ч",
и уравнения движения будут:
1L-L ™--М ^~-N
ffk" д\>." дч"
Так как составляющая R угловой скорости Q не зависит от к", у-", •/', то
Ар' — (AR — Cr)q = L,
Cr' = N.
Таким образом, мы получили опять уравнения F1) п. 400,
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 339
467. Теорема, аналогичная теореме Кёнига. Приложение
К обручу. Пусть х, _у, г — абсолютные координаты точки массы т
в какой-нибудь системе отсчета; ?, т), С — координаты центра тя-
жести G; xt, ух, zy — относительные координаты той же точки по
отношению к осям Oxly1zv проведенным через центр О параллельно
неподвижным осям. Обозначим через /0 абсолютное ускорение точки О:
и через j\ — относительное ускорение точки т относительно
осей G
Обозначим, наконец, через М всю массу системы. Имеем:
2 = :+«!,
Вычислим теперь энергию ускорений
Так как величины
равны нулю, то
2 /их;' = 2 туг; = 2 ««;=о.
Находим
что можно написать в виде
где через Sx обозначена энергия ускорений, вычисленная для отно-
сительного движения вокруг центра тяжести.
Таким образом, мы получаем теорему, аналогичную теореме Кёнига
для кинетической энергии.
Применим изложенный метод к задаче об обруче, исследованной
в п. 411 (рис. 244), сохраняя те же обозначения.
Примем массу обруча за единицу. Обозначим через j0 ускорение точки G
и через ji — относительное ускорение точки т обруча по отношению к осям
с постоянными направлениями Gx^y^Zi, проходящими через точку G. При-
меняя предыдущую теорему, аналогичную теореме Кёнига, напишем
S J + $
22*
340 ДИНАМИКА СИСТЕМЫ
Относительное движение обруча вокруг точки G является движением
тела вращения, закрепленного в некоторой точке своей оси. Прилагая
к этому движению обозначения предыдущего пункта, получим на основании
равенства A4)
2Si = А (р'г + q'2) + Cr'2 + 2(AR- Cr) (pq' -qp')+ ...
Остается вычислить j2. Для этого обозначим через и, v, w проекции
абсолютной скорости точки G на оси Gxyz. Чтобы выразить, что обруч
катится, надо написать, что скорость той материальной точки обруча, кото-
рая касается плоскости в точке Н, равна нулю. Таким образом, имеем:
и + аг = 0, v = 0, w — ар = 0. A5)
Так как мгновенная угловая скорость триэдра Gxyz есть Q, то проек-
ции абсолютного ускорения точки G на оси Gxyz равны
J
или, на основании равенств A5), они равны
-a(Pp + Rr), a(p'+Qr).
Составляя сумму квадратов этих проекций и замечая, что Р = р, Q = q,
найдем:
Л = а2 (р'2 + г'2) - 2cflq (pr' - гр') + ...,
где мы не выписываем тех членов, которые не содержат р', q'. r'. Следо-
вательно, окончательно имеем:
2S = (А + Ф) р'2 + Aq'2 + (С + д2) г'- +
+ 2 (AR — Cr) {pq' — qp') — 2ofiq (pr' — rp')+ ...
Обозначим по-прежнему через Ы, 8,а, 5» бесконечно малые углы, на ко-
торые нужно повернуть обруч вокруг осей Gx, Gy, Gz, чтобы перевести
его из какого-нибудь положения в положение бесконечно близкое. Эти
величины являются произвольными и вполне определяют перемещение об-
руча. Мы примем I, (a, v за параметры qx, q2, ..., qk (к = 3) и по-прежнему
получим:
р'==\", ?' = !*", r'=v".
Тогда мы можем составить левые части уравнений движения вида A0).
Остается определить правые части. Для этого необходимо вычислить сумму
работ приложенных сил
и привести ее к виду
U Ъ\ + М' Ь[д. -f N' hv,
L', M', N' будут тогда правыми частями уравнений. Эти величины имеют
простой смысл. Проведем через точку Н касания с плоскостью три оси Нх',
Ну', Hz', параллельные осям Gx, Gy, Gz. Тогда L', M', N' будут соответ-
ственно суммами моментов приложенных сил, взятых относительно этих
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 341
новых осей. Действительно, так как скорость частицы, находящейся в точке Н
при. перемещении, допускаемом связями, равна нулю, то бесконечно малое
перемещение обруча является результирующим трех элементарных враще-
ний 5Х, &,u, 5v вокруг осей Их', Ну', Hz', проходящих через точку Н. Это и
доказывает предложение.
Если единственной заданной силой является вес g, приложенный в цен-
тре G, то, очевидно, имеем
L'= —ga cos 8, М' = О, N' = 0.
Тогда уравнения движения будут
dS . 3S „ dS
—j- = — ga cos 6, —-,;¦ = 0, 3-j- = 0,
или, если принять во внимание значение S,
(A+a?)p' — (AR— Cr)q + аЦг = —ga cos 9,
Aq' -\-(AR — Cr)p = 0,
(C + a"-) r' — a?pq = 0.
Два последних уравнения совпадают с уравнениями (9) и A0) п. 411, а пер-
вое есть уравнение Лагранжа относительно в (п. 264).
Таким же путем можно исследовать общую задачу качения произволь-
ного тяжелого тела вращения по плоскости. (См. А п п е л ь, Developpe-
ments sur une forme nouvelle des equations de la Dynamique, Journal de Ma-
thematiques de M. Jordan, т. VI, fasc. 1, 1900.).
Движение шара, катящегося по поверхности вращения, рассмотрено
в дихертации Ф. Нётера (Fritz N о е t h e r), представленной Мюнхенскому
университету в 1909 г. (изд-во Teubner).
468. Уравнения движения, получаемые путем нахождения
минимума функции второй степени. Если составить функцию
содержащую величины q" во второй степени, то уравнения дви-
жения A0) можно написать таким образом:
~7 ТГ ^» ~Г 7Г v> • ¦ • , ^ v *-'•
Уравнения A6) совпадают с уравнениями, которые приходится со-
ставлять, когда нужно найти значения q", q"%, . ¦ ., q"k, обращающие R
в минимум. Наоборот, значения q", получаемые из этих уравнений,
обращают R в минимум, так как однородные члены второй степени
в функции R входят в нее через 5 и образуют положительную ква-
дратичную форму. Так как значения q" определяют ускорения, то
можно истолковать этот результат, говоря, что значения ускорений
в каждый момент обращают R в минимум.
342 ДИНАМИКА СИСТЕМЫ
В этой формулировке можно заменить функцию R любой другой
функцией, которая отличается от нее только членами, не зависящими
от ускорений, например, двумя следующими функциями:
1 ^ т (х + у"* + z) - ^ {Хх" + Yy" + Zz").
S i[(*" *J+(y" — YJ+(m2"—ZJ]-
To, что ускорения обращают вторую из этих функций в мини-
мум, является следствием принципа наименьшего принуждения Гаусса,
к которому мы вернемся в конце следующей главы.
469. О невозможности охарактеризовать неголономную систему
одной только функцией Т. Когда связи системы без трения могут быть
выражены в конечной форме и когда применяют параметры, являющиеся
истинными координатами, то можно пользоваться уравнениями Лагранжа.
Допустим для простоты, что существует силовая функция U. Тогда можно
написать уравнения движения, зная выражения кинетической энергии Т
и силовой функции U через независимые параметры.
Наоборот, если связи не могут быть выражены все в конечной форме,
то нельзя больше применять уравнения Лагранжа. Для того чтобы написать
уравнения движения, достаточно знать U и энергию ускорений S = -х- д. тР,
составленную из ускорений так же, как Т составлена из скоростей. Но не-
обходимо ли это?
Не могут ли существовать уравнения движения более общие, чем урав-
нения Лагранжа, применимые во всех случаях и требующие для их соста-
вления лишь знания функций Т и [Л Мы сейчас докажем, что такие урав-
нения не существуют. Для этого укажем две разные системы, обладаю-
щие одинаковыми функциями Т и U, между тем как уравнения движения
для них различны.
Первая система. Рассмотрим тяжелое твердое тело, для которого вы-
полняются следующие условия:
1°. Тело оканчивается острым ребром, имеющим форму окружности К
радиуса а;
2°. Центр тяжести G тела находится в центре окружности К;
3°. Эллипсоид инерции в центре тяжести G является эллипсоидом враще-
ния вокруг перпендикуляра Gz к плоскости окружности.
Допустим затем, что такое твердое тело катится без скольжения по
неподвижной горизонтальной плоскости, которой оно касается круговым
ребром К-
Пусть, как в п. 411, Gzi — направленная вверх вертикаль, проведенная
через G. Примем за ось Gx перпендикуляр к плоскости zGz и за ось Gy —
перпендикуляр к плоскости xGz. Тогда Gx будет горизонталью плоскости
окружности К, a Gy—линией наибольшего ската этой плоскости, упираю-
щейся в точку, в которой эта окружность касается неподвижной плоскости.
Обозначим через 6 угол оси Gz с вертикалью Gzi и через <Ь — угол оси Gz
с неподвижной горизонталью. Эти два угла определяют ориентацию триэд-
ра Gxyz. Чтобы зафиксировать положение тела относительно триэдра Gxyz,
достаточно знать угол у между радиусом окружности К, неизменно связан-
ным с телом, и осью Gx. Мгновенная угловая скорость » тела будет тогда
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 343
результирующей двух угловых скоростей: вращения триэдра и вращения с
угловой скоростью -^- = <р' вокруг оси Gz. Следовательно, составляющие
р, q, r будут
р = 8', q = <|/ sin 8, г = У cos 8 -4- <р'.
С другой стороны, так как окружность К катится, то квадрат скорости
центра тяжести G равен а2 (р2 + г'1). В результате, принимая массу тела за
единицу и обозначая через А и С моменты инерции относительно осей Gx
и Gz, получим:
2Т = я2 (р2 + z-'2) + А (р3 + <?2) + Сгз,
откуда окончательные выражения для функций Т и U будут:
27" = А<У% sin2 8 + (Л + а2) в'2 + (С + а2) (->/ cos 8 + <f'J, )
?/ = — ^а sin 8. J
Вторая система. Рассмотрим теперь другое тяжелое тело такой же
формы, такого же радиуса а и той же массы, что предыдущее. Но допустим,
что масса распределена иначе, а именно таким образом, что, обозначая
через Ах и Сх моменты инерции, аналогичные Л и С, имеем
Л Л Г* „. Г* I п*\
SiX — ¦"> W — ^ "I a •
Подчиним это тело двум следующим связям: тело касается круговым реб-
ром К неподвижной горизонтальной плоскости /\, по которой оно может
скользить без трения; центр тяжести G тела скользит без трения по верти-
кальной неподвижной окружности радиуса а, центр которой О находится на
неподвижной плоскости /\.
Чтобы выразить эти связи, примем те же подвижные оси Gxyz и те же
обозначения, что и выше. Обозначим через ?, irj, С абсолютные координаты
точки G относительно двух осей Oi и Оц в плоскости Рх и восходящей
вертикали ОС Мы можем предполагать, что вертикальная неподвижная
окружность, описываемая точкой G, лежит в плоскости Юц. Тогда имеем:
первая связь: С = a sin 8;
вторая связь: tj = 0, ?2 -)- О = а2,
откуда, очевидно,
? = a cos 8.
При этих условиях
а5) (ф'cos 8 + <fJ. |
или на
Мы
27\ = ?'2 + 1
основании значений ?,
27*! = АУг sin* Ъ-\-(А
Ux = —¦ ga sin 6.
видим, что функции
'2 + С':
т\, С j
+ а2)
Т и
2 +
\i и
в'а-
п.
U к Ui тождественны. Но вместе
с тем уравнения движения различны, так как ко второй системе применимы
уравнения Лагранжа, а к первой системе уравнений Лагранжа применить
нельзя. Это то, что мы желали показать. Можно заметить, что из трех урав-
нений движения два уравнения могут быть приведены к одной форме для
обеих систем. Действительно, интеграл энергии будет, очевидно, одним
и тем же для обеих систем. Кроме того, для первой системы мы имеем
право написать уравнение Лагранжа относительно 8 (п. 464), что, очевидно,
можно сделать и для второй системы. Но третьи уравнения будут различны
для обеих систем; для второй системы имеет место интеграл г = /> кото-
рый не существует для первой.
344 ДИНАМИКА СИСТЕМЫ
Само собой понятно, что разница между обоими движениями обнаружи-
лась бы непосредственно, если бы были составлены обе функции S и S±,
Замечание о связях, выражаемых нелинейными зависимостями между
составляющими скоростей. Рассмотренные до сих пор неголономные связи,
такие, как связи качения, выражаются линейными зависимостями между
дифференциалами координат, определяющих положение системы. Но можно
рассматривать связи более общие, выражаемые нелинейными соотношениями
между этими дифференциалами. Принцип, изложенный в п. 468, позволяет
исследовать и эти вопросы. (Ann ель, Comptes rendus, 8 мая 1911; Rendi-
conti di Palermo, 1911.)
VII. Системы, содержащие сервосвязи
470. Сервосвязи. В замечательной диссертации «Теоретическое иссле-
дование гироскопических компасов Аншютца и Сперри», защищенной в но-
ябре 1922 г. перед Факультетом наук в Париже, Анри Бёген (Henri Beghin)
ввел новое понятие о сервосвязях.
Существует важная категория механизмов, осуществляющих связи мето-
дом, совершенно отличным от тех, которые мы рассматривали до сих пор.
Для такого рода механизмов нельзя отвлечься от способа осуществления
связей.
Связи, осуществляемые этими механизмами, могут быть любыми; чаще
всего они бывают голономными. Но связи эти осуществляются не при по-
мощи простого контакта, так сказать, не пассивно. Их осуществление связано
с использованием разных сил (электромагнитных, давления сжатого воздух\
и т. д.) или, другими словами, с использованием вспомогательных источни-
ков энергии, которые автоматически вступают в действие и автоматически
регулируются, причем так, чтобы в каждый момент осуществлять ту или
иную связь. Этот механизм можно сравнить с живым существом, действую-
щим непосредственным прикосновением и регулирующим свои усилия так,
чтобы заданная связь осуществлялась.
Пусть твердое тело 2, например диск, движется вокруг диаметра Д под
действием некоторых заданных сил. Тело Ъь например концентрическое
кольцо, охватывающее диск, движется вокруг того же диаметра Д, не имея
никакого касания с телом 2. Кольцо 2^ имеет на оси Д зубчатое колесо а,
находящееся в зацеплении с шестерней Ь, насаженной на вал мотора М.
Легко представить себе устройство *), которое, не действуя непосредственно
ни на 2, ни на 21, приводит в движение мотор М в ту или другую сторону
каждый раз, когда 2 и 2t не находятся в одной плоскости. Если а и at —
азимуты диска 2 и кольца 2Х, то осуществляется связь
Таким образом, кольцо X) следует за диском 2 во всех его движениях
вокруг Д, не будучи непосредственно им увлекаемо. Очевидно, что характер
поведения этой системы не имеет ничего общего с тем, что получилось бы,
если бы диск 2 увлекал кольцо 5^ путем прямого контакта, например, если
бы к Ej была прикреплена пластинка, упирающаяся в 2. В частности, в
первом случае (сервосвязь) угловое ускорение системы не зависит от мо-
мента инерции кольца Hi, а во втором случае (прямой контакт) зависит от
него (см. пример на стр. 351).
Выясним, каковы в этом примере реакции связей. Если рассматри-
вать систему ?2:, то этими реакциями с одной стороны будут реакции
*) См. описание компаса Сперри (The Sperri Gyrocompass, 7).
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 345
вдоль оси Д, которые являются обычными реакциями связей, и реакции
шестерни Ь, действующие на колесо а. Эти реакции, играющие в задаче
основную роль, имеют совершенно особый характер, так как шестерня Ь,
их вызывающая (не входящее в систему тело или препятствие, осуществляю-
щее добавочную связь), не неподвижна, но и не совершает того движения,
закон которого заранее известен как функция времени. Характер этой до-
бавочной связи известен заранее как функция параметров (здесь а и ctj),
от которых зависит положение системы 22j.
Если в рассматриваемую систему включить ротор R мотора М, то реак-
циями связей, кроме обычных сил реакций (силы давления со стороны не-
подвижной оси и взаимные давления в местах соприкосновения ротора R
с кольцом 2j), будут также и электромагнитные силы, действующие на ротор
со стороны статора. Эти силы будут действительно иметь характер реакций
связей, так как наперед они неизвестны, но известно, какие значения они
должны иметь, чтобы осуществить рассматриваемую связь.
При любом возможном перемещении, допускаемом связью а = Я], работа
реакций обыкновенных связей равна нулю. Напротив, работа реакций доба-
вочных связей, развиваемых посторонними телами, положение которых за-
висит от параметров а и Я], или электромагнитными силами, действующими
на ротор на расстоянии, не равна нулю. Именно по этой причине механизмы,
содержащие сервосвязи, отличаются от других.
Общее исследование механизмов, содержащих сервосвязи. Принцип
Даламбера. Пусть дана материальная система 2, в которой отсутствует
рассеивание энергии. Допустим, кроме того, что все части этой системы (за
некоторыми исключениями, которые будут указаны ниже) являются неде-
формируемыми (абсолютно твердыми).
Будем считать, что положение системы при наложенных на нее связях
зависит от некоторого ограниченного числа h параметров qb ..., q^ таким
образом, что координаты х, у, z каждого элемента системы являются заранее
известными функциями этих параметров и, быть может, времени t:
q2 4wt)\ у- ¦¦¦; г= ... A)
Пусть некоторые из посторонних тел, осуществляющих связи, с кото-
рыми 2 находится в соприкосновении, или неподвижны или движутся так,
что закон их движения в функции времени t известен. Положения других
посторонних тел и, следовательно, характер осуществляемых ими связей
будем считать зависящими от некоторого числа k введенных параметров q,
например от qv ..., qk, и также, быть может, от времени t.
Условия соприкосновения у всех этих связей считаются такими, что
связи являются голономными.
Допустим, кроме того, что на систему наложены некоторые неголоном-
ные связи, т. е. что параметры qv ..., q связаны некоторым числом р
линейных дифференциальных зависимостей, выражающих условия качения
без скольжения и верчения на некоторых поверхностях или линиях сопри-
косновения. Эти зависимости позволяют выразить р элементарных прира-
щений
dqn+b dqn+2 dqn?p (n +p = К)
в функции dqx, ..., dqn и dt. Они имеют вид
f At dqx + ... Ап dqn + A dt = 0,
(p зависимостей) ¦! B)
В, dql + ... Bh dqh + B dt^O,
346 ДИНАМИКА СИСТЕМЫ
Этими условиями определяются неголономные контактные связи. Таковы
те два единственных вида связей, которые мы обычно встречаем.
При всяком элементарном перемещении, допускаемом связями системы
в момент времени t, т. е. при перемещении, при котором Ы равно нулю,
а Ьди ...,в<7я произвольны, работа взаимных реакций между телами системы,
так же как и реакций неподвижных или зависящих от t связей, равна нулю.
Мы будем говорить, что эти реакции являются реакциями связей первого рода.
Кроме того, предполагается, что на систему 2 наложены другие связи,
которые мы будем называть сервосвязями, также выражаемые конечными
или линейными дифференциальными уравнениями, но осуществляемые совер-
шенно иными силами; эти силы, которые мы назовем обобщенными реак-
циями связей или реакциями связей второго рода, приложены к телам
системы и могут быть как внешними, так и внутренними.
К числу внешних относятся силы, действующие на расстоянии, напри-
мер, электромагнитные или другие силы, автоматически регулируемые таким
образом, чтобы обеспечить конечную или дифференциальную связь, которую
они должны осуществлять; ими будут также контактные действия посторон-
них тел (препятствий), положение которых будет, как указывалось, зависеть
от q{ qk, t и движение которых должно автоматически регулироваться
таким образом, чтобы параметры q удовлетворяли в каждый момент вре-
мени некоторым конечным или дифференциальным уравнениям.
Внутренними реакциями связей второго рода будут либо действия на
расстоянии, такие, как электромагнитные, либо внутренние усилия между
телами, поддающимися сжатию или растяжению (сжатый воздух, мускулы
живого существа), усилия, которые должны регулироваться автоматически,
например по желанию живого существа, таким образом, чтобы осуществлять
ту или иную связь. Кроме этого исключения, система не будет предпола-
гаться деформируемой.
Система 2 может быть образована, например, электродвигателем, угловая
скорость « которого не зависит от нагрузки, каким может быть в некото-
рых случаях синхронный двигатель. .Осуществляемая таким образом серво-
связь будет вида
М = и dt.
Подобная система может быть также образована велосипедистом и его
машиной. Велосипедист может сокращать свои мускулы не на заданную
величину, а на величину, подобранную таким образом, чтобы оказались
осуществленными некоторые связи, например он может регулировать дей-
ствия ног таким образом, чтобы получать постоянную угловую скорость,
или сокращать мускулы тела так, чтобы осуществлялся наклон рамы в виде
определенной функции от / и т. д. Указанные ниже методы позволят изу-
чить изменение неизвестных параметров.
Можно также представить себе, как пример, корабль 2, у которого
часть груза я автоматически приводится в движение мотором таким обра-
зом, чтобы осуществились некоторые связи. Можно, например, в качестве
условия сервосвязи потребовать, чтобы корабль был постоянно вертикаль-
ным, что можно осуществить при помощи стабилизатора боковой качки.
Маленький гироскопический прибор, основанный на принципе стабилизатора
Шлика (Schlick), укажет на борту истинную вертикаль; сервомотор вступит
в действие, если эта вертикаль не будет находиться в плоскости симметрии
корабля. Таким образом, можно регулировать движение груза я так, чтобы
осуществилась нужная зависимость между положением груза и наклоном
корабля. Таким же образом можно изменять по желанию период колебаний
корабля и избегать резонанса при качке. Можно, регулируя движение
груза а, осуществлять такую зависимость между его положением и угловой
скоростью корабля, которая позволит гасить колебания и т д. Реакциями
связей второго рода здесь будут взаимодействия между 2 и з.
ГЛАВА XXIV. ОБЩИЕ УРАВНННИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 347
Мы будем говорить про материальную систему, у которой имеются
реакции связей второго рода, что она содержит сервосвязи. Очевидно, что
возможная работа реакций связей второго рода, вообще говоря, не будет
равна нулю.
Условившись в этих определениях, допустим, что сервосвязи выра-
жаются г соотношениями, из которых одни являются конечными, а другие
дифференциальными вида
(/-зависимостей) { ^ dq^ _j_ ^ dq^ + __ + <-hdqh +г dt = 0, C)
Возможные перемещения системы, допускаемые контактными связями,
такими, какие существуют в момент t (bt = 0), мы получим, если выберем
по произволу h — р вариаций 5^, ..., bq^, p остальных вариаций опреде-
лятся тогда из соотношений B), которые приводятся здесь к следующим:
f A.bq Л- ... + A. bqh = 0,
(р зависимостей) { В bq 4- ... -\- В bq —0, B')
Среди этих перемещений имеются такие, для которых можно заранее
утверждать, что работа реакций связей второго рода равна нулю, не зная
о самих связях ничего, кроме их способа действия. Мы будем предполагать,
что это такие перемещения, которые совместно удовлетворяют у зависимостям
f ai4+ ••• +аЛ = °-
(j зависимостей) { D)
I
Тогда принцип Даламбера, приложенный к любому из этих перемеще-
ний, выразится уравнением
2 т {х" Ьх + у" Ъу + г" Ъг) = 2 <<Х Ьх + Y ЬУ + Z bz)< E>
где знак 2 в левой части распространяется на все элементы системы, т—
масса одного из этих элементов, х", у", г" — проекции его ускорения
и знак 2 в правой части распространяется на все заданные силы X, Y, Z.
В самом деле, очевидно, что на этих перемещениях работа реакций свя-
зей, какими бы они ни были, первого или второго рода, равна нулю.
Это уравнение распадается на h—р — j уравнений, так как h элемен-
тарных вариаций bqt, ..., bqh связаны р зависимостями B') и j зависимо-
стями D), и поэтому только h — р — j из них будут независимыми.
Для составления этих уравнений мы применим метод множителей Лагран-
жа. Если выразить х, у, г при помощи уравнений A) в функции qv ..., qh, t,
то левая часть уравнения E) станет суммой h членов вида
где q обозначает любой из h параметров. Правая часть будет суммой h
членов вида
и уравнение Даламбера напишется так
{Pl-Q1)bql+(P2-Q2)bq2+ ... +(Ph-Qh)bqh = O. (8)
348 ДИНАМИКА СИСТЕМЫ
К этому уравнению мы добавим р зависимостей B'), умноженных соот-
ветственно на коэффициенты Л, М,..., и у зависимостей D), умноженных
соответственно на X, (*,... Эти коэффициенты Л, М X, ц, ... состав-
ляют р -\- j вспомогательных неизвестных. Мы получим уравнение
2i(Pi-Qi + AAi + MBi+ ... + Xo, + |ift,+ ...)»?<= 0. О)
где I принимает значения 1, 2 h. Множители Л, М X, (*,... могут
быть выбраны таким образом, чтобы коэффициенты при р -\- ] вариациях bq$
равнялись нулю, так как имеется в виду, что соотношения B') и D) являются
независимыми. Уравнение (9) должно удовлетворяться, каковы бы ни были
остальные h — р — j вариаций bqit так что коэффициенты при этих h—р — j
вариациях в уравнении (9) должны также равняться нулю.
В результате задача приводится к разрешению h уравнений:
... =0,
=0, }
J
к которым нужно присоединить р уравнений B), выражающих неголономные
контактные связи, и г уравнений C) сервосвязей. Всего получается, таким
образом, h-\-p-\-r уравнений с h-\-p-\-J неизвестными (qt qh, A,
М X, (л, ...).
Если окажется, что г превышает J, то задача, вообще говоря, будет
невозможной, т. е. нельзя будет осуществить сервосвязи, число которых
превосходило бы число ограничительных условий, которые нужно наложить
на параметры q, чтобы обратить в нуль возможную работу реакций вто-
рого рода.
Если г равно J, то задача решается с помощью уравнений B), C) и A0).
Если г меньше j, то движение будет неопределенным, так как понятно,
что если условия, которым должны удовлетворять эти реакции второго рода,
определены недостаточно, то их исключение становится невозможным и
движение не может быть исследовано, если оно частично не задано.
Частные случаи. 1°. Допустим, что уравнения B'), выражающие, что
возможные перемещения допускаются неголономными контактными связями,
и уравнения D) для перемещений, при которых обращается в нуль работа
реакций связей второго рода, разрешены относительно р + j — т вариаций
J
(И)
8о = л Ьа -4- ... + X. од..
Множители Лагранжа в этом случае делаются бесполезными. Подставляя
в уравнение (8) эти выражения для bqb..., bqm, мы получим линейное
уравнение относительно bq bq которое должно удовлетворяться,
каковы бы ни были эти вариации, откуда следуют h — m уравнений вида-
?w)=o, A2)
где I—одно из чисел 1, 2,..., h — т.
К этим уравнениям нужно присоединить р уравнений B) и г уравне-
ний C) сервосвязей.
2 . Если уравнения A1) приводятся к виду
5^=0 5«7TO = O, A3)
то уравнения движения принимают простой вид
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 349
3°. Допустим, что реакции связей второго рода являются исключительно
контактными действиями некоторой вспомогательной системы 2t подвижных
препятствий (тел), положения которых зависят от некоторых параметров
qv ..., qu из совокупности q^, ..., qK В этом случае соотношения D) будут:
5^ = 0, .... 5^ = 0, A5)
ибо как раз, оставляя неподвижными эти препятствия, мы обратим в нуль рабо-
ту сил их действия на заданную систему 2, В этом случае станут ненужными
множители X, ц так как уравнение (8) содержит только bqk t, ..., bqh.
Уравнения A0) приведутся теперь к следующим:
.. =0, ]
A6)
.. = 0, J
число которых равно h — к и к которым, как и в общем случае, нужно
присоединить р соотношений B) и г соотношений C), так что получатся
h — к -\-p-\-r уравнений с h-\-p неизвестными. Задача будет определенной,
если число уравнений сервосвязей будет равно числу к параметров, от кото-
рых зависит вспомогательная система 2j.
4°. Сохраняя предположения предыдущего случая C°), допустим, кроме
того, что все контактные связи являются голономными (р = 0). Тогда мно-
жители Л, М, ... также станут ненужными и уравнения A0) приведутся
к следующим h — к уравнениям:
Лт = <?&+! Ph=>Q* A7)
к которым нужно будет присоединить г уравнений C) сервосвязей. Неизвест-
ными будут только qv ..., qh.
Примечания. 1°. В системах без сервосвязей возможными перемеще-
ниями, к которым применимо уравнение Даламбера, являются те, которые
допускаются всеми связями. В системах, содержащих сервосвязи, это будут
совершенно другие перемещения. Отсюда становятся ясными причины ана-
литического различия, существующего между обеими категориями систем,
и понятен также весь интерес, связанный с практической точки зрения
с механизмами, содержащими сервосвязи.
2°. В случае, когда реакциями связей второго рода являются исключи-
тельно реакции подвижных препятствий, положение которых есть функция
некоторых параметров q (случаи 3° и 4°), решение задачи не будет зависеть
от инерции этих тел и приложенных к ним заданных сил.
Если в какой-нибудь системе, подчиненной г соотношениям сервосвязей,
можно выделить такие две части S и S^ что на частичную систему S не
будет действовать никакая реакция связей второго рода, кроме реакций
системы Si, и если, кроме того, число параметров, от которых зависит
система Si, равно числу условий сервосвязей, то ни заданные силы, прило-
женные к системе 2Х, ни ее инерция не будут влиять на движение систе-
мы 2. Метод, указанный в случаях 3° и 4°, позволит тогда составить урав-
нения задачи, не вводя в них ни заданных сил, ни характеристик инертности
системы Sj. Частичная система будет при этом играть вспомогательную роль.
Этот частный случай не редко встречается в приложениях.
Равновесие систем, содержащих сервосвязи. Принцип Даламбера дает
условия равновесия, если отбросить члены Р, происходящие от сил инерции
рассматриваемой системы. Уравнения A0), относящиеся к общему случаю,
и уравнения A2), A4) и A6) или A7), относящиеся к изученным частным
случаям, переходят в уравнения равновесия, если в них положить все вели-
чины Р равными нулю. К этим уравнениям необходимо присоединить те
из уравнений сервосвязей, которые конечны. Дифференциальные уравнения,
350 ДИНАМИКА СИСТЕМЫ
выражающие неголономные связи, как обычные, так и сервэсвязи, очевидно,
не присоединяются: они удовлетворяются тождественно.
Приложение. Уравнения Лагранжа. Пусть выполняются определенные
с самого начала (стр. 345) общие условия. Если все наложенные контактные
связи являются голономными, то координаты х, у, z различных элементов
рассматриваемой системы 2 выражаются в конечной форме через время t
и параметры qv ..., qh, от которых зависит положение системы [уравнения A)].
Тогда выражение
п ж.' i п дх , „ ду . „ дг
dq dq dq
имеет значение
\
dt \ dq' j dq
Заменяя в уравнениях A0) величины /\ Ph этими значениями,
мы распространим тем самым уравнения Лагранжа на системы, содержащие
сервосвязи.
Существенно заметить, что кинетическую энергию надо вычислять
в функции переменных qv..., qh, qx,..., qh, t, совершенно пренебрегая
сервосвязями. То же самое будет и для элементарной работы
заданных сил. Если эти силы имеют силовую функцию, т. е. если Qi.,...,Q%
dU dU IT
суть частные производные -х— ,... , -z— некоторой функции и от ql qh, t,
то эта функция U будет вычисляться без использования сервосвязей,
и только при составлении самих уравнений, т. е. в выражениях Q, —г—,
d ( дТ\ _
— I-T-7-J, можно принимать во внимание сервосвязи. Однако так как
dT
производная от -^-у по времени вычисляется для действительного движе-
9 dT
ния, которое совместимо с сервосвязями, то можно в выражении -т—г
до дифференцирования по t выполнить все упрощения, вытекающие из этих
связей. Итак, сервосвязи можно принимать во внимание лишь после того,
„ п dT dT
как закончено вычисление трех выражении Q, —^- , , .
Уравнение энергии. Пусть контактные связи не зависят от / и, в част-
ности, в уравнениях B), выражающих неголономные связи, отсутствуют члены
с dt(A = В = ... = 0); пусть далее заданные силы имеют силовую
функцию U(ql qh). Умножим уравнения A0), определяющие движение
в общем случае, на приращения dq1 dqh параметров при действительном
перемещении и сложим результаты. Выражение
pid1i+ ¦¦¦ +pkd4n
представляет собой взятую с обратным знаком работу сил инерции
^ "l (x" dx -\- у" dy -\- z" dz), т. е. дифференциал dT кинетической энергии.
Выражение
<?,<*?,+ ••• +Qhdqh
равно dU. Множитель Л имеет при себе коэффициент
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 351
который равен нулю, так как перемещение удовлетворяет уравнениям B).
То же самое будет и для аналогичных коэффициентов при М, ...
Имеем, следовательно, уравнение
dgh) + ... = 0.
Мы видим, таким образом, что Т— U не будет постоянным. Члены
с X, [х, ... представляют элементарную работу реакций связей второго рода,
которая не равна, вообще говоря, нулю, так как не предполагается, что для
действительного перемещения выполняются условия D). В зависимости
от знака эта работа соответствует для рассматриваемой системы 2 или
прибавлению, или затрате механической энергии.
То же самое будет и в каждом определенном выше частном случае:
из сочетаний кинетической энергии не получится выражение d (T — U), так как
в уравнения движения входит лишь часть выражений Plt ..., Ph, Qj, ..., Qft.
Отсюда вытекает интересный вывод, что сервосвязи могут позволить
по желанию увеличивать или уменьшать механическую энергию системы,
и, в частности, амортизировать колебания системы, в которой отсутствует
рассеивание энергии.
Пример. Пластинка 2, расположенная в неподвижной горизонтальной
плоскости, шарнирно связана в точке С с круговым диском 2Ь лежащим
в той же плоскости и движущимся вокруг своего неподвижного центра О.
Постоянная сила F, параллельная неподвижной прямой Ох, действует на
пластинку 2 в точке А, лежащей на прямой, соединяющей точку С с центром
тяжести G. Сервомотор М при помощи особого сцепления действует на
диск 21f причем так, что постоянно осуществляется связь
«-Р = у О)
[а = (Ох, ОС); р = (Ох, С А); ОС = R;CA = a, CG = Ь].
Исследуем движение системы. Так как в ней имеется только одна серво-
связь, а положение диска 2t зависит только от одного параметра а, то
система 2, взятая изолированно, подходит под частный случай 4° (стр. 349).
Следовательно, уравнения Лагранжа можно применить отдельно к пластин-
ке 2; мы видим, что масса диска 2, не влияет на движение. Напишем кине-
тическую энергию пластинки 2:
Т = 4- М [R^ + ЬЧЛ + ШЬа'Ъ' cos (a — 8) + ??8'2],
где М№— момент инерции пластинки относительно точки G.
Возможная работа силы F будет
bj1 = Fb (R cos a -j- a cos 8).
Единственное уравнение для р, которое нужно написать, будет
Но, принимая во внимание уравнение сервосвязи, имеем
^т = М W + Rba' cos (a — ?) + Щ') = М F2 +
С другой стороны,
4^ = ЛШа'В' Sin (а — 8) = MRb'?'"*,
и следовательно, уравнение движения имеет вид
^ + Fa sin p = 0. C)
352 ДИНАМИКА СИСТЕМЫ
Если бы связь а — р = ^- была осуществлена непосредственным каса-
нием между 2 и Sb то движение было бы совершенно иное. Оно опреде-
лялось бы уравнением
[М {R°- + b*- + *'-) + h\ P" + ^(« sin р + R cos Р) = 0, D)
где /t — момент инерции диска относительно точки О. Из уравнения C)
легко найти движение: р'2 получится в виде суммы показательного члена
и члена, синусоидального относительно Р; р изменяется между двумя пре-
делами, из которых один может стать равным бесконечности. Напротив,
уравнение D) даст колебательное движение наподобие маятника.
Для получения положений равновесия нужно приравнять нулю правую
часть уравнения B). Таким путем получатся два положения, для которых
СА параллельно силе. Наоборот, из уравнения D) получатся положения, для
которых силе параллельна прямая О А.
Приложение уравнений, выведенных в п. 465. Уравнения, выведенные
в п. 465, представляют следующие преимущества: 1° они могут быть прило-
жены к системам, подчиненным неголономным связям, без введения неиз-
вестных вспомогательных множителей; 2° они допускают использование
вспомогательных параметров, связанных с действительными координатами
<?! qh дифференциальными зависимостями.
Рассмотрим систему 2, удовлетворяющую условиям, указанным вначале
(стр. 345). Пусть положение этой системы при наложенных на нее контакт-
ных голономных связях зависит от h параметров qb ..., q^ и, быть может,
от времени t, причем так, что координаты каждого элемента системы суть
конечные функции вида
¦* = /(?i Чъ 0. у= ..., z= ... A)
Допустим, что к параметрам q-y, ..., q^ присоединены s вспомогательных
параметров g^+i, ..., qh+a< связанных с предыдущими параметрами диффе-
ренциальными соотношениями, которые служат лишь для определения вспо-
могательных параметров (никакие реакции связей этим соотношениям не
соответствуют). Выпишем названные соотношения с соотношениями, выра-
жающими неголономные контактные связи, так как при составлении урав-
нений они всюду входят одинаково.
Мы имеем р (р > s) дифференциальных соотношений вида
[ Adqx+ ... +Ah+Sdqh+S+ Adt = O,
(р соотношений)! Bldq[-{- ... -\- Bh+adqh+s -\- В dt = 0, B)
Допустим, что сервосвязи представлены г конечными или дифферен-
циальными соотношениями:
. ••-. Qh+s, 0 = 0,
(г соотношений) { C)
I Hdg\+ '.". +!h+8d4b+S. + Sdt~°'
Наконец, возможные перемещения, для которых обращается в нуль
работа реакций связей второго рода, будут те, которые удовлетворяют
j соотношениям:
(
; соотношений) j bt bqt -\- ... -f bh+sbqh+s = 0, D)
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 353
После этого составим выражение
называемое энергией ускорения. Если мы выразим х", у", г" через
q-y, ..., qh, t и через первые и вторые производные по времени t пара-
метров q, то увидим, что члены Р в уравнении Даламбера представятся в виде
p-dS dS
Отсюда и получаются уравнения движения.
Случай, когда дифференциальные уравнения B), определяющие вспо-
могательные параметры и неголономные контактные связи, разрешены
относительно р величин dq. Для того чтобы уравнения движения пред-
ставлялись наиболее просто, полезно разрешить р уравнений B) относи-
тельно р величин dq из общего числа h -\- s = n -j- p этих величин. Таким
путем мы выразим, с одной стороны, р производных <7И4-1' •••• Qn+p B ФУНК"
ции qx, ..., qn соотношениями вида
E)
и, с другой стороны, р возможных перемещений §qn+i bqn+p в функ-
ции bq± bqn:
Цп+l =»is?i+ .••¦+«nI1?n. \
F)
Чп+р = ft в?1 + • • • +tn 8?n. >
где коэффициенты а^, ..., у суть функции от qb ..., qh. Разумеется, пара-
метры qi, ..., qn могут быть выбраны с одинаковым успехом как среди
действительных координат, так и среди вспомогательных параметров
Ih+ь • • ¦> 4h+s-
Установив это, мы, вместо того, чтобы выражать S в функции парамет-
ров qlt ..., qlt и их первых и вторых производных, как это намечалось
сделать выше, используем уравнения E), которые заменяют собой уравне-
ния B). Дифференцируя уравнение E) по t, выразим вторые производные
q"n+v ..., q'n+p B Функции qx, ..., q"n ив функции первых производных от
параметров q. Таким путем можно исключить из S вторые произ-
водные qn+v •••• Йп+р' после чего S обратится в функцию от
qv ..., qfl+s, t, qv ¦¦., q^+s и от л вторых производных qv ..., qn. Мы
знаем, что при этих условиях взятая с обратным знаком возможная работа
сил инерции ра вна
Если, с другой стороны, воспользовавшись соотношениями (б), выразить
возможную работу заданных сил при помощи только 8^, ...,bqn, то для
этой работы получится выражение вида
Qi»?i+... + Qn»?n. (8)
23 Зак. 922. П. Аппель, т. II
354 ДИНАМИКА СИСТЕМЫ
Эти два выражения должны быть равны между собой для всех пере-
мещений, обращающих в нуль работу реакций связей второго рода, т. е.
для всех перемещений, удовлетворяющих j соотношениям D). Здесь также
представляется выгодным воспользоваться соотношениями F), что позволит
исключить в уравнениях D) величины bqn+1 Цп+р- Эти уравнения,
будучи разрешены относительно / вариаций из числа оставшихся 5^ bqn,
перепишутся так:
... + <Л„>
(9)
Заменяя в выражениях G) и (8) вариации Ьдь ..., bqj их значениями (9)
и принимая во внимание, что эти выражения должны быть равны друг другу
при любых значениях оставшихся произвольными вариаций bqj+1 Цп
мы получим следующие уравнения движения
A0)
Эти уравнения проще, чем написанные для той же задачи уравнения
Лагранжа [см. уравнение A2) на стр. 348], так как в каждом из них
содержится _/ —|— 1 членов вместо m7\-\=p-\-j-\-l членов в уравнениях
Лагранжа. Уравнения A0) осложнены только коэффициентами Л. и Jjf,
появляющимися в связи с необходимостью рассматривать те перемещения,
для которых работа реакций связей второго рода равна нулю, и нисколько
не обусловленными неголономными связями.
К уравнениям A0) следует присоединить р уравнений E) и г уравне-
ний C), выражающих сервосвязи.
Случай, когда перемещения, обращающие в нуль работу реакций
связей второго рода, определены j зависимостями вида
5<7! = О bqj = O. A1)
Сохраняя предположения предыдущего случая, допустим, что условия,
которым должны удовлетворять перемещения, чтобы обратить в нуль работу
реакций связей второго рода, имеют простую форму A1). Впрочем, можно
всегда свести задачу к этому случаю путем введения, если это необходимо,
подходящим образом подобранных вспомогательных параметров.
В этом случае, который по существу является общим, если произво-
дить вычисления, как только что было указано, уравнения A0) упрощаются
и принимают такой же вид, как и в случае отсутствия сервосвязей:
dqj+1 dqn
Мы видим, что уравнения, выведенные в п. 465, дают общее решение
вопроса в более простой форме, чем уравнения Лагранжа. К этим п—j
уравнениям необходимо присоединить р уравнений E) и г уравнений C)
сервосвязей. Если г = /', то число уравнений равно числу неизвестных.
Пример. Материальная плоскость Р может скользить поступательно
по неподвижной горизонтальной плоскости хОу. По плоскости Р может
катиться без скольжения шар 2 радиуса R. Движение плоскости Р авто-
матически регулируется таким образом, что центр шара равномерно
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 355
вращается вокруг Ог с угловой скоростью » относительно неподвижных
осей Ох, Оу, Ог. Исследовать движение при помощи уравнений п. 465.
Пусть и и v — координаты какой-нибудь точки А плоскости Р относи-
тельно осей 0х< Оу, Ог. Положение этой плоскости определяется только
этими двумя параметрами. Положение шара определяется координатами %, т)
ее центра и, например, углами Эйлера <р, 6, <\?, определяющими ее ориен-
тацию.
Если р, q, r суть проекции на оси координат мгновенной угловой ско-
рости шара, то для получения условий качения без скольжения нужно
написать, что совпадающие в момент t материальный элемент шара и
материальный элемент плоскости имеют одинаковые скорости. Отсюда
получаем
4' — qR = u', V + pR — V. A)
Сервосвязей будет две:
dS + щ dt = О, rf-rj — at dt = 0. B)
Так как число этих соотношений равно числу параметров, от которых
зависит положение плоскости Р, то можно разрешить задачу, прилагая
уравнения п. 465 к одному только шару 2.
Принимая во внимание только голономные контактные связи, мы будем
рассматривать шар, как зависящий от семи параметров и, v, 5, rj, cp, 6, ф
(й = 7). Полезно присоединить три вспомогательных параметра (s = 3), свя-
занных с предыдущими параметрами соотношениями
dl=pdt, di>. = qdt, d-i = г dt. C)
Эти h -\- s = 10 параметров связаны между собой тремя последними
соотношениями и двумя соотношениями A), выражающими неголономные
контактные связи. Соотношения A) можно написать так:
dv. (Г)
Соотношения C) и (Г) являются р дифференциальными соотношениями
общей теории [стр. 352, уравнение B)] (р — 5).
Из h-\-s = 10 параметров мы сохраним А -\- s — р = п = 5 параметров.
Мы выберем и, v, S, i\, ч и выразим энергию ускорений S шара в функции
вторых производных этих параметров, воспользовавшись р соотношениями C)
и A'). Значение S определяется формулой
2S = М (Е + V'2) +1 МЯ* (р'* + q'2 + г'2),
или на основании C) и (Г)
2S = М (i + v)) + jM [{v" - т,"K + F" - и"J + /Р*"а1. D)
Возможные перемещения, обращающие в нуль работу реакций связей
второго рода, определяются j = 2 условиями
5м = 0, bv = 0, E)
поскольку эти реакции являются реакциями плоскости на шар. Эти условия
имеют вид, указанный в предыдущем параграфе [уравнение A1)], так что
уравнения движения имеют вид [уравнения A2)]
dS _, dS „ dS
W = *' W=' ' ^ ()
Правые части равны нулю, так как работа заданных сил (вес шара) равна
нулю, и мы получаем уравнения:
75" = 2м", 7-r)" = 2f", V = 0, G)
23*
356 ДИНАМИКА СИСТЕМЫ
которые совместно с уравнениями сервосвязей B) решают задачу. Эти пять
уравнений непосредственно интегрируются и показывают, что точка А
описывает циклоиду. Формулы A') показывают, что вектор мгновенной
угловой скорости остается параллельным образующим наклонного конуса,
основанием которого является горизонтальная окружность, описываемая
с угловой скоростью (о.
УПРАЖНЕНИЯ
1. Применить метод Лагранжа к задачам, разобранным и предложенным
в качестве приложения общих теорем и теории относительного движения
в главах'ХУШ, XIX, XX, XXI и XXII.
2. Однородный тяжелый стержень АВ движется в горизонтальной пло-
скости. К его концам А и В прикреплена нерастяжимая и невесомая нить,
проходящая через бесконечно малое неподвижное колечко О. Найти дви-
жение системы.
Пусть 2с— длина стержня и 1а = АО + ВО — длина нити. Опустим
из точки О перпендикуляр ОР на стержень и пусть GP— расстояние
от точки Р до середины G стержня. Точка О находится на эллипсе, фоку-
сами которого являются точки А и В и длина фокальной оси которого
равна 2а. Следовательно, обозначая а2 — с2 = Ь2, имеем
GP>-
4! П b2 ' .
И МОЖНО ПОЛОЖИТЬ
GP — a cos ср, ОР = 6 sin ср.
Обозначим, с другой стороны, через а угол хОР, который образует
перпендикуляр ОР с неподвижной осью Ох. Для полярных координат г и 8
точки G имеем:
г2 = a2 cos3 ср -[- Ъ2 sln2 ср, 6 =а —arctgfyctgcpV A)
Тогда
где Mk2 -т- момент инерции стержня относительно точки G.
Заменяя г, г' и 6' их значениями из равенства A), мы получим 7", выра-
женное через ср и ср'. Работа приложенных сил равна нулю. Получим два
первых интеграла
-г-т- = const и Т = h.
да.
Исключая а', найдем при помощи квадратуры выражение для t в функ-
ции угла ср.
3. Найти движение однородного тяжелого стержня, один конец кото-
рого А скользит по горизонтальной плоскости хОу, а другой конец В — по
вертикальной оси Ог (Лиценциатская).
Обозначая через ср угол стержня с восходящей вертикалью Ог, через
6 — угол плоскости АОВ с плоскостью хОг и через 2/ — длину стержня,
получим
010
U=— glcos <(>.
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 357
Имеются два первых интеграла
%7 = const и T—U = h.
Величина cos <p является эллиптической функцией времени.
4. Однородный тяжелый стержень прикреплен одним концом А к непо-
движной точ-ке О при помощи нити длины О А = АВ. Другой его конец В
скользит без трения по горизонтальной оси Ох. Найти малые колебания.
Пусть 2/ — длина стержня, 6 — угол между плоскостью ОАВ и верти-
кальной плоскостью, проведённой через Ox, р — угол ОВА. Имеем, прини-
мая массу стержня за единицу,
27" = -i W2 sin* р + 1 /» A + 6 sin* P) р'2,
О О
U — gl sin р cos 6.
Существует положение устойчивого равновесия, соответствующее зна-
чениям 6 = 0, р = -=-.
5. Найти движение математического маятника переменной длины. Рас-
смотреть частный случай, когда / изменяется пропорционально t. (Ле-
корню, Acta mathematica, 1895.)
6. Бесконечно тонкая прямолинейная трубка ОА образует постоянный
угол 6 с восходящей вертикалью Ог. Найти, по какому закону следует вра-
щать эту трубку вокруг оси Ог, чтобы скользящая в ней без трения тяжелая
материальная точка т могла при подходящем подборе начальных условий
двигаться по закону, определяемому уравнением
От — k (t -f- aJ (k и а — постоянные).
Пусть ф — угол между плоскостью гОА и неподвижной плоскостью.
Допустим, что ф задано в функции времени: ф = /@> и обозначим через р
расстояние От. Имеем:
cos 6,
откуда получается уравнение движения
f — р sin* б/'2 @ + g cos 6 = 0.
Вопрос сводится к следующему: какова должна быть функция f{t),
чтобы это уравнение допускало частный интеграл p = ?(^-j-aJ? Из усло-
вия, что искомая функция должна удовлетворять указанному уравнению,
находим
6 t + a
sin 6 V k a
Если, в частности, k = — -=- g cos 6, то получится f(t) = 0; трубка должна
оставаться в покое.
6а. Однородная круговая, трубка бесконечно малого сечения может
вращаться вокруг одного из своих диаметров, который вертикален и непо-
движен. Внутри,трубки может двигаться без трения тяжелая материальная
точка т. Найти движение системы.
Положение системы зависит от двух переменных. Примем начальное
положение трубки за плоскость xOz и. обрзначим через, ^ угол, который
358 ДИНАМИКА СИСТЕМЫ
в момент t образует плоскость трубки со своим начальным положением. При-
мем за ось Ог направленный вниз неподвижный диаметр и пусть в — угол
между радиусом От и осью Ог.
Если R — радиус трубки, а М — ее масса, то
2Г = МЩ'Ъ + mR°- (в'2 + у'2 sini в),
U = mg R cos в.
7. Две материальные точки т и т' притягиваются пропорционально
расстоянию и должны двигаться по двум окружностям радиусов а и а', ле-
жащим в одной и той же горизонтальной плоскости.
Найти бесконечно малые колебания системы вокруг положения устой-
чивого равновесия.
Исследовать конечное движение в случае, когда обе окружности кон-
центричны.
8. Движение тяжелой точки М по окружности, вращающейся с по-
стоянной угловой скоростью ш вокруг вертикальной оси ST, лежащей
в плоскости окружности и не проходящей через ее центр О. Примем
за подвижную систему отсчета систему, образованную направленной
вниз вертикалью Ог и горизонталью О, пересекающей ST.
Пусть от— масса точки М, г — радиус окружности, а — расстояние О А
от центра О до оси 57".
Положение маятника ОМ определяется в каждый момент времени
углом 6, который он образует с осью Ог, причем этот угол считается по-
ложительным в прямом направлении, т. е. от Ог к оси Ох. Применим ме-
тод Жильбера, хотя прямой метод будет значительно ироще.
Вычисление Тг. Это — кинетическая энергия системы S, состоящей здесь
из точки М, в относительном движении по отношению к хОг, т. е. в ее
вращательном движении вокруг О:
Вычисление Те. Мгновенная ось вращения системы хОг при ее дви-
жении около точки О есть прямая Ог. Момент инерции точки М отно-
сительно этой оси равен H=mr* sin2 в. Следовательно, имеем:
Те = ^ /иг2 sin2 в.
Вычисление Т*. Так как вектор ш мгновенной угловой скорости враще-
ния направлен по Ог, а вектор о момента количества движения точки М
в ее относительном движении по отношению к осям хОг перпендикулярен
к плоскости хОг, то эти векторы взаимно-перпендикулярны. Следовательно,'
здесь cos <o,s = 0 и Т* — 0.
Вычисление U. Так как составляющие единственной приложенной силы
суть
X = 0, У = 0, Z = mg,
то
U — mgr cos 8.
Вычисление К. Ускорение j центра О, вращающегося с угловой ско-
ростью (о вокруг точки А, направлено по ОА и равно <о3я. Следовательно,
К as mruPa sin 6,
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 359
Имеем, таким образом,
и
U + К = mgr cos 8 + mr«&a sin 6.
Следовательно, уравнение движения будет
— = и2 sin e cos е — -i- sin e + — cos e.
Чтобы получить положения относительного равновесия, нужно прирав-
нять нулю правую часть. Эта последняя задача была разрешена геометри-
чески в п. 415.
9. Тяжелое твердое тело D движется вокруг горизонтальной оси хОх'.
Ось хх' в свою очередь вращается с постоянной угловой скоростью о> во-
круг пересекающей ее вертикали гОг'. Центр тяжести G тела находится на
перпендикуляре, восставленном в точке О к хОх'. Предполагается, что
оси хх' и OG являются главными осями инерции тела в точке О.
Найти движение тела, пренебрегая вращением Земли.
Примем в качестве системы отсчета прямоугольную систему Oxyz, вра-
щающуюся вокруг Ог с заданной угловой скоростью <в.
Обозначим через 5 расстояние GO, через 6 — угол между прямой 00
и нисходящей вертикалью Ог'. Относительным движением является враще-
ние с угловой скоростью 8' вокруг оси Ох. Применяя метод Жильбера,
имеем:
7V = 1.46'2, re = y(Bcos2 8+Csln2 8), Г = 0.
Величина Т* в общем случае равна «a cos о>, а. В рассматриваемом слу-
чае главный момент а количеств относительного движения равен АЬ' и на-
правлен по оси Ох; угловая скорость о> направлена по оси Ог; следовательно,
cos «а = 0 и Г* = 0. Единственной действующей силой, кроме реакций свя-
зей, является вес; следовательно, имеем
U = Mg Ь cos в.
Наконец, так как начало О неподвижно, то К равно нулю. Таким обра-
зом, уравнение движения будет
А ^- — оJ (С — В) sin 8 cos в = — Mg Ь sin в.
Это уравнение может быть отождествлено с уравнением движения тя-
желой точки по окружности, которая в свою очередь вращается с постоян-
ной угловой скоростью о вокруг неподвижного вертикального диаметра.
См. предыдущее упражнение. (Ж и л ь б е р, Memoire sur Г application de la
methode de Lagrange au mouvement relatif.)
10. Определение движения однородного тела вращения, движущегося
вокруг точки, лежащей на его оси Ог, может быть приведено к квадрату-
рам каждый раз, когда приложенные силы имеют силовую функцию U,
зависящую только от угла между осью Ог и прямой Ог±, имеющей постоян-
ное направление.
Действительно, примем прямую Ozt за координатную ось; тогда t/=/F)
и, написав интеграл энергии и уравнения Лагранжа относительно <р и ф,
мы увидим, что оии приводятся к квадратурам.
11. Показать, что исследование движения однородного тела вращения,
скользящего по неподвижной плоскости, приводится также к квадратурам
каждый раз, когда приложенные силы имеют силовую функцию U, за-
360 ДИНАМИКА СИСТЕМЫ
висящую только от угла в, который образует ось Gz тела с нормалью Gz±
к плоскости.
12. Обобщение теоремы Бонне (п. 247, конец приложения). (См. Р а-
dova (Падуя), Bulletin des Sciences mathematiques, стр. 178, 1885.)
13. Таутохронизм в системах. Дана система с не зависящими от t
связями, находящаяся под действием известных сил, зависящих только от
положения системы. Обозначим через q\,qi, ..., qk независимые параметры,
служащие для определения положения системы. Задача заключается в сле-
дующем.
Определить, какие новые связи числом k — 1 нужно наложить на
систему для того, чтобы полученная таким образом система с пол-
ными связями была таутохронной, т. е: чтобы система достигала
определенного положения за один и тот же промежуток времени,
каково бы ни было начальное положение при условии равенства нулю
начальных скоростей.
Ответ. Имеем:
2i(Xbx+Yby-\-Zbz) = Q1bq1+Q2bq2+ ... + Qkbqk.
Введем новые связи, делающие систему таутохронной системой с пол-
ными связями. Можно всегда предположить, что тогда qb q% ..., qk выра-
жаются в функции одного параметра q. Единственное уравнение движения
новой системы получается из уравнения кинетической энергии
rf2n = Q1rf?1+ ... -\-Qkdqk. A)
Введем вместо q новое переменное S, определяемое соотношением
V^ia{jdqidqj= ds. B)
= is'2, Qtdqt+ ... +Qkdqk=f(s)ds
Тогда
и уравнение A) обратится в следующее:
s"=/(s).
Для того чтобы это уравнение определяло таутохронное движение,
необходимо и достаточно (п. 213), чтобы функция /(s) имела вид — [a"s,
где (j.2 — положительная постоянная. Мы должны, следовательно, иметь
Qidqx + Qidq2 + ... + Qk dqk = - [Л ds. C)
Наоборот, если найдены функции q±, qb ..., qk от s, удовлетворяющие
соотношениям B) и C), то система станет системой с полными связями и
положение ее будет зависеть от единственного параметра s. Эта система
будет таутохронной.
Так как для определения qb q2 qk в функции s имеются только
два соотношения, то k — 2 совместных соотношений между qb q2, ..., qit
и s можно задать по произволу.
Можно, например, сделать задачу определенной, требуя, чтобы система
была таутохронной не только по отношению к заданным силам, но и по
отношению к k — 2 другим системам сил Х^\ У^\ Z^\ зависящим только
от положения. (Ann ель, Comptes rendus, т. CXIV, 1892, стр. 996.)
14. Смысл перехода к мнимым значениям времени. Если дана система,
материальных точек, подчиненная не зависящим от времени связям и на-
ходящаяся под действием сил, зависящих только от положения отдель-
ных точек, то интегралы дифференциальных уравнений движения
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 361
системы остаются вещественными, если в них заменить t величиной
t Y— 1 и проекции dp, Pp, ip скорости каждой точки тр заменить ве-
личинами — apY—It—PpV—1. —1PY—1. Полученные таким обра'
зом выражения являются уравнениями нового движения, которое полу-
чат те же самые точки системы, если их поставить в те же начальные
условия и подвергнуть действию сил, соответственно равных и проти-
воположных тем, которые вызывают первое движение.
Доказательство. Можно использовать уравнения с множителями Ла-
гранжа и заменить в них t величиной t~Y—1. что равносильно замене знака
проекций приложенных сил и видоизменению множителей.
Можно также воспользоваться уравнениями Лагранжа
Тогда Т будет однородной функцией второй степени относительно q[, q'2, ...
..., qk, откуда непосредственно видно, что замена t величиной t"Y—1 сво-
дится к замене Qa величиной — Qa, т. е. к перемене знака приложенных
сил. (Аппель, Comptes rendus, т. LXXXVII, 1878, стр. 1074.)
15. Приложение общих уравнений, данных в п. 465, к твердому телу,
движущемуся параллельно неподвижной плоскости. Примем за плоскость
фигуры плоскость кривой, описываемой цейтром тяжести. Возьмем в этой
плоскости две неподвижные оси Ох и Оу и пусть ? и г) — координаты точки G.
Достаточно, очевидно, знать движение плоской фигуры (Я), являющейся
сечением тела плоскостью хОу. Обозначим через 8 угол между осью Ох и
радиусом GA, неизменно связанным с этой плоской фигурой (Я), и
через М№ — момент инерции тела относительно оси, проведенной через G
перпендикулярно к плоскости хОу.
Движение тела вокруг центра тяжести G есть вращение вокруг непо-
движной относительно тела оси с угловой скоростью в'. Следовательно,
функция Si, вычисленная для движения тела вокруг точки G, имеет вид
/„„2 . „,4\
2 (.» + 6 )¦
Поэтому
где нет смысла выписывать члены, не содержащие вторых производных.
С другой стороны, если через Хо и Го обозначить проекции главного
вектора приложенных сил и через No — сумму моментов этих сил относи-
тельно оси, проведенной через точку G перпендикулярно к плоскости хОу,
то получим
Yby + Zbz) = Х0Ы + Г08т) + Nobb.
Предполагается, что на тело не наложены никакие другие связи и по-
этому параметры t, i), 6 независимы. Тогда уравнения движения будут:
di" ~ °' д-ц" ~~ °' ав" "" 0>
или
Mi" = Хо, Afr)" = Yo, MkW = Л^о.
Таким образом, мы вновь нашли те же уравнения, которые непосред-
ственно получаются из общих теорем.
16. Вычисление энергии S ускорения твердого тела, движущегося,
вокруг неподвижной точки О. Отнесем движение тела к прямоугольному
362 ДИНАМИКА СИСТЕМЫ
триэдру Oxyz с началом в точке О, совершающему известное движение.
Пусть Q — мгновенная угловая скорость триэдра и Р, Q, R — составляющие
этой угловой скорости по осям Oxyz. Пусть, далее, to абсолютная мгновен-
ная угловая скорость тела и р, q, r — ее составляющие по осям Oxyz.
Мы нашли (п. 466) для проекций jx, jy, jz ускорения точки т выраже-
ния вида
Отсюда путем перестановки букв получаются jy, jz. Составив сумму
квадратов, получим р и, наконец, функцию
В этой сумме имеются в качестве коэффициентов моменты инерции
A = 2lm(yi + z?), B^J^mtf + jfl), С = 2 ™ С*2 + У2)
и центробежные моменты
D = 2 туг, •? = 2 mzx> f = 2 тхУ
относительно осей Oxyz. Эти шесть величин будут, вообще говоря, изме-
няться с течением времени, так как оси Oxyz перемещаются в теле.
В рассматриваемом случае параметрами являются углы, определяющие
положение тела относительно точки О. Величины р, q, r содержат первые
производные этих параметров по времени; так как предполагается, что
триэдр Oxyz совершает известное движение, то Р, Q, R должны рассматри-
ваться как известные функции времени; следовательно, вторые производные
параметров входят только в р', q', г'. Тогда иа основании общего замечания
достаточно вычислить в выражении для S члены, содержащие только уско-
рения, т. е. р', q', r', так как только эти члены зависят от вторых произ-
водных параметров.
Положим для краткости
и обозначим временно через а, Ъ, с суммы 2 тх\ 2 тУъ> 2
можем написать
25 = а [(«?' -Qx-pry + if -Ri+ pqT-] +
+ b [(/•' - Rl - qp)* + (p'
+ с [(/ - Pi - rq)* + (q' -
- 2D [(fi - ri) / + (q' - Qx + pr) (/•' -Rt— pq)] -
Раскроем скобки и соберем вместе члены, содержащие р'— Рх, q'~ Qlt
г' — Rh при этом заметим, что
* + с = А, с + а = В, а + Ь = С,
Ь — с = С — В, с — а = А — С, а — Ь=В — А.
ГЛАВА XXIV. ОБЩИЕ УРАВНЕНИЯ АНАЛИТИЧЕСКОЙ ДИНАМИКИ 363
Оставляя в стороне члены, не зависящие от р', q', г', мы можем написать
2S - А (р' - Ptf +B(q'- Qtf + С (г' - Rtf -
- 2Z> (q' - Qj) (/•' - /?t) - 2? (/•' - /?t) (/?' - Pt) -2F(p'- Pt) (q' - Qt) +
+ 2[(A-C)rp-E(ri-pi)-Fqr+Dqp](q'-Ql) +
+ 2[(B — A)pq—F(pt—q*) — Drp+Erq](r' — R1)+..
Примечание. Если оси Oxyz неподвижны в пространстве, то
я = <Э = я = о,
и поэтому
Pl = Ql=R1= 0.
Если оси неподвижны в теле, то
Р = р, Q = q, R = r,
откуда по-прежнему
Л = <?1 = /?1 = о.
(А п п е л ь, Journal de Jordan, 1900.)
17. Определить, каким является в движущемся теле геометрическое
место точек А, обладающих следующим свойством:
Энергия S абсолютных ускорений тела равна энергии ускорения
всей массы, сосредоточенной в точке А, сложенной с энергией ускоре-
ний, вычисленная для относительного движения тела вокруг точки А.
(А. де Сен-Жермен, Comptes rendus, 1901.)
18. Качение кругового диска по заданной поверхности под действием
заданных сил. (Воронец, Mathematische Annalen, т. LXVII, 1909.)
ГЛАВА XXV
КАНОНИЧЕСКИЕ УРАВНЕНИЯ. ТЕОРЕМЫ ЯКОБИ И ПУАССОНА.
ПРИНЦИПЫ ГАМИЛЬТОНА, НАИМЕНЬШЕГО ДЕЙСТВИЯ
И НАИМЕНЬШЕГО ПРИНУЖДЕНИЯ
I. Канонические уравнения
471. Преобразование Пуассона и Гамильтона. В конце первого
тома, в п. 291 ив следующих, мы видели, как можно преобразовать
уравнения движения точки, взятые в форме Лагранжа, к форме, на-
званной канонической.
Такой же метод применим к уравнениям движения любой голо-
номной системы, положение которой зависит от k координат qlt q2, ...
. . ., qk. Мы это сейчас покажем, отсылая за всеми подробностями
вычислений к главе XVI, в которой они выполнены для случая k — 3.
Уравнения Лагранжа будут
dt
_аГ ^ -
Примем, как Пуассон, в качестве новых переменных вместо
Я'г Я'2> ¦ ¦ ¦> Ч'и величины
дТ дТ дТ .о.
Уравнения B), будучи линейными относительно q'v .... q'k, могут
быть разрешены и дают для этих величин выражения, линейные от-
носительно рх рк. Посмотрим, во что обратятся уравнения A),
если сделать такое преобразование переменных.
Оставим переменную t постоянной и дадим переменным q и р
произвольные бесконечно малые независимые приращения 8<7 и Ьр.
Тогда все q' получат приращения oq', определяемые соотношениями B),
которые предполагаются разрешенными относительно q'.
Функция Т, зависящая от переменных q и q', получит тогда из-
менение
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ 365
или в силу уравнений B)
что, полагая K = 2iiP q\— Т, можно написать в виде
Таким образом получается первое выражение для дифференци-
ала S/C. Допустим, с другой стороны, что К выражено через новую
систему переменных д„ и /?,. Когда t остается постоянным, а эти
переменные получают произвольные вариации 8<7„ и 8pv, тогда
Это новое выражение для S/C должно быть тождественно преды-
дущему, каковы бы ни были bq и Ьр. Следовательно, имеем
-?- = 4?-. я' = ^ (v=l. 2 ft). C)
В этих уравнениях частные производные от Т взяты в предполо-
жении, что Г выражено через q и q', а частные производные от К—¦
в предположении, что К выражено через q и р. На основании соот-
ношений C) уравнения Лагранжа A) принимают вид
Эти уравнения первого порядка определяют переменные рь р2, ...
..., pk, <7i> Яг< •••> Як в функции времени.
Во всем дальнейшем мы будем предполагать, что составляющие
по осям приложенных сил, кроме реакций связей, являются частными
производными по координатам некоторой функции U от координат
и времени. Эти условия будут, в частности, выполняться, если при-
ложенные силы имеют силовую функцию, но тогда U будет содер-
жать только координаты и не будет зависеть от времени.
При таком предположении, так как координаты различных точек
являются функциями параметров qu q2, .... qk и быть может вре-
мени t, то U будет функцией от qv q2, ..., qk, t, не содержащей
dU u
величин pv, так что частные производные -^— равны нулю. Кроме
того, имеем Q^= -—•. Положим тогда
К— U = H. E)
Получим
_д^___дЯ М- — П — дН
др, — др., • dq, ^ dq, '
366 ДИНАМИКА СИСТЕМЫ
и уравнения D) примут вид
dq4 _ дН dp±_ дН г , 2 ,ч ,~
Это и будут канонические уравнения движения, данные Гамиль-
тоном. Они образуют систему 2k уравнений первого порядка, опре-
деляющих <7i. Я2' ¦ ¦ ¦' Як и Pi' Pi' • • •• Р/с в ФУНКЦИИ времени и 2k
произвольных постоянных.
Частный случай, когда связи не зависят от времени. Если
наложенные на систему связи не зависят от времени, то параметры
qv q2, ¦ ¦ ¦, qk можно всегда выбрать таким образом, чтобы выра-
жения координат различных точек системы в функции этих параме-
тров не содержали явно t. Тогда Т будет однородной функцией
второй степени относительно q' (п. 445) и по теореме об однород-
ных функциях будет
так как /?v равно —г • В этом случае функция К обращается в сле-
дующую:
и мы имеем
н=к—и = т—и.
Вычисления же, которые нужно выполнить, чтобы перейти от квад-
ратичной формы Т, выраженной через q[, q'% q'k, к форме Т,
выраженной через plt р2, .. ., рк, совпадают с теми, которые нужно
выполнить, чтобы перейти от формы квадратичной к форме, ей со-
пряженной.
Случай, когда связи не зависят от времени и существует
силовая функция; интеграл энергии. Добавим к предположениям
предыдущего случая еще одно дополнительное условие, что суще-
ствует силовая функция, т. е. что функция U зависит от координат
различных точек, но не от времени. Тогда, так как по предположе-
нию выражения координат как функций q не содержат t, то U об-
ращается в функцию от q1, q2, ..., qk, не содержащую t. В этом
случае теорема кинетической энергии приводит к интегралу
T—U = h или H=h.
Это можно легко вывести из канонических уравнений. Действи-
тельно, в рассматриваемом случае функция Н = Т—U не содержит
явно t и выражается только через переменные qw и р . Во время
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ 367
движения эти переменные q^ и pv являются функциями времени и
через них Н также становится функцией времени. Тогда мы имеем
dH _ у IdH dq,, ¦ дН dp,
dt ~ Zd\ dq4 dt ' dp,, dt
Но на основании канонических уравнений каждый член суммы, стоя-
щей в правой части, равен нулю. Следовательно, во время движения
имеем:
Примечание. Если Н содержит явно t, то
dH V / дН dq., , дН dp., \ , дН
~dt
_ у (_дН_ dq^ j, дН_ 4рЛ , дН_
~~ 2j\ dq^ ~1Г~т~ dp, ~Ж) "г ~ЗГ'
Так как сумма в силу канонических уравнений равна нулю, то находим
dH _ дН
~Ж dt '
Преобразование Пуассона — Гамильтона всегда возможно. Преобра-
зование основано на возможности разрешить относительно q'v q'2, ..., q'k
линейные уравнения B). Достаточно показать, так же как в п. 294, что-опреде-
литель коэффициентов при неизвестных #s не может быть равен нулю.
По вопросу о преобразовании Пуассона — Гамильтона и о преобразо-
ваниях переменных, не изменяющих каноническую форму уравнений F), можно
указать на исследование: Vergne (Вернь), Sur certaines proprietes des sy-
stemes d'equations differentielles, Annales de l'Ecole Normale superieure, 1910,
стр. 543.
И. Теорема Якоби и ее приложения
472. Теорема Якоби. Теорема Якоби применима к каноническим
уравнениям, в которых Н является произвольной функцией перемен-
ных qw, py и t, т. е. функцией вида
H(pv р2, .... рк\ qlt q2, . .., qk, t).
Теорема основана на том, что канонические уравнения являются
уравнениями характеристик некоторого уравнения с частными про-
изводными первого порядка. Она сводит интегрирование канониче-
ских уравнений к разысканию полного интеграла этого уравнения.
Формулируется эта теорема следующим образом.
Пусть дано уравнение в частных производных первого порядка
дУ , ufdV dV dV
368 ДИНАМИКА СИСТЕМЫ
определяющее V в функции переменных qv q2, .... qk, t, рассмат*
риваемых как независимые. Если известен полный интеграл
V(qv q2 qk, t; av a2 %) +const (C)
этого уравнения, содержащий k произвольных постоянных
ах, а2, . . ., ак, из которых ни одна не является аддитивной,
то конечные уравнения движения, т. е. общие интегралы кано-
нических уравнений, имеют вид
dV dV dV
~л ~==LD\, -=; = On, .... -т = Оъ, (Jl)
даг * да% 2' дак А ч и
dV dV dV ,т.
P Р{)
с 2k произвольными постоянными аи а2, ..., a%, blt b2, .... bk.
В п. 297 мы доказали эту теорему в предположении, что число
переменных q равно 3 (k = 3). То же доказательство справедливо
и в общем случае, когда k — произвольное целое число. Нет смысла
снова возвращаться к этому доказательству. Следовательно, общую
теорему можно считать доказанной. Уравнения (JJ определяют qu
q2, ..., qu в функции времени и 2k постоянных ау и Ь,. Эти выра-
жения определяют движение системы. Уравнения (J2) определяют
после этого вспомогательные переменные /?v.
473. Частный случай, когда t не содержится в коэффициен-
тах уравнения Якоби. Когда t не содержится в коэффициентах
уравнения (J), то этому уравнению можно удовлетворить функцией
вида
V = — ht-\-W,
где h обозначает постоянную, a W — функцию от qt, q2, .... qk,
не зависящую от t. Подставляя это выражение V в уравнение (J), мы
получим для определения W уравнение
(dW . dW dW
1+9 я
Достаточно найти полный интеграл уравнения (J')
q2 qk\ alt a2 eft_lf h)-\-const,
содержащий, кроме h, еще k— 1 постоянных av a2, ..., ак_и из ко-
торых ни одна не является аддитивной. Тогда, приняв
V=—ht-)rW(ql, q2, .... qk; av a2, ..., ak_t, h),
мы получим полный интеграл уравнения Якоби с k постоянными
av аг %-!¦ h, из которых последняя заменяет собой постоян-
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ 369
ную ак. Конечные уравнения движения (JJ и (J2), если обозначить Ьк
через —tQ, обратятся в следующие:
^L — h ^K — h dW —h - • dW
dW dW
Первые (k—1) уравнения (Ji) не содержат времени t и поэтому
определяют геометрические положения, через которые проходит си-
стема при своем движении; из последнего уравнения (jj) находим
время, необходимое системе для достижения какого-нибудь из этих
положений.
Случай, который мы только что рассмотрели, представится, в част-
ности, тогда, когда силы имеют силовую функцию U(gu q2, ..., qh)
и когда вследствие того, что связи не зависят от времени, коорди-
наты различных точек системы, выраженные в функции q4, не содер-
жат /. Тогда #=Г— U не будет содержать явно t. В этом случае
постоянная h будет постоянной энергии, так как уравнение (J'), если
dW
в нем заменить -г— функциями />„, обратится в следующее:
H(Pi, Рг Ръ gv Яг Яи) — А или T—U = h,
что является интегралом энергии.
Примечание. Метод, которым мы воспользовались, чтобы
упростить нахождение полного интеграла, в случае, когда уравнение
Якоби не содержит t, применим также к случаю, когда любая дру-
гая переменная, например qv не содержится в этом уравнении. В этом
случае нужно стараться удовлетворить уравнению, полагая
V = «i?i + ?(?2. Яз Як> 0.
где aj — некоторая постоянная, а <р уже не зависит от q\. Тогда задача све-
дется к нахождению полного интеграла уравнения, содержащего на одну не-
зависимую переменную меньше.
474. Примеры. 1°. Приложение к движению волчка по горизонталь-
ной плоскости. Эта задача была решена в п. 407 как пример движения
однородного тяжелого тела вращения, скользящего по горизонтальной пло-
скости. Пользуясь обозначениями пп. 407 и 408, мы видим, что положение
системы зависит от пяти параметров 5, •»), <(, ty, в, играющих роль параметров
Чь Чъ <?з> 4i< Чь- Координата С центра тяжести связана с 8 соотношением
C = /cos 8. Для сокращения письма мы предположим, что масса волчка при-
нята равной единице (М — 1). Тогда кинетическая энергия будет
Т¦= -i [5'2 +1)'2 + P sin2 68'2 + А (р* + <Р) +
Т = -i [?'2 + i)'2 + (Г* sin2 8 + Л) 8'2 + A sin" Ц'г + С (<?'+ У cos Щ.
С другой стороны, силовая функция есть
U = — gl cos 8.
24 Зак, 922, П. Аппель, т. 11
370 ДИНАМИКА СИСТЕМЫ
Переменные рч определяются уравнениями /?v = —т, которые здесь имеют
вид:
дТ г, дТ , дТ
= Ь(<(¦ -t- у cos о),
A)
pi = -tj7 = A sin2 8t}/' -[- С cos 6 (9' + 41' cos 8), /?6 = -—=(/2 Sjns 8-|-j4) 6'.
Эти уравнения нужно разрешить относительно ?', ¦»]', 8', ^', ф'. Полу-
чаем
5'= Л. V=P2. |
Внося эти значения в выражение для 7" и замечая, что так как Т яв-
ляется однородной функцией относительно q[, q2, ..., qb, то в рассматри-
ваемом случае Н=Т— U находим:
Мы можем теперь написать канонические уравнения:
i cos 8) „
i^fl—^COS '
C)
di_dH_ ^Т._^_„ d<t_dH p9 (Pi—p3cosd)
Yt~dpx~Pl' dt~dp2~P2' dt~ др3~ С A sinH c '
дН pi — pi cos 8
dt dpt A sin« 8 ' dt dp-o /2 sin2 8 -\- A
и далее:
dp\ uH Л dp% oil
dt ~~ W ~ ' ~dt ~ ~~ дт\ ~ '
dpo Oil _ dp a Oil Л
dt ОФ dt иф
dp* ^ дН
dt дО '
D)
где производную —™- мы не написали явно. Эти канонические уравнения C)
и D) определяют S, к), <р, ф, 8, pif p2, pa, pit Рь в функции t. Первая группа
уравнений, очевидно, идентична уравнениям A). Из второй группы имеем
сразу первые интегралы
А = аъ Pi — л2, Pi = я3. Pi — Й4>
откуда, подставляя эти значения в уравнения A) и C), получаем
' + С cos 6 (9' + У cos 6) = at. j ( }
Эти четыре первых интеграла совпадают с теми, которые мы нашли не-
посредственно (п. 407) путем применения общих теорем. Два первых выражают,
что горизонтальная проекция центра тяжести совершает прямолинейное и
равномерное движение; третий показывает, что составляющая г мгновенной
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ 371
угловой скорости вращения постоянна; последний, — что в движении вокруг
центра тяжести сумма моментов количеств движения относительно вер-
тикали Qzy постоянна. Присоединяя к интегралам E) интеграл энергии
T—U^h или H=h,
мы получим все уравнения, найденные ранее.
Применим теперь теорему Якоби. Мы опять найдем те же интегралы.
Уравнение с частными производными будет
dv I \(dvv- /avy I /av\» ,
dt + 2 L\ di ) ~*~ \ дг) ) "г Р sin2 е + А \дЬ ) Т
Так как оно не содержит явно ни одну из переменных t, ?, т), у, ф, то полный
интеграл можно найти в ниде
V = - fit + а? + а
где ft, at> аь as< ai — постоянные, a F{b) — функция только от 6. Подставляя
и V*
это значение V в уравнение F) и замечая, что -щ- равно F' (в), мы полу-
чим для определения F' (в) уравнение
F'2 F)'= (Р sin2 6 + Л) 2й — 2^/ cos в — а\ — ^ —
Интегрируя, найдем
F (в) = Г У/а sin2 в + А Ув йв,
где для краткости положено
а2 1
- (а4 — а3 cos
Таким образом, получаем полный интеграл
V = — м + ati + ам + йзд + а^ + С У Р sln^ в + А
с пятью постоянными Л, а1( а2, аг, а^ из которых ни одна не является адди-
тивной. Тогда уравнения движения в конечной форме будут
^ V ' <1234)
Следовательно, дифференцируя под знаком интеграла и принимая во
внимание, что в зависит от h, alt a%, a8, а4, получим:
~aiJ Y^—M = bv n~a
УУ^в + А Г?8.__со|»е
24*
372 ДИНАМИКА СИСТЕМЫ
Первые четыре уравнения определяют последовательность положений
волчка; из последнего уравнения определяем время. Заменяя в двух первых
уравнениях последний интеграл через t — t0, приводим их к виду
5 _ bt = ax (t — t0), п — *з = <h V — h)-
Таким образом, вновь получается тот результат, что проекция центра
тяжести на горизонтальную плоскость движется прямолинейно и равномерно.
Наконец, чтобы получить в конечной форме переменные ри р2, р& Pi, Ръ.
dV
составим равенства pv=-5—, откуда
pi — a1, ръ—а2,р3 = аъ, pi = ai, ръ = V>sin^в + А /в.
2°. Пример, в котором связи зависят от времени. Применим метод
Якоби к задаче, изложенной в п. 455.
Рассмотрим однородный тяжелый стержень, движущийся без трения
в плоскости, которая вращается с постоянной угловой скоростью со
вокруг неподвижной вертикальной оси, лежащей в этой плоскости.
Положение системы зависит от трех параметров 5, т\, в, играющих роль
параметров ^i> Чг< Уз-
Допустим, что масса М равна единице. Получим, как это было найдено
ранее, следующие выражения для кинетической энергии и силовой функции
Т = -i- (?'2 +1)'2 + №Ъ'г + ю»?2 cos2 8 + №Щ, U =
Нужно положить
дТ дТ дТ
после чего получим уравнения
А =5'. P2 = V. Р8 = *1в',
непосредственно разрешенные относительно ?', i\', 6'. Далее нужно положить
Тогда после замены 5', tj', в' их значениями и после сокращения получим
Теперь функция Я = К—U будет иметь вид
Теперь легко написать канонические уравнения. Можно убедиться, что
они совпадают с уравнениями, полученными в п. 455.
Применим метод Якоби. Уравнение с частными производными будет
или
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ 373
Ищем полный интеграл уравнения в виде
где функции Fi, F2, F3 переменных Е, ij, 6 тождественно удовлетворяют
уравнению
- 2ft + [f? (I) - «Н8] + [F? (Ц - 2g4] + [-L />," (8) - «W cos2 б] = 0.
Так как в уравнении с частными производными переменные ?, т), 6 рас-
сматриваются как независимые, то это соотношение может иметь место
только тогда, когда каждая из величин, стоящих в скобках, в отдельности
постоянная. Необходимо, следовательно, принять
Подставляя 2% и 2а2 в предыдущее уравнение, получим
^2 (е)
Три последних уравнения определяют Fb F2, и FA при помощи квадратур,
и мы получаем полный интеграл
Г У о
с тремя постоянными %, а2, h, из которых ни одна не аддитивная. Уравне-
ния движения в конечной форме будут
dV , dV .
и
dV t
откуда, обозначая через 8 величину »2?s cos^ 8 -j- 2ft — 2ax — 2a2, получаем:
J Уч>Ч'-\-2а1 J Y® J
Из этих уравнений можно определить ?, к), 6 в функции t и шести по-
стоянных а^, а2, h, b\, b<i, t0. Первые два, принимая во внимание третье, могут
быть написаны в виде
J у ^24-2^ ° J /
у ^24-2^
откуда получаем для ? и т) выражения, совпадающие с найденными в п. 455.
Наконец, параметры рх, р% р% имеют значения:
374 ДИНАМИКА СИСТЕМЫ
475. Теорема Лиувилля. Лиувилль указал очень распространенный
случай, когда уравнения движения интегрируются в квадратурах. Рассмотрим
систему без трения, связи которой не зависят of времени и кинетическая
энергия которой выражается в функции параметров qv q2, ¦ ¦¦, qk в виде
UT = (A1 + A2+ ...+ Ак) (В1<?1/2 + Вд* + ... + Bkq'k2),
где Ах и Bi являются функциями одного только параметра q±, а А2 и В2—
одного только параметра q2 и т. д. Движение этой системы может быть
вычислено при помощи квадратур, когда на нее не действуют никакие силы
или, в более общем случае, когда действующие на нее активные силы имеют
силовую функцию U(qv q2, ..., qk) вида
+Ak
где Ui зависит только от qb U2— только от q2,..., U., — только от q.,.
Частный случай этой теоремы был указан в конце первого тома (п. 305).
Метод Якоби дает сразу искомое движение. Переменные р^ в рассматри-
ваемом случае определяются равенствами
Определяя отсюда q^ и подставляя их значения в Т, найдем для функ-
ции //=7"—U вследствие однородности Т относительно q'
\Ч | +
+Ак [2 \В1 ^ В2 ^ ••• ^ Вк
Следовательно, уравнение с частными производными Якоби, если
положить
V = — ht+ W,
будет иметь вид
h + Ai + A2+ ... +Ак
Оно имеет полный интеграл вида
W = Vx + V2 + ... + Vk, G)
где V\ зависит только от qb V2 — только от q2, ... и Vk — только от qk.
В самом деле, подставим это значение W в предыдущее равенство и от-
бросим знаменатель. Мы получим уравнение, которое можно написать так:
Первая скобка зависит только от qb вторая — только от q% и т. д. Так
как в уравнении с частными производными эти переменные независимы,
то последнее уравнение может быть удовлетворено лишь в том случае, если
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ 375
каждая скобка в отдельности равна постоянной. Следовательно, мы должны
иметь
1 / HV \"
к() 2^=2^ (v=1.2 *),
где av a2, ..., ак обозначают постоянные, сумма которых равна нулю;
k—1 этих постоянных flx, a2, ..., &к_х будут произвольными, и мы имеем
Тогда, интегрируя, получим
= J У
Заменяя в выражении G) функции Vlf V2, ..., Vfc этими значениями,
мы получим полный интеграл с k произвольными постоянными а^,
ау "¦' ak-i' ^- Окончательно уравнения движения будут следующие:
Выполняя дифференцирование и применяя соотношение (8), получим
2л,
Г — Гп.
Таким образом, задача разрешена в квадратурах.
Адамар, совершенствуя метод Штауде (Staude), исследовал преобразо-
вания этих уравнений для случая, когда интервалы изменения каждого из
параметров q ограничены с двух сторон (Hadamard, Bulletin des Scien-
ces mathematiques, т. XXXV, 1911).
476. Теорема Штеккеля (Staeckel). Штеккель в Comptes rendus A893)
указал обобщение теоремы Лиувилля. Это обобщение применимо к системе,
зависящей от k параметров, но чтобы не осложнять обозначений, мы из-
ложим ее для случая трех параметров.
Пусть Д — определитель
Д =
и Фх, Фг, Ф — миноры определителя Д относительно элементов 91. f2> Чз пер-
вой строки, Wlt ..., Xv ... —миноры относительно элементов ?>г .^ъ ...
следующих строк.
Допустим, что кинетическая энергия Т системы и силовая функция U
имеют вид (см. Гурса, Comptes rendus, 1893):
or
В этом случае метод Якоби дает возможность определить движение
при помощи квадратур.
376 ДИНАМИКА СИСТЕМЫ
В самом деле, мы здесь имеем
И Х (п*<Ь I л^Л 1„2Л\ /l*l + ЛФз + /3Ф3
Составим уравнение Якоби и положим в нем V= — ht-\-W; тогда
уравнение (J') для W напишется так:
Попытаемся найти полный интеграл вида
Если мы заметим, что
<Р1*1 + <?2*2 + ?3*3 — Л- 4*1*1 + +2*2 + 'ЬФ3 = 0. 7.1*1 + 7.2*2 + 7.8*3 = 0-
то увидим, что уравнение (J') будет тождественно удовлетворено, если
принять
Тогда движение определится равенствами:
/Ф1 rfgi / ^» dQ9 I
, - + / , - • + / - ' ¦ = О у
Ул Щ\ I /2 Щг , /
YF, (a,) J YFo(a*) J
V^Tft)
.
Полученная теорема содержит теорему Лиувилля как частный случай,
так как, если Т и U имеют вид, требуемый в теореме Лиувилля, то сразу
видно, что они всегда могут быть представлены в форме (А).
Обобщение этой теоремы можно найти во второй заметке Штекеля
(Comptes rendus, 7 октября 1895).
477. Приложение преобразования Лежандра к уравнению Якоби.
В предыдущей теории параметры q и р имели разный смысл. Но легко
видеть, что в каноническую систему
dq1dH Jp± дН
~д^ V-l>z *) U)
dt др., ' dt
переменные рид входят почти симметрично, так как достаточно за-
менить Н величиной — Н, чтобы параметры р заменились параметрами д, и
наоборот. Поэтому уравнения Якоби
dV
dt +'
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ
377
можно заменить уравнением
Рк'
dW
dPl
dW
Если будет найден полный интеграл W (t, p ,
последнего уравнения, то равенства
dW dW dW
C)
Pv ai ak) этого
' = 1, 2 k)
определят интегралы уравнения A).
От уравнения B) к уравнению C) можно перейти так же, заменив пере-
менные q и функцию V новыми переменными р и новой функцией W, свя-
занными со старыми следующими равенствами:
dV
W
SdV
^ da.,
D)
Повторяя вычисления, при помощи которых- мы привели уравнения Ла-
гранжа к канонической форме, мы увидим, что эти формулы влекут за собой
следующие:
dW
дУ
dt
dp
,-k
н
dW
dW
dp-,
-W,
dt
E)
Следовательно, заменяя переменные по формулам D), мы преобразуем
уравнение B) в уравнение C). Полному интегралу V(t, qv ..., qk, av . ..,ak)
уравнения B) соответствует полный интеграл W(t, pv ..., рк, at, ..., а^у
уравнения C), и имеют место соотношения
дУ
да,,
dW
да.,
_ dV ¦ dV , л о ..
Следовательно, уравнения -г— = bv p^=—— (v = 1, 2, ..., k) влекут
за собой уравнения
dW _ _ dW
da
Преобразование D) называется преобразовгнием Лежа^ра. Оно обоб-
щает известное преобразование, которое изучают в курсах анализа для слу-
чая, когда k = 2. Общую теорию контактных преобразований можно найти
в сочинении Гурса «Об уравнениях с частными производными» (Е. О о и г-
sat, Sur les equations aux derivees partielles, гл. XI).
378 ДИНАМИКА СИСТЕМЫ
III. Теорема Пуассона
478. Некоторые общие сведения о дифференциальных урав-
нениях. Рассмотрим дифференциальные уравнения движения в кано-
нической форме
dq, _дН rfpv _ дН _ ...
~Ж—~д^' 4f — ~-dq-, С-1- 2 Щ. (I)
Интегрируя эти уравнения, найдем qv q2, . .., qk, plt p2, .... pk,
в функции времени и 2k произвольных постоянных. Известно, что
первым интегралом дифференциальных уравнений движения назы-
вается любое соотношение вида
f(qx, q2, .... qk, pv p2 рк, t) = С,
которое справедливо для любой системы функции <7„ и р„, удовлетво-
рящих уравнениям A). Другими словами, левая часть f(qv q2 qk,
pv рг, .... pk, t) первого интеграла есть функция параметров <7„, pv
и времени t, остающаяся постоянной в течение всего времени дви-
жения, каковы бы ни были начальные условия. Очевидно, что если
f=C есть интеграл, то интегралом будет также F(f) = C, где F
есть функция от /.
Два первых интеграла
/i(?i. Яг> •••¦ Яи> Pv Рг Рк' t) = Cv f2 = C2
называются независимыми, если одна из функций, например /2>
не является функцией от другой, т. е. если не существует соотно-
шение вида
h = P (Л)-
Вообще п первых интегралов
fi = Clt /2 = C2 fn = Cn B)
называются независимыми, если ни одна из функций, например / ,
не может быть выражена в функции остальных в виде
U = F(A' к /,-1- Д+1. ••••/„)•
Очевидно, что если известно п первых интегралов, таких как B),
то соотношение
F(U к /») = С
будет также первым интегралом, но он не будет независимым от
интегралов B).
Если известны 2fe независимых первых интегралов
Л — С1« к — С2< ¦ ¦ •< кк — С2к< C)
то систему A) можно считать проинтегрированной, так как эти 2k
совместных уравнений определяют параметры qv q2, . .., qk,
pv p2, . . ., pk в функции t n 2k произвольных постоянных.
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ 379
Любые интегралы системы уравнений. Говорят, вообще, что
соотношение вида
/(Яи Яг Як< Pv Рг Рн< t, cv .... ст)—0
есть интеграл уравнений A), если оно тождественно удовлетворяется
при замене параметров q% и />v произвольным решением системы A)
и при замене величин ct, сг ст подходящим образом подобран-
ными постоянными значениями.
Если интеграл содержит только одну постоянную cv то его
можно разрешить относительно этой постоянной и написать в виде
/i(?i. Яг Яъ Pv Рг Рк- t) = cv
что и будет первым интегралом.
479. Условие, при котором /= С, есть первый интеграл;
скобки Пуассона. Пусть
/(?i. Яг Як' Pv Pv ¦¦¦• Рк- *) = С
есть первый интеграл канонических уравнений движения A). Так
как функция / должна, по предположению, оставаться постоянной
при замене в ней параметров <7„ и pv произвольным решением уравне-
ний A), то полная производная от / по / должна быть равна нулю:
дд1 dt ~*~ dq2 dt ~^ " ' "•" dqk dt ~^~
Заменяя -— и —^- их значениями A) и написав все члены в дру-
гом порядке, получим
6/ дН д/ дН df дН df дН
dqt dpt дрх dqt "¦" dq2 др2 др2 dq2
. df дН . df дН . df _Q
дЧк дРк дРк дЧк dt
Так как это условие должно выполняться для любого решения
уравнений A), то оно должно выполняться тождественно, каковы бы
ни были qu q2, ..., qk, px, p2, . .., рк, t. В самом деле, так как
это условие должно выполняться в течение всего времени движения,
то оно должно выполняться и в произвольный момент t0, рассматри-
ваемый как начальный момент, а известно, что в Этот момент можно
дать параметрам qlt q2 qk, р\, р2 Рк произвольные началь-
ные значения. Следовательно, условие должно выполняться, когда
входящим в него переменным даются произвольные значения, т. е.
оно должно удовлетвориться тождественно.
380 ДИНАМИКА СИСТЕМЫ
Скобки Пуассона. Пусть ср и ф—две произвольные функции
от <7, qk, pv .... рк и t. Мы будем пользоваться симво-
лом (ср, ф) для обозначения выражения
. .. д<? дЬ _ ду дф . ду дЬ д<? д<Ь .
yf> т/ dqt др1 dpi ()gl ~т~ Qq^ ^2 ^а ^^2 т"
, dtp dJ> dtp йф
•¦" ^Wkfyk дрк dgk '
называемого скобками Пуассона.
При таком обозначении условие того, что / = С есть первый
интеграл, напишется так:
Отметим некоторые свойства этих скобок, которые будут нам
полезны в дальнейшем.
Если одна из функций ср или <J> постоянна, то скобка (ср, ф) равна
нулю; если переставить ср и ф или у одной из функций ср или ф
переменить знак, то скобка переменит знак:
(ср, Q = 0. («1». ?) = — (ср, ф), (ср, _«],) = _(,, ф).
Функции ср и ф могут содержать время ^ явно; взяв частную про-
изводную от (ср, ф) по t, получим выражение, которое может быть
написано следующим образом:
dt ~
т. е.
и (о, if\ I'd*Q \ i / d^\
dt~~\d7' 'v ' V' dlj'
480. Тождество Пуассона. Между скобками трех взятых по-
парно функций существует замечательное тождество, которое непо-
средственно приведет нас к теореме Пуассона. Чтобы установить
это тождество, сделаем сначала следующее замечание.
Пусть /—функция от qlt q2, ..., qk, pu p2 рк, которая
может, кроме того, содержать t, и Av А2, .... А2к — функции тех же
переменных. Положим
где A(f) обозначает, что над функцией / производится действие,
выражаемое правой частью. Далее, обозначая через Вх, В2, .. ., В2к
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ 381
другую систему функций тех же переменных, положим также
^ ^ g § F)
Рассмотрим затем выражение A[B(f)\, полученное заменой
в обеих частях равенства E) функции / функцией B(f), и выраже-
ние B[A(f)], полученное заменой в обеих частях равенства F)
функции / функцией A(f). Разность A[B(f)] — B[A(f)] не
содержит производных второго порядка от /. Это
можно непосредственно проверить. Например, в выражении
A[B(f)] коэффициенты при —4 и при -^—^—равны соответственно
dq\ oqi oq2
A{Bt и A1B2-\- A2Bt; в выражении B[A(f)] коэффициенты при
ду d*f
—^ и при -5—з— будут теми же самыми и, следовательно, эти про-
dqi °9i "I?,
изводные при составлении разности исчезнут. То же самое будет
дЧ
и с остальными производными второго порядка, например с —^ ,
др{
дЦ 3
и т. д.
dpi dqi ' dpt др2
Пусть теперь /, <р, ф— три произвольные функции от qv q2
/?j, p2 pk. Составим скобки
Л = (?• Ф). <Pi = (Ф-» /). Ф1 = (/- ?)
путем круговой перестановки букв /, <р и ф. Имеем тождественно
т. е.
(/. (<р. Ф)) + (<Р. (Ф. /)) + (Ф.'(/. Т)) = 0. G)
Это и есть тождество, указанное Пуассоном. Его можно про-
верить непосредственным вычислением. Можно сократить вычисления,
если воспользоваться замечанием, которое мы заимствуем у Гурса
(Lemons sur l'integration des equations aux derivees partielles du
premier ordre, стр. 132, 1891 и «Курс анализа», т. II). Каждый член
левой части тождества G), которое требуется доказать, есть про-
изведение производной второго порядка на две- производные первого
порядка. Следовательно, достаточно установить, что левая часть не
содержит никаких производных второго порядка. Покажем, например,
что она не содержит вторых производных от /, т. е. что все члены,
содержащие вторые производные от /, исчезают. В самом деле,
члены, содержащие вторые производные от /, происходят рт
т. е. от
382 ДИНАМИКА СИСТЕМЫ
чго можно написать также в виде
(?.(ф./)) —ОМ?./))- (8)
Мы можем тогда положить
(?./) = Л (/). (ф,/) = ?(/).
поскольку оба выражения линейны относительно производных от /.
При таких обозначениях выражение (8) напишется в виде
A[B(f)] — B[A(f)].
Оно, как мы видели выше, не содержит производных второго по-
рядка от /.
Доказав, таким образом, тождество Пуассона, мы легко выведем
из него теорему, открытую Пуассоном, особая важность которой
была подчеркнута Якоби.
481. Теорема Пуассона. Если
?2> • • •• Як' Pv Рг Рк< t) = a,
?2 Як. Pv Яг. •••• Рк< t) = b
суть два первых интеграла уравнений движения, то
(ср, ф) = с
будет третьим интегралом. Так как у —а и ф —? суть первые
интегралы, то имеем тождественно
(9,Я) + ^ = 0. (ф,Я) + ^=0. (9)
Требуется доказать, что (ср, ф) = с будет также интегралом,
т. е. что из двух тождеств (9) вытекает третье тождество
В самом деле, на основании тождества Пуассона, примененного
к трем функциям Н, ср, ф, имеем
(Я, Ор, ф)) + (ср, (ф, Н)) + (ф, (Я, <р)) э 0.
Отсюда на основании равенств (9) и установленных выше свойств ско.-
бок находим
или также
(".<*.«>-(*. $)-(?. *Н
что и доказывает, что (ср, ф) = с есть тоже интеграл.
Отсюда, казалось бы, достаточно знать'.два интеграла уравнений
движения, чтобы иметь возможность довести интегрирование до
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ 383
конца, так как из этих двух интегралов можно вывести третий,
комбинируя который с одним из предыдущих можно получить чет-
вертый и т. д. Но может случиться, что (ср, ф) приводится тожде-
ственно к постоянной или к функции уже полученных интегралов.
Отсюда следует, что на практике эта теорема, будучи всегда спра-
ведливой, не будет обладать всей той ценностью, которую можно
было бы приписать ей, судя по ее формулировке.
482. Случай, когда Н не содержит t. Замечание об интеграле
энергии. Если Н не содержит t, что будет, в частности, иметь
место, когда связи не зависят от времени и существует силовая
функция U (ft, q2, . . ., qk), то канонические уравнения допускают
первый интеграл
который в указанном только что частном случае совпадает с ин-
тегралом энергии. Пусть тогда
ср (ft, q2, .... qh, pv j02, .... pk, t) = a
будет другим первым интегралом. По теореме Пуассона
(«. <р) = с A0)
будет также первым интегралом. Но так как ср = а является ин-
тегралом, то имеем тождественно
и интеграл A0) напишется так:
Таким образом, если Н не содержит t и у = а есть интеграл,
то -^ = с будет также интегралом; точно так же интегра-
лом будет хг^ = с' и т. д.
В случае, когда ср не содержит /, имеем тождество
Таким образом, теорема Пуассона, примененная к интегралу
энергии Я = й совместно с интегралом ср = а, не содержащим t,
приводит к простому тождеству (ср, //) ^= 0.
За подробностями мы отсылаем к «Лекциям» Якоби и к сочи-
нению Гурса «Об интегрировании уравнений в частных производных»
(Sur l'integration des equations aux derivees partielles).
Другие доказательства теоремы Пуассона можно найти в двух
заметках Верня. (Vergne, Comptes rendus, 25 апреля 1910; An-
nales de l'Ecole Normale, 1910.)
384 ДИНАМИКА СИСТЕМЫ
483. Пример. Возьмем совершенно элементарный пример, рассмотрев
движение свободной точки массы 1, притягиваемой началом 0 пропорци-
онально расстоянию. Тогда, обозначая через х, у, г прямоугольные коор-
динаты точки, имеем
7 = 1 (*'2 + /3 + *'2)> U = - ? (*» + у»
Обозначив координаты через qv qb q%, получим
Pl = дх' = Х ' Pi = У ' Ръ = г '
Уравнения движения в канонической форме имеют вид
dq\ _ dq2 _ dqt _
1п-рь ~Ш~Р* 4i~p*
dPi , dp, . dp* .
I. Сначала получим два первых интеграла, применяя теорему площадей
к проекциям движения на две координатные плоскости. Эти интегралы будут
Ptfh. — ЧъР\ — с* Р&ь — ЯъРз = «1- A1)
Применим теорему Пуассона. Если обозначить через ер и ф левые части
равенств A1), то соотношение
(?. 40 = Н
или, более подробно,
дер д<Ь дер dui . ду di> ду д<\> . ду дЬ ду дЬ _ „,
dq~idp~l~'dpidq[ + dqiW2~dp2W2 &1дР~ Wd<h~ °г '
будет новым интегралом. Проделывая вычисления, получаем
4iP2 = c3. A3)
Это будет действительно новым интегралом, выражающим теорему площа-
дей для проекции движения на третью координатную плоскость. Продолжая
применять теорему Пуассона к этому новому интегралу в сочетании с одним
из двух предыдущих, получим другой из этих двух предыдущих интегралов.
Эта теорема не дает больше новых интегралов.
II. Легко проверить, что уравнения движения имеют первый интеграл:
Pl + V-2q\ = av A4)
Скомбинируем его с одним из интегралов площадей, например с уравне-
нием A3).
Приравнивая постоянной величине скобку A2), составленную из двух
левых частей интегралов A3) и A4), получим новый интеграл
Р\Р% + Н%?2 = *1- A5)
Этот интеграл также скомбинируем с интегралом площадей A3). Получим
Р\ + Л* - 0? + i*Vi) = const.
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ 385
Принимая во внимание равенство A4), окончательно получим
р\ + №1 = «2-
Найденный интеграл не будет новым; он является следствием предыдущих,
как это видно из тождества
{р\ + №)(р1 + ЛЭ = (ЛА +1* W + ^ (qlPa -Plg2y.
Следовательно, из уравнений A3), A4) и A5) вытекает интеграл а2-
Так как пять интегралов A1), A3), A4), A5) независимы, то, приравни-
вая постоянным величинам скобки Пуассона, составленные из этих инте-
гралов, взятых попарно, нельзя получить шестой независимый интеграл.
Действительно, все полученные таким образом новые интегралы не зависят
от t, а больше пяти независимых интегралов, не содержащих t, быть не
может, ибо если бы существовал шестой такой интеграл, то из всех
интегралов получились бы для шести переменных qlt q%, q3, рь р% р3
постоянные значения.
Посмотрим теперь, что можно извлечь из интеграла, содержащего t.
III. Обращаясь к уравнениям движения, легко установить, что они
имеют первый интеграл
fj.03 cos pi — ра sin \xt — g3, A6)
содержащий время. Мы применим сейчас теорему Пуассона к этому инте-
гралу, соединяя его последовательно с двумя интегралами площадей A1).
Таким путем мы получим два новых интеграла:
Mi cos \>.t — pt sin ix.t = gv I
[A^2 COS [A* — p2 Sin ^ = ?2. J
Образованные таким образом шесть интегралов A1), A3), A6) и A7) не
будут независимыми. Действительно, можно убедиться, что имеется тож-
дество
Следовательно, шесть интегралов приводятся к пяти.
Но в данном случае мы найдем шестой интеграл, применяя замечание
п. 482. По условию Н не содержит явно t, поэтому, если tp = а есть ин-
теграл, то -зт = b будет также интегралом. Следовательно, из интеграла A6)
непосредственно находим интеграл
(д.^з sin p.t 4- Рз cos ix.t = /8, A8)
который совместно с пятью предыдущими решает задачу.
Из интегралов A7) можно образовать следующие интегралы:
(Д.?! Sin \>.t + px COS |if = Л, | g
A<72 s'n \?t 4" Pi cos Iх' = fa- I
Шесть интегралов A6), A7), A8) и A9) определяют окончательно шесть
неизвестных в функции времени и шести постоянных git g%, g3, Д, /» Д:
Ml = gl COS }lt -\- /i Sin {it,
Pi = /i COS (x/ — gi Sin fit,
и аналогичные формулы для q%, рь q3, ря. Это как раз те самые интегралы,
которые получаются непосредственным интегрированием уравнений движения.
25 Зак. 922. П. Аппель, т. II
386 ДИНАМИКА СИСТЕМЫ
IV. Принцип Гамильтона. Принцип наименьшего действия
484. Принцип Гамильтона. В предыдущей главе мы видели, что при
движении системы без трения мы имеем в каждый момент t для любого
возможного перемещения Ьх, Ьу, Ьг, допускаемого в этот момент связями,
уравнение следующего вида:
Этот результат можно выразить также в следующей форме, которая соста-
вляет принцип Гамильтона.
Зададимся положениями Ро и Рг системы в моменты t0 и t\. В действи-
тельном движении системы из положения Ро в положение Рх под действием
заданных сил и реакций связей координаты х, у, г ее различных точек
будут функциями времени, удовлетворяющими уравнениям связей и при-
нимающими наперед заданные значения при tu и t±. Пусть х-\-Ьх, у-\-Ьу,
г-{-Ьг—произвольные функции времени t, бесконечно близкие к функ-
циям х, у, г, соответствующим действительному движению. Эти новые функ-
ции также удовлетворяют уравнениям связей и принимают в моменты /0 и h
те же значения, что и х, у, г. Таким образом Ьх, By, Ьг являются бесконечно
малыми функциями времени t, обращающимися в нуль в моменты t0 и <t и
определяющими в этом интервале перемещения, допускаемые связями. Обо-
значим через Т = -=- Л. m (x'2 -(- у'2-|- г'2) кинетическую энергию системы
при ее действительном движении и через 87" вариацию этой энергии, когда
х, у, г получают упомянутые выше вариации Ьх, Ьу, Ьг. Принцип Гамиль-
тона заключается в том, что интеграл
равен нулю при всех системах значений Ьх, Ьу, Ьг, удовлетворяющих указан-
ным условиям. Сумма 2' стоящая под знаком интеграла, распространяется
на все заданные силы, кроме реакций связей. Чтобы доказать, что SQ равно
нулю, заметим, что
ЬТ = ^ m С*' 5*' + У' ЬУ' + ¦*' Ьг')-
Но
t. t, t,
[mx'bx'dt= f m%
J J dt
%dt= fm^
dt J dt
. dx dbx ,.
так как 8 — равно —ут-. Интегрируя по частям, мы можем последний
интеграл написать в виде
dx
'¦ Г d?x
t - J mSB
bxdt.
где проинтегрированная часть равна нулю, так как 8л: обращается на пре-
делах в нуль. Таким же образом мы преобразуем все члены интеграла
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ 387
I ЬТ dt, после чего окончательно получим
т. е. 5g равно нулю, как это вытекает из уравнения A), которое здесь приме-
нимо, так как Ьх, 8у, Ьг являются перемещениями, допускаемыми связями,
имеющими место в момент времени /.
485. Вывод уравнений Лагранжа из принципа Гамильтона. Принцип
Гамильтона позволяет легко получить уравнения Лагранжа для голоном-
ных систем. Допустим, что положение системы зависит от k независимых
параметров qu q2, ..., qk. В действительном движении системы параметры
qb q% qk являются функциями времени t, принимающими при / = t0 и
t = ti заданные значения, так как положения Ро и Р1 системы в эти моменты
времени предполагаются заданными. Для того чтобы сообщить системе
в каждый момент времени допускаемое связями перемещение, которое опре-
деляется вариациями Ьх, Ьу, Ьг координат, обращающимися в нуль в моменты
t0 и tb достаточно сообщить параметрам qlt qb ..., qk произвольные вариа-
ции bqb 8<72, .... bqk, обращающиеся в нуль в те же моменты.
Тогда сумма ~^(ХЬх-\- Yby -\-Zbz) примет вид
(п. 441). С другой стороны, Т будет функцией от qv q2, ..., qk, q[, q'v ...
..., q'k, t. Следовательно, по принципу Гамильтона, если qv q2, .... qk
являются функциями t, соответствующими действительному движению
системы, то выражение
- J
равно нулю, каковы бы ни были 5^, bq2, ..., bqk. Но в каждый момент вре-
мени t имеем
bT^^Lbq1+...+^bqk + ELbq[ + ...+^Lbq'k.
dqx dqk dq1 dqk
Подставим это выражение в SQ и затем преобразуем интегрированием
по частям члены с 8^j, bq'2, ..., 8^. Замечая, что bq[= Ь-~- = Jy , мы
получим
J dt [dqj
Проинтегрированная часть равна нулю, так как bqt обращается в нуль на
пределах. Сделав такое же преобразование со всеми членами, содержа-
щими 8^v, получим:
25*
388 ДИНАМИКА СИСТЕМЫ
где выписан только член с 8^1? а остальные члены получатся путем пере-
мены индексов. Так как это выражение 8Q должно равняться нулю, какозы бы
ни были bqv bq2, ..., bqk в функции t, то необходимо, чтобы все коэффи-
циенты при этих вариациях под знаком интеграла были равны нулю. При-
равнивая их нулю, мы получим уравнения движения в форме Лагранжа.
Предыдущие вычисления неприменимы к неголономным системам, так
как для такого рода систем не будет справедливо равенство d bq = о dq.
[См. Аппель, Bulletin de la Societe mathematique de France, декабрь 1898,
и Филипп Журден (Philip Jourdain), Mathematische Annalen, т. LXV,
1908.]
Частный случай, когда составляющие по осям координат приложен-
ных сил равны частным производным функции U от координат и вре-
мени. В этом случае сумма виртуальных работ
будет полным дифференциалом bU функции U, взятым в предположении,
что t рассматривается как постоянная. Тогда имеем
t, t,
= 5 J {J + U)dt,
и принцип Гамильтона приобретает следующую изящную формулировку.
Если заданы положения системы в моменты t0 и t±, то вариация инте-
грала
3= / (T+U)dt
to
при переходе от действительного движения к любому бесконечно близ-
кому движению, допускаемому связями, равна нулю. Следовательно,
можно найти действительное движение, если искать такое допускаемое
связями движение, для которого интеграл Q имеет максимум или минимум,
так как для нахождения такого движения нужно как раз приравнять нулю
вариацию интеграла Q. Это, однако, не значит, что действительное движе-
ние обязательно обращает интеграл 3 в максимум или минимум. Дарбу
показал, что если U не содержит t, то интеграл 3 будет иметь минимум
для действительного движения при условии, что tt —10 достаточно мало.
(Lecons sur 1а theorie generale des surfaces, т. 11).
486. Принцип наименьшего действия. Этот принцип, менее общий
чем принцип Гамильтона, применим к движению системы, связи которой
не зависят от времени и на которую действуют силы, имеющие силовую
функцию U. Принцип наименьшего действия выражает геометрическое свой-
ство системы, не зависящее от понятия времени.
Пусть Т — кинетическая энергия системы. Применяя к движению тео-
рему кинетической энергии и принимая во внимание, что связи не зависят
от времени и что U не содержит t, получим
Положение системы, которую мы считаем голономной, зависит от k не-
зависимых геометрических параметров q^, q2 qh таким образом, что
координаты х, у, z произвольной точки системы выражаются в функции
параметров, не содержащих t:
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ 389
Чтобы получить бесконечно малое перемещение системы, достаточно
изменить эти параметры на dqy, dq2, ..., dqk, тогда х, у, г получат прира-
щения dx, dy, dz. Положим
dSi — 2 т
где сумма распространена на все точки системы. Заменяя в ней dx, dy, dz
их выражениями в функции dqy dq2, ..., dqw мы получим для afS2 квадра-
тичную форму относительно этих дифференциалов
qj (ay = ajt),
в которой коэффициенты а., суть функции параметров q, q , ..., q.. Кине-
тическая энергия -х-2jmv будет тогда равна -qI-jt) • и интеграл энергии
напишется так:
Мы будем в дальнейшем предполагать, что постоянная энергии h имеет
определенное значение.
Рассмотрим теперь два положения Ро и Pt системы, соответствующих
значениям (?1H, ("?2H, ..., (qk)Q и (q^, (q2), ..., (q^ параметров.
С точки зрения чисто геометрической можно перевести систему из
одного положения в другое бесчисленным множеством способов. Чтобы
получить один из этих способов, достаточно выразить q1% q2, ..., q^B виде
непрерывных функций некоторого параметра X:
причем так, чтобы при X = Хо координаты q приняли значения (^i)o. (?a)o> • ¦ •
¦•¦• (^fc)o' соответствУюЩие положению Ро, и чтобы при I = Xt они приняли
значения (q^, D2)i> •••> (Q]c)v соответствующие положению Pv Тогда при
непрерывном изменении X от Хо до Хх система будет непрерывным образом
переходить из первого положения во второе. Каждому выбору функций fu
/2 Л соответствует свой способ перехода системы из положения Ро
в положение /\.
Пользуясь понятиями геометрии, можно сказать, что мы будем рассма-
тривать qv q2, .... qk как координаты точки в пространстве к измерений.
Тогда положениям Ро и /\ соответствуют две точки этого пространства
с координатами (^)о- (?2H DкH и (q^, (q2\ (q^)v Последователь-
ности точек, определяемых соотношениями B), когда X изменяется от Хо
до Xt, соответствует кривая С, соединяющая обе точки Ро и РА. Тогда
действием вдоль кривой С от Ро до Pi называют интеграл
(Pi
= Г
взятый вдоль этой кривой. Обозначим через qv q2, ..., qk первые произ-
водные от qv q2, ..., qk no X, так что здесь точки над q указывают, что
дифференцирование производится по X. Тогда вдоль кривой С, поскольку для
нее qv q2, ..,, qk будут функциями от X, имеем.
dS =
390 ДИНАМИКА СИСТЕМЫ
так как afft = ft dX и т. д. Обозначим через 6 квадратичную форму
1
Тогда
А = J Y1U + 2Л У 26 d\.
Для каждой кривой, соединяющей обе точки Ро и Рь т. е. при опре-
деленном выборе функций flt /2 Д, это действие имеет определенное
значение. Принцип наименьшего действия состоит в том, что если мы будем
искать кривую С, с помощью которой нужно соединить обе точки,
чтобы интеграл А был минимумом, то мы найдем, что эта кривая
должна быть одной из траекторий, по которой будет действительно
двигаться система, если сообщить ей движение из Ро таким образом,
чтобы она достигла Р± и чтобы при этом постоянная энергии оста-
валась равной h. В этой формулировке мы назовем траекторией* (в прост-
ранстве k измерений) кривую, определяемую последовательностью значений
qv q2 qk, соответствующих действительному движению системы под дей-
ствием заданных сил с силовой функцией U.
Для нахождения выражений qx, q2 ft. в функции X, обращающих
интеграл А в минимум, необходимо написать, что вариация ЬА интеграла
равна нулю, когда qv q%, ..., ft. получают бесконечно малые вариации
8<7lt 6<72, ..., oft., которые являются произвольными функциями X, обращаю-
щимися в нуль на пределах Хо и \1ш Это последнее условие вытекает из того,
что значения qx, q2, ..., qk при X = Xfl и X = Х1 задаются наперед. Когда q
изменяется на hqv его производная q% по X изменяется на bqv Следова-
тельно, имеем
К _
ЬА = I —==^==г — 5ft -] -~— I 5ft А ;— 8 ft ] А- ... afX.
«/ |_у2[/ + 2Л dqt У2в Wft dft / J
Мы выписываем только члены, содержащие вариации параметра ft. Осталь-
ные члены получатся последовательной заменой индекса 1 индексами 2,3 к.
Выполним преобразование, проинтегрировав по частям члены с bq'x, bq2, ...
Имеем
Следовательно, часть интеграла, содержащая 5ft, напишется так:
/
/20 dft
дв .
-^-8ft
Хо
V /26 dq.
Проинтегрированная часть обращается после подстановки прзделов
в нуль, так как при этих пределах равна нулю вариация 5ft. Таким же
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ 391
образом преобразуем и остальные члены. Мы получим
., /' Г /2ё~ ди YuT+W дв „
bqt+...,
_ /^2Z7T
\ /26
где мы выписываем лишь те члены, которые имеют множителем bqb Чтобы
интеграл А был минимумом, необходимо, чтобы ЬА равнялось нулю, каковы
бы ни были бесконечно малые функции bqb bq2 bqk. Следовательно,
необходимо, чтобы по отдельности обращались в нуль коэффициенты при
этих вариациях под знаком интеграла. Таким образом, мы получаем для
определения кривой, обращающей в минимум интеграл, к уравнений,
из которых мы выпишем только первое:
h дЯ1 /26 dqt -
C)
Эти дифференциальные уравнения второго порядка определяют qlt
Яь •••! Чк в функции X. Для определения постоянных интегрирования нужно
написать, что при X = Хо параметры qx, q2, ..., qk принимают заданные зна-
чения (#1H, (qzio,.--, (qic)o и чт0 ПРИ X = Xt эти параметры принимают
заданные значения (</i)i (^2I. •••• (Як)ь Но теперь легко видеть, что урав-
нения C) определяют именно траектории системы в ее действительном
движении. В самом деле, мы сейчас покажем, что заменой независимого
переменного они приводятся к уравнениям движения в форме Лагранжа.
Заменим X другой переменной t, определяемой соотношением
dt=_rJj?L_ dh D)
и обозначим через q[, q'v ..., qk производные от qt, q%, ..., (?ь взятые
по t Положим, кроме того, что
1
~
2 W
и вспомним, что
Очевидно, имеем
дв дТ I dt \2 дв _ дТ dt_
A lg- dq[dl'
в чем можно убедиться, вычисляя эти выражения и замечая, что qt == q't —г-.
Если в уравнения C) подставить выражения E) и заменить dk его
392 ДИНАМИКА СИСТЕМЫ
значением -^5= ' dt, которое получается из равенства D), то эти
уравнения обратятся в следующие:
dqx
Полученные уравнения являются как раз уравнениями Лагранжа. Урав-
нение же D) показывает, что h есть постоянная энергии, так как в силу
1 / И Q\ 2
() р у
того, что в равно-н-(-тг) , имеем >^2в dl — dS и из уравнения D) получаем
z \аА./
T=U+h,
что действительно является интегралом энергии.
Следовательно, теорема доказана: кривая, обращающая в минимум дей-
ствие в промежутке от Ро до Р\, есть одна из действительных траекторий,
соединяющих обе эти точки, и при движении вдоль этой траектории посто-
янная энергии остается равной h. Таким образом, действительные траектории
получаются из условия ЪА = 0.
487. Геодезические линии. Если силовая функция U равна нулю, т. е.
если на систему, предполагаемую неголономной, не действуют никакие силы,
то говорят, что траектории являются геодезическими линиями, распростра-
ненными на fe-мерное пространство, обобщая наименование, данное кривым,"
описываемым на гладкой поверхности материальной точкой, на которую не
действует никакая сила. В этом случае для получения траекторий нужно
искать кривые, обращающие в минимум интеграл
(Р,) ТО
А = J dS = J у ^ atJ dqi dqj .
(П) (Р.)
Нахождение движения голономной системы со связями, не завися-
щими от времени, под действием сил, имеющих силовую функцию U,
может быть приведено к задаче о геодезических линиях. В самом деле, для
нахождения траекторий этого движения нужно обратить в минимум интеграл
(Pi) .
А = f YW + 2h у ^ aii dqi dqi •
TO
где функция U зависит от q±, q^, ..., q^. Рассмотрим форму, квадратичную
относительно дифференциалов dq^
dS\ = BU+ 2А) 2 ац ^i dqj = 2 Ьц dqt dqj.
ся к нахождению мини
(Pi) (P,)
f dSl= I У 2
то то
Тогда задача приведется к нахождению минимума интеграла
(Pi) (P,)
I
то то
что является задачей о геодезических линиях.
488. Вычисление действия вдоль траектории. Согласно теореме
Якоби, примененной к рассматриваемому случаю (когда связи не зависят
от времени и существует силовая функция), для нахождения траекторий
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ 393
достаточно знать полный интеграл W уравнения
W dW dW
q
содержащий, кроме h, еще k -=- 1 произвольных постоянных а1( а2 au-v
Тогда траектории определяются уравнениями
dW , dW , dlf
да, ~"ъ да2 &,
Выразим, что траектория проходит через две заданные точки (q{H, ...
•'•' Aк)о и ^i)i- ¦¦•• №)i' Обозначив через WQ и Wt значения интеграла W
в этих точках, мы получим для определения постоянных а., и Ь., уравнения
dlP0 и dWj. ...
-ШГ^ - ~^7 = К ( 1>2 k~4
откуда, исключая Ь,„ получим k — 1 уравнений вида
-i—tZI—?i = o (v = 1, 2, ..., Л —1)
для определения постоянных av. Допустим, что таким путем определена
траектория, соединяющая обе точки Ро и Р±. Тогда значение действия вдоль
этой траектории равно W^ — Wq. Чтобы это доказать, обозначим через dW
приращение, которое получает W, когда система в ее действительном движе-
нии вдоль рассматриваемой траектории переходит из точки qlt q^ ..., qk
в точку qt + dqv q2 + dq2 qk -\- dqr Имеем
dW dW , , dW , , , dW ,
Но мы нашли, что в этом движении
dW dW _ dW
Следовательно,
Ptf+Ptf + +РЧ 2
С другой стороны, имеем Т = -^-[-rA и на основании интеграла энергии
Следовательно,
л мы получаем действие вдоль рассматриваемой траектории в видз
(Р>) {Pi)
А = Г У[/+2Л dS = С dW=W1— Wo.
(Ро)
394 ДИНАМИКА СИСТЕМЫ
439. Геометрические свойства траекторий. На рассмотренные только
что системы можно распространить теоремы пп. 299 и 301.
Идя по пути, указанному Бельтрами (Be ltr a mi, Memoires de l'Aca-
demie des Sciences de l'lnstitut de Bologne, т. VIII, 1869), введем следующие
определения.
Пусть дана квадратичная форма
dS* = ? atj dqt dqj
и рассмотрим два перемещения dS и BS, соответствующие двум системам
значений dqlt dq2 dqk и bqlt bqit .... bq^ дифференциалов параметров q
Обозначим через dS, bS угол между этими двумя перемещениями, опреде-
ляемый формулой
dS ¦ bS ¦ cos (dS^bS) = 2 aij d1i 4j-
Два направления dS и bS взаимно-перпендикулярны, когда
j 0. G)
Если дано произвольное соотношение
то мы будем говорить, что оно определяет поверхность. Перемещения,
происходящие по этой поверхности, удовлетворяют соотношению
Мы уже называли кривой совокупность значений qb q2, ¦¦¦, qk. являю-
щихся заданными функциями переменного параметра t. Когда t увеличи-
вается на dt, точка совершает перемещение dS, определяемое прираще-1
ниями dqb dq2, ..., dqk. Мы будем говорить, что кривая ортогональна
к поверхности, когда перемещение dS, совершаемое по кривой, ортогонально
ко всем перемещениям SS, совершаемым по поверхности, т. е. удовлетво-
ряющим соотношению (8). Если положить
dt
то условие ортогональности G) обратится в следующее:
дТ „ , дТ „ , , дГ
dqL dq2 dik К '
Сделав такие определения, мы можем непосредственно обобщить тео-
рему, изложенную в п. 299 следующим образом.
Если в уравнениях траекторий
dW dW _ dW _
да, да% J ^^ь_< й—i
постоянным а,, 0%, ..., ак_1 придать определенные значения, а посто-
янные Ьх, Ь% ^u-i изменять произвольным образом, то полученные
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ 395
таким путем траектории будут нормальны к поверхностям, имеющим
уравнение W = const. Для доказательства необходимо установить, что пере-
мещения Ъдь bq2 bqk, совершаемые по поверхностям W — const, т. е.
удовлетворяющие уравнению
ортогональны к действительному перемещению dqb dqit ..., dqk, совершае-
мому по траектории. Другими словами, необходимо показать, что условие A0)
влечет за собой условие ортогональности (9). Но это и очевидно из теоремы
Якоби, на основании которой (п. 473)
_ dW . dW
Рх~ dqt Pk~ dqk'
дТ
а также из самого определения переменных р, согласно которому р., = —т .
За более подробным исследованием этих вопросов мы отсылаем к книге
Дарбу «Лекции по теории поверхностей», т. II, гл. VIII (Lemons sur la theorie
des surfaces de M. Darboux).
490. Расширение понятия силовой функции. Силовая функция,
зависящая от времени и от скоростей. Выше мы рассматривали случай,
когда силы являются производными от функции U, зависящей только от
координат точек системы и времени. Майер (Mayer) следующим образом
расширил это понятие, связав его с принципом Гамильтона (Mathematische
Annalen, т. XIII, стр. 20).
Положим
и пусть W есть функция: от t, от Зп неизвестных функций хч, у,,, z,, пере-
менного t и от их первых производных jcv, ys, zw. Положим, как в принципе
Гамильтона, что значения функций х.„ у,,, .г„ в моменты t0 и tt заданы и
постараемся выяснить, какими должны быть эти функции в течение проме-
жутка времени ^ — t0, чтобы условие
выполнялось для всех возможных вариаций функций х„ yw, z.r Вычисления,
такие же как и в п. 485, приводят к Зп дифференциальным уравнениям вто-
рого порядка:
» dW d dW
dxv
dW
дУ,
dW
dt
d
dt
d
dx'J
dW
dy[
dW
"-J^ dt dzV
Это — отнесенные к ортогональным осям уравнения движения системы
свободных материальных точек с массами mL, т%, .... тп, если на точку /я,
396 ДИНАМИКА СИСТЕМЫ
действует в момент t сила F4 с составляющими:
у dW d dW
дх.
dW
ду.
dW
dt
d
dt
d
dx[
dW
dy[
dW
dz.. dt dz'
A)
Майер предлагает в таких случаях говорить, что эти силы имеют по-
тенциал или силовую функцию W.
491. Задача Майера для случая внутренних сил. Допустим, что все
силы системы являются внутренними, т. е. что они происходят исключительно
от действий одних точек системы на другие. Становясь на очень общую
точку зрения, Майер не предполагает, как мы делали во всем этом курсе,
что внутренние силы происходят исключительно от попарных взаимодействий
точек, т. е., что эти силы попарно равны и противоположны друг другу, а
допускает только, что все внутренние силы в каждый момент времени удо-
влетворяют шести условиям равновесия твердого тела:
1 = П
2 {y,z, - *X) = °- _ _
v=l v = l v=l
так что если бы система в какой-нибудь момент t затвердела, то внутренние
силы оказались бы в равновесии. Установив это, Майер решает следующую
задачу.
Найти наиболее общие выражения внутренних сил Х.„ Y.lt Z.,, дей-
ствующих на движущуюся систему и удовлетворяющих двум следующим
условиям: во-первых, силы имеют силовую функцию W, во-вторых, они
удовлетворяют в каждый момент времени условиям равновесия твердого
тела.
Мы не можем воспроизвести здесь анализ Майера и ограничимся только
формулировкой полученных им теорем.
I. Наиболее общее выражение сил A), удовлетворяющих тождественно
условиям B), получится, если принять за W произвольную функцию
времени и разностей
x.t — хь у,, — уь гч — гь
i i / г I I (м = 2, 3, ..., л).
II. Наиболее общие выражения для сил A), удовлетворяющие то-
ждественно условиям C), получатся, если принять за функцию W
произвольную функцию времени, расстояний точек системы от начала,
их взаимных расстояний и первых производных этих двух видов рас-
стояний по времени.
Соединяя эти две теоремы, получаем ответ на поставленную задачу.
III. Наиболее общие выражения сил A), удовлетворяющие условиям B)
и C), получатся, если принять за W произвольную функцию времени,
взаимных расстояний точек системы и производных этих взаимных
расстояний по времени.
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ 397
Движение центра тяжести будет тогда прямолинейным и равно-
мерным и теорема площадей будет применима к проекциям движения
на каждую из координатных плоскостей.
IV. Для того чтобы существовал интеграл энергии, т. е. для того,
чтобы сумма
была полной производной по времени некоторой функции координат,
их производных и времени, необходимо и достаточно, чтобы силы
имели силовую функцию W, не зависящую от t. Тогда интеграл энер-
гии будет
Если функция W удовлетворяет условиям теоремы III и не содержит t,
то этот интеграл напишется так:
dW ,
где л|хч обозначает расстояние между точками х^, у^. г^ и хч, у.„ г.,
и где /^ есть производная от грт по времени.
Возьмем, например, систему, образованную двумя точками, находящимися
на расстоянии г друг от друга.
Взаимные действия этих двух точек подчиняются закону равенства
действия и противодействия. Если потребовать дополнительно, чтобы они
имели силовую функцию W и чтобы существовал интеграл энергии, то
нужно будет принять для силы взаимодействия R выражение
n.._dW d dW
К~ дг dt дг'
или, что то же самое,
где W—функция одних лишь величин г и г' = —тт ¦
Мы отсылаем по этому вопросу также к заметке Мориса Лёви (Mau-
rice Levy, Comptes rendus, т. XCV.)
V. Множитель Якоби
Мы даем в этих последних параграфах некоторые общие указания
о множителе Якоби и об интегральных инвариантах Пуанкаре. Мы примем
тот же способ изложения, которому следовал Кёнигс (Koenigs) в своих
лекциях в College de France, с тем, чтобы одновременно познакомить и
с важными результатами, принадлежащими этому ученому (Comptes rendus,
декабрь 1895, январь 1896).
492. Определение множителя. Известно, что если дана система диф-
ференциальных уравнений
dx± dx>, dxn ...
¦Л] Лп Лп
39В ДИНАМИКА СИСТЕМЫ
где Х{ — функции переменных xi, Хч, .... хп, то их первым интегралом
называется любая функция 6 (jq, ..., хп), которая остается постоянной
при всех хк, удовлетворяющих системе A). Следовательно, линейное относи-
тельно дифференциалов dx уравнение
будет следствием уравнений A). Необходимое и достаточное условие этого
выражается уравнением
Левую часть этого уравнения обычно обозначают через А F).
Если известны п — 1 независимых между собой интегралов Ьъ 62,.... ®п-ь
то всякий другой интеграл будет функцией этих же величин в^, 92 ®п-ь
и наоборот, любая функция от 8j, 6?, ..., 6n_t будет интегралом. Поэтому,
если обозначить через 6 какой-нибудь произвольный интеграл, то функцио-
нальный определитель
Р(8, et,..., 6n_t)
D(xb хь ..., хп)
равен нулю и, наоборот, если 6 обращает в нуль этот определитель, то это
значит, что в есть функция от 6Х, 82, ..., 8n_t и поэтому 8 есть интеграл.
Вследствие этого, если известна система п — 1 независимых интегралов,
то уравнение B) может быть заменено уравнением
?>(8, % .... 6„-,) = Q
д(хь х2 хп)
Отсюда можно сделать вывод, что существует такая функция М, что
имеет место тождество
У^ШЬ^**4. D)
х)
Якоби назвал эту функцию М множителем.
Обозначим через Д^ минор определителя -—^—-—2' " "—"~1 , соот-
V (хь х2 хп)
ветствующий члену -=—. Тогда имеем
О (в, h 8n_0
D(xh хг хп)
i
так что тождество D), в котором в есть произвольная функция от хь
Х9, .... хп, эквивалентно п соотношениям
MX{=Ai (/=1,2, ..., п). E)
493. Уравнение множителя. Исходя из этих соотношений, легко обра-
зовать дифференциальное уравнение, которому удовлетворяет функция М
и в котором интегралы 8Ь 8?, ..., Qn-x, предполагаемые известными, оказы-
ваются исключенными. Действительно, Якоби заметил, что определители Д*
удовлетворяют тождеству
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ
399
Чтобы доказать это тождество F), рассмотрим определитель
«1
и2
дх2
д\
дх.
дх-.
дхп
где «i, «3>..-> ип обозначают п произвольных постоянных. Раскрывая этот
определитель> получим:
Отсюда видно, что Д* = -х—. Заметим теперь, что х±, х% ..., хп входят в Д$
только через производные -^-2., за исключением производных -~-. Положим
для сокращения -~ = аа 8. Имеем
ох f
дх.
откуда
ар
да
да
„
дг4 дх, '
Сумма 5, для которой нужно доказать, что она равна нулю, является
таким образом линейной однородной функцией вторых производных
кроме того, /ир всегда различны. Следовательно, группируя подобные
члены, получим
S =
Теорема будет доказана, если мы покажем, что
| С— == О
даа о да^ ^
Но левая часть уравнения G) может быть написана еще так:
G)
дщ
Л) 4
Если мы рассмотрим в определителе D первую строку и ту, которая
содержит функцию 6а, т. е. (а-|-1)-ю строку, а Затем столбцы /-й и р-й,
то члены, находящиеся на пересечений этих строк и столбцов, будут
двх два
следующие: щ, и8, -^- = аа> v -^- = аа> 8.
Отсюда на основании хорошо известных свойств определителей выте-
кает, что D может быть написано в виде
400 ДИНАМИКА СИСТЕМЫ
где R уже не содержит членов ир а^, а^ ^ аа< it a /?, содержит эти члены
линейно. Теперь достаточно продифференцировать, чтобы найти
dftD d^D
___ Г) __ D
duida*,f> ' du?da*,i
откуда вытекает справедливость формулы G) и теоремы, выражаемой
тождеством F).
Если сопоставить тождество F) с формулами E), то мы увидим, что
функция М удовлетворяет тождеству
¦- 0. (8)
Таково уравнение множителя. Для расширения этого понятия наимено-
вание множителя дают любому решению уравнения (8).
Легко доказать следующую теорему.
Частное двух множителей, т. е. двух любых решений уравнения (8),
является интегралом.
Пусть, в самом деле, М и М' — два множителя. Из уравнения (8) имеем
i
и точно так же
дМ'
Умножив равенство (9) на — М', а последнее на М и сложив резуль-
таты, получим
или
дм>
М Д( М'
A
М' „
Следовательно, —rjr действительно является интегралом.
Наоборот, произведение множителя на интеграл есть также множитель.
Примечание. Если сумма Q = 2, -s—- равна нулю, то М = 1 является
множителем.
494. Инвариантность множителя. Для последующего важно рассмо-
треть вопрос о замене переменных. Покажем, что каждый множитель является
инвариантом такой замены, но инвариантом относительным, причем в том
смысле, что если умножить его на определитель преобразования, то он будет
множителем для новой системы переменных.
Обозначим через yv y^,.-., уп новые переменные и введем временно
вспомогательную переменную t, дифференциал которой dt равен общему
значению отношений —^Д. Уравнения A) напишутся при этом так:
¦^Т=Щ (' = 1,2 п), (Г)
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ 401
Тогда имеем:
dyt _ дуг dXj dyt dx2 ду{ dxn
dt dxL dt f dx2 dt ""•¦•"" dxn dt
или, принимая во внимание уравнения (Г):
dyt _ у dyt ду{ .
Следовательно, система дифференциальных уравнений обратится в сле-
дующую:
dy^_dy^__ _jdyn_
у — у — ... — у ' Vlu)
I\ 12 'П
где положено Y{ — A (yt).
Покажем, что функция А F) является инвариантным выражением.
В самом деле,
но
дЬ дв dyt с?0 ду2 dQ дуп ^\ ду? дЬ
дХ{ ~~ ду^ dxi ' ду2 dxt ~г • • • -г $уп ^ — ^ $Xi $y^
р
и, следовательно,
v ' ^U ZU * dxi ду9 Ы f dy9
* p p
Таким образом, Л (8) может быть выражено через у, если применить
к уравнениям A0) то же правило, которое позволило построить функ-
цию А F) при помощи уравнений A). Заметим, что это. не было бы верно,
если бы вместо того, чтобы принять функции У< равными выражениям А (у4-),
взять их просто пропорциональными этим выражениям.
Пусть теперь Ьь в2, ..., Ъп-\—система (п—1) независимых интегра-
лов, 8 — произвольная функция и Мо — множитель, который удовлетворяет
тождеству
Произведем замену переменных. Тогда, если yt, y2, ..., уп — новые
переменные, то по известному свойству функциональных определителей
получим
,.... еп_г) = Р(8, ег en-i.) Р(хь х2,..., хп)
=
D (yt, у2 уп) D (хи х2 хп) D (уь у2 уп) '
ель
0
Следовательно, тождество A1) приводится к следующему:
Р(хь хг хп) , й _ ДF. 81( .... 6w-t)
t уп)
Это доказывает, что в новых переменных функция
М' -М д(^ х2,..., хп)
°~ ° Р(У1,у2,...,Уп)
является множителем.
26 Зак. 922, П. Агшель. т. Ц
402 ДИНАМИКА СИСТЕМЫ
Пусть теперь М — произвольный множитель для переменных xlt х2, .. ,,хп,
а Мо — по-прежнему множитель тождества A1). Как мы показали,
М = Мй\,
где X — интеграл. Следовательно, имеем
м Dn {Хь х* ¦ ¦ - х»\ =мо°{Хь х- Хп\ х = м'\.
D (ух, у2, ¦.., Уп) D (уи у2 уп) о
Но так как Мо, как мы только что доказали, является множителем
для переменных ух, у2, ..., уп> а с Другой стороны, X есть интеграл,
то MJ. будет множителем для переменных ух, y2 уп.
Итак, окончательно, М „ . ь ''"—~ есть множитель для новых пере-
менных. Отсюда вытекает теорема:
Если М есть множитель для переменных Хх, х2, ..., хп, то произве-
дение М на функциональный определитель п ;1 Хп\ является мно-
и\Ух, ¦••. Уп)
жителем для новых переменных уь у2 уп.
Эта теорема является основой всей теории множителя.
495. Использование множителя. Допустим, что известны k независи-
мых интегралов в^, 92, ..., 6^. Выберем новые переменные у1( у2, ..., уп,
среди которых k последних связаны с переменными х формулами:
После этого дифференциальные уравнения упрощаются, так как теперь
= A (yt) = 0 для всех I > п — k, и мы получаем следующие уравнения:
dyn
Yx Уг '" Уп-к 0 ••• 0
Мы можем привести эту систему к п — k — 1 первым уравнениям
dyx _ dy2 _ _ dyn-k
'I '2 Уп-к
при условии, что Уп-к+Х' Уп-к+2> •¦¦> Уп рассматриваются как численные
постоянные.
Если бы с самого начала мы знали множитель М для переменных х, то
могли бы составить произведение М' — М п ; *' ' * "—Щ-, которое было бы
и\Ух Уп)
множителем для переменных у, так что получили бы
Таким образом, М', где уп-к+х,..., уп рассматриваются как постоянные,
будет множителем для укороченной системы A2).
496. Последний множитель. Допустим, например, что известны п — 2
интегралов, так что для завершения интегрирования не хватает только
одного интеграла. Система A2) приводится к одному уравнению:
dyx _ йУъ_
Ух ~ У 2
или же
Yidy1—Yldy2 = 0.
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ
103
Если бы был известен интегрирующий множитель ц ятто уравнения,
то мы получили бы последнее недостающее конечное ypai- ллг, к..ш:сав
I
— Y\ dy2) = const.
Но уравнение A3), которое здесь сводится к
diM'Y,) . d(M'Yo) n
выражает, что М' и является таким интегрирующим множителем. Отсюда
наименование последний множитель, которое Якоби дал этой функции М'.
Таким образом, знание множителя позволяет ограничить интегрирова-
ние задачи нахождением п — 2 интегралов; простая квадратура позволит
после этого составить последнее недостающее уравнение.
497. Пример. На практике, чтобы извлечь выгоду из известных инте-
гралов, является естественным исключение некоторых переменных при по-
мощи этих интегралов.
Так как важно прийти к определенному результату, то мы представим
это исключение в следующей форме.
Пусть хге_й+1, л:ге_й+2, ••-, хп представляют собой k переменных, ко-
торые мы желаем исключить, используя k известных интегралов 6^ 62, ..., 6^.
Это исключение сводится к такой замене переменных:
У\ = *i.
Уп-к=Хп-ъ
х,.),
A4)
Уп ~~ h (xv xi ¦*¦«)•
Мы допускаем, правда, что последние k уравнений разрешимы относи-
тельно k переменных хп-]с+ь ..., хп, т. е. что функциональный определи-
тель, составленный из k функций 8 относительно этих переменных, не равен
нулю. Но такое предположение допустимо, так как если бы все определи-
тели с k столбцами, взятыми из таблицы
70* Ova ?7Di
дд2 дд2
дх\ дх2
dh dh
дх< дх->
дхп
<?02
дхп
dh
дхп
были равны нулю, то интегралы 6$ были бы связаны одним соотношением и
не были бы независимыми. Следовательно, из этих определителей по крайней
мере один не равен нулю, и мы можем положить, что нулю не равен опре-
делитель
26*
..k+X хп)
404 ДИНАМИКА СИСТЕМЫ
Заметим также по этому поводу, что функциональный определитель
D (хь хъ ..., хп)
D{yi, у г, •••• Уп)
является обратным к определителю уь ' • • •' Уп> который вследствие
и (хь х2, ..., хп)
частной формы уравнений A4) приводится как раз к определителю
2.---. h)
D(xn-k+1 , хп) *
Если это так, то с новыми переменными уь у2 уп дифференциальные
уравнения принимают вид
ЛУ1—^У1= — d-Уп-к dyn-k+x dyn
Yx Y2 ¦" Уп-к 0 ••• 0 '
Заметим, что ух, у%,..., уп-к являются первоначальными переменными
Х\, х2 xn-h- Следовательно, К( есть А(хх), или, что то же, Хь но
такое Хъ в котором с помощью равенств A4) переменные хп-к+1 хп
заменены их значениями в функции от хь х2, ..., хп-% и новых перемен-
ных yre_fc+i, ..., уп, рассматриваемых как постоянные. Условимся функцию Х\,
в которой произведена указанная подстановка, обозначать через (Хх). Такой
же смысл имеют обозначения (Х2), (Х3), ... Мы получим таким образом
укороченную систему
dxt dx2 dxn-k ,
(Хх) (Х2) - ••• (Хп-к) • {1й}
и согласно общей теореме, если М есть множитель для первоначальной
системы дифференциальных уравнений, то дробь
М
h)
D(xn-k+t хп)
будет множителем для укороченной системы A5).
Допустим, например, что известен только один интеграл и что мы
желаем использовать его для освобождения от одной переменной хп и для
укорочения системы дифференциальных уравнений. Если 6j есть этот интеграл
и если М есть множитель первоначальной системы, то —^— будет мно-
п
жителем для системы, которая получится после исключения переменной хп
при помощи интеграла.
Якоби дает следующий пример.
Дано дифференциальное уравнение
-g-=/(*, у). A6)
dv
Если ввести в качестве переменной величину у' = —i- , то это уравнение
будет эквивалентно следующей системе:
dy' _ dy _ dx
f(x,y) у' 1 '
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ 405
Выражение, которое мы обозначали выше через И, приводится здесь
к нулю. Следовательно, на основании сделанного замечания М = \ есть
множитель.
Допустим теперь, что известен первый интеграл системы A7):
Ч (х< У> /) — с- A8)
Из этого уравнения можно выразить у' в функции х, у, с:
у' = Ъ(х, у, с). A9)
Тогда мы получим более короткую систему
dy
-п— г = dx,
ф (х, у, с)
для которой -з— является множителем, так что окончательно выражение
Of
dy — У' dx
ду'
является точным дифференциалом, если заменить в нем у' его значением
полученным из уравнения A8).
498. Приложение к каноническим уравнениям. Теория множителя
находит в уравнениях динамики одно из своих главных приложений.
В самом деле, возьмем канонические уравнения
B0)
dqx
дН "
dpt
dq2
дН
др2
dqn
дН
дрп
dpx
z дн ¦¦ ¦ •
dqi
dp«,
дН
dqn
которые соответствуют задачам динамики в случае существования силовой
функции или более общим, так называемым вариационным задачам вроде
тех, которые были разобраны в первом томе. Н обозначает функцию от qx,
q% ¦ ¦ ¦' qn> Ръ Pi< • ¦ ¦> Рп' t- Если мы составим величину 2, то убедимся, что
бна равна нулю. В самом деле,
mU dqi \ dpi ) *U dpt \ dqi ) ' dt
i i
Следовательно, M = 1 есть множитель.
Таким образом, канонические уравнения B0) предоставляют широкое
поле для приложений теории множителя.
Если силовая функция не существует, но силы не зависят от ско-
ростей, то результат будет тот же. В самом деле, в этом случае канониче-
ская система примет вид
d4\ _ dq2 _ _ dqn dpt _ dpn .„,
дК дК '" дК ~ «Ж дК
dpi др2 дрп dqx dqn
где Qx, Q2> •¦¦• Qn СУТЬ функции от qb q2 qn, t. Убеждаемся, что в этом
случае по-прежнему 8 = 0 и что М = 1 есть множитель.
Для того чтобы можно было считать интегрирование законченным,
потребуется 2га интегралов; но вследствие существования множителя М = 1
достаточно знать B/i—1) интегралов, чтобы задача могла быть приведена
к одной квадратуре.
406 ДИНАМИКА СИСТЕМЫ
Другие возможности упрощения. Могут представиться другие возмож-
ности упрощения. Например, если кинетическая энергия и силы не зависят
явно от времени, то в уравнениях B0) или B1) можно отбросить последнее
уравнение, которое содержит дифференциал времени. Система оставшихся
2л—1 уравнений имеет множитель М = \. Следовательно, если будут
известны 2/г — 2 интегралов, то B/г—1)-е конечное уравнение получится
при помощи квадратуры. Что касается времени, то, после того как перемен-
ные qi, <7з, .... Ум Рь Ръ •••> Рп будут выражены в функции одной из них
и 2л—1 произвольных постоянных интегрирования, мы получим зависи-
мость между независимой переменной и временем при помощи квадратуры
из уравнения
Л--Ц. B2)
Ц
dpi
Если существует силовая функция, не зависящая от времени, то известен
один из 2л — 2 интегралов, которые нужно найти. Поэтому в этом случае
достаточно знать 2п — 3 интегралов кроме интегралов энергии, чтобы иметь
возможность довести задачу до конца. Если, например, л = 2, то достаточно
знать, кроме интеграла энергии, еще один интеграл.
Так, для случая центральных сил этим интегралом, который при опреде-
лении возможности полного интегрирования задачи является в некотором
смысле решающим, служит интеграл площадей.
Но имеется еще один источник для упрощений, важность которого хо-
рошо освещена Якоби.
Допустим, что одна из переменных, например <?п>'не входит явно в Н.
Тогда
и в силу уравнений B0)
Отсюда прежде всего получается интеграл рп = const. Кроме того, так как qn
входит в уравнения только под знаком дифференциала, то можно отбросить
уравнение
dqn _ dqi_ B3)
B4)
и ограничиться
dqx
дН
dpi
уравнениями:
dqn-\
дН
дрп-1
дН
дН
dpi
дН
dq±
дИ
число которых равно 2л — 3 и для которых М = 1 является множителем;
рп в этих уравнениях представляет произвольную постоянную. Достаточно
знать 2л — 4 интегралов, чтобы привести интегрирование этих уравнений
к одной квадратуре; но так как Н является интегралом, то мы видим, что
достаточно знать 2л — 5 интегралов, отличных от интегралов энергии и от
интеграла рп — const., чтобы интегрирование системы B4) было возможно.
После того как эта система будет проинтегрирована, мы получим из урав-
нения B3) при помощи квадратуры соотношение между параметром qn и
остальными переменными и, наконец, из уравнения B2) мы получим послед-
нюю квадратуру, устанавливающую соотношение между геометрическими ве-
личинами и временем.
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ 407
Итак, в этом случае знание 2и — 5 интегралов, не считая интеграла
энергии и интеграла рп = const., позволяет выполнить интегрирование задачи.
Этот результат непосредственно имеет место для всех случаев движения
твердого тела, уравнения которых удалось до сих пор проинтегрировать.
Рассмотрим, например, движение твердого тела вокруг неподвижной точки,
когда существует не зависящая от времени силовая функция. Положение тела
зависит от трех углов Эйлера 6, у и ф (см. в этом томе п. 381 и следующие
за ним); здесь кинетическая энергия не содержит явно i>; и если силовая
функция также не содержит этого угла, то мы имеем дело с только что ра-
зобранным случаем. Тогда ф будет играть роль переменной qn и интеграл
рп= const, будет зависеть от производной —i. Так как здесь In — 5=1,
то достаточно знать, кроме интеграла рп— const, и интеграла энергии, еще
один интеграл, чтобы задача стала вполне интегрируемой.
Таким будет случай тяжелого тела вращения, подвешенного в какой-нибудь
точке своей оси.
Точно так же Ковалевская, именно благодаря тому, что ей удалось найти
условия существования нового интеграла, сумела разрешить новый случай
задачи движения тяжелого тела вокруг неподвижной точки.
Этим объясняется, что во всех вопросах такого рода все усилия напра-
вляются на разыскание нового интеграла. Это разыскание бывает часто
непрямым, в том смысле, что пытаются заранее наложить определенное усло-
вие на интеграл, как, например, быть алгебраическим или однозначным, и
стараются подобрать таким частным образом данные задачи, чтобы осуще-
ствить условия существования такого рода интеграла. Этот метод бывает
иногда успешным, в чем убеждает нас случай Ковалевской.
499. Приложение. Задача Бруна (Brun). Частицы твердого тела при-
тягиваются неподвижной плоскостью пропорционально расстоянию; найти дви-
жение, предполагая, что тело имеет неподвижную точку на притягивающей
плоскости.
Пусть О — неподвижная точка, Ох, Оу, Ог— главные оси инерции
тела в этой точке, ОМ — перпендикуляр, восставленный в точке О к непо-
движной плоскости, и 1, f'. Y' — направляющие косинусы этого перпендику-
ляра. Масса (л с координатами х, у, г находится под действием силы, равной
ку-(чх-\- "i'y^r f'z) и имеющей направляющие косинусы у, f'> f- Вследствие
этого главный момент приложенных сил относительно оси Ох будет
(Т* + 1'У + 1"г) - Н-г-АГг' A* + Г У + fz)} =
= АЛ Y' [S * (У2 + *2) - 2 V- (*2 + *?)] = *Т Y (С - В)
и аналогичные будут для моментов относительно осей Оу и Ог. Следова-
тельно, уравнения Эйлера напишутся так:
dp . „ ,,. i я \
B5)
Кроме того, имеем
408 ДИНАМИКА СИСТЕМЫ
Мы получаем, таким образом, шесть дифференциальных уравнений, опреде-
ляющих р, q, r, I, Y, Y' в функции времени. Допустим, что мы проинтегри-
ровали эти уравнения. Обозначим через 0, tp, <\/ углы Эйлера и допустим,
что неподвижная ось Ozy перпендикулярна к притягивающей плоскости, а две
другие неподвижные оси Oxt и Оух лежат в этой плоскости. Тогда, как
известно,
1 = sin <j> sin 0, y' = cos 9 sin 6, y" = cos 6,
так что углы tp и в будут известными функциями времени. Что касается
угла 41. то °н получится при помощи квадратуры из уравнения
г = у cos G + 9'. B7)
Следовательно, достаточно проинтегрировать уравнения B5) и B6).
Время можно оставить пока в стороне, так как оно не входит ясно в урав-
нения B5) и B6). Оно определится при помощи квадратуры. Мы будем поэтому
заниматься только пятью уравнениями:
Л dp Bdq Cdr
(C-A)(rp-Kfi) (A-B)(pq-K-\1')~
/T df _ df
qi—pY
п — it pi —n
которые, как легко видеть, имеют множитель М = 1. Следовательно,
достаточно знать четыре интеграла, чтобы привести задачу к квадратурам.
Но мы уже знаем три интеграла: во-первых, интеграл энергии
Ар* + Bq* +Cr* + K Uy2 + By'2 + Cy) = I, B9)
во-вторых, интеграл площадей
Api+Brf + Crt'^lb C0)
и, в-третьих, интеграл
72 + Y'2 + f2= const. = 1, C1)
где / и /х — две произвольные постоянные. Постоянная уравнения C1) должна
быть принята равной единице.
Следовательно, если имеется четвертый интеграл, то задача закончится
квадратурой. Но легко убедиться путем проверки, что
Aipi 4- ва9а -f CV2 — К (BCf + CAf2 + .4By) = k C2)
является четвертым интегралом.
Таким образом, задача приводится к квадратурам. Исходя из предыдущих
формул, легко доказать, что это будут квадратуры от алгебраических пол-
ных дифференциалов. К этому результату пришел Кобб (Kobb) в статье,
помещенной в Bulletin des Sciences mathematiques, т. XXIII. Было бы инте-
ресно произвести более глубокий анализ этих интегралов, но мы это здесь
не делаем *).
Мы обязаны Стеклову интересным замечанием (Conrptes rendus, т. СХХXV,
1902), что уравнения задачи Бруна могут быть приведены к уравнениям дви-
жения твердого тела в бесконечной жидкости, установленным Клебшем
(Clebsch). Следовательно, любой результат, найденный в одной из этих двух
задач, может быть распространен на другую.
*) Брун ввел в выражение рассматриваемой им силы некоторую функ-
цию от расстояния между неподвижной точкой и силой. Но эта функция
естественно выпадает из уравнений и не играет никакой роли.
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ 409
VI. Свойства интегралов. Интегральные инварианты
500. Интегралы. Рассмотрим систему уравнений
dxx _ х dx^ _ х dXji _ х gg
dt dt ~" dt
где Хь Х2, ..., Хп — функции от t, хь хь ..., хп.
Пусть Qx(t, хъ ..., хп), 6г(*, хь ..., хп) bn(t, хх, ..., хп) — си-
стема п независимых интегралов. Для каждой системы решений уравнений C3)
интегралы 6t, 62, ..., 8П имеют постоянные значения аь а2, ..., ап и раз-
личные системы" решений уравнений C3) отличаются значениями этих посто-
янных.
Пусть хх, х2, ..., хпн х[, х'2, ..., х'п — две различные системы решений.
Если обозначить через х[, Х2 х'п результат замены в Хх, X*, ..., Хп
переменных х переменными х', то переменные х' удовлетворяют системе
уравнений
1 _ у' 2 _ у' п _ у' си\
ЧГ~ v ~Ж~л* •¦¦> ~dT~лп- ^>
Если одновременно рассматривать системы уравнений C3) и C4), то
полученная таким образом система допускает интегралы \(хъ х2, ..., хп;
xv x'2> ..., x'w <), в которых имеются две группы переменных: хъ х2, ..., хп
и хр х2, ..., хп. О таком интеграле мы будем говорить, что он зависит
от двух различных решений системы C3). Возьмем простой пример точки,
притягаемой в плоскости, неподвижным центром пропорционально рассто-
янию.
Уравнения задачи имеют вид
dxx _ dx% _ 9
dxx , dx2 g ,
~!i = X* 4i^~aXv
где x, jc,—прямоугольные координаты точки. Интегралы задачи будут,
вообще говоря, функциями двух решений единственной системы
dxx _ dx<> _ _ 2
Можно также представить себе интегралы, зависящие от трех, четырех
и большего числа решений.
Интересным и важным будет тот случай, когда интегралы зависят от
нескольких бесконечно близких решений.
Пусть хх, х2, ..., хп — система решений уравнений C3) и х^-{-Ъхъ
х2-\- Ьх2, ..., хп + 5хп — система решений, бесконечно близкая к первой.
Имеем
d{Xid\bXi) = X,(t, xx + Ьхх, х2 + Ьх2 хп + Ьхп) ¦ (t = 1, 2 п),
и следовательно, принимая во внимание уравнение C3), получим
410 ДИНАМИКА СИСТЕМЫ
Эти уравнения, позволяющие исследовать решения, бесконечно близкие
к заданному решению, были введены Пуанкаре, который назвал их урав-
нениями в вариациях решений системы C3).
Рассмотрим теперь однородную функцию относительно Ъх^, 8х2, ..., Ьхп,
коэффициенты которой будут функциями от jtj, jc2, ..., хп и t. Такая функ-
ция будет интегралом, зависящим от бесконечно близких решений Xi и Xi -J- Ьх„
если ее полная производная в силу уравнений C3) и C5) будет равна
нулю. Пусть /— эта функция. Имеем
df
dt dt ~ Li дх^ dt~ ZUd (ЬхД dt '
i i
откуда получается условие
df dXt % „
^^0- C6)
i ik
Это условие будет необходимым и достаточным для того, чтобы / было
интегралом. Оно должно иметь место, каковы бы ни были вариации bxt
и каковы бы ни были х$ и t. Допустим, в частности, что функции X не за-
висят явно от t Легко показать, что если в функции / заменить 8х* вели-
чинами Xi, то полученная таким образом функция F будет интегралом.
В самом деле, функция f(t, xt хп; Ьхг Ьхп) обратится в функцию
F = f(t, Xi хп; Хь ..., Хп). Следовательно, имеем
dF df у df dxj у df
dt dt~T~ Zu dxt dt + Lk
I dxt dt ^ Li dX{ dt
i i
HO
и, следовательно,
dt Li dxk dt ~ Li dxk Xh
к к
^- = д1+'У ELX i V df dXi x
dt dt Li dX{ i Li dX{ dxk
i ik
Это выражение равно нулю, так как правая часть представляет собой резуль-
тат замены в левой части равенства C6) величин 5х* пропорциональными
// Р
им величинами Х{. Итак, — = 0, и функция F есть интеграл.
501. Теорема Кёнигса. Рассмотрим случай, когда / является линейной
формой:
где 3( — функции от хь х-> хп и от t
Чтобы выразить, что / является интегралом, напишем
или
п
^f V u^i » I X1 " » V г\ /Э7Л
¦^ = X -ji ох{ + >, HibXi = 0, C7)
l
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ 411
что может быть написано еще так:
(S)a C8)
Уравнение C8) легко приводит к доказательству изящной теоремы
Кёнигса (Koenigs, Comptes, rendus, декабрь 1895), который установил связь
между линейными интегралами вида / и приведением к каноническому виду
произвольной системы дифференциальных уравнений.
Линейные дифференциальные формы вида / были предметом многочис-
ленных исследований и особенно исследований Пфаффа (Pfaff), задавше-
гося целью привести их к некоторым каноническим системам (См. Дарбу,
Bulletin des Sciences mathematiques, т. XVII, 1882, стр. 16; Г у р с a, Lefons
sur la probleme de Pfaff, Paris, 1922). Этим же формам посвящены работы
Е. Картана (Е. Cartan).
Действительно, доказано, что каждая линейная дифференциальная форма
может быть приведена к одному из двух видов:
zi ^Ух + zi ^Уг Л~ • • • 4~ гР ^Ур — °У> (А)
где переменные у, Ух, ..., ур, zlt .... zp независимы между собой. Полу-
чение этих приведенных видов требует интегрирования некоторых дифферен-
циальных уравнений, для изучения которых мы отошлем к статье Дарбу.
Допустим теперь, что мы применили процесс приведения к форме /,
в которой t рассматривается как постоянная и что мы пришли, например,
к виду (А), содержащему 1р +1 переменных.
Может случиться, что 1р-\-\ меньше чем п. Тогда, присоединяя
к У, Ух, • • •> Ур> гь • ¦ •> zp переменные и^, ..., Uq, в количестве q = п — 2р — 1,
мы можем принять в качестве новых переменных величин у, г а и.
Тогда в этих новых переменных система дифференциальных уравнений
примет вид
dy dyx dyp dZi dz% dz
p
у у ••• v' ~ 7 7 '¦¦ — 7 '
I IX 'p *-X *-1 *-p
dua
= -^=dt, C9)
где Y, Yx Yp, Zt, ..., Zp, t/t, ..., Uq — функции переменных у, Ух, ...
..., zlt ..., % Uq и t.
Условие C8), так как здесь / =^iZi"oyi—by, обратится в следующее:
- 2 (Zi Ьуг — Yi bz{) = 0. D0)
Положим
р
H^^ZiYi-Y; D1)
1
тогда получим
5^ _ уг ЬгЛ = 0. D2)
412 ДИНАМИКА СИСТЕМЫ
Так как это равенство должно иметь место при любых 8, то должно быть,
Z -—д— Y -+ —
после чего получим
Следовательно, система дифференциальных уравнений C9) имеет вид
и еще
duL diia
— =UX, .... -? = UT D5)
Мы пришли таким образом к канонической системе D3) совместно
с системами уравнений D4) и D5).
Если вместо вида (А) мы приведем / к виду (В), то, поступая точно
так же, мы придем к условию
B ) 2 »Л - Yi bZi) = 0.
Полагая
получим, как и выше,
так что Н удовлетворяет здесь урав'нению
т. е. Н является однородной функцией первого порядка однородности отно-
сительно z.
Тогда система дифференциальных уравнений обратится в систему урав-
нений
dl±--dJL dzt_dJl
dt ~ дг(' dt ду{ ( '
совместно с уравнениями
da, dUf.
7Г=и1 -Ж = и* D7)
Можно легко доказать, что если п число нечетное и если /— произ-
вольный интеграл, линейный относительно переменной, то получится вид (А).
При этом п — 1р-\-\. Если, наоборот, п — четное, то это будет вид (В)
и п = 2р. Таким образом, в общем случае добавочной системы уравнений D5)
или D7) не существует, и мы приведем уравнения к каноническому виду
совместно с уравнением D4) или без него в зависимости от п.
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ 413
Возьмем случай нечетного п и допустим, что дан интеграл ^] Щ bxt,
который после приведения к каноническому виду принимает вид
г—2р + 1 к=р
]? х4 = 2 гкЬук—Ьу.
В частности, если Е не зависят от переменной t, то имеем
2р-Н р
^ 2{dxt = ^lzkdyk — dy
i i
или, вспоминая, что
полечим
Таким образом, сумма ^j ^t^t приводится к главной функции Н. Если Н
не зависит от времени, то, как мы знаем, Н является интегралом..
Таким будет случай, когда X или S не зависят от времени.
Заметим, что во всех случаях уравнение D4) приводится к квадратуре.
Аналогичные замечания имеют место и при п четном.
502. Теорема Пуассона. Рассмотрение интегралов, зависящих не от
двух, а от трех бесконечно близких решений, приводит, как это показал
Пуанкаре, к теореме Пуассона новым путем.
В самом деле, рассмотрим каноническую систему
*Si = d", *-? = -*?- (/=1,2 п). D9)
dt dpi dt dqt v ' v '
Пусть рь ..., pn, qt qn—система решений и пусть /^+5/^,
?4+5<7»; Pi-\-§'Pi> q%-\-^'Qi — Две системы решений, бесконечно близких к
первым.
Билинейная форма
является интегралом. В этом можно убедиться, исходя из общего тожде-
ства, имеющего место для линейных дифференциальных форм.
Пусть
— линейная дифференциальная форма. Положим также
Возьмем три системы дифференциалов d, Ь, Ь'. Имеем тождественно
+ 6'e<j5 = a E0)
414 ДИНАМИКА СИСТЕМЫ
Отсюда следует
d (8в4, - »'в,) + Ь (8'вй - </84,) + 6' (d в8 - S6d) = 0,
что также является тождеством.
Примем тогда в качестве 85 форму 2 Pi Ц<- Мы видим, что
Отсюда, на основании тождества E0),
-d/=-d8M,. = ve(f,-»e<Iv.
Но если дифференциалы d соответствуют такому изменению перемен-
ной t, что выполняются уравнения D9), то
*Л = 2 (dpi bq( - dq{ bPi) = - ЬНЫ, Bav = - VH dt.
Таким образом, имеем
— df = 8'вд, — Ъваь, = — b'bHdt + В8'Я^ = 0,
что и доказывает теорему.
Пусть, наоборот, линейная форма
является интегралом; положим
где е означает бесконечно малую постоянную. Мы утверждаем, что р? + b'pit
1i ~\~ ^'Ч* есть система решений, бесконечно близких к решениям р^ q^
В самом деле, имеем, по предположению,
г i г
Заменяя -jy , -jjj их значениями D9), получим
Это соотношение должно иметь место, каковы бы ни были bpt и bqt;
следовательно, получаются уравнения:
dt
p
,dqt
P ' p '
которые после замены Qt, Pj пропорциональными величинами 5'^, 8'/
принимают вид
Pp~ \dPi)
p f
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ 415
и точно таким же образом
т. е. 8'<7;. Ь'р,- удовлетворяют уравнениям, полученным путем вариирования
уравнений D9).
Отсюда вытекает следующее следствие.
Пусть Ф(<?1, q<z qn, Рь Рь •••¦ />»> 0 — интеграл уравнений D9).
Очевидно, что 5Ф будет интегралом, зависящим от двух бесконечно близких
решений; но
у дФ *' ^Ф *
следовательно, по предыдущей теореме °?j=E^—• » А =—ез— будут
"Pi OQi
решениями уравнений в вариациях.
То же и с другим интегралом Фг; b"q{ = с' -г-t , 8"/;г = — с' -^± будут
также решениями уравнении в вариациях.
Но мы видели, что сумма
является интегралом. Следовательно, сумма
V* /дФ_ дФ^ __ <ЭФ_ дФЛ
Lk \дрг dqt dqt dpt)
i
является тоже интегралом, и мы вновь получаем теорему Пуассона.
Мы закончим главу ознакомлением с новыми понятиями, введенными
Пуанкаре под названием интегральных инвариантов.
503. Интегральные инварианты. Вернемся снова к системе дифферен-
циальных уравнений C3): —гр = Х{. Условимся рассматривать хх, дг2 хп
как координаты точки в пространстве п измерений и t—как меру времени.
Уравнения C3) определяют семейство кривых (С). Какая-нибудь кривая и
движение по ней определены, если задано положение х\, х\, ..., х®п движу-
щейся точки в момент t^. Обозначим через Р° это начальное положение и
через Р—положение, которое займет движущаяся точка в момент t.
Вообразим, что мы заставляем точку Р° описывать некоторое й-мерное
подпространство ?^; тогда точка Р также опишет некоторое й-мерное
подпространство Е^. Например, если точка Р° описывает дугу кривой ?j, то
точка Р опишет другую дугу Е±.
Остановимся сначала на этом случае; условимся обозначать символом Ъ
вариации, соответствующие перемещению Р по дуге Е± или, что приводится
к тому же, перемещению Р° по дуге ?j.
Рассмотрим линейное выражение вида
Е18ж1 + 325*3+ ... +5пЬхп,
где Ej суть функции от jq, x2, .... хп и от t, и возьмем интеграл
416 ДИНАМИКА СИСТЕМЫ
вдоль дуги ?t. Переменные хи х2 хп будут функциями t и начальных
координат х\, х\, ..., х^п точки Р°. Если эта точка Ро перемещается по
дуге ?j, то х\ будут функциями некоторого параметра X, который прини-
мает значения Хр и Xj на концах дуги. Следовательно» величины Х( в инте-
грале / будут также функциями X и t на дуге ?1, причем t при интегри-
ровании рассматривается как постоянная.
Будем теперь изменять t. Тогда пределами интеграла / останутся Хр и Xt,
но так как подынтегральное выражение зависит от t, то /, вообще говоря,
будет функцией от L Может случится, что эта функция от t приведется
к постоянной, какова бы ни была дуга Е\. Тогда говорят, что / является
интегральным инвариантом.
Для того чтобы / было интегральным инвариантом, необходимо, чтобы —
равнялось нулю, какова бы ни была дуга интегрирования. Так как пределы
интегрирования Хр и Xj не зависят от времени, то отсюда следует, что про-
изводная подынтегрального выражения должна быть равна нулю:
Другими словами, для того чтобы / было интегральным инвариантом, необ-
ходимо и достаточно, чтобы выражение
было интегралом, зависящим от двух бесконечно близких решений.
Если вместо элемента, линейного относительно &, взять элемент, являю-
щийся корнем т-й степени от однородной формы f(t, xit..., хп, Ьхь ..., Ьхп)
относительно Ь порядка т, то можно таким же путем рассмотреть криво-
линейный интеграл
T(t, xlt ..., xn, bxt bxn)
и условие, нужное для того, чтобы I было интегральным инвариантом, при-
ведется к тому, что /должно быть интегралом, зависящим от двух бесконечно
близких решений хь хъ ..., хп и Х\-\-Ьхъ ..., хп-\-Ьхп.
Следовательно, вопрос об интегральных инвариантах, представляемых
простыми интегралами, приводится к вопросу об интегралах от двух беско-
нечно близких решений.
Но можно также представить себе интегральные инварианты, выражаю-
щиеся кратными интегралами.
Допустим, например, что точка Р° описывает ограниченное подпростран-
ство двух измерений Щ; тогда точка Р опишет другое подпространство Е^-
Обозначим по-прежнему через 5 перемещения, осуществляемые в этом про-
странстве, и рассмотрим двойной интеграл
ik
распространенный на В^ где Мце—функции от хь ..., хп и от t. Когда
точка ро описывает пространство Ё%, координаты x°v ..., х°п будут функциями
двух параметров X и ц и величины хи ..., хп будут функциями t и этих
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ 417
двух параметров. Интеграл /, если в него ввести переменные X и (х, примет
вид
гк
и пределы интегрирования не будут зависеть от времени.
Однако, так как все М^ и все jc< зависят от t, то интеграл / -будет
также от него зависеть. Для того чтобы он не зависел от t, необходимо,
чтобы
Если это имеет место, что мы и.предполагаем, каковы бы ни были форма
и протяженность подпространства ?^, а следовательно, и подпространства Е2к
то совершенно очевидно, что данное уравнение должно иметь место, как бы
ни были выбраны функции xf, а следовательно, и функции лг,- от X и ц. На
когда X изменяется на ЬХ, тогда Xf изменяется на b'xi = -^ 5Х и совершен--
но ясно, что все Ь'х{ удовлетворяют уравнениям, полученным от вариирова^
ния уравнений C3). То же будет справедливо и для вариаций Ь"Х{ = -^- 5,а>
соответствующих изменению только переменного [л. На основании этого»
уравнение напишется так:
= 0.
Оно выражает, что функция
/ = ^ Mik (Ь'Х{ b"xk — h'xk V'Xi)
ik
является интегралом, зависящим от трех бесконечно близких решений х^
"xh х{ + Ь"х{.
Так, например, мы видели, что в случае канонических уравнений сумма.
есть интеграл, если b'pit b'q^ и b"pit Vqi суть две системы решений уравне--
ний в вариациях. Это равносильно тому, что двойной интеграл
ql + dp2dqi+ ... +dpndqn)
является интегральным инвариантом.
Точно так же можно рассматривать ^-кратные интегралы, представляю-
щие собой интегральные инварианты, т. е. такие, для которых производная.
по времени равна нулю, каково бы ни было подпространство Ек, по кото-
рому происходит интегрирование.
Пусть
К
/= f f •¦¦ Г 2 М», з \ЪхаЪх?... Ьхх
27 Зак. 922. П. Аппель, т. II
418
ДИНАМИКА СИСТЕМЫ
— й-кратный интеграл, в котором Ма,$ х суть функции от х и от t.
Условие — = О эквивалентно следующему:
It
,м.
... X
= 0.
Ха О Хр . . . О Х\
Оно выражает, что сумма 2, в которой Ь1, Ь2, .... Ьк — символы раз-
личных дифференциалов, является интегралом, зависящим от k -j- 1 беско-
нечно близких решений.
Возьмем, например, n-кратный интеграл
— ) \ ... Г МЪхх Ьх
Утверждение, что интеграл / является инвариантом, равносильно утвер-
ждению, что произведение
= M.D,
в котором Ь1, 82, ...,8™ обозначают п систем различных дифференциалов,
является интегралом, зависящим от п -f-1 бесконечно близких решений. Выяс-
ним, какой должна быть функция М, чтобы это имело место. Мы должны
dP .
иметь —г- — 0 или
Дифференцирование определителя D приводит к следующему результату:
х2 ... Ыхп
dD
dt '
dt
d^xt
dt
dbnxx
где точки означают п—1 определителей, подобных написанному первому
определителю.
Но Ь'х/с удовлетворяют уравнениям в вариациях, так что
77
dt
dXi ,,
d l
дх?
дхп
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ 419
Подставляя эти значения в написанный выше определитель, мы видим,
что он равен произведению
х
Точно так же остальные определители равны -g~- D, ..., . n D, откуда вы-
текает, что
dt ~ H dx{ '
г
и поэтому
dP n (dM , „ V dXi
С другой стороны, мы знаем, что
dM V у дМ л дМ
2 X +
Следовательно, окончательно находим
dP nfV^ (XiM) , dM 1
dxi dt
L i J
т. e.
yd(^At) . dM ^Q
i
Отсюда видно, что М должен быть множителем Якоби.
Из предыдущего результата легко вывести свойство инвариантности
множителя, установленное вначале, так как, если произвести преобразование
переменных хь х2, ..., хп, то определитель D умножится на определитель
преобразования Д. И если М будет множителем с прежними переменными,
то МА будет множителем с новыми переменными.
Мы опять приходим к множителю Якоби, что очень интересно, так как
этот результат выясняет важное значение новых понятий, введенных Пуан-
каре, поскольку множитель появляется как частный случай значительно бо-
лее общих понятий. Добавим, что этот выдающийся ученый извлек большую
пользу из интегральных инвариантов в своих исследованиях по механике,
в особенности в вопросах, касающихся устойчивости. Но мы отсылаем по
этому вопросу к книге Пуанкаре «О новых методах небесной механики», т. III
(Sur les methodes nouvelles de la Mecanique celeste).
В заметке, помещенной в январе 1896 г. в Comptes rendus, Кёнигс ис-
следовал также интегральные инварианты, представляемые (и—1)-кратными
интегралами вида
»-1
Г Г Г V1
J I ''" I 2u l dXl ''' dXi-^ dxi+i ¦ • ¦ dxn<
i
в предположении, что коэффициенты X дифференциальных уравнений, так же
как и функции М, не зависят от t. Если положить
27*
420 ДИНАМИКА СИСТЕМЫ
и если а обозначает интеграл, не обращающий в нуль В (а), то В (а) будет,
множителем. Тогда знание двух интегралов аир позволит образовать тре-
тий D, . так же, как это позволяет делать теорема Пуассона в случае ка-
В(а)
ионических уравнении.
Относительно приложений теории интегральных инвариантов можно
сослаться также на работы де Дондера (de bonder, Circolo di Palermo,
т. XV, 1901; т. XVI, 1902), Верня (V е г g n e, Sur certaines_proprietes des
systemes d'equations differentielles, 2e partie, Annales de l'Ecole Normale
superieure, 1910) и Гурса (Journal de Jordan, т. IV, 1908). Укажем, наконец,
на обобщения, принадлежащие Вольтерра (Atti della R. Асе. di Lincei, Ren-
dicont.i, т. VI, 1890) и Фреше (Freche^ Annali di Mai., т. XI, 1905), изложен-
ные де Дондером в публикации Sur ies equations canoniques de Hamilton —
Voltcrra (Gauthier-Villars, 1911).
VII. Принцип наименьшего принуждения Гаусса
504. Формулировка принципа. Ученые искали различные способы
сведения уравнений движения к единому началу путем введения инте-
гралов или функций, которые обращаются в минимум для действи-
тельного движения системы по сравнению с возможными близкими
движениями. Эта идея находит свое выражение прежде всего в прин-
ципе наименьшего действия (п. 486); затем следует более общий
принцип Гамильтона (п. 483), из которого очень просто выводятся
уравнения Лагранжа для голономных систем, но в случае систем не-
голономных эти рассуждения и выводы становятся уже неверными.
Мы займемся здесь принципом наименьшего принуждения Гаусса.
Этот принцип, являясь наиболее общим, не вызывает к тому же
никаких затруднений при его приложениях. Преимущество принципа
состоит и в том, что он имеет простое аналитическое выражение,
позволяющее свести нахождение уравнений движения произвольной
системы, как голономной, так и неголономной, к нахождению мини-
мума функции второй степени.
Мы воспроизводим здесь перевод начала статьи Гаусса вместе
с комментарием, которым сопроводил его И. Бертран в приложе-
нии IX к третьему изданию «Аналитической механики» Лагранжа
(т. II, стр. 357)*).
«В т. IV Crelles Journal Гаусс опубликовал красивую теорему,
содержащую одновременно общие законы равновесия и движения и
являющуюся, по-видимому, наиболее изящным их выражением, какое
только им было придано; французские читатели будут нам благо-
дарны, если мы приведем здесь перевод нескольких страниц, по-
священных знаменитым геометром изложению этого нового принципа.
Как известно, принцип виртуальных скоростей превращает лю-
бую проблему статики в вопрос чистой математики, а с помощью
*) Цитируем по русскому изданию (см. Л а г р а н ж, Аналитическая ме-
ханика, т. II, пер. В. С. Гохмана, под ред. Г. Н. Дубошнна, стр. 411, Гос-
техиздат, 1950). (Прим. пер.)
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ 421
принципа Даламбера динамика в свою очередь сводится к статике.
Отсюда следует, что ни один основной принцип равновесия или дви-
жения не может существенно отличаться от двух упомянутых нами
выше принципов и что, каков бы ни был этот основной принцип,
его всегда можно рассматривать как более или менее непосред-
ственный вывод из двух упомянутых принципов.
Это не значит, что всякая новая теорема не заслуживает поэтому
никакого внимания. Наоборот, всегда интересно и поучительно ис-
следовать законы природы с новой точки зрения, придем ли мы
при этом к более простой трактовке того или иного частного во-
проса или достигнем лишь большей точности формулировок.
Великий геометр (Лагранж), столь блестяще обосновавший науку
о движении на принципе виртуальных скоростей, не пренебрег воз-
можностью улучшить и обобщить принцип Мопертюи, касающийся
наименьшего действия, и, как известно, этот принцип зачастую
с большой пользой применяется геометрами.
Подлинный характер принципа виртуальных скоростей заклю-
чается втом. что этот принцип является, так сказать, общей формулой,
решающей задачи статики, и что, следовательно, он может занять
место всякого другого принципа. Однако он не носит на себе печати
абсолютной очевидности, которая убеждает, как только ознакомишься
с его изложением.
С этой точки зрения основная теорема, которую я собираюсь
изложить, должна, мне кажется, получить предпочтение; сверх того,
она обладает тем преимуществом, что одновременно охватывает
общие вопросы равновесия и движения.
Если для развития науки и для индивидуального исследования
представляется более удобным идти от легкого к тому, что кажется
более трудным, и от простых законов к более сложным, то, с дру-
гой стороны, наш ум, дойдя до более высокой точки зрения, тре-
бует обратного движения, в силу которого вся статика предста-
вляется ему в качестве частного случая динамики .. .
Новый принцип заключается в следующем.
Движение системы материальных точек, связанных между
собой произвольным образом и подверженных любым влияниям,
в каждое мгновение происходит в наиболее совершенном, какое
только возможно, согласии с тем движением, каким обладали бы
эти точки, если бы все они стали свободными, т. е. оно проис-
ходит с наименьшим возможным принуждением, если в каче-
стве меры принуждения, примененного в течение бесконечно
малого мгновения, принять сумму произведений массы каждой
точки на квадрат величины ее отклонения от того положения,
которое она заняла бы, если бы была свободной.
Пусть
т, т', т", ...—массы точек,
а, а', а", ...—их соответственные положения в момент t,
28 Зак. 922. П. Аппель, т. II
422 ДИНАМИКА СИСТЕМЫ
b, b', b", ... — места, какие они заняли бы по истечении неко-
торого бесконечно малого промежутка времени dt под влиянием
действующих на них сил и скорости, приобретенных ими к началу
этого промежутка.
Приведенный выше принцип гласит, что положения с, с', с"
которые эти точки займут, являются между всеми положениями,
допускаемыми наложенными на них связями, такими, для которых
сумма
mbc* + m'VT'2 + m"F7'2 + ...
является минимумом.
Равновесие является частным случаем общего закона; оно имеет
место в том случае, когда точки не имеют скорости и сумма
является минимумом или, другими словами, когда сохранение системы
в состоянии покоя является более близким к свободному движению
всех точек системы в случае упразднения связей, чем к возможным
перемещениям, допускаемым связями.»
Доказательство. В момент t точка т занимает положение а
с координатами х, у, г; она обладает скоростью, проекции которой
равны первым производным х', у', z' от координат х, у, z по вре-
мени, и ускорением, проекции которого равны вторым производным
х", у", z" от координат х, у, z по времени; наконец, кроме реак-
ций связе*5, на нее действуют заданные силы, равнодействующая
которых имеет проекции X, Y, Z. В действительном движении си-
стемы координаты х, у, z являются функциями времени; в момент t
точка т занимает положение а, в момент t-\-dt она занимает поло-
жение с. По формуле Тэйлора, если ограничиться тремя первыми
членами, координаты точки с будут
х-\-х' dt-\-^x"dti, y-j-y'dt + ^y"dt\
z + z'dt + \z"dt\ (с)
Если бы в момент t точка т стала свободной, т. е. если бы
связи были внезапно отброшены, то эта точка имела бы ускорение,
проекции которого в силу основного закона механики (п. 69) рав-
X Y У
нялись бы —, —, —, и ее положение b по истечении промежутка
т т т r J
времени dt определялось бы формулами, аналогичными предыдущим,
v
в которых х", у", z" нужно было бы заменить величинами —,
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ 423
—, —. Следовательно, для координат точки b имеем
-*¦
вектор cb имеет проекции
а проекции вектора mcb, получаемого умножением cb на массу, равны
\{Х— mx")dt\ j(Y—my")dP, ±(Z — mz")dt2.
Отсюда на основании общего уравнения динамики
2 1(Х— тх") Ьх + (Y — ту") by + (Z — mz") lz] = 0,
т. е. сумма работ векторов вида mcb равна нулю при любом возмож-
ном перемещении, допускаемом связями.
Пусть у, у', у", ...—положения, бесконечно близкие к поло-
жениям с, с', с" которые могут принимать точки т, т'', т", ...,
не нарушая связей системы. Работа вектора mcb на возможном пере-
мещении су равна
т • cb • су.
Необходимо, чтобы сумма этих работ
2/и -cb,- су
была равна нулю для всех положений у, у', у", допускаемых свя-
зями.
Но очевидно, что
у?2 _ (^_j_ cbf = ^2 _|_32— 2су" • 7b,
и поэтому
Так как последняя сумма равна нулю, то
и поэтому разнорть
2
'и
всегда положительна. Она равна нулю только в том случае, если
точки у, у', у", . . . совпадают с точками с, с', с", ... Отсюда
424 ДИНАМИКА СИСТЕМЫ
сумма 2т' СЬ2 является всегда минимумом, что и требовалось до-
казать.
Аналитическая формулировка принципа Гаусса. На основа-
нии указанных выше выражений для проекций векторов сЬ имеем:
Если в другом движении, допускаемом связями, точки за тот же
промежуток времени dt приходят в положение у, -\', у", .... то
ускорения будут иметь другие значения х'[, у"х, z'v обусловленные
связями, и точно так же мы найдем
dt* V т U х Л2 i I Y
Так как ^т • be2 всегда меньше чем 2 т • *Т2> т0 можно сказать:
В каждый момент времени t среди всех ускорений, обусло-
вленных связями, действительными ускорениями х", у", г" раз-
личных точек системы будут те, которые обращают в мини-
мум функцию
второй степени относительно х", у", г", .. .
Такова аналитическая формулировка принципа Гаусса.
Мы обязаны А. Майеру из Лейпцига за следующие исто-
рические и библиографические сведения. Аналитическая формули-
ровка принципа Гаусса была указана еще Якоби в одной из
неопубликованных лекций; независимо от Якоби она была дана Шеф-
флером (Scheffler, HI Band der Schlomilchschen Z., стр. 197).
Она воспроизведена у Маха (Die Mechanik in ihren Entstehung his-
torischkritisch dargestellt, Leipzig, 1883), у Герца (Gesammelte Werke,
т. Ill) и у Больтцмана (Vorlesungen iiber die Principien der Mecha-
nik, Leipzig, 1897). Уиллярд Гиббс в одной из своих работ (Wil-
ia r d Gibbs, On the fondamental formuloe of Dynamics, American
Journal of Mathematics, т. II, 1879) указал приложения этой анали-
тической формулировки к различным задачам, в особенности к во-
просу о вращении твердых тел; наконец, Майер также пользовался
этой формулировкой в интересной статье под названием Ueber die
Aufstellung der Differentialgleichungen der Bewegung fiir Reibungslose
Punktsysteme, die Bedingungsungleichungen unterworfen sind und Zur
Regulierung der St6sse in Reibungslosen Punktsystemen, die dem
Zwange von Bedingungsungleichungen unterliegen (Abdruck aus .den
Berichten der mathematisch-physikalischen Kjasse der konigl. SSchs.
Gesellschaft der Wissenschaften zu Leipzig. Sitzung vom 3 Juli 1889).
Можно также указать на статью Хельдера, заключающую в себе
сравнение различных принципов (Н о е 1 d e r, Ueber die Principien von
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ 425
Hamilton und Maupertius, Nachrichten der К- Gesellschaft der Wissen-
schaften zu GOttingen, 1896, Heft 2). Отметим, наконец, статью Bac-
смута Das Restglied bei der Transformation des Zwanges in allgemei-
nen Coordinaten (Sitzungsberichte der kaiserlichen Akademie der Wis-
senschaften in Wien, т. СХ, часть II, апрель 1901)*).
Общая форма уравнений динамики. Отметим в заключение,
что с аналитической формулировкой принципа Гаусса можно свя-
зать найденную выше (п. 465) общую форму уравнений динамики
(Journal de Crelles, т. 121 и 122 и Journal de Mathematiques pures
et appliquees de Jordan, premiers fascicules, 1901 и 1902). Пусть
дана произвольная система, в которой наиболее общее возможное
перемещение, допускаемое связями, определяется k вариациями 8^,
S^2 8<7s- Для произвольной точки системы имеем:
Ъх = ах Ьдх + а2 Ьд2 -4- ... + акЬдк,
Ьу = Ь1Ъд1+ЬлЪдг+ ... +ЬкЪдк,
Ьг = С1Ьд1-!гс2Ьд2-\- ... -\-СкЬдк,
откуда для суммы возможных работ приложенных сил получаем
где
С другой стороны, действительное перемещение системы за про-
межуток времени dt получится, если увеличить qv д2, .. ., дк на
dgv dg2 dqk. Тогда для действительного перемещения точки
(л:, у, z) имеем:
dx = ах dgt -\- а2 dg2 + ' • • • + ач d°k + а dt,
dy=zb1dg1 + b2dg2-{- ... +bkdqk-\-bdt,
dz = c1dgi-\-c2dg2-{- ... -j-ckdgk-\~ с dt.
Разделим эти равенства на dt и применим обозначения Лагранжа
для производных. Получим:
*' = аА + а2д'2 + . .. + акд'к + а,
у'= b1g'1
Отсюда, дифференцируя еще раз по времени, имеем:
д"к+ ...Л
g"k+ .,.,
... +bkg"k+ .,., B)
]
*) См. еще статьи в книге «Вариационные принципы механики», М., 1Э59.
426 ДИНАМИКА СИСТЕМЫ
Если мы подставим значения B) в сумму A), обозначенную через R,
то она обратится в функцию второй степени относительно k вели-
чин q", q\, .... qk. На основании формул B) возможные ускорения
точек (х, у, г) определяются различными значениями, Которые можно
приписывать величинам q"v q, .... q"k. Значения же q"x, q q"k,
соответствующие действительному движению, получатся, если при-
равнять нулю частные производные от суммы R по q", q"^, .... q"k,
так как действительные ускорения точек должны обратить сумму R
в минимум. Напишем эту сумму:
я=т 2
т ^+у'2+2) - ?(Хх"
где ненаписанные члены не зависят от х", у", г". Обозначим, как
и выше, через
энергию ускорений системы; с другой стороны, образуем сумму
Если в ней заменить х", у", г" их значениями B), то эта сумма
примет вид
где мы не выписываем члены, не содержащие q"^, q".)t .. ., qk. Теперь
для получения уравнений движения нужно приравнять нулю частные
производные по q", q q"k функции
R = S-Q1q-Q2ql- ...-Qkq"k.
Таким образом, мы получаем уравнения, выведенные в п. 465,
14-Q.^O, ^_Q2 = 0 ^_qu = o,
dqx dq2 dqk
которые справедливы для любых систем связей и параметров.
Энергия ускорений 5 является функцией, характеризующей си-
стему; величины Qlt Q2 Qk зависят от приложенных сил (см.
также п. 468).
УПРАЖНЕНИЯ
1. Приложить метод интегрирования Якоби к задачам, рассмотренным
в предыдущих главах или предложенным в качестве упражнений в конце
этих глав.
2. Прямоугольный триэдр OXYZ вращается с постоянной угловой ско-
ростью <о вокруг своего ребра OZ, которое направлено в сторону, противо-
положную направлению силы тяжести; он увлекает за собой параболоид Р,
который, отнесенный к осям OX, OY, OZ, имеет уравнение
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ 427
Точка М массы 1 и веса g движется по поверхности Р и притягивается
к вершине О параболоида силой, равной —— МО; кроме того, если МА
и MB — перпендикуляры, опущенные из точки М на прямолинейные обра-
зующие Р, проходящие через вершину О, то точка М находится еще под
действием двух сил, направленных по векторам AM и ВМ и равных соот-
ветственно — AM и — ВМ.
Р Р
Пусть положение точки М определяется значениями параметров X и ц,
входящими в уравнения
? + ?Х2* ** I ^
параболоидов, софокусных с Я и проходящих через М.
Требуется:
1) составить уравнение с частными производными, для которого по
теореме Якоби достаточно знать полный интеграл, чтобы при помощи про-
стых дифференцирований вывести уравнения движения точки М;
2) найти этот полный интеграл и уравнения движения, полагая, что
(о = 0;
3) проинтегрировать уравнение траектории и указать форму этой кривой,
если и все время равно нулю и в начальный момент
,/"з" dx
(Кандидатский экзамен.)
3. Конформные преобразования в механике (по Гурса). Рассмотрим
движение материальной точки в плоскости в случае существования силовой
функции U(x, у). Определение траекторий, соответствующих одному и
тому же значению h постоянной энергии, приводится к нахождению полного
интеграла уравнения с частными производными
Положим z = x-\-yl, Z = X-\-Yl и пусть z = F(Z) — аналитическая
функция комплексной переменной Z. Из этого соотношения вытекает
x±<f(X, Г), у = М*. У). B)
где функции «риф удовлетворяют условиям
dy _ J!i_ _*L _ _ _^Ф. (ъ\
дХ ~~ dY ' dY ~ дХ' ( '
Если в уравнении A) сделать преобразование переменных, определяемое
формулами B), то можно непосредственно убедиться, что оно обратится
в уравнение
(дЬ V
\Jx)
имеющее тот же вид, что и уравнение A). Следовательно, если рассмотреть
все траектории, соответствующие силовой функции U (х, у) и значению h
постоянной энергии, а если эти кривые подвергнуть конформному
428 ДИНАМИКА СИСТЕМЫ
преобразованию B), то новые кривые будут траекториями, соответ-
ствующими новой силовой функции
и значению постоянной энергии, равному нулю.
Например, беря
где о и р — постоянные, и полагая затем z = Z2, х = А!2 — К2, у = 2.ХУ,
найдем новую силовую функцию
4а + 4р (X2 + К2).
Мы переходим, таким образом, от закона притяжения Ньютона к закону
притяжения, пропорционального расстоянию. (О о и г s a t, Comptes rendus,
т. CVIII, стр. 446.)
4. Преобразование Дарбу. Пользуясь обозначениями п. 487, рассмотрим
систему с не зависящими от времени связями, находящуюся под действием
сил, имеющих не зависящую от t силовую функцию U, и пусть
dS°- = 2 "I (dx* + dy2 + dz?) =
Согласно принципу наименьшего действия определение траекторий сво-
дится к определению функций qb q% qk, обращающих в минимум
интеграл
А = Г уа?
где а и Р — постоянные. Так ка# имеем тождественно
где
dS'2
то мы видим следующее:
Если известны траектории данной системы при значении по-
стоянной энергии, равном —, то можно найти траектории другой
системы с k параметрами qh qb ..., qu, для которой новое dS2 опре-
деляется формулой
dS'2 = UdS2,
а новая силовая функция — формулой
И'- 1
и -7Г,
причем новое значение постоянной энергии будет равно -=-.
Это преобразование содержит в себе предыдущее преобразование Гурса
(Darboux, Comptes rendus, т. CVIII, стр. 449.)
5. Система, связи которой могут содержать время, находится под дей-
ствием сил, имеющих силовую функцию U от координат и времени. Кроме
того, на каждую точку действует сопротивление среды, пропорциональ-
ное массе точки и ее скорости. Доказать, что преобразованием независимой
ГЛАВА XXV. КАНОНИЧЕСКИЕ УРАВНЕНИЯ 429
переменной t можно обратить сопротивление среды в нуль, так что после
этого станет возможным применение к системе теорем Гамильтона и
Якоби.
Ответ. Уравнения движения, согласно методу множителей Лагранжа,
будут:
&хч dU Ьт dx, dfx . dfh ...
где k — положительная постоянная, одинаковая во всех уравнениях.
Сделаем замену переменной с помощью подстановки -с = е~м. Тогда
уравнения движения примут вид
где
Таким образом, задача припелась к интегрированию уравнений B),
представляющих собой уравнения движения системы без сопротивления
среды, подверженной действию сил, имеющих новую силовую функцию V.
Следовательно, к этой последней системе можно приложить методы
Гамильтона и Якоби; возвращаясь затем к прежней переменной t, получим
интегралы системы A).
Этот метод можно применить к. следующим частным случаям:
1) к движению одной-единственной точки.
[Эта задача была исследована Эллиотом и приведена им другим способом
к канонической форме (Elliot, Comptes rendus, 1892; Annales de 1'Ecole
Normal, август 1893). См. также первый том, упражнение 12 к главе XVI.]
2) к движению двух тяжелых точек, связанных нерастяжимой и невесо-
мой нитью, когда на каждую из точек действует сопротивление среды,
пропорциональное массе и скорости точки.
* 6. Найти движение трех материальных точек т, т', т", лежащих в од-
ной неподвижной плоскости и взаимно притягивающихся силами, являю-
щимися функциями расстояния; точки т' и т" должны, кроме того, оста-
ваться на постоянных расстояниях от т. (См. L i о u v i 11 е, Sur un probleme
de Mecanique, Journal de Liouville, 2e serie, т. III.)
Положение системы зависит от четырех параметров; принимая за один
из них угол а между mm' и mm", мы видим, что силовая функция зависит
только от а. Задача приводится к квадратурам.
7. Пусть у = с и i/ = с' — два интеграла канонических уравнений. Если
скобка (у, 40 не Равнэ нулю и является функцией только от <f и ф, то
всегда существует функция / от <р и ф, которая, будучи приравнена постоян-
ной, даст такой интеграл, что (у, /) будет тождественно равняться единице.
8. Метод Лиувилля приведения произвольной системы дифферен-
циальных уравнений к канонической форме. Даны обыкновенные диффе-
ренциальные уравнения первого порядка вида
dxt _ dx2 _ _ dxn _ И. m
где Хх, Хо Хп — заданные функции от xlt хг хп и t
Введем вспомогательные переменные ylt уч уп и положим
Н=ХхУх + Х,у2+ ... +ХпУп.
430 ДИНАМИКА СИСТЕМЫ
Мы
вместе с
можем написать
dxx д-
dt д:
уравнениями
dy\ дН
dt ~~ dx-i
систему
И dx2
h' dt
dy2
' dt
A) в виде
дН
дУь '
дН
дх2 '
dt дуп
dyn дН
dt дх„
C)
служащими для определения вспомогательных переменных.
Совокупность уравнений B) и C) образуют каноническую систему.
9. Теорема Буля. Дана система обыкновенных дифференциаль-
ных уравнений
dx\ _ dx% __ _ dxn
Х^ Xi Xn
Можно всегда присоединить к функциям Х±, Х2 Хп функции
Y\, Кг, .... Yn тех же переменных хх, х^, ..., хп таким образом, что
если f(xb хь ..., хп)— const, является произвольным первым интегра-
лом уравнения A), то выражение
будет другим интегралом.
(Buhl, Докторская диссертация, 1901.)
Эта теорема содержит как частный случай теорему Пуассона; но ее
можно также вывести из теоремы Пуассона. (А п п е л ь, Comptes rendus,
август 1901.)j
См. также работу де Дондера «Etude sur les invariants integraux» (Circolo di
Palermo, 9 mars 1902).
10. Преобразование дифференциальных уравнений Гамильтона. Пре-
образование канонических уравнений в другую каноническую систему иссле-
довано Ли (Lie, Die St6rungstheorie und die Beruhrungstransformationen,
напечатанное во II томе Archiv for Mathematik of Naturvidenskab, II,
Kristiania, 1877). См. также статью Морера (Morera, Sulla transformazione
delle equazioni differential! di Hamilton, Rend, della R. Academia dei Lincei,
т. XII, 15 февраля 1903).
11. Определение уравнений Гамильтона — Якоби, интегрируемых по-
средством разделения переменных (Francesc o-A u г е 1 i о D а 11'А с q и а,
Mathematische Annalen, т. 66, 1908, стр. 398; Burgatti Rendiconti della R. Aca-
demia dei Lincei, январь 1911).
12. Канонические формы общих уравнений движения частицы в магнит-
ном поле и в электрическом поле, наложенных друг на друга (Carl S t б г-
шег, Comptes rendus, т. 151, 26 sept. 1910, стр. 590).
ГЛАВА XXVI
УДАР
I. Удар, приложенный к материальной точке
505. Определения. Может случиться, что точки материальной
системы резко меняют свои скорости за весьма короткий промежуток
времени, но система за тот же промежуток времени не меняет заметно
своего положения.
Например, когда толкают кием неподвижный бильярдный шар, то за
весьма короткий промежуток времени, в течение которого кий сопри-
касается с шаром, точки шара мгновенно приобретают конечные ско-
рости, но за тоже время эти точки не меняют заметно своего положения.
После этого шар движется по сукну по изученным нами законам.
Аналогичное явление наблюдается у брошенного в стену и отска-
кивающего от нее упругого мяча, За весьма короткий промежуток
времени, в течение которого мяч находится в соприкосновении со
стеной, он не меняет заметно своего положения, но скорости его
различных точек резко изменяются, так как в момент времени,
непосредственно предшествующий соприкосновению, мяч двигался по
направлению к стене, а тотчас после соприкосновения он от нее уда-
ляется. Начиная с этого момента, движение мяча снова происходит
под действием силы тяжести. Влиянием последней можно было пре-
небречь при соприкосновении мяча со стеной, которое происходило
в течение очень короткого промежутка времени.
При такого рода явлениях говорят, что движущаяся система
испытывает удар.
Эти явления приписывали раньше так называемым мгновенным
силам. По существу явления удара вызываются очень большими
силами, действующими в течение очень короткого промежутка
времени, и могут быть легко изучены с помощью общих теорем дина-
мики. Мы исследуем сначала эти явления для одной материальной точки.
506. Удар, приложенный к одной материальной точке.
1°. Один удар. Рассмотрим сначала материальную точку М
массы т, находящуюся под действием силы F с проекциями X, Y, Z.
Уравнения движения этой точки будут
»ж=* т=^ -S-2 О)
432
ДИНАМИКА СИСТЕМЫ
ИЛИ
О')
Каков бы ни был закон силы, величины X, Y, Z могут быть рас-
сматриваемы во время движения как функции времени t. Умножим
обе части этих уравнений на dt и проинтегрируем от t0 до tv
Получим:
*
(«#И« ?).-/"•
I dx\ I dx\
где I m —rr) и [m —r?) являются значениями
\ dt Л \ dt /0
менты tx и t0-
Те же равенства можно написать в виде
= /
B)
dt '
dt
dt
В МО-
B0
Вектор в правой части равенства B'). составляющие которого
суть интегралы, стоящие в правых частях равенств B), называется
импульсом силы F(X, Y, Z) за промежуток времени tt —10. И мы
имеем следующую теорему:
Геометрическое изменение количества движения точки за
промежуток времени tx —10 равно импульсу силы, действующей
на точку.
Допустим, что промежуток tt —10 очень мал. Если сила X, К, Z
в этом промежутке не будет очень большая, то правые части урав-
нений B) будут очень малыми величинами, и поэтому скорость точки
за промежуток времени tt —10 изменится очень мало. Это и имеет
место при движении точки под действием обыкновенных сил, таких,
например, как силы тяжести, силы ньютоновского притяжения к непо-
движному центру и т. д. Но если сила X, Y, Z имеет в течение очень
короткого промежутка времени tx —10 очень большую величину,
порядка — т-, то интегралы в правых частях уравнений B) имеют
h —»о
конечные значения, импульс остается конечным, и поэтому скорость
точки претерпевает конечное изменение. Однако точка в течение
этого же промежутка времени tx —10 перемещается очень мало, так как
ГЛАВА XXVI. УДАР
433
ее скорость во всем промежутке остается конечной. Точнее говоря,
если обозначить максимальное значение скорости в рассматриваемом
промежутке времени через V, то перемещение точки будет меньше,
чем V{tl — ?0).
Итак, очень большая сала, действующая на точку в течение
очень короткого промежутка времени, производит конечное
изменение скорости без заметного перемещения точки.
В качестве первого приближения рассмотрим предельный (идеаль-
ный) случай, когда промежуток tx—^бесконечно мал, а сила в этом
промежутке бесконечно велика, порядка -т , . Тогда точка полу-
чат внезапно конечное изменение скорости, не изменяя своего
положения. В таких случаях мы будем говорить, что на точку т
действует удар *) и будем представлять этот удар в виде вектора Р
с началом в точке Ж и с проекциями, равными трем интегралам:
*i «1 *¦
а— \ Xdt, Ъ= \ Ydt, с — \ Z dt.
.) J J
<о «о «о
Тогда уравнения B), определяющие изменение скорости, напи-
шутся так:
C)
или
C0
т
Эти уравнения позволяют измерять удар по производимому им
эффекту. Пусть /и{10—количество движения точки т (рис. 270) до уда-
ра, a /rajii — ее количество дви-
жения после удара. Построим
геометрическую разность век*
торов /ирц H/wjig. Уравнение C')
выражает, что эта разность рав-
на удару, приложенному к точ-
ке. Следовательно, имеем: f
, = />. Рис. 270.
Это соотношение определяет удар как функцию количеств дви-
жения в моменты t0 и tv Наоборот, если известны количество дви-
жения /wjiq до удара и удар Р, то количество движения otji, после
удара есть геометрическая сумма векторов /rafio и Р.
*) Здесь и далее под ударом подразумевается то, что обычно назы-
вается ударным импульсом. (Прим. перев.)
434 ДИНАМИКА СИСТЕМЫ
2°. Действие нескольких ударов. Пусть F', F", F'", ...—не-
сколько сил, действующих на точку и имеющих проекции {X'', У, Z'),...
Уравнение движения будет
Умножим обе части на dt и проинтегрируем в пределах от t0
до tv Получим
<, t, t,
т
Предположим, что промежуток времени tt —10 бесконечно мал,
а силы F', F", F'", ... в этом промежутке бесконечно большие,
порядка -г. Тогда, как мы только что видели, интегралы в правой
*1 — 'О
части имеют конечные значения и определяют удары Р', Р", Р"\ ...
Уравнение D) показывает, что изменение количества движения
точки М будет такое же, как и при действии только одного удара Р,
определяемого соотношением Р = Р'-\~ Р"-\-Р'"-\- ...
Этот удар Р, который может заменить рассматриваемые удары,
равен, следовательно, их геометрической сумме. Таким образом,
несколько ударов, приложенных к точке, складываются как силы.
Если а, Ь, с суть проекции вектора Р, а', Ь', с' — проекции
вектора Р', а", Ь", с" — проекции вектора Р" и т. д., то
с=.с'-\-с"-\-с'"-{- ...
507. Эффект действия обыкновенных сил, таких, как сила
тяжести, за время удара равен нулю. В самом деле, допустим, что
так же, как и в предыдущем случае, точка находится под действием не-
скольких сил F', F", F'", но предположим, что сила F' остается конеч-
ной в течение бесконечно малого промежутка времени^ — to,B то время
как другие силы становятся бесконечно большими порядка -. т-.
Ч — h
Тогда Р' равно нулю, в то время как Р", Р"', .. . отличны от нуля,
и в уравнении D) первый член правой части исчезнет, так как эффект-
действия обыкновенной силы F' за промежуток времени tx —10
ничтожно мал.
Так, если мяч ударяется о стену, то действие силы тяжести мяча
во время удара ничтожно мало по сравнению с эффектом самого удара.
508. Выводы. Теоремы для одной материальной точки. Для
сокращения письма мы обозначим через А(т-^-\ величину
/ dx\ I dx\ dx
im —r-1 —Ira ~гг) • т. е. изменение величины tn—п- за промежуток
ГЛАВА XXVI. УДАР 435
времени tx —10. Точно так же Alm-jr-l будет обозначать изменение
величины т —п- за тот же промежуток времени.
Вообще, если и является функцией от х, у, г, —^г, —-, ~
dt dt at '
то мы обозначим через Да изменение их — а0 величины и за проме-
жуток времени tx —10. При вычислении величины Да необходимо
dx dy dz
иметь в виду, что изменяются только —тг, ~гг, ~1Г • а ¦*¦• У> z Hi
изменяются, так как во время удара положение точки не изменяется.
Уравнения D) можно теперь написать так:
A(m^W
или
Эти уравнения выражают следующую теорему:
изменение *) количества движения точки равно геометрической
сумме ударов
или, что то же,
изменение проекции количества движения точки на какую-
нибудь ось равно сумме проекций ударов на ту же ось.
Составим теперь векторное произведение обеих частей равен-
ства E) на ОМ = М. Получим
Д (тОМ X ^р) = 2 °М X Р,
и мы приходим к следующей теореме:
изменение момента количества движения точки М относи-
тельно центра О равно сумме моментов ударов, приложенных
к точке М, относительно центра О,
или, что то же,
изменение момента количества движения точка относи-
тельно какой-нибудь оси равно сумме моментов ударов отно-
сительно этой оси.
II. Удары, приложенные к системе
609. Общие теоремы. При помощи предыдущих теорем мы легко
получим общие теоремы для случая ударов в материальных систе-
мах, Мы будем поступать совершенно так же, как и при выводе
основных теорем динамики системы.
Мы разобьем удары, действующие на каждую точку М (х, у, г)
системы на две категории. К первой категории мы отнесем все
*) Здесь и далее подразумеваются изменения за время удара. (Прим,
пер.).
436 ДИНАМИКА СИСТЕМЫ
внутренние удары Р{(аг, Ьь с4), другими словами, удары, являющиеся
следствием действия внутренних сил. Все другие удары, а именно,
внешние удары Ре(ае, Ье, се), отнесем ко второй категории.
После такого разграничения уравнения E) и E') примут вид
Составим сумму аналогичных уравнений для всех точек системы.
Мы получим
В левой части мы можем поменять местами знаки Д и ? и написать
ее в виде Д V т —?г ', во второй части член 2 2 ^ исчезает, так
как внутренние удары, так же как и вызывающие их силы, подчи-
няются закону равенства действия и противодействия. Следовательно,
имеем
Отсюда теоремы:
Теорема I. Изменение суммы количеств движения равно
сумме ударов внешних сил.
Теорема V. Изменение суммы проекций количеств движе-
ния на неподвижную ось равно сумме проекций внешних ударов
на эту ось.
Эту теорему можно рассматривать как следствие общей теоремы
о проекциях количеств движения. Чтобы показать это, достаточно
проинтегрировать от t0 до tt уравнение
_d_ \? ... dx
dt
сохраняя в правой части лишь члены, содержащие силы, бесконечно
большие в течение бесконечно малого промежутка времени tx—t0.
Можно дать другую интерпретацию предыдущей теоремы, если
ввести в уравнения всю массу ffi — Ът и радиус-вектор G центра
тяжести G(E, t], С) при помощи формул
от, dO V dM „г, d%
ш1пГ 2т ^
Тогда имеем
Отсюда
Теорема. Изменение количества движения центра тяжести
будет таким же, как если бы в нем была сосредоточена вся
ГЛАВА XXVI. УДАР 437
масса системы и были бы к нему непосредственно приложены
все внешние удары.
Возьмем теперь теорему момента количества движения для одной
точки системы, разделяя по-прежнему удары на внешние и внутрен-
ние. Имеем
л [т (х ж -у ж)]=2 <*** - у°i>+2 {хЬ° - уа^-
Складывая аналогичные уравнения для всех точек системы и пере-
ставляя в правой части знаки 2 и А. мы получим
А S т (х ж - у ж) *=
где внутренние удары пропадают, так как они равны и прямо про-
тивоположны. Полученное уравнение выражает следующую теорему:
Теорема II'. Изменение суммы моментов количеств дви-
жения относительно неподвижной оси равно сумме моментов
внешних ударов относительно этой оси.
Теорема II. Изменение суммы моментов количеств движе-
ния относительно неподвижной точки равно сумме моментов
внешних ударов относительно этой точки.
Примечание. Во всех предыдущих теоремах мы говорили
только о неподвижных осях; но так как, по предположению, в тече-
ние бесконечно малой продолжительности удара система не подвер-
гается никакому перемещению, то эти теоремы могут быть прило-
жены также к осям, связанным с одним из тел системы.
III. Приложение общих теорем
510. Прямой удар двух шаров. Допустим, что два однородных
шара с массами тат' сталкиваются в момент времени t0. Удар
этих двух шаров называется прямым, если в момент t0 оба шара
не вращаются и скорости их центров С и С направлены по линии
центров СС. За очень короткий промежуток времени tt —10, в тече-
ние которого происходит удар, линия центров может прибли-
женно рассматриваться как неподвижная, и мы примем ее за ось Ох.
Обозначим через vQ и v'o отсчитываемые вдоль этой оси, алгебраи-
ческие значения скоростей обоих центров в момент ?0 начала удара
и через vt и v'± — алгебраические значения этих скоростей в мо-
мент tv когда удар кончается. Из соображений симметрии мы мо-
жем допустить, что эти конечные скорости также направлены вдоль
оси Ох.
Проанализируем в основных чертах явление. Начиная с момента t0,
когда шары приходят в соприкосновение, они вблизи точки касания
деформируются и их центры продолжают немного сближаться до
29 Ззк. 922. П. Аппель, г. II
438 ДИНАМИКА СИСТЕМЫ
момента t', когда расстояние между ними сделается наименьшим. В тече-
ние этой первой фазы удара между шарами возникают реакции, стре-
мящиеся их раздвинуть. Эти реакции будут очень велики; их работа
будет отрицательной и кинетическая энергия системы будет умень-
шаться. В момент t' скорости обоих центров будут одинаковые,
центры не будут больше сближаться, а деформация будет наиболь-
шей. Начиная с этого момента, взаимные реакции обоих шаров будут
продолжать действовать, оба шара будут стремиться отделиться
и принять свою первоначальную форму, так что в момент t1 они
будут соприкасаться только в одной точке; на этом удар закончится.
В течение этой второй фазы, от момента С до момента tu кинети-
ческая энергия системы будет увеличиваться, так как работа реакций
положительна.
Первую зависимость между скоростями в моменты t0 и tl мы
получим по теореме проекций количеств движения. Так как обыкно-
венными силами, такими, как сила тяжести, можно во время удара
пренебречь, то оба шара составляют систему, находящуюся под дей-
ствием только внутренних ударов. Следовательно, изменение суммы
проекций количеств движения на ось Ох равна нулю, и мы получим
уравнение
mv1 -\- m'v^ = mvQ -j- m'v'Q, A)
которое можно также вывести, написав, что скорость V центра
тяжести не изменяется:
т-\-т' т-\-т!
Чтобы закончить определение скоростей v1 и v'v надо сделать
предположения о природе обоих тел.
1°. Тела абсолютно неупругие. Тела называются абсолютно
неупругими, если они остаются в соприкосновении после удара.
В задаче, которую мы разбираем, это определение выражается равен-
ством v1=^v'v Тогда на основании соотношения A) имеем
mva -4- т vn
В этом случае явление удара сводится только к первой фазе
и момент ? совпадает с моментом tv Следовательно, происходит
потеря кинетической энергии. Это легко проверить непосредственно.
В самом деле, потерянная кинетическая энергия равна
1 (mv* + m'v*) -1 (mv\ + m'v?).
Заменяя vx и v[ их значениями B), найдем:
ГЛАВА XXVI. УДАР 439
что является величиной положительной. Эту потерю кинетической
энергии надо понимать в чисто механическом смысле; по закону
сохранения энергии она должна вновь возникнуть в какой-нибудь
другой форме, например, в форме тепла.
Мы можем на этом примере проверить теорему Карно, которую
мы докажем ниже во всей ее общности. Заметим прежде всего, что
удар происходит вследствие того, что на систему внезапно накла-
дывается новая связь; оба тела, которые вначале были независимы,
пришли в соприкосновение. С другой стороны, в рассматриваемом слу-
чае абсолютно неупругих тел эта внезапно наложенная связь сохра-
няется после удара. При этих условиях потерянная кинетическая
энергия равна кинетической энергии, которую имела бы система,
если бы каждая ее точка имела скорость, которую она теряет
в результате удара. При этом за потерянную скорость каждой
точки принимается, по определению, геометрическая разность ее ско-
ростей до и после удара.
В рассматриваемом случае потерянная скорость каждой точки
первого шара равна абсолютному значению разности v1 — v0, так как
скорости г»! и if,, параллельны оси Ох; точно так же скорость, поте-
рянная каждой точкой второго шара, есть абсолютное значение раз-
ности v^—Vq-, следовательно, кинетическая энергия этих потерянных
скоростей равна
l«« <)
Заменяя в этом выражении v± и v'± их общим значением B), непо-
средственно найдем, что оно равно вычисленной выше потерянной
кинетической энергии C).
2°. Тела абсолютно упругие. Два тела называются абсолютно
упругими, если при их соударении не происходит никакой потери
кинетической энергии. Следовательно, если предположить, что оба
шара удовлетворяют этому условию, то получится новая зависимость
mv\ -f m'v* = mv\ -f m'v*,
которая совместно с соотношением
mvx -\- m'v[ = mv0 -\- m'v'o
позволяет определить неизвестные скорости v1 и v'%. Для решения
этой системы напишем оба уравнения в виде
Отсюда, разделив одно равенство на другое и переставив члены,
получим соотношение
29*
440 ДИНАМИКА СИСТЕМЫ
выражающее, что относительная скорость обоих шаров в результате
соударения не изменяется; она меняет только знак, но не меняет
своей величины. Положим
Тогда предыдущее соотношение будет тождественно удовлетворено.
Если мы эти значения подставим во второе из написанных выше урав-
нений, то получим
ttl — 7tl t r\
откуда непосредственно найдем конечные скорости vl и v'v
Если оба шара имеют одинаковую массу (т = т'), то а = 0,
откуда
wi = l'i- < = '°o'
т. е. каждый из шаров будет иметь после удара такую скорость,
какую имел другой шар до удара, и для невнимательного наблю-
дателя все происходит так, как будто бы оба шара прошли один сквозь
другой, не изменив своего движения.
3°. Промежуточный случай. Мы видели, что в случае абсолютно
неупругих тел в результате удара относительная скорость обоих тел
становится равной нулю; в случае упругих тел эта скорость только
меняет знак. Мы можем попытаться, как это делает Ньютон,
представить себе, что произойдет с телами, не совершенно упругими,
предположив, что в результате удара эта относительная скорость
меняет знак и уменьшается в некотором заданном отношении k:
Если & = 0, то тела будут абсолютно неупругими; если они абсо-
лютно упруги, то k=l. Последнее уравнение, к которому мы
всегда присоединяем уравнение количеств движения
mvl -f- m'v'x = mvQ -4- m'v'o,
позволяет вычислить скорости vx и v'v Легко .проверить, что всегда
имеет место потеря кинетической энергии, выражаемая величиной
т. е. произведением A — k2) на потерю кинетической энергии, кото-
рая была бы при ударе абсолютно неупругих тел.
4°. Полученные результаты могут быть распространены на удар двух
произвольных тел, если выполняются следующие простые условия:
общая нормаль к обоим телам в точке касания проходит при ударе
через оба центра тяжести; оба тела совершают поступательное дви-
жение, параллельное этой нормали.
ГЛАВА XXVI. УДАР 441
Пример: гвоздь и молоток. Пусть т — масса молотка, am' —
масса гвоздя. Найдем конечную скорость v[ гвоздя. В рассматри-
ваемом случае v'o равно нулю и v[ непосредственно находится из
предыдущих уравнений, в которых k определяется свойствами ме-
талла, из которого изготовлены гвоздь и молоток. Потеря кинети-
ческой энергии равна здесь -„-A—k2) m™ , v% Отношение этой
2 т-\-т v
потери к кинетической энергии в начале удара -, wd2 есть
Так как эта потерянная кинетическая энергия вызывает лишь дефор-
мацию гвоздя и его согревание, то представляется выгодным сделать
это отношение R как можно меньше, т. е. сделать так, чтобы т
было велико по сравнению с т'. Таким образом, при одной и той же
работе, затраченной рабочим, т. е. при одной и той же сообщенной
молотку кинетической энергии -к rnv2. выгоднее пользоваться тяжелым
молотком, сообщая ему малую скорость, чем легким молотком,
но действуя им с большой скоростью.
511. Удары, приложенные к телу, вращающемуся вокруг
неподвижной оси Oz. Допустим, что неподвижность оси достигнута
закреплением двух точек О и О' твердого тела. К этому телу, на-
ходящемуся в движении, прикладываются в некоторый мокеит ^0 удары
Рх, Р2 Рп, которые рассматриваются как известные. Тогда
угловая скорость w внезапно переходит от известной величины w0
к подлежащей определению величине a^. Обозначим через xv, yv, zv
координаты точки приложения удара />„ и через av, by, cv — про-
екции этого удара на оси. Тело окажет ударное воздействие на
закрепленные точки О и О' и со стороны последних возникнут ре-
акции в виде приложенных к телу неизвестных ударов Р и Р' с про-
екциями а, Ь, с и а', Ь1', с''. Обозначим через Mk2 момент инерции
тела относительно оси Oz. Тогда сумма моментов количеств дви-
жения тела относительно оси Oz будет равна Мк2ш. Следовательно,
прилагая теорему моментов относительно оси Oz (теорема II п. 509)
и полагая Ao) = o)j—ш0, получим
Л!**Дш = 2(*А — .У А)- A)
V
Удары Р и Р' не входят в это соотношение, так как их моменты
равны нулю. Это уравнение решает задачу, оно определяет вызван-
ное ударами изменение угловой скорости.
Займемся теперь определением действующих со стороны связей
ударов Р и Р'. Мы применим для этого теорему о моментах коли-
честв движения относительно осей Ох и Оу и затем теорему
442
ДИНАМИКА СИСТЕМЫ
о проекциях количеств движения на три оси. Это даст нам пять
новых уравнений:
где h есть координата z точки О'.
Но при вращении с угловой скоростью ш вокруг оси Ог имеем
для каждого момента времени
dx dy dz »
Подставим эти значения производных в написанные выше уравнения.
Тогда в силу предположения, что тело во время удара не меняет
своего положения, мы можем в выражениях вида 2 тхг, зависящих
только от положения, вынести знак Д за знак суммы. Получим:
— B тхг) Дм = 2 (.УЛ — ^ А) — hb',
— B туг) До) = 2 (^ A —
a',
B тх) Дм = 2 b,
B)
Эти уравнения не определяют удары Р н Р' вполне. В самом
деле, они определяют b', a', a, b и только с-\-с'. Величина Дм, вхо-
дящая в левые части, определяется соотношением A).
612. Случай, когда действует один удар. Центр удара. Допу-
стим, что имеется только один заданный удар Pi(alt bv q), приложен-
ный в точке (xlt ylt zt), и выясним, нельзя ли приложить его таким
образом, чтобы опоры О и О' не испытывали никакого удара,, т. е.
чтобы а, Ь, с, а', Ь', с' были равны нулю.
ГЛАВА XXVI. УДАР
443
Внося эти условия в последнее из написанных выше уравнений,
получим:
т. е. заданный удар Р^ должен быть перпендикулярен к оси вра-
щения. Допустим, что в качестве плоскости ху принята плоскость О^х'у',
перпендикулярная к оси Ог и содержащая этот удар, а в этой пло-
скости выбрана ось х', перпендикулярная к удару. Тогда получим
(рис. 271):
так что остальные четыре уравнения в этих
новых осях примут вид
2 тхг' = О,
где г' обозначает новое значение коорди-
наты г и величина Дш Ф О определяется из
уравнения A):
со = xybv Рис. 271.
Первые два уравнения предыдущей группы выражают, что Ог
является главной осью инерции для точки О1. Третье уравнение по-
казывает, что центр тяжести должен лежать в плоскости zOxx'.
Что же касается четвертого уравнения, то, заменяя в нем Дм его
значением
а сумму
центра тяжести, получим:
ее выражением М\ через абсциссу
Итак, пусть тело вращается вокруг неподвижной оси. Для того
чтобы к нему можно было приложить удар, но так, чтобы ось вращения
этого удара не испытывала, необходимо прежде всего, чтобы эта
ось была главной осью инерции для одной из своих точек Ох. Если это
условие выполнено, то удар произвольной силы должен лежать
в плоскости, проведенной через точку О% перпендикулярно к оси
вращения; он должен быть перпендикулярен к плоскости, проходя-
щей через центр тяжести G и ось; наконец, он должен пересекать
эту плоскость в точке, лежащей относительно оси с той же стороны,
что и центр тяжести на расстоянии от оси, равном •=-. Можно также
444 ДИНАМИКА СИСТЕМЫ
сказать, что если ось Oz принята за ось подвеса твердого тела,
то удар должен быть перпендикулярен к плоскости GOxz и при-
ложен к проекции Ах на ось качания точки Ор для которой ось Oz
является главной, причем ось качания соответствует оси подвеса Oz
(п. 362).
Найденная таким образом точка Ах называется центром удара
для оси Oz.
Случай пластинки. Рассмотрим случай тела весьма малой тол-
щины, т. е. случай бесконечно тонкой пластинки, вращающейся вокруг
некоторой оси Oz, лежащей в плоскости пластинки. Какова бы ни была
эта ось, всегда можно определить удар, перпендикулярный к плоскости
пластинки, таким образом, чтобы ось вращения не испытывала удара.
Это вытекает из того, что ось Oz всегда является главной осью
для одной из своих точек. В самом деле, приняв плоскость пла-
стинки за плоскость xz, перенесем оси Oxyz в некоторую точку Ot
оси Oz (OOt = Zj) и обозначим новые оси через Охх'у'г. Для того,
чтобы ось Oz была главной осью для точки Olt необходимо,
чтобы (рис. 271)
2 туг' = О, 2 tnxz' — 0.
Первое из этих условий всегда выполняется, так как для всех точек
тела у = 0. Что касается второго условия, то на основании оче-
видной формулы преобразования
оно может быть написано в виде
2«х(г — 2,) = 0,
откуда
Следовательно, на оси Oz всегда существует одна и только одна
точка, для которой эта прямая является главной осью инерции.
Установив это, переходим к нашей задаче. Для того чтобы
удар Pv приложенный к пластинке, не отзывался на оси, необходимо,
чтобы этот удар был перпендикулярен к плоскости пластинки и пере-
секал ось Огх' в точке Ах на расстоянии
т. е. на расстоянии
от оси. Точка Ах есть центр удара пластцнки относительно оси Oz,
ГЛАВА XXVI. УДАР
445
На основании предыдущего каждой прямой на плоскости соот-
ветствует центр удара. Если положить т' = тх, то координаты
точки Ах будут
, т х
, т г
х, — ¦
т. е. центр удара пластинки относительно оси Oz, лежащей в ее пло-
скости, совпадает с положением, которое занимал бы центр тяжести,
если бы масса каждой частицы была умножена на расстояние х от нее
до оси. Например, для прямоуголь-
ной однородной двери ширины I
центр удара находится на середине
высоты на расстоянии-д-/ от оси.
513. Баллистический маятник.
Этот аппарат предназначен для измере-
ния скорости снарядов. Он состоит из
литой трубки, заполненной землей и под-
вешенной при помощи жестких стерж-
ней к горизонтальной оси, вокруг кото-
рой она может вращаться (рис. 272).
Пущенный горизонтально снаряд прони-
кает в заполняющую трубку землю и
застревает в точке, относительно кото-
рой мы предположим, что она находится
в плоскости, проходящей через ось'
и центр тяжести. Вследствие получен-
ного удара образованный таким образом
физический маятник отклонится на неко-
торый угол от вертикали. Максимальный
угол отклонения 6 замеряют. Этот угол,
как мы сейчас увидим, позволяет опреде-
лить скорость снаряда. Обозначим через
т массу снаряда, через v—его скорость и через а—расстояние от линии,
по которой направлена эта скорость, до оси подвеса. Пусть, кроме того,
М№—момент инерции баллистического маятника относительно оси и / —
расстояние от центра тяжести маятника до этой оси.
Применим теорему моментов количеств движения к системе, состоящей
из маятника и снаряда. Момент количества движения этой системы до удара
равнялся mva, поскольку в движении находился только снаряд. Если через <а±
обозначить угловую скорость вращения маятника непосредственно после
удара, то сумма моментов количеств движения будет теперь
Так как единственными внешними ударами системы являются удары связи
(оси), то их моменты относительно оси равны нулю. Следовательно, сумма
моментов количеств движения не изменится, и мы получим
Отсюда найдем
mva =
v —
4- та*
<
та
A)
446 ДИНАМИКА СИСТЕМЫ
Найдем теперь зависимость между «i и максимальным углом отклоне-
ния в. Мы получим ее из теоремы кинетической энергии. Когда мы перей-
дем от вертикального положения к наибольшему углу отклонения, кине-
тическая энергия, равная вначале -=• (Mk- -\-та2)а>1, обратится в нуль.
Работа сил тяжести, т. е. весов маятника и снаряда, равна
— (Mgl + mga)(\ — cos 8).
По теореме кинетической энергии имеем
(Лда + wa2) <*>\ = 2 (Mgl + mga) A — cos 6),
откуда, заменяя 1 — cos б через 2 sin2 -^-, находим
Подставляя это выражение в равенство A), окончательно получим
v = — Yg (Ml 4- та) (М№ 4- та?) sin -^.
тпа ?
М.ы видим, следовательно, что если снаряд застревает каждый раз на
одном и том же расстоянии от оси, то его скорость пропорциональна си-
нусу половины наибольшего угла отклонения.
Снаряд надо направлять на таком расстоянии а от оси, чтобы последняя
не испытывала удара. Это всегда возможно, так как маятник симметричен
относительно вертикальной плоскости, в которой движется его центр тяжести,
и поэтому ось подвеса является главной осью инерции для точки А — про-
екции центра тяжести на эту ось. Найденные нами общие условия пока-
зывают, что снаряд должен остановиться в точке, лежащей на вертикали,
проходящей через центр тяжести, на расстоянии от оси, определяемом соот-
ношением
al = k\
Если выполняется это условие, являющееся, очевидно, наиболее благо-
приятным для сохранности прибора, то формула для определения v упро-
щается и после замены № его значением принимает вид
т У а 2
614. Твердое тело, движущееся вокруг неподвижной точки.
Пусть твердое тело движется вокруг неподвижной точки О под
действием обыкновенных сил. Допустим, что в момент t0 к нему
прилагаются известные удары /*,, Р2 Рп. В результате этих
ударов за бесконечно малый промежуток времени tl —10 изменятся
скорости различных точек тела, но сохранится его положение.
Внешними ударами, приложенными к телу, являются заданные
удары Plt Р2, ..., Рп и удар Р связи О. Примем за оси Oxyz
главные оси инерции в точке О. Эти оси за промежуток времени,
в течение которого происходит удар, можно рассматривать как
неподвижные. Обозначим через А, В, С моменты инерции относи-
тельно этих осей, через р0, q0, r0 — составляющие мгновенной угло-
вой скорости непосредственно перед ударом и через pv qv rx — те
ГЛАВА XXVI. УДАР 447
же составляющие после удара. Обозначим, кроме того, через L, М, N
суммы моментов ударов относительно трех осей координат.
Согласно теореме моментов изменение суммы Ар моментов ко-
личеств движения относительно оси Ох равно сумме моментов внеш-
них ударов. Последняя сумма приводится к L, так как момент удара Р
равен нулю, и мы, таким образом, имеем
Точно так же
Таким образом, рх, qt, rt определяются из линейных уравнений.
Если надо вычислить удар Р связи, то достаточно применить
теорему о проекциях количеств движения.
Пример. Случай одного удара. Пусть а, Ь, с — проекции на оси Оху
приложенного удара и пусть х, у, г — координаты его точки приложения.
Имеем
L = ус — гЪ, М = га — хс, N = xb — у а.
Полученные ранее формулы определяют рь qb гх. Допустим, что р0, q0,
г0 равны нулю, т. е. что тело в момент t0 неподвижно. Тогда рг, qt, rx
определяются формулами
Apt = L, Bqx = М, Сгх = N.
Эти равенства показывают, что ось мгновенного вращения a>lt сообщен-
ного телу рассматриваемом ударом, является, диаметром эллипсоида инер-
ции, сопряженным с плоскостью, проведенной через точку О и вектор удара.
В самом деле, если через X, Y, Z обозначить текущие координаты, то
уравнение этой плоскости имеет вид
и диаметр, сопряженный с этой плоскостью для эллипсоида
АХ* _|- вуъ _|_ QZ* = \,
определяется уравнениями
АХ BY CZ
L ~ М ~~ N '
т. е.
JL-X-- А.
Pi ~~ 4i ~ гх '
что совпадает с уравнениями оси <ах.
515. Свободное твердое тело. Представим себе свободное твер-
дое тело, совершающее известное движение. В момент t0 к нему
прикладываются различные удары Рх, Р2 Рп, действующие все
в течение одного и того же бесконечно малого промежутка времени
tx — ?0. Тогда скорости различных точек тела подвергнутся резким
изменениям, которые и требуется вычислить.
Известно, что распределение скоростей в твердом теле зависит
только от скорости центра тяжести и от мгновенной угловой
448 ДИНАМИКА СИСТЕМЫ
скорости (в вращения вокруг оси, проходящей через центр тяжести.
Обозначим через ?', ч\', С составляющие скорости центра тяжести
по трем неподвижным осям O?rf, и через р, q, r — составляющие
мгновенной угловой скорости о> по трем главным осям инерции Gx,
Gy, Gz тела для его центра тяжести. Так же как и выше,
будем обозначать индексами 0 и 1 значения этих шести величин
в моменты t0 и tv
Пусть а„, Ьч, с, — проекции удара /*, на неподвижные оси Ohf..
По теореме проекций количеств движения имеем
м&—0 = 2av, М(-п[—<) = 2>„ м& —0 = 2*,. A)
где М — вся масса. Пусть, далее, ?„, М„, Л/, — моменты удара Р„
относительно главных осей Gxyz. Тогда, применяя последовательно
к этим осям теорему моментов количеств движения (п. 514), получим
А (р, —Ро) = 2 Z-v. В (gi — q0) = 2 М„ С (г, — г0) = 2 A^v B)
Эти шесть уравнений A) и B) определяют ^, tj^, Ц, Pj, qv r1#
Их можно получить непосредственно, исходя из уравнений движения
свободного твердого тела, умножением этих уравнений на dt и
последующим интегрированием от t0 до tv
Примечание. Мы видим, что задачи удара приводятся к реше-
нию алгебраических уравнений, а не к интегрированию, как задачи
динамики.
IV. Общее уравнение теории удара. Теорема Карно
616. Общее уравнение. В теории удара можно ввести принцип,
аналогичный принципу Даламбера, который, впрочем, является непо-
средственным следствием последнего.
Рассмотрим материальную точку массы т с координатами х, у, г.
Обозначим через х', у', z' производные от х, у, z по времени,
т. е. проекции скорости точки. Удар продолжается бесконечно
малый промежуток времени tt — ^0. Пусть % и ©t — скорости точки
в моменты ^0 и tl и w — геометрическая разность векторов v0 и vt:
Этот вектор w называется потерянной скоростью точки. Если
обозначить через х'о, у'о, z'o и x'v y'v z[ проекции скоростей v0 и vv
то проекции скорости w будут
Вектор mat представляет собой потерянное количество движения.
Его проекции равны
ГЛАВА XXVI. УДАР 449
или
— Ь.(тх'), —А (ту'), — Д(отг').
если, как и выше, Д(отлг') обозначает изменение т(х[— х'Л.
Этот вектор mw будет играть здесь ту же роль, что сила инер-
ции в принципе Даламбера.
В самом деле, уравнения, выражающие для точки теорему про-
екций количеств движения, могут быть написаны так:
О)
Их можно интерпретировать, говоря, что существует равновесие
между потерянным количеством движения и приложенными
к точке ударами. Если, следовательно, сообщить точке произволь-
ное возможное перемещение Ьх, Ьу, Ьг, то сумма работ потерянного
количества движения и ударов равна нулю:
— Д(тх')Ъх — Ь.(ту')Ьу — Ь(тг')Ьг-f-2(аЬх + b8у-f с Ьг) = 0.
Вообразим теперь систему со связями без трения и допустим,
что в течение бесконечно малого промежутка времени tt —10 она
испытывает заданные удары Pv P2 Рп с проекциями
(flj. bv ct). (a2, b2, c2). ...
Можно рассматривать каждую точку системы как свободную
при условии, что к ней прикладываются удары, вызванные связями,
которые имеют место в промежутке tx —10, иначе говоря, прикла-
дываются удары связей.
Если, .следовательно, сообщить различным точкам системы про-
извольные возможные перемещения, то сумма работ потерянных коли-
честв движения, заданных ударов и ударов связей будет равна нулю.
Но если сообщенные возможные перемещения допускаются связями,
имеющими место в промежутке времени tl — ?0, то сумма работ уда-
ров связей будет сама по себе равна нулю. Следовательно, сумма
работ потерянных количеств движения и заданных ударов будет также
равна нулю. Обозначим через Ьх, Ьу, Ьг произвольное перемещение
точки х, у, г, допускаемое связями, имеющими место в промежутке
времени tx —10. Тогда только что высказанное свойство выразится
уравнением
2 [— Д (тх') Ьх — Д (ту') Ьу — Ь. (тг1) Ьг -}- а Ьх -\-Ь Ьу-\-с Ьг] = 0,
B)
в которое входят только заданные удары (а, Ь, с), причем сумма
распространена на все точки системы. Это и будет уравнением теории
450 ДИНАМИКА СИСТЕМЫ
ударов без трения, играющим такую же роль, как и общее уравне-
ние динамики (п. 431). Это уравнение распадается на несколько раз-
ных уравнений, число которых равно числу степеней свободы системы,
допускаемых связями, имеющими место в промежутке времени tt—10.
Замечание об ударах связей. Мы допустили, что если связи без
трения, то сумма работ ударов связей на допускаемых ими возмож-
ных перемещениях равна нулю. Легко проверить это свойство так же,
как мы это делали в п. 162 для реакций связей. Оно вытекает из
того, что удары связей происходят от реакций связей, действующих
в промежутке времени tx—t0. Например, если два тела, S и S', находятся
в соприкосновении без трения, то реакции связей нормальны к общей
касательной плоскости, равны по величине и противоположны по напра-
влению. Отсюда следует, что и удары, вызванные этими силами, также
нормальны к общей касательной плоскости, равны по величине и проти-
воположны по направлению. В самом деле, обозначим через а, C, •(
направляющие косинусы общей нормали к обоим телам в точке каса-
ния и через N—реакцию тела S' на тело S. Проекции реакции N
будут Nol, Щ, Nf. В течение времени tx — t0 реакция N становится
очень большой и порождает удар, проекции которого равны
<i f, t,
Г Nadt, J Щш, JNfdt.
*о *» «о
Но так как во время удара тела заметно не перемещаются, то а,
р и if можно рассматривать как не зависящие от t и написать эти
проекции таким образом:
<, t, t,
aJNdt. $JNdt, T J N dt.
*o *o *o
Удар связи S' на тело S есть вектор Р, нормальный к общей каса-
тельной плоскости, величина которого равна J N dt. Точно так же
t,
удар связи S на S' есть вектор Р', равный и противоположный
вектору Р, так как его проекции получаются из предыдущих, если
переменить в них знаки. Тогда на перемещении, допускаемом связью,
сумма работ ударов связи Р и Р' равна нулю. Аналогичным обра-
зом производится проверка и для других типов связей.
517. О связях, существующих в момент удара. Связи, суще-
ствующие в момент удара, могут быть двух видов: связи сохраняю-
щиеся и связи не сохраняющиеся. Мы будем называть связь сохра-
няющейся, если она, существуя в момент удара, будет существовать
и непосредственно после него, так что действительное перемещение,
которое последует сразу же после удара, будет допускаться этой
связью. Наоборот, связи не сохраняющиеся — это такие, которые.
ГЛАВА XXVI. УДАР 451
существуя в момент удара, не будут существовать после него; дей-
ствительное перемещение, которое возникнет после удара, не будет
принадлежать к числу перемещений, допускаемых этой связью.
На основании этого, все связи, существующие в момент удара,
подразделяются на следующие друг друга исключающие категории:
1) связи, существующие до, во время и после удара;
2) связи, возникающие во время удара, сохраняющиеся после
него, но не существовавшие до удара;
3) связи, существовавшие до удара, сохраняющиеся во время
него, но после удара не сохраняющиеся;
4) связи, существующие только во время удара, но не существо-
вавшие до него и не сохраняющиеся после него.
Первые две категории содержат сохраняющиеся связи, а две
остальные — связи не сохраняющиеся.
Например, в задаче о баллистическом маятнике последний вра-
щается вокруг неподвижной оси; эта связь (ось) существует до удара,
во время удара и после него. Снаряд, вначале независимый от маят-
ника, внезапно соединяется с ним в одно тело; таким образом полу-
чаем новую связь, внезапное наложение которой и вызывает удар.
Эта связь существует во время удара и после удара, но не суще-
ствовала до него. Действительное перемещение, которое следует
после удара, допускается связью, наложенной в момент удара.
Возьмем в качестве второго примера прямой удар двух шаров.
Удар происходит вследствие того, что оба шара, вначале друг с другом
не связанные, приходят внезапно в соприкосновение. Следовательно,
в систему внезапно вводится новая связь. Эта связь не существует до
удара; она сохраняется, если шары абсолютно неупругие, так как тогда
шары останутся в соприкосновении; она не сохраняется после удара,
если шары упругие, хотя бы даже и не идеально, так как тогда
шары сразу после удара отделяются. В этом последнем случае (упру-
гих шаров) мы имеем связь, которая существует во время удара,
но не существовала до удара и не сохранилась после него. Дей-
ствительное перемещение, которое последует за ударом, не будет
принадлежать к числу допускаемых связью.
Вообразим, наконец, две точки, связанные нерастяжимой нитью
и брошенные в пространство. Допустим, что одну из точек мы вне-
запно схватываем и что в этот момент нить обрывается. Мы видим,
что на одну из точек внезапно накладывается сохраняющаяся связь,
так как она останавливается и остается неподвижной. В то же время
другая связь, существовавшая до и во время удара, перестает суще-
ствовать после него, так как нить обрывается. Эта связь принадле-
жит к третьей категории.
518. Следствия из общего уравнения. Очевидно, что из общего
уравнения B) могут быть выведены следствия, аналогичные тем,
которые мы вывели в динамике из общего уравнения динамики,
установленного в главе XXIII. Например, мы можем получить теоремы,
452 ДИНАМИКА СИСТЕМЫ
аналогичные теоремам, доказанным в пп. 436 и 437, предполагая после-
довательно, что связи, существующие в момент удара, допускают
поступательное перемещение всей системы параллельно оси или сово-
купное вращение вокруг оси. Однако мы ограничимся выводом из
этого уравнения только теоремы Карно.
619. Теорема Карно. Рассмотрим систему со связями без тре-
ния, совершающую известное движение. Допустим, что в момент t0
на эту систему внезапно накладываются новые связи без трения.
Это вызовет удар, который будет продолжаться в течение проме-
жутка времени tt—10. Мы будем рассматривать его как бесконечно
короткий. В течение этого времени скорости различных точек, рав-
ные вначале v0 изменятся и станут vv ... В рассматриваемом
случае заданные удары с проекциями а, Ь, с равны нулю, так как
единственными ударами, действующими на систему, будут те, кото-
рые происходят от связей, первоначально существовавших или вне-
запно наложенных. Тогда общее уравнение B) принимает вид
2 [Л (тх') Ьх + Ь. (ту') Ъу + Ь (mzr) bz\ = 0. C)
Это уравнение должно удовлетворяться при любых возможных пере-
мещениях, допускаемых связями, существующими во время удара.
Теорема Карно заключается в следующем.
Если первоначальные связи и связи, внезапно наложенные,
сохраняются после удара, то кинетическая энергия, потерянная
за время удара, равна кинетической энергии, которую имела бы
система, если бы скорость каждой точки равнялась ее потерян-
ной скорости.
В самом деле, так как уравнение C) должно удовлетворяться
при любых возможных перемещениях, допускаемых связями, суще-
ствующими в момент удара, то в рассматриваемом случае оно должно
удовлетворяться и при действительном перемещении, которое после-
дует за ударом, так как связи при этом сохраняются. Но для этого
действительного перемещения
8л; = х[ dt, Ъу= у[ dt, Ьг = z[ dt
и уравнение C) приводится к виду
2 [Д {тх') х[ + Д (ту') у[ + Д (mzr) z[\ = 0,
или после замены Ь(тх'), ... их значениями т(х[—х'^, . . .,—к виду
2 т [(*; - х'о) х[ + (X - У'о) У[ + (К - z'o) z[] = 0. D)
Скорости до удара, скорости после удара и потерянные ско-
рости w выражаются равенствами:
ГЛАВА XXVI. УДАР
453
Можно непосредственно убедиться, что коэффициент при т
в уравнении D) равен -?>-(^— t^-f-ie;2). Окончательно это уравнение
приводится к виду
^т(у\ — г^-4-щу2) = 0, 2отг;о—' 2 mv\ = 2 mw2.
Таким образом, теорема доказана.
Кинетическая энергия -^ V mw2 называется кинетической энер-
гией потерянных скоростей.
Приложения теоремы Карт. Теорема Карно играет в теории
удара такую же роль, как теорема кинетической энергии в дина-
мике. Она вполне определяет состояние скоростей после удара,
если первоначальные и внезапно наложенные связи являются сохра-
няющимися и число их таково, что система обращается в систему
с полными связями.
Прежде чем рассмотреть некоторые приложения теоремы Карно,
найдем формулы для вычисления кинетической энергии потерянных
скоростей твердого тела, движущегося вокруг неподвижной оси или
неподвижной точки.
Твердое тело, движущееся вокруг неподвижной оси. Обозначим че-
рез М.К1 момент инерции тела относительно неподвижной оси, принятой
за ось Oz, и через ш0 и «j — угловые скорости вращения тела в моменты t0
и t\, когда начинается и когда кончается удар. Точка т тела имеет в мо-
мент t0 скорость, перпендикулярную к плоскости mOz и равную г<оо, где г
обозначает расстояние от точки т до оси вращения Oz. В момент tx ско-
рость этой точки станет равной r<oj и сохранит то же направление. Вектор-
ная разность w = v0 — vh или потерянная скорость, будет равна по абсо-
лютной величине г (о>0 — ох,). Кинетическая энергия, соответствующая этой
потерянной скорости, будет равна для точки -^ тг^ (<о0—• <>>{Р, а для всего
тела
j ^ mr* (co0 _ Ю1)з = -L
Твердое тело, движущееся вокруг неподвижной точки. Пусть О — не-
подвижная точка, Oxyz—главные оси инерции в этой точке и А, В, С —
соответствующие моменты инерции. До удара тело будет совершать мгно-
венное вращение с составляющими угловой скорости по осям Oxyz, рав-
ными р0, <7о> r0' a после удара оно будет совершать мгновенное вращение
с составляющими р\, qb r^. Проекции скорости 730 точки т (х, у, z) равны
<7ог — гоУ> гох — Рог> РоУ — Чох и кинетическая энергия до удара равна
(п. 383)
~2 ^4 т ^q°z ~
Точно так же получаем проекции скорости v^ точки т и конеч-
ную кинетическую энергию -^ (Ар\ -\- Bq\ + О2) . Проекции потерянной
454 ДИНАМИКА СИСТЕМЫ
скорости w равны разностям проекций скоростей
щ и v^.
(р0 —
— (q0 — qx) x.
После этого кинетическая энергия потерянных скоростей получится из ра-
венства E) заменой в нем величин р0, q0, г0 величинами р0—pv qo — qi.
(р0 -
В{д0-
С (г0 -
Первый пример. Баллистический маятник. В баллистическом
маятнике удар происходит вследствие внезапно накладываемо! связи, кото-
рая принадлежит к типу сохраняющихся. Теорема Карно может быть при-
ложена. Пользуемся теми же обозначениями, что и в п. 513.
До удара маятник неподвижен; следовательно, кинетическая энергия
mvl
системы равна кинетической энергии
снаряда.
После удара угловая скорость маятника будет <»( *и скорость снаряда
будет aa>i, следовательно, кинетическая энергия системы будет равна
Вычислим, наконец, кинетическую энергию потерянных скоростей. По-
терянная скорость снаряда равна v0 — ао>ь так как его скорости до удара
и сразу же после него имеют одинаковые направления. Следовательно, ки-
нетическая энергия потерянных скоростей снаряда равна -~- т (v0 — аа^J.
Кинетическая энергия потерянных скоростей маятника на основании при-
веденной выше общей формулы равна -=-.М?'(<»0 — «iJ. Но в рассматри-
ваемом случае <о0 = 0 и это выражение приводится к -у М
что потерянная
Написав,
кинетическая
энергия равна кинетической
энергии потерянных скоростей,
получим
— т (уй — я<0|у
Из этого уравнения после
Рис. 273. сокращения получаем для mL
значение, найденное в п. 513.
Второй пример. Два ролика (рис. 273), имеющие радиусы R и R',
вращаются вокруг параллельных осей О и О' с угловыми скоростями, алге-
браические значения которых, отсчитываемые в одном и том же направле-
нии вращения, равны ф0 и м0.
На оба ролика намотана ненатянутая нить. В некоторый момент нить
натягивается, вследствие чего происходит удар. Требуется найти новые
угловые скорости, которые приобретут ролики, предполагая, что нит» после
удара остается натянутой.
Если мы обозначим через (j. и \>.' моменты инерции роликов относи-
тельно их осей, то потерянная кинетическая энергия системы равна
1
1 ' '2 1 ¦>
/2
ГЛАВА XXVI. УДАР 455
Кинетическая энергия потерянных скоростей равна
— (j. (<оо — и>ху + -j ц' [% — <л[
Следовательно, по теореме Карно имеем
2 . / /2 о / f2 .
цсо* ¦+• (i. <о0 — (iMj — ц. coj = (i (coo — «Х
или, упрощая,
Но так как нить остается натянутой, то
До»! = Я'оу
Из двух последних уравнений находим искомые угловые скорости:
R' {fj.R'o>0 + (л'Дй0) , R
_ ад = —
Третий пример. Представим себе, что твердое тело движется
вокруг неподвижной точки О, и допустим, что в нем внезапно закрепляется
вторая точка О', так что после этого тело может только вращаться вокруг
оси 00'. Найдем конечную угловую скорость вращения <»i вокруг оси 00'.
Так как добавляется связь сохраняющаяся, то можно применить теорему
Карно. Примем за оси Oxyz главные оси инерции тела в точке О.
Обозначим через А, В, С главные моменты инерции и через р0, q0, ra —
составляющие мгновенной угловой скорости до удара, являющиеся извест-
ными величинами.
Обозначим, кроме того, через а, р, f направляющие косинусы оси 00'
относительно осей Oxyz; эти величины известны, так как точка О', кото-
рая внезапно закрепляется, представляет собой определенную точку тела.
Конечная угловая скорость шх вокруг оси 00' имеет следующие составляю-
щие по осям координат:
Pl = а«Ч, Ч\ = ?ui. гх = чщ.
Написав, что потерянная кинетическая энергия равна кинетической
энергии потерянных скоростей, получим
Ар* + Bql + Crl - (Аа* + В? + Cf) 4 =
= А (а, - а^у + B(q0 — ршхJ + С (г0 - ^)%
откуда находим
Ароа -f- Bqo$ + CVot
Мы видим, что если
Ароа + Bq$ -f O0Y = 0,
т. е. если направления вектора <о (р0, q0, го) и оси 00' (а, р, f) являются
для эллипсоида инерции сопряженными направлениями, то ш1 = 0. Тело
после удара станет неподвижным.
520. Распространение теоремы Карно на случай, когда имеются
заданные удары. Допустим, что в тот момент, когда вводятся сохраняю-
щиеся связи, к телу прикладываются также заданные удары Pt, Pt, ..., Рп
с проекциями ач, Ь.„ с.,. Тогда можно применить общее уравнение B)
2 [— Д (тх') Ьх — Д (ту1) Ъу — Д (mz') bz + а Ьх + Ь Ьу + с Ъг] — 0
456 ДИНАМИКА СИСТЕМЫ
к действительному перемещению Ьх — x1dt, By = у1 dt, bz = z't dt, которое
последует за ударом, так как это перемещение допускается связями, суще-
ствующими в момент удара. С помощью вычислений, аналогичных произве-
денным в предыдущем пункте, мы найдем:
mvl — Y
mvl = J 2 mw'i ~ 2 (
Так как a, b, с являются проекциями одного из заданных ударов Я,
ill ¦
a xv yv zi— проекциями в конце удара скорости его точки приложения, то
ах[ + Ьу[ + cz[ = Pvl cos (P, vl).
Мы получаем, таким образом, следующую теорему.
Если на систему внезапно накладываются сохраняющиеся связи
и одновременно прилагаются удары Р, то потерянная кинетическая
энергия равна кинетической энергии потерянных скоростей, умень-
шенной на. сумму произведений каждого удара Р на проекцию на этот
удар конечной скорости точки его приложения в конце удара.
Если не все связи, существующие в момент удара, сохраняются после
него, то предыдущую теорему можно применить при условии причисления
к заданным ударам Р ударов связей, вызываемых теми связями, которые не
сохраняются после удара. Действительно, можно считать, что связи не
существуют, если при расчетах принимать во внимание вызываемые ими
удары.
521. Теорема Г. Робена. Рассмотрим снова систему, в которую вне-
запно вводятся новые сохраняющиеся связи и к которой одновременно
прикладываются заданные удары Р.
Среди бесчисленного множества значений, которыг могут прини-
мать в соответствии со связями скорости точек в конце удара, дей-
ствительные значения, которые они принимают, обращают в минимум
величину
= yV ш' ¦+• V Pw cos (P, w).
Такова теорема Г. Робена (О. Robin, Comptes rendus des seances de
l'Academie des Sciences, т. CV, стр. 61).
Чтобы ее доказать, обозначим через а, Ь, с проекции удара Р; тогда
в предыдущих обозначениях величина Q напишется так
?[fl (х'о -x'i) + b (Уо — У'д + с (z'o — z[)\
Нужно показать, что, задав произвольные допускаемые связями вариа-
ции bxv byv bzx проекций xv yv z1 скорости каждой точки в конце удара,
мы получим
6Q = 0.
Но
»(? = 2 [я (х'г-х'о) bx'i +т{у'х-Уо) ЬУ[ +
+ т {z'i - 4) bz'i - abx'i - ЬЬУ[ - сЬг[].
глава xxvi. удар 457
Заметим теперь, что общее уравнение B) удара имеет вид
т D - х'о) Ьх + т (у[ — у'о) Ьу +
+ т(г[ + г'0)Ьг — аЬх — Ь 5у — с 5г] = 0. F)
Оно справедливо для любых возможных перемещений, допускаемых связями,
существующими в момент удара, но так как в рассматриваемом случае
связи являются сохраняющимися, то оно будет справедливо для конечного
действительного перемещения
bx — x[dt, by = y[dt, bz = z[dt. G)
Пусть х[ -\- Ьх[, ух + Ьу[, zt -f- ^j — другие допускаемые связями воз-
можные значения проекций скорости точки т в конце удара.
Перемещение
также допускается связями.
Заменим в общем уравнении F) величины Ьх, by, bz этими двумя систе-
мами значений G) и (8) и вычтем почленно два полученных таким образом
уравнения одно из другого. Тогда в точности получится то равенство 5Q = О,
которое нужно доказать.
Примечание. Вычитая из Q наперед известную величину
ах'о
мы видим, что смысл теоремы Робена заключается в том, что для действи-
тельного перемещения должна обращаться в минимум величина
cos
Согласно предыдущей теореме этот минимум равен потерянной кинетиче-
ской энергии.
По поводу этой теоремы можно указать на две заметки А. Майера, на-
печатанные в Berichte der Konigl. Sachsischen Gesellschaft der Wissenschaf-
ten zu Leipzig C Juli 1899).
V. Применение уравнений Лагранжа в теории удара
522. Уравнения. В Messenger of Mathematics (т. IV, 1867) Нивен
показал, как можно использовать в теории удара уравнения Лагранжа.
Тот же вопрос исследовал и Раус (Rigid, Dynamics, т. 1). Метод, которому
следовали эти авторы, может быть усовершенствован, так как уравнения,
которые они предлагают, содержат еще удары связей, происходящие от
новых связей, накладываемых в момент удара. Следовательно, эти уравне-
ния не вполне соответствуют цели, которую преследовал Лагранж и заклю-
чающейся в получении уравнений, не содержащих реакций связей. Вот как
может быть достигнута эта цель.
Рассмотрим движущуюся голономную систему со связями без тре-
ния, положение которой определяется k геометрически независимыми
параметрами qb q2 qu- Кинетическая энергия Т этой системы является
функцией второй степени производных qv q2,..., qk, от qlt q-it..., qu no
времени. В заданный момент ^0 на систему внезапно накладываются новые
связи. Движение будет тогда нарушено и за очень короткий промежуток
времени ^ — t0 скорости различных точек системы изменятся на конечные
30 Зак. 922. П. Аппель, т. II
458 ДИНАМИКА СИСТЕМЫ
величины, между тем как система не изменит существенно своего положе-
ния. С аналитической точки зрения величины qv q'2, ..., q'k, определяющие
скорости, за очень короткий промежуток времени ^ —10 изменяются весьма
резко от значений
до значений
между тем как величины qlt q%, ..., qk, определяющие положение, не изме-
няют существенно своих значений. Мы рассматриваем только первое прибли-
жение, считая, что промежутком tx — t0 можно пренебречь, и предполагая,
что q\ изменяют свои значения внезапно, а величины qt остаются неизмен-
ными. Мы допускаем, кроме того, что новые накладываемые в момент удара
связи также являются связями без трения. Однако эти новые связи могут
быть как временными, так и постоянными, т. е. после удара они могут
исчезнуть, но могут и сохраниться. Первоначально наложенные на систему
связи предполагаются сохраняющимися; они будут существовать после
удара *).
Переменные q^, q%, ..., q^ можно всегда выбрать так, чтобы вызывающие
удар новые внезапно накладываемые связи выражались уравнениями
<7„+1 = 0, <7п+2 = 0 qk = 0, A)
где п — некоторое целое число, меньшее чем к. В самом деле, новые вне-
запно наложенные на голономную систему к — п связей выражаются соот-
ношениями вида
Если сделать замену переменных, приняв в качестве новых параметров
вместо <7»+i> <7п+2 Як величины
rn+i = 41 (Яь Яъ •¦•• Як),
2> ••¦> Як),
Гк — <(к-п(Я1> Я2 Як),
то новые наложенные на систему связи выразятся, очевидно, соотношениями
гп+1 = 0, г„+2 = 0, .... гк = 0.
Мы будем предполагать, что такой выбор переменных действительно
выполнен, так что новые связи выражаются уравнениями A).
После удара переменные Яп+ь •••> Як не будут равны нулю, если введен-
ные связи являются временными, и они останутся равными нулю, если эти
связи постоянные.
Для получения возможного перемещения системы, допускаемого связями,
существовавшими до удара, достаточно придать параметрам qlt q% qk
произвольные вариации 5^, bq2, .... bqk.
*) Мы ограничимся здесь наиболее простыми случаями. Подробный
анализ наиболее общего случая можно найти в работе, помещенной в Jour-
nal de Mathematiques, 1896 A-er fascicule).
ГЛАВА XXVI. УДАР 459
Но если желательно, чтобы, сверх того, перемещение было допускаемо
внезапно наложенными новыми связями, то необходимо, согласно уравне-
ниям A), принять
O, Ьдп+2 = О Ъдк = 0, B)
оставляя Ъд^, Ъд2, ..., Ъдп произвольными.
Уравнения движения системы в промежутке времени ft —10, согласно
принципу Даламбера и преобразованию Лагранжа, выражаются формулой
Если bq$ произвольны, то правая часть, представляющая собой сумму
возможных работ приложенных к системе сил, содержит реакции новых
наложенных связей; однако эти последние реакции связей можно исключить,
рассматривая возможные перемещения, допускаемые всеми связями, имею-
щими место в момент удара, т. е. предполагая tglt 8<7г> ¦••> Щп произволь-
ными, а Ьдп+1, Ъдп+2,..., Ьдк равными нулю. Тогда уравнение C) распа-
дется на п следующих уравнений:
dt
в которых нет никаких реакций связей. Так как резкие изменения скоростей
вызываются исключительно реакциями связей, становящимися очень боль-
шими в течение очень короткого промежутка времени ^ — tQ, то вели-
чины Qi, Q2, ¦ • •, Qn> происходящие исключительно от непосредственно при-
ложенных обыкновенных сил, таких, как сила тяжести и др., остаются конеч-
ными в промежутке tx —10. Величины -^— остаются также конечными.
Следовательно, если умножить обе части уравнений D) на dt и проинтегри-
ровать в пределах от t0 до tb то, поскольку величина tt — t0 очень мала,
дТ
интегралами, содержащими -^— и Qi, можно пренебречь. Получим п урав-
нений
= 0 0 = 1, 2 /г), E)
являющихся линейными и однородными относительно k разностей
В уравнениях E) величины <7i> I2, ••¦> Чк имеют значения, соответствую-
щие моменту удара, так что <7n+i. Яп+ъ •••. Чк равны нулю; но необходимо
заметить, что производные дп+1, <7п+2 Чн не будут обязательно равны
нулю ни до удара, ни после него; они будут равны нулю после удара лишь
в том частном случае, когда наложенные связи являются сохраняющимися;
тогда из п линейных ураЕнений E) получим значения величин
т. е. найдем скорости после удара. В других случаях мы будем иметь для
определения k неизвестных
30*
460 ДИНАМИКА СИСТЕМЫ
только п уравнений и тогда, так же как и в случае удара не вполне упру-
гих тел, необходимо будет сделать дополнительные предположения о пове-
дении системы после удара.
Правило. Резюмируя изложенное, можно сказать, что уравнения E)
выражают следующее правило.
Частные производные от Т по производным от тех параметров,
которые не обращаются в нуль в момент удара, имеют одинаковые зна-
чения до и после удара.
Пример I. Прямой, удар двух шаров. Рассмотрим два шара, радиусы
которых /?! и /?2 и массы mi и т2. Их центры движутся по неподвижной
прямой Ох. Предполагается, что оба шара совершают поступательное дви-
жение. Обозначим через x-i и х2 абсциссы центров обоих шаров; положение
системы зависит от двух параметров хх и х2; в момент удара внезапно
накладывается новая связь, выражаемая уравнением
хг — х\ — R% — R\ = 0,
обозначающим, что расстояние между центрами равно сумме радиусов. Для
определения положения системы примем за два параметра
qx—xx и q2 = x^ — xi — R2~ Rb
так что внезапно введенная связь выражается уравнением q2 = 0. Тогда
Т 1 / /2 i 'а\ 1 Г '2 i / ' , 'N21
Т = -J- (mlXl + «2*2 ) = у [m1q1 + m2 (^ + q2Jj.
Из предыдущей теории имеем единственное уравнение
=o
так как qt не обращается в нуль в момент удара, между тем как q% по
условию обратится в нуль. Выполнив вычисления, получим
Это — единственное уравнение, которое дает нам теория. Оно выражает,
что сумма проекций количеств движения иа ось Ох не изменяется. Чтобы
закончить определение (^i)i и O^i- необходимо сделать дополнительные
предположения, как в п. 510.
Пример II. Круглый однородный диск радиуса R и массы М движется
в вертикальной плоскости хОу. В момент t0 он наталкивается на неподвиж-
ную ось Ох, после чего он может лишь катиться по этой оси. Определить
скорость диска после удара.
Положение системы до удара зависит от трех параметров: от коорди-
нат хну центра тяжести диска и от угла 6, на который он поворачивается
в Отрицательную сторону от оси Оу к оси Ох. В момент удара вводятся
две новые связи:
1) диск остается в соприкосновении с осью Ох и, следовательно,
2) диск катится по оси Ох и, следовательно, х = /?6, если подходящим
образом выбрано положение начала.
Мы примем в качестве параметров
ГЛАВА XXVI. УДАР 461
так что вновь накладываемые связи выражаются уравнениями q% = О и ^3 = О,
Имеем
где М№ есть момент инерции диска относительно центра. В новых пара-
метрах
7" =
Единственным параметром, который вновь наложенными связями не
обращается в нуль, является q±. Следовательно, имеем единственное урав-
нение
или
Но qB остается равным нулю, следовательно, (?s)i = 0 и, возвращаясь
к прежним переменным х, у, 8, получим
^ — jr0 = и, ^ =
/?2 /
fe3 , ^2
где индексами 0 и 1 помечены начальные и конечные значения производ-
ных х', у', 6'.
Эта формула выражает конечную скорость центра диска при его качении.
Если, например, движение таково, что в момент удара
то диск остановится.
523. Замечания о неголономных системах. Полученные результаты
распространяются и на неголономные системы. Это вытекает из сле-
дующего.
Хотя уравнения Лагранжа неприменимы к конечным движениям этих
систем, их уравнения движения можно написать в виде
dt \ d4i
где Rt — функции от дг и qt (п. 464).
Следовательно, если умножить обе части этих уравнений на dt и про-
интегрировать в промежутке от t0 до tb в течение которого длится удар,
то интегралами, содержащими Ri и Qi, можно будет пренебречь и по-преж-
нему получатся п уравнений
совпадающие с уравнениями E). [См. статью Бегена (Beghin) и Руссо (Rous-
ьеаи) в Journal de Jordan, 1903.]
462 ДИНАМИКА СИСТЕМЫ
УПРАЖНЕНИЯ
1. Однородный стержень движется в неподвижной плоскости. В момент t0
он наталкивается на вбитый в плоскость гвоздь. Найти последующее значе-
ние скоростей, предполагая, что стержень остается в соприкосновении
с гвоздем, скользя по нему без трения.
2. Твердое тело движется в пространстве. В момент t0 внезапно закре-
пляется одна из его точек. Найти последующее распределение скоростей.
3. Тот же вопрос, предполагая, что закрепляются две точки.
4. Рассматривается однородный стержень, концы которого А и В могут
скользить без трения по двум неподвижным осям Ох и Оу. Стержень вна-
чале неподвижен. Материальная точка массы т, имея скорость с проек-
циями и и v, сталкивается со стержнем, образуя с ним после этого одно тело.
Нужно найти мгновенную угловую скорость системы в конце удара.
Ответ. Обозначим через I точку пересечения нормалей в А и В к обеим
осям (мгновенный центр), через а и b — координаты этой точки, через а'
и Ь' — координаты точки встречи материальной точки со стержнем и через
(а — момент инерции стержня и присоединенной к нему материальной точки
ртносительно I. Тогда угловая скорость после удара определяется формулой
Aш = т [(а' — a) v — (b' — b) и].
5. Если на материальную точку действуют удары, то изменение кинети-
тической энергии равно сумме работ, производимых силами, вызывающими
эти удары, если в течение всего времени их действия материальная точка
сохраняет скорость, равную половине векторной суммы ее начальной и
конечной скоростей.
6. Потеря кинетической энергии равна кинетической энергии потерянной
скорости, уменьшенной на сумму работ, производимых силами, если мате-
риальная точка сохраняет в течение всего времени их действия постоянную
скорость, равную конечной скорости.
7. Приобретенная кинетическая энергия равна кинетической энергии
приобретенной (или потерянной) скорости, увеличенной на работу, произво-
димую силами, если в течение всего времени их действия материальная
точка сохраняет постоянную скорость, равную начальной скорости.
8. Изменение полной кинетической энергии системы равно сумме работ
сил, вызывающих как внешние, так и внутренние удары, если каждая из
точек приложения этих сил сохраняет в течение всего времени их действия
постоянную скорость, равную половине векторной суммы их начальной и
конечной скоростей.
9. Потеря кинетической энергии системы равна кинетической энергии
потерянных скоростей, уменьшенной на сумму работ сил, вызывающих как
внешние, так и внутренние удары, если каждая из их точек приложения
сохраняет в течение всего времени их действия постоянную скорость, рав-
ную ее конечной скорости.
10. Когда силы, вызывающие удары, действуют на твердое тело, то
изменение кинетической энергии равно сумме работ этих сил, если в течение
всего времени их действия каждая из их точек приложения сохраняет свою
постоянную скорость, равную половине векторной суммы ее начальной и
конечной скоростей.
11. Потеря кинетической энергии, испытываемая твердым телом, равна
кинетической энергии потерянных скоростей, уменьшенной на сумму работ
сил, вызывающих удары, если в течение всего времени их действия каждая
из точек их приложения сохраняет постоянную скорость, равную ее конеч-
ной скорости.
(По поводу этих теорем см. Дарбу, I'Etude geometrique sur les percus-
sions et le choc des corps, Bulletin des Sciences mathematiques, 1880.)
ГЛАВА XXVII
ПОНЯТИЕ О МАШИНАХ, ПОДОБИЕ
I. Общие сведения. Маховики. Регуляторы
524. Определения. Машина предназначается для преобразования
одной работы в другую. Она состоит из трех следующих главных
частей:
1) приемника, который получает работу от движущих сил (мус-
кульная сила, водопад, давление газа или пара, электрические или
магнитные силы);
2) рабочего инструмента, который выполняет полезную работу,
например работу подъема тяжести, тяги поезда, обработки металла
сверлением, строганием и т. д.;
3) передаточного механизма, соединяющего приемник с рабо-
чим инструментом.
Рабочая скорость. В каждой машине скорость рабочего
инструмента должна иметь определенную величину в зависимости
от характера производимой работы. Скорость, которую должна иметь
каждая часть машины, чтобы осуществить наилучшую работу рабо-
чего инструмента, называется рабочей скоростью. Эта скорость
считается заданной.
525. Приложение теоремы кинетической энергии к машинам.
Рассмотрим движущуюся машину в промежутке времени от t0 до t.
В этом промежутке t —10 движущие силы, действующие на прием-
ник, производят работу $т движущих сил; сопротивления, испыты-
ваемые рабочим инструментом, производят отрицательную работу—§и;
вредные сопротивления (трение, сотрясение и т. д.) производят
отрицательную работу—&р. Работа §и, взятая по абсолютному зна-
чению, есть полезная работа, Шр—работа вредных сопротивле-
ний. Сумма
называется работой сопротивлений. Работа §р вредных сопроти-
влений может быть уменьшена хорошим расположением частей ма-
шины, тщательной смазкой и другими мерами, но она никогда не может
быть уничтожена вся.
Если через v0 обозначить скорость частицы т машины в мо-
мент ^0, а через v — ее скорость в момент t, то по теореме
464 ДИНАМИКА СИСТЕМЫ
кинетической энергии имеем
Smv2 vi mvl
Вот некоторые непосредственные следствия из этого уравнения.
1°. Допустим, что машина выходит из состояния покоя и движется
до момента tu когда скорости равны vt. Тогда, отмечая индексом 1
работы, произведенные до этого момента, получим
А <5TL of* <5fl
2 — <* т о> и * pi
откуда
Следовательно, кинетическая энергия, которою обладает ма-
шина, меньше неиспользованной части работы, движущих сил за
время после пуска машины в ход.
2°. Кинетическая энергия, которою обладает машина в момент tu
должна рассматриваться как некоторое добавление к работе движу»
щих сил, которая служит для движения машины в последующие
моменты. В самом деле, применяя теорему кинетической энергии
к движению от момента tt до момента t, получим
L
B)
Отсюда видно, что кинетическая энергия, которою обладает ма-
шина к моменту tt, прибавляется к |Гга; все, следовательно, происхо-
дит так, как если бы машина в момент tv выходила из состояния
—2— . Но по
предыдущей теореме эта кинетическая энергия может восстановить
только часть работы движущих сил, затраченной на то, чтобы
сообщить машине данную энергию. Следовательно, во всех случаях
полезная работа меньше затраченной работы движущих сил. что.
доказывает невозможность «вечного двигателя».
3°. В уравнении работ, произведенных от какого-нибудь мо-
мента tx до момента t >• tx, кинетическая энергия, которой обладает
машина в момент t, должна рассматриваться как энергия сопроти-
вления; в самом деле, в уравнении B) к работе $рприбавляется V —я-.
Если в этот момент машину остановить, то эта кинетическая энер-
гия не восстановится как движущая сила в последующие моменты
и она составит, следовательно, потерю работы движущих сил.
ГЛАВА XXVII. ПОНЯТИЕ О МАШИНАХ. ПОДОБИЕ 465
Можно избежать части этой потери, если предоставить машине воз-
можность продолжать движение после того, как действие движущих
сил (двигателя) прекратится. Однако, если работа машины продолжалась
долго, то потеря кинетической энергии после остановки составляет
незначительную долю затраченной работы.
4°. Если продифференцировать уравнение A), то получится соот-
ношение
2mv*
и 2 —°> era— °>ег'
где индекс е указывает, что как для движущих сил, так и для сил
сопротивлений речь идет об элементарной работе.
Кинетическая энергия машины, начиная с некоторого момента,
возрастает или убывает в зависимости от того, будет или не
будет элементарная работа движущих сил превышать элемен-
тарную работу сопротивлений.
Кинетическая энергия проходит через максимум или мини-
мум в моменты, когда элементарная работа движущих сил
равна элементарной работе сопротивлений.
526. Аналитическое выражение кинетической энергии. Машина
в общем случае является системой с полными связями. Положение
различных частей, ее составляющих, зависит тогда от одного-един-
ственного параметра, например, от угла поворота 9 ведущего звена
(вала, кривошипа). Обозначим через ш угловую скорость -—- этого
вала.
Чтобы вычислить кинетическую энергию машины, заметим, что
в каждой машине существуют части двоякого рода.
1°. Части, вращающиеся с угловыми скоростями, пропорциональ-
ными угловой скорости ев; мы будем называть их вращающимися
частями. Кинетическая энергия этих различных частей пропорцио-
нальна величине ев2, и их полная энергия выражается в виде
где А — положительная постоянная.
2°. Части качающиеся (коромысла, тяги и т. д.) и части, вра-
щающиеся с угловыми скоростями, отношения которых к ш зависят
от 9; мы будем называть их качающимися частями.
В какой-нибудь такой части координаты х, у, z точки являются
периодическими функциями от б:
д» = ф (в). г = х
Составляющие скорости этой точки суть
466 ДИНАМИКА СИСТЕМЫ
и ее кинетическая энергия
1
Следовательно, полная кинетическая энергия всех качающихся частей
равна
¦2-/F) ш*.
где /(9)—: существенно положительная периодическая функция угла 6.
Наконец, кинетическая энергия всей машины равна
Y IA + /(9)]
Необходимо отметить, что качающиеся части имеют в общем
случае малые массы; исключение составляют коромысла, но эти
последние обладают небольшими скоростями, так что влияние качаю-
щихся частей на величину кинетической энергии имеет второстепен-
ное значение и /(9) мало по сравнению с А. Для получения правиль-
ного хода надо уменьшить насколько возможно число и массу
качающихся частей и пользоваться главным образом вращающимися
частями. Эти последние должны быть в совершенстве центрированы
для того, чтобы работа силы тяжести не была то работой движу-
щих сил, то работой сопротивления; они должны вращаться вокруг
главных центральных осей инерции, так как если ось вращения не
будет главной центральной осью, то она будет изменять свое поло-
жение в пространстве и отрывать опоры, препятствующие этому из-
менению.
527. Движение машины. При движении машины надо рассмат-
ривать три фазы:
период пуска,
установившееся движение,
период остановки.
При пуске кинетическая энергия, равная вначале нулю, должна
возрастать; элементарная работа движущих сил должна преобладать
над элементарной работой сопротивлений. В периоде остановки имеет
место обратное.
Установившееся движение. Идеалом установившегося движения
является равномерное движение с рабочей скоростью, дающей наи-
лучшую полезную работу. Тогда, обозначая через t0 и t два произ-
вольных момента во время установившегося движения, получим для
каждой точки v = v0
mv2 ^ mv
Smv2 _
v0
и поэтому на основании уравнения кинетической энергии имеем
Шт = $г = §и -f- Шр.
ГЛАВА XXVII. ПОНЯТИЕ О МАШИНАХ. ПОДОБИЕ 467
При таком установившемся движении работа движущих сил за
любой промежуток времени будет равна работе сопротивлений.
Но этот идеал, как мы докажем, не может быть достигнут.
В дальнейшем мы увидим, как можно к нему приблизиться при
помощи маховиков.
528. Причины нарушения равномерности хода при устано-
вившемся движении. Существуют различные причины нарушения
равномерности хода во время установившегося движения. Главней-
шими из них являются следующие.
1°. Части, меняющие направление движения.
2°. Прерывистость действия движущих сил, которые могут быть
не постоянными, а только периодическими. Так, в машинах односто-
роннего" действия давление пара на поршень действует всегда в одном
и том же направлении; оно действует, например, когда поршень
поднимается, и перестает действовать., когда поршень опускается.
В этом случае действие движущей силы является прерывистым и пе-
риодическим.
3°. Прерывистость действия полезных сопротивлений, которые
тоже могут быть не постоянными, а только периодическими, как это
бывает, когда рабочим инструментом является, например, пест или
молот.
Вследствие этих причин, нарушающих равномерность движения,
невозможно поддерживать угловую скорость ш так, чтобы она была
постоянна и равна желаемой рабочей скорости Q. Движение машины
можно лишь считать периодическим, так как существует промежуток
времени, по истечении которого машина возвращается в прежнее
положение и ев принимает прежнее значение. Таким будет, например,
промежуток времени, в течение которого главный вал машины со-
вершает один оборот, т. е. 6 увеличивается на 2тс. По истечении
такого промежутка времени машина возвращается к своему перво-
начальному геометрическому и кинематическому состоянию; говорят,
что она совершает цикл. В каждый момент- времени не будет
соблюдаться равенство между работой движущих сил и работой со-
противлений; но по истечении цикла скорости вновь становятся
прежними, изменение кинетической энергии за цикл равно нулю
и имеет место уравнение
где верхний индекс указывает, что речь идет о работе в течение
цикла.
Отношение ?и _. Х%
v m "га
называется коэффициентом полезного действия машины. Коэффи-
циент полезного действия всегда меньше единицы, так как невоз-
можно уничтожить все вредные сопротивления.
468 ДИНАМИКА СИСТЕМЫ
Коэффициент неравномерности. Так как угловая скорость ш
принимает прежнее значение после каждого цикла, то она проходит
по крайней мере через один максимум и один минимум при каждом
цикле. Пусть cot— наибольший максимум, а и>2 — наименьший мини-
мум. Желательно, чтобы средняя угловая скорость за время цикла,
и>1 -4- со»
которую мы рассматриваем как равную —~—-, в точности совпа-
дала с заданной наперед рабочей скоростью Q:
Ю1 + °>2 О
' 2 •
С другой стороны, для того чтобы ход был возможно более
равномерным, т. е. чтобы угловая скорость со отклонялась как можно
меньше от ее среднего значения, необходимо, чтобы разность шх — св2
была возможно меньшей величиной или чтобы отношение
было как можно меньше.
Это отношение, которое мы обозначим через —, называется коэф-
фициентом неравномерности *). Тогда
Q
10, CD, =
и равномерность хода будет тем больше, чем больше будет л. Ниже
мы увидим, как для заданной машины, присоединяя к ней маховик,
можно добиться, чтобы п имело заданное наперед значение. Мы
начнем с аналитической формы уравнения кинетической энергии.
529. Приближенное выражение работы. При установившемся
движении как движущие силы, так и силы сопротивления зависят от
положений и скоростей их точек приложения. Но влияние положения
будет в общем случае преобладающим и можно приближенно до-
пустить, что все силы зависят только от положений их точек при-
ложения, т. е. от 9. При таком предположении сумма их элемен-
тарных работ имеет вид
6. A)
Уравнение кинетической, энергии. Уравнение кинетической энер-
гии будет такое:
^ B)
*) В оригинале употребляется термин «coefficient de regularisation», ко-
торым так именуется величина п. (Прим. пер.)
ГЛАВА XXVII. ПОНЯТИЕ О МАШИНАХ. ПОДОБИЕ 469
откуда, интегрируя от 0 до 6 и. обозначая через ш0 угловую ско-
рость при 9 =s= 0, получим
9
* —[Д+ /@)] ш§ = 2 J^(9)de = 2ffe. C)
о
где |Го обозначает полную работу сил, как движущих, так и сопро-
тивления, совершенную на перемещении от положения, соответствую-
щего значению 9 = 0, до положения, соответствующего произвольному
значению 9. Эта работа 5Гв, так же как и /@), является периоди-
ческой функцией от 9 периода 2те.
Тогда положения, при которых.кинетическая энергия имеет мак-
симум или минимум, являются положениями равновесия машины, т. е.
положениями, при которых машина, находясь под действием тех же
сил, что и во время установившегося движения, не может начать
двигаться без начальных скоростей. Это вытекает из принципа воз-
можных работ. Действительно, при единственном перемещении d9,
которое можно сообщить машине, сумма работ всех сил равна
Следовательно, положения равновесия определяются уравнением
которое одновременно определяет и максимумы и минимумы кине-
тической энергии.
Уравнение C) показывает, в какой степени различные причины
препятствуют угловой скорости со оставаться постоянной при уста-
новившемся движении. Влияние качающихся частей определяется чле-
ном /(9); влияние неравномерности работ движущих сил и сил
сопротивления характеризуется членом сГ9, который изменяется с из-
менением 9 и обращается в нуль лишь периодически.
Максимум и минимум величины св. Согласно формуле C) ш2
является периодической функцией угла 9, принимающей прежние
значения после каждого цикла, когда 9 увеличивается на 2те. Мы
упростим это уравнение, совершенно пренебрегая влиянием качаю-
щихся частей, которое в общем случае незначительно. Тогда /(9)
принимается равным нулю, и мы имеем
J 4-2ire. D)
Обозначим через §г и |Г2 максимум и минимум аГ6, когда 6 изме-
няется от 0 до 2и; этим значениям отвечают максимум и>х и мини-
мум ш2 величины св. Тогда
Вычитая второе равенство из первого, получим
A (CDJ — Ш2) ((!>! + СВ2) = 2 (f х —
470 ДИНАМИКА СИСТЕМЫ
Но если 2 — рабочая скорость, а коэффициент неравномер-
ности, то, как было положено.
Следовательно,
A = ?2($'l — |Г2). E)
530. Маховики. Маховик это—добавочное колесо, насаженное
на движущий вал. Это колесо имеет обычно большой радиус, и его
масса распределена по возможности по его окружности, где она
образует массивный обод, так что маховик обладает значительным
моментом инерции J относительно своей оси.
Добавление маховика позволяет отрегулировать движение так,
чтобы коэффициент неравномерности принял наперед заданное зна-
чение. В самом деле, до присоединения маховика кинетическая
энергия вращающихся частей равна
После присоединения она становится равной
и уравнение E) заменяется следующим:
A+J^lfa-Sj. F)
Так как §'1, |Г2 и А известны, а п возрастает вместе с J, то
движение получится тем равномернее, чем больше J.
Расчет маховика. Допустим, что п задано; сконструируем тогда
маховик с моментом инерции
J=®&i — &J- G)
Это значение больше того, которое по формуле F) строго необхо-
димо, чтобы коэффициент неравномерности имел заданное значение.
Поэтому взятый маховик обеспечит правильность хода большую, чем
требуется. Для вычисления массы, которую нужно придать ободу,
произведем расчет, пренебрегая моментами инерции спиц и ступицы,
и предположим, что маховик состоит только из одного обода. Ре-
зультатом такого приближения будет увеличение равномерности, так
как в действительности момент инерции сконструированного таким
образом маховика будет больше момента инерции, определяемого
по формуле G).
глава xxvii. понятие о машинах, подобие 471
р
После того как маховик сведем к ободу веса Р и массы —,
можно вычислить его момент инерции, предполагая, что обод заменен
материальной окружностью веса Р, радиус которой равен среднему
радиусу R обода. Тогда для момента инерции маховика получаем
Подставляем этот момент инерции в равенство G):
Если заметить, что RQ есть средняя линейная скорость V точки на
ободе, то окончательно получим формулу Понселе:
PV^ = ng(Sl — S2). (8)
из которой можно найти Р.
Умножив и разделив на произведенную в течение цикла полезную
работу §си, мы можем представить эту формулу также в виде
Множитель ——— является безразмерной величиной, не зави-
ги
сящей от единиц измерения. Что касается остальных членов, то им
можно придать следующую форму.
Возьмем машину с мощностью W л. с. (л. с. — лошадиных сил),
маховик которой совершает Л/ оборотов в минуту. Тогда для сред-
ней скорости V точки на окружности имеем
V =
60 '
где за единицу времени принята секунда.
Для нахождения полезной работы §°и за один оборот маховика
заметим, что за одну минуту (за N оборотов) полезная работа равна
NSu килограммометрам; так как машина мощностью в 1 л. с. про-
изводит 75 кгм полезной работы в секунду, то рассматриваемая ма-
шина, совершающая " килограммометров в секунду, имеет мощ-
"К
ность eQ уе лошадиных сил:
60 • 75 — " •
Окончательно имеем
I —JY\ 60-75
N
472
ДИНАМИКА СИСТЕМЫ
В каждом отдельном частном, случае нужно лишь вычислить
число
Примеры. Рассмотрим вращающийся вал О (рис. 274), который мы
будем предполагать горизонтальным. Допустим для простоты, что различные
сопротивления являются постоянными и действуют непрерывным образом.
Мы можем заменить их единственной постоянной силой F, касательной
к окружности постоянного радиуса О А = а. Что касается движущих сил, то
мы будем предполагать, что они,
как во всех паровых машинах, при-
ложены к какой-нибудь ее части,
совершающей колебательные дви-
жения, которые при помощи ша-
туна QB и кривошипа ОВ длины b
преобразуются во вращательное
движение вала О. Мы допустим,
что движущее усилие Q постоянно
по величине и направлению, т. е.
допустим, что шатун QB остается
параллельным постоянному на-
правлению и что усилие Q дей-
ствует вдоль шатуна, причем так,
что вал вращается в сторону,
показанную стрелкой. (В о и г,
Cours de Mecanique et Machi-
nes, 3е fasc.) Могут представиться
различные случаи в зависимости
от того, как осуществляется дви-
жущее усилие.
Машина одностороннего дей-
ствия. Говорят про машину, что
она одностороннего действия, если усилие Q действует всегда в одном напра-
влении, например, на чертеже вниз. Действие двигателя будет тогда преры-
вистым и будет осуществляться только в течение половины оборота кри-
вошипа, когда он переходит из В' в В".
Найдем сначала, какая зависимость должна существовать между силами Q
и F, чтобы движение было периодическим.
Если оно является таковым, то после полного оборота точка В должна
иметь первоначальную скорость, для чего требуется, чтобы работа силы Q
равнялась работе силы F. Сила Q произведет при опускании работу 2Qb
и после этого не будет больше действовать. Сила F, действующая постоянно,
совершит отрицательную работу, равную произведению силы F на длину 1ъа
окружности. Следовательно,
п
Рис. 274.
2Qb =
(9)
Это условие будет, очевидно, достаточным. Допустим, что оно выпол-
няется и найдем, каким положениям точки В соответствуют максимумы или
минимумы угловой скорости ю или работы J'q. Если обозначить через 8
угол В'ОВ, то на основании равенства (9) полная работа как движущих
сил, так и сил сопротивлений, которая будет произведена от момента,
когда 6 равно нулю, до момента, когда этот угол в достигает значения,
меньшего я, будет
Ъ = bQ A — cos fl) — Fab = Fa [я (l - cos в) — в].
A0)
ГЛАВА XXVII. ПОНЯТИЕ О МАШИНАХ. ПОДОБИЕ 473
Когда й переходит через тс, то сила Q перестает действовать и работа, ко-
торая будет произведена после момента, когда 8 = тс, будет
Максимумы и минимумы J'j соответствуют значениям 6, при которых
производная от функции A0) равна нулю, т. е. когда
sin 8 = 1. A1)
Это уравнение имеет два корня, заключенных между 0° и 180°; они
равны
8а = ОДОЗЬ = 18° З3',6,
61 = 0,8969тс= 161°26',4.
Первый корень соответствует минимуму $г работы, а второй — макси-
муму JV
Когда точка В поднимается от В к В , то единственными приложен-
ными силами будут силы сопротивления и работа будет уменьшаться. Сле-
довательно, за время полного оборота работа J'i будет действительно макси-
мумом работы, a J^2—минимумом. Вычисляя tfx и $ь получим
J~x — /з = Fa Bп cos 82 + 262 — тс) = 2uaF • 0,5517,
так как Ь1 = л — 82. После этого общая формула (8) принимает вдд
PV* = ng {?i — j-2) = п ¦ 5,4125 • 2naF.
Из этой формулы можно определить Р, так как V известно.
Пусть, как и выше, N—число оборотов вала в минуту, W — мощ-
N
ность машины в лошадиных силах. Число оборотов в секунду равно ^,
а число килограммометров работы сил сопротивлений в секунду равно
Пренебрегая вредной работой, мы видим, что это выражение равно
полезной работе, произведенной в одну секунду. Тогда мощность в лоша-
диных силах равна
N
w - zar
и формула (8) принимает вид
а = 24300 п W
N '
Однокривошипная машина двойного действия. В этой машине движу-
щая сила, после того как она действовала в одном направлении на первой
половине окружности В'ВВ", становится равной и противоположно напра-
вленной на второй половине и производит вторично такую же работу. Сле-
довательно, работа силы Q удвоится, и поэтому условие периодичности
примет вид
4Qb = 2nFa.
Работа на участке от В' до В будет
Т = 0* A — cos fl) — Fab = Fa Г|- A — cos 8) — el.
31 Зак. 922. П. Аппель, т. И
474
ДИНАМИКА СИСТЕМЫ
Максимум и минимум соответствует значениям 6, определяемым из
уравнения
Y sin 6 — 1 = 0.
Отсюда получаем
e3 = 39° 32' 35", ex = 180° - e2.
Повторяя все вычисления, найдем
Р К2 = 4646
1
nW
что составляет приблизительно -=- того значения, которое было получено
выше. Это наглядно иллюстрирует влияние двустороннего действия на рав-
номерность хода.
Двухкриеошипная машина двойного действия. Допустим, что вместо
одного машина имеет два кривошипа (на рис. 275 ОВ и ОВ"), заключенных
на оси под прямым углом между ними, причем на эти кривошипы действуют
такие же, как в предыдущей задаче, две равные силы Q.
Условие периодичности, поскольку имеются две силы, равные Q, будет
следующее:
8ЬО = 2naF.
Работа на участке от В' до В будет
s -^ — cos
и после замены Q его значением получим
~ cos 6 + sin е)п — 4е
Минимум и максимум определяются из уравнения
4
cos в = —.
Рис. 275.
sin
Они соответствуют
92=19°12', 61 = 70°48'.
После всех вычислений получим
nN, .
= 465 -
что составляет приблизительно десятую часть результата, полученного для
однокривошипной машины двойного действия. Таким устройством можно,
как видно, уменьшить почти в 10 раз вес маховика, не увеличивая разности
между максимальной и минимальной угловыми скоростями.
531. Регуляторы. До сих пор мы занимались рассмотрением
установившегося движения и мы видели, как маховики уменьшают
колебания угловой скорости вокруг ее среднего значения. Но может
случиться, что в некоторый заданный момент внезапно происходят
такие изменения в движущих силах или в полезных сопротивлениях,
которые стремятся установить другой режим или другую среднюю
скорость. Важно воспрепятствовать этому изменению скорости режима,
ГЛАВА XXVII. ПОНЯТИЕ О МАШИНАХ. ПОДОБИЕ 475
для чего служат регуляторы. Мы ограничимся здесь лишь общими
соображениями о регуляторах, заимствованными из статьи Леотэ
(Leaute) в Revue generate des Sciences (октябрь 1890).
Определение регуляторов и их назначение. Регуляторы являются
приборами, предназначенными для того, чтобы удерживать в возможно
близких друг к другу пределах изменения средней скорости машины,
вызванные изменениями движущих сил или сил сопротивлений.
Часто этому определению придают более сжатую форму, говоря,
что регуляторы имеют целью сохранять скорость постоянной, не-
смотря на изменяющиеся действия движущих сил или сил сопро-
тивлений.
Для того чтобы средняя скорость машины могла оставаться
постоянной, необходимо, чтобы при этой скорости имело место
равновесие между работой движущих сил и работой сопротивлений.
Но это равновесие может нарушаться по различным причинам.
I Изменение уровня воды в гидрав- "j
лических двигателях I Изменения в общем слу-
Изменение давления в котле паро- I чае не существенные
вых машин I
Силы сопро-
тивления
Рабочий инструмент действует
прерывисто
Рабочий инструмент выключается
Рабочий инструмент включается
Это — наиболее важные
возмущения и единст-
венные, которые в об-
щем случае приходится
рассматривать
Все эти причины вызывают изменения скорости, которые могут
оказаться вредными, если они выходят за некоторые пределы, вслед-
ствие чего их нужно избегать.
Нарушенное равновесие между работами движущих сил и сил
сопротивлений можно восстановить без изменения средней ско-
рости, воздействуя или на работу движущих сил, или на работу
сил сопротивлений. Если, например, выключается из хода рабо-
чий инструмент, в результате чего скорость должна увеличиться,
то ее можно привести к первоначальному значению либо увеличивая
сопротивление на величину, на которую оно уменьшилось, либо
уменьшая соответствующим образом движущие силы. Но на прак-
тике не приходится колебаться в выборе между этими двумя теоре-
тически эквивалентными мерами. Очевидно, что с точки зрения эко-
номии затраченной работы выгоднее не создавать добавочных со-
противлений, а регулировать движущие силы в соответствии с той
работой, которую нужно выполнить. В общем случае наименование
«регулятор» дают механизмам, которые действуют именно по этому
принципу.
Мы имеем, таким образом, определение регуляторов:
Регуляторами являются, устройства, которые автоматически
регулируют затрачиваемую работу так, чтобы сохранять
31*
476
ДИНАМИКА СИСТЕМЫ
приблизительно постоянной среднюю скорость двигателя, когда
изменяются силы сопротивлений или движущие силы.
Разница между ролью регуляторов и маховиков. Маховик
служит также для регулирования движения, но его действие совер-
шенно отлично от действия регулятора. Маховик влияет только на
моментальные изменения скорости; он регулирует движение, когда
оно уже периодически равномерно, и уменьшает отклонение между
экстремальными значениями скорости, существующими в течение пе-
риода; но он не может удерживать одинаковые значения средней
скорости от одного периода к другому,
когда изменяется сопротивление; он
может, правда, в случае возмущения
делать менее резким переход от одного
режима к другому, но он не способен
ничего изменить в скорости, которую
получит машина в новом состоянии.
Таким образом, разница в действии
регуляторов и маховиков заключается
в следующем: маховик действует
на колебания скорости около ее
среднего значения; регулятор, на-
оборот, действует на среднюю ско-
рость, которую могут изменять
неожиданные изменения в режиме.
Регулятор Уатта. Наиболее про-
стым является регулятор Уатта. Он
устроен следующим образом.
Четыре попарно равных прямых стержня расположены в одной
плоскости и связаны шарнирами (рис. 276): в точке А с вращаю-
щимся вертикальным валом AI, в точках В и D — между собой, где
они образуют переменные углы, и в точке О — с муфтой, окружаю-
щей вал AI, вдоль которого она может скользить. Точки Р и Р'
являются центрами металлических шаров. Вся система вращается
вместе с валом AI, и каждой угловой скорости соответствует поло-
жение относительного равновесия шаров. Когда скорость возрастает,
шары отдаляются и заставляют подниматься муфту, которая при
помощи системы рычагов частично закрывает клапан подачи пара.
Когда скорость убывает, шары сближаются, муфта опускается и
сильнее открывает клапан подачи. Для более глубокого изучения
этих приборов мы отошлем к Mecanique Бура и к курсу Понселе
для Ecole de Metz.
II. Подобие в механике. Модели
532. Подобие. Теория подобия тесно связана с теорией раз-
мерности. Мы рассмотрим последовательно подобие в геометрии,
кинематике и механике.
Рис. 276.
ГЛАВА XXVII. ПОНЯТИЕ О МАШИНАХ. ПОДОБИЕ 477
Подобие в геометрии. Рассмотрим некоторую геометрическую
фигуру А и построим подобную ей фигуру а. Пусть, например, А
будет статуя, га — ее уменьшенная репродукция. Если L — длина
какой-нибудь линии в А, а 1^—длина соответствующей ей линии в а,
то отношение
I ,
1
называется отношением (коэффициентом) подобия.
Так, полагая, что отношение подобия ^ —ттт. говорят, что ста-
туя а есть модель статуи А, уменьшенная в десять раз.
При этих условиях, если 5 есть площадь какой-нибудь части
поверхности в A, a s—площадь части соответствующей поверхно-
сти в а, то
Точно так же, если Р —объем некоторой части А и р — соот-
ветствующий объем в а, то
Отсюда следует, что если в А при произвольно выбранной еди-
нице длины существует зависимость
/(Ii, L2 Su S2, ...,PUP2, ...) = 0 A)
между некоторыми длинами Lu L2, ¦•-, некоторыми площадями
Slt S2, . .. и некоторыми объемами Pv P2 то в фигуре а бу-
дет существовать между соответствующими длинами, площадями
и объемами llt l2 su s2, .... plt p2, . . . та же самая зависимость
/&. к *i. *2. •••• A. ft. ...) = 0. B)
В самом деле, если зависимость A) справедлива при любом вы-
боре единицы длины, то она должна быть справедливой, если эту
единицу уменьшить или увеличить в X раз. Следовательно, по пра-
вилам однородности
fOJLu \L2, .... Х^, Х252 \*PV Хзр2, .. .) = 0.
что в точности совпадает с зависимостью B).
Так, в пирамиде объем Р есть одна треть произведения осно-
вания 5 на высоту Н:
P=±SH.
В сокращенной модели будет также
p h
478 ДИНАМИКА СИСТЕМЫ
Подобие в кинематике. Пусть материальная система движется
относительно неподвижного прямоугольного триэдра OXYZ. В мо-
мент Т эта система образует с триэдром OXYZ геометрическую
фигуру А, изменяющуюся вместе с Т.
Вообразим теперь другую систему, движущуюся относительно
неподвижного прямоугольного триэдра Oxyz и удовлетворяющую
следующим условиям: между двумя моментами t и Т можно устано-
вить такую зависимость
что в момент t вторая система образует с триэдром Oxyz фи-
гуру а, подобную той фигуре А, которую первая система образует
в момент Т с триэдром OXYZ, причем отношение подобия X обеих
фигур постоянно.
При этих условиях обе системы проходят через последователь-
ность положений и форм, которые между собой геометрически по-
добны.
Говорят, что оба движения кинематически подобны, если
зависимость между соответствующими моментами t и Т, когда
обе системы а и А подобны, имеет вид
где т— постоянная, a t0 и Го — два соответственных момента времени.
Тогда существует два постоянных отношения подобия, одно X
для длин, другое х — для времени.
Траектории двух соответственных точек. Пусть Р чр — по-
ложения двух соответственных точек фигур А и а в соответственные
моменты Т и t, а Ро и р0— их положения в моменты То и ^0. Дуги
Р0Р и рор траекторий обеих точек подобны и их отношение подо-
бия равно X. В самом деле, согласно сделанным предположениям
два радиуса-вектора ОР и Ор в соответственные моменты Tut
одинаково ориентированы относительно триэдров OXYZ и Oxyz
и их отношение равно X. Следовательно, Р и р описывают подоб-
ные дуги, причем длины L и I дуг Р0Р и рвр находятся в отношении X:
Скорости и ускорения двух соответственных точек. Пусть
V и v, Г я y—-скорости и ускорения двух соответственных точек
Р и р в моменты Т и t. Проекции векторов V и Г на оси OXYZ
соответственно равны
(IX dY_ dZ_ (ул
dT' dT1 dT' (*}
dT* '
ГЛАВА XXVII. ПОНЯТИЕ О МАШИНАХ. ПОДОБИЕ 479
где через X, Y, Z обозначены координаты точки Р относительно осей
OXYZ. Точно так же проекции векторов j и у на оси Охуг равны
dx
~dt'
d"-x
dt"-'
dy
dt '
dPy
W'
dz
dt '
d°-z
dfi
Так как
то мы видим, что векторы V и Г с одной стороны и векторы v
и у с другой стороны подобно расположены в обеих фигурах А
и а в соответственные моменты и их длины связаны соотношениями
X X-
Применение принципа однородности показывает, что если в пер-
вом движении существует между длинами, площадями, объемами,
скоростями и ускорениями какое-нибудь соотношение, не зависящее
от выбора единиц длины и времени, то такое же соотношение будет
существовать и во втором движении.
Подобие в механике. Рассмотрим две кинематически подобные
материальные системы и допустим, что масс-ы т и М двух соответ-
ственных частей обеих систем находятся в постоянном отношении ;х:
одинаковом для всех масс системы. Тогда обе системы механиче-
ски подобны.
Пусть F и /—силы, действующие на две соответственные частицы
обеих систем в моменты Т и t, М и тп — массы этих частиц.
Г и у —их ускорения. Тогда имеем
F=MV, f=mf.
Следовательно, обе силы подобно расположены в обеих систе-
мах. С другой стороны, их отношение постоянно:
f__ _от j_ ^
F ~~ М Г ~~ т2 •
Следовательно, если через ср обозначить постоянное отношение
гомологических сил в моменты t и Т, то
1 = $. C)
Это фундаментальное для теории подобия в механике соотноше-
ние показывает, что три из четырех отношений подобия X, т, \i, ср
могут быть выбраны произвольно, но четвертое будет тогда опре-
деляться зависимостью C).
480 ДИНАМИКА СИСТЕМЫ
Отсюда на основании принципов подобия (п. 76) видно, что если
в первой системе существует какое-нибудь не зависящее от выбора
единиц соотношение между длинами, площадями, объемами, массами,
скоростями, ускорениями и силами, то такое же соотношение будет
существовать между соответственными элементами второй системы.
Зависимость, выражаемая уравнением C), была уже дана Ньюто-
ном в его Philosophiae naturalis principia mathematica (книга II, раз-
дел I, предложение XXXII).
Эта теория и ее приложение к исследованию машин по их умень-
шенным моделям составляют содержание работы Бертрана Note sur
la similitude en Mecanique (Journal de l'Ecole Polytechnique, XXXIIе,
Cahier).
По этому же вопросу можно указать также на главу, посвящен-
ную размерностям и подобию в сочинении Пионшона (Pionchon,
Introduction a l'etude des systems de mesures usitees en Physique).
Исследование машины no уменьшенной модели. Теорема Нью-
тона приводит часто к очень интересным практическим заключениям.
В частности, ее применяют, когда хотят исследовать какую-нибудь
механическую конструкцию на малой модели.
Пример I. Допустим, например, „что мы имеем уменьшенную
модель локомотива и обозначим через X отношение геометрического
подобия этой модели к локомотиву, который надлежит построить.
Тогда отношение площадей будет X2, а отношение объемов будет
X3. Если предположить, что как в машине, так и в модели мате-
риалы одинаковы, то отношение ;х одной массы к другой будет
равно X3 и такое же будет отношение сил, вызванных тяжестью.
Следовательно, ср = X.3. Отсюда заключаем, что отношение т одного
времени к другому равно у — или У~\ • а потому отношение
скоростей, равное —, будет тоже равно V^X.. Таким образом, ско-
рости модели и машины должны относиться между собой как
корни квадратные из их размеров.
Такое условие необходимо для осуществления механического
подобия между моделью и машиной. Необходимо, однако, заметить,
что приложенными силами будут не только силы тяжести. Силы
давления пара должны также относиться как X3: 1, и так как они
пропорциональны площадям, т. е. пропорциональны величинам X.2
и силам, приходящимся на единицу площади, то необходимо, чтобы
эти силы находились в отношении X. Таким образом, подобие тре-
бует, чтобы в модели сила давленая пара на единицу площади
находилась в отношении геометрического подобия к силе давле-
ния пара на единицу площади в действительной машине.
Сопротивление воздуха пропорционально площадям и приблизи-
тельно пропорционально квадратам скоростей, т. е. X2 (У^J или
I?, и оно удовлетворяет условию <f = X.3.
ГЛАВА XXVII. ПОНЯТИЕ О МАШИНАХ. ПОДОБИЕ 481
Силы трения скольжения, пропорциональные давлениям, находятся
в отношении этих давлений, т. е. в отношении X3.
Наконец, силы сопротивления качению, которые в разбираемом
случае могут рассматриваться как приблизительно пропорциональ-
ные давлениям и обратно пропорциональные диаметрам колес, нахо-
Хз .
дятся в отношении у или Хг, если материал колес одинаков у модели
и у машины. В модели сопротивление качению слишком велико.
Для осуществления подобия необходимо, следовательно, чтобы
колеса модели были сделаны из материала, сопротивление которого
качению при всех прочих равных обстоятельствах было бы меньше
сопротивления качению материала колес машины, причем это умень-
шение должно равняться отношению геометрического подобия X.
Таким образом, мы видим, что для получения модели, в четыре
раза меньшей рассматриваемого локомотива, удовлетворяющей всем
условиям подобия, надо придать этой модели скорость, вдвое меньшую,
уменьшить вчетверо давление пара и сделать колеса из материала,
для которого сопротивление качению было бы в четыре раза меньше.
Так как это последнее условие, если даже оно выполнимо,
нельзя осуществить без нарушения первоначального условия, заклю-
чающегося в том, что модель и машина сделаны из одинаковых ма-
териалов, то становится ясным, что употребление уменьшенных мо-
делей встречается с затруднениями, которые невозможно избежать
вполне. Предыдущего достаточно, чтобы понять, с какими предосто-
рожностями нужно обставлять опыты в уменьшенных масштабах,
чтобы из них можно было получить строгие практические результаты.
(Leaute, Cours de l'Ecole Polytechnique, 1901 — 1902.)
Пример II. Допустим в виде второго примера, что мы же-
лаем построить модель солнечной системы, подобную настоящей,
сохраняя для постоянной всемирного тяготения / такое же значение.
fmm1
Взаимное притяжение двух частиц равно -—§—. Если бы массы стали
в {л раз меньше, а расстояние в X раз меньше, то притяжение стало
бы меньше в ср раз. Тогда мы имели бы ср = р-. так как т и т'
надо было бы умножить на |х, а г — на X. Но так как, вообще,
ср = ^, то мы получили бы т2 = —.
Если же предположить, что плотности остались прежними, т. е.
что Солнце и планеты, будучи уменьшены в X раз, сохранили свою
плотность, то мы нашли бы, что [а = Х3. Отсюда t2=l, т. е. время
не изменилось бы ни для Солнца, ни для планет.
ИМЕННОЙ УКАЗАТЕЛЬ
Адамар 181, 292, 323 375
Альфен 160, 174, 186, 201, 202
Ампер 77
Андрад 249
Аншютц 344
Аппель 25, 28, 41, 124, 126, 186, 207,
210, 222, 232, 274, 327, 332, 341, 344,
360, 361, 363, 383, 388, 430
Астор 206
Атвуд 91
Бёген 120, 344, 461
Бёклен 91, 127
Бельтрами 394
Берже 249
Бернулли Д. 35, 43
Бернулли И. 43
Бертран 420, 480
Бет 304
Бине 23
Болл 52
Больцман 424
Бонне 78
Брассин 25
Брикар 227
Брилль 160
Врио 158
Брун 407
Брунс 53
Буке 158
Буль 430
Бур 168, 257, 258, 260, 472, 476
Бурле 244, 248
Буссинеск 77, 248
Вассмут 425
Вернь 367, 383, 420
Викер 306
Вольтерра 207, 420
Воронец П. В. 233, 363
Вудворд 261
Гамель 120, 292
Гамильтон 364
Гаусс 222, 225, 342, 420
Гельмгольц 77
Герц 267, 424
Гессе 25
Гесс 165, 171
Гиббс 424
Гири 106, 126
Гохман 420
Гринхилл 128, 130, 150, 171, 174, 186,
204, 205, 206
Грюэ 194
Гупийер де ла 15
Гурса 141, 375, 377, 381, 411, 420, 428
Гюйгенс 15, 43, 88
Гюйу 41, 258, 259
Даламбер 136, 262
Даниэль 126
Дарбу 25, 141, 169, 171, 172, 174, 186,
201, 202, 204, 388, 395, 411, 428, 462
Дарси 35
Д'Арсонваль 249
Де Дондер 420, 430
Делл Акуа 430
Делоне 32, 36
Депейру 169, 186, 201
Депре 25, 41, 78
Де Сен-Жермен 41, 78, 100, 127,
186, 200, 202, 241, 260, 335, 363
Де Спарр 120, 165, 254, 257
Джебиа 201, 202
Джоуль 77
Дорна 80
Достор 27
Драш 207
Дубошин Г. Н. 420
Дюэм 77
Жерва 215
Жильбер 238, 243, 249, 257, 260, 312,
359
Жуковский Н. Е. 25
Журден 388
Зоммерфельд 139, 186, 194
Ирн 77
ИМЕННОЙ УКАЗАТЕЛЬ
483
Камерлинг Оннес 249
Каннуэл 249
Карвалло 210, 216, 248, 323
Кардан 183
Карно 15, 439
Картан 411
Катер 88
Кёниг 56, 139, 172, 173, 397, 411, 419
Кёттер 188
Клебш 25, 27, 408
Клейн Ф. 120, 139, 185, 186, 194
Кобб 408
Ковалевская С. В. 137, 175, 186, 407
Ковалевский Н. 188
Колосов Г. В. 188
Кориолис 210
Кортевег 210, 222, 226, 227, 323
Котельников 42
Коттон Э. 257
Коши О. 27, 78
Курно 21
Кэ 257
Лагранж 136, 175, 202, 277, 289, 420
Лакур 139, 186
Лаплас 59, 136
Леви 25, 41, 72, 77, 397
Лежандр 376
Лежен-Дирихле 289
Лейбниц 43
Лекорню 41, 120, 126, 357
Леотэ 475, 481
Ли 430
Лиувилль 136, 374, 429
Лоттнер 186, 257
Люка 27
Ляме 137
Ляпунов А. М. 292, 309
Майер 117, 141, 395, 396, 424, 457
Мак Куллаг 201
Маклорен 292
Максвелл 77
Мангейм 100, 130
Марко лонго 188
Мах 424
Мещерский И. В. 80
Мизес 120
Миллер 51
Мопертюи 421
Морера 430
Нейман 210, 323
Нётер 341
Нивен 457
Ньютон И. 31, 248, 440, 480
Паде 165
Падова 206, 360
Пенлеве 53, 107, 117, 120, 229 230
231, 289, 292
Пеннакьетти 42
Перрен 77
Перрон О. 206
Пикар Э. 41
Пионшон 480
Понселе 471
Прандтль 120
Пуанкаре 53, 199, 410, 419
Пуансо 20, 60, 78, 136, 150, 160, 165,
168, 172, 175, 186, 249
Пуассон 137, 175, 187, 202, 210, 364
Пфафф 411
Пфейффер 120
Пюизё 49, 189, 210, 215
Раус 39, 127, 133, 210, 232, 233, 242
248, 309, 327, 457
Резаль 26, 98, 189, 199, 243, 257, 260
Рейх 248
Рёло 78
Риккати 141
Робен 456
Родриг О. 137
Рудцкий 254
Руссо 461
Сиаччи 160, 201, 202
Силла 292
Сильвестр 174
Сир 249
Скаутен 21
Слессер 189, 210
Сомов О. И. 157, 160
Сперри 344
Стеклов В. А. 408
Суслов Г. К. 188
Тиссо 206
Томсон 77, 96, 216
Тэт 77, 96
Уатт 238, 476
Ферре 210, 330
Филлипс 133
Фиркандт 323, 327
Флёри 100
Фли 206
Флокс 201
Френель 25
Фреше 420
Фуко 248, 256, 319
Фуре 78
484
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Хассон 188
Хаффнер 25
Хёльдер 425
Хорн 304
Чаплыгин С. А. 323
Челини 160
Четаев Н. Г. 292
Шаль 15
Шевиллье 257
Шеффлер 424
Шлик 346
Шома 120
Штауде 375
Штейхен 206
Штеккель 188, 375, 376
Штёрмер 430
Штуди 227
Эйлер Л. 35, 136, 145, 175
Эллиот 429
Эна 233
Эрмит 137, 160
Якоби 78, 80, 137, 157, 185, 186, 202,
364, 383, 419, 424
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Аномалия эксцентрическая 129
Атвуда машина 91, 23
Барогироскоп 249, 320
Бине задача 23
Бруна задача 407
Буля теорема 430
Велосипед 244
Вес 250
Весы гироскопические 183
Винт 53
Волчок 181, 204, 214, 369
— спящий 184
Ворот 91, 115
Вращение Земли 248, 315
— мгновенное 139
— твердого тела 81
— тел вращения 191
Гамильтона принцип 364, 386, 395, 420
Гаусса принцип наименьшего при-
нуждения 342, 364, 420
Геодезическая линия 392
Геометрия масс 12
Герполодиограф Дарбу и Кёнигса 172
Герполодия 162, 165, 168, 199, 201, 202
Гироскоп 249
— Жерва 215
— Фуко 257
Гюйгенса теорема 88
Даламбера принцип 136, 262, 345
Дарбу и Кенигса герполодиограф 172
— преобразование 428
Движение болта в неподвижной
гайке 51
— «вечное» 464
— относительное 54, 234
— переносное 41
Движение планет 210, 239
— системы 29
— таутохронное 79, 132
— твердого тела вокруг неподвижной
оси 81, 453
точки 135, 174, 453
— параллельно плоскости 93
свободного 208
— — —, соприкасающегося с гори-
зонтальной плоскостью 210
Девиация 250
Действие 389
Деформация 437
Джебиа теорема 201, 202
Динама 52
Динамика аналитическая 277
— твердого тела 81
Жерва гироскоп 215
Жильбера барогироскоп 320
— метод 312
Задача Бине 23
— Бруна 407
— Майера 396
— трех тел 53
Закон равенства действия и противо-
действия 29
— сохранения энергии 70
Импульс силы 432
Инвариант интегральный (Пуанкаре)
397, 409, 416
Инвариантность множителя 400
Инструмент рабочий 463
Интеграл энергии 175, 366, 383, 397
— Пенлеве 288, 318
— первый уравнений движения 148,
378
— площадей 175
— энергии 284
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
485
Кардана подвес 183
Карно теорема 439, 448
Катера маятник 88
Каток 123
Качен* 121, 232
Кёнига теорема 56, 129, 218, 339
Кёнигса теорема 410
Ковалевской случай 175, 186
Колебания голономной системы 289
— малые, вызванные периодической
возмущающей силой 304
— струны 306
— упругой пластинки 74
— четвертичные 96
Колесо маховое 84, 463, 470
Количество движения потерянное 448
Компас гироскопический Фуко 319
— Сперри 344
Координаты голономной системы 267
— нормальные 299
Коэффициент неравномерности 468
— полезного действия машины 467
— трения 106, 121
Кривошип 473
Лагранжа и Пуассона случай 175
— множитель 269, 347
— уравнения 278, 323, 387, 420, 457
Лапласа плоскость неизменяемая 59
Лежандра преобразование 376
Лежен-Дирихле теорема 289
Линия узлов 138
Лиувилля теорема 374
Ляме уравнение 137
Майера задача 396
Мак Куллага теорема 201
Масса 15
Маховик 84, 463, 470
Машина 463
— Атвуда 91, 133
— одностороннего действия 472
—, ход 466
—, часть вращающаяся (качающаяся)
465
Маятник баллистический 445, 451, 454
— изохронный Филлипса 133
— Катера 88
— конический 206, 257
— математический 66, 74, 87, 319, 357
— с двумя концами 126
— синхронный 87, 127
— сферический 174, 176, 185, 205, 254
— физический 25, 86, 127, 321
— Фуко 248, 254
— эллиптический 100, 132, 133
Метод Жильбера 312
Метроном 26
Механизм передаточный 463
—, содержащий сервосвязи 345
Множитель Лагранжа 269, 347
— последний 403
— Якоби 397, 419
Модель 476
Момент главный 58, 142, 190
— инерции 15
центробежный 16
— кинетический 37, 55
— количества движения 54, 141
Наложение малых колебаний 293, 303
Натяжение (нити) 50, 134, 250
Однородность формул 45
Ортогональность 394
Ось вращения естественная 84
постоянная 84
— инерции главная 21, 84, 167, 192,
199, 275, 443
— качания 88
— подвеса 86
Отдача огнестрельного оружия 33
Отношение подобия 477
Параметры Родрига 137
Пенлеве интеграл 288, 318
Переменные главные 299, 304
Перемещение возможное 264
Пластинка упругая 74
Плоскость инерции главная 21
— колеса 245
— максимума площадей 37, 59
— неизменяемая Лапласа 59
— средняя 245
Поверхность волновая Френеля 25
Поглощение лучей избирательное 306
Подвес Кардана 183
Подобие 463, 476
Подшипник 114
Полодия 162, 163
Полюс 169
Понселе формула 471
Постоянная энергии 45
Преобразование Дарбу 428
— изогональное 427
— Лежандра 376
— Пуассона и Гамильтона 364
Приемник 463
Принцип возможных перемещений 46
— Гамильтона 364, 386, 395, 420
— Даламбера 136, 262, 345
— наименьшего действия 364, 386, 420
принуждения (Гаусса) 342, 364,
420
486
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Притяжение 15
Притяжение, пропорциональное рас-
стоянию 32
Произведение инерции 16
Пуанкаре инвариант интегральный 397
Пуассона скобки 379 .
— теорема 364, 378, 413, 430
— тождество 380
Пуассона и Гамильтона преобразо-
вание 364
Работа внешних сил 63
— пассивная 463
— полезная 463
— сопротивления 463
Равновесие 236, 241
Равнодействующая кинетическая 37
Радиус инерции 16
Разрывность в уравнениях движения
107
Реакция неподвижной точки 145
— нормальная 105
— оси 82, 89
— связей 46, 263
второго рода (обобщенная) 346
первого рода 346
Регулятор 463, 474
— с лопатками 115
— Уатта 238, 476
Робена теорема 456
Родрига параметры 137
— формулы 138
Самоторможение 116
Связь без трения 263
—, зависящая (не зависящая) от вре-
мени 268, 283, 366, 372
— идеальная 47
— полная 48, 81, 292, 453
— сохраняющаяся (не сохраняю-
щаяся) 450
Сервосвязь 344, 346
Сила взаимодействия 43
— внешняя 29
— внутренняя 29
— живая (полная) 43
— задаваемая 46
— инерции 262
— мгновенная 431
— центробежная (переносная сила
инерции) 235
сложная (кориолисова сила
инерции) 235
Сильвестра теорема 174
Система голономная (неголономная)
267, 278, 322, 342, 461
— изменяемая тяжелая 60
Система консервативная 68
—, содержащая сервосвязи 344
— сравнения 234
— таутохронная 360
Скобки Пуассона 379
Скорость абсолютная 146
— потерянная 448
— режимная 463
Случай Ковалевской 175, 186
— Лагранжа и Пуассона 175
— Эйлера и Пуансо 175
Сопротивление (среды) 76, 105, 189,
198
Сохранение энергии 70
Сперри компас 344
Стабилизатор Шли к а 346
Степень свободы 266, 269
Стержень тяжелый 60, 130, 356
Стойка эквилибристическая 215
Тело абсолютно упругое (неупругое)
438, 439
— твердое свободное 208, 447
Теорема Буля 430
— Гюйгенса 88
—- движения центра тяжести 31
— Джебиа 201, 202
— Карно 439, 448
— Кёнига 56, 77, 129, 218, 339, 410
— кинетических моментов 34
— кинетической энергии 43, 77, 81,
241, 273
— количества движения 30
— Лежен-Дирихле 289
—¦ Лиувилля 374
— Мак Куллага 201
— моментов количеств движения 29,
34, 42, 82, 94, 241, 272
— площадей 34
— проекций 29, 42
— Пуассона 364, 378, 413, 430
— Робена 456
— Сильвестра 174
— Шевиллье 257
— Штеккеля 375
— Якоби 364
Тождество Пуассона 380
Точка подвеса 127
•— центральная 27
Траектория 390
Трение 76, 189, 194
-г~ верчения 105, 126
— качения 120, 222
— скольжения 105, 273
— цапф в подшипниках 114
Уатта регулятор 238, 476
Угол нутации 138
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
487
Угол прецессии 138
— собственного вращения 138
— трения 115
— Эйлера 137, 208
Удар 431
— прямой 437, 451, 460
— связей 450
Уравнение динамики общее 264
— Ляме 137
— теории удара общее 448
Уравнения в вариациях 410 .
— движения универсальные 29, 53
— канонические 364, 405
— Лагранжа 278, 323, 387, 420, 457
— относительного движения 235
— связей голономной системы 268
— Эйлера 145, 282
Ускорение добавочное 234
Устойчивость вращения вокруг глав-
ных осей 167, 199
— равновесия 261, 289
Филлипса маятник изохронный 133
Формула Понселе 471
— Родрига 138
Френеля поверхность волновая 25
Фуко гироскоп 257
— компас гироскопический 319
— маятник 248, 254
Функции эллиптические 150, 185
— Якоби 185
Функция силовая 395
Ход машины 466
Ходьба 32
Цапфа 114
Центр тяжести 15
— удара 442
Цепь тяжелая 47, 79, 265
Цикл машины 467
Часы стенные (с гирями) 75
Число степенной свободы 266
Шар бильярдный 219
Шевкллье теорема 257
Шероховатость абсолютная 97
Шлика стабилизатор 346
Штеккеля теорема 375
Эйлера и Пуансо случай 175
— угол 137, 208
— уравнения 145, 282
Эквивалент теплоты механический 77
Эллипсоид гирационный 202
— инерции 20, 135, 156, 200
центральный 21
Энергия 68
— кинетическая 43, 54, 81, 141, 209,
236, 277, 386, 468
• потерянных скоростей 453
— полная 70
— потенциальная 69
— скоростей 277
— ускорений 277, 335, 361, 363
Якоби множитель 397, 419
— теорема 364
— функции 185