/












































































































































































































































































Текст
ПРОБЛЕМЫ ИСКУССТВЕННОГО ИНТЕЛЛЕКТА
Д.А. ПОСПЕЛОВ
СИТУАЦИОННОЕ
УПРАВЛЕНИЕ
ТЕОРИЯ И ПРАКТИКА
Алтайская j
плчв €хн>ч?с*ий
’ч.-тч- : г :
М* • - •!!!•• упОМИ
-> ОI сЕ» A i
МОСКВА «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
1986
ББК 32.81
П 62
УДК 519.71
Поспелов Д. А. Ситуационное управление: теория и практика.— М.:
Наука.— Гл. ред. физ.-мат. лит., 1986.— 288 с.
Ситуационное управление'—метод управления сложными техническими
и организационными системами, основанный на идеях теории искусственного
интеллекта: представление знаний об объекте управления и способах управле-
ния им на уровне логико-лингвистических моделей, использование обучения и
обобщения в качестве основных процедур при построении процедур управле-
ния по текущим ситуациям, использование дедуктивных систем для построения
многошаговых решений. Излагается методология ситуационного управления,
его теоретические основы и приводятся примеры его конкретных применений.
Для специалистов в области теории управления и систем искусственного
интеллекта.
Табл. 42. Ил. 97. Библиогр. 186 назв.
Рецензент
кандидат физико-математических наук В. Л. Стефанюк
1504000000—033
П 053 (02)-86 150'86
''С) Издательства «Наука »
Главная редакция
физико-матем атическо/’t
литературы, 1 986
ОГЛАВЛЕНИЕ
Предисловие......................................................... 3-
Глава 1. Принципы ситуационного управления........................... 9
§1.1. Традиционная схема управления............................... 9
§ 1.2. Нетрадиционные объекты управления......................... 11
§ 1.3. Психологические предпосылки ............................... 17
§1.4. В чем состоит ситуационное управление? ................... 25
§ 1.5. Семиотические модели *..................................... 32
§ 1.6. Данные и знания......................................... 39
§ 1.7. План дальнейшего изложения................................. 42
Глава 2. Языки для описания объекта и ситуаций...................... 43
§2.1. Вступительные замечания.................................... 43
§ 2.2. Роли и отношения........................................... 45
§ 2.3. Естественный язык и теория управления..................... 46
§ 2.4. Язык ситуационного управления (ЯСУ)....................... 55
§2.5. Формирование лексики ЯСУ**................................. 57
§ 2.6. Формальная модель синтаксиса ЯСУ *........................ 61
§ 2.7. Дискретные ситуационные сети (ДСС)........................ 63
§ 2.8. Другие языки описания ситуаций *.......................... 67
§2.9. Языки представления знаний**.............................. 71
§2.10. Переход от текстов на естественном языке к внутреннему пред-
ставлению** .................................................... 83
§2.11. Формализация качественных характеристик*................. 87
Глава 3. Пополнение описаний ситуаций............................... 96
§3.1 . Постановка задачи........................................ 96
§ 3.2. Сценарии............................................... 99
§3.3 . Сценарии и фреймы**..................................... 102
§ 3.4. Псевдофизические логики *............................. 106
§3.5 . Временная логика**..................................... 111
§3.6 . Пространственная логика**............................... 125
§ 3.7. Каузальная логика *................................... 136
§3.8 . Неполнота и «абсурдность» знаний....................... 156
Глава 4. Обобщение и классификация ситуаций........................ 159
§4.1 . Суть проблемы.......................................... 159
§4.2 . Обобщение понятий и классификация у человека.......... 162
§4.3 . Обобщение по признакам *.............................. 167
§4.4 . Обобщение по структурам *............................. 182
§ 4.5. «Слоеный пирог»....................................... 203
§4.6 . Некоторые сведения о классифицирующих системах** . . . 206
§4.7 . Дополнительные замечания.............................. 212
1*
4 ОГЛАВЛЕНИЕ
Глава 5. Формирование решений по управлению....................... 216
§5.1. Цели, ситуации и планы................................ 216
§ 5.2. Стратегии планирования................................ 220
§5.3. Использование метода резолюции при планировании ** ... 227
§ 5.4. Функциональные модели для планирования................ 234
§ 5.5. Сценарии и логики действий *.......................... 238
§ 5.6. Экстраполяция решений ................................ 243
§ 5.7. Особенности рассуждений у человека.................... 249
Заключительные замечания.......................................... 252
Приложение. Исторический очерк развития ситуационного управления 254
Комментарии....................................................... 259
Список литературы ................................................ 270
Именной указатель................................................. 279
’ Предметный указатель............................................ 280
ПРЕДИСЛОВИЕ
Когда я задумал написать эту книгу и обдумывал способ, как
наилучшим образом это сделать, мне пришло в голову воспоми-
нание о Боробудуре.
Боробудур — знаменитый храмовый буддийский комплекс, рас-
положенный в центре Явы, в широкой долине, окруженной горами,
часть из которых — действующие вулканы. Когда путник подхо-
дит к Боробудуру, он видит перед собой огромное сооружение,
поднимающееся вверх террасами-уступами. Каждая такая ступень
снаружи сплошь покрыта каменными рельефами, там и сям в пе-
щерах-углублениях сидят будды и бодисатвы. Многие километры
каменной книги, в которой причудливо переплетаются мифологи-
ческие и сказочные сюжеты, сцены из жизни Будды и бодисатв.
Поднимаясь вверх по галереям, опоясывающим Боробудур, пут-
ник постепенно теряет ощущение реальности среди тысяч скульп-
тур и каменных рельефов. Но наступает момент, и он выходит на
очередной уступ — каменную площадку, с которой открывается
удивительный вид на долину и горы. Каменный хаос фантомов
остался внизу. А здесь, наверху, только природа в своей перво-
зданной красе и величии. Но эта терраса еще не последняя. Под-
нимаясь все выше и выше, путник достигает высшей точки Бо-
робудура, где воздвигнута гигантская ступа — непременный ат-
рибут буддийского сооружения. И отсюда уже не видно тех
нижних ярусов, в которых застыла каменная летопись реального
и фантастического миров.
Двигаясь так, трудно уловить общую идею Боробудура, его
скрытый смысл, воплощенный неизвестными строителями в VIII
или IX веках в камне. Но XX век дал новую возможность для
проникновения в тайну этого древнего сооружения. С вертолета
его можно увидеть сразу, в единстве всех его ярусов, интегрально.
И тогда возникает четкий план сооружения. Эта громоздкая пи-
рамида в своем стремлении ввысь отражает три мира: мир чув-
ственных образов, мир идей-представлений и мир абстрактных
идей. То, что путник, движущийся вверх по галереям храма, дол-
жен был вычленить из пестрой мозаики своих впечатлений, вид
с воздуха выявляет сразу.
Описывая некоторую область науки, можно также идти двумя
путями. Можно вести путника-читателя по длинным галереям,
6
ПРЕДИСЛОВИЕ
наполненным отдельными фактами, составляющими все вместе
нечто целое, объединенное общими идеями и принципами. А можно
описать эту область «с высоты птичьего полета», сразу сформули-
ровав эти основные идеи и принципы, отбросив все детали, даже
если каждая из них удивительна и интересна. Но можно попытаться
соединить оба пути: аналитический и синтетический.
В настоящей книге реализован именно этот замысел. Насколько
хорошо — судить не мне, а читателю. Во всяком случае, книга
состоит как бы из четырех уровней.
На первом дается концептуальный взгляд на те вопросы, ко-
торые составляют суть ситуационного управления. Для чтения
этих параграфов не требуется никаких знаний более низкого уров-
ня. И весь первый уровень, как мне представляется, дает читателю,
интересующемуся лишь сутью ситуационного управления, его
идеями и возможностями практического применения, достаточно
полную картину.
На втором уровне (относящиеся к нему параграфы книги по-
мечены звездочкой) излагаются методы и процедуры, использу-
емые в ситуационном управлении. Эти методы могут оказаться
полезными не только для тех, кто захочет применять метод ситуа-
ционного управления. Они могут пригодиться и в иных случаях.
Поэтому второй уровень рассчитан на достаточно широкие круги
специалистов, интересующихся бурно развивающимися методами
решения задач, опирающимися на логико-лингвистические модели.
Для понимания параграфов, входящих в этот уровень, требуется
прочитать и разделы, образующие верхний уровень.
Третий уровень (его параграфы отмечены двумя звездочками)
рассчитан на специалистов, которые захотят практически приме-
нить метод ситуационного управления для решения собственных
задач. В нем сосредоточены методические и методологические ре-
комендации и советы по построению подобных систем. До чтения
параграфов третьего уровня желательно прочитать и те, которые
относятся к первым двум. Но, вообще говоря, в большинстве слу-
чаев можно обойтись только теми сведениями, которые имеются
на первом уровне.
Четвертый уровень — вспомогательный. Поэтому он выделен
в тексте книги петитом. В его разделах комментируются некоторые
положения и методы, описанные на предшествующих уровнях,
и дается обзор литературы. В текстах основных трех уровней нет
прямых ссылок на литературу. Они отвлекают читателя и засоряют
текст. Поэтому на четвертом уровне есть полный обзор использо-
ванных при написании книги источников и тех работ, которые
близко примыкают по своим идеям к тому, что говорится в книге.
Четвертый уровень завершается историческим очерком развития
ситуационного управления.
И еще две особенности книги. В ней довольно много всяких
историй, литературных цитат и анекдотов, вкрапленных в текст,
ПРЕДИСЛОВИЕ
7
особенно на первом уровне. Я придаю им важное значение, хотя
читатели-пуристы могут посчитать, что они неуместны в научной
монографии. Введены они для того, чтобы вызвать у читателя
нужные мне ассоциации. И это все, что я могу сказать здесь в свое
оправдание.
Второе — это примеры. В них нередко содержатся утверждения,
важные для понимания того или иного положения данного уровня,
которое они иллюстрируют. Поэтому их желательно не опускать
при чтении.
Теперь надо сказать несколько слов о том, почему эта книга
выходит в серии книг «Проблемы искусственного интеллекта», чья
эмблема украшает обложку книги. Идеи ситуационного управле-
ния, как узнает об этом читатель из исторического очерка, помещен-
ного в Приложении, возникли куда раньше того момента, когда на
горизонте исследователей появилась новая наука — теория искусст-
венного интеллекта. Но логика рождения новых научных направле-
ний такова, что они никогда не зарождаются на пустом месте, не
возникают, как феникс, из ничего. Новое зреет и зарождается в нед-
рах «старых», признанных наук. Только тогда, когда это созревание
достигнет определенного уровня, происходит рождение новой науки
или новой научной парадигмы.
Искусственный интеллект, этот кумир сегодняшнего дня, конеч-
но, не был исключением. То, что потом вошло в него, возникало в
недрах кибернетики и лингвистики, психологии и программирова-
ния. Если очень сжато (и поэтому неточно с позиций пуриста) оп-
ределить, что сегодня понимают под теорией искусственного интел-
лекта, то можно сказать, что это наука о знаниях, о том, как их до-
бывать, представлять в искусственных системах, перерабатывать
внутри системы и использовать для решения практических задач.
Другими словами, системы, изучаемые в рамках искусственного
интеллекта и создаваемые в русле этой науки, это системы, работа
которых опирается на знания, отражающие семантику и прагматику
того внешнего мира, в котором действуют интеллектуальные сис-
темы.
При таком понимании области исследований, относящихся к
искусственному интеллекту, работы в области ситуационного уп-
равления, без всякой натяжки, к ней принадлежат. Зародившись в
недрах теории управления большими системами, ситуационное
управление с самого начала было ориентировано на использование
знаний об объекте управления и способах управления им, которые
не могут быть строго формализованы, и на активный диалог с уп-
равленцем на языке, максимально приближенном к его профессио-
нальному языку. А это значит, что включение этой книги в серию
книг по искусственному интеллекту полностью оправдано.
Завершая предисловие, мне хотелось бы отметить, что основные
положения этой книги формировались и окончательно оформились
в течение многолетних контактов со всеми активными участниками
8 ПРЕДИСЛОВИЕ
того, что можно было бы назвать «ситуационным движением» (тер-
мин Г. П. Щедровицкого).
Я глубоко благодарен всем моим товарищам и коллегам по этому
«движению». Многочисленные конференции, симпозиумы, школы и
семинары по ситуационному управлению сплотили нас, позволили
выработать общую терминологию и сформулировать концептуаль-
ные модели, лежащие в основе метода ситуационного управления.
И вряд ли можно теперь точно определить, «кто первый сказал А»,
и я не хотел бы, чтобы из текста книги читатель мог бы предположить,
что ее автор придерживается известного правила: «Автор не тот, кто
первый сказал А, а тот — кто первый сказал Я».
ГЛАВА 1
ПРИНЦИПЫ СИТУАЦИОННОГО УПРАВЛЕНИЯ
У народов обыкновенно много слов для
обозначения того, что их больше всего
интересует.
Э. Ренан
§1.1. Традиционная схема управления
Традиционная теория автоматического управления техниче-
скими объектами, выросшая на существовавшей ранее теории
автоматического регулирования, имеет дело с такими объектами,
для которых процедура управления в самом общем виде представ-
ляется так, как показано на рис. 1.1.
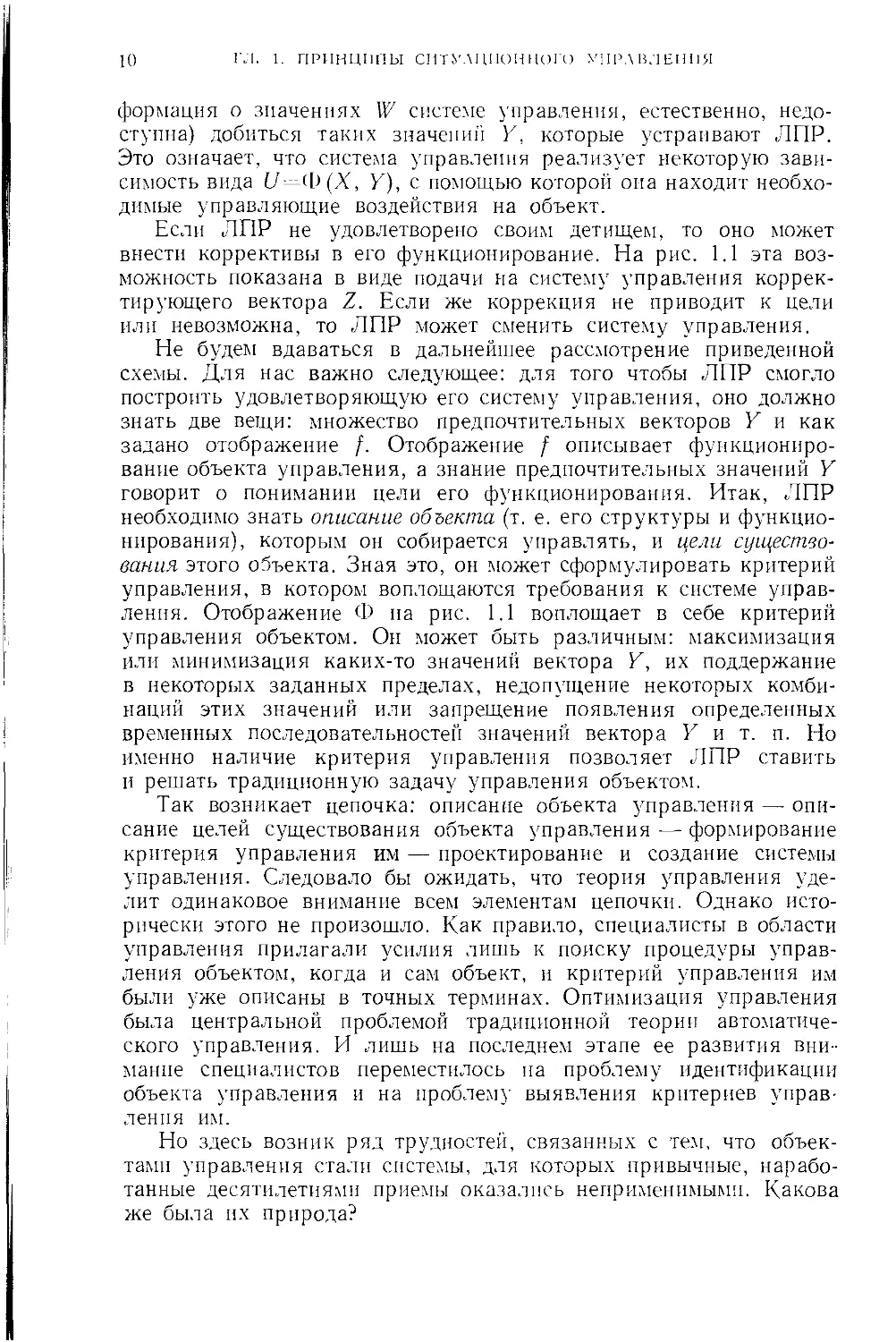
На управляемый объект воздействуют (п+г) входов, причем
значение входов xt можно оценить в каждый момент времени, а
для входов Wj такая воз-
можность отсутствует. Ча-
ще всего это происходит
из-за отсутствия необходи-
мых датчиков. Но бывает,
что измерение входов Wj
физически невозможно или
слишком дорого обходится.
В идеальном случае вхо-
дов Wj нет. Объект имеет
т выходов. Предполагае-
тся, что между входным
вектором <Х, 1Г> и выход-
ным Yесть некоторая связь
F=/(X, IP). Эта связь мо-
Рис. 1.1
жет иметь самые разные характеры: она может быть функциональной,
статистической, в виде неоднозначного отображения и т. п. Важно
лишь то, что изменения в X и W как-то сказываются на значениях
Y. Значения Y небезразличны некоторому лицу, которое мы в даль-
нейшем будем условно называть лицо, принимающее решение (ЛПР),
как принято в современной теории исследования операций. Для
ЛПР важно добиться получения определенных значений Y при
любых значениях X и W. На векторы X и W оно влиять не может.
Поэтому оно строит систему управления так, чтобы получить от
объекта интересующие его значения Y. Это делается с помощью
специальных управляющих воздействий щ, подаваемых от системы
управления на объект. Подобно векторам X и W, значения век-
тора воздействий U влияют на значения вектора Y. Другими
словами, вместо соотношения Y=f(X, W) возникает соотношение
Y=F(X, U, IP). Задача ЛПР — сделать систему управления та-
кой, чтобы при наличии информации о текущих значениях X (ин-
10
ГЛ. 1. ПРИНЦИПЫ СИТУАЦИОННОГО УПРАВЛЕНИЯ
формация о значениях W системе управления, естественно, недо-
ступна) добиться таких значении Y, которые устраивают ЛПР.
Это означает, что система управления реализует некоторую зави-
симость вида l/^Ф (X, У), с помощью которой она находит необхо-
димые управляющие воздействия на объект.
Если ЛПР не удовлетворено своим детищем, то оно может
внести коррективы в его функционирование. На рис. 1.1 эта воз-
можность показана в виде подачи на систему управления коррек-
тирующего вектора Z. Если же коррекция не приводит к цели
или невозможна, то ЛПР может сменить систему управления.
Не будем вдаваться в дальнейшее рассмотрение приведенной
схемы. Для нас важно следующее: для того чтобы ЛПР смогло
построить удовлетворяющую его систему управления, оно должно
знать две вещи: множество предпочтительных векторов Y и как
задано отображение f. Отображение f описывает функциониро-
вание объекта управления, а знание предпочтительных значений Y
говорит о понимании цели его функционирования. Итак, ЛПР
необходимо знать описание объекта (т. е. его структуры и функцио-
нирования), которым он собирается управлять, и цели существо-
вания этого объекта. Зная это, он может сформулировать критерий
управления, в котором воплощаются требования к системе управ-
ления. Отображение Ф па рис. 1.1 воплощает в себе критерий
управления объектом. Ои может быть различным: максимизация
или минимизация каких-то значений вектора Y, их поддержание
в некоторых заданных пределах, недопущение некоторых комби-
наций этих значений или запрещение появления определенных
временных последовательностей значений вектора Y и т. п. Но
именно наличие критерия управления позволяет ЛПР ставить
и решать традиционную задачу управления объектом.
Так возникает цепочка: описание объекта управления — опи-
сание целей существования объекта управления — формирование
критерия управления им — проектирование и создание системы
управления. Следовало бы ожидать, что теория управления уде-
лит одинаковое внимание всем элементам цепочки. Однако исто-
рически этого не произошло. Как правило, специалисты в области
управления прилагали усилия лишь к поиску процедуры управ-
ления объектом, когда и сам объект, и критерий управления им
были уже описаны в точных терминах. Оптимизация управления
была центральной проблемой традиционной теории автоматиче-
ского управления. И лишь на последнем этапе ее развития вни-
мание специалистов переместилось на проблему идентификации
объекта управления и на проблему выявления критериев управ-
ления им.
Но здесь возник ряд трудностей, связанных с тем, что объек-
тами управления стали системы, для которых привычные, нарабо-
танные десятилетиями приемы оказались неприменимыми. Какова
же была их природа?
§1.2. НЕТРАДИЦИОННЫЕ ОБЪЕКТЫ УПРАВЛЕНИЯ Ц
§ 1.2. Нетрадиционные объекты управления
Их называют по-разному: плохо определенные или слабострук-
турированные, организационные или обладающие «свободой воли».
Но независимо от названия эти новые объекты обладают рядом
неожиданных для традиционного управленца свойств, отличаю-
щих их от привычных объектов прошлого. Перечислим основные
их свойства.
1. Уникальность. Каждый объект обладает, такой структурой
и функционирует так, что система управления им должна стро-
иться с учетом всех его качеств и к нему нельзя применить какую-
либо-типовую стандартную процедуру управления. Если, напри-
мер, удалось спроектировать систему управления движением для
автомобиля ВАЗ 2103, то она пригодна для любого конкретного
автомобиля такой модели. Если же спроектирована система уп-
равления для министерства здравоохранения некоторой союзной
республики, то ее нельзя перенести без изменений для того же
министерства другой республики. При переносе надо учесть все
индивидуальные особенности нового объекта управления. Это
обстоятельство резко удорожает процедуру построения системы
управления, ибо фактически нужно создавать столько систем
управления, сколько объектов мы хотим автоматизировать.
2. Отсутствие формализуемой цели существования. Для старых,
привычных для теории автоматического управления объектов всегда
было ясно, зачем был создан тот объект, управление которым мы
строим. Как правило, управленцы имели дело с объектами искус-
ственного происхождения, созданными людьми для достижения
понятных им целей. Станок должен был производить определен-
ную обработку заготовок, самолет должен был перевозить по воз-
духу пассажиров и грузы. Но не для всех объектов (даже созданных
человеком) можно так же четко сформулировать цель их сущест-
вования. Сейчас, когда мы хотим управлять городами, отраслями
народного хозяйства, регионами, экосистемами, мы попадаем в
весьма затруднительное положение при попытке четко сформули-
ровать цель существования этих объектов. Даже созданные людьми,
они возникли не по чьему-то плану, для решения какой-то кон-
кретной задачи, а развились постепенно в силу определенных
социально-экономических и исторических причин. Каковы, на-
пример, цели существования сверхгородов? Или для чего возникла
экосистема Азово-Черноморского бассейна? На такие вопросы
практически невозможно ответить.
А это приводит к весьма большим сложностям в формировании
критерия управления. Ибо критерий управления в традиционных
системах управления был теснейшим образом связан с целью су-
ществования объекта. Критерий управления самолетом был ос-
нован на достижении им своей цели существования — перевозки
люден и грузов по воздуху, управления производством синтети-
12
ГЛ. 1. ПРИНЦИПЫ СИТУАЦИОННОГО УПРАВЛЕНИЯ
ческого каучука — на соображениях повышения качества про-
дукта. Именно поэтому в различных автоматизированных системах
управления, создаваемых для объектов нового класса, очень часто
можно наблюдать реализацию различных критериев управления.
3. Отсутствие оптимальности. Следствием того, о чем говори-
лось в предшествующих двух пунктах, является неправомочность
постановки для объектов новой природы классической задачи
оптимизации. Из-за отсутствия цели существования (в рамках
теории управления) для рассматриваемых объектов нельзя по-
строить объективный критерий управления. Критерий управления
становится субъективным, целиком зависящим от ЛИР.
Эту чрезвычайно важную для дальнейшего мысль можно про-
иллюстрировать следующим примером, стоящим, правда, несколько
в стороне от собственно задачи управления. Пусть с помощью
людей-экспертов мы хотим измерить размер какого-либо предмета.
Например, длину автомашины ВАЗ 2105. Каждый специалист
называет некоторое число, которое, по его мнению, означает длину
автомобиля. ЛПР (которое также может прикинуть длину авто-
мобиля) анализирует показания экспертов. Если находится экс-
перт, оценивающий длину автомобиля в 10 м или в 50 см, то ЛПР
вправе усомниться в его квалификации как эксперта. Отбросив
такие аномальные предложения, ЛПР может просуммировать
остальные числа и найти среднее арифметическое от полученного
результата. Такое усреднение как бы объективизирует резуль-
тат. Если экспертов было много и они обладали неплохим глазо-
мером, то результат экспертизы будет близок к истинной длине
автомобиля.
Отметим две особенности описанной нами процедуры. Во-пер-
вых, если экспертов уже много, то появление некоторого нового
эксперта не внесет особых изменений в результат, полученный
ЛПР. Другими словами, такая экспертиза обладает свойством
устойчивости. Во-вторых, можно проверить качество экспертизы,
взяв какое-либо измерительное приспособление, точность которого
удовлетворяет ЛПР, и провести измерение. Та или иная близость
данных измерения к результату, полученному с помощью экспер-
тов, будет характеризовать качество экспертизы. А это позволяет
ставить, например, задачу оптимизации формирования коллектива
экспертов по их количеству или каким-либо социальным или физио-
логическим особенностям.
Теперь рассмотрим пример другой экспертизы. Группа людей
заблудилась в пещере. После долгого блуждания они оказались
на площадке, с которой путь, приведший их на нее, разветвляется.
Влево и вправо уходят подземные коридоры. Требуется решить:
куда идти? Руководитель группы (ЛПР) устраивает опрос. Сто-
ронники движения по левому коридору высказывают свои сооб-
ражения, их противники — другие. Для ЛПР доводы тех и других
не кажутся слишком убедительными, и оно проводит простое
§ 1.2. НЕТРАДИЦИОННЫЕ ОБЪЕКТЫ УПРАВЛЕНИЯ
13
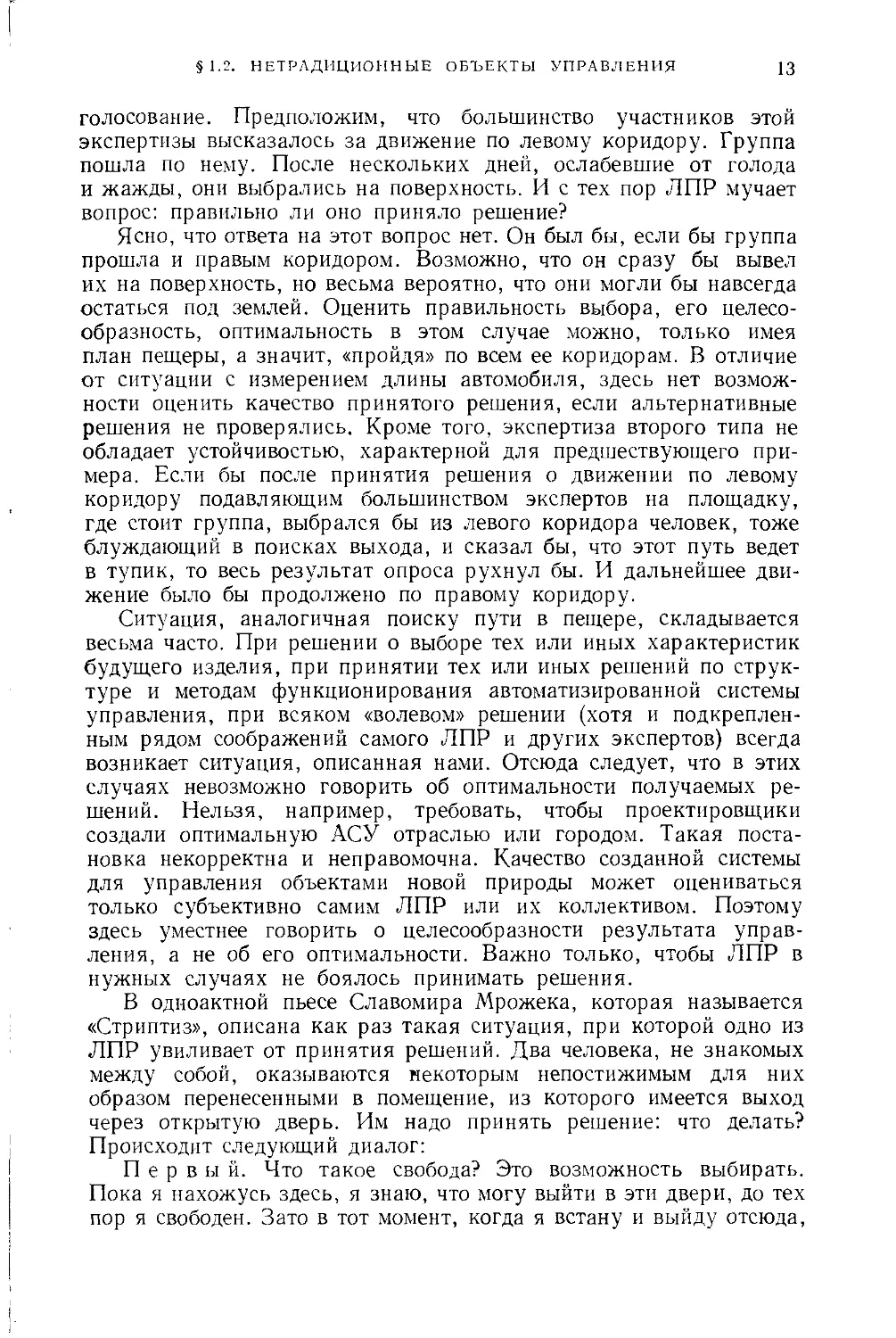
голосование. Предположим, что большинство участников этой
экспертизы высказалось за движение по левому коридору. Группа
пошла по нему. После нескольких дней, ослабевшие от голода
и жажды, они выбрались на поверхность. И с тех пор ЛПР мучает
вопрос: правильно ли оно приняло решение?
Ясно, что ответа на этот вопрос нет. Он был бы, если бы группа
прошла и правым коридором. Возможно, что он сразу бы вывел
их на поверхность, но весьма вероятно, что они могли бы навсегда
остаться под землей. Оценить правильность выбора, его целесо-
образность, оптимальность в этом случае можно, только имея
план пещеры, а значит, «пройдя» по всем ее коридорам. В отличие
от ситуации с измерением длины автомобиля, здесь нет возмож-
ности оценить качество принятого решения, если альтернативные
решения не проверялись. Кроме того, экспертиза второго типа не
обладает устойчивостью, характерной для предшествующего при-
мера. Если бы после принятия решения о движении по левому
коридору подавляющим большинством экспертов на площадку,
где стоит группа, выбрался бы из левого коридора человек, тоже
блуждающий в поисках выхода, и сказал бы, что этот путь ведет
в тупик, то весь результат опроса рухнул бы. И дальнейшее дви-
жение было бы продолжено по правому коридору.
Ситуация, аналогичная поиску пути в пещере, складывается
весьма часто. При решении о выборе тех или иных характеристик
будущего изделия, при принятии тех или иных решений по струк-
туре и методам функционирования автоматизированной системы
управления, при всяком «волевом» решении (хотя и подкреплен-
ным рядом соображений самого ЛПР и других экспертов) всегда
возникает ситуация, описанная нами. Отсюда следует, что в этих
случаях невозможно говорить об оптимальности получаемых ре-
шений. Нельзя, например, требовать, чтобы проектировщики
создали оптимальную АСУ отраслью или городом. Такая поста-
новка некорректна и неправомочна. Качество созданной системы
для управления объектами новой природы может оцениваться
только субъективно самим ЛПР или их коллективом. Поэтому
здесь уместнее говорить о целесообразности результата управ-
ления, а не об его оптимальности. Важно только, чтобы ЛПР в
нужных случаях не боялось принимать решения.
В одноактной пьесе Славомира Мрожека, которая называется
«Стриптиз», описана как раз такая ситуация, при которой одно из
ЛПР увиливает от принятия решений. Два человека, не знакомых
между собой, оказываются некоторым непостижимым для них
образом перенесенными в помещение, из которого имеется выход
через открытую дверь. Им надо принять решение: что делать?
Происходит следующий диалог:
Первый. Что такое свобода? Это возможность выбирать.
Пока я нахожусь здесь, я знаю, что могу выйти в эти двери, до тех
пор я свободен. Зато в тот момент, когда я встану и выйду отсюда,
14
ГЛ. 1. ПРИНЦИПЫ СИТУАЦИОННОГО УПРАВЛЕНИЯ
я тем самым произведу выбор, т. е. ограничу возможность моего
поведения и утрачу свободу. Я стану рабом своего ухода.
Второй. Но, оставаясь на месте и никуда не выходя, вы
тоже производите выбор. Вы избираете сидение и невыход.
Первый. Неправда. Я сижу, но я могу выйти. Выйдя, я
исключаю возможность сидения.
4. Динамичность. В каком-то смысле объекты, с которыми сей-
час сталкивается теория управления, подобны живым системам.
С течением времени изменяется их структура и функциониро-
вание. Объекты как бы эволюционируют во времени. На пред-
приятии строят новые цеха, возникают новые производства, меняет-
ся технология. Сеть ЭВМ растет, отдельные сети начинают сое-
диняться между собой, стремясь к общемировой сети обработки
данных. Меняется структура отрасли, города расширяют свои
границы, меняется их застройка, смещаются транспортные и люд-
ские потоки. И эта динамичность должна быть учтена в системах
управления подобными объектами. Они поневоле должны быть
адаптивными, готовыми к изменению своего функционирования.
5. Неполнота описания. Как правило, никакой коллектив экспер-
тов, знающих объект управления, не в состоянии сразу же обеспе-
чить информацию, которой бы заведомо хватило для создания си-
стемы управления объектом. Существует несколько причин, почему
это происходит. Описывая объект управления старого типа, уп-
равленец всегда знал о тех допущениях, которые он принял, строя
описание. Он мог предполагать, что передаточная функция объекта
имеет тот или иной вид, что запаздывание не играет в его функцио-
нировании большой роли, что влияние параметров Wj незначительно
и им можно пренебречь и т. п. И если созданная им система управ-
ления оказывалась не слишком хорошей, то он знал, от каких
допущений надо отказываться. Но при работе с объектами новой
природы эти допущения нельзя сформулировать столь ясно и
просто. Управленец в этом случае почти целиком полагается на
экспертов, знающих объект управления. И тот или иной уровень
допущений фактически предлагают они. Но, не будучи специали-
стами по системам управления, эксперты не могут оценить тот
уровень полноты описания, который нужен специалисту по уп-
равлению.
Ведь само описание, вычленение в нем тех или иных аспектов
и особенностей тесно связано с задачей управления. И это не всегда
может уловить человек, смотрящий на объект управления другими
глазами — глазами технолога. Проиллюстрирую свою мысль при-
мером разговора двух управленцев, двух превосходных летчиков
Антуана де Сент Экзюпери и его друга Гийоме. Гийоме объясняет
своему коллеге, как летать над Испанией из Франции в Африку:
«Странный то был урок географии! Гийоме не преподносил мне све-
дений об Испании, он дарил мне ее дружбу. Он не говорил о водных
бассейнах, о численности населения и поголовье скота. Он гово-
§ 1.2. НЕТРАДИЦИОННЫЕ ОБЪЕКТЫ УПРАВЛЕНИЯ
15
рил не о Гуадисе, но о трех апельсиновых деревьях, что растутна
краю поля неподалеку от Гуадиса. «Берегись, отметь их на карте...»
И с того часа эти три дерева занимали на моей карте больше места,
чем Сьерра-Невада. Он говорил не о Лорке, но о маленькой ферме
возле Лорки. О жизни этой фермы. О ее хозяине. И о хозяйке.
И эта чета, затерявшаяся на земных просторах за тысячу с лишним
километров от нас, безмерно вырастала в моих глазах. Их дом
стоял на горном склоне, их окна светили издалека, словно звезды,—
подобно смотрителям маяка эти двое всегда были готовы помочь
людям своим огнем... Так понемногу Испания на моей карте,
под лампой Гийоме, становилась какой-то сказочной страной.
Я отмечал крестиками посадочные площадки и опасные ловушки.
Отметил фермера на горе и ручеек на лугу. Старательно нанес
на карту пастушку с тридцатью баранами...» («Планета людей»).
Это образец того, как один профессионал описывает объект
другому профессионалу. Тут важно все: о чем говорится, с каким
уровнем детализации, на каком языке. При работе управленца
со сложным объектом самые большие сложности возникают при
контактах с технологами, знающими данный объект. Несходство
их взглядов на него иногда приводит к полному непониманию
друг друга, в результате чего возникает неполнота описания,
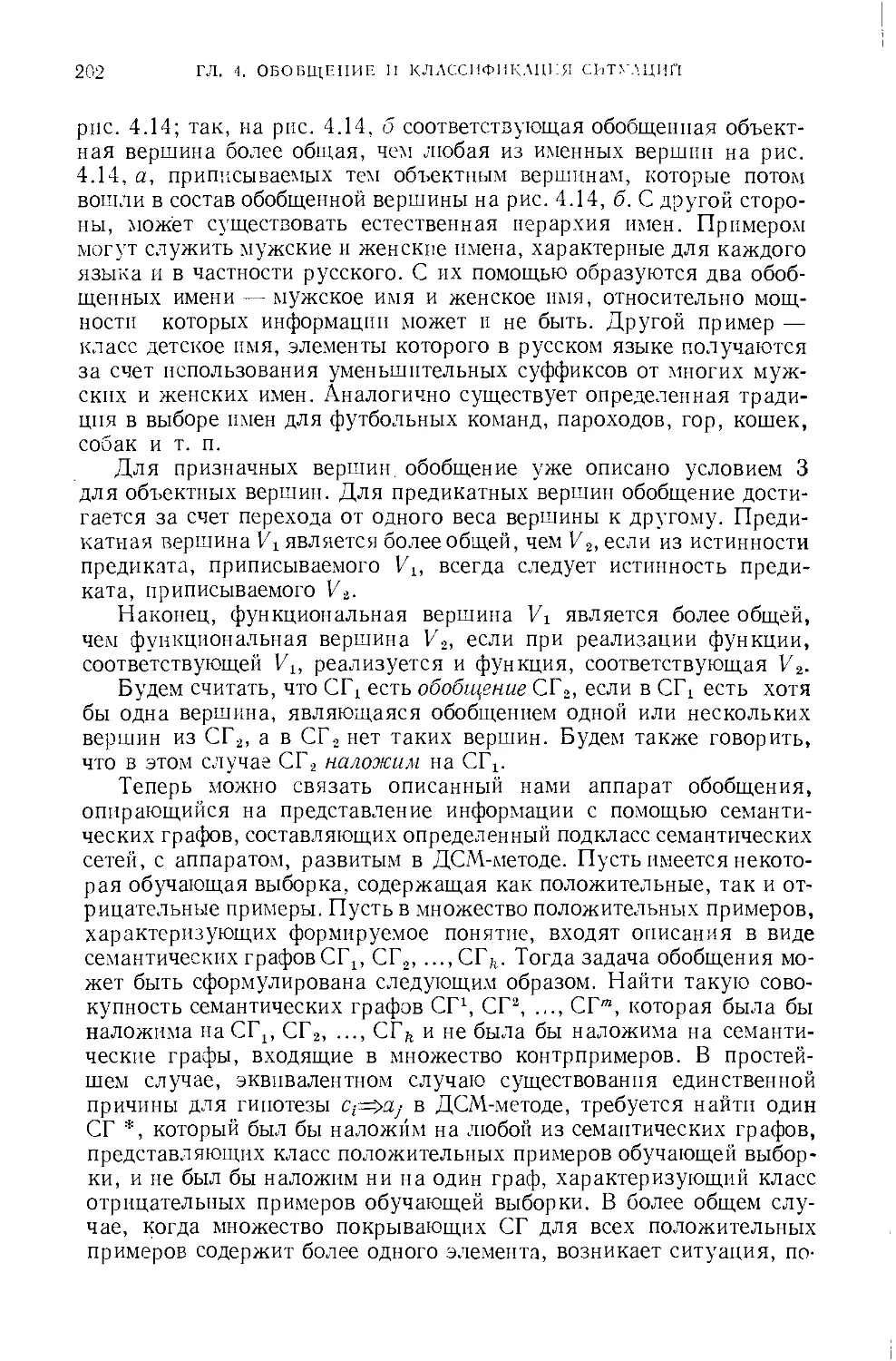
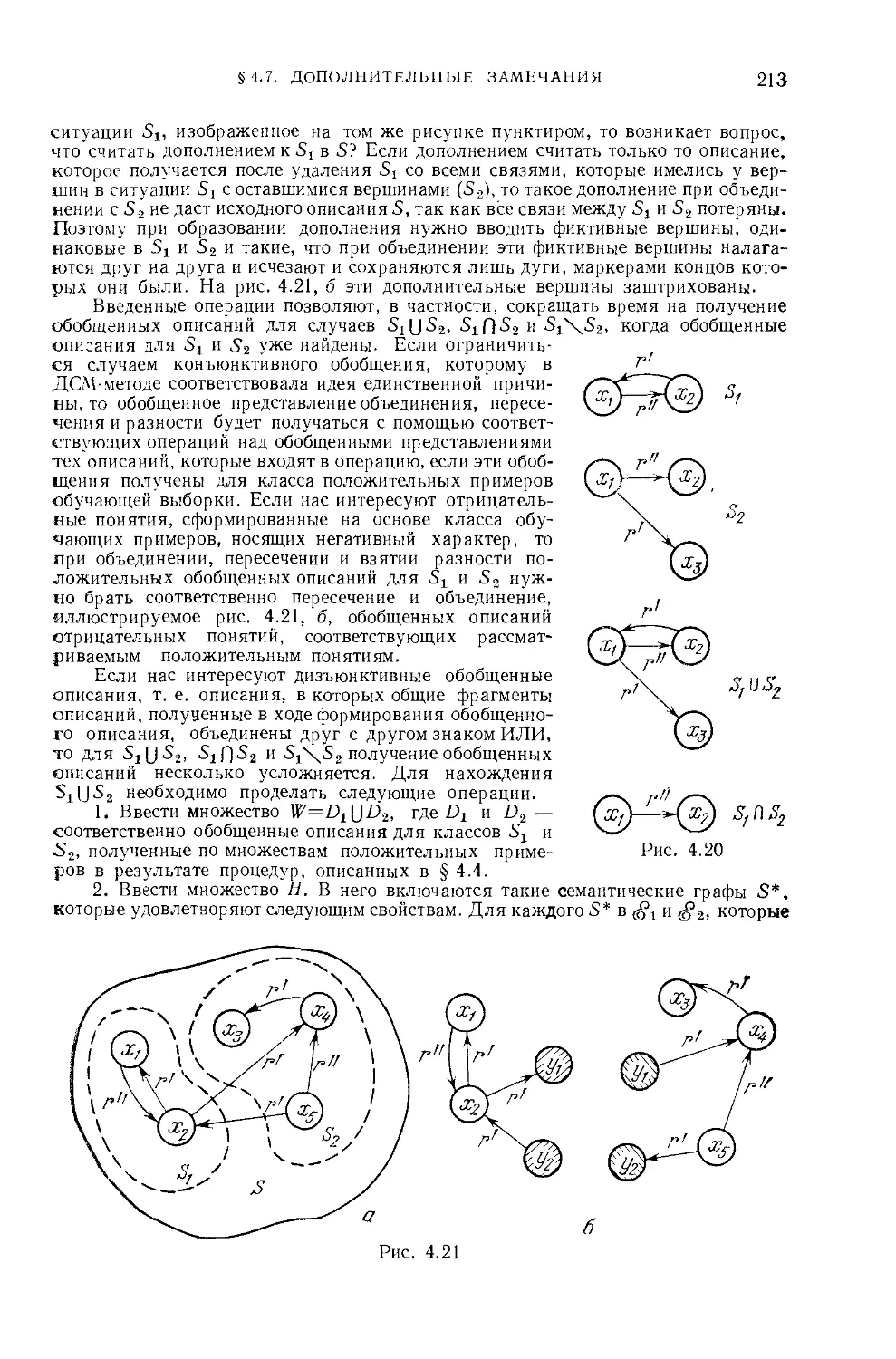
которым руководствуется проектировщик системы управления.
Другая немаловажная причина неполноты описания объекта —
незнание некоторых сторон функционирования его самим техно-
логом. Некоторые ситуации, никогда не встречавшиеся им ранее,
естественно, нельзя сообщить и проектировщику системы управ-
ления. Чаще всего это всевозможные аварийные ситуации. Для
иллюстрации возможных последствий аварий вспомним ката-
строфу с энергетической системой США, происшедшую несколько
десятилетий назад. Развал системы возник по вине системы управ-
ления. Автоматическое отключение линий и источников энергии
при перегрузках привело к тому, что значительная часть страны
лишилась электроэнергии, а это привело к огромным потерям.
Другим примером может служить система управления большой
ЭВМ, ее операционная система. Когда специалисты по ее проек-
тированию в шестидесятых годах создавали мультипрограммные
операционные системы с развитыми системами прерываний и при-
оритетов, то они вовсе не рассчитывали на ситуации, в которых
система управления блокировала бы сама себя из-за невозможности
выйти из прерываний. И в том, и в другом случае управленцев
подвела неполнота описания функционирования объекта и влияния
сигналов ui на это функционирование.
Третья причина неполноты описания — отсутствие у самого
технолога четкого понимания функционирования объекта. Выда-
вая управленцу большое количество информации, он тем не менее
не сообщает ему самой главной, по которой сам принимает реше-
ние о функционировании объекта. Делает он это не сознательно,
16
ГЛ. 1. ПРИНЦИПЫ СИТУАЦИОННОГО УПРАВЛЕНИЯ
ибо «самая главная информация» может учитываться им только
на уровне собственной интуиции.
Мне вспоминается следующий случай, свидетелем которого
я был. Всемирная организация здравоохранения (ВОЗ) распро-
странила в ряде стран истории болезни нескольких больных из
скандинавских стран. И попросила ведущих психиатров различных
стран дать заочный диагноз заболевания на основании историй
болезни. В СССР последние были размножены и разосланы зна-
чительному количеству специалистов. Через некоторое время они
собрались все вместе в Москве для обсуждения своих диагнозов.
Была составлена и вывешена для всеобщего обозрения сводная
таблица, в которой для всех больных были указаны диагнозы.
Это была удивительная таблица! Почти для каждого случая имелся
разброс диагноза от «практически здоров» до «заболевание X в
самой тяжелой форме». Авторы диагнозов выходили на трибуну
и обосновывали свою точку зрения. Самым интересным было то,
что, привлекая одни и те же данные из истории болезни, они при-
ходили к почти противоположным выводам. Например, из того,
что больной отказался входить в контакт с близкими и врачом,
в одном случае следовал вывод о стремлении к изоляции, некон-
тактное™, а в другом — о вполне адекватной данной ситуации
форме поведения. Споры фактически прекратились после выступ-
ления одной очень уважаемой пожилой специалистки в области
психиатрии. Она сказала, буквально, следующее: «Коллеги, о
чем мы спорим? Ведь мы все знаем, что как только к нам на прием
придет пациент, мы в первую же секунду определим — болен он
или нет. Только мы не можем сказать, как это у нас получается».
И все согласились с выступавшей.
И, наконец, еще одна причина, приводящая к неполноте опи-
сания сложных объектов. Эта причина состоит в том, что многие
особенности функционирования объекта, а иногда и его структуры
не могут быть описаны количественно. Они допускают лишь ка-
чественное, словесное описание. Переход от качественных опи-
саний к некоторым формальным представлениям должен произ-
водиться управленцем, который не всегда в состоянии решить
такую' сложную проблему.
6. Наличие свободы воли. Во многих объектах управления люди
являются элементами их структуры. Это так называемые органи-
зационные системы. В отличие от всех других элементов, образую-
щих объекты, люди функционируют в нем с учетом своих личных
интересов и целей. Их интересы и цели могут значительно отли-
чаться от того, что они должны делать с точки зрения ЛПР. Их
индивидуальное поведение практически невозможно учесть при
создании системы управления, и требуются специальные приемы
для нейтрализации их воздействия на функционирование объекта
управления. Иначе могут возникнуть ситуации вроде той, которая
описана в следующем анекдоте.
§ 1.3. ПСИХОЛОГИЧЕСКИЕ ПРЕДПОСЫЛКИ
17
Некто X, большой начальник, говорит подчиненным: «Я счи-
таю, что должность А должен занять генерал в отставке в возрасте
около 60 лет». Один из подчиненных радостно восклицает, что он
знает такого человека. Но X явно недоволен. «Идиот,— шепчет
на ухо выступившему его сосед,— он просто хочет посадить на
это место своего приятеля».
Существует еще несколько особенностей объектов нового типа,
с которыми теория управления начала сталкиваться с конца пя-
тидесятых годов нашего столетия. Но и сказанного, по-видимому,
вполне достаточно для того, чтобы оценить необходимость в новом
подходе к объекту управления при попытке создать систему, уп-
равляющую им. Но прежде чем мы перейдем к описанию, возмож-
ных путей решения этой проблемы, нам нужно совершить экскурс
в психологию мышления.
§ 1.3. Психологические предпосылки
Психологи много внимания уделяли проблеме исследования поведения че-
ловека при решении возникающих перед ним задач. Было создано немало концеп-
туальных схем, объясняющих особенности его поведения при решении различ-
ных по своему характеру задач. Рассмотрим три такие схемы, получившие наибо-
лее широкое распространение и представляющие для нас интерес в рамках нашей
книги.
Самая грубая схема носит название стимульно-реактивной теории. В ее
основе лежит представление об объекте управления как о «черном ящике». Внут-
ренняя структура объекта непостижима для ЛПР. Наблюдению доступны лишь
внешние входные сигналы, поступающие на объект (стимулы), и выходные си-
гналы объекта (реакции). Задача ЛПР состоит в том, чтобы, меняя значения вход-
ных сигналов и наблюдая за возникающим при этом изменением выходных сиг-
налов, сказать что-то о /, т. е. об описании функционирования объекта.
В психологии такой подход к изучению поведения человека носит название
бихевиоризма. Он справедливо подвергся критике, ибо сводит весь процесс реше-
ния проблемы к методу проб и ошибок с постепенным накоплением вероятностной
информации о целесообразном поведении в данной ситуации. Тем ие менее ряд
систем управления может быть построен на основе этой весьма грубой теории.
Ограничимся для иллюстрации этого утверждения всего одним примером.
Пример 1.1. Рассмотрим объект, имеющий выходной канал и два входных
канала хг и х.2. На входы .г, и х2 могут подаваться сигналы двух типов 1 и 0, что
соответствует возбуждению и невозбуждению соответствующих входов. На выходе
также могут появиться два сигнала 0 и 1, что соответствует невозбуждению и
возбуждению выхода объекта. При фиксированном возбужденном входе случай,
когда оба входа возбуждены, исключается; значение сигнала на выходе определя-
ется распределением (р;; 1— р;), где 1=1, 2. Другими словами, с вероятностью р,-
на выходе объекта при возбужденном входе х; появляется сигнал 0, а с вероят-
ностью 1—pi — сигнал 1. Задача ЛПР состоит в проектировании такой системы
управления, которая минимизировала бы случаи невозбуждения выхода объекта.
Если бы значения р,- были ЛПР известны, то дело обстояло бы весьма просто.
Пусть, например, для X; распределение имеет вид (0,9; 0,1), а для х2 — вид (0.01;
0,99). Тогда совершенно ясно, что необходимо всегда возбуждать вход х2 и только
его. При этом случаи невозбуждения объекта будут сведены к минимуму. Но в
случае «черного ящика» информация о распределениях (рр, 1—р;) априорно неиз-
вестна. Надо суметь построить такую систему управления, которая бы при любых
заранее неизвестных распределениях добивалась бы успеха, минимизируя число
невозбуждений объекта. Как это сделать, показано на схеме, приведенной на
18
ГЛ. I. ПРИНЦИПЫ СИТУАЦИОННОГО УПРАВЛЕНИЯ
рис. 1.2. В качестве системы управления использован конечный автомат вероят-
ностного типа. Он работает следующим образом. Во всех состояниях левой груп-
пы автомат выдает на объект сигнал х,. а во всех состояниях правой группы —
сигнал х.,. Смена состояний автомата происходит с помощью анализа сигнала,
поступившего от объекта после подачи на него того или иного входного сигнала.
Если этот сигнал равен 0, то происходит смена текущего состояния автомата по
стрелке, приведенной на рисунке штриховой линией, или сохранение текущего
состояния, что показано петлеобразной штриховой дугой. Выбор того или другого
происходит равновероятно. Если выходной сигнал от объекта равен 1, то всег-
да происходит смена текущего состояния автомата в соответствии со сплошной
стрелкой.
Можно строго доказать, что подобный автомат с увеличением глубины памяти
п будет, по мнению ЛПР, асимптотически стремиться к наилучшему функцио-
нированию. Но и без строгого доказательства это видно из структуры автомата.
Пусть, например, объект описывается распределениями, приведенными выше:
(0,9; 0,1) и (0,01; 0,99). И пусть в начальный момент наш автомат находится в со-
стоянии 2 левой группы. Он выдает на объект сигнал хх. С вероятностью 0,9 в ответ
будет получен сигнал о том, что объект не возбудился. Тогда с вероятностью 0,5
автомат останется в состоянии 2 левой группы, а с вероятностью 0,5 перейдет в
состояние 1 той же группы. Таким образом, с вероятностью 0,45 сохранится состоя-
ние 2 в левой группе, с такой же вероятностью возникает состояние 1 в левой груп-
пе и лишь с вероятностью 0,1 — состояние 3 в левой группе. На следующем такте
работы автомат опять выдаст сигнал х, и снова с вероятностью 0,9 получит сигнал
о невозбуждении объекта. Если он находился в состоянии 1 левой группы, то с
вероятностью 0,45 это состояние сохранится, а с вероятностью 0,45 произойдет
переход автомата в состояние 1 правой группы. Рассуждения относительно ос-
тальных состояний левой группы, в которых мог находиться автомат, аналогичны.
После двух тактов работы из начального состояния (состояние 2 левой группы)
его очередным состоянием будет с вероятностью 0,2025 состояние 1 правой груп-
пы, с вероятностью 0,405 — состояние 1 левой группы, с вероятностью 0,2025 —
состояние 2 левой группы, с вероятностью 0,09 — состояние 3 левой группы и с
вероятностью 0,01 — состояние 4 левой группы. Легко посчитать, что с течением
времени вероятность уйти в глубь левой группы будет все время падать, а вероят-
ность перейти в правую группу — возрастать.
Но как только автомат перейдет в правую группу п начнет выдавать сигнал х2,
положение резко изменится. Теперь с вероятностью 0,99 на каждом такте работы
он будет переходить в глубь состояний этой группы п лишь с вероятностями
0,005*сохранять свое текущее состояние или менять его, переходя влево. Очевидно,
что с течением времени автомат обязательно попадет в правую группу состояний
и практически при большом п никогда ее не покинет. Тем самым он найдет правиль-
§ 1.3. ПСИХОЛОГИЧЕСКИЕ ПРЕДПОСЫЛКИ
19
ный способ управления объектом лишь на основании знания его выходных сигна-
лов, ничего априорно не зная о внутренней структуре объекта.
Несмотря на столь эффектный пример, следует все-таки отметить, что сти-
мульно-реактивная теория слишком слаба как для объяснения сложных форм
поведения человека при решении задач, так и для использования подобного под-
хода в системах управления сложными объектами. Даже там, где поначалу ка-
залось, что модели такого типа могут привести к успеху, в теории опознавания
образов (наиболее популярная модель стимульно-реактивного типа в этой об-
ласти — персептрон), оказалось, что отсутствие структурирования задачи (объек-
та) неминуемо приводит к непреодолимым трудностям. Научив, например, пер-
септрон устойчиво отличать букву А от буквы Б и показав ему сочетание АБ, мы
поставим его полностью в тупик. Ибо сочетание АБ он не может расчленить на
известные ему А и Б. Это сочетание выступает для него как абсолютно новый об-
раз, никак не связанный с ранее усвоенными.
Другая концепция, получившая значительное развитие в моделях решения
задач человеком и оказавшая существенное влияние на развитие эвристического
программирования для ЭВМ, носит название лабиринтной теории. Согласно
этой теории перед человеком, принимающим решение, находится как бы лабиринт
возможных путей. Используя некоторые локальные критерии, он выбирает то
или иное продолжение движения в лабиринте возможностей. Особенность лаби-
ринтной модели состоит в том, что человек видит лабиринт не целиком, а только
в некоторой фиксированной окрестности площадки, где он находится.
Иллюстрацией этого могут служить ситуации, складывающиеся в различных
позиционных играх. Пусть разыгрывается некоторая шахматная партия. Любая
позиция, сложившаяся в процессе игры на доске, есть площадка некоего лаби-
ринта, коридорами которого являются все возможные ходы, допустимые в игре.
Итак, мы находимся на некоторой площадке. Игрок, собирающийся сделать оче-
редной ход, имеет возможность выбора любого хода (коридора лабиринта), допус-
тимого в данной позиции. Если бы он видел лабиринт с высоты птичьего полета,
то он мог бы наметить последовательность ходов, ведущую к матовой позиции или
к ничьей. Но для человека это исключено. Он может мысленно экстраполировать
развитие партии только на несколько ходов вперед, учитывая возможные ответные
ходы противника. А это означает, что он может проанализировать лишь некоторую
часть лабиринта, некоторую окрестность той площадки, где он сейчас находится.
И он должен сделать выбор на основе этой локальной информации. Поэтому пра-
вила, которыми игрок руководствуется при выборе хода, неточны, эвристичны.
Его выбор не обязательно приведет его к положению, которое приближает для
него победу в игре. Он может допустить ошибку, чего-то не учесть вне анализируе-
мой окрестности лабиринта.
Точное решение в лабиринтной модели достигается только тогда, когда удается
проанализировать весь лабиринт. Пример такого положения — игра в крестики-
нолики на поле 3x3. Недаром ею увлекаются малыши. Они еще не сообразили,
что можно априорно проанализировать все пути развития игры и всегда выигры-
вать, если противник допускает ошибку. При безошибочной игре крестики-нолики
всегда заканчиваются ничьей.
Малые конечные лабиринты приводят к модели решения задачи, имитируемой
конечными автоматами. Любая площадка лабиринта соответствует некоторому
состоянию автомата, а коридоры — переходам автомата из состояния в состояние
под воздействием входного сигнала и с учетом того состояния (той площадки
лабиринта), где автомат сейчас находится. Входной сигнал имитирует те решения,
которые принимает ЛПР при выборе коридора лабиринта. При этом ЛПР может
создать систему управления объектом также в виде некоторого конечного (детер-
минированного или вероятностного) автомата. Подобная схема управления пока-
зана на рис. 1.3.
• На нем V и V отражают обратные связи, характеризующие память автоматов,
имитирующих объект управления и систему управления. Если ЛПР структура
автомата, имитирующего-объект, полностью известна (т. е. известен автоматный
граф смены состояний п формирования выходных сигналов), то обратная связь от
объекта к системе управления не нужна. Поэтому она показана штриховой линией.
20
ГЛ. !. ПРИНЦИПЫ СИТУАЦИОННОГО УПРАВЛЕНИЯ
Необходимость в ней возникает только тогда, когда в процессе работы нужно
производить «настройку» автомата, имитирующего систему управления, из-за
неполного априорного знания об объекте управления. По сравнению со схемой
на рис. 1.1 здесь нет входов, характеризуемых вектором W. Это соответствует
тому, что в лабиринтной теории поведения предполагается, что влияние
Система управления
_______II ~
Рис. 1.3
этих не поддающихся измерению параметров можно
описать некоторой вероятностной схемой связи между
вектором (X, W) и вектором Y.
Пример 1.2. Проиллюстрируем схему, показанную
на рис. 1.3, для конкретного примера. Для этого выбе-
рем простейшую схему условного рефлекса с двумя
раздражителями: безусловным ту и условным х2. Как
известно, при поступлении на вход схемы безусловно-
го раздражителя должна быть выдана некоторая фик-
сированная реакция — сигнал у. При подаче на вход
схемы только условного раздражителя необученная
схема сигнала у выдавать не должна. Пусть в течение
некоторого числа тактов (некоторого времени) на вход
схемы подаются одновременно два сигнала: ту и л'2.
Тогда через определенное время должен возникнуть
условный рефлекс. Он заключается в том, что при подаче на вход схемы только
сигнала х2 она все-таки выдает сигнал у, т. е. реагирует на условный раздражи-
тель, как собака в опытах И. П. Павлова, которая после долгого кормления
одновременно со звонком начинает выделять желудочный сок при наличии звонка.
Если теперь некоторое число тактов на вход схемы подается только сигнал х2,
то возникает явление угасания условного рефлекса. Через какое-то число тактов
рефлекс должен исчезнуть и наступит такой момент, что подача х2 на вход схемы
не вызовет сигнала у на ее выходе.
На рис. 1.4 показана схема вероятностного конечного автомата, которая
имитирует, описанный процесс. Автомат состоит из трех блоков: логического
Рис. 1.4
блока ЛБ, магазинной памяти и датчика, на выходе которого появляется сшнал
5, принимающий с вероятностями 1/3 значения —1, 0, 1. Автомат работает следую-
щим образом. В начальный момент память-магазин пуста. Пусть глубина магазина
есть п. Если на вход автомата поступает только сигнал xlt то на выходе ЛБ по-
§ 1.3. ПСИХОЛОГИЧЕСКИЕ ПРЕДПОСЫЛКИ
21
является сигнал у и содержимое магазина не меняется. Датчик при наличии только
ту не срабатывает. Если на вход автомата поступили два сигнала .г, и х2, то ЛБ
выдает сигнал у. Кроме того, в магазин передается сигнал s,, вызывающий появ-
ление единицы на самом нижнем уровне магазина. При повторении комбинации
сигналов ту и х2 сигнал sx сдвигает эту единицу каждый раз на одну ячейку мага-
зина вверх. При комбинации сигналов и х2 срабатывает и датчик случайных
сигналов. При 5=0 он не оказывает никакого действия на запись в магазине.
При 5—1 он выдает сигнал, заставляющий единицу в магазине сдвинуться еще
на одну ячейку вверх. Наконец, при 5=— 1 сигнал от датчика заставляет единицу
в магазине сдвинуться на одну ячейку вниз или исчезнуть из магазина, если еди-
ница находилась на самом нижнем его уровне. При поступлении на вход автомата
только сигнала х2 происходит следующее. Если единица в магазине находится
выше некоторого уровня т, то магазин вырабатывает сигнал q, который формирует
на выходе ЛБ сигнал у. Если же уровень т в магазине не достигнут, то сигнал q
не выдается и на выходе автомата нет сигнала у. Кроме того, при наличии только
х2 ЛБ выдает в магазин сигнал s2, заставляющий единицу в магазине опуститься
на одну ячейку вниз. Датчик при наличии только х2 работает так же, как и при
наличии %! и х2.
Таким образом, положение единицы в магазине характеризует степень обу-
ченности автомата условному рефлексу. Уровень т есть порог рефлекса. Меняя
его, можно имитировать различные предрасположенности системы к установлению
рефлекса. Датчик вносит необходимую вероятностную компоненту. Но так как
математическое ожидание 5 равно нулю, то он не вносит в процесс систематических
искажений.
Как следует из рис. 1.3, мы предполагаем, что имитирующий автомат и объект
описываются одинаковыми (с точностью до вероятностных реализаций) процессами
функционирования. Другими словами, схема эта как бы обратима. И подопытное
животное может рассматривать себя в качестве экспериментатора, устанавливаю-
щего условный рефлекс у истинного экспериментатора (ЛПР). Ситуация эта хоро-
шо отражена в следующем анекдоте.
В клетке находятся две подопытные обезьяны. В комнату входит научный
сотрудник, экспериментирующий с обезьянами. В этот момент одна обезьяна
говорит другой: «Посмотри, чему я научилась. Сейчас я дерну за веревку, зазве-
нит колокольчик, и этот чудак даст мне банан. Правда, получилось это не сразу.
Пришлось с ним поработать.»
Однако в большинстве практически интересных случаев ЛПР не стремится
к тому, чтобы система управления имитировала объект управления. В этом нет
никакой необходимости. Как правило, систему управления можно сделать проще
объекта, которым она управляет.
Например, нетрудно показать, что с усложнением объекта имитации — с пере-
ходом от простейшей схемы условного рефлекса к цепочкам таких рефлексов и
сетям условных рефлексов, способным моделировать весьма сложные поведенче-
ские акты,— система управления, воспроизводящая их особенности, останется
таким же конечным автоматом, который был использован в примере 1.2.
Но что делать, если лабиринт оказывается слишком большим? Или вообще
бесконечным. Например, мы играем в крестики-нолики на неограниченном поле с
условием, что I одинаковых крестиков или ноликов (/ выбирается по договорен-
ности) в горизонтальных или вертикальных рядах или на диагонали приводят к
выигрышу. Такой лабиринт нельзя отобразить в схему конечного автомата. В этом
случае можно воспользоваться гипотетическим устройством, легко имитируемым
на ЭВМ, которое носит название «Общий решатель задач» (ОРЗ). Его функциони-
рование протекает следующим образом. Пусть мы имеем некоторую начальную
площадку лабиринта. Эту площадку (текущую ситуацию) можно как-то описать.
Если снова привлечь в качестве примера шахматную игру, то описание начальной
площадки может заключаться, например, в том, что в нем будут перечислены все
фигуры, имеющиеся на доске, с указанием полей, на которых они находятся.
А описание конечной площадки также будет описанием некоторой позиции на
шахматной доске. И цель состоит в поиске такой последовательности ходов,
которая постепенно преобразует исходное описание в желаемое (целевое). Для
22
ГЛ. I. ПРИНЦИПЫ СИТУАЦИОННОГО УПРАВЛЕНИЯ
преобразования описаний используются специальные операторы из некоторого
фиксированного списка, хранящегося в ОРЗ. Условие их применения формирует-
ся на основе системы различий и приоритетов различий. Каждые два несовпадаю-
щих описания в чем-то различаются между собой. Это фиксируется в ОРЗ в виде
некоторого типового различия. Например, в шахматной игре одна позиция от
другой может отличаться набором фигур на доске или их положением на игровых
полях. Приоритет различий задает локальные правила выбора. Они определяют,
какие различия требуется устранить в первую очередь. Такая приоритетность раз-
личий позволяет ОРЗ на каждом шаге его работы выбирать для применения те
операторы (выбирать коридоры в лабиринте), которые уст-
раняют наиболее приоритетные различия. При нескольких
операторах, способных устранить определенное различие,
в ОРЗ может быть задан и набор приоритетов для опера-
торов. Проиллюстрируем работу ОРЗ на примере, который
понадобится нам и в дальнейшем.
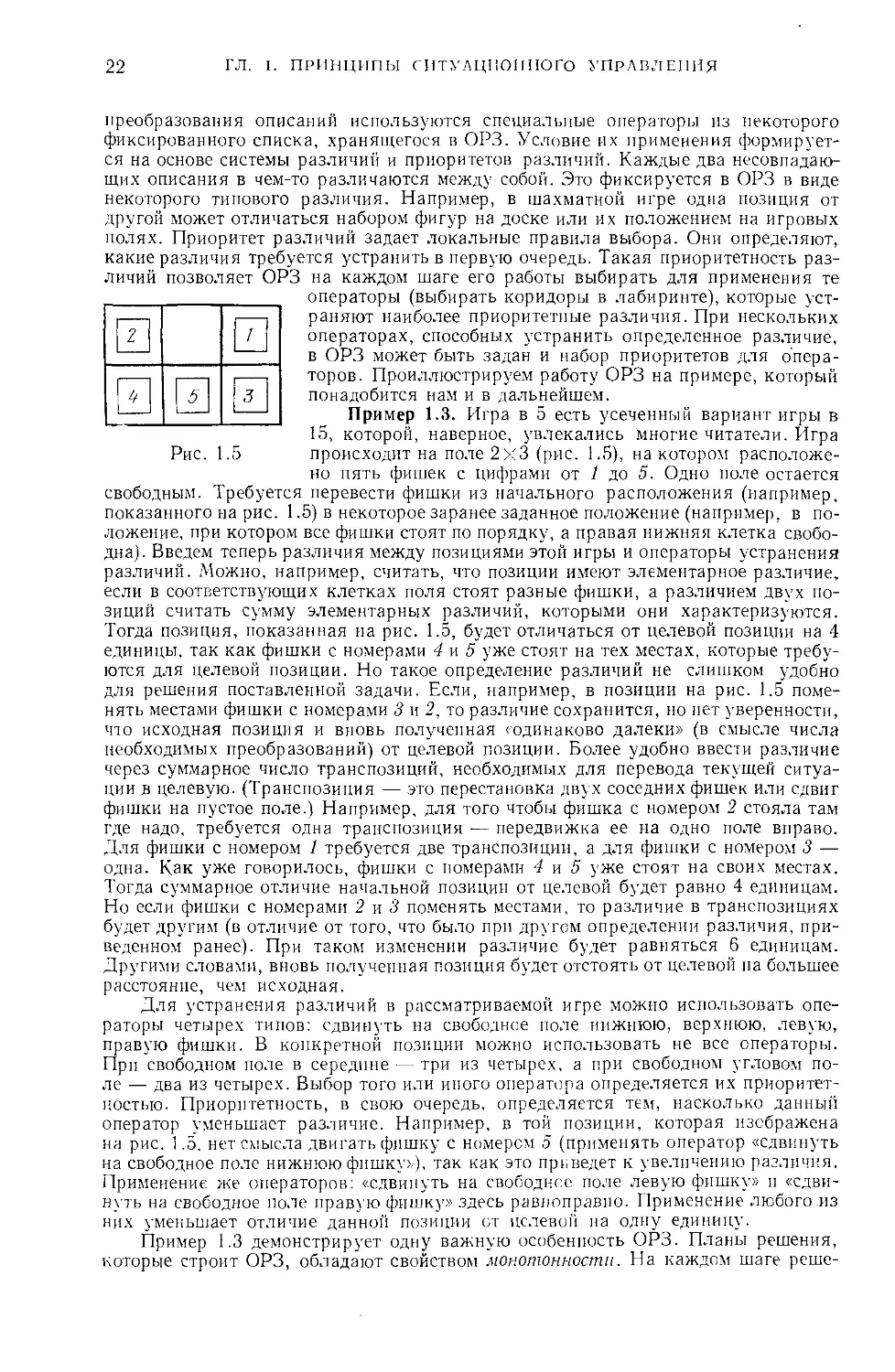
Пример 1.3. Игра в 5 есть усеченный вариант игры в
15, которой, наверное, увлекались многие читатели. Игра
происходит на поле 2x3 (рис. 1.5), на котором расположе-
но пять фишек с цифрами от 1 до 5. Одно поле остается
свободным. Требуется перевести фишки из начального расположения (например,
показанного на рис. 1.5) в некоторое заранее заданное положение (например, в по-
ложение, при котором все фишки стоят по порядку, а правая нижняя клетка свобо-
дна). Введем теперь различия между позициями этой игры и операторы устранения
различий. Можно, например, считать, что позиции имеют элементарное различие,
если в соответствующих клетках поля стоят разные фишки, а различием двух по-
зиций считать сумму элементарных различий, которыми они характеризуются.
Тогда позиция, показанная на рис. 1.5, будет отличаться от целевой позиции на 4
единицы, так как фишки с номерами 4 и 5 уже стоят на тех местах, которые требу-
ются для целевой позиции. Но такое определение различий не слишком удобно
для решения поставленной задачи. Если, например, в позиции на рис. 1.5 поме-
нять местами фишки с номерами 3 и 2, то различие сохранится, но нет уверенности,
что исходная позиция и вновь полученная ('одинаково далеки» (в смысле числа
необходимых преобразований) от целевой позиции. Более удобно ввести различие
через суммарное число транспозиций, необходимых для перевода текущей ситуа-
ции в целевую. (Транспозиция — это перестановка двух соседних фишек или сдвиг
фишки на пустое поле.) Например, для того чтобы фишка с номером 2 стояла там
где надо, требуется одна транспозиция — передвижка ее на одно поле вправо.
Для фишки с номером 1 требуется две транспозиции, а для фишки с номером 3 —
одна. Как уже говорилось, фишки с номерами 4 и 5 уже стоят на своих местах.
Тогда суммарное отличие начальной позиции от целевой будет равно 4 единицам.
Но если фишки с номерами 2 и 3 поменять местами, то различие в транспозициях
будет другим (в отличие от того, что было при другом определении различия, при-
веденном ранее). При таком изменении различие будет равняться 6 единицам.
Другими словами, вновь полученная позиция будет отстоять от целевой на большее
расстояние, чем исходная.
Для устранения различий в рассматриваемой игре можно использовать опе-
раторы четырех типов: сдвинуть на свободное поле нижнюю, верхнюю, левую,
правую фишки. В конкретной позиции можно использовать не все операторы.
При свободном поле в середине — три из четырех, а при свободном угловом по-
ле — два из четырех. Выбор того или иного оператора определяется их приоритет-
ностью. Приоритетность, в свою очередь, определяется тем, насколько данный
оператор уменьшает различие. Например, в той позиции, которая изображена
на рис. 1.5, нет смысла двигать фишку с номером 5 (применять оператор «сдвинуть
на свободное поле нижнюю фишку»), так как это приведет к увеличению различия.
Применение же операторов: «сдвинуть на свободнее поле левую фишку» п «сдви-
нуть на свободное поле правую фишку» здесь равноправно. Применение любого из
них уменьшает отличие данной позиции от целевой на одну единицу.
Пример 1.3 демонстрирует одну важную особенность ОРЗ. Планы решения,
которые строит ОРЗ, обладают свойством монотонности. На каждом шаге реше-
§ 1.3. ПСИХОЛОГИЧЕСКИЕ ПРЕДПОСЫЛКИ
23
пия должно происходить улучшение, приближение к цели. Именно это свойство
и оказалось роковым для ОРЗ и подобных ему программ и систем. Можно привести
следующую аналогию из математики. Метод градиента позволяет находить экстре-
мум функции только при условии, что эта функция имеет один экстремум. Тогда
возможно монотонное движение к экстремальной точке. Но в большинстве случаев
экстремумов }' функции несколько. Тогда метод градиента, последовательно
«улучшающий» значения функции, может завести нас в любой локальный экстре-
мум, который окажется для нас ловушкой. Куда бы мы ни двигались из данной точ-
ки с заданным шагом градиента, везде нас ожидает неудача, ибо значения функ-
ции во всей доступной нам окрестности «хуже» того, которое соответствует точке,
в которой мы находимся.
Для поиска глобального экстремума в теории оптимизации придумано немало
приемов: изменение градиентного шага, движение «вдоль оврага» и т. и. В системах
типа ОРЗ также построены некоторые приемы улучшения планов решения. На-
пример, переход от исходного лабиринта к более простому, более грубому. Плани-
рование движения сначала по нему, а потом уточнение этого плана на исходном
лабиринте, причем при монотонности грубого плана уточненный план может
стать немонотонным. Но, к сожалению, пока не удалось найти хорошие процедуры
для построения грубых планов. А пока это не сделано, нельзя надеяться на постро-
ение хороших моделей принятия решений.
Но у лабиринтной теории есть куда более важный недостаток, чем свойство
монотонности, присущее практически всем процедурам движения по лабиринту.
Этот недостаток заключается в априорной заданности лабиринта или способа его
построения. Но откуда берутся эти сведения? В терминах, принятых в п. 1.1, это
•означает, что ЛПР знает / и ему нужно лишь построить процедуру управления.
Но мы уже говорили, что создание описания объекта управления — задача не
только более сложная, чем нахождение самой процедуры управления, но и не
имеющая пока каких-либо стандартных приемов решения.
При решении различных задач, при принятии решений мы всегда сталкиваем-
ся с двумя случаями. Либо перед нами задача, которую, в принципе, мы умеем
решать и надо только найти решение данной конкретной задачи, либо мы сталки-
ваемся с совершенно неясной для пас проблемой, для которой даже неизвестно, с
чего начать. Вот ребенок пробует сложить из кубиков то, что нарисовано на картин-
ке. Если в коробке всего шесть кубиков, на сторонах которых что-то нарисовано,
то его лабиринт весьма велик — можно сложить более 48 тысяч комбинаций. Но
маленький ребенок справляется с таким громадным лабиринтом. Ибо он не скла-
дывает кубики хаотично, а соотносит их с концевой площадкой лабиринта, выби-
рая для каждого кубика одну верную грань из шести. В этой задаче лабиринт
налицо. Раз научившись что-либо складывать, ребенок уверенно выполняет ана-
логичную работу для других кубиков, даже если число их значительно больше
шести. Но вот перед ним другая задача.
Обратимся к рис. 1.6. На нем изображена карта острова. На ней отмечены
города и связывающие их железные дороги. Мистер Браун живет в городе А,
находящемся па севере острова. Во время отпуска он поставил перед собой сле-
дующую задачу: не пользуясь шоссейными дорогами и автомобилем, проехать
из города А в город Я, посетив по пути все города, отмеченные на карте, ровно по
•одному разу.
Разрешима ли эта задача? Лабиринт перед вами. Остается только пробовать.
Прежде чем читать дальше, попробуйте.
Теперь вам стало ясно, что решение, по-видимому, не существует, но мистер
Браун решил поставленную перед собой задачу. Как он это сделал? По-видимому,
он кое-что слышал о лабиринтной и модельной теориях мышления, а скорее всего,
обошелся без них, не зная, что он «говорит прозой». Он знал, что задача разре-
шима. Для этого достаточно воспользоваться тем, что между городами В и Щ
можно проехать морским путем, па который нет запрета в условии задачи. Тогда
поставленная задача разрешима. Если вы сами догадались о подобном решении,
то вы испытали инсайт (озарение), чувство радостного изумления от найденного
решения. При этом от лабиринта, навязанного чертежом, приведенным на рис. 1.6,
вы сумели перейти к новому лабиринту, построенному вами.
24
ГЛ. 1. ПРИНЦИПЫ СИТУАЦИОННОГО УПРАВЛЕНИЯ
Рис. 1.6
лабиринта вызывает у человека поток
В рассмотренной задаче подсказка о новом лабиринте содержалась в чертеже.
Города В и Щ стоят на море. Но подобная подсказка может и отсутствовать. Такое
положение имеется в весьма популярной в психологических экспериментах голо-
воломке «не ломая и не сгибая спичек, сложить из шести спичек четыре одинако-
вых равносторонних треугольника». В эксперименте все шесть спичек кладутся
перед испытуемым на стол, что задает лабиринт всевозможных положений шести
спичек на плоскости стола. Испытуемые делятся на две группы. Те, кто относится
к первой группе, подвигав спички и
убедившись, что задача не решается (в
данном лабиринте!), отказываются от
ее решения, считая, что их попросту
надули. Испытуемые второй группы
начинают пытаться выяснить условия,
при которых решение задачи возмож-
но. И вознаграждаются за усилия тем,
что строят новый лабиринт возможно-
стей — пространственный. В нем легко
решают поставленную эксперименталь-
ную задачу, сооружая правильную
треугольную пирамиду.
Можно считать, что в какой-то ме-
ре лабиринтная модель описывает пове-
дение человека при решении задач,
когда им используется стандартная
шаблонная модель, найденная ранее
им самим, или сообщенная ему учите-
лем, или почерпнутая им из книг и
учебников.
Итак, кроме поиска по лабиринту
возможностей для человека при реше-
нии нетривиальных проблем весьма
важна процедура поиска самого лаби-
ринта (или его части), в котором можно
найти необходимое решение. В процессе
решения задачи он должен сформиро-
вать этот лабиринт, а затем уже искать
решение. Именно нахождение такого
ложительных эмоций, «радость откры-
тия». Сформулированное нами положение о двухэтапности решения любой задачи
является краеугольным камнем третьей психологической теории решения за-
дач —• модельной теории.
В рамках этой теории всякое решение некоторой проблемы состоит из по-
следовательности нескольких шагов: описание исходной позиции задачи, описа-
ние целевой позиции задачи, установление гомоморфизма между этими описания-
ми или сведение их к одинаковому языку описания, установление системы пре-
образований описаний, поиск последовательности преобразований, ведущих от
начальной позиции к целевой. Лишь последний шаг отражен в лабиринтной мо-
дели решения задач, первые четыре шага в ней считаются уже реализованными.
Рассмотрим суть первых четырех этапов. На этапе описания исходной пози-
ции можно поступать по-разному. Для иллюстрации этого опять обратимся к шах-
матам. В некоторой шахматной позиции можно, как уже говорилось, описать
положение каждой фигуры на игровом поле. И это описание будет полным и ис-
черпывающим. Но шахматист вряд ли использует его для поиска своего хода.
Оно для него слишком далеко от способа описания целевой йозиции. В самом деле,
окончательная позиция в шахматной игре не описана в терминах расположения
конкретных фигур на полях доски. Она описана в других терминах, типа «Король
противника находится под ударом, не может покинуть клетку, где он находится,
так, чтобы перейти на клетку, не находящуюся под ударом, и не может другими
фигурами ликвидировать угрозу взятия короля». Это означает, что описание ис-
§ 1.4. В ЧЕМ СОСТОИТ СИТУАЦИОННОЕ УПРАВЛЕНИЕ?
25
ходной позиции, которое мы приняли, и описание конечной позиции (описание
патовой позиции производится в тех же терминах, что и описание мата) не гомо-
морфны друг другу. Они не лежат в пределах одного лабиринта. И именно в
этом состоит психологическая трудность решения шахматных задач для неопыт-
ных шахматистов. Опытные же шахматисты описывают исходную позицию на
языке того же уровня, что и язык, использованный для описания заключительной
позиции. Так вместо отдельных фигур и ходов появляются связки, вилки, сдвоен-
ные и проходные пешки, форсированные ходы и многое другое.
В шахматах нет нужды искать систему преобразований описаний. Она опреде-
лена правилами игры. Но во многих случаях это необходимо делать. На сорев-
нованиях кондитеров, которые должны приготовить торт из заданного для всех
одинакового набора исходных компонент, каждый участник соревнования форми-
рует свою систему «преобразования позиций». И насколько успешно он это сделает,
настолько успешен будет результат его работы.
Заканчивая этот экскурс в психологию решения задач человеком, остановим-
ся еще на одном важном для нас вопросе. До сих пор мы рассматривали решение
задач человеком в статике, вне времени и пространства. Но для реальных объектов
управления такое ограничение вряд ли возможно. Как правило, решения по
управлению принимаются с учетом динамики функционирования объекта управле-
ния. Что по этому поводу может сказать нам психология?
При наблюдении за поведением людей, занятых управлением динамическими
объектами, психологи выявили определенные принципы, которыми люди руко-
водствуются при принятии своих решений. И основной вывод заключается в том,
что при решении управленческих задач, в которых учитывается динамика процес-
сов в объекте, человек строит их динамическую модель. Они как бы протекают у
него в уме, сохраняя относительный временной масштаб частей процессов.
В зависимости от «удаленности» управленца от процесса управления дина-
мическая модель может быть различной. Если дежурный на железнодорожной
сортировочной горке, который управляет перемещением локомотивов и вагонов
с помощью стрелок, видит всю пространственную картину перемещений непо-
средственно, то дежурный по станции воспринимает ее с помощью мнемосхемы,
а поездной диспетчер — лишь по графику движения поездов, вычерчиваемому по
дискретным сообщениям, поступающим к нему. Таким образом, динамическая
модель процесса на сортировочной горке не требует от дежурного специальных
способов отображения кроме тех, которые связаны с непосредственным наблюде-
нием за реальным положением вещей. Дежурный по станции непосредственно на-
блюдать и оценивать может только то, что видно из окна помещения, где он нахо-
дится. Остальная информация является опосредованной, она отражена на мнемо-
схеме. Поэтому развитие процессов частично происходит как бы в его голове.
Он вынужден интерполировать и экстраполировать это развитие. В наибольшей
степени интерполяция и экстраполяция процессов происходит в голове поездного
диспетчера или дежурного по отделению железной дороги. В его голове как бы
отражается в реальном масштабе времени процесс перемещения поездов на участ-
ке, которым он управляет. У опытных дежурных и диспетчеров такое протекание
процессов на объекте управления отражается как бы «само собой», вне активного
сознания. Поступающие к диспетчеру или дежурному словесные сообщения
перекодируются им на уровень представлений, характерных для имитационной
модели, работающей в его голове.
§ 1.4. В чем состоит ситуационное управление?
Итак, при работе с объектами, с которыми столкнулась сейчас
теория управления, по-видимому, не приходится надеяться на
возможность использования для управления ими традиционных
методов и приемов. Как уже выяснилось, проблема состоит в самом
описании уникального объекта управления, учета в этом описании
26
ГЛ. 1. ПРИНЦИПЫ СИТУАЦИОННОГО УПРАВЛЕНИЯ
не только его специфической структуры и функционирования, но
и поведения людей, и возможностей эволюции объекта во времени.
Требуется создать такой подход, который на едином языке давал
бы возможность описывать как объект управления и его функцио-
нирование, так и процедуру управления им.
Рассмотрим сначала постановку задачи управления, в схему
которой укладываются все известные сегодня задачи управления
сложными объектами.
Определение 1.1. Будем называть текущей ситуацией
на объекте управления совокупность всех сведений о структуре
объекта управления и его функционировании в данный момент
времени.
Определение 1.2. Будем называть полной ситуацией
совокупность, состоящую из текущей ситуации, знаний о состоя-
нии системы управления в данный момент и знаний о технологии
управления.
В этих двух определениях многое нуждается в уточнении.
Но на концептуальном уровне изложения, по-видимому, достаточно
того их понимания, которое было дано выше. Будем обозначать
полные ситуации через S, (t есть отличительный номер ситуации),
а текущие ситуации — через Q,- (/ есть отличительный номер си-
туации). Пусть в распоряжении системы управления имеется п
различных способов воздействия на объект управления (одноша-
говых решений). Каждое такое решение мы будем обозначать как
Uk (k есть отличительный номер воздействия). Элементарный
акт управления можно представить в следующем виде:
St; Q,=>Q{.
Смысл этого соотношения заключается в следующем. Если па
объекте управления сложилась ситуация Q,- и состояние системы
управления и технологическая схема управления, определяемые
Si, допускают использование воздействия Uk, то оно применяется,
и текущая ситуация Q; превращается в новую ситуацию Q,. По-
добные правила преобразования в дальнейшем называются логико-
трансформационными правилами (ЛТП) или корреляционными
правилами. Пслный список ЛТП задает возможности системы
управления воздействовать на процессы, протекающие в объекте.
Очевидно, что в силу конечности числа различных воздействий
все множество возможных полных ситуаций как-то распадается на п
классов, каждому из которых будет соответствовать одно из воз-
можных воздействий на объект управления. Другими словами,
должны существовать такие процедуры; которые позволили бы
классифицировать полные ситуации так, чтобы из них можно
было образовать столько классов, сколько различных одношаговых
решений есть в распоряжении системы управления. Эти проце-
дуры можно назвать процедурами классификации. Если для не-
§ 1.4. В ЧЕМ СОСТОИТ СИТУАЦИОННОЕ УПРАВЛЕНИЕ?
27
которых полных ситуаций невозможно в силу не слишком хоро-
шего знания как объекта, так и влияния воздействий на него, ука-
зать единственное одношаговое решение, то можно пока включить
эту ситуацию в несколько классов.
Но из-за такого пересечения классов возникнет задача выбора
того или иного решения из числа возможных для данной полной
ситуации. Для осуществления подобного выбора нужны специ-
альные процедуры экстраполяции последствий принятия того или
иного решения. С их помощью можно на основании знаний об объ-
екте управления и его функционировании заранее оценить резуль-
таты применения выбран-
ного воздействия и срав-
нить полученные прогнозы
для всех возможных для
данной полной ситуации
воздействий.
Если все указанные
процедуры оказалось воз-
можным построить, то об-
щая схема решения задачи
управления выглядела
бы так, как показано на
рис. 1.7.
Описание текущей си-
туации, сложившейся на
объекте управления, дается
на вход Анализатора. Его
Воздействие
на объект
Рис. 1.7
задача состоит в оценке
сообщения и определения необходимости вмешательства системы
управления в процесс, протекающий в объекте управления. Если
текущая ситуация не требует такого вмешательства, то Анализатор
не передает ее на дальнейшую обработку. В противном случае
описание текущей ситуации поступает в Классификатор. Исполь-
зуя информацию, хранящуюся в нем, Классификатор относит
текущую ситуацию к одному или нескольким классам, которым
соответствуют одношаговые решения. Эта информация передается
в Коррелятор, в котором хранятся все ЛТП. Коррелятор опре-
деляет то ЛТП, которое должно быть использовано. Если такое
правило единственное, то оно выдается для исполнения. Если же
таких правил несколько, то выбор лучшего из них производится
после обработки предварительных решений в Экстраполяторе,
после чего Коррелятор выдает решение о воздействии на объект.
Если Коррелятор или Классификатор не могут принять решения
по поступившему описанию текущей ситуации, то срабатывает
Блок случайного выбора и выбирается одно из воздействий, оказы-
вающих не слишком большое влияние на объект, или же система
отказывается от какого-либо воздействия на объект. Это говорит
28
ГЛ. 1. ПРИНЦИПЫ СИТУАЦИОННОГО УПРАВЛЕНИЯ
о том, что система управления не располагает необходимой инфор-
мацией о своем поведении в данной ситуации.
Фактически из-за сложности объектов управления, которыми
мы занимаемся, нет надежды на то, что исходные знания о них
и способах управления ими будут достаточно полны. Поэтому си-
стема управления подобного типа принципиально должна быть
открытой системой. Она должна иметь возможность корректиро-
вать свои знания об объекте и методах управления им. В работе
такой системы управления имеется как бы два этапа: этап обучения
и настройки и этап работы. В начальный период, когда система
управления только еще создается, собираются многочисленные
сведения от технологов, хорошо знающих объект управления.
С их помощью формируются классы ситуаций и ЛТП. Они опре-
деляют целесообразность использования тех или иных воздействий
на объект управления в той или иной ситуации. При этом мнения
экспертов могут не совпадать, что и приводит к попаданию одной
и той же ситуации в различные классы по управлению. С помощью
экспертов формируются и процедуры экстраполяции, способы оцен-
ки ситуаций, исходящие из желаемого функционирования объекта
управления.
Это означает, что на первом этапе в проект системы заклады-
вается значительное количество субъективной информации об
объекте управления и процедурах управления им. Это как бы кол-
лективный опыт тех людей, которые — хорошо или плохо — справ-
лялись со своими обязанностями при управлении объектом.
Здесь важно, что при проектировании системы желательно учи-
тывать самые, на первый взгляд, незначительные сведения об
объекте. Зачастую оказывается, что именно такие побочные зна-
ния играют большую роль в принятии решений по управлению
объектом.
После этапа накопления знаний и формирования процедур в
блоках, показанных на рис. 1.7, система может начинать работать.
Но в процессе своей эксплуатации, особенно на первых порах,
она будет довольно часто принимать неверные решения из-за не-
полноты информации и неточности процедур. Во всех этих случаях
необходим этап дообучения системы управления.
Отметим одну важную особенность рассматриваемого класса
систем. Число различных полных ситуаций обычно весьма велико.
Возможно, что их заранее и нельзя перечислить. А число решений
конечно и невелико. Другими словами, чаще всего I{S,} |^>|{Uh} I,
где, как всегда, |А | означает число элементов, входящих в мно-
жество А. Находясь за рулем автомобиля, водитель воспринимает
огромное число полных ситуаций, определяемых внешней обста-
новкой на пути движения и состоянием автомобиля. А число при-
нимаемых им одношаговых решений невелико. Регулировщик на
перекрестке сводит все множество ситуаций в окрестности пере-
крестка к двум одношаговым решениям по переключению сигнала
§ 1.4. В ЧЕМ СОСТОИТ СИТУАЦИОННОЕ УПРАВЛЕНИЕ?
29
светофора в некотором фиксированном направлении. Секретарь,
находящийся в приемной большого начальника, мгновенно оце-
нивает полную ситуацию и принимает одно из трех решений, вы-
ражаемых, обычно в стандартных словах «Проходите, пожалуйста»,
«Подождите, сейчас он занят», «К сожалению, Его нет и сегодня
не будет».
Чем больше число возможных ситуаций и чем меньше число
допустимых одношаговых решений, тем эффективнее выглядит
работа схемы управления, которую мы показали на рис. 1.7. Но
и тогда, когда |{SJ| ~ |{€7а}1, можно применить подобную схе-
му. Хотя ее эффективность в таком случае и не будет очень
высока, но, возможно, что это единственный путь управления
объектом.
Метод управления, который в общих чертах мы описали, ос-
нован на введении понятия ситуации, классификации ситуаций
и их преобразовании. Естественно поэтому назвать его методом
ситуационного управления, ибо, в противовес к эпиграфу данной
главы, в русском языке слово, определяющее суть описываемого
подхода, фактически единственное. И лишь большой интерес к
методам управления подобного типа породил в последнее время
ряд названий методов, частично более широких, а частично и
более узких по сравнению с тем, что вкладывается в понятие ме-
тода ситуационного управления (семиотическое моделирование,
семиотическое управление, логико-лингвистические методы управ-
ления и т. и.).
Сформулируем теперь ряд особенностей, присущих методу
ситуационного управления.
1. Ситуационное управление требует больших затрат на созда-
ние предварительной базы сведений об объекте управления, его
функционировании и способах управления им. Эти затраты оп-
равданы только тогда, когда традиционные пути формализации
описания объекта управления и процедуры управления реализо-
вать невозможно. Другими словами, если объект управления
таков, что адекватно описывается, например, системой линейных
дифференциальных уравнений первой степени с постоянными ко-
эффициентами, то нет никакой нужды использовать метод ситуа-
ционного управления. Это оправдано лишь тогда, когда традици-
онная формализация приводит к задаче такой размерности, что
ее практическое решение известными методами невозможно — на-
пример в случае, когда число уравнений в системе составляет не-
сколько десятков тысяч.
2. Описание ситуаций, складывающихся на объекте управления
(текущих ситуаций), должно быть произведено на таком языке,
в котором отражались бы все основные параметры и связи, не-
обходимые для классификации этого описания и сопоставления
ему одношагового решения по управлению. При этом необходимо
правильно выбрать уровень описания, который не должен быть
30
ГЛ. I. ПРИНЦИПЫ СИТУАЦИОННОГО УПРАВЛЕНИЯ
ни слишком подробным, ни слишком грубым. При слишком под-
робном описании возникает «шумовой эффект», частности п несу-
щественные для управления факты и явления могут сильно услож-
нить понимание сути функционирования объекта и сделать пост-
роение системы управления невозможным. Этот случай можно
проиллюстрировать следующим примером. Некто, никогда не
видевший игры в футбол описывает свои впечатления от игры
другому лицу, также не имеющему представления об этой игре,
следующим образом: «двадцать два человека, одиннадцать из
которых одеты в одну форму с номерами на спине, а одиннадцать
других — в другую форму, также с номерами на спине, перемеща-
ются по полю, которое имеет следующие особенности (следует
точное и подробное описание поля и его разметки). Каждый из
играющих может перемещаться по следующим, по-видимому, свя-
занным с его номерами траекториями (следует формальное описа-
ние динамики перемещения игроков по полю). Иногда вместе с
перемещением игроков перемещается круглый предмет (следует
описание мяча), но с некоторой вероятностью осуществляется
передача этого предмета от одного играющего к другому или вы-
вод его из поля игры (следует описание вероятностного процесса
передачи мяча). В последнем случае специальные игроки возвра-
щают мяч на поле по некоторым траекториям (следует описание
динамики вбрасывания мяча). И т. д.». Возникает вопрос: сможет
ли слушающий уловить в этом научном изложении, достаточно
точно описывающем наблюдавшийся матч, суть игры в футбол?
Думаю, что это весьма затруднительно. А если бы футбольный матч
был описан на уровне языка статистической физики (что тоже прин-
ципиально возможно), то что тогда можно было извлечь из этого
описания?
3. Язык описания ситуаций должен позволять отражать в нем
не только количественные факты и соотношения, характеризующие
объект управления, но и качественные знания, которые не могут
быть формализованы в обычном математическом смысле. Ведь
большинство сведений, которые управленец будет получать от
технолога, будут иметь примерно такой вид: «в большинстве слу-
чаев я думаю, что надо делать X, если имеет место У»; «мне кажется,
что в ситуации X хорошо было бы сделать Z», «когда X растет, то,
как правило, Y убывает, но не очень сильно» и т. п. Й надо на-
учиться отражать эти качественные высказывания на языке опи-
сания ситуаций. Следует также учитывать, что высказывания
человека об объекте и способах управления им неполны. Нужны
специальные приемы для получения от него всей той информации,
которая нужна для принятия решений по управлению (вспомним
случай с диагностикой психических заболеваний, когда на самом
деле истории болезней не содержали информации). Известная
детская задача: «в движущемся поезде, состоящем из 40 вагонов,
три из которых пассажирские, а остальные товарные, имеется три
§1.1. В ЧЕМ СОСТОИТ СИТУАЦИОННОЕ УПРАВЛЕНИЕ?
31
проводника и один охранник; требуется узнать сколько лет маши-
нисту» — иллюстрирует сказанное.
4. Классификация ситуаций, объединение их в классы при ис-
пользовании одношаговых решений происходит на субъективной
основе, ибо первоначальная информация о соответствии той или
иной текущей ситуации тому или иному решению получается от
экспертов. Система как бы суммирует знания отдельных экспертов
и становится носительницей коллективного опыта людей. Однако
процедуры классификации должны быть построены таким образом,
чтобы сама классификация годилась бы для тех текущих ситуаций,,
о которых система не получила информации от экспертов. Это при-
водит к тому, что задача классификации становится аналогичной
задаче формирования понятий на основе обучающих последова-
тельностей. Система, сформировав некоторое понятие, обладает
уже большими знаниями, чем те, которые были заложены в нее
вначале экспертами, хотя эти дополнительные знания могут ока-
заться и неверными, что может выявиться в процессе ее эксплуа-
тации. Таким образом, в системе могут появляться «предрассудки»,
неверные представления и неправомерные обобщения. Она может
вести себя, как женщина, которая говорит в разговоре: «знаю я
вас. Все мужчины лгут». А на ехидный вопрос «вы что же, имели
дело со всеми мужчинами?», простодушно отвечает: «да, была
знакома с одним вроде вас...».
5. Аналогичные слова можно сказать и о формировании ЛТП.
Они первоначально также получаются с помощью информации,
сообщаемой экспертами. Уточнение этих правил, уничтожение
противоречий в них и формирование новых ЛТП происходят уже
в процессе эксплуатации системы. Все это верно и для правил
экстраполяции и для оценки тех или иных текущих ситуаций.
6. Из двух последних пунктов вытекает принципиальный вывод
о том, что системы ситуационного управления не могут оптимизи-
ровать сам процесс управления. Они ориентированы лишь на такое
управление, когда достигнутые результаты будут не хуже лучших
результатов, которые мог бы получить человек. Однако, как по-
казала практика применения систем подобного типа, чаще всего
результаты, выдаваемые системой, лучше человеческих. Это про-
исходит по ряду причин. В частности, на систему не влияют эмо-
ции человека-управленца и в стрессовых ситуациях она прини-
мает решения так же, как и в обычных; система ничего не забы-
вает и не упускает решений, которые для человека апостериори
«сами собою разумеющиеся», но не пришли ему вовремя в голову.
Помните, как в известном рассказе А. П. Чехова: «Было б мне
козьей ножкой!». Таким образом, метод ситуационного управления
можно считать эвристическим.
7. На самом деле- для многих реальных объектов управления
одношаговые решения не определяют стратегии управления. В та-
ких объектах необходимо формировать в качестве решении цепочки
J2 ГЛ. I. ПРИНЦИПЫ СИТУАЦИОННОГО УПРАВЛЕНИЯ
из одношаговых решений. Для этого в системе экстраполяции
должны быть предусмотрены специальные процедуры «склейки»
одношаговых решений. С их помощью формируются более сложные
решения по управлению.
Указанные особенности учтены в процедурах и методах, опи-
санных в последующих главах. Надо помнить, что эти методы не
единственно возможные. И любой специалист вправе придумывать
и предлагать свои подходы к решению задач, вытекающих из
сути метода ситуационного управления.
И последнее замечание. Как следует из Исторического очерка
развития ситуационного управления, приведенного в конце книги,
оно возникло много раньше, чем сформировалось активно разви-
вающееся сейчас научное направление, называемое теорией ис-
кусственного интеллекта. У ситуационного управления много
общего с методами, характерными для исследований в области
искусственного интеллекта. По ходу изложения эти аналогии мы
будем отмечать, что поможет читателю использовать из арсенала
теории искусственного интеллекта не только терминологию, но
и те результаты, которые там получены, для обогащения своих
систем управления сложными объектами.
§ 1.5. Семиотические модели *
Цель настоящего параграфа — уточнить понятие семиотиче-
ской модели, лежащее в основе метода ситуационного управления
и вообще методов семиотического управления. В том, что в таких
методах используется именно данная модель, состоит главное от-
личие от традиционных методов теории управления, в основе ко-
торых лежит некая формальная (в логическом смысле) модель.
Начнем с определения формальной модели.
Определение 1.3. Формальной моделью называется
четверка
М = <Т, Р, А, П>,
где Т — множество базовых элементов, Р — синтаксические пра-
вила, А — система аксиом, П — семантические правила.
Поясним суть элементов, образующих формальную модель.
Множество Т состоит из конечного или счетного множества элемен-
тов любой природы. Это как бы алфавит формальной системы, на-
бор элементов, из которых будут строиться все остальные ее эле-
менты. На элементы формальной системы не накладывается ни-
каких ограничений. Важно только, чтобы любые два элемента
из Т чем-то отличались друг от друга. Иными словами, должна
существовать такая конструктивная (завершающаяся через ко-
нечное число шагов) процедура Лр что ее применение к элементам
множества Т дает ответ на вопрос: одинаковы ли два сравниваемых
элемента или нет. Важность этой процедуры можно проиллюстри-
§ 1.5. СЕМИОТИЧЕСКИЕ МОДЕЛИ
33
ровать на примере множества Т, состоящего из букв русского
алфавита. Отождествление различных написаний буквы А, на-
пример, дело не такое простое. А иногда, особенно в скорописи,
бывает довольно трудно идентифицировать в слове ту или иную
букву.
Кроме того, должна существовать конструктивная процедура
л2, которая дает ответ на вопрос: принадлежит ли данный элемент
к Т или не принадлежит. Для того же иллюстративного примера
это соответствует ответу на вопрос о принадлежности некоторой
графемы к списку букв
русского алфавита.
Синтаксические прави-
ла Р используются для
того, чтобы из базовых
элементов строить такие их
совокупности, которые в
рамках данной формальной
системы считаются синтак-
сически правильными сово-
купностями. На множество
синтаксических правил нет
особых ограничений. Тре-
буется только наличие кон-
структивной процедуры л3,
которая давала бы одно-
значный ответ на вопрос:
является ли данная сово-
купность базовых элемен-
тов синтаксически пра-
вильной или нет.
Систему аксиом А об-
разует любое множество
синтаксически правильных
совокупностей. На это множество не накладывается никаких
специальных ограничений. В частности, оно может совпадать
со всем множеством синтаксически правильных совокупностей.
Наконец, семантические правила П (по-другому они называются
правилами вывода) расширяют, если это возможно, множество ак-
сиом, добавляя к ним новые синтаксически правильные совокуп-
ности. Множество, получаемое после применения семантических
правил к аксиомам, носит название множества семантически пра-
вильных совокупностей.
На рис. 1.8 условно показан результат работы формальной
системы, которая выступает как автономный генератор. Проце-
дуры порождения множества синтаксически правильных совокуп-
ностей, основанные на произвольном применении правил Р, и
процедуры порождения множества семантически правильных
2 Д. А. Поспелов
34
ГЛ. 1. ПРИНЦИПЫ СИТУАЦИОННОГО УПРАВЛЕНИЯ
совокупностей, основанные на применении правил П, работают
независимо.
Определение 1.4. Формальная модель, для которой
существуют конструктивные процедуры л1; л2 н л3, называется
конструктивной формальной моделью.
Определение 1.5. Конструктивная формальная модель,
для которой существует конструктивная процедура л4, дающая
однозначный ответ на вопрос — принадлежит ли данная синтак-
сически правильная совокупность множеству семантически пра-
вильных совокупностей, называется разрешимой формальной мо-
делью.
Приведем несколько иллюстративных примеров.
Пример 1.4. Вернемся снова к коробке детских кубиков, содер-
жащей всего шесть кубиков. Каждый кубик есть базовый элемент.
Легко убедиться, что существуют и л2, позволяющие отличать
один кубик от другого (по несовпадающему рисунку хотя бы на
одной грани двух сравниваемых кубиков) и отличать кубики из
других наборов (например, по несовпадению концевых точек линий
или границ между цветами на всех шести гранях данного кубика
со всеми другими кубиками набора, если нет более простого при-
знака типа другого размера кубика). Система синтаксических
правил такова, что она считает синтаксически правильными любые
совокупности кубиков, в которых все шесть кубиков выложены в
виде прямоугольника 2x3 или 3x2. Ясно, что существует кон-
структивная процедура л3. Система аксиом совпадает с такой со-
вокупностью кубиков, которая соответствует одной из приложен-
ных к коробке картинок (эта картинка как бы фиксируется в виде
начальной позиции). Правила П дают возможность получать из
исходной картинки новые картинки (думаю, что читатели в детстве
сами строили эти правила). И, наконец, ясно, что существует
конструктивная процедура л4, ибо определение всех семантически
правильных совокупностей содержится в наборе шести картинок,
приложенных к набору. Следовательно, мы имеем дело с разре-
шимой формальной моделью.
Пример 1.5. Рассмотрим классическое исчисление высказываний.
В качестве элементов Т будем использовать малые латинские
буквы без индексов и с нижними индексами, а также символы “],
&, V и В качестве Р возьмем следующий набор правил: 1. Каж-
дый базовый элемент есть синтаксически правильная совокупность.
2. Если а — синтаксически правильная совокупность (формула),
то “]а также есть формула. 3. Если а и |3 — формулы, то (а\/|3),
(а&|3), (а->|3) — также формулы. Здесь а и |3 — метасимволы, не
входящие в Т. Процедура щ явно существует. Рассмотрим, на-
пример, совокупность базовых элементов вида (~\а\/Ь).
Это, конечно, формула, ибо а и b — формулы согласно первому
правилу из Р, — формула согласно второму правилу из Р,
a (“|aV&) — формула по третьему правилу из Р. В противопо-
§ 1.5. СЕМИОТИЧЕСКИЕ МОДЕЛИ
35
ложность предыдущей совокупности совокупность (Я Vа) не есть
формула, ибо в Р нет правил, последовательное применение ко-
торых привело бы к ее построению. Явное выражение процедуры
л3 не приводится, чтобы доставить читателю удовольствие самому
написать ее.
Система аксиом имеет следующий вид:
(1) (а —(₽^а));
(2) ((« -«-(₽-> у)) ((а Р) — (а у));
(3) ((а & 0) —► а); (4) ((а &Р) — Р);
(5) ((а Р) -* ((« у) (а (0 & у))));
(6) (а->(а\/Р)); (7) (0(а V 0));
(8) ((а-^у)->((Р-^у) ^((а VP)-*У)));
(9) ((а — Р) ( Я Р - Я а)); (Ю) (а - Я Я «);
(11) (Я Я « —а).
Конечно, аксиом многовато и непривычному к логической сим-
волике читателю трудно их охватить единым взглядом. Но это
и не нужно. Надо смотреть на них, как на множество произвольно
выбранных из правильных совокупностей элементов.
Наконец, правила П в классическом исчислении высказываний
в той его форме, как она рассматривается в данном примере, имеют
вид: 1. Если a — семантически правильная совокупность (выво-
димая формула), то при замене в а любого базового элемента (везде,
где он входит в а) любой формулой вновь получается выводимая
формула; 2. Если (а->0) и a — выводимые формулы, то р также
выводимая формула.
Вопрос о существовании конструктивной процедуры л4, которая
позволяла бы для любой формулы исчисления высказываний оп-
ределять выводима она или нет, пока остается открытым. Но в
рассуждениях, которые будут следовать после определения 1.6,
мы дадим на этот вопрос положительный ответ. И тогда читателю
станет ясно, почему в данном примере выбрана именно такая си-
стема аксиом.
Приведенных примеров, по-видимому, достаточно. Отметим
только, что исчисление предикатов и формальные грамматики, ши-
роко используемые в языках программирования, суть конструк-
тивные формальные системы. Но в общем случае они не являются
разрешимыми формальными системами.
Рассмотрим теперь модель вида
jL = <Z, D, Н, Е>.
Здесь Z — некое множество, которое мы будем называть множест-
вом интерпретируемых значений. Правила D, называемые прави-
лами отображения, устанавливают возможность отображения T^Z,
которое является многозначным в обе стороны. Эти правила при
некоторой конкретной реализации дают отображение T->Z, од-
2*
36
ГЛ. 1. ПРИНЦИПЫ СИТУАЦИОННОГО УПРАВЛЕНИЯ
позначное в одну сторону, т. е. приписывают каждому элементу,
из Т некоторое интерпретирующее значение. Та или иная реали-
зация отображения задается И — правилами отображения или
задается извне. Наконец, правила интерпретации V позволяют
приписывать любой синтаксически правильной совокупности ба-
зовых элементов некоторое интерпретирующее значение, если за-
даны интерпретирующие значения для всех базовых элементов,
входящих в эту совокупность.
Определение 1.6. Формальная модель .-И, для которой
задана модель L, называется интерпретированной формальной
моделью.
Пример 1.6. Для исчисления высказываний, рассмотренного в
примере 1.5, можно в качестве модели интерпретации взять мо-
дель, в которой Z={Истина, Ложь}, правила отображения зада-
ют произвольное отображение любых элементов из Т, кроме ~],
&, V и в любой элементZ, правила Н отсутствуют, а правила V
определяются табл. 1.1.
Таблица 1.1
а ь П а а & b а V 4 а —>- b
Ложь Ложь Истина Ложь Ложь Истина
Ложь Истина Истина Ложь Истина Истина
Истина Ложь Ложь Ложь Истина Ложь
Истина Истина Ложь Истина Истина Истина
Эти правила позволяют для любой синтаксически правильной
формулы исчисления высказываний приписать некоторое интер-
претирующее значение. Нетрудно проверить, что всем аксиомам,
перечисленным в примере 1.5, эти правила при любых интерпре-
тациях входящих в них базовых элементов приписывают значение
«Истина». Семантические правила, приведенные в том же примере,
не могут изменить значение формул, к которым они применяются.
Таким образом, все формулы, которые выводятся из аксиом, также
всегда имеют интерпретирующее значение «Истина». Можно до-
казать, что аксиомы и правила вывода, приведенные нами, обла-
дают свойством полноты в том смысле, что любая формула исчис-
ления высказываний, которая имеет значение «Истина», выводима
из этого множества аксиом с помощью имеющихся семантических
правил. А это означает, что исчисление высказываний, рассмот-
ренное нами, является разрешимой формальной системой. Про-
цедура л4 состоит в проверке того, что при любых интерпретациях
базовых элементов проверяемой формулы она принимает значение
«Истина». Если это не так, то проверяемая формула не прннад-
§ 1.5, СЕМИОТИЧЕСКИЕ МОДЕЛИ
37
лежит множеству семантически правильных формул (совокупно-
стей).
В формальных системах Т. Р. .4 и П остаются неизменными.
Это означает, что если бы формальные системы использовались для
создания ситуационных моделей управления, то язык описания
ситуаций (он определяется Т и Р), исходные знания об объекте
управления и законах управления (они определяются заданием
множества аксиом) и ЛТП (они совпадают с семантическими пра-
вилами) оставались бы неизменными и незыблемыми. Но это про-
тиворечит всему, что мы говорили об объектах управления и самой
системе ситуационного управления, ее принципиальной открыто-
сти для обучения и дообучения. Система управления, базирующаяся
на формальной модели, априорно должна иметь всю информацию,
которая остается для нее неизменной в течение всего периода
управления. Все утверждения, выведенные в ней в любой момент
времени, остаются выведенными навсегда.
Ясно, что для объектов управления, отличных от детских ку-
биков из примера 1.4, такое положение не имеет места. В процессе
функционирования системы управления могут корректироваться
языки описания ситуаций, изменяться знания об объекте и методах
управления им. Это означает, что все элементы, входящие в опре-
деление М, могут изменяться в процессе ее функционирования.
Рассмотрим в связи с этим модель вида
С = <^У1, Хг> ур, уА, /п>-
Здесь Хт, хР, Хз. 1! Хп — соответственно правила изменения Т, Р,
А и П.
Определение 1.7. Модель С называется семиотической
моделью.
Подобное название С связано с тем, что в отличие от формаль-
ных моделей, в которых элементы, образующие множество Т, об-
ладают жестким синтаксисом, задаваемым процедурой л1; жесткой
семантикой, определяемой процедурой интерпретации, и жесткой
прагматикой (то, как трактует этот элемент ЛПР с точки зрения
процесса управления), в модели С все эти свойства элементов i,
становятся доступными для изменения. Но именно такой особен-
ностью обладают знаки — элементы знаковых, или семиотических,
систем, изучаемых в семиотике. Такие системы тесно связаны со
всей человеческой деятельностью. Именно изменчивость и услов-
ность знаков делают эту деятельность эффективной. Поясним ска-
занное на простом примере. Сигнал звонка может означать, что
кому-то надо поднять телефонную трубку. Но прагматика звонка
для меня может быть различной в зависимости от того, жду ли я
с кем-то разговора или знаю, что трубку должны снять в соседней
комнате. Вместо звонка меня могут позвать к телефону стуком в
перегородку. Синтаксис знака изменился, а семантика и прагма-
тика сохранились. И точно такой же звонок может означать конец
38
ГЛ. !. ПРИНЦИПЫ СИТУАЦИОННОГО УПРАВЛЕНИЯ
работы, что при неизменном синтаксисе знака дает другую семан-
тику. А в странах, где надо особо платить за каждое соединение
абонентов, люди договариваются о том, что если телефон прозвонит
четыре раза, то встреча состоится, а если пять — откладывается.
Сохраняя синтаксис телефонных звонков, они меняют их семан-
тику и прагматику.
Человек окружен знаковыми системами, его деятельность
пронизана ими. Он постоянно творит такие системы, договариваясь
с другими партнерами о синтаксисе, семантике и прагматике знаков.
Правила изменения, введенные нами в модель С, в какой-то
мере отражают подобный процесс. Правила и меняют син-
таксис базовых элементов и их совокупностей, правила и уп—
семантику и прагматику совокупностей. Можно было бы еще из-
менять модель интерпретации. Тогда бы мы получили модель,
подобную знаковым системам человека. Но мы этого делать не
будем. Для систем управления вполне достаточно изменения эле-
ментов в формальных моделях.
Другое название знаковых систем и моделей —• семиотические
модели. Этого названия мы и будем придерживаться в дальнейшем.
Посмотрим, что означают правила изменения в модели С в
терминологии системы управления. Начнем с ЛТП. Модель М
детерминирована и неизменна. Правила /п дают возможность
отказаться от этого, сделать ЛТП переменными, например адап-
тивными. Примерами таких ЛТП могут служить ЛТП с вероятност-
ной перенастройкой вида
Qj —> (Qit’ Qto 7г> • •! Qir, Qr)'
uk
В таком ЛТП текущая ситуация Q, при полной ситуации S, пре-
образуется не в одну фиксированную текущую ситуацию Qf, как
было ранее, а в г различных текущих ситуаций. Выбор того или
иного преобразования осуществляется вероятностным механизмом
с учетом того, что дг (г = 1, 2, . . ., г) — вероятности реализации
соответствующего преобразования I 2 7 г = В зависимости от
\ i = 1 /
удачи или неудачи применения такого ЛТП происходит измене-
ние распределения. Если, например, в полной ситуации было
применено преобразование Q/=>QZ. и оно оказалось удачным (на-
пример, с точки зрения ЛПР), то qt может увеличиться на неко-
торую величину при условии сохранения нормировки, т. е. при
условии соответствующего уменьшения остальных q'j. Такой способ
изменения ЛТП позволяет подстраивать семантические правила
под тот объект, для которого построена система управления. Вме-
сто пересчета вероятностной схемы можно менять ЛТП и другими
способами, и об этом будет говориться в соответствующем разделе
книги.
§ 1.6. ДАННЫЕ 11 ЗНАНИЯ
39
В каждый текущий момент некоторые утверждения об объекте,
его состоянии, а также состоянии системы управления являются
истинными, отражают положение вещей. Эти знания можно вы-
разить в виде набора аксиом. Можно считать, что все, составляю-
щее в момент принятия решений описание полной ситуации 5г,
есть набор таких аксиом. Они служат источником вывода о том
решении Uk, которое надо применить в данном случае. Однако
в другой момент времени эти знания будут уже другими. И утверж-
дение о том, что станок № 1245 свободен, которое могло выступать
как аксиома в предшествующий такт управления, на данном такте
может уже оказаться ложным. Система аксиом все время «дышит»,
меняется. И эти изменения можно явно указывать, например, в
правых частях ЛТП, записывая их в виде
Qz=>Qz; Л-
Здесь Ц — те изменения, которые необходимо внест
полной ситуации 8, после того, как Qj перешла в
возможны и другие способы описания измене-
ний аксиом, задаваемых правилами /Л.
Наконец, изменения синтаксических правил (лЛ
могут свидетельствовать, что язык описания
ситуаций на объекте управления, полные зна- *
ния о нем и процедурах управления оказался
слишком бедным. В него необходимо ввести
новые способы образования функций, отноше-
ний типовых сообщений. Функции такого из-
менения выполняют правила /р. Правила /г
добавляют в список исходных понятий, отношений или функций
новые элементы или исключают из него те, которые оказались
ненужными для целей управления.
Семиотическую модель можно представить в виде сети, пока-
занной на рис. 1.9. Каждая вершина сети представляет собой
некоторую формальную систему, а связи между вершинами опре-
деляют переходы от одной формальной системы к другой под влия-
нием изменений х'. Эти изменения могут совпадать с хг, Хд
или Хп или быть какой-то их комбинацией. За один такт работы
семиотической модели в зависимости от содержимого Ц модель
либо останется в том же состоянии (в рамках той же формальной
системы), что и ранее, либо перейдет в новое состояние. §
§ 1.6. Данные и знания
Введенное нами понятие семиотической модели и ее интерпретация, показан-
ная на рис. 1.9, позволяют рассмотреть важную проблему искусственного интел-
лекта — взаимоотношение данных и знаний и логическую противоречивость зна-
ний. Вопрос этот важен и для ситуационного управления. Но прежде чем мы не-
посредственно перейдем к его обсуждению, отметим, что до последнего времени в
и в
Qi.
хг
описание
Конечно,
а-з
X'
Xе
Рис. 1.9
X?
40
ГЛ. 1. ПРИНЦИПЫ СИТУАЦИОННОГО УПРАВЛЕНИЯ
теории программирования задач для систем искусственного интеллекта оживленно
дебатировался вопрос о двух возможных путях построения подобных систем:
процедурном и декларативном. В процедурном подходе в центре внимания раз-
работчика находилась процедура, программа, а информация для нее играла второ-
степенную роль. Программа работала с данными, вызывала их по мере необходи-
мости, уничтожала в памяти. Данные оставались где-то на периферии. Считалось,
что основная работа по созданию системы лежит в области создания процедур.
Это положение стало меняться, когда данные стали усложняться. Появились
структурированные данные — списки, документы, семантические сети, фреймы.
О некоторых из них речь еще впереди, они будут играть важную роль на страни-
цах нашей книги. Затем возникли специальные средства для хранения данных —
информационные банки и базы, к которым стал добавляться термин интеллекту-
альный. Это означало, что вместе с хранением данных в базах и банках происходит
их элементарная обработка, выполняемая специальными вспомогательными про-
граммами. Они осуществляют поиск данных, запись их в отведенное место и ряд
других операций. Форма записи данных в хранилище может не совпадать с той
их формой, которую использует программа, решающая основную задачу, ибо таких
программ много, а хранилище одно. Поэтому сервисные программы стали брать на
себя функцию перевода запроса и выдаваемого ответа из одной формы представле-
ния в другую. Информация усложняла свою форму представления, она станови-
лась структурированной, одни порции информации стали связываться с другими
некоторыми отношениями. Процедуры, связанные с ее обработкой, начинали ус-
ложняться. становились самодовлеющими. Многие преобразования, 'которые
раньше осуществлялись программами, решающими основную задачу (например,
поиск по образцу) стали выполняться вне основной программы. Во многих случаях
Рис. 1.10
привычные программы, перерабатывающие информацию за счет ее прямого видо-
изменения, заменялись специальными процедурами по переработке информации.
Так возник декларативный подход, в котором работа с данными (их начинают на-
зывать знаниями} выходит на первый план, оттесняя сами процедуры на второй
план.
В чем же принципиальная разница между данными и знаниями? Традиционное
программирование не дает на это ответа. Но в рамках теории семиотических моде-
лей такой ответ можно найти. Давайте посмотрим на рис. 1.10. На нем очень
условно показана лошадь, пасущаяся на лугу, что вызывает в голове видящего
§ 1.6. ДАННЫЕ II ЗНАНИЯ
41
ее индивида некоторый обобщенный образ «лошади, пасущейся на лугу». Этот
образ включен в некоторую систему данных о такой ситуации. Индивид может,
например, понять, что движения, которые делает лошадь, сводятся к перемещению
по лугу, отгону надоедливых слепней и к поглощению травы — пищи для лошади.
Он может установить, что это лошадь определенной масти (если он, конечно,
знает, что это такое), домашняя и. следовательно, она кому-то принадлежит. По
некоторой ассоциации он может себе представить конюшню (не конкретную, где
живет данная лошадь, а конюшню вообще), человека, который за лошадью ухажи-
вает, и т. п. Важно, что весь тот информационный комплекс, который возникает
у индивида, видящего пасущуюся лошадь, оказывается логически непротиворе-
чивым, ибо он может представить себе конкретную ситуацию (ей в ситуационном
управлении соответствует текущая ситуация), в рамках которой все эти сведения
могут быть совмещены. И если индивиду задать вопрос: «Лошадь летает?», то он
ответит на него отрицательно. Такие лошади, конечно, не летают. Но индивид мо-
жет легко представить себе летающую лошадь. Например, Пегаса, если он что-то
слышал о нем. В мире греческой мифологии, где действует Пегас, лошадь может
летать. Но если в мире мифологии задать вопрос: «С помощью чего летает Пегас?»,
то ответом будет: «С помощью крыльев». Ибо Пегас — крылатая лошадь. А в мире
русской народной сказки лошади не надо иметь даже крыльев. Конек-Горбунок
умеет летать и без них, перенося героя сказки куда тому нужно.
Если эти знания о лошади совместить в рамках одной конкретной ситуации,
то получится логически противоречивая система. В ней лошадь летает и не летает,
летает только если у нее есть крылья и может летать без крыльев. Получается аб-
сурд. Но подобный абсурд встречается на пути человека постоянно, и он нисколько
не страдает от этого. Он вполне спокойно оперирует с такими, например, логиче-
ски противоречивыми образами: «Началась третья половина игры», «Исполнение
всех желаний, у которых нет предела», «Речка движется и не движется, вся из
лунного серебра» и т. п. Более того, подобные абсурдные утверждения развлекают
человеческий ум, приятны для человека. Это происходит потому, что в голове
человека вся такая информация не .хранится в рамках одной системы. Тогда бы
он был лишен возможности производить над ней логические операции, а следова-
тельно, не смог бы использовать хранимую информацию для своих прагматиче-
ских целей. Значит, эта логически противоречивая информация так организована
в его памяти, чтобы избежать возможных логических противоречий.
Одна из возможностей такой организации информации как раз и показана на
рис. 1.9. В каждой вершине сети хранится логически непротиворечивая информа-
ция, совместимая в рамках одной ситуации, и эта информация может быть отра-
жена в некоторой формальной системе. Относительно нее можно делать логически
обоснованные выводы, которые можно использовать при наличии подобной ситуа-
ции. Но возможны и другие ситуации, в которых действуют свои аксиомы и семан-
тические правила, своя интерпретация. В этих ситуациях (возможных мирах)
может выводиться то, что в другой ситуации оказалось бы бессмысленным.
Отметим еще один важный аспект, позволяющий уяснить разницу между дан-
ными и знаниями. Любое понятие, используемое человеком, имеет как бы две сто-
роны — экстенсивна.! и интенсивна.!. В науке до сих пор продолжаются споры
относительно точной их интерпретации. Поэтому наши дальнейшие рассуждения
нельзя рассматривать как способ разрешить эти споры. Понятия «экстенспонал»
и «интенсионал» мы будем трактовать прагматически, как принято в теории пред-
ставления знаний. Под экстенсионалом некоторого понятия мы будем подразуме-
вать набор конкретных фактов, соответствующих данному понятию. Если, напри-
мер, для некоторой конкретной лаборатории в данном научном учреждении мы
рассмотрим понятие «сотрудник», то его экстенсионалом может быть список работа-
ющих в этой лаборатории. Экстенсионалом понятия «ателье по ремонту микрокаль-
куляторов в г. Минске» служит перечень всех таких ателье, имеющихся в данном
городе в данный момент времени. Экстенспонал понятия может быть конечным,
как было в приведенных нами примерах, но может быть и бесконечным. В послед-
нем случае, разумеется, его нельзя задать простым перечислением. В этом случае
поступают по-иному. Например, задают некоторое характеристическое правило,
удовлетворение или неудовлетворение которому определяет принадлежность к
42
ГЛ. I. ПРИНЦИПЫ СИТУАЦИОННОГО УПРАВЛЕНИЯ
эксгенчионалу данного понятия. Например, определяя экстснсионал понятия
«четное число», мы не можем просто перечислить все четные числа, но можем задать
его путем следующего характеристического правила: если при делении на 2 данное
число имеет нулевой остаток, то оно принадлежит экстенспопалу понятия «четное
число». Подобное правило можно (что обычно и делается) использовать для опре-
деления понятия «четное число». Это определение и будет интенсионалом данного
понятия.
Между декларативным и процедурным представлением, с одной стороны,
и экстенсионалом и интенсионалом, с другой, существует очевидная связь. Экс-
тенсионал — это набор конкретных данных, заданных в декларативной форме.
Интенсионал же, как правило, задает некоторую процедуру, позволяющую опре-
делять принадлежность того или иного конкретного факта к некоторому понятию.
Интенсионал выделяет знания, отделяет и.х от данных, которые всегда задаются
экстенсионально.
Теперь можно описать разницу между данными и знаниями. Данные есть
комплекс информации, совместимый в рамках некоторой формальной системы
с учетом всех возможных интерпретаций этой системы. В случае ситуационного
управления множество данных есть множество текущих ситуаций, которые могут
складываться на объекте управления (последний предполагается неизменным),
и информация о текущем состоянии объекта и системы управления им. Знания же
есть информация, которая хранится во всех возможных мирах вместе с условиями
перехода от одного мира к другому. Другими словами, знания — это не только
множество всех текущих ситуаций в объектах данного типа, но и способы перехода
от одного описания объекта к другому, способы изменения компонент формальной
системы, а, следовательно, знания — это то, что воплощается в некоторой семио-
тической модели.
§ 1.7. План дальнейшего изложения
Прежде чем переходить к изложению основных проблем, свя-
занных с созданием систем ситуационного управления, наметим
план изложения.
В последующих главах мы прежде всего займемся описанием
языка ситуационного управления, с помощью которого будут
описываться ситуации. Этот язык допускает согласование с языком
описания знаний об объекте управления и управления им, а также
с языком, на котором описываются цели управления.
Затем мы рассмотрим процедуры классификации, столь важные
для ситуационного управления. Опишем методы пополнения опи-
саний ситуаций за счет использования знаний относительно объ-
екта управления и методов управления им, хранящихся в памяти
системы. В связи с этим мы обсудим специальные псевдофизиче-
ские логики, используемые для пополнения описаний и процедуры
индуктивного вывода, позволяющие получать в процессе управ-
ления новые знания.
Наконец мы обсудим различные подходы к проблеме принятия
решений по управлению, традиционные для ситуационного управ-
ления. Будут описаны как традиционные дедуктивные системы
вывода решений, так и нетрадиционные системы, опирающиеся
на специфические свойства семиотических моделей.
ГЛАВА 2
ЯЗЫКИ ДЛЯ ОПИСАНИЯ ОБЪЕКТА И СИТУАЦИЙ
Понятие розы так же мало обладает
ароматом, как мало понятие прыжка
прыгает.
Г. Ферстер
§2.1. Вступительные замечания
В традиционных методах управления объект управления, как
правило, заменяется некоторой синтаксической формальной мо-
делью. Поясним, что вкладывается в это название. Пусть мы имеем
некоторое дифференциальное уравнение вида
Л'-г 2х — Зе': = 12.
Попробуем задать себе вопрос — какой объект описывается этим
уравнением? К сожалению, ответить на него невозможно, если не
знать,, для описания какого объекта было оно построено. Переход
от содержательной задачи управления к ее математическому ана-
логу исключает семантику исходной задачи, лишает проблему
конкретности.
Если такой переход совершен, математик берется за дело. Ему
нет дела до объекта управления. С него вполне достаточно той
математической реальности, которая скрывается за синтаксиче-
ской моделью. Он может исследовать самые тонкие оттенки пове-
дения интегральных кривых для этого уравнения, решать про-
блему об устойчивости его решений, разрабатывать методы решения
уравнений подобного типа. Это его епархия, и для владения ею
ему совершенно необязательно видеть и знать объект управления.
Аналогичная картина возникает при переходе от объекта управ-
ления к любой синтаксической (формальной по своей природе)
математической модели. При этом обнаруживается сила мате-
матики, широкая применимость предлагаемых ею методов. Если
математику удалось найти и исследовать решения уравнения,
описывающего колебание мембраны в телефонной трубке, а коле-
бания крыльев самолета, приводящие, в конце концов, к их раз-
рушению (флаттер), описываются уравнениями такого же вида, то
решения, полученные для колеблющейся мембраны, полностью
переносятся на явление флаттера. Или, если множества различных
задач можно свести к задаче целочисленного линейного програм-
мирования, то для всех них, независимо от семантики решаемой
задачи, математик даст метод нахождения оптимального решения.
Но, как уже говорилось в гл. 1, новые объекты не дают такой
возможности. Стандартизация методов решений возникающих тут
задач практически невозможна. Всем памятен призыв, прозву-
чавший десяток лет тому назад среди специалистов по пресловутым
41
ГЛ. J. ЯЗЫКИ для ОПИСАНИЯ ОБЪЕКТА II СИТУАЦИИ
автоматизированным системам управления, как они мыслились
их первым адептам, призыв к стандартизации блоков этих АСУ.
Если бы такие блоки оказалось возможным изготовить, то проблема
проектирования АСУ, одна из наиболее актуальных проблем
последнего двадцатилетия, существенно упростилась бы, и можно
было бы надеяться на возникновение теории АСУ. Но опыт показал,
что подобные надежды призрачны. И кроме типового блока расчета
заработной платы и некоторых других (кадровая система, система
учета на складе и т. п.), вообще говоря, не удалось создать ника-
ких типовых модулей. Ибо, как уже отмечалось ранее, каждый
объект АСУ уникален. Для него требуется разработка ориентиро-
ванной на него системы управления. И, по-видимому единствен-
ное, что можно стандартизовать, это методику проектирования
однотипных АСЬ’.
Уникальность объекта управления (а только такие объекты мы
и рассматриваем в нашей книге) требует для описания его струк-
туры, функционирования и особенностей управления им спе-
циальных семантических и прагматических формальных
моделей.
Это требует специальных языковых средств для описания
таких моделей. Языковые средства должны быть способны ото-
бражать семантику и прагматику описываемого явления. К со-
жалению, классическая математика не позволяет сделать это.
Поэтому приходится расширять ее средства. И их расширение
легче всего производить в области математической логики, наи-
более близко сталкивающейся со способом описания явлений и
получения выводов из этих описаний человеком. С другой сто-
роны, технологи, которые до автоматизации объекта управления
как-то справлялись со своей задачей, могут дать много инфор-
мации о нем и о своей деятельности по управлению. Но сообщаемая
ими информация всегда выражена на естественном языке, весьма
далеком от точного языка математики.
Что происходит, когда на сложный объект, управление кото-
рым еще не автоматизировано, приходит ученик? Что делает опыт-
ный технолог-управленец в этом случае? Конечно, он не может
сообщить ученику точного алгоритма управления, ибо он его не
знает. Но кое-что, находящееся на каком-то интуитивном уровне,
он знает. И он начинает объяснять ученику принципы управления
объектом. И велит следить ученику за тем, как он реализует про-
цесс управления. И вот через некоторое время наступает чудо.
Обыкновенное чудо, происходившее в истории человечества мил-
лионы раз. Ученик построил в своей голове модель объекта и мо-
дель управления им и становится сам технологом-управленцем.
Ему для этого вполне хватило объяснений учителя, сделанных
на обычном естественном языке, и наблюдения за его действиями
по управлению. Это позволяет нам выдвинуть следующую естест-
веннонаучную гипотезу.
§ 2.2. РОЛИ И ОТНОШЕНИЯ 45
Гипотеза 2.1. Всю информацию об объекте управления
и способах управления им можно выразить средствами обычного
естественного языка.
Эту гипотезу, конечно, нельзя строго обосновать. Возможно,
что для некоторых объектов она просто неверна. Вспомним опи-
санный в гл. 1 случай с диагностикой психических заболеваний.
Вряд ли то мгновенное «ощущение» болезни, позволяющее опытным
врачам практически безошибочно ставить правильный диагноз,
можно записать в виде текста на русском языке. Тогда бы не было
проблемы диагностики. Но для многих объектов подобную ги-
потезу можно принять. А следствием этого является тот интерес
к естественному языку и его изобразительным средствам, который
характерен для метода ситуационного управления.
Но для современных ЭВМ, на базе которых строятся наиболее
гибкие системы управления, естественный язык в его полном объ-
еме недоступен. Поэтому возникает проблема сужения текстов на
естественном языке, описывающих сам объект управления и опыт
по управлению им, до такого уровня, чтобы полученные описания
можно было «погрузить» в семиотическую систему. Это приводит
к некоторому утверждению, выливающемуся в гипотезу.
Гипотеза 2.2. Всякий текст на естественном языке, отно-
сящийся к тому, о чем говорится в гипотезе 2.1, можно перевести
на формальный язык семиотической модели.
Эта гипотеза, как и предыдущая, верна, по-видимому, не всегда.
Но практический опыт автора книги и всех разработчиков систем
ситуационного управления подтверждает ее справедливость.
Таким образом, мы приходим к следующей постановке основной
задачи, связанной с описанием ситуаций, а также структуры и
функционирования объекта управления: найти такой способ ес-
тественно-языкового описания необходимой информации, ко-
торый позволял бы реализовать основные процедуры ситуацион-
ного управления: классификацию, корреляцию (соотнесение с
помощью ЛТП описания ситуаций с одношаговыми решениями),
экстраполяцию. Этой проблемой мы и будем заниматься в настоя-
щей главе.
§ 2.2. Роли и отношения
Постигая мир, осуществляя свою деятельность в нем, человек должен уметь
Моделировать и описывать окружающий его мир. Однако как он это делает, мы
знаем еще очень плохо. Многие детали этого процесса остаются нам неизвестными.
Гем не менее в последние десятилетия в психологии, психолингвистике и теории
дознания получено немало фактов, на основании которых можно сформулировать
следующую гипотезу.
Гипотеза 2.3. При отображении внешнего мира, при описании его чело-
век вычленяет в нем конечный набор отношений. Эти отношения связывают между
собой отдельные элементы модели внешнего мира. Сами элементы, связанные от-
ношениями, выступают в них как определенные po.ni, семантика которых определя-
ется видом отношения.
46
ГЛ. 2. ЯЗЫКИ ДЛЯ ОПИСАНИЯ ОБЪЕКТА И СИТУАЦИИ
Эта гипотеза нуждается в некоторых пояснениях. По-вндимому, не вызывает
сомнений, что человек (возможно, что и все животные, находящиеся на достаточно
высокой ступени развития) воспринимает окружающий мир структурированно.
Свидетельство этого — человеческий язык, предназначенный, в частности, для
описания мира, в котором человек живет. Человек выделяет в этом мире отдель-
ные конкретные факты, предметы, явления, процессы, события и отношения между
ними. Язык сохраняет эту структуризацию. Факты, предметы, явления, процессы
и события получают в языке свои, присущие им имена, а отношения выражаются
либо с помощью специальных имен, либо чисто языковыми синтаксическими сред-
ствами.
Семантика отношений неразрывно связана с теми ролями, в которых выступа-
ют элементы, связанные отношением. Например, отношение начальник — подчи-
ненный связывает двух людей (элементов модели), которым присущи определенные
роли, одна из которых называется начальник, а вторая — подчиненный. Во фразе
«Иванов —• начальник Петрова» Иванов и Петров находятся именно в этих
ролях. Постигая роли, человек познает ситуацию реальной действительности и
может организовать свою целенаправленную деятельность в ней. Для решения
последней задачи он использует роли типа средство — результат, причина —
следствие, и ряд других ролей.
Согласно гипотезе 2.3 таких ролей существует конечное число, а следователь-
но, существует и конечное число отношений, выделяемых человеком в реальном
мире, ибо каждое такое отношение есть пара взаимосвязанных между собой ролей.
Справедливость подобного утверждения вряд ли можно доказать. Но наблюдения
над языковыми текстами и методами построения специальных языков для описания
действительности, с которыми мы познакомимся в последующих параграфах, как
будто подтверждают эту гипотезу. Приведем в заключение данного параграфа
список ролей (явно неполный): целое, признак, признак признака (и далее
рекурсивно любое число раз), владелец, количество, множество, порядок, сравнение,
вышестоящее понятие, мера, приписываемый признак (например, «человек из тех,
которых я знаю»), действие, признак действия, лицо, совершающее действие,
пособник, средство, объект, информационный объект (например, «Иван получил
известие о своих делах»), источник, принимающий, место, время, причина, обсто-
ятельство, цель, результат, заместитель («Он выпил чай вместо меня»).
Как мы увидим далее, все эти роли можно отразить в предлагаемых языках
описания ситуаций.
§ 2.3. Естественный язык и теория управления
Для представителей разных наук естественный язык видится
по-разному. Для лингвиста он есть объект изучения как таковой.
Для психолога он выступает как инструмент мышления и комму-
никации между людьми, для философа — как модель, с помощью
которой организуются познавательные процессы. Специалист в
теории управления также имеет свою концепцию языка. Для него
язык выступает прежде всего как средство описания тех объектов,
которыми он собирается управлять, ситуаций, складывающихся
на этих объектах, и процедур управления. Высказанные нами ги-
потезы об использовании естественного языка в ситуационном
управлении инициируют поиск тех механизмов, с помощью ко-
торых естественный язык может выражать понятия, отношения
п роли, важные для управленца. И первый шаг на пути нахож-
дения этих механизмов — выделение в лексике языка групп, не-
сущих определенную функциональную нагрузку при описании
объектов, ситуаций и процедур управления.
§2.3. естественный язык и теория управления
47
1. Понятия. Сюда входит большая группа лексических единиц
языка, которая используется для обозначения однородных групп
фактов, событий, явлений и других элементов в реальном мире.
Примерами понятий могут служить: стол, подъемный кран, фрезе-
рование, конец смены, землетрясение, премия и т. п. Важно здесь
то, что слово стол означает не какой-то конкретный предмет ре-
ального мира, а стол вообще, любой предмет, который можно
назвать столом. Аналогично, конец смены также не конкретизи-
рован и событие, описываемое данным словосочетанием, может
происходить неизвестно где и неизвестно когда.
Это означает, что понятиям соответствует какая-то своя струк-
тура, некий набор обязательных характеристик, с помощью ко-
торых одни понятия отделяются от других, причем конкретные
элементы действительности называются этими словами и словосо-
четаниями. Это, действительно так. И в следующей главе книги
мы специально остановимся на этом вопросе. Пока же будем апел-
лировать к нашей интуиции, которая должна нам подсказать, что
можно отнести к группе понятий.
В дальнейшем понятия будут обозначаться латинскими бук-
вами с индексами или без них. Не будут использоваться лишь те
буквы, которые мы введем для обозначения других функциональ-
ных групп лексики естественного языка. Договоримся также о
следующем обозначении. Когда понятие будет употребляться по
отношению к некоторому конкретному элементу действительности,
мы будем применять малые, строчные, буквы, а когда оно будет
относиться к классу однородных элементов — большие, прописные.
Например, для фразы «Стол может быть деревянным, железным
или каменным», понятие стол мы будем обозначать какой-либо
большой латинской буквой, а во фразе: «Этот стол мне нравится»
понятие стол мы будем обозначать малой буквой. Таким образом,
величина буквы показывает, имеем ли мы дело с конкретным по-
нятием или понятием-классом.
2. Имена. Практически любые слова и словосочетания могут иг-
рать роль имен. Имена служат для конкретизации тех или иных
элементов действительности, входящих в понятие-класс. Приме-
рами имен могут служить: Петр Петрович Петров, поезд номер 33,
вагон номер 7, номер вешалки Театра на Бронной и т. д. Номера
не всегда выделяют единственный элемент из класса. Петровых с
именем отчеством Петр Петрович существуют сотни, если не ты-
сячи, поездов с номером 33 и вагонов с номером 7 — десятки,
номеров в гардеробе Театра на Бронной — сотни. Поэтому, как
и для понятий, мы введем два обозначения для имен. Малыми
буквами i с различными индексами мы будем обозначать имена
конкретных элементов, а большими буквами I с различными ин-
дексами — имена подклассов понятия-класса, всем элементам ко-
торого присвоено это имя. Рассмотрим фразу «Мой дядя Петр Пет-
рович Петров». В этой фразе используется понятие-класс «дядя».
48
ГЛ. 2. ЯЗЫКИ ДЛЯ ОПИСАНИЯ ОБЪЕКТА И СИТУАЦИЙ
Его мы обозначим некоторой большой латинской буквой. «Мой
дядя» выделяет из этого класса некий подкласс людей, для которых
я являюсь племянником. Это как бы имя, которое мы должны
были бы обозначить как Наконец, Петр Петрович Петров из
этого подкласса выделяет конкретного человека, и, согласно нашей
договоренности, его имя нужно обозначить какой-либо малой
буквой с индексом, например t\. Иногда трудно узнать, относится
ли имя к конкретному элементу, или речь идет о неком подклассе
элементов. Но можно надеяться, что при описании узких про-
блемных областей, связанных с управлением конкретным объектом,
подобная трудность исчезает.
3. Отношения. Отношения фиксируют связи между понятиями и
именами, а также между другими функциональными группами
языка, о которых речь пойдет ниже. В отличие от других функ-
циональных групп, отношения могут задаваться не только с по-
мощью лексики языка, но и с помощью грамматических связей,
выражаемых средствами языка. В силу большой важности отно-
шений для построения языка ситуационного управления и других
языков реляционного типа *), опишем группы отношений языка
более детально.
3.1. Отношения классификации. С помощью
этих отношений происходит классификация элементов реального
мира, образуются классы элементов, устанавливаются отношения
между классами, а также между классами и отдельными элемен-
тами. Важнейшее из этих отношений — иметь имя, которое в
дальнейшем мы будем обозначать буквой р. Это отношение позво-
ляет выделять из понятия-класса разные по мощности подклассы,
вплоть до выделения конкретного элемента из класса однородных
элементов. Его действие мы продемонстрировали в предшествую-
щем разделе, когда говорили об именах. К той же группе отно-
шений принадлежат отношения класс — подкласс и элемент —
класс. По сути, эти два отношения выполняют роль, аналогичную
отношению иметь имя. Но в языке они могут фиксироваться и без
каких-либо применений слов и словосочетаний, относящихся к
именам. Например, «Некоторые члены бригады № 1», «Часть ра-
бочих сборочного цеха», «Один из автомобилей колонны таксо-
парка». Близким по духу к этим отношениям являются отношения
типа: род — вид, нижестоящее понятие — вышестоящее понятие.
Примерами их использования могут служить «В число подъемных
кранов входят как стационарные краны, так и передвижные»,
«Молоток может служить примером инструмента». К той же группе
отношений принадлежит и отношение часть — целое, суть кото-
рого ясна из следующих примеров: «Это окна моего дома», «Токар-
ный станок имеет станину», «Карбюратор двигателя автомобиля
Э От английского слова relation, означающего отношение. В названии этих
языков подчеркивается, что именно отношения играют в них основную роль.
§ 2.3. ЕСТЕСТВЕННЫЙ ЯЗЫК И ТЕОРИЯ УПРАВЛЕНИЯ
49
является одной из важных частей системы». Все эти отношения
(как и отношения других типов) мы будем в дальнейшем обозна-
чать малыми буквами г с различными индексами. В конце раздела
об отношениях мы приведем список некоторых отношений вместе
с теми индексами, которые будут присвоены им в рамках данной
книги.
3.2. Признаковые отношения. Эти отношения
приписывают различные качественные признаки понятиям. Все
их можно представить в виде последовательной композиции двух
отношений: иметь признаком и иметь значение признака. При-
мерами их могут служить «Очередь на шлюзование большая»
(«Очередь на шлюзование имеет длину. Эта длина — большая»),
«Портальный кран», «Ткацкий станок». Эти отношения описывают
совокупность атрибутов, присущих понятиям, являются их ха-
рактеристиками. Одни из них имеют для понятий определяющий
характер (например, иметь длину d для понятия очередь), а для
других это не так, и они характеризуют лишь данный конкретный
элемент в данном месте и в данное время (например, «Этот дом
белый», но, конечно, в другое время он может оказаться перекра-
шенным).
Признаковые отношения тесно связаны с понятиями. Можно
считать, что понятия есть некоторый набор определенных атрибу-
тивных признаковых отношений. Понятие есть как бы сумма опре-
деляющих его признаков. В понятии сосредоточено то общее, что
объединяют отдельные, конкретные элементы в один класс. И это
общее как бы колеблется в некоторых пределах изменения зна-
чений атрибутивных понятий.
К признаковым отношениям относятся и различные отно-
шения, имеющие метафорический смысл (например «План тя-
желый»).
3.3. Количественные отношения. Они выражают
квантитативные характеристики понятий. Количественные отно-
шения можно свести к композиции двух отношений иметь меру
и иметь значение меры. Примерами фраз, в которых реализованы
подобные отношения, могут служить: «В распоряжении диспет-
чера имеется два свободных автобуса», «Расстояние между пунктами
А и Б равно десяти километрам». Особую роль играют количест-
венные отношения, в которых вместо конкретного значения меры
указано некоторое качественное значение": «Имеется много времени
для выполнения этой работы», «Часто станок № 7 не работает».
Этот случай мы в нашем анализе языка выделим особо и рассмот-
рим после анализа отношений.
3.4. Отношения сравнения. Эти отношения по ка-
кому-то признаковому или количественному отношению сопостав-
ляют две характеристики некоторого понятия или группы понятий.
Примерами их могут служить «Это решение эффективнее того,
которое принял диспетчер Петров», «Танкер по длине больше
50
ГЛ. 2. ЯЗЫКИ ДЛЯ ОПИСАНИЯ ОБЪЕКТА И СИТУАЦИИ
причала», «Рабочий Иванов в два раза быстрее выполняет работу,
чем Смирнов».
3.5. Отношения принадлежности. Эти отно-
шения близки к отношениям классификации, но отличаются от
них тем, что связывают два элемента внешнего мира, которые
связаны лишь ситуативно. Примерами таких отношений могут
служить: «Иванов — коллега Петрова, у них одинаковая специ-
альность», «Работы X и Y находятся сейчас в поле зрения диспет-
чера», «Сидоров — брат Купцова». ।
3.6. Временные отношения. К ним принадлежат
отношения типа быть одновременно, быть раньше, совпадать по
началу, пересекаться во времени и ряд других. Сюда же относятся
и отношения, приписывающие элементам некоторое время суще-
ствования или дату: «План будет выполнен в этом году», «Сборка
изделия закончилась в 8 ч утра 30 ноября 1983 г.».
3.7. Пространственные отношения. Эти от-
ношения фиксируют место пребывания некоторого элемента ре-
ального мира или вазимоотношение элементов между собой в не-
котором пространстве. Примерами их служат отношения находить-
ся в, быть между, быть слева, касаться и т. п. В следующих фразах
реализованы пространственные отношения: «Эти два цеха разде-
ляет стена», «Справа от причала находится судно», «Деталь лежит
на станине».
3.8. Каузальные отношения. Это отношения для
отражения причинно-следственных связей, а также связей, отра-
жающих цель, мотивацию, предпочтения при принятии решений
и действиях. Примерами фраз, в которых проявляются подобные
отношения, могут служить: «Передвижка судов от причала позво-
лит разгрузить танкер «Баку»», «Для устранения аварии диспетчер
отключил линию № 6», «Когда давление поднимается выше нормы,
то температура расплава резко возрастает».
3.9. Инструментальные отношения. Эти от-
ношения отражают прагматический аспект деятельности. Самые
важные из них — служить для пли быть средством для. Сюда
же относятся отношения типа быть инструментом, быть вспомо-
гательным средством, способствовать и т. п. Отношения такого
типа присутствуют, например, в следующих фразах: «Десятник
топором срубил сосну», «Для разгрузки сухогрузов используется
причал № 8», «Этот процесс может быть реализован только в ва-
кууме».
3.10. Информационные отношения. Эта группа
отношений описывает различные стороны передачи и получения
информации, приказов, просьб и т. п. Примерами могут служить
фразы «Иванов передал Сидорову приказ начать бурение скважины»,
«Министерство не получило в срок отчета о работе предприятия А».
3.11. Порядковые отношения. Они описывают
соотнесенность элементов реального мира между собой. Они вы-
§2.3. ЕСТЕСТВЕННЫЙ ЯЗЫК И ТЕОРИЯ УПРАВЛЕНИЯ
51
ражаются такими, например, словами, как следующий, ближайший,
очередной и т. и.
Существуют и другие группы отношений (например, отношение
замещения: «Бригада Иванова выполнила разгрузку вместо бри-
гады Петрова»), но основные группы отношений, важные для
задач управления, мы перечислили. В табл. 2.1 представлены ос-
Таблица 2.1
№ п/п Наименование отношения । № П/П Наименование отношения
1 Иметь 32 Быть справа
2 Быть элементом класса 33 Быть спереди
3 Быть подклассом класса 34 Быть сзади
4 Род — вид 35 Наискосок
5 Нижестоящее — вышестоящее 36 Пересекаться в пространстве
(по иерархии) 37 Касаться
6 Часть — целое 38 Быть внутри (в пространстве)
7 Иметь признак 39 Находиться на
8 Признак — значение 40 Быть сверху
9 Признак — мера 41 Быть снизу
10 Мера — значение 42 Быть между
11 Равно 43 Находиться в
12 Сравнимо 44 П ринад лежать
13 Больше 45 Служить для
‘ 14 Больше или равно 46 Быть средством для
15 Меньше 47 Быть инструментом для
16 Меньше или равно 48 Способствовать
17 И есравнимо 49 Причина—следствие
18 Сравнимость—мера 50 Быть целью
19 Соотноситься 51 Быть мотивом
20 Соотнесенность—значение 52 Быть отправителем
21 Одновременно 53 Быть получателем
22 Быть раньше 54 Быть источником информации
23 Быть позже 55 Быть следующим
24 Начинаться одновременно 56 Быть очередным
25 Кончаться одновременно 57 Быть ближайшим
26 Примыкать по времени слева 58 Быть замещающим
27 Пересекаться во времени 59 Находиться в состоянии
28 Совпадать во времени 60 Иметь имя (обозначается че-
29 Быть внутри (во времени) рез р)
30 Совпадать в пространстве 61 Иметь оценку (обозначается
31 Быть слева через е)
новные отношения. (Порядковый номер отношения в таблице в
дальнейшем будет совпадать с индексом соответствующего г;.)
Этот список не есть полное перечисление всех статических
отношений русского языка (статических, так как мы еще не рас-
сматривали действия). Кроме того, легко заметить, что не все
отношения, приведенные в таблице, взаимозаменяемы. Это обстоя-
тельство мы обсудим несколько далее. Смысл списка, приведенного
52
ГЛ. 2. ЯЗЫКИ для ОПИСАНИЯ ОБЪЕКТА И СИТУАЦИИ
в табл. 2.1, скорее иллюстративный. Мы будем использовать от-
ношения, включенные в него, для примеров, которые будут даны
в настоящей и последующих главах.
4. Действия. Всю динамику внешнего мира язык выражает слова-
ми и словосочетаниями, описывающими действия. Эти действия
бывают разных типов, и для нас важно выделить из них основные.
Для обозначения действий будем использовать букву d с раз-
личными индексами.
4.1. Императивы. Входящие сюда действия — это раз-
личные приказы и указания на выполнение некоторых действий:
включить, выполнить план, снизить давление и т. п. Эти импера-
тивы, как правило, задают те решения, которые выдает система
управления на управляемый объект.
4.2. Процессы. В эту группу входят лексические единицы,
соответствующие названиям технологических процессов, которые
могут протекать на управляемом объекте. Часто мы будем назы-
вать их действиями-процессами. Примерами их могут служить
перевалка груза, регулировка клапана, окраска и т. и.
4.3. Состояния. В эту группу входят слова и словосоче-
тания, фиксирующие определенные состояния управляемого объ-
екта и системы управления. Примерами их могут служить неис-
правный автомобиль, свободный причал и т. п. Состояния мы часто
будем называть действиями-состояниями.
Читателя не должно смущать наше весьма широкое толкование
термина действия. К процессам и состояниям такая терминология
Рис. 2.1
вполне применима, когда в текстах встречаются выражения типа
«Происходит погрузка автомобиля» или «Причал освобождается».
К сожалению, на сегодняшний день не существует полной и удоб-
ной для решения прикладных задач классификации действий.
Попытки ее создания делались неоднократно. На рис. 2.1 при-
§2.3. естественный язык и теория управления
53
ведена одна из таких классификаций. На нем через С обозначен
субъект, совершающий действие, а через О — объект, на который
это действие направлено. Верхние индексы соответствуют состоя-
ниям субъекта и объекта, нижние — различным субъектам. Сплош-
ные стрелки символизируют активные воздействия, а штриховые —
пассивные переходы. Приведем примеры для различных классов
действий, показанных на рисунке: 1 — Нагружать судно, 2 —
Наблюдать за показанием высотомера, 3 — Послать сигнал ре-
гулятору на изменение давления, 4 — Построить дом (знак Ф,
как всегда, означает пустоту), 5 — Включить комплекс программ,
управляющих стиральной машиной, 6 — Сменить режим слеже-
ния, 7 — Проверить исправность своих цепей, 8 — Подавать ава-
рийные сигналы.
Подобно таблице для статических отношений можно создать
таблицу динамических отношений. В нее, кроме тех отношений,
которые определяются классами действий, показанных на рис. 2.1,
войдут еще отношения, связанные с перемещением предметов во
времени и пространстве. В табл. 2.2 приведены примеры динами-
ческих отношений (нумерация этих отношений продолжает нуме-
рацию табл. 2.1).
Т а б л и ц а 2.2
№ п/п Наименование отношения № п/п Наименование отношения
62 63 64 65 66 67 68 69 Двигаться к Опускаться П риближаться Стареть Нагружать Включить Забивать Быть исправным 70 71 72 73 74 75 76 Быть свободным Иметь объектом действия Перевести в состояние Двигаться из-за какого-либо предмета Действие—место Действие—время Совершать действие
5. Квантификаторы. Особую группу слов и словосочетаний язы-
ка образуют так называемые квантификаторы. Два из них имеют
четкий смысл. Один из них, называемый обычно квантором общ-
ности и обозначаемый перевернутой буквой А, задает утвержде-
ния вида «Все рабочие получили зарплату», «Каждый автомобиль
таксопарка проверен ГАИ». Его смысл сводится к тому, что некая
информация распространяется на все без исключения элементы
какого-то фиксированного класса. Другой квантификатор, назы-
ваемый обычно квантором существования и обозначаемый зер-
кально отраженной буквой Е, задает утверждения вида «Среди
автомобилей, ждущих погрузки, имеются автомашины ЗИЛ 130»,
«Эта деталь хранится по крайней мере на одном из складов». Смысл
54
ГЛ. 2. ЯЗЫКИ ДЛЯ ОПИСАНИЯ ОБЪЕКТА И СИТУАЦИЙ
квантора существования сводится к тому, что некоторая инфор-
мация является истинной хотя бы для одного элемента из рас-
сматриваемого класса.
Остальные квантификаторы, широко используемые в естест-
венных языках и столь же широко применяемые технологами при
описании процессов на объекте управления и способов управления
им, такой однозначной семантикой не обладают. Примерами их
могут служить: часто, много, вскоре, через большой промежуток
времени, только, даже и т. п. Мы специально посвятим этим не-
четким квантификаторам несколько параграфов книги как в дан-
ной главе, так и в последующих. Сейчас мы только проиллюстри-
руем сложности, которые здесь возникают. Во фразе «Даже Иванов
мог выполнить эту работу» квантификатор даже как бы проеци-
рует всех рабочих на некоторую шкалу по умению выполнить ту
работу, о которой говорится во фразе, и Иванов помещается в
самом низу этой шкалы. Но во фразе: «Даже Петров не смог выпол-
нить эту работу» тот же самый квантификатор даже фиксирует
уже не низ шкалы, а ее верх. Но кроме способности выделять в
упорядоченных шкалах крайние значения, этот квантификатор
может передавать и совсем другие смысловые оттенки (например,
во фразе «Он не мог даже встать»). Столь же трудно выявить все
оттенки, которые придает тексту на естественном языке квантифи-
катор только. Приведем ряд примеров: «Кран только что начал
работу», «На стройке занято только три студента», «Работа будет
выполнена только завтра, а не сегодня», «Работа будет выполнена
только завтра, а не послезавтра». Смысл квантификаторов типа
много, часто, близко и т. п. представляется более простым, и не-
сколько позже мы опишем процедуры интерпретации подобных
нередко встречающихся в практике управления квантификаторов.
Квантификаторы мы будем обозначать через сохраняя тра-
дицию перевернутых букв, идущую от логики.
6. Модификаторы. Эта группа слов и словосочетаний практически
входит в группу отношений, устанавливающих признаки элемен-
тов. Но по ряду причин нам удобнее рассмотреть их отдельно.
К ним относятся такие лексические единицы, как: быстро, осто-
рожно, портовый, грузовой и т. п. Для обозначения модифика-
торов будем использовать буквы тг.
7. Модальности. К ним относятся лексические единицы типа:
необходимо, желательно, совершенно невозможно, обязательно и т. п.
Эти единицы языка мы будем обозначать ft.
8. Оценки. К оценкам относятся хорошо, целесообразно, вредно,
достижимо и т. п. Для обозначения оценок будем использовать
символы vt.
Рассмотренные нами восемь функциональных групп для естест-
венных языков, конечно, не единственно возможные. Можно произ-
вести разделение единиц и по-другому. Но такое деление дает нам
возможность построить удобный язык для описания ситуаций, скла-
§2.4. язык СИТУАЦИОННОГО УПРАВЛЕНИЯ (ЯСМ)
55
дывающпхся на объекте управления и в самой системе управления,
а также производить над описаниями необходимые процедуры клас-
сификации, корреляции и экстраполяции.
§ 2.4. Язык ситуационного управления (ЯСУ)
Здесь мы опишем основы языка ситуационного управления. Это
описание будет носить полуформальный характер для того, чтобы не
слишком утомлять читателя многоскобочными формулами. В §2.5 мы
опишем строгий подход к формированию лексики языка подобного
типа на примере ЯСУ, ориентированного на определенную проблем-
ную область, а в § 2.6 дадим формальное определение основных син-
таксических структур ЯСУ. После рассмотрения языков, близких
по своей идеологии к ЯСУ, и сравнения их возможностей мы уточ-
ним понятие семиотической модели, введенной в гл. 1, и укажем ме-
сто ЯСУ в этой модели.
Основной единицей ЯСУ является простая ядерная конструкция
в виде тройки (xzy). В средней ее позиции находится некоторое
отношение или действие. В крайних позициях — понятия. Если
в средней позиции стоит отношение иметь имя, то в правой пози-
ции стоит имя, а если отношение в средней части тройки есть отно-
шение иметь оценку, то в правой позиции стоит оценка. Если, на-
конец, в средней позиции стоит отношение мера — значение, то
в левой позиции стоит понятие — мера, а в правой—-числовое зна-
чение.
Пример 2.1. Покажем, как фразы, описывающие некоторую си-
туацию, можно представить простыми ядерными конструкциями
ЯСУ. Начнем с фразы «Деталь № 1244 обрабатывается на станке».
В этой фразе на ЯСУ как бы две фразы: «Деталь имеет имя № 1244»
и «Деталь обрабатывается на станке». Будем использовать для
указания одновременного существования двух фактов знак конъюнк-
ции &,:который везде, где в нем не будет специальной необходимости,
будем опускать. Тогда, если ввести обозначения: а — деталь, b —
станок, d — обрабатывается (здесь и сейчас), i — № 1244, то сообще-
ние в языке ситуационного управления запишется в виде (apt) (adb).
Или в другой эквивалентной форме, не требующей повторения
некоторых символов: ((apt)db). Другое описание: «Изготовлено 100
автомобилей ВАЗ 2103». Если q — автомобиль, t\ — ВАЗ 2103, г59 —-
находится в состоянии, dt — быть готовым, и — мера, г10 — мера —
значение, гх — иметь, v — штука, то это описание примет вид
(((<7pii) G ((«Р») ПоЮО))г594).
Здесь самая левая простая ядерная конструкция говорит о том, что
в описании идет речь об автомобилях ВАЗ 2103, конструкция
(црц) — о том, что мера имеет имя штука, а присоединенная к ней
г10 100—100 штук. Тогда все в большой левой скобке соответствует
тому, что речь идет о 100 штуках автомобилей ВАЗ 2103. И, наконец,
56
ГЛ. 2. ЯЗЫКИ для ОПИСАНИЯ ОБЪЕКТА И СИТУАЦИИ
отношение находиться в состоянии и состояние быть готовым поз-
воляют получить отображение той информации, которая содержа-
лась в исходном описании.
Из приведенного примера видно, что в ЯСУ важное значение име-
ет операция подстановки вместо левого или правого члена простой
ядерной конструкции целой простой ядерной конструкции. И этот
процесс можно продолжать рекурсивно. В частности, в последнем
описании на ЯСУ слева от такая подстановка произведена один
раз, а справа от — два раза.
Сложной ядерной конструкцией называется тройка вида
> ((ахх) (ааг) (а3у)). На месте аг могут стоять некоторые квантифика-
торы или модификаторы, на месте а2, кроме того, могут стоять мо-
дальные операторы, на месте > — только квантификаторы. На каж-
дом месте а, может стоять несколько модификаторов.
Пример 2.2. Рассмотрим следующее описание: «Часто, когда дав-
ление выше нормы, температура также выше нормы». Пусть
есть квантификатор часто, h — давление, t — температура, т —
модификатор выше нормы. Тогда этому описанию соответствует сле-
дующая запись на ЯСУ: ((tnh)ri9(mt)). Отношение г49, взятое из
табл. 2.1, есть отношение причина — следствие. Вместо него можно
было бы использовать и отношение г48 способствовать, так как в ис-
ходном описании не утверждается строгая каузальная зависимость
повышения температуры от повышения давления. При утверждении
такой зависимости описание имело бы вид «Всегда при повышении
давления выше нормы температура также превышает норму».
Другое описание: «Автомобиль быстро двигался к складу № 2».
Если для понятия автомобиль использовать обозначение а, для скла-
да обозначение с, через г62 обозначить динамическое отношение дви-
гаться к, а через т — модификатор быстро, то приведенное описа-
ние можно представить в виде: (а(тгв2) (ср № 2)). Заметим, что в
этом примере мы вместо символьного имени склада, как и в случае
100 штук ВАЗ 2103, использовали в записи непосредственное зна-
чение имени.
Приведенные примеры дают возможность записывать на ЯСУ
достаточно произвольные описания ситуаций. При этом фразы опи-
сания переводятся в отдельные «фразы» ЯСУ.
Пример2.3. Рассмотрим следующее описание ситуации на объек-
те: «Одновременно с погрузкой состава «Москва — Владивосток»
необходимо перевести поезд № 126 на шестой путь. Бригаду носиль-
щиков № 1 вызвать на платформу № 6. На ту же платформу необхо-
димо вызвать тележку для получения почты из почтового вагона.
Желательно из бригады Иванова». Это сложное описание ситуации
можно представить в следующей форме, где арабские цифры, необя-
зательные при использовании ЯСУ в ЭВЛ4, здесь применяются для
большей наглядности записи. Они отделяют одни «предложения»
ЯСУ от других
(1) ((«РЧ) ((«РЧ) (/Л) (/РЧ)).
§ 2.5. ФОРМИРОВАНИЕ ЛЕКСИКИ ЯСУ
57
(2) ((&pt3) (£РЧ))>
(3) ((^! (gptj) rs31) (lr3s (mv)) (k (f2r2) q).
Здесь использованы следующие обозначения: s — состав, А —•
«Москва — Владивосток», в—погрузка, п — поезд, —•№ 126,
dt — перевести, — необходимо, / — путь, b — бригада носиль-
щиков, i3 — № 1, А — № 6, g — платформа, k — почтовая тележ-
ка, I — почта, v — вагон, т — почтовый, f2 — желательно, q —
бригада Иванова. Отношения, использованные в записи на ЯСУ,
взяты из табл. 2.1.
Таким образом, мы видим, что достаточно сложные описания си-
туаций, складывающихся на объекте управления, можно описывать
на языке ситуационного управления. Если читателю идея этого язы-
ка уже понятна, то он может перейти к тому, как описывать ситуации
на ЯСУ в связи со структурой и функционированием объекта управ-
ления. Об этом говорится в § 2.7. Параграфы 2.5 и 2.6 не относятся
к первому уровню изложения.
§ 2.5. Формирование лексики ЯСУ **
При работе с некоторой конкретной проблемной областью воз-
никает первая основная проблема: формирование лексики ЯСУ. Сло-
вари базовых понятий, отношений, действий, оценок, квантифика-
торов, модификаторов, имен и модальных операторов должны быть
достаточно полными и отражать все стороны объекта управления и
способов управления им, необходимые для создания полноценной
системы ситуационного управления. И прежде всего это касается
создания трех .словарей: словаря понятий, словаря отношений и сло-
варя действий (операций). Эти три словаря — основные для всех
систем ситуационного управления. Ибо остальные словари, кроме
словаря имен, универсальны. Они одинаковы для всех систем ситу-
ационного управления и носят универсальный характер. Словарь
имен является открытым, и в каждой системе надо просто указать
принцип образования имен в данной системе. Аналогичное замеча-
ние касается словаря значений меры или мер, используемых в дан-
ной проблемной области.
Словари понятий и действий целиком определяются семантикой!
проблемной области. Словарь же отношений носит более широкий
характер. Из гипотезы 2.3 можно было бы сделать вывод, что этот
словарь (в его базовой части) вообще конечен. Некоторые экспери-
менты, проведенные для нескольких европейских языков (итальянс-
кого, английского, русского), как будто подтверждают эту гипоте-
зу. Эксперименты проводились следующим образом. Брался доста-
точно большой текст из универсальной области (как правило, текст
из художественной литературы). Анализируя последовательно фра-
зу за фразой, фиксировались отношения, встречающиеся в этих
фразах. Если вновь фиксируемое отношение уже было включено в
5S
ГЛ. 2.
ЯЗЫКИ ДЛЯ ОПИСАНИЯ ОБЪЕКТА II СИТУАЦИИ
Если
ранее рассматриваемый список, то оно пропускалось, если же нет,
то сначала делалась попытка выразить его через комбинацию ранее
найденных отношений. Например, в тексте «Когда начался бой, на-
чались и его страдания, страхи за свою жизнь. Но в середине сраже-
ния эти страхи куда-то исчезли, как бы пропали навечно»; отноше-
ние двух событий «бой» и «страх» можно зафиксировать отношением
г24 начинаться одновременно, но можно пе-
рейти к событиям — «начало боя и начало
страха»», «конец боя и конец страха». Тогда
вместо отношения г24 можно употребить
для первых двух новых событий отноше-
ние г21 — одновременно, а для двух других
новых событий — отношение г22— быть
раньше. Взяв конъюнкцию двух простых
ядерных конструкций, мы получим запись,
эквивалентную той, которая использовала
отношение г24. Это послужило бы сигналом
о невключении отношения начинаться од-
новременно в базовый список отношений,
же вновь найденное отношение нельзя свести к комби-
нации уже включенных в список ранее, то оно вносится в список
как базовое. Эти эксперименты, проведенные на достаточно больших
объемах текстов, дали для разных языков приблизительно одинако-
вую картину. Список насыщался где-то при 175—185 отношениях и
далее не пополнялся, что подтверждает гипотезу 2.3 в отношении
описания реального мира. Внутренний мир человека, конечно, опи-
сывается целым рядом других отношений, не вошедших в тот спи-
сок, который формировался в экспериментах.
Конечность списка отношений интересна скорее концептуально,
чем практически. На практике нет особой нужды сокращать его.
Ибо это приводит к ненужному усложнению записей, которые и так
плохо обозримы. Поэтому на практике стараются построить достаточ-
но полный список отношений, важных для данного объекта управ-
ления и методов управления им.
Дадим классификацию отношений, несколько отличную от той,
которая была приведена в предшествующем параграфе. Эта класси-
фикация опирается на рис. 2.2. На нем А, В к С обозначают множе-
ства элементов, присущих объекту управления или выделяемых в
процессе управления им, свойств данных элементов и операций, ко-
торые могут реализоваться на нем или в системе управления им.
Обозначения R ц соответствуют классам отношений, которые можно
установить между вершинами диаграммы, показанной на рисунке.
Смысл этих классов очевиден. Например, отношения, входящие в
класс 7?ц, это отношения типа элемент — элемент, а отноше-
ния, образующие класс 7?31,— отношения типа операция — эле-
мент. Аналогично интерпретируются и остальные классы отно-
шений.
§2.5. ФОРМИРОВАНИЕ ЛЕКСИКИ ЯСУ
59
Если теперь через X обозначить любую из вершин А, В или С,
то для X получим диаграмму, показанную на рис. 2.3. На ней D есть
множество мер с различными именами, а — множество значений.
Штриховая стрелка на диаграмме соответствует тому, что отношение
г8 реализуется только, когда X совпадает с В, а в качестве значений
выступают качественные значения признака.
В §2.3 мы выделили 11 классов отношений,
показанная на рис. 2.2, фиксирует 9 их типов
показана связь этих разбиений. Крестики постав-
лены в тех клетках, где пересечение разбиений
непусто.
Здесь нет признаковых отношений. Они погло-
щены свойствами. Вместо отношения иметь цвет,
например, использовано свойство цвет. Нет и ко-
личественных отношений, которые определяются
не диаграммой, показанной на рис. 2.2, а диаграм-
а диаграмма,
В табл. 2.3
Рис. 2.3
мой, показанной на рис. 2.3.
Приведем примеры отношений, которые могут характеризовать
совокупности, отмеченные в табл 2.3 крестиками.
Для типа отношение классификации — «портальный кран
относится к погрузочно-разгрузочным механизмам»; отношение при-
Т а б л и ц а 2.3
Типы
Классы
1. Отношения класси- -j-
фикации
2. Отношения сравне-
ния
3. Отношения принад- -j-
лежногти
4. Временные отноше-
ния
5. Пространственные от- -f-
ношения
6. Каузальные отноше- -J-
ния
7. Инструментальные
отношения
8. Информационные от- ~У
ношения
9. Отношения порядка -у
надлежности — «стрела есть часть портального крана»; простран-
ственное отношение — «автомобиль находится правее въезда на
60
ЯЗЫКИ ДЛЯ ОПИСАНИЯ ОБЪЕКТА И СИТУАЦИИ
мост»; каузальное отношение — «перегрев вызывает пожар»; инфор-
мационное отношение — «директор информировал диспетчера», от-
ношение порядка — «станок обрабатывает следующую деталь».
Для типа Т?12: отношение принадлежности — «пожарный автомобиль
есть красный предмет». Для типа R13 каузальное отношение — «пре-
града заставляет обойти ее», инструментальное отношение — «гвоз-
ди забивают молотком». Для типа /?21: отношение принадлежно-
сти — «пожарный автомобиль красный», информационное отноше-
ние — «красное — сигнал опасности». Для типа Т?22: отношение
классификации — «синее часть окрашенных», отношение сравне-
ния — «ВАЗ 2106 мощнее ВАЗ 2103», отношение порядка — «оран-
жевый цвет в спектре следует за красным». Для типа Ri3: инструмен-
тальное отношение — «рыхлость грунта требует предварительного
укрепления пути». Для типа R31: отношение принадлежности —
«операция сложения входит в систему команд ЭВМ», каузальное от-
ношение — «просека возникла из-за вырубки деревьев», информа-
ционное отношение — «включение аварийной сигнализации сви-
детельствует о нарушении работы объекта». Для типа R32: каузаль-
ное отношение — «после полировки поверхность стала гладкой».
Для типа R33: отношение классификации — «смена масла входит
в комплекс работ по техническому обслуживанию автомобиля»,
отношение сравнения — «операция фрезерования труднее операции
точечной сварки», отношение принадлежности — «крепление детали
в зажиме — часть операции токарной обработки», временное от-
ношение — «реактор сработал раньше, чем включились насосы»,
каузальное отношение — «из-за прокладки кабеля было необходи-
мо прекратить выполнение монтажных работ», отношение поряд-
ка — «сборка является следующей по порядку операцией».
Пример 2.4. Приведем для иллюстрации словарь основных лек-
сических единиц, который был использован при создании системы
ситуационного управления, помогающей мастеру участка приборо-
строительного завода принимать решения по распределению работ
на участке. В этом словаре содержалось 17 базовых отношений: быть
именем, быть частью, быть классом, быть ранее (во времени), быть
равным, быть больше, подчиняться, обеспечивать, подготавливать,
субъект — объект, перемещаться в пространстве на место... (для
объекта действия), перемещаться в пространстве на место... (для
субъекта действия), перемещаться во времени на..., находиться в
окрестности, быть одновременно, быть местом, быть временем.
В этом списке некоторые отношения по сути — действия, но в опи-
саниях текущих ситуаций они представляют собой как бы застыв-
шие действия.
Кроме того, в словаре основной лексики содержалось 158 базо-
вых понятий. Перечислим для примера некоторые из них: инвентар-
ный номер, показатель точности, ремонт, фонд времени, время ос-
вобождения от работы, деталь — операция, план, срок, длитель-
ность, брак, исправление, смена, сутки, рабочая суббота, комплект,
§ 2.6. ФОРМАЛЬНАЯ МОДЕЛЬ СИНТАКСИСА ЯСУ fij
продукция, вал, расценка, трудоемкость, слесарь, фрезеровщик, то-
карь, кладовщик, автомобиль, электрокар, линия конвейера, корпус,
втулка, заглушка, ключ, развертка, матрица, пуансон, обмотка,
трансформатор и т. п.
Наконец, словарь содержал 7 операций-решений, которые могла
принимать система управления: запустить в производство; снять
с производства; получить оснастку, материалы, приспособления;
выдать оснастку, материалы, приспособления; отремонтировать
оборудование; перевести рабочего... на деталь-операцию...; объявить
субботу рабочей.
Этот пример еще раз демонстрирует, что словарь базовых отно-
шений зависит от специфики задачи куда меньше, чем словари базо-
вых понятий и операций-решений.
Отметим также, что при переходе от описаний, использующих
естественный язык, к описаниям на ЯСУ не всегда можно провести
четкую границу между понятиями и свойствами, а также свойствами
и операциями. Столь же неформальна и граница между отношениями
и операциями и отношениями и свойствами. Это позволяет проекти-
ровщику системы с учетом тех или иных прагматических соображе-
ний относить те или иные элементы к нужному виду лексики.
§ 2.6. Формальная модель синтаксиса ЯСУ *
Синтаксис ЯСУ можно задать формальным способом, как дела-
ется при задании множества базовых элементов и синтаксических
правил в формальных системах или при задании синтаксиса язы-
ков программирования для ЭВМ.
Определение 2.1. Множество Х={лу}, где х — любые ма-
лые буквы латинского алфавита кроме d, f, i, т, п, о, р, v, a I про-
бегает натуральный ряд, есть множество базовых понятий ЯСУ.
Определение 2.2. Множество I = {ij}, где j пробегает на-
туральный ряд, называется множеством имен понятий ЯСУ.
Определение 2.3. Множество D = {dt}, где i пробегает
натуральный ряд, называется множеством действий {опера-
ций) ЯСУ.
Определение 2.4. Множество V={uj}, где i пробегает
натуральный ряд, называется множеством свойств понятий (объ-
ектов) и действий ЯСУ.
Определение 2.5. Множество Л1 = {тг}, где i пробегает
натуральный ряд, называется множеством модификаторов ЯСУ.
Определение 2.6. Множество х = {>;}, где i пробегает
натуральный ряд, называется множеством квантификаторов ЯСУ.
Определение 2.7. Множество О={ог}, где i пробегает на-
туральный ряд, называется множеством оценок ЯСУ. В это множе-
ство входят, в частности, все действительные числа.
Определение 2.8. Множество F— {f;}, где I пробегает на-
туральный ряд, называется множеством модальностей ЯСУ.
6>
ГЛ. 2. ЯЗЫКИ ДЛЯ ОПИСАНИЯ ОБЪЕКТА И СИТУАЦИЙ
dj^D,
Определение 2.9. Множество R = {rt} U {р, е}, где i про-
бегает натуральный ряд, называется множеством отношений ЯСУ.
Отношения р и 8 синтаксически отличаются от rt.
Определение 2.10. Множество Х'={тглу}, где mt £ М,
a Xj £ X, называется множеством модифицированных понятий ЯСУ.
О п р е д е л е н и е 2.11. Множество Х"={»гх7}, где >h ё
a Xj£X, называется множеством квантифицированных понятий
ясу.
Определение 2.12. Множество D' = {тЯ,}, где С М, а
называется множеством модифицированных действий ЯСУ.
Определение 2.13. Множе-
ство D"={yhdj}, где a dj£D,
называется множеством квантифициро-
ванных действий ЯСУ.
Определение 2.14. Множество
D"' = {fidj}, где fidF, a dj(tD, назы-
вается множеством «модализированныхъ
действий ЯСУ.
Определение 2.15. Множество
V' = {niiVj}, гдетг(ЕЛ4, a v, б V, назы-
вается множеством модифицированных
свойств ЯСУ.
Определение 2.16. Множество
V” = {yuvj}, где a v}£V,
называется множеством квантифициро-
ванных свойств ЯСУ.
Эти определения полностью задают множество базовых элементов
формальной системы, соответствующей синтаксической части ЯСУ.
Введем обозначения X=XljX'uX", D=D U D' U D" U D"’, V—
= V U V U V" Для задания синтаксиса ЯСУ введем еще три опера-
ции: конкатенацию (приписывание символов друг другу), которую
никак специально обозначать не будем, конъюнкцию и отрицание
с их обычными обозначениями. При введении синтаксически правиль-
ных совокупностей в ЯСУ будем использовать еще круглые скобки.
Элементы X, D и V будем обозначать соответствующими малыми бук-
вами, помеченными значком тильда.
Определение 2.17. Множество простых ядерных конструк-
ций ЯСУ состоит из троек вида (луг/гД (лу-рД), (луеой), (лугДД,
(xjrjVh), (dtrjdRp (dipi1{), (d^oh), (dir}xk), (dtrjvh), (щгръ), (vtrjXk),
(piCjd^). Эти конструкции считаются синтаксически правильными.
Рис. 2.4 иллюстрирует это определение. Легко усмотреть связь
этой диаграммы с диаграммами, показанными на рис. 2.2 и 2.3, а
также с табл. 2.3. Подчеркнем, что в данном параграфе речь идет
лишь о синтаксической правильности, а не о семантической ин-
терпретации простых ядерных конструкций. В условиях того или
иного объекта управления в ЯСУ различные конструкции будут
§2.7. ДИСКРЕТНЫЕ СИТУАЦИОННЫЕ СЕТИ (ДСС)
63
интерпретируемы или не интерпретируемы. Но важно, что 13 троек,
введенных определением 2.17, исчерпывают все возможные простые
синтаксические конструкции ЯСУ.
Определение 2.18. Множество сложных ядерных конст-
рукций ЯСУ состоит из конструкций вида: (а; (.т,Г;)ак),
(ai (>/j)ah), (>z (а^-аД), (fc (a^ah)), (а^-аД, где a;, ah — любой из
символов, допустимых, согласно определению 2.17, на данном месте.
Последняя конструкция содержит г; — знак отрицания отноше-
ния г}, что интепретируется как наличие отношения «не /у».
Определение 2.19. Синтаксически правильны для ЯСУ
любые ядерные конструкции, соответствующие определениям 2.17
и 2.18, а также конструкции, получаемые следующим образом. Если
(Pi) и (Р2) — две синтаксически правильные конструкции, то
((Pi)r,-(P-2)), и ((Pi)ptft), ((Pi)eOfe), ((Pi)&(P2)) также синтаксически пра-
вильные конструкции. Других синтаксически правильных конст-
рукций нет.
Это определение полностью задает синтаксис ЯСУ. Заметим, что
от конъюнкции можно избавиться, заменив ее отношением одновре-
менно.
§ 2.7. Дискретные ситуационные сети (ДСС)
Язык ситуационного управления, с которым мы познакомились
в предшествующих параграфах, дает средства для описания ситуа-
ций, складывающихся на объекте управления, и позволяет, как мы
увидим в дальнейшем, формировать решения по управлению. Во
многих задачах требуется еще некоторое описание структуры объ-
екта управления. Но желательно, чтобы язык, который позволял
бы отражать необходимые сведения о структуре и функционировании
объекта управления, был согласован с ЯСУ, отражающим ситуа-
ции, возникающие на этой структуре.
Подробно о таких языках мы будем говорить в главе, посвящен-
ной проблеме экстраполяции развития ситуаций и оценки влияния
тех или иных решений по управлению. Здесь же мы опишем простой
вариант такого языка, в основе которого лежит модель объекта уп-
равления, называемая дискретной ситуационной сетью (ДСС).
Введем в рассмотрение три множества: множество истоков И,
множество стоков С и множество решателей Р. Все три множества
для каждой конкретной ДСС будут считаться конечными. Любая
вершина ДСС может быть одним из элементов указанных трех мно-
жеств. Введем еще множество, элементы которого будут называться
объектами, и множество X. элементы которого будут называться
характеристиками. Будем соединять две вершины ДСС связью, если
объекты могут попадать из одной вершины в другую, минуя осталь-
ные вершины ДСС. Связь может быть ориентированной или неориен-
тированной.
64
ГЛ. 2. ЯЗЫКИ ДЛЯ ОПИСАНИЯ ОБЪЕКТА И СИТУАЦИИ
Теперь охарактеризуем основные элементы ДСС.
Определение 2.20. Функционирование истока заключает-
ся в порождении в каждый такт функционирования ДСС одного или
нескольких объектов с заданными характеристиками в соответствии
с законом их порождения или с законом непорождення никакого
объекта в некоторые такты функционирования.
Отсюда, в частности, следует, что ДСС функционирует в диск-
ретные такты. Закон порождения объектов в истоках ДСС может
быть детерминированным (например, по фиксированному расписа-
нию), либо вероятностным с известным распределением.
Определение 2.21. Функционирование стока заключает-
ся в устранении из ДСС объектов, попавших в сток.
Решатели ДСС делятся на два типа — пассивные и активные.
Определение 2.22. Пассивный решатель ДСС представ-
ляет собой задержку на определенное число тактов, определяемое
типом объекта и этим решателем.
Таким образом, пассивный решатель может имитировать в ДСС
ожидание в очереди или затраты времени на перемещение между вер-
шинами ДСС, если путь между ними проходит через пассивный ре-
шатель.
Определение 2.23. Объекты, попавшие в активный реша-
тель, либо меняют свои характеристики, либо для них решается аль-
тернатива о дальнейшем движении по ДСС, либо происходит и то,
и другое.
Из приведенных определений следует, что истоки не должны
иметь входящих связей, а стоки — выходящих связей. Пассивные
решатели могут иметь произвольное число входящих связей и одну
выходящую связь. Активные решатели имеют по крайней мере одну
Рис. 2.5
входящую и одну выходящую
связи, но их число может быть
и большим.
В ряде случаев полезно
вводить еще позиции. Их роль
состоит в фиксации положе-
ния объектов на сети, когда
они находятся вне решате-
лей, истоков п стоков. Пози-
ции обычно нумеруются. На
рис. 2.5 показана некоторая
ДСС. Истоки И на ней изо-
бражены квадратиками, пас-
сивные решатели Р — кружками, активные решатели АР — двой-
ными кружками, а стоки С — треугольниками. Позиции отмече-
ны маленькими зачерненными кружками.
В графическом представлении ДСС, конечно, нет особой необхо-
димости, хотя оно п наглядно. ДСС можно задать чисто функцио-
нально, определив законы порождения объектов различного типа
§2.7. ДИСКРЕТНЫЕ СИТУАЦИОННЫЕ СЕТИ (ДСС)
65
в истоках, правила перемещения объектов по ДСС. правила их об-
служивания в пассивных и активных решателях. Здесь мы этого не
будем делать, а перенесем это в главу, посвященную экстраполяции
развития ситуаций. Задача данного параграфа другая. На примерах
мы покажем, как ЯСУ можно использовать при описании стати-
ческих ситуаций, складывающихся в некоторый момент времени на
ДСС.
Но прежде чем перейти к примерам, введем понятие объекта на
ДСС:
Ок = <Д;, t 2, • , t т, K-'j, W2, • • • , K-'fC-
Здесь первые т характеристик объекта носят временной характер
(например, суммарное время, прошедшее с момента появления объек-
та в ДСС, суммарное время потерь на обслуживание в активных ре-
шателях, время ожидания обслуживания в каждом из активных ре-
шателей и т. п.), а остальные характеристики могут быть произволь-
ными. Для объектов управления транспортного типа они могут, на-
пример, иметь следующее значение: тип объекта, скорость в данный
момент, приоритет в перемещении, приоритет в обслуживании, га-
баритные размеры и вес, конечный пункт перемещения. Для систем
другого типа (например, при использовании ДСС для описания сис-
темы документопотоков в организационных системах или конвейер-
ного производства) эти характеристики могут быть другими.
Пример 2.5. Пусть нам необходимо управлять светофорами на
участке города, показанном на рис. 2.6. Он включает в себя два
перекрестка с регулируемым
движением, соединенных меж-
ду собой магистралями с од-
носторонний! движением. На
рисунке эти перекрестки по-
казаны кружками — знаками
светофоров. Для описания
ситуаций, которые могут сло-
житься на таком объекте уп-
равления, перейдем от конк-
ретного объекта управления
к ДСС.
Результирующая ДСС по-
казана на рис. 2.7. Индексы
истоков на схеме совпадают с
номерами, отмеченными на
предшествующем рисунке.
Индексы стоков соответствуют римским цифрам на этом ри-
сунке. Верхний перекресток соответствует Д/Д, нижний — АРг.
Позиции введены произвольно. Они соответствуют некоторым се-
чениям магистралей, на которых производится учет автомашин.
Вместо непрерывного движения автомашин, которое происходит в
3 Д. А. Поспелов
66 гл. 2. языки ДЛЯ ОПИСАНИЯ ОБЪЕКТА И СИТУАЦИИ
реальности, на ДСС объекты, соответствующие автомашинам, пере-
мещаются дискретно по позициям и основным вершинам сети. На
тех дугах, где позиции нет, перемещение происходит за один такт
работы ДСС. Для целей управления исток Иs можно не учитывать,
так как он никак не влияет на переключение светофоров на регули-
руемых перекрестках.
Рис. 2.7
в
Позиции 1, 2, 3, 6, 7 можно рассматривать
как линии СТОП перед соответ-
ствующим перекрестком.
Пусть а есть понятие автома-
шина. Тройка вида (арД) будет
пониматься нами как автома-
шина с государственным номе-
ром Д, который и является ее
именем. Если b есть позиция,
то (ЬрДг) означает позицию
ДСС с номером Дг. Тогда запись
(.(apik)rM(bpim)) соответствует
тому, что автомашина с номером
Д находится на позиции с но-
мером 1т. Не будем для просто-
ты и удобства описания фик-
вершинах ДСС. Другими словами, все ав-
сировать автомашины
томашины находятся только на позициях ДСС. Это позволяет нам
при описании статических ситуаций (мгновенных фотографий
положения) не рассматривать истоки и стоки, а ограничиться толь-
ко позициями и активными решателями. Активные решатели будем
обозначать через h и присваивать им имена 1 и 2. Активные решате-
ли могут находиться в двух состояниях. В первом из них по горизон-
тальному направлению магистралей (рис. 2.6) горит зеленый сиг-
нал. Во втором состоянии — красный сигнал. Эти состояния мы
будем соответственно обозначать как^ ng2. Тогда запись ((/ipl) r59g2)
будет означать, что в горизонтальном направлении магистра-
ли, которая проходит через перекресток, первый светофор находит-
ся в таком состоянии, что на нем горит красный сигнал.
Введем две характеристики автомобилей: v — скорость, р — тип.
Значения скорости будут браться из множества {0, 5, 10, ..., 140},
а значения типа — из множества {qt — специальный, q2 — обыч-
ный}. Тогда запись
(ДрС) г33 (Ьр1)) ((арД) г. ДрО)) ((арД) г. (ppqj) ((/ipl) r59g2)
соответствует той ситуации, когда обычный автомобиль с номером
Д стоит на позиции 1 перед первым светофором, так как в его направ- t
Ленин горит красный сигнал. f
Такое описание можно выполнить для каждой автомашины, на- 5
ходящейся в этот момент на ДСС. Совокупность подобных описаний
и есть полное описание статической ситуации, которая сущест-
вует в данный момент на объекте управления.
§2.8. ДРУГИЕ ЯЗЫКИ ОПИСАНИЯ СИТУАЦИИ
67
Пример 2.6. Рассмотрим учреждение, в котором имеются плано-
вый отдел, бухгалтерия, отдел кадров. Между этими подразделени-
ями существует некоторый документопоток. Имеются стандартные
документы нескольких типов и нестандартные документы. В каче-
стве характеристик документов могут выступать названия атрибу-
тов, имена заполнителей для этих атрибутов и т. п. Каждый доку-
мент можно рассматривать как объект на ДСС, в которой есть три
истока, три стока и три активных решателя. Другими словами,
каждое подразделение учреждения как бы разделяется на три
части: исток, сток и активный решатель (не хотелось бы, чтобы они
были пассивными решателями, ибо это означало бы, что документы
в некоторых инстанциях не обрабатываются, а «вылеживаются»).
Можно ввести позиции, которым, например, будут соответствовать
стопки документов, ждущих своей очереди на столе у того или иного
работника. При необходимости можно развернуть структуру каж-
дого подразделения, сделав каждого его работника, имеющего дело
с документами, активным решателем. Но важно, что полученная
ДСС принципиально ничем не будет отличаться от ДСС для системы
перекрестков, а некоторый объект — документ — от автомобиля.
Только смысл его характеристик будет другим и другими законами
будет описываться функционирование ДСС.
Приведенные примеры иллюстрируют одну важную мысль. Если
различные по своей природе объекты управления можно представить
в виде некоторой ДСС, то описания текущих ситуаций на этих объек-
тах будут строиться однотипно с использованием универсальных от-
ношений ЯСУ типа находиться в позиции с номером..., иметь имя...,
иметь приоритет... и т. п. Это позволяет надеяться на создание уни-
версального по своему составу ЯСУ для описания текущих ситуа-
ций на ДСС. Такая надежда не лишена оснований. В разделе об
экстраполяции ситуаций мы еще вернемся к этому вопросу.
§ 2.8. Другие языки описания ситуаций *
Язык ситуационного управления, конечно, не единственный, ко-
торый можно использовать для описания текущих и полных ситуа-
ций. В настоящем параграфе мы рассмотрим еще три языка, пригод-
ных для этих целей, хотя и обладающих некоторыми недостатками
при их использовании для ситуационного управления.
Один из них RX-код, послуживший исходным прототипом
для создания ЯСУ. В языке ДХ-кодов используются лишь понятия
и отношения. Каждое понятие, кроме базовых, задается стандарт-
ным выражением следующего вида:
. . . Г„
Графической иллюстрацией этого выражения служит сеть, показан-
ная на рис. 2.8. Из нее вытекает, что понятие хп как бы определяется
через понятия х1; х>, ..., xtl_A с помощью отношений t\, г2, ..., гп_х.
3*
68
ГЛ. 2. ЯЗЫКИ ДЛЯ ОПИСАНИЯ ОБЪЕКТА И СИТУАЦИЙ
Пример 2.7. Рассмотрим 7?Х-код вида х4 = r7iX1r45x2r2xs. Ес-
ли — мощность, х2 — увеличение, х3 — прибор, а отношения
определяются из табл. 2.1 и табл. 2.2, то этот код можно трактовать
как определение понятия усилитель мощности.
Для /?Х-кодов возможна операция подстановки на место х;, от-
личных отхп, /?Х-кодов, определяющих эти xt. Процесс такой под-
становки можно продолжать столько раз, сколько нужно. Получа-
ющаяся в результате древообраз-
ная структура в виде фрагмента
показана на рис. 2.9.
В отличие от записей на язы-
ке ситуационного управления,
7?Х-коды не позволяют явно
указать связи между xit исполь-
зуемыми для определения хп.
Если хп — код некоторой ситу-
ации, то компоненты хг, входя-
щие в ее описание, никак не
Рис. 2.9
Рис. 2.8
взаимодействуют друг с другом. Если их взаимодействие нужно
отразить, то приходится дублировать компоненты в описании.
Пример 2.8. Пусть xs есть код ситуации, которая задается следу-
ющим описанием: «К перекрестку приближается санитарный авто-
мобиль, а сзади него движется грузовик».
Пусть Xj — санитарный автомобиль, а х2 —
грузовик. Описание ситуации х3 с помощью
/?Х-кода имеет вид
Графически этой записи соответствует сеть,
показанная на рис. 2.10. Мы не будем останав-
ливаться на тех проблемах, которые вызывает необходимость пов-
торения записей в 7?Х-кодах, так как не собираемся особенно ра-
товать за применение этого языка в ситуационном управлении,
хотя у него и были сторонники. Отметим только одну особенность
языка 7?Х-кодов. С его помощью можно определять Такие понятия,
§2.8. ДРУГИЕ ЯЗЫКИ ОПИСАНИЯ СИТУАЦИЙ
69
которые образуют классы объектов, никак не связанных между со-
бой. Другими словами, 7?Х-коды могут задавать классы путем про-
стого перечисления их элементов. Например, если х2 есть стол,
х2 — кровать, х3 — секретер и т. п., то
Хп = г1х1г4х2г4х3 ...
определяет понятие мебель. В ЯСУ такое понятие ввести невозмож-
но, если не использовать операцию дизъюнкции между простыми
ядерными конструкциями этого языка.
Второй язык для описания ситуаций, который до сих пор пользу-
ется популярностью среди специалистов по ситуационному управ-
лению,— язык исчисления предикатов первого порядка. В этом язы-
ке .можно выразить все то, что выразимо и в ЯСУ, если не учитывать
модификаторы и все квантификаторы, кроме принятых в исчислении
предикатов кванторов V и 3. У исчисления предикатов есть свои
преимущества, связанные с наличием развитых процедур вывода.
Об этом мы будем говорить в дальнейшем. Предполагая, что боль-
шинство читателей знакомо с классическим исчислением предикатов,
не будем тратить здесь место для его описания и ограничимся лишь
примером.
Пример 2.0. Пусть имеется описание следующей ситуации: «Меж-
ду роботом и складом находится яма, слева от которой расположен
экскаватор». Введем двуместный предикат Рг (х, у) со значением х
левее у. Введем еще трехместный предикат Р2(х, у, z) со значением
у находится между х и z. Если х* — экскаватор, у* — яма, az* —
склад, то конъюнкция Pt(x*, у*)&Р2(х*, у*, z*) описывает исход-
ную словесную ситуацию.
Менее известен среди разработчиков систем ситуационного управ-
ления третий язык описания ситуаций — универсальный семантиче-
ский код (УСК). Простой ядерной конструкцией в УСК является трой-
ка вида (5Л0). В этой тройке S соответствует субъекту, совершаю-
щему акцию А, а О — объекту, на который направлена данная ак-
ция. Такой тройке может, например, соответствовать предложение
«Кран разгружает судно». В УСК вводится замкнутая система опе-
раций, позволяющих из простых ядерных конструкций строить бо-
лее сложные цепочки.
Пример 2.10. Пусть S2 — самолет, S, — бензозаправщик, —
совершать посадку, А2 — двигаться к, О2 — стоянка № 12. Тогда
запись на УСК (51Л1О1)Л3(52Л 2О2) трактуется следующим обра-
зом: «Самолет совершает посадку и одновременно бензозаправщик
двигается к стоянке № 12». Черта над О2 означает незамещенность
этой позиции, так как акция совершать посадку относится к са-
мому объекту Незамещенность акции Л3 трактуется в УСК как
отношение одновременности. Если же Л3 трактовать как причина —
следствие, то запись (SMjOi)Л 3(52Л2О2) будет соответствовать тек-
сту «Бензозаправщик двигается к стоянке № 12 потому, что самолет
совершает посадку».
70
ГЛ. 2. ЯЗЫКИ для ОПИСАНИЯ ОБЪЕКТА И СИТУАЦИИ
При создании УСК были реализованы следующие принципы.
1. Полная экспликация смысла. Другими словами, любая запись
в УСК имеет один соответствующий ей смысл, причем это смысл на
некотором метауровне. Например, первой из цепочек, приведенных
в примере 2.10, соответствует метасмысл «Субъект X совершает дей-
ствие, направленное на себя, одновременно с этим субъект У совер-
шает действие, направленное на объект Z». Конкретизация метасмыс-
ла происходит при конкретной интерпретации всех элементов, вхо-
дящих в цепочку. Требование полной экспликации смысла приводит
к необходимости введения в УСК разнообразных средств для уточ-
нения смысла записи. Например, фраза естественного языка «Стан-
ки работают» может трактоваться по-разному, иметь разный смысл.
Она может рассматриваться как некоторое общее утверждение о стан-
ках вообще или как утверждение, касающееся некоторых конкретных
станков, как утверждение, относящееся к некоторому моменту време-
ни, а также как утверждение, справедливое всегда. В УСК вводятся
для подобных высказываний специальные маркеры, помогающие
уточнить тот смысл, который должен быть приписан данному выска-
зыванию. Так возникают следующие четыре цепочки УСК: {5}оЛО —
«Эти станки сейчас и здесь работают (работают одновременно)»,
{£}>, АО — «Эти станки работают (всегда и везде)», {S' К А О — «Неко-
торые станки работают», {{S}}^ АО — «Все станки работают». Интер-
претация таких цепочек в терминах станков означает, что S' в цепоч-
ках интерпретировано как станок, а Л — работают. Фигурные скоб-
ки в УСК означают множественность. Двойные фигурные скобки соот-
ветствуют квантору общности исчисления предикатов, а штрих —
квантору существования того же исчисления. Знаки » и q — специ-
фические для УСК, соответствуют кванторным и дейктическим утвер-
ждениям (всегда и везде и здесь и сейчас). Кроме этих средств в УСК
используются символы обычного логическсго отрицания, модальные
операторы и еще целый ряд специальных символов. Важным пред-
ставляется то, что в последних версиях УСК действительно удалось
однозначно приписывать смысл любой цепочке, допустимой синтак-
сисом УСК, если это приписывание происходит на некотором мета-
уровне.
2. УСК реализует принцип независимости от предметной обла-
сти. При различных интерпретациях символов, входящих в цепочки,
можно получать описания, пригодные для любых мыслимых пред-
метных областей. Это обстоятельство носит принципиальный харак-
тер. В языке ситуационного управления принцип полной эксплика-
ции смысла реализован не полностью, отношения из базового мно-
жества как бы «свалены в одну кучу». Они конкретизованы до раз-
личного уровня общности, что требует введения модификаторов на
отношения. В языках типа языка исчисления предикатов не реали-
зован принцип экспликации смысла. Записи в этих языках не дают
возможности сопоставить им смысл ни на каком уровне общности.
§2.9. ЯЗЫКИ ПРЕДСТАВЛЕНИЯ ЗНАНИЙ
71
3. Та семантика, которая реализуется в УСК на метауровне, т. е.
без интерпретации символов, входящих в цепочку, является недого-
воренной. Она жестко задается семантикой простых ядерных кон-
струкций и синтаксисом производной цепочки. Такое свойство УСК
также отличает этот язык от языка исчисления предикатов, в кото-
ром смысл предикатных формул зависит от той или иной договорен-
ности. Язык ситуационного управления при заданном списке базо-
вых отношений и их интерпретации приближается в этом смысле к
ВОЗМОЖНОСТЯМ УСК.
4. Как уже говорилось, исчисление предикатов и другие чисто
логические исчисления обладают тем преимуществом, что в них ча-
сто можно сформировать процедуры вывода, имеющие целенаправ-
ленный характер, позволяющие за конечное число шагов либо по-
лучить нужное преобразование, либо показать, что интересующий
нас вывод построить невозможно. К сожалению, ЯСУ и в этом от-
ношении уступает языку логических исчислений. УСК обладает на-
бором правил преобразования цепочек друг в друга. Однако пока
еще не доказана ни полнота этого набора, ни эффективность проце-
дуры преобразования, определяемой способностью через конеч-
ное число шагов прекратить преобразования, если цель недо-
стижима.
Указанные особенности УСК делают его весьма интересным для
использования в системах ситуационного управления. Однако не-
обходимо отметить, что структура цепочек УСК (в отличие от ЯСУ)
такова, что для человека интерпретация их смысла бывает весьма зат-
руднитель а, а хорошего алгоритма перевода текстов на естествен-
ном языке в записи на УСК пока еще не существует.
§2.9. Языки представления знаний**
Описанный нами язык ситуационного управления, а также дру-
гие языки, о которых шла речь выше, при работе с ЭВМ преобразу-
ются в специальные языки представления знаний, удобные для орга-
низации машинных процедур. В языках представления знаний (ЯПЗ),
используемых в настоящее время, основная единица — слот. Слот
имеет следующий вид:
•;<имя слотам <Л><м>; <fn><vny-
Здесь ft — имена атрибутов, характерных для данного слота, иг —
значения этих атрибутов или множества их значений, a qt — раз-
личные ссылки на другие слоты.
Пример 2.11. {/АВТОМОБИЛЕМ <НОМЕРНОЙ ЗНАК>
<ММГ 06-40, МММ 65-12>; <СОСТОЯНИЕ> <ИСПРАВЕН, В РЕ-
МОНТЕМ <ТИП> <ГАЗ-24, ГАЗ-24>; <КОЛОННА>, <ГАРАЖ>,
< ВОДИТЕЛЬ;}.
Этот слот имеет имя АВТОМОБИЛЬ. В нем хранится информа-
ция о двух автомобилях с указанными номерами, один из которых
72
ГЛ. 2. ЯЗЫКИ ДЛЯ ОПИСАНИЯ ОБЪЕКТА И СИТУАЦИИ
находится в ремонте, а второй —• в рабочем состоянии. Оба автомо-
биля имеют одинаковый тип. Некоторые другие сведения, относя-
щиеся к этим объектам, можно найти в слотах с именами КОЛОН-
НА, ГАРАЖ и ВОДИТЕЛЬ. Например, слот ВОДИТЕЛЬ может
иметь вид: {<ВОДИТЕЛЬ>; (ФИО) (Иванов Иван Петрович, Сидо-
ров Никанор Степанович^ (НОМЕРНОЙ ЗНАК> <ММГ 06-40,
МММ 65-12>}. При переходе от слота АВТОМОБИЛЬ к слоту ВО-
ДИТЕЛЬ можно установить, что Никанор Степанович Сидоров в
данный момент не на линии, а в гараже, или в отпуске, или... Ко-
нечно, что происходит в данный момент с Никанором Степановичем
сказать нельзя, но одно можно утверждать точно. Он является во-
дителем автомашины МММ 65-12, которая в настоящий момент на-
ходится в ремонте.
Для упорядочивания информации, хранящейся в отдельных сло-
тах, используется более крупная структурная единица — фрейм.
Структура фрейма, как правило, имеет следующий вид:
{(имя фрейма) (имя слота)(значение слота>
<имя слота)(значение слота) ...}.
Отметим, что каждый фрейм — это как бы готовая структура,
которая при том или ином заполнении слотов значениями превраща-
ется в описание конкретного факта, события, явления или процес-
са. Поэтому можно говорить о фреймах-прототипах и конкретных
фреймах. Фреймы-прототипы хранят знания о предметной области,
а конкретные фреймы пополняют эти единицы знания реальными
данными. Данные и знания во фреймовых структурах начинают то
совместное существование, которое было невозможно реализовать
прежними средствами.
Отметим также, что имена слотов часто называют ролевыми мет-
ками или просто ролями. Это подчеркивает ту особенность этих
имен, которая легко демонстрируется, например, на структуре фрей-
ма КОМАНДИРОВКА:
{(КОМАНДИРОВКА) (КТО> (значение слота) (КУДА)
(значение слота) (КОГДА) (значение слота) (НА КАКОЙ СРОК)
(значение слота) (С КЕМ) (значение слота)}.
При этом некоторые слоты при переходе к конкретному фрейму
должны быть обязательно заполнены, а другие могут оставаться пу.-
стымн. Для нашего примера такой необязательной ролью может быть
роль С КЕМ.
Во фреймовых языках основной операцией является поиск по
образцу. Образец представляет собой фрейм, в котором заполнены
не все структурные единицы, а только те, по которым среди фреймов,
хранящихся в памяти ЭВМ, будут отыскиваться нужные фреймы.
Образец может, например, содержать имя фрейма, а также имя не-
которого слота во фрейме с указанием значения слота. Такой обра-
§2.9. ЯЗЫКИ ПРЕДСТАВЛЕНИЯ ЗНАНИЙ
73
зец проверяет наличие в памяти ЭВМ фрейма с данным именем и
данным значением слота, указанного в образце. Или в образце может
быть указано имя некоторого слота и его значение. Тогда процедура
поиска по образцу должна обеспечить выборку из памяти ЭВМ всех
фреймов, в которых содержится слот с таким именем и таким значе-
нием слота, как у образца. Наконец, может быть задана некоторая
логическая функция от имени фрейма, каких-то имен слотов и
значений слотов, например, {<КТО> <Иванов В. В.> <КУДА>
<Минск>\/<Киеву <КОГДА> <1.07.83>\/<10.07.83'}. Такой образец
заставит выбрать из памяти все фреймы, в которых имеются слот
<КТО> со значением <Иванов В. В.>, слот <КУДА> со значением
<Минск> или <Киев>, а также слот <КОГДА'> со значением
<1.07.83> или <10.07.83>. Имя фрейма, который будет выбирать-
ся процедурой поиска по образцу, в данном случае произвольно.
В конкретных реализациях фреймовых языков на процедуру
поиска по образцу накладываются конкретные ограничения, кото-
рые, однако, дают для пользователя достаточно широкий простор
для манипулирования знаниями и данными.
Другими процедурами, характерными для фреймовых языков, яв-
ляются процедуры наполнения слотов данными, а также процедуры
введения в систему новых фреймов-прототипов (т. е. новых знаний)
и введение новых связей между ними.
Применение фреймовых языков для задач управления породило
желание ввести типологию основных фреймов-прототипов. В одной
из них предполагается ввести четыре типа фреймов: фрейм техноло-
гии, фрейм конфликтности, фрейм продукции и фрейм показателя.
Первый тип фреймов используется при описании знаний и данных,
связанных с протеканием процессов в объекте управления и техно-
логическими моделями, применяемыми при управлении процессом
в нормальных режимах. Второй тип фреймов служит для классифи-
кации конфликтных ситуаций, способов их обнаружения, выявле-
ния причин, вызвавших их, и описания способов устранения кон-
фликтных ситуаций. Фреймы, относящиеся к третьему типу, опи-
сывают причинно-следственные связи, лежащие в основе процесса
получения некоторого конечного продукта или результата (ситуа-
ции), что является непосредственной целью управления. Наконец,
фреймы четвертого типа задают структуру тех показателей, ко-
торыми оценивается сам процесс, протекающий в объекте управле-
ния, и результаты воздействия на него со стороны системы управле-
ния.
Пример 2.12. На рис. 2.11 показана структура фрейма конфликт-
ности, в котором использованы следующие обозначения фреймов и
ссылок между фреймами: F — фрейм-прототип, Fx — конкретный
фрейм, в котором хранятся конкретные данные о возникшем кон-
фликте. Эти данные используются во фрейме F для возбуждения тех
или иных связей. Множество {Fl2} — все те фреймы, которые тре-
буется анализировать при возникновении конфликта, описанного во
74
ГЛ. 2. ЯЗЫКИ для ОПИСАНИЯ ОБЪЕКТА И СИТУАЦИИ
Рис. 2.11
фрейме Ft. Множество {Я,} содержит фреймы, выступающие в ка-
честве родовых для фрейма F. В них содержится информация, ха-
рактеризующая тот класс конфликтных ситуаций, к которому при-
надлежит ситуация, составляющая значение слотов в Ft. Фрейм F, —
тот фрейм технологии, к которому относится конфликтная ситуация
рассматриваемого вида. Множества {Fi,}, {F£}, {F(} и {Fls} —
множества фреймов, в которых
содержатся процедуры, позволяю-
щие анализировать конфликт-
ность, возникшую, соответствен-
но, при нарушении работы струк-
турных подразделений на объек-
те управления, при отклонениях
показателей для полуфабрикатов
и изделий, при отклонении показа-
телей для материальных и энерге-
тических потоков, циркулирующих
в объекте управления, при нару-
шениях в работе обслуживающего
персонала. Эти группы фреймов,
по сути, формируют основные све-
дения о способах устранения кон-
фликта. Фрейм F9 содержит оценки, позволяющие считать причинами
возникновения конфликтной ситуации, задаваемой F1; те причины,
которым соответствуют только что описанные четыре группы фрей-
мов. В том же фрейме Fg может формироваться оценка степени кон-
фликтности возникшей ситуации. Фрейм F10 фиксирует динамику
развития конфликтной ситуации,' хранит те мероприятия, которые
уже были применены при уменьшении степени конфликтности си-
туации. Наконец, множество фреймов {F{T} соответствует множеству
фреймов, где хранится информация, интересная для анализа причин
возникновения конфликтной ситуации типа описанной во фрей-
ме F, а ее конкретным представителем является ситуация, описан-
ная во фрейме Fj. Движение по всем связям^, показанным на рисун-
ке, происходит за счет процедуры, которая хранится во фрейме-
прототипе F.
Такие многосортные системы фреймов оказываются близкими по
своей природе к тому, что многие авторы называют семантической
сетью. Это понятие в современной литературе не имеет четкого оп-
ределения. Поэтому мы ограничимся здесь лишь содержательным
обсуждением семантических сетей, затрагивая в основном лишь те
аспекты, которые важны для их использования в системах ситуа-
ционного управления. Рассмотрим прежде всего два возможных типа
семантических сетей: экстенсиональные и интенсиональные семан-
тические сети (ЭСС и ИСС). Напомним читателям, которые читают
всю книгу без пропусков, что в § 1.6 мы затрагивали проблему экстен-
сиональных и интенсиональных знаний. Во фреймовых представле-
§2.9 ЯЗЫКИ ПРЕДСТАВЛЕНИЯ ЗНАНИЙ
75
ниях им в известной мере соответствуют конкретный фрейм и фрейм-
прототип с его связями.
ЭСС отражает знание о некотором конкретном факте или неко-
торой конкретной ситуации, фиксируемой в системе управления.
ЭСС состоит из вершин и связей между ними. Вершинам соответ-
ствуют некоторые объекты, присутствующие в данном факте или си-
туации и выделенные с помощью индивидуальных имен из классов
однотипных объектов, а связям — те конкретные отношения, кото-
рые связывали их в описываемой ситуации или факте. Таким обра-
зом, ЭСС фиксируют в себе мгновенные снимки реальной дей-
ствительности.
ИСС внешне ничем не отличаются от ЭСС. Но только вершинам
ее соответствуют имена классов, а не индивидуальные имена, а свя-
зи отражают те отношения, которые всегда присущи этим объектам.
Таким образом, в ИСС фиксируются некоторые закономерности,
характерные для той или иной проблемной области.
Пример 2.13. Рассмотрим пример ЭСС. Пусть имеется группа
фактов, относящихся к множеству, состоящему из трех чисел: 0, 1,2.
Эти факты касаются двух отношений, определенных на множестве
указанных чисел. Первое из них — отношение строгого порядка, вто-
рое — отношение, определяемое операцией суммирования. Пусть
Ф, — имена этих фактов; тогда всю группу фактов можно задать,
например, табл. 2.4 и 2.5.
ЭСС, в которой отражены факты, приведенные в этих таблицах,
показана на рис. 2.12.. На нем вершины сети (квадратики) соответ-
ствуют элементам базового множества 0, 1,2, вершины, показанные
кружками,— факты, отраженные в табл. 2.4 и табл. 2.5. Около стоят
76
ГЛ. 2. ЯЗЫКИ ДЛЯ ОПИСАНИЯ ОБЪЕКТА И СИТУАЦИЙ
имена аргументов соответствующих отношении. Имена отношений
записаны в вершинах сети, обозначенных ромбиками. Связи от фак-
тов к именам отношений для простоты в нашей ЭСС не имеют спе-
циальных меток.
Отметим, что в нашем примере знание об отношении суммирова-
ния не является полным. Мы не знаем, чему равна сумма 2+0 и сум-
ма /+/. Мы не знаем также, что
отношение суммирования на на-
шем базовом множестве не может
быть установлено между элемен-
тами 2, стоящими в позициях
обоих слагаемых, и между эле-
ментами 2 и 1, двумя способами,
расставленными по первым двум
позициям, характеризующим от-
ношение суммирования.
Пример 2.14. В качестве примера ИСС рассмотрим сеть, пока-
занную на рис. 2.13. Она определяет понятие КОМАНДИРОВКА
в соответствии с тем ролевым фреймом, который мы рассмотрели для
этого понятия в начале данного параграфа. На рисунке имена ролей
Таблица 2.4
Имена фактов Имя отношения меньше (<)
аргументы отношения
меньший больший
Ф1 0 1
ф'2 1 2
Фз 0 2
Таблица 2.5
Имена фактов Имя отношения суммирование ( + )
аргументы отношения
I -е слагаемое 2-е слагаемое сумма
ф4 0 0 0
0 , 1 1
1 0 1
ф7 0 2 2
выступают в качестве меток на дугах, а вершины сети помечены име-
нами классов объектов, элементы которых могут заполнять в экстен-
сионалах эти вершины.
Таким образом, в языках представления знаний можно выделить
экстенсиональную и интенсиональную составляющие. При этом раз-
личные языки отличаются друг от друга теми или иными средствами
для представления интенсиональных знаний.
В заключение данного параграфа опишем кратко структуру од-
ного из языков представления знаний, получившего название ФРЛ
(язык представления фреймов). Этот ЯПЗ пока единственный, для
которого имеется реализация на отечественных ЭВМ. Эта реализа-
§ 2.9. ЯЗЫКИ ПРЕДСТАВЛЕНИЯ ЗНАНИИ
77
ция существует в двух версиях, одна из которых опирается в ка-
честве базового языка на ЛИСП ЕС, а другая — на версию языка
РЕФАЛ ЕС. Имеется несколько систем ситуационного управления,
использующих ФРЛ для представления знаний и манипулирования
ими.
В ФРЛ каждый фрейм представляет собой структуру с максималь-
ной степенью вложенности, равной пяти. Эта структура имеет сле-
дующий вид:
(Имя фрейма
(имя первого слота
(имя первой ячейки
(первое данное
(первый комментарий:
сообщение)
(второй комментарий:
сообщение)
(г-й комментарий:
сообщение))
(второе данное
...................))
(/-е данное
..................)))
(имя второй ячейки
...............................)))
(имя /г-й ячейки
..............................))))
(имя второго слота
..................................))))
(имя 1-го слота
.................................)))))
В такой структуре могут отсутствовать некоторые уровни. На-
пример, могут отсутствовать комментарии и сообщения к некоторым
данным, во фрейме может быть только один слот, а в слоте только
одна ячейка, в ячейке может содержаться только одно данное. Для
указания местоположения некоторой порции информации во фрейме
в ФРЛ используется индикаторный путь. Примером его служит ин-
дикаторный путь для поиска сообщения, хранящегося во втором ком-
ментарии к третьему данному первой ячейки седьмого слота во фрей-
ме с именем /.Этот путь имеет вид (/; s7; /1; d3; с2). Анализируя его,
легко найти нужный «адрес» в структуре фрейма с именем /. В совет-
ских реализациях ФРЛ индикаторный путь требует явного указа-
ния всех имен частей структуры фрейма. Сделано это для того, чтобы
при поиске адреса использовать не счетчики, а стандартную опера-
цию поиска по образцу.
78
ГЛ. 2. ЯЗЫКИ для ОПИСАНИЯ ОБЪЕКТА И СИТУАЦИИ
Для работы с фреймами в ФРЛ имеется четыре основных опера-
тора FASSERT, FPUT, FGET и FREMOVE. Оператор FASSERT
позволяет ввести в базу знаний тот фрейм, который является аргу-
ментом этого оператора. Пусть, например, имеется запись
FASSERT (КОМАНДИРОВКА
(КТО
(S VALUE
(Иванов Иван Иванович)
(Петров Петр Петрович)))
(КУДА
(S VALUE
(Ленинград)
(Баку)
(Ашхабад)))
(КОГДА
(S VALUE
(2.05.84
(COMMENT
(Распоряжение и. о. директора
Сидорова Евгения Степановича))))))
В этом фрейме три слота с именами КТО, КУДА, КОГДА. Каждый
слот содержит одну ячейку со стандартным именем S VALUE. Это
имя показывает, что в данной ячейке хранятся обычные данные.
К данному, хранящемуся в ячейке S VALUE слота КОГДА, добавлен
комментарий, говорящий о том, что лицо, направляющееся в ко-
мандировку 2 июня 1984 г., отправляется в нее в соответствии с рас-
поряжением и. о. директора Сидорова Евгения Степановича. С по-
мощью оператора FASSERT этот фрейм будет занесен в базу знаний
системы, допуская вызов по имени КОМАНДИРОВКА.
Оператор FPUT добавляет новые данные в некоторое место фрей-
ма. Аргументом этого оператора служит введенный выше индикатор-
ный путь, в конце которого явно выписывается вставляемая часть.
Например, FPUT (КОМАНДИРОВКА; КТО; S VALUE; Сидоров
Евгений Степанович; COMMENT; распоряжение директора Петрова
Ильи Алексеевича) приведет к тому, что фрейм КОМАНДИРОВКА
изменит содержимое первого слота, который теперь будет выгля-
деть так:
(КТО
(S VALUE
(Иванов Иван Иванович)
(Петров Петр Петрович)
(Сидоров Евгений Степанович)
(COMMENT
(распоряжение директора Петрова Ильи Алексеевича))))
§2.9. ЯЗЫКИ ПРЕДСТАВЛЕНИЯ ЗНАНИИ
79
При необходимости извлечь из фрейма некоторую информацию
для работы используется оператор FGET. В качестве его аргумента
используется тот же индикаторный путь. Если, например, имеется
оператор FGET (КОМАНДИРОВКА; КУДА; SVALUE;), то с его
помощью из фрейма КОМАНДИРОВКА будет извлечена информа-
ция, хранящаяся в ячейке слота КУДА. Эта информация будет вы-
дана в виде списка ((Ленинград), (Баку), (Ашхабад)).
Наконец, оператор FREMOVE, в качестве аргумента которого
выступает все тот же индикаторный путь, позволяет исключать из
фрейма ненужную информацию. Если, например, к нашему фрейму
применить оператор FREMOVE (КОМАНДИРОВКА; КУДА; SVA-
LUE Баку), то в слоте КУДА в соответствующей ячейке исчезнет
данное Баку и содержимым этой ячейки будут лишь Ленинград и
Ашхабад. При наличии оператора FREMOVE (КОМАНДИРОВКА)
фрейм с этим именем убирается из базы знаний. (В некоторых вер-
сиях ФРЛ для удаления фрейма используется специальный опера-
тор FERASE.)
Так как истинная адресация в памяти ЭВМ прямо никак не свя-
зана с той адресацией, которая образует индикаторные пути, то
реальное расположение фреймов и их подструктур в памяти поль-
зователю неизвестно. Соотнесение реальных адресов с индикатор-
ными путями при записи и поиске фреймов и их подструктур осу-
ществляется системой управления базой знаний. В этой же системе
работает стандартный «мусорщик», который включается в работу или
по специальным сигналам в программе, или автоматически после
работы операторов типа FREMOVE.
В языке ФРЛ, кроме ячеек S VALUE, предусмотрено еще пять
типов ячеек, распознающихся системой как специальные. Ячейки
первого специального типа имеют имя S DEFAULT. Содержимое та-
ких ячеек используется «по умолчанию». Такое использование ин-
формации возникает тогда, когда при поиске в слоте информации,
указанной, например, в индикаторном пути оператораFGET, обна-
руживается, что такой информации нет. Тогда вместо нее выдается
информация, содержащаяся в ячейке S DEFAULT. Если бы первый
слот нашего фрейма КОМАНДИРОВКА имел вид
(КТО
(S VALUE
(Иванов Иван Иванович)
(Петров Петр Петрович))
(S DEFAULT
(Приказа на командировку пока нет))),
то при наличии оператора FGET (КОМАНДИРОВКА; SVALUE;
Сидоров Евгений Степанович) индикаторный путь при поиске при-
вел бы к ненахождению нужного данного. При сигнале об этом систе-
80
ГЛ. 2. ЯЗЫКИ для ОПИСАНИЯ ОБЪЕКТА И СИТУАЦИИ
ма автоматически перешла бы к содержимому ячейки S DEFAULT
из этого слота и выдала бы информацию о том, что на Сидорова Ев-
гения Степановича приказа на командировку пока нет.
Два типа специальных ячеек SIF ADDED и SIF REMOVED ис-
пользуются соответственно ’при работе операторов FPUT и FRE-
MOVE. В качестве данных в этих ячейках стоят имена некоторых
процедур, по которым они вызываются и выполняются. Сами про-
цедуры написаны на том языке программирования, на который опи-
рается язык ФРЛ. Как уже говорилось, отечественные системы в ка-
честве базового языка используют ЛИСП или РЕФАЛ. Когда опе-
ратор FPUT добавляет что-то в ячейку S VALUE данного слота, то
автоматически выполняются процедуры, указанные в ячейке SIF
ADDED. Эти процедуры в ФРЛ называются присоединенными.
Пусть, например, необходимо хранить сведения о числе командируе-
мых. Тогда первый слот фрейма КОМАНДИРОВКА может иметь
следующую структуру:
(КТО
(S VALUE
(Иванов Иван Иванович)
(Петров Петр Петрович))
(SIF ADDED
(AMOUNT)))
Здесь AMOUNT — имя процедуры, написанной, например, на
ЛИСПе. Эта процедура работает следующим образом: к числу, хра-
нимому в определенном месте памяти, добавляется число вновь до-
бавляемых в ячейку S VALUE слота КТО данных.
Ячейка SIF REMOVED используется так же, как и ячейка
SIF ADDED, но при удалении данных из ячейки S VALUE с по-
мощью оператора FPEMOVE. В только что приведенном примере
при вычеркивании из списка КТО тех или иных лиц при наличии в
структуре этого слова ячейки SIF REMOVED, в которой хранится
данное DECREASE, будет включаться процедура, уменьшающая
количество командируемых на число данных, указанных в индика-
торном пути оператора FREMOVE.
В качестве данных ячейки SIF NEEDED также выступают име-
на процедур. Эти процедуры также являются присоединенными, т. е.
выполняются вне языка ФРЛ на базовом языке программирования.
Процедуры, хранящиеся в ячейке SIF NEEDED, выполняются тог-
да, когда в индикаторном пути оператора FGET имеется ссылка на
эту ячейку и имя соответствующей процедуры. Если имя процедуры
не указано, то выполняются последовательно все процедуры, хра-
нящиеся в ячейке SIF NEEDED.
§2.9. ЯЗЫКИ ПРЕДСТАВЛЕНИЯ ЗНАНИЙ
81
Присоединенные процедуры позволяют использовать все возмож-
ности вычислительного характера, которые доступны системе прог-
раммирования базового уровня.
Последняя специальная ячейка — ячейка с именем S REQUIRE.
В качестве данных в этой ячейке хранятся имена некоторых преди-
катов, определенных на значениях данного слота. Такие предикаты
принимают истинное или ложное значение в зависимости от тех ре-
альных ячеек и данных, которые хранятся в данный момент в слоте.
Это позволяет, например, отвечать на вопросы: «Верно ли, что сре-
ди городов, указанных в слоте КУДА, нет Москвы?», «Верно ли, что
в мае командировок не было?», «Верно ли, что Иванов Иван Ивано-
вич и Петров Петр Петрович единственные, кто уезжал в команди-
ровку в июне 1984 г.?» Предикаты, подобно присоединенным про-
цедурам для проверки истинного значения, вызывают соответству-
ющие процедуры, написанные на базовом языке программирования.
В качестве ответа на действие, оказываемое оператором FGET, в
индикаторном пути которого после имени некоторого слота указа-
на ячейка S REQUIRE, система выдает список истинных значений
всех предикатов на тех данных слота, которые в этих предикатах
выступают в качестве аргументов.
Пока мы рассматривали изолированные фреймы и работу с ними.
Но в языке ФРЛ имеется возможность связывать фреймы между со-
бой в единую сеть. Прежде всего, фреймы связываются друг с дру-
гом с помощью отношения род — вид. В ФРЛ связи, характеризую-
щие переход от вида к роду, называются АКО-связи (сокращение
от a kind of, т. е. один из). Обратные связи носят название INSTAN-
СЕ-связи. Они используются для запоминания пути вверх по АКО-
связям для возвращения к начальному фрейму. АКО-связи позво-
ляют сокращать объем информации, хранящейся в базе знаний.
Информация, общая для нескольких фреймов, собирается в спе-
циальный фрейм, в котором она и хранится в единственном экзем-
пляре. Для получения ее (наследования) фреймами более низкого
уровня в них создается специальный слот с именем АКО. В качест-
ве данных, хранимых в ячейке S VALUE этого слота, выступают име-
на фреймов, с которыми данный фрейм связан АКО-связями.
Пусть, например, в базе знаний, кроме фрейма КОМАНДИРОВ-
КА, хранится еще фрейм СОВМЕСТИТЕЛЬ. По существующим нор-
мам, если человек отбывает в командировку, то необходимо учесть
это при оплате его труда по совместительству. Это означает, что во
фреймах КОМАНДИРОВКА и СОВМЕСТИТЕЛЬ слот КТО ока-
жется общим. Для того чтобы не дублировать информацию, можно
завести специальный фрейм, присвоив ему имя КОМАНДИРУЕ-
МЫЙ. Этот новый фрейм будет иметь вид:
(КОМАНДИРУЕМЫЙ
(КТО
(S VALUE
82
ГЛ. 2. языки ДЛЯ ОПИСАНИЯ ОБЪЕКТА И СИТУАЦИИ
(Иванов Иван Иванович)
(Петров Петр Петрович)))
(INSTANCE
(S VALUE
(КОМАНДИРОВКА)
(С О В М Е С Т И Т Е Л Ь)))
Во фреймах КОМАНДИРОВКА и СОВМЕСТИТЕЛЬ слота с
именем КТО не будет. Вместо него будет стоять слот с именем АКО,
в котором в ячейке SVALUE будет стоять в качестве данного КО-
МАНДИРУЕМЫЙ. При наличии подобных ячеек во фреймах КО-
МАНДИРОВКА и СОВМЕСТИТЕЛЬ выполнение, например, опера-
тора FGET (КОМАНДИРОВКА; КТО; SVALUE) будет происхо-
дить следующим образом. Анализируя индикаторный путь, систе-
ма найдет фрейм с именем КОМАНДЙРОВКА и, просматривая его,
не обнаружит слота с именем КТО. Это служит сигналом для авто-
матического обращения к слоту АКО в этом фрейме. Получив ин-
формацию о данных, хранящихся в его ячейке S VALUE,^система
переходит к поиску фрейма с именем КОМАНДИРУЕМЫЙ, в ко-
тором ищет слот с именем КТО. Найдя этот слот, система выделяет
информацию, требование на которую было сформулировано в ин-
дикаторном пути. При нахождении фрейма КОМАНДИРУЕМЫЙ
оператор FGET записывает в его слот INSTANCE имя того фрей-
ма, от которого осуществлен переход по АКО-связи. Поэтому мы
и выделили данные в слоте INSTANCE фрейма КОМАНДИРУЕ-
МЫЙ разрядкой. Фактически, их там нет, пока некоторый опера-
тор не перешел к данному фрейму по АКО-связи. В некоторых сис-
темах эти данные уже есть, а оператор, пришедший к данному фрей-
му по АКО-связи, лишь активизирует то или иное данное с помощью
специальной метки.
Оператор FGET отказывается от выполнения поставленной пе-
ред ним задачи (как и другие операторы ФРЛ), если им будут ис-
пользованы все возможности поиска, предоставляемые АКО-свя-
зями и содержимыми ячеек S DEFAULT.
В существующих версиях ФРЛ пока еще слабо развиты про-
цедуры, позволяющие вводить на фреймах отношения, отличные от
тех, которые образуют структуру типа дерево (род — вид, целое —
часть, класс — элемент и т. п.). Однако в последнее время видны
успешные шаги в этом направлении, что сделает ФРЛ еще более
перспективным для использования в системах ситуационного управ-
ления и других системах, традиционно относимых к сфере искусст-
венного интеллекта.
Если в ФРЛ не выделяются специальные типы фреймов, что, как
отмечалось выше, удобно для практических систем, то в другом язы-
ке представления знаний KRL введено семь различных типов фрей-
мов: базисный фрейм, абстрактный фрейм, фрейм-специализация,
индивидуальный фрейм, декларирующий фрейм, фрейм-отношение
§ 2.10. ПЕРЕХОД ОТ ТЕКСТОВ К ВНУТРЕННЕМУ ПРЕДСТАВЛЕНИЮ
83
и фрейм-условие. Увеличено в этом языке по сравнению с ФРЛ и
число различных по своему значению ячеек. Однако и в этом языке
плохо развиты (по крайней мере в тех версиях, которые работают
на ЭВМ) средства для эффективной организации и манипулирова-
ния с сетевыми фреймовыми структурами.
§ 2.10. Переход от текстов на естественном языке
к внутреннему представлению **
Между описанием ситуаций на естественном языке и внутрен-
ними представлениями информации о них в управляющей системе
имеется явный разрыв. Поэтому одной из трудных проблем, кото-
рые приходится решать при создании систем ситуационного управ
ления, является проблема преобразования словесных описаний во
внутренние представления. Эта проблема тесно связана с задачей
построения диалоговых систем, базирующихся на естественном
языке. Однако для ее решения недостаточно воспользоваться гото-
выми лингвистическими процессорами, обеспечивающими диалог.
Требуется еще получать специфическую информацию, связанную
с функционированием Анализатора, показанного на рис. 1.7. На-
помним, что его задача состоит в классификации поступившей ин-
формации в соответствии с теми задачами, которые должна решать
система управления. Эти задачи могут быть трех типов: пополне-
ние системы новой информацией об объекте управления или спосо-
бах управления, формирование ответа на некоторый запрос на ос-
нове информации, уже хранящейся в системе, поиск решения в си-
туации, описание которой уже поступило в систему. Первые две
задачи — вспомогательные, третья — основная. Но разделение их
на три класса нужно производить при преобразовании входного
текста во внутренние представления. Именно на этом этапе система
должна «понять», что от нее требуется. Поэтому Анализатор может
рассматриваться как составная часть лингвистического процессора.
На рис. 2.14 показана традиционная структура лингвистиче-
ского процессора, в котором анализ поступившего на вход текста
идет по предложениям в порядке их поступления. Сначала для всех
слов, входящих в него, из словаря находят нужные морфологиче-
ские и синтаксические характеристики, приписывают род, число,
падеж, наклонение и т. п. Затем происходит синтаксический ана-
лиз, цель которого состоит в выявлении синтаксической структуры
предложения. Она имеет вид дерева и напоминает известные всем
деревья, получающиеся в результате школьного разбора предложе-
ний. На этом этапе вычленяется сказуемое и именная группа суще-
ствительного, а также все остальные зависящие от них члены пред-
ложения. На этапе семантического анализа строится семантическая
структура предложения, происходит процесс его интерпретации в
терминах, используемых в языке представления знаний. На этом
этапе лингвистический процессор взаимодействует не только с соб-
84
ГЛ. 2. языки ДЛЯ ОПИСАНИЯ ОБЪЕКТА И СИТУАЦИЙ
ственными словарями, но и с базой данных и базой знаний, отоб-
раженных на нашем рисунке в виде блока Модель проблемной об-
ласти. После этой интерпретации наступает очередь Анализатора,
которому в нашей схеме соответствует Блок прагматического ана-
лиза.
В реальных лингвистических процессорах и диалоговых систе-
мах структура, показанная на рис. 2.14, может видоизменяться.
Рис. 2.14
Последовательный харак-
тер выполнения отдельных
этапов анализа может стать
последовательно - парал-
лельным, когда некоторые
этапы начинают выполнять-
ся раньше окончания пред-
шествующих. Некоторые
этапы (например, этап мор-
фологического анализа) мо-
гут вообще отсутствовать.
При построении систем,
ориентированных на узкие
проблемные области, мож-
но вообще отказаться от
структуры, показанной на
рис. 2.14. Кроме того, боль-
шим недостатком сущест-
вующих лингвистических
процессоров является то,
что они работают лишь с от-
дельными предложениями
и не улавливают смысла
целого текста, что резко
Особенно это следует учиты-
сужает возможности таких систем.
вать при создании систем управления обсуждаемого здесь типа.
Ибо описание ситуации, как правило, носит характер текста,
состоящего из ряда предложений. И как тут не вспомнить высказы-
вание выдающегося советского психолога А. Н. Соколянского, соз-
давшего методику обучения языку слепоглухонемых. Он писал:
«Основным элементом является текст, но ни в коем случае не от-
дельное слово и не отдельное предложение. Название закрепляется
не за предметом, а за ситуацией, в которой используется предмет»1).
Мы не будем здесь развивать его мысль, поскольку это увело бы нас
в сторону от основной темы настоящего параграфа. В комментариях
к данной главе читатель найдет сведения о той литературе, где эти
вопросы обсуждаются подробно. Мы же перейдем к описанию мето-
!) Со ко л я н ск и й А. Н. Обучение слепоглухонемых языку.— Тезисы
конференции по машинному переводу. М.: 1958.
§ 2.10. ПЕРЕХОД ОТ ТЕКСТОВ К ВНУТРЕННЕМУ ПРЕДСТАВЛЕНИЮ
85
дов перехода от текста к представлениям, характерным для языка
ситуационного управления.
В § 2.3 мы приводили таблицы статических и динамических от-
ношений, которые могут использоваться при описании ситуаций,
складывающихся на объекте управления. 51ы говорили о том, что
число базовых отношений такого рода конечно и включает в себя не
более 200 отношений. Некоторые из них приведены в табл. 2.1 и
2.2. В § 2.4 мы привели табл. 2.3, которая показывает, что на мно-
жестве отношений можно ввести некоторую иерархию (в данном слу-
чае двухуровневую).
Пусть теперь выбрана некоторая проблемная область и зафик-
сирован словарь основных понятий, которые будут использоваться
для описания характерных для нее ситуаций. Для перехода от сло-
весных описаний к записям на ЯСУ необходимо научиться находить
соответствие между некоторыми частями текста и символами, ис-
пользуемыми в ЯСУ. В § 2.3 мы выделили восемь классов — поня-
тия, имена, отношения, действия, квантификаторы, модификаторы,
модальности и оценки. Кроме того, для отношений и действий мы
дали более подробную классификацию внутри этих классов. При
небольшой проблемной области (в смысле используемого словаря
для описания ситуаций и принимаемых решений по управлению)
нужное нам соответствие можно задать с помощью специальных таб-
лиц.
Пример 2.15. Предположим, что в памяти системы хранится
табл. 2.6.
Таблица 2.6
Лексическая единица Фрагмент на ЯСУ Лексическая единица Фрагмент на ЯСУ
Температура g Из-за Из
Давление ь Насос а
В коллекторе гз&с Насоса а
Повысилось ds Необходимо fl
Снизилось d-> Включить ^72^2
Нормальное d, № 5 рг'1
Остановка di № 8 Р<2
Остановки d, № 9 Р!'з
Из-за Пэ Автокар h
Пусть на ход системы поступил следующий текст: «Давление в
коллекторе № 5 снизилось из-за остановки насоса № 8. Необходимо
включить насос № 8 или насос № 9». Анализируя последовательно
этот текст, можно построить соответствующее ему внутреннее пред-
ставление. Сначала вместо слова давление подставляется b — его
обозначение во внутреннем языке. Затем находятся фрагменты пред-
86
ГЛ. 2. языки ДЛЯ ОПИСАНИЯ ОБЪЕКТА И СИТУАЦИИ
ставления для лексем «в коллекторе» и «№ 5». Они выглядят как г.,с и
р(\. Для сборки из найденных фрагментов описания вида (br3s (срц))
надо иметь некоторую дополнительную информацию. Она хранится
в системе в виде специальных продукционных правил. Продукцион-
ное правило (продукция) есть выражение вида а=>р, которое чита-
ется так: «Если а, то Р». Правила такого типа будут предметом на-
шего обсуждения в следующей главе. Левая часть продукции зада-
ет некое условие, выполнение которого обеспечивает применимость
данной продукции. В правой части продукции описано некое пре-
образование, которое можно выполнить. Примером такой продукции
может служить правило «Если имеются стоящие рядом фрагменты
х и ру, где х принадлежит к множеству понятий, ay — к множеству
имен, то эти фрагменты объединяются в конструкцию (хру)». Так
из фрагментов образуется синтаксически правильная запись на
ЯСУ.
Дальнейший анализ текста дает новые фрагменты, которые объе-
диняются между собой за счет продукционных правил. Например,
когда при анализе встречается из-за, то априорно неясно, какой
фрагмент из имеющихся в таблице соответствует данному случаю.
Ясно, что в случае «из-за остановки насоса» следует заменить «из-
за» отношением г49. Но столь же необходимо во фразе «автокар вы-
ехал из-за насоса» заменить из-за на отношение г73. Выбор той
или иной возможности и здесь осуществляется за счет специального
продукционного правила. В результате подобной процедуры из
исходного текста формируется внутреннее представление на ЯСУ,
которое имеет следующий вид:
1((^РС) Г59^1) Г49 [(^38 (^РС)) fl |[(СРЕ) ^72^а] V [(^РЙ) Г72^г]}}'
Вместо знака дизъюнкции можно ввести соответствующее от-
ношение. Заметим, что в первом предложении сначала формируется
та его часть, которая во внутреннем представлении стоит справа от
отношения г49. Она соответствует следствию. А часть, описывающая
причину, формируется позже. Их правильное расположение отно-
сительно г49 получается также за счет специальных продукционных
правил.
Тот подход к преобразованию текста на естественном языке во
внутреннее представление, который был продемонстрирован в при-
мере 2.15, отличается принципиально от традиционного подхода вы-
явления смысла текста, используемого в лингвистике. И дело тут
в том, что в системах управления важен не смысл самого текста, а
то, что надо сделать системе, когда она получает его. Другими сло-
вами, тот или иной текст должен вызывать определенную реакцию
системы. Именно это позволяет во многих практических системах
общения на естественном языке использовать не структуру, пока-
занную на рис. 2.14, а прямой переход от текста к внутреннему
представлению. В романе Лоренса Стерна «Жизнь и мнения Три-
§2.11. ФОРМАЛИЗАЦИЯ КАЧЕСТВЕННЫХ ХАРАКТЕРИСТИК
87
страмаШенди, джентельмена»эта ситуация иллюстрируется следую-
щими словами: «Мать моя... могла употреблять трудное слово 20 лет
подряд, а также отвечать на него, если то был глагол, во всех време-
нах и наклонениях, не утруждая себя расспросами о его значении».
В комментариях к данной главе читатель найдет указания на лите-
ратуру, в которой описаны системы, опирающиеся на прямой пере-
ход от текстов к внутренним представлениям. В настоящее время
практика построения транслирующих блоков для перехода от тек-
стов на естественном языке к внутренним представлениям в системах
ситуационного управления такова, что создаются узкоспециализи-
рованные трансляторы, полностью ориентированные на те проб-
лемные области, для которых они предназначаются.
§ 2.11. Формализация качественных характеристик *
Наиболее трудно формализуются при переходе от естественного
языка к ЯСУ квантификаторы, модификаторы, оценки и модаль-
ности, которые человек использует чисто качественно. Примерами
такого рода описаний, присущих человеку, могут служить «Турбина
часто выходит из строя», «Потери от плохой регулировки темпера-
туры весьма значительны», «Можно включить дополнительный
двигатель, но это опасно». Что скрывается за приведенными фраза-
ми? Что значит, что турбина выходит из строя часто? Раз в день,
в месяц, в год? Каковы на самом деле потери, которые весьма зна-
чительны? Сколько они составляют процентов — 20 или 80? И ка-
кая регулировка температуры называется плохой? И, наконец, вклю-
чать или не включать все-таки дополнительный двигатель, ибо сде-
лать это можно, но опасно?
На эти вопросы нет прямого ответа. Язык человека не оперирует
точными значениями слов, выделенных в наших вопросах курси-
вом, и это понятно, так как эти слова сами по себе, вообще говоря,
ничего не обозначают. Их смысл полностью определяется некоторой
конкретной действительностью, для описания которой они привле-
каются. Поэтому утверждения «Для изделия требуется весьма мно-
го крепежных элементов» и «В изготовлении изделия участвует
весьма много предприятий» говорят о разных весьма много. В пер-
вом случае речь, по-видимому, идет о тысячах или десятках тысяч
крепежных элементов, а во втором случае количество предприятий,
наверное, исчисляется десятками.
Человек для понимания смысла подобных слов и словосочета-
ний очень часто привлекает понятие нормы, характеризующей дан-
ное явление, факт или процесс. Само понятие нормы тоже текуче,
ситуативно, зависит от конкретных условий, в которых восприни-
мается текст или речь. Если в разговоре двух москвичей фраза
«Я живу далеко от работы» ассоциируется у собеседника с затратами
времени на транспорт порядка часа, то для жителей Академгородка
под Новосибирском та же фраза означает куда меныпие затраты
88
ГЛ. 2. ЯЗЫКИ ДЛЯ ОПИСАНИЯ ОБЪЕКТА И СИТУАЦИЙ
времени на дорогу до работы. И это связано с различной нормой за-
трат у москвичей и жителей Академгородка.
Пусть некоторая переменная х принимает значения из отрезка
[о, Ь] (рис. 2.15). И пусть наблюдения за значениями х позволили
построить гистограмму, показанную на этом рисунке. Тогда нор-
норна
Рис. 2.15
му будут характеризовать те
значения х, которые встречались
наиболее часто. Человек выде-
ляет некоторый интервал значе-
ний (х*, х**), внутри которого
он готов считать все значения
нормальными. Если значения х
лежат левее интервала нормы,
то человек склонен их считать
меньшими нормы, а когда зна-
чения х оказываются правее
л-**, то человек интерпретирует их как превосходящие норму.
i ем самым он оперирует с некоторой шкалой, в которой понятие
нормы занимает центральное положение.
Примером такой шкалы для оценки расстояний служит следую-
щий ряд слов: вплотную; очень близко; близко; не далеко, не близко
(норма); далеко; очень далеко. Другим примером может служить
шкала для оценки частоты событий или явлений: никогда; почти ни-
когда; очень редко; редко; не часто, не редко (норма); часто; очень
часто; почти всегда; всегда. Такого же типа шкалы можно образо-
вать на антонимичных парах слов: большой — маленький, много —
мало, сильно — слабо и т. п.
Можно провести следующий эксперимент, который действитель-
но неоднократно проводился с испытуемыми разного возраста, со-
циального положения, национальности. Испытуемому предъявля-
ется стопка карточек, на каждой из которых написано одно из слов
Никогда оНёнь
редко
-ре'дко
Не часто,
нередко
Часто
'очень Всегда
часто
Рис. 2.16
или словосочетаний, входящих в шкалу. Кроме того, испытуемому
предъявляется отрезок шкалы, в левом и правом концах которой
стоят слова антонимы, замыкающие шкалу (например, никогда и
всегда для шкалы частот), а в середине шкалы расположено слово
или словосочетание, соответствующее норме для данной шкалы.
На шкале нанесены деления, количество которых больше слов об-
разующих ряд-шкалу. Задача испытуемых состоит в указании ин-
тервалов, которые, по их мнению, соответствуют словам шкалы. На
рис. 2.16 показан результат такого эксперимента, проведенного с
одним испытуемым по построению шкалы никогда — всегда, когда
§2.11. ФОРМАЛИЗАЦИЯ КАЧЕСТВЕННЫХ ХАРАКТЕРИСТИК
89
шкала включала следующие слова: никогда; очень редко; редко; не
часто, не редко; часто; очень часто; всегда. С понятиями никогда и
всегда испытуемые, как правило, связывают лишь конечные точки
отрезка. Остальные слова интерпретируются ими некоторыми отрез-
ками, аналогично тому, как показано на нашем рисунке.
Если теперь набрать достаточную статистику на большой груп-
пе испытуемых, то можно построить некоторую обобщенную шка-
лу по группе испытуемых. При этом возникает определенная труд-
ность, так как границы интервалов для слов у разных испытуемых
могут оказаться различными, что заставляет переходить к некото-
рой гистограмме, пример которой показан на рис. 2.17. Пять кри-
вых, показанных на ней (для слов никогда и всегда отклонений, прак-
тически, нет) называются функциями принадлежности слов очень
редко; редко; не часто, не редко; часто и очень часто.
Понятие функции принадлежности, которое возникло у нас в
связи с обработкой экспериментального материала, может быть за-
дано вполне строго.
Функцией принадлежности для некоторого множества W назы-
вается функция p-(tc'), определенная на всех элементах множества
и принимающая значения из отрезка [0,1].
Смысл этого определения можно интерпретировать следующим об-
разом. Если для некоторого w£W р,(да)=0, то это означает, что w
не принадлежит 1П;если для некоторого р(да) = 1,то w при-
надлежит W. Если же для некоторого w 0<р(да)<1, то это означа-
ет, что w принадлежит W с некоторой возможностью, оцениваемой
величиной р(да).
Пример 2.16. На рис. 2.18 показан ряд картинок. Относительно
левой из них мы не сомневаемся — это человек. Относительно пра-
вой сомнения также нет. Это, конечно, кошка. Будем формировать
по множеству показанных на рис. 2.18 изображений множество W,
интерпретируемое как изображения кошек. Тогда для правого изоб-
ражения функция принадлежности к этому множеству р (да) = 1, а
для левого — р(да)=0. Остальные изображения, по-видимому,
нельзя со столь глубокой уверенностью отнести к данному множе-
90
ГЛ. 2. ЯЗЫКИ для ОПИСАНИЯ ОБЪЕКТА И СИТУАЦИИ
ству или исключить из него. Значение р(ау) явно возрастает при ана-
лизе изображений слева направо. Но возникает проблема, какое
численное значение ц (и) нужно приписать каждому изображению.
Ответ на этот вопрос может дать только человеческая экспертиза.
Опросив достаточное число людей-экспертов, каждый из которых
Рис. 2.18
дает по каждому изображению свою числовую оценку, можно ус-
реднить ее по всем экспертам и получить для каждого изображения
значение функции принадлежности для множества изображения
кошек. Интересно отметить, что характер экспертизы во многом за-
висит, как уже говорилось, от нормы, которой придерживаются
эксперты. Если в данном социуме не принято носить усы, то, воз-
можно, все оценки экспертизы сместятся в сторону их увеличения.
Еще более наглядно это может быть продемонстрировано на приме-
ре образования значений функции принадлежности к такому, на-
пример, множеству, как старые люди в зависимости от конкретного
возраста людей. В социуме долгожителей возраст 50 лет вряд ли
может получить большое значение функции принадлежности к этому
множеству. Но в социуме, где продолжительность жизни в среднем
невелика, для возраста 50 лет может быть получена весьма высокая
степень принадлежности к множеству старые люди.
Вернемся к рис. 2.16 и 2.17. Можно ли их связать между собой?
Введем уровень отсечки а, где а принимает определенное значение
в интервале от 0 до 1. На рис. 2.17 показано два уровня отсечки с
ат;>0,5 и а2<?0,5. Эти уровни позволяют выделить две системы за-
штрихованных отрезков для ат и а2 на нижних осях. Точки, попав-
шие в них, соответствуют значениям частоты, которые принадлежат
с возможностью, превосходящей данный уровень, к множествам,
характеризуемым нашими пятью словами. «Пустые» интервалы зна-
чений содержат такие значения частоты, относительно которых с
данным уровнем возможности ничего сказать нельзя. Чем меньше
а, тем, естественно, большее место занимают заштрихованные от-
§2.11. ФОРМАЛИЗАЦИЯ КАЧЕСТВЕННЫХ ХАРАКТЕРИСТИК
91
резки. При некотором значении а* они заполняют всю ось, а при
дальнейшем уменьшении а начинают налагаться друг на друга. Это
будет означать, что с заданным уровнем возможности некоторое от-
ношение частоты может принадлежать как множеству, определяе-
мому некоторым словом на шкале, так и соседнему с ним множеству.
Отсюда вытекает способ выбора а*, обеспечивающий отнесение
всех значений на шкале к некоторому единственному множеству.
Рассмотрим теперь весьма важную проблему — проблему уни-
версальной шкалы. Пока значения функций принадлежности будут
целиком определяться семантикой некоторой конкретной проблем-
ной области, трудно делать какое-либо общее заключение о шкалах
или строить процедуры ра-
боты с ними.
Преобразуем гистограм-
му, показанную на рис.
2.15, следующим образом
(рис. 2.19). Отобразим уча-
сток кривой, который на-
ходится правее экстре-
мальной точки, зеркально
вверх, а затем проведем
аффинное преобразование
полученной кривой так,
чтобы точка бывшего мак-
симума получила коорди-
наты (0,5; 0,5), а вся кри-
вая вписалась в единичный
квадрат таким образом, что
6=1, а=0, /(6) = 1 и f(a) =
=0. Теперь отметим на оси
Рис. 2.19
ординат отрезки, соответствующие шкале частоты и полученные
экспериментальным путем с некоторым уровнем отсечки а*. Пе-
реход на универсальную шкалу происходит следующим образом.
Пусть некоторое явление или событие имеет частоту встречи, ле-
жащую в отрезке [g1; £2]. Спроектируем этот отрезок, используя ги-
стограмму Д (х), на ось ординат. Ему будет соответствовать отрезок,
оцениваемый характеристикой редко. Это означает, что появление
события, определяемого гистограммой Д(х) с такой частотой, оце-
нивается как редкое событие.
Если мы имеем другое событие или явление со своей гистограм-
мой f2(x), то истинные частоты его появления, оцениваемые как ред-
кие, будут другими. На рис. 2.19 им соответствует отрезок [гц, т]2],
который не совпадает с отрезком [Нт, £,1.
Подобно случаю нечеткой шкалы для частот можно построить
универсальные шкалы и для других нечетких шкал. Например, для
пространственной шкалы по оси абсцисс вначале откладываются рас-
стояния, выраженные в каких-нибудь натуральных единицах
92
ГЛ. 2. ЯЗЫКИ ДЛЯ ОПИСАНИЯ ОБЪЕКТА И СИТУАЦИИ
граммы всегда можно
измерения расстояний (например в метрах), а по оси ординат разме-
щаются отрезки, соответствующие словам очень далеко, далеко и т. д.
Затем происходит перевод всего графика в единичный квадрат при
условии, что точка максимума гистограммы попадает в точку (0,5;
0,5). После этого переход от нечеткой пространственной шкалы к
универсальной шкале происходит так же, как было сделано для
частотной шкалы.
Вообще, если имеется некоторая шкала, отражающая некоторый
порядок в словесных оценках какого-то явления или факта, и су-
ществует способ количественной их оценки, то при наличии гисто-
рейти к универсальной шкале, независящей
от конкретной семантики данного явления
или факта.
Опишем теперь иной подход к процессу
введения универсальной шкалы.
Если объект управления сложен и при
описании текущих ситуаций на нем, а так-
же для описания знаний о функциониро-
вании объекта и управлении им приходит-
ся использовать качественные описания,
то ясно, что модель, формируемая' в системе
управления, является лишь приближенным
описанием объекта и процесса управления
им. Но не всякая приближенная модель
пригодна для этого, а лишь такая, для ко-
торой верно утверждение о согласованно-
сти.
Смысл нашего утверждения можно проил-
Рис. 2.20 люстрировать с помощью рис. 2.20. На нем
W есть множество состояний w (понимаемых
в самом широком смысле) объекта управления. Его можно трак-
товать как множество всех возможных для объекта точных описа-
ний его состояний. Множество S есть множество описаний полных
ситуаций, которые используются системой управления для приня-
тия решений. Отдельные полные ситуации s, не точно соответствуют
истинным описаниям того, что характеризует текущее состояние
объекта с учетом его специфики wt. Поэтому отображение X является
нечетким. Вместо четкого однозначного в обе стороны отображения
б: мы имеем в обе стороны многозначное отображение X:
где Wi и S, суть подмножества W и S соответственно. При
этом отображение б: да;«->8г как бы «включается» в отображение X:
т. е. является одним из отображений этого многозначного
отображения X. Пусть О есть некоторый оператор перевода одного
полного описания ситуации в другое, а Л — некоторый процесс
перехода из состояния Wi объекта управления в состояние w2-
И пусть О имитирует в системе управления переход А. Тогда мо-
дель описания будет согласованной, если б: включается в
§2.11. ФОРМАЛИЗАЦИЯ КАЧЕСТВЕННЫХ ХАРАКТЕРИСТИК
93
X: 6: ш2<->52 включается в X: W2-*S2 и подмножества ITi и
W2 таковы, что при данном критерии управления объектом (или
соображений о целесообразности, используемых при его управле-
нии) все состояния, попавшие в и И?2, требуют одинаковых (с не-
которой допустимой точностью) решений по управлению. Другими
словами, от X требуется лишь «приблизительная правдивость» пере-
дачи того, что происходит на объекте управления, но степень приб-
лизительности не должна превышать некую границу, вне которой
решения по управлению, принимаемые в модели, не будут соответ-
ствовать необходимым. Это отображение должно быть зеркалом с не-
большими искажениями, а не тем «диким зеркалом», о котором в свое
время писал В. Набоков: «Одним словом, у вас было такое дикое зер-
кало и целая коллекция разных неток, т. е. абсолютно нелепых
предметов: всякие такие бесформенные, пестрые, шишковатые шту-
ки, вроде каких-то ископаемых,— но зеркало, которое обыкновен-
ные предметы абсолютно искажало, теперь, значит, получало на-
стоящую пищу, т. е. когда вы такой непонятный и уродливый
предмет ставили так, что он отражался в непонятном и уродливом
зеркале, получалось замечательно; нет на нет давало да, все восста-
навливалось, все было хорошо...»
Отображение X можно задать в виде некоторой матрицы, в ко-
торой строкам соответствуют состояния wit а столбцам — полные
ситуации s;. На пересечении строк и столбцов можно задать число
0<тг,<1, которое будет характеризовать возможность замены Wi
на s} или обратной замены. Тогда строки матрицы можно рассмат-
ривать как функции принадлежности на множестве полных си-
туаций. А столбцы матрицы — как функции принадлежности s; на
множестве истинных состояний объекта управления.
Пример 2.17. Рассмотрим таблицу-матрицу 2.7.
Т а б л и ц а 2.7
Расстояние, м Очень близко Близко Не далеко, не близко Далеко Очень далеко
0,5 0,9 0,1
2 0,05 0,65 0,2
20 0,15 0.6 0,05
100 0,05 0,4 0,8
3000 0,05 0,7 0,2
Эта матрица отражает мнение некоторого эксперта и получена
в процессе психологического эксперимента. Эксперимент заключал-
ся в том, что испытуемые могли ставить свои оценки из отрезка [0,11
с шагом 0,05 в клетках матрицы. Матрица задает пять функций при-
надлежности значений точной метрической шкалы расстояний к ело-
94
ГЛ. 2. ЯЗЫКИ ДЛЯ ОПИСАНИЯ ОБЪЕКТА И СИТУАЦИИ
весным оценкам расстояний и пять функций принадлежности сло-
весных оценок на нечеткой шкале расстояний к точным метрическим
значениям. На рис. 2.21 для иллюстрации приведена функция при-
надлежности для не далеко, не близко. Ее график состоит из пяти то-
чек, определяемых тре-
тьим столбцом матрицы.
Кусочно-линейная ап-
проксимация сделана
для наглядности.
Отображение Л, за-
даваемое матрицей, мож-
но назвать нечетким от-
ношением моделирова-
ния. Оно показывает,
как моделируется одна
четкая или нечеткая
шкала некой другой шкалой. И в частности, как происходит пе-
реход от словесных оценок некоторых качественных характеристик
к их числовым оценкам, что и является целью настоящего пара-
графа.
С нечетким отношением моделирования можно связать диаграм-
му моделирования
в В'
о.
Здесь А и А' — состояния некоторой среды, а В и В' — связанные
сними состояния модели, отображающей эту среду. Операторам пре-
образования Т в среде должны согласованно соответствовать опе-
раторы преобразования в модели Q. Для успешности моделирова-
ния необходимо, чтобы диаграмма моделирования была коммутатив-
ной.
Пример 2.18. В предшествующем примере испытуемые строили
матрицу как бы вне учета семантики. Представляет интерес выяв-
ление ее влияния на построение нечеткого отношения моделирова-
ния. В одном из проведенных экспериментов испытуемые должны
были вписать оценки в матрицы, подобные использованным в пре-
дыдущем примере, при попадании в следующие три реальные ситуа-
ции: обход ямы со скользкими краями, обход работающей поливаль-
ной автомашины и переход дороги перед быстро движущимся тран-
спортом. Результатом эксперимента оказалась практически та же
матрица, которая зафиксирована в примере 2.17, но оценки при
переходе от одной ситуации к другой как бы сдвигались на один
разряд вправо при переходе от более опасной (третьей) ситуации,
§2.11. ФОРМАЛИЗАЦИЯ КАЧЕСТВЕННЫХ ХАРАКТЕРИСТИК
95
которой соответствовала матрица из примера 2.17, к менее опасным
второй и первой ситуациям эксперимента. Например, в ситуации
с поливальной автомашиной расстояние в 0,5 м со степенью принад-
лежности 0,85 получило оценку близко, а в ситуации обхода ямы
со скользкими краями примерно с той же степенью принадлежности
это расстояние было оценено как «не далекое, не близкое».
Такой линейный сдвиг, наблюдавшийся в описанном выше при-
мере, позволяет выдвинуть весьма важную гипотезу о том, что из-
менение семантики ситуаций, в которых производится оценка рас-
стояний, приводит к гомоморфному отображению функции принад-
лежности. Другими словами, если шкалы, на которых заданы наши
функции принадлежности или нечеткие интервалы, преобразовать
линейно с помощью функции у=ах—Ь, то функции принадлежности
не меняются, а меняется лишь семантика той ситуации, к которой
они относятся. Высказанная гипотеза должна найти подтвержде-
ние в экспериментах с людьми для различных по интерпретации от-
ношений моделирования (пока она проверялась лишь для отноше-
ния расстояния). Если эксперименты подтвердят ее, то работа с ка-
чественными описаниями существенно упростится.
Перечислим в заключение параграфа те задачи, в решении кото-
рых нечеткое отношение моделирования может сыграть важную
роль.
1. Вычисление функций принадлежности не полностью заданных
нечетких лингвистических шкал с помощью вычисления неполного
или полного транзитивного замыкания отношения моделирования,
задаваемого матрицей типа рассмотренной нами в примере 2.17.
2. Проведение классификации нечетких понятий для уменьше-
ния размерности пространства модели.
3. Возможность аппроксимации новых нечетких понятий, за-
данных в виде функций распределения или нечетких интервалов.
4. Построение иерархической системы отношений моделирова-
ния, что соответствует построению иерархической системы шкал для
определения нечетких понятий с различной степенью обобщения.
5. Построение универсальных шкал, учитывающих конкретную
семантику тех или иных ситуаций.
ГЛАВА 3
ПОПОЛНЕНИЕ ОПИСАНИЙ СИТУАЦИЙ
До того как что-нибудь было, ничего
не было.
И. Шток
§3.1. Постановка задачи
Когда человек воспринимает сообщение в виде текста на естест-
венном языке, то имеет место феномен настолько нам привычный,
что мы его просто не замечаем. Он состоит в том, что при восприя-
тии сообщения мы воспринимаем гораздо больший объем информа-
ции, чем непосредственно в сообщении содержится. И это обогаще-
ние происходит за счет трех причин. Во-первых, само сообщение
принимается нами в рамках некой ситуации, которая и обогащает
его, ибо воспринимается вместе с языковым сообщением. Например,
когда вам говорят: «Включите вон тот рубильник», то вы видите, на
какой рубильник указывает говорящий, и правильно выполняете
указание. Если бы это сообщение не сопровождалось жестом, то
сообщение не было бы понято. В вопросе: «Как же это получилось?
Посмотри!» текст остается полностью непонятным вне рамок тон
реальной ситуации, в которой он был произнесен. Итак, к информа-
ции, которая содержалась в тексте, как правило, необходимо еще
добавлять информацию о той ситуации, в рамках которой возник
данный текст.
Во-вторых, автор может использовать текст для достижения ка-
ких-то своих целей, которые в тексте явно не выражены. Известное
определение понятия «зануда» как человека, который на вопрос:
«Как поживаешь?» начинает подробно рассказывать о своей жиз-
ни за последнее десятилетие, основывается именно на этом. Целью
спрашивающего было вовсе не желание получить подобную инфор-
мацию. Он использовал текст своего вопроса лишь как специальную
метку-сигнал для выражения своего внимания к личности слушаю-
щего. К тому же типу дополнительной информации относится ин-
тонация говорящего, мимика его лица и многое другое.
В-третьих, к информации, которая непосредственно выражена
в тексте сообщения, немедленно добавляется информация, связан-
ная с ним и хранящаяся в памяти слушающего. Пусть вы услышали
сообщение «Прежде чем мы сели, самолет сделал пять кругов над
аэродромом. Потом резко снизился и сел. Только на земле я почув-
ствовал, как дрожат у меня ноги». В этом сообщении между факта-
ми, выраженными первыми двумя предложениями, которые непо-
средственно следуют друг за другом во времени, и последним фактом
имеется логический разрыв. Для слушающего он не имеет большого
значения. Всякий человек, знакомый с полетами на самолетах, по-
§3.1. ПОСТАНОВКА ЗАДАЧИ
97
нимает, что после того как самолет сел, произошел еще ряд обяза-
тельных для данной ситуации фактов: самолет доехал до стояночной
площадки, выключил двигатель (или двигатели), дверь открыли,
был подан трап или спущена лестница, пассажиры, и среди них
говорящий, спустились на землю. И только после этого имел место
факт «дрожи в ногах» у говорящего. И вся эта дополнительная ин-
формация помогает слушающему правильно понимать то, что было
сообщено ему непосредственно в тексте.
Если речь идет о системе управления, то дополнительная ин-
формация, возникающая при общении людей в силу первых двух
причин, ей недоступна, если система не снабжена, подобно роботу,
специальными рецепторными каналами: зрением, слухом и т. п.
Поэтому если для управляющей системы подобная информация не-
обходима, то она должна быть сообщена ей вместе с тем основным
сообщением, которое передается. Что же касается обогащения ин-
формации за счет сведений, хранящихся в памяти системы, то эта
функция может быть возложена на саму систему управления. Та-
кую задачу мы будем называть пополнением описания.
В рамках данной книги будет рассматриваться лишь задача по-
полнения описаний за счет специальных семиотических систем. Дру-
гими словами, основная задача, которую мы будем обсуждать, это
построение специальной системы, обеспечивающей пополнение опи-
сания, поступающего на вход. В самом общем виде нужная нам систе-
ма может быть задана в виде системы продукций вида
у; а => р; 6.
Здесь у означает некоторое условие, выполнение которого позволя-
ет использовать продукцию. Через а обозначен фрагмент той струк-
туры (описания), которая подвергается преобразованию. Само пре-
образование заключается в замене фрагмента а на новый фрагмент |3.
В рамках решения задачи пополнения описаний фрагмент |3 должен
быть в каком-то смысле богаче фрагмента а. Наконец, б есть неко-
торый модификатор условия- у. После применения продукции этот
модификатор меняет условие применимости данного правила или ос-
тавляет его неизменным.
Разные системы пополнения описаний отличаются друг от друга
тем, как организованы продукции и как выглядит стратегия их
применения к исходному описанию и получающимся в процессе по-
полнения промежуточным описаниям. Система продукций, в част-
ности, может образовывать некоторую логическую систему. Такая
система должна отражать закономерности, присущие данной проб-
лемной области п способам построения решений на основании опи-
сания ситуаций в ней. При этом можно разделить продукции на три
типа: дедуктивные, индуктивные и продуктивные. В продукциях
первого типа факт |3 — частный, вытекающий из выполнения усло-
вия у и одновременного наличия факта а в преобразуемом описании.
Для индуктивных продукций факт (3 — более общий чем факт а,
Д, Л. Поспелов
98
ГЛ. 3. ПОПОЛНЕН НЕ ОПИСАНИИ СИТУАЦИИ
удовлетворяющий условию у. Наконец, при традуктпвной продук-
ции факты Р и а имеют одинаковую степень общности.
Пример 3.1. Рассмотрим три продукции, в которых модификатор
6 отсутствует.
1. Накопитель деталей станка пуст. Если накопитель деталей
станка пуст, то станок простаивает.
2. Станок простаивает. Если станок простаивает, то накопи-
тель пуст.
3. Накопитель деталей станка пуст. Если станок простаивает,
то необходимо принять меры по наполнению накопителя.
Эти три продукции иллюстрируют соответственно продукции де-
дуктивного, индуктивного и традуктивного типов.
Системы продукций обладают рядом свойств, делающих их весь-
ма удобным средством описания системы пополнения описаний и ее
программной реализации. Во-первых, система продукций обладает
свойством автономности. Любая продукция может быть изъята из
нее или добавлена в нее, причем все остальные продукции остаются
неизменными. Это свойство делает систему продукций гибкой и легко-
адаптируемой к любым изменениям проблемной области. Заметим,
что адаптация продукций может происходить и за счет изменения у
и 6, что позволяет, сохраняя продукцию в системе, менять ее дей-
ствие. Каждая продукция есть некоторый законченный фрагмент
сведений о проблемной области, и в этом смысле она не зависит от
других продукций. Но при необходимости можно устанавливать свя-
зи между отдельными продукциями за счет системы взаимных ссы-
лок. Правда, тогда автономность, которую мы описываем, исчезает.
Во-вторых, система продукций представляет процедуры пре-
образования описаний в асинхронном виде. Продукции естествен-
ным способом задают возможность параллельной обработки. Каж-
дая из них может выполняться независимо от других, что, правда,
может привести к неоднозначности результата преобразования. Но
либо это несущественно (возможны различные варианты пополне-
ния описания), либо имеются специальные процедуры, разрешаю-
щие лишь такие параллелизмы, которые не приводят к нежелатель-
ным результатам.
В-третьих, системы продукций легко отображаются в системы
операторов языков программирования. А некоторые языки програм-
мирования (например, отечественный язык РЕФАЛ или такой рас-
пространенный язык как ПРОЛОГ) имеют продукции в качестве
своих основных операторов.
Наконец, модели в виде систем продукций охватывают широ-
кий класс различных порождающих моделей, в который входят такие
известные модели, как формальные грамматики, исчисления выска-
зываний и предикатов, сетевые модели и многие другие. Во всех
известных на сегодня моделях ситуационного управления для реше-
ния задачи пополнения использовались именно продукционные сис-
темы.
§ 3.2. СЦЕНАРИИ
99
§ 3.2. Сценарии
Наиболее часто для пополнения используются сетевые модели,
получившие в последнее время название сценариев. Сценарий пред-
ставляется некоторой сетью, вершинам которой соответствуют фак-
ты, а дугам — связи, описывающие отношения специального типа.
Эти отношения обладают следующим свойством: если между вер-
шинами х и у существует множество путей л15 л2, ..., лп и наличест-
вуют оба факта а и Ь, отвечающие вершинам х и у, то имеет место,
по крайней мере, совокупность фактов, соответствующих вершинам
на одном из путей, соединяющих х и у.
Примерами отношений, обладающих указанным свойством, мо-
гут служить отношения типа: причина — следствие, часть — под-
часть, цель — подцель и т. п.
Пример 3.2. На рис. 3.1 показан сценарий, в котором в качестве
отношения выступает отношение причина — следствие. Вершинам
в этом сценарии соответствуют следую-
щие факты: 1 — станок простаивает, ;
2 — на рабочем месте нет рабочего,
3 — станок неисправен, 4 — нет заго- .’
товок, 5 — обеденный перерыв, 6 — ра- \
бочий отошел от станка во время рабо- \
ты, 7 — внешний поставщик не обеспе- I
чил предприятие заготовками, 8 — вы-
шел из строя станок, производящий за- /
готовки для данного станка. ’
Если в памяти системы хранится
подобный сценарий и на вход системы .
поступил текст «Обеденный перерыв», то
система с помощью сценария способна Рис. 3.1
пополнить это описание, добавив к нему
факты: «На рабочем месте нет рабочего» и «Станок простаивает».
Заметим, что наш сценарий говорит о станке вообще, т. е. применим
к любому станку.
Пример 3.3. На рис. 3.2 показан еще один пример сценария, в
котором вершинам соответствуют следующие факты: 1 — самолет
приближается к аэродрому, 2 — самолет запрашивает разрешение
на посадку, 3 — самолет отправляется на круг ожидания, 4 — само-
лет выполняет полет по кругу ожидания, 5 — самолет получает
разрешение на посадку, 6 — самолет совершает посадку, 7 — само-
лет выруливает на стоянку, 8 —-к самолету подается пассажирский
трап, 9 — пассажиры сходят на землю, 10 — пассажиры находятся
у места выдачи багажа.
В этом сценарии, в отличие от того, что мы рассматривали в
примере 3.2, дуги характеризуют не причинно-следственное отно-
шение, а операциональное отношение. Порядок реализации состоя-
ний, характеризуемых вершинами, это порядок во времени. Строгая
4*
100
ГЛ. 3. ПОПОЛНЕНИЕ ОПИСАНИЙ СИТУАЦИЙ
упорядоченность нарушается лишь альтернативным переходом пос-
ле вершины 2. В зависимости от реальной ситуации может либо сра-
зу возникнуть состояние, характеризуемое вершиной 5, либо один
Рис. 3.2
или несколько раз появятся состояния, характеризуемые последо-
вательностью вершин 2 — 3 — 4 — 2 — 3 — 4 — 2 — . . . — 2,
после чего будет осуществлен переход к вершине 5.
Если на вход системы поступил факт — самолет совершил посад-
ку, пассажиры ожидают багаж, то сценарий поможет пополнить это
описание за счет тех фактов, которые присутствуют в нем и должны
были обязательно произойти до появления фактов, соответствующих
вершинам 6 и 10. И лишь относительно фактов, соответствующих вер-
шинам 3 и 4, система не может сказать ничего определенного.
Пример 3.4. Рассмотрим, наконец, еще один сценарий, структура
которого показана на рис. 3.3. Дуги на этом сценарии отображают
Рис. 3.3
отношение целое—часть, а верши-
ны интерпретируются следующим
образом; 1 — электропылесос, 2 —
верхняя часть, 3 — уплотнитель-
ное кольцо с фильтром, 4 — ниж-
няя часть, 5 — электродвигатель
с вентиляторным устройством, 6 —•
выключатель, 7 — рассеиватель,
8 — шнур.
Сценарий с отношением целое —
часть используется при попол-
чем ранее рассмотренные нами сценарии.
нении описаний иначе,
Пусть, например, на вход системы поступило описание; «В комнате
работал пылесос». За счет имеющегося у нас сценария это описание
может быть пополнено целой группой фактов типа «Выключатель
пылесоса находился в комнате» (имеется в виду та же комната, ко-
торая упомянута во входном описании), «Шнур пылесоса существо-
вал в момент времени t» (имеется в виду тот момент времени, который
соответствовал существованию факта, отраженного в исходном опи-
сании). Другими словами, в ряде случаев можно переносить ут-
вержденияо нахождении в пространстве и времени, высказанные о
некотором предмете, на его составные части. Конечно, это удается не
во всех случаях. Если, например, утверждение «Поезд проходит через
туннель» перенести на некоторый вагон поезда, то такое перенесе-
ние может оказаться и неверным. Данный вагон в этот момент вре-
мени может еще и не находиться в туннеле.
5 3.2. СЦЕНАРИИ
101
Пусть теперь на вход системы поступило описание «Поток воз-
духа из рассеивателя сдувает бумаги, лежащие на столике». Поль-
зуясь нашим сценарием, можно было бы пополнить описание, на-
пример, таким фактом: «Пылесос находится в том же помещении,
что и столик с бумагами в момент времени Ь> (имеется в виду момент
времени, которому соответствует факт, указанный в исходном опи-
сании). Как и в предыдущем случае, механическое перенесение про-
странственных и временных утверждений с части предмета на него
целиком, конечно, не всегда возможно.
Пополнение с помощью сценария, опирающегося на отношение
целое — часть, может касаться не только положения в пространстве и
времени. Если, например, входное описание имеет вид «Электродви-
гатель пылесоса стоит более ста рублей», то в качестве пополняющего
факта может быть введен в описание факт: «Пылесос стоит более ста
рублей». Этот новый факт может быть сформирован на основании
сценария, показанного на рис. 3.3, и дополнительного правила
о суммировании цен при переходе от части к целому (более точ-
но, не о суммировании цен, а о сохранении отношения стоить
больше).
Те дополнительные правила, о которых мы говорили в послед-
нем примере, являются правилами продукционного типа. Их при-
менимость в том или ином случае связана с выполнением условия
применимости продукции. В условие применимости продукции
входит также та необходимая связь между объектами, которая фик-
сируется в сценарии. Таким образом, мы приходим к выводу, что
возможны два пути пополнения описаний: за счет формальных
свойств используемых в сценариях отношений и за счет семантики
последних. Так, в первых двух примерах мы рассмотрели отноше-
ния «причина— следствие» и «порядковое отношение». Эти отноше-
ния транзитивны. А это значит, что без всякого учета семантики
фактов а; наличие в исходном описании фрагментов («ira2) и (azras)
позволяет пополнить описание фрагментом (оугйз). Например, из
того, что «Цилиндр есть часть двигателя» и того, что «Двигатель есть
часть автомобиля», следует, что «Цилиндр есть часть автомобиля».
Аналогичным образом происходит пополнение описания, если в нем
используется симметричное отношение. Если, например, на вход
системы поступило описание «Сверлильный станок включен одно-
временно с токарным станком», то оно пополняется фактом «Токар-
ный станок был включен одновременно со сверлильным станком».
Другими словами, при наличии фрагмента (адга,) с симметричным от-
ношением г можно автоматически пополнить описание за счет фраг-
мента (ajar).
Но пополнения такого типа, использующие лишь алгебраиче-
ские свойства отношений, входящих в них, не столь интересны.
Более важны правила, учитывающие семантику самих отношений
и семантику той ситуации, в которой формируется попол-
нение.
102
I Л. 3. ПОПОЛНЕНИЕ ОПИСАНИИ СИТУАЦИЙ
Пример 3.5. Возьмем из табл. 2.2 отношения г71— иметь объек-
том действия и г74 — действие — место. Пусть а — самолет, —
борт 1244, d —• полет, b — город, Ц— Одесса. Отношение г40, взя-
тое нами из табл. 2.1, означает быть сверху. Пусть на вход системы
поступила следующая информация: «Самолет борт 1244 пролетает
над Одессой». Запись этого описания на ЯСУ имеет вид
((арЦ) r71d) ((api4) r40 (&pt2)).
Между большими скобками опущено отношение одновременно. Се-
мантика г71 и г40 такова, что исходное описание можно пополнить
фактом следующего вида: (drM (bpi2)), что соответствует утвержде-
нию о том, что полет происходит над Одессой.
Приведенные примеры показывают, что сами по себе сценарии
еще не решают проблемы пополнения описаний. На самом деле для
решения задачи пополнения нужно создавать продукционные сис-
темы, в которых правила учитывают семантику отношений, входя-
щих в пополняемое описание. В последующих параграфах (начиная
с § 3.4) мы покажем, как строятся такие системы для выделенных
групп отношений. В ближайшем же параграфе мы обсудим связь
между сценариями и фреймовыми представлениями, которыми мы
занимались в гл. 2.
§ 3.3. Сценарии и фреймы **
Цель данного параграфа — показать, что сценарии легко отобра-
жаются в те фреймовые структуры, которые мы описали в § 2.9.
Для наглядности здесь мы воспользуемся графическим изображением
фрейма в том виде, как показано на рис. 3.4. Каждый прямоуголь-
ник соответствует фрейму с определенным именем. Фрейм состоит
Рис. 3.4
из слотов, имена которых указаны в прямоугольниках меньшего
размера. Слоты могут быть терминальными или нетерминальными.
В последнем случае их имена служат именами других фреймов, сос-
тавляющих содержание данного слота. Терминальные слоты задают
3.3. СЦЕНАРИИ И ФРЕЙМЫ
103
список некоторых значений, соответствующих им. На рис. 3.5 по-
казан пример такой структуры. Имя первого слота фрейма КОМАН-
ДИРОВКА есть имя фрейма КТО. Слоты этого фрейма являются
терминальными. Каждому из них соответствует список С элементов,
образующих данный! слот. Слоты с именами КУДА и КОГДА фрей-
ма КОМАНДИРОВКА тоже являются терминальными. Подобная
КоканЗировка ।
Кто | | Куса | | Ког'ва | |
I
Рис. 3.5
структура может быть реализована на традиционных языках пред-
ставления знаний (например, с использованием ФРЛ, основ-
ные особенности которого были описаны нами в §2.9). Однако в
Причинно - следственное отношение Станок не работает
На рабочей месте нет рабочего Станок неисправен Нет заготовок ^Простои станка'
ш
Причинно - следственной итнсшение
Отсутствие рабочего
Рис. 3.6
Причин чо- следственное отношение
Отсутствие заготовок
силу простоты рассматриваемого представления можно попытаться
создать более простой и эффективный язык, свободный от недостат-
ков, присущих языкам типа ФРЛ пли KRL.
В примерах 3.2—3.4 мы рассмотрели сценарии, которые опира-
лись соответственно на причинно-следственные связи, операцно-
104
ГЛ. 3. ПОПОЛНЕНИЕ ОПИСАНИП СИТУАЦИИ
нальные связи и связи типа часть — целое. Покажем, что сценарии
такого типа легко отображаются в структуры рассматриваемых нами
фреймов.
Рис. 3.7
Пример 3.6. Вернемся к сценарию, описанному в примере 3.2.
Рассмотрим сеть фреймов, изображенную на рис. 3.6 (терминаль-
ные слоты заштрихованы). Легко видеть, что эта сеть эквивалентна
сценарию, показанному на рис. 3.1.
Рис. 3.8
На рис. 3.7 фрейм причинно-следственного отношения показан
в общем виде. На нем, кроме слотов ПРИЧИНА и СЛЕДСТВИЕ,
имеются еще слоты /МЕХАНИЗМ, ВОЗДЕЙСТВУЮЩИЕ ФАКТО-
РЫ и ЗАКОНОМЕРНОСТЬ. Фреймы, соответствующие слоту
/МЕХАНИЗМ, описывают причинно-следственные цепочки (на
§3.3. СЦЕНАРИИ И ФРЕЙМЫ
105
рис. 3.7 эти слоты обозначены буквами .VI с различными индекса-
ми), реализация которых приводит к тем или иным следствиям,
указанным в исходном фрейме с именем X. Слоты ПРИЧИНА (на
Полет в районе аэродрома
Рис. 3.9
рисунке они показаны буквами П с различными индексами) указы-
вают прямую причину, вызывающую одно или несколько следствий,
описанных в исходном фрейме. Следствия (буквы С с различными
индексами) — терминальные слоты. Им соответствуют некоторые
106
ГЛ. 3. ПОПОЛНЕНИЕ ОПИСАНИЙ СИТУАЦИЙ
конечные тексты. Слоты ВОЗДЕЙСТВУЮЩИЕ ФАКТОРЫ (бук-
вы ВФ с различными индексами) отсылают нас к фреймам, в которых
описываются факторы, служащие причиной возникновения явле-
ния, описанного во фрейме с именем А'. Наконец, слоты, соответ-
ствующие ЗАКОНОМЕРНОСТЯМ (буквы 3 с различными индек-
сами), всегда терминальны. Их содержание отражает характер за-
кономерности, существующей между причинами и следствиями, опи-
санными во фрейме с именем X.
Пример 3.7. На рис. 3.8 показано отображение в систему фрей-
мов причинно-следственного сценария для объяснения факта острой
кровопотери. Значение слота СЛЕДСТВИЕ в исходном фрейме
ОСТРАЯ КРОВОПОТЕРЯ — имя этого фрейма.
Рассмотрим теперь представление сценариев, опирающихся на
операциональные отношения, в виде сети фреймов.
Пример 3.8. В примере 3.3 мы рассмотрели сценарий, показан-
ный на рис. 3.2 и относящийся к операции посадки самолета в
аэропорту. На рис. 3.9 показана сеть фреймов, соответствующая,
как легко видеть, сценарию на рис. 3.2. Движение по сети фреймов
происходит за счет слотов УСЛОВИЕ. Они позволяют совершать
те или иные операции, связанные с данным фреймом. Результаты
проведенных операций влияют на значение слотов УСЛОВИЕ в
других фреймах, связанных с данным фреймом операционально.
В нижней части рисунка показан результирующий фрейм, реализа-
ция которого соответствует полному выполнению сценария.
Мы не будем увеличивать число примеров. Поясним только на
последнем из них, как производится пополнение описания ситуации.
Пусть, как и ранее, на вход системы поступил текст: «Самолет со-
вершил посадку, пассажиры ожидают багаж». Эти два факта свиде-
тельствуют о том, что имеются результаты, локализованные во
фреймах ПОСАДКА и ПЕРЕХОД В БАГАЖНОЕ ОТДЕЛЕНИЕ.
Это позволяет, пользуясь сетью фреймов, показанной на рис. 3.9,
двигаясь от имеющихся результатов к условиям последующих фрей-
мов, узнать, что имелись условия для операций, связанных с вы-
садкой пассажиров, а также для реализации всего сценария. Если
теперь двигаться по сети фреймов от конца к началу, от условий к
результатам, которые определяли данные условия, то мы получим
всю нужную нам совокупность фактов.
Итак, сети фреймов не только удобны для представления знаний,
о чем подробно говорили в § 2.9, но и оказывают важную услугу при
решении задачи пополнения описаний.
§ 3.4. Псевдофизические логики *
Мы уже говорили о том, что было бы желательно для определен-
ных классов отношений построить дедуктивные продукционные сис-
темы, которые позволяли бы производить необходимое пополне-
ние описаний без хранения в памяти системы совокупности боль-
§ 3.4. ПСЕВДОФИЗИЧЕСКИЕ ЛОГИКИ
107
шого числа сценариев. Одним нз классов таких дедуктивных систем
являются псевдофизические логики.
Название «псевдофизические логики» они получили из-за того,
что в их правилах вывода использованы свойства восприятия чело-
веком окружающего мира, которое обладает рядом субъективных
особенностей. Поэтому они описывают не объективный физический
мир, а его субъективнее восприятие человеком.
В отличие от формальных систем, о которых шла речь в § 1.5,
псевдофизические логики обладают рядом важных особенностей.
Отметим основные из них.
1. Псевдофизические логики суть логики отношений. Именно
отношения выполняют в них роль переменных. Поэтому псевдофи-
зические логики классифицируются в зависимости от типов исполь-
зуемых отношений. Логика времени изучает взаимосвязь времен-
ных отношений, логика пространства — пространственных, логика
действий — отношений типа субъект — действие или действие —
место, каузальная логика — взаимосвязь отношений типа причи-
на — следствие, частотная логика — отношений типа повторяе-
мость — частота и т. д. Объекты же, связанные отношениями, вы-
ступают в этих логиках лишь в качестве неизменной части описаний.
Поясним это следующим примером. Пусть в нашем распоряжении
имеются два факта (аг2ф) и (сг21Ь). Из них при любой интерпретации
объектов а, b и с можно вывести факт (аг22с). Правило вывода та-
кого рода должно входить в систему правил временной псевдофи-
зической логики.
2. Псевдофизические логики суть логики на шкалах. Шкалы
бывают двух типов: метрические и топологические. Метрические
шкалы в свою очередь делятся на абсолютные и относительные. То-
пологические шкалы задают между фактами, проецируемыми на
них, отношения нестрогого порядка, или размытые отношения, о
которых говорилось в §2.11. Пусть, например, мы рассуждаем о
пространственном расположении трех объектов а, b и с на прямой.
Если в нашем распоряжении имеется абсолютная метрическая шка-
ла, то на ней задан некоторый масштаб и зафиксировано начало от-
счета. Предположим для простоты, что масштаб шкалы выбран так,
что объекты, о которых идет речь, можно считать точечными, рас-
положенными на делениях шкалы. Ситуация такого типа показана
на рис. 3.10, а. При наличии абсолютной метрической шкалы все
пространственные отношения на прямой легко вычисляются и не
вызывают никаких проблем. Одна абсолютная шкала отличается от
другой лишь расположением начальной точки и масштабом, что дает
простые соотношения для перехода от одной шкалы к другой. На
рис. 3.10,6 показана относительная шкала, а точка начального
отсчета фиксируется только в самих описаниях, например: «В двух
километрах за селом находится река, но до села мне еще идти три
километра». Относительная метрическая шкала легко переводится
в абсолютную. Формулы для такого преобразования тривиальны.
108
ГЛ. 3. ПОПОЛНЕНИЕ ОПИСАНИИ СИТУАЦИИ
Более интересны топологические шкалы. Они тесно связаны с
нечеткими словесными оценками, активно используемыми челове-
ком для описания ситуаций (в том числе и технологических, на-
пример). Эти словесные оценки определяют лишь некоторый поря-
док расположения фактов на шкалах. На рис. 3.10, в показан
. f 2 J )
7 2 3 в 5 6 7 8 S ~1О 11 12
'А---1--I---i---1----1---:___I___!___I l ' !____________
Начат Расстояние, км
отсчета г
—к------
Начало
о-псчета
Рис. 3.10
Расстояние, кн
Порядковая
шкала
пример отображения на топологическую шкалу времен трех фактов:
а — скоро наступит момент, когда сталь будет готова, b — после
разлива стали бригада закончит смену, с — через небольшое вре-
мя после окончания работы специалисты выйдут с территории пред-
приятия. Топологические шкалы связаны с проблемой формализа-
ции качественных описаний и понимания таких описаний. Об этом
мы говорили в § 2.11. Различие шкал определяет и различие логик,
которые могут быть метрическими и топологическими.
3. Не только факты располагаются на шкалах, но и сам вывод
(конструкция продукционных правил) должен учитывать упорядо-
ченность, присущую рассуждениям в рамках псевдофизических
логик. Для иллюстрации этого положения рассмотрим следующую
схему рассуждений. Пусть нарушение технологии а приводит к
ухудшению качества продукции степени |3. Пусть нарушение тех-
нологии у более серьезно, чем а (расположено на шкале серьезности
нарушений технологии дальше от начала координат, чем а). Тогда,
если а соответствует |3, то у должно соответствовать такому ухуд-
шению продукции, которое по шкале оценки ухудшения качества
должно находиться дальше (во всяком случае не ближе), чем |3.
Рассуждения такого типа весьма важны при создании правил вы-
вода для псевдофизических логик.
4. Псевдофизические логики в качестве своих аксиом содержат
некоторые утверждения, вытекающие из восприятия мира челове-
ком. Эти утверждения должны быть обоснованы результатами соот-
ветствующих психологических экспериментов. Аксиомы связывают
между собой отношения различной природы, что позволяет челове-
§ 3.4. ПСЕВДОФИЗИЧЕСКИЕ ЛОГИКИ
109
ку производить замену одних отношений другими. Примером может
служить замена пространственных отношений временными «Дале-
ко ли магазин? — Минут пятнадцать-двадцать ходу.». Здесь заме-
на оказалась возможной благодаря аксиоматическому соотношению,
связывающему путь, время и среднюю скорость передвижения
пешком.
5. Система псевдофизических логик характеризуется связями,
существующими между отдельными логиками. Одни из типов свя-
зей проиллюстрирован выше. Аксиому s=vt, где s — путь, t — вре-
мя, v — скорость, можно рассматривать в качестве связи временной,
пространственной псев-
дофизических логик и
псевдофизической логи-
ки действия. Примерами
связей иного рода могут
служить отношения, су-
ществующие между кау-
зальной (причинно-след-
ственной) логикой и ло-
гикой действий.
При построении псев-
дофизических логик сле-
дует учитывать три типа
задач, для решения кото-
рых они предназначены:
а) пополнение посту-
пающих в память систе-
мы описаний ситуаций с
помощью тех знаний, ко-
торые уже хранятся в
системе об объекте упра-
вления, предыстории уп-
равления и законов уп-
равления объектом;
б) проверка достовер-
ности поступающего опи-
сания ситуации, выявле-
ние противоречий в этом
описании и совместимо-
сти его с той инфор-
мацией, которая уже
Рис. 3.11
хранится в системе;
в) участие в формировании решений по управлению и провер-
ке возможностей реализации выбранного управляющего воздей-
ствия.
Однако здесь мы будем обсуждать псевдофизические логики лишь
для задач первых двух типов. В последующих главах, посвященных
по
ГЛ. 3. ПОПОЛНЕНИЕ ОПИСАНИЙ СИТУАЦИИ
проблемам обобщения и классификации ситуаций и выработке реше-
ний по управлению, мы вновь вернемся к псевдофизическим ло-
гикам.
Обычно та или иная псевдофизическая логика охватывает круг
представлений человека о тех или иных явлениях окружающего ми-
ра. Так возникают временная логика, отражающая закономерно-
сти, присущие человеку при восприятии времени и рассуждений
о нем, пространственная логика, каузальная (причинно-следствен-
ная) логика, логика действий, логика целей, логика оценок и т. п.
Для задач управления сложными объектами наиболее интересны
именно те шесть логик, которые мы только что перечислили. Эти
логики не независимы. На рис. 3.11 показана взаимосвязь между
ними. К сожалению, пока в ситуационном управлении использова-
лись лишь отдельные фрагменты псевдофизических логик, что объяс-
няется их неразработанностью. За последние годы в этой области
сделаны большие успехи. В настоящее время можно считать, что
завершено создание временной логики и статической пространст-
венной логики, созданы фрагменты для логики время — действие
и для логики целей. Однако для каузальной логики, логики про-
странство — действие и, как следствие этого, полной логики дей-
ствий ситуация пока еще остается не слишком хорошей. Что каса-
ге время проходит в своем
1ия тех понятий, которые
должны быть использованы
в ней при построении этой
логики, нацеленной на ре-
шение задач управления.
Более подробные сведения
о путях развития псевдо-
физических логик можно
найти в работах; обсужда-
ющихся в комментарии к
данной главе. В трех по-
следующих параграфах мы
в качестве примера постро-
ения таких логик и исполь-
зования их для целей по-
полнения описаний затро-
нем лишь временную, про-
странственную и каузаль-
ную логики.
Каждая псевдофизичес-
кая логика может рассмат-
риваться как система, имеющая структуру, показанную на рис. 3.12.
На нем показано, что сначала из исходного описания выделяется не-
которая структура фактов или событий, характерная для данной псев-
дофизической логики (временная структура, пространственная стру-
ется логики оценок, то она в
развитии этап философского
Рис. 3.12
§ 3.5. ВРЕМЕННАЯ ЛОГИКА
111
ктура и т. д.). В ней выделены некоторые единицы типа явлений, собы-
тий, процессов, фактов и определены отношения между ними из рас-
сматриваемой группы отношений. Эта часть, по сути, не относится к
собственно псевдофизической логике и ее функционирование осно-
вано на процедурах, описанных в §2.10. В модели представлений
отражены те основные закономерности восприятия, которые харак-
терны для системы управления (или человека, если происходит
имитация его восприятия). Для конкретных псевдофизических ло-
гик эта модель превращается в модель времени, модель пространст-
ва и т. д. Наконец, модель вывода содержит правила, с помощью
которых происходит пополнение описания ситуаций. Функциони-
рование модели представления и модели вывода, а также методи-
ка их построения будут ясны из материала следующих трех па-
раграфов.
§ 3.5. Временная логика **
Мы начнем с рассмотрения наиболее простой псевдофизической
логики — временной. Как следует из рис. 3.12, нам нужно постро-
ить модель представления времени и модель вывода новых фактов
о времени, которые могли бы вытекать из уже имеющихся фактов.
Начнем с первой компоненты.
Сформулируем сначала некоторые общие свойства времени, ко-
торые удобно принять при построении временной логики, ориенти-
рованной на использование в системах управления, причем мы не бу-
дем учитывать здесь возможных философских возражений, связан-
ных с временем как философской категорией. В комментарии к дан-
ной главе об этом говорится более полно.
Рассмотрим множество Т, элементы которого мы будем называть
моментами времени. Зададим на Т полный строгий порядок. Отно-
шение строгого порядка на Т задает порядковую шкалу для моментов
времени tt. Рассмотрим другое множество Е, элементы которого е, мы
будем называть событиями. Рассмотрим отношение (е;т((), смысл ко-
торого сводится к приписыванию событию ej некого момента време-
ни t[. Мы будем говорить, что событие происходит в момент времени
tt. Если для е^ существует лишь один момент времени tt, в котором
оно происходит, то событие е, в данной шкале называется точечным.
Кроме точечных событий, могут быть еще интервальные события и
цепочечные события: интервальные события обладают тем свойством,
что им с помощью отношения проектирования на шкалу сопостав-
ляются моменты времени ti, ti+1, . . ., tl+k, образующие непрерыв-
ную последовательность1) на этой шкале (т. е. имеет место: /(<
Для цепочечных событий отображение, осущест-
вляемое с помощью т, произвольно. Ясно, что цепочечные события
Я Это значит, что между tl + s п t[ + s4 т при любом s от 0 до Z—k—1 нельзя вста
вить никакого элемента из Т без нарушения порядка.
112
ГЛ. 3. ПОПОЛНЕНИЕ ОПИСАНИЙ СИТУАЦИЙ
распадаются на совокупность интервальных и точечных, а интер-
вальные события могут заменяться совокупностью точечных событий.
Введем теперь специальную операцию дискретизации Dn. Если
эту операцию применить к множеству Т с заданным на нем отноше-
нием строгого порядка, то с ее помощью между любой парой сосед-
них элементов из Т таких, что £г<7;+1, вставляется ровно п новых
элементов Ц и ^<^<^<- •
Введем еще операцию редискретизации Rn. Она устроена сле-
дующим образом. Если Rn применяется к множеству Т с введенным
-1986
-1987
1934
1985
—Деквбрь
-Январь
—Февраль
- Нарт
-Апрель
-Май
-Июнь
-Июль
-Август
-Сентябрь
-Октябрь
-Ноябрь
-Декабрь
-Январь 1986
Февраль
-Март
—Апрель
-Май
-Июнь
-Июль
-Август
-Сентябрь
-Октябрь
-Ноябрь
'^Декабрь
\р Январь 1987
I— Февраль
Ъ
Рис. 3.13
-ДА век
t
в
на нем отношением строгого порядка,
то для любой совокупности из п+2
элементов Т, образующих непрерыв-
ную последовательность ti < ti+1 <
<. . .<_t!+rl+1, исключаются п ,сред-
них элементов, которые тем самым
исключаются и из множества Т. При
этом применяется последовательно,
начиная с самого левого элемента из
Т, образующего шкалу. После выбра-
сывания первых п элементов рассма-
тривается новая последовательность
из (п+2) элементов, левым элементом
которой является сохраненный на
предшествующем шаге правый элемент
предшествующей последовательности.
Суть введенных операций дискрети-
зации и редискретизации поясним
на следующем примере.
Пример 3.9. На рис. 3.13, а пока-
зана исходная порядковая шкала. На
ней моменты времени — годы. На рис.
3.13, б показан результат применения
к этой шкале операции Оп. Новая
шкала устроена так, что между двумя
старыми элементами Т появились 11
новых элементов для каждой пары.
Для различения элементов введены
новые названия. На рис. 3.13, в пока-
зан результат применения к исход-
ной шкале операции Д99. С ее помощью
каждая непрерывная последователь-
ность из 101 элемента преобразована
в последовательность из двух элементов, которым присвоены но-
вые имена (XX век, XXI век).
Таким образом, с помощью операций Dn и Rn порождается для
множества Т бесконечное множество шкал. Вместо введенных нами
операций дискретизации и редискретизации можно для формирова-
§3.5. ВРЕМЕННАЯ ЛОГИКА
113
- 28/ViH
~ 30/VlU
- 31/V III
18ь7год 1857год
г
-Сентябрь
ez
4
5//Х
6/1Х
7/,'Х
8ЦХ
9!/Л
iohx
ZZ/ZX
12//Х
i3hx
Khx
ti/tX
16/IX
17//Х
18/IX
>9l:x
20/lX
21/IX
22/IX
ел
4i
ния новых шкал использовать любую монотонную функцию, так
как все такие функции обладают свойством сохранять строгий
порядок, заданный на элементах множества Т. Все шкалы такого
вида мы в дальнейшем будем называть абсолютными.
Если для некоторой шкалы с номером i (нумерация шкал мо-
жет быть задана произвольным образом, например, с помощью ряда
натуральных чисел) было произведе-
но отображение тг элементов множе-
ства Е на эту шкалу, то при перехо-
де к новой шкале тг изменится. Если
Cj было точечным событием, то при
операциях Rn точечные события со-
храняются и отображаются в тот мо-
мент времени, который сохраняется
в новой шкале в качестве левого мо-
мента в обрабатываемой последова-
тельности. Если ej было интерваль-
ным событием, то после преобразова-
ния оно либо сжимается, стягиваясь
к левому концу старого интервала,
либо (в пределе) превращается в точе-
чное событие. Цепочечное событие при
операциях редискретизации превра-
щается либо в цепочечное событие с
меньшими интервалами, либо в ин-
тервальное событие, либо стягивается
в точечное событие.
Пример 3.10. На рис. 3.14, а по-
казано точечное событие е1( соответст-
вующее высказыванию «Константин
Циолковский родился 17 сентября
1857 г.». На рис. 3.14, б показано,
как преобразовалось это событие в
отображение на шкале, в которой со-
вершен переход от дней к месяцам.
Теперь точечное событие <?( соответст-
вует высказыванию: «Константин Ци-
олковский родился в сентябре 1857 г.».
Интервальное событие е2, показанное
на рис. 3.14, а, соответствует в дан-
ном случае высказыванию «Весь сен-
тябрь 1857 г. лил, не переставая, про-
ливной дождь». На рис. 3.14, б это
же событие показано как точечное (е'2).
Если над шкалами производится
отображения событий на шкалах могут претерпевать следующие
изменения: точечные события могут превращаться в интервальные
J
1
3
1
24//Х
26/!X
27//X
30//Х
- Октябрь
Г'
б
Рис. 3.14
2/К
t
дискретизации, то
операция
114
ГЛ. 3. ПОПОЛНЕНИЕ ОПИСАНИИ СИТУАЦИИ
или цепочечные, интервальные события могут растягиваться или
превращаться в цепочечные, а цепочечные события могут приобре-
тать большую длину отдельных своих участков или увеличивать
число отдельных интервальных участков. При этом возможны раз-
личные комбинации из указанных типов изменений.
Пример 3.11. Если использовать рис. 3.14, б и сделать переход
к шкале, типа показанной на рис. 3.14, а, то в качестве результата
для е'г мы получим интервальное событие е[, изображенное пунк-
тиром на рис. 3.14, а. Таким образом, сравнение отображения этого
события с тем, что было на рис. 3.14, а, показывает, что может воз-
никнуть потеря информации, и операции Dn и Rn не могут рассма-
триваться по отношению к отображаемым событиям как взаимно
обратные.
Название, которое мы присваиваем каждому моменту времени
на той или иной шкале, отражает наше представление о поряд-
ке следования этих моментов времени. За точку начального отсчета
обычно выбирается некоторое событие, относительно которого име-
ется всеобщая договоренность. В человеческом обществе существова-
ли самые разнообразные начальные точки отсчета. В допетровское
время в нашей стране счет годам велся от сотворения мира, со вре-
мен Петра I мы ведем счет от рождества Христова, жители му-
сульманских стран ведут счет от вхождения Пророка в Мекку
и т. п. Важно, что эта начальная точка отсчета для моментов времени
раз и навсегда зафиксирована, имеет абсолютное значение. Именно
поэтому подобный тип шкал мы назвали абсолютными шкалами.
Но кроме абсолютных шкал возможны еще шкалы относитель-
ные. В них за начало отсчета принимается тот момент времени, когда
происходит некоторое событие, называемое в высказывании, или
когда актуализируется само высказывание. В последнем случае
обычно говорят о «точке говорения», которую и принимают за на-
чало отсчета для моментов времени. Следующие два примера иллю-
стрируют высказывания, в которых упоминаемые события отобра-
жаются на относительные шкалы: «За два года до начала Великой
Отечественной войны Германия захватила Чехословакию» и «Через
пять минут обед будет готов». В первом из них за начальную точку
отсчета взят момент начала Великой Отечественной войны, а во вто-
ром — тот момент, когда актуализируется (например произносит-
ся) само высказывание.
Абсолютные шкалы и относительные шкалы являются метриче-
скими (в качестве единицы измерения расстояния между и t, можно
брать увеличенное на единицу число моментов времени, которые
образуют от ti до t} непрерывную последовательность) и могут иметь
одинаковую (по наименованию) единицу измерения. Однако между
ними не всегда можно установить прямую связь. Так, для первого
из двух приведенных выше высказываний за счет знания факта, что
Великая Отечественная война началась в 1941 г.,можно связать отно-
сительную шкалу с абсолютной, в которой в качестве наименований
§ 3.5. ВРЕМЕННАЯ ЛОГИКА
115
моментов времени используются годы. Если начало отсчета рассмат-
риваемой относительной шкалы совместить с моментом времени с
именем 1941 на абсолютной шкале, то событие «Германия захватила
Чехословакию» получит точное место с именем 1939 на этой абсолют-
ной шкале. Но для второго высказывания такое отображение
возможно только в том случае, если в момент его произнесения по-
смотреть на часы, которые показывают точное время и календарь, от-
мечающий текущее число, месяц и год. Без такой информации отоб-
ражение в абсолютную шкалу окажется невозможным. Таким обра-
зом, в любом случае переход от относительных шкал к абсолютным
требует привлечения специальных дополнительных знаний, которые
должны храниться в памяти системы пли наблюдаться ею.
Отметим еще, что к относительным шкалам можно применять
те же операции Dn и Rn, которые мы рассматривали для абсолютных
шкал. Преобразование отображений событий на относительных шка-
лах в результате применения Dn и Rn происходит по тем же прави-
лам, что и описанные ранее преобразования для абсолютных шкал.
Отметим важное для нас обстоятельство, а именно то, что для
метрических шкал любое интервальное событие можно полностью
определить двумя точечными событиями, соответствующими момен-
там времени, когда интервальное событие начинается и когда оно
заканчивается. Эти точечные события называются маркерами начала
и конца и обозначаются как ц/ и р£, где / — индекс интервального
события бу. Цепочечные события можно заменить на последователь-
ность интервальных событий с разными индексами, а каждое такое
интервальное событие можно задать парой своих маркеров.
Кроме метрических шкал, как уже упоминалось в § 3.4, сущест-
вуют еще топологические шкалы. В таких шкалах моментам време-
ни нельзя сопоставить никаких имен и нельзя ввести расстояния
между этими моментами. Таким образом, на топологической шкале
можно отразить только порядок некоторых моментов времени.
Поэтому при отображении событий на топологические шкалы фик-
сируется лишь их взаимное расположение во времени. Необходи-
мость в топологических шкалах может возникнуть по разным при-
чинам. Примерами их могут служить нечеткое отображение событий
на шкалу или нечеткие временные отношения, устанавливаемые
между событиями. Первый случай иллюстрируется высказы-
ванием «В начале мая подул свежий ветер». Второму случаю соот-
ветствует, например, высказывание «Незадолго до выстрела сосед
вышел из комнаты преступника». Разница между этими двумя типа-
ми неопределенностей состоит в том, что при переходе от абсолют-
ной шкалы, единицами которой служат дни месяца, к другой, тоже
абсолютной шкале, единицами которой служат сами месяцы, можно
«спрятать» нечеткость первого высказывания. Для высказывания
второго типа это принципиально невозможно.
Между введенными нами топологическими шкалами и рассмат-
ривавшимся в §2.11 нечетким отношением моделирования сущест-
116
Г/. 3. ПОПОЛНЕНИЕ ОПИСАНИИ СИТУАЦИИ
вует прямая связь. Матрица, задающая это отношение, по сути, яв-
ляется способом перехода от четких шкал (абсолютных и относитель-
ных) к нечетким шкалам, которые входят в состав топологических
шкал. Поэтому часто топологические шкалы называют размытыми
или нечеткими. Мы, однако, в нашей книге будем придерживаться
введенного термина, так какие всегда топологическую шкалу можно
интерпретировать в виде набора функций принадлежности, характе-
ризующих значения лингвистических переменных, как было в
§2.11. Отметим также, что матрица, задающая нечеткое отношение
моделирования, позволяет преобразовывать и топологические шка-
лы в некоторые метрические. С помощью преобразования матрицы
нечеткого отношения моделирования, сохраняющего порядок, можно
вводить классы топологических шкал (по аналогии со шкалами,
получающимися для метрических шкал с помощью операций Dn и
Rn или монотонных преобразований).
Для завершения модели представлений во временной логике мы
должны еще зафиксировать тот набор временных отношений, кото-
рый будет использоваться для описания временной структуры ситу-
аций.
Начнем с точечных событий. Одно базовое отношение (еугт6),
где т — номер шкалы, мы уже ввели. Введем еще четыре отноше-
ния: r2i — одновременно, r2i— быть раньше, г23— быть позже и
г26— непосредственно примыкать слева.1) Ясно, что с помощью
введенных отношений можно описать любую временную структуру,
в которую входят лишь точечные события.
Пример 3.12. Рассмотрим следующий текст: «В 9 часов Павел
садится, как обычно, на лошадь и в сопровождении наследника
отправляется осматривать войска. 10 часов. Обычный плац-парад,
развод караула в присутствии императора... С 11 часов их вели-
чества изволили прогуливаться по городу верхом: его император-
ское величество с графом Кутайсовым, а ее императорское величество
с фрейлиной Протасовой 2-й». Город, как обычно, пустеет до часу
дня, все боятся встречи с Павлом... После обеда «В 4 часа ее им-
ператорское величество с фрейлиной Протасовой 2-й изволила вы-
езд иметь в карете в Новодевичий Смольный монастырь и возврати-
лась обратно в 6 часов. Потом их императорские величества изво-
лили в сей вечер препроводить время с их императорскими высо-
чествами и знатными особами в гостинной комнате...» 2).
На рис. 3.15 показано отображение событий, перечисленных в
нашем тексте, на абсолютную шкалу. То, что эти события происхо-
дили 11 марта 1801 г., указано в источнике, откуда взят текст для
примера. Как мы видим, на осях лет, месяцев и дней все события,
перечисленные в тексте, отображаются все вместе в одно событие
Ч Номера отношений г21, г22, г2з и г26 совпадают с присвоенными им номерами
в табл. 2.1.
2) Эйдельман Н. Я- Грань веков.— М.: Мысль, 1982, с. 268, 274, 275
§3.5. ВРЕМЕННАЯ ЛОГИКА
117
на каждой из них. На оси часов события разводятся. Эти события
являются либо точечными (например, Павел садится на лошадь и
отправляется осматривать войска), либо представляют собой не-
которое множество событий на оси часов, образующих непрерыв-
ную последовательность (например, город пустеет). Некоторые
события не привязаны в тексте к точным часам (например, возвраще-
ние с прогулки). Наконец, событие, связанное с вечерним препро-
вождением времени императорской четы с детьми, на шкале часов
не отмечено, так как в тексте не указаны ни начало, ни конец этого
события. Ясно только, что оно началось позже шести вечера. Такие
события связаны с топологическими, а не с абсолютными шкалами.
118
ГЛ. 3. ПОПОЛНЕНИЕ ОПИСАНИЙ СИТУАЦИЙ
Для систем управления важно еще ввести функцию р(е;,е^),
с помощью которой можно определять расстояние между событиями
e-t и е7- на метрической шкале, а также обычные арифметические опе-
рации над расстояниями. Это позволит системе управления, на-
пример, получить ответ на вопросы типа «Насколько событие
случилось раньше события е^?», «Сколько времени прошло между
событиями е, и е;-?», «Если е; случилось через т единиц после
е>
a ej было на п единиц раньше eq, то сколько времени прошло между
событиями ei и е9?»
Легко видеть, что выбранная нами базовая система отношений
для точечных событий не единственно возможная и не минимальная.
При наличии функции р можно считать, что события е, и е, находятся
в отношении г21, если р(еь е;-)=0, и в отношении г2б, если эта функ-
ция принимает значение 1. Отношения г22 и г23 можно выразить
друг через друга с использованием операций конъюнкции и отри-
цания: (е;Г22е7-) = (егг23е^ (егг21е^. Но стремление к минимальности
§3.5. временная логика
119
базового набора отношений не всегда оправдано. Чем меньше допу-
стимый для системы набор отношений, тем более громоздкими будут
представления в ней ситуаций. Правда, уменьшение числа отноше-
ний может привести к уменьшению количества правил вывода в
модели ввода, но длина вывода в среднем все равно будет возрастать.
Поэтому ни здесь, ни в дальнейшем мы не будем решать задачу
минимизации базового множества отношений в той или иной псев-
дофизической логике.
Для топологических шкал отношение т не реализуется. Вместо
него появляется отношение т, аналогичное нечеткому отношению
моделирования. Отношения г22, г23 и г26 сохраняются. Они задаются
с помощью специальных размытых квантификаторов вида незадолго
до этого, вскоре, сейчас же после этого и т. п. Следовательно, эти
отношения также связаны с функциями принадлежности и нечет-
ким отношением моделирования. Наконец, отношение г21 может
задаваться либо как точное, либо опять-таки как нечеткое отноше-
ние моделирования (например, с помощью квантификатора вида
почти одновременно).
При работе с топологическими шкалами используется также идея
универсальной шкалы, которая обсуждалась в §2.11. Все события,
для которых в систему управления можно ввести сведения о частот-
ных гистограммах этих событий, переводятся на универсальную
шкалу.
Перейдем теперь к интервальным событиям. Введем для них во-
семь отношений, семантика которых проиллюстрирована на
рис. 3.16. Эти отношения имеют следующие названия: г22—быть
раньше, г23— быть позже, r2i— начинаться одновременно, г2-—• кон-
чаться одновременно, г2в— примыкать по времени слева, г2-—
пересекаться во времени, г28— совпадать во времени, гм— быть вну-
три по времени. (Названия всех отношений заимствованы из
табл. 2.1.)
Если для всех интервальных событий указаны маркеры их на-
чала и конца или длина события и один из его концевых маркеров,
то отношения между интервальными событиями можно заменить
совокупностью отношений между маркерами, т. е. между точечны-
ми событиями. Если, например, события е, и е2 находятся в отноше-
нии г2., то для их маркеров выполняются следующие отношения:
((РнОгРн) \/ 1Р1? 22Цн) V (Ин^ззНл) г/1(РнО :Р.ч) V (ра^гиИн)) (Pk^2iPk) •
Другими словами, для маркеров начала событий ег и е2 могут
реализоваться произвольные отношения, а для маркеров концов
этих событий всегда выполняется отношение г21. Аналогичным об-
разом можно записать отношения между маркерами событий е± и е2,
когда между ними реализованы другие отношения для интервальных
событий.
Однако, к сожалению, это не всегда удается. Весьма часто в тек-
стах содержится неполная информация о моментах начала и окон-
120
ГЛ. 3. ПОПОЛНЕНИЕ ОПИСАНИЙ СИТУАЦИЙ
чания интервальных событий. В таком случае отношения между
ними задаются фактически на топологической шкале.
Пример 3.13. Пусть имеется следующий текст: «Барон Мюнхгау-
зен, как был в спальном колпаке и длинной ночной сорочке, спустил
ноги в туфли и в следующую секунду уже сидел в карете и торопил
фельдъегеря, хотя тот и сам отчаянно торопился, от нетерпения
время от времени соскакивал с козел и, подавая лошадям пример,
несколько раз их обгонял. Досадная задержка произошла, когда уже
подъехали к Потсдаму. Лошади так разгорячились, что не было ни-
какой возможности их остановить. Пришлось объехать Потсдам три-
надцать раз, пока удалось, наконец, сдержать тридцать шесть ог-
недышащих змиев,— на это ушло по крайней мере три минуты.
У лошадей затлелись постромки, удила и подпруги, а дуги п дышла
охватило огнем, и они сгорели прежде, чем подоспели пожарные.» х).
Приведенный текст можно различным образом преобразовать во
временную структуру. Это зависит от способа выделения из него со-
бытий. Предположим, что выделение событий таково, что мы имеем
следующие события, верхний индекс у которых показывает,
относятся ли они к .Мюнхгаузену, фельдъегерю, лошадям или по-
жарным.
— Мюнхгаузен спускает ноги в туфли, е;,л — Мюнхгаузен са-
дится в карету и сидит в ней; — Мюнхгаузен торопит фельдъеге-
ря; — Мюнхгаузен покидает карету; е* — фельдъегерь садится
Рис. 3.17
на козлы; ef — фельдъегерь соскакивает с козел и некоторое время
бежит рядом с лошадьми; Д1— фельдъегерь пытается остановить
лошадей; ef — лошади несутся; eg — лошади объезжают вокруг
Потсдама; е% —• лошади останавливаются; <?J — у лошадей тлеют
постромки, удила и подпруги, а дуги и дышла горят; е" — подъеха-
ли пожарные.
Соответствующая структура показана на рис. 3.17. Для боль-
шей наглядности на этом рисунке события, относящиеся к разным
') Глоба А. П. Сказки дня и ночи.—М.: Современник, 1976, с. 72.
§35 ВРЕМЕННАЯ ЛОГИКА
121
персонажам, показаны на различных временных осях. Разные со-
бытия выделены штриховкой, зачернены или заполнены точками.
Между отдельными осями времени имеется временное соответствие —
события, лежащие на одной вертикали, происходят одновременно.
На каждой из осей совмещены те события, которые происходят од-
новременно для данного персонажа. Дадим некоторые дополнитель-
ные пояснения. Мы не знаем из текста, когда именно наступают
моменты времени, в которые барон Мюнхгаузен торопит фельдъе-
геря. По-видимому, это происходит неоднократно. Поэтому внутри
события появляется некоторое число событий е^. Оно в реальной
системе может, например, породиться случайным образом. Длины
событий для Мюнхгаузена не определены анализируемым текстом.
Однако ясно, что длина значительно превосходит длины осталь-
ных событий, события е^- и по длине близки между собой. О собы-
тии в тексте вообще ничего не говорится. Его можно было бы
и не показывать на рис. 3.17. Но если бы оно не произошло, то ба-
рон, наверное, сгорел бы, что противоречит дальнейшему тексту
Глобы.
Для фельдъегеря число событий ef и е? из текста не определя-
ется, ясно лишь, что общее число событий е? должно быть на едини-
цу больше числа событий е^. Кроме того, ej и Д’ должны чередо-
ваться и последовательность начинается и заканчивается событием
е$. Последнее событие совмещается во времени с началом попыт-
ки остановить лошадей. Длина последнего события в тексте опреде-
лена словами «На это ушло по крайней мере три минуты». Можно
предположить, что события еф и et имеют меньшую длительность,
хотя для е$ это может оказаться и неверным, если фельдъегерь спо-
собен долго бежать в темпе лошадей.
Наконец, для лошадей до события ej продолжается их скачка,
часть которой («по крайней мере три минуты») совпадает с событием
е%. Когда начинает загораться сбруя — из текста неясно, поэтому
начало события Д не определено. Более или менее ясно, что загора-
ние должно было бы произойти еще во время скачки. Что касается
пожарных, то относительно местоположения события их прибытия
на место происшествия вряд ли могут быть разногласия.
Отметим, что при переходе от текста к временной структуре мы
использовали не только те сведения, которые прямо содержатся в
тексте, но и некоторую дополнительную информацию, вытекающую
из сценариев, связанных с теми или иными действиями. Подобное
положение возникает весьма часто. Именно сценарии играют боль-
шую роль при формировании временной структуры и пополнения
описаний. Ниже мы будем говорить об этом более подробно.
Для цепочечных событий мы не будем вводить собственную сис-
тему отношений. Их мы будем сводить к последовательности интер-
вальных и точечных событий, что на самом деле не всегда возможно
на топологических шкалах, но этот тонкий вопрос мы здесь рассма-
тривать не будем.
122
ГЛ. 3. ПОПОЛНЕНИЕ ОПИСАНИЕ! СПТУАЦНП
Мы закончили построение модели представлений для временной
логики. Эта модель состоит из набора шкал, отношений проекцпро-
вания тг или тг событий на шкалы, системы отношений во времени
между событиями, связывающих отношения для интервальных со-
бытий с точечными через маркеры, и функций р для различных шкал
вместе с набором необходимых арифметических процедур.
Теперь можно перейти к модели вывода новых утверждений о
времени на основе тех правил вывода, которые мы заложим в нашу
логику, и знаний, хранящихся в системе управления.
Все правила вывода можно разбить в любой псевдофизической
логике на две группы: синтаксические и семантические. К первой
группе относятся правила вывода, вытекающие из алгебраических
свойств тех отношений, к которым они применяются. Правила второй
группы вытекают из некоторой внешней семантической интерпрета-
ции этих отношений и сценариев, используемых при выводе новых
фактов и отношений.
Общее число используемых нами во временной логике отношений
равно восьми. Правила первой группы для них строятся следующим
образом. Рассматривается некоторое отношение. Выявляются его
алгебраические свойства и выписываются соответствующие прави-
ла. Например, рассматривая отношение г22, мы убеждаемся, что оно
антирефлексивно, антисимметрично и транзитивно. Это позволяет
нам написать следую ие три утверждения: (er22e); (e1r22e2)=>(e2r22ei);
(eir22e2) (е2г22ез)=>(е1Г22ез). Среди этих утверждений основной инте-
рес представляет третье, которое имеет вид классического правила
вывода в виде продукции. Второе утверждение также имеет продук-
ционный вид, но его использование для получения новых фактов
сомнительно. Скорее оно может оказаться полезным при проверке
содержимого памяти системы на непротиворечивость. В качестве
другого примера можно рассмотреть правило типа
(*-1^25^2) (^2^2в^з) —(^1^2в^з)-
Его смысл сводится к тому, что если события ег и е2 заканчиваются
одновременно и событие е2 непосредственно слева примыкает к со-
бытию е3, то и событие <?L непосредственно слева примыкает к собы-
тию е3. Проиллюстрируем работу правил первой группы на примере.
Пример 3.14. Вернемся к ситуации, описанной в тексте, приве-
денном в примере 3.13. Выпишем из этого текста набор ядерных
конструкций (троек вида (arb)), который в нем непосредственно со-
держится. Анализируя текст последовательно, мы получаем следую-
щий набор: (e?V26e^); (e^r29e'A); (е|>г29е^); (е?г22е:?); (ф21е?); (е2г2/ф);
(е2г .23е-]). Посмотрим, какую дополнительную информацию можно
получить из этого набора. Сравнивая первую тройку со второй и
третьей, мы можем вывести новую информацию, используя правило
вывода
§ 3.5. ВРЕМЕННАЯ ЛОГИКА
123
Применяя его, мы находим еще две тройки: (е^г22е^) и (eJV22ef).
Из четвертой и пятой тройки с помощью соответствующего правила
(мы их не выписываем, чтобы не загромождать изложение) полу-
чается тройка (е^г22^)- Четвертая и шестая тройки порождают
(е?г22е2), пятая и шестая — (ф-22ез)- Наконец, две последние трой-
ки порождают новый факт вида
Интересно сравнить полученный результат с временной струк-
турой, показанной на рис. 3.17. Становится ясным, что правила вы-
вода первой группы дают недостаточно информаций для пополнения.
События и е? вообще не возникли, и, следовательно, не возникли
временные отношения, связывающие их с остальными событиями.
Осталось полностью не определенным, как соотносятся между со-
бой события е2 и ef, а также события е3 и е%. Всю эту информа-
цию нельзя получить с помощью правил вывода первой группы.
Она возникает лишь при обращении к знаниям, хранящимся в виде
сценариев в памяти системы. Правила вывода, работающие с этими
сценариями, относятся ко второй группе правил. Их работу мы про-
иллюстрируем на двух примерах пополнения описаний.
ПримерЗ.15. Рассмотрим текст, который уже использовался в при-
мере 3.3: «Самолет совершил посадку. Пассажиры ожидают багаж».
При попытке построить временную структуру этого текста, исполь-
зуя только сам текст, нас ожидает полная неудача. Мы выделяем
два события: ех— самолет совершил посадку; е2— пассажиры ожи-
дают багаж. Но мы не можем установить никакого временного от-
ношения между ними. Однако, если в памяти системы хранится
сценарий, подобный показанному на рис. 3.2, то с его помощью
легко устанавливается нужное отношение, а именно (eir22e2).
Пример 3.16. Предположим, что на вход системы поступил
текст «В пятницу на балу Вельчковский публично оскорбил За-
ренина, и Заренин, немедля ни секунды, вызвал его на дуэль. После
бала Заренин заехал к своему старому другу генералу Мурашёву
и попросил его быть секундантом. Был составлен письменный вызов и
утром в субботу он был вручен Вельчковскому. Сейчас Заренин и
Мурашёв писали протокол об отказе от дуэли, ибо срок ответа, даже
при наличии веских причин, уже прошел».
После анализа этого текста система может выделить следующие
события: в!— оскорбление Заренина, е2— вызов Вельчковского на
дуэль, е3— просьба Заренина, обращенная к Мурашёву, и согласие
последнего, е4— составление письменного вызова, е5— вручение вы-
зова, е6— составление протокола об отказе. Из текста можно уста-
новить следующие тройки: (ехг26е^-, (е2г22е3); (е3г22е4); (е4г22е5);
(е5г2л); (e2rf); (e.rs).
Здесь f и s означают соответственно дни недели: пятницу и суб-
боту. Пользуясь обычными правилами, связанными с транзитив-
ностью отношений г2е и г22, система может вывести еще ряд соотно-
шений типа Но из текста она не может вывести никаких
троек, позволяющих отобразить с помощью т на шкалу дней недели
124 ГЛ. 3- ПОПОЛНЕНИЕ ОПИСАНИЯ СИТУАЦИИ
события е3, i?4 и е«. Это можно сделать только в том случае, если в па-
мяти системы имеется сценарий, описывающий принятый порядок
проведения дуэлей. Если такой сценарий имеется т), то ясно, что
событие ее не могло произойти ранее утра понедельника (т), так
как ответ на письменный вызов на дуэль должен быть получен от
обидчика не позднее, чем через 24 часа после вручения ему письмен-
ного вызова. Упомянутые в тексте «веские причины» позволили от-
далить ответ еще на 24 часа. После этого, если ответ обидчика не
поступал, то составлялся унизительный для него протокол об от-
казе от дуэли. Так что е6 могло происходить только в понедельник,
что позволяет вывести тройку (е6тт). В тексте сказано, что Заренин
заехал к Мурашёву после бала. Это означает, что скорее всего со-
бытие е3 произошло в пятницу, так как в XIX веке балы, как пра-
вило, кончались к полуночи. Поэтому с большой долей вероятно-
сти события е3 и е4 произошли в пятницу, что позволяет системе
вывести еще две тройки: (е3т/) и (е4т/).
Нам остается обсудить проблемы, -связанные с выводом на топо-
логических шкалах. Для возможности отображения событий на
таких шкалах обычно используются методы, подобные описанным в
§2.11. Прежде всего выбирается список квантификаторов, который
мог бы образовать некоторую порядковую шкалу размытых момен-
тов времени.
Примером такого списка для временных размытых квантифика-
торов может служить последовательность: очень давно, давно, недав-
но, совсем недавно, только что, сейчас, вскоре после этого, очень
скоро, скоро, в недалеком будущем, в будущем. Более или менее ясно,
что такая последовательность способна порождать некоторую по-
рядковую шкалу. Для того чтобы последняя могла служить для
целей вывода и пополнения описаний, необходимо перейти к более
точному шкалированию. Для этого используется аппарат функций
принадлежности, о которых шла речь в том же § 2.11. Для каждого
элемента из заданного списка строится с помощью эксперимента с
людьми функция принадлежности этого элемента к отрезку [0, 1].
Затем выбирается такой уровнь отсечки а, который мог бы образо-
вать хорошую шкалу на данном отрезке. Как уже говорилось выше
(см. §2.11), это приводит к тому, что отрезок [0, 1] разбивается на
непересекающиеся интервалы, каждый из которых соответствует
с гарантированным уровнем функции принадлежности, равным
0<а<;1, некоторому элементу из списка, образующего словесную
шкалу. Этот процесс показан на рис. 2.17 для размытых частотных
квантификаторов. Для временных квантификаторов он реализуется
аналогичным образом.
После получения топологической шкалы оказывается возмож-
ным строить систему правил вывода на ней. Мы не будем специально
У Например, дуэльный кодекс, описанный в книге: Дурасов, Дуэльный
кодекс.— Град Святого Петра, 1908.
§ 3.G. пространственная логика
125
останавливаться на этом во временной логике, так как в следующем
параграфе опишем всю методику достаточно подробно. Перене-
сение ее на случай более простой временной логики не вызывает
затруднений.
§ 3.6. Пространственная логика **
Как и для временной логики, начнем построение пространствен-
ной статической логики с модели представлений. Учитывая доста-
точно полное изложение методики построения псевдофизических ло-
гик на примере временной логики, мы ограничимся для пространст-
венной логики более фрагментарным изложением. Наибольший ин-
терес в пространственной логике представляет та ее часть, кото-
рая связана с получением выводов на топологической шкале рас-
стояний между объектами. Именно эту часть логики мы и рассмот-
рим здесь. Наше изложение должно пополнить общее представле-
ние о тех проблемах, которые встают перед разработчиками псев-
дофизических логик. Другие же разделы, относящиеся к простран-
ственной статической логике (работа с метрическими шкалами и
отображение высказываний на них, работа с отношениями взаим-
ного расположения предметов, отношениями ориентации их в про-
странстве и многое другое), фактически строятся аналогично тому,,
как это делалось для временной логики.
Начнем с формирования списка размытых квантификаторов, ко-
торые могут использоваться для оценки расстояния на топологи-
ческой шкале расстояний. Конечно, этот список может быть более
или менее обширным. В качестве примера рассмотрим список из
25 квантификаторов, перечисленных в левом столбце табл. 3.1.
В ней показаны результаты экспериментов, проведенных на основе
данного списка квантификаторов расстояния, для большой группы
испытуемых. В столбцах указано число испытуемых, положивших
карточку с соответствующим квантификатором в позицию, номер
которой указан вверху.
Какие выводы можно сделать из данных табл. 3.1? Таких вы-
водов можно сделать несколько. Испытуемые плохо различают ме-
жду собой некоторые квантификаторы: вплотную и очень-очень близ-
ко, довольно близко и совсем близко, близко, вблизи, рядом, возле,
около и другие. Два квантификатора: недалеко и неблизко испытуе-
мые понимают неодинаково. При построении хорошей порядковой
шкалы это надо учесть. Поэтому вместо исходного списка кванти-
фикаторов для построения шкалы нужно оставлять только те, ко-
торые указаны в левом столбце в табл. 3.2. Здесь уже произведено
отображение результатов из табл. 3.1 в соответствии с процедурой,
описанной в §2.11, в значения функции принадлежности. Наверху
с шагом 0,1 перечислены значения переменной из отрезка [0,1],
на котором определены семь функций принадлежности (строки
табл. 3.2) для всех оставшихся в списке квантификаторов.
12G
ГЛ. 3. ПОПОЛНЕНИЕ ОПИСАНИЙ СИТУАЦИЙ
Из таблицы ясно видно, что оставшиеся семь квантификаторов
образуют хорошую порядковую шкалу для отношений расстояния.
В рамках настоящего параграфа мы будем рассматривать лишь
двумерную пространственную логику расстояний. Перенос излагае-
Таблица 3.1
Лексемы н сочетания лексем 0 I 2 3 4 5 6 7 8 9 10
1. Вплотную 27
2. Очень-очень близко 20 7
3. Очень близко 2 21 4
4. Довольно близко 1 13 13
5. Совсем близко 2 20 4 1
6. Совсем рядом. 15 7 4 1
7. Близко 4 21 2
8. Вблизи 3 18 6
9. Рядом 3 19 3 2
10. Возле 2 15 8 2
11. Около 5 18 2 2
12. Неблизко 3 И 9 4
13. Не очень близко 4 12 8 3
14. Недалеко 1 2 И 10 3
15. Не далеко, но и не очень 12 12 3
близко
16. Не далеко, не близко 27
17. Не очень далеко, но и 9 14 3 1
не близко
18. Не очень далеко 3 8 14 2
19. Вдали 2 12 10 2 1
20. Совсем далеко 4 20 3
21. Довольно далеко 6 18 3
22. Очень-очень далеко 7 20
23. Очень далеко 4 21 2
24. Далеко 1 19 7
25. В бесконечности 27
Таблица 3.2
Лексемы п сочетание лексем 0 0 , I 0.2 0.3 0,4 0,5 0,6 0, 7 0,8 0,9 I , 0
1. Вплотную 2. Очень близко 3. Близко 4. Не далеко, не близко 5. Далеко 6. Очень далеко 7. Очень-очень далеко 0.966 0,2 о.озз 0,666 0,133 0.133 0.733 0,133 1 0,1 0.666 0,066 0,133 0,266 0.666 1
§ 3.6. ПРОСТРАНСТВЕННАЯ ЛОГИКА
127
мых ниже результатов на случай трех или большего числа измере-
ний происходит чисто техническим путем.
Для интерпретации квантификаторов расстояний нам понадо-
бится рассмотреть еще список нечетких квантификаторов, оцениваю-
щих размеры предметов.
Связь между оценками расстояний на топологической шкале
и оценками размеров предметов, между которыми определяются рас-
стояния, довольно хорошо прослеживается с помощью примеров.
Рассмотрим два высказывания: «Человек находится далеко от горо-
да» и «Человек находится далеко от автомобиля». Ясно, что в пер-
вом случае далеко оценивает большее расстояние, чем во втором. Еще
два высказывания — «Книга находится близко от стола» и «Лес
находится близко от деревни» — также характеризуют зависимость
оценки фактического расстояния, передаваемого квантификатором
близко, от размеров предметов, о которых здесь идет речь.
Введем список квантификаторов размеров, который образует
порядковую шкалу для оценок размеров. Эта шкала получена в ре-
зультате такого же эксперимента, который для расстояний отражен
в табл. 3.1 и табл. 3.2. Список квантификаторов размеров имеет сле-
дующий вид: нулевой, очень маленький, средний, большой, очень
большой и очень-очень большой. При этом в класс средних предме-
тов попадает человек, что делает его как бы модулем, относительно
которого происходит деление окружающих предметов на классы.
К классу очень маленьких предметов относятся, например, булавка
Таблица 3.3
Расстояние Размер
Очень миленький Маленький Средний 5 3 Очень большой Очень-очень большой
Вплотную Очень близко Близко Не далеко, не близко Далеко Очень далеко Очень-очень далеко 0,933 0,2 0,033 0,666 0,333 0,133 0,733 0,133 0.266 1,0 0,933 0,266 0,066 0,733 0,066 0,933
или пуговица. Чашка пли книга могут выступать представителями
маленьких предметов, а город в зависимости от своего размера по-
падает либо в класс очень больших, либо очень-очень больших
объектов.
128
ГЛ. 3. ПОПОЛНЕНИЕ ОПИСАНИЯ СИТУАЦИЙ
Проведем теперь психологический эксперимент, в ходе которого
испытуемые должны оценивать по некоторой условной десятибалль-
ной системе оценок степень близости пар квантификаторов, один
из которых относится к размерам, а другой — к расстояниям. Ре-
зультат одного из таких экспериментов приведен в табл. 3.3.
Из анализа этой таблицы явно вытекает наличие связи между
оценками расстояний и размерами на топологических шкалах. Меж-
ду списками тех и других квантификаторов существует определенное
соответствие. Оно может быть выражено в виде некоторого гипоте-
тического утверждения.
Гипотеза 3.1. Для оценки расстояний между двумя объек-
тами можно использовать третий объект, помещаемый между ними
вплотную. Размер этого объекта однозначно определяет расстояние
между исходными объектами в соответствии с табл. 3.4.
Таблица 3.4
Размер Расстояние
1. Ну левой 2. Очень маленький 3. Маленький 4. Средний 5. Большой 6. Очень большой 7. Очень-очень большой Вплотную Очень близко Близко Не далеко, не близко Далеко Очень далеко Очень-очень далеко
Будем в дальнейшем обозначать через af некоторый объект
с именем i и размером q. Размеры будем задавать порядковыми но-
мерами в соответствии с нумерацией размеров в табл. 3.4. Через Rj
будем обозначать отношение расстояния на топологической шкале.
Индекс j совпадает с порядковым номером соответствующего отно-
шения в той же табл. 3.4. Запись (a^Rja?2) означает, что кратчай-
шее расстояние между границами объектов аг и а2 с размерами
t/i и q2 оценивается как R,. На рис. 3.18 показа-
но графическое изображение этой ситуации.
К a2j Выскажем еще две гипотезы по поводуоцен-
кп расстояний на топологической шкале. РаС-
Рис. 3'18 о in тт < ?,
смотрим рис. 3.19. На этом рисунке объект йГ
остается неизменным, а вместо объекта сА’ подставляются объек-
ты различного размера, но так, что истинное расстояние между
границами объектов не меняется.
Г ппотез а 3.2. Оценка расстояния на топологической! шкале
для тройки не меняется при изменении размеров объекта
й2 и сохранении истинного расстояния между границами объектов.
§ 3.6. ПРОСТРАНСТВЕННАЯ ЛОГИКА
129
Как и гипотеза 3.1, данная гипотеза может приниматься или не
приниматься, так как ее истинность нельзя строго доказать. Оправ-
данием ее служит лишь то (как и для других гипотез), что с ее по-
мощью получаются результаты, не противоречащие интуиции чело-
века.
Заметим, что при изменении размеров предмета ах, от которого
оценивается расстояние (лучше сказать «с точки зрения» которого),
оценка расстояния даже при сохране-
нии истинного расстояния может из-
меняться. Если, например, некото-
рый человек находится близко от
дома, то для булавочной головки это
расстояние может оказаться весьма
далеким.
Отсюда вытекает еще одна гипоте-
за, говорящая о несимметричности
оценок расстояний.
размерах объектов а* и
Г ипотеза 3.3. При различных
а2 в тройках (af1/?/^) и значения Rj и Rk могут отли-
чаться друг от друга.
Нетранзитивность R}- очевидна. Ясно, что если близко от
о2, а2 близко от а3 и т. д., то между ад и последним объектом в такой
Таблица 3.5
Вплотную- вплотную ОМ ? ОМ м ? м с ? с б ? б об ? об ооб ? ооб
1. ом обл обл обл обл обл обл
2. м бл обл обл обл обл обл
3. с нд, нбл бл обл обл обл обл
4. б д нд, нбл бл обл обл обл
5. об од д нд, нбл бл обл обл
6. ооб оод ^д д нд, нбл бл ОЭ 1
последовательности может зафиксироваться практически любое от-
ношение от близко до очень-очень далеко. Это зависит от числа эле-
ментов в рассматриваемой последовательности.
Сформулируем последнюю гипотезу, обоснованием которой могут
служить результаты многочисленных психологических экспери-
ментов, а также интуиция человека.
Гипотеза 3.4. Для любых трех объектов одинакового раз-
мера, расположенных вплотную друг к другу на одной прямой,
расстояние между крайними объектами в тройке оценивается кван-
тификатором очень близко.
5 Д. А. Поспелов
130
ГЛ. 3. ПОПОЛ НЕНИЕ ОПИСАНИИ СИТУАЦИЙ
Все сформулированные гипотезы (если они принимаются, ко-
нечно) использованы при построении базовой матрицы оценок
расстояний на топологической шкале (табл. 3.6). В этой матрице
использованы следующие обозначения: ом — очень маленький,
м — маленький, с — средний, б — большой, об — очень большой,
ооб — очень-очень большой, обл — очень близко, бл — близко,
нд, нбл — не далеко, не близко, д — далеко, од — очень далеко,
оод — очень-очень далеко. Запись q? q, где q — указание некоторо-
го размера, соответствует тому, что вместо среднего объекта вплот-
ную к двум крайним указанного размера можно вставить третий
объект, размер которого указан в левом столбце матрицы. При этом
расстояние между крайними объектами можно оценить путем оцен-
ки расстояния, указанной в соответствующей клетке матрицы. На-
пример, если между двумя объектами среднего размера вплотную
к ним поместить маленький объект, то расстояние между крайними
объектами будет очень близким, а при помещении между объектами
среднего размера вплотную к ним очень большого объекта получится
расстояние между исходными объектами, которое оценивается кван-
тификатором не далеко, не близко.
Пример 3.17. Расстояние между двумя блюдцами оценено как
очень далеко. Какова бы была оценка того же расстояния, если бы
вместо блюдец мы имели людей? Будем считать, что блюдца — ма-
ленькие объекты. В столбце м?м табл. 3.5 ищем квантификатор од
и находим, что он соответствует помещению между блюдцами вплот-
ную очень-очень большого объекта (ооб). Теперь в строке, соответ-
ствующей этому объекту на пересечении со столбцом с?с (считаем,
как говорилось ранее, что человек относится к классу средних по
размеру объектов) находим оценку расстояния в виде квантифика-
тора далеко. Таким образом, если вместо
R?______________________блюдец на их места поставить людей, то
Ji между ними будет расстояние, оценива-
емое квантиФикат0Р0М далеко.
J Пример 3.18. Пусть два человека нахо-
Рис. 3.20 дятся на одной прямой по обе стороны
современного городского дома, имеюще-
го форму замкнутого квадрата или прямоугольника, близкого к
квадрату (в идеале — форму цилиндра, как некоторые экспери-
ментальные дома в Ереване или Братиславе, например). И мы хо-
тим оценить расстояние между этими людьми. Так как человек
относится к классу средних по размеру объектов, а дом, по-види-
мому, следует относить к классу больших объектов, то на пересече-
нии столбца с?с и строки для больших объектов в табл. 3.5 мы
находим интересующий нас квантификатор расстояния. Как сле-
дует из базовой матрицы, этим квантификатором является кван-
тификатор близко.
Теперь можно перейти к обсуждению правил вывода, характер-
ных для топологической шкалы расстояний в статической простран-
§3.6. ПРОСТРАНСТВЕННАЯ ЛОГИКА
131
ственной логике. Сначала рассмотрим ситуацию, иллюстрируемую
рис. 3.20. На этом рисунке имеются три объекта с заданными раз-
мерами (размер объекта а3 не играет роли, как следует из нашей
гипотезы 3.2), расположенные на одной прямой. Известны оценки
расстояний между объектами af1 и а’2, а также между объектом
а’2 и а3. Требуется найти оценку расстояния между объектом а’1 и
а3. Другими словами, требуется построить систему правил в виде
таких продукций:
(a^R^) (al2Rj-a3) => (allR,a3),
с помощью которых можно было бы задать полную систему выводов
о расстояниях на топологической шкале для объектов, расположен-
ных на одной прямой. Рассмотрим последовательно четыре возмож-
ных случая.
1. Объекты и а2 имеют одинаковые размеры, a Rt и Rj совпа-
дают. Тогда правило вывода записывается следующим образом:
(a$Ra%) (a%Ra3) => (a%R? а3).
В этом случае 7?? определяется с помощью операции 1.
Смысл этой операции поясняется с помощью табл. 3.6.
Таблица 3.6
R R + i R - 1
Вплотную Очень близко Близко Не далеко, не близко Далеко Очень далеко Очень-очень далеко Очень близко Близко Не далеко, не близко Далеко Очень далеко Очень-очень далеко Очень-очень далеко Вплотную Вплотную Очень близко Близко Не далеко, не близко Далеко Очень далеко
Пример 3.19. Пусть аг и а2 — маленькие объекты и оценка рас-
стояний между ними, а также между а2 и а3 есть близко. Тогда
оценка расстояния между и а3 не далеко, не близко.
2. Объекты аг и а2 имеют одинаковые размеры, но Rt и Rj раз-
личны. В этом случае правила вывода имеют вид
(alRja3) => (a<lR?a3).
Значение R? определяется на основании следующего соотношения:
I max(R(, Rj), если |i—/|> 1,
— I шах (У?;, jRz)-Р-1, если |i—/| = 1.
Если |i—/|=0, то этот случай сводится к предшествующему.
5*
г
132 гл. 3. ПОПОЛНЕНИЕ ОПИСАНИЯ СИТУАЦИЙ
Пример 3.20. Пусть для маленьких а± и а2 расстояние от аг
до а2 оценивается квантификатором близко, а от а2 до а3 — кванти-
фикатором далеко. Тогда расстояние от аг до а3 будет оцениваться
квантификатором очень далеко, так как в нашем случае \i—/| =
= |3—5|=2.
3. Оценки Rt и Rj совпадают, но размеры объектов а± и а2
различны. В этом случае правила вывода имеют вид
(al'Ral2) (a4iRa3) —> (cfiRja,,).
В этом случае сначала необходимо «уравнять» размеры ад и а2.
Для этой цели воспользуемся гипотезой 3.2 и базовой матрицей,
отраженной в табл. 3.5. В первой тройке приписываем а2 размер qlt
что не сказывается на квантификаторе R. Во второй тройке приписы-
ваем тот же размер а3, что не сказывается на R, если не менять
размера а2. Но так как мы его меняем, то необходимо найти новое
значение квантификатора. Для этого и служит табл. 3.5. Если новое
значение R’ во второй скобке сохранит то же значение R, то данный
случай сводится к первому из рассмотренных ранее случаев. Если
же это не произойдет, то наш случай сводится ко второму из ранее
рассмотренных случаев.
Пример 3.21. Пусть от чашки (маленький объект) до дома (боль-
шой объект) расстояние оценивается квантификатором близко,
а от дома до некоторого третьего объекта а3 — квантификатором
не далеко, не близко. Для перехода от класса больших объектов к
маленьким объектам используем базовую матрицу (табл. 3.5). На-
ходим в этой матрице столбец б?б и ищем в нем квантификатор не
далеко, не близко. Ему соответствует последняя строка таблицы, т. е.
объект, относящийся к классу очень-очень больших. Помещая такой
объект между маленькими объектами (т. е. заменяя большой а2
на маленький), мы находим в столбце м?м на пересечении с послед-
ней строкой значение Д'. Как видно из табл. 3.5, это значение есть
очень далеко. Так как оно не совпадает с квантификатором близко,
то имеет место второй случай. Учитывая, что \i—j| = |3—6] =3,
получаем окончательно, что расстояние от чашки до объекта а3
должно оцениваться квантификатором очень-очень далеко.
4. Пусть не совпадают ни размеры од и а2, ни квантификаторы
Ri и Rj. Тогда можно с помощью базовой матрицы сначала уравнять
размеры объектов, а затем получить ту же ситуацию, что и в пред-
шествующем случае.
Приведенные правила вывода, хорошо работающие для случая
трех объектов, расположенных на одной прямой, удовлетворяют
в этом случае человеческой интуиции, но при перенесении на случай
произвольного числа объектов на одной прямой могут привести к
нежелательным эффектам.
Пример 3.22. Пусть имеется шеренга посаженных вдоль дороги
деревьев. Между соседними деревьями такое расстояние, которое
оценивается квантификатором близко. Если аи а2, ..., ап суть
§ 3.6. ПРОСТРАНСТВЕННАЯ ЛОГИКА
133
деревья, то от аг до а2 близко, от аг до а3 на основании первого случая
правил вывода не далеко, не близко, от а± до а4 на основании того же
правила далеко, а для расстояний от аг до ав и всех последующих де-
ревьев в шеренге будет сохраняться отношение далеко. Это происхо-
дит в результате поглощения одним квантификатором других,
которые отстоят от него более чем на единицу.
В настоящее время для устранения эффекта поглощения нет
сколько-нибудь эффективных приемов. Один из частных приемов,
к сожалению, применимый не всегда,— способ разбиения на каждом
шаге объектов на пары, внутри которых квантификаторы отлича-
ются на единицу по своему индексу, и правила вывода применяются
именно к таким парам. Если таких квантификаторов нет, то исполь-
зуются пары с одинаковыми расстояниями между объектами.
Подобный подход неприменим, если все попарные расстояния отли-
чаются по индексам квантификаторов более чем на единицу.
Пример 3.23. В условиях примера 3.22 после нахождения рас-
стояния от Й! до а3 имеет смысл искать расстояние от а3 до а,, которое
будет оцениваться в результате как не далеко, не близко. Применяя
теперь правило вывода к объектам alt а3 и а3, а3, мы получим, что
расстояние от о, до а5 оценивается квантификатором далеко. Ана-
логично расстояние от до as оценивается также квантификатором
далеко. Если теперь использовать правило вывода для объектов
й!, а5 и а9, то расстояние от а± до а9 будет оцениваться уже кванти-
фикатором очень далеко. Продолжая процедуру подобным же обра-
любых произвольных по размерам
зом, можно оценивать рассто-
яния по все более увеличива-
ющимся по индексу квантифи-
каторам (в предположении,
что за квантификатором очень-
очень далеко находится беско-
нечная их последовательность:
очень-очень-очень далеко, очень-
очень-очень-оченъ далеко и
т. д.).
Перейдем теперь к пост-
роению правил вывода для
пространственной логики рас-
стояний на плоскости. Базо-
вая матрица (табл. 3.5) дает
возможность преобразования
объектов в очень маленькие объекты, которые в дальнейшем мы будем
для краткости называть точечными. Поэтому при построении правил
вывода на плоскости будем рассматривать лишь точечные объекты.
На рис. 3.21 показаны три объекта а1; а2 и а3, произвольно рас-
положенные на плоскости. Пусть расстояния и R, нам известны
(т. е. мы знаем их словесную оценку), а расстояние R^ требуется
определить. Построим два вспомогательных объекта а3 и а3 так, как
134
ГЛ. 3. ПОПОЛНЕНИЕ ОПИСАНИЙ СИТУАЦИЙ
показано на рисунке. Ясно, что для индексов квантификаторов вы-
полняются неравенства Rmin^R^Rmax- Для определения 7?min
и Rm™ используются следующие специальные операции:
Вплотную, Rt-!, если если
если i = / + 1,
Ri, если i—/ Js 2
I Rp если ! — 2
/ Rt + 1, если i = /-
R{^\, если i = /n-l,
^max " И Ml, если /
1 Rt, если i -J>2,
если / —1>2.
Ограничимся для простоты не любыми угловыми направлениями
<р на плоскости, а некоторым числом фиксированных направлений.
При достаточно большом их числе можно получить сколь угодно
близкое приближение к модели с непрерывным значением <р. Для
наглядности возьмем небольшое число направлений, показанное на
рис. 3.21. Другими словами, будем считать, что объект а3 может
находиться только на этих фиксированных пяти направлениях. По-
строим специальную таблицу (табл. 3.7), которая по местонахожде-
нию объекта а3 и вычисленным значениям /?min и /?тах определяет
Таблица 3.7
ф s Тг (?3 <F.
0 ^max R max ^max ^max $tnax
1 ^tnax s, ^min
2 ^max 7?min
3 ^max R4>i ^min
4 ^max R^1 $min
5 ^max (%-lp-l 1 ^min
6 ^max 1)^-1 ^min
7 ftnax 55 7 Я min
значение R^. При увеличении числа направлений характер таблицы
не меняется.
Здесь s означает разность индексов для квантификаторов, соот-
ветствующих RmaK и 7?min. Для случая s=l предполагается, что
§ 3.6. ПРОСТРАНСТВЕННАЯ ЛОГИКА
135
7?min не является квантификатором вплотную. Если это так, то
7?Ф1 =Дф2 =R<p, =RVi = очень близко. При 5=0 /?max=7?min. Опера-
ция специального вычитания, используемая в этой таблице, опре-
делена в правом столбце табл. 3.6.
Для полного завершения логики на плоскости необходимо еще
построить правила вывода направлений по заданным направлениям
для двух объектов относительно третьего. Другими словами, необ-
ходимо еще ввести правила вывода следующего типа:
(ai‘<Pm<42) (42<р„а?) => (<4*<р?<43).
Приведем примеры подобных правил, ограничившись лишь че-
тырьмя фиксированными направлениями впереди, слева, сзади, спра-
ва. Эти правила сведены в табл. 3.8.
Таблица 3.8
Впер’еди Слева Сзади Справа
Впереди Впереди Впереди, если Rj<Ri Слева, если Rj > Ri Впереди, если Rj<Ri Сзади, если Rj > Ri Впереди, если Rj < Ri Справа, если Rj > Ri
Слева Слева, если Rj<Ri Впереди, если Rj>Rt Слева Слева, если Rj<Ri Сзади, если Rj > Ri Слева, если Rj<Ri Справа, если Rj>Ri
Сзади Сзади, если Rj<Ri Впереди, если Rj > Ri Сзади, если Rj<Ri Слева, если Rj > Ri Сзади Сзади, если Rj<Ri Справа, если Rj > Ri
Справа Справа, если Rj<Ri Впереди, если Rj > Ri Справа, если Rj<Ri Слева, если Rj > Ri Справа, если Rj< Ri Сзади, если Rj > Ri Справа
Пример 3.24. Пусть впереди дома далеко имеется лес, а справа
от леса близко находится ветряная мельница. Определим направле-
ние от дома к ветряной мельнице. В нашем случае Rj>Rt и, соглас-
но табл. 3.8, мы получаем, что мельница находится впереди дома.
При увеличении числа допустимых направлений таблица для
определения направлений быстро растет, увеличивается и число
136
ГЛ. 3. ПОПОЛНЕНИЕ ОПИСАНИИ СИТУАЦИИ
условий, связанных с соотношением и Rj для выбора того или
иного ответа. Но суть дела от этого не меняется.
Как и во временной логике, в пространственной логике не всегда
удается получить пополнение описания, используя лишь те правила
вывода, которые мы здесь описали. Часто возникает необходимость
в использовании дополнительной информации, хранящейся в памя-
ти системы в виде сценариев или в каком-либо ином виде.
Пример 3.25. В примере 3.4 мы обсуждали сценарий, в котором
отражено строение пылесоса из ряда деталей. Пусть на вход системы
поступило следующее описание ситуации: «В комнате рядом со
столом работает пылесос». Если непосредственно по этому описанию
построить пространственную структуру ситуации, то она будет
иметь следующий вид: (arSgb) (aR3c), где а — пылесос, b — комната,
с — стол, г38 — быть внутри, R3— близко. Ничего другого из
исходного описания впрямую получить нельзя. Однако используя
сценарий, приведенный на рис. 3.3, можно это описание пополнить,
например, фактом (dr3sb) или фактом (dR3c), где d.— шнур от пыле-
соса.
§ 3.7. Каузальная логика *
Выше уже говорилось, что в настоящее время не существует
сколько-нибудь завершенного фрагмента этой логики, которая дол-
жна работать с отношениями, связывающими между собой причины
и следствия. Вообще говоря, если каузальную логику трактовать
достаточно широко, то ее можно расширить почти до теории вывода,
в которой рассматриваются не только традиционные дедуктивные
системы вывода, но и выводы индуктивного типа или выводы типа
«от частного к частному» (традуктивные). Но мы не будем заниматься
таким расширением, а рассмотрим в рамках данного параграфа
несколько фрагментов каузальной логики в узком смысле, которые
уже сейчас можно применять в системах управления семиотического
типа.
Прежде всего необходимо отметить, что до последнего времени
даже в философском плане не проведено достаточного анализа сути
отношения причина — следствие. Большинство авторов склоняется
к тому, что существует по крайней мере пять основных видов таких
отношений.
1. Энергетическая причина. Причина изменения w, наблюдае-
мого в некотором явлении или процессе П2, есть передача некоторой
энергии v от явления или процесса И,. В этом случае можно говорить,
что v — есть причина w, aw — следствие v.
2. Причина изменения w в П2 есть не само воздействие и. Оно
скорее играет роль «последнего толчка», после которого в П2 на-
чинает развиваться процесс, приводящий к w. Однако и в этом слу-
чае можно считать v причиной (первопричиной) для w, a w — след-
ствием V.
§3.7. КАУЗАЛЬНАЯ ЛОГИКА
137
3. Причина изменения w есть информация v, в которой содержит-
ся указание для П2 о характере необходимого изменения. В таком
случае также можно считать, что между этим указанием v и измене-
нием w есть отношение причина — следствие.
4. Изменение w возникает за счет того, что в П2 имеются два
подпроцесса, или системы, которые взаимодействуют между собой
и порождают само изменение w. Такие причины изменений могут
возникать и как вторичные после появления первичных причин,
указанных в предшествующих пунктах. Отметим, что взаимодейст-
вие внутри процесса может определять развитие самого процесса,
которое выражается в цепи его изменений wlt w2, ..., wn, ...
5. В качестве причины может выступать некий «фундаменталь-
ный» закон, согласно которому всякий процесс стремится к некото-
рым устойчивым состояниям (например, всякое тело, находящееся
под влиянием гравитационного поля, стремится «упасть»).
Существует довольно устойчивое представление о причине неко-
торого явления, как об его единственной, необходимой и достаточ-
ной причине. Даже при создании методов вывода на основании
индукции (мы с ними столкнемся в гл. 4) это заблуждение будет
играть роль некоего весьма важного предположения, при выполне-
нии которого тот или иной метод эффективно реализуется. На самом
же деле связь причин и следствий может оказаться значительно
более тонкой. С этой точки зрения можно дать следующую класси-
фикацию причинно-следственных отношений.
1. Необходимая и достаточная причина.
Причина v при своей актуализации всегда вызывает следствие w.
И, наоборот, появление w всегда свидетельствует о предшествующей
актуализации и. Это довольно редкий для реальной ситуации слу-
чай. Примером его может служить связь между лишением некоторого
тела опоры и его падением.
2. Достаточная причина. Это наиболее часто встре-
чающийся в реальной практике случай, когда причина v всегда
вызывает следствие w, а из появления w не всегда следует и. При-
мером такого положения может служить связь между невыполне-
нием плана и отсутствием премирования. Однако из отсутствия
премирования не может следовать вывод о невыполнении плана.
3. Дополнительные сопричины. Ни vlt ни о2
не являются причинами w. Лишь их совместное действие вызывает
w. Возможен случай не пары дополнительных сопричин, а некоторо-
го множества их. Например, если щ есть наличие пневмококка,
a w — заболевание пневмонией, то для возникновения w кроме
01 необходима актуализация еще какой-либо сопричины, например,
переохлаждения, простуды или травмы.
4. Необходимые сопричины. В списке сопричин,
каждая из которых к w не приводит, могут быть сопричины, нали-
чие которых для вызывания w необходимы. Для предшествующего
примера такая необходимая сопричина — наличие пневмококка.
138
ГЛ. 3. ПОПОЛНЕНИЕ ОПИСАНИЯ СИТУАЦИИ
5. Возможные сопричины. Причинами аварии на
улице могут быть неисправность некоторого транспортного средства,
нарушение правил дорожного движения, состояние опьянения у
водителя и т. д. Ни одна из этих сопричин не обязательно приводит
к аварии. Но возрастание множества подобных одновременно акту-
ализированных сопричин увеличивает шансы на появление w.
В нашу классификацию причин можно было бы включить и
различные псевдопричины, нередко игравшие на первых порах
развития мышления определяющую роль. Примером такой псевдо-
причины может служить правило «После этого,— значит вследствие
этого».
При рассмотрении не одной причинно-следственной связи, а
цепочки таких связей может оказаться, что воздействие тех или иных
последовательностей причин куммулирует или ослабляет эффект,
связанный с необходимостью появления w. Вообще, в причинно-
следственных сетях могут возникать различные тонкие эффекты,
часть которых мы обсудим чуть ниже, когда будем анализировать
сценарии, связанные с каузальными отношениями.
Вернемся к примеру 3.2 и связанным с ним рис. 3.1 и рис. 3.6.
Основным свойством причинно-следственных отношений является
их антисимметричность и транзитивность, что позволяет для любого
явления, которое может выступать в роли следствия, строить дерево
причин или сопричин, способных его породить. Как можно исполь-
зовать это дерево? Если, например, в тексте, поступившем на
вход системы, явно содержится информация о том, что внешний
поставщик сорвал план поставки заготовок, то текст может быть
пополнен фактами о том, что заготовок нет и станок простаивает
(см. рис. 3.1). Наличие причинно-следственного сценария, таким
образом, позволяет при наличии сведений о любой его вершине
достраивать цепочки фактов, ведущих от нее к следствиям. Единст-
венная тонкость тут заключается в необходимости учета времен
наступления событий. Если факт «Поставщик сорвал план поставки
заготовок» поступил в момент времени t, то факты «Заготовок нет» и
«Станок простаивает», которые являются одномоментными, сами
могут возникнуть не в момент t, а в некоторый момент t+r, ибо
производство может располагать определенным запасом заготовок.
И величина т может быть достаточной для того, чтобы факты-след-
ствия вообще не возникли, если за время т запас не израсходуется,
а поставщик исправит свою оплошность.
Именно здесь смыкаются временная и каузальная логики. Мы
уже говорили, что рассуждения о будущем носят модальный харак-
тер. В будущем может реализоваться не одна последовательность
событий, а целый веер таких последовательностей. И при выводе
от причин к следствиям это необходимо учитывать. Поэтому причин-
но-следственные сценарии нужно снабжать дополнительной инфор-
мацией (весами) о временных задержках в наступлении следствий
после непосредственных причин. Этими весами можно помечать
§ 3.7. КАУЗАЛЬНАЯ ЛОГИКА
139
дуги, показанные в сценарии, что дает возможность делать выводы
в каузальной логике более богатыми.
Пример 3.26. На рис. 3.22 показан тот же сценарий, что и на
рис. 3.1. К нему лишь добавлена информация о времени возникно-
вения следствий после наступления непосредственных их причин.
Пусть в момент t в системе имеется информация о том, что станок
простаивает, а в момент t—т поступила информация о том, что по-
ставщик прекратил поставлять заготовки. Ес-
ли т меньше чем 48 ч, то вывод о том, что
заготовок нет и станок простаивает, еще не
реализуется.
Вывод от причин к следствиям всегда ис- \6)
пользует свойство транзитивности. Если име-
ется информация о двух событиях, одно из кото-
рых может рассматриваться как причина, а О/
другое — как следствие, то легко выводят-
ся и все промежуточные события. Вывод
же от следствий к причинам более сложен,
ибо он не однозначен. При формировании та-
ких правил каузальной логики большую роль Рис 3 22
играет вся информация, имеющаяся в рас-
поряжении системы на данный момент времени. Если, например,
системе известно, что станок простаивает, то еще нельзя восстано-
вить причину. Но если при этом имеется дополнительная информа-
ция о том, что станок исправен, а заготовки имеются, то из факта
простоя станка немедленно будет следовать факт, что на рабочем
месте нет рабочего.
При построении причинно-следственных сценариев часто возмож-
но указать ряд отношений, связывающих между собой причины.
Например, может оказаться, что некоторые причины не могут одно-
временно существовать. Например, следствие «Магнитофон не
воспроизводит запись» может возникать в результате двух фактов:
«В магнитофоне нет пленки» и «Произошел обрыв пленки». Эти
два факта-причины между собой взаимосвязаны. Они не могут суще-
ствовать одновременно. Поэтому при выводе причины для следствия
«Магнитофон не воспроизводит запись» и наличии дополнительной
информации о реализации факта «Пленка вынута из магнитофона»
система должна сделать однозначный вывод о том, что причина
интересующего нас факта состоит в отсутствии пленки в магни-
тофоне.
Сценарий, показанный на рис. 3.6, довольно прост. Но сценарий,
который приведен на рис. 3.8, содержит много дополнительной
информации, которую вполне можно использовать в процессе полу-
чения выводов как от причин к следствиям, так и от следствий к
причинам.
Кроме указания на прямую связь причин и следствий, в этом
сценарии содержится еще информация о тех воздействующих факто-
140
ГЛ. 3. ПОПОЛНЕНИЕ ОПИСАНИИ СИТУАЦИЙ
рах, которые вызывают или стимулируют причины. Вместе с тем в
этом сценарии могут быть указаны и тормозящие факторы, которые
препятствуют возникновению причин. И, наконец, в сценарии могут
быть указаны некоторые наблюдаемые закономерности в появлении
и непоявлении фактов, что позволяет устанавливать причины и
прогнозировать развитие процесса от причин к следствиям.
Таким образом, в каузальной логике больше вопросов и нере-
шенных проблем, чем ответов на них. И один из наиболее трудных
вопросов — проблема получения в каузальной логике нечетких
выводов, когда наличие причин известно лишь с некоторой оценкой
достоверности, а иногда и нет полной уверенности, что именно
данные факты служат причинами интересующего нас факта. Именно
этой проблемой, играющей во всех системах управления объектами
сложной природы большую роль, мы будем заниматься в оставшей-
ся части настоящего параграфа, причем будем считать, что уже вы-
работана гипотеза о том, что щ, v2, vm могут быть причинами w.
О методах формирования таких гипотез будет говориться в гл. 4.
Мы же обсудим, как строятся специальные правила вывода, позво-
ляющие осуществлять переход от щ, v2, •••, vm к w, и сосредоточим
свое внимание на том случае, когда все причины непосредственно
приводят к w. Для простоты изложения ограничимся случаем,
когда между нет никаких связей, которые запрещали бы появле-
ние одной из причин при наличии другой. В списке литературы к
данной главе указаны источники, в которых это ограничение снято.
И, наконец, будем считать, что w наступает, если все щ реализова-
ны. Случай, когда достаточно хотя бы одной причины к,- для реали-
зации w, не вносит ничего принципиально нового и также рассмот-
рен в работах, указанных в списке литературы.
В логических системах вывода широко используются схемы вида
А., А2, ..., А„; {А,, А2, .... Ап\=>В
В
Смысл их интерпретируется следующим образом: если Ль А2....
Ап уже выведены и из совокупности выведенных формул А1Г А2,
..., Ап следует выводимость В, то В считается выведенным. Эта схема
обобщает знаменитое правило «модус поненс», принадлежащее
классической логике:
А, АВ
В
Здесь знак -> трактуется как обычная импликация.
Пусть теперь наши знания о том, что At действительно выведены,
неполно. Другими словами, вместо той части схемы вывода, которая
стоит над чертой, мы имеем
мИх- >2^2- > ]Л1( Л2, ..., Л„}=>В.
§ 3.7. КАУЗАЛЬНАЯ ЛОГИКА
141
Здесь »г — некоторые квантификаторы, например, квантификаторы
частотного типа почти никогда, очень редко, редко, не часто, не
редко, часто, очень часто, почти всегда т). В этой записи причины,
вызывающие выводимость В, заданы с некоторой долей уверенности.
Что в этих условиях можно сказать о выводимости В?
Неполным может быть и наше знание не о причинах Дг, а о самом
факте выводимости из этих причин. В таком случае верхняя часть
схемы дедуктивного вывода выглядит следующим образом:
Аг, А2, ..., Л„; у|НЛ1; Д2, .... Л„}=>В].
Как и ранее, квантификатор » можно трактовать здесь по-раз-
ному. Лишь бы он отражал каким-то образом степень уверенности
в том, что вывод из {Лг} в В реализуется. Конечно, возможен и
такой случай, когда имеет место и та, и другая неопределенность.
Описанная ситуация на практике возникает весьма часто. В ус-
ловиях ситуационного управления она оказывается скорее прави-
лом, чем исключением. Знания об объекте управления и способах
управления им накапливаются постепенно, и необходимость исполь-
зования нечетких схем вывода, примеры которых мы только что
рассмотрели, остается почти на всем периоде функционирования
системы управления, построенной на основе семиотических моделей.
Возможны различные способы работы с такими нечеткими пра-
вилами вывода. Проиллюстрируем это на нескольких подходах,
причем для большей наглядности изложения мы будем анализиро-
вать лишь тот случай, когда схема вывода имеет вид такой продукции
>|АЛ, »[А=>В], где »А и » — квантификаторы некоторого типа,
отражающие сомнение в истинности посылки Д и самой продукции.
Нас интересует значение квантификатора »в, с которым надо запи-
сать факт В в память системы или использовать его в дальнейшем
выводе или при принятии окончательного решения.
Рассмотрим вначале случай, когда вместо квантификаторов стоят
некоторые вероятности, отражающие наши знания о влиянии А
на появление В и появление самого А. Такие вероятности могут быть
либо априорными, либо апостериорными, накопленными после неко-
торого опыта работы системы. В таком случае можно предложить
две схемы приписывания вероятностной оценки для В, которые более
или менее соответствуют интуиции человека:
РА
РА=>В>Ь______________ Ра=>в>Ь
Рв^тах(0, а^-Ь—1) ’ Рв ~^ab
В приведенных соотношениях указаны лишь оценки снизу.
Насколько их можно превышать, остается неясным. Некоторая ин-
формация об этом может быть извлечена из оценок для правила
') Возможны и иные квантификаторы. Например: почти уверенно, с неко-
торой долей уверенности, фифти-фифти, сомнительно и т. п.
142
ГЛ. 3. ПОПОЛНЕНИЕ ОПИСАНИЙ СИТУАЦИЙ
«модус толленс», также хорошо известного в классической логике:
В, А^В
А
Вероятностные аналоги этого правила имеют вид
Рл^в^а PA^B^a
Рв^Ь________________. РВ^Ь____________________
РА < min (1, 1 — аА~Ь) ’ РА min (1, b/d), а=А=0'
Буквами Р в этих схемах всюду обозначены соответствующие веро-
ятности.
Однако, как уже говорилось, в семиотических системах управле-
ния и, в частности, в системах ситуационного управления накопление
статистических данных идет слишком медленно, а априорные зна-
ния о вероятностных оценках отсутствуют. Поэтому представляется
интересным формировать оценку достоверности В, оставаясь в рам-
ках использования квантификаторов, оценивающих достоверности
А, А—>В и В.
Зафиксируем в качестве таких квантификаторов частотные кван-
тификаторы, которые мы только что привели, добавив к их списку
еще два квантификатора никогда и всегда, ограничивающие его слева
и справа. Для этих квантификаторов мы и будем строить правила
оценки В.
Пример 3.27. Рассмотрим следующую схему рассуждений:
При швартовке судно «А. Пушкин» изредка теряет 20—30 мин
времени; если потеряно более 20 мин времени, то план погрузки
очень часто приходится переделывать. Обозначим через А высказы-
вание «Швартовка судна «А. Пушкин» приводит к потерям 20—
30 мин времени», через »А — квантификатор редко, через В —
высказывание «План погрузки переделывается», а через » — кван-
тификатор очень часто. Тогда приведенный текст можно предста-
вить схемой >aA; >[А=>.В]. Что можно сказать об оценке истиннос-
ти В, если известно, что в данный момент судно «А. Пушкин» гото-
вится начать швартовку? Более или менее опытный диспетчер при
наличии такой информации скорее всего станет готовиться к про-
цедуре изменения плана погрузки.
В § 2.11 и в предшествующем параграфе мы уже говорили о том,
что квантификаторам можно сопоставить функции принадлежности
пли интервалы на отрезке [0,1]. В частности, на рис. 2.16 и 2.17
были показаны эти интервалы и вид функций принадлежности как
раз для случая частотных квантификаторов. Тогда задачу можно
поставить следующим образом.
По известным квантификаторам »А и » строим (или используем
ранее построенные) функции принадлежности (или интервалы) на
отрезке [0,1] и ищем отображение пары этих функций (или интер-
валов) в функцию принадлежности (или интервал) для квантифика-
§ 3.7. КАУЗАЛЬНАЯ ЛОГИКА
143
тора >|д. Таким образом, нас интересует вид функции F, задающей
соотношение |tb=F(|ta, М-)- Здесь цА, ц и iirt— функции принадлеж-
ности, соответствующие »А, » и »в. Прежде чем определять вид
функции F, сформулируем некоторые достаточно очевидные свойст-
ва, которым она должна удовлетворять. Если в качестве квантифи-
каторов взять квантификаторы всегда, то верхняя часть схемы вы-
вода будет иметь вид Л; /1=>В. Другими словами, правило вывода
превратится в «модус поненс». Это означает, что и квантификатор
должен стать квантификатором всегда. Для функций принадлеж-
ности это эквивалентно требованию выполнения равенства
М-1) = Рв, гДе Ид, И1- Ив — функции принадлежности, соответствующие
квантификатору всегда. Для случая, когда »А есть квантификатор
всегда, а — никогда, очевидно, что должен также принимать
значение никогда. Другими словами, должно выполняться равенство
F(pA, p°) = |1b, где ц" и ii?j— функции принадлежности, соответ-
ствующие квантификатору никогда.
Два сформулированных нами требования к функциям принад-
лежности ц° и р,1 ограничивают вид этих функций. Их можно опреде-
лить лишь двумя способами:
( ц1(х) = о,
J и1 (*)=1>
I ц°(4=1,
хе [о,1), 9
х=1,
хе (о, 1],
х — 0.
|Д(л') = х, х£[0, 1],
ц0 (х) = 1 —х, х С [0, 1].
Рис. 3.23
принадлежности для квантификаторов
Рассмотрим один из возможных способов определения F, при
котором удовлетворяются сформулированные нами требования г).
Этот способ сводится к тому, что получается из цА и р с помощью
суперпозиции ца(х) =
= цА[ц(х)]. Такая операция
корректна, так как для
функций принадлежности
областью определения и
областью значений являет-
ся отрезок [0, 1]. Легко
проверить, что при любом
из двух возможных спосо-
бов определения функций
всегда и никогда в случае суперпозиции выполнены наши два тре-
бования.
Пусть теперь цА и ц — произвольные функции, соответствующие
каким-то значениям квантификаторов частоты. На рис. 3.23 пока-
заны две одногорбые кривые, отвечающие этим функциям. Результат
их суперпозиции — двугорбая кривая, показанная штриховой ли-
нией. Каков ее смысл? Если, например, iiA есть редко, ар — часто,
Э Он предложен И. В. Ежковой.
144
ГЛ. 3. ПОПОЛНЕНИЕ ОПИСАНИЙ СИТУАЦИЙ
то максимумы их суперпозиции характеризуют те значения из от-
резка [0, 1], которые редко встречаются в нечетком подмножестве
функции принадлежности часто. Если же, например, цА и ц отвеча-
ют квантификатору часто, то максимумы соответствуют тем значе-
ниям, которые часто встречаются в нечетком подмножестве функции
принадлежности часто. Поскольку » характеризует множество
возможных значений частоты появления факта В, обусловленных
всевозможными значениями частоты появления факта Л, то супер-
позиция выделяет из этого множества лишь те значения частоты
появления факта В, принадлежность которых этому множеству
характеризуется квантификатором »А- Иными словами, оценка,
задаваемая квантификатором выделяет из множества значений,
выделяемых квантификатором », те значения, которые встречались
в множестве, характеризуемом », с частотой, характеризуемой >А.
Такая интерпретация опе-
рации суперпозиции явля-
ется достаточно «человече-
ской», что может служить
аргументом в пользу при-
нятия подобного способа
определения функции F.
Единственный недоста-
ток предлагаемого подхода
О 0,1 O,Z 0,3 ОЛ 0,5 0,6 0,7 0,8 0,9 1 X
Рис. 3.24
к определению функции F состоит в том, что суперпозиция порождает
функции принадлежности, число горбов в которых может при повтор-
ном применении этой операции возрастать. Но, как мы показали еще
в § 2.11, а затем и в § 3.6, функции принадлежности, соответствую-
щие различным квантификаторам, которыми пользуются люди,
либо монотонны на отрезке [0, 1], либо унимодальны. Появление
многогорбых функций делает словесную интерпретацию результа-
тов достаточно сложной. В естественном языке просто нельзя найти
соответствующих им лексем или сочетаний лексем. Однако это не
так уж и страшно, если все результаты, связанные с оценкой >|s
при многошаговом выводе с помощью нечетких схем вывода, будут
лишь внутрисистемными. При выдаче окончательного результата
пользователю системы или для принятия решений по управлению
можно использовать специальную процедуру «аппроксимации»
многогорбых функций теми же словами, которыми характеризуются
исходные частотные квантификаторы с некоторыми словесными доба-
вками (например, близко и часто или между редко и не редко,
не часто).
Пример 3.28. Вернемся к примеру 3.27. На рис. 3.24 показан
в виде штрих-пунктирной кривой результат суперпозиции двух
функций принадлежности, соответствующих тем квантификаторам,
которые имеются в этом примере. С помощью уровня отсечки со зна-
чением 0,7 получены нечеткие интервалы на оси абсцисс. Теперь мы
можем сказать, что диспетчер должен ожидать изменения плана
о
I
г*
о
§ 3.7. КАУЗАЛЬНАЯ ЛОГИКА
145
погрузки с уверенностью не менее 0,7 со значениями внутри интер-
валов (0,62; 0,67) и (0,95; 1).
Если же взять уровень отсечки, равный единице, то диспетчер
может ожидать изменения плана на интервалах (0,6; 0,7) и (0,9; 1)
с теми показателями уверенности, которые задаются функцией ps.
И в том, и в другом случае мы получаем, что при наличии факта
(сведений) о начале швартовки судна «А. Пушкин» опытный диспет-
чер, начинающий готовиться (по крайней мере морально) к измене-
нию плана погрузки, поступает разумно.
Мы рассмотрели лишь простейший случай правила вывода в
случае нечетких частотных кванторов. В литературе по этой про-
блеме, указанной в комментарии к настоящей главе, сформулирова-
ны требования к построению Хв в случае наличия п посылок Ait
из которых следует утверждение В (зависимых между собой или
независимых в смысле влияния на появление друг друга), а также
получение оценок типа х в,в2или XsiVB2, когда из группы посылок
выводится конъюнкция двух фактов или их дизъюнкция. Рассмот-
рение таких достаточно громоздких конструкций выходит за рамки
данной книги.
Другой способ определения функции F, отличный от способа
суперпозиции, состоит в том, что при применении какого-либо
квантификатора к другому квантификатору происходит некое мо-
нотонное преобразование исходной функции принадлежности, сво-
дящееся к растяжению и сдвигу максимума функции в ту или дру-
гую сторону.
Преимущество такого способа определения F состоит в том,
что при монотонных преобразованиях вид функции принадлежнос-
ти меняется не кардинально. Ее унимодальность или монотонность
сохраняется, и переход от нового вида функции к словесной оценке,
соответствующей некоторому квантификатору, происходит куда
проще, чем от многогорбых функций, возникающих в результате
операции суперпозиции.
Пример 3.29. На рис. 3.25 показаны два результата, полученные
с помощью суперпозиции и сдвига с растяжением, для случая,
когда Ха и X соответствуют квантификатору часто. Разница
состоит, по-видимому, в том, что суперпозиция вычленяет в функции
принадлежности часто те значения, которые часто встречаются.
В случае же сдвига и растяжения мы можем интерпретировать ре-
зультат как появление нового квантификатора со значением часто-
часто, который можно при желании аппроксимировать, например,
значением очень часто.
Недостаток второго подхода к определению вида функции F
заключается в том, что ни сдвиг функции принадлежности для х>
ни характер ее растяжения, определяемые функцией принадлеж-
ности, соответствующей Ха, никак не определены. Нужны какие-
то специальные соображения по поводу этих параметров. Но в
настоящее время такие соображения отсутствуют.
146
ГЛ. 3. ПОПОЛНЕНИЕ ОПИСАНИЙ СИТУАЦИЙ
В заключение настоящего параграфа рассмотрим некоторый но-
вый подход к получению нечетких выводов, успешно развиваемый
в последнее время С. В. Чесноковым, Приводимые ниже результаты,
возможно, за исключением их интерпретации, заимствованы из работ
Рис. 3.26
этого автора, указанных в
списке литературы к дан-
ной главе.
На рис. 3.26 показана
некоторая ситуация, исхо-
дя из которой можно ут-
верждать, что некоторые аг
суть Ь, где t = l, 2, ..., п.
Рассмотрим запись вида
а^Ь, которую мы будем
называть детерминацией.
Введем два важных поня-
тия. Точностью детерми-
нации будем называть ве-
личину условной вероятно-
сти P(blai). Полнотой де-
терминации ар~>Ь будем
называть величину услов-
ной вероятности P(ailb).
Если точность детермина-
ции оценивает степень уве-
ренности в том, что появ-
ление некоторого элемента
из А ведет к появлению Ь,
то полнота детерминации
оценивает верность утвер-
ждения о том, что появле-
ние b свидетельствует о на-
личии хотя бы одного эле-
мента из А. Далее мы
всюду будем вместо мно-
жества причин, стоящих в левой части детерминации, рассматри-
вать только одну причину, которую и будем обозначать через а.
Пример 3.30. Пусть, например, на основании некоторых наблю-
дений получена табл. 3.9.
Каждая ее клетка в соответствии с определением точности и
полноты детерминации, которые мы будем соответственно обозначать
буквами I и С, позволяет определить эти характеристики детерми-
нации. Для нашего примера имеем
/(fl^6) = P(^) = w^ = 0,7,
С(а^&) = Р(а/&) = п^ = 0,4.
§ 3.7. КАУЗАЛЬНАЯ ЛОГИКА
147
Для обратной детерминации bt-^a точность и полнота получаются
перестановкой значений точности и полноты для прямой детерми-
нации. Другими словами: I (6н-а)=0,4, а C(bh>a)=Q,7.
Т а б л и ц а 3.9
Есть а Нет а
Есть b 60 590
Нет Ъ 140 210
Таблица 3.10
Есть а Нет а
Есть b 100 100
Нет b 100 100
Таблица 3.11
Есть ас Есть ас Есть ас Есть'ас
Есть Ъ 100 40 0 60
Нет b 0 60 100 40
Таблица 3.12
Есть с Нет с
Есть b 140 60
Нет b 60 140
Пример 3.31. Пусть а означает наличие в данном месте извест-
няка, с — наличие карстовых воронок и пещер в том же месте,
b — наличие подземных рек и озер. Отрицание этих пропозици-
ональных переменных соответствует отсутствию соответствующего
явления. Рассмотрим табл. 3.10—3.12. Что показывают эти табли-
цы? Табл. 3.10 показывает, что на основании некоторой статистики,
отраженной в ней, можно утверждать, что в половине случаев в тех
местах, где имеется известняк, имеются подземные реки и озера.
Табл. 3.11 говорит о том, что при наличии в известняке карстовых
явлений всегда есть уверенность в существовании в этом месте
подземных рек и озер. Даже в том случае, когда карстовые явления
(более точно, их аналоги) имеются не на чистом известняке, то в
40 случаях из 400 есть и подземные реки и озера. Однако в известня-
ковом слое, в котором не обнаружено карстовых являений, подземные
реки и озера искать бесполезно. Вот если их нет в тех местах, где
вместо известняка наблюдаются другие породы, то в 40 случаях
из 400 можно дать положительный ответ и на вопрос о наличии
здесь подземных рук и озер.
Как следует из этих таблиц, / (ан-6)—0,5, а I (асн-6) = 1. Таким
образом, наличие карстовых явлений для известняковых пород
уточняет детерминацию, с помощью которой утверждается наличие
в данном месте, подземных рек или озер. Если рассмотреть ас^Ь,
то, как следует из табл. 3.11, точность ухудшается до нуля. Поэтому
148
ГЛ, 3. ПОПОЛНЕНИЕ ОПИСАНИЙ СИТУАЦИЙ
дополнительная конъюнктивная посылка в детерминации может как
увеличивать ее точность, так и уменьшать ее. Аналогичным образом
можно рассмотреть и случай, когда при переходе от а к b использу-
ется не конъюнкция, а дизъюнкция, т. е. осуществляется переход
к детерминации вида (а'/с)^Ь.
Интуитивно ясно, что детерминации тесно связаны с нечеткими
выводами, когда квантификаторы частоты оцениваются статисти-
ческими вероятностями. Это действительно так. Мы проиллюстри-
руем их связь на примере обобщения понятия силлогизма, являюще-
гося классическим объектом в логике. Как известно, Аристотель
предложил 19 основных модусов силлогизмов, которые дают всегда
верные результаты. Кроме того, имеется еще пять модусов, которые
представляют собой ослабленные основные модусы. Например,
для модуса (все а суть 6; все b суть с)=>(все а суть с) ослабленный
модус имеет вид (все а суть 6); (все b суть с)=5>(некоторые а суть с).
Остальные модусы четырех возможных фигур Аристотеля, кроме
этих 24, не являются в строгом смысле истинными. Детерминации
позволяют расширить множество модусов, оперирование которыми
становится возможным за счет введения в них частотных квантифи-
каторов.
Пусть мы имеем детерминации ah>b и Ь\->с. Эти детерминации
характеризуются своими точностями и полнотой. Обозначим их
для простоты записи следующим образом: I g L1; С (а~>Ь) =
=k g А41; I (b\->c) = l g L2; С (b\->c)~ni g М2. Здесь L1, М1, L2 и М2 —
какие-то конкретные значения интервалов из отрезка [0, 1]. Нас
будет интересовать, что можно сказать при известных i, k, I и т о
точности и полноте детерминации с^а. Эти характеристики детер-
минации с н>а будем обозначать соответственно как г и s, а интервалы,
в которых лежат эти значения,— как L3 и А43.
Если вернуться к рассмотрению силлогизмов Аристотеля и взять
тот модус, который мы только что рассмотрели, то для него L1 =
=L2=L?=1. Относительно Л41, М2 и М3 ничего сказать нельзя.
•Они могут быть любыми интервалами в полуинтервале (0,1].
§3,7. КАУЗАЛЬНАЯ ЛОГИКА
149
Введенные нами характеристики трех детерминаций, определяю-
щих силлогизм, вычисляются по стандартным формулам на основа-
нии табл. 3.13. В соответствии с этой таблицей величина /, на-
пример, равна
i = Х1Н~ хз
XiH-Xa + xj-f-X;
Аналогично определяются и остальные характеристики детермина-
ций, образующих силлогизм.
Поставим теперь перед собой задачу поиска силлогизмов, в ко-
торых участвовали бы частотные квантификаторы, и пусть послед-
ние соответствуют соотношениям, связанным с точностью и полнотой
детерминаций, входящих в силлогизм.
Пример 3.32. В качестве примера такого силлогизма рассмотрим
рассуждение
Среди водителей автобусов мало нарушителей уличного движения
Среди женщин мало нарушителей движения
Почти все водители автобуса — женщины.
По-видимому, читатели не согласятся с верностью полученного
вывода. Но если предположить, что эти рассуждения относятся к
военному времени, то в ситуации, когда класс водителей автобусов
почти включался в класс женщин, такое утверждение могло бы
оказаться верным. Значит, все дело в том, как связаны друг с другом
эти классы, что определяется введенными нами характеристиками
детерминаций, образующих модус силлогизма.
Задачу построения силлогизмов, удовлетворяющих некоторым
заранее заданным требованиям, учитывающим их обоснованность,
можно сформулировать во вполне строгой форме. Вернемся к табл.
3.13. Будем считать хг неизвестными. Выпишем набор ограничений,
которым эти неизвестные должны удовлетворять.
Первое ограничение тривиально:
(1) x1+x2 + x3 + x4 + x54-xe4-x7 + xj= 1.
Следующие шесть ограничений, которые можно назвать ограниче-
ниями на «контекст» силлогизма, вытекают из того, что частоты, с
которыми встречаются а, b и с, должны лежать в некоторых задан-
ных пределах:
(2, 3) 0 < ga xl -j- х2 х3 х4 47 ha 47 1,
(4, 5) 0 < gb 47 х4 х3 х5 -{- х7 47 47 1,
(6,7) 0<^<x1 + x2 + x5J-xe</ic<l.
И, наконец, имеется еще восемь ограничений, связанных с тре-
бованиями удовлетворения определенным ограничениям точности
150
ГЛ. 3. ПОПОЛНЕНИЕ ОПИСАНИЙ СИТУАЦИЙ
и полноты детерминаций, входящих в посылки силлогизма.
(8, 9) i 0 Х1 4“ х3 Д’1,
' + х2 4" х3 4- xi
(Ю, И) Хх4“Х3
«Q - х1 + хз-1- Х5-рХ7
(12, 13) /о = *1 + Х5 С/х,
*14-Хз-|-
(И, 15)
//40 - "гл-х + х2+х5 + х6'
Ограничения (8,9) и (10, 11) задают условия, налагаемые на точность
и полноту детерминации ал-^b, а остальные ограничения — на точ-
ность и полноту детерминации Ь\->с.
Четырнадцать параметров в этих ограничениях (верхние и ниж-
ние границы в неравенствах) дают весьма широкие возможности.
Их задание определяет вид тех частотных квантификаторов, которые
используются в посылках силлогизма. Нас же интересуют значения
четырех ограничений для точности и полноты детерминации сн-а,
которая является заключением силлогизма
Г <_____Ч+-Г2_____<г
° + х2-|-Х5 -рХ8 х’
.. Х1 + *2 -- „
° Х1-|-Х24-Хз4-Х4 1
Тогда при заданных ограничениях и таких ,гг, что все 15 ограни-
чений удовлетворяются, можно утверждать, что точность и полнота
детерминации с^а, которые мы можем обозначить через г и s,
удовлетворяют ограничениям г0<№сДх и s0^s^Sx. Решение сформу-
лированной задачи можно свести к задаче дробно-линейного про-
граммирования. Результатом ее решения будет нахождение таких
областей в пространстве хг, в которых будет реализовываться вывод
с помощью силлогизма с заданными фиксированными значениями
квантификаторов. Для этого только еще нужно сопоставить словес-
ным оценкам этих квантификаторов некоторые отрезки или интер-
валы на отрезке [0, 1].
Нашу постановку задачи можно упростить. Так как из ограниче-
ний 2, 4, 6 следует строгая положительность знаменателей в огра-
ничениях 8—15, то все ограничения можно переписать в линейной
форме. Кроме того, если еще учесть, что Р(ыу)=Р(ы/у)Р(у) и перей-
ти от условных частот к частотам Р (ab), Р (ас) и Р (cb), то и целевые
функции в нашей задаче можно выразить в линейной форме (для
этого нужно будет изменить значение ограничений). Тогда задача
поиска обобщенного (детерминационного) силлогизма будет сведена
к стандартной задаче линейного программирования.
Для качественного анализа того, что получается при решении
подобной задачи, рассмотрим случай, когда нас инетересует лишь
точность соответствующих детерминаций. Кроме того, предположим,
§3.7. КАУЗАЛЬНАЯ ЛОГИКА
151
что имеют место следующие однородные ограничения на точности
детерминаций (они обозначены соответствующими условными ве-
роятностями) и на контекст силлогизма:
х С Р (Ыа) С 1,
(с/b) +( 1,
О < v < Р (а) С 1,
О < v С Р (b) С 1,
О < v <4 Р (с) "С 1,
где х и v — неизвестные пока ограничения на частоты.
С учетом этих неравенств и равенства (1) можно свести исходную
задачу к задаче вида: найти хх, х2, х3, х4, х5, х6, х2 и х8, которые
удовлетворяют ограничению (1) и системе ограничений
(1 —х) х4 + х2 + (1 — х) х3 + х4 > О,
(1 —х)х4 + х3 + (1 —х) х5 + х7>0,
Х1 + Х2 + Х3 + xi 'V,
Х4 + Х3 + X- -^- Х7 (5^ V,
. ^i + x2 + x5 + xe>v.
Кроме того, все хг должны быть равны или больше нуля (это усло-
вие вместе с соотношением (1) гарантирует выполнение верхних
ограничений для всех пяти вероятностей), a P(da) должно лежать
в заданных пределах [6, 1].
Если найти решение поставленной задачи, считая х и v некото-
рыми параметрами, то оно будет иметь вид, различный для трех
областей, на которые разбивается единичный квадрат, задаваемый
соотношениями 0^х<^1 и 0<v=Cl:
!0 для области 1,
2—1/v для области 2,
1—(1—x)(x-|-l/v) для области 3.
Перенумерованные области показаны на рис. 3.27. Их границы опре-
деляются следующими соотношениями:
Область 1
Область 2
Область 3
f v "С 0,5
< 1—х ;
I V ' 1 —х+х2
I v > 0,5
।
( . X
V < 1-f-x—X2
1-х •
V > 1 —х+х2
152
ГЛ. 3. ПОПОЛНЕНИЕ ОПИСАНИЙ СИТУАЦИЙ
Рассмотрим эти области х). В области 1 выполняется неравенство
(ЕДР(с/а)<;1. Оно тавтологично, так как выполняется всегда и ни-
как не зависит от точности детерминаций, образующих посылки. Для
этого достаточно лишь факта существования самой частоты Р(с1а),
что в нашем квадрате всегда имеет место. Значит, область 1 нам ни-
чего интересного не дает. В области 2 выполняется неравенство 2—
l/v^P(c/a)^l. Рассмотрим лишь те свойства, которые мы обозна-
чили через а и с, а про b не будем иметь никакой информации. Тогда
неравенство для Р(с!а) в данной об-
ласти все равно будет иметь место
только потому, что для Р (а) и
Р(с) величина v превышает 0,5.
Таким образом, область 2, хотя и
не тавтологична, как область 7,
но не содержит собственно сил-
логизмов. Утверждения из этой
области можно было бы назвать,
например, тривиальными истина-
ми. Для области 3 выполняется
неравенство
1 —(1 —х) (%+ 1/v) Р \ .
Наличие х в данном неравенстве
связывает точность заключитель-
ной детерминации с точностями детерминаций, входящих в посылки.
Это область обобщенных силлогизмов. Если, например, х=1, то
Р(Ь/а) = 1, Р(с/Ь)=\ и Р(с/а)=1. Мы получаем известный аристоте-
левский силлогизм, называемый обычно Barbara. Интересно, что
при х=1 оказываются незначимыми значения v, т. е. характер
контекста силлогизма. Это означает, что то условие v=2, которое
всегда подразумевается в классическом истолковании силлогизмов
Аристотеля, не является обязательным для модусов типа Barbara.
Если отказаться от одинаковости ограничений v в контексте, то
можно получать и другие расширения силлогизмов. Отметим, что
значение v легко связывается с квантификаторами оценки частоты
типа часто, очень часто, почти всегда. А если правые ограничения в
контексте также сделать различными и отличными от единицы, то
контекст будет определять частотные квантификаторы, с которыми
входят в схему вывода посылки силлогизма.
Пример 3.33. Пусть 0<х<е и 0<v^£, где е — малое число.
Тогда, согласно Аристотелю, такие параметры будут давать ложные
силлогизмы. На рис. 3,28 показаны области, построенные в квадрате
(х, v), аналогичные приведенным на рис, 3,27. Область 1 есть область
ложности силлогизма. Область 2, показанная жирной линией, есть
область тривиальной истины, подобная области 2 на рис. 3.27,
х) Штриховка показывает открытую границу.
§ 3.7, КАУЗАЛЬНАЯ ЛОГИКА
153
В областях 3 и 4 силлогизм существует, а в области 5 не сущест-
вует, Открытые границы областей показаны штриховкой.
Вот пример силлогизма, содержащегося в области существования
силлогизма, показанной на рис. 3,28.
Среди любителей сигар редко встречаются женщины
Среди женщин редко встречаются политические деятели
Среди любителей сигар политические деятели встречаются нередко
В заключение остановимся еще на одном классе правил вывода
нечеткого типа. Такие правила, по-видимому, не имеют прямого
отношения именно к каузальной ло-
гике, но по своей идеологии они
тесно связаны с рассмотренными на-
ми здесь правилами. Эта группа пра-
вил связана с рассуждениями по ана-
логии, играющими огромную роль для
человека и находящими широкое
применение при полуформальном объ-
яснении технологии управления и спо-
собов принятия решений в условиях
альтернативного выбора.
Прежде всего возникает вопрос о
том, что именно следует считать анало-
гией . Рассмотрим следующий пример1).
Пример 3.34. Пусть имеются
два текста, описывающих две си-
туации. Первый текст: «Ромео любит Джульетту. Джульетта
любит Ромео. Ромео — мужчина. Он итальянец. Джульетта —
женщина. Она красива. Она незамужняя». Второй текст: «Тристан
любит Изольду. Тристан — мужчина. Он бретонец. Изольда —
женщина. Она красива. Она замужем за королем Марком». На рис.
3.29 показаны графы, соответствующие приведенным текстам. Из
самих текстов и из рис. 3.29 вытекает (с точки зрения человечес-
кой интуиции), что между обеими ситуациями много общего. Но в
чем это проявляется? Что важно в описаниях для установления
аналогии и что не столь уж важно? Важно ли то, что Ромео и Трис-
тан мужчины? Играет ли роль их национальность? Весомо ли раз-
личие в том, что у Изольды есть муж, а у Джульетты его нет? От-
веты на эти вопросы зависят от того, как будет определено само поня-
тие аналогии.
В настоящий момент все исследователи согласны, что одной из
моделей, которые могут использоваться при выявлении сути рассуж-
дений по аналогии и построении соответствующих правил вывода,
х) Этот пример был рассмотрен в докладе А. Фаррени и А. Праде на Европей-
ской конференции по искусственному интеллекту, проходившей в Орсее в 1982 г.
154
ГЛ. 3. ПОПОЛНЕНИЕ ОПИСАНИЙ СИТУАЦИЙ
может служить введенный еще Лейбницем предикат аналогии. Этот
предикат описывается диаграммой, весьма похожей на диаграмму
моделирования, о которой упоминалось в §2.11:
А => а'
¥$ Т
Рассмотрим класс объектов X, в котором реализуется вывод из
объекта А в объект А', другой класс объектов Y, где реализуется
вывод из объекта В в объект В', и пусть, наконец, между объектами,
входящими в X и Y, установлено некое соответствие (например,
существует взаимно однозначное соответствие между X и Y). Тогда,
если согласно этому соответствию А отображается в В, то должно
выполняться требование коммутативности диаграммы. Другими
словами, должно существовать отображение W, которое устроено
так, что В'отображается в тот же элемент Д', который выводится
с помощью Т из Л, если В' получен за счет вывода Q из В. Напомним,
что и для диаграммы моделирования требование коммутативности
было необходимым. И такое совпадение не случайно. Как приведен-
ная нами диаграмма, иллюстрирующая суть аналогии по Лейбницу,
так и диаграмма, характеризующая отношение моделирования,
по сути одинаковы. Введение нечеткого отношения моделирования
§ 3.7. КАУЗАЛЬНАЯ ЛОГИКА
155
есть один из возможных способов введения аналогий. Но их можно
вводить и без аппарата функций принадлежности, оставаясь в рам-
ках обычных алгебраических систем. Эта возможность иллюстриру-
ется следующим простым примером ’)
Пример 3.35. На рис. 3.30 показаны три элемента А, А' и В,
которые входят в диаграмму для предиката аналогии. Возникает
вопрос, какая картинка должна стоять на месте В' для сохране-
ния коммутативности диаграм-
мы? Для ответа на него необ-
ходимо построить отображения
V и W. Но прежде чем делать
это, необходимо описать сами
картинки, выбрав подходящий
язык. Для нас естественно выб-
рать в качестве такого языка
язык ситуационного управления,
описанный в гл. 2. Позаимство-
вав из табл. 2.1 обозначения
для отношений, введем следую-
щие обозначения: щ — малень-
кий незакрашенный кружок,
а2 — большой кружок, а3— пря-
моугольник, Ь± — крестик, Ь2—
треугольник, Ь3 — маленький
черненький кружок, г10 — быть
сверху, rit — быть снизу, г13 —
находиться в.
Опишем в этих терминах
картинки, соответствующие А,
А' и В.
А (a2r10a3) (fly 43й2)>
A': (a3ri3a2)(ayilal);
В'. (byl0b3)(byi3b3).
Введем теперь соответствие V; зададим его как изоморфизм: а,^Ь,,
ay-^b2, а3<г-^Ь3. Так как мы установили отношение изоморфизма,
то вместе с V однозначно определено и W. Тогда для перехода от
описания А' к описанию В' достаточно произвести нужную замену,
вытекающую из заданного изоморфизма. Проделав это, получим
В'- (b3ri3b2) (byubt). Такому описанию соответствует картинка,
показанная в правом нижнем углу на рис. 3.30. Она и должна быть
помещена в качестве В' в основной рисунок.
х) Этот пример приводится в докладе Д. Пётчке, представленном в материалах
той же Европейской конференции по искусственному интеллекту, проходившей в
Орсее в 1982 г.
156
ГЛ. 3. ПОПОЛНЕНИЕ ОПИСАНИИ СИТУАЦИЙ
Сделаем несколько важных замечаний. Процедура установления
соответствий V и W зависит от выбранного способа описаний А, А'
и В. Представим себе, например, что А' описано не так, как мы сде-
лали, а в следующем виде: A': (a1ri0a2)(a3ri3a2). Тогда сравнитель-
ный анализ описаний не дает возможности найти какой-либо гомо-
морфизм между тремя заданными описаниями. В качестве второго
замечания укажем на то, что для описания нужно выбирать такие
отношения, для которых существовали бы правила вывода, перево-
дящие комбинации одних отношений в комбинации других отноше-
ний. В нашем случае это оказалось возможным из-за наличия пра-
вила вывода, относящегося к пространственной логике взаимного
расположения предметов, которое имеет вид
(а2гыа3) (atri3a2) =>
И последнее замечание. Если Т и V установлены и являются
отношениями изоморфизма, то Q и W всегда существуют и также
являются отношениями изоморфизма.
Анализ приведенного примера и высказанные после него заме-
чания показывают, что на пути практического использования пра-
вил, отражающих рассуждения по аналогии, имеются пока большие
трудности. Особенно это касается выбора подходящего языка опи-
сания множеств объектов, входящих в диаграмму аналогии, и раз-
работки мощных средств преобразований описаний друг в друга.
В гл. 4 мы еще раз вернемся к правилам рассуждений по аналогии в
связи с описанием специального метода, позволяющего генерировать
гипотезы о наличии или отсутствии причинно-следственных связей
между явлениями и распространять эти гипотезы на ранее неизвест-
ные случаи.
Завершая параграф, посвященный каузальным логикам, надо
отметить, что по сравнению с временными и пространственными ло-
гиками эти логики пока еще разработаны весьма поверхностно. Тре-
буются еще большие усилия для их завершения. Особенно мало сде-
лано в области анализа взаимного влияния выводов в каузаль-
ных логиках на выводы во временной и пространственной логиках
(на рис. 3.11 эти. связи отмечены прямыми стрелками, идущими
между соответствующими логиками), а также в области влияния
каузальных логик на принятие решений в логиках действий. Об этом
последнем влиянии мы еще поговорим в последующих главах, где
будут обсуждаться логики действий.
§ 3.8. Неполнота и «абсурдность» знаний
Проблему противоречивости знаний, хранящихся в системе управления, мы
уже затрагивали в § 1.6. При работе системы пополнения знаний, особенно при
использовании правил вывода, которые не имеют абсолютного характера истиннос-
ти получаемых утверждений, появление в памяти системы управления противоре-
чивых описаний объекта управления протекающих в нем процессов или самой
§ 3.8. НЕПОЛНОТА И «АБСУРДНОСТЬ» ЗНАНИИ
157-
процедуры управления не столь уж маловероятно. Поэтому здесь мы обсудим
некоторые из причин появления «абсурдных» знаний и методы их устранения.
Источник неприятностей, которые могут возникнуть в памяти системы,,
кроется в неполноте информации, хранящейся в базе знаний. Если в базе отсут-
ствует некая информация, то совершенно неясно, является ли отсутствующий факт
истинным (и, например, противоречащим какому-либо факту, который уже имеет-
ся в памяти) или ложным. В силу неполноты заполнения памяти отсутствие в
ней какого-либо утверждения ничего не говорит об его истинности или ложности,
возможности или невозможности его появления в памяти. В известной логической
системе средневековой Индии Навья-ньяя различаются четыре вида отсутствия:
отсутствие из-за непоявления этого до настоящего момента времени, отсутствие-
чего-либо, так как к настоящему моменту времени оно уже исчезло, отсутствие-
в силу невозможности появления этого никогда ни в прошлом, ни в настоящем и
отсутствие из-за того, что в настоящий момент присутствует нечто, с чем несовмес-
тимо появление интересующего нас. Все четыре вида отсутствия в Навье-ньяя.
строго различаются; и оперирование с ними происходит различным образом. Не-
что подобное наблюдается и в современных базах знаний как в семиотических
системах управления, так и в других интеллектуальных системах, опирающих-
ся в своей работе на базу знаний. Поэтому мы здесь попробуем обсудить не-
которые фрагменты еще не созданной теории работы с неполными базами
знаний.
Начнем с того, что неполнота, о которой идет речь, многолика. Существует
несколько видов неполноты, по-разному сказывающихся на возможности появления
противоречивой информации в памяти системы. Во-первых, значения данных,
начиная с числовых, могут быть точно не определены. Вместо точного значения
<7, о котором известно, что оно принимает некоторое числовое значение, в памяти
системы имеется лишь указание на некий интервал, в котором находится это зна-
чение. Пусть, например, мы имеем q, значение которого фиксировано где-то в
интервале (0, 10) и g, значение которого фиксировано где-то в интервале (5, 12)..
И пусть нам известно, что g<q. Тогда информация, хранимая в памяти системы,
в некотором смысле противоречива, так как при значениях g из интервала (10,
12) будет нарушаться условие g<q. Для устранения этого противоречия можно
произвести уточнение информации для g и считать, что g приписывается значение
из интервала (5, 10), a q — значение также из интервала (5, 10). С такими ин-
тервальными значениями можно совершать все необходимые операции. В настоя-
щее время арифметика, работающая с интервальными представлениями, хорошо-
развита. Две такие системы описаны в работах, указанных в комментарии к дан-
ной главе.
Можно предполагать, что конкретные значения, которые на самом деле соот-
ветствуют </, не просто фиксированы где-то на интервале (а, Ь), а имеется допол-
нительная информация о выборе истинного значения q на этом интервале. Такая
информация может иметь характер вероятностного распределения для поиска
истинного значения или задаваться, например, в виде функции принадлежности
того типа, который мы ввели в § 2.11 и уже неоднократно использовали. В подобных
случаях также могут возникать противоречивые ситуации, связанные, например,
с несовместимостью таких утверждений: «С вероятностью, большей 0,99, значение
q находится в интервале (0, 1)» и «С вероятностью, большей 0,95, значение q на-
ходится в интервале (10, 60)». Арифметика таких интервальных величин разви-
та чрезвычайно слабо и еще ждет своих исследователей.
Таким же образом можно определить неопределенное множество, неопределен-
ную переменную, неопределенный предикат и неопределенное отношение. Несколь-
ко сложнее вводится понятие неопределенной функции. Весь этот набор не-объек-
тов требует создания для оперирования с ним специального математического
аппарата. Только в этом случае появляется надежда справиться с теорией баз
знаний, в которых представлены неопределенные объекты. В рамках этой теории
должны быть, в частности, разработаны методы уточнения границ интервалов и
описания множеств, предикатов, отношений и функций, которые позволили бы
системе максимально устранять в содержимом памяти возможные в будущем
противоречия из-за поступления новой информации.
158 ГЛ. 3. ПОПОЛНЕНИЕ ОПИСАНИЙ СИТУАЦИЙ
Другим видом некорректности, грозящим «спокойствию» содержимого базы
знаний, является так называемая переопределенность. При переопределенности
одним и тем же интервальным константам, переменным и прочим не-объектам
приписываются одновременно и с равным основанием противоречащие друг другу
значения. Например, некоторой пропозициональной переменной одновременно
приписывается значение истины и лжи. Для работы с подобными переопределенны-
ми (абсурдными) объектами также строятся специальные процедуры. Примером
такой процедуры может служить четырехзначная логика, в которой каждой про-
позициональной переменной приписывается одно из четырех значений: истина,
ложь, полная неопределенность и истина —ложь (абсурд). В последние годы ис-
следования в области логик такого типа активно развиваются, и есть надежда,
что в ближайшем будущем необходимый аппарат будет создан.
В заключение настоящего параграфа напомним о том, о чем уже говорилось
в § 1.6. В ряде случаев противоречащие друг другу утверждения возникают в па-
мяти системы и из-за того, что для каждого достаточно жизненного (не чисто ма-
тематического) понятия всегда возможно его рассмотрение в различных аспектах
или различных возможных мирах. И это противоречие устраняется фиксацией
того аспекта или мира, к которому данный объект относится.
ГЛАВА 4
ОБОБЩЕНИЕ И КЛАССИФИКАЦИЯ СИТУАЦИЙ
Интервью с пожарником в консерва-
тории:
— Вы проработали здесь 20 лет и
теперь, наверное, хорошо знаете раз-
ницу между контрабасом и скрипкой?
— Конечно. Контрабас горит значи-
тельно дольше.
Из музыкального фольклора
§4.1. Суть проблемы
Вернемся на минуту к рис. 1.7, на котором мы привели общую
схему, характерную для систем ситуационного управления; цент-
ральной ее частью был КЛАССИФИКАТОР. С его помощью решает-
ся основная задача — получение классов ситуаций, каждый из кото-
рых однозначно или с определенными приоритетами соответствует
тем или иным решениям по управлению. Отсюда становится очевид-
ной важная роль процесса обобщения описаний и их классификации.
На первый взгляд может показаться, что подобная проблема актив-
но решается в других науках, например, в теории распознавания
образов или в кластерном анализе. Это так и не так. Конечно, многие
методы, развитые в данных разделах дискретной математики, ис-
пользуются (и не безуспешно) и здесь. Но кардинальное отличие
проблемы обобщения и классификации в ситуационном управлении
и вообще в семиотических моделях состоит в том, что, кроме самой
задачи формирования обобщенных понятий и классификации по
множеству заданных признаков, требуется еще решать задачу
определения прагматически важных признаков, которая, как пра-
вило, заменяется в теории распознавания образов поиском инфор-
мативных признаков.
Различие в этих подходах можно проиллюстрировать цитатой х)
«...можно увидеть в логарифмической линейке предмет для забива-
ния гвоздей. Логарифмической линейкой можно забить гвоздь,
в ней есть протяженность и известная масса. Но это тот самый вари-
ант, при котором видишь десятую, двадцатую функцию предмета,
между тем как с помощью линейки можно считать, а не только
забивать гвозди».
Можно сформировать много различных понятий, которые будут
опираться на четкие логические соображения, но они не будут
играть никакой роли при решении задачи управления. Ведь недаром
среди специалистов, занимающихся диагностикой психических
заболеваний, бытует такое определение «Он рассуждает абсолютно
логично, но неверно». Что это значит? Хорошо известен тест, с
х) Семенов Ю. Семнадцать мгновений весны.— Баку, 1981, с. 17.
160
ГЛ. 4. ОБОБЩЕНИЕ И КЛАССИФИКАЦИЯ СИТУАЦИИ
помощью которого проверяется способность к «правильной» клас-
сификации. Из заданных на карточках изображений предметов
надо сформировать некоторые группы — классы. В этой задаче
проверяются те основания, которые будет использовать человек
при образовании понятий. Классическим примером является тот,
в котором испытуемый в один класс объединяет изображения челове-
ка, дерева, карандаша, а в другой — изображения шкафа, водо-
сточной трубы и надувного шара. На вопрос о причинах такой клас-
сификации испытуемый отвечает, что он выбрал информативный
признак — наличие пустоты внутри объекта. Такая классификация,
конечно, логически безупречна. Но ее ли мы априорно ожидали,
начиная испытания? Очевидно, нет.
Итак, первая особенность задач формирования понятий и класси-
фикации в ситуационном управлении — поиск прагматических
признаков классификации, способных обеспечить нахождение таких
обобщенных описаний ситуаций, которые позволяли бы успешно
решать задачу поиска решения по управлению объектом.
В традиционной теории распознавания образов и в кластерном
анализе центральную роль играет понятие признака. Именно приз-
наки выступают в качестве параметров, на основании которых про-
исходит выделение обобщенных понятий и строится та или иная
классификация. В языках описания ситуаций, типичных для всех
методов управления, опирающихся на семиотические модели, ог-
ромную роль играют не признаки, а структуры отношений между
объектами. Во многих случаях, конечно, комплексы отношений
можно было бы рассматривать как своеобразные признаки. Но этому
мешают два обстоятельства. Прежде всего, отметим резкое возрас-
тание числа признаков, так как число возможных комплексов отно-
шений стремительно возрастает с ростом числа отношений и увели-
чением их типового разнообразия, а большинство их комбинаций не
имеет никакого значения для решения задачи обобщения. Кроме
того, признаки приписываются определенным объектами и использо-
вание комплексов отношений в качестве признаков приведет к не-
обходимости введения огромного числа лишних объектов. Понятия,
связанные с этими объектами, также будут лишними, ибо «понятие,
которое мы не можем развернуть в суждение, не имеет для нас ни-
какого логического смысла». ’) И, наконец, зачастую практически
невозможно вычленить тот признак, который используется для фор-
мирования понятия. Примерами таких псевдопонятий (в рамках
признанного подхода) могут служить: ручка управления, нос кораб-
ля, очередь на обслуживание и т. п.
Вторая особенность задачи формирования понятий и обобщения
ситуаций в рассматриваемой области — наличие процедур обобще-
ния, основанных на структуре отношений, присутствующей в опи-
сании ситуаций.
х) Асмус В. Ф. Логика.— М., 1947, с. 70.
§4.1. СУТЬ ПРОБЛЕМЫ
161
И, наконец, третья особенность обсуждаемых процедур, харак-
терных для всех систем, работающих со знаниями,— возможность
работы с именами, присваиваемыми отдельным понятиям и ситуа-
циям. Имена—это, конечно, не признаки. Во всяком случае, это при-
знаки особого рода. И использование их при классификации отличает
описываемый подход от традиционных процедур. Для человека
в его модели мира имена, по-видимому, играют особую роль. Как
писал В. Катаев, «Я заметил, что человека втрое больше мучает
вид предмета, если он не знает его названия. Давать имя окружаю-
щим вещам — быть может, это одно и отличает человека от другого
существа. Но у меня нет такого запаса слов, чтобы назвать миллио-
ны существ, понятий, вещей, окружающих меня. Это мучит. Но еще
большее мучение, вероятно, испытывает вещь, лишенная имени:
ее существование неполноценно. Сонмы неназванных предметов
терзаются вокруг меня и в свою очередь терзают меня самого страш-
ным сознанием того, что я не бог. Не имеющие имен вещи и понятия
стоят в стеклянных шкафах вечности, как новенькие золоченые
фигуры еще не воплотившихся будд в темных приделах храма...
Они ждут своего воплощения, а это может произойти лишь тогда,
когда в мире появится какое-нибудь совершенно новое понятие,
требующее пластического выражения» х).
Эти три особенности задачи обобщения понятий и классификации
заставляют разрабатывать специфические процедуры формирования
понятий и их классификации, ориентированные на решение задач
ситуационного управления и других методов управления аналогич-
ного типа. Общая постановка этих задач в нашем случае имеет
следующий вид (обозначения взяты из § 1.4).
На множестве конкретных ситуаций {QJ найти такое разбиение
их на классы, при котором каждый класс Q1 имел бы в рамках дан-
ной модели управления некоторую «разумную» интерпретацию
процесса управления ситуацией. На множестве полных ситуаций
{SJ необходимо выделить такое множество классов S‘, что каждый
из них допускал бы «разумную» интерпретацию для процедуры
поиска решения по управлению объектом. В частности, классифи-
кация S‘ по некоторому основанию должна быть согласована с
классификацией на множестве воздействий (управлений) {Uk}-
Сделаем некоторые пояснения в связи с подобной постановкой
задач. Как мы видим, задача разбивается на два этапа: обобщение
текущих ситуаций и обобщение полных ситуаций. Такая этапность
не обязательна. Но в большинстве практически интересных случаев
она оправдана. Текущие ситуации связаны только с самим объектом
управления, с особенностями протекающих в нем процессов. Поэтому
классам Q‘ отвечают обобщенные описания данного объекта. Они
базируются на признаках и структурах отношений, характерных
для объекта управления и важных для сжатия информации об
х) Катаев В. Трава забвения,— М.: Детская литература, 1967, с. 31.
6 Д. А. Поспелов
162
ГЛ. 4. обобщение и классификация ситуации
объекте и протекающих в нем процессов. Классы же S' формируются
в основном на базе тех признаков и структур отношений, которые
связаны с процессом управления объектом, они используют как
априорные знания об объекте и методах управления им, так и реаль-
ную предысторию, накопленную в процессе функционирования
системы управления.
При постановке задачи обобщения для текущих ситуаций речь
шла о поиске разбиения множества {Q;}. Другими словами, классы
Q1' удовлетворяли двум требованиям, обязательным для разбиений: j
Q‘(}QJ'=0 если i=/=j и U Q' = Q, где Q—полное множество всех !
i
текущих ситуаций. То или иное решение этой задачи всегда возмож- (
но. При решении же задачи об обобщении и классификации полных
ситуаций, как правило, найти разбиение их множества на классы
не удается. Это связано с тем, что для поиска классов S' использу-
ется весьма неполная информация, получаемая от технологов-уп-
равленцев, имеющих по многим вопросам управления свое личное
мнение, не совпадающее с мнениями других экспертов. Поэтому
вместо разбиения {5г-} на классы в этом случае решается задача о
нахождении покрытия множества S. При этом S‘ Л S7 не обязательно
пусты при но U S'’ = S.
i
И последнее пояснение. В процессе обобщения ситуаций Зг-
и появления классов ситуаций возникает естественная иерархия,
определяемая вхождением одних классов в другие. Так как прагма-
тическая классификация основана на стремлении так сформировать
классы, чтобы облегчить поиск решения по управлению объектом, то
иерархия классов полных ситуаций должна быть согласована
с иерархией воздействий (управлений) следующим образом: ес-
ли S' crS7' и для S' характерны управления из множества t/',
а для S7' — из множества U7, то должно иметь место вхождение
П'сДЛ
Ниже мы укажем пути решения поставленных задач. В ближай-
шем же параграфе мы сообщим некоторые сведения их психологии
мышления, которые оказываются важными при решении задач ;
формирования понятий и классификации в системах семиотического
управления.
§ 4.2. Обобщение понятий и классификация у человека
Здесь мы достаточно бегло и конспективно коснемся данных, накопленных в
области психологии мышления и важных для решения проблем, обсуждаемых в
данной главе.
Прежде всего привлекают внимание современные представления о том, каким .
образом у ребенка возникают понятия, каким образом он из потока собственных
ощущений вычленяет тот или иной их комплекс, который впоследствии выступает
для него как единое обобщенное целое, как понятие или типовая ситуация. Если
суммировать эти представления, то они сводятся к следующему. В начальный '
период (так называемый период бормотания) ребенок, еще не овладевший словом,
а вместе с тем и способностью к декомпозиции ощущений и представлений, воспри-
§4.2. ОБОБЩЕНИЕ ПОНЯТИЙ И КЛАССИФИКАЦИЯ У ЧЕЛОВЕКА 163
нимает конкретные ситуации в нерасчлененном виде. При этом зрительные, акус-
тические и другие ощущения оказываются у него тесно связанными с данной
ситуацией. Поэтому на первом этапе овладения языком именно звуковые образы
начинают играть роль имени некоторого объекта (например, би-би для обозначения
автомашины или кис-кис для кошки). Характерным примером важности «интонаци-
онного бормотания» для понимания ситуации могут служить многочисленные в по-
следнее время мультфильмы для детей, герои которых не произносят никаких слов,
а только интонационно бормочут «по-английски», «по-польски» или «по-русски».
И тем не менее такое неязыковое бормотание вполне однозначно интерпретируется
зрителями фильмов. В этот период ребенок объединяет в единые комплексы слу-
чайно оказавшиеся в ситуации факты и явления. Для него в роли понятий высту-
пают такие конкретные ситуации, в которых как определяющие, так и случайные
факторы оказываются равноправными.
На следующем этапе формирования своей модели окружающего мира ребенок
использует то, что психологи называют «псевдопонятиями». Эти образования в
•отличие от комплексов уже не случайны. Основную роль в них играют ассоциатив-
ные связи между отдельными явлениями и фактами, подкрепляемые той деятель-
ностью, которую реализует ребенок в окружающей его среде. В этот период он
уже овладевает морфологией и приобретает возможность разделять между собой
объекты, процессы и явления (от би-би образует бибика, бибикать, бибиканье).
Чуть позже возникает стремление к классификации накопленных знаний. В этот
период, когда ребенок еще не может оперировать с абстрактными понятиями, а
пользуется лишь понятиями-комплексами, состоящими из конечного числа вклю-
чаемых в данное понятие его конкретных представителей, детская классификация
конкретна. Отсюда возникают такие классифицирующие «определения» как
«Собака — она меня вот сюда укусила» или «Завод •— это где папа работает».
Но в этом возрасте (4—6 лет) уже идет активное развитие способности к вычлене-
нию понятий-классов из окружающего мира. Конкретное уступает место общему.
И если раньше на вопрос «Кто водит поезда?, ребенок отвечал «Машинист», а на
вопрос «Кто ломает игрушки?» — «Петька», то теперь на второй вопрос он вполне
может дать ответ «Ломатель».
Если проследить, как ребенок структурирует окружающую его действитель-
ность, то можно выделить следующие этапы: нерасчлененные гештальты ситуаций,
выделение и называние некоторых элементов таких ситуаций (присвоение им имен
по какой-нибудь составляющей данной ситуации), присвоение самостоятельного
имени ситуации, присвоение имен отдельным объектам и фактам, образование по-
нятий-комплексов, называние истинных понятий и формирование (как правило,
четко не формулируемое) функций классификации, обеспечивающих отнесение
тех или иных единичных сущностей к тем или иным понятиям, вычленение призна-
ков как самостоятельных атрибутов, связанных с понятиями, ситуативная клас-
сификация понятий, логическая классификация понятий.
Многое из сказанного требует пояснений. Мы их дадим постепенно, использо-
вав для этой цели не только наблюдения за развитием способности детей к класси-
фикации и образованию понятий, но и соответствующие наблюдения над взрослы-
ми людьми. Прежде всего еще раз обратим внимание на то, что при формировании
истинных понятий (которыми оперируют и взрослые люди) основания, служащие
для их выделения, появляются генетически раньше возникновения четкого осозна-
ния признаков предметов, процессов и явлений как специальных, особых сущнос-
тей. Поэтому у взрослого человека, как и у ребенка, огромные трудности вызывает
задача определения через признанную структуру тех понятий, которые носят
для него само-собой разумеющийся характер (так называемые бытовые понятия
в отличие от научных, вводимых с помощью строгих научных определений).
В одной из своих популярных книг известный специалист в области языка и
культуры А. М. Кондратов приводит результаты эксперимента, который прово-
дился со школьниками старших классов и взрослыми испытуемыми. Требовалось
дать определение понятия, «дверь». Оказалось, что задача эта чрезвычайно трудна.
Вот образцы полученных в ходе эксперимента ответов.
— Дверь... На нее табличку можно повесить, дермантином обить, ручку
красивую сделать.
6*
164
ГЛ. 4. ОБОБЩЕНИЕ И КЛАССИФИКАЦИЯ СИТУАЦИЙ
— Ну, дверь... Это когда входить в квартиру. Она открывается. Еще запереть
ее можно, чтобы не обокрали.
— Дверь, она деревянная. Хотя не всегда — бывают и стеклянные двери,
в гостиницах, например. Она поворачивается, дверь. Хотя есть и раздвижные —
в купе поезда.
При чтении таких «определений» хорошо всем известного класса предметов
охватывает какое-то чувство неловкости за человека. Но не следует спешить с
выводами об уровне развития тех, кто давал эти ответы. Попробуйте сами дать
определения таких простых понятий, как «окно», «стол», «ложка» и многое дру-
гое х). А вот как понятие «дверь» определяется в «Кратком толковом словаре рус-
ского языка для иностранцев»: «Дверь — отверстие в стене для входа и выхода,
а также то, чем закрывают это отверстие». Теперь трудность задачи очевидна. Ибо
даже толковый словарь дает явно неточное определение (или толкование) понятия
«дверь». Согласно ему, например, штора, закрывающая «отверстие в стене для
входа и выхода», также является дверью.
Итак, большинство понятий, с которыми оперируют люди в повседневной
жизни, не имеют для них строго выделенной признанной структуры. Что же тогда
служит для объединения конкретных сущностей в некоторый класс, которому
присваивается специальное имя? Ответ на поставленный вопрос с виду несложен.
В подавляющем большинстве случаев это объединение происходит по принципу
одинаковой прагматической функции, реализуемой всеми сущностями, входящими
в данный класс. В ответах по поводу двери у испытуемых несколько раз встреча-
лись попытки выявления этой функции. В толковом словаре сделана попытка
также использовать для определения двери ее функциональное назначение. По-
этому столь часто встречаются определения типа «Стул — это на чем сидят»,
«Ложка — это то, чем едят кашу и жидкую пищу» и т. п.
Однако наряду с этим встречаются понятия, которые сформированы по дру-
гому принципу. Интересно, что классифицирующие возможности естественных
языков отражают именно другую возможность выделения понятий. Характерное
для ряда языков деление по родам основано на вычленении в живом сложного при-
знака — пола. Правда, род мы распространяем и на неодушевленные объекты,
хотя говорить о неграмматической основе отнесения стола к мужскому роду, а
табуретки — к женскому не приходится. Но для одушевленных предметов этот
признак выделяет вполне определенные классы сущностей. А в папуасском языке
асмат с помощью грамматики выделяется шесть классов: предметы узкие и высо-
кие, покоящиеся на малом основании (люди, деревья), одинаково высокие и широ-
кие (дом, собака), широкие и низкие, покоящиеся на большом основании (лежащие
стволы, змея), плавающие (рыба, лодка), летающие (птица, бабочка), лежащие
наверху так, что для того, чтобы увидеть их, надо подняться на что-нибудь (лук,
лежащий под крышей хижины на полке и не видный с пола хижины). И для каждо-
го такого класса имеются свои специальные способы обозначения с помощью
грамматических форм.
Язык позволяет вводить и такие абстрактные понятия, которые вычленяются
прямым указанием на классифицирующий признак. Таково, например, понятие
синее, вычленяющее из всего окружения все, что имеет синий цвет.
Классические опыты Лурия, проведенные в тридцатые годы, в глухих киш-
лаках Средней Азии (особенно, когда испытуемыми были женщины) выявили ряд
особенностей формирования понятий, которые у людей, подвергшихся влиянию
науки и обучения научному мышлению, становятся мало заметными. Основной
особенностью, отмечаемой исследователем, является доминанта различения над
сходством. Гипотезу о том, что исторически сначала возникла операция различения
и выделения различия, а лишь потом операция объединения и выделения сходства
выдвинул еще А. Бинэ. Он основывался на том, что факт различия непосредственно
наблюдается в сравниваемых объектах или явлениях, а факт сходства есть резуль-
тат проведения некоторой логической, абстрактной операции. Гипотеза Бинэ
х) По слухам, известному ленинградскому писателю-фантасту принадлежит
следующее замечательное определение ложки. «Ложка, по военной терминологии,
делится на хлебало, держало и соединительную планку».
§ 4.2. ОБОБЩЕНИЕ ПОНЯТИЙ И КЛАССИФИКАЦИЯ У ЧЕЛОВЕКА
165
подтвердилась в опытах Лурии. Испытуемые, например, никак не могли сформи-
ровать класс «домашние животные», когда им показывали изображение на карточ-
ках домашних животных, растений, диких животных, предметов домашнего оби-
хода. И даже на прямой вопрос экспериментатора «Что общего между курицей
и собакой?»,— следовал ответ «Ничего общего. У собаки четыре ноги, а у курицы
две». Подобно детям, жители глухих кишлаков Памира в эти годы так давали «оп-
ределения» понятий: «Дерево — это яблоня, карагач, тополь», «Автобус силой огня
движется и его человек двигает... Если масла туда не наливать, и народа не
будет, он не будет двигаться». Весьма характерно, что многие вещи, которые в
эксперименте предлагалось определить, не определялись потому, что «это и так
видно». В ответ на просьбу дать определение понятию «горы» был получен ответ
«Если горы ты никогда не видел, как тебе это можно объяснить?» Аналогично на
вопрос, как можно объяснить человеку, который никогда не видел автобуса, что
это такое, был получен ответ «Буду так рассказывать: ходят автобусы, у них четы-
ре ноги, передние стулья, чтобы сидеть, крыша для тени и машина... А вообще,
я скажу: если сядешь, увидешь, что это такое».
Приведенные эксперименты еще раз подчеркивают важную для нас мысль
о том, что не признанная структура, находящаяся в центре внимания специалис-
тов по распознаванию образов, а ситуативное положение того или иного факта
или объекта определяют его интерпретацию у человека, не имеющего дело с науч-
ными определениями и теориями.
Перейдем теперь к проблеме классификации. И здесь научный стиль мышле-
ния сыграл значительную роль в нашей оценке этой процедуры. Начиная с Линнея,
давшего блестящую структуру классификации растений, в науке возобладал прин-
цип родо-видовых классификаций. Такие деревообразные классификации стали
повсеместным явлением. Получение классификации подобного типа представляется
заманчивым и абсолютно необходимым. Возрастает роль отношений типа часть —
целое, род — вид, множество — подмножество, элемент — класс и т. п. Однако
те же психологические эксперименты показывают, что естественная для чело-
века классификация основана на других принципах. При раскладывании
карточек испытуемые А. Р. Лурии никогда не клали в одну группу изображение
овцы и волка, ибо «волк загрызет овцу, а это нехорошо», но помещали в одну
группу карточки с изображением овцы, котла, ножа, скатерти, говоря «Будет празд-
ник, расстелим скатерть, овцу зарежем, сварим хороший плов». Таким образом,
ситуативная классификация играет в мышлении человека доминирующую роль, а
категориальная классификация (в частности, родо-видовая) — куда менее зна-
чительную.
Заметим, что среди категориальных классификаций использование прямых
наблюдаемых признаков также встречается весьма нечасто. Многие классифициру-
ющие системы основаны на прагматических признаках, о которых мы уже упоми-
нали. Так, например, образованы понятия орудия труда или растения. Особый
класс понятий составляют социальные понятия: семья, школьный класс, нумизматы
нашего города и т. п. Основанные на них классификации также весьма характерны
для человека.
Остановимся еще на одном тоже важном для построения систем классифика-
ции свойстве человеческого мышления. Известно, что при образовании понятий
значительную роль играют ассоциации, возникающие у всех нас при работе
с языковыми и внеязыковыми текстами. Упомянем о результатах, относящихся
к семантическому пространству Ч. Осгуда. Идея, которую много лет развивал этот
ученый и его многочисленные ученики и последователи, заключалась в том, что
все понятия, которыми оперирует человек, занимают определенное местоположе-
ние в специальном субъективном семантическом пространстве, метрика которого
отражает ассоциативную близость тех или иных понятий. Само это пространство
строится следующим образом. Для естественного языка берутся антонимичные пары
типа: большой — маленький, острый — тупой, быстрый — медленный, добрый —
злой и т. п. Для каждой такой пары (обычно в языке их 300—400) строится шкала,
в которой сами эти слова занимают концевые позиции, а середину шкалы—нейт-
ральное выражение (например, не большой, не маленький и т. п.). Кроме того
на шкале имеется еще некоторое число делений, которые могут и не обозначаться
166
ГЛ. 4. ОБОБЩЕНИЕ И КЛАССИФИКАЦИЯ СИТУАЦИЙ
никакими словами. Для заданного списка слов испытуемые должны на каждой
из шкал отметить местоположение каждого слова. Подчеркнем, что, как правило,
признак, которым характеризуется шкала, никак не связан с понятием, выражае-
мым данным словом. Тем не менее по требованию эксперимента испытуемый все
равно должен (пусть случайным способом) поставить слово из списка на какое-то
деление каждой из шкал. Статистическая обработка результатов подобного экс-
перимента весьма интересна. Оказывается, что наблюдаются определенные статис-
тически значимые закономерности расстановки слов на шкалах. После соответст-
вующей обработки (например, по методу выделения факторов дисперсионного
анализа) мы получаем возможность выделения трех главных факторов, «съедаю-
щих» в сумме почти всю дисперсию. Эти факторы Осгуд назвал: шкала оценок,
шкала силы и шкала активности. Они и образуют оси семантического пространст-
ва1). На них проецируются практически все исходные шкалы. Так шкалы доб-
рый— злой, полезный—бесполезный, хороший — плохой и т. п. проецируются
на шкалу оценок; шкалы типа большой — маленький, тяжелый — легкий,
сильный — слабый и т. п.— на шкалу силы, а шкалы типа: острый — тупой,
быстрый — медленный, спокойный — беспокойный и т. п.— на шкалу актив-
ности .
Теперь каждое понятие может рассматриваться как точка семантического
пространства. Наиболее интересный для нас результат Осгуда состоит в том, что
при использовании кластерного анализа в этом пространстве мы получаем в от-
дельны:; кластерах понятия, связанные между собой либо ситуативными, либо
ассоциативными связями. Примерами кластеров, которые выделяются в семанти-
ческом пространстве Осгуда, могут служить (рыцарь, роза, турнир, перчатка,
поцелуй) или (отец, мать, сын, дочь, собака).
Таким образом, мы приходим к чрезвычайно важному для нас выводу, что
в обычной жизни человек формирует понятия и организует системы классифика-
ции, как правило, на основе тех ситуаций, с которыми on сталкивается в своей
повседневной деятельности и на основании тех прагматических признаков, учет
которых важен для успешной ее реализации. Этот факт необходимо учитывать при
построении классифицирующих систем в системах управления.
И еще одно, последнее в данном параграфе, замечание. При проведении пси-
хологических экспериментов на «мгновенный отклик», в ходе которых испытуемый
должен сне раздумывая» отвечать каким-либо словом на слово, произносимое экс-
периментатором, был обнаружен устойчивый факт вероятностного предпочтения
типового ответа. Характер ответа зависел от того социума, к которому принадле-
жит испытуемый, но в пределах этого социума ответ на многие слова прогнозиру-
ется правильно с вероятностью, близкой к единице. Если, например, просить ис-
пытуемых быстро ответить на задание типа «Назовите поэта», «Назовите плод»,
«Назовите предмет, относящийся к мебели», то в подавляющем большинстве слу-
чаев в качестве ответов мы получим «Пушкин, яблоко и стол». Это происходит по-
тому, что в системе классификации реалий окружающего мира у человека имеется
еще некая оценка типичности той или иной ситуации, того пли иного контекста,
в котором встречается данное понятие. Это как бы готовый отклик на ситуацию,
в которой надо принимать мгновенное решение, когда нет времени на анализ зада-
чи и поиск решения. По-видимому, именно эта способность (а также априорное
проигрывание абсурдных ситуаций, о котором мы говорили в §3.8) позволяет че-
ловеку довольно успешно реагировать на встречающиеся ему непредвиденные и
незнакомые по прошлому опыту ситуации. Во всяком случае, подобная тактика
во многих случаях оказывается успешной.
Отметим, что идея шкал и рован ности, которая следует из приведенных нами
рассуждений, во многом похожа на выводы и положения, изложенные в § 2.4,
посвященном общим свойствам псевдофизических логик.
') Имеется немало критических замечаний по поводу методики Осгуда и ре-
зультатов, получающихся с ее помощью. Но главные идеи, о которых мы говорим,
по-видимому, находятся вне этой критики.
§ 4.3. ОБОБЩЕНИЕ ПО ПРИЗНАКАМ
167
§ 4.3. Обобщение по признакам *
Начнем с самого простого и хорошо изученного случая обоб-
щения по признакам. Общая постановка задачи имеет следующий
вид. Имеется множество объектов Д = {аг} и множество признаков
П = {л/}, каждый из которых может принимать какое-либо значение
из соответствующего множества значений признаков {П?}. Здесь
верхний индекс показывает тот признак, к которому относится это
множество значений. Все множества, кроме А, предполагаются ко-
нечными. Обобщенным объектом называется некоторое подмножест-
во множества А. Если удается построить такую функцию ф(Л1,
л2,...,л.п), что она определяет принадлежность или непринадлеж-
ность любого «г к интересующему нас подмножеству, то эта функ-
ция называется решающей функцией (вместо нее может быть сфор-
мулировано некоторое решающее правило, использующее значения
этой функции или некую процедуру, которую трудно выразить в виде
аналитической функциональной записи, но мы не будем акценти-
ровать пока на этом внимание). В самом простейшем случае функ-
ция ф может быть булевой функцией, если для определения принад-
лежности элемента at к подмножеству А‘^А требуется ответить
на вопрос, какими признаками или значениями признаков он обла-
дает или не обладает.
Какие у нас имеются возможности для построения решающей
функции?
Пример 4.1. На рис. 4.1 показана гистограмма распределения
значений некоторого признака среди множества объектов. Какие мо-
гут быть основания для его разбиения на классы? По-видимому, един-
ственный способ — такое разбиение, при котором в один класс по-
падают объекты с достаточно часто встречающимся значением при-
знака, а один класс от другого отделен «провалами». На рис. 4.1
таким способом можно выделить три класса; им соответствуют три
168
ГЛ. 4. ОБОБЩЕНИЕ И КЛАССИФИКАЦИЯ СИТУАЦИИ
обобщенных понятия, которым можно присвоить новые имена.
Для задания понятий можно использовать задание отрезков, из ко-
торых берутся значения признака: [2, 3], [4, 7] и [9, 12].
Метод, проиллюстрированный в примере 4.1, в свое время
М. М. Бонгард назвал «развал на кучи». В методах такого типа пред-
полагается, что структура признаков выбрана столь удачно, что в про-
странстве признаков объекты, образующие некоторое понятие, груп-
пируются компактным образом. Они как бы «сгущаются» около не-
которого «ядра», характеризующего наиболее существенные для
данного признака комбинации их значений.
На этом принципе построено довольно много методов обобщения
понятий, которые можно было бы назвать методами разделения
в пространстве признаков. В простейшем случае ситуация, показан-
ная на рис. 4.1, обобщается на пространство произвольной размер-
ности и строятся методы выделения наиболее крупных скоплений
объектов, для которых расстояния между признаками значительно
меньше расстояний между отдельными скоплениями. На этой идее
основано большинство методов, развиваемых в рамках кластерного
анализа.
Обобщением такого подхода к образованию понятий служит идея
использования специальной функции для выделения «ядер» из за-
данного множества объектов. Эта функция может быть построена
различными способами. Например, она может принимать на объ-
ектах, входящих в ядро, значения, значительно превосходящие зна-
чения той же функции в некоторой окрестности пространства призна-
ков, окружающей ядро. Эти функции как бы задают распределение
потенциалов в пространстве признаков, почему и сам метод работы
с такими функциями получил название метода потенциальных
функций.
Однако подобные методы, основанные на использовании лишь
сведений о пространстве признаков и некоторых его свойствах, мно-
гократно исследованные в теории распознавания образов, почти ни-
чего не дают для решения задачи формирования понятий, возни-
кающей в теории ситуационного управления и родственных ей под-
ходов к решению проблемы целесообразного управления объектом,
И связано это с тем, что в таких условиях мы всегда имеем некото-
рую априорную информацию о конкретных представителях, входя-
щих в формируемое понятие. Иными словами, мы заранее знаем,
что некоторые объекты at должны входить в формируемое понятие
(положительные примеры), а другие at не должно входить в него
(отрицательные примеры). Это приводит к постановке задачи обоб-
щения по признакам на основе обучающей выборки, состоящей из
положительных и отрицательных примеров. Именно такие задачи
мы и будем изучать ниже в данной главе.
Существует большое число методов, занимающих пограничное
положение между методами типа выделения ядер и методами, осно-
ванными на привлечении дополнительной содержательной инфор-
§ 4.3. ОБОБЩЕНИЕ ПО ПРИЗНАКАМ
169
мации об объекте управления и методах организации управления
им. Опишем кратко наиболее широко распространенный метод та-
кого пограничного типа, который обычно называют методом гипер-
плоскостей.
Поясним его на примере двух признаков, приписываемых объек-
там аг. Это позволит нам проиллюстрировать идею метода геометри-
чески, что обеспечивает необходимую
наглядность. При реализации метода
гиперплоскостей для произвольного
числа признаков нужно произвести
прямой перенос всех процедур с дву-
мерного случая на n-мерный. Итак,
пусть мы имеем некоторое множест-
во объектов Д={аг), элементы кото-
рого обладают двумя признаками
и л2, принимающими значения из не-
которых множеств П1 и П2. Для про-
стоты будем считать, что П1 и № —
определенные отрезки на оси дейст-
вительных чисел. Тогда все объекты ai
в пространстве признаков находятся
внутри некоторого прямоугольника.
Одну из его вершин мы примем .за
начало координат. Рассмотрим ситуа-
цию, показанную на рис. 4.2. На нем
Рис, 4.2
показаны объекты, имеющиеся в обучающей выборке. Зачернен-
ные кружки соответствуют положительным примерам, светлые —
отрицательным. Таким образом, в нашем конкретном случае име-
ется четыре положительных примера и два отрицательных. Бу-
дем формировать обобщенное понятие последовательно. Возьмем
один из положительных примеров (пусть это будет щ) и про-
ведем прямую, которая отделила бы его от некоторого отри-
цательного примера (пусть это будет а6). Для построения раз-
деляющей прямой тл1+/л2+(7=О, воспользуемся следующим прие-
мом. Будем подбирать q таким образом, чтобы точки, соответствую-
щие щ и а6, лежали по разным сторонам от нашей прямой. Подстав-
ляя в уравнение прямой координаты точек, соответствующих аг
и а5, получаем т+8/+д=0 и 5т+3/+<?=0. Так как для определе-
ния трех неизвестных мы имеем два уравнения, то можно разде-
ляющую прямую построить различным способом. Положив, напри-
мер, /=0 и взяв т=1 и с/=—2, мы получим разделяющую прямую
в виде: лх—2=0, которая на рис. 4.2 помечена буквой А. Но эта
прямая плоха тем, что отделяет всего одну точку из формируемого
множества и сложность оставшейся задачи почти сравнима со слож-
ностью исходной. Куда более разумным было бы в качестве разде-
ляющей прямой взять прямую —4=0. Она на рис. 4.2 помечена
буквой В. Эта прямая отделяет от объектов, не принадлежащих фор-
170
ГЛ. 4. ОБОБЩЕНИЕ И КЛАССИФИКАЦИЯ СИТУАЦИЙ
мируемому множеству, все нужные точки, кроме а4. Теперь наша
задача состоит в отделении этого объекта от а5 и щ. Для этого мож-
но, например, воспользоваться прямыми С и Ь на рис. 4.2. Жирным
контуром выделена получившаяся граница между сформированным
множеством объектов (зачерненные кружки) и остальными объектами.
Для проверки того, принадлежит ли произвольный объект a* (nJ, лД
сформированному множеству, надо подставить его координаты
в уравнения прямых В, С и D и проверить знаки отклонения.
Если знаки отклонения составляют комбинацию (—, +, —), то
проверяемый объект принадлежит к сформированному понятию,
если эта комбинация иная, то проверяемый объект к нашему поня-
тию не принадлежит. Такое разделение не всегда получается.
На рис. 4.3 показана ситуация, в которой положительные и отри-
цательные примеры сгруппированы таким образом, что при прове-
дении разделяющих прямых возникают области, не содержащие ни
положительных, ни отрицатель-
ных примеров из обучающей вы-
борки. Эти области отмечены на
рисунке знаком вопроса. Относи-
тельно объектов из них мы не
можем ничего сказать об их при-
надлежности или непринадлеж-
ности к построенному понятию.
Поэтому в методах, опирающих-
ся на разделение в пространст-
ве признаков, применяют спе-
циальные приемы для повыше-
ния эффективности отделения
(например, проводят гиперплос-
кости посредине между двумя
разделяемыми объектами перпендикулярно соединяющему их от-
резку) и для уменьшения объема областей, в которых объекты не
классифицируются. В списке литературы, указанном к данной гла-
ве, эти приемы описаны весьма подробно.
Видоизменением метода разделяющих гиперплоскостей являются
методы, в которых разделение происходит за счет криволинейных
поверхностей. Однако в силу трудностей формирования удачных
разделяющих поверхностей второго и более высоких порядков эти
методы на практике применения фактически не нашли.
Имеется еще группа методов, в которых вместо простого разде-
ления в пространстве признаков используются метрические функ-
ции этого пространства. Например, группировка объектов в новое
понятие происходит таким образом, что расстояния между парами
объектов, попавших в одно понятие, существенно превосходят рас-
стояние от них до объектов, лежащих вне его (разделение по потен-
циальной функции).
Недостаток описанного метода и тех методов, которые подобно
§4.3. ОБОБЩЕНИЕ ПО ПРИЗНАКАМ
171
методу гиперплоскостей используют лишь гипотезу об образовании
в пространстве выбранных признаков компактного множества объ-
ектов, входящих в одно обобщенное понятие, состоит в том, что язы-
ки, на которых задано как описание объектов а, (т. е. язык набора
выбранных признаков и их значений), так и описание самого
сформированного понятия, различны. В нашем конкретном методе
понятие задается перечислением разделяющих гиперплоскостей с
указанием знаков отклонений от них. Такой способ описания поня-
тий не позволяет производить процедуру обобщения на последую-
щем шаге, т. е, получать понятия второго уровня общности, а, сле-
довательно, не дает основ и для построения классификации понятий.
Указанный недостаток, несмотря на простоту процедур форми-
рования понятий по методу разделения в пространстве признаков,
делает эти методы мало пригодными для задач ситуационного управ-
ления. Именно поэтому в системах ситуационного управления, как
правило, используются другие принципы формирования понятий
и организации классификации.
Прежде всего, необходимо указать группу методов, в основе
которых лежит предложенная Бонгардом схема формирования
решающего правила для оценки принадлежности объектов к форми-
руемому понятию. Эта схема устроена следующим образом. Заданы
некоторые логические функции от признаков, которые могут харак-
теризовать объекты. Для осуществления такой возможности предпо-
лагается, что признаки принимают двоичные значения (типа есть —
нет). Подобный переход от произвольных признаков к двоичным
теоретически всегда возможен. Для этого достаточно считать, что
каждое допустимое значение признака л, выступает как самостоя-
тельный признак или что на множестве его значений введены какие-то
предикаты, превращающие их значения в двоичные переменные.
Набор этих логических функций должен быть достаточно богатым,
чтобы охватить как можно больше отношений между признаками.
В методе Бонгарда в зависимости от специфик задачи набор преди-
катов выбирается каждый раз заново. Если нужно различать ариф-
метические выражения, то в качестве таких предикатов выступают
предикаты, связанные с арифметикой, если речь идет о сравнении
некоторых программ и формировании классов программ, то в ка-
честве предикатов выступают предикаты-процедуры, оценивающие
истинность или ложность утверждений, касающихся, например,
длины программы, необходимого объема памяти для ее размещения
или времени ее выполнения. Если же в качестве предметной обла-
сти, где производится обобщение, выбираются задачи, связанные
с ситуационным управлением, то предикаты, превращающие наборы
признаков в двоичные переменные, полностью определяются семан-
тикой той проблемной области, в которой используется ситуацион-
ное управление. Важно лишь выделить достаточно полный набор
таких предикатов, а применение их к объектам можно организовать
и с помощью случайной процедуры.
172
ГЛ. 4. ОБОБЩЕНИЕ И КЛАССИФИКАЦИЯ СИТУАЦИЙ
Когда всем объектам сопоставлены наборы двоичных признаков,
наступает второй этап. На нем случайным образом генерируются
функции от получившихся двоичных аргументов, принимающие
также двоичные значения. Число аргументов у этих функций может
быть либо фиксированным, либо меняться от 1 до щ, где т — число
различных двоичных признаков, получившихся после применения
предикатов к исходному множеству признаков. Каждая такая функ-
ция рассматривается как потенциальное элементарное разделяющее
правило. Для обеспечения разделения нужно, чтобы для всех объек-
тов, входящих в число отрицательных примеров в обучающей выбор-
ке, эта функция обращалась в нуль, а для всех объектов, входящих
в число положительных примеров в той же обучающей выборке,
принимала значение 1 хотя бы один раз (но чем больше, тем разде-
ляющее правило лучше). Тогда дизъюнкция таких элементарных
разделяющих правил может рассматриваться как окончательное
разделяющее правило при условии правильной классификации
всех объектов, образующих обучающую выборку.
Возможны и другие способы организации общего решающего
правила, а также отбора для включения в него элементарных раз-
деляющих правил. Но суть метода от этого не меняется.
Проиллюстрируем выполнение описанной процедуры сначала на
очень простом примере, в котором исходное множество признаков
таково, что они уже являются двоичными. В этом случае первый
этап, связанный с применением подходящих предикатов к исходным
признакам, отсутствует.
Пример 4.2. На рис. 4.4 показана обучающая выборка, состоя-
щая из пяти положительных и четырех отрицательных примеров.
Положительные призеры
Рис.
В качестве признаков выступают четыре независимых признака, ко-
торые нам для простоты записи удобно обозначить через а, Ь, с
и d. Все признаки принимают двоичные значения, и эти значения
приписываются им следующим образом: а=1 (шляпа есть), а=0
(шляпы нет), 6 = 1 (глаза круглые), 6=0 (глаза-щелочки), с=1 (нос
широкий книзу), с=0 (нос узкий книзу), d=l (рот «веселый») d =
§4.3. ОБОБЩЕНИЕ ПО ПРИЗНАКАМ
173
= 0(рот «печальный»). Метод Бонгарда состоит из многократного по-
вторения процедуры случайного формирования элементарного раз-
деляющего правила в виде некой логической функции, проверке
этого правила на эффективность разделения на обучающей выборке
и накопления таких эффективных разделяющих правил, которые
после объединения их через дизъюнкцию дадут глобальное разделя-
ющее правило.
Пусть в результате работы некоторого случайного механизма
были выработаны следующие функции от признаков: bd, c\J a, abc,
abed. Что можно сказать об эффективности порожденных правил?
Стоит ли их сохранять для дальнейшего? Функция bd соответствует
набору признаков глаза круглые и рот «веселый». На отрицатель-
ных примерах обучающей выборки соответствующая функция при-
нимает на всех примерах значение 0. Для положительных примеров
функция bd принимает значение 1 на трех примерах из пяти. Это по-
зволяет оценить элементарное правило разделения М=1 как весьма
эффективное. Функции с\J а соответствует нос широкий книзу или
шляпы нет. На множестве отрицательных примеров эта функция
трижды обращается в 1, а на множестве положительных примеров —
все пять раз. Однако правило cV^=l не обеспечивает высокую эф-
фективность разделения и его не оставляют для дальнейшей работы.
Функция abc требует, чтобы у персонажа была шляпа, глаза-щелоч-
ки и нос, широкий книзу. Среди положительных примеров есть два
таких персонажа. Среди отрицательных примеров подобных пер-
сонажей нет. Значит, элементарное разделяющее правило abc= 1
эффективно. Наконец, функция abed обращается в 1 только для тех
персонажей, у которых есть шляпа, круглые глаза, нос, широкий
книзу, и «веселый» рот. Среди положительных примеров в обучаю-
щей выборке есть один такой персонаж, а среди отрицательных при-
меров таковых вообще нет. Это значит, что правило разделения
abcd=l можно сохранить для дальнейшей работы. Таким образом,
мы решили сохранить три правила разделения. Если считать, что
процедура поиска элементарных правил разделения завершена, то
можно образовать глобальное правило, которое будет иметь вид
bd\/аЬс\/abcd=i. Для того чтобы данное правило можно было
считать окончательным, оно должно абсолютно правильно класси-
фицировать персонажей, входящих в обучающую выборку. Это тре-
бование выполняется. Но само правило получилось у нас избыточ-
ным. Элементарное разделяющее правило abcd=i явно лишнее,
потому что правило bd\/abc~l. уже правильно классифицирует всех
персонажей, входящих в обучающую выборку. Формально это можно
было бы обнаружить, проведя известные из теории функций алгебры
логики преобразования: bd\/abc\/abcd=bd(i\/ас)\/abc=bd\/abc.
На вопрос о том, насколько правильно построено разделяющее
правило можно ответить лишь на основе экзаменационной выборки,
174
ГЛ. 4. ОБОБЩЕНИЕ И КЛАССИФИКАЦИЯ СИТУАЦИЙ
которая не пересекается с обучающей выборкой. Если и на экзаме-
национной выборке правило разделения работает эффективно, то
значит мы удачно его построили. В противном случае эта выборка
рассматривается как дополнительная часть обучающей выборки и
процедура поиска решающего правила повторяется заново.
В заключение опишем еще один метод формирования понятий
на основе признанной структуры, отличающийся по своей идее от
ранее рассмотренных. Этот метод носит наз-
вание метода растущих пирамидальных сетей
(РПС-метод). Для нас он интересен не только
в качестве еще одного метода обобщения по
признакам, но и потому, что он может исполь-
зоваться при планировании многошаговых ре-
шений. И в соответствующей главе книги мы
об этом будем говорить.
Растущая пирамидальная сеть — динами-
ческий объект, ее конфигурация меняется в
процессе функционирования. Она состоит из
вершин двух типов, показанных на рис. 4.5
квадратиками и кружками. Вершины перво-
го типа называются рецепторами, вершины
второго типа — ассоциативными элементами1). Каждый рецептор
соответствует некоторому фиксированному значению определенного
признака. Таким образом, число рецепторов в РПС равно произведе-
нию числа признаков на суммарное число принимаемых ими зна-
чений. Любой элемент РПС может быть в двух состояниях — воз-
бужденном и невозбужденном. Для всех элементов РПС зафиксиро-
вано некоторое определенное число тактов тп характеризующее
период, в течение которого возбужденные элементы сохраняют свое
возбуждение и передают его через свои выходные дуги. Для воз-
буждения рецепторов требуется специальный внешний сигнал, а
ассоциативные элементы переходят в возбужденное состояние, если
на всех их входах в течение определенного числа тактов т2 сохра-
няется возбуждающий сигнал. Таким образом, хотя передача воз-
буждения по дугам РПС происходит мгновенно, каждый ассоциа-
тивный элемент выступает еще и в виде задержки, величина которой
зависит от длины пути, проходимого сигналом возбуждения. Во вся-
ком случае величина т2 должна быть мала по сравнению с
Набор возбужденных рецепторов в некоторый момент времени
образуется в результате подачи на вход РПС в данный момент опи-
сания некоторого объекта через значения его признаков. Интервал
между сменами описаний объектов, подаваемых на вход РПС, всег-
J) По своему функционированию этот элемент есть элемент типа И, но мы
сохраняем его название, данное ему авторами РПС-метода. Обычно под ассоциа-
тивным элементом понимают элемент, реализующий некоторую пороговую функ-
цию.
§ 4.3. ОБОБЩЕНИЕ ПО ПРИЗНАКАМ
175
да превосходит интервал, в течение которого РПС возбуждена.
Это означает, что при подаче любого описания на рецепторы РПС
находится в невозбужденном состоянии.
Если имеется некоторый ассоциативный элемент, то субмножест-
во этого элемента образуют все те элементы, от которых имеются
пути, ведущие ко входам данного элемента. Субмножество опреде-
ляется вполне корректно, если учесть, что в РПС запрещены связи,
которые могут привести к возникновению петель и циклов; иными
словами, ни один ассоциативный элемент не может быть соединен
своим выходом со входом самого себя или входами каких-либо эле-
ментов, входящих в его субмножество. Нулевой слой субмножества
некоторого элемента образуют те элементы, выходы от которых не-
посредственно поступают на входы данного элемента.
Аналогично можно определить и супермножество данного ассо-
циативного элемента, как множество тех элементов, к которым име-
ется путь, ведущий от выхода данного элемента. Те элементы, для
которых этот выход непосредственно является входом, образуют
нулевой слой супермножества.
Динамика изменения (роста) РПС задается с помощью специаль-
ных правил.
1. Пусть при возбуждении некоторой комбинации рецепторов в
существовавшей до этого РПС имелись ассоциативные элементы,
у которых в нулевом слое субмножества возбудилось не менее двух
элементов. Для всех таких элементов происходит следующее. Вы-
ходы всех возбужденных в нулевом слое субмножества элементов
а б
Рис. 4.6
становятся входами нового ассоциативного элемента, вошедшего
в РПС; выход нового элемента становится входом исходного ассо-
циативного элемента; все непосредственные связи, существовавшие
у него до этого с возбужденными элементами из нулевого слоя суб-
множества ликвидируются.
176
ГЛ. 4. ОБОБЩЕНИЕ И КЛАССИФИКАЦИЯ СИТУАЦИЙ
Выполнение этого правила иллюстрирует рис. 4.6. Те рецепто-
ры, которые возбудились, зачернены. На рис. 4.6, а показана РПС
до применения правила, а на рис. 4.6, б — после его применения.
После того, как в соответствии с правилом 1, введены все новые эле-
менты, проверяются условия для применения правила 2 и если они
удовлетворяются, то это правило реализуется.
2. Пусть при возбуждении некоторой комбинации рецепторов
произошло возбуждение определенной части элементов в РПС. Если
множество возбужденных элементов, в котором остались невозбуж-
денными все элементы, входящие в нулевой слой их супермножест-
ва, состоит более чем из одного элемента, то вводится новый эле-
мент, входами которого служат выходы всех упомянутых возбуж-
денных элементов.
Выполнение этого правила иллюстрируется ситуацией, изобра-
женной на рис. 4.7. На рис. 4.7, а показаны два возбужденных эле-
мента: ассоциативный элемент 2 и рецептор 5, для которых в нулевом
I
V5
Рис. 4.7
слое их супермножеств нет возбужденных элементов. Тогда вводится
новый ассоциативный элемент 4 и РПС приобретает вид, показанный
на рис. 4.7, б.
Перейдем теперь к процедуре формирования понятий с помощью
РПС. В обучающей выборке с двоично кодированными значениями
признаков рецептор РПС, соответствующий данному значению неко-
торого признака, возбуждается, если это значение актуализируется,
и не возбуждается в противном случае. На вход РПС последова-
тельно подаются все значения признаков объектов из обучающей
выборки как из группы положительных примеров, так и из группы
отрицательных примеров. При подаче каждого значения происходит
переформирование РПС в соответствии с описанными правилами.
Каждому ассоциативному элементу будем приписывать два пара-
метра т и I, значения которых могут меняться в процессе работы
§4.3. ОБОБЩЕНИЕ ПО ПРИЗНАКАМ
177
РПС. Параметр т есть суммарное число возбуждений ассоциатив-
ного элемента при подаче на рецепторы РПС последовательности
примеров. Параметр I характеризует число рецепторов, входящих
в субмножество данного ассоциативного элемента. В процессе пре-
образования РПС в множестве ее ассоциативных элементов вы-
деляются специальные элементы, носящие название положитель-
ных и отрицательных контрольных элементов для данного по-
нятия.
Формирование понятий происходит за счет выполнения трех
специальных процедур.
1. Если на рецепторы подается описание объекта обучающей
выборки, который является положительным примером, и в РПС не
выделен положительный контрольный элемент понятия, то находится
ассоциативный элемент, у которого максимальны т и I. Такой эле-
мент становится положительным контрольным элементом понятия.
Если в группе элементов с одинаковым максимальным значением т
имеется несколько элементов с одинаковым максимальным значе-
нием I, то в качестве положительного контрольного элемента поня-
тия берется любой из них.
2. Если на рецепторы подается описание объекта обучающей
выборки, который является отрицательным примером, и в РПС
имеются положительные контрольные элементы понятия, не содер-
жащие в своих супермножествах других возбужденных контроль-
ных элементов, то в каждом из этих супермножеств в качестве отри-
цательных контрольных элементов выбираются элементы, имеющие
минимальное значение I. Если таких элементов несколько, то выби-
рается любой из них.
3. Если на рецепторы подается описание объекта обучающей
выборки, который является положительным примером, и в РПС име-
ются отрицательные контрольные элементы, не содержащие в своих
супермножествах других возбужденных контрольных элементов,
то в каждом из этих супермножеств в качестве положительных
контрольных элементов выбираются элементы, имеющие минималь-
ное значение I. Если таких элементов несколько, то выбирается лю-
бой из них.
Выполнение всех трех процедур иллюстрируется ситуациями,
показанными на рис. 4.8. На рис. 4.8, а показана РПС, в которой
около всех ассоциативных элементов проставлено значение т, на-
копленное до этого такта. На вход РПС подан положительный при-
мер. В соответствии с первой процедурой на рис. 4.8, б отмечен
элемент 2, который будет на следующем такте играть роль положи-
тельного контрольного элемента понятия. На рис. 4.8, в показана
РПС, на вход которой поступает отрицательный пример. На рис.
4.8, г показан результат применения второй процедуры. Если теперь
для РПС, приведенной на этом рисунке, на рецепторы поступит опи-
сание положительного примера, то за счет срабатывания третьей
процедуры получится РПС, изображенная на рис. 4.8, д.
и 78
ГЛ. 4. ОБОБЩЕНИЕ И КЛАССИФИКАЦИЯ СИТУАЦИЙ
Контрольные элементы играют важную роль в процессе формиро-
вания понятий. С помощью положительных контрольных элементов
выделяются те сочетания рецепторов (значений признаков), которые
с частотой т встречались в обучающей выборке на положительных
Рис. 4.8
примерах. С помощью отрицательных контрольных элементов вы-
деляются сочетания значений признаков объектов, входящих в
группу отрицательных примеров обучающей выборки. Но не для
всех таких объектов, а только для тех, в которых сочетание значе-
ний признаков возбуждает положительные контрольные элементы,
что соответствует наличию у отрицательного примера такого соче-
тания значений признаков, которое до этого было выделено в ка-
честве важного (контролируемого) для формирования правила отне-
сения объектов к формируемому понятию.
При формировании РПС обучающая выборка используется мно-
гократно. Как только в РПС в соответствии с одной из описанных
выше процедур происходит появление нового контрольного эле-
мента, начинается новый просмотр примеров из обучающей выбор-
ки, начиная с первого. Обучение считается завершенным, если опи-
§ 4.3. обобщение по признакам
17»
сания всех объектов, входящих в обучающую выборку, при подаче
их на рецепторы РПС не вызывают появления новых контрольных
элементов.
Когда понятие сформировано, то РПС дает возможность пользо-
ваться следующим правилом отнесения объектов к сформированному
понятию. Объект а; входит в понятие, если при введении его опи-
сания в рецепторы РПС в ней нет возбужденных отрицательных
контрольных элементов понятия, в супермножестве которых не
имелся бы хотя бы один возбужденный положительный контроль-
ный элемент. Объект а> не входит в данное понятие, если при вве-
дении его описания в рецепторы РПС в ней нет возбужденных поло-
жительных контрольных элементов, которые не содержали бы в сво-
их супермножествах хотя бы одного возбужденного отрицательного
контрольного элемента. Если ни одно из условий, сформулирован-
ных выше, не выполняется, то относительно объекта at не высказы-
вается окончательных утверждений.
Можно показать, что три процедуры перестройки РПС, которые
используются в процессе работы с обучающей выборкой, всегда за
конечное число шагов приводят к завершению формирования поня-
тия. При этом все положительные и отрицательные примеры из обу-
чающей выборки распознаются РПС правильно.
Описанный нами способ формирования понятий обладает не-
сколькими достоинствами. Все понятия, формируемые с его по-
мощью, допускают содержательную интерпретацию, так как зада-
ются через логическую функцию, в которую в явном виде входят
значения исходных признаков. Метод хорошо автоматизируется при
работе на ЭВМ. После сформирования окончательной РПС ту ее
часть, которая не содержит контрольных элементов и не оказывает
влияния на их возбуждение, можно ликвидировать, что во многих
случаях позволяет использовать память ЭВМ весьма экономно.
Для задач типа, характерного для систем ситуационного управ-
ления, весьма часто встречается ситуация, при которой из-за не-
полноты знаний об объекте управления и методов управления обу-
чающая выборка может быть противоречивой. В этом случае одни
и те же описания в ней могут входить и в группу положительных
примеров и в группу отрицательных примеров. Этот важный для
нас случай может быть реализован в методе РПС с помощью некото-
рой модификации процедур ее построения.
В силу противоречивости обучающей выборки решение о вклю-
чении или невключении объекта а,; в сформированный класс должно
быть недетерминированным. Эта недетерминированность должна от-
ражать те частоты, с которыми в обучающей выборке объект at
относится к множеству положительных и множеству отрицатель-
ных примеров.
В РПС сформированные пирамиды могут быть теперь трех ти-
пов: П 1, соответствующие положительному объекту, т. е. объекту,
сформированному на основании тех примеров обучающей выборки,
180
ГЛ. 4. ОБОБЩЕНИЕ И КЛАССИФИКАЦИЯ СИТУАЦИЙ
которые входят только в класс положительных примеров; П 2,
соответствующие отрицательному объекту, т. е. объекту, сформи-
рованному на основании тех примеров обучающей выборки, которые
входят только в класс отрицательных примеров; П 3, соответствую-
щие бивалентному объекту, сформированному на основании приме-
ров из обучающей выборки, которые одновременно входят в оба
класса примеров.
Опишем теперь процедуры, характерные для этого случая. Про-
цедура 1 не изменяется. Процедуры 2 и 3 имеют теперь следую-
щий вид.
2. Если на рецепторы подается описание объекта обучающей
выборки, относящегося к отрицательным примерам, пирамида не
отлична от пирамиды типа П 3 и среди возбужденных положитель-
ных и бивалентных контрольных элементов есть такие, что в их
супермножествах нет других возбужденных контрольных элементов,
то в каждом из этих супермножеств выбирается элемент с наимень-
шим значением I (или любой из них, если их несколько), который
становится отрицательным контрольным элементом понятия.
3. Если на рецепторы подается описание объекта обучающей
выборки, относящегося к положительным примерам, пирамида от-
лична от пирамиды П 3 и среди возбужденных отрицательных или
бивалентных контрольных элементов есть такие, что в их супермно-
жествах нет других возбужденных контрольных элементов понятий,
то в каждом из этих супермножеств выбирается элемент с наимень-
шим значением I (или любой из них, если их несколько), который
становится положительным контрольным элементом.
Кроме того, добавляются новые процедуры, связанные с появ-
лением бивалентных понятий.
4. Если на рецепторы подается описание объекта обучающей
выборки, относящегося к положительным или отрицательным при-
мерам, пирамида есть пирамида типа П 3 и среди возбужденных
контрольных элементов есть такие, которые не содержат в своих су-
пермножествах других возбужденных контрольных понятий (кро-
ме, может быть, самой вершины пирамиды), то в пересечении этих
супермножеств находится элемент с минимальным значением I
(или любой из них, если их несколько), который становится дву-
значным 'контрольным элементом.
5. Если при восприятии некоторого объекта в вершинный эле-
мент пирамиды, образованной возбужденными элементами, вносится
признак П 3 (это происходит тогда, когда эта вершина соответст-
вовала П 1, и поступил отрицательный пример, либо когда она соот-
ветствовала П 2, и поступил положительный пример), то эта вер-
шина становится бивалентным контрольным элементом.
При работе с бивалентными понятиями возникает возможность
выделять в РПС отдельные пирамиды, которые соответствуют поло-
жительным подпонятиям, отрицательным подпонятиям и бивалент-
ным подпонятиям. Эти пирамиды могут вкладываться друг в друга
§ 4.3. ОБОБЩЕНИЕ ПО ПРИЗНАКАМ
181
произвольным образом. Для двузначных элементов надо запоминать
пару параметров т+ и т~ вместо одного т. Они отражают число по-
ложительных и отрицательных примеров обучающей выборки, при
которых данный элемент возбуждался.
Правила отнесения объектов а, к сформированному понятию или
их исключение из него остается прежним. Но к решающему прави-
лу добавляются еще два случая. Объект a-t включается в сформиро-
ванное понятие, если бивалентный контрольный элемент, возбуж-
ден, не имеет в своих супермножествах других возбужденных конт-
рольных элементов и если выполняется неравенство:
h+ 2 т+
------->1-
л- 2 т~
/=1
Здесь h+ и h~— цены ошибки нераспознавания соответствующего
объекта как положительного или как отрицательного, as — число
бивалентных контрольных возбужденных эле-
ментов, в супермножествах которых нет дру-
гих возбужденных контрольных элементов.
Если ф<1, то элемент а, не включается в
сформированное понятие.
Можно доказать, что с ростом объема
обучающей выборки решающее правило ф в
пределе дает известное правило Байеса, мини-
мизирующее риск ошибки при классификации
объектов.
В заключение рассмотрения РПС отметим,
что на практике часто встречаются случаи, ког-
да необходимо формировать понятия, имею-
щие динамическую природу. Для таких поня
ляющих их признаков появляются с определенной закономерностью
во времени. Для формирования подобных понятий, по-видимому,
можно использовать РПС с несколько видоизмененными условиями
возбуждения ассоциативных элементов. А именно, будем считать,
что элемент возбуждается, если сигналы на его входах появляются
в определенной временной последовательности. Для этого на мно-
жестве входов таких элементов можно установить отношение стро-
гого порядка, например, перенумеровав их.
На рис. 4.9 показана некоторая РПС. Если рецепторы этой сети
возбуждаются последовательно, то возбуждение ассоциативных
элементов зависит от последовательности возбуждения рецепторов.
Например, элемент 3 возбудится только в том случае, если сначала
на его вход придет возбуждение от элемента Д затем от рецептора
4, а после этого от элемента 2. Это произойдет, если последователь-
ность возбуждения рецепторов будет иметь вид 1—2—3—4—5 или
182
ГЛ. 4. ОБОБЩЕНИЕ И КЛАССИФИКАЦИЯ СИТУАЦИЙ
/—2—4—3—5. При других последовательностях возбуждения ре-
цепторов элемент 3 не возбудится.
В языке ситуационного управления признанные структуры объ-
ектов в описаниях задаются с помощью отношений г7 — иметь при-
знак, rs — признак — значение, г9 — признак — мера и г10 —
мера — значение. Эти отношения позволяют описывать все необхо-
димые знания о признаках и их значениях. После проведения обоб-
щения по признакам можно переформировать исходные описания в
описания, оперирующие с вновь сформированными понятиями. Воз-
можны процедуры обобщения по признакам, которые ориентиро-
ваны непосредственно на язык ситуационного управления. Здесь
мы не будем о них говорить, так как ниже мы рассмотрим эту проб-
лему с более общих позиций.
Теперь перейдем к другому виду обобщения, учитывающего не
только признаки, присущие объектам, но и те отношения, которые
между этими объектами существуют.
§ 4.4. Обобщение по структурам *
Этот вид обобщения для ситуационного управления наиболее
важен. Так как в задачах ситуационного управления для описания
ситуаций используется язык отношений, именно в структуре по-
следних чаще всего и кроется то, что объединяет в один класс опи-
сания ситуаций, в которых для объекта управления принимается
одно и то же решение. Задача обобщения по структурам тесно свя-
зана с активно развивающимися в последнее время методами поиска
закономерностей, опирающихся на аппарат логики, а не на тради-
ционный для этого класса задач аппарат математической статистики
и теории вероятностей.
При наличии хорошо собранных сведений об интересующем ис-
следователя или систему управления процессе, удовлетворяющих
известным статистическим требованиям, можно применить много
хороших методов, позволяющих описать все те закономерности, ко-
торые можно из этой статистики извлечь. Но, как уже неоднократно
говорилось, «бедой» тех объектов, для которых строятся системы
управления, опирающиеся на семиотические модели, является либо
полное отсутствие наблюдений, которые были бы статистически до-
стоверны, либо наличие лишь косвенных наблюдений, из которых
нужную информацию можно извлечь лишь после проведения логи-
ческого вывода.
Эти обстоятельства привели к тому, что в последнее десятилетие-
активно развиваются работы в области построения закономерностей,
опирающихся лишь на небольшое число подтверждающих и опро-
вергающих примеров. По своим постановкам такие задачи похожи,
с одной стороны, на традиционные задачи распознавания образов
на обучающих выборках, а, с другой стороны,— на задачи, возни-
кающие в индуктивной логике.
§ 4.4. ОБОБЩЕНИЕ ПО СТРУКТУРАМ
183
В начале настоящего параграфа мы опишем процедуру выдви-
жения гипотез и построения закономерностей, в основе которой ле-
жат схемы индуктивной логики, предложенные еще в прошлом веке
С. Миллем. Эти схемы, названные у него методами индуктивных
рассуждений, имеют следующий вид.
1. Метод сходства. Рассмотрим следующий вывод:
а, Ь, с =$>d,
а, е, f =$>d,
a, g, h=i>d,
a, I, m=i>d,
a=> d
Число посылок тут не определено. Во всяком случае их доста-
точно для того, чтобы лицо, реализующее индуктивный вывод, убе-
дилось в том, что именно а есть посылка, в результате которой реа-
лизуется следствие d. Конечно, этот вывод не бесспорен. На самом
деле может оказаться, что d возникает вовсе не из-за а. Причинами
d могут быть, например, b, е, g,. . .,1. Но вывод о том, что именно
а есть причина d, кажется куда более обоснованным, чем любые
другие предположения.
2. Метод различия. Он характеризуется следующей схе-
мой вывода (знак трактуется как «не выводится»):
а, Ь, с^> d,
а, е, f =>d,
a, I, т=$> d,
b, c^>d,
е, f^d,
I, m~dd
a=^>d
Этот метод как бы включает в себя предшествующий, усиливает его.
В более простом варианте схема метода различий может содержать
совсем немного строк, используемых в методе сходства. Например,
всего одну такую строку.
3. М е т о д «о с т а т к о в». В данном методе используется сле-
дующая схема вывода:
a, b, c=$>d, е, f,
a =£>d,
b =$>е,
c=t>f ’
184
ГЛ. 4. ОБОБЩЕНИЕ И КЛАССИФИКАЦИЯ СИТУАЦИЙ
Как и предшествующие схемы, данную схему нельзя считать абсо-
лютно достоверной. На самом деле f может возникать вовсе не из-за
с, а определяться, например, совместным появлением а и с.
4. Метод сопутствующих изменений. Пусть
имеются два множества А и В. Тогда схему вывода можно записать
так:
аг, c=i>b1, а^А, 1 = 1,2, ...,т,
а2, с=?Ь2, Ь{£В,
........ с£А,
ат> с=^>Ьт, сёВ.
А=>В
С помощью этого метода делается привычный индуктивный шаг.
От подтверждающих примеров мы переходим к обобщенному утверж-
дению, касающемуся всех объектов некоторого класса.
Опишем теперь специальный метод формирования гипотез на
основе имеющихся в распоряжении системы наборов примеров, под-
тверждающих и отрицающих формируемую гипотезу (положитель-
ные и отрицательные примеры). Этот метод был назван его авторами
ДСМ-методомх).
Введем два множества — множество причин С={с1; с2, . . .
.. ., сп, ...} и множество следствий Л = {а1; аг, . .., ат, . . Гипо-
тезой будем называть выражение вида Jm(cF^>+ai), где Jm — спе-
циальный квантификатор оценки обоснованности (достоверности)
гипотезы о том, что сг есть причина ai. Одновременно с положитель-
ной гипотезой /+{с;=;>+яг) будем рассматривать отрицательные гипо-
тезы /т{сг=>_аг), в которых с обоснованностью Jm считается, что
ci не является причиной аг. Эти две гипотезы формируются в ДСМ-
методе независимо. Поэтому оценки JA и могут быть, например,
одновременно высокими, или одновременно низкими, или одна из
них может быть высокой, а другая — низкой. В ДСМ-методе оценки
обоснованности принимают рациональные числовые значения.
Для удобства интерпретации Jm будем считать, что некоторая ги-
потеза имеет оценку обоснованности, равную т. Верхний индекс
у оценок обоснованности опускаем, поскольку для положительных
и отрицательных гипотез оценки берутся из одного и того же мно-
жества * 2).
Значения и Jm образуют две прямоугольных матрицы J+
и J~. На пересечении t-й строки и /-го столбца первой матрицы стоит
оценка обоснованности гипотезы Cf=>+a;, а на том же месте во вто-
рой матрице — оценка обоснованности гипотезы
х) Это название образовано из инициалов Джона Стюарта Милля.
2) Заметим, что в ДСМ-методе оценки обоснованности довольно грубые (они
выражаются рациональными числами). Можно, конечно, вместо рациональных
чисел использовать нечеткие интервалы или функции принадлежности.
§4.4. ОБОБЩЕНИЕ ПО СТРУКТУРАМ
185
Основная процедура ДСМ-метода заключается в нахождении на
основе работы с положительными и отрицательными примерами но-
вых гипотез, т. е. элементов указанных нами матриц J+ и J", раз-
мерность которых в процессе работы метода увеличивается, а также
в пересчете элементов этих матриц на основании анализа подтверж-
дения или отвергания соответствующей гипотезы. Кроме того, в
ДСМ-методе имеются правила для перенесения найденных правила-
ми первой группы гипотез на другие «аналогичные» случаи. Таким
образом, правила в ДСМ-методе бывают двух типов: правила выде-
ления закономерностей, построенные по типу индуктивных правил
Милля, и правила распространения найденных закономерностей на
те случаи, для которых пока подобные примеры не найдены. Важно
подчеркнуть, что как правила первого типа, так и правила второго
типа являются правилами не точного, а правдоподобного вывода.
Пусть J принимают значения {0, 1/(га—1), 2/(га—1),...,(га—2)/
(га—1), 1}. Тем самым множество П = {согД={сг=>а;} разбивается
на (га+1) подмножество. В подмножество По входят те элементы Q,
для которых оценка обоснованности равна 0. Относительно этих
гипотез точно известно, что они неверны. В подмножество вхо-
дят абсолютно достоверные гипотезы, так как их оценка обоснован-
ности равна 1. В подмножества где 1=2, 3,...,п—2 входят
соответственно гипотезы, для которых степень обоснованности рав-
на числу, равному индексу у подмножества. Подмножество с ин-
дексом 1/(га—1) — особое. Входящие в него гипотезы считаются не-
исследованными и оценка соответствует значению недоопре-
делено. Используем правило вывода первого типа. Оно могло поро-
дить новые положительные или отрицательные гипотезы, которым
на основании некоторого правила приписаны оценки обоснованности.
Кроме того, выясняем, подтвердился или не подтвердился ряд ранее
найденных гипотез (положительных и отрицательных). Для этих
гипотез пересчитываются оценки обоснованности. Если правило
подтвердило некоторые гипотезы, то пересчет происходит следующим
образом. Множества Qo и сохраняются. Всем подтвердившимся
гипотезам, входящим в подмножества где 1=2, 3,..., га—2,
присваиваются оценки (i4~l)/ra. С помощью правил аналогии (см.
ниже) часть элементов H3,Qi/(n_i) получает некоторые оценки обосно-
ванности. Те элементы из подмножества Q !/(„_!), которые не полу-
чили таких оценок, переходят в подмножество Qi/n и считаются на
следующем шаге снова недоопределенным.
Если некоторые гипотезы не подтвердились, то их оценку обос-
нованности следует уменьшить. Пересчет происходит следующим
образом. Множества Йо и сохраняются. Всем неподтвердившимся
гипотезам, входящим в множества где i=2, 3,..., га—2,
присваиваются оценки (i—1)/га. С помощью правил аналогии часть
оценок переносится на гипотезы, которые входили в множество
Те из них, для которых новая информация не возникла,
образуют множество Qi/„.
186
ГЛ, 4. ОБОБЩЕНИЕ И КЛАССИФИКАЦИЯ СИТУАЦИЙ
Процедура ДСМ-метода завершается в двух случаях: если но-
вые гипотезы не порождаются и если не происходит изменения оце-
нок обоснованности ранее найденных гипотез.
Заметим, что в рамках логики на каждом шаге ДСМ-метода про-
исходит переход от логики одной значности к логике другой знач-
ности (значность логики увеличивается). Наименьшая значность
логики, с которой ДСМ-метод начинает свою работу,— троичная
логика. В этом случае значения 1 и 0 трактуются как абсолютная
оценка истинности гипотезы (она приписана положительным приме-
рам) и абсолютная оценка ложности гипотезы (она приписана отри-
цательным примерам), а значение 1/2 приписывается всем тем (если
они уже есть) гипотезам (или примерам), относительно которых нуж-
ная информация отсутствует.
Последнее, что нам еще нужно рассмотреть, это как устроены
правила порождения новых гипотез и приписывания им некоторой
оценки обоснованности и правила аналогии.
Будем считать, что в качестве исходных объектов выступают
описания ситуаций на некотором реляционном языке, например, на
языке ситуационного управления. Пусть S* — некий фрагмент опи-
сания ситуации. Если известно, что для какой-то ситуации S надо
принимать решение U, а фрагмент S* входит в описание ситуации
S, то гипотеза S*=$>+U имеет право на существование. Если на ос-
новании анализа положительных примеров мы убеждаемся, что
фрагмент S* имеется в большинстве описаний ситуаций, для кото-
рых принимается решение U, то достоверность гипотезы S*=>+(/
должна увеличиваться. Она растет особенно сильно, если этот фраг-
мент отсутствует в отрицательных примерах, соответствующих слу-
чаю принятия других решений по управлению, отличных от U. Если
же это не так, то можно считать, что принятие других решений, от-
личных от U, при наличии фрагмента S*, влияет на некоторый фраг-
мент S**, играющий роль «тормоза» для S*. Идеология такого типа
может распространяться на тормоз второго и более высоких уровней
(тормоз тормоза и т. д.). Тормозы порождают отрицательные гипо-
тезы
Таким образом, в рассматриваемой нами предметной области и
при выбранном языке описания объектов и гипотез правила выра-
ботки гипотез связаны с нахождением фрагментов в описании ситуа-
ций, которые могут оказаться причиной выработки тех или иных
решений.
Общая схема для правила сходства, используемого в ДСМ-мето-
де, имеет следующий вид:
J1 (п- 1) (Q —у G/), JiM (С{, Oj)
J f’n (t i =>+ fl/)
(ci =>+Gy) , JrM (Cj, Gy)
(c, =>+ a,)
§ 4,4. ОБОБЩЕНИЕ ПО СТРУКТУРАМ
187
Здесь Л4(сг, aj} есть предикат сходства, а его оценка Л показывает,
что его истинность абсолютна. Сам предикат сходства определяется
следующим образом:
/И (с;, ay) = ЭкМ (ct, а}-, k).
Параметрический предикат сходства Л4(сг, a,-, k) становится истин-
ным при определенном значении параметра k, который определяет
необходимое число примеров, используемых для выявления сход-
ства. Этот параметрический предикат сходства определяется сле-
дующим образом:
Л4(с-, а,, /г) = Зг 3,. ,, . ,.Зг. ,,
' 1 J ' У 1 Л 2’ У 2 k, k
П b \ / z к \ ----- \ \
', ( & А (Х1 => Ui) I ' i П xi ~~ 1 !
1 ; \ \i=1 /________________
vz, q W.I ^q)(\^l, q < /г)) (хг = a;7) (yt = yq)}
Vz, и ь ('г => u) (ci г)) ((«/ u) («/ = 0))
। V (г = хг)^
J=‘
(*>2).
Для тех, кто не привык к символике математической логики,
сделаем необходимые пояснения, связанные с интерпретацией этого
предиката. Первая часть выражения, стоящего справа от знака
равенства, говорит о том, что по прошлым наблюдениям связь
Xi=>yi реализовалась k раз. При этом J ъ означает, что эта связь
действительно существовала, так как индекс b выделяет на множест-
ве значений логической переменной какое-либо, выделенное для
фиксации истинных значений значение (в эти выделенные значения
могут не входить, как у нас например, значение 0, трактуемое как
ложь, п значение 1/(га—1), которое мы трактуем, как неопределен-
ность). Скобка, в которой имеется знак пересечения, соответствует
утверждению, что во всех наблюдавшихся случаях связи xq=>yi
в левых ее частях имелось нечто общее, некий фрагмент описания ct
и этот фрагмент не пуст. Выражение в первых квадратных скобках
интерпретируется как утверждение о том, что среди наблюдавшихся
k интересующих нас случаев взаимосвязи Xi с yt не было абсолютно
одинаковых. Наконец, последняя квадратная скобка выделяет само
утверждение о наличии связи между сг и су, полученное на основе
k
наблюдений. Условие V (г = л',)есть условие полного исчерпывания
/=1
всего множества примеров.
Если к описанному нами предикату добавить еще одно условие,
присоединенное к Л4(с;, оу, k) с помощью операции конъюнкции,
Vz„«, ((Л. (?1=> «1) (ау S «0) (сгЕ z,)),
188
ГЛ. 4. ОБОБЩЕНИЕ И КЛАССИФИКАЦИЯ СИТУАЦИИ
то мы получим предикат, отражающий сильное положительное сход-
ство между Ci и a.j. В этой записи означает, что z-^Ui имеет невы-
деленную оценку.
Метод сходства был предложен Миллем в следующей словесной
формулировке: «Если два или более случая подлежащего исследо-
ванию явления имеют общим лишь одно обстоятельство, то это об-
стоятельство, в котором только и согласуются все эти случаи, есть
причина (или следствие) данного явления» ').
Метод сильного положительного сходства, который мы получи-
ли из простого метода сходства, у Милля отсутствует.
Второй основной метод, который вытекает из схем индуктивных
рассуждений Милля,— метод различия. Сам автор так сформулиро-
вал его суть: «Если случай, в котором исследуемое явление насту-
пает, и случай, в котором оно не наступает, сходны во всех обстоя-
тельствах, кроме одного, встречающегося лишь в первом случае,
то это обстоятельство, в котором они только и разнятся, есть след-
ствие, или причина, или необходимая часть причины» * 2).
Схема правила вывода по методу различия такая же, как и для
вывода по методу сходства. Разница состоит только в том, что вместо
предиката М(сг, а}, k) используется предикат различия N, имеющий
следующий вид:
М (с,-, а^, k) = 3Х11й13Ха1!/а.. ,3Xk yk
<xi => Уг)) ( ( л j М = с,) (с, = 0)))
vz, g № 7) 0 < 7 < kY) (xi = xg) (Уг = у9)]
Vz,a[((Jb(z=>U)(Cl.Ez))-^
((ау £= и) (а7=0) ( ^ (? = )
/ к \
(г2 = ц2—с,.)( V (v2 = xt)) Jb (г2 => и2)]
4=1 /
/ k \
[((г3 = 0—Ct) (y3 = xt) j
Jb (z3 => u3)) - + (a, s w3)] (k > 2).
В записи этого предиката его начальная часть совпадает с преди-
катом сходства. Пояснения требует лишь последняя часть записи,
начиная со скобки (г2=г2—сг). Знак минус, который здесь и далее
используется, это знак теоретико-множественной операции, порож-
дающей разность двух соответствующих множеств. Вся эта часть
записи формализует утверждение о том, что, при исключении из
'(Милль Д. С. Система логики силлогистической и индуктивной.— М.;
Книжное дело, 1900, с, 313.
2) М и л л ь Д. С. Система логики силлогистической и индуктивной.— М.:
Книжное дело, 1900, с. 314.
§ 4.4, ОБОБЩЕНИЕ ПО СТРУКТУРАМ
189-
рассмо.трения общего, содержащегося в левых частях хг=£>уг в ис-
следуемых примерах, корреляция между хг и yt исчезает.
Так как предикат различия N(ct, aj, k) содержит предикат сход-
ства М (clt aj, k), то метод различия оказывается более сильным, чем
метод сходства. Факты, устанавливаемые по методу различия, более
обоснованы, чем те, которые были найдены лишь на основании вы-
деления сходства. Подобно предикату сильного положительного
сходства можно построить предикат сильного положительного раз-
личия.
Наконец, можно ввести еще методы сходства и различия не для
множества положительных примеров, а для множества отрицатель-
ных примеров. Вид соответствующих правил вывода и предикатов
отрицательного сходства и различий как в слабой, так и в сильной
форме, имеет вид, подобный тем записям, которые мы уже привели.
Поэтому не будем утомлять читателей. Отметим только явную связь
приемов, используемых в ДСМ-методе, с теми приемами, которые
встречались нам при использовании пирамидальных растущих се-
тей.
Как уже говорилось, ДСМ-метод состоит не только из уже рас-
смотренных правил поиска закономерностей, но и из правил рас-
пространения найденных результатов по аналогии на другие слу-
чаи. Возможны два типа выводов по аналогии: с помощью положи-
тельной аналогии и с помощью отрицательной аналогии. Правило
вывода по методу положительной аналогии имеет вид
JrA + (clt aj)
'Jb'(ci=>aj)
Здесь А+—предикат положительной аналогии, А означает, что
истинность этого предиката установлена, а Ь' — характеризует
оценку из множества выделенных истинных значений, в которое
не входит единица, т. е. вывод о связи сг=>а^ не носит абсолютного
характера. Предикат А+ задается в следующем виде:
А + (с„ aj) = 3^u(Jb, (z =>u)Jx =>ay)
(z s C() (u £= aj)) Vx, y [((z £= x) ((у £= и) V
V (« <= У))) -* J и- ((x —г)=фу)].
Сделаем некоторые пояснения. В качестве исходных посылок в
методе положительной аналогии выступает утверждение о том, что
с некоторой достоверностью, характеризуемой оценкой истинности
из Ь', имеется связь z—>u, а относительно связи сг=>а7- пока ничего
не известно (значение т есть значение недоопределенное™, которое,
например, может быть 1/(га—1), как в нашем случае). Известно также,
что z входит в Ci как подструктура, а и есть подструктура для aj.
Тогда утверждается, что при исключении z из посылки вывод (х—
—z)=>y будет оцениваться как недостоверный. Множество невыделен-
ных оценок истинности н' может определяться тремя различными
190
ГЛ. 4. ОБОБЩЕНИЕ И КЛАССИФИКАЦИЯ СИТУАЦИЙ
способами, что дает три версии предиката положительной аналогии
и, следовательно, три версии правила вывода по положительной ана-
логии. В первой версии в качестве н' берется множество, состоящее
лишь из значения 0. Во второй версии это множество расширяется
на все невыделенные истинные значения, кроме значения т. В тре-
тьей версии в н' включается и т. Ясно, что эти три версии упорядо-
чены по своей силе. Вывод, сделанный, например, по первой из них,
влечет за собой и два остальных вывода.
Предикат отрицательной аналогии, входящий в правило вывода
по отрицательной аналогии (вид того, что осталось, совпадает с
правилом положительной аналогии) записывается следующим об-
разом:
Я - (cf, ау) = Зг, „ (J„ (z => u)JT (с; => aj)
(z £= (u s aj)) Vx< y [((г £= x) ((у c= и) V
V (« s У))) - + Jb"((x~ z) => У)] •
Как видно из записи предиката отрицательной аналогии, внешне он
почти ничем не отличается от предиката А+. Только вместо множест-
ва Ь' взято множество н, состоящее из всех невыделенных элементов,
кроме Онг, а вместо множества н' — множество Ь". Если в качест-
ве Ь" взять 1, то мы получим первую, наиболее сильную версию
вывода по отрицательной аналогии, при отождествлении Ь" с мно-
жеством всех выделенных элементов получается вторая версия, а при
добавлении еще элемента т — третья версия.
В заключении самого правила вывода по аналогии с помощью
предиката Л" вместо стоит JH, где н—множество невыделенных
оценок истинности, в которое не входят значения 0 и т.
Мы ввели, следуя авторам ДСМ-метода, несколько правил выво-
да, формирующих гипотезы и ряд правил вывода, распространяю-
щих по аналогии накопленную информацию на пары (с;, ау), для
которых гипотеза непосредственно не выведена. Поскольку порядок
применения правил первой группы не фиксирован, то вполне воз-
можно, что на некотором шаге в памяти системы возникнет противо-
речивая информация. Например, относительно некоторой гипотезы
Cj^aj будут существовать два утверждения, одно из которых «голо-
сует» за наличие связи сг с а^, а другое отрицает ее. Однако можно
показать, что непротиворечивости можно добиться, если избегать
комбинации пар правил вывода первой группы, относительно кото-
рых известно, что хотя бы одно из них является сильным, если одно-
временно применяются правила по сходству и по различию. Можно
вообще не заботиться о противоречиях, тем более, что относительно
комбинаций правил вывода по аналогии с правилами первого и вто-
рого типов проблема порождения противоречивых утверждений не
исследована. Практическим выходом из той ситуации, когда возни-
кает противоречие, является исключение этой пары (сг, а}) из мно-
жества выработанных гипотез и присваивания сг=>а7- значения
оценки т.
$4.4. ОБОБЩЕНИЕ ПО СТРУКТУРАМ
191
При практическом применении ДСМ-метода появляются два
важных вопроса. Как оценивать достоверность той или иной полу-
ченной гипотезы? Как организовать последовательность применения
правил вывода новых гипотез и правил аналогии для достижения
наиболее эффективных гипотез при условии принятой оценки их до-
стоверности? Ответ на эти вопросы весьма важен. Но, к сожалению,
сегодня его получить еще не удается. Авторы ДСМ-метода в качест-
ве оценки достоверности гипотез предлагают векторную оценку
вида v=<n, tn,ly, где п — число шагов ДСМ-метода, которое потре-
бовалось для вывода данной гипотезы, т — характеристика мно-
жества правил, использованных при данном выводе; I — характе-
ристика, зависящая от того, какие именно множества использо-
вались при выводе (т. е. каковы были индексы у J в предикатах,
использованных при выводе). В оценке v учтены, по-видимому,
все необходимые сведения, способные повлиять на достоверность
окончательной гипотезы. Но беда заключается в том, что сейчас нет
соображений о процедурах, позволяющих вычислять т и I, а также
нет никаких методов (что, впрочем, общая беда всех задач с вектор-
ной оптимизацией) сравнения между собой оценок v в области
множеств Парето.
Для решения проблем, связанных со вторым вопросом, можно
использовать некоторые частные соображения, полученные автора-
ми ДСМ-метода. Обозначим через некоторое правило вывода,
причем /? — положительное правило, a Rj — отрицательное пра-
вило, Rcc, Rc, Raw — соответственно правила сильного и слабого
сходства и правила аналогии версии i (i = 1, 2, 3). Их суперпозиция
означает последовательное применение правил вывода. Доказы-
ваемые в рамках ДСМ-метода соотношения, связывающие между
собой правила вывода, имеют вид
(1) ^(^+О = ^+(^1).
(2) ^(^(П,-)) = ^(Пг),
(3) R-(RT^i)) = Rc^l),
(4) /?с-д^ед=^(^).
Эти четыре свойства отражают то обстоятельство, что последова-
тельное применение двух одинаковых методов сходства не приводит
к появлению новой информации. Поэтому такие последовательности
правил вывода нерациональны.
Кроме того, используются еще шесть соотношений
(5) Зй.((^а,(^(П,))^^(П£))),
(6) ^(Qjs^,^^)),
(7) зй.((^(^ед^^+^)))>
(8) Л№)е^+ (W<)).
(9) /?Ж) (#№))>
(10) 3Q//?m)^^ (#№))•
192
ГЛ. 4. ОБОБЩЕНИЕ И КЛАССИФИКАЦИЯ СИТУАЦИЙ
В этих соотношениях индекс р означает сильное или слабое сходст-
во, а индекс h — сильное или слабое различие. Последние соотно-
шения показывают, что применение правил аналогии приводит к
расширению множества гипотез, которые, таким образом, считаются
доопределенными. Использование приведенных отношений между
Рис. 4,10
правилами вывода, по-видимому, в будущем сможет помочь при
построении более эффективной процедуры нахождения гипотез, чем
та, которая выполняется в существующей сейчас программной реа-
лизации ДСМ-метода. То, что есть сейчас, требует многократного
просмотра совокупностей из k пар, поиска пересечений в левых и
правых элементах этих пар и выделения описаний, входящих в эти
пересечения. Непустые пересечения будут соответствовать ct и а3
и образовывать гипотезу c^aj. В методах, основанных на разли-
чии, кроме этой процедуры, требуется еще найти контрпример, воз-
§ 4.4. ОБОБЩЕНИЕ по структурам
193
пикающий при отсутствии в пересечении левых частей гипотезы ct.
Для устранения факториальной сложности пой, которая появляется
при прямом поиске всевозможных пересечений описаний по k
штук (величина k меняется от 2 до п, где п — число описаний, хра-
нящееся в исходном множестве), можно применять различные прие-
мы уменьшения числа реализаций пересечения одного и того же
описания с другими. Но мы на этом останавливаться не будем.
При реализации правил аналогии также требуется перебор, но не
по k элементов, как для правил формирования гипотез, а лишь по
й=2. Однако и в таком случае при большом объеме исходного мно-
жества и множества порожденных гипотез прямой перебор по парам
для выявления условий применимости того или иного метода ана-
логий также имеет полиномиальную сложность высокого порядка.
Поэтому и здесь нужны специальные приемы, уменьшающие число
сравниваемых пар описаний.
Хотя сущность процедуры, реализуемой на ЭВМ, достаточно
ясна из вида записей предикатов сходства, различия и аналогий,
проиллюстрируем одну из этих процедур блок-схемой программы,
показанной на рис. 4.10. На нем приведена блок-схема для правила
положительной аналогии версии 3.
На рис. 4.11 в весьма схематической форме показана общая блок-
схема программы, работающей в соответствии с ДСМ-методом.
Прежде чем завершить рассказ о ДСМ-методе, сделаем одно важ-
ное замечание, имеющее большое значение для использования мето-
дов структурного обобщения в системах типа систем ситуационного
управления. Как следует из описаний основных предикатов, входя-
щих в правила и процедуры ДСМ-метода, этот метод успешно ра-
ботает лишь при наличии непустых пересечений щ и а}-. Другими
словами, предполагается, что причина, порождающая связи вида
Хг=^уг, х2-=^>у2, ..., xn=>yn, единственна. На самом деле такое допу-
щение слишком жестко. Оно может часто приводить к появлению
пустого пересечения из-за того, что причина не единственна. В дру-
гих случаях оно может приводить и к неверным выводам относитель-
но истинных причин. Например, обобщая подобным образом два
высказывания «Сегодня прекрасная погода, я в отпуске — поеду
на дачу» и «Сегодня прекрасная погода, воскресенье — поеду на
дачу», система придет к выводу, что причина поездки на дачу —
наличие хорошей погоды, т. е. будет считать достоверной гипотезу:
«Сегодня хорошая погода — поеду на дачу». На самом деле причи-
ной может быть некоторая логическая функция от фрагментов опи-
саний, входящих в Xj, т. е. вместо простой гипотезы сг=>а7- введена
гипотеза вида f(c), cj, ..., с"’)=>а7-. Вид этой функции может быть
произволен. Например, функция вида f=c}cl говорит о том, что
связь f=>aj имеет место лишь тогда, когда в описании присутствует
с} и отсутствует фрагмент с]. Таким образом, с, играет здесь роль
тормоза, запрещающего появление следствия а} даже при наличии
7 Д. А. Поспело»
194
ГЛ. 4. ОБОБЩЕНИЕ И КЛАССИФИКАЦИЯ СИТУАЦИЙ
причины с}. В случае же f=c?(c?Vc-) фрагмент 4 может рассмат-
риваться как тормоз для тормоза с?, так как наличие с] даже при
наличии с' создает условия для возникновения связи f=^aj.
Конец процедуры
Рис. 4.11
Переход от принципа единственной причины к рассмотрению со-
вокупности причин вместе с тормозами и тормозами на тормозы
резко расширяет возможности метода формирования гипотез. В этом
§ 4.4. ОБОБЩЕНИЕ по структурам
195
с-лучае можно рассматривать обобщенные правила вывода типа пра-
вил положительных и отрицательных сходств и различий и модифи-
цированные правила вывода по аналогии. В настоящее время в
ДСМ-методе нет реально действующих процедур такого типа, но
создание их не представляется слишком сложным. Интересна и не
решена пока еще и задача установления соответствия между пра-
вилами вывода по аналогии, применяемыми в обсуждаемом нами
методе обобщения по структурам, и ме-
тодами вывода по аналогии, о которых
шла речь в § 3.7.
Кроме того подхода к обобщению по-
нятий по структуре, который основан
на идеях, высказанных еще Ф. Бэко-
ном и С. Миллем, можно построить и
другие процедуры, не опирающиеся в
явной форме на идею индукции. Рас-
смотрим в связи с этим ряд примеров.
Пример 4.3. На рис. 4.12 показана
некоторая структура, состоящая из одно-
типных объектов с именами ilt i2...i9.
Ее можно рассматривать, например, как
игровое поле для известной всем с дет-
ских лет игры в крестики-нолики. Сплошным стрелкам на этом
рисунке соответствует отношение г32 — быть справа, а пунктир-
ным стрелкам — отношение г41 — быть снизу. Всю показанную
структуру можно описать на языке ситуационного управления сле-
дующим образом:
(((«РЁ) Г32 (apij) ((api3) r32 (api2))),
(((«PE) r32 (api4)) ((api„) r32 (api6))),
(((«РЁ) r32 (api7)) ((api9) r32 (api8))),
(((«РЁ) r41 (ape)) ((api7) r41 (api4))),
(((«РЁ) r4i («РЁ)) ((«РЁ) Гц («РЁ))),
(((«РЁ) r41 (api3)) ((api9) r41 (ape))).
Тройными скобками в этой записи выделены однотипные струк-
туры. Первые три и соответственно последние три структуры отли-
чаются друг от друга лишь использованными в атомарных форму-
лах именами. Установим между первыми тремя фрагментами отно-
шение изоморфизма: /2<—>/5<—>/8; i3^is^i3. Если для изо-
морфных троек ввести обозначение g2, и g3, то все три первых фраг-
мента станут одинаковыми и примут вид (|2^32?i) (ЬЕ^г)- Это опи-
сание можно считать новым понятием — горизонтальный ряд из
трех элементов. Его черезвычайно легко обобщить на случай, когда
в ряду имеется п элементов. Описание этого понятия записывается
следующим образом:
(У 32^1) (-зОг-а) • • • (^лг32?п-1)
7*
196
ГЛ. 4. ОБОБЩЕНИЕ И КЛАССИФИКАЦИЯ СИТУАЦИИ
Рассмотрим теперь три последних фрагмента в исходном опи-
сании. Введем следующий изоморфизм для имен: >ie;
<->z3; >£s<—>i9. Если для изоморфных имен ввести обозначения ц2,
T]i и т|3, то все три последних фрагмента примут вид (т]2 г41 т^) (ц3
г41т]2). Это описание можно считать новым понятием — вертикальный
ряд из трех элементов. Его также нетрудно обобщить на случай,
когда в вертикальном ряду имеется п элементов:
(ibGBIi) (П3Г41П2) • • .(Л„г41Л„-1)-
Установим теперь изоморфизм EiWrp; 1д-^ц2; t3<-»rj3; г32<-+Гц и обо-
значим отношение, характеризующее последний изоморфизм, через
га. Тогда получим запись, в которой v; есть обозначения изоморфных
и тр: (VaWVi) (v3cov2). Смысл этого понятия — ряд иЭ трех эле-
ментов. Для произвольного п — ряд из п элементов вида
(v^vj (v3wv2)...(vn<ov„_.).
Для более полного определения последнего понятия надо в изо-
морфизм между отношениями включить еще отношение быть слева
и быть сверху.
Сделаем некоторые замечания в связи с только что приведенным
примером. С помощью операции изоморфизма мы ввели в описание
некоторые новые элементы; их можно считать классами, в которые
входят все элементы, изоморфные между собой. Такие классы при-
нято называть классами эквивалентности. В ходе формирования
окончательного описания мы последовательно увеличивали мощ-
ность этих классов. На рис. 4.13 показана получившаяся иерархия.
§4.4. ОБОБЩЕНИЕ ПО СТРУКТУРАМ
197
Это типичная родо-видовая иерархия, которая упоминалась в
§4.2.
Пример 4.4. Пусть дано следующее описание ситуации на языке
ситуационного управления:
((ap*i) r7ed) ((api2) г31 (ар^)),
((ар*з) r3i (api2)).. . (api10) r3i (api39)),
((api\) r7 (vr80)) ((api2) r7 (vr80))...
(WHo) G (vr80)).
Здесь приняты следующие обозначения: а — автомобиль, i}(J=
= 1,2,...,40) — различные государственные номерные знаки, d —
заправка автомобиля, v — скорость, г76 — совершать действие,
г31 — быть сзади, г7 — иметь признак, rs — признак — значение.
После пояснений обозначений ситуация, описанная выше, стано-
вится ясной. В некотором месте на заправку имеется очередь из
40 автомобилей с конкретными государственными номерными зна-
ками. Автомобиль с номерным знаком в данный момент заправ-
ляется топливом.
Будем постепенно проводить обобщение нашего описания.
Прежде всего введем свободные номера £2,...,£4o, которые будут
соответствовать любым попарно различным государственным но-
мерным знакам. Автомобиль (ар^) имеет некоторый, точно не на-
званный номер. Кроме того, не будем фиксировать число автомоби-
лей в очереди. Для этого введем кроме свободных имен еще и сво-
бодный порядковый номер б. Значениями б могут быть любые эле-
менты натурального ряда. После этого находим
№p5i) r26d) ((ар?2) r34 (apSJ)...
((Ф?б) r3i W?6-i)) ((apgt) r7 (vr80))...
((цр£6) r7 (щ80)).
Это описание может рассматриваться, как структура понятия «оче-
редь автомобилей на заправку». Если теперь исключить из описа-
ния первую скобку, то оставшуюся часть можно считать структурой
понятия «стоящая колонна автомобилей». Если же вместо значения
скорости 0 в описании присутствует некоторое ненулевое свобод-
ное значение X, то полученная структура может интерпретироваться
как «движущаяся колонна автомобилей». Если, наконец, вместо а
в описание подставить свободную переменную т|, интерпретируемую
на множестве объектов, способных к движению, то находим
((ПР^) r3i W) • • • ((ПрВб) r3i (ПР?в-1))
((TlP^i) G (^8Х)) •. .((т]р£б) G (цг8Х)).
Это описание отражает структуру понятия «движущаяся колонна
объектов». Если из него исключить информацию о скорости, заме-
нить атомарные тройки с именами (т]рЕ;) на vt, а отношение г..л
198
ГЛ. 1. ОБОБЩЕНИЕ И КЛАССИФИКАЦИЯ СИТУАЦИИ
заменить на со, то мы получим
(v^ovj (v3®v2).. .(v6cov6_4).
Если это описание сравнить с тем, котороемы получили в предшест-
вующем примере, то при отождествлении б с п мы увидим их полное
совпадение. И действительно колонна неподвижных объектов вполне
может трактоваться, как ряд из п элементов.
Пример 4.5. Рассмотрим следующее описание ситуации:
((Pl'V) г-,с)
((М) r59c)...((₽6r2f) г59с).
Здесь Р; — сокращенная запись атомарного описания вида
(gpij), где g— станок, I, — индивидуальные номера станков, f—
фрезерный станок, с — состояние быть свободным, г.2 — быть эле-
ментом класса, г59— находиться в состоянии. Напомним еще раз,
что между всеми скобками имеется отношение быть одновременно.
Таким образом, здесь описана ситуация, что в некоторый момент
времени б фрезерных станков свободны. Обобщим это описание с по-
мощью квантификатора х, интерпретируемого как некоторые из.
Новое описание будет иметь вид ((xg')r2/)r59c. Смысл этой записи та-
кой же, как и исходной, ибо значение б не определено. Если же,
например, мы располагаем априорной информацией о количестве
фрезерных станков на данном предприятии и значение б указано
конкретно, то в зависимости от б и общего числа фрезерных станков
квантификатор » может принимать значения: лишь небольшая часть,
примерно половина, почти все и т. п.
Обсудим еще два небольших примера.
Пример 4.6. Рассмотрим описание
Wi) r7 (сгД)) r7 (сгД)) ((/ipz3) r7 (cr8&3)),
где h—-кран, ilt i2, 1Я — индивидуальные номера кранов, с — цвет,
bi, Ъ2, bs— конкретные значения цветов. Отношения имеют тот же
смысл, что и в примере 4.4. Заменим это описание описанием, в
котором модификатор т имеет значение цветной’. ((mh)pii) ((m/t)pz2)
((m/i)pf3). Смысл его состоит в утверждении о существовании трех
кранов, окрашенных в некоторые цвета.
Пример 4.7. Пусть а — молоток, b— пила, с — клещи, d — ста-
меска, е — рубанок, г47— быть инструментом для, pt — забивание
гвоздей в дерево, р2—• разрезание дерева на части, р3 — вытаскива-
ние гвоздей из дерева, р4— создание углублений в дереве, р5 — вырав-
нивание поверхности дерева. Рассмотрим описание, в котором точки
с запятой, стоящие между скобками, соответствуют отсутствию меж-
ду ними отношения быть одновременно, (ar^pi); (brl-p2)’, (cr47p3);
(dr47p4); (ег47щ). Введем понятие г — инструмент и понятие р —
процесс обработки дерева. Тогда описание (гг47р), которое заменяет
предшествующее, можно интерпретировать, как понятие столярный
инструмент.
$ -1.4. ОБОБЩЕНИЕ ПО СТРУКТУРАМ
199
О чем говорят приведенные нами примеры? Скорее всего о том,
что способов обобщения по структуре довольно много. В примере
4.3 обобщались объекты, участвующие в описании, их имена и от-
ношения. И это обобщение происходило за счет установления неко-
торого-изоморфизма. В примере 4.4 кроме обобщения по именам ис-
пользовалось еще обобщение по значению признака V, а также за
счет введения неопределенного количественного показателя 6.
В примере 4.6 обобщающим фактором было введение модификатора
цветной вместо конкретного указания на цвет. Наконец, в послед-
нем примере использовано обобщение по процессам с обобщением
по объектам.
Для каждого вида обобщений нужно иметь специальные сред-
ства. Однако для многих из них существует общая модель, свя-
занная с моделью представления описаний в виде семантического
графа. Каждый семантический граф (СГ) представляет собой взве-
шенный мультиграф, причем веса могут приписываться как верши-
нам СГ, так и его дугам. Будем рассматривать СГ, в которых исполь-
зуется пять типов вершин. Вершины первого типа носят название
объектных. Вес объектных вершин имеет вид <га, т>. Здесь п — число
однотипных объектов, приписываемых данной вершине или некото-
рый квантификатор, оценивающий это число, т — тип объекта (не-
который класс, к которому принадлежат объекты, соответствующие
данной вершине). Вершины второго типа называются признанными.
Вес таких вершин имеет вид <(лх, Пг), (л2, П2)...(лй, Пь)>, где л; —
имена признаков, а П; — значения признаков. Вершины третьего
типа называются предикатными. В качестве их веса выступает имя
некоторого предиката Р{ с указанием его местности. Функциональ-
ные вершины составляют четвертый тип вершин в СГ. В качестве их
веса выступает тот функциональный символ, который определяет
суть этой вершины. Для функционального символа указывается
его местность. Наконец, последний тип вершин вСГ — именные вер-
шины; их вес выражается через некоторые символы из множества
имен.
Опишем теперь правила проведения дуг в СГ. Начнем с при-
знанных вершин. В них могут входить дуги, помеченные весами,
которые соответствуют именам признаков, имеющимся в весе дан-
ной вершины. Из признанной вершины всегда исходит лишь одна
дуга, которая ведет к некоторой объектной вершине. Для предикат-
ных вершин число входных дуг должно соответствовать местности
данного предиката. Эти дуги идут от объектных вершин и имеют
веса, определяющие положение соответствующих значений в
структуре предиката. Их можно рассматривать как определенные
указания на те роли, которые они играют в предикатном выражении.
Выходные дуги для этих вершин могут идти к объектным или функ-
циональным вершинам. Для функциональных вершин входными ду-
гами могут служить дуги, идущие от объектных, предикатных и
функциональных вершин. Веса дуг определяют либо значения со-
200
ГЛ. 4. ОБОБЩЕНИЕ И КЛАССИФИКАЦИЯ СИТУАЦИЙ
ответствующих аргументов, либо возможность или невозможность
выполнения той или иной последовательности операций в зависимо-
сти от значений, выдаваемых предикатными вершинами. Но для
каждой функциональной вершины заведомо существует хотя бы
один путь, ведущий от некоторой объектной вершины к другой
объектной вершине. Наконец, именные вершины не имеют входных
дуг, а единственная их выходная дуга связана с некоторой объект-
ной вершиной. Для объектных вершин единственным ограничением
на входные дуги является то, что у нее может быть только одна дуга,
идущая от признанной вершины.
Между СГ и описаниями на языке ситуационного управления
существует прямая связь. Проиллюстрируем ее на примере.
Пример 4.8. На рис. 4.14 показан СГ, который соответствует
описанию, приведенному в примере 4.4. На нем объектные вершины
<и, О') if <о,О> lz i3
Рис. 4.14
обозначены двойными кружками, предикатные — обычными круж-
ками, именные — маленькими зачерненными кружками, признан-
ные — квадратиками. Роли R’ и R" — соответственно получатель
и отправитель. Роли Q' и Q" определяют соответственно тех, кто
стоит слева и справа в отношениях г34. На рис. 4.14, б показан один из
этапов обобщения, когда произошло обобщение всех автомобилей
с номерами от 2 до 6 в одну объектную вершину. Такое обобщение
вызывает много вопросов, связанных с однозначной интерпрета-
§4.4. ОБОБЩЕНИЕ ПО СТРУКТУРАМ
201
цией тех знаний, которые содержатся в обобщенном С Г, в частности,
знаний о выборе аргументов для предикатной вершины, связанной
с обобщенной объектной вершиной, знаний о приписывании имен
объектам, входящим в обобщенную вершину и т. п. Для ответа на
подобные вопросы необходимо сначала сформулировать более точ-
но понятие обобщенной вершины того или иного типа.
Начнем с объектных вершин. Будем говорить, что объектная вер-
шина является более общей чем объектная вершина V2, если выпол-
нены следующие условия.
1. Составляющая веса п для больше, чем для V2. Это соответ-
ствует тому, что объект, сопоставляемый вершине 1Д, содержит
больше однотипных элементов, чем такой же объект, сопоставляемый
вершине V2. На рис. 4.14, б вершина с весом ч6, а> играет в част-
ности именно такую роль по отношению к вершине с весом yl, а>.
2. Составляющая веса т для 1Д включает в себя как подмноже-
ство составляющую т для У.2. Примером такого обобщения может
служить переход от вершины, для которой т — класс автомобилей,
к вершине, для которой т — класс с именем «транспортные средст-
ва». Это обобщение есть по сути приписывание данной объектной
вершине другого имени, хотя имя, сопоставляемое ей именной
вершиной, может и сохраниться.
3. Признанная вершина, приписываемая Vlt включает в себя
весь набор значений признаков в признанной вершине, приписы-
ваемой V2, причем все области значений признаков для не мень-
ше, чем области значений признаков для V2, и содержат в перечне
признаков в своей признанной вершине еще хотя бы один признак.
Если же наборы признаков для и V2 одинаковы, то область зна-
чений хотя бы для одного признака для включает в себя область
значений этого признака для У2.
Эти три условия отражают различные способы обобщения, кото-
рые мы рассмотрели в примерах 4.3—4.7. Так, первое условие есть
обобщение по квантификатору. В частности, при объединении в од-
ну вершину неопределенного количества объектов (примером этого
служит СГ на рис. 4.14, б) вместо количественного значения для
составляющей веса п можно использовать качественный квантифи-
катор количества. Второе условие есть обобщение по имени, так
как т связаны некоторой иерархической связью родо-видового типа.
В § 2.9 мы уже говорили о иерархиях типа АКО-связи, которая как
раз и задает условия для обобщения, выполняемого по такому прин-
ципу. Наконец, третье условие есть условие обобщения по модифи-
каторам, проиллюстрированное нами в примере 4.6.
Рассмотрим теперь вершины других типов. Для именных вершин
Vi и У2 вершина будет более общей, если имя, представляемое
У2, входит в имя, представляемое 1Д. Вхождение имен надо пони-
мать двояко. С одной стороны, 1Д может соответствовать множество
имен, а У2 — подмножество имен (в частности, одно имя), входящее
в множество имен 1\. Пример такой ситуации демонстрирует нам
202
ГЛ. 4. ОБОБЩЕНИЕ 11 КЛАССИФИКАЦИЯ СИТУАЦИИ
рис. 4.14; так, на рис. 4.14, б соответствующая обобщенная объект-
ная вершина более общая, чем любая из именных вершин на рис.
4.14, а, приписываемых тем объектным вершинам, которые потом
вошли в состав обобщенной вершины на рис. 4.14, б. С другой сторо-
ны, может существовать естественная иерархия имен. Примером
могут служить мужские и женские имена, характерные для каждого
языка и в частности русского. С их помощью образуются два обоб-
щенных имени — мужское имя и женское имя, относительно мощ-
ности которых информации может и не быть. Другой пример —
класс детское имя, элементы которого в русском языке получаются
за счет использования уменьшительных суффиксов от многих муж-
ских и женских имен. Аналогично существует определенная тради-
ция в выборе имен для футбольных команд, пароходов, гор, кошек,
собак и т. и.
Для признанных вершин, обобщение уже описано условием 3
для объектных вершин. Для предикатных вершин обобщение дости-
гается за счет перехода от одного веса вершины к другому. Преди-
катная вершина 1Д является более общей, чем У2, если из истинности
предиката, приписываемого Vlt всегда следует истинность преди-
ката, приписываемого V2.
Наконец, функциональная вершина является более общей,
чем функциональная вершина V2, если при реализации функции,
соответствующей 1Д, реализуется и функция, соответствующая V2.
Будем считать, что СГХ есть обобщение СГ2, если в СГХ есть хотя
бы одна вершина, являющаяся обобщением одной или нескольких
вершин из СГ2, а в СГ2 нет таких вершин. Будем также говорить,
что в этом случае СГ2 наложим на СГХ.
Теперь можно связать описанный нами аппарат обобщения,
опирающийся на представление информации с помощью семанти-
ческих графов, составляющих определенный подкласс семантических
сетей, с аппаратом, развитым в ДСМ-методе. Пусть имеется некото-
рая обучающая выборка, содержащая как положительные, так и от-
рицательные примеры. Пусть в множество положительных примеров,
характеризующих формируемое понятие, входят описания в виде
семантических графовСГХ, СГ2, ..., CTft. Тогда задача обобщения мо-
жет быть сформулирована следующим образом. Найти такую сово-
купность семантических графов СГ1, СГ2, СГга, которая была бы
наложима на СГХ, СГ2, ..., CTfe и не была бы наложима на семанти-
ческие графы, входящие в множество контрпримеров. В простей-
шем случае, эквивалентном случаю существования единственной
причины для гипотезы сг=>ау в ДСМ-методе, требуется найти один
СГ *, который был бы наложйм на любой из семантических графов,
представляющих класс положительных примеров обучающей выбор-
ки, и не был бы наложим ни на один граф, характеризующий класс
отрицательных примеров обучающей выборки. В более общем слу-
чае, когда множество покрывающих СГ для всех положительных
примеров содержит более одного элемента, возникает ситуация, по-
§4,5. «СЛОЕНЫП ПИРОГ»
203
добная той, которая в ДСМ-методе привела к появлению обобщен-
ных правил. Не желая утомлять читателей изложением соответст-
вующих процедур поиска СГ * или некоторого дизъюнктивного пред-
ставления из покрывающих СГ, которые во многом аналогичны
процедурам ДСМ-метода, отсылаем читателя к работам Н. П. Викто-
ровой, указанным в списке литературы к данной главе. В этих рабо-
тах описан весь спектр необходимых процедур работы с семанти-
ческими графами.
§ 4.5. «Слоеный пирог»
Мы рассмотрели методы, позволяющие формировать обобщенные
описания ситуаций в соответствии с теми решениями, которые были
приписаны ситуациям, входившим
цессе функционирования си-
стемы ситуационного управ-
ления работа по формирова-
нию классов ситуаций и уточ-
нению ранее сформированных
классов происходит постоян-
но, так как обучающая вы-
борка может не исчерпывать '
всего богатства возможных
в обучающую выборку. В про-
ситуаций, складывающихся
на объекте управления.
Обобщение может проис-
ходить на многих этапах, и
поэтому исходные описания
ситуаций и обобщенные их
описания образуют иерархи-
ческую структуру, в каждом
слое которой находятся опи-
сания, полученные из исход-
ных с помощью тех или иных
процедур обобщения. Если
исходные описания принять
за нулевой уровень, то на
первом уровне будут нахо-
диться описания, получен-
ные непосредственно из опи-
Рис. 4.15
саний ситуаций, лежащих
на нулевом уровне. На вто-
рой уровень попадут описания, которые возникнут за счет при-
менения процедур обобщения к описаниям первого уровня и
т. д. Так возникает «слоеный пирог», показанный на рис. 4.15.
Ситуации на всех уровнях обобщения соответствуют некоторым
решениям по управлению. В идеальном случае на самом верхнем
204
ГЛ. 4. ОБОБЩЕНИЕ И КЛАССИФИКАЦИЯ СИТУАЦИЙ
уровне системы классификации возникают описания, каждому из ко-
торых соответствует определенное решение по управлению. В более
частых случаях при недостаточной обучающей выборке окончатель-
ное разделение классов может и не произойти. Оно никогда не на-
ступает при недетерминированном процессе формирования обоб-
щенных ситуаций.
Если решения по управлению сами обладают некоторой струк-
турой, то при формировании «слоеного пирога» требуется соотнести
уровни управления в структуре принимаемого управленческого
решения с уровнями классификатора. Для осуществления этого
можно использовать следующий прием. Пусть в некоторой ситуации
необходимо принять решение U, которое само распадается на три
самостоятельных решения по управлению £7Х, U2 и U3, связанные
с решением и следующим образом. Прежде всего принимается ре-
шение £Л, а затем по результату его реализации необходимо выбрать
/-----------------------------7 либо решение U2, либо реше-
ние U3. При классификации
ситуаций это означает, что
имеется некий класс ситуа-
ций, которому соответствует
решение U2, другой класс си-
туаций, которому соответст-
вует решение U3 и, наконец,
класс ситуаций, которому со-
ответствует решение U. Имен-
но U, а не СД, так как Ui мо-
жет определять совершенно
другой класс ситуаций, для
которых одношаговое реше-
ние t/i окончательно.
Это приводит к необходи-
мости разнесения описаний
обобщенных ситуаций для U
и для U2 и U3 на разные
уровни обобщения, так как
для £72и £73 обучение форми-
рованию обобщенных ситуа-
ций должно происходить
лишь на множестве ситуаций,
относящихся к решению U. Кроме того, на том же уровне, что и
для U, могут существовать классы ситуаций, для которых одно-
шаговые решения U2 и U3 окончательны.
Если имеется управление (решение) U, которое состоит из п
последовательных управлений, то в «слоеном пироге» возникает п
уровней классификации.
Иерархичность управления позволяет формировать обобщенные
описания за существенно меньшее число шагов, чем в общем случае.
§ 4.5. «СЛОЕНЫЙ ПИРОГ»
205
Столь же полезны и иерархические описания ситуаций на объекте
управления, что определяется структурой самого объекта. Иерархи-
ческие описания помогают каждый раз выделять общие части срав-
ниваемых описаний (и именно эта процедура является центральной
во всех методах обобщения в ситуационном управлении) за меньшее
число операций, так как граф описания естественным образом рас-
падается на графы меньшей размерности.
Во многих задачах, важных в теории ситуационного управления,
все эти иерархии имеют специальный вид /-графа. Общий вид /-
графа показан на рис. 4.16. Такие иерархические графы обладают
следующими свойствами.
1. /-граф состоит из некоторого числа подграфов G;, которые
не пересекаются между собой. На рис. 4.16 показано три таких
подграфа.
2. Подграфы G; могут быть упорядочены по уровням при усло-
вии выполнения следующего
Gt связана дугой с какой-то
одной вершиной Подграф
Gx всегда состоит из одной
вершины, с которой связана
одна или несколько вершин
подграфа G2. Направление
дуг, связывающих вершины
разных подграфов, всегда та-
ково, что дуга направлена
из подграфа с большим но-
мером в подграф с меньшим
номером.
3. Если в некотором под-
графе G; две вершины связаны
дугой, то они соединены с
одной и той же вершиной
подграфа 0г_х.
Пример 4.9. На рис. 4.17
показана структура семанти-
ческого графа, описывающая
знания о некотором участке
энергосистемы, где приняты
следующие обозначения: П —
потребитель, СТ — станция,
СВ — линия связи. Обозна-
чения на третьем уровне идентифицируют конкретных предста-
вителей классов, показанных на втором уровне этого /-графа.
Для /-графов решение задачи поиска общих фрагментов в се-
мантических графах требует существенно меньшего времени, чем
для СГ произвольной структуры. Поэтому желательно стараться
206
ГЛ. 4. ОБОЕЩЕНИЕ и классификация ситуации
представлять описание ситуаций на объекте управления и общих
знаний о структуре управления в виде /-графов.
При построении «слоеного пирога», составляющего сущность
Классификатора, выполняется следующая последовательность про-
цедур. Сначала исходное описание текущей ситуации пополняется
всеми дополнительными сведениями за счет работы процедур попол-
нения описаний, о которых шла речь в гл. 3. Затем к полученным
описаниям применяются процедуры обобщения. Полученные ре-
зультаты, относящиеся к первому уровню «слоеного пирога», рас-
сматриваются снова, как исходное описание. К ним вновь применя-
ются методы пополнения и происходит очередной шаг обобщения.
Так продолжается до тех пор, пока на очередном уровне к получен-
ным фрагментам нельзя будет применить ни процедур пополнения,
ни процедур обобщения, не приводящих к противоречивым управ-
ленческим решениям.
Когда Классификатор сформирован, то его работа заключается
в следующем. Если на вход системы управления поступает некоторая
конкретная ситуация, то она обогащается за счет работы процедур
пополнения описаний ситуаций и поступает на нулевой уровень
«слоеного пирога». С помощью вертикальных связей она обобщается
до наивысшего возможного уровня. Если на этом уровне ей соот-
ветствует решение по управлению, то оно поступает из Классифика-
тора в Коррелятор. Если же при невозможности дальнейшего обоб-
щения данному уровню не соответствует никакого решения, то
Классификатор переходит в стадию обучения.
Иерархическая структура, формируемая в Классификаторе в
процессе обучения, отражает ту ситуативную классификацию, о
которой речь была в §4.2.
§ 4.6. Некоторые сведения о классифицирующих системах § **
Здесь мы постараемся сообщить некоторые сведения о системах
классификации, которые могут оказаться полезными при построе-
нии Классификаторов систем ситуационного управления. В самом
общем виде система классификации определяется следующим обра-
зом. Пусть задано некоторое множество М и определена на нем си-
стема подмножеств Л4Х, М2, .... Мп. Эта система образует либо раз-
биение М, либо его покрытие. В первом случае, для любой пары
подмножеств Mit Mj имеем Mj (} Mj—0 и и Mt = M. Подмножест-
г
ва Mt в таком случае называются классами эквивалентности. Во вто-
ром случае, имеется хотя бы одна пара таких подмножеств М[ и
Mj, что при Mt(}Mj^=0, но U Mt = M. Подмножества 44г в
I
этом случае называются классами толерантности.
Подмножества можно в свою очередь представить системами
своих подмножеств, которые могут давать либо разбиение Mt, либо
его покрытие. И т. д. Так возникает классификация ситуаций, в
§4.6. О КЛАССИФИЦИРУЮЩИХ СИСТЕМАХ
207
которой одновременно отражена и родо-видовая классификация и та
ситуативная классификация, которая определяется выбором тех
или иных подмножеств Мг, образующих классификационную струк-
туру.
Возникает естественный вопрос — как сравнивать между собой
различные классификации для одного и того же множества? Ко-
нечно, их сравнение во многом определяется целью классификации.
Например, для ситуационного управления нужно располагать клас-
сификацией, которая давала бы наиболее быстрые и однозначные
ответы по поводу рекомендаций тех или иных решений по управле-
нию. Поэтому классификация будет наилучшей, если множества
верхнего уровня «слоеного пирога» дают разбиение множества ис-
ходных ситуаций таким образом, что каждому классу эквивалент-
ности данного верхнего уровня соответствует одно решение по управ-
лению. А среди всех таких классификаций, очевидно, наилучшей
будет та, которая содержит минимальное число уровней, т. е. яв-
ляется наиболее «быстрой» при поиске ответа. Но уже неоднократно
отмечалось, что классификации такого типа построить практически
невозможно. Большинство классификаций будет содержать классы
толерантности, а не классы эквивалентности. В таком случае воп-
рос о выборе наилучшей классификации становится уже не столь
тривиальным.
Рассмотрим задачу о качестве описания некоторого подмножества
Mi признаками, характерными для множества М. Под признака-
ми здесь и далее мы будем понимать как признаки в обычном смыс-
ле, так и структурные признаки, т. е. фрагменты структуры, зада-
ваемой на объектах, входящих в М (например, в качестве таких
объектов могут выступать описания ситуаций на языке ситуацион-
ного управления). Если бы речь шла о характеристике Mt каким-
либо набором наилучших признаков, то можно было бы ввести при-
знак л, который есть 1, если объект принадлежит .И,-, и 0 — если он
не принадлежит Мг. Если — класс эквивалентности для М,
то справедлива теорема, доказательство которой здесь не приво-
дится. Она говорит о том, что признак л, если он не является при-
знаком для М, можно выразить в виде двоичной логической функ-
ции от тех признаков, которые используются в М для организации
классификационной структуры. Недостаток этой теоремы состоит
в том, что она лишь декларирует существование этой двоичной логи-
ческой функции, но не дает возможности получить ее конструкцию.
Второй недостаток — требование принадлежности к классу
эквивалентности, что ограничивает классификационные структуры
лишь такими, в которых все Mt — классы эквивалентности. Пусть
для классификации множества М используется набор из п при-
знаков л;, i=l, 2,..., п. Тогда Л1; соответствует некоторая конъюнк-
ция из части лг. Если классификация такова, что среди М, имеются
множества, которые отвечают любым таким возможным конъюнк-
циям, то решение, следующее из приведенной теоремы, будет един-
208
ГЛ. 4. ОБОБЩЕНИЕ И КЛАССИФИКАЦИЯ СИТУАЦИИ
ственно возможным. На рис. 4.18 показан такой случай классифи-
кации для двух признаков, определяющих объекты множества М.
Однако в практически важных случаях имеется довольно много
признаков, используемых для классификации, и далеко не все их
комбинации встречаются в тех подмножествах, на которые можно
декомпозировать М. И, кроме того, в классификациях могут встре-
чаться классы толерантности. Поэтому несколько изменим поста-
новку задачи. Будем искать такие множества М;, набор характе-
ристик которых «достаточно похож» на не-
которую систему признаков, определен-
ных на М с целью классификации. От-
метим, что классы, показанные на рис.
4.18 на одном уровне, могут считаться по-
парно «достаточно похожими», так как они
отличаются друг от друга всего .одним
признаком.
Назовем а-эталоном для множества Л4г
такой набор признаков, что для любого объ-
екта х из Mt справедливо неравенство
| лм1 П лх | а [ лЛ1' |.
Здесь лг — множество признаков, которыми
описывается Y, |У| означает число элемен-
тов множества Y. Смысл a-эталона состоит
в том, что с его помощью выделяется такой набор признаков, что
для любого элемента, включенного в Л4г, относительная доля его
признаков, общих со всеми остальными признаками множества Mit
не меньше а. Если существует такой объект х £ Mt, что все его при-
знаки входят в состав a-эталона, то он называется а-эталонным
объектом. Очевидно, что O^a^l. При а=1 все объекты, входящие
в М;, обладают некоторыми общими признаками. В качестве 1-эта-
лонного объекта в этом случае можно брать любой объект из М;.
При 0<а<1 существование эталонного объекта не обязательно,
так как признаки, приписываемые различным М{ из Mit могут и не
пересекаться так, чтобы выполнялось условие существования
a-эталонного объекта. В этом случае a-эталон дает представление о
некотором «идеальном объекте». Подобная ситуация часто возни-
кает в жизни. Когда вы участвуете в обмене своей квартиры, то
даже при условии четкого перечисления всех признаков, которыми
должна характеризоваться квартира, вряд ли обязана существо-
вать идеальная квартира, удовлетворяющая всем выдвинутым вами
требованиям. А то, что обмен все же происходит, говорит о том, что
для процедуры классификации квартир и выбора в соответствии
с этой классификацией устраивающего вас варианта реальное
существование эталонного объекта вовсе не обязательно.
Теперь можно определить понятие меры общности для множест-
ва A4j. Будем говорить, что Л4; имеет меру общности е, если е есть
§4.6. О КЛАССИФИЦИРУЮЩИХ СИСТЕМАХ
209
максимальное значение, при котором для этого множества сущест-
вует a-эталон. Такой е-эталон называется также полным эталоном
для множества Mt. Для одного и того же множества Мг может су-
ществовать несколько полных эталонов. Набор признаков, который
входит в какой-либо a-эталон, будем называть максимальным, если
любое расширение набора приводит к тому, что он перестает быть
a-эталоном. Пусть теперь /Е = шах|л?| — максимальное количество
I
признаков в полных эталонах (л) есть число признаков, входящих
в j-й полный эталон для Мг). Пусть кроме того 1М — максимальное
число признаков, которые используются в для характеристики
какого-либо объекта, входящего в это множество. Тогда мерой
сходства для множества Mt будем называть величину : 1М
Нетрудно видеть, что |3Л1г изменяется от 0 до 1. При рл1.=0 в пол-
ных эталонах нет признаков, т. е. полные эталоны не сущест-
вуют. Все объекты в ЛД описываются различными признаками.
При |3Л1. = 1 все объекты в Л1г описываются одними и темп же на-
борами признаков. Таким образом, чем больше тем больше
сходства между элементами в Л4г.
Можно считать лучшей ту классификацию, для которой величина
min рЛ1^ больше. Прежде чем высказать некоторые другие сообра-
жения, связанные с качеством классификаций, покажем, как можно
использовать понятие a-эталонов при решении задач классифика-
ции и образования понятий более высокого уровня.
Пусть имеется два множества М; и Л1у, характеризуемые этало-
нами аг и а7-, которые эти множества различают. Такие эталоны на-
зываются эталонами различия. Для них справедливо следующее
положение: для любого х£Мг имеет место Пл*|<In211/,,
а для любого у С Mj имеет место ПТогда можно
предложить следующие условия принадлежности некоторого эле-
мента z к множеству Mt или Mj.
1. Если при добавлении г к М; сохраняются аг-эталоны этого
множества (заметим, что добавление новых элементов к некоторому
множеству может только уменьшить сходство, но не увеличить его)
и остается справедливым неравенство \nMJ П лг|<а/лЛ1/|, то
объект z относится к множеству Л4г.
2. Если при добавлении z к Mj сохраняются а7-эталоны этого
множества и остается справедливым неравенство |л,М‘ П лг| <
<<хг[этЛГ'|, то объект z относится к множеству Mj.
3. Если не выполнены условия 1 или 2 (одновременное их выпол-
нение, как нетрудно видеть, невозможно), то объект z нельзя вклю-
чить в эти множества. Для него либо должно существовать другое
множество Mk в М, Либо он является представителем нового мно-
жества, которое необходимо выделить в М.
210
ГЛ. 4. ОБОБЩЕНИЕ И КЛАССИФИКАЦИЯ СИТУАЦИЙ
Рис. 4.19
Можно использовать полные эталоны и при выборе характеристи-
ческих признаков, определяющих принадлежность объектов к не-
которому сформированному ранее обобщенному понятию, которому
соответствует множество /Й,. Если ЛД имеет единственный полный
эталон и мера общности для данного множества достаточно велика,
то этот эталон можно считать призна-
ком для данного множества, т. е. счи-
тать, что «удовлетворение» эталону есть
причина отнесения проверяемого объек-
та к данному множеству.
Укажем теперь еще ряд характери-
стик, которые можно использовать при
оценке качества классификации.
Прежде всего,эти оценки оказываются
связанными с эффективностью решений
тех задач, ради которых производится
классификация. Для нас такими зада-
чами являются задачи поиска решения по
управлению для ситуации,описание ко-
торой в данный момент поступило в си-
стему управления. Рассмотрим множе-
ство возможных решений по управле-
нию U={Ut, U2, .... Un}. Каждая про-
верка, связанная с анализом описа-
ния ситуации S, позволяет произвести
в множестве U разбиение, при котором из U выделяется подмно-
жество U' решений, которые можно применить в данной ситуации.
Если через v' обозначить число элементов, входящих в U', то чем
меньше v' тем более точные рекомендации по управлению мы полу-
чим на данном шаге. В идеале v' должно быть равно единице. В этом
случае решение по управлению будет однозначным. Постепенное
уточнение U' есть некоторый процесс проверок, связанных с анали-
зом U. Каждая такая проверка имеет некоторую цену rf, выражае-
мую, например, числом операций, которые надо на нее затратить.
Если представить себе всю процедуру перехода от U к одноэлемент-
ному О' (или U' с наименьшим возможным для данного способа
классификации числом элементов) в виде некоторого древовидного
графа, то получим граф, показанный на рис. 4.19. На нем вершины
соответствуют тем классам, которые выделены в «слоеном пиро-
ге», а дуги — проверкам описания S, позволяющим переходить
от одного обобщенного описания к другому. Эти дуги нагруже-
ны, как уже говорилось, весами ц', а вершинам сопоставлены
веса v'.
Структуры такого типа в теории диагностики получили название
вопросников. Для получения интересующего нас ответа — множест-
ва рекомендаций по управлению, мы как бы задаем вопросы, кото-
рым в нашем случае соответствуют проверки описания S. Каждому
§ 4.6. О КЛАССИФИЦИРУЮЩИХ СИСТЕМАХ
21В
вопросу соответствует на графе дуга. Параметр v' в теории вопрос-
ников называется основанием вопроса, а параметр ц'—ценой воп-
роса.
Введенные параметры позволяют ставить задачу об оптимизации
графа классификации, а так как вид его прямо связан со структурой,
«слоеного пирога»,— то и об оптимизации структуры, формируемой
Классификатором. Легко видеть, что средняя цена обхода вопрос-
ника зависит от порядка вопросов, а значит, ее можно изменить
приписыванием некоторых приоритетов тем или иным вопросам.
Если, например, цена вопроса, ведущего от корневой вершины к вер-
шине 2, не превосходит суммарной цены вопросов, ведущих от этой
корневой вершины к вершине 1, а затем к вершине 2, то для дви-
жения к вершине 2 выгоднее задать этот один вопрос. Но движение
к вершине 1 позволяет при определенном описании S сразу следую-
щим вопросом придти к конечной вершине U'b, что может оказаться
более выгодным, чем движение к вершине 2. Эта дилемма может
быть разрешена только в том случае, если кроме параметров v'
и т|' системе известна еще некоторая информация о частоте отнесе-
ния S при решении задач по управлению к тому или иному классу
U'j. Но, как мы уже неоднократно подчеркивали, такая информа-
ция отсутствует. Вместо нее можно попытаться использовать ин-
формацию, связанную со структурой вопросника, введя понятие
веса вершин. Весами концевых вершин остаются v'-, соответствую-
щие числу элементов, входящих в U'j, весами промежуточных вер-
шин — суммы весов тех концевых вершин, которые достижимы с
помощью вопросов из данной промежуточной вершины. Таким об-
разом, вес корневой вершины вопросника есть число всех возмож-
ных решений по управлению. Более удобно использовать относи-
тельный вес вершин, равный частному от деления веса данной вер-
шины на сумму весов всех вершин, образующих вопросник.
Если, например, для вопросника, показанного на рис. 4.19,
считать, что веса концевых вершин в том порядке, как они проин-
дексированы, равны соответственно 1, 2, 2, 1, 1, то веса промежуточ-
ных вершин в порядке их номеров, начиная с последнего, будут
равны: 3, 5, 2, 7, 7, 7, а относительные веса будут получаться деле-
нием этих значений на 38.
Введенные нами параметры вопросников можно использовать
при таком преобразовании их структуры, при котором уменьшается
цена их обхода, определяемая как £ = 211 (0 03 (О- Здесь
I
т] (i) — цена пути, ведущего из корневой вершины в вершину I.
Если этот путь единственный, то г) (/) есть сумма цен (ц') вопросов,
образующих его. Если путей несколько, то берется путь с минималь-
ной ценой. Параметр со (/) есть сумма весов всех вершин, которые
достижимы из вершины i. Вопросник называется оптимальным,
если | минимальна. Минимизация | достигается за счет преобразо-
вания вопросника с помощью четырех групп правил.
212
ГЛ. 4. ОБОБЩЕНИЕ И КЛАССИФИКАЦИЯ СИТУАЦИЙ
1. Величину g можно уменьшить, если можно так перераспреде-
лить цены путей к двум вершинам вопросника (ни одна из вершин
вопросника не является предком или потомком другой) или веса
двух вершин, чтобы вершина с более высоким весом имела бы более
низкую цену пути, ведущего к ней, и наоборот.
2. Величину £ можно уменьшить, если можно перераспределить
цены или веса двух вопросов таким образом, чтобы вопрос с более
высоким весом имел более низкую цену, и наоборот.
3. Величину Z можно уменьшить, если возможно такое перерас-
пределение оснований и цен путей для вершин, соответствующих
двум вопросам, при котором цены путей к потомкам вершины с мень-
шим основанием оказались бы больше цен путей к потомкам верши-
ны с большим основанием, и наоборот.
4. Величину £ можно уменьшить за счет перераспределения весов
потомков вершин, для которых одинаковы длины путей, ведущих
к ним из корневой вершины. Это перераспределение должно быть
таким, что потомкам вершин, расположенным в невозрастающем по-
рядке их оснований, будут приписаны веса в невозрастающем по-
рядке. Затем надо применить первое правило для пары подвопрос-
ников, входящих в вопросник, полученный на предыдущем шаге.
Такая пара подвопросников выбирается так, что для первого из
них корень есть вопрос с наименьшим основанием, а для второго —
потомок с наибольшим весом.
Применяя перечисленные правила, можно прийти к оптимально-
му вопроснику. Каждое правило связано с требованием переформи-
рования структуры «слоеного пирога». Недостаток всей процедуры
оптимизации — ее ненаправленность. Достижение наилучшего ре-
зультата обеспечивается некоторой последовательностью примене-
ния правил преобразования, но выбор этой наилучшей последова-
тельности не формализуем, что делает задачу оптимизации вопрос-
ника комбинаторной по своей сложности. Именно этим, по-видимо-
му, объясняется, что проблема оптимизации классификаций и
структуры «слоеного пирога» остается на сегодняшний день достоя-
нием теории классификации, а не практики построения эффектив-
ных систем обобщения и классификации описаний в ситуационном
управлении.
§ 4.7. Дополнительные замечания
При работе с отдельными структурными описаниями в виде семантических
графов или формул языка ситуационного управления часто возникает задача вы-
полнения теоретико-множественных операций над этими описаниями. Другими
словами, хотелось бы иметь возможность получать объединение, пересечение и
разность для таких объектов. Рис. 4.20 иллюстрирует выполнение операций
объединения и пересечения для сетей, отображающих записи на языке ситуацион-
ного управления. Эти операции выполняются обычным образом и никаких труд-
ностей не вызывают. Операция определения разности не столь проста. Если мы
имеем ситуацию S, показанную на рис. 4.21, а и из ее описания выделено описание
§ 4.7. ДОПОЛНИТЕЛЬНЫЕ ЗАМЕЧАНИЯ
213
Г
ситуации Sx, изображенное на том же рисунке пунктиром, то возникает вопрос,
что считать дополнением к Sj в S? Если дополнением считать только то описание,
которое получается после удаления S! со всеми связями, которые имелись у вер-
шин в ситуации S] с оставшимися вершинами (S2), то такое дополнение при объеди-
нении с S-2 не даст исходного описания S, так как все связи между Sx и S2 потеряны.
Поэтому при образовании дополнения нужно вводить фиктивные вершины, оди-
наковые в Sx и S2 и такие, что при объединении эти фиктивные вершины налага-
ются друг на друга и исчезают и сохраняются лишь дуги, маркерами концов кото-
рых они были. На рис. 4.21, б эти дополнительные вершины заштрихованы.
Введенные операции позволяют, в частности, сокращать время на получение
обобщенных описаний для случаев SiHSj, S1f)S2 и SX\S2, когда обобщенные
описания для Sx и S2 уже найдены. Если ограничить-
ся случаем конъюнктивного обобщения, которому в
ДСМ-методе соответствовала идея единственной причи-
ны, то обобщенное представление объединения, пересе-
чения и разности будет получаться с помощью соответ-
ствующих операций над обобщенными представлениями
тех описаний, которые входят в операцию, если эти обоб-
щения получены для класса положительных примеров
обучающей выборки. Если нас интересуют отрицатель-
ные понятия, сформированные на основе класса обу-
чающих примеров, носящих негативный характер, то
при объединении, пересечении и взятии разности по-
ложительных обобщенных описаний для Sx и S2 нуж-
но брать соответственно пересечение и объединение,
иллюстрируемое рис. 4.21, б, обобщенных описаний
отрицательных понятий, соответствующих рассмат-
риваемым положительным понятиям.
Если нас интересуют дизъюнктивные обобщенные
описания, т. е. описания, в которых общие фрагменты
описаний, полуденные в ходе формирования обобщенно-
го описания, объединены друг с другом знаком ИЛИ,
то для Sj U S2, SjfjSa и получение обобщенных
описаний несколько усложняется. Для нахождения
5хи52 необходимо проделать следующие операции.
1. Ввести множество W7=D1LJD2, где УД и О2—
соответственно обобщенные описания для классов .5Х и
S2, полученные по множествам положительных приме-
ров в результате процедур, описанных в § 4.4.
2. Ввести множество И. В него включаются такие семантические графы S*,
которые удовлетворяют следующим свойствам. Для каждого S* в и ^2, которые
Рис. 4.20
Рис. 4.21
214
ГЛ. 4. ОБОБЩЕНИЕ И КЛАССИФИКАЦИЯ СИТУАЦИЙ
представляют собой обобщенные описания классов отрицательных примеров из
обучающей выборки, соответствующей классам Sx и S2, найдутся такие S' и S",
что выполняются следующие два требования.
2а. S* изоморфно наложим на5' при условии, что типы совмещаемых вершин
совпадают и между весами этих вершин имеются отношения по включению, рас-
смотренные в § 4.4.
26. S* изоморфно наложим на S" при тех же условиях. Если, кроме того, S'
сам изоморфно наложим на S" при тех же условиях, то в Н включается S".
3. К полученным множествам 'll-' и Н применить метод нахождения обобщенно-
го описания; им может быть любой из методов, описанных в том же § 4.4.
Если необходимо найти обобщенное описание для S1P|S2 при наличии дизъ-
юнктивных обобщений, то процедура их нахождений сводится к процедуре вывода
обобщения для 5хи52, где Sx и S2 соответственно классы отрицательных понятий
для Sx и S2. Можно построить процедуру нахождения обобщенного дизъюнктив-
ного описания и для 5Х\52. В этом случае последовательность необходимых шагов
имеет вид:
1. Вводится множество
2. Вводится множество И, которое строится в результате следующей процеду-
ры. Составляется список L, в который в начальный момент помещаются элементы
из Dt. ’Для очередного элемента из этого списка берется очередной элемент из
D2 и для полученной пары проверяется условие изоморфного наложения S'
на S", где S' — СГ из списка £>х, a S" — из О2, если выполнены условия, сформу-
лированные в пункте 2а для процедуры нахождения обобщенных дизъюнктивных
описаний для объединения. Если это условие не выполнено, то берется следующий
элемент из О2. Если все элементы из О2 уже использованы, то берется следующий
элемент из списка L, a S' из L вычеркивается и с ним снова сравниваются после-
довательно все элементы из £>2. Если же для некоторой пары S' и S" условие изо-
морфного наложения выполнены, то для этой пары образуют новое описание,
в котором вершина V(j соответствует паре вершин V, и Vj из S' и S", для которых
произошло наложение, причем весом этой новой вершины будет разность весов,
которые соответствовали Г; и Vj. В семантическом графе S' вместо вершины Vi
используют вершину Vij, а остальные вершины сохраняют. Так поступают для
всех пар вершин, что приводит к образованию N новых описаний, где АГ — число
вершин в S' (в S" столько же вершин). Все эти новые описания помещают в спи-
сок L, aS' из него вычеркивают. Если после появления первого изоморфного
наложения для S' все элементы из £>, уже с ним сравнены, то S' становится элемен-
том Н. Процесс заканчивается, когда список L оказывается пустым.
Введение теоретико-множественных операций, применяемых к описаниям,
оказывается полезным и в задачах, связанных с классификацией. Если S1 и S2 —
классы эквивалентности или классы толерантности, то S1 f|S2 и SXUS2 также
являются такими классами.
Наконец, определенные нами операции над описаниями весьма полезны при
представлении информации в современных базах данных реляционного или сете-
вого типа. В таких базах данных операции пересечения, дополнения, объедине-
ния и разности структурных описаний являются базовыми и выполняются средст-
вами, встроенными в эти базы данных, т. е. «ничего не стоят».
Отметим еще некоторые свойства классов толерантности, полезных при по-
построении классификаторов, для которых разбиение на классы эквивалентности
по управлению оказывается невозможным из-за недостатка информации в обуча-
ющей последовательности.
Пусть имеется множество описаний ситуаций S и множество признаков, по
которым эти ситуации классифицируются. Два описания Sx и S2 оказываются
связанными отношением толерантности, если у них имеется какая-нибудь сово-
купность общих признаков. Если зафиксировать ее, то максимальное подмножество
S', в котором любые два описания связаны отношением толерантности по выбран-
ной группе признаков, образует класс толерантности. Так как отношение толе-
рантности является рефлексивным, то любой элемент S, если он не похож ни на
какой другой из выбранной совокупности признаков — все равно образует класс
§4.7. ДОПОЛНИТЕЛЬНЫЕ ЗАМЕЧАНИЯ
15
толерантности сам с собой, т. е. класс, состоящий из одного этого элемента. Рас-
сматривая все комбинации классифицирующих признаков и образуя системы
классов толерантности по этим совокупностям, мы получим пространство толерант-
ности. Одно и то же описание в этом пространстве может входить в несколько клас-
сов толерантности. В пространстве толерантности можно ввести некоторое подобие
метрики, если присвоить классифицирующим признакам веса, отражающие меру
сходства. Тогда мерой сходства описаний, попавших в один класс толерантности,
можно считать взвешенную сумму признаков, характеризующих этот класс. Можно
доказать, что во всяком пространстве толерантности существует множество классов
толерантности, которое образует базис. Свойством базиса является его минималь-
ность. Для любых двух толерантных описаний, найдется в базисе класс, куда они
оба попадут. Но при удалении любого из классов толерантности, входящих в
базис, исчезает свойство полноты. Всегда найдется такая пара описаний, толерант-
ная по какой-то совокупности признаков, для которой не найдется класса толерант-
ности в множестве классов, полученном из базиса выбрасыванием какого-либо
класса. Переход к базису позволяет минимизировать описание в «слоеном пироге»,
но не дает возможности эффективно использовать меру сходства.
И, наконец, последнее замечание. При формировании обобщенных описаний
при малых объемах обучающих выборок возможно возникновение «заблуждений»,
связанных с тем, что используемые для классификации решающие правила не
отражают классификации описания технологом-управленцем. Это делает интерес-
ным исследование того, какими функциями от признаков пользуется человек
в своей повседневной практике, когда он формирует новые для себя понятия.
В экспериментах было показано х), что имеется вполне определенная приоретет-
ность этих функций для человека, имеющего, по крайней мере, школьное образо-
вание. Наиболее простыми классифицирующими функциями для него являются
конъюнкции признаков или дизъюнкции одиночных признаков. С функциями, со-
держащими четыре — пять признаков, человек работает свободно, при возраста-
нии числа классифицирующих признаков сверх этого сложность задачи классифи-
кации для него начинает возрастать. Значительно сложнее для человека оказыва-
ются те ситуации, где приходится применять функции, в которых одновременно
используются операции конъюнкции и дизъюнкции. Но еще более трудными, прак-
тически не встречающимися в практике человеческой классификации, являются
случаи, когда классифицирующая функция включает в себя не только факт нали-
чия какого-то признака, но и факт отсутствия некоторого признака. Примером
такой «нечеловеческой» функции классификации может служить функция вида:
(редУад, гДе xi и х2 — некоторые признаки.
х) Эти эксперименты проводились Е. В. Романовой и Н. В. Чудовой со студен-
тами технических учебных институтов и научными сотрудниками.
ГЛАВА 5
ФОРМИРОВАНИЕ РЕШЕНИЙ ПО УПРАВЛЕНИЮ
Если бы это было так, то это бы еще
ничего, а если бы ничего, оно бы так
и было, но так как это не так, то оно
и не этак. Такова логика вещей!
Л. Кэррол
§ 5.1. Цели, ситуации и планы
В настоящей главе мы рассмотрим процедуры, используемые
при семиотическом управлении для формирования последователь-
ности решений, с помощью которых можно перевести текущую ситу-
ацию в некоторую целевую. В общей схеме ситуационного управ-
ления эту задачу совместно решают Коррелятор, Классификатор
и Экстраполятор, показанные на рис. 1.7. Системы, обеспечивающие
решение данной задачи, принято называть планирующими систе-
мами или планировщиками. Планировщики сначала формируют
план, затем проверяют его выполнимость и эффективность, отби-
рают среди сформированных наилучший план, начинают его вы-
полнение и при необходимости корректируют план при поступле-
нии дополнительной информации от объекта управления п окру-
жающей среды.
Обычно различают два вида планирования: планирование по
состояниям и планирование по подзадачам. В первом случае вво-
дится понятие состояния, которое складывается из состояния объекта
управления, состояния окружающей среды и состояния системы
управления. Построение плана происходит в пространстве со-
стояний таким образом, что каждое одноразовое решение по управ-
лению переводит всю систему из одного состояния в другое в про-
странстве состояний. План представляется в этом случае некоторой
траекторией в пространстве состояний.
Во втором случае предполагается, что имеется некоторый на-
бор модулей, способных решать определенные задачи. Процесс пла-
нирования состоит в поиске такой декомпозиции исходной задачи,
элементами которой оказались бы готовые модули. Тогда план пред-
ставляет собой деревообразную структуру, двигаясь по которой
можно постепенно получить из решения более частных задач реше-
ние исходной задачи.
Несмотря на некоторое различие в формулировках этих двух
задач планирования, их можно описать некоторой общей моделью,
показанной на рис. 5.1. На нем приведена сеть, состоящая из 15 вер-
шин. Заштрихованная вершина 1 — начальная. Она символизирует
либо текущую ситуацию или состояние в пространстве состояний,
либо исходную задачу, которую необходимо решить. Вершины 13,
14 и 15 (на рисунке они заштрихованы) символизируют либо те це-
§5.1. ЦЕЛИ, СИТУАЦИИ И ПЛАНЫ
217
левые ситуации или конечные состояния в пространстве состояний,
в которые необходимо перевести объект управления и систему управ-
ления, либо готовые модули для решения задачи, уже имеющиеся в
системе. При планировании в пространстве состояний необходимо
найти путь, ведущий из вершины 1 в какую-нибудь из заштрихо-
Рис. 5.1
ванных вершин. При постановке оптимизационной задачи можно,
например, искать кратчайший путь такого вида. Или, если пере-
ходы по дугам требуют некоторого расхода ресурсов, приписанных
этим дугам, можно ставить задачу достижения конечной ситуации
с минимальным расходом ресурсов или ставить более сложные
задачи: найти путь с минимальным расходом ресурсов, но такой,
что число шагов (время в пути) будет не больше заданного, или
найти путь, минимальный по числу шагов, но не минимальный по
ресурсам, хотя и удовлетворяющий верхним ограничениям по ре-
сурсам.
При планировании по задачам необходимо пройти весь веер
путей, ведущих от исходной вершины с номером 1 к модульным зашт-
рихованным вершинам, обеспечивающий решение исходной задачи.
Таким образом, при поиске плана в пространстве состояний все
разветвления в вершинах считаются альтернативными. Надо вы-
брать одно (любое) продолжение движения. При работе же в прост-
ранстве задач все дуги, выходящие из данной вершины, должны быть
пройдены, если они интерпретируются как отношения часть —
целое. Конечно, и тогда можно рассматривать не единственную де-
композицию исходной задачи на подзадачи, а альтернативное ее
218
ГЛ. 5. ФОРМИРОВАНИЕ РЕШЕНИЙ ПО УПРАВЛЕНИЮ
разбиение. В этом случае требуются специальные указания о ха-
рактере выходящих из вершин дуг: являются ли они альтернатив-
ными (ИЛИ-дуги) или обязательными для совместного прохожде-
ния (И-дуги). Сеть с такими двумя видами дуг обычно называют
И-ИЛ И-сеть или И-ИЛИ-граф. На рис. 5.1 использованы двойные
дужки, которые объединяют между собой И-дуги. Это значит, что
исходная задача, соответствующая вершине 1, декомпозируется на
подзадачи 2 и 5. Задача 2 сводится к задаче 3 или к задаче 4, ко-
торая однозначно сводится к задаче 5. Задача 5 может быть све-
дена либо к задаче 6, либо к задаче 9. Задача 9 декомпозируется
на задачи 10 и 13. Задача 10 сводится к решенной в системе за-
даче 14, а задача 13 декомпозируется на уже решенные задачи
12 и 15.
Таким образом, в случае пространства подзадач план решения
задачи 1 имеет следующий вид: используя решенную задачу 14, ре-
шить задачу 10. Используя решенные задачи 10, 12, 15, решить
задачу 9. Используя решенную задачу 9, решить задачу 5. Исполь-
зуя решенную задачу 4, решить задачу 2. Используя решенные за-
дачи 2 и 5, решить задачу 1. Для случая пространства состояний на
той же сети план достижения целевого состояния мог бы быть таким:
1—5—9—10—14. На этом примере видна разница рассмотренных
выше двух задач планирования. Поэтому мы будем говорить о за-
даче планирования вообще, не указывая ее вида, только тогда,
когда излагаемые положения будут верными и в том, и в другом
случае.
Прежде чем рассматривать сами задачи планирования, полез-
но ввести некоторые классы сетей типа сети, показанной на рис. 5.1.
Во-первых, разделим такие сети на замкнутые и открытые. Сеть зам-
кнута, если число ее вершин и дуг фиксировано и не меняется в про-
цессе планирования. Такйе сети наиболее просты, но, к сожалению,
редко встречаются на практике. Возможность построения замкну-
той сети для систем ситуационного управления означала бы, что
число полных ситуаций конечно и заранее перечисленно. Тогда,
анализируя сеть, построенную на этих ситуациях, можно было бы
искать план перевода текущей ситуации в ту, которая нас интере-
сует. Тогда дуги можно было бы интерпретировать как управляю-
щие воздействия, под влиянием которых осуществляется переход.
Ясно, что подобная конечная модель практически нереальна. Как
правило, число полных ситуаций столь велико, что можно рассмат-
ривать его как счетное. Кроме того, наши знания об объекте управ-
ления и окружающей среде обычно неполны и, следовательно, не
позволяют считать, что сеть для планирования нам априорно дана.
В открытых сетях могут появляться новые вершины из-за воз-
никновения новых (нештатных) ситуаций. В них могут появляться
и новые дуги, если в процессе функционирования системы управле-
ния нам удастся найти новые связи между управленческими реше-
ниями и сменой ситуаций.
§5.1. ЦЕЛИ, СИТУАЦИИ И ПЛАНЫ
219
Можно ввести еще одну характеристику сети планирования, ко-
торая делит такие сети на детерминированные и недетерминирован-
ные. В детерминированных сетях принятое решение, соответствую-
щее некоторой дуге, точно реализует переход к новой вершине,
указанный в сети. В недетерминированных сетях этого нет. При
реализации какого-либо одношагового решения переход в то или
иное, состояние определяется либо некоторым распределением ве-
роятностей, либо оценивается качественно с помощью частотных
квантификаторов или функций распределения. Такая ситуация весь-
ма типична для систем управления сложными объектами, когда тех-
нология управления зависит от уровня обученности управленца
или от полноты знаний об управлении, хранящихся в памяти систе-
мы управления.
Приведенная нами классификация сетей планирования верна и
для планирования в пространстве задач. Открытость в такой систе-
ме связана, например, с введением новых методов декомпозиции и
переводу некоторых задач в типовые модули, решение которых из-
вестно, т.е. с расширением библиотеки стандартных модулей. Неде-
терминированность может трактоваться, например, как неточная
сводимость декомпозируемой задачи к совокупности тех или иных
подзадач. Но, если для планирования в пространстве состояний
введенные классы сетей весьма важных для методов планирования,
то для планирования в пространстве подзадач подобное деление
менее значимо.
Можно, наконец, делить задачи планирования на одноуровневые
и многоуровневые. Многоуровневое планирование возникает тогда,
когда строится совокупность планов на основании информации о
пространстве состояний или пространстве подзадач разного уров-
ня детализации. Прежде чем составлять точный и подробный план,
всегда желательно иметь некоторую уверенность, что конечные це-
ли планирования достижимы. Если они недостижимы, то желательно
не тратить время на планирование. Оно может оказаться весьма
большим. Для этого и служат многоуровневые планы. Сначала на
самом верхнем уровне выясняется возможность планирования.
Если оно возможно, то строится вариант наиболее грубого плана,
шаги которого должны уточняться на более низких уровнях, рабо-
тающих с более подробными описаниями ситуаций или задач. Если
первоначальный грубый план проходит все уровни планирования, то
на самом нижнем уровне мы получаем окончательный план. Если же
на некотором уровне выясняется, что переход, спланированный на-
верху по грубой, обобщенной, информации, нельзя реализовать, то
происходит возврат наверх,-где выбирается (если он есть) другой
вариант плана.
В системах ситуационного управления иерархическое планирова-
ние возникает естественным образом из-за иерархичности Класси-
фикатора. «Слоеный пирог» в Классификаторе требует для возмож-
ности работы с ним такого же «слоеного пирога» в Корреляторе.
220
ГЛ. 5. ФОРМИРОВАНИЕ РЕШЕНИЙ ПО УПРАВЛЕНИЮ
Только в этом случае будет успешно использоваться вся информа-
ция, хранящаяся в многоуровневой системе обобщенных описаний.
О том, как это делается, будет сказано ниже.
§ 5.2. Стратегии планирования
Мы опишем здесь несколько универсальных стратегий плани-
рования, которые были использованы в различных планировщиках
как для систем ситуационного управления, так и при решении за-
дач об автоматизации составления программ для ЭВМ или нахожде-
ния целесообразной последовательности действий для роботов. Для
вопросов планирования все эти задачи имеют много общего, что
позволяет рассматривать задачу построения планировщика в неко-
тором отрыве от содержательной постановки задачи.
1. М е т о д прямой в о л н ы. Он является наиболее про-
стым из всех методов планирования. Его суть сводится к следующе-
му. В начальный момент возбуждаются все вершины, которые соот-
ветствуют начальным условиям задачи (например,описанию исход-
ной ситуации). Затем, если планирование ведется в пространстве
состояний, то возбуждаются все дуги, выходящие из возбужденных
вершин. Если же планирование осуществляется в пространстве задач,
то возбуждаются все дуги, выходящие из возбужденных вершин,
но сами дуги отмечаются специальными пометками. А именно, все
дуги, относящиеся к одному альтернативному варианту, снабжаются
номером этого варианта. Например, для сети планирования, пока-
занной на рис. 5.1, после возбуждения вершины 1 возбуждаются
обе дуги. Им присваивается номер альтернативы 1. Далее возбуж-
дение продолжает распространяться по сети планирования. В слу-
чае планирования в пространстве состояний распространение воз-
буждения либо закончится в целевых вершинах, либо перестанет
распространяться, если невозможно возбудить новые вершины. При
планировании в пространстве задач планирование прекращается при
достижении тех же условий. Однако, если для пространства состоя-
ний достижение хотя бы одной целевой вершины служит сигналом о
решении задачи, то для пространства задач надо еще проверить
возбуждены ли все пути, относящиеся хотя бы к одной альтерна-
тиве, ведущие от исходных вершин к целевой. Искомый план фор-
мируется обратным просмотром возбужденных путей, ведущих от
целевой вершины, которая возбудилась, к исходным вершинам. В
случае пространства состояний это обычный путь (любой возбуж-
денный путь, если не ставится задача оптимизации), а для прост-
ранства задач — совокупность путей, соответствующая некоторой
альтернативе.
Пример 5.1. На рис. 5.2 показано распространение возбужде-
ния по методу прямой волны для случая планирования в пространст-
ве задач. Сеть планирования такая же, как на рис. 5.1. Номер
§5.2. СТРАТЕГИИ ПЛАНИРОВАНИЯ
221
альтернативного варианта образуется постепенным наращиванием
его слева направо. Целевые вершины возбудились альтернативами
с номерами 121 и 122. Для альтернативы 121 возбуждены все вер-
шины, которые к ней относятся, и, следовательно, для этой альтер-
нативы план есть последовательность выполнения задач 13, 12,
15, 11, 14, 10, 9, 5, 4, 2,
1. Для альтернативы 122
также возбуждены все
вершины, соответствую-
щие ей. План по этой
альтернативе имеет вид
следующей последова-
тельности: 14, 10, 8, 7, 6,
5, 4, 2, 1. Если бы для
какой-то альтернативы
возбудились вершины,
которые оказываются
«висячими», т. е. из ко-
торых нет дальнейшего
пути к заштрихованным
вершинам, то такая аль-
тернатива не соответст-
вовала бы плану решения
задачи. На рнс. 5.2 этот
случай связан с альтер-
нативой 11.
Недостаток метода
прямой волны состоит в
по всей сети, что может
Рис. 5.2
том, что возбуждение распространяется
потребовать большого расхода времени.
2. Метод обратной волны. Этот метод полностью
подобен предыдущему. Только возбуждение начинает распростра-
няться от тех целевых вершин, которые необходимо достичь. Пре-
кращение распространения возбуждения происходит при достиже-
нии исходных вершин. При планировании по состояниям — при
первом таком достижении, а при планировании по задачам — при
достижении исходных вершин всеми ветвями какой-либо альтерна-
тивы.
3. Метод встречных волн. Для ускорения процесса
поиска пути между исходными и целевыми вершинами можно одно-
временно использовать метод прямой и обратной волн. При этом
процесс возбуждения в пространстве состояний заканчивается, когда
произойдет первая встреча возбужденных фронтов, а в случае прост -
ванства задач такая встреча должна произойти для всех ветвей ка-
кой-либо альтернативы. Недостаток метода встречных волн может
проявляться в том случае, когда фронты волн расходятся и возни-
кает проблема определения момента прекращения процесса воз-
буждения. Эта ситуация показана на рис. 5.3.
222
ГЛ. 5. ФОРМИРОВАНИЕ РЕШЕНИЙ ПО УПРАВЛЕНИЮ
4. Метод локальных улучшений. Этот метод дол-
гие годы лежал в основе многих планирующих систем. Его идея
состоит в том, что в сеть планирования вводится некоторая метрика.
В каждой вершине сети планирования при наличии альтернативного
выбора продолжения движения по сети оказывается возможным
оценить, насколько эффективно тот или иной выбор приближает к
целевой вершине. Если бы такая оценка была истинной, то движение
от исходной вершины к целевой не вызывало бы никаких трудностей.
Достаточно было бы в каждой вершине с альтернативным выбором
идти по дуге, имеющей наилучшую оценку. Такое решение возможно
Рис. 5.3
лишь в небольших детерминированных замкнутых сетях планирова-
ния. Но для подобных сетей задача планирования практически ис-
чезает. Для любой исходной и любой конечной вершин можно зара-
нее найти наилучший путь и записать его в памяти системы. При
возбуждении соответствующей пары вершин или множества таких
пар ответ получается за один шаг обращения к информации, хра-
нящейся в памяти системы.
Для случая же открытых сетей или замкнутых сетей, размерность
которых не позволяет перечислить все пути, имеющиеся в сети,
возникает задача типа поиска пути в лабиринте ’) при наличии
В § 1.3 такие задачи были названы лабиринтными. Там же обсуждались пси-
хологические предпосылки, лежащие в основе стратегии локальных улучше-
§5.2. СТРАТЕГИИ ПЛАНИРОВАНИЯ
223
локальной информации о степени приближения к целевой вершине
при выборе того или иного преобразования, соответствующего вы-
бираемой дуге, выходящей из данной вершины. Эта идея впервые
была использована в известной программе «Общий решатель задач»
(ОРЗ). Метод локальных улучшений базируется на том, что в прост-
ранстве ситуаций вводится специальная метрика. С ее помощью ока-
зывается возможным измерять расстояния между ситуациями, оце-
нивать меру их близости. И, в частности, оценивать меру близости
ситуации, соответствующей вершине сети, в которой мы находимся,
с целевыми ситуациями, достижимыми из этой вершины. Для каждо-
го преобразования, допустимого в сети планйрования (т. е. перехода
от одной ситуации к другой по дуге, характеризующей это преобра-
зование), указаны те изменения в мере сходства с целевыми ситуа-
циями, которые возникают после преобразования. И на каждом шаге
метода локальных улучшений выбирается то преобразование, кото-
рое максимально уменьшает отличия получаемой ситуации от целе-
вых. Этот метод применим при планировании как в пространстве
состояний, так и в пространстве задач. Его можно также положить
в основу системы установления эквивалентности описаний различ-
ных ситуаций в смысле их преобразуемое™ друг в друга с использо-
ванием заданного множества операторов.
Пример 5.2. В программе ЛОГИК-ТЕОРЕТИК, послужившей
прообразом программы ОРЗ, введена система различий и система
операторов их устранения для преобразования описаний, сделанных
на языке формул исчисления высказываний. Всего введено восемь
различий между этими формулами.
1. Различие Рг. В проверяемом равенстве двух выражений
исчисления высказываний ®1=®2 (т. е. при установлении эквива-
лентности этих двух описаний) имеется различие между и, и ю2
в том, что либо «!, либо ®2 содержит пропозициональную перемен-
ную, которой нет в другом сравниваемом выражении. Такое различие
есть, например, в описаниях а и ab. Необходимо выбрать преобра-
зование, добавляющее эту переменную.
2. Различие Р2. Оно аналогично Ри но необходимо выб-
рать преобразование, устраняющее лишнюю переменную.
3. Различие Р3. В одной из формул сщ или w2 некоторая
пропозициональная переменная имеет на I вхождений больше, чем
в другой. Такое различие наблюдается, например, между описания-
ми: а\/ab и ab. Необходимо выбрать преобразование, уменьшающее
число вхождений этой переменной.
4. Различие Р4. Оно аналогично Ps, но необходимо выб-
рать преобразование, увеличивающее число вхождений этой пере-
менной в то описание, где вхождений меньше.
ний. И, наконец, там же был охарактеризован ОРЗ, о котором тут еще пойдет
речь. Системы, основанные на модельном принципе, мы будем обсуждать чуть
позже.
224
ГЛ. 5. ФОРМИРОВАНИЕ РЕШЕНИЙ ПО УПРАВЛЕНИЮ
5. Различие Р5. Различие в самой внешней операции, име-
ющейся в формуле. Оно наблюдается, например, в описаниях
(а\/Ь) (а\/с) и аЬУас.
6. Различие Р6. Одно из описаний содержит общий знак
отрицания над всем описанием, а другое описание не имеет его.
Примером могут служить описания а\/Ь и а\/Ь.
7. Различие Р7. Различие в характере группировки про-
позициональных переменных в и ®2, как, например, в описаниях
«V (ЬУс) и (ayb)ус.
8. Различие Ps. Различие в положении подформул относи-
тельно внешней операции. Примером такого различия может слу-
жить различие в описаниях ab->c и c^ab.
Введенные нами различия между описаниями, конечно, могут
комбинироваться между собой. Но важно, что приведенная выше
система различий образует полную базовую систему. Любое разли-
чие в двух описаниях на языке исчисления высказываний выража-
ется некоторой комбинацией этих базовых различий.
Перечислим теперь те операторы преобразования, служащие
для устранения различий, которые использованы в программе ЛО-
ГИК-ТЕОРЕТИК. Всего имеется десять групп таких операторов.
Операторы, входящие в первые восемь групп, симметричны, их
можно применять в любом направлении. Операторы последних двух
групп несимметричны и их использование возможно только в на-
правлении, показанном стрелкой. В описаниях приняты стандартные
обозначения:
| а/b =Ь/а,
I ab =Ьа\
( а/а =а,
Оз 4
\аа = а,
О (ayb = ab,
\ab = а\/Ъ\
f a\/bc = (аУЬ) (аус),
7 \ а (byс) = abyac;
( ab =>а,
0я \ ,
(аЬ—> Ь\
\ а~ b =Ь ~ а,
2 \ a-b^b —> а\
I аУ(Ьус) = (aybyyc,
О* I a (be) == (ab) с\
(а~ b = a\/b,
06
I а—>- b = ab',
Ф [ а =a\/bb,
8 | а = а (byby,
01(| a^ayb.
Преобразования первых восьми операторных групп не меняют
истинности выражений исчисления высказываний. Последние две
труппы преобразований, служащие для введения и устранения про-
позициональных переменных таковы, что из истинности выражения,
стоящего слева от стрелки, следует истинность выражения, стоя-
щего справа от нее, но не наоборот.
§5.2. СТРАТЕГИИ^ПЛАНИРОВАНИЯ
225
После введения набора различий и набора операторов для их
устранения составляется специальная таблица, в которой приво-
дятся в порядке присвоенных им приоритетов операторы, устраняю-
щие те или иные различия. Между самими различиями также уста-
навливаются приоритеты по значимости того или иного из них.
В нашем примере нумерация различий определяет эти приоритеты,
а приоритетов на операторы нет. Сама же таблица, связывающая
различия и операторы, которые их устраняют, приведена ниже
(табл. 5.1). Крестиками в ней отмечены позиции, в которых при-
менение данного оператора устраняет имеющееся различие.
(й->Ь)с и ab\/c. Будем для определенности преобразовывать второе
описание, стремясь свести его к первому. Основное наблюдаемое
различие состоит в наличии общего отрицания над формулой, т. е.
имеет место различие Ре. Для его устранения применяем оператор
05 и в результате получаем описание (ab)c. Сравнивая получившееся
выражение с непреобразуемым исходным, обнаруживаем различие
в том, что появляется подформула, содержащая общее отрицание,
т. е. опять имеется различие Рв. Применяем к этой подформуле тот
же оператор 06 и получаем (а\/Ь)с. Теперь наблюдается различие Ръ
для той же подформулы, ибо более внешняя операция у сравнивае-
мых описаний совпадает (конъюнкция). Для устранения различия
применяем оператор 06. В результате получаем (й->Ь)с. Совпадение
описании доказывает эквивалентность обоих исходных описаний.
Проблемой для программы ЛОГИК-ТЕОРЕТИК и, вообще, для
всех методов планирования, основанных на идее локальных улуч-
шений, является определение неэквивалентности сравниваемых
описаний. В таком случае на некотором шаге преобразований не-
обходимо прекратить их, как неперспективные. Это может и не на-
8 Д. А. Поспелов
226
ГЛ. 5. ФОРМИРОВАНИЕ РЕШЕНИЙ ПО УПРАВЛЕНИЮ
ступить автоматически, поскольку операторы, как было и в приве-
денном выше примере, могут давать циклически повторяемые опи-
сания. Подобная ситуация аналогична той, в которой при блужда-
нии по лабиринту попавшие в него многократно повторяют один
и тот же путь. Как известно, выходом является маркировка прой-
денного пути (нить Ариадны в известном греческом мифе о Тесее,
ищущем выход в лабиринте Минотавра). Для алгоритма планирова-
ния это означает, что необходимо помнить предысторию и осуществ-
лять операцию возвращения (back-traking) при обнаружении пов-
торения преобразований в виде некоторого цикла.
В программе ЛОГИК-ТЕОРЕТИК таблица различий и опера-
торов их устранения задавалась заранее. Однако существуют про-
граммы, которые формируют различия в описании, полученном на
данном шаге, и в целевом описании т).
5. Метод построения доказательства. При
таком подходе описания исходной и целевой ситуации рассматри-
ваются как формулы некоторого исчисления. Все элементы, вхо-
дящие в исходное описание, трактуются как аксиомы этого исчисле-
ния, а все элементы, образующие целевое описание,— как формулы,
которые необходимо вывести из данного набора аксиом с помощью
имеющейся системы правил вывода. Обычно в качестве такого ис-
числения используется исчисление предикатов первой степени. Пра-
вила вывода делятся на два типа: правила вывода универсального ха-
рактера, используемые в традиционном исчислении предикатов, и
правила вывода, верные только в рамках той проблемной области,
которая описывает данный объект управления, особенности его
функционирования и специфику управления им. Правила второго
типа принято называть эвристическими правилами вывода. В ка-
честве процедуры поиска вывода используется какая-нибудь до-
статочно мощная процедура типа метода резолюций или обратного
метода вывода Маслова. Эти процедуры будут описаны ниже.
Обычно технология планирования методом построения доказа-
тельства имеет следующий вид. Сначала делается попытка найти
вывод целевого описания из исходного. Если такой вывод найден,
то план построен. Если это сделать не удается, что определяется
на основе некоторого принципа остановки, подобного тому, кото-
рый мы указали для программы ЛОГИК-ТЕОРЕТИК, то к исход-
ному описанию применяется некоторое эвристическое правило вы-
вода, и процесс доказательства повторяется уже при новом исход-
ном описании. Методы такого типа сейчас являются основными при
построении планировщиков в самых различных областях.
6. Метод опережающего планирования. Эта
стратегия планирования находит все большее применение в систе-
мах семиотического управления и при планировании действий ин-
Ь Такой программой является, например, программа FDS Квинлана и Хан-
та, о которой говорится в комментарии к данной главе.
§5.3. ИСПОЛЬЗОВАНИЕ МЕТОДА РЕЗОЛЮЦИИ
227
теллектуальных роботов. В ее основе лежит идея многоуровневого
планирования, о которой мы уже упоминали. Прежде чем осуществ-
лять окончательное планирование, например, путем поиска вывода
(который может и отсутствовать), выполняется обобщенное плани-
рование. Оно отличается от обычного планирования тем, что ис-
пользует для построения планов не полные описания возможных
путей достижения целей, а усеченные описания или описания, полу-
ченные из исходных путем агрегирования за счет слияния отдель-
ных вершин в обобщенные вершины. Если обобщенное планирование
позволяет построить план, то происходит переход на точный уро-
вень планирования, где этот обобщенный план служит начальным
приближением к точному плану.
Сделаем еще одно важное замечание. Возможны два типа пла-
нирования: монотонное (линейное') и немонотонное (нелинейное).
При планировании первого типа на каждом шаге планирования мы
приближаемся к целевой вершине, как бы все время локально улуч-
шаем свое положение в сети. Процедуры планирования второго
типа этим свойством не обладают. На отдельных шагах они допус-
кают как бы ухудшение плана, очередная вершина может оказаться
более удаленной от целевой, чем найденная ранее. Но зато потом
оказывается возможным резко улучшить план, т. е. ближе подойти
к целевой вершине. В своей жизненной практике мы найдем нема-
ло примеров, когда такие нелинейные планы оказывались единст-
венно возможным средством для достижения цели. Локальный не-
успех (иногда создаваемый сознательно) позволял потом быстро
продвинуться к намеченной цели.
В заключение настоящего параграфа заметим, что планировщик
может использовать не одну фиксированную стратегию, а иметь в
своем распоряжении набор стратегий планирования, что может обес-
печить более эффективное его функционирование.
§ 5.3. Использование метода резолюции
при планировании **
Метод резолюции, предложен в середине 60-х годов. Он отно-
сится к той группе методов поиска вывода, которую обычно назы-
вают методами опровержения. Это название вызвано тем, что в
этих методах вместо поиска вывода некоторого утверждения F
ищется доказательство невыводимое™ отрицания данного утвержде-
ния F. Эквивалентность обеих задач вытекает из замкнутости ис-
числения предикатов первого порядка, в котором используется ме-
тод резолюции, т. е. в силу закона исключенного третьего в таких
исчислениях из ложности F следует истинность F.
Для применения метода резолюции необходимо перевести опи-
сание интересующего нас утверждения на язык логики предикатов
первого порядка и представить его в нем в некотором стандартном
каноническом виде. Такое представление обычно называется стан-
з*
228
ГЛ. 5. ФОРМИРОВАНИЕ РЕШЕНИЙ ПО УПРАВЛЕНИЮ
дартизованным. Оно не содержит кванторов (они заменяются из-
вестными в математической логике функциями Сколема) и пред-
ставляет собой конъюнкцию дизъюнкций предикатов. В качестве
аргументов в предикатах могут выступать константы, переменные
и функции Сколема. Стандартизация производится путем использо-
вания системы эквивалентных преобразований исчисления преди-
катов первого порядка.
Пример 5.3. Пусть имеется описание
Vx Зт [[(xr52b) V (xriSb)] (фт)].
Здесь х—какой-то человек, имя которого не фиксировано, b —
письмо, t—время, гб2—быть отправителем, ri3—быть получа-
телем. Смысл этого описания состоит в том, что каждый человек
в какой-то момент времени т (всегда найдется хотя бы один такой
момент времени) является либо отправителем письма, либо его полу-
чателем. Перейдем от этой записи на языке ситуационного управле-
ния к записи на языке предикатов. Выражения в круглых скобках
заменим на соответствующие предикаты, интерпретация которых
определяется интерпретацией отношения в скобках. Тогда получим
Ух Зт (/\ (х, Ь, х)\/Р2(х, Ь, т)).
В предикаты т внесено в качестве переменной. Квантор существо-
вания в этом описании находится в зоне действия квантора общности.
Поэтому при исключении квантора существования вводится функ-
ция Сколема а квантор общности, как всегда, исключается без
какого-либо изменения записи. После этого наше описание прини-
мает вид
Pi (х, b, f1(x))\/P2(x, b, /2(х)).
Пример 5.4. Рассмотрим предикатную запись
(Pi W Pt W) (Ps <х, у) Pt (//)).
Используя эквивалентные отношения логики предикатов, преобра-
зуем ее таким образом, чтобы исключить из записи операции им-
пликации
(Р1[х)\/Р2 (х)) (Р3(х, у)\/Р4 (//)).
Оба представления, полученные в двух последних примерах, уже
стандартизованы. Для метода резолюции принято еще опускать зна-
ки конъюнкции и записывать вместо конъюнктивной формы множе-
ство образующих ее дизъюнктов. В примере 5.3 такой дизъюнкт
один, а в примере 5.4 их два. Множество дизъюнктов для формулы F
будем обозначать через SF. Для опровержения формулы F достаточ-
но показать, что хотя бы один из ее дизъюнктов невыводим. В силу
конъюнктивной связи дизъюнктов при этом будет невыводима и
сама формула F. Смысл всего сказанного состоит в том, что возникает
возможность заменить проверку противоречивости некой формулы F,
§ 5.3. ИСПОЛЬЗОВАНИЕ МЕТОДА РЕЗОЛЮЦИИ
229
которая может быть весьма сложной, последовательной проверкой
на противоречивость довольно простых по структуре формул —
дизъюнктов. Но метод резолюции позволяет и этот процесс, который
при большом числе дизъюнктов может оказаться громоздким, сделать
более однообразным и эффективным.
В чем состоит основная трудность проверки ложности или ис-
тинности предикатного выражения? В том, что необходимо прове-
рить истинность таких выражений при комбинациях переменных,
взятых из областей определения предикатов, содержащих такие
переменные. Сами эти области могут быть бесконечными. Поэтому
перспектива прямого просмотра всех возможных интерпретаций зна-
чений предикатов и их комбинаций кажется весьма печальной. Од-
нако дело обстоит не так уж плохо. Показано, что существует та-
кая область определения всех предикатов, входящих в описание,
называемая универсумом Эрбрана, которая обладает для нас исклю-
чительно важным свойством, а именно: если на универсуме Эрбра-
на SF противоречиво, то выводима F.
Универсум Эбрана строится с помощью специальной процеду-
ры. Если в SF имеется I констант, то образуется нулевое множество
Но, состоящее из этих констант. Если в Sf нет констант, то в каче-
стве нулевого множества эрбрановой базы берется некоторая про-
извольная константа. Далее множества эрбрановой базы строятся
индуктивно. Множество Нт+1 получается объединением Нт и тех
пропозициональных переменных f(wlt w2, . . ., wn), для которых
Wi есть элементы множества Нт.
Пример 5.5. Рассмотрим предикатное описание, полученное в
примере 5.3. Если для него построить SF, состоящее из одного дизъ-
юнкта, то видно, что в этом дизъюнкте нет константы. Введем про-
извольную константу х=а. Тогда для этого дизъюнкта универсум
Эрбрана примет вид
#о=Н.
Н1=\а, ^(а),
Я2={й, Л (а), /2(й), Л(Л(й)), /1(/2(й)), /2(/!<й)), /2(/2(й))},
Если во все дизъюнкты из SF вместо переменных подставить кон-
стантные выражения из универсума Эрбрана. то в результате обра-
зуется эрбранова база.
Пример 5.6. Для SF из примера 5.3 с учетом результата примера
5.5 получаем следующую эрбранову базу:
РДй, 6, Д(й)), Р2(а, Ь, /2(й)),
Pi (Л (а), Ь, А (Д (й))), Р2 (К (й), b, f2 (К Д))),
Л(/г(«)> Ь, /Д/Дй))), P2(J2(a), b, /2(/2(й))),
Л(/1(/1(а))> ь’ Л (Л (Л («))))» •••
230
ГЛ. 5. ФОРМИРОВАНИЕ РЕШЕНИЙ ПО УПРАВЛЕНИЮ
Если вместо переменных в дизъюнкты подставить какой-то элемент
из универсума Эрбрана, то получится некоторая интерпретация SF.
В нашем примере в явном виде выписаны три интерпретации и при-
ведено одно выражение, относящееся к четвертой интерпретации.
Таким образом, эрбранова база содержит все интерпретации дизъ-
юнктов S,? на универсуме Эрбрана. Число этих интерпретаций может
быть конечным, когда конечен универсум Эрбрана, или бесконеч-
ным, как в нашем примере.
Каждой эрбрановой базе можно однозначно сопоставить неко-
торое семантическое дерево. Его построение мы проиллюстрируем
на примере.
Пример 5.7. Для эрбрановой базы, построенной в предыдущем
примере, семантическое дерево имеет вид, показанный на рис. 5.4.
На нем Р{ и Р* означают предикаты Pi и Р2 с порядковыми номе-
рами /, k, присвоенными им порядком записи в примере 5.6. Так,
предикат Р[ имеет вид
b, Д(Д(а))).
В семантическом дереве пути, ведущие от корневой вершины
вниз, соответствуют интерпретациям SF на универсуме Эрбрана.
Полное дерево содержит все такие интерпретации.
Пример 5.8. Пусть Sf={/\(x), Р2(а)\/ Р3(у), Pi(x)\'Pz(x),
Pi(x)\/P3(a)}. Для этого множества дизъюнктов универсум Эрбра-
на очень прост. Он состоит лишь из одной константы Н0={а}. Тогда
эрбранова база также конечна и имеет вид
/ = {Р1(а), Р2(а)\уР3(а), Pi(a)yP2(a), Р3(а)\.
Или, опуская для простоты записи а
I = {Pi, P2\JPS, Р^Р2, PiVP3}.
§ 5.3. ИСПОЛЬЗОВАНИЕ МЕТОДА РЕЗОЛЮЦИИ
231
Этой эрбрановой базе соответствует самантическое дерево, по-
казанное на рис. 5.5. Рассмотрим те восемь интерпретаций, которые
это дерево задает для Sf. Для интерпретаций с номерами 5—8 мно-
жество дизъюнктов неудовлетворимо уже потому, что при ложном
Pi первый дизъюнкт будет ложен независимо от интерпретации
и Р3. Поэтому правую часть семантического дерева, показанного
на рис. 5.5, можно дальше не анализировать, т. е. можно не прово-
дить дальнейшего движения вниз по ветвям дерева от этой вершины,
что позволяет резко сокращать перебор и проверку выполнимости
для множества допустимых интерпретаций SF. Таким образом,
необходимо еще проверить те интерпретации, в которых Pi прини-
мает истинное значение. При этом условии первый дизъюнкт Sr
истинен. Для истинности третьего и четвертого дизъюнктов в SF
необходимо, чтобы одновре-
менно Р2 и Р._ были бы лож-
ными. Но выполнение этого
условия приводит к ложно-
сти второго дизъюнкта в SF,
откуда следует, что все до-
пустимые восемь интерпре-
таций таковы, что ни одна
из них не приводит к удов-
летворению Sf. Поэтому F,
невыводимая, a F — выво-
димая формула.
Вершины семантическо-
го дерева, в которых впер-
вые обнаруживается непри-
годность данной интерпре-
тации для вывода F (удов-
летворения SF), обычно принято называть неблагоприятными. Если
все дуги, выходящие из некоторой вершины дерева, оканчиваются
в неблагоприятных вершинах, то говорят, что для данной вершины
дерево замкнуто. Если оно замкнуто для корневой вершины, то
это свидетельствует о невыполнимости SP, т. е. о невыводнмостп F.
Метод резолюции состоит в том, что имеется процедура посте-
пенного подъема вверх по семантическому дереву, в результате ко-
торой неблагоприятные вершины поднимаются вверх по ярусам де-
рева. Подъем происходит до тех пор, пока это возможно. Если та-
ким путем удастся дойти до корневой вершины, т. е. сделать все
исходное семантическое дерево замкнутым, то тем самым будет
доказана невыводимость F.
Эта процедура основана на поиске резольвент. Резольвентой
двух дизъюнктов называется та часть описания, которая остается,
если из этих двух дизъюнктов удалить дополнительную пару. До-
полнительной парой называется два выражения, в которых исполь-
зуются одни и те же предикаты, но в одном выражении они входят
232
ГЛ. 5. ФОРМИРОВАНИЕ РЕШЕНИЙ ПО УПРАВЛЕНИЮ
без отрицания, а в другом с отрицанием. Аргументы предикатов
роли не играют. Примером дополнительной пары могут служить два
следующих дизъюнкта: Рг (х)\/ P2(y)P3(z); Pt(x, у)\/P2(f (х)) Ps(z).
Резольвента этой дополнительной пары имеет вид Pi(x)\/Pt(x, у).
Чем хороша резольвента? Если два дизъюнкта, содержащих допол-
нительную пару, таковы, что они приводят к неудовлетворению SF,
то п их резольвента обладает тем же свойством. Это и учитывается
в процессе доказательства невыводимое™ F. Если пара дизъюнктов
не содержит дополнительной пары, то резольвента может отсут-
ствовать. Если пара дизъюнктов такова, что оба они целиком обра-
зуют дополнительную пару, то резольвента для них равна нулю.
Возможность не обращать внимания при поиске дополнительных
пар на их аргументы основана на том, что замена переменных в пре-
дикате, если он ложен в некоторой области значений, не может при
замене переменной и сохранении или уменьшении этой области
значений сделать его истинным.
Теперь можно описать суть процедуры метода резолюции. В мно-
жестве дизъюнктов ищут такие два дизъюнкта, которые содержат
дополнительную пару. В множество SF добавляется резольвента
этих двух дизъюнктов. Процесс повторяется до тех пор, пока в
множестве SF не появится «пустой» дизъюнкт, т. е. нулевая ре-
зольвента. Это будет свидетельствовать об окончании процесса
доказательства невыводимое™ F.
Пример 5.9. Рассмотрим множество SF={P1(x)\/ Р2 (х),
Pi(f Pi(x)\ Р2(у)\/Ps(f (у)), Рз(х)}. Для двух дизъюнктов ре-
зольвента есть Р2(х). Вместе с третьим дизъюнктом эта резольвен-
та порождает новую резольвенту P3(f(y)). Наконец, резольвента
этой вторичной резольвенты с последним дизъюнктом дает нулевой
дизъюнкт. Теперь можно утверждать, что F в нашем примере не-
выводима.
Мы изложили лишь суть метода резолюций. При проведении
процедуры последовательного поиска резольвент возможны раз-
личные неприятности, когда очередная резольвента не порождает-
ся, или когда процесс зацикливается. Кроме того, при большом ко-
личестве исходных дизъюнктов (а их может быть и бесконечно много)
требуются специальные меры для ускорения процесса поиска пу-
стого дизъюнкта. И, наконец, как и во всех методах опровержения,
для метода резолюции возникает проблема прекращения поиска ну-
левого дизъюнкта, когда на самом деле опровержение из-за вы-
водимости F в множестве SF получить нельзя. Существует большая
литература, посвященная всем этим проблемам, но обсуждение по-
добных вопросов, важных для повышения эффективности работы
планировщиков, опирающихся на реализацию данного метода по-
иска вывода, выходит за границы нашей книги. Заинтересованные в
детальном изучении этих проблем могут ознакомиться с литерату-
рой, указанной в комментарии к данной главе.
5.3. ИСПОЛЬЗОВАНИЕ МЕТОДА РЕЗОЛЮЦИИ
233
В заключение настоящего параграфа отметим несколько осо-
бенностей систем планирования решений, опирающихся на вывод в
формальной системе. Во-первых, сам план, найденный с помощью
логического вывода, реализуется в реальном времени и простран-
стве. И особенности этой реальной среды необходимо учитывать
при планировании. Следующий пример иллюстрирует те неприят-
ности, которые могут возникнуть при их игнорировании.
Пусть в некоторый момент планирования, анализируя имеющую-
ся ситуацию, оказалось возможным выработать два независимых
друг от друга решения: иг— «Продвинуть кран на 200 м вперед по
причалу» и U2— «Повернуть стрелу крана на 90° влево». Однако
из вывода этих двух решений совершенно не следует вывод о воз-
можности их совместной реализации, хотя в обычных дедуктивных
системах из выводимости Ur и U2 следует выводимость их конъюнк-
ции и2&иг. «Продвинуть кран на 200 м вперед по причалу, повора-
чивая одновременно его стрелу на 90° влево». В реальной ситуации
это может привести к аварии. Может оказаться, что по ходу движе-
ния крана через 50 м от точки, где он находился, расположен дру-
гой кран, о корпус которого может задеть стрела нашего крана при
повороте. Другими словами, планирование требует учета выводи-
мости того или иного решения в связи с динамикой изменения ситу-
ации, возникающей от реализации некоторого другого выведенного
решения.
Есть и еще одно замечание, связанное с формированием планов,
в основе которых лежит идея локального улучшения движения к це-
ли. Во многих задачах цель может быть достигнута только в том
случае, если на некотором шаге решения необходимо на какое-то
время как бы отойти от цели, сделать свое положение «хуже чем
было», что позволит на следующем шаге значительно приблизиться
к конечной цели. Теория таких немонотонных планов пока находится
в зачаточном состоянии и не разработаны сколь-нибудь общие под-
ходы к их формированию.
Метод резолюции, конечно, не единственный метод дедуктив-
ного вывода, который может использоваться в системах семиоти-
ческого управления. Существуют и другие методы планирования,
в основе которых лежит логический вывод. О них говорится в ча-
стности в комментариях к данной главе. Но у всех подобных мето-
дов есть один общий недостаток. Он заключается в том, что в ка-
честве исходных аксиом, с помощью которых будут делаться выво-
ды, необходимо располагать достаточно полным описанием проблем-
ной области. А это вызывает большие трудности и часто приводит
к непоправимым ошибкам из-за неполноты исходного описания.
Кроме того, отмеченные перед этим трудности, связанные с динамич-
ностью проблемных областей, также ограничивают возможности
использования чисто дедуктивных систем формирования решений.
Ниже мы расмотрим тот путь, по которому пошли системы плани-
рования решений в практических системах управления.
234
ГЛ. 5. ФОРМИРОВАНИЕ РЕШЕНИИ ПО УПРАВЛЕНИЮ
§ 5.4. Функциональные модели для планирования
При поиске решения, связанного с управлением каким-либо
объектом, естественно использовать те сведения, которые известны
системе управления как о самом объекте управления, так и о про-
цессах, протекающих в нем. Эти сведения, как уже говорилось не-
однократно, хранятся в памяти управляющей системы в виде базы
знаний. Знания о каждой текущей ситуации должны наполняться
конкретными характеризующими ее данными. База знаний оказы-
вается как бы погруженной в базу данных, она «подпитывается»
данными. И в зависимости от наполнения конкретными данными
планировщик вырабатывает те или
иные решения, выраженные в планах
воздействия на объект управления. На
рис. 5.6 все сказанное изображено в ви-
де ставшей стандартной схемы плани-
рования поиска решений. На этом ри-
сунке не показаны связи, которые име-
ются у базы данных с объектом управ-
ления, и связи планировщика с осталь-
Рис. 5.6
ными подсистемами системы управле-
ния.
Для иллюстрации того, как устроена модель проблемной обла-
сти и как планировщик может использовать ее при поиске решения
для достижения поставленной цели управления, рассмотрим один
класс таких моделей, часто встречающийся на практике. Это так
называемые функциональные модели. Всякая функциональная мо-
дель представляет собой сеть без ориентации, включающую в себя
вершины двух типов: дескрипторы и спецификаторы. При графиче-
ском изображении функциональных моделей дескрипторы принято
обозначать кружками, а спецификаторы — прямоугольниками. Вся-
кому спецификатору сопоставляется некоторое функциональное
выражение вида f(xlt х2, . . ., х„)=0, причем предполагается, что f
допускает явное разрешение хотя бы относительно одного из аргу-
ментов хг. Другими словами, хотя бы для одного xt это уравнение
можно переписать в виде: Xt=f (xlt . . ., x{_i, xi+1, . . ., хп). Та-
кая операция называется допустимым разрешением спецификатора.
Допускается, что для одного спецификатора может быть от 1 до п
допустимых разрешений. Со спецификатором /(xt, хг, . . ., хп)=0
связано п ребер функциональной модели, каждое из которых соеди-
нено с одним из дескрипторов множества {х±, х2, . . ., хп}. Два спе-
цификатора в функциональной модели соединены друг с другом
некоторым дескриптором, если последний определяет аргумент,
общий для обоих спецификаторов.
Пример 5.10. На рис. 5.7 показан фрагмент функциональной
модели, относящейся к предметной области «Планиметрия треуголь-
ника». На рисунке элементы треугольника обозначены, как при-
§5.4. ФУНКЦИОНАЛЬНЫЕ МОДЕЛИ ДЛЯ ПЛАНИРОВАНИЯ
235
нято в школьном курсе: а, [3 и у — углы треугольника; а, b и
с — его стороны (связь между обозначениями углов и сторон
иллюстрируется чертежом в верхней части рисунка); R и г — соот-
ветственно радиусы описанной около треугольника и вписанной в
него окружностей; р — полупериметр треугольника, a s — его
площадь. Внутри каждого спецификатора записано соотношение,
Рис. 5.7
связывающее между собой те или иные дескрипторы. Максималь-
ное число возможных разрешений каждого спецификатора совпадает
с числом связанных с ним ребер. Например, для спецификатора с.
соотношением s—гр=0 таких возможных и допустимых разрешений
три: s=rp; r=s/p и p=slr.
Функциональные модели, подобные рассмотренной только что
в примере 5.10, позволяют описать целый комплекс процедур, свя-
занных с определением одних дескрипторов через другие. Для этого
достаточно лишь задать исходное множество дескрипторов и целе-
вые дескрипторы и найти с помощью планировщика такие допусти-
мые разрешения для спецификаторов, которые образовали бы ори-
ентированный путь, ведущий от исходных дескрипторов к целе-
вым. Поиск такого пути (хотя бы одного из возможных) и есть ос-
новная задача планировщика.
Пример 5.11. Пусть на вход планирующей системы поступило
задание «Найти площадь треугольника, если даны его стороны а, b
236
ГЛ. 5. ФОРМИРОВАНИЕ РЕШЕНИЙ ПО УПРАВЛЕНИЮ
и с». По тексту задания планировщик возбуждает в функциональной
модели дескрипторы, соответствующие а, b и с, и начинает поиск
пути, ведущего к целевому дескриптору s. Поиск протекает в соот-
ветствии с одной из стратегий, о которых говорилось в § 5.2. Пусть
для определенности это будет стратегия прямой волны. Тогда про-
цесс поиска плана будет протекать так, как показано на рис. 5.8.
Рис. 5.8
На первом шаге планировщик убеждается в том, что допустимое раз-
решение обеспечивает только спецификатор, помеченный на рисун-
ке цифрой 1. Разрешение для него дает возможность найти значение
дескриптора р, если известны значения а, b и с. Далее оказывается
возможным разрешение спецификатора, отмеченного цифрой 2,
что позволяет определить значение дескриптора г. Наконец, на
третьем шаге планирования разрешается спецификатор, отмеченный
цифрой <3, что приводит к определению значения дескриптора s.
Так как дескриптор s является целевым, то планировщик заканчи-
вает свою работу.
После нахождения ориентированного пути, ведущего от исход-
ных дескрипторов к целевым, необходимо сформировать программу
вычислений. Это возможно, если в памяти управляющей системы
имеется заранее заготовленный набор стандартных программных
модулей, каждый из которых соответствует тому или иному допу-
стимому разрешению определенного спецификатора. При наличии
набора таких модулей найденный планировщиком путь указывает
последовательность выполнения модулей друг за другом.
Описанная процедура планирования решает только первую
часть задачи поиска решения — формирует программу, после чего
§5.4. ФУНКЦИОНАЛЬНЫЕ МОДЕЛИ ДЛЯ ПЛАНИРОВАНИЯ
237
необходимо произвести наполнение программы конкретными дан-
ными. На этом этапе также приходится обращаться к базе знаний
о проблемной области, ибо только в ней содержатся закономерности,
позволяющие судить о допустимости того или иного сочетания дан-
ных. Например, если мы пользуемся функциональной моделью,
описанной в примерах 5.10 и 5.11, то при поступлении на вход сис-
темы планирования задания «Найти площадь треугольника, если
даны его стороны а= 100, Ь=\ и с=20», будет построена программа,
соответствующая пути, найденному в примере 5.11. Далее она нач-
нет выполняться для конкретных значений сторон треугольника,
зафиксированных в задании. Но выполнение программы успешно не
завершится. Произойдет аварийный останов, так как при вычисле-
нии радиуса вписанной окружности в соответствии со спецификато-
ром, помеченным на рис. 5.8 цифрой 2, под корнем будет получено
отрицательное выражение.
Для того чтобы исключить подобные случаи в модели проблем-
ной области заранее предусматриваются закономерности, выполне-
ние которых должно быть обязательным при работе с конкретными
данными. В нашем случае в модели проблемной области должны хра-
ниться такие закономерности, «Сумма длин двух сторон треуголь-
ника всегда больше длины третьей стороны», «Разность длин двух
сторон треугольника всегда меньше длины третьей стороны», «Сум-
ма углов треугольника всегда равна 180°» и т. п. Эти предваритель-
ные проверки должны выявить все случаи недопустимости исполне-
ния программ при таких фиксированных исходных данных, кото-
рые нарушают основные закономерности проблемной области.
Совокупность дедуктивного вывода, обеспечиваемого плани-
ровщиком на функциональной модели, описание самой модели, свя-
занных с ней программных модулей и закономерностей данной
проблемной области вместе с процедурами их проверки образуют
то, что сейчас принято называть интеллектуальным пакетом при-
кладных программ. Именно в виде такого пакета выступает в ситу-
ационном управлении Коррелятор. Основная его компонента —
набор логико-трансформационных правил
si; s2=>s3.
D
Здесь Si— описание фрагмента текущей ситуации, наличие ко-
торого определяет применимость логико-трансформационного пра-
вила, S2— описание преобразуемого фрагмента, a S3— результи-
рующее описание нового фрагмента описания. Если рассматривать
Sj, S2 и S3 как дескрипторы, а => как некоторый спецификатор,
D
то легко установить соответствие между функциональными моде-
лями и набором логико-трансформационных правил. Поэтому мож-
но считать, что методы, традиционные для ситуационного управле-
ния, предвосхитили идею работы с функциональными моделями.
238
ГЛ. 5. ФОРМИРОВАНИЕ РЕШЕНИЙ ПО УПРАВЛЕНИЮ
В реальных задачах часто встречается случаи, когда переходы
между состояниями в пространстве состояний или между подзада-
чами в пространстве подзадач недетерминированы, что отражает
неполноту наших знаний о возможностях таких переходов. В этом
случае дуги сети, на которой производится планирование, взвеши-
ваются, например, значениями функции принадлежности. Общая
оценка найденного плана вычисляется по оценкам этих значений
на отдельных дугах разными способами. В частности, общая оценка
может совпадать с минимальной оценкой, встречающейся на данном
пути, или быть средней арифметической этих оценок.
§5.5. Сценарии и логики действий*
При поиске решений в системах ситуационного управления ис-
пользуются не только функциональные модели, но и другие спосо-
бы нахождения решений. В § 5.4 мы уже упоминали о логико-тран-
сформационных правилах, лежащих в основе многих реальных сис-
тем ситуационного управления. Использование подобных правил
предполагает, что вся необходимая информация для вывода решения
хранится в специально организованной базе знаний (см. рис. 5.6).
Эта организация заключается в разбиении всей базы знаний на от-
дельные, возможно пересекающиеся участки, называемые сферами.
Каждая сфера содержит знания, между которыми существует тес-
ная семантическая, прагматическая или ситуативная связь. Сфере
приписано определенное имя. Каждый факт, хранящийся в памяти
системы управления, содержит информацию об именах тех сфер, в
состав которых он входит. Кроме того, факт имеет собственное,
присущее только ему, имя. Наконец, для факта указываются спис-
ки отношений, которыми он связан с другими фактами, и типов
(имен) этих отношений.
В зависимости от конкретной используемой базы данных, в ко-
торую погружена база знаний, оформление факта может быть
различным. Например, он может быть описан в виде ролевого
фрейма.
Пример 5.12. При создании системы управления погрузкой и раз-
грузкой вагонов на железнодорожной станции может потребовать-
ся описать в виде факта знание о технологии разгрузки вагонов.
Это знание можно представить следующим ролевым фреймом:
{<РАЗГРУЗКА> <МЕСТО> <3начение слота> <ТИП ВАГОНА>
<3начение слота> <ТИП ГРУЗА> <3начение слота> <СРОЧНОСТЬ>
<3начение слота> <ВРЕМЯ ПРИБЫТИЯ> <3начение слота> <ПОЛУ-
ЧАТЕЛЬ> ^Значение слота>}.
Такой ролевой фрейм может иметь вложенную структуру. Дру-
гими словами, отдельные слоты, соответствующие ролям, определяе-
мым их именами, сами могут быть именами других ролевых фрей-
мов. Например, слот МЕСТО сам может задаваться в виде следую-
щего фрейма:
§ 5.5. СЦЕНАРИИ И ЛОГИКИ ДЕЙСТВИЙ
239
{<МЕСТО> <ОТКУДА> <3начение слота> <КУДА> <3начение
слота> <ТИП ВАГОНА> <3начение слота> <СРЕДСТВО> <3начение
слота>}.
В свою очередь слот ТИП ВАГОНА также может иметь вид не-
которого ролевого фрейма.
{;ТИП ВАГОНА4' <СРЕДСТВА ПОГРУЗКИ> <3начение слота>
<СРЕДСТВА РАЗГРУЗКИ> <.3начение слота> <УСЛОВИЯ> Зна-
чение слота',}.
При заполнении слотов приведенных ролевых фреймов конкрет-
ными данными из базы данных возникают конкретные фреймы, полу-
чающиеся из этих фреймов-прототипов. Например,
{ РАЗГРУЗКА? < МЕСТО? <Платформа № 2? <ТИП ВАГОНА>
<Тип 4> ЗИП ГРУЗА? /Песок? <СРОЧНОСТЬ> <Первая> <ВРЕМЯ
ПРИБЫТИЯ? <25 декабря 1985 г.> <ПОЛУЧАТЕЛЬ> <Кизпичный
завод № 68 };
{ .МЕСТО / <ОТКУДА> <Платформа № П <КУДА> <Платфор-
ма№2?<ТИП ВАГОНА> <Тип 4> <СРЕДСТВО> <Тепловоз 02652 >};
{ <ТИП ВАГОНА / <СРЕДСТВА ПОГРУЗКИ4/ <Любые? СРЕД-
СТВА РАЗГРУЗКИ> <Любые> <УСЛОВИЯ> <Длина платформы не
менее 50 м, высота платформы не более 0,5 м?};
{<ПЕСОК? СРЕДСТВА ПОГРУЗКИ-РАЗГРУЗКИ> Тран-
спортеры типа 1, 4, 7; кран типа 6; ручная погрузка-разгрузка>
МЕСТОНАХОЖДЕНИЕ МЕХАНИЗМОВ> Транспортеры типа 1,
4 на платформе № 2; транспортер типа 7 и кран типа 6 на платфор-
ме № 7>}.
Что дают эти описания? Они содержат в себе информацию о том,
что 25 декабря 1985 г. железнодорожный вагон типа 4 с песком, при-
бывшим для использования на кирпичном заводе № 68, находится
около платформы № 1. Однако на этой платформе нет механиче-
ских средств, пригодных для разгрузки песка. Поэтому с помощью
тепловоза 02652 вагон может быть доставлен к платформе № 2, на
которой имеются транспортеры типа 1 и 4, пригодные для выгрузки
песка. При проведении в жизнь этого решения необходимо еще
проверить выполнение условия, связанного с типом данного вагона,
касающееся длины платформы № 2 и ее высоты. Если эти условия
выполнены, то решение задачи найдено. Если они не удовлетворя-
ются, то необходимо искать другой вариант разгрузки, связанный,
например, с перегонкой вагона с песком к платформе № 7.
Как видно из приведенного примера, в памяти системы хранятся
два типа описаний: интенсиональные и экстенсиональные. Интен-
сиональные описания — это описания чистых знаний об объекте
управления и протекающих в нем процессах. Ролевой фрейм, в ко-
тором роли только названы, но не заполнены, представляет со-
бой пример такого интенсионального описания. При заполнении
же ролей возникает множество экстенсиональных описаний —
конкретных фактов, дающих в совокупности описание текущей
ситуации.
240
ГЛ. 5. ФОРМИРОВАНИЕ РЕШЕНИЙ ПО УПРАВЛЕНИЮ
Как интенсиональные, так и экстенсиональные описания могут
быть связаны между собой различными отношениями. В нашем
примере для большей наглядности эти отношения, как и имена сфер,
в которые входят эти факты, не были указаны. Наиболее важны для
интенсиональных описаний классифицирующие отношения, ха-
рактерные для Классификатора, т. е. отношения типа класс — эле-
мент класса. Эти отношения описывают структуру объекта управ-
ления и структуру процессов принятия решений по управлению
данным объектом. Отношения же на множестве экстренсиональных
описаний являются ситуативными. Они связывают отдельные кон-
кретные факты между собой в единую ситуацию.
Связывая между собой описания двух типов, можно получить
сценарий принятия решений.
Рис. 5.9
Пример 5.13. На рис. 5.9 приведен фрагмент сценария для случая
управления водопользованием и водопотреблением в некотором ре-
гионе. На первом уровне этого сценария выделяется семь классов
ситуаций, при появлении которых необходимо управление. Эти
классы интерпретируются следующим образом: 0 — необходимо
rJ
!
§5.5. СЦЕНАРИИ И ЛОГИКИ ДЕЙСТВИЙ
24|.
изменение работы системы водопотребления, 1.1 — из-за состояния
погодных условий, 1.2 — из-за воздействий сельскохозяйственного
водопотребления, 1.3—из-за воздействий водного транспорта,
1.4 — из-за воздействий коммунально-бытового потребления, 1.5 —
из-за воздействий гидроэнергетических сооружений, 1.6 — из-за
воздействий промышленности, 1.7 — из-за воздействий индустрии
туризма. Далее анализируется лишь та часть сценария, которая
связана с необходимостью управления в результате требований,
предъявляемых к системе управления коммунально-бытовым по-
треблением. Оставшиеся на рис. 5.9 вершины сценария интерпре-
тируются следующим образом: 2.1 — увеличение количества по-
требляемой воды, 2.2 — увеличение количества уходящей воды и
ухудшение ее качества, 3.1 — анализ причин нарушения баланса,
4.1 — прогноз дальнейших изменений, 5.1 — изменения носят
временный характер, 5.2— изменения носят постоянный характер,
6.1 — моделирование влияния изменений на состояние окружаю-
щей среды, 6.2 — определение недостающего количества воды,
6.3 — моделирование влияния изменения качества стоков на сос-
тояние окружающей среды, 7.1 — оценка результатов моделирова-
ния, 7.2 — анализ влияния водохозяйственного баланса на перспек-
тиву, 8.1 — оценка возможности увеличения водопотребления,
8.2 — оценка результатов моделирования, 9.1 и 9.2 — определение
решений на основании проделанного анализа.
Далее следуют сами решения, обозначенные на рис. 5.9 цифрами:
1 — введение режима экономии воды, 2 — увеличение нагрузки
на водохозяйственные предприятия, 3 — ввод в действие резерв-
ных мощностей, 4 — строительство водопроводов, 5 — модерниза-
ция оборудования имеющихся очистных сооружений, 6 — строи-
тельство новых очистных сооружений, 7 — перераспределение сто-
ков с дальнейшим их использованием, 8 — увеличение нагрузки
на очистные сооружения и использование резервных мощностей.
Таким образом, сценарий содержит в себе самые разнородные
элементы, связанные с проверкой условий, требующих вмешатель-
ства системы управления, анализом текущей ситуации, прогнозиро-
ванием ее развития и собственно принятием того или иного решения.
Но сценарий, рассмотренный в нашем примере 5.13,— это только
верхний уровень системы принятия решений. На нижних уровнях
решение должно быть конкретизовано. Конкретизация может по-
требовать нескольких этапов, включающих в себя процедуры ана-
лиза, имитационное моделирование (экстраполяцию) или оптими-
зацию. В ряде систем ситуационного управления, созданных в на-
шей стране, системы принятия решений имеют три уровня конкре-
тизации. На самом верхнем уровне происходит выявление кон-
фликтных ситуаций, требующих принятия решений по управле-
нию. На втором уровне вычленяются все допустимые решения и для
них осуществляется экстраполяция и, если возможно, оптимизация.
Наконец, на третьем уровне найденная схема решения (интенсис-
242
ГЛ. 5. ФОРМИРОВАНИЕ РЕШЕНИИ ПО УПРАВЛЕНИЮ
нальное описание сценария решения типа ролевого фрейма из при-
мера 5.12 или логико-трансформационного правила) наполняется
конкретным содержанием из базы данных и превращается в эк-
стенсиональное описание сценария принятия решения, которое
и реализуется покомандно. Переход со второго уровня на третий
сопряжен с возможной неоднозначностью конкретной схемы реали-
зации интенсионального описания из-за неоднозначности последова-
тельности срабатывания логико-трансформационных правил. Для
устранения этих коллизий вводятся специальные метаправила, с
помощью которых выбираются допустимые последовательности
применения логико-трансформационных правил.
Рассмотрим еще один подход, связанный с принятием многоша-
говых решений, когда в качестве аппарата принятия решений ис-
пользуется логика действий. Рассмотрим фрагмент такой логики,
связанный с частичной упорядоченностью во времени действий,
составляющих в совокупности реализацию некоторого решения.
Пусть di—элементарные действия, для которых управляющая
система имеет стандартные приемы реализации; Ds— сложные
действия, состоящие из цепочек действий df, Ак — субъекты, способ-
ные выполнять действия di из некоторой совокупности таких дейст-
вий. При этом в роли субъектов могут выступать как люди, так и все-
возможные механизмы и аппараты. Через Тк будем обозначать ин-
тервалы времени, в течение которых действует субъект Ak. Наконец,
От— объекты, испытывающие воздействие. Введем теперь основные
базовые тройки, характерные для логики действий во времени.
При обозначении отношений, входящих в них, будем пользоваться
отношениями из табл. 2.1 и табл. 2.2, а именно:
d;r^Dj—элементарное действие есть часть действия Dj,
Ahr76di— субъект Ak выполняет действие dt,
Akr7eDf— субъект Ak выполняет действие Dj,
dir7Th—действие di реализуется в интервале Th,
DjrrTk —действие D} реализуется в интервале Тh,
A^iTk — субъект Ah действует в интервале времени Т h,
Omi\Th—объект 0m испытывает воздействие на интервале Тк,
dtr^di — действия d( и могут быть выполнены друг за другом
в произвольном порядке, не примыкая друг к другу,
dtrzedi—действия di и di должны быть выполнены, примыкая
друг к другу, в указанном порядке,
D^Dm — действия Dj и Dm могут быть выполнены, примыкая
друг к другу, в любом порядке,
Djr2eDm— действия Dj и Dm должны быть выполнены, примыкая
друг к другу, в заданном порядке,
dir2ldi—действия di и выполняются одновременно,
Dj-r-ziDn—действия Dj и Dm выполняются одновременно,
dtr-jOm— действие dt выполняется на объекте 0т.
Приведем еще примеры правил вывода, используемых в такой
логике действий.
§ 5.6. ЭКСТРАПОЛЯЦИЯ РЕШЕНИЙ
213
1. Всякий субъект может выполнять некоторое действие (dt или
Dy) лишь на том временном интервале, на котором он может это де-
лать. Для действий di это правило имеет вид
GViT*) (Afer76d,.) (dtrtT**)^> (Т**г29Т*).
2. Время, в течение которого субъект совершает действие на ка-
ком-либо объекте, и время, в течение которого объект испытывает
воздействие от этого действия (dt или Dy) должны быть одинаковы.
Для действия dt это правило имеет вид
(Лftr7edf) Ц-г71Ои) (О^Т**) => (Т*г21Т**).
3. Элементарные действия, входящие в сложное, должны иметь
интервалы реализации, содержащиеся в интервале реализации
сложного действия. Для действия di это правило имеет вид
(^eD,) (ПГ1Т**) => (7>r29T**).
4. Для непосредственно примыкающих друг к другу действий
(di или Dy) интервалы их реализаций должны находиться в отно-
шении примыкания. Для dt это правило имеет вид
(d/2,A) (dtr(Т*г2еТ**).
5. Если некоторое действие (dt или Dy) совершается раньше дру-
гого действия (dj или Dm), то такое же отношение имеется и между
интервалами, на которых они реализуются. Для dt это правило
имеет вид
(d;r22di) (dfrj*) (dirtT**) => (T*r22T**).
6. Если два действия (di или Dy) выполняются одновременно, то
их интервалы выполнения совпадают. Для dt это правило имеет
вид
(d^di) (d^T^idirJ**) => (T*r21T**).
Аналогичным образом можно построить фрагмент логики дей-
ствий, связанный с пространственной реализацией действий. Для
этого из табл. 2.1 и табл. 2.2 надо выбрать соответствующие про-
странственные отнэшения.
Подобные фрагменты логики действий можно использовать при
построении сложных решений из элементарных и проверки условий
возможности их совмещения во времени и пространстве.
§ 5.6. Экстраполяция решений
Сложность объектов, для которых обычно используются методы
ситуационного управления, требует при поиске решения по управ-
лению имитации возможных последствий принятия того или иного
решения. Проблема имитационного моделирования не относится к
какой-то особой проблеме, связанной именно с ситуационным уп-
244
ГЛ. 5. ФОРМИРОВАНИЕ РЕШЕНИЙ ПО УПРАВЛЕНИЮ
равлением. Существует много методов такого моделирования, поз-
воляющих экстраполировать динамику состояний объекта и про-
цессов, протекающих в нем. Разработаны специальные языки ими-
тационного моделирования и созданы пакеты программ, позволя-
ющие такую имитацию осуществлять.
Однако при использовании методов семиотического типа и тех
языков описания ситуаций, которые в них применяются, возникают
особые требования к системам моделирования. Эти требования свя-
заны с тем, что в идеале хотелось бы получить прогноз развития
событий на уровне описаний тех ситуаций, которые могут возникнуть
в будущем. Другими словами, хотелось бы получить экстраполяцию
в виде перевернутого дерева, показанного на рис. 5.10. Его корень
соответствует ситуации (описанию ситуации) на объекте в данный
момент времени. Если в качестве решения планируется D* =с?гс?2с?з,
то последующие ярусы дерева показывают те ситуации, в которые
реализации именно данного ре-
шения. Ветвление дерева соот-
ветствует той неопределенно-
сти, с которой можно пред-
ставить себе процесс развер-
тывания событий. Около каж-
дой ситуации, лежащей на
концевых ветвях дерева, про-
ставлены оценки gi, характе-
) ризующие возможность тако-
го исхода (они показаны за-
штрихованными кружками).
Эти оценки могут иметь экс-
пертный, вероятностный или
размытый характер.
Если в исходной ситуа-
ции, кроме решения D* можно использовать некоторые другие
решения, то для всех них строится имитационный процесс, по-
рождающий свое дерево такого же типа, каки на рис. 5.10. Далее
по некоторому решающему правилу оцениваются полученные в ре-
зультате моделирования оценки gi и выбирается то решение D*,
для которого решающее правило дает наилучший результат.
Важная особенность приведенного выше метода состоит в том,
что при моделировании мы каждый раз имеем описание получае-
мой ситуации, а, значит, может классифицировать ее с помощью
Классификатора и оценивать ее конфликтность или неконфликт-
ность для управления объектом. Это приводит к имитационному мо-
делированию как бы на двух уровнях: на уровне динамики самого
объекта управления и на уровне описания складывающихся на нем
операций с учетом возможностей (например, ресурсов) самой систе-
мы управления. Таким двухступенчатым образом и формируются
значения оценок g;.
§ 5.6. ЭКСТРАПОЛЯЦИЯ РЕШЕНИЙ
245
Следующая особенность имитационных процессов в системах
принятия решений при управлении, в основе которых лежат логико-
лингвистические модели, состоит в том, что интерес представляют
не только статистические данные, накапливаемые в процессе модели-
рования (например, средние времена ожиданий или длины очередей
объектов, ждущих обслуживания), но и динамика одной конкретной
ситуации, причем изменяются не только (и не столько) какие-то
числовые параметры, но и структурные описания (например, от-
ношения, реализуемые между отдельными элементами, входящими
в описание ситуации). Все это приводит к необходимости при по-
строении Экстраполятора для систем ситуационного управления
использовать возможности, содержащиеся не только в традицион-
ных языках для имитационного моделирования, но и в языках, ха-
рактерных для описания и трансформации описаний ситуаций.
И, наконец, еще одна особенность Экстраполятора — его рабо-
та должна быть тесно увязана с работой других блоков системы си-
туационного управления и прежде всего с работой Классификатора
и системы выбора решений. Это означает, что имитационный про-
цесс в системах ситуационного управления протекает таким обра-
зом, что движение по дереву типа дерева, показанного на рис. 5.10,
осуществляется не только с учетом самого объекта, но и с привле-
чением процедур классификации ситуаций, возникающих по ходу
моделирования, и применения процедур формирования решений на
основе результатов этой классификации.
В § 2.7 мы ввели представление объектов управления в виде
дискретной ситуационной сети (ДСС). Подобная модель позволяет
весьма просто продемонстрировать сущность процесса имитаци-
онного моделирования в
Экстраполяторе системы
ситуационного управления.
Напомним, что ДСС
включает в себя элементы
четырех типов: истоки, сто-
ки, пассивные решатели и
активные решатели. По ДСС
перемещаются в дискретные моменты времени объекты, каждый из
которых задается набором характеристик. Характеристики бывают
двух типов: статические, характеризующие сущность данного объек-
та, и динамические, связанные с временными оценками, приписывае-
мыми объекту в данном конкретном процессе, реализуемом на ДСС.
Каждый элемент, входящий в состав ДСС, можно представить
некоторым детерминированным или вероятностным автоматом. Эти
автоматы можно даже схемно реализовать, но в системах ситуацион-
ного управления предпочитают иметь их программно реализованные
модели.
Пример 5.14. Рассмотрим ДСС, показанную на рис. 5.11. Как
мы видим, ДСС имеет один исток, функционирование которого по-
Трансп-2
Детали
Транса-1
~й\—ЧдУ-
Заготовки
Станок
Рис. 5.11
246
ГЛ. 5. ФОРМИРОВАНИЕ РЕШЕНИЙ ПО УПРАВЛЕНИЮ
рождает объекты двух типов: заготовка! и заготовка2. Объекты
поступают в пассивный решатель, а затем в решатель, в котором
объединены пассивный и активный решатели АР-\-Р. Наконец,
после этого объекты попадают еще в один пассивный решатель и
уходят в сток. Первый и последний пассивные решатели имитиру-
ют транспортеры трансп-1 и трансп-2, подают заготовки решателю
АРА-Р, который имитирует станок, и передают готовые детали в.
бункер, показанный на ДСС в виде стока С. Обработка объектов за-
готовках и заготовка2 на станке требует определенного времени,
что меняет динамические характеристики этих объектов. Сама же
обработка на станке меняет их статические характеристики.
При имитации процесса движения заготовок и обработки их на
станке введем следующие процессы.
1. УСТАНОВКА. Этому процессу соответствует логико-транс-
формационное правило (ЛТП) следующего вида: если станок свобо-
ден и заготовка; находится на трансп-1, то следует поместить
объект заготовка; на станок, убрав его с трансп-1, и затем переве-
сти станок в состояние занят.
2. ВКЛЮЧЕНИЕ. Соответствующее ЛТП имеет вид. Если
станок занят, то перевести его в состояние включен.
Отметим, что состояние свободен имеет неопределенный по вре-
мени интервал актуализации. Состояние же занят в зависимости
от типа объекта заготовка,- (г = 1, 2 для нашего примера) актуализу-
ется на определенный период времени (например, для г = 1 на 10 мин,
а для г=2 на 45 мин).
3. ПОДАЧА ЗАГОТОВКИ. Соответствующее ЛТП имеет вид.
Если на трансп-1 нет объектов вида заготовка г, то передать управ-
ление истоку и ждать появления первого объекта заготовка,, после
чего функционирование истока прекращается до освобождения.
трансп-1.
Такие условия срабатывания ЛТП для процесса подача загото-
вок, конечно, на практике могут и не выполняться. Исток может
функционировать независимо от наличия или отсутствия заготовок
на транспортере, подающем детали к станку.
4. ВЫКЛЮЧЕНИЕ. Соответствующее ЛТП имеет вид. Если
счетчик астрономического времени для состояния занят достиг гра-
ницы, соответствующей объекту заготовка,, то перевести станок
в состояние свободен и поместить готовую деталь на трансп-2.
5. ПОДАЧА ДЕТАЛИ. Соответствующее ЛТП имеет вид. Если
деталь находится на трансп-2, то включить его и через заданное
астрономическое время t выключить.
Это правило соответствует перемещению детали от станка в.
выходной бункер (сток ДСС).
Описанные нами пять ЛТП содержат в себе условия примени-
мости, выполнение которых допускает изменения в ситуации, опи-
санные в этих ЛТП. Условия применимости вводятся маркером;
Если, а операторы преобразования — маркером то.
§ 5.6. ЭКСТРАПОЛЯЦИЯ РЕШЕНИЙ
247
Приведенный чрезвычайно простой пример показывает, что опи-
сание текущей ситуации и описание ЛТП для сколь-нибудь слож-
ного реального объекта будут весьма громоздки, а сама работа по
формированию нужного списка ЛТП представляет очень нелегкую
задачу. В реальных объектах по ДСС будут перемещаться многие
весьма разнотипные объекты и ЛТП для их переработки в активных
решателях будут многочисленны и взаимосвязаны по условиям
своей применимости.
Пример 5.16. Для иллюстрации сказанного приведем в качестве
примера табл. 5.2, в которой перечислены виды и количество объек-
тов, перемещающихся по ДСС и образующих ее активные решатели,
для Калининградского морского рыбного порта.
Таблица 5.2
Объекты и активные решатели Количество, встреча- ющееся в рамках одной ситуации
Эстакадные краны 2
Портальные краны 36
Причалы
Индустриальная гавань 8
Лесная гавань 7
Нефтебаза 2
Мелькомбинат 1
п/п Светлый 1
Газационный 1
Электропогрузчики 115
Автопогрузчики 28
Суда портфлота 45
Холодильники 2
Склады крытые 13
Площадки открытые 30
Железнодорожные пути 7
Рабочие 2459
Бригады 32
Суда Калининградской приписки более 400
Виды судовых лебедок 25
Виды твиндеков 126
Виды грузовых помещений 63
Типы вагонов 17
Ассортимент грузов около 500
Типы автомашин 7
Мы здесь не разделяем объекты и активные решатели, так как
в зависимости от желания их можно превращать друг в друга.
Анализ таблицы показывает сколь сложным может оказаться сис-
тема ЛТП, учитывающая все виды объектов, ресурсов и синхронизи-
рующих процессы параметров. Оценка числа ЛТП, характерных
для систем моделирования таких объектов, лежит в пределах 200—
400. Количество решений, принимаемых при обработке судов в пор-
ту типа морского рыбного порта также весьма велико. Практиче-
248
ГЛ. 5. ФОРМИРОВАНИЕ РЕШЕНИЙ ПО УПРАВЛЕНИЮ
ски каждое такое решение является многошаговым. В его состав
Входят следующие основные операции: погрузка, выгрузка, пере-
валка, буксировка; дислокационные: постановка первым бортом, по-
становка вторым бортом, перетяжка, раскантовка, отшвартовка,
перешвартовка; бункеровоч-
ные: заправка топливом,зап-
равка маслом,заправка мазу-
том, заправка водой, отстой,
перевозка; вспомогательные:
газация, дератизация, дезак-
тивация, дезинфекция,зачист-
ка, мойка и сушка, затарка,
судоремонт, очистка, противо-
пожарные операции, водолазные операции, пассажирские опера-
ции. С грузами также связан целый спектр операций. Ряд операций
(например, погрузка или буксировка) сами состоят из ряда более
простых операций. Эти операции связаны между собой сценария-
ми, определяющими необходимые и допустимые последовательности
выполнения отдельных операций. Примером может служить сцена-
рий, показанный на рис. 5.12. Здесь, как и всегда, отношение
г21 есть отношение одновременно, а отношение г22— быть раньше.
Цифрами обозначены следующие операции: 1 — передача карго-
плана, даты прихода, 2 — подготовка к обработке судна, 3 — переход
судна в порт, 4 — оформление прихода, 5 — обработка судна, 6 •—
оформление грузовых документов и отхода. Конечно, каждая вер-
шина сценария сама является именем некоторого сценария, и та-
§5.7. ОСОБЕННОСТИ РАССУЖДЕНИЙ У ЧЕЛОВЕКА
249
кая «вложенность» сценариев может быть достаточно глубокой.
В качестве параметров, меняющих вид сценариев или их последова-
тельности, выступают конкретные характеристики типов судов,
причалов и других элементов, перечисленных в табл. 5.2.
Кроме тех решений, которые связаны с учетом совокупности сце-
нариев, определяющих технологические требования к реализации
решений и входящих, как правило, в условия применимости тех
или иных ЛТП, имитируются и принимаются решения, определяе-
мые лишь теми критериями управления, которыми руководствуется
сама система управления. Эти критерии, как правило, противоре-
чивы, так как они затрагивают интересы различных ведомств. План
разгрузки и отправления грузов всегда рождается в результате не-
которого компромиса, оцениваемого в процессе имитации послед-
ствий принимаемых решений. За простотой окончательного реше-
ния, иллюстрируемого, например, рис. 5.13, скрывается реализа-
ция весьма громоздкой процедуры имитации и принятия решения.
§ 5.7. Особенности рассуждений у человека
В процессе первоначального заполнения памяти системы управления семиоти-
ческого типа и в процессе обучения, когда технолог-управленец формирует для
системы основные стратегии управления, а также обучающие выборки, он невольно
вносит в эту информацию те особенности своего мышления, которые присущи ему
как человеку.
В данном параграфе мы постараемся перечислить приемы мышления, охотно
используемые человеком в ходе своих рассуждений и не укладывающиеся в тра-
диционные рамки логики. Цель настоящего раздела — насторожить специалиста
по управлению, который зачастую легкомысленно относится к тому уровню строгос-
ти, который на самом деле характеризует позицию и высказывания эксперта-
управленца. Вторая цель излагаемого ниже — дать набор некоторых рекоменда-
ций по построению систем, имитирующих человеческие способы рассуждений. Не-
обходимость в этом вызывается не собственно задачами имитации человеческих
способностей искусственными системами, а тем, что в системах общения между
человеком и интеллектуальной системой необходимо создать уровень взаимопони-
мания и доверия, возникающий при общении двух людей.
Дальнейшее изложение будет носить конспективный характер. Более раз-
вернутое рассмотрение тех или иных проблем, связанных со способами рассужде-
ний человека, можно найти в книгах и статьях, о которых говорится в коммента-
рии к данной главе. Порядок рассмотрения особенностей рассуждений и выводов,
делаемых человеком на основе этих рассуждений, отражает ту значимость, которую
сегодня им можно приписывать при решении управленческих задач.
1. Шкалированность выводов. В § 4.2 мы много говорили о
шкалах, образующих пространство, в котором осуществляется классификация
объектов и явлений окружающего мира у человека. Понятно, что его рассуждения
и формируемые нм выводы не могут не учитывать эти шкалы. Однако шкалиро-
вание выводов происходит, как правило, как бы вне их вербального выражения,
остается «за кадром», хотя и осознается при необходимости. Но иногда такая шка-
лированность выступает в явной форме. Пусть мы имеем две шкалы: шкалу причин
и шкалу следствий. На каждой шкале определено некоторое отношение порядка.
Обозначим через то, что причина аг меньше причины а2, а через р1<Р2,
что следствие ^меньше следствия Р2. Пусть известно, что справедлив вывод =>р,.
Что можно сказать о выводе а2=»>р2, для которого известно, что ат<а2? Нас
будет интересовать тот случай, когда из данной информации можно сделать либо
вывод Р1<₽2, либо вывод Р2<Pj. В первом случае мы будем говорить, что шкала
250
ГЛ. 5. ФОРМИРОВАНИЕ РЕШЕНИЙ ПО УПРАВЛЕНИЮ
причин и шкала следствий согласованы, а во втором,— что они обратно согласованы.
Представляется, что для человека эти два случая согласованности шкал причин
и следствий практически всегда имеют место.
Рассмотрим следующий пример. Пусть шкала а есть шкала уголовных пре-
ступлений. Тогда отношение меньше может интерпретироваться, как «быть легче
с точки зрения нанесенного ущерба». Пусть шкала Р есть шкала наказаний, опре-
деляемых за преступления. Ясно, что шкалы а и Р согласованы. За более тяжелое
преступление полагается и более тяжелое наказание. Если же в качестве шкалы
Р рассмотреть шкалу, на которой отмечается вероятность исправления преступни-
ка, то можно считать, что она обратно согласована со шкалой а.
2. Некорректное использование причин. При выводах
вида а=?>Р в рассуждениях человека весьма часто встречаются случаи, когда их
реализация обусловлена некоторыми условиями. Другими словами, вывод имеет
виду: а=:>Р, где предикату характеризует возможность вывода а=>р. Однако очень
часто у оказывается «забытым» и вывод «=>р делается «по традиции». Это тот пласт
знаний, которые принято называть родительскими. Подобные знания усваиваются
человеком некритично, без оценки их достоверности. В первобытном мышлении,
в мифах, обрядах подобные выводы используются повсеместно. И в наши дни вы-
ражения «Принято считать, что...» или «В соответствии со сложившейся традици-
ей...» и т. п., демонстрируют тот же способ рассуждения. Однако часто такие вы-
воды оказываются неверными вследствие ложности в данной ситуации предиката у.
Другой пример некорректного использования причин — случай, когда в
выводе принимает участие детский пласт знаний. Выводы, основанные на подобных
знаниях, как правило, опираются на рассуждение типа «Мне хочется Р но для
того, чтобы было р нужно а. Пусть а имеется» 1). Далее происходит вывод а=±>Р,
хотя а может и не существовать.
Наконец, очень часто в качестве причины Р выбирается не та истинная при-
чина, которая вызывает Р, а какая-либо лежащая на поверхности квазипричина.
Это наиболее часто встречающееся чисто человеческое заблуждение. Именно из-за
него, например, Наполеон считал, что пароходы не могут плавать: они должны
потонуть, потому что железо, из которого они сделаны, тонет в воде.
3. Незаинтересованность в следствиях. Очень часто в
выводе а=>Р человеку довольно безразлично, что именно выводится из а. Такая
ситуация в некотором смысле противоположна рассуждениям на основе детского
пласта знаний. Часто в ответ на вопрос «Что из этого следует?» или «Зачем это
сделано?», следует ответ «Не знаю». Рационализм, обычно приписываемый чело-
веческому мышлению и человеческим рассуждениям, на самом деле встречается
не столь уж и часто. Поэтому многие выводы Р, которые следуют из а, на самом
деле носят случайный и непрагматический характер.
4. Традуктивность выводов. В практике человека вывод чаще
всего является традуктивным, т. е. выводом от частного к частному. В детском
мышлении процент таких выводов близок к 100. Их примерами могут служить
рассуждения типа «Этот дядя плохой, у него грубый голос» или «Эта вещь красная,
значит она вкусная». Но выводы такого типа и в рассуждениях взрослых людей
встречаются чрезвычайно часто.
5. Субъективное использование квантификато-
ров. Квантификаторы всегда субъективны и отражают личный опыт лица,
использующего их в рассуждениях. Об этом мы уже говорили, обсуждая кванти-
фикаторы. Здесь же мы отметим несколько иной аспект этой субъективности, иг-
рающий важную роль при оценке информации, получаемой от экспертов-управлен-
цев. При использовании ими квантифицированных рассуждений всегда необхо-
димо помнить, что на оценку квантификатора огромное влияние сказывает Личная
заинтересованность употребляющего его. Если, например, многие люди покупают
билеты денежно-вещевой лотереи или спортлото, то мало бы нашлось желающих
участвовать в этих мероприятиях, если бы условия их были изменены следующим
образом: с той вероятностью, близкой к нулю, с которой реализуется максимально
возможный выигрыш, купивший данный билет подвергался бы очень тяжелому
!) Вывод такого типа принадлежит математическому фольклору.
§5.7. ОСОБЕННОСТИ РАССУЖДЕНИЙ У ЧЕЛОВЕКА
251
наказанию, а во всех случаях, соответствующих проигрышу, платился бы неболь-
шой выигрыш. Потому что, когда последствия для личности могут быть тяжелыми,
то и вероятность риска субьективно возрастает. Грубо говоря, с ростом возможных
неприятностей растет априорная оценка субъективной вероятности ожидания
этого события. Традуктивные выводы с такими квантификаторами — обычное
явление.
6. Сценарный вывод. В практике человека часто встречаются
выводы, опирающиеся на некоторые временные ряды, каузальные сценарии или
сценарии других типов. Примерами подобных выводов могут служить «Электричка
приближается к станции, перрон безлюден, у дверей вагона скопилось много наро-
да. Следовательно, на перроне будет много людей». «Лектор вошел в аудиторию
и стал писать на доске формулы. Следовательно, слушатели записывают в свои
конспекты то, что написано на доске». Заметим, что в подобных рассуждениях
большое значение играют знания о ролевых структурах, о которых шла речь в
§ 2.2. В частности, именно знанием ролевой структуры объясняется такой вывод:
«Человек колол дрова топором; топор был острым. Следовательно, колоть было
легко».
7. Парадоксальность и абсурдность рассуждений.
Это свойство человеческих рассуждений менее значимо для нас, чем остальные.
Поэтому мы ограничимся лишь примерами, показывающими, что человек в ряде
случаев идет на нарушение даже основных законов логики. Особенно часто это
происходит в пословицах и поговорках. Например, в известных пословицах «Не
сжег, а спалил» или «Не полсорока, а двадцать», нарушается логический закон
тождества. В пословицах «Умный был бы человек, кабы не дурак» или «Сыта Уля,
когда не хочет есть» с точки зрения логики не должно содержаться никакой
информации, ибо в них утверждается, что А=А. Для нас особенно интересны ква-
зивыводы, основанные на том, что при ложной посылке можно выводить в импли-
кации любое следствие «Коли найдешь у коровы гриву, так и у кобылы будут рога».
Интересной модификацией таких выводов является пословица «Мерин гнед, а
шерсти на нем нет» и прекрасный текст Д. Хармса, построенный на той же идее
«Был один рыжий человек, у которого не было глаз и ушей. У него не было и волос,
так что рыжим его называли условно».
ЗАКЛЮЧИТЕЛЬНЫЕ ЗАМЕЧАНИЯ
Любая программа, как только законче-
на ее отладка, становится никому не
нужной.
Программистский фольклор
Книга подходит к концу, а многие вещи, связанные с созданием
и функционированием систем ситуационного управления, оста-
лись вне ее рамок. Не все получилось так, как задумывалось. Но,
по-видимому, это удел всех работ, в тесные рамки которых прихо-
дится «втискивать» обширные области знаний. Но остается надежда,
что читатель все же увидел тот Боробудур ситуационного управления,
который был анонсирован в предисловии к нашей книге.
Завершая изложение метода ситуационного управления, хоте-
лось бы перечислить основные этапы проектирования и разра-
ботки подобных систем, которые всегда необходимо пройти их соз-
дателям.
1. Принятие решения о применимости метода ситуационного
управления для управления данным объектом. Это решение должно
опираться на два исходных принципа. А. Не существует традици-
онного метода управления, опирающегося на какую-либо анали-
тическую модель процессов, протекающих в объекте, либо раз-
мерность такой модели такова, что ее практическая реализация не-
возможна. Б. Объект управления изучен настолько, что его можно
описать на языке ситуационного управления, а методы управления
им также допускают описание на этом языке.
2. Обследование объекта и методов управления им с целью
создания словарей понятий и отношений, характерных для данного
случая. Создание языка описания ситуаций, складывающихся в
системе объект — управляющая система. Выявление общих крите-
риев управления и выделение уровней управления с локальными
критериями. Взаимоувязка критериев между собой. Построение
целевых структур.
3. Выявление и описание конфликтных классов ситуаций, в
которых требуется принимать решения. Создание глобального сце-
нария решений на множестве конфликтных ситуаций. Декомпозиция
решений на элементарные. Создание сценариев для принятия реше-
ний в подситуациях, входящих в конфликтные ситуации. Создание
списка ЛТП.
4. Выработка принципов композиции решений в цепочки. Созда-
ние правил имитации ситуационных описаний при изменениях на
объекте и при реализации решений. Создание динамической модели
типа ДСС и Экстраполятора.
5. Создание списка правил обобщения и процедур обобщения
для Классификатора.
ЗАКЛЮЧИТЕЛЬНЫЕ ЗАМЕЧАНИЯ
253
6. Выбор программных средств для реализации системы ситу-
ационного управления, включая язык программирования, язык
представления знаний, базу данных.
7. Создание программной версии системы. Автономная и общая
отладка системы программ на реальной задаче.
8. Пробная эксплуатация системы и выявление требований к
корректировке и модификации системы.
За каждым из этих этапов стоит множество реальных задач и
проблем, частично обсуждавшихся в нашей книге. И понять их
сложность и трудоемкость можно лишь в том случае, если начнется
реальный процесс создания системы ситуационного управления,
ибо уникальность каждого сложного объекта управления будет
сказываться на создаваемой системе куда больше, чем общие идеи,
лежащие в основе описанного нами подхода.
Все это лишь посох, облегчающий долгий и не всегда прохо-
димый путь к работающей «не в принципе», а реально системе управ-
ления. И лишь то, что некоторые коллективы одолели этот путь,
позволяет сказать решившимся — «В добрый путь!».
ПРИЛОЖЕНИЕ
ИСТОРИЧЕСКИЙ ОЧЕРК РАЗВИТИЯ
СИТУАЦИОННОГО УПРАВЛЕНИЯ
За возом воз, обоз громаден,
И прямо диво посмотреть
На то, что за день, только за день
Отжить успело, устареть.
Везут, как трухлые поленья,
Как барахло, как ржавый лом,
Ошибочные представленья
И кучи мнимых аксиом.
Л. Мартынов
В начале шестидесятых годов в моде была бионика. Ее основная цель —
использовать при создании технических устройств то, что реализовала природа
в растениях и животных,— казалась весьма заманчивой. Созывались конферен-
ции и симпозиумы по бионике. Биологи, инженеры, математики и кибернетики
учились слушать и понимать друг друга. Шло формирование специалистов, спо-
собных работать на стыке весьма разнородных научных дисциплин.
И на этом фоне вполне естественно встал вопрос о содружестве кибернетиков
и психологов. Использовать знания, накопленные психологами, при создании
интеллектуальных систем было не менее интересной целью по сравнению с целью
бионики. По аналогии с бионикой новое направление было названо психоникой.
Название это оказалось не слишком удачным и не привилось. Но семинар с таким
названием функционировал почти 10 лет. Создан он был в Московском энергети-
ческом институте. Основными его участниками, состав которых менялся с течением
времени, были специалисты, работавшие в МЭИ и Институте общей и педагогиче-
ской психологии. Постоянным руководителем семинара был автор настоящей
книги.
Именно на этом семинаре впервые были сформулированы принципы модель-
ного метода решения задач человеком. Отказ от господствовавшей в психологии
теории лабиринтного мышления, о котором мы говорили в гл. 1 нашей книги,
переход К теории мышления, где доминировала процедура построения лабиринта,
приводящего после поиска к решению, неоднократно декларировались в выступле-
ниях В. Н. Пушкина и его учеников. Идеи структуризации исходного описания
задачи и взаимосвязи этой структуры со структурой целевой ситуации были понят-
ны кибернетикам. Вместо эвристических процедур перебора, имитирующих поиск
по лабиринту возможностей, новый подход требовал создания процедур, опираю-
ющнхся на работу со структурированными описаниями. А это в свою очередь тре-
бовало создания новых моделей представления объектов управления и разра-
ботки специальных языков для описания ситуаций, складывающихся на объекте
управления и в системе управления им. Эти две проблемы получили свое решение
в первых диссертациях, защищенных в области ситуационного управления в
1967 г. В работе Ж. Железова была развита теория дискретных ситуационных
сетей, послуживших хорошей моделью объектов управления для многих последую-
щих разработок по ситуационному управлению. Дискретные ситуационные сети
были описаны в гл. 2 этой книги. Другой аспирант автора настоящей книги
Ю. И. Клыков, опираясь на известный в то время язык ДХ-кодов (краткие све
дения о нем приведены в гл. 2 этой книги), разработал специальный модельный
язык, названный им позже языком синтагматических цепей. Этот язык описан
в гл. 2. На долгие годы он стал основным языком описания ситуаций и принятия
решений в ситуационном управлении.
Результаты 1967 г. подвели прочную базу под концепцию модельного управ-
ления, активно развивавшуюся В. Н. Пушкиными Д. А. Поспеловым. Появление
ИСТОРИЧЕСКИЕ! ОЧЕРК РАЗВИТИЯ СИТУАЦИОННОГО УПРАВЛЕНИЯ 255
в 1972 г. их совместной монографии «Мышление и автоматы» завершило начальный
этап развития нового подхода.
Сам термин ситуационное управление возник не сразу. В работах начального
периода новый подход к управлению сначала назывался модельным. Потом возник
термин ситуационная модель. И лишь с появлением в 1971 г. статьи Д. А. Поспе-
лова «Принципы ситуационного управления» (Изв. АН СССР. сер. Техническая
кибернетика, № 2) это название окончательно вытеснило все остальные. Одновре-
менно стало ясно, что принципы ситуационного управления (описанные выше) не
являются обязательными и всеобщими для методов, использующих логико-линг-
вистические модели. Это послужило толчком к возникновению нового термина:
семиотическое управление (иногда говорят семиотическое моделирование).
Впервые этот термин был использован в названии семинара, организованного
в Московском доме научно-технической пропаганды в 1971 г. Семинар, руководи-
телями которого были Л. Т. Кузин и Д. А. Поспелов, носил название «Семио-
тические методы управления в больших системах». Во вступительном докладе ор-
ганизаторов семинара «Проблемы семиотического управления» впервые было сфор-
мулировано положение о том, что использование логических и лингвистических,
средств в задачах управления, которые рассматриваются в ситуационном управле-
нии, и задачах, возникающих в других областях, имеют много общего. Другими,
словами, идеи, используемые в ситуационном управлении, на самом деле имеют
более общий характер.
Следствием такого взгляда на логико-лингвистические модели было возникно-
вение двух новых научных направлений, отличных от ситуационного управле-
ния, но использующих в своих исследованиях многие идеи, первоначально воз-
никшие в среде специалистов в области ситуационного управления. Одно из этих
направлений —характеризационное управление, активно развиваемое В. А. Гор-
батовым и его учениками. Они создали принципиально новые методы решения
традиционных задач синтеза дискретных систем управления, опирающиеся на
принцип «семантического эквивалентирования», структурированные описания
схем и заданий на их функционирование.
В Московском инженерно-физическом институте под руководством Л. Т. Ку-
зина стали активно развиваться идеи управления в АСУ различной природы, опи-
рающиеся на логико-лингвистические модели, отличные от ситуационного управ-
ления. Такие исследования закономерно привели к решению проблем построе-
ния интеллектуальных банков и языков представления знаний и манипулиро-
вания ими.
К 1971 г. сложился коллектив исследователей, увидевших в методе ситуаци-
онного управления способ преодолеть те трудности, с которыми они сталкивались
при проектировании систем управления сложными объектами. Этот коллектив
был не слишком большим, ибо непривычность нового подхода, опирающегося
на иные идеи, резко отличные от традиционных методов автоматического управле-
ния, создавала психологический барьер, который сейчас вряд ли уже можно по-
чувствовать. Но тогда критиков было куда больше, чем последователей. В 1970 г.
Л. С. Загадская защитила диссертацию, в которой новый метод послужил основой
для создания экспериментальной программной системы для управления грузо-
выми операциями в морском порту. Эта программа мало чем напоминала простень-
кие программы 1967, 1968 гг., в которых метод ситуационного управления ис-
пользовался для управления движением судов на шлюзованных участках каналов.
В программной системе Л. С. Загадской уже присутствовали все основные блоки
ситуационного управления: Анализатор, Классификатор, Коррелятор и Экстра-
полятор.
Начали складываться свои территориальные школы в области ситуационного
управления. В Одессе школа возглавлялась Л. С. Загадской, в Грозном —
Л. А. Афониным, в Калининграде — В. Ф. Пономаревым. Несколько позже
появились группы специалистов по ситуационному управлению и в других горо-
дах: Риге (под руководством Я. А. Гельфандбейна), Устинове (под руководством
А. Ю. Левиатова), Баку (под руководством Р. Э. Гаджиева). Эти коллективы
были нацелены на использование метода ситуационного управления для решения
конкретных задач, стоящих перед ними. В Одессе и Калининграде это была задача
256
ПРИЛОЖЕНИЕ
оперативного диспетчерского управления погрузочно-разгрузочными операциями
в морском порту, в Грозном — задача оперативного управления перемещением
по буровым специальных установок для производства тампонажных работ и буро-
вых установок по пунктам бурения, в Риге решался комплекс задач, связанных
с АСУ гражданской авиации, в Устинове —с оперативным управлением производ-
ственными участками на приборостроительных предприятиях, в Баку — с опера-
тивной диагностикой заболеваний и назначением лечения. Такой широкий спектр
приложений естественным образом заставлял в каждом конкретном случае раз-
вивать и модифицировать те методы и модели ситуационного управления, которые
родились в первоначальном коллективе исследователей.
Участники этих работ были полны энтузиазма и оптимизма. Им казалось, что
принципы ситуационного управления будут реализованы в создаваемых ими сис-
темах легко и эффективно. И не их вина, что дело оказалось значительно слож-
нее, чем они думали. Существовавшие в то время отечественные ЭВМ по своим
техническим возможностям и математическому обеспечению никак не соответство-
вали тем требованиям, которые к ним предъявляли методы ситуационного управ-
ления. И понятно это стало не сразу. Нужно было на практике почувствовать, что
скрывается за тем новым подходом, который они используют. Поэтому первые про-
граммные системы так и остались чисто экспериментальными.
В том же важном для ситуационного управления 1971 г. было принято реше-
ние о проведении Всесоюзных симпозиумов по ситуационному управлению боль-
шими системами. Первый такой симпозиум состоялся в Одессе в 1972 г. С тех пор
Одесса стала на долгое время традиционным местом проведения симпозиумов;
.последний (шестой по счету) состоялся в 1981 г.
В пленарном докладе, сделанном на первом симпозиуме Ю. И. Клыковым,
Д. А. Поспеловым и В. Н. Пушкиным, который назывался «Зачем нужно ситуаци-
онное управление?» его авторы попытались впервые четко наметить место ситуа-
ционного управления среди других методов управления сложными объектами.
Отвечая на вопрос, поставленный в названии доклада, авторы сформулировали те-
зис о том, что ситуационное управление в отличие от других методов управления
решает не только задачу управления на основе некоторой заранее известной моде-
ли управляемого объекта, но и строит саму эту модель. Построение модели объек-
та управления, построение процедуры управления им и поиск целесообразных
решений по управлению неразрывно связаны в методе ситуационного управления.
А именно эта его особенность позволяет надеяться на его применимость в тех случа-
ях, когда сложность объекта управления не позволяет строить его формаль-
ную математическую модель и ставить задачу управления в традиционном
духе.
За первым симпозиумом последовало еще два, в 1973 и 1974 гг. На втором сим-
позиуме центральной обсуждавшейся проблемой была проблема построения много-
уровневого Классификатора. Идея «слоеного пирога», возникшая еще в модели
гиромата (устройства, способного подстраивать свою структуру под структуру
решаемой задачи), впервые предложенная на семинаре по психонике в середине
шестидесятых годов, получила на этом симпозиуме поддержку и одобрение со
стороны его участников. Было предложено несколько принципов формирования
такого Классификатора, описанных на страницах настоящей книги.
На третьем симпозиуме в центре внимания были проблемы, связанные с
созданием математического обеспечения для систем ситуационного управления.
Именно этот вопрос был тогда самым актуальным, ибо от решения его зависела
сама возможность применения идей ситуационного управления в системах управ-
ления реальными объектами. Участники дискуссий по этим проблемам указывали
на необходимость использования языков, способных работать с данными, облада-
ющими сложной внутренней структурой и ориентированных на такие прогрессив-
ные в то время ЭВМ, как БЭСМ-6 и ЕС РЯД- Было высказано немало предложений,
многие из которых существенно позже реализовались в языках представления
знаний типа реляционных или фреймовых языков.
Необходимость в расширении сферы применения метода ситуационного
управления, передаче другим организациям созданных к тому времени методов
и программ, поставили задачу о разработке специальных типовых методик. Эта ра-
ИСТОРИЧЕСКИЙ ОЧЕРК РАЗВИТИЯ СИТУАЦИОННОГО УПРАВЛЕНИЯ 257
бота, активно проводившаяся в начале 70-х годов, завершилась успехом. Были соз-
даны первые типовые методики по проектированию ситуационных моделей управ-
ления (Л. С. Загадская, О. В. Соколова, 1973 г.), формированию модели описания
объекта управления на языке синтагматических цепей (В. Ф. Пономарев, А. В. Ко-
лесников, 1973 г.), разработке программного обеспечения моделей ситуационного
управления (О. В. Соколова, Л. С. Загадская, ГО. И. Клыков, 1973 г.). Эти пер-
вые методики, несмотря на их несовершенство, сыграли определенную роль в разви-
тии метода и доведения его до практических программных моделей.
В 1974 г. вышел первый сборник работ по ситуационному управлению, за
которым последовало еще три сборника (1975, 1977 и 1980 гг.) Все сборники были
изданы Научным Советом по комплексной проблеме «Кибернетика» при Президиу-
ме АН СССР.
Для координации всех исследований по ситуационному управлению и ис-
пользованию его для решения практических задач был создан проект «Ситуация»,
организационно входивший в Научный Совет по проблеме «Искусственный ин-
теллект» Комитета системного анализа при Президиуме АН СССР. Начиная с
1975 г. рабочий совет этого проекта координировал все исследования в области
ситуационного управления, проводившиеся в СССР.
В 1974 г. вышла в свет первая монография по ситуационному управлению
(Клыков Ю. И. Ситуационное управление большими системами — М.: Энер-
гия, 1974), сыгравшая наряду со сборниками по ситуационному управлению важ-
ную роль в популяризации и распространении метода.
К 1975 г. метод ситуационного управления в своих основных частях уже
сформировался, появилась устойчивая, общепринятая терминология, был соз-
дан комплекс базовых методов и процедур. Начиная с этого года коллективы, в
которых использовался новый подход, стали переходить от экспериментальных
систем и модельных задач к построению реальных систем управления, базирую-
щихся на идеях ситуационного управления. Это потребовало координации уси-
лий ряда коллективов и обмена накопленным при создании реальных систем опы-
том. Так родилась идея проведения совещаний, посвященных «технологии» систем
ситуационного управления. Всего было проведено пять таких совещаний (Грозный,
1975 г., Устинов, 1977 г., Калининград, 1979 г., Куйбышев, 1982 г., Каунас,
1982 г.).
Количество организаций, заинтересованных в применении метода ситуацион-
ного управления, стало быстро расти. Для популяризации метода проводятся
учебные школы, на которых читаются лекции по всем основным проблемам, свя-
занным с ситуационным управлением и его использованием при разработке раз-
личных реальных систем (Москва, 1974 г.; Баку, 1975 г.; Ташкент, 1977 г.; Моск-
ва, 1979 г.; Куйбышев, 1982 г.) С той же целью издательство Знание в 1975 г.
издало популярную книгу Д. А. Поспелова «Большие системы. Ситуационное уп-
равление».
К этому моменту стало ясно, что кроме традиционных задач диспетчеризации
и оперативного управления техническими и организационными системами, ситуа-
ционное управление может применяться и в тех случаях, когда традиционные
подходы не дают решения из-за размерности решаемой задачи. В таких случаях
вместо точного решения, получение которого становится практически невозмож-
ным, методом ситуационного управления удается получить приближенные решения,
приемлемые по своему качеству. Первыми примерами подобных задач были задача
о распределении программ в комплексах ЭВМ (Д. Боев, 1974 г.) и задача о разре-
зании графа со взвешенными ребрами на компоненты с минимизацией суммарного
веса ребер, попавших на линию разреза (Н. Георгиева, 1977 г.). Обе задачи хоро-
шо известны в дискретной математике. Для них предложено немало методов реше-
ния. Но из-за времени, затрачиваемого на поиск их решений, эти методы непригод-
ны в операционных системах, в задачу которых входит сегментирование программ
и распределение сегментов на параллельно работающие ЭВМ. Использование ме-
тода ситуационного управления позволило создать процедуры решения указан-
ных задач, выполнимые в реальном масштабе времени.
В середине 70-х годов Ю. И. Клыков стал активно использовать метод ситуа-
ционного управления при моделировании процесса обучения людей. Со временем
? Д. А. Поспелов
258
ПРИЛОЖЕНИЕ
под его руководством возникла школа, в которой стали развиваться методы моде-
лирования познавательной деятельности человека и способы управления ею.
Характерной особенностью конца семидесятых годов стало существенное рас-
ширение понимания ситуационного управления. Фактически ситуационное уп-
равление стало рассматриваться с единых позиций семиотического моделирова-
ния и управления. Причиной этого послужило бурное развитие в теории искусст-
венного интеллекта той области, которая носит название представление знаний.
Ситуационное управление на десяток лет предвосхитило развитие этой области,
впервые начав работать со структурированной информацией. В ситуационном уп-
равлении были созданы первые модели представления знаний и языков представ-
ления и манипулирования знаниями. Поэтому новые веяния в области искусст-
венного интеллекта, активное развитие теории семантических сетей и фреймовых
представлений были восприняты коллективами, накопившими большой опыт
в области ситуационного управления «с ходу», позволили воспринять новые
идеи и использовать их в своих разработках. Столь же безболезненно произошел
переход к языкам программирования нового типа (ЛИСП и его расширения
ФРЛ). В этом плане специалисты, овладевшие принципами ситуационного управ-
ления, оказались на передовых рубежах работ в области искусственного интел-
лекта.
Начиная с 1980 г. уже практически невозможно отделить развитие собственно
ситуационного управления от развития семиотического управления, органично
включившего в себя своего исторического предшественника. И весьма символично
звучат названия пленарных докладов, сделанных на VI Всесоюзном симпозиуме
по ситуационному управлению большими системами (Одесса, 1981 г.) «Ситуацион-
ный анализ» (Л. С. Загадская), «Ситуационное программирование» (В. С. Лозов-
ский), «Схема выводов в семиотических моделях» (Д. А. Поспелов).
Логика развития науки жестка и не подчиняется ничьей воле. Ситуационное
управление сыграло роль катализатора, вызвав к жизни новые идеи и принципы
построения моделей действительности и деятельности человека, столь широко
развившиеся в широком потоке исследований по искусственному интеллекту. Но
хочется верить, что в рождающейся на наших глазах теории семиотических моде-
лей результаты, полученные в недрах ситуационного управления, займут подобаю-
щее им место.
КОММЕНТАРИИ
К главе 1
Схема управления, описанная в 1.1, конечно, не единственно возможная. Ти-
пология схем управления, иллюстрирующая постепенный переход от простейших
регуляторов к схемам, основанным на логико-лингвистических моделях, имеется
в первой главе книги [1.1]. Несколько иной взгляд на схему управления и ее
функции, может быть небесполезный для читателей, содержится в [1.2]. Появ-
ление объектов управления качественно нового типа было замечено многими спе-
циалистами. Среди тех, кто уделил этому вопросу немало внимания, отмечу лишь
работы [1.3—1.6]. В них можно найти и другие особенности, присущие новым
объектам, а также иные, чем на страницах этой книги, соображения о методах уп-
равления ими.
Модели управления, опирающиеся на стимульно-реактивную теорию, извест-
ны под названием «модели коллективного поведения автоматов». Создание этого
научного направления связано с именем Михаила Львовича Цетлина. много сде-
лавшего для развития кибернетики в нашей стране. Монографии [1.71; 1.83]
могут дать достаточно полное представление об этом направлении. Схема авто-
мата, приведенная на рис. 1.2, предложена В. Крыловым, как обобщение автомата
с линейной тактикой, придуманного М. Л. Цетлиным.
Лабиринтная модель в психологии восходит еще к проведенным в начале этого
века опытам по научению крыс движению в лабиринте американского психолога
Смолла [1.9]. Использованию этой идеи в эвристическом программировании для
ЭВМ посвящено весьма много работ. Укажем лишь на такие монографии, как
[1.10—1.13], в которых идея поиска в лабиринте является центральной для задач
принятия решений и решения других многочисленных задач. Система ОРЗ опи-
сывалась во многих работах. Сошлемся, например, на [1.14—1.16]. Отметим, что
блестяще проявив себя при решении задачи установления эквивалентности двух
формул в исчислении высказываний (программа ЛОГИК-ТЕОРЕТИК) ОРЗ оказа-
лся бессильным при попытке играть в шахматы. И это объясняется тем, что в слу-
чае исчисления высказываний имеется полный и исчерпывающий перечень разли-
чий и устраняющих их операторов, а в случае шахмат списка различий, который
обеспечивал бы монотонное приближение позиции к выигрышной, нет и его, по-
видимому, невозможно создать. О трудностях эвристического программирования
(в частности о проблеме гомоморфизма описаний исходной и целевой позиций)
впервые говорилось, по-видимому, в работе [1.17].
Четкое понимание недостатков стимульно-реактивной и лабиринтной теорий
для объяснения феномена метода решения задач человеком, в частности, решения
управленческих задач при наличии объектов управления нового типа, возникло из
развития работ по психологии мышления, которые вел блестящий советский пси-
холог В. Н. Пушкин и возглавляемый им коллектив. Под его руководством была
создана модельная теория мышления. Совместная работа кибернетиков и школы
В. Н. Пушкина позволила использовать принципы модельной теории мышления
при создании систем ситуационного управления, а позже и систем семиотического
управления. В работах [1.18—1.22] заинтересованный читатель найдет для себя
немало интересного и поучительного, что возможно, еще не нашло применения в
системах управления. Исследование процесса управления динамическими объек-
тами также было проведено В. Н. Пушкиным и его учениками (по крайней мере,
9*
260
КОММЕНТАРИИ
в том объеме, как это отражено в § 1.3). Дополнительный материал можно полу-
чить в [1.23; 1.24].
Принципы ситуационного управления обсуждались не один раз. В связи с
этим можно рекомендовать читателю познакомиться с работами [1.25—1.28],
а также с гл. 1 книги [1.29] и гл. 6 книги [1.1].
Понятие логико-трансформационного правила впервые в ситуационном
управлении возникло в г. Одессе в коллективе исследователей, работавших в
тогдашнем Одесском отделении Института экономики АН УССР. Почти одновре-
менно такая форма, которая показана в соотношении S;; Q;=>Qt: /;, была исполь-
зована в известной американской системе планирования действий для работы
STRIPS.
Материал, вошедший в § 1.6, представляет собой переработанный вариант
доклада автора книги, прочитанный им на IX Симпозиуме по кибернетике, со-
стоявшемся в 1981 г. в Сухуми.
К главе 2
На важное значение понятия «роли» в процессе познания действительности
обратили внимание уже давно. Фактически еще Аристотель, вводя свои знамени-
тые десять категорий классификации (сущность, количество, качество, соотнесе-
ние, место, время, положение, состояние, действие, претерпевание), указал тем са-
мым основные роли сторон связей, которые необходимо учитывать при описании
действительности. Естественно, что в естественных языках, предназначенных для
описания действительности, эти роли нашли свое отражение, что неоднократно
отмечалось в литературе. Укажем лишь на монографию [2.1], специально посвя-
щенную исследованию этой проблемы. В ней любопытствующий читатель может
найти обширную библиографию. К проблеме ролей и ролевых структур и ее важ-
ности в задаче построения систем, понимающих естественный язык, пришел не-
сколько лет назад коллектив исследователей из Тартуского университета, воз-
главляемый И. Я. Сильдмяэ. В работах [2.2; 2.3] можно познакомиться со взгля-
дами этого коллектива на проблему ролей в искусственном интеллекте. Исследо-
вание по глубинным падежам, которые велись в лингвистике (см. [2.4, 2.4а])
также имеют своим истоком все те же десять аристотелевых категорий. И, наконец,
Универсальный Семантический Код, описанный нами в § 2.8, автором которого
является известный советский лингвист В. В. Мартынов [2.5-—2.7], также опира-
ется на ролевую структуру описания действительности.
При описании лексических единиц естественного языка для классификации
действий частично были использованы работы [2.1; 2.8]. Некоторые тонкие сооб-
ражения, связанные с квантификаторами даже и только, можно найти в работах
[2.9] и [2.10].
Язык ситуационного управления (язык синтагматических цепей) впервые
был разработан в Московском энергетическом институте в конце шестидесятых
годов под руководством автора данной книги. Основные идеи этого языка, перво-
начальным толчком для развития которых явилось изучение языка 7?Х-кодов
[2.11; 2.12], были разработаны Ю. И. Клыковым. Эволюцию взглядов на ЯСУ
можно проследить по литературе [2.13—2.16].
Пути уточнения лексики ЯСУ методологически во многом опираются на логи-
ко-философскую традицию (см., например [2.17, 2.18]). Конкретный пример,
использованный в § 2.5 для иллюстрации пути формирования лексики ЯСУ. при-
надлежит разработчикам АСУ семиотического типа для управления операциями
в рыбном порту Калининграда (В. Ф. Пономарев, А. В. Колесников). Соответ-
ствующий материал почти без всяких особых изменений заимствован из их работы
[2.19], хотя табл. 2.3 и не полностью совпадает с классификацией, принятой в
этой работе.
Модель объекта в виде ДСС также была разработана в МЭИ в конце шести-
десятых годов. С некоторыми свойствами ДСС, не отраженными в § 2.7, можно
познакомиться в работах [2.20; 2.21]. Методы синтеза детерминированных ко-
нечных автоматов хорошо известны (см., например [2.22]). С синтезом вероятност-
ных автоматов можно познакомиться по монографии [2.23].
КОММЕНТАРИИ
261
Сопоставление особенностей представления ситуаций в ЯСУ и языке RX-
кодов впервые было проделано Л. Б. Нисенбоймом. Сопоставление ЯСУ и языка
исчисления предикатов было начато (но не закопчено) в работе [2.24]. Более
подробное знакомство с использованием языка исчисления предикатов для целей
управления можно осуществить по монографии [1.1], а также по монографии [2.25].
Формализация понятия семиотической модели была сделана Г. С. Осиповым.
Подробное изложение его исследований приведено в [2.26; 2.27].
Положения вещей
Примеры:
"'шуметь, Варить, делать, сделать,регулировать, отрегулировать, находить,
достигать.
Рис. К-1
Топология фреймов в задачах управления и пример 2.13 заимствованы из
диссертационной работы В. Ю. Мачераускаса.
Параграф 2.10 дает лишь самое общее представление о проблеме перевода
текстов на естественном языке во внутренние представления. Важные соображения
относительно перехода от текстов на естественном языке к записи на ЯСУ, в виде
7?Х-кодов, в виде формул на УСК, а также в виде предикатных выражений вы-
сказаны в работах [2.7; 2.12; 2.28—2.32]. Хорошее освещение проблем, связанных
с построением диалоговых систем, дано в монографии [2.33]. В ней описаны оте-
чественные системы подобного типа, отличающиеся между собой как по выбран-
ным формам внутреннего представления информации, так и по способам построе-
ния лингвистического процессора. Обширная библиография, приведенная в
монографии, поможет заинтересованному читателю продолжить знакомство с
вопросами, относящимися к этой проблеме. Укажем еще на сборник [2.34], в кото-
ром помещены доклады с описанием различных подходов к построению систем
общения, опирающихся на естественный язык.
262
КОММЕНТАРИИ
Идея, высказанная в § 2.10 относительно принципиального отличия диалого-
вых систем в системах управления от информационных диалоювых систем и систем
машинного перевода, фактически реализована в системе ДИСПУТ [2.33] и в сис-
теме ДАТУМ [2.35]. Методология их построения опирается на соображения, вы-
сказанные нами в§ 2.2. Те же вопросы обсуждаются в работах [2.2, 2.3, 2.36, 2.37].
Основной трудностью на пути построения систем перевода во внутренние представ-
ления такого типа является необходимость в составлении словарей-таблиц, по-
добных тем, которые были рассмотрены в примере 2.15. В настоящее время такие
словари-таблицы создаются авторами систем перевода, исходя из здравого смыс-
ла и знания проблемной области. Однако такого эмпирического подхода явно не-
достаточно. Очевидно, что при организации трансляции текстов во внутренние
представления необходимо учитывать и специфику последних. Знакомство с ра-
ботами [2.38—2.44] поможет читателю уловить высказанную здесь мысль. Неко-
торую помощь при составлении необходимых слсварей-таблиц могут оказать сло-
вари. подобные [2.45].
В основном тексте гл. 2 мы уже отмечали, что в настоящее время, к сожалению,
нет хорошо разработанной схемы классификации предикатов естественного языка
и, в частности, действий. Это вызывает большие трудности при создании систем
ситуационного управления. На рис. К-1 мы приводим некоторую достаточно об-
щую классификацию предикатов, заимствованную из работы [2.46]. Возможно,
что она сможет помочь разработчикам реальных систем управления.
Основные понятия, связанные с нечеткостями, имеются в [2.47]. В работе
[2.48] приведен пример построения шкалы пространственных отношений с по-
мощью экспертов. Универсальная шкала впервые была введена в [2.49] для случая
нечеткой шкалы частотных отношений. Нечеткая диаграмма моделирования вве-
дена А. Н. Аверкиным [2.50]. Ему же принадлежит формулировка гипотезы 2.4
в той форме, в какой она приведена в §2.11.
К главе 3
Проблема, затронутая во вводном разделе данной главы, сейчас находится
в центре внимания лингвистов и психо-лингвистов. Идет активное создание тео-
рии дискурса, в рамках которой исследователи намереваются отразить ту внеязы-
ковую информацию, которая используется участниками диалога для понимания
друг друга. В качестве примера можно указать на работу [3.1], в которой каждый
речевой акт задается специальным фреймом. Слотами этого фрейма являются сло-
ты с названиями; цель говорящего, пресупозиция говорящего, признак успеха для
говорящего, показатель отношения к слушающему, выгодность для говорящего,
показатель сотрудничества, кодексные ограничения. Для слушающего фрейм имеет
аналогичную структуру. Взаимодействие содержимого слотов этих фреймов поз-
воляет по мнению автора работы [3.1] описывать внеязыковую дополнительную
информацию второго рода. Определенный интерес представляет и работа [3.2],
в которой обсуждаются общие проблемы, связанные с моделью дискурса.
Проблеме пополнения описаний, выявления той информации, которая прямо
не выражена в тексте, посвящено много работ. Укажем лишь на работы [3.3—3.5].
В первой из них описана по сути первая попытка увязать текст описания со знани-
ями, хранящимися в системе. Во второй работе дано освещение современного
состояния дел в этой области. Идея сценариев, развитая в [3.5], использована
в несколько переосмысленном виде в § 3.2. Пример, относящийся к медицине в
§3.3, заимствован из книги [3.6].
Псевдофизические логики активно изучаются в нашей стране и за рубежом
в течение последних десяти лет. В [1.1] сформулированы общие принципы построе-
ния логик такого типа, которые в несколько иной форме изложены в настоящей
книге в §3.4. Библиография по псевдофизическим логикам весьма обширна. При
написании соответствующих разделов данной книги были использованы в основ-
ном результаты, имеющие прямое отношение к проблемам ситуационного управ-
ления. В параграфе, посвященном временной логике, использованы работы
[3.7—3.11]. Отметим, что описанная в нем модель времени, может оказаться неудо-
влетворительной при применении в других областях, например, для интеллекту-
КОММЕНТАРИИ
263
ального робота. Связано это с тем, что ряд основных допущений о времени может
оказаться иным. Например, во многих задачах управления экономикой может
быть полезной модель времени с циклической шкалой. Такая же шкала может ока-
заться полезной в социологических или исторических моделях. Деление времени
по совокупности выполняемых работ, характерное для всех первобытных земле-
дельческих культур, носило явно выраженный циклический характер. Один
сельскохозяйственный год как бы накладывался на другой. Повторяемость времени
характерна для многих художественных произведений древности, например, ми-
фов. Особыми свойствами обладает время в волшебных сказках. Оно как бы рас-
творяется в цепочке событий, составляющих их сюжет. Во многих приложениях
приходится учитывать неоднородность прошедшего и будущего времени. Ясно,
что линейность, столь характерная для прошлого, в зоне будущих событий не реа-
лизуется. Время как бы «ветвится» в будущем, ибо развитие событий в нем носит
модальный характер. При рассужданиях о субъективном времени может оказаться
неприемлемой гомогенность времени. Мы различно оцениваем одни и те же времен-
ные интервалы даже в зависимости от эмоционального состояния или возраста.
Все это касается и модели пространства, а также соображений о каузальных рас-
суждениях, которые приведены в § 3.6 и § 3.7. В рамках данной книги мы лишены
возможности обсуждать эти весьма важные, но побочные для наших целей вопросы.
Описание пространственной логики в § 3.6 в основном опирается на работу
[2.47]. Мне неизвестны работы, в которых рассматривались бы какие-либо модели
динамических пространственных отношений. Те же соображения, которые свя-
заны с развитием действий в пространстве, будут рассмотрены в комментарии к
соответствующей главе.
Однако в отличие от работы [2.47] в § 3.6 иначе ведется работа с отношениями
на плоскости. Результаты экспериментов, отраженные в этом параграфе, принад-
лежат С. О. Варосян. Ей же принадлежат результаты, касающиеся учета направ-
лений на плоскости. Кроме того материала, который приведен нами в §3.6, по-
священном пространственной логике, в диссертационной работе С. О. Варосян
имеется достаточно законченный фрагмент, посвященный логике взаимного рас-
положения предметов.
Пять понятий причинной связи, обсуждающиеся в §3.7, впервые сформули-
рованы польским философом В. Краевским в 1965 г. Частотные квантификаторы,
используемые в данном параграфе, встречались нам еще в § 2.11. В связи с этим еще
раз повторим ссылку на работу [2.48]. Правила вывода, опирающиеся на принцип
суперпозиции, обсуждались в работах [3.12, 3.13]. Другие правила вывода, опи-
рающиеся на вероятностные соображения и соображения, связанные с учетом
частотных кванторов, заимствованы нами из работы [3.14].
Подробное рассмотрение детерминаций, тщательный анализ понятия и облас-
тей их приложения дан в монографии С. В. Чеснокова [3.15]. Силлогистические
схемы, расширяющие понятие силлогистики Аристотеля на случай работы с
частотными квантификаторами, заимствованы из работы [3.16]. В последнее время
на основании этой модели Е. И. Ефимовым предложена другая конструкция для
расширения понятия силлогизма Аристотеля. В его конструкции используются не
условные вероятности, как в конструкции Чеснокова, а вероятности совместных
событий. Это позволило Е. И. Ефимову построить процедуру оценки истинности
силлогизма (т. е. нахождения границ интервала, в которых находится значение
соответствующих вероятностей для заключительной детерминации), которая не
требует для своего осуществления решения громоздкой задачи дробно-линейного
программирования. Однако до настоящего времени не удалось доказать эквива-
лентность определения понятия истинности силлогизмов, используемых в моделях
Чеснокова и Ефимова. Интересные соображения о способах вычисления истиннос-
ти для полисиллогизмов, интерпретируемых в виде причинно-следственных сетей,
можно найти в работе [3.17].
В известной монографии [3.18] приводится еще ряд схем, позволяющих делать
правдоподобные выводы при наличии посылок, которые не могут быть признаны
абсолютно истинными. Знакомство с этой книгой для тех читателей, которы-
заинтересованы в создании каузальных логик, является, по-видимому, необхо-
димым.
264
КОММЕНТАРИИ
То, о чем говорилось в § 3.8, пока еще находится в стадии изучения. Однако
уже сейчас можно ознакомиться с рядом важных результатов и положений, свя-
занных с решением проблемы работы с неполными и противоречивыми базами зна-
ний. Укажем для начального ознакомления работы [3.19—3.23]. Необходимые све-
дения об особенностях логики Навья-ньяя приведены в монографии [3.24].
Возможно, читателям будет небезынтересно узнать, что многие проблемы,
возникающие при работе с причинно-следственными деревьями и сетями, хорошо
исследовались совершенно в другой области, связанной с диагностикой неисправ-
ностей технических систем или с причинами заболеваний у человека. В связи с
этим можно рекомендовать познакомиться с работой [3.25], в которой излагается
специальная теория вопросников, близкая по духу к тем идеям, которые мы об-
суждаем в разделе о каузальной логике. В монографии [3.26] вводится модель
обратимого конечного автомата, которая позволяет делать определенные выводы
о причинах, приводящих к тому или иному следствию. Использование причинно-
следственной сети в [3.27] для выявления причин заболеваний и постановки диаг-
ноза в экспертных медицинских системах может служить еще одной иллюстрацией
применения каузальных логик для пополнения знаний.
Имеется сравнительно небольшое число исследований, в которых причинно-
следственные отношения и каузальная логика рассматриваются в более широком
контексте правдоподобных выводов индуктивного типа. Наиболее интересная по-
пытка такого рода сделана в монографии [3.28]. В ней для всякого следствия, выво-
димого индуктивным путем, рассматриваются причины (автор называет их усло-
виями) трех типов: необходимые, достаточные и необходимые и достаточные. Дру-
гими словами, достаточные причины всегда в совокупности вызывают данное
следствие. Если следствие реализовано, то обязательно реализовано множество
необходимых причин. Множество необходимых и достаточных причин по сути
включает в себя все множество причин, вызывающих данное следствие. Г. фон
Вригт сформулировал конструктивные теоремы, позволяющие находить множест-
ва необходимых, достаточных, а также необходимых и достаточных причин на
основе наблюдаемых следствий.
К главе 4
Проблемы формирования понятий и классификации многократно служили
объектом обсуждений и у философов, и у логиков, и у психологов. По этому вопро-
су существует громадная литература. Укажем поэтому лишь те работы, которые
оказали влияние на написание данной главы, либо впрямую использованы в ней,
а также некоторое количество фундаментальных работ в данной области.
В § 4.2 источниками высказанных там положений в основном послужили рабо-
ты отечественных психологов. Эго прежде всего фундаментальные исследования,
выполненные Л. С. Выготским и А. Р. Лурия, которым отечественная психология
обязана очень многим. Для выводов о характере детской эволюции в формировании
понятий и классификации были использованы работы [4.1—4.5] и ряд статей,
приведенных в библиографии к этим источникам. С проблемой формирования
понятий и классификаций у взрослых в тех ее аспектах, которые затронуты в
§4.2, читатель может более подробно познакомиться по работам [4.6—4.8].
Сводку философско-логических концепций, связанных с формированием понятий,
можно найти в [4.9, 4.10].
Собственно проблеме формировния понятий так, как она понимается в задачах
распознавания образов и понималась на первом этапе развития теории искусст-
венного интеллекта, посвящено огромное количество работ. Сошлемся прежде
всего на источники, уже упоминавшиеся ранее, где обсуждаются эти проблемы
в рамках, близких к задачам данной книге [1.1. 1,11, 2.16], Упомянем еще две моно-
графии Э. Ханта [4.11, 4.12], который много занимался проблемой формирования
понятий. В § 4.3 мы использовали прежде всего методы разделения в пространстве
признаков, описанные, например, в [4.13]. Монографию [4.14] можно использовать
для ознакомления с процедурами порождения новых методов, в которых разделе-
ние осуществляется на основе значений некоторой специально конструируемой
функции q>j (см. §4.3). Наконец, методы кластерного анализа, о которых в этой
КОММЕНТАРИИ
265
книге практически ничего не было сказано, так как языки типа ЯСУ дают до-
статочно априорной информации для разделения, также хорошо описаны в лите-
ратуре. Для ознаксмления с этими методами можно рекомендовать читателям
обратиться к монографии [4,15] и сборнику [4.16], в котором помещены многие
основополагающие для кластерного анализа статьи. Метод Бонгарда, описанный в
§ 4,3, подробно изложен в монографии [4,17], а метод пирамидальных сетей — в
работах [4.18—4.20], Ряд черезвычайно полезных соображений для случая форми-
рования понятий в пространствах двоично-кодированных признаков можно найти
в монографии [4.21],
В нашей стране создано немало программ, которые решают задачу формиро-
вания понятий по признакам. Укажем, например, на программу «анализатор»,
достаточно подробно описанную в монографии [4.22], Эта программа реализована
на ЭВМ БЭСМ-6 и использует для формирования понятий растущие пирамидаль-
ные сети. С помощью такой программы удалось решить немало важных задач
и, в частности, задачу о прогнозировании химических соединений с заданными
структурами, задачу медицинской диагностики, задачу прогнозирования сильных
вспышек на Солнце и многие другие задачи.
В связи с обобщением по именам большой интерес представляют работы,
относящиеся к проблемам выбора терминов для тех или иных понятий, и проблемы,
связанные с классификационными возможностями имен. К сожалению, исследова-
ния такого типа очень далеки от тех задач, которые стоят в области формирования
обобщений за счет имен в системах управления. Тем не менее укажем для интере-
сующихся этой проблемой работы [4.23, 4.24]. Списки приведенной в них литерату-
ры позволяют читателям найти очередную «порцию» работ в этой области.
Параграф, посвященный методам обобщения по структуре, основан на резуль-
татах, полученных в трех коллективах, активно работающих в этой области.
ДСМ-метод разработан группой сотрудников ВИНИТИ под руководством
В. К- Финна. Дополнительные сведения об этом методе, в частности, о логической
модели, лежащей в его основе, оценках эффективности его применения и описании
применения его для прогнозирования биологической активности вновь синтезируе-
мых фармакологических средств можно найти в работах [4.25—4.27].
Укажем еще на метод, разработанный чешскими учеными П. Гаеком и Т. Гав-
ранеком, в котором гипотезы формируются на основании совместного использова-
ния логических и статистических средств. Этот метод, названный его создателями
ГУХА-метод, описан в монографии [4.28]. Он был первым в мировой практике, в
котором логика при формировании гипотез заняла подобающее ей место.
Сходные методы формирования индуктивных понятий с учетом структуры
предложены в работах [4.29—4.32]. Такие методы характеризуются алгоритмами,
строящими функции принадлежности к некоторому классу ситуаций, что и позво-
ляет вводить обобщенные понятия. В какой-то мере указанные методы соприка-
саются с недетерминированным вариантом РПС-метода, о котором шла речь
в §4.3.
В работах П. Гаека и Т. Гавранека, а также в исследованиях Г. Плоткина
были сформулированы основные вопросы, которые всегда возникают при использо-
вании индуктивных методов. Они сводятся к поиску ответов на следующие пять во-
просов: 1. Как соотносятся между собой средства языка, на котором сформулиро-
ваны определенные экспериментальные утверждения, и языка, на котором форму-
лируется теоретическое утверждение? 2. Когда можно считать, что теоретическое
утверждение есть аналог эмпирического утверждения и какими средствами это
можно проверить? 3. Можно ли построить рациональные процедуры, проверяю-
щие обоснованность теоретических утверждений? 4. Какие теоретические утверж-
дения можно считать важными для данного научного исследования? 5. Существуют
ли достаточно мощные средства, с помощью которых можно порождать важные
теоретические утверждения и отсеивать утверждения, имеющие малую значи-
мость? Авторы ДСМ-метода считают, что построенные ими Модели и процедуры
позволяют ответить на все эти вопросы с достаточной полнотой. И хотя подходы
создателей ДСМ-метода, ГУХА-метода или того метода, который предлагает
Г. Плоткин, различны (например, в ГУХА-методе вводятся нестандартные кван-
торы, связанные с частотными квантификаторами, отражающими статистические
266
КОММЕНТАРИИ
данные, а в примере Плоткина используется спец [альный алгоритм аитиунифика-
ции, порождающий по множеству дизъюнктов наименьшее общее обобщение, кото-
рое является дополнительным понятием к известному по методу резолюций поня-
тию наибольшего общего унификатора), окончательные результаты всех исследова-
ний обоснованности и эффективности методов автоматизированного формирования
гипотез совпадают.
Идея выделения в множестве структурных описаний, которые необходимо от-
нести к одному классу, в ситуационном управлении возникла практически сразу.
В работах [1.25—1.29] об этом постоянно говорится. Там же приводятся простей-
шие приемы, пригодные для реализации процедур выделения общей части в опи-
саниях на языке ситуационного управления. Однако до середины семидесятых го-
дов эта задача не имела общего мощного метода своего решения. Лишь с появлени-
ем работ в области логических методов формирования гипотез возникли хорошие
программные системы типа ГУХА, системы, реализующей ДСМ-метод, или систе-
мы обобщения по структурам, описанные в работах [4.33—4.35]. Внимательный
читатель найдет много общих идей, реализованных в процедурах ДСМ-метода
и процедурах обобщения и классификации, созданных Н. П. Викторовой. В кон-
це раздела о структурных методах обобщения мы воспользовались рядом идей,
высказанных в ее работах. Ей же принадлежит введение понятия /-графов. Создан-
ный ею программный комплекс применялся при решении задачи оперативного
диспетчерского управления в энергосистеме. Отметим еще монографию [4.36],
авторы которой разработали метод классификации, совмещающий в себе основ-
ные идеи метода Бонгарда с некоторыми положениями, близкими по духу к индук-
тивным схемам Милля,
Завершая описание метода, основанного на использовании растущих пирами-
дальных сетей, мы упомянули о такой его модификации ассоциативных элементов,
которая способна учитывать временную компоненту процессов, формировать
гипотезу о явлениях, развертывающихся во времени. Такая трактовка индукции
не нова. Многие исследователи предлагали рассматривать индуктивные схемы
вывода, подобные схемам Милля, как утверждения о появлении или непоявлении
определенных событий в данный момент и будущие моменты времени. С подобным
подходом можно познакомиться, например по работам [4.37, 4.38].
При использовании в практике ситуационного управления систем, опираю-
щихся на индуктивные методы Милля, необходимо учитывать ту критику, которая
неоднократно высказывалась по их поводу. Вес основные концепции Милля, свя-
занные с методами сходства и различия, верны, строго говоря, лишь в статике, без
учета динамики развития ситуаций. Для иллюстрации этого положения рас-
смотрим следующий пример, опровергающий метод различия Милля. Как следует
из его словесной формулировки или логической записи, приведенной при описании
ДСМ-метода, а считается причиной Ь, если в отсутствии а Ь не имеет места, а при
его наличии Ь имеет место, а все остальные условия ситуации сохраняются одина-
ковыми. Рассмотрим теперь две страны Ав В, в которых совпадают все условия, но
люди говорят на разных языках и кроме того в А развод разрешен, а в В он запре-
щен. Тогда по методу различия Милля необходимо следует, что либо развод есть
причина отличия языка жителей страны А от языка жителей страны В. либо,
наоборот, различие языков служит причиной различия законов о браке. Ясно, что
дело совсем не в этом. Могло оказаться, что ранее существовала единая страна С,
часть которой была завоевана и отторгнута от С. Так образовались страны А и В.
В завоеванной стране захватчики насадили свой язык и свое отношение к браку,
не изменив больше ничего и растворившись среди жителей этой страны. Так воз-
никла ситуация, описанная нами. Аналогичную критику можно высказать и в
отношении метода сходства и метода сопутствующих изменений. Критика же в
отношении метода остатков основана на том, что при его формулировке Милль
неявно предполагает, что все сопричины аддитивны, что не всегда справедливо.
Хорошую критику законов Милля можно найти, например, в монографии [4.39],
из которой мы и заимствовали пример со странами А и В.
Значительная часть материала параграфа, посвященного проблемам класси-
фикации, в частности, относящаяся к использованию признанных эталонов, заим-
ствована нами из работы [4.40]. Некоторые соображения, относящиеся к оценке
КОММЕНТАРИИ
267
качества классификации, навеяны работами [3.25] и [4.41]. Многие дополнитель-
ные аспекты проблемы классификации, не затронутые в этом параграфе, можно
найти в работах [4.42] и [4.43].
Алгоритмы обобщения на основании использования теоретико-множественных
операций, о которых шла речь в последнем параграфе главы, предложены
Н. П. Викторовой. В ее программной системе для обобщения описания ситуаций
подобные процедуры использовались в режиме диалога с технологом-управленцем
при корректировке описаний, помещаемых в память системы до обучения и после
формирования результатов на основе обучающей выборки.
Укажем еще на некоторые работы, важные и интересные для тех, кто собирает-
ся реализовать Классификатор для систем типа систем ситуационного управления.
Сошлемся на работу [4.44], в которой делается попытка формализовать процеду-
ру индуктивного обобщения при формировании описаний. Несмотря на некоторую
узость темы, идеи, высказанные в этой работе, могут оказаться полезными и при
построении понятий в классификационных системах, пригодных для поиска уп-
равления.
В работе [4.45] под понятием понимается некоторая формула узкого исчисле-
ния предикатов, записанная в предваренной нормальной форме. Задача формиро-
вания понятия рассматривается в виде двух последовательно решаемых задач:
формирование префиксной части формулы, т. е. определение объема понятия, и
формирование матричной части формулы, т. е. определение содержания понятия.
В работах [4.46, 4.47] затрагивается чрезвычайно важная проблема сущест-
вования запретов на комбинации классифицирующих признаков, возникающих
лишь из семантики тех объектов, для которых производится обобщение. Совокуп-
ность признаков, приписываемых некоторому понятию или классу эквивалентно-
сти, или классу толерантности, должна иметь нечто семантически общее. Не имеет,
например, смысла одновременно рассматривать признак длина крыла и наличие
крыльев. Такие семантические запреты должны играть значительную роль при
построении реальных классификаций.
Пространства толерантности можно модифицировать за счет введения нечет-
ких квантификаторов в комбинации признаков, определяющих классы толерант-
ности. Примером того, как это можно сделать, является мажоритарное пространст-
во и классификация с квантификатором большинство, описанная в [4.48]. Дальней-
шее развитие таких подходов должно оказаться чрезвычайно полезным в Класси-
фикаторах для систем семиотического управления.
К главе 5
Проблема построения планировщиков, которая возникла еще на заре разви-
тия метода ситуационного управления, сейчас активно исследуется не только для
этих целей. Создание ЭВМ пятого поколения поставило задачу прямого контакта
между ЭВМ и непрограммирующим пользователем. Решение ее означает, что в
ЭВМ будущего должны присутствовать специальные встроенные средства, кото-
рые позволяли бы строить программу решения задачи, интересующей пользовате-
ля, по ее описанию на языке той проблемной области, в которой данный пользова-
тель является специалистом. А это означает, что в ЭВМ кроме стандартных для
нее блоков и устройств должны быть, по крайней мере, три новых устройства:
устройство для коммуникации с пользователем на его профессиональном языке,
которое мсжет воспринять описание задачи на этом языке и преобразовать его
во внутреннее представление, принятое в данной ЭВМ; база знаний, содержащая
достаточный набор сведений о проблемной области; планировщик, способный на
основе поступившего в ЭВМ описания задачи и тех знаний, которые хранятся
в базе знаний, составить машинную программу из готовых стандартных модулей,
решающую поставленную задачу.
Все рассмотренные нами подходы к планированию можно обсуждать и под
этим углом зрения, но задача нашей книги несколько иная, чем планирование вы-
числений. Поэтому мы рассматривали принципы построения планировщиков под
углом зрения поиска многошаговых решений по управлению объектами сложной
природы.
268
КОММЕНТАРИИ
Программа ЛОГИК-ТЕОРЕТИК, которая приведена нами в качестве примера
системны планирования, ориентированной на локальное улучшение плана для до-
стижения поставленной цели, нами уже упоминалась в предшествующих главах
{1.15]. Идеи этой программы, развитые в программе GPS (ОРЗ), имевшей много
модификаций, привели к созданию уровня опережающего планирования [1.14].
Программа FDS, позволяющая автоматически порождать оценки различий в до-
казываемых утверждениях, описана в [5.1]. В этой программе имеются специаль-
ные универсальные средства, ориентированные на язык исчисления высказываний,
Которые позволяют проводить синтаксический анализ двух сравниваемых выраже-
ний и формировать список различий между ними.
Среди планирующих систем, ориентированных на работу в заданной проблем-
ной области и применявших для нахождения планов логический вывод с использо-
ванием метода резолюций, в начальный период особенно известной была система
STRIPS, предназначенная для нахождения целесообразного поведения интел-
лектуального робота. Эта система описана, например, в работах [5.2, 5.3]. Как и
для системы GPS, для системы STRIPS имеются многочисленные модификации, в
которых число стратегий планирования расширено. Например, в системе
ABSTRIPS использована стратегия опережающего планирования. При создании
системы STRIPS впервые проявились особенности, присущие планировщикам,
работающим с описаниями, заданными на языке исчисления предикатов. Основные
продукционные формулы в системе STRIPS имели вид Q; А=>5, Н. В них, кроме
самой продукции А=ф5, имелись еще предикат условия применимости продукции Q
и предикат «чистки», определявший аксиомы или уже выведенные ранее формулы,
которые необходимо после данного шага вывода убрать из памяти системы, т. е.
перевести в тип невыведенных. Об этой проблеме мы уже упоминали в основном
тексте данной главы. В системе STRIPS введение О и Н происходило с помощью
создателей системы планирования. Автоматическое формирование их в процессе
планирования — пока еще нерешенная задача.
Модификации системы STRIPS, система ABSTRIPS, а также дедуктивные воп-
росно-ответные системы QA-3 и QA-4, идеи которых легли в основу многих плани-
рующих систем, описаны в монографии [5.4]. Пионерской работой в области мето-
да резолюции была работа [5.5]. Различные способы повышения эффективности
стратегий, используемых при нахождении резольвент, описаны в монографии
[5.6]. Поиск таких улучшений все время продолжается, так как метод резолюции
остается одним из самых популярных среди разработчиков многих практических
систем. Однако он не единственно возможный или самый эффективный. Например,
обратный метод поиска доказательства, предложенный в свое время известным
советским логиком С. Ю. Масловым [5.7], во многих отношениях превосходит ме-
тод резолюции. Этот метод реализован, например, в системе планирования
СФИНКС, описанной в уже упоминавшейся монографии [5.4]. Трудности, харак-
терные для имеющихся сейчас процедур вывода, и возможность совмещения этих
процедур с некоторыми эвристическими приемами обсуждалась многими авторами.
Сводка соответствующего материала приведена в [5.8] и [5.9]. В монографии [5.4]
проводится сравнение чисто логических стратегий планирования с теми стратегия-
ми. которые мы обсуждали в § 5.7. Некоторые дополнительные соображения
по поводу методов планирования, опирающихся на вывод в исчислении преди-
катов, можно найти в работе [1.1]. Рассуждения о необходимости нелинейных
планов, приведенные в конце§5.2, заимствованы из работы [5.10], где излага-
ется описание планирующих систем, допускающих построение немонотонных
планов.
Функциональные модели под названием «вычислительные модели» впервые
были введены Э. X. Тыугу в работе [5.11]. В той же работе были сформулированы
следующие основные проблемы, связанные с вычислительными моделями. 1. Уз-
нать, имеет ли решение данная задача. 2. Если задача имеет решение, то найти
ориентацию в модели, которая обеспечит путь от исходных дескрипторов к целе-
вым. 3. Указать, совпадают ли множества решений для двух данных задач, для
которых имеется решение в рамках данной функциональной модели. 4. Найти
для данной задачи минимальный в некотором определенном смысле путь, ведущий
от исходных дескрипторов к целевым.
КОММЕНТАРИИ
269
Большим достижением в области функциональных моделей явилось доказа-
тельство разрешимости для вычислительных моделей, описанных в [5,11] и реали-
зованных в виде тиражируемой системы планирования ПРИЗ [5.12], а также полу-
чение весьма обнадеживающих оценок сложности решения указанных выше четы-
рех основных проблем, связанных с функциональными моделями. В специальном
языке описания спецификаций все эти задачи можно решать с линейной сложнос-
тью [5.13; 5.14]. Отметим, что функциональные модели в последнее время активно
используются при решении важной для приложений задачи — автоматического
синтеза программ по исходному описанию, которая ставится в более общем виде,
чем в рассмотренных нами функциональных моделях [5,15].
Вне поля нашего зрения остался цикл работ, развивавшихся в течение ряда
лет в Институте кибернетики АН УССР, по созданию системы планирования,
которая ищет планы в человеко-машинном режиме. Такой подход может оказаться
полезным при решении задачи управления объектами, для которых создание пол-
ной функциональной модели оказывается нереальным.
Прямое обобщение схем планирования в пространстве состояний и в простран-
стве подзадач на случай, когда дуги сети планирования имеют размытые оценки, со-
держится в работе [5.16]. В монографии [5.17] приведена схема ситуационного
управления, в которой нечетким может быть как задание текущей ситуации и сте-
пень ее принадлежности к тому или иному классу, так и оценка истинности и вы-
полнимости выработанного в процессе планирования решения в заданное время.
Развитый авторами монографии подход дает полное решение задачи планирования
в классе нечетких схем принятия решений.
Иллюстративный пример сценария, приведенного на рис, 5.9, и пояснения к
нему заимствованы из работы [5,18]. Аналогичные сценарии, предназначенные
для выявления конфликтных ситуаций при управлении отгоном самолетов граж-
данской авиации, можно найти в работе [5,19]. Методика их построения подробно
изложена в работах [5.20—5.22]. Другой подход к построению сценария выявле-
ния конфликтных ситуаций содержится в [5.23]. Однако этот подход, дающий
весьма эффективные схемы принятия решений, пригоден лишь для объектов уп-
равления не слишком сложной структуры.
Фрагмент логики действий, описанный в § 5.5, заимствован из работы [5.24].
Ряд соображений, связанных с организацией поиска решений с использованием
сценариев, Логико-трансформационных правил и имитационного моделирования,
приведен в статье [5.25], Из этой же статьи заимствован пример 5.15.
Использование детерминированных и вероятностных автоматов для описания
процессов, протекающих в элементах ДСС, описано в работах [2,21—2.23], при-
веденных в списке литературы к гл. 2 книги. Укажем еще на монографию [5.26],
в которой автоматы применяются для имитационного моделирования систем, струк-
тура которых близка к ДСС.
Примеры, связанные с моделированием процесса обработки судов в Калинин-
градском морском рыбном порту, заимствованы из работ группы специалистов
(И. А. Кириков, А. В, Колесников и др.), создавших под руководством В. Ф. По-
номарева систему ситуационного управления этим сложным реальным объектом
[2.19, 5,27—5.29],
В § 5.7 использованы фрагменты из работы [5.30]. Многие интересные сообра-
жения на тему об особенностях человеческих рассуждений имеются еще в моногра-
фии [5.31], а также в тех работах, которые указаны в списке литературы к этим
двум книгам.
СПИСОК ЛИТЕРАТУРЫ
К главе 1
1.1. Поспелов Д. А. Логике-лингвистические модели в системах управле-
ния.— М.: Энергия, 1981.— 231 с.
1.2. Захаров В. Н., Поспелов Д. А., X а з а ц к и й В. Е. Системы
управления. Задание. Проектирование. Реализация.— М.: Энергия, 1977.—
423 с.
1.3. Моисеев Н. Н. Математик задает вопросы...— М.: Знание, 1974.—
190 с.
1.4. Кини Р. Л., Райфа X. Принятие решений при многих критериях:
предпочтения и замещения.— М.: Радио и связь, 1981.— 560 с.
1.5. Проблемы программно-целевого планирования и управления Под ред.
Г. С. Поспелова.— М.: Наука, 1981.— 460 с.
1.6. Б л а у б е р г И. В., Ю д и н Э. Г. Становление и сущность системного
подхода.— М.: Наука, 1973.— 270 с.
1.7. Ц е т л и н М. Л. Исследования по теории автоматов и моделированию био-
логических систем.— М.: Наука, 1969.— 316 с.
1.8. Варшавский В. И. Коллективное поведение автоматов.— М.: Нау-
ка, 1973.— 407 с.
1.9. Вудворте Р. Решение проблем животными.— В кн.: Хрестоматия по
общей психологии: психология мышления. М.: Изд-во МГУ, 1981, с. 228—
234.
1.10. Первозванский А. А. Поиск.— М.: Наука, 1970.— 262 с.
1.11. Слэйгл Дж. Искусственный интеллект.— М.: Мир, 1973.— 319 с.
1.12. Нильсон Н. Искусственный интеллект.— М.: Мир, 1973.— 270 с.
1.13. Рейтман У. Познание и мышление: моделирование на уровне инфор-
мационных процессов.— М.: Мир, 1978.— 400 с.
1.14. Ньюэлл А., Саймон Г. GPS-программа, моделирующая процесс
человеческого мышления.— В кн.: Вычислительные машины и мышление.
М.: Мир, 1967, с. 283—301.
1.15. Ньюэлл А., Шоу Дж., Саймон Г. Эмпирические исследования
машины «Логик—Теоретик»: пример изучения эвристики.— В кн.: Вычис-
лительные машины и мышление. М.: Мир, 1967, с. 113—144.
1.16. Ньюэлл А., Ш о у Дж., Саймон Г. Программа для игры в шахматы
и проблема сложности.— В кн.: Вычислительные машины и мышление. М.:
Мир, 1967, с. 33—71.
1.17. Поспелов Д. А., Пушкин В. Н., Садовский В. Н. К опре-
делению предмета эвристики.— В кн.: Проблемы эвристики. М.: Высшая
школа, 1969, с. 5—19.
1.18. П у ш к и н В. Н. Оперативное мышление в больших системах.— М.; Л.:
Энергия, 1965.— 375 с.
1.19. Пушкин В. Н. Эвристика — наука о творческом мышлении.— М.:
Изд-во политической литературы, 1967.— 270 с.
1.20. Пушкин В. Н. Психология и кибернетика.— М.: Педагогика, 1971.—
230 с.
1.21. Поспелов Д. А., Пушкин В. Н. Мышление и автоматы.— М.: Со-
ветское радио, 1972.— 222 с.
СПИСОК ЛИТЕРАТУРЫ
271
1.22. Пушкин В. Н. Психологические возможности человека.— М.: Знание,
1972,— 63 с.
1.23. Пушкин В. Н. Психологические основы построения обучающих си-
стем.— В кн.: Вопросы кибернетики. Человеко-машинные обучающие систе-
мы. М.: Научный совет по комплексной проблеме «Кибернетика» при Пре-
зидиуме АН СССР, 1979, с. 8—39.
1.24. Пушкин В. Н. Принципы математического моделирования познания и
пути построения систем искусственного интеллекта.— В кн.: Вопросы ки-
бернетики. Ситуационное управление. Теория и практика, М.: Научный
совет по комплексной проблеме «Кибернетика» при Президиуме АН СССР,
1980, с. 5—33.
1.25. П о с п е л о в Д. А. Принципы ситуационного управления.— Изв.
АН СССР, Техническая кибернетика, 1971, №2, с. 10—17.
1.26. Клыков Ю. И., Поспелов Д. А. Ситуационное управление в
АСУ.— Управляю цие машины и системы, 1972, № 1, с. 27—34.
1.27. Клыков Ю. И., Поспелов Д. А., Пушкин В. Н. Зачем нужно
ситуационное управление? — В кн.: Вопросы кибернетики. Ситуационное
управление. Теория и практика. М.: Научный совет по комплексной проб-
леме «Кибернетика» при Президиуме АН СССР, 1974, с. 7—15.
1.28. Поспелов Д. А. Большие системы. Ситуационное управление.— М.:
Знание, 1975.— 62 с.
1.29. Клыков Ю. И. Ситуационное управление большими системами.— М.:
Энергия, 1974.— 134 с.
К главе 2
2.1. Степанов Ю. С. Имена. Предикаты. Предложения.— М.: Наука,
1981— 360 с.
2.2. Сильдмяэ И. Я- Значение, смысл и мысль.— В кн.: Ученые записки
Тартуского государственного университета. Вып. 551. Тарту, 1980, с. 121 —
127.
2.3. Сильдмяэ И. Я- О когитологии.— В кн.: Ученые записки Тартуского
государственного университета, вып. 594. Диалоговые системы и пред-
ставление знаний. Тарту, 1981, с. 126—133.
2.4. Филлмор Ч. Дело о падеже.— В кн.: Новое в зарубежной лингвистике.
Вып. 10. Лингвистическая семантика. М.: Прогресс, 1981, с. 369—495; Дело
о падеже открывается вновь. Там же, с. 496—530.
2.5. Мартынов В. В. Семиологические основы информатики.— Минск:
Наука и техника, 1974.— 191 с.
2.6. Мартынов В. В. Универсальный семантический код.— Минск: Наука
и техника, 1977.— 190 с.
2.7. Мартынов В. В. Человеко-машинные методы решения задач в системе
УСК.— В кн.: Вопросы кибернетики. Человеко-машинные обучающие
системы. М.: Научный совет по комплексной проблеме «Кибернетика» при
Президиуме АН СССР, 1979, с. 49—65.
2.8. Апресян Ю. Д. Экспериментальное исследование семантики русского
глагола.— М.: Наука, 1967.— 251 с.
2.9. Ревзин И. И. Современная структурная лингвистика: проблемы и ме-
тоды.— М.: Наука, 1977.— 283 с.
2.10. Богуславский И. М. Семантика частицы «только».— В кн.: Семио-
тика и информатика, Вып. 14, М,: ВИНИТИ, 1980, с. 134—158,
2.11. Пшеничная Л. Э,, С к о р о х о д ь к о Э, Ф. Единицы информацион-
ного языка в сопоставлении с единицами естественного языка.— В кн.:
Труды III Всесоюзной конф, по информационно-поисковым системам и авто-
матизированной обработке научно-технической информации. Т. 2. М.:
ВИНИТИ, 1967, с. 187—191.
2.12. Скороходько Э. Ф. и др. Информационно-поисковая система
БИТ.— Киев: Наукова думка, 1968.— 120 с.
272
СПИСОК ЛИТЕРАТУРЫ
2,13. Клыков Ю. И. Модельный язык.— В кн.: Труды III Всесоюзной конф,
по информационно-поисковым системам и автоматизированной обработке
научно-технической информации. Т. 2. М.: ВИНИТИ, 1967, с. 360—371.
2.14. Клыков Ю. И. Язык ситуационного управления.— В кн.: Семиотические
.методы управления в больших системах. М.: Моск, дом научно-технической
пропаганды, 1971, с. 67—81.
2.15. Кузнецов И. И. Механизм обработки семантической информации.—
М.: Наука, 1978,— 175 с.
2.16. Нисенбойм Л. Б. Некоторые модели обобщения понятий языка ситуа-
ционного управления.— В кн.: Вопросы кибернетики. Проблемы искусст-
венного интеллекта. М.: Научный совет по комплексной проблеме «Кибер-
нетика» при Президиуме АН СССР, 1980, с. 131—136.
2.17. Уемов А. И. Вещи, свойства и отношения.— М.: Изд-во АН СССР, 1963.—
184 с.
2.18. У е м о в А. И. Логические основы метода моделирования.— М.: Мысль,
1971,— 311 с.
2.19. П о н о м а р е в В. Ф., Колесников А. В., Кириков И. А.
Об одном подходе в семиотическом моделировании состояния транспортных
систем.— В кн.: Вопросы кибернетики. Ситуационное управление. Теория
и практика.— М.: Научный совет по комплексной проблеме «Кибернетика»
при Президиуме АН СССР, 1980, с. 109—130.
2.20. Железов Ж. Й., Поспелов Д. А. Дискретните ситуационни мрежи
— подкласс на големити системы.— Автоматика и изчислителна техника,
1969, № 2, с. 5—12.
2.21. Ж е л е з о в Ж. Й., Поспелов Д. А. Об одном классе больших си-
стем.— Изв. АН СССР: Техническая кибернетика, 1970, № 2, с. 49—53.
2.22. Лазарев В. Г., П и й л ь Е. И. Синтез управляющих автоматов.— М.:
Энергия, 1978.— 408 с.
2.23. Поспелов Д. А. Вероятностные автоматы.— М.: Энергия, 1970.— 87 с.
2.24. Б и б и н Г. Б. Применение метода автоматического доказательства тео-
рем в ситуационном управлении.— В кн.: Теоретические проблемы ситуа-
ционного управления, М.: Научный совет по комплексной проблеме «Кибер-
нетика» при Президиуме АН СССР, 1975, с. 28—34.
2.25. /Александров В. В., Б у л к и н Г. А., П о л я к о в А. О. Автома-
тизированная обработка информации на языке предикатов.— М.: Наука,
1982.— 103 с.
2.26. Осипов Г. С. Две задачи теории семиотических моделей управления.
I. Представления семиотических моделей.— Изв. АН СССР: Техническая
кибернетика, 1981, №6, с. 100—110.
2.27. Осипов Г. С. Две задачи теории семиотических моделей управления.
II. Семантический анализ.— Изв. АН СССР: Техническая кибернетика,
1982, № 1, с. 131—137.
2.28. Падучева Е. В. Семантический анализ естественного языка при пере-
воде на языки математической логики.— В кн.: Труды III Всесоюзной конф,
по информационно-поисковым системам и автоматизированной обработке
научно-технической информации. Т. 2. М.: ВИНИТИ, 1967, с. 156—169.
2.29. Попов Э. В., Р о д и о н о в Е. В. Алгоритм синтеза предложений огра-
ниченного русского языка из семантической сети.— Изв. АН СССР: Техни-
ческая кибернетика, 1978, №6, с. 44—51.
2.30. Брябрин В. М., Сенин Г. В. Анализ естественного языка в ограни-
ченном контексте.— В кн.: Вопросы кибернетики. Проблемы искусственно-
ного интеллекта.— М.: Научный совет по комплексной проблеме «Киберне-
тика» при Президиуме АН СССР, 1980, с. 111 —117.
2.31. Падучева Е. В. Проблемы логического анализа местоимений.— В кн.:
Семиотика и информатика. Вып. 15. М.: ВИНИТИ, 1980, с. 125—153.
2.32. Попов Э. В. Общение с ЭВМ на естественном языке.— М.: Наука,
1982,— 360 с.
2.33. Диалоговые системы в АСУ/Под ред. Д. А. Поспелова.— М.: Энергоатом-
издат, 1983.— 204 с.
СПИСОК ЛИТЕРАТУРЫ
273
2.34. Диалог в автоматизированных системах.— М.: Моск, дом научно-технической
пропаганды, 1981.— 160 с.
2.35. С и л ь д м я э И. Я- Действительность — текст — знания.— В кн.: Ученые
записки Тартуского государственного университета. Вып. 621. Тарту,
1983, с. 118—134.
2.36. Файн В. С. Новые аспекты понимания машинных сообщений.— Изв. АН
СССР: Техническая кибернетика, 1982, №5, с. 100—112.
2.37. Файн В. С. Содержательный аспект информационного обмена в диалоге.—
М.: Ин-т проблем передачи информации АН СССР, 1983, препринт № 1.—
33 с.
2.38. Плесневич Г. С. Представление знаний в ассоциативных сетях.—
Изв. АН СССР: Техническая кибернетика, 1982, № 5, с. 6—22.
2.39. Лозовский В. С. Экстенсиональная база данных на основе семанти-
ческих сетей.— Изв. АН СССР: Техническая кибернетика, 1982, №5,
с. 23—42.
2.40. К л е щ е в А. С., Черняховская М. Ю. Системы представления
проблемно-ориентированных знаний.— Изв. АН СССР: Техническая кибер-
нетика, 1982, № 5, с. 43—63.
2.41. Александров В. В., Булкин Г. А., Поляков А. О. Автома-
тизированная обработка информации на языке предикатов.— М.: Наука,
1982,— 101 с.
2.42. С к р э г г Г. Семантические сети как модели памяти.— В кн.: Новое в за-
рубежной лингвистике. Вып. 12. АС: Радуга, 1983, с. 228—271.
2.43. Преображенский А. Б. Лингвистический процессор для реализа-
ции общения с базами данных.— Изв. АН'СССР: Техническая кибернетика,
1982, № 5, с. 121 — 129.
2.44. К о р д ь е М. О. Использование знаний о предметной области в системе
управления роботом на естественном языке: эксперимент с кулинарными
рецептами.— В кн.: Лингвистические процессоры и представление знаний.
Новосибирск: ВЦ СО АН СССР, 1981, с. 5—21.
2.45. Русский семантический словарь.— М.: Наука, 1982.— 564 с.
2.46. Семантические типы предикатов.— М.: Наука, 1982.— 365 с.
2.47. Заде Л. Понятие лингвистической переменной и его применение к приня-
тию приближенных решений.— М.: Мир, 1976.— 165 с.
2.48. Варосян С. О., П о с п е л о в Д. А. Неметрическая пространственная
логика.— Изв. АН СССР: Техническая кибернетика, 1982, № 5, с. 86—99.
2.49. Е ж к о в а И. В., Поспелов Д. А. Принятие решений при нечетких
основаниях. 1. Универсальная шкала.— Изв. АН СССР: Техническая ки-
бернетика, 1977, №6, с. 3—11.
2.50. Аверкин А. Н. Нечеткое отношение моделирования в системах планиро-
вания поведения робота.— В кн.: Artificial Intelligence and Information-
Control Systems of Robots, October 18—22, Smolenice, 1982, p. 6—10.
К главе 3J>
3.1. Дебренн M. M., Нариньяни А. С. Речевой акт как элемент диало-
гового взаимодействия.— Ученые записки Тартуского государственного
университета. Вып. 654. Тарту, 1983, с. 39—48. ГМ с
3.2. Виноград Т. Об одном подходе к изучению дискурса,—В кн.: Взаимо-
действие с ЭВМ на естественном языке. Новосибирск, ВЦ СО АН СССР,
1978, с. 11—47.
3.3. Виноград Т. Программа, понимающая естественный язык.— М'.: Мир,
1976,— 292 с.
3.4. Черняк Ю. Умозаключения и знания.— В кн.: Новое в зарубежной
лингвистике. Вып. 12: Прикладная лингвистика. М.: Радуга, 1983,
с. 171—207; 272—317.
3.5. Шенк Р. Обработка концептуальной информации.— М.: Энергия, 1980.—
358 с.
274
СПИСОК ЛИТЕРАТУРЫ
3.6. Черняховская М. Ю. Представление знаний в экспертных системах
медицинской диагностики.— Владивосток: Ин-т автоматики и процессов
управления с вычислительным центром ДНЦ АН СССР, 1983.— 212 с.
3.7. Поспелов Д. А. Элементы аксиоматики временных отношений.—
В кн.: Ситуационное управление. Теория и практика. М.: Советское радио,
1975, с. 15—21.
3.8. Кандрашина Е. Б., Очаковская О. Н., Г о л у б е в а Л. А.
Экспериментальная вопросно-ответная система, включающая простую мо-
дель времени с элементами логического вывода.— В кн.: Взаимодействие
с ЭВМ на естественном языке. Новосибирск, ВЦ СО АН СССР, 1978, с. 207—
222.
3.9. Дембовская В. Н. Логика времени для структурирования связного
текста.— В кн.: Вопросы кибернетики. Проблемы искусственного интел-
лекта. М.: Наука, 1980, с. 144—158.
3.10. Л и т в и н ц е в а Л. В., П о с п е л о в Д. А. Время в роботах и диалого-
вых системах.— В кн.: Вопросы кибернетики. Проблемы искусственного ин-
теллекта.— М.: Наука, 1980, с. 62—70.
3.11. Кандрашина Е. Ю. Время в представлении знаний: Соотношения
между единичными событиями.— Препринт. Проект ВОСТОК- Вып. 7.
Новосибирск, 1983.— 25 с. Вып. 8. Новосибирск, 1983.— 32 с.
3.12. Е ж к о в а И. В., Поспелов Д. А. Принятие решений при нечетких
основаниях. Правила вывода.— Изв. АН СССР: Техническая кибернетика,
1978, №2, с. 5—11.
3.13. Ежкова И. В. Обобщение схем принятия решений с использованием
нечеткой логики,— В кн.: Информационно-программное обеспечение систем
искусственного интеллекта. М.: Моск, дом научно-технической пропаганды,
1978, с. 102—111.
3.14. Prade Н. Data bases with fuzzy information and approximate reasoning
in expert systems.— В кн.: Труды Международного симпозиума по искусст-
венному интеллекту ИФАК- Ленинград, 4—6 октября 1983 г.— 20 с.
3.15. Ч е с н о к о в С. В. Детерминационный анализ социально-экономических
данных.— М.: Наука, 1982.— 168 с.
3.16. Чесноков С. В. Силлогизмы в детерминационном анализе.— Изв.
АН СССР: Техническая кибернетика, 1984, «Ча 5, с. 55—83.
3.17. Закревский А. Д. К формализации полисиллогистики.— В кн.: Ло-
гический вывод. М.: Наука, 1979, с. 330—309.
3.18. П о й а Д. Математика и правдоподобные рассуждения,— М.: ИЛ, 1957.—
535 с.
3.19. Н а р и н ь я н и А. С. Недоопределенные множества — новый тип дан-
ных для представления знаний.— Препринт ВЦ СО АН СССР, № 232,
Новосибирск, 1980.— 26 с.
3.20. Нариньяни А. С. Средства моделирования неполноты данных в ап-
парате представления знаний.— В кн.: Представление знаний и модели-
рование процесса понимания. Новосибирск: ВЦ СО АН СССР, 1980, с. 153—
162.
3.21. Разлогова Е. Э. Логические отношения между смыслом и его компо-
нентами.— Научно-техническая информация, Сер. 2, 1981, № 1, с. 14—20.
3.22. Шок ин Ю. И. Интервальный анализ.— Новосибирск: Наука, 1981.—
111 с.
3.23. Нариньяни А. С. Недоопределенные модели и операции с недоопреде-
ленными значениями.— Препринт ВЦ СО АН СССР, № 400. Новосибирск,
1'982,— 33 с.
3.24. Инголлс Д.-Г.-Х. Введение в индийскую логику Навья-ньяя.— М.:
Наука, 1975,—237 с.
3.25. Пархоменко П. П. О технической диагностике.— М.: Знание, 1969.—
64 с.
3.26. Новорусский В. В. Конечно-автоматные системы управления.—
Новосибирск: Наука, 1982.— 269 с.
СПИСОК ЛИТЕРАТУРЫ
275
3.27, Ковригин О. В,, Смолянинов Н. Д., Ч м ы р ь А. Я. Эксперт-
ные медицинские диагностирующие системы.— Изв. АН СССР; Техническая
кибернетика, 1982, № 5, с. 199—216.
3.28. Wright von G. Н. A treatise on induction and probability.— Paterson,.
N. Y.: Littlefield, Adams a. Co., 1960.— 310 p.
К главе 4
4.1. Леонтьев А. А. Языкознание и психология.— М.; Наука, 1966.—
80 с.
4.2. Выготский Л. С. Собр. соч. Т. 2. М.: Педагогика, 1982.— 502 с.
4.3. Зубкова Т. И. Об одном направлении развития детской речи.— В кн.;
Структурная и прикладная лингвистика, Л.: ЛГУ: 1983, вып. 2, с. 53—57.
4.4. Негневицкая Е. И., Шахнарович А. М. Язык и дети.— М.:
Наука, 1981.— НО с.
4.5. Пиаже Ж- Избранные психологические труды.— М.: Просвещение»
1969.— 659 с.
4.6. Лурия А. Р. Об историческом развитии познавательных процессов.— М.:
Наука, 1974.— 171 с.
4.7. Лурия А. Р. Язык и сознание.— М.: Изд-во МГУ, 1979.— 319 с.
4.8. Коул М., Скрибнер С. Культура и мышление.— М.: Прогресс,
1977.— 261 с.
4.9. Лосский Н. О. Логика. 4.1.— Берлин: Обелиск, 1923.— 166 с.
4.10. В о й ш в и л о Е. К. Понятие.— М.: Изд-во МГУ.—285 с.
4.11. Хант Э., Марин Дж., Стоун Ф. Моделирование процесса форми-
рования понятий на вычислительной машине.— М.: Мир, 1970.— 301 с.
4.12. Хант Э. Искусственный интеллект.— М.: Мир, 1978.— 558 с.
4.13. А р к а д ь е в А. Г., Б р а в е р м а н Э. М. Обучение машины классифи-
кации объектов.— М.; Наука, 1971.— 110 с.
4.14. А й з е р м а н М. А., Б р а в е р м а н Э. М., Р о з о н о е р Л. И. Метод
потенциальных функций в теории обучения машин.— М.; Наука, 1970.—
384 с.
4.15. Александров В. В., Горский Н. Д. Алгоритмы и программы
структурного метода обработки данных.— Л.: Наука, 1983.— 207 с.
4.16. Классификация и кластер.— М.г Мир, 1980.— 389 с.
4.17. Б он гард М. М. Проблема узнавания,—М.: Наука, 1967.— 320 с.
4.18. Г ладун В. П. Формирование понятий путем обучения растущих се-
тей.— Кибернетика, 1970, №2, с. 99—104.
4.19. Г л а д у н В. П., В а ще н к о Н. Д. Методы формирования понятий на
ЦВМ.— Кибернетика, 1975, №2, с. 107—112.
4.20. Г ладун В. П. .Ефименко О. М., Рабинович 3. Л. Выделение
характерных сочетаний признаков объектов на ЦВМ.— Управляющие ма-
шины и системы, 1972. №2, с. 34—37.
4.21. Камилов М. М., Журавлев Ю. И. и др. Алгоритмы вычисления
оценок и их применение.— Ташкент: Фан, 1974.— 120 с.
4.22. Г л а д у н В. П. Эвристический поиск в сложных средах.— Киев: Наукова
думка, 1977.— 166 с.
4.23. Старченко А. А., К а л а й д ж и е в а М. А. Понятийный аппарат
тезаурусов и операции на ЭВМ.— В кн.: Логико-методологические исследо-
вания.— М.: Изд-во МГУ, 1980, с. 109—129.
4.24. Резников Л. О. Понятие и слово.— Л.:— Изд-во ЛГУ: 1958.— 124 с.
4.25. Финн В. К-, 3 а б е ж а й л о М. И. Логические проблемы автоматиче-
ского формирования гипотез.— В кн.: Тезисы докладов IX Всес. симп. по
кибернетике, Сухуми, 10—15 ноября 1981 г., т. 2, с. 54—61.
4.26. Финн В. К- О машинно-ориентированной формализации правдоподобных
рассуждений в стиле Ф. Бэкона — Д. С. Милля.— В кн.: Семиотика и ин-
форматика. Вып. 20. М.: ВИНИТИ, 1983, с. 35—101.
4.27. 3 а б е ж а й л о М. И., Ф и н н В. К-, К о з л о в а С. П. и др. Об од-
ном методе автоматического формирования гипотез и его программной
.276
СПИСОК ЛИТЕРАТУРЫ
реализации.— Научно-техническая информация. Сер. 2, 1982, № 4,
с. 20—26.
4.28. Гаек П., Гавранек Т. Автоматическое образование гипотез.— М.:
Наука, 1984.—277 с.
4.29. Plotkin G. D. A note on inductive generalization.—Machine Intelligen-
ce, 1970, v. 5, p. 153—164.
4.30. Plotkin G. D. A further note on inductive generalization.— Machine
Intelligence, 1971, V. 6, p. 101 — 124.
4.31. Жуков Л. Г. Об одном алгоритме индуктивного формирования поня-
тий.— В кн.: Вопросы кибернетики. Теория и практика ситуационного уп-
равления. М.: Советское радио, 1977, с. 167—171.
4.32. В а г и н В. Н. О дедуктивных и недедуктивных системах принятия реше-
ний.— В кн.: Вопросы кибернетики. Ситуационное управление. Теория и
практика.— М.: Советское радио, 1980, с. 45—59.
4.33. Вагин В. Н., Викторова Н.П. Вопросы структурного обобщения
и классификации в системах принятий решений.— Изв. АН СССР: Техни-
ческая кибернетика, 1982, № 5, с. 64—73.
4.34. Викторова Н.П. Два подхода к решению задачи классификации дре-
вовидных структур.— Научно-техническая информация, Сер. 2, 1981, №9,
с. 17—21.
4.35. Викторова Н. П. Разработка алгоритмов структурного обобщения.—
В кн.: Труды МЭИ, 1981, вып. 533, с. 49—53.
4.36. Голендер В. Е., Розенблит А. Б. Вычислительные методы конст-
руирования лекарств.— Рига: Зинатне, 1978.— 231 с.
4.37. Магинскас Ю. А. Об одном подходе к анализу причинности.— В кн.:
Проблемы логики, М.: Изд-во АН СССР, 1963, с. 144—150.
4.38. Los I. The fundation of a methodological analisis of Mill’s methods.— In:
25 years of logical methodology in Polland. Warszawa, 1977, p. 291—325.
4.39. Джини К. Логика в статистике.— М.: Статистика, 1973.— 128 с.
4.40. Шрейдер Ю. А. Математическая модель теории классификации.—
Научно-техническая информация, Сер. 2, 1968, № 10, с. 7—24.
4.41. Найденова К, А- Реляционная модель анализа экспериментальных
данных.— Изв. АН СССР: Техническая кибернетика, 1982, № 4, с. 103—119.
4.42. Шрейдер Ю. А. Равенство. Сходство. Порядок.— М.: Наука, 1971.—
254 с.
4.43. Шаров А. А. Осмысленность признаков и теория классификации.—
В кн.: Семиотика и информатика. Вып. 11. М.: ВИНИТИ, 1979, с. 37—51.
4.44. Погосян Э. М. К теории автоматического синтеза понятий.— В кн.:
Семиотика и информатика. Вып. 8. М.: ВИНИТИ, 1977, с. 125—152.
4.45. Ефимов Е. И. Автоматическое формирование понятий, описываемых зам-
кнутыми формулами узкого исчисления предикатов.— В кн.: Семиотика и
информатика. Вып. 13. М.: ВИНИТИ, 1979, с. 86—108.
4.46. Заренков Н. А. Лекции по теории систематики.— М.: Изд-во МГУ,
1976.— 140 с.
4.47. Панова Н. С., Шрейдер Ю. А. О знаковой природе классификации,
Научно-техническая информация, Сер. 2, 1974, № 12, с. 3—10.
4.48. Виленкин Н. Я-, Ш р е й д е р Ю. А. Мажоритарные пространства
и квантор «большинства».— В кн.: Семиотика и информатика. Вып. 8. М.:
ВИНИТИ, 1977, с. 45-82.
К главе 5
5.1. Quinlan J., Н u п t Е. A formal deductive problem-solving system.—
J. ACM, 1968, v. 15, N 4, p. 625—646.
5.2. Файке P. Механизмы поиска вывода для моделей, описывающих состоя-
ния.— Труды IV Объединенной международной конференции по искусст-
венному интеллекту. Вып. 3. Методы поиска решений, эвристические мето-
ды. М.: Научный Совет по комплексной проблеме «Кибернетика» при Прези-
диуме АН СССР, 1975, с. 206—226.
СПИСОК ЛИТЕРАТУРЫ
277
5.3. Файке Р., Нильсон Н. Система STRIPS —новый подход к приме-
нению методов доказательства теорем при решении задач.— В кн.: Интег-
ральные роботы.— М.: Мир, 1973, с. 382—403.
5.4. Ефимов Е. И. Решатели интеллектуальных задач.— М.: Наука, 1982.—
320 с.
5.5. Робинсон Дж. Машинно-ориентированная логика, основанная на
принципе резолюции.— В кн.: Кибернетический сборник, Новая серия.
Вып. 7. М.: Мир, 1970, с. 194—218.
5.6. Чень Ч., Л и Р. Математическая логика и автоматическое доказательство
теорем.— М.: Наука, 1983.— 358 с.
5.7. Маслов С. Ю. Обратный метод установления выводимости в классическом
исчислении предикатов.— ДАН СССР, 1964, т. 159, № 1, с. 17—20.
5.8. Маслов С. Ю. Поиск вывода, как модель эвристического процесса.—
Кибернетика, 1972, № 5, с. 74—78.
5.9. Маслов С. Ю. Теория поиска вывода.— Кибернетика, 1975, №4,
с. 134—144.
5.10. С а к е р д о у т и Э. Нелинейная природа планов.— В кн.: Труды IV
Объединенной международной объединенной конференции по искусственно-
му интеллекту. Вып. 4: Обучение, отладка и автоматическое программирова-
ние. М.: Научный Совет по комплексной проблеме «Кибернетика» при Пре-
зидиуме АН СССР, 1975, с. 99—133.
5.11. Т ы у г у Э. X. Решение задач на вычислительных моделях.— Ж. мат. и
мат. физ., 1970, №3, с. 716—733.
5.12. К а х р о М. И., К а л ь я А. П., Т ы у г у Э. X. Инструментальная систе-
ма программирования ЕС ЭВМ (ПРИЗ).— М.: Финансы и статистика,
1981,— 157 с.
5.13. Минц Г. Е., Т ы у г у Э. X. Структурный синтез и неклассические ло-
гики.— В кн.: Применение методов математической логики: Тезисы докла-
дов. Таллин, 1983, с. 52—60.
5.14. Д и к о в с к и й А. Я. Оценки эффективности алгоритмов, связанных с вы
числительными моделями.— В кн.: Применение методов математической ло-
гики: Тезисы докладов, Таллин, 1983, с. 42—51.
5.15. Т ы у г у Э. X. Вычислительные фреймы и структурный синтез программ.—
Изв. АН СССР: Техническая кибернетика, 1982, № 6, с. 176—182.
5.16. Аверкин А. Н., Твида Дж., Поспелов Д. А., Сомальви-
к о М. Обобщенные стратегии в решателях проблем.— Изв. АН СССР:
Техническая кибернетика, 1978, № 5, с. 71—83.
5.17. Борисов А. Н., Алексеев А. В. и др. Модели принятия решений
на основе лингвистической переменной.— Рига: Зинатне, 1982.— 256 с.
5.18. Колесников А. В., П о н о м а р е в В. Ф. и др. Системы ситуацион-
ного управления: Предварительная публикация.— М.: Научный Совет по
комплексной проблеме «Кибернетика» при Президиуме АН СССР, 1978.—
43 с.
5.19. В и ш н я к о в Н. А., Гельфандбейн Я. А., Мамонтов А. И.
Базис-граф топологической модели оперативного управления авиаремон-
то.м.— В кн.: Вопросы теории и практики создания АСУ в гражданской
авиации. Труды ГосНИИ ГА. Вып. 143. М., 1976, с. 25—34.
5.20. Вишняков Н. А., Гельфандбейн Я. А. Механизм разрешения
конфликтных ситуаций на базе модели конструирования решения.— В кн.:
Вопросы теории и практики создания АСУ в гражданской авиации. Труды
ГосНИИ ГА. Вып. 143. М., 1976, с. 35—43.
5.21. Вишняков Н. А., Зе н к о в и ч Ю. А. Применение принципов ситуа-
ционного управления для решения задач оперативного управления деятель-
ностью гражданской авиации.— В кн.: Вопросы теории и практики созда-
ния АСУ в гражданской авиации. Труды ГосНИИ ГА, вып. 173, М., 1979,
с. 201—207.
5.22. Вишняков Н. А., Гельфандбейн Я- А., Цветков Г. С.
. Функционально-структурный подход к моделированию объекта управле-
ния в задачах автоматизации управленческой деятельности. Предваритель-
278
СПИСОК ЛИТЕРАТУРЫ
ная публикация. Научный Совет по комплексной проблеме «Кибернетика»
при Президиуме АН СССР, М., 1978.— 29 с.
5.23. Загадская Л. С.,Соколова О. В. Методика проектирования си-
туационных моделей управления.— Препринт. Научный Совет по комплекс-
ной проблеме «Кибернетика» при Президиуме АН СССР. М., 1973.— 40 с.
5.24. Жолондзь В. Я. Использование закономерностей времени и действия
в ситуационном управлении дискретными объектами.— В кн.: Вопросы
кибернетики. Ситуационное управление. Теория и практика. М.: Научный
Совет по комплексной проблеме «Кибернетика» при Президиуме АН СССР,
1980, с. 60—69.
5.25. Загадская Л. С..Лозовский В. С., Сокольников А. И.,
Горячук В. Ф. Реализация базовых процессов в системе ситуационного
управления. В кн.: Вопросы кибернетики. Ситуационное управление. Тео-
рия и практика.— М.: Научный Совет по комплексной проблеме «Киберне-
тика» при Президиуме АН СССР, 1980. с. 94—108.
5.26. Б а к а е в А. А., Костина Н. М., Я р о в и ц к и й Н. В. Автоматные-
модели экономических систем.— Киев: Наукова думка, 1970.— 191 с.
5.27. Пастин Ю. Я., Пожидаев В. Г. О взаимосвязи методов моделиро-
вания диспетчерского управления в морском рыбном порту. В кн.: Автома-
тизированные системы управления в рыбной промышленности. Калинин-
град. АтлантНИРО, Труды, Вып. 55, 1974, с. 40—46.
5.28. Гельфандбейн Я. А., Колесников А. В., Рудин-
с к и й И. Д. Семиотико-статистическая модель поведения транспортного
узла.— В кн.: Ситуационное управление и семиотическое моделирование.
М.: Научный Совет по комплексной проблеме «Кибернетика» при Президи-
уме АН СССР, 1983, с. 40—49.
5.29. К и р и к о в И. А. Использование ППП Моделирование состояния и по-
ведения большой системы — МОСОП в АСУ морским рыбным портом.—
В кн. Экономические проблемы развития советского рыболовства в Атлан-
тике. Калининград: АтлантНИРО, 1981, с. 82—84.
5.30. П о.с п е л о в Д. А. О «человеческих» рассуждениях в интеллектуальных
системах.— В кн.: Логика рассуждений и ее моделирование. М.: Научный
Совет по комплексной проблеме «Кибернетика» при Президиуме АН СССР,
1983, с. 5—37.
5.31. Кликс Ф. Пробуждающееся мышление: у истоков человеческого интел-
лекта.— М.: Прогресс, 1983.—302 с.
ИМЕННОЙ УКАЗАТЕЛЬ
Аверкин А. Н. 262
Аристотель 248, 260
Асмус В. Ф. 160
Афонин Л. А, 255
Bailee (Bayes) 181
Бинэ A. (Binet А.) 164
Боев Д. 257
Бонгард М. М. 168, 171, 266
Бэкон Ф. (Bacon F.) 195
Варосян С. О. 263
Викторова Н. П. 203, 266, 267
Вригт Г. фон (von Wright G. Н.) 264
Выготский Л. С. 264
Гавранек (Havranek Т.) 265
Гаджиев Р. Э. 255
Гаек П, (Hajek Р.) 265
Гельфандбейн Я. А. 255
Георгиева Н. 257
Гийома 14
Горбатов В. А, 255
Дурасов 124
Ежкова И. В. 143
Ефимов Е. И. 263
Железов Ж- 254
Загадская Л. С. 255, 257
Катаев В. 161
Квинлан (Quinlan J.) 226
Кириков И. А. 269
Клыков Ю. И. 254, 256, 257, 290
Колесников А. В, 260, 269
Кондратов А. М. 163
Краевский В. 263
Крылов В. 259
Кузин Л. Т, 255
Левиатов А. Ю. 255
Лейбниц (Leibniz G. W.) 154
Линней (Linnaeus С.) 165
Лозовский В. С. 258
Лурия А. Р. 164, 165, 264
Мартынов В. В. 260
Маслов С. Ю. 226, 368
Мачераускас В. Ю. 291
Милль С. (Mill S.) 183, 184, 188, 195, 266
Нисенбойм Л, Б, 291
Осгуд Ч, (Osgood Ch.) 165
Осипов Г. С. 291
Пётшке Д. (Potschke D.) 155
Плоткин Г. 265
Пономарев В. Ф. 255, 260
Поспелов Д. А. 254—258
Праде A. (Prade Н.) 153
Пушкин В. Н, 254 , 256 , 259
Сент-Экзюпери А. де (Saint-Exupery
A. de) 14
Смолл (Smoll) 259
Соколова О. В. 257
Соколянский А. Н. 84
Сильдмяэ И. Я- 260
Тыугу Э. X. 368
Фаррени А. 153
Финн В. К- 265
Хант Э, (Hunt Е.) 226, 264
Цетлин М, Л. 259
Чесноков С. В. 146, 263
Эйдельман Н, Я. 116
предметный указатель
«Абсурдность» знаний 156
— рассуждений 251
Автомат конечный вероятностный 18, 20
---детерминированный 245
АКО-связь 81
Алгоритм унификации 266
Анализ кластерный 166, 168
— семантический 83
Анализатор 27, 83
Аналогия 153
— отрицательная 189
— по Лейбницу 154
— положительная 189
База данных 214
— знаний 157
— эбранова 229
Базис в пространстве толерантности 215
Бионика 254
Бихевиоризм 17
Блок случайного выбора 27
• — прагматического анализа 84
Вершина дискретной семантической се-
ти 63
— семантического графа 199
•--— объектная 199
— — — предикатная 199
--- — признанная 199
— — — функциональная 199
— — дерева неблагоприятная 231
Вопросник 210
— оптимальный 211
Выборка обучающая 168
Гиперплоскость разделяющая 169
Гистограмма 88, 167
Грамматики формальные 35
Граф иерархический (/-граф) 205
— семантический (СГ) 199
ГУХА-метод 265
Данные 39, 42
ДАТУМ 262
Действие 52
— квантифицированное 62
— «модализированное» 62
Действие модифицированное 62
Действие-состояние 52
Дерево 82, 83
— семантическое замкнутое 231
Дескриптор 234
Детерминация 146
Детство, психология 162
Дизъюнкт 228
Дискретизация 112
ДИСПУТ 262
ДСМ-метод 184
Дуга в семантическом графе входная
199
—-------— выходная 199
Задача лабиринтная 222
Замещение 51
Знаки 37
Знания 39, 40, 42
—, логическая противоречивость 39
— родительские 250
Значение интерпретируемое 35
Игра в «крестики-нолики» 21, 195
— в пять 22
— в шахматы 19
— позиционная 19
И-дуга 218
И-ИЛИ-граф 218
И-ИЛИ-сеть 218
Императивы 52
Имя 47
Интеллект искусственный 32
Интенсионал 41
Информация 50
Исток 63
Исчисление высказываний 34
— предикатов 35
— — первого порядка 69, 226
Квантификаторы 53, 61
— временные 124
— нечеткие 54
— размеров 127
Квантор существования 53
Кванторы частотные нечеткие 145
Класс толерантности 206, 214 , 267
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
281
Класс эквивалентности 197, 206, 214
Классификатор 27, 159 , 206, 216, 244,
255, 256, 267
Классификация 26, 48, 159 и д., 165
Кластер 166
Код универсальный семантический 69,
260
Конкатенация 62
Конструкция ядерная простая 55, 62
--- синтаксически правильная 63
---сложная 63
Конъюнкция 62
Коррелятор 27, 216, 237, 255
«Крестики-нолики» 19, 21, 195
Лабиринт 19, 222
Лексика языка ситуационного управле-
ния 57
ЛИСП ЕС 77
Лицо, принимающее решение (ЛПР) 9
ЛОГИК-ТЕОРЕТИК 223, 368
Логика временная 138
— каузальная 136, 138
— Навья-ньяя 157
— псевдофизическая 107
— — временная 109, 111
— — действия 109, НО
---каузальная 109, НО
---оценок 110
— — пространственная 109, НО
— ---- статическая 125
---целей 110
— четырехзначная 158
Маркер 115
Мера общности 208
— сходства 209
Метафора 49
Метка ролевая 72
Метод Бонгарда 171
— встречных волн 221
— гиперплоскостей 169
— градиента 23
— ГУХА 265
— индуктивных рассуждений 183
— локальных улучшений 222
— обратной волны 221
— опережающего планирования 226
— опровержения 227
— «остатков» 183
— планирования 220
— построения доказательства 226
— потенциальных функций 168
— прямой волны 220
— разделения в пространстве призна-
ков 168
— различия 183, 188, 266
— растущих пирамидальных сетей 174
— резолюции 227
Метод ситуационного управления 29
— сопутствующих изменений 184
— сходства 183, 186
---сильного положительного 188
— управления логико-лингвистичес-
кий 29
Множество базовых понятий ЯСУ 61
— действии (операций) ЯСУ 61
— имен понятий ЯСУ 61
— истоков 63
— квантификаторов ЯСУ 61
— квантифицированных свойств ЯСУ
62
— «модализированных» действий ЯСУ
— модальностей ЯСУ 61
— модификаторов ЯСУ 61
— модифицированных действий ЯСУ
62
— модифицированных понятий ЯСУ
62
---свойств ЯСУ 62
— неопределенное 157
— отношений ЯСУ 62
— оценок ЯСУ 61
— Парето 191
— простых ядерных конструкций ЯСУ
62
— решателей 63
— свойств понятий (объектов) и дейст-
вий ЯСУ 61
— сложных ядерных конструкций
ЯСУ 63
— стоков 63
Модальности 54, 61
Моделирование нечеткое 94, 116
— семиотическое 29 , 255
Модель коллективного поведения авто-
матов 259
— лабиринтная 19
— логико-лингвистическая 255
— порождающая 98
— проблемной области 84
— семиотическая 33, 37, 38, 45, 55
— ситуационная 255
— формальная 32
— — интерпретируемая 36
— — конструктивная 33
---разрешимая 33
— — семантическая 44
— — синтаксическая 43
— — прагматическая 44
— функциональная 234
Модификаторы 54
Модусы силлогизмов Аристотеля
248
Момент времени 111
Мотивация 50
Мультиграф взвешенный 199
282
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Набор признаков максимальный 209
Неполнота знаний 156
— описания 14
Норма 87, 88
«Общий решатель задача 21
Обобщение 159, 162
— по имени 201
— по квантификатору 201
— по модификаторам 201
— по признакам 167
— по структурам 182
— семантического графа 202
Объект 63, 65
— обобщенный 167
— управления 9, 11
— а-эталониый 208
Описание объекта 10
Оптимизация графа классификации 211
Отношения 45
— временные 50
— динамические, таблица 53
— замещения 51
— инструментальные 50
— информационные 50
— каузальные 50
— классификации 48
— количественные 49
— неопределенные 157
— нечеткие моделирования 94, 116
— порядковые 50
— признаковые 49
— принадлежности 50
— пространственные 50
— сравнения 49
— статические, таблица 51
Отрицание 62
Опенки 54, 61
Пакет прикладных программ интеллек-
туальный 237
Пара дополнительная 231
Парадоксальность рассуждений 251
Переменная неопределенная 157
Переоиределенность 157
Персептрон 19
Планировщик 216, 267
Планирование многоуровневое 219
— монотонное (линейное) 227
— немонотонное (нелинейное) 227
— обобщенное 227
— по подзадачам 216
— по состояниям 216
Подграф 205
Позиция 64
Полнота детерминации 146
Понятие 47, 49, 165
— бивалентное 180
— квантифицированное 63
Понятие модифицированное 62
Пополнение описания 97
Порядок 50
Правила вывода 33
— — семантические 122
— — синтаксические 122
— — универсального характера 226
— — эвристические 226
— логико-трансформационные (кор-
реляционные, ЛТП) 26
— — адаптивные 38
— отображения 35
— продукционные 85
— семантические 32
— синтаксические 32
Правило Байеса 181
— решающее 167
— сходства 186
Предикат аналогии Лейбница 154
— неопределенный 157
— — отрицательной 190
— — положительной 189
— различия 189
— сходства 188
--- параметрический 187
Представление знаний 258
ПРИЗ 369
Признак 49
Признаки классификации прагматиче-
ские 160
Пример отрицательный 168
— положительный 168
Принадлежность 50
Приоритетность различий 22
Продукция 85, 97
— Дедуктивная 97
— индуктивная 97
— традуктивная 97
Проецирование событий на шкалы 122
ПРОЛОГ 98
Пространство признаков 168
— семантическое Осгуда 166
— состояний 216
— толерантности 215, 267
Процедура классификации 26
— экстраполяции 27
Процессы 52
Псевдопонятие 160, 163
Псевдопричины 138
Психология ребенка 162
— решения задач 17
Психоника 254
Путь индикаторный 77
«Развал на кучи» 168
Разрешение спецификатора допустимое
234
Рассуждения 249
— по аналогии 153
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
283
Реакции 17
Редискретизация 112
Резольвента 231
РЕФАЛ 77, 98
Рефлекс условный 20
Рецептор 174
Решатель активный 64
— «общий» 21
— пассивный 64
Решение одношаговое 26
Роль 45, 72, 260
Свойство квантифицированное 62
— модифицированное 62
— монотонности 22—23
Связи причинно-следственные 50
Связь неориентированная 63
— ориентированная 63
Семинар по психонике 254
Сеть планирования детерминированная
219
— — замкнутая 218
— — недетерминированная 219
— — открытая 218
— семантическая 74, 202
---интенсиональная (ИСС) 74
---экстенсиональная (ЭСС) 74
— ситуационная дискретная (ДСС) 63
Силлогизм 248
— Аристотеля 152
Синтаксис языка ситуационного упра-
вления 61
Система знаковая (семиотическая) 37
— классифицирующая 206
— планирующая 216
Системы классификации 207
Ситуация полная 26, 29
— текущая
Сколема функции 228
Словарь действий (операций) 57
— имен 57
— отношений 57
— понятий 57
«Слоёный пирог» 203, 219
Слой нулевой субмножества 175
— — супермножества 175
Слот 91, 262
События 111
— интервальные 111
— точечные 111
— цепочечные 111
Совокупность семантически правиль-
ная 33
— синтаксически правильная 33
Сопрнчнны возможные 138
— дополнительные 137
— необходимые 137
Состояние 52, 216
Спецификатор 234
Сток 63
Стратегии планирования 220
Субмножество 175
Супермножество 175
Сфера знаний 238
СФИНКС 368
Схема вывода нечеткая 141
Сходство сильное положительное 88
Сценарий 99, 240
Теория автоматического управления 9
— дискурса 262
— искусственного интеллекта 32
— лабиринтная 19
— модельная 24
— распознавания образов 168
— стимульно-реактивная 17
Толерантность, класс 206, 214 , 267
— , пространство 215
Точность детерминации 146
Традуктивиость выводов 250
Универсум Эрбрана 229
Управление семиотическое 29 , 255
— ситуационное 29 , 254 , 255
— характеризационное 255
Уровень отсечки 90
Утверждение о согласованности 92
Формирование гипотез автоматизиро-
ванное 266
Фрейм 72, 102
— абстрактный 82
— базисный 82
— декларирующий 82
— индивидуальный 82
— конкретный 72
— конфликтности 73
— показателя 73
— продукции 73
— ролевой 238
— технологии 73
Фрейм-отношение 82
Фрейм-прототип 72
Фрейм-условие 83
Фрейм-специализация 82
Функции Сколема 228
Функция принадлежности 89
— решающая 167
Характеристика 63
— объекта динамическая 245
— — статистическая 245
— понятия квантитативная 49
Цель 10, 50
Черный ящик 17
284
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Шахматы 19
Шкала 107
— абсолютная 107, 113, 114
— активности 160
— метрическая 107, 114
— относительная 107, 114
— оценок 166
— причин 249
— размытая (нечеткая) 116
— силы 166
— следствий 249
— топологическая 107, 108, 115
— универсальная 91
Шкалированность 166, 249
Эквивалентность, класс 197, 206, 214
Экспликация смысла полная 70
Экстенсионал 41
Экстраполятор 27 , 216, 245 , 255
Экстраполяция решений 243
Элемент ассоциативный 174
Элемент базовый 32
— контрольный бивалентный 180
— — отрицательный 177
— — положительный 177
Эрбрана универсум 229
Эталон полный 209
— различия 209
Язык естественный 46
— представления знаний (ЯПЗ) 71
— — фреймов (ФРЛ) 76
— реляционного типа 48
— ситуационного управления (ЯСУ)
55, 155, 186, 197
— фреймовый 73
ABSTRIPS 368
RX-ход 67
STRIPS 368
а-эталон 208
Дмитрий Александрович Поспелов
СИТУАЦИОННОЕ УПРАВЛЕНИЕ:
ТЕОРИЯ И ПРАКТИКА
Серия «Проблемы искусственного интеллекта», выпуск 7
Редактор Г. С. Осипов
Художественный редактор Г. М. Коровина
Технический редактор Е. В. Морозова
Корректор В. П. Сорокина
ИБ № 12028
Сдано в набор 29.07.8 5. Подписано к печати 04.02.86. Т-033 88.
Формат 60x90vie. Бумага книжно-журнальная. Гарнитура ли-
тературная Печать высокая. Усл.печ.л. 18.Усл. кр.-отт. 18.
Уч.-изд. л. 20,85. Тираж 6300 экз. Заказ № 1412. Цена 2р.70 •
Ордена Трудового Красного Знамени издательство «Наука»
Главная редакция физико-математической литературы
117071 Москва В-71, Ленинский проспект, 15
Ордена Октябрьской Революции
и ордена Трудового Красного Знамени
МПО «Первая Образцовая типография» имени А. А. Жданова
Союзполиграфпрома при Государственном комитете СССР
по делам издательств, полиграфии и книжной торговли.
1 13054 Москва, Валовая, 28
Отпечатано во 2-й типографии изд-ва «Наука»
121099 Москва Г-99, Шубинский пер., 6. Зак. 2295