/
































































































































































Текст
ОЛСОН и МАССА
ПРИКЛАДНАЯ
АКУСТИКА
ПЕРЕВОД С АНГЛИЙСКОГО под редакцией.
И. Г. ДРЕЙЗЕНА и Ю. М. СУХАРЕВСКОГО
ГОСУДАРСТВЕННОЕ ИЗДАТЕЛЬСТВО ПО ВОПРОСАМ РАДИО
МОСКВА • 1938
ГЛАВА I
ОСНОВНЫЕ УРАВНЕНИЯ И ОПРЕДЕЛЕНИЯ
1. 1. ВВЕДЕНИЕ
Разнообразные вопросы, входящие в круг вопросов современной акустики, можно разделить на три основных группы. Первую группу составляют вопросы, касающиеся различного рода излучателей звука, как например, струна, столб воздуха, диафрагма громкоговорителя, человеческий голос и т. п. Вторую группу составляют вопросы пространственной акустики, изучающей законы распространения звука в помещениях и в открытом пространстве. Третья группа вопросов относится к области так называемой физиологической акустики, предмет которой составляет суб'ективное восприятие акустических явлений нашим органом слуха. Современный специалист-акустик так или иначе соприкасается со всеми указанными областями акустики. Микрофоны, громкоговорители, радиостудии, аудитории, залы, законы суб'ективного восприятия звука и об'ективные его измерения—в равной степени заслуживают детального изучения в систематической последовательности.
Настоящая книга в общем охватывает очерченный выше круг вопросов, а расположение в ней материала соответствует их взаимозависимости.
Перед изложением принципов действия аппаратуры и основ пространственной и физиологической акустики, мы считали полезным дать вывод основных уравнений теоретической акустики.
1. 2. ВЫВОД УРАВНЕНИЯ ЗВУКОВОЙ ВОЛНЫ
Как известно, звук распространяется в трех измерениях. Выведем общие уравнения распространения в трех измерениях и затем применим полученные выражения к частным случаям.
Начнем вывод с основного уравнения гидрокинематики —-уравнения неразрывности. Это уравнение представляет собой математическую формулировку того, что количество жидкости, втекающей через грани малого об‘ема, равно увеличению массы внутри этого об'ема. Рассмотрим малый элемент об'ема жидкости. Разность между количеством втекающей в этот об'ем и
5
вытекающей, из пего ia единицу времени жидкости представляет собой скорость изменения массы элемента.
Рассматривая потоки жидкости, проходящие через каждую пару граней кубика размерами Дх, Ду, и Дг в единицу времени, получаем, что разность между количеством втекающей и вытекающей жидкости дли всего кубика может быть определена следующим выражением
-[-^ 01)
г
vjifi х, у, z—координаты частиц среды
и, v, w—компоненты скоростей частиц р—плотность среды.
Каждое из слагаемых (1.1) выражает накопление массы (в единицу времени через одну пару граней) за счет изменения скорости в данном направлении.
Сравнивая скорость изменения массы в кубике _р~ лх- Av- Az с уравнением (1.1) мы получаем Л Дл'Н
gp , д(ри) , д(Ру) , д (pw)__n п
dt дх + ду + дг ~и
где t—время.
Это может быть переписано в таком виде
> + *<««-1^=0 <! 3)
где Vuva, —полная скорость, представляющая собой, результирующую компонент и, -V и w.
Уравнение (1.3) и есть уравнение неразрывности или, точнее, уравнение сохранения массы в трехмерном пространстве.
Приступим к выводу уравнений движения. Рассмотрим массу, заполняющую об'ем Дг Ду Дг. Слагающая силы инерции по . . . ди
оси х равняется рДхДуДг .
Средние давления на две грани, перпендикулярные к оси х, равны
(А —э?' ЬУ-kz и (а + -у^ДУ-Дг где рй—статическое давление.
Разность средних давлений—Дх-Ду-Дг равна силе в направлении возрастания х.
Приравнивая последнюю силам инерции, получаем
d« др0 dv др0 dw дрп ..
дх’ P-dF=-^ ?~аг=—^ <L4>
5 В этом выводе мы не принимали во внимание „внутренней силы". Под внутренними силами подразумеваются силы, подобные силам тяжести, т. е. силы, действующие на расстоянии на каж-
6
дую молекулу тела. Для акустических волн эта сила равна нулю и уравнение движения (1.4) можно написать в виде
.— "2!?L-|-_LgradA-0 (1. 5)
Рассматриваемые колебания—безвихревые, так что curl Vuvw—0.
Это является необходимым и достаточным условием существования скалярной величины потенциала скорости <р, который определяется как dtp da> dtp
дх ’ dy ’ dz
ИЛИ ?•
Подставляя эти выражения в уравнение (1.4) и умножая на dx, dy, и dz, получаем д . 1 .
д? ____ frfPo
dt J ₽
Так как изменения р весьма малы, то можно принять ее равной средней плотности—р0.
Интеграл fdp0 выражает избыточное давление, поэтому
(1- 7) dt ₽о '
где р—избыточное давление.1
Из рассмотрения термодинамических процессов сжатия получаются следующие соотношения, которыми можно воспользоваться для определения давления. Если принять процесс сжатия и расширения изотермическим2 то,
Сч—Р<у Ро где с — скорость распространения звука Если же процесс принять адиабатическим, то ^2—ДРО. ₽0 где у — отношение удельной теплоемкости при давлении к удельной теплоемкости при постоянном
$ н Второе предположение, вообще говоря, более соответствует действительности.
Итак, принимая процесс адиабатическим и обозначая через р'о—полное давление (статическое+избыточное) и через р0'— мгновенную плотность (статическую-ризбыточную), получаем
(1. 6)
(1- 8)
(1- 9)
постоянном об'еме.
I р в дальнейшем называется просто давлением. (Прим, ред.).
2 L a m b, И. Dynamical Theory of Sound, Arnold, p. 16.
7
/о_(_Рк)Т (1. 10)
Ро \ Ро J
Введем новый термин—сжатие (х), выражающий отношение величины изменения плотности к первоначальной плотности х_(р'°~р° ) (1. 11)
Комбинируя уравнения (1-11) и (1-Ю) получаем или
P'0=Po+PotS
И Р=Р№ (1- 12)
Три уравнения: (1.3), (1.5) и (1. 9) характеризуют возмущение среды, имеющее некоторую амплитуду. Первые два уравнения являются нелинейными, за исключением случая малых амплитуд. При акустических колебаниях мы имеем дело, вообще говоря, с малыми амплитудами (переменные давления малы по сравнению с атмосферным давлением) и с большими длинами волн, так что и, v, w их при больших изменениях х, у и z изменяются очень мало. Подставляя уравнение (1-11) в (1-2) получаем
(1. 13) dt 1 дх ду 1 дг ' '
Из уравнений (1.13), (1.6), (1.7), (1.9) и (1.12) получаем уравнение
(1 14)
которое является обычным волновым уравнением Даламбера для <р.
1. 3. ПЛОСКИЕ волны
В случае плоской волны ср является функцией только х и t, поэтому волновое уравнение (1-14) для случая плоской волны упрощается и принимает вид
•Й-=с2Й (1-15)
dt2 ол2 v ’
Общее решение этого уравнения
(ct—x)+F (ct-\-x) (1. 16)
где f и F—произвольные функции.
Первый член правой части уравнения (1.16) представляет волну, распространяющуюся в положительном по х направлении, тогда как второй член правой части представляет волну, распространяющуюся в отрицательном по х направлении. Рас
8
сматривая синусоидальную волну, распространяющуюся вправо, имеем
<р=/ (ct— x)—Acosk (ct—х) (1. 17)
где А—амплитуда <р, . 2г
/г = у, к—длина волны.
Из уравнения (1.6) скорость частиц
п=;—-==/гД sin/г (ct — х) (1. 18)
Из уравнений (1.7), (1.9) и (1-12) получаем
<р =—c2s— — Akc sin/г (ct — х) (1. 19)
и s=^-sinfe(c^—х) (1. 20)
Из уравнений (1.12) и (1.9) имеем
p=c2pos (1. 21)
И p --kcpnA sin k (ct—x) (1. 22)
Таким образом в плоской волне давление и скорость колебания частиц совпадают по фазе. Другими словами через плоскость, перпендикулярную к направлению распространения, протекает равномерный поток энергии.
1. 4. СФЕРИЧЕСКИЕ ВОЛНЫ
В настоящем разделе рассматриваются некоторые простейшие свойства сферических волн. В сферических координатах1
x=r cos 0 • cos ф, у—г sin 0 • sin ф, z=r cos 0.
Тогда
2 &У Фр, _1 д Лщ @ 1 ^'-Р
v ? ~дг2 г dr'r^ sin © дв \ 11 де Р г’- sin2 © ЭДг
Для случая сферической симметрии по отношению к источнику
Д2?= ’ (1-23)
И общее волновое уравнение принимает вид
J = с2 ~:(г<р) (1.24)
Решение его
• ^A.f(ct-r)A--r F(ct+r) (1.25)
Первый член правой части уравнения представляет сферическую волну, расходящуюся от точечного источника, а второй
1 Смирнов, Курс высшей математики, Т. II, § 121, изд. 1931 г. (Прим,
р е д.)
9
член представляет сходящуюся сферическую волну. Обычно, интересуются только расходящейся волной.
Уравнение расходящейся волны от источника, расположенного в начале координат, имеет следующий вид
efk (1.26)
Из уравнений (1. 7), (1. 9) и (1. 12) получаем
1 *• jkA jklct — r)
s= —<L27)
Из уравнений (1. 12) и (1-9) имеем p=c2ps, используя (1. 27), получаем выражение для давления
(1. 28)
Радиальная скорость частиц равна^, следовательно
«=-(4
(1. 29)
Для действительной части уравнений (1. 28) и (1. 29) получаем
и
p=p-y-sinft (ct—г)
(1. 30)
«=—™ ^^cos/г (ct— г) — sin k (ct—г) J (1-31)
Из последних уравнений видно, что р представляет функцию
—, тогда как скорость частиц представляет функцию-^- и Да
Рис. 1. 1. Фазовый угол между давлением и скоростью частиц в сферической звуковой волне при различных расстояниях от источника звука.
лее, давление и скорость частиц не совпадают по фазе, как это имеет место в плоской волне. Разность фаз при постоянной величине г увеличивается с увеличением длины волны, а при постоянной длине волны уменьшается с увеличением г. Кривые рис. 1.1
иллюстрируют зависимость разности фаз от частоты для различных расстояний от источника звука. Кривые рис. 1. 2
иллюстрируют зависимость отношения абсолютных величин
10
скорости и давления от частоты для различных расстояний от точечного источника звукаДза единицу выбрано отношение для плоской волны или для
случая, когда г значительно больше длины полны).
1. 5. СТОЯЧИЕ ВОЛНЫ
Рассмотрим'две плоских волны одинаковой амплитуды, распространяющиеся в противоположных ' направлениях. Для этого случая потенциал скорости’ может быть выражен следующим образом
Рис. 1. 2. Отношение абсолютных величин скорости частиц к давлению в сферической звуковой волне при различных расстояниях от источника звука.
<Р=Д [cos k {ct— x) + cosA (ct-|-x)] (1. 32)
Давление
P= — P ^-=kcpA [sin k {ct — x)-|-sin k (ctA-x) (1. 33)
и
p—2kcpA [sin Ac/ 'cosfexj (1. 34)
Скорость частиц в этой системе
u=-~=kA [sinA(c/— х)— sinA (cf-j-x)] (1. 35)
«——2kA [cos Ас/sin Ax] (1. 36)
и
u=2kA £sin (kct--~)cos(Ax— £ )] (1-37)
Уравнения (1-34) и (1-37) показывают, что точки с максимальными значениями скорости частиц и давлений расположены на расстоянии, равном четверти длины волны. Далее, максимумы р и и смещены по фазе во времени на 90°.
Стоячие волны рассмотренного типа образуются при отражении плоской волны от плоскости перпендикулярной к направлению распространения. При работе источника звука в помещении с отражающими стенами образуется сложная система стоячих волн.
1. 6. ПЛОТНОСТЬ ЗВУКОВОЙ ЭНЕРГИИ
Плотностью звуковой энерги называется количество звуковой энергии, приходящееся на единицу об'ема. Кинетическая энергия системы звуковых волн
К.Е.^р
ffk
dV
(1. 38)
11
Для плоской волны
/CF.=3-i-pJ JJttW
(1. 39)
Работа, совершаемая единицей массы при малом увеличении ее об'ема, равна
^-(Р'о-Ро) (V-Vo) (1. 40)
где V—увеличенный об'ем
Vo—первоначальный об'ем. *
Из уравнения (1.12)
P=Pa\s (1. 41)
и
. Vn—У=$ (1. 42)
2 Р^2 J J J s2dV (1.43)
Откуда получаем для совершенной работы выражение Интегрируя по всему об'ему, получаем общую потенциальную энергию
Р.Е.=~^1Рй
Из уравнения (1.18) имеем u=k .Asin k(ct—х) Примем
Тогда смещение
— A cos k (ct—х) (1. 44)
Сравнивая (1.44) с уравнением (1.19), получаем
> = ~» (1. 45)
Диференцируя уравнение (1.44) получаем
Из уравнений (1.45) и (1.46)
u—cs (1. 47)
Подставляя значение $ из уравнения (1.47) в уравнение (1.43),, получаем уравнение (1.39). Это показывает, что в плоской волне кинетическая энергия равна потенциальной энергии.
1. 7. СИЛА ЗВУКА
Сила звука определяется как скорость потока энергии (на квадратный сантиметр), проходящего через неподвижную плоскость, перпендикулярную к направлению распространения. Она равняется произведению плотности энергии на скорость распространения.
Чтобы получить среднюю плотность энергии в плоской волне, нужно проинтегрировать в пределах целого числа длин волн
12
либо удвоенную кинетическую энергию, либо удвоенную потенциальную энергию (так как в разделе 1. 6 было показано, что полная энергия в плоской волне равна 2 К. Е. или 2 Р. Е.) и разделить результат на рассматриваемый об'ем.
Средняя плотность энергии
Е=-где X—длина волны и т—целое число.
Р J A2k2 sin2 k (ct — x) dx X__________________
ml
E=\ pAW
(I- 48)
(1- 49)
Так как сила звука согласно определению, равняется средней скорости потока энергии, то
I=Ec=~pA2k2c (1.50)
Максимальное значение давления из уравнения (1.22)
Апах^РЛ <Ь 51>
Подставляя в уравнение (1.50), получаем, что сила звука для плоской волны
г 1 max 1 1 о ,,
-----—пР и =-^-рси2 „ (1. 52)
2 рс 2 rmax max 2 r max ' '
или
1-Р*г P И=рСИ* (1. 53)
где p—среднее квадратичное значение звукового давления, и—среднее квадратичное значение скорости частиц, и рс—акустическое активное сопротивление среды—гА.
Для сухого воздуха при температуре 20°С и давлении 760 миллиметров ртутного столба р—0,001205г на куб. сантиметр, с=34 400 см в сек. и
гс=Рс=42.
1. 8. ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ
Звук, а) звук — волнообразное движение упругой среды, б) звук,. также ощущение воспринимаемого ухом определенного выше волнообразного движения.
Цикл колебаний—совокупность последовательных мгновенных значений периодической колебательной величины за один период.
Частота к о л е б а н и й —число циклов в секунду.
Фаза или фазный угол <р—угол, определяющий значение колебательной величины, претерпевающей простое колебание, в
13
какой-либо момент времени. Фаза измеряется протекшим от условного момента промежутком времени, отнесенным к периоду колебания и увеличенным в 2к раз.
Длина волны X. Длина бегущей волны—наименьшее расстояние, измеряемое по направлению распространения волны между двумя точками, имеющими одну и ту же фазу или состояние колебания.
Бел (Ы—.разность уровней двух мощностей, десятичный логарифм отношения которых (мощностей) равняется единице.
Децибел (db)—одна десятая бела.
Бар—давление, испытываемое плоской поверхностью в один квадратный сантиметр под действием равномерно по ней распределенной, нагрузки в одну дину.
Статическое давление (ро). Статическое давление— давление, существующее в среде при отсутствии.звуковых волн. Единица—-бар.
Мгновенное звуковое давление (pt). Мгновенное звуковое давление в данной точке—полное мгновенное давление в этой точке минус статическое давление. Единица—бар.
Звуковое давление (р). Звуковое давление—среднее квадратичное значение мгновенного звукового давления за полный цикл. Единица—бар.
Максимальное звуковое давление (ртх). Максимальное звуковое давление—максимальная величина мгновенного звукового давления. Единица—бар.
Среднее звуковое давление (pcpY Среднее звуковое давление за данный цикл—среднее значение абсолютных величин мгновенного звукового давления за один цикл. Единица—бар.
Плотность звуковой энергии (£). Плотность звуковой энергии—звуковая энергия на единицу об'ема. Единица—эрг на кубический сантиметр.
Сила звука. Сила звука определяется через звуковое давление р, скорость звука с и плотность среды р соотноше-нием /— микроватт. Она равна потоку звуковой энергии, проходящему в единицу времени через единицу площади для волны свободно распространяющейся в той же самой среде с плотностью р и имеющей те же значения р и с. Единица—эрг в секунду на квадратный сантиметр.
Интерференция. Интерференция — взаимоослабляющее или взаимоусиливающее действие двух или более волн, приходящих в данную точку одновременно.
Дифракция. Дифракция—изменение направления распространения звука, вызываемое прохождением волны вблизи края какого-либо препятствия.
14
Преломление. Преломление—изменение направления распространения волны, вызываемое изменением скорости распространения звуковой волны в различных частях ее пути.
Правильное отражение. Правильное отражение звука— такое изменение направления распространения у поверхности, при котором углы падения и отражения равны между собой и расположены в одной плоскости, поэтому это отражение дает юркальное изображение источника звука или „мнимый" источник.
Диффузное отражение. Диффузное отражение—отражение от многих поверхностей, не лежащих в одной плоскости, при котором не может образоваться одно зеркальное изображение источника звука.
Биения. Биения—периодическое изменение силы звука в данной точке, вызываемое интерференцией двух звуковых волн различных частот.
Стоячие волны. Стоячие волны возникают при интерференции двух одинаковых волн, распространяющихся в противоположных направлениях. Стоячие волны характеризуются наличием в среде некоторых точек (линий или поверхностей), в которых амплитуда колебания равна нулю.
Узлы. Узлы—точки, линии или поверхности системы стоячих волн, имеющие амплитуду равную нулю1.
Пучности. Пучности—точки, линии, поверхности в системе стоячих волн, имеющие максимальную амплитуду.
Приведенные определения взяты частью из ОСТ, частью из доклада Комиссии по акустическим стандартам Американского акустического общества. Этот доклад опубликован в Journal Acoustical Sosiety of America vol. И, № 3, январь 1931 г., стр. 312, 3132.
1. 9. СКОРОСТЬ ЗВУКА В РАЗЛИЧНЫХ МАТЕРИАЛАХ
В таблице 1 приведены данные скорости распространения звука в различных материалах, взятые из International Critical Tables, том VI. В таблице 1 приведено также вычисленное для каждого материала акустическое сопротивление (ре).
1 Возможны различные типы узлов, как например, узлы давления или узлы скорости, следовательно тип должен быть оговорен.
2 Определения: цикл колебаний, частота колебаний, фаза или фазный угол взяты из ОСТ 7242. Определения: бел, децибел и бар взяты из ОСТ 7769. (II р и м. р ед.).
ТАБЛИЦА 1. СКОРОСТЬ ЗВУКА В РАЗЛИЧНЫХ МАТЕРИАЛАХ И АКУСТИЧЕСКОЕ СОПРОТИВЛЕНИЕ МАТЕРИАЛОВ
Материал Физическое состояние Скорость м!сек. Плотность г) см? Акустическое сопротивление г/секлм?
Воздух (760 мм 20°С) . . газообразное 344 0,001205 42
Хлор ?? 206 0,0032 66
Водород 1261 0,00009 11
Кислород 316 0,00143 45
Водяной пар 5? 405 0,00058 23
Углекислый газ 260 0,00198 51
Ртуть жидкое 1407 13,6 191.104
Вода (дистиллированная, без
воздуха) 99 1461 1.0 15.104
Спирт, метил п 1143 0,81 9,3.104
Газолин 99 1395 0,68 9,5.104
Морская вода (3% соли) . 99 1504 1,03 15.104
Серебро твердое 2678 10,5 280.104
Алюминий 99 5105 2,71 138.104
Золото . • 79 1743 19,3 336.1(,4
Медь 3560 8,9 316.104
Железо 99 5130 7,9 405.104
Сталь 4990 7,8 390.104
Магний 99 4602 17,4 800.104
Никель 99 4973 8,75 430.104
Свинец 99 1322 11,3 150.104
Воск (при 15° С) ... . 880 0,97 8,5.104
„ (при 28° С) ..... 99 450 0,96 4,3.104
Кирпич 99 3652 2,0 73.104
Резина вулканизированная
при 0° С 99 54 0,92 5000
Черная при 50° С 99 31 0.92 2800
Пробка 99 480 0,24 1,2.104
Желатин 1500 1,27 19.104
Стекло (кронглас) .... 99 5000 2,5 125.104
Стекло (флинтглас) .... уч 4000 3,0 120.104
Гравит 99 3950 2,7 110.104
Парафин при 16° С . . . . 99 1304 0,91 12.104
„ „ 38° С ... . 99 1035 0,90 9,3.104
„ „ 35° С . . . . 99 250 0,87 2,2.104
Камень 2500 + 700 2,6 65.104
Песок «• 2000 + 600 1,6 32.104
Ясень (вдоль волокна) . . 4670 0,85 40.104
Ель 99 1040 0,54 5,6.104
Бумага (пергамент натяну-
тый) 99 2198 1.0 22.104
Бумага (тонкая натянутая). 99 1989 0,9 18.104
Баранья кожа 99 471 0,9 4,2.104
16
ГЛАВА II
ДИНАМИЧЕСКИЕ СИСТЕМЫ, ЭЛЕКТРИЧЕСКИЕ, МЕХАНИЧЕСКИЕ И АКУСТИЧЕСКИЕ ЭЛЕМЕНТЫ И СИСТЕМЫ ЭЛЕМЕНТОВ
2. 1. ВВЕДЕНИЕ
Устройства, передающие звук, заключают в себе механические, акустические, электроакустические, электро-мехцнические и механо-акустические системы или некоторые из них. Эти устройства можно изучать с помощью того же математического аппарата, который применяется в теории электрических цепей.
Решение каждой из упомянутых систем состоит из двух определенных стадий. Первая —вывод диференциальных уравнений па физических законов, постоянных и связей системы, или, дру-। ими словами, математическая формулировка проблемы; вторая— решение диференциальных уравнений.
Теория электрических цепей, представляющая собой отрасль теории электромагнитных колебаний, имеет дело с электриче-<кпми колебаниями в электрических сетях. Электрическая сеть состоит из соединения ряда цепей, каждая из последних в свою очередь состоит из активных и реактивных (индуктивных и емкостных) элементов. Отдельные цепи сети называются ответвлениями или контурами.
Уравнения теории цепей могут базироваться на динамической теории Максвелла. При этом методе сеть рассматривается как динамическая система, в которой токи эквивалентны скоростям. Гд-лн выведены выражения для кинетической энергии, потенциальной энергии и рассеяния, то сеть решается с помощью общих динамических уравнений.
Анализируя электрическую, механическую или акустическую цепь, мы стремимся определить результат, который получат* гея от действия данной физической причины. В большинстве случаев мы рассматриваем в качестве причины: электродвижущую силу в электрических системах, силу в механических системах и давление в акустических системах. Эти силы даются, как некоторые функции времени.
Неизвестными функциями (результатом действия сил) яв-। потея токи, скорости или скорости об'емного смещения в co-
in пклаДная акустика.
17
ответствующих системах. Элементы цепи могут быть постоянными или переменными. Если элементы постоянны, то цепь называется линейной. Постоянными называются такие элементы, величины которых остаются неизменными, независимо от того, что происходит в цепи в данный момент. Элементы, с которыми мы будем иметь дело, могут рассматриваться постоянными.
Математически эти элементы представляют собой просто коэфициенты диференциальных уравнений. Физически же каждый элемент определяет, действующую силу в соответствующей ему части цепи. Действие элементов в теории электрических цепей хорошо известно. При изучении механических и акустических систем анализ упрощается введением элементов, аналогичных элементам электрической цепи. Таким образом, каждая механическая или акустическая система может быть рассматриваема, как соединение механических или акустических элементов. Задача настоящей главы состоит в том, чтобы рассмотреть механические и акустические системы с этой точки зрения.
2.2. АКТИВНОЕ СОПРОТИВЛЕНИЕ
Простейший элемент цепи, обусловливающий рассеяние энергии, называется сопротивлением. Сопротивление определяется по закону Ома.
e=rei (2. 1)
где е—напряжение
ге—активное сопротивление I—ток.
В электрической цепи активное сопротивление, обратно пропорциональное силе тока1, превращает электрическую энергию в тепло.
В механической системе аналогичной величиной является трение, определяемое уравнением
(2. 2)
J М М 47
где f —механическая сила J м
гм—механическое сопротивление «—скорость.
Механическое сопротивление равно силе, которая должна быть приложена для установления постоянной скорости, равной единице.
В акустической системе аналогичной величиной является активное сопротивление среды. Например, поток, текущий через трубу с постоянной скоростью, равной единице, испытывает акустическое сопротивление, численно равное падению давления вдоль трубы.
1 При постоянном е.
18
Эта зависимость выражается
P^rAU (2.3)
где р — давление г—акустическое сопротивление, U—скорость об'емного смещения, равная произведению скорости колебания частиц на площадь сечения трубы.
Примечание. Скорость об'емного смещения иногда сокращенно называется об‘емной скоростью.
2.3 ИНДУКТИВНОСТЬ, МАССА, АКУСТИЧЕСКАЯ МАССА
В предыдущем параграфе было показано, что активное сопротивление обратно пропорционально току, а индуктивность обратно пропорциональна изменению силы тока. Индуктивность представляет собой инерционный элемент электрической цепи Она определяется уравнением
g (2. 4)
Это уравнение показывает, что напряжение на зажимах чистого индуктивного сопротивления пропорционально скорости изменения протекающего через него тока.
В механической системе аналогичной величиной является масса. Масса может быть определена из уравнения
/Л, = т4" (2. 5)
JM dt ' '
где т—масса.
Масса равна силе, которую необходимо приложить для того, чтобы получить единицу изменения скорости, или, другими словами, единицу ускорения.
В акустических системах аналогичной величиной является акустическая масса.
Акустическая масса (А4) определяется уравнением dU т dU
РМ • dt <2- 6>
где S—площадь, по которой распределена масса (т).
Акустическая масса численно равна давлению, которое вызывает единицу ускорения об'емного смещения (или единицу об'емного ускорения).
2. 4. ЕМКОСТЬ, ГИБКОСТЬ, АКУСТИЧЕСКАЯ ЕМКОСТЬ
Как индуктивность противодействует изменению тока, точно так же емкость противодействует изменению напряжения. Емкость представляет собой как бы пружину или гибкий момент в электрической цепи. Емкость (Се) определяется уравнением
19
(Ip
it (2- 7)
Из этого уравнения видно, что ток, проходящий через емкость, пропорционален скорости изменения напряжения на зажимах емкости.
Уравнение (2.7) можно переписать так
е £ ( idt (2. 8)
е= чг (2. 9)
где q - заряд емкости.
Из этих уравнений видно, что емкость элемента равна заряду, который изменяет напряжение на этом элементе на единицу.
В механических системах аналогичной величиной является гибкость. Гибкость может быть определена из уравнения
(2. 10)
где х—смещение, производимое приложенной силой.
Гибкость равна смещению от положения равновесия, при котором в пружине получается сила, равная единице. Упру-, гость обратна гибкости. Коэфициент упругости равен силе, вызывающей единицу смещения пружины от положения равновесия.
В акустических системах аналогичной величиной является акустическая емкость об'ема V, которая может быть определена из рассмотренного уравнения (1.21)
« п d V с с' \ S jc X. ч - %
P-^cs- — pc2 v=-v- (Sx)—-gr—(2.11)
где р — плотность
с — скорость звука dV—изменение об'ема
р — изменение давления, соответствующее изменению об'ема
V7 — первоначальный об'ем
х — смещение
X — об'емное смещение
С—акустическая емкость.
Акустическая емкость равна об'емному смещению, при котором давление в рассматриваемом об'еме изменяется на единицу.
В предыдущих параграфах мы определили три аналогичных типа электрических, механических и акустических элементов. Всякую электрическую, механическую или акустическую систему
20
можно рассматривать как комбинацию этих элементов.
В следующих параграфах даются основы для изучения ука-1.ТННЫХ систем с этой важной точки зрения.
2.5. ЭЛЕКТРИЧЕСКАЯ СИСТЕМА С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Рассмотрим электрическую цепь, ток в каждом элементе которой можно выразить как функцию одной переменной. Индуктивность L, сопротивление’ ге, емкость Се и элек
тродвижущая сила е соединены между собой последовательно, как показано на рис. 2.1
Кинетическая энергия или энергия, сосредоточенная в магнитном поле
Рис. 2. 1. Электрическая, механическая и акустическая системы с одной степенью свободы.
(2. 12)
где i — ток, протекающий через индуктивность L.
Потенциальная энергия или энергия, сосредоточенная в электрическом поле
VP= 2 Се <2’ 13>
где q — заряд емкости.
Суммарная энергия в системе
W=Tk+Vp= (2. 14)
Скорость изменения энергии магнитного и электрического нолей
" = Li 2+#=^?+-# (215)
etc ас 42
Мощность энергии, превращающейся в тепло
D-=reF (2. 16)
Скорость изменения энергии системы (?*.+ Vp) плюс мощность, сообщаемая системе внешними силами, должны быть равны рассеиваемой мощности.
Мощность, развиваемая в системе приложенной электродвижущей силой, равна EeJUlt q=eq
Таким образом мы получаем следующее уравнение
Lqq-]-reqi+-^--EeJU>t q (2. 17)
21
Lq+req+^~=EeJwt
Решая это уравнение для q, мы получаем
• . ЕеJa,t е
q—i-=----------— —
(2. 18)
(2- 19)
(2. 20)
где ze—вектор полного электрического сопротивления системы xeL~tf>L—индуктивное электрическое сопротивление (2. 21), л/,с=^—емкостное электрическое сопротивление (2. 22).
Ток в этой цепи для данного приложенного напряжения зависит от re, L, Се и частоты этого напряжения. Для данной величины L и Се имеется определенная частота, при которой xeL—хеС. Эта частота называется резонансной частотой. При резонансной частоте отношение тока к приложенному напряжению максимально. Кроме того, ток и напряжение совпадают по фазе.
Резонансная частота
Для частот ниже fr ток опережает по фазе приложенное напряжение, а для частот выше fr ток отстает по фазе от напряжения.
2. 6. МЕХАНИЧЕСКАЯ СИСТЕМА С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Рассмотрим такую механическую систему, в которой колебания каждой части могут быть выражены функциями одной переменной. Частица массы т (рис. 2. 1), прикрепленная к упругой пружине (СЛ1), находится под действием силы /и и скользит по плоскости, преодолевая силу трения, пропорциональную скорости. Кинетическая энергия системы
х2
(2. 24)
где х—скорость массы т.
Сила, необходимая для смещения пружины на х от положения равновесия, равна х/Сл1, где См — гибкость пружины. Следовательно, потенциальная энергия
V —1
VP~~ 2 С
Л4
(2. 25)
22
Полная энергия системы
W^TK + Vp= | тх2+4 (2- 26)
(2. 27) dt см
Рассмотрим силу трения, действующую на массу т при ее колебаниях. Предполагаем, что эта сила пропорциональна скорости
f-M ~гмх & 28^
Мощность, развиваемая внешней силой Fe}a>t, действующей на массу, равна х FeJ^ = xf
Найдем уравнение колебания системы
mxx-Fr..хх-^-^^- х • Fe^mt (2. 29)
м СМ
mx+rMx+^ fM (2. 30)
Скорость массы т
хи-----------------j-y (2. 31)
+J уу)
Теперь мы можем определить механическое полное сопротивление, как
(2- 3?1 где fm—прилагаемая сила
и—скорость
гм — механическое активное сопротивление (2. 33), и
xM --i^m—j~^— — механическое реактивное сопро-“СЛ1 тивление. (2. 34)
Для данных значений т и См имеется одна определенная частота, для которой Эта частота называется резонан-
“C/f
спой частотой механической системы. При резонансной частоте отношение скорости к приложенной силе—максимально; кроме того скорость и приложенная сила совпадают по фазе.
Резонансная частота определяется из. равенства
/ = о / .... (2. 35)
23
2. 7. АКУСТИЧЕСКАЯ СИСТЕМА С ОДНОЙ СТЕПЕНЬЮ СВОБОДУ
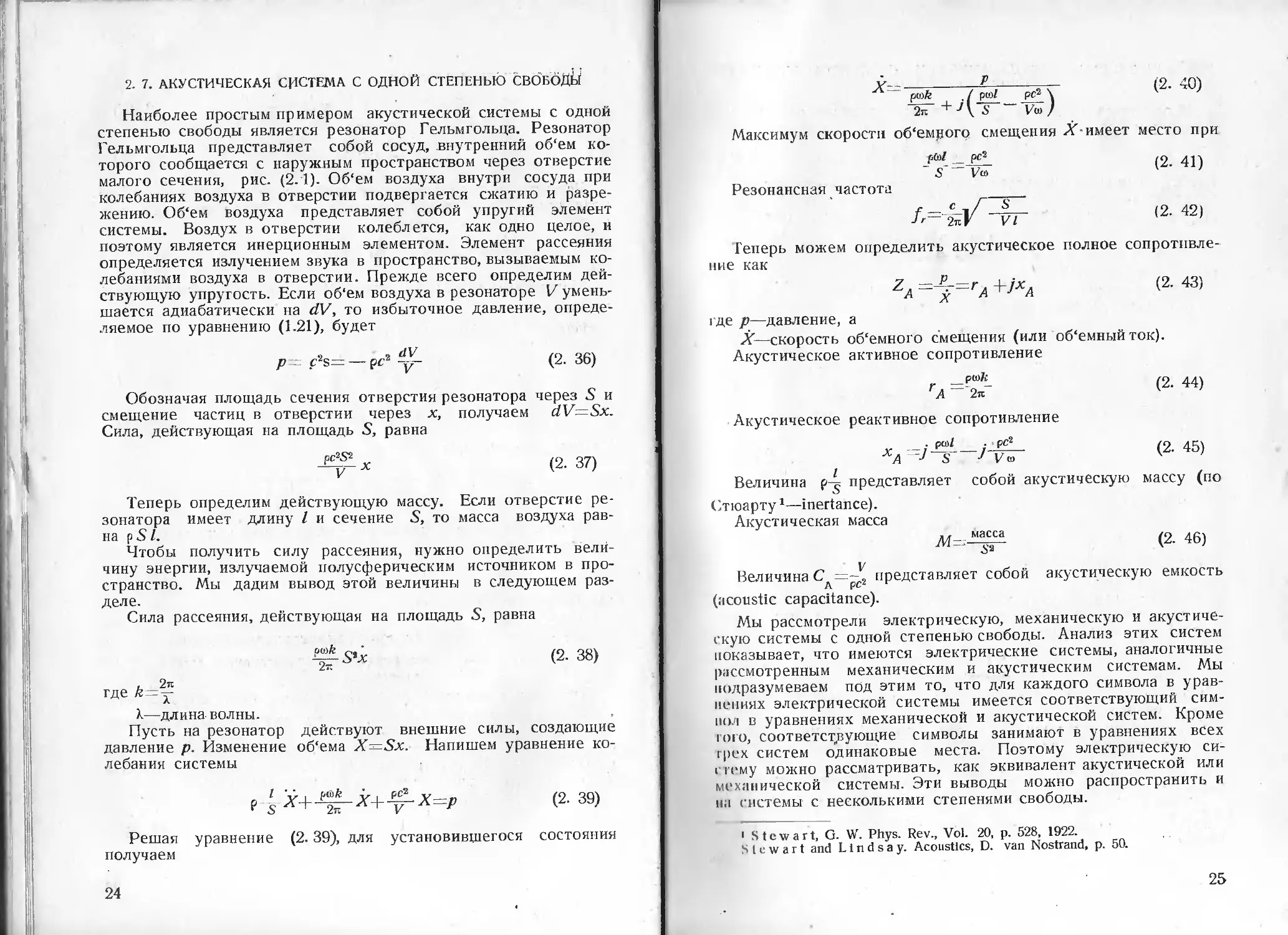
Наиболее простым примером акустической системы с одной степенью свободы является резонатор Гельмгольца. Резонатор Гельмгольца представляет собой сосуд, внутренний об'ем которого сообщается с наружным пространством через отверстие малого сечения, рис. (2.1). Об'ем воздуха внутри сосуда при колебаниях воздуха в отверстии подвергается сжатию и разрежению. Об'ем воздуха представляет собой упругий элемент системы. Воздух в отверстии колеблется, как одно целое, и поэтому является инерционным элементом. Элемент рассеяния определяется излучением звука в пространство, вызываемым колебаниями воздуха в отверстии. Прежде всего определим действующую упругость. Если об'ем воздуха в резонаторе V уменьшается адиабатически на dV, то избыточное давление, определяемое по уравнению (1.21), будет
р — c2s= — рс2 (2. 36)
Обозначая площадь сечения отверстия резонатора через S и смещение частиц в отверстии через х, получаем dV=Sx. Сила, действующая на площадь S, равна
-&~х (2. 37)
Теперь определим действующую массу. Если отверстие резонатора имеет длину I и сечение S, то масса воздуха равна р S /.
Чтобы получить силу рассеяния, нужно определить величину энергии, излучаемой полусферическим источником в пространство. Мы дадим вывод этой величины в следующем разделе.
Сила рассеяния, действующая на площадь S, равна
^S’x (2. 38)
, 2г.
где «=у
X—длина волны.
Пусть на резонатор действуют внешние силы, создающие давление р. Изменение об'ема X=Sx. Напишем уравнение колебания системы
Р I Х+-^Х+-^-Х=р (2. 39)
Решая уравнение (2.39), для установившегося состояния получаем
24
Х~—г--------------—- (2. 40)
рсо£ / рю/ рс2 \ 47
Максимум скорости об'емрого смещения X имеет место при
Резонансная частота
р&>/ ___ рС2
5 ~ 1Ло
(2. 41)
(2. 42)
Теперь можем определить акустическое полное сопротивление как
ZA =^=ГА +JXA <2- 43>
где р—давление, а
X—скорость об‘емного смещения (или об'емный ток). Акустическое активное сопротивление
ршк
ГА — 2яГ
(2. 44)
Акустическое реактивное сопротивление
(2- 45)
Величина р-^ представляет собой акустическую массу (по Стюарту1—inertance).
Акустическая масса
Величина Сд=-^ представляет собой акустическую емкость (acoustic capacitance).
Мы рассмотрели электрическую, механическую и акустическую системы с одной степенью свободы. Анализ этих систем показывает, что имеются электрические системы, аналогичные рассмотренным механическим и акустическим системам. Мы подразумеваем под этим то, что для каждого символа в уравнениях электрической системы имеется соответствующий сим-пол в уравнениях механической и акустической систем. Кроме гою, соответствующие символы занимают в уравнениях всех грех систем одинаковые места. Поэтому электрическую систему можно рассматривать, как эквивалент акустической или механической системы. Эти выводы можно распространить и п.। системы с несколькими степенями свободы.
1 Stewart, G. W. Phys. Rev., Vol. 20, p. 528, 1922.
Stewart and Lindsay. Acoustics, D. van Nostrand, p. 50.
25
2. 8. УСТАНОВИВШИЕСЯ КОЛЕБАНИЯ СИСТЕМ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ!
В электрических цепях кинетическая энергия, запасаемая в магнитном поле
(2- 47J
где Lnn—суммарная индуктивность ветви п, L—индуктивность или взаимная индуктивность ветвей т и п и ги-токв ветви п. Потенциальная энергия или энергия электрического поля
<2 * *-48)
где Спп—емкость ветви п
Стп—-емкость связи между ветвями т и п.
Мощность, поглощаемая всей цепью
D=y^J^rmnimin (2. 49)
где гпп— сумма последовательно соединенных сопротивлений ветви п,
гтп— сопротивление связи между ветвями т и п.
В механических системах кинетическая энергия
Тк = I S 22 тшпХтХп (2‘ 5°)
где т— массы и х—скорости
Потенциальная энергия
^=-2 2222^- (2- 51>
где Стп—величина, обратная упругости (гибкость) и х—смещения.
Имеется еще другая группа сил, обусловливаемых трением или вязкостью. Предполагаем, что силы трения пропорциональны скорости, тогда мощность рассеяния
D=22 22г^хтхп (2. 52)
Аналогичный ряд уравнений можно написать и для акустических систем.
Мы вывели выражения для кинетической энергии, потенциальной энергии и рассеяния. Уравнения электрических цепей
iMcjl wain and Brainerd. High Frequency Alternating Currents, John Wiley & Sons, p. 439.
Carson. Electric Circuit Theory and the Operational Calculus, McGraw—
Hill, p. 6.
Maxwell. Electricity and Magnetism, Vol. I, Chapter III and Vol. II, Chapter VII.
26
ТАБЛИЦА СООТВЕТСТВУЮЩИХ ЕДИНИЦ ДЛЯ ТРЁХ СИСТЕМ (в системе С. G. S.)
Фазный угол= Фазный угол = Радианы о*, Мощность
хе хм \ Ри со* ?А Эрг/сек. ГА
Те агс 2 Ге адианы ve ср^—arctg Фазный угол= Радианы <рд
^А
Та = artc2 "7Т
27
dD дЧп~вп
ар , дх„~-'п
могут быть получены из уравнений (2. 47), (2.48), (2. 49) и на основании принципа Лагранжа. Уравнения Лагранжа имеют следующий вид
для электрической системы d Г6 (Tk-VP) 1 <4rfe-V;,) 1
dt L дЧп J дЧп 2
для механической системы
d Р (Тк - V» 1 _ д ( 4 - Vp) _ ]
dt L дхп J дхп 2
где еп и fn—прилагаемые силы (см. Rayleigh, Theory of Sound, стр. 103, том I).
Рассмотрение уравнений (2. 47), (2.48), (2.49), (2.50), (2. 51) и (2-52) показывает, что для всех трех систем получается одна и таже форма уравнений. Для механической или акустической системы с п степенями свободы можно написать п уравнений полного сопротивления, аналогичных п уравнениям полного сопротивления для п ветвей, а следовательно, и для п независимых токов.
2. 9. АКУСТИЧЕСКИЕ ЭЛЕМЕНТЫ
Выше мы рассмотрели аналогии между электрическими, механическими и акустическими системами, чтобы с их помощью облегчить решение акустических проблем. Акустические системы, которые мы будем рассматривать, состоят из комбинации элементов. Тип же элемента (т. е. активное сопротивление, акустическая масса или акустическая емкость) зависит от характерных особенностей поведения среды по отношению к различным источникам звука и от различных граничных условий среды. В следующих параграфах мы рассмотрим простейшие типы акустических элементов и комбинации этих элементов.
2.10. РЕАКЦИЯ ВОЗДУХА НА ПОРШЕНЬ, КОЛЕБЛЮЩИЙСЯ В БЕСКОНЕЧНОЙ СТЕНЕ
Рассмотрим колеблющийся поршень, заключенный в бесконечную плоскую стену. Определим реакцию окружающей среды на этот поршень, если он колеблется со скоростью Действие поршня может быть рассматриваемо, как действие суммы элементарных источников, каждый напряженностью udS, распределенных на поверхности 5 поршня. Давление на расстояние г от точечного источника из уравнения (1. 28)
jkcAp cjk dS * г
(2. 53)
28
Определим А. Рассмотрим малый полусферический источник шука с поверхностью dS радиуса го. Из уравнения (1.29) скорость для полусферической волны
I 1 \ 1 Jwt
и = Ч1]~е (2.54)
г0 V го / 'о
В последнем уравнении мы заменили dS площадью рассма-|риваемой полусферы 2пго1 2 *
Из граничного условия имеем
lim п и ~и eJust (2. 55)
ro=O r0 max '
где Kmaxe7“Z—скорость поршня.
Следовательно
и =lim max
ro=O
-2«г,’(Д+д)Д1=-2^
(2. 56)
"max 2г,
(2. 57)
Давление в некоторой точке у на поверхности диска, обусловленное его колебанием и излучением в простр анство по одну сторону диска, находится интегрированием уравнения (2. 53) и пшеной А величиной, определяемой из уравнения (2.57)
р =j^L и eJ^ Г е(2. 58)
z 2г. max J J Й1
где flj—радиус ^вектор, лежащий на поверхности поршня и простирающийся от точки у до элемента поверхности dS. Чтобы найти силу, действующую на весь поршень, нужно проинтегрировать уравнение (2. 58) и полученное в результате интегрирования давление еще проинтегрировать по всей поверхности поршня. Суммарная сила
=_Jp^“m^e J JfZS' J (2.59)
где dS'—элемент поверхности при втором интегрировании. Вообще, для поверхностей не круглой, а другой формы интегрирование выполнить нельзя, в этих случаях может быть полу-ш по только приближенное решение. Например, поверхность может быть разделена на отдельные малые элементы, поддающие ся интегрированию. Вычисления для поршня круглой формы рицпуса R выполнены Рейли Ч Сила
1 Rayleigh. Theory of Sound, Macmillan, Vol. Il, § 278 and § 301.
i .i n d a 11. Vibrating Systems and Sound, D. Van Nostrand, p. 143.
Sir wart and Lindsay. Acoustics, D. van Nostrand, p. 244.
29
(2W)-j* (1 (2. 60)
Функции Jv (2kR} и R1 (2kR) могут быть найдены в пособиях по математике, содержащих Бесселевы функции ’. Эти функции определяются рядами
, л(2й/?)_/да ыи ш?
kR ~ 2 22 • 3-г 2* • 3« 4
и
К, (2«)=4(«! - (2. 62,
Полное механическое сопротивление, оказываемое средой поршню (см. таблицу раздела 2. 8)
Ли га /, J,(2kR)\ ,
Z..— ----. , тг/?1 2рс 1-Ц,- -f-
М „ PJ<°t 1 kR '
max - V '
+J^-^(2kR) (2.63)
Акустическое полное сопротивление (см. табл. разд. 2.8)
<2.64)
Полное сопротивление на единицу площади поршня
z1=pc (i _ Ki {2kR} (2 65)
Характеристики активной и реактивной составляющих акустического сопротивления на единицу площади одной стороны поршня, колеблющегося в бесконечной стене, показаны на рис. (2.2). Активная и реактивная составляющие акустического сопротивления на единицу площади поршня на низких частотах (при малых значениях kR)
Z^.P^+j (2. 66)
2. 11. КРУГЛОЕ ОТВЕРСТИЕ В СТЕНЕ БЕСКОНЕЧНО МАЛОЙ ТОЛЩИНЫ
Исследование сопротивления различных типов каналов представляет собой важную часть теории акустических фильтров. За исключением немногих случаев, точное решение не может быть получено с помощью существующих методов математического анализа. Один путь, при помощи которого эта задача может быть решена, состоит в том, что исследуемое отверстие рассматривается как поршень бесконечной малой толщины с массой, равной нулю. Тогда полное сопротивление
1 Смирнов. Курс высшей математики. Том III. Янке и Эмде. Табли-
цы специальных функций. (Прим. ред).
30
и гнерсгия может быть определено из уравнений, выведенных в предыдущем параграфе.
Акустическое полное сопротивление отверстия в бесконечно гонкой стене получается при умножении сопротивления, Опре-пленного из уравнения (2. 64), на 2
=5- (1 - т)+' at <2W< <2- 67>
Рейли1 дан вывод реактивной составляющей полного сопротивления в стене бесконеч
но малой толщины для длин волн больших по сравнению с диаметром отверстия.
Акустическое реактивное сопротивление по Рейли
. ры . 0,5р о -о, xa^1r^—7T-(2- 68) Для низких частот реактивная составляющая из уравнения (2.67) получается
.16 пор . 0,56юр „„
ХА=^^ R=J ~R~ & 69>
Как видим, разница получается не очень большой и для низких частот можно пользоватся как тем, так и
другим выражением. Для Рис. 2. 2. Активная и реактивная состав-высоких же частот урав- ляющие полного акустического сопротивле-непие (2 69) дает более точ- ниянаеДинину поверхности одной стороны ' ‘ А поршня, радиуса R сантиметров, колеблю-
П ые результаты. щегося в бесконечном экране.
2. 12. ОТКРЫТАЯ ТРУБА С ФЛЯНЦЕМ
В дальнейшем мы будем предпологать, что на концах трубы имеются бесконечно большие флянцы, что отверстие трубы представляет собой свободно колеблющийся поршень, не имеющий толщины и массы и, наконец, что длина трубы мала по р.ишепию с длиной волны. К полному сопротивлению, оказы-। н-мому поршню внешней средой, вывод которого дан выше, мы должны прибавить реактивное сопротивление массы воздуха, 1ключенного между двумя воображаемыми поршнями.
Масса воздуха, заключенная между поршнями
1 1( л у 1 е I g h. Theory of Sound, Vol. II, § 306.
3J
масса=рЛс/?3 (2. 70)
где I—длина трубы
Акустическое реактивное сопротивление этого столба воздуха
(2.71)
Акустическое полное сопротивление всей системы
=> (> -Аг)+7 те (2W) + <“ <2- 72>
2. 13. ЗАКРЫТАЯ ТРУБА С ФЛЯНЦЕМ
Рассмотрим теперь трубу, закрытую с одного конца и имеющую с другого открытого конца бесконечно большой флянец. Попрежнему предположим, что отверстие трубы представляет собой свободно колеблющийся поршень бесконечно малой толщины, не имеющий массы, и что волны в трубе—плоские, т. е. что для всех точек любого сечения, перпендикулярного к оси трубы, имеют место синфазные колебания.
Общее выражение для скорости об'емного смещения в плоской волне, для которой из уравнения (1.16) <p={Aeikx—Bejkx)elvyt может быть написано согласно уравнения (1.6)
U=jkS (AeJ'kx+Be~-fkx) eju>t (2. 73)
с учетом того, что волны распространяются в трубе в обоих направлениях.
Из уравнения (1.7) давление
p——jkpc (Aejkx — Be~jkx) eJ,ot (2. 74)
где А и В—произвольные функции, определяемые из граничных условий. Принимая х=0 у отверстия трубы длиной I, и х-Z у закрытого конца, мы получаем четыре уравнения (опуская изменение по времени,
U9--.jkS (А+Я) (2. 75)
JkS (Ае jkl + Be ~ Jkl) (2. 76)
и
Ро = — jkpc (А —В) (2. 77)
——jkpc (Aejkl—Be~ jkl) (2. 78)
Акустическое полное входное сопротивление закрытой трубы
— Ро — рс <А — В} zAO~ Vo~ S (А+В)
(2- 79)
32
1.1к как труба закрыта, то
Ц = JkS (Ае jkl + Be ~fkl')=Q (2. 80)
Выражение для полного акустического входного сопротивления, если подставить А и В из уравнения (2.80) в уравнение (2.79)
= —^соШ (2.81)
Для общего полного акустического сопротивления трубы, складывая уравнения (2.81) и (2.64), получаем
-Д^соШ] (2.82)
В некоторых случаях интересно знать отношение давления у ыкрытого конца трубы к давлению в свободном пространстве. 11усть давление в свободном пространстве р, давление у открытого конца рс, давление у закрытого конца трубы рг Из уравнений (2.77) и (2.78) получаем
PL^Ae^1 -Ве~^1
p0~ A - В
из уравнения (2.80) имеем
А = — Be~2jkl (2.84)
Подставляя в уравнение (2.83), получаем
<2- 85)
Падение давления между р и р0 равно произведению скорости об'емного смещения на полное сопротивление между этими двумя точками
Ро=Р~ U^A (2. 86)
где zл определяемое из уравнения (2.64), равняется
2 —Г А--/Х — f 1 \ I
ZA — ГА JA V kR )
+J 2^fe3 (2- 87>
Из уравнений (2.81), (2.85) и (2.86), исключая ро, получаем
,. Jp.^R2 cos kl
р, cos kt ~~р — —-----—— z . (2. 88)
r pc cotkl A ' '
,1 ИрикппХшш акустика.
33
Отношение давления в свободном пространстве к давлению у закрытого конца трубы
—| =1/Tcos kl—^х . sin /г/Т + г1 2, sin2 kl (2. 89)
Pi! г L ₽c A J 1 (pc)2 A v 7
Это уравнение позволяет определить поведение трубы или впадины и, в частности например, влияние рассматриваемой ниже впадины перед диафрагмой конденсаторного микрофона.
2. 14. УЗКИЕ ТРУБЫ
Узкие трубы характеризуются малым диаметром по сравнению с длиной. В дальнейшем мы будем предполагать, что длина трубы мала по сравнению с длиной волны. При прохождении звуковой волны через узкую трубу, можно ожидать -значительного влияние вязкости, так как стенки трубы оказывают большое сопротивление колебанию частиц воздуха, с ними соприкасающихся. Рейли Лэмб2, Крендалл3 и Стюарт и Линдсей4 5 исследовали распространение звука в узких трубах. Поскольку диаметр трубы очень мал, можно пренебречь поправкой на влияние конца трубы, которая мала по сравнению с полным сопротивлением трубы.
Стюарт и Линдсей дали следующее выражение для полного сопротивления узкой трубы длины /и радиуса R
ZA ] (2’ 90)
_4
где р= 1,86.10 (для воздуха).
Итак, мы видим, что от вязкости зависят как активная, так и реактивная слагающие полного сопротивления.
2. 15. ЩЕЛИ
Щелью называется отверстие, имеющее малую высоту по сравнению с длиной. В дальнейшем мы будем предполагать, что высота щели мала по сравнению с длиной волны.
Рассмотрим щель, образующуюся между двумя пластинами длины I и шириной w, расположенных одна от другой на расстоянии d, как показано на рис. 2.3. Щели такого вида исследовались Лэмбом6. Им дано следующее выражение для полного акустического сопротивления щели
12[xw . . 6pw> ZA ™
1 Rayleigh. Theory of Sound, Vol. II, p. 318.
2 Lamb. Dynamical Theory of Sound, Arnold, p. 193.
3 Crandall. Vibrating Systems and Sound, D' van Nostrand, p. 229.
4 Stewart and Lindsay. Acoustic, D. van Nostrand, p. 117.
5 Lamb. Hydrodynamics, 4th Ed. p. 577.
34
Как и в случае узкой трубы, пренебрегаем поправкой на
плнипие конца щели, как величиной малой по сравнению с пол-
Рис. 2. 3. Щель, имеющая активное и реактивное сопротивление.,
ным сопротивлением щели. Нужно отметить, что активное сопротивление обратно пропорционально кубу ширины щели d, а реактивное (инерционное) сопротивление обратно пропорционально первой степени d. Следовательно, практически можно получить любое соотношение реактивной к активной составляющей.
После того, как желаемое соотно-
щель является весьма можно получить любое
шение между составляющими сопротивления получено, нужную величину сопротивления можно получить при надлежащем выборе w и I. Поэтому при проектировании акустических фильтров ценным средством, с помощью которого последовательно соединенное активное и реактивное(инерционное) акустическое сопротивление.
2. 16. АКУСТИЧЕСКАЯ ЕМКОСТЬ
Рассматривая в разделе 2. 4 акустическую емкость, мы нашли, что акустическая емкость некоего об'ема
С. =~ (2. 92)
A pc2 v ’
где V—об‘ем полости. Полость является обычным типом акустической емкости, применяемым в акустических системах. В дальнейшем предполагается, что длина волны велика по сравнению с размерами полости. Рассматривая полость как цилиндрическую трубу, закрытую с одного конца, получаем для входного сопротивления полости из уравнения (2.81)
* PC , , . рГ СОS A? /п л
z — I -75T c°t Kt— / i, (2- 93)
AO J j nR2 sin At ' '
Если k мало (а следовательно, длина волны велика) по сравнивши с I, то
ZA0 J -itRtkl— j <onR4~~ J u>V 94)
Таким образом, полость является акустической емкостью, пели ее размеры малы по сравнению с длиной волны.
Теперь рассмотрим акустическую емкость вместе с акустическим активным сопротивлением.
Рассмотрим входное полное сопротивление цилиндрической грубы, конец которой замкнут на акустическое активноеj сопротивление га.
35
Из уравнений (2.76) и (2.78) имеем
Ek— — pc Ae^kl — Be~jkl Ut A S Aejkl + Bg— jki
(2. 95)
Сопоставляя уравнения (2. 75) и (2. 77), исключаем А и В и для малых величин k получаем выражение
ГА ГА
гА0~ jrA Ski ~ 1 +jurA СА (1 2’ 96)
представляющее собой уравнение цепи, в которой емкость и активное сопротивление включены параллельно. Итак, полость с звукопоглощающими стенками эквивалентна конденсатору, обладающему утечкой.
2. 17. ЭЛЕКТРИЧЕСКИЕ, МЕХАНИЧЕСКИЕ И АКУСТИЧЕСКИЕ ФИЛЬТРЫ
В электрических, механических и акустических системах часто желательно пропускать данную полосу частот и задерживать все остальные частоты. Устройства, с помощью которых можно этого достигнуть, называются волновыми фильтрами. Электрические фильтры, предложенные Кэмпбеллом \ находят обширное применение в электрических цепях. Акустические фильтры, предложенные Стюартом2, также широко применяются, причем в настоящее время область их применения еще более расширяется.
Механические фильтры применялись как механизмы уже в продолжении нескольких веков. За последнее время в связи с тем, что механические устройства играют важную роль в звуковых системах, им уделяется весьма серьезное внимание.
Электрические фильтры исследовались Кэмпбеллом, Нобелем3, Джонсоном4 5, Ши® и другими.
Акустические фильтры исследовались Стюартом, Мэзоном6 и другими.
Механические системы исследовались Крендалом7 и другими.
Наиболее глубоко исследованы электрические фильтры. Методы исследования последних применимы также и к механическим и акустическим системам. В этой книге не представляется возможным дать глубокий анализ каждой системы. Мы здесь
1 Campbell. G. A. Bell System Tech. Jour., Vol. 1, No. 2, 1922.
2 Stewart, G. W. Phys. Rev., Vol. 20, p. 528, 1922.
3 Zobel, O. J. Bell System Tech. Jour., Vol. II, No. 1, 1923.
4 Johnson, К S. Transmission Circuits and Telephonic Communication, D. van Nostrand, p. 186.
5 Shea. Transmission Networks and Wave Filters, D. van Nostrand.
6 Mason, W. P. Bell Syst m Tech. Jour.. Vol. 6, 1927.
7 Crandall, 1. Vibrating Systems and Sound, D. vau Nostrand p. 64.
36
опишем простейшие конструкции фильтров и покажем анало-iiiio между тремя системами.
Если фильтр представляет собой идеальное устройство, то ••го затухание для всех частот пропускаемой полосы должно равняться нулю, т. е. элементы фильтра не должны иметь активного сопротивления. Идеальный (без потерь) фильтр должен состоять исключительно из реактивных сопротивлений.
Почти всякая симметричная комбинация положительных и отрицательных реактивных сопротивлений может рассматриваться, как ячейка идеального фильтра. Обычно практический интерес представляют только такие комбинации элементов, которые пропускают одну (или в некоторых случаях две) полосы частот.
Наиболее часто встречающимся типом фильтра является такой фильтр, в котором одни сопротивления включаются последовательно с линией, а другие параллельно линии;
Ко второму типу относятся мостовые фильтры. Фильтр такого типа может быть заменен эквивалентным фильтром первого типа.
Обозначим последовательные и параллельные элементы :со-ответственно через zx и г2. Анализ фильтров показывает, что фильтр вносит затухание, когда — положительно, а также когда
отрицательно, но абсолютная величина - — больше четы-
рех. Следовательно, мы не имеем затухания тогда, когда — от-
г2 рицательно и по абсолютной величине меньше четырех. Суммируя сказанное, можно формулировать так: фильтр без потерь первого типа с последовательно соединенными сопротивлениями 2; и шунтирующими z2 пропускает токи только таких час-
тот, для которых величина отношения — лежит между 0 и 4.
2. 18. ФИЛЬТРЫ НИЖНИХ ЧАСТОТ
Простейший тип электрического, механического и акустического фильтров нижних частот показан на рис. 2. 4. Такие фильтры называются двухэлементными, потому что каждая повторяющаяся ячейка состоит только из двух различных элементов. Полное сопротивление последовательной ветви
z , = iii>L el •
.(2. 97)
37
гМ\—^т (2.98*
zA}=--jwM (2.99)
соответственно для трех систем. Полное сопротивление параллельной ветви
1 ' /шСе (2, 100)
ZM2 _ 1 ‘ ~j^CM (2. 101)
ZA1 1 (2. 102)
также для трех систем.
Пограничные частоты, как указано выше, определяются из
^-=:0 И — 4 (2. 103)
z2 z2
Подставляя обозначения для постоянных системы, получаем
—-£C/d2c=0 или сос—0
— /пС.,со?—-0 или <1>Л”0
--Л1С.<£>2 —0 ИЛИ со.—0 /Iе с
Далее
/ 1 или ^e-yLce 2
, ТСеТ^Т Электрический — тС.м2 —4 или «>— /—=< Л! V тСм 2 -МСлсо/=-4 или ^=у^сА-
си с„ С„ I т т Следовательно, системы, показанные на рис. 2.4, являются фильтрами нижних частот, пропускаю-
Механический Н М _rLrlLrl Акустический щими токи скорости, и скорости об'емного смещения (соответственно в электрической, механической и акустической системах) всех частот, лежащих между 0 и верхней
Рис. 2. 4. Фильтры нижних частот. пограничной частотой fc, raefe=^-
38
2.19. ФИЛЬТРЫ ВЕРХНИХ ЧАСТОТ
Электрические, механические и акустические фильтры верхних частот показаны на рис. 2.5. Как и в фильтрах нижних частот, каждая повторяющаяся ячейка состоит только из двух различных элементов. Полное сопротивление последовательной ветви
1 (2 104)
"el /<оСе
ZM1 _ 1 ~^СМ (2. 105)
ZAl _ 1 (2. 106)
соответственно для трех систем.
Полное сопротивление параллельной ветви
(2. 107)
zM2=jum (2. 108)
ZA2=J^M (2. 109)
также для трех систем.
Подставляя обозначения для постоянных системы, получаем
для одной пограничной частоты
(t=°)
1 —0 LC^c ~ или со£=оо
ИЛИ СО.—СО
1 —о МСА^с -и ИЛИ <i)fz=CO
Для другой пограничной частоты —4^
1 л 2
— Ггл ——4 ИЛИ <Ц-~ ._____аг
2с с УТСе
1 л 2
тСм^ УтСм
1 и 2
^СА^с с Уме.
Следовательно, система, показанная на рис. 2.5, является фильтром верхних частот, пропускающим токи, скорости, ско-
39
рости об'емного смещения (соответственно в электрических, механических и акустических системах) всех частот, лежащих между нижней пограничной частотой fc = ^ и бесконечно-
стью.
В последнем
личными электрическими, механическими и акустическими элементами и также аналогию между
параграфе мы показали
аналогию между раз-
Q Се
HhHMh-iH
Электрический
акустический
механический
Рис. 2. 5. Фильтры верхних часют.
некоторыми комбинациями этих элементов. Применяя выведенные, основные соотношения, можно привести механическую или акустическую систему к эквивалентной электрической системе и решить ее, применяя теорию электрических фильтров. Также, очевидно, можно построить механико-акустические фильтры с заранее заданными характеристиками. Другими словами, если нужно осуществить механо-акустическую систему, обладающую определенной частотной характеристикой, то простейший способ решения этой задачи заключается в том, что рассчитывается одна или несколько электрических цепей, дающих требуемую характеристику, а затем электрические элементы этих цепей заменяются их механическими или акустическими эквивалентами.
Применение этого метода является могучим средством в деле развития акустики за последние несколько лет.
2 . 20. РУПОРА
Рупор является акустическим передатчиком, согласовывающим сопротивления колебательной системы и среды, в которой распространяются звуковые колебания. Рупор представляет собой трубу с переменным сечением. Рупора уже давно применяются в звукоизлучающей и звукоприемной аппаратуре.
Рассмотрим кратко некоторые типы рупоров.
Теоретически рупора исследованы Вебстером1, Стюартом2 3, Голдсмитом и Минтоном8, Слепяном и Ханна4 *, Баллантайном®, Крендалом6, Стюартом и Линдсеем7 и другими.
В дальнейшем мы будем пользовать я методами анализа, применявшимися этими исследователями.
1 Webster. Jour. Nat. Acad. Sci., p. 275. 1919.
3 Stewart. Phys. Rev., p. 313, 1920.
3 Goldsmith and Minton. Proc. Inst. Rad. Eng., p. 423, 1924.
4 Slepian and Hanna. Jour. Amer. Inst. Elect. Eng., 1924.
3 Ballantine. Jour. Frank. Inst, p. 85, 1927.
Crandall. Vibrating Systems and Sound, D. van Nostrand.
C Stewart and Lindsay. Acoustics, D. van Nostrand.
Возьмем трубу переменного сечения с диаметром малым по < равнению с длиной проходящей через трубу звуковой волны. Рассмотрим на рис. 2.6 элемент 5Дх.
Разность между потоком воздуха, входящим и выходящим (и единицу времени) из об'ема элемента, огра-ничейного парой нормальных сечений трубы, ') равна увеличению массы элемента. Предста- ~~( )—Г"* I ним эту разность в математической форме. J
(2.110) "Рис\. 6.
где S—площадь сечения трубы в точке х.
Приравнивая скорость изменения массы в об‘еме (иМ разности потоков, получаем
(2. Ill) dt ' дх v
Уравнение (2.111) есть уравнение неразрывности.
Из уравнений (1.19), (1-18) и (1.11) получаем
<р=—c2s; и-~- (2. 112)
и уравнение распространения:
(i0gS)_c2^=o (2.113)
“ ох дх 4 & 7 Ох2 . '
Последнее представляет собой волновое уравнение колебаний в трубе переменного сечения, происходящих вдоль оси трубы. При выводе этого уравнения были приняты некоторые допущения. Приведем основные из них. Диаметр рупора мал по сравнению с длиной волны. Применимы основные акустические уравнения; отсутствуют смещения в направлениях, перпендикулярных оси рупора; как давления, так и скорости малы и;.следовательно, можно пренебречь членами второго порядка.
Нет оснований полагать, чтобы эти допущения не соответствовали действительным условиям. Практически проверено, что расчеты, основанные на этой теории, достаточно хорошо согласуются с экспериментально полученными данными и с успехом могут применяться при проектировании рупоров.
2. 21. ПАРАБОЛИЧЕСКИЙ РУПОР 1
Рассмотрим рупор с поперечным сечением, возрастающим по закону S0--Sx. Общее уравнение такого рупора
ду__ (2.114)
\О Ison, И. F. and. I. Wolff. Jour. Aeons. Soc. Amer., Vol. 1, No. 3, p. 410.
41
Решая это уравнение, получаем
<Р=А [Jo (kx) -/Fo (fcx)] eJ'“‘ (2. 115)
Выражения для давления и скорости об'емного смещения имеют следующий вид
р=—уырД |J0 (kx)—JY0 (kx)]eJUit (2. 116)
U= ASk [ — J'o (kx) +JY'O (kx)] e jti>t (2, 117)
Акустическое полное сопротивление у горла рупора
_ рс 2/кДх0
А — So J? (kx0) + ^(kx)
_ pc Jo (kx?) JL (kxn) + Fo (kxa) Yt (kxa) A Sq Jj2 (kx^) -f- У]2 (kxa)
(2. 118)
(2. 119)
где Jo, —Бесселевы функции первого рода нулевого и первого порядка
а Уо и ¥г—Бесселевы функции второго рода нулевого и первого порядка.
Для Бесселевых функций имеют место следующие соотношения
Л (*) Y'n (%) - Yn (х) J'n (л)=~ (2. 120)
J'n{x) = Jn_l(x)-^-Jn(x) (2.121)
и аналогично для функций У'„(х).
2. 22. КОНИЧЕСКИЙ РУПОР
Рассмотрим рупор с поперечным сечением, возрастающим по закону S=Sox2. Диференциальное уравнение такого рупора
и — 2^. — '
? х дх с дх^~и
Потенциал скорости
A' j (.wt — kx) В' j {at + kx) т— r к Т *• е
(2. 122)
(2. 123)
42
Для случая расходящейся волны
A' j (at — kx)
(2. 124)
Из уравнения (1.26) потенциал скорости сферической волны
(2.125)
Эти уравнения разнятся только своим постоянными. Изменение постоянной показывает, что в коническом рупоре излучение ограничивается телесным углом рупора.
Рассмотрим бесконечный конический рупор; потенциал скорости, давление и скорость об'емного смещения в таком рупоре
A e j (at — kx) * x (2- 126)
_ /<apA j (at — kx) ? X (2. 127)
jt _AS (1 + jkx) e~kx>> U ~ X2 (2- 128)
Составляющие сопротивления у горла рупора
__ рС k‘2X02
ГА~~1Г0 1 + k2xti2
pc kx0
XA^ S0
(2. 129)
(2. 130)
На приведенных соотношениях базируется общая теория распространения аксиальных колебаний в конических рупорах, разработанная Вебстером, Стюартом и другими.
2. 23. ЭКСПОНЕНЦИАЛЬНЫЙ РУПОР
Рассмотрим рупор с поперечным сечением, возрастающим по закону S—Soemx. Диференциальное уравнение такого рупора
»131>
Решение этого уравнения
т Г . У 4ft2 — т2
~— ~q" X j q X
<f—e Ae ]-
. J/4*2 — m2
+ J о
+Be 2
eJ'at
(2. 132)
43
Для расходящейся волны
т Г у 4fe2 — т'2
~2 х . -J—2------Х
<р=е 1Ае
(2. 133)
Давление и скорость об'емного смещения
т . У 4А3 — т2
2 х 2
Р— — /<|>ре Ае
У 4^2—W12 +/------о----
tn У 4k'2 — nfi
— ~2-x—j--------g---x +
Составляющие сопротивления у горла рупора
г - рс -т-
А - So 2k
(2. 134)
(2. 135)
(2. 136)
(2. 137)
U -- Л£ р? +
eJ^t
Для частот ниже рупор звука не передает. Другими словами, бесконечный экспоненциальный рупор ведет себя как фильтр верхних частот,
2. 24. ХАРАКТЕРИСТИКИ БЕСКОНЕЧНЫХ РУПОРОВ
Сравним акустические активные сопротивления у горла рупора для рассмотренных выше трех типов рупоров при условии, что эти рупора имеют одинаковую площадь сечения горла, равную одному кв. сантиметру и одинаковую площадь.сечения на расстоянии 100 см от горла, равную 100 кв. см.
Зависимость этих сопротивлений от частоты иллюстрируется рис. 2. 7.
Как показывают кривые рис. 2.7, сопротивление рупора на. низких частотах тем больше, чем больше раствор рупора1. Эти’
1 Баллантайн исследовал рупора типа S—Soxm’ носящие название Бесселевых. Эти исследования показали влияние увеличения раствора на отдачу низких частот. Ханна показал (/ourn. Franklin Jnst. Vol. 203 p. 849), что при бесконечном возрастании показателя т Бесселев рупор приближается по форме к экспоненциальному. При и=2 получаем частный случай конического рупора.
44
кривые показывают также, что экспоненциальный рупор имеет преимущество перед другими типами рупоров, которое и обусловливает его исключительное применение в громкоговорящих устройствах. Кривая сопротивления экспоненциального рупора показывает, что для этого рупора существует некоторая кри-
Частнпа в герца)
Рис. 2. 7. Активные сопротивления у горла бесконечного параболического, конического и экспоненциального рупоров, имеющих одинаковую площадь горла и одинаковое сечение при х=100 см.
тическая частота, выше которой активное сопротивление резко возрастает и далее быстро приближается к постоянной величи-... рс
не, равной
До сих пор мы рассматривали рупора бесконечной длины, практически, однако, рупора имеют конечные размеры.
В конечных рупорах при низких частотах имеют место отражения от конца, обусловленные изменением полного сопротивления между устьем рупора и атмосферой. Влияние полного сопротивления открытого конца pyiTopa будет, установлено далее при рассмотрении конечных рупоров.
ГЛАВА III
ОСНОВНЫЕ АКУСТИЧЕСКИЕ ИЗМЕРЕНИЯ
3. 1. ВВЕДЕНИЕ
Основными свойствами звуковой волны являются частота, амплитуда и форма волны. Если рассматривается несколько волн или рассматриваются компоненты, составляющие одну сложную волну, то фазные соотношения выступают как еще одно свойство звуковой волны. Методы измерения величин, характеризующих указанные свойства звуковых волн, являются важнейшим орудием в работе акустических лабораторий. Настоящая глава посвящена описанию этих методов.
3. 2. АБСОЛЮТНОЕ ИЗМЕРЕНИЕ ЧАСТОТЫ
Частота звуковой волны может быть определена как число полных циклов колебаний, испытываемых частицей среды в единицу времени. Очевидно, что абсолютные измерения частоты требуют точного измерения времени. Если в качестве эталонов частоты применяются камертоны или камертонные генераторы, то для измерения неизвестной частоты можно воспользоваться ее сравнением с эталонной частотой. Это сравнение может быть произведено при помощи одного из описанных ниже методов. Прежде чем рассматривать методы сравнения, мы остановимся на абсолютной градуировке частоты. Если требуется измерить частоту акустического эталона, как например, камертона, то необходимо определить число колебаний камертона, совершаемых в точно определимый промежуток времени. Для грубого определения числа колебаний можно рекомендовать следующий метод. К одной из ножек камертона прикрепляется тонкая легкая игла так, что конец ее касается папиросной бумаги, накрученной на барабан. Барабан вращается с постоянной и точно определенной скоростью, а камертон приводится в колебательное состояние (направление колебаний должно быть перпендикулярно к направлению движения барабана). При этом колебания ножки камертона будут записываться иголкой на папиросной бумаге в виде волнистой линии. Подсчитав число целых волн, записанных на бумажной полоске известной длины и зная диаметр ба-
46
paoaua и скорость его вращения, можно легко определить число полных циклов колебаний камертона в единицу времени.
Более сложный и точный метод измерения частоты был предложен Кёнигом1. Метод этот состоит в том, что маятник обычных часов заменяется испытуемым камертоном. Колебания камертона поддерживаются часовым механизмом и он, как маятник, управляет ходом часов. Общее число колебаний камертона определяется по показаниям часовой, минутной и секундной стрелки часов. Зная это число и определив по точным часам промежуток времени, в продолжении которого колебания совершались, легко определить частоту колебаний камертона. Описанный метод градуировки применяется для камертонов, имеющих низкую частоту колебаний (меньшую, чем 100 периодов в секунду).
Другой абсолютный метод измерения частоты предложен Макледом и Клэрком2, применившими стробоскопический диск с нанесенными на его боковой поверхности (параллельно оси) белыми и черными линиями равной толщины, могущий вращаться с различной, но точно определенной скоростью. Если вибрирующий камертон расположить перед цилиндром и установить такую скорость вращения стробоскопического диска, чтоб у краев камертона диск казался неподвижным, то частоту . Wr
камертона можно определить по формуле —, где п—целое число, W—число белых линий на поверхности цилиндра и г—число оборотов диска в секунду. Очевидно, что точность этого метода зависит исключительно от точности определения скорости вращения диска.
Более современным методом абсолютного измерения частоты является метод, при котором применяются синхронные электрические часы, приводящиеся в движение переменным током. Частота этого тока регулируется источником градуируемой частоты. Показание электрических часов сравнивается с показанием точных часов за тот же промежуток времени. Абсолютная частота неизвестного источника легко определяется, если известны данные синхронных часов (число полюсов и отношение передачи) и отношение показаний двух часов.
3. 3. СРАВНИТЕЛЬНЫЕ МЕТОДЫ ИЗМЕРЕНИЯ ЧАСТОТЫ
Описанные выше методы абсолютного измерения частоты применяются при акустических измерениях сравнительно редко. Наиболее употребительный метод измерения частоты состоит в сравнении неизвестной частоты с известной' частотой. Это сравнение может быть произведено различными спо-
1 Koenig. Wied. Ann., 1880, Vol. 9, p. 394.
8 M’Leod & Clarke. Phil. Trans., 1880. No. 1, p. 1.
47
собами. Очень удобным прибором для сравнения является электромагнитный осциллограф, имеющий не менее двух шлейфов, регистрирующих колебания. Если необходимо определить частоту колебаний звука, то в звуковое поле вносится микрофон, который преобразует акустические колебания в электрические. Эти последние подводятся к одному шлейфу осциллографа. Ко второму шлейфу подводится переменный ток от источника известной частоты, например, от камертонного генератора, и обе частоты записываются одновременно. Сравнивая длины волн двух записанных частот, легко определить отношение этих частот, а следовательно и частоту измеряемого звука.
Если эталонная частота может плавно меняться, как например, при применении в качестве эталона частоты градуированного генератора на биениях, то неизвестную частоту можно определить на слух методом биений. При этом методе генератор на биениях настраивается на частоту, близкую к неизвестной. Две одновременно воздействующие на ухо частоты, вызывают в нем ощущение слышимости третьей частоты, так называемой частоты биений, равной разности двух частот. Из
меняя частоту генератора, можно постепенно уменьшить число биений в секунду до нуля. В тот момент, когда биения пропадают, частота генератора равна определяемой частоте.
Метод биений может быть применен для градуировки частоты источников переменного тока. В этом частном случае на телефон или громкоговоритель по-
Рис. 3. 1. Сравнение двух частот на слух методом биений.
даются одновременно как ток неизвестной частоты, так и ток от градуированного источника, частота которого может плавно меняться.
Каждая слагающая подается на отдельную первичную обмотку трансформатора (см. рис. 3. 1), вторичная же обмотка подводится к громкоговорителю. Мощность, под-
водимая от градуированного источника, устанавливается того же
порядка, как и мощность, подводимая от источника неизвестной частоты. Частота градуированного источника устанавливается так, чтобы частота биений равнялась нулю. В этот момент неизвест-
ная частота равна установленной частоте градуированного гене-
ратора.
Наиболее точным и скорым методом сравнения двух частот является способ наложения их „под прямым углом" и наблюдения фигур Лиссажу, получающихся при изменении одной из частот. Если на частицу действуют две силы одной и той же частоты под прямым углом одна к другой, то проекции смещения частицы на направления этих сил определяются уравнениями
48
x^a sin to/ (3, 1)
J= bsin (<o/+a) (3. 2)
Форма кривой пути частицы в плоскости ху может быть определена, если из вышеуказанных уравнений исключить t. Уравнение (3.2) может быть написано в виде
jy=b(sinco/cosa+cos wf sin a) (3. 3)
Из уравнения (3.1)
sinw/=-^- (3. 4)
Подставляя (3.4) в (3.3), получаем
y~b
— cos k а
X2
•sin a
из которого
; —— cos a b а
• sin a a1
Возводя в квадрат и приводя подобные члены, получаем
у2 , х1 2ху . »
4г4—5------4- cos а= sin2 a
Ь‘ ab
(3. 5)
Уравнение (3.5) представляет собой общее уравнение эллипса в прямоугольных координатах с полуосями а и Ь, расположенными по отношению к осям координат под углом, зависящим от величины а.
Если а=0 или пк (где п—целое число), то уравнение (3. 5) превращается в уравнение двух прямых линий у/= 4—представляющих собой диагонали прямоугольника. Если а равен (2л—1)4р то уравнение (3. 5) принимает вид
1
a2Tfc2—
т. е превращается в уравнение эллипса с центром в начале координат и полуосями, совпадающими с осями координат. Очевидно, что если а=Ь, то эллипс превращается в круг. Итак, если к частице приложить две силы, действующие под прямым углом, а путь, совершаемый частицей, наблюдать на экране, то в случае одинаковой частоты прилагаемых сил, фигуры, видимые на экране, будут иметь вид неподвижных эллипсов (а в частных случаях, прямых линий или кругов). Если частоты немного различны, то фаза между двумя волнами будет постоянно меняться, совершая циклические изменения с частотой, равной разности действующих на частицу частот. Изменение фазы вызывает колебание по амплитуде одной из осей эллипса
'l Щикладная акустика.
49
(от максимума до нуля), что создает для глаза эффект вращения эллипса со скоростью, зависящей от разности частот приложенных сил.
Если две частоты неодинаковы, но их отношение равно небольшому целому числу, то путь, описываемый частицей, представляется замкнутой кривой и имеет число петель, равное отношению частот. Если же одна из частот изменяется, то также непрерывно изменяется и фазное соотношение, благодаря чему фигура, видимая на экране, кажется вращающейся, подобно описанному выше эллипсу. Фигуры Лиссажу для малых простых отношений частот и для сдвига фаз 0,тс/4 и п/2 показаны на рис. 3. 2.
Устройством, позволяющим приложить две частоты под прямым углом и воспроизвести фигуры Лиссажу, служит катодный осциллограф, состоящий из катодной трубки, в которой пучок электронов, вылетающих из. раскаленного катода, фокусируется в виде точки на флюоресцирующем экране. Вдоль оси трубки расположены две пары управляющих электродов (электростатических или электромагнитных )под прямым углом одна к другой. Каждая из частот подводится
к одной паре управляющих электродов. Результирующие силы действуют на электронный поток, который описывает на экране фигуры Лиссажу.
Рис. 3. 2. Фигуры Лиссажу, получающиеся при указанных иа рисунке разностях фаз и отношениях двух частот.
Установка для сравнения двух частот показана на рис. 3.3.
Описанный метод сравнения частоты является наиболее эф-
фективным из известных методов. Пользуясь установкой рис. 3.3, можно выполнить полную градуировку генератора на биениях в течение времени, которое требуется только для записи делений по шкале и соответствующих этим делениям частот. Эталонная частота подводится к одной паре, а выход градуируемого генера-
З/палсннах частото
Рис. 3. 3. Сравнение частот с помощью катодного осциллографа.
тора присоединяется к другой паре управляющих электродов катодной трубки осциллографа.При градуиров-
ке частота градуируемого генератора
медленно изменяется и в те моменты, когда на экране получаются различные фигуры Лиссажу, деления шкалы записываются. Много точек частотной шкалы генератора может быть
50
усыновлено простым сравнением с одной эталонной частотой, шщанасмой на одну пару управляющих электродов.
3. 4. РЕЗОНАНСНЫЙ МЕТОД ИЗМЕРЕНИЯ ЧАСТОТЫ
Рассмотрим простую электрическую цепь, содержащую кон-ненсагор емкостью С микрофарад, индуктивность £ генри и оми-ческое сопротивление г ом, соединенные последовательно. Известно, что если к такой цепи приложено напряжение е часто-1Ы /, то ток в цепи определяется уравнением
е
(3- 6)
Очевидно; что максимум тока имеет место, когда
2тс/£-1С)с/2л/С
Это резонансное явление может быть использовано для измерения частоты. Генератор, частоту которого требуется опре-
делить, присоединяется к зажимам электрической цепи, показанной на рис. 3. 4, а переменный конденсатор устанавливается так, чтобы ламповый вольтметр давал наибольшее отклонение. В этом случае частота градуируемого источника может быть определена из уравнения
Оаяповый ылътлетр
Рис. 3. 4. Электрический резонансный метод измерения частоты.
1000
---7= гЧ
2тс/LC
(3. 7)
Можно также определить частоту электрических колебаний, используя механический резонанс. Резонанс гибкого стержня определяется его упругостью и массой. Если стержень приводится в движение переменной силой с частотой, равной его собственному периоду, то амплитуда колебания стержня получается наибольшей. На силовых электрических установках используются измерители частот, представляющие собой ряд стержней, настроенных на различные частоты, немного отличающиеся между собой. Стержни укреплены на общем основании. Основание приводится в колебательное состояние электромагнитом, возбуждаемым от источника тока, частоту которого требуется определить. Колебания основания передаются укрепленным.на нем стержням, причем стержень, имеющий собственный период колебаний, совпадающий с периодом источника, колеблется с наибольшей амплитудой, по которой и определяется частота источника тока.
51
Другой метол измерения частоты использует явление акустического резонанса. В вышеописанном резонаторе Гельмгольца собственный период является функцией размеров горлышка и об'ема полости резонатора.
Если построить резонатор, имеющий форму цилиндра, об'ем которого может изменяться с помощью хорошо пригнанного поршня, и поместить такой резонатор вблизи источника звука неизвестной частоты, то, изменяя положение поршня и следовательно об'ем резонатора, мы при некотором положении поршня получим усиление звука. При этих условиях частота источника звука будет равна собственной частоте резонатора, последняя же может быть определена (если известны данные резонатора) по положению поршня в цилиндре.
3. 5. ИЗМЕРЕНИЕ АМПЛИТУДЫ
Рассмотрим акустические волны, распространяющиеся в среде, обладающей плотностью р со скоростью с. Сила звука определяется колебанием частиц среды и может быть выражена через скорость колебания частиц или через давление р вблизи рассматриваемой точки. Как было показано выше, в плоской бегущей волне отношение между скоростью частиц и давлением выражается уравнением
(3. 8)
так что, измеряя и или р, можно определить амплитуду колебаний.
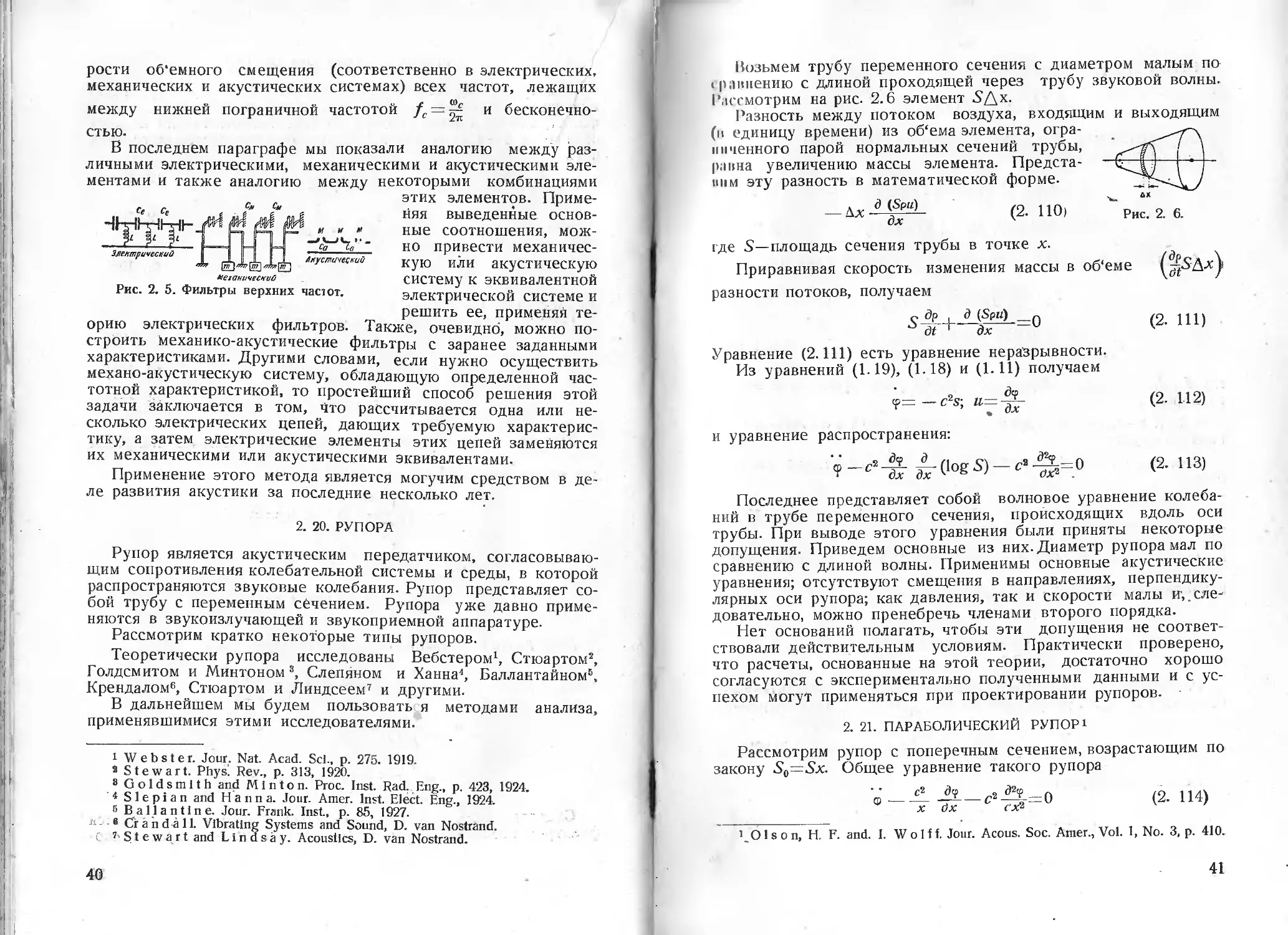
3. 6. ДИСК РЕЙЛИ
Рейли1 заметил, что легкий диск, подвешенный в отверстии резонатора, внесенного в звуковое поле, всякий раз стремится установиться своей плоскостью перпендикулярно оси горлышка резонатора, как только устанавливается частота звука, соответствующая собственному периоду колебаний резонатора.
Этот принцип и служит основанием одного практического метода, дающего возможность производить абсолютные измерения силы звука.
В 1891 г. Кёниг2 показал, что если диск подвесить как показано на рис. 3. 5 в поток жидкости, то
М=~ pa* su? sin 26 (3. 9)
о
где: М—вращающий момент, действующий на диск
р—плотность жидкости
а - радиус диска
1 Rayleigh. Phil. Mag., Vol. 14, 1882, p. 186.
s Koenig. Anti. d. Physlk, Vol. 43, 1891, p. 43.
52
О —угол между нормалью к плоскости диска и направлением потока жидкости
и—скорость потока (среднее квадратичное значение).
Из уравнения (3. 9) видно, что наибольший вращающий момент имеет место при 0, равном 45°. Для диска данного разме. p.i, подвешенного в определенном поло-кении по отношению к направлению по-н»ка жидкости, вращающий момент пропорционален и2. Следовательно описанное устройство может быть применено для измерения скорости колебания частиц в туковом поле.
Если диск Рейли предназначается для ческих измерений, то его величина должна
пению с длиной волны наиболее высокой измеряемой частоты. Для измерения частот до 8000—10000 гц. диаметр диска должен быть не больше одного сантиметра. Чтобы получить достаточную чувствительность устройства, диск подвешивается на весьма тонкой нити. В особых случаях, когда измерения производятся только на одной частоте, диск для увеличения чувствительности устанавливается в горлышке резонатора. Часто диск подвешивается в длинной трубе, в которой плоские волны возбуждаются громкоговорителем, установленным в одном конце грубы. Сила звука в трубе получается более высокой чем в открытом пространстве, что позволяет получить большие отклонения диска. Измерение в трубе применяется при градуировке микрофонов малого размера, которые можно устанавливать на месте диска, не опасаясь искажений звукового поля.
Для придания большей универсальности применения, диск в большинстве случаев устанавливается в помещении открыто. При этом абсолютные измерения силы звука производятся в свободном звуковом поле, что позволяет при помощи диска Рейли количественно изучать явление дифракции звука вокруг препятствий1. Так как величина силы звука (при данной мощности источника звука) в свободном пространстве получается значительно меньшей, чем в трубе, то чувствительность диска, подвешенного в свободном пространстве, должна быть соответственно выше. Увеличение чувствительности диска достигается применением для подвеса более тонкой нити.
Установка с диском Рейли, предназначенная для градуировки микрофонов в свободном звуковом поле, схематически показана на рис. 3. 6. В скелетном каркасе с размерами, ука-ьшпыми на рис. 3. 6, на конце тонкой кварцевой нити (пришли in гельно диаметром 0,005 мм и длиной 35 см) под
• ,)н> явление рассматривается в главе, посвященной методам градуировки МП* J >< 1<|>< > 11 < > в
S3
вешен посеребрены# диск толщиной 0,05 мм и диаметром 1 см. Второй конец кварцевой ке, посредством которой
нити приклеен к вращающейся голов-устанавливается нулевое положение диска. Неподвижное зеркало установлено под углом 45° к оси телескопа и параллельно диску, как показано на рис. 3. 6. При отсутствии звука в телескоп видно изображение некоторого участка освещенной шкалы, отраженное диском и неподвижным зеркалом.
При возбуждении звука диск поворачивается на угол, пропорциональный средней квадратичной величине скорости колебания частиц. Поворот диска вызывает изменение наблюдаемого в телескоп деления шкалы., Определить угол отклонения диска под действием звука можно либо отсчетом угла отклонения диска по шкале, либо установкой диска обратно в его нулевое положение путем вращения головки. В последнем случае угол поворота головки и будет равен первоначальному от-действием звука. Второй способ отни-
Рис. 3. 6. Схематическое расположение диска Рейли в установке для измерения силы звука.
клонению диска под
мает много времени, хотя он более точен, так как поверхность диска в момент отсчета угла остается под углом 45° к направлению звука, тогда как при первом способе отсчета поверхность диска в момент отсчета находится под меньшим углом к направлению звука, вследствие чего вращающий момент уменьшается пропорционально синусу двойного угла поворота диска. Кроме того, при первом способе определения отсчета угла вводится еще другая ошибка, так как обычно шкала представляет собой плоскую, а не цилиндрическую поверхность. Однако обе указанные ошибки при нормальных размерах шкал малы и притом взаимно нейтрализуют друг друга. Поэтому и первый способ непосредственного отсчета угла отклонения диска по шкале дает при обычных отклонениях диска достаточно точные данные, а так как он не требует установки диска каждый раз в нулевое положение, то позволяет по сравнению со вторым способом значительно сократить процесс
Как указывалось выше, в звуковом поле, под момента сил диск поворачивается относительно оси некоторый угол.
Этот угол поворота
измерения, действием подвеса на
м
радиан
(3. 10)
54
। де S'—момент кручения нити подвеса, который может быть най* * цеп )цспериментально и определяется отношением
S=^ [4z»+ (In D)2] (3.11)
i де /'—собственный период подвешенного диска
I—момент инерции диска —
т—масса диска а—радиус диска D—декремент затухания, равный отношению амплитуд двух последовательных отклонений диска, выведенного из состояния равновесия И предоставленного самому себе.
В уравнения (3. 9) и (3. 11) можно подставить все физические постоянные диска и решить их относительно средней квадратичной скорости, которая определяется из выражения
и=/С|/<р см\сек (3. 12)
Для постоянных диска, примененного в установке рис. 3. 6, чувствительность диска была такова, что при скорости колебания частиц, равной 0,3 см в секунду (для плоской волны это •соответствует звуковому давлению 12,3 бар), на шкале получалось отклонение, равное одному делению шкалы (около 0,3 см).
Так как диск Рейли чувствителен к малым скоростям, то необходимо защищать его от конвекционных воздушных потоков. Вполне достаточную защиту от постоянных воздушных потоков можно получить, если окружить диск двойным слоем тонкого шелка, разделенным воздушным промежутком порядка 8 сМ, и обтянуть таким же шелком весь каркас снаружи. На рис. 3.7 • приведена фотография описанной выше установки с диском Рейли. Наружный слой шелка, натянутый на каркас, с передней стороны раздвинут для того, чтобы дать возможность видеть внутреннюю оболочку.
Применение диска Рейли, как прибора .для абсолютных измерений, описано в главе VIII в связи с вопросами градуировки микрофонов.
3. 7. АБСОЛЮТНОЕ ИЗМЕРЕНИЕ ЗВУКОВОГО ДАВЛЕНИЯ
Звуковые волны, подобно другим видам волн, возбуждают некоторые малые силы давления на поверхности, на которые они падают. Это было впервые показано Альтбергом1, измерившим статическое давление, оказываемое звуковой волной на маленький диск, свободно расположенный в плоскости твердой стены. Акустический „радиометр"2, основанный на этом прин
* Altberg, W. Ann. d. Physik, Vol. 11, 1903, p. 405.
* Поц радиометром в широком смысле слова понимается прибор, реги-(ц»н||ун>|Ций лучистую энергию. (Прим, ред.)
55
ципе, состоит из маленького поршня, который свободно помещается в соответствующем его размерам отверстии в твердой стене и соединен с плечом крутильных весов. Отклонение кру-
Рис. 3. 7. Конструкция установки с диском Рейли, защищенной от воздействия воздушных потоков.
тильных весов показывает акустическое давление, оказываемое на поршень. Приборы подобного типа мало чувствительны, так что при их помощи можно измерять только звуки очень большой силы. Это исключает возможность их применения в обычных случаях измерительной практики.
3. 8. КОСВЕННЫЕ МЕТОДЫ АКУСТИЧЕСКИХ ИЗМЕРЕНИЙ
Абсолютное измерение звука посредством диска Рейли производится только как первично-эталонное измерение. Для коммерческих и большинства лабораторных измерений обычно применяется градуированный микрофон. Наиболее желательным типом микрофона для использования в качестве вторичного эталонного прибора, естественно, является такой тип, который, во-первых, вызывает минимальное искажение звукового поля, а, во-вторых, не вносит частотных искажений. Этим требованиям вполне удовлетворяет описанный подробно в главе V ленточный микрофон, реагирующий на градиент звукового давления. Градуировка ленточного микрофона, произведенная при помощи диска Рейли, показывает, что этот микрофон обладает хорошей равномерностью чувствительности во всем слышимом диапазоне частот, так что практически его можно считать сво--бодным от разного рода резонансов и сколько-нибудь значительных частотных искажений. Если абсолютная градуировка
ленточного микрофона, произведенная в свободном звуковом поле, дает значения индуктируемого в ленточке напряжения в вольтах на единицу силы звука, то неизвестная сила звука может быть определена путем измерения напряжения, индуктируемого в ленточке. Для градуировки микрофона последовательно с ленточкой включается небольшое активное сопротивление. Напряжение на зажимах ленточки, получаемое в результате действия на микрофон звукового поля, усиливается микрофонным усилителем и подводится к индикатору.
Градуировка производится следующим образом. Отмечая показания индикатора, выключают источник звука и пропускают через сопротивление, включенное последовательно с ленточкой, ток с частотой, равной частоте звука. Регулируя силу тока, добиваются отклонения индикатора, равного отклонению, отмеченному при воздействии на микрофон звукового поля. Добившись такого отклонения, отмечают силу тока. Произведение этого тока на сопротивление равняется напряжению, индуктируемому в ленточке под действием звука измеряемой силы. Зная величину напряжения на зажимах ленточки и располагая градуировкой микрофона, можно легко определить абсолютную величину силы звука. Тщательно отградуированный ленточный микрофон является весьма удобным прибором для абсолютных акустических измерений в лаборатории. Удобство и быстрота таких стандартных измерений обеспечивают широкое применение измерительного микрофона.
3. 9. ИССЛЕДОВАНИЕ ФОРМЫ ВОЛНЫ
Как известно, сложная акустическая волна состоит из основной частоты и ряда различных гармонических составляющих. Полный анализ акустической волны очевидно должен заключаться в измерениях различных частот, составляющих волну, и амплитуд каждой составляющей. В некоторых специальных случаях является желательным измерение фазовых соотношений между гармониками. Ниже описываются методы, применяемые при исследовании формы волны, и указываются преимущества одних методов перед другими.
3. 10. ГРАФИЧЕСКИЙ АНАЛИЗ СЛОЖНЫХ ВОЛН
Опишем метод анализа волн, не требующий непосредственного измерения составляющих гармоник, но требующий графического анализа тщательно записанной волны. Этот метод анализа сложных волн носит название метода Фишер-Хиннена.
Обратимся к рис. 3. 8, на котором изображен один период сложной волны, протекающий в отрезок времени О — Z. II шало координат устанавливаем в точке, в которой волна н юходит через нуль. Разделим О—Z на п одинаковых частей
57
(п представляет порядок интересующей нас гармоники) и нанесем в точках деления ординаты PQ и RS. Найдем алгебраическую сумму этих ординат; Для этого измерим их в известном масштабе и сложим, причем ординаты вверх от OZ будем считать положительными, а вниз от OZ— отрицательными. Эта сумма может быть выражена уравнением
Sv—n (ап +а2я+°3п ' • • ) !3)
Рис. 3. 8. Графический анализ сложной волны.
где: п—порядок определяемой гармоники,
ап—ордината n-й гармоники в точках О, Р или R,
а,,п—ордината в этих точках гармоники порядка 2п, и т. д.
Можно показать, что всякая гар
моника, не кратная п, не входит в алгебраическую сумму ординат в точках О, Р и R. Продолжая анализ, строим второй ряд ординат n-й гармоники, смещенный по сравнению с предыдущим рядом ординат на угол 90° для n-й гармоники (или на угол л/2п для основной частоты).
На рис. 3. 8 этот второй ряд представлен ординатами TU, VW й XY. Их алгебраическая сумма
s2=n (ьп +ь7п+ь3п. . . ) (3. 14)
где: п—порядок определяемой гармоники
&л—ордината n-й гармоники в точках Т, V или X
bin—ордината в этих точках гармоники порядка 2п, и т. д.
Из уравнений (3. 13) и (3. 14) видно, что для определения ап и Ьп (по которым можно определить амплитуду и фазу п-й гармоники) нужно знать величины а и b для высших гармоник. Таким образом прежде всего необходимо задаться наибольшей величиной п, соответствующей порядку наивысшей принимаемой во внимание гармоники. Задавшись Пш„ и, принимая, что «гптах, b2ntn&x, aSnmax, &3nmax и т. д. равны нулю, получаем из приведенных уравнений овИш.и &„гаах- Далее, пользуясь этими же уравнениями, не представляет труда определить ап и Ьп для гармоники любого порядка (при условии п/пгаах) Так как ап и Ьп являются ординатами n-й гармоники в точках кривой смещенных между собой на 90°, то амплитуду n-й гармоники Ап можно определить из уравнения
(3- 15)
Фазный угол ап для n-й гармоники 1
1 Под этим углом подразумевается угол сдвига гармоники по отношению к началу координат.
58
a„=arctg-^- (3. 16
причем an положителен, если он откладывается влево от начала координат О.
После определения величины всех гармоник можно подсчитать и величину основной частоты. В точке О сумма ординат основной частоты и ординат всех гармоник равна нулю, откуда
О1 = — (o2+tzs+a4 . . .) (3.17)
где ордината основной гармоники в точке О и а2, as—ординаты второй, третьей гармоник в той же точке.
В точке L, соответствующей углу тс/2 (для основной частоты), ордината LM представляет алгебраическую сумму основной частоты и гармоник в этой точке. Следовательно, величина ординаты основной частоты (сД в точке L
C1=LM-(c2+c,. . .) (3.18)
где с2, с3—ординаты различных гармоник в точке L.
Зная и с1г определим амплитуду основной частоты
А^у/а^ + с^ (3. 19)
и фазный угол основной частоты
ах = arctg (3. 20)
Из вышеприведенного описания видно, что графический метод анализа становится весьма сложным, если волна имеет много гармоник. Другое неудобство этого метода состоит в том, что для анализа необходимо располагать очень аккуратно записанной осциллограммой волны. Обычный тип осциллограмм с толстой линией записи не дает точных результатов.
Таким образом применение графического метода анализа волны ограничивается теми случаями, когда гармоники волны малого порядка и когда имеется отчетливая и тонкая осцил* лограмма волны.
3. II. МЕХАНИЧЕСКИЙ АНАЛИЗ СЛОЖНЫХ ВОЛН;
Пусть перо или кончик карандаша совершает сложное движение, представляющее собой сумму движений, сообщаемых ему несколькими отдельными механическими источниками различных частот, амплитуд и фаз. Если карандаш касается бумажной ленты, двигающейся перпендикулярно движению карандаша, то на ленте получается след сложной волны, соответствующей указанной сумме движений. Для вычерчивания таких кривых строятся сложные механизмы. Несколько передаточных колес соединяются механически таким образом, что они могут
59
вращаться с угловыми скоростями относящимися как 1:2:3... и в то же время каждое из них для обеспечения возможности изменения фаз отдельных компонент может быть смещено по отношению к другому. Каждый элемент механизма состоит из подвижного штифта, укрепленного в щели диска так, что амплитуда может меняться от нуля (когда штифт находится в центре диска) до максимума (когда штифт находится на краю диска). Система передач сообщает одновременно алгебраическую сумму отдельных амплитуд перу, зачерчивающему сложную кривую, представляющую сумму различных составляющих, соответствующих установке отдельных элементов механизма. Некоторые механизмы подобного типа строятся с 30 и даже 40 элементами и дают возможность вычерчивать кривые сложной волны, имеющей соответственно до 30—40 гармоник.
Описанное механическое устройство позволяет по заданным амплитудам и фазам отдельных гармоник построить форму суммарной кривой.
Это устройство можно применить также и для анализа сложной волны. В этом случае приходится подбирать амплитуды и фазы различных возможных гармоник, составляющих анализируемую волну. В результате такого подбора амплитуд и фаз вычерчивается ряд кривых, которые сравниваются с анализируемой кривой. Останавливаясь на кривой, наиболее близкой по форме к анализируемой, и изменяя соотношения амплитуд и фаз, получают новый ряд кривых и вновь сравнивают эти кривые с анализируемой. Метод последовательного приближения применяют до тех пор, пока не получается кривая вполне аналогичная по форме с анализируемой. Амплитуды и фазы, соответствующие различным гармоникам, отсчитываются по положению элементов механизма.
Описанный метод анализа сложной волны требует отчетливой осциллограммы равной по размерам кривой, вычерчиваемой механизмом. Высокая стоимость устройства, а также громадная работа, которую приходится затрачивать для подбора амплитуд и фаз при анализе, заставили отказаться от применения подобных приборов в современных акустических лабораториях.
3. 12. ЭЛЕКТРИЧЕСКИЙ РЕЗОНАНСНЫЙ МЕТОД АНАЛИЗА ВОЛН
Поскольку сложная волна состоит из нескольких простых синусоидальных волн с частотами/i, /2, /3... и т. д., то представ-, ляется возможным с помощью избирательных резонансных контуров выделить любую составляющую и измерить ее в отдельности. Простейшее устройство, которое позволяет это осуществить, схематически показано на рис. 3. 9. Напряжение анализируемой сложной волны подводится к зажимам последовательного резонансного контура, собственная частота которого может изменяться с помощью переменного конденсатора С;
60
Источник слежкой 9ОЛИЫ
Если контур настроен на частоту данной составляющей сложной волны, то сила тока, протекающего через сопротивление R, определяется напряжением этой составляющей и величиной сопротивления.
Если резонансный контур настроить на частоту /л основной составляющей сложной волны, зажимы сопротивления, покажет напряжение этой составляющей, подводимое к зажимам резонансного контура.
При соответствующем выборе величин С и L реактивное сопротивление контура может быть сделано достаточно высоким, так что напряжение на зажимах R для всех составляющих сложной волны, за ис
ключением той, на которую контур настроен, получается незначительным.
то вольтметр, включенный на
* Ламповый вольтметр
Рис. 3. 9. Анализ гармоник сложной волны путем избирательной настройки.
После определения напряжения основной частоты, с по-
мощью конденсатора контур настраивается на частоту второй гармоники и определяется напряжение, соответствующее второй гармонике. Следующее измерение делается для третьей гармо-
ники и т. д., пока не
Источник сложной волны
окажутся измеренными все составляющие.
Если требуется определить общую величину напряжения всех гармоник, то, применяя вместо изображенной на рис. 3. 9 ____ схему, показанную на черт. 3. 10,
Квадратичный вольтметр
Рис. 3. 10. Измерение эффективной суммы гармоник сложной волны.
можно определить эту величину одним измерением. Напряжение анализируемой волны подводится к зажимам последовательного резонансного конту-
ра. К этим же зажимам присоединяется ламповый вольтметр. Если резонансный контур с помощью переменного конденсатора С настроить на основную частоту волны, то полное сопротивление контура для этой частоты будет очень малым, тогда как для всех гармоник оно будет большим. Таким образом на зажимах вольтметра мы получим суммарное напряжение гармоник. Поскольку гармоники в общем случае составляют сложную волну, необходимо измерение их суммарной величины производить прибором, реагирующим на среднее квадратичное значение. При измерении процентного отношения напряжения гармоник к напряжению основной частоты1, в цепь контура включается
1 Согласно привившейся у нас терминологии это отношение называется к.трфактором (Прим. ред.).
61
ключ, а контур настраивается .на основную частоту, При замкнутом ключе вольтмер показывает среднее квадратичное значение напряжения суммы гармоник
К= (3. 21)
где V2, VB, Vt и т. д.—слагающие напряжения второй, третьей и четвертой гармоник.
При разомкнутом ключе вольтметр показывает среднее квадратичное значение напряжения суммы основной частоты и всех гармоник
Vo= ^V\+W+Vs2 (3. 22)
Процентное отношение напряжения суммы гармоник к напряжению основной частоты равно
ЮО % (3. 23)
Из уравнений (3. 21), (3. 22) и (3. 23) видно, что процент гармоник может быть определен из показаний, полученных при замкнутом ключе (Vc) и разомкнутом ключе (Vo), если воспользоваться соотношением
Vc
Общий процент гармоник — XI00 (3. 24)
3. 13. ГЕТЕРОДИННЫЙ МЕТОД АНАЛИЗА ВОЛНЫ
Другой электрический метод измерения гармоник сложной волны основан на гетеродинном принципе и аналогичен методу супергетеродинного приема радиосигналов. В основном гетеродинный метод анализа состоит в наложении, переменной звуковой частоты на комплекс частот, как показано на рис. 3.11, в детектировании частоты биений и в ее измерении, когда переменная звуковая частота находится в определенном соотношении с частотой измеряемой гармоники
Два источника подводятся к соп-
ротивлению г, приключенному к детектору, и усилителю звуковой частоты.
Усилительное устройство состоит из двухкаскадного резонансного усилителя с большой селективностью, контура которого настроены на частоту 10 гц.
Медленно проходя генератором по всему диапазону частот, можно выделить и измерить все гармоники анализируемой волны. Индикатор дает одни и те же показания, как в том случае, когда частота генератора на 10 гц выше частоты гар-
tfcmo чиик с/иж ной волны
Генератор звуковых частот с варьирующей-ся ча'.тошой
Детектор усилитель
Дзиеритель-ный прибор
Анализ гармоник
Рис. 3. 11.
при помощи гетеродинного метода.
62
мопнки, так и в том случае, когда частота генератора на 10 гц токе частоты гармоники.
Если напряжение генератора при всех частотах поддерживается постоянным, а усиление установлено таким, что при биениях частоты генератора с основной частотой анализируемой волны индикатор показывает 100 делений, то шкала индикатора может быть отградуирована непосредственно в процентах гармоник.
Преимущество гетеродинного метода анализа волны перед простым резонансным методом заключается в высокой селективности системы, которая позволяет весьма точно определить величины составляющих сложной волны. При гетеродинном методе частоты отдельных составляющих вне зависимости от их расположения по частотному диапазону могут быть определены с точностью до одного-двух герц. При резонансном же методе измерения можно производить только в ограниченной части диапазона^ звуковых частот, определяемой величинами емкости и индуктивности контура.
3. 14. АНАЛИЗ АПЕРИОДИЧЕСКИХ ВОЛН
Вышеописанные методы анализа электрических волн применимы только при периодических волнах, т. е. при таких волнах, в которых последовательные циклы повторяются и имеют одинаковую форму. В некоторых специальных случаях приходится иметь дело с анализом апериодических волн, как например, при анализе звуков речи. В этом случае описанные
выше электрические методы анализа непосредственно применены быть не могут, вследствие нестационарного характера волн, применение же графических или механических методов
хотя и возможно, но, как указывалось выше, оно требует большой затраты времени и кропотливого труда.
Для обхода этих трудностей Сачия1 разработал фотомеханический метод анализа сложных
Отрезок ленты
Ниноленто
Рис. 3. 12. Анализ апериодических волн.
волн. При этом методе апериодическая функция преобразовывается в периодическую. Последняя же анализируется электрическим путем. Осциллограмма волны, подлежащей анализу, записывается на отрезок кинематографической лен-, ты. Концы этого отрезка склеива-
ются так, что образуется замкнутая петля, которая надевается па два вращающихся барабана, как показано на рис. 3. 12.
1 S а с 1 а, С. F. Journ. Opt. Soc. of Amer., Vol. 9, 1929, p. 487.
63
Петля должна иметь целое число волн, а в месте Соединения концов ленты не должно быть разрыва записи волны. Кроме того, на ленте область, занимаемая записью волны, должна быть зачернена, как показано на рис. 3. 12. Через изготовленную таким образом ленту, вращающуюся с постоянной скоростью, пропускается узкий пучок света постоянной ширины, фукусирующийся на фотоэлементе. Свет, проходящий через ленту, модулируется зачерненной областью ленты, вследствие чего в цепи фотоэлемента возбуждаются переменные электрические токи, форма волны которых аналогична форме волны, записанной на осциллограмме, причем электрические волны получаются периодическими, так как лента непрерывно вращается.
Таким образом, преобразуя апериодическую функцию в периодическую, остается просто анализировать составляющие волны электрического напряжения на выходе усилителя фотоэлемента и по ним определять частоты и относительные амплитуды этих составляющих. При этом приходится принимать во внимание скорость вращения ленты. Возможность изменения скорости вращения ленты может быть использована для уменьшения частотного диапазона’ записанных волн, что позволяет использовать анализаторы с небольшим частотным диапазоном.
Применение фотомеханического анализатора очень ограничено и экономически выгодно только тогда, когда анализируется большое количество апериодических волн. При малом же количестве анализируемых волн целесообразнее применять графический метод.
3. 15. ИЗМЕРЕНИЕ ФАЗЫ
Фазные измерения, возможно, являются наименее важными из рассмотренных в этой главе типов измерений. Весьма редко встречается необходимость в определении сдвига по фазе между двумя периодическими функциями. Поэтому методы измерения фазы мало разработаны. Но поскольку в некоторых специальных случаях все-таки приходится измерять фазы, мы кратко опишем методы, при помощи ' которых можно осуществить эти изме-
Ч? ь\ \ // Проще всего определить фазный
угол между двумя напряжениями, если Рис. 3. 13. их одновременно записать на осцилло-
графическую ленту. Такая осциллограмма показана на рис. 3. 13. Измеряя на этой осциллограмме от-
1 Путем понижения скорости по сравнению со скоростью, имевшей место при записи, частоты записанных волн понижаются, и, наоборот, при повышении скорости—они повышаются.
64
резки а и Ь, получаем фазный угол между волнами х и у (в । радугах)
<? =-£-Х360 (3. 25)
В параграфе 3. 3 было показано, что если два напряжения, немного отличающихся между собой частот, подводятся к управляющим электродам катодной трубки осциллографа, то на экране появляется эллипс, у которого большая и малая оси изменяются по величине. Этот эллипс определяется уравнением 3.5.
Гак как вид эллипса зависит от фазного угла между двумя напряжениями, подводимыми к управляющим электродам трубки, то, очевидно, что катодная трубка может быть использована для измерения фаз. Если два напряжения одной и той же амплитуды и частоты подводятся к трубке катодного осциллографа, то кривая, видимая на экране, согласно уравнению (3. 5) может быть представлена следующим уравнением
_у2+л2— 2ху cosa=«2 sin2 a (3. 26)
где: л, у—координаты точки р на рис. 3. 14
а—амплитуда каждой составляющей напряжения
a—фазный угол между составляющими.
Преобразовывая уравнение (3. 26) в полярные координаты и упрощая, получаем
. г2 — г2 sin 20 cosa=;a2sin2a
(3. 27)
Из рис. 3. 14 при 0=45°
г=1/И
где А—большая ось эллипса. При 0-45°
г='\„В
где В—малая ось эллипса.
Подставляя эти величины в уравнение (3. 27), получаем
Л2 /2 В4- , S2
-4—~4 cosa=T-}--cosa
откуда
cos a_
Д2_ £2
Л2 + В2’
(3. 28)
Гаким образом фазный угол между двумя напряжениями может быть найден с помощью катодной трубки. Для этого 5
5 111 н г ллдная акустика.
65
напряжения подводятся к зажимам управляющих' электродов трубки, измеряется большая и малая оси неподвижного эллипса, получающегося на экране, и, наконец, ио уравнению (3.28) определяется фазный угол между напряжениями.
Величины напряжений, подаваемых на управляющие электроды, регулируются таким образом, чтобы для каждого напряжения в отдельности на экране трубки получались одинаковые амплитуды.
Второе требование, обусловливающее точность измерений, заключается в том, чтобы вся электрическая система не вносила нелинейных искажений, в противном случае получаются искажения формы эллипса, вызывающие ошибки в измерениях.
Другой метод, применяемый для измерения фаз, основан на принципе компенсации каждого неизвестного напряжения другим напряжением той же частоты, фаза которого может произвольно изменяться, а также может быть измерена. Если включить последовательно два источника, имеющие одинаковые амплитуды напряжения и частоты, но противоположные фазы, то ток в цепи, питаемой этими источниками, будет равен нулю. Для определения сдвига по фазе между двумя данными напряжениями, каждое из напряжений в отдельности компенсируется третьим напряжением с варьирующейся фазой. Разность в установке фаз третьего напряжения при о.боих компенсациях и определяет искомый сдвиг по фазе между двумя заданными напряжениями.
Напряжение с переменной фазой можно получить от фазовращателя, состоящего из двух катушек с обмотками, плоскости витков которых взаимно перпендикулярны. Одна катушка фазовращателя имеет большую индуктивность, вторая же — очень маленькую, поэтому ток в катушках сдвинут по фазе примерно на 90°. Обе катушки присоединяются к одному источнику и в каждой катушке устанавливается такой ток, чтобы магнитодвижущая сила по оси катушек была одинакова. При этих условиях магнитные поля в обеих катушках, сдвинутые как в пространстве, так и во времени на четверть периода, дают магнитное поле постоянной индукции, вращающееся с частотой тока, протекающего в катушках. Если внести в магнитное поле третью катушку и начать ее перемещать таким образом, чтобы плоскость витков катушки все время оставалась перпендикулярной к вращающемуся полю, то индуктируемая в катушке э. д. с. останется постоянной, фаза же будет меняться прямо пропорционально углу перемещения катушки. Укрепив катушку на оси с указателем и проградуировав шкалу по углу поворота, можно при компенсации отсчитывать фазный угол непосредственно по шкале. Угол сдвига фаз между двумя напряжениями определится как разность углов, отсчитываемых по шкале при компенсации каждого из измеряемых напряжений.
И)
ГЛАВА IV
ЭЛЕКТРИЧЕСКАЯ АППАРАТУРА ДЛЯ АКУСТИЧЕСКИХ ЛАБОРАТОРИЙ
4. 1. ГЕНЕРАТОРЫ ЗВУКОВОЙ ЧАСТОТЫ
Генератор звуковой частоты является необходимым прибором для всякой акустической лаборатории. Простейший тип генератора звуковой частоты представляет собой электромеханический генератор, состоящий из камертона, звук которого воздействует непосредственно на угольный микрофон. Механические колебания камертона поддерживаются электрическим током, получаемым от возбуждаемого камертоном микрофона.
Камертонные генераторы, обладающие большой стабильностью (абсолютные изменения не превосходят 0,1% номинальной частоты), могут использоваться в качестве вторичных лабораторных эталонов частоты.
Применение камертонных генераторов ограничивается, во-первых, тем, что они дают одну частоту, а во-вторых, тем,, что отдаваемая ими мощность мала, вследствие чего требуется усиление. Практически электромеханические камертонные генераторы применяются не только в качестве вторичных эталонов частоты, но и для питания измерительных мостов в том случае, если измерения производятся на одной частоте.
Более желательным типом генератора звуковых частот для лабораторных работ является ламповый генератор. Если трехэлектродную лампу включить, как показано на рис. 4.1, установивши соответствующие для данной лампы напряжения анода, накала и сетки, то в анодной цепи возникнут колебания,
период которых определится величиной индуктивности L и емко-i ги С анодного контура. Частота генератора изменяется с изменением С, или L, или одновременно С и L, а отдаваемая им мощ-ii >сп. может быть повышена с помощью соответствующего уси
67
лителя до нужной величины. Существует многт других схем генераторов звуковой частоты, однако мы здесь на них останавливаться не будем. Интересующиеся могут найти эти схемы в различных справочниках и учебных пособиях по катодным лампам.
Ламповый генератор более удобен, чем камертонный генератор, так как с помощью переменной емкости и самоиндукции он может давать несколько частот.
Недостатком лампового генератора является то, что его частота не может изменяться, а его отдача зависит от установленной частоты. Генераторы этого типа, несмотря на их недостатки и в настоящее время широко используются в лабораториях, вследствие постоянства их частотной градуировки, а также за отсутствием более совершенных генераторов, которые могли бы их заменить.
Генератор, позволяющий плавно изменять частоту и имеющий постоянную отдачу для частот заданного диапазона, в большинстве случаев является наиболее желательным и удобным типом генератора. При снятии частотных характеристик громкоговорителей и микрофонов, измерении усилителей, трансформаторов и ,во многих других аналогичных случаях такой генератор значительно упрощает и ускоряет процесс испытания. Приведенным требованиям удовлетворяет гетеродинный генератор, в котором детектируются и усиливаются биения двух генераторов высокой частоты, из которых один имеет фиксированную частоту, а частота другого может плавно изменяться.
На рис. 4. 2 показана одна из схем генератора на биениях. Два генератора высокой частоты настроены примерно на частоту 140 000 гц Параллельно контуру генератора с фиксированной частотой включены два конденсатора (грубый и точный), позволяющие установить нуль (нулевые биения). Частота генератора переменной частоты изменяется с помощью «конденсатора биений», емкостью 0,00025 pF, форма пластин которого рассчитана таким образом, что при повороте пластин конденсатора на постоянный угол частота биений изменяется логарифмически. Высокая частота от обоих генераторов подводится к плечам моста, во избежание «затягивания» при низких частотах биений одного генератора высокой частоты другим. Звуковая частота биений детектируется, фильтруется и усиливается. Генератор на биениях позволяет плавно изменять частоту в пределах полосы частот от 1 гц до 12 000 гц и обеспечивает практическое постоянство отдаваемой мощности во всем этом диапазоне. Выше указывалось, что пластины «конденсатора биений» имеют особую форму. Если применить обыкновенный конденсатор, в котором емкость меняется пропорционально углу поворота, то низкие частоты будут занимать очень малую часть шкалы частот, тогда как высокие частоты займут остальную, большую часть шкалы. При обычных измерениях требуется число периодов определять
68
с одинаковой точностью для всех частот, поэтому процент изменения частоты для одного и того же изменения угла поворота роторных пластин конденсатора должен быть постоянным при
30000 о.
Детектор
О О
20000Q
VVX/WAAV
гшт ipf
Генератор Выс част с варьирующейся частотой
20000С
Дроссель иыс чост.
Мит
Генератор Выс. Част, с фиксированной частотой
доогл^
Рис. 4. 2. Схема генератора на биениях.
О'Оигьд Конденс биений
30000Q
всех частотах. Это щим образом:
Дроссель выс. част
Регулировка усиление
Фильтр к. частот 0-12000-
Усилит.
зб. частот
условие выражается математически следую-
d (loge/) dW
(4. 1)
Интегрируя по 6; получаем
loge/=Z\0 + m
(4- 2)
где Н —• угол, на который сдвинуты роторные пластаны 1 — частота биений
т — постоянная.
К — постоянная.
69
Постоянная m может быть определена из уравнения' (4.2), если в него подставить значение частоты при 6 = 0
™=logf/0 (4- 3)
где f„ — частота биений при 6=0.
Аналогично К может бь/ть найдена, если задаться некоторым значением частоты при определенном угле поворота роторных пластин. Например, если/ = частоте биений, которая получается при повороте роторных пластин на угол т радиан, то уравнение (4.2) может быть написано следующим образом
f = g^+loSe /о)
•'It и
logf/_ =A’^+loge/0 (4. 4)
откуда
^=4-">ь-л <4-4>
Частота биений f равняется разности между фиксированной частотой (ft) и переменной частотой (/й)
/-Л-А ' (4. 5)
/в ' ,с ~ <4- 6)
2m р L (C04-Cq)
где Со—’суммарная постоянная емкость, включенная параллельно переменному «конденсатору биений».
Св—• емкость, вводимая при смещении пластин переменного конденсатора на угол 0
L — индуктивность колебательного контура генератора
С@ =КАв (4- 7)
N — постоянная, зависящая от расстояния между пластинами
А& — площадь роторных пластин, оказывающаяся при повороте конденсатора на угол 6 между статорными пластинами.
Согласно рис. 4.3
(о \
(4.8)
О /
а — радиус отверстия в роторных пластинах
г — радиус внешней кривой роторной пластины.
О — угол, при котором измеряется г.
70
Подставляя (4 . в (4.7), а затем в уравнение (4.6), заменяя
и, наконец, подставляя результат в уравнение (4.5), получаем
а Со Т N
(4- Ю)
Подставляя (4.10) в уравнение (4.2) и преобразовывая его, получаем
(4. 11)
Диференцируя последнее уравнение по 6 и решая относительно г, получаем:
Л 4/<Л/2Л0|от 2
„И-Лв+“1’
(4- 12)
Уравнение (4 . 12) представляет собой общее выражение для г как функции 0. Постоянные К, М, N, и а определены выше и их численные значения могут быть вычислены для конкретных случаев расчета генератора.
Генератор на биениях, переменный конден- / Ч-д ч. сатор которого имеет роторные пластины, г-----------
рассчитанные согласно уравнению (4.12), должен обладать частотной характеристикой i, Рис 4 3 Форма ротор-показанной на рис. 4.4. Рассеяние электроста- пых пластин „конден-тического поля между конденсаторными пла- сатора биений^ для ге-стинами, вообще говоря незначительное; име- неРат0Ра на биениях-ет важное значение при малых углах и нарушает на низких частотах прямолинейную зависимость частоты от угла поворота конденсатора. Небольшим добавочным подрезыванием роторных пластин можно компенсировать влияние электростатического рассеивания и таким образом эмпирическим путем выпрямить характеристику (рис. 4.4) на низких частотах. Генератор с линейной шкалой, позволяющей устанавливать частоты по всем диапазоне с одинаковой точностью, можно дополнить по-
1 Понимая под частотной характеристикой ' зависимость частоты биений <>| угла поворота роторных пластин переменного конденсатора.
71
^автоматическим устройством, непосредственно записывающим частотные характеристики электроакустической аппаратуры на полулогарифмической бумаге. Такое устройство описано в разделе 4.3.
Рис. 4. 4.
4. 2. УСИЛИТЕЛЬ ЗВУКОВОЙ ЧАСТОТЫ
К усилителю низкой частоты, применяемому для акустических измерений, пред’являются весьма высокие качественные требова
ния. Он должен усиливать без искажения все частоты слы-шимого диапазона. Наиболее известная схема усилителя, которая позволяет избавить от частотных искажений, это —
схема на сопротивлениях с емкостной связью. Схема входа усилителя должна быть приспособлена к рабочим условиям, например, если к усилителю приключается конденсаторный микрофон, То вход усилителя должен иметь схему, показанную на рис. 4.5. Так как конденсаторный микрофон имеет весьма большое внутреннее сопротивление, то подводящие проводники должны быть короткие, так как длинные проводники, обладающие большой емкостью, уменьшают чувствительность микрофона. Сопротивление входа усилителя должно быть очень высоким — порядка 10—20 мегом, в противном случае чувствительность микрофона на низких частотах благодаря большому внутреннему сопротивлению будет мала. Средняя величина собственной емкости конденсаторного микрофона обычно порядка 200 y-p-F; таким об-
Конденсатор иый микра-
Рис. 4. 5. Схема соединения конденсаторного микрофона с входом усилителя.
разом внутреннее сопротивление ми-крофона при частоте 60 гц больше 16 мегом, поэтому при малом сопротивлении цепи сетка-нить лампы, большая часть электродвижущей силы, развиваемой в микрофоне, теряется в самом микрофоне. Переходной конденсатор (рис. 4.5) во избежание появления шума должен иметь весьма малую утечку.
Усилители, не рассчитанные для работы от конденсаторного микрофона, обычно имеют на входе повышающий трансформатор с входным со
противлением 250 или 500 ом. Максимально допустимый коэфи-циент трансформации трансформатора зависит от типа лампы и величины распределенной емкости обмоток трансформатора. Применяя секционированную «галетную» вторичную обмотку
72
трансформатора и некоторые типы ламп, можно увеличить пол-; ное сопротивление вторичной обмотки до 200 000 ом, не понижая заметно чувствительности на высоких частотах.
Во многих случаях для работы удобно пользоваться трехкаскадным усилителем с входным сопротивлением 250 ом Если такой усилитель применяется с конденсаторным микрофоном, то желательно иметь предварительный каскад усиления, смонтиро-
Рис. 4. 6. Схема линейного детектора.
Входное напряжение в вольтах
Рис. 4. 7. Характеристика линейного детектора.
ванный вместе с‘ микрофоном и имеющий на выходе понижающий трансформатор. Полное сопротивление вторичной обмотки выходного трансформатора предварительного усилителя должно быть согласовано с полным сопротивлением входа трехкаскадного усилителя.
Если усилитель низкой частоты используется в качестве измерительного усилителя, то он должен иметь на выходе какой-либо прибор, показывающий величину усиленных сигналов. Включенная на выходе усилителя вакуумная термопара позволяет измерять среднее квадратичное значение сигнала, что является в некоторых случаях весьма удобным. Однако отсчеты, производимые с помощью термопары, занимают много времени, так как работа термопары основана на нагревании спая двух разнородных металлов, на что требуется определенное время. В большинстве случаев более удобным измерительным прибором является ламповый вольтметр и в особенности ламповый вольтметр с линейной шкалой, т. е. такой вольтметр, у которого анодный ток лампы прямо пропорционален измеряемому напряжению. Схема лампового-вольтметра с линейной шкалой, рабо
тающая весьма удовлетворительно, показана на рис. 4.6. В основном схема состоит из триода, поставленного в детекторный режим. Измеряемое напряжение через микроамперметр подается па анод лампы. Ток в лампе течет только в продолжении поло
73
жительного полупериода волны. Среднее значение тока отсчитывается по показаниям стрелки микроамперметра. Установлено, что •если лампа работает в качестве диода, то при малых подаваемых напряжениях не получается линейной зависимости между подводимым напряжением и анодным током лампы. Однако, подавая на сетку лампы положительный потенциал, можно так подобрать постоянные схемы, что линейная зависимость сохранится для всего диапазона измеряемых напряжений. Экспериментальная градуировка лампового вольтметра, имеющего .постоянные, указанные на рис. 4.6, приведена на рис. 4.7.
Рис. 4. 8. Различные схемы корректирования частотных характеристик усилителя.
На страницах этой книги мы не можем входить в детали проектирования усилителей, однако имеется ряд вопросов, на которых необходимо вкратце остановиться. В некоторых случаях практики усилители должны обеспечивать возможность корректировать частотные искажения, вносимые другими частями
74
системы. На рис. 4.8 показаны схемы четырех основных типов коррекции, комбинируя которые, можно получить желаемую частотную характеристику. Схема (а) дает возможность поднять низкие частоты усилителя, как показано на кривой (а). Конденсатор, включенный последовательное с сопротивлением в цепь анода, увеличивает полное сопротивление на низких частотах, и таким образом увеличивает коэфициент усиления, определяемый величинами г , и С (гр — внутреннее сопротивление лампы). Для коэфициента усиления можно написать следующее выражение
__1
А=К —...........- (4. 13)
+ j^C+rP
Присоединяя сопротивление г2 к зажимам конденсатора С, мы достигнем того, что усиление на самых низких частотах несколько уменьшится и частотная характеристика пойдет, как показывает пунктирная кривая (а). Подбирая постоянные, можно получить желаемую кривую в пределах, показанных на рис. 4.8. В цепь анода, как показано на схеме, для отвода постоянной слагающей анодного тока может быть включена индуктивность. Индуктивное сопротивление должно быть большим по сравнению с другими сопротивлениями цепи. В противном случае соотношение 4.13 нарушается. -
Схема (й) аналогична (а), но в ней вместо конденсатора С включена индуктивность L, вызывающая под’ем на высоких частотах, как показано на кривой Ь. Коэфициент усиления в этом случае определяется следующим уравнением
А=К-
ri+jioL+Гр
(4- 14)
Присоединяя сопротивление т2 к зажимам L, мы уменьшим усиление на крайних высоких частотах, как показывает пунктирная кривая (Ь).
Схема (с), приведенная на рис. 4.8, дает возможность уменьшить усиление на низких частотах. Если сопротивление г2 в несколько раз больше сопротивления анодной цепи предыдущей лампы, то напряжение, подаваемое на сетку лампы,
г Г 9
е_= К -г-------=—
(4- 15)
Это напряжение уменьшается с уменьшением частоты, как пока-1ывает сплошная кривая (с) на рис. 4.8. Если конденсатор за-шуптировать сопротивлением rlt то усиление на крайних низких частотах несколько увеличивается, как показывает пунктирная кривая (с). В этом случае напряжение на сетке лампы
75
е —к__________h________
8 r , 2 + 1 + («ЗСГ1)2
(4. 16)
Последняя схема (<f) дает возможность уменьшить усиление на высоких частотах. Она аналогична схеме (с), но в ней вместо конденсатора включена индуктивность. Если сопротивление г, отключено от индуктивности L, то напряжение на сетке лампы
> — Д'____—'2
8 Vrf + w2£2
(4. 17)
Это напряжение уменьшается с увеличением частоты, как показывает сплошная кривая (с/). Если индуктивность ,1 зашунтиро-вать сопротивлением i\, то усиление на крайних высоких частотах несколько увеличивается, как показывает пунктирная кривая (d).
В этом случае напряжение на сетке лампы
е -- К___________________
£* rt (соЛ)2 4- jwLr-P
Г2 + 7? Т(^£)г
Применяя в отдельности или комбинируя описанные выше четыре схемы, можно получить желаемую форму частотной ха рактеристики усилителя.
4. 3. ПОЛУАВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ СНЯТИЯ ЧАСТОТНЫХ ХАРАКТЕРИСТИК ЭЛЕКТРОКАУСТИЧЕСКОЙ АППАРАТУРЫ
Исследование электроакустической аппаратуры сильно упрощается, если применять непрерывную запись частотных характеристик. Способ снятия частотных характеристик по точкам слишком кропотлив и продолжителен, кроме того он не точен, так как в силу необходимости пропускаются целые полосы частот, в которых могут проявляться присущие исследуемой аппаратуре особенности. В разделе 4.1 описан генератор на биениях, у которого зависимость частоты от угла поворота конденсатора, представленная на графике с полулогарифмической сеткой (рис. 4.4), имеет вид прямой линии. Авторы построили такой генератор. Ось ротора «конденсатора биений» этого генератора механически связана с барабаном, на котором укрепляется лист полулогарифмической бумаги. Барабан вращается вместе с бумагой с такой скоростью, что записывающее перо автоматически находится на абсциссе, соответствующей частоте генератора. Движения же записывающего пера в направлении оси ординат управляются механической передачей, связанной со стрелкой измерительного прибора на выходе усилителя, при этом ординаты, отмечаемые на бумаге пером, прямо пропорциональны напряжению
76
на входе усилителя. Фотография всей установки приведена на
рис. 4.9.
На левой стороне фотографии виден кожух зубчатой передачи, связывающей ротор переменного конденсатора с осью барабана, на которой надето переставное резиновое колесо. Последнее может быть сцеплено с регистрирующим барабаном, на котором укрепляется полулогарифмическая бумага.
Движения записывающего пера управляются системой передач, связанной с вспомогательной стрелкой, которая устроена таким образом, что следует за движениями стрелки измерительного прибора, включенного на выходе усилителя. Усилитель виден на правой части фотографии. Его вход соединен с выходом ленточного микрофона, установленного на стойке. Конденсаторный микрофон, смонтированный вместе с однокаскадным уси-
Рис. 4. 9. Полуавтоматическая установка для снятия частотных характеристик аппаратуры.
лителем, виден па нижней полке стола. Сопротивление выхода .чак конденсаторного, так и ленточного микрофонов — 250 ом. Входное сопротивление усилителя также 250 ом. Усилитель может применят!,ся как для усиления микрофонных токов, так и в качестве чувствительного вольтметра для многих лабораторных целей.
Прежде чем производить запись частотной характеристики какого-либо аппарата нужно установить на генераторе самую низкую частоту того частотного диапазона, в котором предполагается производить измерения. Лист полулогарифмической бумаги с логарифмической частотной шкалой укрепляется на барабане, а барабан устанавливается так, чтобы записывающее перо лежало па частоте, соответствующей частоте, установленной на генераторе. Выход генератора соединяется с испытуемым аппаратом,
77
микрофонный ток усиливается усилителем, выходное напряжение которого регистрируется записывающим прибором.
Включением кнопки на боку ящика вся установка пускается в ход. Записывающий барабан начинает вращаться, а частота генератора начинает постепенно увеличиваться. Вспомогательная стрелка при этом движется, следуя за отклонениями измерительного прибора, включенного на выходе усилителя.
Если частота генератора плавно меняется, а напряжение, подаваемое генератором на испытуемый аппарат, все время остается постоянным, то отдача испытуемого аппарата на различных частотах непрерывно наносится в линейном масштабе1 по ординатам листа бумаги, укрепленного на записывающем барабане. После того, как будет пройден весь частотный диапазон, частотная характеристика испытываемого аппарата окажется автоматически записанной на бумаге.
1 Так как у большинства электроакустических аппаратов в пределах передаваемого частотного диапазона имеют место значительные изменения отдачи, то линейный масштаб для отдачи оказывается часто неудобным. Это заставляет прибегать к логарифмическому масштабу для отдачи, при котором большие изменения отдачи могут быть уложены на небольшом отрезке бумаги с сохранением одинаковой точности отсчета как для больших, так и для малых значений отдачи.
„Логарифмирование" напряжения н современных установках осуществляется при помощи так называемого логарифмического вольтметра, в котором обычно применяются лампы с переменной крутизной. К сожалению, авторы не упоминают об этом приборе, имеющем в настоящее время широкое применение в практике не только научно-исследовательских, но и заводских лабораторий. (Прим, ред.)
я f>
ГЛАВА V
МИКРОФОНЫ
5. 1. ВВЕДЕНИЕ
Начало исследования акустических систем было положено-работами Белла (Bell). Эти работы должны быть отнесены к выдающимся достижениям техники.
В марте 1876 г. Беллу впервые удалось осуществить передачу звуков речи на расстояние при помощи электрической энергии. Эта дата является началом целого ряда работ по акустическим системам, в которые включились тысячи исследователей.
Всякая звукопередающая система состоит из двух основных элементов: аппарата, преобразовывающего звуковую энергию в электрическую, и аппарата, преобразовывающего электрическую энергию в звуковую. Эти аппараты называются электро-акустическими преобразователями.
Основные принципы работы применяющихся в настоящее время различных электроакустических преобразователей были известны еще несколько десятков лет назад. Однако, благодаря слабой чувствительности этих преобразователей их применение для целей передачи стало возможно только с появлением ламповых усилителей.
Применение катодной лампы резко изменило основные требования, пред’являемые к электроакустическим преобразователям, и практически все развитие современных акустических систем обусловлено применением катодных ламп. Большинство преобразователей, рассматриваемых в ©той книге, непосредственно или косвенно связаны с ламповыми усилителями.
Мы начнем изучение электроакустических преобразователей с рассмотрения микрофонов.
Микрофон является электроакустическим преобразователем, в котором акустическая энергия преобразовывается в электрическую, при этом электрическая волна соответствует по форме воспринимаемой акустической волне. В настоящей главе рассматриваются наиболее распространенные типы микрофонов и описы-н ются развитие этих типов за последние годы.
79
Звуковая волна характеризуется, как- указано в главе I, периодическими изменениями давления и периодическими изменениями скорости колебания частиц среды. Эти возмущения воздействуют на микрофон. Отдаваемая микрофоном электрическая энергия соответствует колебаниям среды.
Микрофоны, отдача которых соответствует колебаниям давления среды, называются микрофонами давления. Микрофоны же, отдача которых соответствует скорости колебания частиц среды, называются микрофонами скорости.
Согласно рассмотренным в главе II электроакустическим аналогиям, микрофон давления в акустической системе аналогичен вольтметру в электрической цепи, а микрофон скорости аналогичен амперметру. В настоящей главе мы рассмотрим микрофоны давления, микрофоны скорости и, наконец, комбинацию того и другого типа микрофонов.
Ц. МИКРОФОНЫ ДАВЛЕНИЯ
5. 2. УГОЛЬНЫЕ МИКРОФОНЫ
Диафрагм
Рис. 5. 1. Обычный угольный микрофон.
Угольные зерно
Прокладка аз фальца
Действие угольного микрофона основано на свойстве угольного контакта изменять свое сопротивление в зависимости от оказываемого на него давления. Для эффективной работы микрофона его сопротивление должно быть чувствительно к малым смещениям диафрагмы, имеющим место при звуковых давлениях, возбуждаемых человеческим голосом.
Благодаря своей высокой чувствительности угольный микрофон является единственным типом микрофона, применяющимся в коммерческой телефонии, где чувствительность более важна чем качество, определяющееся степенью равномерности отдачи и шириной диапазона частот.
В таких высококачественных системах, как радиовещание, или запись звука на кинопленку, вопрос о передаче широкой полосы частот, напротив, играет исключительную роль.
Приспособление угольных микрофонов для высококачественных систем сильно
уменьшает их чувствительность, однако эта чувствительность все же остается больше чувствительности высококачественных микрофонов других систем, поэтому в некоторых случаях угольному микрофону отдается предпочтение.
Простейший тип угольного микрофона показан на фиг. 5.1. Он состоит из металлической чашечки цилиндрической формы, наполненной угольными зернами, обычно изготовляемыми из антрацита. Прокладка из какого-либо мягкого материала предохраняет зерна в металлической чашечке от высыпания.
80
Угольны'е зерна имеют электрический контакт с диафрагмой и чашечкой. При смещении диафрагмы изменяется давление между зернами в чашечке, в результате чего изменяется переходное сопротивление от одного зерна к другому, а следова-п пли) изменяется соответственно и сопротивление между чашечкой и диафрагмой.
Для изображенной на рис. 5.2 схемы угольного микрофона мы примем, что при малых смещениях сопротивление микрофона изменяется пропорционально смещению диафрагмы. Тогда гок в цепи микрофона
" Qi * fei
Рис. 5.2. Схема включения одностороннего угольного микрофона.
/= —- (5. 1
г 4 hx sin cot
где:
е — напряжение батареи
г - сопротивление цепи, когда х=0 х — амплитуда смещения диафрагмы h — постоянная микрофона <•) 2к/, где f— частота.
Разлагая уравнение (5.1) в ряд, получаем
I—---- (1— sin ——j—smW-) ... j (5. 2)
Ч V Ге0 e0 /
г. е. сумму, состоящую /из /постоянной слагающей, основной частоты, равной частоте колебаний диафрагмы, и бесконечного ряда гармоник. Предположение, что сопротивление между контактами зерен изменяется равномерно, следуя за смещениями диафрагмы, не всегда соответствует действительности. Однако, при большом числе зерен (порядка 3000 на микрофон) это условие практически выполняется. В угольных микрофонах 'часто наблюдается уплотнение зерен с образованием комков, в результате чего чувствительность микрофона сильно падает. Другим неблагоприятным фактором является изменение чувствительности при изменении положения микрофона. В новых типах микротелефонов компании Белла1 эти недостатки устранены путем изменения всей конструкции микрофона. Вышеописанный микрофон относится к типу так называемых микрофонов прямого действия; его подвижная диафрагма не только передает акустические силы на угольные зерна, но также является элек-। родом. В современных моделях угольного микрофона оба элек-грод;| неподвижны, а диафрагма изолирована от угольных зерен HiiiKiiM слоем лака.
1 .lunes, W. С. and А. Н. Inglis. Bell Sys. Tech. Jour., Vol. XI, No. 2 ;> ) III
П Принлиднья акустика.
81
Частотная характеристика микрофона, имеющего ненатянутую диафрагму и одну камеру с угольными зернами, приведена на рис. 5.3. Неравномерность характеристики показывает, что диафрагма колеблется не как одно целое, а частями, разделенными узловыми неподвижными линиями.
В угольном микрофоне для получения равномерной частотной характеристики должна быть обеспечена независимость ве
Рис. .5.3. Частотная характеристика угольного микрофона при постоянном звуковом давлении, равном одному бару в свободном поле; О до — 1 ев разомкнутой цепн. Сопротивление микрофона = 100 ом.
личины смещения диафрагмы от частоты. Если диафрагма микрофона натянута, то механическое полное сопротивление для частот ниже резонансной представляет собой реактивное сопротивление упругости. Для этих частот постоянное звуковое давление вызывает постоянное смещение диафрагмы. Чем сильнее натянута диафрагма, тем выше ле-
жит её резонансная частота (ниже которой чувствительность микрофона постоянна) и тем ниже чувствительность микрофона. Чтобы избавиться в угольных микрофонах от четных гармоник (см. уравнение 5.2), применяются микрофоны диференциального типа. Высококачественный диференциальный угольный микрофон имеет сильно натянутую диафрагму, с обеих сторон которой расположены камеры с угольными зернами. Конструкция такого микрофона показана на рис. 5.4. Для создания воздушного демпфирования с задней стороны диафрагмы помещена демпфирующая пластина, имеющая бороздки и отделенная от диафрагмы узкой воздушной щелью. Задняя камера с угольными зернами заключена в демпфирующую пластину, передняя же укреплена в перемычке. Поверхности дюралюминиевой диафрагмы, соприкасающиеся с угольными зернами, для обеспечения хорошего
контакта между зернами и диафрагмой, позолочены.
Резонансная частота микрофонов описанного типа обычно лежит между 5000 и 8000 гц. При отсутствии демпфирующей пластины амплитуда на резонансной частоте была бы значи-
Изолирующая втулка
ДЛмлфиоующае пластина с кольцевыми канавками
диафрагма
Угольный зле кт род
Угольные зерна
5. 4. Конструкция дифе-ми-
Рис. ренциального угольного крофона.
82
н льно больше, чем амплитуда на частотах, лежащих ниже ре и шанса. Применяя же надлежащим образом рассчитанную демп-ф и рующую пластину, можно сильно уменьшить резонансный пик и, таким образом, обеспечить равномерность частотной характеристики микрофона в широкой полосе частот. Частотная харак-и'ристика диференциального угольного микрофона приведена на рис. 5.5.
Нормальная схема включения этого микрофона представлена па рис. 5.6. Внутреннее сопротивление микрофона—обычно около 200 о,я (по 100 ом для
каждой половины). Такое сопротивление обеспечивает возможность передачи на большие расстояния по обычным линиям без заметного затухания или частотных искажений. Таким образом микрофон может быть расположен на большом
Рис. 5. 5. Частотная характеристика диференциального угольного микрофона при постоянном звуковом давлении на диафрагме, равном одному бару; Одб 1 в в разомкнутой цепи. Сопротивление каждой половины микрофона -- 100 ом.
расстоянии от усилителя.
Если обе половины микрофона идентичны и засыпаны одинаковым угольным порошком, то
они имеют и одинаковые
Рнс. 5. 6. Схема включения диференциального угольного микрофона.
характеристики. Различие же в деталях или неидентичность сборки обеих половин может вызвать различие в их характеристиках. При полной симметрии диференциального микрофона, развиваемая им э. д. с. свободна от гармоник. Поэтому важно добиться равенства токов в обеих половинах микрофона.
Качество передачи диференциального угольного микрофона и конденсаторного микрофона примерно одинаково. Угольный • микрофон требует меньшего усиления, однако сфера его применения ограничивается высоким уровнем шумов. Шумы эти значительно больше тех, кото рых можно было бы ожидать от тепловых колебаний в зернах. Полагают, что они вызываются нагрева
нием бесконечно малых контактов между зернами.
5.3. КОНДЕНСАТОРНЫЙ МИКРОФОН
Действие конденсаторного микрофона основано на изменении емкости конденсатора. Конденсаторный микрофон за послед.
8
ние десять лет считался стандартным типом микрофона для высококачественных передающих систем. И только лишь за последние годы появились микрофоны, обладающие лучшими характеристиками. Современная электроакустика, можно сказать, ведет свое начало от конденсаторного микрофона, разработанного Венте Ч
лтп пт>
>е e
е0
Рис. 5. 7. Обычная схема конденсаторного микрофона.
изменения напряжения на что в некоторый момент
В основном конденсаторный микрофон состоит из тонкой диафрагмы, отделенной узким’ воздушным промежутком от неподвижной пластины. Электрическая схема конденсаторного микрофона приведена на рис. 5.7. 'Колебания диафрагмы микрофона, происходящие под влиянием звуковых волн и сопровождающиеся изменениями емкости микрофона, вызывают соответствующие зажимных сопротивлениях ге . Примем, емкость
С =Сп+с. е еО el
।
sin Hit
(5. 3)
отсутствии звукового давле-
максимальном смещении диа-
где:
С — емкость микрофона при ния на диафрагме
С— изменение емкости при
фрагмы, вызываемом внешним приложенным давлением 2л/ и /—частота.
cl
<u
Для непи рис. 5.7 можно написать следующее уравнение б?0 — rei= }CJ Utt
Подставляя уравнение (5.3) в уравнение (5.4) и диференцируя, получаем
(C,e + C ]sin <»f) re +(1 +reCHwcos nt) i —
—e С <o ‘cos Mt = 0 о el
Решением этого уравнения является
(5. 4)
(5. 5)
sin (w/4- ®j) —
ге
----- ---------- sin + %)i
V[(11Се^+4^,] [(IICg(t<o)2J-r‘-J
члены высшего порядка (5.
i Wente, E. C. Phys. Rev., July, 1917, p. 39.
arctg 'eV c<’o e
rp^arctg^— o, e
Для получения напряжения основной частоты, соответствующего частоте изменений емкости, т. е. без гармоник, величина С i должна быть мала по сравнению с С^. При этом условии напряжение на зажимах сопротивления
^^el<е
е rei sin (wf+?i)
Сео |/
Последнее уравнение показывает, что со стороны электрической схемы конденсаторный микрофон можно рассматривать как генератор с электродвижущей силой
/Се1\
е0 (yr- sin (5. 8)
\ е° J
и внутренним сопротивлением = ^'/(jeo <°-
Это обстоятельство учитывается при градуировке микрофона. Для конденсаторного микрофона желательным является получение независящего от частоты отношения напряжения на выходе микрофона к звуковому давлению, действующему на диафрагму, или, иначе говоря, независимости от частоты отношения изме нения емкости к звуковому давлению. Поэтому механическое полное сопротивление системы должно быть реактивным сопротивлением упругости. В этом случае при постоянной приложенной силе амплитуда колебаний диафрагмы остается постоянной для всех частот.
Если диафрагма микрофона натянута, то механическое полное сопротивление для всех частот ниже резонансной, практически представляет собой реактивное сопротивление упругости, следовательно, чтобы получить с этой простой системой равномерную частотную характеристику нужно сдвинуть резонансную частоту за пределы передаваемой полосы частот. Это сопровождается однако сильным понижением чувствительности. Получение боль того натяжения диафрагмы ограничивается пределом упругости ее материала. Венте1 2 и Крендал2 показали, что тонкий воздушный слой между диафрагмой и неподвижной пластиной
1 Wente, Е. С. Phys. Rev>., May, 1922, р. 498.
2 Crandall, 1. В. Phys. Rev., June, 1918, p. 449.
84
85
стояния, олагодаря уменьшению ность микрофона.
увеличивает упругость и вязкость, т. е. затухание системы. В первых моделях конденсаторных микрофонов применялась гладкая неподвижная пластина. Упругость тонкого воздушного слоя позволила уменьшить натяжение диафрагмы, а затухание этого воздушного слоя позволило уменьшить амплитуды при резонансной частоте. Однако упругость воздушного слоя является функцией частоты и становится очень малой при низких частотах, следовательно амплитуда колебаний диафрагмы при постоянной величине приложенной силы должна увеличиваться ,с уменьшением частоты.
Крендал1 показал, что упругость можно сделать практически независящей от частоты путем увеличения расстояния между диафрагмой и неподвижной пластиной. Но увеличение этого рас-емкости, уменьшает чувствитель-
При устройстве соответствующей величины бороздок на неподвижной пластине, как показано на рис. 5.8, можно достигнуть постоянства упругости, не увеличивая расстояния 'между диафрагмой и неподвижной пластиной, и получить затухание, в достаточной мере уменьшающее амплитуду колебания диафрагмы при частоте резонанса. Если затухание велико, то резонансная частота может быть оставлена в пределах передаваемой полосы
частот. При этом чувствительность микрофона значительно увеличивается. Амплитуда колебаний диафрагмы определяется уравнением
fM_______
х . j j rM jam - иС юС
где:
f..— прилагаемая сила ЛI
W:-2к/ f— частота — сопротивление рассеяния воздушного слоя т— эффективная масса диафрагмы — гибкость воздушного слоя
C^2 — гибкость диафрагмы.
Двмафирумщая
е кет новыми канавками Mr и лиру к тая вяулаа
Рис. 5, 8. Конструкция конденсаторного микрофона
Экран ___Диафрагма уЬка, в ыровни ваюикгя аавленин — __Мсмпенсирующап
йиафрагмо
(5. 9)
1 Crandall. Vibrating Systems and Sound. D. Van Nostrand, p. 28
86
Для получения максимальной чувствительности, т. е. максимального смещения диафрагмы на единицу приложенной силы, необходимо, как это видно из уравнения, сделать упругость возможно малой, а также уменьшить до минимума величину механиче-i кого активного сопротивления, лишь бы оно обеспечивало в до-i r;ri очной степени затухание для резонансной частоты. Малая упругость и большое затухание могут быть получены при малой
массе, так как в этом случае для получения заданной резонансной частоты требуется меньшая упругость, а необходимое затухание достигается при меньшем механическом активном сопротивлении. Из этих соображений диафрагма микрофона делается из алюминиевого сплава. Про-
Рис. 5. 9. Частотная характеристика конденсаторного микрофона. Электродвижу-
изводственные трудности щая сила в вольтах при постоянном зву-с уменьшением толщины новом давлении иа диафрагме, равном од-диафрагмы, конечно, уве- ному бару: ° дб ~ 1 е--
личиваются. Практически толщина диафрагмы в существующих микрофонах берется от 0,025 до 0,05 мм. ,
Конструктивное оформление конденсаторного микрофона по-
казано на рис. 5.8, а его частотная характеристика приведена на рис. 5.9.
Рис. 5. 10. Конденсаторный микрофон с усилителем.
Емкость конденсаторного микрофона лежит между 200 и 400 рр F. Большое внутреннее сопротивление микрофона заставляет располагать его близко к усилителю, как это видно из рис. 5.10. Схема усилителя показана на рис. 5.11. Если является необходимым отделить микрофон от усилителя, то для соеди
87
нения их нужно применять специальный кабель с малой емкостью. Включение соединительного кабеля вводит добавочное затухание, не внося при этом частотных искажений. В этом легко убедиться, рассматривая емкость кабеля, включенную между
।
<- ISO -Д . «А +90
Рис. 5. 11. Схема усилителя конденсаторного микрофона.
точками А и В рис. 5.11. Практическая невозможность разделения микрофона и усилителя является большим недостатком конденсаторного микрофона. Другим недостатком этого микрофона является возникновение шумов в больших сопротивлениях, включенных в цепь сетки лампы. Благодаря высокому поляризую щему напряжению между отсыревшими частичками пыли, находящимися на деталях цепи сетки, образуются маленькие вольтовы дуги. Поэтому для обеспечения нормальной работы конденсаторного микрофона и предотвращения появления больших шумов, детали цепи сетки следует содержать в сухом и чистом состоянии.
5. 4. МИКРОФОН С ПОДВИЖНОЙ КАТУШКОЙ
Микрофон с подвижной катушкой состоит из диафрагмы и жестко прикрепленной к ней катушки, расположенной в магнитном поле. Напряжение,- индуктируемое при движении катушки в магнитном поле,
е=В1х (5. 10)
где В — индукция
1 — длина проводника катушки
х — скорость катушки.
Из уравнения (5.10) следует, что диафрагма микрофона, обладающего в данной полосе частот равномерной чувствительностью, должна иметь для всех частот этой полосы одну и ту же величину скорости на единицу давления действующей звуковой волны.
88
Лиасрра/ло
Рис. 5. 12. Конструкция микрофона с подвижной катушкой.
(ин обеспечения этого в механической системе должно преобладать активное сопротивление. Как известно, скорость поритно пропорциональна сопротивлению, поэтому если активное сон|ютивление является преобладающим, то для получения П1.ЦЧЖОЙ чувствительности или большой величины скорости на < шпицу действующей силы. должны быть уменьшены до минимума величины упругости,) массы и сопротивления. Реактивное (ошротивление упругости диафрагмы при низких частотах и реактивное сопротивление массы диафрагмы при высоких частотах должны быть компенсированы другими элементами устройства. При проектировании электрических фильтров передача широкой полосы частот достигается при помощи комбинации нескольких резонансных контуров.
Венте и Турас1 применили этот принцип при проектировании механической системы микрофона с подвижной катуш
кой. Разрез микрофона Венте и Тураса показан на рис. 5.12. Элементы этого микрофона состоят из:
mf> — масса диафрагмы и катушки
^AfO — гибкость закрепления диафрагмы
г И0—механическое активное сопротивление закрепления
СМ1 — гибкость воздушной полости под диафрагмой
Г7И2 — механическое активное сопротивление щели Sj пг8— эффективная масса щели
C^2 — гибкость об‘ема воздуха в полости магнита
ГMO f'MO . А ААЛА J IL» » ГМЗ — механическое активное сопротивление щели S2
у V W — v v V v v ||
L7X 77?» f *” Oj * •I L/ \ \ - са ms— эффективная мас-щели S., С..„ — гибкость об'ема С Л43
yVVVvVVv' s Си, = 5S С,э са /н4- эффективная мас-воздуха в трубке Т
Рис. 5. 13. Эквивалентная электрическая схема механической системы микрофона с подвижной катушкой. г...— механическое ак-Л44 тивное сопротивление труб- ки Т.
Электрическая схема, эквивалентная механической системе, показана на рис. 5.13. Подставляя соответствующие величины для
1 We iite and Th и г as. Jour. Acous. Soc. Amer., Vol. Ill, No. 1, p. 44.
89
различных сопротивлений, можно определить для этой цепи ско
рость диафрагмы под действием силы,
Рис. 5. 14. Частотная характеристика микрофона с подвижной катушкой при постоянном звуковом давлении на диафрагме. Кривая А вычислена теоретически. Кривая В получена экспериментально.
равной единице.
Частотная характеристика микрофона, полученная Венте и Турасом, представлена кривой А рис. 5.14 (вычисленные значения) и кривой В того же рисунка (получена экспериментально). Небольшая величина вну треннего сопротивления микрофона позв о л я ет
удалять его на большое расстояние от усилителя, не внося при этом заметного затухания или частотных искажений. На
входе усилителя .применяется повышающий трансформатор, приводящий полное сопротивление микрофона к сопротивлению цепи сетка-нить усилительной лампы.
5. 5. ЛЕНТОЧНЫЙ МИКРОФОН ДАВЛЕНИЯ
Ленточный микрофон давления состоит ческой ленточки, подвешенной в магнитном
рону ленточки свободно воздействует окружающая атмосфера, а другая ее сторона нагружена некоторым акустическим сопротивлением (рис. 5.15). Напряжение, генерируемое в ленточке, определяется уравнением
из легкой металли-поле. На одну сто-
е~—В1х (5. 11) <!-----
Рис. 5. 15. Конструкция ленточного ми-
крофона давления.
где В — магнитная индукция
/ — длина ленточки
х — скорость ленточки.
Ленточка микрофона, обладающего в данной полосе частот постоянной чувствительностью, должна иметь для всех частот этой полосы одну и ту же величину скорости на единицу давления действующей звуковой волны.
Другое требование относится к фазе.
90
1 огдннение ленточного микрофона давления с описанным IHOKI скоростным микрофоном и получение в результате комбинированного микрофона, имеющего одностороннюю* направленное и., возможно только в том случае, если скорость колебания uni очки микрофона давления совпадает по фазе с давлением нуконой волны для всех частот передаваемой полосы.
Скорость системы с одной степенью свободы определяется уравнением
где:
т— сумма духа гд/ —сумма точки
массы ленточки и массы соколеблющегося воз-механического активного сопротивления лен-и сопротивления реакции среды
См—гибкость закрепления ленточки р—звуковое давление А — площадь ленточки f—частота.
Если отношение к реактивному сопротивлению велико, то скорость X совпадает по фазе с давлением р. Способ при помощи которого осуществляется выполнение последнего условия, заключается в том, что активное сопротивление, на которое нагружена одна сторона ленточки, делается большим по сравнению с реактивной слагающей. Система, которую мы будем рассматривать, изображена на рис. 5.15. „
Механическое реактивное сопротивление, соответствующее массе ленточки
ZMRP XMRP~i^m
где т— масса ленточки.
Рассмотрим реакцию воздуха на ленточку. Давление на расстоянии а от элементарного источника (глава 2.10)
dS . iuit — ika
р — /роц е е ' -'1 шах
(5- 14)
р плотность воздуха
где:
91
f—частота
и-—скорость на элементарной поверхности dS
t— время
k- 2тс,;Х
X— длина волны.
Давление в данной точке ленточки, соответствующее ско-fa>t
рости ленточки И|пах^
. _ „ е Jot f f dS_ e -Jkat (5 ,15)
' 4r. max J J • 7
где at — радиус-вектор, направленный по кратчайшему расстоянию от точки 1 до элемента поверхности dS. Для определения силы, действующей на ленточку, нужно выполнить интегрирование согласно (5.15), а затем проинтегрировать полученное давление по .всей открытой поверхности ленточки.
Полная сила
'шчи е Г Г I ( dS •.
f = — ma*---------• t/S' ХГ^~} x (5. 16)
Механическое полное сопротивление
fMA /c
ZMAP~ rMAP '* ,XMAP~ u ejwt Л5’ 17)
Интегрирование для определенной ленточки было выполнено приближенно, путем разделения поверхности ленточки на отдельные элементы и затем выполнения интегрирования.
Для обеспечения возможности свободных колебаний ленточки, последняя подвешивается таким образом, что не прикасается к полюсным наконечникам магнита. Полное механическое сопротивление образующейся щели выражается уравнением
Z MSP ~ rMSP + XMSP = rMSP + /ш,п8 $ • 18)
где:
rMSP—'механическое активное сопротивление щели
XMSP—' механическое реактивное сопротивление щели т$ — эффективная масса воздуха, перемещающегося в щели.
Очевидно, что в соответствии с заданными условиями, акустическое активное сопротивление, приложенное к задней стороне ленточки, должно быть велико по сравнению -с рассмотренными выше полными сопротивлениями. Идеальной формой та
92
кого акустического активного сопротивления является длинная груба. Акустическое активное сопротивление бесконечной трубы
_ 42 ~ А
(5. 19)
где А — площадь трубы.
Слишком длинные трубы неприменимы из практических соображений. Однако, можно осуществить сравнительно короткую грубу, представляющую для частот выше определенной низкой частоты акустическое активное сопротивление. Этого можно достигнуть, если наполнить короткую трубу звукопоглощающим материалом. Рассмотрим, сперва как частный случай, двухметровую трубу с сечением в 1,9 кв. см, закрытую с одного конца и не наполненную звукопоглощающим материалом.
Рис. 5. 16. Эквивалентная электрическая схема трубы, заполненной комками войлока.
Рассеяние энергии в такой трубе мало, а отражения от конца вызывают стоячие волны. Задача состоит в том, чтобы путем наполнения трубы звукопоглощающим материалом внести сильное затухание для отраженных волн и получить систему, имеющую чисто активное сопротивление постоянной для данной полосы частот величины. Оказалось, что применение комков войлока дает вполне достаточный эффект. На рис. 5.16 показана заполненная звукопоглощающим материалом труба и эквивалентная такой системе электрическая схема. Если войлока много и он плотно заложен, то Мл и гА велики и величина Z Ар оказывается большей, чем 42/А. Если же войлока мало и он свободно расположен, то М. и г. малы, а г. велико. В этом случае затухание системы оказывается небольшим, что обусловливает большие отражения от конца трубы. Соответствующим подбором постоянных можно получить систему, акустическое активное сопротивление которой г ,рВ точкеZAPравно 42/А. Очевидно, что при очень низких частотах в системе преобладает емкостное сопротивление. Последнее определяется об’емом трубы. Полное сопротивление
93
трубы может быть измерено при помощи моста для измерения акустических сопротивлений, описанного в главе XL
Механическое активное сопротивление рассмотренной трубы,.
приведенное к ленточке
ГМРР ~
(в) Система с двумя трансформаторами
( с) Эквивалентная схема
Рис. 5. 17.
АрА\ (5. 20)
где-
Ар— сечение трубы
А„— площадь ленточки.
Напряжение, развиваемое микрофоном, подается на сетку лампы через повышающий трансформатор, как показано на рис. 5.17А Если является желательным отделение микрофона от усилителя,, то применяются два трансформатора, первый для приведения сопротивления микрофона к величине, соответствующей сопротивлению линии, и второй для приведения сопротивления линии к сопротивлению цепи сетка-нить усилительной лампы, как показано на рйс. 5.17 В. Эквивалентная схема такой системы представлена на рис. 5.17 С. Теперь опре делим действие электрической системы на механическую систему.
Сила, необходимая для генерирования тока i в эквивалентной схеме, рис. 5.17. (5.21).
fM ВИ (5. 21)
где В — магнитная индукция I — длина ленточки.
Из уравнений (5.11) и (5.21) определим механическое полное сопротивление реакции электрической депи
_ fM_ (Biy ZMeP ~ х zT
(5. 22)
1 — длина ленточки.
где zp—-электрическое полное сопротивление на входе. Механическое полное сопротивление zMp реакции электриче
94
(кой цени и механическое полное сопротивление ZMSR щели между ленточкой и полюсными наконечниками по сравнению с другими сопротивлениями системы в общем малы, в особенности тля низких частот.
Скорость ленточки определяется уравнением
л рА
ТМРР 1 ГМАР^ JXMRPVJXМАР ‘
Зависимость величин] г мрр, гмдр, xMRp и хмдр, а также (разного угла между х и /? от частоты приведены на рис. 5. 18.
[Электродвижущая сила, генерируемая при колебаниях лен-гочки, определяется из уравнений (5.23) и (5.11). Зависимость ее ог частоты показана на рис. 5.19. На том же рис. 5.19 нанесены и точки, соответствующие экспериментально найденным величинам.
5. 6. ПЬЕЗОЭЛЕКТРИЧЕСКИЕ МИКРОФОНЫ
В пьезоэлектрических суждения электродви-
жущей силы при деформации кристаллов, имеющих Пьезоэлектрические свойства. Величина этой э. д. с., как известно, пропорциональна деформации. Очевидно, что пьезомикрофон, обладающий независящей
микрофонах используется явление воз-
от частоты чувствительностью, должен иметь при всех частотах одинаковую величину амплитуды кристалла на единицу звукового давления.
В наиболее чувствительных пьезоми-крофона-х применяются кристаллы сегнето-ной соли.
Главным недостатком этих кристаллов
Рис. 5. 18. Характеристики составляющих полного сопротивления механической системы ленточного микрофона давления.
Кривая А х t (механическое реактивное соп-ротивление ленточки).
,; В — х (механическое реактивное сон-МАР ротивление массы соколеблю-щегося воздуха).
„ С =г. (механическое активное соп-Мар' ротивление излучения).
„ D - г (механическое аюпнное соп-мрр ротивление крепления ленточки).
„ /: = ф (фазный угол между давлением
плоской звуковой волны и скоростью ленточки).
пьезоэлектрических свойств от темпера-
является зависимость их
|\ |>ы. При температуре выше 38° С чувствительность их станции пн настолько малой, что микрофоны практически совсем пе-
95
решают работать. В настоящее время разработано и построено несколько типов пьезоэлектрических микрофонов х. У некоторых из них звуковое давление действует непосредственно на кристалл, у других на диафрагму, связанную с кристаллом. Существенным недостатком пьезомикрофонов является их высокое внутреннее сопротивление, ограничивающее возможность большого удаления микрофона от предварительного усилителя.
5 7. ИСКАЖЕНИЕ ЗВУКОВОГО ПОЛЯ МИКРОФОНАМИ ДАВЛЕНИЯ
Звуковое давление представляет собой скалярную величину. Следовательно, точный прибор для измерения давлений не должен обладать на-
Рис. 5. 19. Частотная характеристика ленточного микрофона давления. Напряжение, развиваемое микрофоном на зажимах нагрузки сопротивлением 250 ом при звуковом давлении 1 бар', О дб = 1 в.
-----------— теоретическая
. . . — измеренная с помощью дис-
ка Рейли.
правленностью. При применении в качестве измерительного прибора какого-либо, микрофона давле н и я, размеры . последнего должны быть малы по сравнению с длиной звуковой волны. Описанные выше микрофоны давления состоят из диафрагмы или ленточки, заключенной в корпус микрофона. Эти микрофоны искажают звуковое поле, в которое они внесены, благодаря своим габаритам, а также благодаря наличию у них углубления
перед диафрагмой. Искажения, вызываемые габаритами микрофона, впервые были рассмотрены Крендаллом и Макензи 1 2, они являются функцией направления звука по отношению к диафрагме и функцией частоты. Искажения же, вызываемые резо-
нансом углубления, в общем не зависят от направления звука, но зависят от соотношения между размерами углубления и длиной
волны.
Для получения независимости чувствительности микрофона от направления звука размеры микрофона должны быть уменьшены настолько, чтобы отражение и разность фаз были незначительны. Кроме того необходимо Избавиться и от углубления перед диафрагмой микрофона.
• В следующем разделе описываются указанные два типа искажений звукового поля.
1 Sawyer, С. В. Proc. I. R. Е., Vol. 19, р. 2022, 1931.
2 Crandall, I. В. and D. МасКе nzle. Phys. Rev., March, 1922.
96
Формы существующих микрофонов как представляющих отдельную конструкцию, так и оформленных конструктивно в одно целое с предварительными усилителями, обычно настолько неправильны, что теоретически трудно определить для них дифракцию звука.
Экспериментально найдено, что дифракция звука, вызываемая гелом правильной формы (для которой дифракция может быть подсчитана), и телом неправильной формы — одинакова, если проекции этих форм на падающую волну и об’емы тел одинаковы.
б. 8 ДИФРАКЦИЯ ЗВУКОВЫХ ВОЛН 'ВОКРУГ ТВЕРДОЙ СФЕРЫ
Дифракция плоских звуковых волн вокруг препятствий сферической формы впервые была исследована Рейли х. Впоследствии математический анализ был развит Стюартом2, приложившим его к явлениям дифракции звука вокруг человеческой головы.
Баллантайн3 также дополнил теорию, найдя решения в форме рядов функции Бесселя, порядок которых равен половине нечетного целого числа. Давление на сфере для различных поляр
ных углов, вычисленное по уравнению Баллантайна, показано на рис. 5.20. Эти данные могут быть использова-
ны для подсчета действительного увеличения звукового давления, получающегося на диафрагме микрофона давления при различных углах падения звука. При этих подсчетах микрофон заменяется эквивалентной сферой.
5. 9. РЕЗОНАНС УГЛУБЛЕНИЯ В МИКРОФОНАХ
Конструктивной особенностью конденсаторных и диференциаль-
Рис. 5. 20. Изменение давления по поверхности твердой сферы радиуса R в зависимости от угла а, вызываемое дифракцией плоской звуковой волны.
пых угольных микрофонов является наличие углубления цилин-(рической формы, дном которого служит диафрагма. Резонанс
и'ого углубления аналогичен резонансу трубы, закрытой с одного конца. При резонансной частоте давление у закрытого конца.по-
1 Rayleigh. Theory of Sound, Vol. II, 8. 291.
• Stewart, G. W. Phys. Rev., 1911, p. 467.
• Ballantine, S. Phys. Rev., Dec., 1928.
7 Hi iBftAfivi’ituf акустика.
97
думается значительно большим по сравнению с давлением в свободном пространстве. В главе 2.13 мы вывели величину отношения давления у закрытого конца цилиндрического углубления к давлению в свободном пространстве. Эта величина определяется выражением
( C0S kl ~ 1Г ХА sin kl )L| ("f АД sin2 kl <5; 24)
где:
p-—давление в свободном пространстве
р.,_—давление на диафрагме
Л—-длина волны
R — радиус углубления
I—высота углубления
t“A — акустическое активное сопротивление поршня в бесконечной стене
— акустическое реактивное сопротивление поршня в бесконечной стене.
На рис. 5.21 нанесены полученные расчетным путем кривые, показывающие увеличение давления на диафрагме микрофона, изображенного на рис. 5.8, обусловленное дифракцией и резонансом углубления для звука, падающего по нормали к плоскости диафрагмы. ,
Рис. 5. 21. Рис. 5. 22.
Рис. 5. 21, А. Увеличение давления на круглой диафрагме, вызываемое резонансом углубления. В. У величения давления на дифриме, вызываемое явлением дифракции. С. Суммарное увеличение, соответствующее кривым А и В. Точки показывают величины давления, порченные экспериментально.
Рис. 5. 22. Характеристика направленности конденсаторного микрофона.
Кривая А вычислена по уравнению (5.24), кривая В построена на основании данных рис. 5.20. Кривая С, вычисленная по данным кривых А и В, иллюстрирует отношение давления на диафрагме к давлению в свободном пространстве. Нанесенные на рис. 5.21 точки представляют собой отношение э. д. с. микрофона при постоянном давлении в свободном звуковом поле
98
к ->. д. с. при постоянном звуковом давлении на диафрагме. Эти полученные экспериментально данные, как видно, хорошо совпадают с вычисленными теоретически. Характеристика направленности конденсаторного микрофона приведена на рис. 5.22. Кривые рис. 5.22 показывают, что для точек, удаленных от оси (т. е. ли» пии нормальной к диафрагме), отдача микрофона сильно зависит от частоты. Этим недостатком обладают микрофоны давления,
размеры которых соизмеримы с длинами волн частот передаваемой полосы. Для измерительных целей применяются конденсаторные микрофоны малых размеров \ которые не вызывают искажения звукового поля до 6000 гц. Ленточный микрофон давления, описанный в главе 5.5, благодаря сквозной конструкции полюсных наконечников не имеет направленности. Характеристики направленности ленточного микрофона, приведенные на рис. 5.23, показывают, что чувствительность это-
г ч ст оси
5. 23. Характеристика направленности ленточного микрофона давления.
•то микрофона Для любого Направления звука практически не зависит от частоты до 6000 гц.
5. 10. НАГРУДНЫЙ МИКРОФОН
Для усиления речей, хроникальных записей, а также в некоторых случаях практики широковещания оказалось удобным применять легкие микрофоны, которые можно прикреплять на грудь говорящего. Основное преимущество нагрудного микрофона по сравнению со стационарным микрофоном заключается в том, что при работе с последним говорящий должен постоянно находиться вблизи места установки микрофона и быть обращенным к микрофону лицом, тогда как при применении нагрудного микрофона говорящий может свободно поворачиваться и двигаться в студии, на сцене и т. п., не вызывая этим изменения громкости передачи, обусловленного изменением расстояния от микрофона. Попытаемся установить некоторые специальные тре бования для нагрудного микрофона.
Основным требованием, пред’являемым к микрофону, является требование равномерной чувствительности в определенной полосе частот.
Для нормального микрофона это означает, что отношение напряжения, развиваемого микрофоном на сетке первой лампы.
1 Harrison, Н. С. and Р. В. Flanders. Bell Sys. Tech. Jour., Vol. X! No. 3, p. 451.
7*
99
к звуковому давлению в свободном поле должно быть.постоянным и не должно .зависеть от частоты.
Известно, что тембр человеческого голоса меняется при по. вороте головы говорящего по отношению к слушателю. В нормальной радиовещательной практике не стремятся избавиться от этого эффекта. Таким образом слушатель как бы переносится на место, занимаемое микрофоном. Некоторые частотные искажения, получающиеся при повороте головы говорящего, только увеличивают натуральность передачи. Иначе дело обстоит в тех практических случаях, для которых предназначен нагрудный микрофон. В этих случаях прежде всего стремятся получить максимальную артикуляцию. Артикуляцию в значительной мере определяет форма частотной характеристики, ширина передаваемой полосы частот и ее расположение в частотном спектре. Приняв в качестве эталона для сравнительных артикуляционных испытаний частотную характеристику, получающуюся при расположении говорящего вплотную перед микрофоном, и зная характеристику направленности человеческого голоса, можно определить необходимую компенсацию для получения той же частотной характеристики при применении нагрудного микрофона в его нормальном положении. Стюарт теоретически исследовал характеристики направленности человеческого голоса. Человеческий голос оказался эквивалентным источнику звука малых размеров, расположенному на поверхности сферы с диаметром в .19 см. ' ,
Давление на поверхности сферы, развиваемое удаленным источником звука, рассматривалось в разделе 5.8. Применяя теорему взаимности Гельмгольца, можно определить давление, развиваемое в некоторой точке пространства источником звука, расположенным на сфере. Теорема взаимности Гельмгольца гласит:. «если в об’еме, наполненном воздухом, частично ограниченном телами конечной протяженности, а частично неограниченном, из точки А излучаются звуковые волны, то потенциал скорости в точке В по величине и фазе будет таким же, как и потенциал скорости в точке А при перенесении источника звука в точку В». \ Человеческая голова заменяется твердой сферой с источником звука, расположенным на некоторой ее оси, т. е. 6 — 0. Очевидно, что нагрудный микрофон расположен к этой оси под углом 0 =90°. Данные, вычисленные для расстояния от источника звука до микрофона, равного 25 см, показали, что большое различие в частотных характеристиках получается на высоких частотах. На основании этих данны_х можно определить необ ходимую компенсацию для частотной характеристики нагрудного микрофона, которую необходимо осуществить, чтобы получить при применении этого микрофона такой же результат, как и при разговоре вплотную перед микрофоном нормального типа Поскольку размеры нагрудных микрофонов малы, их направлен-йостью, сказывающейся только при очень высоких частотах.
100
свободно можно пренебречь. Нагрудные микрофоны должны быть возможно легкими и- миниатюрными, чтобы не стесняю движений говорящего. В настоящее время применяются нагрудные, микрофоны угольного, ленточного, а также пьезоэлектрического типа. Эти микрофоны отличаются от описанных выше микрофонов тех же типов только чувствительностью и габаритами.
II. МИКРОФОНЫ СКОРОСТИ ИЛИ ГРАДИЕНТА ДАВЛЕНИЯ
Рис. 5. 24. Упгощенная сис- -тема электродинамического Микрофона, в механическом сопр тивлении которой преобладает реактивное сопротивление массы.
5. 11. ВВЕДЕНИЕ
Как уже указывалось выше, высококачественный микрофон должен иметь равномерную чувствительность в Широкой полосе? частот, т. е/ отношение Отдаваемой им мощности к силе звука звуковой волны должно быть постоянным, независящим от частоты. В электродинамических микрофонах это можно осущест-вить при помощи нескольких методов, зависящих от выбранного тифа'механической системы. В настоящей главе рассматриваются электродинамические микрофоны, в которых поведение колеблющейся истемы эквивалентно поведению чистой массы.
Для электродинамического микрофона требование равномерной чувствительности означает, что отношение электродвижущей силы микрофона к давлению или к скорости частиц звуковой волны должно в широкой полосе частот оставаться постоянным. Рассмотрим систему рис. 5.24, состоящую из проводника, длиной 7, находящегося в равномерном магнитном поле с индукцией В и двигающегося Со скоростью х. Возбуждаемая в проводнике электродвижущая сила
е,-В1х
В электродинамических микрофонах э. д. с. определяется скоростью механической системы; поэтому для электродинамического микрофона отношение скорости механической системы к давлению или скорости частиц падающей звуковой волны не должно зависеть от частоты.
Рассмотрим колебания механической системы под действием периодической силы. В микрофоне периодические силы звуковой волны действуют на механическую систему; Всякая механик веская система обладает трением, массой и упругостью. Однако, в некоторых механических системах один из трех факторов преобладает и в определенной полосе частот определяет характеристику колебаний системы. Выбор преобладающего фактора зависит от природы .сил, воздействующих на механическую си-
101
стему, Например, для механической системы, в которой преобладает масса, скорость определяется выражением
Ьл
jwm
(5. 26)
гле:/^ — периодическая сила
т — масса механической системы
f—-частота.
Чтобы получить постоянную скорость этой системы, нужно приложить силу, величина которой растет пропорционально частоте. Рассмотрим случай, в котором это условие выполняется Давление и скорость частиц как функции потенциала скорости выражаются (см. уравнения 1.7 и 1.6) следующим образом
Р=-Р# (5- 27)
«=Grad? = y<p (5. 28)
Градиент давления определяется уравнением
V/7~— PV-J- (5. 29)
Потенциал скорости звуковой волны может быть выражен
<?=AF (х, у, z) cos k \ct-\-f (х, у, z)] (5. 30)
откуда
—AkcF (х, у, z) sin k [ct+f (х,у, z)J (5. 31)
Из сравнения (5.29) и (5.31) видно, что величина ур пропорциональна частоте. Следовательно, если сила, действующая на механическую систему микрофона, определяется градиентом давления звуковой волны, то эта сила растет пропорционально частоте и условие независимости скорости системы от частоты выполняется.
Для иллюстрации сказанного разберем один пример.
Допустим, что на цилиндр, обладающий массой гп, рис. 5.24, и представляющий собой часть механической системы, воздействуют звуковые волны. Для звуков с длинами волн большими по сравнению с размерами цилиндра, величины средней силы звука для всех точек поверхности одинаковы. Рассмотрим плоскую звуковую волну, распространяющуюся вдоль оси х. Давление в точке х, = Д х/2 (из уравнения 1.22).
p=kc?A sin k (ct— ‘ (5. 32)
где: k = 2тс/Л
A — длина волны
102
5)
с — скорость распространения звука
А— амплитуда потенциала скорости <?
Давление в точке х2=—Дх/2
sin k (ct) (5. 33)
Результирующая сила, действующая на цилиндр, равняется разности сил, приложенных к концам 1 и 2, и определяется выражением
fM~-Q.Skc^A cos (5. 34)
где S—площадь концов 1 и 2.
Если Дх мало, то
fM=S kcpAbx cos (kct) (5. 35)
Это уравнение показывает (при сравнении с уравнением 1.22), что сила, действующая на механическую систему, пропорциональна частоте падающей волны. Скорость механической системы
хДх cos (kct)=skc?A.. к* Sin kd (5. 36)
c jm к ' m '
Таким образом скорость не зависит от частоты, а следовательно не зависит от частоты и отношение э. д. с. микрофона к звуковому давлению. Уравнение (5.36) показывает также, что скорость механической системы, в которой преобладает масса, находится в фазе с давлением или со скоростью частиц упругой среды (см. уравнения 1.18 и 1.22 для х — 0).
Итак, мы рассмотрели в общих чертах действие микрофона градиента давления, в механической системе которого преобладает масса. Примером микрофона подобного типа является ленточный микрофон.
5. 12. ЛЕНТОЧНЫЙ МИКРОФОН СКОРОСТИ
Ленточный микрофон состоит из легкой гофрированной ленточки, подвешенной в магнитном поле, на которую с обеих сторон свободно воздействуют колебания воздуха. При колебаниях ленточки, вызываемых действием звуковых волн, в ней возбуждается э. д. с., соответствующая колебаниям падающей звуковой волны. Отклонения ленточки от положения равновесия обусловливаются разностью давлений, оказываемых звуковой волной на стороны ленточки. Важное примущество скоростного микрофона перед микрофонами давления заключается в том, что он обладает направленным действием, тогда как микрофоны давления направленности не/имеют Ч Исследованы различные типы
1 Строго говоря, микрофоны давления имеют направленность, но только на высоких частотах, при которых длины волн соизмеримы с габаритами микрофона. (Прим. ред.).
103
ленточных микрофонов Д Одной из важных деталей конструкции ленточного микрофона является арматура, окружающая ленточку и являющаяся акустическим экраном. Размеры арматуры определяют длину пути, проходимого звуковой волной от одной до другой стороны ленточки.
На рис. 5.25 показана форма арматуры, окружающей ленточку. Определение для такой формы разности давлений между двумя
Рис. 5. 25. Ленточный микрофон скорости.
сторонами ленточки математическим путем чрезвычайно сложно. Мы примем в качестве основного параметра, определяющего разницу давлений между двумя сторонами ленточки, наикратчайшее расстояние по воздуху между передней и задней сторонами данной части ленточки. Далее мы примем, что разность давлений между двумя сторонами ленточки равна разности давлений между двумя точками звукового поля, отстоящими одна от другой на том же расстоянии 1 2. Таким образом на ленточку микрофона скорости действует разность давлений, соответствующая разности фаз между передней и задней сторонами ленточки. •
Определим для плоской и сферической волны разность давлений между двумя точками в пространстве, отстоящими одна от другой на расстоянии 2 d. -Пусть две точки А и В находятся на расстоянии 2d одна от другой по линии распространения волны. Разность давлений между этими двумя точками для плоской волны.
Др=2АсрД cos (kef) sin (kd) (5. 37)
Для сферической волны давление (из уравнения 1.30)
р~ sin k (ct— r) (5. 38)
где tu =: kc.
1 Olson, H. F. Jour. Soc. Mot. Pic. Eng.u Vol. XVI, No. 6, 1931.
Olson, H. F. Jour. Acous. Soc. Amer., Vol. Ill, No. T, p. 56, 1931.
Olson, H. F. Proc. Inst. Rad. Eng., Vol. XXI, No. 5, p. 655, 193<
2 Точное установление акустического пути между задней и передней сторонами ленточки выходит за пределы нашего анализа. Для случая круглого экрана и плоской звуковой волны разность фаз для нормально падающей волны соответствует половине пути по воздуху между центрами противоположных сторон. Между прочим, на дальнейший анализ и выводы изменение этого расстояния существенно не влияет.
104
Примем расстояние от источника звука до точки А- равным г—д до точки В равным r+d, а также примем, что источник звука и точки А и В находятся на одной прямой линии. При этих условиях разность давлений определяется уравнением
. Г2г ccs k (ct — г) sin (kd)+2d sin к (ct — r) cos (A'd)l s,™
Др^Аюр[------------------------------------—;J (5. 39)
Если d мало,по сравнению с г и kd мало по сравнению с единицей, то уравнение (5.39) принимает вид
tkp^.Awgd [ 2kr cosk {ct ~ У 2 Sln k (c~'-21] (5. 40)
В последних выражениях, для длин волн больших по сравнению с d, величина Др пропорционально частоте. Если сила Д/т действует на механическую систему, в которой преобладает масса, то скорость этой системы при плоской звуковой волне постоянной силы не зависит от частоты. При сферической волне скорость системы является функцией величин 1/г и 1/г2, а также частоты. Если ленточка колеблется в магнитном поле, то напряжение на зажимах микрофона пропорционально скорости колебания частиц звуковой волны. Чувствительность такого микрофона, как это будет показано ниже, и при стоячих волнах пропорциональна скорости колебаний частиц.
Рассмотрим две плоские волны одинаковой амплитуды, распространяющиеся в противоположных направлениях вдоль оси х. Давление из уравнения (1.33)
p=kc$A [sin k (ct — x)+sin k (<?/-(-x)] —
=2kcpA sin (kd) cos (kx) (5. 41) i
Разность между давлениями в двух точках, помещенных в л — b и х + d, определяется выражением
Др=2йср А { sin (kd) [cos k (x —d) — cos/г (x + d)]
=4AcpA sin (kd) sin (kx) sin(/?d) (5. 42)
Скорость частиц для такой системы из уравнения (1.36) и — — 2kA cos (kd) sin kx (5. 43)
Максимумы для Др и для скорости частиц вдоль оси х совпадают. Следовательно, максимальную чувствительность ленточный микрофон имеет в пучности скорости волны. Эти выводы применимы для случая отражения плоской волны от стены. Рассмотрим плоскую волну, падающую на хорошо отражающую стену, расположенную в точке х = 0. Чувствительность ленточного микрофона для всех точек, близких к стене, оказывается
105
равной нулю. Максимум чувствительности имеет место в этом случае на расстояниях (2 п—1) -т- от стены (где п — целое число, а X—длина волны). Максимум же чувствительности микрофонов давления имеет место на поверхности стены и на расстояниях 2 п Х/4 от нее.
Рис. 5. 26. Характеристики составляющих полного сопротивления механической системы ленточного микрофона скорости.
Кривая А—х^ (механическое реактив,.ое сопротивление ленточки).
» В—х (механическое реактивное сопротивление массы соколеб-
Л1/ лющегося воздуха).
С—''MAV (механическое активное сопротивление излучения).
ДР
» D— -р- (отношение разности давлений между двумя сторонами ленточки к давлению в свободном поле).’
„ Е— ф (фазный угол между давлением плоской звуковой волны н скоростью ленточки).
Выражения для мгновенных давлений, действующих на механическую систему микрофона, для двух типов акустических волн выведены выше. Разность -давлений в случае плоской волны для микрофона, показанного на рис. 5.25, представлена кривой D на рис. 5.26. Выведем выражение полного сопротивления - механической и акустической системы микрофона.
Механическое реактивное сопротивление массы ленточки
ZMRV~xMRV=21zfmR 44)
где I — частота,
ат — масса ленточки.
Определим реактивное сопротивление окружающей среды, оказываемое колебаниям ленточки.
Звуковое давление на расстоянии а от элементарного источника ;
р—-.—
* 4~а 1 max
eJ^te-jka
(5. 45)
1С6
Давление в некоторой точке ленточки
efmt f (5. 46)
г 4л max J J «1 v /
где а — радиус-вектор, направленный по кратчайшему пути (по воздуху) от точки 1 до элемента поверхности dS. Интегрирование выполняется для обеих сторон ленточки. Чтобы определить силу, действующую на ленточку, нужно проинтегрировать уравнение 5.46 и затем полученное давление проинтегрировать по поверхности ленточки. При этом нужно принять во внимание сдвиг фаз на 180° между передней и задней сторонами ленточки.
Полная сила
(б-47)
Полное сопротивление
ZMAV^rMAV^jXMAV~~ ^5- 48^
max
Интегрирование выполнялось для отдельных ленточек приближенно. Зависимость от частоты реактивной и активной составляющих полного сопротивления реакции окружающей среды иллюстрируется кривыми графика рис. 5.26. При обычных размерах ленточки и арматуры реактивная и активная составляющие системы в пределах рассматриваемого диапазона частот возрастают при увеличении частоты. Ленточка отделена от полюсных наконечников магнита воздушным зазором порядка нескольких сотых миллиметра. Полное сопротивление этой цели
ZMSP~rMSP^XMSP рМ5Р^1шт8 49)
где f"MSp—механическое активное сопротивление щели
XMSP—механическое реактивное сопротивление щели
—эффективная масса воздуха, перемещающегося в щели.
Полное сопротивление щели шунтируется реактивным сопротивлением массы ленточки. Полным сопротивлением щели можно пренебречь, так как оно обычно велико по сравнению с реактивным сопротивлением ленточки. Важно отметить, что, если полное сопротивление щели соизмеримо с реактивным сопротивлением массы ленточки, то чувствительность микрофона понижается, тогда как его частотная характеристика не изменяется.
107
Выход ленточного микрофона, как показано на рис. 5.17 Л. подается через повышающий трансформатор на сетку лампы. В тех случаях, когда желательно разделить микрофон и усилитель, применяются, как показано на рис. 5.17 В, два повышающих трансформатора, первый из которых приводит сопротивление ленточки к сопротивлению линии, а второй — привб-дит сопротивление линии к сопротивлению цепи сетки-нить лампы. .л-
Эквивалентная схема включения микрофона приведена 'на рис. 5.17 С. .
Выясним влияние электрической цепи на механическую си-1 стему. Электродвижущая сила, возбуждаемая в ленточке ийтФ рофона
е—В1х (5 50)
где: ;
В — индукция
I — длина ленточки
х — скорость ленточки
Для возбуждения тока / в эквивалентной схеме рис. 5.17 С нужно приложить силу
tMe=Bli (5- 51)
Механическое полное сопротивление реакции электрической цепи
w=t=-T (5-52)i
где ze — полное электрическое сопротивление на входе схемы. Почти для всей полосы частот механическое полное сопротивле^ ние реакции электрической цепи мало по сравнению с рассмотренным выше механическим полным сопротивлением. Исключение составляют низкие частоты, при которых эти сопротивления соизмеримы. Используя выражение для механического полного сопротивления системы, можно определить скорость колебания ленточки. При этом механическим сопротивлением реакции электрической цепи и сопротивлением щели между ленточкой и полю сами, как малыми величинами, можно пренебречь.
Скорость ленточки
у. АХр__
ZMRV^MAV
(5. 53)
Выше было установлено, что величины г„П1„ г,,, и Д// MR V МА г практически пропорциональны частоте. Поэтому скорость ленточки х в передаваемой полосе частот практически остается постоянной. .1 . . ’
Электродвижущая сила микрофона
е=В1х=----В1
ZMRV+ZMAV
(5. 54)
Выражение (5.54) показывает, что э. д. с. не зависит от ча-тоты. Напряжение, подводимое к линии, может быть опреде явно из данных электрической цепи рис. 5.17 А.
Микрофон типа, изображенного на рис. 5.25, был отградуирован при помощи диска Рейли. Полученная таким путем частотная характеристика этого микрофона приведена на рис. 5.27, 'вид ее Свидетельствует о том, что выходное напряжение микрофона практически не зависит от частоты, кроме того из рис. 5.27 видно, что теоретически вычисленные данные совпадают с данными, полученными экспериментальным путем,
Рис. 5. 27. Частотная характеристика ленточного микрофона скорости. Напряжение, развиваемое микрофоном на зажимах нагрузки сопротивлением 250 олн при звуковом давлении 1 бар-,О дб=Х в.
— теоретическая ..........— измеренная с помощью диска Рейли.
гем самым подтверждает-
ся справедливость сделанных теоретических выводов. Равномерная частотная характеристика показывает, что микрофон не имеет резонансных систем. Собственный период ленточки ле-
Рис. 5. 28. Кривые, показывающие влияние размеров экрана на отдачу микрофона. Л—для •крапа шириной 15 см, В — для экрана шириной 7,5 см и С — для экрана шириной 2 см
Рассмотренные выше конденсаторные микрофоны в слышимом диапазоне частот имеют минимум два резонанса, а именно: резонанс углубления перед диафрагмой и резонанс диафрагмы.
Для выяснения влияния длины пути по воз' духу между передней и
задней сторонами ленточки была изготовлена арматура различных размеров. Результаты испытаний показаны на
|нк 5.28. Как это можно было предвидеть на основании теорети-п- к их выводов, чувствительность микрофона увеличивается
109
108
с увеличением размеров арматуры. Для некоторой частоты, при которой длина пути по воздуху между передней и задней сто-
то разность давлении между
да
Градусы o"’ett
Рис. 5. 29. Характеристика наврав-, ленности ленточного микрофона скорости.
ронами ленточки становится равной, примерно, половине длины волны, наступает полное отражение, при этом давление на ленточке получается практически в два раза большим, чем давление в свободном пространстве.
Удвоение давления имеет место и для всех частот выше указанной. Так как система при этих частотах работает .как микрофон давления, то сила, действующая на ленточку, становится независящей от частоты, а чувствительность микрофона с возрастанием частоты уменьшается.
В вышеразобранном случае мы полагали, что звуковая волн; падает по направлению, перпендикулярному к плоскости арматуры. При направлении звуковой волны, составляющем угол а с плоскостью арматуры, длина пути по воздуху между передней и задней сторонами ленточки умножается на cos 6. Если 0 = 90е, редней и задней сторонами ленточки при всех частотах равняется нулю и ленточка остается в неподвижном состоянии. Таким образом, характеристика направленности скоростного ленточного микрофона имеет вид косинусоиды. Нужно заметить, что правильная косинусоида получается только при малых размерах арматуры, если же экран имеет относительно большие размеры, то на высоких частотах, при которых размеры арматуры становятся соизмеримыми с длиной волны звука, характеристика направленности искажается; Однако, уменьшение размеров • экрана вызывает уменьшение чувствительно сти микрофона, кроме того, такому
уменьшению кладут предел требования. магнитной цепи, часть которой составляет арматура. Поэтому в практических конструкциях, подобных изображенной на рис. 5.25, приходится в отношении размеров арматуры прибегать к компромиссному решению.
Полученные экспериментально характеристики направленности ленточного скоростного микрофона, приведенные на рис. 5.29, по форме близки к теоретической косинусоидальной форме и практически не зависят от частоты. Поэтому этот микрофон не вносит. частотных искажений, обусловленных зависимостью характеристики направленности микрофона от частоты.
110
Ленточный скоростный микрофон, реагирующий на скорость колебания частиц звуковой волны, является весьма ценным прибором для акустических лабораторий.
Выведем коэфициент отдачи скоростного микрофона для звуков, падающих на микрофон по всем возможным направлениям.
Напряжение на выходе скоростного микрофона для звука, направление которого составляет угол 0 с нормалью к плоскости ленточки
ev—e0 cos О (5. 55)
Для ненаправленного микрофона при звуке, поступающем в любом направлении, напряжение на выходе микрофона
eND (5; 56)
Примем, что ненаправленный микрофон при 6—0 имеет такую же чувствительность, как микрофон скорости.
Коэфициент отдачи скоростного микрофона, определяемый как отношение энергии, развиваемой этим микрофоном под действием звуков, падающих по всем возможным направлениям к энергии, развиваемой в тех же условиях ненаправленным микрофоном, можно выразить следующим образом:
ъ
__^=4л 4ке20 J" cos2 6 sin 0rf0
Отношение =-,—=---------------——т—»----------—4~ (5.57)
Vl<p=4rc 4яе02 3 v ’
Отсюда можно заключить, во-первых, что энергия, развиваемая ленточным микрофоном скорости под действием звуков, падающих на него по всем возможным направлениям, равна одной трети энергии, развиваемой в тех же условиях ненаправленным микрофоном, и, во-вторых, что для получения одинаковой эффективной реверберации передаваемого звука следует скоростной микрофон удалять от источника звука на расстояние в 1,7 раза большее, чем ненаправленный микрофон.
Особенности направленной характеристики ленточного скоростного микрофона оказываются весьма удобными с точки зрения расположения источников звука и в частности расстановки действующих лиц и инструментов оркестра перед микрофоном.
План расположения скоростного микрофона и нескольких источников звука показан на рис. 5.30. Пусть источники 2 и 5 представляют собой #вух говорящих, ведущих между собой собеседование. Так как скоростной микрофон имеет в противоположных направлениях одинаковую чувствительность, то говоря-
111
щие могут быть обращены лицом друг к другу. Микрофоны давления, имеющие диаметр порядка 8 см, не обладают направленным действием для частот ниже 1500 гц, для частот же выше .2000 гц угол, под которым падающие звуковые волны эффективно воспринимаются микоофоном, становится все меньше и меньше.
Чтобы микрофон давления воспринимал одинаково звуки всех частот, источник звука должен находиться в пределах угла 40°, т. е. для получения хороших результатов говорящие должны быть обращены лицом к микрофону и не могут быть обращены лицом друг к другу, как это оказывается возможным при применении скоростного микрофона.
Пусть источники 1, 2, 3 и 4 представляют собой инструменты оркестра.
При применении микрофона скорости, относительная, громкость т исполнителей может регулироваться как путем изменения расстояния от микрофона, так и путем изменения угла между нормалью к плоскости ленточки и линией, соединяющей источник звука с микрофоном. На приведенной диаграмме все источники звука расположены на одинаковом расстоянии от микрофона Источник звука / расположен под углом 45е, а источник 3 расположен под углом '60°. Под действием первого из них на выходе микрофона получим 0,7, а. под действием второго и третьего только 0,5 того напряжения, которое получается от источника 2 при равной мощности источников.
Рис. 5. 30 Использование характеристики направленности ленточного микрофона для установке ия оптимального соотношения уровней передачи отдельных источников звука и их групп, расположенных вокруг микрофона.
Рис. 5. 31. Ленточный микрофон подвешен сверху, в нулевой зоне его чувствительности установлен звукозаписывающей аппарат, в зоне максимальной чувствительности располагается сцена. Воздействие шумов звукозаписывающего аппарата 'уменьшается до нуля.
При применении же микрофона давления относительная громкость различных источников может /регулироваться только путем изменения расстояния от микрофона. Таким образом, в отношении расстановки инструментов оркестра Лоростной микрофон имеет большое преимущество перед ненаправленным микрофоном. На рис. 5.30 источник звука 4, представляющий собой
112
источник нежелательных помех, расположен в нулевой зоне и микрофоном не воспринимается. Отраженные звуки от всех источников, в том числе и от источника 4, конечно, воспринимаются микрофоном, но их энергия сравнительно невелика. В качестве примера можно указать на шумы с’емочного аппарата, которые часто записываются ненаправленными микрофонами. Влияние этих шумов при применении скоростного ленточного микрофона, путем соответствующей ориентировки микрофона по отношению к с’емочному аппарату может быть сведено до нуля. На рис. 5.31 дан пример такого расположения. Ленточный микрофон подвешен сверху и ориентирован таким образом, что с’емочный аппарат оказывается в нулевой зоне микрофона, тогда как исполнители — в зоне его максимальной чув-с твительности.
5. 13. .ТЕРМОМИКРОФОНЫ
Действие термомикрофона основано на явлении изменения сопротивления накаленной проволоки при изменении температуры, вызываемом колебаниями частиц звуковой волны.
В результате действия звуковой волны на накаленную проволоку получается: во-первых, изменение сопротивления проволоки па постоянную величину, во-вторых, переменные изменения сопротивления с частотой звуковой волны и, в-третьих, переменные изменения сопротивления с двойной частотой звуковой волны. Для целей измерений, наиболее интересно первое изменение, позволяющее превратить силу звука непосредственно в постоянный электрический ток. Для увеличения чувствительности проволока обычно помещается в горлышке резонатора Гельмгольца, настроенного на частоту измеряемой звуковой волны. Изменение сопротивления проволоки, определяемое мостом Уитстона, пропорционально квадрату скорости колебания частиц звуковой волны.
При использовании термомикрофона, как преобразователя акустической энергии в электрическую, для уменьшения нелинейных искажений приходится создавать постоянный поляризующий поток воздуха, так как при отсутствии такого потока отношение второй гармоники к основной частоте получается недопустимо большим. Постоянный поток воздуха может быть получен от конвекционных потоков, 'вызываемых нагретой прово-чокой. Чувствительность термомикрофона сильно падает с увеличением частоты. Кроме того, термомикрофон подвержен влиянию внешних воздушных потоков. Таким образом при использовании термомикрофона для передачи звука необходимо создать поляризующий воздушный поток, защитить микрофон от внешних воздушных потоков и применять фильтр, корректирующий частотные искажения микрофона. Все эти трудности, свя-чшпые с эксплоатацией термомикрофона, мешают применению
Н При акустика. » 113
его в качестве преобразователя. Термомикрофоны описаны Танкером и Пэрисом 1 и Вестом 2.
III. КОМБИНИРОВАННЫЙ МИКРОФОН ДАВЛЕНИЯ И СКОРОСТИ
5. 14. ОДНОСТОРОННЕ НАПРАВЛЕННЫЙ МИКРОФОН
В предыдущих главах (5.6 и 5.12) было рассмотрено два типа микрофонов, а именно микрофон давления и микрофон скорости. Выходное напряжение микрофона первого типа пропорционально давлению звуковой волны, тогда как у микрофона второго типа оно пропорционально скорости колебания частиц звуковой врлны.
В колеблющейся под действием звуковой волны ленточке микрофона скорости возникает э. д. с.
ev=- ^(cose) . Bl (5 58)
rMAV'J 'хMAV^ х MRV?
Как показывают кривые рис. 5.18, скорость ленточки, а следовательно и э. д. с. находятся практически в фазе с давлением плоской звуковой волны.
Э. д. с., возникающая в ленточном микрофоне давления е=—----------------------------------- (5. 59)
rMAP+rMRP^] (х МАР+^ MRP'
Рис. 5. 32—34. А—Характеристика направленности ленточного микрофона • скорости е =е cos ©.
V о
В. Характеристика направленности микрофона давления е —е р о.
С. Характеристика направленности комбинированного микрофона SUD =еО (1+CM
Рис. 5. 35. Односторонне направленный ленточный микрофон.
Как показывают кривые рис. 5.1'8 скорость ленточки, а следовательно и э. д. с. находятся практически в фазе с давлением
1 Tucker and Paris. Phil. Trans. Roy. Soc., 1921, p. 389.
2 West. Acoustical Engineering, Pitman, p. 193.
114
плоской звуковой волны. Для 6 =0 при известном подпоре постоянных системы, получаем уравнения (5.58), тождественное е уравнения (5.59). Характеристики направленности микрофонов показаны на рис. 5.32 и 5.33. Если соединить две ленточки последовательно, то э. д. с. комбинации двух ленточек будет
eUD=e/>+e^ cos0 (5.60)
Характеристика направленности такого комбинированного микрофона изображена на рис. 5.34. Она представляет собой кардиоид вращения с осью вращения нормальной к плоскости леи-точки. Комбинированный ленточный микрофон давления и скорости называется односторонне направленным микрофоном. Он представляет собой аналогию комбинации вертикальной и рамочной антенн.1
Модель комбинированного ленточного микрофона показана па рис. 5.35. Ленточка этого микрофона разделена на две части.
Рис. 5. 35 Конструкция односторонне направленного ленточного микрофова.
Одна половина ленточки, работающая как микрофон скорости, открыта с обеих сторон, вторая же половина ленточки, работающая как микрофон давления, одной из своих сторон примыкает
I. Авторы описывают микрофон скорости и комбинированный микрофон ленточного типа. Направленные микрофоны других типов в 1534 г. (год выпуска настоящей книги) еще не были разработаны. В 1935 г. (журнал „Hoch-ln<(|iiciiztechnik und Elektroakustik", В 46 Н. 6), были разработаны микрофон (короыи и комбинированный микрофон конденсаторного типа, обладающие со-iii piiii'iiiio такими же характеристиками направленности, как и соответствующие микрофоны ленточного типа, описываемые в настоящей книге. (Прим, р г я).
h'
115
к трубке. Трубка соединена с змеевиком, заключенным в кожух, как показано на черт. 5.36. Магнитная система комбинированного ленточного микрофона не отличается от магнитной системы ленточного микрофона скорости или ленточного микрофона давления. Полученная экспериментально характеристика направленности комбинированного микрофона приведена на рис. 5.37. 'Она представляет собой кардиоид вращения и сохраняет свою форму
1ST} !SS° гзтГ
0‘
Рис. 5. 37. Характеристика направленности односторонне направленного микрофона при различных часто гах.
вплоть до самых высоких частот. Вид характеристики рис. 3.57 подтверждает правильность выводов, которые можно .сделать из теории микрофонов скорости, давления и комбинированного микрофона.
Расхождения характеристик направленности на высоких частотах обусловливаются прежде всего вышеупомянутой разностью фаз, не позволяющей при такой простой конструкции получить на этих частотах чистую кардиоиду.
Как следует из частотной характеристики одно
сторонне направленного
микрофона, приведенной на рис. 5.38, чувствительность этого микрофона равномерна в широком диапазоне частот. Экспери-
Рис. 38 Частотная характеристика односторонне направленного микрофона. Напряжение, развиваемое микрофоном на зажимах на:рузки сопротивлением 250 ом при звуковом давлении 1 бар; О 06= в.
--------------теоог-тическая >
. —измеренная с помощью диска Рейли.
ментально полученная частотная характеристика очень хорошо совпадает с вычисленной теоретически. Выведем коэфициент от-
116
/Ц1чн односторонне направленного микрофона для звуков, да-, 1.1Ю1ЦИХ на него по всем возможным направлениям, Для звука,.' направление которого образует с нормалью к плоскости ленники угол 0 напряжение на выходе односторонне направлен-' no.ro микрофона ,
eUD =е° <1+cos (5- 61)
Для ненаправленного микрофона при любом направлении' лпука напряжение на выходе микрофона
eND =2е0 (5. 62) ,
Примем, что ненаправленный микрофон и односторонне направленный микрофон имеют одинаковую чувствительность при " = 0.
Отношение энергии, развиваемой односторонне направленным микрофоном, к энергии, развиваемой ненаправленным микрофоном для звуков, падающих по всем возможным направлениям, определяется следующим выражением.
• Отношение
,ср= 4т
о
ср —
?=0 Nl)'-?
2те02 J (1 +cos О)8 sin 0<Z0 о __ 1
16те2о 3
(5.63)
Отсюда можно заключить, во-первых, что энергия, развиваемая односторонне направленным микрофоном под действием звуков, падающих на него по всем возможным направлениям, равна одной трети энергии, развиваемой в тех же условиях ненаправленным микрофоном, и во-вторых, что для получения одинаковой эффективной реверберации односторонне направленный микрофон должен быть удален от источника звука на расстояние п 1,7 раза большее, чем ненаправленный микрофон.
Применяя односторонне направленный микрофон, восприни- мающий без особого ослабления звуки в пределах широкого телесного угла, практически можно обслужить при помощи только одного микрофона любую сцену.
Как видно из рис. 5.37 для звуков, падающих под углом большим, чем 90°, чувствительность микрофона относительно мала. Шумы с’емочного аппарата обычно локализуются именно и этой области пространственной характеристики микрофона. При усилении речей микрофон обычно располагается у рампы п(> шли сцены (у нижних софит). Для этого случая характеристика направленности комбинированного микрофона является
117
-
исключительно благоприятной, так как микрофон, расположенный таким образом, воспринимает звуки, идущие со сцены, и не воспринимает звуков зала.
Итак, комбинированный микрофон обладает хорошей частотной характеристикой, а также односторонней направленностью, являющейся весьма полезным средством для устранения нежелательных шуМО'в и помех. С равным эффектом он может быть использован в звукозаписи, радиовещании и при усилении речей, словом во всех случаях, когда источники звука расположены перед микрофоном, а источники мешающих шумов находятся позади микрофона.
ГЛАВА VI.
ТЕЛЕФОНЫ
6. 1. ВВЕДЕНИЕ
Телефон представляет собой электроакустический преобразо-ппгель, в котором электрическая энергия преобразовывается и акустическую энергию. Форма звуковых колебаний, возбуждаемых телефоном, соответствует форме волны подводимых в нему электрических колебаний.
По принципу работы можно различать три группы телефонов: •лектромагнитные, электродинамические и электростатические гелсфоны.
Изготовляемые в настоящее время электромагнитные телефоны в свою очередь можно подразделить на два типа: в телефонах первого типа электромагнитные силы действуют непосредственно на диафрагму из магнитопроводящего материала, и в телефонах второго типа электромагнитные силы действуют на якорек, механически связанный с диафрагмой.
Изготовляемые в настоящее время электродинамические телефоны также можно подразделить на два типа: в телефонах первою типа подвижной проводник, находящийся в постоянном магнитном поле, механически связан с диафрагмой, а в телефонах второго типа подвижной проводник одновременно служит и диафрагмой.
В настоящей главе рассматриваются типы телефонов, применяющиеся в настоящее время.
о 2. ЭЛЕКТРОМАГНИТНЫЙ ТЕЛЕФОН С ДИАФРАГМОЙ-ЯКОРЬКОМ
Телефон с электромагнитом, действующим непосредственно на диафрагму, изготовленную из магнитопроводящего материала, и.1 । впервые предложен Беллом.
Со времени изобретения Белла телефон в основном мало изменился, но улучшения в отношении применяемых материалов и 1(|>н< грукции деталей позволили повысить его чувствительность.
49
На рис. 6.1 схематически показано устройство двухполюсного телефона с железной диафрагмой, расположенной на близком расстоянии от двух полюсных наконечников постоянного магнита. На полюсных наконечниках надеты катушки с обмоткой из изолированной проволоки, по которой протекает переменный ток.
Постоянный магнитный поток, возбуждаемый магнитом (6.1)
(6. 1)
где М—-магнитодвижущая сила магнита и
Rz— магнитное сопротивление цепи.
Переменный поток, возбуждаемый синусоидальным током zm„v sin w t, протекающим в катушке
4лМ' sin <ot
Фтах
•= я,
(6- 2)
где W — число витков в катушке
1 — ток в катушке в абсолютных единицах
/?2 — сопротивление .магнитной цепи переменному потоку, w—2-/
f — частота
t— время.
Сила, действующая на диафрагму
Г __2(Ф1+Ф2?_
2MNI sin at max . max
81т 4
4-kR-^A ' R^R^A 27t№i2max cos 2oT
R^A
(6. 3)
где А — эффективная
Рис. 6. 1. Двухполюсный телефон.
площадь одного полюса.
Первый и третий члены правой части уравнения (6.3) представляют собой постоянную силу, второй и четвертый члены представляют переменную силу, причем второй — силу той же частоты, как и ток в катушках, а четвертый — силу удвоенной частоты. Из уравнения (6.3) следует, что увеличение постоянного потока Ot увеличивает чувствительность телефона, кроме того, для уменьшения относительной величины второй гармоники, по
стоянный поток должен быть значительно большим, чем переменный поток Ф2.
В рассматриваемом типе телефона при больших амплитудах колебания диафрагмы расстояние между диафрагмой и полюсными наконечниками сильно измеряется, при этом изменяется
120
сопротивление магнитной цепи, благодаря чему имеют место искажения. Однако, поскольку амплитуды диафрагмы практически малы, эти искажения незначительны.
Для уменьшения сопротивления переменному потоку, проходящему через постоянный магнит, обычно устраивается дополнительный зазор G (рис. 6.1). Уменьшение сопротивления переменному магнитному потоку достигается также применением полюсных наконечников, изготовленных из тонких листов железа.*
Механической системой телефона является диафрагма. Хотя диафрагма на первый взгляд кажется чрезвычайно простой системой, однако, теоретическое изучение ее действия весьма сложно. Обычно принимают, что диафрагма телефона представляет собой идеально зажатую по краям круглую пластинку. Теоретическое исследование колебания диафрагмы производили Лэмб *, Кеннелли1 2, Крендалл3 и другие. В коммерческих телефонах частота, основного резонанса диафрагмы, при которой реактивные сопротивления массы и упругости равны, имеет порядок 1000 гц. При более высоких частотах имеют место другие резонансы, соответствующие парциальным колебаниям диафрагмы.
Нормальная форма амбушюра телефона показана на рис. 6.2. Эта акустическая система состоит из реактивного сопротивления воздушной массы отверстия О и акустической емкости об’ема С. При проектировании телефона эта система должна быть рассмотрена вместе с механизмом диафрагмы.
Так как телефон в рабочем состоянии прикладывается к уху, то величиной, характеризующей работу телефона, является звуковое давление, развиваемое им в ушной полости.
Телефон не вносит частотных искажений, если отношение развиваемого им в ушной полости звукового давления к напряжению на его зажимах остается в данном диапазоне частот постоянным.
Принимая, что ушная полость нагружает телефон постоянной акустической емкостью, получаем, что отношение звукового давления в ушной полости к амплитуде диафрагмы не зависит от частоты. Однако, полное сопротивление ушной полости, как известно, не является чисто реактивным сопротивлением акустической емкости, поскольку (в особенности при высоких частотах) имеет место образование стоячих волн между телефоном и частями этой полости, а также поскольку поглощение звука в полости обусловливает наличие активной составляющей сопротивления.
Кроме того, фактором, обусловливающим при низких частотах как активную, так и реактивную слагающую акустического сопротивления, является утечка между ухом и амбушюром телефона. Так как перечисленные факторы не постоянны и меняются
1 Lamb, Н. The Dynamical Theory of Sound, Arnold, London.
2 Ken nelly. Electrical Vibration Instruments, MacMillan.
8 Crandall, I. B. Theory of Vibrating Systems and Sound, D. van Nostrand.
121
для различных лиц, то их трудно учесть, поэтому для практических целей за идеальный телефон можно принять такой, у которого отношение амплитуды колебания диафрагмы к напряжению на зажимах не зависит от частоты.
Приводимые в настоящей главе частотные характеристики построены по данным .звукового давления, развиваемого телефоном в замкнутой полости об’емом 4 ел»3. Методы испытания телефонов описываются в главе IX. Среди этих методов рассматривается также и метод, упомянутый выше.
Рис. 6. 2. Конструкция двухполюсного телефона.
Рис. 6. 3 Частотная характеристика двухполюсного телефона.
Частотная характеристика телефона, типа, показанного на рис. 6.2, представлена на рис. 6.3. Из кривой видно, что давление не зависит от частоты до 800 гц. При ЮОО гц наступает пер
частата в гериаи
Рис. Ь. 4. Конструкция телефона с подвижным якорьком.
Рис. 6.- 5. Частотная характеристика телефона с подвижным якорьком.
вый резонанс, при котором отдача телефона сильно возрастает. Пики на частотах выше основного резонанса обусловлены парциальными колебаниями диафрагмы.
В радиотелеграфии обычно пользуются частотой 1000 гц, поэтому телефоны, имеющие большую отдачу на этой частоте, с успехорл применяются для радиотелеграфного приема. В обычной телефонной связи, где получение большой чувствительности телефона важнее, чем обеспечение высокого качества передачи, связанное с необходимостью пропускания широкого диапазона ча-
122
его т, описываемые телефоны также получили всеобщее применение. Для установок высокого качества, в которых частотные и амплитудные искажения должны быть минимальны, электромагнитные телефоны неприменимы. Такие установки снабжаются специальными высококачественными телефонами, описанными в разделах 6.4 и 6.5.
(i. 3. ЭЛЕКТРОМАГНИТНЫЕ ТЕЛЕФОНЫ С ПОДВИЖНЫМ ЯКОРЬКОМ
Электромагнитный телефон, в котором возбуждаемый переменным током электромагнит действует на якорек, механически связанный диафрагмой, показан на рис. 6.4. Анализ работы такой механической системы дан в разделе 4 главы VII, посвященном электромагнитным громкоговорителям. При тщательном расчете этой системы, эффективная масса подвижных элементов может быть сделана меньше, чем в телефоне описанного в предыдущем разделе типа. Следствием уменьшения эффективной массы подвижных элементов является улучшение частотной характеристики. Кроме того, применение в рассматриваемом типе телефона диференциальной магнитной системы позволяет избавиться от всех четных гармоник.
Диафрагма телефона, показанная на рис. 6.4, изготовляется из тонкого дюралюминия. Для увеличения упругости она гофрирована. До резонансной частоты 2000 гц диафрагма колеблется как одно целое и ее механическое сопротивление обусловливается упругостью, выше же ©той частоты возникают парциальные колебания диафрагмы, которые дают на спадающей (благодаря действию массы диафрагмы) ветви характеристики (рис. 6.5), отдельные пики. Рассматриваемый тип телефона имеет лучшую частотную характеристику, чем телефон, описанный в параграфе 6.2, однако, оба эти типа телефона непригодны для высококачественной передачи.
€. 4. ЭЛЕКТРОДИНАМИЧЕСКИЙ ТЕЛЕФОН С ПОДВИЖНОЙ КАТУШКОЙ
В конструктивном отношении электродинамический телефон имеет сходство с описанным выше электродинамическим микрофоном Венте и Тураса 1. Разрез электродинамического телефона с подвижной катушкой показан на рис. 6.6.
Для увеличения жесткости диафрагме придана сферическая, куполообразная форма. Звуковая катушка жестко прикреплена к основанию купола диафрагмы. Механические элементы системы состоят из:
— массы диафрагмы и звуковой катушки
Слю — Скости подвеса диафрагмы
1 Wente and Thur as. Jour. Acous: Soc. Amer., Vol. Ill, No. 1, p. 44,
123
rМО—механического активного сопротивления подвеса диафрагмы
— гибкости воздушной полости позади диафрагмы
— механического активного сопротивления щели
тл—-эффективной массы щели.
Рис. 6. 6. Конструкция
электродинамического телефона с подвижной катушкой
Эквивалентная электрическая схема этой системы приведена на рис. 6.7. Венте и Турас выбрали постоянные системы таким образом, что амплитуда диафрагмы при постоянной приложенной силе не зависит от частоты в широком диапазоне частот. Вычисленные и полученные экспе-
риментально частотные характеристики телефона Венте и Тураса приведены на
рис. 6.8. Эти характеристики обнаруживают полное совпадение на низких и сред
них частотах, на высоких же частотах, при которых диаметр диафрагмы становится соизмеримым с длиной волны, характеристики не совпадают.
Рис. 6. 7. Эквивалентная электрическая схема механической системы электродинамического телефона с подвижной катушкой.
Рис. 6. 8. Частотная характеристика электродинамического телефона с подвижной катушкой. Пунктиром обозначена, вычисленная кривая (по Венте и Турасу).
6. 5. ЭЛЕКТРОДИНАМИЧЕСКИЙ ТЕЛЕФОН ЛЕНТОЧНОГО ТИПА
При применении ленточной диафрагмы в электроакустических преобразователях одно из основных преимуществ заключается в том, что вся колеблющаяся система одновременно является проводником тока и акустическим излучателем. Как мы видели ленточная диафрагма с успехом применяется для высококачественных микрофонов *. . •
1 Глава V.
124
I - - -
11иже показывается, что она гложет быть также использована и в высококачественном телефоне *.
Чувствительность микрофона остается постоянной при различных частотах в том случае, если отношение скорости проводника подвижной' системы микрофона к звуковому давлению в данном диапазоне частот не зависит от частоты.
В сопротивлении механической системы микрофона преобладает инерционная составляющая, поэтому оно растет пропорционально частоте.
Для получения постоянной скорости ленточки, акустическая система проектируется так, что сила, действующая на ленточку, остается пропорциональной частоте во всем рабочем диапазоне частот. В случае телефона при постоянном напряжении на его гажимах требуется обеспечить постоянное звуковое давление в слуховом канале уха. Если принять, что телефон нагружается
Рис. 6. 9. Механическая система ленточного телефона.
Рис. 6. 10. Эквивалентная электрическая схема механической системы ленточного телефона.
постоянным реактивным сопротивлением акустической емкости ушной полости, то отношение амплитуды ленточки к подводимому напряжению не долж'но зависеть от частоты.
Для того, чтобы получить в проектируемом аппарате равномерную и высокую чувствительность в широком диапазоне частот, приходится применять системы с несколькими степенями свободы. Примером такой системы является система с двумя степенями свободы, показанная на рис. 6.9. Она применяется в ленточном телефоне. Эквивалентная электрическая схема этой системы приведена на рис. 6.10. Скорость колебания ленточки
• _______^М^М2+гМЗ}_______
z М\ гМ2+гМ2 zM3+zM ZM3 где:
ВИ
В — индукция
I—длина ленточки
i—ток, протекающий через ленточку
I Olson, Н. F. and F. Massa. Proc. Inst. Rad. Eng., May, 1933.
(6- 4)
Ли
125
z,,, = r ,+Jwnu
Ml /н1 J 1
1
ZM2~
mj — масса ленточки
r —механическое активное сопротивление системы подвеса Ml
ленточки
— акустическая емкость полости позади ленточки
С.,п — акустическая емкость второй полости
М2
г—механическое активное сопротивление отверстия, сое-
диняющего обе полости
т2 — эффективная масса этого отверстия.
Амплитуда и скорость связаны между собой равенством
Можно выбрать постоянные системы таким образом, чтобы
отношение амплитуды к силе практически не зависело от ча-
стоты. На рис. 6.11 приведена частотная характеристика амплитуд диафрагмы для одного из
образцов ленточного телефона. Ленточный телефон состоит из трех основных частей: магнитной системы ленточки с арматурой и амбушюра. Магнитная система состоит из трех кобальтовых магнитов подковообразной формы, смонтированных в бакелитовом корпусе,
Рис. 6. 11. Теоретическая частотная харак- придающем КОНСТру К Ц И И теристика ленточного телефона. жесткость и являющемся внешним оформлением телефона. Ленточка закреплена в полюсных наконечниках магнита, изготовленных из сплава Армко, концы ленточки соединены с изолированными от полюсных наконечников бронзовыми клеммами, через которые отводится ток. Части полюсных наконечников, примыкающие к воздушному зазору, имеют накладки, при помощи которых закрепляется ленточка. Детали крепления ленточки показаны на рис. 6.13. Для того, чтобы не получить уменьшения чувствительности телефона на низких частотах, необходимо устранить всякую утечку возду-ха между передней и задней сторонами ленточки. Для устранения утечки в местах закрепления ленточки, последняя приклеивается к тонкой шелко-
126
ной материи, которая зажимается накладками полюсных наконечников.
В шелковой материи позади ленточки для уменьшения эффективной массы диафрагмы вырезано «окно». Шелк используется не только для устранения утечки воздуха в местах закрепления ленточки, но и для демпфирования резонанса ленточки на высо-
Рис. 6 12. Конструкции ленточного телефона.
ких частотах. Для устранения парциальных колебаний, ленточка гофрирована. Закрепляется она без натяжения. Большая упругость системы достигается благодаря наличию закрытой полости сзади ленточки. Размеры полости рассчитаны таким образом, что основной резонанс системы лежит около 8000 гц, т. е. близко к верхней границе диапазона частот, который желательно воспроизводить. Повышение может быть достигнуто путем уменьшения размеров полости, однако при этом уменьшается чувствительность телефона. Для устранения пика чувствительности на резонансной частоте, вторая полость соединяется с первой при помощи рада маленьких отверстий. Такой метод коррекции частот-
ной характеристики одновременно вызывает увеличение чувствительности телефона.
Частотная характеристика ленточного телефона приведена на рис. 6.14. Выше указывалось на необходимость устранения утечки между передней и задней сторонами ленточки. Не менее важно также устранить утечку воздуха между ленточкой и окружающей атмосферой, когда телефон прикладывается к уху. Для более плотного прилегания телефона к уху, амбушюру телефона, сделанному из резины, придана форма, показанная на рис. 6.12. Пе
резонансной частоты до
Гъфрироеанная алюминиевая -ленточка Прямо ft ольное отверстие в шелковой материи
Основная камера
гц
А нтирезонансная камсро
Рис. 6. 13. Детали ленточки и ее крепления.
127
ред сборкой поверхность полюсных наконечников, соприкасающаяся с амбушюром, покрывается слоем пластической массы, состоящей из воска и масла.
Этот слой очень хорошо устраняет утечку между амбушюром и полюсными наконечниками. К оголовью приделаны два ленточных телефона (рис. 6.12), их ленточки, соединенные последовательно, включаются через трансформатор, предназначенный для повышения сопротивления до 2000 <>м.
Каждый телефон развивает в полости об’емом 4 смг звуковое давление 1,3 бара при частоте 1000 гц и одном милливатте
Рис. 6. 14. Частотная ха а-леристика ленточного телефона t) дб=\ бап на ватт подводимой мощности.
Мембрана
неподвижная пластина
Рнс. 6 15. Конструкция конденсаторного телефона.
подводимой электрической мощности. Метод градуировки телефонов описывается в главе IX.
Электродинамические телефоны, описанные в разделах 6.4 и 6.5, имеют в широком диапазоне частот практически равномерную чувствительность, кроме того, они не вносят нелинейных искажений. В тех широкополосных передающих системах, в которых применяются головные телефоны, необходимо пользоваться электродинамическими телефонами.
Высококачественные головные телефоны в настоящее время применяются в звуковом кино и широковещании в качестве высококачественных контрольных телефонов; при исследовании различных типов искажений звука в передающих системах; в лабораторной работе (включая и, высокочастотные измерения); в эталонных телефонных цепях; в качестве эталонов, с которыми сравниваются другие типы телефонов и т. д.
6. 6. ЭЛЕКТРОСТАТИЧЕСКИЙ ИЛИ КОНДЕНСАТОРНЫЙ ТЕЛЕФОН
В конденсаторнорд телефоне, показанном на рис. 6.15, электростатические силы, возбуждаемые разностью -электрического потенциала между неподвижной пластиной и подвижной пластиной — диафрагмой, действуют на последнюю. •
128
Анализ работы такой системы приведен в разделе 7.5 главы VII, посвященном конденсаторному громкоговорителю.
11олное сопротивление конденсаторного телефона весьма высоко и для приведения его к нормальному выходному сопротивлению требуется специальный трансформатор. Кроме того, кон-(.спсаторный телефон требует поляризующего напряжения (200 b или более), при отсутствии которого имеют место сильные нелинейные искажения. Естественно, что при высоком поляризующем напряжении должны быть предусмотрены меры, обеспечивающие безопасность работы с телефоном и в частности электрическая цепь должна быть хорошо изолирована. Все это «месте взятое представляет большие неудобства, благодаря которым конденсаторный телефон не получил широкого распространения.
9 зрллжла/.паи рсустика
ГЛАВА VH
ГРОМКО ГОВО РИТЕЛ и
7. 1. ВВЕДЕНИЕ
Громкоговоритель представляет собой электроакустический преобразователь, излучающий акустическую энергию в помещении или в открытом пространстве.
Основным элементом громкоговорителей всех применяющихся в настоящее время типов является диафрагма. Различие между отдельными типами заключается главным образом в способе возбуждения диафрагмы и в связи диафрагмы с окружающей средой.
Слабая связь между диафрагмой и окружающей .средой имеет место на низких частотах, при которых сопротивление излучения диафрагмы мало. Для увеличения излучения на низких ча слотах применяются ’диафрагмы больших размеров и группы диафрагм, а также различные типы экранов и рупоров.
Преобразование электрической энергии в акустическую может быть осуществлено различными способами. Размеры настоящей главы не позволяют подробно описать все применяющиеся устройства для воспроизведения звука. Мы рассмотрим наиболее распространенные типы громкоговорителей, применяющихся в радиовещании, в звуковом кино, при усилении речей и при воспроизведении механической записи звука.
7. 2. ГРОМКОГ ОВОРИТЕЛЬ С ПОДВИЖНОЙ КАТУШКОЙ 1
В громкоговорителе с подвижной катушкой механические силы получаются в результате взаимодействия тока и постоянного магнитного поля, в котором помещается несущий ток про
1 Этот тип громкоговорителя был впервые описан Райсом (С. W. Rice) и Келлогом (Kellogg), AmeT. Inst, of Elect. Eng.-Vol. 44 стр. 982, 1925 г. Гофрированный конус впервые был предложен Циммерманом (Zimmerman). U. S Patent, I, 689, 513.
130
водник. Этот тип громкоговорителя известен также под названием электродинамического или динамического.
Нормальный громкоговоритель с подвижной катушкой, изображенный на рис. 7.1, состоит из бумажного конуса \ приво-
Рис. 7. 1. Динамический громкоговоритель и эквивалентная электрическая схема его механической системы:
—гибкость подвеса и центрирующего устройства.
— масса звуковой катушки.
С—гибкость части конуса, прилегающей к звуковой’катушке.
т1 тг— массы элементов конуса и соколеблющихся масс воздуха С С „— гибкость складок.
7112 .Л’13
ms —масса подвеса.
г—активное сопротивление подвеса.
г ГЛГ2 — активные сопротивления излучения.
димого в движение звуковой катушкой, помещенной в магнитном поле. Колеблющаяся система характеризуется массой, упругостью и активным сопротивлением. При низких частотах скорость колебания конуса как функция этих величщг определяется выражением
i Эта деталь громкоговорителя называется у нас обычно диффузором (франц.) (П р и м. р е д.)
9*
131
J rMA +J'mm— t»C
где:
В - индукция магнитного поля г —ток в звуковой катушке
I — длина проводника звуковой катушки
т- — суммарная масса конуса, звуковой катушки и эффективной соколеблющейся массы воздуха
— гибкость подвеса и центрирующего приспособления
Гд — механическое активное сопротивление, обусловленное излучением
w = 2к/
f—частота.
В качестве примера рассмотрим работу громкоговорителя с диаметром конуса 20 при частотах ниже 1000г*{. При этих частотах механическое реактивное сопротивление гибкостей ” (Рис- 7-1) в&лико по сравнению с реактивным
Рис. 7. 2. Характеристика механической системы конусного громкоговорители <• диаметром кощса 20 см.
Кривая ^~ГЛ]А (сопротивление излучения).
„ В—X (реактивное сопротивление массы соко-
Л‘А леблющ я ося воздуха)
„ мс (РеаК1И8НОе сопротивление конуса).
" D~XMS < ” ’ подвеса).
„ Д—Z (суммарное полное механическое сопротии-
. лтние системы).
„ В —X (скорость конуса в см1сек),
„ G=P~~r—(излучаемая мощность в эрг/сек)
„ Н—Ро (звуковое давление на оса)
сопротивлением масс m1( т,, т3... следовательно мы может пренебречь гибкостями и сложить массы ш,, ш2, ш3.- . . ., сумма ко-
132
itipwx представляет массу всего конуса. Это показывает, что до частоты 1000 гд все части конуса колеблются практически в фазе и следовательно можно считать, что сопротивление излучения такой системы равно сопротивлению излучения поршня, того же диаметра, колеблющегося в бесконечной стене или в экране. Реакция окружающей среды на поршень, колеблющийся в бесконечной стене, была рассмотрена в разделе 2.10. Используя приведенные в этом разделе выражения, можно подсчитать величину активной и реактивной составляющих полного сопротивления конуса с диаметром 20 ст. Результаты этих вычислений иллюстрируются кривыми рис. 7.2.
Условие бесконечной протяженности экрана практически не выполняется. Для того, чтобы выражения, выведенные для бесконечного экрана, могли быть применены к имеющимся системам, они должны быть соответствующим образом изменены. Хорошо рассчитанный ящик для громкоговорителя по своему поведению отличается от бесконечного экрана только при очень низких частотах, поэтому рассмотрение его как бесконечного ©крана не вносит существенных изменений.
Вычислим скорость конуса из уравнения (7.1), учитывая реакцию воздуха и задаваясь следующими данными системы:
Масса конуса и звуковой катушки —12 г.
Гибкость подвеса —4,3 X Ю с/и/дин.
Длина проводника звуковой катушки —1180 см.
Индукция — 8500 гаусс.
Для тока в 1 а зависимость скорости от частоты, подсчитанная по уравнению (7.1), приведена на рис. 7.2.
Излучаемая акустическая мощность, равная произведению сопротивления излучения на квадрат скорости конуса и определяемая по уравнению 2.63,
<7-2)
В рассматриваемом диапазоне частот, как видно из кривых рис. 7.2, скорость диафрагмы обратно пропорциональна, .а сопротивление излучения прямо пропорционально квадрату частоты. Следовательно излучаемая акустическая мощность не зависит от частоты. При увеличении частоты квадратичный характер кривой сопротивления излучения несколько нарушается, вследствие чего получается некоторое уменьшение излучаемой мощности, однако, оно компенсируется увеличением направленности излучения. 1
Для иллюстрации этого Эффекта уклонимся несколько в сторону от рассматриваемого вопроса и приведем уравнение для характеристики направленности поршня, колеблющегося в бес-к< точной стене. При нйзких частотах, когда все части конуса i 'геблются в фазе, приближенное вычисление характеристики на-
133
правле-нности можно производить, рассматривая конус как поршень в бесконечной стене. Характеристика направленности излучения круглого плоского диска, исследованная Штенцелем *, а также Волфом и Мальтером 2, определяется уравнением
2/1 ("Т" sln а)
Q -------------_Z_ (7. 3)
—2~ sin а
где Q — отношение звукового давления под данным углом к оси громкоговорителя к звуковому давлению на оси
X— длина волны d—-диаметр поршня J, — функция Бесселя первого порядка.
Характеристика направленности конуса диаметром 20 см, колеблющегося в бесконечном экране, приведена на рис. 7.3 Из графика видно, что с увеличением частоты характеристика суживается, следовательно энергия изучения, необходимая для получения одной и той же чувствительности на оси, должна с увеличением частоты уменьшаться.
Покажем как благодаря этой компенсации достигается равномерная частотная характеристика на оси громкоговорителя.
Акустическая мощность громкоговорителя, выраженная в эрг/сек., может быть получена путем интегрирования потока
звуковой энергии по сфере, в центре которой расположен громкоговоритель.
Поток энергии, проходящий через площадь dS сферы, равен IdS, где I — сила звука. Так как dS = R2d&, то поток равен IR2dQ, где R — радиус сферы и d2—телесный угол, соответствующий площади dS. Сила звука на единицу поверхности (см. раздел 1.7)
Мг <7- 4)
где р— звуковое давление.
1 Stenzel, Н. Ele. Nach. Tech., June, 1927. . .
«Wolff, I. and L Walter. J->ur. Acous. Soc. Amer., Vol. II, No. 2, p. 210.
Wolff, I. Electronics, Jan., 1932.
Чувсткотепиоеть • нроиентаи wo to co «с го о
Рис. 7. 3. Характеристика направленности конуса диаметром 20 см, колеблющегося в бесконечном экране, при условии поршневого действия.
134
Полная излучаемая звуковая мощность может быть получена 7)2
путем интегрирования R~ по поверхности сферы.
Если р0 звуковое .давление при а = 0, то звуковое давление щя угла а, равное p0Q, может быть определено из уравнения (7.3). Полная мощность, излучаемая громкоговорителем
p0=^-fQ^Q
(7. 5)
Поскольку излучаемая мощность может быть определена из уравнения (7.2), то звуковое давление на оси—-ро можно вычислить по уравнению (7.5).
Из характеристик конусной диафрагмы с диаметром 20 см, приведенных на рис. 7.2, видно, что звуковое давление на оси практически не зависит от частоты. Другими словами, уменьшение излучаемой мощности, имеющее место при увеличении ча стоты, компенсируется сужением характеристики направленности. До сих пор мы рассматривали поведение конусного громкоговорителя с диаметром конуса в 20 ел на частотах ниже 1000 /1ц, при которых конус ведет себя как поршень. Для того, чтобы исследовать поведение громкоговорителя при высоких частотах, рассмотрим механические элементы конуса и системы, приводящей его’в движение, показанные на рис. 7.1, г. е. звуковую катушку массы mv гибкость С,И1 соединения между каркасом катушки и конусом и полное сопротивление конуса
Как указывалось выше, если конус считать жестким, то полное сопротивление /^представляет собой реактивное сопротивление массы, а величина CjM1 равна нулю. Так как сила, действующая на звуковую катушку, остается постоянной, то скорость системы обратно пропорциональна частоте. Сопротивление излучения конуса с диаметром в 20 сти для частот выше 1000 ги остается постоянным, следовательно излучаемая мощность для этих частот обратно пропорциональна квадрату частоты. Если бы даже и представлялась физическая возможность иметь порш-новое действие конуса при частотах выше ЮООГд, то по двум существенным причинам оно было бы нежелательным. Во-первых, как видно из характеристики направленности, конус при высоких частотах излучает узкий пучок, вследствие чего для точек, сдвинутых от оси, должны получаться значительные частотные искажения. Во-вторых, мощность излучения при высоких частотах сильно уменьшается. Действительно, реактивное сопротивление массы рассхматриваемой системы растет пропорционально частоте, а следовательно скорость системы при постоянной приложенной силе обратно пропорциональна частоте. По-кольку акустическое сопротивление излучения для высоких ча
135
стот остается постоянным, излучаемая мощность с увеличением частоты сильно падает.
Очевидно, что для получения постоянной акустической мощности в полосе частот, для которых сопротивление излучения остается постоянным, необходимо при постоянной приложенной силе сделать скорость конуса независящей от частоты.
При расчете электрических фильтров, передача широкой полосы частот достигается путем применения нескольких резонансных контуров. Тот же метод применяется и в рассматриваемой механической системе.
Для уменьшения эффективного полного сопротивления z^( конус разделен на секции с массами m15 m2, m=... и т. д., соединенные механическими гибкостями кольцевых гофрировок.
Для того, чтобы получить постоянную, мощность излучения, необходимо обеспечить независимость от частоты суммы' мощностей излучения отдельных элементов. Мощность излучения каждого из этих элементов определяется произведением сопротивления излучения элемента на квадрат его скорости. Сопротивление излучения элемента является функцией его размеров и соотношения фаз между элементами.
Характеристика направленности всей системы в целом также определяется соотношением фаз между элементами.
Для упрощения можно рассматривать каждую секцию как кольцо, колеблющееся в бесконечном экране. Это допущение справедливо при условии, что ширина кольца мала по сравнению с длиной волны. Излучение кольца исследовано Штенцелем *. Согласно Штеяцелю для кольца
siu а) (7. 6)
где Q — отношение звукового давления под данным углом к оси громкоговорителя, к звуковому давлению на оси.
k — 2га
d — диаметр кольца
Jo— функция Бесселя нулевого порядка.
Эквивалентная электрическая схема механической системы гофрированного конуса приведена на рис. 7.1. При расчете конуса нужно подобрать силы и фазы токов в т„ тг, in, таким образом, чтобы характеристика направленности не зависела от частоты. Характеристика направленности каждого элемента определяется уравнением (7.6). Суммарное звуковое давление в некоторой точке пространства, являющееся результирующим давлением всех элементов, определяется соотношением
1 Loc. си.
126
фаз, которое может быть получено из эквивалентной схемы рис. 7.1, а также пространственным соотношением фаз для этой точки.
Проведение всестороннего анализа системы рис. 7.1 не входит в задачи этой книги. Если же такая система рассчитана, го можно получить значение г^^для части схемы рис. 7.1, отделенной пунктирной линией. Зависимость zMC от частоты для одного опытного конуса приведена на рис. 7.4. На том же рисунке приведена зависимость от частоты реактивного сопротивления массы звуковой катушки нормального типа, приводящей в движение этот конус.
Рис. 7. 4.
Кривая А~х (скорость z )
„ B—z „ (полное со-ТИС
противлс ние конуса)
_ С—( еактивное AIV
сопротивление зв\ кокой катушки).
Рис. 7. 5. Частотная характеристика динамического конусного громкоговорителя с неси мметричным экраном, снятая на оси конуса на расстоянии 3 л в свободном пространстве.
Отдача громкоговорителя практически не зависит от частоты, если реактивное сопротивление массы катушки соизмеримо с полным сопротивлением конусной диафрагмы. Для рассматриваемого конуса и звуковой катушки это согласно рис. 7.4 имеет место на частотах 2000—4000 гц, выше которых отдача конусного громкоговорителя с обычной звуковой катушкой, как показано на рис. 7.5, уменьшается. Для увеличения отдачи на частотах выше 3000 гц, нужно уменьшить эффективную массу звуковой катушки. Такое уменьшение может быть достигнуто путем применения звуковой катушки, представляющей собой механическую систему со многими резонансами.
До сих пор мы рассматривали работу конусных громкоговорителей нормального типа. Дальше мы остановимся на широкополосных громкоговорителях, в которых звуковая катушка является механической системой специального типа.
137
7. 3. ШИРОКОПОЛОСНЫЙ ГРОМКОГОВОРИТЕЛЬ С ПОДВИЖНОЙ КАТУШКОЙ 1
Широкополосный громкоговоритель с подвижной катушкой имеет звуковую катушку, намотанную на особого типа каркасе таким -образом, что она оказывается разделенной механически на отдельные элементы массы и гибкости. Звуковая катушка широкополосного громкоговорителя прикреплена к гофрированному конусу.
Полное сопротивление всей колеблющейся системы таково, что громкоговоритель имеет практически равномерную чувствительность в диапазоне частот от 80 до 8000 гц. В громкоговорителе, схематически изображенном на рис. 7.6, звуковая катушка механически разделена на две части тх и т2, соединенные гибкой связью
На рис. 7.7 показана электрическая схема включения звуковой катушки, позволяющая распределять электрический ток
Рис. 7. 6.
Рис. 7. 6. Механическая система, состоящая из масс частей звуковой, катушки т, и т-,, массы ворошика катушки т», гибкостей С,„ ,С„„ ,С„_ и полного
1 г о ЛИ AI2 Л13
сопротивления конуса Z .
Рис. 7. 7. Электрическая с»ема звуковой катушки.
между секциями катушки в зависимости от частоты. При низких частотах ток течет через обе секции звуковой катушки и конус приводится в движение силами, возбужденными в т1 и т2; при высоких частотах большая часть тока протекает через 1п2, и конус приводится в движение силами, действующими в секции пи.
Ток в секции пц
(7' 7)
где:
ze — полное сопротивление секции т1 z — полное сопротивление секции т/га
1 Olson, Н. F. June Convention I. R. E., 1933.-Proc. Inst. Rad. Eng., Jan. 1934.
rs—сопротивление генератора
z ———
e3~wCe'
Ток в секции m2
j _ ______el _ _ f7 01
2 (z. +re)Z + z Z 4- (Z re) z 1 • I
‘a г i ез ез
Сложная звуковая катушка, конус и эквивалентная электрическая схема всей механической системы приведены на рис. 7.6. Силы и f^2 равны произведению индукции на ток и длину проводника соответствующей секции катушки.
Сила
УЛИ
где В — индукция
— длина проводника секции т1
i, —ток, определяемый уравнением (7.7)
те В—индукция
/2 — длина проводника секции т2
is — ток, определяемый уравнением (7.8).
На рис. 7.8 представлена зависимость токов в секциях звуковой катушки от частоты. Фазный угол между токами играет важную роль только в области частот, при которых конус приводится в движение обеими секциями катушки. Оптимальную величину угла
(7. 10)
М2 2 2
Рис."7. 8. Кривые, показывающие величины 4аз и токов в частях звуковой катушки 5 . <, рис. 7. 6.
можно определить, рассматривая механическую систему рис, 7.6
и задаваясь целью получить максимальную величину скорости конуса xs, сопротивление которого равно
Скорость х8 определяется выражением
x3—
f Ml ZM?ZM4ZM6
| ZM6+ ZMc[ J Z Ml (ZM2+ 2 Mi> <-ZM4+ ZM5> +
+ ZM2 ZM3 (ZMA + ZM$+ZM4 ZM5 (ZAfl + ZM$
+ZM6 ZMC { (ZAfl + ZAf2) (ZM3+ZM^+ZMl ZM$
138
169
________________Afrf2ZAf4ZAf6_______________ (ZA43+ZAfP (ZAf4+ ZMi> (ZM6+ ZMC ^+ZM6 ZMC
(Z'Ml+^Мз +Mi (Zm& +^MC.) (J. 11!
где
m1 — масса большей части звуковой катушки
m2— масса меньшей части звуковой катушки
т3 — масса воротника и подводящих проводников звуковой катушки
Ст — гибкость, разделяющая тг и т2
СМ) — гибкость, разделяющая т2 и т3
^МЗ — ™бкость соединения между воротником звуковой катушки и конусом
ZMC — механическое полное сопротивление конуса
ZM2 ~ Х^'аСМ1
ZMi ~ 1 №СМ2
ZM5=j^
ZM6 = 1 1^СМЗ
г, _ 2М1 гМ2
ZM\ 2ЛЗ]+г.М2
Отвлечемся несколько в сторону и рассмотрим конструктивную форму применяемых в системе элементов гибкости. В соответствии с конструкцией магнитной цепи и звуко-to/ото ЕОЙ катушки, которая в настоящее время практи-
чески стандартизована, гибкость лучше всего де-лать в виде складки, выдавленной в материале кар-каса звуковой катушки. Профиль элемента гиб-\ s кости, успешно применяемого для соединения от-
дельных масс колеблющейся системы, показан на
W рис. 7.9.
Рассмотрим в первом приближении (пренебре-!Т'п- гая величинами второго порядка) элемент гибко-Рис. 7. 9. Форма сти рис. 7.9. Разделим его на четыре консольные складок, приме- балочки АВ, ВС, CD и DE. Упругость, а следова-няемых в конv- тельно и гибкость каждой балочки может быть СвыхИкату3шках. вычислена. Суммируя гибкость отдельных балочек, получаем общую гибкость складки. Если по форме каждая балочка представляет четверть окружности, то упругость может быть определена по формуле
Л/И 4£Z упругость—--^——-^-5 (7. 12)
где — сила.
d —• смещение
Е‘—модуль Юнга
/ ™Ьй/12—момент инерции сечения
b — длина окружности цилиндра
й—толщина материала
R — радиус кривизны складки.
Если ширина складки мала по сравнению с ее глубиной, то •фирма балочек приближается к прямолинейной «с острым сгибом па конце. Если пренебречь сгибом и спрямить балочки, то для вычисления упругости каждой балочки можно применить формулу прямолинейной балки
Ли 3EI . v.
упругость=-й (7. 13)
где J — длина каждой балочки, равная половине глубины складки.
Радиус 1? уравнения (7.12) идентичен длине балочки I в уравнении (7.13). Испытания экспериментальных моделей показали, что действительная величина упругости лежит между величинами, определяемыми уравнением (7.12) для широкой и уравнением (7.13) для узкой складки. Для определения упругости можно предложить следующую эмпирическую формулу
упругость— т (7. 14)
где U —постоянная зависящая от формы элемента гибкость.
В выводах мы пренебрегали поверхностными силами, получающимися при приложении давления к элементу гибкости. Лднако они учитываются при выборе постоянной в эмпирической формуле-. 1
При частотах ниже 1000 гц реактивное сопротивление конденсатора Се {рис. 7.7) велико и токи в секциях звуковой катушки оказываются одинаковыми по величине и по фазе. Кроме того, механическое сопротивление гибкости С (рис. 7.6), связывающей секции тг и т2 звуковой катушки, велико по сравнению с механическим сопротивлением масс тъ т2 и полным ме ханическим сопротивлением z^r. Поэтому при частотах ниже ИОСЮ гц обе части звуковой катушки работают как одно целое и по своей физической характеристике сложная звуковая ка-k ушка не отличается от обычной звуковой катушки, описанной з предыдущем разделе.
Таким образом действие громкоговорителя с секционирован-
1 И
140
ной катушкой для частот ниже 1000гц эквивалентно действию громкоговорителя с обычной звуковой катушкой.
В полосе частот от 1000 до 4000 гц разность фаз между скоростями и х2 механической системы рис. 7.6 растет с увеличением частоты. В этой полосе частот желательно механическую мощность, возбуждаемую в обеих секциях звуковой катушки, перенести в секцию т2, действующую на конус. Анализ уравнений (7.7) и (7.8), определяющих величины и фазы токов в секциях звуковой катушки, показывает, что разность фаз между токами в /д, и т2 растет с увеличением частоты (см. рис. 7.8).
Максимальную величину суммарной силы, действующей на конус ZAJC иожно получить при согласовании фазного угла между силами fMX и с фазным углом между скоростями х, и х2. Как видно из рис. 7.8, сила тока в секции дц уменьшается с увеличением частоты. Кроме того, в середине полосы 1000—4000 гц реактивное сопротивление гибкости СЛ/( равняется реактивному сопротивлению массы секции дц звуковой катушки. При частотах выше 4000 гц сила, возбуждаемая в /д„ становится малой по сравнению с силой, возбуждаемой в т2, а реактивное сопротивление гибкости становится малым по сравнению с реактивным сопротивлением массы т,. Таким образом при этих частотах система приводится в движение силой /,М2. Масса секции лк звуковой катушки у опытной модели равна 0,9 г. Масса части каркаса, соединяющей секцию т2 и конус вместе с массой подводящих проводников звуковой катушки, также равна 0,9 г. Суммарное реактивное сопротивление массы катушки и каркаса все же достаточно велико и должно быдо бы вызывать значительное уменьшение скорости на частотах выше 6000 пц. Во избежание этого воротник и секция катушки т2 соединяются гибкостью Сд^2 .Равным образом реактивное сопротивление суммарной массы верхней части каркаса катушки и (прилегающей к нему части конуса вызывает уменьшение на высоких частотах скорости конуса 7^мс . Эта часть подвижной системы также может быть секционирована путем соединения верхней части каркаса катушки с конусом через гибкость. Рассмотренная конструкция в целом представляет собой резонансную механическую систему, посредством которой силы, возбуждаемые в т2, передаются конусу.
Перейдем к анализу работы системы, показанной на рис. 7.6 с конусом типа, изображенного на рис. 7.1. Зависимость полного сопротивления конуса -2^сот частоты изображена на рис. 7.10. Зависимость от частоты скорости, сообщаемой ZA,^системой звуковой катушки, вычисленная по уравнению 7.11, представлена на
142
рис. 7.10. Как видно из рис. 7.10, кривая скорости весьма равномерна и лишь немного поднимается с увеличением частоты. Следовательно, сила, действующая на сопротивление практически не зависит от частоты. Согласно предыдущему разделу, если это условие выполнено, то отдача громкоговорителя практически не зависит от частоты. На рис. 7.11 приведена частотная характеристика рассмотренного громкоговорителя, за-моптированного в несимметричный 90-сантиметровый экран. Эта характеристика снималась в свободном звуковом поле на расстоянии 3 м. Как видно из рис. 7.11, чувствительность громкоговорителя в полосе частот от 80 до 8000 /щ практически не зависит от частоты.
Таким образом, вышеприведенные теоретические соображения хорошо согласуются с практическими результатами.
Рис. 7. 10. Кривая A—Z.(полное сопротивление конуса)
Кривая Д—х (скорость в Z ).
Рис. 7. 11. Частотная характеристика конуса рис. 7. б, зьуковое давление на оси конуса на расстоянии 3 м в свободном звуковом поле.
До сих пор при рассмотрении электрической цепи электродинамического громкоговорителя мы пренебрегали электрическим сопротивлением движения *. Это сопротивление представляет собой геометрическую разность полного сопротивления звуковой катушки громкоговорителя, работающего в нормальных условиях, и его полного сопротивления при заторможенной звуковой катушке. Коэфициент полезного действия электродинамических громкоговорителей, рассмотренных типов весьма низок, поэтому электрическое сопротивление реакции механической системы мало сказывается на силе тока, протекающего через звуковую катушку. Однако на резонансной частоте всей механической системы в целом (основной резонанс), при которой реактивное сопротивление массы конуса, звуковой катушки и соко-
1 Под электрическим сопротивлением движения (motional impedance) понимается дополнительное сопротивление в электрической цепи, обусловленное реакцией механической системы.
143
леблющегося воздуха равняется реактивному сопротивлению гибкости подвеса и центрирующего устройства, полное электрическое сопротивление реакций механической системы достигает большой величины.
Сила взаимодействия тока звуковой катушки и магнитного поля.
(7. 15)
где В — индукция
1 — длина проводника звуковой катушки
/ — ток звуковой -катушки
Возбуждаемая при колебаниях катушки э. д. <с.
е=В1х ' (7. 16)
где х — скорость катушки.
Из уравнения (7.15) и (7.16) получаем
— = (В/)2-^- 17)
Так как e/i 5 ^^представляет собой полное электрическое сопротивление движения, a f^,Jx = zM полное механическое сопротивление, то полное электрическое сопротивление движения вьГражается через полное механическое сопротивление следующим образом:
„ _(W
ZeM—(7. 18)
При рассмотрении электрической цепи fгромкоговорителя можно принимать, что полное электрическое сопротивление движения включено последовательно с полным -сопротивлением громкоговорителя при заторможенной (х = 0) звуковой катушке.
Путем измерения полного электрического сопротивления движения можно определить к. л. д. громкоговорителя, если только сопротивление излучения является рреобладающей компонентой активного сопротивления колеблющейся системы. При этом условии к. п. д. представляет собой отношение активной составляющей полного электрического сопротивления движения к активной составляющей полного электрического сопротивления громкоговорителя (при отсутствии торможения).
7. 4. ЭЛЕКТРОМАГНИТНЫЙ ГРОМКОГОВОРИТЕЛЬ
В электромагнитном громкоговорителе используются механические силы, возникающие при магнитном взаимодействии. Гром-
144
коговорителями с подвижным якорьком называются такие элек-
тромагнитные громкоговорители, в подвижную систему которых входит элемент, являющийся частью магнитной цепи.
Имеется много разнообразных типов магнитных систем для громкоговорителей г. Одна из распространенных магнитных систем схематически изображена на рис. 7.12. Для возбуждения постоянного магнитного поля обычно применяется постоянный магнит. Якорь устанавливается таким образом, что дей
ствующие на него постоянные силы взаимно компенсируются. Постоянные силы в ' точках 1, 2, 3 или 4 (рис. 7.12).
/ -ф12
J М~ 8кА
Рис. 7. 12. Механизм электромагнитного громкоговорителя.
(7. 19)
Где Фх -— постоянный поток, проходящий через каждый полюс, |
А—эффективная площадь полюсных наконечников 1, 2, 3 или 4. ’
Поток в 1, 2, 3 или 4, возбуждаемый при протекании через катушку тока 1.
где N— число витков катушки.
К — сопротивление магнитной цепи, через которую проходит магнитный поток звуковой катушки.
Сумма сил, действующих .на якорек в точках 1, 2, 3 и 4 при протекании в катушке тока i:
2£Ф1 - Ф2У _ 2 (Ф1- Фг)2 _J_ ф ф /7 2П
•'МТ 8тМ 8лА — кА 12 V-
ИЛИ
/мт (7- 22) ,
Интересно отметить, что при синусоидальном токе для лифе-ренциальной магнитной системы, член, содержащий вторую гармонику, пропадает2. Анализ простой (не диференциальной) магнитной системы дан в разделе 6.2.
1 Анализ различных типов магнитных систем см. у С. R. Hanna, Proc. Ipst. Radio Engineers, August, 1925. ’<
2 При выводе уравнения (7.21) принято, что смещение якорька не ска-и,1вается на величине постоянного потока каждого магнитного зазора или, что амплитуды смещения якорька весьма малы по сравнению с величиной зазора,
10 ИршсладппЕ акустика.
145
Если zмр — полное механическое сопротивление подвижной системы, включающей якорек, его крепление и конус с его креплением, приведенное к точкам 1, 2, 3 или 4, то скорость системы
fMT
Л=----
ZMT
(7. 23)
Практически не представляется возможным точно центрировать якорек. Кроме того, якорек, отклонившийся под действием’ тока, должен быть возвращен в прежнее положение равновесия. Таким образом, якорек должен иметь центрирующее устройство с большой упругостью.
Действительно, уменьшить упругость настолько, чтобы сдвинуть резонанс системы ниже 100 гц практически не удается. У большинства электромагнитных громкоговорителей масса якорька и диафрагмы резонирует с упругостью крепления якорька на ча стотах между 100 и 200гц. При рассмотрении электродинамических громкоговорителей с конусной диафрагмой было отмечено, что для получения нормальной чувствительности на низких частотах нужно так выбрать параметры механической системы, чтобы ее скорость была обратно пропорциональна частоте. При
поэтому для диференциальной магнитной системы ур-ние (7.21) оказалось линейным. В практических конструкциях электромагнитных громкоговорителей амплитуды смещения якорька (при низких частотах) соизмеримы с величиной
зазора, поэтому смещения якорька вызывают соответствующие изменения в потоках постоянного магнита, проходящих через зазоры. Это явление обусловливает сильные нелинейные искажения, которые имеют место в электромагнитных громкоговорителях, в том числе и в громкоговорителях, обладающих диференциальной магнитной системой. Точный анализ уравнения для силы, действующей на якорек (см. Ю. М, Сухаревский „К вопросу о нелинейных искажениях в электромагнитных громкоговорителях*4. „Техника связи” № 9 1934 г), дает следующие выражения для относительных величин второй и третьей гармоники звукового давления, развиваемого громкоговорителем
= 300 d q„ п
Pt 2
50 q. п?
Px 2
-р- — процентные отношения соответствующих гармоник звукового
И
y2 где:Р? давления к основной частоте, d — отношение постоянного смещения якорька с нейтрали (следствие неточной сборки) к величине зазора, п — отношение ам-
плитуды переменного смещения якорька к величине зазора, a q2 и qs — отно-
шения чувствительности громкоговорителя при частоте гармоники к чувствительности при основной частоте (берется из частотной характеристики).
Подсчеты, произведенные для электромагнитного громкоговорителя типа. .Рекорду показали, что при низких частотах клирфактор, который с достаточной точностью может быть принят равным р достигает не-
скольких десятков процентов, что хорошо согласуется с данными измерений, (Прим, ред.).
146
ном излучаемая акустическая мощность (т. е. произведение (опрогивления излучения на квадрат скорости) не зависит от частоты. Для частот ниже резонансной, в системе преобладает \крутое сопротивление и скорость ее пропорциональна частоте. I лким образом на этих частотах система имеет низкую чувстви-нльпость. Поскольку резонансная частота в электромагнитных । ромкоговорителях лежит сравнительно высоко, электромагнитные громкоговорители плохо воспроизводят низкие частоты, что является их существенным недостатком.
Интересную величину в этих 'громкоговорителях представляет собой электрическое полное сопротивление движения. Пусть якорь отклонился на величину Дх от полюсов '2 и 3. Полагая, что псе магнитное сопротивление сосредоточено в воздушном зазоре для потока, проходящего через полюса 1 и 4, получаем
фи=2-(в^Г (7-24)
। де 44 —- магнитнодвижущая сила постоянного поля, а — расстояние между якорьком и полюсом.
Поток, проходящий через полюса 2 и 3
Ф28=^-, М г-. (7- 25)
23 2 (д+Дх) 4 '
Поток, проходящий через якорек
ЛФ=Ф„-Ф»=-р^дГ (7. 26)
Откуда
ЙФ М dx М *
~~dt~ ~dt~ cfi X (7- %7)
Возбуждаемая в катушке электродвижущая сила
(7.28) dt а2
Из уравнений (7.22) и (7.28) получаем
е _ 4№Ф,Л4 х , (7. 29)
' и A fМТ
Полное электрическое сопротивление движения
4Д'йфЛ/ —-----1--
еМ a^ARz^’p
10 - 147
Мы приняли, что .все магнитное сопротивление сосредоточено в воздушном зазоре поэтому
4№Ф .2 р —-------*—
еМ~ а^АгМт
(7- 31)
Уравнение {7.31) аналогично уравнению (7.18) раздела 7.3, выведенному для динамического громкоговорителя.
7. 5. КОНДЕНСАТОРНЫЙ ГРОМКОГОВОРИТЕЛЬ
В конденсаторном громкоговорителе1 используются механи-
4иафрас*о
Рис. 7. 13. Конденсаторный громкоговоритель.
ческие силы, возникающие при электростатическом взаимодействии.
В отношении простоты системы, конденсаторный громкогово" ритель представляется идеальным типом звукового преобразователя. Однако у этой системы имеются некоторые нежелательные свойства, о которых будет сказано ниже.
Рассмотрим поверхность, колеблющуюся в направлении перпендикулярном к ее плоскости и отделенную от неподвижной пла-
стины воздушным промежутком, как показано на рис. 7.13.
Сила, возникающая между пластинами на единицу поверхности пластин в электростатических единицах
j М 8^
(7. 32)
где е — напряжение между пластинами х—'расстояние между пластинами.
Если поляризующее напряжение равно ё0, а подводимое переменное напряжение ^=ernaxsinW^ то сила
(eo+emaxsin
go2 + 2eoemax sin +4~ g2max ~ ~Г е‘max cos 2u>t 8лх2
1 Graves, V. F., F. W. Kranz and W. D. Crozier. Proc. I. R. E., Vol XVII, p. 1142.
Hanna, C. R. Jour. Acous. Soc. Amer., Vol. II, No. 2, p. 143.
(7. 33)
148
,. e2o i пнх
Она имеет постоянную слагающую 16;ix2, переменную e°€max sin wt слагающую . -2~ и другую переменную слагающую »•«
1 бпх?
Вторая переменная сила вынуждает диафрагму колебаться с частотой, равной удвоенной частоте подводимого переменного напряжения. Если е0 велико по сравнению с emaxsin <£(, то эта сила еоетах sin <ot
мала по сравнению с----4^~х^ и вызываемые ею нелинейные
искажения также малы. Полезная сила, вынуждающая диафрагму колебаться с частотой, равной частоте подводимого' 'напряжения
_ e°emaxslno)f J М 4лх2
(7. 34)
1'сли z., полное механическое м
рость диафрагмы
сопротивление диафрагмы, то ско-
См
х=----
гм
eoemaxsln<e/
4г^
(7. 35)
Выведем выражение для полного электрического сопротивления движения конденсаторного громкоговорителя. Заряд конденсатора ",
\7. 36)
где Cg — емкость на единицу площади. Ток, протекающий через конденсатор при колебаниях диафрагмы
. dq dCe dx 1 dt C° dx dt (7. 37) '
Емкость на единицу площади
С =-^— е 4tzx (7. 38)
(>ткуда 1 dCe _ _ 1 dx 4пх2 (7. 39)
Из уравнений (7.37) и (7.39) определяем ток
/Ч" X 4тсх2 (7. 40)
111 уравнений (7.34) и (7.40) получаем
149
(7. 41)
(7. 42)
(7. 43)
(7. 44)
g _ 16it8x*
1 e02 x
Полное механическое сопротивление
z _ Ьл
МГ~' -х
Полное электрическое сопротивление движения
16^2x4 ZgjW " g02 ZM
или в абсолютных единицах
_ 144 • 10W
ZeM~ е02 • г1Л
В рассматриваемой системе подвижный электрод излучает звук непосредственно в пространство. Этот электрод должен быть изолирован от неподвижного электрода без большого однако, увеличения механической упругости.
В диференциальных электростатических громкоговорителях подвижный электрод располагается между двумя неподвижными электродами и постоянные силы, действующие на подвижный электрод, взаимоуравновешиваются. Для увеличения эффективности системы подвижный электрод должен иметь возможно меньшую массу. Сопротивление излучения круглой колеблющейся пластины определяется по уравнениям раздела 2.10. Для пластин прямоугольной формы, сопротивление излучения может быть определено механическим интегрированием уравнения (2.59). Если в сопротивлении механической системы преобладает элемент массы, то ее действие аналогично действию громкоговорителя с конусной диафрагмой. Если же в сопротивлении системы преобладает активная составляющая или реактивное сопротивление упругости, то, для получения хорошей отдачи на низких частотах, поверхность подвижного электрода должна быть выбрана возможно больших размеров.
Схема включения конденсаторного громкоговорителя приведена на рис. 7.13, выходное сопротивление усилителя берется приблизительно равным реактивному сопротивлению емкости громкоговорителя при самых высоких частотах для того, чтобы ток, потребляемый громкоговорителем при этих частотах, не вызывал сильного падения напряжения на его клеммах. Это является одним из существенных недостатков конденсаторного громкоговорителя. Второе неудобство, связанное с эксплоатацией конденсаторного громкоговорителя, заключается в том, что он требует высокого поляризующего напряжения. В типичной схеме включения конденсаторного громкоговорителя, приведенной на
150
рис. 7.13, высокое поляризующее напряжение получается от диодного выпрямителя. Пластины конденсаторного громкоговорителя соединяются с выходом усилителя через трансформатор.
7. 6. ПРИМЕНЕНИЕ ДИНАМИЧЕСКИХ, МАГНИТНЫХ И КОНДЕНСАТОРНЫХ ГРОМКОГОВОРИТЕЛЕЙ
Динамические и магнитные громкоговорители, имеющие простую, прочную, компактную конструкцию и хорошие частотные карактеристики, получили широкое применение в радиовещании и при воспроизведении звукозаписи.
В первое время в радиовещании применялись приемники с питанием от постоянного тока. Для этих приемников было целесообразно применять громкоговорители с постоянным магнитом, не требующие энергии для возбуждения магнитного поля. Когда же стали применять приемники с питанием от переменного тока, то стало возможным для возбуждения магнитного поля громкоговорителя пользоваться выпрямленным переменным током, одновременно используя индуктивность катушки возбуждения громкоговорителя как дроссель в фильтре питания приемника. Таким образом, динамический громкоговоритель, как имеющий лучшую частотную характеристику, большую предельную мощность и почти не дающий нелинейных искажений, практически вытеснил магнитный тип. Однако магнитные громкоговорители применяются и в настоящее время в приемниках с питанием от постоянного тока и в других установках, где требуются громкоговорители с постоянными магнитами. Их приемущество перед динамическими громкоговорителями с постоянными маг-нитками заключается в том, что при равной чувствительности они требуют меньшего количества магнитного материала и поэтому имеют меньшую стоимость. Так по крайней мере было до последнего времени. За последние годы, однако, разработаны дешевые магнитные сплавы с высокими магнитными свойствами и упрощена конструкция динамических громкоговорителей, что позволяет изготовлять динамические громкоговорители примерно такой же стоимости, как магнитные громкоговорители. Надо .полагать, что динамический громкоговоритель с постоянным магнитом в скором времени окончательно вытеснит магнитный тип во всех случаях практики.
Рассмотренный в разделе 7.5 конденсаторный громкоговоритель, обладающий отмеченными недостатками, вряд ли получит большое практическое применение в звуковоспроизводящих установках.
7. 7. РУПОРНЫЙ ГРОМКОГОВОРИТЕЛЬ. ВВЕДЕНИЕ
При звукофикации открытых пространств и больших помещений, где требуется громкоговоритель, обладающий высоким к. п. д. и направленностью излучения, исключена возможность применения многих из существующих типов громкоговорителей.
151
Под зв офикацией открытых пространств и больших помещений нужно понимать высококачественное воспроизведение звука в аудиториях, театрах и открытых стадионах. Исследование характеристик громкоговорителей рупорного >типа показывает, что этот громкоговоритель удовлетворяет высоким требованиям как в отношении к. п. д., так и в отношении направленности излучения. Рупорные громкоговорители с высоким к. п. д. описаны Ханна \ Венте и Турасом 1 2 3, Олсоном ’ и Бостуиком 4.
Рупор представляет собой звукопровод, состоящий и з трубы переменного сечения.
При помощи рупора, согласовывающего сопротивления тяжелой диафрагмы и легкой окружающей среды можно излучать, большую акустическую мощность.
Для получения высокого к. й. д. нужно, чтобы механические силы, возникающие в громкоговорителе, тратились на преодоление сопротивления излучения, а не на преодоление инерции диафрагмы.
По вопросу исследования рупоров можно указать на работы Вебстера5 *, Стюарта®, Слепяна и Ханна7, Балантайна8 *, Голдсмита и Минтонав, Крендалла 10 11 и Стюарта и Линдсея Ч
7. 8. РУПОРНЫЕ ГРОМКОГОВОРИТЕЛИ С УЗКИМ ГОРЛОМ
В существующих типах рупорных громкоговорителей, обладающих высоким к. п. д., и рассчитанных на излучение большой акустической, мощности, обычно применяется электродинамическая система. На рис. 7_14 показан разрез рупорного электродинамического громкоговорителя, состоящего из магнитной цепи, возбуждаемой либо электрическим током, либо постоянным маг нитом, диафрагмы и воздушной камеры, соединяющей диафрагму с горлом рупора.
Действие основных частей громкоговорителя мы рассмотрим, представив себе громкоговоритель соединенным с бесконечной трубой, обладающей акустическим сопротивлением г^. Эквивалентная электрическая схема акустической системы изображена в правом нижнем углу рис. 7.14. Скорость об’емного смещения в трубе определяется уравнением
1 Hanna, С. R. Amer. Inst. Elect. Eng., 1928, Vol. 47; Hanna, C. R. Jour. Acous. Soc. Amer., Vol. II, No. 2, p. 150.
2 Wente, E. C. and A. L. Thur as. Bell System Tech. Journ., Jan, 1928.
3 Olson, H. F. Jour. Acous. Soc. Amer., Vol. Il, No. 4, p. 485.
4 Bostwick, I. G. Jour. Acous. Soc. Amer., Vol. II, No. 2, p. 242.
s Webster, A. G. Proc. Nat. Acad. Scl., 1919-
3 Stewart, G. W. Phys. Rev., XVI, Oct., 1920, p. 313.
7 S 1 e p i a n, J, and C. R. Hann a. Amer. Inst Elec. Eng., 1924, p. 384.
8 Ballantine, S. Jour. Franklin Inst., Jan., 1927, p. 85.
0 Goldsmith and Minton, Proc. Inst. Rad. Eng., Aug., 1924, p. 423.
i° CrandalI, I. Theory of Vibrating Systems, D. Van Nostrand.
11 Stewart, G. W. and R. B. Lindsay. Acoustics, D. Van Nostrand.
152
где:
ZA\ ZA2^ZA\ zA3+zA2 гАЪ
„ _ jts>m j
Al ~ A\ o>C ..
c Al
(7. 45>
m— масса диафрагмы и звуковой катушки
Ас— площадь диафрагмы
Ш =
/—частота
СА1— акустическая емкость = механической гибкости подвеса X А \
ZA2 = ~-flwCA2
Сд2—'акустическая ем-
, кость воздушной Ка-меры=рс2/ V р — плотность воздуха . с — скорость звука
V—об'ем воздушной камеры
2д3 = гд •— акустическое активное сопротивление трубы
Рис. 7. 14. Рупорный громкоговоритель, соединенный с бесконечной трубой и его эквивалентная электриче-
ская схема.
М — реактивное сопротивление массы диафрагмы.
Сд — реактивное сопротивление гибкости подвеса.
СА — реактивное сопротивление гибкости воздуха в камере.
г — активное
А
трубы.
сопротивление
Ар^-площадь сечения трубы.
При расчете системы задача заключается в z..; и г.„, чтобы мощность, поглощаемая в
Д/ До
таком выборе г.„, была по-
До
сгоянной во всем требуемом диапазоне частот.
Теоретические характеристики рупорного электродинамического громкоговорителя приведены на рис. 7.15. Этот громкого
воритель имеет следующие данные:
Массу диафрагмы и звуковой катушки . . . =1,1 г
Площадь диафрагмы.......................=48 сл9
Упругость подвеса..............’........=1,5 • 105 дн/см
Длину проволоки звуковой катушки........=1000 см
Индукцию в воздушном зазоре.............=12000 гаусс
Площадь сечения трубы...................=3 см2
Об'ем воздушной камеры..................=1,15 куб см.
Ток в катушке........-..................=4 ма
...............................=4800 дин
Ли
р=-— ------------—
площадь диафрагмы
. . =100 бар.
153
►
На рис. 7.15 приведена также кривая скорости об'емного смещения в трубе при об’еме камеры равном нулю. Из кривых видно, что при высоких частотах емкость воздушной камеры улучшает характеристику громкоговорителя. Для отсутствия резонансов в воздушной камере необходимо, чтобы расстояние от любой точки диафрагмы до трубы было меньше одной четверти длины волны для самой высокой частоты, воспроизводимой полосы.
Рис. 7. 15. Характеристики системы, показанной на рис. 7. 14.
Кривая А—х (акустическое реактивное соп-ротивление диафрагмы)
, В—х (реактивное сопротивление
АС акустической емкости Сд2>-
, С—г (акустическое активное сопро-
А тивление трубы).
„ Е—U' (скорость об'емного смещения
в трубе для х = оо).
Одна из конструкций, облегчающих решение этой задачи, приведена на рис. 7.14. При очень высоких частотах части диафрагмы колеблются не син-фазно, поэтому на этих частотах экспериментально полученные характеристики должны несколько отличаться от теоретических. Заменим бесконечную трубу постоянного сечения бесконечной трубой с экспоненциально увеличивающимся сечением. Как Показано Вебстером, акустическое активное
сопротивление у узкого конца такого рупора постоянно для всех частот выше пограничной частоты рупора. Пограничная ча-
стота определяется «величиной раствора» рупора или показателем степени экспоненты и может быть взята ниже самой низкой
частоты, воспроизводимой полосы. Если рупор обрезать на некотором расстоянии от горла, то его действие изменится и будет зависеть от площади сечения, образовавшегося устья. Если площадь сечения устья достаточно велика, то отражения звуковой волны при проходе через устье рупора в окружающую среду —
малы, и полное сопротивление у горла для частот выше пограничной частоты практически остается постоянным. В этом случае система излучает в рупор одинаковую мощность при всех частотах выбранного диапазона, а следовательно, если пренебречь малым отражением от устья, то можно считать мощность, излучаемую этой системой в окружающую среду, постоянной, независящей от частоты.
В волновом уравнении д’Аламбера для аксиальных колебаний в экспоненциальном рупоре, предполагается, что во всякой плоскости, перпендикулярной к оси рупора, имеют место синфаз
154
ные колебания. Это условие практически выполняется, если только диаметр сечения рупора не превышает длину волны.
Экспериментально установлено, что для данной воспроизводимой полосы частот увеличение длины рупора сверх некоторой определенной величины не влияет на его действие, так что рабочая часть рупора уменьшается с увеличением частоты Поэтому в рупорах с прямолинейной осью условие синфазности колебаний в плоскости перпендикулярной оси рупора выполняется само собой. Однако, трудно получить синфазные колебания в плоскости перпендикулярной оси для рупоров искривленных или свернутых по спирали. Условие синфазности выполняется практически только в том случае, если диаметр сечения в месте сгиба меньше длины волны самой высокой частоты воспроизводимой полосы. Последнее условие ограничивает степень искривления рупора, которая может быть допущена без заметного ухудшения его акустических свойств. Если это условие не выполнено, то в рупоре получается интерференция, кроме того, некоторые части рупора при высоких частотах начинают работать как отражатели. Такой рупор ухудшает частотную характеристику громкоговорителя.
Нижняя пограничная частота конечного экспоненциального рупора определяется величиной раствора и площадью устья. Если пограничная частота выбрана, то этим самым уже задана как величина раствора, так и площадь устья рупора2. Имеется еще один фактор, определяющий длину рупора, это — площадь его горла.
Условия эксплоатации налагают ограничения на размеры театрального громкоговорителя. В звуковых кинотеатрах, а в особенности в тех из них, в которых экран для демонстрации звуковых картин расположен на или перед сценой для выступлений артистов, место за экраном весьма ограничено, поэтому громко-
1 В конечном рупоре отражения уменьшаются с возрастанием частоты В пределе, при достаточно высокой частоте, конечный рупор ведет себя как бесконечный. (Прим р е д.)
® Штенцель теоретически показал, что отражения от конца рупора минимальны в том случае, если диаметр устья рупора (при круглом сечении) составляет -—часть длины волны критической частоты рупора, определяемой
тс
соотношением f =-------. При этом касательная к поверхности рупора у его
Up ЗХ
устья составляет с осью рупора угол 45°. Вилсон и Вебб, ссылаясь иа эксперименты, дают в качестве оптимального угол 42°, при котором диаметр устья соста-
дают в качестве оптимального угол 42°, при котором диаметр
.вляет-5-е часть X Наконец, практически, американцы считают <5>О Кр.
пользоваться соотношением: диаметр устья рупора = -j- X
ющиеся при таком соотношений (благодаря отражениям от конца рупора) неравномерности частотной характеристики громкоговорителя на низких частотах, еще вполне допустимы. (Прим, ре д.).
допустимым
Получа-
/v/А
155
говоритель, устанавливаемый за экраном, должен иметь по длине минимальные габариты. -v '{
7. 9. РУПОРНЫЙ ГРОМКОГОВОРИТЕЛЬ С НАПРАВЛЯЮЩИМ ЭКРАНОМ
Имеются два основных класса рупорных громкоговорителей, отливающихся между собой размерами горла рупора.
Громкоговорителем с направляющим экраном называют обычно конусный громкоговоритель, соединенный с рупором, имеющим горло больших размеров .
Такой рупор нет необходимости сворачивать в виде спирали, так как, увеличивая горло рупора, можно сделать его коротким.
Рис. 7. 16. Громкоговоритель с направленным экраном и его эквивалентная электрическая схема.
При малых же размерах горла рупора, для уменьшения размеров громкоговорителя, приходится прибегать к сворачиванию рупора.
В настоящем разделе описывается рупорный громкоговоритель с направляющим экраном. Однако, общая теория этого громкоговорителя применима к обоим типам рупорных громкоговорителей.
Громкоговоритель с направляющим экраном состоит из .нескольких основных элементов, каждый из которых имеет определенные акустические постоянные. На рис. 7.16 они имеют следующие обозначения:
1. Широкое горло рупора zA].
.2. Бумажный конус и звуковая катушка /И,. •.
3. Ящик Сд-g, задняя стенка которого покрыта слоем войлока г
Аг
4. Воздушная камера между конусом и рупором С^.
1. Рупор
В рассматриваемом типе громкоговорителя применяется экспоненциальный рупор. Площадь сечения рупора на некотором расстоянии х вдоль оси определяется следующим выражением
< S — S^x
где So —• площадь горла,
156
S — площадь сечения рупора на расстоянии х вдоль оси, т—-показатель экспоненты.
Поведение рупора как акустической системы определяется характеристикой полного сопротивления и характеристикой направленности рупора. Выведем характеристику полного сопротивления конечного экспоненциального рупора. Волновое уравнение д’Аламбера в применении к аксиальным колебаниям экспоненциального рупора имеет вид'(из уравнения 2.131).
у — с2т-д-Л—=0 (7. 46)
т дх дх2 ' '
Решение этого уравнения может быть написано в форме
ср = еах [A cos bx+B~sin bx] eJwt (7. 47)
где a——m\2
Ь=-^}/4Л2— in2
k—2r.^
Л—длина волны
ы—2itf
f—частота
Давление в некоторой точке рупора
р=—р <р ——jwpeax [A cos fex-|-Bsin bx] е1'^ (7. 48)
Скорость об’емного смещения в некоторой точке рупора
U—S = S \аеах (A cos fex+Asin bx}-\-beax {—A sin bx-\-
+В cos bx)]eJwt (7. 49)
Располагая выражениями для давления и скорости об’емного смещения в данной точке рупора, можно определить давление и скорость об’емного смещения у горла в зависимости от давления и скорости об’емного смещения у устья рупора.
Полное сопротивление- у горла zAl
Полное сопротивление у устья
Таким образом мы имеем четыре уравнения, содержащие А, В, plf Ux, р2 и U2, из которых можно исключить А и В и получить отношение рг к Ult т. е. полное сопротивление горла рупора zAl.
157
Выражение для в зависимости от гд2 имеет вид
z
А\ ~ S,
z,42 cos (Ы— И) -| J sin (ЬГ) рС
jz^sm (Ь1)+~$^ cos (&/+©)
(7. 50)
где I—длина рупора
6 = arctg-°-
Si—площадь горла
S2— площадь устья.
Как показано Крэндаллом1 сопротивления у устья рупора2 * * *
активная составляющая полного (см. уравнение 2. 64)
г — РС (у A MR) \
kR ) <7’ 51>
Реактивная составляющая
рс ( К. (2АЯ) \
Д2 № V W ) V'
где
«=/?
Полное сопротивление гД2 у устья рупора
ZA2 ~ rA2 JXA2 (7. 53)
Теперь, подставив величину гД2 в уравнение, можно вычислить полное сопротивление у горла рупора.
2. Конус и звуковая катушка
В качестве материала для конусной диафрагмы применяется бумага. Звуковая катушка, прикрепленная к бумажному конусу, наматывается из алюминиевого провода. Воздушная камера соединяет поверхность конуса с горлом рупора (см. рис. 7.16). Сзади конус закрыт ящиком. Задняя стенка последнего покрыта слоем войлока.
Рассмотрим отдельные элементы этой системы.
Акустическое сопротивление- массы конуса и звуковой ка тушки
(7. 54)
1 Crandall. Theory of Vibrating Systems and Sound, p. 170.
2 Эти выражения не отличаются от выражений, выведенных в разделе 2. 10
для поршня, колеблющегося в бесконечной стене. Строго говоря, в примене-
нии к сопротивлению у устья рупора они не очень точны, но практически
достаточно хорошо иллюстрируют действие устья рупора.
158
/
где m —• масса конуса и звуковой катушки,
А — площадь конуса.
Допустим, что все части конуса колеблются синфазно. Очевидно, что при высоких частотах это допущение незаконно. Однако, благодаря большому сопротивлению излучения конуса и применению гофрировки, при частотах до 2000 гц можно не считаться с парциальными колебаниями конуса.
Акустическое реактивное сопротивление конуса и звуковой катушки
чип
ХАС~ ДР"
(7. 55)
3. Ящик громкоговорителя
Рассмотрим полное сопротивление излучения задней стороны конуса. Выражения для полного сопротивления поршня в бесконечной стене выведены в главе 2.10. Экспериментальные исследования конусов с плоскими экранами показали, что конус с размерами, нормальными для рассматриваемого нами типа громкоговорителя ведет себя как поршень при частотах примерно до 200 гц.
Рассмотрение же ящика как бескнечной плоскости законно только для тех частот, при которых полное сопротивление излучения задней стороны конуса имеет большую величину.
Сделав '.вышеуказанные замечания, можно дать выражение для полного сопротивления излучения задней стороны конуса. Оно состоит из двух частей: активной и реактивной составляющей.
Активная составляющая (см. уравнение 2.64)
(> - ) <7- 56>
где /?' — радиус конуса. Реактивная составляющая
АВ~~ nR'* V 2#УП /
(7. 57)
Ящик, задняя стенка которого покрыта слоем войлока, образует вместе с конусом замкнутый об’ем воздуха. Назначение войлока — поглощать звук и устранять стоячие волны в ящике. Последние могли бы вызвать резкие неравномерности в характеристике полного сопротивления излучения задней стороны конуса. Для высоких частот поглощение войлока практически равно единице. Таким образом при этих частотах звуковые волны войлоком полностью поглощаются. При низких же частотах поглощение (оказывается вес-ьма небольшим, поэтому при низких частотах нужно считаться с реактивным сопротивлением акустической емкости ящика.
159
Возьмем наиболее неблагоприятный случай, когда поглощение задней стенки ящика равно нулю. Акустическая емкость .ящика
(7.-58)
АВ рс* ' '
где Vj —• об’ем ящика, с — скорость звука, р —плотность воздуха.
Реактивное сопротивление акустической емкости ящика, которое должно быть включено в эквивалентной схеме рис. 7.16 последовательно с сопротивлением рупора
--------J—= —-Pg, (7.59) АВС Ш^АВ “Ц v '
Это уравнение справедливо при размерах ящика, соизмеримых с четвертью длины волны. При более высоких частотах поглощение достигает практически единицы и, следовательно, сопротивлением ящика можно пренебречь.
4. Воздушная камера
Воздушная камера является своего рода акустическим трансформатором, включенным между большой площадью конуса и меньшей площадью горла рупора. Акустическая емкость камеры (С. на рис. 7.16).
Z1 I
=-^ Р- 60)
где V» — об’ем воздушной камеры.
Реактивное сопротивление акустической емкости камеры
х — (1
л А1С~~ шУ2 v-
Таким образом выражения для всех сопротивлений акустической системы получены.
5. Эквивалентная электрическая схема громкоговорителя и к о э ф и ц :и е н т полезного действ и я.
Эквивалентная электрическая схема всей акустической системы приведена на рис. 7.16. Акустическое полное сопротивление в точке Р определяется уравнением
% А1— ^А7'~^~ j%AT
Механическое полное сопротивление акустической системы в точке Р
ZM=r^ГАТ^ХАТ^ 63)
где А — площадь конуса.
160
Для громкоговорителя с подвижной катушкой полное элек-
трическое сопротивление движения определяется (см. уравнение 7.18)'
— 1 • - ШУ _ .
ZeM~reM JXeM - zM ‘ '
выражением
(7. 64)
где В — индукция,
а 1 — длина проводника звуковой катушки.
С помощью полного электрического сопротивления движения можно определить коэфициент полезного действия, характеризующий громкоговоритель. Коэфициент полезного действия
к. п. д.=
ГеМ
геМ Ге“
(7. 65)
где Г(М—активная составляющая сопротивления движения
rcd— активное сопротивление звуковой катушки (при заторможенной катушке).
Мы получили выражение для всех основных сопротивлений акустической системы. Теперь нужно выбрать величину этих со-
противлений таким образом, чтобы получить в широком диапазоне частот равномерную отдачу. Как видно из эквивалентной схемы (рис. 7.16) для обеспечения постоянства мощности, рассеиваемой в сопротивлении весьма важно иметь малую массу конуса и звуковой катушки. Это условие выполнимо при-применении легкого жестко-, го бумажного конуса и’ звуковой катушки из алюминиевой проволоки. Однако обыкновенный конус из легкой жесткой бумаги дает неравномерную
Рис. 7. 17. Характеристики системы, показанной на рис. 7. 16.
Кривая А—г (активное сопротивление у гор-Л5 ла рупора).
, В—х (реактивное сопротивление у
711 горла рупора).
„ С—х (реактивное сопротивление
Л1Своздушной камеры).
» D—х (реактивное сопротивление
АВС ящика),
„ Е—г (активное сопротивление Зад
АВ ней стороны конуса).
„ F—x (реактивное сопротивление
АВ задней стороны конуса).
частотную характеристику на высоких частотах. Для уменьшения
неравномерности конус соответствующим образом гофрируется Размеры горла рупора должны обеспечивать необходимую
акустическую нагрузку конуса и -в то же время не должны ухуд-
11 Прикладная акустика.
161
шать частотной характеристики на высоких частотах из-за поглощения вдоль стенок или вредной интерференции в воздушной камере. Размер горла в сконструированном нами громкоговорителе взят 10 X Ю еда. Для получения хорошей характеристики на низких частотах размер устья рупора был выбран 110Х 145 сда.
Было решено ограничиться длиной рупора 125 еда, что при выбранных размерах горла и устья дает величину раствора рупора, соответствующую пограничной частоте порядка 100 гц. Характеристики сопротивлений горла рупора приведены
на рис. 7.17. Благодаря конечной длине рупора, кривая его акустического активного сопротивления на низких частотах, где это сопротивление падает, имеет ряд постепенно. затухающих максимумов. Уменьшение активного сопротивления компенсируется уменьшением реактивного сопротивления в других частях системы и следовательно мощность, поглощаемая в гА^ гри низких частотах, существенно не уменьшается (основная задача при выборе сопротивлений элементов рассматриваемой системы заключается в том, чтобы сделать эту мощность независящей от частоты). Характеристика реактивного сопротивления акустической емкости ящика приведена на рис. 7.17. Размеры ящика были выбраны так, чтобы уменьшение тока в эквивалентной схеме рис. 7.16 для частот выше 100 гц было незначительным.
На рис. 7.17 приведена также характеристика реактивного сопротивления акустической емкости воздушной камерыл^^. Размеры воздушной камеры взяты такими, чтобы при верхних частотах воспроизводимой полосы не получалось вредной интерференции. Расстояние между диафрагмой и стенкой воздушной камеры взято порядка 3 мм, что позволяет конусу колебаться с большой амплитудой, достаточной для получения полной мощности на низких частотах. Акустическая емкость воздушной камеры увеличивает коэфициент мощности схемы и таким образом повышает поглощаемую в zM мощность Ч
Реактивное сопротивление задней стороны конуса xA[i (см. соответствующую характеристику на рис. 7.17) уменьшает мощность, поглощаемую в zA}, однако поскольку это сопротивление мало по сравнению с реактивным сопротивлением массы конуса и звуковой катушки, оно мало влияет на общие характеристики системы.
Кривая коэфициента полезного действия, вычисленная по уравнению (7.65), приведена на рис. 7.18. Однако определение к. п. д. громкоговорителя теоретически, на основании приведенных формул, для частот выше 2000 гц, страдает большой неточностью, так
t По этому вопросу подробнее см. например Харкевич „Электроакустическая аппаратура" стр. 149. (Прим, р е д.)
162
как при частотах выше 2000 гц возникают порциальные колебания и конус не может быть рассматриваем, как простой поршень. Действие примененного в рассматриваемом громкоговорителе гофрированного конуса не отличается от действия гофрированного конуса, описанного в разделе 7.2. Этот конус имеет большую отдачу, чем простой поршень, что является его благоприятным свойством, поскольку оно увеличивает акустическую отдачу системы.
На рис. 7.18 приведены также экспериментально определенные величины к. п. д., полученные методом измерения электрического сопротивления движения. Коэфициент полезного действия подсчитывался по уравнению (7.65). Кроме того на рис. 7.18 нанесены
— теоретическая; .... полученная методом измерения электрического сопротивления движения; хххх полученная путем измерений с микрофоном.
Рис. 7. 18. Коэфициент полезного действия громкоговорители с направляющим экраном-
величины к. п. д., полученные по методу измерения акустической и электрической мощности громкоговорителя. Измерения звукового давления производились при помощи градуированного микрофона давления, перемещавшегося по поверхности сферы, в центре которой на
ходился громкоговоритель, причем поверхность сферы была разделена на элементы и измерялась энергия, проходящая через каждый элемент. Энергия, излучаемая громкоговорителем, вычислялась путем суммирования энергии, проходящей через элементы сферы. Измерительный микрофон градуировался при помощи диска Рейли. Нужно заметить, что как при теоретическом подсчете, так и при измерении к. п. д., учитывалась энергия, излучаемая задней стороной конуса, которая входит в энергию, отдаваемую громкоговорителем, но не может быть использована.
Как видно из рис. 7.18 все три метода дают близкие результаты. Кривая к. п. д. рис. 7.18 показывает, во-первых, что громкоговоритель рассматриваемого типа имеет высокий к. п. д., и, во-вторых, что уменьшение к. п. д. с увеличением частоты невелико. Такому уменьшению к. п. д. соответствует незначительный завал частотной характеристики, так как к. п. д. пропорционален квадрату звукового давления. Вообще кривая к. п. д., выраженного в процентах, представляет собой весьма показательную характеристику качества работы громкоговорителя.
Если выразить изменения к. п. д. в величинах более наглядных с точки зрения воспроизведения звука, а именно в децибелах, то получится, что максимальные отклонения не превышают четырех децибел. Как видно из сопоставления частотной харак-
11*
163
теристики и характеристики направленности (рис. 7.18 и 7.20), небольшая разница между формой последней для высоких и низких частот хорошо компенсирует завал кривой к. п. д. на высо-
ких частотах, так что кривая чувствительности громкоговорителя (рис. 7.19) получается весьма равномерной Ч
Частотная характеристика и характеристика направленности являются лучшими критериями качества работы громкоговори-
Рис. 7. 19. Частотная характеристика громкоговорителя с направляющим экраном (длина рупора 125 см).
теля. Частотная характеристика описываемого громкоговорителя снималась на оси на расстоянии 6 ж от выходного отверстия рупора на открытом воздухе.
Можно не говорить" о том, что частотная характеристика громкоговорителя, снятая в помещении, является чрезвычайно ус-
ловной, если только путем снятия большого числа ха рактеристик и тщательного их анализа не изучено влщ
яние помещения (см. гл. X).
Частотная характеристика (рис. 7.19) и характеристика направленности (рис. 7.20) показывают, что развиваемая описываемым.
типом громкоговорителя мощность не претерпевает резких изменений с частотой.
1 Направленность рупоров до настоящего времени теоретически не исследована, вследствие ряда трудностей, которые возникают при решении этой задачи. Однако, направленность рупоров является проблемой, представляющей чрезвычайный интерес для практики, поэтому в настоящее время ведутся работы по экспериментальному исследованию этого вопроса, имеющие целью установить хотя бы общие закономерности.
Такая работа ведется одновременно Олсоном в Америке и НИИСом НКСвязи у нас в СССР. Результаты первого этапа работы Олсона опубликованы в апрельском номере журнала «КСА Review» за 1937 г.
Согласно этим результатам на частотах, при которых длина волны больше диаметра устья рупора, характеристика направленности рупора аналогична характеристике направленности поршня с диаметром, равным диаметру устья рупора. При более высоких частотах, когда длина Волны становится меньше диаметра устья, характеристики направленности рупора сужаются, однако не так сильно как у поршня. Таким образом кажущийся источник звука как бы уходит вглубь рупора и соответственно уменьшается в диаметре. Олсон утверждает, что при средних и высоких частотах срезание широкой части рупора, прилегающей к устью, сЪвершенно не отражается на характеристике направленности, последняя при этих частотах зависит исключительно от .показателя экспоненты. Как и следовало ожидать, чем меньше показатель экспоненты рупора, тем для данной частоты характеристика направленности оказывается более узкой.
Олсон экспериментирует с рупорами, устье которых заключено в плоский экран, причем использует маленькие высокочастотные рупоры. НИИС наоборот, экспериментирует с рупорами нормальных размеров и без экранов.
164
Это нужно отнести частично за счет того, что акустическая нагрузка также не претерпевает подобных изменений. Неравномерности частотной характеристики, встречающиеся часто в громкоговорителях с кониной диафрагмой, в рассматриваемом типе громкоговорителя устранены благодаря уменьшенной массе конуса и звуковой катушки и благодаря применению гофрированного конуса, подобного описанному в разделе 7.2.
Громкоговоритель с направляющим экраном, обладая прочной конструкцией и высоким коэфициентом полезного действия, способен развивать без искажений большую акустическую мощность (от пяти до десяти ватт звуковой энергии). С помощью одного
Рис. 7. 20. Характеристики направленности громкоговорителя с направляющим экраном (длина рупора 125 см).
такого громкоговорителя, имеющего высокий к. п. д., хорошую частотную характеристику и большую направленность, можно обслужить при хорошем качестве передачи театр большого об’ема.
7. 10. РАБОТА КОНУСНОЙ ДИАФРАГМЫ, ЗАМОНТИРОВАННОЙ В СТЕНКЕ ЗАКРЫ1ОГО ЯЩИКА
Обычно в громкоговорителях с конусной диафрагмой как та, так и другая сторона конуса открыты и звуковая энергия излуг чается в обе стороны. В некоторых случаях, как например, для эталонных источников звука, применяемых при градуировании микрофонов, измерениях реверберации и т. п., желательно заключить громкоговоритель в закрытый ящик для того, чтобы избавиться от излучения задней стороны конуса. В такой системе
Поскольку работа НИИСом не закончена, еще рано подводить окончательные итоги, интересно однако, отметить одни, весьма, важный момент, уже выяснившийся в результате этой работы. Оказывается, что в рупорах с большим устьем (порядка иа сравнительно высоких частотах
(порядка 8 fkp) получается эффект расширения характеристики направленности, сопровождающегося изменением обычной формы характеристики. Этот эффект пропадает при срезании широкой части рупора. В свете этого явления утверждение Олсона, что при высоких частотах широкая часть рупора не работает, представляется проблематичным. (Прим, р е д.).
165
трим систему, показанную нуса
дополнительная упругость ящика, действующая на заднюю сторону конуса, уменьшает отдачу на низких частотах.
Отметим наиболее важные факторы такой системы. Рассмо-на рис. 7.21. Скорость колебания ко-
х ------------------ q 66)
Рис. 7. 21. Динамический громкоговоритель в ящике.
т? г См?
Эквивалентная схема низких частотах
В — индукция в воздушном зазоре
I — длина проводника звуковой катушки
i — ток в звуковой катушке
— сопротивление излучения
т — масса конуса, звуковой катушки и соколеблющаяся масса воздуха
СМ~ СМ\+СМ2
—гибкость центрирующего устройства и подвеса конуса ^Ж2 — гибкость воздуха в ящике, закрывающем заднюю сторону конуса
СЖ2 = t'W
А — площадь конуса
Р — плотность воздуха с — скорость звука.
Эквивалентная электрическая схема этой системы приведена на рис. 7.21. Из уравнения (7.66) видно, что при частотах выше резонансной частоты системы скорость конуса обратно пропорциональна частоте, а так как гм пропорционально квадрату частоты, то развиваемая мощность не зависит от частоты. При частотах ниже резонансной частоты скорость конуса ограничивается величинами Си , причем она практически пропорциональна частоте, а следовательно отдача с уменьшением частоты быстро падает.
Таким образом, отдача при низких частотах определяется резонансной частотой системы. Если велико по сравнению с С. то акустическая емкость ящика существенно не отражается на поведении системы и оно будет таким же, как и в случае конуса, открытого с обеих сторон. Если об’ем ящика, удовлетворяющего этим условиям, получается слишком большим, то остается изменить систему громкоговорителя. Так как масса конуса практически пропорциональна его площади, а действие на 166
него гибкости воздуха в ящике СЛ) обратно пропорционально квадрату площади, то можно понизить резонансную частоту путем уменьшения площади конуса. Нужно заметить, что при этом вообще говоря понизится коэфициент полезного действия системы.
Остроту основного резонанса системы и стоячие волны в ящике, получающиеся при высоких частотах, можно уменьшить, покрывая внутренние стенки ящика рыхлым шерстяным войлоком.
7. 11. ЭКРАНЫ ГРОМКОГОВОРИТЕЛЕЙ
Экран громкоговорителя представляет собой поверхность, применяемую для увеличения «акустического пути» между передней и задней сторонами конуса. Обычно в качестве экранов применяются плоские поверхности.
Передняя и задняя стороны конуса излучают звуковые волны, сдвинутые по фазе на 180°. При малых размерах экрана на низких частотах воздух просто «перекачивается» от одной стороны конуса к другой его стороне и, следовательно, сопротивление излучения весьма мало.
Экспериментально установлено, что при больших по сравнению с размерами экрана длинах волн, акустический путь от передней до задней стороны какого-либо элемента конуса равен кратчайшему .расстоянию по воздуху между указанными двумя сторонами элемента.
При этом условии можно приближенно проинтегрировать уравнение (2.59) раздела 2.10 и получить активную и реактивную составляющие для экрана конечных размеров. Нужно принимать во внимание разность фаз в 180° между сторонами, а также и то, что каждая сторона излучает в телесном угле 4л.
Для конуса, колеблющегося в экране квадратной формы, все возможные акустические пути от передней до задней стороны практически имеют одинаковую длину. Поэтому при длине волны равной разности акустических путей от двух сторон конуса до рассматриваемой точки следует ожидать глубоких провалов в частотной характеристике. На рис. 7.22 приведена частотная характеристика динамического громкоговорителя с диаметром конуса 20 см, работающего в экране квадратной формы со стороной 90 см, снятая в открытом пространстве на расстоянии Зм.
Рис. 7. 22. Частотная характеристика конусного громкоговорителя с диаметром конуса 20 ск, снятая с помощью микрофона на расстоянии 3 м. 2—квадратный экран 2—несимметричный экран.
167
Как видно из рис. 7.22, эта характеристика имеет глубокий провал на частоте 500 гц (длина волны 69 см), тогда как кратчайший акустический путь экрана — 71 см. Применяя несимметричные экраны (рис. 7.22), можно избавиться от провалов и выравнять-частотную характеристику. В несимметричных экранах длины путей между передней и задней сторонами неодинаковы, поэтому вредная интерференция распределяется по широкой полосе ча-* стот. I
Изображенная на рис. 7.22 сплошной линией частотная характеристика, получившаяся при замене
Рис- 7. 23. Частотные характеристики ксиус-нЬго громдоговорите । я с диаметром конус.' 20 см с квадпатны«и экранами различных размеров, снятые в свободном звуковом поле на расстоянии 3 м.
симметричного экрана несимметричным, не имеет резких провалов и достаточно равномерна.
Влияние размеров экрана на частотную характеристику ворителя большой ближенные
могут быть выполнены согласно приведенным выше указаниям.
Приведенные на рис 7.23 частотные характеристики динамического громкоговорителя с диа
метром конуса 20 см при экранах различных размеров получены, экспериментальным путем.
громкого-представляет интерес. При-вычисления
7. 12. ИСКУССТВЕННЫЙ ГОЛОС
Каждая лаборатория, занимающаяся испытаниями акустической аппаратуры, испытывает необходимость в источнике звука, обладающем в широком диапазоне частот равномерной частотной характеристикой. Для испытания некоторых типов микрофонов, кроме того, желательно иметь источник звука, обладающий акустическими характеристиками человеческой головы. Теоретические исследования явления дифракции звука у человеческой головы были проведены Стюартом (Stlewart), рассматривавшим голову как твердую сферу с источником звука, помещенным на ее поверхности (см. раздел 5.8). Согласно этому исследованию диафрагма малых размеров, колеблющаяся на поверхности сферы, имеет такие же характеристики, как и человеческий голос. Другими словами, такой источник дает такую же форму распределения звукового поля, как и человеческий рот.
Располагая микрофон близко к «искусственному толосу», получаем те же искажения звукового поля, как и для человеческого
168
голоса в аналогичных условиях. Искусственный голос, разумеется, в пределах диапазона частот и мощностей человеческого голоса, не должен вносить амплитудных искажений.
Монтаж маленького громкоговорителя на поверхности сферы сопряжен с некоторыми конструктивными трудностями. Экспериментально же установлено, что куб вызывает такую же дифракцию звука, как и сфера равного об’ема. Показанный на рис. 7.24 искусственный голос, имеющий простую конституцию, состоит из маленького динамического громкоговорителя с конусом диаметром 6,3 с.м, замонтированного в стенку прямоугольного ящика. Полученная экспериментально характеристика направленности этого искусственного голоса хорошо совпала с теоретически вы численной.
Выводы раздела -7.10 вполне применимы и к этой системе.. Масса конуса и звуковой катушки 2 г. Резонанс этой массы с суммарной упругостью системы, состоящей из упругости воздуха в ящике и упругости подвеса конуса, лежит на частоте порядка 70 гц. При маленьком диаметре конуса задача получения на высоких частотах равномерной частотной характеристики значительно упрощается. Для выравнивания частотной характеристики конус имеет' гофрировку, состоящую из двух складок. Приведенная на рис. 7.25 частотная характеристика показывает, что отдача системы равномерна в широком диапазоне частот. При постоянной величине -подводимого к звуковой катушке напряжения для частот ниже 300 гц имеет место
понижение чувствительности. Верх- Рис. 7. 24. Искусственный голос и (няя кривая рис. 7.25, представляю- установленный дли градуировки (цая частотную характеристику ис- микгофон.
кусственного голоса вместе с усилителем, компенсирующим завал низких частот характеристики искусственного голоса, обладает хорошей равномерностью в полосе частот от 50 до 10000 Щ.
7. 13. ПНЕВМАТИЧЕСКИЙ ГРОМКОГОВОРИТЕЛЬ
Основную часть этого громкоговорителя представляет клапанный механизм, управляемый электрическими токами. Этот механизм регулирует постоянный поток воздуха в соответствии с изменениями подводимого переменного электрического тока. Обычно для пневматических громкоговорителей применяются
169
экспоненциальные рупора. Для того, чтобы отношение отдавае мой звуковой мощности к подводимой электрической мощности не зависело от частоты, нужно, чтобы при изменении частоты (для частот выше пограничной частоты рупора) отношение скорости об’емного смещения к подводимому напряжению оставалось постоянным. Последнее требование обусловливает незави
симость от частоты отношения амплитуды клапана к подводимому напряжению, что, вообще говоря, трудно выполнимо. Дей-
ствительно, для этого в полном сопротивлении механизма клапана должно преобладать реактивное сопротивление упругости, а масса, следовательно, должна оставаться малой. В то же время клапан должен быть достаточно прочным, для того, чтобы вы держивать давление постоянного потока воздуха.
Основное преимущество рассматриваемой системы заклю-
Рис. 7. 25. Частотная характеристика „искусственного голоса*: А—вместе с корректированным усилителем, В—ври п< сюян-ном напряжении на зажимах звуковой катушки.
вае'мой в регулирующем механизме,
чается в том, что она способна отдавать большую акустическую мощность при малой подводимой электрической мощности.
Коэфициент полезного действия, т. е. .отношение отдаваемой акустической мощности к подводимой электрической мощности в такой системе может, превышать 100%. Однако не нужно забывать, что в дополнение к электрической мощности, затрачи-нужно затрачивать также
значительную механическую мощность для создания постоянного
воздушного потока.
Если эту механическую мощность прибавить к электрической мощности, то «эффективный» коэфициент полезного действия, конечно, окажется значительно ниже 100%.
7. 14. РЕЗОНАНС ЯЩИКА РАДИОПРИЕМНИКА
Когда говорится о резонансе какой-либо системы, предполагается, что реактивное сопротивление равно нулю и система обладает только активным сопротивлением. В громкоговорителе, замонтированном в стенку ящика, имеются две системы: механическая система самого громкоговорителя и акустическая система ящика. Примем, что громкоговоритель имеет механическую систему, в полном сопротивлении которой преобладает реактивное
170
сопротивление массы, т. е., что рабочая полоса частот лежит выше резонансной частоты конуса и его системы подвеса.
Если задняя стейка ящика открыта, то такая система аналогична трубе, имеющей конус на одном конце и открытую заднюю
Рис. 7. 26. Частотная характеристика динамического конусного । ромкоговорители, за-моатированного в я пике радиоприемника. А—ящик без резонатора, В—ящик с резонатором.
стенку ящика на другом конце. Резонанс наступает на такой ча
стоте, при которой отношение скорости конуса (или скорости
частиц воздуха у открытого конца) к вится максимальным. При этой частоте Иой ящика излучается максимальная энергия. Частотная характеристика, приведенная на рис. 7.26, иллю- *» стрирующая влияние резонанса Гг' ящика, показывает* что этот резонанс имеет место при частоте порядка 130 гц. Резонанс ящика сильно уменьшает артикуляцию и натуральность передачи речи. Он также заметно ухудшает передачу
приложенной силе стано-
конусом и задней сторо-
Эквивалентная с я ено
Рис. 27. Ящик приемника с резонатором Гельмгольца.
Mt, z (реактивное и активное сопротивления конуса). г (реакти«кое соиротив-Л2 ление и сопротивление излучения задней’ стороны ящика)
С (акустическая емкость ящики)
М3,С (акустическая масса и А2 емкоеib резонатора).
музыки, вызывая на некоторых но-тах большое увеличение громкости и продолжительности звучания по сравнению с натуральной музыкой.
В некоторых случаях резонанс ящика усиливает акустическую обратную связь и «вытье» приемника. «Заглушение» резонанса в таких случаях’ устраняет или сглаживает нарушение правильного режима работы.
Распространенный метод борьбы
с резонансом ящика состоит
в гом, что устраивается сообщение между частью ящика, при-
мыкающей к передней стенке, в которой замонтирован громко
171
говоритель, и внешним воздухом.. Это сообщение как бы разряжает давление и препятствует возникновению резонансных колебаний. Если этот путь представляет небольшое акустическое сопротивление, то давление действительно сильно уменьшается, однако,благодаря циркуляции воздуха от передней к задней,стороне конуса и обратно, получается понижение отдачи на низких частотах. При применении правильно рассчитанного резонатора Гельмгольца можно, не понижая отдачи на низких частотах, ослабить давление на резонансной частоте.
Рассмотрим, каким образом можно посредством резонатора Гельмгольца уменьшить резонансные явления в ящике.
При резонансе в точке рг (рис. 7.27) получается высокое да вление Г В этой точке скорость колебания частиц равна нулю. В разделе 2.7 при рассмотрении резонаторов Гельмгольца былс показано, что на резонансной частоте в горлышке резонатора скорость колебания частиц максимальна, а давление минимально.
Если поместить горлышко резонатора в точку с высоким давлением и настроить резонатор на резонансную частоту системы громкоговоритель-ящик, то давление в точке р уменьшится и тем самым уменьшатся резонансные явления в ящике.
В действительности акустическая емкость и масса ящика представляют собой распределённые величины. Однако при резонансной частоте можно представить рассматриваемую систему
как систему с сосредоточенными постоянными, не уклоняясь далеко от действительности. Основной резонанс получается на ча-
стоте, при которой реактивное сопротивление параллельно вклю
ченных масс М± и М2 равно реактивному сопротивлению акустиче-
ской емкости ящика. При этой частоте в сопротивлениях
и
г. поглощается максимальная мощность и в частотной характе-у12
ристике получается пик.
Если в ящике имеется резонатор, как показано на рис. 7.27, то при резонансной частоте реактивное сопротивление последовательно включенных М3 и Сд2 равно нулю. Это, конечно, изменяет
условия при основном резонансе ящика.
Анализ эквивалентной электрической схемы показывает, что при надлежащем выборе постоянных можно в широкой полосе частот получить в акустических сопротивлениях г и гд2 постоянную скорость об’емного смещения.
Поскольку обычно применяются ящики больших размеров, резонатор не имеет сильной связи с акустической системой ящика и они не могут быть рассматриваемы как одно целое. Кроме того, как отмечалось выше, акустическая масса и емкость ящика пред-
1 Как „падение напряжения" это давление надо представить себе на зажимах контура М2га2 (Прим, ре д.)
172
ставляют собой не сосредоточенные, а распределенные постоянные. Поэтому приведенное выше об’яснение не отражает действительной картины, однако оно выясняет принципы, лежащие в основе явления.
Практически в процессе проектирования ящика для радиоприемника обычно стремятся свести до минимума основной резонанс ящика путем соответствующего распределения заключающихся в нем деталей. Далее определяют для ящика при основной резонансной частоте область высокого давления и находят наивыгоднейшее место для расположения резонатора. Положение ящика по отношению к стене комнаты изменяет амплитуду и частоту основного резонанса. Это должно быть принято во внимание при проектировании акустической системы.
Детальный анализ всей системы в целом представляет собой весьма сложную задачу, и об’ем настоящего раздела книги не позволяет привести этот анализ. Во всех тщательно проводимых разработках радиоприемников главные усилия направляются на то, чтобы добиться хорошей равномерности частотной характеристики. На рис. 7.26 приведены частотные характеристики громкоговорителя в ящике, причем характеристика, изображенная сплошной линией, снималась без резонатора, а характеристика, изображенная пунктирной линией, — с резонатором. Кривые иллюстрируют эффективность применения резонатора.
7. 15. ВЫСОКОЧАСТОТНЫЙ РУПОРНЫЙ ГРОМКОГОВОРИТЕЛЬ С ЛЕНТОЧНОЙ ДИАФРАГМОЙ
Улучшение качества передачи при расширении полосы частот сверх 8000 гц, вообще говоря не так велико, чтобы оправдать требующиеся в настоящее время дополнительные расходы, связанные с таким расширением воспроизводимой полосы частот. Однако в некоторых случаях практики, как например для измерения или для эталонных систем передачи звука, желательно воспроизводить весь слышимый диапазон частот.
Как отмечалось выше, громкоговорители не воспроизводят очень высоких частот обычно потому, что реактивное сопротивление диафрагмы или колеблющейся системы при этих частотах становится соизмеримым и даже преобладающим над сопротивлением излучения. Один из методов уменьшения реактивного сопротивления диафрагмы описан в разделах 7.2 и 7.3. В разделах 7.8 и 7.9 было показано, что рупор дает возможность во много раз увеличить сопротивление излучения диафрагмы и тем самым дает возможность уменьшить отношение между реактивным сопротивлением массы диафрагмы и сопротивлением излучения. В настоящем разделе описывается рупорный громкоговоритель ленточного типа, воспроизводящий полосу частот от 3500 до 16 000 гц.1
173
На рис. 7.28 изображен построенный авторами’громкоговори-тель, который воспроизводит такую полосу частот. Диафрагма этого громкоговорителя представляет собой гофрированную- алюминиевую ленточку длиной 5 см, шириной 0,5 см и толщиной 0,0004 см, укрепленную в рамке из шелка, аналогично ленточке ленточного телефона, описанного в разделе 6.5.
Для уничтожения интерференции в камере, связывающей диафрагму с рупором, последний разделен на две части, как показано на рис. 7.28. Горло рупора имеет такую площадь, что реактивное сопротивление массы ленточки при частоте 14000 гц
Высокочастотный рупорный громкоговоритель с диафрагмой, приводимой в движение катушкой, описан Бостуиком (Bostwick) *.
7. 16. ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ МАГНИТНЫХ ЦЕПЕЙ
Рис. 7. 28. Высокочастотный ленточный громкоговоршель.
Рис. 7. 29. Частотная характеристика высокочастотного громк< говорителя с рупором и ленточной диафрагмой.
равняется активному сопротивлению у горла рупора. Горло рупора имеет размеры 7X7 см. Нижняя пограничная частота рупора— 2500 гц. Начиная от этой частоты, сопротивление у горла рупора растет и при частоте 3500 гц достигает полной величины Теория рупорных громкоговорителей, изложенная в разделах 7.8 и 7.9, приложима и к рассматриваемому громкоговорителю, поэтому излишне повторять ее применительно к этому громкоговорителю. Частотная характеристика громкоговорителя, представленная на рис. 7.29, в диапазоне частот от 3500 до 16 000 лц имеет хорошую равномерность.
Такой громкоговоритель является ценным прибором при измерениях на верхних частотах слышимого спектра. Он может также работать совместно с рупорным или безрупорным громкоговорителем, . причем воспроизводимая полоса частот расширяется до 16 000 гц. В этом случае применяется специальный фильтр, распределяющий подводимую электрическую энергию между двумя громкоговорителями, в соответствии с их частотными диапазонами.
174
Для возбуждения магнитного поля в электроакустических преобразователях применяется либо постоянный магнит, либо электромагнит. В обоих случаях основной задачей является получение возможно большей магнитной индукции в воздушном зазоре аппарата. Величина индукции при заданной магнитодвижущей силе зависит от сопротивления зазора и сопротивления самого магнита. Очевидно, что для получения максимальной индукции последнее должно быть сделано минимальным. С этой точки зрения является нежелательным работать-с индукциями, при которых наступает насыщение магнитопровода. С л •
работа магнитного материала при ------" _
в экономическом и конструктивном отношениях. Определение магнитного потока, проходящего через каждую часть магнитопровода, обычно производится экспериментальным путем, так как точный подсчет магнитного рассеяния возможен только для самых простых типов магнитных систем. Ниже описывается способ экспериментального исследования магнитной цепи.
На рис. 7.30 изображена простейшая магнитная цепь, состоящая из U-образного магнита и прямоугольного воздушного зазора. Достаточно полную характеристику магнитной цепи дают результаты измерения потока в воздушном зазоре и потока рассеяния. Обратимся к рис. 7.30а.
Величины потоков, проходящих через различные части магнитной цепи, можно определить из следующих выражений (в соответствии с рис. 7.30а):
~ &L5 + Ф/.4+ Ф/.З + Ф/.2 + ФД + ®ag
Ф/i ~ Фд + Ф/.3 + Фд + Фд + Фд^
Фс—Ф/,3 + Фд+ Фд + ®ag
Ф D~ Ф/.3 + Фд + Фц£
где Фд . и т. д.—полные потоки, обозначенные на рис. 7.30а.
------£ другой стороны, малой индукции невыгодна
Рис. 7.30. Экспериментальное исследование распределения магнитного потока в магнитной цепи.
(7.67)
(7.68)
(76.9)
(7.70)
• См. раздел 7- 7.
175
Способ измерения потока в зазоре и потока рассеяния ясен из схемы рис. 7.30b. Виток проволоки, присоединенный к флюксметру (или балистическому гальванометру), вводится в магнитное поле таким образом, чтобы активная сторона витка была расположена параллельно оси зазора. В зависимости от того, какой поток желательно измерить, подвижная сторона витка помещается в то или другое место поля. Так например, если проводник помещается в положение-7 (рис. 7.3ОЬ) и затем резко поднимается вверх вплоть до выхода из пределов поля рассеяния, то прибор (флюксметр) проинтегрирует число пересеченных линий поля и покажет величину потока . Если проводник поместить в положение / и повторить с ним такую же операцию, то флюксметр покажет сумму • Потокв воздушном зазоре может
быть измерен либо путем передвижения проводника по вертикали из положения 7 в положение 2 (или из 2 в 7), либо как разность отсчетов прибора при .вынесении проводника за пределы поля из положения 2 и 1 Очевидно, что Ф/3 получается при передвижении проводника из 4 в 2 или обратно, Фм—при передвижении проводника из Положения 4 в положение 5, а Ф/с.— из положения 5 к основанию магнита.
Если измерительное устройство с одним подвижным проводником получается малочувствительным, то нужно увеличить число витков. При этом чувствительность возрастает пропорционально числу витков.
Измерив все составляющие потока, можно, пользуясь вышеприведенными выражениями от (7.60) до (7.70), подсчитать суммарные потоки, протекающие через отдельные части магнитопровода.
Изложенный метод применим главным образом для исследования магнитного поля аппаратуры с постоянными магнитами. Магнитное поле электромагнитов может быть исследовано более простым способом. В этом случае измерительный виток надевается на исследуемую часть магнитопровода. После этого замыкается цепь обмотки возбуждения электромагнита, а величина потока определяется по отклонению флюксметра.
Этот способ весьма прост и обычно применяется при испытании магнитных цепей динамических громкоговорителей. Столь быстрое исследование помогает конструктору оценить, насколько рационально рассчитана магнитная цепь и насколько правильно выбрана конфигурация магнитопровода и габариты катушки возбуждения. Наконец, оно позволяет оценить величину потока рассеяния и путем соответствующего выбора конструкции магнито-провода— его уменьшить. При этом может быть уменьшено сечение тех частей магнитопровода, через которые проходит поток рассеяния.
От полного потока весьма просто перейти к величине магнитной индукции путем деления потока на площадь соответ-176
ствующего поперечного сечения. В случае зазора цилиндрической формы, измерение магнитного потока, 'проходящего через зазор, можно производить при помощи прямоугольной катушки, согнутой по форме дуги окружности цилиндра. Выдергивая эту катушку из зазора, получаем отсче/ прибора, соответствующий полному потоку, пронизывающему катушку, умноженному на число витков катушки. Величину индукции в зазоре можно получить из следующего выражения
В=^А (7‘ 71>
где N — число витков измерительной катушки А —• площадь катушки.
Интересен еще один способ измерения индукции, применяющийся особенно часто при испытании систем с цилиндрическим зазором (например динамических громкоговорителей). Способ заключается в измерении силы, с которой втягивается в магнитное поле проводник известной длины под действием пропускаемого через этот проводник постоянного тока.
Эта сила определяется формулой
гЦАдин (7.72)
где В — индукция в гауссах
1 — активная длина проводника в см
I — сила тока, протекающего через проводник, в амперах.
Из вышеописанного уравнения можно получить, что
D 9800 IT
#=----------гаусс
(7. 73)
где W —- сила в граммах, действующая на проводник. Лабораторная установка, позволяющая производить подобные измерения, изображена на рис. 7.31. Коромысло точных весов имеет на одном конце небольшую чашечку для гирек, а на другом — измерительную катушку, намотанную из проводника известной длины.» Ток батареи протекает через реостат, амперметр и измерительную катушку. Направление тока выбирается таким, чтобы под его действием катушка втягивалась в зазор. Затем в чашечку накладываются гирьки до тех пор, пока их! вес не уравновесит притяжения поля.
Этот вес (W) и является искомой величиной, необходимой для вычисления индукции В согласно уравнению (7.73).
Рис. 7.31. Установка для измерения магнитной индукции в воздушном зазоре громкоговорителя.
] 2 Прикладная акустика.
177
7. 17. РАСЧЕТ МАГНИТНОЙ ЦЕПИ С ПОСТОЯННЫМИ МАГНИТАМИ
Применение постоянных магнитов в электроакустической аппаратуре вызывается рядом практических преимуществ постоянного магнита перед электромагнитом. Если бы стоимость аппаратуры с постоянными магнитными даже превосходила стоимость аппаратуры, требующей постороннего источника электрической энергии для возбуждения магнитного поля, то и в этом случае потребитель предпочел бы более совершенную в техническом отношении аппаратуру с постоянными магнитами. Все большее распространение электроакустической аппаратуры с постоянными магнитами выдвигает вопрос о принципах расчета магнитной цепи таких аппаратов.
Часто неудовлетворительные результаты и в первую очередь небольшая эффективность аппаратуры с постоянными магнитами об’ясняются несоблюдением основных требований при проектировании магнитных цепей этой аппаратуры.
Выбор магнитного материала определяется в основном двумя факторами: весом или об’емом магнитного материала и его стоимостью. Среди магнитных материалов, используемых для постоянных магнитов, в первую очередь необходимо отметить кобальтовую сталь, магнитодвижущая сила (на единицу об’ема) . которой в 3 раза превосходит магнитодвижущую силу хромистой и вольфрамовой стали; таким образом, с точки зрения веса и об’ема, кобальтовой стали должно быть отдано предпочтение перед другими сталями \
1 За сравнительно короткий срок, протекший с момента выхода в свет настоящей книги, изобретен ряд новых магнитных сплавов, обладающих значительно более высокими магнитными свойствами, чем кобальтовая сталь.
В нижеследующей таблице приведены значения Вг У.Нс, характеризующие магнитную энергию материала для известных в настоящее время магнитных сплавов.
Сплав В X Н
г ' с
Хромистый..............................0,6. 10г>
Вольфрамовый .................... .... 0,7. 106
Кобальтовый (15%) . . ...... 1,6. 106
Кобальтовый (35%).....................2,2. *10''
Никель-алюминиевый (альни)............4,2. 106
Никель-алюминиево-кобальтовый (альнико) . 5,4. 106
Читапо-никель-кобальтовый.............6.0. 106
Железо платиновый.....................7,2. 106
Сплавы альни (25% никеля) и альнико (20% никеля, 6% кобальта), обладающие в 2—2, 5 раза большей магнитной энергией, чем 35% кобальтовый сплав, за последнее время нашли себе широкое применение в технике и в частности в технике репродуктостроения, вытеснили кобальтовые сплавы. Современный комнатный динамик с постоянным магнитом из сплава альнико, обладающий несравненно более высокими акустическими характеристиками, чем электромагнитный громкоговоритель, по весу, габаритам, стоимости и к. п. д. почти не отличается oi последнего. (Прим, р е д.).
178
Однако стоимость кобальтовой стали в 20—30 раз превыш шт стоимость хромистой или вольфрамовой стали, поэтому если вес не является решающим фактором, то преимущества остаются на стороне дешевых сталей.
На рис. 7.32 представлены соотношения между магнитной индукцией и магнитодвижущей силой для упомянутых трех видон
стали. При помощи этих характеристик и подобных им характеристик других материалов можно определить наивыгоднейшие размеры магнита для различных практических случаев. Для этого прежде всего необходимо знать величину полного магнитного потока, который требуется возбудить в данной магнитной системе. Полный поток слагается из полезного потока, пронизывающего воздушный зазор, и
Рис. 7. 32. Соотношение между маг ниткой йндукнией и намагвичива ющей силой для различных маг нитных сталей.
потока рассеяния, величина которого может быть установлена с помощью одного из описанных методов. Зная величину требуе-
мого потока и задавшись маг-
нитной индукцией, с которой желательно работать в данном ма-
териале, можно определить сечение магнитопровода. Для того, чтобы установить длину магнитопровода, необходимо знать величину магнитодвижущей силы, требующуюся для преодоления
магнитного сопротивления цепи. Если магнитная цепь правильно
рассчитана, то все магнитное сопротивление почти целиком со средоточено в воздушном зазоре, поэтому требующаяся магнитодвижущая сила
F=Bl джильберт
(7- 74)
где В-—индукция в воздушном зазоре
/ — длина воздушного зазора в см.
Так как магнитная индукция выбрана, то для нахождения величины намагничивающей силы Н (в джильбертах на сантиметр) можно воспользоваться характеристиками упомянутых магнитных материалов. Эти характеристики изображены на рис. 7.32. Необходимая длина магнита
7.=-^- см
(7. 75)
Внимательный анализ кривых рис. 7.32 показывает, что при малых или больших индукциях на данную магнитную цепь рас
12*
179
ходуется больше материала, чем при некоторой средней величине индукции. Таким образом должна существовать некоторая оптимальная величина магнитной индукции, при которой получается минимальный расход материала. Установление такого
Рис. 7. 33. Об'ем стали, требующийся для получения данной магнитной индукции в данной магнитной цепи, для различных сталей.
оптимума весьма важно при проектировании электроакустической аппаратуры массового типа.
На рис. 7.33 приведены кривые, иллюстрирующие высказанные положения. Эти кривые представляют зависимость об’ема магнитного материала от величины индукции и вычислены для случая, когда полный поток Ф должен быть равным 1000 максвелл, при магнитодвижущей силе магнита 1000 джильберт.
Пусть 7—длина магнита в см.
А — поперечное сечение магнита в см2.
V — об’ем магнита в см,3. Тогда
Н-Д/ (7. 76)
Так как по условию магнитный поток равен 1000 максвелл, то индук-'
ция в магните
„ 1000
В-=—А~ гаусс
(7. 77)
При магнитодвижущей силе в 1000 джильберт намагничивающую' силу можно определить из выражения
уу_1000 джильберт на см (7. 78)
Перемножая два последних равенства, получаем
/5H-_J20oxl00° (7 . 79)
/\1
откуда
у=ДОООХ1Р22_СЛ{311ООО максвелл/1000 джильберт (7. 80)
вн
Подставляя соответствующие В и И, из рис. 7.39 можно получить зависимости V от В для трех магнитных сплавов, которые 180
изображены на рис. 7.33 (при условии, что Ф = 1000 максвелл, а В = 10-00 джильберт). Из этих кривых видно, что, например, для кобальтовой стали наиболее экономичной, является индукция 6-800 гаусс, для тунгстеновой стали — 6400 гаусса, для хромистой стали—- около 6000 гаусс. При индукциях больших или м’еныпих этих оптимальных значений получается бесполезная затрата материала. Так, например, выбирая для кобальтовой стали индукцию 2000 или 8300 гаусс, мы затратим двойное количество стали по сравнению с тем количеством, которое должно быть затрачено при оптимальной индукции.
В заключение приведем пример расчета постоянного магнита на основе приведенных кривых. Пусть требуется построить наиболее экономичную магнитную цепь с магнитом из стали, содержащей 35°/о кобальта, при длине воздушного зазора 0,4 см, площади зазора (перпендикулярной к силовым линиям) 1,2 кв. см и магнитной индукции в зазоре 3000 гаусс. Допустим, что поток рассеяния в данной системе в четыре раза больше полезного потока и что нее магнитное сопротивление сосредоточено в зазоре. Найдем величину полного потока, который должен протекать через магнит, а также магнитодвижущую силу, необходимую для преодоления сопротивления зазора. Поток в воздушном зазоре = 3000 X 1,2 — 3600 максвелл. Поток рассеяния =s 4 X 3600 = — 14 400 максвелл. Полный поток = 18 800 максвелл.
Из кривых рис. 7.33 находим, что наивыгоднейшая величина магнитной индукции для 35% кобальтовой стали равна 5800 максвелл. При такой индукции поперечное сечение магнита получается равным:
,18 000 о , А~ 5800 ~3,1 СМ
Магнитодвижущая -сила, необходимая для установления в зазоре магнитного потока в 3000 максвелл
F= 3000X0,4= 1200 джильберт
Согласно кривой рис. 7.32 для кобальтовой стали индукции в 5800 гаусс соответствует намагничивающая сила 140 джиль-берт/см. ।
Откуда длина магнита
, 1200 Q с
/=-[4q-=8,6 см
и об'ем магнита
17=3,1X8,6=26,6 см3
181
Тот же результат можно получить непосредственно^ из кривой 3 рис. 7.33, согласно которой при индукции 5800 гаусс об’ем магнита на 1000 максвелл и 1000 джильберт получается равным 1,23 см8. Приводя к магнитному потоку в 10 000 максвелл и магнитодвижущей силе 1200 джильберт, получаем об’ем магнита
V=1,23X
18000
1000
..1200
Хщбб^26’6
СМЛ
ГЛАВА VIII
ГРАДУИРОВКА МИКРОФОНОВ
8. 1. ВВЕДЕНИЕ
При градуировке микрофона необходимо произвести следующие абсолютные измерения:
1) измерение отдачи,
2) измерение частотной характеристики чувствительности,
3) измерение частотной характеристики полного сопротивления.
Результаты этих измерений дают полную характеристику микрофона. Чувствительность и частотная характеристика микрофона, имеющего диафрагму, может быть получена в зависимости от давления, приложенного к диафрагме, или в зависимости от давления в поле плоской бегущей волны. В последнем случае результаты градуировки характеризуют также и искажения, обусловленные присутствием в звуковом поле микрофона.
Обычно чувствительность микрофона выражают в единицах мощности, развиваемой им в известном сопротивлении нагрузки или в единицах напряжения, развиваемого микрофоном на сетке первой усилительной лампы1. Оба эти метода выражения чувстви тельности приводят к двойственности, когда сравниваются различные микрофоны, которые могут быть соединены с усилителем различными способами. Только абсолютные независимые ха рактеристики микрофона позволяют отделить случайные переменные факторы и установить об’ективные качества микрофона Такими характеристиками являются зависимости электродвижущей силы микрофона и его электрического сопротивления от ча
1 Чувствительность микрофонов обычно относят к условному пулевому уровню чувствительности. В США для определения чувствительности микрофонов пользуются часто нулевым уровнем 1 вольт на бар (в открытой цепи) па клем мах 250-омного выхода. Таким образом чувствительность микрофона, развивающего 1 милливольт на бар, равна—60 (минус) дб. (Прим. ред.).
183
стоты. Располагая этими характеристиками, можно просто и точно согласовать элементы схемы включения микрофона, а также производить количественные сравнения различных' типов микрофонов. Характеристика полного сопротивления дает возможность согласования микрофона с входом усилителя, а величина э. д. с., развиваемой в открытой цепи, позволяет определить напряжение, которое получается на входе усилителя при различных схемах включения микрофона.
Характеристика полного сопротивления микрофона легко может быть получена при помощи одного из хорошо известные «мостовых» методов, которые мы не будем описывать. Ниже дается описание различных методов определения акустических характеристик микрофонов. Рассмотрим сначала методы градуировки микрофонов, которые позволяют получить характеристики в зависимости от давления на диафрагме микрофона, а затем методы градуировки в свободном поле, которые дают характеристики в зависимости от давления в поле плоской бегущей звуковой волны.
8. 2. «ПИСТОНФОН» (ПОРШНЕВОЙ ИСТОЧНИК ЗВУКА)
Неподвижная пластана
Конденсаторный микрофон
Рис. 8. 1. Конструкция „Пистонфона".
Непосредственный способ получения переменного давления на диафрагме микрофона схематически показан на рис. 8.1. Испытуемый микрофон соединен с камерой, имеющей жесткие стенки, таким образом, что диафрагма микрофона является задней стенкой камеры. Маленький поршень приводится в движение при помощи кривошипного механизма и совершает простые гармонические колебания. Если стенки камеры достаточно толсты, то при движении поршня практически не получается тепловых потерь, и можно считать процесс сжатия й расширения .‘воздуха в камере адиабатическим,
У микрофонов, имеющих большое механическое сопротивление, как например, конденсаторный микрофон, амплитуды колебания диафрагмы весьма малы, поэтому зависимость между давлением и об’емом для этих микрофонов может быть выражена следующим образом:
от Ц)АР+г/’оЛ1/—0 (8. 1)
где Ц, — средний об'ем камеры
Др— изменение давления у диафрагмы, вызванное изменением об'ема на ДЕ
у —постоянная газа (для воздуха у=1,41)
184
р0 — среднее давление в камере
ЛЁ—изменение об'ема камеры.
Если г — радиус кривошипа, а А—‘площадь поршня, то максимальная величина изменения об’ема от среднего значения
+ Д V=rA
(8- 2)
измерении нескольких физг
Конденсаторный минроср&н
Рис. 8. 2. Абсолютная градуировка конденсаторного микрофона по давлению на диафрагме с помощью „пистонфона^.
Подставляя уравнение (8.2) в (8.1) и решая последнее относительно давления на диафрагме, получаем
(8- 3) где
р—-средняя квадратичная величина давления на диафрагме ри—атмосферное давление, а г, А и V,,— определены выше. Из уравнения (8.3) следует, что давление на диафрагме может быть точно определено по данным чеоких величин. Описанный абсолютный метод весьма удобен при градуировке конденсаторных микрофонов на низких частотах —-до 200 гц. При более высоких частотах получаются уже недопустимо большие скорости механической системы. Метод измерения э. д. с. микрофона показан схематически .на рис. 8.2. Колебания поршня создают на диафрагме микрофона переменное давление, э. д. с. микрофона измеряется с помощью усилителя. При
некоторой величине давления устанавливается такое усиление, чтобы измерительный прибор, включенный на выходе усилителя, давал достаточное отклонение. Затем механизм, приводящий поршень в движение, выключается, а от электрического звукового генератора к зажимам сопротивления, включенного последовательно с микрофоном, подводится напряжение той частоты, с которой колебался поршень. К сопротивлению подводится такое напряжение, чтобы показание измерительного прибора, включенного на выходе усилителя, было таким же, как и при воздействии на диафрагму переменного давления. Величина этого напряжения определяется по показаниям миллиамперметра с учетом величины последовательно включенного и известного сопротивления.
Абсолютная величина чувствительности микрофона, при известном поляризующем напряжении, определяется из выражения S — — милливольт/бар (в открытой цепи)
где е = /г,
185
i — ток, проходящий через сопротивление г ом, в миллиамперах, <
р—-средняя квадратичная величина звукового давления на диафрагме.
Результаты измерения чувствительности микрофона, полученные при помощи описанного метода замещения, не зависят как от характеристики усилителя, так и от сопротивления микрофона (см. раздел 5.3).
8. 3. ТЕРМОФОН
В 1898 т. Браун 1 установил, что если через тонкий проводник пропускать переменный ток, то чередующиеся нагревания и охлаждения проводника вызывают в окружающей среде звуковые волны. Позднее Арнольд и Крендалл 2 построили прибор, основанный на этом принципе, так называемый термофон, применяемый как источник звука при градуировке микрофонов. Термофон состоит из очень тонких платиновых или золо-тых ленточек, смонтированных на клеммах, к которым подводится электрический ток. Фо-| тогРаФия термофона, построенного авторами,
ЫВЖЖаЯ приведена на рис. 8.3. Термофон можно питать либо переменным током, либо пульсирующим током. В последнем случае постоянная слагаю-Рис 8 з Общий щая тока Должна быть значительно больше пе-ВИД термофона, ременной слагающей.
В первом случае частота возбуждаемой термофоном акустической волны равна удвоенной, частоте переменного тока. Причина удвоения частоты заключается в том, что выделение тепла в проводнике является квадратичной функцией тока.
Удвоение частоты легко может быть показано аналитически. Пусть ток (z sin w t) протекает через сопротивление т . Количество тепла, выделяющееся в проводнике, пропорционально
г/2 sin2«»Z (8. 4)
Уравнение (8.4) может быть представлено в виде
-^-(1 — cos2wZ) (8.5)
Если кроме тока (z sin w f) через сопротивление протекает постоянный ток /0, то количество тепла пропорционально
re (z0+zsinwf)2 (8. 6)
После тригонометрических преобразований, получаем
ге (42+~у-) + 2rez0z sin to t — cos 2w7 (8. 7)
1 Braun. Ann. d. Physik, 65, 1898, p. 358.
2 Arnold and Crandall. Phys. Rev., Vol. 10, No. 1, 1917, p. 22.
186
из которого очевидно, что членом с двойной частотой, при соответствующем выборе соотношения между А и i, можно пренебречь.
Для вычисления абсолютной величины развиваемого термофоном в замкнутом об’еме звукового давления требуется измерить 15 физических и электрических величин, некоторые из которых с достаточной точностью неизвестны, в частности неизвестно точно распределение температуры при низких частотах. Первоначальные теоретичесиие выводы Арнольда и Крэндалла не совпали с экспериментально полученными данными при низких частотах. Венте 1 позднее проанализировал вопрос более детально и принял во внимание тепловой процесс в газе, учтя скорость накопления тепла при изменении давления. Баллантайн2 сделал дальнейшие уточнения. В его выводах приняты во внимание начальные условия, при которых температура стенок металлической камеры термофона равна температуре окружающей среды.
Полученное Баллантайном выражение для амплитуды переменного давления, развиваемого термофоном в закрытом об’еме, имеет следующий вид
п_ 28 О,48г0 i re /о о\
Р штСУАа pi/2 * ' '
где
4feS2 У । Л । 45 । 4kSa । 4kS2 V
U~V uCVA) ' V 4 VA«.+ и>С +v>CVa)
-С-ФГ
С—общая теплоемкость ленточек термофона (массаХудель-ную теплоемкость)
i0 — постоянная слагающая тока, проходящего через ленточку (в амперах)
i — амплитудное значение переменной слагающей тока (в амперах)
ге— сопротивление ленточки (в омах)
Т^-—средняя температура ленточки (по абсолютной шкале)
Тп — средняя температура газа в закрытом об'еме (по абсолютной шкале)
k — теплопроводность газа
р-—плотность газа
Ст—удельная теплоемкость при постоянном объеме
1 W е n t е, Е. С. Phys. Rev., 19, 333, 1922.
2 Ballantine, S. Jour. Acous. Soc. Amer., Vol. Ill, No. 3, 319, 1932.
187
Ср — удельная теплоемкость при постоянном давлении
Гр
---постоянная газа
р0 — среднее давление в закрытом об'еме
S — площадь одной стороны ленточки термофона
V— величина закрытого об'ема
<□ — 2~f
f— частота.
Величины постоянных, входящих в выражение для а, берутся для средней температуры ленточки Tso.
Термофонная установка для градуировки конденсаторного ic. 8.4. Термофон приложен вплотную к конденсаторному микрофону, через ленточку , термофона пропускается переменный ток от генератора и постоянный ток от1 батареи.
Последовательно с микрофоном включено сопротивление, используемое для измерения электродвижущей силы микрофона методом замещения, описанным в разделе 8.2. Замкнутый об’ем, образующийся между термо-фоном и диафрагмой микрофона, наполняется водородом, что позволяет, благодаря увеличению скорости звука, и при высоких частотах получить длины волн большие, чем размеры замкнутого об’ема. Капиллярные трубки, через которые входит и выходит водород, должны иметь малый диаметр отверстия (0,25 мм) и длину порядка нескольких сантиметров, чтобы предотвратить на низких частотах утечку звука, которая уменьшает звуковое давление на диафрагме микрофона.
С помощью термофона можно проградуировать конденсаторный микрофон на более высоких частотах, чем с поршневым источником звука. Выше уже отмечалось, что для термофонной градуировки необходимо произвести измерения нескольких величин, не только связанные с известными трудностями, но служащие также источниками возможных ошибок. Применение водорода сопряжено еще с некоторыми нежелательными особенностями. Но даже и при применении водорода пользоваться термофоном при очень высоких частотах весьма трудно, так как размеры камеры становятся соизмеримыми с длиной волны. Кроме того, как это видно из уравнения (8.8), звуковое давление, развиваемое термофоном, с возрастанием частоты резко падает.
показана на
"г
Генератор
Термофон
Конденсаторный микрофон
Диафрагма
микрофона
Неподвижная ляости-г—, на микрофона
Измерительный прибор
Рис. 8. 4. Градуировка конденсаторного микрофона с помощью термофона.
188
8. 4. ЭЛЕКТРОСТАТИЧЕСКИЙ ВОЗБУДИТЕЛЬ
Наиболее совершенным методом градуировки конденсаторного микрофона в зависимости от давления на диафрагме, не связанным с трудностями экспериментального порядка, присущими термофонному методу, является метод, при котором колебания диафрагмы возбуждаются электростатическими силами. Помещая неподвижную пластину на близком расстоянии от диафрагмы и прикладывая к ним некоторую разность потенциала, получаем между пластинкой и диафрагмой электрическое поле.
Известно, что если к двум параллельно расположенным пластинам, разделенным воздушным промежутком, шириной d сантиметров, подвести напряжение е вольт, то между пластинами возникает электростатическое давление
/?=^^дин на кв. см. (8. 9)
Если к пластинам приложено синусоидальное переменное напряжение (е sin со/), то возникающее давление
е2 sin2 <ot ,о ,
те— <8- 10)
’Последнее уравнение показывает, что частота переменного давления получается равной удвоенной частоте прилагаемого напряжения.
Если переменное напряжение (еsin со/) подвести к пластинам вместе с постоянным поляризующим напряжением е0. то давление
_=(еп + е sin со,)* (8 12)
После тригонометрических преобразований и приведения членов уравнение (8.12) принимает вид
1 / е2 X ] 1
Р=^ ^-)+-4mr ео е sin ы №^e2cos2w/ <8’ 13>
Если е мало по сравнению с е0, как Это обычно имеет место, то последним членом в уравнении (8.13) можно пренебречь и для переменной составляющей электростатического давления можно написать
Р—-^- ео е sin “ 1 (8- Н)
Выражая все величины в практических единицах, получаем
Р Ю~7 - (8. 15)
где р — среднее квадратичное давление в динах на кв. сантиметр,
189
е0 — постоянное поляризующее напряжение (в вольтах)
е—среднее квадратичное значение переменной составляющей напряжения {в вольтах).
Уравнение (8.15) выведено' для случая двух плоских твердых, параллельных пластин, расстояние между которыми мало по сравнению с их размерами. Практически же неподвижная пластина, как показано на рис. 8.5, имеет форму решетки. 11 Гели в пластине делаются для того, чтобы между неподвижной пла
Рис. 8. 5. Электростатический возбудитель.
Рис. 8. 6. Разрез электростатического возбудителя, установленного перед диафрагмой микрофона.
стиной 'и диафрагмой не было воздушного слоя, увеличивающего упругость диафрагмы. При наличии щелей в неподвижной пластине электростатическое давление на диафрагме получается меньше, чем определяемое по уравнению (8.15). Величина уменьшения зависит от ширины щели и ширины ребра решетки, а также от расстояния между решеткой и диафрагмой.
На рис. 8.6 показано сечение электростатической решетки, имеющей ширину ребра W и ширину щели S и расположенной на расстоянии d от диафрагмы. Если глубина щели велика по 'Сравнению с ее шириной, то решетка математически может быть заменена пластиной, расположенной от диафрагмы на расстоянии ф. Расстояние ф можно получить из кривых, данных Картером 1 для определения эквивалентного воздушного зазора, обладающего сопротивлением, равным сопротивлению воздушного зазора, образующегося между сплошной пластиной бесконечной длины и решеткой бесконечной длины со щелями бесконечной глубины.
Для решетки, показанной на рис. 8.6, отношение ф/ф подсчитано для различных величин W/S и W/d. Результаты этих подсчетов приведены на рис. 8.7. При вычислениях принималось, что глубина щели велика по сравнению с шириной щели, а поверхность решетки бесконечно велика. Оба эти условия могут быть при расчете решетки практически выполнены. Площадь решетки должна быть настолько большой, чтобы решетка перекрывала всю поверхность диафрагмы. Уравнение (8.15) было выведено для сплошной неподвижной пластины, поэтому, применяя его для
1 Carter. Elec. World and Engineer (English), Nov” 30, 1921.
190
случая решетки, необходимо величину d в уравнении (8.15) заменить величиной ф. Последняя находится из кривых рис. 8.7.
Уравнение для решетки получает следующий вид.
Р=^^ ХЮ-7 (8. 16) ,
где обозначения р, е0 и е те же, что и в уравнении (8.15), a dx— эффективное расстояние, получаемое из кривых рис. 8.7.
Если конфигурация решетки такова, что допущения, принятые при вычислении рис. 8.7, ста
новятся незаконными, то величину dt можно определить экспериментально. При применении электростатического возбудителя частотная характеристика микрофона может быть получена простым измерением развиваемого микрофоном напряжения, причем на электростатическую решетку нужно подавать напряжение различной частоты, но постоянной амплитуды. Абсолютная же величина уровня чувствительности микрофона в этом случае может* быть установлена с помощью поршневого источника или какого-либо другого градуированного источника звука. Часто об’ектом измерения является толь
Рис. 8. 7. Отношения для различных данных решетки электростатического возбудителя и для различных расстояний между решеткой и диафрагмой микрофона.
ко относительная частотная харак-
теристика микрофона. <В таких случаях нет необходимости производить вычисления, связанные с определением постоянной
решетки.
Из уравнения (8.16) следует, что абсолютные величины давлений при градуировке электростатическим методом определяются величинами подводимых постоянного и переменного напряжений, величиной воздушного промежутка между решеткой и диафрагмой, а также конфигурацией и размерами решетки. Легкость определения этих немногих параметров, по сравнению с измерениями и вычислениями многих величин при термофонном методе, обусловливает большое преимущество электростатического метода градуировки микрофона. Кроме того, при электростатическом методе нет необходимости применять особые меры предосторожности, поскольку при этом методе не опасно влияние изменения атмосферного давления и не требуется применения водорода.
Другое преимущество электростатического метода заключается в том, что при постоянной величине подводимого к решетке напряжения на диафрагму микрофона действует давление,
191
величина которого не зависит от частоты, в то время как в термофоне давление с увеличением частоты быстро падает. На
рис. 8.8 приведена схема градуировки конденсаторного микрофона электростатическим методом. Поляризующее напряжение е0 подводится к решетке и диафрагме микрофона, причем
последняя соединена с землей. Напряжение звуковой частоты !е от генератора налагается на постоянное напряжение :е0. В 'конденсаторном мйкрофоне под действием электростатического давления, приложенного к диафрагме, возбуждается э. д. с., величина которой после до-
Рис. 8. 8. Градуировка конденсаторного статочного усиления может микрофона с помощью электростатнче- быть определена по показа-ского возбудителя. ниям измерительного прибо-
ра, включенного на выходе усилителя. Давление, действующее на диафрагму, вычисляется указанным выше методом, а развиваемое микрофоном напряжение определяется следующим образом. Переменное напряжение снимается с решетки и подводится к сопротивлению, включенному последовательно с микрофоном. Затем, посредством реостата в сопротивлении г устанавливается ток такой силы, чтобы отклонение прибора на выходе усилителя было равным •отклонению, имевшему место' при воздействии на диафрагму микрофона электростатического давления. Зная силу тока, про
ходящего через сопротивление г, и величину сопротивления, можно определить падение напряжения /г, которое равно напряжению, развиваемому микрофоном при воздействии на его диафрагму данного электростатического давления. Частотная характеристика микрофона может быть непосредственно автоматически записана при помощи описанного в главе IV генератора на биениях с усилителем и записывающим устройством. Чтобы исклю-
чить влияние характеристики усилителя и генератора, нужно снять две кривые: подавая-при снятии первой кривой напряжение от генератора на решетку, а при снятии второй кривой — на сопротивление, включенное последовательно с микрофоном. В цепь выхода генератора последовательно с г должно быть включено достаточно большое сопротивление, чтобы частотная характеристика генератора при снятии первой и второй кривой не менялась. Частотная характеристика микрофона может быть получена, если взять отношение ординат записанных кривых. На .рис. 8.9 приведены типичные кривые, полученные таким методом.
Кривая А записана при подаче напряжения генератора на решетку, а кривая В — при подаче напряжения на сопротивление,
192
включенное последовательно с микрофоном. Кривая С, получен-
ная путем деления ординат кривой А на ординаты кривой В, пред-
ставляет частотную характеристику микрофона.
Электростатический метод градуировки конденсаторных микрофонов, как наиболее простой и удобный, практически вполне применим и на промышленных предприятиях, где испытывается большое количество 'микрофонов.
8. 5. ГРАДУИРОВКА МИКРОФОНОВ В СВОБОДНОМ ЗВУКОВОМ ПОЛЕ (ДИСКОМ
РЕЙЛИ)
Описанные методы градуировки микрофонов характеризуют отдачу микрофонов как функцию давления, приложенного к диафрагме. Эти методы примечены только в том случае, если микрофон обладает высоким механическим со
Рис. 8. 9. Кривые градуировки конденсаторного микрофона с помощью электростатического возбудителя.
Кривая А—напряжение от генератора полается на решетку.
„ В—напряжение от генератора по-
дается на сопротивление, включенное последовательно с микрофоном.
„ С—частотная характеристика ми-кривая А кро*она=крйвэя"в
противлением, как например конденсаторный микрофон. Полученные с помощью этих методов характеристики не всегда соответствуют характеристикам поведения микрофона в действи
тельных условиях.
В общем случае, если микрофон помещен в равномерное звуковое поле, то при высоких частотах, в зависимости от формы и размеров микрофона, получаются те или иные .искажения поля, которые вызывают в частотных характеристиках микрофона соответствующие частотные искажения.
Для количественной оценки этих искажений нужно располагать частотной характеристикой микрофона, снятой в свободном звуковом поле. Метод градуировки микрофона в свободном звуковом поле заключается в том, что в поле плоской бегущей волны с 'известной силой звука .помещается микрофон и измеряется его электродвижущая сила.
Один из способов получения плоской бегущей волны показан на рис. 8.10. Громкоговоритель присоединен к одному концу длиной трубы с толстыми стенками (длина трубы — 9 лт, а толщина стенок — 4 см, достаточны, если труба выполнена из дерева), которая служит акустической линией передачи. Для устранения стоячих волн труба внутри покрыта слоем поглощающего материала, при этом толщина слоя изменяется 'по длине трубы
13 Прикладная акустика.
193
таким образом, что общее поглощение увеличивается с увеличением расстояния от громкоговорителя (см. рис. 8.10). Диск Рейли (описанный в (главе III) подвешен в трубе на короткой нити. Угол отклонения диска наблюдается через стеклянное окошечко в стенке трубы. Диск измеряет ' абсолютную силу звука звуковой волны.
Одновременно для данной силы звука звуковой волны определяется отдача микрофона. Метод градуировки в трубе со свободной 'бегущей волной обычно применяется для низких частот. При высоких частотах .возможно возникновение стоячих волн поперек тру-
бы и отражения от градуируемого микрофона, благодаря которым получаются искажения звукового поля v диска. Чтобы избавиться от искажений поля, вызываемых отражением от микрофона, последний при измерении силы звука из трубы убирается.
Нсточиин
звука Диск Рейли Микрофон
Тонкая фланелевая материя
Звукопоглощающий материал
Рис 8. 10. Диск Рейли, установленный в специально оборудованной трубе для градуировки микрофонов малых размеров в поле свободной звуковой волны.
Рис. 8. И. Градуировка в свободном звуковом поле конденсаторного микрофона, смонтированного в одном кожухе с усилителем.
с усилителями, не могут градуироваться указанным способом, если их размеры соизмеримы с размерами сечения трубы.
Для градуировки микрофонов в свободном звуковом поле при высоких частотах можно рекомендовать установку, изображенную на рис. 8.11. «Искусственный голос», описанный в главе VII, устанавливается на могущей вращаться подставке между испытуемым микрофоном и диском Рейли на одинаковом от них расстоянии. Конструкция диска показана на соответ-
194
ствующей фотографии главы Ill. К «искусственному голосу» подводится напряжение от генератора звуковой частоты. Источник звука поворачивается к диску Рейли, а от генератора дается такая мощность, чтобы диск отклонился на удобный для отсчета угол. Затем источник звука поворачивается к испытуемому микрофону. Если источник звука расположен симметрично относительно диска и микрофона, то звуковое поле, сила звука в котором измеряется диском, не отличается от звукового поля, действующего на микрофон. Возбуждающееся в микрофоне напряжение измеряется упомянутым при описании электростатического метода градуировки микрофонов способом замещения. Абсолютная чувствительность микрофона в свободном поле для данной частоты определяется как отношение развиваемого микрофоном напряжения к звуковому давлению, измеряемому при помощи диска Рейли.
Методом диска Рейли можно градуировать микрофоны всех без исключения типов, тогда как с помощью ранее описанных методов не представляется возможным градуировать электродинамические или ленточные микрофоны, имеющие подвижную систему с малым механическим сопротивлением. При градуировке ленточного микрофона последовательно с ленточкой, для определения способом замещения э. д. с. микрофона, включается сопротивление. Это сопротивление, для того, чтобы в цепи ленточки не получались заметного увеличения сопротивления, должно быть порядка 5% сопротивления ленточки, т. е. добавочное сопротивление должно быть порядка 0,01 ом. Индуктивное сопротивление такого малого активного сопротивления должно быть незначительным даже при наивысших частотах, в пртивном случае результаты измерений будут ошибочными, поскольку э. д. с. микрофона определяется как величина ir и индуктивное сопротивление не учитывается. Описанный метод градуировки микрофонов в свободном поле при помощи диска Рейли при низких частотах не дает точных результатов. Это происходит по двум причинам. Во-первых, диск Рейли измеряет скорость колебаний частиц; давление же прямо пропорционально скорости только при относительно высоких частотах. При низких частотах скорость и давление не совпадают по фазе и между ними нет пропорциональности, поэтому при градуировке микрофонов давления необходимо знать переводный коэфициент от скорости к давлению. Величины этого коэфициента для различных частот и расстояний от источника звука даны на рис. 1.2. Второй источник ошибок при низких частотах заключается в возможных отражениях от пола комнаты, в которой производятся измерения.
Так как при низких частотах для микрофонов обычных размеров не должно быть разницы в результатах градуировок в свободном поле или методами искусственного давления, то во избежание возможных при градуировке, в свободном поле ошибок при низких частотах можно при частотах ниже 400—500 г\ц про
13*
195
изводить градуировку при помощи одного из методов искусственного давления, если только микрофон допускает применение этих методов.
Микрофоны же ленточного типа при низких частотах можно градуировать с помощью предварительно градуированного конденсаторного микрофона. При измерении оба микрофона нужно располагать рядом, один над другим, на расстоянии, по крайней мере 3 м от источника звука. Определяя относительную отдачу обоих микрофонов при различных частотах и зная чувствительность конденсаторного микрофона, можно вычислить чувствительность ленточного микрофона.
Для градуировки ленточного микрофона при низких частотах можно применить также метод трубы, показанный на рис. >8.10. При этом диск Рейли заменяется градуированным конденсаторным микрофоном, который должен быть замонтирован в стенку трубы таким образом, чтобы его диафрагма оказалась в плоскости внутренней поверхности стенки трубы. При подаче в трубу звука непосредственно сравнивается чувствительность микрофонов. Если чувствительность конденсаторного микрофона известна, то по данным сравнения можно определить абсолютную чувствительность ленточного микрофона.
Градуировка в свободном звуковом поле является наиболее целесообразной в отношении микрофонов, применяемых для радиовещания или1 для измерений Громкоговорителей. Только в особых случаях приходится прибегать к градуировке микрофонов методами искусственного давления. Одним из таких случаев является испытание телефонов, три котором приходится определять чувствительность телефонов с помощью измерения звукового давления, развиваемого телефоном на диафрагме конденсаторного микрофона. Этот случай описан в следующей глазе.
8. 6. ВТОРИЧНЫЕ ЭТАЛОНЫ ДЛЯ ГРАДУИРОВКИ В СВОБОДНОМ ПОЛЕ
Градуировка микрофонов с помощью диска Рейли является длительным и утомительным процессом измерения по точкам. Точно отградуированный и хорошо сконструированный ленточный микрофон скорости, не дающий частотных искажений, может служить в качестве .лабораторного вторичного эталона для измерения скорости частиц в плоской волне и в большинстве случаев может заменить диск Рейли. Этот микрофон является весьма удобным сравнительным эталоном, кроме того, он конструктивно более прочен и более портативен, чем диск Рейли. С помощью градуированного ленточного микрофона скорости градуировка других микрофонов в свободном поле может быть выполнена в несколько минут. Эталонный микрофон устанавливается на расстоянии около 30 см от «искусственного голоса», возбуждаемого током от генератора на биениях, и его частотная
19 6
характеристика фиксируется пишущим устройством. Затем на место эталонного микрофона помещается испытуемый микрофон и процесс записи повторяется. Если испытуемый микрофон является микрофоном скорости, то его градуировочная кривая в свободном поле получается как отношение ординат записанных кривых {при том условии, что усилители обоих микрофонов имеют совершенно одинаковые частотные характеристики). Если же испытуемый микрофон является микрофоном давления, то отношение ординат двух кривых для перехода от скорости частиц к давлению следует еще умножить на переводный коэфициент, приведенный на рис. 1.2. Если микрофоны устанавливаются на большом расстоянии от источника звука, что можно осуществить при измерении в открытом пространстве, то переводной коэфициент близок к единице и поправку можно не делать.
ГЛАВА IX
1
ИСПЫТАНИЕ ТЕЛЕФОНОВ
9. 1. ВВЕДЕНИЕ
Характеристика телефона должна давать представление о работе телефона в его нормальном рабочем положении, т. е. в тех акустических условиях, которые получаются, когда телефон приложен к уху. Эта характеристика должна представлять отношение силы звука, развиваемой телефоном, питаемым от идеального электроакустического канала, к силе звука первоначального звукового ноля, воздействующего непосредственно на ухо.
Если человеческая голова находится в поле плоской волны, то давление на поверхности головы у уха является функцией угла поворота головы по отношению к направлению распространения .звука.
Давление на твердой сферической поверхности, помещенной в звуковом поле \ исследовано теоретически Стюартом 1 2 и Баллантайном 3. Применение результатов этих исследований для определения давления на поверхности головы показало, что давление у уха существенно не отличается ст давления в свободном поле. Изменяется отношение давления у уха к давлению в свободном поле только при высоких частотах и то незначительно. *
Если голову повернуть так, чтобы звук попадал прямо в ухо, то давление у уха для высоких частот будет в два раза больше, чем в свободном поле, но зато затененное головой от источника звука второе ухо будет подвергаться воздействию очень малого звукового давления. Нормальным положением слушающего, ко
1 См. раздел 5. 8.
2 Stewart, G. W. Phys. Rev., Vol. 14, p. 376, 1919.
3 Ballantine, S. J. Aeons. Soc. of Amer., Vol. Ill, No. 3, p. 319.
198
нечно, является такое положение, при котором он обращен лицом к источнику звука. В комнате, кроме прямо падающего звука, имеется еще отраженный звук. Если принять равновоз-можиыми отражения звука по всем направлениям, то практически в различных точках поверхности головы не будет получаться частотных искажений, т. е. можно сказать, что при нормальных условиях отношение звукового давления, действующего на ухо, к давлению в свободном поле не зависит от частоты.
Следовательно, для создания при передаче через телефон эффекта натуральности звука нужно, чтобы отношение звукового давления, развиваемого телефоном в ухе, к напряжению на зажимах телефона не зависело от частоты.
9. 2 ФАКТОРЫ, ВЛИЯЮЩИЕ НА РАБОТУ ТЕЛЕФОНА
Развиваемое телефоном в слуховом канале уха звуковое давление определяется: напряжением, подводимым к зажимам телефона, полным 'сопротивлением телефона, полным акустическим сопротивлением уха и, наконец, плотностью прижатия телефона к уху. Если сопротивление уха рассматривать у отверстия в амбушюре телефона, то сопротивление связи между телефоном и ухом- не должно быть рассматриваемо в отдельности, так как оно автоматически включается в суммарное сопротивление телефона. Изменения электрического сопротивления телефона при различных частотах должны быть в характеристиках телефона учтены.
Если телефон, рассчитанный для работы в цепи с некоторым сопротивлением, включить последовательно с таким сопротивлением и подвести к такой цепи переменное напряжение варьирующейся частоты, но постоянной амплитуды, т > изменения полного сопротивления телефона, вызывающие соответствующие изменения тока, в определяемой при таких условиях характеристике телефона, будут учтены.
Правильность этого метода испытания будет показана в следующем разделе при рассмотрении условий потребления громкоговорителем максимальной мощности в том случае, если мощность источника энергии ограничена.
Отдача телефона при низких частотах в значительной степени определяется плотностью прилегания микрофона к уху. Утечка в местах касания телефона с ухом сильно понижает отдачу на низких частотах, если не предусмотрена соответствующая компенсация.
При испытании телефон прикладывается к устройству, представляющему собой искусственное человеческое ухо, и развиваемое телефоном звуковое давление измеряется для различных частот при постоянной величине подводимой °к телефону мощности или напряжения на его зажимах.
199
9. 3. ИСКУССТВЕННОЕ УХО
Инглис, Грэй и Дженкинс 1 исследовали акустическое сопротивление человеческого уха и обнаружили 'большие колебание его величины у различных индивидуумов. Данные измерения со-противления ушей семи мужчин приведены в таблице. Большие расхождения в данных для разных индивидуумов, а также в данных, полученных для одного индивидуума в разные моменты времени, свидетельствуют о трудности проектирования акустической системы, эквивалентной среднему человеческому уху.
ПОЛНОЕ АКУСТИЧЕСКОЕ СОПРОТИВЛЕНИЕ СЛУХОВОГО
КАНАЛА
Частота в гц Данные измерения ушей семи мужчин
Активное сопротивление Реактивное сопротивление
200 50 до 250 —1134 до —633
400 20 до 250 — 760 до —254
300 35 до 136 — 300 до —130
1200 60 до 91 — 180 до — 20
2000 8 до 70 — 155 до — 50
3000 15 до 60 — 144 до + 50
рис. 9.1 показано искус-
На ственное ухо с изменяющимися постоянными, разработанное Инглисом, Грэем и Дженкинсом. На этой же фигуре показан разрез телефонного амбушюра и человеческого уха. Д искусственном ухе амбушюр телефо-, в которой устроена полость, имеющая форму канала наружного уха. Для получения соответствующей утечки, в верхней части резиновой детали устроено отверстие, имеющее полное сопротивление Zr, равное величине сопротивления утечки между ухом и приложенным к нему телефоном. Резиновая деталь прикреплена к детали из твердого материала, в которой имеется полость, соответствующая по форме и размерам слуховому каналу. Полость оканчивается
Акуслшчесн. утечка
дружное ухо
Ло нденсатарный микрофон
А кусхпический (pUj.oftip
Рис. 9. 1. Разрез человеческого уха и „искусственного уха“ (по Инглнсу, Грэю и Дженкинсу).
барабанная оерепорка
н>
ит^ттм на лежит на мягкой резине, наружному сл ухо ее- 1 ’
. лгу проходу
Резинный деталь
1 Inglis, Gray and Jenkins. Bell Sys. Tech. J., Vol. XI, No. 2, p. 293, April, 1932.
200
устройством, имеющим такие же акустические постоянные, как и человеческое ухо, если его рассматривать со стороны входа в слуховой канал. Звуковые давления, развиваемые телефоном при различных условиях в искусственном ухе, измеряются маленьким конденсаторным микрофоном, замонтированным в стенку полости искусственного уха.
При испытании телефона эти давления измеряются для различных частот при постоянной величине напряжения на зажимах цепи телефона. Акустические постоянные искусственного уха соответствуют средним значениям постоянных человеческого уха, которые отклоняются в широких пределах от величин для ушей отдельных индивидуумов.
Однако установление определенных постоянных искусственного уха необходимо для обеспечения возможности испытания телефонов в одинаковых условиях.
9. 4. ИСПЫТАНИЕ ТЕЛЕФОНОВ ПУТЕМ ИЗМЕРЕНИЯ ДАВЛЕНИЯ, РАЗВИВАЕМОГО ,В УПРОЩЕННОЙ ПОЛОСТИ
В предыдущем разделе указывалось на то, что сопротивление человеческого уха у отдельных индивидуумов сильно меняется и следовательно некоторые постоянные, выбранные для искусственного уха, могут резко отличаться от действительных. Изме
рения полного сопротивления уха при высоких частотах не
производилось и поэтому для этих частот не имеется количественных данных. При низких частотах сопротивление уха (если телефон к нему плотно прилегает) является чисто реактивным сопротивлением акустической емкости. При высоких же частотах могут иметь место резонансные явления, вызываемые стоячими волнами в слуховом канале, однако относительно большая активная составляющая
Измерительный прибор
Рис. 9. 2. Измерение звукового давления, развиваемого телефоном в упрощенной полости.
сопротивления уха при этих ча-
стотах сглаживает получающиеся пики.
Упрощенный метод испытания телефона схематически показан на рис. 9.2. |В конденсаторный микрофон вставляется бакелитовая втулка так, что размеры углубления перед диафрагмой микрофона уменьшаются до 4 см:'. Испытуемый телефон плотно' прикладывается к концу бакелитовой втулки и места соприкосновения амбушюра телефона и втулки замазываются пластичной массой. Звуковое давление, развиваемое телефоном на диафрагме микрофона, измеряется при постоянной величине подводимого к телефону напряжения. Конденсаторный микрофон должен быть отградуирован в условиях, при которых производится испытание телефонов.
201
Так как полость, образуемая стенками бакелитовой втулки и диафрагмой микрофона, имеет незначительное активное сопротивление, то давление на диафрагме микрофона пропорционально амплитуде колебания диафрагмы телефона.
Выше уже указывалось, что при снятии характеристик телефона описываемым методом во избежание утечки, сказывающейся на низких частотах, необходимо амбушюр телефона плотно прижимать к втулке. Поскольку в действительности в местах соединения амбушюра с ухом обычно получается утечка, то имеющие место в ухе при низких частотах звуковые давления оказываются меньше измеренных при испытании телефона. Таким образом полученная методом измерения в упрощенной полости характеристика телефона является идеальной характеристикой, которая соответствует только такому случаю практической работы телефона, когда он находится с ухом в самом тесном контакте.
В полости, образуемой втулкой и диафрагмой микрофона и телефона, если она заполнена воздухом, при частоте порядка 7500 гц возникают стоячие волны, благодаря которым в характеристиках телефона на соответствующей частоте получается пик. Если же в полость, как показано на рис. 9.2, ввести водород, то во всем рабочем диапазоне частот телефона резонансных явлений не получится, так как скорость ‘распространения звука в водороде выше, чем в воздухе.
Частотная характеристика при плотно закрытой и наполненной водородом полости дает представление о работе телефона в идеальных условиях. В действительности же благодаря резонансу об’ема слухового канала, при частоте порядка 7500 гц получается некоторое увеличение давления. Однако, эта частота у разных индивидуумов различна.
Для определения абсолютной чувствительности телефона необходимо установить некоторые величины, при помощи которых ее можно было бы оценивать. Оценивать чувствительность коэ-фициентом полезного действия телефона было бы неправильно, так как активное сопротивление уха, на которое телефон работает, представляет собой неопределенную величину. При испытании телефона в упрощенной полости, чувствительность телефона можно определять как величину звукового давления, развиваемого им в полости данных размеров на единицу подводимой электрической мощности. Единицей чувствительности в этом случае является бар на ватт.
Схема испытания телефона приведена на рис. 9.2. К телефону подводится постоянной величины мощность при различных частотах. Получающееся на диафрагме конденсаторного микрофона звуковое давление возбуждает в нем э. д. с., которая после усиления отсчитывается в относительных единицах, по отклонению измерительного прибора. Затем методом замещения, описанным в разделе 8.4, посредством известного сопроти
202
вления R э. д. с. микрофона определяется в вольтах. Зная э. д. с. микрофона и располагая кривой его градуировки, легко определить звуковое давление, развиваемое телефоном. Применяя генератор на биениях и усилитель с записывающим устройством (глава IV), можно быстро записать частотную характеристику телефона в виде непрерывной кривой.
9. 5. СУБ’ЕКТИВНЫЕ ИСПЫТАНИЯ ТЕЛЕФОНОВ
Описанные в разделе (9.3) и (9.4) методы измерения полезны при стандартных испытаниях телефонов, а также при испытаниях, имеющих целью улучшение работы телефонов. Однако большой интерес представляет часто окончательная проверка работы телефона в нормальных эксплоатационных условиях с включением всех факторов, как-то: утечки между амбу
шюром и ухом, резонансов в различных полостях уха и теле
фона и т. д. Схематически установка для таких испытаний показана на рис. 9.3. Переменное напряжение от генератора подводится к громкоговорителю и устанавливается некоторая величина звукового давления, определяемая по показаниям измерительного прибора, включенного на выходе микрофонного усилителя. Лицо, производящее испытание телефона, сначала непосредственно слушает звук громкоговорителя в •свободном поле, затем прикладывает телефоны к ушам, переключает генератор на потенциометр и изменяет напряжение на зажимах телефонов до тех пор, пока не получится сила звука, равная силе звука, возбуждавшегося громкоговорителем. Эта процедура повто-
Рис. 9. 3. Схематическое расположение установки для суб'ективных испытаний телефона. Частотная характеристика телефона получается путем сравнения давления, развиваемого телефоном, с постоянным давлением в поле свободной звуковой волны и отсчета напряжения на зажимах телефона, при котором эти оба давления кажутся одинаково громкими.
ряется для различных частот, причем звуковое давление, развиваемое громкоговорителем, поддерживается постоянным. Чувствительность телефона определяется как отношение звукового давления в свободном поле к напряжению, подводимому к зажи-
мам телефона.
Для таких испытаний обычно привлекается большое число лиц и на основании данных произведенных ими измерений по средним значениям строится частотная характеристика телефона.
Результаты этих испытаний наиболее показательны, так как характеризуют работу телефона в нормальных эксплоатацион-пых условиях
ГЛАВА X
ИСПЫТАНИЕ ГРОМКОГОВОРИТЕЛЕЙ
10. 1. ВВЕДЕНИЕ
Высококачественный громкоговоритель должен точно и эффективно преобразовывать получаемую им электрическую энергию в звуковую, не изменяя при этом формы волны. Первое время испытания громкоговорителей производились путем простого прослушивания их работы и ее качественной оценки. Полная непригодность такого метода для научных исследований работы громкоговорителя сама собой понятна и для каждого заинтересованного в усовершенствовании громкоговорителей очевидна необходимость измерения физических величин.
Для того, чтобы Составить исчерпывающую картину работы громкоговорителя необходимо провести испытания, подробно описываемые в этой главе. Предметом этих испытаний является определение:
1. Предельной нагрузки.
2. Коэфициента полезного действия.
3. Частотной характеристики.
4. Характеристики направленности.
10. 2. ПРЕДЕЛЬНАЯ НАГРУЗКА
Сборник стандартов Института радиоинженеров за 1931 г. определяет предельную нагрузку громкоговорителя при установленной частоте, как максимальную мощность, которую можно подвести к громкоговорителю, не вызывая сколько-нибудь заметного на слух изменения качества звука. Это определение, хотя и совершенно ясно устанавливающее, что следует понимать под предельной нагрузкой, построено, однако, не на физическом основании. Слуховая оценка изменений качества вносит в .испытание субъективный элемент, (затрудняя этим количественное сравнение отдельных громкоговорителей, особенно же в связи с возможными различиями слуха у отдельных лиц.
204
На рис. 10.1 схематически изображено устройство для измерения предельной нагрузки громкоговорителя; Предлагаемый метод исходит из того, что предельная нагрузка ограничивается некоторой величиной мощности, при превышении которой в звуке, возбуждаемом громкоговорителем, начинают появляться гармоники. Независимо от того, что является ограничивающим фактором, дребезжание ли диафрагмы (при парциальных коле-
Рис. 10. 1. Схема для определевия предельной нагрузки громкоговорителей.
баниях), механические ли паразитные вибрации или чрезмерные амплитуды, при которых закон Гука теряет свою силу, результатом являются амплитудные искажения; поэтому предельную нагрузку громкоговорителя можно определять путем анализа возбуждаемых им. гармоник при питании громкоговорителя чистым синусоидальным током, сила которого увеличивается до тех пор, пока не будет достигнута предельно допустимая величина гармоник. 'Согласно схеме рис. 10.1, выходное напряжение генератора звуковой частоты подается через фильтр, срезающий гармоники, градуированный атенюатор и измерительный прибор, на испытуемый громкоговоритель. Звук от громкоговорителя воспринимается высококачественным микрофоном, превращается в электрические колебания, которые усиливаются усилителем. Для определения содержания гармоник в выходном напряжении усилителя, при различных положениях атенюатора производится анализ этого напряжения при помощи анализатора гармоник (глава III). Кривая, представляющая зависимость электрической мощности, потребляемой громкоговорителем от частоты при условии двухпроцентного содержания гармоник в выходном напряжении усилителя, может быть названа кривой предельной нагрузки 1 данного громкоговорителя.
1 В нашей практике предельная нагрузка носит название номинальной мощности громкоговорителя. Что касается до величины предельно допустимого процента гармоник, то допуск в 2% реален при средних и высоких частотах, пл низких же частотах приходится допускать значительно больший клирфактор, который, однако, не ухудшает качества передачи, как это показано в примечаниях главы XIV. (П р и м. р е д.).
205
Описанный метод измерения отличается достаточной четкостью и дает количественные результаты, которые выражают об’ективные физические свойства громкоговорителя и которые можно сравнивать с результатами других измерений, проведенных аналогичным методом.
Выше мы предполагали, что ограничивающим фактором при определении предельной нагрузки громкоговорителей является неискаженное воспроизведение звуковой мощности. В некоторых случаях определенная при этом условии мощность может оказаться больше мощности, которой в действительности можно нагружать громкоговоритель, не вызывая повреждения громкоговорителя. Последнее может наступить в результате, например, перегрева звуковой катушки электрическим током звуковой частоты или пробоя изоляции, поэтому предельную нагрузку следует устанавливать не только с точки зрения искажений, но и по соображениям механической и электрической прочности громкоговорителя.
10. 3. ИЗМЕРЕНИЕ КОЭФИЦИЕНТА ПОЛЕЗНОГО ДЕЙСТВИЯ
Обычно коэфициент полезного действия устройства определяется как отношение мощности, отдаваемой устройством, к мощности, которую это устройство потребляет от питающего его источника. Это определение применимо ко всем типам генераторов звука, возбуждаемых механическим путем или питаемых от источника с практически неограниченной мощностью.
В случае громкоговорителя, питаемого от электронной лампы, мощность источника ограничена, и поэтому для громкоговорителя более удобно определение коэфициента полезного действия, учитывающее способность громкоговорителя получать от источника максимальную мощность. «Коэфициент полезного действия громкоговорителя, питаемого от электронной лампы, есть отношение звуковой мощности, отдаваемой громкоговорителем, к максимальной электрической мощности, которую может дать лампа, нагруженная на этот громкоговоритель при оптимальных условиях нагрузки».
На рис. 10.2 изображена упрощенная схема анодной цепи электронной лампы с переменной анодной э. д. с. и внутренним сопротивлением г? . Громкоговоритель питается через трансформатор, рассчитанный на оптимальное согласование полных сопротивлений. Лампа отдает наибольшую мощность, если сопротивление нагрузки, приведенное к первичной цепи трансформатора, равно внутреннему сопротивлению лампы г , При этих условиях электрическая мощность, отдаваемая лампой и поглощаемая нагрузкой, равна
206
Предположим, что громкоговоритель, изображенный на рис. 10.2, излучает полную акустическую мощность Рд , тогда коэфициент полезного действия определяется следующим выражением :
Из установленного определения коэфициента полезного действия следует, что, если полное сопротивление громкоговорителя изменяется с частотой, то соответ-
ствующие изменения в соотношении сопротивлений приводят к понижению коэфициента полезного действия громкоговорителя. Предположим, например, что громкоговоритель рассчитан на оптимальные условия работы, при какой-либо определенной частоте; при некоторой другой частоте реактивное сопротивление может воз
Рис. 10. 2.
расти настолько, что суммарное
полное сопротивление цепи возрастет в два раза, благодаря чему то.к, протекающий через громкоговоритель, уменьшится наполовину по сравнению с током, протекающим при оптимальных условиях. Это приведет к уменьшению потребляемой мощности до 25% от ее первоначальной величины и к соответствующему уменьшению коэфициента полезного действия на 75%. Так как уменьшение коэфициента полезного действия громко-
говорителя происходит за счет изменения полного сопротивления самого громкоговорителя, то при измерениях коэфициента полезного действия это изменение необходимо учитывать.
Измерение электрических величин, входящих в уравнение Г0.2, не представляет затруднений, как это можно видеть из рис. 10.3, изображающего громкоговоритель, предназначенный для работы от электронной лампы с внутренним сопротивлением R и питаемый от выходной лампы генератора звуковой частоты с внутренним сопротивлением г .
Величина е в уравнении 10.2 устанавливается с помощью лампового вольтметра, включенного согласно схеме рис. 10.3 и непосредственно измеряющего е (при условии, что входное сопротивление вольтметра имеет большую величину по сравнению с г?), когда переключатель S занимает соответствующее положение. Установив выбранную величину е, вводим последовательно с лампой сопротивление ге и выбираем величину его так, чтобы общее сопротивление (г + г ) было равно R, т. е. сопротивле-р е
207
нию источника, на работу от которого рассчитан громкогово
ритель.
Простой экспериментальный метод установления величины rg
заключается в следующем: переключатель S на рис. 10.3 ставится в положение А и включает декадный магазин сопротивлений. На
брав в магазине сопротивление R, регулируем величину rg до
тех пор, пока ламповый вольтметр не покажет е, тогда г + г — R. Таким образом необходимые электрические постоянные схемы установлены и переключатель можно поставить в положение В, при котором в цепь включается громкоговоритель.
,— Измерение общей акусти-
Рнс. 10. 3.
ческой мощности, излучаемой громкоговорителем, представляет наиболее трудную задачу. Если громкоговоритель излучает в неограниченной цреде, т. е. в средне, в которой нет отражающих звук поверхностей, то мощность.
излучаемую при определенной частоте, можно найти, измерив скорость частиц или звуковое давление на достаточно большом расстоянии от источника в различных точках сферической поверхности (центром сферы служит источник .звука). Полная излучаемая мощность равна интегралу измеренных в различных точках .значений, взятому по всей поверхности сферы и может быть выражена формулой
рл =7гГТ № <10- 3)
где р - плотность среды, с — скорость звука в среде, р — эффективная величина давления на элементе поверхности dS,
dS — элемент сферической поверхности.
Метод определения полной излучаемой мощности громкоговорителя путем измерения звуковой энергии в одной точке был описан Мейером и Юстом Если в помещение с большой реверберацией, не имеющее кривых поверхностей, внести некоторый источник звука, то благодаря многократным отражениям сила звука в помещении на некотором расстоянии от источника звука будет значительно больше силы прямого звука источника. Вследствие большого числа всевозможно направленных отражений внутри помещения звук распределится равномерно. Таким образом измерения, произведенные в различных точках помещения,
1 Meyer and Just. Zeit. f. Techn. Physik, Vol. 10, Nov. 8, 1929.
208
дадут одни и те же результаты и каждое из них будет характеризовать полную энергию, излучаемую источником.
Если источник звуковой энергии излучает постоянную мощность Рл в закрытом помещении с большим временем реверберации, то плотность энергии в любой точке помещения определяется формулой
Е <10- 4)
где А — общее поглощение в помещении, с — скорость звука.
Заменяя Е в уравнении (10.4) через р2/рс2и решая это уравнение относительно Рд , получаем:
РА =5,6Ар'1 микроватт (10. 5)
где Рд—'полная акустическая мощность источника звука в микроваттах
А — общее поглощение в помещении в эквивалентных квадратных метрах открытого окна
р— эффективное давление в какой-либо точке помещения.
Таким образом, зная общее поглощение внутри помещения, мы можем определить мощность, излучаемую громкоговорителем путем одного измерения эффективного давления в какой-либо точке помещения. Для получения хороших результатов .время реверберации помещения должно быть не меньше 6—7 сек. Кроме того необходимо знать величину общего поглощения для всех частот, при которых производятся измерения громкоговорителя.
Другая мера предосторожности, которая должна быть принята, заключается в предотвращении возможности возникновения стоячих волн внутри помещения. Для этой цели применяются различные методы, среди которых следует отметить периодическое изменение частоты, вращение микрофона, вращение громкоговорителя и вращение лопастей. Периодическое изменение частоты на гЬ 50 гц со скоростью от 10 до 20 раз в секунду непрерывно меняет распределение звука внутри помещения и почти полностью устраняет стоячие волны. Единственный недостаток этого метода заключается в том, что при его- применении акустическая мощность измеряется не при какой-либо одной частоте, а как средняя в частотном диапазоне периодического изменения гона. Для получения результатов, свободных от влияния стоячих волн, применяется также вращение микрофона при неподвижном источнике звука. При использовании этого метода необходимо принимать меры для того, чтобы помещение не'оказывало обратного воздействия на источник звука. Если, например, в помещении возникают стоячие волны и источник звука оказывается в пучности давления, то получающееся увеличение нагрузки
1-1 Прикладная акустика.
209
источника звука приводит к значительному увеличению акустической мощности. При этом очевидно создаются условия, не соответствующие нормальным условиям работы громкоговорителя. При применении метода выравнивания звукового поля помещения с помощью только вращения микрофона, когда стоячие волны неизбежны, всегда имеется опасность ошибок, вследствие обратного воздействия помещения на источник звука (особенно в помещениях с большой реверберацией). Поэтому не следует рекомендовать пользоваться этим методом выравнивания звукового поля, так как само это поле может оказаться усиленным или ослабленным вследствие реакции помещения на источник звука.
Вращение громкоговорителя препятствует возникновению стоячих волн, при условии, что диаметр окружности вращения больше, чем длина волны. При низких частотах громкоговоритель приходится перемещать на очень большие расстояния, благодаря чему 'Оказывается затруднительным сконструировать соответствующего -размера вращающийся штатив, годный для всех испытываемых типов громкоговорителей.
Применение вращающихся лопастей, искусственно рассеивающих -волны по всем направлениям, является эффективным средством уменьшения стоячих волн в помещении. Этот метод, приводящий к непрерывному смещению стоячих волн в помещении, уменьшает возможность обратного воздействия помещения н; громкоговоритель, обусловливающего, как указывалось выше, не нормальную нагрузку и отдачу последнего. Можно применять одновременно два или более из вышеописанных методов борьбы с образованием стоячих волн, обеспечивая, таким образом, равномерное распределение звуковой энергии внутри помещения.
10. 4. ОПРЕДЕЛЕНИЕ К. П. Д. ПОСРЕДСТВОМ ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКОГО СОПРОТИВЛЕНИЯ ДВИЖЕНИЯ
Одним из наиболее простых методов определения коэфициента полезного действия громкоговорителя является определение его при помощи измерения электрического сопротивления движения ’. Если электрическое полное сопротивление громкоговорителя (обозначим его через zf) измеряется при условиях, соответствующих нормальным условиям его работы, то активная составляющая полного сопротивления, умноженная на квадрат силы тока, определяет потребляемую громкоговорителем мощность. Если же диафрагма громкоговорителя зажата так, что она не может колебаться, то активная часть полного сопротивления (обозначим это полное сопротивление через zb), умноженная на квадрат тока, равняется мощности потерь громкоговорителя. Разность между сопротивлениями zf и zb, которую мы ’будем называть электрическим сопротивлением движения
1 Кепп ell у and Pierce. Proc. A. A. A. S., Vol. 48, No. 6, Sept., 1912.
210
Zem Zf Zb
(10. 6)
где:
zem гет+7ллт~ полное сопротивление движения Zf—rf-\-JXf—полное сопротивление свободной системы zh rh-\-jxb— полное сопротивление заторможенной системы.
Коэфициент полезного действия, выраженный через отдаваемую акустическую мощность, ' деленную на потребляемую электрическую мощность, равен:
К. П.Д.: ГГ J” /100%
(10. 7)
Из уравнения 10.7 следует, что определение коэфициента полезного действия путем измерения электрического сопротивления движения дает точные результаты только для громкоговорителей с относительно высоким коэфициентом полезного действия. Если же коэфициент полезного действия низок, то rh имеет величину того же порядка, что и rf, так что небольшая погрешность в измерении одной из составляющих приводи! к большой ошибке в определении коэфициента полезного действия. Необходимо также помнить, что уравнение (10.7) предполагает, что механические потери на вязкость и механический гистерезис исчезающе малы. Это предположение в большинстве случаев оправдывается; в тех же случаях, когда оно не оправдывается, активное сопротивление заторможенной системы в уравнении (10.7) приходится заменять активной составляющей полного сопротивления громкоговорителя, работающего в вакууме.
Коэфициент полезного действия громкоговорителя, опреде-. ленный из уравнения (10.7), представляет собой отношение развиваемой- акустической мощности к потребляемой электрической мощности. Это определение не соответствует определению, выраженному уравнением (10.2), учитывающему возможность с данным громкоговорителем использовать в максимальной мере мощность источника, если эта мощность ограничена. Для того, чтобы устранить расхождение между определением к. п. д., согласно уравнению (10.7) и принятым ранее определением коэфициента полезного действия согласно уравнению (10.2), -мы должны изменить уравнение (10.7). На рис. 10.4 громкоговоритель питается от источника
с сопротивлением R. В цепь громкоговорителя включен, как указано, амперметр, измеряющий ток 1 при подведении к цепи громкоговорителя напряжения е. В этом случае коэфициент по-
Рис. 10 4.
1 |':
211
лезного действия громкоговорителя можно определить из выражения
к. п. д.
/2 (Г/ гь)
(10. 8)
где:
Гу и гь — активные составляющие определенных выше полных сопротивлений свободной и заторможенной системы.
10. 5. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ
Определенный выше коэфициент полезного действия 'громкоговорителя не характеризует исчерпывающим образом качеств громкоговорителя. Так как конфигурация звукового поля вокруг громкоговорителя меняется при изменении частоты, то очевидно, что установление развиваемой громкоговорителем акустической мощности приносит очень мало пользы, если неизвестно распределение акустической энергии в пространстве. Характеристикой, хорошо иллюстрирующей качество работы громкоговорителя, является зависимость развиваемого им на определенном расстоянии звукового давления от частоты. Эта зависимость называется частотной характеристикой громкоговорителя. Заметим, что измерения звукового давления в большинстве случаев принято производить непосредственно на оси громкоговорителя.
Для того, чтобы иметь возможность сравнивать различные громкоговорители, мы будем определять чувствительность в данной точке через измеренные постоянные следующим образом:
Чувствительность =---р___ (10. 9)
е/2 1 гР
где р —- эффективное давление в выбранной точке, е и гр — определены в уравнении (10.1) и на рис. 10.2.
В данном случае опять наибольшие затруднения представляют акустические измерения (измерение р). Чувствительность громкоговорителя может оказаться совершенно различной в зависимости от акустических условий, при которых производятся измерения. Действительную характеристику громкоговорителя мы получили бы в том случае, если бы излучение происходило в безграничном пространстве. Некоторые исследователи предложили учитывать при снятии характеристики громкоговорителя акустику помещения, так как громкоговоритель нормально работает в помещении, и в соответствии с этим рекомендовали производить измерения чувствительности на расстоянии, соответствующем нормальному расположению слушателя перед громкоговорителем в помещении с акустическими характеристикам» средней жилой комнаты. Авторы не согласны с этим предложением по многим причинам. Во-первых, не существует такого
понятия, как нормальное расстояние слушателя от громкоговорителя. Во-вторых, трудно определить, что такое средняя жилая комната. В этом отношении существует бесконечное количество возможностей. Кроме того, испытания громкоговорителя, учитывающие особенности некоторого помещения, характеризуют его работу только при определенных условиях, соответствующих этому помещению, и результаты теряют свой смысл, если громкоговоритель применяется в другой обстановке.
Если громкоговоритель испытывается в условиях равноценных излучению в безграничном пространстве, то полученные таким образом характеристики не зависят от акустических свойств окружающего пространства. Зная же акустические характеристики того помещения, в котором предполагается использовать громкоговоритель, всегда можно на основании этих данных предвидеть как последний будет в этом помещении работать. Для каждого желающего получить действительные характеристики работы громкоговорителя понятно, чго это и есть единственно научный метод испытания громкоговорителей.
Выбор минимального расстояния между громкоговорителем и микрофоном при измерениях чувствительности определяется эффективным диаметром излучающей поверхности и размерами экрана (если задняя сторона громкоговорителя открыта и он за-монтирован в экран).
Крэндалл 1 показал, что в случае плоского поршня, излучающего в полубезграничном пространстве, на расстоянии Д2/ 1 от поршня, по оси последнего образуется ряд максимумов звукового давления (R — радиус поршня, а X— длина волны возбуждаемого звука). Таким образом очевидно, что для получения правильной характеристики громкоговорителя, расстояние между громкоговорителем и микрофоном следует выбирать в соответствии с наиболее высокой измеряемой частотой и радиусом диафрагмы, по формуле
л>-у (10. 10)
Если громкоговоритель замонтирован в экран и излучает как двойной источник, то, для получения действительной картины на низких частотах, микрофон следует устанавливать на таком расстоянии, чтобы на него действовали звук, излучаемый задней стороной громкоговорителя, т. е. расстояние между громкоговорителем и микрофоном должно превышать наибольшее измерение экрана. Другое ограничение в выборе минимального расстояния имеет место в случае конусного или рупорного громкоговорителя и обусловливается смещением положения мнимого источника звука при изменении частоты. Это явление будет подробнее рассмотрено в разделе (10.8А).
1 С г а и d а 11, G. В. „Theory of Vibrating Systems and Sound*, D. Van
Nostrand, p. 137.
213
212
10. 6. ИЗМЕРЕНИЯ В ЗАКРЫТОМ ПОМЕЩЕНИИ
Громкоговоритель п ъ » рофон
Рис. 10. 3.
jeptfaJibuoe изображение
ностью пола. Если
Хорошо известно, что стоячие .волны, возникающие в помещении вследствие отражений, представляют собой наиболее трудно устранимые препятствия при измерениях характеристик громкоговорителя в закрытом помещении.
Для того, чтобы получить правильную характеристику громкоговорителя, нужно было бы отнести микрофон на расстоянии 1,8 м от микрофона и на высоте 2 м ’над полом, то отражен-женный звук становится сравнимым с прямым звуком и в характеристике появляются резкие пики и провалы, обусловленные .интерференцией. Чтобы получить количественное представление об этой интерференции, рассмотрим простой случай, изображенный на рис. 10 5, когда происходит одно отражение. Предположим, что S есть громкоговоритель, находящийся на высоте h над полом и на расстоянии dt от микрофона. Луч, отраженный от пола, может быть рассматриваем, как приходящий от мнимого источника S', находящегося на расстоянии h под поверх-мы примем громкоговоритель за точечный
источник звука и предположим, что пол имеет коэфициент поглощения а, то отношение давления отраженного звука к давлению прямого звука в точке М будет равно
Таким образом, если громкоговоритель находится на расстоянии 1,8 м от микрофона и на высоте 2 м над полом, то отраженная часть давления в М равна 0,71 (1—а) давления прямого звука, поступающего из S. При изменении частоты эта отраженная часть оказывается попеременно то в фазе с прямым звуком, го смещенной относительно него н'а 180°.
Отраженная волна сдвинута по фазе относительно прямой волны на 180°, когда
]/(//+4/г2X (10.12)
где п — целое число, а А—длина волны.
Наоборот эта волна находится в фазе с прямой волной, когда:
—^=л). (10. 13)
На рис. 10.6 изображена частотная характеристика громкоговорителя. Она снята при помощи конденсаторного микрофона, установленного на расстоянии 1,2 м от громкоговорителя с диаметром диафрагмы —-18 см в звукоиспытательном помещении, размерами 4,8 X 4,8 X 2,4 да, стены, потолок и пол которого были
214
tr>wn
Частота e герцах
нусного громко/ оворителя с конусгм диа-метром 18 см, излучающим только своей
на расстоянии 1,2 м от гр- мкоговорителя. Громкоговоритель и микрофон установлены на высоте 1,2 м над полом. Пунктирная кривая показывает вычисленные неравномерности, обусловленные интерференцией звуковых волн, отраженных от пола и потолка, с прямой звуковой волной.
Примечание. Пик при частоте 350С гц обусловлен резонансом углубления перед диафрагмой конденсаторною микрофона.
покрыты минеральной шерстью толщиной 10 см. Громкоговоритель и микрофон находились на высоте 1,2 м над полом. Пунктирная кривая, изображенная на этом же рисунке, вычислена по уравнениям (10.12) и (10.13). Она позволяет теоретически определить частоты, при которых характеристика чувствительности должна иметь пики и провалы. Рис. 10.6 показывает, что данные измерений хорошо согласуются с данными, вычисленными теоретически. Если помещение имеет большие размеры и громкоговоритель и микрофон установлены высоко над по-лом, то влияние отражений |яю уменьшается, как в этом В-ю случае отражаклцие поверхно-7 6£) сти оказываются на относи-| тельно большом расстоянии. |<б Однако стоячие волны всегда|а образуются, если помещение s 0 не приближается по своим" свойствам к безграничному
пространству (случай практи- Рис- Ю- 6. Частотная характеристика ко-чески неосуществимый). Та-
ким образом проблема изме- передней стороной. Снята с помощью кон-рений в закрытом помещении денсаторпого микрофона, установленного сводится к уменьшению влияния помещения. В разделе (10.13) были предложены различные методы сглаживания пик, вызываемых отражением звука в помещении, и было указано, что в случае большой реверберации не рекомендуется применять метод вращаю-
щегося микрофона, так как этот метод не исключает опасности обратного воздействия помещения на источник звука. При снятии характеристик громкоговорителя в акустически обработанных помещениях, звукопоглощение которых очень велико, возможность обратного воздействия помещения на источник звука значительно уменьшается и поэтому для сглаживания пик, обусловленных помещением, в таких помещениях уже можно применять вращающийся микрофон. Бостуик1 дал описание вращающегося микрофона, применяемого в телефонных лабораториях Белла для сглаживания пик, вызываемых стоячими волнами помещения. Схематически эта система изображена на рис. 10.7. Генератор переменной частоты можно включать на испытуемый громкоговоритель и на градуированный атенюатор, выходное напряжение которого подводится к сопротивлению,
1 Bostwick, L. G. Bell System Teclin. J., Vol. VIII, No. 1, Jan., 1920, |i. 135.
215
включенному последовательно с конденсаторным микрофоном. Чтобы избежать применения длинных проводов с большим сопротивлением, в непосредственной близости от микрофона расположен однокаскадный усилитель. После микрофонного усилителя включен фильтр низкой частоты с переменной настройкой, срезающий гармоники, возникающие в системе. После фильтра включен основной усилитель, выходное напряжение которого измеряется квадратичным измерительным прибором с термопарой. Во время испытаний микрофон вращается по окружности диаметром в 1,7 /и, наклоненной к горизонтали под углом 45°.
JciMumem
Рис. 10. 7. Схема установки для снятия частотной характеристики громкоговорителя (по Бостуику).
В системе предусмотрено устройство, устанавливающее диафрагму микрофона перпендикулярно к оси громкоговорителя.
При проведении измерений выходное напряжение генеоатора подводится к громкоговорителю и для каждой частоты устанавливается такое усиление; чтобы при действии громкоговорителя на микрофон стрелка измерительного прибора отклонялась на половину шкалы. После этого генератор переключается на градуированный атенюатор и в последнем устанавливается такое затухание, чтобы измерительный прибор дал то же самое отклонение. Зависимость разности положений атенюатора для того и другого случая от частоты и представляет собой частотную характеристику громкоговорителя. Абсолютную величину звукового давления, действующего на микрофон, можно вычислить по кривой градуировки микрофона и по величине напряжения, подводимого к сопротивлению, включенному последовательно с микрофоном.
216
Звуковое давление равно
Рис. 10. 8. Частотная характеристика гром коговорителя с поршневой диафрагмой диаметром около 8,5 см. Снята в сильно заглушенном помещении на расстоянии 3,5 м от диафрагмы с помощью вращающегося конденсаторного микрофона. Пунктирная кривая получена на открытом воздухе (по Босту ику).
р ет ЦО. н)
где р — эффективная величина звукового давления в барах, е — напряжение на сопротивлении 500 ом, включенном последовательно с микрофоном, необходимое для получения отклонения измерительного прибора, равного отклонению, наблюдаемому при действии на микрофон звука (в милливольтах),
т — чувствитель н о € т ь микрофона при данной частоте в милливольтах на бар (в открытой цепи).
Результаты, получающиеся при применении описанного метода, являющегося методом замещения, не зависят от градуировки или характеристики усилителя. Необх о д и и а лишь градуировка атенюа-тора и микрофона. Однако, этому методу все же присущи следующие два недостатка: затрата значительного времени, необхо
димого для испытания громкоговорителя, и невозможность получения непрерывной частотной кривой чувствительности вследствие применения метода измерения по точкам.
Эффективность вращения микрофона в отношении усреднения влияния стоячих волн иллюстрируется рис. 10.8 и 10.9, на которых приведены характеристики громкоговорителей двух типов, снятые на открытом воздухе и в сильно звукопоглощающем помещении, размерами 10 м X X 5,4 м X 2,7 гл, все шесть поверхностей которого были покрыты слоем войлока толщиной в 12,5 мм и кроме того были завешаны драпировками из ткани.
Расхождения между кривыми, снятыми на от-
Рис. 10. 9. Частотная характеристика электродинамического громкоговорителя с экспоненциальным рупором, имеющим пограничную частоту 115 гц. Снята в сильно заглушенном помещении иа расстоянии 3,5 м от устья рупора с помощью вращающегося конденсаторного микрофона. Пунктирная кривая получена на открытом воздухе (но Бостуику).
217’
крытом воздухе и в закрытом помещении, можно отчасти объяснить неравномерностью характеристики поглощения прмеще-ния. Коэфициент поглощения для войлока толщиной 13 мм при низких частотах меньше, чем при высоких; поэтому при -низких частотах поглощение звука в помещении сравнительно невелико, результат чего и представляет кажущееся увеличение чувствительности при этих частотах, видное из кривых рис. 10.8 и 10.9. Расхождения между кривыми чувствительности для громкоговорителей различных типов неодинаковы, что об’ясняется различными характеристиками направленности громкоговорителей, которые должны сказываться при измерениях в закрытом помещении. Таким образом очевидно, что даже при принятий мер предосторожности испытания громкоговорителей в закрытых помещениях при значительных расстояниях от источника звука дают все же сомнительные результаты.
Замена конденсаторного микрофона микрофоном скорости, обладающим способностью слабо реагировать на рассеянный звук, обеспечивает лучшие результаты.
В следующих разделах приведены количественные данные, характеризующие преимущество применения при испытании гром коговорителей микрофона скорости.
10. 7. ИЗМЕРЕНИЕ ЭНЕРГИИ В ЗАКРЫТОМ ПОМЕЩЕНИИ С ПОМОЩЬЮ МИКРОФОНА
Стоячие волны, возникающие благодаря отражениям уже на расстоянии 1—2 м от источника звука, даже в сильно заглушенном помещении, представляют собой серьезную помеху при изме рениях громкоговорителей. Для того, чтобы обойти это затруднение, был исследован вопрос о возможности измерения вместо звукового давления плотности энергии в какой-либо точке помещения Ч Полная энергия в какой-либо точке звукового поля слагается из кинетической и потенциальной энергии. В поле, в кото ром имеются стоячие волны, эта энергия может быть в некоторых точках только потенциальной, а в других только кинетической; в общем же случае она может представлять собой любое сочетание этих двух видов энергии. Таким образом очевидно, что в отдельных точках полная энергия изменяется не так сильно как потенциальная или кинетическая энергия в отдельности.
Метод непосредственного .измерения плотности энергии осно ван на применении двух микрофонов: одного — для измерения потенциальной энергии, другого — для измерения кинетической энергии. Потенциальная энергия в какой-либо точке звукового поля пропорциональна квадрату звукового давления. Так как давление в среде является скалярной величиной, то путем одного измерения с помощью микрофона давления уже можно опреде-
1 Wolff and Massa. J. Acous. Soc. Amer., Vol. IV, No. 3, Jan., 1933.
218
лить потенциальную энергию. Хорошо известно, что конденсаторный микрофон измеряет давление звуковой волны, и при условии, что его размеры малы по сравнению с длиной волны, оказывает лишь незначительное влияние на звуковое поле. Поэтому для измерения потенциальной энергии можно применить или этот микрофон или другие аналогичные микрофоны, например, ленточный микрофон давления.
Кинетическая энергия в звуковом поле пропорциональна квадрату колебательной скорости частиц в рассматриваемой точке. В главе V было показано, что микрофон градиента давления или микрофон скорости измеряет скорость частиц в звуковой волне. Мгновенное значение скорости является простой векторной вели чиной, которую можно проектировать на любую ось, выражать С помощью закона косинуса и складывать геометрически.
zzcosH (10. 15)
где В—угол между некоторым направлением и направлением, по которому перемещается частица
и — мгновенная скорость частицы
ио — проэкция скорости на направление О.
Какое бы значение скорости: среднее, эффективное или максимальное ни измерял бы детектор на выходе микрофона, величина этой скорости не является вектором указанного выше типа. Поэтому при падении на микрофон ряда волн, сдвинутых по фазе, квадратичный, например, индикатор покажет эффектив ное значение геометрической суммы отдельных составляющих, а не просто 'сумму эффективных значений всех составляющих.
В плоских или сферических бегущих звуковых волнах скорость, измеряемую микрофоном, можно рассматривать как простую векторную величину и составляющую этой величины для любого направления можно определить по закону косинуса как
И cosMcosw^ (10. 16)
0 UVW '
где:
абсолютная максимальная величина скорости частиц
<) z= 2-f
f— частота.
(zz„) V cost» (10. 17)
' 0 max tivw v '
В звуковом поле, в котором происходит интерференция двух волн, измеряемая скорость не является простой векторной величиной. Это можно показать рассматривая две плоских волны равной силы, распространяющиеся под прямым углом и накладывающиеся в плоскости их распространения.
В плоскости распространения можно найти точки, в которых 1ве волны отличаются по временной фазе на я/2.
219
Т огда
«i 4„,wcos 0 cosw/ и
и2— Кг® sin 6 sin где:
и, и иг— составляющие мгновенной скорости частиц в направлении 0.
Сумма в направлении 0
— Vuvw (sin 0 sin wZ+cos 0 cos to/) или ,
%=VlvwCOS (0 ' О (10- 18)
Выражение (10.18) свидетельствует о том, что максимальные, средние и квадратичные величины скорости не зависят от направления. Таким образом индикатор на выходе микрофона должен давать показания, независящие от направления в плоскости распространения двух волн.
Скорость частиц в этих особых точках пространства имеет тот же характер, что и поле, создаваемое электрическими или магнитными векторами в световой по кругу поляризованной волне или аналогична вращающемуся полю в некоторых типах электрических генераторов и моторов. Путем соответствующего выбора величин, направлений и фаз интерферирующих волн можно, как и в случае эллиптически поляризованного света, получить любую форму вращения Ч
В нашей опытной установке ленточный микрофон был смонтирован на двойной стойке, которая позволяла установить плоскость микрофона в любое положение. Отсчеты, полученные для плоской бегущей волны, соответствовали отсчетам, которые следовало ожидать для проекции вектора на перпендикуляр к плоскости ленточки; отсчеты же, полученные в системе стоячих волн, показали вращение вектора по эллипсу и в отдельных частных случаях по окружности, что -и следовало ожидать на основании теоретического анализа.
Для нахождения абсолютной величины скорости частиц в какой-либо точке, необходимо измерить три составляющие, расположенные относительно друг друга под прямыми углами, и затем сложить их геометрически. Это можно сделать с помощью трех ленточных микрофонов, расположенных перпендикулярно один по отношению к другому, при условии, что расстояние между ними мало по сравнению с длиной волны измеряемого звука. Показания индикаторов на выходах микрофонов следует возвести
1 В простейшем рассматриваемом выше случае двух сдвинутых на я/2 (по времени и направлению) волн, вращение по кругу совершает вектор с проекциями их= VUl)W cos <st и nv=V,n,lasin wt (Прим, ред.)
220
в квадрат и сложить1; полученная сумма и даст квадрат скорости частиц, пропорциональный кинетической энергии в данной точке звукового поля. Другой возможный метод измерения скорости заключается в получении трех независимых отсчетов в одной и той же точке с помощью микрофона, последовательно располагаемого по трем перпендикулярным осям. Этот последний метод применяют при измерениях авторы, считая его наиболее удобным.
Желая проверить работу ленточного микрофона, мы провели измерения составляющих в различных системах прямоугольных координат для того, чтобы убедиться, будет ли векторная сумма одной и той же для любой пары осей. 'Некоторые типичные данные сведены в таблицу 1, показывающую соответствие между величинами скорости частиц в некоторой точке, измеренными при различных положениях системы прямоугольных координат, по осям которой располагался ленточный микрофон. Эти данные пропорциональны квадрату скорости частиц.
ТАБЛИЦА ।
Частота //2 мо° “290° V2 UVW и'2зо° “2120° V2 UVW
150 400 99 170 18 10 117 180 55 124 61 57 116 181
Частота “245° и2135° 1/2 UVW "'75° “2165° V* UVW
150 400 32 83 84 ЮЗ ’116 186 10 16 109 166 119 182
Обведенные цифпы представляют собой сумму квадратов составляющих скоростей, измеренных по осям, указанным в таблице; в пределах возможной погрешности измерений, совпадение между отдельными данными удовлетворительно.
Для сравнения изменений полной плотности энергии в отдельных точках с изменениями потенциальной или кинетической энергии было проведено экспериментальное исследование рас
* Если применяется квадратичный индикатор (например термопара), то нужно складывать первые степени отклонений индикатора. (Прим, ред.)
221
пределения плотности энергии в закрытом помещении, причем мощность источника звука поддерживалась постоянной. Иссле-
дование было проведено в помещении кубической формы разме-
рами приблизительно 5
Рис. 10. 10. Расположение аппаратуры при измерении энергии в ряде точек кнутри закрытого помещения. Размены помещения 4 8Х 4,8X4,8 м; стены и потолок покрыты целсексом толщиной 1,25 см.
ти в стороне с твердым деревянным полом. Стены и потолок помещения были покрыты целотексом толщиной в 1,25 ст.
Во время первой стадии опытов были произведены измерения в ряде точек, указанных на рис. 10.10. Громкоговоритель и микрофон были установлены на высоте 90 ат над полом. Изйе-. нения звукового давления, скорости частиц и квадратного корня из энергии вдоль точек ряда А рис. 10.10 изображены на рис. 10.11.
Характер трех кривых, приведенных на этой фигуре, с очевидностью показывает большие изменения давления в отдельных точках, обусловливаемые наличием стоячих волн. Изменения скорости частиц не так велики, как изменения давления, причем, как можно видеть, точкам низкого давления соответствует большая скорость частиц и наоборот. Сочетание звукового давления и скоро
сти частиц, представленное квадратным корнем
энергии, изменяется от точки до точки сравнению с изменениями давления или нейшее исследование распределения энергии было проведено в этом же > помещении, причем наблюдению- подвергался ряд точек, указанных
из плотности
значительно меньше по скорости частиц. Даль-
на
Рис. 10. 12. Расположение аппаратуры при измерении энергии в ряде точек внутри закрытого помещения. Размеры помещения: 4,8x4,8X^,8 м. Стены и потолок покрыты целотексом толщиной 1,25 см.
Рис. 10. 11. Изменения Р, V и _____ UVW
|/” £ вдоль ряда А для точек, указанных иа рис. 10. 10. /=290 гц.
222
рис. 10.12: некоторые из полученных результатов приведены на рис. 10.13 и 10.14. На рис. 10.13 приведены кривые давления, скорости частиц и квадратного корня из плотности энергии, измеренные для точек, расположенных по дуге В на расстоянии 1.5 м от громкоговорителя (рис. 10.12). На рис. 10.14 приведены результаты аналогичных измерений, проведенных по дуге G на
Рис. 10. 13. Изменения Р, Vuvw и У Е вдоль дуги В на расстоянии 1,5 м от громкоговорителя (конус диаметром 15 см, излучающий одной стороной, частота—290 гг$).
Рис. 10. 14. Р, Vvvw и у-Г вдоль дуги G Ил расстоянии 3 м, от громкоговорителя iko-вус диаметром 15 см, излучающий одной стороной, частота —290 гц).
расстоянии 3 я от громкоговорителя. Мы приводим. результаты измерений только для двух рядов точек, так как они уже достаточно хорошо иллюстрируют общую закономерность, выявившуюся при измерениях.
Сравнение результатов, приведенных на рис. 10.13 и 10.14, по называет, как и следовало ожидать, что при увеличении расстояния от громкоговорителя, изменения давления в отдельных точках становятся более сильными вследствие уменьшения роли прямого звука громкоговорителя по сравнению с отраженным звуком. Рис. 10.14 весьма наглядно иллюстрирует изменения давления на расстоянии 3 я- от источника звука. Изменения скорости частиц не так велики, как изменения давления. Следует отметить, что на рис. 10.14, как и на рис. 10.11, максимумы кривых давления приблизительно совпадают с минимумами кривых скорости частиц. Равномерный ход кривой плотности энергии рис. 10.14 показывает преимущество измерений в выбранной группе точек.
При проведении описанных измерений с помощью четырех отдельных микрофонов эти микрофоны снабжаются отдельными усилителями, выходные напряжения которых складываются только после детектирования. Если на выходах усилителей включены термопары, то выходы этих термопар соединяются последовательно и включаются на измерительный прибор, отклонение которого в этом случае пропорционально полной энергии.
223
Желая получить более точную количественную оценку изменений измеренных величин, мы взяли данные, соответствующие всем точкам, изображенным на рис. 10.12, и определили отклонение от средней величины вдоль каждой дуги. Такое определение мы произвели для каждой составляющей скорости, для результирующей скорости, для давления и для энергии. В допол нение к наблюдениям в точках, указанных на рис. 10.12, был проведен еще ряд наблюдений, при которых гоомкоговоритель и микрофон всегда находились на расстоянии 3 м один от другого и, оставаясь взаимно неподвижными, поворачивались в произвольных направлениях внутри помещения. Из результатов, полученных для этих точек, также были выведены средние величины; в таблице 2 дана сводка средних отклонений от средней величины для различных составляющих звуковой энергии, измеренных в закрытом помещении, в котором поддерживалось постоянство излучаемой звуковой мощности.
ТАБЛИЦА 2
Источник звука >/о Р или о/о щ ПЛОСКОСТЬ ленточки по оси громкоговори-те 1Я О/о «2 плоскость ленточки парал. полу % плоскость лен очки перпенд. оси громкоговорителя 0/“ V UVW или % Е'!г
Громкоговоритель с 38 конусной диафрагмой диаметром 30 см в экране 90 см X 90 см
Громкоговоритель с 28 конусной диафрагмой диаметром 15 см, замонтиро-ванный в ящике
Громкоговоритель и 51 микрофон при расстоянии между ними 3 м перемещаются в помеще- [ НИИ i
36 31 26 17
36 28 27 16
51 49 33 22
Из таблицы 2 можно видеть, что отклонения давления и двух из трех составляющих скорости имеют в общем величину одного и того же порядка. Изменения составляющей скорости, для которой плоскость ленточки перпендикулярна оси громкоговорителя, сравнительно невелики, что и следовало ожидать, так как ленточный микрофон благодаря своей направленности реагирует главным образом на прямой звук громкоговорителя. Значительное уменьшение изменений в отдельных точках показывают измерения суммарной скорости частиц (графа 5).
224
Распределение полной энергии оказывается еще более равномерным, как это можно видеть из графы 6.
Следует заметить, что (К. E.)'h дает значительно меньшие изменения, чем Е.) ‘/“вследствие того, что (К Е) ''“слагается из трех независимых составляющих скорости. Несколько большая равномерность Е1/2 по сравнению с (/f. Е.)'1- оправдывает применение дополнительного микрофона, но она не настолько велика, чтобы являться подтверждением предположенного соответствия между максимумами К.Е. и минимумами Р.Е. и наоборот. Практически применение трех микрофонов скорости с перпендикулярно расположенными осями и одного микрофона давления равноценно усреднению отсчетов четырех микрофонов давления, расположенных на произвольных расстояниях друг от друга порядка нескольких длин волн, при этом отсчеты микрофонов являются взаимно независимыми. Экономия же места и простота установки при работе с микрофонами скорости представляют преимущества применения этих микрофонов.
10. 8. ВЫВОДЫ ОТНОСИТЕЛЬНО ИЗМЕРЕНИЙ В ЗАКРЫТОМ ПОМЕЩЕНИИ
Как можно вывести ив предыдущего (разделы 16.6 и 10.7) главным источником погрешностей при снятии частотных характеристик громкоговорителей в закрытых помещениях являются звуки, отражающиеся от стен и накладывающиеся на прямой звук громкоговорителя. Так как полностью устранить это явление в практических условиях невозможно, то очевидно, что невозможным представляется и получение в закрытом помещении абсолютно точной частотной характеристики громкоговорителя. Погрешности, обусловливаемые отраженным звуком, могут быть лишь уменьшены с помощью различных.методов, описываемых ниже.
Наиболее эффективная мера, которую можно принять для устранения стоячих .волн в помещении, заключается в устранении отражений. Полное устранение отражений может быть достигнуто только в помещении, стены которого отнесены на бесконечное расстояние, что эквивалентно условиям, имеющимся на открытом воздухе. В закрытом же помещении, которое имеет конечные размеры, наибольшее приближение к условиям открытого пространства достигается тогда, когда помещение велико и коэфициент поглощения стен близок к единице. Размеры помещения ограничиваются соображениями практического порядка, .1 коэфициент поглощения ограничен свойствами тех материалов, которые имеются в продаже. В преодолении этих трудностей и состоит проблема испытания аппаратуры в условиях закрытого помещения.
|,) U ри гсладная акустика.
225
А.. Снятие кривых на небольшом расстоянии для уменьшения погрешностей, обусловливаемых отражением
Уравнение 10.10 дает минимальное расстояние, на которое следует отнести микрофон от плоского поршня, излучающего в полубесконечную среду, для того, чтобы получить правильную частотную характеристику. Для поршня диаметром в 20 си, излучающего частоты до 10 000 гц, минимальное расстояние, на которое следует отнести микрофон во избежание погрешностей вследствие интерференции, равняется 30 си. В помещении средних размеров, в котором микрофон находится на расстоянии 30 си от колеблющейся диафрагмы, частотная характеристика не должна практически искажаться помещением, так как отношение прямого звука к отраженному у микрофона получается очень большим. Если плоский поршень заменить конусом того же диаметра и установить микрофон на том же самом , месте, то частотная характеристика не будет искажена влиянием помещения и интерференции, однако, она не будет точно характеризовать работу громкоговорителя. Чувствительность на низких частотах окажется преувеличенной вследствие смещения кажущегося источника звука при изменении частоты. Из рис. 10.15 видно, что если конус излучает низкие частоты, то кажущийся источник звука расположен в точке L у основания конуса. По мере повышения частоты кажущийся источник приближается к вершине конуса и при высоких частотах оказывается в точке Н. Если громкоговоритель развивает по оси постоянную звуковую энергию при всех частотах и микрофон находится в точке. ~Mt, то отношение звукового давления при низкой частоте к звуковому давлению при высокой частоте выражается отношением \d/ . Если .микрофон переместить в точку М2 расположенную очень близко к громкоговорителю, то отношение давления на низких частотах к давлению ,на высоких частотах окажется равным dj_j 'df и величина этого отношения для точки М.2 будет значительно больше, чем для точки J\I\.
На рис. 10.16 приведены частотные характеристики динамического громкоговорителя с диаметром конуса 18 см, снятые с помощью конденсаторного микрофона, установленного на расстоянии 90 см и 30 см от основания конуса. Из этих характеристик ясно видно увеличение давления на низких частотах, получающееся при снятии характеристики на небольшом расстоянии от громкоговорителя.
Характеристика, снятая на расстоянии 90 см, показывает меньшее давление при низких частотах и кроме того имеет большое количество пик и провалов, обусловленных отражениями от пола помещения. Изменения частотной характеристики с изменением расстояния еще сильнее выражены в случае рупорного
226
громкоговорителя, когда кажущийся источник перемещается от
устья рупора при низких частотах к его горлу при высоких частотах, причем это расстояние может равняться метру и более.
Смещение кажущегося микрофон на расстоянии, в несколько раз превышающем высоту конусной диафрагмы или длину рупора. В этом случае изменения расстоя н и я при переходе от низких частот к высоким по сравнению со средним
источника заставляет устанавливать
Рис. 10. 16. Увеличение чувствительности на низких частотах, обусловленное близким расположением к динамическому конусному громкоговорителю. Пунктирная кривая была получена с помощью конденсаторного микрофона, установленного на расстоянии 90 см от основания конуса диаметром 18 см, сплошная кривая снята на расстоянии 30 см.
Приме м анис Пик лрм частоте 3500 гц, обусловлен рез< нанеси углубления перед диафрагмой конденсаторного микрофона.
Мсяусный грсякоговириШезь
Рис. 10. 15. Смешение кажущегося источника звука при изменении частоты для конусного громкоговорителя.
расстоянием между громкоговорителем и микрофоном, получаются незначительными.
Принятый метод снятия частотных характеристик на небольшом расстоянии с целью избежания погрешностей, обусловливаемых отражением звука в помещении, связан таким образом с внесением другой погрешности, обусловливаемой смещением кажущегося источника звука, как. было описано выше. Результаты измерений громкоговорителей, установленных на небольшом расстоянии, могут быть использованы для получения сравнительных характеристик, при условии, что эти громкоговорители имеют конусы одинакового размера; в этом 'Случае погрешность можно устранить, если взять отношение чувствитель-ностей. Для получения же абсолютных характеристик громкоговорителя микрофон следует устанавливать на относительно большом расстоянии.
В особых случаях, когда громкоговорители устанавливаются на близком расстоянии, например, при радиофоническом контроле или в автомобильных приемниках, слушатель должен заметить относительное увеличение громкости воспроизведения низких частот, благодаря близости к источнику звука. Для таких специфических случаев является целесообразным снимать частотную характеристику на расстоянии, соответствующем данному частному случаю. Такая характеристика должна дать бо
15*
227
лее точное представление о работе громкоговорителя в действительных условиях слушания.
В. Снятие кривых в закрытом помещении на большом расстоянии и методы устранения погрешностей, обусловливаемых отражениями звука
Необходимость снятия частотных характеристик громкоговорителя на относительно большом расстоянии от источника отмечалась в предыдущем разделе. Если такие измерения проводятся в закрытом помещении, то отраженный звук составляет значительную часть общего звука, воспринимаемого микрофоном. Отраженный звук находится в различных фазных отношениях с прямым звуком в зависимости от частоты и расстояния от отражающих поверхностей. Поэтому на частотной кривой, снятой с помощью микрофона, неподвижно установленного на большом расстоянии в закрытом помещении (как было описано в разделе 10.6 и показано на рис. 10.6), получается ряд пик и провалов, если только не приняты меры для усреднения фазных соотношений различных отраженных лучей. Одна из таких мер заключается в применении нескольких микрофонов, выходные напряжения которых отдельно усиливаются, детектируются квадратичным прибором и складываются. Эти микрофоны устанавливаются в произвольных положениях перед громкоговорителем на достаточном расстоянии друг от друга, так что относительные фазы между прямыми и отраженными звуками, поступающими к каждому .микрофону, усредняются. Такой метод непрактичен вследствие того, что приходится применять несколько усилителей; кроме того с помощью этого метода измеряется среднее давление, создаваемое громкоговорителем в зоне, занятой микрофонами, а не давление на оси громкоговорителя.
Метод устранения стоячих волн в помещении с помощью вращающегося микрофона был подробно описан в разделе 10.6. Недостаток этого метода заключается в том, что с помощью его определяется среднее давление, создаваемое громкоговорителем по некоторой дуге окружности, а не давление на оси громкоговорителя. Если, как имеет место при высоких частотах, громкоговоритель излучает узкий пучек лучей, то измерения по этому методу дают неправильную характеристику, так как микрофон вращается по дуге, может быть даже не проходя через ось громкоговорителя. Наряду с только что отмеченными недостатками метод вращающегося микрофона обладает преимуществом, заключающимся в том, что он дает возможность весьма эффективно устранить влияние отражений в помещении и дает кри вую, в достаточной мере свободную от резких пиков.
Для сглаживания пиков, обусловленных отражениями, применяют также периодическое изменение частоты на величину до-
228
11 а точную, чтобы фаза отраженного звука прошла через все величины относительно фазы прямого звука. Абсолютная величина расстройки при периодическом изменении частоты должна быть одинаковой для всех частот. Относительная же (процентная) величина этой расстройки должна быть максимальной для низких частот.
Главный и притом серьезный недостаток метода периодического изменения частоты заключается в том, что измерения показывают среднее давление, создаваемое громкоговорителем в полосе частот, обусловленной пределами расстройки, а не давление при какой-либо одной частоте. Вызываемая этим погрешность довольно значительна при низких частотах, при которых относительная величина расстройки составляет большой процент от основной частоты. При применении периодического изменения частоты в частотных характеристиках громкоговорителей не получается резких неравномерностей. Метод вращения громкоговорителя в помещении для устранения образования стоячих волн у микрофона имеет те же недостатки и те же преимущества, что и метод вращения микрофона.
Другой метод, применявшийся для устранения влияний отраженного звука при измерении на большом расстоянии, заключается в быстром изменении частоты, благодаря которому распределение отраженного звука непрерывно меняется с такой большой скоростью, что микрофонное устройство не может за ними следовать. Недостаток этого метода заключается в том, что быстрое изменение частоты вызывает также сглаживание частотной характеристики громкоговорителя, так что пики и провалы, присущие самому громкоговорителю, проявляются не в той пропорции, какая им свойственна в действительности. Наиболее целесообразным методом усреднения фаз звуковых волн, отраженных от стен помещения, является, пожалуй, метод вращающегося микрофона, бывший до недавнего времени общепринятым методом испытания громкоговорителей в закрытых помещениях на большом расстоянии.
С. Избирательность но отношению к отраженному звуку
В последнем разделе мы рассмотрели различные методы усреднения фаз отраженного звука в помещении. К сожалению, если бы мы даже и имели идеальный метод для такого усреднения, то характеристика поглощения помещения все же привела бы к погрешности в результатах измерений. Типичный пример влияния акустической характеристики помещения иллюстрируется рис. 10.8 и Г0.9, на которых сравниваются кривые двух громкоговорителей, полученные в закрытом помещении и на открытом воздухе. Общее кажущееся увеличение мощности, излучаемой громкоговорителем при низких частотах, обнаружи
229
ваемое при испытаниях в закрытом помещении, объясняется тем, что общее поглощение в помещении при этих частотах сравнительно невелико и поэтому отраженный звук при низких частотах имеет большую силу, чем при высоких частотах. На первый взгляд может показаться, что кривую, снятую в закрытом помещении, можно исправить, внеся в нее поправку на общее поглощение при различных частотах, в действительности, однако, это не так. При внимательном рассмотрении рис. 10.8 и 10.9 обнаруживается, что отношение характеристик, снятых на открытом воздухе и в закрытом помещении, различно для двух типов испытанных громкоговорителей; отсюда следует, что поправка зависит не только от изменения поглощения в помещении при изменении частоты, но и от характеристики направленности громкоговорителя. Последняя в свою очередь определяет, как звуковая энергия распределяется и в какой мере она отражается от стен. Если бы поглощение в помещении было постоянным при всех частотах, то мы все же имели бы отклонения от кривой, снятой на открытом воздухе. Эти отклонения зависели бы от тех изменений, которые претерпевает характеристика направленности громкоговорителя при переходе от одной частоты к другой.
Так как сглаживание отражений не обеспечивает снятия точной частотной характеристики громкоговорителя, то нам остается лишь прибегнуть к такому методу измерений, при котором влияние отражений исключается. Если бы мы могли создать микрофон, который реагировал бы только на прямой звук громкоговорителя и совершенно не реагировал бы на звук, отраженный стенами, то, пользуясь этим микрофоном, мы могли бы получить правильную частотную характеристику и в закрытом помещении. Микрофон скорости, подробно описанный в главе V, обладает большей чувствительностью по отношению к звуку, поступающему в одном направлении, чем к звуку, поступающему в других направлениях. Таким образом мы вполне можем применить этот микрофон для того, чтобы исключить влияние отраженных звуков в помещении.
Что касается микрофона давления, то отраженный звук действует на его диафрагму так же, как прямой, т. е. с 100% эффективностью; в случае же микрофона скорости действие отраженных звуковых лучей изменяется пропорционально косинусу угла между направлением луча и нормалью к плоскости ленточки. Если этот угол равен 90° •(условие для звука, поступающего в плоскости ленточки), то этот луч не оказывает на микрофон никакого действия. Если помещение настолько велико, что приходится считаться только с отражениями ют пола, то микрофон скорости можно ориентировать так, что на него будет действовать только прямой звук от громкоговорителя, как это будет описано в разделе об измерениях на открытом воздухе (рис. 10.18). В более общем случае следует считать, что в поме
230
щении происходит не одно отражение, и что поэтому часть отраженного звука все же будет приниматься микрофоном. Количественное уменьшение энергии отраженного звука, принимаемого ленточным микрофоном, по сравнению с конденсаторным микрофоном, установленным в то же самое положение, обнаруживается при сравнении граф 4 и 1 таблицы 2.
Отклонение от средней величины для ряда отсчетов, полученных с помощью ленточного микрофона скорости, установленного на расстоянии 3 м от громкоговорителя в помещении с размерами 4,8 X 4,8 X 4,8 м, составляет 33% по сравнению с 51 % для конденсаторного микрофона. Таким образом, вращая ленточный микрофон скорости на упоминавшемся выше вращающемся устройстве и ориентировав его так, чтобы во время движения ленточка оставалась обращенной к 'громкоговорителю, мы можем достигнуть значительно большего совпадения между кривыми,
снятыми на открытом воздухе и в 'закрытом помещении, чем
с помощью микрофона давления.
Рис. 10. 17. Конструкция пола и потолка, устраняющая влияние отражений на результаты измерений, проводимых с помощью ленточного микрофона.
Направленная характеристика ленточного микрофона скорости позволяет получить правильную частотную характеристику громкоговорителя при особых условиях опыта и в закрытом помещении. Если микрофон и громкоговори
Рис. 10. 18. Два метода расположения громкоговорителя и ленточного микрофона, устраняющих влияние отражения
от земли.
тель расположены так, как указано на рис. 10.17, а пол и потолок помещения спроектированы так, как указано на рис. 10.17, то отражения от обеих этих поверхностей будут лежать в плоскости ленточки. Боковые стены можно сконструировать по тому же принципу, так что отражения от этих четырех поверхностей будут лежать в зоне нулевой чувствительности микрофона. Таким путем можно снять частотную характеристику громкоговорителя, практически неискаженную влиянием помещения. Единственным отражением, которое будет при этом влиять на изме
231
рения, является отражение от стены, расположенной позади громкоговорителя; но эта стена может находиться на большом расстоянии. Предложенная схема расположения стен требует сохранения постоянного расстояния между громкоговорителем и микрофоном, так как очевидно, что при изменении расстояния приходится также менять и углы между стенами. Этот метод не дает эффективного результата в случае рупорных громкоговорителей, для которых кажущийся источник звука при переходе от низких частот к высоким перемещается на значительные расстояния, также как и мнимые источники, образуемые отражающими поверхностями. Вследствие этого часть отраженного звука воспринимается микрофоном.
Целесообразность сооружения 'помещения специальной формы, которое может быть использовано только для определенного расстояния от громкоговорителя, может быть оправдана в специальных случаях. Вообще же этот метод едва ли может иметь широкое применение.
10. 9. СНЯТИЕ ЧАСТОТНЫХ ХАРАКТЕРИСТИК НА ОТКРЫТОМ ВОЗДУХЕ
Мы уже упоминали о целесообразности снятия частотных характеристик громкоговорителей на большом расстоянии от источника и о необходимости проведения измерений на открытом воздухе для получения правильных данных, неискаженных влиянием помещения. Ленточный микрофон исключительно удобен для измерений громкоговорителей на открытом воздухе не только благодаря своей направленной характеристике, но' и благодаря тому, что частотная характеристика этого микрофона, снятая в свободном поле, не имеет резких неравномерностей.
Характеристика конденсаторного микрофона имеет пик приблизительно на частоте 3500 гц, обусловленный резонансом углубления перед диафрагмой микрофона. Соответствующее кажущееся увеличение чувствительности при этой частоте должно получаться :и у громкоговорителей, испытанных при помощи конденсаторного микрофона.
Обычно единственным отражением, имеющим место при измерениях громкоговорителей на открытом воздухе, является отражение от земли; 'влияние этого отражения на показания измерительного микрофона может быть исключено путем расположения громкоговорителя и микрофона, согласно рис. 10.18, где направление распространения отраженной 'волны совпадает с плоскостью нулевой чувствительности ленточки. Насколько полно исключаются отражения от земли, можно видеть из рис. 10.19. Сплошная кривая получена с помощью конденсаторного микрофона, установленного на расстоянии 3 м от громкоговорителя, причем |громкоговоритель и микрофон находились на высоте около 2 м над землей. Пунктирная кривая получена с помощью
232
ленточного микрофона, ось которого была расположена наклонно' таким образом, что микрофон не реагировал на волны, отражен-
ные ют земли.
При ориентировке большая ось микрофона должна быть наклонена так, чтобы длина проекции ленточки на ось громкогово-
рителя была наименьшей и во всяком случае достаточно малой по сравнению с длиной волны, соответствующей наиболее высокой измеряемой частоте. Если микрофон повернут вокруг малой оси так, что длина проекции при высоких частотах соизмерима с длиной волны, то чувствительность
Частота
Рис. 10. 20. Величива погрсш-
ногти при снятии частотной характеристики громкоговорителя с помощью различных методов. Расстояние громкоговорителя и микрофона от земли 2 м. Расстояние от громкоговорителя до микрофона 3 м.
Рис. 10. 19. Устранение пик, вызываемых отражением от земли, при применении ленточного микрофона. Пунктирная кривая снята с помощью ленточного микрофона (плоскость ленточки на одной линии с мнимым изображе-
нием громкоговорителя). Сплошная кривая снята конденсаторным микрофоном (с применением коррекции, уничтожающей влияние дифракции и резонанса углубления). Громкоговоритель и микрофон установлены на высоте 2 м над землей. Расстояние между микрофоном и громкоговорителем 3 м.
при этих частотах понижается благодаря тому, что скорость частиц в этом случае по длине ленточки имеет неодинаковую фазу.
Интересная группа кривых приведена на рис. 10.20, она иллюстрирует количественно, насколько' применение ленточного микрофона устраняет погрешности, обусловливаемые отражениями от земли. Кривая .(а) вычислена теоретически. Она характеризует изменения звукового давления, обусловленные отражениями от земли для точки, удаленной от громкоговорителя на 3 ;да при высоте подвеса громкоговорителя над землей 2 да. При вычислении предполагалось сферическое распределение звука вокруг источника и 100-процентное отражение от земли. Отклонения,
233
полученные экспериментально .при снятии частотной характеристики .громкоговорителя с помощью конденсаторного микрофона, иллюстрируются кривой (Ь). Расхождения между кривыми (а) и (Ь) при высоких частотах вполне естественны, так как распределение звука при этих частотах становится более направленным и лучи, падающие на отражающую землю, обладают меньшей силой. Кривая (с) показывает отклонения, получившиеся при замене конденсаторного микрофона ленточным микрофоном скорости, плоскость ленточки которого была установлена вертикально. Эти отклонения оказались меньше, чем в случае конденсаторного микрофона, так как на ленточку действовала лишь часть отраженного луча, пропорциональная косинусу угла между лучом и нормалью к ленточке. Кривая (d) совершенно свободна от искажений, благодаря такому выбору угла наклона плоскости ленточки, при котором отраженный1 луч оказался в плоскости нулевой чувствительности микрофона.
Весьма эффективный и точный метод снятия частотных характеристик громкоговорителей на открытом воздухе основан на применении .ленточного микрофона и гетеродинного генератора с’ полуавтоматическим записывающим устройством, описанным в главе IV. При пользовании .ленточным 'микрофоном на открытом воздухе, необходимо принять меры для предотвращения ошибок, которые может вызвать действие на микрофон ветра. Хороший экран для защиты от ветра можно изготовить из двух слоев китайского шелка (редкий и весьма легкий материал, нити которого волокнисты и представляют большое сопротивление для воздушных потоков). Первый слой шелка натягивается на сетку, монтируемую на расстоянии 5—10 см от ленточки. 'Отверстия в сетке должны быть большими '(диаметром больше 6 мм') для того, чтобы сетка не представляла для звуковой волны заметного сопротивления. Другая мера предосторожности, которую необходимо принять, заключается в таком выборе расположения граней каркаса сетки, при котором они не были бы параллельны плоскости ленточки, в противном случае при высоких частотах должны образоваться стоячие волны. Вторая оболочка, применяемая только при сильном ветре, может состоять из жесткого каркаса, имеющего форму куба со стороной в 60 см, покрытого слоем того же шелка. Двойной экран, сконструированный описанным образом, не задерживает звуковых волн при частотах до 8000 гц. Для частот выше 8000 гц получается небольшое затухание, достигающее при 10 000 гц приблизительно .10%.
10. 10. ХАРАКТЕРИСТИКИ НАПРАВЛЕННОСТИ
Характеристики направленности громкоговорителя можно представить либо системой частотных кривых, снятых под раз-
234
личными углами к оси громкоговорителя, либо системой полярных диаграмм, снятых при различных фиксированных частотах. Установка, применявшаяся авторами для снятия характеристик направленности, изображена на рис. 10.21. Громкоговоритель шарнирно закреплялся на плите, установленной на земле, указанным на фигуре образом. Угол наклона громкоговорителя определялся градуированным угломером. Микрофон, смонтированный
31
to
е
5 го
в
в экране, защищающем от§ ветра, был подвешен 1 тикально над громкоговорителем большом
вер-|
на достаточно* se расстоянии от§ и
Частота е герцах
Рис. 10. 22. Кривые, характеризующие направленность маленького рупорного громкоговорителя, полученные с помощью установки, изображенной на рис. 10. 21.
, Рис. 10. 21. Испытание громкоговорителя на открытом воздухе.
fcseo
Рис. 10. 23. Характеристики направленности рупорвого громкоговорителя, составленные по данным рис. 10. 22.
зданий и других отражающих звук об’ектов. Благодаря этому на микрофон действовал только прямой звук громкоговорителя.
Для питания громкоговорителя применялся гетеродинный генератор с вышеописанным полуавтоматическим записывающим устройством На рис. 10.22 изображена типичная система частотных характеристик -громкоговорителя. По этим характеристикам можно легко построить полярные диаграммы для различных частот. Система полярных кривых, вычисленных по кривым рис. 10.22, приведена на рис. 10.23.
Единственный практический метод получения правильных характеристик направленности громкоговорителя заключается в
235
измерении на открытом воздухе. Влияние помещения при снятии полярной диаграммы вносит более серьезное осложнение, чем при измерениях на оси громкоговорителя. Если кривая снимается в закрытом помещении по направлению относительно низкой чувствительности громкоговорителя (на средних и высоких частотах), то отраженный звук, достигающий микрофона, сильно возрастает по сравнению с прямым звуком, вызывая при измерениях большие ошибки.
ГЛАВА Xi
ИЗМЕРЕНИЯ ДИНАМИЧЕСКИХ СИСТЕМ
11. 1. ВВЕДЕНИЕ
Быстрое развитие акустики за последние несколько лет сделало измерения акустического и механического сопротивления такими же актуальными, как и измерения электрического сопротивления. Нередко бывает практически нецелесообразно или просто невозможно определить теоретически поведение рассматриваемой электрической цепи. В таких случаях обычно измеряется сопротивление элементов, или всей цепи с помощью моста для измерения электрического сопротивления и^и каким-либо другим методом. Точно также часто не представляется возможным теоретически определить поведение акустической или механической системы. >
В таких случаях оказывается необходимым произвести измерения акустического или механического сопротивления системы. В настоящей главе описываются методы измерения акустического и механического сопротивления.
11. 2. ИЗМЕРЕНИЕ АКУСТИЧЕСКОГО СОПРОТИВЛЕНИЯ
Кеннелли (Kennelly) и Курокава (Kurokawa) кажется впервые сделали количественные измерения акустического сопротивления. Их метод заключался в электрических измерениях электрического сопротивления движения телефона. При частотах, близких к резонансу диафрагмы, этот метод неточен, так как акустическому сопротивлению соответствует большое механическое сопротивление.
Метод измерения акустического сопротивления, предложенный Стюартом1, не включает в себе измерения механического сопротивления и является чисто акустическим. При этом методе
1 Stewart, G. W. Phys. Rev., Vol. 28, p. 1038, 1926.
измеряется изменение акустической передачи через длинную трубу постоянного сечения, к ответвлению которой присоединено сопротивление.
На рис. 11.1 показано устройство установки. Неизвестное со-ответвлению в точке В. Рас-
противление присоединяется к
Рис. 11. 1. Устройство для измерения акустического сопротивления (по Стюарту).
смотрим сначала соотношения для точки В. Установим следующие граничные условия, выражающие непрерывность давления у разветвления:
и Pi+Pr=Pb=Pt (Н- 1)
и,-и=иьА-и. (И. 2)
где:
д.—давление падающей волны от источника 1\
рг—давление отраженной вол ны у разветвления В
pb pt—давление в точке В
U,— скорость об'емного смещения падающей волны от источника 1\
Ur — скорость об'емного смещения отраженной волны у разветвления В
U6 — скорость об'емного смещения волны, входящей в ответвление
Uz— скорость об'емного смещения волны, проходящей через главный канал трубы.
Скорость об'емного смещения может быть выражена следующим образом
Ur=^-; Ut=-Pt- и (11. 3)
’ ГА Г rA ‘ rA b ZAU 7
где:
rA =pc|S—акустическое активное сопротивление главного канала трубы
S— площадь его сечения
zAy—неизвестное полное сопротивление ветви.
Уравнение (11. 2) можно написать в виде
Уравнение же (11. 1) можно представить в виде Pi—Pr^Pi—Pt СИ. 5)
Из уравнений (11. 5) и (11. 4) получаем
238
Pt = 2zAU
Pi ^zAU+rA
Мы можем написать, что
J mt
PP4W
(Н- 6)
(И. 7)
(П- 8)
где в фазный угол между д- и pt.
После подстановки уравнение (11. 6) принимает вид
<cos 0+> sin 8)~ 2z ~+r 9) p’oe-----------------------------------------Po 2zAUrA
Уравнение (11. 9) показывает, что неизвестное полное сопротивление можно определить из отношения р0 к р'с и разности фаз между этими давлениями.
Экспериментальная измерительная установка, показанная на рис. 11.1, состоит из двух громкоговорителей электродинамического типа 7\ и Т2, являющихся источниками звука, каждый из которых соединен с трубой. Длина одной трубы может изменяться. Другая труба соединена в точке В с неизвестным сопротивлением.
На некотором расстоянии от точки В две трубы сообщаются маленькой трубкой. К последней присоединен стетоскоп. Для устранения отраженной волны в трубах по всей их длине расположены пучки шерстяной ваты. Метод устранения стоячих волн в трубах при помощи ваты рассматривался в разделе 5.5.
Для того, чтобы при регулировке потенциометра не получалось изменения фазы в электрической цепи, активные сопротивления ее ветвей должны быть большими по сравнению с реактивными сопротивлениями.
Измерения производятся следующим образом:
Отключается ответвление и закрывается отверстие в точке В, затем регулируется напряжение е, и е2 и устанавливается такая длина раздвижной трубы, при которой в точках Е и G звуковые давления оказываются равными по амплитуде и обратными по фазе, при этих условиях в стетоскопе не будет слышно • звука. После этого отверстие в точке, В открывается, подключается неизвестное сопротивление и все измерение повторяется.
Отношение давлений в уравнении (11.9) определяется уравнением
А>_ gi'ga До e'j/с'г
где е, и еа—напряжения при закрытом ответвлении.
е\ е\— напряжения при включении в ответвление неизвестного сопротивления. i
(11. 10)
239
Фазный угол определяется по расстоянию между первым и вторым положением d.
Фазный угол
2nd
(И. И)
где Л — длина волны — с/f.
с —- скорость звука.
/—частота Звука.
Неизвестное полное сопротивление zau определяется из уравнения (11.9), в которое подставляются величины, полученные из уравнений (11.10) и '(11.11).
Другой метод измерения акустического полного сопротивления был предложен Фландерсом Ч При этом методе сопротивле-
ния определяются непосредственно в долях известного акустического сопротивления по положениям ручек трех потенцио-
Рис. 11. 2. Схема устройства для измерения акустического сопротивления (по Фландерсу).
метров, при помощи которых устанавливается баланс. Такое измерительное устройство показано на рис. 11.2. Электрическая энергия от генератора подводится к громкоговорителю и превращается в акустическую энергию, излучающуюся в трубу и в измеряемое акустическое сопротивление. Маленькая трубка, имеющая на одном конце конденсаторный микрофон, служит для измерения давления в месте соединения трубы с изме-
ряемым сопротивлением. Получающееся на зажимах конденсаторного микрофона напряжение, соответствующее звуковому давле-
нию, усиливается, и ток от выхода усилителя проходит через реостат. Последний включен последовательно с пер- _________.
вичной обмоткой переменной взаимоиндукции. 5^ I g
Часть энергии генератора подается на выход вто- < ЛТ ₽ < 2/1
рого усилителя. Напряжение на выходе второго Ч t ?
усилителя уравновешивается падением напряжения на концах реостата и .вторичной обмотки взаимоиндукции. Для определения величины неизвестного сопротивления к концу трубы присоединяются по очереди три различные акустические сопротивления. Балансировка производится для каждого из
Рис. 11.3. Эквивалентная электрическая схема устройства рис.
11.2.
трех сопротивлений, а именно: при включении закрытой трубы,
длиной в одну восьмую длины волны; при плотном закрытии конца трубы; и, наконец, при включении неизвестного измеряе-
1 Flanders, Р. В. Bell System Tech. Jour., July, 1932, p. 4i)2.
240
мого сопротивления. По данным измерения электрических величин и величине реактивного сопротивления закрытой трубы можно определить неизвестное полное сопротивление. Эквивалентная описанной акустической системе электрическая цепь показана на рис. 11.3. Пусть р0 давление, развиваемое громкоговорителем при разомкнутой цепи, другими словами, давление, .которое получается при закрытии конца трубы жесткой стенкой. Пусть — полное сопротивление трубы у ответвления, a zA — полное сопротивление, приключенное к концу трубы.
Давление у ответвления при включении трех сопротивлений:
(11. 12)
Ръ—Рй, когда zA =со
(11 13)
P°ZAU
Pi=—Z + ~z-'> КОГДа ZA=ZAU
ZAT'ZAU ли
(И- И)
где:
Хду—неизвестное полное сопротивление
zAO—известное полное сопротивление.
Отношение неизвестного полного сопротивления zAU к известному полному сопротивлению zAO в зависимости от трех давлений
гЛС/
Р1
ZAQ 1
/'з
(И. 15)
Падение напряжения на концах активного сопротивления и первичной обмотки взаимоиндукции пропорционально давлению р у ответвления. Если система сбалансирована и напряжение на зажимах телефона равно нулю, до падение напряжения на концах сопротивления и вторичной обмотки взаимоиндукции равно напряжению, пропорциональному р0.
Пусть ze—-полное сопротивление, включающее активное сопротивление и взаимоиндукцию,
а р — давление у ответвления, тогда
pze=Kp. (И. 16)
где К — постоянная системы.
Располагая данными измерений, можно написать три следующих уравнения:
<11- Н) ,
16 Прикладная акустика.
241
_ _Кро ет- р2
~ -Кру ps Подставляя их в уравнение ('11.15), получаем гАЦ __ ге\-ге2 = <гс1 -/е2>+-/<1) (от1~^) zA0 геЗ~ге2 <-геЗ ~ re2) + Ju> Cms —^2)
(11. 18)
(11. 19)
(11. 20)
Конус Пружина КмесгЪудля измерения злекггграчес кого полного сопротивление
Рис. 11. 4. Устройство для измерения механического сопротивления системы подвеса конуса.
где те—•активная слагающая сопротивления z m >— коэфициент взаимоиндукции.
Реактивное сопротивление трубы с закрытым концом, имеющей длину, равную одной восьмой длины волны, может быть вычислено. Уравнение (2.81) главы 2.13 показывает, что акустическое полное сопротивление трубы такой длины является отрицательным акустическим реактивным сопротивлением. Величина его при 20° С равняется 42/S, где S— сечение трубы.
И. 3. ИЗМЕРЕНИЕ МЕХАНИЧЕСКОГО СОПРОТИВЛЕНИЯ
Аппараты, которые мы рассматриваем, представляют собой обратимые электромеханические преобразователи. Механическое сопротивление этих аппаратов можно определять методом измерения электрического сопротивления движения. На рис. 11.4 изображена электромеханическая система, состоящая из катушки, помещенной в постоянном магнитном поле. Сила, возбуждаемая током /, протекающим в катушке,
' М
(11. 21)
где:
В —магнитная индукция
/—длина проводника катушки. Генерируемая в катушке э. д. с.
е—В1х
(11. 22)
где х — скорость катушки.
Из уравнений (11. 21) и (11. 22) мы получаем
(11. 23)
х е
где:
242
z,, —механическое полное сопротивление
Л1
ze — электрическое полное сопротивление.
Если электрическое полное сопротивление при неподвижной механической системе равнялось бы нулю, то механическое полное сопротивление можно было бы вычислить непосредственно по уравнению (11.24). Так как это допущение физически невыполнимо, то в знаменатель уравнения (11.24) нужно подставить разность между электрическими полными сопротивлениями при свободной и при заторможенной подвижной системе.
Таким образом механическое полное сопротивление определяется уравнением.
ВФ
Z.,—--------
М zeF~zeB
(11. 25)
системе.
полное сопротивление можно измерять обыч-измерении механического сопротивления аппа-разность между и
электрическими полными со-
5 х 10x10*.
gxtO*
§
4x10*
1 I ZxiO* i.
Рис. 11.5. Теоретически вычисленное и полученное экспериментально механическое сопротивление системы, показанной на рис. 11.4
О
О 1000 4000 6000 0000 10000
Частота. В герцах
где zeF —-электрическое полное сопротивление при свободной механической системе,
a zgB —электрическое полное сопротивление при заторможенной механической
Электрическое ным мостом. При ратов, у которых противлениями при свободной заторможенной подвижной системе мала, получаются большие ошибки.
Во всех случаях желательно иметь возможно большую индукцию в зазоре, так как электрическое полное сопротивление движения пропорционально квадрату индукции. Приведем пример измерения механического полного сопротивления. В рассматриваемом случае исследовалось механическое полное сопротивление демпфирующего материала, применяемого для подвешивания конуса громкоговорителя. Для этого был изготовлен маленький конус, колеблющийся во всем исследуемом диапазоне частот, как одно целое (рис. 11.4). Конус был подвешен на очень легких пружинках. Благодаря малой поверхности конуса, его сопротивлением излучения можно было пренебречь. Масса всей системы в целом равнялась 1,3 г.
Приведенные на графике рис. 11.5 теоретически вычисленные величины механического полного сопротивления (полагая массу системы 1,3 г) и измеренные величины совпадают при частотах
Ki*
243
до 8000 гц, следовательно, система до этой частоты колеблется как одно целое. Отклонения же экспериментально полученных величин механического полного сопротивления от вычисленных при частотах выше 8000 гц показывают, что имеется гибкость
Рис. 11. 6
Кривая А—полное сопротивление конуса и его поднеса „ В— реактивное сопротив-
ление конуса (из рис. 11.5).
„ С—активное сопротивление подвеса.
„ D—реактивное сопротив-
ление подвеса.
системы, которая уменьшает при этих частотах величину полного сопротивления. После этого предварительного эксперимента края конуса были закреплены при помощи кольца из тонкой кожи аналогично конусам громкоговорителей. Составляющие измеренного сопротивления приведены на рис. 11.6.
Чтобы найти полное сопротивление подвеса системы, нужно
исключить реактивное сопротивление конуса, приведенное на рис. 11.6. Полученные результаты, приведенные на рис. 11.7, показывают, что полное сопротивление подвеса системы состоит из активной и реактивной составляю
щей. Приведенные данные могут быть использованы при проектировании конусных диафрагм гром-говорителей, так как они определяют характер изменения сопротивления подвеса колеблющейся системы при изменении ча-
стоты.
11. 4. ИЗМЕРЕНИЕ ГИБКОСТИ
В разделе 7.2, был описан конус, разделенный на секции, состоящие из элементов массы и гибкости. Выбрав соответствующим образом постоянные этой системы, можно получить желаемые частотные и характеристики направленности конусного громкоговорителя. Масса каждого элемента определяется путем взвешивания. Гибкость, разделяющая отдельные массы, обусловлив-вается наличием кольцевых складок конуса. Зная модуль упругости материала, можно теоретически определить величину этой гибкости (см. главу 7.3). Для некоторых материалов эти постоянные неопределимы. В таких случаях гибкость необходимо измерять.
Метод измерения гибкости схематически показан на рис. 11,7’. В данном частном случае рассматривается гибкость, обозначенная индексом См2. Две массы т1 и т2 укреплены на конусе, как показано на рис. 11.7. Эквивалентная электрическая схема этой
1 Этот метод измерения гибкости был разработан по указаниям J. Preston’a.
244
fr g*»T 3mf
Эквивалентная сгем
Рис. 11.7. Метод измерения гибкости складок гофрировки.
системы приведена на рис. 11.7. СМ1 представляет собой гибкость соединения цилиндра катушки и конуса, тя — массу катушки и конуса между катушкой и гибкостью Смр Для упрощения анализа масса пц взята очень большой по сравнению с и12, а величина массы т2 выбрана так, что ее реактивное сопротивление при резонансе пц +; т3 с См2 очень велико, по сравнению с реактивным сопротивлением Смр В этом случае систему при резонансной частоте можно рассматривать, как последовательно соединенные т3, т2 и С м2. Резонансная частота массы т3 + л?2 с гибкостью См2 определяется следующим уравнением-
2тс V (та + т2) Cyg
Из этого уравнения величина См2 может быть определена, если известна резонансная частота. Резонансная же частота определяется по максимуму отношения между напряжением на зажимах звуковой катушки и протекающим через нее током. При этих условиях скорость массы т3 + т2 достигает наибольшей величины, что указывает на резонанс т2+ т:< с гибкостью См, Таким же путем могут быть определены и другие гибкости.
И. 5. ИЗМЕРЕНИЕ СКОРОСТЕЙ И ФАЗ ЧАСТЕЙ КОНУСНОЙ ДИАФРАГМЫ
В конусах, конструкция которых подобна показанной на {5|ис. 7.1, раздела 7.2, нас интересуют скорости и фазы отдельных частей конуса. Хотя их и можно определить теоретически,
зная постоянные системы, но в некоторых случаях, однако, желательно экспериментально проверить теоретический анализ. На рис. 1'1.8. схематически изобр а ж е н а установка для экспериментального сравнительного определения скоростей и фаз частей конуса. Две стетоскопические трубки, длина одной из коих может изменяться, соединены с микро
Рис. 11. 8. Устройство для измерения фаз и скоростей частей гофрированного конуса.
245
фонами. По всей длине трубки заполнены комками войлока, ослабляющими отраженные от микрофонов волны. Выходы усилителей соединены последовательно и включены на тепловой амперметр. Если обе трубки поместить против колеблющейся поверхности одной из секций конуса и путем регулировки длины трубки добиться минимального отклонения амперметра, то при этих условиях фазы звуковых давлений, действующих на микрофоны, оказываются смещенными на 180°. Переместим одну трубку и установим ее против другой секции, затем будем изменять длину трубки до тех пор, пока не добьемся минимального отклонения амперметра. Разность фаз между скоростями двух секций в этом случае может быть определена из соотношения
(11. 27)
где d— разность установки трубки переменной длины ггри первом и втором измерении
X—длина звуковой волны, возбуждаемой громкоговорителем.
Для определения сравнительных величин скоростей отдельных секций конуса применяется только одна трубка. Перемещая трубку от одной секции к другой и располагая градуировкой устройства микрофон — усилитель — измерительный прибор, легко определить эти величины. При этом необходимо соблюдать одно и то же расстояние между трубкой и поверхностью секции конуса при всех наблюдениях.
11. 6. ИСПЫТАНИЕ МЕХАНИЗМА РУПОРНОГО ГРОМКОГОВОРИТЕЛЯ
При конструировании рупорного громкоговорителя мы имеем дело с двумя составными частями, а именно с механизмом и с конечным рупором. В разделе 7.9 рассматривался рупорный громкоговоритель, состоящий из конуса, соединенного с экспоненциальным рупором, а в разделе 7.8 — механизм малых размеров, соединенный с бесконечной трубой.
В некоторых случаях нужно знать качество работы рупора и механизма в отдельности. При стандартных испытаниях механизма рупорного громкоговорителя желательно ограничивать распространение звука. В таких случаях наиболее простым решением является соединение механизма с сопротивлением, равным сопротивлению рупора бесконечной длины, а именно с акустическим активным сопротивлением
Г, =4 (П. 2Я)
где S — площадь рупора.
Для испытания малых механизмов вполне пригодна труба длиной 15 /и, заполненная комками войлока, заглушающими
246
звуковые волны, отраженные от конца трубы. Для проверки тбго, что механизм громкоговорителя действительно нагружен на акустическое активное сопротивление соответствующей величины, необходимо произвести измерение акустического сопротивления такой трубы.
Звуковое давление в трубе измеряется при помощи микрофона давления, подключенного к ответвлению трубы вблизи громкоговорителя. Акустическая мощность, поступающая в трубу
Р=-^~ ' (П. 29)
А
где р—'давление в барах,.
—-акустическое активное сопротивление трубы.
На рис. 11.9 показана установка для испытания громкоговорителей, рассчитанных на работу с широкогорлым рупором. Основной частью установки является деревянная труба с внутренним сечением 10 X 10 см, длиной 12 м и толщиной стенок — 38 мм.
Задняя часть трубы выдвинута, чтобы показать набивку, состоящую уз шерстяных лоскутьев, скрепленных проволокой.
Рис. 11. 9. Акустическая линия передачи с чисто активным сопротивлением при всех частотах.
Часть трубы, длиной 90 см, прилегающая к громкоговорителю, не заполнена поглощающим материалом. В остальной - части поглощающие материалы распологаются так, что поглощение в трубе увеличивается по .мере удаления от громкоговорителя. При таком распределении поглощающего материала сводятся до минимума резкие изменения сопротивления вдоль трубы. Кроме того, отраженные волны имеют все возможные фазы и действие их в некоторой точке в предельном случае равно нулю.
В описанной установке применяются два микрофона: микрофон скорости, описанный в разделе 5.12, и конденсаторный микрофон, описанный в разделе 5.3. Акустическое полное сопротивление трубы можно определить из отношения давления к ско-
247
роста об’емного смещения. Зависимость скорости колебания частиц и давления, развиваемого громкоговорителем от частоты при некоторой постоянной величине подводимой к нему электрической мощности, представлена на рис. 11.10. Теоретически вычисленное полное сопротивление трубы
г, — р/ --—0,42 акустических ома
Эта величина хорошо совпадает с данными, полученными экспериментально и приведенными на рис. 11.10.
Описанная установка, ис
Рис. 11. 10. Давление и скорость об'емного смещения в трубе рис. 11.9 при некоторой постоянной подводимой электрической мощности.
Кривая А- давление.
. В—полное сопротивление „ С—скорость об'емного
смещения.
пользуется для повседневных испытаний громкоговорителей, так как звук громкоговорителя изолируется стенками трубы и испытания не мешают выполнению других работ.
11. 7. АРТИКУЛЯЦИОННЫЕ ИСПЫТАНИЯ
Во всякой акустической системе прежде всего требуется получить условия полной понятности и натуральности передачи. При передаче разговора главным фактором является понятность. Под понятностью обычно понимают легкость и точность распознавания отдельных элементов речи. Напряжен
ность внимания слушателя при восприятии речи представляет собой основной критерий качества работы системы. Система может представлять собой воздушную среду между ртом говорящего и ухом, телефонную систему или звуковоспроизводящую систему, как, например, фонограф, радио, звуковое кино и т. д.
В телефонии разработаны методы количественного измерения разборчивости воспринимаемой слушателем речи. При таких испытаниях одно лицо произносит неимеющие смысла разговорные звуки по специальным таблицам на одном конце испытуемой системы, а другое лицо или несколько лиц на другом конце этой системы слушают и записывают их. Сравнение записанных таблиц с оригиналами и дает оценку качества системы. Такие испытания называются артикуляционными испытаниями. Звуки речи, обычно применяемые в артикуляционных испытаниях, группируются в неимеющие смысла отдельные слога. Слог считается принятым неправильно, если допущена ошибка в одном или больше знаках, составляющих слог. Часто требуется анализиро
248
вать эти ошибки и определить артикуляцию звуков речи. Процентное содержание в общем числе переданных звуков речи правильно принятых звуков называется артикуляцией звука.
Выражения «артикуляция гласных» и «артикуляция согласных» относятся к процентному содержанию в общем числе переданных гласных или согласных звуков правильно принятых гласных или согласных звуков. При артикуляционных испытаниях применяются также слова и короткие фразы, однако, при этом вводится элемент мышления и смысла, связанного со словами или с фразами. Выражения «артикуляция слов», и «артикуляция фраз» характеризует последние испытания.
Артикуляционные испытания казалось бы достаточно просты, однако, получение точных результатов испытания встречает большие трудности. Особенности, свойственные отдельным лицам, производящим испытания, могут внести большие неточности. Для получения точных результатов необходимо иметь для испытания бригаду артикулянтов, тренированных на такой работе. Флетчер и Стейнберг1 детально изучили практически и теоретически артикуляционные методы. Интересующимся количественными измерениями рекомендуем обратиться к их работам.
Для изучения влияния всякого рода искажений на разборчивость звуков речи составлены таблицы, называемые стандартными артикуляционными таблицами. В них встречаются только самые простые формы слогов, а именно, состоящие из согласной — гласной, гласной — согласной и согласной — гласной — согласной. Различные основные звуки английского или какого-нибудь другого языка в случайных комбинациях соединяются в слога, причем стремятся, чтобы каждый звук встречался одинаково часто.
Флетчер и Стейнберг пришли к заключению, что для сравнения результатов, полученных различными бригадами, на различных языках, желательно применять технику измерения, основанную на одном принципе, и тренировать различные бригады па одинаковых стандартных цепях.
Кнудсен 2 3 применил артикуляционные испытания для иссле дования акустических свойств помещений. Он показал, что про цент артикуляции, полученный в помещении, можно выразить гак: артикуляция=0,96 KeKrKnKs где:
Ке— постоянная, зависящая от уровня громкости
Кг— постоянная, зависящая от времени реверберации
К„ — постоянная, зависящая от уровня шума
— постоянная, зависящая от формы помещения.
1 Fletcher and Steinberg. J. Aeons. Soc. Amer., Vol. 1, No. 2, Part 2,
p. 1, см также Fletcher, Speech and Hearing, D. Van. Nostrand.
3 Knudsen, V. O. J. Acous. Soc. Amer., Vol. 1, p. 56.
249
Коэфициент 0,96 показывает, что уменьшение артикуляции на 4% в идеальных условиях обусловливается особенностями персонала, производящего испытания.
Стейнберг 1 исследовал влияние на разборчивость звуков речи различного рода искажений (частотных искажений, шумов, резонансных явлений и реверберации).
11. 8. ИСПЫТАНИЕ ТРАКТА ЗВУКОВОЙ ЧАСТОТЫ В ЦЕЛОМ
В предыдущих главах описывались различные методы испытания •электроакустической аппаратуры. После соединения всех элементов в общую цепь может потребоваться снять характеристику системы в целом. На рис. 11.11 схематически показана
Рис. 11. 11. Принципиальная схема тракта звуковой частоты.
установка, состоящая из микрофона, микрофонного усилителя, мощного усилителя и громкоговорителя. Качество передачи всякой системы характеризуется ее частотной характеристикой и величиной амплитудных искажений.
На рис. 11.12. приведена схема испытания всей системы в целом как в отношении частотных, так и амплитудных искажений.
Микрофон
Громкоговорителе
Микрофонный __ усилитель
________Громкоговоритель уста-
навливается перед ми-
Moutnui _ крофоном. Напряжение
усилитель
от генератора, имеющее
чис то синус о и да льну ю
измерительное аппара тура
Генератор
форму волны, подводится к входу мощного усилителя. Выход микро-
Рис. 11. 12. Схема общего испытания тракта звуковой частоты.
фонного усилителя, соединенный с мощным каскадом, подводится к из-
мерительной аппаратуре. Если снимается частотная характеристика, т.о измерительный аппарат состоит из градуированного усилителя и измерительного прибора на его выходе (см. главу IV). Для определения же амплитудных искажений измерительная аппаратура может быть дополнена одним из приборов для исследования формы волны, описанных в главе III.
При этом гармоники измеряются при различных нагрузках испытуемой аппаратуры. При испытании весьма важна согласо-
1 Steinberg, J. С. J. Acous. Soc. Amer., Vol. 1, No. 1, p. 121.
250
данность между сопротивлениями выхода генератора я входа мощного усилителя, а также между сопротивлениями выхода микрофонного усилителя и входа измерительного аппарата.
И. 9. ИСПЫТАНИЯ ТРАНСФОРМАТОРОВ ЗВУКОВОЙ ЧАСТОТЫ
Трансформаторы звуковой частоты1 являются необходимой частью электроакустических устройств. Поскольку они имеют широкое применение, дадим краткое описание метода снятия их частотных характеристик. Трансформаторы обычно рассчитываются для соединения двух сопротивлений, что должно быть
учтено при испытании трансформаторов.
В некоторых случаях при снятии частотной характеристики трансформатора допускаются ошибки, как например в случае, если напряжение измеряется на ненагруженном выходе при подаче непосредственно на вход э. д. с. постоянней величины (без учета внутрен
Рис. 11. 13. Снятие частотной характеристики трансформатора звуковых частот.
него сопротивления источника).
Правильный метод снятия частотной характеристики трансформатора схематически показан на рис. 11.13. Напряжение ех подводится к первичной обмотке, соединенной последовательно с сопротивлением г г Последнее равняется входному сопротивлению, на которое рассчитан трансформатор. Напряжение измеряется на зажимах вторичной обмотки, нагруженной нормальным сопротивлением нагрузки г,2- Коэфициент трансформации определяется как отношение» е2 /е 1 • Измеряя при различных частотах коэфициент трансформации, мы и определим частотную характеристику испытуемого трансформатора.
Если трансформатор рассчитан на то, что его первичная или вторичная обмотки будут работать не на чисто активное сопротивление, а на некоторое комплексное сопротивление, то в схеме рис. 11.13 активные сопротивления должны быть заменены соответствующими комплексными сопротивлениями.
ГЛАВА ХП
АРХИТЕКТУРНАЯ АКУСТИКА
12. 1. ВВЕДЕНИЕ
С тех пор, как люди начали пользоваться для собраний закрытыми помещениями, вопросы пространственной акустики стали в некотором смысле вопросами цивилизации. Впервые на почву научного исследования эти вопросы были поставлены работой проф. У. Сэбина в 1895 г., в которой была показана связь между временем реверберации помещения и количеством находящегося в нем звукопоглощающего материала.
До самого недавнего времени вопросы пространственной акустики не вызывали большого интереса со стороны исследователей.
Развитие радиовещания и звукового кино дало толчок для многочисленных исследований в этой области и разработки целого ряда методов и материалов для обеспечения в аудиториях удовлетворительных акустических условий.Разработанные многочисленные методы измерения реверберации и коэфициентов поглощения материалов послужили ценным средством для количественной и качественной оценки физических факторов, характеризующих акустику помещения.
В настоящей главе мы не будем входить в детали расчета помещений, подробно излагаемого в ряде руководств по архитектурной акустике *. Предметом рассмотрения будут технические приемы, служащие для изучения акустики помещений.
12. 2. РЕВЕРБЕРАЦИЯ
Сила звука в помещении не устанавливается мгновенно в момент возникновения звука. С каждым новым отражением
1 Watson, F. R. Acoutics of Buildings, John Wiley and Son, 1923.
В a gen al and Wood. Planning for Good Acoustics, Methuen, 1931.
Knudsen, V. O. Architectural Acoustics, John Wiley and Son, 1932.
Sabine, P. E. Acoustics and Architecture, McGRAW Hill, 1932.
252
звука от внутренних поверхностей помещения общая звуковая энергия в последнем нарастает. Через некоторое время устанавливается равновесие, при котором поглощаемая энергия восполняется энергией, генерируемой источником звука.
Время, требующееся для установления стационарного состояния в помещении, зависит от частоты следования одного отражения за другим и от поглощения звука при каждом отражении.
Если помещение велико, то число отражений в единицу времени невелико, благодаря значительному расстоянию между поверхностями стен, потолка, пола и т. д. Соответственно удлиняется время установления процесса (стационарного). В том же направлении влияет и малое поглощение поверхностей. Такое помещение обладает большой реверберацией. Те же свойства помещения могут быть усмотрены и из процесса затухания звуковой энергии в помещении, только в этом случае приходится говорить уже о времени, в течение которого звук в помещении длится после прекращения работы источника звука. Это «после-звучие», продолжающееся после «отсечки звука», носит название реверберации и является наиболее существенным критерием качества помещения.
У. Сэбин 1 вывел в результате 'Многочисленных экспериментов эмпирическую зависимость затухания звука от размеров помещения и общего поглощения. Несколькими годами позднее Франклин 2 вывел эту зависимость математически, допуская рассеянное состояние звуковой энергии в помещении и принимая, что поглощение звука-—непрерывный процесс. Уравнения установления звуковой энергии в прямоугольном помещении с размерами, значительно превосходящими длину звуковой волны, имеет вид
(cAt \
1— е 4lJ (12. 1)
где:
Е-—плотность звуковой энергии через промежуток времени t после начала звучания
с — скорость звука
А — общее количество единиц поглощения в помещении
Л"-a1S1-j-fl!2.S2+osSg
Яр п2, а3—-коэфициенты поглощения поверхностей S2, Ss F - 4po cA
Pn — мощность, излучаемая источником звука.
Если после установления звука в помещении внезапно прервать работу источника звука, то через промежуток времени t
1 S a b i ti е, W. С. Collected Papers In Acoustics, Harvard University Press, Cambridge, Mass.
2 F r a n k 1 i n. W. S. Phys. Rev., Vol. 16, p. 372, 1903.
253
после «отсечки» звука плотность энергии может быть выражена как
cAt
Е-=Еое (12. 2)
где все обозначения прежние.
Сабин определил время реверберации, как промежуток времени, которое требуется для уменьшения силы звука до одной миллионной части ее первоначальной (в момент отсечки) величины. Подставляя 10“6Z?0 вместо Е в (12.2) и решая относительно f, получаем
Г=0,161-*- (12. 3)
где: Т—время реверберации в секундах
V—об'ем комнаты в м*
А — суммарное число единиц поглощения в эквивалентных м* открытого окна.
Уравнение (12.3) получено, исходя из теоретических предпосылок Франклина. Интересно отметить, что эмпирическое соотношение 'Сабина дает
7=0,164-^- (12. 4)
Более поздние эксперименты показали, что вышенаписанные формулы для реверберации не годятся для сильно «заглушенных» помещений. Указывалось на то, что при выводах этих формул делалось допущение о непрерывном поглощении и полном рассеянии звука в помещении. Шустер и (Ветцман1 и Эйринг 2 показали, что формула Сабина действительна лишь для «живых» (незаглушенных) помещений, имеющих малое поглощение и большую реверберацию. Эйринг вывел более общее соотношение для явления затухания звуковой энергии, причем он предположил прерывное поглощение звуковой энергии, т. е. допустил,, что звуковая волна между отражениями совершает некоторый средний путь, зависящий от размеров и формы помещения, и что определенное процентное уменьшение энергии таким образом происходит с промежутком времени, необходимым для прохождения звуковой волной этого пути. При выводе своей формулы Эйринг заменяет стены помещения мнимыми источниками звука для каждого отражения. Бесконечное множество этих мнимых источников развивает звуковую энергию в помещении. Когда же прекращается звучание действительного источника, замолкают и все мнимые. Сила звука в данной точке помещения снижается «каскадами» по мере того, как отпадают отдельные
1 Schuster and Waetzmann. Ann. d. Physik, Vol. 5, No. 1 p.671,1929.
2 E у ring, C. F. J. Aeons. Soc. of Amer., Vol. 1, No. 2, p. 217, 1930.
254
4V
(12. 5)
мнимые источники (через промежутки времени, соответствующие их расстоянию от данной точки)Ч Более общее выражение для затухающей звуковой энергии в закрытом помещении
cS in (1 — аср\ t
Е=Еое
где Е, Ео, ,с, V и t определены выше
X—суммарная площадь всех поверхностей внутри помещения.
аср — средний коэфициент поглощения поверхностей
ср Sj-|-S2-|-S3
as — коэфициенты поглощения поверхностей S1; S2, времени ревер-
^1,
Из уравнения (12.5) получается уравнение для берации
(12. 6)
«живых» поме-так как в этом равному А — зна-
т 0,1641/ _ ~ — S in (1 —аср)
Нетрудно видеть, что эта формула для случая щений (с малым а равноценна формуле Сэбина, СР
случае — Sin (1 — приближается к S а ,
менателю в уравнении (12.4). Представление о сравнительной ценности обеих формул дает рис. 12.1. Из кривых ясно, что при a J>0,4 ошибка, получаемая при пользовании формулой Сэбина,
Рис. 12. 1. Сравнение формул реверберации:
(Д) Сэбина; (6) Эйриига.
становится весьма значительной.
Рис. 12. 2. Оптимальное время реверберации в зависимости от об’ема помещения для частоты 512 гц (по Макнейру).
12. 3. ОПТИМАЛЬНОЕ ВРЕМЯ РЕВЕРБЕРАЦИИ ДЛЯ АУДИТОРИЙ
Хорошо известно, что большое время реверберации служит причиной «наплыва» одного слога на следующий за ним другой
1 Развитие этой концепции позволило вывести выражения для звукового давления н функции телесного угла видимости протяженного источника (например музыкального ансамбля), см. .Журнал Технической Физики" №3,1934 г. статья И. Г. Дрейзена.
255
слог. В результате разборчивость речи уменьшается. С другой стороны, малая реверберация, несмотря на хорошую артикуляцию, лишает передачу «воздуха» и требует от исполнителей повышенной громкости исполнения. Оптимальные значения времени реверберации для помещений различных размеров были получены путем сопоставления времени реверберации лучших в акустическом отношении .зал.
Рис. 12.2 показывает зависимость между оптимальным временем реверберации и об’емом помещения по Ватсону \ Лифшицу 1 2, 'Сабину3 и Макнейру 4. Кривая Макнейра найдена математически и основана на предположении, что «интегральная громкость» звука с момента прекращения его до порога слышимости должна иметь некоторую постоянную величину5 * *.
Макнейр рассчитал относительное количество единиц поглощения, которое требуется при различных частотах для того, чтобы скорость убывания громкости оставалась при всех частотах одинаковой. Результаты видны из -кривой рис. 12.3, показывающей, что реверберация с понижением частоты должна возрастать. Не имея возможности в рамках этой книги рассмотреть вопросы реверберации более подробно, мы принуждены отослать читателя к целому ряду книг и статей, посвященных проблемам архитектурной акустики. Можно считать установленным, что реверберация является наиболее существенным фактором, определяющим акустические свойства помещений, поэтому нельзя обойти молчанием методы измерения времени реверберации.
12. 4. СУБЪКТИВНЫЙ МЕТОД ИЗМЕРЕНИЯ ВРЕМЕНИ РЕВЕРБЕРАЦИИ
Впервые время реверберации было измерено У. Сэбином. Сэбин, применяя в качестве источника звука органную трубу, .измерял длительность звука в помещении после прекращения работы источника. Мы уже определили время реверберации, как
1 Watson, F. R. Architecture, May, 1927.
2 Lifschltz, S. Phys. Rev., Vol. 27, p. 618, 1926.
s S a bln e, P. E. Jour. S. M. P. E„ Vol. XII. p. 35, 1928.
4 MacNair, W. A. J. Acous. Soc. of America, Vol. 1, p. 242, 1930.
6 В основу получаемых закономерностей (Лифшиц, Мэкнейр) положена интегрирующая способность уха и величина „оптимума протяжности*, определяемого на базе экспериментальных данных лучших помещений. Под протяжностью подразумевается интеграл громкости по времени. Величина оптимальной протяжности для аудиторий по Лифшицу—около 40 единиц протяжности (децибел—секунд). По этому поводу смотри последнюю работу С. Я- Лифшица J. A. S. A. Vol. 7 Jan. 1936, а также J. A. S A. Vol. 1. р. 242, 1930 г.
Говоря об оптимальном времени реверберации, нельзя не упомянуть о работе д-ра Бекеши (Bekezy) — „Ueber die Horsamkeit von Konzert und Rundfun-ksalen" Elektr. Nachr. Technlk. В 11. H. 11.1934. Найденное Бекеши экспериментальным путем оптимальное время реверберации оказалось практически одинаковым для всех частот, почти независящим от об'ема помещения (по крайней мере для помещений с объемом до 3000 -и8) и лежащим в пределах от 0,7 до 0,8 сек. Этот результат находится в противоречии с теоретическими
предположениями Мэкнейра «и Лифшица. Разрешение вопроса об оптималь-
ном времени реверберации, как функции частоты и об'ема помещения, явится очевидно предметом дальнейших исследований. (Прим, ред.)
256
время, необходимое для того, чтобы сила звука уменьшилась после «отсечки звука» до одной миллионной части своей первоначальной величины. Иначе говоря, эго — время, необходимое для понижения уровня силы звука на 60 дб. Наблюдатель ждет пока звук в 1помещении установится настолько, что оно окажется в состоянии
акустического равновесия, затем он одновременно прекращает звук и пускает секундомер. В тот момент, когда звук в комнате снижается до порога слышимости, наблюдатель останавливает секундомер и отмечает длительность затухания звука. Затем начальный уровень звука изменяется в известной заранее мере и опыт измерения времени повторяется. Два таким образом измеренных интервала времени и известная разность начальных
Рис. 12. 3. Процентное изменение суммарного поглощения, требующегося при различных частотах для получения равной скорости затухания громкости всех тонов (по .Мэкнейру).
уровней силы звука дают возмож-
ность рассчитать время реверберации по формуле.
Г- 60 (12. 7)
Г-1 — где:
Т — время реверберации
I.! — уровень силы звука до момента отсечки при первом опыте (в децибелах по 'отношению к произвольно взятому нулевому уровню)
£2 — уровень силы звука при втором опыте (в децибелах по отношению к тому же нулевому уровню)
tx—длительность звучания после прекращения работы источника звука при первом опыте
4— длительность звучания после прекращения работы источника звука при втором опыте.
Ради точности результатов полезно, не ограничиваясь двумя вышеописанными опытами, проделать целую серию таких опытов для ряда начальных уровней силы звука и затем прочертить среднюю прямую, представляющую собой зависимость начального уровня L от длительности соответствующего интервала t. Такая зависмость представлена на рис. 12.4. Средняя прямая линия, проведенная через точку, представляет среднюю характеристику затухания комнаты. Подставляя любые два значения ординат и соответствующие им значения абсцисс в формулу 12.7,
Прикладная акустика.
257
можно найти время реверберации Т. В частности, из графика рис. 12.4 время реверберации помещения равно
Рис. 12. 4. Кривая затухания звука в одном помещении, полученная для различных начальных уровней силы звука, методом суб‘ективных наблюдений с секундомером.
(2,78—0,8)=3,96 сек.
Если в качестве источника звука применяется громкоговоритель, то начальный уровень силы звука может быть выражен в величинах напряжения на зажимах громкоговорителя. Этот уровень
£„=20 log (12. 8> где:
—относительный уровень силы звука в децибелах
еп—напряжение звуковой ча стоты на зажимах гром-
коговорителя
р0 —напряжение на зажимах, принятое соответствующим некоторому условному нулевому уровню силы звука.
Описанный суб’ективный метод дает достаточно точные результаты в том случае, если измеряемое время реверберации велико. Для помещений с малой реверберацией разница длительностей затухания для разных начальных уровней получается незначительной, поэтому небольшая ошибка, допущенная при измерении, может -повести к большим ошибкам в грезультатах. Это обстоятельство устанавливает пределы использования описанного метода, который не может быть применен для помещений с малым временем реверберации. При измерениях реверберации надо помнить, что звуковая энергия в помещении должна быть хо
рошо размешана, т. е. .распределение ее в помещении должно быть по возможности равномерным. В противном случае кривая затухания имеет крайне неравномерный характер, причина которого заключается в наличии в помещении стоячих волн.
Один из известных способов размешивания состоит в том, что напряжение на громкоговорителе модулируется по частоте способом, описанным в главе, посвященной испытанию громкоговорителей. Возможно также применение и других методов борьбы с образованием в помещении стоячих волн.
12. 5. ИЗМЕРЕНИЕ ВРЕМЕНИ РЕВЕРБЕРАЦИИ МЕТОДОМ «ВРАЩАЮЩЕГОСЯ КОММУТАТОРА» 1
Если источник звука периодически включать и выключать, причем период времени включения сделать короче периода вре
1 Метод подобен предложенному Норрисом (см. J. A. S. A., Vol. Ill, № 3, р. 361.)
258
мени выключения (паузы), то максимумы силы звука, достигаемые при каждом периоде включения, будут в некоторой точке помещения одинаковыми \ Устанавливающийся в помещении режим может быть иллюстрирован рис. 12.5. После включения источника звука энергия в помещении нарастает по логарифмическому закону до некоторого максимального значения силы звука / определяемого, с одной стороны, акустическими качествами помещения, а с другой стороны, длительностью периода включения. После выключения звука последний затухает по экспоненциальному закону. Измерение сил звука /ъ /2, 13 и т. д. в определенные моменты #i, t2, t3 и т. д. периода затухания звука позволяет определить время реверберации помещения.
Рис. 12.6 изображает расположение аппаратуры при измерении реверберации описанным способом. Четыре контактных сегмента
Рис. 12. 6. Схема расположения аппаратуры при измерении реверберации методом „вращающегося коммутатора".
Рис. 12. 5. Нарастание и затухание реверберационного звука в помещении прн попеременном включении и выключении источника.
скользящим контактом, через который происходит периодическое включение цепи громкоговорителя на известный отрезок времени. Таким образом, при вращении валика в помещении устанавливается режим, иллюстрируемый рис. 12.5. Небольшая часть окружности А присоединена к С. Щетка, скользящая по сегменту А, может перемешаться вдоль его дуги. При этом изменяется интервал времени между моментом отсечки звука и моментом включения индикатора на выход микрофонного усилителя.
Таким образом, включение последнего может производиться в любой момент процесса затухания звука. Положение подвиж-
1 Для соблюдения указанного условия требуется, чтобы к моменту следующего включения произошло полное затухание энергии в помещении, иначе энергия будет нарастать. (Прим, ре д.)
17*
259
ной щетки определяется положением указателя, скользящего вдоль шкалы, проградуированной в градусах. Для получения данных, требующихся для вычисления времени реверберации, аппаратура располагается как показано на рис. 12.6. После того как требующаяся скорость мотора, вращающего валик коммутатора, установлена, при различных положениях подвижной щетки на сегменте Д наблюдают показания измерительного прибора. Время, протекшее с момента отсечки звука, определяется при данном положении щетки из выражения
'= сек. (12. 9)
где t — время, протекшее с момента отсечки звука до момента отсчета силы звука по прибору, в секундах
0 — угловое смещение щетки по отношению к делению диска, при котором включается громкоговоритель
п — число оборотов коммутатора в минуту.
Отсчеты по индикатору, включенному на выходе микрофонного усилителя, для разных положений подвижной щетки выражаются в децибелах относительно некоторого условного нулевого уровня. Отсчеты углов 0 позволяют подсчитать по формуле (12.9) промежутки времени Г, зная соответствующие им показания индикатора, переведенные в децибелы, можно начертить характеристику затухания звука в помещении. Такая характеристика представлена на рис. 12.7. Экстраполируя кривую вплоть до покрытия интервала силы звука в 60 дб, можно найти время реверберации. В частном случае, иллюстрированном кривой рис. 12.7, время реверберации
Г==^(0,5-^0,06) = 1,32 сек.
Описанный метод измерения времени реверберации имеет преимущество перед слуховым суб’ективным методом, так как исключает ошибки суб’ективного порядка. Фотография вращающегося коммутатора приведена на рис. 12.8.
12. 6. ОСЦИЛЛОГРАФИЧЕСКИЙ МЕТОД ИЗМЕРЕНИЯ ВРЕМЕНИ
РЕВЕРБЕРАЦИИ
Непосредственная запись кривой затухания звука после момента его отсечки может быть получена посредством осциллографа. Огибающая осциллографической кривой представляет правильную экспоненциальную кривую лишь в том случае, если звуковая энергия в помещении хорошо размешана. Такая кривая показана на рис. 12.9. Существующие способы размешивания звука в помещении позволяют получить почти экспоненциальную огибающую; в этом случае измерение ординат кривой, соответ
260
ствующих различным значениям времени (отложенного по оси абсцисс кривой), протекшего с момента отсечки звука, дает данные для расчета реверберации. Способом изображения величин, примененным при построении кривой рис. 12.7, удобно пользоваться также при применении осциллографического метода.
Недостаток этого метода заключается в
Рис. 12. 7. Кривая затухания звука для различных начальных уровней, полученная методом „вращающегося коммутатора".
том, что точное определение амплитуды кривой затухания, возможно лишь в первой, относительно небольшой части
Рис. 12. 8. „Вращающийся коммутатор", применяемый для измерения времени реверберации.
осциллограммы. Этот дефект устранен Мейером и Юстом применившими автомат, увеличивающий усиление подво
Рис. 12. 9. Огибающая осциллограммы процесса затухания звука в помещении.
Регулировка чувствительность.
упроелнемае реле
Рис. 12. 10. Схема устройства, повышающего точность измерения реверберации методом осциллографа.
димого к осциллографу тока в тот момент, когда амплитуда кривой затухания спадает до известного уровня. Это устройство показано на рис. 12.10. Реле, управляемое выходным напряжением усилителя, отрегулировано таким образом, что когда затухающая сила звука падает до ’/10 своей первоначаль-
1 М е у е г and J u s t Elek. Nach. Technik, Vol. 5, 293, 1928.
261
ной величины, реле 'Срабатывает ,и увеличивает коэфициент усиления в 10 раз. Огибающая осциллограммы такого вида представ-
Рис. 12. И. Кривые затухания, полученные с применением схемы рис. 12. 10.
лена на рис. 12.11. Расширение интервала времени, в котором можно использовать осциллограмму (с tt до f2), значительно повышает точность метода. Другой способ увеличения точности этого метода заключается в применении логарифмического детектирования тока!, питающего шлейф осциллографа. При этом средняя огибающая осциллограммы представляет прямую линию, по крутизне которой легко определить время реверберации.
12. 7. ИСКРООТМЕТОЧНОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВРЕМЕНИ • РЕВЕРБЕРАЦИИ
В разделе 12.4 был описан метод измерения времени реверберации посредством целого ряда отсчетов времени, в течение которого звук, заранее известной начальной силы, после отсечки затухает до порога слышимости. Нижеследующий метод, предложенный Венте и Бэделлом 1 2, по существу состоит из электроакустического уха с управляемым порогом чувствительности. При ©том методе измеряется время, в течение которого звук определенной начальной силы затухает до различных заранее установленных уровней.
Расположение аппаратуры схематически представлено на рис. 12.12. Микрофон, воспринимающий звук в испытуемом помещении, соединен с усилителем, снабженным аттенюатором, отградуированным по логарифмическому закону. После детектирования ток от усилителя подается на максимальное реле (R), которое размыкает контакт в тот момент, когда ток в обмотке реле превышает определенную величину. Таким образом, когда на усилитель действует сильный сигнал, контакт разорван и конденсатор (С) заряжается от батареи. Когда же подача на усилитель уменьшается, то при некотором значении тока реле замыкает контакт, что вызывает разряд конденсатора через катушку Румкорфа, в цепи вторичной обмотки которой при этом проскакивает искра между острием Р и барабаном D. Чувствительность устройства определяется величиной минимального тока, при ко-
1 Описание такого детектора см. в статье Баллантайна J. A. S. A. Vol. 5, № 1. р. 10, 1933 г.
2 Wente and Bedell. Jour. Acotts. Soc. Amer, Vol. I, No. 3, p. 422.
262
тором срабатывает реле. Чувствительность можно регулировать (при различных силах звука) посредством аттенюатора. Перед измерением на барабан накладывается лист вощеной бумага и барабан приводится в равномерное вращение с постоянной скоростью. Указатель, связанный с острием Р, может передвигаться вдоль шкалы S, на которой имеется разметка, соответствующая логарифмической шкале аттенюатора. Перед измерением указа-
Градуированноя шкала
Рис. 12. 12. Схема соединения аппаратуры, применяемой при измерении реверберации с помощью искроотметочного метода (по Венте и Бэделлу).
тель устанавливается в соответствии с установкой аттенюатора. Затем включается звук в помещении. После этого при заранее
определенном начальном угле поворота барабана звук автоматически выключается.
Когда затухающий звук достигает «порога», реле срабатывает и проскакивающая искра оставляет на бумаге черное пятнышко. Затем изменяется установка аттенюатора, соответствующим образом устанавливается указатель барабана и операция повторяется сначала. В результате серии измерений на бумаге оказывается отмеченным ряд точек, показанный на рис. 12.13. Абсциссы пропорциональны коэфициенту усиления усилителя в децибелах, а ординаты
Рис. 12. 13. Типичный ряд точек, полученный с помощью аппаратуры, показанной на рис. 12.12.
пропорциональны времени, протекшему
с момента отсечки звука до момента срабатывания реле. Время
вычисляется по известным величинам диаметра и скорости вращения барабана. Через ряд полученных на бумаге точек прово-
263
дится прямая линия: экстраполируя ее до 60 дб (отложенных по оси абсцисс), можно найти по оси ординат время реверберации.
12. 8. РЕВЕРБЕРАЦИОННЫЙ МОСТИК
Известно, что при разряде конденсатора через сопротивление напряжение на зажимах последнего падает по экспоненциальному закону. По такому же закону происходит и затухание звуковой энергии в помещении. Эта аналогия лежит в основе нижеописываемого способа измерения времени реверберации \
Действие мостика заключается в следующем. Давление затухающего звука посредством микрофона преобразовывается в электрическое напряжение. Это напряжение сравнивается с затухающим напряжением на сопротивлении, на которое разряжается конденсатор. Сопротивление подбирается так, чтобы декременты затухания обоих процессов были одинаковыми. Тогда время реверберации может быть легко вычислено. Если конденсатор заряжен до напряжения Е, то мгновенное значение напряжения на сопротивлении г , включенном параллельно конденсатору, при разряде конденсатора
j
Е^Е()е ГеСе (12. 10)
где:
Е —мгновенное значение напряжения
Ео — начальное напряжение на конденсаторе
ге—величина сопротивления в омах
Сс — емкость в фарадах
t—время в секундах.
Как было указано выше, время реверберации эквивалентно уменьшению напряжения до 10~3 первоначальной величины (60 дб по мощности или энергии).
__з
Подставляя 10 Ео вместо Е в уравнение (12. 10) и решая его относительно t, получаем
Т = 6,9 X Ю-6 геСе (12‘
где:
Т — время реверберации
Се—емкость в микрофарадах
ге — сопротивление в омах.
Схема реверберационного мостика приведена на рис. 12.10. Звук, воспринимаемый микрофоном, усиливается и затем подается на детекторную лампу с прямолинейным детектированием. D2 — ламповый вольтметр, постоянные которого подобраны так, что анодный ток /2 также пропорционален напряжению. Ха
1 Olson and К г е u z е г. J. Acous. Soc. of Amer., Vol. 2, No. 1, p. 78, 1930.
264
рактеристики и D2 делаются одинаковыми посредством подбора сопротивлений в цепи сетки. Оба анодных тока проходят в противоположных направлениях через сопротивление, параллельно которому включен гальванометр, имеющий двухстороннюю шкалу (с нулем посредине). Как это можно усмотреть из схемы, необходимо, чтобы цепь накала D2 не была связана
Рис. 12. 14. Схема измерения реверберации методом моста.
с другими элементами схемы. Зарядное напряжение на конденсаторе подбирается с расчетом, чтобы гальванометр под действием тока /2 отклонялся на всю пткалу (при отсутствии подачи на D,). Включая источник звука посредством замыкания ключа S, подбирают усиление таким образом, чтобы стрелка вернулась в нулевое положение (/i = j2). В таком положении воздействие на индикатор двух частей схемы одинаково.
Выключением S достигается одновременно отсечка звука и отключение зарядной батареи от конденсатора. Ток 12 после этого начинает спадать по экспоненциальному закону с быстротой, определяемой емкостью конденсатора и величиной сопротивления г . При диффузном распределении звука в помещении спадение также экспоненциально. Подобрав rg так, чтобы в течение всего периода затухания гальванометр оставался на нуле, можем на основании (12.11), зная и С , вычислить время реверберации. Практически затухание звука не получается строго экспоненциальным, поэтому гальванометр во время процесса измерения обычно колеблется около нулевой точки. Можно удовлетвориться таким течением опыта, при котором гальванометр
265
совершает колебания около нулевой точки шкалы, так как это свидетельствует о том, что кривая затухания в среднем идет экспоненциально. При данной емкости конденсатора пределы изменения сопротивления должны обеспечивать необходимые пределы измерения времени реверберации. Фотография реверберационного мостика представлена на рис. 12.1'5. В этой конструкции переменное сопротивление разделено на две части: одна
Рис. 12. 15. Реверберационный мостик.
часть отградуирована в секундах, другая — в десятых долях секунды. Таким образом, подобрав сопротивление так, чтобы стрелка гальванометра во время периода затухания находилась в покое, можно прочесть искомую реверберацию по шкале сопротивления.
12. 9. ПОГЛОЩЕНИЕ ЗВУКА
Выше указывалось на время реверберации как на основной фактор оценки акустических свойств помещения. Время же реверберации является прямой функцией количества единиц поглощения, имеющихся в помещении. Таким образом, весьма важно знать характеристики поглощения различных строительных материалов, что позволяет рационально рассчитать помещение с заданными акустическими свойствами.
Когда звук падает на поверхность стены, он частично ею поглощается, частично пропускается и частично отражается обратно. В общем случае имеет место и то, и другое, и третье.
Обычно представляет интерес сумма двух составляющих падающего звука, а именно звук, поглощенный стеной, и звук, прошедший через нее насквозь. Эта сумма и определяет общее поглощение. Открытое окно поглощает (или пропускает) 100% падающей на него звуковой энергии (предполагается, что источник находится внутри помещения и реверберация получается за счет внутренних отражений от стен и предметов, заполняющих комнату).
266
Обычно стены помещения достаточно фундаментальны ,и можно не считаться с прохождением звука, а рассматривать только его «поверхностное» поглощение. Звук может поглощаться различными способами, причем всегда звуковая энергия переходит в другой вид энергии. Пористая поверхность оказывает звуку сопротивление вязкой среды, вызывающее превращение звуковой энергии в тепловую. Пористый материал может быть волокнистым; в этом случае имеет место добавочная потеря звуковой энергии, расходуемой на механические колебания волокон. Наконец, если поверхность стены связана с ее основной массой в такой незначительной степени, что способна колебаться подобно диафрагме, то такая система также поглощает звуковую энергию. Поглощение особенно велико, если частота падающего на стену звука совпадает с собственной частотой стены или ее частей, способных колебаться 1.
Коэфициент поглощения определяется, как отношение звуковой энергии, поглощенной в материале, к падающей на него энергии. Очевидно, что, чем выше коэфициент поглощения, тем он больше уменьшает реверберацию помещения. Для измерения коэфициентов поглощения применяются различные методы, к изложению которых мы и перейдем.
12. 10. ИЗМЕРЕНИЕ КОЭФИЦИЕНТОВ ПОГЛОЩЕНИЯ МЕТОДОМ СТОЯЧИХ ВОЛН
Если плоская бегущая волна падает на жесткую стену, полностью отражающую звук, то образуется стоячая волна. Максимум давления получается у стены и на расстояниях от нее, 2„—1 , нулевые же давления получаются на расстояниях — 4 А от стены, где п произвольное целое число, а А —длина волны. Если стена отражает не весь падающий на нее звук, а < только часть его, то давления в пучностях определяются выражением
Лпах^С1^) О2’ 12>
где Ртах—давления в пучностях стоячих волн К — постоянная
1 Поглощение подобного рода известно под названием резонансного поглощения. Система резонаторов, внесенная в помещение, .может, в зависимости от величины ’потерь на трение, удлинить (при малых потерях) и укоротить {при больших потерях) время реверберации помещения. В первом случае резонаторы играют роль как бы добавочного об’ема, во втором—-роль добавочного звукопоглотителя. При очень больших потерях на
трение резонаторы практически не влияют на время реверберации помещения. Применение резонансных поглотителей представляет большой практический интерес. Теоретически резонансное поглощение разобрано проф. С. Н. Ржевкиным .в его работе, напечатанной в «Журнале технической физики», том VI, № 12 1937. (Прим, р е д.).
267
к—•отношение давления отраженной волны к давлению падающей волны.
Давление в узлах определяется выражением
<12- 13>
Решая 12.12 и 12.13 относительно к, получаем
Ymin (12- И)
^max +^min
Коэфициент поглощения определяется, как отношение поглощаемой звуковой энергии к падающей, поэтому этот коэфициент
а=1- Л2 (12. 15)
Подставляя в (12.15) значение к из (12.14), получаем
4 Ртах Ptnin IPmax+Pmin
(12. 16)
Из последней формулы ’видно, что, создавая стоячие волны между источником звука и некоторым материалом и измеряя Дтах и pmin, можно определить коэфициент поглощения материала.
Тэйлор 1 2 впервые применил такой метод измерения коэфи-циентов поглощения. При этом методе кусок испытуемого материала помещается в одном конце .прямой жесткой трубы, источник же звука помещается в другом открытом конце трубы.
Нахождение максимумов и минимумов давления вдоль трубы, а также их измерение производятся при помощи соответствующего звукоиамерительното устройства.
Экхардт и Крайслер2 видоизменили метод Тэйлора. Они применили закрытую с двух сторон трубу, настроенную на частоту подаваемого звука. Схематически их метод изображен на рис. 12.16. Звук от источника подается в трубу через маленькую подводящую трубку. Длина трубы подбирается так, чтобы ее резонансная частота была равна частоте источника звука. Образец материала помещается в основании трубы. Вдоль трубы может скользить трубка-зонд, имеющая на наружном конце микрофон (в качестве такового может служить и телефон). После усиления микрофонного тока, последний измеряется прибором. Показания прибора пропорциональны звуковому давлению
1 Taylor, Н. О. Phys. Rev., р. 270, 1913.
2 Eckhardt and Chrisler. Bur. of Standards Sci. Paper 526, 1926.
268
у входного отверстия зонда. Максимальные и минимальные значения звукового давления получаются в относительных величинах и в таковых же подставляются в формулу (12.16).
Если диаметр т.рубы мал, то вдоль трубы по мере удаления от конца, вследствие потерь на трение, будут наблюдаться все уменьшающиеся значения максимумов и минимумов. Экхардт и Крайслер учли поправку, которую надо вносить по указанной причине в формулу (12.16), и получили для коэфициента поглощения выражение
Рис. 12. 16. Схема соединения аппаратуры для измерения коэфн-циента поглощения методом стоячих волн (по Экхардту и Крайслеру).
£min2 ^minl
-^maxl -^minl 2
. Лтип2 Лп1п1
Лпах1 +/’mini 2
2
(12. 17)
где:
/’тчх!—первый максимум звукового давления, ближайший к испытуемому образцу
Pmini—первый минимум звукового давления
Лп1п2—ВТ°Р°Й минимум звукового давления.
Если =/7min2’ что свидетельствует о ничтожном затухании вдоль трубы, то (12. 17) переходит в (12. 16).
Описанный метод прост и удобен в тех случаях, когда испытываются образцы небольших размеров. Особенностью метода является то, что звук падает на испытуемый материал по нормали к его поверхности. Так как длина трубы должна быть достаточно . велика по сравнению с длиной волны, то при низких частотах требуется очень длинная труба. Венте 1 применил трубу переменной длины и измерял максимум и минимум давления вблизи источника звука, получающиеся при изменении длины трубы. Этот способ позволяет применять трубу меньшей длины, чем это требуется при методе описанном выше. Схематическое изображение метода Венте, известного под названием «метода акустического полного сопротивления», приведено на рис. 12.17.
Стальная труба длиной 270 см с внутренним диаметром• 7,5 см и толщиной стенок 0,6 см возбуждается звуковыми колебаниями с одного конца посредством нормального электродина-
•Wente, Е. С. Bell Sys. Tech. Jour., Vol. 7, No. 1, 1928.
269
мического механизма с поршневой диафрагмой. С такой длиной трубы можно вести испытания при частотах вплоть до 60 гд.
Рис. 12. 17. Измерение коэфи-циентов поглощения методом акустического сопротивления (по Вейте).
Такая же, как в предыдущем методе, трубка-зонд введена в трубу вблизи источника звука.
Вдоль трубы скользит поршень, в торце которого замонтирован образчик испытуемого акустического материала. Передвигая поршень вдоль трубы, наблюдают и записывают максимальные и минимальные показания индикатора. Коэфициент поглощения определяется по формуле
4 Лпах Tmin
Лпах ' Лпах Лтйп ^min
(12. 18)
Вышеописанные методы предполагают испытание маленьких образцов материала при падении звука по нормали к поверхности материала. В действительности же материал располагается большими поверхностями и звук падает на него по всем возможным направлениям. Оба эти фактора сказываются на коэфи-циенте поглощения. Поэтому методы стоячих волн непригодны в тех случаях, когда требуется знать поглощающие свойства материалов в действительных условиях их работы.
12. 11. РЕВЕРБЕРАЦИОННЫЙ МЕТОД ИЗМЕРЕНИЯ КОЭФИЦИЕНТОВ ПОГЛОЩЕНИЯ
Если в комнату с хорошо отражающими стенами, полом и потолком внести относительно небольшое количество поглощающего материала, реверберация комнаты заметно уменьшится. Помещая большие образцы испытуемого материала в реверберирующее помещение и монтируя этот материал так, как это делается в условиях его практического применения, можно по величине времени реверберации определить коэфициент поглощеиия материала.
На основании формулы Эйринга (12.6) можно написать, что
0,164У
аср=\-е~ ST (12.19)
где:
аср — средний коэфициент поглощения комнаты
аср__а\ ^>1 + Q2 S2-j- a2S, +..
•$i + S2 -J- S3 ф ...
Oj, a2, as — коэфициенты поглощения внутренних поверхностей комнаты Sj, S2, Ss
270
V—об'ем комнаты в м3
S — общая площадь внутренних поверхностей комнаты в ж2
Т—время реверберации в секундах.
Значение аср может быть найдено из (12.19), если известны время реверберации пустой комнаты, ее об’ем и общая площадь внутренних поверхностей. Умножая аср на S, получим полное число единиц поглощения пустой комнаты. Внеся в помещение, положим, Sk м2 звукопоглощающего материала, получим путем измерения новую величину реверберации Т' и соответственно из (12.19) новый средний коэфициент поглощения аср. Беря произведение a'cpS, получим новое общее число единиц поглощения. Если испытуемый материал с коэфициентом поглощения а укреплен на стене, имеющей коэфициент поглощения аъ то
a’cpS=ac/,S-alSk-YaSk (12.20)
где ct!CJ> найдено из (12. 19) путем подстановки времени реверберации для комнаты с укрепленным на стене испытуемым образцом
S— общая площадь внутренних поверхностей комнаты в м3 аср — найдено из (12. 19) для пустой комнаты (без испытуемого образца)
at—-коэфициент поглощения стены, на которой укреплен образец
Sk—площадь испытуемого образца а — коэфицйент поглощения образца.
Решая (12.20) относительно а, получаем а—_^ср-^с^+а^ (12. 21)
^/г
Таким образом, измеряя время реверберации дважды — до и после установки образца, и определяя из (12.19) а'ер и a'f;) можно определить искомый а из (12.21). Для измерения времени реверберации пригоден любой из вышеописанных методов. Диффузное распределение звуковой энергии в помещении может быть достигнуто путем применения воющего тона, больших вращающихся лопастей, а также других методов.
Точность реверберационного способа измерения коэфи-циента поглощения возрастает вместе с увеличением разности в значениях реверберации до и после внесения образца. Таким образом для испытания акустических материалов, а тем более материалов с малым поглощением, требуется помещение с возможно большим временем реверберации.
271
12. 12. ОПРЕДЕЛЕНИЕ КОЭФИЦИЕНТОВ ПОГЛОЩЕНИЯ ПУТЕМ ИЗМЕРЕНИЯ СИЛЫ ЗВУКА
Решая уравнение i(12.1) для установившегося состояния в помещении, в котором действует источник звука постоянной мощности, получаем
(12- 22) где:
Ео — плотность звуковой энергии при установившемся состоянии
Ро — мощность источника звука
А—общее поглощение в помещении с — скорость звука.
Вместо плотности звука удобно измерять силу звука; в этом случае вместо (12.22) можно воспользоваться следующим выражением 1
A=-j- (12. 23)
где А — общее поглощение (количество единиц поглощения) в помещении
I—'Средняя сила .звука в помещении,
К — постоянная.
После измерения 1, вносим в помещение м2 испытуемого материала и измеряем новую силу звука Г. Тогда
А'^-у- (12. 24)
где А' — общее количество единиц поглощения, включая поглощение образца
Г— сила звука, измеренная после внесения образца.
Исключая К из двух предыдущих уравнений, получаем
А' — A=(-t---1)д (12.25)
Очевидно, что, если общее поглощение помещения А известно, то увеличение поглощения (Д' — А), получившееся за счет испытуемого материала, может быть вычислено, если известно отношение ///'. Достаточно после этого разделить почленно (12.25) на площадь образца и прибавить коэфициент поглощения стены, на которой смонтирован образец, чтобы получить искомый коэфициент поглощения. Он определяется следующим выражением.
а—х '--------|_« (12. 26)
где а — коэфициент поглощения образца !
272
1/Г —отношение средних сил звука в помещении до и после внесения образца
А—-общее количество единиц поглощения самого помещения (без образца) в м2 открытого окна
Sk — площадь испытуемого образца в ж2
а,— коэфициент поглощения стены, на которой монтируется испытуемый материал.
Кнудсен1 пользовался описанным методом и обнаружил хорошее совпадение между результатами, полученными при помощи этого метода и реверберационного метода. Точность измерений, разумеется, зависит от точности измерения силы звука. Здесь, как и при реверберационном методе, важно диффузное распределение -энергии в помещении. Кроме того, чем меньше начальное поглощение А в комнате, тем больше получается отношение 1/Г и тем, следовательно, больше точность метода. В случаях, когда мешающий «шумовой фон» затрудняет применение реверберационного метода, метод, основанный на измерении силы звука, представляет безусловные преимущества.
12. 13. СРАВНИТЕЛЬНЫЙ МЕТОД ОПРЕДЕЛЕНИЯ КОЭФИЦИЕНТОВ ПОГЛОЩЕНИЯ
Остроумный метод измерения коэфициентов поглощения схематически представлен на рис. 12.18.
Прямоугольная комната с массивнь имеет гладкие внутренние поверхности. В. одной из стен имеется ниша шириной 120 см и глубиной 180 см.
Сверху углубление прикрывается скользящим вертикально ставнем, сделанным из досок толщиной 5 см и покрытым шлифованной сталью толщиной 1,2 см. Эта ниша заполнена поглощающим материалом, причем плотность укладки последнего постепенно возрастает по мере приближения к задней стене ниши. Назначение ниши состоит в том, чтобы воспроизвести поглощающие свойства «открытого окна» (когда ставень поднят). При спущенном ставне и внесенном в комнату испытуемом образце измеряют посредством микрофона среднюю силу звука в помещении. После этого образец выносят, при этом сила звука увеличивается. Затем ставень поднимают до тех пор, пока сила звука не понизится до такой величины, какую она имела при первом измере
1 Knudsen, V. О. Phil. Mag., 6, 1242, 1928.
бетонными стенами
Рис. 12. 18. Схема расположения аппаратуры при измерении коэфициентов поглощения методом сравнения.
18 Прикладная акустика.
273
нии. Площадь незакрытой ставнем ниши численно равна общему поглощению испытуемого ‘Образца.
При этом методе особенное значение имеет диффузное распределение звука. Как говорилось выше, удовлетворительный результат получается при применении воющего тона. Как чисто сравнительный метод, этот метод не требует никакой градуировки. Поэтому характеристики усилителя, микрофона, детектора и т. д. могут быть некорректированными и только в необходимой мере должны быть стабильными. Если испытуемые образцы имеют стандартные размеры, то поднятие ставня может быть заранее проградуировано в коэфициентах поглощения. Время, затрачиваемое на измерение при этом методе, минимально, тогда как точность его — высока. Не требуется даже знать общего поглощения помещения, так как его акустическая характеристика в расчеты не входит.
12. 14. КОЭФИЦИЕНТЫ ПОГЛОЩЕНИЯ РАЗЛИЧНЫХ МАТЕРИАЛОВ
В таблице 1 приведены коэфициенты поглощения различных материалов *.
12. 15. НАКОПЛЕНИЕ ЗВУКОВОЙ ЭНЕРГИИ В РЕВЕРБЕРИРУЮЩЕМ ПОМЕЩЕНИИ 1 2
Нарастание и затухание звука в помещении представляет собой весьма сложное явление.
Это особенно относится к помещениям с большим временем реверберации. Большинство студий для радиовещания и звукозаписи представляют собой прямоугольные параллелипипеды и отличаются малым временем реверберации. В подобных случаях
1 Приводимая авторами настоящей книги табл. 1 (см. ниже) дает представление о большом ассортименте специальных «акустических» материалов, производимых американской промышленностью. Наша промышленность пока еще не развернула заводского производства подобных материалов. Разработанные в наших лабораториях и изготовлявшиеся на опытной по-лузаводской установке акустические материалы арборит и асборит имеют на стандартных частотах, приведенных в табл. 1 (кроме частоты 64 цикла, для которой данных нет) следующие коэфициенты поглощения:
арборит—плиты из размельченных древесных волокон (рафинерной массы), пропитанный жидким стеклом (огнестойкий), перфорированный.
Коэфициенты поглощения: 0,31; 0^33; 0,47; 0,53; 0,59; 0,64;
асборит'—-—рамы, высотой 4 см, набитые асбестовым волокном и рафинерной массой (соотношение 3:1), с передней стороны закрытые перфорированной жесткой корочкой (асбест-цемент, картон или т. п.), при расстоянии между перфорациями 3 см. Коэфициенты поглощения: 6,28; 0,43; 0,57; 0,36; 0,17.
Нужно упомянуть также о разработанной лабораторией Архитектурнэ-строительного института пористой пемзовой штукатурке. Ее коэфициенты поглощения (слой 4 см) :0,06; 0,08; 0,35; 0,44; 0,37; 0,26. (Прим, ред.)-
2 Olson, Н. F. Proc. Inst., Rad. Eng. Vol. 21, No. 5, 655, 1933.
274
ТАБЛИЦА 1. КОЭФИЦИЕНТЫ ПОГЛОЩЕНИЯ РАЗЛИЧНЫХ СТРОИТЕЛЬНЫХ МАТЕРИАЛОВ1
СО
S
Ct о
сО
§
СЧ СО
Ю со СО СП о
СО ио СО Ц- со СП
г Толщина материала дана в дюймах. Одни дюйм (") равен 2,54 см.
2
18*
275
to от № Материал Коэфициенты для частот
64 128 256 512 1024 2048 4096
ПЛИТЫ И ПАНЕЛИ
20 Армстронгова пробковая плита, 1", 4,25 кг/м2 ......... . — — 08 0,30 0,31 0,28 —
21 Армстронгова пробковая плита, обрызганная холодной краской (на
воде) • — — — 0,07 0,30 0,28 0,29 —
22 Армстронгова пробковая плита 2", 7,8 кг/м2 — — 0,17 0,35 0,27 0,34 —
23 Акустик zenitherm 1,14", пробковая крошка, сцементированная
в твердую пористую плитку — 0,03 0,13 0,33 0,42 0,42 0,15
24 Absorbege Ц/4" — 0,38 0,40 0,45 0,53 0,66 0,91
25 Акустический целотекс, типа А 5,4 «г/л/2, перфорированный
4750 маленьких отверстий на кв. метр на задней стороне плиты — 0,13 0,28 0,25 0,23 0,23 0,23
26 Акустический целотекс, тип В с перфорацией на передней стороне
панели (крашеной или некрашеной) — 0,22 0,28 0,47 0,53 0,62 0,62
27 Акустический целотекс, тип ВВ 11/4", 8кг/м2 с верхней перфора-
цией (как предыдущий образец) — 0,28 0,42 0,70 0,74 0,77 0,77
28 Акустический целотекс, тип С %", 2,3 кг)м2, перфорированный
насквозь — 0,14 0,16 0,30 0,45 0,57 0,55
29 Целотекс ‘/г", стандартная плитка — 0,17 0,18 0,20 0,20 0,19 0,19
30 Пробка (грубой обработки) 1", доска 100 см X 50 см, укрепленная
на расстоянии 2,5 см от стены на деревянной раме — 0,14 0,25 0,40 0,25 0,34 0,21
31 Firtex i/2" на деревянных стойках, сечением 5 X 10 см ...... — 0,22 0,21 0,28 0,31 0,44 0,55
32 Инсулит 1/2" стандартная плитка — 0,23 0,26 0,28 0,29 0,32 —-
33 Иисулит acoustile один слой — 0,24 0,26 0,30 0,36 0,38 ——
34 Инсулит acoustile два слоя с 18 см воздушным промежутком 0,34
плитки 1,8 см X 4,3 см .................... 0,30 0,31 0,37 0,40
bo
№ Материал Коэфициенты для частот
64 128 256 512 1024 2048 4096
35 Масонит 7/]6", плитка, непокрытая (голый) — 0,19 0,25 0,32 0,36 1 0,36 —
36 То же, ’/и", на мягких подкладках сечением 5 см X 2,5 см . . . . — 0,17 0,24 0,28 0,295 0,30 0,28
37 То же, 7/1е", на стойках, сечением 5 см X Ю см ........ — 0,18 0,245 0,31 0,34 0,30 0,24
38 Дерево (панель) 0,8" сосна 0,064 0,98 0,11 0,10 0,081 0,082 0,11
39 Дерево, тройная тиковая панель, 90 см X 65 см, укрепленная иа 0,09 0,17 0,17 0,15 0,15 0,15
деревянной раме на расстоянии 2,5 см от стены —
ВОЙЛОКИ И МЕМБРАНЫ
40 Асбестовый войлок 3/8" 33% об'ема—твердая структура 0,06 0,06 0,14 0,32 0,25 0,19 0,18
41 0,07 0,08 0,17 0,35 0,30 0,23 0,20
42 Бальзамовая шерсть 1/2", покрытая бумагой и тканью, весом — 0,05 0,22 0,41 0,58 0,52 0,39
43 Бальзамовая шерсть 1", покрытая бумагой и тканью, весом — 0,06 0,30 0,56 0,70 0,58 0,46
44 Бальзамовая шерсть 1", бумага с задней стороны, другая сторона открытая, весом 1,15 кг/м2 — 0,09 0,24 0,45 0,64 0,55 0,42
45 Бальзамовая шерсть, одеяло легко валеное из деревянного волок- 0,18 0,44 0,62 0,62
— — —
46 Бальзамовая шерсть, покрытая стальной плиткой, перфорирован- 0,19 0,47 0,64 0,66
иой 10 отверстиями на 1 см2, вес 4,5 кг)м2 ...... ». . - — — —
47 Cabot Quilt (трава подбитая бумагой) 3 складки, 2 слоя, 3,7 см от 0,22 0,42 0,74 0,77 0,69 0,44
стены плюс холст на расстоянии 2,5 см ............ —
48 Flaxlinum (из льняного волокна), 9/16" — 0,08 0,14 0,31 0,54 0,51 0,45
49 Flaxlinum 1" валеное льняное волокно непокрытое, вес 5,7 кг/м2 . 1 0,49 0,61 0,67 0,66
278 I 279
№ Материал Коэфициенты для частот
64 128 256 512 1024 2048 4096
50 Flaxlinum 1", с некрашеной декоративной мембраной (установленной на расстоянии 1,8 см от плиты) ' 0,30 0,61 0.60 0,55
51 Волосяной и асбестовый войлок, 19% об'ема—твердая структура . 0,04 0,05 0,11 0,38 0,55 0,46 0,39
52 Волосяной войлок, 12% об'ема—твердая структура 0,09 0,10 0,20 0,52 0,71 0,66 0,44
53 То же, но покрытый 0,13 0,13 0,33 0,74 0,76 0,49 0,18
54i То же, с легкой мембраной, натянутой близ поверхности 0,17 0,20 0,40 0,65 0,27 0,14 0,11
55 То же, с тяжелой мембраной, натянутой близ поверхности. 0,25 0,29 0,41 0,32 0,19 0,11 0,08
56 То же 1", вплотную к стене 0,09 0,10 0,23 0,58 0,72 0,66 0,46
57 , 1", на 5 См от стены . 0,10 0,11 0,26 0,62 0,73 0,66 0,45
58 „ 1", на 10 см от стены ........ 0,11 0,13 0,30 0,66 0,74 0,66 0,45
59 „ 1", на 15 см от стены 0,12 0,15 0,35 0,68 0,75 0,66 0,45
60 „ 1", помещенный в центре комнаты со сводчатым потолком . 0,14 0,15 0,32 0,96 1,27 1,02 0,62
61 ,, 1", помещенный по сторонам той же комнаты 0,11 0,20 0,25 0,54 0,43 0,48 0,20
62 Джутовый войлок 1/2“ 0,038 0,049 0,076 0,17 0,48 0,52 0,51
63 ,, 1" 0,12 0,15 0,22 0,54 0,63 0,57 0,52
64 „ 1’/2" 0,19 0,24 0,38 0,63 0,65 0,57 0,52
65 „ 2" 0,27 0,34 0,50 0,69 0,67 0,58 0,52
66 „ ,. 21/2" 0,34 0,43 0,59 0,75 0,67 0,58 0,52
67 » . 3" 0,40 0,50 0,66 0,77 0,68 0,58 0,52
68 J.-M. (Asbestos akoustikos) 1/2" открытый . — 0,07 0,14 0,31 0,51 0,51 0,43
69 » „ » 8/4" „ — 0,08 0.23 0,45 0,65 0,56 0,46
70 1" » » » -1 и — 0,11 0,31 0,59 0,68 0,58 0,46
71 J.-M. (Asbestos akoustikos) 11/2" открытый — 0,13 0,41 0,73 0,73 0,58 0, 46
72 » л * зь — 0,21 0,46 0,79 0,75 0,58 0,46
№ Материал Коэфициенты для частот
64 128 256 512 1024 2048 4096
73 74 J.-M. (Asbestos akoustikos) 3" открытый J.-M. nashkote тип АХ (J.-M. Asbestos akoustikos с батистовой про- — 0,33 0,56 0,79 0,77 0,58 0,46 0,17
крашенной мембраной) — 0,10 0,22 0,34 0,41 0,32
75 То же, тип АХ з/4" — 0,13 0,24 0,38 0,45 0,35 0,17
76 ,. „ 1" — 0,15 0,38 0,43 0,40 0,29 0,18
77 „ „ . В/г" — 0,22 0,38 0,41 0,39 0,29 0,20
78 2" — 0,34 0,38 0,44 0,41 0,30 0,23
79 — 0,40 0,47 0,48 0,45 0,31 0,24
80 Мембрана легкая 0,01 0,01 0,04 0,10 0,07 0,02 0,01
81 Мембрана тяжелая 0,05 0,06 0,16 0,16 0,10 0,07 0,06
82 Мембрана холщевая 15 см от стены -- 0,10 0,12 0,25 0,33 0,15 0,35
83 Минеральная шерсть, полотнище 1" . - 0,35 0,49 0,63 0,80 0,83 —
84 Минеральная шерсть, полотнище 2" — 0,44 0,59 0,68 0,82 0,84 —
85 Минеральная шерсть, полотнище 4", гранулированная, свободно уложенная между стойками, 5 см X 10 см ........... — 0,43 0,52 0,57 0,65 0,64 —
86 Минеральная шерсть, полотнище 1", 2 слоя, разделенные воздуш-ным промежутком 4,3 см 0,53 0,64 0,71 0,87 0,90 —
87 Минеральная шерсть, П/4" силикатные волокна, набитые на метал-лической сетке, вес 7 kz{m^ — — 0,46 0,57 0,56 0,72 —
88 Silent — ceal (минеральная шерсть) — 0,28 0,74 0,68 0,67 0,75 0,64
89 Slagbestos I1//, плиты 1,8 см от стены — 0,32 0,38 0,65 0,73 0,30 0,29
90 Slagbestos 11/2", плюс холст на расстоянии 2,5 см от плиты . . . — 0,42 0,49 0,80 0,78 0,47 0,42
Коэфициенты для частот
4096 О- Ю -Ф 00 О 3 CM CM СО СМ СО 04 СС О CN О Ю О О •—< О О o' о о о" <Э О О' О~ О О' o' О d o' o' о" о о о . .... =5
2048 Г— Г- СО о т—< т— СМ СМ СЧ СМ •—I о о о о о о с < И О -< г— со о о m -ф см к LO см —< о — о ''ооо'оо'осГ s о о о о о о я
1024 о -f ОО О со СМ LO оо 0-1 О’ СО г-’ -1 СО ЯГ- ООО-ООО—< СЧ TF тг CQ ’Ф lO О «“2. О СЧ. ’“1 т"' О о о сГ о о о о о о о*” о~ о o' g о” o' О~‘О О о
512 я г- It— LO СО’фоОСОЮСОЮоООЬ о- оо о 1О •“• СЧ со со СОСЧСЧОч’-“<ООСМООк я см о о о* o' о о о” о о~ о~ о" сГ о o' £ o' o'* o’ о о o'
256 & rt <O co ’ф ТГ СОСООт^тфСМСООСО^ Qj co о T-< co ~ о r-^ —«_ ОЛ —* О. О О О —« О О —> т~* О о о о о” o’ о” о” о о о o' о о о o' о о” о о о m
128 О lQ LO О •—1 1—• —'OCN^OCO’tQbOCO ФО Г— *— Г- r—1 ОЛ -^O — OOOOOOO Я CO о о о o' o' о о о o' о' о o' о' О О E о о o' о о о'
64 II 1 III 'S О t> IG I I 1 1 111 т~| 1 1 1 1 1 1 1 ~ - <=>- о о о о о о о о о
Материал ПОКРЫТИЕ ПОЛА Ковер, ворсистый толщиной 0,4" на бетоне То же, ворсистый на войлоке 1/8" последний на бетоне То же, ворсистый на войлоке на 3/4" шлифованной пробке на бетоне То же, ворсистый на войлоке на 3/4" сосновых брусках, скрепленных смолой, на бетоне Ковер, amritza 0,43" на бетоне Ковер, cardinal batala яркокрасный, 0,43” на бетоне Ковер 3/]6", резина на бетоне Ковер, резина на шлифованной пробке на бетоне Пробка 3/4" плитки, приклееные Пробка 3/4" плитки, навощеные и шлифованные Ozlte 3/4” Дерево 3/4", сосновые плитки, положенные на мастике Дерево 3/4", Gurjan на мастике ЕДИНИЧНЫЕ ОБ'ЕКТЫ Публика на одно лицо Подушки 0,28 м2, хлопок под холстом и коротковорсистым плюшем Подушки, волосяные 0,28 м2 под холстом и плюшем Подушки, волосяные под холстом и тонкой кожей Подушки, растительное волокно под холстом и Дамаском Стулья гнутые, ясеневые
GO О О о о о
й
280
может найти применение классическая теория реверберации, которая с вполне достаточным приближением отражает действительные условия. Когда звук только еще возникает в помещении, он падает на звукоприемник, причем на пути к звукоприемнику звук не претерпевает никаких отражений; после прямой волны на звукоприемник падает волна, отразившаяся один раз, два раза, три раза и т. д. Таким образом, плотность звуковой энергии у звукоприемника постепенно возрастает, по мере того как возрастает число отражений. Наконец, поглощение энергии ограничивающими поверхностями уравновешивается энергией источника и в помещении устанавливается стационарное состояние. Как уже отмечалось, в большинстве студий время реверберации мало, так что стационарное состояние успевает установиться в течение отдельных элементов речи и музыки. Можно считать, что в каждую точку помещения приходят как бы два звука, а именно — от источника прямого звука и от источника отраженного звука. Если помещение не обладает заведомо ненормальными акустическими свойствами, то можно считать, что эффективная реверберация определяется отношением отраженного (или рассеянного) звука к прямому звуку.
В дальнейшем мы рассмотрим вопросы, касающиеся приема звуковых колебаний в помещении посредством как направленных, так и ненаправленных устройств.
12. 16. НЕНАПРАВЛЕННЫЙ ПРИЕМ ЗВУКА
Рассмотрим ненаправленное звукоприемное устройство, харак-
теризующееся тем, что
Рис. 12. 19. Ненаправленный прием звука.
его отдача не зависит от того, в каком направлении по отношению к фиксированной оси устройства падает звук. Если расстояние между источником звука и звукоприемником равно D (рис. 12.19), То плотность звуковой энергии и звукоприемника от прямого звука.
ED=-Ae 02.27)
где Ро — мощность источника звука с —• скорость звука.
Если звукоприемник находится в по
мещении, средний коэфициент поглощения поверхностей кото-
рого равен а, то для плотности энергии за счет отраженного звука, спустя время t, после начала действия источника звука можно написать следующее выражение:1
cS In (1 — а) С
1 — е 4к <1—°) (12.28) R caS J 4 ’
1 Еу ring, С. F. J. A. S. А. 1, 217, 1920.
281
ER 16-02
(12. 29)
где а — средний коэфициент поглощения ограничивающих поверхностей
S —общая площадь поверхностей
V — об’ем помещения
t — время.
Отношение энергии 'рассеянного звука к энергии прямого звука представляет меру принимаемой (received) реверберации *. Это отношение
cS In (1 — а) Л ’ ]
Eq ' aS
Если звук продолжает нарастать до установления стационарного состояния, то предыдущее уравнение принимает вид
( -°> (12. 30)
Из уравнений (12.29) и (12.30) видно, что принимаемую реверберацию можно уменьшить, путем приближения источника звука к звукоприемнику. Однако, при большом количестве исполнителей такой способ уменьшения реверберации становится практически невыполнимым. Остается другой метод, а именно увеличение акустического поглощения помещения путем увеличения количества поглощающего .материала. Для большинства материалов коэфициент поглощения зависит от частоты, поэтому общее поглощение
А-ЪаБ=ЪКР (f)S (12. 31)
где f — частота
а К — постоянная материала.
Итак, увеличивая А, мы тем самым увеличиваем отношение прямого звука к рассеянному. Это — обычный способ изменения реверберации в практике студий для радиовещания и звукозаписи. Для получения значительного поглощения приходится применять материалы с большим коэфициентом поглощения. Материалы же, имеющие большие коэфициенты поглощения, обладают плохой частотной характеристикой поглощения, причем с понижением частоты коэфициент поглощения уменьшается. На рис. 12.20 приведена типичная частотная характеристика такого материала. На том же рисунке показано влияние хода частичной характеристики поглощения на ход частотной характеристики плотности энергии рассеянного звука. Сумма энергии прямого и рассеянного звука дает общую звуковую энергию в помещении, .действующую на приемник звука. Из рис. 12.20 можно усмо
1 Отношение энергии рассеянного звука к энергии прямого звука встречалось в литературе также и под другими, трудно переводимыми терминами, как-то: recorded или collected reveberatlon см. J. М. Р. Eng., 695, 1931 г. Оно часто называется также „акустическим отношением*. (Прим. ред.).
282
треть, что при применении звукопоглощающих материалов за счет неравномерности частотной характеристики поглощения этих материалов получаются частотные искажения. В рассматри
ваемом случае максимальная плотность энергии рассеянного звука получается на низких частотах. Недостатков, свойственных ненаправленным) звукоприемникам, удается избежать при применении*направленных звукоприемников, к описанию которых мы и перейдем.
12.17. НАПРАВЛЕННЫЙ ПРИЕМ ЗВУКА
Рассмотрим направленные звукоприемные устройства, отличающиеся той
Рис 12. 20. Частотная характеристика поглощения помещения, суммарной плотности энергии, плотности энергии прямого звука и плотности энергии рассеянного знука, действующих на приемник звука, расположенный в помещении.
Коэффициент помощани*
особенностью, что их отдача зависит от направления, под которым на них подает звуковая волна. Э. д. с. микрофона может быть выражена, как
е QpFx W)F^)
(12. 32)
где е — э. д. с. микрофона в вольтах р — звуковое давление в барах Q — чувствительность микрофона в вольтах на бар
6 и ср—углы, показанные на рис. 12.21.
Рис. 12. 21. Направленный прием звука.
Для упрощения рассуждений предположим, что чувствительность микрофона в пределах телесного угла Q (рис. 12.21) — постоянна, а вне этого угла равна нулю. Если расстояние между источником звука и микрофоном равно D, а источник звука расположен в пределах телесного угла Й, то отдаваемая микрофоном энергия будет заключать в себе часть, пропорциональную энергии прямого звука, и часть, пропорциональную энергии рассеянного звука. Первая, согласно уравнению (12.27), выражается так
р ___ I1»
(12. 33)
Вторая — энергия рассеянного звука — выражена уравнением (12.28). Все возможные направления и фазы отраженных звуковых волн — равновероятны и случайны. Таким образом, рассеян-
283
ная энергия воздействует на направленный микрофон в пределах пучка лучей с углом S . Поэтому направленный микрофон реагирует лишь на^Атсчасть падающего на него рассеянного звука, тогда как ненаправленный микрофон реагирует на весь падающий на него рассеянный звук. Энергия рассеянного звука, действующая на направленный микрофон, таким образом, может быть выражена уравнением - '
F 4Р0« R ~ caSbn
с Sin (1 — a) t
1 — е
4V
(1 -«)
(12. 34)
Разделив (12.34) на (12.28), получим отношение энергии рассеянного звука к энергии прямого звука, т. е. меру принимаемой реверберации.
Г с Sln П —*~| _
£/? _ 4£)2Я I 1 — е 417 ( й (12.35)
ED~ aS
Когда звук настолько продолжителен, что в помещении устанавливается стационарное состояние, то уравнение (12.35) принимает вид
<12‘ 36>
Из уравнений (12.35) и (12.36) можно усмотреть, что принимаемая реверберация уменьшается при уменьшении расстояния между источником и приемником звука, при увеличении поглощения aS, а также при уменьшении Й.
Трудности, связанные с изменением первых двух факторов, рассматривались выше. Однако, при применении направленного микрофона мы располагаем средством уменьшения реверберации путем уменьшения угла, в пределах которого микрофон реагирует на звук. При применении направленного микрофона получаемая эффективная реверберация1 составляет 2/4п часть реверберации, получаемой при применении ненаправленного микрофона.
1 Принимаемая микрофоном эффективная реверберация, в случае ненаправленного микрофона, эквивалентна эффективно® реверберации помещения в точке установки микрофона. В случае направленного микрофона должен рассматриваться спад суммарной энергии прямого и отраженного звука, преобразованного в электрическую энергию. Влияние величины отношения энергий .прямого и отраженного звука на физиологический (слуховой) эффект реверберации до сих пор не выяснено. Интересно отметить, что изменение этого отношения на величину меньшую € дб не замечаются ухом. По этому поводу см. работу А. В. Рабиновича «Журнал технической физики», том IV, выпуск 6. 1934 г. (При м, р е д.).
284
На рис. 12.22 представлены частотные характеристики плотности энергии прямого и рассеянного звука, действующего на направленный микрофон, обладающий «углом приема» и расположенного в том же помещении, в котором были получены кривые для ненаправленного микрофона (рис. 12.20).
Результирующая частотная характеристика направленного микрофона, работающего в помещении, оказывается более равномерной, чем частотная характеристика ненаправленного микрофона, работающего в тех же условиях, что является следствием увеличения, при применении направленного микрофона, роли
прямого звука по отношению к рассеянному.
Если желательно при применении направленного микрофона иметь такую же эффективную реверберацию, какая получается с .ненаправленным микрофоном, то можно применить материал с меньшим коэфициентом поглощения. Обычно такие материалы
отличаются лучшей частот-
ной характеристикой. Таким образом, при установке направленного и ненаправленного микрофонов на равном расстоянии от источника звука (исполнителя) условия для получения равномерной частотной характеристики оказываются более благоприятными именно для направленного микрофона.
Часто при звуковой ки-нос’емке желательно по возможности увеличить рас-
Рис. 12. 22. Частотная характеристика поглощения помещения, суммарной энергии, энергии прямого звука и энергии рассеянного звука, принимаемых направленным звукоприемником, расположенным в помещении.
стояние между микрофоном
и артистом для того, чтобы обеспечить свободу действия. Для данного помещения с применением направленного микрофона это расстояние может быть увеличено в 1Л 4тс/й раз, по сравнению с
расстоянием для ненаправленного микрофона, при одной и той
же реверберации помещения в обоих случаях. Некоторые помещения и студии обладают особыми акустическими характеристиками, благодаря, главным образом, особенностям конфигурации их внутренних поверхностей. В таких условиях можно наблюдать направленный характер реверберации. Иначе говоря, скорость затухания звука зависит от направления приема звука (по отношению к некоторой оси помещения). Таким образом, оказы-
вается, что в различных направлениях звук затухает неодинаково Ч
1 Этот вопрос подробно разбирается в статье И. Г. Дрейзена. Научно-технический сборник ЛЭНС за 1936 г. (Прим, р е д.)
285
Направленное микрофонное устройство дает возможность ориентировки относительно осей помещения и следовательно возможность измерения реверберации в том или другом интересующем нас направлении. Наконец, наблюдаются случаи, когда, благодаря преобладанию повторных многократных отражений в известном направлении (как, например, между двумя параллельными стенами) выделяются некоторые частоты. Выбором соответствующей ориентировки направленного микрофона можно избежать влияния также и указанного фактора. Шумы и другие нежелательные звуки очень часто составляют весьма существенные помехи при приеме звука. Если шум равномерно рассеян по всему помещению, то направленное микрофонное устройство воспримет лишь Й/4п часть той энергии, которая была бы воспринята ненаправленным микрофоном. Если шум приходит в определенном направлении, то направленный микрофон следует устанавливать таким образом, чтобы источник шума попал в зону нулевой чувствительности микрофона. При такой ориентировке микрофона от шума удается практически избавиться. Вышеизложенные соображения показывают, что направленный прием звука имеет перед ненаправленным приемом некоторые существенные преимущества. В следующем разделе излагаются требования к направленным звукоприемным устройствам.
12. 18. ТРЕБОВАНИЯ К НАПРАВЛЕННЫМ ЗВУКОПРИЕМНИКАМ
Существеннейший фактор, характеризующий направленный звукоприемник, представляет телесный угол, в пределах которого приемник принимает звук и 'чувствительность приемника приблизительно постоянна (угол приема). Этот угол должен быть достаточно большим, чтобы охватывать весь об’ем звучащего тела, являющегося об’ектом приема. С другой стороны, величина угла приема должна обеспечивать невосприимчивость микрофона к нежелательным посторонним звукам и шумам.
Другое требование — независимость от частоты характеристики направленности звукоприемника. Если это требование не выполняется, то неизбежны частотные искажения. Так как слышимый спектр частот достаточно широк, то направляющие устройства рефлекторного типа, работающие по принципу фокусирования звука, получаются сложными и громоздкими, если только к ним пред’являются требования неменяющейся при изменении частоты характеристики направленности.
При ввукос’емках в киноателье весьма желательно и важно, чтобы драматическое действие не встречало препятствий и не было стеснено большими размерами звукоприемного устройства. Отсюда требование, чтобы микрофон имел малые размеры, был легким и портативным, так что мог бы быть скрытым среди висящей осветительной арматуры или других предметов. Кроме того, микрофон должен иметь сравнительно небольшое электри
286
ческое сопротивление для того, чтобы можно было пользоваться длинным соединительным кабелем от микрофона к усилителю в тех случаях, когда неудобно располагать предварительный уси литель непосредственно у микрофона. Практически .все вышСпе речисленные вопросы и затруднения, связанные со студийной передачей, разрешаются при применении ленточного микрофона скорости, описанного в главе V. Этот микрофон имеет косинусоидальную характеристику направленности, т. е. принимает звук спереди и сзади, но нечувствителен к звукам, приходящим с боковых сторон. Более современным устройством является «униполярный» односторонне направленный микрофон, разработанный авторами, этот микрофон также описан в главе V. Он имеет кардиоидную характеристику направленности и при применении в киноателье имеет то преимущество перед микрофоном скорости (который, в свою очередь, имеет преимущества перед микрофонами ненаправленного действия), что нечувствителен к шумам и к рассеянной звуковой энергии, поступающим сзади.
12. 19. СТУДИИ ДЛЯ РАДИОВЕЩАНИЯ И ЗВУКОЗАПИСИ
Акустика студий для радиовещания и звукозаписи отличается от акустики театров, аудиторий и других помещений, предназначенных для непосредственного слушания. Когда слушатель пользуется двумя ушами, слушая источник .звука в помещении, он способен, благодаря бинауральному характеру слуха, сосредоточить свое внимание на прямом, идущем от источника, звуке, отвлекаясь от влияния неориентированной отраженной энергии или от случайных шумов, имеющихся в помещении. Если слушатель закрывает одно ухо, то он теряет эту .способность слухового сосредоточения, действие реверберации и шумов делается более неприятным и разборчивость передачи уменьшается.
Общепринятый способ приема звука как в радиовещании, так и в звукозаписи, использует не два, а лишь один канал, что равносильно монауральному слуховому восприятию. Отсюда возникает необходимость уменьшения реверберации и шума по сравнению с нормально допустимым уровнем для сохранения натуральности передаваемого звука.
Относительно оптимума реверберации радиовещательных студий установилось мнение, что требуется 2/s той величины, которая является оптимальной для данного помещения в условиях бинаурального слушания. Звукоизоляция студий от всех внешних шумов — вопрос первостепенной важности. Большинство современных студий построены с расчетом, чтобы уровень шума в них не превышал 10 дб, в основном это достигается благодаря отсутствию окон, являющихся главными проводниками внешних шумов. Применение направленных микрофонов получило распространение в практике большинства студий и является эффективным средством уменьшения шума и реверберации, как указыва
287
лось в .разделе 12.18. Так как радиовещательная студия предназначается для различных родов исполнений, причем каждый род исполнения требует своего оптимума реверберации, то желательно обеспечить возможность изменения акустического поглощения студии наиболее удобным способом. Простейшее решение этого вопроса заключается в том, что стены завешиваются драпировками, которые в соответствии с требуемой реверберацией могут в той или иной степени раздвигаться.
Более современный метод изменения поглощения применен в Чикагских студиях Национальной радиовещательной компании Ч Части стен оборудованы рядом .поворотных панелей, причем каждая панель покрыта с одной стороны материалом с большим поглощением, с другой же стороны имеет непотлощающую звук Поверхность. Регулирование реверберации достигается поворотом соответствующего числа панелей. Кнудсен предложил применять систему щитов, при помощи которых можно закрыть (или открыть) большее или меньшее количество поглощающего материала.
Чтобы обойти это затруднение иногда практикуется неодинаковое поглощение в двух концах студии: один конец делается акустически «мертвым», а другой «живым», с таким расчетом, чтобы все поглощение было сосредоточено в первой части студии. В другом незаглушенном конце студии располагаются исполнители 2. При этом способе пение и игра на музыкальных инструментах для исполнителей значительно облегчаются, благодаря тому, 'что происходят в условиях «местной» нормальной для концертного исполнения реверберации, в то время, как эффективная реверберация, воспринимаемая микрофоном, может быть уменьшена до желаемой величины. Кроме желательности изменения реверберации в соответствии с родом исполнения ®, в процессе исполнения данного музыкального произведения для создания нового акустического эффекта может потребоваться быстрое 'изменение реверберации. Вообще говоря, большая реверберация должна сопровождать громкие пассажи, когда требуется создать впечатление мощи ,и силы; малая же реверберация целесообразна при быстром темпе исполнения с частым следованием отдельных звуков, когда требуется обеспечить хорошую различимость этих звуков, которые при большой реверберации сливаются. Способ изменения реверберации-—быстрого и плавного — схематически изображен на рис. 12.23. Кусок акустического материала может перемещаться посредством двух барабанов с одной на другую сторону жесткого, отражающего звук щита. Таким образом, путем поворота барабанов можно закрыть
1 Hanson and Morris. Proc. Inst. Rad. Eng., Jan., 1931.
2 Опасности, связанные с такой системой акустического оборудования студий, разбираются в цитированной выше статье Й. Г. Дрейзен Н. Т. С. ЛЭИС 1936 г. (Прим, ре д.)
3 Caporale, Р. Jour. S. М. Р. Е., February. 1933.
288
акустическим материалом большую или меньшую часть этого щита. Такие щиты размещены в нескольких нишах стен и прикрыты снаружи решеткой, так что при изменении реверберации
внешний вид стен не меняется. Вращение барабанов осуществляется дистанционно посредством электродвигателей, что обеспечивает удобный и гибкий способ акустической регулировки помещения.
Выше уже указывалось, что студии для звукозаписи так же, как и радиовещательные студии, предназначены для монаурального (при помощи микрофона) восприятия звука. Реверберацию помещения, в котором происходят кинос’емки, поэтому следует выбирать порядка двух третей реверберации, характеризующей реальную обстановку, представляемую декорациями. Этому требованию удовлетворяет практически получаемая реверберация, так как декорации состоят обычно из двух-трех стен, благодаря чему поглощение такого «помещения»
Рис. 12. 23. Схема устройства для регулирования времени реверберации, позволяющего производить плавное изменение времени реверберации. Изменение реверберации с помощью этого устройства может быть осуществлено в короткий промежуток времени.
оказывается значительно большим
нормального. Очевидно, что кино-
ателье, в котором устанавливается такая сцена, должно иметь возможно большее поглощение, чтобы его реверберация заметно не влияла на акустические характеристики снимаемой сцены.
После рассмотрения проблем приема звука в помещении перейдем в следующих разделах к вопросам воспроизведения
звука.
12. 20. РАССЕЯНИЕ ЗВУКА В РЕВЕРБЕРИРУЮЩЕМ ПОМЕЩЕНИИ
Получаемый при воспроизведении Звука в комнате или в театре акустический эффект зависит от многих факторов, учесть которые очень трудно. Поэтому едва ли можно достичь пол-, ново соответствия между воспроизводимым и оригинальным звуком, передаваемым из студии или ателье. Предметом дальнейшего изложения будет являться рассмотрение того влияния, которое оказывают акустические характеристики воспроизводящего устройства и самого помещения на получаемую в месте расположения слушателя звуковую энергию (как функцию частоты). Основными факторами этого влияния являются: частотная характеристика, характеристика направленности и величина отдаваемой мощности источника звука, а также характеристика ревер
19 Прикладная акустика.
289
берации комнаты или театра. Для того, чтобы проанализировать явление в данном конкретном помещении, нужно знать соответствующие характеристики. Вообще говоря, частотные характеристики и характеристики направленности громкоговорителя не могут быть выражены, как простая функция частоты. Поэтому анализ явления можно произвести лишь для одной какой-либо частоты. Пусть имеется частотная характеристика чувствительности громкоговорителя, снятая на его осевой линии. Тогда можно вычислить .звуковое давление р на некотором расстоянии г от источника звука. Характеристика дает величину давления р0 на расстоянии Хр от громкоговорителя, для вычисления давления р можно воспользоваться следующим выражением
Р Ро^~ (12.37)
Чтобы получит давление в точке, не лежащей на оси. нужно полученное давление умножить на некоторый коэфициент, определяемый из характеристики направленности громкоговорителя. Таким образом, можно получить звуковое давление, создаваемое прямым звуком .громкоговорителя.
Плотность же звуковой энергии, обусловленная прямым звуком, для данной частоты может быть вычислена по формуле
где R® — отношение звуковых давлений для звука, направленного соответственно под углом Н и под углом 0 = 0 с осью громкоговорителя. Полная звуковая энергия, излучаемая громкоговорителем, при данной частоте
р -ЛАГ™ ж (12.39)
LS рс J 0 ' '
где Ро — давление на расстоянии т0,
Q—.телесный угол, под которым видна обслуживаемая звуком площадь.
Теперь можно определить плотность энергии в комнате заданного об’ема и поглощения, если в ней работает источник звука известной мощности Р^.
Плотность энергии, обусловленная отраженными звуковыми
волнами,
(12. 40)
где а—.среднее поглощение (на единицу площади) .S — площадь поглощающего материала
V — об’ем помещения
290
t — время
PLS -— излучаемая громкоговорителем мощность.
Во многих случаях поглощение помещения неизвестно, но известно время реверберации. Тогда поглощение можно вычислить с помощью уравнения 12.6.
Общая плотность звуковой энергии в данной точке помещения может быть найдена, как сумма плотностей энергии прямого и рассеянного звука. Эта сумма
Et=Ed^Er (12. 41)
Таким образом, можно определить плотность звуковой энергии, которая получается при работе громкоговорителя в любой точке помещения. Отношение плотности энергии рассеянного звука к плотности (энергии прямого звука, т. е, второго члена уравнения (12.41) к первому члену этого уравнения, является известной нам из предыдущего «мерой эффективной реверберации».
Если громкоговоритель и помещение рассматривать как одно целое, т. е. учитывать как характеристики направленности громкоговорителя, так и акустические свойства помещения, то указанное отношение Плотностей энергии можно назвать реверберацией рассеяния. Суммарная же реверберация всей системы в целом, куда входит и радиостудия (или киноателье) с микрофоном и громкоговорители с их характеристиками, могла бы быть названа реверберацией воспроизведения звука.
12. 21. РАБОТА РАДИОПРИЕМНИКА В КОМНАТЕ
Изучение действия радиоприемника в помещении представляет интерес с точки зрения установления действительной частотной характеристики аппарата, получаемой в нормальных эксплоатационных условиях. Выберем помещение, принадлежащее к типу среднего жилого помещения. Работа аппаратуры в указанных условиях обычно оценивается путем суб’ек-тивных испытаний на слух, являющийся конечным критерием качества.
Приемник, который применялся в описанном ниже исследовании, был супергетеродинного типа. Громкоговоритель, составлявший элемент приемника, был нормального типа с конусной диафрагмой. Чтобы устранить излучение звука задней стороной приемника,, ящик был совершенно закрыт. Все частотные характеристики и характеристики направленности приемнйка были сняты в условиях открытого пространства при помощи генератора высокой частоты, модулируемого генератором низкой частоты. Частотные характеристики и характеристики направленности этого приемника представлены на рис, 12.24 и 12.25. По Данным этих характеристик рассчитана звуковая энергия излучае
19*
291
мая приемником при различных частотах, зависимость от частоты которой представлена ,на рис. 12.24.
Размеры комнаты, выбранной для испытаний, следующие:
длина — 6 м, ширина — 4,5 м, высота — 3 т. Характеристика измеренной при разных частотах реверберации этой комнаты 'представлена на рис. 12.26.
Радиоприемник помещался у стены в одном конце комнаты, а слушание производилось по осевой линии приемника на расстоянии 1,8 м от последнего. Такими же условиями мы задавались и для теоретического анализа. Плотность
энергии прямого звука на расстоянии 1,8 т 'по оси приемника рассчитана по формуле (12.38). Зависимость этой энергии от частоты представлена на рис. 12.26. Плотность энергии рассеянно-
Рис. 12. 24. Частотная характеристика радиоприемника, снятая в открытом пространстве. Излучаемая приемником акустическая мощность подсчитана по данным частотной характеристики чувствительности и характеристики направленности.
Кривая Д^полная излучаемая акустическая мощность.
„ В—чувствительность на оси на рас-
стоянии 1 м (0 дб= 1 бар).
го звука рассчитана по формуле (12.40) по данным мощности, излучаемой приемником, и величине поглощения комнаты, определяемого по времени реверберации и об’ему комнаты, согласно уравнению (12.6). На рис. 12.26 представлены две кривые плотности звуковой энер
гии в зависимости от частоты: одна кривая для установившегося состояния — через очень большое время после включения (f=oo), другая—через 1=0,02 сек. после включения. Заметим, что произнесение согласных требует около 0,2 сек., а гласных—около 0,07 сек. Что касается музыки, то в этом случае t, вообще говоря,, гораздо больше 0,02 сек. Таким образом средняя кривая плотности рассеянной энергии должна располагаться в интервале между указанными двумя кривыми рис. 12.26.
Анализ 1 Характеристик рис.
Рис. 12. 25. Характеристики направленности радиоприемника с закрытой задней стенкой.
292
12.26 показывает, что плотность энергии прямого звука практически не зависит от частоты, в то время как плотность энергии рассеянного звука, зависящего от характеристики поглощения комнаты, надает с возрастанием частоты. Падает с возрастанием
частоты также и суммарная плотность звуковой энергии. Возникает вопрос, является ли эта характеристика наилучшей с точки зрения суб’ективной оценки на слух. Испытания, проведенные в описанном помещении, показали, что в общем эта характеристика наиболее приятна . для слуха. В данном частном случае изменения плотности звуковой энергии в пределах воспроизводимого диапазона частот не превышали 5 дб. В некоторых же случаях условия получения максимальной натуральности вос-
Рис. 12. 26. Частотные кривые реверберации помещения, плотности энергии прямого звука на расстоянии 1.8 м от приемника и плотности энергии рассеянного звука для t=oo и t=0,02 сек. (О дб=1 эрг!сл&) Кривая А—прямой звук.
, В—рассеянный звук 1=ос
„ С— „ Z=V,02
„ D—время реверберации.
Вр едя р ев ерьерации
произведения или наиболее приятного впечатления могут соответствовать и большим изменениям. Это обстоятельство может показаться неожиданным, так как принято считать, что равномерная частотная характеристика наиболее желательна. Однако, мы не учли некоторых факторов, которые показывают, что это не всегда верно. При подсчете . суммарной плотности звуковой энергии мы не считались с направленностью звукоприемника. Известно, что комбинация двух ушей представляет сильно направленный звукоприемник. Слушая работу приемника, слуховой аппарат «отвлекается» от рассеянного звука. Таким образом, кажущееся отношение прямого звука к рассеянному возрастает и частотная характеристика плотности звуковой энер
гии искусственно «сглаживается».
В предыдущих рассуждениях мы предполагали, что сила воспроизводимого звука равна силе оригинального звука в студии. Вообще же сила воспроизводимого в жилой комнате звука обычно значительно меньше силы звука в студии1. В результате звук теряет свою мощь. Этот эффект, проявляющийся особенно резко на низких частотах, об’ясняется тем, что человеческое ухо' обладает для разных уровней силы звука различными характери
1 Это утверждение авторов, по нашему мнению, ошибочно. При применении высококачественной аппаратуры, и в частности динамических громкоговорителей, средний уровень громкости воспроизведения в жилой комнате, устанавливаемый радиослушателем, обычно бывает не меньше среднего уровня громкости в концертном или театральном зале. (Прим. ред.).
293
стиками (частотными) -чувствительности, причем наибольшее различие в характеристиках имеет место при низких уровнях силы звука. (В самом деле измерения показали, что соответственно определенной силе звука тона при 1000 гц можно выбрать силу звука какого-нибудь другого тона, который будет казаться одинаково громким со сравниваемым. Если соединить между собой точки, соответствующие силам звука, требующимся для получения равной громкости на разных частотах, то образуются так называемые кривые равной громкости (см. раздел 13.3). Из этих кривых можно получить величину звукового давления, которое требуется при разных частотах для получения данной громкости. Из этих же кривых можно заключить, что если уровень силы воспроизводимого звука мал по сравнению с уровнем силы оригинального звука, то передача будет страдать недостатком низких частот. Неодинаковая (по частотам) чувствительность уха при низких уровнях громкости может быть компенсирована специального типа регулятором уровня (volume control), в котором-должен быть обеспечен под’ем низких частот в обратном отношении к относительной чувствительности уха (уменьшающейся на этих частотах с понижением уровня). Такой «волюМ-контрол'ь» известен под названием «волюм-контроля с акустической компенсацией». Он широко применяется в высококачественных радиоприемниках *.
Выше были описаны явления, определяемые характеристикой помещения и радиоприемника, с точки зрения результирующей звуковой энергии в комнате. В нормальных условиях правильно рассчитанный радиоприемник, снабженный волюм-контролем с акустической компенсацией, работающий в комнате среднего типа и принимающий высококачественную передачу, дает удовлетворительное качество воспроизведения. При особо же ненормальных условиях требуется добавочная частотная компенсация. Для этой цели большинство приемников снабжается «тон-контролем», посредством которого выделяются высокие или низкие тона. Таким способом можно компенсировать недостатки в частотной характеристике как самой -передачи, так и комнаты и .приспособить передачу к индивидуальным вкусам слушателя.
12. 22. РАБОТА ГРОМКОГОВОРИТЕЛЕЙ В ОТКРЫТЫХ ТЕАТРАХ
Анализ работы громкоговорителя в звуковом кинотеатре или в вещательных установках, притом в условиях открытого воздуха, представляет интерес как с точки зрения частотной характеристики, так и с точки зрения необходимой мощности аппаратуры. При работе громкоговорителя на открытом воздухе Приходится иметь дело с отражением звука лишь от одной поверхности ‘—- земли. Поэтому вопрос (весьма упрощается по сравнению
1 Wolff and Cornell. Electronics. January, 1933.
294
€ условиями замкнутого помещения. Обратимся к рассмотрению работы громкоговорителя на открытом воздухе.
Главное требование при «звукофикации» 1 какой-либо площади заключается в равномерном распределении по этой площади звуковой энергии. Вертикальный разрез открытого театра представлен на рис. 12.27. Две крайние обслуживаемые точки обозна-
Рис. 12. 27. Схема взаиморасположения громкоговорителя и мест для публики в открытом театре.
йены / и 2. Если бы громкоговоритель был .ненаправленным излучателем, то отношение плотности звуковой энергии прямых лучей для этих двух точек было бы обратно отношению квадратов расстояний их от громкоговорителя.
В нашем конкретном случае, представленном на рис. 12.27, при применении ненаправленного излучателя получается разница уровней в 13 дб. Очевидно, что столь большая разница в плотности звуковой энергии исключает возможность получения хорошей передачи на всей звукофицируемой площади. Требуется, таким образом, каким-либо способом компенсировать эту неравномерность. Применение направленных излучателей представляет одно из таких средств. Покажем на примере метод использования направленности громкоговорителя.
Характеристика направленности громкоговорителя, который мы хотим применить в нашем примере, представлена на рис. 7.20. Средняя разность уровней для точек, лежащих под углом 40° от осевой линии, и для точек, лежащих на осевой линии, 'составляет 13 дб.
Выберем такое расположение громкоговорителя, чтобы осевая линия прошла через точку 2. Затем высота расположения громкоговорителя выбирается так, чтобы угол 0 составлял 40°. Таким образом удается избытком звукового давления на оЫ по отношению к крайним лучам компенсировать-уменьшение звукового давления, получающееся при удалении от источника звука. Отражением от пола мы вправе пренебречь, так как оно одинаково для обоих точек. Кроме того, это отражение очень мало для сплошь занятого । публикой театра или аудитории. На рис. 12.28 представлена вычисленная кривая распределения звуко
1 |Мы употребили здесь термин «звукофикации», привившийся в нашей практике. (Прим, ре д.).
295
вого давления в театре. Отдельными точками показаны данные наблюдений *. i
Как видно из рис. 12.28, расхождение между экспериментальной кривой и вычисленными точками — невелико. Этот рисунок показывает также, что неравномерность звукового покрытия площади, охватываемой излучением громкоговорителя, не превышает 3 д/б.
Для получения полной картины распределения плотности звуковой энергии по обслуживаемой площади рассмотрим план
Рис. 12. 28. Вычисленное и измеренное распределение звуковой энергии в открытом театре (О дб=\ бар).
Рис. 12. 29. Схема взаиморасположения громкоговорителей' и мест для публики в открытом театре (план).
театра, учитывая направленность громкоговорителя в горизонтальной плоскости. Как видно из плана театра (рис. 12.29) угол, охватываемый излучением громкоговорителя, должен быть не менее 90°. Если пользоваться одним -громкоговорителем, то на крайних лучах уровень окажется на 11 дб ниже, нежели на осевой линии громкоговорителя. Применяя же два громкоговорителя и располагая их оси под углом 40°, можно покрыть звукофици-
1 Весьма интересным является связать теоретически величину неравномерности звукового покрытия площади, высоту подвеса и угол наклона громкоговорителя с законом характеристики направленности громкоговорителя. Последнюю, как видно например из рис. 7.20. можно заменить эллин-сом, при условии допущения произвольного эксцентриситета эллипса и произвольного расположения его центра на оси симметрии характеристики направленности. Такая замена, практически не .ведущая и серьезным ошибкам, позволяет с помощью простых формул связать указанные выше величины.
Расчеты, проделанные Ю. М. Сухаревским для характеристик направленности нормальных типов рупорных громкоговорителей, показали, что наибольшие размеры обслуживаемой громкоговорителем площади при хорошей равномерности звукового покрытия получаются при углах наклона громкоговорителя порядка 84—86° (под углом наклона подразумевается угол, образуемый осью громкоговорителя и перпендикуляром, опущенным из точки подвеса громкоговорителя на плоскость обслуживаемой поверхности). Результаты экспериментов, .при которых варьировался угол наклона оси громкоговорителя, также подтвердили выгодность направления оси громкоговорителя почти параллельно плоскости обслуживаемой 'поверхности. (П р и м. ре д.).
296
руемую площадь с большой равномерностью. Наибольшая разность уровней плотностей звуковой| энергии в этом случае не превысит 5 дб, что можно считать вполне приемлемым.
Обычный уровень громкости разговорной речи -— порядка 70 дб над порогом слышимости (для громкой речи). В среднем же уровень громкости речи можно считать равным 65 дб. Этот уровень громкости обеспечивает максимальную разборчивость речи и потому его можно считать нормальным для звукофика-ции театра. Шумы от всякого рода посторонних источников иногда заставляют поднять уровень громкости передачи для получения максимальной артикуляции. Для обеспечения натуральности воспроизведения музыки требуется значительно большая мощность, чем для речи.
Установлено, что при- нормальных условиях сила звука (поток звуковой энергии) порядка 0,24 мквт на кв. сантиметр является достаточной. Такой силе звука соответствует уровень громкости 88 дб над порогом слышимости. Соответствующее звуковое давление составляет 10 бар — оно с избытком удовлетворяет потребность слушателя. Мы уже указывали, что осевая линия громкоговорителя должна ’быть направлена на точку 2. Практически примененный нами громкоговоритель потреблял 5 вт электрической мощности, развивая при этом звуковое давление порядка 10 бар на расстоянии около 20 л по осевой линии. Так как применялись два громкоговорителя, то полное потребление мощности составляло 10 <вт.
В открытых театрах приходится считаться с посторонними шумами. Там, где 'эти шумы особенно велики, уровень передачи приходится значительно повышать, В рассмотренном практическом случае уровень шума составлял около 50 дб над порогом слышимости.
12. 23. РАБОТА ГРОМКОГОВОРИТЕЛЕЙ В ЗАКРЫТЫХ ТЕАТРАХ И АУДИТОРИЯХ
В предыдущем разделе были рассмотрены условия работы громкоговорителя на открытом воздухе, где отражением от поверхностей можно пренебречь.
В разделе 12.21 в общих чертах разбиралась работа громкоговорителя в помещении. Теперь же рассмотрим работу громкоговорителя в закрытом театре или аудитории. Уже ранее указывалось на требование равномерного покрытия звуком обслуживаемой площади. В рассматриваемых нами условиях работы громкоговорителя, а именно в условиях закрытого помещения, на слушателя действуют как бы два звука: прямой звук громкоговорителя, т. е. звук, который приходит к слушателю без отражений,, и звук, который прежде чем дойти до слушателя, претерпевает отражение от поверхностей помещения.. В театрах, лишенных акустических дефектов, плотность отраженной звуковой энергии
297
распределена по всему помещению практически равномерно. Остается задача разместить и направить громкоговорители таким образом, чтобы и плотность энергии прямого звука была распределена по возможности равномерно. Но это—та же проблема, которая была поставлена в предыдущем разделе в отношении открытых театров. На примере театра, схематически изображенного на рис. 12.30, разберем различные факторы, оказывающие влияние на получаемый конечный эффект. Плотность рассеянной звуковой энергии зависит от частоты, поскольку и коэфициент поглощения театра и отдача громкоговорителя также являются функциями частоты. Частотная характеристика реверберации (театра представлена кривой В рис. 12.31. Зная время реверберации,
можно при помощи уравнения (12.6) вычислить величину поглощения при всех частотах. Мощность, излучаемая громкоговорителем, определяется уравнением (12.39). Таким образом мы располагаем данными для подсчета плотности рас-
Рцс. 12. 31. Частотная характеристика реверберации театра (рис. 12. 30). Плотность энергии прямого звука в точках 1 и 2 и плотность энергии рассеянного звука для t=co, <=0,05 и 0,02 сек. (Одб 1 эрг/смг).
Кривая А— рассеянный звук <=оо
„ В—время реверберации
„ С—рассеянный звук <=0,05
„ D— „ „ <=0,02
Е—прямой звук в точке 1.
„ Е- „ „ „ „ 2.
Рис. 12. 30. Установка громкоговорителя в звуковом кинотеатре. Об‘ем театра= =3400 куб. м.
сеянной энергии при помощи уравнения (12.40). Если стационарное состояние достигнуто, то энергия, поглощаемая ограничивающими поверхностями помещения за 1 сек., равна мощности, излучаемой громкоговорителем.
Частотная характеристика плотности энергии рассеянного звука, получающаяся при этих условиях, иллюстрпоуется кривой рис. 12.31 (t=ca). Из кривых рис. 12.31 видно, что доля рассеянной энергии значительно превышает долю энергии прямого звука. Однако отдельные звуки речи и музыки недостаточно длительны для того, чтобы в помещении могло установиться стационарное состояние. На рис. 12.31 приведены кривые плотности энергии рассеянного звука для разной длительности звуков. Из этих кривых можно усмотреть, что практически при всякой длительности наличие граничных поверхностей вызывает увеличение
298
плотности энергии по сравнению с открытым пространством. Однако с практической точки зрения, как мы увидим далее, роль этих поверхностей в звукофицируемых театрах весьма незначительна.
В процессе речи согласные произносятся с длительностью около 0,02 сек., а гласные—около 0,07 сек. В среднем, при длительности 0,05 сек., энергия прямых и рассеянных звуков приблизительно одинакова. Таким образом увеличение уровня силы звука, обусловленное наличием отражающих поверхностей, составляет 3 дб, так что экономия в расходуемой мощности, по сравнению с открытым театром, получается сравнительно небольшой. Задаваясь мощностью, необходимой для покрытия площади театра в условиях открытого воздуха, мы таким образом резервируем громкость, причем .для звуков большой длительности (Для музыки, например, эта длительность значительно больше 0,05 сек.) запас мощности получается весьма значительным.
Мы знаем из практики, что разговор в закрытом помещении звучит гораздо более громко, чем на открытом воздухе. В свете этого факта высказанное выше (замечание о незначительной роли поверхностей в балансе общей звуковой энергии кажется парадоксальным. Следует однако заметить, что звук, воспринимаемый слушателем в театре, обладает комплексной реверберацией, содержащей в определенном соотношении реверберацию студии, в которой производилась запись или исполнение звука, и реверберацию самого театра. Поэтому для получения хорошей артикуляции нужно уменьшать эффективную реверберацию путем применения направленных громкоговорителей, а также уменьшать (по сравнению с обычными нормами для театров) общую величину времени реверберации звукофицируемого театра. Оба эти средства уменьшают отношение рассеянной звуковой энергии к прямой, т. е. уменьшают эффективную реверберацию. Наилучшие результаты, вообще говоря, получаются при максимальном уменьшении эффективной реверберации.
Выше мы рассмотрели факторы, оказывающие влияние на воспроизведение звука в театре. Одним из таких факторов является реверберация. Теоретически реверберация идеального с точки зрения артикуляции театра должна быть равна нулю, как это имеет место в открытом театре. Однако высокая стоимость такого количества поглощающего материала, которое необходимо для получения в театре весьма малой реверберации, исключает возможность этого решения. Применение направленных громкоговорителей, (как это указывалось выше, позволяет понизить эффективную реверберацию, однако опыты показали, что по достижении некоторой величины реверберации, ее дальнейшее уменьшение заметно не улучшает качества передачи.
На рис. 12.32 приведены кривые зависимости времени реверберации, дающего вполне удовлетворительное качество воспроиз
299
ведения звука от кубатуры театра. Отношение прямого звука к рассеянному в этих театрах практически то же, что и в рассмот-
Рис. 12. 32. Оптимальное время реверберации для звуковых киноателье.
А—100 гц
В—250 гц
С—500—2000 гц
рейном выше частном примере.
Множество других факторов, кроме реверберации, влияют на акустику театра. Акустический расчет театра, однако, не входит в круг вопросов, составляющих содержание этой книги. По этому предмету читатель может найти специальный материал в ряде других работ.
12. 24. ЗВУКОУСИЛИВАЮЩИЕ СИСТЕМЫ
Одним из серьезных факторов, препятствующих получению хорошей слышимости в театре, является несоответствие мощности человеческого голоса размерам театра. Это относится главным образом к очень большим закрытым или открытым театрам. Кроме того, в некоторых случаях исполнение оркестра также не дает полного художественного впечатления из-за недостаточной мощности. В таких случаях требуется усиление звука посредством технических средств.
Некоторые проблемы, связанные с поставленной задачей, осве
щаются в настоящем разделе.
Рис. 12.33 показывает разрез театра, оборудованного звукоусиливающей установкой. 1 Микрофоны, скрытые в рампе, предназначены для приема звука со сцены. Другие микрофоны размещены в соответствующих местах среди оркестра. Громкоговорители помещены над сценой, как показано на рис. 12.33. Устройство для регулировки
Рис. 12.33. Расположение аппаратуры звукоусиливающей установки в театре.
уровня и микшерное устройство монтируется в специальном, пульте и обычно располагается в ложе балкона.
В рассматриваемой системе (имеется два прямых звука: оригинальный звук и усиленный звук от громкоговорителей. При
300
установке громкоговорителей задача заключается в том, чтобы распределить суммарную энергию этих двух источников звука равномерно по всему театру.
Энергии звука, идущего со сцены, вообще говоря, бывает достаточно для обеспечения слышимости в местах, расположенных вблизи сцены и оркестра. Для этих мест усиления не требуется. Но оно требуется для мест, удаленных от сцены и расположенных в глубине театра. Метод получения равномерного распределения звуковой энергии, излучаемой громкоговорителями, был изложен в одном из предыдущих разделов, поэтому нет необходимости в его вторичном описании. Потребная для озвучания театра мощность может быть вычислена так же, как это указано в отношении кинотеатров.
Микрофоны, принимающие звук, идущий со сцены, как уже было сказано, скрыты в рампе. При расположении громкоговорителей, изображенном на рис. 12.33, звук, действующий на микрофоны непосредственно от громкоговорителей, весьма мал, благодаря чему устраняется возможность обратной акустической связи или самовозбуждения всей системы. В больших театрах, имеющих большие сцены, расстояние от исполнителей до микрофонов получается весьма значительным. Поэтому для компенсации ослабления звука, действующего на микрофон, требуется большое усиление. Это приводит к осложнению, так как при большом усилении склонность к самовозбуждению сильно возрастает. Поэтому приходится прибегать к дальнейшему ослаблению действия громкоговорителей на микрофоны. Это ослабление может быть достигнуто при применении направленных микрофонов, которые нужно ориентировать так, чтобы громкоговорители оказались в зоне нулевой чувствительности микрофонов. Важно также, чтобы микрофоны сцены не подвергались воздействию звуков оркестра и шума публики. Микрофоны, расположенные в рампе, достаточно ограждены от этих влияний рампой. При другом расположении микрофонов удовлетворительные результаты могут быть получены с односторонне направленным микрофоном, как это можно заключить из рассмотрения характеристик этого микрофона (см. раздел 5.14). Для равномерного «обслуживания» всех участков сцены применяют несколько микрофонов, обычно располагаемых с интервалом порядка 3 |м.
Выход каждого микрофона как из сценической, так и оркестровой групп, заводится на общий микшер с отдельным регулятором уровня на каждом микрофоне и общим регулятором уровня, которые монтируются в пульте управления. Оператор1 следит за тем, чтобы по ходу действия на сцене включался ближайший к исполнителям микрофон. Он же устанавливает оптимальное соотношение уровней передачи со сцены и из оркестра,
1 В нашей практике это лицо называется радиофоническим режиссером или тонмейстером (Прим, ре д.)
301
а также соразмеряет минимальный и пиковый уровень передачи’ с установленными пределами усиления.
Исходя из очерченных задач ради (ми опического режиссера, пульт управления лучше всего располагать на балконе в глубине театра, что наиболее удобно как в отношении качественной оценки усиливаемого звука, так и потому, что отсюда сцена наиболее доступна для наблюдения.
Таковы же в общих чертах и проблемы, связанные с усилением звука в открытых театрах.
В звукоусиливающей установке концертного зала Радиогорода (США) применены микрофоны скорости, громкоговорители и система управления, аналогичные описанным в настоящем разделе.
Эта театральная звукоусиливающая установка является в настоящее время наибольшей из установок подобного рода.
12. 25. ЗВУКОИЗОЛЯЦИЯ И ЕЕ ИЗМЕРЕНИЕ
Возрастающий с каждым годом шум городских улиц, с одной стороны и распространение радио среди городского населения, с другой стороны, выдвигает проблему звукоизоляции городских помещений. Звук может проникнуть из одного помещения в другое двумя путями: во-первых, посредством прямой передачи ударов и механических вибраций по той или иной части сооружения, а во-вторых, посредством передачи акустической энергии через стены, перегородки и перекрытия. Примером первого способа звукопередачи является вибрация частей сооружения, вызываемая вибрацией машин, установленных непосредственно на твердом полу, или волочением по полу твердых предметов. Примером второго способа передачи звука может служить проникновение звуков разговора, музыки, смеха и т. п. из одной комнаты в другую или проникновение в комнаты шума уличного движения. Для борьбы с первым видом звукопередачи существуют два средства. Монтируют машину на каком-нибудь упругом основании, материал которого (вследствие своей волокнистой, сыпучей или вязкой структуры) обладает способностью демпфировать колебания. Последние, поглощаясь материалом, превращаются в тепло. Для защиты перекрытий от передачи ударов, по черному полу настилают слой войлока, пробки или резины. Весьма эффективным средством уменьшения шума в комнатах учреждений является покрытие пола плиткой из специального материала с содержанием резины. Другой способ защиты от распространения вибраций машин также заключается в том, что последние устанавливаются на упругом основании, но величина упругости подбирается так, чтобы собственная частота всей системы была ниже частот, возбуждаемых машиной вибраций. Такое устройство эквивалентно в электрическом смысле контуру, состоящему из последовательно включенных сопротивления, индуктивности и емко
302
сти, собственная частота которого ниже частоты, приложенной э. д. с.
В более совершенных методах изоляции от шума машины используется принцип соединения нескольких резонансных механических контуров, образующих механические фильтры, задача которых, так же как и электрических фильтров, заключается в поглощении возбуждаемых машиной колебаний.
В главе II приведена аналогия между электрическими и механическими фильтрами. Расчеты, связанные с применением механических фильтров, осуществляются методам^, известными из электротехники. Для более детального ознакомления с этим вопросом читатель может обратиться к специальным трудам *.
Весьма большой интерес представляет проблема звукоизоляции от проникновения акустической энергии через конструкции зданий.
Прохождение акустической энергии через стену может происходить, во-первых, посредством возбуждения в материале стены молекулярньЙ! Колебаний, получающих энергию от падающих на стену звуковых волн и передающих энергию в форме таких же звуковых волн по другую сторону стены, во-вторых, если материал стены пористый, то путем распространения звука сквозь поры, благодаря чему по другую сторону стены также возбуждается звуковая волна; в третьих, если стена недостаточно жестка иЛИ массивна и способна совершать колебания в целом или в своих частях, то эти колебания передают свою энергию частицам воздуха, прилегающим к стене по другую сторону от источника звука. 1
Рейли 2 нашел выражение для частиц звуковой энергии, проникающей Через совершенно твердую непоглощающую звук стену, колеблющуюся, как целое. Это выражение
1 _ /19
у 1 + (Pid/pW
где pi — плотность материала стены р —-плотность воздуха *
d — толщина стены
X — длина волны.
Можно подсчитать по формуле (12.42), что обычно применяющиеся материалы средней толщины пропускают звук очень слабо.
Практически же наблюдающееся прохождение звука сквозь стены следует отнести за Счет пористости стен и колебательной способности их структурных элементов.
Зная природу передачи звука из одного помещения в другое, можно оценить эффективность тех или других мер звуко-
1 Timoshenko, S. Vibrational Problems in Engineering, D. Van Nostrand.
« Rayleigh. Theory pf Sound, 2 nd edition, Vol. 2, p. 88.
303
изоляции. Вредность трещин и отверстий в стене сама по себе очевидна. Труднее бороться с вибрациями стены. Часто и массивная стена несвободна от колебаний. Опасен этот вид передачи звука и в сложных конструкциях: в этих случаях между отдельными слоями укладывается демпфирующий материал, поглощающий энергию колебаний первого (по отношению к источнику звука) слоя. Существующие решения проблемы звукоизоляции слишком разнообразны, чтобы они могли найти место в рамках этой книги. Читателю, которого заинтересует этот вопрос, можно порекомендовать множество специальных пособий по архитектурной акустике.
Звукоизолирующая способность стены характеризуется так называемым коэфициентом звукопроводности стены, т. е., отношением проникшей сквозь стену (дверь, пол, окно и т. п.) звуковой энергии к звуковой энергии, падающей на нее. Коэфициент зву-
копроводности стены является основным критерием для оценки звукоизоляции. Вообще говоря, получить представление о звуко-
изоляции какой-либо конструкции проще всего можно путем измерения уровней шума по одну и другую сторону (или до и после
Рис. 12. 34. Разрез помещевия для измерения звукоизоляции в лаборатории Амер.бюро стандартов.
установки) звукоизолирующей конструкции. Отношение полученных величин в децибелах является мерой звукоизоляции. Уровень шума измеряется с помощью методов, описанных в следующей главе, причем предпочтителен электрический шумомер. В лабораторной обстановке измерение коэ-фициентов звукопроводности различных материалов производится путем помещения испытуемого образ-
• ца- 'между источником звука и микрофоном, как это делается в лаборатории Американского бюро стандартов (см. рис. .12.34) *. В качестве источника звука
применяется громкоговоритель, дающий «воющий» тон варьируемой частоты и вращаемый со скоростью 1 об/сек. по кругу диаметром в 120 см. Громкоговоритель помещается в хорошо изолированной комнате S, сообщающейся посредством отверстий с двумя комнатами R, и R2, служащими для приема звука. Первая комната (/?,) служит для испытания звукопроводности отно-
сительно легких конструкций, вторая (1?2) для испытания тяжелых конструкций, монтируемых на месте в вертикальном окне.
1 Eckhardt and Сh г 1 s 1 ег. Bur. of Standards Sci. Paper No. 526.
304
Процесс измерения состоит в том, что сначала в комнатах S и R, при отсутствии испытуемого образца измеряется средняя сила звука. Измерение производится по линий перпендикулярной к поверхности образца. Обозначим измеренные величины силы звука через S и R, соответственно обозначениям комнат. После указанного измерения образец ставится на свое место и измерения повторяются. Пусть новые результаты измерений S' и R' (S' несколько больше S, a R' — меньше R). Тогда «коэфициент ослабления» звука согласно Экгардту и Крайслеру для известной полосы частот определяется отношением
4 • 4 (12- «)
Это отношение можно выразить и в децибелах.
Мейер и Юст1 использовали для измерений устройство, показанное на рис. 12.35. Они применяли два микрофона — один по одну, другой по другую сторону испытуемого образца. Источ-
ник звука направляется на стену, после чего сила звука измеряется при помощи двух микрофонов. Градуированный аттенюатор, включенный в цепь микрофона № 1, регулируется до тех пор, пока напряжение на выходе двух микрофонов не сделается одинаковым. По положению атте
коэфициен-тов звукопроводности.
нюатора можно непосредствен-п
1 и « Рис. 12. 35. Схема измерения
но определить «число ослабления». Строго говоря, коэ-
фициент ослабления Мейера и Юста должно быть умножено на отношение сил звука в положениях № 2 и № 1 при отсутствии образца, для того чтобы результат совпал с (12.43).
Однако при близком расположении микрофонов друг к другу эта поправка оказывается незначительной.
В методе, предложенном У. Сэбином2, используется разность времени затухания звука в реверберационной комнате и вне ее. При этом образец устанавливается на место двери. Если время затухания звука (до порога слышимости) в комнате сек., а вне ее t2 сек. 1 (при той же начальной силе звука в комнате), то ослабление в децибельной шкале пропорционально —t2. Для того, чтобы при этом методе получить результаты, совпадающие с предыдущими, нужно производить измерение на близком рас
1 Meyer and Just. Sitzungsber. d. Preuss. Akad. d. Wiss. Phys.—Math. Klasse IX, 1931.
a Sabine, W. C. Loc. cit.
20 Прикладная акустика.
305
стоянии от испытуемого образца. Как всякий суб’ективный метод, метод У. Сэбина не отличается точностью и требует большого числа опытов, результаты которых должны быть усреднены.
В таблице 2 приведены коэфициенты ослабления шумов, характеризующие различные конструкции стен, полов и окон.
ТАБЛИЦА 2
Материал
Среднее ослабление в дб
Волосяной войлок толщиной 2,5 см........................
® И П И ........ ......
Дерево толщиной 0,5 см, вес 2,2 кг/м?.....
Зеркальное стекло толщиной от 0,28 до 0,4 см, вес 12 кг/м2 Зеркальное стекло толщиной 0,6 см, вес 15,6 кг/м2.
Железный лист, вес 15,6 кг/м2 ................ Стальной лист вес 49 кг/м2 .................. Целотекс оштукатуренный, вес 58 кг/м2.....
Прессованная оштукатуренная солома 68 кг/м2.. . .
Кирпичная стена толщиной 15 см, оштукатуренная, вес
224 кг/м2 ..........................
Кирпичная стена толщиной 26,2 см, оштукатуренная, вес 455 кг/м2.................................
Шлак доменных печей в блоках, толщиной 20 см (2,5 см штукатурки , вес 274 кг/м2......................
Блок шлакобетона толщиной 10 см (2,5 см штукат.), вес 157 кг/м2....................................
Стальная дверь толщиной 30 см, площадью 90 см X 210 см . .
Дверь сосновая, заполненная пробкой, толщиной 146 см, площадью 90 см X 210 см.........................
Тяжелая дубовая дверь толщиной 4,8 см, площадью 90 см X
X 210 см .........................
Дверь двойная с воздушной прослойкой толщиной 4,8 см, площадью 90 X 210 см ................
То же с бальзам, шерстяной засыпкой, толщиной 2,5 см . . . Дверь, оклеенная фанерой (90 X 210 см) ........... Две двери, оклеенные фанерой, с промежутком в 5 см (90X210 см).................................
Окно одностворчатое (200X75 см), стекло толщиной 0,6 см . .
Окно 4-рамное 37 x98 см (каждая рама)..........
Окно 2-рамное 77 x 98 см, стекло толщиной 0,35 см.
Двойная нештукатуренная гипсовая плита, тол’щиной 5 см с промежутком 5 см, вес 100 кг/м2..............
То же с перемычкой посредине плиты, вес тот же.
Двойная нештукатуренная гипсовая плита толщиной 5 см, с промежутком 10 си, вес 100 кг/м2.............
То же, но со слоем войлока толщиной 2,5 см, вес 109 кг/м2
7,1 10,5 13,4 16,7 18,5
28 27
34 34
37 38
43
49
56
47 34,7
29,4
25,0
26,8 26,6 31,8
30,0 26,2 29,2 22,8
56 48
59 65
ГЛАВА XIII
ИЗМЕРЕНИЕ ШУМА
13. 1. ВВЕДЕНИЕ
Развитие современной техники сопровождается своего рода симфонией лязгающего железа и грохочущих машин. Жителю города, к сожалению, знакомо ежедневное погружение в целое море невыносимых шумов. Он окружен шумными экипажами, грохочущими надземными и подземными поездами, пронзительными свистками, кричащими рупорами, оглушительной клепкой и многими другими источниками шума, достигающего иногда уровня, грозящего здоровью. Проблема шума столь значительна, что еще в октябре 1929' г. Ширлей Уинн, уполномоченный по здравоохранению города Нью-Йорка, под влиянием жалоб граждан, назначил комиссию по изучению шума и для предложений по борьбе с ним.
В настоящей книге не рассматривается физиологическое действие шума. Однако все представляют себе вред шумов и приветствуют мероприятия, ведущие к их уменьшению. Для исследования проблемы шума нужно располагать методами количественного измерения шума. В настоящей главе описываются некоторые методы измерения шума и указываются области применения этих методов.
13. 2. ЕДИНИЦА ИЗМЕРЕНИЯ
Суб’ективное ощущение шума возникает как результат раздражения уха, вызванного внешним шумовым раздражителем. С увеличением физической силы шума растет и ощущение его громкости. Возникает необходимость выбрать какую-нибудь шкалу для оценки абсолютной силы шума. Человеческое ухо способно различать звуки в диапазоне сил звука, относящихся как 10 биллионов к 1. Хорошо известно, что некоторое приращение силы слабого звука вызывает более заметное увеличение громкости, чем то же приращение силы более сильного звука.
20*
307
Таким образом оказывается, что выбор линейной шкалы сил звука не соответствует закону нарастания громкости. Однако установлено, что восприятие возрастающей громкости приблизительно определяется относительной величиной приращения силы звука. Это дает основание для использования логарифмической шкалы, получившей универсальное применение в измерении шума.
Основная единица этой шкалы — бел, определяющийся следующим выражением.
бел=1о§10-^- (13. 1)
где 1г—измеренная сила звука {микроватт/см2);
/0—эталонный уровень силы звука (в тех же единицах).
В качестве практической единицы применяется обычно децибел = 1/10 бела, так как бел слишком большая для практических измерений единица.
дй=101оёю4- <13- 2)
'0
Обычно вместо силы звука измеряется звуковое давление или скорость частиц, тогда (для плоской волны) I
66=20 log10 -g-=20 log10 (13. 3)
где рг—• измеренное звуковое давление
Ро— эталонное давление
Ui— скорость частиц измеряемого звука
и0—скорость частиц эталонного звука.
Удобство пользования децибелом заключается и в том, что" один децибел является тем минимальным изменением громкости, которое может воспринять человеческое ухо. В таблице 3 приведены логарифмические единицы и соответствующие им отношения сил звука.
ТАБЛИЦА 3
Белы Децибелы Отношение звуковых давлений или скоростей частиц Отношение сил звука
0 0 in. 1
1 10 10°>5 10
2 20 10 ю2
3 30 ю.;® 103
4 40 10\ 10*
5 50 ю2.5 10®
6 60 1°з 10?
7 70 10/5 10R
8 80 10* ю8
9 90 10*® 10®
10 100 10® ю10
308
13. 3. ЧАСТОТНАЯ ХАРАКТЕРИСТИКА ЧУВСТВИТЕЛЬНОСТИ ЧЕЛОВЕЧЕСКОГО УХА
Благодаря неравномерной чувствительности уха в диапазоне звуковых частот, два тона одинаковой силы, но различной частоты вызывают неодинаковое ощущение громкости.
Кроме того, если силу тонов различной высоты, но равной громкости увеличить на одинаковое количество децибел, то громкость тонов возрастет различно. Количественные измерения, позволившие определить кривые равной громкости для разных индивидуумов, были первоначально проделаны Кингсбери *.
Позднее Флетчер и Мансон2 повторили измерения в лучших условиях. Полученные ими результаты представлены на рис. 13.1. Из кривых рис. 13.1 видно, что ухо обладает максимальной чувствительностью
при частоте около 3000 гц. Данное увеличение уровня силы звука вызывает при всех частотах выше 1 000 гц приблизительно одинаковое увеличение громкости, тогда как при высоких и особенно низких частотах то же измене
Рис 13. 1. Кривые равной громкости для нормального уха (по Флетчеру и Мансону) О дб= =10 вт/см2—соответствует звуковому давле-
нию =0,000204 бар.
ние уровня силы звука вызывает значительно большее изменение громкости. Например,
при частоте 1 000 гц увеличение уровня силы звука на 80 дб вызывает изменение уров-
ня громкости от нуля
(порога слышимости) до 80 дб, в то время как при частоте 100 рц
равное увеличение громкости получается при изменении уровня силы звука только на 45 дб.
Эти особенности человеческого уха надо иметь в виду тгри измерениях шумов, если измеряются физические величины.
1 Kingsbury, В. A. Phys. Rev., 29, 588, 1927.
2 Fletcher and Munson. J. Acous. Soc. of Amer., Oct. 1933, p. 82.
3 В качестве стандартного порога слышимости при частоте 1000 гц, соответствующего нулю шкалы громкости, в Америке, Англии и СССР в настоящее время принята сила звука 10~1« вт[см2, которй соответствует звуковое давление 2.10—4 бара.
В Германии пользуются стандартным порогом слышимости, выражающимся силон звука 2,4 10 —16 вт/см или звуковым давлением Vю. io—* бара-(Прим. ред.).
309
13. 4. КАМЕРТОННЫЙ МЕТОД ИЗМЕРЕНИЯ ШУМА
Пожалуй, наиболее простым методом количественного измерения шума является камертонный метод. Этот метод состоит в том, что измеряемый шум маскирует затухающий звук колеблющегося камертона \ Если ударить по камертону, а затем предоставить ему свободно колебаться, то сила возбуждаемого камертоном звука может быть выражена следующим равенством
<13 4> где:
It — сила звука в момент t
/0~ начальная сила звука в момент удара
а — постоянная зависящая от физических и механических свойств камертона.
Пользуясь логарифмическим законом затухания колебаний камертона, можно выражение (13.4) представить :в другой форме, а именно
/Л=4>-д* (13- 5)
где:
Idt— сила звука в момент t в децибелах
1ай— начальная сила звука в момент удара, также в децибелах Д-—декремент затухания камертона в децибелах в секунду t— время, протекшее с момента удара.
Возбужденный ударом камертон, помещенный около уха в тихой комнате, звучит достаточно продолжительное время. Повторяя тот же опыт в ноле действия шума, мы будем наблюдать укорочение времени звучания камертона, вследствие маскирующего эффекта шума. Чем больше шум, тем короче время звучания. Количественно эта зависимость выражается следующим образом .
NL=Idt — М~\-М (13. 6)
где:
NL — уровень шума в децибелах
Idt, Д, t—определены в уравнении (13. 5).
М—'разность уровня шума и уровня силы звука камертона, которая необходима для того, чтобы последний был замаскирован шумом (в децибелах).
Таким образом, очевидно, что, если I dt, Д и М известны, то уровень шума может быть определен простым измерением времени, .протекшего с момента удара камертона до момента, в который звук камертона совершенно маскируется шумом. Для получения точных результатов требуется, чтобы начальная сила звука в момент удара была постоянной. Простое и надежное механическое устройство, обеспечивающее постоянство силы удара, показано на рис. 13.2. Молоточек с фильцовым наконечником укреплен на рычажке, поворачивающемся вокруг оси, про
1 Davis, А. Н. Nature, Vol. 125, р. 48, (Jan. 11, 1930).
310
ходящей через него близко от его середины. Рычажок закрепляется в положении, изображенном на рис. 13.2 с помощью небольшой щеколды, устройство которой видно на фотографии.
Если, поставив камертон в вертикальное положение, оттянуть щеколду вниз, то, под действием на рычажок пружины, молоточек резко ударит по вилке камертона. В момент удара молоточка по вилке, рычажок нажимает .резиновый цилиндрик, также видный на рисунке. Назначение этой детали — отбрасывать молоточек от вилки после удара по ней, и таким образом избегнуть излишнего затухания, которое вносило бы в систему близость молоточка к колеблющейся вилке. Измерения показали, что при применении такой системы величина колебаний начальной силы звука не превышает одного децибела.
Следующая задача, возникающая при применения камертонного метода, — это обеспечение постоянного расстояния камертона от уха. Однако это условие достигается только тренировкой экспериментатора. У нетренированного экспериментатора получаются большие расхождения между результатами отдельных измерений благодаря тому, что расстояние камертона от уха не поддерживается постоянным. Чтобы избежать устало-
Рис. 13. 2. Камертон с автоматическим ударным приспособлением.
сти, желательно медленно двигать камертон параллельно плоскости уха, это дает впечатление медленных изменений силы звука. Полная маскировка может быть констатирована,
когда даже максимальная величина изменяющейся силы звука становится неслышной.
Декремент затухания камертона может быть без особого труда найден экспериментально. Для этого достаточно лишь держать возбужденный ударом камертон на известном расстоянии от микрофона, соединенного с усилителем, с включенным на выходе аттенюатором и индикатором, отклонение которого фиксируется через известные промежутки времени после удара. Камертон следует держать в руках таким же образом, как и при измерении шума (так как от этого зависит декремент затухания). Кривая затухания камертона, имеющего собственную частоту 512 гц изображена на рис. 13.3. Угол наклона кривой представляет собой декремент затухания ( Л), который в рассматриваемом частном случае равен 0,55 дб в секунду. Величину (7И) уравнения (13,6) определить, пожалуй, труднее всего. Трудность определения /И заключается в том, что при изменении уровня шума, частоты его компонент и частоты камертона, величина (М) изменяется. Строго говоря, для каждого измеряемого шума сле
311
довало бы определять и Л1. Найдено, однако, что для стандартного камертона с частотой 512 гц и обычных уличных шумов, значение /И колеблется в пределах 10—20 дб. Если в шуме преобладают компоненты с частотами ниже 500 гц, то величина 7W оказывается значительно большей.
Наилучший метод градуировки камертона заключается в том, что экспериментатор, тренирующийся по измерениям шума, устанавливает опытным путем длительность звучания камертона при наличии шумов известной громкости. Шумы могут быть воспроизведены электрическим путем или же могут быть использованы естественные шумы. При этом громкость шумов измеряется с помощью какого-либо электрического шумомера, например опи
Рис. 13. 3. Кривая затухания камертона рис. 13.2, имеющего собственную частоту 512 гц.
Рис. 13. 4. Зависимость между временем звучания камертона и уровнем шума.
санного в разделе 13.6. На рис. 13.4 представлена типичная кривая градуировки камертона. Располагая такой кривой, достаточно сообщить удар камертону, одновременно пустив секундомер и застопорив его в момент маскировки звука шумом. Определив отсчет секундомера, можно с .помощью кривой градуировки камертона найти уровень измеряемого шума. Несмотря на простоту метода, получаемые с его помощью результаты отличаются достаточной точностью. При известной тщательности измерений и их многократности, результаты совпадают с данными, получаемыми более точными методами.
К числу недостатков камертонного метода следует отнести то, что самый характер измерений является суб’ективным и потому не гарантирует от ошибок. Далее, для того, чтобы произвести отсчет, требуется достаточно большой промежуток времени, поэтому с помощью этого метода невозможно измерить звуки крат
312
кой продолжительности или следовать за быстрыми колебаниями уровня силы неравномерного шума. Кроме того шумы, сила которых выше определенного предела, не могут быть измерены, так как они маскируют даже (начальную силу звука камертона. Наконец, если шум по своему характеру значительно отличается от типа шумов, примененных при градуировке камертона, то измерения неизбежно получаются ошибочными, благодаря изменению величины 'при переходе от градуировки к измерению.
13. 5. АУДИОМЕТРИЧЕСКИЙ МЕТОД ИЗМЕРЕНИЯ ШУМА
Аудиометрический метод измерения шума более совершенен, чем камертонный метод1. Аудиометр содержит электрический зуммер, который возбуждает э. д. с. со сложной формой кривой; составляющие этой э. д. с. распределены по всему частотному диапа-
зону звуковых частот. Через градуированный аттенюатор напряжение подводится к телефону. Конструкция телефона
Аттенюатор
Тслефол
Рис. 13. 5. Схема зуммерного аудиометра.
такова, что между ним и ухом остается воздуш-
ный промежуток, через
который в ухо проникает и окружающий шум. Схематически аудиометр изображен на рис. 13.5. Для того, чтобы измерить шум
посредством аудиометра, нужно изменять установку аттенюатора до тех пор, пока звук зуммера не будет замаскирован измеряемым шумом. Сумма отсчета аттенюатора и постоянной маскировки М представляет действительный уровень измеряемого шума. Аудио-
метрическому методу измерения шумов присущи те же недостатки, что и камертонному методу. При том и другом методе ошибки проистекают из суб’ективного характера измерений; кроме того, причина неточностей лежит в том, что постоянные маскировки для различных шумов различны. Преимущество аудиоме-
трического метода перед камертонным заключается в сравнительной простоте первого, так как для измерения требуется лишь такая установка аттенюатора, при которой звук зуммера становится неслышным. Это обстоятельство дает возможность производить измерения шумов более краткой продолжительности, чем это возможно при камертонном методе. Кроме того звук зуммера более 'Соответствует по свому характеру измеряемым шумам, нежели чистый тон камертона. Поэтому для зуммера постоянная маскировки мало меняется, благодаря чему точность измерений повышается. Наконец, аудиометр позволяет измерять шум более высокого уровня, чем это возможно при применении камертон
ного метода.
1 Fletcher. Speech and Hearing. D. Van. Nostrand Co., p. 103.
313
Модифицированная система зуммерного аудиометра разработана фирмой Western Electric C-ny. В этой системе звук, возбуждаемый в телефоне, имеет спектр частот, состоящий из отдельных полос, так что для каждой из этих полос можно найти маскирующий эффект измеряемого шума. В результате серии таких измерений можно в первом приближении определить частотный спектр измеряемого шума.
13. 6. ЭЛЕКТРИЧЕСКИЕ ШУМОМЕРЫ
Известно, что во всех случаях, когда требуются количественные измерения, элемент суб’ективности должен быть по возможности исключен. Лишь измерения, 'поставленные на об’ективную физическую базу, могут обеспечить любую необходимую точность.
Проще всего было бы измерять уровень шума посредством микрофона с усилителем и индикатором на выходе. Этот метод измерения был бы вполне об’ективным. Однако измеренный таким методом абсолютный уровень шума не давал бы еще понятия об уровне громкости этого шума. Из рис. 13.1 можно усмотреть, что для получения равной громкости при разных частотах требуется различная сила звука. Для получения электрического аналога системы человеческого уха микрофонно-усилительному устройству надо придать соответствующие частотные характеристики \ Прежде всего чувствительность устройства на низких и высоких частотах должна быть меньше, чем на средних частотах. При низких уровнях шума эти отклонения в'частот-ной характеристике должны быть большими, чем при средних и высоких уровнях. Таким образом совершенным электрическим шумомером являлся бы такой, частотная характеристика чувствительности которого изменялась бы автоматически в соответствии с уровнем воспринимаемого микрофоном шума. Построение такого прибора, однако, затруднительно и едва ли могло бы оправдать его сложность и высокую стоимость, так, как средняя частотная характеристика уха, в соответствии с которой этот прибор должен был бы быть откорректирован, значительно отличается от характеристики уха отдельных индивидуумов.
В измерителе шумов, разработанном RCA Victor С-ny, усилитель имеет частотную коррекцию, которую можно установить соответственно характеристике уха для уровня либо в 40 дб, либо в 70 дб. Частотные характеристики, соответствующие этим двум уровням, приведены на рис. 13.6. На этом же рисунке нанесены характеристики, соответствующие уровням в 20 дб, 50 дби90дб. Для уровней ниже 50 дб коррекция устанавливается на харак
1 Речь идет здесь, конечно, ве о пошей аналогии, а о частичной аналогии касающейся лишь одной из многочисленных особенностей нашего слухового аппарата. (Прим, ред.)
314
теристику 40 дб, а для уровней выше 50 дб — на характеристику 70 дб.
Очевидно, что так как все уровни шумов приходится измерять при одной из двух указанных характеристик, то имеются уровни, для которых коррекция должна была бы проходить,
строго говоря, по линии не совпадающей с кривыми для 40 и 50 дб. В этом случае коррекция для низких частот не будет абсолютно точной. Однако влиянием этой неточности вполне можно пренебречь, во-первых, потому, что расхождения между отдельными индивидуумами могут быть больше, чем эта неточность, а, во-вторых, потому что у большинства обычных шумов большая часть частотных со
Рис. 13. 6. Частотная характеристика шумомера при установке на уровни громкости в 70 и 40 дб. Пунктирными кривыми показаны характеристики, требующиеся для уровней 90, 50 и 20 дб.
ставляющих лежит в среднем диапазоне частот, где расхождения между характеристиками при различных уровнях значительно уменьшаются.
Схема электрического шумомера представлена на рис. 13.7. Микрофон преобразует шумы в электрические колебания. После
Момерительп неадратитй ч-каскадный Переключатель потенциометр/Дп
прибор Детектор усилитель еопб-70об рсталовко нуле
Рис. 13. 7. Схема электрического шумомера.
микрофона с двухкаскадным усилителем на трансформаторах включен избирательный полосный фильтр, предназначенный для изучения частотного спектра шумов. После фильтра включен аттенюатор, шкала которого проградуирована непосредственно в децибелах, а после аттенюатора — однокаскадный усилитель с трансформаторной связью. Далее включен неградуированный потенциометр, используемый для установки нуля шумомера, как
315
это будет описано ниже, после которого включен однокаскадный усилитель и, наконец, детектор с микроамперметром, имеющим шкалу, проградуированную в децибелах.
Фотография, изображающая шумомер в готовом для работы виде, приведена на рис. 13.8. На треножнике смонтирована открытая рама, к которой подвешен микрофон в соединении с двухкаскадным усилителем. Весь комплект подвешен на двух-
Рис. 13. 8. Шумомер, готовый для работы.
спиральных пружинах, препятствующих передаче микрофону сотрясений, причем внутрь пружин для демпфирования слабо набита вата. На фотографии микрофон закрыт ветрозащитным экраном, представляющим собой «птичью клетку», обтянутую двумя слоями шелка. Этот экран применяется только при измерениях на открытом воздухе, где ветер может повлиять на отсчеты индикатора в цепи микрофонного усилителя.
Выход микрофона подается на измерительное устройство (на фотографии рис. 13.8 расположено на столе). Это устройство состоит из градуированного аттенюатора, регулятора для установки нуля, выходного измерительного прибора и т. д. )В ящике, стоящем на переднем плане, помещаются батареи, питающие измерительное устройство, а также имеются отделения для переноски треножника, кабелей, микрофона и эталонного источника звука, который на рис. 13.8 лежит на ящике.
Фотография того же устройства в крупном плане представлена на рис. 13.9. Эталонный источник звука изображен на том месте.
316
где он должен находиться при отсчете абсолютных уровней шума.
- В ©талонном источнике звука применен свисток. Давление воздуха, прогоняемого через свисток, поддерживается постоянным, так чго сила возбуждаемого звука также остается постоянной. Постоянство давления обеспечивается с помощью утяжеленного поршня, который подымается вверх со дна цилиндра, а затем самостоятельно падает под влиянием силы тяжести. Сила трения поршня о стенки цилиндра незначительна по сравнению с весом поршня. Поэтому сопротивление, встречаемое порш-’ нем при падении, обусловленное только размерами свистка, остается постоянным.
Рис. 13. 10. Разрез эталонного источника звука.
Рис. 13. 9. Шумомер с эталонным источником звука, установленным на своем рабочем месте.
Разрез эталонного источника звука изображен на рис. 13.10. В положении, изображенном на рис. 13.9, этот источник создает у микрофона уровень шума, равный приблизительно 90 дб (абсолютная градуировка вкратце описана ниже). С помощью такого эталонного источника звука можно легко отрегулировать нулевую установку измерительного прибора так, чтобы последний давал отсчеты непосредственно в абсолютных единицах шумового уровня.
В шумомере применена трансформаторная связь, причем характеристика трансформатора подобрана с таким расчетом, чтобы получить частотную характеристику всего усилительного
317
устройства в целом, приведенную на рис. 13.6 для уровня 70 дб. В случае необходимости можно осуществить кривую для 40 дб. Коррекция сводится просто к шунтированию вторичной обмотки одного из трансформаторов соответствующей индуктивностью; этим достигается необходимое уменьшение чувствительности усилителя на низких частотах.
Чтобы производить измерения не только уровня шума, но и направления, по которому он поступает, в описываемом шумомере применен ленточный микрофон скорости с постоянным магнитом. Выбор типа микрофона для этого шумомера определяется областью его применения. Если нас интересует только общий уровень шума в некоторой точке, то более целесообразно применять микрофон давления. В главе V уже было показано, что конденсаторный микрофон обычного типа вызывает частотные искажения звукового поля при частотах около 3 000 г;ц, приводящие к преувеличенным измеренным звуковым давлениям по сравнению с истинными звуковыми давлениями 1 для звуков, поступающих под прямым углом к плоскости диафрагмы. Это преувеличение уменьшается для звуков, поступающих в плоскости диафрагмы, для звуков же, поступающих сзади, измеренные микрофоном звуковые давления при высоких частотах оказываются ниже истинных. Рассматривая работу микрофона в условиях, когда на него действует звук, приходящий во всех возможных направлениях (например, в помещении), приходится считаться с взаимокомпенсирующим действием звука, приходящего спереди и сзади микрофона. Первый принимается микрофоном с избыточной чувствительностью благодаря резонансу углубления перед диафрагмой, второй — с пониженной чувствительностью, благодаря экранирующему действию корпуса микрофона.
Ленточный микрофон давления свободен от частотных искажений, поэтому, если необходимо провести измерения уровня шума с большой точностью, то можно с успехом применить микрофон этого типа. Специально сконструированный конденсаторный микрофон с маленькой диафрагмой и практически без углубления перед ней также свободен от частотных искажений и может быть применен с равным успехом. Если требуется сколько-нибудь значительная степень точности измерения шума, то не следует применять угольный микрофон, так как благодаря недостаточной равномерности частотной характеристики этого микрофона, при его применении получается неравномерное восприятие отдельных составляющих частот шума.
13. 7. АБСОЛЮТНАЯ ГРАДУИРОВКА ШУМОМЕРА
Метод возбуждения эталонного звука, которым следует пользоваться при установке нуля шумомера, был уже описан выше.
1 Считая за истинные отсчеты те, которые в точности соответствуют давлению в свободном поле. (П р н м. ре д.)
318
Однако, прежде чем приступить к установке нуля, следует убедиться, в том, что сила звука у микрофона имеет эталонную величину. Необходимо принять меры для того, чтобы эталонный источник звука всегда устанавливался в одном и том же положении относительно микрофона; в противном случае сила звука будет изменяться. В описанном шумомере это условие обеспечивается с помощью фланцев, имеющихся на дне цилиндра эталонного источника, которые скользят вдоль направляющих и позволяют, таким образом, ставить генератор всегда в одно и то же положение относительно микрофона.
Абсолютная градуировка производится следующим образом. Шумомер включается и устанавливается на одну из возможных частотных характеристик. Предположим, что он установлен на коррекцию, в результате которой получается характеристика для уровня 70 дб, представленная на рис. 13.6. Если теперь к микрофону подвести звук, в спектре которого сила звука меняется с частотой в соответствии с указанной выше характеристикой, то индикатор шумомера должен давать постоянный, независящий от частоты отсчет. Если же абсолютные величины силы звука сделать равными величинами, взятым из кривой для уровня 70 дб, представленной на рис. 13.1, то индикатор шумомера должен показать 70 дб. Для подачи на микрофон такой эталонной силы звука применяется посторонний источник звука, который регулируется так, чтобы в некоторой точке свободного пространства получилась требуемая сила звука. Соответственно коррекции на 70 дб мощность источника звука, дающего звук частотой в 500 гц, регулируется до тех пор, пока давление в данной точке не сделается равным 0,655 дя/с/и2 (величина, соответствующая уровню 70 дб при 500 гц, согласно рис. 13.1). Если выбрана частота не равная 500 гц, то сила звука устанавливается соответственно этой частоте. Затем в той же точке устанавливается микрофон шумомера и потенциометр для установки нуля регулируется до тех пор, пока индикатор шумомера не покажет 70 дб. Теперь шумомер можно использовать для непосредственного отсчета абсолютного уровня шума.
Посторонний источник звука выключается, а эталонный источник звука устанавливается так, как было указано выше. После этого эталонный источник включается и сила звука у микрофона отсчитывается по показаниям индикатора шумомера. Это показание и представляет собой абсолютную градуировку шумомера. Располагая абсолютной градуировкой шумомера, можно всегда, когда понадобится, проверить установку нуля- шумомера, для этого требуется лишь включить эталонный источник звука и регулировать «нуль» до тех пор, пока отсчет индикатора шумомера не сделается равным отсчету^ полученному при абсолютной градуировке.
Описанный выше метод градуировки шумомера для непосредственного отсчета абсолютных величин уровней шума выгоден
319
в том отношении, что он позволяет исключать влияние возможных изменений чувствительности микрофона. Если бы мы применяли электрический метод градуировки шумомера, пропуская, например, известный ток через известное сопротивление на входе микрофонного усилителя, то чувствительность микрофона пришлось бы предполагать постоянной. Другим недостатком электрического метода градуировки является необходимость пользоваться дополнительным оборудованием, как-то: электрическим генератором и амперметром.
13. 8. СРАВНЕНИЕ РАЗЛИЧНЫХ МЕТОДОВ ИЗМЕРЕНИЯ ШУМА
Указанные выше недостатки методов измерения шума с помощью камертона и аудиометра несвойственны электрическому методу измерения. Элемент суб’ективности здесь! отсутствует, а измерения не отнимают много времени. С помощью шумомера можно легко исследовать проходящие кратковременные шумы и наблюдать мгновенные изменения уровня шума.
Измерения с этим прибором, поставленные на чисто физическую базу, позволяют провести количественное сравнение данных, полученных отдельными лицами при различных условиях. Изучать спектр шума путем использования полосных фильтров можно только при работе с электрическим прибором. Осуществление же этого процесса с помощью аудиометра отнимает много времени, не давая при этом надежных результатов. Возможность изучать направление распространения различных шумов, и, в частности, определять направления, по которым большая часть звуковой энергии перемещается внутри помещения, имеется только при применении с шумомером направленного микрофона.
Короче говоря, метод измерения шума при помощи электрического шумомера имеет огромные преимущества по сравнению со слуховыми методами практически во всех отношениях, за исключением вопроса стоимости. Правда, сложная конструкция шумомера обусловливает сравнительно большую его стоимость, но расходы вполне себя оправдывают, если требуется систематически проводить точные измерения шума *.
1 В свете современных исследований свойств человеческого уха (работы Флетчера) электрический шумомер теперь уже не представляется таким точным прибором как раньше. Законы «сложения» громкостей отдельных компонент при сложном спектре шума, у человеческого уха п электрического прибора (даже обладающего частотной характеристикой уха) имеют мало общего. Подсчеты показывают, что обусловленные этим ошибки при определении абсолютных уровней громкости шума с помощью электрического шумомера в некоторых случаях могут быть весьма значительными, так что суб’ективНые методы измерения шума оказываются в этих случаях точнее об’ективного метода. Несомненно, однако, что подчеркнутые авторами преимущества электрического шумомера будут заставлять в большинстве случаев отдавать ему предпочтение перед другими шумомерами, в которых использован суб’ективный метод измерения шума. (П р и м. ре д.).
320
13. 9. ПРИМЕНЕНИЕ ШУМОМЕРА
Шумомер может быть использован для многих целей, не связанных 'непосредственно с измерениями шума. Шкала индикатора, проградуированная непосредственно в децибелах, позволяет с большим удобством проводить количественные акустические исследования. При исследованиях передачи звука через различные конструкции с помощью шумомера, можно непосредственно определять звукоизоляцию в децибелах.
С помощью шумомера можно также определять эффективность мер по борьбе с шумом в учреждениях, на предприятиях, на транспорте и т. д. Для разработки мер по борьбе с шумом машины этот простой физический метод измерения шума незаменим. i
ТАБЛИ ЦА 4
УРОВЕНЬ ШУМА, СОЗДАВАЕМОГО РАЗЛИЧНЫМИ ИСТОЧНИКАМИ
Источники или описание шума Расстояние от источника в м Уровень шума в дб
Порог болезненного ощущения Удары молотом по стальной плите (почти бо- — 130
лезненное ощущение) 0,6 114
Клепальный станок 10 97
Надземная железная дорога • . . . . 4,5—6 90
Обычный грузовик 4,5—15 75
Движение на оживленной улице 4,5—25 68
Средний автомобиль 4,5—15 66
Обычный разговор 1 65
Тихая улица • • 4,5—90 58
Бесшумный автомобиль 4,5—15 50
Среднее учреждение — 47
Шумное жилое помещение — 45
Тихое радио в доме ...... — 40
Среднее жилое помещение — 32
Шопот средней громкости 1,2 20
Шелест листьев при легком ветерке ...... — 10
Порог слышимости — 0
Шумомер можно применять не только для измерения шумов. С его помощью можно также измерять уровень силы звуков музыкальных инструментов.
Учащийся на каком-либо музыкальном инструменте может контролировать силу звука с помощью шумомера, находящегося непосредственно перед ним и точно показывающего, с какой силой он играет. Певцы могут проверять силу своих голосов таким же образом. Существуют также и многие другие области применения шумомера, на которых мы здесь не будем останавли
21 Прикладная акустика.
321
ваться. Приведенные выше примеры достаточно хорошо иллюстрируют возможности применения шумомера.
В заключение настоящей главы целесообразно дать представление о шкале громкостей, иллюстрируя ее конкретными примерами.
В таблице 4 дан перечень хорошо известных шумов с указанием уровня их громкости в децибелах. Этот перечень шумов взят из обзора Нью-Йоркской комиссии по борьбе с шумами. Уровни шума, указанные в таблице 4, являются только средними величинами. Мгновенные величины могут отличаться от них на 10 ф в ту или другую сторону.
ГЛАВА XIV
ФИЗИОЛОГИЧЕСКАЯ АКУСТИКА
14. 1. ВВЕДЕНИЕ
На всем протяжении настоящей книги мы стремились привести акустические измерения к физическим измерениям абсолютных величин. ;
Поступая таким образом, мы исключали влияние на результаты измерений характеристик человеческого уха и 'связанную с ним суб’ективную ошибку, которая неизбежна, если испытания проводятся на основе качественного суб’ективного суждения. Физические измерения различных элементов акустических устройств позволяют получить об’ективные количественные характеристики. Однако, для того, чтобы получить некоторое представление о физиологическом восприятии тех или иных физических характеристик человеческим ухом, необходимо знать характеристики последнего. Так, например, сравнение частотных характеристик двух микрофонов дает нам количественную физическую картину работы обеих этих устройств, но для того, чтобы дать относительную оценку качества этих микрофонов, мы должны интерпретировать результаты измерений, учитывая особенности слухового восприятия. В настоящей главе сообщается ряд сведений об акустических характеристиках и чувствительности нормального уха; с помощью этих сведений читатель сможет дать оценку относительного качества акустических устройств, если их физические характеристики известны. Составить правильное представление о характеристиках уха почти невозможно, не проведя испытаний с большим числом лиц, вследствие сильных расхождений данных для отдельных индивидуумов и одного и того же лица в разное время. В некоторых специфических случаях оказывается возможным или даже необходимым использовать небольшую группу специалистов-экспертов, которые в состоянии дать критическую оценку относительных качеств какого-либо-акустического устройства, работающего при различных заданных
21*
323
условиях. В следующих разделах дается анализ уха, как акустического аппарата и приводятся его характеристики. Вследствие недостатка места мы не будем вдаваться в подробные описания различных деталей. Мы приведем только основные сведения, отсылая читателей, заинтересованных в более глубоком изучении вопроса, к соответствующим работам.®
14. 2. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ЧЕЛОВЕЧЕСКОГО УХА
Хорошо известно, что, если имеется звук определенной частоты, сила которого постепенно уменьшается, то наступает момент, когда звук делается неслышным. Измеряя при различных частотах и при минимальной воспринимаемой силе звука величину звукового давления в ухе, мы получаем кривую, представляющую зависимость порога слышимости от частоты. Аналогично этому порог болезненного восприятия представляет собой звуковое давление в ухе, при котором ощущение звука, как такового, прекращается и наступает ощущение боли.
В 1870 г. Теплер и Больцман 1 впервые определили чувствительность уха; затем их примеру последовали другие исследователи, проведшие аналогичные исследования. Подробный исторический обзор по (ЭтРму вопросу дан Флетчером 2, сообщающим также результаты тщательных исследований, проведенных в телефонных лабораториях Белла.
Рис. 14.13 показывает верхний и нижний пределы слышимости для среднего нормального уха. Эти данные являются только средними величина
Рис. 14. 1. Пределы слышимости нормального уха.
А—порог болезненного ощущения (по Впджелу).
В—порог слышимости (по Флетчеру и Мансону).
ми; как и следует ожидать, для каждого отдельного уха имеют место значительные отклонения от этих усредненных ,кривых. Из рис. 14.1 можно видеть, что чувствительность уха при изменении частоты сильно меняется. Система кривых, представляющих частотные характеристики уха при уровнях громкости, лежащих между предельными уровнями рис. 14.1, приведена на рис. 13.1; эти кривые показывают, что относительная характеристика
1 Т о е р 1 е г and Boltz шапп. Ann. der Physik, Vol. 141, p. 321, 1870.
2 Fletcher, H. Jour. Franklin Institute, September, 1923.
3 Верхняя кривая приводится в работе Виджела. Bell System Techn. Journ. Vol. 1, p. 56, 1922. Нижняя кривая приводится в работе Флетчера и Мансона. J. A. S. A. Oct., 933, р. 82.
324
чувствительности уха изменяется с изменением уровня силы звука. Таким , образом, очевидно, что воспроизведение музыки с иным уровнем силы звука, чем тот, с которым она исполнялась в оригинале, вызывает изменение качества. Уменьшение уровня силы звука приводит к относительному западанию низких и высоких частот, как это можно усмотреть из частотных характеристик уха '{рис. 13.1). !
В разделе 12.21 было указано на желательность применения регулятора громкости с часготной>коррекцией для компенсации частотных искажений в ухе, вызываемых общим изменением уровня силы звука.
Кривые изменения кажущейся громкости в зависимости от уровня ощущения (уровнем ощущения называется уровень над значениями кривой порога слышимости рис. 14.1) для различных частот приведены на рис. 14.2. Кривые построены по рис. 13.1. Они показы
Рис; 14. 2. Зависимость между уровнем ощущения (в децибелах над порогом) и кажущейся громкостью при различных частотах. Величины вычислены
звука, различаемое человеческим ухом. Цифры над кривыми указывают уровень ощущения тона в децибелах над порогом. (Из книги Флетчера „Речь и слух“).
вают, что при равном увеличении уровня силы звука громкость низких тонов возрастает быстрее, чем громкость высоких тонов.
14. 3. МИНИМАЛЬНЫЕ РАЗЛИЧИМЫЕ ИЗМЕНЕНИЯ СИЛЫ И ЧАСТОТЫ ЗВУКА
Минимальные различимые изменения силы звука при различных частотах и уровнях ощущения были впервые точно определены Кнудсеном \ который провел исследования в диапазоне частот от 100 до 4000 гц. В лабораториях Белла1 2, метод исследований был изменен и диапазон частот был расширен до 35—10 000 гц. На рис. 14.3 представлено минимальное различимое ухом изменение силы звука, как функция частоты
1 Knudsen, V. О. Phys. Rev., Vol. XXI, No. 1, January, 1923.
2 Fletcher, H. Speech and Hearing, D. Van Nostrand, p. 145.
325
и уровня ощущения. (Можно видеть, что при уровнях ощущения выше 50 дб ухо обладает наибольшей чувствительностью к изменениям силы звука, в особенности в среднем диапазоне частот.
При этих условиях ухо различает изменение силы звука на 5—10%. При более низких уровнях и особенно при крайних частотах слышимого диапазона ухо различает только значительно большее процентное изменение силы звука (см. рис. 14.3).
Человеческое ухо значительно более чувствительно к изменениям частоты, чем к изменениям силы звука. Исчерпывающая
работа по определению минимального различимого Изменения частоты при различных уровнях ощущения и при различных частотах были проведены Шауэром и Биддалфом Ч Сводка полученных ими данных приведена на рис. 14.4. Из этого рисунка видно, что чем выше уровень ощущения тона, t-ем меньшее процентное изменение частоты может быть обнаружено ухом. Кроме того, очевидно, что чувствительность уха к из-
Рис. 14. 4. Минимальное изменение частоты, различаемое человеческим ухом. Цифры над кривыми указывают уровень ощущения юна в децибелах няд порогом (по Шоуэру и Биддалфу).
менениям частоты понижается с уменьшением частоты тона. В диапазоне от 500 до 10 000 гд и при уровнях ощущения выше 40 дб человеческое ухо различает изменения частоты меньшие У2®/о;
Выше предполагалось, что сравнимые частоты включаются на период времени, достаточный для того, чтобы их можно было распознать. Если звук действует на ухо в течение очень короткого периода времени, то способность распознавать его частоту уменьшается с уменьшением длительности звука.
Стюарт1 2 назвал это явление принципом неопределенности в акустике и выразил его математически формулой
Д/. А/—1 где:
f— исходная частота звука
М—длительность звука
Д/— минимальное различимое ухом частоты звука, совершающееся времени ДА
(И. 1)
абсолютное изменение в течение промежутка
1 Shower and Blddulph. J. Acous. Soc. of Amer., October, 1931.
2 Stewart, G. W. J. Acous. Soc. of Amer., January, 1931.
326
Из выражения (14.1) следует, что при низких частотах частота может быстро изменяться в пределах большой части октавы, причем это изменение не обнаруживается ухом. Этот факт нашел свое подтверждение в том, что vibrato, соответствующее изменению частоты 60 гц на два полутона семь раз в секунду, ухом не замечается.
14. 4. ЭФФЕКТ МАСКИРОВКИ СЛЫШИМОСТЬ ОДНОГО ТОНА ПРИ ОДНОВРЕМЕННОМ ЗВУЧАНИИ ДРУГОГО ТОНА
Известно, что человек, говорящий в шумной обстановке, должен повышать силу своего голоса для того, чтобы его можно было услышать. Уменьшение способности уха различать звук при одновременном воздействии на него других звуков известно под названием ‘эффекта маскировки. Виджел и Лэйн1 исследо
Рис. 14. 5. Маскирующее действие чистых тонов различной силы и частоты (по Флетчеру).
вали эффект маскировки одного чистого тона другим при различных частотах и уровнях силы звука. Эти исследования были проведены в лабораториях Белла.
На рис. 14.5 приведены некоторые из опубликованных Вид-желом и Лэйном данных, иллюстрирующих маскирующее дей
1 W е g е 1 and Lane. Phys. Rev., 23, 266, 1924.
327
ствие чистых тонов с частотами 200, 400, 800, 1 200, 2 400 и 3 500 гц на тоны с частотами в диапазоне от 100 до 4 000 Цифры, проставленные над каждой из кривых шести графиков, показывают уровни силы звука маскирующего тона в децибелах над порогом (частота маскирующего тона указана над каждым графиком).
По оси ординат каждого графика отложено «изменение порога», т. е. число децибел над порогом, на которое должна возрасти сила звука при различных частотах (отложенных по оси абсцисс) для того, чтобы их можно было услышать в присутствии маскирующего тона данной частоты и силы.
Для примера рассмотрим нижний левый график рис. 14.5, для которого маскирующий тон имеет частоту 2 400 гц. Если на ухо действует чистый тон с частотой 1 200 гц и одновременно другой чистый тон с частотой в 2 400 гц и силой звука 100 дб над порогом (верхняя кривая), то для того, чтобы тон с частотой 1.200 гц стал слышным, его силу звука нужно повысить только на 12 дб. Если же частота маскируемого тона 2 000 гц, то изменение порога, как показывает та же кривая, равно 65 Дб.
При высоком уровне силы звука маскирующего тона, для тонов с частотой большей, чем частота маскирующего тона, изменение порога весьма значительно и мало меняется с частотой, при низком же уровне силы звука маскирующего тона, изменение порога велико только вблизи частоты маскирующего тона и падает по частотному спектру по обе стороны от этой частоты.
Данные, приведенные на рис. 14.5, показывают, что распространенное прежде мнение будто бы низкие тоны полностью маскируют более высокие тоны значительной силы и будто высокие тоны никогда не маскируют более низких тонов, правильно только при некоторых условиях. Если низкий тон имеет небольшую силу, то он не маскирует высокого тона, отстоящего от него далеко в частотном спектре. Кроме того, высокие тоны могут легко маскировать тоны более низкой частоты, если частотный интервал между ними не слишком велик. Когда частоты обоих тонов лежат очень близко друг к другу, то, получаются биения, которыми и об’ясняется резкое падение кривых в Ьтих точках.
14. 5. НЕЛИНЕЙНОСТЬ УХА
Хорошо известно, что при воздействии на ухо двух неодинаковых частот, при некоторых условиях слышатся биения. Эти биения свидетельствуют о нелинейности уха. Если на ухо действует чистый тон, то могут образоваться гармоники; их присутствие можно обнаружить вспомогательным тоном-искателем изменяющейся частоты, который дает биения с составляющими гармониками каждый раз, когда его частота приближается к частоте одной из гармоник. Виджел и Лэйн1 провели эксперимен
1 Loc. cit.
328
тальное исследование суб’ективных тонов, возникающих в ухе, в зависимости от частоты и силы действующих на него тонов. Приближенное количественное определение уровня ощущения, при
котором возникали различные гармоники, для различных тонов, было сделано путем измерения варьируемой силы звука тона-искателя в тот момент, когда становились слышными биения с различными гармониками. На рис. 14.6 приведены кривые уровня ощущения (децибелы над порогом), при котором появляются гармоники при возбуждении уха чистым тоном. Эти кривые показывают, что низкие тона искажаются при более низких уровнях, чем высокие гона, этим отчасти можно об’яснить тот факт, что высокие тона маскируются низкими тонами, лучше, чем низкие — высокими (см.
раздел 14.4).
Нелинейностью характеристики уха можно также об’яснить понижение разборчивости речи при увеличении громкости .воспроизведения и этих условиях.
уров-возни-
Рис. 14. 6. Зависимость от частоты ней ощущения, при которых в ухе кают различные гармоники. Порядок гармоник указан на кривых. (Из книги Флетчера „Речь и слух‘‘).
сильные искажения, наблюдаемые при
14. 6. ЛОКАЛИЗАЦИЯ ЗВУКА: БИНАУРАЛЬНЫЙ ЭФФЕКТ
Известно, что человек, слушающий двумя ушами, может отличать звуки, поступающие справа, от звуков, поступающих слева, и что при закрытии одного уха способность определять местоположение источника звука практически теряется. В течение многих лет способность двух ушей определять местоположение источника .звука об’яснялась разностью сил звука в обоих ушах. Значительно позднее было, однако, установлено \ что в определении местоположения источника звука играет главную роль разность фаз звуков в обоих ушах. Стюарт нашел, что если на каждое ухо действует два тона одной и гой же силы, фаза которых меняется, то кажущееся направление источника (в градусах от плоскости симметрии) пропорционально фазному сдвигу между тонами. Он также нашел, что отношение фазного сдвига между двумя тонами к кажущемуся угловому смещению источника звука возрастает линейно с повышением частоты. Это говорит о том1 2, что кажущееся положение источника звука
1 Stewart, G. W. Phys. Rev., May, 1920.
2 Так как пространственная фаза свободной звуковой волны (в радианах)
<ОХ п
определяется выражением —(П р и м. р е д.)
329
зависит только от интервала по времени между мо-ментами поступления одинаковой фазы звуковых колебаний к обоим ушам. Таким образом, если из какой-либо точки поступает звук варьирующейся частоты, то разность по времени между моментами поступления одной и той же фазы к обоим ушам остается одной и той же для всех частот, и кажущееся положение источника звука также остается одинаковым для всех частот, что находится «в согласии с действительностью. Описанный выше бинауральный фазный эффект был обнаружен только при относительно низких частотах. Проведенные Стюартом исследования предельной частоты, выше которой способность человека определять местоположение источника звука теряется, показывают, что для 15 наблюдателей эта частота изменяется от 1 058 гц до 1 393 гд и что средняя предельная частота равна 1 260 гц.
Для иллюстрации бинаурального фазного эффекта можно провести весьма убедительный эксперимент, при котором оба уха подвергаются воздействию двух источников >звука с несколько различными частотами. В результате этого создается впечатление, будто имеется один источник звука, который при изменении фазного угла между тонами, действующими на оба уха, перемещается вокруг головы. При этом передвижении источник не описывает полной окружности вокруг головы, а резко перескакивает с одной стороны на другую и перемещается по полуокружности.
14. 7. ВЛИЯНИЕ ЧАСТОТНЫХ ИСКАЖЕНИЙ НА КАЧЕСТВО ВОСПРОИЗВОДИМОГО ЗВУКА
Рис. 14.1 показывает, что диапазон частот, слышимых средним человеческим ухом, простирается от 20 до 20 000 гц.
Рис. 14. 7. Влияние ограничения пропускаемого частотного диапазона на разборчивость воспроизводимой речи (по Флетчеру)
(А) частоты ниже абсциссы не пропускаются. (В) частоты выше абсциссы ие пропускаются.
Полоса пропускания большинства звуковоспроизводящих устройств значительно уже указанного диапазона. В главе Х-1 был описан метод измерения артикуляции, с помощью которого можно получить данные о степени разборчивости, передаваемой при различных условиях, речи. С помощью этого метода Флетчер* 1 исследовал изменение разборчивости речи, вызываемые ис-
ключением из передавае-
1 Fletcher, Н. Franklin Institute, June, 1922.
330
мото частотного диапазона различных частот; полученные им результаты приведены на рис. 17.4. Можно видеть, что больше,- чем 90% произнесенных слогом могут быть поняты при воспроизведении полосы частот от 500 до 5 000 гц.
Несмотря на хорошую артикуляцию, которую можно получить при воспроизведении относительно узкой полосы частот, следует помнить, что качество технически воспроизводимой речи при этом значительно отличается от качества оригинальной речи. Это обстоятельство не имеет значения в телефонных системах, назначение которых заключается, главным образом, в передаче смысла речи и в которых обращается внимание только на разборчивость. При воспроизведении же музыки возникает проблема качества передачи и необходимость расширения частотного
Рис 14. 9. Влияние ограничения пропускаемого диапазона частот на качество воспроизводимой оркестровой музыки (по Сноу). (Д) частоты ниже абсциссы не пропускаются. (В) частоты выше абсциссы не пропускаются.
диапазона приобретает большое
значение.
Авторы провели опыты, при которых в систему, способную воспроизводить диапазон частот от 60 до 16 000 гц, вводились
фильтры с различной полосой пропускания и при включении и выключении различных фильтров проводились сравнения качества воспроизведения. На основании полученных данных можно с уверенностью сказать, что для действительно точного воспроизведения музыки и большинства звуков, необходима полоса частот, по крайней мере от 80 до 10 000 гц. Существуют также и особые звуки, как, например, звон монет, для точного воспроизведения которых необходим весь диапазон звуковых частот.
ВИТАВР»
ЗвЛЬШОН БАРАБм МАЛ. БАРАБАН /4" ТАРГЛКИ
КОНТРАБАС
-РОЯЛЬ
скрипка
ТУ£А
ТРОМБОН
АНГЛИЙСКИЙ РОЖОК ГРУБА
6АС -СС'КСОФОН ФАГОТ ЪдС-КЛАМН .•амркег СОПРАНО- CQKfOWi Г0Б0»
ФЛЕЙТА пикколо
МУЖСКАЯ Р£Уб
ЖЕНСКАЯ Р£УЬ ШУМ ШАГОВ АПЛОДИСМЕНТЫ ЗВОН КЛЮЧЕЙ
УеГСГКЛ^'-' -
Диапазон частот, необходимый для точного воспроизведения различных музыкальных инструментов, речи и шумов (по Сноу).
, Рис. 14.8.
331
Сноу1 провел весьма полное исследование влияния полосы частот на качество воспроизведения различных музыкальных инструментов. На рис. 14.8 показаны полосы частот, необходимые для точного воспроизведения различных музыкальных инструментов и других источников звука. Рис. 14.9 показывает влияние срезания низких и высоких частот на качество воспроизведения оркестрового исполнения.
Изложенные выше результаты специальных исследований показывают, что в настоящее время в радиотехнике мы еще далеки от высококачественного воспроизведения звука. Необходимость расширения частотного диапазона все с большей остротой ощущается всеми, и в настоящее время в этом направлении уже многое сделано. Весьма возможно, что с переходом радиовещания на короткие волны в деле улучшения качества радиовещания будет сделан большой шаг вперед ввиду представляющейся возможности расширить ширину канала передачи за пределы 10 кгц 2 3.
14. 8. ВЛИЯНИЕ АМПЛИТУДНЫХ ИСКАЖЕНИЙ НА КАЧЕСТВО ВОСПРОИЗВОДИМОЙ РЕЧИ з
Существующие количественные данные о влиянии амплитудных искажений на качество воспроизведения звука весьма скудны. Было проведено лишь краткое исследование влияния амплитудных искажений на качество воспроизведения речи4. При этом группе экспертов было предложено высказать свое мнение о качестве воспроизводимой речи, степень искажения которой была заранее установлена. При опытах использовались каналы с различным ограничением воспроизводимой полосы частот на высоких частотах.
Вводились искажения двух видов!, а именно: искажения, получающиеся при перегрузке одной лампы, приводящие в основном к- образованию второй гармоники, и искажения при перегрузке двухтактного усилителя, результатом которых является, в основном, образование третьей гармоники.
«Искажающая» система была отградуирована с помощью чистых тонов.
I Snow, W. В. J. Acous. Soc. Amer., July, 1931.
8 Подобные же возможности открываются в настоящее время перед проволочным вещанием, получившим у нас (а также в Англии, Голландии, Швейцарии) чрезвычайно широкое распространение. В лучших из существующих систем проволочного вещания (Англия) передаваемый частный диапазон пока ограничен 6000 гц, однако расширение его до 10000 гц не встречает трудностей принципиального порядка и практически вполне осуществимо ,(П р'И м. р ® д.)
3 Massa, Frank, Proc. I. R. E.. May. 1933.
4 Недавно было проведено весьма полное исследование различимости нелинейных искажений (Akustische Zeitschrift) № 3, 1937). Основные результаты этого исследования приведены ниже. (П р и м. р е д.).
332
Применявшийся при исследовании амплитудных искажений речи пиковый вольтметр (импульсмессер) указывал пиковое значение напряжения, подведенного к системе; процент возбуждаемых .гармоник определялся по градуировке аппаратуры, причем речь заменялась чистым тоном равной пиковой мощности. Рис. 14.10 и 14.11 иллюстрируют влияние образования второй и третьей гармоник на качество воспроизводимой речи при различной ширине пропускаемого частотного диапазона. Ниже дается шкала оценки качества воспроизведения, использованная в качестве ординат для построения кривых.
Рис. 14. 10. Влияние нелинейных искажений иа качество воспроизведения речи. (Перегрузка одной лампы, преобладает 2 я гармоника) А, С, D—дикторы мужчины, В, Е— дикторы женщины.
Процент гармонии
Рис. 14. 11. Влияние нелинейных искажений на качество воспроизведения речи. (Перегрузка пушпульного каскада, преобладает 3-я гармоника). A, D, С — дикторы мужчины, В, Е—дикторы женщины.
Едва заметное искажение, которое только начинает вызывать заметное изменение качества (при сравнении искаженной передачи с неискаженной).
Заметное искажение, которое вызывает заметное изменение качества воспроизведения (без сравнения с неискаженной передачей).
Очевидное искажение, которое можно с очевидностью отметить в передаче (искажение начинает становиться недопустимым).
Совершенно недопустимое искажение, которое вопринимается как таковое средним слушателем.
333
Из вышеприведенных данных следует, что различимость искажений тем больше, чем шире передаваемая полоса частот воспроизводящей системы, и что искажение при некотором проценте второй гармоники менее неприятно, чем! искажение при том же проценте третьей гармоники *.
1 Вкратце результаты исследования различимости нелинейных искажений, на которое мы ссылались выше, сводятся к следующему. Человеческое ухо особенно чувствительно к нелинейным (амплитудным) искажениям чистых тонов и двойных тонов. При благоприятных условиях гармоника, составляющая по амплитуде меньше 1°/<> от основной частоты, может быть замечена ухом. При низких частотах нелинейные искажения менее заметны, чем при высоких частотах. При искажении двойных тонов особенно заметны возникающие разностные тоны, плохо маскируемые основными тонами. При речевой и музыкальной передаче условия для обнаружения нелинейных искажений менее благоприятны. Различимость искажений в этом случае зависит как от спектра возникающих гармоник (на что указывают и Олсон и Масса), так и от формы частотной зависимости клирфактора. Если клирфактор при всех частотах имеет одну и ту же величину, то искажения наиболее заметны, если же искажения возникают ® пределах только некоторой части частотного диапазона, то они менее заметны. Наименее заметными получаются искажения в том случае, когда они имеют максимальную величину на низких частотах, а с увеличением частоты уменьшаются (случай, весьма часто встречающийся в практике и в частности соответствующий искажениям, вызываемым большинством электроакустических аппаратов). Если максимальный клирфактор аппаратуры имеет место при средних частотах, то искажения наиболее заметны. Это об’ясняется аналогичным распределением по частотам звуковой энергии музыки и речи.
На основании средних оценок, выведенных из оценок многих экспертов, можно считать установленным, что при передаче музыки и речи нелинейные искажения практически незаметны, если клирфактор аппаратуры на средних частотах не превышает 4%. На низких частотах допустим значительно больший клирфактор — до 2О°/о. При особо тщательном сравнении искаженной н неискаженной передачи искажения могут быть замечены, если клирфактор превышает 2°/о на средних частотах и 15°/о на частотах ниже 100 гц. (Прим, ред.).
ГЛАВА XV
РАЗЛИЧНЫЕ ОБЛАСТИ ПРИМЕНЕНИЯ АКУСТИКИ
15. 1. ВВЕДЕНИЕ
Широкое применение граммзаписи, радиовещания и звукового кино послужило в течение последнего десятилетия мощным стимулом для развитиия техники воспроизведения звука. В связи с этим большая часть настоящей книги посвящена теории действия, конструкции, работе и испытанию электроакустических преобразователей, применяемых в устройствах для воспроизведения звука, а также поведению среды, окружающей первичный источник звукам слушателя. В дополнение к описанным разделам прикладной акустики значительная работа была также проведена в области звуковой сигнализации, определения расстояний, ультразвуковых частот и электро-акустических музыкальных инструментов. Исследования в области воспроизведения звука естественно способствовали прямо или косвенно развитию всех этих смежных областей. В настоящей главе дается краткий обзор различных сфер применения акустики *.
15. 2. ЗВУКОВАЯ СИГНАЛИЗАЦИЯ И ОПРЕДЕЛЕНИЕ РАССТОЯНИЙ 1 2
Принципы акустики уже давно используются для звуковой сигнализации. В результате последних исследований, проведенных в различных областях техники воспроизведения и приема звука, интерес к использованию этих принципов в звуковой сиг
1 Полный анализ вопросов, рассматриваемых в настоящей главе, мог бы сам по себе составить отдельную книгу. В пределах этой небольшой главы мы сделали попытку осветить основные моменты, связанные с предшествующим материалом.
2 Подробный анализ вопроса о подводной сигнализации и определении расстояния дан в работе Стюарта и Линдсэя „Acoustics D. Van Nostrand“. См. также Хаббард J. A. S. A. Vol. IV, № 2, р. 138, и Лэмзон. J. A. S. A. Vol. I, № 3, р. 403.
335
нализации и при определении расстояний сильно возрос. Простейшими средами для передачи звука являются, конечно, воздух, вода и земля. Автомобильные сигналы, паровые свистки, сирены и рожки, применяемые во время тумана, — вот наиболее распространенные источники звука, используемые для сигнализации в воздухе. Помехи со стороны ветра, тумана, дождя и т. д. не дают возможности осуществить надежную звуковую сигнализацию по воздуху, за исключением разве только случая малых расстояний. Поэтому при навигации пользуются морской 1во-дой, которая благодаря своей однородности и большой .проводимости является более подходящей средой для передачи звуковых сигналов, чем воздух. Изменения скорости распространения звука в различных слоях земли используются при некоторых геофизических исследованиях и в частности при разведках нефти. В настоящем разделе мы кратко остановимся на принципах, положенных в основу звуковой сигнализации и определения расстояний.
Звук от источника, находящегося непосредственно перед слушателем или сзади его, производит на слушателя иное впечатление, чем звук, поступающий сбоку. Это об’ясняется, во-первых, тем, что в последнем случае звук приходит к обоим ушам с разными фазами, а, во-вторых, тем, что и сила звука у обоих ушей, благодаря 'дифракции звука около головы, получается неодинаковой. Иными словами, наша оценка положения источника звука зависит частично от разности фаз, а частично от соотношения громкостей звуков, достигающих обоих ушей. Точность определения направления источника звука повышается при увеличении расстояния между ушами.
Этот бинауральный эффект положен в основу различных акустических приборов, применяемых для обнаружения невидимых источников звука.
Возможность использования принципа бинаурального слушания для определения местоположения подводных лодок и невидимых судов (во время войны была осуществлена при разработке «С»-устройства, в котором «уши» размещены на концах горизонтального коромысла, вращающегося под поверхностью воды. Бинауральные наблюдения над источниками звука производились путем поворота этого коромысла до тех пор, пока оно не располагалось перпендикулярно направлению источника звука. Затем эта система была усовершенствована и в ней были применены два микрофона, монтировавшиеся в определенном стационарном положении на корпусе судна или в каком-либо другом наблюдательном пункте.
Для проведения бинауральных наблюдений с помощью неподвижно укрепленных микрофонов применяется компенсатор, вызывающий то или иное запаздывание по времени в цепях, соединяющих микрофон с ушами наблюдателя. Запаздывание электрических импульсов, возбуждаемых двумя микрофонами, осу
336
ществляется с помощью искусственных линий, подобных фильтрам, описанным в главе II. Эти фильтры состоят из ячеек, образуемых емкостями и самоиндукциями и снабжены переключателями, позволяющими осуществить то или иное запаздывание по времени. С помощью этих устройств звуковые волны, принятые микрофонами, могут быть подведены к обоим ушам син-фазно. Величина искусственного запаздывания, необходимая для достижения этой цели, определяется по установке фильтров; по величине же запаздывания находится искомое угловое положение источника звука относительно микрофонов. В акустических системах, в которых в качестве звукоприемников применены полые трубки, сообщающиеся с ушами, компенсация фазы осуще-ставляется с помощью изменения длины звукопровода перед стетоскопами.
Недостаток системы «двух ушей» или двух микрофонов заключается в том, что чувствительность системы остается одной и той же для всех направлений. Поэтому при наличии нескольких источников звука задача определения местоположения значительно' усложняется. Это затруднение было устранено путем применения для каждого уха нескольких микрофонов, соединенных с компенсатором. Каждая из двух групп отдельно отрегулирована на максимальную чувствительность по отношению к звукам, поступающим в определенных направлениях, и нечувствительна к звукам, поступающим в других направлениях. В этом случае каждая группа 'представляет собой на1правлен|ный звукоприемник; обе группы уравновешиваются относительно ушей таким же образом, как и система с двумя микрофонами. Микрофоны обычно монтируются по прямым линиям приблизительно параллельно килю судна. Передняя половина соединена с одним, а задняя с другим ухом наблюдателя. Обычно на каждой стороне судна вблизи носа устанавливаются две полных системы. В бинауральной системе, сосредоточенной в одной плоскости, имеются два возможных положения для определения местоположения источника звука. Применяя две полных системы и переключающее устройство для приема с какой-либо одной стороны судна, оператор может пользоваться судном как экраном, облегчая себе т аким образом выбор между двумя неясными пеленгами.
Многие маяки на берегу и на судах, курсирующих в береговых водах, оборудованы большими подводными колоколами. Если наблюдаемое судно идет по заданному курсу, то по звуку этих колоколов с помощью гидрофонов берутся пеленги.
Проведя ряд наблюдений во время движения судна с некоторой скоростью в известном направлении, мы получаем данные, по которым путем простой триангуляции можно определить расстояние, а также направления маяка для какой-либо точки пути и установить таким образом положение судна относительно источника звука.
22 Прикладная акустика.
337
Эту систему возможно также применить для определения глубины моря по шуму от винта, отражаемому морским дном. Здесь микрофоны устанавливаются так, как было указано выше, вблизи носа судна по линии, параллельной килю. Звук, непосредственно приходящий через воду, и звук, отраженный поверхностью раздела двух сред (воздух — вода), оказываются смещенными по фазе на 180° вследствие практически равной длины путей; поэтому у микрофонов эти звуки взаимно уничтожаются и наблюдению подвергается лишь звук, отраженный от морского дна. По величине расстояния между винтом и микрофонами и по «углу отражения», определенному путем наблюдений над системой, можно вычислить глубину моря. Так как глубина изменяется как тангенс угла отражения, го точность метода уменьшается с увеличением глубины; вообще- же говоря, этот метод пригоден для измерения глубины, не более, чем в три раза превышающей длину судна.
Моряки очень часто определяют положение судна по глубине моря. Поэтому карта глубины моря должна быть, конечно, достаточно точной. Гидрография на этой карте показывает невидимые опасности, которые моряк должен избегать, а также показывает1 конфигурацию дна. С помощью звуковых устройств моряк может определить положение судна относительно опасных мест и расстояние судна от земли. |С помощью описанной гидрофонной системы глубину можно определять там, где море относительно мелко. В более глубоких же водах целесообразнее пользоваться методом определения глубины с помощью эхо.
Метод эхо является хорошо известным методом определения глубины моря. Этот метод заключается в посылке сигнала от подводного громкоговорителя и в отсчете времени, требующегося для возвращения звука, отраженного от морского дна. При работе с аппаратами одного типа оператор надевает специальный головной телефон, который дает ему возможность слышать одним ухом исходящий сигнал, а другим импульсы эхо, принятые микрофоном и связанными с ним устройствами. С помощью аттенюаторов силы обоих звуков уравниваются. Наблюдатель изменяет скорость посылки импульсов до тех пор,, пока исходные и отраженные импульсы не станут совершенно синхронными. При этом условии интервал между импульсами представляет собой время, затрачиваемое звуком на прохождение до морского дна и обратно.
Метод эхо используется и для определения высоты под’ема самолета. В этом случае в качестве источника звука применяется мощный свисток, работающий сжатым воздухом. Время, необходимое для отражения от земли, определяется с помощью вышеописанного метода или с помощью хронометра. Описанная выше система из нескольких гидрофонов может быть также установлена на берегу; в этом случае по шуму винта можно определять
338
положение судна, находящегося на расстоянии нескольких километров от берега. В таких установках, как показано на рис. 15.1, применяются две группы гидрофонов, расположенных на значительных расстояниях друг от друга. Пересечение одновременно
взятых пеленгов и определяет положение судна. Другая система, применяемая для определения
молета, состоит из двух рупоров, установленных на расстоянии
одного или нескольких метров друг от рычаге, горло каждого рупора соединено с помощью трубок с одним из ушей наблюдателя. Все устройство 'ориентируется так, чтобы шум самолета казался идущим из точки, расположенной непосредственно впереди. В этом случае линия, соединяющая устья рупоров, является нормалью к плоскости, в которой расположен источник звука. Путем поворота устройства определяется другая плоскость, пересечение двух плоскостей дает линию, соединяющую устройство и источник звука. Если наблюдения проводятся одновременно
положения са-
друга на вращающемся
Рис. 15. 1. Система подвод-
ного пеленгирования.
двумя лицами и используются четыре
рупора, то две плоскости определяются одновременно. Этот вариант более пригоден при определении положения быстролетящего самолета.
Изменения скорости распространения звука при прохождении через различные слои земной коры используются при некоторых геофизических исследованиях и в частности при разведке нефти. Известно, что нефть содержится в том, что геологи называют антиклин. Этот нефтеносный слой залегает обычно на глубине порядка сотни и больше метров под поверхностью земли. Акустический метод, применяемый для исследования толщины различных слоев земной коры, основан на явлении отражения звука от границ, разделяющих эти слои. Микрофоны, соединенные с записывающими осциллографами, устанавливаются на поверхности земли над исследуемым участком. В результате взрыва небольшого количества динамита создается звуковая волна,* которая достигает микрофона через воздух, как непосредственно
по поверхности земли, так и после отражения от различных слоев земной коры. По записям, произведенным различными осциллографами, можно определить конфигурацию слоев.
В основу расчета систем звуковой сигнализации, использующих в качестве передающей среды воздух, кладутся те же принципы, что и в основу расчета устройства для возбуждения и приема звука. Для приема звука в воде при звуковых частотах применяются как чисто акустические устройства, соединяемые с ушами, так и электроакустические системы, использующие микро
22*
339
фоны. Коэфициент полезного действия первых может быть значительно повышен путем применения акустических трансформаторов (обычно называемых стетоскопами) для согласования большого сопротивления воды с относительно малым сопротивлением воздуха. В случае применения электрических систем используются описанные в главе V микрофоны, определенным образом измененные, в соответствии с условиями работы под водой.
Направленный звукоизлучатель позволяет получить при данном расстоянии от источника звука более сильный сигнал, чем ненаправленный излучатель, питаемый той же мощностью. В главе VII были рассмотрены факторы, влияющие на коэфициент полезного действия и направленные свойства звуковоспроизводящих устройств. В настоящей главе было показано, что для получения системы, обладающей направленным действием, следует размеры излучателя выбирать большими по сравнению с длиной волны. В воде скорость распространения звука имеет в пять раз большую величину, чем в воздухе, поэтому для получения при звуковых частотах направленного излучения приходится применять устройства весьма больших размеров. Акустическое сопротивление воды приблизительно в 3 500 раз превышает акустическое сопротивление воздуха, что, вообще говоря, упрощает конструкцию эффективных колебательных устройств, отвечающих требованию малого собственного сопротивления по сравнению с сопротивлением среды. Трудности подводной сигнализации с помощью звуковых частот послужили стимулом для проведения исследований по использованию для этой цели ультразвуковых частот
Ультразвуковыми частотами называются частоты, лежащие выше диапазона звуковых частот.
15. 3. УЛЬТРАЗВУКОВЫЕ КОЛЕБАНИЯ
В 1917 г. Ланжевен1 разработал акустический генератор, основанный на использовании пьезоэлектрического эффекта и могущий давать акустические сигналы частотой в 50 000 гц. Некоторые ассиметричные кристаллы, подверженные давлению, электрически поляризуются и, наоборот, в таких кристаллах электрическая поляризация всегда сопровождается механической деформацией. Наиболее известными примерами кристаллов, обладающих пьезоэлектрическими свойствами и широко в настоящее время используемых, являются турмалин, кварц и сегнетовая соль. Последняя применяется в микрофонах и громкоговорителях (см. раздел 5.6). Сегнетовая соль обладает большей пьезоэлектрической активностью, чем кварц, однако она имеет недостатки, заключающиеся в уменьшении чувствительности с повышением
1 Langevin, Р. British Patent No. 145, 691, 1920.
340
температуры и в восприимчивости к сырости. По этой причине в кристаллических генераторах ультразвуковых частот почти исключительно применяется кварц. Обычно пластинку из кристалла кварца принято вырезать параллельно оптической оси и перпендикулярно электрической оси кристалла. Если к двум сторонам этой пластинки приложить электроды, соединенные с источником переменного напряжения, то пластинка начнет колебаться с частотой приложенного напряжения. И, наоборот, если кварц заставить вибрировать, приложив к нему внешнюю механическую силу, то между электродами создается переменная разность потенциалов. Резонанс имеет место тогда, когда частота подведенного напряжения совпадает с одной из собственных частот кристалла. На этом и основан пьезоэлектрический резонатор Кэди 1, показавшего, что кварц можно использовать в ламповых схемах для поддержания весьма точного постоянства частоты электрических колебаний.
Этот же принцип положен и в основу стабилизации частот радиовещательных станций. Моррисон2 использовал тот же принцип в своих электрических часах. Он нашел, что, вырезая из кварца кольца определенных размеров, можно получить кристаллы, практически не обладающие температурным коэффициентом. С использованием кварцевого резонатора такого типа были
генератор
генератор
Рис. 15. 2. Ультразвуковой громкоговоритель.
разработаны самые точные часы в мире. Ван Дейк3 показал, что пластинку кварца, снабженную электродами, 'можно представить эквивалентной схемой, состоящей из сопротивления, самоиндукции и емкости. Это обстоятельство играет большую роль при расчете фильтров с очень узкой полосой пропускания. Вуд и Лумис4 провели обширное исследование биологических свойств ультразвуковых частот. Пирс5 использовал пьезоэлектрическую
• Cady, W. G. Proc. Inst. Rad Eng., Vol 10, p. 83, 1922.
2 Morrison, W. A. Bell System Tech Jour, Vol. 8, p. 493.
3 Van Dyke, K. S. Proc Inst Rad Eng., Vol. 16, p. 742, 1928.
4 Wood and Loomis. Phil. Mag., Vol. 4, p 417, 1927.
6 Pierce, G. W. Proc. Am. Acad. Arts and Sci., Vol. 63, p. 1, 1928.
341
пластинку в качестве ультразвукового громкоговорителя. Используя устройство, аналогичное трубке Кундта, он измерил скорость распространения ультразвуковых частот в газах. Пирсом1 же был разработан магнитострикционный генератор, работающий в качестве ультразвукового громкоговорителя. С помощью этого генератора можно воспроизводить низкие ультразвуковые частоты, трудно воспроизводимые как с помощью излучателей звуковой частоты, так и с помощью кварцевых излучателей.
На явлении обратимости пьезоэлектрического и магнитострикционного эффектов основана работа микрофонов, в которых тот или другой эффект используется для приема ультразвуковых колебаний. На рис. 15.2 изображены две обычные схемы генераторов ультразвуковых частот.
15. 4. ВОСПРОИЗВЕДЕНИЕ ОРКЕСТРОВОЙ МУЗЫКИ С ЗВУКОВОЙ ПЕРСПЕКТИВОЙ
Основной задачей при конструировании и применении звуковоспроизводящих устройств является устранение искажений и воспроизведение перед слушателем звуковых волн, тождественных с волнами, излучаемыми оригинальным источником звука.
Рис 15. 3. Схема воспроизведения оркестровой музыки с звуковой перспективой.
« Практически все системы воспроизведения звука — радио, фонографы и звуковое кино — используют только один канал. Вследствие этого звук может быть назван одномерным и за исключением некоторых явлений, как например, восприятия прямого звука на фоне отраженного, слушатель не получает впечатления перспективы принимаемого звука, в особенности при воспроизведении оркестровой музыки. Для получения более точного и полного воспроизведения оркестровой музыки, в телефонных лабораториях Белла была недавно разработана система воспроизведения звуковой перспективы. На рис. 15.3 изображена принципиальная схема, положенная в основу этой системы. Оркестр, играющий в студии, может находиться на большом расстоянии от .зала, в котором происходит воспроизведение звука.
1 Loc. cit.
342
Как можно видеть из рис. 15.3, в этой системе заняты два дирижера:' один, находящийся в студии, управляет оркестром обычным путем, другой, находящийся в зале, регулирует уровень передачи в отдельных каналах для получения наибольшего художественного эффекта. В системе используются три канала: один—для солистов и два других—для оркестра. Таким образом уровень передачи канала для солистов можно регулировать независимо от уровней передачи двух других каналов, поддерживая громкость голоса несколько выше громкости оркестра и получая этим путем требуемый музыкальный эффект. Помимо воспроизведения полного диапазона мощностей оркестра, все устройство рассчитано на дополнительное усиление в 10 д|б. Это дополнительное усиление позволяет получить эффекты, которые ранее были неосуществимыми. На публичной демонстрации устройства дирижер филадельфийского оркестра, д-р Стоковский, управлял регулятором из ложи в Конституционном зале г. Вашингтона, в то время, как Филадельфийский оркестр под управлением дирижера Смолленса играл в зале Музыкальной академии г. Филадельфии.
15. 5. ЭЛЕКТРОАКУСТИЧЕСКИЕ МУЗЫКАЛЬНЫЕ ИНСТРУМЕНТЫ
Появление ламповых усилителей и генераторов привело к возникновению и развитию совершенно новых методов генерации звука любой частоты и практически неограниченной амплитуды. Совершенно естественно поэтому, что появилась возможность конструировать новые музыкальные инструменты, основанные на использовании этих устройств. (В настоящем разделе вкратце рассматриваются некоторые разработанные музыкальные инструменты, в которых применены ламповые усилители и генераторы.
Термен1 состоит из гетеродинного генератора, аналогичного генератору, описанному в разделе 4.1. Частота одного из низкочастотных генераторов остается постоянной, а частота другого генератора изменяется путем изменения емкости между рукой играющего и металлическим стержнем, прикрепленным к инструменту. Таким образом частоту биений можно изменять так, чтобы в результате получить любую частоту звукового диапазона. Выходное напряжение детектора подается на вход усилителя мощности, питающего громкоговоритель. Амплитуда сигнала регулируется путем изменения емкости между другой рукой и другим металлическим стержнем, соединенным с вторым высокочастотным генератором, который управляет громкостью. Желаемый тембр тона и его изменение можно получить, регулируя состав и относительную величину гармоник, возбуждаемых в усилителях. Этот инструмент может давать любые тоны звукового диапазона с изменяющейся в широких пределах силой.
1 Прибор изобретателя Термена, известный у нас под названием „Термен-вокса". (Прим, ре д.)
343
Хэрди был разработан электрический орган, в котором отдельные тоны записаны на пленку, аналогичную применяемой в звуковом кино. В органе предусмотрены устройства для непрерывного движения всех пленок. Модулированный свет, получающийся в результате просвечивания пленки лучом постоянной яркости, падает на фотоэлемент, выходное напряжение которого усиливается и с помощью громкоговорителей превращается в звуки. Клавиатура и селекторная система позволяют играть на этом инструменте обычным образом.
Ренджером разработан электрический орган, в котором тоны возбуждаются небольшими генераторами переменного тока, вращаемыми с постоянной скоростью. Клавиатура и селекторная система позволяют играть на этом инструменте обычным путем. Основными новыми особенностями этого инструмента являются: точный контроль частоты с помощью камертонов, применение отдельных усилителей для каждой ноты, переключаемых автоматической селекторной системой, комбинирование требуемого количества гармоник с основной частотой, регулировка громкости, автоматические тремоло, введение затухания для подражания роялю.
Разработаны также электроакустические колокола, в. которых вибрация небольших полосок и пружин преобразуется в соответствующие изменения электрического тока, усиливаемого в несколько сот раз и затем превращаемого в звуковые волны с помощью громкоговорителей.
Раньше музыкальные инструменты разрабатывались экспериментальным путем. Руководствуясь теорией и применяя различные приборы для анализа звука, мы можем теперь усовершенствовать существующие музыкальные инструменты.
Исследования инструментов типа флейты, проведенные Айронсом 1 * по методу анализа полного акустического сопротивления, показывают путь, по которому должно итти развитие этих инструментов. Возможности электроакустических инструментов практически неограничены и они несомненно окажут влияние на разработку новых музыкальных инструментов 3.
1 Irons, Е. J. Phil. Mag, Vol. 10, No. 62, p. 16.
’ Несмотря на все возможности электромузыкальных инструментов, получение в них действительно «живых» тембров связано с пока непреодоленными трудностями. Исследования показали, что состав и относительная амплитуда обертонов, даже при стационарном звуке, все время изменяется, и что эти изменения тем сильнее и сложнее, чем выше качество инструмента и чем выше искусство исполнителя.
Кроме того, каждый инструмент обладает характерной картиной возникновения звука, в значительной мере определяющей тембровую окраску инструмента. Этот процесс возникновения звука меняется для разных частот и кроме того зависит от исполнителя. Современные электроакустические инструменты, при всем их многообразии, не обеспечивают еше возможности воспроизведения всех тонкостей тембра обычных музыкальных инструментов. (П р и м. р е д.).
ОГЛАВЛЕНИЕ
• ГЛАВА1
ОСНОВНЫЕ УРАВНЕНИЯ И ОПРЕДЕЛЕНИЯ
Стр.
1. 1. Введение............................................... 5
1.2. Вывод уравнения звуковой волны............................ 5
1. 3. Плоские волны........................................... 8
1.4. Сферические волны • . •.................................. 9
1. 5. Стоячие волны......................................... 11
1.6 Плотность звуковой энергии ................................11
1.7. Сила звука .............................................. 12
1 8. Основные определения . . •............................... 13
1.9. Скорость звука в различных материалах................... 15
ГЛАВА II
ДИНАМИЧЕСКИЕ СИСТЕМЫ: ЭЛЕКТРИЧЕСКИЕ, МЕХАНИЧЕСКИЕ И АКУСТИЧЕСКИЕ ЭЛЕМЕНТЫ И СИСТЕМЫ ЭЛЕМЕНТОВ
2.1. Введение.............................. . . •........ 17
2.2. Активное сопротивление . •............................ 18
2.3. Индуктивность, масса, акустическая масса............. 19
2.4. Емкость, гибкость, акустическая емкость ............. 19
2.5. Электрическая система с одной степенью свободы •...... 21
2.6. Механическая система с одной степенью свободы......... 22
2. 7. Акустическая система с одной степенью свободы........24
2.8. Установившиеся колебания систем с несколькими степенями свободы . . . •............................... ... 26
2. 9. Акустические элементы .... ............................ 28
2.10 Реакция воздуха на поршень, колеблющийся в бесконечной стене 28
2. 11. Круглое отверстие в стене бесконечно малой толщины .... 30
2.12. Открытая труба с флянцем . . . . •.......•................ 31
2.13. Закрытая труба с флянцем •................................. 32
2. 14. Узкие трубы.................•............................ 34
2.15. Щели....................................................... 34
2.16 Акустическая емкость ...................................... 35
2.17. Электрические, механические и акустические фильтры........ 36
2. 18. Фильтры нижних частот ................................... 37
2.19. Фильтры верхних частот ................. 39
2.20. Рупора .... ........................’. ............ 40
2.21. Параболический рупор .................................. 41
345
Стр.
2. 22. Конический рупор........................................ 42
2. 23. Экспоненциальный рупор.........• •...................... 43
2. 24. Характеристики бесконечных рупоров...................... 44
ГЛАВА III
ОСНОВНЫЕ АКУСТИЧЕСКИЕ ИЗМЕРЕНИЯ
3. 1. Введение.................... •...........................
3. 2. Абсолютное измерение частоты ............................
3. 3. Сравнительные методы измерения частоты..........• . . . .
3. 4. Резонансный метод измерения частоты.....................
3. 5. Измерение амплитуды......................................
3. 6. Диск Рейли...............................................
3. 7. Абсолютное измерение звукового давления..................
3. 8. Косвенные методы акустических измерений..................
3. 9. Исследование формы волны.................................
3.10. Графический анализ сложных волн..........................
3.11. Механический анализ сложных волн ........................
3. 12. Электрический резонансный метод анализа волн .... . . . .
3. 13. Гетеродинный метод анализа волн.........................
3. 14. Анализ апериодических волн .............................
3. 15. Измерение фазы..........................................
46
46
47
51
52
52
55
56
57
57
59
60
62
63
64
ГЛАВА IV
ЭЛЕКТРИЧЕСКАЯ АППАРАТУРА ДЛЯ АКУСТИЧЕСКИХ ЛАБОРАТОРИЙ
4.1. Генераторы звуковой частоты........................ 67
4.2. Усилитель звуковой частоты......................... 72
4.3. Полуавтоматическое устройство для снятия частотных характеристик электроакустической аппаратуры..................... 76
ГЛАВ А V
МИКРОФОНЫ
5.1. Введение . . . . •................................. 79
I. Микрофоны давления
5.2. Угольные микрофоны..................., . , . . 80
5.3. Конденсаторный микрофон........................... 83
5. 4. Электродинамический микрофон с подвижной катушкой ... 88
5. 5. Ленточный микрофон давления • ......... . 90
5.6. Пьезоэлектрические микрофоны....................... 95
5. 7. Искажение звукового поля микрофонами давления..... 96
5. 8. Дифракция звуковых волн вокруг твердой сферы...... 97
5. 9. Резонанс углубления в микрофонах.................. 97
5. 10. Нагрудные микрофоны.............................. 99
II. Микрофоны скорости или градиента давления
5. 11. Введение..........................................101
5.12. Ленточный микрофон скорости....... •...........103
'5.13. Термомикрофоны...................................• ИЗ
III. Комбинированный микрофон давленияискорости
5.14. Односторонне направленный микрофон ................114
346
Стр.
ГЛАВА VI
ТЕЛЕФОНЫ
6. 1. Введение............................................... 119
6.2. Электромагнитный телефон с диафрагмой-якорьком ...........119
6. 3. Электромагнитные телефоны с подвижным якорьком..........123
6.4. Электродинамический телефон с подвижной катушкой .... 123
6.5. Электродинамический телефон ленточного типа..............124
6.6. Электростатический или конденсаторный телефон............128 *
ГЛАВА VII
ГРО МКОГОВОРИТЕЛ И
7. 1. Введение ....................................... ....... 130
7. 2. Громкоговоритель с подвижной катушкой....................130
7. 3. Широкополосный громкоговоритель с подвижной катушкой . . 138
7. 4. Электромагнитный громкоговоритель....................... 144
7. 5. Конденсаторный громкоговоритель..........•.............• 148
7. 6. Применение динамических, магнитных и конденсаторных громкоговорителей ............• ...................................151
7.7. Рупорный громкоговоритель, введение.......................151
7.8. Рупорные громкоговорители с узким горлом..................152
7. 9. Рупорный громкоговоритель с направляющим экраном . . 156
7. 10. Работа конусной диафрагмы, замонтированной в стенке закрытого ящика.......................................•.................• . 165
7.11. Экраны громкоговорителей ...... 167
7.12. Искусственный голос .................................. 168
7.13. Пневматический громкоговоритель.....................• . . 169
7.14. Резонанс ящика радиоприемника........................... 170
7. 15. Высокочастотный рупорный громкоговоритель с ленточной диафрагмой .................................... .... . ........173
7. 16. Экспериментальное исследованне магнитных цепей..........175
7. 17. Расчет магнитной цепи с постоянными магнитами.......... 178
ГЛАВА VIII
ГРАДУИРОВКА МИКРОФОНОВ
8. 1. Введение.................•............................. 183
8. 2. ,.Пистонфон" (поршневой источник звука)..................184
8.3 . Термофон . . ........................................186
8. 4. Электростатический возбудитель . . •.....................189
8.5 . Градуировка микрофонов в свободном звуковом поле .(диском Рейли) .... •..................................................193
8. 6. Вторичный эталон для градуировки в свободном поле .... 196
ГЛАВА IX
ИСПЫТАНИЕ ТЕЛЕФОНОВ
9. 1. Введение.................•............................ 198
9. 2. Факторы, влияющие на работу телефона................... 199
9.3 . Искусственное ухо.......................................200
9. 4. Испытание телефонов с помощью измерения давления развиваемого в упрощенной полости . •.............................. 201
9.5. Суб'ективные испытания телефонов . .... . ............. 203
347
Стр.
ГЛАВА X
ИСПЫТАНИЕ ГРОМКОГОВОРИТЕЛЕЙ
10. 1. Введение .............. .... ...............204
10.2. Предельная нагрузка.................... . 204
10. 3. Измерение коэфициента полезного действия..............206
10.4. Определение коэфициента полезного действия посредством измерения электрического сопротивления движения................210
10.5. Частотные характеристики............................ 212
10.6. Измерения в закрытом помещении........... ............214
10.7. Измерение энергии в закрытом помещении с помощью микрофона ...................................... . .... 21К
10. 8. Выводы относительно измерений в закрытом помещении . . . 225
А. Снятие кривых на небольшом расстоянии для уменьшения погрешностей, обусловливаемых отражением.
В. Снятие кривых в закрытом помещении на большом расстоянии и методы устранения погрешностей, обусловливаемых отражениями звука.
С. Избирательность но отношению к отраженному звуку.
10.9. Снятие частотных характеристик на открытом воздухе . . . 232'
10. 10. Характеристики направленности........................234
Г Л А В А XI
ИЗМЕРЕНИЯ ДИНАМИЧЕСКИХ СИСТЕМ
11. 1. Введение . . . . ... ... ... 237
11.2. Измерение акустического сопротивления ... ... 237
11.3. Измерение механического сопротивления . ... 242
11.4. Измерение гибкости . ............... 244-
11.5. Измерение скоростей и фаз частей конусной диафрагмы 245
11.6. Испытание механического рупорного громкоговорителя . . 246
11.7. Артикуляционные испытания .... . . . . 248
11.8. Испытание тракта звуковой частоты в целом . . . ... 250
11.9. Испытания трансформаторов звуковой частоты..........• . 251
ГЛАВА XII
АРХИТЕКТУРНАЯ AKSСТИКА
12.1. Введение . . ............... . . . ". ... 252
12.2. Реверберация.............. . . •.......................252
12.3. Оптимальное время реверберации для аудиторий...........255
12.4. Суб‘ективный метод измерения времени реверберации . ... 256
12.5. Измерение времени реверберации методом ..вращающегося коммутатора".................................................258
12.6. Осциллографический метод измерения времени реверберации . . 260
12. 7. Искроотметочное устройство для измерения времени реверберации ..................... • . ... . . . 262
12.8. Реверберационный мостик . ... 264
12.9. Поглощение звука . . 266
12. 10. Измерение коэфициентов поглощения методом стоячих волн 267
12.11. Реверберационный метод измерения коэфициентов поглощения 270
12. 12. Определение коэфициентов поглощения путем измерения силы звука................................................. ....... 272 '
12. 13. Сравнительный метод определения коэфициентов поглощения . 273
12.14. Коэфициенты поглощения различных материалов...........274
12. 15. Накопление звуковой энергии в реверберирующем помещении 274
12.16. Ненаправленный прием звука................ . .... 281
12.17. Направленный прием звука........ . •...............283
348
(Hip.
Г.' 18. Требования к направленным звукоприемникам . . . 286
12. 19. Студии для радиовещания и звукозаписи .........287
12.20. Рассеяние звука в реверберирующем помещении .........289
12.21. Работа радиоприемника в комнате.......'............. 291
Г.1. 22. Работа громкоговорителей в открытых театрах........294
12. 23. Работа громкоговорителей в закрытых театрах и аудиториях 297
12.24. Звукоусиливающие системы ............................300
12. 25. Звукоизоляция и ее измерение........ .... . . 302
ГЛАВА ХШ
ИЗМЕРЕНИЕ ШУМА
13. 1. Введение....................................... . . 307
13.2. Единица измерения.....................................307
13.3. Частотная характеристика чувствительности человеческого уха . 309
13.4. Камертонный метод измерения шума . ... 310
13.5. Аудиометрический метод измерения шума ...............313‘
13.6. Электрические шумомеры........... . 314
13. 7. Абсолютная градуировка шумомера.................... 318
13. 8. Сравнение различных методов измерения шума 320
13.9. Применение шумомера..................... . . 321
ГЛАВА XIV
ФИЗИОЛОГИЧЕСКАЯ АКУСТИКА
11.1. Введение.............................................323
14.2. Частотные характеристики человеческого уха..........• 324
14.3. Минимальные различимые изменения силы и частоты звука. 325
14.4. Эффект маскировки: слышимость одного тона при одновременном звучании другого тона................................ 327
14.5. Нелинейность уха.........• . . . . . .... . 328
14.6. Локализация звука: бинауральный эффект .... . . . 329
14.7. Влияние частотных искажений на качество воспроизводимого звука......................................• . ............330
14.8. Влияние амплитудных искажений на качество воспроизводимой речи...................................................... 332
ГЛАВА XV
РАЗЛИЧНЫЕ ОБЛАСТИ ПРИМЕНЕНИЯ АКУСТИКИ
15.1. Введение . ...........................................335
'15.2. Звуковая сигнализация и определение расстояний.......335
15.3. Ультразвуковые колебания............................ 340
15.4. Воспроизведение оркестровой музыки с звуковой перспективой 342
15. 5. Электроакустические музыкальные инструменты..........313