






































Автор: Петров А.И. Козырев Г.И. Назаров А.В. Шитов И.В. Обрученков В.П. Древин А.В. Краскин В.Б. Кудряков С.Г. Соколов С.М. Якимов В.Л. Лоскутов А.И.
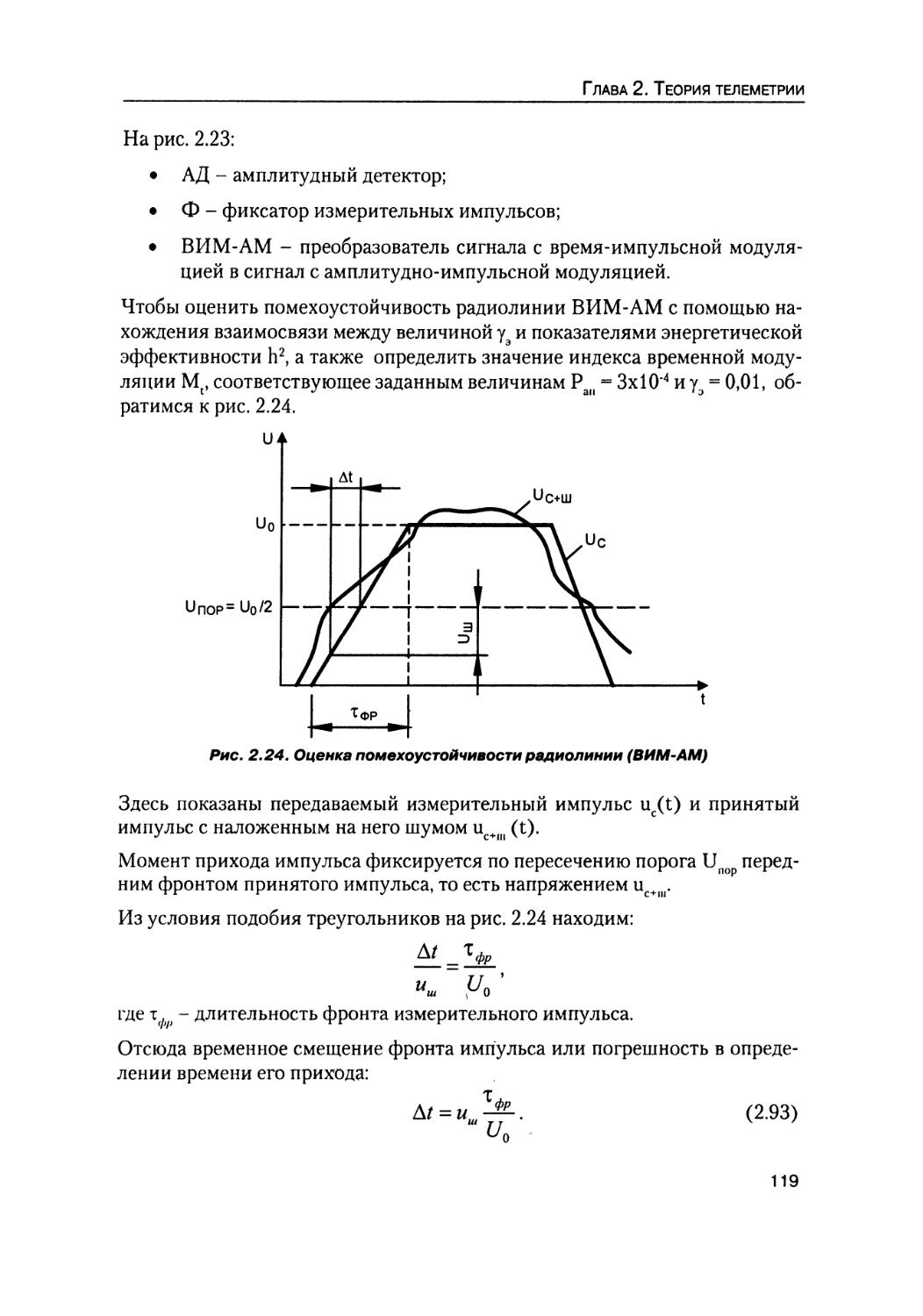
Теги: телеметрия серия полное руководство
ISBN: 5-94387-409-7
Год: 2007


серия - Полное руководство - серия
Наука и Техника
Санкт-Петербург
2007
Для заметок
Назаров А. В., Козырев Г. И., Шитов И. В.,
Обрученков В. П., Древин А. В., Краскин В. Б.,
Кудряков С. Г., Петров А. И., Соколов С. М., Якимов В. Л.,
Лоскутов А.И.
Современная телеметрия
в теории
и на практике
учебный курс
^издато
И*АШ*6ДГ
Наука и Техника
Санкт-Петербург
2007
Назаров А. В., Козырев Г. И., Шитов И. В., Обрученков В. П., Древин А. В.,
Краскин В. Б., Кудряков С. Г., Петров А. И., Соколов С. М., Якимов В. Л., Лоскутов А.И.
СОВРЕМЕННАЯ ТЕЛЕМЕТРИЯ В ТЕОРИИ И НА ПРАКТИКЕ. УЧЕБНЫЙ КУРС. -
СПб.: Наука и Техника, 2007. — 672 с, ил. цветные вкладки
ISBN 5-94387-409-7
Рецензент: Кузнецов С. В.
Серия «Полное руководство»
Данная книга представляет собой великолепное руководство по телеметрии,
позволяющее получить наиболее полное представление об этой отрасли науки
и техники. Слово «телеметрия» означает измерение на расстоянии. Содержание
современной телеметрии составляет широкий круг проблем, связанных с
получением, преобразованием, передачей и обработкой измерительной
информации, используемой при управлении удаленными объектами,
определении их состояния или при изучении физических процессов в местах, где
непосредственное присутствие наблюдателя затруднено или невозможно.
Книга состоит из двух частей. В главах первой части дается общая теория
современной телеметрии, начиная с основ и заканчивая последними разработками
и стандартами в данной области. Главы второй части посвящены рассмотрению
практического применения телеметрии в различных отраслях промышленности и
народного хозяйства: в машиностроении, нефтяной и газовой промышленности,
различныхвидахмониторинга(транспортныймониторинг,мониторингокружающей
среды и т.д.) и др.
Авторами книги является группа известных специалистов и ученых, которые,
помимо научных разработок, преподают и осуществляют внедрение средств
телеметрии на различных предприятиях в самых разных областях («Газпром»,
нефтяные компании, предприятия тяжелой металлургии, машиностроительные
предприятия, охранные фирмы, операторы сотовой связи и др.). Книга написана
доступным языком с большим количеством иллюстративного и аналитического
материала. Рассчитана на широкий круг читателей - студентов, инженеров,
специалистов.
Контактные телефоны издательства:
(812) 567 70 25, (812) 567 70 26, (044) 516 38 66
Официальный сайт: www.nit.com.ru
© Назаров А. В., Козырев Г. И., Шитов И. В и др.
© Наука и техника (оригинал-макет), 2007
ISBN 5-443U7-4CH-"
ТД CQli^ulhnqi
Содержание
ГЛАВА 1. ЧТО ТАКОЕ ТЕЛЕМЕТРИЯ? 21
1.1. ТЕЛЕМЕТРИЯ И СФЕРЫ ЕЕ ПРИМЕНЕНИЯ 22
Общая информация 22
Основные понятия телеметрии 23
1.2. СОСТАВ ИНФОРМАЦИОННО-ТЕЛЕМЕТРИЧЕСКОГО КОМПЛЕКСА И КЛАССИФИКАЦИЯ
ТЕЛЕМЕТРИЧЕСКИХ СИСТЕМ 26
1.2.1. Состав информационно-телеметрического
комплекса (ИТК) 26
1.2.2. Классификация информационно-телеметрических систем 30
ЛИТЕРАТУРА К ГЛАВЕ 1 32
ГЛАВА 2. ТЕОРИЯ ТЕЛЕМЕТРИИ 33
2.1. ТЕЛЕМЕТРИРУЕМЫЕ ПАРАМЕТРЫ И СПОСОБЫ ИХ ПРЕДСТАВЛЕНИЯ 34
2.1.1. Классификация телеметрируемых параметров 35
2.1.2. Телеметрические сообщения 36
2.1.3. Способы представления телеметрируемых параметров 37
2.2. ПОГРЕШНОСТИ ТЕЛЕИЗМЕРЕНИЙ 39
2.2.1. Характеристика и классификация погрешностей
телеизмерений 39
Верность оценки телеметрического сообщения
и точность телеизмерения 39
Классификация погрешностей по признакам, отвлеченным
от физической природы и свойственным самым различным
погрешностям 42
2.2.2. Вычисление суммарной среднеквадратическои погрешности по
известным среднеквадратическим погрешностям
состабляющих 44
2.2.3. Суммирование систематических погрешностей 47
2.2.4. Погрешности квантования функциональных параметров 48
2.2.5. Погрешности дискретизации функциональных параметров 51
Общая информация 51
Погрешность дискретизации при восстановлении
функциональных параметров с помощью фильтров 53
Погрешность дискретизации при восстановлении параметра с
помощью степенных полиномов 56
Современная телеметрия в теории и на практике
2.2.6. Погрешности дискретизации сигнальных параметров 59
2.2.7. Погрешность отсчета времени при передаче сигнальных
параметров в канале с шумами 60
2.2.8. Оценка шумовой погрешности в канале связи 62
2.3. КОЛИЧЕСТВЕННАЯ ОЦЕНКА ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ 65
2.3.1. Количество информации, получаемой при измерении
функциональных параметров 65
2.3.2. Оценка количества информации о функциональных
параметрах 68
Пример 1 68
Пример 2 69
ПримерЗ 69
2.3.3. Оценка количества информации о сигнальных параметрах 69
2.4. АДАПТИВНЫЕ ПРОЦЕДУРЫ В ТЕЛЕМЕТРИИ 73
2.4.1. Проблемы сжатия 73
2.4.2. Задачи и общая характеристика техники сжатия данных
в телеметрии 74
2.4.3. Информационное содержание задачи сжатия данных 78
Количество информации в телеметрическом сообщении 78
Объем аналого-дискретных сообщений 81
Объем сообщений и количество передаваемой информации .... 83
Сжатие объема сообщений 84
2.4.4. Математическое содержание задачи сжатия данных 85
Постановка задачи 85
Параметры алгоритмов сжатия 88
Адаптивные алгоритмы сжатия 90
2.4.5. Классификация и основные определения теории и техники
сжатия данных 91
Необратимые и квазиобратимые преобразования 91
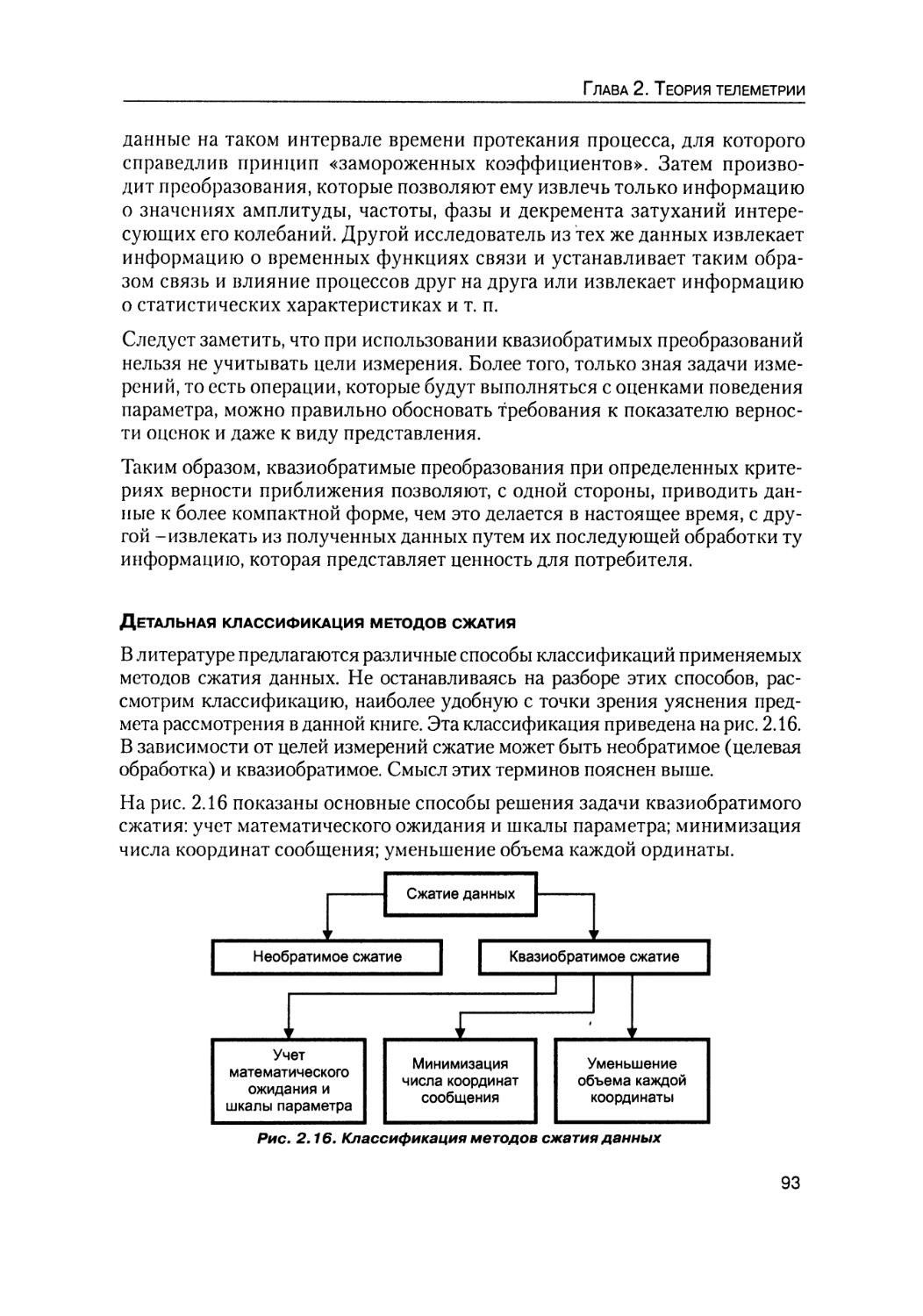
Детальная классификация методов сжатия 93
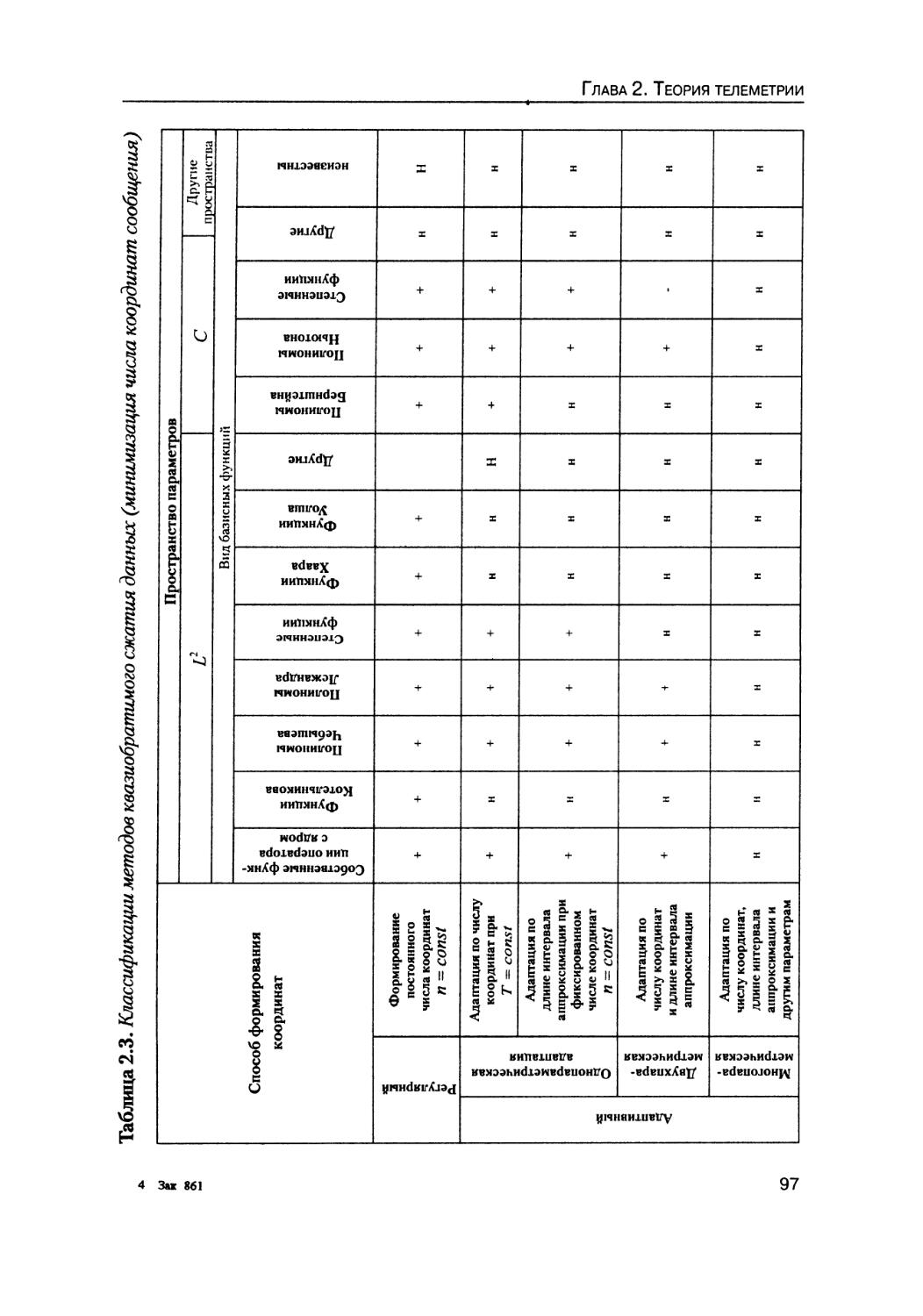
2.4.6. Принципы построения адаптивных алгоритмов сжатия
данных 96
ч
2.4.7. Критерии оценки алгоритмов сжатия данных 99
Классификации и отличительные особенности алгоритмов
сжатия 99
Коэффициент сжатия данных 101
6
Эффективность представления сообщений 102
Коэффициент сложности алгоритма 104
Время задержки сообщения в аппаратуре сжатия 104
Показатель помехоустойчивости 104
2.5. ПРИНЦИПЫ РАЗДЕЛЕНИЯ СИГНАЛОВ 106
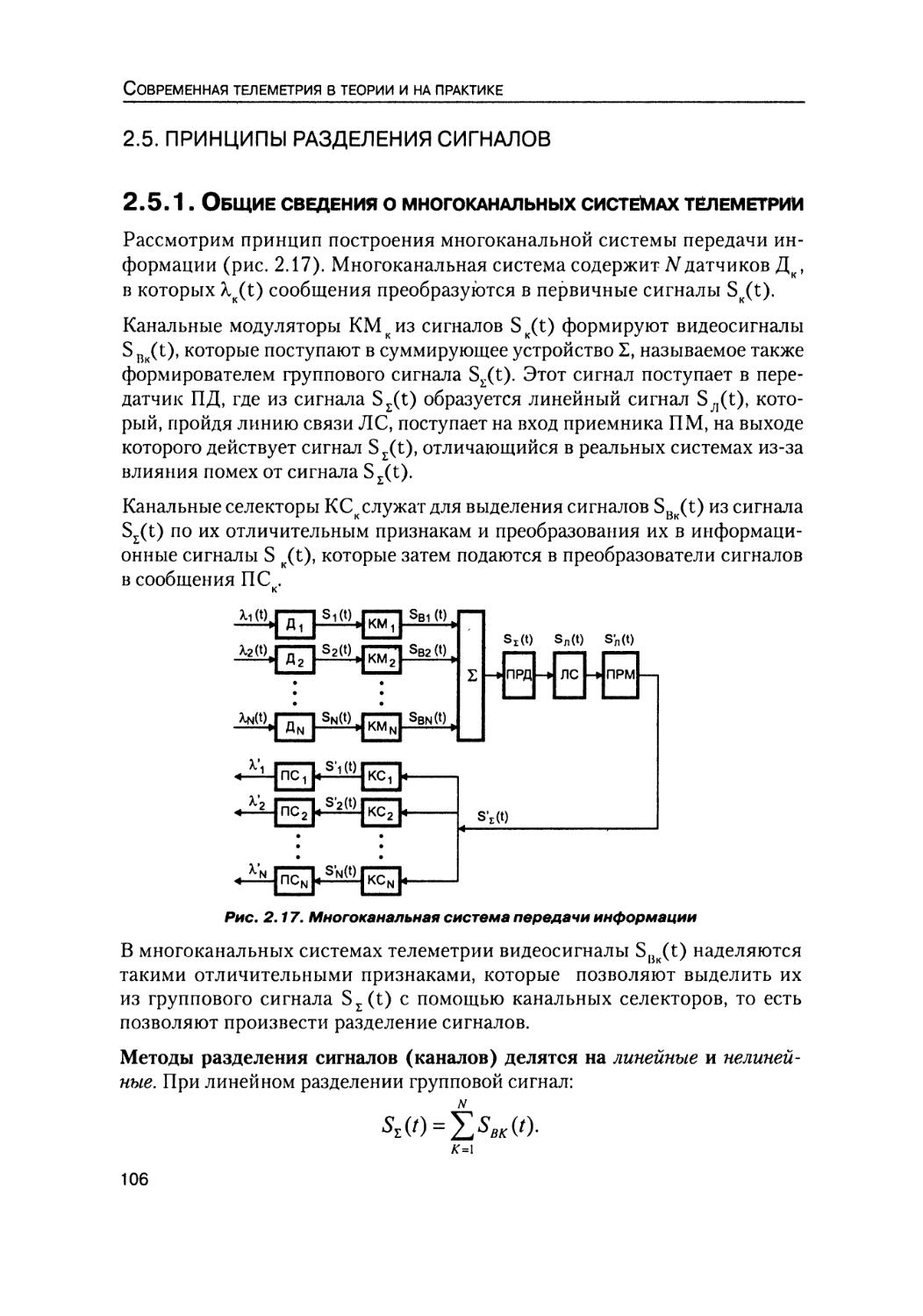
2.5.1. Общие сведения о многоканальных системах телеметрии 106
2.5.2. Основы линейного разделения сигналов 107
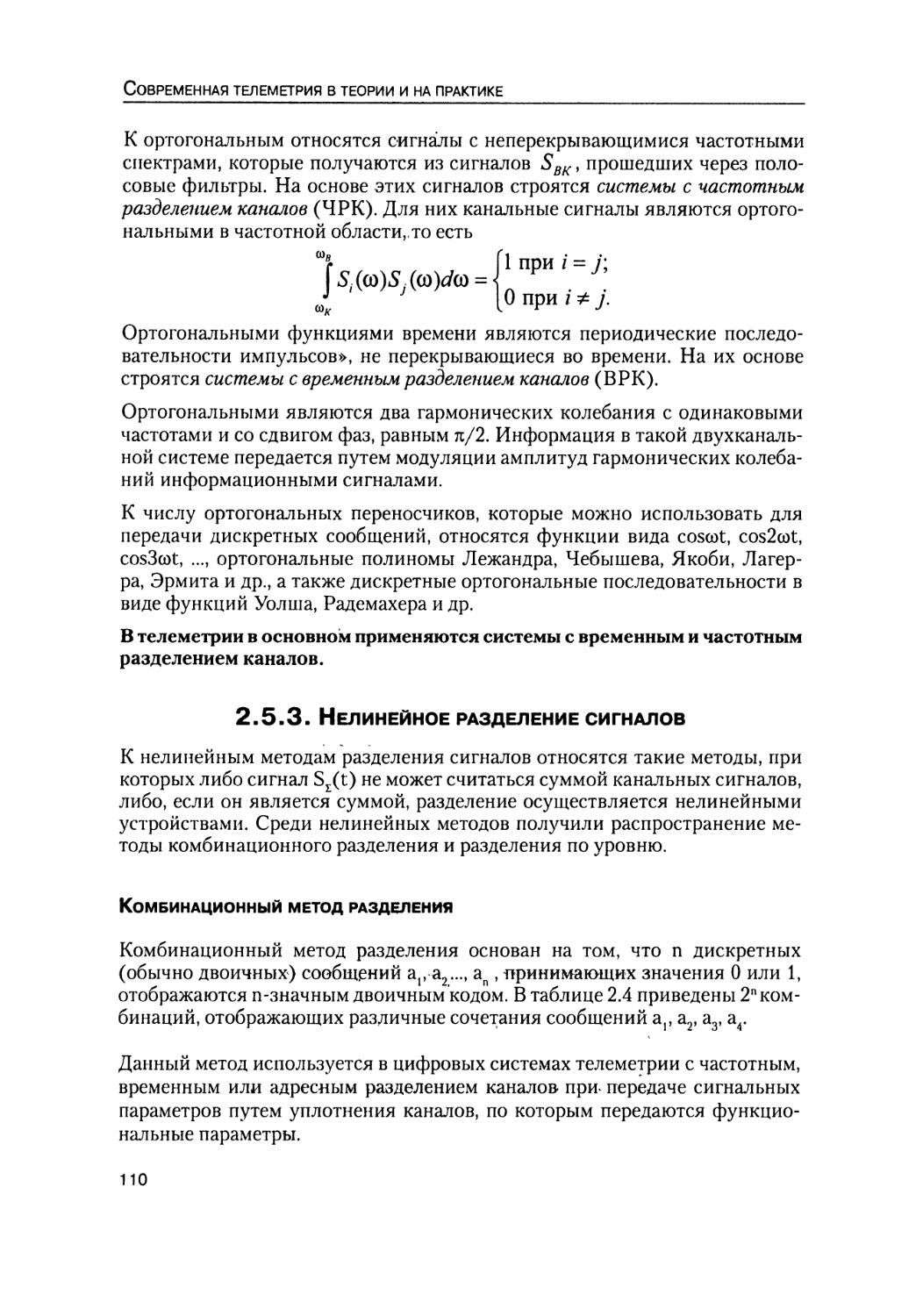
2.5.3. Нелинейное разделение сигналов 110
Комбинационный метод разделения 110
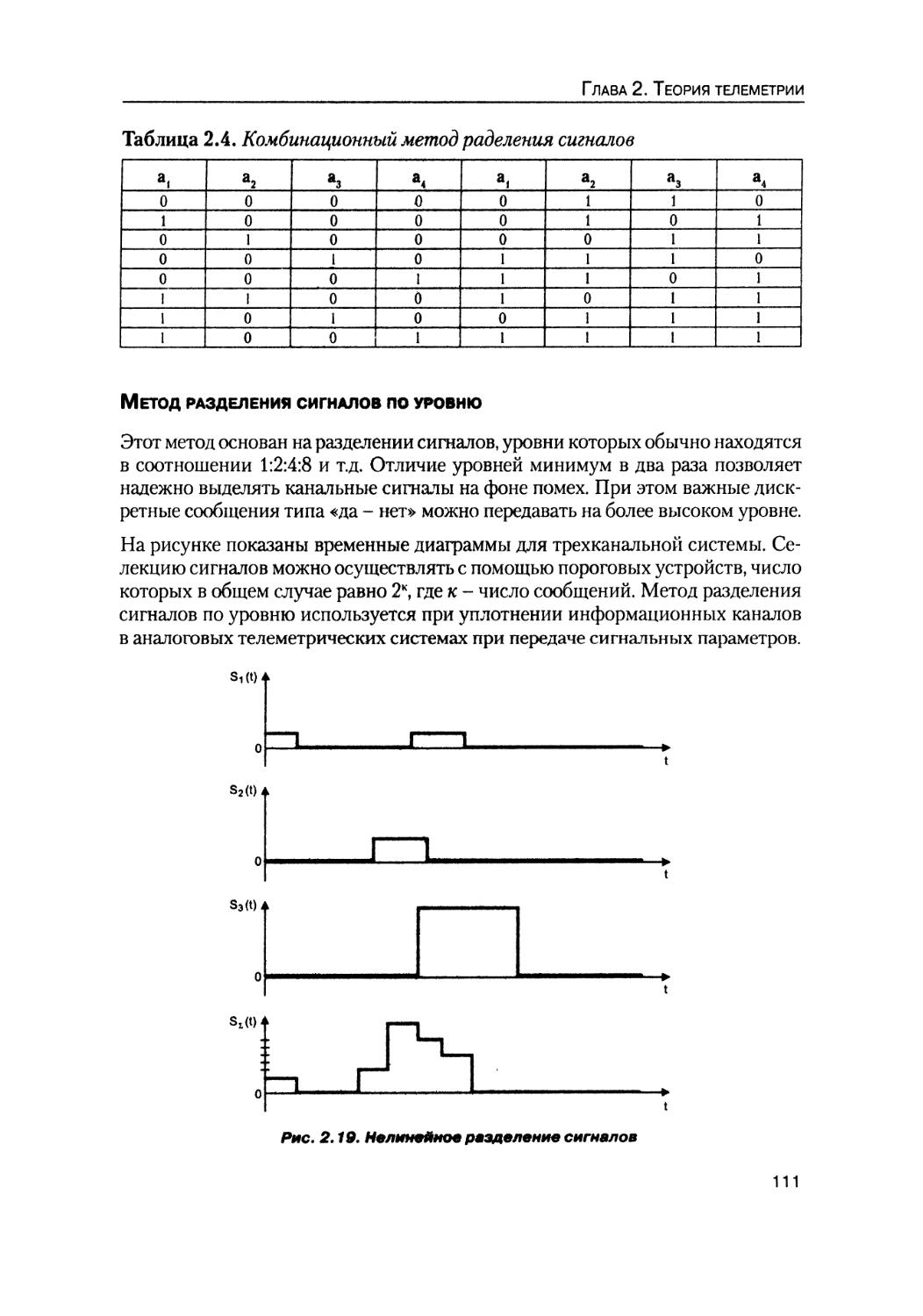
Метод разделения сигналов по уровню 111
2.6. АНАЛОГОВЫЕ МЕТОДЫ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ 112
2.6.1. Показатели качества аналоговых телеметрических
радиолиний 112
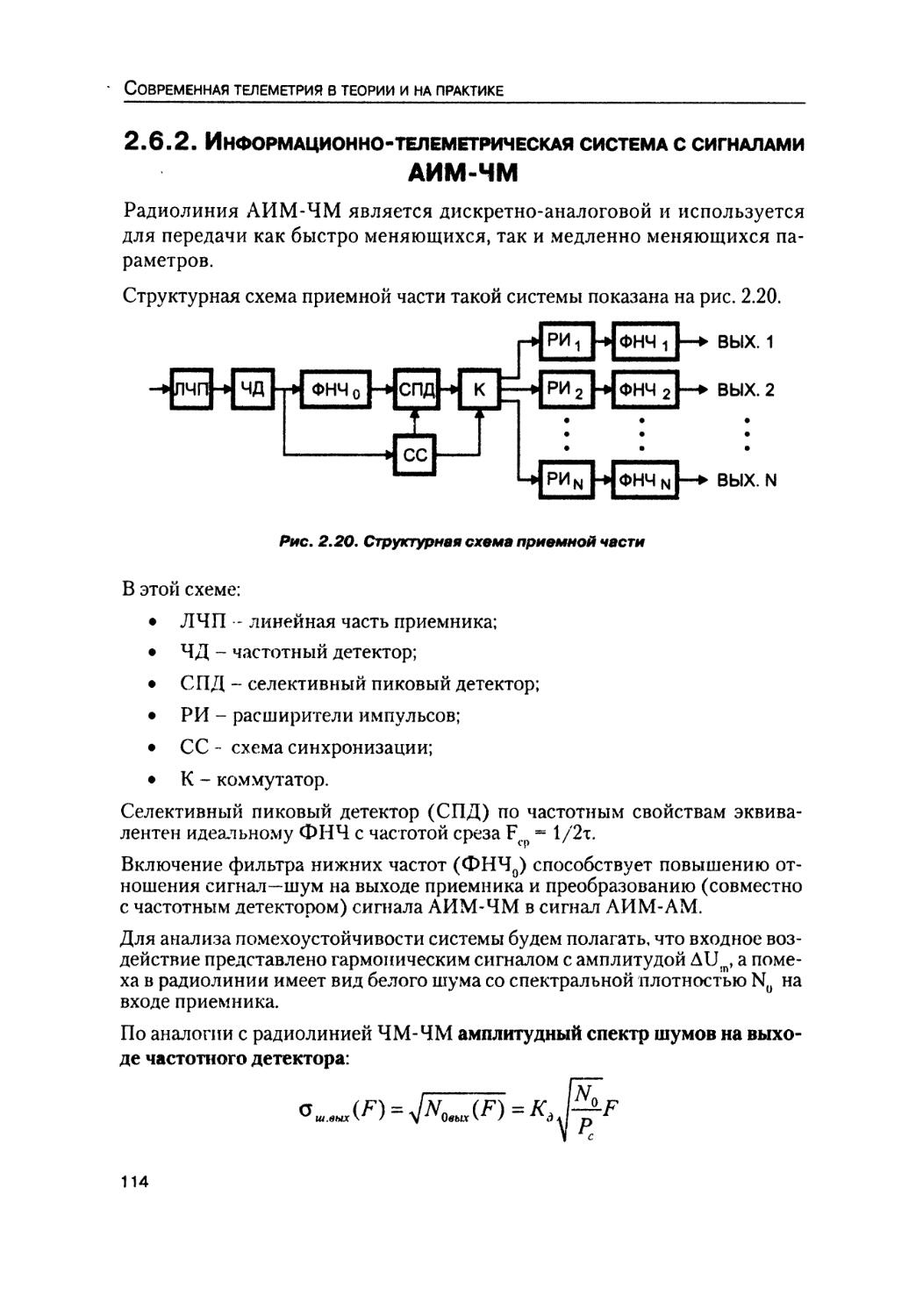
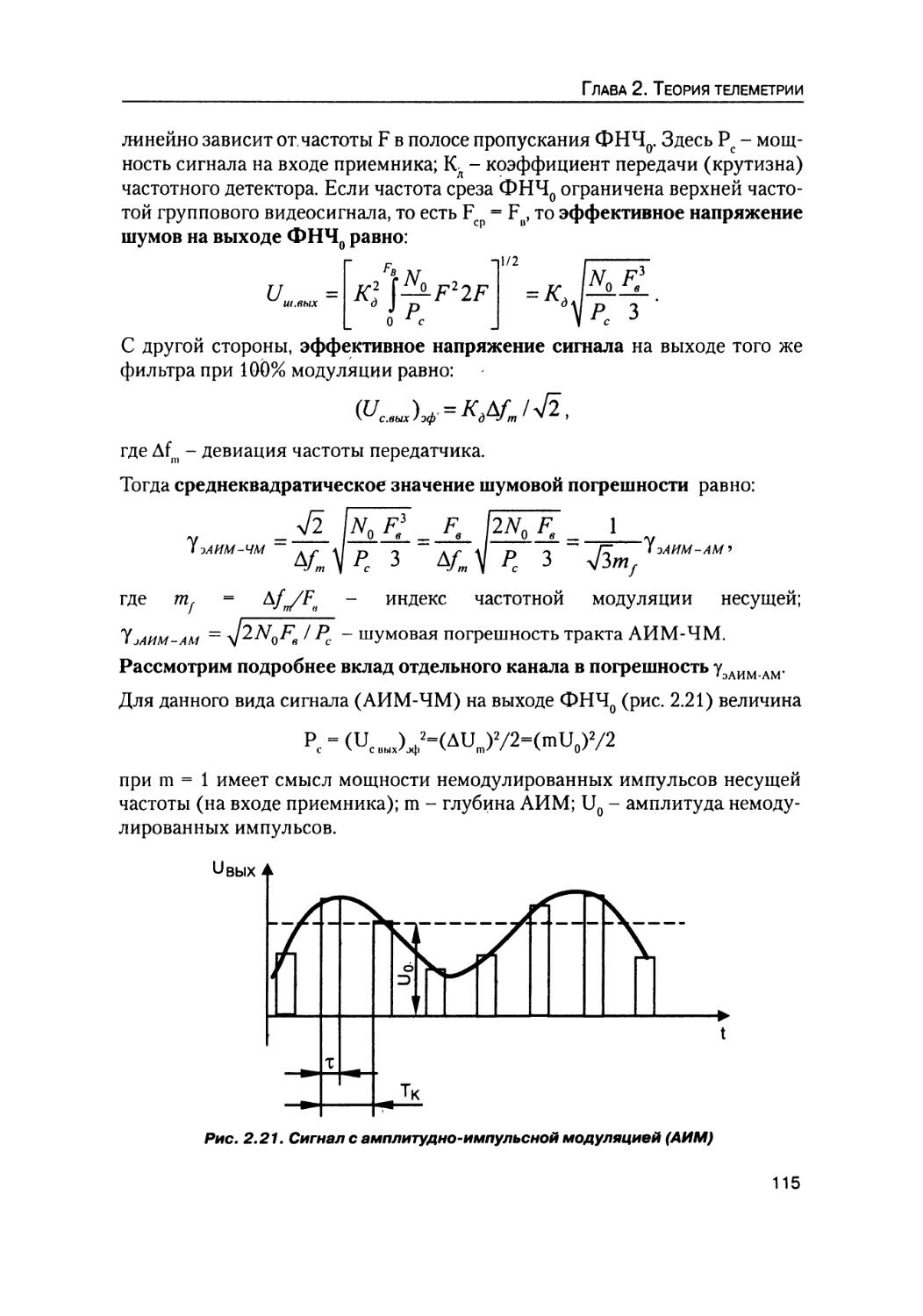
2.6.2. Информационно-телеметрическая система с сигналами
АИМ-ЧМ 114
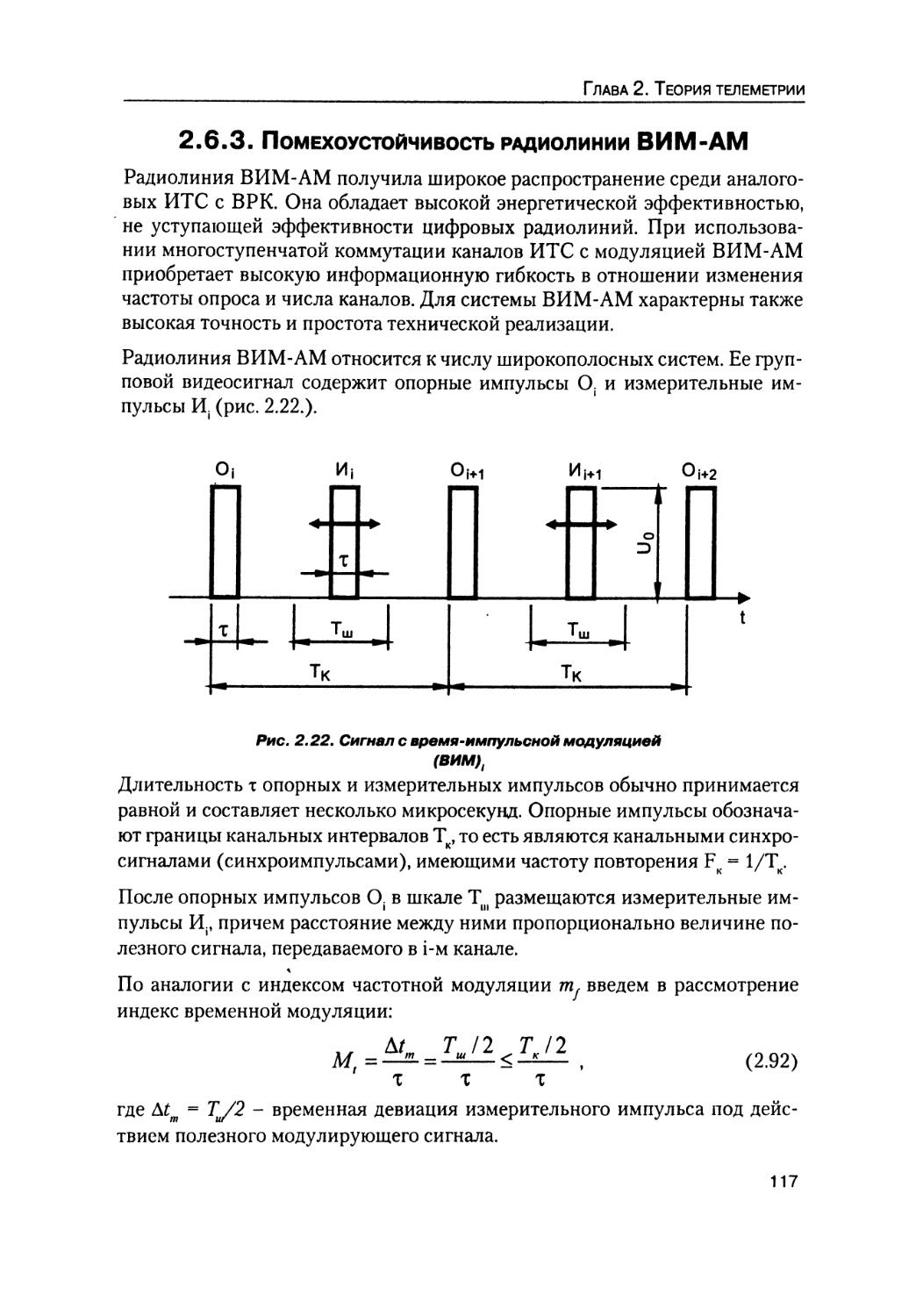
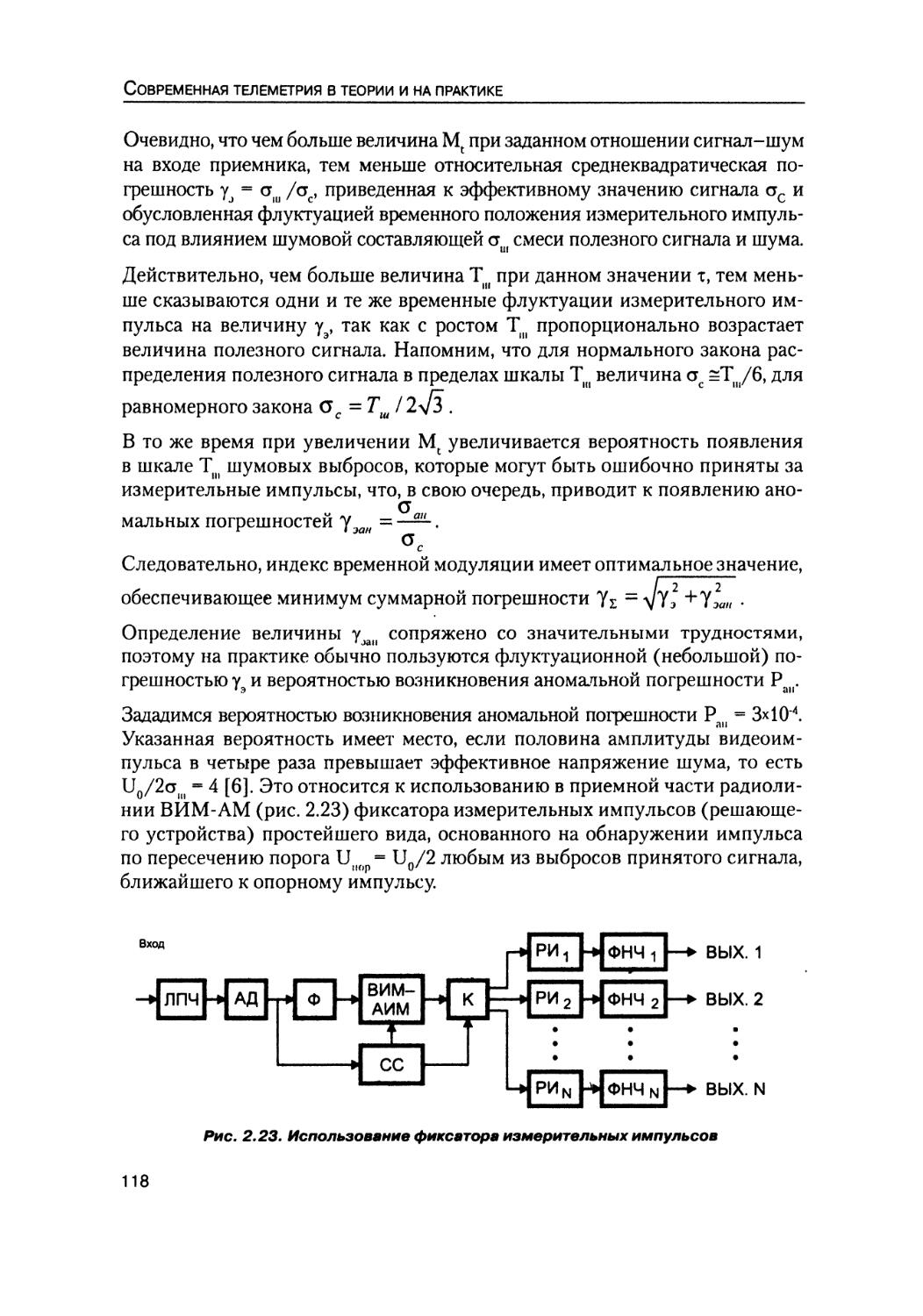
2.6.3. Помехоустойчивость радиолинии ВИМ-АМ 117
2.7. ЦИФРОВЫЕ МЕТОДЫ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ 122
2.7.1. Показатели качества цифровых телеметрических радиолиний
и предельные соотношения между ними 122
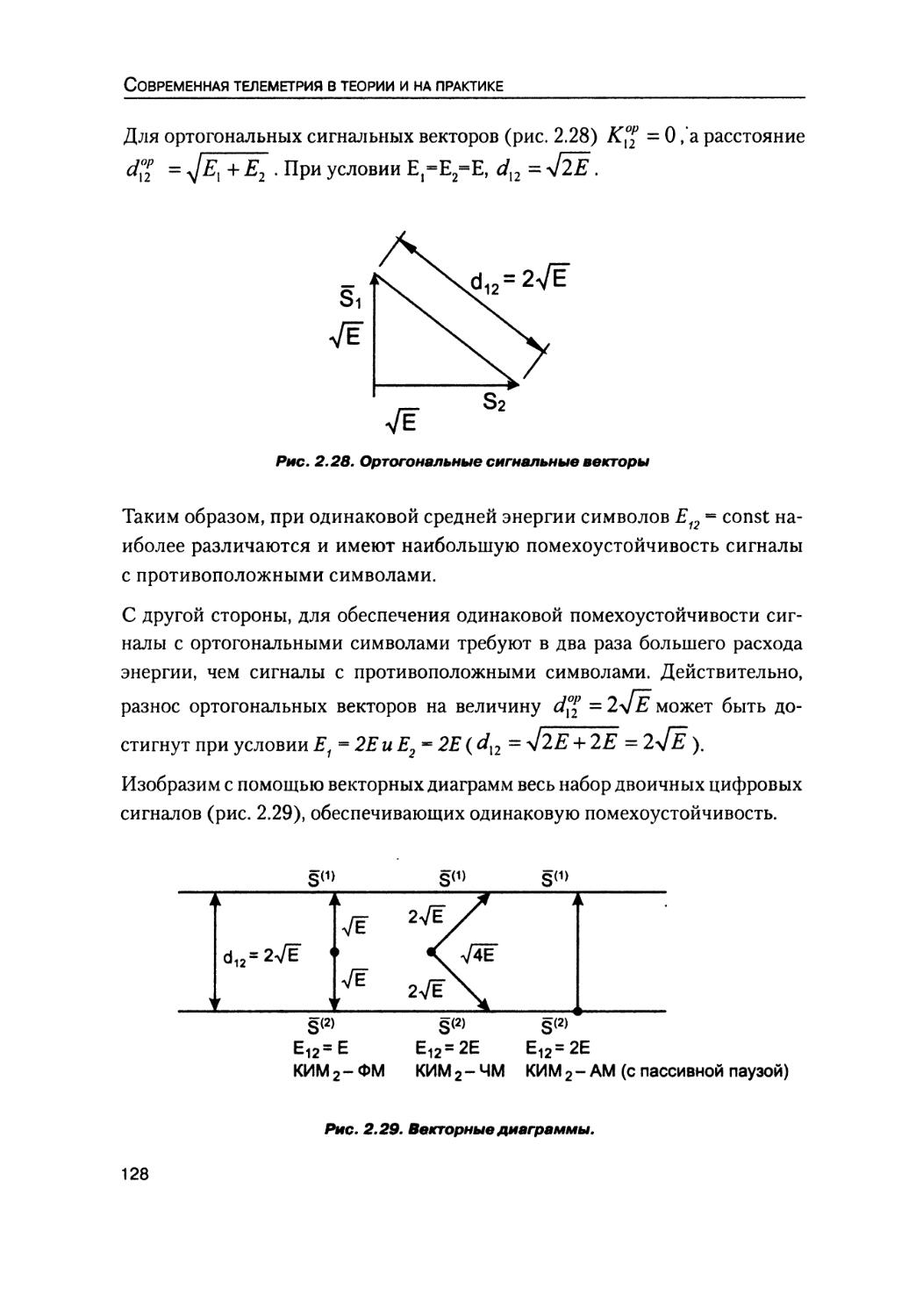
2.7.2. Представление символов в виде сигнальных векторов 125
Свойства векторного представления цифровых сигналов 125
Скалярное произведение 126
Расстояние между концами сигнальных векторов 126
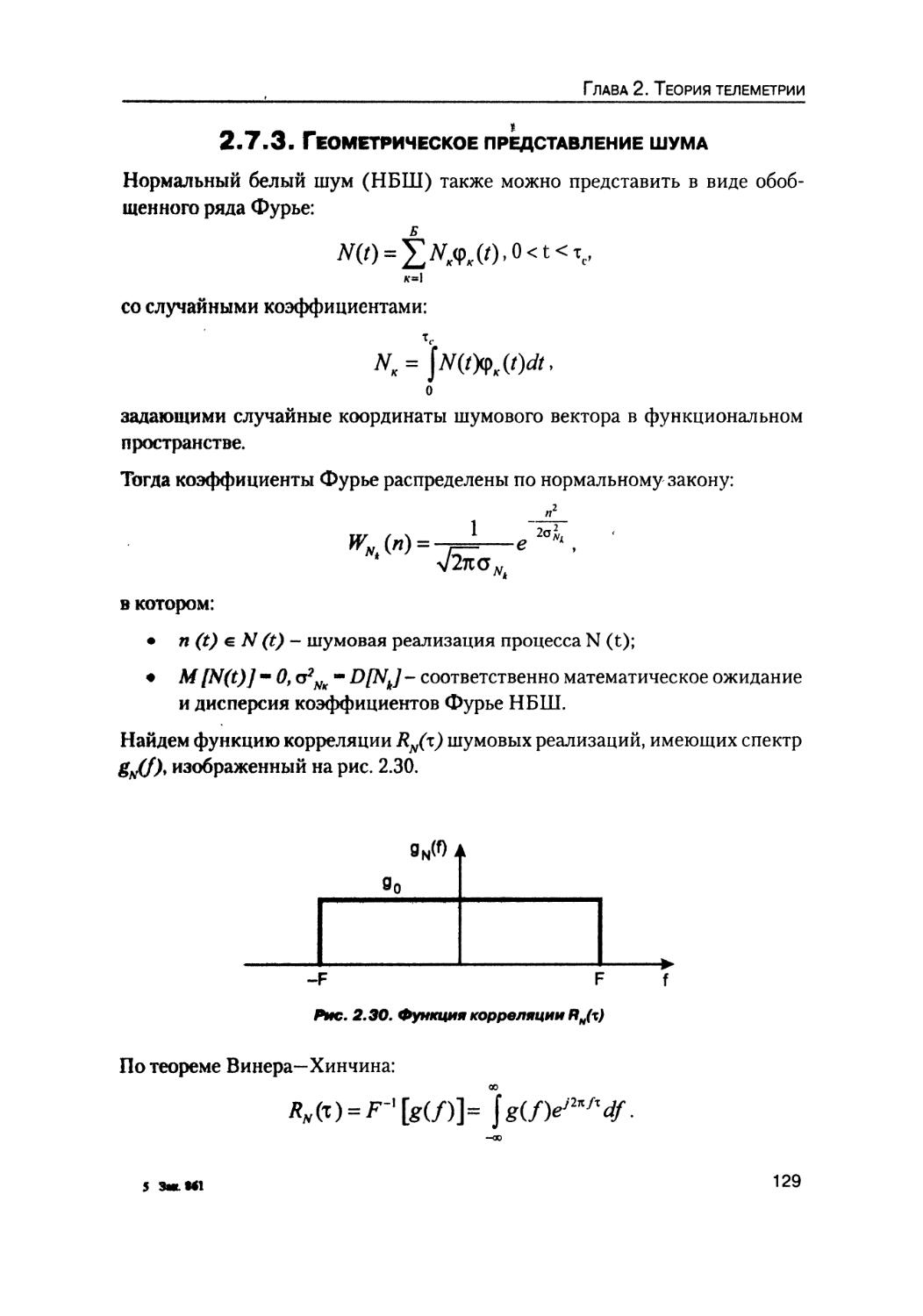
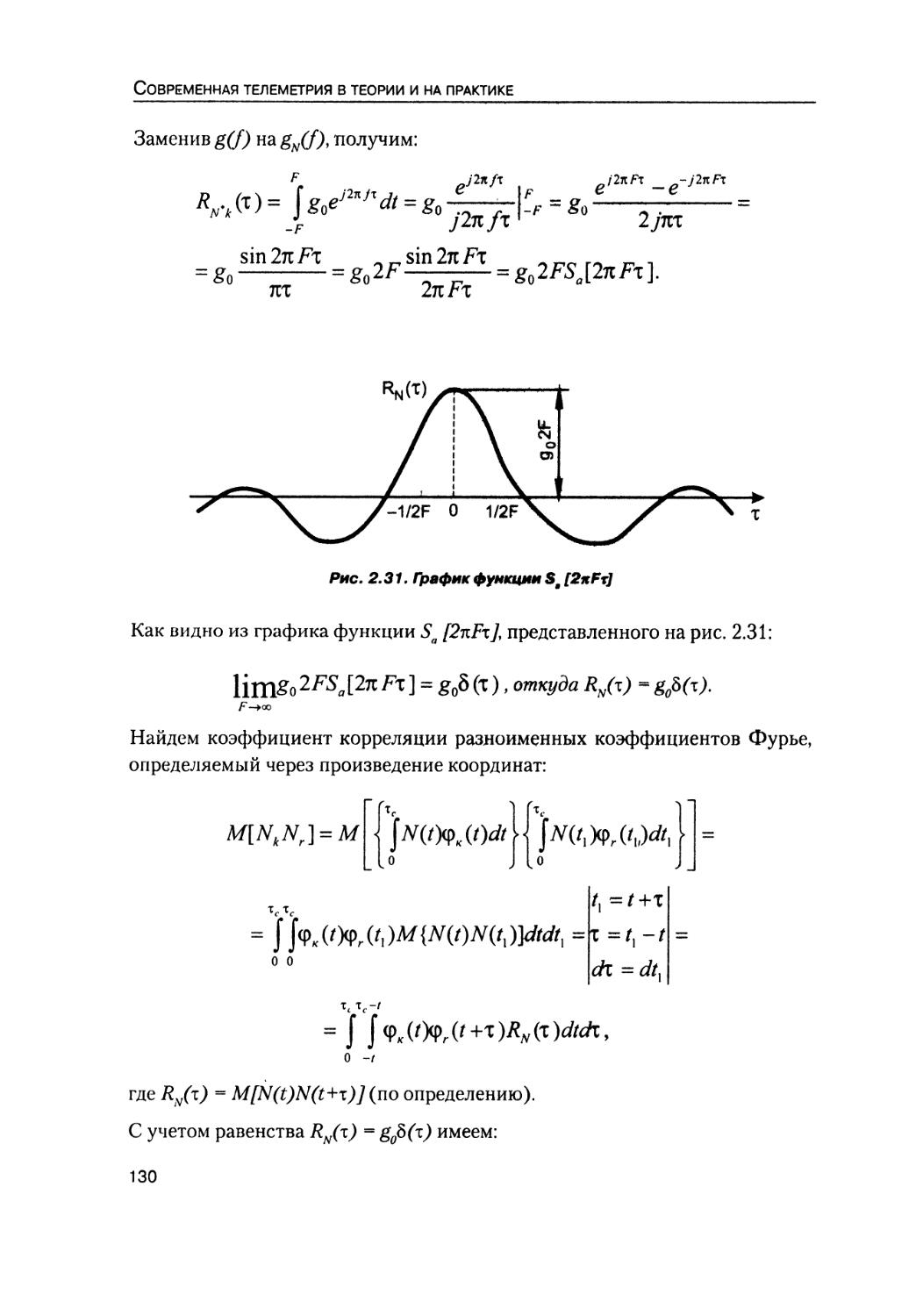
2.7.3. Геометрическое представление шума 129
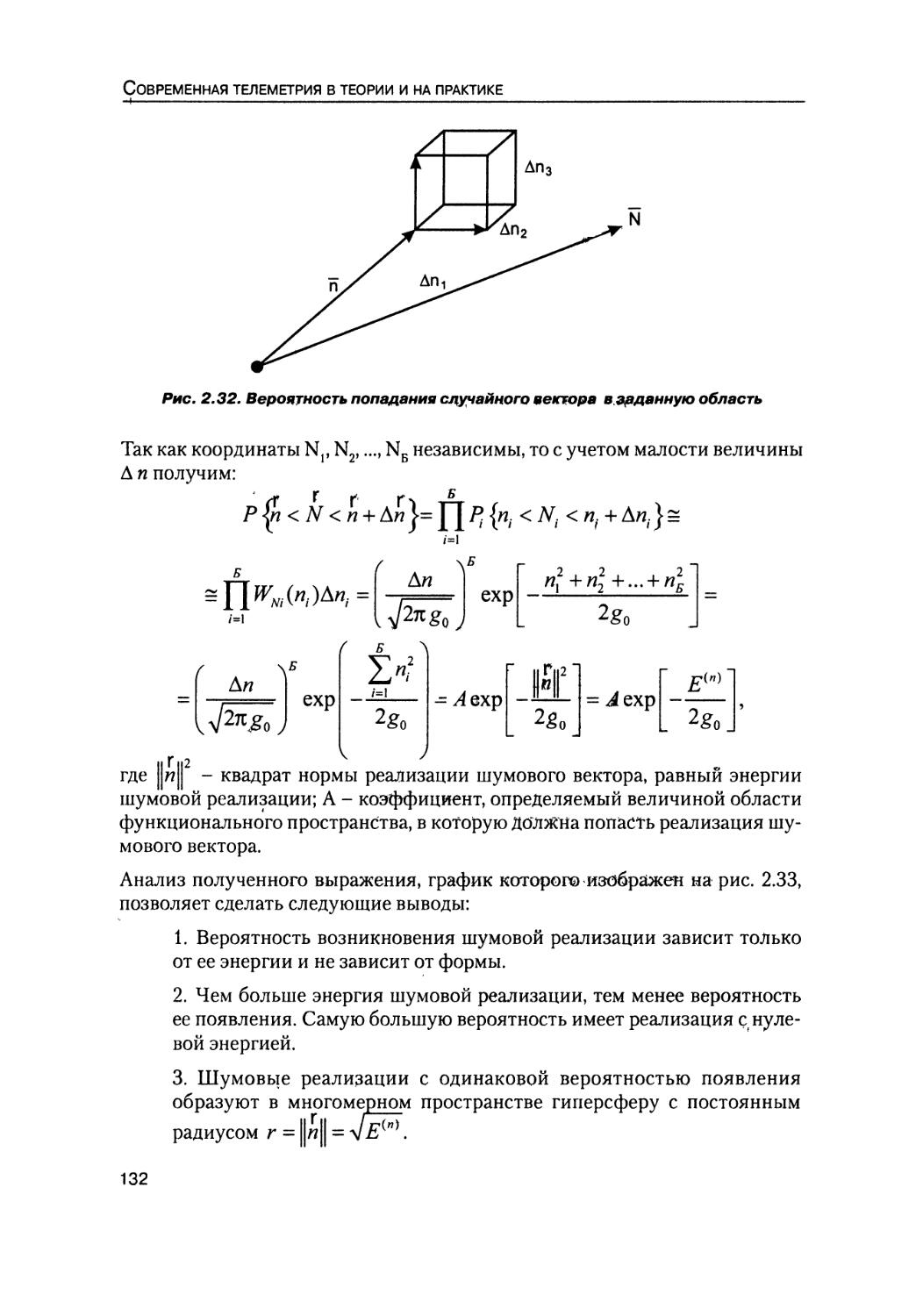
Вероятность возникновения заданной шумовой реализации... 131
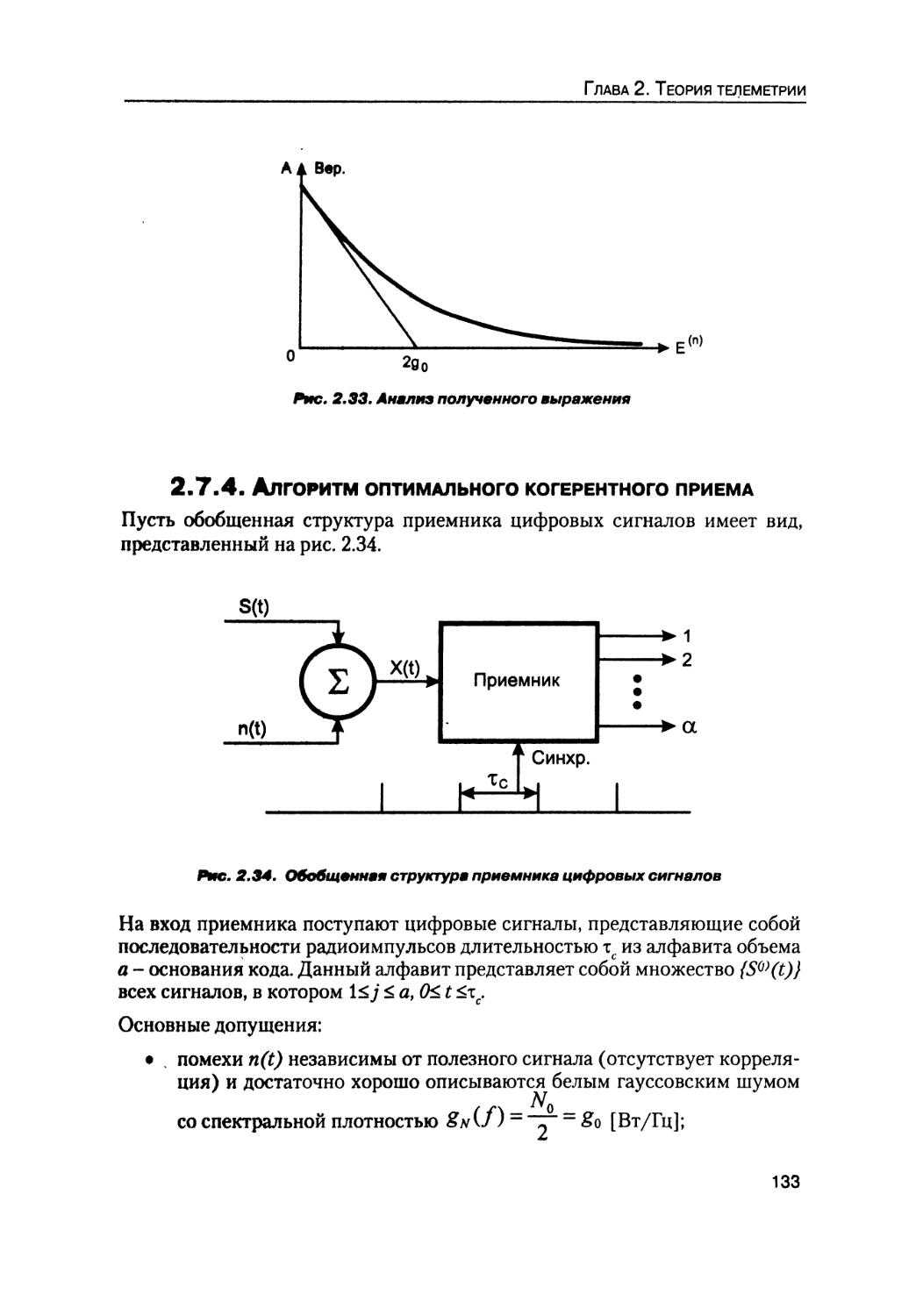
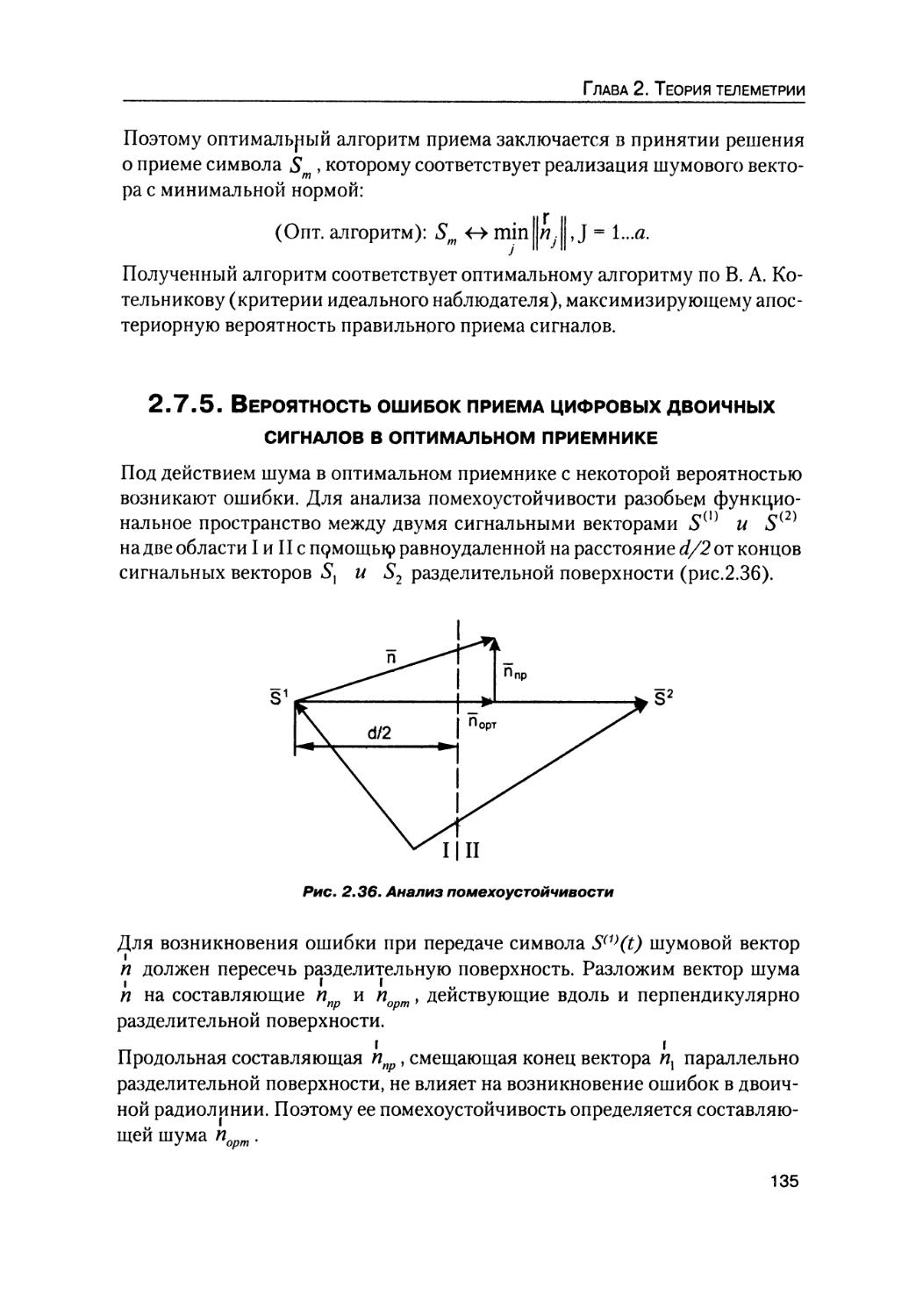
2.7.4. Алгоритм оптимального когерентного приема 133
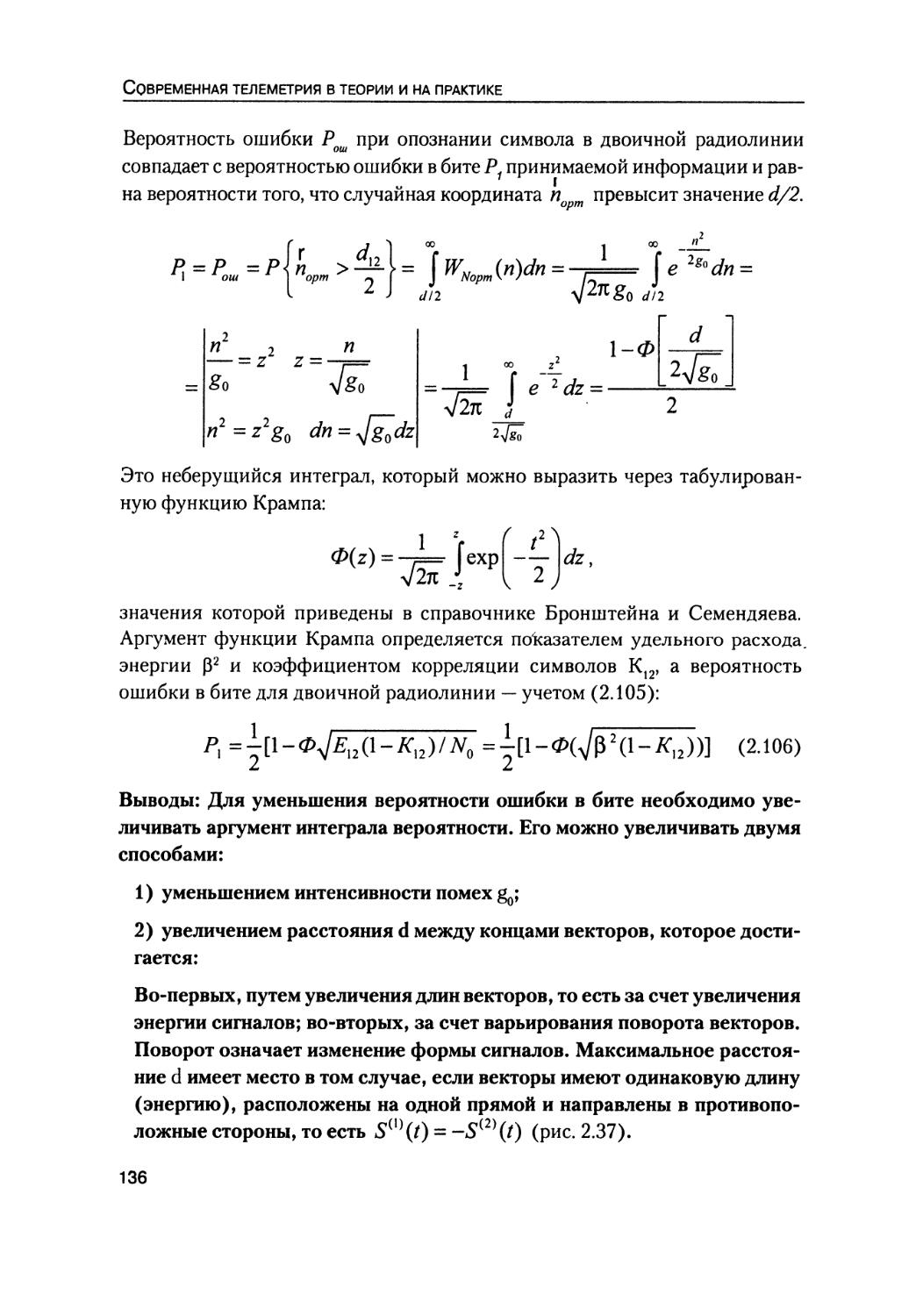
2.7.5. Вероятность ошибок приема цифровых двоичных сигналов
в оптимальном приемнике 135
2.7.6. Оценка помехоустойчивости двоичных радиолиний 139
2.7.7. Цифровые радиолинии с многоосновными кодами 140
Ортогональные сигналы 140
Симплексные сигналы 141
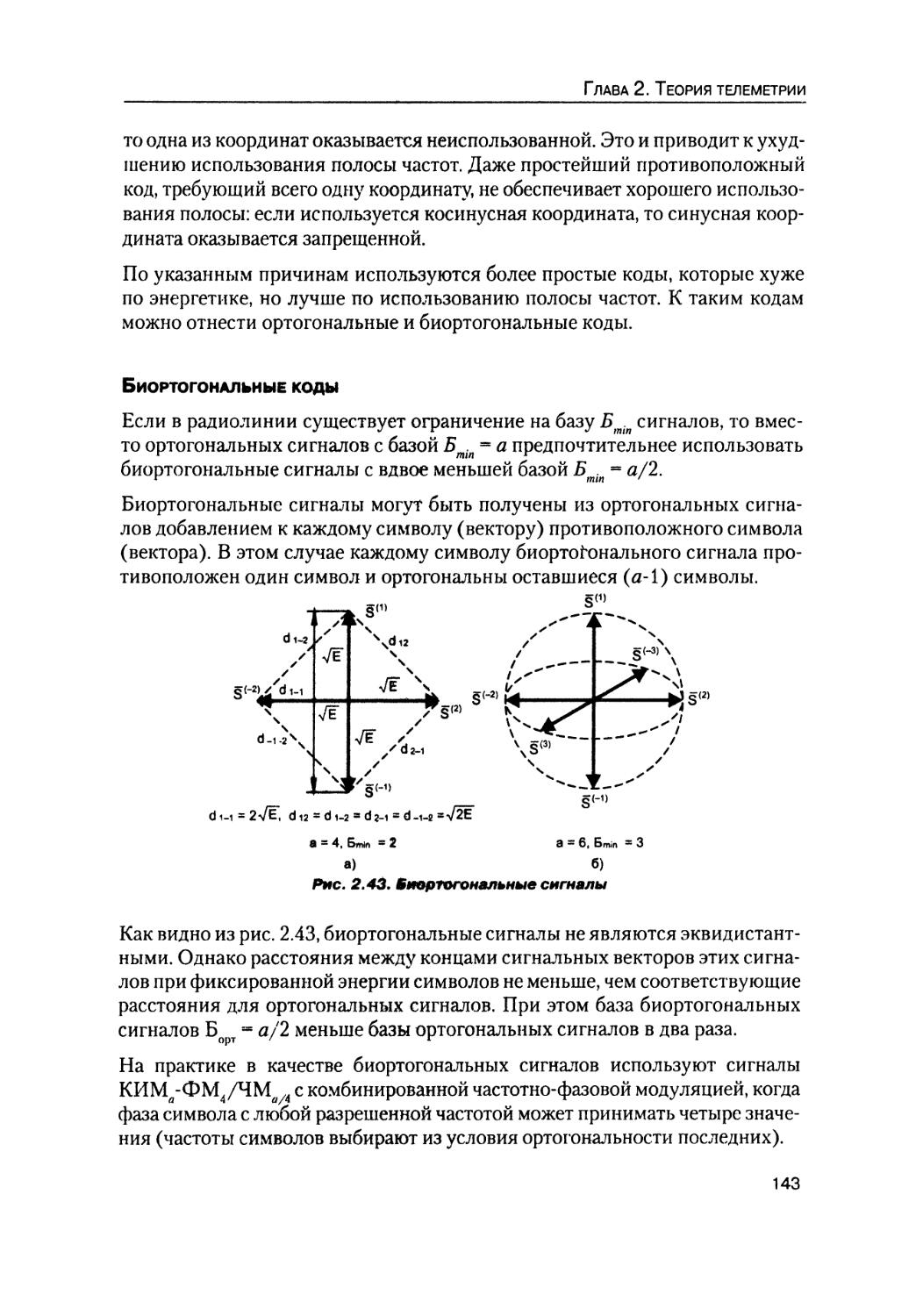
Биортогональные коды 143
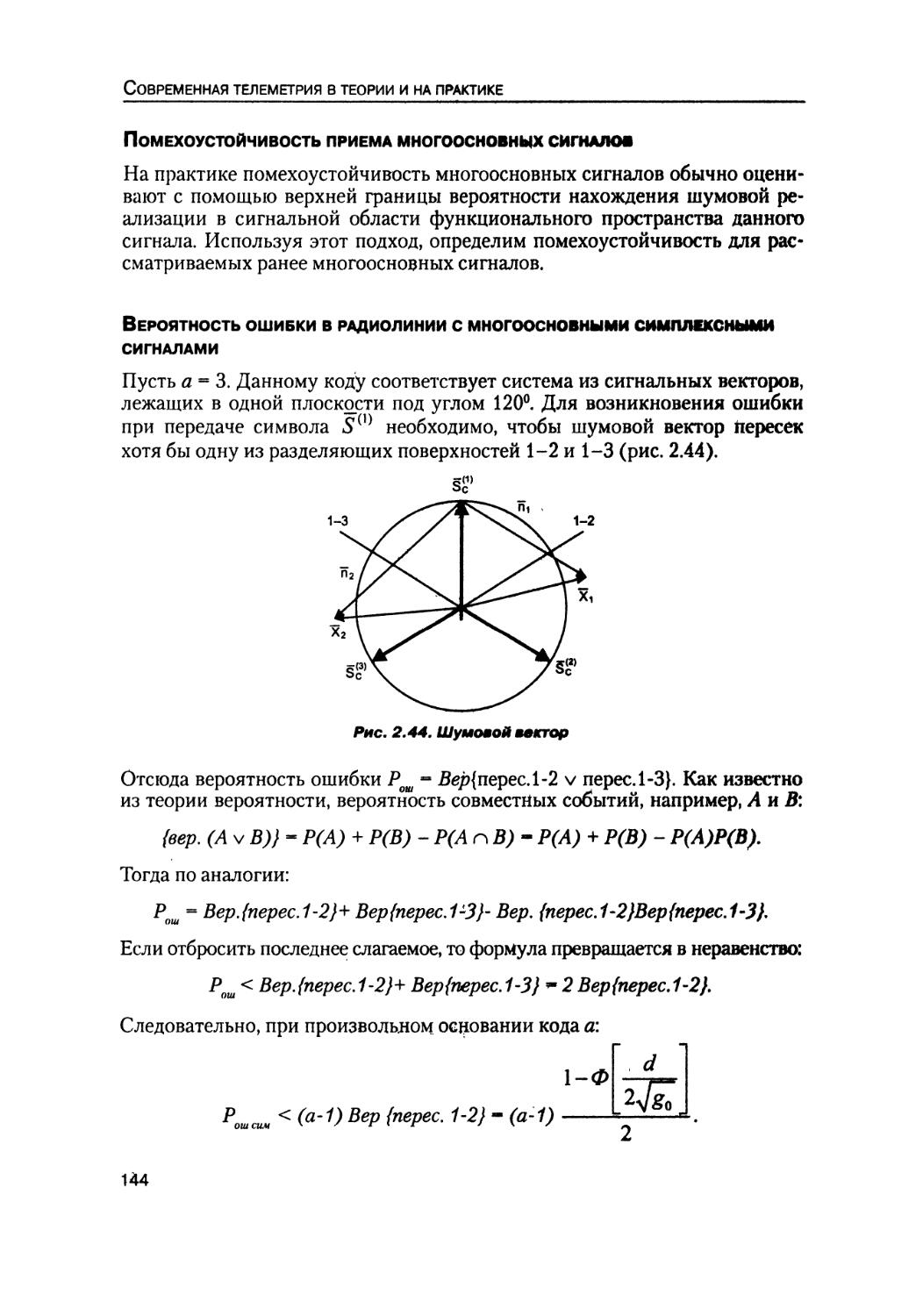
Помехоустойчивость приема многоосновных сигналов 144
Современная телеметрия в теории и на практике
. Вероятность ошибки в радиолинии с многоосновными
симплексными сигналами 144
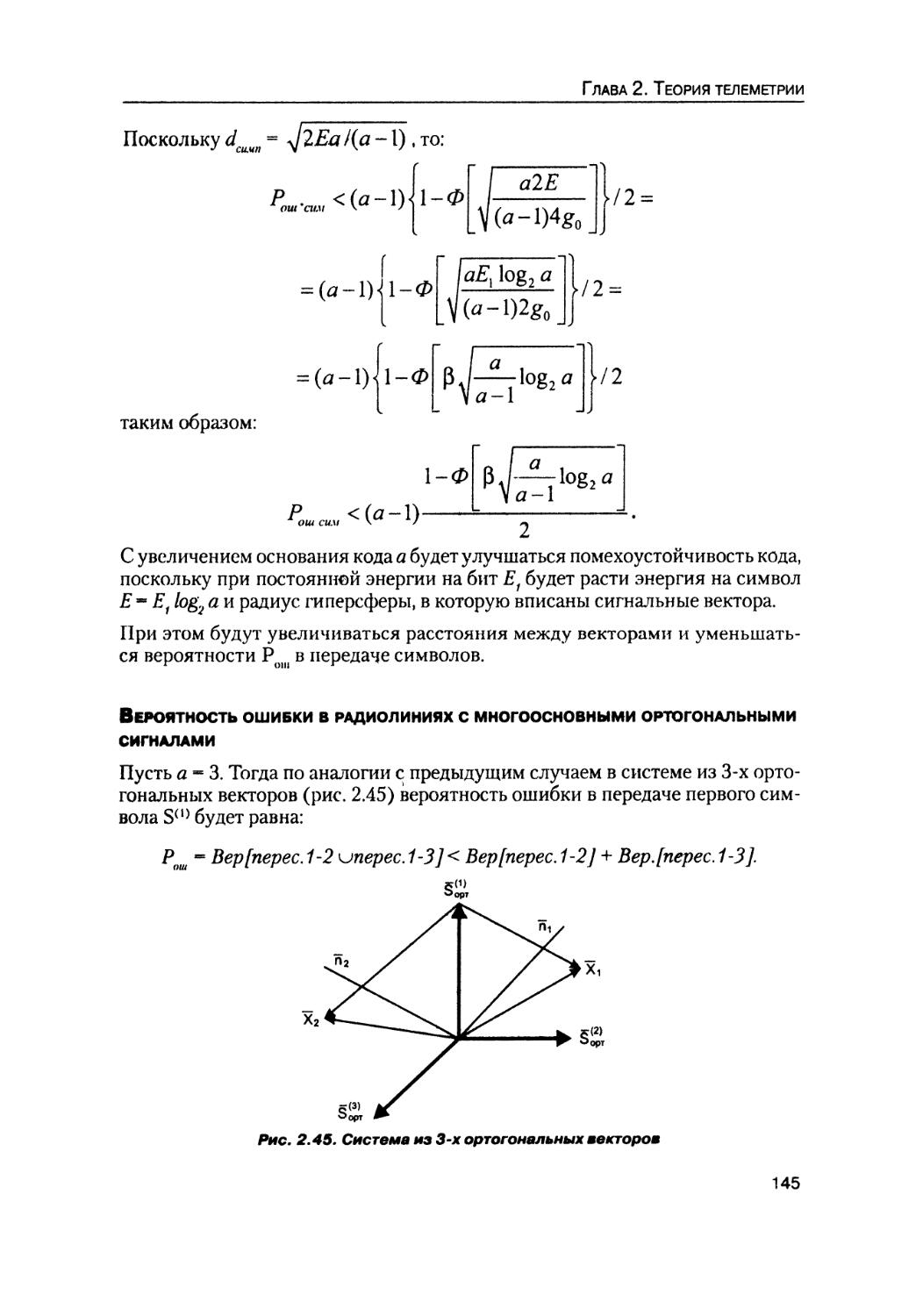
Вероятность ошибки в радиолиниях с многоосновными
ортогональными сигналами 145
Вероятность ошибки в радиолиниях с биортогональными
символами 146
Оценка потенциальной помехоустойчивости многоосновных
радиолиний 146
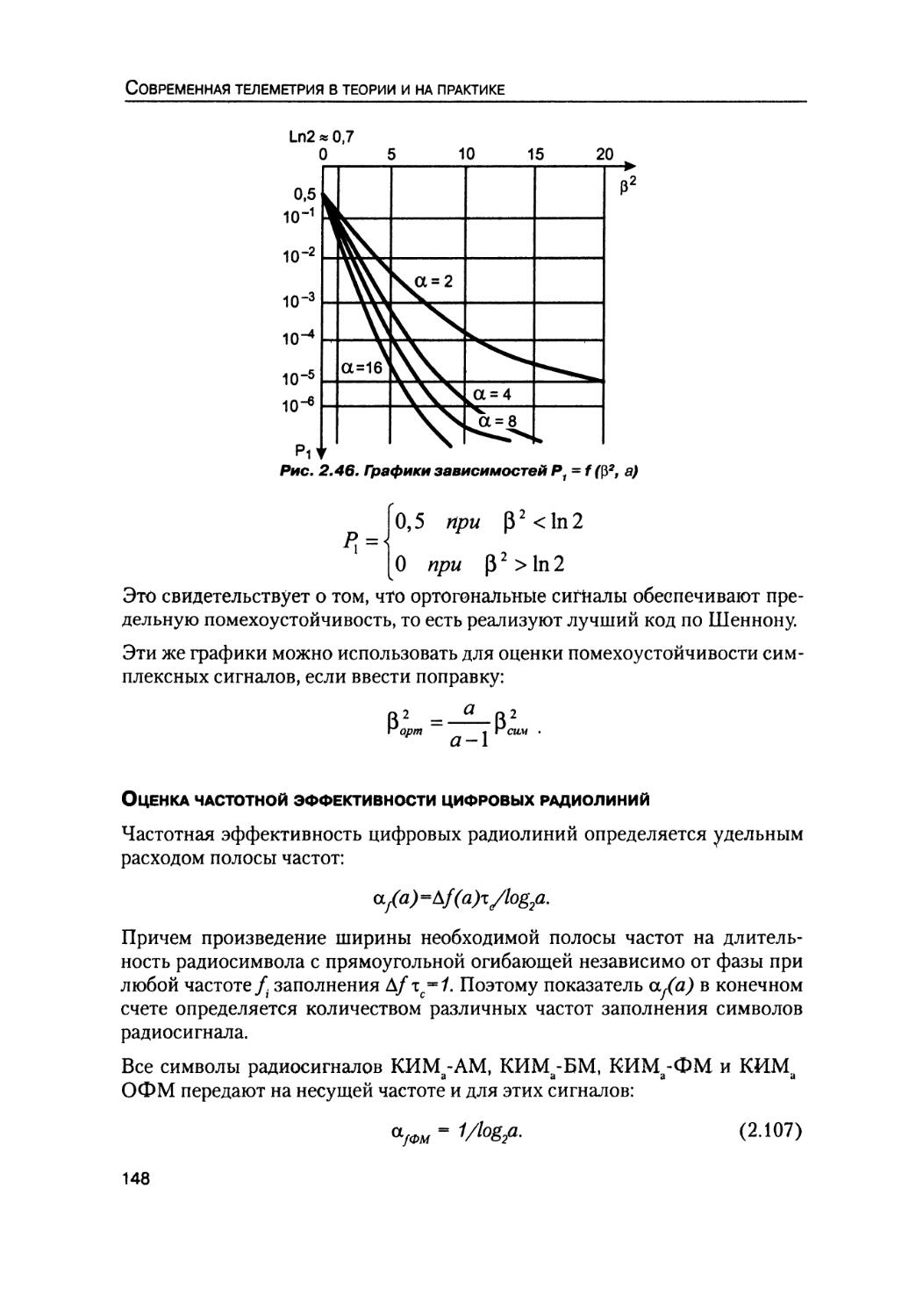
Оценка частотной эффективности цифровых радиолиний 148
2.7.8. Сравнение информационно-телеметрических систем 149
Общий подход 149
Алгоритм сравнения аналоговых и цифровых радиолиний 149
Сравнительный анализ цифровых и аналоговых радиолиний... 151
ЛИТЕРАТУРА К ГЛАВЕ 2 156
ГЛАВА 3. СРЕДСТВА ТЕЛЕМЕТРИИ 157
3.1. ТЕЛЕМЕТРИЧЕСКИЕ ДАТЧИКИ И ИХ КЛАССИФИКАЦИЯ 158
3.1.1. Определения и основные характеристики 158
3.1.2. Классификация телеметрических датчиков 159
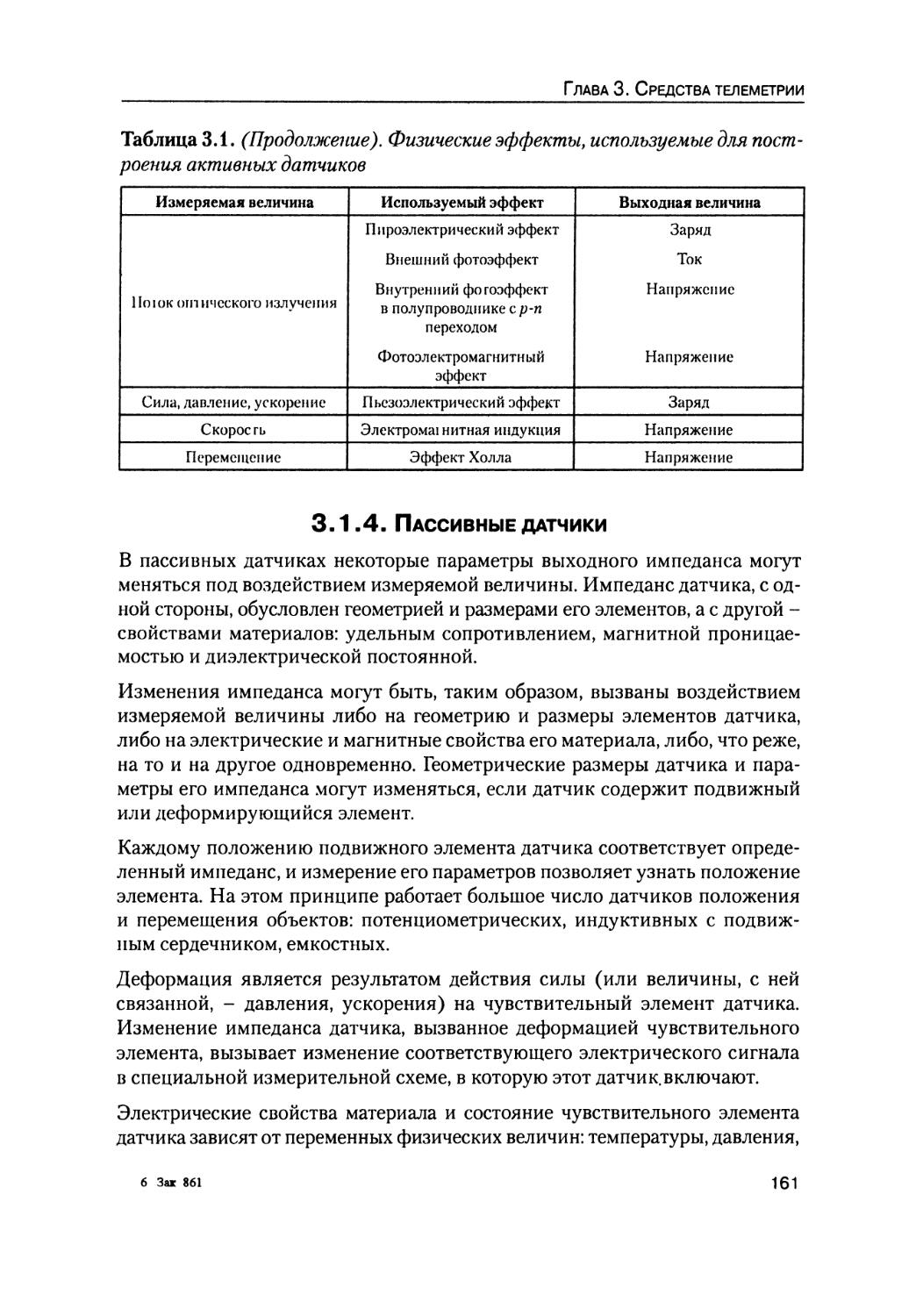
3.1.3. Активные датчики 160
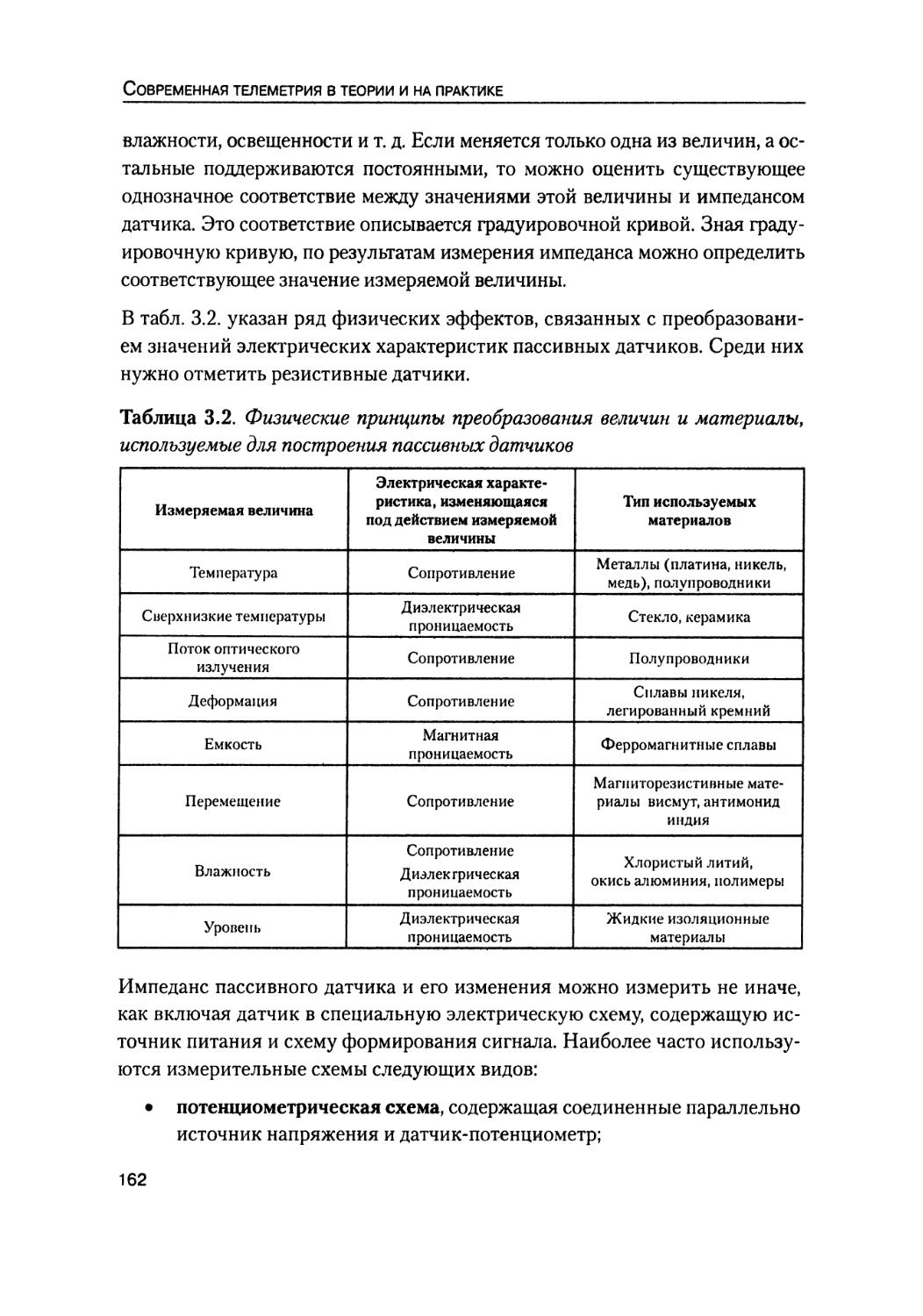
3.1.4. Пассивные датчики 161
3.1.5. Комбинированные датчики 163
3.1.6. Влияющие величины 163
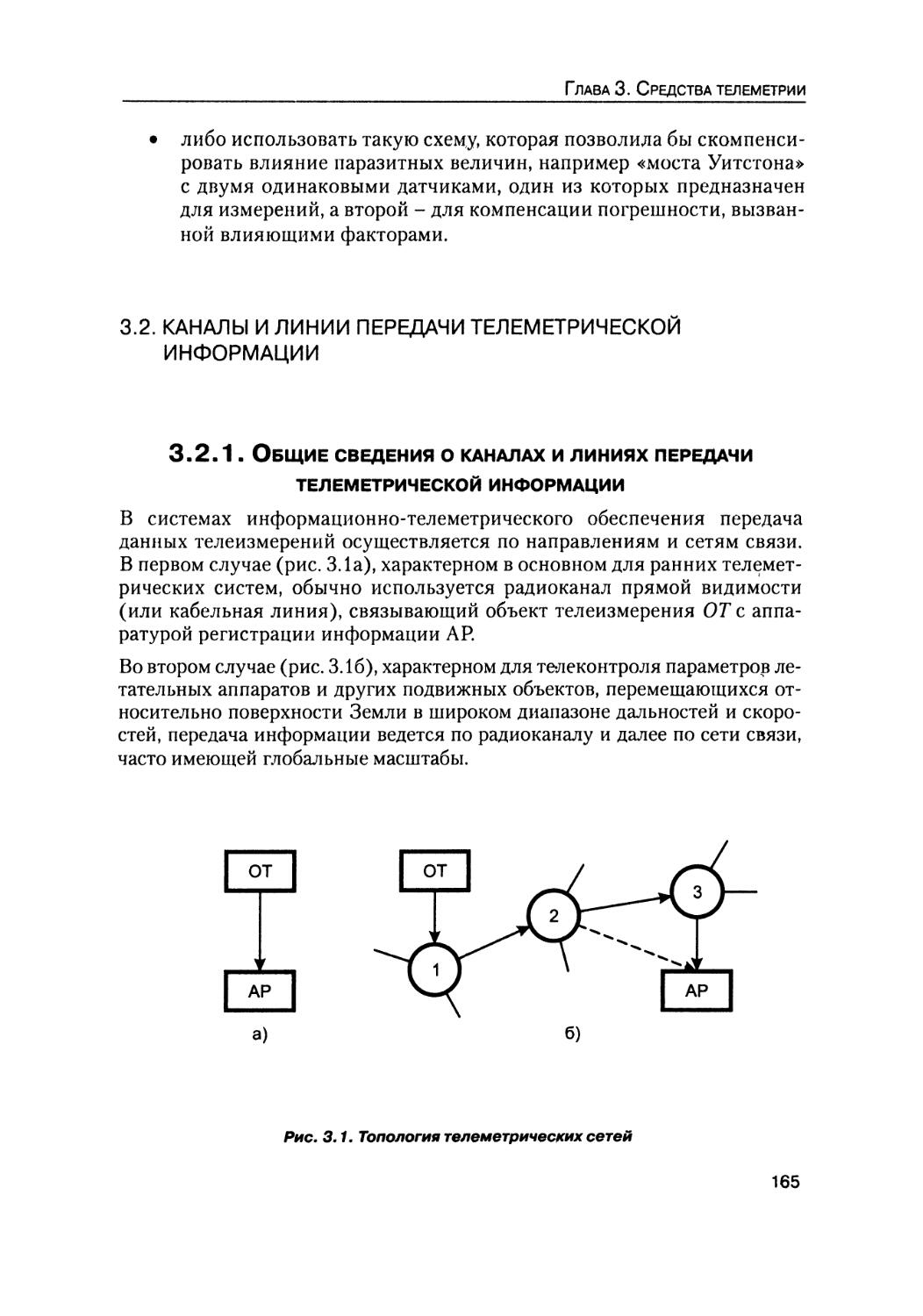
3.2. КАНАЛЫ И ЛИНИИ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ 165
3.2.1. Общие сведения о каналах и линиях передачи
телеметрической информации 165
3.2.2. Проводные линии связи 168
Общая информация 168
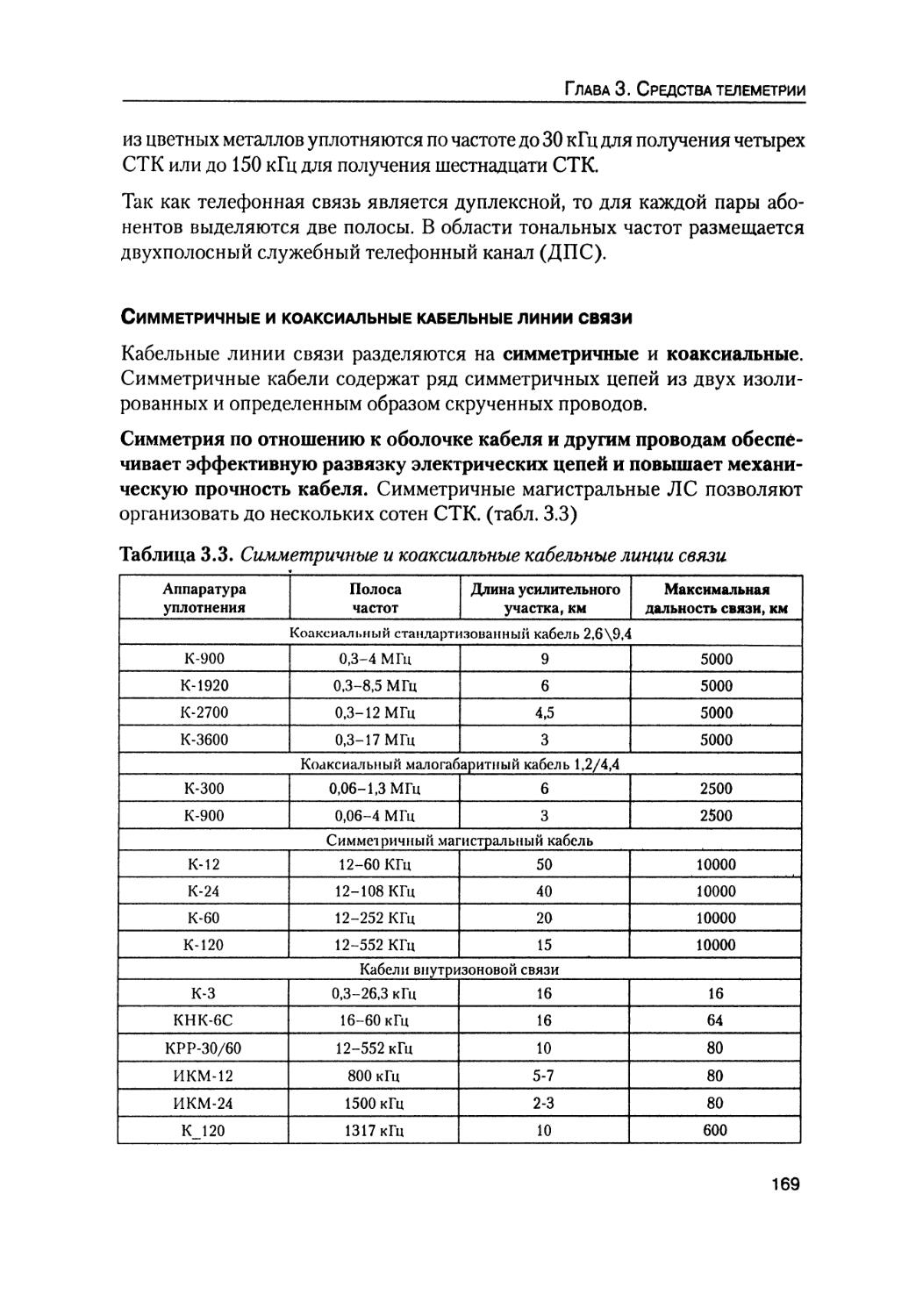
Симметричные и коаксиальные кабельные линии связи 169
Варианты передачи цифровых данных
(данных телеизмерений) 170
3.3. ИНФОРМАЦИОННО-ТЕЛЕМЕТРИЧЕСКИЕ СИСТЕМЫ С ЧАСТОТНЫМ РАЗДЕЛЕНИЕМ
КАНАЛОВ 172
3.3.1. Принцип частотного разделения каналов 172
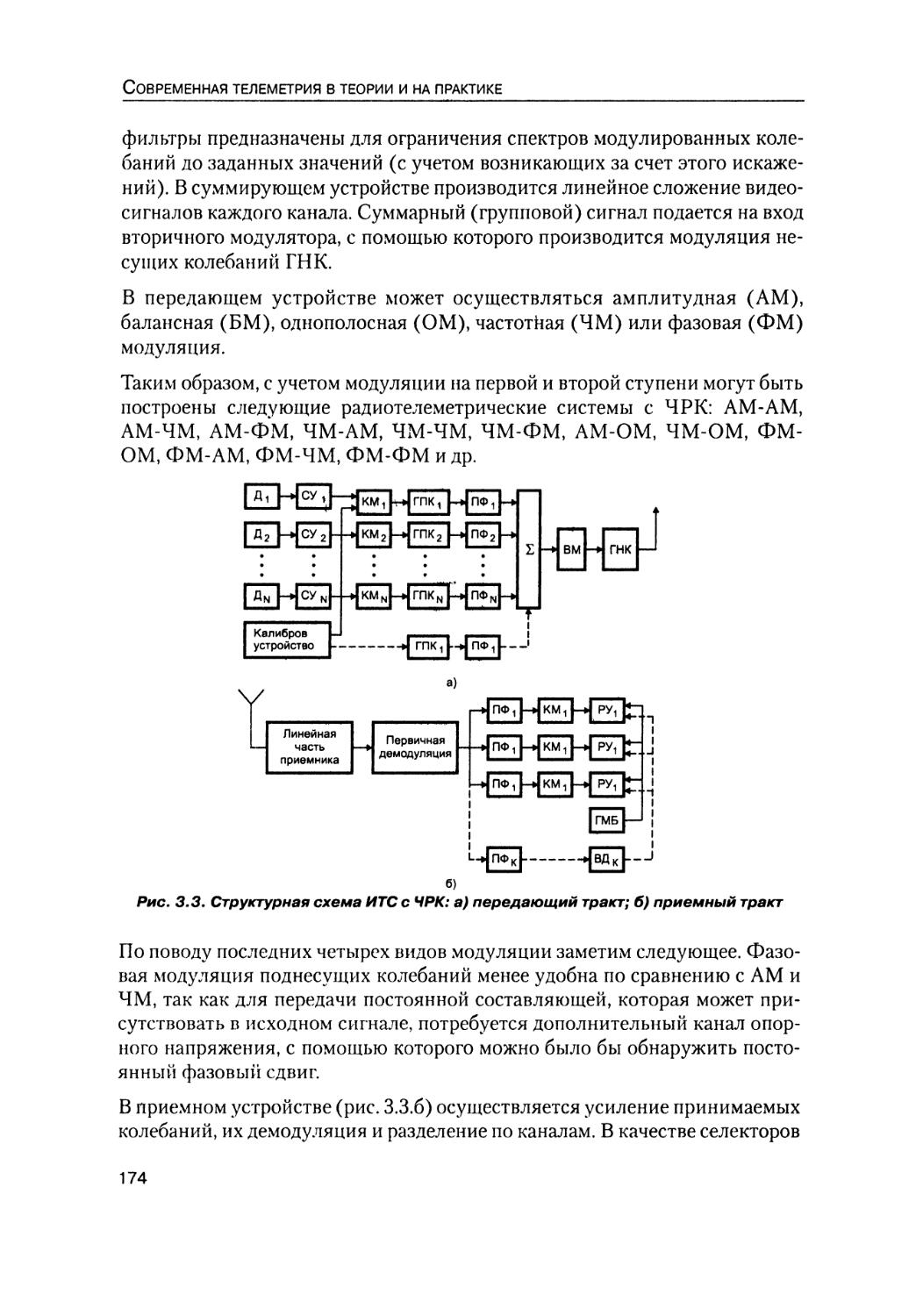
3.3.2. Структурная схема радиотелеметрической системы с ЧРК 173
3.4. РАДИОТЕЛЕМЕТРИЧЕСКИЕ СИСТЕМЫ С ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ 176
8
Содержание
3.4.1. Принцип временного разделения каналов 176
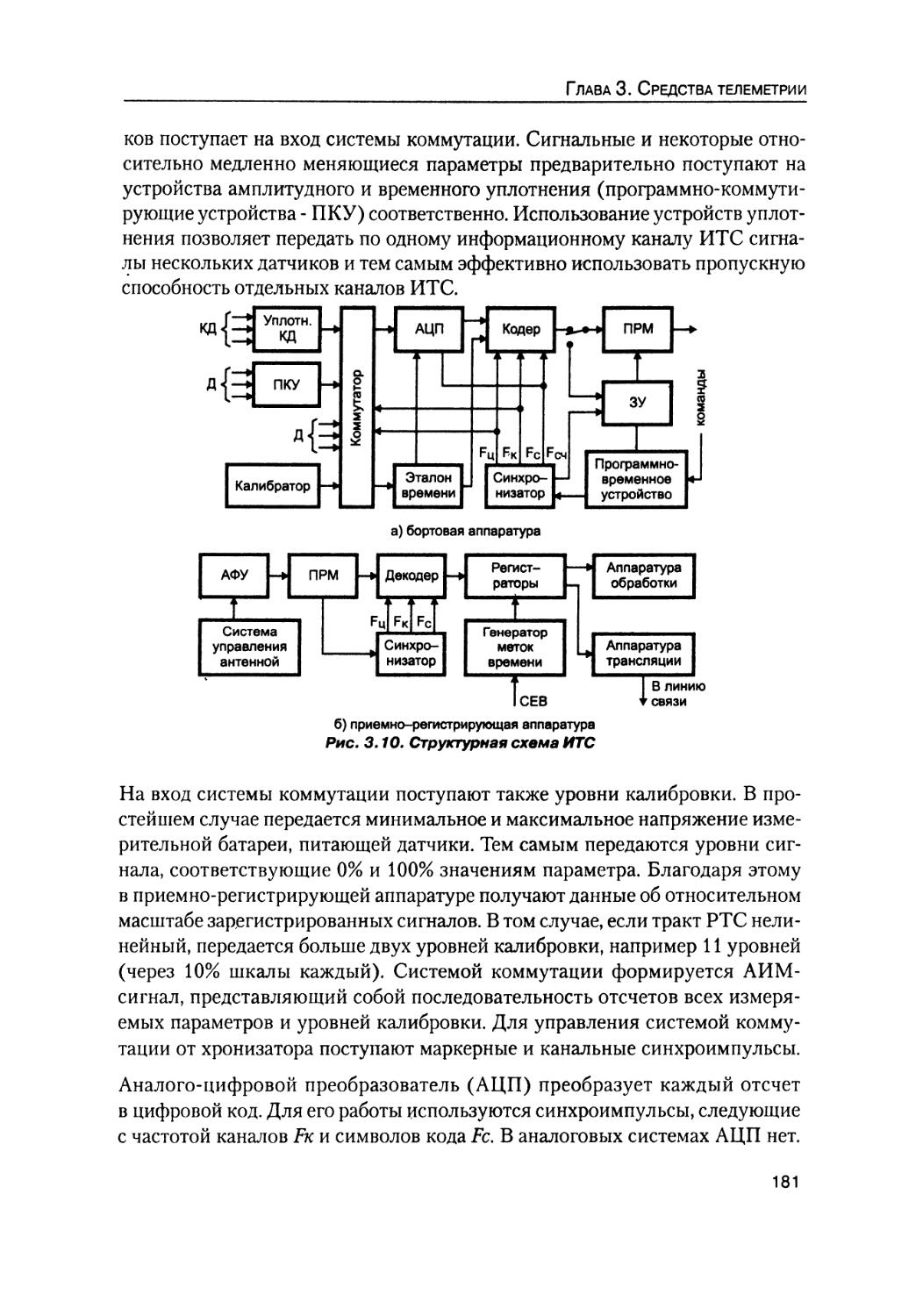
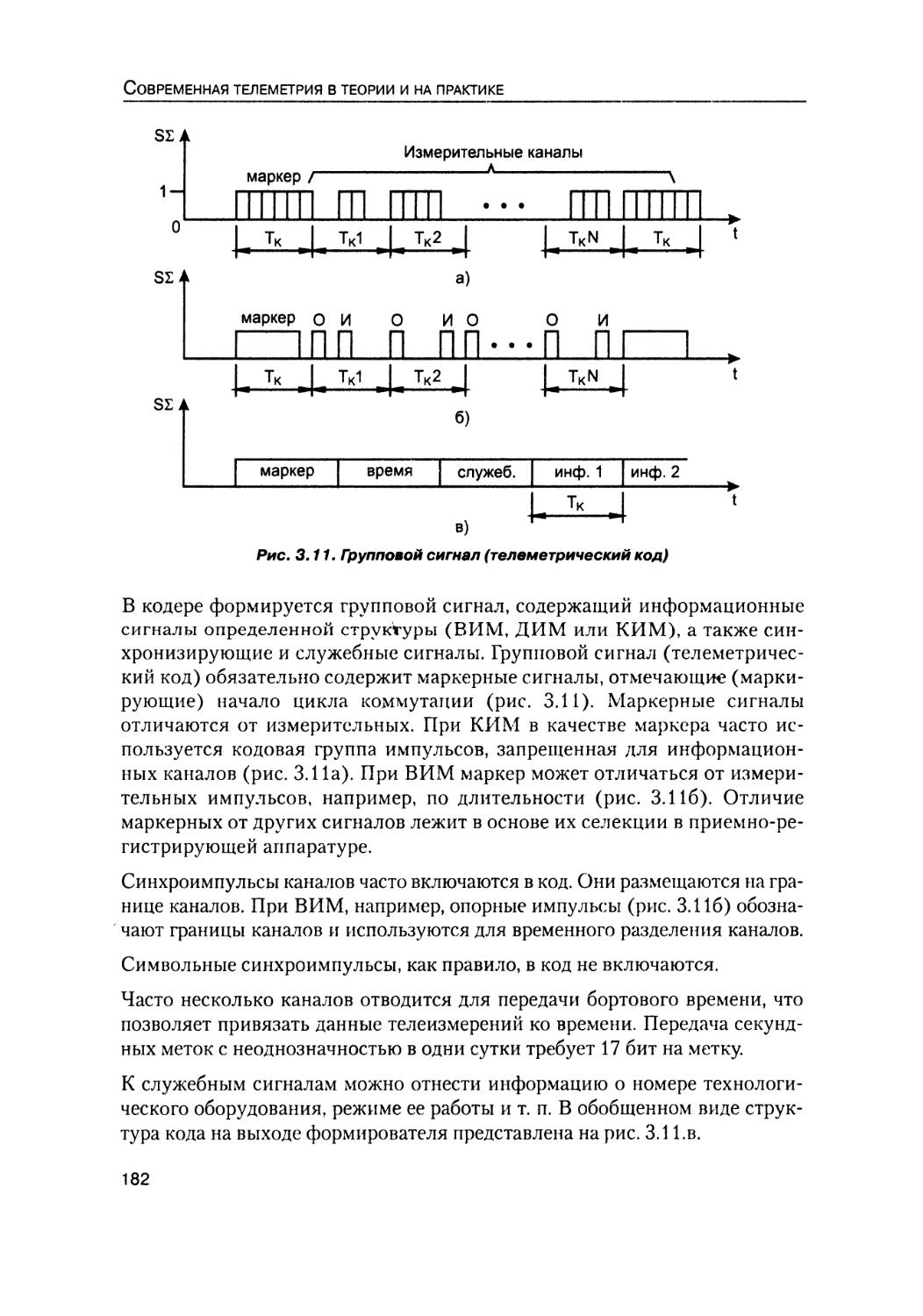
3.4.2. Структурная схема РТС с временным разделением каналов 180
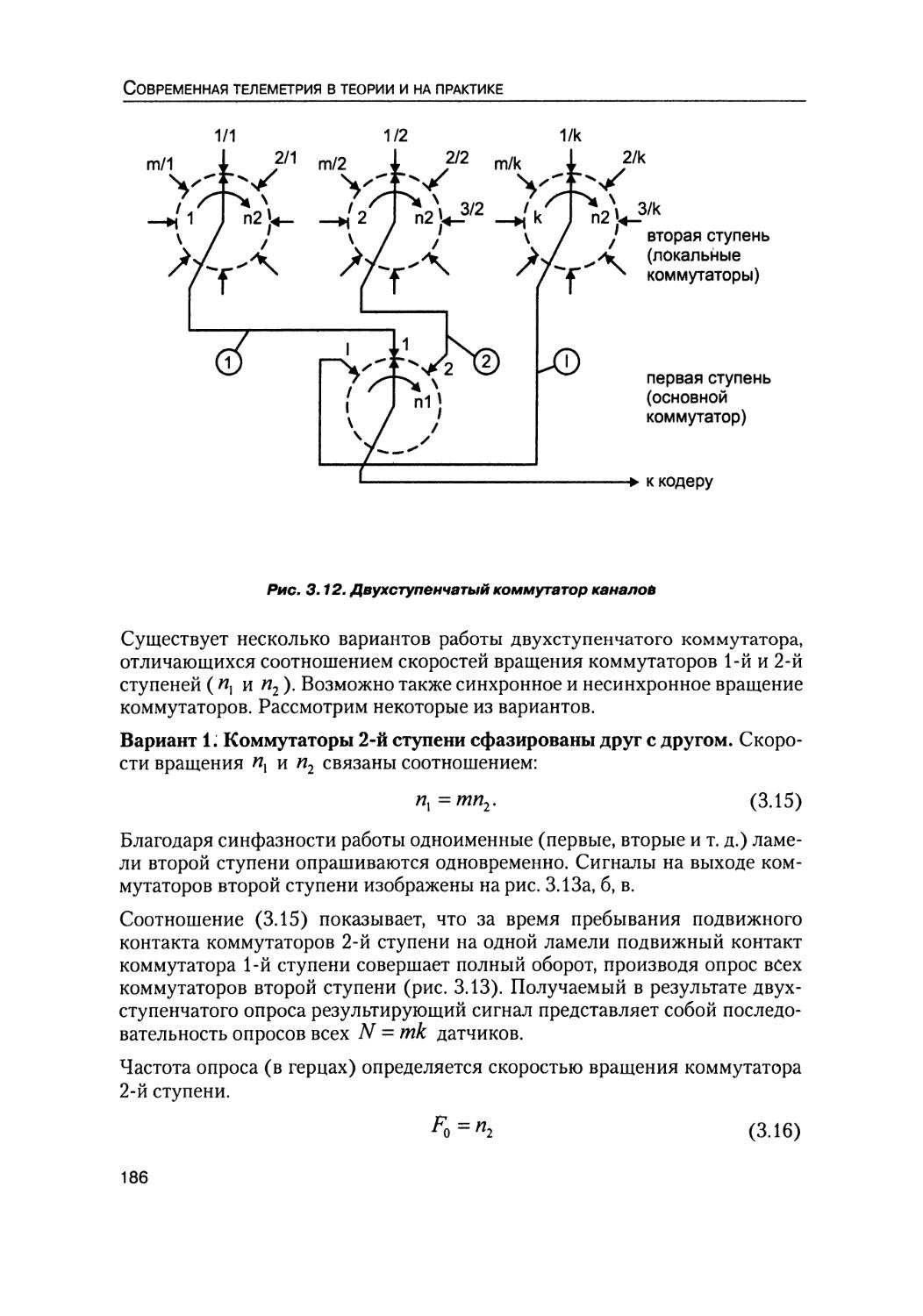
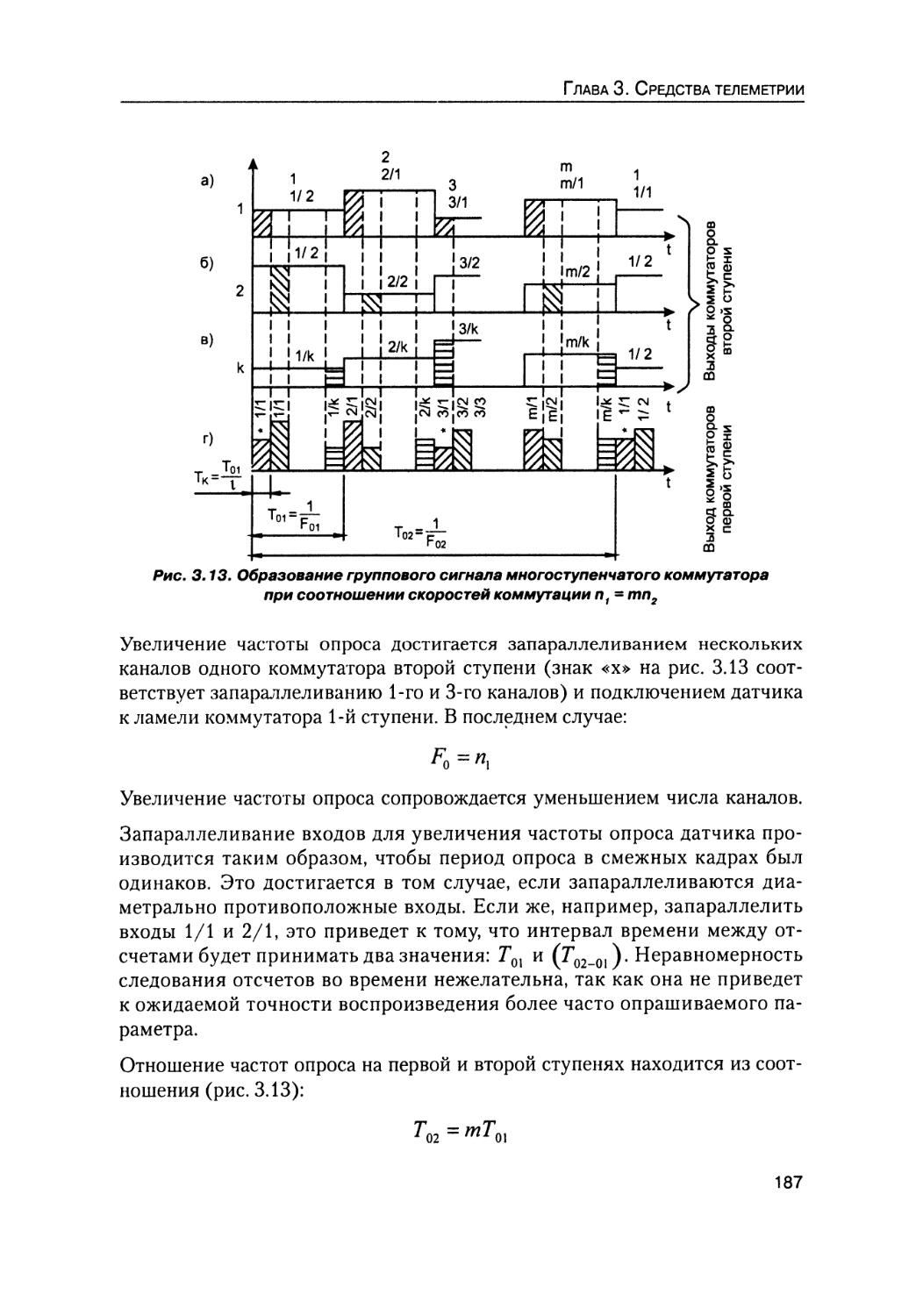
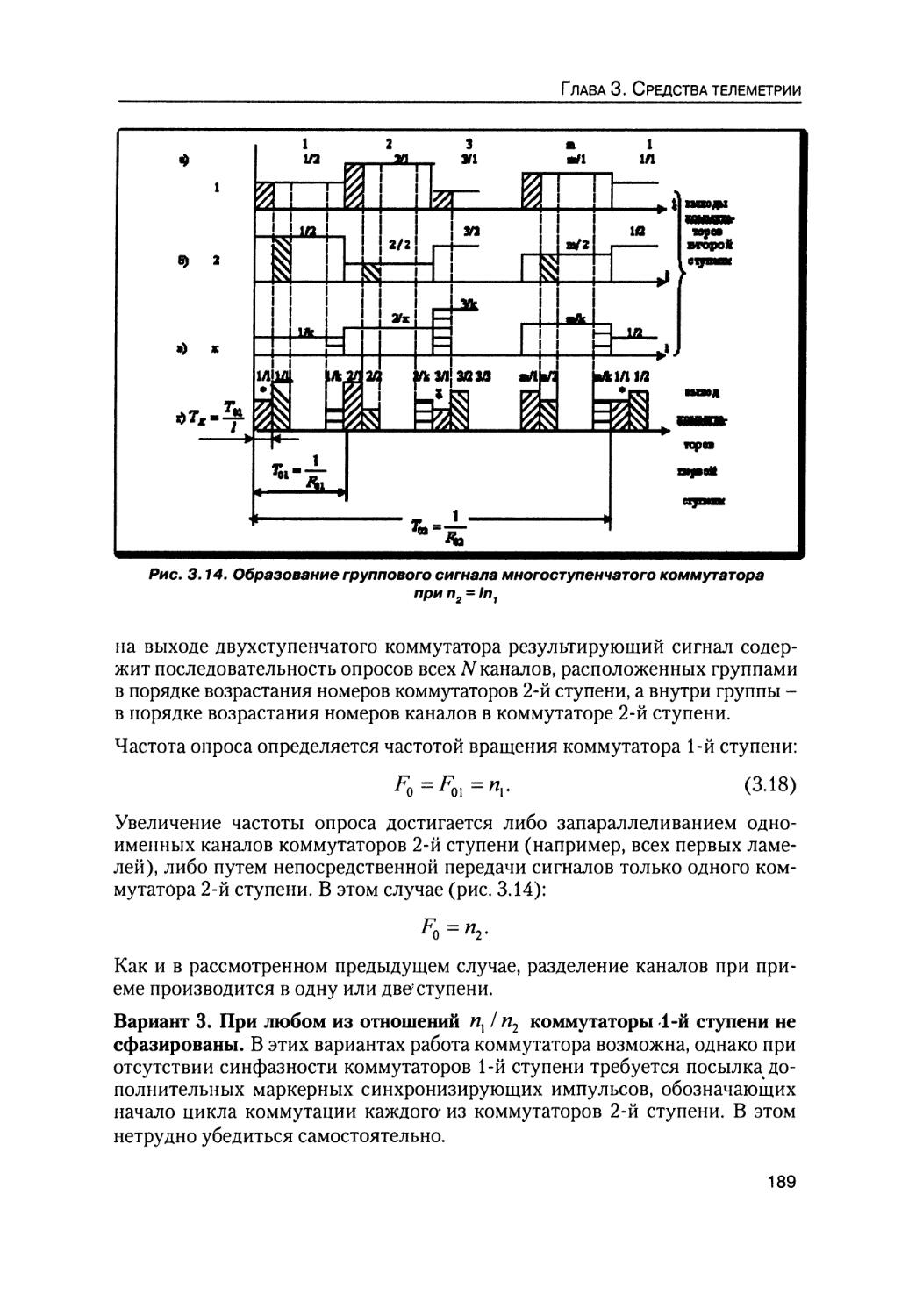
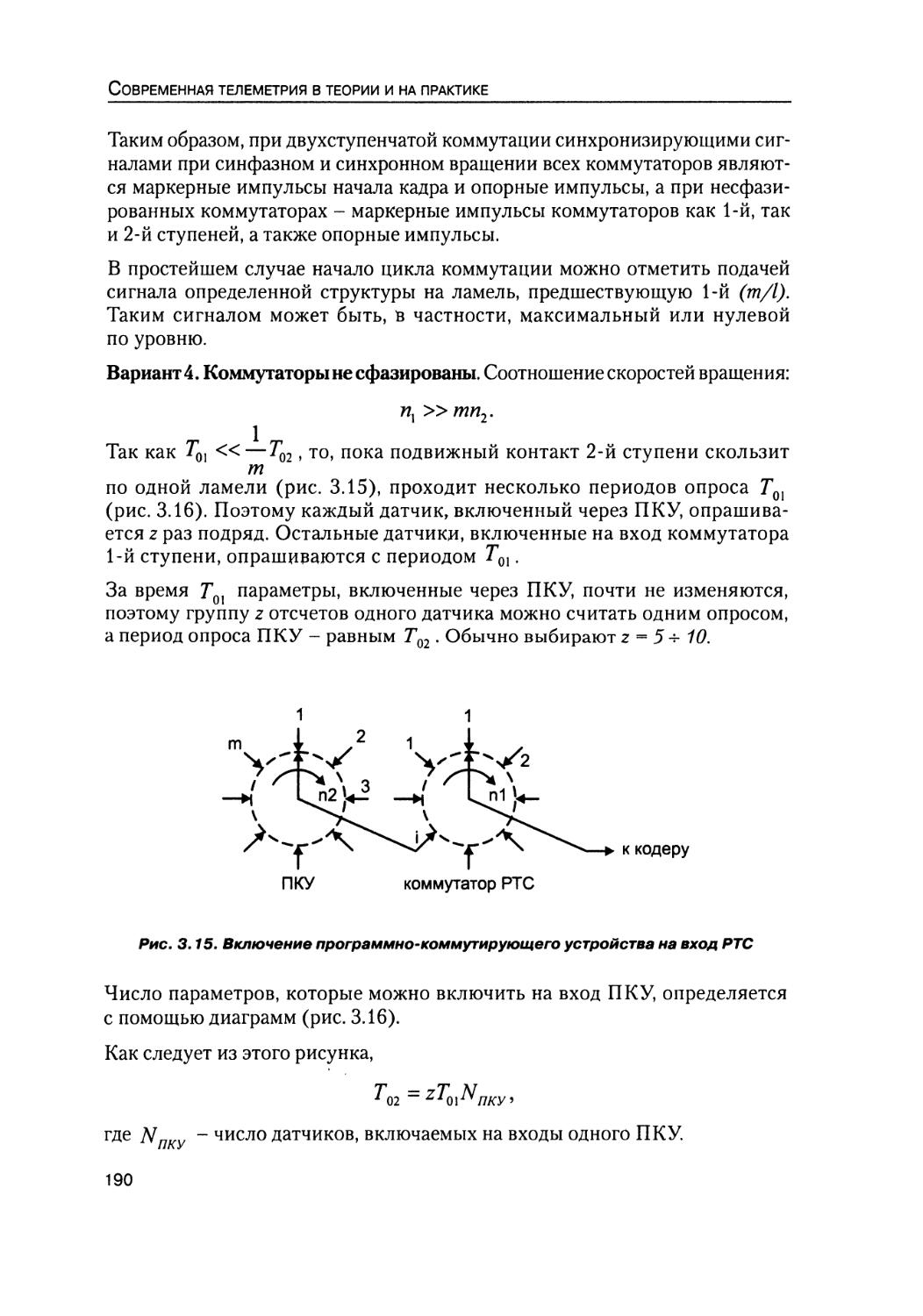
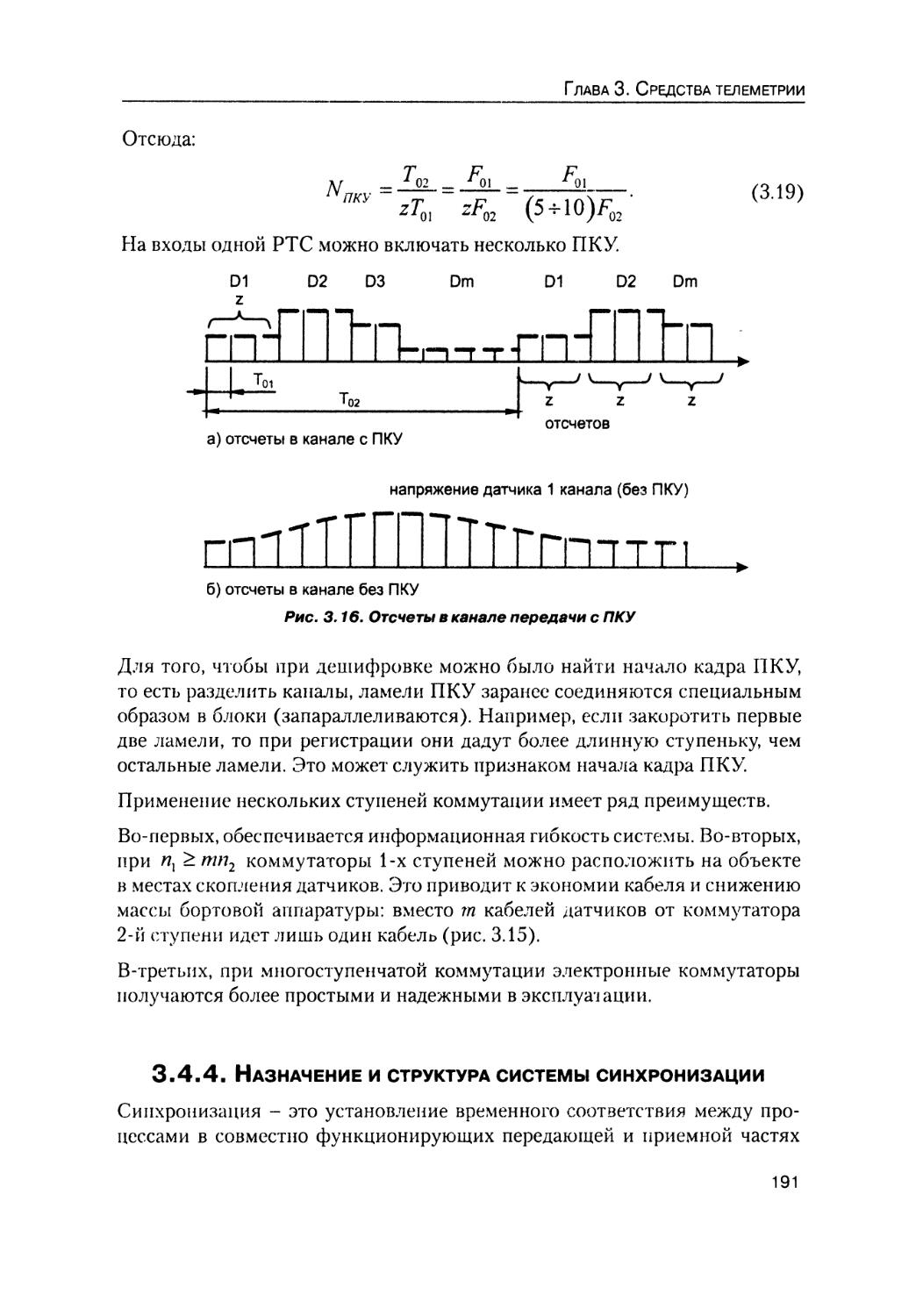
3.4.3. Многоступенчатая коммутация каналов 185
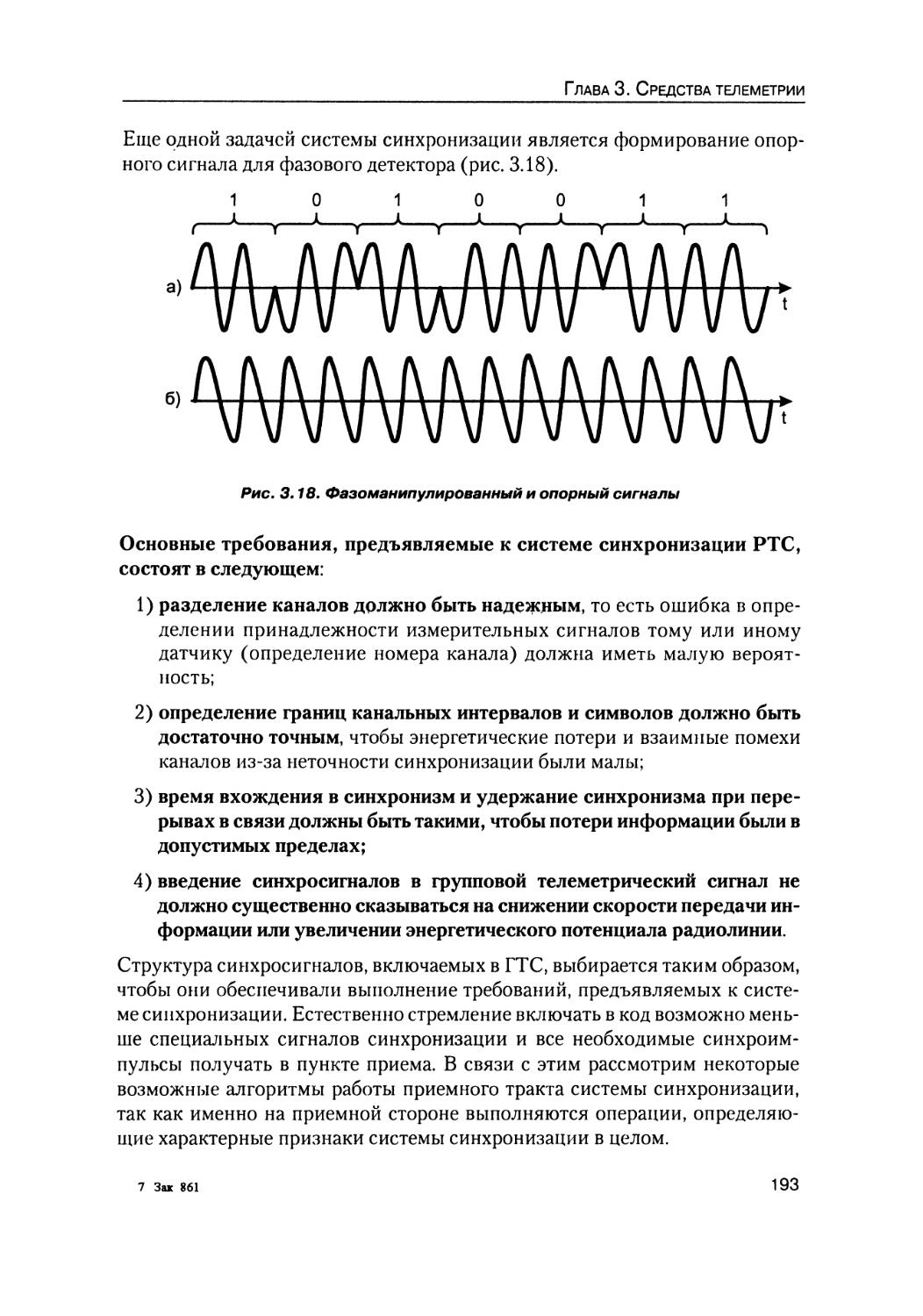
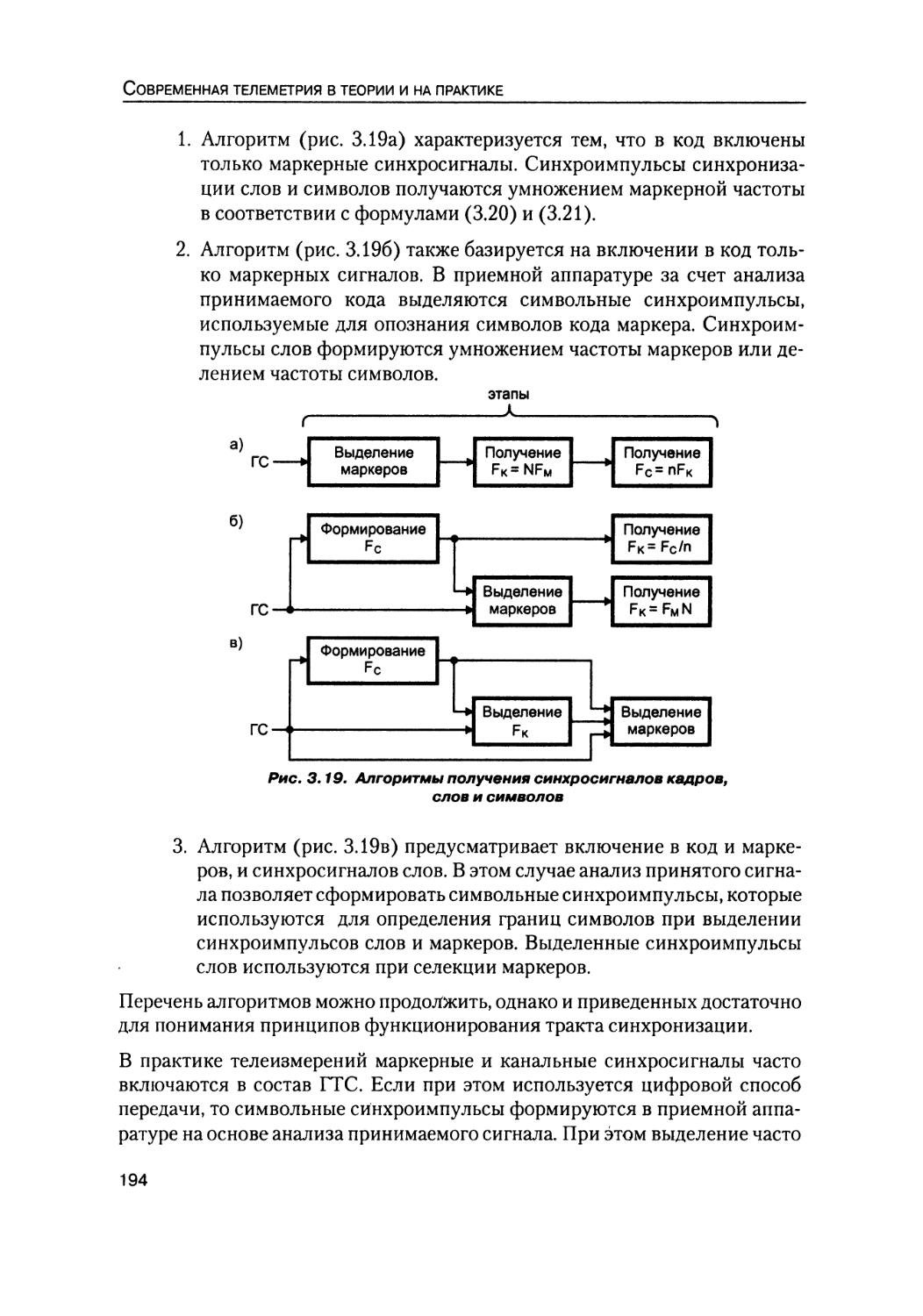
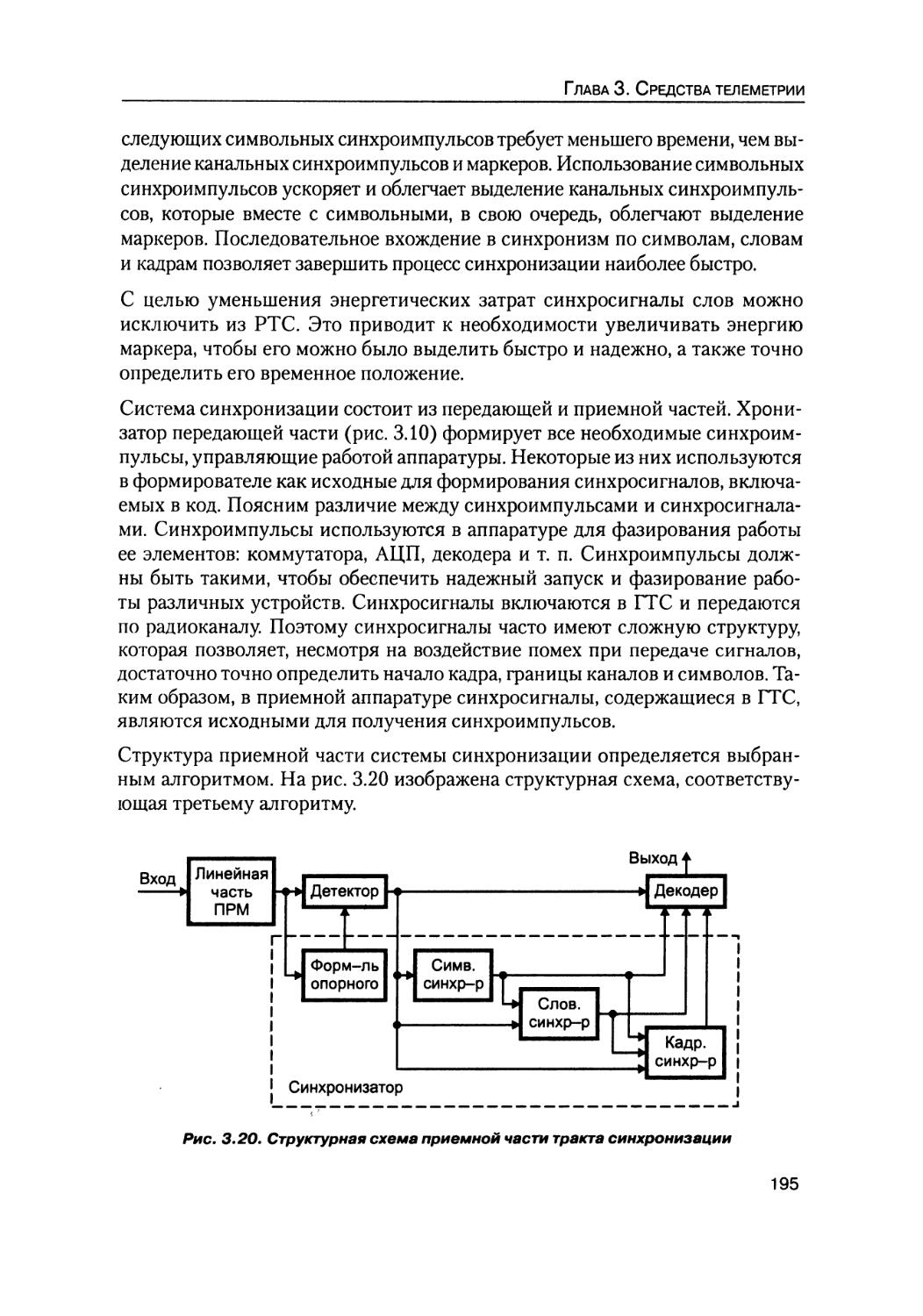
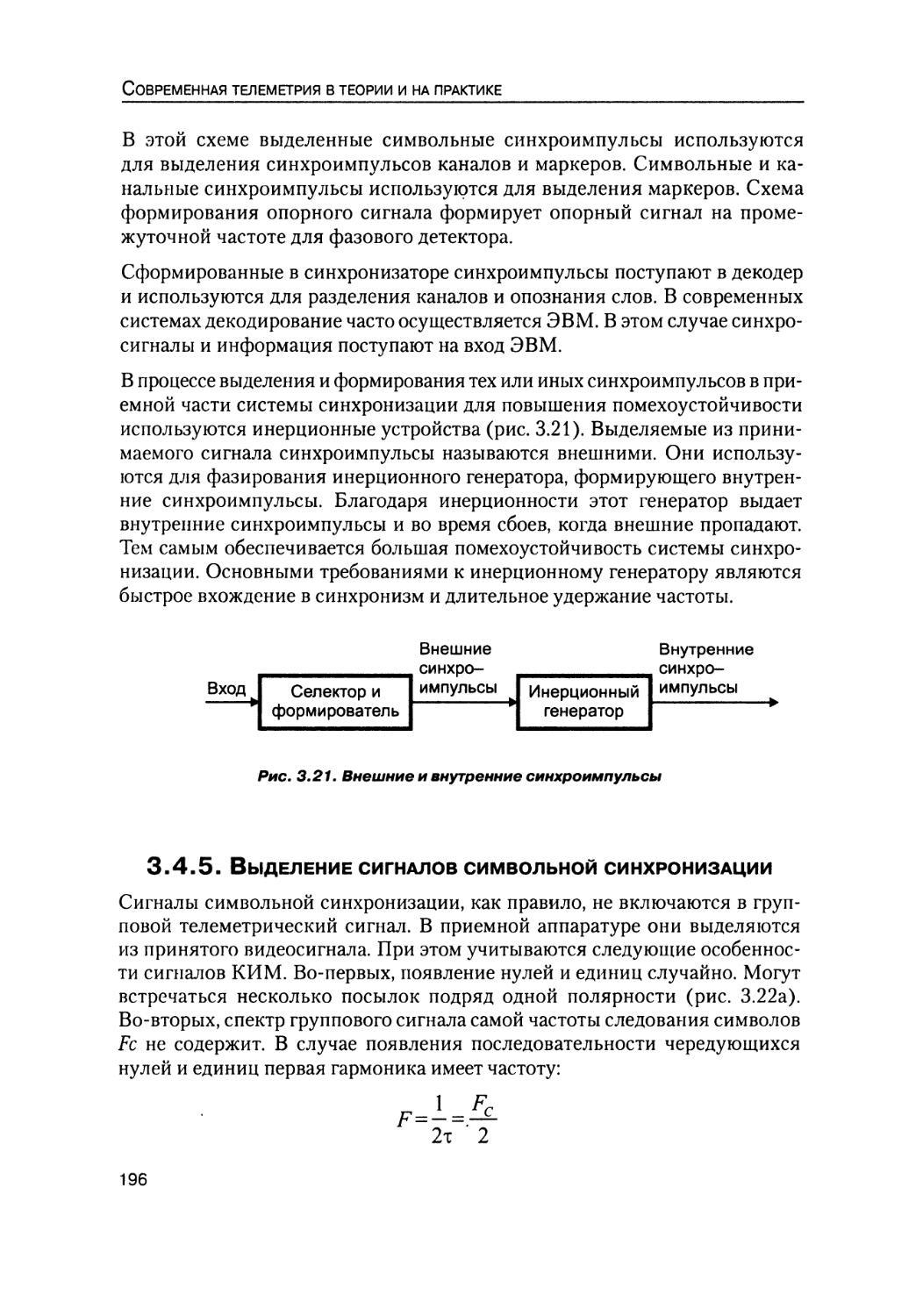
3.4.4. Назначение и структура системы синхронизации 191
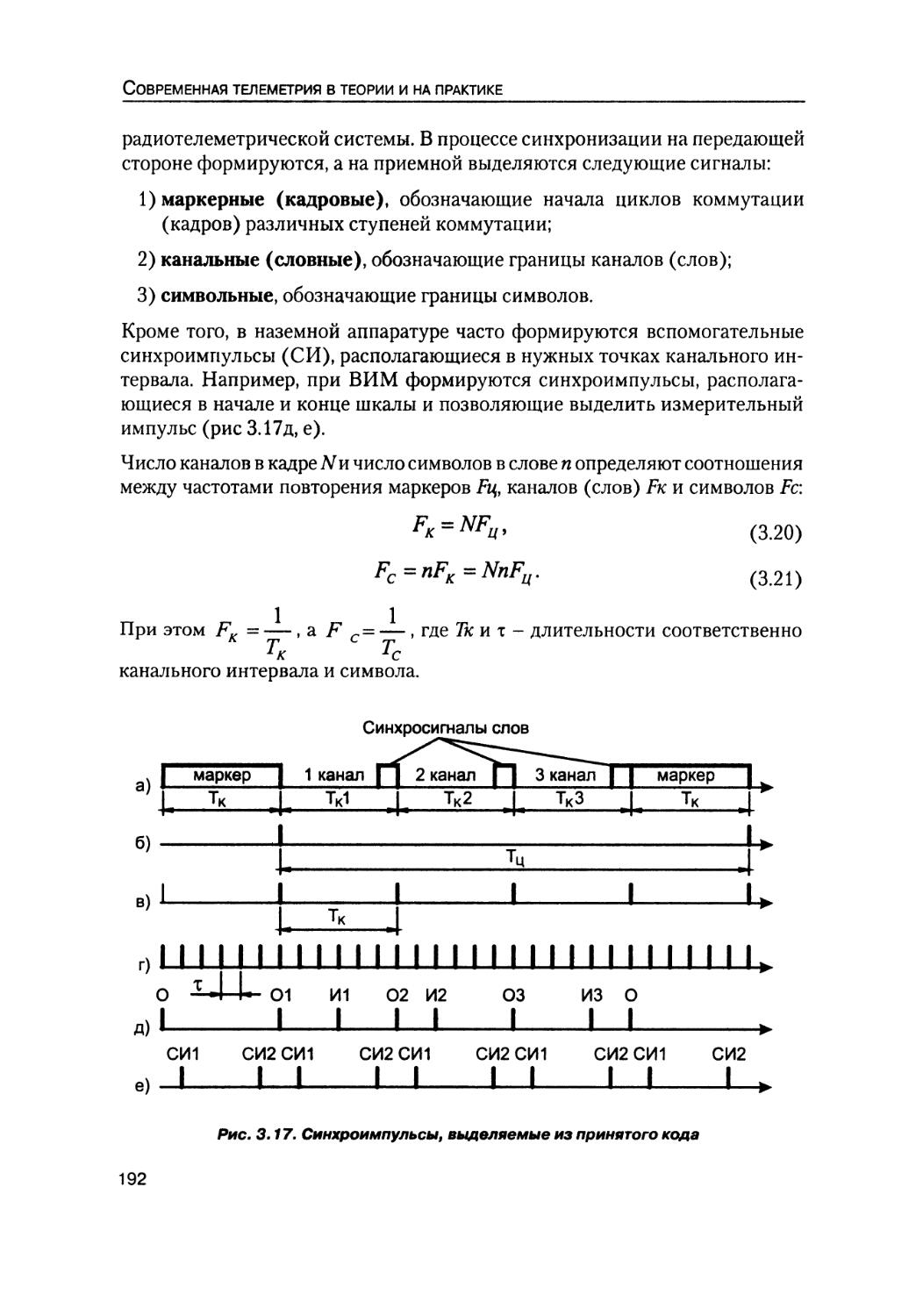
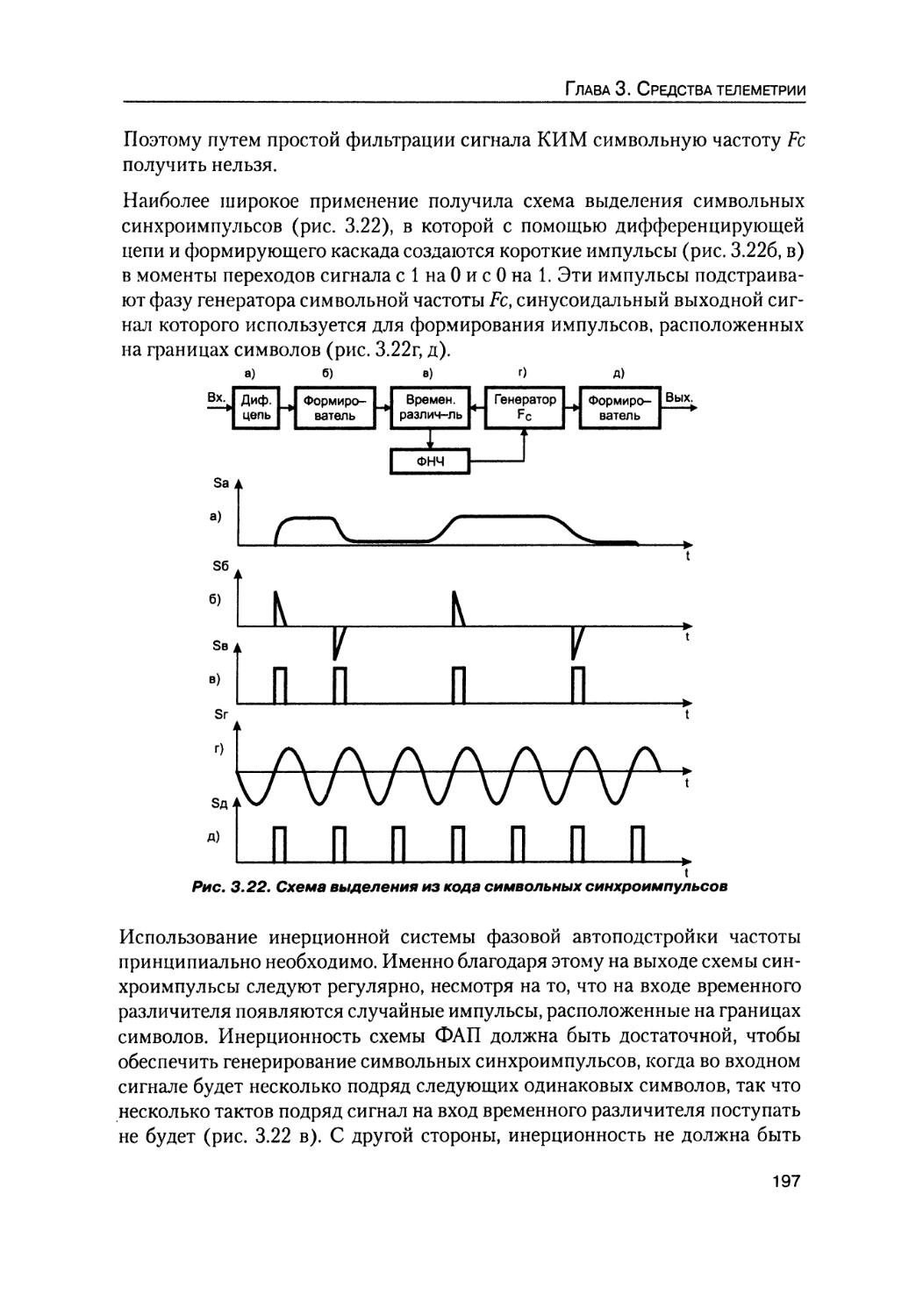
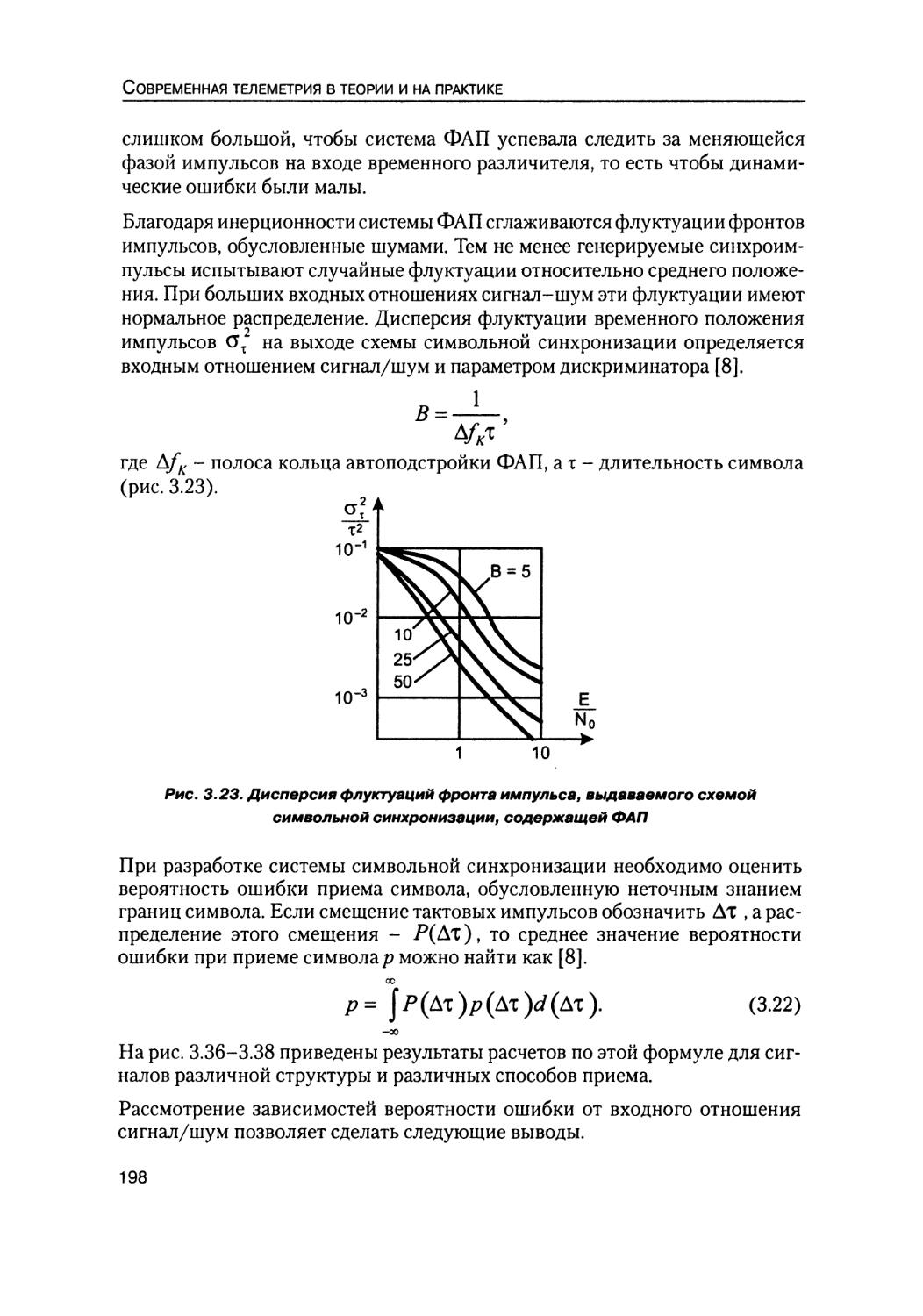
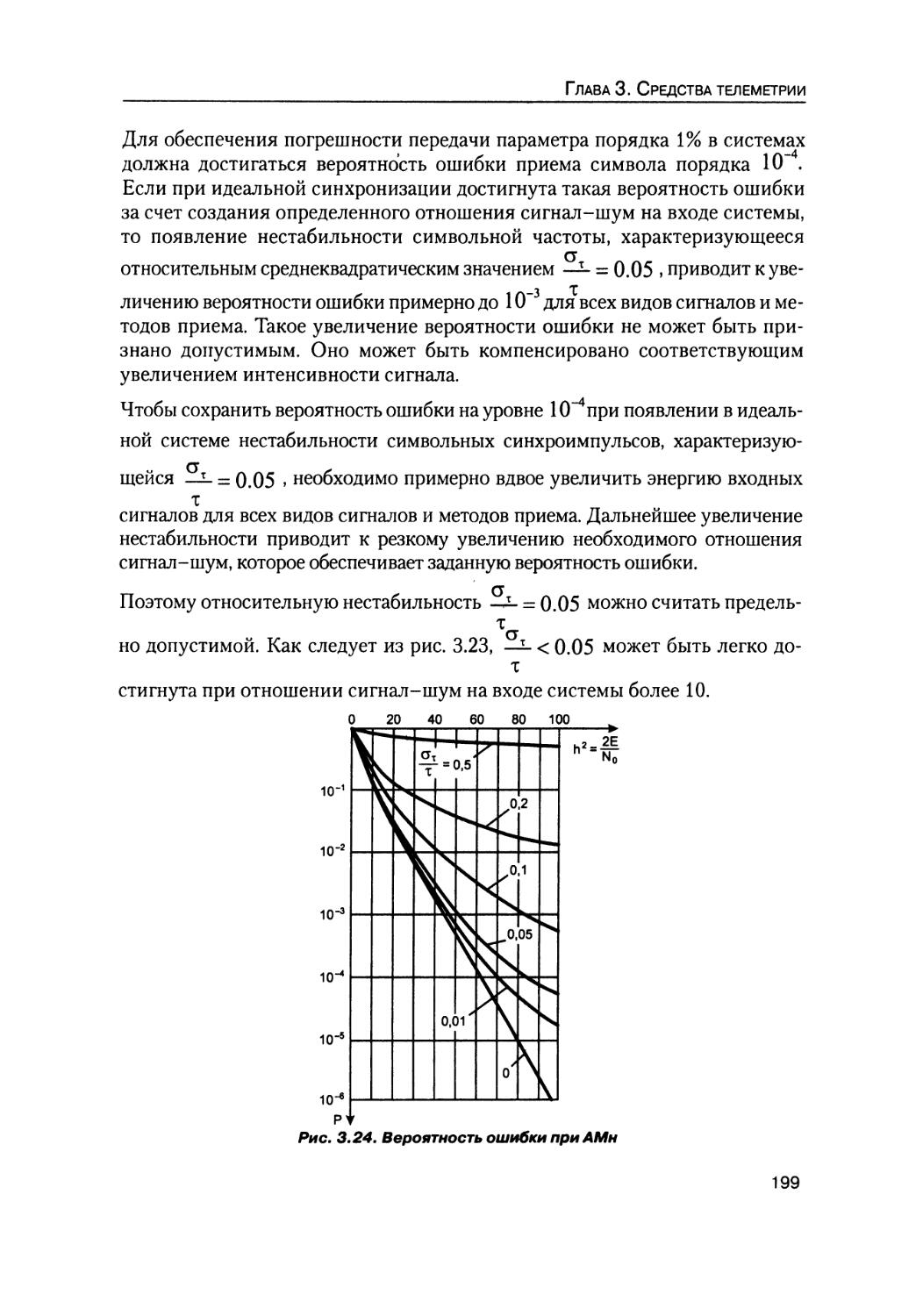
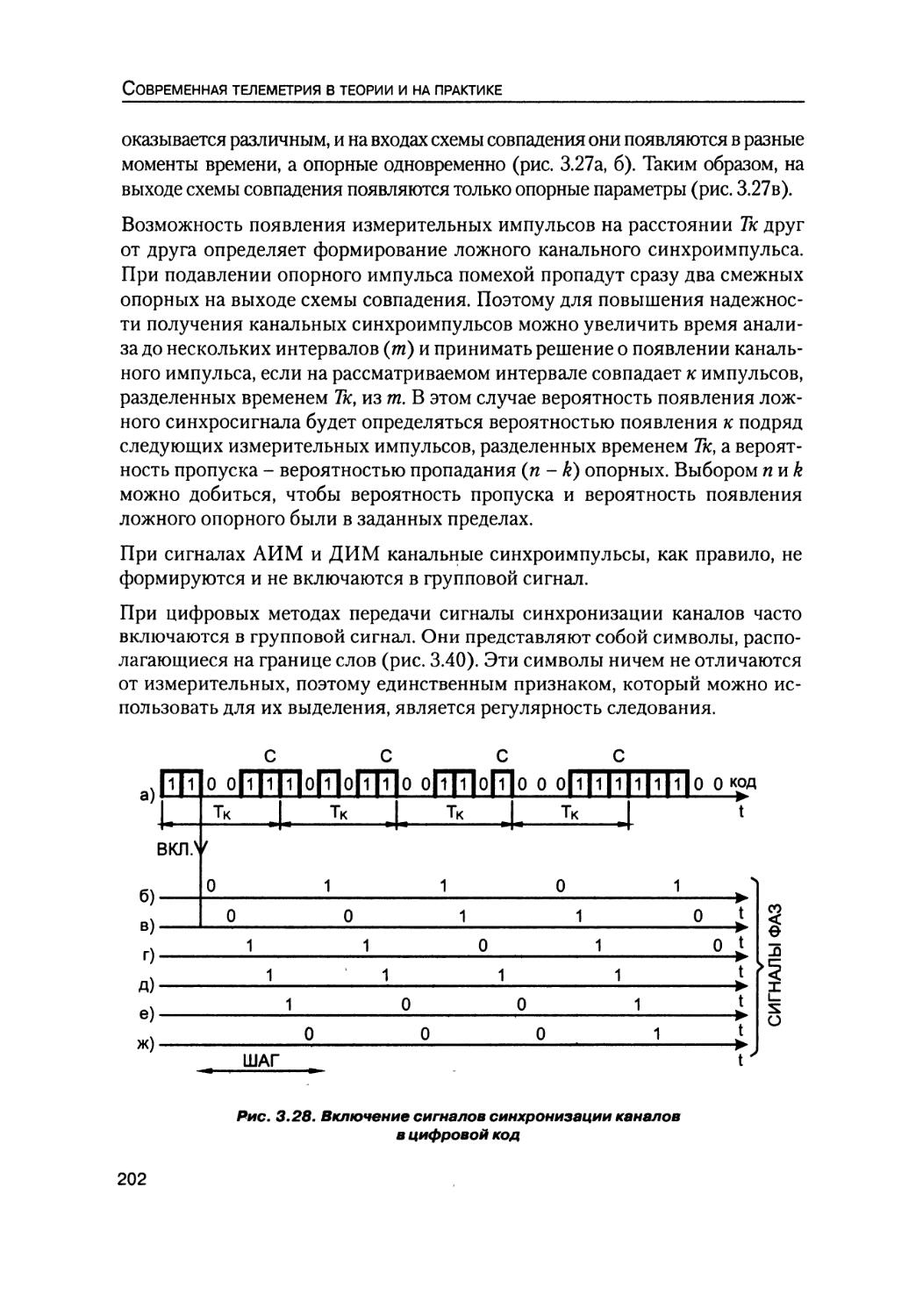
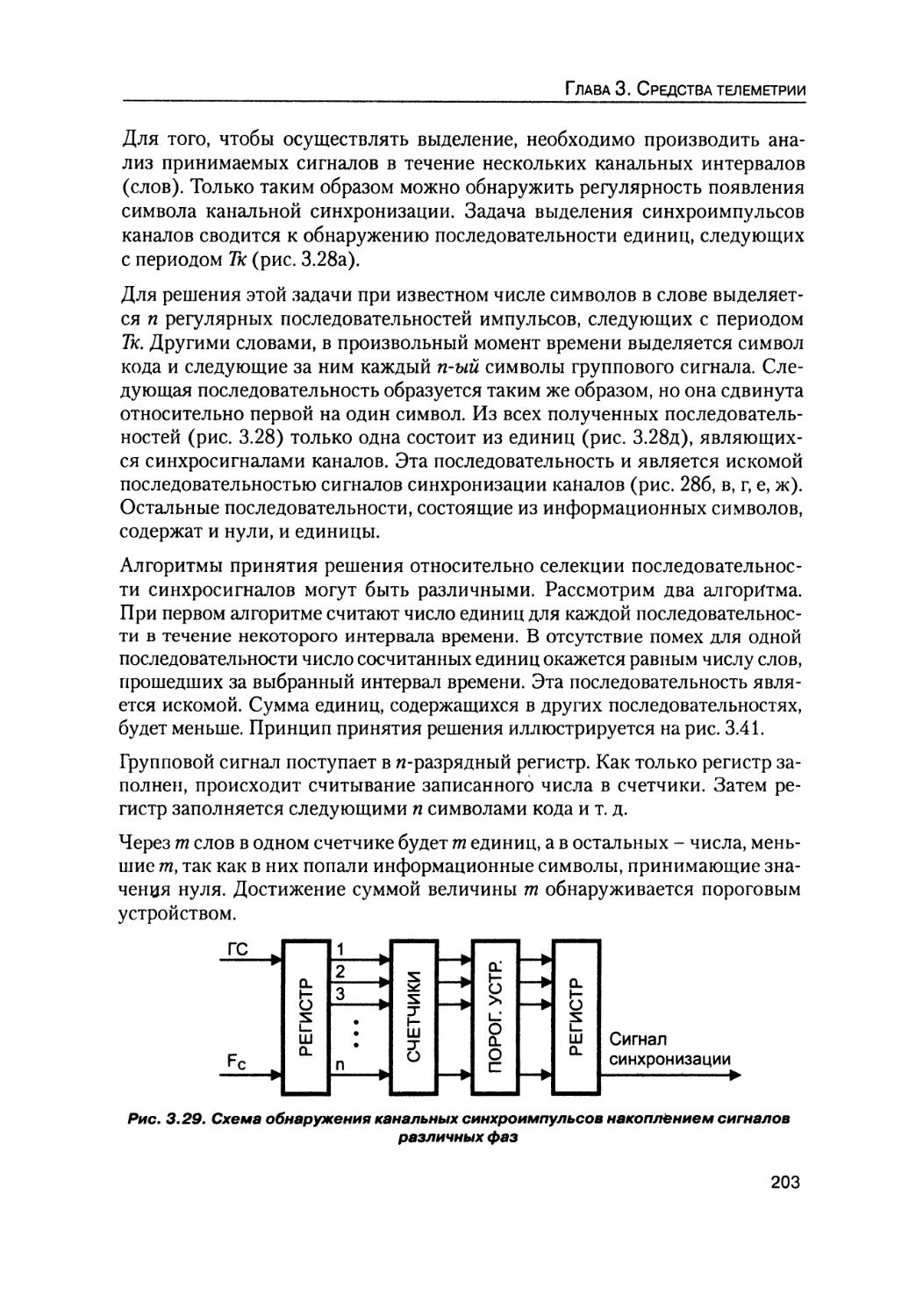
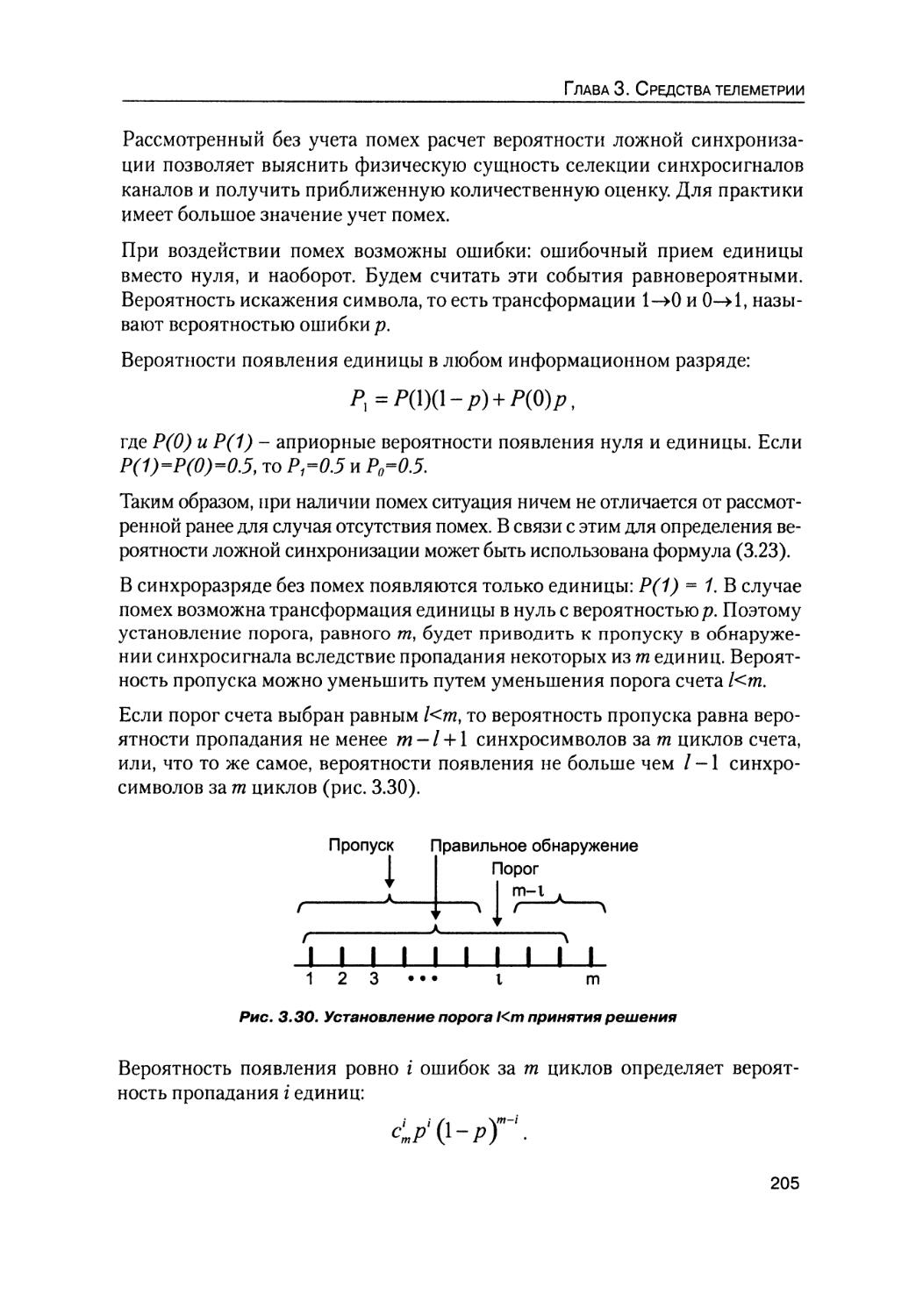
3.4.5. Выделение сигналов символьной синхронизации 196
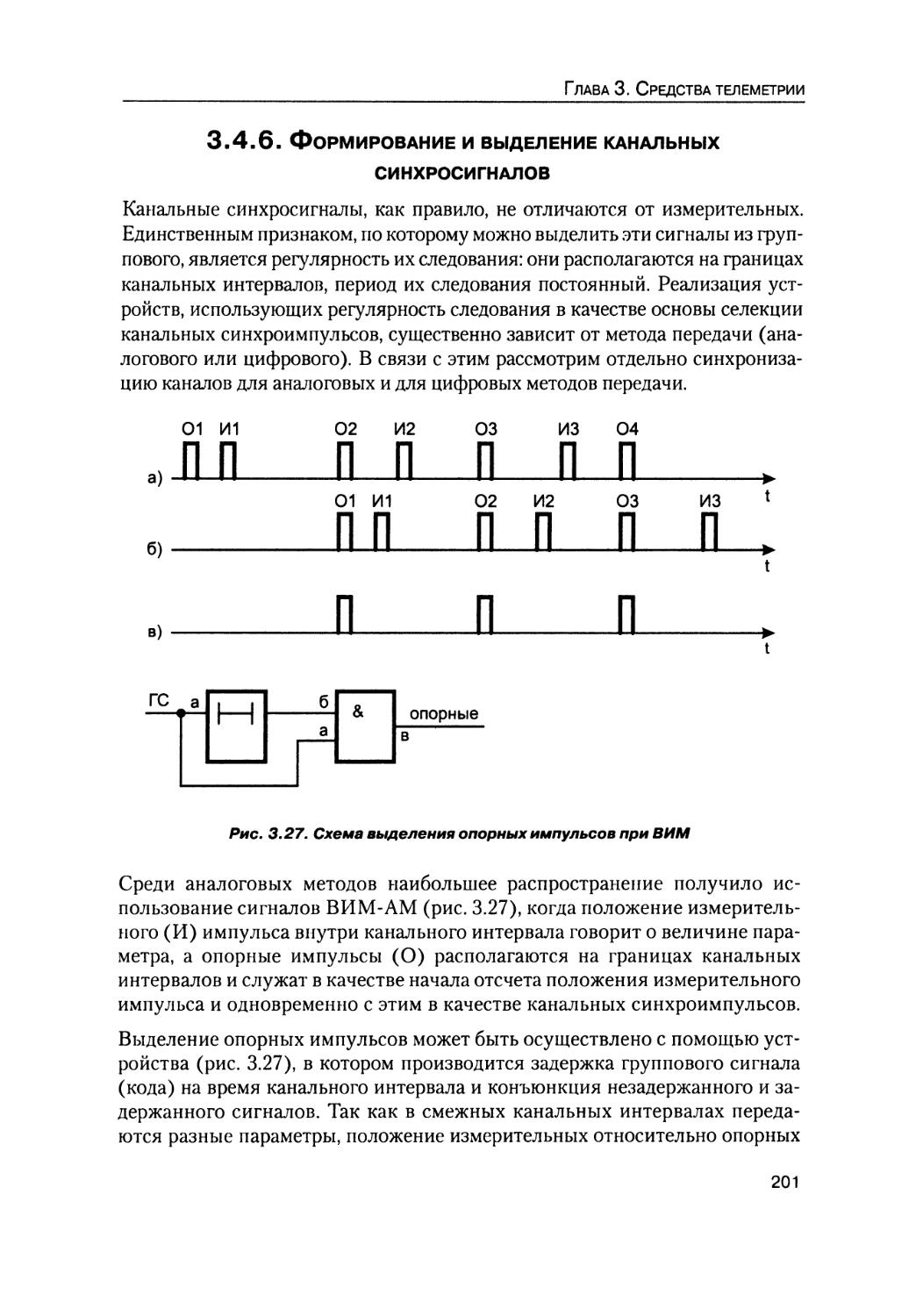
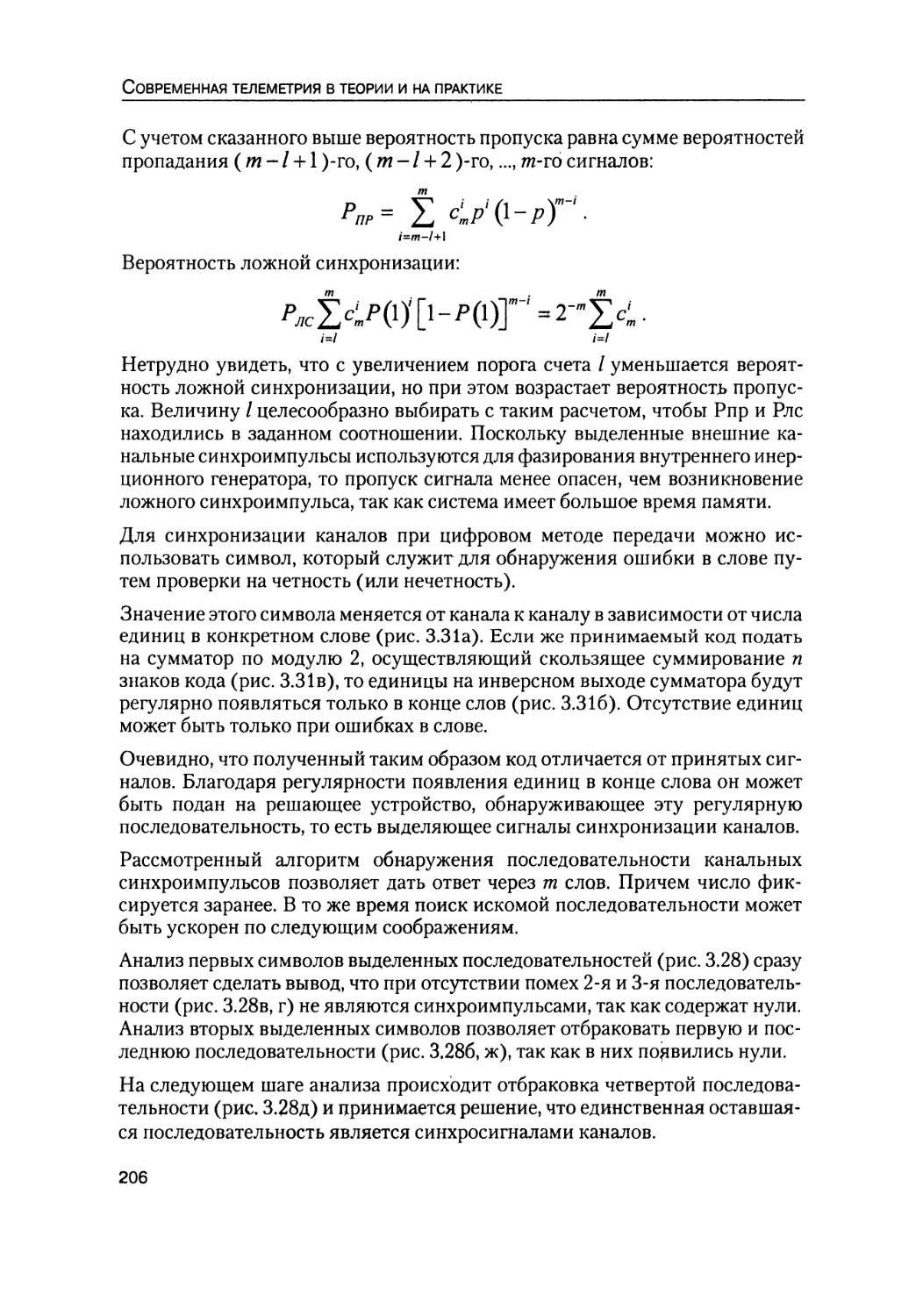
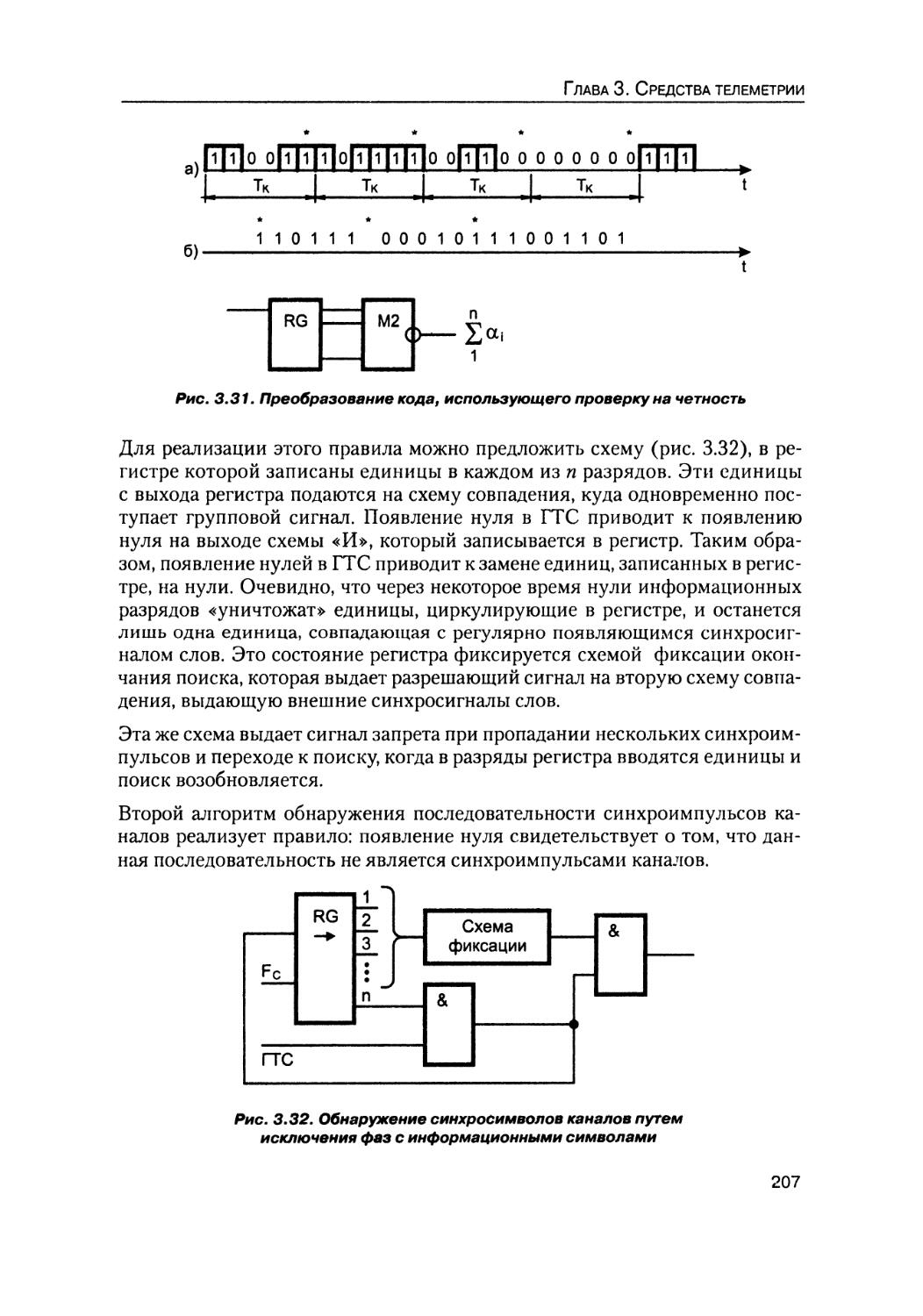
3.4.6. Формирование и выделение канальных
синхросигналов 201
3.4.7. Маркерные сигналы в аналоговых РТС 209
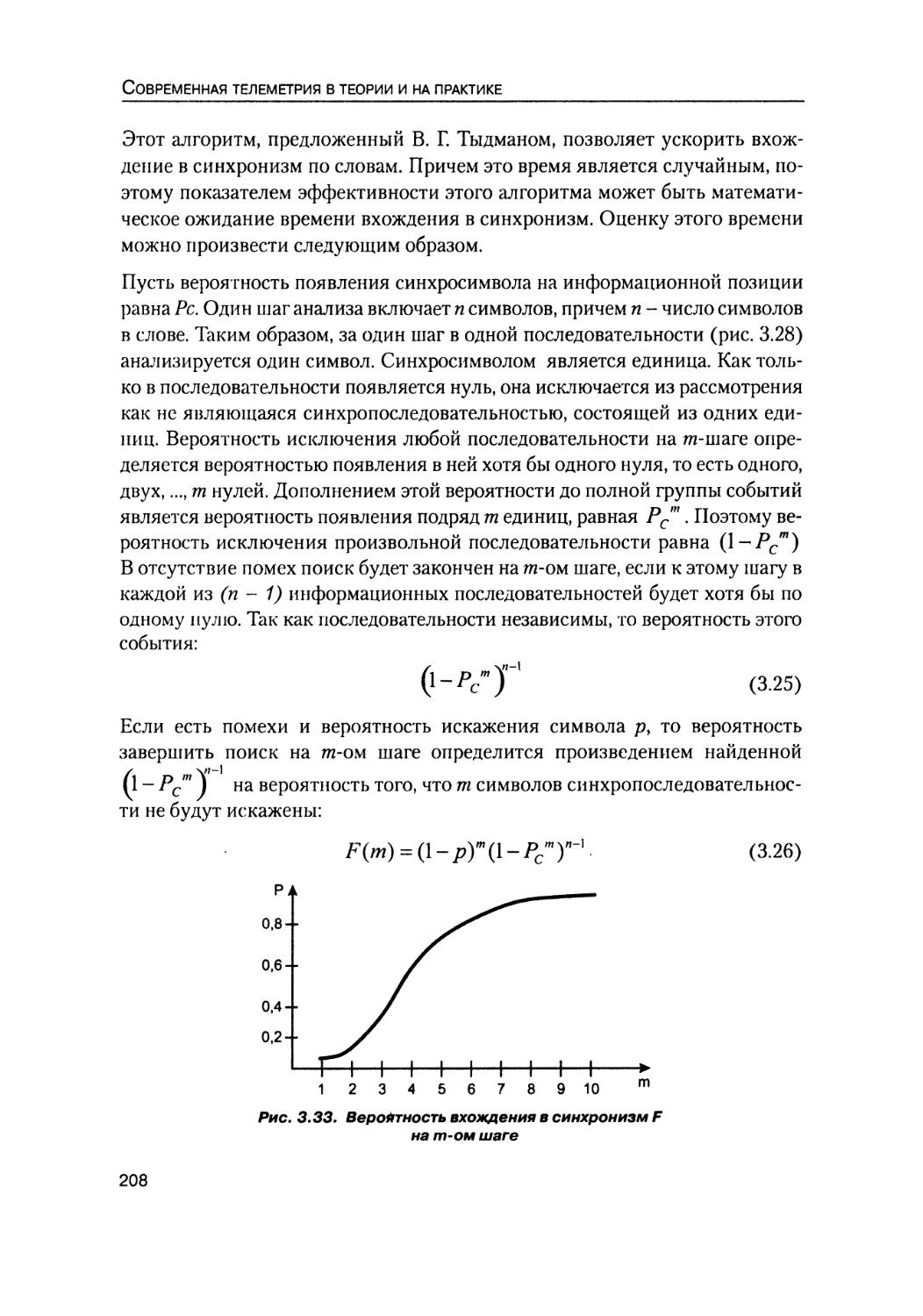
3.4.8. Вероятностная оценка поиска маркерного
синхросигнала при цифровой передаче 212
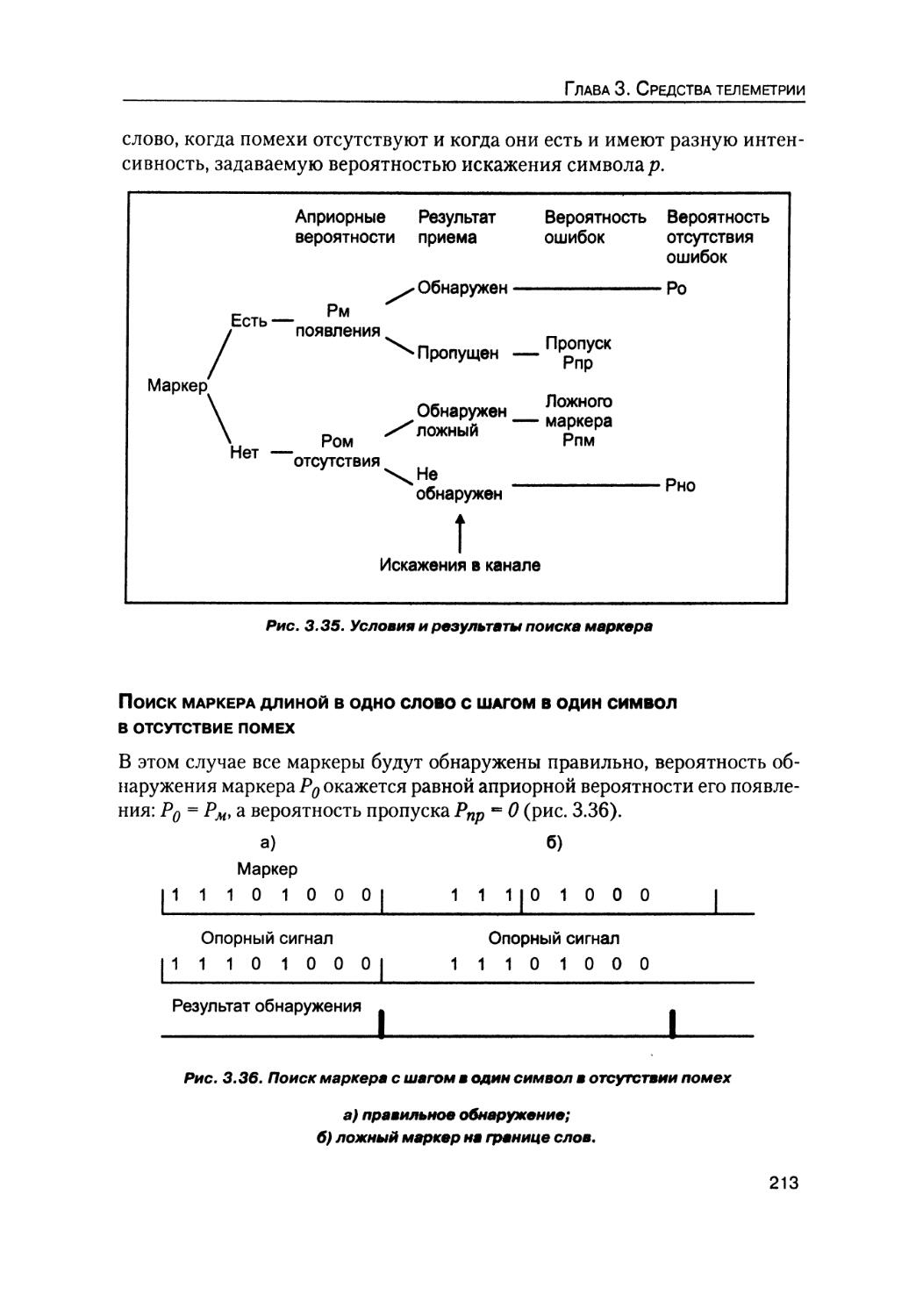
Ситуации, возникающие при поиске маркера 212
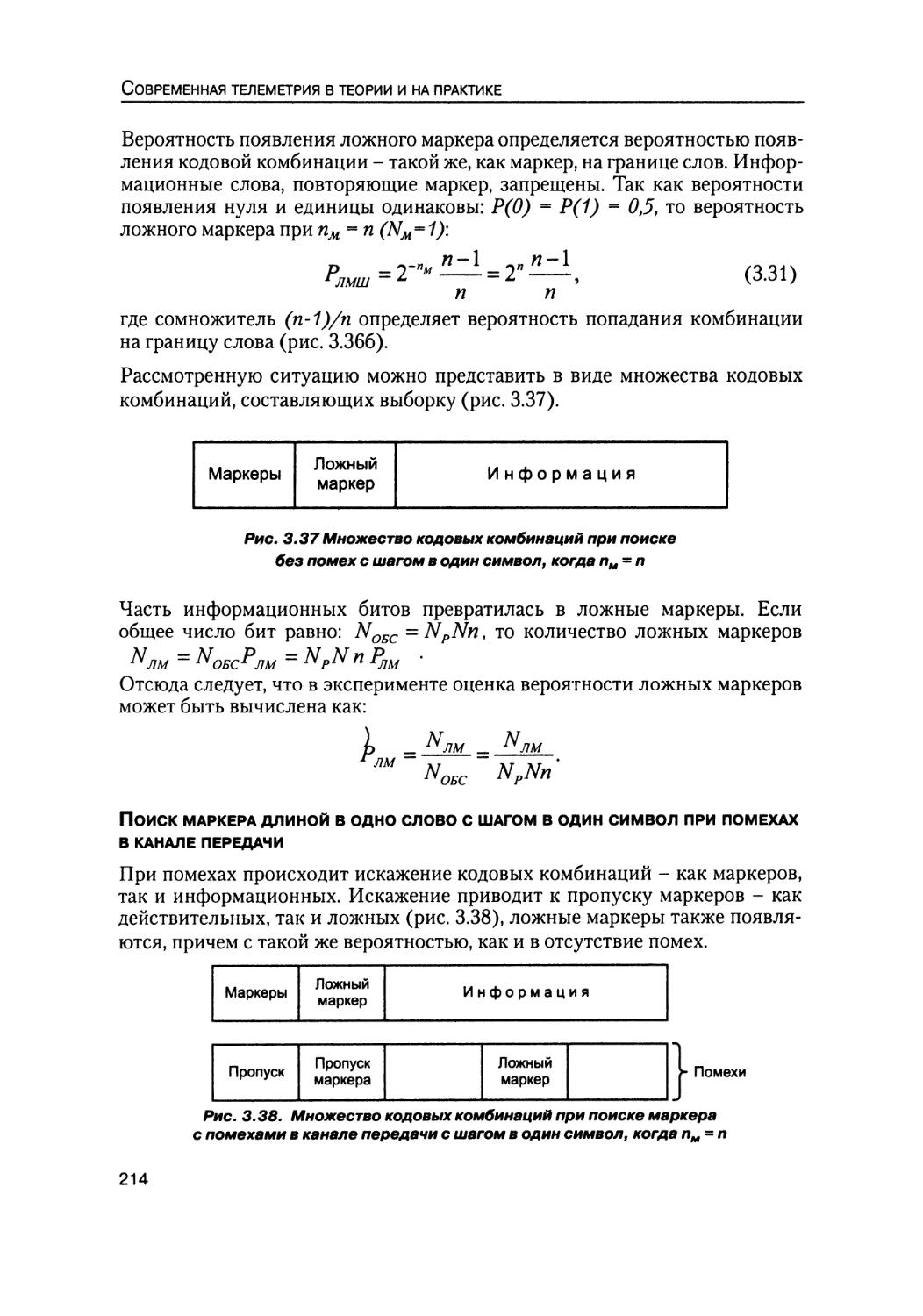
Поиск маркера длиной в одно слово с шагом в один символ
в отсутствие помех 213
Поиск маркера длиной в одно слово с шагом в один символ
при помехах в канале передачи 214
Поиск маркера с шагом в одно слово при nM = n 217
Поиск маркера длиной в два слова: пм = 2п 218
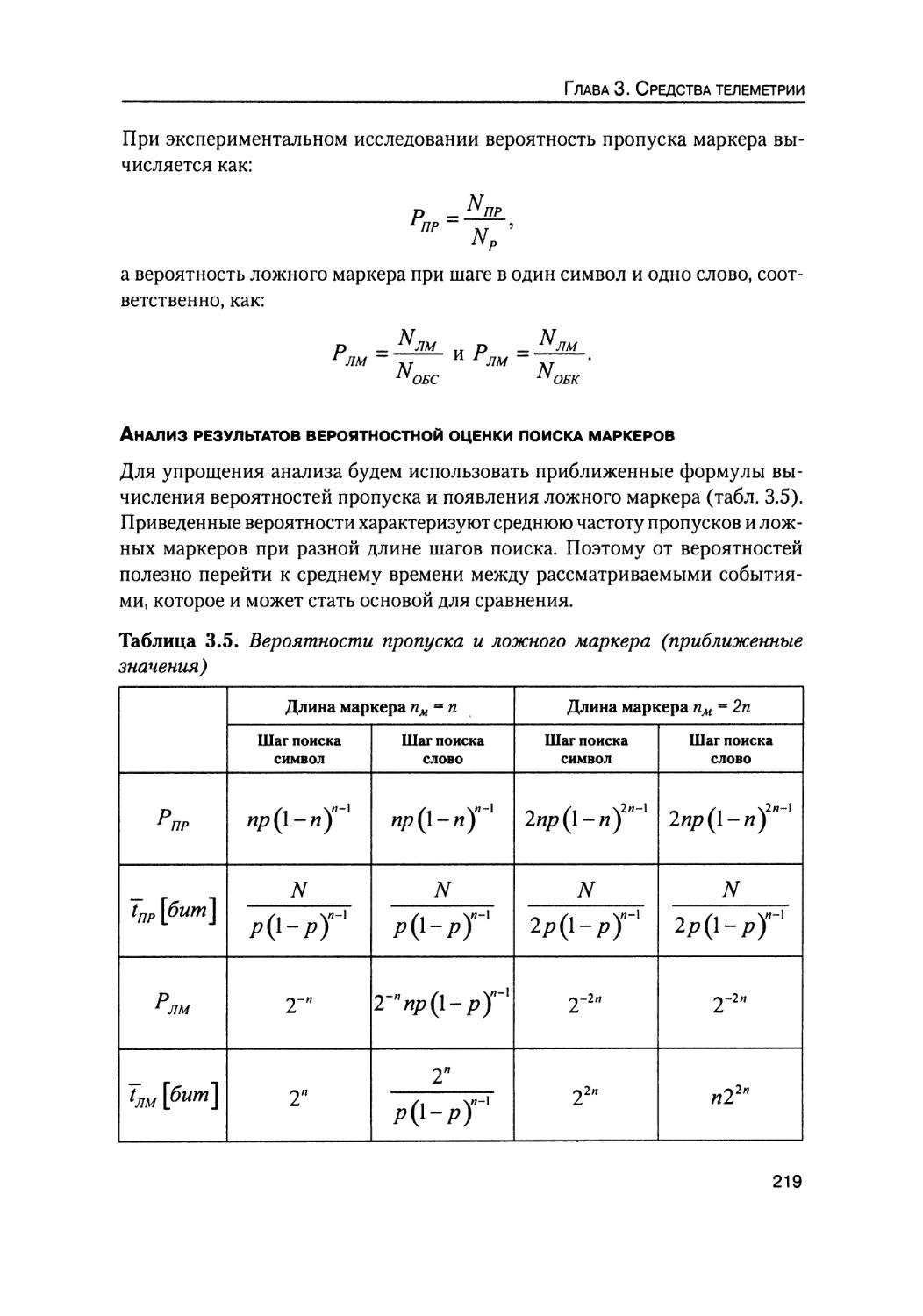
Анализ результатов вероятностной оценки поиска
маркеров 219
3.5. ШТАТНЫЕ ИНФОРМАЦИОННО-ТЕЛЕМЕТРИЧЕСКИЕ СИСТЕМЫ 221
3.5.1. Бортовая информационно-телеметрическая система БР-92 .... 221
3.5.2. Бортовая информационно-телеметрическая система БР-93 .... 229
Общие сведения о бортовой радиотелеметрической
системе БР-93 229
Основные технические характеристики системы БР-93-1 234
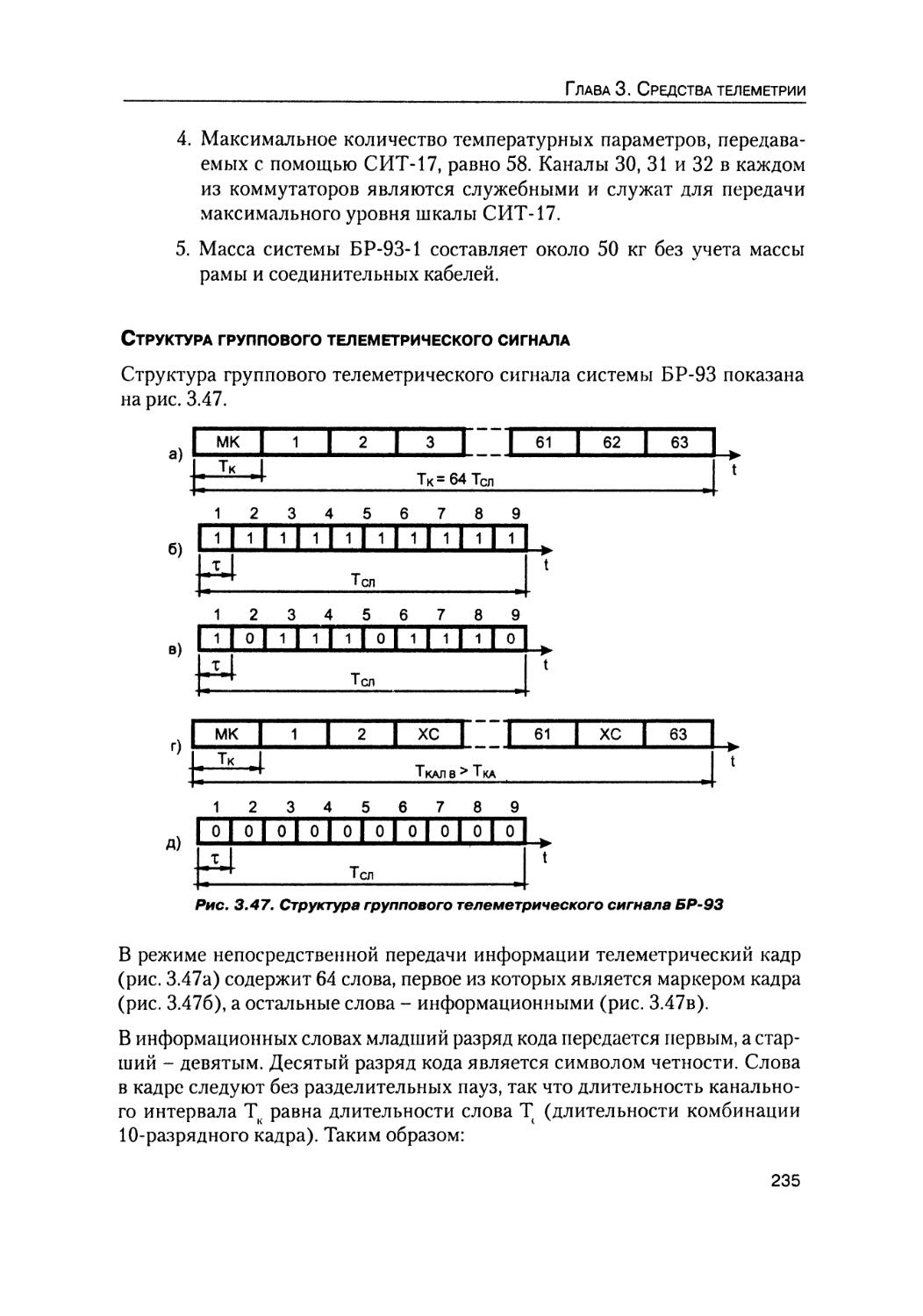
Структура группового телеметрического сигнала 235
3.5.3. Бортовая информационно-телеметрическая
система БР-91Ц 236
3.5.4. Бортовая информационная телеметрическая
система «Сириус» 244
Назначение и основные характеристики БИТС «Сириус» 244
Принципы организации информационных процессов в БИТС
«Сириус» 245
Структурная схема БИТС «Сириус» 250
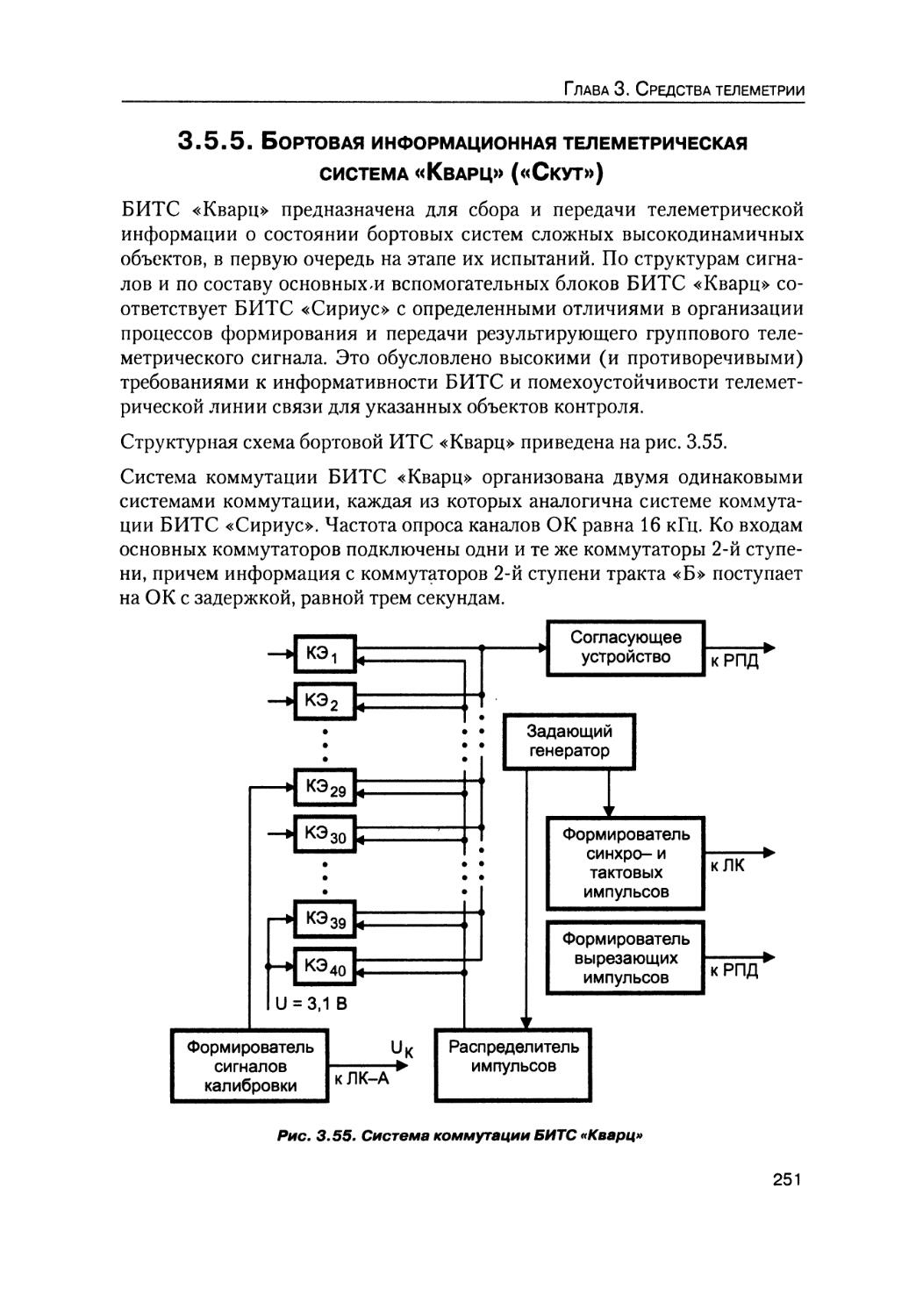
3.5.5. Бортовая информационная телеметрическая
система «Кварц» («Скут») 251
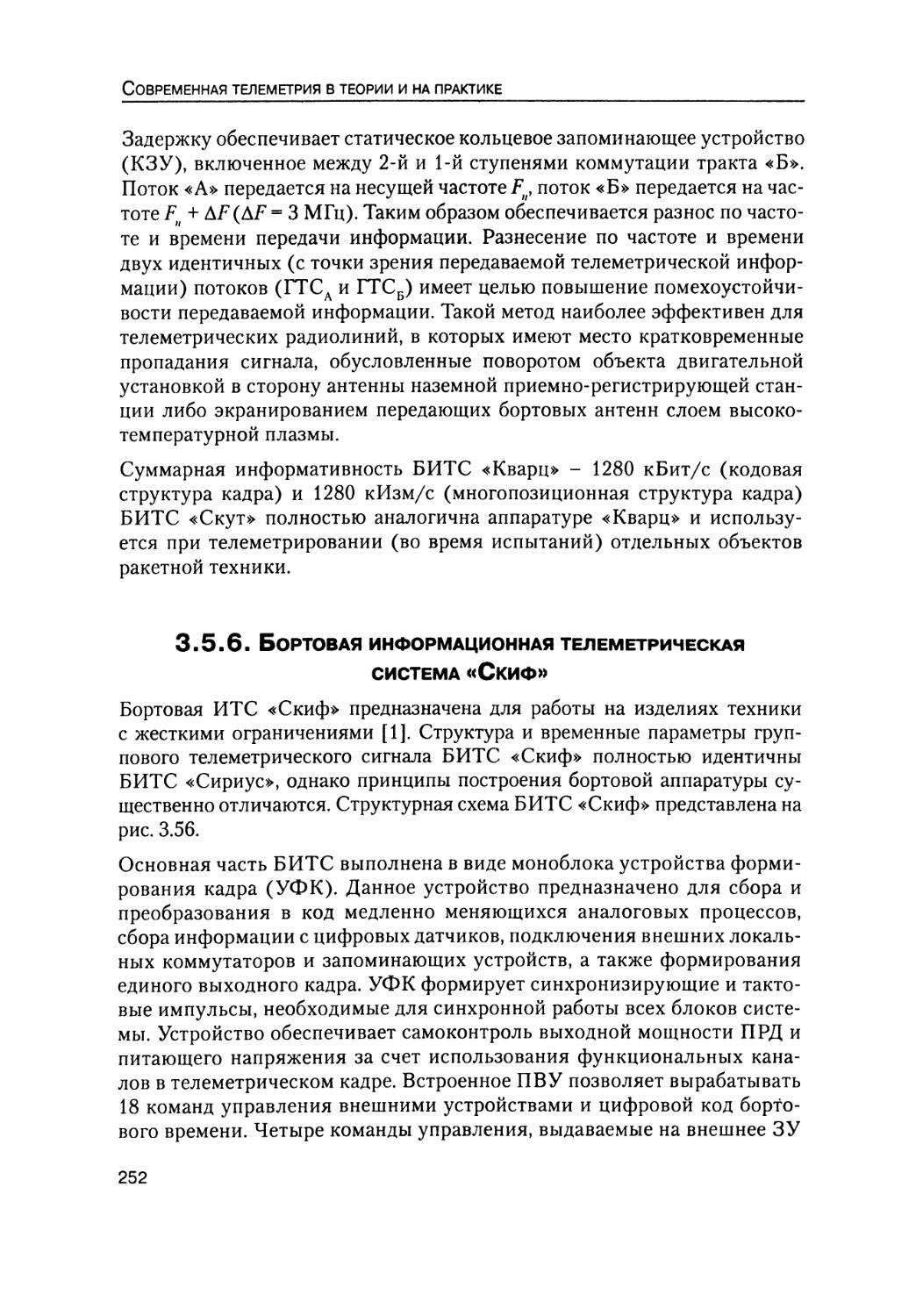
3.5.6. Бортовая информационная телеметрическая система «Скиф» . 252
9
Современная телеметрия в теории и на практике
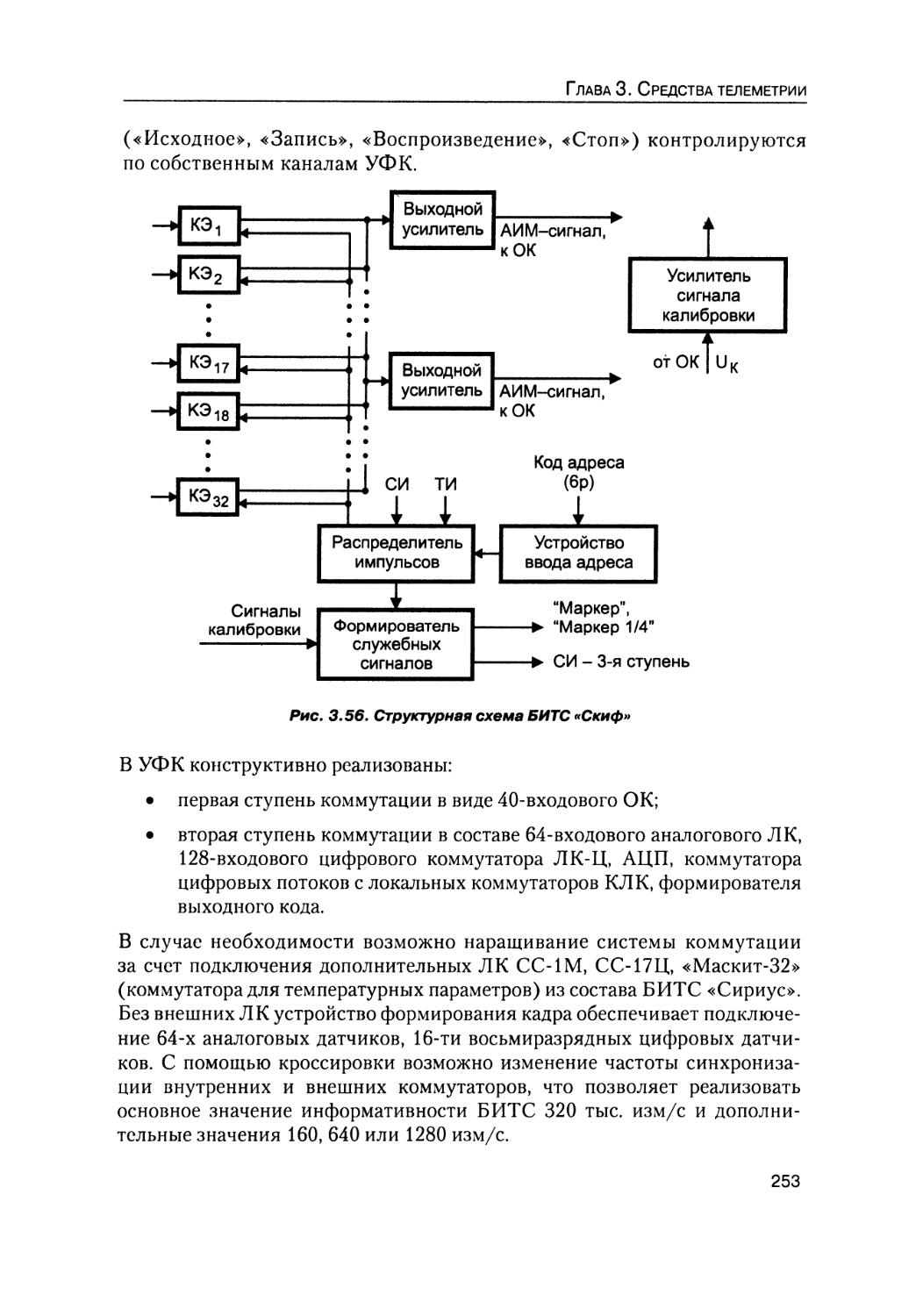
3.5.7. Приемно-регистрирующая аппаратура МА-9МКТМ-4 254
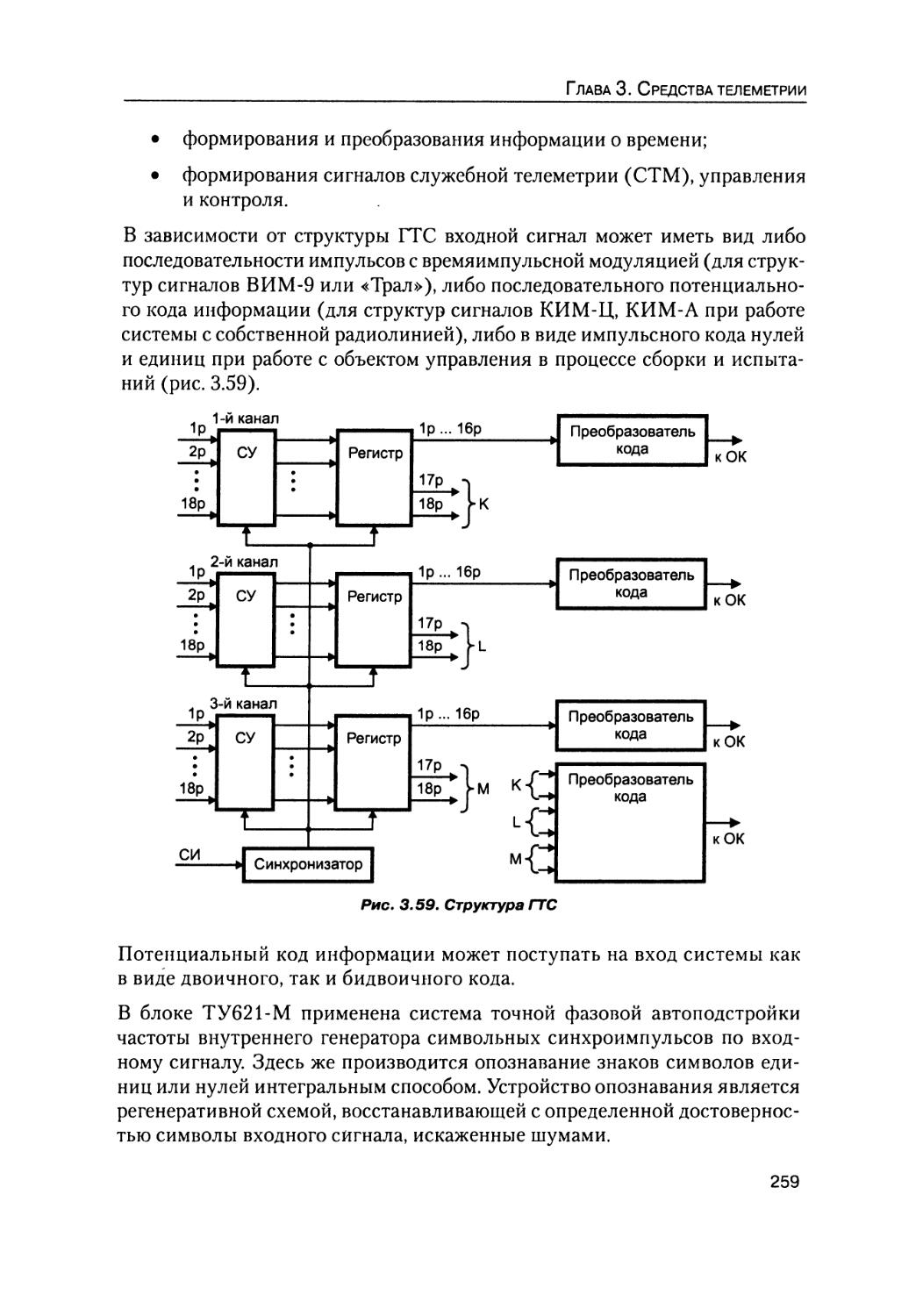
3.5.8. Приемно-регистрирующая аппаратура ПРА-МК 260
ЛИТЕРАТУРА К ГЛАВЕ 3 268
ГЛАВА 4. ОБРАБОТКА И АНАЛИЗ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ 269
4.1. ОБЩИЕ СВЕДЕНИЯ 270
4.1.1. Задачи и этапы обработки телеметрической
информации 270
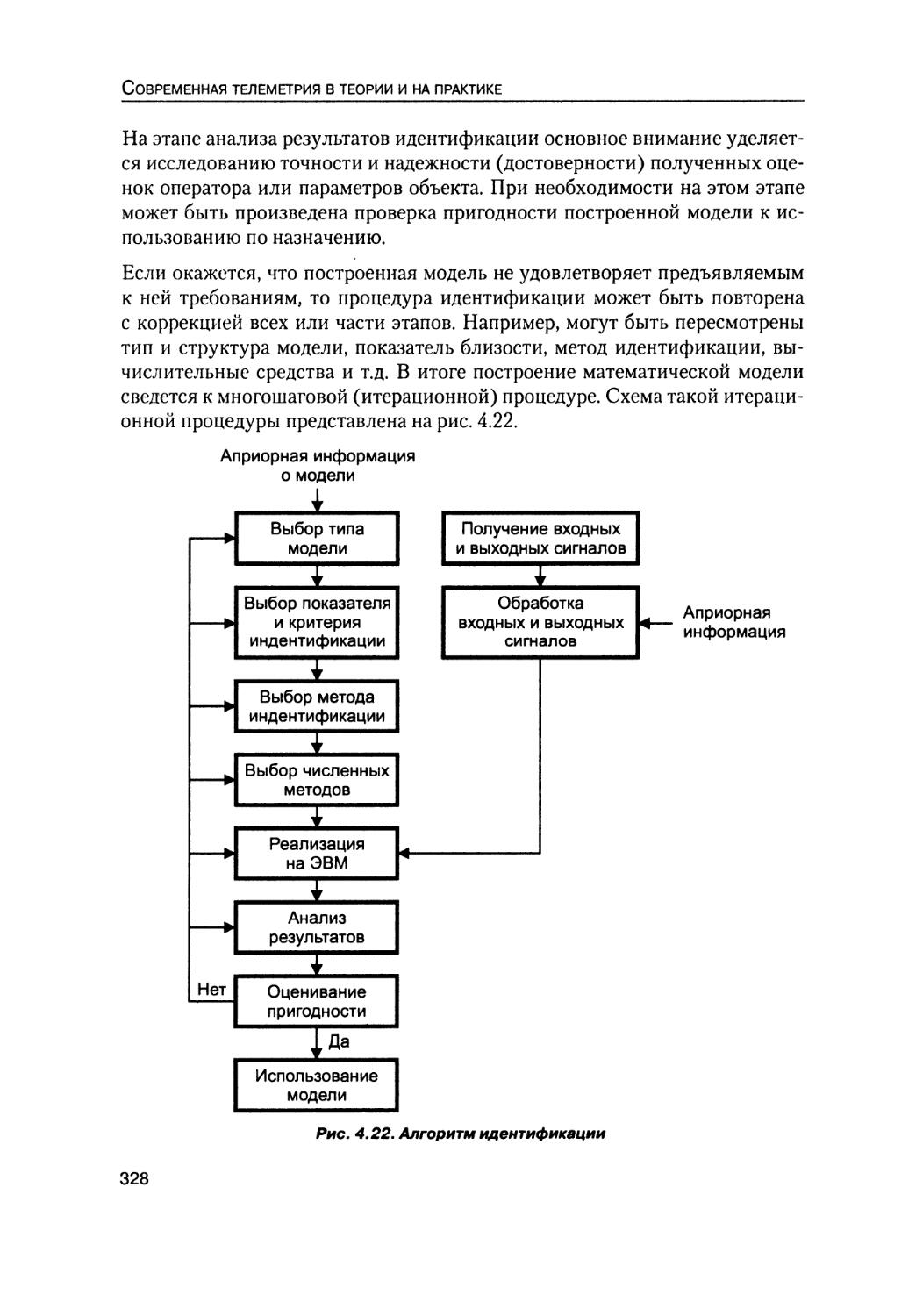
Определения 270
Основные задачи обработки телеметрической информации.... 270
4.1.2. Назначение и задачи первичной обработки
телеметрической информации 272
Этапы обработки ТМИ 273
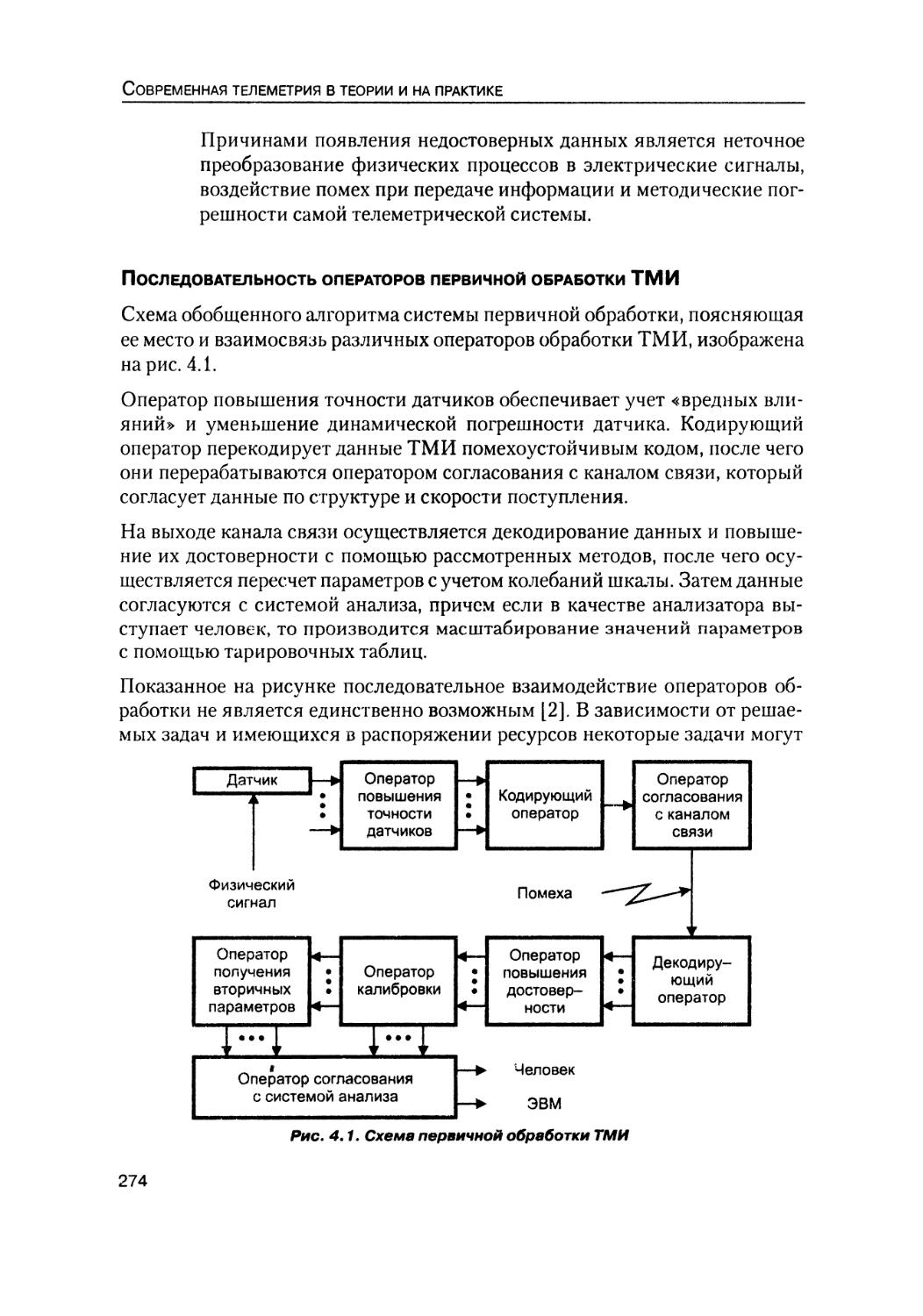
Последовательность операторов первичной обработки ТМИ... 274
4.1.3. Назначение и задачи вторичной обработки
телеметрической информации 275
Место вторичной обработки в системе управления
объектом 275
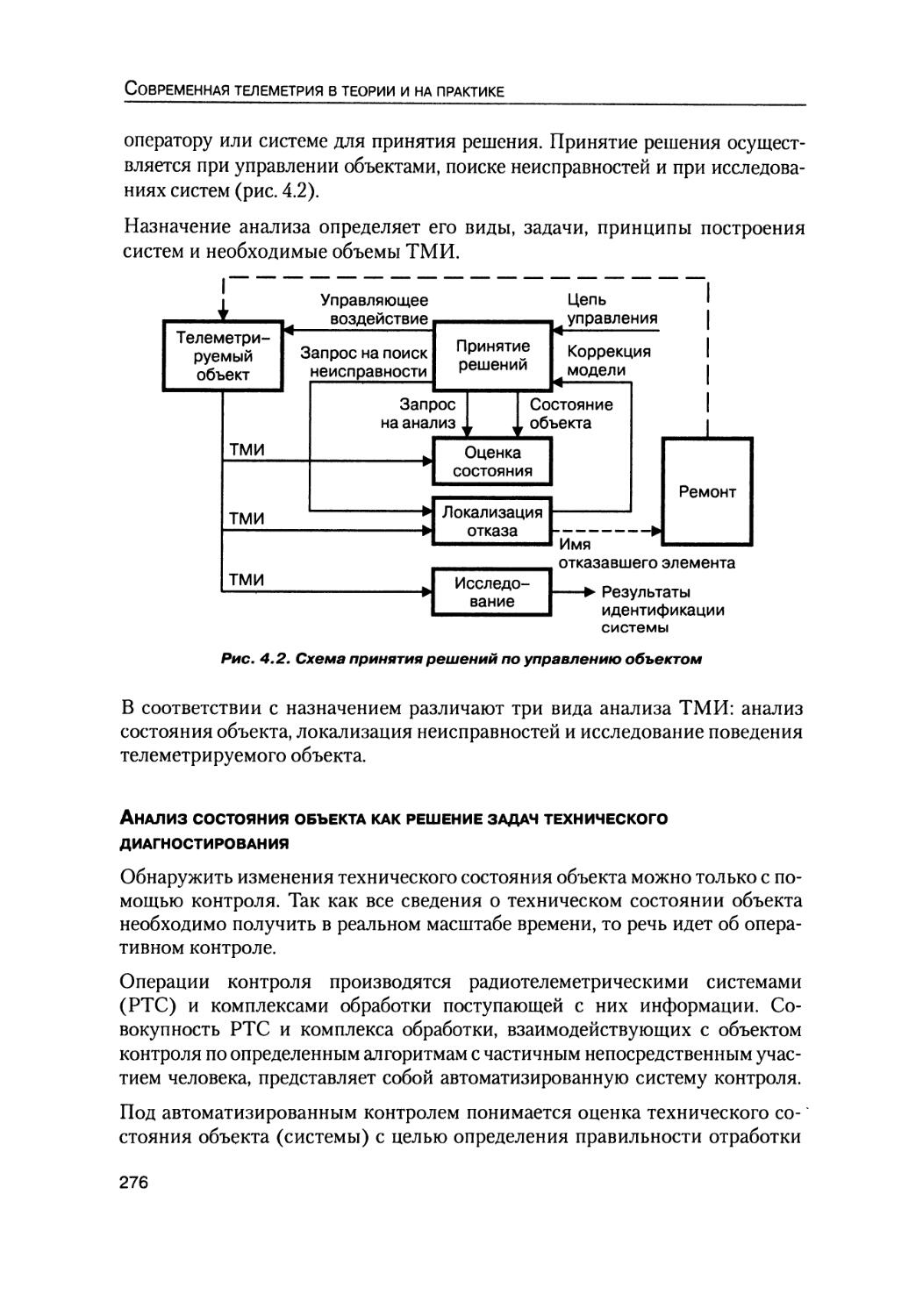
Анализ состояния объекта как решение задач технического
диагностирования 276
Локализация неисправностей методами технической
диагностики 279
Исследование поведения объекта как решение задач
идентификации систем 281
4.2. ПЕРВИЧНАЯ ОБРАБОТКА ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ 282
4.2.1. Методы обработки при согласовании потоков данных
с каналами связи и системой анализа 282
Согласование потока данных по скорости передачи 282
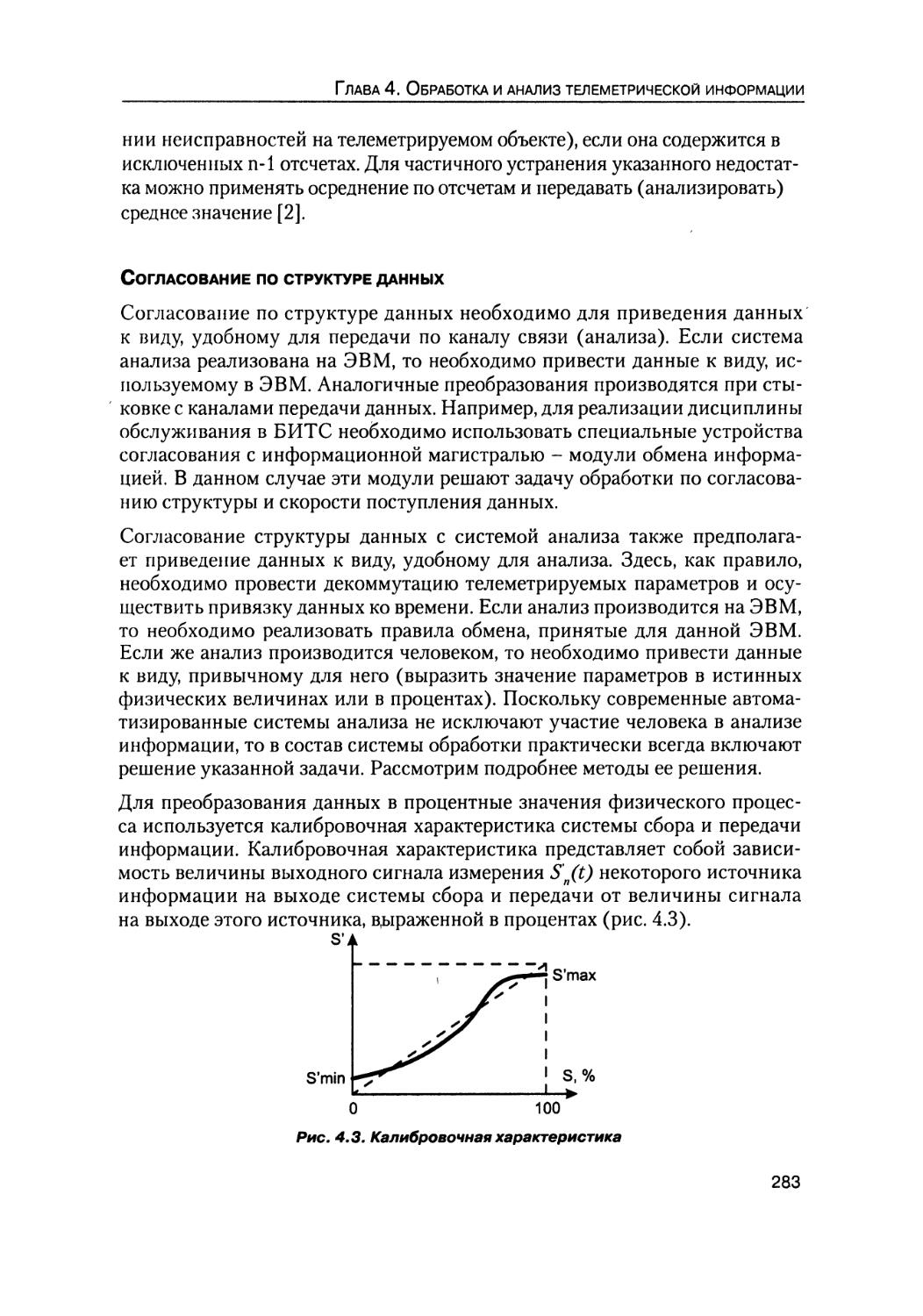
Согласование по структуре данных 283
4.2.2. Методы обработки при оценке значений параметров по
косвенным измерениям 285
Оценка спектральной плотности программными средствами .. 285
Оценка спектральной плотности в специализированных
аналоговых устройствах 286
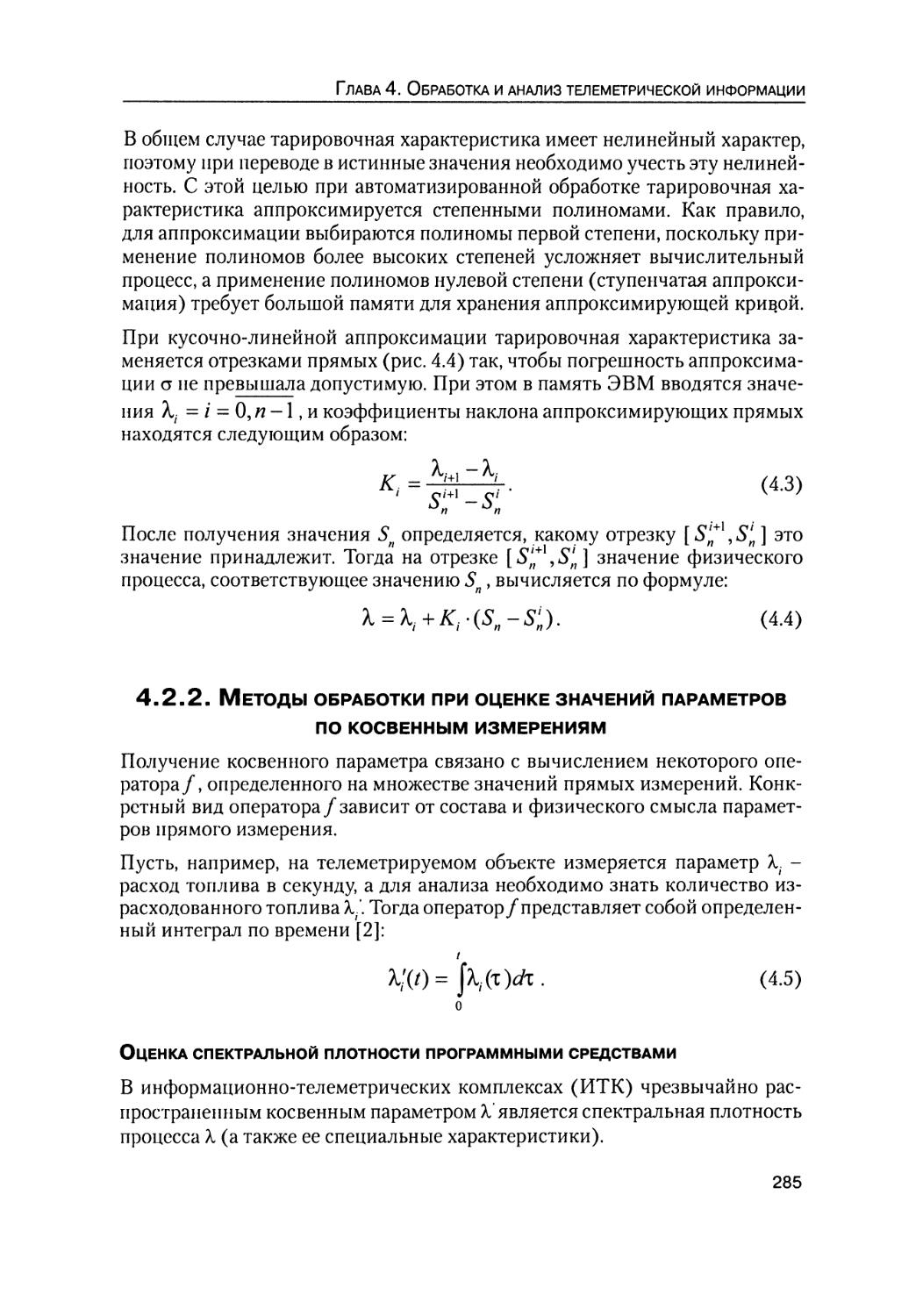
Методы узкополосной фильтрации 288
4.2.3. Оперативная обработка быстро меняющихся
параметров 290
Особенности быстро меняющихся параметров и их обработки 290
10
Содержание
Способы оперативной обработки БМП 292
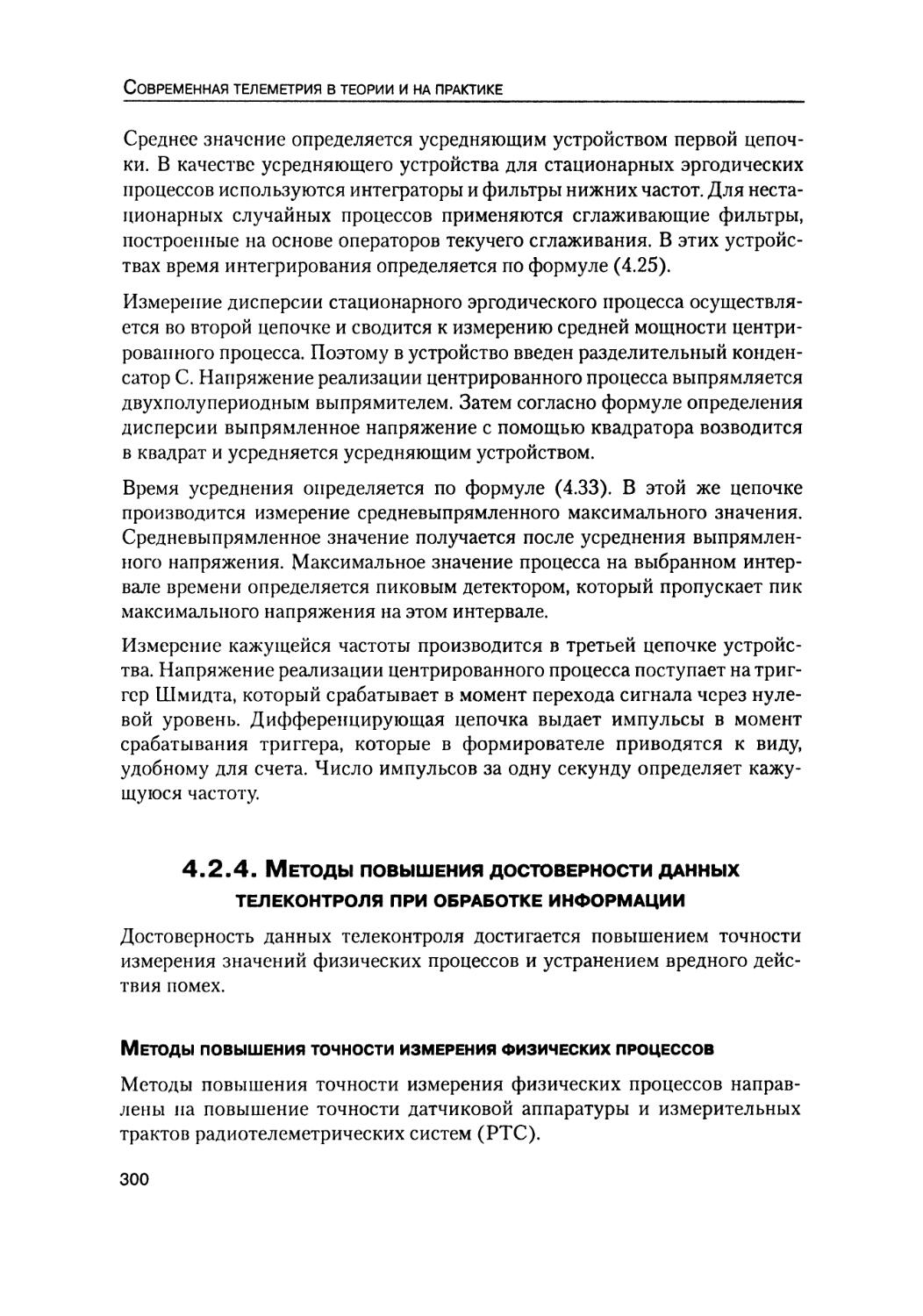
Определение среднего и средневыпрямленного значений 294
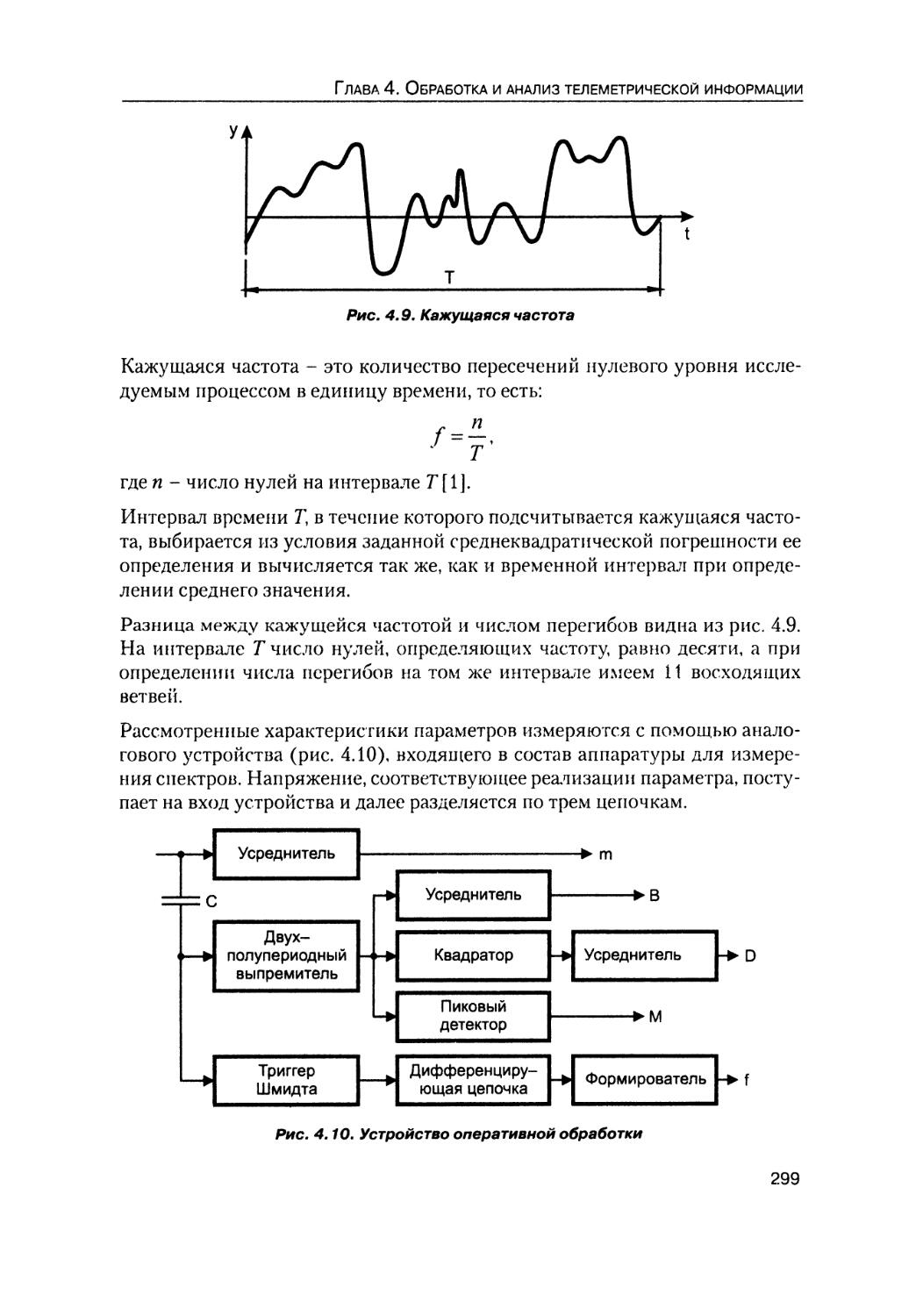
Определение дисперсии и кажущейся частоты 297
4.2.4. Методы повышения достоверности данных телеконтроля
при обработке информации 300
Методы повышения точности измерения физических
процессов 300
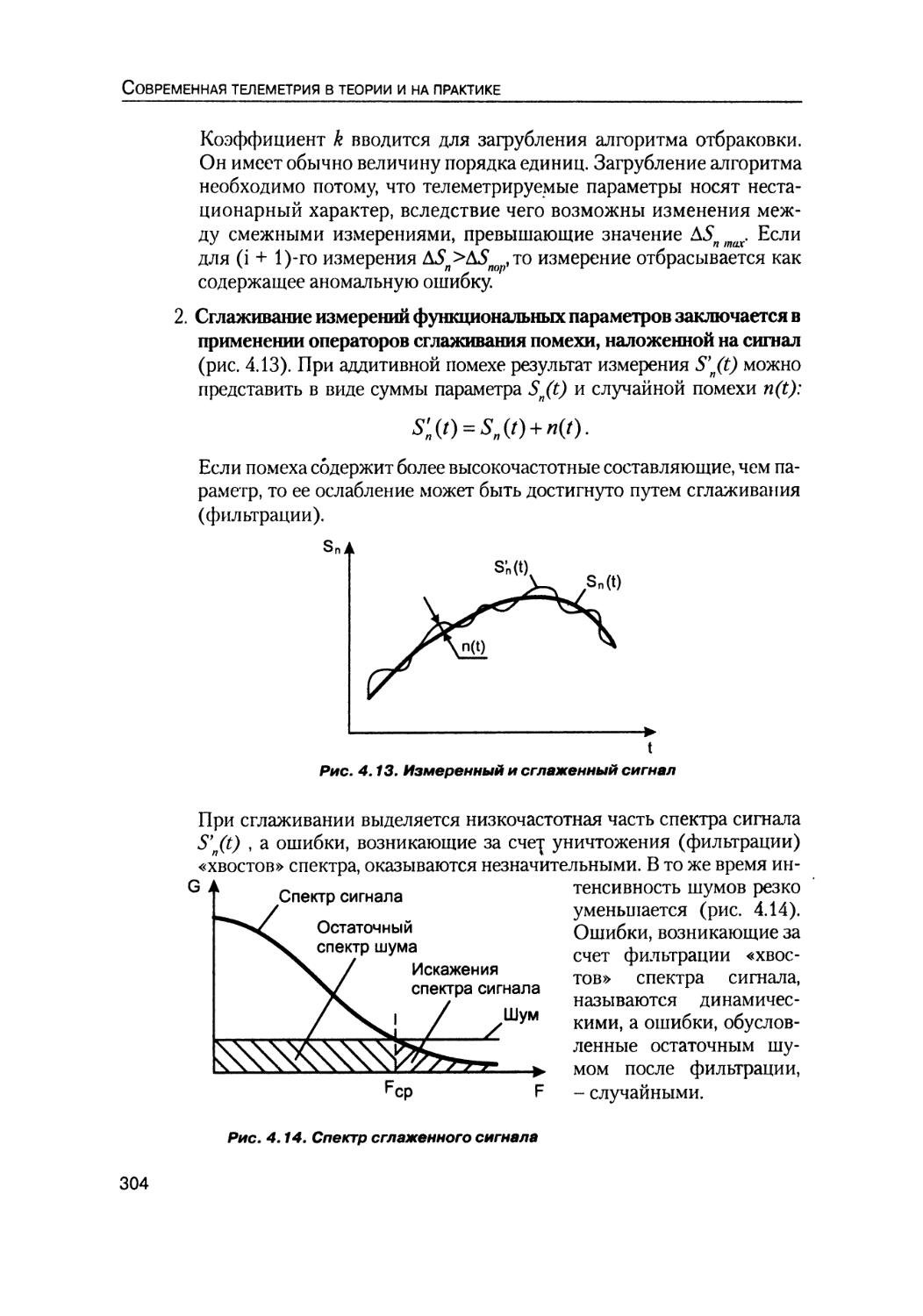
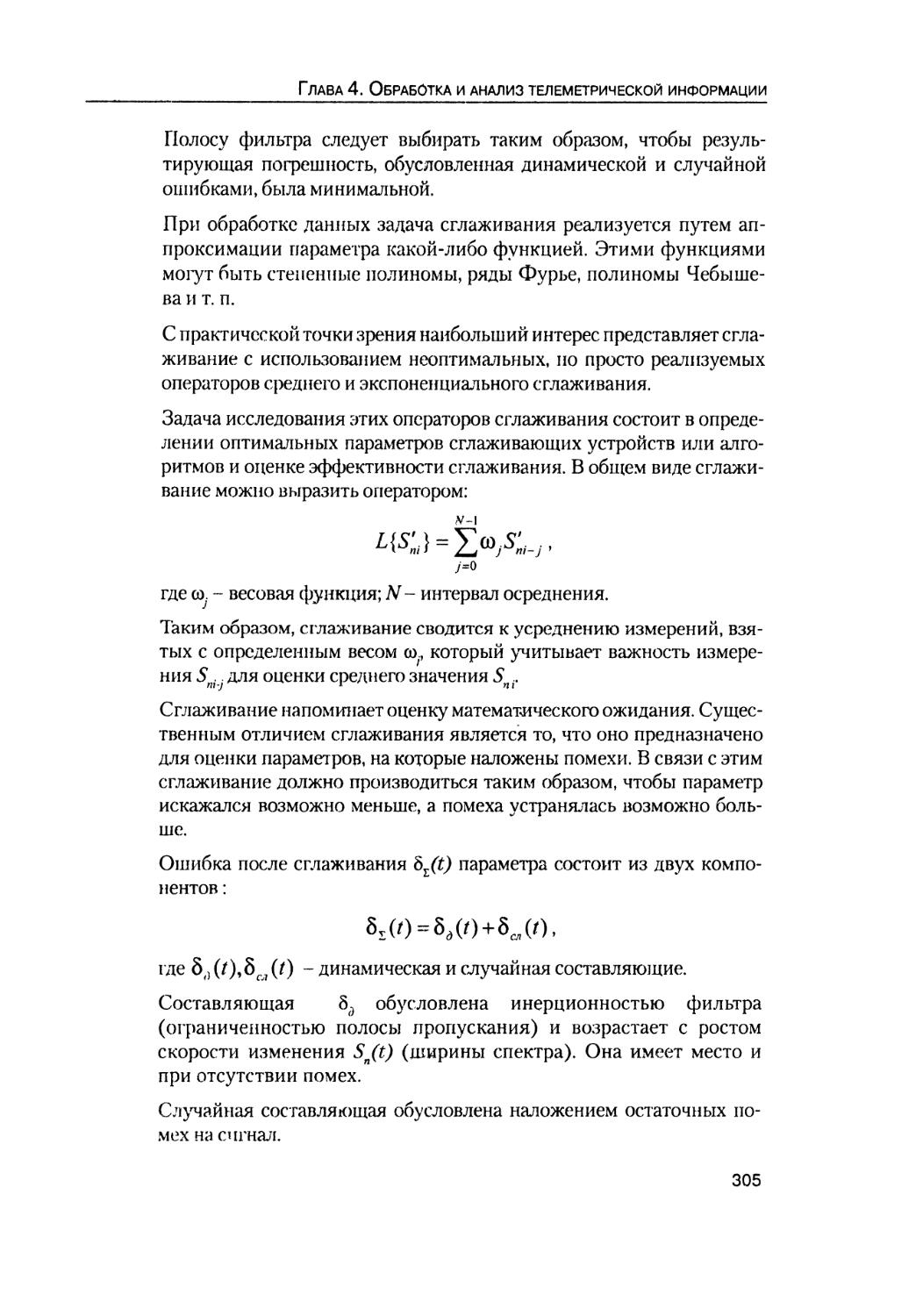
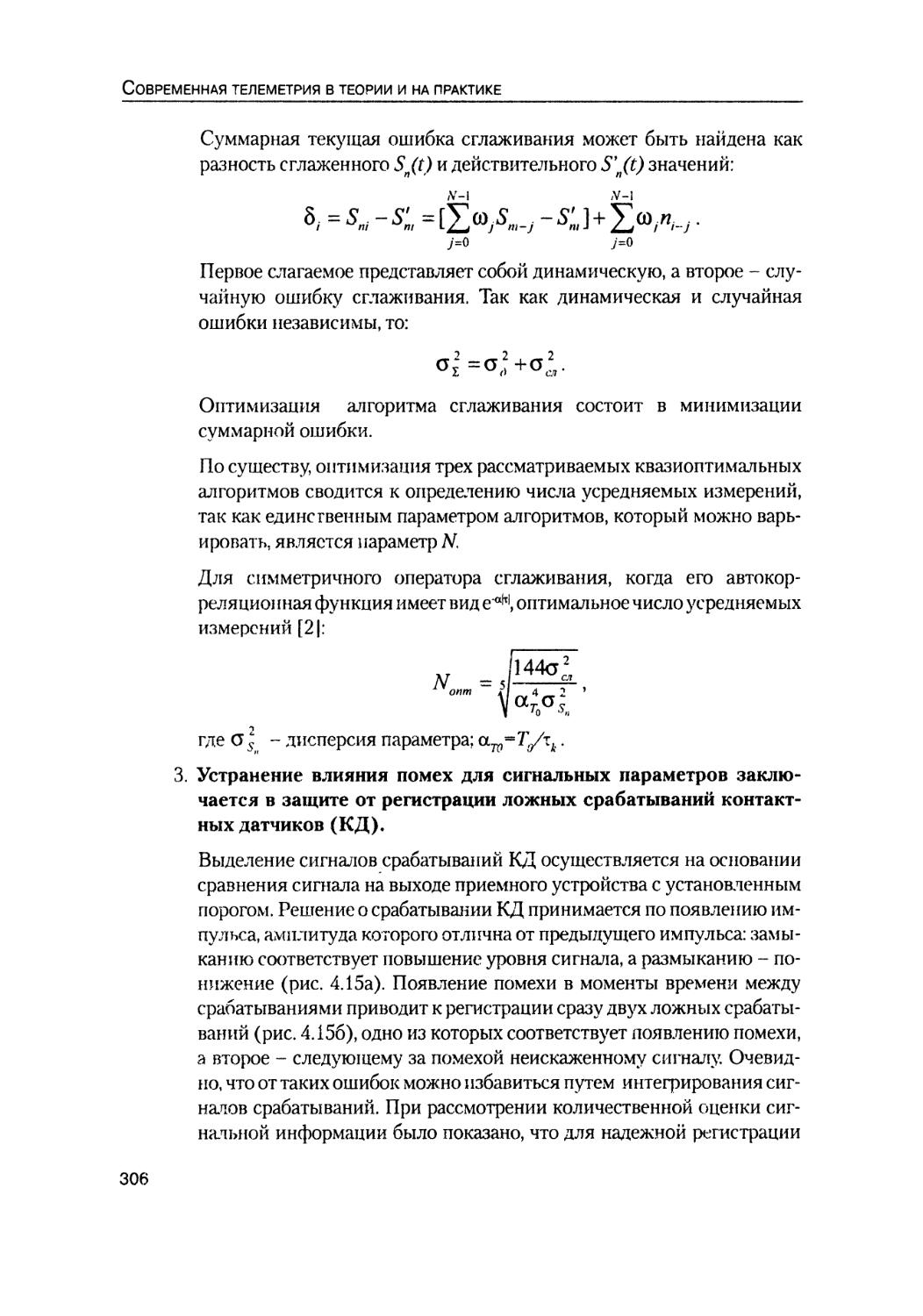
Методы учета влияния помех 302
4.2.5. Дешифровка телеметрической информации 309
Алгоритмы автоматизированной дешифровки телеизмерения 309
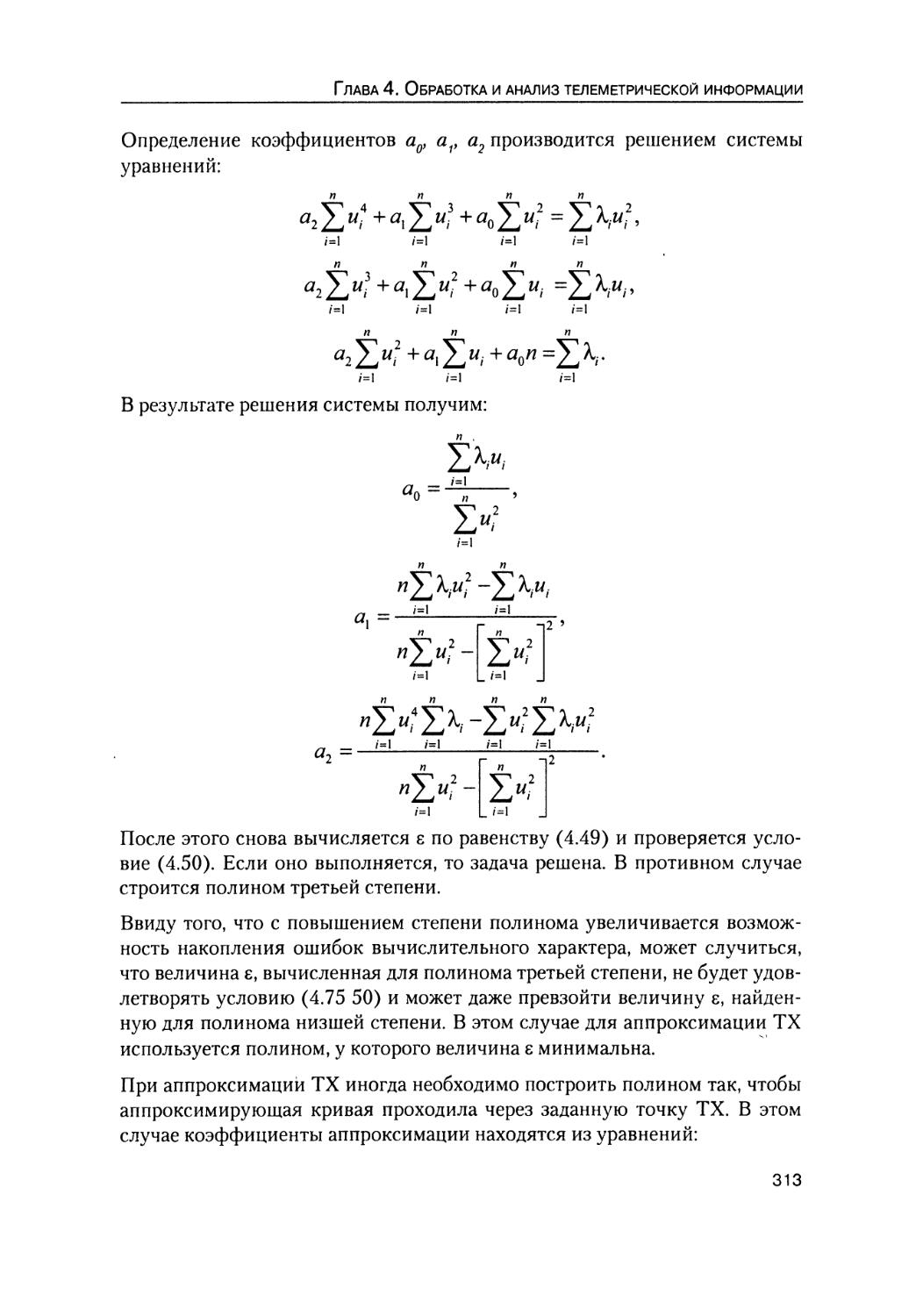
Аппроксимация тарировочных характеристик 312
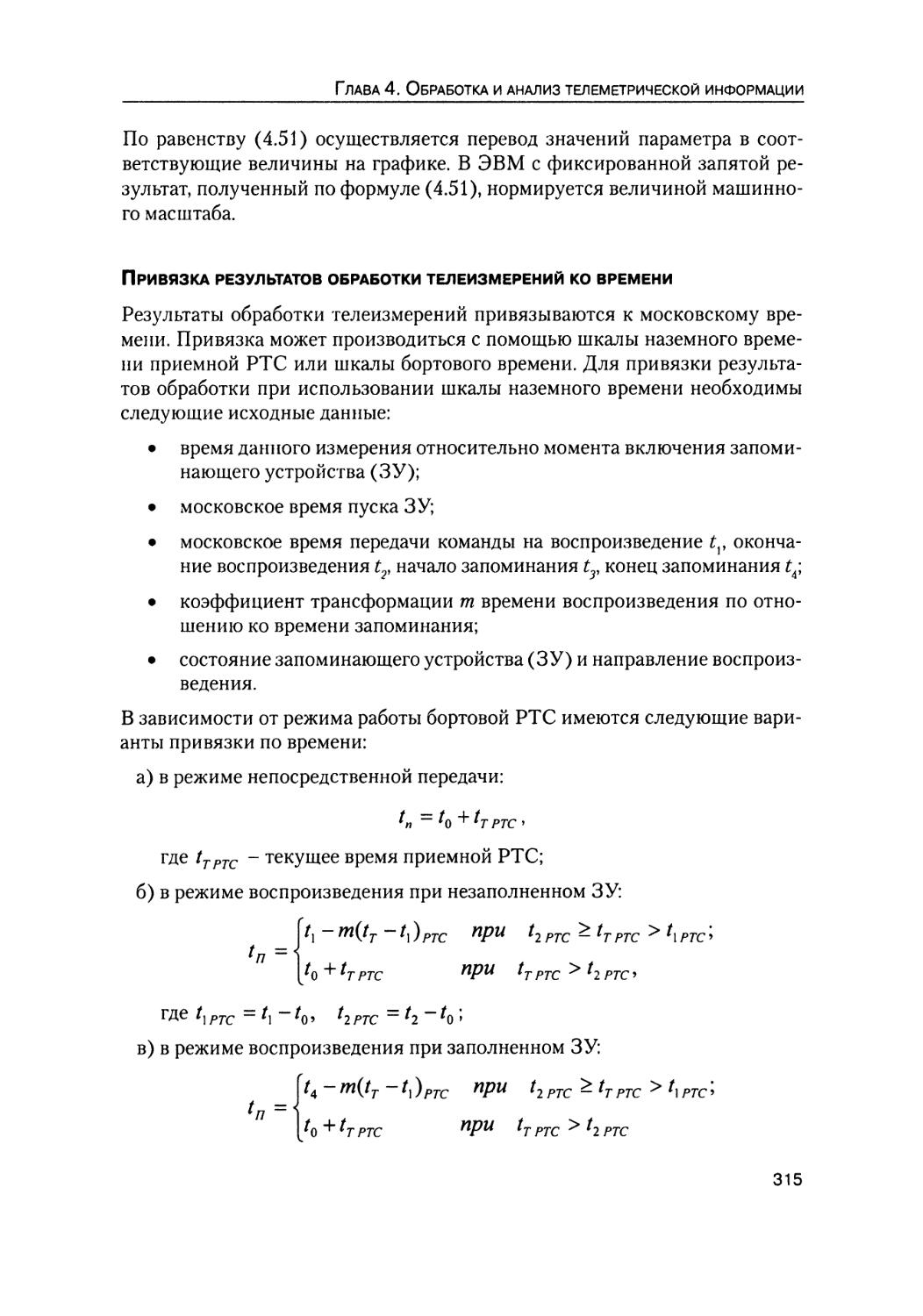
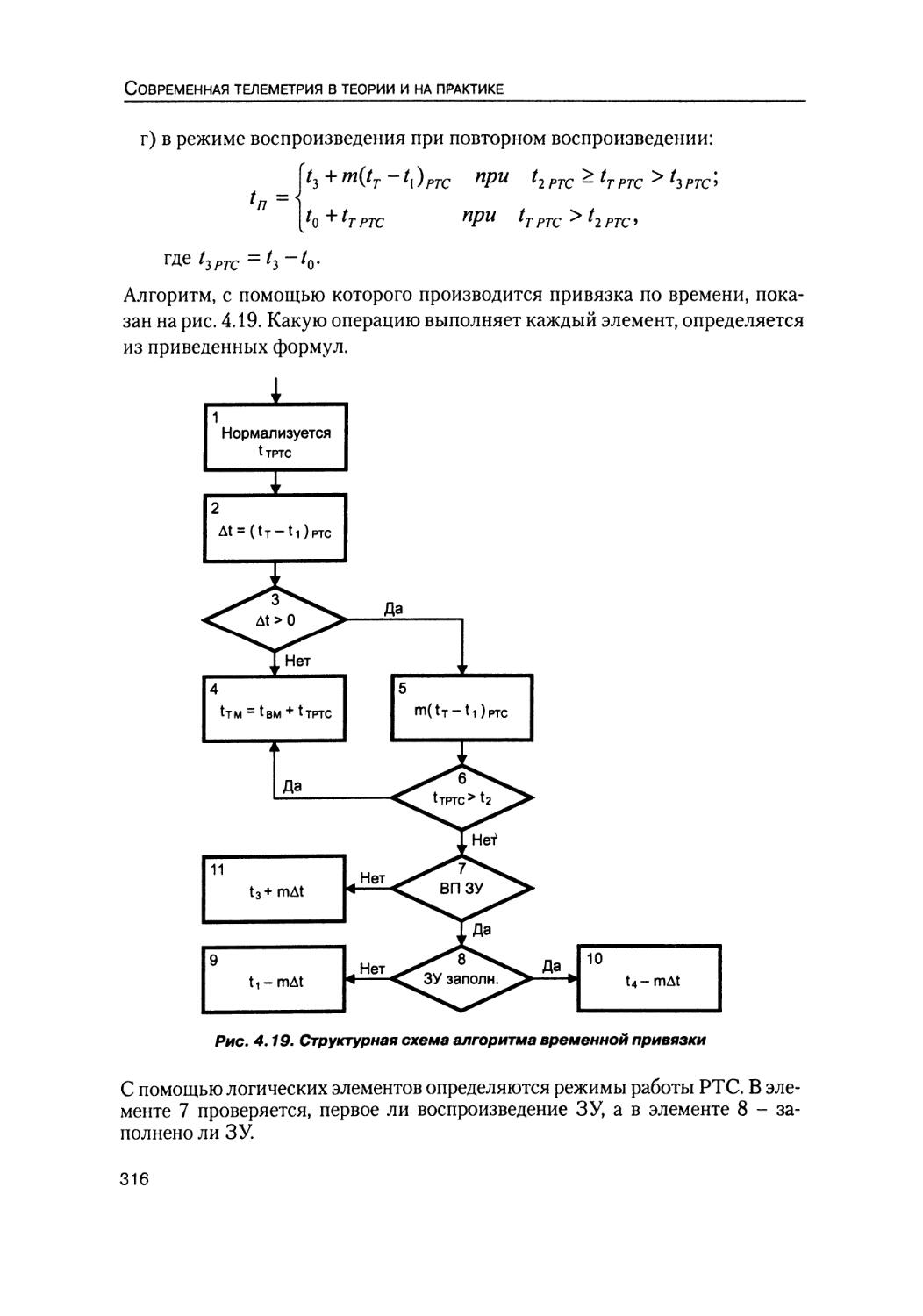
Привязка результатов обработки телеизмерений ко времени.. 315
4.3. ВТОРИЧНАЯ ОБРАБОТКА ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ 317
4.3.1. Исследование поведения объекта и решение задач
идентификации 317
Задача и методы определения характеристик систем 317
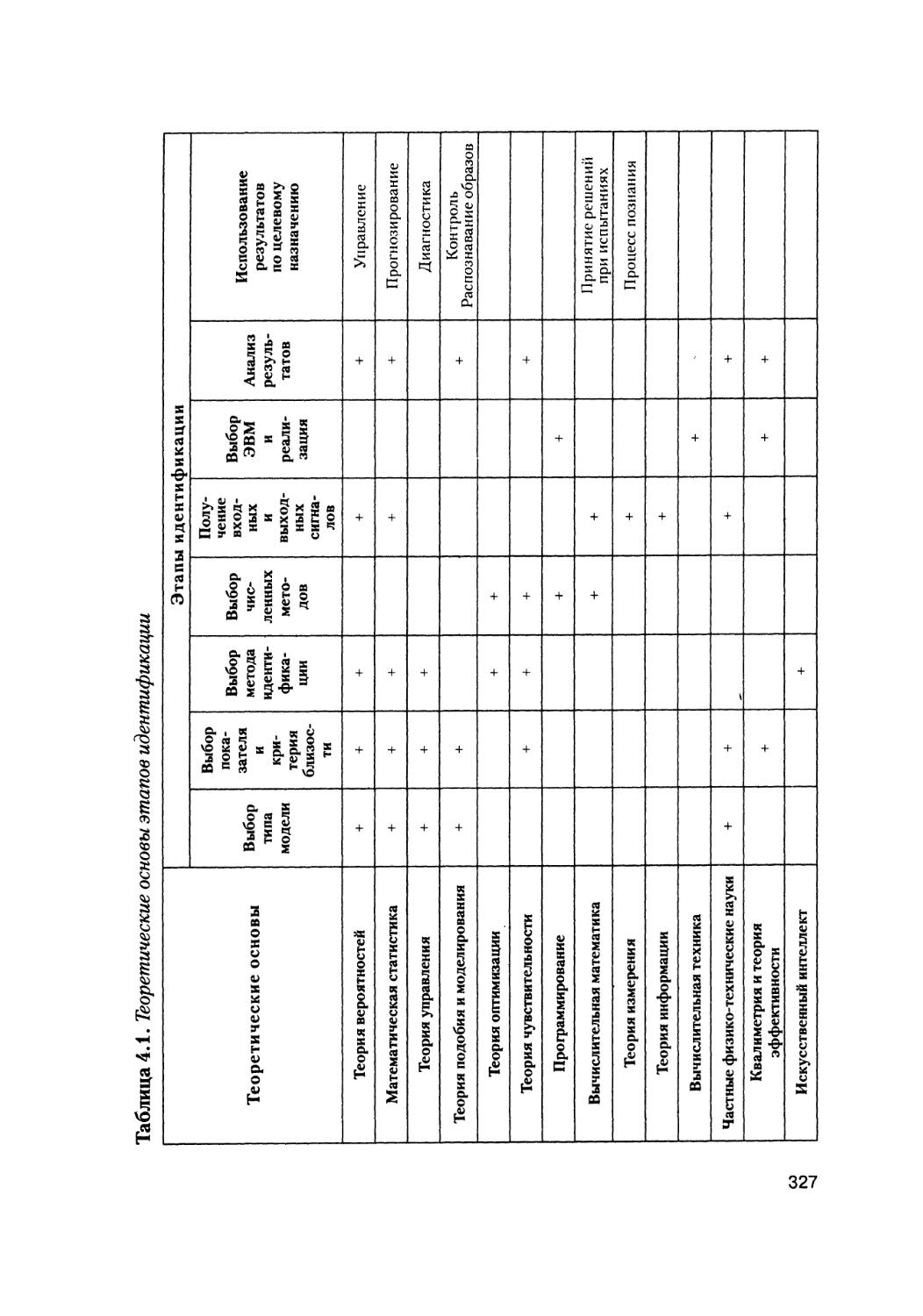
Идентификация телеметрируемых объектов 322
4.3.2. Контроль функционирования и работоспособности
объекта 334
Схемы контроля 334
Контроль по параметру 335
Контроль по показателю качества 337
Контроль функционирования систем 341
Контроль работоспособности с помощью алгоритмов
обучения 342
Классификация методов распознавания технических
состояний объекта диагностирования 350
4.3.3. Поиск места и определение причин неисправностей
объекта 361
Алгоритм обучения распознаванию отказов 361
Поиск дефектов в электро-радиоэлектронной аппаратуре 369
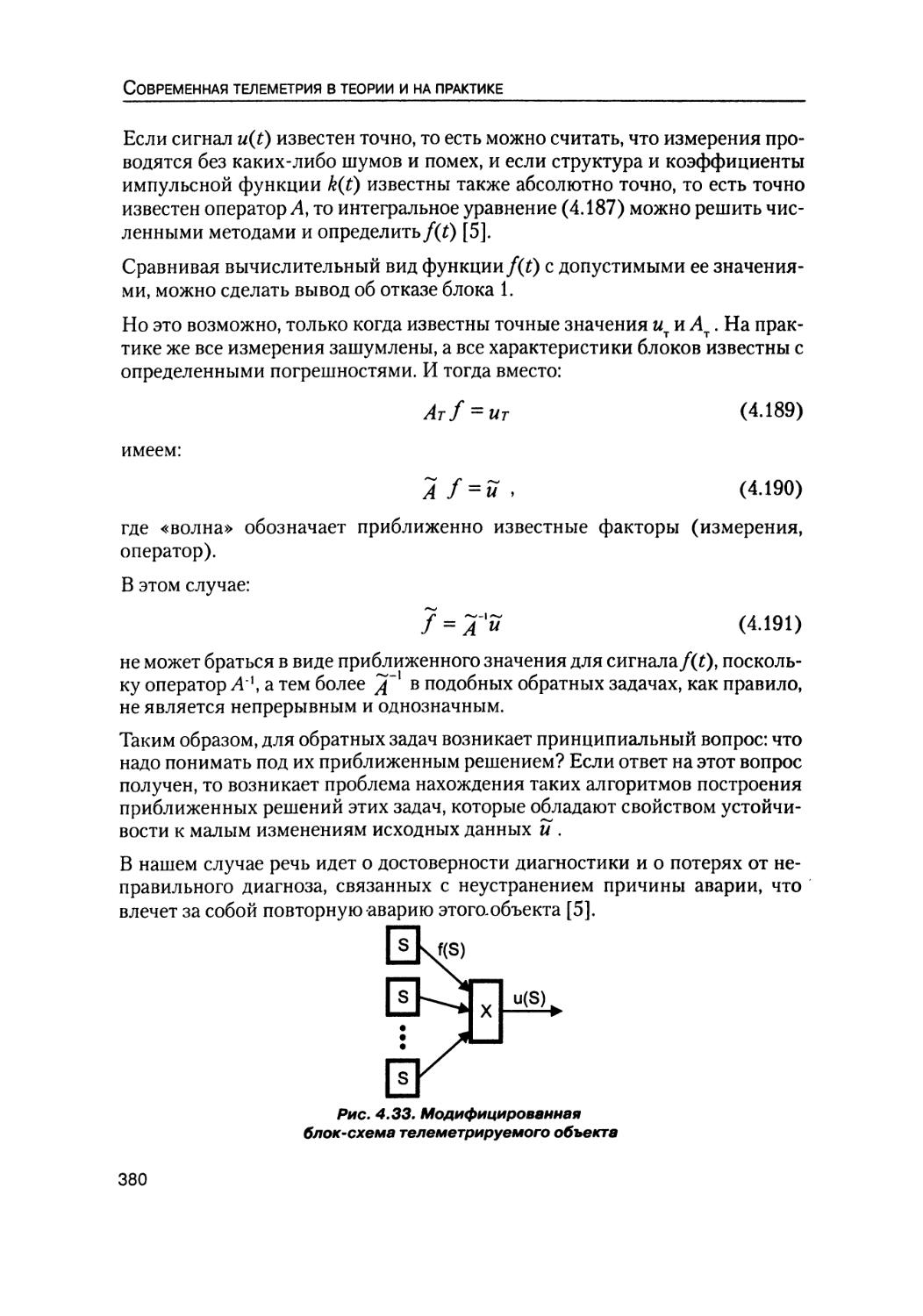
4.3.4. Задачи технического генеза 373
4.3.5. Прогнозирование технического состояния объектов
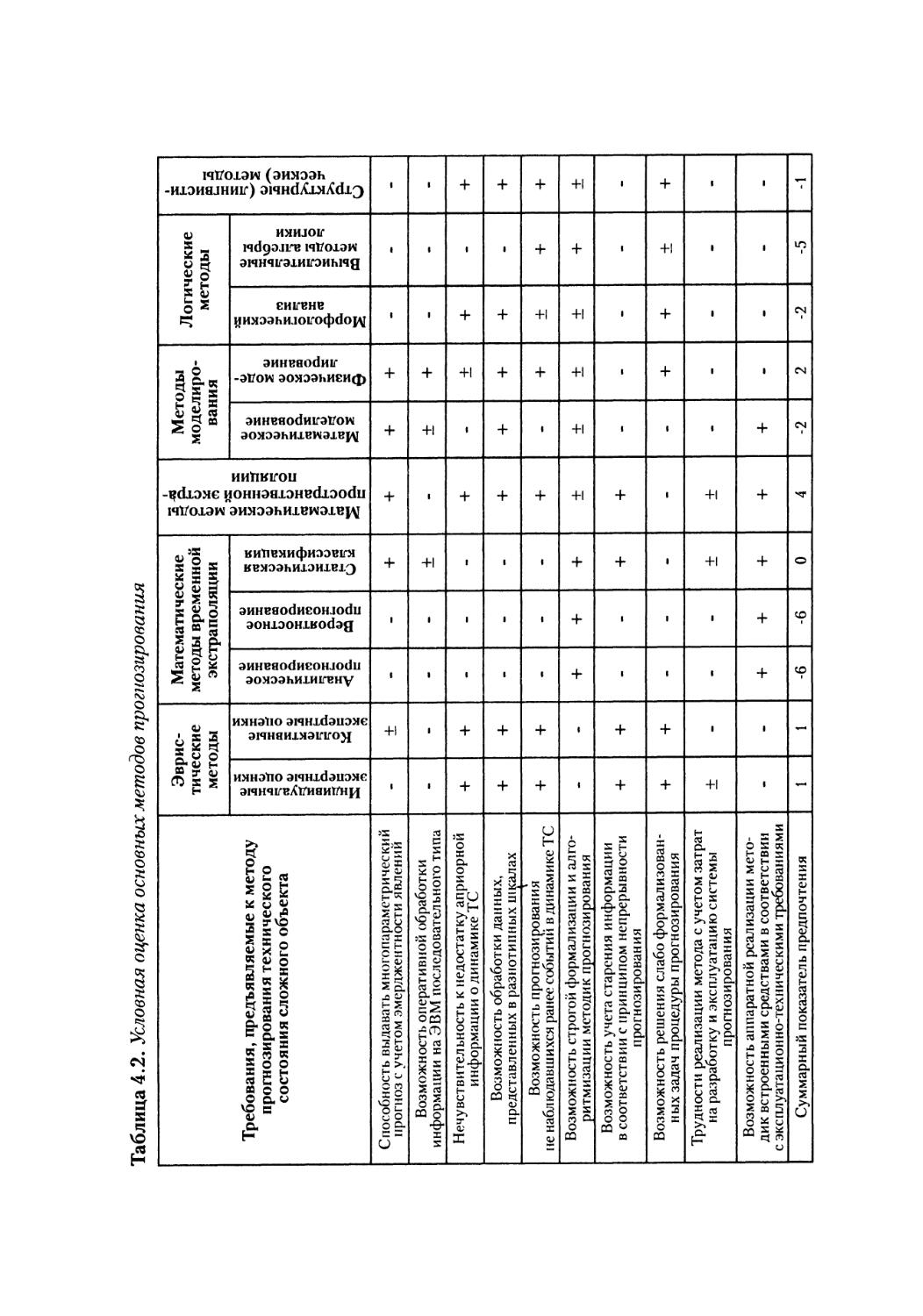
диагностирования 381
Задачи прогнозирования 381
Методы эвристического прогнозирования 382
Математические методы временной экстраполяции 384
Математические методы пространственной экстраполяции.... 392
11
Современная телеметрия в теории и на практике
Методы моделирования процессов функционирования
систем 393
Логические и структурные методы искусственного интеллекта 394
ЛИТЕРАТУРА К ГЛАВЕ 4 400
ГЛАВА 5. СТАНДАРТЫ И ТЕХНОЛОГИИ СОВРЕМЕННОЙ ТЕЛЕМЕТРИИ 401
5.1. КОНЦЕПЦИЯ ТЕЛЕМЕТРИЧЕСКОЙ СИСТЕМЫ 402
5.1.1. Организаторы CCSDS 402
5.1.2. Понятие телеметрической системы 406
5.2. МЕТОДИКА ПРОЕКТИРОВАНИЯ ТЕЛЕМЕТРИЧЕСКИХ СИСТЕМ 407
5.2.1. Методика стандартизации телеметрических систем 407
Общая концепция 407
Уровень пакетирования 410
Уровень сегментации 410
Уровень фреймов 410
Уровень кодирования канала 410
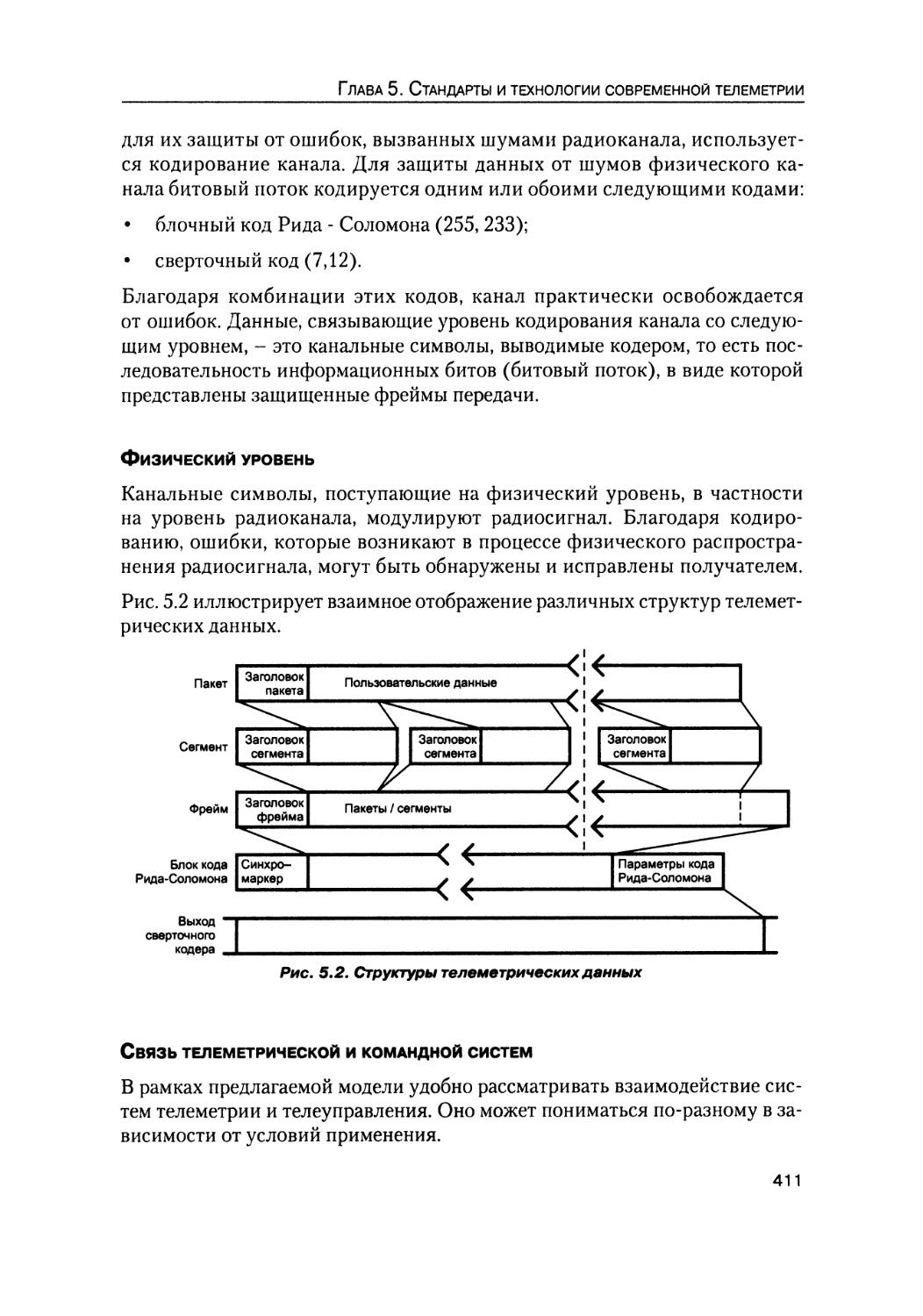
Физический уровень 411
Связь телеметрической и командной систем 411
Механизм управления потоком данных 412
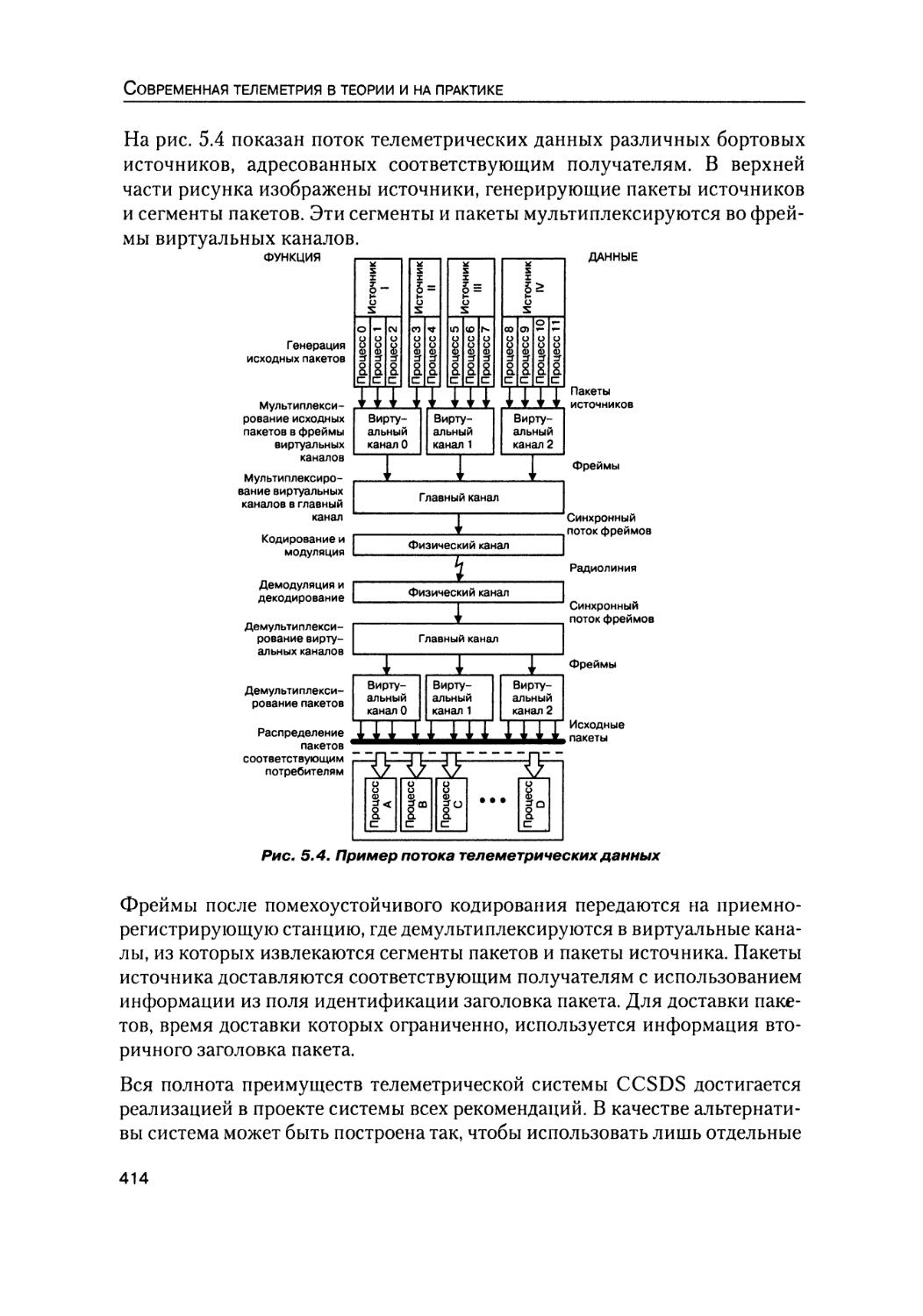
5.2.2. Управление потоком данных 413
5.3. СТАНДАРТЫ И ТЕХНОЛОГИИ ПАКЕТНОЙ ТЕЛЕМЕТРИИ 415
5.3.1. Соглашения CCSDS 415
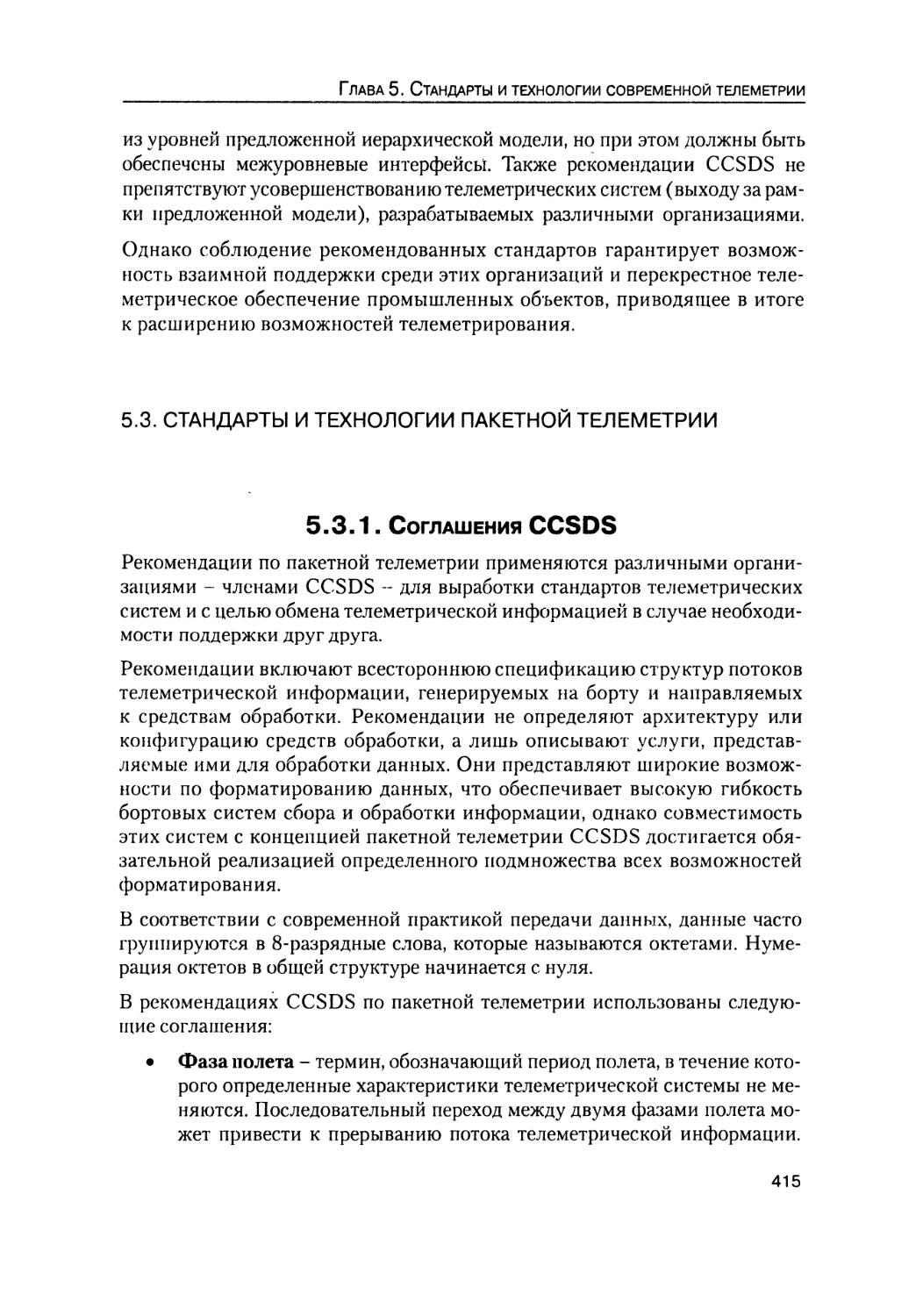
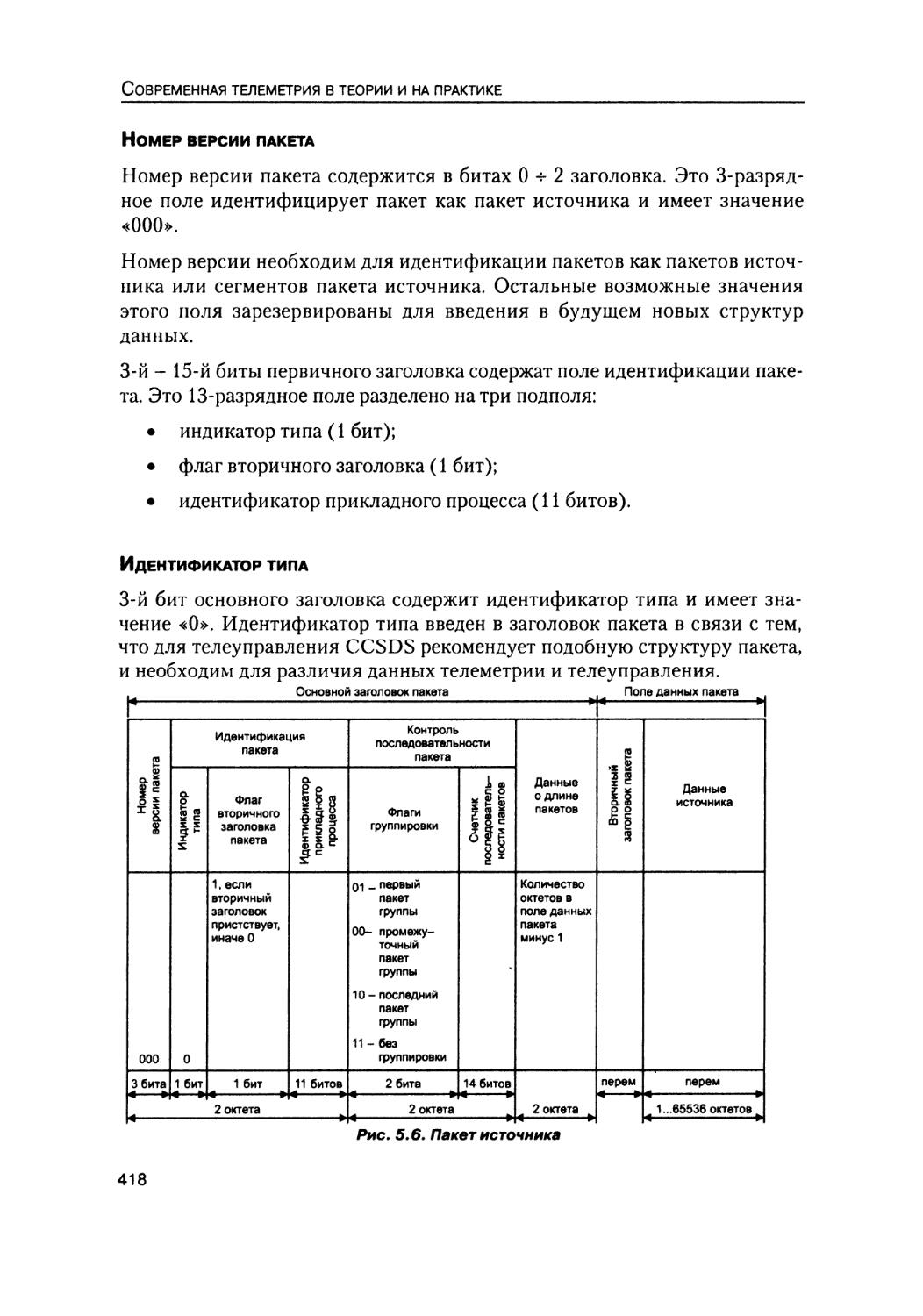
5.3.2. Пакет источника 416
Основной заголовок пакета источника 417
Номер версии пакета 418
Идентификатор типа 418
Флаг вторичного заголовка 419
Идентификатор прикладного процесса 419
Поле контроля последовательности пакетов 419
Флаги группирования 419
Счетчик последовательности пакетов 420
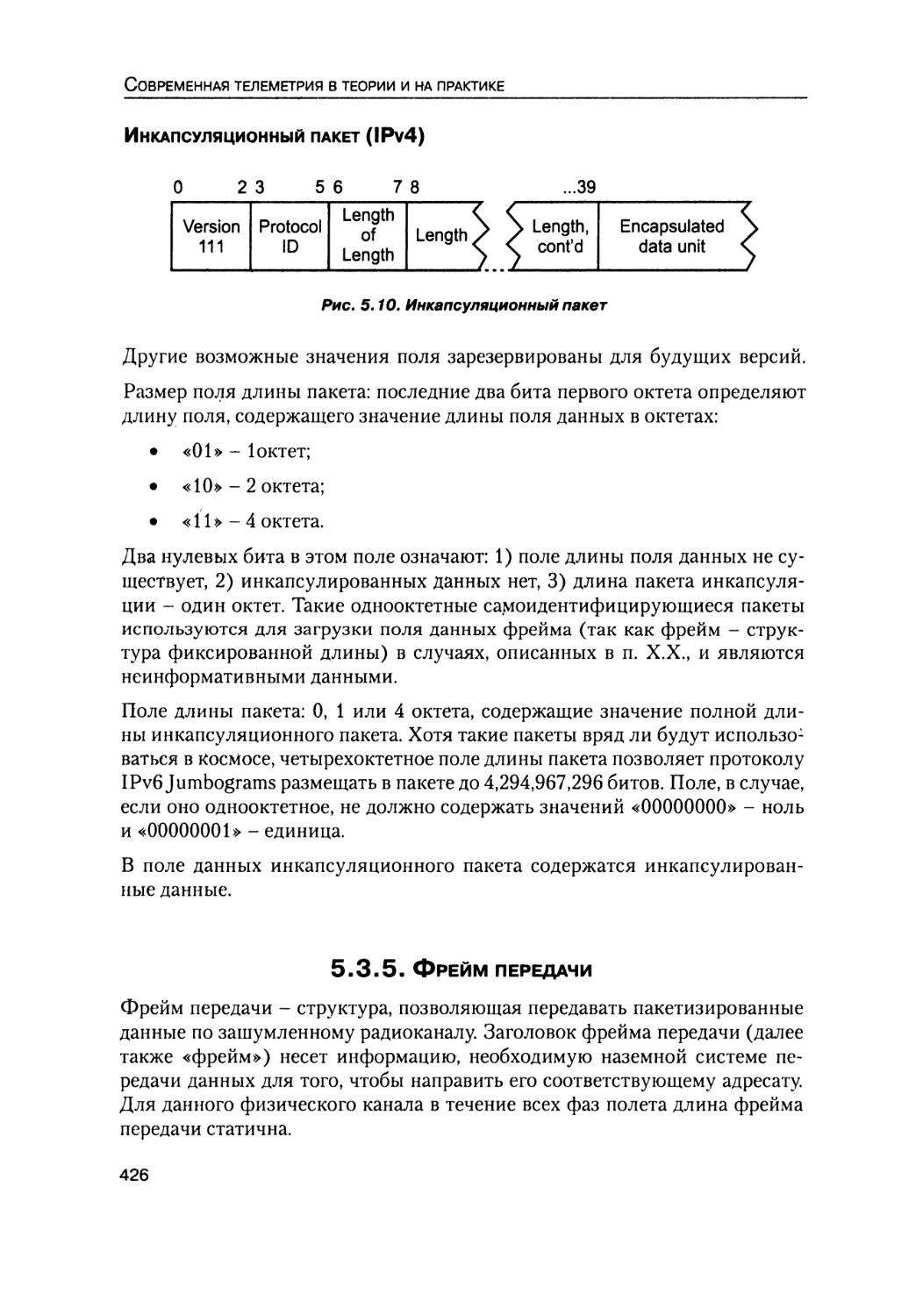
Поле длины пакета 420
Поле данных пакета источника 420
Поле данных вторичного заголовка 421
Поле данных пакета источника 421
12
Содержание
5.3.3. Сегмент пакета 422
Основной заголовок сегмента 422
Номер версии 422
Поле идентификации сегмента 423
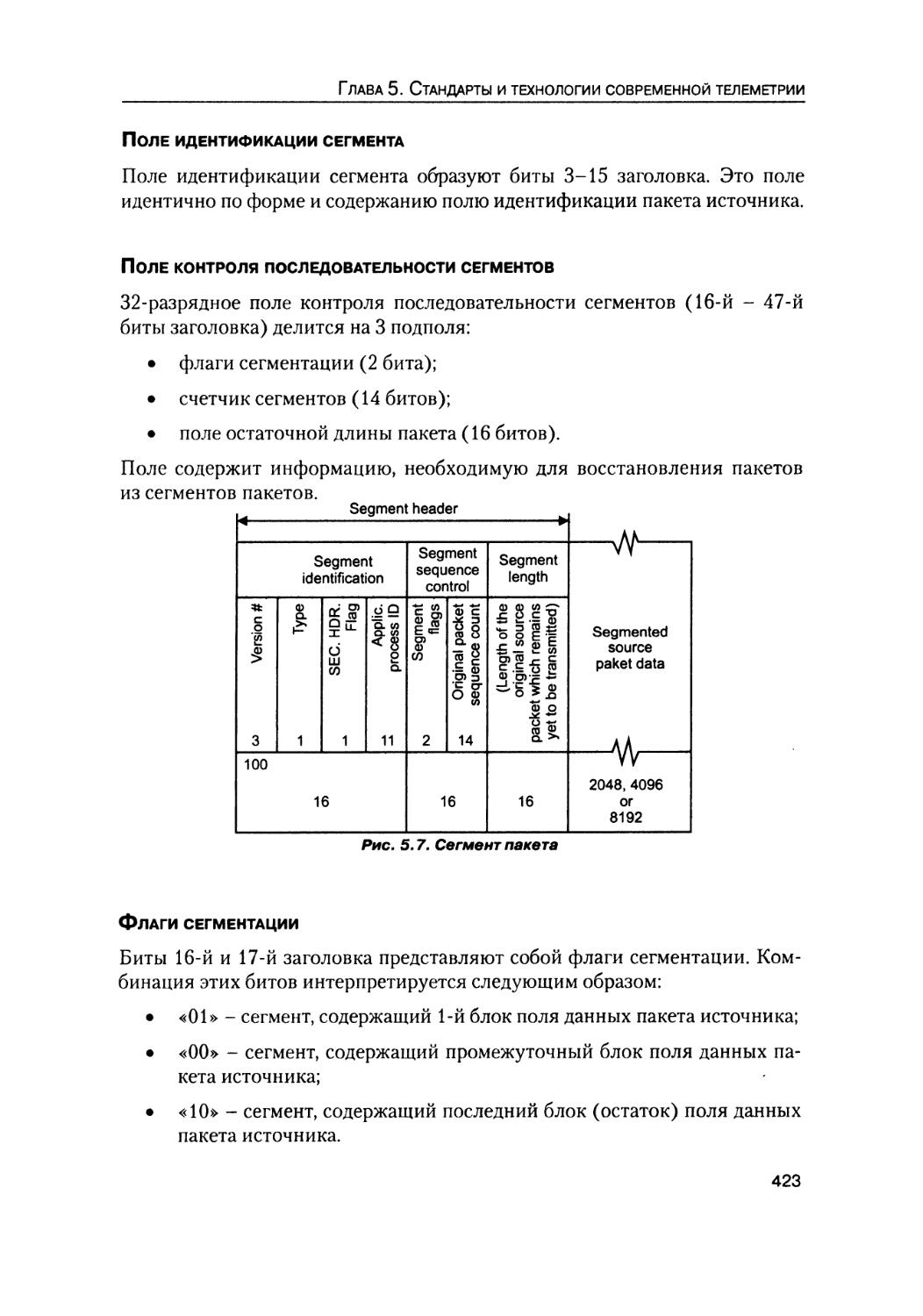
Поле контроля последовательности сегментов 423
Флаги сегментации 423
Счетчик последовательности сегментов 424
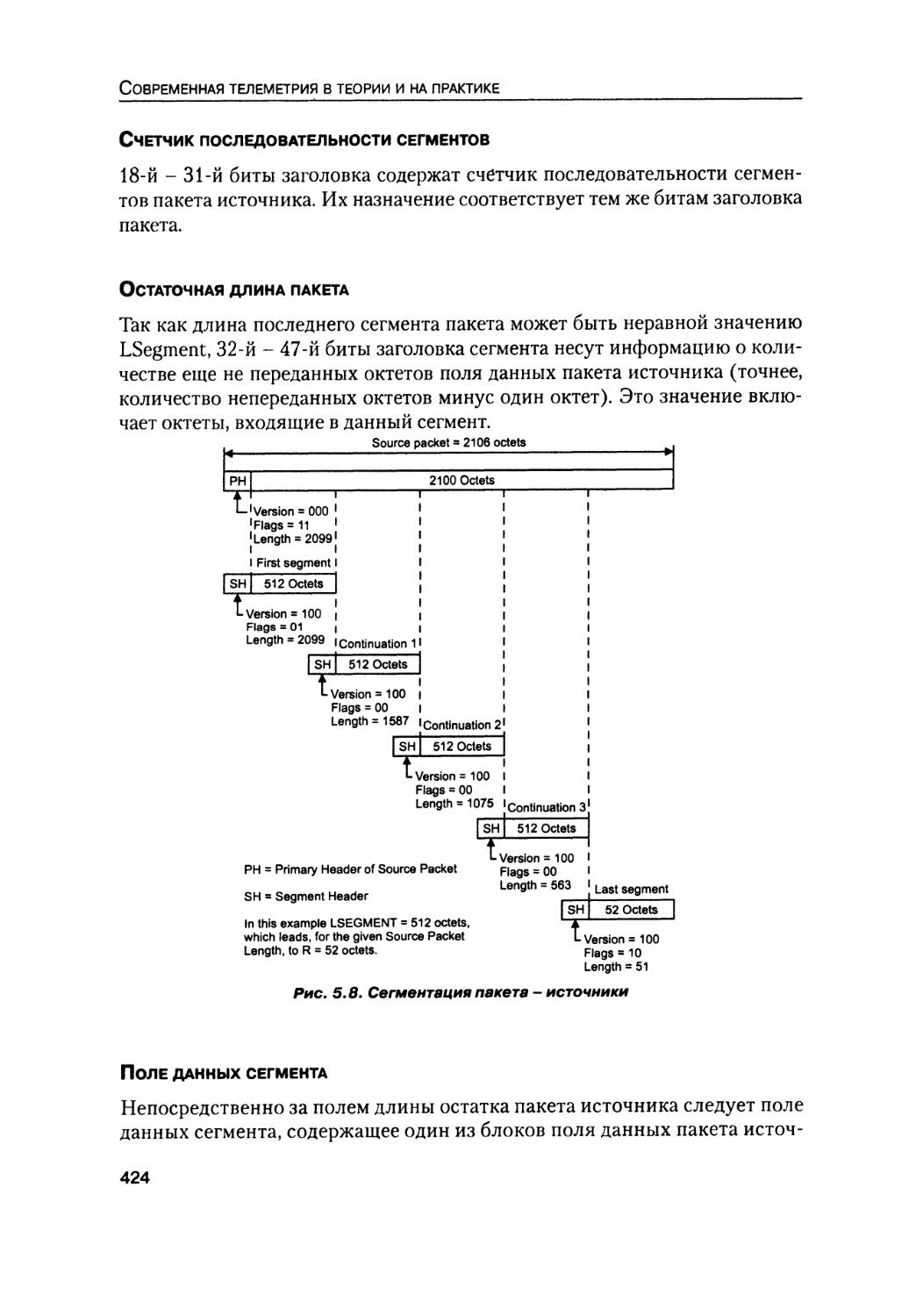
Остаточная длина пакета 424
Поле данных сегмента 424
5.3.4. Другие типы пакетов 425
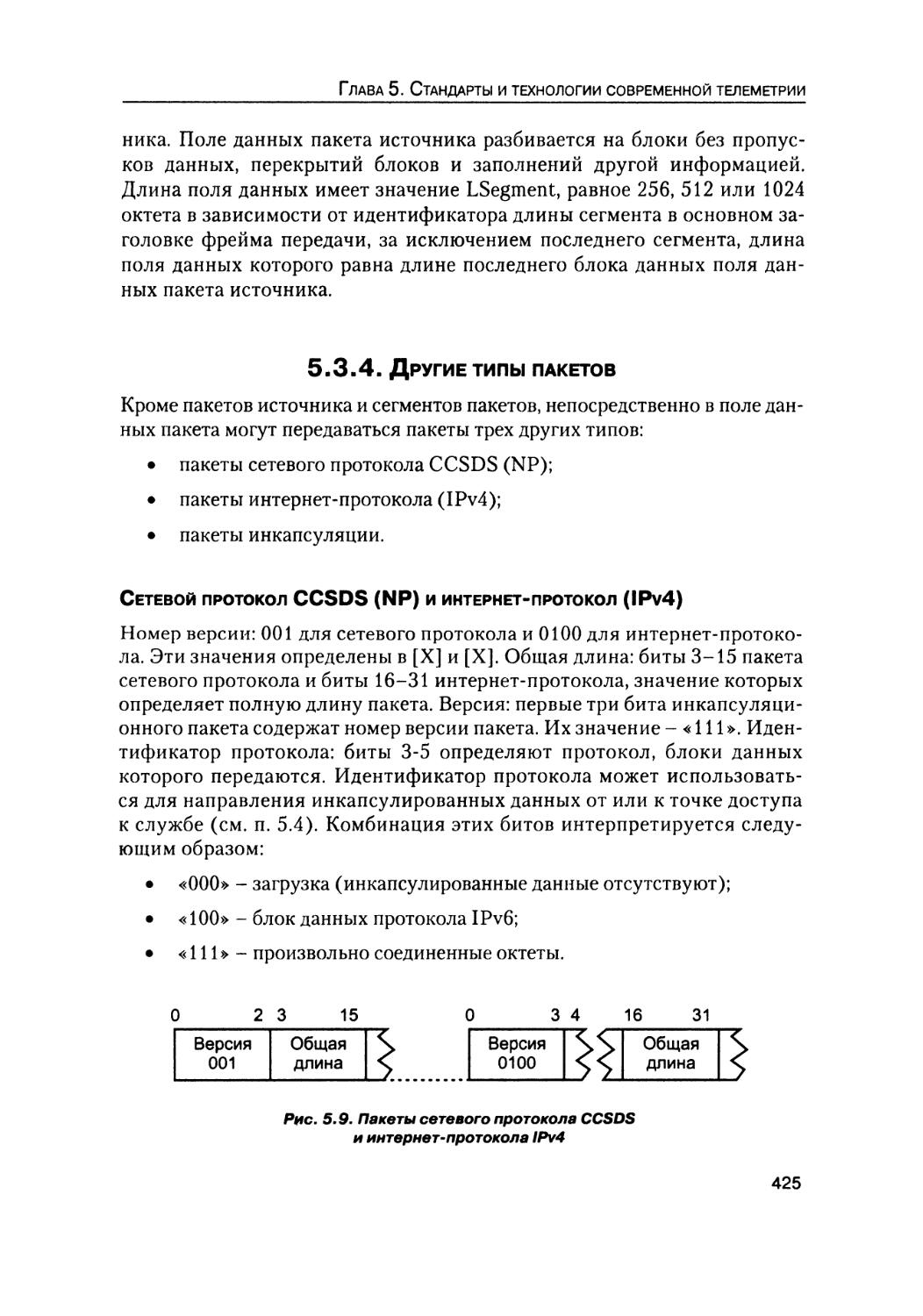
Сетевой протокол CCSDS (NP) и интернет-протокол (IPv4) 425
Инкапсуляционный пакет (IPv4) 426
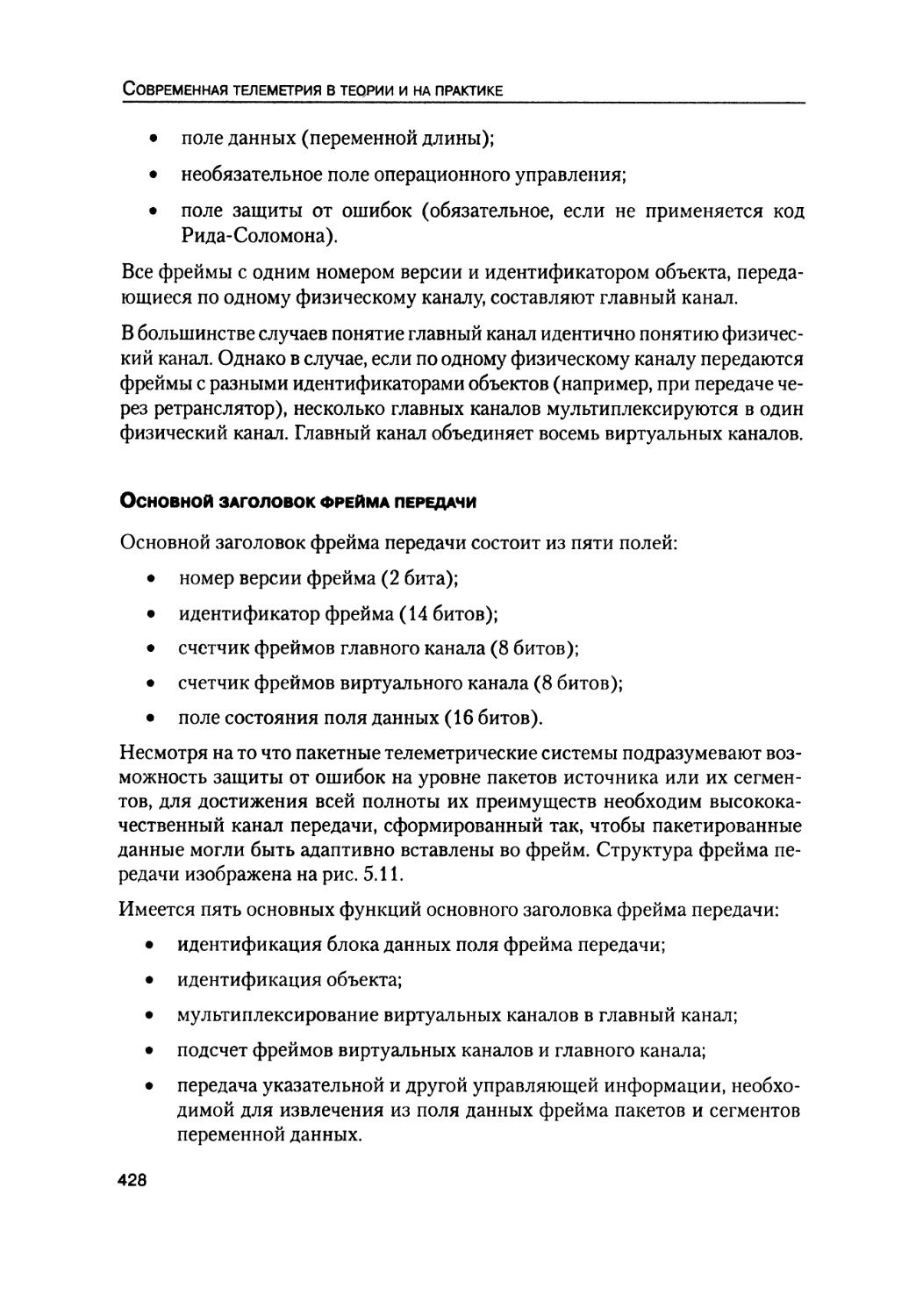
5.3.5. Фрейм передачи 426
Основной заголовок фрейма передачи 428
Номер версии фрейма передачи 429
Идентификатор фрейма 429
Счетчик фреймов главного канала 430
Счетчик фреймов виртуального канала 430
Поле состояния поля данных фрейма 430
Флаг вторичного заголовка фрейма 431
Флаг синхронизации 431
Флаг порядка пакетов 431
Идентификатор длины сегмента 432
Указатель заголовка 1-го пакета 432
Вторичный заголовок фрейма передачи 432
Поле данных фрейма передачи 433
Поле операционного управления 433
5.4. ПОМЕХОУСТОЙЧИВАЯ ПЕРЕДАЧА ТЕЛЕМЕТРИЧЕСКИХ ДАННЫХ 434
Сверточное кодирование 437
Спецификация базового сверточного кода 438
Сверточный кодер с выбиванием битов 439
Спецификация сверточного кода с выбиванием битов 439
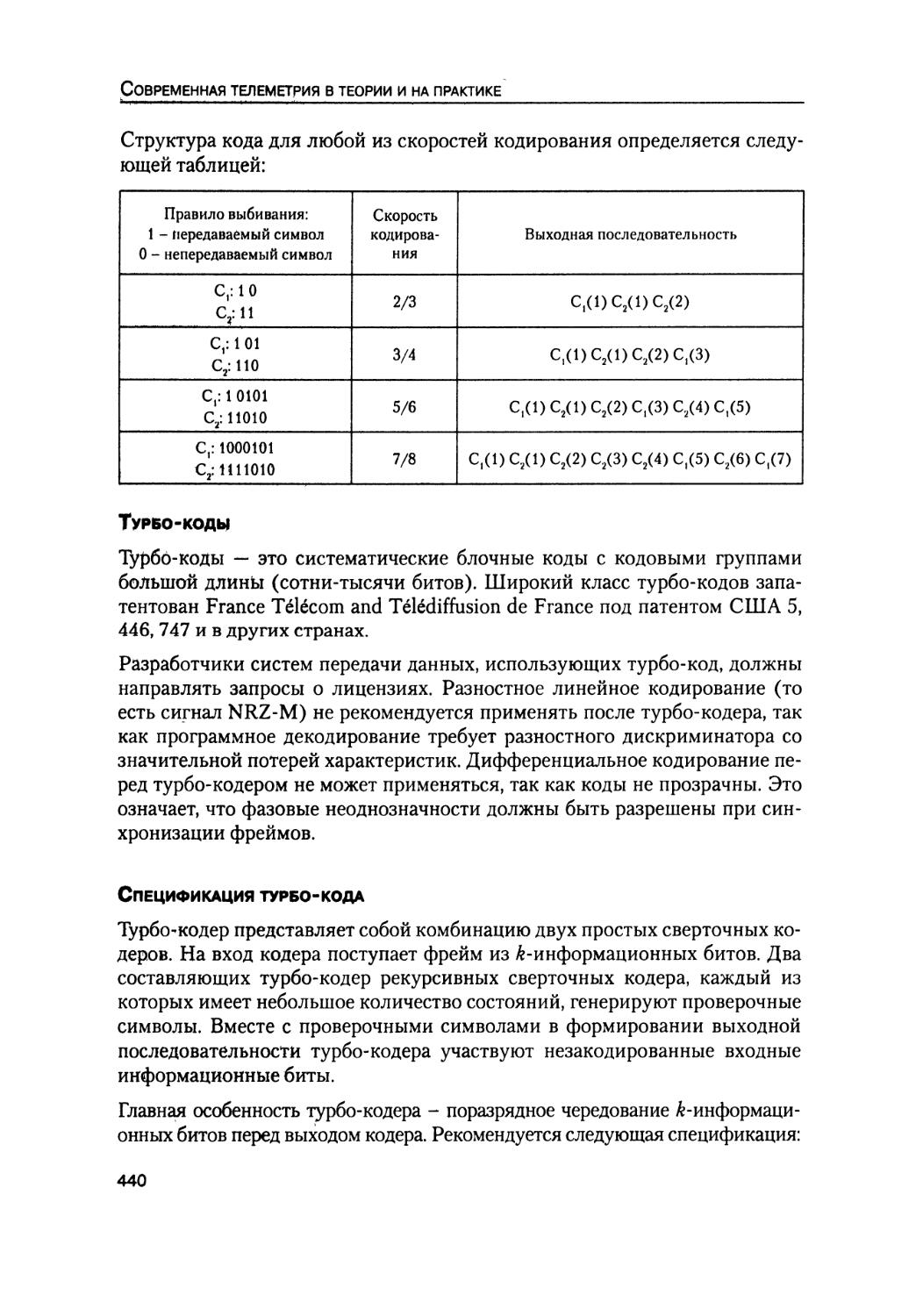
Турбо-коды 440
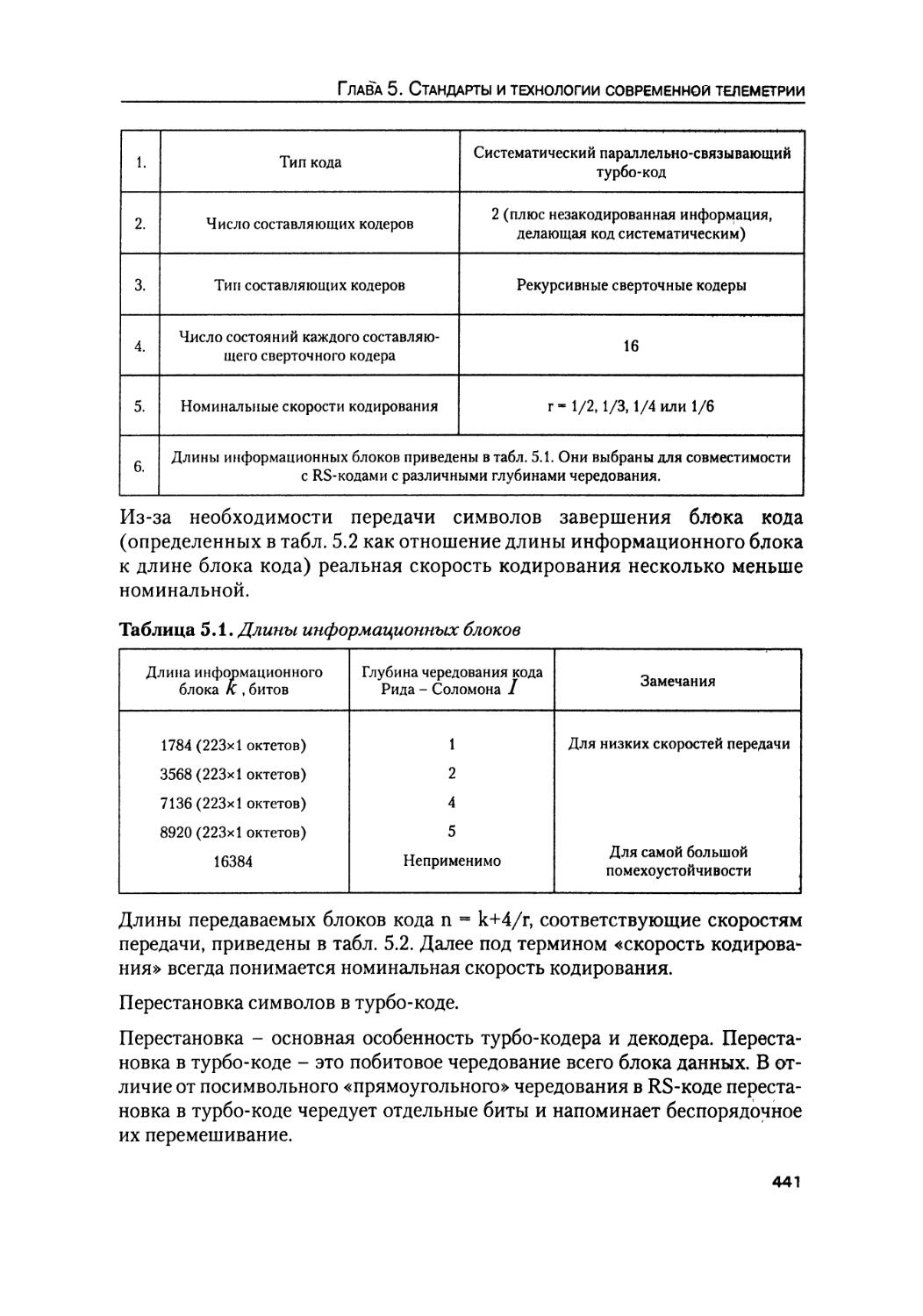
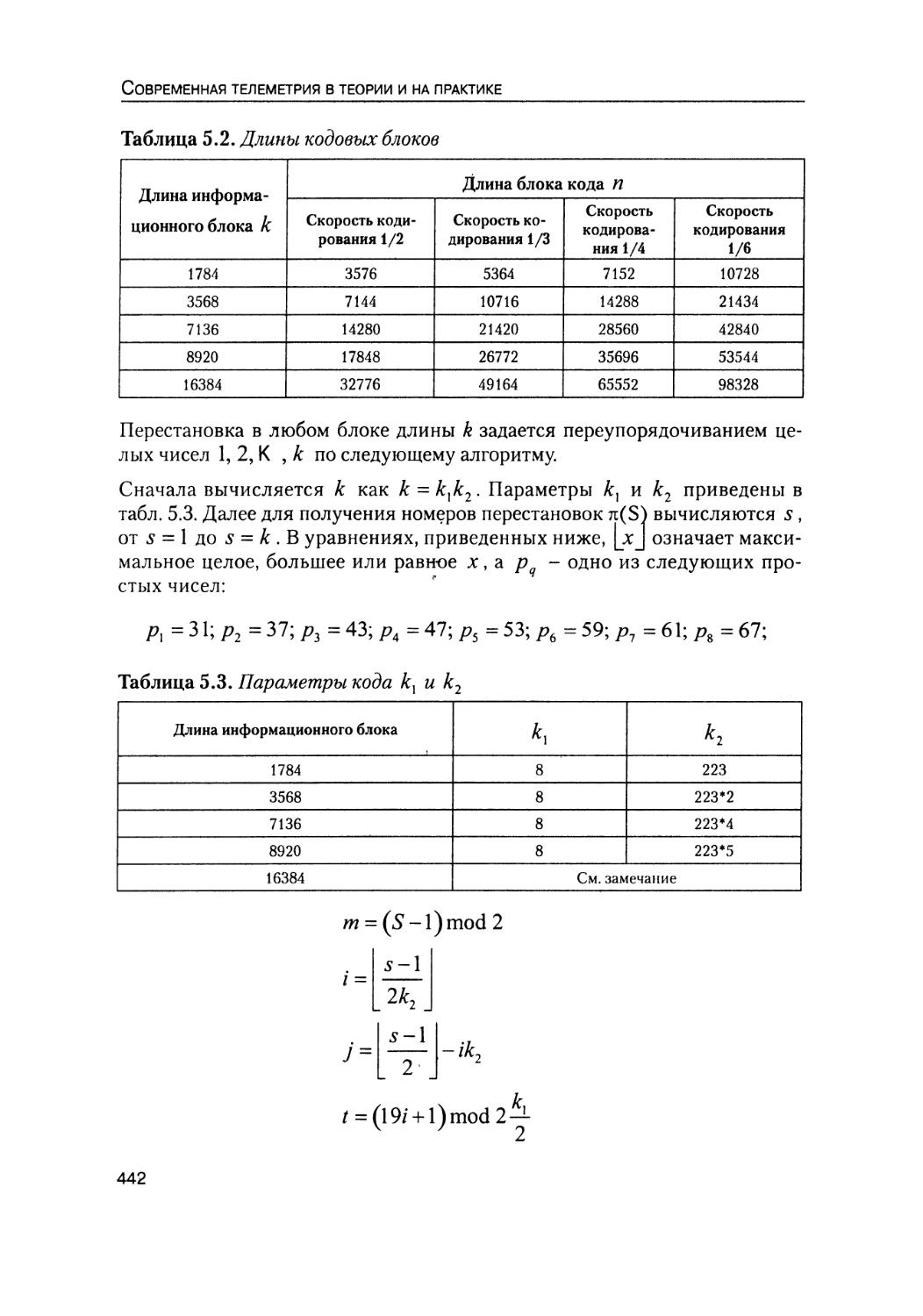
Спецификация турбо-кода 440
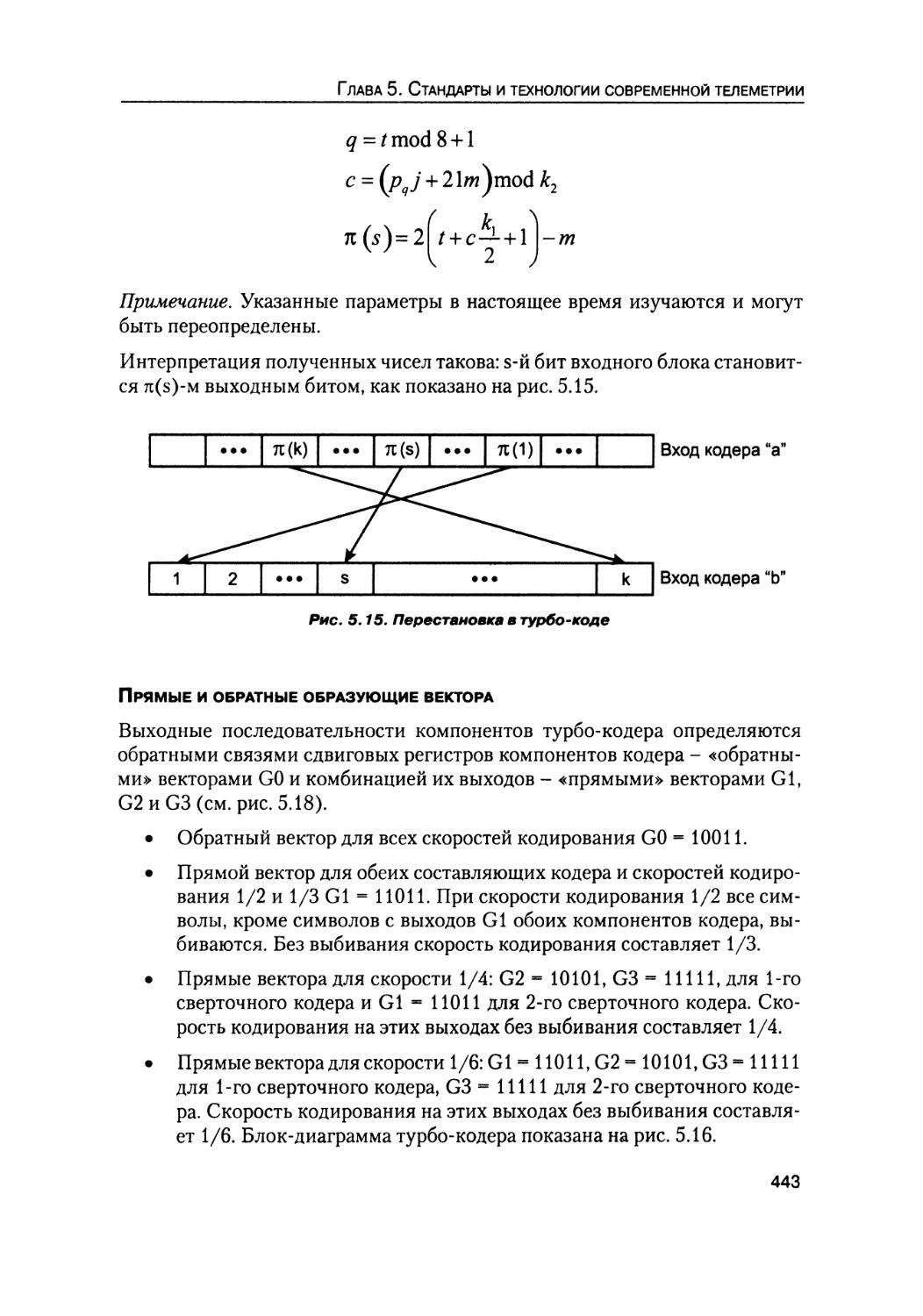
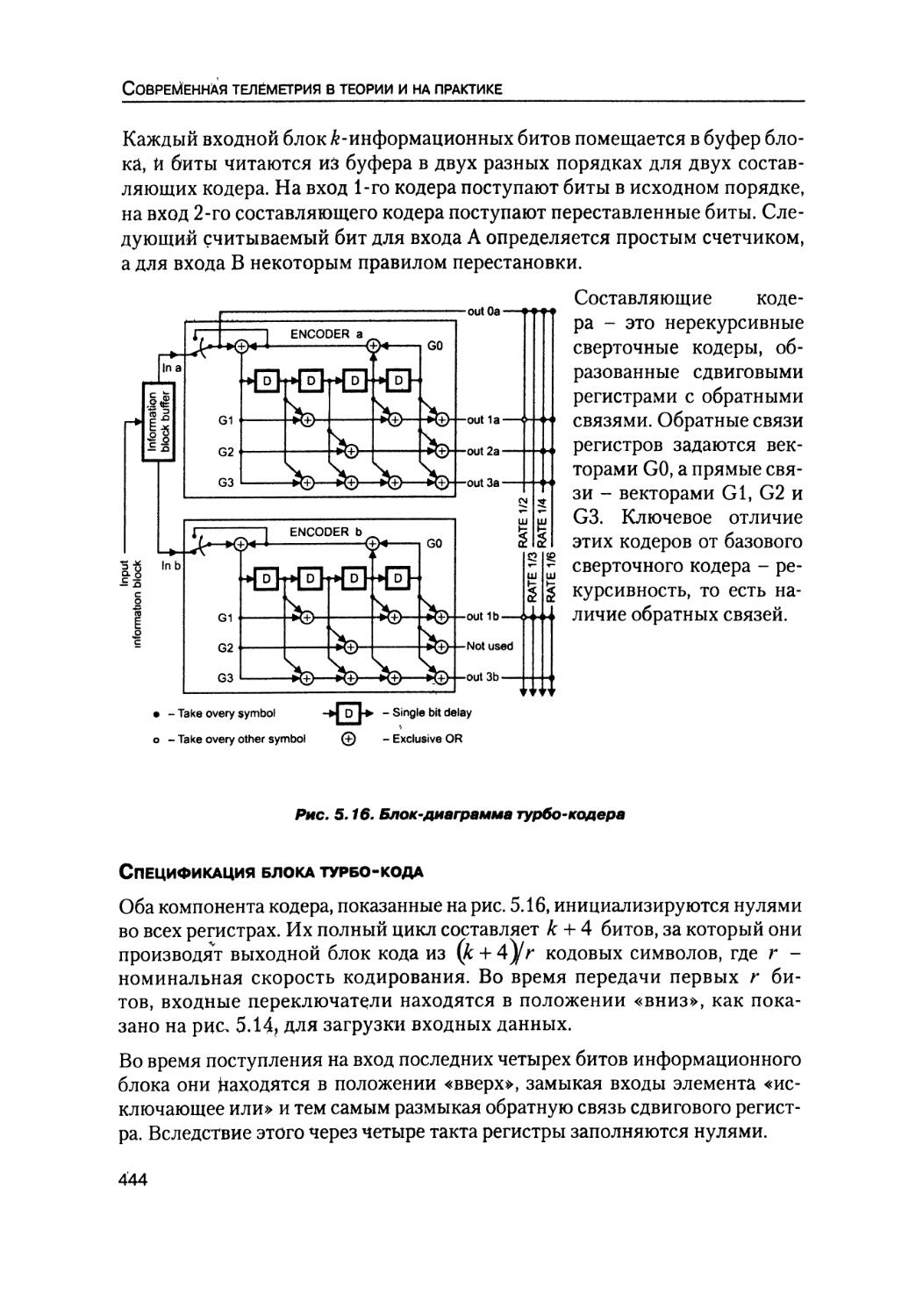
Прямые и обратные образующие вектора 443
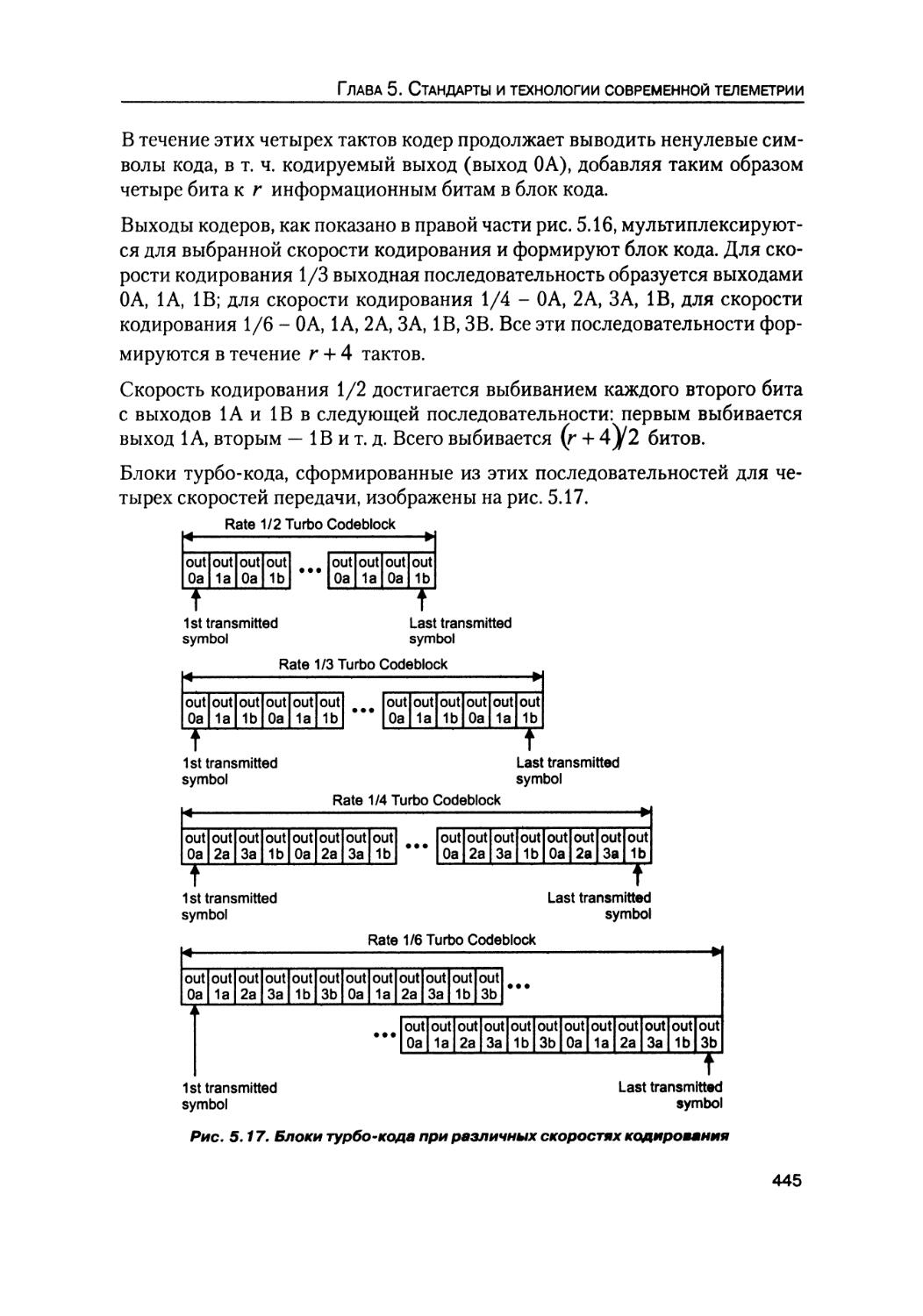
Спецификация блока турбо-кода 444
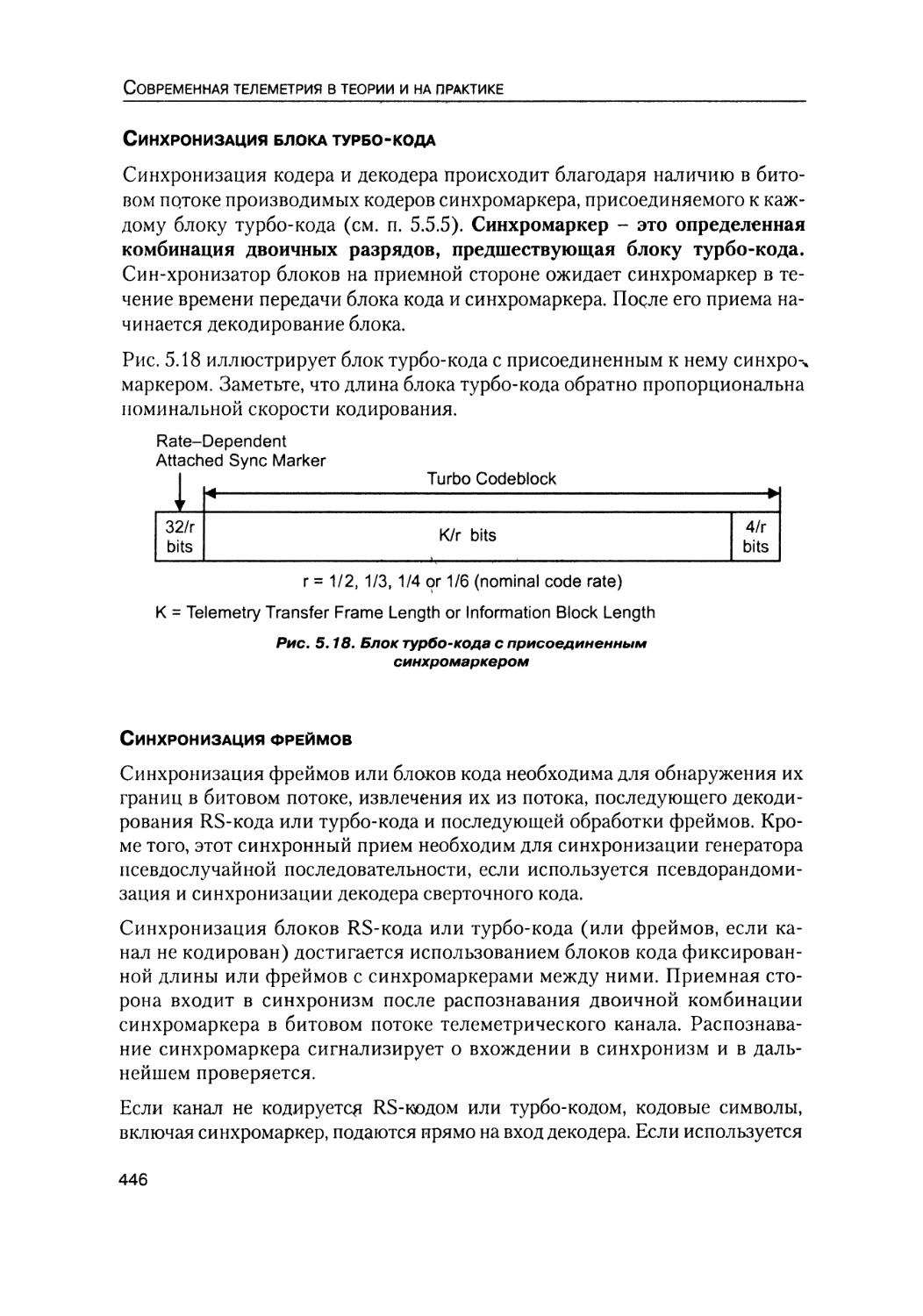
Синхронизация блока турбо-кода 446
13
Современная телеметрия в теории и на практике
Синхронизация фреймов 446
Синхромаркер вложенного потока данных 447
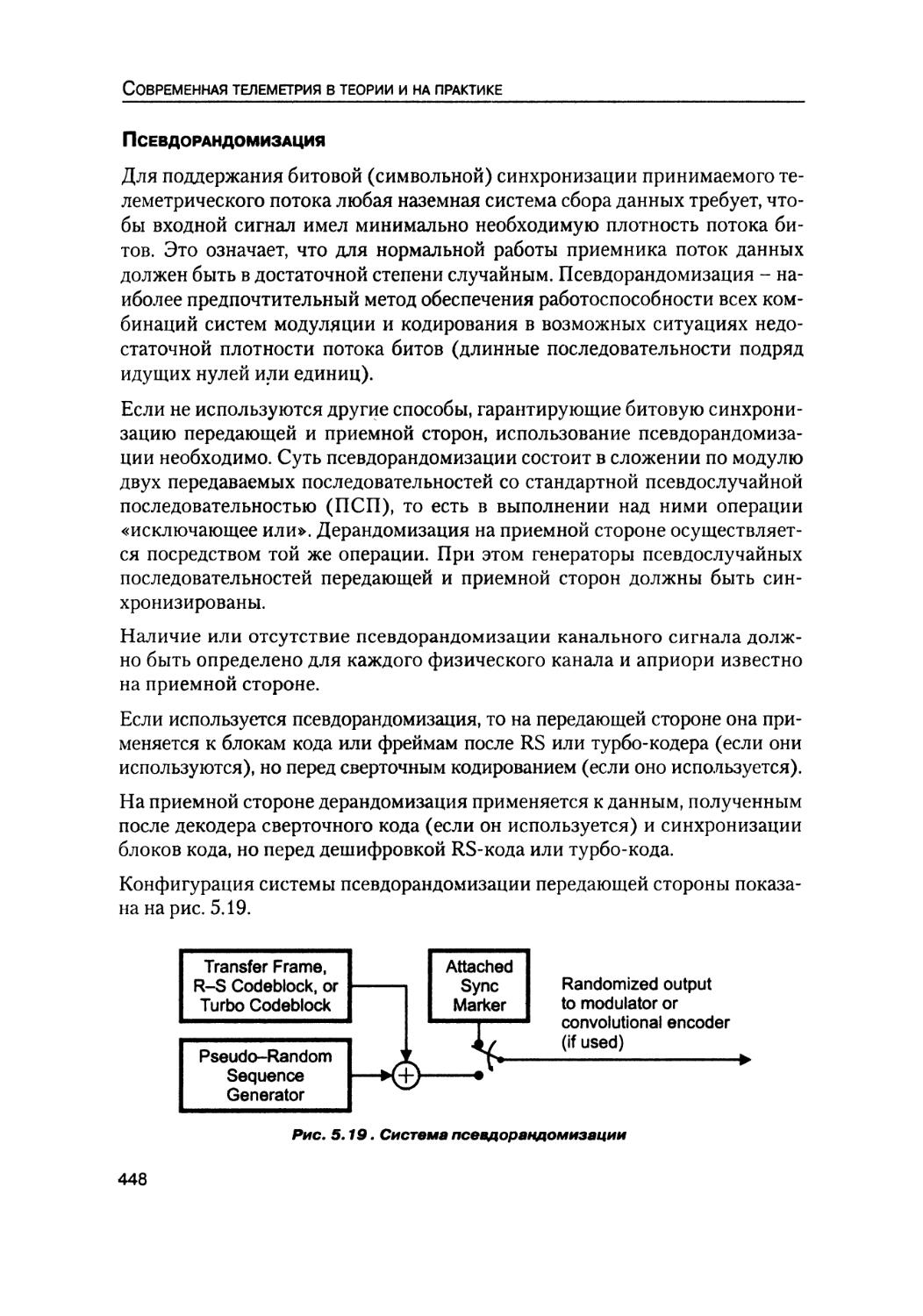
Псевдорандомизация 448
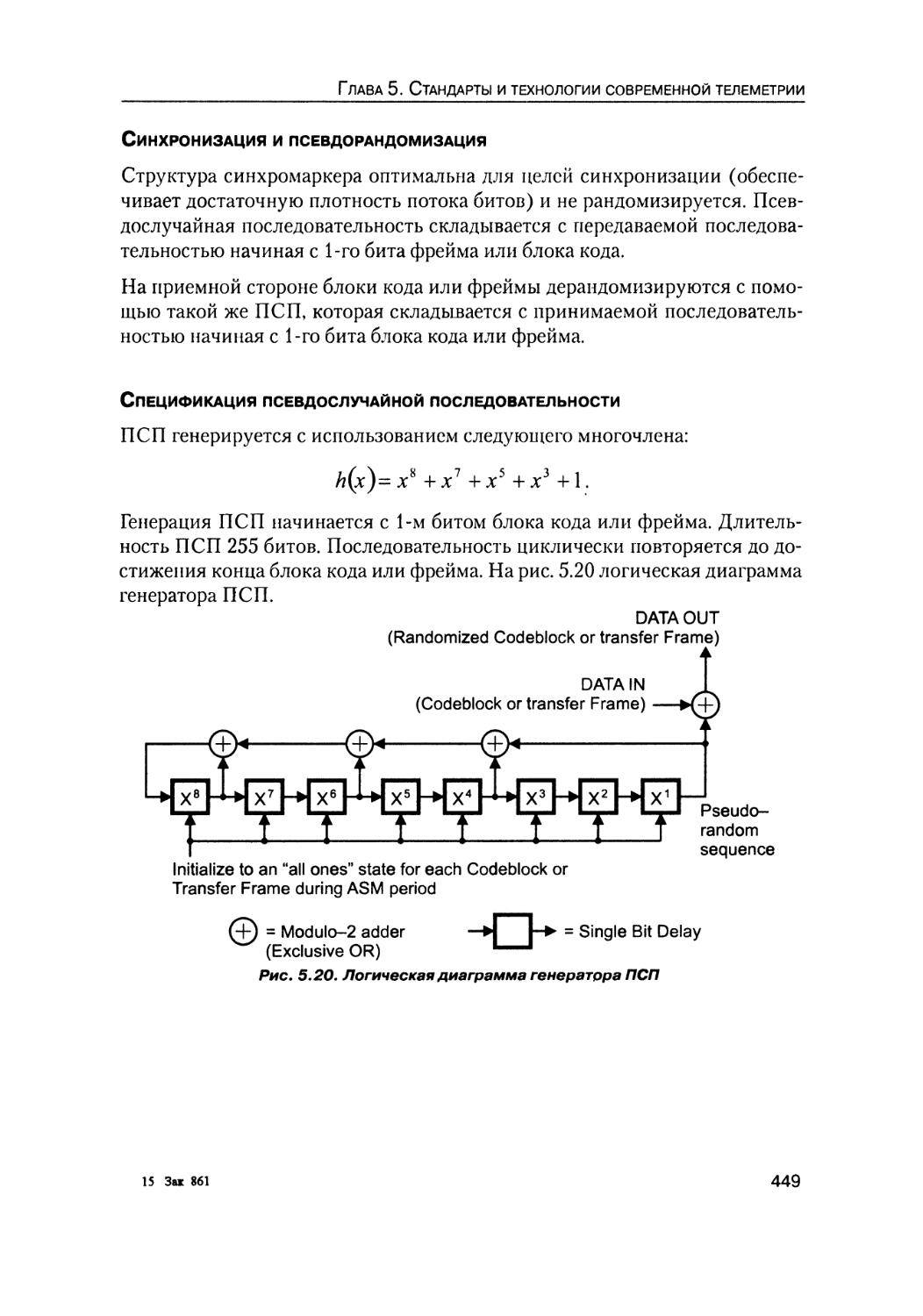
Синхронизация и псевдорандомизация 449
Спецификация псевдослучайной последовательности 449
ЛИТЕРАТУРА К ГЛАВЕ 5 450
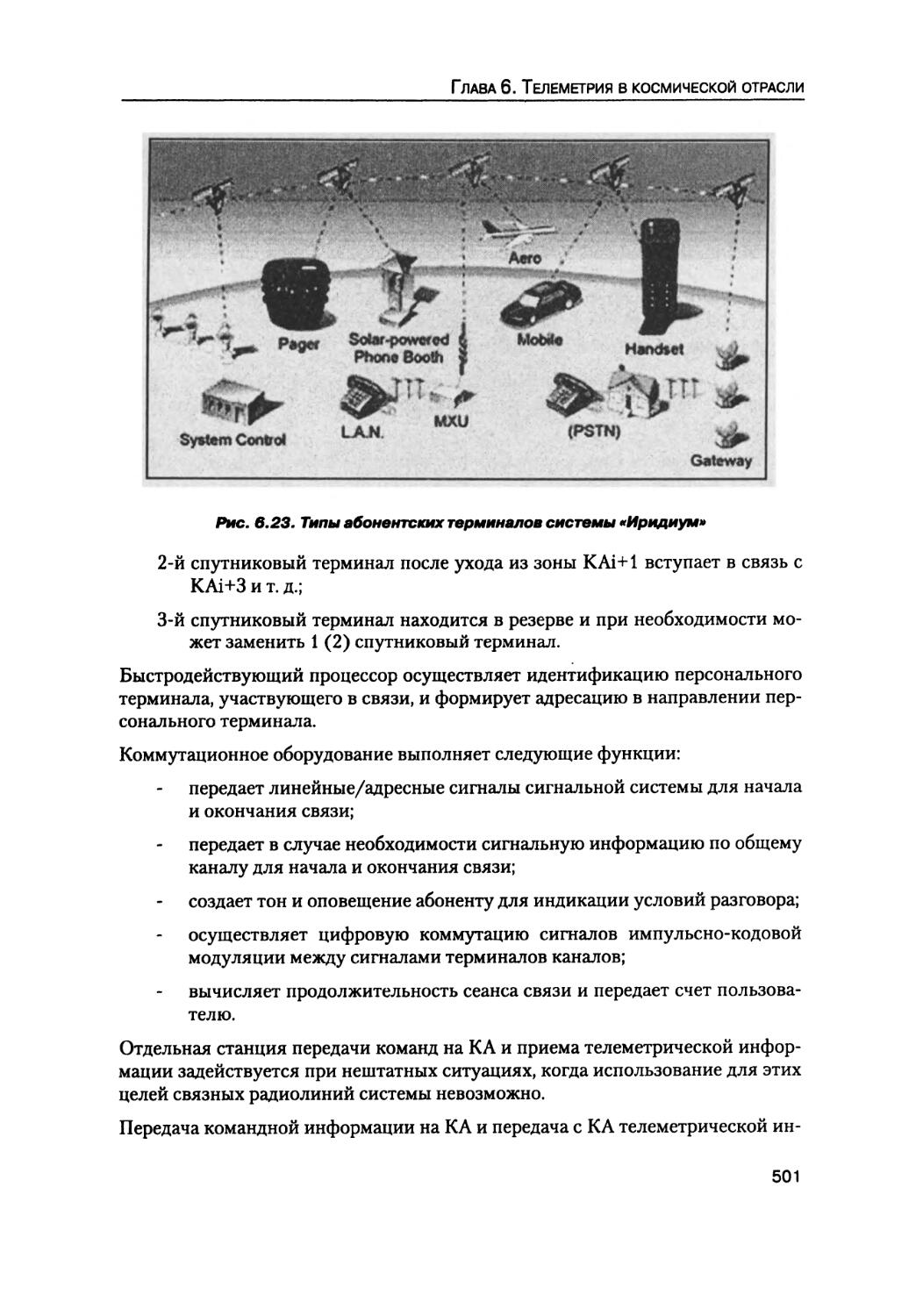
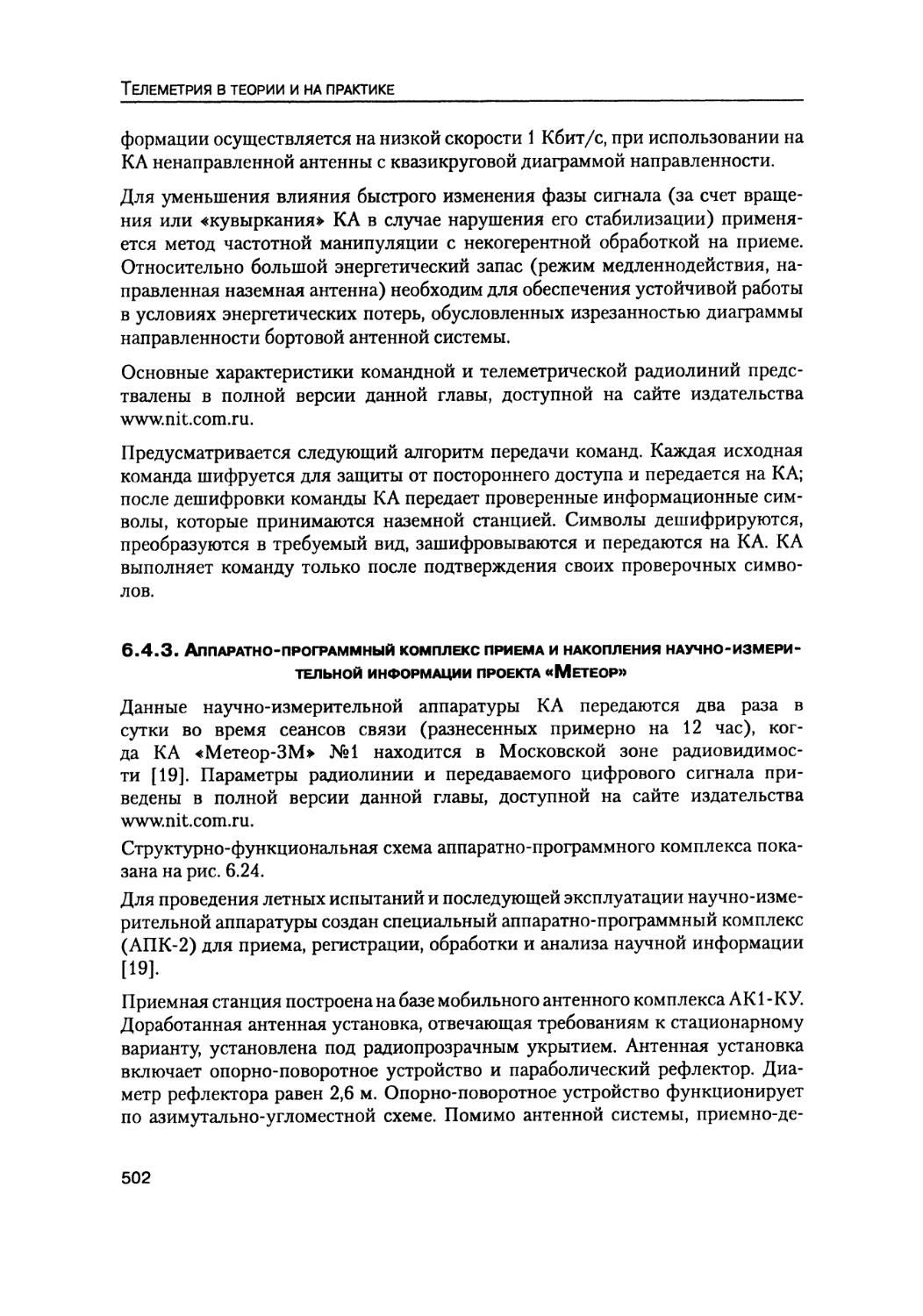
ГЛАВА 6. ТЕЛЕМЕТРИЯ В КОСМИЧЕСКОЙ ОТРАСЛИ 454
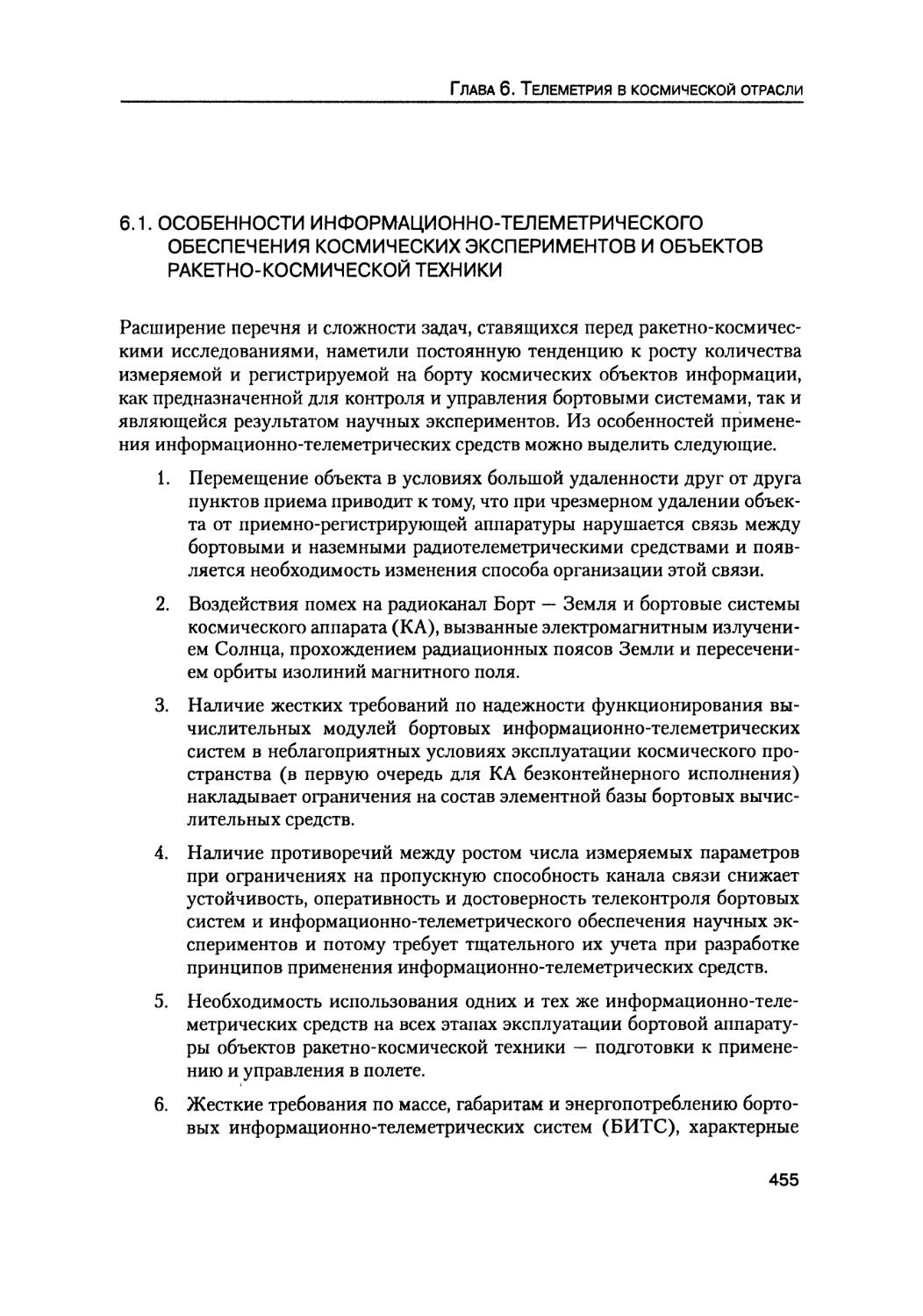
6.1. ОСОБЕННОСТИ ИНФОРМАЦИОННО-ТЕЛЕМЕТРИЧЕСКОГО ОБЕСПЕЧЕНИЯ КОСМИЧЕСКИХ
ЭКСПЕРИМЕНТОВ И ОБЪЕКТОВ РАКЕТНО-КОСМИЧЕСКОЙ ТЕХНИКИ 455
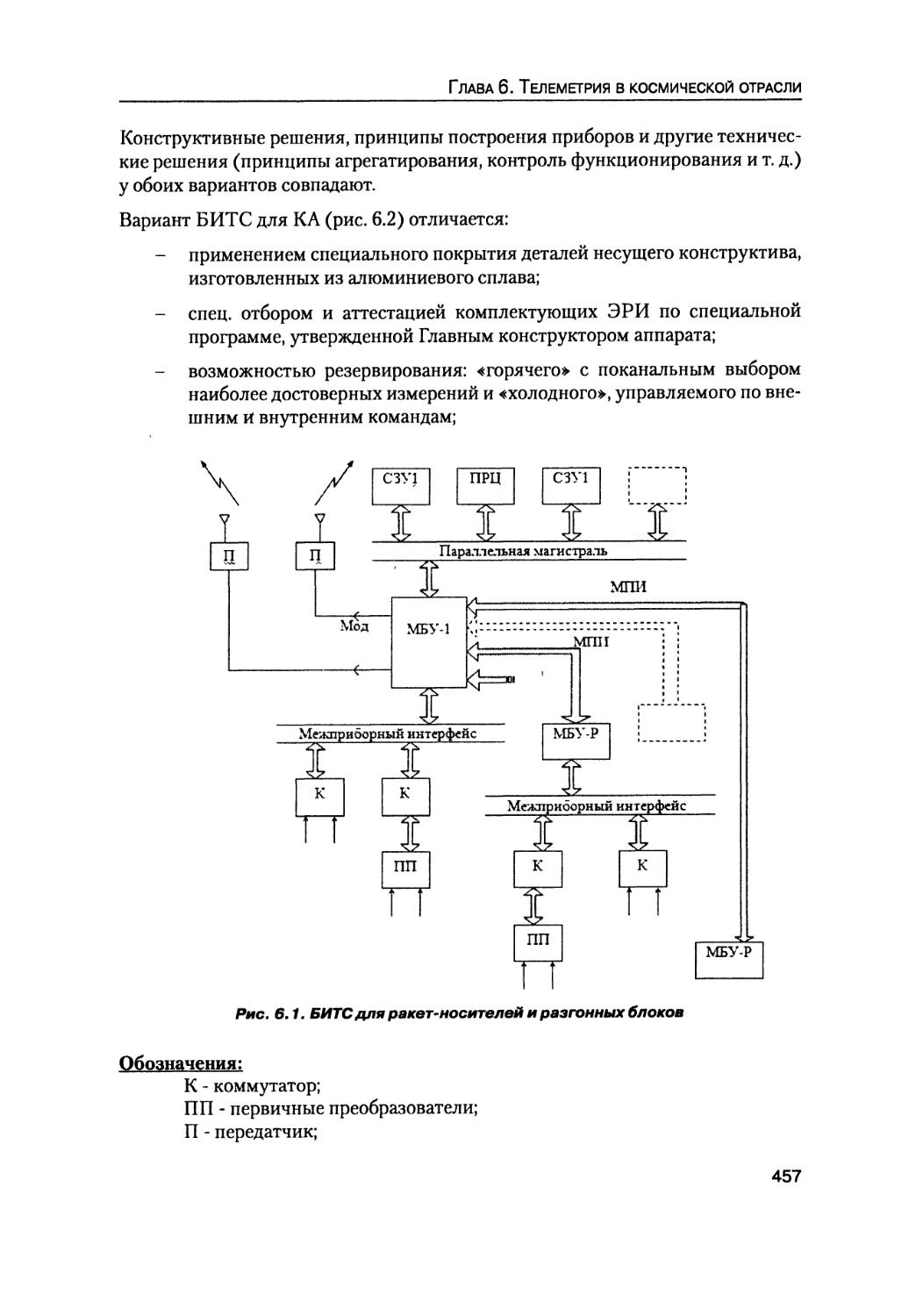
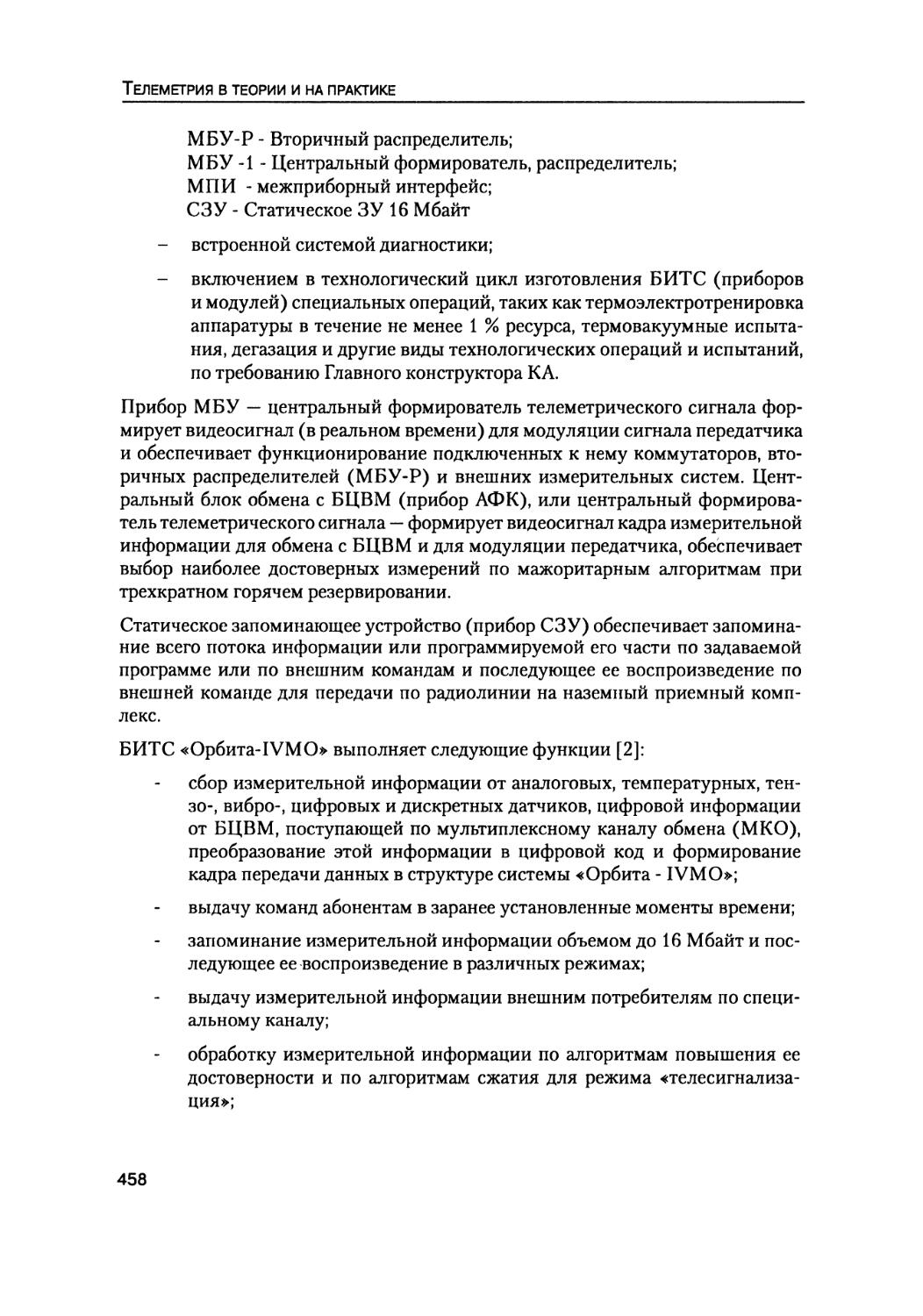
6.2. ПЕРСПЕКТИВНЫЕ БОРТОВЫЕ ИНФОРМАЦИОННО-ТЕЛЕМЕТРИЧЕСКИЕ СИСТЕМЫ 456
6.2.1. Бортовая информационно-телеметрическая система
«Орбита-IV» 456
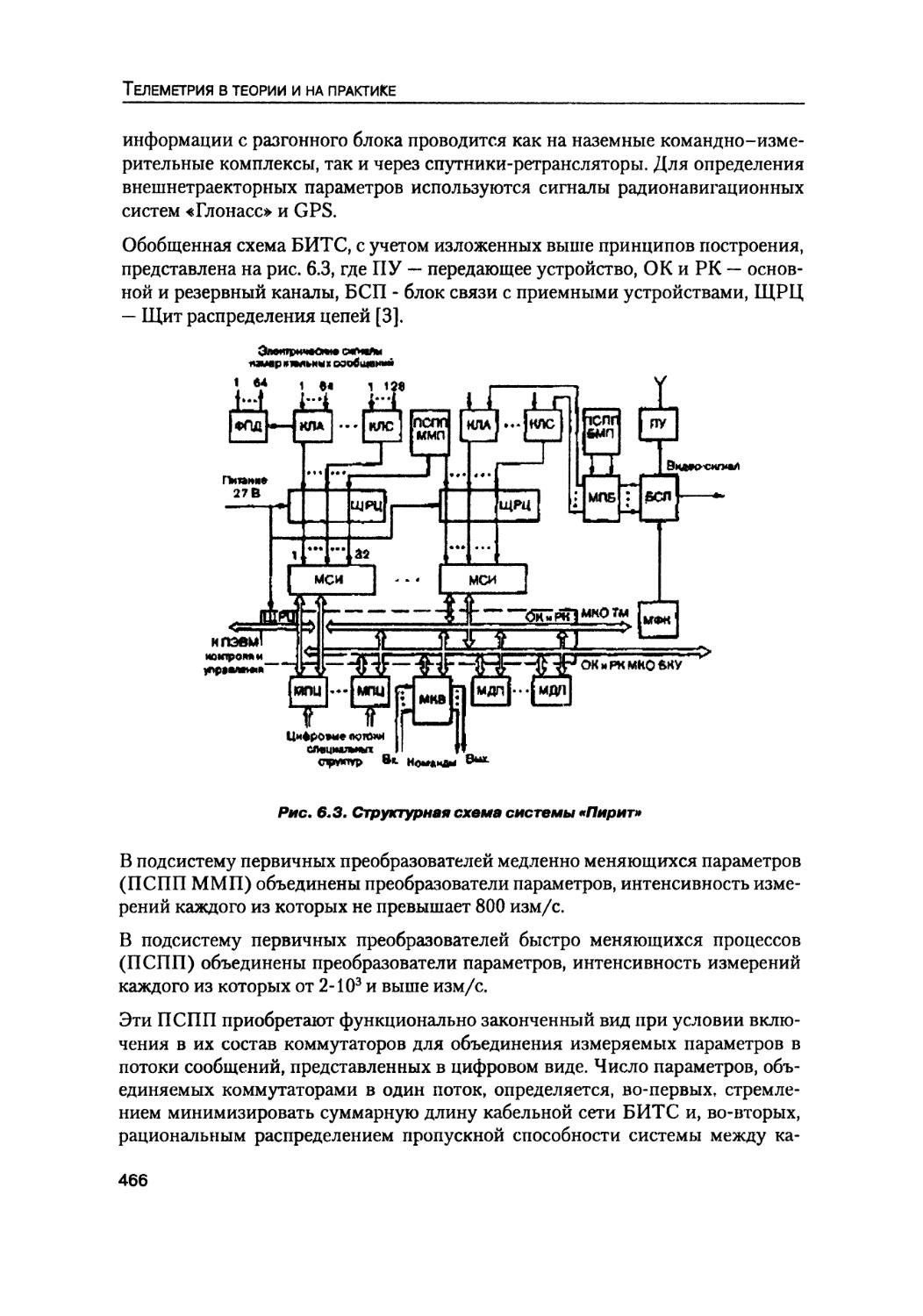
6.2.2. Система телеметрических измерений «ПИРИТ» 465
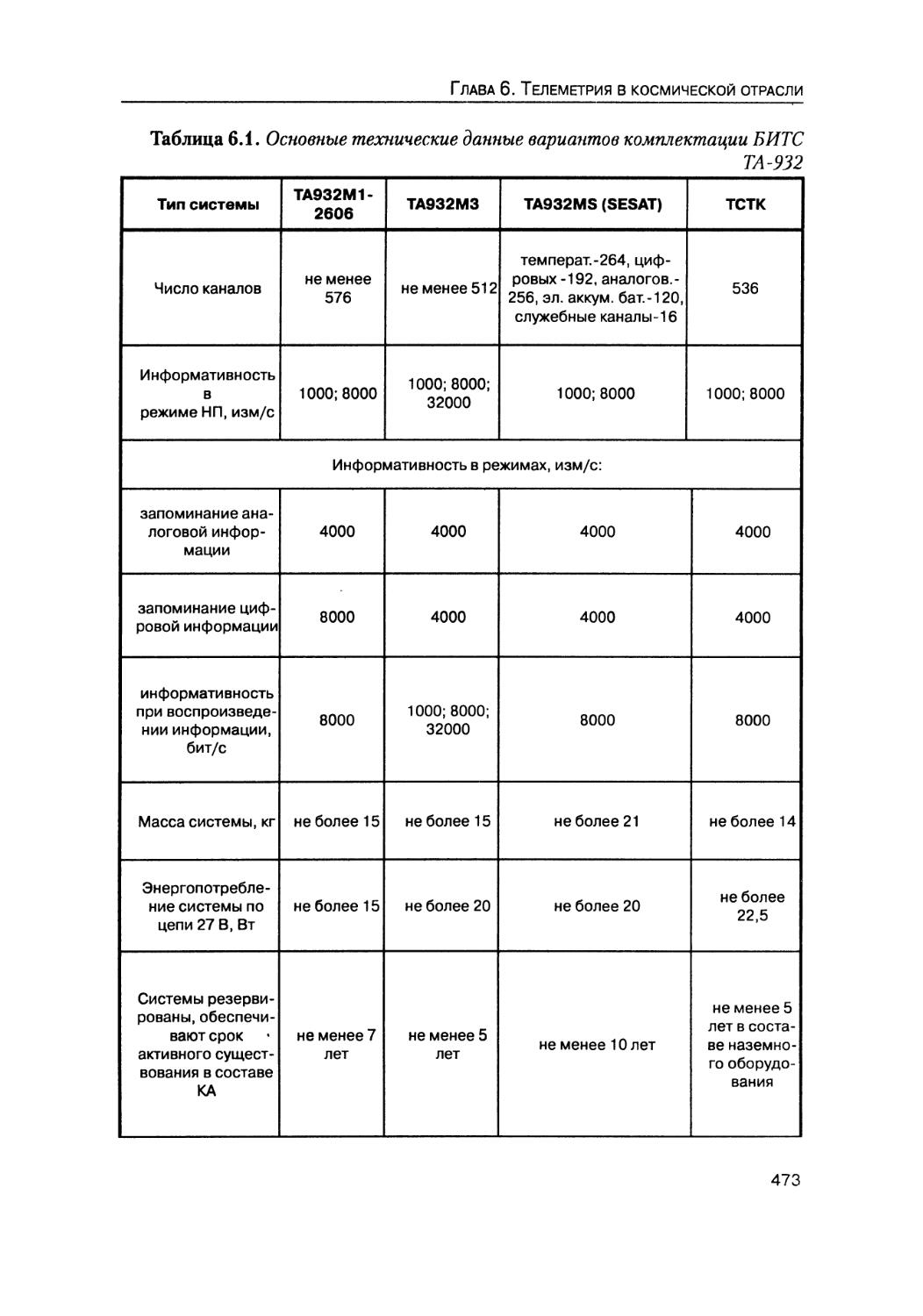
6.2.3. Телеметрическая аппаратура «ОРБИТА-4МТ» 470
6.2.4. Модификации малогабаритной цифровой телеметрической
системы ТА-932 471
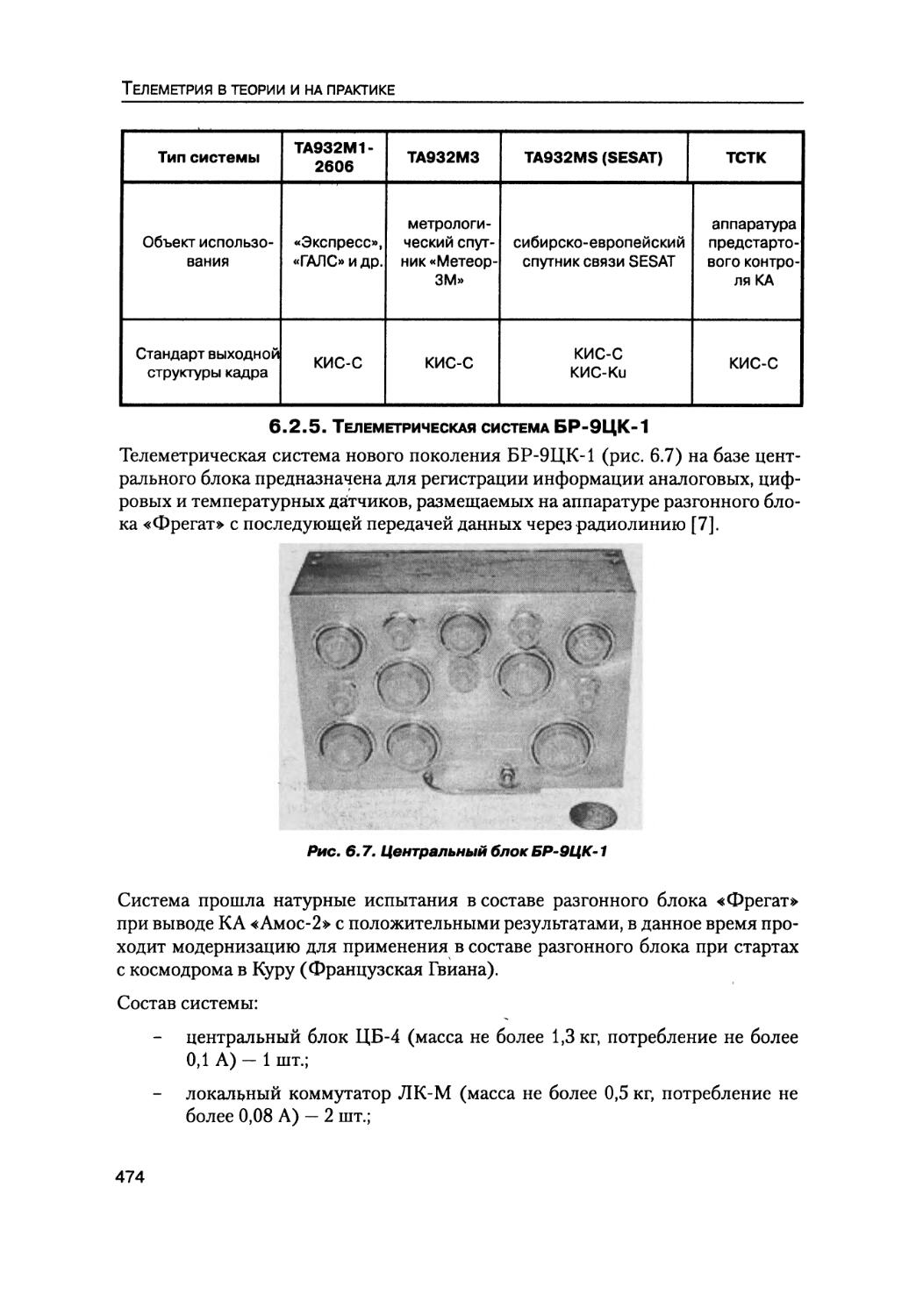
6.2.5. Телеметрическая система БР-9ЦК-1 474
6.3. ПЕРСПЕКТИВНЫЕ СТАНЦИИ ПРИЕМА И РЕГИСТРАЦИИ ТЕЛЕМЕТРИЧЕСКОЙ
ИНФОРМАЦИИ 476
6.3.1. Малогабаритная приемно-регистрирующая станция МПРС-5 .. 477
6.3.2. Приемно-регистрирующая станция НПРС-9 482
6.3.3. Комплекс аппаратуры обработки и регистрации цифровой
информации «Литон-3» 483
6.3.4. Малогабаритный переносной телеметрический комплекс 486
6.3.5. Аппаратура приема, регистрации и информационного
контроля «Опал-М» 487
6.3.6. Агрегатируемые антенно-приемные средства «МАРС» 489
6.3.7. Наземная приемно-регистрирующая станция комплекса
«Монитор» 490
6.3.8. Мобильный измерительный пункт РНИИКП 492
6.3.9. Средства сбора и обработки телеметрической информации
«Родник» 495
6.4. ИНФОРМАЦИОННО-ТЕЛЕМЕТРИЧЕСКИЕ СРЕДСТВА В МЕЖДУНАРОДНЫХ
КОСМИЧЕСКИХ ПРОЕКТАХ 496
14
Содержание
ЛИТЕРАТУРА К ГЛАВЕ 6 507
ГЛАВА 7. ТЕЛЕМЕТРИЯ В СОВРЕМЕННОЙ ПРОМЫШЛЕННОСТИ И ЭНЕРГЕТИКЕ.
ТЕЛЕМЕХАНИКА 509
7.1. ОСОБЕННОСТИ ПРИМЕНЕНИЯ ТЕЛЕМЕТРИЧЕСКИХ СИСТЕМ В СОВРЕМЕННОЙ
ПРОМЫШЛЕННОСТИ И ЭНЕРГЕТИКЕ 510
Общие положения 510
Современные мировые тенденции 511
7.2. СИСТЕМА ТЕЛЕМЕТРИИ КАК ИНФОРМАЦИОННАЯ ЧАСТЬ АВТОМАТИЗИРОВАННЫХ
СИСТЕМ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ 512
Понятие телемеханики 512
SCADA — что это такое? 514
7.3. ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К СОВРЕМЕННЫМ СИСТЕМАМ ТЕЛЕМЕХАНИКИ 515
Промышленный объект(ПО) как обобщенный прототип широкого
класса технологических установок и комплексов. Общие
положения 515
Задачи системы телемеханики 517
Требования к структуре системы телемеханики 517
Требования к элементной базе 518
Требования к программному обеспечению 518
7.4. ОСНОВНЫЕ ПРИНЦИПЫ ПОСТРОЕНИЯ СОВРЕМЕННЫХ СИСТЕМ ТЕЛЕМЕХАНИКИ 519
7.4.1. Задачи системы телемеханики 519
7.4.2. Особенности измеряемых и анализируемых технологических
процессов 520
7.4.3. Система телеметрии 521
7.4.4. Состав системы телеметрии промышленных объектов 522
7.4.5. Структура системы телеметрии промышленных объектов 522
7.4.6. Информационная структура системы телеметрии промышленных
объектов 524
7.4.7. Выводы 525
7.5. ЭЛЕМЕНТНАЯ БАЗА И ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ СОВРЕМЕННЫХ
СИСТЕМ ТЕЛЕМЕХАНИКИ 526
7.5.1. Выбор и обоснование элементной базы 526
Основные требования, предъявляемые к элементной базе 526
Выбор элементной базы 527
Основные сведения об устройствах серии ADAM-5000 528
Технические характеристики устройств серии ADAM-5000 529
15
Современная телеметрия в теории и на практике
7.5.2. Выбор и обоснование математического обеспечения 530
Основные требования, предъявляемые к математическому
обеспечению 530
Описание пакета GENESIS32 532
7.6. ЭТАПЫ РАЗРАБОТКИ СОВРЕМЕННЫХ СИСТЕМ ТЕЛЕМЕТРИИ
ДЛЯ ПРОМЫШЛЕННЫХ ОБЪЕКТОВ 535
ГЛАВА 8. ТЕЛЕМЕТРИЯ В АТОМНОЙ ПРОМЫШЛЕННОСТИ 539
8.1. ОСОБЕННОСТИ СИСТЕМ ТЕЛЕМЕТРИИ В АТОМНОЙ ПРОМЫШЛЕННОСТИ 540
8.2. СИСТЕМА ТЕЛЕКОНТРОЛЯ УСТАНОВКИ ПРОИЗВОДСТВА СТАБИЛЬНЫХ ИЗОТОПОВ
МЕДИЦИНСКОГО НАЗНАЧЕНИЯ 542
Задачи системы телемеханики производства стабильных
изотопов 543
Этапы разработки системы телемеханики для варианта
промышленного объекта в виде комплекса тепломассообменных
высотных колонн (изотопный обогатительный каскад) 544
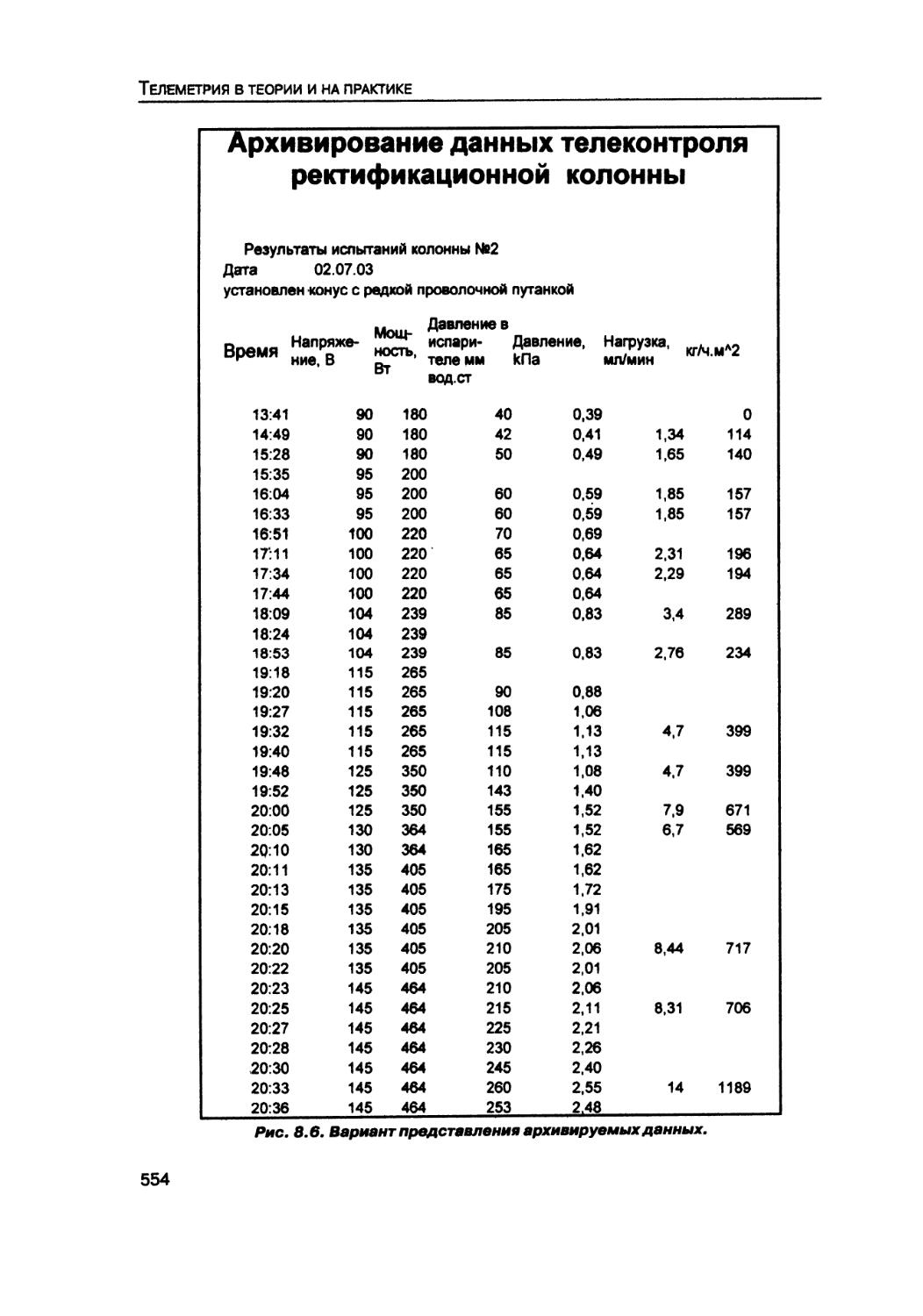
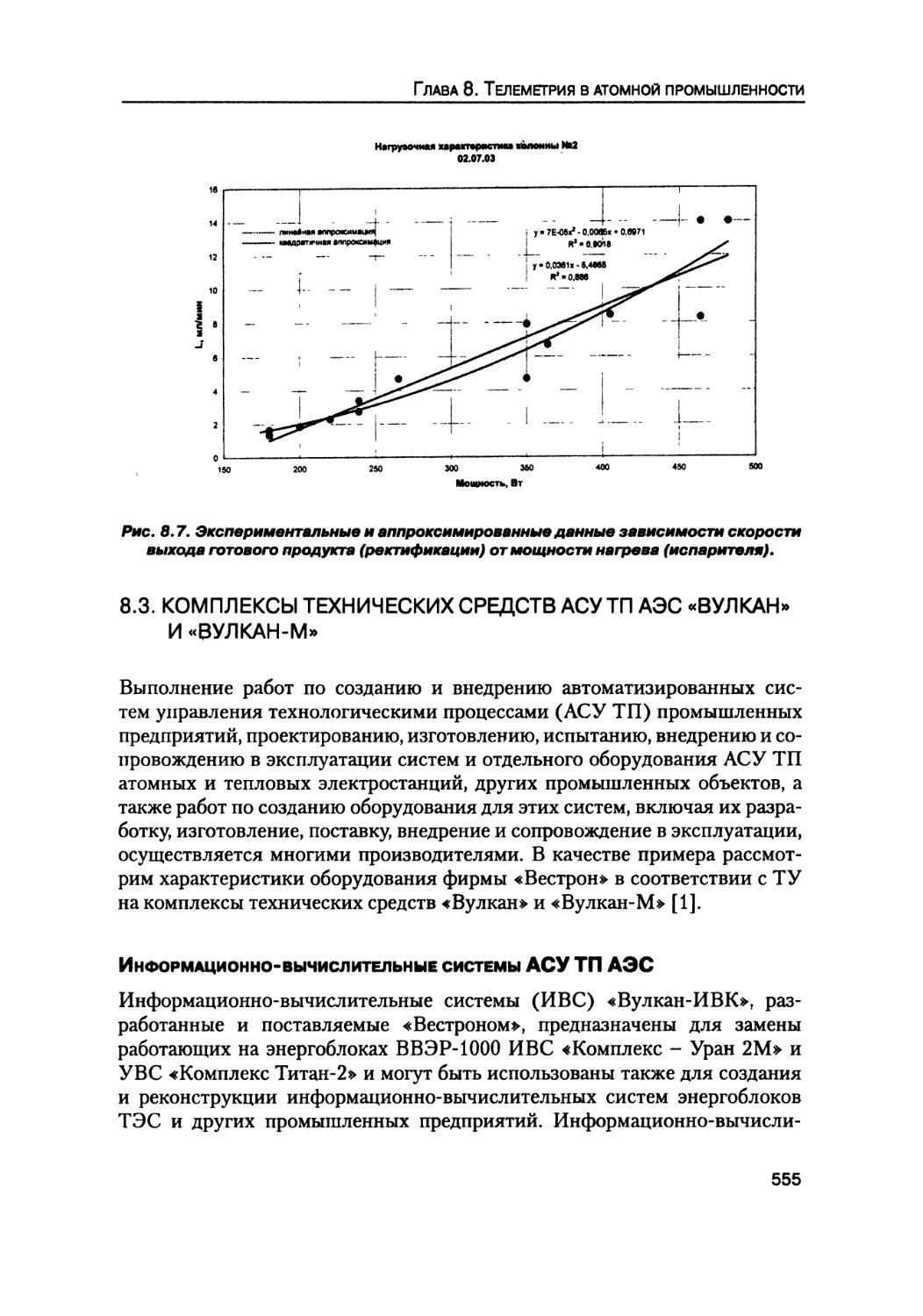
8.3. КОМПЛЕКСЫ ТЕХНИЧЕСКИХ СРЕДСТВ АСУ ТП АЭС «ВУЛКАН» И «ВУЛКАН-М» 555
Информационно-вычислительные системы АСУ ТП АЭС 555
Системы представления параметров безопасности 556
Системы автоматического регулирования 556
Системы радиационного контроля 557
Система радиационного контроля Запорожской АЭС 558
Системы контроля турбогенераторов 558
Системы регистрации аварийных параметров 558
Программно-аппаратная Платформа «ВУЛКАН-М»/«ВУЛКАН».. 559
Основные данные 559
Программное обеспечение 560
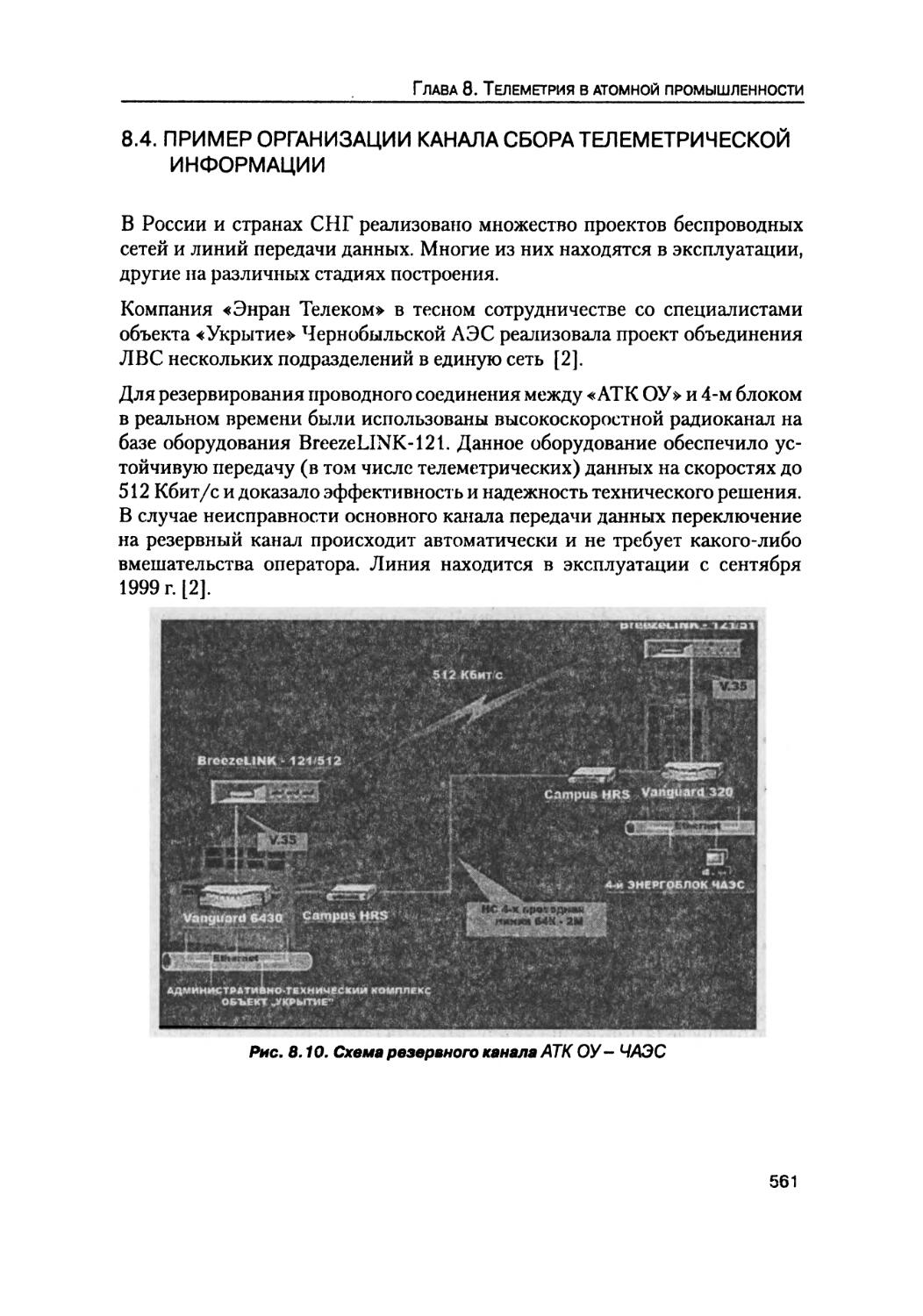
8.4. ПРИМЕР ОРГАНИЗАЦИИ КАНАЛА СБОРА ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ 561
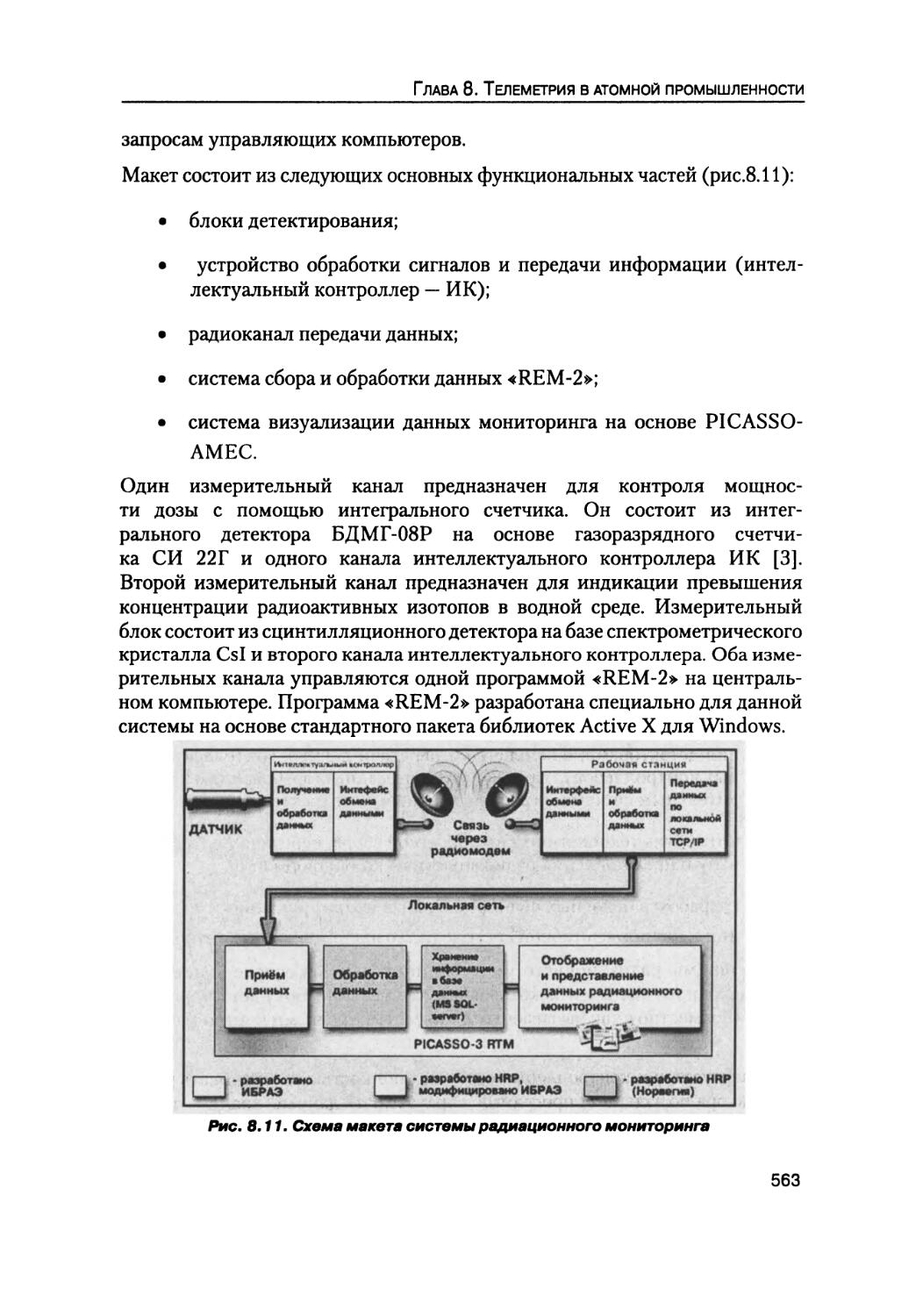
8.5. СИСТЕМА РАДИОЭКОЛОГИЧЕСКОГО МОНИТОРИНГА АТОМНЫХ ОБЪЕКТОВ.
ПРОЕКТ АМЕС 1.5-1 562
ЛИТЕРАТУРА К ГЛАВЕ 8 , 565
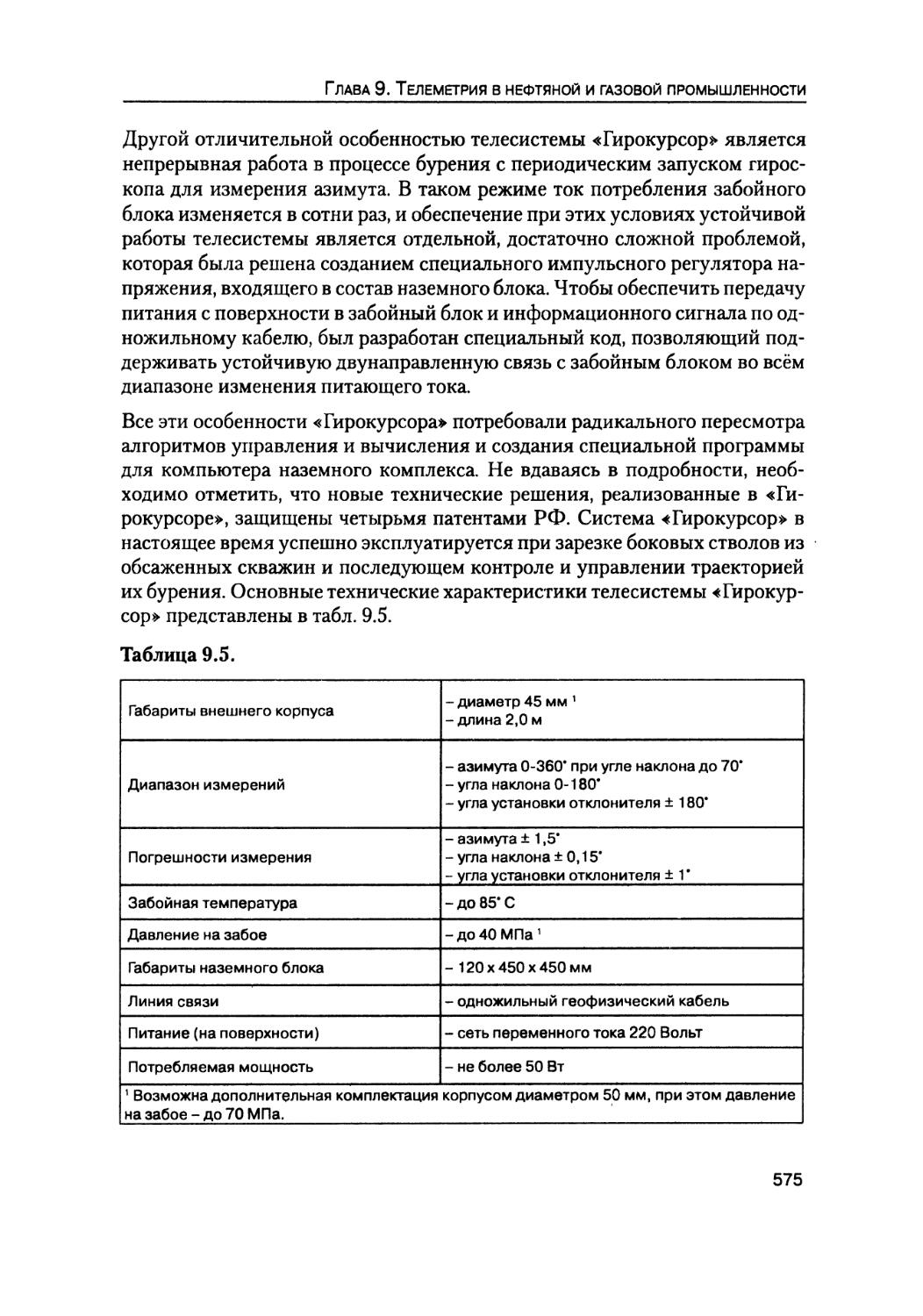
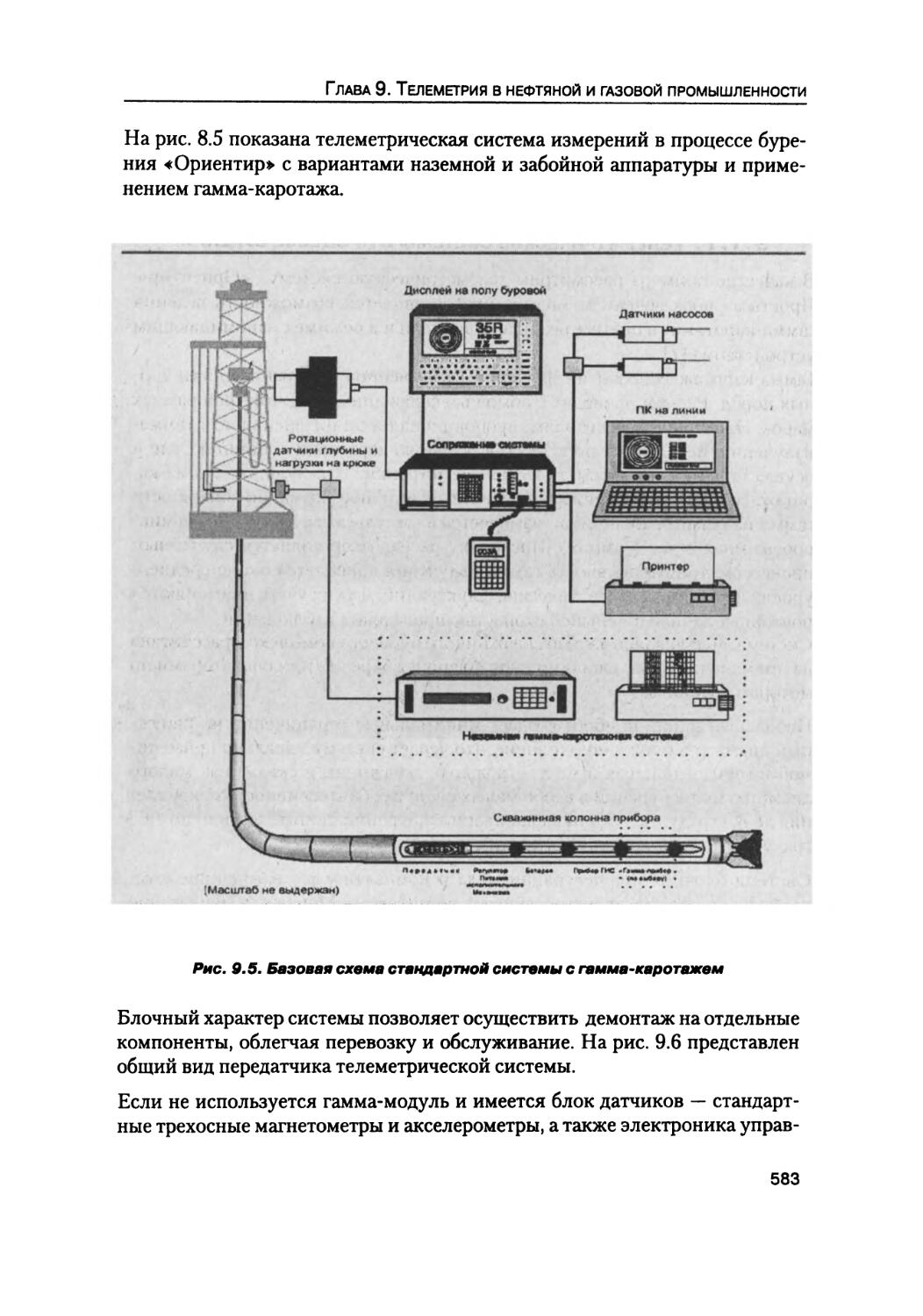
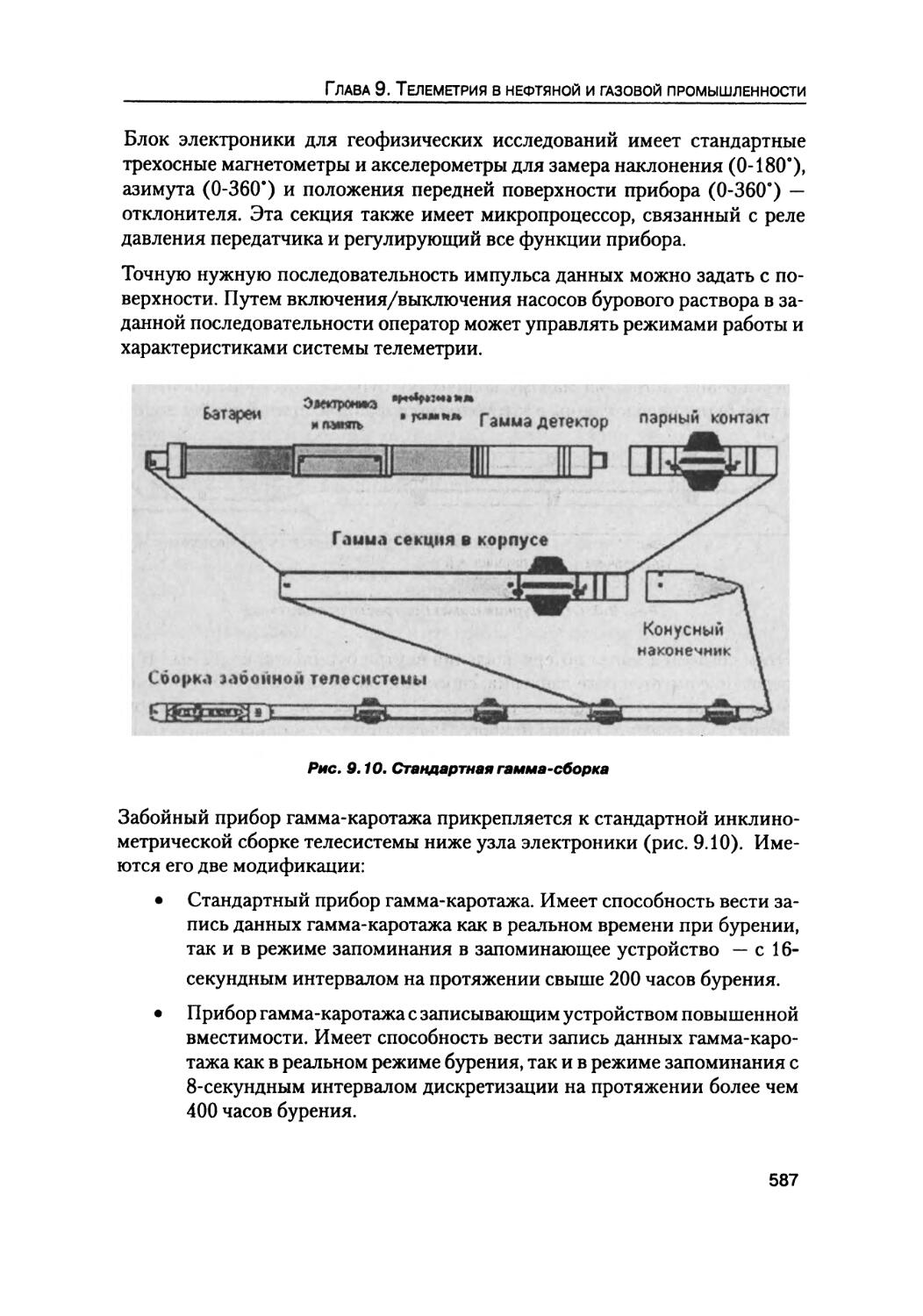
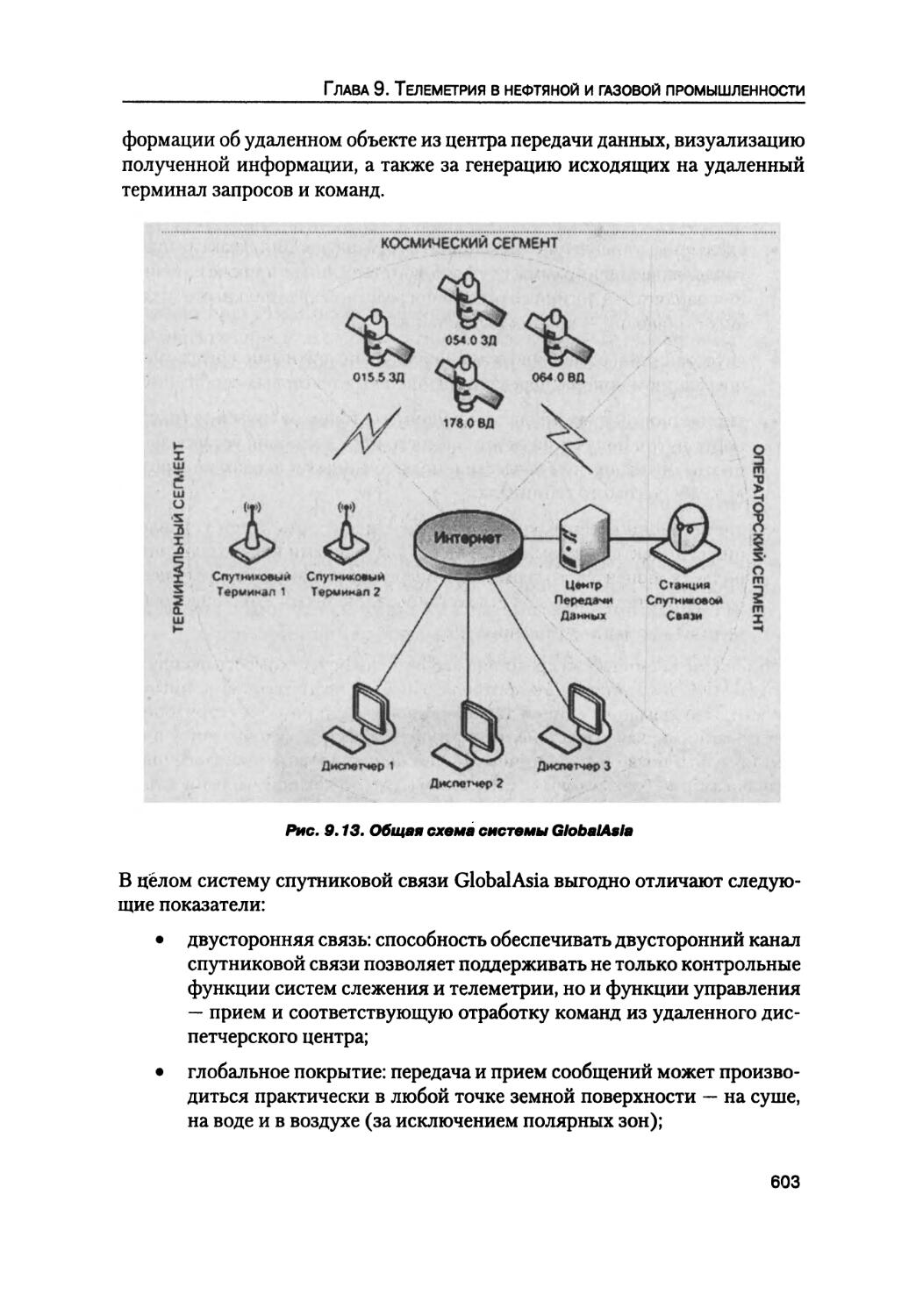
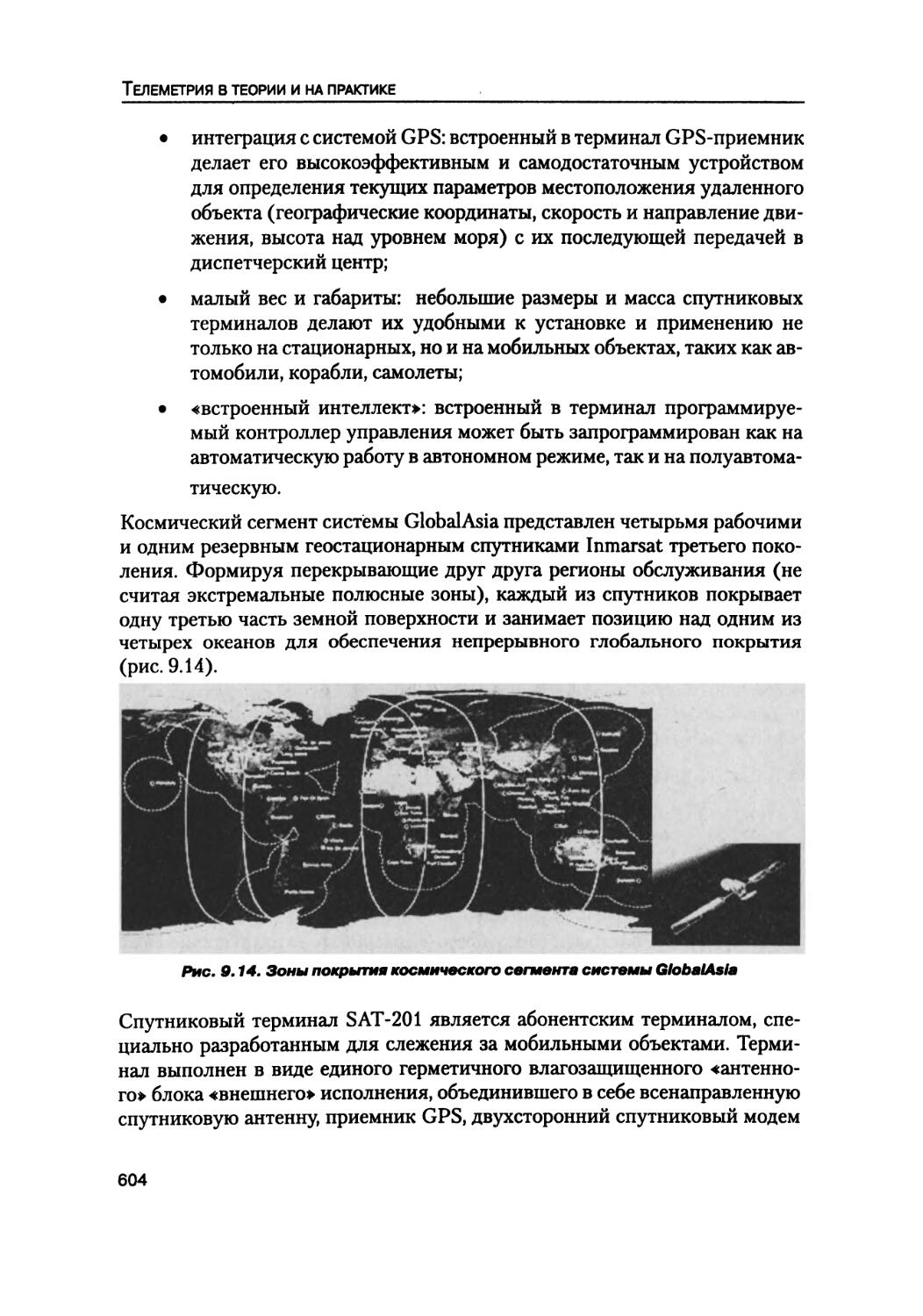
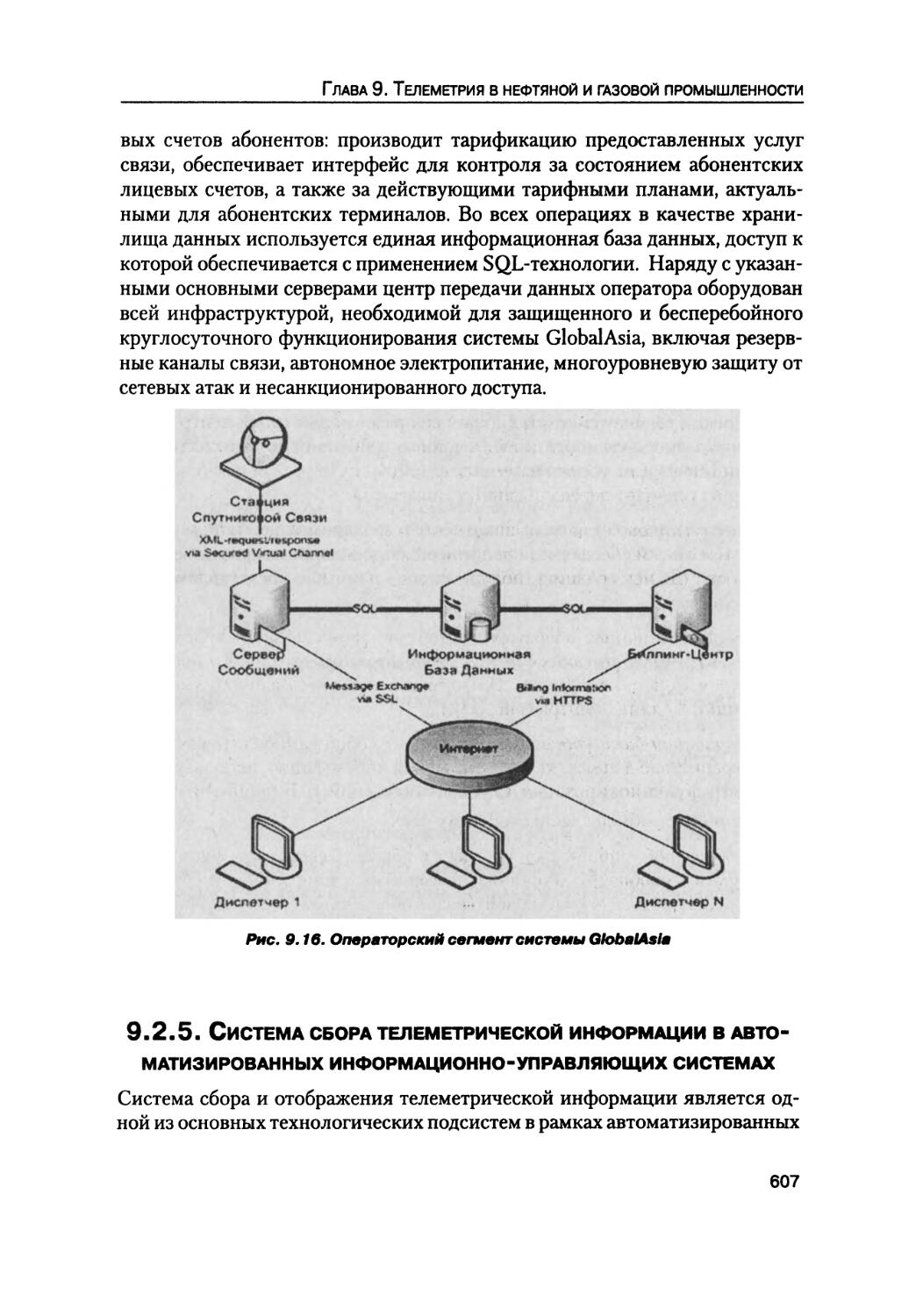
ГЛАВА 9. ТЕЛЕМЕТРИЯ В НЕФТЯНОЙ И ГАЗОВОЙ ПРОМЫШЛЕННОСТИ 566
9.1. МАЛЫЕ ТЕЛЕМЕТРИЧЕСКИЕ СИСТЕМЫ 568
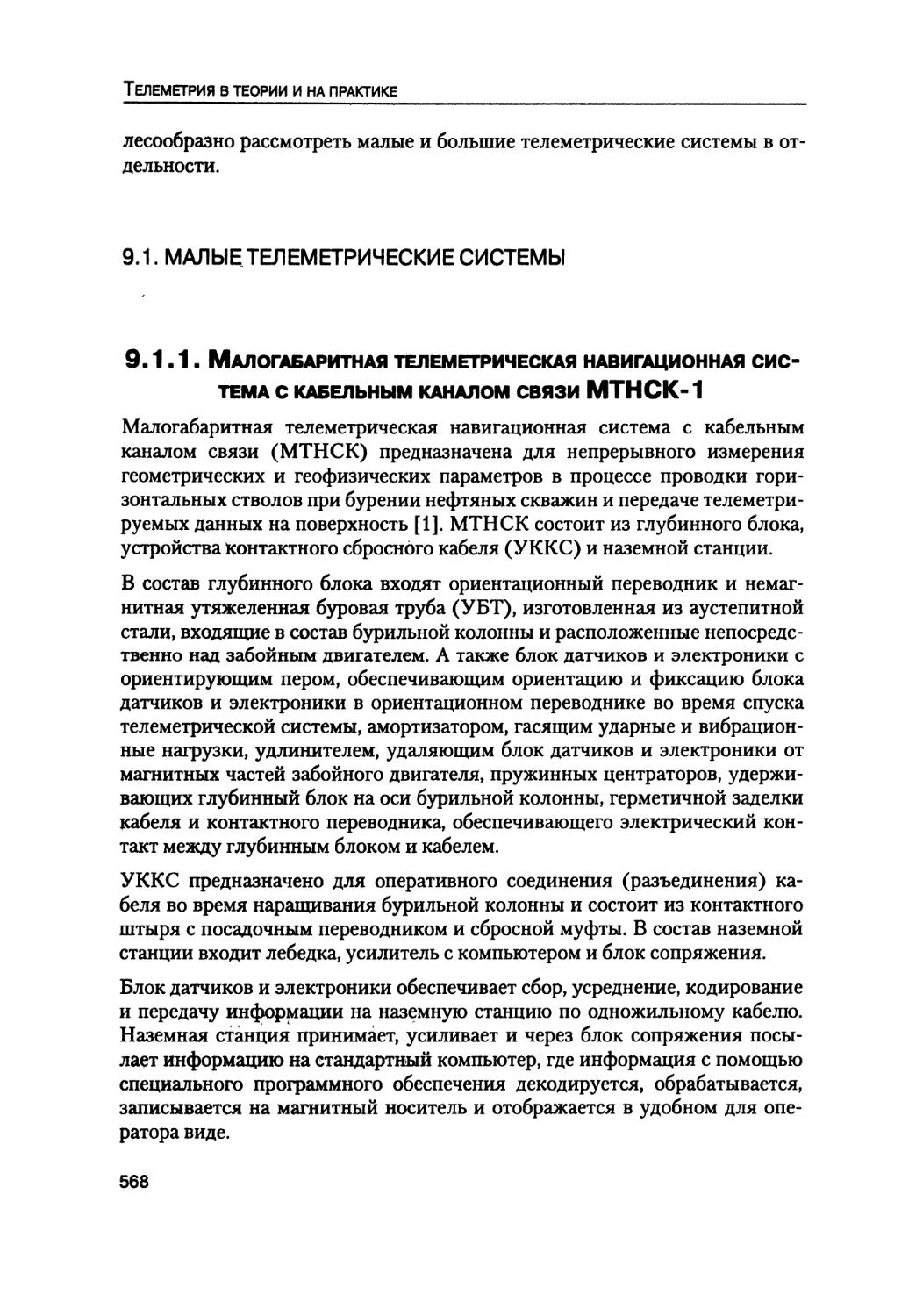
9.1.1. Малогабаритная телеметрическая навигационная система с
кабельным каналом связи МТНСК-1 568
9.1.2. Телеметрическая система ТМ-ПЭНП 569
16
Содержание
9.1.3. Малогабаритная гироскопическая телесистема 571
9.1.4. Система автоматического регулирования уровня жидких
сред 576
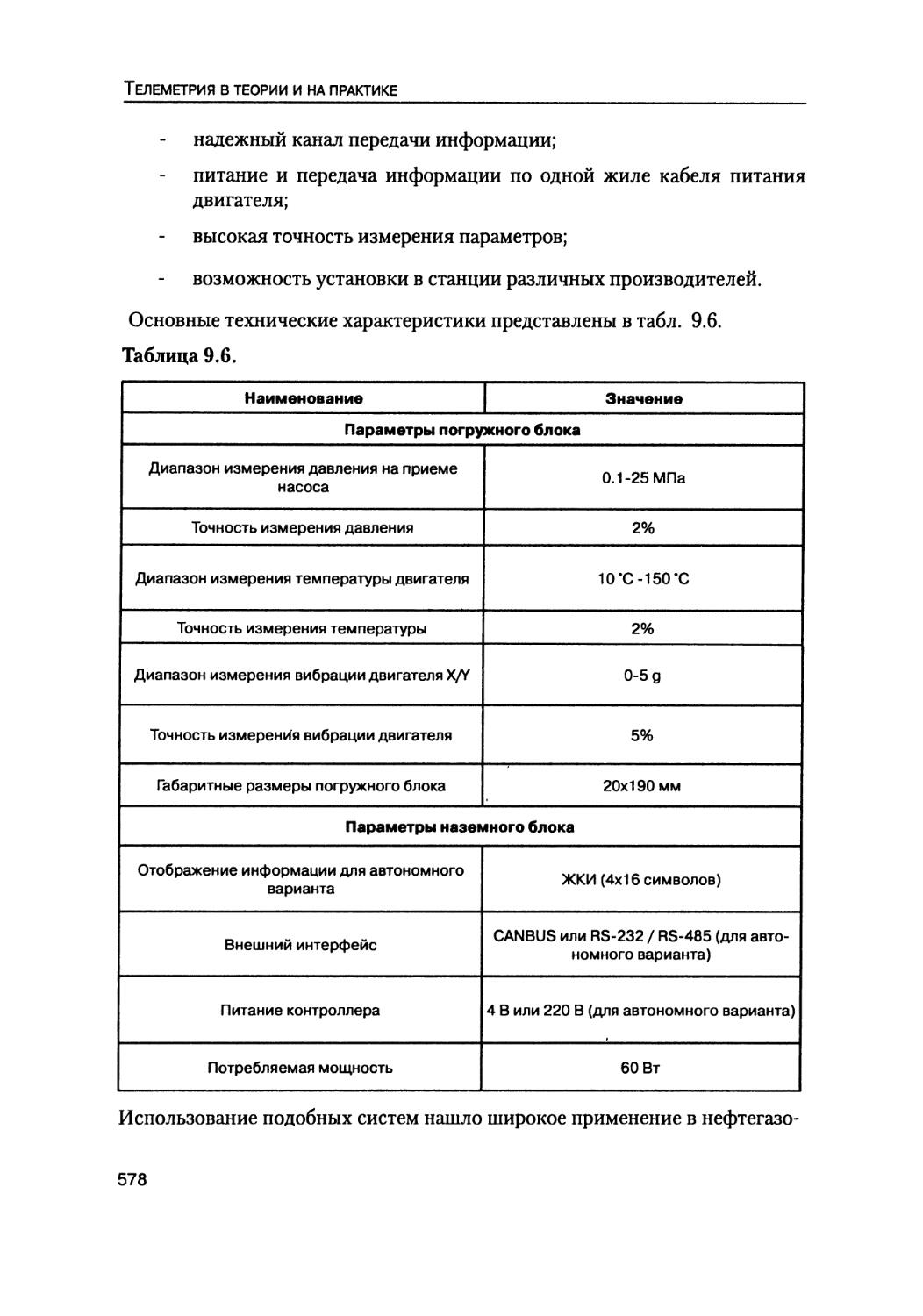
9.1.5. Комплекс погружной телеметрии 577
Основные особенности и преимущества: 577
9.1.6. Система быстрой скважинной телеметрии 579
9.1.7. Телеметрические системы в процессе бурения 582
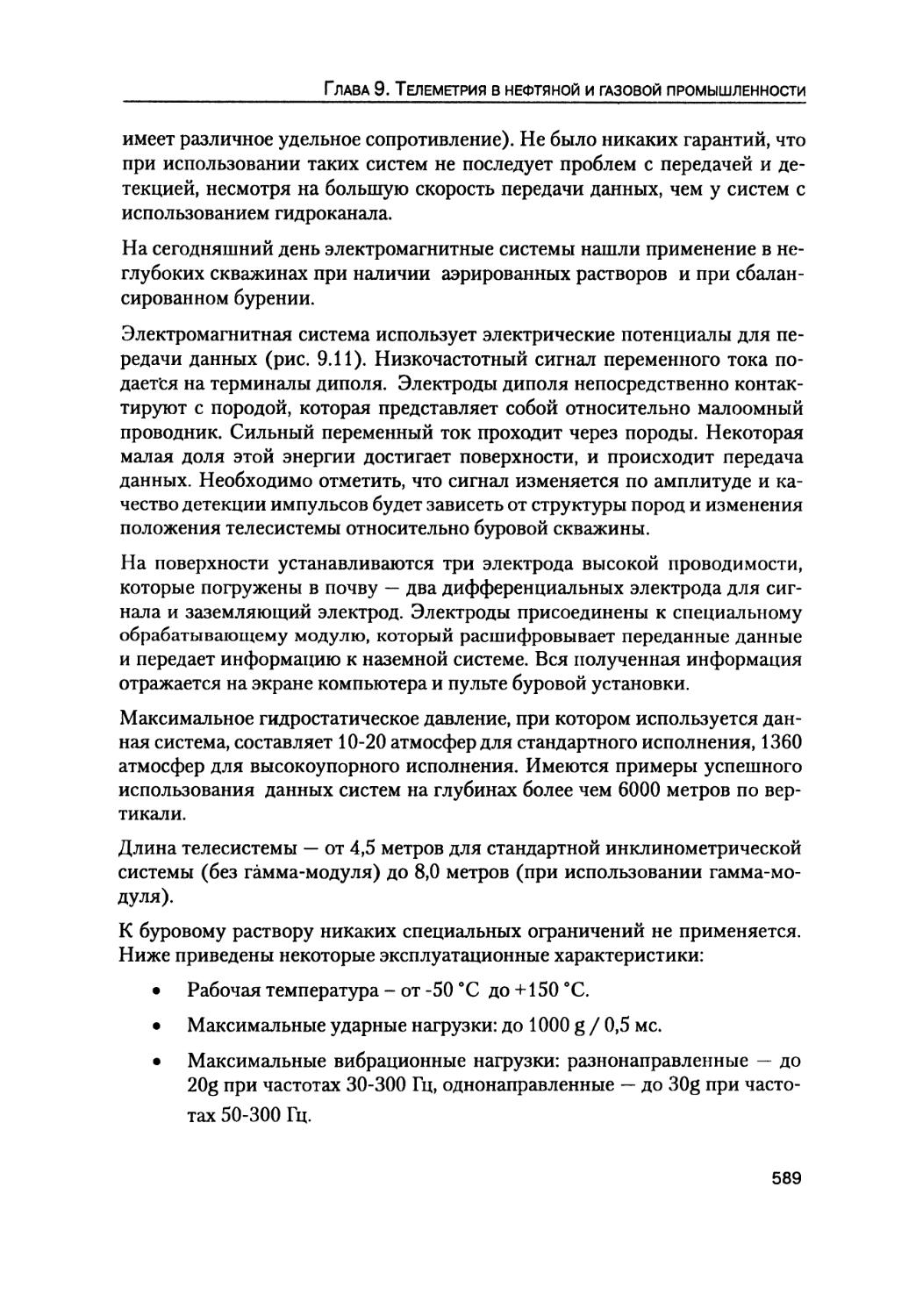
9.1.8. Сейсморазведка в скважинах глубокого бурения 590
9.2. БОЛЬШИЕ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЕ СИСТЕМЫ НЕФТЕГАЗОВОЙ
ПРОМЫШЛЕННОСТИ 592
9.2.1. Автоматизированная система управления технологическими
процессами установки каталитического крекинга 592
9.2.2. Система автоматизации для узла сепарации нефти 595
9.2.3. Коммерческие проекты нефтегазовой промышленности с
использованием средств телеметрии 596
9.2.4. Использование телеметрических средств космических систем
в интересах нефтегазодобывающей отрасли 599
9.2.5. Система сбора телеметрической информации в
автоматизированных информационно-управляющих системах 607
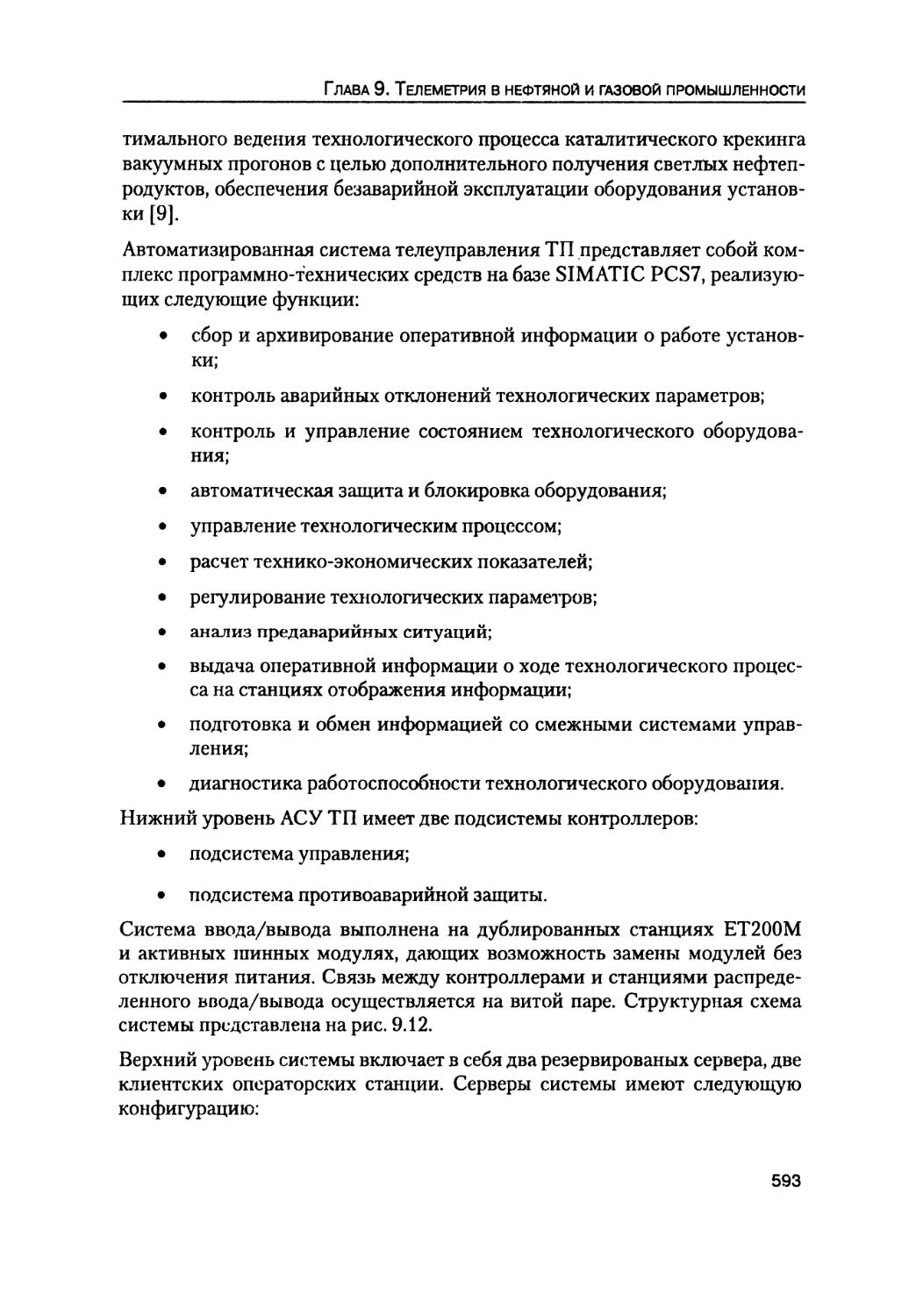
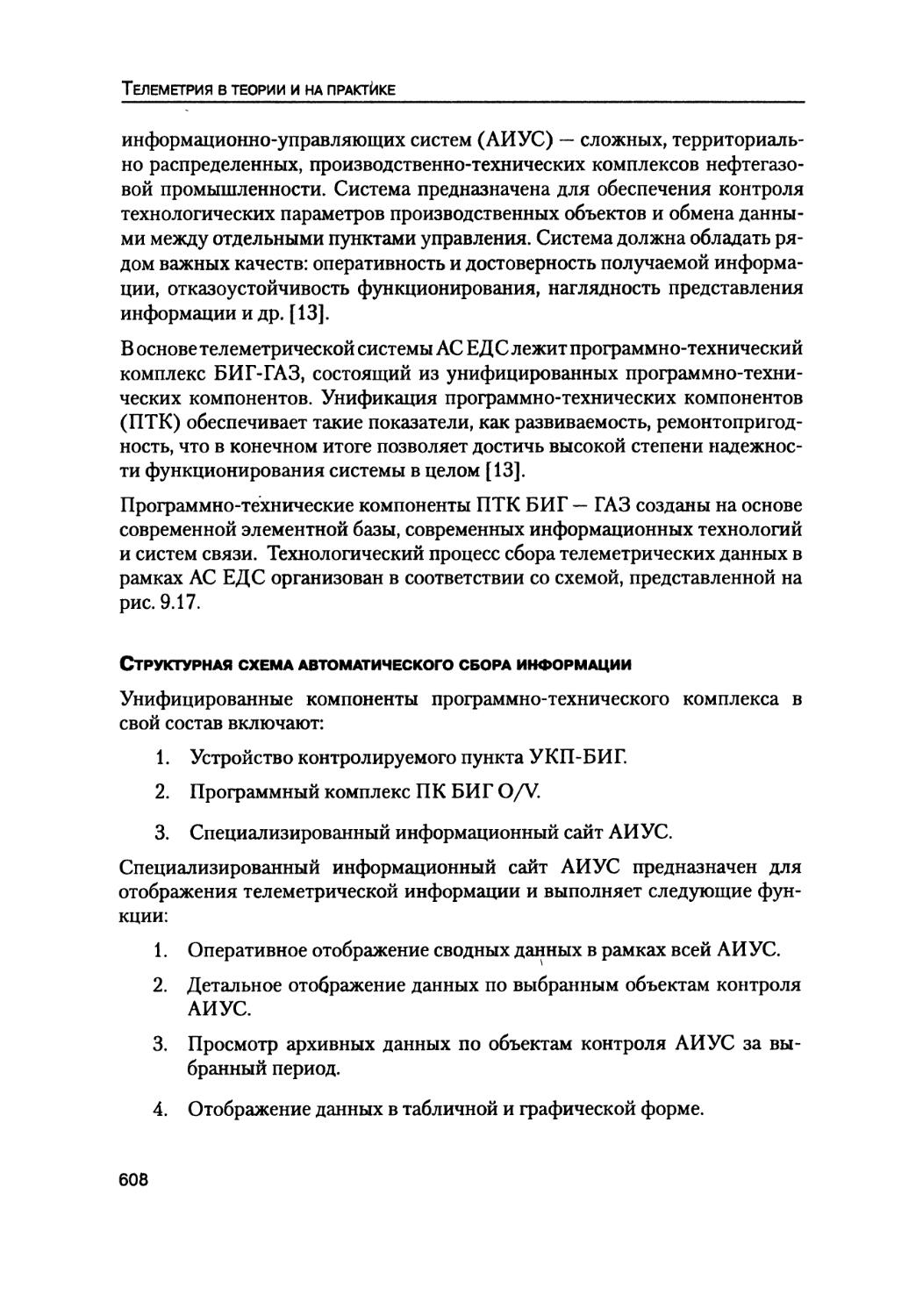
Структурная схема автоматического сбора информации 608
ЛИТЕРАТУРА К ГЛАВЕ 9 612
ГЛАВА 10. ПРИМЕНЕНИЕ ТЕЛЕМЕТРИИ В ТРАНСПОРТНОМ МОНИТОРИНГЕ 613
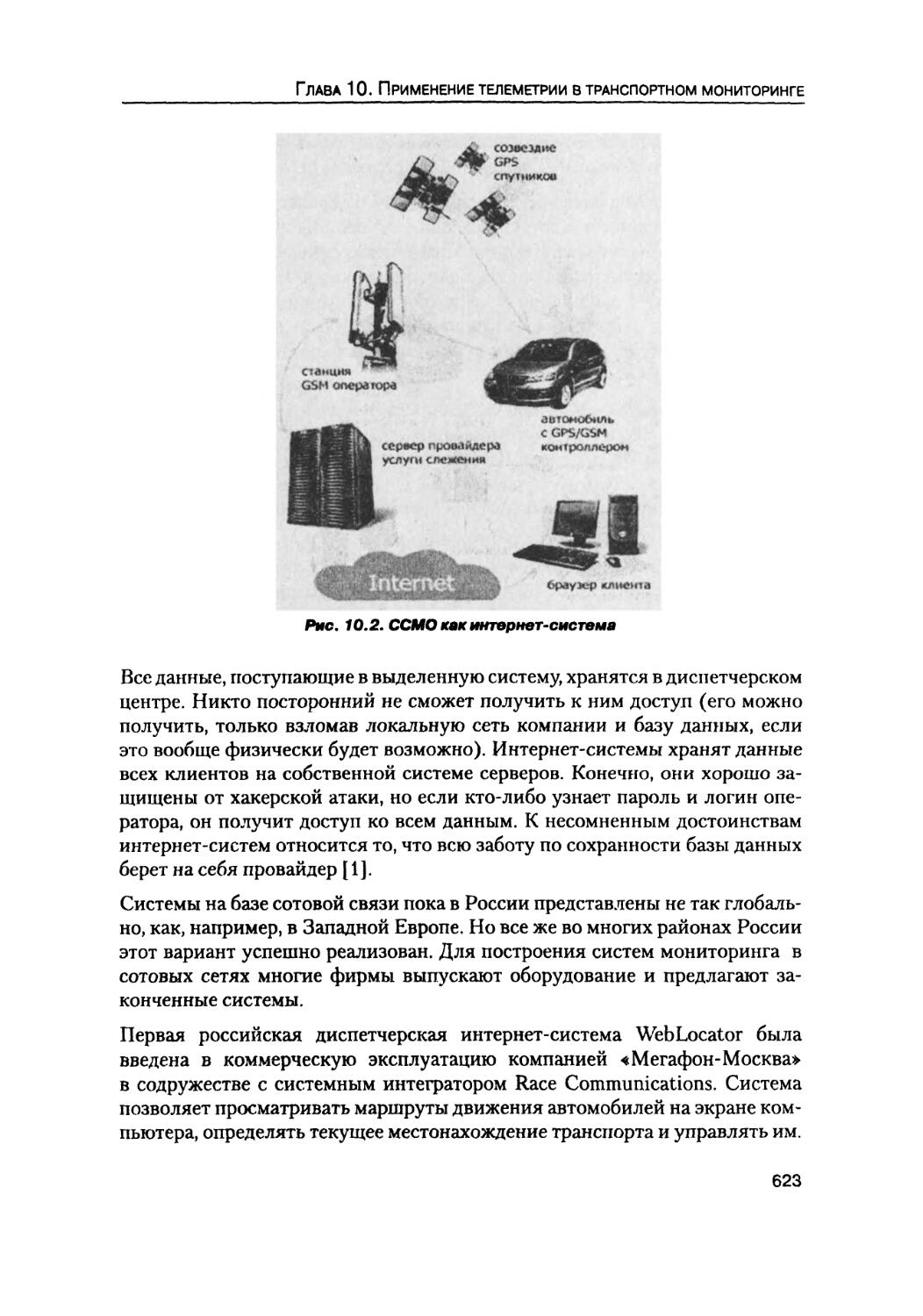
10.1 СИСТЕМЫ МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ 614
10.1.1. Система сбора информации 616
10.1.2. Система позиционирования 617
10.1.3. Система связи (каналы обмена данными с мобильными
объектами) 618
Системы на базе геостационарных спутников 618
Системы на базе низкоорбитальных спутников 619
Системы на базе транкинговой связи 620
Системы на базе КВ-связи 621
Системы на базе сотовой связи (GSM) 621
10.1 А Система обработки, хранения и анализа поступающей
телеметрической информации (диспетчерский пункт) 624
10.2. ПРИМЕРЫ СИСТЕМ МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ 626
17
Современная телеметрия в теории и на практике
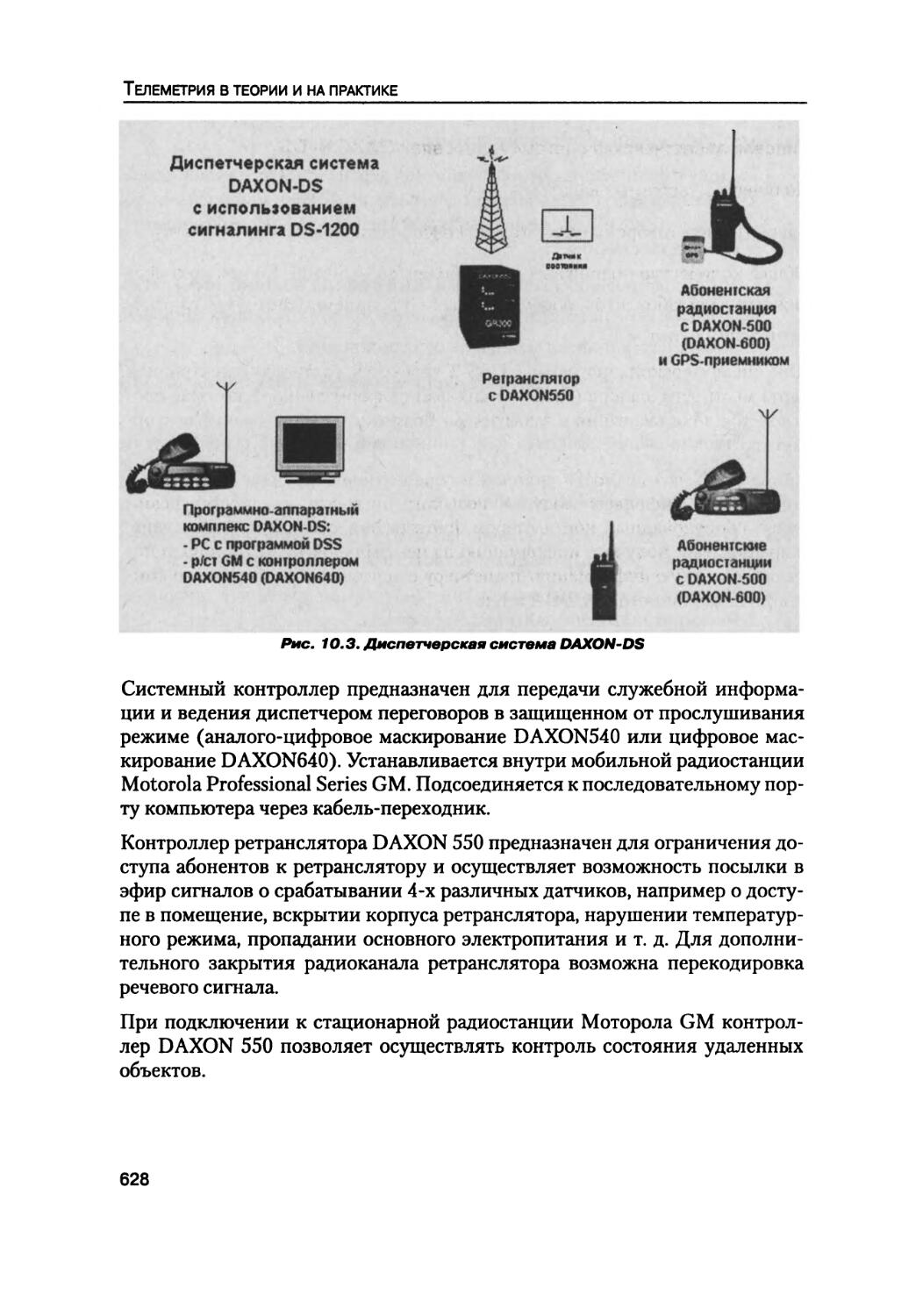
10.2.1. Диспетчерская система DAXON-DS 626
Программно-аппаратный комплекс диспетчерской
системы DAXON-DS: 627
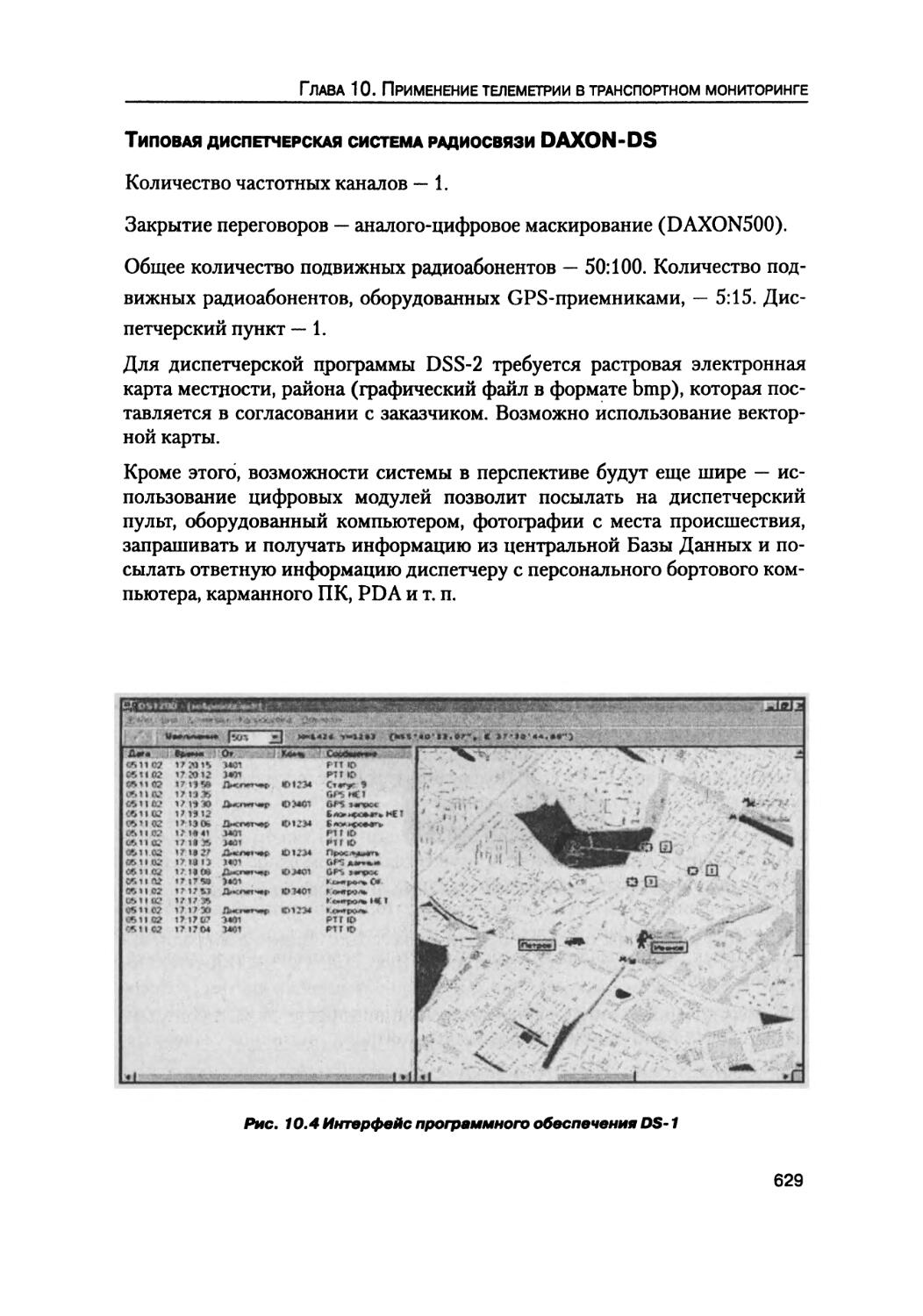
Типовая диспетчерская система радиосвязи DAXON-DS 629
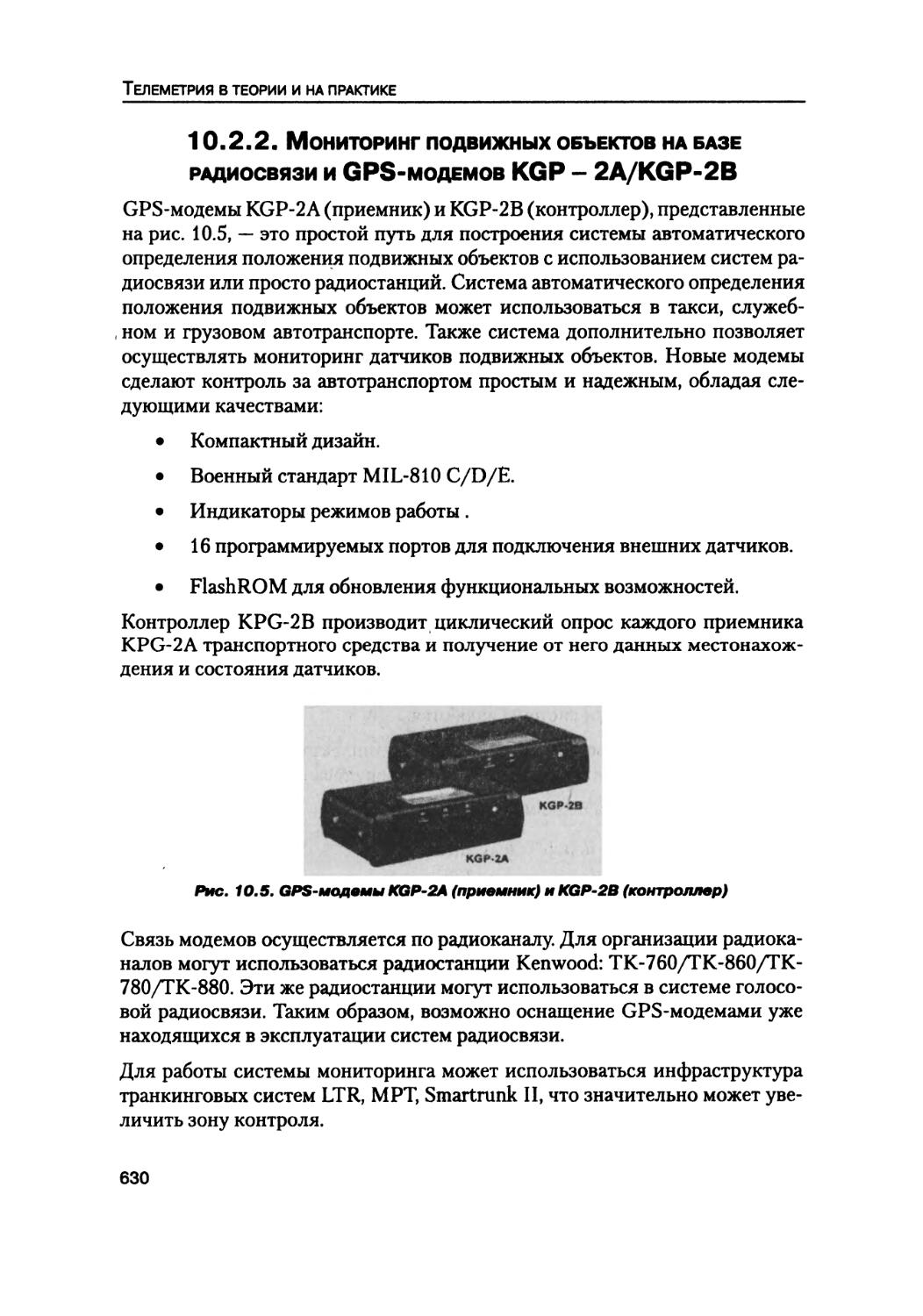
10.2.2. Мониторинг подвижных объектов на базе радиосвязи
и GPS-модемов KGP - 2A/KGP-2B 630
10.2.3. Система TrackMaster 631
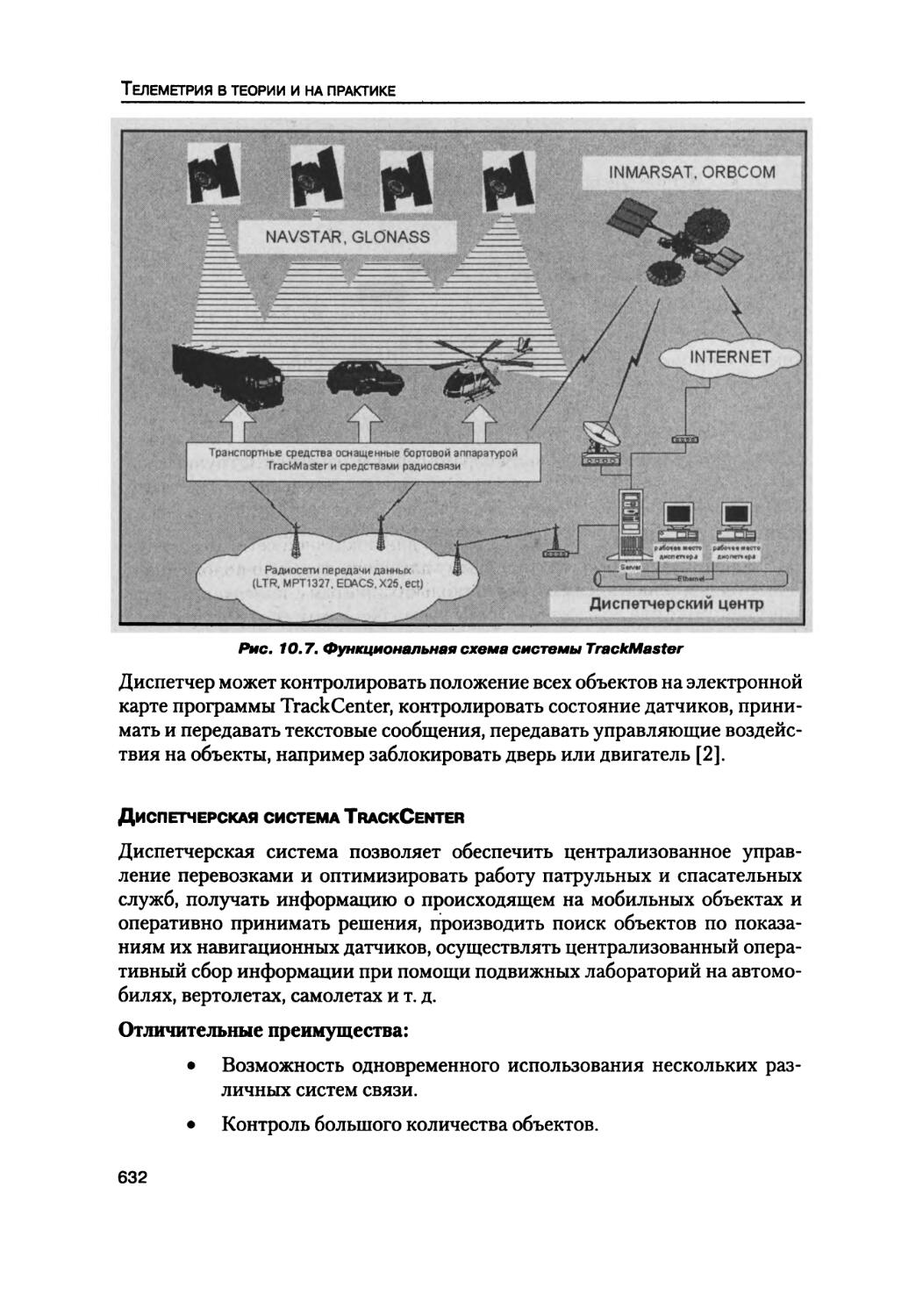
Диспетчерская система TrackCenter 632
Техническое построение системы 633
10.2.4. Система мониторинга автотранспорта G4echo 637
10.2.5. Интернет-система диспетчеризации WebLocator 640
Схема функционирования 640
Оборудование 640
10.2.6. Информационно-навигационная диспетчерская система
ИНС-КОНТРОЛЬ 641
Назначение 641
Функции 641
Принцип действия 642
Программное обеспечение системы ИНС-Контроль 642
Основные функции 643
10.2.7. Диспетчерская система GPS-контроля грузоперевозок
НАУЦИЛУС 643
10.2.8. Спутниковый комплекс «Эшелон» 646
Функциональные возможности спутникового охранного
комплекса «Эшелон» 647
Принцип работы спутникового охранного комплекса
«Эшелон» 650
ЛИТЕРАТУРА К ГЛАВЕ 10 652
ГЛАВА 11. МОНИТОРИНГ ОКРУЖАЮЩЕЙ СРЕДЫ 653
11.1. ОСНОВЫ ИНФОРМАЦИОННЫХ БАЗ СИСТЕМ МОНИТОРИНГА 654
11.2. ВЕРТИКАЛЬНАЯ ГРАДИЕНТНАЯ СИСТЕМА СБОРА ГЕОФИЗИЧЕСКОЙ ИНФОРМАЦИИ 657
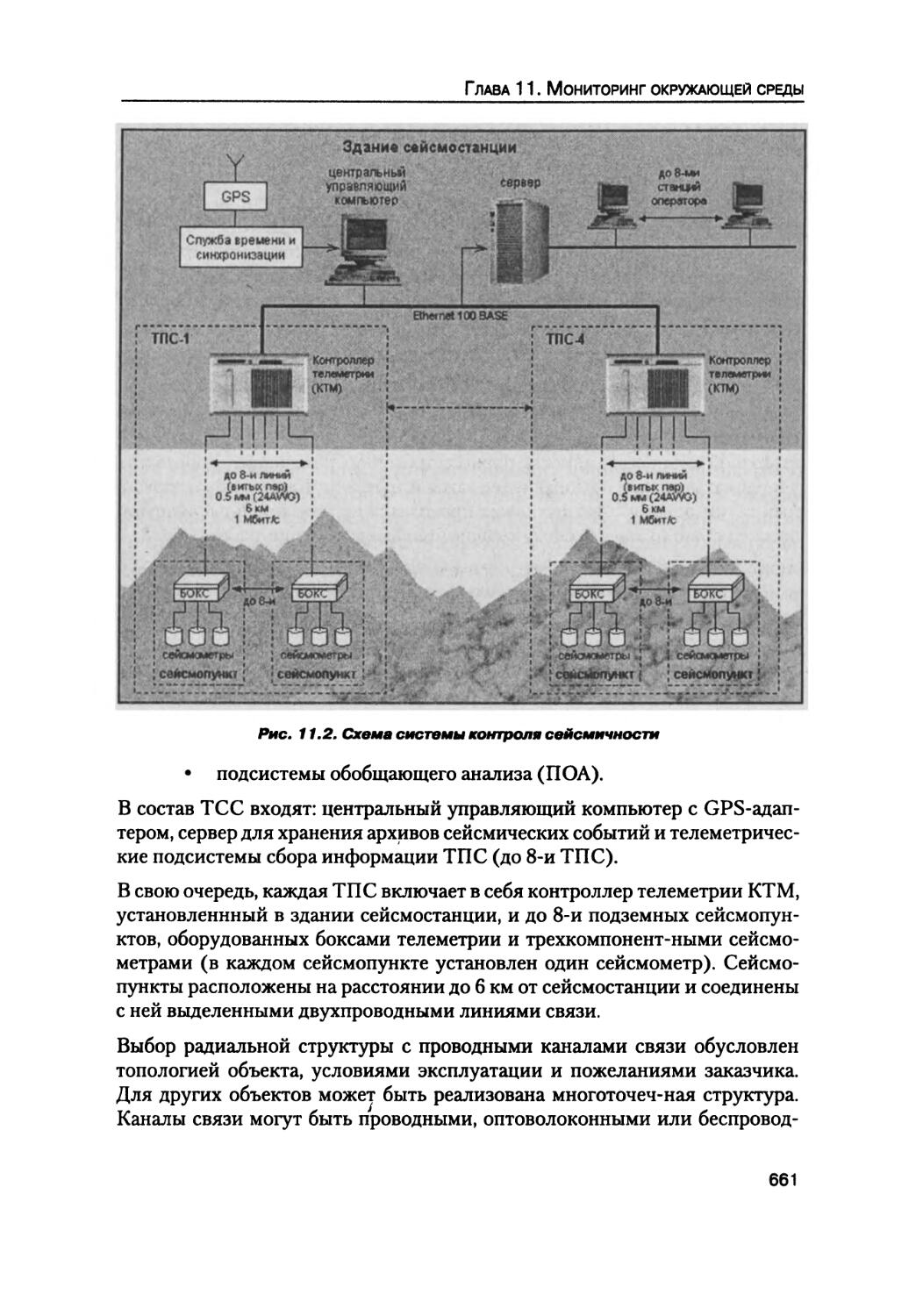
11.3. АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ СЕЙСМИЧНОСТИ 660
11.4. СИСТЕМА СБОРА, ОБРАБОТКИ И ПЕРЕДАЧИ ДАННЫХ НА БАЗЕ
ПЛАТФОРМЫ MOSCAD 663
ЛИТЕРАТУРА К ГЛАВЕ 11 667
18
Для заметок
Часть I
Основы телеметрии
Глава 1.
Что такое телеметрия?
1.1. ТЕЛЕМЕТРИЯ И СФЕРЫ ЕЕ ПРИМЕНЕНИЯ
Общая информация
В буквальном смысле «телеметрия» означает измерение на расстоянии.
Содержание современной телеметрии составляет широкий круг проблем,
связанных с получением, преобразованием, передачей и обработкой
измерительной информации, используемой при управлении удаленными объектами,
определении их состояния или при изучении физических процессов в местах,
где непосредственное присутствие наблюдателя затруднено или невозможно.
В соответствии с ГОСТом [3], «телеметрия - это область науки и техники,
занимающаяся вопросами разработки и эксплуатации комплекса
автоматизированных средств, обеспечивающих получение, преобразование, передачу
по каналу связи, прием, обработку и регистрацию измерительной
информации и информации о событиях с целью контроля на расстоянии состояния
и функционирования технических и биологических систем различных
объектов и изучения явлений природы».
Средства телеметрии являются мощным инструментом познания мира.
Контроль самых разнообразных явлений, процессов и объектов,
определение условий их функционирования, испытания новых образцов техники и
вооружения стали возможны на основе использования средств телеметрии.
Особенно возрастает роль телеметрии в связи с реализацией намеченных
правительством Российской Федерации широких планов и программ
автоматизации производства, внедрением автоматизированных методов и
средств контроля качества продукции, исследованием природных ресурсов
22
Глава 1. Что такое телеметрия?
Земли с использованием различного рода летательных аппаратов, судов,
наземных и надводных автоматических станций наблюдения.
Необходимость решения поставленных задач привела к массовому применению
средств телеметрии в современной технике. По характеру решаемых задач
средства телеметрии стали глобальными: они используются при измерении
температуры океанов и морей, исследовании сейсмической активности
различных районов Земли, изучении воздушного и космического пространств,
в т. ч. за пределами Солнечной системы и т. д.
Ведущую роль играет телеметрия в процессе испытаний военной техники
и вооружения, а также при управлении автоматизированными техническими
системами в процессе решения целевых задач. Сложность технических
объектов приводит к необходимости контроля большого числа параметров,
характеризующих состояние и режимы работы отдельных агрегатов и объектов
в целом. Вместе с этим в процессе совершенствования техники к средствам
телеизмерений предъявляются все более возрастающие требования в
отношении точности, надежности данных и оперативности их получения.
Именно эти вопросы и находятся в центре проблем современной телеметрии.
Основные понятия телеметрии
Характерной чертой современных средств телеметрии, используемых при
испытании и целевом применении объектов телеконтроля, является
высокий уровень автоматизации всех процессов получения, передачи и
обработки измерительной информации. Устройства автоматического
преобразования, кодирования и обработки телеметрической информации, построенные
с широким применением микропроцессоров, специализированных и
универсальных цифровых вычислительных машин, гарантируют высокую
точность и оперативность получения данных телеизмерений при числе
параметров, измеряемых на одном объекте, доходящем до нескольких тысяч.
В настоящее время телеметрическая аппаратура широко используется в
метеорологии и геофизике, в газовой, атомной и химической
промышленности, в медицине и других отраслях народного хозяйства.
При испытании объектов вооружения информация о состоянии
контролируемых систем и агрегатов объектов, а также о работе установленной на них
аппаратуры получается различными способами. Часть информации
доставляется экипажем. Однако значительно больший объем данных может быть
получен с помощью бортовых (автономных) регистраторов. Последние
позволяют объективно контролировать значительное число физических
величин с большой точностью.
23
Современная телеметрия в теории и на практике
Однако при испытаниях ряда объектов, например беспилотных самолетов,
информация доставляется получателю только по окончании эксперимента.
Она может быть утеряна в случае аварии или катастрофы. Кроме того,
оказывается невозможным текущий контроль состояния объекта и его систем
на расстоянии. Вследствие указанных причин
информационно-телеметрические системы (ИТС) стали основным средством получения
измерительной информации с самолетов и других объектов. Они позволяют проводить
летно-конструкторские испытания летательных аппаратов, а также
получать важную научную информацию.
Телеметрическая информация, поступающая с объектов телеконтроля,
может быть разделена на группы:
1) информация о состоянии систем и агрегатов контролируемого
объекта, а также о работе различной аппаратуры;
2) информация о параметрах окружающего пространства;
3) информация о медико-биологических параметрах человека и
животных.
В состав указанных групп входят весьма разнообразные физические
величины или телеметрируемые параметры (ТМП). В зависимости от целей
испытания объекта их измерение обеспечивает:
• получение информации о соответствии характеристик объекта
телеконтроля тактико-техническим требованиям;
• получение достаточно подробных сведений о функционировании
агрегатов и аппаратуры объекта, а также о параметрах окружающей
среды;
• выявление неисправностей и их устранение перед применением
объекта.
В большинстве случаев для решения этих задач необходимо иметь
временные функции (зависимости) контролируемых параметров,
представленные в виде графиков и таблиц. По одной оси указанных графиков
откладываются абсолютные или относительные значения измеряемых
физических величин, а по второй — время, нуль которого обычно
соответствует моменту начала испытаний объекта. Очень важное значение
имеет информация о моментах прохождения команд и возникновении
различных событий.
Вместе с тем в ряде случаев оказывается достаточным знание
экстремальных значений параметров, их средних величин и дисперсий, а также
сведений о нахождении контролируемых процессов в пределах заданных границ.
24
Глава 1. Что такое телеметрия?
Некоторые параметры исчерпывающим образом характеризуются
спектральным составом, то есть распределением амплитуд отдельных
компонентов контролируемого процесса. К таким параметрам относятся
вибрационные, акустические и другие величины.
В зависимости от характера изменения во времени ТМП разделяются
на функциональные и сигнальные. Характерная особенность
функциональных параметров состоит в том, что они являются непрерывными
функциями времени. Типичными функциональными параметрами являются:
температура в приборном отсеке, давление в баке горючего, углы
отклонения рулей и др. Для сигнальных параметров характерно скачкообразное
изменение во времени, например, связанное с переходом из одного
дискретного состояния в другое. К ним относятся сигналы: «включено - выключено»,
«да - нет» и т. п.
В зависимости от скорости изменения во времени ТМП функционального
типа разделяются на медленно меняющиеся и быстро меняющиеся.
Первые характеризуются спектром частот от нуля до 20-50 Гц, вторые — до
2..3 кГц и более. Медленно меняющиеся параметры наиболее
многочисленны. К ним относятся температуры, давления, скорости потоков жидкостей и
газов, линейные и угловые перемещения, скорости и ускорения и др.
Быстроменяющиеся параметры составляют значительно меньшую группу, в
которую входят вибрации и акустические шумы, быстрые колебания в
системе управления и в пневмогидросистеме и т. д.
Исходя из решаемых задач можно сформулировать ряд общих
требований, предъявляемых к телеметрическим системам. К их числу следует
отнести:
1) возможность одновременной передачи большого числа разнообразных
параметров (от нескольких десятков до нескольких сотен);
2) обеспечение заданной точности, которая оценивается для систем
средней, высокой и очень высокой точности среднеквадратическими
погрешностями 3-f-5 %, 1ч-2 % и 0,1 ч-0,5 % соответственно;
3) возможность оперативного изменения состава измеряемых параметров
с учетом их важнейших особенностей (скорости изменения во времени,
скорости передачи и др.);
4) высокую степень автоматизации процессов сбора, передачи и
обработки данных;
5) обеспечение высокой надежности телеметрической аппаратуры и ряда
других эксплуатационных требований (малый вес, объем, стоимость в
расчете на одно измерение или одну двоичную единицу информации).
25
Современная телеметрия в теории и на практике
Очевидно, конкретные требования, предъявляемые к той или иной ИТС,
а также особенности ее построения существенно зависят от назначения и
условий применения данной системы. Например, если ИТС входят в состав
системы телеуправления в качестве информационного звена, то решающую
роль играют быстрота и достоверность получения данных телеизмерений.
В другом случае при передаче информации на очень большие расстояния
важнейшее значение приобретает энергетическая эффективность
радиолинии, определяемая затратами энергии на одну двоичную единицу
информации. Для ИТС, предназначенных к отработке и летно-конструкторс-
ким испытаниям летательных аппаратов, определяющими являются такие
показатели, как скорость передачи данных и информационная гибкость
системы.
Вместе с тем/ несмотря на значительные различия существующих ИТС
и информационно-телеметрических комплексов (ИТК), представляется
возможным уяснить их структуру и принцип действия на основе
обобщенной структурной схемы ИТК, которая рассматривается ниже.
1.2. СОСТАВ ИНФОРМАЦИОННО-ТЕЛЕМЕТРИЧЕСКОГО КОМПЛЕКСА
И КЛАССИФИКАЦИЯ ТЕЛЕМЕТРИЧЕСКИХ СИСТЕМ
1.2.1. Состав информационно-телеметрического
комплекса (ИТК)
Отличительная особенность современных
информационно-телеметрических систем и комплексов состоит в том, что они обеспечивают
одновременную передачу большого числа измеряемых величин на одной
несущей частоте (по одному каналу связи). Такие системы передачи
информации называются многоканальными. Количество каналов
телеметрической системы определяется числом независимых
информационных входов.
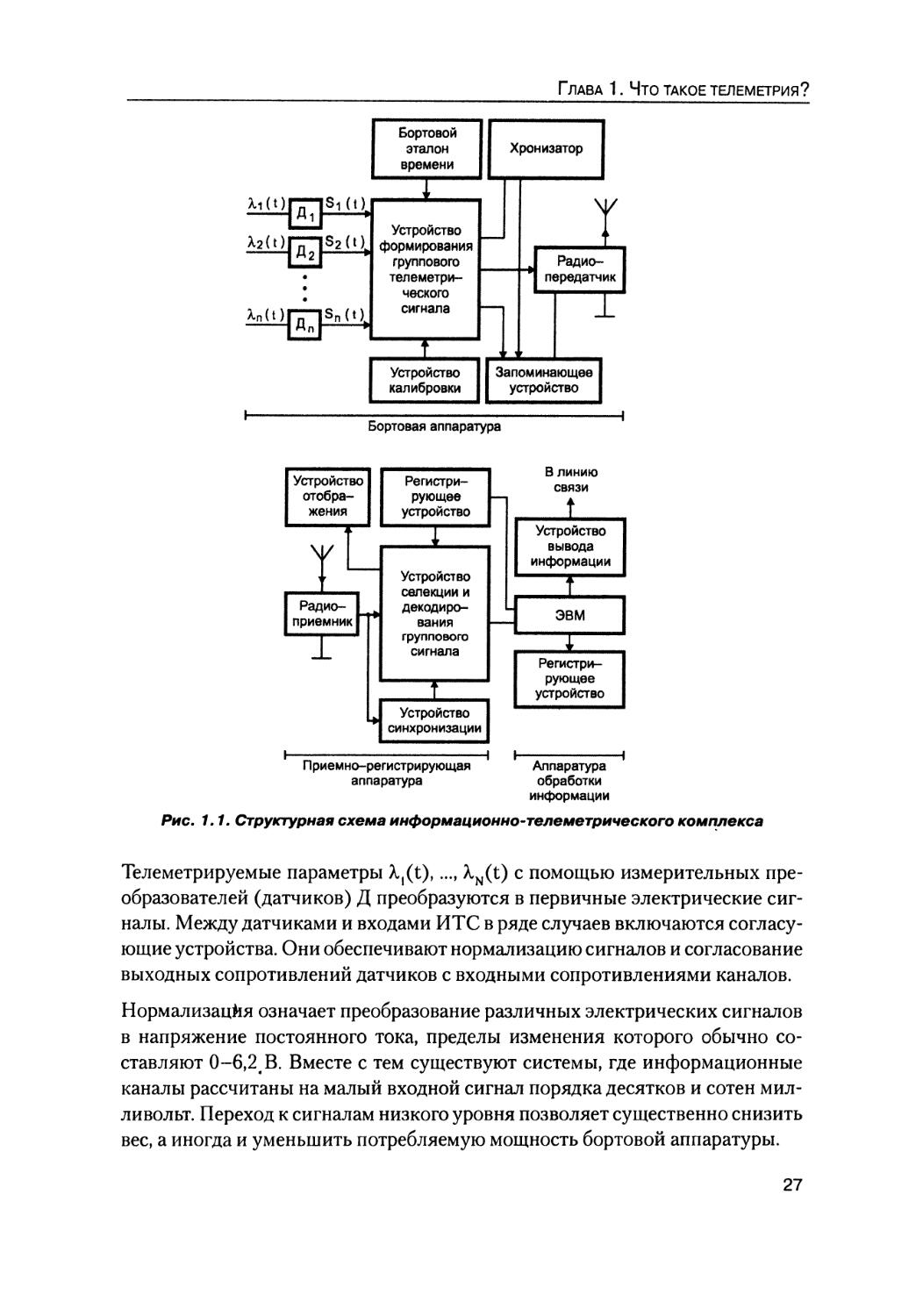
Обобщенная структурная схема информационно-телеметрического
комплекса (ИТК) представлена на рис. 1.1. Из рисунка видно, что ИТК
состоит из совокупности датчиков Дг ..., Дм,
информационно-телеметрической системы, включающей в себя бортовую и приемно-регистри-
рующую аппаратуру и аппаратуру обработки телеметрической
информации [7].
26
Глава 1. Что такое телеметрия?
ыо
x2(tu
LSi
—Lili
11Ч
\S?U\
1—*
•
X„(t)
•
"дГ
Sn(t)
Бортовой 1
эталон 1
времени 1
i
Устройство 1
формирования Г
группового 1
телеметри- Г
ческого 1
сигнала г
т
Устройство I
калибровки 1
Хронизатор
_JLJ
V
L
Радиопередатчик
'
1
Запоминающее
устройство
Бортовая аппаратура
Устройство
отображения
V
Радиоприемник
1
Регистрирующее
устройство
~Г~"
В линию
связи
Устройство
селекции и
декодирования
группового
сигнала
Устройство
вывода
информации
А
LI Устройство
^ синхронизации
ЭВМ
Т"
Регистрирующее
устройство
Приемно-регистрирующая
аппаратура
Н Н
Аппаратура
обработки
информации
Рис. 1.1. Структурная схема информационно-телеметрического комплекса
Телеметрируемые параметры A,,(t),..., A,N(t) с помощью измерительных
преобразователей (датчиков) Д преобразуются в первичные электрические
сигналы. Между датчиками и входами ИТС в ряде случаев включаются
согласующие устройства. Они обеспечивают нормализацию сигналов и согласование
выходных сопротивлений датчиков с входными сопротивлениями каналов.
Нормализация означает преобразование различных электрических сигналов
в напряжение постоянного тока, пределы изменения которого обычно
составляют 0-6,2 JB. Вместе с тем существуют системы, где информационные
каналы рассчитаны на малый входной сигнал порядка десятков и сотен
милливольт. Переход к сигналам низкого уровня позволяет существенно снизить
вес, а иногда и уменьшить потребляемую мощность бортовой аппаратуры.
27
Современная телеметрия в теории и на практике
Первичные сигналы от датчиков затем объединяются в групповой
телеметрический сигнал (ГТС) на основе принципов частотного, временного
или кодового разделения канальных сигналов. При частотном разделении
каналов (ЧРК) каждому сообщению отводится своя, не перекрывающаяся
с другими каналами, полоса частот. При временном разделении каналов
(ВРК) сообщения передаются поочередно. Каждому сообщению
периодически предоставляется некоторый временной интервал, в пределах
которого осуществляется передача одного значения измеряемой величины. При
кодовом разделении каналов (КРК) каждое из сообщений наделяется
определенным кодовым признаком. Очевидно, при любом из указанных
способов формирования ГТС должно обеспечиваться минимальное взаимное
влияние каналов.
Многоканальные системы передачи информации являются системами
с многоступенчатой модуляцией. На первой ступени каждый из
первичных сигналов модулирует свое поднесущее колебание (гармоническое - при
ЧРК, импульсное - при ВРК, кодовое - при КРК). На второй ступени
осуществляется модуляция групповым сигналом одного из параметров
высокочастотного несущего колебания. Модулированный радиосигнал далее
излучается антенной в пространство.
Вместе с информационными сообщениями в групповом сигнале передается
также служебная информация: сигналы синхронизации, «командное слово»,
или сведения, необходимые для декодирования ГТС при приеме, сигналы
бортового времени, калибровочные уровни и другие вспомогательные данные.
ГТС с помощью маркерных сигналов разделяется на кадры (псевдокадры).
Существенно отметить, что в отличие от систем передачи речевой
информации и телевизионных изображений, где потребителя, как правило,
не интересуют абсолютные величины звукового давления на мембрану
и освещенности объекта, в телеметрии имеют важное значение
абсолютные величины измеряемых физических параметров с привязкой ко
времени. Это приводит к необходимости передачи специальных калибровочных
уровней, например, соответствующих 0; 50 и 100% максимального значения
величины параметра, а также сигналов бортового времени. С помощью этих
данных при обработке информации осуществляется масштабирование
телеметрических сигналов по уровню и времени.
В состав бортовой аппаратуры, кроме того, входят: бортовой эталон времени,
запоминающее устройство, обеспечивающее накопление информации между
сеансами съема телеметрической информации, хронизатор, устройство
калибровки, а также коммутаторы, устройства кроссировки и другие приборы.
28
Глава 1. Что такое телеметрия?
В современных системах телеметрии широко используются устройства
цифрового и помехоустойчивого кодирования данных. Переход от
аналоговых к цифровым методам передачи информации позволяет существенно
повысить ряд важнейших показателей ИТС. В современных ИТС в состав их
передающей части зачастую входит аппаратура предварительной обработки
информации, обеспечивающая сокращение избыточности передаваемых
сообщений, получение обобщенных данных, согласование производительности
системы с пропускной способностью канала связи и решение других задач.
Приемно-регистрирующая аппаратура обеспечивает прием, селекцию,
декодирование, регистрацию и отображение телеметрической
информации. Принятый сигнал с выхода приемника поступает в устройство
селекции и декодирования. Здесь осуществляется выделение части
телеметрических сигналов, которые поступают в устройство визуального отображения
данных. Этим достигается возможность оперативного контроля наиболее
важных ТМП в темпе приема информации. Одновременно весь поток
принимаемых данных после необходимых преобразований поступает на вход
магнитного регистрирующего устройства.
При частотном разделении каналов селекция отдельных сообщений из
группового сигнала осуществляется по частотному признаку с помощью
полосовых разделительных фильтров. При временном разделении
каналов селекция осуществляется по временному признаку, для чего
используются сигналы синхронизации, определяющие временные границы
канальных интервалов (отдельных сигналов) и кадров (полной
совокупности сигналов всех каналов). В РТС с кодовым разделением каналов
сообщения обычно передаются во времени последовательно, как при ВРК,
однако их селекция осуществляется по кодовым признакам, которыми
наделяется каждый из каналов в отдельности.
После селекции и преобразования наиболее важные параметры
отображаются обычно не только с помощью электронно-лучевых индикаторов,
но и с помощью графических устройств. Обзорные графики дополняются
метками времени и другой служебной информацией, облегчающей ее
дешифровку и быстрое восприятие.
С выхода приемно-регистрирующей аппаратуры информация поступает в
электронно-вычислительную машину для обработки данных
телеизмерений. С этой целью применяются как универсальные, так и
специализированные вычислительные машины. Возможна также неавтоматизированная
(ручная) обработка данных. В результате обработки данных получаются
графики и таблицы измеряемых физических величин (ТМП) в абсолютных или
относительных единицах с привязкой к бортовому или наземному времени.
Основными операциями первичной обработки телеметрической информа-
29
Современная телеметрия в теории и на практике
ции являются дешифровка данных, отбраковка ошибок, усреднение
отсчетов, выделение экстремальных значений параметров, контроль за
отклонением от номинальных значений и др.
Следующим этапом обработки информации является анализ или
вторичная обработка данных, которая производится с целью определения
характеристик контролируемого объекта, его агрегатов и систем,
отыскания неисправностей, получения обобщенных данных и т. д.
1.2.2. Классификация информационно-телеметрических
систем
В настоящее время существует большое количество различных ИТС, поэтому
целесообразно стремиться к установлению некоторого порядка, облегчающего
их обозрение. Приведенная ниже классификация в известной мере является
условной, так как на практике не всегда представляется возможным четко
разделить телеметрические системы на определенные типы и группы.
Обычно ИТС классифицируются по ряду признаков: назначению, области
применения, принципу измерения параметров, способу разделения
каналов, методу передачи информации и др.
1. По назначению ИТС подразделяются на оперативные,
регистрирующие и комбинированные.
Оперативные ИТС входят в состав системы телеуправления в
качестве информационного звена. Измерительная информация, получаемая
с помощью телеметрической системы, используется с целью
формирования команд управления.
Регистрирующие ИТС служат для документальной регистрации
большого числа разнообразных ТМП, характеризующих работу агрегатов
и систем объекта, параметров окружающего пространства, медико-
биологических параметров и др. По сравнению с оперативными
системами, регистрирующие ИТС имеют большое число каналов и
характеризуются значительным временем обработки информации.
Комбинированные ИТС выполняют функции как оперативных, так
и регистрирующих систем. Большинство современных ИТС
относится к комбинированным системам.
2. В зависимости от области применения ИТС можно разделить на ряд
типов: для контроля производственных процессов, для различных
научных исследований, для испытаний авиационной,
ракетно-космической техники и т. п.
30
Глава 1. Что такое телеметрия?
Каждый из указанных типов ИТС имеет ряд существенных
особенностей, касающихся как принципов построения, так и
конструктивных решений.
3. По принципу измерения телеметрируемых параметров ИТС можно
разделить на системы телесигнализации и системы телеизмерений.
Первые служат главным образом для передачи отдельных значений
ТМП и событий: «да - нет», «включено - выключено», «работает - не
работает» и т. п. Как правило, системы телесигнализации отличаются
относительно невысокой скоростью передачи данных. Системы
второго типа позволяют контролировать характер изменения ТМП во
времени с необходимой точностью, а также передавать дискретные
(сигнальные) сообщения. Канал связи этих систем обычно
отличается большой пропускной способностью.
4. По способу разделения каналов ИТС подразделяются на системы с
временным, частотным адресным и комбинированным разделением
каналов. Наиболее часто на практике используется комбинация
частотного и временного разделения каналов.
5. В зависимости от типа линии связи ИТС делятся на системы с
проводным каналом, радиоканалом и оптическим каналом связи.
Системы проводной телеметрии широко применяются в
промышленности и военном деле. К ним, в частности, относятся стендовые
регистраторы, используемые при отработке реактивных двигателей
на испытательных стендах.
6. По принципу использования канала связи ИТС подразделяются
на системы с собственным каналом и с совмещенным каналом. На
практике часто одна радиолиния служит для измерения параметров
движения и передачи телеметрической информации. Совмещение
каналов позволяет снизить вес аппаратуры и потребление
электроэнергии на борту летательного аппарата.
7. По способу передачи телеметрической информации ИТС делятся
на аналоговые и цифровые. Цифровые методы передачи
информации широко используются в космической телеметрии. Они обладают
достаточно высокой помехоустойчивостью, относительно узкой
полосой частот и рядом других положительных качеств.
8. По информативности (пропускной способности) ИТС делятся на
системы малой, средней и высокой информативности. К ИТС
малой информативности относятся системы, где граничная частота
ТМП F = 5ч-15 Гц, а суммарная полезная полоса частот всех каналов
AFZ = 300-^500 Гц. Системы средней информативности, используемые
31
Современная телеметрия в теории и на практике
для передачи широкополосной информации, характеризуются
значениями Fm = 100-ь2000 Гц и AFZ e 5000 Гц. В системах высокой
информативности Fm =100-2000 Гц и AFZ= 4000-20000 Гц.
9. В зависимости от способа обслуживания ИТС можно разделить на
неадаптивные и адаптивные (самонастраивающиеся или
приспосабливающиеся). Последние отличаются значительной сложностью, но
более высокой гибкостью. Они позволяют менять программу
телеизмерений, точность передачи и частоту дискретизации ТМП,
регулировать скорости передачи данных, приспосабливаться к изменению
помеховой обстановки в канале связи и т. п. Их применение может
дать значительный экономический эффект, главным образом, в связи
с исключением избыточных данных, которые не передаются по
каналу связи и не представляют ценности для потребителя информации.
ЛИТЕРАТУРА К ГЛАВЕ 1
1. Гертиг О, Ю., Урманчеев С. И. Зарубежные цифровые
радиотелеметрические системы (обзор по материалам зарубежной прессы). - МО
СССР, 1970.-45 с.
2. Жаков А. М. Как управляют спутниками. - Л.: Лениздат, 1986. - 136 с.
3. Меньшиков В. Л. Байконур: моя боль и любовь. - М.: ИЦ «Гарант», 1994.
- 232 с.
4. Переверткин С. М., Кантор А. В., Бородин Н. Ф. и др. Бортовая
телеметрическая аппаратура космических летательных аппаратов. - М.: «Маши- -
построение», 1977. - 208 с.
5. Поляков О. М., Степанов В. С, Чуркин А. В. Зарубежное
информационно-телеметрическое обеспечение. - МО СССР, 1980. - 48 с.
6. ГОСТ 19619-74. Оборудование радиотелеметрическое. Термины и
определения.
7. Белицкий В. И., Зверев Р. И., Морозов В. М. и др. Телеметрия. - Л.: МО
СССР, 1984. - 465 с.
8. Зверев Р. И., Шитов И. В. Основы радиотелеметрии. Учебное пособие.
Часть I. - Л.: МО СССР, 1978.- 195 с.
9. Победоносцев В. А. Основания информметрии. - М.: «Радио и связь»,
2000. - 192 с.
Глава 2.
Теория телеметрии
2 Заж. 861
2.1. ТЕЛЕМЕТРИРУЕМЫЕ ПАРАМЕТРЫ И СПОСОБЫ ИХ
ПРЕДСТАВЛЕНИЯ
Под телеметрыруемым параметром понимается показатель физического
процесса, события или явления, значение или поведение которого
подлежит измерению или контролю телеметрической системой.
Измеряемые физические величины A,(t) разделяются на постоянные и
переменные во времени. Для постоянной величины достаточно определить лишь
одно ее мгновенное значение. Переменные во времени величины могут быть
детерминированными и случайными. При детерминированном характере,
например гармоническом, изменения мгновенного значения A,(t)
неизвестной может быть амплитуда. Закон изменения параметра может быть
определен по мгновенным значениям X.. Наиболее общим является гелеметрирова-
ние параметров со случайным законом изменения величины X(t).
Физические параметры применительно к телеметрии летательных
аппаратов характеризуют:
• состояние и функционирование бортовой аппаратуры летательного
аппарата, его систем и агрегатов;
• поведение и состояние человека;
• окружающую среду.
Телеметрируемые параметры (ТМП) в зависимости от задач контроля
объекта могут быть представлены в виде непрерывных или
дискретных функций времени. Часто достаточно иметь данные об экстремальных
и средних значениях или дисперсиях, а также о моментах превышения
34
Глава 2. Теория телеметрии
параметром заданного уровня или о выходе его из зоны допуска.
Существует большая группа параметров, для которых достаточно знать
спектральные характеристики (распределение амплитуд частотных
составляющих, изменение во времени отдельных частотных компонентов,
энергетический спектр или корреляционную функцию).
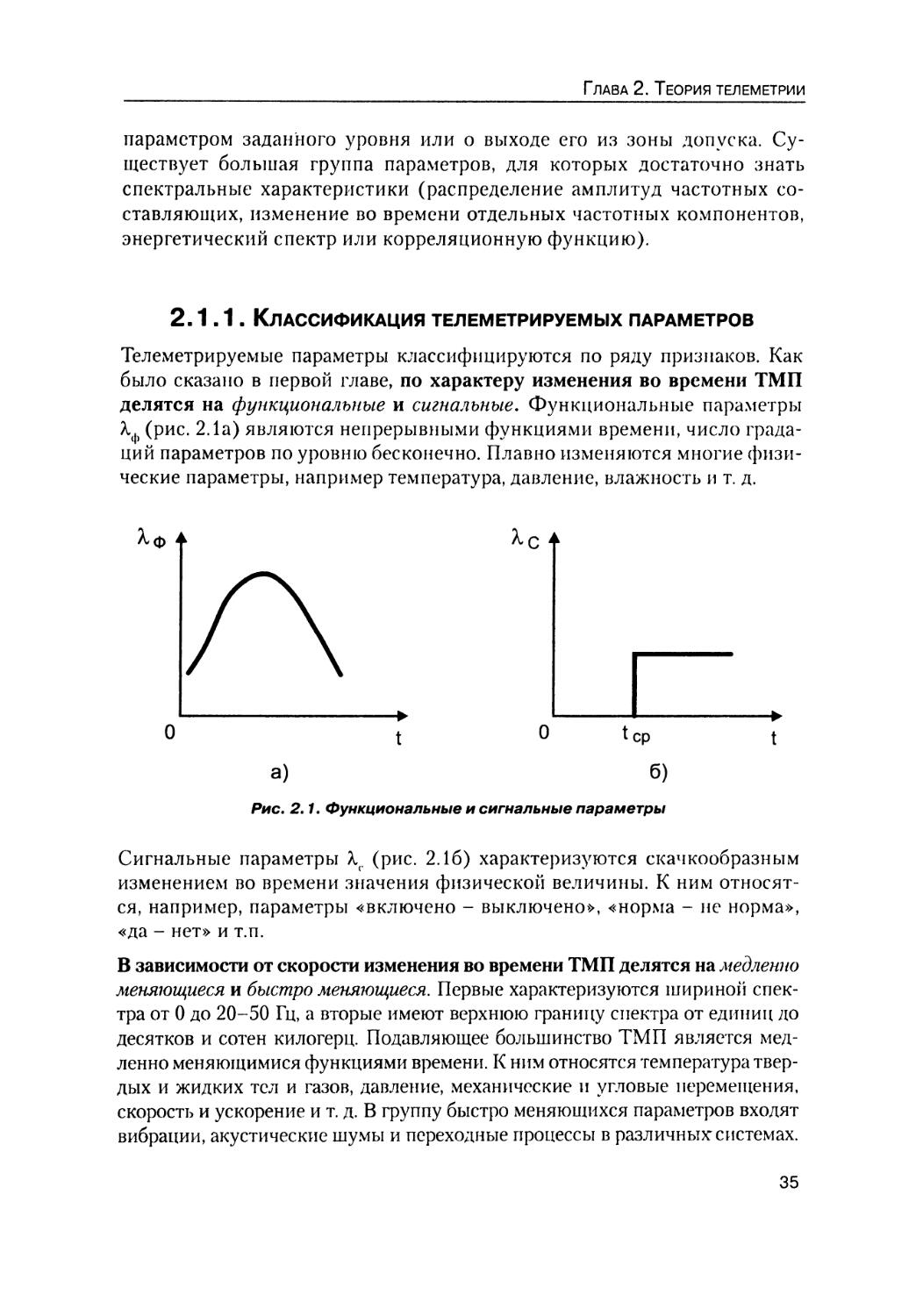
2.1.1. Классификация телеметрируемых параметров
Телеметрируемые параметры классифицируются по ряду признаков. Как
было сказано в первой главе, по характеру изменения во времени ТМП
делятся на функциональные и сигнальные. Функциональные параметры
\. (рис. 2.1а) являются непрерывными функциями времени, число
градаций параметров по уровню бесконечно. Плавно изменяются многие
физические параметры, например температура, давление, влажность и т. д.
<Ф
^С
t 0 tCp
а) б)
Рис. 2.1. Функциональные и сигнальные параметры
Сигнальные параметры \ (рис. 2.16) характеризуются скачкообразным
изменением во времени значения физической величины. К ним
относятся, например, параметры «включено - выключено», «норма - не норма»,
«да - нет» и т.п.
В зависимости от скорости изменения во времени ТМП делятся на медленно
меняющиеся и быстро меняющиеся. Первые характеризуются шириной
спектра от 0 до 20-50 Гц, а вторые имеют верхнюю границу спектра от единиц до
десятков и сотен килогерц. Подавляющее большинство ТМП является
медленно меняющимися функциями времени. К ним относятся температура
твердых и жидких тел и газов, давление, механические и угловые перемещения,
скорость и ускорение и т. д. В группу быстро меняющихся параметров входят
вибрации, акустические шумы и переходные процессы в различных системах.
35
Современная телеметрия в теории и на практике
ТМП независимо от их физической природы в большинстве случаев
являются случайными нестационарными процессами, однако всегда
можно определить относительно протяженные участки стационарности. Как
и всякий случайный стационарный процесс, зависимость X(t) можно
охарактеризовать числовыми характеристиками:
• одномерной и многомерными функциями распределения;
• одномерной и многомерной плотностью вероятности случайного
процесса;
• распределением вероятностей случайных дискретных величин;
• средним значением или математическим ожиданием;
• дисперсией;
• функцией корреляции (автокорреляционной и взаимно
корреляционной);
• спектральной плотностью.
Знание этих характеристик или их получение на основе обработки
результатов телеизмерений позволяет решать новые задачи познания
материального мира, в которых телеметрии принадлежит достойное место.
2.1.2. Телеметрические сообщения
Информация о ТМП передается в виде телеметрических сообщений S(t).
Под телеметрическим сообщением понимается сообщение, передаваемое
телеметрической системой, несущее информацию о контролируемых
событиях и процессах, а также служебную информацию.
Для современной телеметрии характерны три вида сообщений:
• Сообщения о событиях типа «включено-выключено», «да-нет»,
«работает-не работает» и т.п. Показателем таких событий является
состояние объекта или системы на данный момент времени, в
который произошло событие.
• Сообщения, несущие информацию о величинах телеметрируемых
параметров в определенный момент времени. Такие сообщения
содержат сведения об отдельных измерениях физических величин.
• Сообщения о процессах конечной длительности, представленных
в непрерывной или дискретной форме.
36
Глава 2. Теория телеметрии
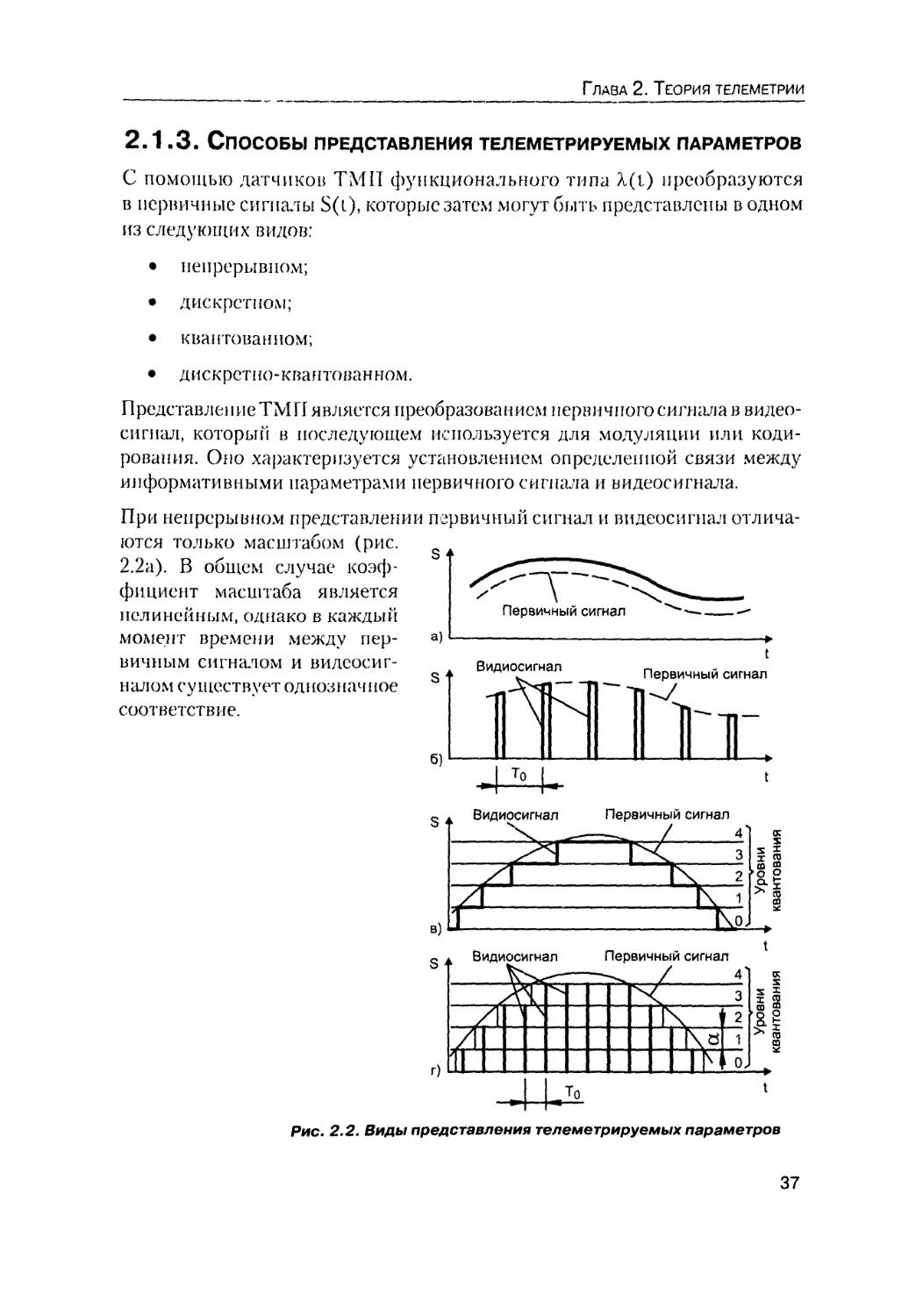
2-1.3. Способы представления телеметрируемых параметров
С помощью датчиков ТМП функционального типа X(t) преобразуются
в первичные сигналы S(t), которые затем могут быть представлены в одном
из следующих видов:
• непрерывном;
• дискретном;
• квантованном;
• дискретно-квантованном.
Представление ТМП является преобразованием первичного сигнала в
видеосигнал, который в последующем используется для модуляции или
кодирования. Оно характеризуется установлением определенной связи между
информативными параметрами первичного сигнала и видеосигнала.
При непрерывном представлении первичный сигнал и видеосигнал
отличаются только масштабом (рис.
2.2а). В общем случае
коэффициент масштаба является
нелинейным, однако в каждый
момент времени между
первичным сигналом и
видеосигналом существует однозначное
соответствие.
s t
'Т
Первичный сигнал
а)
St
б)
Видиосигнал
t
Первичный сигнал
IX
То
Видиосигнал
Первичный сигнал
з^
ее
,*i
в)
е а Видиосигнал Первичный сигнал
Рис. 2.2. Виды представления телеметрируемых параметров
37
Современная телеметрия в теории и на практике
Примером непрерывного представления может служить сигнал на выходе
согласующего устройства аналогового датчика.
При дискретном представлении однозначное соответствие между
первичным сигналом S(t) и видеосигналом S(t.) существует только в дискретные
интервалы времени t (рис. 2.26). Процесс дискретного представления
называют дискретизацией или опросом датчиков.
Отдельные дискреты называются отсчетами, а интервал их следования
(tiM-t) - периодом опроса Т0. Частота следования отсчетов F0 часто
называется частотой опроса. Таким образом, при дискретном представлении
видеосигнал является последовательностью импульсов, модулированных
по амплитуде в соответствии с изменением параметра. Дискретное
представление часто называют квантованием во времени.
При квантованном представлении осуществляется квантование
первичного сигнала по амплитуде (рис. 2.2в). Если при дискретизации
осуществляется фиксация произвольных значений непрерывно меняющегося
первичного сигнала S(t) в дискретные моменты времени t, то при квантовании
по амплитуде производится фиксация дискретных уровней S, сигнала S(t)
в произвольные моменты времени. Поэтому часто говорят, что при
квантовании непрерывная шкала изменения параметра заменяется дискретной.
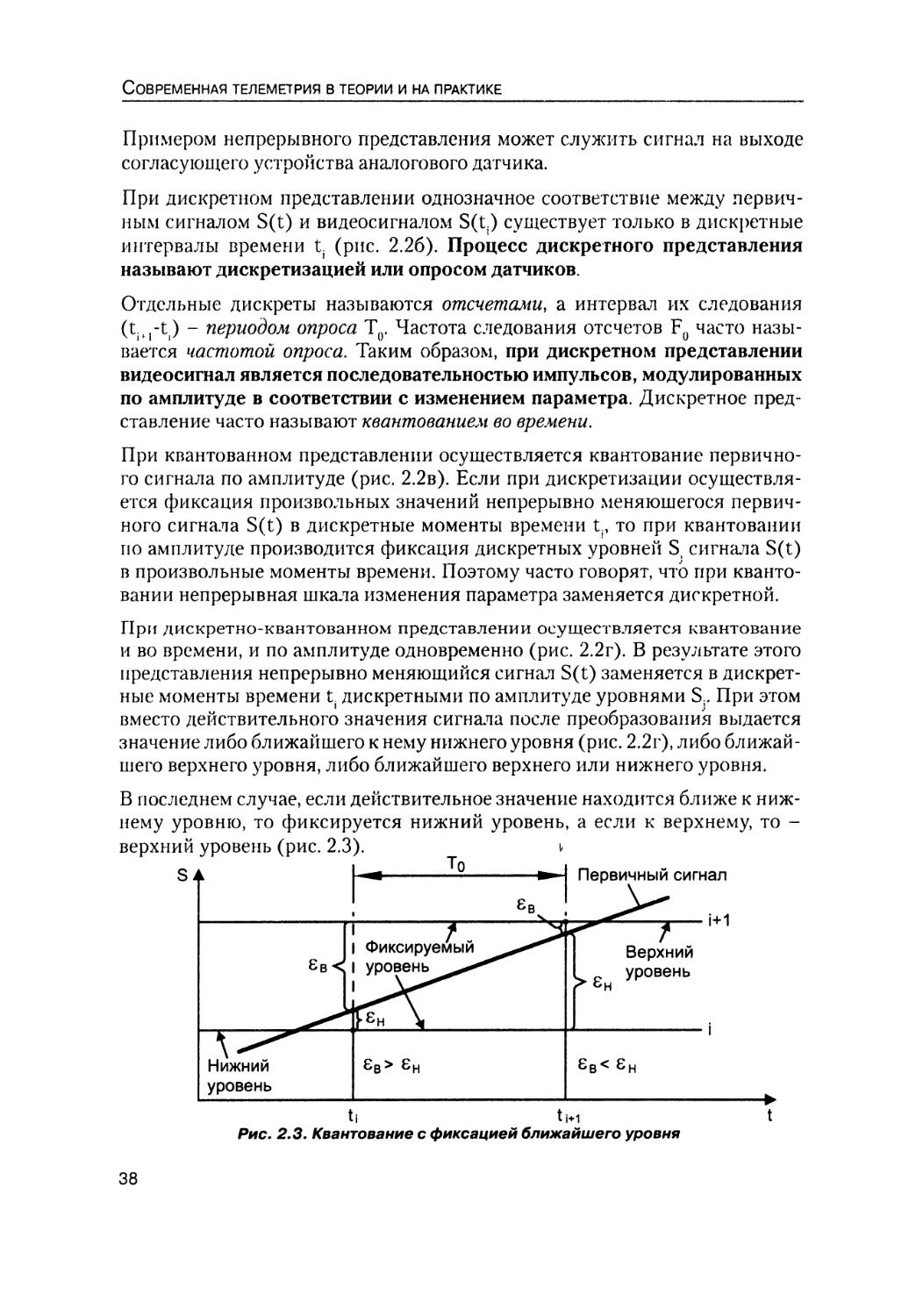
При дискретно-квантованном представлении осуществляется квантование
и во времени, и по амплитуде одновременно (рис. 2.2г). В результате этого
представления непрерывно меняющийся сигнал S(t) заменяется в
дискретные моменты времени t. дискретными по амплитуде уровнями S.. При этом
вместо действительного значения сигнала после преобразования выдается
значение либо ближайшего к нему нижнего уровня (рис. 2.2г). либо
ближайшего верхнего уровня, либо ближайшего верхнего или нижнего уровня.
В последнем случае, если действительное значение находится ближе к
нижнему уровню, то фиксируется нижний уровень, а если к верхнему, то -
верхний уровень (рис. 2.3). i*
— ' Первичный сигнал
S*
Верхний
уровень
■i+1
ti tM
Рис. 2.3. Квантование с фиксацией ближайшего уровня
38
Глава 2. Теория телеметрии
В общем случае в процессе квантования и дискретизации в сигнал вносятся
дополнительные погрешности. Совершенно точно восстановить первичный
сигнал по квантованному видеосигналу нельзя. Следовательно, операции
квантования и дискретизации являются существенными с
информационной точки зрения: при этих преобразованиях погрешность передачи
возрастает, а количество сведений в сигнале о параметре уменьшается.
В связи с этим важное значение приобретает выяснение вопроса о том, как
нужно осуществлять квантование и дискретизацию, чтобы вносимая при
этом погрешность укладывалась в допустимые пределы, которые
определяются требуемой точностью телеизмерений. Квантование и дискретизация
тесно связаны с количественной оценкой телеметрической информации.
Поэтому в последующих подразделах вопросы погрешностей и
количественной оценки будут рассмотрены более подробно.
2.2. ПОГРЕШНОСТИ ТЕЛЕИЗМЕРЕНИЙ
Погрешность телеметрической системы является одной из важнейших ее
характеристик. Поэтому в телеметрии большое внимание уделяется
анализу погрешностей, возникающих в измерительном тракте, и синтезу системы
или отдельных ее элементов, удовлетворяющих предъявляемым
точностным требованиям.
2.2.1. Характеристика и классификация погрешностей
телеизмерений
Верность оценки телеметрического сообщения
и точность телеизмерения
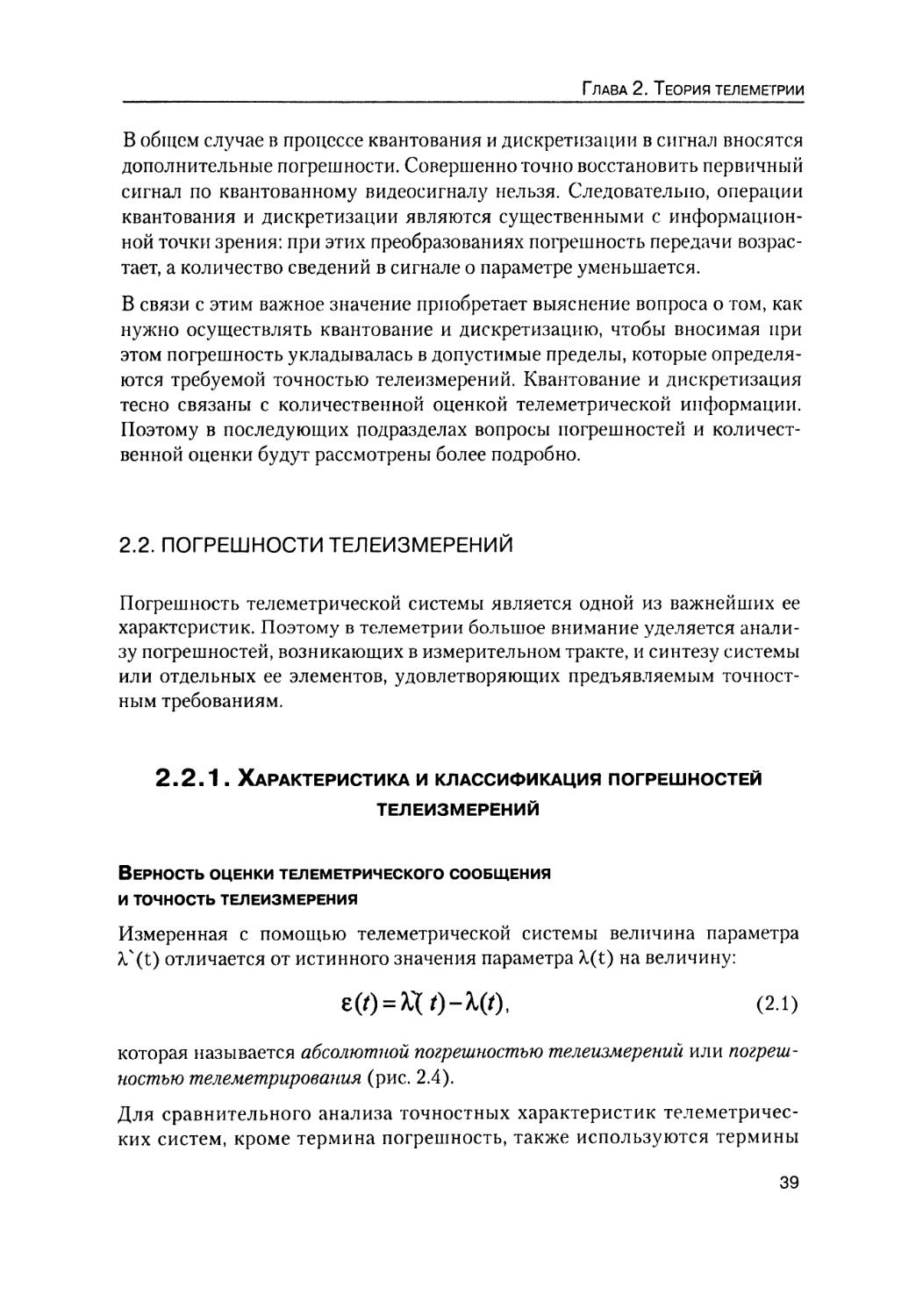
Измеренная с помощью телеметрической системы величина параметра
V(t) отличается от истинного значения параметра k(t) на величину:
8(0 = Ц0-М0. (2-1)
которая называется абсолютной погрешностью телеизмерений или
погрешностью телеметрирования (рис. 2.4).
Для сравнительного анализа точностных характеристик
телеметрических систем, кроме термина погрешность, также используются термины
39
Современная телеметрия в теории и на практике
^X *
max
min
i
-J
I
!
\ ^^ f A
S XT
Г £
[ £J
Шт\шттят .
t
►
Рис. 2.4. Определение абсолютной погрешности телеизмерений
«верность оценки телеметрического сообщения» и «точность
телеизмерения».
Под верностью понимается показатель соответствия полученной оценки
телеметрического сообщения его истинному значению [1]. Точцость
указывает степень приближения результата измерения к истинному значению.
Чем меньше погрешность, тем больше точность. При оценивании отдельных
значений ТМП верность оценки характеризуется точностью измерений [1].
Истинное значение параметра X(t) обычно неизвестно, поэтому
абсолютную погрешность вычислить невозможно. В связи с этим вводится понятие
предельной абсолютной погрешности, которая характеризуется величиной,
не меньшей абсолютной погрешности. Относительная погрешность есть
абсолютная величина отношения абсолютной погрешности к истинному
значению измеряемой величины:
-г
(2.2)
Параметр X(t) изменяется от некоторого минимального значения A,min до
максимального X . Размах изменения L = А,тяу - Xmin называется шкалой
max rnax mm
изменения параметра. Для характеристики телеметрических систем часто
используется приведенное к этой шкале максимальное значение абсолютной
погрешности:
8 =
[е(')]„
(2.3)
40
Глава 2. Теория телеметрии
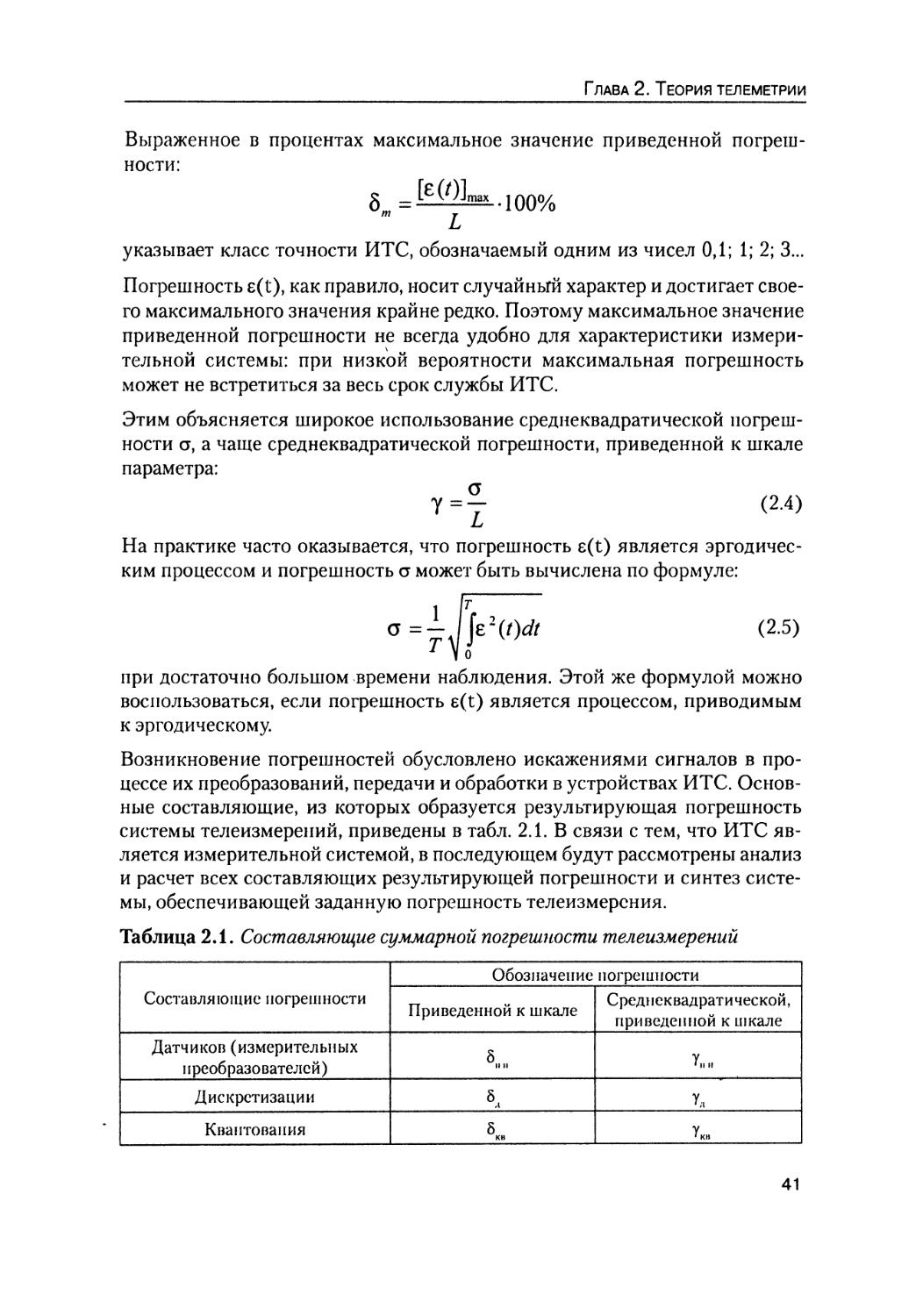
Выраженное в процентах максимальное значение приведенной
погрешности:
[е(0]„
8 =■
•100%
указывает класс точности ИТС, обозначаемый одним из чисел ОД; 1; 2; 3...
Погрешность e(t), как правило, носит случайный характер и достигает
своего максимального значения крайне редко. Поэтому максимальное значение
приведенной погрешности не всегда удобно для характеристики
измерительной системы: при низкой вероятности максимальная погрешность
может не встретиться за весь срок службы ИТС.
Этим объясняется широкое использование среднеквадратической
погрешности а, а чаще среднеквадратической погрешности, приведенной к шкале
параметра:
у=| (2.4)
На практике часто оказывается, что погрешность e(t) является эргодичес-
ким процессом и погрешность а может быть вычислена по формуле:
° 4Л£2<'>*
(2.5)
при достаточно большом времени наблюдения. Этой же формулой можно
воспользоваться, если погрешность e(t) является процессом, приводимым
к эргодическому.
Возникновение погрешностей обусловлено искажениями сигналов в
процессе их преобразований, передачи и обработки в устройствах ИТС.
Основные составляющие, из которых образуется результирующая погрешность
системы телеизмерений, приведены в табл. 2.1. В связи с тем, что ИТС
является измерительной системой, в последующем будут рассмотрены анализ
и расчет всех составляющих результирующей погрешности и синтез
системы, обеспечивающей заданную погрешность телеизмерения.
Таблица 2.1. Составляющие суммарной погрешности телеизмерений
Составляющие погрешности
Датчиков (измерительных
преобразователей)
Дискретизации
Квантования
Обозначение погрешности
Приведенной к шкале
5
И II
5
Л
«„
Среднеквадратической,
приведенной к шкале
У
У*
У
1 кн
41
Современная телеметрия в теории и на практике
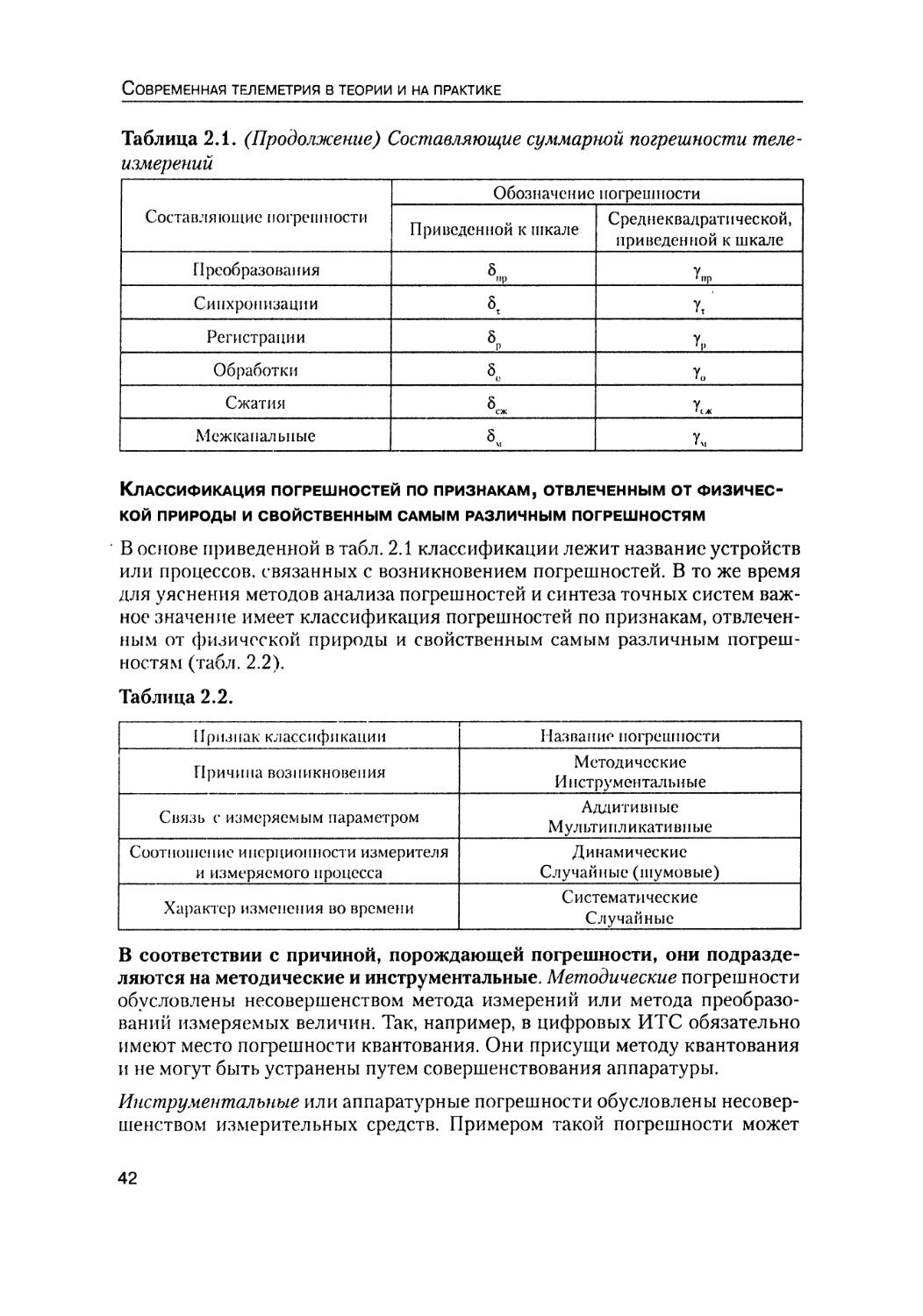
Таблица 2.1. (Продолжение) Составляющие суммарной погрешности
телеизмерений
Составляющие погрешности
Преобразования
Синхронизации
Регистрации
Обработки
Сжатия
Межканальные
Обозначение погрешности
Приведенной к шкале
5,
8,
5
р
5о
5
еж
5
м
Среднеквадратической,
приведенной к шкале
Y
пр 1
У,
Y"
У„
Г,ж
Vm
Классификация погрешностей по признакам, отвлеченным от
физической ПРИРОДЫ И СВОЙСТВЕННЫМ САМЫМ РАЗЛИЧНЫМ ПОГРЕШНОСТЯМ
В основе приведенной в табл. 2.1 классификации лежит название устройств
или процессов, связанных с возникновением погрешностей. В то же время
для уяснения методов анализа погрешностей и синтеза точных систем
важное значение имеет классификация погрешностей по признакам,
отвлеченным от физической природы и свойственным самым различным
погрешностям (табл. 2.2).
Таблица 2.2.
Признак классификации
Причина возникновения
Связь с измеряемым параметром
Соотношение инерционности измерителя
и измеряемого процесса
Характер изменения во времени
Название погрешности
Методические
Инструментальные
Аддитивные
Мультипликативные
Динамические
Случайные (шумовые)
Систематические
Случайные
В соответствии с причиной, порождающей погрешности, они
подразделяются на методические и инструментальные. Методические погрешности
обусловлены несовершенством метода измерений или метода
преобразований измеряемых величин. Так, например, в цифровых ИТС обязательно
имеют место погрешности квантования. Они присущи методу квантования
и не могут быть устранены путем совершенствования аппаратуры.
Инструментальные или аппаратурные погрешности обусловлены
несовершенством измерительных средств. Примером такой погрешности может
42
Глава 2. Теория телеметрии
служить погрешность, возникающая из-за неточного определения уровней
калибровки, неточной градуировки канала измерений или
нелинейности шкалы. Инструментальная погрешность может быть принципиально
устранена путем совершенствования измерительных средств, хотя эту
возможность на практике реализовать обычно трудно.
В зависимости от характера связи с измеряемой величиной
погрешности подразделяются на аддитивные n(t) и мультипликативные m(t).
Результат измерения параметра ^s(t) и погрешности связаны соотношением:
X%(t) = X(t)m(t) + n(t). (2.6)
Аддитивные погрешности суммируются с истинным значением X(t)
измеряемой величины, а мультипликативные связаны с самой измеряемой
величиной и порождены, как часто говорят, ее модуляцией возмущающим
воздействием. Поэтому такие погрешности часто называют модуляционными.
Примером аддитивных погрешностей могут служить шумы приемного
устройства, которые, складываясь с сигналом в высокочастотном тракте,
искажают его, вызывая погрешность измерения. Примером мультипликативной
погрешности может служить искажение сигнала при распространении
радиоволн из-за нестабильности коэффициента усиления системы.
Соотношение инерционности измерительного устройства и скорости
изменения параметра является признаком классификации погрешностей, в
соответствии с которым они подразделяются на динамические и
статические. Динамическая погрешность обусловлена инерционностью устройств
ИТС Например, инерционность датчика приводит к тому, что
высокочастотные составляющие спектра параметра уменьшаются по величине. Это
вызывает погрешность.
Статическая погрешность характеризует неточности ИТС, когда
инерционностью можно пренебречь, что характерно, например, для измерения
постоянных или мало изменяющихся на интервале наблюдения параметров.
Таким образом, динамическая погрешность связана со сглаживанием, то
есть с искажением быстрых флуктуации параметра, а статическая - с
наложением на сигнал в тракте ИТС всякого рода неточностей.
В зависимости от характера изменения во времени различают
погрешности систематические и случайные. Причиной систематических
погрешностей является несовершенство метода измерения или аппаратуры, а
характерной особенностью - постоянство от измерения к измерению, или
изменение по определенному закону Примерами систематических ошибок
могут служить погрешности, вызванные неточной установкой шкалы и
неточной градуировкой прибора.
Систематические погрешности могут быть определены
экспериментальным или расчетным путем с некоторой погрешностью и исключены из из-
43
Современная телеметрия в теории и на практике
мерений путем внесения поправок. Поправка е(юп - это величина, которую
нужно прибавить к результату измерения, чтобы получить более близкое
к истинному значение измеряемой величины:
X = АЛге (2.7)
ист ^попр V*"'/
Следовательно, поправка равиа систематической погрешности по величине
и противоположна по знаку:
£ =-£ (2.8)
попр сист ^ /
Полного исключения систематических погрешностей добиться нельзя: их
минимальный уровень можно довести лишь до уровня случайных погрешностей.
Случайными называют неопределенные по величине и природе
погрешности, случайно изменяющиеся от измерения к измерению. Примером
случайной погрешности может быть погрешность, возникающая вследствие
искажений сигналов при передаче по радиоканалу ИТС.
Разница между систематическими и случайными погрешностями условна.
Погрешность случайна до тех пор, пока неизвестна причина, ее
порождающая. Поэтому случайная погрешность после выяснения ее причины может
перейти в систематическую, если будет точно установлена функциональная
связь погрешности и причины.
Случайную погрешность, которая существенно превышает ожидаемую,
называют промахом или аномальной погрешностью. Таким образом,
характерными признаками промаха являются большая величина и малая
вероятность появления. Причинами промахов являются кратковременные сбои в
работе аппаратуры, резкое ухудшение условий распространения радиоволн,
наложение на сигнал помех от близко расположенных источников
излучения радиоволн и т. и. На практике часто промахом 8.4 считают погрешность,
втрое превышающую ее среднеквадратическое значение:
5й>3у. (2.9)
Если погрешность 8 имеет нормальное распределение, то вероятность
появления промахов Р5й >3у =0,0027. Следовательно, разница между
промахами и случайными погрешностями определена не четко. Кроме того,
большие выбросы параметра также можно принять за промахи.
2.2.2. Вычисление суммарной среднеквадратической
погрешности по известным среди екв ад рати ческим
погрешностям составляющих
Если составляющие погрешности являются случайными величинами, то
44
Глава 2. Теория телеметрии
для нахождения суммарной среднеквадратичсскои погрешности можно
воспользоваться известным из математической статистики положением о том,
что дисперсия суммы нескольких случайных величин равна сумме их
дисперсий и произведений каждого коэффициента попарной корреляции
случайных величин на их среднеквадратические отклонения. В соответствии с этим
для суммы погрешностей:
е|+е2+е3+...+еп>
имеющих коэффициенты корреляции г12, г13,...г1к,...и
среднеквадратические значения av а2,..., ап, дисперсия:
Dz=D[e]]+D[e2]+...D[E„]+YJrAbk- (2.10)
Ык
Приведенное к шкале среднеквадратическое значение погрешности:
[51
Yi=2tl=Jy,2+y22+-+y„2+Z'^,y* - (211)
где у = Л L_li.
h L
Наиболее часто суммируются две погрешности с коэффициентом
корреляции г. В этом случае:
Yx=Vy,2+Y2+>7,Y2- (2-12)
Если составляющие погрешности статистически независимы, то г1к = 0 и
Yx=Jl>,2- (2-13)
Погрешности, определяющие1 суммарную погрешность телеизмерений
(см. табл. 2.1), можно считать < <* i этически независимыми. Следовательно:
Yi = yjyL +У1 + Ykb + Уш + Ynp + Yx2 +YP2 + Yo + Усж + ll • (2-14)
Следует отметить, что составляющие погрешности в ряде случаев
оказываются функционально связанными, но при этом статистически
независимыми. Так, например, погрешности квантования укв и шумовая уш при
фиксированной длительности канального интервала связаны через значность
кода: увеличение значности кода приводит к уменьшению погрешности укв
и увеличению уш Тем не менее они статистически независимы.
Рассмотрим некоторые свойства соотношения (2.13), которые необходи-
45
Современная телеметрия в теории и на практике
мо учитывать при расчете суммарной погрешности уг и решении обратной
задачи, когда по заданной погрешности системы находят погрешности ее
элементов, то есть определяют требования к этим элементам в отношении
точности.
Так как суммируются квадраты отдельных среднеквадратических
погрешностей, вклад каждой составляющей быстро убывает при уменьшении ее
величины. Поясним это на следующем примере. Пусть составляющие yt=3%,
у2=1%. Тогда yz = Jy2 +у2 = V32 -fl2 = 3,15%. Таким образом, вклад
второй составляющей в суммарную погрешность составляет 0,15% и им
практически можно пренебречь.
В общем виде формула для результирующей погрешности может быть
записана следующим образом:
:У,Л +
^
\t'j
= 7.
1 + 1
2
V
.Ъ)
(2.15)
Приближение с погрешностью, не превышающей 1%, справедливо при
у2<0,5уг Из формулы (2.15) следует, что вклад второй составляющей в
результирующую погрешность в относительных единицах равен 1/2 (у2/У\)-
Если считать увеличение погрешности за счет добавления второй
составляющей пренебрежимо малым при условии, что суммарная погрешность
увеличивается на 10 %, или на 0,1, по сравнению с одной составляющей, то
<0,1 илиу2<0,45у1
(2.16)
Соотношение (2.16) позволяет сделать заключение о том, что если
меньшая составляющая отличается от большей более чем в два раза, то
ею в принципе можно пренебречь. Это позволяет сделать
практические выводы. Пусть, например, погрешность датчиков составляет 1-3%
и необходимо, чтобы ИТС не вносила дополнительной погрешности
в суммарный результат. В соответствии с соотношением (2.16) можно
определить требования к погрешности ИТС: она должна быть не более
0,45-1,35%.
Проведенный анализ формулы суммарной погрешности (2.13) позволяет
определить разумный подход к распределению суммарной погрешности
между составляющими.
Обычно погрешность датчика оказывается большой. В этом случае исходят
46
Глава 2. Теория телеметрии
из того, что погрешности тракта ИТС не должны существенно ухудшать
точности измерений. Распределение погрешностей производится по
формуле (2.13). при этом все составляющие принимаются примерно одинаковыми.
Если погрешности датчиков унп малы, то суммарная погрешность
распределяется поровну между составляющими. Такое распределение позволяет
предъявить одинаковые в отношении точности требования к элементам ИТС.
При проектировании ИТС величина составляющих суммарной
погрешности выбирается с таким расчетом, чтобы обеспечивалась возможность
технической реализации тех устройств, которые определяют эти погрешности.
2.2.3. Суммирование систематических погрешностей
Суммирование систематических погрешностей производится
алгебраически с учетом их знаков. При этом суммируются относительные погрешности,
погрешности, приведенные к шкале или пересчитанные к одному сечению
ИТС (например, к выходу). Чаще всего погрешность выражается в
процентах шкалы, поэтому пересчет не нужен.
Знание суммарной систематической погрешности позволяет по формуле
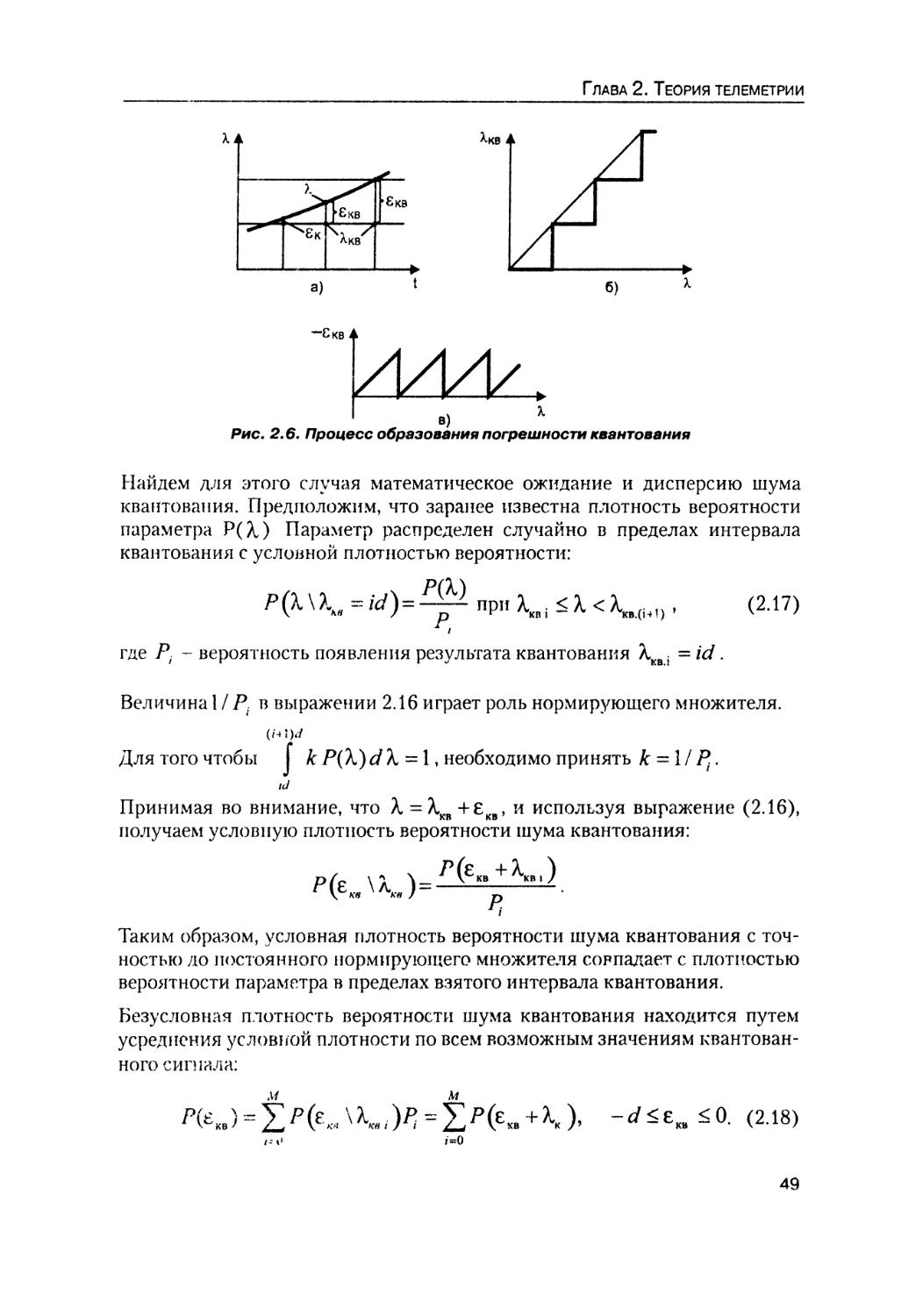
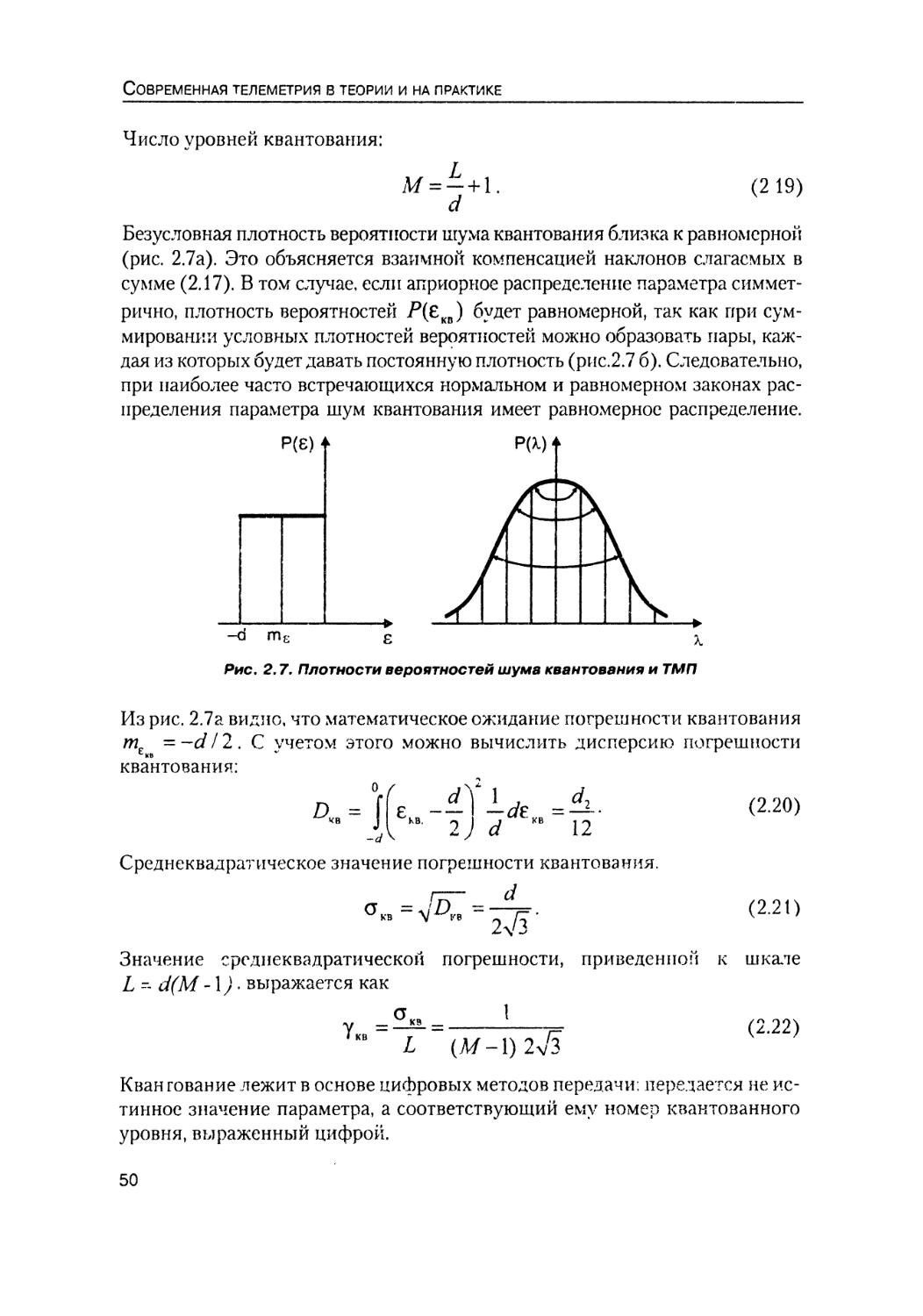
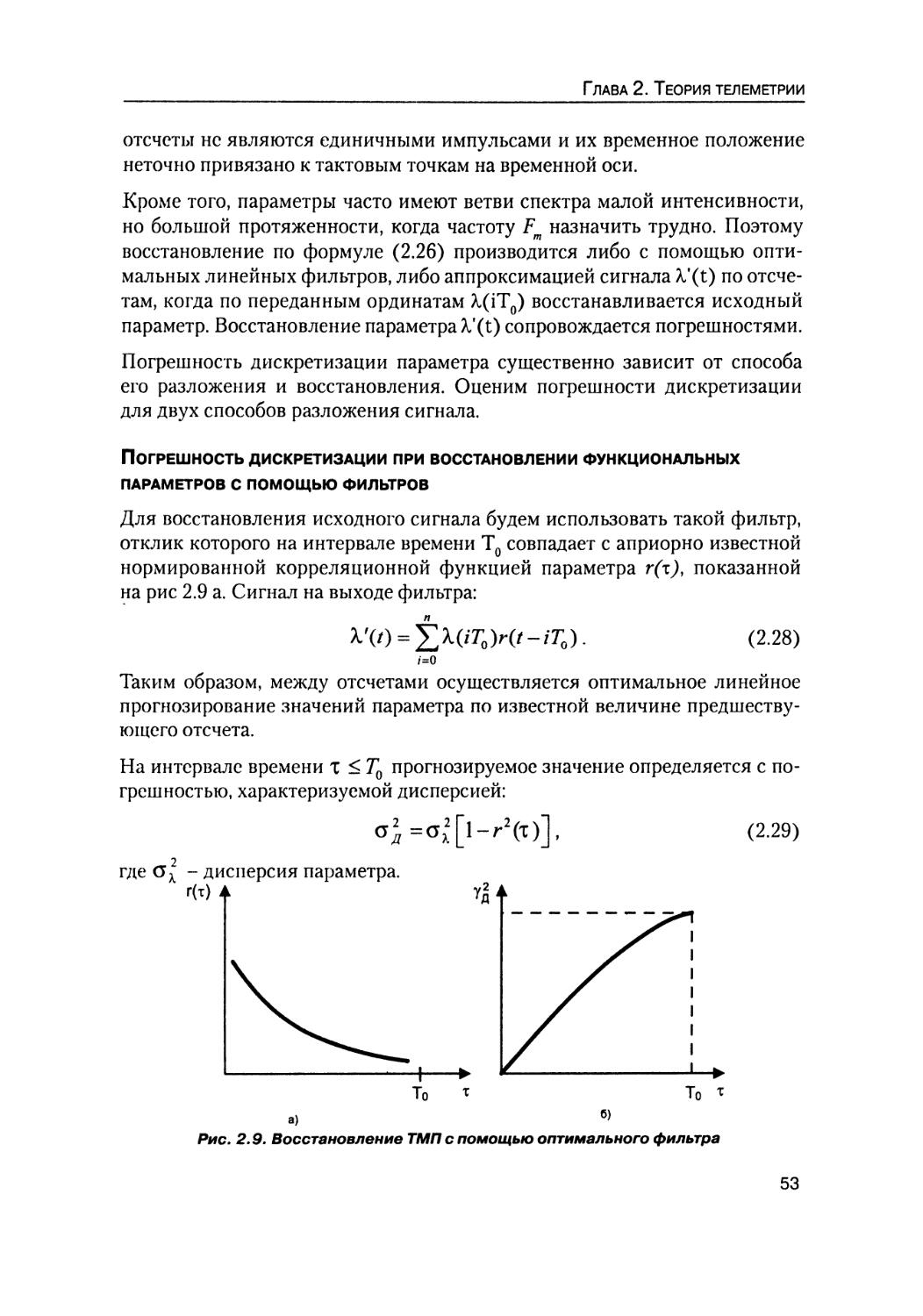
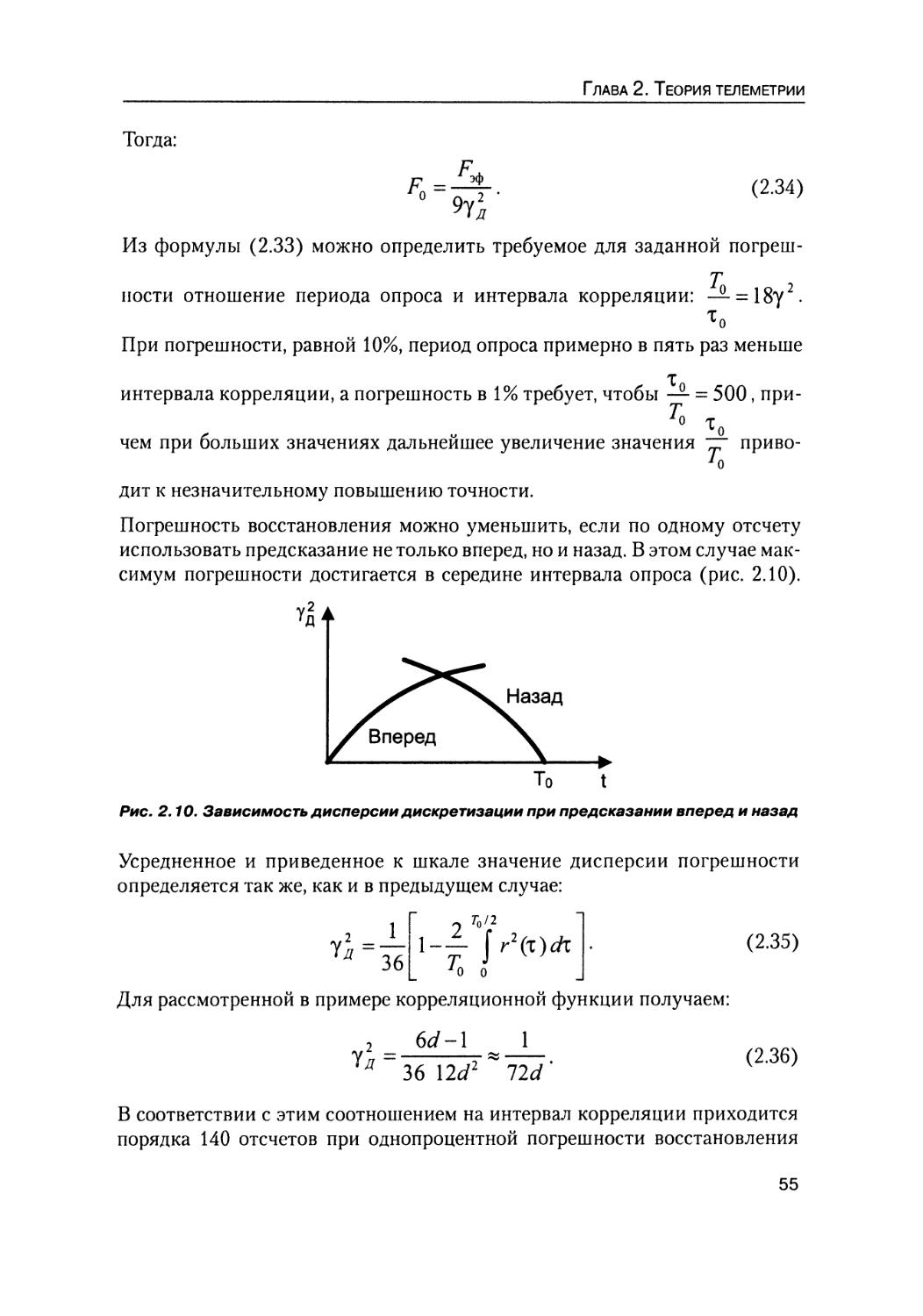
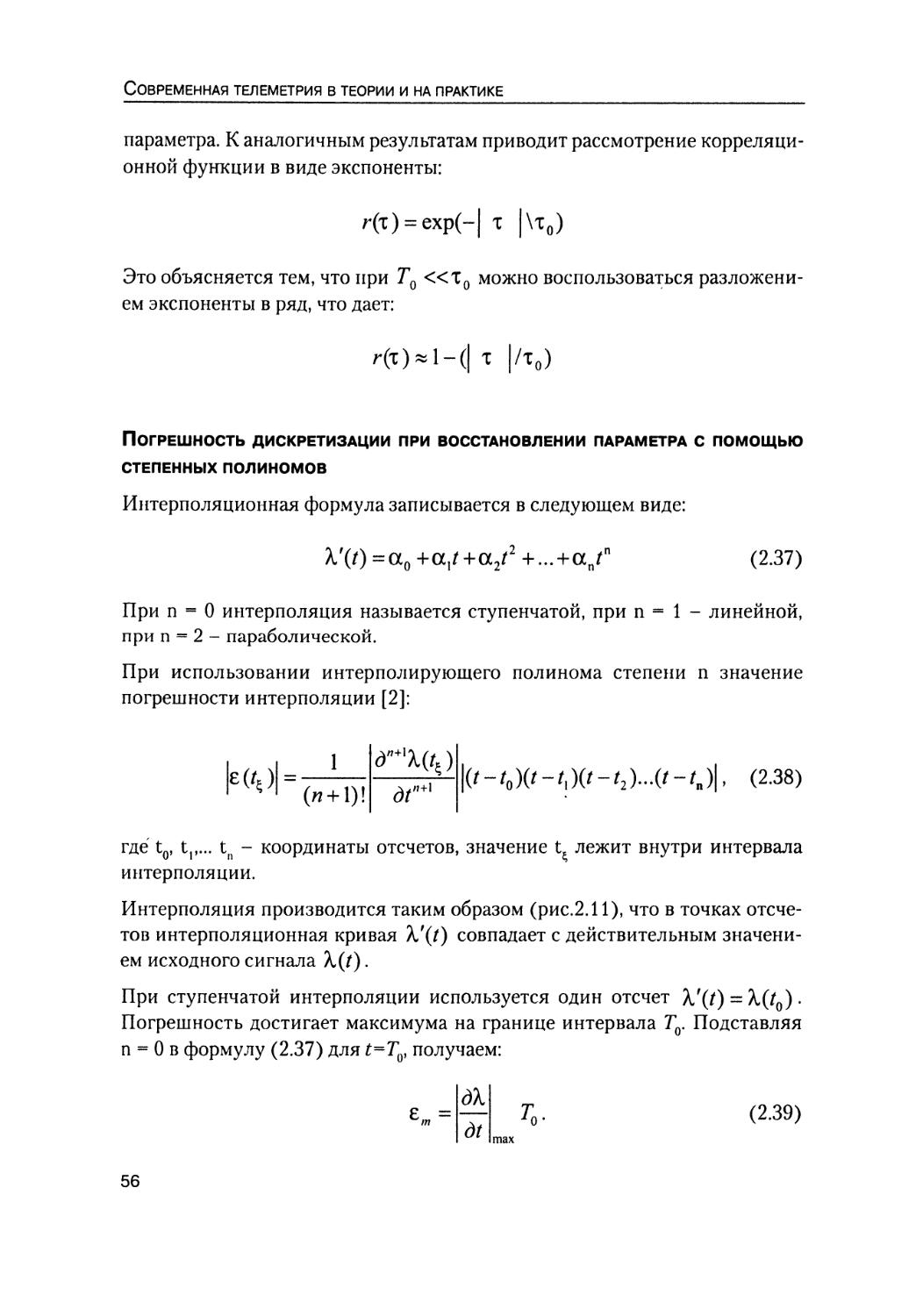
(2.8) определить поправку и с определенной надежностью исключить
систематические погрешности. Определение систематических погрешностей
на практике затруднено ввиду неизвестности истинного значения
величины параметра. Математическое ожидание результатов ряда измерений
представляет собой сумму математического ожидания погрешности и
истинного значения измеряемой величины:
A/(V]=k + A/[e].
Магемат ическое ожидание погрешности есть систематическая погрешность
системы Е(ц1п:
г^=М[еУ-М[Х']-Х.
Хорошего приближения математического ожидания А/[А/] к истинному
значению Л, можно достигнуть проведением достаточного числа серий
измерений, выполняемых различными методами и средствами со случайным
рассеиванием их центров, а затем усреднением всех результатов, то есть
вычислением АЛ где черта означает усреднение по множеству различных
методов и средств, а волнистая линия - усреднение при проведении
измерений в каждой серии.
47
Современная телеметрия в теории и на практике
2.2.4. Погрешности квантования функциональных
параметров
На вход устройств квантования и дискретизации поступает первичный
сигнал S(t), являющийся аналогом телеметрируемого параметра ^(0-
Выполняемое датчиком преобразование X(t) —> S(t) несущественно с точки
зрения рассмотрения процессов квантования и дискретизации. Поэтому
часто говорят о квантовании и дискретизации параметров, что хорошо
отражает существо этих процессов.
Квантование сигналов состоит в замене непрерывной шкалы
телеметрируемого параметра дискретной: параметр может принимать только
определенные, заранее установленные значения, называемые уровнями
квантования. Таким образом, значение параметра округляется до величины,
соответствующей ближайшему квантованному уровню.
Наиболее просто технически реализуется способ квантования, при котором
значения параметра в интервале квантования, ограниченном двумя
смежными уровнями, округляются до его нижней границы, то есть фиксируется
ближайший к значению параметра нижний уровень (рис. 2.5), Этот способ
находит наибольшее распррстранение, и поэтому целесообразно оценить
погрешности квантования применительно к нему.
▲
^'
|\
4"
3
X1 'X 2
I/1 X1
Ь_ bd
I
ров
>
^
t
Рис. 2.5. Квантование с фиксацией нижнего уровня
Появление погрешности квантования £кв, часто называемой шумом
квантования, амплитудные характеристики и зависимости погрешности
квантования £кв от величины параметра X показаны на рис. 2.6. При округлении
до нижнего квантованного уровня погрешность квантования равна
значению, определяемому следующим образом:
e„(/) = Ata(0-A.(0nPM^li<X<\Bi+Jf
где XKh j = id - квантованное значение параметра X •
48
Глава 2. Теория телеметрии
*ке А
-с кв ж
И/И/,
в)
Рис. 2.6. Процесс образования погрешности квантования
Найдем для этого случая математическое ожидание и дисперсию шума
квантования. Предположим, что заранее известна плотность вероятности
параметра Р(Х) Параметр распределен случайно в пределах интервала
квантования с условной плотностью вероятности:
Р(\\\,=Ш):
Р(К)
при X . < X < X ,. п ,
v кв I кв.(и!) '
Р » " WKB I "~ ' w КВ.(Ы)
где Р} - вероятность появления результата квантования X,Kai = id.
(2.17)
Величина 1 / Р. в выражении 2.16 играет роль нормирующего множителя.
Для того чтобы | k P(X)d X = 1, необходимо принять к = 1 / Р..
id
Принимая во внимание, что X ~ХШ +£кв> и используя выражение (2.16),
получаем условную плотность вероятности шума квантования:
»(е„Ч>^^.
Р,
Таким образом, условная плотность вероятности шума квантования с
точностью ло постоянного нормирующего множителя совпадает с плотностью
вероятности параметра в пределах взятого интервала квантования.
Безусловная плотность вероятности шума квантования находится путем
усреднения условной плотности по всем возможным значениям
квантованного сигнала:
^(0 = Z/,(e«^i)/? = ZP(e-+^)' -^екв^°- (2-18)
49
Современная телеметрия в теории и на практике
Число уровней квантования:
м=-+\.
d
(2 19)
Безусловная плотность вероятности шума квантования близка к равномерной
(рис. 2.7а). Это объясняется взаимной компенсацией наклонов слагаемых в
сумме (2.17). В том случае, если априорное распределение параметра
симметрично, плотность вероятностей Р(£кв) будет равномерной, так как при
суммировании условных плотностей вероятностей можно образовать пары,
каждая из которых будет давать постоянную плотность (рис.2.7 б). Следовательно,
при наиболее часто встречающихся нормальном и равномерном законах
распределения параметра шум квантования имеет равномерное распределение.
Р(е)
-d m£ £ х
Рис. 2.7. Плотности вероятностей шума квантования и ТМП
Из рис. 2.7а видно, что математическое ожидание погрешности квантования
тг ~—dl2. С учетом этого можно вычислить дисперсию погрешности
квантования:
д.
(2.20)
(2.21)
Среднеквадратическое значение погрешности квантования.
Значение средиеквадратической погрешности, приведенной к шкале
L -- d(M - \). выражается как
/т 1
(2.22)
кв L (Л/-1) 2л/3
Кван гование лежит в основе цифровых методов передачи: передается не
истинное значение параметра, а соответствующий ему номер квантованного
уровня, выраженный цифрой.
50
Глава 2. Теория телеметрии
Часто уровни нумеруются в двоичном коде. Разрядность простого
двоичного кода п определяется числом уровней квантования М:
п > log2 M. (2.23)
При этом п выбирается ближайшим целым числом.
Если задается среднеквадратическая погрешность YKB и требуется
определить число разрядов преобразователя, то:
п > log2
1
273^
■ + 1
(2.24)
Если среднеквадратическая погрешность квантования выражена в
процентах, то
п > log2
28,9
«KB
+1
(2.25)
Например, при укв = 1% п - 5.
Следует отметить, что при рассматриваемом способе квантования имеет
место систематическая погрешность, равная математическому ожиданию
d „ d
mz = . ина может оыть устранена введением поправки £поп =н—.
Рассмотренные погрешности носят принципиальный характер. Они
обусловлены методом преобразования и поэтому являются методическими.
Кроме того, процесс квантования сопровождается инструментальными
погрешностями, которые носят индивидуальный для каждого
преобразователя характер и вызываются такими причинами, как неточность изготовления
элементов схемы, изменение параметров элементов и т. п.
Инструментальные погрешности могут быть сведены до величины порядка 0,01 %.
2.2.5. Погрешности дискретизации функциональных
параметров
Общая информация
Дискретизацию обычно понимают как выборку значений передаваемого
параметра в некоторые моменты времени. Интервалы времени между
выборками могут быть одинаковыми и разными. В соответствии с этим
говорят о постоянном и переменном периоде опроса Т0 (рис. 2.8).
51
Современная телеметрия в теории и на практике
То
Т0 = const
а)
Рис. 2.8. Дискретизация ТМП
В понятие «дискретизация» можно вложить более широкий смысл: в
выбранные дискретные моменты времени фиксируются некоторые числовые
характеристики сигнала, по которым он может быть восстановлен с
заданной точностью. Таким образом, при дискретизации параметр X(t)
заменяется оценкой Xr(t), которая представляется в следующем виде:
w=2«л>/(0.
(2.26)
/=о
где ос,. - некоторые коэффициенты, определяемые при разложении
заданной реализации X(t) по базисным функциям ф,.(/). Эти коэффициенты и
представляют собой передаваемые данные. В частности, значения
коэффициентов ОС, могут быть отсчетами сигнала в дискретные моменты времени:
Г(о = ХМ/Т0)Ф(^/Т0).
(2.27)
/=о
Если параметр является непрерывной функцией времени со спектром,
ограниченным частотой Fm, то, в соответствии с теоремой В. А. Котельнико-
ва (теоремой отсчетов), он может быть представлен в виде отсчетов,
следующих с периодом Т0 > -г-^-. В этом случае базисная функция:
2F
ф(/) =
sin(27C Fj)
2kFJ
представляет собой реакцию на единичный импульс фильтра нижних частот
с граничной частотой Fm. Следовательно, при подаче на вход такого фильтра
последовательности отсчетов X(iT0) на выходе его, в соответствии с
выражением (2.26) точно восстанавливается исходный сигнал X'(t) = X(t).
Однако практически восстановление происходит с погрешностями,
обусловленными рядом причин. Во-первых, идеальный фильтр физически
неосуществим; во-вторых, в реальных условиях число членов ряда (2.26)
ограничено, а по теореме В. А. Котельникова п = ±оо; и в в-третьих, сами
52
Глава 2. Теория телеметрии
отсчеты не являются единичными импульсами и их временное положение
неточно привязано к тактовым точкам на временной оси.
Кроме того, параметры часто имеют ветви спектра малой интенсивности,
но большой протяженности, когда частоту Fm назначить трудно. Поэтому
восстановление по формуле (2.26) производится либо с помощью
оптимальных линейных фильтров, либо аппроксимацией сигнала A/(t) по
отсчетам, когда по переданным ординатам A,(iT0) восстанавливается исходный
параметр. Восстановление параметра X'(t) сопровождается погрешностями.
Погрешность дискретизации параметра существенно зависит от способа
его разложения и восстановления. Оценим погрешности дискретизации
для двух способов разложения сигнала.
Погрешность дискретизации при восстановлении функциональных
параметров с помощью фильтров
Для восстановления исходного сигнала будем использовать такой фильтр,
отклик которого на интервале времени Т0 совпадает с априорно известной
нормированной корреляционной функцией параметра г(х), показанной
на рис 2.9 а. Сигнал на выходе фильтра:
X'(/) = i>(iT0)r(/-/T0). (2.28)
/=0
Таким образом, между отсчетами осуществляется оптимальное линейное
прогнозирование значений параметра по известной величине
предшествующего отсчета.
На интервале времени х < Т0 прогнозируемое значение определяется с
погрешностью, характеризуемой дисперсией:
а2д=с1[1-г\х)], (2.29)
где Gx - дисперсия параметра.
г(т)
То * То '
а) б>
Рис. 2.9. Восстановление ТМП с помощью оптимального фильтра
53
Современная телеметрия в теории и на практике
Приведенная к шкале величина дисперсии предсказываемых значений
при шкале L&6ox определяется как:
а2 1
Y^T) = -^f = -[l-r2(T)] (2.30)
Из этой формулы следует, что дисперсия погрешности предсказания
оказывается разной в различных точках интервала времени Т0 (рис. 2.8 б).
Она равна нулю в момент отсчета и увеличивается, достигая максимума
при значении т, близком к Т0.
Произведем усреднение дисперсии на интервале Т0:
у1=т-}у^Сс)Л=^-1~}г2(х)Л
^0 0 ^ ^0 0
(2.31)
Рассмотрим пример. Предположим, что корреляционная функция сигнала
представляется в виде зависимости:
г2(т) = 1-Д
где х0 - интервал корреляции.
Вычислим по формуле (2.30) среднее значение дисперсии:
2 _J_
Ул~36
Г»-
6Г0т0-Г0
108тл2
Если F3(i, эффективная ширина спектра параметра, то, обозначив
а=-^:
Т 2F
, представим эту формулу в следующем виде:
2 6а
108а
2 '
(2.32)
Для обеспечения малых погрешностей период опроса приходится выбирать
гораздо меньшим, чем интервал корреляции. Поэтому а » 1 и
справедливо приближенное соотношение:
Y2 * — = —
Д 18а 9Fn
(2.33)
54
Глава 2. Теория телеметрии
Тогда:
F
9у2д
(2.34)
Из формулы (2.33) можно определить требуемое для заданной погреш-
Т
ности отношение периода опроса и интервала корреляции: — = 18у2.
При погрешности, равной 10%, период опроса примерно в пять раз меньше
X
интервала корреляции, а погрешность в 1% требует, чтобы — = 500, при-
0 X
чем при больших значениях дальнейшее увеличение значения —
приводе
дит к незначительному повышению точности.
Погрешность восстановления можно уменьшить, если по одному отсчету
использовать предсказание не только вперед, но и назад. В этом случае
максимум погрешности достигается в середине интервала опроса (рис. 2.10).
Назад
То t
Рис. 2.10. Зависимость дисперсии дискретизации при предсказании вперед и назад
Усредненное и приведенное к шкале значение дисперсии погрешности
определяется так же, как и в предыдущем случае:
1 \r\x)di
fa
1
36
о о
(2.35)
Для рассмотренной в примере корреляционной функции получаем:
Ы-\ 1
у1
36 Ш2 72d
(2.36)
В соответствии с этим соотношением на интервал корреляции приходится
порядка 140 отсчетов при однопроцентной погрешности восстановления
55
Современная телеметрия в теории и на практике
параметра. К аналогичным результатам приводит рассмотрение
корреляционной функции в виде экспоненты:
г(т) = ехр(-| т |\х0)
Это объясняется тем, что при Т0 «Х0 можно воспользоваться
разложением экспоненты в ряд, что дает:
г(т)*1-(| х |/х0)
Погрешность дискретизации при восстановлении параметра с помощью
степенных полиномов
Интерполяционная формула записывается в следующем виде:
А/(/)=а0+а1/+а/-к..+ап/п (2.37)
При п = 0 интерполяция называется ступенчатой, при п = 1 - линейной,
при п = 2 - параболической.
При использовании интерполирующего полинома степени п значение
погрешности интерполяции [2]:
■(ф
(и + 1)!
дп+Ш)
dt
и+1
|(/-/о)('-0('-'2)-('-'.)|. (2-38)
где t0, t,,... tn - координаты отсчетов, значение Ц лежит внутри интервала
интерполяции.
Интерполяция производится таким образом (рис.2.11), что в точках
отсчетов интерполяционная кривая X\t) совпадает с действительным
значением исходного сигнала X(t).
При ступенчатой интерполяции используется один отсчет X'(t) = X(tQ).
Погрешность достигает максимума на границе интервала Г0. Подставляя
п = 0 в формулу (2.37) для £=Г0, получаем:
Ы
(2.39)
56
Глава 2. Теория телеметрии
tr
и
t
и
и
L0 Ч И 12 13
Рис. 2.11. Восстановление ТМП с помощью интерполяционных полиномов
При линейной интерполяции используются два отсчета X(t0) и А,(/,) для
интерполяции параметра на интервале Г0. Погрешность интерполяции
достигает максимума в середине интервала Т0, поэтому L -t0 =Т0/2,
tx—U =Т0/2 . Используя формулу (2.37) и подставляя п = 1, получаем:
д2Х
dt2
т2
_2_
8
(2.40)
При параболической интерполяции используются три отсчета
Ц/0)Д(/,)Д(/2),причем ^ -/0 =Г0/2, /,-/5 = Г0/2, t2-t^ = ЗГ0/2,
л = 2 .При этом предполагается, что погрешность интерполяции достигает
максимума в середине между отсчетами. Действительное положение
максимума погрешности находится дифференцированием функции E(L) no t
V3
[см. формулу (2.37)], что дает^ = /, ± Т0. Следовательно, с достаточной
для инженерных расчетов точностью можно считать t^ «/, ± Т012 . Учитывая
это, по формуле (2.37) вычисляем:
£~ =
д2Х
dt3
16
(2.41)
Обычно из паспортных характеристик датчика известна граничная
частота первичного сигнала. Поэтому целесообразно перейти от производных
д"\ I dt" к спектральным характеристикам первичных сигналов.
57
Современная телеметрия в теории и на практике
Верхнюю оценку производной можно найти, используя неравенство С. Н. Берн-
штейна [2]:
|xw(o|^<d:hl, (2.42)
где C0W = 2л Fm; |^(0|тах ~ амплитуда отклонения параметра от
номинального значения. Так как отклонения параметра, как правило,
случайны, то 2А, -L>
max
Используя формулы (2.38), (2.39), (2.40) и неравенство (2.41), найдем
максимальное значение погрешности, приведенной к шкале, для ступенчатой,
линейной и параболической интерполяции:
К=^< (2-43)
к 2F2
6ди=-^- (2-44)
Ьдт=^Г- (2-45)
Погрешность интерполяции имеет нормальное распределение, поэтому
S„ « 37 . Это позволяет по известным значениям 8 для каждого вида
интерполяции найти среднеквадратические погрешности:
Уд*^Г- (2-46)
к F2
Г,«77£. (2-47)
Ул*2,5^. (2.48)
Используя эти формулы, по заданным погрешностям уд и граничной
частоте спектра параметра Fm можно найти требуемую частоту опроса.
При восстановлении функций по отсчетам обычно получаются плавные
кривые. Это говорит о том, что интерполяция имеет порядок не меньше
второго. Поэтому для расчета частоты опроса целесообразно пользоваться
формулой (2.47), из которой следует, что
F
F0*l,35-^_ (2.49)
58
Глава 2. Теория телеметрии
На практике требуется обеспечивать погрешность за счет дискретизации
порядка долей процента. Расчеты, выполненные по формуле (2.48),
показывают, что при погрешностях дискретизации 10"3 и 10'2, то есть при 0,1 и 1 %,
частота опроса должна превышать граничную частоту спектра первичного
сигнала соответственно в 13,5 и 6,25 раза. Это соответствует опытным
данным, согласно которым частота опроса должна превышать граничную
частоту спектра первичного сигнала в 5-10 раз.
2.2.6. Погрешности дискретизации сигнальных параметров
При передаче сигнальных параметров требуется определить момент
срабатывания контактного датчика (КД) с заданной погрешностью. Величина
погрешности может быть задана в виде максимальной либо в виде средне-
квадратической погрешности в фиксации момента срабатывания
контактного датчика.
Из-за дискретности опроса контактного датчика момент его
срабатывания фиксируется с запаздыванием хд (рис. 2.12). Таким образом,
погрешность в фиксации времени срабатывания изменяется в пределах от нуля
доТ0.
То
Рис. 2.12. Погрешность дискретизации сигнальных параметров
Если задана максимальная погрешность, то ХДп
v Д max о
Гп. Отсюда:
(2.50)
Распределение времени срабатывания контактного датчика мало влияет на
распределение погрешности тд, так как период опроса Т0 несоизмеримо
мал по сравнению с интервалом наблюдения. Распределение погрешности
59
Современная телеметрия в теории и на практике
Т
можно считать равномерным в пределах щ = —. Отсюда следует, что
Хд 2
Т
математическое ожидание погрешности тх = —, а ее дисперсия:
о; =-*ч
Хд 12 ■
Среднеквадратическая погрешность оценки срабатывания КД:
Эта формула может служить исходной для определения частоты
опроса КД, если задана среднеквадратическая погрешность определения его
срабатывания:
Расчеты по этой формуле показывают, что при Ст = 0,01 с частота опроса
^0=29Гц
2.2.7. Погрешность отсчета времени при передаче сигнальных
параметров в канале с шумами
Под воздействием помех в канале происходит фиксация ложных
срабатываний КД (рис. 2.13). Возникающая погрешность отсчета времени
значительно превышает другие составляющие общей погрешности и носит
аномальный характер. Оценим эту погрешность.
Предположим, что на интервале наблюдения Тн ожидается одно
срабатывание.
SA
Ложное Действительное
_i
t
Рис. 2.13. Срабатывание КД в канале связи с помехами
60
Глава 2. Теория телеметрии
Вероятность этого события рс = {F{jTII)~i. Вероятность искажения сигнала
равна р. Плотности вероятностей времени срабатывания и появления помехи
подчиняются закону Пуассона:
РЮ = рсе"', (2.53)
рЮ = ре-"'-. (2.54)
Предположим также, что р <рс.В противном случае количество информации
о времени срабатывания КД будет отрицательно.
Величина погрешности Д / = tc —tn > О . Распределение погрешности
находится по формуле:
00
p(At) = \pceKxpep(s-^dx = -&£- ерЫ при A t > О. (2.55)
Д, Рс+Р
Для этого распределения математическое ожидание погрешности:
М[ДЛ= £ . (2.56)
L J Ре(Рс + Р)
Здесь математическое ожидание погрешности выражено в единицах длин
интервала опроса Т0.
Для того, чтобы погрешность, обусловленная шумами, в среднем была мала,
можно потребовать, чтобы математическое ожидание было М[Д/] = 1,
при котором среднее значение шумовой составляющей соизмеримо с
погрешностью дискретизации. При этом условии требование к вероятности
искажения может быть сформулировано в виде:
Р*р1 (2-57)
Пример. Пусть Ти = 100 с, F0 = 100 Гц. Тогда рс=10*4 и вероятность ложного
срабатывания должна быть не более 108. Очевидно, что требования к
вероятности ошибочного приема сигнала при передаче сигнальных параметров
гораздо выше, чем при передаче функциональных параметров.
Так как функциональные и сигнальные параметры передаются
одинаковыми сигналами и нет смысла использовать разные сигналы, требуемая
вероятность ложного срабатывания р может быть обеспечена либо путем
простого их повторения, либо путем использования при передаче сигнальных
параметров помехоустойчивого кодирования.
61
Современная телеметрия в теории и на практике
Обычно повторение сигналов (рис. 2.13) имеет место, так как функция
включения передается дискретными отсчетами. В этом случае требуемая
достоверность может быть достигнута при обработке принятой
информации: решение о срабатывании должно приниматься не по первому
импульсу, а по тс подряд появившимся импульсам. Следовательно, при вероятности
искажения одного импульса/?:
рк*р2
Отсюда число повторений:
Пример. Пусть р = 10"4, рс = 104. Тогда к = 2, то есть решение нужнЬ
принимать по двум и более подряд следующим импульсам. Это, естественно,
снижает разрешающую способность системы и требует соответствующего
повышения частоты опроса.
Решение о срабатывании можно принимать по к импульсам на интервале п
импульсов опроса. Такой мажоритарный способ обработки сигналов часто
кратко называют «по к из п». Он используется при большом числе к, когда
требуется обеспечить низкую вероятность ошибки, и отличается от
простого повторения сигналов меньшей вероятностью пропуска сигнала.
2.2.8. Оценка шумовой погрешности в канале связи
Пусть информация о ТМП функционального типа передается по
симметричному каналу простым (безызбыточным) двоичным п -разрядным
кодом. Действие помех в канале связи приводит к искажению отдельных
символов кодовой комбинации и в конечном итоге к искажению всей
кодовой комбинации.
Введем следующие обозначения:
• р - вероятность искажения одиночного (элементарного) двоичного
символа. Для симметричного канала связи вероятность
трансформации 1 в 0 равна вероятности трансформации 0 в 1, то есть
р = Ро(\) = МО);
• 1-р - вероятность правильного приема одиночного символа;
• (1-р)" ~ вероятность правильного приема п -разрядной кодовой
комбинации.
62
Глава 2. Теория телеметрии
Тогда вероятность Рш ошибочного приема ^-разрядной кодовой
комбинации при условии, что элементы (символы) кода искажаются независимо
друг от друга, будет равна:
^=1-0-рГ=1-(1-С> + СУ-СУ+... + С>'')| (2.59)
п\
где С' = - число сочетаний из п элементов по i.
" (я-/)!/!
При относительно низком уровне шумов в канале связи (пр«1) можно
считать, что одновременное искажение двух и более элементов кодовой
комбинации маловероятно, и рассматривать только одиночные ошибки,
связанные с ошибочной регистрацией лишь одного из п символов, то есть:
Рош=Сп>р = лр. (2.60)
При этом одиночный сбой может произойти в любом месте кодовой
комбинации. В то же время последствия от искажения младших и старших
разрядов кодовой комбинации получаются совершенно разные. Вероятность
искажения конкретного одиночного символа в кодовой комбинации будет
равна р(1-р)п\ причем эта вероятность для различных символов одинакова.
Если в кодовой комбинации искажен только один символ, соответствующий
младшему разряду кода, то погрешность проявляется в переходе на один
из соседних уровней квантования, то есть она равна Аш = ±2° d , где d -
шаг квантования.
При искажении только второго символа ошибка вызывает переход через
два уровня квантования, то есть Аш =±2 d. Искажение третьего символа
приводит к погрешности Дш = ±2 d и т.д., в соответствии с весами
разрядов двоичного кода. Таким образом, будем считать, что погрешность,
вызванная действием шумов в канале связи, с вероятностью р{\ - р)"~х может
принимать только одно из следующих значений:
AM=±2°d;±2d\±2*d;..r,±2n-2d\±2"-ld. (2.61)
Наибольшая погрешность, возникающая при искажении старшего разряда,
как следует из выражения (2.60), Дш -±2п~ d. По абсолютной величине
она соответствует половине шкалы, поскольку 2п~ d = 2nd 12 - LI2.
Если считать распределение передаваемого параметра в шкале
равномерным, то число погрешностей со знаком плюс в выражении (2.60)
равно числу погрешностей со знаком минус. Следовательно, математическое
ожидание шумовой погрешности после усреднения по всем передаваемым
63
Современная телеметрия в теории и на практике
кодовым комбинациями М[Дш] = 0. С учетом этого дисперсия шумовой
погрешности определится из выражения:
<^d1P^-pT^'d)p,
/-о /=о
или:
oi=/*/2Z4'^2^ = (2V)2£ (2.62)
Отсюда среднеквадратическая погрешность, приведенная к шкале:
Y.=y = V3* (2>63)
Таким образом, дисперсия шумовой погрешности прямо пропорциональна
вероятности искажения символа/?. При р = 3-10~4 погрешность передачи
Уш = 0,01, то есть составляет 1%. Следовательно, если в отличие от
погрешностей квантования считать шумовые погрешности аномальными и за их
допустимый уровень принять погрешность в 1%, то она будет
соответствовать вероятности Раи =3-10" . Именно это значение вероятности
аномальных погрешностей обычно принимается при сравнении различных ИТС.
Из формулы (2.62) также следует, что приведенная шумовая погрешность
не зависит от значности кода п. Это объясняется тем, что с увеличением
п среднеквадратическое отклонение шумовой погрешности сш и шкала L
возрастают пропорционально 2п.
При обработке результатов измерений путем отбраковки аномальных
отсчетов, резко отличающихся от соседних, величина уш может быть
уменьшена в два или большее число раз.
Действительно, при отбраковке погрешностей, связанных с переходом
через 2м"1 уровней квантования или через половину шкалы I, из ряда (2.60)
исключается последний член. В этом случае суммирование в формуле (2.61)
производится от 0 до /2-2, что приводит к снижению дисперсии сш в четыре
раза, а аш в два раза.
Можно заметить, что отбраковка погрешностей Дш >—, связанных с
искажением двух разрядов кода с наибольшим весом, обеспечивает уменьшение
величины уш в четыре раза. Очевидно, чем медленнее изменяется телемет-
рируемый параметр, тем большим можно принять интервал отбраковки
шумовых погрешностей. Искажения старших разрядов кода, как легко
заметить, вызывают самые значительные погрешности, имеющие
характер импульсных помех. Специальные меры по защите старших разрядов
от помех могут быть реализованы путем помехоустойчивого кодирования.
64
Глава 2. Теория телеметрии
Формулы (2.61) - (2.63) были выведены в предположении равномерного
распределения параметра в шкале L и симметричности канала связи.
Однако при/?<0,7, что всегда выполняется в телеметрии, указанные
ограничения не оказывают существенного влияния на точность расчетов. Простое,
но весьма важное соотношение (2.63) широко используется при расчетах
циклических и адресных ИТС.
2.3. КОЛИЧЕСТВЕННАЯ ОЦЕНКА ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ
2.3.1. Количество информации, получаемой при измерении
функциональных параметров
Количество информации в любом сечении тракта РТС определяется
разностью начального и конечного незнания значения передаваемого сигнала.
Незнание количественно характеризуется энтропией. Начальная энтропия
определяется распределением параметра и погрешности, вносимой
оцениваемым участком тракта РТС. Закон распределения величины х лежит
в основе вычисления ее энтропии:
т
tf(x) = -£i>log2/>, (2.64)
где Р - вероятности появления х=хг
Если х является непрерывной переменной с плотностью вероятностей Р(х),
то характер х существенно не изменяется, если ввести дискретные хг х2,..., хц,
отстоящие друг от друга на равные расстояния Ах и имеющие вероятности
Р=Р(х)Ах. Замена будет тем более точной, чем меньше Ах. В соответствии
с формулой (3) энтропия:
00
Н(х) = - J P(x) log2 [P(x)]dx - log2Ax,
-00
где величина -/og^Ar зависит от выбранного интервала разбиения Ах. В
технических расчетах энтропия, как правило, используется для оценки количества
информации, определяемого разностью априорной и апостериорной энтропии.
При вычислении разности величина log2Ax, содержащаяся в вычитаемом
и уменьшаемом, исчезает. Поэтому эту величину очень часто исключают
из рассмотрения, полагая:
00
Н{х) = - JP(x) \og2[P(x)]dx. (2.65)
3 Заж 861
65
Современная телеметрия в теории и на практике
Очевидно влияние закона распределения на энтропию. Поэтому для
каждого закона распределения Р(х) нужно производить вычисление Н(х),
что в инженерной практике оказывается неудобным, а часто и ненужным.
В связи с этим находит применение вычисление энтропии по простым
формулам непосредственно через дисперсию случайной величины.
Рассмотрим методику такого вычисления.
Однозначного соответствия между дисперсией случайной величины и ее
энтропией не существует. Это можно показать на следующем примере.
Рассмотрим две погрешности, одна из которых распределена равномерно
в интервале ±А с дисперсией а2)} а вторая - нормально с дисперсией о2и.
Вычисленные по формуле (2. энтропии этих погрешностей
соответственно равны:
Нр = l0g22Д = log2 2>/Зс р, (2.66)
Я„=1оЕ2(а„72^Г), (2.67)
где I - основание натурального логарифма.
В этих формулах под знаком логарифма стоит произведение некоторого
коэффициента, определяемого видом закона распределения, и дисперсии
случайной величины. Это и является исходной предпосылкой для расчета энтропии:
Н=2Кру
где Кч - энтропийный коэффициент.
Сравнение энтропии нормального и равномерного распределения
показывает, что с информационной точ^и зрения они эквивалентны, если:
2V^=o,,V2rcT. (2.68)
Таким образом, нормально распределенная погрешность вносит в измерение
большую неопределенность, чем равномерно распределенная при той же
дисперсии. Мало того, можно сказать, что из всех возможных распределений
нормальное дает наибольшую энтропию. В применении к помехе
потребуется меньшая мощность, чем при любом другом распределении. С другой
стороны, для произвольно распределенной помехи характерно то, что лишь
часть ее мощности идет на эффективное дезинформирующее действие.
Значение энтропийного коэффициента равномерного и нормального рас-
2,07 1 . _
пределении отличается в~-— = 1,2 раза. При вычислении энтропии этих
1,73
распределений разница составит log21,2 =0,26 дв. ед. Если значение энтропии
66
Глава 2. Теория телеметрии
(или информации) составляет значительную величину (десять и более бит),
to замена одного распределения другим к большой погрешности расчетов
не приводит. Эти рассуждения применимы также и в том случае, когда
распределение погрешностей одномодальное и не имеет резкого выброса.
Например, экспоненциальное распределение имеет ^=1,95.
На практике при анализе прохождения сигнала в РТС встречается
задача суммирования большого числа погрешностей, возникающих в
процессе передачи. Если порядок погрешностей, вносимых на различных этапах
передачи, одинаков, то распределение результирующей ошибки согласно
предельной теореме теории вероятности стремится к нормальному уже при
небольшом числе составляющих. В этом случае без дополнительного
анализа с достаточной для практики точностью можно принимать Kd=2-i-2,07.
Понятие энтропийного значения может использоваться не только
применительно к погрешности, но и к любой случайной величине. Это положение
используется для расчета количества информации, получаемой в
результате измерения величины параметра.
Если в некотором сечении тракта РТС сигнал может быть представлен суммой
статистически независимых значений параметра X и погрешности в, то
дисперсия распределения этого сигнала равна сумме ох2+о2, где ох2 - дисперсия
параметра, а о2 - дисперсия погрешности. Начальная, или априорная, энтропия:
H,im=log2(2K3liJol+o2e),
где КШ1Ч - энтропийный коэффициент распределения сигнала и погрешности.
Конечная, или апостериорная, энтропия определяется распределением
погрешности:
HKOII=log2(2KJHmaJ,
где Нкоп - энтропийный коэффициент распределения погрешности.
Количество информации, получаемое в результате измерения:
/ = # -# =iog *^Wax+aE (269)
нач коп Ь2 v '
Кэко,Рг
Если к1мц=кк(и1, то получаемое в результате измерения количество информации:
/=Ilog2(l + %). (2.70)
2 ое
Формулы (2.69) и (2.70) позволяют рассчитать количество информации,
получаемое в результате однократного измерения параметра. Если рассматри-
67
Современная телеметрия в теории и на практике
вать ряд последовательных измерений, то приведенные формулы
оказываются неточными, так как не учитывают наличие корреляционных связей
между отсчетами. Эти связи уменьшают количество информации,
содержащейся в последующих отсчетах, так как начальная неопределенность
существенно уменьшается из-за того, что по предыдущим можно предсказать
последующие отсчеты.
Если коэффициент корреляции отсчетов р(Т), то по предшествующему
можно предсказать следующий отсчет с дисперсией предсказания:
<*l(T0)=al[l-p{Te)],
которая определяет начальную энтропию. Поэтому количество
информации, которое дает последующий коррелированный с предыдущим отсчет:
/ =11о8 <Ю+а
так как а «а., то / • <1.
2.3.2. Оценка количества информации о функциональных
ПАРАМЕТРАХ
Используя выводы предыдущего пункта, найдем формулы, удобные для
инженерных расчетов количества информации, которое содержится в
одном некоррелированном с соседними отсчете при различных законах
распределения параметра и погрешностей.
Пример 1
Параметр имеет равномерное распределение в пределах шкалы I, а
погрешность - нормальное с дисперсией ос2«ох2. Эти условия характерны
для расчета количества информации на выходе аналоговой РТС или
аналогового элемента тракта передачи, например датчика.
Так как Gi2«ak2} то априорное распределение суммы А,+е определяется в
основном параметром и является равномерным, а К = V3 . Принимая во
Д
внимание, что /С^ч=2,07, а СУ х = —j= > формулу (2.69) можно записать в виде:
Г К г \
/, = log
S
2,07 2V3
= -log2(4,14y)
68
Глава 2. Теория телеметрии
где у = —^ - приведенная к шкале погрешность измерений. Если она выра-
жена в процентах, то:
/,=4,6-3,321gY. (2.71)
В соответствии с этой формулой при погрешности измерения, равной 1%,
количество информации в одном отсчете равно 4,6 бит.
Пример 2
Параметр распределен равномерно в пределах шкалы I, и погрешность
распределена равномерно в пределах интервала d. Эти условия характерны
для процесса квантования. Обычно d«L, поэтому априорное
распределение суммы (Х+е) близко к равномерному, следовательно, к =к
Воспользовавшись формулой (2.69), получим:
L
/7=log2^ = log2l (2.72)
2>/з
Этот результат показывает, что количество информации равно значности
двоичного кода п на выходе устройства квантования 1=п.
Пример 3
Предположим, что параметр и погрешность распределены нормально,
причем L«6ar В этом случае к |ач= кк и при условии ае2«ах2:
/1=1о§2 —= 1°g2
vKy
= -l0g2(6y).
Нетрудно видеть, что в этом случае количество информации на отсчет
получается меньше, чем в рассмотренных выше ситуациях, если
величина у фиксированна.
2.3.3. Оценка количества информации о сигнальных
параметрах
Сигнальные параметры содержат информацию о дискретных во времени
событиях: исполнении команд, включении и выключении узлов аппаратуры и т. п.
69
Современная телеметрия в теории и на практике
При этом передается лишь сам факт совершения события без его
количественной характеристики. Для формирования первичных сигналов используются
контактные датчики, сигнал на выходе которых имеет вид функции включения.
В общем случае наблюдателя интересуют следующие данные:
• номер сработавшего датчика;
• время срабатывания;
• направление срабатывания контактного датчика: с высокого уровня
на низкий или с низкого на высокий.
При известном числе контактных датчиков NKd информация о номере
содержит:
IN = log2 NKd бит.
Количество информации о времени зависит от погрешностей, вносимых
в сигнал при передаче. Начальная энтропия определяется априорным
распределением моментов срабатывания и вычисляется по формуле:
где Кмац - энтропийный коэффициент; а - дисперсия априорного
распределения времени срабатывания КД.
Конечная энтропия определяется распределением ошибок, вносимых
элементами системы при передаче сведений о моменте срабатывания. Если это
распределение характеризуется энтропийным коэффициентом кпп и
дисперсией оп2, то конечная энтропия:
#™,=l°g2(2o„K„)-
Количество информации, получаемое в результате регистрации одного
срабатывания:
ср нач кон xwo2
Кяая
Если априорное распределение и распределение погрешностей одинаковы,
ток =к и
■ншч п
4,=1°g2
(<5 ^
w нач
\Сп J
Часто предполагают априорное распределение равномерным на
некотором интервале Г, где ожидается срабатывание. Если при этом погрешность
70
Глава 2. Теория телеметрии
распределена равномерно на интервале Г, что имеет место, если учитывать
только погрешность из-за дискретизации, то количество информации,
получаемое в результате регистрации одного срабатывания:
1сР=1°82
(т \
к?о;
= \og2(Fo-T0). (2.73)
Эту формулу можно интерпретировать следующим образом. За время
наблюдения получается FTu отсчетов. Для регистрации срабатывания
необходимо передать номер отсчета, на котором зафиксировано срабатывание.
Приведение формулы для оценки количества информации о времени
срабатывания КД позволяет произвести расчеты в общем виде без учета
способов передачи, опираясь только на знание погрешностей. В то же время
представляет интерес оценка количества информации для широко
применяемого способа кодирования, когда опрос КД происходит дискретно во
времени с интервалом То.
Разомкнутое положение соответствует отсутствию, а замкнутое - наличию
импульса. Учтем потери информации, обусловленные помехами в
радиоканале. При этом канал считаем симметричным, то есть вероятности
искажения нулей и единиц одинаковы: Ро(1)=Р1(0)=Р.
Априорное распределение вероятности срабатывания считаем равномерным:
FT
О Н
Появление ошибки на интервале наблюдения приводит к фиксации
ложного срабатывания. Вероятность того, что произойдет это событие,
определится вероятностью ошибки Р.
Найдем количество информации, содержащееся в одном отсчете. Априорная
энтропия определяется вероятностью срабатывания Рс, апостериорная -
вероятностью ошибки р:
Нпач = 'Рс l082 Рс ~ О - Рс ) 10§2 О - Рс X
Нт = -р log2 рош - (1 - р ) log2 (1 - р ).
Количество информации о времени срабатывания контактного датчика,
содержащееся в одном отсчете, определяется разностью Нтч - Нкон:
Ix=-p^g2pc-{\- pc)\og2(\- pc) + p\og2p + (\- p)\og2{\- р)
Количество информации за время наблюдения 7^/,-fT.
71
Современная телеметрия в теории и на практике
Если интенсивность помех мала (р«рс), то справедливы приближенные
соотношения:
/,=/>>g2- = %^. (2.74)
р FT
Г с о и
I^Log.FJ,,. (2.75)
Как следовало ожидать, формулы (7) и (10) совпадают.
Из формулы (8) следует, что для того, чтобы количество информации,
получаемой о времени срабатывания КД, было положительным, необходимо,
чтобы р«рг
Для того, чтобы получить представление о требованиях к каналу,
рассмотрим пример. Пусть время наблюдения Г = 1000 с, Г = 100 Гц. Тогда
необходимо, чтобы р«р = = 105. Следовательно, требования к верности
6 F0T„
передачи отсчетов сигнальных параметров оказываются более жесткими,
чем функциональных.
Второй вывод, который можно сделать, заключается в том, что каждый
отсчет несет количество информации существенно меньше, чем один бит.
Так, для Г=1000 с, F = i00 Гц:
w.i^'k*(jr-r-)=JSb£=i.6.iir'<fc,.
' ' Вг/>, FJ. 105
Очевидно, что при использовании рассмотренного способа кодирования
сигналов КД сообщения обладают чрезвычайно большой
избыточностью: каждый отсчет может нести 1 бит, а при данном способе он
содержит 1,6-10'4 бит информации, то есть 99,84% информации оказывается
избыточной.
Количество информации о факте наступления события составляет одну
двоичную единицу. Оно определяется числом срабатываний за время
наблюдения.
Таким образом, общее количество информации, получаемое при
регистрации срабатывания КД, определяется сведениями о номере КД, времени
и направлении срабатывания:
I-IN+I, + 1. (2.76)
Рассмотрим пример. Число параметров равно 1000, время наблюдения
составляет 100 с, и среднеквадратическая погрешность передачи времени
имеет порядок 102секунд.
72
Глава 2. Теория телеметрии
2.4. АДАПТИВНЫЕ ПРОЦЕДУРЫ В ТЕЛЕМЕТРИИ
2.4.1. Проблемы сжатия
Непрерывное развитие телеметрии в связи с расширением объемов
испытаний разнообразной техники вызвало повышенный интерес к вопросам ,
сжатия объема передаваемых данных.
Сжатие данных приобретает все большее значение, так как
телеметрические системы находят не только временное применение при создании
какого-либо нового объекта, но и становятся постоянно действующей «нервной
системой» сложных автоматизированных комплексов, контроль состояния
которых и управление которыми требуют огромных и все возрастающих
потоков информации. При этом по крайней мере три стимула определяют
необходимость решения проблемы сжатия данных и применения устройств
«сжатия»:
1. Уменьшение огромных потоков цифровых данных с целью
разгрузки, упрощения и рационального использования каналов (в т. ч.
радиоканалов), сужение полосы пропускания каналов, сокращение
объемов памяти выходных регистрирующих устройств.
2. Повышение оперативности в управлении сложными объектами
благодаря быстрому получению необходимой информации из
сжатых данных.
3. Большая экономия, достигаемая при надлежащем сжатии данных,
за счет упрощения и уменьшения объемов регистрирующих
устройств.
Это новое самостоятельное направление в радиотелеметрии вызвало к
жизни рассмотрение и решение ряда математических, экономических и
инженерных проблем.
К числу математических проблем можно отнести разработку теории
оптимальных представлений поведения непрерывных процессов с учетом их
свойств и априорных данных; разработку и исследование алгоритмов,
обеспечивающих отбор существенных координат; составление вычислительных
программ и другие вопросы.
К числу экономических проблем следует отнести оценку экономического
эффекта от использования устройств сжатия данных по сравнению со
средствами, затраченными на другие способы передачи потоков данных,
например на прокладку широкополосных наземных каналов связи или доставку
73
Современная телеметрия в теории и на практике
данных в центры обработки с помощью каких-либо транспортных средств;
оценку стоимости обработки несжатых данных. В конечном итоге должно
быть показано, к какой экономии в стоимости передачи и обработки
информации может привести сжатие данных.
К числу инженерных относится широкий круг проблем, включающий
в себя установление области применения методов и алгоритмов сжатия
данных для разных классов телеметрируемых процессов, моделирование
телеметрической системы с целью установления конечного полезного
эффекта от применения алгоритмов сжатия, разработку принципов построения
систем и создание устройств сжатия данных, удовлетворяющих
требованиям заданной точности воспроизведения, рациональным формам
представления информации; вопросы достоверной передачи сжатой информации
и целый ряд других задач.
Столь многогранные и большие проблемы объединяют интересы потребителей
информации - специалистов, занимающихся сбором, передачей и обработкой
данных, а также конструкторов радиотелеметрических систем с интересами
математиков, занимающихся разработкой методов и алгоритмов сжатия.
Для решения задач сжатия данных разработан ряд алгоритмов,
основанных на методах теории случайных функций, конструктивной теории
функций и теории аппроксимации. В настоящее время уже нет сомнений в том,
что сжатие данных получило все права как одно из направлений развития
техники. Об этом свидетельствует то, что ряд методов сжатия данных
прошел период критических исследований в лабораториях и получает
воплощение в аппаратуре.
В связи с разнообразием путей решения проблемы сжатия данных, большим
количеством методов и алгоритмов, отсутствием единства в терминологии
и выборе критериев оценки эффективности устройств сжатия
необходимо выработать общий подход к решению указанной задачи и на его основе
no-строить систему классификационных характеристических признаков, а
также провести корректное сравнение методов сжатия.
2.4.2. Задачи и общая характеристика техники сжатия
данных в телеметрии
При передаче данных цифровыми телеметрическими системами, к которым
относятся многие системы телеизмерений, под данными об измеряемом
параметре понимается совокупность величин, даже если параметр является
функцией непрерывного времени. В телеметрических системах с
циклической дискретизацией избыточность данных возникает даже при правильно
74
Глава 2. Теория телеметрии
выбранной частоте опроса датчиков вследствие того, что жесткий цикл
коммутации не учитывает «динамических» свойств контролируемых
параметров, в результате чего при мало меняющихся во времени значениях
параметра частота опроса остается той же, что и на участках «высокой
динамичности», где она является необходимой.
Под динамичностью понимается изменение во времени
(неинвариантность поведения) тех свойств контролируемого параметра, которые
положены в основу выбора вида представления поведения этого параметра.
В частном случае динамичность соответствует ее интуитивной
интерпретации как скорости изменения параметра, то есть характеризуется
производными функции, описывающей поведение параметра во времени.
Большая подробность описания параметра на участках с малой
динамичностью не всегда является необходимой, часто требуется подробное
описание параметра на переходных участках. Устранение избыточных данных
приводит к восстановлению поведения параметра с одинаковой верностью
на всех участках, при этом появляется резерв информативности
телеметрической системы, который может быть полезно израсходован.
Таким образом, целью сжатия данных является формирование
минимального количества величин, обеспечивающих представление в общем
случае непрерывного поведения параметра с заданной верностью.
Совершенно естественно, что при такой постановке задачи передаваемыми
величинами необязательно должны быть значения параметра в точках опроса,
ибо при заданной верности и определенном виде исходного параметра
минимизация может быть достигнута лишь путем соответствующего выбора
вида этих величин.
Последние в минимальном их количестве как раз и являются тем
обобщенным концентрированным математическим представлением, которое
позволяет количественно оценить информацию, содержащуюся в передаваемых
данных и являющуюся «полезной для потребителя».
При таком определении информация должна оцениваться количеством
измеренных величин и точностью их отсчета, ибо каждую передаваемую
величину можно рассматривать как «обобщенное» измерение параметра
в отличие от ординат параметра в точках опроса, которые являются
измерениями в обычном смысле.
Если представить информационный канал телеметрической системы
(для одного датчика) в виде модели, показанной на рис. 2.14, то
рассматриваемая задача сжатия данных относится к кодеру источника.
Источник (датчик) формирует электрический сигнал, являющийся
материальным носителем сообщения об измеряемом физическом параметре,
75
Современная телеметрия в теории и на практике
которое содержит интересующую потребителя информацию. Сообщение
может быть передано телеметрической системой целиком или по частям.
В последнем случае сигнал датчика несет совокупность сообщений.
При рассмотрении функций кодера источника под «телеметрируемым
сигналом» будем понимать сигнал датчика, поскольку он является для кодера
первичным. В этой терминологии задача кодера источника заключается в
компактном дискретном представлении сообщений датчика, составляющих
«телеметрируемый параметр».
Задачей кодера канала связи является согласование сообщений,
поступающих из кодера источника, с каналом связи с целью наиболее эффективного
использования последнего (синтез оптимальных кодов). В частности, в
кодере канала связи может быть введена определенная избыточность в
передаваемых сообщениях, определяемая статистическими характеристиками
сообщений и помех.
Декодер канала связи и декодер сообщений совершают преобразования,
обратные, соответственно, кодеру канала и кодеру источника.
В настоящей работе основное внимание уделено методам обработки
сообщений в кодере и декодере источника. Вопросы синтеза оптимальных кодов
представляют самостоятельную задачу и здесь не рассматриваются.
Приведенная модель телеметрической системы не исчерпывает возможных
вариантов применения устройства сжатия данных, роль которого в
рассмотренном выше случае играет кодер источника.
Устройство сжатия данных может быть поставлено во многих сечениях
телеметрического тракта, в частности, перед регистрирующим устройством
или вычислительной машиной, осуществляющей обработку данных. В этих
случаях целью сжатия данных является сокращение объема ЗУ или
уменьшение времени вычислений.
JL.
Канал
связи
Рис. 2.14. Модель информационного канала телеметрической системы
Источник
сообщений
(датчик)
Кодер
источника
ы
Кодер
канала
связи
Потребитель
Декодер
сообщений
Декодер
канала
связи
76
Глава 2. Теория телеметрии
Существуют и другие полезные варианты применения в телеметрии
математического аппарата представления поведения телеметрируемых
параметров, являющегося основой методов сжатия данных. Здесь имеется в виду
прежде всего возможность снижения частоты циклического опроса
датчиков при использовании на приемной стороне эффективных методов
восстановления параметра как функции времени.
Не исключая этих возможностей, будем для определенности рассматривать
наиболее сложный случай применения устройства сжатия,
соответствующий рис. 2.14, а в дальнейшем вернемся к некоторым другим.
В наиболее общей формулировке под сжатием данных можно понимать
сокращение объема передаваемых сообщений до некоторого
допустимого минимума.
Постановка задачи и выбор метода сжатия данных зависят от того
смысла, который вкладывается в понятие «полезная информация». Обычно при
телеизмерениях предметом исследования является поле измеряемых
параметров, поэтому конечным полезным для потребителя результатом
телеизмерений может являться информация, необходимая для анализа
контролируемого объекта. Тогда задача сжатия должна быть поставлена как задача
получения данных, достаточных для проведения такого анализа.
Методы сжатия, решающие эту задачу, должны предусматривать
совместную обработку в одном устройстве сигналов всех датчиков,
характеризующих поле измеряемых параметров.
Такая обработка в принципе возможна, и она может обеспечить
существенное сокращение объема передаваемых данных, поскольку между
различными видами телеметрируемых на объектах параметров существуют
сильные взаимные зависимости, обусловленные тем, что эти параметры
характеризуют различные стороны одних и тех же физических процессов,
протекающих на телеметрируемом объекте. Однако для практической
реализации методов сжатия данных о совокупности параметров необходимы
априорные данные о характере этих зависимостей, предполагающие знание
если не функциональных, то хотя бы статистических (корреляционных)
связей между измеряемыми параметрами.
В условиях, когда такими сведениями исследователь заранее не
располагает (например, при испытаниях новых объектов или в тех случаях,
когда сами эти взаимосвязи являются предметом исследования),
задачей сжатия данных является получение и передача минимального
количества данных о каждом параметре.(точнее, о параметре в каждой точке
измерения), что достигается путем независимой обработки сигналов
отдельных датчиков.
77
Современная телеметрия в теории и на практике
2.4.3. Информационное содержание задачи сжатия данных
Количество информации в телеметрическом сообщении
Рассмотрим случай, когда данные о каждом телеметрируемом процессе /(/)
передаются последовательностью сообщений, которые формируются
независимо (автономно) от сообщений о других телеметрируемых процессах.
Последовательность сообщений V^ , F , К должна позволить восстановить
процесс /* (t), воспроизводящий /*(/) с требуемой потребителем вернЬстью.
Положим, что сообщение V^' формируется в результате обработки
(обозрения) процесса f(t) на интервале времени Г , сообщение V^ - на
последующем интервале времени 7^2' и т. д.
Формируемые сообщения могут быть различного вида: аналоговые, ана-
лого-дискретные и цифровые (дискретно-квантованные). Количество
информации, которое содержится в каждом передаваемом сообщении I(V),
находится по известным соотношениям теории информации.
Рассмотрим сообщение V^' в цифровой форме. Это сообщение может
содержать несколько координат (чисел) Vj9K 9V„ 9 . В современных
системах такие сообщения формируются путем опроса датчиков и передачи
информации о текущих значениях f(t) в моменты опроса. Тогда реализация
каждой координаты Vj определяется значением f(t'.) , где t*., j -й момент
опроса датчика на интервале Т^'\ j = 1,К , и.. Величина Vj может быть
представлена числом Vj = 0,1, К , (М -1), которое определяется из
условия квантования шкалы процесса /(/), например: Vjd < f(tj p (Vj + \)d,
где d = Ш/М - шаг квантования; Ш -шкала процесса; М -число
уровней квантования.
В общем случае будем полагать, что различные Fj , V} К ,
координаты сообщения могут иметь разное число уровней квантования, так что
VP = 0,l,K ,(Mj-\).
В дальнейшем, рассматривая сообщение V0) = V , для упрощения
написания формул будем опускать индекс /.
Согласно общим соотношениям теории информации количество
информации, содержащееся в сообщении V , равно:
Ш А/,-1 А/„-1 п
/(П = -2> I £W«K K^og.P^lV^K VJ (2.77)
К,=0 Vn=0 J=\
78
Глава 2. Теория телеметрии
где Pj(V^K Vn) - вероятность того, что передаваемые координаты
сообщения имеют некоторый определенный набор значений Vl9K Vn\
Pj(Vj | Pj,K Vn) - условная вероятность того, что у-я координата имеет
значение V. при остальных координатах, равных Fj,K Vn.
В частном случае, если все координаты статистически независимы, а их
уровни квантования равновероятны, то:
I(V)^±\o%2M^ (278)
Если при этом М] - М2 = К = Мп = М, то в случае, когда йрордина-
ты статистически независимы, вероятности передачи различных уровней
квантования неодинаковы: I(V) = ~jT £, S^^/) x '°&2 ^С/) •
Если статистические связи имеют место лишь между смежными
координатами, так что P(Vj j V^K Vn) = Р(у. \ Vj_x), j = 2,К , /7, a
P(VX | F2,K ,ГИ) = P(Fj), то из (2.77) получим:
Для характерного случая, когда передаются (с ошибкой квантования)
значения телеметрируемого процесса в точках опроса /*(/,) /(/,) К , для
воспроизведения на земле процесса /(/) с небольшой ошибкой период опроса
Т0 = tj —/,-_! приходится выбирать небольшим.
При этом, как правило, имеют место сильные корреляционные связи между
несколькими подряд передаваемыми координатами сообщения. Как^идно,
даже в этом, казалось бы, простом случае для оценки величины I(V)
потребуется знание многомерных функций распределения /(/).
Знание I(V) полезно с той точки зрения, что позволяет оценить предельно
малую пропускную способность С канала связи и объем памяти
запоминающих устройств, обеспечивающие получение потребителем информации,
необходимой и достаточной для того, чтобы функция f*(t)
воспроизводила /*(/) с требуемой верностью.
Так, в частности, если последовательность формируемых сообщений
—(О —(2)
V , V , К может быть представлена как марковский процесс, то
минимальная пропускная способность канала С определяется основной
теоремой Шеннона. Эта теорема утверждает, что последовательность сообщений
V 9V ,К , формируемых на интервалах времени Г(1),Г(2),К , может
79
Современная телеметрия в теории и на практике
быть преобразована (закодирована) в новые сообщения, так что вся
необходимая информация будет передана со сколь угодно малой вероятностью
ошибок при:
С = 1 + Е бит/с, (2.79)
где £ - как угодно мало; / = I/T , а / - количество информации,
содержащееся в кодируемой последовательности сообщений V ,V , К .
Однако для реализации такого оптимального кодирования опять-таки
потребуются достаточно глубокие знания статистических характеристик те-
леметрируемого процесса /*(/).
Из сказанного следует, что при ограниченных априорных знаниях
статистических характеристик /*(/) нельзя, по существу, ни оценить I(V), ни
использовать эту оценку, если бы все-таки она как-то была получена.
Поэтому при решении практических задач формирования оптимальных
сообщений и сжатия данных представляется целесообразным оперировать
не оценками количества информации I(V), а более простой
характеристикой - объемом сообщений (данных) J(V).
Для случая цифровой передачи объем сообщений определим по формуле,
идентичной (2.78):
J(V) = i,logMJt (2.80)
и измерять его будем в битах.
Таким образом, объем сообщения численно равен количеству информации,
содержащемуся в сообщении, при условии, что все координаты этого
сообщения статистически независимы, а их уровни квантования равновероятны.
Такое определение объема сообщений оправдывается следующими
соображениями.
1. Каналы связи и ЗУ на практике строятся так, что все
сформированные кодовые комбинации (слова) передаются и регистрируются как
равноправные, то есть как равновероятные.
2. Четко разделяются функции устройств формирования сообщений
каналов связи или ЗУ. Устройства формирования сообщений (в т. ч.
и устройства сжатия) должны, учитывая всю априорную и текущую
информацию о телеметрируемом процессе /(/)> а также запросы
потребителя, сформировать сообщения, чтобы при минимальном
объеме их (J=;Jmm) была передана информация, необходимая
80
Глава 2. Теория телеметрии
для получения с требуемой верностью. Каналы связи и ЗУ имеют
задачей лишь передачу или запоминание сообщений, с которыми могут
обращаться как с равноправными.
3. Сравнительная оценка эффективности различных алгоритмов
работы устройств формирования сообщений может вестись по величине
объема сообщений, для расчета которой не требуется
труднодоступной оценки количества содержащейся в них информации.
4. Если известны статистические характеристики /(/), то в
принципе могут быть сформированы сообщения, у которых J = /, то есть
шенноновское количество информации в сообщении дает оценку
нижней грани его объема. Однако, зная, что такая оценка существует,
мы не всегда можем и не всегда обязаны ее отыскивать.
Следует отметить, что на практике так часто и поступают, то есть оценивают
не величину / , а величину J, но при этом величину / называют
количеством информации в сообщении. Такое неразличение понятий об объеме
сообщений J и количестве содержащейся в них шенноновской
информации / ведет к ряду неправильных истолкований и путанице в терминологии.
Рассмотрим теперь случай формирования аналого-дискретных сообщений,
когда координаты Pj, F2, К 9Vn - случайные величины, которые могут
принимать непрерывное множество (континиум) значений в пределах некоторой
шкалы. Так, для характерного случая передачи текущих значений f{t) в
точках опроса будет V} = /(/,), V2 = f(t2), К , V„ = f(tn) .
Объем аналого-дискретных сообщений
Теория информации указывает, что точная передача значений VX,V2,K
невозможна, т. к. для этого потребуется иметь бесконечно большие
пропускную способность канала С и емкость запоминающих устройств.
К счастью, в этом нет никакой нужды, тек как уже первичные
преобразователи (датчики) неизбежно вносят ошибки, и нет смысла требовать, чтобы
ошибки передачи и регистрации совсем отсутствовали; достаточно, чтобы
они были невелики.
Минимальное количество информации, которое должно быть передано
аналого-дискретными сообщениями, определяется е - энтропией
Колмогорова:
tfe=inf/(§,?) (2.81)
при р (F*, F) - рдоп, (0(Q | V) - var. где inf означает вычисление нижней
81
Современная телеметрия в теории и на практике
грани; I(Q, V) - количество шенногювской информации, содержащейся
в принятом с искажениями сообщении Q о переданном сообщении V;
p(F , F) - некоторый показатель верности воспроизведения множеством
реализаций / (/), восстанавливаемых на приемной стороне множества
реализаций / (/) телеметрируемого процесса; рдоп - допустимое
значение показателя верности; (0(Q\ V) - условная плотность распределений
вероятности Q при известных V.
Вычисление I(Q, V) в (2.81) представляет собой задачу еще более
сложную, чем в случае квантованных координат Vf.. Для оценки I(Q, V) здесь
также потребуются глубокие знания вероятностных характеристик /(/), и,
наконец, без знания этих характеристик мы не можем такой оценкой
воспользоваться, так как эти характеристики нужны для отыскания
алгоритмов оптимального кодирования.
Таким образом, и при формировании аналого-дискретных сообщений для
решения задач формирования оптимальных сообщений (сжатия) следует
ориентироваться на более простую характеристику - объем сообщений.
Объем аналого-дискретных сообщений может быть определен по формуле,
идентичной (2.80), если в ней число Мj - заменить некоторым
эквивалентным числом уровней квантования М]экв.
Искажение координат аналого-дискретного сообщения
характеризуется обычно среднеквадратичной погрешностью у., приведенной к шкале.
Известно также, что среднеквадратичная погрешность квантования,
приведенная к шкале, равна:
Ч,~=Уа~Мг (2.82)
где акв - коэффициент, зависящий от распределения погрешностей квантования.
Для равномерного распределения акв = 2V3, а для треугольного -(Хкв = V6 .
Приравнивая у .кл = у , получаем эквивалентное число уровней квантования
MJm = 1/«Л> • (2-83)
Следует, однако, отметить, что если объем сообщения и его длительность Т
полностью определяют требования к цифровой радиолинии (так как очень
просто реализовать устройства перекодирования сообщений), то для линии
с передачей аналого-дискретных сообщений (например, с модуляциями
ФИМ-AM, АИМ-ЧМ) нужно знать конкретные значения числа координат
п и допустимых среднеквадратичных погрешностей - у,,К ,уя. Обычно
82
Глава 2. Теория телеметрии
такие радиолинии строятся так, что у, = у2 = К = уп, тогда объем
сообщения может характеризоваться двумя цифрами - и, у :
У = •/(/!,?). (2.84)
Объем сообщений и количество передаваемой информации
В литературе встречаются следующие термины:
• устранение избыточности информации,
• уменьшение избыточности информации,
• сжатие информации,
• уменьшение избыточности сообщений,
• сжатие сообщений,
• сжатие данных и др.
Следует прежде всего отметить, что более точными являются термины,
трактующие об устранении избыточности или сжатии сообщений или данных.
—(1) —(2)
Рассмотрим два сообщения V и V с квантованными ординатами
PJ(1),K F„(1) и PJ(2),K V^2\ Допустим, что щ <nv число уровней квантования
у всех координат одинаково, то есть М,(1) = К М^] = М\2) = К = М(п2) = М
и Г(1) =Г(2). Пусть в сообщении V координаты сильно коррелирован-
— (2)
ны, а в V - не коррелированны. Тогда возможно положение, когда
—(2) —(1)
I(V )>I(V ).
В том, что это так, легко убедиться из формул, приведенных выше.
Очевидно, что передача V больше загрузит обычный канал связи, чем пере-
— (2) —(2) —(1)
дача V . Допустим, что I(V ) = I(V ) , тогда процесс преобразования
— (1) —(2)
V —> V нужно рассматривать как сжатие сообщения, позволяющее
разгрузить канал связи и ЗУ, в то же время количество передаваемой
информации сохраняется (информация не сжимается).
В качестве простого примера рассмотрим случай, когда априори известно,
что f(t) - непрерывная кусочно-линейная функция с изменением
(скачками) первой производной в моменты времени /,, /2, К .
Очевидно, что для восстановления f{t) достаточно знания ее текущих
значений f(t{) f(t2) К . Текущие значения f{t) в другие.моменты времени
83
Современная телеметрия в теории и на практике
либо вовсе не несут информации об /(/), либо несут очень мало
информации, поскольку позволяют при соответствующей обработке уменьшить
влияние ошибок, вносимых системой при передаче f(tx) f(t2) К .
Итак, очень важное для разгрузки радиолинии и ЗУ сильное уменьшение
объема сообщений может быть совсем не связано с уменьшением
количества передаваемой информации либо может сопровождаться незначительным
уменьшением этого количества.
По этим соображениям мы считаем предпочтительнее использовать термин
«сжатие сообщений» (данных).
Сжатие объема сообщений
Важной задачей является именно сжатие объема передаваемых сообщений
при обеспечении передачи (с учетом вносимых системой ошибок) всей
необходимой потребителю информации, то есть чтобы при данном объеме
сообщений передавалось максимальное количество информации.
Интересно заметить, что К. Шеннон в своей основополагающей работе
«Математическая теория связи» применяет термины «избыточность
английского текста» или «избыточность языка» и нигде не говорит об избыточности
или сжатии информации.
Избыточность сообщений (данных), по Шеннону, определяется формулой:
R = (I-I0)/I0, (2.85)
где / — количество информации, фактически передаваемое используемым
алфавитом (набором) сообщений; 10 - максимально возможное
количество информации, которое может быть передано используемым алфавитом
сообщений.
Таким образом, с точки зрения теории информации задача сжатия данных
заключается в выборе таких алгоритмов формирования сообщений, при
которых содержащаяся избыточность была бы минимальной.
Учитывая введенную ранее характеристику - объем сообщения, мы можем
сжатие данных формулировать как задачу формирования сообщений с
минимальным объемом при обеспечении требуемой верности f (t).
Верность / (t) в общем случае может характеризоваться несколькими
показателями, например среднеквадратичной ошибкой, вероятностью
аномальных ошибок и др.
84
Глава 2. Теория телеметрии
В таком случае показатель верности будет^представлен несколькими
числами и может рассматриваться как вектор р (F *, F) .
Итак, задача сжатия сообщения математически сводится к выполнению
условия:
•/ = •/«10 (2-86)
при p(F\F) = pdon.
Если все координаты сообщения имеют идентичные характеристики -
число уровней квантования М или допустимую среднюю квадратичную
ошибку, то условие (2.86) можно записать в форме:
" = ",„,„ (2-87)
при p(F , F) = рдоп; 8, = 5, = К = 8„ = 8 = const, где 8, - некоторая
характеристика ошибки, вносимой в координату V., определяющая загрузку
канала связи или ЗУ (8 . = уу или 8у = 1/А/ ■ ) при передаче или
запоминании Vj.
2.4.4. Математическое содержание задачи сжатия данных
Постановка задачи
Решение задачи сжатия данных существенным образом зависит от цели
выполняемых измерений. Здесь ниже рассмотрим характерный случай, когда
целью измерений является получение информации, позволяющей
восстановить функцию / (/) , описывающую поведение телеметрируемого
параметра во времени. Вследствие ошибок, вносимых системой, и ограниченной
пропускной способности линии передачи, точное восстановление поведения
телеметрируемого параметра принципиально невозможно, поэтому
восстановленная функция / (/) может лишь с некоторой верностью описывать
истинную функцию /(/). Сжатие данных (представление поведения
параметра), позволяющее получить f(t) с требуемой верностью, будем
называть квазиобратимым. Реализация квазиобратимого сжатия требует выбора
двух операторов:
1. Представления непрерывного сообщения f{t) на интервале Т
совокупностью чисел Kj, К Vn, называемых координатами сообщения.
Если ввести вектор:
v = \ м|
v.
85
Современная телеметрия в теории и на практике
математически эта операция может быть записана в форме V = Af{t),
где А - оператор представления.
2. Получения восстановленной функции (оценки) / (t) по
координатам сообщения РрК Vn. Эту операцию представим в форме
/*(/) = BV = B(VVK Vn), где В - оператор восстановления
(обработки). Если функция /(/) является элементом некоторого
метрического пространства Р, то есть /(/) € Р, то обычно восстановленная
функция / (t) вычисляется на том же интервале времени Т} и в
общем случае она принадлежит метрическому пространству Ф , то есть
/ (0 € Ф , которое является метрическим расширением
пространства Р, то есть Фэ?.
Задачей восстановления (выбора оператора В ) является обеспечение
наилучшей верности / (t) при данных координатах. Верность f*(t)
характеризуется расстоянием между / (t) и /(/) в метрике пространства Р.
Обозначим это расстояние р(/, / ).
Задачей сжатия является выбор такого представления (способа
формирования координат), который обеспечивает получение требуемой верности ее
восстановления /(/) при минимальном количестве координат nmin с
выбранной точностью их отсчета.
Эта задача может решаться при заранее выбранном операторе
восстановления В , однако наиболее эффективные решения могут быть получены лишь
при одновременном, согласованном выборе как оператора А , так и
оператора В.
Например, в современных системах, как правило, в качестве координат
Vx, К Vn используются мгновенные значения телеметрируемого параметра
/(0>/(^)>^ »/(C)» отбираемые через постоянные интервалы времени
(период опроса Т0 ): Т0 = t2 - tx = /3 -12 = К =tm- tm.x.
Выбор оператора восстановления в этом случае сводится к выбору
наиболее эффективных способов интерполяции функции по ее дискретным
значениям в равноотстоящих узлах. Возможности сжатия объема
сообщения при этом лимитируются эффективностью способа интерполяции, то
есть получением заданной допустимой интерполяционной ошибки при
возможно большем периоде опроса.
Задача выбора операторов представления А и восстановления В может
решаться лишь при наличии некоторых априорных сведений о телеметри-
руемом параметре. Характер и объем этих сведений определяет возможный
выбор метрики пространства параметров Р и класс операторов А и В.
86
Глава 2. Теория телеметрии
В настоящее время получены решения этих задач для двух видов
пространств:
• Для пространства С, которое охватывает совокупность всех
непрерывных функций /(/), определенных на ограниченном
замкнутом множестве С евклидова пространства; метрика определена как
Р(/> /*) = max I /(0 - /*(01» где /(/), /*(/) е С. Этот показатель
верности принято называть показателем равномерного
приближения. Метрика пространства С может использоваться, если известны
априорные оценки пределов изменения телеметрируемого
параметра /(/) и его производных (одной, двух или более). Эти показатели
принято называть конструктивными параметрами функции /(/).
При этом априори принимается, что все возможные реализации /(/)
с известными конструктивными показателями равновероятны.
• Для гильбертовых пространств, элементами которых являются
реализации f(i) телеметрируемых процессов (пространство
реализаций) и множество F{t) реализаций (пространство случайных
функций), показателями верности являются среднеквадратичные
ошибки на интервале. Так, в частности, в пространстве
реализаций такой показатель верности может характеризоваться форму-
лойр(/,/) = Д/[/(/)-/(/)]2л|
Пространство с такой метрикой называют L2. В пространстве множеств
показатель верности вычисляется как математическое ожидание в
пространстве реализаций.
Метрика гильбертовых пространств может использоваться, когда
априори известна вторая моментная функция телеметрируемого процесса. При
решении задач в указанных двух видах пространств и при названных выше
составах априорных данных операторы представления и обработки могут
отыскиваться лишь в классе линейных, т. к. для нахождения этих
операторов в более широком классе (нелинейных) указанных априорных данных
недостаточно.
Следует отметить, что линейные операторы представления и
восстановления являются наиболее благоприятными и с точки зрения аппаратурной
реализации, ибо, как правило, аппаратура с нелинейными
преобразованиями труднее в реализации и зачастую вносит большие ошибки.
В силу этих обстоятельств ниже рассматриваются лишь методы сжатия
с использованием линейных операторов представления и восстановления
в линейных пространствах С и L .
87
Современная телеметрия в теории и на практике
Восстановление сообщения в линейном пространстве Ф с помощью
линейного оператора может быть записано в форме:
/=2ЙФ*(0. (2-88)
где фД/), £ = 1, К , п — совокупность линейно-независимых элементов из
Ф; Vk - координаты сообщения.
Из данной записи следует, что задача выбора операторов представления
и восстановления сводится к выбору координат Fj,K Ffl и совокупности
линейно-независимых функций фДО . Следовательно, задача сжатия
данных в соответствии с (2.87) сводится к обеспечению условия п = птт при
Р (/> / ) - е »гДе минимизация должна производиться по всем возможным
способам формирования координат и всем возможным выборам системы
базисных функций.
Базис {ф*} и координаты \Ук}, являющиеся решением сформулированной
задачи, если оно существует, иногда называют оптимальными (для
выбранного пространства Ф представления сообщений).
Вйбор базиса производится заранее, до проведения эксперимента, в
котором должно быть получено сообщение / (/) на основании априорных
данных о функции f(t) , позволяющих конкретизировать вид пространства Р .
Анализируя требования, которым должна удовлетворять система базисных
функций, легко прийти к выводу, что не существует единой универсальной
системы для всех классов функций, описывающих поведение телеметри-
руемых параметров, и различных априорных сведений о них. Тем не менее
отдельные требования могут быть сгруппированы так, что с практической
точки зрения может быть найдено довольно удачное решение поставленной
задачи. Обычно ставится задача выбора такого базиса разложения, который
обеспечивает для функций определенного класса в среднем минимальное
число координат.
На практике в качестве {ф^} часто берутся, например,
последовательность 1,/,/2,/3,К алгебраических полиномов, последовательность
тригонометрических функций 1, sin/, cos/, sin2/, К или последовательность
показательных функций 1, еа,/, е"2', К , где ОС,. - некоторая числовая
последовательность. При некоторых априорных данных можно указать на
оптимальные базисные функции.
Параметры алгоритмов сжатия
Кроме выбора рационального оператора квазиобратимых
преобразований, приходится решать ряд других вопросов, существенно влияющих
88
Глава 2. Теория телеметрии
на построение алгоритма сжатия. К числу таких вопросов можно отнести
выявление возможностей:
• автоматического определения интервала аппроксимации;
• адаптации аппроксимирующего полинома к поведению
контролируемого процесса в темпе поступления данных о нем;
• отбора существенных координат в реальном масштабе времени.
Остановимся на рассмотрении первого вопроса более подробно.
Как уже говорилось, основная задача устройства сжатия заключается в
передаче необходимого количества информации обо всем телеметрируемом
параметре на интервале Тн.
Сформировать данные обо всем параметре можно различными путями.
Например, можно рассматривать телеметрируемый параметр в течение
времени Тн как одно сообщение и вычислять координаты такого сообщения,
пользуясь ортогональным каноническим разложением или каким-либо
другим методом.
Можно разбить интервал Тн на равные отрезки длиной Т каждый и
вычислить координаты каждого сообщения в отдельности. В ряде случаев
величина задержки в получении данных составляет важный фактор и не
должна превышать допустимого значения. Задержка на время Тн
недопустима, однако, даже не принимая во внимание недопустимость временной
задержки в первом случае и неопределенность длины Т отдельного
сообщения во втором случае, поставим вопрос: какой из возможных способов
формирования координат обеспечит их минимальное количество для всего
контролируемого параметра на всем интервале наблюдения Тн ?
На первый взгляд кажется, что ответ на этот вопрос является тривиальным:
учитывая известное положение теории информации, можно ожидать, что
количество координат будет минимальным, если рассматривать весь параметр
как одно сообщение. Это верно, но такой способ формирования сообщения
может потребовать недопустимо большого времени задержки, равного всему
времени наблюдения, а также может оказаться сложным в аппаратурной
реализации.
Следует отметить, что для минимизации объема сообщений вплоть до шен-
ноновского предела не требуется обязательная задержка на все время
наблюдения. Это положение известно также из теории информации, которая
утверждает, что задержка является достаточным условием для устранения
избыточности, но не указывает на необходимость этого условия.
Более того, имеется ряд примеров, когда избыточность источника
сообщения полностью устраняется без существенной задержки. Применительно
89
Современная телеметрия в теории и на практике
к рассматриваемому случаю представления телеметрируемого процесса
вопрос о выборе длительности сообщения и, следовательно, о его
задержке решается различно для стационарных и нестационарных процессов.
Для стационарных процессов всегда может быть заранее указана
достаточно большая длительность сообщения, при которой получается почти
предельно достижимое сжатие его объема.
Длительность всех сообщений на интервале наблюдения при этом
одинакова, и расположение границ сообщений во времени значения не имеет.
Вследствие этого для стационарных процессов всегда могут быть
найдены операторы представления с заранее заданным алгоритмом регулярного
формирования координат, число которых не зависит от конкретной
реализации процесса (регулярные, или неадаптивные алгоритмы). Эти
алгоритмы в данном случае способны обеспечить эффективное сжатие.
В случае нестационарных процессов длительности сообщений,
обеспечивающие эффективное сжатие при выбранных способах формирования
координат и восстановления поведения телеметрируемого параметра, меняются
в течение времени наблюдения.
Существенное значение имеет также расположение границ сообщений.
Вследствие этого для нестационарных процессов эффективное сжатие
может быть достигнуто, как правило, лишь применением адаптивных
методов формирования координат, при которых разбиение времени
наблюдения на отдельные сообщения и число формируемых координат в каждом
сообщении автоматически согласуются с характером текущей реализации
телеметрируемого параметра.
Адаптивные алгоритмы сжатия
Адаптивные алгоритмы позволяют получать эффективное сжатие без
большой задержки. Например, если параметр ведет себя, как показано на
рис. 2.15, то легко видеть, что с помощью аппроксимации полиномом
нулевой степени на каждом из интервалов [0, /,], [0, /2], К этот параметр с
любой точностью можно представить с помощью семи координат на всем
интервале наблюдения Тн. Попытка же представить его одним полиномом на
всем интервале [О, ТН] приведет к необходимости построения полинома со
степенью, значительно выше седьмой.
При регулярном представлении с восстановлением полиномами нулевой
степени потребуется иметь период опроса, много меньший минимального
интервала времени, на котором /(/) = const.
90
Глава 2. Теория телеметрии
f(t)
►
о t, ts
и и и
Рис. 2.15. Пример поведения телеметрируемого параметра
Ясно, что такое представление приведет к большой избыточности. Таким
образом, представление рассматриваемого параметра на неравных интервалах
[О, /,], [0, t2],K является наиболее эффективным. Однако разбиение
времени наблюдения на сообщения с длительностями /,, t2 —1], /3 - ^ > К > К "" К-\
и с расположением границ в указанные моменты времени требует
адаптации к текущей реализации.
Следовательно, решение задачи сжатия данных, кроме выбора способа
формирования координат и оптимального базиса, содержит еще нахождение
процедуры такого способа разбиения интервала наблюдения на отдельные
сообщения, при котором общее число координат было бы минимальным
по сравнению с другими возможными разбиениями. Эта процедура
разбиения должна носить адаптивный характер. Естественно, что длительности
сообщений при этом не должны превышать допустимой задержки.
Вопросы адаптации аппроксимирующего полинома и отбора существенных
координат в реальном масштабе времени рассматриваются в п. 4.2.5.
2.4.5. Классификация и основные определения теории
и техники сжатия данных
Необратимые и квазиобратимые преобразования
Всякая классификация обычно связана с попыткой привести в систему
разрозненные сведения, обобщить понятия, термины и определения,
которыми пользуются специалисты, занятые исследованием какого-либо
нового направления в технических или естественных науках. Исследователь
пытается найти общие и отличительные устойчивые признаки,
позволяющие ему построить прочный фундамент, а затем и все здание.
91
Современная телеметрия в теории и на практике
Далеко не всегда удается найти такие устойчивые признаки сразу. Обычно
процесс поиска признаков заканчивается в ту пору, когда накоплен
большой опыт или найдены такие характерные черты, которые обеспечивают
не только устойчивость классов, групп, методов и т. д., но и способствуют
открытиям или указывают направления, в которых нужно проводить
исследования, чтобы заполнить все белые пятна в классификационной таблице.
Такой законченной классификации методов и алгоритмов сжатия данных
телеизмерений нет ни в отечественной, ни в зарубежной литературе,
известной авторам.
При анализе различных методов преобразования контролируемых
процессов и методов обработки результатов эксперимента по данным
телеизмерений можно выделить два класса преобразований:
1. Необратимые преобразования, в результате которых можно
восстановить контролируемый процесс как функцию времени, но которые
обеспечивают получение необходимых данных в виде конечного
полезного результата (например, интегральная или
дифференциальная кривая распределения плотности вероятности,
спектральная плотность мощности, корреляционная функция и т. д.).
2. Квазиобратимые преобразования, позволяющие представить
контролируемый процесс меньшим числом координат, но достаточным
для воспроизведения параметра как функции времени с заданной
точностью.
Необратимые преобразования в ряде случаев могут дать весьма высокие
коэффициенты сжатия, поэтому их надо всемерно внедрять в
практику радиотелеметрии, однако в настоящее время для анализа поведения
отдельных систем и элементов конструкции телеметрируемых объектов
требуется в результате измерений иметь оценки функций, описывающих
изменение величин параметров во времени. Такие оценки могут быть
получены лишь с помощью квазиобратимых преобразований. Следует
ожидать, что эти преобразования и в дальнейшем будут занимать большое
место в телеметрии.
Чтобы аргументировать высказанные соображения, рассмотрим пример.
Допустим, что отрабатывается какой-либо сложный объект, состоящий
из большого числа агрегатов, узлов, блоков, систем. Назначается объем
контролируемых параметров и проводятся измерения, по которым
разработчики ведут анализ функционирования систем и объекта в целом.
У каждого исследователя своя цель, и, руководствуясь этой целью,
каждый из одних и тех же данных отбирает нужную ему информацию.
Например, при анализе скрытых периодичностей исследователь отбирает
92
Глава 2. Теория телеметрии
данные на таком интервале времени протекания процесса, для которого
справедлив принцип «замороженных коэффициентов». Затем
производит преобразования, которые позволяют ему извлечь только информацию
о значениях амплитуды, частоты, фазы и декремента затуханий
интересующих его колебаний. Другой исследователь из тех же данных извлекает
информацию о временных функциях связи и устанавливает таким
образом связь и влияние процессов друг на друга или извлекает информацию
о статистических характеристиках и т. п.
Следует заметить, что при использовании квазиобратимых преобразований
нельзя не учитывать цели измерения. Более того, только зная задачи
измерений, то есть операции, которые будут выполняться с оценками поведения
параметра, можно правильно обосновать требования к показателю
верности оценок и даже к виду представления.
Таким образом, квазиобратимые преобразования при определенных
критериях верности приближения позволяют, с одной стороны, приводить
данные к более компактной форме, чем это делается в настоящее время, с
другой -извлекать из полученных данных путем их последующей обработки ту
информацию, которая представляет ценность для потребителя.
Детальная классификация методов сжатия
В литературе предлагаются различные способы классификаций применяемых
методов сжатия данных. Не останавливаясь на разборе этих способов,
рассмотрим классификацию, наиболее удобную с точки зрения уяснения
предмета рассмотрения в данной книге. Эта классификация приведена на рис. 2.16.
В зависимости от целей измерений сжатие может быть необратимое (целевая
обработка) и квазиобратимое. Смысл этих терминов пояснен выше.
На рис. 2.16 показаны основные способы решения задачи квазиобратимого
сжатия: учет математического ожидания и шкалы параметра; минимизация
числа координат сообщения; уменьшение объема каждой ординаты.
1
г
~
Необратимое сжатие
1
1
г
1 Квазиобратимое сжатие
'
Учет
математического
ожидания и
шкалы параметра
1
Минимизация
числа координат
сообщения
[
'
У
г
Уменьшение
объема каждой
координаты
Рис. 2.16. Классификация методов сжатия данных
93
Современная телеметрия в теории и на практике
Учет математического ожидания и шкалы процесса широко используется
на практике и, по существу, является простейшим мероприятием,
способствующим сжатию данных. Если априори известно математическое
ожидание параметра, то, очевидно, нет смысла передавать информацию о нем,
поскольку оно может быть восстановлено в месте приема по априорным
сведениям, то есть нет смысла передавать центрированное значение
параметра: /(/) = F(t) — mF (/), где mF (/) - математическое ожидание
случайной функции F{t).
Можно показать, что объем сообщения о f{t), как правило, будет меньше,
чем /(/). Естественно, что на практике может быть известно не точное
значение mF (/), а лишь его оценка mF (/). Кроме того, учет изменения во времени
mF (/) требует усложнения аппаратуры, поэтому часто на практике
используется среднее значение оценки Wf(/) = const.
Шкалой параметра назовем, как обычно, величину, равную:
J Ш ~ J max "Утт> (2.89)
где /max > /min ~ соответственно максимальное и минимальное возможные
значения параметра для всего множества реализаций.
Учет шкалы параметра должен заключаться в согласовании ее со шкалой
канала измерительной системы Шк . Наилучшее согласование достигается
при соблюдении равенства /ш = Шк.
Если /ш > Шк , то имеют место недопустимые ухудшения оценки / (/)
на приемной стороне. При /ш < Шк для обеспечения заданной верности
оценки / (/) потребуется уменьшение ошибки, вносимой каналом и
приведенной к его шкале, что вызовет увеличение объема сообщения.
Уменьшение числа координат сообщений достигается различными
методами, рассматриваемыми ниже. Сокращение объема каждой координаты
достигается тремя путями: квантованием шкалы координат с неравномерным
шагом, статистическим кодированием уровней квантования и нелинейным
преобразованием значений координат.
Для проведения этих операций требуется априорная оценка плотности
распределения вероятностей значений каждой координаты. В смысле
потенциально достижимых значений коэффициента сжатия эти мероприятия
равноценны и различаются лишь аппаратурной реализацией. Следует
отметить, что задача минимизации объема сообщений не всегда может быть
разделена на уменьшение числа координат сообщения и объема каждой
координаты.
94
Глава 2. Теория телеметрии
Такое разделение возможно при условии, если способ представления
сообщений выбирается для системы без шумов с учетом лишь координатной
ошибки (ошибки представления), а ошибки, вносимые шумами системы
(помехи, аппаратурные ошибки и др.), учитываются отдельно. При
выборе же наиболее эффективного представления с учетом шумов системы
оказывается необходимым минимизировать не только число координат
и объем каждой координаты, но и выбирать способ формирования этого
числа координат для минимизации объема сообщений в целом.
В настоящей книге рассматриваются эффективные методы сжатия
сообщений с учетом того, что они выбираются по допустимой ошибке
представления, а ошибки, вносимые шумами системы, учитываются отдельно.
Поскольку предметом рассмотрения данной книги является минимизация
числа координат сообщения, в дальнейшем под квазиобратимым сжатием
понимается решение именно этой задачи.
Решение задачи сжатия сводится к выбору двух операторов:
представления (А) и обработки (В). При заданном показателе верности
последний, в свою очередь, определяет вид пространства, элементами
которого являются точные значения и оценки функций, описывающих
поведение телеметрируемого параметра.
Оператор представления может характеризоваться способами
формирования координат, основными из которых являются регулярный и
адаптивный.
Оператор обработки может полностью характеризоваться видом базисных
функций в пространстве параметров, поскольку мы ограничиваемся
рассмотрением лишь линейных операторов.
В табл. 2.3 приведена классификация методов квазиобратимого сжатия
(минимизации числа координат сообщений) по указанным признакам.
Знаком «+» в этой таблице отмечены известные алгоритмы. Естественно, что
таблица может быть расширена как по видам используемых пространств,
так и по виду параметров адаптации.
При регулярном представлении все время наблюдения Тн разбивается на
интервалы равной длины Т, и на каждом интервале формируется число
координат, равное п , одинаковое для всех интервалов. Длительность
сообщения Т и число координат в нем выбираются заранее по априорным
сведениям. В качестве координат могут использоваться мгновенные значения
параметра в точках опроса (ординаты), коэффициенты разложения в ряд
функции, описывающей поведение телеметрируемого параметра на данном
интервале, разделенные разности или другие функционалы.
95
Современная телеметрия в Теории и на практике
Адаптивный способ формирования координат отличается от регулярного
тем, что некоторые параметры, характеризующие сообщение,
изменяются в соответствии с видом текущей реализации. В табл. 2.3 показаны
характерные способы адаптации. В случае однопараметрической адаптации
может фиксироваться длительность сообщения, и тогда изменяется число
формируемых координат; либо может фиксироваться число формируемых
координат, и тогда изменяется длительность сообщения.
При двухпараметрической адаптации изменяется как число формируемых
координат, так и длительность сообщений. В зависимости от числа
параметров, над которыми осуществляется адаптация, можно говорить об одно-,
двух- и в общем случае многопараметрической адаптации. Рассмотрим
вопросы организации адаптивных алгоритмов сжатия несколько подробнее.
2.4.6. Принципы построения адаптивных алгоритмов сжатия данных
Математическое моделирование различных алгоритмов сжатия данных о
поведении телеметрируемых процессов свидетельствует о том, что коэффициент
сжатия существенно зависит от организации алгоритма сжатия. Эта
зависимость становится еще более заметной, когда отбор существенных координат
осуществляется в реальном масштабе времени.
Сам факт такой зависимости не очевиден, однако может быть объяснен,
если рассмотреть возможные варианты организации алгоритмов.
Используя классификационные признаки адаптации, описанные в предыдущем
параграфе, можно построить три варианта алгоритмов в классе
квазиобратимых преобразований:
1. Фиксируется интервал аппроксимации, на котором отыскивается
аппроксимирующий полином соответствующей степени (то есть
подбирается число координат).
2. Фиксируется число координат, и автоматически подбирается
интервал аппроксимации.
3. Автоматически выбирается интервал аппроксимации и число
координат.
Алгоритмы с однопараметрической адаптацией, у которых адаптивным
параметром является либо степень аппроксимирующего полинома, либо интервал
аппроксимации, представляют собой алгоритмы с низким уровнем адаптации
и обеспечивают сравнительно невысокий коэффициент сжатия. Простота
алгоритмов сжатия данных с однопараметрической адаптацией и
аппаратурных решений и привлекла внимание большого числа исследователей,
разработавших значительное количество модификаций алгоритмов нулевой и
первой степени, основанных на применении простых базисных функций.
96
Таблица 2.3. Классификации методов квазиобратимого сжатия данных (минимизация числа координат сообщения)
(О
Способ формирования
координат
Регулярный
Адаптивный
Однопараметрическая
адаптация
Двухпара-
метрическая
Многопараметрическая
Формирование
постоянного
числа координат
п = const
Адаптация по числу
координат при
Т — const
Адаптация по
длине интервала
аппроксимации при
фиксированном
числе координат
п = const
Адаптация по
числу координат
и длине интервала
аппроксимации
Адаптация по
числу координат,
длине интервала
аппроксимации и
другим параметрам
Пространство параметров |
с
с
Другие 1
пространства |
Вид базисных функций |
Собственные
функции оператора
с ядром
+
+
+
+
н
Функции
Котельникова
+
н
и
н
н
Полиномы
Чебышева
+
+
+
f
н
Полиномы
Лсжандра
+
+
+
+
н
Степенные
функции
+
+
+
н
н
Функции
Хаара
+
н
н
н
н
Функции
Уолша
+
н
н
н
н
Другие
Н
н
н
н
Полиномы
Бернштейна
+
+
н
н
н
Полиномы
Ньютона
+
+
+
+
н
Степенные
функции
+
+
+
-
н
Другие
н
н
н
н
н
неизвестны
Н
н
н
н
н
Современная телеметрия в теории и на практике
Алгоритмы сжатия данных с адаптацией по степени при фиксированном
интервале аппроксимации требуют накопления данных измерений и
представляют собой хорошо разработанные классические методы теории
интерполяции. Сам факт накопления данных и последующей их обработки
с целью отбора существенных координат приводит к задержке в передаче
данных, которая не всегда может допускаться.
В последнее десятилетие были разработаны главным образом алгоритмы
сжатия данных с адаптацией по интервалу аппроксимации при
фиксированной степени аппроксимирующего полинома. Алгоритмы такого типа
позволяют осуществлять отбор существенных координат в реальном
масштабе времени или в темпе поступления ординат и, следовательно,
лишены недостатка, свойственного алгоритмам с адаптацией по степени.
Эти алгоритмы позволяют более полно использовать приближающие
свойства полиномов в метрике выбранного пространства (обычно в пространстве
С). Значительное число таких алгоритмов сжатия данных предполагает
использование низкостепенных приближающих функций (ступенчатая
или линейная аппроксимация) и отличается лишь способом отбора
существенных координат. Алгоритмы сжатия данных с адаптацией по длине
интервала аппроксимации работают следующим образом.
Для заранее установленной фиксированной степени делается попытка
построить приближающий полином через существенные ординаты,
отобранные из дискретной последовательности ординат, подаваемой на устройство
сжатия данных с равномерным шагом. Попытка считается удачной, если
погрешность интерполяции во всех т узлах для ранее поступивших ординат
Fie превышает допустимой.
В этом случае делается попытка экстраполировать ранее вычисленным
полиномом вновь поступающие ординаты (т +1) -ю, (т + 2) -ю и т. д. Если
в (т + к)-и точке ошибка приближения оказывается больше допустимой,
то есть Ет+к > Едоп, то выдается информация о правой границе интервала
аппроксимации; начинается выбор существенных узлов и поиск правой
границы нового интервала аппроксимации.
Построение алгоритмов сжатия с однопараметрической адаптацией может
предусматривать использование интерполяционной процедуры. В этом
случае алгоритм строится с таким расчетом, чтобы подбор существенных
узлов и координат позволял построить приближающий полином для
возможно большего количества ординат контролируемого процесса.
Алгоритмы сжатия данных с двухпараметрической адаптацией сочетают
процедуры интерполяции и экстраполяции и позволяют по мере
поступления ординат контролируемого процесса наращивать степень приближающе-
98
Глава 2. Теория телеметрии
го полинома. Такая организация алгоритма хотя и усложняет
вычислительную схему отбора существенных координат, но позволяет получить высокие
коэффициенты сжатия данных.
Из всех существующих алгоритмов сжатия данных алгоритмы с двухпа-
раметрической адаптацией обладают наибольшей эффективностью.
Кроме того, эти алгоритмы позволяют сохранить непрерывность
контролируемого процесса и ряда его производных.
При построении алгоритмов сжатия данных с двухпараметрической
адаптацией возможны две схемы:
1. Сначала осуществляется процедура выбора оптимального интервала
аппроксимации, а затем производится выбор степени и построение
аппроксимирующего полинома.
2. Выбор длины интервала аппроксимации и наращивание степени
полинома осуществляются при последовательном чередовании обеих
процедур: на шаг или несколько шагов увеличивается интервал,
затем на единицу или несколько единиц повышается степень и т. д.
Способ совмещения обеих описанных процедур является наиболее
сложным логическим элементом каждого алгоритма и в значительной степени
определяется видом базисных функций. Проведенные авторами
исследования показали, что для ортогональных полиномов наиболее выгодной
является первая схема, а для неортогональных - вторая.
2.4.7. Критерии оценки алгоритмов сжатия данных
Классификации и отличительные особенности алгоритмов сжатия
Каждый метод сжатия (табл. 2.3) может быть реализован, вообще
говоря, несколькими алгоритмами обработки сообщений в кодере источника,
при этом основными отличительными особенностями алгоритмов
сжатия являются:
• число параметров адаптации,
• характер обработки,
• характер аппроксимирующей процедуры, учитываемый при
вычислении координатной ошибки,
• способ выбора длины интервала аппроксимации,
• способ контроля координатной погрешности.
99
Современная телеметрия в теории и на практике
Характер обработки может быть непрерывный или дискретный в
соответствии с математическим выражением оператора вычисления координат
сообщения. Непрерывную обработку применяют обычно при допустимости
невысокой точности преобразований, поскольку они реализуются на
аналоговой аппаратуре. Достоинством непрерывной обработки является
возможность обеспечения большого быстродействия аппаратуры.
По характеру аппроксимирующей процедуры алгоритмы могут быть
разделены на три группы:
• с интерполяцией,
• с экстраполяцией (то есть предсказанием или прогнозированием),
• с интерполяцией и экстраполяцией одновременно.
Всякое прогнозирование основано на предположении о возможности
распространения аппроксимирующей формулы на последующий интервал
времени, то есть на предположении о постоянстве, инвариантности свойств
контролируемого параметра, на базе которых проводилась аппроксимация
на предыдущем участке. Только при этих условиях экстраполяция может
обеспечить коэффициент сжатия, сравнимый с тем, который дает
интерполяция. Если же параметр динамичен или искажен случайной помехой, то
эффективного сжатия можно ожидать только от интерполяционных
алгоритмов. Совмещение экстраполяции с интерполяцией полезно в тех случаях,
когда контролируемые параметры имеют участки с малой динамичностью.
Несмотря на указанные недостатки, алгоритмы с экстраполяцией имеют
одно достоинство, которое заключается в том, что в случае аномального
поведения параметра они обеспечивают возможность выбирать данные о
характере поведения контролируемого параметра с большей подробностью и малой
задержкой.
По способу выбора длины интервала аппроксимации нельзя провести столь
четких градаций. Во всех известных алгоритмах, где решается вопрос о
выборе интервала аппроксимации, степень аппроксимирующего многочлена
является фиксированной и задача, таким образом, сводится просто к
текущему контролю погрешности аппроксимации при фиксированном
количестве координат и наращивании интервала.
Как только погрешность достигает заданной величины, интервал
обрывается и процесс начинается сначала. Исключением является алгоритм, в
котором автоматически выбирается как степень аппроксимирующего
полинома, так и интервал аппроксимации. Для ортогональных координатных
функций предложенный способ практически неприемлем из-за
чрезвычайно большого количества вычислений.
100
Глава 2. Теория телеметрии
Способ контроля координатной ошибки может быть непосредственный и
косвенный. При непосредственном контроле координатной ошибки
проверяется уклонение аппроксимирующей функции в каждой точке опроса
контролируемого параметра, либо вычисляется дисперсия ошибки на
интервале и сравнивается с допустимой, либо контролируется ошибка на концах
отрезка аппроксимации, где ошибки обычно имеют наибольшее значение.
Косвенный способ предусматривает контроль не самой ошибки, а
величины, с ней связанной, например разделенной разности п- го порядка или
модуля значений координат.
Могут быть и другие отличительные особенности алгоритмов, например
содержание выходных данных устройства сжатия, то есть математический
смысл формируемых координат.
Координатами могут быть: коэффициенты аппроксимирующего ряда,
разделенные разности (в случае применения полиномов Ньютона), ординаты
контролируемого процесса в узлах интерполяции (если не все точки
отсчета контролируемого параметра являются узлами). В соответствии с
перечисленными особенностями можно построить множество разнообразных
алгоритмов.
Для сравнения их между собой необходимо установить систему единых
числовых характеристик алгоритмов. Такими характеристиками могут
быть следующие:
• коэффициент сжатия;
• показатель эффективности представления сообщений;
• коэффициент сложности алгоритма, оцениваемый, например,
количеством вычислительных операций на отсчет;
• время задержки сообщения в кодере источника;
• показатель помехоустойчивости.
В настоящее время различные исследователи хотя и пользуются
некоторыми из этих характеристик, но допускают иногда определения, применимые
лишь к частным задачам. Ниже предлагаются математические определения
названных характеристик.
Коэффициент сжатия данных
Поскольку сжатие данных используется для разгрузки каналов связи и
запоминающих устройств, то коэффициент сжатия должен
характеризовать изменение объема сообщений. Естественно, что оценку
коэффициента сжатия целесообразно производить путем сравнения объема сообще-
101
Современная телеметрия в теории и на практике
ний J, получаемого в результате сжатия, то есть при выбранном способе
представления (кодирования) сообщений с объемом J0, получаемым при
некотором исходном или эталонном способе формирования сообщений,
то есть
KM=J/Jo
прирС^»^.
Если координаты сообщения имеют идентичные характеристики, то:
Кж = "/"о (2.90)
при p(F\F)<pdon и 6 = const.
В качестве эталонного способа формирования координат Vx, К Vn
удобно взять циклический опрос датчика и аналоговую или цифровую
передачу значений /(/) в точках опроса. В качестве эталонного способа
восстановления функции / (/) можно взять интерполяцию значения / (t)
полиномами нулевой или первой степени между точками опроса.
Коэффициент сжатия может определяться лишь при выбранном показателе
верности p(F ,F). Значение р зависит не только от способа
формирования координат сообщения и восстановления /*(/) , но и от погрешностей,
вносимых системой в координаты сообщения.
В ряде случаев, чтобы разделить влияние этих факторов, коэффициент
сжатия алгоритмов характеризуют значением к = а?/ип и пРи вычислении
ф СЭ9С щ U
р (F , F) полагают, что координаты сообщения передаются и
воспроизводятся точно, то есть ксж = п/п0 при p(F >F) = рао„и 5=0.
Таким образом, при определении ксж учитываются лишь базисные
погрешности, а влияние погрешностей, вносимых системой, учитывается отдельно.
Такой подход вполне закономерен, но нужно иметь в виду, что без учета
влияния погрешностей, вносимых системой в координаты сообщения, он
еще не дает полной оценки данного метода (алгоритма) сжатия.
Эффективность представления сообщений
Для некоторых критериев верности, характеризуемых одним скалярным
показателем p(F ,F), теория позволяет вычислить минимально
достижимый объем сообщений Jmin или число координат nmin в
определенном классе алгоритмов формирования координат сообщения и
восстановления процесса f*(t). Используя такие оценки, можно выбранный
в данном классе способ представления сообщений (способ сжатия)
102
Глава 2. Теория телеметрии
характеризовать коэффициентом эффективности Г\сж -Jm[n/J при
р(/г*,/г) = рлм|,или
Л„=лт1п//1 (2.91)
при p(F\F) = рдоп и 8 = co/w/.
Коэффициент эффективности является некоторой абсолютной
характеристикой выбранного способа представления сообщений в данном классе
сигналов.
Условием однозначности определения коэффициента сжатия (а также
показателя эффективности сжатия) является проверка алгоритмов на
контролируемых параметрах с одинаковыми характеристиками, то есть на
сигналах одного класса.
Поскольку эффективность алгоритмов сильно меняется для разных классов
сигналов, то одной из задач исследования каждого алгоритма является
правильный выбор области его применения; для достаточно точного выявления
области применения каждого алгоритма следует установить систему тест-сигналов.
В эту систему включены сигналы трех основных классов:
• случайные;
• аналитические;
• аддитивные комбинации тех и других (в аддитивных сигналах можно
использовать и типовые телеметрируемые функции).
Для восстановления всякого сообщения в месте приема необходима
время-адресная информация, а именно: временная привязка символов
сжатого сообщения, показатели количества членов разложения в зависимости
от принятого алгоритма сжатия, способа восстановления и способа
передачи. При этом речь идет не об избыточной информации, которая
вносится при последующем кодировании для повышения достоверности
передачи, а лишь об информации, требуемой для восстановления исходной
функции даже при отсутствии помех в канале связи. Время-адресную
информацию часто называют служебной.
Ясно, что необходимость передачи этой информации понижает
эффективность сжатия, причем есть основания считать, что с увеличением
коэффициента сжатия будет возрастать количество время-адресной информации,
которую необходимо передавать.
Поэтому коэффициент сжатия и показатель эффективности сжатия
следует вычислять с учетом количества время-адресной информации и под
количеством информации понимать сумму количеств основной и время-
адресной информации. N
103
Современная телеметрия в теории и на практике
Коэффициент сложности алгоритма
Коэффициент сжатия зависит от сложности алгоритма обработки, и, как
правило, чем выше требуемый коэффициент сжатия, тем сложнее алгоритм
обработки.
От сложности алгоритма в значительной степени зависят: вес, габариты,
стоимость, надежность и другие характеристики аппаратуры обработки,
поэтому коэффициент сложности может рассматриваться и как
эксплуатационная характеристика метода сжатия.
В качестве коэффициента сложности рационально принять среднее число
вычислительных операций, реализуемое аппаратурой сжатия для
вычисления одной координаты, - при этом вычислительные операции должны
быть приведены к коротким операциям.
Другим показателем сложности алгоритма может быть количество команд
в вычислительной программе, которое определяет объем памяти,
необходимой для хранения команд.
Время задержки сообщения в аппаратуре сжатия
Этот параметр (хз) очень важен при сжатии в процессе проведения
эксперимента. Допустимая величина задержки в основном определяется
вероятностью аварийной ситуации и временем протекания аварийных процессов,
ибо в этом случае вся накопленная в оперативной памяти информация
может быть потеряна, тогда как именно она наиболее важна.
Задержка сообщения X 3 в общем случае складывается из времени
накопления в оперативной памяти кодера источника Т и времени вычисления
координат, то есть времени обработки в кодере источника Хобр: X 3 = Т +1обр.
Если применяется экстраполяция при вычислении координат, то
формирование координат производится параллельно с накоплением в оперативной
памяти, и время 7" в задержку X 3 может не входить, тогда X3 -Хобр.
Показатель помехоустойчивости
Прежде всего следует ввести четкое разделение понятий
«помехоустойчивости выбранного способа представления сообщений» и
«помехоустойчивости системы — радиолинии».
Помехоустойчивость способа представления сообщений (сжатия)
характеризуется чувствительностью сообщений к искажениям координат.
104
Глава 2. Теория телеметрии
Пусть 8 - некоторый показатель искажения передаваемых координат
сообщений (средняя квадратичная ошибка, шаг квантования шкалы,
вероятность аномальных ошибок и т. п.).
Обозначим р(8) значение показателя верности p(F , F) при заданном 8
и выбранном способе представления сообщений, а р0(8) - значение
показателя верности при некотором исходном или эталонном способе
формирования координат и восстановления процесса / (/). Тогда
помехоустойчивость выбранного способа представления сообщений может
характеризоваться показателем JLI = р(5)/р0(5) при р(0) = р0(0).
Приведенное отношение характеризует относительное уменьшение
верности восстановленной функции / (/), обусловленное искажением
координат сообщений.
Обычно |И < 1, так как большая избыточность координат сообщения в
эталонном способе обусловливает меньшее влияние ошибок, вносимых в эти
координаты (некоррелированные ошибки взаимно компенсируются).
Помехоустойчивость системы передачи информации может
характеризоваться различными показателями и, в частности, выигрышем в средней
мощности -полезного сигнала или полосы частот радиолинии при
обеспечении той же верности, например: Ps 0 jPs ; Af0 /Af при р (F*, F) = р доп,
где Ps, Pso - мощности полезного сигнала на входе приемного устройства,
а Д/, Д/q - полосы частот, занимаемые радиолинией, соответственно, при
выбранном и эталонном способах представления сообщений.
Важно обратить внимание на то, что при \1 < 1 для правильно выбранных
способов сжатия Pso/Ps > 1 или Af0/Af > 1. Таким образом, сжатие
сообщений, несмотря на увеличение их чувствительности к искажениям
случайной помехой, позволяет получить более высокую помехоустойчивость
системы в целом, то есть улучшить энергетические показатели радиолинии
или уменьшить полосу занимаемых ею частот.
Выигрыш объясняется тем, что в сжатом сообщении уменьшение числа
координат позволяет, соответственно, увеличить длительность их сигналов и,
следовательно, обеспечить ту же или даже большую энергию, расходуемую
на передачу каждой координаты при меньшей средней мощности
полезного сигнала Ps. Увеличение длительности сигналов отдельных координат
непосредственно позволяет уменьшить полосу частот Af, что опять-таки
повышает помехоустойчивость системы.
Естественно, что, используя те же значения Ps и Af при передаче сжатых
сообщений, можно получить лучшую верность p(F , F).
105
Современная телеметрия в теории и на практике
2.5. ПРИНЦИПЫ РАЗДЕЛЕНИЯ СИГНАЛОВ
2.5.1. Общие сведения о многоканальных системах телеметрии
Рассмотрим принцип построения многоканальной системы передачи
информации (рис. 2.17). Многоканальная система содержит N датчиков Дк,
в которых A,K(t) сообщения преобразуются в первичные сигналы SK(t).
Канальные модуляторы КМкиз сигналов SK(t) формируют видеосигналы
SBK(t), которые поступают в суммирующее устройство I, называемое также
формирователем группового сигнала S2(t). Этот сигнал поступает в
передатчик ПД, где из сигнала Sz(t) образуется линейный сигнал S^t),
который, пройдя линию связи Л С, поступает на вход приемника ПМ, на выходе
которого действует сигнал Sz(t), отличающийся в реальных системах из-за
влияния помех от сигнала Sz(t).
Канальные селекторы КСк служат для выделения сигналов SBK(t) из сигнала
SL(t) по их отличительным признакам и преобразования их в
информационные сигналы S K(t), которые затем подаются в преобразователи сигналов
в сообщения ПС .
SB1 (t)
SB2 «)
Sx(t) Sn(t) S'n(t)
Mnpflh
ЛС
ПРМ
^ncg^Mi)^
s\(t)
Рис. 2.17. Многоканальная система передачи информации
В многоканальных системах телеметрии видеосигналы SBK(t) наделяются
такими отличительными признаками, которые позволяют выделить их
из группового сигнала Sr(t) с помощью канальных селекторов, то есть
позволяют произвести разделение сигналов.
Методы разделения сигналов (каналов) делятся на линейные и
нелинейные. При линейном разделении групповой сигнал:
Sz(0 = fX(>).
к=\
106
Глава 2. Теория телеметрии
Наиболее распространенными являются способы линейного разделения
канальных сигналов по частоте, времени, фазе и форме.
К нелинейным методам разделения относятся разделение по уровню
и комбинационное разделение.
2.5.2. Основы линейного разделения сигналов
При линейном разделении сигналов групповой сигнал можно представить
в виде:
tf=l N=\
rae(p,(t), (p2(t) , cpN(t) - система функций, с помощью которых
производится перенос информации; Ск - коэффициенты, отображающие мгновенные
значения непрерывных сообщений, или числа, соответствующие символам
дискретных сообщений.
Идеальный канальный селектор в канале с отсутствием помех должен
реагировать только на сигналы данного канала и давать нулевой отклик
на сигналы других каналов, то есть:
где RK — оператор разделения.
Эту операцию можно представить иначе:
Р Км\-15в*(')прИ i = K'>
M-WbJQ при/* к.
или:
Л{Сдр(/)} = (С"ф'(0прИ./ = ,С:
к V-/Y«V )f |q при 1фК #
Избирательные свойства устройства, состоящего из N канальных
селекторов, каждый из которых реагирует только на свой сигнал SBK (/) , впервые
были описаны Д. В. Агеевым в 1935 г.
Линейное разделение сигналов возможно лишь в идеальном канале без
помех при линейной независимости канальных сигналов SBK(t) - CKq>K(t)y
справедливой, если тождество:
Clyl(t) + C2<p2(t) + ... + CNyN(t) = 0
выполняется только тогда, когда С, = 0.
107
Современная телеметрия в теории и на практике
Принцип разделения сигналов наглядно демонстрируется при
представлении группового сигнала Sz(0 и канальных видеосигналов SBi(t) в виде
векторов многомерного пространства.
Для *-го источника множество его сигналов 5Д/)с граничной частотой ¥min
длительностью Т\ образует подпространство {Ф,} мерностью Л^,. =2FmjTCi.
Видеосигналы SBi(t), формируемые канальными модуляторами,
представляются в виде векторов подпространства (Ф,} мерностью JV . = 2FaTa.
В общем случае Мру = 8^ЫФ!. Например, при амплитудной модуляции:
На рис. 2.18 показаны подпространства фу видеосигналов SBi(t), входящие
в пространство ф0.
Разделение сигналов возможно, если подпространства ф. не пересекаются
N
ни в одной точке пространства ф0, для которого Л^ф0 > ^N . .
Рис. 2.18. Подпространства ф,- видеосигналов SBi (t), входящие в пространство ф0
В случае пересечения подпространств фу и фу возникают переходные помехи.
Каждое подпространство ф. задается направлением а,. Вектор 5Z (/) в
N-мерном пространстве можно разложить на N независимых векторов
направлений ОС] ,0C2,..,0Cw, составляющих базис пространства, то есть вектор:
/=1 /=]
где С. — коэффициенты разложения, численно равные мгновенным
значениям SBi(t).
108
Глава 2. Теория телеметрии
Величина вектора сигнала SBK (/) получается путем отображения вектора
Sj.(t) на пространство ф^- таким образом, чтобы его проекции на
остальные подпространства ф. еф0(/ Ф к) были равны нулю.
Таким образом, при векторном представлении разделение сигналов есть
разложение суммарного вектора S1 (/) по линейно-независимым
направлениям. Это возможно, как упоминалось ранее, при условии, что канальные
видеосигналы являются линейно-независимыми функциями времени.
Для N- мерного базиса скалярное произведение двух векторов:
(СС/,ССу) =
юс,
ос,
cos0 ,
где ОС, и OLj- модули векторов; 0 - угол между ними.
Векторы ОС,- ОС у могут быть не только линейно-независимыми, но и
ортогональными, то есть:
(СС/,(Ху)=0при 1ф j,
Если:
Га а )-!1при/ = У;
то базис называется ортонормированным.
Система функций ф/(/),ф2(/),...,флг(^) будет ортогональной и
нормированной, если скалярное произведение:
Ту
J * J [0 при / Ф j.
На приемной стороне канальный видеосигнал:
Из изложенного следует, что для канала без аддитивных помех
многоканальные системы могут строиться на базе линейно-независимых
неортогональных и линейно-независимых ортогональных переносчиков tyK(t).
В реальных каналах с помехами используются ортогональные сигналы,
обладающие более высокой помехоустойчивостью по сравнению с
неортогональными сигналами.
Ортогональные сигналы обладают и другими достоинствами: простотой
технической реализации и возможностью в ряде случаев совмещать задачи
разделения сигналов и демодуляции.
109
Современная телеметрия в теории и на практике
К ортогональным относятся сигналы с неперекрывающимися частотными
спектрами, которые получаются из сигналов SBK, прошедших через
полосовые фильтры. На основе этих сигналов строятся системы с частотным
разделением каналов (ЧРК). Для них канальные сигналы являются
ортогональными в частотной области,,то есть
щс Г1 при / = /';
Г5Дю)5>)с/со =
4 [0 при/* у.
Ортогональными функциями времени являются периодические
последовательности импульсов», не перекрывающиеся во времени. На их основе
строятся системы с временным разделением каналов (ВРК).
Ортогональными являются два гармонических колебания с одинаковыми
частотами и со сдвигом фаз, равным к/2. Информация в такой двухканаль-
ной системе передается путем модуляции амплитуд гармонических
колебаний информационными сигналами.
К числу ортогональных переносчиков, которые можно использовать для
передачи дискретных сообщений, относятся функции вида coscot, cos2cot,
cos3cot, ..., ортогональные полиномы Лежандра, Чебышева, Якоби, Лагер-
ра, Эрмита и др., а также дискретные ортогональные последовательности в
виде функций Уолша, Радемахера и др.
В телеметрии в основном применяются системы с временным и частотным
разделением каналов.
2.5.3. Нелинейное разделение сигналов
К нелинейным методам разделения сигналов относятся такие методы, при
которых либо сигнал Sz(t) не может считаться суммой канальных сигналов,
либо, если он является суммой, разделение осуществляется нелинейными
устройствами. Среди нелинейных методов получили распространение
методы комбинационного разделения и разделения по уровню.
Комбинационный метод разделения
Комбинационный метод разделения основан на том, что п дискретных
(обычно двоичных) сообщений аг-а2..., ап, принимающих значения 0 или 1,
отображаются n-значным двоичным кодом. В таблице 2.4 приведены 2П
комбинаций, отображающих различные сочетания сообщений аг а2, а3, а4.
Данный метод используется в цифровых системах телеметрии с частотным,
временным или адресным разделением каналов при* передаче сигнальных
параметров путем уплотнения каналов, по которым передаются
функциональные параметры.
110
Глава 2. Теория телеметрии
Таблица 2.4. Комбинационный метод раделения сигналов
1 а'
0
1
0
о
0
1
1
1
а2
0
0
1
0
0
1
0
0
аз
0
0
0
1
0
0
1
0
«4
0
0
0
0
1
0
0
1
а!
0
0
0
1
1
1
0
1
а2
0
0
аз
1
0
1
1
0
1
1
1
а4
0
1
1
0
1
1
1
1 1
Метод разделения сигналов по уровню
Этот метод основан на разделении сигналов, уровни которых обычно находятся
в соотношении 1:2:4:8 и т.д. Отличие уровней минимум в два раза позволяет
надежно выделять канальные сигналы на фоне помех. При этом важные
дискретные сообщения типа «да - нет» можно передавать на более высоком уровне.
На рисунке показаны временные диаграммы для трехканальной системы.
Селекцию сигналов можно осуществлять с помощью пороговых устройств, число
которых в общем случае равно 2К, где к - число сообщений. Метод разделения
сигналов по уровню используется при уплотнении информационных каналов
в аналоговых телеметрических системах при передаче сигнальных параметров.
Si(t)
S2(t)
JZIL
s3(tu
SL(t)4
rC^
Рис. 2.19. Нелинейно* разделение сигналов
111
Современная телеметрия в теории и на практике
2.6. АНАЛОГОВЫЕ МЕТОДЫ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ
ИНФОРМАЦИИ
Несмотря на значительное распространение цифровых методов передач
достаточно широко еще распространены и аналоговые методы. При этом во
многих случаях переход на "цифру" не производится из принципиальных
соображений. В связи с этим аналоговые методы не теряют своей
актуальности и на сегодняшний момент, а потому и их рассмотрение включено в
данную книгу.
При рассмотрении аналоговых и цифровых методов передачи информации
используется единый подход, цель которого состоит в определении
основных особенностей многоканальных телеметрических радиолиний (систем)
и показателей их качества.
2.6.1. Показатели качества аналоговых телеметрических
радиолиний
Основные характеристики телеметрических систем - точность,
достоверность и скорость передачи данных — во многом определяются качеством
каналов связи, которые зависят от уровня шумов и полосы занимаемых частот.
Для сравнения телеметрических радиолиний с различными скоростями
передачи информации желательно использовать удельные показатели
расхода энергии и полосы частот, не зависящие от абсолютных значений
скоростей передачи.
Наиболее удобной характеристикой удельного расхода энергии в
телеметрической радиолинии является средняя энергия Е{ сигнала на входе
приемника, затрачиваемая на передачу единичного объема информации и
обеспечивающая требуемую верность В в заданной помеховой обстановке.
При передаче аналоговых телеметрических сообщений в качестве
единичного объема информации рассматривают объем, переносимый одной
выборкой.
Скорость передачи информации в таких радиолиниях определяется числом
выборок, переданных в единицу времени:
где: T^Tq/N - длительность канального интервала; Т0 - период опроса
отдельного канала ИТС; N- общее количество каналов.
112
Глава 2. Теория телеметрии
Тогда энергетическую эффективность аналоговой радиолинии оценивают
по показателю:
V-E/N,-PtT/Ne
удельного расхода энергии Еи> затрачиваемой на передачу одного измерения
(одной выборки) при фиксированных значениях показателей верности у^, РА,
где:
• N0 - односторонняя спектральная плотность мощности шума на входе
приемника;
• Рг- средняя мощность сигнала на входе приемника;
• у^ - среднеквадратическая погрешность измерения, приведенная
к эффективному значению сигнала;
• РА - вероятность появления аномальной ошибки.
Определим физический смысл показателя Pw. С этой целью преобразуем
соотношение Ры2 - PTk/N0 = PTo/N0Nk виду:
V=Pc/N0N2Fm=Pc/N02AFv
в котором учтено предельное значение для TQ=1/2Fm (согласно теореме Ко-
тельникова); AF1=NFm - суммарная полоса частот, занимаемая N каналами.
Таким образом, при полосе радиоканала А/ - 2AFZ показатель Pw2s=Pc/
Nf)Af^(Pc/Pu4)ex представляет собой отношение сигнал-шум на входе
приемника, которые имеют общепринятое условное обозначение (Pc/PJ=h2,
то есть В 2~h2.
ги
Эффективность использования полосы частот в радиоканале оценивают
показателем удельного расхода полосы частот:
затрачиваемой на передачу одного результата измерения (одной выборки)
при фиксированных значениях показателей верности у и РА.
В некоторых случаях, например, при сравнивании систем с
двухступенчатой модуляцией, представляет интерес показатель расхода полосы частот
в виде отношения r| = Af/AFr
113
Современная телеметрия в теории и на практике
2.6.2. Информационно-телеметрическая система с сигналами
АИМ-ЧМ
Радиолиния АИМ-ЧМ является дискретно-аналоговой и используется
для передачи как быстро меняющихся, так и медленно меняющихся
параметров.
Структурная схема приемной части такой системы показана на рис. 2.20.
|ри1 [-»|фнч1[—► вых. 1
|РИ2 ЦфНЧ2|—► ВЫХ. 2
N
Н"ч|1Н^ПтНФНЧ ° Нспд1
U|phn |-^|фнчм|—► вых.
Рис. 2.20. Структурная схема приемной части
В этой схеме:
ЛЧП - линейная часть приемника;
ЧД - частотный детектор;
СПД - селективный пиковый детектор;
РИ - расширители импульсов;
СС - схема синхронизации;
К - коммутатор.
Селективный пиковый детектор (СПД) по частотным свойствам
эквивалентен идеальному ФНЧ с частотой среза F = 1/2т.
Включение фильтра нижних частот (ФНЧ0) способствует повышению
отношения сигнал—шум на выходе приемника и преобразованию (совместно
с частотным детектором) сигнала АИМ-ЧМ в сигнал АИМ-АМ.
Для анализа помехоустойчивости системы будем полагать, что входное
воздействие представлено гармоническим сигналом с амплитудой AU!n, а
помеха в радиолинии имеет вид белого шума со спектральной плотностью N0 на
входе приемника.
По аналогии с радиолинией ЧМ-ЧМ амплитудный спектр шумов на
выходе частотного детектора:
о „,«,(?) = J N0ebLX(F)=KdJ^F
114
Глава 2. Теория телеметрии
линейно зависит от,частоты F в полосе пропускания ФНЧ0. Здесь Рс -
мощность сигнала на входе приемника; К^ - коэффициент передачи (крутизна)
частотного детектора. Если частота среза ФНЧ0 ограничена верхней
частотой группового видеосигнала, то есть Fcp = FB, то эффективное напряжение
шумов на выходе ФНЧ0 равно:
/г -|1/2
и
К] ]^F22F
= КЛ
л з
С другой стороны, эффективное напряжение сигнала на выходе того же
фильтра при 100% модуляции равно:
где Afm - девиация частоты передатчика.
Тогда среднеквадратическое значение шумовой погрешности равно:
_V2 К F> _ Fe '
2N0 Fe
1
i оАИМ-ЧМ
Pc 3 jbm,
I оАИМ-АМ'
где
m,
,*, Afn/F„ ~ индекс частотной модуляции несущей;
Уэаим-ам =yj2N0Fe/Pc - шумовая погрешность тракта АИМ-ЧМ.
Рассмотрим подробнее вклад отдельного канала в погрешность уэАИМ.АМ.
Для данного вида сигнала (АИМ-ЧМ) на выходе ФНЧ0 (рис. 2.21) величина
P=(UCBWXV=(AUm)V2=(mU0)V2
при ш = 1 имеет смысл мощности смодулированных импульсов несущей
частоты (на входе приемника); m - глубина АИМ; U0 - амплитуда
смодулированных импульсов.
^вых
Рис. 2.21. Сигнал с амплитудно-импульсной модуляцией (АИМ)
115
Современная телеметрия в теории и на практике
Если aK-TK/x - скважность амплитудно-модулированных
(информационных) импульсов, то средняя мощность сигнала Рс, затрачиваемая на
передачу сообщения по одному каналу, будет равна:
а верхняя частота группового видеосигнала:
Fe = 1/2х = а/2Т = aKN/2T0,
где Тк = Т/Ы.
При условии, что период опроса Т0 = l/2Z0Fm, где Z0 - показатель
превышения реального значения частоты опроса F0 над минимальным (по Котель-
никову), частота Fe = aZ0NFm = olkZ0AFv где AFL = NFm - суммарная полоса
частот, занимаемая N каналами.
Тогда:
„ рад _ пг 2N0akAF, _ nr 2N0AF,
р Jz~
с учетом выражения h2 « с , Уэ/Ша/-,ш = —Г2"'
2N0AFZ h
Возвращаясь к рассмотрению радиолинии АИМ-ЧМ и учитывая выигрыш
от применения ЧМ, равный y/3mf, получим:
Уэаим-чм = /г , >откУДа Л = /г—.
Если принять ак = Z0 = 2, уэ = 0,01, то при mf e 5 отношение сигнал-шум
составить = 16,2.
Оценим расход полосы частот, отводимой для передачи сигналов АИМ-ЧМ.
Как было ранее показано, в разделе 2.3, ширина спектра ЧМ колебаний
на несущей частоте равна:
А/ = 2pA/m = 2pmfFe = 2?>mfaZ0Afv
meAfm = mfFe.
Следовательно, полоса канала связи для вышеприведенных исходных
данных составит Af = 66 AfT, а искомый показатель расхода полосы частот
составит Г) = = 66.
щ
116
Глава 2. Теория телеметрии
2.6.3. Помехоустойчивость радиолинии ВИМ-АМ
Радиолиния ВИМ-АМ получила широкое распространение среди
аналоговых ИТС с ВРК. Она обладает высокой энергетической эффективностью,
не уступающей эффективности цифровых радиолиний. При
использовании многоступенчатой коммутации каналов ИТС с модуляцией ВИМ-АМ
приобретает высокую информационную гибкость в отношении изменения
частоты опроса и числа каналов. Для системы ВИМ-АМ характерны также
высокая точность и простота технической реализации.
Радиолиния ВИМ-АМ относится к числу широкополосных систем. Ее
групповой видеосигнал содержит опорные импульсы 0; и измерительные
импульсы И. (рис. 2.22.).
Рис. 2.22. Сигнал с время-импульсной модуляцией
(ВИМ),
Длительность т опорных и измерительных импульсов обычно принимается
равной и составляет несколько микросекунд. Опорные импульсы
обозначают границы канальных интервалов Тк, то есть являются канальными
синхросигналами (синхроимпульсами), имеющими частоту повторения Fk = 1/Тк.
После опорных импульсов Oj в шкале Тш размещаются измерительные
импульсы И., причем расстояние между ними пропорционально величине
полезного сигнала, передаваемого в i-м канале.
По аналогии с индексом частотной модуляции mf введем в рассмотрение
индекс временной модуляции:
А*.
М,=-
TJl^TJl
(2.92)
ххх
где Atm = Tu/2 - временная девиация измерительного импульса под
действием полезного модулирующего сигнала.
117
Современная телеметрия в теории и на практике
Очевидно, что чем больше величина Mt при заданном отношении сигнал-шум
на входе приемника, тем меньше относительная среднеквадратическая
погрешность yj = аш /ас, приведенная к эффективному значению сигнала ас и
обусловленная флуктуацией временного положения измерительного
импульса под влиянием шумовой составляющей аш смеси полезного сигнала и шума.
Действительно, чем больше величина Ти| при данном значении т, тем
меньше сказываются одни и те же временные флуктуации измерительного
импульса на величину уэ, так как с ростом ТН1 пропорционально возрастает
величина полезного сигнала. Напомним, что для нормального закона
распределения полезного сигнала в пределах шкалы Тш величина ас =Тш/6, для
равномерного закона Сс = Тш /2v3 .
В то же время при увеличении Mt увеличивается вероятность появления
в шкале Т|и шумовых выбросов, которые могут быть ошибочно приняты за
измерительные импульсы, что, в свою очередь, приводит к появлению ано-
С
мальных погрешностей уэаи = ■—^.
Следовательно, индекс временной модуляции имеет оптимальное значение,
обеспечивающее минимум суммарной погрешности Yz =>/уэ +Уэа„ •
Определение величины умн сопряжено со значительными трудностями,
поэтому на практике обычно пользуются флуктуационной (небольшой)
погрешностью уэ и вероятностью возникновения аномальной погрешности Ра||.
Зададимся вероятностью возникновения аномальной погрешности Ран - ЗхЮ4.
Указанная вероятность имеет место, если половина амплитуды
видеоимпульса в четыре раза превышает эффективное напряжение шума, то есть
U0/2oln - 4 [6]. Это относится к использованию в приемной части
радиолинии ВИМ-АМ (рис. 2.23) фиксатора измерительных импульсов
(решающего устройства) простейшего вида, основанного на обнаружении импульса
по пересечению порога IIе U0/2 любым из выбросов принятого сигнала,
ближайшего к опорному импульсу.
ЧримИ
ФНЧм
ВЫХ. N
Рис. 2.23. Использование фиксатора измерительных импульсов
118
Глава 2. Теория телеметрии
На рис. 2.23:
• АД - амплитудный детектор;
• Ф - фиксатор измерительных импульсов;
• ВИМ-АМ - преобразователь сигнала с время-импульсной
модуляцией в сигнал с амплитудно-импульсной модуляцией.
Чтобы оценить помехоустойчивость радиолинии ВИМ-АМ с помощью
нахождения взаимосвязи между величиной уэ и показателями энергетической
эффективности h2, а также определить значение индекса временной
модуляции Mt, соответствующее заданным величинам Рап = 3x10"4 и уэ = 0,01,
обратимся к рис. 2.24.
и
иПОр=и0/2
Рис. 2.24. Оценка помехоустойчивости радиолинии (ВИМ-АМ)
Здесь показаны передаваемый измерительный импульс uc(t) и принятый
импульс с наложенным на него шумом uc+m (t).
Момент прихода импульса фиксируется по пересечению порога Uno
передним фронтом принятого импульса, то есть напряжением uc+iij.
Из условия подобия треугольников на рис. 2.24 находим:
А/ т„
и..
Фр
где т - длительность фронта измерительного импульса.
Отсюда временное смещение фронта импульса или погрешность в
определении времени его прихода:
At = u,^. (2.93)
иЛ
119
Современная телеметрия в теории и на практике
Погрешность At в выражении (2.93) является случайной величиной.
Обычно считают, что она распределена по нормальному закону с нулевым
математическим ожиданием и дисперсией <5фр.
Так как и2ш = Рш, то дисперсия флуктуации переднего фронта импульса,
обусловленная влиянием шума:
(2.94)
<=Д'!
хфр
При передаче телеметрического сигнала, изменяющегося по
синусоидальному закону, с помощью время-импульсной модуляции:
где ас. - эффективное значение временной девиации измерительного
импульса, обусловленное передаваемым телеметрическим сигналом.
Из (2.95), (2.94) и (2.92) следует:
= аФР^2 =хфРл12Рш =хфр^2Рш ,29б)
Ь Д/и U0Atm U0M,x •
Выразим величину U0 через среднюю мощность полезного сигнала Рс.
U0=j2F^ = j2P£=JPcTK/x, (2.97)
где Рс|| = U02/2 - мощность немодулированной несущей в импульсе; Q = Тк/2т -
скважность сигнала В ИМ.
Подставим (2.97) в (2.96) с учетом того, что Рш = N0Af, Д/= 1/х(
Фр
Фр _ Фр
\2N0Afx ft
_ 1#у^ш _ l# fZiv0zyT _ у/^фр ^2 98)
J MtZyJPcTK/z Af,T \ PJK M,hy/x'
В выражении (2.98) было принято во внимание, что для сигнала ВИМ
показатель энергетической эффективности h2 = PcTk/N0.
Если считать форму измерительного импульса треугольной, то
длительность импульса т на уровне Uiiop=U0/2 будет равна хфр. Тогда из (2.98)
следует:
Y'=T7T- (299)
Теперь определим минимальное значение h, соответствующее порогу
помехоустойчивости радиолинии ВИМ-АМ, которая имеет место при ио/2ош=
4, где с = х[р .
120
Глава 2. Теория телеметрии
Из выражения (2.97) и условия т = т s У/А/следует:
#"
Отсюда минимальное значение h, соответствующее вероятности
возникновения аномальной погрешности Ран = 310'4:
^min=-l= = 8. (2.101)
Пользуясь выражением (2.99), найдем оптимальное значение индекса
временной модуляции Mt, соответствующее h = hmin и уэ = 0,01:
л/2
М = — = 17,7.
Lopt 0,01-8
Полученный показатель hmin = 8 характеризует высокую энергетическую
эффективность радиолинии ВИМ-АМ. Для сравнения укажем, что
цифровая радиолиния КИМ-ФМ имеет величину h = 10,6. Следовательно,
последняя проигрывает ей по мощности в 1,7 раза*
В заключение определим полосу частот, занимаемую радиолинией
ВИМ-АМ. Обозначим через at = TK/2Atm - величину, характеризующую
продолжительность интервалов при ВИМ. Очевидно, что:
Т Т \ 1
тк
2а,
_ т* _ 1
7a,N 4a,NZ0Fm
1
4a,Z0AFz
где Z0 - коэффициент превышения реальной частоты опроса F0 над
величиной 2Fm (частотой опроса по Котельникову), то есть F0 - 2Z0Fm; AFL = NFm -
суммарная полоса передаваемой информации.
Так как Af = 1/т, а т = A tm/Mt, то из выражения (2.102) получим:
Af = ~ = Т*- = ^-АМ,^г ■ (2.103)
В частности, при Z0 = 2 и at = 2 полоса занимаемых частот Af = 283AFr
Таким образом, по полосе занимаемых частот радиолиния ВИМ-АМ
уступает практически всем аналоговым и в особенности цифровым радиолиниям,
у которых Af / AFL = 28.
121
Современная телеметрия в теории и на практике
2.7. ЦИФРОВЫЕ МЕТОДЫ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ
ИНФОРМАЦИИ
Большинство современных и перспективных ИТС являются цифровыми,
что обусловлено их высокими показателями. Цифровые системы
обеспечивают ряд важных преимуществ по сравнению с аналоговыми, хотя и
являются более сложными. К основным достоинствам цифровых методов
передачи в телеметрии относятся:
• высокая точность передачи и отображения информации, практически
недостижимая при современной технологии в аналоговых системах;
• высокая помехоустойчивость, возможность многократной
ретрансляции и перезаписи информации;
• малый удельный расход полосы частот, то есть малые затраты
полосы частот канала на передачу 1 бит/с;
• удобство использования временного разделения каналов, создания
адаптивных и адресных телеметрических систем, их сопряжения с ЭВМ
и интегральными сетями связи;
• широкое использование достижений современной
микроэлектроники, обеспечивающее устранение противоречия между сложностью,
надежностью и стоимостью цифровой телеметрической аппаратуры.
2.7.1. Показатели качества цифровых телеметрических
радиолиний и предельные соотношения между ними
При передаче цифровых сообщений в качестве единичного объема
информации рассматривают один бит информации с заданной верностью. Верность
передачи цифрового сообщения оценивают по вероятности Р{ искажения
бита исходной информации, а скорость передачи информации
определяется числом бит, переданных в секунду:
Rrlog2a /тс,
где: тс - длительность многоосновного символа, а - основание кода.
Эффективность цифровой радиолинии оценивают по показателям
удельного расхода энергии Et:
V - E/N0 = E/(N0log2a) = P/(R^
и удельного расхода необходимой полосы частот Д/ :
122
Глава 2. Теория телеметрии
затрачиваемых на передачу одного бита информации при фиксированных
значениях вероятности Pi ошибки в бите; Ес - энергия, затрачиваемая на
передачу одного символа цифрового сообщения.
Вместе с тем используют и отношение сигнал-шум по мощности в полосе
пропускания приемника:
нг_Рс_ Рс ^ Рс *, З2
Рш N0Afnp ЯД, АД а/
Предельные соотношения между |32 и af могут быть найдены из формулы
Шеннона для пропускной способности канала связи:
С = А/пр1о§2а(1+Р/Рш),[6т/с]
где: Рс - средняя мощность передаваемого сигнала; Рш - мощность шума в
канале связи; А/пр - полоса пропускания канала связи.
Пропускная способность - предельное значение скорости передачи в
данном канале, то есть R<C. Из теоремы Шеннона следует, что существует
такое кодирование, при котором можно достичь R=C при Р^е (где £ - любая
сколь угодно малая заданная величина).
В случае невыполнения соотношения Rt<C радиолиния становится
практически неработоспособной, поскольку вероятность Pt резко возрастает.
Теорема Шеннона - это теорема о существовании идеального кодирования,
обеспечивающего безошибочную передачу информации. Шеннон не указал
способа кодирования, однако из выводов теоремы следует, что для
кодирования необходимо применять многоосновные коды, для которых
справедливо соотношение:
тсА/пр-> оо при хс -» оо (а -> оо>
Преобразовав выражение для С, получим:
C/Afnrlog2(1+P/PJ,
где: Ре = Е/хс = EJog^A, = £Д- Рш = А/А
При R=C:
1/а, = /og/f+Я,£/Д/А> - log2(1+F/af).
По определению логарифма:
21/а/ « 1 + р2/а^ откуда р2 e af( 21/a/ _ i). (2.104) х
123
Современная телеметрия в теории и на практике
Построим график зависимости р2 e/(d X
J v^*
\f__
г
" о,5Г
3,75
б.*
1.5
1
1
2
0,82
А 1
0,8 1
Р'<
3-
2-
1-^
Ln2'
i.
■i
-
.
Б
Г
v__
1 P-i = const
Y
—л ш
1 1 1 1 ►
af
Рис. 2.25. График зависимости р2 = f^
Предел Шеннона, то есть зависимость (рис. 2.25), позволяет теоретически
обосновать возможность взаимообмена энергетических и частотных
ресурсов радиолинии при фиксированных скорости и верности передачи
информации.
Из графика видно, что желание сэкономить полосу частот при af< 1
приводит к резкому увеличению расхода энергии р2. С другой стороны, для
уменьшения расхода энергии р2 необходимо увеличивать расход полосы частот си
Однако ни при какой сколь угодно большой полосе частот Afnp не удается
обеспечить расход энергии ниже минимального значения p2wjn = 1п2 « 0,7.
Любая реальная система отображается в данных координатах в виде точек,
лежащих выше предела Шеннона.
Точки А и Б, лежащие на пределе Шеннона, являются несравнимыми. Для
выбора системы следует использовать дополнительные ограничения либо
критерии предпочтения.
На практике любые системы в указанных координатах могут сравниваться
между собой либо с пределом Шеннона.
Для определения значений показателя р2 конкретных телеметрических
радиолиний необходимо найти его зависимость от основания кода с^ и
вероятности ошибки Рг Указанная задача может быть решена геометрическим
методом, наиболее наглядным из известных методов.
124
Глава 2. Теория телеметрии
2.7.2. Представление символов в виде сигнальных векторов
Покажем возможность распознавания символов на основе векторного
представления их в функциональном пространстве.
Любой символ из алфавита {S0)(t)} объема я, в котором 1< j < я, на
интервале от 0 до тс может быть представлен в виде разложения в обобщенный ряд
Фурье по ортонормированному базису:
5U)(0 = Z^V.(0,0<t<telj-l...e,
где к - номер члена ряда; S(KJ) = \SU)(t)<pK(t)dt- коэффициент
обобщенного ряда Фурье (координата); q>jj(t) - базисная (координатная) функция,
удовлетворяющая условию ортонормированности:
О, кФг
1 ,к*г
/ф,(0Фг(')л = '
о
Б - база сигнала, определяющая размерность ортонормированного
базиса {yK(t)}B.
Все координатные функции обладают единичной энергией и между собой
ортогональны.
Коэффициенты Фурье могут рассматриваться как координатные точки
в некотором многомерном абстрактном (функциональном)
пространстве. В этом случае каждый символ представляется либо точкой, либо
вектором, который расположен между началом координат и
вышеупомянутой точкой:
s^\t)^{s\\s[\...,s^}^s^{s\^s[^...,s^}:
Размерность Б-мерного пространства следует выбирать в соответствии
с требуемой точностью представления сигналов.
Свойства векторного представления цифровых сигналов
Энергия символа:
£"> = )[S(i\t)}2dt = } МЧС) ХЯ°Ч(0U =
= IW |ф*(0ф,(0л = I [^;)]2,
k,r
125
Современная телеметрия в теории и на практике
(при условии к = г). Энергия каждого символа равна сумме квадратов
координат в функциональном пространстве и численно равна квадрату нормы
сигнального вектора Sij), изображенного на рис. 2.26.
В
S
к
si
=rmll2
Effl=?[s«>]2=||s«f
JO)
VF"=«S!»|!
Рис. 2.26. Энергия символа равна сумме квадратов координат
Как следствие, если все символы Sa>(t), j = 1...Я цифрового сигнала
имеют одинаковую энергию Е, то соответствующие сигнальные векторы S(J),
j = 1,...,я располагаются на гиперсфере радиуса г
Скалярное произведение
Корреляционный интеграл с учетом свойств ортонормированного базиса:
)s"\t)S(l\t)dt = £ £ sy>S<'> |фД/)фг(0^ =
О .*=! г=\ о
S. . . . А. . Г_ ч и Г, .„„Г,
cos(py/
=Z^)^)=(^0)^(/))=I^0)llp(,)
равен сумме произведений одноименных коэффициентов Фурье,
перемножаемых сигналов иЛи произведению норм векторов на косинус угла между
ними.
Физический смысл скалярного произведения векторов заключается в том,
что оно дает проекцию вектора S{j) на вектор 5(/).
Расстояние между концами сигнальных векторов
i I
Различие символов S{J) (t) и S() (t) цифрового сигнала определяется
расстоянием между концами сигнальных ве^торор этих символов. Это
расстояние равно норме разностного вектора (S(J) - S(l));
126
Глава 2. Теория телеметрии
«*/.=
su)-s
1
= [EU) + E{,) - 2 (Su), S(,) )J = [e{j) + E(l) - 2 VF%^ coscp,., J.
Для оценки корреляции сигнальных векторов S J и S (символов SiJ) (t)
и S(,)(t)) принято использовать коэффициент корреляции, нормированное
значение которого равно:
Кл=-
1
coscp07' =—jS(J)(t)S(/)(t)dt,
Eu,D Еил ■ £.
где Е«'>=(Е«>+Е<1>)/2 - средняя энергия символов Su> (t) и S{" (t).
Q учетом этого, расстояние между концами сигнальных векторов 5(у и
'/V О
?(» /*ч.. с(').
S в функциональном пространстве:
djt =[EU) + Eif) -2(SU)SU))Y = [2Еил(1-Кил))2 (2.105)
зависит от средней энергии символов Su) (t) и S{,) (t) и от значения
коэффициента К, их корреляции.
Коэффициент корреляции символов S(1)(t) и S(2)(t) двоичных цифровых
сигналов (а=2) может принимать значения от-1 до+1. Если К12= 1, то
сигнальные векторы совпадают и их невозможно различить.
Максимально различаются противоположные сигнальные векторы
5,(1)=-5(2) (рис. 2.27), для которых расстояние d]2 :=Z{JE] +yjE2 1 При
условии Е1 - Е2 = Е, d12 = 2 \Е .
Рис. 2.27. Противоположные сигнальные векторы
127
Современная телеметрия в теории и на практике
Для ортогональных сигнальных векторов (рис. 2.28) К°!? = 0 ,а расстояние
d°l = yJEx + Е2 . При условии Е,-Е2-Е, dn = 4lE.
Рис. 2.28. Ортогональные сигнальные векторы
Таким образом, при одинаковой средней энергии символов Е12 ■= const
наиболее различаются и имеют наибольшую помехоустойчивость сигналы
с противоположными символами.
С другой стороны, для обеспечения одинаковой помехоустойчивости
сигналы с ортогональными символами требуют в два раза большего расхода
энергии, чем сигналы с противоположными символами. Действительно,
разнос ортогональных векторов на величину d^ = 2v E может быть
достигнут при условии Е1=2ЕиЕ2ж2Е{ dn = V 2Е + 2Е = 2v E ).
Изобразим с помощью векторных диаграмм весь набор двоичных цифровых
сигналов (рис. 2.29), обеспечивающих одинаковую помехоустойчивость.
1
>
§0)
k J
d12=2V¥ <
г ^
1
>
r_
s<1»
2&/
\№.
2VE\
s<1>
i
1
к
>
s<2>
E12=E
s<2' s(2)
E12=2E E12=2E
КИМ2-ФМ КИМ2-ЧМ КИМ 2-AM (с пассивной паузой)
Рис. 2.29. Векторные диаграммы.
128
Глава 2. Теория телеметрии
2.7.3. Геометрическое представление шума
Нормальный белый шум (НБШ) также можно представить в виде
обобщенного ряда Фурье:
со случайными коэффициентами:
NK = )N(toK(t)dt,
задающими случайные координаты шумового вектора в функциональном
пространстве.
Тогда коэффициенты Фурье распределены по нормальному закону:
^00 =
1
2о
yJ2noNk
"I
в котором:
• п (t) € N (t) - шумовая реализация процесса N (t);
• М [N(t)] - 0, g2Nk - DfNJ - соответственно математическое ожидание
и дисперсия коэффициентов Фурье НБШ.
Найдем функцию корреляции RN(i) шумовых реализаций, имеющих спектр
gfXf)t изображенный на рис. 2.30.
9n(0a
-F F
Рис. 2.30. Функция корреляции RJx)
По теореме Винера—Хинчина:
/W = F-'(>(/)]= )g(f)eilK*df.
5 3ml Ml
129
Современная телеметрия в теории и на практике
Заменив g(f) на gN(f), получим:
eJ2'/x Хр
^^4^J2K^t = g0-—\% = go
eilnFx _e~j2nFx
sin 2л Ft
go = go2F
7ГТ
J2k/x
sin2nFx
2nFx
2jnx
= g02FSa[2nFx].
RnW
Рис. 2.31. График функции S, [2nFr]
Как видно из графика функции Sa [2nFx], представленного на рис. 2.31:
HmSo 2FSa[2к Ft ] = g05 (т ), откуда Rn(t) - gfi(x).
F~*ao
Найдем коэффициент корреляции разноименных коэффициентов Фурье,
определяемый через произведение координат:
M[NkNr] = M
ЦофЛОЛШ^,)фЛО«*1
= ]]ук(Ш*1)М №)*(*№<*> =
О О
|'.=
ГС =
ch
■ t+x
tx-t
~dtx\
= | J<p,(Oq>r(r+T)J^(t)<*A,
0 -/
где RN(x) = M[N(t)N(t+i)] {no определению).
С учетом равенства RN(x) = g08(x) имеем:
130
Глава 2. Теория телеметрии
M[NKNr]= j<P,(» /фг(/+т)^(т)ЛЛ .
О -г
Воспользовавшись фильтрующим свойством дельта - функции:
Jq>r(r+T)5(T)A=<pr(0.
получим:
% fgo пРи к = г
J4 10 /7/7W К* Г
Дисперсии всех коэффициентов одинаковы и численно равны
двусторонней спектральной плотности белого шума:
D[Nk]=c2Nt=g0
Разноименные коэффициенты Фурье не коррелированны между собой.
Следовательно, коэффициенты Фурье белого шума представляют собой
независимые случайные величины, подчиняющиеся нормальному закону
распределения:
Вероятность возникновения заданной шумовой реализации
Поскольку шумовая реализация описывается набором коэффициентов
Фурье, то она может быть представлена в функциональном пространстве
вектором с соответствующими координатами.
Будем считать, что ряд Фурье ограничен Б членами. Тогда:
б г
В связи с этим можем найти вероятность того, что случайный вектор N
лежит в пределах между п и п + Ап.
Точно заданная реализация шумового вектора If - {п]9п29...9пБ} возникает
с нулевой вероятностью P{N = п) = 0, , где~ N - случайный вектор.
Поэтому будем искать вероятность Р{п < N <п + An} * 0 попадания
случайного вектора N в заданную (небольшую) область функционального
пространства {(/?! <Nx<nx + Aw,),..., (пБ <NE <пБ + АпБ)} шумового вектора
п (рис. 2.32).
131
Современная телеметрия в теории и на практике
/
1
\z
—►
У\
1
'ДГЬ
АПз
Рис. 2.32. Вероятность попадания случайного вектора в заданную область
Так как координаты N,, N2,..., NB независимы, то с учетом малости величины
А п получим:
Р«I < N< n + An\=Y\Pi {ni <Ni <n\r+A«J =
/=i
= X\Wm{n^n.,=
/=1
An
An
V^J
exp
oy
2g0
exp
п]+п\+..Лп\
f в \
2
-=^exp
Г1|2
4o
2§o
= J exp
r(«)
2g0
|Г||2
где /7 - квадрат нормы реализации шумового вектора, равный энергии
шумовой реализации; А - коэффициент, определяемый величиной области
функционального пространства, в которую Должна попасть реализация
шумового вектора.
Анализ полученного выражения, график которого изображен на рис. 2.33,
позволяет сделать следующие выводы:
1. Вероятность возникновения шумовой реализации зависит только
от ее энергии и не зависит от формы.
2. Чем больше энергия шумовой реализации, тем менее вероятность
ее появления. Самую большую вероятность имеет реализация с
нулевой энергией.
3. Шумовые реализации с одинаковой вероятностью появления
образуют в многомерном пространстве гиперсферу с постоянным
радиусом г = \\п\\ = у}Е{п).
132
Глава 2. Теория телеметрии
А А Вер
■►Е
(п)
Рис. 2.33. Анализ полученного выражения
2.7.4. Алгоритм оптимального когерентного приема
Пусть обобщенная структура приемника цифровых сигналов имеет вид,
представленный на рис. 2.34.
Приемник
Синхр.
-►1
-►2
■>а
I L
Рис. 2.34. Обобщенна* структура приемника цифровых сигналов
На вход приемника поступают цифровые сигналы, представляющие собой
последовательности радиоимпульсов длительностью тс из алфавита объема
a - основания кода. Данный алфавит представляет собой множество {S0)(t)j
всех сигналов, в котором l£j<af0<t <тс.
Основные допущения:
• , помехи n(t) независимы от полезного сигнала (отсутствует
корреляция) и достаточно хорошо описываются белым гауссовским шумом
со спектральной плотностью 8n\J) = "~T~ = So [Вт/Гц];
133
Современная телеметрия в теории и на практике
• в канале нет существенных переходных искажении;
• синхронизация идеальная;
• в точке приема известны формы всех сигналов (символов),
неизвестен только номер j принимаемой функции S0)(t), который подлежит
распознаванию.
Покажем алгоритм распознавания символов S0)(t) на геометрической
модели оптимального приемника заданной структуры.
Передаче символа S0)(t) в функциональном пространстве соответствует
сигнальный вектор SU). В радиоканале к символу S0)(t) добавляется
реализация белого шума n(t). При этом суммарному сигналу x(t) - S0)(t) + n(t)
соответствует суммарный вектор х = SU) + п . Однако этот вектор может
быть результатом сложения с шумом любого символьного вектора из
набора объемом а (рис. 2.35).
г ' \ г
Рис. 2.35. Суммарный тектор х = S + П
i
Таким образом, если известны все символьные вектора S, j - 1,...,я, то в
результате анализа вектора х можно принять а гипотез:
г' ' г
x = Su)+nu),j = \ a
Г Г '
и найти а гипотетических реализаций шума n{J) = х - Su).
Далее приемник вычисляет нормы гипотетических реализаций. На этом
заканчивается обработка сигналов. Производится сравнение норм. Наиболее
вероятной является реализация шума с минимальной нормой:
mm
j
п.l~> max Вер.
134
Глава 2. Теория телеметрии
Поэтому оптимальный алгоритм приема заключается в принятии решения
о приеме символа S , которому соответствует реализация шумового
вектора с минимальной нормой:
и Г и
(Опт. алгоритм): Sm <-» mm \\n. II, J = 1...я.
j и j\\
Полученный алгоритм соответствует оптимальному алгоритму по В. А. Ко-
тельникову (критерии идеального наблюдателя), максимизирующему
апостериорную вероятность правильного приема сигналов.
2.7.5. Вероятность ошибок приема цифровых двоичных
сигналов в оптимальном приемнике
Под действием шума в оптимальном приемнике с некоторой вероятностью
возникают ошибки. Для анализа помехоустойчивости разобьем функцио-
:<2>
нальное пространство между двумя сигнальными векторами S и S
на две области I и II с прмощьнр равноудаленной на расстояние d/2 от концов
сигнальных векторов 5, и S2 разделительной поверхности (рис.2.36).
Рис. 2.36. Анализ помехоустойчивости
Для возникновения ошибки при передаче символа S(1)(t) шумовой вектор
п должен пересечь разделительную поверхность. Разложим вектор шума
п на составляющие п и nopm, действующие вдоль и перпендикулярно
разделительной поверхности.
Продольная составляющая ппр, смещающая конец вектора щ параллельно
разделительной поверхности, не влияет на возникновение ошибок в
двоичной радиолинии. Поэтому ее помехоустойчивость определяется
составляющей шума nopm.
135
Современная телеметрия в теории и на практике
Вероятность ошибки Рош при опознании символа в двоичной радиолинии
совпадает с вероятностью ошибки в бите Р1 принимаемой информации и
равна вероятности того, что случайная координата по т превысит значение d/2.
ош орт /-»
d/2 VLll50 d/2
dn =
\n2 2 И
— = z z- -j=
\§o V£o
n2 = z2g0 dpi = yfg^dz
=_L г
72л J
*,/&
1-Ф
:t/z = -
Это неберущийся интеграл, который можно выразить через
табулированную функцию Крампа:
ф(г)=:тЬН-т
72л"
Л,
значения которой приведены в справочнике Бронштейна и Семендяева.
Аргумент функции Крампа определяется показателем удельного расхода,
энергии р2 и коэффициентом корреляции символов К12, а вероятность
ошибки в бите для двоичной радиолинии — учетом (2.105):
Pt =±[l-0jEl2(l-Ki2)/No =^[\-фф\1-Кп))] (2.106)
Выводы: Для уменьшения вероятности ошибки в бите необходимо
увеличивать аргумент интеграла вероятности. Его можно увеличивать двумя
способами:
1) уменьшением интенсивности помех g0;
2) увеличением расстояния d между концами векторов, которое
достигается:
Во-первых, путем увеличения длин векторов, то есть за счет увеличения
энергии сигналов; во-вторых, за счет варьирования поворота векторов.
Поворот означает изменение формы сигналов. Максимальное
расстояние d имеет место в том случае, если векторы имеют одинаковую длину
(энергию), расположены на одной прямой и направлены в
противоположные стороны, то есть iS(1)(/) = -iS(2)(/) (рис. 2.37).
136
Глава 2. Теория телеметрии
s(V
VP>=7i;. yp>=yi; ^ 5И
*,s(
d = 2VEi
Рис. 2.37. Максимальное расстояние d
Где:
• Е(,) - энергия первого двоичного символа;
• Е(2) - энергия второго двоичного символа;
• Е, - энергия, приходящаяся на один бит.
Таким образом, для противоположных сигналов вероятность ошибочного
приема бита информации составит:
1-Ф
/Г=-
2^
1-Ф
1-ф
2 2 2
С учетом равенства р2 = E1/N0 = E^g^
1-ф[р>/2]
2
У ортогональных двоичных сигналов (рис. 2.38):
1-ф[Щ/2^~0] 1-ф[У2£, /4g0] _ 1_ф[р]
2 ~ 2 2
<w=2Ve;
Uopm "~ VZjC1 • P^w
» "* 1
ve; s<2>
Рис. 2.38. Ортогональные двоичные сигналы
137
Современная телеметрия в теории и на практике
Из формулы видно, что радиолиния с ортогональными сигналами при том же
1 расходе энергии (как у противоположных сигналов) дает большую
вероятность ошибки. С другой стороны при той же вероятности ошибки эта
радиолиния проигрывает в удельном расходе энергии в два раза радиолинии с
противоположными сигналами.
При передаче информации с помощью ортогональных сигналов при
основании кода а = 2 фактически передаются два противоположных сигнала,
энергия которых составляет половину энергии ортогонального сигнала
(рис. 2.39).
Еорт /2
IISорт II = -у/ Еорт S
Рис. 2.39. Передача информации с помощью ортогональных сигналов
Остальная энергия (вторая половина) уходит на передачу опорного сигна-
i и i и р
ла Son, который не несет полезной информации. Причем poJ = JEopm /2.
Данная геометрическая модель вытекает из системы равенств:
где
• So/LiO и S{OpL(0 ~~ первый и второй ортогональные символы
соответственно;
• ЗЦр(0 И ^«рЧО ~" соответствующие ортогональным первый и второй
противоположные символы;
• $оп (0 ~ опорный сигнал.
Примечание: опорный сигнал может использоваться для синхронизации
приемной аппаратуры.
138
Глава 2. Теория телеметрии
2.7.6. Оценка помехоустойчивости двоичных радиолиний
Количественные оценки помехоустойчивости типовых двоичных
радиолиний могут быть найдены из графиков зависимостей Р^Р^р2), приведенных
на рис. 2.40.
6 8 10 12 14 16 18 20 22
Рис. 2.40. Количественны* оценки помехоустойчивости
На рис. 2.40 принято: ОФМ — относительная фазовая манипуляция, МЧМ
— минимально-частотная манипуляция. Графики построены при
различных значениях коэффициента К12 корреляции символов. Цифровые
сигналы КИМ2-ФМ, КИМ2-ЧМ и КИМРАМ (рис. 2.40) имеют коэффициенты
корреляции /С - -1, КЧМ^КЛМ^0. Поэтому при одинаковой вероятности
ошибки:
Сигналы КИМ2-ОФМ и КИМ2-МЧМ получают путем относительного
кодирования сигнала КИМ2-ФМ, поэтому одной ошибке в символе сигнала
КИМ2-ФМ будут соответствовать две ошибки в двух последовательных
символах сигналов КИМ2-ОФМ и КИМ2-МЧМ, если один из символов принят
правильно. Следовательно, при одинаковом удельном расходе энергии:
р «р =2Р (1-Р )*2Р Р «1
г ОФМ * МЧМ *£ ФМ\ ' £ ФМ' *£ ФМ* £ ФЛЛ^'*
При этом для достижения одинаковой вероятности ошибки Р=105
удельный расход энергии р20фЛ/яе9,8 лишь немного превышает значение (32фЛ/=9,2.
Это означает, что радиолинии КИМ2=ФМ, КИМ2-ОФМ и КИМ2-МЧМ
характеризуются практически одинаковым удельным расходом энергии
и превышают в два раза по энергетической эффективности радиолинии
КИМ2-ЧМ и КИМ2-АМ с пассивной паузой.
139
Современная телеметрия в теории и на практике
2.7.7. Цифровые радиолинии с многоосновными кодами
Как известно из теории потенциальной помехоустойчивости, уменьшение
вероятности ошибки в приеме символов возможно только с применением
многоосновных кодов.
Как показал В. А. Котельников, наилучшие показатели эффективности
радиолиний обеспечивают так называемые эквидистантные
(равноудаленные) сигналы, у которых расстояние и коэффициенты корреляции между
любыми парами символов одинаковы (d. - const, Kjc - const). Данные
сигналы имеют одинаковую энергию, причем концыизображающих их
векторов лежат на гиперсфере постоянного радиуса VЕ . Известны два вида
эквидистантных сигналов - ортогональные и симплексные сигналы.
Рассмотрим эти сигналы в отдельности.
Ортогональные сигналы
Ортогональным алфавитом называется алфавит, составленный из
символов одинаковой энергии, удовлетворяющих условию ортогональности -
равенства нулю корреляционного интеграла:
)s(,)(t)Sl2\t)dt = (S«\Sl2))=Q.
О
Скалярное произведение векторов, равное коэффициенту корреляции:
(5<'>,^>)=|^>||^>lcos9l2=/:i2
равно нулю, если угол между векторами равен 90°.
Физический смысл скалярного произведения векторов заключается в том,
что оно дает проекцию вектора! S(l) на вектор S(2' - величина, которой
определяется значение коэффициента корреляции (К - 0). Таким
образом, если используется алфавит символов S® (t);j - 1,..., at попарно
ортогональных друг другу, то изображающие их в функциональном пространстве
сигнальные вектора SiJ) J - 1,..., а также попарно ортогональны
(перпендикулярны) между собой. Причем концы сигнальных векторов
располагаются на гиперсфере радиуса г = у/Е , расстояние между концами любых
двух сигнальных векторов:
dapm=>l2E= const
постоянно при любом основании кода а. Рассмотрим ортогональные
сигналы в 2- и 3-мерном пространствах (рис. 2.41).
Характерной особенностью этих сигналов является то, что база Б
(размерность функционального пространства) равна основанию кода а.
Создание новых ортогональных сигнальных векторов при увеличении основания
140
Глава 2. Теория телеметрии
а=2 а=3
а) б)
Рис. 2.41 Ортогональные сигналы
кода а возможно лишь за счет увеличения размерности Б = а
функционального пространства. На практике в качестве ортогональных сигналов
обычно используют сигналы КИМа-ЧМ.
Симплексные сигналы
Концы сигнальных векторов SCJ , j = 1,..., а симплексных сигналов
размещаются в вершинах правильного многоугольника (симплекса) в
функциональном пространстве с размерностью Бсимп = а-1, из-за чего и возникло
название этих сигналов. При этом расстояния между концами сигнальных
векторов одинаковы и равны:
dcalw=pE(l-Kaiun)=pEa/(a-l),
где Ксимп = - 1/(я-1) - коэффициент корреляции символов симплексного
сигнала.
Приведем примеры геометрического изображения симплексных сигналов с
различным основанием кода а (рис. 2.42).
а) б) в)
Рис. 2.42. Геометрическое изображение симплексных сигналов
141
Современная телеметрия в теории и на практике
При фиксированном основании кода а концы симплексных сигнальных
векторов S{cj) ,j e 1,..., а совпадают с концами ортогональных сигнальных
векторов S^m ,j- l,...,fl.
На практике в качестве симплексных сигналов обычно используют сигналы
КИМл-ФМ. При а = 2 симплексные сигнальные вектора S(1\ и S(2)c
оказываются противоположными друг другу и для их представления в
функциональном пространстве нужна всего одна координата. Пара
противоположных сигналов (векторов) изображает наилучшие двоичные сигналы. Как
видно из рис. 2. 47а, при фиксированном dn - 2\JE -Е = р/2£| = 2£,
то есть в 2 раза больше средней энергии противоположных сигналов.
При а = 3 концы симплексных сигнальных векторов S(1)c, S(2)c, S(3)c лежат
на окружности под углом 120°, что соответствует максимальному
расстоянию между векторами. Для таких сигналов размерность Бсимп = 2, а
расстояние между их концами dciiMn = \ЗЕ достигается при энергии Есимп = Е, в то
время как при использовании ортогональных символов Ео т *= ЗЕ/2.
Если а = 4, то наилучшему расположению векторов соответствует
вершина тетраэдра. Он вписан в 3-мерную сферу с центром в начале координат.
Очевидно, что минимальное число координат (база) равно 3. Сфера имеет
радиус л[Ё = yJElog24 - yJ2E} . При этом расстояние между концами
сигнальных векторов damn = V 8 is / 3 . Для получения такого же расстояния при
использовании ортогональных векторов необходима энергия Еорт = 4Е/3
(Е - Е).
При дальнейшем увеличении основания кода а различие между требуемой
энергией симплексных и ортогональных символов, необходимой для
обеспечения заданного расстояния между концами сигнальных векторов, еще
более уменьшается и стремится к нулю, или а->оо.
В то же время симплексные сигналы несколько выгоднее отличаются от
ортогональных по показателю расхода полосы частот, поскольку база этих
сигналов на единицу меньше Б = Б - 1.
J орт симп
Однако у симплексных сигналов полоса частот используется не лучшим
образом. Это связано с тем, что при а = 2Г база симплексного кода оказывается
нечетной Б = 2Г - 1. Поскольку координатные функции всегда парные:
Ф.(0 =
(p2w(/) = .4cos27t —
%с
<p2n_](t) = Asm2n—, / = —
ХС ХС
142
Глава 2. Теория телеметрии
то одна из координат оказывается неиспользованной. Это и приводит к
ухудшению использования полосы частот. Даже простейший противоположный
код, требующий всего одну координату, не обеспечивает хорошего
использования полосы: если используется косинусная координата, то синусная
координата оказывается запрещенной.
По указанным причинам используются более простые коды, которые хуже
по энергетике, но лучше по использованию полосы частот. К таким кодам
можно отнести ортогональные и биортогональные коды.
Биортогональные коды
Если в радиолинии существует ограничение на базу Бт.п сигналов, то
вместо ортогональных сигналов с базой Бт.п - а предпочтительнее использовать
биортогональные сигналы с вдвое меньшей базой БтЫ = а/2.
Биортогональные сигналы могут быть получены из ортогональных
сигналов добавлением к каждому символу (вектору) противоположного символа
(вектора). В этом случае каждому символу биортокжального сигнала
противоположен один символ и ортогональны оставшиеся (я-1) символы.
s<1)
d 1-1 = 2VE, d 12 s d 1-2 a d2-i = d-1-2 sV2E
a = 4, Bmin * 2
3 = 6, Bmir
a) 6)
Рис. 2.43, Штортогоналъные сигналы
Как видно из рис. 2.43, биортогональные сигналы не являются
эквидистантными. Однако расстояния между концами сигнальных векторов этих
сигналов при фиксированной энергии символов не меньше, чем соответствующие
расстояния для ортогональных сигналов. При этом база биортогональных
сигналов Бо т - а/2 меньше базы ортогональных сигналов в два раза.
На практике в качестве биортогональных сигналов используют сигналы
КИМо-ФМ4/ЧМл/4 с комбинированной частотно-фазовой модуляцией, когда
фаза символа с любой разрешенной частотой может принимать четыре
значения (частоты символов выбирают из условия ортогональности последних).
143
Современная телеметрия в теории и на практике
Помехоустойчивость приема многоосновных сигналю
На практике помехоустойчивость многоосновных сигналов обычно
оценивают с помощью верхней границы вероятности нахождения шумовой
реализации в сигнальной области функционального пространства данного
сигнала. Используя этот подход, определим помехоустойчивость для
рассматриваемых ранее многооснозных сигналов.
Вероятность ошибки в радиолинии с многоосновными симплексными
сигналами
Пусть а = 3. Данному коду соответствует система из сигнальных векторов,
лежащих в одной плоскости под углом 120°. Для возникновения ошибки
при передаче символа 5(,) необходимо, чтобы шумовой вектор Пересек
хотя бы одну из разделяющих поверхностей 1-2 и 1-3 (рис. 2.44).
Рис. 2.44. Шумовой вектор
Отсюда вероятность ошибки Рош e 5ер{перес.1-2 v перес.1-3}. Как известно
из теории вероятности, вероятность совместных событий, например, А и В:
{вер. (A v В)} - Р(А) + Р(В) - Р(А пВ)- Р(А) + Р(В) - Р(А)Р(В).
Тогда по аналогии:
Рош - Вер.{перес.1-2}+ Вер{перес.1-3}- Вер. {перес.1-2}Вер{перес.1-3}.
Если отбросить последнее слагаемое, то формула превращается в неравенство:
Рош < Вер.{перес.1-2}+ Вер{перес.1-3} *■ 2 Вер{перес.1-2}.
Следовательно, при произвольном основании кода а:
d
1-Ф
< (а-1) Вер {перес. 1-2} - (а-1)
2^
144
Глава 2. Теория телеметрии
Поскольку datMn - yJZEa 1{а -1), то:
^«.•«ш<(в-0
1-Ф
а2Е
l(a-\)4g0
12 =
таким образом:
= (а-М
1-Ф
= (а-1)
1-Ф
fgg, log2 a
ka-l)2g0
Pj^jlog^
/2 =
/2
1-Ф
<я
'а-1
log2a
Рошсш,<(а-1)—
z
С увеличением основания кода а будет улучшаться помехоустойчивость кода,
поскольку при постоянней энергии на бит Е, будет расти энергия на символ
Е *° Е1 log.j а и радиус гиперсферы, в которую вписаны сигнальные вектора.
При этом будут увеличиваться расстояния между векторами и
уменьшаться вероятности Р в передаче символов.
Вероятность ошибки в радиолиниях с многоосновными ортогональными
сигналами
Пусть а - 3. Тогда по аналогии с предыдущим случаем в системе из 3-х
ортогональных векторов (рис. 2.45) вероятность ошибки в передаче первого
символа S(,) будет равна:
Рпш - Bepfnepec. 1-2 иперес. 1-3] < Вер[перес. 1-2J + Bep.fnepec.1-3].
► С
Рис. 2.45. Системе из 3-х ортогональных векторов
145
Современная телеметрия в теории и на практике
Таким образом, для ортогональных многоосновных сигналов, как и для
симплексных сигналов:
^ш„рИ,<(Я-1)
Рошарт <(<*-!)
(а-1)
t-0[pyi^7j
При а > 3 значения Р мало отличаются от значения Р
г ow орт с
, что свиде-
и' ^
тельствует о том, что формулы для Рош симплексных и ортогональных
многоосновных сигналов сходятся при а -> оо к пределу Шеннона.
Вероятность ошибки в радиолиниях с биортогональными символами
Поскольку биортогональный код не является эквидистантным
(равноудаленным), то вероятность перехода символа под действием шумов в другие
символы неодинакова: вероятность перехода каждого символа в
противоположный много меньше, чем вероятность перехода в один из (а-2)
ортогональных символов.
Если пренебречь вероятностью перехода в противоположный символ, то
выражение для вероятности ошибки будет определяться практически тем
же выражением, что и для ортогональных сигналов:
ошбиорт
<{а-2)
1-Ф[РУь^]
(работает при а > 4).
Биортогональный сигнал обладает той же помехоустойчивостью, что и
ортогональные сигналы при заданном основании, однако позволяет
экономить число координат в 2 раза.
Оценка потенциальной помехоустойчивости многоосновных радиолиний
Для оценки помехоустойчивости типовых цифровых радиолиний
найденные выше вероятности ошибки в символе Рош=*/ф2,а) пересчитываются
146
Глава 2. Теория телеметрии
в вероятности ошибки в бите Р1 =/ф2, а). В многоосновной радиолинии
каждый символ несет п = log2a бит информации. Так как все
коэффициенты корреляции Kjt = k при всех; и 1, то вероятность ошибки в символе не
зависит от того, какой конкретно символ передавался.
При ошибке в опознании символа S. (t) может быть принято решение о
приеме любого из (я-1) других равноудаленных символов St (t),j *1. При этом
среднее число ошибочных бит при ошибке в символе можно найти как
отношение числа ошибочных бит во всех ошибочных символах к числу бит во
всех ошибочных словах:
lBi tt n{a-\) 2{а-\) 2(*-1)
Тогда вероятность ошибки в бите связана с вероятностью ошибки в символе
зависимостью:
р= а р
1 2(в-1) ои"
откуда:
Р=Р ,а=2
Р=ЗАР ,а=3
Р1 = 1ЛР0Ш, а = оо
Для ортогональных кодов, для которых:
^.<(«v-««y^.
зависимость Рх - f (Р2, а) имеет вид неравенства:
г, < .
1 2 2
Из анализа последней формулы можно установить, что с ростом основания
кода а помехоустойчивость возрастает при постоянной величине р2, так как
уменьшается вероятность Рош. Графики зависимостей Р1 =/ ф2, а) для
ортогональных сигналов представлены на рис. 2.46.
Если устремить а -> оо, то зависимость Р1 от р2 приобретает ступенчатый
характер.
147
Современная телеметрия в теории и на практике
Ln2 * 0,7
0
0,5
ю-1
ю-2
ю-3
10"4
ю-5
10"6
10
15
20
(г
а=1б*
\а = 2
,а = 4
^01 = 8
1—►
р2
Рис. 2.46. Графики зависимостей Р, =f ($г, а)
10,5 при р2<1п2
[0 при р2 > In 2
Рх =
Это свидетельствует о том, что ортогональные си^йалы обеспечивают
предельную помехоустойчивость, то есть реализуют лучший код по Шеннону.
Эти же графики можно использовать для оценки помехоустойчивости
симплексных сигналов, если ввести поправку:
a
r'opm * г*.
0 — 1
Оценка частотной эффективности цифровых радиолиний
Частотная эффективность цифровых радиолиний определяется удельным
расходом полосы частот:
af(a)=Af(a)x/log2a.
Причем произведение ширины необходимой полосы частот на
длительность радиосимвола с прямоугольной огибающей независимо от фазы при
любой частоте/^, заполнения А/тс=1. Поэтому показатель a/a) в конечном
счете определяется количеством различных частот заполнения символов
радиосигнала.
Все символы радиосигналов КИМРАМ, КИМа-БМ, КИМа-ФМ и КИМа
ОФМ передают на несущей частоте и для этих сигналов:
а
'/ФМ
1/log2a.
(2.107)
148
Глава 2. Теория телеметрии
Частота заполнения символов сигнала КИМа-ЧМ принимает а различных
значений. При частотном разносе Д/ смежных символов:
А/(а)тс-1+(а-1)А/.„тс
Поэтому сигналы КИМа-ЧМ с ортогональными символами (A/).+fxcel)
характеризуются удельным расходом частот:
af4M=a/log2a. (2.108)
Сигналы КИМ2-МЧМ характеризуется разносом частот Af12=1/2xc и а/чм=1.
Биортогональные сигналы КИМа-ФМ4/ЧМа/4 построены так, что на
каждой из частот/, передают четыре символа с различными фазами, поэтому:
а/ФМ4/чМ=а/41°ёга- (2-109)
Из выражений (2.1) - (2.3) видно, что при больших основаниях кода а
существенный выигрыш по удельному расходу необходимой полосы частот
могут обеспечить радиолинии КИМа-ФМ.
2.7.8. Сравнение информационно-телеметрических систем
Общий подход
Сравнение ИТС с различными сигналами можно производить как по
отдельным показателям эффективности (точности, удельному расходу
энергии и полосы частот, отношению сигнал-шум и т. д.), так и по
эффективности этих систем в целом, то есть по степени приближения
сравниваемых систем к идеальной (пределу Шеннона).
В последнем случае сравниваемые системы отображаются в виде точек
в системе координат из Р*, af или p2w, а/ы, нормированных по отношению
к одному биту передаваемой информации или к одной выборке,
соответственно, при фиксированных показателях верности воспроизведения.
По степени близости точек к кривой (пределу Шеннона), построенной в
этих координатах по зависимости (2.1), судят о наиболее эффективной
из сравниваемых систем.
Таким образом, можно сравнивать между собой отдельно как цифровые, так
и аналоговые радиолинии.
Алгоритм сравнения аналоговых и цифровых радиолиний
Данный подход можно использовать и для сравнения в единых координатах
аналоговых и цифровых радиолиний. Но для этого необходимо привести
149
Современная телеметрия в теории и на практике
в соответствие не только показатели удельных расходов энергии и полосы
частот, но и показатели верности передаваемых сообщений.
В аналоговой радиолинии для большинства передаваемых выборок
характерна нормальная погрешность, определяемая приведенным к шкале
среднеквадратичным значением, для меньшинства выборок - большие
аномальные погрешности, возникающие с вероятностью РА.
В цифровой радиолинии при передаче большинства выборок за счет
квантования сигнала на передающей стороне возникает погрешность
квантования, определяемая также приведенным к шкале среднеквадратичным
значением ук. Кроме того, при передаче некоторого числа выборок один или
несколько символов, входящих в кодовую комбинацию, искажаются
шумами настолько, что происходит трансформация переданной комбинации
в ошибочную. Вероятность этого события, вызывающего аномальную
погрешность, обозначают РАЦ.
Анализ рассмотренных погрешностей показывает:
1. Имеется явная аналогия в характере проявления нормальных
погрешностей в аналоговой радиолинии и погрешностей квантования
в цифровой радиолинии: эти погрешности проявляются в
большинстве выборок, и их распределения определяются единственным
параметром - дисперсией. Этим сходство погрешностей заканчивается,
они имеют различное распределение и зависят от различных
характеристик системы.
2. Аномальные погрешности в аналоговой и цифровой радиолиниях
имеют то сходство, что возникают с некоторой небольшой
вероятностью и искажают выборку настолько, что ее желательно отселектиро-
вать и не включать в итоговые результаты.
В связи с этим, при сравнении аналоговых и цифровых линий следует
потребовать равенства:
Выполение указанных равенств означает в первом приближении
одинаковость метрологических характеристик передаваемых выборок. При этом
пренебрегают различиями в законах распределения погрешностей
квантования и нормальных погрешностей, а также различиями распределений
аномальных погрешностей в аналоговых и цифровых радиолиниях.
Приведение в соответствие удельных показателей аналоговых и цифровых
систем осуществляется путем пересчета показателей эффективности р2, а.
150
Глава 2. Теория телеметрии
цифровых систем в показатели эффективности p2w, а, аналоговых систем.
Сделать это можно, если учесть, что любая выборка (измерение) передается
в цифровой радиолинии словом, длительностью Тю состоящим из m
символов, имеющих одинаковую длительность тс = Т^/т. При основании кода а
это обеспечивает М = ат уровней квантования.,
Удельный расход необходимой полосы частот на измерение в цифровой
радиолинии:
( ¥ )
Uog2aJ
Удельный расход энергии на измерение в цифровой радиолинии:
ntcc=maf. (2.111)
K=EJNo=El(\ogaM)/N0 = V2\ogaM. (2.112)
Вероятность аномальной погрешности в цифровой радиолинии - это
вероятность искажения хотя бы одного символа в слове:
Вероятность ошибки в бите с учетом (2.4.):
р= ^ р = 2 ^L /2113л
2(а-\) 2(а-1) т
Сравнительный анализ цифровых и аналоговых радиолиний
Используя данный подход, сравним между собой нехудшие цифровые и
дискретно-аналоговые радиолинии с сигналами, например, КИМа-ЧМ и АИМ-
ЧМ, соответственно. Данные радиолинии наиболее полно отвечают
требованиям адекватности модели сравнения:
1. Дискретный характер сигналов, то есть использование единого
метода разделения сигналов - ВРК.
2. Общий метод модуляции в радиоканале - ЧМ.
3. Использование сигналов с большей базой (2>=Д/Т »1):
• Б - а - в многоосновной радиолинии КИМа-ЧМ;
• Б = А/Тк*=а/и=2рт;ак - в радиолинии АИМ-ЧМ (см. раздел 2.4).
4. Общие закономерности в характере проявления аномальных
погрешностей, а также погрешностей у;/, ук. Тогда правомерность такого
сравнения обоснованна.
151
Современная телеметрия в теории и на практике
Воспользуемся результатами расчетов удельных расходов энергии и
полосы частот для аналоговых радиолиний, представленных в виде графиков
зависимостей p2w - p2w (ун, у J и а, = а, (уи, РА) приведенных на рис. 2.47
построенных в двойном логарифмическом масштабе.
200
Рис. 2.47. Графики зависимостей р*и = р*и (уи , Уж; и а„, = afu (y„, PJ
Из рис. 2.47 видно, что в широком диапазоне изменения нормальных
погрешностей удельный расход полосы частот afu обратно пропорционален уп
и мало зависит от вероятности аномальной погрешности РА.
С другой стороны, требуемый расход энергии имеет противоположную
тенденцию: в меньшей степени зависит от погрешностей уи и в большей
степени - от вероятное? й РА.
Полученные (с помощью рассмотренного выше алгоритма) результаты
вычисления р2мц, а/ш< для пяти семейств (М в 4; 16; 64; 256; 1024) цифровых
радиолиний с ортогональными сигналами приведены в табл. 2.5 и нанесены
на график, показанный на рис. 2.48 [9].
Таблица 2.5.
Параметры
М - 1024
уи - 0,0282%
РА-10-'
а
2
4
32
1024
П
10
5
2
1
а
2
2
6,4
102,4
а„
20
20
64
1024
Р2И
95
54
24,6
20
152
Глава 2. Теория телеметрии
Таблица 2.5. {Продолжение
Параметры
М = 256
у =0,113%
•и
рл = ю-2
М =64
У„ - 0,45%
Р =102
М- 16
Рл = 10"2
М = 4
у„ - 7,2%
Рл-102
а
2
4
16
256
2
4
64
2
4
16
2
4
)
П
8
4
2
1
а
2
2
4
1 32
^
16
16
32
256
Аналоговая радиолиния 53,7
6
3
1
2
2
10,7
14,0
12
12
64
Аналоговая радиолиния 15,06
4 1
2
1 |
2
2
4
К
73,0
39,2
22,2
14,4
1 51,3
27,9
1 12>3
11.8 |
8
8
16
Аналоговая радиолиния 4,5
2 1
1 1
2
2
9,4
4
4
Аналоговые радиолинии 1,7
7,0
31,6
20,6
10
13,2
7,2
3 5
10 20 30 50 100 200 300 500 1000
-=4
5-7,2%1м=4
Рис. 2.48. Результаты вычисления (3*иц, аГицдля пяти семейств
(М = 4; 16; 64; 256; 1024)
Точки, принадлежащие к каждому семейству, соединены сплошными
линиями. В каждое семейство входят радиолинии с одинаковыми точностными
характеристиками: вероятность аномальной ошибки составляет РАЦ = 102,
153
Современная телеметрия в теории и на практике
шумы квантования для всех радиолинии каждого семейства одинаковы,
поскольку М фиксированно.
На рис. 2.48 в виде точек в кружке нанесены удельные показатели пяти
аналоговых радиолиний, имеющих те же точностные характеристики, что
и цифровые радиолинии упомянутых пяти семейств:
у'-"--ш'р''-р"'-[о"- <2ш)
Анализ приведенных на рис. 2.48 результатов сравнения радиолиний
позволяет сделать следующие выводы:
1. Двоичные радиолинии относятся к худшим системам по энергетике
и к лучшим по расходу полосы частот при точностях, определяемых
ум < 1%. При невысоких требованиях к точности они проигрывают
аналоговым радиолиниям в расходе полосы примерно в два раза.
2. Четверичные радиолинии, не уступая двоичным радиолиниям в
расходе полосы частот, выигрывают в энергетике примерно в два раза, что
составляет 3 дБ.
3. Наилучшей в энергетическом плане среди цифровых радиолиний в
каждом семействе является радиолиния с высоким основанием кода
и одноразрядными словами.
4. Аналоговые радиолинии экономичнее цифровых радиолиний своих
семейств примерно в т раз, то есть при т = 1 (независимо от
основания а) они не имеют преимуществ в расходе энергии перед
радиолиниями с одноразрядными словами. В то же время аналоговые
радиолинии экономичнее одноразрядных цифровых радиолиний по
использованию полосы частот. Выигрыш колеблется от 3 до 5 раз.
5. При высоких точностях измерений (М=256, 1024) аналоговые
радиолинии во всех случаях, кроме а = М, проигрывают цифровым в
использовании полосы частот.
6. При средних точностях (М=64) аналоговые радиолинии сравнимы с
цифровыми радиолиниями по расходу полосы частот (кроме
случаев а = М).
7. При низких требованиях к точности измерений (М=4; 16)
аналоговые радиолинии превосходят цифровые как по энергетическому, так
и по частотному показателю (кроме случаев а = М). Применение при
этом цифровых радиолиний нецелесообразно.
154
Глава 2. Теория телеметрии
Таким образом, в теоретическом плане аналоговые радиолинии, в частности
дискретные, не уступают цифровым по энергетической и частотной
эффективности, даже при высоких требованиях к точности измерений. Однако,
из-за технических трудностей реализации оптимального приема
широкополосных аналоговых сигналов они не нашли широкого применения в
высокоточных радиолиниях.
Современная телеметрия в теории и на практике
ЛИТЕРАТУРА К РАЗДЕЛУ 2
1. ГОСТ 19619-74. Оборудование радиотелеметрическое. Термины и
определения,
2. Белицкий В. И., Зверев Р. И., Морозов В. М. и др. Телеметрия. -Л.: МО
СССР, 1984. - 465 с.
3. Мановцев А. П. Основы теории радиотелеметрии.- М. Энергия, 1973.-
592 с.
4 Тепляков М. И. Радиотелеметрия. М.: Советское радио, 1966. - 311 с.
5. Сафаров Р. Т., Буга Н.Н., Зверев Р. И., Шитов И. В. Радиотелеметрия.
4.1. Под ред. Р. Т. Сафарова. МО СССР, 1973. - 422 с.
* 6^ Зверев R И., Шитов И. В. Основы радиотелеметрии. 4.1. МО СССР,
1978.-195 с.
7. Белицкий В, И., Зверев В. И., Морозов В. М. и др. Телеметрия. МО
СССР, 1084. - 465с
8. Ольховский Ю. Б., Новосёлов О. Н., Мановцев А. П. Сжатие данных
при телеизмерениях. Под ред. В. В. Чернова. Изд-во «Советское радио»,
1971 г.- 304 с.
Глава 3.
Средства телеметрии
3.1. ТЕЛЕМЕТРИЧЕСКИЕ ДАТЧИКИ И ИХ КЛАССИФИКАЦИЯ
3.1.1. Определения и основные характеристики
Устройство, преобразующее физический (телеметрируемый) параметр
(ТМП) в первичный электрический сигнал s (обычно напряжение, ток или
импеданс), называется датчиком. Датчик, в свою очередь, называют также
измерительным преобразователем, поскольку он представляет собой
средство измерений для выработки сигнала измерительной информации в форме,
удобной для передачи, дальнейшего преобразования, обработки и/или
хранения, но не поддающейся непосредственному восприятию наблюдателя [1].
Таким образом, здесь сигнал измерительной информации - это сигнал,
функционально связанный с измеряемой физической величиной или ТМП.
Совокупность операций, направленных на установление численного
значения ТМП, составляет процесс телеизмерения. Если при измерении
используются электронные средства обработки сигнала, необходимо сначала
преобразовать измеряемый параметр X в эквивалентную электрическую величину
5 (первичный сигнал), причем как можно точнее. Это значит, что полученная
электрическая величина должна содержать всю информацию об измеряемом
параметре s =/(\).
Для всех датчиков характеристика преобразования - соотношение s = f(X) -
в численной форме определяется экспериментально в результате
градуировки, при проведении которой для ряда точно известных значений X
измеряют соответствующие значения s, что позволяет построить градуировочную
кривую 5 = /(X). Из этой кривой для всех полученных в результате
измерений значений s можно найти соответствующие значения искомой величины X.
Изменение условий функционирования датчика (температуры, давления,
перегрузки и т. д.) приводит-к изменению/(\). Это отражается в
паспортных данных, где приводятся характеристики с учетом условий работы
датчика.
158
Глава 3. Средства телеметрии
Различают характеристики датчиков для статического и динамического
режимов их работы [1].
Статическими характеристиками датчика являются:
• s в/(\), имеющая вид графика или таблицы. Эта характеристика
называется градуировочной или тарировочной;
• коэффициент преобразования или чувствительность,
As
к = —,
АХ
где As и ДА, - приращение сигнала и параметра соответственно;
• порог чувствительности (разрешающая способность) датчика, под
которым понимается минимальное изменение параметра X,
вызывающее изменение выходного сигнала и превышающее уровень
собственных шумов датчика.
Для удобства измерений датчик стараются построить или по крайней мере
использовать таким образом, чтобы существовала линейная зависимость
между малыми приращениями выходной As и входной ДА, величин. As = к АХ.
Большое значение имеют динамические свойства датчика, которые
характеризуются инерционностью. Для экспериментального определения
динамических свойств датчика применяются стандартные типовые входные
воздействия. По реакции на выходе датчика судят о его инерционных
свойствах Чаще всего применяются входные воздействия типа функций
включения или гармонические сигналы. Важными параметрами датчика являются
амплитудно-частотная Л (со,) и фазочастотная q>(<o) характеристики
Характеристиками датчиков являются также диапазон измерений,
надежность, габариты и масса, потребляемая мощность и др Выбирая тип
датчика, нельзя забывать об условиях его работы: диапазоне изменений
окружающей температуры, механических воздействиях (вибрациях, перегрузках),
действии электрических и магнитных полей и радиации, диапазоне
изменений атмосферного давления и др.
3.1.2. Классификация телеметрических датчиков
Телеметрические датчики принято классифицировать:
• По физическому параметру, преобразуемому в электрический
сигнал, классификация датчиков весьма многообразна Чаще всего
наименование датчика согласуется с измеряемой физической
величиной (например, датчик давления).
159
Современная телеметрия в теории и на практике
По форме сигналов различают датчики функциональных и
сигнальных параметров.
По характеру электрических сигналов датчики подразделяются
на датчики постоянного и переменного тока.
По величине выходного электрического о/гнала различают датчики
сигнала высокого (0-6В) и низкого уровня (0-100 мВ). Наряду с од-
нодиапозонными датчиками в ряде случаев используются
многодиапазонные датчики, которые позволяют охватывать более широкие
пределы изменения контролируемого параметра.
По форме представления сигнала датчики делятся на аналоговые
и цифровые.
В зависимости от метода преобразования неэлектрических
величин в электрические сигналы различают активные
(генераторные) и пассивные (параметрические) датчики. Различие между
активными и пассивными датчиками обусловлено их
эквивалентными электрическими схемами, отражающими фундаментальные
отличия в природе используемых в датчиках физических
явлений. Активный датчик является источником непосредственно
выдаваемого электрического сигнала, а измерение изменений
параметров импеданса пассивного датчика производится косвенно, по
изменению напряжения или тока в результате его обязательного
включения в схему с внешним источником питания.
Электрическая схема, непосредственно связанная с пассивным датчиком,
формирует его сигнал, и, таким образом, совокупность датчика и
этой электрической схемы является источником электрического
сигнала.
3.1.3. Активные датчики
Принцип действия активного датчика основан на томили ином физическом
явлении, обеспечивающем преобразование соответотвующей измеряемой
величины в электрическую энергию. Наиболее важные из этих физических
явлений указаны в табл. 3.1.
Таблица 3.1. Физические эффекты, используемые для построения активных
датчиков
Измеряемая величина
Температура
Используемый эффект
Термоэлектрический эффект
Выходная величина |
Напряжение
160
Глава 3. Средства телеметрии
Таблица 3.1. (Продолжение). Физические эффекты, используемые для
построения активных датчиков
Измеряемая величина
1 Io i ок от ичсского излучения
Сила, давление, ускорение
Скорость
Перемещение
Используемый эффект
Пироэлектрический эффект
Внешний фотоэффект
Внутренний фотоэффект
в полупроводнике с р-п
переходом
Фотоэлектромагнитный
эффект
Пьезоэлектрический эффект
Электрома1 нитная индукция
Эффект Холла
Выходная величина
Заряд
Ток
Напряжение
Напряжение
Заряд 1
Напряжение
Напряжение
3.1.4. Пассивные датчики
В пассивных датчиках некоторые параметры выходного импеданса могут
меняться под воздействием измеряемой величины. Импеданс датчика, с
одной стороны, обусловлен геометрией и размерами его элементов, а с другой -
свойствами материалов: удельным сопротивлением, магнитной
проницаемостью и диэлектрической постоянной.
Изменения импеданса могут быть, таким образом, вызваны воздействием
измеряемой величины либо на геометрию и размеры элементов датчика,
либо на электрические и магнитные свойства его материала, либо, что реже,
на то и на другое одновременно. Геометрические размеры датчика и
параметры его импеданса могут изменяться, если датчик содержит подвижный
или деформирующийся элемент.
Каждому положению подвижного элемента датчика соответствует
определенный импеданс, и измерение его параметров позволяет узнать положение
элемента. На этом принципе работает большое число датчиков положения
и перемещения объектов: потенциометрических, индуктивных с
подвижным сердечником, емкостных.
Деформация является результатом действия силы (или величины, с ней
связанной, - давления, ускорения) на чувствительный элемент датчика.
Изменение импеданса датчика, вызванное деформацией чувствительного
элемента, вызывает изменение соответствующего электрического сигнала
в специальной измерительной схеме, в которую этот датчик,включают.
Электрические свойства материала и состояние чувствительного элемента
датчика зависят от переменных физических величин: температуры, давления,
6 Заг 861
161
Современная телеметрия в теории и на практике
влажности, освещенности и т. д. Если меняется только одна из величин, а
остальные поддерживаются постоянными, то можно оценить существующее
однозначное соответствие между значениями этой величины и импедансом
датчика. Это соответствие описывается градуировочной кривой. Зная граду-
ировочную кривую, по результатам измерения импеданса можно определить
соответствующее значение измеряемой величины.
В табл. 3.2. указан ряд физических эффектов, связанных с
преобразованием значений электрических характеристик пассивных датчиков. Среди них
нужно отметить резистивные датчики.
Таблица 3.2. Физические принципы преобразования величин и материалы,
используемые для построения пассивных датчиков
Измеряемая величина
Температура
Сверхнизкие температуры
Поток оптического
| излучения
Деформация
Емкость
Перемещение
Влажность
Уровень
Электрическая
характеристика, изменяющаяся
под действием измеряемой
величины
Сопротивление
Диэлектрическая
проницаемость
Сопротивление
Сопротивление
Магнитная
проницаемость
Сопротивление
Сопротивление
Диэлек грическая
проницаемость
Диэлектрическая
проницаемость
Тип используемых
материалов
Металлы (платина, никель,
медь), полупроводники |
Стекло, керамика
Полупроводники
Сплавы никеля,
легированный кремний |
Ферромагнитные сплавы
Магниторезистивные
материалы висмут, антимонид
индия
Хлористый литий,
окись алюминия, полимеры
Жидкие изоляционные
материалы
Импеданс пассивного датчика и его изменения можно измерить не иначе,
как включая датчик в специальную электрическую схему, содержащую
источник питания и схему формирования сигнала. Наиболее часто
используются измерительные схемы следующих видов:
• потенциометрическая схема, содержащая соединенные параллельно
источник напряжения и датчик-потенциометр;
162
Глава 3. Средства телеметрии
• мостовая схема, разбаланс которой характеризует изменение
импеданса датчика;
• колебательный контур, включающий в себя импеданс датчика
(при ртом контур является частью генератора колебаний и
определяет его частоту);
• операционный усилитель, в котором импеданс датчика является
одним из элементов, определяющих коэффициент усиления.
Выбор схемы формирования сигнала является важным этапом в
реализации измерений, от которого зависят метрологические характеристики
телеметрических комплексов в целом - погрешность, чувствительность,
линейность, невосприимчивость к влиянию определенных величин.
3.1.5. Комбинированные датчики
При измерениях некоторых неэлектрических величин не всегда удается
преобразовать их непосредственно в электрическую величину. В этих
случаях осуществляют двойное преобразование исходной (первичной)
измеряемой величины в промежуточную неэлектрическую величину, которую
преобразуют затем в выходную электрическую величину. Совокупность
двух соответствующих измерительных преобразователей образует
комбинированный датчик.
Подобные преобразования удобны для измерения механических величин,
вызывающих в первичном преобразователе деформацию или перемещение
выходного элемента, к которым чувствителен вторичный преобразователь.
Давление, например, можно измерить с помощью мембраны, служащей
первичным преобразователем, деформация которой преобразуется в
электрическую величину датчиком, реагирующим на механическое смещение. Так
мембрана электродинамического микрофона является первичным
преобразователем, деформация которой, вызванная воздействием акустического
давления, преобразуется в соответствующий электрический сигнал.
Если механические напряжения в первичном преобразователе не
превышают предел упругости, то его характеристика линейна. Характеристику
преобразования датчика в целом определяют путем градуировки.
3.1.6. Влияющие величины
Датчик в определенных условиях эксплуатации может подвергаться
воздействию не только измеряемой величины,' но и других физических величин,
163
Современная телеметрия в теории и на практике
именуемых влияющими, к которым чувствителен датчик. Вариации этих
паразитных воздействий могут привести к изменениям выходного электрического
сигнала датчика и появлению соответствующей погрешности измерений.
Основными физическими величинами, влияющими на погрешность
датчиков, являются:
• температура, которая изменяет электрические и механические
характеристики датчика, а также размеры составляющих его деталей;
• давление, ускорение и вибрация, вызывающие в определенных
элементах датчиков деформации и напряжения, изменяющие их
чувствительность;
• влажность, которая может вызвать изменение определенных
электрических характеристик элементов, таких как диэлектрическая
проницаемость и удельное сопротивление, вследствие чего возникает
опасность нарушения электрической изоляции между отдельными
конструктивными элементами датчика (либо между датчиком и
окружающей средой);
• постоянное или переменное магнитное поле, индуцирующее в
проводниках э.д.с, которая накладывается на полезный сигнал, и
изменяющее электрические характеристики некоторых чувствительных
элементов, например удельное сопротивление магниторезисторов;
• изменение параметров напряжения питания - его амплитуды и
частоты.
Если обозначить величины, влияющие на датчик, через gv g2..., то связь
между выходным электрическим сигналом s и измеряемой величиной А,,
которая в идеальном случае выражается как:
преобразуется к виду:
Для того, чтобы в этом случае определить измеряемую величину по
выходному сигналу датчика без внесенной влияющими величинами
погрешности, необходимо:
• либо снизить значения влияющих величин соответствующей
защитой датчика, используя, например, антивибрационное основание,
магнитные экраны и др.;
• либо стабилизировать влияющие величины и градуировать датчик
для этих условий, используя, например, термостат, источник
стабилизированного напряжения питания и др.;
164
Глава 3. Средства телеметрии
• либо использовать такую схему, которая позволила бы
скомпенсировать влияние паразитных величин, например «моста Уитстона»
с двумя одинаковыми датчиками, один из которых предназначен
для измерений, а второй - для компенсации погрешности,
вызванной влияющими факторами.
3.2. КАНАЛЫ И ЛИНИИ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ
ИНФОРМАЦИИ
3.2.1. Общие сведения о каналах и линиях передачи
телеметрической информации
В системах информационно-телеметрического обеспечения передача
данных телеизмерений осуществляется по направлениям и сетям связи.
В первом случае (рис. 3.1а), характерном в основном для ранних
телеметрических систем, обычно используется радиоканал прямой видимости
(или кабельная линия), связывающий объект телеизмерения ОТ с
аппаратурой регистрации информации АР.
Во втором случае (рис. 3.16), характерном для телеконтроля параметров
летательных аппаратов и других подвижных объектов, перемещающихся
относительно поверхности Земли в широком диапазоне дальностей и
скоростей, передача информации ведется по радиоканалу и далее по сети связи,
часто имеющей глобальные масштабы.
а) б)
Рис. 3.1. Топология телеметрических сетей
165
Современная телеметрия в теории и на практике
При этом обеспечивается оперативная доставка информации практически
в реальном масштабе времени на расстояние в несколько сотен или тысяч
километров. Высокая надежность передачи данных достигается благодаря
использованию в сети обходных линий связи, а также разнесенного приема
радиосигналов.
Пространственный и поляризационный разносы дают возможность
устранить замирания сигнала и прерывания связи с объектом телеизмерения.
Следует заметить, что значительный пространственный разнос пунктов
приема приводит к необходимости сведения несинхронных потоков
информации в процессе их обработки с помощью сигналов единого времени.
Характерной особенностью сетей связи, используемых для сбора
телеметрической информации с пунктов приема, является применение в них
составных каналов радио-, радиорелейной и кабельной связи, соединенных
узлами автоматической коммутации. Проблема трансляции информации
усложняется не только из-за разнообразия физической природы и свойств
отдельных линий связи, но и вследствие различия принципов, лежащих в
основе построения систем передачи и систем коммутации информации.
Как известно, работа систем передачи данных телеизмерений основана
на коммутации сообщений, а работа узлов сети связи - на коммутации
каналов, обычно имеющих вид физически обособленных электрических
цепей. Таким образом, на данном этапе развития техники связи невозможно
рассматривать способы передачи информации и уплотнения
телеметрических линий без учета особенностей построения сетей связи и управления
в них информационными потоками.
В общем случае к каналам передачи телеметрической информации
предъявляются следующие требования:
а) возможность осуществления многоканальной передачи большого
числа различных параметров с высокой точностью;
б) обеспечение высокой пропускной способности и достоверности
передачи данных;
в) удобство сопряжения линий связи между собой, с аппаратурой
автоматической коммутации и аппаратурой обработки данных;
г) возможность использования существующих сетей связи для
трансляции данных телеизмерений;
д) обеспечение высоких эксплуатационных и экономических, в т. ч.
удельных, показателей.
Следует заметить, что большая часть существующих многоканальных
линий, радио-, радиорелейной и кабельной связи общего назначения создана
166
Глава 3. Средства телеметрии
на основе частотного разделения каналов и стандартных телефонных
каналов с возможностью их объединения для передачи цифровых данных
с большой скоростью или дополнительного уплотнения телеграфными
каналами малой производительности. При частотном разделении сигналов
в магистральных линиях связи наблюдается достаточно высокий уровень
межканальных помех, существенно превышающий допустимый уровень
для передачи телеметрической информации. По этой причине возникает
необходимость применения различных мер для повышения достоверности
передачи, основанных на сокращении избыточности передаваемых
телеметрических сообщений, использовании корректирующих кодов, канала
обратной связи и ряда других средств.
Таким образом, вопросы рационального построения каналов передачи и
трансляции телеметрической информации требукл единого системного подхода.
Это позволяет не только исключить ряд ненужных преобразований сигналов
в отдельных звеньях общей транзитной цепи, которые наблюдались в ранних
телеметрических системах, но и обоснованно определить требования к
каждому из них.
В этой связи существенно отметить внедрение в сетях связи цифровых
многоканальных систем с временным разделением сигналов и передачей
всех видов информации (от телефонных сообщений до программ цветного
телевидения) в единой цифровой форме. Их использование обеспечивает:
• повышение показателей существующих линий связи для
обеспечения многоканальной дискретной передачи информации с высокой
достоверностью;
• создание цифровых интегральных сетей связи, в которых передача
и коммутация сигналов осуществляется в единой цифровой форме;
• уплотнение низкочастотных проводных каналов, имеющих
сравнительно низкое сопротивление изоляции, а также перспективных све-
товолоконных линий;
• широкое использование достижений микроэлектроники.
В настоящее время превосходство цифровых каналов над аналоговыми
в большинстве случаев следует считать бесспорным (даже при передаче
относительно быстро меняющихся телеметрических параметров).
Радио-, радиорелейные линии и коаксиальные кабели в состоянии
обеспечить передачу информации в полосе частот 3-5 МГц и более, а современные
волоконно-оптические линии связи в полосе частот до нескольких десятков
ГГц. Следует также иметь в виду, что цифровые системы хотя и требуют
использования широкополосных линий связи, однако обладают малыми
удельными расходами полосы частот и мощности на передачу одного бита
информации в секунду.
167
Современная телеметрия в теории и на практике
В заключение отметим, что помехи в каналах передачи телеметрической
информации, особенно в составйых каналах, имеют сложный характер.
Однако в большинстве случаев для инженерных расчетов полагают, что в
радиолиниях УКВ-помехи имеют вид, близкий к гауссову шуму В кабельных
линиях флуктуационные шумы малы, главное значение имеют импульсные
помехи, обусловленные работой коммутационной аппаратуры.
3.2.2. Проводные линии связи
Общая информация
Проводные динии связи используются для передачи информации с
неподвижных и малоподвижных объектов телеизмерений, а также для ее
трансляции по сетям связи.
Наибольшее распространение получили кабельные и
волоконно-оптические линии связи, которые характеризуются широкой полосой
пропускания, малым уровнем помех, устойчивостью и большой дальностью связи.
Вместе с радиорелейными линиями и аппаратурой автоматической
коммутации они составляют основу Единой автоматизированной сети связи страны.
По проводным линиям связь организуется на тональных (звуковых) и
высоких (f > 4 кГц) частотах. Телеграфная и телефонная связь на тональных
частотах отличается простотой, однако имеет малую дальность.
Высокочастотная связь обычно является многоканальной и обеспечивает
дальность до 10000 км. Она строится преимущественно на основе
частотного уплотнения линий связи и стандартных телефонных каналов (СТК)
с использованием однополосной модуляции. Ширина СТК принимается
равной 3,1 кГц (от 0,3 до 3,4 кГц).
Промежутки шириной 0,3 и 0,6 кГц ниже и выше разговорных частот
используются для передачи сигналов вызова, набора номера и взаимодействия
устройств коммутации, а также сигналов контрольных частот, используемых
для контроля и регулировки линейного тракта. При необходимости в СТК
может размещаться до 24 стандартных телеграфных каналов со скоростью
телеграфирования 50-70 Бод (бит/с) и полосой 120-140 Гц.
Путем объединения СТК можно создавать широкополосные каналы для
передачи данных и другой информации. Проводные линии связи обеспечивают
передачу сигналов в широкой полосе частот. Они разделяются на воздушные
и кабельные.
Воздушные линии связи (ЛС) имеют малую стоимость, большой срок службы,
но сравнительно низкую граничную частоту (100-150 кГц). Воздушные Л С
168
Глава 3. Средства телеметрии
из цветных металлов уплотняются по частоте до 30 кГц для получения четырех
СТК или до 150 кГц для получения шестнадцати СТК.
Так как телефонная связь является дуплексной, то для каждой пары
абонентов выделяются две полосы. В области тональных частот размещается
двухполосный служебный телефонный канал (ДПС).
Симметричные и коаксиальные кабельные линии связи
Кабельные линии связи разделяются на симметричные и коаксиальные.
Симметричные кабели содержат ряд симметричных цепей из двух
изолированных и определенным образом скрученных проводов.
Симметрия по отношению к оболочке кабеля и другим проводам
обеспечивает эффективную развязку электрических цепей и повышает
механическую прочность кабеля. Симметричные магистральные ЛС позволяют
организовать до нескольких сотен СТК. (табл. 3.3)
Таблица 3.3. Симметричные и коаксиальные кабельные линци связи
Аппаратура
1 уплотнения
Полоса
частот
Длина усилительного
участка, км
Максимальная
дальность связи, км
| Коаксиальный стандартизованный кабель 2,6\9,4
К-900
K-1920
K-2700
K-3600
0,3-4 МГц
0.3-8,5 МГц
0,3-12 МГц
0,3-17 МГц
9
6
4,5
3
5000
5000
5000
5000
Коаксиальный малогабаритный кабель 1,2/4,4 |
K-300
К-900
0,06-1,3 МГц
0,06-4 МГц
6
3
2500
2500
Симметричный магистральный кабель |
К-12
К-24
К-60
К-120
12-60 КГц
12-108 КГц
12-252 КГц
12-552 КГц
50
40
20
15
10000
10000
10000
10000 |
Кабели внутризоновой связи |
К-3
КНК-6С
КРР-30/60
ИКМ-12
ИКМ-24
К_120
0,3-26,3 кГц
16-60 кГц
12-552 кГц
800 кГц
1500 кГц
1317 кГц
16
16
10
5-7
2-3
10
16 1
64
80
80
80
600 1
169
Современная телеметрия в теории и на практике
Коаксиальные кабельные линии предназначены для организации
нескольких сотен и тысяч СТК, передачи данных и телевизионных программ.
Коаксиальный кабель представляет собой проводник, помещенный в
цилиндрическую трубку, которая является вторым проводником. Между центральным
проводником и трубкой устанавливаются шайбы из диэлектрика. Типовые
коаксиальные кабели изготавливаются с двумя и четырьмя коаксиальными
парами. Особым видом коаксиальных кабелей являются фидерные кабели
для радиочастот.
Дискретные каналы проводных ЛС создаются на основе физически
обособленных цепей и каналов, уплотненных по частоте. Физическая цепь,
например кабельная пара, позволяет использовать сигналы-переносчики
(посылки) постоянного и переменного тока. Посылки постоянного тока широко
используются только в телеграфных каналах малой протяженности.
Биполярные посылки позволяют увеличить дальность связи, однако всего
на 30-35%. Дискретные каналы дальней связи реализуются в настоящее
время главным образом за счет посылок переменного тока в полосе СТК.
Подтональное (на частотах ниже 300 Гц) и надтональное (на частотах
выше 3,4 кГц) телеграфирование используется сравнительно редко.
Варианты передачи цифровых данных (данных телеизмерений)
Высокоскорос гные системы передачи данных строятся на основе частотных
полос нескольких СТК или групповых спектров. Рассмотрим основные
варианты передачи цифровых данных (данных телеизмерений),
рекомендуемые МККТТ
1. Двусторонняя одновременная передача данных методом ЧМ по
двухпроводному высокочастотному СТК со скоростью 200 Бод
(fHl - 980 Гц, fB1 = 1180 Гц, fii2- 1650 Гц, fj2= 1850 Гц).
2. Односторонняя передача данных методом ЧМ по
двухпроводному высокочастотному СТК со скоростью 600 или 1200 Бод и
служебной информации со скоростью 75 Бод (fnl = 380 Гц, fB1 = 450 Гц,
ft2 = 1300 Гц, fB2« 1700 Гц при ит= 600 Бод или fi2= 2300 Гц при
ит= 1200 Бод). Служебный канал занимает полосу 0,3-0,5 кГц
и может быть использован для решающей обратной связи.
3. Двусторонняя одновременная передача данных методом
двукратной или трехкратной относительной фазовой манипуляции
(ОФМ) при и = 2400-4800 бит/с или и - 3600-7200 бит/с,
соответственно, при использовании четырехпроводных прямых
высокочастотных СТК со скоростью 1200-2400 Бод. Предусмотрена
170
Глава 3. Средства телеметрии
также возможность использования восьмеричного сигнала с
амплитудно-фазовой модуляцией АФМ4_2-ОМ, то есть AM сигнала
с четырьмя градациями амплитуды сигнала, ФМ с фазами 0 и 180°
и однополосной модуляции. При этом обеспечивается скорость
передачи информации 9600 бит/с.
4. Двусторонняя одновременная передача данных при
использовании высокочастотных первичных групповых трактов
высокочастотной связи (60-108 кГц). Применение ЧМ обеспечивает
скорость 48 кбит/с, а двукратной ОФМ - 96 кбит/с.
Таким образом, существующая аппаратура может использоваться для
передачи в реальном масштабе времени лишь данных телесигнализации и
ограниченных объемов телеметрической информации.
Более перспективными представляются высокоскоростные методы
передачи данных, основанные на использовании групповых трактов и
волоконно-оптических линий связи. При этом высокоскоростная передача данных
лучше всего реализуется в интегральных цифровых системах, где все виды
информации передаются в цифровой форме.
Благодаря широкому внедрению волоконно-оптических технологий
коренным образом изменяется вся инфраструктура сетей связи, на много
порядков возросла пропускная способность систем передачи, в особенности
магистральных, увеличилась их протяженность. Для реализации и
максимального использования возможностей, предоставляемых этими
технологиями, Международным комитетом по электросвязи - МСЭ-Т (ITU-T)
разработана следующая классификация иерархий скоростей цифрового
метода передачи информации (синхронная цифровая иерархия (СЦИ,
или SDH в английском варианте) - СТМ-1, СТМ-4, СТМ-16, СТМ-64,
СТМ-256 (табл. 3.4.), а также новые протоколы передачи информации,
методы уплотнения оптических каналов и технические средства реализации
этих методов.
Таблица 3.4. Классификация иерархий скоростей цифрового метода передачи
Уровень СЦИ
СТМ-1
СТМ-4
СТМ-16
СТМ-64
СТМ-256
Коэффициент
потерь, дБ/км
менее 0 2
менее 0 2
менее 0 2
менее 0.2
менее 0.2
Скорость передачи,
Мбит/с
155
622
2500
10000
40000
Максимальная
длина регенерацион-
ных участков, км
1000-1500
1000-1500
1000-1500
1000-1500
1000-1500
171
Современная телеметрия в теории и на практике
3.3. ИНФОРМАЦИОННО-ТЕЛЕМЕТРИЧЕСКИЕ СИСТЕМЫ
С ЧАСТОТНЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ
3.3.1. Принцип частотного разделения каналов
В телеметрических системах с частотным разделением каналов (ЧРК)
каждому каналу отводится своя полоса частот, не перекрывающаяся с соседней.
Как видно на рис. 3.2, первому каналу отводится полоса частот AF{ = F2-F,,
второму каналу отводится полоса частот AF2= F4-F3 и т. д. Передача
информации ведется одновременно по всем N каналам. Для разделения
информационных сигналов достаточно иметь полосовые фильтры в соответствии
с проведенным рассечением обшей полосы на канальные полосы.
4-й канал 5-й канал
Рис. 3.2. Распределение каналов при ЧРК
Частотное разделение в системах телеметрии осуществляется в
видеотракте. При этом используется N гармонических колебаний, разнесенных
по частотной оси и модулированных информационными сигналами.
В информационно-телеметрических системах (ИТС), являющихся, как
правило, системами с двухступенчатой модуляцией, суммарный сигнал
генераторов поднесущих колебаний используется далее для модуляции
генератора несущих колебаний. В системах проводной телеметрии с ЧРК
генератор несущих колебаний может отсутствовать.
Видеосигнал, несущий информацию всех каналов, принято называть
групповым, а те части видеосигнала, которые переносят информацию отдельных
172
Глава 3. Средства телеметрии
каналов - канальными. Общая полоса частот, занимаемая групповым
видеосигналом, равна сумме полос отдельных каналов, то есть:
Ширина спектра частот каждого канала зависит от вида модуляции подне-
сущих колебаний и ширины спектра частот первичных сигналов,
передаваемых по этим каналам. Для уменьшения влияния соседних каналов спектры
частот поднесущих колебаний разносятся так, чтобы между ними имелась
некоторая неиспользуемая полоса частот AF3, называемая защитной.
Следует заметить, что изложенное выше касается идеального принципа
частотного разделения каналов, когда сигнал каждого из них имеет
ограниченную полосу частот и разделительный фильтр на приемной стороне
выделяет только эту полосу Реальные сигналы ограничены во времени,
поэтому имеют бесконечный спектр. Отсюда возникает необходимость
ограничения спектра передаваемых сигналов, что приводит к искажению их
формы и взаимному влиянию каналов.
3.3.2. Структурная схема информационно-телеметрической
системы с ЧРК
Структурная схема информационно-телеметрической системы (ИТС) с
ЧРК приведена на рис. 3.3. На передающей стороне (рис. 3.3а) имеются:
датчики (Д), усилительно-согласующие устройства (СУ), канальные
модуляторы (КМ), генераторы поднесущих колебаний (ГПК), полосовые
фильтры (ПФ), суммирующее устройство (£), вторичный модулятор (ВМ) и
генератор несущих колебаний (ГНК).
В состав приемно-регистрирующего устройства входят: усилители высокой
и промежуточной частот (УВЧ, УПЧ), первичный демодулятор,
полосовые фильтры, канальные демодуляторы (КД), регистрирующие устройства
(РУ) и генератор меток времени (ГМВ).
Система работает следующим образом.
Сигналы датчиков подаются на входы канальных модуляторов через
усилительно-согласующие устройства, которые выполняют функции усиления
сигналов до стандартного значения, преобразования напряжения
переменного тока в напряжение постоянного тока, а также функции согласования
выходных сопротивлений датчиков с входными сопротивлениями
информационных каналов. С помощью канальных модуляторов осуществляется
амплитудная, частотная или фазовая модуляции колебаний ГПК. Полосовые
173
Современная телеметрия в теории и на практике
фильтры предназначены для ограничения спектров модулированных
колебаний до заданных значений (с учетом возникающих за счет этого
искажений). В суммирующем устройстве производится линейное сложение
видеосигналов каждого канала. Суммарный (групповой) сигнал подается на вход
вторичного модулятора, с помощью которого производится модуляция
несущих колебаний ГНК.
В передающем устройстве может осуществляться амплитудная (AM),
балансная (БМ), однополосная (ОМ), частоткая (ЧМ) или фазовая (ФМ)
модуляция.
Таким образом, с учетом модуляции на первой и второй ступени могут быть
построены следующие радиотелеметрические системы с ЧРК: АМ-АМ,
АМ-ЧМ, АМ-ФМ, ЧМ-АМ, ЧМ-ЧМ, ЧМ-ФМ, АМ-ОМ, ЧМ-ОМ, ФМ-
ОМ, ФМ-АМ, ФМ-ЧМ, ФМ-ФМ и др.
1 fli Нсу^Ь^|км1[Ц'гпк1 [^пф^
Калибров |—1
устройство
UJ вм I-J гнк [—J
т
а)
Ц|пф]}^
V
Линейная
часть
приемника
—►
Первичная
демодуляция
ь-*|пф
вДкТ— J
б)
Рис. 3.3. Структурная схема ИТС с ЧРК: а) передающий тракт; б) приемный тракт
По поводу последних четырех видов модуляции заметим следующее.
Фазовая модуляция поднесущих колебаний менее удобна по сравнению с AM и
ЧМ, так как для передачи постоянной составляющей, которая может
присутствовать в исходном сигнале, потребуется дополнительный канал
опорного напряжения, с помощью которого можно было бы обнаружить
постоянный фазовый сдвиг.
В приемном устройстве (рис. З.З.б) осуществляется усиление принимаемых
колебаний, их демодуляция и разделение по каналам. В качестве селекторов
174
Глава 3. Средства телеметрии
канальных сигналов используются полосовые фильтры. На выходе каждого
канального демодулятора получается изменяющийся во времени сигнал,
который в идеальном случае соответствует сигналу датчика. В
регистрирующих устройствах принятые сигналы могут быть записаны в виде
непрерывных кривых на фотопленку, магнитную ленту, фотобумагу и т. д.
В системе предусмотрена периодическая калибровка каналов, которая может
осуществляться подачей калибрационных напряжений на входы
информационных каналов. Такой метод обладает тем недостатком, что при измерении
сравнительно быстро меняющихся параметров возможна потеря
информации в момент передачи калибрационных уровней. Если все каналы РТС
идентичны, то для передачи калибрационных сигналов может быть выделен
один канал, который на структурной схеме показан штриховой линией.
[77}
НО
ПКУ,
Канальный
модулятор
ПКУ3
НКМ2НГПК1 h
>1
ПКУ„
|-»| KMN|-+{rnKN[-
Рис. 3.4. Дополнительная коммутация каналов
С целью привязки принимаемой информации ко времени на
регистрирующие устройства подаются метки времени, вырабатываемые генератором
меток времени (ГМВ). Сигналы точного времени могут вводиться и извне.
Наряду с частотным разделением каналов возможно построение систем
с комбинированным (частотно-временным) разделением каналов.
С целью увеличения количества контролируемых параметров отдельные
датчики, измеряющие медленно меняющиеся процессы, могут группами
подключаться к одному каналу через программно-коммутирующие
устройства (ПКУ). В этом случае на входы канальных модуляторов подаются
сигналы указанных датчиков, разделенные во времени. Коммутация,
структурная схема которой приведена на рис. 3.4, применяется для однотипных
датчиков, имеющих достаточно высокое выходное напряжение. Систему
с испоть.юванием программного коммутатора на входе
информационного канала обозначают АИМ-ПМ-ПМ, где ИМ - произвольный (AM, ЧМ
или ФМ) вид модуляции.
175
Современная телеметрия в теории и на практике
На рис. 3.5 приведена схема коммутации выходных сигналов генераторов
поднесущих колебаний, обозначаемая АМ-АИМ-ПМ. Такая система может
использоваться при наличии разнотипных генераторов поднесущих
колебаний или датчиков и при малом уровне выходных сигналов датчиков.
I ДмНГП|Ч
>i
Рис. 3.5. Дополнительная коммутация поднесущих
3.4. РАДИОТЕЛЕМЕТРИЧЕСКИЕ СИСТЕМЫ С ВРЕМЕННЫМ
РАЗДЕЛЕНИЕМ КАНАЛОВ
3.4.1. Принцип временного разделения каналов
Принцип временного разделения каналов (ВРК) иллюстрируется
упрошенной схемой (рис. 3.6). В бортовой аппаратуре механический
коммутатор, вращаемый мотором, поочередно подключает датчики Д1, Д2, ... , ДИ
на вход формирователя телеметрического кода. В процессе коммутации
получаются сигналы с амплитудно-импульсной модуляцией (АИМ). Величина
амплитуды импульсов равна величине сигнала датчика во время
подключения его к общему тракту. Таким образом, на входе кодера действует АИМ-
сигнал, содержащий импульсы всех N информационных каналов (рис. 3.7).
Бортрвая аппаратура
л
Наземная аппаратура
л
Синхросигнал
Радиоканал
А
|мото|
пим
пим-пм
коммутатор
Гру
кадёрТ-ЦПтрд^ j^J
1 ступень 2 ступень
модуляции
щ
/РУМ1
МОТО к"
Рис. 3.6. Упрощенная схема ИТС и ВРК
8.8.
176
Глава 3. Средства телеметрии
Передача сигналов датчиков происходит дискретно во времени. При
вращении подвижного контакта коммутатора производится последовательный
«опрос» датчиков. Частота, с которой производится «опрос» одного датчика,
называется частотой опроса Fo. Она связана с периодом опроса соотношением:
r=-L
Последовательность сигналов, соответствующих одному циклу опроса всех
датчиков, называется кадром или цикчом. Время Тк (рис. 3.7.а), отводимое
в кадре для передачи информации одному каналу, называется канальным
интервалом. Для передачи измерительной информации отводится лишь
часть канального интервала, называемая измерительным интервалом Ти\
остальные части канального интервала 7з, называемые защитными (рис. 3.7.6),
используются для того, чтобы на приемной стороне можно было разделить
каналы.
Кодер телеметрического сообщения преобразует сигналы с АИМ в более
помехоустойчивые, чем АИМ, аналоговые или цифровые сигналы, К
аналоговым сигналам относятся импульсы, модулированные по
длительности, или, что то же самое, по ширине (ДИМ, или ШИМ), и по временному
положению, или, что то же самое, по фазе появления импульса (ВИМ,
или ФИМ).
JL
у;
~Ч ^\ )l[«w f-Ц д?д Кч • ^™Н^*"Ь4
Рис 3.7. Упрощенная схема РТС и ВРК
При ДИМ в зависимости от величины передаваемого параметра
изменяется длительность т импульса (рис. 3.8а). При этом положение одного
из фронтов может быть фиксировано. При ВИМ в зависимости от
величины параметра изменяется фаза появления импульса т относительно
опорной точки, часто обозначаемой опорным импульсом (0 на рис. 3.8в).
Шкала L параметра соответствует временной шкале Тш положения
измерительного импульса (И).
177
Современная телеметрия в теории и на практике
SZ
SIA
SIA
к
•т—
, 1
* 1
х J
1к_-
ДИМ(ШИМ)
-►
ш*
W
t
и
а)
в)
110 0 0
б)
Г о
П 1
\т
И
п п
тш J
I* .
0
п»
1 t
*т
-4
дим-чм
jvwyv .
ВИМ-АМ
Нг—V
КИМ U 4
д)
КИМ-ФМ <©= Я
WWW ■.
в)
Рис. 3.8. Преобразование сигналов на первой и второй ступенях модуляции
При цифровых методах передачи величина параметра преобразуется в циф-
ровойлсод, или сигнал с кодоимпульсной модуляцией (КИМ). Чаще других
используется двоичный код (рис. 3.8д). Цифровая запись отсчета в
канальном интервале часто называется словом.
Сигналы с выбранной импульсной модуляцией, снимаемые с выхода
кодера, используются для модуляции высокочастотных колебаний передатчика
178
Глава 3. Средства телеметрии
(по амплитуде, частоте, фазе). Первая ступень модуляции осуществляется
в кодере, вторая - в передатчике. Сигнал в радиолинии обозначается в
соответствии с видом модуляции на первой и второй ступенях: ДИМ-ЧМ,
ВИМ-АМ, КИМ-ФИМ и т. д. (рис. 3.8.6, г, е).
Принятые приемником сигналы детектируются. Для этого используются
детекторы, соответствующие виду модуляции на второй ступени: AM -
амплитудный, ЧМ - частотный, ФМ - фазовый. В приемнике, таким
образом, производится первая ступень демодуляции.
Вторая ступень демодуляции осуществляется декодером
телеметрического сообщения. Часто в регистраторах записываются сигналы с ВИМ, КИМ
и т. п.; в этих случаях вторая ступень модуляции отсутствует.
Синхронность и синфазность вращения коммутаторов бортовой и
наземной аппаратуры обеспечивает разделение каналов и достигается за счет
передачи специальных синхронизирующих сигналов, которые
управляют работой генератора, задающего скорость и фазу вращения вала мотора
в наземной аппаратуре. В итоге сигнал i-го датчика попадает в i-e
регистрирующее устройство.
Видеокод на выходе кодера содержит информационные сигналы, сигнал
синхронизации, а также некоторые служебные сигналы (уровни
калибровки, время) и называется групповым сигналом (ГС), или
телеметрическим кодом.
Удобные для пояснения принципа ВРК механические коммутаторы
находят ограниченное применение. Вместо них используются электронные
коммутаторы (рис. 3.9). Распределитель импульсов выдает ряд
последовательностей не перекрывающихся во времени импульсов (рис. З.Э.в, г, д, е,
ж). Он представляет собой либо многофазный генератор импульсов, либо
счетчик с дешифратором, либо фазорасщепитель. Электронные ключи К1,
К2,..., KN в течение цикла коммутации Т = То последовательно один за
другим открываются сигналами Sk1, Sk2> ... ,SkNh3. время, равное канальному
интервалу Тк, и пропускают сигналы датчиков Д1,Д2,..., ДЫ, также
поступающих на их входы. В сумматоре Е формируется последовательность
сигналов с АИМ всех датчиков 5Z.
В принимающей аппаратуре на вход коммутаторов подается групповой
сигнал, а на выходе электронных ключей К1У К2, ..., KN появляются сигналы
отдельных каналов S1, S2,..., SN.
Начало цикла коммутации определяется маркерными синхроимпульсами
Sm, следующими с периодом опроса То; время, отводимое каналу Тк,
определяется периодом следования канальных синхроимпульсов Sk.
179
Современная телеметрия в теории и на практике
^и
АИМ ГС
Распределитель
импульсов
Sm
^Ь
S1
S2
SN
Распределитель
импульсов
а) коммутаторы бортовой и наземной аппаратуры
SmA
а
а
Тц
Я
п п п п п п п п п
б) Временные диаграммы
Рис. 3.9. Коммутаторы передающей и приемной частей РТС
с временными диаграммами
3.4.2. Структурная схема информационно-телеметрической
системы (ИТС) с временным разделением каналов
Информационно-телеметрическая система состоит из бортовой и приемно-
регистрирующей аппаратуры (рис. 3.10). Первичный сигнал с выхода датчи-
180
Глава 3. Средства телеметрии
ков поступает на вход системы коммутации. Сигнальные и некоторые
относительно медленно меняющиеся параметры предварительно поступают на
устройства амплитудного и временного уплотнения
(программно-коммутирующие устройства - ПКУ) соответственно. Использование устройств
уплотнения позволяет передать по одному информационному каналу ИТС
сигналы нескольких датчиков и тем самым эффективно использовать пропускную
способность отдельных каналов ИТС.
Уплотн.
КД
ПКУ
«а
Калибратор
АЦП
Т
Эталон
времени
Кодер
A J
FK
ПРМ
А
Fcm
Синхронизатор I*
ЗУ
2
S
Программно-
временное
устройство
а) бортовая аппаратура
АФУ
ПРМ
т
управления
антенне
)Й
F
Декодер
......
с—г-
Fc
Синхро-1
низ*
1тор
Регистраторы |~,
А
Генератор
меток
времени
#| Аппаратура
обработки
II Аппаратура
^ трансляции
ICEB
В линию
'СВЯЗИ
б) приемно-регистрирующая аппаратура
Рис. 3.10. Структурная схема ИТС
На вход системы коммутации поступают также уровни калибровки. В
простейшем случае передается минимальное и максимальное напряжение
измерительной батареи, питающей датчики. Тем самым передаются уровни
сигнала, соответствующие 0% и 100% значениям параметра. Благодаря этому
в приемно-регистрирующей аппаратуре получают данные об относительном
масштабе зарегистрированных сигналов. В том случае, если тракт РТС
нелинейный, передается больше двух уровней калибровки, например 11 уровней
(через 10% шкалы каждый). Системой коммутации формируется АИМ-
сигнал, представляющий собой последовательность отсчетов всех
измеряемых параметров и уровней калибровки. Для управления системой
коммутации от хронизатора поступают маркерные и канальные синхроимпульсы.
Аналого-цифровой преобразователь (АЦП) преобразует каждый отсчет
в цифровой код. Для его работы используются синхроимпульсы, следующие
с частотой каналов Fk и символов кода Fc. В аналоговых системах АЦП нет.
181
Современная телеметрия в теории и на практике
SZA
1-
0
Измерительные каналы
А
маркер /
I Т
* .|.Тк1 .[■
Тк2
• • • ||
LtkN L T
л
ill w
к J "*
»l
SI A
a)
маркер О И О И О О И
пп п пп---п п
SX
Тк1
Тк2
TKN
1
маркер
время
б)
служеб.
в) ^
инф. 1
тк
инф. 2
—"'"г
t
Рис. 3.11. Групповой сигнал (телеметрический код)
В кодере формируется групповой сигнал, содержащий информационные
сигналы определенной структуры (ВИМ, ДИМ или КИМ), а также
синхронизирующие и служебные сигналы. Групповой сигнал
(телеметрический код) обязательно содержит маркерные сигналы, отмечающие
(маркирующие) начало цикла коммутации (рис. 3.11). Маркерные сигналы
отличаются от измерительных. При КИМ в качестве маркера часто
используется кодовая группа импульсов, запрещенная для
информационных каналов (рис. 3.11а). При ВИМ маркер может отличаться от
измерительных импульсов, например, по длительности (рис. 3.116). Отличие
маркерных от других сигналов лежит в основе их селекции в приемно-ре-
гистрирующей аппаратуре.
Синхроимпульсы каналов часто включаются в код. Они размещаются на
границе каналов. При ВИМ, например, опорные импульсы (рис. 3.116)
обозначают границы каналов и используются для временного разделения каналов.
Символьные синхроимпульсы, как правило, в код не включаются.
Часто несколько каналов отводится для передачи бортового времени, что
позволяет привязать данные телеизмерений ко времени. Передача
секундных меток с неоднозначностью в одни сутки требует 17 бит на метку.
К служебным сигналам можно отнести информацию о номере
технологического оборудования, режиме ее работы и т. п. В обобщенном виде
структура кода на выходе формирователя представлена на рис. 3.11.в.
182
Глава 3. Средства телеметрии
Видеокод с выхода поступает либо непосредственно на вход передатчика,
либо через долговременное запоминающее устройство. Высокочастотные
колебания передатчика модулируются одним из возможных способов:
используется AM, ЧМ или ФМ. Далее радиосигнал поступает в антенну и
излучается в направлении приемно-регистрирующей станции.
Долговременное запоминающее (ДЗУ) устройство служит для
запоминания информации на время отсутствия связи, которое ограничено в
пределах от нескольких секунд до сотен минут.
При известном числе каналов N, частоте опроса Fo и значности кода в каждом
канале п можно рассчитать скорость потока информации на выходе кодера:
В = NF0n бит/с.
Эта скорость при заданном времени запоминания £зап определяет
необходимую емкость долговременного запоминающего устройства (ДЗУ):
V -Bt
Y ДЗУ ul3AW
Емкость используемых ДЗУ достигает нескольких миллионов бит. В
качестве ДЗУ часто используются ДЗУ с магнитной лентой, допускающей
запись тысяч битов на 1 м длины, поэтому длина используемой ленты
оказывается в приемлемых пределах. При воспроизведении информации,
записанной в ДЗУ, на него подается от хронизатора сигнал считывания.
Частота считывания Feu стабильна. Воспроизведение информации в случае
использования в качестве ЗУ магнитного регистратора сопровождается
изменениями частоты следования слов из-за неравномерности протяжки
магнитной ленты.
Частота считывания сигналов из выходного регистра магнитного
регистратора выбирается большей максимальной частоты воспроизведения, которая
меняется случайно. Из-за этого в некоторые моменты времени при приходе
импульсов считывания выходной регистр оказывается пустым. В эти
моменты времени формируются «холостые» слова, которые не несут
информации. «Холостым» словом может быть последовательность, состоящая из
одних нулей.
Стабилизация частоты следования элементов группового сигнала при
воспроизведении информации с долговременного ЗУ приводит к облегчению
работы наземной части канала синхронизации, но сопровождается потерей
энергии, обусловленной передачей «холостых» слов.
Дополнительные затраты энергии на передачу «холостых» слов составляют
до 6% от общих затрат на передачу.
183
Современная телеметрия в теории и на практике
Таким образом, бортовая аппаратура может работать в одном из трех
режимов: непосредственной передачи (НП), воспроизведения информации
(ВИ) и запоминания информации (ЗИ).
Отличительной особенностью режима ЗИ является уменьшение частоты
опроса датчиков по сравнению с непосредственной передачей.
Соответственно, уменьшаются Fm, Fk, Fc. Это обусловлено стремлением уменьшить
объем ДЗУ. Соотношение частот опроса в режимах НП и ЗИ
пропорционально отношению скоростей воспроизведения Ueu и записи 11зи
магнитной ленты. Именно благодаря этому скорость передачи в режимах НП и ВИ
одинакова.
Бортовой эталон времени выдает высокостабильные сигналы, которые
являются задающими для хронизатора, а также код времени, включаемый
в групповой сигнал в режиме ЗИ.
Приемно-регистрирующая аппаратура (ПРА) осуществляет прием,
декодирование и регистрацию телеметрической информации (рис. 3.1 Об). В состав
этой аппаратуры может включаться аппаратура обработки данных
телеизмерений и передающая часть системы трансляции, обеспечивающей
передачу данных в центр сбора и обработки информации.
Антенно-фидерное устройство, управляемое системой управления
антенной, позволяет осуществлять поиск приходящего от объекта сигнала по
направлению, захват и слежение по углу. Слежение осуществляется одним
из возможных способов: вручную, автоматически, по программе.
Групповой сигнал с выхода приемника поступает на входы декодера и син^-
хронизатора. В синхронизаторе выделяются маркерные и канальные
синхроимпульсы, используемые в декодирующем устройстве для выделения
сигналов информации и служебных сигналов. Декодер, кроме того, может
выполнять декодирование помехоустойчивого кода, формирование
сигналов записи и считывания для регистраторов и т. п. В качестве регистраторов
используются магнитные, графические, фоторегистраторы, а также
электронно-лучевые трубки и световые табло для визуального отображения
данных телеизмерений.
В процессе регистрации данных осуществляется их привязка к наземному
времени. Для этого в регистратор подаются метки времени от генератора,
который синхронизируется сигналами службы единого времени (СЕВ).
Минимальный интервал между метками СЕВ составляет 1 с, генератор
меток времени выдает сигналы через 0.1 или 0.0001 с. Аппаратура обработки
позволяет в соответствии с приоритетом обработать зарегистрированные
данные и выдать их потребителю в требуемом виде. Аппаратура трансляции
служит для согласования выходных сигналов РТС с входом используемой
для трансляции данных типовой линии связи.
184
Глава 3. Средства телеметрии
3.4.3. Многоступенчатая коммутация каналов
Существенным техническим показателем РТС с ВРК является частота
опроса - чем она выше, тем более точно можно воспроизвести измеряемую
величину по ряду ее отсчетов. Поэтому частота опроса выбирается из
условия обеспечения воспроизведения параметра с требуемой точностью.
При измерении многих параметров, как правило, встречается такая
ситуация, когда скорости изменения различных параметров различны. В связи
с этим требуется обеспечить информационную гибкость системы, то есть
возможность выполнения телеизмерений с различной частотой опроса по
различным каналам. Одним из путей обеспечения такой гибкости является
применение многоступенчатых коммутаторов. Рассмотрим принцип
многоступенчатой коммутации на примере с двумя степенями механической
коммутации (рис. 3.12).
На второй ступени имеется k коммутаторов, подвижные контакты которых
вращаются со скоростью п2 об/с. К ламелям присоединяются датчики. Если
число ламелей каждого коммутатора второй ступени т, то общее число
датчиков (а в нашем случае и каналов):
N<mk.
На первой ступени используется один коммутатор, подвижный контакт
которого вращается со скорость пх об/с. К его ламелям подводятся
сигналы от коммутаторов первой ступени. Поэтому число ламелей / должно
быть не меньше числа коммутаторов первой ступени:
1>к.
На рис. 3.12 изображен случай, когда / = к.
Коммутаторы второй ступени располагаются в местах скопления датчиков
на объекте телеизмерений и осуществляют тем самым сбор информации
в локальных частях объекта. Поэтому часто они называются локальными
коммутаторами (ЛК). Для удобства каналы локальных коммутаторов
имеют двойное обозначение. Каналы первого ЛК, с первого по т-ый,
обозначаются: 1/1, 2/1, 3/1, ..., m-1/1, m/1; каналы второго ЛК, с первого по т-ый,
обозначаются: 1/2,2/2,3/2,..., т-1/2, т/2; каналы к-го Л К, с первого по т-ый,
обозначаются: 1/к, 2/к, 3/к,..., m-1/k, m/k.
Коммутатор первой ступени называется основным (ОК). Его входы
обозначаются цифрами 1, 2,..., 1 (рис. 3.12).
Число ступеней коммутации может быть три и более. В этих случаях в
системе коммутации есть основной коммутатор, локальные коммутаторы 1-й
ступени, локальные коммутаторы 2-й ступени и т. д.
185
Современная телеметрия в теории и на практике
т/1
вторая ступень
(локальные
коммутаторы)
первая ступень
(основной
коммутатор)
+> к кодеру
Рис. 3.12. Двухступенчатый коммутатор каналов
Существует несколько вариантов работы двухступенчатого коммутатора,
отличающихся соотношением скоростей вращения коммутаторов 1-й и 2-й
ступеней (л, и п2). Возможно также синхронное и несинхронное вращение
коммутаторов. Рассмотрим некоторые из вариантов.
Вариант 1. Коммутаторы 2-й ступени сфазированы друг с другом.
Скорости вращения пх и п2 связаны соотношением:
л,
mn.
2*
(3.15)
Благодаря синфазности работы одноименные (первые, вторые и т. д.)
ламели второй ступени опрашиваются одновременно. Сигналы на выходе
коммутаторов второй ступени изображены на рис. 3.13а, б, в.
Соотношение (3.15) показывает, что за время пребывания подвижного
контакта коммутаторов 2-й ступени на одной ламели подвижный контакт
коммутатора 1-й ступени совершает полный оборот, производя опрос всех
коммутаторов второй ступени (рис. 3.13). Получаемый в результате
двухступенчатого опроса результирующий сигнал представляет собой
последовательность опросов всех N = mk датчиков.
Частота опроса (в герцах) определяется скоростью вращения коммутатора
2-й ступени.
F0=n2
(3.16)
186
Глава 3. Средства телеметрии
Рис. 3.13. Образование группового сигнала многоступенчатого коммутатора
при соотношении скоростей коммутации л, = mn2
Увеличение частоты опроса достигается запараллеливанием нескольких
каналов одного коммутатора второй ступени (знак «х» на рис. 3.13
соответствует запараллеливанию 1-го и 3-го каналов) и подключением датчика
к ламели коммутатора 1-й ступени. В последнем случае:
Увеличение частоты опроса сопровождается уменьшением числа каналов.
Запараллеливание входов для увеличения частоты опроса датчика
производится таким образом, чтобы период опроса в смежных кадрах был
одинаков. Это достигается в том случае, если запараллеливаются
диаметрально противоположные входы. Если же, например, запараллелить
входы 1/1 и 2/1, это приведет к тому, что интервал времени между
отсчетами будет принимать два значения: Г01 и (Г02_01). Неравномерность
следования отсчетов во времени нежелательна, так как она не приведет
к ожидаемой точности воспроизведения более часто опрашиваемого
параметра.
Отношение частот опроса на первой и второй ступенях находится из
соотношения (рис. 3.13):
Т02 = тТ0]
187
Современная телеметрия в теории и на практике
и оказывается равным
Т F
Т F
Величина канального интервала (рис. 3.13в) в /раз меньше периода опроса
коммутатора первой ступени:
Тм 1 m
Тк =
_ л 01 _
/ ^о. иъ
Частоту F01 называют частотой опроса 1-й ступени, a F02 - частотой опроса
2-й ступени.
Число каналов в системе определяется по формуле:
Т
Т
В общем случае часть каналов отводится для передачи маркерных
служебных групп импульсов (Л/с). В этом случае число измерительных каналов:
N„=N-NC.
При цифровом методе передачи длительность символа кода т при
известном числе импульсов в кодовой группе п определяется по формуле:
Т
п
Разделение каналов производится либо в одну, либо в две ступени. Во
втором случае сначала выделяются сигналы отдельных коммутаторов 1-й
ступени, а затем сигналы отдельных каналов.
Вариант 2. Коммутаторы 2-й ступени сфазированы друг с другом,
соотношение скоростей вращения:
п2=Ыпх (3.17)
При таком соотношении скоростей за время полного оборота коммутатора
2-й ступени скользящий контакт 1-й ступени пройдет ровно одну ламель.
Таким образом, когда подвижный контакт коммутатора 1-й ступени
находится на 1-й ламели, передаются только сигналы 1-го коммутатора 2-й
ступени (рис. 3.14а, г, заштрихованы):
F0=n2 (3.16)
При переходе контакта на 2-ю ламель передаются только сигналы 2-го
коммутатора 2-й ступени (рис. 3.146, г, заштрихованы) и т. д. Получаемый
188
Глава 3. Средства телеметрии
Рис. 3.14. Образование группового сигнала многоступенчатого коммутатора
при п2 = /л,
на выходе двухступенчатого коммутатора результирующий сигнал
содержит последовательность опросов всех N каналов, расположенных группами
в порядке возрастания номеров коммутаторов 2-й ступени, а внутри группы -
в порядке возрастания номеров каналов в коммутаторе 2-й ступени.
Частота опроса определяется частотой вращения коммутатора 1-й ступени:
F0=F01=ai,. (3.18)
Увеличение частоты опроса достигается либо запараллеливанием
одноименных каналов коммутаторов 2-й ступени (например, всех первых ламе-
лей), либо путем непосредственной передачи сигналов только одного
коммутатора 2-й ступени. В этом случае (рис. 3.14):
Как и в рассмотренном предыдущем случае, разделение каналов при
приеме производится в одну или две'ступени.
Вариант 3. При любом из отношений пх I п2 коммутаторы 1-й ступени не
сфазированы. В этих вариантах работа коммутатора возможна, однако при
отсутствии синфазности коммутаторов 1-й ступени требуется посылка
дополнительных маркерных синхронизирующих импульсов, обозначающих
начало цикла коммутации каждого* из коммутаторов 2-й ступени. В этом
нетрудно убедиться самостоятельно.
189
Современная телеметрия в теории и на практике
Таким образом, при двухступенчатой коммутации синхронизирующими
сигналами при синфазном и синхронном вращении всех коммутаторов
являются маркерные импульсы начала кадра и опорные импульсы, а при несфази-
рованных коммутаторах - маркерные импульсы коммутаторов как 1-й, так
и 2-й ступеней, а также опорные импульсы.
В простейшем случае начало цикла коммутации можно отметить подачей
сигнала определенной структуры на ламель, предшествующую 1-й (т/1).
Таким сигналом может быть, в частности, максимальный или нулевой
по уровню.
Вариант 4. Коммутаторы не сфазированы. Соотношение скоростей вращения:
1
пх »тп2.
Так как Т01 «—Т02, то, пока подвижный контакт 2-й ступени скользит
m
по одной ламели (рис. 3.15), проходит несколько периодов опроса Г01
(рис. 3.16). Поэтому каждый датчик, включенный через ПКУ,
опрашивается 2 раз подряд. Остальные датчики, включенные на вход коммутатора
1-й ступени, опрашиваются с периодом Т01.
За время Т0] параметры, включенные через ПКУ, почти не изменяются,
поэтому группу 2 отсчетов одного датчика можно считать одним опросом,
а период опроса ПКУ - равным Т02. Обычно выбирают z = 5-ь 10.
ПКУ
коммутатор РТС
к кодеру
Рис. 3.75. Включение программно-коммутирующего устройства на вход РТС
Число параметров, которые можно включить на вход ПКУ, определяется
с помощью диаграмм (рис. 3.16).
Как следует из этого рисунка,
Тм =zTmN,
02
0ГТ/7АУ>
где Nпку - число датчиков, включаемых на входы одного ПКУ
190
Глава 3. Средства телеметрии
Отсюда:
М
02
01
01
ПКУ
zTm zF02 (5 + 10)F02'
На входы одной РТС можно включать несколько ПКУ.
D1 D2 D3 Dm D1 D2
Dm
п
EL
гтт-г
£П
'02
а) отсчеты в канале с ПКУ
Z Z
отсчетов
(3.19)
ГЦ
напряжение датчика 1 канала (без ПКУ)
ш!
ТГГТптг
б) отсчеты в канале без ПКУ
Рис. 3.16. Отсчеты в канале передачи с ПКУ
Для того, чтобы при дешифровке можно было найти начало кадра ПКУ,
то есть разделить каналы, ламели ПКУ заранее соединяются специальным
образом в блоки (запараллеливаются). Например, если закоротить первые
две ламели, то при регистрации они дадут более длинную ступеньку, чем
остальные ламели. Это может служить признаком начала кадра ПКУ.
Применение нескольких ступеней коммутации имеет ряд преимуществ.
Во-первых, обеспечивается информационная гибкость системы. Во-вторых,
при Щ > тпг коммутаторы 1-х ступеней можно расположить на объекте
в местах скопления датчиков. Это приводит к экономии кабеля и снижению
массы бортовой аппаратуры: вместо m кабелей датчиков от коммутатора
2-й ступени идет лишь один кабель (рис. 3.15).
В-третьих, при многоступенчатой коммутации электронные коммутаторы
получаются более простыми и надежными в эксплуатации.
3.4.4. Назначение и структура системы синхронизации
Синхронизация - это установление временного соответствия между
процессами в совместно функционирующих передающей и приемной частях
191
Современная телеметрия в теории и на практике
радиотелеметрической системы. В процессе синхронизации на передающей
стороне формируются, а на приемной выделяются следующие сигналы:
1) маркерные (кадровые), обозначающие начала циклов коммутации
(кадров) различных ступеней коммутации;
2) канальные (словные), обозначающие границы каналов (слов);
3) символьные, обозначающие границы символов.
Кроме того, в наземной аппаратуре часто формируются вспомогательные
синхроимпульсы (СИ), располагающиеся в нужных точках канального
интервала. Например, при ВИМ формируются синхроимпульсы,
располагающиеся в начале и конце шкалы и позволяющие выделить измерительный
импульс (рис 3.17д, е).
Число каналов в кадре ЛГи число символов в слове п определяют соотношения
между частотами повторения маркеров Fu„ каналов (слов) Fk и символов Fc:
F -NF
Fc^nFK^NnFu.
(3.20)
(3.21)
При этом FK =—, a F с-
1К ЛС
канального интервала и символа.
—, где Тк и т - длительности соответственно
Синхросигналы слов
а)
б)
в)
г)
Д)
е)
| маркер | 1 канал f| 2 канал
I Тк
ут
I
I Тк1 | Тк2
1
1,
1* ■■' - -
1 1
1 тк |
Г"| 3 канал 1 1 маркер 1
1 Тк3 | Тк I*
1,
Тц ,|
1 1 1,
I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I
о XJ
I
СИ1
J
i - Г\Л ХАЛ Г\0 1АО
~Г*" \Jl V\\ UZ V\£.
1 1 1 1
СИ2 СИ1 СИ2 СИ1 <
_L_I LJ
ОЗ ИЗ О
III „
DH2 СИ1 СИ2 СИ1 СИ2
J_J l_l U.
Рис. 3.17. Синхроимпульсы, выделяемые из принятого кода
192
Глава 3. Средства телеметрии
Еще одной задачей системы синхронизации является формирование
опорного сигнала для фазового детектора (рис. 3.18).
10 10 0 11
Рис. 3.18. Фазоманипулированный и опорный сигналы
Основные требования, предъявляемые к системе синхронизации РТС,
состоят в следующем:
1) разделение каналов должно быть надежным, то есть ошибка в
определении принадлежности измерительных сигналов тому или иному
датчику (определение номера канала) должна иметь малую
вероятность;
2) определение границ канальных интервалов и символов должно быть
достаточно точным, чтобы энергетические потери и взаимные помехи
каналов из-за неточности синхронизации были малы;
3) время вхождения в синхронизм и удержание синхронизма при
перерывах в связи должны быть такими, чтобы потери информации были в
допустимых пределах;
4) введение синхросигналов в групповой телеметрический сигнал не
должно существенно сказываться на снижении скорости передачи
информации или увеличении энергетического потенциала радиолинии.
Структура синхросигналов, включаемых в ГТС, выбирается таким образом,
чтобы они обеспечивали выполнение требований, предъявляемых к
системе синхронизации. Естественно стремление включать в код возможно
меньше специальных сигналов синхронизации и все необходимые
синхроимпульсы получать в пункте приема. В связи с этим рассмотрим некоторые
возможные алгоритмы работы приемного тракта системы синхронизации,
так как именно на приемной стороне выполняются операции,
определяющие характерные признаки системы синхронизации в целом.
7 Зак 861
193
Современная телеметрия в теории и на практике
1. Алгоритм (рис. 3.19а) характеризуется тем, что в код включены
только маркерные синхросигналы. Синхроимпульсы
синхронизации слов и символов получаются умножением маркерной частоты
в соответствии с формулами (3.20) и (3.21).
2. Алгоритм (рис. 3.196) также базируется на включении в код
только маркерных сигналов. В приемной аппаратуре за счет анализа
принимаемого кода выделяются символьные синхроимпульсы,
используемые для опознания символов кода маркера.
Синхроимпульсы слов формируются умножением частоты маркеров или
делением частоты символов.
этапы
а)
ГС-
Выделение
маркеров
—щ
Получение
FK=NFM
Получение
Fc=nFK J
б)
ГС-
в)
ГС-
Формирование
Fc
Формирование
Fc
Выделение
маркеров
Выделение
FK
Получение
FK=Fc/n
J Получение
Н FK=FMN
л
Выделение
маркеров
Рис. 3.19. Алгоритмы получения синхросигналов кадров,
слов и символов
3. Алгоритм (рис. 3.19в) предусматривает включение в код и
маркеров, и синхросигналов слов. В этом случае анализ принятого
сигнала позволяет сформировать символьные синхроимпульсы, которые
используются для определения границ символов при выделении
синхроимпульсов слов и маркеров. Выделенные синхроимпульсы
слов используются при селекции маркеров.
Перечень алгоритмов можно продолжить, однако и приведенных достаточно
для понимания принципов функционирования тракта синхронизации.
В практике телеизмерений маркерные и канальные синхросигналы часто
включаются в состав ГТС. Если при этом используется цифровой способ
передачи, то символьные синхроимпульсы формируются в приемной
аппаратуре на основе анализа принимаемого сигнала. При этом выделение часто
194
Глава 3. Средства телеметрии
следующих символьных синхроимпульсов требует меньшего времени, чем
выделение канальных синхроимпульсов и маркеров. Использование символьных
синхроимпульсов ускоряет и облегчает выделение канальных
синхроимпульсов, которые вместе с символьными, в свою очередь, облегчают выделение
маркеров. Последовательное вхождение в синхронизм по символам, словам
и кадрам позволяет завершить процесс синхронизации наиболее быстро.
С целью уменьшения энергетических затрат синхросигналы слов можно
исключить из РТС. Это приводит к необходимости увеличивать энергию
маркера, чтобы его можно было выделить быстро и надежно, а также точно
определить его временное положение.
Система синхронизации состоит из передающей и приемной частей. Хрони-
затор передающей части (рис. 3.10) формирует все необходимые
синхроимпульсы, управляющие работой аппаратуры. Некоторые из них используются
в формирователе как исходные для формирования синхросигналов,
включаемых в код. Поясним различие между синхроимпульсами и
синхросигналами. Синхроимпульсы используются в аппаратуре для фазирования работы
ее элементов: коммутатора, АЦП, декодера и т. п. Синхроимпульсы
должны быть такими, чтобы обеспечить надежный запуск и фазирование
работы различных устройств. Синхросигналы включаются в ГТС и передаются
по радиоканалу. Поэтому синхросигналы часто имеют сложную структуру,
которая позволяет, несмотря на воздействие помех при передаче сигналов,
достаточно точно определить начало кадра, границы каналов и символов.
Таким образом, в приемной аппаратуре синхросигналы, содержащиеся в ГТС,
являются исходными для получения синхроимпульсов.
Структура приемной части системы синхронизации определяется
выбранным алгоритмом. На рис. 3.20 изображена структурная схема,
соответствующая третьему алгоритму.
Вход
1неиная| ■ ■
часть |-f*| Детектор I
ПОКА I ■ 1 I
Форм-ль
опорного
Выход |
—J Декодер I
'AAA1
Симв.
синхр-р
Слов,
синхр-р
Кадр,
синхр-р
Синхронизатор
Рис. 3.20. Структурная схема приемной части тракта синхронизации
195
Современная телеметрия в теории и на практике
В этой схеме выделенные символьные синхроимпульсы используются
для выделения синхроимпульсов каналов и маркеров. Символьные и
канальные синхроимпульсы используются для выделения маркеров. Схема
формирования опорного сигнала формирует опорный сигнал на
промежуточной частоте для фазового детектора.
Сформированные в синхронизаторе синхроимпульсы поступают в декодер
и используются для разделения каналов и опознания слов. В современных
системах декодирование часто осуществляется ЭВМ. В этом случае
синхросигналы и информация поступают на вход ЭВМ.
В процессе выделения и формирования тех или иных синхроимпульсов в
приемной части системы синхронизации для повышения помехоустойчивости
используются инерционные устройства (рис. 3.21). Выделяемые из
принимаемого сигнала синхроимпульсы называются внешними. Они
используются для фазирования инерционного генератора, формирующего
внутренние синхроимпульсы. Благодаря инерционности этот генератор выдает
внутренние синхроимпульсы и во время сбоев, когда внешние пропадают.
Тем самым обеспечивается большая помехоустойчивость системы
синхронизации. Основными требованиями к инерционному генератору являются
быстрое вхождение в синхронизм и длительное удержание частоты.
Вход
Селектор и
формирователь
Внешние
синхроимпульсы
Инерционный
генератор
Внутренние
синхроимпульсы
Рис. 3.21. Внешние и внутренние синхроимпульсы
3.4.5. Выделение сигналов символьной синхронизации
Сигналы символьной синхронизации, как правило, не включаются в
групповой телеметрический сигнал. В приемной аппаратуре они выделяются
из принятого видеосигнала. При этом учитываются следующие
особенности сигналов КИМ. Во-первых, появление нулей и единиц случайно. Могут
встречаться несколько посылок подряд одной полярности (рис. 3.22а).
Во-вторых, спектр группового сигнала самой частоты следования символов
Fc не содержит. В случае появления последовательности чередующихся
нулей и единиц первая гармоника имеет частоту:
2т 2
196
Глава 3. Средства телеметрии
Поэтому путем простой фильтрации сигнала КИМ символьную частоту Fc
получить нельзя.
Наиболее широкое применение получила схема выделения символьных
синхроимпульсов (рис. 3.22), в которой с помощью дифференцирующей
цепи и формирующего каскада создаются короткие импульсы (рис. 3.226, в)
в моменты переходов сигнала с 1 на 0 и с 0 на 1. Эти импульсы
подстраивают фазу генератора символьной частоты Fc, синусоидальный выходной
сигнал которого используется для формирования импульсов, расположенных
на границах символов (рис. 3.22г, д).
а) б) в) г) д)
Вх. I ДисЬ. I I Фсюмипо- I I Воемен. I I Генератор I I Фопмипо- I Вых.
1 Диф.
цепь
Формирователь
Времен,
различ-ль
1
ч/т
Генератор
Fc
А
Формирователь
^АЛЛААЛ
Д)
п п п п п п п
Рис. 3.22. Схема выделения из кода символьных синхроимпульсов
Использование инерционной системы фазовой автоподстройки частоты
принципиально необходимо. Именно благодаря этому на выходе схемы
синхроимпульсы следуют регулярно, несмотря на то, что на входе временного
различителя появляются случайные импульсы, расположенные на границах
символов. Инерционность схемы ФАП должна быть достаточной, чтобы
обеспечить генерирование символьных синхроимпульсов, когда во входном
сигнале будет несколько подряд следующих одинаковых символов, так что
несколько тактов подряд сигнал на вход временного различителя поступать
не будет (рис. 3.22 в). С другой стороны, инерционность не должна быть
197
Современная телеметрия в теории и на практике
слишком большой, чтобы система ФАП успевала следить за меняющейся
фазой импульсов на входе временного различителя, то есть чтобы
динамические ошибки были малы.
Благодаря инерционности системы ФАП сглаживаются флуктуации фронтов
импульсов, обусловленные шумами. Тем не менее генерируемые
синхроимпульсы испытывают случайные флуктуации относительно среднего
положения. При больших входных отношениях сигнал-шум эти флуктуации имеют
нормальное распределение. Дисперсия флуктуации временного положения
импульсов От на выходе схемы символьной синхронизации определяется
входным отношением сигнал/шум и параметром дискриминатора [8].
где AfK - полоса кольца автоподстройки ФАП, а т - длительность символа
(рис. 3.23).
Т2
ю-1
ю-2
ю-3
1 10
Рис. 3.23. Дисперсия флуктуации фронта импульса, выдаваемого схемой
символьной синхронизации, содержащей ФАП
При разработке системы символьной синхронизации необходимо оценить
вероятность ошибки приема символа, обусловленную неточным знанием
границ символа. Если смещение тактовых импульсов обозначить Дт , а
распределение этого смещения - Р(Дх), то среднее значение вероятности
ошибки при приеме символар можно найти как [8].
ос
/? = jP(Ax)p(Ax)d(Ax). (3.22)
-00
На рис. 3.36-3.38 приведены результаты расчетов по этой формуле для
сигналов различной структуры и различных способов приема.
Рассмотрение зависимостей вероятности ошибки от входного отношения
сигнал/шум позволяет сделать следующие выводы.
198
Глава 3. Средства телеметрии
Для обеспечения погрешности передачи параметра порядка 1% в системах
должна достигаться вероятность ошибки приема символа порядка 1(Г.
Если при идеальной синхронизации достигнута такая вероятность ошибки
за счет создания определенного отношения сигнал-шум на входе системы,
то появление нестабильности символьной частоты, характеризующееся
относительным среднеквадратическим значением —- = 0.05 , приводит к
увеличению вероятности ошибки примерно до 10~ для всех видов сигналов и
методов приема. Такое увеличение вероятности ошибки не может быть
признано допустимым. Оно может быть компенсировано соответствующим
увеличением интенсивности сигнала.
Чтобы сохранить вероятность ошибки на уровне 10-4при появлении в
идеальной системе нестабильности символьных синхроимпульсов,
характеризующейся —L- = 0.05 » необходимо примерно вдвое увеличить энергию входных
т
сигналов для всех видов сигналов и методов приема. Дальнейшее увеличение
нестабильности приводит к резкому увеличению необходимого отношения
сигнал-шум, которое обеспечивает заданную вероятность ошибки.
Поэтому относительную нестабильность -4- = 0.05 можно считать предель-
т
но допустимой. Как следует из рис. 3.23, —1- < 0.05 может быть легко до-
т
стигнута при отношении сигнал-шум на входе системы более 10.
0 20 40 60 80 100
ю-1
ю-2
10"3
ю-4
10"5
ю-*
Рис. 3.24. Вероятность ошибки при АМн
199
Современная телеметрия в теории и на практике
ю-1
ю-2
ю-3
ю-4
10"5
Ю"6
р>
3
2
0
40
60
ь-J 1 1
т
0
= с
).5
0
i
2
80
0,1
.0,05
I
^0,01
'
100
h2 =
2Е
"N0
Рис. 3.25. Вероятность ошибки при ЧМн
0 20 40 60 80 100
10
10
10
10
10
10
-1
)
1-2
1-3
)
)~*
-5
-в
Р^
г
X
:_ _
0
0
/
•°
1
,0,
2
15
I ►
h2 = -^
П N0
Рис. 3.26. Вероятность ошибки при ФМН
Таким образом, рациональный выбор характеристик системы символьной
синхронизации и величины отношения сигнал-шум на входе приемника
позволяет обеспечить требуемую вероятность ошибки передачи символа.
200
Глава 3. Средства телеметрии
3.4.6. Формирование и выделение канальных
синхросигналов
Канальные синхросигналы, как правило, не отличаются от измерительных.
Единственным признаком, по которому можно выделить эти сигналы из
группового, является регулярность их следования: они располагаются на границах
канальных интервалов, период их следования постоянный. Реализация
устройств, использующих регулярность следования в качестве основы селекции
канальных синхроимпульсов, существенно зависит от метода передачи
(аналогового или цифрового). В связи с этим рассмотрим отдельно
синхронизацию каналов для аналоговых и для цифровых методов передачи.
01 И1 02 И2 03 ИЗ 04
„JLD Q_J D П_П ,
01 И1 02 И2 03 ИЗ t
„ DJ D-J D П_
t
., D D D „
t
ГС
a
!h
б
a
&
опорные
в
Рис. 3.27. Схема выделения опорных импульсов при ВИМ
Среди аналоговых методов наибольшее распространение получило
использование сигналов ВИМ-АМ (рис. 3.27), когда положение
измерительного (И) импульса внутри канального интервала говорит о величине
параметра, а опорные импульсы (О) располагаются на границах канальных
интервалов и служат в качестве начала отсчета положения измерительного
импульса и одновременно с этим в качестве канальных синхроимпульсов.
Выделение опорных импульсов может быть осуществлено с помощью
устройства (рис. 3.27), в котором производится задержка группового сигнала
(кода) на время канального интервала и конъюнкция незадержанного и
задержанного сигналов. Так как в смежных канальных интервалах
передаются разные параметры, положение измерительных относительно опорных
201
Современная телеметрия в теории и на практике
оказывается различным, и на входах схемы совпадения они появляются в разные
моменты времени, а опорные одновременно (рис. 3.27а, б). Таким образом, на
выходе схемы совпадения появляются только опорные параметры (рис. 3.27в).
Возможность появления измерительных импульсов на расстоянии Тк друг
от друга определяет формирование ложного канального синхроимпульса.
При подавлении опорного импульса помехой пропадут сразу два смежных
опорных на выходе схемы совпадения. Поэтому для повышения
надежности получения канальных синхроимпульсов можно увеличить время
анализа до нескольких интервалов (т) и принимать решение о появлении
канального импульса, если на рассматриваемом интервале совпадает к импульсов,
разделенных временем 7к, из т. В этом случае вероятность появления
ложного синхросигнала будет определяться вероятностью появления к подряд
следующих измерительных импульсов, разделенных временем Тк, а
вероятность пропуска - вероятностью пропадания (п - k) опорных. Выбором nwk
можно добиться, чтобы вероятность пропуска и вероятность появления
ложного опорного были в заданных пределах.
При сигналах АИМ и ДИМ канальные синхроимпульсы, как правило, не
формируются и не включаются в групповой сигнал.
При цифровых методах передачи сигналы синхронизации каналов часто
включаются в групповой сигнал. Они представляют собой символы,
располагающиеся на границе слов (рис. 3.40). Эти символы ничем не отличаются
от измерительных, поэтому единственным признаком, который можно
использовать для их выделения, является регулярность следования.
а)
С С С С
|1|1|0 0|11111 |оПо|11110 0|1|1|оПо 0 0|1|1|1И|1|1|0 0КОД
вкл.у
б).
в).
д)-
в)-
ж).
Тк
Тк
Тк
Тк
ШАГ
i
I
I—
О
Рис. 3.28. Включение сигналов синхронизации каналов
в цифровой код
202
Глава 3. Средства телеметрии
Для того, чтобы осуществлять выделение, необходимо производить
анализ принимаемых сигналов в течение нескольких канальных интервалов
(слов). Только таким образом можно обнаружить регулярность появления
символа канальной синхронизации. Задача выделения синхроимпульсов
каналов сводится к обнаружению последовательности единиц, следующих
с периодом 75с (рис. 3.28а).
Для решения этой задачи при известном числе символов в слове
выделяется п регулярных последовательностей импульсов, следующих с периодом
Тк. Другими словами, в произвольный момент времени выделяется символ
кода и следующие за ним каждый п-ый символы группового сигнала.
Следующая последовательность образуется таким же образом, но она сдвинута
относительно первой на один символ. Из всех полученных
последовательностей (рис. 3.28) только одна состоит из единиц (рис. 3.28д),
являющихся синхросигналами каналов. Эта последовательность и является искомой
последовательностью сигналов синхронизации каналов (рис. 286, в, г, е, ж).
Остальные последовательности, состоящие из информационных символов,
содержат и нули, и единицы.
Алгоритмы принятия решения относительно селекции
последовательности синхросигналов могут быть различными. Рассмотрим два алгоритма.
При первом алгоритме считают число единиц для каждой
последовательности в течение некоторого интервала времени. В отсутствие помех для одной
последовательности число сосчитанных единиц окажется равным числу слов,
прошедших за выбранный интервал времени. Эта последовательность
является искомой. Сумма единиц, содержащихся в других последовательностях,
будет меньше. Принцип принятия решения иллюстрируется на рис. 3.41.
Групповой сигнал поступает в «-разрядный регистр. Как только регистр
заполнен, происходит считывание записанного числа в счетчики. Затем
регистр заполняется следующими п символами кода и т. д.
Через тп слов в одном счетчике будет m единиц, а в остальных - числа,
меньшие т, так как в них попали информационные символы, принимающие
значения нуля. Достижение суммой величины m обнаруживается пороговым
устройством.
ГС
Fc
ь
РЕГИСТР
1
2
3
•
•
•
п
^
W
СЧЕТЧИКИ
ь
ш
W\
ПОРОГ. УСТР
ь
w
W\
РЕГИСТР
Сигнал
синхронизации
- i ■ Ь
. .и i p
Рис. 3.29. Схема обнаружения канальных синхроимпульсов накоплением сигналов
различных фаз
203
Современная телеметрия в теории и на практике
Сигнал порогового устройства записывается в регистр. Если теперь
последовательность нулей и одной единицы, записанных в этом регистре,
выдавать последовательно с символьной частотой, то появившаяся единица
будет канальным синхроимпульсом.
Продолжительность суммирования, или число единиц т, которое нужно
накопить в счетчике для обнаружения символьных синхроимпульсов с
заданной надежностью, можно определить следующим образом.
Вначале предположим, что искажения сигналов отсутствуют. В этом случае
пропуска сигнала быть не может, так как по крайней мере в одном счетчике,
соответствующем последовательности символьных синхросигналов, будет
накоплено т единиц. В то же время ложные синхроимпульсы могут
появиться, так как существует некоторая вероятность появления
последовательности т единиц информационных сигналов в каком-либо счетчике. Оценим эту
вероятность, определяющую вероятность ложной синхронизации.
Если параметр случаен и имеет симметричное распределение в пределах
шкалы, то вероятность появления нулей и единиц на произвольной
позиции в слове одинаковы:
/>(())= Р(1)= 0.5
Вероятность появления ложного синхросигнала на выходе
произвольного порогового устройства можно определить как вероятность появления
подряд т единиц, то есть 0.5W. Если информационных разрядов (п - 1)> то
вероятности ложной синхронизации определяются суммой вероятностей
ложных синхросигналов во всех информационных разрядах:
Рлс=2-т(п-\) (3.23)
Точная формула учитывает вероятности достижения порога т
одновременно в г информационных разрядах:
^с=1^.(0-5Г[1-(0.5ГГ"'
Если задана вероятность ложной синхронизации, то можно вычислить
необходимое число анализируемых слов:
m = log2^- (3.24)
*лс
Рассмотрим пример. Пусть требуется обеспечить Р =10~6, а значность
кода п = 10. Определим число анализируемых слов:
10-1 , 1л7 ^А
т = log. т- - log. 10 =24 слова.
62 Ю-6 2
204
Глава 3. Средства телеметрии
Рассмотренный без учета помех расчет вероятности ложной
синхронизации позволяет выяснить физическую сущность селекции синхросигналов
каналов и получить приближенную количественную оценку. Для практики
имеет большое значение учет помех.
При воздействии помех возможны ошибки: ошибочный прием единицы
вместо нуля, и наоборот. Будем считать эти события равновероятными.
Вероятность искажения символа, то есть трансформации 1-»0 и 0-»1,
называют вероятностью ошибки р.
Вероятности появления единицы в любом информационном разряде:
Р1=Р(Щ-р) + Р(0)р,
где Р(0) и Р(1) - априорные вероятности появления нуля и единицы. Если
Р(1)=Р(0)=0.5, то Рг05 и Р0=0.5.
Таким образом, при наличии помех ситуация ничем не отличается от
рассмотренной ранее для случая отсутствия помех. В связи с этим для определения
вероятности ложной синхронизации может быть использована формула (3.23).
В синхроразряде без помех появляются только единицы: Р(1) = 1. В случае
помех возможна трансформация единицы в нуль с вероятностью р. Поэтому
установление порога, равного т, будет приводить к пропуску в
обнаружении синхросигнала вследствие пропадания некоторых из т единиц.
Вероятность пропуска можно уменьшить путем уменьшения порога счета 1<т.
Если порог счета выбран равным 1<т, то вероятность пропуска равна
вероятности пропадания не менее т-/ + 1 синхросимволов за т циклов счета,
или, что то же самое, вероятности появления не больше чем / -1
синхросимволов за т циклов (рис. 3.30).
Пропуск Правильное обнаружение
i
Порог
J I m-t
I i I I I I I I I i
1 2 3 ••• I m
Рис. 3.30. Установление порога Km принятия решения
Вероятность появления ровно / ошибок за m циклов определяет
вероятность пропадания i единиц:
c'J^-pT-
205
Современная телеметрия в теории и на практике
С учетом сказанного выше вероятность пропуска равна сумме вероятностей
пропадания (т-1 +1 )-го, (т-1 + 2)-го,..., т-госигналов:
т
рПР= I су(\-р)т->.
Ыт-1+\
Вероятность ложной синхронизации:
т . т
ы /=/
Нетрудно увидеть, что с увеличением порога счета / уменьшается
вероятность ложной синхронизации, но при этом возрастает вероятность
пропуска. Величину / целесообразно выбирать с таким расчетом, чтобы Рпр и Рлс
находились в заданном соотношении. Поскольку выделенные внешние
канальные синхроимпульсы используются для фазирования внутреннего
инерционного генератора, то пропуск сигнала менее опасен, чем возникновение
ложного синхроимпульса, так как система имеет большое время памяти.
Для синхронизации каналов при цифровом методе передачи можно
использовать символ, который служит для обнаружения ошибки в слове
путем проверки на четность (или нечетность).
Значение этого символа меняется от канала к каналу в зависимости от числа
единиц в конкретном слове (рис. 3.31а). Если же принимаемый код подать
на сумматор по модулю 2, осуществляющий скользящее суммирование п
знаков кода (рис. 3.31 в), то единицы на инверсном выходе сумматора будут
регулярно появляться только в конце слов (рис. 3.316). Отсутствие единиц
может быть только при ошибках в слове.
Очевидно, что полученный таким образом код отличается от принятых
сигналов. Благодаря регулярности появления единиц в конце слова он может
быть подан на решающее устройство, обнаруживающее эту регулярную
последовательность, то есть выделяющее сигналы синхронизации каналов.
Рассмотренный алгоритм обнаружения последовательности канальных
синхроимпульсов позволяет дать ответ через т слов. Причем число
фиксируется заранее. В то же время поиск искомой последовательности может
быть ускорен по следующим соображениям.
Анализ первых символов выделенных последовательностей (рис. 3.28) сразу
позволяет сделать вывод, что при отсутствии помех 2-я и 3-я
последовательности (рис. 3.28в, г) не являются синхроимпульсами, так как содержат нули.
Анализ вторых выделенных символов позволяет отбраковать первую и
последнюю последовательности (рис. 3,286, ж), так как в них появились нули.
На следующем шаге анализа происходит отбраковка четвертой
последовательности (рис, 3.28д) и принимается решение, что единственная
оставшаяся последовательность является синхросигналами каналов.
206
Глава 3. Средства телеметрии
*
* * *
з)|1|1|0 0|1|1|1|0|1|1|1|1|0 0|1|1|0 0 0 0 0 0 0 0|1|1|1|
L Тк I Тк I Тк I Тк
* * *
^ 110111 00010111001101
о)
jRG
M2
n
9 E<*i
1
^
t
w
w
t
Рис. 3.31. Преобразование кода, использующего проверку на четность
Для реализации этого правила можно предложить схему (рис. 3.32), в
регистре которой записаны единицы в каждом из п разрядов. Эти единицы
с выхода регистра подаются на схему совпадения, куда одновременно
поступает групповой сигнал. Появление нуля в ГТС приводит к появлению
нуля на выходе схемы «И», который записывается в регистр. Таким
образом, появление нулей в ГТС приводит к замене единиц, записанных в
регистре, на нули. Очевидно, что через некоторое время нули информационных
разрядов «уничтожат» единицы, циркулирующие в регистре, и останется
лишь одна единица, совпадающая с регулярно появляющимся
синхросигналом слов. Это состояние регистра фиксируется схемой фиксации
окончания поиска, которая выдает разрешающий сигнал на вторую схему
совпадения, выдающую внешние синхросигналы слов.
Эта же схема выдает сигнал запрета при пропадании нескольких
синхроимпульсов и переходе к поиску, когда в разряды регистра вводятся единицы и
поиск возобновляется.
Второй алгоритм обнаружения последовательности синхроимпульсов
каналов реализует правило: появление нуля свидетельствует о том, что
данная последовательность не является синхроимпульсами каналов.
Fc
RG
п
ГТС
Схема
фиксации
&
т
Рис. 3.32. Обнаружение синхросимволов каналов путем
исключения фаз с информационными символами
207
Современная телеметрия в теории и на практике
Этот алгоритм, предложенный В. Г. Тыдманом, позволяет ускорить
вхождение в синхронизм по словам. Причем это время является случайным,
поэтому показателем эффективности этого алгоритма может быть
математическое ожидание времени вхождения в синхронизм. Оценку этого времени
можно произвести следующим образом.
Пусть вероятность появления синхросимвола на информационной позиции
равна Рс. Один шаг анализа включает п символов, причем п - число символов
в слове. Таким образом, за один шаг в одной последовательности (рис. 3.28)
анализируется один символ. Синхросимволом является единица. Как
только в последовательности появляется нуль, она исключается из рассмотрения
как не являющаяся синхропоследовательностью, состоящей из одних
единиц. Вероятность исключения любой последовательности на m-шаге
определяется вероятностью появления в ней хотя бы одного нуля, то есть одного,
двух,..., т нулей. Дополнением этой вероятности до полной группы событий
является вероятность появления подряд т единиц, равная Рст. Поэтому
вероятность исключения произвольной последовательности равна (1-PCW)
В отсутствие помех поиск будет закончен на m-ом шаге, если к этому шагу в
каждой из (п - 1) информационных последовательностей будет хотя бы по
одному нулю. Так как последовательности независимы, то вероятность этого
события:
О "Л:" Г (3-25)
Если есть помехи и вероятность искажения символа р> то вероятность
завершить поиск на га-ом шаге определится произведением найденной
1 - Рст ) на вероятность того, что т символов синхропоследовательнос-
ти не будут искажены:
F(m) = (\-p)m(l- Рст Г1 (3.26)
р
0,8
0,6
0,4
0,2
1 2 3 4 5 6 7 8 9 10 m
Рис. 3.33. Вероятность вхождения в синхронизм F
на m-ом шаге
208
Глава 3. Средства телеметрии
На рис. 3.33 приведено распределение вероятностей F(m) для случая
отсутствия помех, Рс в 0,5 и п - 10. График показывает, что с достаточной
для практики надежностью можно считать, что за 10 шагов система
войдет в синхронизм (F(10) = 0.997). Оценим для этих же исходных данных
среднее время вхождения в синхронизм. Для этого найдем плотность
вероятностей вхождения в синхронизм на m-ом шаге:
Р{т) = ^^ = In 2Рст (1 - Рст У'2
dm
и среднее время вхождения в синхронизм, выраженное числом слов:
00
т = ^тР(т)
Величина т для Рс = 0,5 и п в 10 оказывается равной 4,5.
Таким образом, при использовании второго алгоритма вхождение в
синхронизм в среднем осуществляется за 4,5 шага, то есть за время
прохождения 5 слов.
Проведенный анализ показывает, что помехи мало влияют на работу
системы словной синхронизации. Реальна вероятность ошибки приема
символа р < 10~4 , то есть в среднем искажается один символ на 104. Система
входит в синхронизм за несколько слов, то есть несколько десятков синх-
росимволов. Поэтому вероятность сбоя при входе в синхронизм мала.
Здесь уместно заметить, что в отсутствие шумов при использовании
второго алгоритма вероятности ложной тревоги и пропуска синхросигнала
равны нулю.
3.4.7. Маркерные сигналы в аналоговых РТС
При аналоговых методах передачи маркер может отличаться от
измерительных сигналов по амплитуде, длительности, высокочастотному
заполнению, форме и т. п. (рис. 3.17). Это отличие лежит в основе селекции
маркерных сигналов. Маркер, отличающийся от других сигналов по амплитуде,
использовать невыгодно по энергетическим соображениям: передатчик,
рассчитанный на передачу маркера, большую часть времени будет работать
с недогрузкой.
Если маркер отличается от измерительных сигналов по длительности
(рис. 3.34а), его селекция возможна с помощью устройства, содержащего
интегратор и амплитудный селектор.
209
Современная телеметрия в теории и на практике
ГС
Фильтр
маркера
Формирователь
Синхроимпульс
а)
б)
ЕШЗ Щ ГШЗ Щ ESJ
пп пп п п пп пп п
м
о и
О И
И
Рис. 3.34 Варианты отличия маркера от измерительных сигналов
при аналоговых сигналах
На выходе интегратора импульс маркера отличается большей амплитудой
и, следовательно, может быть выделен амплитудным селектором.
Формирователь формирует маркерный синхроимпульс, используемый для
фазирования коммутатора каналов приемно-регистрирующей станции. Таким
образом, при приеме осуществляется селекция маркерного синхросигнала,
формирование маркерного синхроимпульса и фазирование этим
импульсом коммутатора.
При использовании маркера, отличающегося от других сигналов
длительностью, возникает трудность оптимизации полосы приемных устройств
Afnp = —, где х - длительность поступающих на вход приемных
устройств импульсов. Так как длительность маркера и измерительных
сигналов различна, то полоса, оптимальная для измерительных сигналов, не
будет оптимальной для маркеров. Это ведет к энергетическому проигрышу:
уменьшение надежности выделения маркера из-за ухудшения отношения
сигнал-шум при неоптимальной полосе приходится компенсировать путем
увеличения его энергии.
Если маркер отличается от измерительных сигналов по форме (рис. 3.176),
он представляет собой кодовую группу, состоящую из импульсов - таких
же, как и измерительные. Селекция маркера производится с помощью
фильтра, настроенного на маркер, далее формируется маркерный
синхроимпульс (рис. 3.34в). Такого типа маркерные сигналы получили
наибольшее распространение из-за простоты генерирования и высокой надежности
выделения.
Определим, каким образом можно найти число импульсов маркера исходя
из требуемой надежности его выделения.
210
Глава 3. Средства телеметрии
Для различения маркерного Su(t) и информационного Su(t) сигналов
используется только их несовпадающая часть, называемая эквивалентным
сигналом:
S3{t) = S„(t)-SM(t). (3.27)
Обозначим энергию эквивалентного сигнала:
Еэ = JS32 {t)dt = ЕИ+ЕМ- 2г^Е~Е~и , (3.28)
74/
где Тм - длительность маркера, Ей - энергия информационного сигнала,
Ем - энергия маркера, г - коэффициент корреляции сигналов маркерного
и информационного.
Рассмотрим пример. Пусть в РТС, использующей ВИМ-АМ, маркер
формируется в виде последовательности импульсов, каждый из которых не
отличается от информационных (рис. 3.346). В этом случае эквивалентная
энергия маркера определяется числом его имйульсов, не совпадающих с
другими сигналами при смещении во времени. По существу эквивалентный
сигнал представляет собой разность отклика согласованного с маркером
фильтра на маркер и отклика этого же фильтра на другие сигналы. Так как
на интервале маркера может появиться только один информационный
импульс, то эквивалентная энергия разностного сигнала:
Еэ=Е(пм-1), (3.29)
где Е - энергия импульса, пм число импульсов в маркере.
Число импульсов в маркере:
Еъ . h
2
"a,= —+ 1 = -т- + 1> (3.30)
м Е h2
где h - отношение сигнал-шум по напряжению для измерительных сигналов.
По заданным вероятностям ложной тревоги и пропуска маркера можно най-
1 2 Е
ти требуемое отношение пэ , а затем число импульсов в маркере пм .
Пусть, например, исходя из требуемой точности передачи параметров
обеспечено И2 = 30 , а требуемая вероятность ложной синхронизации не
должна превышать Рлс = 10-6. Для данной вероятности по графику P(h2) для AM
находим h^ = 90.
90
Отсюда число импульсов в маркере пм =—'+1 = 4.
211
Современная телеметрия в теории и на практике
3.4.8. Вероятностная оценка поиска маркерного
синхросигнала при цифровой передаче
Исходные положения:
1. Маркерный синхросигнал представляет собой комбинацию
импульсов, являющуюся псевдошумовой последовательностью,
которая занимает один или несколько канальных интервалов
времени. Длина маркера, выраженная числом символов, - пМ} длина
канального интервала (слова) - п. Она включает в себя
информационные символы и символ, используемый для получения
канальных синхроимпульсов.
2. Вероятности появления нуля - Р(0) и единицы - Р(1)
информационных символов одинаковы: Р(0) = Р(1). Канал симметричный,
вероятность ошибки при передаче одного символа обозначим:
р = Р(0)Р(р -» 1) + Р(\)Р(\ -» 0),
где Р(0->1) = Р(1->0) - вероятности искажения нуля и единицы
в канале передачи соответственно - и, кроме того,
ДО -> 1) = Р(1 -» 0) = р.
3. Общее число каналов в кадре (цикле) - N Часть из них Nu -
информационные, а остальные заняты маркером: NM= N - Nu. Число
реализаций кадра, используемых в расчетах и экспериментальном
исследовании, - Np. Тогда объем выборки составляет NOEC = NpNn
символов (бит) и NOBK - NPN каналов (слов).
4. Поиск маркера осуществляется согласованным фильтром в
предположении, что тактовая частота (частота символов) известна
с шагом в один символ. Если к тому же известна частота слов,
то поиск осуществляется с шагом в слово, длина которого п
символов.
Ситуации, возникающие при поиске маркера
Эти ситуации можно представить схемой, изображенной на рис. 3.35.
Особенностью приема маркеров является то, что поиск проходит на фоне
информационных кодовых комбинаций и с искажением как маркера, так
и информационных слов помехами в канале передачи. Рассмотрим
обнаружение маркера разной длины при шаге поиска в один символ и в одно
21,2
Глава 3. Средства телеметрии
слово, когда помехи отсутствуют и когда они есть и имеют разную
интенсивность, задаваемую вероятностью искажения символа/?.
Априорные Результат Вероятность Вероятность
вероятности приема ошибок отсутствия
сть появления
ошибок
^Обнаружен Ро
Маркер
/появления ^ „
^Пропущен -Прр°пПруСК
\ ^Обнаружен
Ложного
Сложный"'— марРпк«Ра
н Ром Рпм
отсутствия ^
^ Не
обнаружен
Искажения в канале
•Рно
Рис. 3.35. Условия и результаты поиска маркера
Поиск маркера длиной в одно слово с шагом в один символ
В ОТСУТСТВИЕ ПОМЕХ
В этом случае все маркеры будут обнаружены правильно, вероятность
обнаружения маркера Р0 окажется равной априорной вероятности его
появления: Р0 = Рм, а вероятность пропуска Рпр - 0 (рис. 3.36).
а) б)
Маркер
1111010001 111101000 I
Опорный сигнал Опорный сигнал
11 1 1 0 1 0 0 0 | 1110 1 0 0 0
Результат обнаружения в
Рис. 3.36. Поиск маркера с шагом а один символ в отсутствии помех
а) правильное обнаружение;
6) ложный маркер на границе слов.
213
Современная телеметрия в теории и на практике
Вероятность появления ложного маркера определяется вероятностью
появления кодовой комбинации - такой же, как маркер, на границе слов.
Информационные слова, повторяющие маркер, запрещены. Так как вероятности
появления нуля и единицы одинаковы: Р(0) = Р(1) - 0,5, то вероятность
ложного маркера при пм - п (NM=1):
РЛМШ=Г"»— = Т^, (3.31)
п п
где сомножитель (п-1)/п определяет вероятность попадания комбинации
на границу слова (рис. 3.366).
Рассмотренную ситуацию можно представить в виде множества кодовых
комбинаций, составляющих выборку (рис. 3.37).
Маркеры
Ложный
маркер
Информация
Рис. 3.37 Множество кодовых комбинаций при поиске
без помех с шагом в один символ, когда пм = п
Часть информационных битов превратилась в ложные маркеры. Если
общее число бит равно: NOEC = NpNn, то количество ложных маркеров
1У ЛМ 1УОБСгЛМ 1УР1УПГЛМ
Отсюда следует, что в эксперименте оценка вероятности ложных маркеров
может быть вычислена как:
р _ ^ лм _ ^ лм
М NOEC NpNn
ПОИСК МАРКЕРА ДЛИНОЙ В ОДНО СЛОВО С ШАГОМ В ОДИН СИМВОЛ ПРИ ПОМЕХАХ
В КАНАЛЕ ПЕРЕДАЧИ
При помехах происходит искажение кодовых комбинаций - как маркеров,
так и информационных. Искажение приводит к пропуску маркеров - как
действительных, так и ложных (рис. 3.38), ложные маркеры также
появляются, причем с такой же вероятностью, как и в отсутствие помех.
Маркеры
Ложный
маркер
Информация
Пропуск
Пропуск
маркера
Ложный
маркер
Рис. 3.38. Множество кодовых комбинаций при поиске маркера
с помехами в канале передачи с шагом в один символ, когда пм = п
214
Глава 3. Средства телеметрии
Рассмотрим эти явления подробнее.
Оценим вероятность появления нуля и единицы в информационных
посылках. Вероятность появления единицы:
p,=p(W-p)+p(0)p=±(\-p)+±p=±.
Очевидно, что вероятность появления нуля и единицы в коде, искаженном
помехами:
Д0) = Р(1) = |,
то есть такая же, как и в отсутствие помех. Поэтому вероятность ложных
маркеров такая же, как и в отсутствие помех. Искажение и пропуск ложных
маркеров компенсируется их появлением на новых позициях
информационной части кода (рис. 3.38).
Отличие поиска маркера при помехах состоит лишь в том, что он может
появиться и вместо информационных слов, искаженных помехами. Расчет
вероятностей появления ложного маркера на месте информационного
слова Рлми производится следующим образом.
Вероятность появления информационной кодовой группы, отличающейся
от маркера одним символом, равна 2~".
Вероятность искажения этого символа составляет р(\ - р)п~ .
Очевидно, что вероятность появления ложного маркера равна
произведению этих вероятностей, то есть 2~п р{\ - р)п~ .
Всего комбинаций столько, сколько символов, поэтому общая вероятность
появления ложного маркера:
РЛШ1=г"Р(\-Ру-'п.
Вероятность появления информационной кодовой группы, отличающейся
от маркера / символами, также 2~" а вероятность искажения этих символов
равна р1 (1- рУ . Таких кодовых групп может быть сп'. Следовательно,
суммарная вероятность появления ложного маркера определяется
вероятностью появления кодовых групп, отличающихся от маркера на один, два, ..., п
символов, и вероятностью их искажения, что дает появление ложного маркера:
V=2-"|]C;(l^f=r[l-(l-p)"] = 2-"(l-P„M), (3.32)
где РПРАВ =(\-рУ - вероятность правильного приема кодовой группы
из п символов.
215
Современная телеметрия в теории и на практике
Информационные слова появляются с вероятностью 1/п, то есть один шаг
из п попадает точно на слово, а остальные (п-1) шагов оказываются на
границе слов. Таким образом, вероятность ложного маркера на шаге поиска,
когда информационное слово точно попало в фильтр:
Рми=Т"1-[\-(\-р)"].
На остальных (п-1) шагах ложный маркер появляется, и когда есть ошибки
(i = 1...п), и когда их нет (i = 0), поэтому:
^^ =2-—ЕУ О'/'Г = 2""—, (3-33)
результирующая вероятность появления ложного маркера в этом случае:
Рлм=Рлмш+Рлш=Г"^ + 2-1-(\-рУ=2-"П~(1~Р>> . (3.34)
п п п
Заметим, что при р « 1 Рлм «2~w ,то есть ошибки в канале связи
практически не влияют на вероятность ложного маркера. Так как « 1,
п
то Рлм «2 п, то есть равна вероятности появления комбинаций, таких как
маркер.
Пропуск маркера происходит из-за искажения его помехами при передаче.
При помехах слабых, когдар « 1, часто достаточно учитывать однократные
ошибки, вероятность которых и определяет вероятность пропуска маркера:
Рпр £ Пр.
В общем случае:
^р=Ес>'(1-рГ=1-(1-Я- <3-35>
При экспериментальном исследовании фиксируется число ложных NJlM и
пропущенных Nnp маркеров. Число реализаций кадра Np определяет число
маркеров в коде: по одному на кадр. Вероятности ложного маркера и
пропуска маркера вычисляются как:
лм м '
1УОБС
Здесь N06c - число шагов, определяемое числом символов в выборке и
равное числу испытаний.
216
Глава 3. Средства телеметрии
ПОИСК МАРКЕРА С ШАГОМ В ОДНО СЛОВО ПРИ NM = N
В случае отсутствия помех маркеры не искажаются, и Рпр = 0, в
информационных словах маркеры запрещены, и, следовательно, Р^ = 0. При помехах
пропуск маркера возникает при ошибках любой кратности, то есть i = 1 -г- п.
Вероятность пропуска маркера:
^ = ЕСУ0-/>Г, (з.зб)
когда р мала, можно ограничиться учетом однократных ошибок (i = 1),
и вероятность пропуска:
Pnp*nP(l-pJ~l*nP-
Ложный маркер может появиться на месте информационного слова из-за
искажения этого слова, как было ранее установлено (формула 3.18) с
вероятностью:
V.-IW-1
рш=г"[\-(\-Ру
N
(3.37)
#-1
Сомножитель является вероятностью появления информационного
слова (один канал в кадре занят под маркер).
В первом приближении можно ограничиться однократными ошибками
N-1
и считать « 1.
N
Тогда:
Рлд,*2->(1-pf *2->.
Сравнение вероятностей пропуска и появления ложного маркера при
поиске с шагом в один символ и слово показывает, что при шаге в слово Рш
значительно уменьшается, однако реализация этого алгоритма поиска маркера
требует предварительно выделить синхроимпульсы слов.
При экспериментальном исследовании по известным числам ложных
маркеров Njim и пропусков маркеров Nnp можно вычислить соответствующие
оценки вероятностей (рис. 3.39):
глм~ N
к
""К
217
Современная телеметрия в теории и на практике
Маркеры
Информация
Пропуск
Ложный
маркер
Рис. 3.39. Множество кодовых комбинаций при поиске маркера
с помехами в канале передачи с шагом в слово, когда пм = п
Поиск маркера длиной в два слова: nm = 2n
Рассмотрим код, в котором комбинация из двух смежных слов,
повторяющая маркер, не запрещена.
Появление нулей и единиц в информационных словах равновероятно и
не зависит от помех, как это было показано ранее, то есть Р0 = Рх = 0.5.
Поэтому вероятность появления комбинации, повторяющей маркер, на
любом шаге составляет 2~w" = 2~ ". Исключение составляет один шаг,
на котором находится действительный маркер. Следовательно, при
шаге поиска в один символ вероятность появления ложного маркера
определяется как:
-2„Nn-l
а при шаге в одно слово -
Р = 2
г лм *
Р = 2
глм L
Nn
TV
Вторые сомножители в этих формулах определяют вероятность попадания
на любую комбинацию в кадре, кроме одной, которой является
действительный маркер.
Вероятность пропуска маркера вычисляется как вероятность его
искажения:
PnP-^Cjp'il-pf
/=1
\2n-i
Если при р « 1 ограничиться однократными ошибками, то справедливо
приближение:
\2w-l
Рпр*2пр(1-рУ~ *2"Р-
218
Глава 3. Средства телеметрии
При экспериментальном исследовании вероятность пропуска маркера
вычисляется как:
р _ 1У пр
ПР~ N/
а вероятность ложного маркера при шаге в один символ и одно слово,
соответственно, как:
N N
р — лм лл р __ 1У лм
ш ~ м И Г™ " ы '
1УОБС 1УОБК
Анализ результатов вероятностной оценки поиска маркеров
Для упрощения анализа будем использовать приближенные формулы
вычисления вероятностей пропуска и появления ложного маркера (табл. 3.5).
Приведенные вероятности характеризуют среднюю частоту пропусков и
ложных маркеров при разной длине шагов поиска. Поэтому от вероятностей
полезно перейти к среднему времени между рассматриваемыми
событиями, которое и может стать основой для сравнения.
Таблица 3.5. Вероятности пропуска и ложного маркера (приближенные
значения)
р
1 ПР
1ПР\бит\
р
Глм
Тш [бит]
Длина маркера пм=п
Шаг поиска
символ
ир (1-й)"
N
р(1-рГ
2~"
2"
Шаг поиска
слово
np(l-nj
N
p(i-pT]
Т"пр(\-р)п-х
2"
р(1-рГ
Длина маркера пм - 2п
Шаг поиска
символ
2пр(\-п)"
N
2Р(\-рГ
2~г"
22"
Шаг поиска
слово
2пр(\-п)"
N
2р(\-РГ
2-2„
п22"
219
Современная телеметрия в теории и на практике
Это время удобно измерять числом символов, укладывающихся на
временном интервале.
Слово «символ» часто заменяется словом «бит». Среднее время между
ложными маркерами при поиске с шагом один символ (бит) можно
вычислить как:
- NPNn NpNn •> -,
tn\ =— = с \бит\,
при поиске с шагом в п бит:
NDN
t = -----я-
1Лп
) n L J
N NP Р
1У р1УГлм 1 лм
Интервал между маркерами составляет Nn бит, а число маркеров при
расчете вероятности пропуска составляет Np. Следовательно, среднее время
между пропусками маркера:
- NpNn Nn г^ т
tnp = —L— = \oum .
N P P l J
Iyргпр гпр
Принимая во внимание физическую сущность процесса, это время можно
измерять также числом кадров:
ТПР= — [кадров].
*ПР
Анализ формул для расчета интервалов времени, приведенных в табл. 3.5,
позволяет сделать ряд выводов:
1. Вероятность пропуска маркера существенно зависит от его длины.
При увеличении длины маркера вдвое его пропадание происходит
вдвое реже.
2. Вероятность пропуска маркера одинакова и для шага поиска
«символ», и для шага поиска «слово» при одинаковой длине маркера,
так как определяется вероятностью искажения маркера, которая
позволяет вычислить число пропущенных маркеров Nnp как часть
их общего числа Np. Nnp e Np*Pnp. Это число не зависит от
величины шага.
3. Вероятность и частота появления ложного маркера при поиске
с шагом в один символ не зависит от помех и определяется длиной
220
Глава 3. Средства телеметрии
маркера. Поэтому маркер в два слова появляется в 2п раз реже,
чем однословный, что при п = 8 составляет 256 раз.
4. Использование частоты слов при поиске однословного маркера
существенно увеличивает среднее время появления ложного
маркера, а при поиске маркера, занимающего два слова, это время
увеличивается в п раз.
3.5. ШТАТНЫЕ ИНФОРМАЦИОННО-ТЕЛЕМЕТРИЧЕСКИЕ СИСТЕМЫ
3.5.1. Бортовая информационно-телеметрическая
система БР-92
Бортовая информационно-телеметрическая система (БИТС) БР-92
является аналоговой системой с временным разделением каналов, модуляцией
ВИМ-АМ и многоступенчатой коммутацией, которая обеспечивает
высокую информационную гибкость системы и сокращение протяженности
кабельной сети датчиковой аппаратуры.
Системы БР-92 устанавливались на самых разных промышленных
объектах с середины пятидесятых годов и, используются до настоящего времени.
Прием радиосигнала БИТС БР-92 выполняет станцией МА-9МКТМ.
Принцип передачи информации в системе РТС-9 основан на
использовании временного разделения каналов и модуляции ВИМ-АМ.
В системе РТС-9 используется многоступенчатая (разветвленная)
коммутация, которая предусматривает установку так называемых локальных
(местных) коммутаторов в местах сосредоточения датчиков. Благодаря
этому представляется возможным существенно уменьшить протяженность
и вес кабельной сети.
Информация с локальных коммутаторов (ЛК), число которых в данной
системе может достигать семи, поступает (рис. 3.40) на основной
коммутатор (ОК). Его выходной сигнал, представляющий собой
последовательность импульсов, промодулированных по амплитуде (АИМ-сигнал),
подается на преобразователь модуляции АИМ-ВИМ. Здесь АИМ-сигнал
преобразуется в последовательность коротких импульсов,
промодулированных по временному положению.
221
Телеметрия в теории и на практике
1-
26-
1
26
1
26-
1-
26-
ЛК1
•
•
•
р
ЛК2
лкз
ЛК7
ОК
АИМ-
ВИМ
ПРД
Рис. 3.40. Упрощенная функциональная схема БИТС БР-92
При подаче опорных и измерительных импульсов на передатчик последний
излучает короткие радиоимпульсы, что соответствует его амплитудной
модуляции (манипуляции).
Многоступенчатая коммутация в системе РТС-9 используется только в
бортовых устройствах первой и второй групп (большой и средний борт), где
число каналов Л^= 100, а частота опроса соответственно F0 = 100 и 50 Гц.
В бортовом устройстве третьей группы (малый борт), где NK = 50 и F0 = 50 Гц,
используется одноступенчатая коммутация. Однако все три модификации
бортовых устройств (в т. ч. и базовая БИТС БР-92) имеют одинаковую
структуру сигнала (телеметрический код). Это обеспечивает возможность
приема сигналов от различных бортовых устройств с помощью одной и той же
наземной станции.
Двухступенчатая коммутация в БИТС осуществляется за счет
применения основного и локальных коммутаторов на бесконтактных устройствах
(транзисторах и диодах). Однако для уяснения принципа коммутации
каналов целесообразно воспользоваться механической моделью
коммутаторов (рис. 3.41).
Все локальные коммутаторы идентичны. Каждый из них имеет 32 ламели,
на 26 из них подаются сигналы от датчиков. Остальные шесть ламелей
являются служебными. На ламели 13,14 и 29 поступают калибровочные уровни,
соответствующие 50,100 и 0% напряжения питания датчиков. Ламели 30,31
и 32 соединены вместе и имеют постоянный потенциал -2,2 В, за счет чего
обеспечивается формирование маркерного сигнала локального коммутато-
222
Глава 3; Средства телеметрии
ра. Каждый локальный коммутатор имеет свой сигнал синхронизации
указанного вида, чем, как будет показано ниже, достигается независимая работа
коммутаторов в отношении порядка опроса подключенных к ним датчиков.
Локальный коммутатор
-2.2В
Локальный коммутатор
-2.2В
Ч--Гг'\ 50%
100%
o%w/v»30 КД
7 I n~ \
. • • • ♦—( 4 }
13/^ \ 13/^
X
ЧЫ 50%
100%
Основной коммутатор
ЛК1
АИМ-
ВИМ
ПРД
ЛК7"\
Х-ГА
ЛКб Т Л
ЛК5
Рис. 3.41. Схема коммутации каналов БР-92
На рис. 3.42 приведена временная диаграмма, соответствующая одному
циклу работы локального коммутатора.
Щетки локальных коммутаторов вращаются с одинаковой скоростью пш(об/с),
определяющей частоту опроса датчиков F0. Так, для первой группы
бортовой аппаратуры плк= 100 об/с, так что F0 = 100 Гц. При этом каждый датчик
будет подключаться к выходу локального коммутатора в течение
канального интервала:
tKMK- Тлк/32 = 1/32/^0 >
где Т = 1/FQ - период опроса локального коммутатора.
6,2
kU
,В
2 4
6
1клк
8
100%,
50%
V" .
10 12 14 16 • • • 28 |30|31|32
_
Тлк
= 1
/F
0
Марке
зрныи "^
—
Рис. 3.42. Видеосигнал на выходе локального коммутатора
223
Современная телеметрия в теории и на практике
Так, для большого борта Глк- 1/Р0в 1/100= 10MC,tKJlK9B 10/32 = 312мкс.
Для среднего борта, который является основным, то есть наиболее
распространенным, вариантом бортового оборудования, имеем Тдк = 20 мс
и tKm= 625 мс.
Выход каждого локального коммутатора подключается к
соответствующему входу основного коммутатора. Последний имеет 8 ламелей, 7 из
которых служат для подключения локальных коммутаторов. 8-я ламель
обеспечивает формирование маркерного сигнала основного коммутатора в виде
синхропаузы. С этой целью на нее подается относительно большое
отрицательное напряжение U3A[JUP Это напряжение запирает преобразователь
АИМ-ВИМ в соответствующий момент времени при каждом цикле работы
основного коммутатора.
Скорость вращения основного коммутатора в 32 раза больше скорости
вращения локальных коммутаторов, то есть n0K e 32 пж За счет этого каждому
полному обороту щетки основного коммутатора будет соответствовать
перемещение щеток локальных коммутаторов ровно на одну ламель.
При этом следует отметить два обстоятельства:
1. Для обеспечения нормальной коммутации опрос каждого
локального коммутатора должен осуществляться в момент, времени,
соответствующий нахождению его щетки на середине (или во 2-й
половине) ламели. Это диктуется наличием переходных процессов
в цепях датчиков и канальных элементов локальных коммутаторов.
2. Работа локальных коммутаторов должна быть жестко
синхронизирована с работой основного коммутатора, то есть должно
строго соблюдаться соотношение пок = 32 пж В реальной схеме это
достигается за счет подачи на локальные коммутаторы специальных
сигналов синхронизации из блока основного коммутатора. Однако
при наличии жесткой синхронизации работа локальных
коммутаторов не фазируется. Это означает, что в одни и те же моменты
времени щетки разных локальных коммутаторов обычно проходят
ламели с различными номерами. Только случайно может оказаться
так, что щетки всех локальных коммутаторов подключаются к
одноименным ламелям. Практически более вероятна работа
локальных коммутаторов с различными фазами.
Несмотря на независимую работу локальных коммутаторов, на приемной
стороне представляется возможным однозначно дешифрировать
принятый сигнал с помощью их маркерных сигналов. Вместе с тем это позволяет
упростить бортовую аппаратуру, так как при этом отпадает необходимость
фазирования локальных коммутаторов.
224
Глава 3. Средства телеметрии
На рис. 3.43 представлены временные диаграммы, поясняющие
формирование сигнала на выходе основного коммутатора. Из рисунка следует, что
за один цикл его работы на выходе формируется сигнал, имеющий
ступенчатую форму, причем высота ступеней соответствует напряжениям,
действующим на выходах соответствующих локальных коммутаторов. В
течение первого канального интервала tK0K "7^/8 напряжение равно нулю.
На это время происходит запирание преобразователя АИМ-ВИМ
напряжением ЬТЗАПИР и формирование синхропаузы ОК.
На рис. 3.43 показана синхронизация локальных коммутаторов,
осуществляемая таким образом, что их опрос основным коммутатором
производится во второй половине канальных интервалов. С этой целью локальные
коммутаторы объединяются в две группы (1,2, 3-й и 4, 5, 6, 7-й) и для каж-
дой из них формируются свои сигналы синхронизации.
2
оо
2-й канал
ЛК4 Х//Л 25-й канал \///Л
///Г7777///////к \ Ч////////ЛГ//Л
Напряжение
на выходе
ОК
^JL^yi
Ток = Тлк/32
Рис. 3.43. Формирование видеосигнала при двухступенчатой коммутации
8 Заж 861
225
Современная телеметрия в теории и на практике
Нетрудно заметить, что канальный интервал основного коммутатора:
Хкт = Ток/* = 7W(8*32) = l/256Fo,
для большого борта этот интервал составляет tK0K =1/256*100 = 39 мкс.
В бортовых устройствах 2-й группы частота опроса в два раза ниже, так
что Тлк = 1/50 = 20 мсек и tK0K « 78 мксек. Следовательно, канальный
интервал в этом случае оказывается в два раза больше, чем для бортовых
устройств 1-й группы. Вследствие указанного обстоятельства
погрешность, вносимая радиолинией, будет меньше, чем для бортовой
аппаратуры 1-й группы.
Запараллеливание каналов БИТС позволяет в случае необходимости
увеличивать частоту опроса датчиков за счет соответствующего сокращения
числа независимых входов.
Трехступенчатая коммутация датчиков в системе применяется в тех
случаях, когда возникает потребность в большом числе каналов с относительно
низкой частотой опроса. Например, часто бывает необходимо измерять
температуру в большом числе точек объекта путем периодического
контроля напряжения соответствующих датчиков. В других случаях
относительно редкий периодический опрос тех или иных датчиков с частотой в
несколько герц или долей герца представляется единственно возможным
методом контроля ряда параметров. В частности, к этому приходится
прибегать при весьма объемных программах телеизмерений и при передаче
данных с объектов.
Во избежание погрешностей, обусловленных переходными процессами в
цепях датчиков, выход коммутатора 3-й ступени подключается к одному из
каналов локального коммутатора с порядковым номером от 16 до 28.
На рис. 3.44 в качестве примера показаны временные диаграммы,
соответствующие подключению коммутатора 3-й ступени на вход 21-го канала
локального коммутатора 2-й ступени.
Маркерный сигнал коммутатора 3-й ступени передается по 16-му каналу
ЛК 2-й ступени. В течение первых 16 тактов коммутатора 3-й ступени он
равен нулю, а в течение остальных тактов его величина соответствует 100%
напряжения источника 6,2 В, от которого питаются датчики.
Групповой телеметрический сигнал, поступающий на передатчик,
показан на рис. 3.45. Он. содержит 32 цикла основного коммутатора. Все
циклы имеют одинаковую структуру и на рисунке условно расположены
один под другим. Их длительность равна периоду основного
коммутатора ТспГ Тш/32'
226
Глава 3. Средства телеметрии
Напряжение на входе
ЛК 2-й ступени
100%
Маркерный сигнал ЛК 3-й ступени
0%
201 LJJJl
15 20
Синхроимпульсы ЛК
3-й ступени
И 15 20
1 15 20 t
Напряжение
I на выходе Л К
I 3-й ступени
2-й канал
t\\\\\^\\\\N
Т3 = 1/Т
Рис. 3.44. Формирование видеосигнала при трехступенчатой коммутации
Поскольку циклы основного коммутатора в принципе идентичны, то
достаточно рассмотреть лишь один из них, например 1-й. На рис. 3.45 первый
цикл начинается с маркерного сигнала основного коммутатора в виде син-
хропаузы. Затем передается опорный импульс i-ro канала первого
локального коммутатора. За ним идет измерительный импульс данного канала.
После этого следует опорный импульс j-ro канала 2-го локального
коммутатора и соответствующий ему измерительный импульс и т. д.
В общем случае, как уже отмечалось, вследствие независимой работы
локальных коммутаторов i ф j. Это означает, что, если, например, в первом
локальном коммутаторе в течение первого цикла опрашивался первый канал,
во втором локальном коммутаторе может опрашиваться любой из 32
каналов. Таким образом, за время одного цикла основного коммутатора будет
опрошено по одному датчику всех семи локальных коммутаторов.
Измерительные импульсы могут занимать одно из возможных положений
в пределах шкалы канала длительностью tiw которая равна половине
канального интервала для всех трех групп бортовой аппаратуры. На рис. 3.45
она условно показана в виде заштрихованной области.
227
Современная телеметрия в теории и на практике
Маркер ОК ЛК1
1-й
цикл
Oi И| Oj Hj
ЛК2 ЛКЗ ЛК4 ЛК5 ЛК6 ЛК7
О ИОИ ОИОИО И
77?
Т77\
Ы7777*
Х777П
Ш
У777Л
77**771
тУ77Л
У777Л1
ю
2-й
цикл
jOi+i Hi+i Ю|+1 И]+1 О И ОИ
[I А\777}\\ 777Л\пЩ77777?< [I Г77*\т\\\ 777Л\п\[
7А777Л i
О И Ю И Ю И
•о
3-й
цикл
I 0,12 tKQK,
I '
I
I
[oi+2 и!+2 "Oj+2 и,+2Ь иЬи ЬиЬиЬи
ILez^piII mtmm777m И иктяН ряртяН Y7mW
У77лУЛ
ю
32-й
цикл
Ю И Ю ИОИ
И О
И Ю И Ю И
II Г7ЯР7Я II У7ШЛХ\ nVTTTlW Т77Л71 11 ГТТТТЯН II Av77A\\ IV
777m
tnK
tKOK
Ток = ТЛк/32
Рис. 3.45. Телеметрический код системы РТС-9
Частота опроса, канальный интервал основного коммутатора и шкала
канала для бортовых устройств 1, 2 и 3-й групп имеют различные значения,
которые приведены в табл. 3.6.
Таблица 3.6. Характеристики ГТС
Параметры
телеметрического кода
Частота опроса (Гц)
Длительность цикла ОК (мкс)
Канальный интервал (мкс)
Шкала канала (мкс)
Группы бортовых устройств
1
большой борт
100
312
39
19.5
2
средний борт
50
625
78
39
3
малый борт
50
2500
312
156
На рис. 3.45 показан случай, когда в течение первого, второго и третьего
циклов основного коммутатора осуществляется передача маркерного
сигнала 4-го локального коммутатора. В 5-м канальном интервале
измерительный импульс занимает крайнее левое положение в пределах шкалы
канала, что соответствует передаче нулевого уровня при опросе 5-го
локального коммутатора в течение первого цикла работы основного
коммутатора. В 7-м канальном интервале измерительный импульс занимает
крайнее правое положение. Этот случай соответствует передаче уровня 100%.
228
Глава 3. Средства телеметрии
В бортовых устройствах 3-й группы, имеющих только одно
коммутирующее устройство, структура кода остается прежней. Однако в этом случае
синхропаузы, следующие через каждые восемь каналов, служат лишь для
разделения опорных и измерительных импульсов в наземной приемно-ре-
гистрирующей станции. Маркерный сигнал в этом случае передается таким
же способом, как сигнал синхронизации локальных коммутаторов в
бортовых устройствах 1-й и 2-й групп.
В дальнейшем бортовая аппаратура 3-й группы не рассматривается,
поскольку она находит применение на объектах с малым числом параметров.
3.5.2. Бортовая информационно-телеметрическая
система БР-93
БИТС БР-93 используется в телеметрическом комплексе РТС-9 при
цифровой передаче информации.
В соответствии с принятой классификацией БР-93 относится к 3-й группе
бортовых систем (к системам малой информативности).
Передача информации системой БР-93 осуществляется с помощью
собственного радиопередатчика или бортового радиопередатчика совмещенной
командно-измерительной системы. Прием в структуре сигнала РТС-9Ц
от БР-93 производится с помощью приемно-регистрирующего
оборудования телеметрического комплекса РТС-9 типа М А-9МКТМ малогабаритной
приемно-регистрирующей станцией МПРС-5, малогабаритным
переносным телеметрическим комплексом МПТК и другой современной приемно-
регистрирующей аппаратурой. В совмещенных командно-измерительных
системах групповой телеметрический сигнал (ГТС) БР-93 может
обрабатываться и регистрироваться с помощью аппаратуры У РТС-2, аппаратурой
приема по видеотракту «ОПАЛ-М» и др.
Общие сведения о бортовой радиотелеметрической системе БР-93
Бортовая радиотелеметрическая система БР-93 предназначена для
цифровой передачи телеметрической информации с объектов различного типа.
Она предусматривает непосредственную передачу данных телеизмерений,
запоминание информации и ее воспроизведение. С помощью системы БР-93
могут передаваться медленно меняющиеся функциональные и сигнальные
параметры. По структуре группового телеметрического видеосигнала и
составу аппаратура БР-93 имеет много общего с бортовой аналоговой
системой 3-й группы информативности с модуляцией ВИМ-АМ.
229
Современная телеметрия в теории и на практике
По принципу действия система БР-93 относится к телеметрическим системам
с временным разделением каналов и передачей информации по методу КИМ-
ЧМ. Ее особенность состоит в исполнении большого числа команд,
обеспечивающих изменение состава работающих устройств и режимов их работы.
Система БР-93 имеет несколько модификаций, различающихся составом
и типом комплектующих устройств (БР-93-1, БР-93-2 и др.).
Структурная схема системы БР-93-1 приведена на рис. 3.46. На схеме не
показаны устройства резервного комплекта и распределительное устройство,
обеспечивающее соединение отдельных приборов и управление режимами
работы системы БР-93-1.
Блоки кроссировки БК-9Е служат для подключения первичных
измерительных преобразователей к выходам коммутатора каналов ЛК-64.
Датчик
времени
Б202Т
Преобразователь
временной
информации
Б201-Т
X
3
i
JQ
Is
88-
u
is
I*
о
с
Распределительное
устройство
БК-9Е
Радиопередатчик
Б-158Т
к
АФУ
Коммутатор
каналов ЛК-64Л
DFY— С7С I ^
Кодирующее
устройство
Б-147Т
ел
Система
измерения
температур
СИТ-17
Хронизатор
Б-219Т
\-\
Запоминающее
устройство
Э-137
Рис. 3.46. Структурная схема БИТС БР-93
Кроме того, они предназначены для питающих напряжений на
измерительные преобразователи, запараллеливания каналов коммутатора ЛК-64Л
с целью увеличения частоты опроса каналов, а также для амплитудного
уплотнения каналов сигнальными параметрами. С каждым коммутатором
каналов ЛК-64Л (основным и резервным) работают два устройства.
Коммутатор каналов ЛК-64Л обеспечивает коммутацию каналов, то есть
поочередное подключение измерительных преобразователей к кодирующему
устройству Б-147, осуществляющему аналого-цифровое преобразование
информации. Частота опроса каналов коммутатора задается распределительным
устройством Б-103Т1 в соответствии с поступающими на него командами.
230
Глава 3. Средства телеметрии
Общее число входов коммутатора равно 64, из которых 60 входов
являются информационными. Три входа используются для передачи
сигналов калибровки (каналы 61-й, 45-й и 46-й обеспечивают передачу
калибровочных уровней напряжениями 0, 50 и 100% телеметрической шкалы).
Во время опроса 64-го канала коммутатор выдает маркер кадра,
совпадающий по времени с 64-м каналом. Входы коммутатора рассчитаны на
подключение первичных измерительных преобразователей с
телеметрической шкалой 0-6,ЗВ постоянного тока. Предусмотрено разделение каналов
с четными и нечетными номерами для подключения к двум устройствам
кроссировки БК-9Е. Этим достигается удобство запараллеливания
каналов для увеличения частоты их опроса. Второй коммутатор со своими
распределительными устройствами служит в качестве резерва или
используется в режиме запоминания информации, когда состав измерительных
телеметрических параметров отличается от состава параметров в режиме
непосредственной передачи.
Кодирующее устройство Б-147Т служит для преобразования сигналов,
поступающих с выхода коммутатора каналов в последовательный
цифровой 10-разрядный код. Девять разрядов этого кода являются
информационными, 10-й является служебным символом четности. Четность кодовых
комбинаций группового телеметрического сигнала используется на
приемной стороне системы для разделения принятого сигнала на отдельные
слова. Устройство формирует также маркер кадра, который размещается
в начале группового телеметрического сигнала и имеет вид комбинации
1111111111. Эта комбинация отличается от других слов кадра не менее
чем в двух любых разрядах, что обеспечивает ее надежное выделение при
наличии помех в канале связи. Прибор исключает формирование
комбинаций 1111111111 и 0000000000 при передаче сигналов измерительных
преобразователей. Комбинация 0000000000 также является служебной и
называется «холостым» словом. «Холостые» слова включаются в состав
телеметрического кадра в режиме воспроизведения информации
запоминающим устройством.
Запоминающее устройство Э-137 обеспечивает запоминание
телеметрической информации и ее воспроизведение. Запись производится
цифровым кодом на магнитной ленте шириной 6,25 мм. Две дорожки
используются для записи информации последовательно-параллельным кодом:
на одной из них записываются нечетные разряды, а на другой четные
разряды 10-разрядного кода, поступающего от кодирующего устройства
Б-147Т. Регистрация данных последовательно-параллельном кодом
позволяет улучшить использование поверхности магнитного носителя и
снизить скорость его протяжки.
231
Современная телеметрия в теории и на практике
Две другие дорожки носителя предназначены для регистрации
синхроимпульсов. На одной дорожке записываются импульсы тактовой частоты
Ft »которая в два раза ниже частоты F следования символов 10-раз-
2FC
рядного кода, а на другой - импульсы с частотой следования слов F л.
Запоминающее устройство Э-137 имеет четыре режима запоминания,
различающихся продолжительностью и скоростью записи информации.
Воспроизведение записанной информации производится в двух режимах, один
из которых соответствует максимальной информативности системы БР-93,
а второй - пониженной.
Воспроизведение информации характеризуется высокой стабильностью
длительностей символов и слов телеметрического сигнала, что необходимо
для достоверного приема информации в условиях помех. Как и в режиме
непосредственной передачи данных, она определяется нестабильностью
кварцевого генератора хронизатора. При этом непостоянство скорости
протяжки магнитной ленты (детонация) приводит лишь к необходимости
включения в состав группового телеметрического сигнала «холостых» слов,
то есть к некоторому снижению полезной информативности системы.
Хронизатор Б-219Т формирует сетку высокостабильных частот,
предназначенных для синхронизации работы всех устройств системы БР-93-1.
Выбор необходимых частот осуществляется распределительным
устройством Б-103Т1 по соответствующим командам, изменяющим режим работы
системы. Синхронизация кодирующего устройства Б-147Т производится
синхроимпульсами с частотой повторения символов телеметрического
сигнала F. Кодирующее устройство формирует синхроимпульсы с частотой
коммутатора каналов ЛК-64Л. В свою очередь, коммутатор каналов
синхронизирует устройство измерения температур СИТ-17 синхроимпульса-
F
г-» СП
ми с частотой повторения кадров гКАД =—^.
64
Система измерения температур СИТ-17 обеспечивает поочередное и
периодическое (с периодом Тсит) подключение терморезисторов,
предназначенных для измерения температурных параметров, к мостовым
измерительным схемам и преобразования выходных сигналов мостовых схем к шкале
постоянного тока 0-6,2 В.
В составе СИТ-17 имеется два механических коммутатора с шаговым
двигателем, каждый из которых работает со своей мостовой измерительной схемой.
Сигналы с выходов мостовых схем поступают на усилители переменного тока
и выпрямители. Коммутаторы СИТ-17 работают синхронно и синфазно.
Каждый из них имеет по 32 входа, из которых 29 являются информационными.
232
Глава 3. Средства телеметрии
Датчик времени Б-202Т служит для формирования высокостабильных
сигналов времени, предназначенных для привязки телеметрической
информации в режиме запоминания к команде «НОВ» (Начало
отсчета времени). Метки времени с необходимой частотой повторения
выбираются в зависимости от режима, в котором работает система БР-93-1.
Прибор может вызвать метки времени с частотой следования 100; 50; 25;
10; 5; 1; 0,1; 1/60; 1/600 Гц. Прибор обеспечивает выдачу меток
времени и при работе от внешнего источника запускающих импульсов с
частотой следования 25600, 12800, 6400, 3200, 100, 50 и 25 Гц. Возможна
также синхронизация импульсами с другими частотами следования, но
не выше 25600 Гц. Однако шкала меток времени при этом будет другая.
Прибор позволяет производить фазирование меток времени с помощью
внешних команд. Задающий генератор прибора стабилизирован кварцем
и обеспечивает формирование прямоугольных импульсов с частотой
следования 25600 Гц.
Преобразователь временной информации Б-201Т обеспечивает
преобразование импульсов меток времени прибора Б-202Т или бортового эталона
времени в оцифрованные метки времени, представленные 10-разрядным
двоичным кодом. Оцифровке подвергается каждая секундная или десяти-
секундная метка времени. Начало счета меток времени задается командой
«НОВ» от командной радиолинии или программно-временного
устройства. Перед началом кода времени передается служебный символ «1», затем
10 разрядов кода времени и еще один символ «1». Преобразователь
временной информации Б-201Т подключается к выходу коммутатора каналов
ЛК-64Л. Таким образом, код времени со служебными символами в его
начале и конце передается за 12 кадров телеметрического сигнала.
Распределительное устройство Б-103Т1 служит для соединения всех
устройств системы БР-93-1 между собой и управления режимами работы
системы. Распределительное устройство обеспечивает также коммутацию
цепей при проверке работоспособности системы БР-93-1 с помощью
наземной испытательной аппаратуры P-6I7. Команды управления, которые
поступают на устройство Б-103Т1 и число которых достигает нескольких
десятков, задаются замыканием соответствующих цепей («сухих»
контактов), а при работе с пультом проверки Р-617 - импульсами положительной
полярности с амплитудой 27 В.
Радиопередатчик Б-158Т генерирует высокочастотные колебания с частотной
модуляцией КИМ2-ЧМ. Рабочих частот 6. Девиация частоты 100-250 кГц.
Стабилизация частоты - кварцевая. Питание радиопередатчика
осуществляется от блока питания Б-284Т. Он преобразует напряжение бортовой
сети 27 В в высокое напряжение радиоламп передатчика.
233
Современная телеметрия в теории и на практике
Основные технические характеристики системы БР-93-1
1. Бортовая радиотелеметрическая система БР-93-1 может работать
в нескольких режимах (табл. 3.7), которым соответствуют
определенные частоты следования синхроимпульсов символов Fc и слов Fcji [17].
Продолжительность непосредственной передачи ограничивается
допустимым временем непрерывной работы радиопередатчика,
продолжительность режимов записи и воспроизведения может
быть уменьшена в 2 или 3 раза (путем установки соответствующих
кроссировочных заглушек в запоминающем устройстве Э-137).
2. Среднеквадратическая погрешность измерения параметров,
приведенная к шкале, составляет:
• не более 1,17%, как в режиме непосредственной передачи,
режиме воспроизведения при подключении к коммутатору
каналов ЛК-64Л (через блоки кроссировки БК-9Е) потенцио-
метрических измерительных преобразователей с выходным
сопротивлением Яшх < 1 кОм;
• не более 2,4% при подключении к СИТ-17 с сопротивлением
RT < 50 Ом;
• не более 1,51% при использовании СИТ-17 в качестве
коммутатора второй ступени коммутации и измерительных
преобразователей R < 1 кОм.
пых
3. Максимальное количество функциональных параметров при
подключении измерительных преобразователей к коммутатору
каналов ЛК-64Л не превышает 60.
Таблица 3.7. Режимы работы БР-93-1
Режим работы
Непосредственная передача
"""
■"■
Запись 1
Запись 2
Запись 3
Запись 4
Воспроизведение 1
Воспроизведение 2
Гц
32000
8000
1000
500
62,5
32000
8000
32000
8000
F ,
ел'
Гц
3200
800
100
50
6,25
3200
800
3200
800
Продолжительность,
мин
45
45
45
768
6144
12
48 |
15 |
60 |
234
Глава 3. Средства телеметрии
4. Максимальное количество температурных параметров,
передаваемых с помощью СИТ-17, равно 58. Каналы 30, 31 и 32 в каждом
из коммутаторов являются служебными и служат для передачи
максимального уровня шкалы СИТ-17.
5. Масса системы БР-93-1 составляет около 50 кг без учета массы
рамы и соединительных кабелей.
Структура группового телеметрического сигнала
Структура группового телеметрического сигнала системы БР-93 показана
на рис. 3.47.
а)
б)
мк
U-is-4
I 1 I 2 | ГТ" I 61 | 62 I
Тк=64ТСл
123456789
I 1 I 1 I И 11 И И И И И 1
I Т I
Г Тел
1 W
t
63
в)
И 1 о| 1 | 1 | 1 | о| 1| 1 | 1 | о
I т I
""' Тел
Ут I,,. т.
t
МК
хс
Тк
IIJ 61 l xc3
Ткал в > Тка
63
Д)
12 3 4 5 6 7 8 9
о|о1о|о|о|о|о|о|о|сГ
Тел
Рис. 3.47. Структура группового телеметрического сигнала БР-93
В режиме непосредственной передачи информации телеметрический кадр
(рис. 3.47а) содержит 64 слова, первое из которых является маркером кадра
(рис. 3.476), а остальные слова - информационными (рис. 3.47в).
В информационных словах младший разряд кода передается первым, а
старший - девятым. Десятый разряд кода является символом четности. Слова
в кадре следуют без разделительных пауз, так что длительность
канального интервала Т. равна длительности слова Т (длительности комбинации
10-разрядного кадра). Таким образом:
235
Современная телеметрия в теории и на практике
Ткад=64Тк=64Тсл;
Г„=10Ге,
где Г - длительность одного кодового символа.
Структура телеметрического кадра (рис. 3.47г) в режиме воспроизведения
информации отличается от рассмотренной выше структуры кадра в режиме
непосредственной передачи информации. Это отличие состоит в
увеличении общего числа слов в кадре за счет включения в его состав «холостых»
слов. «Холостые» слова занимают в телеметрическом кадре случайные
места. Среднее число «холостых» слов не превышает 20%, формирование
«холостых» слов происходит в запоминающем устройстве Э-137 в режиме
воспроизведения информации.
При одинаковой частоте следования слов F;(в режимах непосредственной
передачи и записи информации средняя длительность кадра в режиме
воспроизведения Т в 1,2 раза больше длительности кадра Т в режиме
непосредственной передачи. Запись информации с малой скоростью и ее
ускоренное воспроизведение приводит к трансформации временного
масштаба телеметрического кадра. Например, сочетание режимов «Запись 1» -
«Воспроизведение 2» дает сокращение длительности телеметрического
кадра в 16 раз, а «Запись 2» - «Воспроизведение 2» - в 128 раз.
При использовании различных режимов работы система БР-93-1 имеет
только три частоты следования слов F^ = 100, 800 и 3200 1/с в канале связи.
3.5.3. Бортовая информационно-телеметрическая
система бр-91ц
Многоканальная бортовая информационно-телеметрическая система БР-
91Ц является одним из вариантов бортовой аппаратуры
радиотелеметрического комплекса РТС-9 и предназначена для обеспечения
радиотелеметрических измерений на искусственных спутниках Земли с передачей
информации по радиолинии РТС-9 КИМ-Ц.
Назначение, состав и технические характеристики БИТС
БИТС БР-91Ц предназначена для обеспечения следующих режимов
работы:
• непосредственной передачи (НП);
• запоминания и хранения информации (ЗАПИСЬ);
236
Глава 3. Средства телеметрии
• непосредственной передачи одновременно с запоминанием
(НП+ЗАПИСЬ);
• непосредственной передачи одновременно с воспроизведением
запомненной информации (НП+ВОСПР. 1,2,3);
• непосредственной передачи на низкой частоте по
высокочастотному кабелю при проведении испытаний объектов на заводе-сборщике
и технической позиции (НП-НЧ).
БИТС обеспечивает привязку запомненной информации к текущему
времени объекта и наземному времени (СЕВ):
• суммарная выходная информативность системы 25600 измерений
в секунду;
• информативность радиолинии системы 256000 бит/с;
• дальность действия системы БР-91Ц до 2000 км в пределах прямой
видимости (при коэффициенте усиления АФУ в провале 0,3).
Минимальный угол места 5°.
Система коммутации и кодирования БИТС БР-91Ц
В системе БР-91 Ц реализован принцип временного разделения каналов с
циклической дисциплиной обслуживания источников информации.
Система коммутации (рис. 3.48) образована тремя ступенями: на 1-й
ступени - «быстрый» основной коммутатор (ОК) на 8 входов; на 2-й ступени -
«медленные» локальные коммутаторы (ЛК) на 32 входа, на 3-й -
коммутаторы системы измерения температур (СИТ) на 32 входа. В БИТС БР-91 Ц
возможно подключение одного коммутатора СИТ к любому из локальных
коммутаторов. Максимальное количество коммутаторов СИТ в БР-91 Ц
ограниченно и не должно превышать восьми. Такое количество
коммутаторов СИТ достаточно для передачи информации медленно меняющихся
параметров объектов, телеметрирование которых осуществляется системой
БР-91Ц.
В БИТС БР-91 Ц применяется система измерения температур СИТ-9Л.
Эта система имеет два синфазных коммутатора, на 32 входа каждый, для
передачи температурных параметров и формирователь служебного
сигнала СИТ Таким образом, для передачи информации СИТ-9Л необходимо
задействовать 3 канала ЛК: два - для передачи информационных сигналов
СИТ, один - для передачи служебного сигнала СИТ В системе БР-91 Ц
в ЛК для передачи этих сигналов закреплены соответственно 25-й, 26-й
и 15-й каналы. Служебный сигнал СИТ предназначен для «распаковки»
237
Современная телеметрия в теории и на практике
в приемно-регистрирующий аппаратуре информационных сигналов и
представляет собой меандр с частотой следования импульсов, в 2 раза
меньшей частоты опроса Л К, амплитудой U = О В по нечетным каналам
служебного сигнала СИТ (за исключением 31-го канала) и U = 3,1 В по четным
каналам. Амплитуда служебного сигнала СИТ в 31-м канале U = 6,2 В
(маркер СИТ).
кд
ци
ци
БК
(TA-602)
КСС«
Пр.ЦИ
ЦИ, сигн.
32
ЛК-1
(ТА-203)
КИМ2-ЧМ
1-
32-
1-
32-
ци
сит
(ТА-604,
СИТ-9Л)
1
служ. 15
151
инф.1 25 wl
— I Н
инф.2 _26
ДВ,
ПВИ
26'
аналог
32,
32'
ЛК-4
(ТА-203)
Резерв ЛК-4Р
1
32,
ЛК-5
ДПН
irh
лк-в I
(ТА-203)
Резерв ЛК-8Р
Рис. 3.48. Система коммутации БР-91Ц
Структура группового видеосигнала на выходе системы коммутации
БРЭНД (АИМ-сигнал) представляет собой 256 временных каналов (32 х 8).
АИМ-сигнал (сигнал с амплитудно-импульсной модуляцией)
преобразуется в последовательный 10-разрядный двоичный импульсный код (сигнал с
кодово-импульсной модуляцией - КИМ), девять разрядов которого -
информационные, десятый - символ четности. КИМ-сигнал манипулирует по
частоте несущую частоту передатчика. Таким образом, тип радиолинии сис-
238
Глава 3. Средства телеметрии
темы БР-91Ц - КИМ-ЧМ. Достаточно высокая помехоустойчивость
радиолинии КИМ-ЧМ, синхронная и синфазная работа коммутаторов 2-й
ступени позволили задействовать для передачи сигналов
синхронизации только один временной канал системы - 256 (32-й канал 8-го ЛК).
Этот сигнал синхронизации называется маркером кадра и представляет
собой кодовую комбинацию из 10 единиц.
Тракт передачи цифровой информации в системе БР-91Ц
В БИТС БР-91 Ц предусмотрена возможность передачи цифровой
информации от внешних источников цифровой информации (ЦИ). Цифровая
информация параллельными 8-разрядными словами подается на цифровой
вход локального коммутатора (усилитель цифры), с выхода усилителя
через коммутатор цифровых датчиков на цифровой вход ОК. Для передачи
ЦИ задействуется один или несколько каналов системы. Внедрение слов
ЦИ в структуру ГТС осуществляется в сечении «устройство
аналого-цифрового преобразования (АЦП) - кодирующее устройство» (АЦП и
кодирующее устройство образуют в ОК шифратор). Во временные интервалы,
отведенные для передачи ЦИ, система БР-91 Ц отключает систему коммутации
и АЦП от входа в кодирующее устройство и подключает к входу
кодирующего устройства внешнюю цифровую информацию. Сигналом,
синхронизирующим процесс выставления ЦИ на вход системы БР-91 Ц и процесс
формирования ГТС, является сигнал «Признак ЦИ», формируемый
системой из АИМ-сигнала на выходе системы коммутации. Структурная схема
тракта передачи ЦИ в системе БР-91 Ц приведена на рис. 5.2.
Пусть для передачи ЦИ в системе БР-91 Ц выделен j-ый канал (1-канал
п-го локального коммутатора). Тогда на 1-й вход п-го ЛК необходимо
подать отрицательное напряжение, уровень которого меньше 0%
телеметрической шкалы. Это напряжение является признаком передачи ЦИ.
Селектор признака ЦИ выделяет этот сигнал из АИМ-сигнала на выходе системы
коммутации и формирует управляющий сигнал, по которому выход АЦП
отключается от входа выходного регистра кода, а ЦИ через устройство
ввода ЦИ записывается в выходной регистр кода (в 2 ... 9 разряды кода). После
этого последовательный код ЦИ подается на вход кодирующего
устройства, которое формирует значение десятого разряда - символа четности. При
передаче ЦИ первый разряд слова, отведенного для передачи ЦИ, меняет
свое значение от кадра к кадру системы БР-91 Ц.
Тракт передачи информации о бортовом времени в системе БР-91 Ц
Методы передачи информации о бортовом времени в штатных БИТС
определяются видом сигнала на выходе устройства, формирующего код номера
239
Современная телеметрия в теории и на практике
метки бортового времени, и возможностями БИТС. На практике широкое
распространение получили два метода:
• передача кода номера бортовой метки времени как информации
функционального параметра;
• передача кода номера бортовой метки времени как слов цифровой
информации.
В БИТС БР-91Ц находят применение оба метода.
При получении запомненной информации на Земле ее привязка к наземной
(московской) шкале осуществляется по времени выдачи команды «НОВ».
Частота опроса датчиков, подключенных к входам БИТС БР-91Ц (входам
ЛК), в режиме запоминания много меньше частоты опроса в режиме
непосредственной передачи. Это является следствием ограниченного объема
бортового долговременного запоминающего устройства и ограниченного
времени сеанса связи при достаточно длительном режиме запоминания
информации. Реально F0 нп > F0 зап в 30-100 раз. Код номера бортовой
метки состоит из 12-ти разрядов (рис. 3.49), первый и последний разряды
которого постоянно равны «1» (маркеры кода бортового времени).
Длительность одного разряда кода выбирается равной длительности кадра
системы БР-91Ц. Поэтому информация о коде номера бортовой метки
передается (в режиме непосредственной передачи) или записывается (в
режиме запоминания) за интервал времени, равный 12-ти кадрам системы.
Следовательно, интервал Т6и меток бортового времени должен
удовлетворять соотношению:
Tft 12T =12 — .
on кадр /-»
Если Fo =100 Гц, тогда при уменьшении частоты опроса в режиме записи
информации в 33 раза Fo мп = 3Гц, Т6и = 4с, реально - Тбн = 10с.
Пр.ЦИ
256
ЦИ
Канальные
элементы
второй
ступени
коммутации
АИМ, Пр.ЦИ
Селектор
признака
ЦИ
АЦП
Пр.ЦИ
Выходной
регистр
кода
ЦТ
Устройство
ввода
ЦИ
нт
КУ
Рис. 3.49 Формирование кода номера бортовой метки
гтс
240
Глава 3. Средства телеметрии
Таким образом, информация о номере метки бортового времени
передается по одному из каналов БИТС БР-91Ц 12-разрядным
последовательным двоичным кодом, при этом информация о значении одного разряда
(«О» или «1») 12-разрядного кода передается 10-разрядным кодом (10-й
разряд - символ четности) в канальном интервале (слове ГТС), отведенном
для передачи информации о бортовом времени. Период следования
временного канального интервала равен периоду кадра ГТС. Поэтому информация
о коде номера одной бортовой метки времени передается за 12 кадров ГТС
системы БР-91Ц.
Передача кода номера бортовой метки времени как слов цифровой
информации в системе БР-9Щ основывается на возможности передачи цифровой
информации по каналам БР-91Ц.
Наиболее распространенными структурами кода бортового времени
являются: одношкальная структура номера метки кода (для
кодирования номера метки используется всё из разрядов кодовой комбинации) и
многошкальная структура, в которой различные слова разрядной
цифровой информации кодируют метки времени различных шкал бортового
времени.
Примеры одношкальной структуры (код секунд) и трехшкальной (часы,
минуты, секунды) структуры бортового времени приведены на рис. 3.50.
В обеих структурах информация о бортовом времени передается
17-разрядным кодом. Маркеры Ml и М2 несут информацию об изменении состоянии
кода бортового времени и используются в графических устройствах прием-
но-регистрирующей аппаратуры для выдачи меток на оцифровку.
i - ое слово
Код секунд
i+1 - ое слово
i+2 - ое слово
9П011Ц2
И314И5И6И7
i - ое слово
разряды кода БВ
Код ЧМС
1+1 -ое слово
i+2 - ое слово
1|2|б|5|4|з|2|1|s| 1112|6|5H31211ISI
12 5 4 3 2 1
код часов
код минут
код секунд
Рис. 3.50. Одношкальная структура кода бортового времени
241
Современная телеметрия в теории и на практике
Особенности функционирования системы в режиме
воспроизведения информации
Устойчивость работы системы синхронизации (СС) приемно-регистрирую-
щей аппаратуры (ПРА) в значительной степени определяется
стабильностью формируемой в СС ПРА символьной частоты. Перерывы в потоке
поступающей с борта цифровой информаци и нарушают все в иды си нхронизации
в приемно-регистрирующей аппаратуре и поэтому крайне нежелательны.
В то же время существующие бортовые энергонезависимые запоминающие
устройства (ЗУ) большой емкости сталкиваются с проблемами
энергопотребления, надежности, массо-габаритными ограничениями.
С целью предотвращения возможных перерывов в передаче
воспроизводимой информации и обеспечения требуемой стабильности символьной
частоты в системе БР-91Ц в состав группового телеметрического сигнала
в режиме воспроизведения вводятся «холостые» слова - слова
длительностью 10 разрядов, состоящие из одних «нулей». «Холостые» слова вводятся
в состав группового сигнала при отсутствии в буферном ЗУ готового к
передаче информационного слова.
С целью предотвращения потери информации в случае переполнения
буферного ЗУ, вследствие непредусмотренного повышения скорости
воспроизведения информации из долговременного ЗУ, в системе БР-91Ц
реализован замедленный режим воспроизведения информации, причем замедление
при воспроизведении выбирается равным величине максимально
возможного увеличения скорости протяжки.
Замедление режима воспроизведения информации из долговременного в
буферное ЗУ совместно с нормальным темпом выдачи информации из
буферного ЗУ исключает потерю воспроизводимой информации, но и
повышает процент «холостых» слов в потоке ГТС. В системе БР-91Ц замедление
выбрано равным 20% от скорости воспроизведения «идеального»
долговременного ЗУ. Поэтому длина кадра в режиме воспроизведения примерно на
20% больше длины кадра системы в режиме непосредственной передачи.
Другими словами, примерно каждое пятое слово в кадре системы в режиме
воспроизведения является «холостым» словом.
Еще одной характерной особенностью режима воспроизведения
является совмещение режимов воспроизведения и непосредственной передачи
(НП + ВОСПР.): в структуре ГТС в интервалы времени, отводимые для
передачи информации 1-7 локальных коммутаторов, передается воспро-
242
Глава 3. Средства телеметрии
изводимая с ЗУ информация этих ЛК; в интервалы времени,
соответствующие каналам 8-го ЛК, - передается информация этого же ЛК в режиме
непосредственной передачи, при этом синхронизация ЛК-8 (переключение
каналов ЛК-8) осуществляется синхросигналами, считываемыми с ЗУ.
При воспроизведении информации в зависимости от направления
движения магнитной ленты порядок следования информации на выходе ЗУ
может быть прямым (воспроизведение прямое) или обратным
(воспроизведение обратное).
При прямом воспроизведении порядок следования каналов Л К и ЛК на
выходе ЗУ аналогичен порядку следования в режиме непосредственной передачи.
В режиме «воспроизведение обратное» порядок следования каналов и ЛК
меняется на противоположный. Это обстоятельство порождает две
особенности функционирования БИТС БР-91Ц. Обратный порядок следования
каналов Л К в воспроизводимой информации обусловливает необходимость
введения обратного хода опроса каналов ЛК-8, работающего в режиме
непосредственной передачи. Необходимость строгого соблюдения порядка
следования во времени командного слова системы (1-й канал ЛК-1 или 1-е
слово ГТС) за маркером кадра системы (32-й канал ЛК-8 или 256-е слово
ГТС), обусловленная логикой работы приемно-регистрирующей
аппаратуры в режиме управления по командному слову, требует задержки
командного слова на интервал времени длительностью в два слова и передачи его
в канальном интервале 32-го канала ЛК-7.
Особенности построения кодирующего устройства
Слова цифровой информации, состоящие из десяти единиц или из десяти
нулей в ГТС системы БР-91Ц, являются особенными: маркером кадра и
«холостым» словом соответственно. Однако в некоторых случаях подобные
кодовые комбинации могут появиться в информационных каналах ГТС. Так,
например, при обрыве датчика на входе соответствующего канального
элемента Л К появится положительное напряжение, значительно превышающее
уровень 100%, АЦП преобразовывает это напряжение в кодовую
комбинацию «десять единиц», кодирующее устройство добавляет в разряд символа
четности десятую единицу, и в ГТС появляется ложный маркер кадра,
который приведет к сбою маркерной (кадровой) синхронизации на приемной
стороне. С другой стороны, на вход канала ЛК может быть подано
отрицательное напряжение, которое преобразуется АЦП и кодирующим
устройством в кодовую комбинацию «десять нулей». Данная кодовая комбинация
воспримется приемно-регистрирующей аппаратурой как «холостое» слово
и будет исключена из группового телеметрического сигнала, что приведет
243
Современная телеметрия в теории и на практике
к потере телеметрической информации не только данного, но и
последующих каналов. С целью предотвращения описанных ситуаций в состав
кодирующего устройства введены: устройство переполнения «О» и устройство
переполнения «1». Эти устройства анализируют кодовые комбинации в
информационных словах ГТС и преобразуют кодовую комбинацию «десять
нулей» в комбинацию «10000000001» и кодовую комбинацию «десять
единиц» - в комбинацию «0111111110».
3.5.4. Бортовая информационная телеметрическая
система «Сириус»
Назначение и основные характеристики БИТС «Сириус»
Бортовая аппаратура «Сириус» радиотелеметрической системы БРС-4М
предназначена для сбора и передачи по радиолинии с объектов
информации о телеметрируемых параметрах вибрации в широком диапазоне частот,
высокочастотных давлениях, переходных и ударных процессах, импульсах
и цифровых сигналах.
Различные сочетания основных и вспомогательных блоков позволяют
получить до 30-ти вариантов аппаратуры, отличающихся информационными
возможностями и техническими характеристиками. Основными из этих
характеристик являются:
• максимальная общая информативность - 320 000 измерений в секунду;
• метод передачи информации - аналоговый и аналого-цифровой;
• режим информационного обслуживания - циклический;
• частота опроса основного коммутатора первой ступени - 8000,16000,
32000 Гц, коммутаторов второй ступени - 25, 50, 100 Гц (локальный
кодовый коммутатор) и 500, 1000, 2000 Гц (локальный аналоговый
коммутатор), коммутаторов третьей ступени - 0,75; 1,5; 3,0 Гц
(возможно повышение частоты опроса в 2, 4, 8 раз);
• число каналов основного коммутатора - 40, из которых 36 каналов
являются информационными, четыре канала - служебными (39 и 40
используются для передачи маркера основного коммутатора, 19
канал - для передачи маркера локальных коммутаторов 12, 5 Гц, 30
канал - для передачи сигнала калибровки 1000 Гц);
• число каналов локального кодового коммутатора - 128, из которых
62 канала используются для передачи функциональных параметров,
244
Глава 3. Средства телеметрии
64 канала - для передачи сигнальных параметров, два канала - для
передачи сигналов калибровки 0% (61-й канал) и 100% (46-й канал);
• число каналов локального аналогового коммутатора - 32, из
которых 30 каналов являются информационными, два канала -
калибровочными;
• число каналов локального коммутатора 3-й ступени (для термопар
СС-16Т и терморезисторов СС-16С) - 32, из которых два канала
(СС-16С) и четыре канала (СС-16Т) отводятся для передачи
сигналов калибровки;
• общее количество контролируемых с помощью одного цифрового
коммутатора каналов БЦВМ - 3. Вид информации по каждому
каналу - 18-разрядный параллельный двоичный код;
• емкость программно-временного устройства - 9999 единиц.
Дискретность отсчета времени - 1 с, 10 с;
• структура сигналов бортового времени - 17-разрядный
последовательный двоичный код;
• общее количество команд управления - 16;
• общий ресурс аппаратуры не менее 2000 часов, время непрерывной
работы - 2 часа с последующим перерывом 1 час.
Бортовая аппаратура предусматривает возможность засекречивания
цифровой информации с помощью аппаратуры ЗАС типа «Муравей-А».
Принципы организации информационных процессов в БИТС «Сириус»
БИТС «СИРИУС» реализует принцип временного разделения каналов
с циклической дисциплиной обслуживания источников информации.
Структура ГТС на выходе системы представляет собой 40 временных
каналов, частота опроса каждого из которых равна 8 (16) кГц. Система
коммутации - трехступенчатая: первую ступень коммутации образует
«быстрый» основной коммутатор (ОК) на 40 входов, вторую ступень
коммутации образуют «медленные» локальные коммутаторы - кодовые
(ЛК-К) и аналоговые (ЛК-А). ЛК-К имеет 64 входа для подключения
аналоговых датчиков и 64 входа для подключения КД.
Сигнал на выходе ЛК-К представляет собой 64 кодовых слова. Каждое
кодовое слово содержит информацию функциональных и контактных датчиков.
Эта информация может быть представлена или двоичным кодом (т = 2), или
четырехосновным кодом (т = 4). Соответственно, кодовое слово будет иметь
длину в 10 или 5 разрядов. При т = 2 амплитуда АИМ-сигнала в каждом
245
Современная телеметрия в теории и на практике
канале преобразуется в последовательный 9-разрядный двоичный код. В 10-м
разряде слова передается информация о состоянии КД («1» - разомкнут,
«0» - замкнут). Преобразование информации из двоичного в
четырехосновный код поясняется рис. 3.51.
т = 2
i
т = 2
к
т = 4
1р
Код аналогового параметра
2р
к
0
0
Зр
4р
0
1
I
к
0
1
5р
6р
1
0
2
7р
8р
1
1
3
Информ. КД
9р
Юр
0
1
1
I t
t
—►
Вых.
ЛКЦ
I L- -| - L -
Г 6,2В Ь ^ ,
1
i
'
0.33L
i
1
г "
1
0.66L
f
_) 1 1
—1 1 L
■ ■ — - - - - -w
t
Рис. 3.51. Преобразование в четырехосновный код
В ЛК-К преобразование входных сигналов четырехосновным
последовательным кодом осуществляется путем последовательной реализации
операций преобразования «напряжение - двоичный код», затем «двоичный
код - четырехосновный код». При включении режима кодирования
четырехосновным кодом частота опроса каналов ЛК-К и частота
преобразования «напряжение - двоичный код» удваиваются по сравнению с режимом
передачи информации ЛК-К двоичным кодом. Поэтому длина слова
(длительность канального интервала ЛК-К) в режиме m - 4 будет в два раза
короче слова в режиме m = 2. Применение четырехосновного кодирования
в системе «Сириус» позволяет увеличить частоту опроса датчиков,
подключаемых по входам ЛК-К, в два раза, однако помехоустойчивость передачи
информации данных датчиков снижается.
3-ю ступень коммутации образуют «медленные» коммутаторы СИТ
(системы измерения температур) на 32 входа. Коммутаторы СИТ подключаются
к входам ЛК-К. Частота опроса ^датчика, подключенного на вход
соответствующей ступени коммутации, определяется соотношениями:
246
Глава 3. Средства телеметрии
1-я ступень: .F0OK = 8 (16) кГц;
2-я ступень: ЛК-А: Fom_A - -^ЯЦ ^ЛК.А= 32;
N
ЛК-К:т = 2,Р0ЛК.к =
^о.ок
nN
где и = 10 (количество разрядов); #лк.к = 64;
ш <*, i олк_к ,
"^лк-к
где я = 5; NnKK = 64.
3 ступень: F0 сит = -^-, JVCHT = 32.
iVCHT
При расчете F{)Cm необходимо учитывать режим кодирования (двоичный
или четырехосновный) ЛК-К.
Для передачи выходных сигналов СИТ необходимо задействовать два
канала ЛК-К: по одному из них передавать информационный сигнал СИТ,
по второму - служебный сигнал. Служебный сигнал СИТ представляет
собой меандр с частотой следования импульсов, в два раза меньшей
частоты опроса ЛК-К, амплитудой 0В по нечетным каналам и 3,1В по четным
(за исключением 32-го канала) каналам служебного сигнала СИТ
Амплитуда служебного сигнала СИТ в 32-м канале 6,2В (маркер СИТ).
Коммутаторы СИТ, формирующие информационный и служебный сигналы СИТ,
синхронны и синфазны, что позволяет однозначно «распаковать»
информационный сигнал СИТ с помощью служебного сигнала.
Коммутаторы 2-й ступени системы «Сириус» синхронны и синфазны.
Фазирование коммутаторов осуществляется синхросигналом ОК частоты 12,5 Гц.
Этот же сигнал используется для формирования маркера коммутаторов 2-й
ступени, называемого маркером низкой частоты (МНЧ). МНЧ передается
по 19-му каналу ОК уровнем 100% телеметрической шкалы в том кадре ОК,
во время формирования которого ОК снимает информацию последнего 10-го
разряда 64-го канала ЛК-К, работающего в режиме кодирования двоичным
кодом. Так как период следования МНЧ равен 80 мс, а период опроса ОК -
125 мкс, то уровень 100% МНЧ передается только в одном из 640 кадров
ОК, в остальные 639 кадров ОК по 19-му каналу передается уровень 0%.
Очевидно, что фазирование ЛК-К, работающего в режиме кодирования че-
тырехпозиционным кодом, будет осуществляться не в каждом кадре ЛК-К,
247
Современная телеметрия в теории и на практике
а через кадр (в 1-м, 3-м, 5-м и т. д.). Фазирование Л К-А будет
осуществляться в F0JlKK(m = 2)/FQJlK.Араз реже, то есть один раз за 20 кадров ЛК-А.
Для радиолинии БИТС «Сириус» характерно совмещение аналоговой
и цифровой линий передачи информации. Аналоговая линия образована
аналоговым локальным коммутатором, основным коммутатором,
передатчиком с ЧМ-модуляцией, приемно-регистрирующей аппаратурой.
Тип радиолинии: АИМ-ЧМ. Цифровая линия передачи информации
образована цифровым локальным коммутатором, основным
коммутатором, передатчиком с ЧМ-модуляцией приемно-регистрирующей
аппаратуры. Типы радиолиний: КИМ2-ЧМ, КИМ4-ЧМ. Совмещение типов
радиолиний демонстрируется на рис. 3.52.
fioo
fee
f33
fo
kF
^^
I I I
Umca
1 ►
V
m = 2
m = 4
11
о V33 Vee V
1 1
1 1
i i Z
i^
Ljx
к
>
\
1 1 1 1 k
^—^—_J__—J
у
у
' \/
\
r^
У
100
6,2 U, В
1
0 Передача
цифровой
1 информации
3
0
2
1
Передача
аналоговой
информации
Рис. 3.52. Совмещение в радиолинии БИТС «Сириус»
БИТС «СИРИУС» реализует циклический способ обслуживания
источников информации (датчиков, источников цифровой информации): Тип
передаваемых сообщений:
• телеизмерения;
• цифровая информация внешних источников.
248
Глава 3. Средства телеметрии
Способы передачи:
• непосредственная передача;
• запись с последующим воспроизведением информации.
Режимы работы ЗУ:
• «линейка» (запоминание до заполнения ЗУ);
• «кольцо» (запоминание со стиранием «устаревшей» информации).
а)
100%
1кГц
*2а
*3
I*
2 с:
8 2
2
СО
б)
39J40
N
18 19 20
Ч-Щ
30
39J40
*Ч
1/2Тк
*g_ug
То с
,?§*
ii
(О О
в)
•18 «19 «20 *S Tj
fsO U *2 Ив И9 *20 *S TS0
Рис. 3.53. Формирование ГТС БИТС «Сириус»
Структура АИМ-сигнала на выходе ОК представлена на рис. 3.65а. 39-й
и 40-й каналы ОК отведены для передачи маркера основного коммутатора
(МВЧ). МВЧ формируется подачей на 39-й, 40-й входы ОК напряжения
U = 3,1В. Основной коммутатор формирует последовательность
вырезающих импульсов с периодом следования, равным по длительности половине
канального интервала ОК. Во временном интервале сорокового канала
вырезающий импульс не формируется (рис. 3.536). При формировании
группового радиосигнала вырезающие импульсы позволяют устранить
переходные помехи между каналами ОК и надежно разделять каналы ОК на
приемной стороне. Канал ОК №19 отведен для передачи МНЧ, 30-й канал
249
Современная телеметрия в теории и на практике
- для передачи стандартного синусоидального сигнала частотой 1кГц.
Сигнал 1 кГц предназначен для оценки качества передачи информации по
радиолинии БИТС «Сириус». Оценка основана на сравнении
синусоидального сигнала с эталонным сигналом на приемной стороне и калибровки
каналов ОК.
Структурная схема БИТС «Сириус»
Бортовая аппаратура «Сириус» выполнена в виде отдельных функциональных
блоков. Комплект блоков аппаратуры, состоящий из основного коммутатора
СС- 16Б, блока включения СС-15 и передатчика, является основным. Получение
других вариантов аппаратуры достигается применением необходимого
количества различных типов локальных коммутаторов 2-й и 3-й ступеней коммутации,
запоминающих устройств и соответствующих вспомогательных блоков. Состав
конкретного варианта аппаратуры определяется программой телеизмерений.
На рис. 3.54. представлена структурная схема, поясняющая возможные
варианты включения локальных коммутаторов 2-й и 3-й ступеней коммутации.
СТУПЕНИ КОММУТАЦИИ
1
2 ^
30
1
2 ^
?а
3-я ступень
ПВУ I
СС-17В
1
2 Команды
16^ управления
1
2 ^
з ;
лк I
терморез. I
СС-16С I
1
I ЛК
кодовый
СС-1М
128 ^
... ,—»
ЛК I
термопар 1
СС-16Т Г
| ЛК
i КОДОВЫЙ
| СС-1М
2-я ступень
ЗУ
УЗУ-1
Т А
Формир. и
синхрониз.
СС-18А
ЗУ
(КЗУ)
+ \
БЗУ
1
2 ^
3
1
2
32^
1
2 ^
32^
Коммутатор
цифровой
СС-17Ц
ЛК
аналоговый
СС-16А
ЛК
аналоговый
СС-16А
1
Г'
»
АЦП
СС-17
-►
тя ступень
I ОК
| СС-16Б
ahmJ
м
Вырезе
ющий
импуль
ПРД|
ЧМ
модулятор
1
С 1
J
Рис. 3.54. Система коммутации БИТС
250
Глава 3. Средства телеметрии
3.5.5. Бортовая информационная телеметрическая
система «Кварц» («Скут»)
БИТС «Кварц» предназначена для сбора и передачи телеметрической
информации о состоянии бортовых систем сложных высокодинамичных
объектов, в первую очередь на этапе их испытаний. По структурам
сигналов и по составу основных.и вспомогательных блоков БИТС «Кварц»
соответствует БИТС «Сириус» с определенными отличиями в организации
процессов формирования и передачи результирующего группового
телеметрического сигнала. Это обусловлено высокими (и противоречивыми)
требованиями к информативности БИТС и помехоустойчивости
телеметрической линии связи для указанных объектов контроля.
Структурная схема бортовой ИТС «Кварц» приведена на рис. 3.55.
Система коммутации БИТС «Кварц» организована двумя одинаковыми
системами коммутации, каждая из которых аналогична системе
коммутации БИТС «Сириус». Частота опроса каналов ОК равна 16 кГц. Ко входам
основных коммутаторов подключены одни и те же коммутаторы 2-й
ступени, причем информация с коммутаторов 2-й ступени тракта «Б» поступает
на ОК с задержкой, равной трем секундам.
Чкэ1 Е
кэ
2 |4-
Согласующее
устройство
кРПД
| *| КЭ29 [Jh
КЭ
30
Задающий
генератор
КЭ
39
КЭ
40 Ц-
U = 3,1 В
Формирователь
сигналов
калибровки
U*
кЛК-А
Формирователь
синхро- и
тактовых
импульсов
кЛК
Формирователь
вырезающих
импульсов
кРПД
Распределитель
импульсов
Рис. 3.55, Система коммутации БИТС «Кварц»
251
Современная телеметрия в теории и на практике
Задержку обеспечивает статическое кольцевое запоминающее устройство
(КЗУ), включенное между 2-й и 1-й ступенями коммутации тракта «Б».
Поток «А» передается на несущей частоте FH, поток «Б» передается на
частоте Fu + AF(AF = 3 МГц). Таким образом обеспечивается разнос по
частоте и времени передачи информации. Разнесение по частоте и времени
двух идентичных (с точки зрения передаваемой телеметрической
информации) потоков (ГТСА и ГТСБ) имеет целью повышение
помехоустойчивости передаваемой информации. Такой метод наиболее эффективен для
телеметрических радиолиний, в которых имеют место кратковременные
пропадания сигнала, обусловленные поворотом объекта двигательной
установкой в сторону антенны наземной приемно-регистрирующей
станции либо экранированием передающих бортовых антенн слоем
высокотемпературной плазмы.
Суммарная информативность БИТС «Кварц» - 1280 кБит/с (кодовая
структура кадра) и 1280 кИзм/с (многопозиционная структура кадра)
БИТС «Скут» полностью аналогична аппаратуре «Кварц» и
используется при телеметрировании (во время испытаний) отдельных объектов
ракетной техники.
3.5.6. Бортовая информационная телеметрическая
система «Скиф»
Бортовая ИТС «Скиф» предназначена для работы на изделиях техники
с жесткими ограничениями [1]. Структура и временные параметры
группового телеметрического сигнала БИТС «Скиф» полностью идентичны
БИТС «Сириус», однако принципы построения бортовой аппаратуры
существенно отличаются. Структурная схема БИТС «Скиф» представлена на
рис. 3.56.
Основная часть БИТС выполнена в виде моноблока устройства
формирования кадра (УФК). Данное устройство предназначено для сбора и
преобразования в код медленно меняющихся аналоговых процессов,
сбора информации с цифровых датчиков, подключения внешних
локальных коммутаторов и запоминающих устройств, а также формирования
единого выходного кадра. УФК формирует синхронизирующие и
тактовые импульсы, необходимые для синхронной работы всех блоков
системы. Устройство обеспечивает самоконтроль выходной мощности ПРД и
питающего напряжения за счет использования функциональных
каналов в телеметрическом кадре. Встроенное ПВУ позволяет вырабатывать
18 команд управления внешними устройствами и цифровой код
бортового времени. Четыре команды управления, выдаваемые на внешнее ЗУ
252
Глава 3. Средства телеметрии
(«Исходное», «Запись», «Воспроизведение», «Стоп») контролируются
по собственным каналам УФК.
. ,
—J кэ., г
■——* 1
1 , 1
—Н кэ° и 1
1 - г t
f Ш
——
Выходной
усилитель
-р-
АИМ—гигнал
' кОК
•
КЭ
кэ
18 U-
Сигналы
калибровки
Выходной
усилитель
АИМ-сигнал,
кОК
Г l l
СИ ТИ
Распределитель
импульсов
1
Код адреса
(6р)
i
Устройство
ввода адреса
Формирователь
служебных
сигналов
1
Усилитель
сигнала
калибровки
of OK
К
"Маркер",
-► "Маркер 1/4"
->► СИ - 3-я ступень
Рис. 3.56. Структурная схема БИТС «Скиф»
В УФК конструктивно реализованы:
• первая ступень коммутации в виде 40-входового ОК;
• вторая ступень коммутации в составе 64-входового аналогового ЛК,
128-входового цифрового коммутатора ЛК-Ц, АЦП, коммутатора
цифровых потоков с локальных коммутаторов КЛК, формирователя
выходного кода.
В случае необходимости возможно наращивание системы коммутации
за счет подключения дополнительных Л К СС-1М, СС-17Ц, «Маскит-32»
(коммутатора для температурных параметров) из состава БИТС «Сириус».
Без внешних Л К устройство формирования кадра обеспечивает
подключение 64-х аналоговых датчиков, 16-ти восьмиразрядных цифровых
датчиков. С помощью кроссировки возможно изменение частоты
синхронизации внутренних и внешних коммутаторов, что позволяет реализовать
основное значение информативности БИТС 320 тыс. изм/с и
дополнительные значения 160, 640 или 1280 изм/с.
253
Современная телеметрия в теории и на практике
3.5.7. Приемно-регистрирующая аппаратура
МА-9МКТМ-4
Назначение и состав системы
Наземная радиотелеметрическая станция МА-9МКТМ-4 предназначена для:
• приема телеметрической информации с бортовой ИТС по
радиоканалу и по видеочастоте;
• преобразования и регистрации полного объема информации на
магнитном запоминающем устройстве;
• открытой регистрации части информации на графических и цифро-
печатающих устройствах;
• выдачи информации в линию связи.
В состав аппаратуры МА-9МКТМ-4 входят:
• антенно-приемная система (АПС) Б529М;
• коммутационное устройство (КУ) ТУ640;
• универсальная радиотелеметрическая станция УРТС-2.
Антенно-приемная система Б529М предназначена для приема, выделения
и демодуляции радиосигналов телеметрической информации.
Коммутационное устройство»ТУ640 обеспечивает управление цепями
индикации режимов работы и выдачу групповых телеметрических
видеосигналов на входы каждой из двух систем УРТС-2 (рис. 3.57).
АИМ-сигнал,
кОК
Код адреса
(6р)
i
Устройство
ввода адреса
Рис. 3.57. Общая схема МА-9МКТМ-4
Чкэ1 Е
кэ
2 U-
Выходной
усилитель
КЭ
32 U-
I] СИ ТИ
тт i
Распределитель
импульсов
254
Глава 3. Средства телеметрии
Технические характеристики МА-9МКТМ-4
ПРА МА-9МКТМ-4 обеспечивает:
1. Работу с различными модификациями бортовой аппаратуры
радиотелеметрической системы РТС-9 аналогового и
цифрового типов (режим «РТС-9 ВИМ» и режимы «РТС-9КИМ-Ц»,
«РТС-9 КИМ-А») и радиотелеметрической системы «Трал»
(режим «Трал»).
2. Преобразование ГТС (независимо от режимов работы) к единой
адресной структуре сигналов.
3. Преобразование и регистрацию ТМИ при следующей
информативности:
• в режиме «РТС-9 ВИМ» - 25600,12800, 6400, 3200 изм/с;
• в режиме «РТС-9 КИМ-Ц - 500, 1000, 2000, 4000, 8000, 16000,
32000, 64000, 128000,512000 дв.ед./с;
• в режиме «РТС-9 КИМ-А» 1000, 8000, 32000, 256000 дв.ед/с.
4. Наведение антенны и сопровождение объекта по азимуту и углу
места в режимах ручного и программного наведения, а также в
режиме автоматического сопровождения.
5. Предельные углы наведения антенны в режиме
автосопровождения по углу места от 0° до 108° и по азимуту ± 270°.
6. Запоминание с последующим воспроизведением полного объема
принимаемой информации на магнитную ленту
7. Открытую графическую регистрацию части телеметрической
информации о сигнальных и функциональных параметрах на
электрохимическую бумагу.
8. Регистрацию информации в режиме телесигнализации в виде
табуляграммы с помощью цифропечатающего устройства.
9. Визуальное отображение части телеметрической информации
на экране блока визуального наблюдения.
10. Выдачу телеметрической информации в виде
частично-уплотненного сигнала по одному коаксиальному кабелю на расстояние до 2 км
на аналогичную аппаратуру, а также ввод информации в аппаратуру
обработки информации СТИ-90М и в аппаратуру сопряжения с
высокочастотным широкополосным „каналом связи (ВШК).
11. Контроль технического состояния аппаратуры и качества
принимаемой информации.
255
Современная телеметрия в теории и на практике
Назначение и состав системы У РТС-2
Станция УРТС-2 предназначена для преобразования, регистрации,
отображения и воспроизведения телеметрической информации, полученной по
видеочастоте с приемного устройства, объекта испытания или объекта управления.
В состав УРТС-2 входят следующие подсистемы, выделяемые по
конструктивному признаку:
а) аппаратура синхронизации и первичной регистрации (АСПР);
б) подсистема нормализации и графической регистрации (ПНГР);
в) подсистема цифровой регистрации (ПЦР);
г) аппаратура управления и контроля.
Рассмотрим состав и назначение подсистем УРТС-2.
АСПР включает в себя:
• устройство синхронизации и преобразования информации (стойка
ТУ621М);
• устройство магнитной регистрации (стойка 17С06 -17С07).
АСПР обеспечивает:
• выделение из ГТС синхросигналов и формирование искусственных
синхроимпульсов;
• выделение из ГТС измерительной информации и преобразование ее
для регистрации на магнитном запоминающем устройстве (МЗУ);
• Запись на МЗУ информации о параметрах бортовой аппаратуры
(БА), синхросигналов, сигналов времени, служебной телеметрии
(СТМ), командно-программной информации об условленных
режимах работы УРТС-2, а также легендной информации;
• воспроизведение с МЗУ перечисленных выше сигналов; выдачу
всего объема измерительной и служебной информации в аппаратуру
обработки (СТИ-90М) и трансляцию данных (ВШК).
ПНГР содержит:
• устройство нормализации (ТУ630М2);
• устройство графической регистрации (две стойки ГУ-1);
• сервисные устройства, обеспечивающие работу нормализатора;
• устройство подготовки программы;
• устройство ввода программ с перфоленты.
256
Глава 3. Средства телеметрии
Подсистема обеспечивает:
• дешифрацию информационной части псевдокадра (ПСК) для
адресных структур ГТС;
• приведение информации, поступающей в подсистему, в стандартную
адресную структуру, когда для каждого информационного слова ГТС
формируется определенный адрес;
• отбор из всего потока телеметрической информации той ее части,
которая предназначена для регистрации на ГУ;
• адресацию отобранной информации на заданные дорожки
выбранных лентопротяжных механизмов;
• регистрацию выбранной по программе телеизмерений
информации на ГУ.
ПЦР состоит из двух устройств:
• устройство подготовки информации для цифропечати ТУ633М;
• малогабаритное печатающее устройство МПУ-16-2.
Подсистема цифропечати обеспечивает:
• подготовку формата слов и печати в двоичном или десятичном коде
информации о бортовых событиях (БС);
• вывод на печать программ дешифрации ПСК и программ выбора
и адресации с целью контроля их правильности.
В состав аппаратуры управления и контроля входят:
• пульт дистанционного управления и контроля (ТУ627М);
• устройство формирования команд управления УРТС-2 (ТУ635-03М);
• устройство визуального наблюдения;
• устройство имитации ГТС (ТУ638).
Существует три способа управления системой:
• автономный;
• дистанционный;
• командно-программный.
Автономное управление и контроль осуществляются органами
управления, расположенными непосредственно на лицевых панелях стоек УРТС-2.
Дистанционное управление системой производится с блоков управления
и контроля, размещенных в пульте управления ТУ627М. На каждую
подсистему имеется свой блок управления и контроля.
9 Заж.861 257
Современная телеметрия в теории и на практике
Для командно-программного способа управления существует три вида
программ:
• программа дешифрации ПСК;
• программа выбора и адресации;
• программа управления режимами работы.
О первых двух видах программ речь уже шла выше. Последний вид
программы составляется оператором на основании исходных технологических
данных о КА и режимах работы наземной аппаратуры. Этот вид программы
состоит из команд управления, которые набираются с помощью штырьков
на наборном поле блока формирования комалд дистанционного управления.
Структурная схема УРТС-2
Структурную схему системы (рис. 3.58) рассмотрим с позиции
информационных процессов, протекающих в УРТС-2.
ФП
Чкэ1 Ц
-*|кэ2
АЦП
UK=6,2B
4^3t(
и„ = ов
Формирователь
служебных
сигналов
СП
Н КЭ64 fc±j
Нкэ1 Ь
си ти
Распределитель
импульсов
-Н КЭ2
Преобразователь
кода
1 Г
Дв. код Четв.
(Юр) код
(5р)
-Код "О"
-Код "Г
Н кэв4 bi=L
си ти
1_1
Распределитель
импульсов
Рис. 3.58. Структурная схема аппаратуры УРТС-2
С этой точки зрения выделим в схеме четыре тракта:
• синхронизации;
• преобразования информации;
258
Глава 3. Средства телеметрии
• формирования и преобразования информации о времени;
• формирования сигналов служебной телеметрии (СТМ), управления
и контроля.
В зависимости от структуры ГТС входной сигнал может иметь вид либо
последовательности импульсов с времяимпульсной модуляцией (для
структур сигналов ВИМ-9 или «Трал»), либо последовательного
потенциального кода информации (для структур сигналов КИМ-Ц, КИМ-А при работе
системы с собственной радиолинией), либо в виде импульсного кода нулей
и единиц при работе с объектом управления в процессе сборки и
испытаний (рис. 3.59).
1р
2р
18р
1р
1-й канал
СУ
Регистр
1р ... 16р
Пвр^к
2-й канал
2р|
18р
1р
2р
18р
СИ
СУ
3-й канал
СУ
Регистр
1р... 16р
17Р,
Регистр
1р... 16р
11вр " Уьл К\-А
Синхронизатор
«а
Преобразователь
кода
кОК
Преобразователь
кода
кОК
Преобразователь
кода
Преобразователь
кода
кОК
кОК
Рис. 3.59. Структура ГТС
Потенциальный код информации может поступать на вход системы как
в виде двоичного, так и бидвоичного кода.
В блоке ТУ621-М применена система точной фазовой автоподстройки
частоты внутреннего генератора символьных синхроимпульсов по
входному сигналу. Здесь же производится опознавание знаков символов
единиц или нулей интегральным способом. Устройство опознавания является
регенеративной схемой, восстанавливающей с определенной
достоверностью символы входного сигнала, искаженные шумами.
259
Современная телеметрия в теории и на практике
Тракт преобразования информации
Для структуры сигнала ВИМ-9 в тракте преобразования информации
(ТУ621М) происходит преобразование ГТС из аналоговой формы в
цифровую, которая удобна для последующей регистрации, обработки и ввода в ЭВМ.
Перекодирование осуществляется в преобразователе ВИМ - КИМ и
заключается в представлении временных интервалов между опорными и
измерительными импульсами параллельным 9-разрядным двоичным кодом,
отображающим число, пропорциональное величине телеметрируемого
параметра. Для преобразования информации используется широко
известный метод последовательного счета.
Для структуры сигнала КИМ-Ц последовательный код единиц с селектора
частоты символов поступает в устройство преобразования
последовательного кода в параллельный.
В структуре сигналов КИМ-А информационная часть поступает в
нормализатор для нарезки на смысловые слова.
Преобразованная информация с выхода ТУ621 поступает в аппаратуру
нормализации сигнала (ТУ630-М2), а также на устройства регистрации
(МЗУ, ГУ, МПУ) и отображения информации (блок визуального
наблюдения БВН ТУ626М).
В зависимости от структуры сигнала и информативности при регистрации
на МЗУ (стойка 17С06-17С07) применяют три режима записи:
1) истинными словами;
2) условными словами;
3) последовательным кодом с дублированием.
Запись информации истинными словами используется для структур
сигналов «ТРАЛ», ВИМ-9, КИМ-Ц, когда слова, несущие информацию о теле-
метрируемых параметрах, преобразованы в 9- или 10-разрядный
параллельный код и каждое слово сопровождается своим синхроимпульсом. Запись
на МЗУ в этом случае осуществляется параллельным кодом.
3.5.8. Приемно-регистрирующая аппаратура ПРА-МК
Назначение и технические характеристики ПРА-МК
Аппаратура ПРА-МК предназначена для работы в составе комплекса
средств «быстрой» телеметрии БРС-4МК (БРС-4, БРС-4М). Она обес-
260
Глава 3. Средства телеметрии
печивает прием, преобразование, регистрацию и выдачу на обработку
измерительной информации от различных модификаций бортовой
телеметрической аппаратуры системы БРС-4М «Кварц», «Сириус», «Скут»,
ИС-1162.
1. Диапазон частот принимаемых волн:
• метровый (три поддиапазона MI-M3, фиксированные частоты
настройки);
• дециметровый (два поддиапазона Д1, Д2, фиксированные
частоты настройки, перенос частоты дециметрового диапазона
в метровый осуществляется в антенном комплексе).
2. Максимальная информативность при приеме сигнала по
радиоканалу или по видеоканалу (с использованием аппаратуры
ретрансляции видеосигналов):
• от одного устройства «Кварц» («Скут») - 1280 кБит/с
(кодовая структура кадра) и 1280 кИзм/с (многопозиционная
структура кадра);
• от двух бортовых устройств «Сириус» - 2 х 640 кБит/с
(кодовая структура кадра) и 2 х 640 кИзм/с (многопозиционная
структура кадра);
• от одного бортового устройства «Сириус» - 640 кБит/с
(кодовая структура кадра) и 640 кИзм/с (многопозиционная
структура кадра).
3. Аппаратура ПРА-МК обеспечивает:
• выдачу принимаемой информации в темпе приема на
аппаратуру оперативного представления информации в аналоговом
или цифровом виде в структуре условного кадра;
• выдачу измерительной информации в темпе приема и при
воспроизведении в цифровом виде в аппаратуру обработки и
отображения Спектр-А2, Спектр-АО, Спектр-В1, ВЛ-АОВИ-06
и аппаратуру средств обработки и передачи данных ВЛ-1033;
• формирование и регистрацию дополнительной легендной
информации (признак легендного слова, год, месяц, число, часы и
минуты сеанса связи, код аппаратуры ПРА-МК, код
программной работы, код изделия, код территории) и легендной
стартовой информации (признак «Старта», год, месяц, число, час,
минута, секунда, миллисекунда старта);
261
Современная телеметрия в теории и на практике
• сбор, формирование и регистрацию вспомогательной
информации, характеризующие качество принимаемой информации,
углы поворота антенн, номера несущих частот, режима работы,
качество функционирования отдельных устройств.
4. Время вхождения в режим синхронизации и регистрации
информации после появления сигнала, переключения на прием сигнала
другой частоты или переключения потоков информации не
превышает 0,35 с. Ускоренное вхождение в синхронизм при
отсутствии помех в канале связи не превышает длительности одного
цикла опроса локального цифрового коммутатора.
5. Величина шумов и взаимовлияний между любыми каналами кадра
основного коммутатора бортового устройства «Сириус» в
аппаратуре ПРА-МК не более 5% от полной шкалы.
6. Нелинейность амплитудной характеристики любого
измерительного канала аппаратуры не более 5%.
7. Максимальное время регистрации потока информации бортового
устройства «Кварц» на единый магнитный носитель - 1400 с.
8. Регистрация информации при скорости записи:
• 3048 мм/с для регистрации в структуре С4 информации
бортового устройства «Сириус» с многопозиционной и
комбинированной структурой кадра;
• 1524 мм/с для регистрации в структуре С1 информации
бортового устройства «Кварц»;
• 1524 мм/с для регистрации в структуре С2 информации двух
бортовых устройств «Сириус» с кодовой комбинацией;
• 762 мм/с для регистрации в структуре СЗ информации
бортового устройства «Сириус» с кодовой информацией.
9. Максимальная суммарная полезная информативность
регистрируемых потоков 3200000 бит/с при скорости движения ленты
3048 мм/с и, соответственно, в 2П раз ниже при других скоростях.
Особенности обработки информации
Передача информации от одного бортового устройства «Кварц» или двух
бортовых устройств «Сириус» осуществляется потоками А и Б:
информация потока А передается на одной несущей частоте и преобразуется в тракте:
блок антенных усилителей - аппаратура коммутации трактов - устройство
262
Глава 3. Средства телеметрии
фильтров и гетеродинов - устройство демодуляции сигналов - устройство
преобразования и формирования - устройство преобразования сигналов -
устройство преобразования информации ~ устройство преобразования
сигналов; информация потока Б - на другой несущей частоте и преобразуется в
тракте: блок антенных усилителей - аппаратура коммутации трактов -
устройство фильтров и гетеродинов - устройство демодуляции сигналов -
устройство преобразования и формирования - устройство преобразования
сигналов - устройство преобразования информации ~ устройство преобразования
сигналов. Передача информации от одного бортового устройства «Сириус»
ведется одним потоком и преобразуется в одном из вышеприведенных трактов.
Синхросигналы и видеокод выбранного ствола устройства демодуляции
сигналов подаются на вход устройства преобразования и формирования,
которое производит:
• стабилизацию информационного видеокода при изменении его
уровня на 40% от нормального значения на входе до 3% - на выходе
устройства преобразования и формирования и выдачу его в аппаратуру
оперативного представления информации;
• преобразование измерительного видеокода в параллельный
8-разрядный двоичный код, называемый основной информацией;
• преобразование сигналов времени, легендной информации и
вспомогательной информации для регистрации на магнитную ленту на
место старшего разряда 40-го канала ОК.
8-разрядный параллельный код основной информации в сопровождении
синхроимпульсов и последовательный код служебной ТМИ поступают
из устройства преобразования и формирования на вход устройства
преобразования сигналов.
В состав аппаратуры ПРА-МК входит устройство контроля и управления,
которое предназначено для централизованного дистанционного контроля
и управления режимами работы аппаратуры ПРА-МК и подключения к ней
входов аппаратуры коммутации трактов. Устройство контроля и
управления обеспечивает:
• формирование и выдачу в магистраль управления кодовых команд
управления устройствами аппаратуры ПРА-МК по восьми
программам работы;
• выдачу команд управления входами четырех комплектов аппаратуры
коммутации трактов по восьми программам работы;
• отображение на экранах видеоконтрольных устройств информации
о режимах работы и состоянии устройств аппаратуры ПРА-МК;
263
Современная телеметрия в теории и на практике
• формирование тестовых сигналов видеокода для проверки работы
аппаратуры;
• отображение на осциллографе и видеоконтрольных устройствах
тестовой и измерительной информации в структуре основного, одного
кодового или двух аналоговых локальных коммутаторов.
Управление работой аппаратуры ПРА-МК с УКУ осуществляется
четырьмя способами:
• вручную с помощью органов управления, размещенных на панелях
оперативного управления и контроля аппаратуры;
• по предварительно набранным на панелях программного управления
программам работы с ручным выбором одной из восьми программ;
• по предварительно набранным программам работы с ручным
выбором и с программно-временным управлением протяжкой цифрового
устройства регистрации от устройства сигналов времени (временное
управление);
• через внешнее управление включением ПРА, выбором
предварительно набранной программы работы и протяжкой цифрового
устройства управления (внешнее управление).
Антенные системы аппаратуры ПРА-МК
Станция БРС-4МК способна принимать сигналы с антенных систем
«Жемчуг», «Изумруд». Для обеспечения приема телеметрической информации
при протяженностях радиолиний связи, превышающих 3000 и более км,
станция может работать с антенной системой Б-529 («Ромашка»),
применяемой в приемно-регистрирующей аппаратуре МА-9МКТМ4
радиотелеметрической системы РТС-9. Антенные системы «Жемчуг» и «Изумруд»
аналогичны по построению и отличаются количеством ячеек в антенной решетке.
Поверхность антенны «Жемчуг» состоит из 7-ми больших шестигранных
ячеек, вертикальные плоскости которых образуют своего рода волновод, в
центре которого расположен симметричный крестообразный вибратор
метрового диапазона волн. Крестообразный вибратор обеспечивает прием волн
с вертикальной и горизонтальной поляризацией.
В каждой из больших шестигранных ячеек установлена 21 малая
элементарная ячейка, схожая по форме и построению с большой ячейкой. В
каждой из элементарных ячеек расположен симметричный крестообразный
вибратор, обеспечивающий прием волн дециметрового диапазона с
вертикальной и горизонтальной поляризацией.
264
Глава 3. Средства телеметрии
Формирование острой (4°-5° в дециметровом диапазоне и 15°-18° в
метровом диапазоне) и широкой (10°-15° в дециметровом и 50°-70° в метровом
диапазонах) диаграммы направленности осуществляется подключением
всей антенной решетки либо ее центральной ячейки.
Поверхность антенны «Изумруд» состоит из 49-ти больших шестигранных
ячеек, обеспечивающих прием волн метрового диапазона с вертикальной и
горизонтальной поляризацией. Диаграмма направленности антенны - 5,5°-10°.
Существенной особенностью системы БРС-4М является то, что в случае
комплектации ее наземной приемно-регистрирующей аппаратурой типа
ПРА-МК она может одновременно работать с 8-ю бортовыми системами.
Распределение поступающих потоков информации с выхода блоков
антенных усилителей осуществляется с помощью аппаратуры коммутации
трактов. Данная аппаратура распределяет потоки по полукомплектам
аппаратуры ПРА-МК, по стволам полукомплектов аппаратуры приема и
демодуляции, по ветвям стволов аппаратуры приема и демодуляции (сигналы
горизонтальной или вертикальной поляризации).
Тракт прохождения сигналов в аппаратуре ПРА-МК
Структурная схема аппаратуры ПРА-МК представлена на рис.3.70.
Совокупность устройств фильтров и гетеродинов (УФГ) и устройств демодуляции
сигналов (УДС), осуществляющих прием и преобразование высокочастотных
сигналов в видеосигналы, образует АПД. Совокупность устройств
преобразования и формирования (УПФ), устройства преобразования сигналов (УПС),
осуществляющих преобразование полученных видеосигналов в структуры,
необходимые лля регистрации и выдачи потребителям, образует аппаратуру
преобразования сигналов (АПС). В радиолинии БРС-4МК ввиду нестабильности
положения объекта в пространстве и условий распространения волн различных
частот излученные бортовой аппаратурой сигналы принимаются в
вертикальной и горизонтальной плоскостях поляризации. Тракт приема и преобразования
сигналов одной частоты (потока) в АПД называется стволом, а тракт приема
сигналов одной частоты, различающихся по поляризации, называется ветвью.
Передача информации от одного бортового устройства «Кварц» или двух
бортовых устройств «Сириус» осуществляется потоками А и Б:
информация потока А передается на одной несущей частоте и преобразуется в тракте
БАУ - АКТ - УФГ-1 - УДС-1 - УПФ-1 - УПС - УПИ-1 - УПС, информация
потока Б - на другой несущей частоте и преобразуется в тракте БАУ - АКТ -
УФГ-2 - УДС-2 - УПФ-2 - УПС - УПИ-2 - УПС. Передача информации
от одного бортового устройства «Сириус» ведется одним потоком и
преобразуется в одном из вышеприведенных трактов.
265
Современная телеметрия в теории и на практике
АПД производит фильтрацию принятого радиосигнала, его усиление,
демодуляцию, формирование тактовых и кадровых синхросигналов, а также
автокомбинирование видеосигнала - сравнение и выбор лучшей из двух
ветвей поляризации.
Синхросигналы и видеокод выбранного ствола УД С подаются на вход У ПФ.
УПФ производит: стабилизацию информационного видеокода при
изменении его уровня на 40% от нормального значения на входе до 3% - на выходе
УПФ и выдачу его в аппаратуру АОПИ; преобразование измерительного
видеокода в параллельный 8-разрядный двоичный код; преобразование
сигналов времени, легендной информации и вспомогательной информации
для регистрации на магнитную ленту.
УФГ предназначено для фильтрации радиосигналов по четырем каналам на
фиксированных частотах, преобразованных в диапазонах метровых волн (в
т. ч. на частотах, преобразованных из диапазона дециметровых волн),
одновременной выдачи двух напряжений соответствующих гетеродинных
частот и выбора частоты работы станции.
АОПИ - аппаратура оперативного представления информации; УУК -
устройство управления и контроля; СИ - синхроимпульсы; УРК - устройство
распределения команд; ВК - видеокод; УПК - устройство переключения
команд; ВИ - временная информация; АРВ - аппаратура ретрансляции;
ОВ - оцифровка времени;
Изумруд
ВИ
ЛОПИ,
АРВ АРВ ^
А+Б
БАУ
М1.2.3
АКТ
1.2
УФГ
№1
| УКП-М I"
АКТ
3,4
УДС
№1
ВИ,
ВК,
Ц
СИ
УПФ
№1
" О
ОВ.ВИ, ▲ I
сиди -L±.
Цепь
управления
и контроля
УФГ
№2
А+Б
УДС
№2
УПФ
№2
ВИ
*Т
АРВ
ОИ
ОВ.ВИ,
сиди
воспроизв.
УРЦ
УПС
СИ.ВИ,
ОВ
УК.ПК
ОИ
Жемчуг
ЛОПИ,
АРВ
УКУ
Рис. 3.60. Структурная схема аппаратуры ПРА-МК4
266
Глава 3. Средства телеметрии
Фильтрация радиосигналов по двум каналам и выдача напряжения одной
из гетеродинных частот обеспечивается отдельным стволом. УФГ имеет два
идентичных ствола.
УДС предназначено для бесподстроечного приема и преобразования
радиосигналов БРС-4М в видеосигналы: измерительный видеокод и сигналы
тактовой и кадровой синхронизации.
УПС предназначено для восстановления непрерывности входных
информационных потоков, их коммутации, формирования структур
регистрации на УРЦ.
УПИ предназначено для преобразования информации в структуры,
требуемые для ввода в систему «Спектр-Б1». УПИ обеспечивает: ввод
информации от аппаратуры ПРА-МК; обработку информации; ввод
информации с цифровой линии связи; преобразование вводимой информации
в структуры, необходимые для ввода в систему «Спектр-Б1»; визуальное
наблюдение выходных структур преобразования информации.
Устройство регистрации цифровое (УРЦ) предназначено для записи,
воспроизведения и перезаписи цифровой информации. Оно обеспечивает
регистрацию и воспроизведение: двух синхронных информационных потоков
с асинхронными служебными каналами (такой режим работы используется
в аппаратуре ПРА-МК); двух синфазных информационных потоков с
асинхронными служебными каналами. Каждый из регистрируемых потоков
включает в себя ОИ (разряды 1-8), символ четности, служебные каналы
(разряды 9,10) и импульсы синхронизации. Запись речевого комментария
производится по 24-й дорожке МЛ.
Устройство контроля и управления (УКУ) предназначено для
централизованного дистанционного контроля и управления режимами работы
аппаратуры ПРА-МК и подключения к ней входов аппаратуры АКТ. УКУ
обеспечивает: формирование и выдачу в магистраль управления кодовых команд
управления устройствами аппаратуры ПРА-МК по восьми программам
работы; выдачу команд управления входами четырех комплектов аппаратуры
АКТ и УФГ по восьми программам работы; отображение на экранах ВКУ
информации о режимах работы и состоянии устройств аппаратуры ПРА-МК;
формирование тестовых сигналов видеокода для проверки работы
аппаратуры; отображение на осциллографе и видеоконтрольных устройствах
тестовой и измерительной информации в структуре основного, одного кодового
или двух аналоговых локальных коммутаторов.
267
Современная телеметрия в теории и на практике
ЛИТЕРАТУРА К РАЗДЕЛУ 3
1. Аш Ж., Андре П., Бофрон Ж. Датчики измерительных систем. - М.: Мир,
1992 г.
2. Багдатоев Е. Е., Ефимова А. А., Иванова Н. И. Датчиковая аппаратура для
телеизмерений - М.: МОСССР, 1970-1971 гг.
3. Борисов Ю. П., Пенин П. И., Основы многоканальной передачи
информации. - М.: Связь, 1967 г.
4. Гомон Ю. Б. Теоретические основы идентификации измерительных
систем при неизвестных входных сигналах. - Л.; МОСССР, 1983 г.
5. Кошевой Л. А. Телеметрические комплексы летательных аппаратов - М.:
Машиностроение, 1975 г.
6. Николе М. X., Раух Л. Л. Радиотелеметрия - М.: ИИЛ, 1958 г.
7. Сафаров Р. Т., Буга Н. Н., Зверев Р. И., Шитов И. В. Радиотелеметрия
части I и II, - Л.: МОСССР, 1973 г.
8. Свириденко С. С. Основы синхронизации при приеме дискретных
сигналов. - М.: Связь, 1974 г.
9. Белицкий В. И. и др. Телеметрия - Л.: МОСССР, 1984 г.
10. Тепляков И. М. Радиотелеметрия - М.: Советское радио, 1966 г.
Глава 4.
Обработка и анализ
телеметрической информации
4. ОБРАБОТКА И АНАЛИЗ
ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ
4.1. ОБЩИЕ СВЕДЕНИЯ
4.1.1. Задачи и этапы обработки телеметрической информации
Определения
Извлечение информации из телеметрических данных, математическое
преобразование, анализ и представление результатов за минимальное
время, обеспечивающее своевременное использование их в процессе
управления телеметрируемым объектом, - первая цель
автоматизированной обработки телеметрической информации ТМИ [1]. Второй, не менее
важной, целью автоматизированной обработки является определение
частных и обобщенных характеристик систем телеметрируемого объекта, их
каталогизация, хранение и своевременная выдача потребителям.
Общая задача обработки ТМИ формулируется следующим образом: дана
совокупность измерений за некоторый период наблюдения, требуется
определить вектор-функцию параметров состояния, вектор обобщенных
характеристик и оценить точность полученных результатов.
Основные задачи обработки телеметрической информации
Основными задачами обработки телеметрической информации являются:
1. Выбор необходимых параметров, интервалов времени для
обработки и оценка качества измерений, согласование потоков
270
Глава 4. Обработка и анализ телеметрической информации
данных и оценка параметров по косвенным измерениям.
Данный этап осуществляется в соответствии с заданием на обработку,
учитывающим интересы потребителя результатов обработки и
возможность решения последующих задач [1].
2. Повышение достоверности телеметрических данных. Задача
решается путем отбраковки аномальных измерений, сильно
искаженных помехами, сглаживания, усреднения измеренных параметров,
и учета состояния каналов измерения, и передачи данных [1].
3. Уменьшение избыточности телеметрических данных.
Осуществляется рациональным отбором параметров, необходимых для
решения поставленной задачи, целесообразным уменьшением
количества отсчетов выбранных параметров и представлением их
на нужном интервале времени минимальным количеством
данных без существенного снижения информационного содержания.
Повышение достоверности и уменьшение избыточности решаются
в ряде случаев совместно. Так, рационально организованное
сглаживание в известной степени решает обе эти задачи. Если первые
три задачи, рассмотренные выше, могут решаться в первичной
форме телеметрических данных, то в дальнейшем необходимо
иметь значения параметров в физических единицах, знать точно
моменты времени, в которые выполнены измерения.
4. Дешифровка выбранных данных, определение оценок
измеряемых параметров в физических единицах и их представление.
Дешифровка выбранных данных предусматривает вычисление
оценок измеренных значений параметров, привязку их к заданному
времени и представление результатов в заданной форме.
Результаты дешифровки могут быть напечатаны на бумаге, фотопленке,
или изображены на экранах мониторов в виде таблиц и графиков,
или записаны на магнитные носители в цифровых кодах в
зависимости от содержания и методов решения следующих задач.
5. Определение параметров состояния и оценка работоспособности
систем. Заключается в определении вектора состояния телемет-
рируемого объекта по косвенным измерениям. Если измеряемые
параметры выбраны удачно и обеспечены соответствующими
измерительными преобразователями, то задача состоит в
непосредственном измерении телеметрируемых параметров (ТМП) (прямые
измерения).
6. Определение обобщенных характеристик систем и объекта в
целом. Найденные оценки обобщенных характеристик определяют
271
Современная телеметрия в теории и на практике
качество телеметрируемого объекта как технического устройства,
системы, и т. д. Их значения сравнивают с требуемыми
(заданными) и вырабатывают меры по приближению первых ко вторым,
то есть меры по технической доработке объекта и его систем.
Поэтому представление результатов обработки и их анализ наряду с
выработкой элементов решения по управлению объектом или на
техническую его доработку являются важными задачами обработки
информации.
7. Представление и анализ результатов обработки.
8. Выработка элементов решения.
Как следует из перечня задач, которые необходимо решать для перехода от
телеметрических данных к результатам обработки, в процессе этого
перехода четко различаются два этапа: начальный и последующий.
Соответственно, этим этапам можно сопоставить первичную и вторичную обработку
телеметрических данных.
4.1.2. Назначение и задачи первичной обработки
телеметрической информации
Для того, чтобы обеспечить анализ телеметрической информации,
необходимо подготовить соответствующим образом данные о телеметрируемом
объекте (собрать данные, передать в место анализа, преобразовать к
нужному виду и т. д.). Очевидно, что содержание операций по подготовке
данных определяется содержанием анализа и исходным видом
анализируемых данных.
Первичной обработкой ТМИ называется процесс уточнения оценок теле-
метрируемых параметров, масштабирования и приведения их к виду,
удобному для дальнейшего использования.
Таким образом, первичная обработка выступает в качестве
промежуточного (согласующего) звена между источниками информации и системой
анализа (человеком или компьютером). Поэтому цель обработки, состав задач
и способы их решения определяются видом анализа и структурой
исходных данных ТМИ.
Поскольку количество информации, необходимой для анализа ТМИ,
достигает десятков и сотен мегабайт, объем вычислений при обработке
оказывается очень большим. Поэтому в обработке ТМИ широко
используются вычислительные машины самого различного вида (начиная со
специализированных микропроцессоров и заканчивая большими
универсальными рабочими станциями и вычислительными кластерами).
272
Глава 4. Обработка и анализ телеметрической информации
Этапы обработки ТМИ
Несмотря на многообразие задач анализа, при обработке ТМИ всегда
присутствуют следующие этапы [2].
1. Оценка параметров по косвенным измерениям. В ряде случаев
по технологическим соображениям измеряются не те параметры,
которые нужны для анализа. При этом, однако, измеряемые
величины несут необходимую информацию (случай так называемых
косвенных измерений). Например, в процессе анализа важно
определить число срабатываний некоторого сигнального датчика, в то
время как контролируются сами срабатывания. Другим
примером косвенных измерений является контроль значений параметра
во времени, на основе которого рассчитываются спектральные
характеристики процесса вибраций. При этом возникает потребность
по измеряемым величинам восстановить недостающие параметры,
необходимые для анализа.
2. Согласование потоков данных. Чтобы проанализировать данные,
их необходимо представить в виде, удобном для получателя
(человека или ЭВМ). Для этого необходимо согласовать поток
данных с пропускной способностью анализирующей системы. Кроме
того, необходимо, чтобы форматы данных ТМИ были наиболее
удобны для анализа, с тем чтобы обеспечить его максимальную
оперативность. Задача согласования существенно зависит от
расположения анализирующей системы относительно места
измерений и используемых структур данных. Так, например, если задача
оперативного анализа решается на борту телеметрируемого
объекта, а задача исследований - в наземном центреуправления, то
для решения задачи исследований дополнительно к согласованию
потока измерений с бортовыми информационными магистралями
необходимо обеспечить согласование с радиоканалом, наземной
вычислительной машиной в месте приема, сетью передачи данных
и вычислительной машиной наземного центра управления.
3. Повышение достоверности данных ТМИ. На правильность
результатов любого вида анализа оказывает существенное влияние
достоверность анализируемых данных. Так, для рассмотренного
в предыдущей главе метода последовательного анализа
недостоверное значение измерения может привести к тому, что анализ
пойдет по ветви, которая приведет к неправильному результату.
Уровень требований к достоверности исходной информации
возрастает при переходе от задачи оперативного анализа ТМИ к
диагностической задаче, а от последней - к задаче исследования.
273
Современная телеметрия в теории и на практике
Причинами появления недостоверных данных является неточное
преобразование физических процессов в электрические сигналы,
воздействие помех при передаче информации и методические
погрешности самой телеметрической системы.
Последовательность операторов первичной обработки ТМИ
Схема обобщенного алгоритма системы первичной обработки, поясняющая
ее место и взаимосвязь различных операторов обработки ТМИ, изображена
на рис. 4.1.
Оператор повышения точности датчиков обеспечивает учет «вредных
влияний» и уменьшение динамической погрешности датчика. Кодирующий
оператор перекодирует данные ТМИ помехоустойчивым кодом, после чего
они перерабатываются оператором согласования с каналом связи, который
согласует данные по структуре и скорости поступления.
На выходе канала связи осуществляется декодирование данных и
повышение их достоверности с помощью рассмотренных методов, после чего
осуществляется пересчет параметров с учетом колебаний шкалы. Затем данные
согласуются с системой анализа, причем если в качестве анализатора
выступает человек, то производится масштабирование значений параметров
с помощью тарировочных таблиц.
Показанное на рисунке последовательное взаимодействие операторов
обработки не является единственно возможным [2]. В зависимости от
решаемых задач и имеющихся в распоряжении ресурсов некоторые задачи могут
Датчик
Оператор
повышения
точности
датчиков
Кодирующий
оператор
Оператор
согласования
с каналом
связи
Физический
сигнал
Помеха
Оператор
получения
вторичных
параметров
Оператор
калибровки
Оператор
повышения
достоверности
Декодирующий
оператор
Оператор согласования
с системой анализа
Человек
ЭВМ
Рис. 4.1. Схема первичной обработки ТМИ
274
Глава 4. Обработка и анализ телеметрической информации
решаться раньше или позже (например, повышение точности датчиков
может происходить одновременно с получением вторичных параметров).
Кроме того, может появиться необходимость в решении новых задач, а
некоторые из рассмотренных могут быть опущены.
Часто встречающимся вариантом обработки является ручная дешифровка
результатов телеизмерений. Исходными данными для дешифровки
являются: программа телеизмерений, тарировочные характеристики датчиков
(иногда калибровочная характеристика системы сбора и передачи
информации) и материалы регистрации результатов телеконтроля на различных
носителях.
В процессе дешифровки определяют качество регистрации информации
(при наличии нескольких экземпляров регистрации выбирают наилучший)
и выделяют существенные для потребителя участки изменения параметров.
После этого выделяют сигналы калибровки и отмечают уровни 0 и 100%
(иногда и 50%).
Первичная обработка проводится в объеме перечисленных задач как при
обработке оперативной информации, так и при полной обработке.
Разница заключается в целях, качестве и методах проведения обработки.
При проведении первичной обработки в рамках полной обработки
необходимо добиваться более полного и компактного представления телемет-
рируемых процессов для последующего вычисления по ним обобщенных
характеристик систем. Менее жесткие требования к минимизации
времени полной обработки (по сравнению с оперативной) позволяют проводить
первичную обработку в этом случае по более оптимальным и в смысле
точности и надежности алгоритмам.
Точность обработки здесь играет первостепенную роль, так как
полученные временные функции измеряемых параметров и параметров состояния
могут в дальнейшем подвергаться, например, операциям
дифференцирования, что может вызвать ухудшение результатов при недостаточном качестве
указанных зависимостей.
4.1.3. Назначение и задачи вторичной обработки
телеметрической информации
Место вторичной обработки в системе управления объектом
Вторичной обработкой или анализом телеметрической информации
называется часть обработки ТМИ, связанная с формированием данных, необходимых
275
Современная телеметрия в теории и на практике
оператору или системе для принятия решения. Принятие решения
осуществляется при управлении объектами, поиске неисправностей и при
исследованиях систем (рис. 4.2).
Назначение анализа определяет его виды, задачи, принципы построения
систем и необходимые объемы ТМИ.
1
. i ,
Телеметри-
руемый
объект
к—
3
ТМИ
тми
Управляющее
воздействие,
апрос на поиск
неисправности
Запр
на ана;
W
L -- - w
■ ■ w
тми
1— __ _..... ^
Принятие
решений
>ос 1 1 Со
1ИЗ 1 1 Об
Г Оценка
состояния
Локализация
отказа
Исследование
Цепь
, управления
т —
Коррекция
^ модели
стояние
ьекта
гм
Ремонт
■ имя ——■—^——
отказавшего элемента
► Результаты
идентификации
системы
Рис. 4.2. Схема принятия решений по управлению объектом
В соответствии с назначением различают три вида анализа ТМИ: анализ
состояния объекта, локализация неисправностей и исследование поведения
телеметрируемого объекта.
Анализ состояния объекта как решение задач технического
диагностирования
Обнаружить изменения технического состояния объекта можно только с
помощью контроля. Так как все сведения о техническом состоянии объекта
необходимо получить в реальном масштабе времени, то речь идет об
оперативном контроле.
Операции контроля производятся радиотелеметрическими системами
(РТС) и комплексами обработки поступающей с них информации.
Совокупность РТС и комплекса обработки, взаимодействующих с объектом
контроля по определенным алгоритмам с частичным непосредственным
участием человека, представляет собой автоматизированную систему контроля.
Под автоматизированным контролем понимается оценка технического
состояния объекта (системы) с целью определения правильности отработки
276
Глава'4. Обработка и анализ телеметрической информации
временных программ работы систем и выполнения передаваемых команд
управления. Автоматизированный контроль включает операции приема
и обработки телеизмерений, получение информации о состоянии
параметров, по результатам которых принимается решение о состоянии системы
или выдается управляющее воздействие.
В процессе эксплуатации объект должен выполнять свои функции в
соответствии с целевым назначением. Для этого необходимо последовательно
управлять аппаратурой объекта для перевода его в заданные состояния.
Для управления исправным объектом необходимо с помощью средств и
методов идентификации получить модель его поведения. По этой модели,
зная состояние на данный момент времени и целевое состояние, можно
определять последовательность управляющих воздействий, реализация
которой обеспечивает достижение целевого состояния. Такую модель
управления объектом называют моделью управления, а задачу определения
последовательности управляющих воздействий - задачей управления.
Чтобы правильно осуществлять оперативное управление объектом,
необходимо на каждом шаге управления проверять правильность изменения
состояния. Для этого надо определять текущее состояние и сравнивать его
с предсказанным по модели управления состоянием. В результате такого
сравнения решается (положительно или отрицательно) задача оценки
правильности функционирования объекта в текущий момент времени. Таким
образом, анализ текущего состояния объекта позволяет производить оценку
правильности его функционирования (при наличии модели управления).
Если текущее состояние не совпадает с ожидаемым (объект функционирует
неправильно), то это свидетельствует о возникновении неисправности.
Контроль функционирования характеризует поведение объекта в данном
состоянии в текущий момент времени и заключается в проверке
выполнения объектом своих функций без их количественной оценки. Он является
простейшей формой контроля.
Оценка функционирования производится по принципу «да - нет». Как
правило, для проведения такого контроля используются показания сигнальных
и диапазонных преобразователей. Используя проверку функционирования,
можно получать более общие заключения о поведении объекта. По степени
общности различают контроль работоспособности объекта и контроль
исправности объекта.
Контроль работоспособности - это допусковый или количественный
контроль параметров с целью определения работоспособности системы:
пригодна ли она для выполнения своих функций. В данном виде контроля
используются результаты измерений параметров, характеризующих работу
277
Современная телеметрия в теории и на практике
системы. Оценка работоспособности производится по принципу «годен-
не годен», «меньше-норма-больше» с регистрацией абсолютных
(относительных) величин параметров или их отклонения от номинальных значений.
Принцип «годен-не годен» означает работоспособность и
неработоспособность системы, а принцип «меньше-норма-больше» указывает на
состояние параметров: находятся ли они в пределах номинальных значений, или
меньше их, или больше их.
Результат проверки на работоспособность зависит от тех целей, которые
ставятся при управлении аппаратурой объекта. Для того, чтобы проверить
работоспособность системы, необходимо проверить правильность ее
функционирования во всех состояниях, которые проходит система при
достижении целевых состояний, а также во всех целевых состояниях. Таким
образом, многократное решение задачи оценки состояния объекта совместно
с моделью управления (проверка функционирования) позволяет оценить
работоспособность объекта.
Контроль исправности объекта заключается в проверке нормального
функционирования объекта во всех возможных состояниях. Таким образом,
проверка правильности функционирования в каждом состоянии позволяет
оценить исправность объекта. Рассмотрим бортовую
информационно-телеметрическую систему (БИТС), которая состоит из нерезервированной
системы сбора, двух комплектов регистраторов и двух передающих
устройств.
Пусть БИТС находится в выключенном состоянии. Если это состояние
должно быть по плану работ, то БИТС функционирует правильно (при этом
все устройства БИТС могут быть неисправны). Если под целевыми
состояниями понимаются режим записи на регистратор и передача ТМИ, то БИТС
будет работоспособна, если даже один комплект регистратора и один
комплект передатчика будут неисправны. Для исправности БИТС необходимо,
чтобы все комплекты и устройства были исправны. Таким образом, решение
задачи оценки состояния совместно с моделью управления позволяет
контролировать правильность функционирования, работоспособность и
исправность систем объекта.
Определение технического состояния, в котором находился объект в
некоторый момент времени в прошлом, называется задачей генеза, а
соответствующая отрасль знаний - технической генетикой.
Задачи технической генетики возникают, например, в связи с расследованием
аварий и их причин, когда техническое состояние объекта в
рассматриваемое время отличается от состояния, в котором он был в прошлом - в
результате появления первопричины, вызвавшей аварию. Эти задачи решаются
278
Глава 4. Обработка и анализ телеметрической информации
путем определения возможных или вероятных предыстории, ведущих в
настоящее состояние объекта. Типичное средство реализации задач данного
типа - автономные регистраторы, осуществляющие запись ТМИ за
некоторый предшествующий период времени.
При работоспособной системе необходимо знать ее поведение в будущем.
Ответ на этот вопрос дает прогнозирующий контроль. Он проводится по
результатам измерений параметров. Полученные данные контроля
используются для планирования дальнейшей работы системы.
Локализация неисправностей методами технической диагностики
Если в процессе контроля правильности функционирования объекта
произошло расхождение между ожидаемым и действительным состоянием,
то это свидетельствует о возникновении неисправности и необходимости
ее локализации. Локализация неисправности может преследовать
различные цели. Например, в тех случаях, когда ремонт возможен, целью
локализации является указание отказавшего устройства для его замены или
восстановления.
При невозможности устранения неисправности (неремонтируемые
объекты) целью локализации является коррекция модели управления.
Например, обнаружение неисправного устройства и переход на исправный
комплект связан с коррекцией модели в том смысле, что после локализации
неисправности запрещаются состояния объекта, в которых работает
неисправный комплект, а также управляющие воздействия, которые переводят
объект в эти состояния. В некоторых случаях результатом локализации
отказа считают имя физического процесса, приведшего к возникновению
неисправности, и наименования параметров с аномальным поведением.
Локализация неисправности может иметь различную глубину. В частности,
уровень детализации отказа при управлении объектом часто определяется
интересами самого управления. Это, например, уровень резервируемых
устройств, которые можно подключить с помощью управляющих воздействий
вместо неисправных. При этом нет необходимости проводить более
глубокую детализацию, поскольку она не дает дополнительной информации для
коррекции модели управления.
В противоположность вышесказанному при испытаниях объекта
стараются произвести более глубокую локализацию, поскольку это необходимо
для качественной доработки технических устройств объекта и
восстановления его работоспособности. По составу локализуемых отказов
различают системы упрощенного и полного диагностирования. Смысл такого
разделения заключается в следующем.
279
Современная телеметрия в теории и на практике
Локализация отказов осуществляется по данным телеконтроля. Поскольку
различным отказам объекта соответствуют различные последовательности
значений параметров (в противном случае отказы были бы неразличимы),
система локализации отказов представляет собой систему классификации,
которая сопоставляет последовательностям значений телеметрических
параметров имена классов (имена отказавших элементов), соответствующих
этим значениям.
Система классификации, которая решает эту задачу, реализует полную
систему диагностирования. Сложность построения системы полного
диагностирования заключается в том, что число возможных отказов очень велико и
заранее не фиксировано. Другими словами, обычно трудно предположить
возможность тех или иных отказов (тем более их перечислить). Выходом из
этой ситуации является использование дополнительных априорных данных
о структуре диагностируемых устройств и принципах их функционирования.
Применение информации о структуре позволяет создавать так называемые
неявные модели диагностирования, которые по мере надобности способны
самостоятельно формировать классы телеметрических образов и присваивать
им имена отказавших устройств. Однако формирование структурных данных
об объекте — задача чрезвычайно сложная. Достаточно сказать, что
формирование этих данных даже для такой сверхуниверсальной системы, как человек,
занимает годы обучения (фактически обучение в вузе сводится к
формированию структурных данных для конкретной предметной области).
В настоящее время существует ряд подходов к решению этой проблемы,
однако все они являются слишком громоздкими, и их область применения
ограничивается довольноузкимиклассамиотказов. Поэтому в
автоматизированных системах, как правило, реализуется упрощенное диагностирование.
Принцип упрощенного диагностирования заключается в классификации
отказов для чаще всего встречающихся типовых неисправностей
объекта. При таком подходе фиксируется небольшое число классов отказов,
в силу чего оказывается возможным синтез автоматизированной системы
диагностирования в режиме обучения. Для реализации такого режима
формируется обучающая выборка неисправностей.
При возникновении нетиповой неисправности (которую обнаруживает
система оценки состояния) локализация отказа выполняется оператором. В
настоящее время практически для всех технических систем в перечень технической
документации входит список типовых неисправностей, который и является
обучающей выборкой для синтеза упрощенной системы диагностирования.
Синтез упрощенной системы диагностирования может производиться,
в частности, методом, применяемым для синтеза системы оценки
состояния. В этом случае система упрощенного диагностирования представляет
собой иерархическую систему последовательного анализа.
280
Глава 4. Обработка и анализ телеметрической информации
Исследование поведения объекта как решение задач идентификации
систем
При создании объекта производятся его испытания (стендовые, опытно-
конструкторские и др.), а при штатной эксплуатации объекта - доработка
и совершенствование его систем. В этих случаях задачей анализа ТМИ
является определение тех характеристик объекта, на улучшение которых
направлены испытания и доработка. Как правило, этот вид анализа связан
с расчетом обобщенных характеристик систем объекта по заданной
методике. Часто такими характеристиками являются различные статистические
характеристики, и их оценка производится по формулам, известным из
математической статистики [2].
Различные виды анализа связаны друг с другом (рис. 4.2). При штатном
управлении проводится оценка исходного режима (состояния) объекта и,
в соответствии с указанием о цели управления, с помощью модели
осуществляется формирование последовательности управляющих
воздействий, переводящих объект в заданный режим (состояние).
В процессе управления текущее состояние объекта, определяемое системой
оценки состояния, периодически сравнивается с прогнозируемым
состоянием по модели. Несовпадение этих состояний означает переход к
нештатному управлению объекта и локализации отказа. После коррекции модели
управления или восстановления объекта вновь осуществляется штатное
управление объектом. При подготовке объекта к эксплуатации, когда
возможен ремонт его подсистем, коррекция модели управления объектом
нецелесообразна. ,В результате анализа ТМИ устанавливается готовность
объекта к применению. В остальном задачи анализа ТМИ на этом этапе
совпадают с задачами на этапе эксплуатации.
Вторичная обработка ТМИ в оперативном и полном вариантах различается
существенно. Так, при оперативной обработке анализ включает [1]
определение параметров состояния и оценку работоспособности объекта,
выявление и локализацию неисправностей в системах, краткосрочный прогноз
состояния систем на заданный срок, решение задачи генеза технического
состояния (в силу специфики эксплуатации объекта). Решение этих задач
технической диагностики позволяет принять обоснованное решение по
управлению объектом.
В процессе полной обработки телеметрических данных всесторонне
анализируется качество функционирования систем, оценивается их надежность,
определяются обобщенные характеристики, вычисляются статистические
характеристики процессов, протекающих на объекте, и сравниваются с
требуемыми методами искусственного интеллекта; выявляются скрытые
закономерности, делается вывод о совершенствовании методов применения
объекта или о его технической доработке.
281
Современная телеметрия в теории и на практике
Решение перечисленных задач основано на использовании сложных
статистических методов обработки информации. Реализация этих методов
требует больших мощностей ЭВМ, и высокой степени автоматизации
программирования, и решения задач автоматизированной обработки.
4.2. ПЕРВИЧНАЯ ОБРАБОТКА ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ
4.2.1. Методы обработки при согласовании потоков данных
с каналами связи и системой анализа
Согласование потока данных с каналами передачи данных и системой
анализа ТМИ предполагает решение двух основных задач [2]:
• согласование потока данных с каналом (системой анализа) по
скорости передачи (скорости поступления на анализ);
• согласование потока данных с каналом (системой анализа) по струк-(
туре данных.
Согласование потока данных по скорости передачи
Согласование потока данных с каналом (системой анализа) по скорости
передачи производится в тех случаях, когда данные для передачи
поступают неравномерно во времени либо средняя скорость поступления данных
превышает пропускную способность канала (системы анализа). Когда
данные поступают неравномерно, применяются буферные запоминающие
устройства, которые осуществляют временное хранение передаваемых данных
(данных для анализа) на период перегрузки канала.
Предельным случаем неравномерного поступления данных является
поступление данных блоками. Такой способ выдачи данных используется
довольно часто, поскольку это позволяет разгрузить устройство,
формирующее данные, от взаимодействия с каналом (с системой анализа).
Если входной поток данных превышает пропускную способность канала
(системы анализа), то производят сжатие данных.
Простейшим и наиболее распространенным методом сжатия данных
является прореживание отсчетов, при котором для каждого телеметрируемого
параметра производится выборка для передачи (анализа) одного отсчета из
п произведенных. Применение такого метода сокращения объема данных
может привести к потере важной информации (особенно при возникнове-
282
Глава 4. Обработка и анализ телеметрической информации
нии неисправностей на телеметрируемом объекте), если она содержится в
исключенных п-1 отсчетах. Для частичного устранения указанного
недостатка можно применять осреднение по отсчетам и передавать (анализировать)
среднее значение [2].
Согласование по структуре данных
Согласование по структуре данных необходимо для приведения данных
к виду, удобному для передачи по каналу связи (анализа). Если система
анализа реализована на ЭВМ, то необходимо привести данные к виду,
используемому в ЭВМ. Аналогичные преобразования производятся при
стыковке с каналами передачи данных. Например, для реализации дисциплины
обслуживания в БИТС необходимо использовать специальные устройства
согласования с информационной магистралью - модули обмена
информацией. В данном случае эти модули решают задачу обработки по
согласованию структуры и скорости поступления данных.
Согласование структуры данных с системой анализа также
предполагает приведение данных к виду, удобному для анализа. Здесь, как правило,
необходимо провести декоммутацию телеметрируемых параметров и
осуществить привязку данных ко времени. Если анализ производится на ЭВМ,
то необходимо реализовать правила обмена, принятые для данной ЭВМ.
Если же анализ производится человеком, то необходимо привести данные
к виду, привычному для него (выразить значение параметров в истинных
физических величинах или в процентах). Поскольку современные
автоматизированные системы анализа не исключают участие человека в анализе
информации, то в состав системы обработки практически всегда включают
решение указанной задачи. Рассмотрим подробнее методы ее решения.
Для преобразования данных в процентные значения физического
процесса используется калибровочная характеристика системы сбора и передачи
информации. Калибровочная характеристика представляет собой
зависимость величины выходного сигнала измерения S'n(t) некоторого источника
информации на выходе системы сбора и передачи от величины сигнала
на выходе этого источника, выраженной в процентах (рис. 4.3).
S'
S'min
О 100
Рис. 4.3. Калибровочная характеристика
- S max
283
Современная телеметрия в теории и на практике
Калибровочная характеристика системы сбора и передачи данных служит
для оценки нелинейности тракта передачи информации. Основой для
расчета калибровочной характеристики служат сигналы калибровки, которые
соответствуют некоторым стандартным значениям сигнала Sn (S1f..., SJ.
Измеряя значения сигналов калибровки на выходе системы (S\,..., S'J и
осуществляя аппроксимацию полученных точек графика, определяют
калибровочную характеристику системы S'n(t)=f(Sn), Если система имеет
достаточно линейную калибровочную характеристику, то нет необходимости
передавать все сигналы калибровки. Их число можно сократить, если
передавать, например, только два или три: 5;= 0%, 52= 50%, S3= 100%.
Получив на выходе системы значения £'/£,) =/(5,), S'n(t)=f(S2), S'n(t)=f(S3),
можно определить значения сигнала на выходе источника информации
(или на входе системы сбора и передачи) по формуле:
Л" Л| — (4.1)
S = -
•100%.
Таким образом, сигналы калибровки 5, и S3 служат для определения
пределов динамического диапазона тракта передачи (шкалы параметра) [2].
Из формулы (4.1) следует, что:
100 3 ' '
(4.2)
Поэтому точность определения величины S'n существенно зависит от
точности определения значений сигналов калибровки на выходе системы.
Для преобразования данных в истинные значения контролируемого
физического процесса используются тарировочные характеристики датчиков.
Эти характеристики представляют собой зависимость истинных значений
физического процесса X от уровня сигнала Sn (в процентах) на выходе
датчика (рис. 4.4).
Sn, %
Рис. 4.4. Тарировочная характеристика
284
Глава 4. Обработка и анализ телеметрической информации
В общем случае тарировочная характеристика имеет нелинейный характер,
поэтому при переводе в истинные значения необходимо учесть эту
нелинейность. С этой целью при автоматизированной обработке тарировочная
характеристика аппроксимируется степенными полиномами. Как правило,
для аппроксимации выбираются полиномы первой степени, поскольку
применение полиномов более высоких степеней усложняет вычислительный
процесс, а применение полиномов нулевой степени (ступенчатая
аппроксимация) требует большой памяти для хранения аппроксимирующей кривой.
При кусочно-линейной аппроксимации тарировочная характеристика
заменяется отрезками прямых (рис. 4.4) так, чтобы погрешность
аппроксимации а не превышала допустимую. При этом в память ЭВМ вводятся
значения Х{ = i = 0, п -1, и коэффициенты наклона аппроксимирующих прямых
находятся следующим образом:
K,=ht£h. (4.3)
' S'+i-S'
п п
После получения значения Sn определяется, какому отрезку [Sln+\Sln ] это
значение принадлежит. Тогда на отрезке [S^\S'n] значение физического
процесса, соответствующее значению Sn, вычисляется по формуле:
X = Xi+Kr(Sn-Sln). (4.4)
4.2.2. Методы обработки при оценке значений параметров
по косвенным измерениям
Получение косвенного параметра связано с вычислением некоторого
оператора/, определенного на множестве значений прямых измерений.
Конкретный вид оператора/зависит от состава и физического смысла
параметров прямого измерения.
Пусть, например, на телеметрируемом объекте измеряется параметр X. -
расход топлива в секунду, а для анализа необходимо знать количество
израсходованного топлива А..'. Тогда оператор/представляет собой
определенный интеграл по времени [2]:
W)=\\(%)dz. (4.5)
Оценка спектральной плотности программными средствами
В информационно-телеметрических комплексах (ИТК) чрезвычайно
распространенным косвенным параметром ^является спектральная плотность
процесса X (а также ее специальные характеристики).
285
Современная телеметрия в теории и на практике
Так, часто необходимо знать частоту и амплитуду вибрации некоторого
узла в системе, резонансные характеристики механических устройств и т.п.
Однако непосредственное измерение спектральной плотности и ее
характеристик связано с необходимостью создания громоздкой преобразующей
аппаратуры. Поэтому вместо измерения спектральных характеристик
контролируют временные изменения соответствующих параметров, по которым
система обработки получает оценку спектральных характеристик [2].
Для этого случая вид оператора / совпадает с оператором разложения
параметра прямого измерения X в ряд Фурье. Для конечного интервала
наблюдения Г и частоты спектра сок величина спектральной плотности Х'(и>,)
определяется по формуле:
^coJ~(a>+(3*), (4.6)
где:
2nkt , л л,,, . 2nkt
aK=2JX(t)bos—dt; ^K=2JX(t)sin=^dt. (4.7)
о -* о -*
Конечность интервала Г приводит к тому, что величину Х'( со,) можно вы-
2nk n
числить только в дискретных точках (Ок . Для ее определения в
промежуточных точках можно использовать любой приемлемый по точности
метод интерполяции, например ряд Котельникова, для чего значения X^coJ
последовательно пропускают через фильтр нижних частот.
При Т —>оо можно показать, что моменты спектральной плотности Х'( (йк):
M[?i'((ok)] = V((Ok),
°2[V(G)k)] = g2K).
Поэтому оценка косвенного параметра Х'(<йк) является несмещенной, но не-
состоятельной, так как при Г—>оо о 2[V(G\)] —» const Ф О.
Оценка спектральной плотности в специализированных аналоговых
устройствах
Оценку спектральной плотности можно производить с помощью простых
аналоговых устройств, используя формулу [2]:
*'(ю) = ^[а2(со) + р2(со)] (4.8)
286
Глава 4. Обработка и анализ телеметрической информации
где:
a (to) = 2J\(/)cosco/<#, (3 (со) = 2 jX(t) sin cotdt. (4.9)
о о
В соответствии с этой формулой в спектроанализаторе должны быть
генератор гармонических составляющих, перемножители, интегратор,
квадратор и сумматор. Более простым устройством, производящим оценку
спектральной плотности, является устройство (рис. 4.5), состоящее из генератора
гармонических колебаний (~), фазовращателя (ф), перемножителя (х),
интегратора ( I) и индикатора наибольшего сигнала.
Х(«)
—+
X
JZ
_1J
|—►
-
X
f
0
Г"*
Индикатор
наибольшего
сигнала
Рис. 4.5. Структурная схема спектроанализаторе
На выходе интегратора:
z(/,co,9) = 2J?i(T)sin(cox +ф)<Л
о
или, с учетом sin(cox + ф) = sin СОХ соБф 4-coscox БШф и выражений для а
и р, получим:
ч . а р
z(t,(0,(p) = БШф — 4- СОБф — .
Наибольшее значение z можно найти, приравняв к нулю производную:
dz a . р л
— = cos smcp —= 0.
5ф 2 2
Отсюда, заменяя sinф Hayl-cos ф и разрешая уравнение, получаем:
Р
С08ф
■; 81Пф
а
После подстановки полученных значений в формулу для z(t, со, ф^) получим:
Индикатор наибольшего сигнала выдает таким образом оценку
спектральной плотности сигнала.
287
Современная телеметрия в теории и на практике
Методы узкополосной фильтрации
Рассмотренные выше способы оценки спектральной плотности пригодны
для реализации на цифровых и аналоговых ЭВМ. В случаях большого
числа параметров, требующих оценки спектральных характеристик и высокой
динамичности изменений параметров, возникает необходимость создания
специальной аппаратуры для их обработки. Принцип действия такой
аппаратуры основан на методах узкополосной фильтрации [2].
ПАРАЛЛЕЛЬНАЯ УЗКОПОЛОСНАЯ ФИЛЬТРАЦИЯ. Такая фильтрация
основана на использовании набора узкополосных фильтров,
перекрывающих заданный диапазон спектра А/ параметра X(t) (рис. 4.6а). При подаче
сигнала X(t) на вход устройства на выходе некоторых фильтров появляется
отклик.
Номера фильтров и величина отклика на их выходе позволяют судить о
спектральной плотности параметра X(t) на дискретных частотах f1ff2,.-ffn • Если
полосы пропускания фильтров AF не перекрываются, то необходимое число
фильтров для перекрытия диапазона AF составляет:
N = -^-
Ф AF/
С помощью метода узкополосной фильтрации удобно определять
спектральные характеристики параметра X(t). Например, резонансная частота
определяется номером фильтра с наибольшим откликом. При этбм
максимальная погрешность определения резонансной частоты не превосходит
AV2-
нмж
\?:\
а)
ГАТАТА1 ,
AF, AF2 AF3
AF
в)
Рис. 4.6. Схема узкополосной фильтрации
Параллельный анализ резонансной частоты монохроматического сигнала X(t)
можно производить с помощью фильтров с перекрывающимися частотными
характеристиками (рис. 4.66). При этом в процессе анализа определяется
288
Глава 4. Обработка и анализ телеметрической информации
отклик на выходе каждого фильтра (рис. 4.66, точки а, б, в). На оси частот
в точках, соответствующих резонансным частотам фильтров, строятся
ординаты, равные по величине полученным откликам. По этим ординатам
приближенно строится резонансная характеристика, максимум которой
соответствует резонансной частоте сигнала X(t).
Достоинством параллельной фильтрации является высокая скорость,
недостатком - сложность устройства, так как для обеспечения высокой
точности необходимо иметь большое число высокодобротных фильтров [2].
ПОСЛЕДОВАТЕЛЬНАЯ УЗКОПОЛОСНАЯ ФИЛЬТРАЦИЯ При
последовательной узкополосной фильтрации используется только один
фильтр, перестраиваемый в диапазоне AF. Если фильтр перестраивать
достаточно медленно, то величина его отклика при различной настройке будет
соответствовать спектральной плотности параметра X(t) .
Увеличение точности преобразования параметра X(t) в X'(t), так же как
и при параллельной фильтрации, связано с уменьшением полосы
пропускания фильтра, однако это ведет к увеличению времени преобразования, так
как увеличивается время установления колебаний и приходится снижать
скорость перестройки.
На практике обычно фильтр не перестраивают, а смещают спектр
исследуемого сигнала путем его перемножения с гармоническим сигналом линейно
изменяющейся частоты.
Пусть одна из гармоник спектра сигнала X(t) имеет вид wcosCD0/ • Тогда ее
умножение на гармонический сигнал частоты со приведет к результату:
и coscof cosgv = — w[cos(co - со0)/ + cos(co + со0)/].
Полученный спектр сигнала имеет две полосы, расположенные
симметрично относительно частоты со. Изменяя частоту и выделяя фильтром одну
из боковых полос, можно по отклику фильтра оценивать спектральную
плотность параметра X(t).
КОМБИНИРОВАННАЯ УЗКОПОЛОСНАЯ ФИЛЬТРАЦИЯ. Эта
фильтрация реализуется несколькими фильтрами, которые перестраиваются в
своих поддиапазонах (рис. 4.6в). Использование комбинированной фильтрации
позволяет ускорить время получения спектральной плотности (по сравнению
с последовательной фильтрацией) и одновременно уменьшить число
фильтров (по сравнению с параллельной фильтрацией).
По найденной спектральной плотности можно определить другие
спектральные характеристики процесса (ширину спектра, его граничную частоту и т. п.).
10 За*. 861
289
Современная телеметрия в теории и на практике
4.2.3. Оперативная обработка быстро меняющихся параметров
Особенности быстро меняющихся параметров и их обработки
В процессе испытания телеметрируемых объектов производятся измерения
большого числа быстро меняющихся параметров (БМП). К таким
параметрам относятся вибрации конструкций корпуса, пульсации давления в
камере сгорания двигателя, акустические и аэродинамические шумы,
деформации корпуса и др. [ 1 ].
Различия между быстро- и медленно меняющимися параметрами не носят
качественного характера, так как те и другие являются непрерывными
функциями времени. Количественное отличие заключается в различных
скоростях изменения и ширине спектра. Это отличие вытекает из характерных
особенностей быстро меняющихся параметров.
Быстро меняющиеся параметры прямо или косвенно отражают сложные
колебательные процессы, протекающие в механических, электрических и других
системах. По своей физической сущности колебательные процессы есть результат
наложения гармонических колебаний, вызванных независимыми источниками.
Ввиду сложности структуры и высокой динамичности процессов,
наложения случайных помех в процессе измерений, периодические компоненты
замаскированы и практически неразличимы при визуальном просмотре
записей БМП [1].
Быстро меняющиеся параметры характеризуют случайно возникающие
процессы и поэтому в общем случае являются случайными и
нестационарными. Они имеют, как правило, сравнительно широкий спектр, верхняя
граница которого простирается до нескольких десятков килогерц.
Наибольший практический интерес для потребителя представляют такие
характеристики БМП, как время возникновения колебаний, их частота и
интенсивность. Именно эти характеристики являются исходными для
возможных доработок конструкции объекта. Таким образом, не всегда
требуется знать параметры как функции времени, достаточно .знать их
спектральные характеристики. Это определяет специфику обработки БМП, в
которой значительное место занимает спектральный анализ исследуемых
процессов. К числу спектральных характеристик БМП относятся:
• амплитудно-частотная характеристика;
• спектральная плотность мощности;
• ширина спектра или его граничная частота;
• граничные частоты при заданном уровне спектральной плотности
мощности.
290
Глава 4. Обработка и анализ телеметрической информации
Здесь уместно заметить, что результаты спектрального анализа содержат
меньший объем данных, чем функция поведения параметра. По
результатам спектрального анализа невозможно сколь угодно точно восстановить
исходную функцию.
Большое место в обработке БМП занимают методы выявления скрытых пе-
риодичностей. Эти методы позволяют определить такие возможные
характеристики, как периоды гармонических составляющих, их амплитуды и
декремент затухания.
При обработке БМП ставятся различные задачи, решение которых
выполняется с различными целями. По целям использования результатов
обработки основные задачи обработки БМП можно разделить на несколько
групп [1].
1. Обработка БМП с целью получения обобщенных характеристик
процесса. Эта группа задач позволяет произвести оперативную
оценку БМП для планирования последующих этапов обработки
и, в частности, предварительного выбора метода обработки,
грубой оценки стационарности процесса и др. В результате
обработки определятся максимальные значения параметров на некотором
интервале времени, среднее и средневыпрямленное их значение,
дисперсия, кажущаяся частота и др.
2. Обработка БМП с целью получения данных о прочности
конструкций отдельных узлов и исследования их устойчивости и
надежности. К этой группе задач можно отнести анализ вибраций
в различных точках и узлах объекта и их источников, таких как
пульсации в камере сгорания двигателя, акустические шумы и др.
Здесь оцениваются наиболее важные и опасные с точки зрения
целостности конструкции сиектральныесоставляющие,
присутствующие в вибропроцессах, и различные характеристики источников
вибраций.
Основными характеристиками, которые требуется получить в
результате обработки, являются амплитудно-частотный спектр,
спектральные плотности мощности, пиковые значения отдельных спектральных
составляющих, взаимокорреляционные функции,
взаимоспектральные плотности и функции плотности вероятности.
3. Обработка БМП с целью получения обобщенных данных по
определенному типу изделий. В этой группе задач решаются
многочисленные вопросы, связанные с обобщением различных
характеристик БМП по определенному типу объектов. При этом - такие
важные вопросы, как прогнозирование отдельных БМП и выдача
рекомендаций на испытания.
291
Современная телеметрия в теории и на практике
Основными характеристиками, получаемыми при решении этих задач,
являются характеристики, перечисленные в предыдущих группах, но
полученные в результате обработки по нескольким объектам одного типа.
Последовательное решение всех групп задач обработки позволяет получить4
наиболее важные данные о быстро меняющихся параметрах. Выбор
конкретного метода обработки зависит от множества причин и в первую очередь
от способа представления БМП.
Существуют два принципиально разных подхода к способу представления
БМП. В первом случае поведение БМП представляется как
детерминированный процесс, во втором случае - как случайный процесс. Эти два
представления определяют выходные результаты обработки. Так, обработка
БМП, представленных как детерминированный процесс, требует, по
существу, исследования амплитудно-частотных характеристик.
В то же время обработка их при представлении случайным процессом
требует обязательного изучения усредненных характеристик, причем чаще
всего исследуются мощностные характеристики. Если в первом случае
для обработки достаточно применения амплитудных анализаторов спектра
частот, то во втором случае необходимо иметь в наличии различные
устройства для квадратирования, суммирования, умножения, усреднения и т. д.
Достоинством представления БМП как детерминированного процесса
является то, что они понятны и хорошо интерпретируются простыми
характеристиками. Недостатком является то, что чаще всего это представление -
только приближение, и очень грубое.
Анализ БМП, основанный на концепции случайности, имеет разнообразные
приближения. Основное приближение, которое приходится применять, - это
допущение стационарности и эргодичности процесса. Допущение о
стационарности процесса позволяет эффективно применять метод
корреляционного анализа, с помощью которого можно исследовать различные взаимосвязи.
Способы оперативной обработки БМП
Оперативная обработка БМП является наиболее простой и решает задачи
первой группы. Она позволяет получить следующие характеристики на
определенном временном интервале [1]:
• среднее значение параметра т ;
• средневыпрямленное значение В;
• максимальное значение М;
• дисперсное D (или а2);
• кажущуюся частоту /.
292
Глава 4. Обработка и анализ телеметрической информации
Основное достоинство этих характеристик состоит в простоте их
получения. Однако выводы, вытекающие из их анализа, являются слишком
поверхностными. Между перечисленными характеристиками справедливы
некоторые соотношения, позволяющие определить одну характеристику по
известным другим. Эти соотношения следующие.
1. Для синусоидальных сигналов:
М = л[2-о\ В = ^-а . (4.10)
к
Пусть:
у(0 = у „shoot,
где ут - амплитуда сигнала; со - его частота.
Тогда дисперсия сигнала на интервале времени Г определится из
равенства (для стационарного процесса):
1 Т
D = M[y2(t)] = -\y2msm2(Otdt. (4.11)
* о
Вычислим интеграл равенства:
Т 2 Т 2гр 2
. \yl sin2 шЖ =^=- J(l-cos2©0* = — —sin2cor.
о ^ о 2 4соГ
Учитывая, что соГ = 2к , окончательно получаем:
Z) = i^L,G =-^Вг. (4.12)
2 V2
Максимальное значение сигнала равно его амплитуде, и, следовательно:
M = V2.o.
Средневыирямленное значение сигнала В на интервале Гопределяется
по формуле:
5 = -^-Jsin©fA. (4.13)
^ о
После интегрирования получим:
в = 2у-
К
Учитывая, что ут выражается через среднеквадратическое отклоне-
ние, получаем:
2л/2
В = -^— о. (4.14)
71
293
Современная телеметрия в теории и на практике
2. Для пилообразных сигналов:
Л/ = л/3-о, А/ = 2Я.
3. Для прямоугольных сигналов с симметричными полупериодами:
Af=G.
Все написанные соотношения справедливы для сигналов с нулевым
средним.
По приведенным формулам можно оценить характер исследуемого
параметра и составить план дальнейшей обработки [1].
Определение среднего и средневыпрямленного значений
1. Определение среднего значения.
Оценка среднего значения параметра на интервале времен Г
определяется по формуле:
m;=j\y(tdt). (4.15)
^ О
Вычисления по формуле (4.15) осуществляются либо с помощью
цепочек RC, либо интегратора. Для определения параметров этих
устройств необходимо рационально выбрать время усреднения. Оно
выбирается исходя из заданной величины погрешности усреднения,
обусловленной длительностью интервала интегрирования.
Запишем выражение для определения дисперсии оценки среднего
значения:
D(m;) = M[(j\y(t)dt)2]. (4.16)
* О
Возведя в квадрат и перенеся знак математического ожидания под
интеграл, получим:
, тт
D^y)-^\\Mb^\y^2)\dtxdt2. (4.17)
^ 0 0
Положив tft2 = 0 и произведя операцию вычисления
математического ожидания, будем иметь:
^К) = ~гИ ]КФ)Я. (4.18)
1 о -/,
294
Глава 4. Обработка и анализ телеметрической информации
Рассмотрим интеграл (4.18) подробно, так как он будет использован
в последующих выкладках. Сначала определим область
интегрирования. Новая переменная интегрирования (рис. 4.7) будет:
t=T-Q (при Q=T t=0y при 9=0 t-T)
или:
*,—еСпри^-Г 0—7).
н(е)
Рис. 4.7. Область интегрирования
С учетом новой переменной интеграл (4.18) запишется в виде суммы
двух интегралов:
т г-/, т о
jdt} J K(Q)de = |(г-ещеуе + |(7чеще)лв =.
-г
■■2J(T-Q)K(Q)dt
Теперь формула (4.17) будет иметь вид:
е.
D(my) = -j(\--)K(Q)dQ.
(4.19)
В частном случае, когда корреляционная функция параметра
представляется соотношением:
K(Q) = o e
2 -а |9|
295
Современная телеметрия в теории и на практике
дисперсия среднего значения, согласно равенству (4.19), после
интегрирования будет:
у) Шу уаТ
В случае ОС Г > 1 получим:
1-—(1-е-«г)
аТ
(4.20)
ОI = с2 —. (4.21)
"' уаТ
2
Задав погрешность определения среднего значения О m , по
формуле (4.21) можно найти минимально возможный интервал
интегрирования при вычислении среднего значения параметра. Однако при
оперативной обработке корреляционная функция процесса, как
правило, неизвестна и, следовательно, пользоваться формулой
(4.19) нельзя. В этом случае можно применить следующее
приближение. Предположим, что спектр частот процесса ограничен снизу
частотой (Од. Тогда корреляционную функцию в смысле
протяженности корреляционной связи можно приближенно представить
выражением:
К(в)=о2уеЧХ\ 'coscoG (4.22)
при соответствующим образом выбранных а и со.
Представим равенство (4.22) в виде:
с2
K(Q ) = _JL[V <«+*» + е-(«-У*»е ].
2
Подставив его в формулу (4.22), после интегрирования получим:
1 L 1 г, e-(a+y(0)rj1
.е-<«-*»Г.ч (423)
i
В предельном случае, когда а=0 и со=со0, соотношение (4.23) примет
вид:
G2mv 4 . 2 СО0Г
—f- = —— sin2-^-. (4.24)
о] <Т2 2
Верхняя оценка равенства (4.24) даёт:
Глава 4. Обработка и анализ телеметрической информации
(й0Т
sin
2со0Г
2с,
<V<°o
(4.25)
I т J t
Рис. 4.8. Средневыпрямленное значение
Полученная формула дает решение задачи, то есть позволяет
приближенно выбрать минимально возможный интервал
интегрирования.
2. Вычисление средневыпрямленного значения. Вычисление этого
значения (рис. 4.8) производится по формуле:
B = -\\y{t)\dt.
Интервал интегрирования Т определяется так же, как и при расчете
среднего значения.
Определение дисперсии и кажущейся частоты
Вычисление оценки дисперсии производится по формуле:
Т
Dy=U[y(t)-myfdt.
(4.26)
Для простоты будем рассматривать сигнал с m =0. Здесь снова
сталкиваемся с задачей определения времени интегрирования. Как и в случае
297
Современная телеметрия в теории и на практике
определения среднего значения, при выборе интервала интегрирования
будем исходить из величины допустимой ошибки определения дисперсии [1].
Дисперсия оценки дисперсии:
D(Dy) = M[D2y]-{M[Dy]}2 =M[D2y)-D2y. (4.27)
Математическое ожидание квадрата дисперсии выражается
соотношением:
* 0 0
Таким образом, для оценки точности определения дисперсии, как следует
из формулы (4.28), необходимо знание момента четвертого порядка от
случайной функции y(t). Если случайная функция y(t) имеет нормальный
закон распределения, то для определения момента четвертого порядка можно
воспользоваться формулой:
М[у2 (/, )у2 (/2)] = М[у2 (/, )]М[у2 (/2)] + 2{M[y(tt )y{t2)] }2 =
= £>;+2{М[ХОЖ)]}2 (4-29)
С учетом равенства (4.29) соотношение (4.28) запишется в виде:
1 тт
т
Следуя рассмотренной методике, получаем:
_1
Т
М£>,2] = 77 \р{М[у{ф^)\}2 +D2y]dt,dt2 . (4.30)
Г
*■ оо
M[D2y] = -^\{\~)2K2{Q)dQ+D2y. (4.31)
^ 0 *
Для дисперсии оценки дисперсии с учетом равенства (4.31) будем иметь:
D(Dy) = ^l(l~)2K2(Q)dQ. (4.32)
^ о *
Используя корреляционную функцию вида (4.32), получаем формулу для
определения времени интегрирования:
G2d 2
—Г<^г^- (4.33)
<*; «2г2
Кажущаяся частота играет большую роль при изучении усталости
различных конструкций. Наиболее интересной характеристикой усталости
конструкций является количество перегибов в единицу времени. Кажущаяся
частота приблизительно описывает число перегибов (рис. 4.9).
298
Глава 4. Обработка и анализ телеметрической информации
Рис. 4.9. Кажущаяся частота
Кажущаяся частота - это количество пересечений нулевого уровня
исследуемым процессом в единицу времени, то есть:
где п - число нулей на интервале Г[1].
Интервал времени 1\ в течение которого подсчитывается кажущаяся
частота, выбирается из условия заданной среднеквадратической погрешности ее
определения и вычисляется так же, как и временной интервал при
определении среднего значения.
Разница между кажущейся частотой и числом перегибов видна из рис. 4.9.
На интервале Т число нулей, определяющих частоту, равно десяти, а при
определении числа перегибов на том же интервале имеем i 1 восходящих
ветвей.
Рассмотренные характеристики параметров измеряются с помощью
аналогового устройства (рис. 4.10), входящего в состав аппаратуры для
измерения спектров. Напряжение, соответствующее реализации параметра,
поступает на вход устройства и далее разделяется по трем цепочкам.
} ...-^
= с
►—►
Усреднитель
Двух-
полупериодный
выпремитель
i Ь
h "W
.... _
W;
Триггер
Шмидта
""W
Усреднитель
Квадратор
Пиковый
детектор
Дифференцирующая цепочка
^ .V4
W III
.Ь, Г)
1 ■ " — ■ - 'W D
Усреднитель
1 , ь, М
' W М
Формирователь
Рис. 4.10. Устройство оперативной обработки
299
Современная телеметрия в теории и на практике
Среднее значение определяется усредняющим устройством первой
цепочки. В качестве усредняющего устройства для стационарных эргодических
процессов используются интеграторы и фильтры нижних частот. Для
нестационарных случайных процессов применяются сглаживающие фильтры,
построенные на основе операторов текучего сглаживания. В этих
устройствах время интегрирования определяется по формуле (4.25).
Измерение дисперсии стационарного эргодического процесса
осуществляется во второй цепочке и сводится к измерению средней мощности
центрированного процесса. Поэтому в устройство введен разделительный
конденсатор С. Напряжение реализации центрированного процесса выпрямляется
двухполупериодным выпрямителем. Затем согласно формуле определения
дисперсии выпрямленное напряжение с помощью квадратора возводится
в квадрат и усредняется усредняющим устройством.
Время усреднения определяется по формуле (4.33). В этой же цепочке
производится измерение средневыпрямленного максимального значения.
Средневыпрямленное значение получается после усреднения
выпрямленного напряжения. Максимальное значение процесса на выбранном
интервале времени определяется пиковым детектором, который пропускает пик
максимального напряжения на этом интервале.
Измерение кажущейся частоты производится в третьей цепочке
устройства. Напряжение реализации центрированного процесса поступает на
триггер Шмидта, который срабатывает в момент перехода сигнала через
нулевой уровень. Дифференцирующая цепочка выдает импульсы в момент
срабатывания триггера, которые в формирователе приводятся к виду,
удобному для счета. Число импульсов за одну секунду определяет
кажущуюся частоту.
4.2.4. Методы повышения достоверности данных
телеконтроля при обработке информации
Достоверность данных телеконтроля достигается повышением точности
измерения значений физических процессов и устранением вредного
действия помех.
Методы повышения точности измерения физических процессов
Методы повышения точности измерения физических процессов
направлены на повышение точности датчиковои аппаратуры и измерительных
трактов радиотелеметрических систем (РТС).
300
Глава 4. Обработка и анализ телеметрической информации
1. Поскольку на датчик помимо физического процесса X(t) ,
оказывают воздействие другие физические процессы (Xf..., XJ, то тариро-
вочная характеристика как бы «расплывается» (становится
многомерной) и в действительности имеет место зависимость:
5(/) = лл(0),
где\(t)- (k(t),X1 (t),...,\(t))\
Учет вредных воздействий производится путем измерения параметров
физических процессов А.,,... Дв и разработки оператора:
Sj = g(S(t) , (АЗА)
где S\ - уточненное значение 5я; S(t) - вектор измеренных воздействий
на да™ (S(t)=(Sn> S\}..., &J).
Если в качестве величин S\, ..., S"n используются сигналы с
дополнительных датчиков, измеряющих значения того же процесса X(t)}
то говорят, что оценка S\ получена с помощью введения структурной
избыточности.
2. Датчик, как и всякая реальная система, обладает инерционностью.
Это проявляется в том, что его реакция Sn(t) на единичный скачок
входного воздействия отлична от скачка. Поэтому при быстрых
изменениях входного процесса X(t) (этот особо важный случай, как
правило, возникает при неисправностях контролируемой
аппаратуры) выходная величина Sn(t) как бы «отстает» от изменений X(t).
Учет динамической погрешности датчика X(t)- Sn(t) производится
различными методами и составляет важный этап повышения
точности датчиковой аппаратуры.
3. Для повышения точности измерений можно использовать
корреляционные связи между параметрами. Например, в силу постоянства
объема давление и температура зависят друг от друга. Таким
образом, значение Sn(t) с выхода одного датчика может быть уточнено
путем использования информации с других датчиков.
4. Учет изменения телеметрической шкалы (4.2) также позволяет
повысить точность измерения телеметрируемых параметров.
Изменение шкалы (величин S1 и S3) обусловлено медленным
изменением напряжения питания датчиков. Для устранения этих
флуктуации производят усреднение сигналов калибровки S1wS3. За время
усреднения напряжение источника можно считать постоянным,
так как при используемых значениях частоты опроса за несколько
периодов опроса оно не успевает измениться.
301
Современная телеметрия в теории и на практике
Методы учета влияния помех
Важное место в повышении достоверности данных телеконтроля
занимают методы учета влияния помех. Рассмотрим три основных метода борьбы
с искажениями ТМИ:
• отбраковку аномальных ошибок измерения функциональных
параметров;
• сглаживание измерений функциональных параметров;
• отбраковку ложных срабатываний сигнальных параметров.
1. Передача функциональных параметров в цифровой форме
осуществляется путем передачи последовательностей двоичных импульсов.
Оптимальный приемник таких сигналов настроен на оптимальный
прием одиночного импульса. Поэтому искажения значения
параметра, связанные с неправильным приемом импульса, равновероятны
как для старших, так и для младших разрядов кода. По этой причине
искажения при передаче параметра (рис. 4.11) имеют вид выброса
(аномальное измерение). Аналогичные искажения могут возникать
при аналоговой передаче функциональных параметров (например,
при передаче способом ВИМ к аномальному измерению может
привести появление импульса помехи в канальном интервале параметра).
Отбраковка аномальных ошибок основана на ограниченности полосы
пропускания датчика (0+F). В силу этой ограниченности
автокорреляционная функция параметра не может быть уже, чем 1/Fm.
Sn
Аномальные
^У ошибки
V ч
t
Рис. 4.11. Искажения при передаче параметра
Поскольку частота опроса выбирается в несколько раз больше
граничной частоты спектра, то соседние измерения оказываются
статистически зависимыми и каждое последующее измерение может отличаться
от предыдущего на величину A5w, зависящую от
автокорреляционной функции параметра. Оценим эту зависимость в предположении,
что параметр Sn(t) является марковским процессом, распределенным
по нормальному закону с математическим ожиданием ms, дисперсией
а/ и коэффициентом автокорреляции за период опроса р(Т^).
302
Глава 4. Обработка и анализ телеметрической информации
Используя методы оптимального линейного предсказания,
основанные на предсказании значения измерения 5w+/ при имеющемся
измерении Sni с минимизацией дисперсии ошибки предсказания по
критерию наименьших квадратов, можно показать, что в среднем значение
измерения (рис. 4.12):
где
Li=4po;).
4=$,-«,;&, =$-!»,.
Следовательно, разница между соседними измерениями в среднем
составляет:
а* = 4-1!+1=4[1-р(7;)].
(4.35)
В действительности величина ASn имеет случайный характер со
случайным распределением (o(ASn), математическим ожиданием ASn
и дисперсией:
м„
=<*Л1-Р2(Го)].
(4.36)
К погрешности предсказания ASn следует добавить суммарную по-
фешность GI? вносимую датчиком и РТС. Тогда:
<Ыг = ^^П-Р2^)]-^! . (4.37)
Если случайная величина Д5; распределена по нормальному закону,
то, используя правило «За» , получим максимальное различие
последующего отсчета от предыдущего:
Д£.
Д£,£ •
(4.38)
Отбраковка отсчетов, содержащих аномальные ошибки, сводится
к нахождению разности последующего и предыдущего отсчетов и
проверке этой разности на порог:
AS Hfe-AS
пор п
Snk
Sni СО (ASn) I
ti+i t
Рис. 4.12. Случайный характер измерений
303
Современная телеметрия в теории и на практике
Коэффициент k вводится для загрубления алгоритма отбраковки.
Он имеет обычно величину порядка единиц. Загрубление алгоритма
необходимо потому, что телеметрируемые параметры носят
нестационарный характер, вследствие чего возможны изменения
между смежными измерениями, превышающие значение &Sn max. Если
для (i + 1)-го измерения ASn>ASm),TO измерение отбрасывается как
содержащее аномальную ошибку.
2. Сглаживание измерений функциональных параметров заключается в
применении операторов сглаживания помехи, наложенной на сигнал
(рис. 4.13). При аддитивной помехе результат измерения S\(t) можно
представить в виде суммы параметра Sn(t) и случайной помехи n(t):
Sl(t) = Sn(t) + n(t).
Если помеха содержит более высокочастотные составляющие, чем
параметр, то ее ослабление может быть достигнуто путем сглаживания
(фильтрации).
SnA
S'n(t)
Sn(t)
t
Рис. 4.13. Измеренный и сглаженный сигнал
При сглаживании выделяется низкочастотная часть спектра сигнала
S\(t) , а ошибки, возникающие за сче^ уничтожения (фильтрации)
«хвостов» спектра, оказываются незначительными. В то же время
интенсивность шумов резко
уменьшается (рис. 4.14).
Ошибки, возникающие за
счет фильтрации
«хвостов» спектра сигнала,
называются
динамическими, а ошибки,
обусловленные остаточным
шумом после фильтрации,
"ср F - случайными.
г Спектр сигнала
Н"*4*^ Остаточный
^V спектр шума
^v / Искажения
X/ спектра сигнала
Lww^w^.,
= ►
Рис. 4.14. Спектр сглаженного сигнала
Глава 4. Обработка и анализ телеметрической информации
Полосу фильтра следует выбирать таким образом, чтобы
результирующая погрешность, обусловленная динамической и случайной
ошибками, была минимальной.
При обработке данных задача сглаживания реализуется путем
аппроксимации параметра какой-либо функцией. Этими функциями
могут быть степенные полиномы, ряды Фурье, полиномы Чебыше-
ва и т. п.
С практической точки зрения наибольший интерес представляет
сглаживание с использованием неоптимальных, но просто реализуемых
операторов среднего и экспоненциального сглаживания.
Задача исследования этих операторов сглаживания состоит в
определении оптимальных параметров сглаживающих устройств или
алгоритмов и оценке эффективности сглаживания. В общем виде
сглаживание можно выразить оператором:
где со. - весовая функция; N- интервал осреднения.
Таким образом, сглаживание сводится к усреднению измерений,
взятых с определенным весом со., который учитывает важность
измерения 5\. для оценки среднего значения Sni.
Сглаживание напоминает оценку математического ожидания.
Существенным отличием сглаживания является то, что оно предназначено
для оценки параметров, на которые наложены помехи. В связи с этим
сглаживание должно производиться таким образом, чтобы параметр
искажался возможно меньше, а помеха устранялась возможно
больше.
Ошибка после сглаживания 8z(t) параметра состоит из двух
компонентов :
61(/) = 8д(0+6О1(0,
где 5а (/),807 (/) - динамическая и случайная составляющие.
Составляющая 8д обусловлена инерционностью фильтра
(ограниченностью полосы пропускания) и возрастает с ростом
скорости изменения Sn(t) (ширины спектра). Она имеет место и
при отсутствии помех.
Случайная составляющая обусловлена наложением остаточных
помех на сигнал.
305
Современная телеметрия в теории и на практике
Суммарная текущая ошибка сглаживания может быть найдена как
разность сглаженного Sn(t) и действительного S\(t) значений:
/V-l /V-1
5 =5-5' =[У(о5 .-S'1 + Уш.л. ..
Первое слагаемое представляет собой динамическую, а второе -
случайную ошибку сглаживания. Так как динамическая и случайная
ошибки независимы, то:
Оптимизация алгоритма сглаживания состоит в минимизации
суммарной ошибки.
По существу, оптимизация трех рассматриваемых квазиоптимальных
алгоритмов сводится к определению числа усредняемых измерений,
так как единственным параметром алгоритмов, который можно
варьировать, является параметр N
Для симметричного оператора сглаживания, когда его
автокорреляционная функция имеет вид е*а(т|, оптимальное число усредняемых
измерений [2|:
тт К<'
где ОI - дисперсия параметра; aT0'=sT!/xk.
3. Устранение влияния помех для сигнальных параметров
заключается в защите от регистрации ложных срабатываний
контактных датчиков (КД).
Выделение сигналов срабатываний КД осуществляется на основании
сравнения сигнала на выходе приемного устройства с установленным
порогом. Решение о срабатывании КД принимается по появлению
импульса, амплитуда которого отлична от предыдущего импульса:
замыканию соответствует повышение уровня сигнала, а размыканию -
понижение (рис. 4.15а). Появление помехи в моменты времени между
срабатываниями приводит к регистрации сразу двух ложных
срабатываний (рис. 4.156), одно из которых соответствует появлению помехи,
а второе - следующему за помехой неискаженному сигналу.
Очевидно, что от таких ошибок можно избавиться путем интегрирования
сигналов срабатываний. При рассмотрении количественной оценки
сигнальной информации было показано, что для надежной регистрации
Глава 4. Обработка и анализ телеметрической информации
вероятность ошибки долж
на удовлетворять
соотношению рош < р(2.
Практически это означает, что р й
7 гош
108. Интегрирование
производится путем
суммирования квантованных
сигналов.
SnA
Помеха
icp
Sn
а)
lcp t
б)
Рис. 4.15. Выявление срабатываний КД
Таким образом, схема обработки срабатываний КД содержит два
пороговых устройства, первое из которых осуществляет выделение
двоичных сигналов срабатывания КД, а второе - сравнивает
накопленную сумму срабатываний с определенным порогом (рис. 4.16). Этот
второй порог называется порогом счета.
В общем случае срабатывание КД фиксируется тогда, когда
появляются k из п подряд следующих импульсов. Величина k представляет
собой порог счета (рис. 4.17). При n=k вероятность/?^ = pck и для
суммирования достаточно двух-трех импульсов, однако при этом велика
вероятность пропуска срабатывания, так как любое искажение на
интервале осреднения приводит к пропуску. Поэтому важно
рационально выбрать k<n.
Приемник
Первый
порог
Накопитель
Второй
порог
Рис. 4.16. Схема обработки срабатываний КД
Пусть уровень первого порога обеспечивает вероятность превышения
его сигналом рс и шумом рт . Тогда вероятность того, что из п
импульсов i превысят порог:
A(«,0«ci/»cO-A)"
307
Современная телеметрия в теории и на практике
а аналогичная вероятность для шума:
Вероятность правильного обнаружения сигнала соответствует тому,
что на интервале п импульсов более чем к из них превысят порог:
Ык
Вероятность ложного обнаружения (ложной тревоги):
Sn
(4.39)
(4.40)
i = k
L.
J
L.
j
t
П П
Рис. 4.17. Соотношение кип при фиксации
срабатываний КД
Требуемые вероятности Рп\\Рлъ соответствии с формулами (4.39) и
(4.40) можно получить при различных сочетаниях величин k и п.
Обычно первый порог выбирается таким, чтобы обеспечить
требуемую величину Р;г Оптимальный порог, при котором обеспечивается
минимальная вероятность ложных тревог при минимальном числе
суммируемых импульсов, соответствует/^ = 0,1+0.2. Однако, при
соотношении сигнал-шум порядка трех проигрыш оказывается весьма
незначительным при изменении вероятности рш в пределах от 0,2
до 0,01 (рис. 4.18). Оптимальный порог счета:
к = l,5v n .
(4.41)
Оптимум второго порога счета, так же как и первого, не является очень
острым. Так, например, при п = 5 минимум входного отношения
сигнал-шум соответствует к = 3-ь4 в широком диапазоне значений Р( и Р(.
|| с/со=2
1 2'8
3,5 J
Рис. 4.18. Зависимость числа импульсов от вероятности
превышения порога шумом
308
Глава 4. Обработка и анализ телеметрической информации
Величина первого порога обычно устанавливается исходя из
требований на передачу функциональных параметров. Этот порог
соответствует рп~Ю4 и соотношению сигнал/шум порядка трех. Из рис. 4.18
следует, что в этом случае с достаточной для практики точностью
можно пользоваться формулой (4.41).
Прирш«1 ирс = 1 -рш формулы (4.39) и (4.40) можно привести к более
удобной форме:
Рл=Скрк(\-рГк+... + рп*Скрк, (4.42)
Рп=£си\-ртуР?*(1-ряу
В проведенных рассуждениях считалось, что в момент срабатывания
происходит увеличение сигнала, условно соответствующее замыканию. Однако
КД может как замыкаться, так и размыкаться. Поэтому после того, как
зафиксировано замыкание, устройство обработки должно перестроиться
на обнаружение перехода сигнала с высокого уровня на низкий. Это
обстоятельство следует учитывать в системах обработки.
4.2.5. Дешифровка телеметрической информации
Алгоритмы автоматизированной дешифровки телеизмерения
Автоматизированная дешифровка телеизмерений включает в себя два
последовательных этапа. На первом этапе производится калибровка телеизмерений.
Второй этап составляет собственно дешифровку откачиброванных значений.
Калибровка телеизмерений осуществляется по калибровочной
характеристике тракта передачи телеметрической информации. Основой для расчета
калибровочной характеристики служат калибровочные уровни локальных
коммутаторов. Значение каждого /-го калибровочного уровня
соответствует определенной величине шкалы телеметрического масштаба в процентах.
При нелинейной шкале по каналам локального коммутатора передается
несколько равноотстоящих калибровочных уровней между 0 и 100%. Если
РТС имеет достаточно линейную характеристику, то нет необходимости
использовать все калибровочные уровни. В этом случае используют уровни,
соответствующие 0 и 100% шкалы телеметрического масштаба. Обозначив
эти уровни через у0 и ут соответственно, калибровочную характеристику
представим аналитически в виде:
и= У~~Уо -100%, (4.43)
где у - текущее значение шкалы.
309
Современная телеметрия в теории и на практике
В формуле (4.43) у, у0, у100 представляются в двоичном ^-разрядном коде.
Откалиброванное значение параметра в соответствии с равенством (4.43)
определяется по формуле:
100
Для исключения влияния помех на калиброванное значение производится
сглаживание измерений калибровочных уровней.
В ряде задач первичной обработки возникает необходимость в так
называемой обратной калибровке некоторых параметров. Такая необходимость,
в частности, возникает в задаче обнаружения отклонения параметра от
заданных пределов. В этом случае величины порогов обнаружения е и
уставок 8 обычно заданы в процентах от полного значения диапазона изменения
параметра и калибровка порога обнаружения производится по формуле:
8 =7оо ,00^*Уо
а уставок - по формуле:
= Тоо •У100~'Уо °*
Преимущество обратной калибровки состоит в том, что поскольку
значения порогов и уставок неизменны во времени, то отпадает необходимость в
калибровке каждого текущего измерения параметра, так как для проверки,
например, условия у<8 достаточно проверить, чтоу.[Ь]<Ь[Ь]. В данном
случае отпадает необходимость в калибровке самого параметра, а
производится калибровка исходных данных для того или иного вида его обработки.
Калиброванные значения параметров с помощью тарировочных
характеристик преобразователей переводятся в истинные значения, то есть
производится их дешифровка. Тарировочные характеристики (ТХ) вводятся в
ЭВМ в виде таблиц узловых точек или в виде коэффициентов
аппроксимации кривой ТХ. Способы дешифровки параметров различаются в
зависимости от способа представления ТХ. При представлении ТХ в виде таблицы
определение значения параметра производится по формуле интерполяции:
X = X + ^~V(v. -Uj) % (4.45)
где Xj+1, Xj} ui+1, ui - координаты узловых точек ТХ; у - калиброванное
значение параметра.
310
Глава 4. Обработка и анализ телеметрической информации
Для машинного счета формулу (4.45) удобно представить в виде:
и , — v v —и
X^.J±Jl + Kx.Ij--L., (4.46)
UM~Ui Ui+\~Ui
предположив при этом, что номера координат точек ТХ, между которыми
находится значение параметра, известны.
При дешифровке температурных параметров непосредственно
формулой (4.46) пользоваться нельзя, так как они имеют двойную ТХ. Сначала
по калиброванному значению температурного параметра определяют
соответствующее сопротивление датчика, а затем по этому сопротивлению
из ТХ находят температуру. На первом шаге определение сопротивления
производится по формуле:
У' = 1 + /M"w '(У" - Г>)% ' (4>47)
где г. - калибровочные сопротивления температурного моста; у" -
результат измерений.
Для машинного счета формулу (4.47) удобно записать в виде:
Г-уЧ у»-Г
yj=ri - + гм-— •
гм~г, rM~ri
Если нет необходимости учитывать нелинейность температурного моста, то
равенство (4.72) можно записать в следующей форме:
(rs-9\)%
где rv r5 - сопротивления соответствующих плеч моста.
На втором шаге перевод величины у. (в омах) в градусы температуры
производится по формуле (4.46).
В случае аналитического представления ТХ дешифровка производится по
формуле:
т
\=Yuakyki '
к=0
где ак - коэффициенты аппроксимации ТХ.
Аппроксимирующий полином ТХ обычно бывает не выше третьей степени.
Аппроксимация ТХ полиномом степени т является наиболее
рациональным методом ее представления в ЭВМ. В этом случае в памяти хранится т
коэффициентов, тогда как при табличном способе представления
необходимо хранить всю таблицу
311
Современная телеметрия в теории и на практике
Аппроксимация тарировочных характеристик
Аппроксимацию ТХ можно производить различными способами, среди
которых особо следует выделить построение полинома с использованием
равномерного приближения. Задача аппроксимации решается следующим
образом. Сначала делается попытка аппроксимировать ТХ полиномом
первой степени:
X = а0 +ахи.
Коэффициенты а0, а1 определяются по методу наименьших квадратов из
системы уравнений:
п п
n n n
(4.48)
где n - число узлов ТХ.
Решение системы (4.48) даёт значение коэффициентов:
п п
Z^- Zv,-
"О ' ик п
П тгр 2
Lui
Затем проверяется правильность подбора полинома. Для этого
вычисляется величина г, характеризующая отклонение полинома от заданной ТХ,
по формуле:
е=-*52 , (4.49)
п
где ДА, = Х"ст - У}ас; Х"ст - истинное значение параметра по ТХ; \?ас -
рассчитанное значение. Если полученная величина удовлетворяет условию:
е<ав(^и»-^„). (4-50)
где оа - допустимая относительная ошибка аппроксимации, то полином
подобран правильно. Если это условие не выполняется, то производится
аппроксимация ТХ полиномом второй степени:
X = а0 + ахи + а2и2.
312
Глава 4. Обработка и анализ телеметрической информации
Определение коэффициентов а0, a1f a2 производится решением системы
уравнений:
п п и п
/=l /=l /=l /=l
П П П П
/=i /=i ;=i /=i
n n n
flf2Zw'2+aiZw/+aow=Z^-
/=1 /=1
В результате решения системы получим:
/=i
2>,
ао =
/=]_
2>.г
п п
я,
/=1
/=i
2 '
я,
/=1 /=1
/=1 /=1
«1«2
/=1
IX
/=1
После этого снова вычисляется е по равенству (4.49) и проверяется
условие (4.50). Если оно выполняется, то задача решена. В противном случае
строится полином третьей степени.
Ввиду того, что с повышением степени полинома увеличивается
возможность накопления ошибок вычислительного характера, может случиться,
что величина е, вычисленная для полинома третьей степени, не будет
удовлетворять условию (4.75 50) и может даже превзойти величину е,
найденную для полинома низшей степени. В этом случае для аппроксимации ТХ
используется полином, у которого величина е минимальна.
При аппроксимаций ТХ иногда необходимо построить полином так, чтобы
аппроксимирующая кривая проходила через заданную точку ТХ. В этом
случае коэффициенты аппроксимации находятся из уравнений:
313
Современная телеметрия в теории и на практике
для полинома первой степени:
а0=\ -аиВ9
п
Х(И/-«в)(*7-Л)
а =
i=\
\=\
для полинома второй степени:
«2Z^2~Me)(M,-Me) + ai
Е(м'~"е)
/=|
п
/=i
а2£(и? -uff+a^iu, -uQ)(uf -we2) = £(\-\)(и? -we2).
/=i /=i /=i
Используя метод наименьших квадратов, можно получить уравнение для
полинома третьей степени.
При отображении результатов обработки на графических устройствах
необходимо привести данные телеизмерений параметра и его ТХ к масштабу
графика. Получим соотношения для перевода этих данных в масштаб графика.
Диапазон измерения параметра или аргумента ТХ на графике отобразится
числом масштабных единиц:
т
где Х0- начало ТХ, а для параметра - начало отсчета его ординат на
графике; т - масштаб графика.
Так как величина Х0 в общем случае может не совпасть с началом координат
графика, то ее значение учитывается числом масштабных единиц /, то есть:
Д' = -
■+/.
т
Суммарная ордината в двоичных единицах:
Pi
гр
К * An
+ 1\-к99
т
(4.51)
где k - число двоичных единиц, содержащихся в масштабной единице графика.
314
Глава 4. Обработка и анализ телеметрической информации
По равенству (4.51) осуществляется перевод значений параметра в
соответствующие величины на графике. В ЭВМ с фиксированной запятой
результат, полученный по формуле (4.51), нормируется величиной
машинного масштаба.
Привязка результатов обработки телеизмерений ко времени
Результаты обработки телеизмерений привязываются к московскому
времени. Привязка может производиться с помощью шкалы наземного
времени приемной РТС или шкалы бортового времени. Для привязки
результатов обработки при использовании шкалы наземного времени необходимы
следующие исходные данные:
• время данного измерения относительно момента включения
запоминающего устройства (ЗУ);
• московское время пуска ЗУ;
• московское время передачи команды на воспроизведение tv
окончание воспроизведения tT начало запоминания tv конец запоминания £4;
• коэффициент трансформации т времени воспроизведения по
отношению ко времени запоминания;
• состояние запоминающего устройства (ЗУ) и направление
воспроизведения.
В зависимости от режима работы бортовой РТС имеются следующие
варианты привязки по времени:
а) в режиме непосредственной передачи:
К — К + ^т ртс
где tTPTC - текущее время приемной РТС;
б) в режиме воспроизведения при незаполненном ЗУ:
f/j —m(tT —tx)PTC при t2PTC > tTPTC > tXPTC\
t0 + tT pTC При tT pTC > 12 PTC,
где /, PTC = /, — /0, t2 PTC = t2—t0;
в) в режиме воспроизведения при заполненном ЗУ:
itA — m(tT — /, )РТС при t2 РТС > tT ртс > /, РТС;
/0 + tT PTC при tT ртс > /2 РТС
315
Современная телеметрия в теории и на практике
г) в режиме воспроизведения при повторном воспроизведении:
113 + m(tT — /j)ртс при t2 ртс > tTртс > /3Ртс;
при 1Т ртс > t2 РТС,
'//=■
|/0 +tTPTC
где t-^pjQ — tз /0.
Алгоритм, с помощью которого производится привязка по времени,
показан на рис. 4.19. Какую операцию выполняет каждый элемент, определяется
из приведенных формул.
|1
1 Нормализуется
1 tjPTC
1
I2
At = (tT-ti)prc
^^зЧ.
|Нет
I4
I tjM = tBM + tjPTC
i
i
Да
|11
t3+mAt
I9 I
ti-
mAi
Да
^Нет
4" ' *
Г5
^Нет
Ч "^
1
г
Nti-tOprc
tTPTC> t2 ^^
|Hef
ВПЗУ ^^
jTfla
ЗУ заполн.^^
Да
1 ' W,
10
t4 - mAt
Рис. 4.79. Структурная схема алгоритма временной привязки
С помощью логических элементов определяются режимы работы РТС. В
элементе 7 проверяется, первое ли воспроизведение ЗУ, а в элементе 8 -
заполнено ли ЗУ.
316
Глава 4. Обработка и анализ телеметрической информации
При использовании шкалы бортового времени привязка к московскому
времени производится по формуле:
tn=t°0 +X0NQ+XnNn-b,
где tc04 - московское время сброса на нуль счетчика бортового времени;
Х0,\п - цена основной и промежуточной меток (с); N0, NfI - значения
основной и промежуточной меток.
В режиме НП и обратном воспроизведении 5=0, а при прямом
воспроизведении 5=Х0. Алгоритм реализуется программно в виде двух блоков.
4.3. ВТОРИЧНАЯ ОБРАБОТКА ТЕЛЕМЕТРИЧЕСКОЙ
ИНФОРМАЦИИ*
4.3.1. Исследование поведения объекта и решение задач
идентификации
Задача и методы определения характеристик систем
Идентификация и техническое диагностирование являются
неотъемлемой частью процесса разработки, испытаний и эксплуатации различных
технических объектов. Задача определения характеристик процессов и
объектов можечт быть поставлена следующим образом [1]. Получена
выборка результатов измерений, относящихся к известным моментам
времени, известна математическая модель функционирования объекта в виде
зависимости (4.77) и ее предшествующих соотношений:
Л(0=Л(б»0, (4.77)
где h(t) - вектор-функция измеряемых параметров; Q - вектор обобщенных
характеристик объекта.
Требуется определить параметры состояния и значения числовых
характеристик элементов и систем, а также обобщенные характеристики объекта
в целом.
* Материалы подготовлены при поддержке гранта Президента Российской Федерации «Для
поддержки молодых российских ученых и ведущих научных школ Российской Федерации»
№ MK-2822.2003.09
317
Современная телеметрия в теории и на практике
Возможна и другая постановка задачи, когда математическая модель
объекта неизвестна. В этом случае по результатам измерений необходимо
построить математическую модель объекта, то есть создать структуру модели
и определить ее характеристики. Это - более сложная задача, решением
которой занимается отдельная отрасль знаний, поэтому идентификация
технических систем будет рассмотрена ниже.
В данном подпункте будем рассматривать задачу определения
характеристик в первой постановке.
В зависимости от состава, количества и точности телеметрических данных,
используемых для получения оценок параметров состояния и
характеристик объекта, в зависимости от полноты и адекватности математической
модели, используемой при обработке измерений, а также в зависимости
от уровня априорной информации и требуемой точности оценок для
обработки данных могут использоваться либо детерминированные, либо
статистические методы [1].
Под детерминированными методами определения характеристик будем
понимать методы, основанные на использовании однозначной простой
связи между определяемой характеристикой q или параметром
состояния X, с одной стороны, и соответствующими измеряемыми параметрами,
с другой стороны, без учета ошибок последних. При этом состав и
количество измеряемых параметров должны быть такими, чтобы указанную
связь можно было построить в виде сравнительно простой формулы:
qJ = qJ(hb-,hmJ,ql), j,I = l(l)m9 но /*у\ (4.78)
где q} - определяемые числовые характеристики; А,,...,А . - измеряемые
параметры; т - число измеряемых параметров, используемых для
определениями характеристики.
Обычно число т. равно минимально необходимому количеству измеряемых
параметров для определения q. или незначительно его превышает. Число
т обеспечивает получение одного значения q.. Поэтому рассматриваемый
метод часто называют методом определения характеристик по минимуму
данных [1].
При построении зависимости (4.78) никаких мер для уменьшения
влияния погрешностей измерения на результат q. не принимается. Однако если
известны погрешности измерений или их вероятностные характеристики
(например, СКО), то погрешность определяемой по формуле (4.78)
характеристики может быть вычислена следующим образом:
»b'»bdq,dq,
ч> MMdhidh,
318
Глава 4. Обработка и анализ телеметрической информации
где ги - коэффициент корреляции погрешности z-ro измерения с /-м; а., а, -
среднеквадратические погрешности тех Же измерений.
Частные производные dqi/dhi и dq/dhl вычисляются по формулам,
полученным путем дифференцирования выражения (4.78).
Достоинствами детерминированных методов являются наличие
сравнительно простой зависимости (4.78), которая позволяет легко, а во многих
случаях и наглядно, проанализировать влияние измеряемых параметров
на определенную характеристику, исследовать влияние ошибок измерений
на точность полученной оценки и выбрать оптимальный состав
измеряемых параметров для определения данной характеристики, а также
простота алгоритмов и малые затраты машинного времени [1J.
Недостатками детерминированных методов следует считать практическую
невозможность повышения точности результата а при неизменной
(недостаточной) точности измерений, а также необходимость построения
полностью новой зависимости (4.78) и алгоритма ее машинной реализации
при изменении состава измеряемых параметров, используемых для
определения одной и той же характеристики. Кроме того, оценка у-й
характеристики (q) требует в общем случае знания многих других характеристик
ql при fcj, которые очень часто также неизвестны. По этой причине всю
совокупность неизвестных характеристик qv...,qm необходимо определять
одновременно, решая систему из т уравнения типа (478), а это уже
усложняет процесс решения задачи [1].
Иногда число измеряемых параметров, полученных в один момент
времени, является недостаточным для нахождения всех характеристик (т<т).
Тогда используют измерения, полученные в различные (разнесенные)
моменты времени. Интервалы времени между этими измерениями следует
выбирать такими, чтобы измеряемые параметры за это время заметно
изменялись (в этом случае система уравнения не будет вырожденной), но в то же
время эти интервалы должны быть не настолько большими, чтобы
существенно изменилась сама искомая характеристика.
Детерминированные методы исходя из их свойств целесообразно
использовать для определения небольшого количества параметров состояния
элементов и некоторых характеристик систем, когда имеются надежная
информация о структуре этих систем и достаточно точные измерения требуемого
состава.
Наиболее целесообразно детерминированные методы применять при
обработке оперативно используемой информации в контуре управления объектом.
Статистические методы определения характеристик систем объекта
предусматривают привлечение значительно большего количества измерений,
319
Современная телеметрия в теории и на практике
чем минимально необходимое (т.), с целью повышения точности оценок.
Кроме того, статистические методы позволяют более просто, по
сравнению с детерминированными методами, решать задачу одновременного
определения многокомпонентного вектора характеристик объекта в
целом. В ряде случаев к числу определяемых характеристик удается отнести
не только характеристики объекта и его систем, но и характеристики
условий, окружающих объект, иногда даже характеристики сильно
коррелированных погрешностей получаемых оценок, вызванных неизвестными
систематическими погрешностями измерения [1].
Рассматриваемые в дальнейшем статистические методы являются
частными случаями разработанной в 40-х гг. XX века теории статистических
решений. Наиболее широкое распространение при определении характеристик
по результатам измерения получили следующие статистические методы:
• метод максимального правдоподобия;
• метод наименьших квадратов;
• метод максимальной апостериорной вероятности.
Эти методы позволяют строить два вида вычислительных алгоритмов
(процедур, схем): оптовые (разовые) и рекуррентные. Реализация разовых
алгоритмов предусматривает одновременное использование всей выборки
накопленных за определенное время измерений. Рекуррентные
алгоритмы позволяют обрабатывать результаты измерений по мере их
поступления [1].
Статистические методы лишены многих недостатков, присущих
предыдущим методам. Они позволяют существенно повысить точность оценок по
сравнению с точностью, обеспечиваемой детерминированными методами,
при использовании измерений одинаковой точности. Большая часть
алгоритма статистических методов не зависит от состава измеряемых
параметров или оцениваемых характеристик. При их замене изменения вносятся
лишь в отдельные блоки алгоритма. Оценка точности найденных
характеристик производится стандартными приемами попутно с решением задачи
определения характеристик.
Недостатком статистических методов следует считать, как правило,
значительно больший объем вычислений, чем при использовании
детерминированных методов. Кроме того, требуемая для реализации статистических
методов машинная память обычно также больше за счет увеличения
массивов измерений, их корреляционной матрицы и т. п.
Возможны и находят применение на практике различные комбинации
детерминированных и статистических методов для определения оценки
характеристик систем и объекта в целом по результатам телеизмерений.
320
Глава 4. Обработка и анализ телеметрической информации
Если временные зависимости результатов измерений входных и выходных
параметров системы сначала сгладить статистическим методом, а потом
уже сглаженные значения их использовать для определения характеристик
по формуле (4.78) детерминированного метода, то получим существенный
выигрыш в точности. Однако время, затрачиваемое на решение,
несомненно, увеличится за счет необходимости проведения сглаживания
результатов измерений [1].
Возможен и другой подход, заключающийся в вычислении нескольких
значений искомой характеристики по формулам детерминированного метода
при различных вариантах состава измерения. Полученную таким образом
выборку случайных значений оценок искомой характеристики подвергают
статистической обработке.
В качестве конечного результата оценки характеристики используют
оценку математического ожидания выборки.
Анализ состояния и функционирования объекта и его систем
заключается в следующем: в сравнении фактических значений параметров состояния
и характеристик систем с их требуемыми расчетными или допустимыми
значениями; выявлении причин получившихся отклонений; определении
фактических значений возмущающих факторов; выработке рекомендаций
по устранению причин имеющихся отклонений и т. д. Поэтому анализ
требует определения всех характеристик и параметров состояния.
Такой анализ представляет собой очень сложную задачу, решение
которой в полном объеме сопряжено со значительными трудностями, как в ее
постановке и формализации, так и в вычислительном плане, даже с учетом
высокого быстродействия и большого объема памяти современных ЭВМ.
Поэтому в большинстве случаев общую задачу анализа разделяют на ряд
частных задач:
• определение и анализ характеристик объекта;
• определение и анализ параметров состояния объекта в различные
моменты времени;
• определение и анализ характеристик основных систем;
• определение характеристик возмущений и т. д.
Найденные оценки сравниваются с расчетными или требуемыми
значениями, оценивается достоверность полученных результатов на основе
обработки многих экспериментальных или эксплуатационных актов. По
результатам этих сравнений вырабатываются рекомендации для принятия решения
по управлению объектом или по его технической доработке и
совершенствованию процесса эксплуатации и применения [1].
11 Зах. 861
321
Современная телеметрия в теории и на практике
Идентификация телеметрируемых объектов
Определение параметров и структуры математической модели,
обеспечивающих наилучшее совпадение выходных координат модели и процесса
при одинаковых входных воздействиях, называется идентификацией [3].
Приведенное определение в равной степени распространяется не только на
процессы, но и на технические объекты (функционирование объекта,
описываемое моделью, есть также процесс) и на то, что определение параметров
и структуры объекта производится по наблюдаемым сигналам - входному
воздействию и телеметрируемым параметрам.
Идентификацию можно рассматривать как неотъемлемую часть процесса
диагностирования, связанную с определением текущих значений
параметров (а иногда и структуры) объекта, которые используются в качестве
признаков для последующего определения его технического состояния. Иными
словами, идентификация есть процесс построения модели объекта по
реализациям его входных и выходных сигналов, предшествующий процессу
определения его технического состояния.
Получение исчерпывающих сведений о структуре и параметрах объекта,
находящегося в различных технических состояниях, включая
неработоспособные, не всегда возможно в реальных условиях [3]. Например, весьма
затруднительно определить адекватную структуру объекта при наличии в
нем дефектов типа «обрыв» и «короткое замыкание» в условиях жестких
временных ограничений, обусловленных необходимостью быстрейшего
определения дефекта в функционирующем объекте.
При поиске дефектов приходится чаще всего ограничиваться данными
непосредственных измерений входных и выходных сигналов без
определения параметров объекта. Но это вовсе не означает, что при поиске
дефектов не требуется построения и использования модели диагностируемого
объекта. Модель, конечно, используется, но, во-первых, она имеет
специфический вид, а во-вторых, построение ее производится заранее путем
проведения значительных по объему экспериментальных исследований
как в лабораторных, так и натурных условиях [3].
Такая модель содержит в себе априорные сведения об объекте
диагностирования и его технических состояниях. Эти сведения используются
совместно с результатами текущих измерений, выполняемых на объекте, для
определения его технического состояния, в частности, для поиска дефекта в нем.
Так как построение модели по результатам текущих измерений не
предусматривается (однако возможно уточнение ее), то время поиска дефекта
значительно сокращается.
Априорная информация имеет важное значение при осуществлении
идентификации и технического диагностирования. Чем больше объем этой
322
Глава 4. Обработка и анализ телеметрической информации
информации, тем быстрее и точнее определяется состояние объекта. При
полном отсутствии априорной информации ни идентификация, ни
диагностирование объекта не осуществимы.
Специфичность формы представления модели связана с тем, что из нее
стремятся исключить детали, выходящие за рамки поставленной цели
диагностирования. Например, в модели, ориентированной на поиск дефектов
с заданной глубиной, описываются только те состояния объекта, которые
соответствуют отказам его составных частей, с точностью до которых
определяется место дефекта. Благодаря этому достигается максимальное
упрощение модели и повышение оперативности при отыскании дефекта.
Таким образом, для осуществления диагностирования всегда необходимо
построение в том или ином виде модели диагностируемого объекта, то есть
решение задачи идентификации.
Допустим, что функционирование реального объекта описывается
соотношением:
Z = F(X9V), (4.80)
где:
• Z - вектор наблюдаемых выходных переменных (сигналов);
• X - вектор наблюдаемых входных переменных (сигналов);
• V- вектор ненаблюдаемых входных переменных (сигналов);
• F- оператор, связывающий входные и выходные переменные объекта.
Задачей идентификации является построение модели с оператором FM,
который бы в определенном смысле был близок к оператору объекта F,
то есть FM « F.
Очевидно, что связь между входными сигналами Хм и выходными
сигналами ZM модели при этом описывается соотношением:
Zm = Fm{Xm) . (4.81)
Понятие близости является условным, а тождественное совпадение
операторов F и FM практически невозможно. В реальных условиях
операторы FwFM могут иметь разные области задания, вследствие этого разные
структуры, размерность и т. д.
Задача усложняется тем, что во многих случаях априорная информация об
операторе ^сама является весьма относительной, то есть, в свою очередь,
модельной. Поэтому в процедурах идентификации близость операторов
323
Современная телеметрия в теории и на практике
F и FM оценивают обычно по реакциям объекта и модели на одно и то же
входное воздействие X. При этом:
Zm = Fm(X). (4.82)
Для оценивания этой близости вводится скалярная функция
J=J(Z,ZM), (4.83)
удовлетворяющая следующим трем условиям:
1. Функция является неотрицательной, то есть:
J(Z,ZJ>0 3 Z HZM. (4.84)
2. Функция равна нулю, при Z=ZM, то есть:
J(Z,ZM) = 0. (4.85)
3. Функция непрерывна и выпукла по обоим аргументам.
Применительно к мере у используются разные термины: функция потерь,
функция невязки, показатель адекватности модели реальному объекту,
показатель близости, показатель качества идентификации и т. д. В
дальнейшем в основном будет использоваться термин «показатель близости» или
«показатель качества идентификации».
Вследствие (4.82) выражение для показателя (4.83) имеет вид:
y=y[Z,FM(X)]- (4-86)
В силу свойств показателя близости можно предположить, что
эквивалентность выходных сигналов объекта и модели будет достигнута при условии:
у=0. (4.87)
Отсюда следует очевидное правило: оператор FM модели надо подбирать
таким, чтобы выполнялось условие (4.87). На практике порой приходится
удовлетворяться достижением минимума величины у. Этого в общем
случае можно добиться путем реализации какого-либо алгоритма
минимизации функции (4.86). Формально такую процедуру можно записать
следующим образом:
y(Fa/)-> min ->F'a#, (4.88)
FM*QF
гдеПг - класс (множество) допустимых операторов; F9- оптимальная
оценка оператора FM.
324
Глава 4. Обработка и анализ телеметрической информации
Обобщенная схема системы идентификации показана на рис. 4.20. Система
предусматривает измерения входных и выходных сигналов объекта и
использование определенной априорной информации об объекте и внешних
условиях.
TJ
Априорная
информация
л
Объект
1 £
Индентификатор
гг
Рис. 4.20. Обобщенная схема идентификации
телеметрируемого объекта
Более подробная схема системы идентификации, реализующей правило (4.88),
изображена на рис. 4.21.
V2
<
*«g>
il
Объект
Априорная
информация
1
Модель
объекта
±
Zm
Минимизация
показателя
индентификации
0
Г
Формирование
показателя
качества
индентификации
т
Индентификатор i
Рис. 4.21. Структурная схема идентификатора
телеметрируемого объекта
На рис. 4.21 через V2 и V3 обозначены помехи в каналах измерений
(передачи) соответственно входного X и выходного Z сигналов, через 0 - сигнал
перестройки оператора Fv модели, через Vv - ненаблюдаемые входные
переменные объекта.
325
Современная телеметрия в теории и на практике
Можно выделить следующие основные этапы процедуры идентификации:
1) выбор и обоснование класса (типа) моделей объекта идентификации;
2) выбор показателя и критерия близости объекта и модели;
3) выбор метода (принципа) идентификации и разработка
соответствующих алгоритмов;
4) выбор численных методов для реализации алгоритмов
идентификации;
5) получение и соответствующая обработка данных о входных и
выходных сигналах объекта;
6) выбор вычислительных средств (системы) и реализация процедуры
идентификации;
7) анализ полученных результатов;
8) использование полученных результатов по целевому назначению.
Теория идентификации как научная дисциплина родилась в недрах теории
управления при широком привлечении методов математической
статистики. Для решения отдельных проблем теории идентификации используется
и ряд других системных и частных наук [3]. В табл. 4.1 для наглядности
представлены указанные выше этапы идентификации и соответствующие
научные дисциплины, которые служат и могут служить теоретической
базой для решения конкретных задач и проблем на отдельных этапах
идентификации.
Крестик на пересечении определенной строки и столбца означает, что
данный раздел науки используется или может быть использован при
реализации данного этапа идентификации. Выбор и обоснование класса
математической модели объекта является важнейшим этапом процедуры
идентификации, существенно влияющим на все последующие этапы.
Выбор модели объекта в каждом конкретном случае производится с учетом
всей априорной информации об объекте идентификации.
Эта априорная информация может содержать данные о классе объекта
(линейный-нелинейный, стационарный-нестационарный, непрерывный-
дискретный, наблюдаемый-ненаблюдаемый и т. д.), о порядке
(размерности) уравнений, описывающих объект, и т. д. На выбор модели определенное
влияние могут оказывать и такие факторы, как целевое предназначение
модели, возможности, имеющиеся в распоряжении исследователя
вычислительной техники, квалификация специалистов, привлекаемых к решению
задачи идентификации, и прочие факторы, выступающие в качестве
ограничивающих условий.
326
Таблица 4.1. Теоретические основы этапов идентификации
Теоретические основы
Теория вероятностей
Математическая статистика
Теория управления
Теория подобия и моделирования
Теория оптимизации
Теория чувствительности
Программирование
Вычислительная математика
Теория измерения
Теория информации
Вычислительная техника
Частные физико-технические науки
Квалиметрия и теория
I эффективности
Искусственный интеллект
Этапы идентификации |
Выбор
типа
модели
+
+
+
+
+
Выбор
показателя 1
и
критерия
близости
+
+
+
+
+
+
+
Выбор
метода
фикации
+
+
+
+
+
+
Выбор
численных
методов
+
+
+
+
Получение
входных
и
выходных
сигналов
+ j
+
+
+
+
+
Выбор
ЭВМ
и
реализация
+
+
+
Анализ
результатов
+
+
+
+
+
+
Использование
результатов
по целевому
назначению
Управление
Прогнозирование
Диагностика
Контроль
Распознавание образов |
Принятие решений
при испытаниях |
Процесс познания
Современная телеметрия в теории и на практике
На этапе анализа результатов идентификации основное внимание
уделяется исследованию точности и надежности (достоверности) полученных
оценок оператора или параметров объекта. При необходимости на этом этапе
может быть произведена проверка пригодности построенной модели к
использованию по назначению.
Если окажется, что построенная модель не удовлетворяет предъявляемым
к ней требованиям, то процедура идентификации может быть повторена
с коррекцией всех или части этапов. Например, могут быть пересмотрены
тип и структура модели, показатель близости, метод идентификации,
вычислительные средства и т.д. В итоге построение математической модели
сведется к многошаговой (итерационной) процедуре. Схема такой
итерационной процедуры представлена на рис. 4.22.
Аг
ь
w
ь
W
ы
и
ш
■
—п
ш
W\
Нет
приорная информация
о модели
1
Выбор типа
модели
*
Выбор показателя
и критерия
индентификации
i
Выбор метода
индентификации
i
Выбор численных
методов
*
Реализация
на ЭВМ
*
Анализ
результатов
*
Оценивание
пригодности
1 Да
Использование
модели
Получение входных
и выходных сигналов
i
Обработка
входных и выходных
сигналов 1
ш
щ
Априорная
информация
Рис. 4.22. Алгоритм идентификации
328
Глава 4. Обработка и анализ телеметрической информации
Во многих случаях проверка пригодности сводится к проверке адекватности
модели объекту с использованием более сложного (чем при оценивании
оператора или параметров модели) показателя близости (адекватности) [4.3].
Пригодностьмоделиопределяетсятребованиями,которыезависятоттойцели,
ради которой строится данная модель. Дело в том, что в науке и технике
задача идентификации является не самостоятельной, а подчиненной конкретным
целям, определяемым системой, в которой используется построенная модель.
Некоторые наиболее типовые возможные задачи, в интересах которых
идентифицируются объекты, указаны в последнем столбце таблицы 4.4:
управление, прогнозирование, диагностирование, контроль, распознавание
образов, принятие решений, например, при проведении испытаний
техники, процесс познания окружающего нас мира. В связи с указанным
естественным является рассмотрение системы идентификации в качестве
подсистемы основной системы (суперсистемы).
Основная система характеризуется своими целями, показателями и
критериями эффективности (качества). Им должны быть подчинены
соответствующие характеристики подсистемы идентификации. Логично также
исследование задачи идентификации производить совместно с исследованием
основной задачи (например, управления или диагностирования). Это
вполне соответствовало бы требованиям системного подхода. Но, к сожалению,
достаточно обоснованные методы такого подхода к проблеме
идентификации в настоящее время отсутствуют.
На рис., 4.22 в блоки «Выбор модели» и «Обработка входных и выходных
сигналов» вводится априорная информация о модели и о входных и выходных
сигналах объекта. Эта информация характеризует степень предварительной
изученности объекта и условий его функционирования. Учитывая сложность
решения задач идентификации, трудно переоценить роль указанной
априорной информации при построении модели объекта. Априорная информация
оказывает существенное влияние практически на все этапы процесса
идентификации. Особенно велика ее роль при выборе модели, показателей и
критериев близости, а также при обосновании методов идентификации.
Исследователь располагает определенными предварительными
сведениями об объекте и о входных и выходных (в т. ч. телеметрических) сигналах
объекта. Заметим, что отсутствие каких-либо сведений (априорной
информации) об объекте и сигналах делает бессмысленной на современном
уровне развития кибернетики задачу построения математических моделей более
или менее сложных объектов в условиях их функционирования (пассивная
идентификация). При этих условиях исследователь имеет дело с объектом
тина «черный ящик». На практике обычно рассматриваются объекты типа
«серый ящик», о которых априори что-то известно.
329
Современная телеметрия в теории и на практике
Наиболее значимой для специалистов по идентификации является
информация о том, известна или неизвестна структура модели объекта, к какому
типу относится модель.
Структура модели характеризуется оператором FM. Поэтому под
структурой подразумевается вид оператора с точностью до его параметров
(коэффициентов). Оператор определяет фактически и тип модели.
Признаками, характеризующими тип модели, как уже было рассмотрено,
являются стохастичность модели (детерминированные и стохастические),
динамичность (динамические и статические), нелинейность по параметрам
(линейные и нелинейные по параметрам), нелинейность по переменным
состояния или фазовым координатам, дискретность (непрерывные и
дискретные), размерность (одномерные и многомерные), распределенность пара-
метров(ссосредоточеннымипараметрамиираспределеннымипараметрами),
переменность параметров (с постоянными параметрами, с переменными
параметрами) и т. д.
В рамках известного типа модели важной может оказаться дополнительная
информация о структуре и свойствах оператора F. Например, только факт
отнесения модели к нелинейному классу существенно не упрощает задачу
идентификации, так как класс нелинейных систем чрезвычайно
многообразен и, можно сказать, неограничен. В связи с этим любые сведения о
структуре уравнений, о типе нелинейности (гладкие, разрывные, однозначные
и т.д.), о характере процессов в объекте (монотонность,
автоколебательность и пр.), о свойствах линейной части и другие данные могут оказаться
весьма полезными исследователю.
В зависимости от степени изученности структуры объекта различают
структурную и параметрическую идентификацию.
Структурной идентификацией называется процесс построения модели в
случае, когда априори отсутствует полная (исчерпывающая) информация о
структуре (и, естественно, о параметрах) оператора F. Синонимом понятия
«структурная идентификация» является «идентификация в широком смысле».
При идентификации в широком смысле вначале определяется структура
оператора F (к какому классу принадлежит этот оператор), затем
оцениваются неизвестные параметры этого оператора.
Заметим, что даже структурная идентификация возможна только тогда,
когда об объекте (модели) что-то известно. Как уже было указано,
отсутствие всякой информации об объекте практически не позволяет построить
его модель. Так, определение порядка линейного дифференциального
уравнения, описывающего поведение объекта, возможно только в
предположении того, что объект линеен и одномерен.
330
Глава 4. Обработка и анализ телеметрической информации
Сведения о линейности и одномерности и могут составить априорную
информацию о модели. Конечно, в данной ситуации принципиально задача
идентификации может быть решена и при отсутствии каких бы то ни было
сведений об объекте. Для этого вначале необходимо определить
размерность объекта, затем проверить гипотезу о линейности и после этого
оценить размерность уравнения, описывающего объект с последующим
оцениванием параметров. Но даже для этого простейшего случая с линейным
объектом необходимо реализовать весьма трудоемкий длительный по
времени процесс.
Если же идентифицируется достаточно сложный нелинейный объект, то
необходимость проверки огромного количества возможных описаний объекта
сведет на нет оперативность решения задачи.
Если структура оператора модели априори известна, то в процессе
идентификации оцениваются только неизвестные параметры. При этом говорят о
параметрической идентификации или об идентификации в узком смысле.
При идентификации в узком смысле класс оператора F задается с
точностью до параметров.
Обозначив вектор неизвестных параметров ар а2, ..., а, через Аг
формальную запись (4.88), условно описывающую задачу идентификации, можно
переписать в виде:
y(Fa/M))-> min -+FM> (4.89)
где QA - множество допустимых значений параметров Аг
В некоторых случаях процедура (4.89) приводит к линейным или
нелинейным алгебраическим уравнениям, неизвестными в которых являются
искомые параметры А(. Аналогичные уравнения в дальнейшем будем называть
уравнениями идентификации.
Рассмотренная выше априорная информация об объекте носит в основном
качественный характер. Но могут иметь место и количественные
предварительные данные об объекте. Пусть, например, известно, что параметры
объекта с заданной структурой являются случайными величинами,
которые необходимо оценить в процессе идентификации. При этом могут быть
заданы априорные законы распределения в виде функции распределения
FA(A) или плотности распределения <рА(А) с точностью до параметров
распределения. Эти законы и образуют априорную информацию об объекте.
Априорная информация о входных и выходных сигналах содержит
качественные сведения о природе этих сигналов (детерминированные или
стохастические), о типе сигналов (непрерывные или дискретные), об их
331
Современная телеметрия в теории и на практике
размерности (одномерные или многомерные) и т. д. Для случайных
входных и выходных сигналов могут быть известны их качественные и
количественные характеристики.
Информация качественного характера касается класса случайных сигналов:
случайные величины или случайные процессы, стационарные или
нестационарные, эргодические или неэргодические, марковские, полумарковские
или немарковские процессы и т. д. Информация количественного характера
содержит априорные законы распределения или числовые характеристики
входных сигналов и помех.
В отличие от априорной информации апостериорная информация обычно
имеет количественное выражение. Она представляет собой результаты
измерений входных и выходных сигналов объекта.
Для непрерывных сигналов и непрерывных измерений эти данные
представляют собой одну или несколько реализаций векторов X(t) и Z(t). В
первом случае имеем запись:
5(/)= <X(t),Z(t)>9 fe[/o,/i], (4.90)
во втором случае:
s(t>
<Xxit\ Zi(/)>|
<x2{t) z2(/)>;
<хМ) zM)>\
fe[/0,/i]-
(4.91)
Первый случай характерен для детерминированных и случайных эргоди-
ческих процессов, второй - для неэргодических случайных процессов.
На практике, к сожалению, как правило, удается зафиксировать на
интервале [1(), tj только одну реализацию векторов X(t) и Z(t).
Для дискретных сигналов или дискретных (цифровых) измерений
соответственно имеем:
5(/,)= <X(/,),Z(,;)>, / = 1(1)#;
(4.92)
s(td=
<хЫ, Zi(td>
<X2(ti) Z2(ti)>\
< XMi) Zmiti) >\
i = l(\)N.
(4.93)
332
Глава 4. Обработка и анализ телеметрической информации
Теория и практика построения моделей объектов показывает, что не во всех
случаях структура и параметры объекта могут быть восстановлены.
Принципиальная возможность построения модели объекта на основании
имеющейся априорной информации и данных о входных и выходных
переменных характеризуется понятием идентифицируемости.
Качественные и количественные требования к процессам в системе
(входные и выходные сигналы, переменные состояния), а также к структурным
характеристикам объекта и обратной связи, если рассматривается
замкнутая система, формируют условия идентифицируемости.
К настоящему времени универсальные понятия и условия
идентифицируемости применительно к широкому классу динамических объектов и их
моделей не существуют. Предложено и разрабатывается несколько
подходов, базирующихся на идеях и методах теории управления и теории
оценивания. Так как методы идентификации в широком смысле (структурная
идентификация) развиты недостаточно, то в большинстве из известных
подходов структура модели предполагается известной.
Группа понятий и условий идентифицируемости, развитая на
методологии теории управления, не зависит от метода идентификации и
оперирует результатами точных измерений входных и выходных сигналов
идентифицируемого объекта. Эти условия идентифицируемости аналогичны
условиям управляемости и наблюдаемости и непосредственно связаны
с ними.
Понятия управляемости и наблюдаемости относят в теории управления к
фундаментальным системным понятиям. Поэтому по аналогии с этим
указанные понятия и условия идентифицируемости будем называть
(возможно, несколько условно) системными.
Группа понятий и условий идентифицируемости, опирающаяся в основном
на теорию оценивания, связана, как правило, с рассмотрением зашумлен-
ных входных и выходных сигналов и в значительной мере зависит от
выбранных критерия и метода идентификации. При этом зачастую
предполагается также разрешимость задачи идентификации по точным измерениям
входных и выходных сигналов.
Эта группа понятий и условий идентифицируемости формулируется,
как правило, с использованием аппарата теории вероятностей и
математической статистики. Более или менее завершенные исследования
проблемы идентифицируемости получены пока только для линейных
систем.
333
Современная телеметрия в теории и на практике
4.3.2. Контроль функционирования и работоспособности
ОБЪЕКТА
Схемы контроля
Схема контроля определяет алгоритм контроля и зависит от принятой
модели объекта контроля. Наибольшее применение получили четыре схемы
контроля [1].
Первая схема контроля предполагает, что состояние системы определяется
совокупностью параметров. Если параметры находятся в пределах
допусков, то система считается работоспособной. При выходе хотя бы одного
параметра за пределы допуска система становится неработоспособной. По
этой схеме измеряются значения параметров, сравнивается с допусками
относительно номинальных значений и применяется логическая схема И.
Для удобства автоматизации контроля параметру, не вышедшему за
пределы допуска, присваивается признак «1», а вышедшему за него - «О». Тогда
правило оценки работоспособности будет выглядеть следующим образом:
если в результате логического умножения получается единица, то система
работоспособна, если нуль - неработоспособна.
Вторая схема предполагает, что моделью системы как объекта контроля
является совокупность параметров, функционально связанных между собой
через показатель качества работы. Нахождение показателя качества в поле
определенного допуска относительно номинального значения
обеспечивает выполнение системой поставленных задач. По этой схеме производится
измерение параметров, вычисляется функционально связанный с
параметрами показатель качества, сравнивается со значением, соответствующим
номинальным значениям параметров.
Третья схема контроля предполагает, что показатель качества определяется
как функционал от наблюдаемых выходных сигналов реальной и идеальной
систем. Зависимость показателя качества от параметров неизвестна. По
наблюдениям выходных сигналов реальной и идеальной систем формируется
оценка показателя качества. Далее полученная оценка сравнивается с
контрольными допусками и принимается решение о работоспособности системы.
Первая и вторая схемы контроля наряду с оценкой работоспособности
системы обеспечивают решение задачи диагностики.
Четвертая схема осуществляет контроль функционирования системы.
По результатам измерений сигнальных или диапазонных параметров
составляется индикаторная ячейка, характеризующая состояние
параметров. Полученная ячейка сравнивается с контрольной ячейкой,
содержание которой дает представление о действительной картине положения
датчиков при данном режиме работы системы.
334
Глава 4. Обработка и анализ телеметрической информации
Контроль по параметру
На практике для простых систем контроль производится по одному или
небольшому количеству измеряемых параметров, сравниваемых с
допусками [1]. Получим алгоритм принятия решения для случая одного
измеряемого параметра. Пусть на контролируемый параметр определены допуски
и сигнал, соответствующий его значению, имеет аддитивную структуру
полезного сигнала и помехи:
j>(0 = *(/)+е (0.
Сигнал y(t) распределен по нормальному закону с математическим
ожиданием т и дисперсией D . Построим правило выбора решений о нахождении
параметра в поле допуска или вне его из условия минимума вероятности
ошибочного решения. В рассматриваемой задаче возможны две гипотезы:
первая - параметр в поле допуска и вторая - параметр вне поля допуска.
Правило решения представляется отношением правдоподобия:
A(v)- Р(У)
гцер(у) - апостериорная вероятность первой гипотезы.
Апостериорная вероятность нахождения параметра в поле допуска
определяется интегрированием по полю допуска плотности вероятности §(х/у) того,
что при полученном измерении параметра у его значение будет х, то есть
д2
Р(У)= fo(x/y)dy- (4.94)
д'
Для нормального закона распределения:
ф(х/v) = -r===^exP
(х-ту)2
2D.
(4.95)
Подставляя равенство (4.95) в выражение (4.94) и выполняя
интегрирование, получаем:
р(у)=:ф(А2-ту)-Ф(&]-ту),
71 Л' лз д2
где Д =—, Д =• относительные допуски;
- ту
ту=~.
335
Современная телеметрия в теории и на практике
Отношение правдоподобия запишется теперь в виде:
Ф(#-т,)-Ф(А-т,)
1-Ф(А-ту) + Ф(А1 -ту)
Правило решения выглядит следующим образом: если А(у)> 1 , то
принимается решение о нахождении параметра в поле допуска, если А(у)< 1,
то вне поля допуска.
В формуле (4.96) ту представляет апостериорное математическое
ожидание. Для целей контроля удобнее использовать величину априорного
математического ожидания и, соответственно, допуски отсчитывать также
от этой величины. В этом случае в поле допуска может появиться
асимметрия относительно априорного математического ожидания. Поэтому
целесообразно ввести коэффициент асимметрии поля допуска X [1]. Он
изменяется от нуля до единицы.
При симметричном относительно априорного математического ожидания
поле допуска коэффициент асимметрии равен единице. В результате
формула (4.96) запишется в новых обозначениях:
А(у) = V Л- 11 V - lJ-, (4.97)
1-Ф(ЬД-Л/,)-Ф(Д + А/,)
где Мv =ту-т[, ХА = А2 -ту, А = А'-т'у (т'у - априорное
математическое ожидание).
Вместо сравнения отношения правдоподобия ( ) с единицей можно
сравнивать с 0,5 величину:
А(Му) = Ф(ХА -Му) + Ф( А + Му). (4.98)
Эквивалентность этой процедуры можно проверить делением равенства
(4.97) на_его числитель. Правило решения в этом случае_определяется так:
если А(Му) > 0,5, то параметр в поле допуска; если А(Му) < 0,5, то
параметр вне поля допуска.
Это правило можно упростить, переходя к непосредственному сравнению
оценки параметра с некоторым новым контрольным допуском. Величина
контрольного допуска находится из условия А(Му) = 0,5. Аналитически
контрольные допуски определяются решением уравнения:
Ф(АА - А,) + Ф(А - АА) = 0,5 , (4.99)
где Ак - контрольный допуск.
336
Глава 4. Обработка и анализ телеметрической информации
Для решения практических зццач определения контрольных допусков
необходимо решить уравнение (4.99) и построить зависимость
контрольных допусков от абсолютного допуска и коэффициентов асимметрии. На
рис. 4.23 изображены кривые для определения относительных
контрольных допусков как функций относительных допусков и различных
значений коэффициента асимметрии. 4
3
2
1
О
-1
-2
-3
-4
Рис. 4.23. Графики относительных контрольных допусков
Из рисунка следует, что при А,= 1 контрольный допуск стремится к
асимптоте - биссектрисе координатного угла. При значительной асимметрии поля
допуска относительный контрольный допуск становится меньше
относительного допуска и поле допуска сужается.
Процедура принятия решения «параметр в поле допуска или вне его»
представляет собой процесс сравнения оценки параметра с контрольными
допусками. Принимается решение «параметр в поле допуска», если его оценка
лежит внутри контрольных допусков, и «параметр вне поля допуска», если
оценка находится вне контрольных допусков.
Данная процедура принятия решения обеспечивает минимум вероятности
ошибочных решений. Если работоспособность системы определяется
несколькими параметрами, то принятие решения о годности системы
производится по описанной схеме.
Контроль по показателю качества
Для контроля состояния системы по показателю качества необходимо
получить его оптимальную оценку. Примем за показатель качества работы
337
Современная телеметрия в теории и на практике
системы минимум среднего квадрата ошибки отклонения полученного
показателя качества от его требуемого значения. Согласно принятому
критерию выражение для определения оптимальной оценки можно
записать в виде:
6* = ]e(bp(b^)flfF, (4.100)
-сю
где интегрирование производится / раз по всем параметрам.
Для расчета показателя качества примем зависимость его от параметров
первой группы, то есть:
А=П/,(£:
0.(г) = Ц/,(Г,) (4Ю1)
и от параметров второй группы:
Q2&) = Qo + BT$ + tTC$. (4.102)
При независимых параметрах первой группы оптимальная оценка
показателя качества согласно формуле (4.100):
3*=П ]/Д)ф(£/*)4- (4-103)
'=1 -ос
В силу свойств характеристической функции имеем:
' ^ ( (
Й*=П \Wi'XWi. (4.104)
При высокой точности измерения апостериорная плотность вероятностей
(p(YtJ X ) близка к нормальному закону с математическим ожиданием /^.
и дисперсией D:
С 1 ^
ф(Г/А') = -г==— е щ . (4.105)
Подставив это равенство в выражение (4.104) и вычислив интеграл,
получим:
Q; = П[Ф(Д<2> - Ь-Ф(А!° - Ь] =- ПР,(Ь • (4-Ю6)
где:
A(U) / $
(4.107)
а;
338
Глава 4. Обработка и анализ телеметрической информации
(4.110)
Для параметров второй группы оценка показателя качества будет:
Qi = \{Q0+BTY + YTCYy${YIX)dY. (4.108)
-оо
Вычисление оценки показателя качества по этой формуле дает следующий
результат:
Qi =Q0+BTlf + lfTC$ + trCK} (4.109)
где К- матрица корреляционных моментов параметров.
Так как параметры первой и второй групп не зависят друг от друга, общая
формула для оптимальной оценки показателя качества будет иметь вид:
Выражение (4.110) показывает, что если все параметры первой группы
находятся в пределах допуска, то Q* = 1 и показатель качества определяется
только параметрами второй группы. Если хотя бы один параметр первой
группы выходит за пределы допуска, то Q*= 0 и показатель качества всей
системы также равен нулю.
Таким образом, численное значение оценки показателя качества
определяется параметрами второй группы. Отклонение показателя качества от его
значения при номинальных значениях параметров определится по формуле:
q*-q0.=вт$+$тс$+&ск. (4.ш)
В этой формуле значения элементов вектора К и элементов матрицы /
определяются по результатам измерений параметров. Если полученное
отклонение оценки показателя качества не выходит за пределы допустимого
значения, то система считается работоспособной.
Измерение параметров сопровождается погрешностями, поэтому
процедура принятия решения должна выполняться так, чтобы ошибки были
минимальными. Получим правило решения, минимизирующее полную
вероятность ошибки [1].
Условный риск при принятии решения выражается формулой:
r(Y,X) =\ll(Y,YT ^{qlX^2{YTlq)dkq, (4.112)
где l(Y,fT) - функция потерь; ф,(д/X) - условная плотность
вероятности того, что при фиксированном значении параметра X показатель качества
равен q ; ф2(У^ I q) - условная плотность вероятности требуемого
показателя качества при фиксированном его значении.
339
Современная телеметрия в теории и на практике
Возможны четыре ситуации: правильные решения «годен», «не годен» и
неправильные решения «не годен» при работоспособной системе и «годен»
при неработоспособной системе. Согласно этим ситуациям функция потерь
запишется матрицей:
|0 1|
К
Ц)=
о
где единица означает неправильное решение, а нуль - правильное.
Условная плотность вероятности ф2(^> IЧ) характеризует закон
требуемого преобразования. В данном случае требуемое преобразование не случайно
и характеризуется принятием решения «годен», если Q*> Qr и «не годен»,
если Q*< Qr Поэтому плотность вероятности ф2(2> IЧ)имеет ВИД дельта-
функции:
фД/?) = 5(^-Ъ. (4.113)
При принятых предположениях условный риск можно записать в виде:
оо QT
r(Y9X)= faiq/Xydq* faiq/Xydq. (4.114)
Qt
Оптимальное решение дает следующее правило:
Qt
faiq/XytqZ ^(q/Xytq (годен)
Qr
Qt
\%(qlX)dq< \<$x(qlX)dq {негоден)
Qt
Введя отношение правдоподобия:
(4.115)
\%{qlX)dq
От
fir
\%(qlX)dq
Л=| , (4.116)
запишем алгоритм принятия решений в виде:
Л>1 - система работоспособна;
Л<1 - система неработоспособна.
340
Глава 4. Обработка и анализ телеметрической информации
При достаточно высокой точности определения оценки показателя качества
апостериорная плотность вероятности близка к усеченному нормальному
закону с условным математическим ожиданием М= Q и дисперсией DQ:
<p(q/X)
JbiD,
•exp
{q-QY
2Dn
при 0<Q*<\;
(4.117)
[<p(q/X) = 0 при Q*>\ и Q*<0,
где k - нормирующий множитель:
\<V{qlX)dq
(4.118)
Подставив выражения плотности вероятности в отношение правдоподобия
и вычислив интегралы, получим:
Ф
\
-Ф
Qt-Q
л
ф
+ ф
rQr-Q*^
(4.119)
Алгоритм принятия решения при контроле заключается в вычислении
оптимальной оценки показателя качества Q* и отношения
правдоподобия и сравнении его с единицей.
Контроль функционирования систем
Контроль функционирования систем состоит в проверке правильности
выполнения программы работы данной системы [1]. Предварительно на
основании программы работы системы составляется модель системы. Модель
системы представляет собой матрицу состояний блоков системы при
выполнении той или иной операции согласно программе работы. Число
столбцов матрицы равно количеству блоков системы, а число строк - числу
запланированных операций.
Каждый элемент матрицы представляется нулем или единицей. Единица
соответствует включенному состоянию, а нуль - выключенному. Номер
строки есть код операции. Сформированная матрица хранится в
запоминающем устройстве автоматизированного комплекса обработки
информации. Выполнение запланированных операций производится по командам,
вырабатываемым датчиком команд. Команда представляется кодом
выполняемой операции.
341
Современная телеметрия в теории и на практике
В соответствии с программой работы системы датчиком команд подаются
команды для выполнения системой запланированных операций. Эта же
команда подается в устройство памяти комплекса, где по ее коду выбирается
соответствующая строка матрицы. Выбранная строка представляет собой
модель системы при выполненной команде. По команде система выполняет
предусмотренную операцию. Система контроля производит измерение
параметров контролируемой системы.
Состояние системы контролируется сигнальными и диапазонными
параметрами. По результатам контроля в ЭВМ комплекса формируется образ
состояния системы. Затем производится сравнение полученного образа
с выбранной строкой матрицы (моделью). При совпадении модели и
полученного образа делается заключение о нормальном функционировании
системы. При несовпадении хотя бы одного элемента образа делается
заключение о ненормальном функционировании системы. Сравнение
модели с образом и заключение о функционировании системы осуществляется
по соответствующим алгоритмам [1].
Контроль работоспособности с помощью алгоритмов обучения
Задача контроля работоспособности систем может трактоваться как
задача опознавания состояния системы. Для ее решения система опознавания
(ЭВМ автоматизированного комплекса обработки информации) сначала
проходит обучение. Обучение производится посредством показа ей
образов, принадлежность которых к тому или иному классу известна.
Геометрически задача обучения состоит в построении такой поверхности,
которая в каком-либо смысле лучше всего разделяла бы многомерное
пространство образов на различимые классы. В алгебраической постановке
задача обучения состоит в построении некоторой разделяющей функции
по показам образов и указаниям, к какому классу они принадлежат [1].
Применительно к задачам контроля работоспособности обучение будет
состоять в предъявлении значений параметров и указании, какому состоянию
системы они соответствуют. Задача обучения сводится к построению такой
гиперплоскости или разделяющей функции, которая разделяла бы
пространство параметров на классы.
Представим разделяющую функцию в виде:
/<У) = &М,(У)+К, (4-120)
/=1
где X.- весовые коэффициенты; yfy) - действительные однозначные функции,
не зависимые от весов X:, d - число составляющих разделяющей функции.
342
Глава 4. Обработка и анализ телеметрической информации
Задача обучения состоит в построении такой разделяющей функции, чтобы
f(y)>0, если;; придадлежитq-классу; |
f(y)<0, если>> не принадлежит q-классу;]
Построение разделяющей функции при заданных функциях у .(у) сводится
к нахождению некоторой системы весовых коэффициентов Х.у
удовлетворяющих условию данной разделяющей функции. По виду функции ц(у)
различают алгоритмы обучения..
Метод разделяющей гиперплоскости. Пусть функции \|л(у) заданы в виде
v|/.(y)=y.|,. В этом случае разделяющая функция представляет собой
гиперплоскость и ее уравнение на основании выражения (4.120) будет:
/(У) = ^У,+К- (4-121)
/=1
При построении алгоритма распознавания ограничимся случаем, когда
состояние системы характеризуется двумя классами: «годен», «не годен».
Этот случай называют дихотомией. Для обучения имеем обучающую
выборку измерений объемом Vo6, которая состоит из выборки V1 объемом /,,
относящейся к классу «годен», и выборки V2 объемом 12 относящейся к классу
«не годен», то есть:
К={у\ V,e "годен"
с л ■ (4.122)
V2 = {уд )п V2 е "не годен"
Выборки V1 и V2 являются линейно-разделимыми, то есть существует такой
разделяющий вектор X, что удовлетворяются условия:
(П)>0 для ^е^(* = 1,2 /,);
(П)<0 для y,€V2(s = l,2,..J2), (4123)
где (Yk) - скалярное произведение векторов.
Геометрически решение задачи обучения будет выглядеть следующим
образом. Имеем два раздельных состояния V1nV2. Линия АВ - линия,
разделяющая эти состояния. Выберем начало координат в точке 0 (рис. 4.24).
Разделяющий вектор к0 направлен вдоль линии АВ. Отобразим область
параметров выборки V2 симметрично началу координат. В результате этого
получим объединенную выборку V] v V2. При (Yk)>0 объединенная область
Vo6 лежит по одну сторону плоскости (прямая АВ), а при (Yk)<0 -по другую.
При появлении первого измерения yv строится плоскость f(y)= (Yk) =0 с
направляющим вектором у г
343
Современная телеметрия в теории и на практике
А4 А
Рис. 4.24. Схема построения разделяющей
гиперплоскости
На рис. 4.24 это соответствует линии А1В1. Если измерение следующего
параметра попадает в полупространство, куда направлен вектор yv то
положение линии А1В1 остается неизменным. При попадании измерения
параметра в противоположное полупространство производим исправление
положения линии A 1Bf Для этого векторы у1 и у2 суммируем и для
суммарного вектора определяем такой вектор Хг чтобы их скалярное произведение
равнялось нулю, то есть производим поворот линии А1В1. В такой
последовательности продолжается обучение до построения разделяющей
плоскости (линия АВ) [4.1].
Математически алгоритм обучения заключается в предъявлении значения
параметров и изменении весовых коэффициентов на (k+1)-u шаге по
следующим правилам:
К+х =К, если
г(лА)>° и Ум gF.;
ЛУк+М<° и Ум gF2>
b*+i =К -ЧУМ* если(^+1^)>0, а ум
V2\
К+\ =К +скУы> если(ук+]Хк)<0, а ук+] <=V]9
(4.124)
где Ск - числа, которые выбираются из условия быстрой сходимости
процесса обучения.
344
Глава 4. Обработка и анализ телеметрической информации
Качество обучения оценивается следующими-критериями:
• отношением числа правильно классифицируемых изображений к
общему числу обучающих изображений r|f;
• суммой квадратов расстояний от разделяющей гиперплоскости до
неправильно опознанных изображений:
л2=Е^Ь—• с4-125)
'" IV
Первый критерий полностью характеризует качество разделения, но
неудобен для целей оптимизации. Второй критерий дает возможность
оптимизировать процесс обучения. Оптимизация в алгоритме обучения производится
градиентным методом. Итерационная процедура определения
составляющих вектора X ЭВМ комплекса обработки осуществляется по правилам:
К+\ = К +скУы = grad\\2(X\
к_Л ПРИ Л2(^)<Л2(^-|)
скУ*+\ =1
(4.126)
*±ук при Г|2(^)>Л2(^-|)
2
Процесс определения составляющих вектора X заканчивается при
выполнении одного из условий:
г|2=0 или |gradr|2(A,)|<e,, (4.127)
гдее>0.
Достоинствами метода являются простота алгоритма контроля и
относительно высокое быстродействие.
В качестве недостатка следует отметить принципиальную невозможность
разделения состояний, занимающих некомпактные области в пространстве
измерений параметров.
Машинная реализация описанного алгоритма представляется следующим
порядком действий. Оператор вводит в машину вектор измерений Yv а
также число ау=±У, указывающее, к какому состоянию системы относится Y1
(а1 = +1 для V1 и а= -1 для V2). Компьютер вычисляет вектор
коэффициентов X из условия (Y1X,)=().
Затем оператор вводит следующий вектор Y2, который умножается на Хг
Если (Y2 Х^>0У то исправлений вектора Х1 не производится и Y2 забывается.
345
Современная телеметрия в теории и на практике
Если окажется, что (Y2 А,Г/)<0, то, значит, появилась ошибка и производится
вычисление величины Х2 по формуле (4.124). В этом случае значения Y2X2
и а2 запоминаются [1].
В такой последовательности следует производить определение тех
значений X, которые разделяют состояния V1 nV2.
Рассмотрим k-и шаг алгоритма. К этому шагу в памяти машины хранятся
все значения Yfi - 1,/), показанные до этого шага и требовавшие
исправлений ошибок, числа а1,а2,...,а1, указывающие своим знаком, к какому
состоянию относятся У., а также значения коэффициентов г|2, вычисленные
по формуле (4.125). При предъявлении на (к+1)-м шаге значения Yk+1
вычисляются Х1+1 по формуле (4.126) и gradr\r производится его сравнение с
заданным значением е. При выполнении одного из условий (4.127) процесс
обучения заканчивается. Если это условие не выполняется, процесс
обучения продолжается. Полученные в результате обучения величины X
хранятся в памяти компьютера.
Контроль работоспособности состоит в вычислении скалярного
произведения векторов полученных значений параметров Y и коэффициентов X с
последующей проверкой условия разделяющей функции.
В методе потенциальных функций в качестве действительных функций
(4.120) используются функции двух переменных \\t(yfy*), где у, х - точки
из пространства состояний системы [1]. Если зафиксировать точку х}
положив х=у*, то функция \\f(y, у*) станет функцией точки пространства и
будет зависеть от того, как выбрана точка у*. В физике такой функцией
является потенциал. По аналогии функцию у (у, х) называют потенциальной
функцией. Для целей контроля работоспособности удобно представить
функцию \\f(y, x) в виде функции расстояния между точками у их. В
качестве такой функции могут быть использованы функции:
У(У,У*) = Г > У(у,У*) = е~*а'У1 (я = 1,2). (4.128)
Выбранная функция у (у, у*) определяет поверхность над точками
пространства состояний. Рассмотрим, как можно решить задачу распознавания
состояний, используя потенциальные функции. Идея метода состоит в
следующем. Надо научиться по значениям параметров определять состояние
системы «годен», «не годен».
Условно эти состояния назовем классами А и В. Предположим, что
предъявлено значение параметра у и сообщено, что оно принадлежит классу А.
Примем точку в пространстве состояний, соответствующую данному
значению, за источник потенциала, положив у^у*, и построим «холм» (рис. 4.25)
с вершиной в этой точке.
346
Глава 4. Обработка и анализ телеметрической информации
Ф(Х Г)к
Рис» 4.25. Потенциальная функция
Запомним, что этот холм принадлежит точке класса А. При предъявлении
следующих значений параметров ys из класса А или В каждый раз строятся
подобные «холмы» с вершинами в точках, соответствующих
предъявленным значениям параметров, и запоминается, к какому классу эти холмы
принадлежат. По окончании процесса обучения складываются отдельно
потенциалы точек класса А и точек класса В, то есть:
v/^)=Zv(^^*)
и (4.129)
У,еВ
Функции \\tA(y) и ув(у) называются потенциалами классов А и В.
После обучения начинается «экзамен». Теперь предъявляются значения
параметров и требуется дать ответ, к какому классу они относятся. В методе
потенциальных функций предлагается относить предъявленное значение
параметра yi к классу Л, если:
Ул(У)>Ув(У)' (413°)
и к классу В при обратном знаке неравенства.
Описанная процедура далеко не всегда приводит к успеху, так как среди
предъявляемых точек пространства состояний системы классы А и В могут
быть представлены неравномерно. Если, например, число точек класса А
будет больше числа точек класса В, то это приведет к неправильно
построенной разделяющей поверхности.
347
Современная телеметрия в теории и на практике
Для того, чтобы обойти это затруднение, в методе потенциальных
функций строится разделяющая функция f(y). Способ построения разделяющей
функции характеризуется следующей рекуррентной процедурой:
/к+>(У) = /Лу) + гкУ(У>Ум)> (4-131)
где г - некоторая числовая последовательность; к - номер приближения.
Разделяющая функция/(г/,) принимает положительные значения в точках,
соответствующих классу Л, и отрицательные значения в точках,
соответствующих классу В.
В качестве нулевого приближения может быть использована любая
функция с произвольными коэффициентами, сумма квадратов которых меньше
бесконечности. Этому условию удовлетворяет функция f0(y)=0.
Выбор числовой последовательности на (k+1)-M шаге алгоритма в формуле
(4.131) определяется по следующим правилам:
ГО, если fk(ykJ>0 и ук+] еА;
О, если /, (ум) < 0 и ум еВ;
гк =< (4.132)
+ 1, если Л0>,+1)<0, а уш еА;
[-1, если fk(yM)>0, a ум efi.
Здесь ук+1 - значение параметра, предъявленное на (к+1)-м шаге обучения,
fk(yk+1) - к-е приближение разделяющей функции, построенное к (к+1 )-му
шагу.
Данный алгоритм приводит к точному разделению классов А и В для
каждой конкретной задачи за конечное число шагов.
Процесс обучения заканчивается, если после очередного исправления
ошибки следующие за ним подряд / отказов не приводят к новому исправлению
ошибки. Число / зависит от числа s имевшихся ранее исправлений ошибок
и определяется по формуле:
/ = /0+^, (4.133)
где 10 - наперед заданное число.
Число 10 определяется по формуле:
^ттгт? (4134)
ln(l-e)
где 8 - вероятность попадания значений параметра в неправильно
разделенные части классов А и В (ошибка первого рода); г - вероятность ошибки
при экзамене (ошибка второго рода).
348
Глава 4. Обработка и анализ телеметрической информации
Машинную реализацию алгоритма можно пояснить следующей схемой.
Оператор вводит первое значение параметра yv и строится первое
приближение разделяющей функции по формуле:
(\1/(у,у,), если у. е А;
/(у) = Г l ] . (4.135)
H'O'.J'i)» если У| еВ
При предъявлении второго значения параметра г/2 строится второе
приближение:
/2(У) = Му) + г2У(У,У2) = 2,'?У(У,У,)- (4-136)
Если/2(у)>0и у2 G A {wm\f2(y)<0w y2 е В), то значениеу2забывается
и рассматривается следующий показ. Если же/2(у)>0и y2 е В (или/2(у)<0
и у2 G A )j то значение у2 запоминается с числом а2=±1} указывающим,
к какому классу это значение относится.
Рассмотрим k-и шаг алгоритма. К этому шагу в памяти машины хранятся
значения y.(i = 1,/) , показанные в процессе обучения до этого шага, для
которых требовалось исправление ошибки, а также числа a1fa2,...,ar которые
указывают, к какому классу принадлежат эти значения. При появлении на
k-м шаге нового значения yk машина вычисляет величины \\f(yk, у), i— 1,/
и сумму:
ЛО0 = 2>О^Д- (4-137)
/=1
Если fk(y)>0 и ук G А (или fk(y)<0 и ук G В), то результаты вычислений
и значение ук забываются и рассматривается следующий показ. Если же
fk(y)>0, а ук G В (или fk(y)<0 и ук e A), то в память машины
заносятся значение ук и число ak> указывающее, к какому классу принадлежит ук.
Таким образом, к концу каждого шага (а значит, и к концу всего процесса
обучения) в памяти машины хранятся наборы y.fi = 1,/) и аг Значения
потенциальных функций у (у, у.) и функций fk(y) не хранятся в памяти. Они
вычисляются каждый раз при новом показе или контроле. Процесс
обучения заканчивается, если подряд / раз не совершаются ошибки.
При контроле с появлением значений параметров у вычисляется функция:
/00 = XWO^,)- (4-138)
1=1
Если f(y)>Oy то система находится в состоянии, соответствующем классу Л.
Если же/(у)<0, то система принадлежит классу В [1].
349
Современная телеметрия в теории и на практике
Классификация методов распознавания технических состояний объекта
диагностирования
Возможные методы распознавания технических состояний объекта могут
быть классифицированы с позиций теории распознавания образов и с
позиций технической диагностики. Однако могут быть выделены общие
признаки классификации, применяемые в каждом из указанных научных
направлений. Здесь мы остановимся именно на таких признаках [3].
По характеру и объему используемой информации все методы
распознавания технических состояний объекта делятся на две большие группы:
детерминированные и статистические (последние иногда называют
вероятностными методами).
Детерминированные методы базируются на математическом аппарате,
не использующем в явном виде вероятностные характеристики изучаемых
классов состояний объекта. Обычно при детерминированных методах
решение о принадлежности распознаваемого изображения одному из классов
принимается по результатам вычисления некоторой функции расстояния
от этого изображения до эталонных изображений классов в пространстве
измеряемых признаков.
Поскольку за основу построения классифицирующего правила при этом
берется некоторая мера расстояний между векторами - точками
метрического пространства, то эти методы распознавания называют метрическими.
В качестве метрики используется евклидово расстояние между векторами.
Для оценки близости векторов могут быть использованы и другие
показатели, так или иначе зависящие от расстояния (скалярное произведение
векторов, косинус угла или коэффициент корреляции между векторами,
расстояние Махаланобиса и т. п.).
К группе детерминированных методов относятся также метод
потенциальных функций, метод кластеризации, различные логические методы и много
других.
Главное достоинство детерминированных методов - простота их
алгоритмической и технической реализации. Они применяются в основном тогда,
когда по доступной для анализа информации точно устанавливаются
границы областей, соответствующих разным классам, причем эти области не
пересекаются между собой, а значит, между ними могут быть построены
разделяющие гиперплоскости. Однако при соответствующем выборе признаков
эти методы могут быть использованы также и в тех случаях, когда области
классов представляют собой пересекающиеся множества изображений.
Статистические методы основаны на математических правилах
классификации, которые формулируются и выводятся в терминах математической
350
Глава 4. Обработка и анализ телеметрической информации
статистики. В большинстве своем эти методы сводятся к построению
классифицирующего правила, обеспечивающего в среднем наименьшую
вероятность ошибочного решения при распознавании или наименьшее
значение некоторой функции потерь.
В качестве исходных данных для построения классифицирующего правила
используются априорные вероятности классов состояний объекта и
плотности распределения признаков внутри классов, а также стоимости
принятия решений при распознавании. Оценка плотностей - основная проблема
применения статистических методов распознавания. Среди методов этой
группы наиболее распространенным является байесовский метод
построения классифицирующего правила на основе элементарной теории
статистических решений. Среди других методов этой группы следует выделить
последовательный (метод последовательной проверки гипотез) и
минимаксный (игровой) методы.
Основное преимущество статистических методов распознавания
заключается в возможности непосредственного использования диагностических
признаков различной физической природы, поскольку в расчетных
формулах фигурируют не значения этих признаков, а вероятности их появления
в различных классах состояний объекта.
При построении решающих правил, минимизирующих средние потери
при распознавании, в ряде случаев достаточно, если для каждого класса
вычислена некоторая вероятностная мера (например, вероятность появления
состояний данного класса). Однако при этом требуется задание
показателей, характеризующих затраты на выполнение каждого шага распознающей
процедуры (например, затраты временных или материальных ресурсов).
В настоящее время развивается несколько подходов к распознаванию,
использующих аппарат теории нейронных сетей, генетических
алгоритмов, понятия теории формальных языков.
С позиций технической диагностики распознавание состояний объекта
может быть функциональным и тестовым. Напомним, что функциональное
распознавание технического состояния объекта заключается в выполнении
ряда проверок выходных сигналов (параметров) в выбранных контрольных
точках объекта при поступлении на его вход только рабочих воздействий,
то есть в условиях пассивного эксперимента. При тестовом распознавании
на объект подаются специальные тестовые воздействия, то есть
осуществляется активный эксперимент.
Методы функционального распознавания в основном используются для
контроля правильности функционирования объекта. Для распознавания
отказов широко используются методы обеих групп, причем процесс
обучения осуществляется, как правило, в условиях активного эксперимента,
351
Современная телеметрия в теории и на практике
а процессы непосредственного распознавания и самообучения - в
условиях пассивного эксперимента.
В зависимости от порядка выполнения проверок различают методы
комбинационного (параллельного) и последовательного распознавания (как тот,
так и другой метод может быть детерминированным или статистическим).
При комбинационном распознавании классифицирующее правило
строится на основе анализа результатов всех проверок из заданного множества.
При этом проверки могут выполняться в произвольном порядке.
При последовательном распознавании соблюдается некоторая очередность
выполнения проверок. Совокупность правил, определяющих состав
проверок и последовательность их выполнения в процессе распознавания,
называется программой распознавания (диагностирования). Последняя может
быть безусловной (жесткой) и условной (гибкой).
При распознавании отказов по жесткой программе очередность
выполнения проверок задается заранее и остается неизменной в течение всего
процесса распознавания. При использовании же гибкой программы каждая
последующая проверка выбирается в зависимости от .результатов
предшествующих, уже выполненных проверок. При этом для распознавания
каждого из технических состояний объекта предусматривается своя очередность
выполнения проверок. Программа может быть представлена в виде
словесной инструкции, таблицы, графа и т.п.
В основу детерминированного подхода к распознаванию технических
состояний объекта кладется принцип сравнительной оценки степени
сходства распознаваемого изображения с изображениями классов из заданного
алфавита. Такая оценка осуществляется с помощью функций расстояния.
Рассмотрим т классов (т технических состояний), для которых в процессе
обучения получены изображения enV...,enm. Пусть в результате выполнения п
проверок к., (j = 1,..., п) получено изображение распознаваемого состояния
объекта:
где признаки s., (j = 1,..., п) есть исходы соответствующих проверок, то есть
*Гпг
Мерой сходства изображения У с изображением eni каждого класса может
служить евклидово расстояние р., (/в1,..., w), которое определяется по
следующей формуле:
р, = р(У„ em) = s£(sj-rv)2, (4.139)
где г.. - компоненты вектора епГ
352
Глава 4. Обработка и анализ телеметрической информации
Классифицирующее правило, реализующее принцип минимума расстояния,
заключается в вычислении расстояния рг отделяющего распознаваемое
изображение У от изображения eni каждого класса, и зачислении
изображения У в класс, оказавшийся ближайшим к нему, то есть:
Y.eYp если Р,<Р/ V/' '*/>/ = U*- С4-14»)
Классифицирующее правило может быть записано и в другой
эквивалентной форме:
Y„eYi> если P. = m/wP > * = 1>W- (4.141)
Формулу (4.139) можно представить в более удобном виде:
Выбор минимального значения р,2 эквивалентен выбору минимального
р., так как при всех i= l,...,m р.>0 (по определению расстояния). Формула
(4.142) показывает, что выбор минимального значения р;2 эквивалентен
т \ т
выбору максимального ^значения разности Y 6 С 6? ' так как член
YTnYn не зависит от значения i и будет одинаковым 4фи вычислении всех
значений p.2 (f= 1,..., m). Следовательно, классифицирующее правило при
распознавании изображения У будет иметь вид
7„€7, если J,(7>max df(Y„y / = *Я (4143)
где решающая функция d.(Yn) определяется выражением:
d(Yn)=YT„enr\enien, ' = uf. (4.ш)
Для того, чтобы функция dt(Yn) сохраняла в себе свойства расстояния,
необходимо, чтобы она была неотрицательной, то есть чтобы выполнялось нера-
т 1 т
венство V р ^-—р р , причем однозначное решение о принадлежности
Л n\s ni О п m
изображения У к г'-му классу может быть принято тогда, когда это
неравенство строгое.
Решающую функцию (4.144) можно записать в виде скалярного
произведения так называемых пополненных изображений У+1 и еп+и, которые
отличаются от соответствующих им изображений У и enj тем, что содержат
дополнительные компоненты sn+l и гп+1 соответственно, то есть:
т.
^"Н'^'"'^/!'^^) >
e<n+\>i Vi\>ri2>~">rm>rin+\) >
12 Заж.861
353
Современная телеметрия в теории и на практике
1 W+1
причём sn+l = 1; rin+] = ~25/гУ '
Тогда вместо выражения (4.144) имеем:
"/V^<w+1>/ = *<w+l>^</i+l>/ = ZjSjrj *
7=1
Поскольку одна и та же величина вводится в изображения всех
распознаваемых состояний, основные геометрические свойства соответствующих
классов не изменяются, а значит, не изменяются и условия разделения
их гиперплоскостями. По этой причине в выражении (4.144) второй член
в правой части может быть опущен. Решающая функция,
характеризующая сходство изображений Y<n> и e<n>jf будет определяться в этом случае
их скалярным произведением, то есть:
4(П„>) = C*<w>, = (П„»е<„>,) = 5>,г; (4Л45>
7=1
и в таком виде войдет в классифицирующее правило (4.143).
Использование решающей функции (4.145) вместо функции (4.144) не приведет в силу
указанной выше причины к ухудшению качества распознавания. Этот
вывод хорошо согласуется с упомянутой теоремой отделимости.
Использование скалярного произведения распознаваемого и эталонного
изображений в качестве меры их близости (сходства) является наиболее
распространенным при реализации детерминированного подхода к
распознаванию состояний объекта.
Обусловлено это тем, что такая мера легко вычисляется, имеет ясный
физический смысл и является достаточно универсальной. Она применима
при любых формах представления признаков, лишь бы они были
вещественными числами. Скалярное произведение непосредственно оценивает
степень совпадения соответствующих координат сравниваемых
изображений: чем ближе они друг к другу, тем оно больше, и при полном их
совпадении оно будет максимальным.
Существуют и другие способы оценки степени сходства распознаваемого
изображения с описаниями классов и, соответственно, другие формы
классифицирующего правила. Однако все они вписываются в рамки
рассмотренной схемы распознавания. Во всех случаях информация о текущем
состоянии объекта получается за счет выполнения проверок п. из заданного
множества П. В результате выполнения каждой проверки я ( j = 1,я )
получается признак s , а после выполнения всех п проверок - изображение
состояния объекта в виде вектора Y<n> = (s]9...9sn) . Процедура распознавания
354
Глава 4. Обработка и анализ телеметрической информации
реализуется по однотипной схеме при любых формах признаков:
определяется степень сходства каждого признака s. с соответствующими признаками
г.. технических состояний е<п>. диагностируемого объекта (i -\,m).
Результаты сопоставления всех признаков s.( j = 1,и ) с соответствующими
признаками г.. кладутся в основу выработки решения о принадлежности
состояния объекта определенному классу согласно принятому
классифицирующему правилу. Операция сопоставления признака s. с признаком г.
обычно рассматривается как неотъемлемая часть проверки л.. При этом
безразлично, в какой последовательности выполняются проверки (они
могут выполняться и одновременно, если это позволяют технические
средства), так как решение о принадлежности состояния объекта
определенному классу принимается после выполнения всех проверок.
Общей основой всех методов статистического подхода является аппарат
теории статистических решений. Различие в методах сводится в основном
к различию критериев, используемых при выработке решений. В
прикладных задачах распознавания наиболее часто используется критерий Байеса
- правило, в соответствии с которым стратегия решений выбирается так,
чтобы обеспечить минимум средних потерь.'
Критерий Байеса может быть представлен в различных формах. В ряде
определений критерий Байеса рассматривается как один из возможных
критериев для получения оптимальных оценок идентифицируемых параметров.
Сохраняя принятые обозначения и терминологию, мы вместе с тем введем
ряд дополнительных обозначений и понятий, связанных главным образом
со спецификой задачи распознавания технического состояния
диагностируемого объекта.
Пусть, как и прежде, задано т технических состояний е<п>г в одном из
которых может находиться объект. Распознаваемое состояние объекта
описывается изображением (4.139), полученным в результате выполнения п
проверок тс. ( j = 1,и ). Требуется определить, с каким из заданных технических
состояний e<n>i может быть идентифицировано распознаваемое состояние
объекта, то есть найти класс, к которому принадлежит изображение Y<n>.
Вероятность принадлежности изображения г-му классу обозначается как
P(e/Y). Если при распознавании принимается решение о том, что
изображение Y<n> принадлежит £-му классу, когда на самом деле оно принадлежит
/-му классу, то допускается ошибка, которая влечет за собой определенные
потери Cjk.
Предположим, для всех i,k = 1,/и определены значения потерь С.к% которые
в совокупности образуют матрицу потерь, или так называемую платежную
матрицу - квадратную матрицу порядка т, диагональные элементы которой
355
Современная телеметрия в теории и на практике
соответствуют правильным решениям при распознавании. Так как
распознаваемое изображение может принадлежать любому из m классов, то
математическое ожидание потерь, связанных с отнесением изображения Y<n>
к &-му классу, определяется следующим выражением:
т
Q(ek/Y) = Qk(Y) = YJcikP(ei/Y), k = l,m. (4.146)
/=1
В теории статистических решений величину Q называют условным
средним риском или условными средними потерями. Распознаваемое
изображение относится к тому £-му классу, для которого величина риска Qk будет
минимальной, то есть классифицирующее правило записывается в
следующем виде:
Y<n>eYn если &(r) = max,=I^{{Q.(y)}. (4.147)
Стратегию, основанную на этом правиле, называют байесовской стратегией,
а минимальный средний риск - байесовским риском.
Условную вероятность в выражении (4.146) можем определить по формуле
Байеса:
/>(е,./У) = Р(е-)Р(У/^ /-1Я (4.148)
P(Y)
где:
P(Y) = JjP(e/)P(Y/ef),
/-1
с учетом которой имеем:
1 т
ОЛУ) = -^г^р^р(¥/е^ к = 1>т- <4149>
Условную вероятность P(Y/e) в формуле (4.149) называют функцией
правдоподобия для i-го класса. Так как выражение 1/P(Y) входит во все
формулы вычисления условного среднего риска Qk(y), где к — 1, т, в качестве
общего множителя, то его можно исключить из соотношения (4.149), то есть
записать:
т
Ш^Х^Ле^У/е,.), к = \,т. (4.150)
/=1
В частном случае, когда рассматриваются только два технических
состояния объекта е<п>1 и е<п>2 (например, работоспособное и неработоспособное),
356
Глава 4. Обработка и анализ телеметрической информации
величины условных рисков, связанных с определением каждого из них,
вычисляются по формулам:
Q](Y) = cuP(e])P(Y/e]) + c2]P(e2)P(Y/e2);
Q2(Y) = cuP(el)P(Y/e,) + c22P(e2)P(Y/e2)'
При этом считается, что объект находится в техническом состоянии е<п>1,
если С/У)<(2/К), то есть:
(с21-с22)Р(г2)Р(У/е2)<(с12-с11)Р(в1)Р(Г/в1). (4.151)
Обычно полагают, что потери, связанные с ошибочным решением при
распознавании, всегда больше потерь, которые имеют место при правильной
классификации, то есть cik>cu для любых /,к = 1, т; i*k. При таком
допущении условие (4.151) может быть записано в следующем виде:
P(Y/ei)^P(e2)(c2l-c22)
P(Y/e2) P{e{){cn-cu)-
Левую часть этого неравенства называют отношением правдоподобия:
^--Ш- <4153)
а правую часть - пороговым значением отношения правдоподобия:
К(У<п>)=Р^~Сг2\- (4-154)
С учетом введенных обозначений байесовское классифицирующее правило
для двух классов записывается в следующем виде:
r<n>ei если \2(Y<n>)>Qn(Y<n>y,}
Y<a>eY2, если Я12(У<я>)<в12(Г<||>).
(4.155)
В общем случае, когда число рассматриваемых технических состояний
равно т, классифицирующее правило имеет вид:
lm m
Y<nX если £сгД^ДГ/ег)<£с,,/>(е,)Р(Г/в5);
Г=1 5=1
i,k=:Um,i = k. (4.156)
Неравенство в условии (4.156) можно выразить с помощью приемов,
аналогичных использованным при рассмотрении двух технических состояний
объекта, через отношение правдоподобия и соответствующее пороговое
значение, то есть:
357
Современная телеметрия в теории и на практике
•к (Y Л-Ж131- А (V 4-P(g*Xc*/~c**)
MJ"^/tf Ь'Д^)-р(е,.)(с,-с,)-
Тогда классифицирующее правило примет вид, аналогичный условиям
(4.155), то есть:
Y<n>st если К(У<п>)>%к(У<Л
Г<н>€^ если К(У<п>)<^(У<Л\ (4-157)
/,£ = 1,/и; /*£.
Однако для представления общего случая разделения на несколько классов
удобнее использовать функцию потерь специального вида, которую можно
получить, если потери при правильном принятии решения считать
равными нулю ( е.. = 0 при всех / = l,w), а при принятии любого ошибочного
решения - одинаковыми (с.кж cki при всех i9k = l9m;i*к). В этом случае
функцию потерь можно представить как:
с„ =1-6,,,, (4.158)
где 5jk - символ Кронекера. Это соотношение устанавливает
нормированную величину потерь, равную единице, при ошибочной классификации и
отсутствие потерь в случае правильной классификации распознаваемого
состояния объекта. Подстановка соотношения (4.158) в формулу (4.150)
приводит к выражению:
т т т
Qk{Y) =£(1-81,)/>(^)Р(Г/е1.) = £/>(е,)Р(Г/е,.)-£б„Р(е,.)Р(Г/е,.) =
i=l /=1 /=1
= P(Y)-P(ek)P(Y/ek\ k = T^i. (4.159)
Байесовское классифицирующее правило в этом случае обеспечивает
отнесение изображения Y<n> к классу /j., если выполняется условие:
P(Y) - P(ej)P(Y /et) < P(Y) - P(ek)P(Y/ek)
или условие:
P(ei)P(Y/ei)>P(ek)P(Y/ek); /,* = ui; i*k (4.160)
Таким образом, байесовское классифицирующее правило принимает
форму условия (4.143), в котором решающая функция dt(Y<n>) определяется в
соответствии с формулой (4.160) следующим выражением:
di(Y<n>) = P(ei)P(Y/ei), i = \^i. (4.161)
358
Глава 4. Обработка и анализ телеметрической информации
Если в это выражение вместо вероятности P(Y/e) подставить
соответствующее ей значение из формулы (4.148), то получится эквивалентное
выражение:
di(Y<n>) = P{Y)P(eiIY\ i = ui.
Вероятность P(Y) из полученного выражения можно исключить, так как
она не зависит от *, в связи с чем окончательно можем записать:
^(У<п>) = Р(е,/¥), / = 1Я (4.162)
Формулы (4.161) и (4.162) выражают два различных, хотя и эквивалентных
подхода к решению одной и той же задачи. В первом из них используется
функция правдоподобия P(Y/e), а во втором - вероятность P(e/Y)
принадлежности наблюдаемого состояния объекта к его i-му техническому состоянию.
Функция правдоподобия P(Y/e) есть не что иное, как условная плотность
распределения изображения Y<n> в i-м классе, обозначаемая ранее как
$;(У<п>). Помимо плотности распределения ф.(У</?>/) при реализации первого
подхода необходимо знание вероятностей технических состояний Р(е).
Таким образом, выбор того или иного статистического метода
распознавания зависит от характера исходной информации и возможностей ее
получения на этапах, предшествующих непосредственной реализации
распознающей процедуры. Байесовский метод применяется тогда, когда априори
известны вероятности технических состояний объекта, многомерные
плотности распределения признаков в каждом из них и стоимости принятия
соответствующих решений. Если определение вероятностей Р(е) вызывает
затруднение, то можем обойтись без них, используя так называемый
минимаксный критерий, который минимизирует максимально возможное
значение среднего риска при распознавании.
При использовании этого критерия компенсируются любые
неблагоприятные случайности, связанные с недостатком информации об априорных
вероятностях Р(е). Благодаря этому получаются наименьшие средние потери
при распознавании технического состояния объекта в наихудших
возможных условиях. По своей сути минимаксная стратегия есть байесовская
стратегия для наихудших значений априорных вероятностей Р(е)у дающая хотя
и осторожную, но гарантированную величину условного среднего риска.
В случае, если не известны ни вероятности P(Y/et), ни значения потерь сл,
для построения алгоритма распознавания целесообразно использовать
критерий Неймана-Пирсона. Этот критерий заключается в построении такой
разделяющей границы между классами, при которой обеспечивается
минимальное значение вероятности ошибки второго рода в процессе выработки решения
при заданном допустимом значении вероятности ошибки первого рода.
359
Современная телеметрия в теории и на практике
Хотя все три упомянутых выше критерия явно различны, но все они
основаны на отношении правдоподобия. В этом смысле достаточно
ограничиться изложением основного из этих критериев - байесовского, а остальные
рассматривать как его частные модификации.
Следует отметить факт, который связан с применением байесовской
стратегии в случае, когда функции правдоподобия ty.(Y<n>)= P(Y/ei) есть
многомерные плотности нормального (гауссовского) распределения, то есть:
P(Y/e) = 1
(2кУ
i = \,m (4.163)
где Y<n>. - n-мерный вектор средних значений измеряемых признаков
Sj (j = 1, п); Cr j - ковариационная матрица;
риационной матрицы.
Они определяются по формулам:
У<„>< = М {YU}, (4.164)
%} = М {(С* - Y<JWLk - y<Jf }. (4.165)
где М - оператор математического ожидания, определяемый по всей
совокупности векторов Y^n>k, относящихся к i-му классу (/ = 1, т ).
Образы i-ro класса, выбранные из совокупности с нормальным
распределением, проявляют тенденцию к образованию одного изображения e<n>i
данного класса, центр которого определяется вектором средних значений Y<n>.,
а форма - ковариационной матрицей Сг -... В качестве решающей функции
при распознавании может быть использована функция (4.161). Однако в
связи с тем, что плотность нормального распределения выражается экспонен-
той, удобнее использовать натуральный логарифм от этой решающей
функции, то есть:
di^<n>) = ln[P(ei)P(Y/ei)]=lnP(ei) + lnP(Y/eil / = l,m. (4.166)
Решающая функция (4.166) эквивалентна решающей функции (4.161)
в смысле качества классификации, так как натуральный логарифм -
монотонно возрастающая функция. Подставив выражение (4.163) в
формулу (4.166) и учитывая, что член (п/2) In 2к не зависит от г, а поэтому
может быть опущен, получим следующую решающую функцию:
360
/
"[»}
ехр
—(Y -Y
/) С[л)'(^01> *о
\с[п}\ - определитель кова-
Глава 4. Обработка и анализ телеметрической информации
1 = 1,01 (4.167)
Если для всех / = \,т Сгг — It л, Р(е:) = —, то вместо функции (4.167)
будем иметь m
dAY<J = Y;j<n>i-X-Y<TnJ<n>i i = un. (4.168)
Так как вектор средних значений Y<n>j совпадает с изображением е<п>.,
то есть У, . =е^ .., то можем окончательно записать:
<П>1 <П>1
d.(Y ) = YT е .--ег е . i = Lm.
V*l\M<n>J *<П>^<П>1 гу <И>1 <П>1 х,"*.
Полученная решающая функция полностью совпадает с решающей
функцией (4.144), используемой при классификации образов по критерию
минимума расстояния.
Таким образом, при нормальном распределении изображений Y<n> внутри
классов байесовский подход к распознаванию технических состояний
объекта дает такие же результаты, что и подход, основанный на использовании
функций расстояния. И вообще, внимательно изучая каждый из этих
подходов, мы можем установить значительное сходство между
статистическими и детерминированными алгоритмами распознавания.
4.3.3. ПОИСК МЕСТА И ОПРЕДЕЛЕНИЕ ПРИЧИН НЕИСПРАВНОСТЕЙ
ОБЪЕКТА
Алгоритм обучения распознаванию отказов
Различные отказы элементов объекта проявляются по-разному. Этот факт
и позволяет отличать один отказ от другого при их распознавании. В
большинстве случаев задача распознавания отказов не предусматривает
определение каждого отказавшего элемента.
Ввиду большого числа элементов в современных технических объектах
такая задача практически не только невыполнима, но зачастую и
бессмысленна, так как не всякий отказавший элемент может быть заменен на
исправный. Поэтому смысл имеет распознавание отказов на уровне сменных
ГМ
~(Y ) = YT Y -~-YT Y
361
Современная телеметрия в теории и на практике
функциональных элементов объекта (блоков, узлов, плат, модулей и т. п.).
В этом случае между сменными функциональными элементами (в
дальнейшем для краткости будем называть их блоками) и классами
распознаваемых отказов существует взаимно однозначное соответствие: в каждый
f-й класс включаются отказы элементов только /-го блока (/ = 1,/и).
Разные дефекты внутри одного и того же блока могут отличаться друг
от друга по ряду признаков. В то же время существуют некоторые общие
свойства этих дефектов, которые отличают их от дефектов других блоков.
Например, отказы элементов внутри одного блока ведут к изменению одних
и тех же параметров (выходных сигналов), в то время как другие параметры
не реагируют на них [3].
Для успешного распознавания отказавших блоков необходимо каким-то
образом выяснить общие признаки дефектов внутри каждого блока,
отвлекаясь от их отличительных признаков. В этом заключается основной смысл
обучения распознаванию отказов.
Для осуществления обучения может быть использовано физическое или
математическое (имитационное) моделирование различных отказов. Для
этого в каждый блок заведомо исправного объекта (или его модели)
вводятся отдельные дефекты (повреждения) и фиксируются при этом значения
всех выходных сигналов у. в выбранных контрольных точках объекта при
подаче на его вход сигналов, имитирующих внешние возмущения.
Предположим, в /-й блок введено N. дефектов и зафиксированы при этом значения
всех п контролируемых выходных сигналов. Результаты эксперимента
могут быть представлены в виде матрицы:
U =
Уг
Уг
Уг
Уг
У\п
Уи
(4.169)
Уи,\ У N,2 •"• У^п_
гдеу^. - значение^-го контролируемого сигнала при k-м дефекте i-ro класса
(i = l,m;j = l,n\k = \,N.). Из матрицы (4.169) может быть вычислен
искомый вектор е<п>. , в котором каждый компонент представляет собой
усредненную величину значений элементов^-го столбца матрицы.
Поскольку заранее неизвестно, какое количество обучаемых примеров потребуется
для получения векторов e<n>i с необходимой точностью, то расчет этого
вектора ведется рекуррентно после каждого введенного дефекта в соответствии
с изложенным выше алгоритмом обучения [3].
362
Глава 4. Обработка и анализ телеметрической информации
Обучение распознаванию отказов производится после обучения
распознаванию технических состояний объекта, характеризующих его нормальные
(номинальные) режимы функционирования. В этом случае для каждого
контролируемого параметра (сигнала) у. оказываются установленными
его нижнее у"г и верхнее у'\ допустимые значения в каждом /-м режиме
нормального функционирования объекта. Поэтому в процессе обучения
распознаванию отказов можно не фиксировать значения
контролируемых параметров, а достаточно установить, какие из них вышли за
допустимые пределы. Тогда возможно представление признаков sk. в бинарной
форме. Для обозначения бинарных признаков можно использовать
символы 1 и 0.
Однако более удобным в вычислительном отношении является
использование для этих целей символов 1 и -1, причем первым из них обозначается
соответствие контролируемого параметра установленному допуску, а
вторым - его несоответствие. Если при обучении имитируется /-й режим ра-
боты объекта / = 1,jL, который нарушается введением в i-й блок (i = 1,/w)
очередного k-vo дефекта (к = 1, N.), то бинарные признаки skj
определяются по правилу:
s, f1' еслиЛе[Х'>0
[-1, еслиУ'к;г[у;;,у;].
При использовании признаков в бинарной форме анализ и обработка
результатов наблюдений значительно упрощаются, соответственно
упрощается и реализация алгоритмов распознавания без снижения достоверности
получаемых результатов. В частности, при бинарных признаках sk. е{-1,1}
в качестве базисных функций Уу(У<п>), c помощью которых
аппроксимируется искомая разделяющая функция fj(Y<n>),выступают функции
Vij(Y<n>) =SJ~ Тогда возможна запись:
/ \e<n>i>*<n>) ~~ 2-,rj S j ~~ e<n>i*<n> »
с учетом чего рекуррентная формула алгоритма обучения принимает вид:
e<n>m-e<n>i{k-\)-j[e<n>i{k)-Y<n>(k)\ / = 1,2,3 m. (4.170)
где:
e<nyXk) = [rn{k),ri2{k),...,riSk)l-,
Y<n>{k) = [s,{k),s2{k),...,sn{k)j; .
Sj(k)e{-\,\}; k = l,2...
363
Современная телеметрия в теории и на практике
В случае фиксированной обучающей выборки, когда состав дефектов,
вводимых в каждый г-й блок объекта, заранее определен,.выборка f-ro класса
может быть записана в виде матрицы [3]:
U г
sn
*;.
с''
S\2
s22
SN,2 •
" *!„
•• 4
•• SN,n
,/ = 1,/и. (4.171)
Эта матрица отличается от матрицы (4.169) тем, что элементами ее
являются бинарные признаки s'kJ е {-1,1}; / = l,/w;y = 1,и ;& = 1,N., в то время
как в матрице (4.171) элементами являются значения контролируемых
параметров при реализациях работоспособных состояний объекта.
Из матрицы (4.171) компоненты искомого вектора е<п>. определяются
по формуле:
n: n.-n; 2n;
к. =—2L ! lL = 2—lf (4.172)
4 N„ Ъ N,
где Ny - число элементов s1., равных единице, в^'-м столбце матрицы (4.172).
Как следует из формулы (4.172), значения искомых коэффициентов г..
располагаются в замкнутом интервале [-1,1]. Удобство представления искомых
коэффициентов в такой форме заключается в том, что каждый из них имеет
ясный физический смысл.
. При введении в г-й блок очередного дефекта из обучающей выборки у'-й
параметр объекта в общем Случае изменяет свое значение. Однако при одном
дефекте изменение^то параметра оказывается незначительным (или вовсе
отсутствует) и его значение не выходит за пределы установленного
интервала. Это означает, что по данному параметру введенный дефект не
идентифицируется (не проявляет себя).
При другом же дефекте значение того же/то параметра может оказаться
вне допустимого интервала (дефект идентифицируется по^-му параметру).
Положительное значение коэффициента г.. указывает на то, что в
обучающей выборке i-ro класса преобладают такие дефекты, при которых значения
у-го параметра не выходят из допустимого интервала.
Количественной мерой этого преобладания по^-му параметру служит
величина модуля | г. |. Отрицательное значение г.. свидетельствует о том, что
значение j-го параметра при обучении оказывается чаще вне допустимого
интервала, чем в нем. Если обучающая выборка по объему представительна,
то всякий полученный коэффициент г. будет достаточно точно отражать
поведением-го параметра при отказах i-го блока (/ = 1, т; j = 1, п ).
364
Глава 4. Обработка и анализ телеметрической информации
Таким образом, всякий коэффициент г.. можно рассматривать как
обобщенный символ 5.. = sign г.., взятый с соответствующим весом gr = | г..|, то есть:
г^ед (/ = й;у = й). (4.173)
По своей сути коэффициент г.. является обобщенным признаком дефектов
i-го блока по^-му параметру, а вектор e<n>i =(ги, г.2,...у г.п)т- обобщенным
описанием этих дефектов по всей, совокупности контролируемых параметров,
то есть изображением класса Y.{i = 1, m)
Признаки г..е[-1,1] , полученные при достаточно большом объеме
обучающей выборки, содержат в себе статистические сведения, которые могут быть
использованы для определения вероятностных характеристик классов.
Так как число N* в формуле (4.172) случайно, то появление признака г..
со знаком «+» или «-» является случайным событием sr, которое
характеризуется соответствующей вероятностью P(s..). Обозначим через е;>
событие, заключающееся в выходе; -го параметра объекта за пределы
допустимого интервала в случае введения в его z-й блок дефектов из обучающей
выборки. Вероятность Р(ег) этого события приближенно оценивается
через соответствующий признак г.. по формуле [3]:
Де,) = -уЧ (4.174)
которая непосредственно следует из формулы (4.172). Очевидно, что:
\P(EfJ)9 если sign г.. =-1;
P(su) = <
[l-P(Ey)9 если signrtJ=l.
События sr - являются элементарными событиями по отношению к
отказу z-ro блока, который многократно воспроизводится в процессе обучения.
Другими словами, отказ z-ro блока есть сложное событие, которое
сопровождается совместным появлением элементарных событий sr
В общем случае события sr являются зависимыми. Тогда вероятность q.
отказа z-ro блока находится через вероятности P(stj) по формуле
q, = P{\ sv) = P(sn)P(si2 /sn)P(si3/sn | si2)...P(sin 11 ' sy). (4.175)
y=i y=i
Условные вероятности, фигурирующие в этой формуле, могут быть
найдены из анализа обучающей выборки z-ro класса, представленной в виде
матрицы (4.171).
Для каждого ;-го столбца этой матрицы (у = 1,и) определим разбиение
множества ее строк на два непересекающихся подмножества LTjj и U~.
365
Современная телеметрия в теории и на практике
Первое из них включает в себя строки U'k матрицы, содержащие в^'-м
столбце признаки s[j = 1, а второе - строки, содержащие в этом же столбце
признаки s[. = — 1, то есть:
Число элементов, входящих в множество, будем обозначать двумя
вертикальными черточками, между которыми заключено обозначение самого
множества. Например, число элементов множества U^ обозначается
через
и:
С учетом введенных обозначений имеем [3]:
^,.)=-
и:
и,
P(sl2/sn) =
к\ и;2
и:
P(s,3/sn\ si2) =
К\ и;2\ и;ъ\
Un\ u;2
У=1
I и:
У=1
I и:
7=1
где:
U =
\Uy, если stJ =signrv=\;
[иу, если sv=signry=-l.
Подставив эти значения в формулу (4.175), получим:
4i=i
I и:\
I У]
\М
(i = l,w).
(4.176)
366
Глава 4. Обработка и анализ телеметрической информации
В случае, если объем обучающей выборки заранее не определен, то есть
число N. вводимых в z'-й блок дефектов заранее не установлено, то
определение коэффициентов г.. производится рекуррентно, согласно
соотношению (4.170).
Для каждого определяемого коэффициента г. это соотношение принимает
следующий вид:
гД*) = г/*-1)-|[г,(*-1)-5у(*)], (4.177)
где5,. е{-1,1}.
В аналогичной форме могут быть представлены рекуррентные
соотношения для вычисления вероятностных характеристик классов. В частности,
вероятность Р/е (^/выхода,/-го параметра объекта за допустимые пределы
при введении в z-й блок &-го дефекта определяется по формуле:
Р[ги(к)] = р[г¥(к-1)] + ±-[г¥(к-1)-з{к)]. (4.178)
Путем несложных выкладок можно также получить рекуррентное
соотношение для определения вероятности q.(k) отказа z-ro блока на k -м шаге
обучения в следующем виде:
4i(k) = q^)-j\q^-^-fl[sii(k-l)®sJ(k)]\, (4.179)
где знак © означает сложение по mod 2~ , выполняемое по правилу:
|Х если sJk-l) = s.(ky,
sJk-l)®s,(k) = \ J '
А [0, если sv(k-\)*Sj(.k);
Sij(k-\)ASj(k)e{-\,\}.
Реализация процесса обучения в изложенной форме требует постановки
ряда экспериментов, связанных с введением различных дефектов в объект.
Эти операции могут быть выполнены на этапе лабораторных или
стендовых испытаний опытного образца объекта или его макета.
Очевидно, что чем больше при обучении используется примеров дефектов
(обучающих реализаций), тем выше точность определения коэффициентов
г., описывающих свойства классов, а также их вероятностных
характеристик. Однако проведение большого числа подобных экспериментов не всегда
возможно, особенно когда исследуемый объект представляет собой
сложную и дорогостоящую техническую систему. В этом случае целесообразно
использовать имитационное моделирование, при котором эксперименты
над реальным объектом заменяются экспериментами над его моделью [3].
367
Современная телеметрия в теории и на практике
В принятой нами модели предусмотрено наличие генератора случая
(датчика случайных чисел). В рамках этой модели можно реализовать алгоритм
обучения, основанный на формировании случайных обучающих
изображений и последующей их классификации в соответствии с определенными
требованиями.
Реализация алгоритма требует наличия в качестве начальных
приближений некоторых грубых значений коэффициентов г..(0)> которые получаются
за счет использования небольшой по объему обучающей выборки, включаю-
щей по нескольку реальных дефектов каждого /-го блока (/ = 1,т).
Значения г..(0) уточняются затем по мере поступления обучающих изображений,
формируемых датчиком случайных чисел [3].
Каждое формируемое изображение У<п> представляет собой набор из п
равномерно распределенных бинарных признаков §. е{-1,1}. Равномерность
распределения признаков наилучшим образом согласуется с требованиями
к представительности обучающей выборки в статистическом смысле.
Однако при этом не исключается возможность использования и других видов
распределения (нормального, биномиального, Пуассона и т. д.) в
зависимости от имеющейся априорной информации о предполагаемом поведении
контролируемых параметров.
Способы формирования последовательностей, состоящих из конечного
числа случайных признаков §ф е{-1,1}, при любом законе их распределения
достаточно полно разработаны и описаны.
Сформированное на каждом k-м шаге обучения изображение:
^<„>(*) = &■(*) s2Ck},...9SjCk\...9s„Ck}J (4.180)
используется для получения уточненных значений rv(k), P(e..(k)) и q.(k) no
формулам (4.176) - (4.178). Так как принадлежность случайного
изображения (4.179) одному из классов заданного алфавита не установлена, то
поправке подвергаются полученные на предыдущем шаге обучения
характеристики всех классов. Если при этом изображение (4.180) имеет
V,(*-i),...,/i,(*-i)] ,
наибольшее сходство с изображением e<n>i(k -1) =
то соответствующие характеристики i-го класса r..(k-1), P(e..(k-1)) и q^k-1)
улучшаются в наибольшей степени по сравнению с аналогичными
характеристиками других классов. В случае полного несовпадения изображений
У<п>(к)и e<n>iQ*~1) характеристики данного z-ro класса ухудшаются. Такую
процедуру обычно называют обучением с поощрением и наказанием. В
пределе (при k -> оо) эта процедура дает устойчивые значения указанных
характеристик для всех классов заданного алфавита [3].
Сходимость описанной процедуры обучения можно ускорить за счет
целенаправленного выбора обучающих изображений из числа
формируемых случайных изображений. Очевидно, что не всякое сформированное
368
Глава 4. Обработка и анализ телеметрической информации
случайное изображение может быть использовано как обучающее.
Некоторые из них не будут достаточно полно отражать свойства реальных
дефектов исследуемого объекта. Такие изображения искажают уже
полученные характеристики классов, и для компенсации подобных искажений
требуется значительно увеличить число последующих обучающих
изображений, а следовательно, и затраты на обучение.
ПОИСК ДЕФЕКТОВ В ЭЛЕКТРО-РАДИОЭЛЕКТРОННОЙ АППАРАТУРЕ
Поиск дефектов может выполняться при условии, когда известно, что в элек-
тро-радиоэлектронной аппаратуре (ЭРЭА) возник дефект, или в том случае,
когда неизвестно, есть ли в ЭРЭА дефект [4J. В первом случае
осуществляется собственно поиск дефекта. При этом технические средства
диагностирования должны помочь определить, какой именно дефект возник. Во втором
случае, который называется проверкой исправности, технические средства
диагностирования должны ответить на вопрос, есть ли в ЭРЭА дефект, и
если есть, то какой именно.
Технические средства диагностирования и в том, и в другом случае могут
предназначаться для анализа выходного сигнала ЭРЭА или
последовательной оценки множества сигналов, возникающих в специально выбранных
для проверки местах ЭРЭА (контрольных точках). Для анализа выходного
сигнала необходима информация о связи возникающих дефектов с
изменением формы и величины выходного сигнала. Для'последовательной
проверки сигналов в контрольных точках необходимо обеспечить выполнение
техническими средствами жестких или гибких алгоритмов, определяющих
последовательность выполнения проверок [4].
Поиск дефектов в ЭРЭА осуществляется проверкой признаков наличия
дефектов. Признаками наличия дефектов являются увеличение или
уменьшение выходных параметров, выход параметров и характеристик за
допустимые пределы, появление логических сигналов о срабатывании или
несрабатывании элементов. Наличие дефектов определяется проверкой условий:
Х,=\ ' 2
\0,при f < f ;
' ; (4.181)
к\1,при/</-,
Wnpuf^f,
где х*, xf- - признаки i-ro дефекта; fjt/',/? - текущее и эталонное значения
диагностических показателей.
369
Современная телеметрия в теории и на практике
Техническая реализация операции формирования признаков наличия
дефектов может быть различной. На рис. 4.26а показана схема сравнения.
Здесь Yi - вектор ответных реакций; У7э - вектор эталонных сигналов; Si -
вектор, характеризующий состояние ЭРЭА (дефект). Подобная схема
используется в тех случаях, когда входное воздействие Xi не изменяется.
В тех случаях, когда можно осуществить тестовое воздействие, схема
изменяется (рис. 4.266). При этом тестовое воздействие ^вырабатывается
генератором тестовых воздействий; эталонные значения У7э выходных сигналов Yi
вырабатываются формирователем эталонов по команде программного
устройства. На рис. 4.26в приведена схема обнаружения дефекта путем
сравнения реакции ЭРЭА и эквивалентной модели на один и тот же входной
сигнал Xi с помощью схемы сравнения.
На рис. 4.26г приведена схема обнаружения дефекта путем подсчета с
помощью счетного устройства числа операций, выполняемых ЭРЭА над
входным воздействием Xi . При этом эталонная последовательность Яэ,
поступающая с формирователя эталона, сравнивается в схеме сравнения с
текущим значением FL
Электрорадиоэлектронная
аппаратура
т
л
Схема
сравнения
Электрорадиоэлектронная
аппаратура
А
У1э
а)
Yi,
fSi
Схема
сравнения
Yi3
Генератор
тестовых
воздействий
Формирователь
этапов
Программное устройство
б)
1
Электрорадиоэлектронная
аппаратура
i
Xi
i
-►
Р*
fSi
Схема
сравнения
■'"■;
Yi3
Генератор тестовых
воздействий
Xi
Электрорадиоэлектронная
аппаратура
1
г
Счетное
устройство
Fi>
—►
t»
Схема
сравнения
Fia
к
Формирователь
этапов J
в), г)
Рис. 4.26. Схема формирования признаков наличия дефектов
Для поиска возникшего дефекта ЭРЭА разделяют на отдельные части
(функциональные элементы), объем которых зависит от заданной глубины поиска
дефекта. В результате осуществления поиска устанавливают, в каком
функциональном элементе возник дефект. Наличие дефекта в функциональном
элементе соответствует отсутствию требуемого сигнала на его выходе [4].
370
Глава 4. Обработка и анализ телеметрической информации
Технические средства для поиска функционального элемента в ЭРЭА, в
котором возник дефект, могут строиться на логических элементах. Схемы
технических средств различаются по структуре и числу логических элементов
в зависимости от принятого алгоритма поиска и используемого
математического описания. Наиболее целесообразную схему выбирают в
результате сравнения возможных вариантов. Возникновение дефектов в элементах
электрооборудования приводит к изменению их электрических параметров
или характеристик, что позволяет обнаружить их, сравнивая текущие
значения этих параметров или характеристик с номинальными.
Одним из показателей диагностирования, которые должны обеспечить
технические средства диагностирования, является глубина поиска дефекта.
Чем ниже уровень структурной единицы, тем сложнее алгоритм поиска в
ней дефекта и тем выше стоимость технических средств диагностирования.
В то же время чем ниже уровень структурной единицы, тем ниже стоимость
запасных элементов.
В связи с этим при задании глубины поиска дефекта необходимо
стремиться обеспечить минимальные затраты на создание технических
средств диагностирования и запасных элементов, то есть выполнить
условие С = min Ci, /=1,..,&, где Cz - суммарные затраты на создание средств
и комплекта запасных элементов при z-й глубине поиска дефектов; k -
минимальный иерархический уровень структурной единицы,
определяемый возможностью ее восстановления.
Объект диагностирования представляется уровнями структурных единиц,
которые отражают соответствующую глубину поиска дефектов (например,
для стоек / =1; для блоков i = 2; для субблоков i = 3; для плат i = 4; для
микросборок i - 5 и т. п.). На каждом z-м уровне объект содержит г. структурных
единиц, каждая из которых характеризуется стоимостью:
a/=ZGp (4.182)
Л=1
где пи С - соответственно число и стоимость составных элементов
структурной единицы.
Множество параметров, подлежащих проверке при поиске дефектов с
глубиной i, разделяется на Si групп однотипных параметров (токи, напряжения,
частота следования импульсов, временной интервал и др.), которые
проверяются одними и теми же техническими средствами. Элементами
технических средств диагностирования для проверки этих групп параметров могут
служить датчики эталонных напряжений, компараторы, счетчики,
программные устройства и др. Это оборудование для каждой j-и группы
характеризуется стоимостью:
371
Современная телеметрия в теории и на практике
ЯУ = ХСЛ, (4.183)
Л=1
где т - число составных элементов.
Поскольку совокупность параметров структурных единиц более низких
уровней может включать в себя параметры структурных единиц более
высоких иерархических уровней, то при последовательном увеличении
глубины поиска с z-ro до (z+l)-ro уровня к средствам, обеспечивающим проверку
Si- групп параметров, добавляются лишь элементы, обеспечивающие
проверку дополнительных AS.+] групп параметров, число которых определено
из условия AS-{/>;}.+Д{/>}..'
Для проверки параметров j-и группы, кроме общих средств, необходимо
иметь однотипные, встраиваемые в объект датчики, обеспечивающие
выделение и нормирование проверяемых параметров, а также разделение
функционального и измерительного трактов системы диагностирования.
Датчику каждойу-й группы соответствует стоимость а..
Общая стоимость технических средств диагностирования, обеспечивающих
поиск дефекта с глубиной г\
S • z S
R„J)=L LajK+LRj» <4-184>
j=\ v=i j=\
rjxexv — булева переменная, определяемая по условию:
Г1, если состояние V - и структурной единицы хар - ся
Xv = \ зн. одного из параметров j - й группы
[О, в противном случае
Средняя стоимость структурных единиц а-го уровня, заменяемых в
процессе эксплуатации:
e,(0=-tovtto/v (4.185)
где N - среднее число отказов v-й структурной единицы, определяемых
поу-й группе параметров за время эксплуатации объекта.
Таким образом, суммарные затраты на создание технических средств
диагностирования и запасных элементов при реализации поиска
дефектов с глубиной i:
C(i)=Rnd.(i)+Q3(i). (4.186)
На рис. 4.27 приведена зависимость затрат на технические средства
диагностирования и запасные элементы для объекта диагностирования от глубины
372
Глава 4. Обработка и анализ телеметрической информации
поиска дефекта. Стоимость Run растет с увеличением i (кривая 1), а
стоимость Q3 снижается с ростом i (кривая 2).
Рис. 4.27. Зависимость затратна технические средства
диагностирования и запасные элементы объекта диагностирования
от глубины поиска дефектов
В связи с этим результирующая кривая 3 имеет минимум в точке А.
Глубина поиска дефекта определяется при линейном поиске минимума.
Процедура поиска строится следующим образом. Значение функционала
вычисляется в двух соседних точках 1^ и /2 дискретного интервала [1, k]\
/,=]&/2[, /2e /j+1. По ним оценивается градиент суммарной стоимости в
середине интервала. Если C(/j) > C(/2), то минимум функционала достигается
в правой части интервала [1, к] , в противном случае - в левой. Принимая
половину предыдущего интервала, содержащего минимум С(/)> за
исходный интервал, повторяем процедуру до получения решения [4].
Достоверность диагноза во многом определяется инструментальной
достоверностью технических средств диагностирования. С целью повышения
инструментальной достоверности в технические средства
диагностирования вводят операции самоконтроля.
4.3.4. Задачи технического генеза
Задачи технической генетики возникают в связи с расследованием аварий
и их причин, когда техническое состояние объекта в рассматриваемое
время отличается от состояния, в котором он был в прошлом, в результате
появления первопричины, вызвавшей аварию. Под поставарийной
диагностикой подразумевается процесс установления причины аварии
объекта с использованием всей доступной информации [5]:
• телеметрической информации, полученной во время эксплуатации
объекта вплоть до развития аварии;
373
Современная телеметрия в теории и на практике
• результатов всех предшествующих измерений, сделанных во время
предварительных исследований и испытаний объекта;
• результатов поставарийных расчетов, моделирований и
исследований на стендах;
• исследований фрагментов аварийного объекта и т.д.
Исследуются только случаи, когда авария объекта уже случилась и
необходимо установить конкретные причины ее возникновения.
Рассматриваться будут те аварии, которые влекут за собой полное невыполнение задачи
объекта, и такое разрушение объекта или наземного комплекса приема
регистрации телеметрической информации (ТМИ), после которого основные
их элементы не подлежат дальнейшему использованию. Например, взрыв
ракеты-носителя на старте или в полете.
Обычно ТМИ позволяет сравнительно быстро определить, где именно
произошел отказ - в наземном или бортовом комплексе. Затем, если отказал
бортовой комплекс, выделяется отказавшая бортовая система. Если
выявлен отказ системы, то далее устанавливается отказавшая подсистема,
агрегат, блок, узел, элемент.
Если однозначно установлен отказавший элемент, то его доработка или
замена проводится в таком объеме, который должен исключить подобный
отказ в будущем. Иногда не удается установить однозначно элемент, и тогда
доработке подвергается более крупный узел или блок.
Можно говорить о некотором множестве тех элементов, с глубиной до
которых следует провести диагностику и которые потом следует доработать так,
чтобы их отказ не приводил к аварии.
Мощность этого множества называется глубиной постдиагностики. Опыт
показывает, что данная глубина очень велика [5]. Случались аварии по
причине замыкания кусочком монтажной проволоки, всплывшим в
невесомости, двух соседних контактов системы управления движением разгонного
блока ракеты космического назначения. Этот пример показывает, что число
отказов единичных элементов, которые могут приводить к авариям, может
быть достаточно большим. Поэтому при разработке объекта обычно
создается специальная служба обеспечения безопасности и надежности, которая
выявляет и заставляет разработчиков устранять все критические точки,
отказ в которых ведет к аварии. Однако опыт эксплуатации показывает, что
далеко не все такие критические точки оказываются доработанными, хотя на
этапе разработки они выявляются сотнями и тысячами.
При внедрении на борт телеметрируемого объекта программного
обеспечения (ПО) было выяснено, что в ПО также могут быть критические ошибки,
374
Глава 4. Обработка и анализ телеметрической информации
приводящие к аварии. Они, как правило, проявляются в полете при
появлении маловероятных сочетаний различных возмущающих факторов. Это
затрудняет их выявление на наземных стендах. Ошибки ПО еще больше
увеличивают глубину постдиагностики.
Второй особенностью постдиагностики является то, что материально
система постдиагностики практически не существует в виде отдельной системы.
Обычно при аварии объекта создается государственная комиссия по
расследованию и устранению ее причин. В нее входят как представители
заказчика, так и представители промышленных, научных организаций.
Эта комиссия, по сути дела, и организует процесс постдиагностики
применительно к данной аварии. Но поскольку аварии случаются не каждый год
и обычно уникальны по изделиям и по причинам, то не удается
формализовать стратегию постдиагностики и воплотить ее в единых документах,
аппаратурном и программном обеспечении.
Вместе с тем последствия аварий объекта в стоимостном выражении очень
велики, что настоятельно требует энергичной работы по:
• разработке мер безопасности, мер по предотвращению и локализации
аварийных ситуаций;
• быстрому и достоверному установлению причины аварии и
устранению этой причины.
Решение второй из приведенных проблем естественным образом ведет к
построению некоторой экспертной системы (ЭС), специализированной
на задачу постдиагностики. Эта ЭС может на первом этапе быть
«настроена» на конкретный объект. Однако рано или поздно все равно придется
говорить о построении сети из ЭС. Такая сеть должна иметь иерархическую
структуру, на нижних уровнях которой будут находиться ЭС, для которых
ЭС более нижнего уровня будут служить базой данных. А их база знаний
будет уже «настроена» на более широкое поле знаний, включая общие
проблемы для нескольких объектов.
На самом верхнем уровне будут решаться задачи выбора технической
политики в области постдиагностики для всей отрасли в целом. Очевидно, что
статистика и рекомендации с этого уровня должны доходить до
разработчиков перспективных объектов и их ЭС, специализирующихся на задачах
автоматизированного проектирования [5].
На рис. 4.28 обозначены:
1 - блоки, соответствующие объекту и их авариям;
2 - блоки ЭС, настроенные на постдиагностику соответствующих объектов
(летательных аппаратов (ЛА));
375
Современная телеметрия в теории и на практике
3 - блоки доработок объекта по результатам аварий;
4 - блок ЭС самого верхнего уровня, на котором обобщаются все данные
об авариях объекта и методах постдиагностики;
5 - блок управления технологией разработки и производства объекта (ЛА).
1 1 н ПА 11
А ЛА! I-U-
1 1 fc.i^^^'^TI Л 1
Гг*
4 1
IL
1
П ЛА2Р+
3d 1Д1
•
•
•
1 1 2
3C2U=-
—►
-]-►
Рис. 4.28. Информационная система постдиагностики
Известно, что любая ЭС состоит из следующих основных блоков ПО:
• блок решений, который воспринимает входную информацию,
организует сам процесс выработки и выдачи решения;
• блок базы данных (БД);
• блок базы знаний (БЗ).
На вход ЭС нижнего уровня поступают все данные по конкретной аварии.
Блок решений должен помочь госкомиссии организовать процесс
постдиагностики и получить окончательный диагноз. Блок БД содержит все
данные о функциональных схемах объекта и особенностях его
функционирования на предыдущих этапах жизненного цикла.
Наиболее важный блок БЗ должен содержать знания (правила) типа: «Если
бы имела место такая-то причина аварии, то она с большой вероятностью
протекала бы вот таким образом».
БЗ накапливается и по статистике аварий по результатам расчетов, и по
данным физического моделирования. Кроме того, БЗ должна содержать
знание основных законов движения ЛА и функционирования его
подсистем и элементов.
Функционирование локальной ЭС может быть описано блок-схемой на
рис. 4.29, где обозначены:
1 - основное вероятностное пространство (Q,F,P);
376
Глава 4. Обработка и анализ телеметрической информации
2 - телеметрируемый объект (показаны его «входы» и «выходы», которые
соответствуют некоторым телеметрическим параметрам: из 1-го блока
на вход объекта аварии поступает причина аварии z и шум w)\
3 - измеритель (для аварии в полете - ТМИ);
4 - блок накопления информации об аварии;
5 - блок сравнения реальных измерений по аварийному объекту с данными
моделирования при проверке некоторой гипотезы о причине аварии (будем
называть его блоком оценки невязки);
6 - блок оптимальной остановки процесса постдиагностики;
7 - блок принятия окончательного решения;
8 - блок принятия следующей гипотезы о причине аварии и мерах ее
проверки;
9 - блок реализации указанных мер проверки гипотезы о причине аварии
(частично информация от него может пополнять и накопитель блока 4:
дополнительные исследования остатков аварийного объекта или
дополнительная обработка ТМИ и т.д.)-
ЕЬЕЬ
Рис. 4.29. Функциональная схема экспертной системы постдиагностики
Петля блоков 5-6-8-9-5 может усложняться выделением промежуточных
блоков фильтрации информации, оценки апостериорной вероятности
на значениях z и т.д.
377
Современная телеметрия в теории и на практике
Блок 9 часть информации черпает в базе знаний, а часть - в результатах
реального физического и математического моделирования.
Третья и основная особенность задачи постдиагностики заключается в том,
что она является некорректной (по А. Н. Тихонову).
Условия корректной постановки математической задачи требуют
выполнения таких достаточно общих свойств, как существование,
единственность и устойчивость решения.
Задача постдиагностики прежде всего не удовлетворяет третьему условию
устойчивости, или робастности. Причина аварии существует. Опыт
показывает, что зачастую эта причина единственная и сводится или к отказу
одного элемента, или к набору маловероятной цепочки сочетаний
возмущающих факторов, что приводит в итоге к «прорыву» всех ступеней и барьеров
безопасности.
Задача постдиагностики принадлежит к кругу обратных задач, в которых по
следствиям надо установить причину. Приведем примеры обратных задач.
1. По движению объекта требуется определить действующие на него
силы (управления).
2. По результатам замера температуры на внутренней стенке
конструкции телеметрируемого объекта оценить тепловую нагрузку
на наружную обшивку.
3. По заданным эксплуатационно-техническим характеристикам
определить схемные и параметрические характеристики объекта.
Можно привести и много других примеров. В СССР эти задачи под
названием «некорректные» начал исследовать в 40-е гг. А. Н. Тихонов
применительно к задаче геологической разведки и интерпретации ее данных [5]. Это
всегда задачи идентификации неизвестных причин (параметров, функций)
по известным следствиям (результатам измерений).
Допустим, авария произошла по вине отказа одного из блоков, который
на рис. 4.30 обозначен как блок 1.
Ш
Рис. 4.30. Функциональная блок-схема
телеметрируемого объекта
378
Глава 4. Обработка и анализ телеметрической информации
В результате отказа блок 1 выдал сигнал вида, изображенного на рис. 4.31.
Этот сигнал поступил на вход исправного блока 2, которому соответствует
оператор:
Af=jk(t-T)f(x)dz=u(t)t
о
где k(t) - известная импульсная функция, в которой:
С П 2\
(4.187)
*(0=т1(0-7Г=ехр
-Р
4/
(4.188)
где р - константа; r\(t) - единичная функция.
8 10 12 14 16 18 20
Рис. 4.31. Выходной сигнал
отказавшего блока
Если р = 3,05 , то при сигнале/(0, изображенном на рис. 4.31 на выходе
блока 2 будет сигнал u(t) вида, изображенного на рис. 4.32 . Положим, что
выход u(t) телеметрировался и известен. Постдиагностика должна ответить
на вопрос: отказ какого блока, 1-го или 2-го, привел к аварии.
0,05
Рис. 4.32. Сигнал на выходе
последующего блока
379
Современная телеметрия в теории и на практике
Если сигнал u(t) известен точно, то есть можно считать, что измерения
проводятся без каких-либо шумов и помех, и если структура и коэффициенты
импульсной функции k{t) известны также абсолютно точно, то есть точно
известен оператор Л, то интегральное уравнение (4.187) можно решить
численными методами и определить f(t) [5].
Сравнивая вычислительный вид функции f(t) с допустимыми ее
значениями, можно сделать вывод об отказе блока 1.
Но это возможно, только когда известны точные значения итиАт. На
практике же все измерения зашумлены, а все характеристики блоков известны с
определенными погрешностями. И тогда вместо:
Ат/ = ит (4.189)
имеем:
А/ = и> (4-190)
где «волна» обозначает приближенно известные факторы (измерения,
оператор).
В этом случае:
7 = Ти (4.191)
не может браться в виде приближенного значения для сигнала/(£),
поскольку оператор Л'1, а тем более ^Г в подобных обратных задачах, как правило,
не является непрерывным и однозначным.
Таким образом, для обратных задач возникает принципиальный вопрос: что
надо понимать под их приближенным решением? Если ответ на этот вопрос
получен, то возникает проблема нахождения таких алгоритмов построения
приближенных решений этих задач, которые обладают свойством
устойчивости к малым изменениям исходных данных и .
В нашем случае речь идет о достоверности диагностики и о потерях от
неправильного диагноза, связанных с неустранением причины аварии, что
влечет за собой повторную аварию этого-объекта [5].
u(S)^
Рис. 4.33. Модифицированная
блок-схема телеметрируемого объекта
380
Глава 4. Обработка и анализ телеметрической информации
На рис. 4.33 дано развитие блок-схемы (рис. 4.30) для случая, когда теле-
метрируется лишь выход блока дг, а неисправность может случиться в
любом блоке типа s.
Даже если отказал лишь один блок s, то по ТМИ и(х) бывает практически
невозможно поставить однозначный диагноз. Тем более если и(х) телемет-
рируется с шумом, а операторы переработки информации от блоков s
известны с погрешностями. В общем случае приходим к интегральному
уравнению Фредгольма первого рода с ядром K(x,s) вида:
JK(x,s)f(s)ds = u(x)9 xeXy (4.192)
е
где s - неизвестный аварийный отказ; f(s)~ динамика его последствий.
Даже если ядро K(x,s) интерпретировать как вероятность перехода из
состояния s в состояние х, то и тогда однозначная постдиагностика
невозможна. Достоверность всегда будет несколько ниже единицы.
4.3.5. Прогнозирование технического состояния объектов
диагностирования
Задачи прогнозирования
К задачам технической прогностики относятся, например, задачи, связанные
с определением срока службы объекта или с назначением периодичности
его профилактических проверок и ремонтов. Эти задачи решаются путем
определения возможных или вероятных эволюции состояния объекта,
начинающихся в настоящий момент времени.
Решение задач прогнозирования весьма важно, в частности, для
организации технического обслуживания объектов по состоянию (вместо
обслуживания по срокам или по ресурсу). Непосредственное перенесение методов
решения задач диагностирования на задачи прогнозирования невозможно
из-за различия моделей, с которыми приходится работать: при
диагностировании моделью обычно является описание объекта, в то время как при
прогнозировании необходима модель процесса эволюции технических
характеристик объекта во времени.
В результате диагностирования каждый раз определяется не более чем одна
«точка» указанного процесса эволюции для текущего момента (интервала)
времени. Тем не менее хорошо организованное диагностическое
обеспечение объекта с хранением всех предшествующих результатов
диагностирования может дать полезную и объективную информацию, представляющую
собой предысторию (динамику) развития процесса изменения технических
381
Современная телеметрия в теории и на практике
характеристик объекта в прошлом, что может быть использовано для
систематической коррекции прогноза и повышения его достоверности.
По оценкам отечественных и зарубежных исследователей число различных
методов, приемов, методик прогнозирования превысило 200 [6]. Однако
число базовых методов, повторяющихся в различных вариациях в других
методах, не превышает десятка. Специфика исходной информации и
объекта прогнозирования требует выбора адекватной модели, а значит, и метода
прогнозирования. Поэтому анализ будет касаться только тех методов
прогнозирования, которые целесообразно применить к техническим системам
с учетом рассуждений, приведенных в разделе 4.
Под методом прогнозирования технического состояния (ТС) будем
понимать совокупность приемов прогнозирования, позволяющих на основе
ретроспективных данных, известных внешних и внутренних связей подсистем,
а также их измерений в рамках рассматриваемых видов ТС вывести
суждения определенной достоверности относительно будущего ТС системы.
Из множества возможных классификационных признаков методов
прогнозирования определяющими взяты признаки, характеризующие способ
преобразования прогностической информации и природу знания,
лежащего в основании прогноза. Методы прогнозирования рассмотрим в составе
пяти основных групп [6]:
• эвристические методы прогнозирования;
• математические методы временной экстраполяции;
• математические методы пространственной экстраполяции;
• методы моделирования процессов развития;
• логические и структурные методы искусственного интеллекта (ИИ).
Методы эвристического прогнозирования
Эвристическое прогнозирование является наиболее ранним в
историческом плане направлением прогнозирования, применяемым в повседневной
жизни и технике.
В широком смысле эвристическое прогнозирование состоит в
интуитивном выборе из бесчисленного множества обстоятельств важнейших и
решающих. Большая часть этой интуиции состоит в полусознательном
сравнении всех величин и вариантов, с помощью которых быстро
устраняется все маловажное и несущественное. Несмотря на то, что эксперт,
как правило, не осознает технологии эвристического прогнозирования,
он дает в среднем неплохой прогноз [6].
382
Глава 4. Обработка и анализ телеметрической информации
Эвристические методы применимы для прогнозирования любых процессов
независимо от того, непрерывный процесс или дискретный, стационарный
или нестационарный, требуется качественный прогноз или
количественный, имеется статистика или не имеется, описаны ли математически
закономерности процесса или нет. Результаты эвристического прогнозирования
представляются различными видами экспертных оценок. Широко
используются оценки наиболее вероятного значения прогнозируемой величины,
а также оценки возможных границ прогнозируемой величины.
Несомненным достоинством эвристических методов является возможность избежать
грубых ошибок, особенно в области скачкообразных изменений
прогнозируемой величины.
Эффективность методов эвристического прогнозирования повышается не
за счет их внутренней структуры (человеческие знания о
нейрофизиологических процессах функционирования головного мозга недостаточны для
этого), а за счет внешнего оформления указанных методов: подбора
соответствующих по квалификации и количеству экспертов,
совершенствования алгоритмов обработки результатов опроса. В итоге были разработаны
методы индивидуальных экспертных оценок, как, например, интервью и
аналитические экспертные оценки.
Основные методы коллективных экспертных оценок включают методы
комиссий, «Делфи», коллективную генерацию идей, матричный метод и т.д [6].
Преимущества индивидуальных методов заключаются в максимальном
использовании индивидуальных способностей эксперта и
незначительности психологического давления на отдельного эксперта. Коллективные
экспертные оценки основываются на принципах выявления согласованных
мнений экспертов о перспективах развития ТС сложных объектов или его
подсистем. Преимущество данных методов состоит в возможности
прогноза многопараметрических процессов с разделением функций прогноза
отдельных групп параметров между экспертами. При этом достоверность
прогноза пропорциональна зависимости параметров друг от друга.
Однако эвристические методы субъективны и пригодны только тогда, когда
существуют эксперты, знакомые с прогнозируемой ситуацией. Кроме того,
при прогнозировании многочисленных характеристик сложных
технических устройств методы эвристического прогнозирования становятся весьма
сложными и трудоемкими.
Данное обстоятельство потребовало разработки математических методов
прогнозирования, основные достоинства которых состоят в объективности
получаемой информации и в возможности автоматизации процесса
прогнозирования с использованием ЭВМ. И, хотя разработка любых методов
прогнозирования на всех этапах непосредственно связана с эвристической
383
Современная телеметрия в теории и на практике
деятельностью, с ростом использования вычислительной техники для задач
прогнозирования в ряде вспомогательных операций роль эвристической
деятельности как решающего фактора снижается.
Математические методы временной экстраполяции
В зависимости от используемого математического аппарата и целевой
направленности, математические методы временной экстраполяции можно
условно разделить на три группы: методы аналитического
прогнозирования, методы вероятностного прогнозирования и методы статистической
классификации [6].
Предположим, что контролируемый процесс изменения параметров ТС
можно представить в виде многомерной функции состояния Q(kvkr ..., kn),
которая наблюдается в моменты времени (t0, ...ftm)eTv вследствие чего
известны значения этой функции - Q(£0), ..., Q(tm). Необходимо
определить значения функции состояния - Q(£m+1),..., Q(tm+2) в моменты времени
т+\, т+г 2
Подобная постановка задачи справедлива в предположении, что значения
Q(^0)' •••» Q(0 предопределяют величины Q(£m+t),..., Q(tm+z), иными
словами, что процесс изменения ТС «информативен» во времени. Возможность
подобного допущения зависит от степени изученности прогнозируемого
процесса в интервале времени Т{.
Идеальным случаем является получение аналитического выражения для
функции состояния Q(k, t). Задачу прогнозирования в подобной
постановке можно решить различными методами, отличающимися применяемым
математическим аппаратом и называемыми методами аналитического
прогнозирования.
К числу методов аналитического прогнозирования многомерных процессов
относится градиентный метод, в рамках которого функция состояния
экстраполируется в направлении вектора градиента функции состояния:
Q(k,0 = Q(k,tJ+ym+lVQ(k,tJ, (4.193)
где Q(k, t) - функция состояния; уш+1 > 0 - параметр, характеризующий
длину шага прогнозирования; VQ(£,£m) - вектор градиента функции
состояния.
Недостатком данного метода является его неэффективность в случае
изменения функции состояния по нелинейному закону.
Существует ряд методов аналитического прогнозирования, учитывающих
производные изменений функции состояния. К числу таких методов отно-
384
Глава 4. Обработка и анализ телеметрической информации
сят операторный метод, метод суммирования производных и т.д. Функция
состояния в данных методах определяется зависимостью:
Q(k,tm+,) = f(Q(k,tm),yAQ{k,tm)), (4.194)
где у > 0 - параметр прогнозирования; AQ(k,tm) - оператор, определяемый
через производные функции состояния.
Модели методов прогнозирования, учитывающие производные функции
состояния, обладают неопределенностью начальных условий, и при
случайных помехах, накладывающихся на функцию состояния, начальная
неопределенность возрастает, что затрудняет определение параметров модели и,
как следствие, ухудшает точность прогнозирования. Задачу
прогнозирования изменений ТС многопараметрического объекта можно свести к
прогнозированию одномерной обобщенной временной функции вида [6]:
Ш'оХ->ШО- (4-195)
Идея метода обобщенного параметра при прогнозировании
заключается в описании процесса изменения ТС, характеризуемого многими
компонентами, одномерной функцией, численные значения которой
зависят от контролируемых компонентов процесса. Отдельно для каждого
параметра kn .-1,..., п можно выделить допустимое значение k.°, при
достижении которого система теряет работоспособность.
Однако при изучении процесса изменения ТС, характеризуемого
одновременно большим количеством параметров и сложной зависимостью
между ними, допустимые значения k.° можно выделить лишь путем натурных
испытаний или в процессе систем. Трудности при использовании данного
метода в целях прогнозирования ТС объекта могут возникнуть при оценке
значимости первичных параметров, а также при построении
математического выражения обобщенного параметра.
На практике прогнозируемые процессы можно представить в виде
временного ряда чисел, определяющих их характер. При этом результат
прогнозирования получается в виде одного числа. Прогнозирование многомерного
процесса также сводится к этому случаю, если рассматривать характер
изменения его компонентов в отдельности. Например, в результате контроля
выбранных параметров системы получены временные ряды:
*,(>о)>." *i('/),-.. *i('J
k2(t0)9... k2(tj'
(4.196)
**('o)>- КЮ
где ti+l -1. = At - постоянный интервал, t. eTvi=l,..., m.
13 3a*. 861
385
Современная телеметрия в теории и на практике
Требуется вычислить значение параметров kl,... kn в будущие моменты
времени tm+. eT2,j=l,..., z. Выбор и построение аналитического выражения
для прогнозирования является одним из основных вопросов, который
принципиальным образом влияет на конечный результат прогнозирования с
использованием временных рядов.
Наиболее распространенным прогнозирующим аналитическим
выражением является многочлен вида:
A(t)= i.ArF,(k.t)9 (4.197)
r=I
где Fr(k,t) - базовые выражения (базисные функции), составляющие
основу прогнозирующей формулы; Аг - степенные адаптационные
коэффициенты; г = 1,..., R - степень базовых выражений.
Выражение вида (4.197) подходит для описания монотонного и
постепенного изменения параметров. Анализ временных последовательностей
показывает, что для прогнозирования параметров используются только
исторические данные об их изменениях, в связи с чем временные ряды широко
применяются для прогнозирования экономических показателей.
Очевидно, что для успешного прогнозирования ТС-объектов
использование только истории их изменения недостаточно. Также к недостаткам
данного метода прогнозирования можно отнести сложность и трудоемкость
вычислений, связанных с необходимостью выбора и вычисления для
каждого параметра прогнозирующего аналитического выражения.
К общим недостаткам методов аналитического прогнозирования следует
отнести большой объем вычислительных процедур при определении
прогнозных значений параметров, а также неточность результатов
прогнозирования при неправильно выбранной модели и неточности исходных данных,
полученных в период наблюдения Тх [6J.
Необходимость вероятностного прогнозирования многомерных процессов
определяется сильным влиянием внешних и внутренних факторов,
имеющих случайный характер. Преобладание случайной составляющей при
измерениях k(t.) приводит к большим случайным изменениям функций
состояния Q(k).
Задача вероятностного прогнозирования формулируется следующим
образом: пусть известны значения параметров ks, 5=1,..., п, полученных в
моменты времени t}J ;=1,..., гп, и в каждый момент t. функция состояния Q(k,t.)
полностью характеризуется функцией распределения H(Q). Необходимо
по известным значениям ks(t), Q(&?, t), F.(Q) вычислить:
F„+j(E) = P{\Q(kfkm+J)~Qll(k)\pE} (4.198)
386
Глава 4. Обработка и анализ телеметрической информации
где е = Q°(ks)- QH(ks); Qn(ks) - номинальное значение Q(k,t); Q°(ks) -
допустимое значение Q(k,t).
К методам вероятностного прогнозирования относится метод
статистического градиента, при котором закономерность движения функции состояния
Q(k,t) к допустимым границам Q°(k) оценивается статистически. В момент^
из п координат вектора Q(k) случайным образом выбираются группы по d
координат и определяются соответствующие приращения координат ум,...,
yis,...,y/V/, где is - случайные единичные векторы, у = tm- tmV При этом
выражение, определяющее приращение функции состояния, имеет вид:
щ=е[*с„м)+у"]-б[*('_,)], <41")
Метод, использующий Байесов критерий, позволяет определить плотность
распределения /(VQ) вектора градиента функции состояния Q(k,t). В
общем виде, для нормальной распределенной помехи, выражение для оценки
функции состояния имеет вид:
л/ 2л а
1
ехр|
-1
2а2
£q,-aq°)
(4.200)
где AQ° - наиболее вероятное значение градиента функции состояния; а2 -
дисперсия градиента функции состояния.
Для определения наиболее вероятного направления градиента в этом
случае строится распределение приращений Ak по каждой координате вектора
функции состояния.
В методе гипотез и фильтрации вводится гипотеза о том или ином
поведении функции состояния, а затем все результаты контроля и
прогнозирования, не удовлетворяющие принятой гипотезе, отфильтровываются.
Недостатком метода является низкая оперативность из-за инерционности
в получении результатов прогноза.
Прогнозирование изменений функции распределения параметров с
преобладанием случайных составляющих заключается в вычислении
статистических характеристик и построении интегральных функций распределений
различных последовательностей временных рядов. Существенным
недостатком метода является необходимость длительного наблюдения при
индивидуальном прогнозировании для получения представительных выборок.
Также при построении одномерных временных рядов функций
распределения для многомерного объекта выдвигается условие некоррелированности
между этими функциями, что на практике не всегда имеет место [6].
Для получения непрерывного прогноза используются оптимальные
фильтры: фильтр Винера-Хопфа для прогнозирования стационарных процессов
387
Современная телеметрия в теории и на практике
и фильтр Калмана для нестационарных процессов. Принципиальными
трудностями применения этих фильтров для многомерных процессов
является громоздкость вычислительных процедур и необходимость наличия
представительных статистических данных.
Метод статистической регрессии позволяет предсказать одну или
несколько величин yl,..., yq на основе информации о параметрах объекта kv ..., kn.
Величина Y может представлять собой какой-либо обобщенный критерий
состояния или в частном случае будущие значения параметра k(tm+)J=l,...t
z, tm+ err Задача заключается в определении такой функции (модели) W(k)}
зная которую можно с некоторой достоверностью судить об изменении
прогнозируемой величины Ув зависимости от аргументов ks, s=l,...,ft.
Наиболее распространенной формой представления функций является
линейное соотношение вида:
Y = a\k\ + a2k2 + - + adkd + e> (4.201)
где as - неизвестные коэффициенты функции W} 5=1, ..., d\ e - некоторая
случайная величина, характеризующая совокупную погрешность измерений.
Функция Ww ее коэффициенты определяются из условия достижения
экстремального значения некоторого выбранного критерия. В качестве
такого условия широко используется минимум среднеквадратической ошибки
(метод наименьших квадратов):
M[Y-W(k)]2 =min. (4.202)
Данный метод объективен, но требует соблюдения ряда условий для
успешного применения. Прежде всего необходим достаточно большой объем
статистических данных, полученных на участке наблюдения. Кроме того,
необходимо знать вид детерминированной основы процесса или функции,
описывающей процесс изменения параметров. Самым большим
недостатком метода является невозможность предсказания качественного
изменения характера динамики технического состояния объекта, то есть скачка.
Довольно большой класс прогнозируемых случайных процессов
описывается с помощью их канонического представления, когда функции, по которым
ведется разложение процесса, являются аналитическими, а в качестве
приближения процесса рассматривается конечное число членов канонического
разложения. В этом случае прогнозируемый процесс представляется в виде:
*(o=w*(0+i>vs(o, <4-203>
v=l
где mk(t) - математическое ожидание k(t); Vv - некоррелированные
случайные величины, математические ожидания которых равны нулю, v= 1, ..., L\
q(t) - неслучайные функции времени (координатные функции разложения).
388
Глава 4. Обработка и анализ телеметрической информации
Воздействуя оператором прогнозирования, например Wy на процесс k(t),
описываемый уравнением (4.203), можно предсказать его в моменты tm+.
еГ2,;=1,...г:
*('«♦,)=wm))=^ К wj+L^v^ fe (о}. (4.204)
V
Метод канонического разложения процесса - по своему принципу
промежуточный между методом наименьших квадратов (регрессией) и
использованием прогнозирующих фильтров. Основными недостатками данного
метода являются: невозможность учета скачков и необходимость в
представительном объеме априорных статистических данных.
К общим недостаткам большинства вероятностных методов
прогнозирования многомерных процессов можно отнести:
• необходимость наличия представительного объема статистических
данных о процессах изменения параметров;
• невозможность учета скачков на участке прогнозирования;
• невозможность обойтись без математического описания процессов
изменения параметров.
В методах аналитического и вероятностного прогнозирования временная
экстраполяция функции состояния заложена в явном виде. При
прогнозировании состояния одного экземпляра - объекта время контроля ограничено
(до момента возникновения необходимости в прогнозировании), и в начале
применения по целевому назначению отсутствуют предпосылки для
экстраполяции с помощью рассмотренных методов.
Данная проблема частично решается прогнозированием на основе теории
статистической классификации (распознавания образов), при которой
процесс установления экстраполяционных связей осуществляется на основе
априорной информации и называется процессом обучения экстраполяци-
онным связям.
Задача прогнозирования в рамках данных методов формулируется
следующим образом: пусть в момент времени t0 или в ограниченный начальный
интервал эксплуатации объекта получены значения параметров ТС
контролируемой БС, характеризующих функцию состояния Q(k).
Необходимо по совокупности параметров kS координат многомерной
функции состояния принять решение о принадлежности аппаратуры к тому
или иному классу Rv При этом классы Rx могут быть параметрическими,
временными и т.д. [6]. Данная постановка задачи предполагает, что п
параметров kS(t)} характеризующих ТС системы, будут иметь идентичную k -
совокупность для БС с равным или примерно равным запасом
работоспособности. Иными словами,группа£БС,имеющая одинаковую долговечность,
389
Современная телеметрия в теории и на практике
будет отличаться от БС, не входящих в эту группу, вектором или функцией
состояния, которые описываются координатами (параметрами) ks> s=l,...,n.
При прогнозировании по результатам текущего контроля обнаружение и
распознавание экстраполяционных связей производится с помощью той
или иной модели. Таким образом, из общего круга решаемых при
статистической классификации вопросов можно выделить два основных:
количественная оценка обучения экстраполяционным связям и формирование
оптимальной модели распознавания.
Осуществляя вероятностную и статистическую обработку векторов ke Rv
ke R2 ..., внутри каждого класса, можно описать Rv А,в1,...,м, и-количество
классов с помощью эталонного вектора к1о, ..., кпэ или функции плотности
распределения/1(&), .~,fg(k). В зависимости от того, как описывается класс
или как того требует постановка задачи, векторы k классифицируют либо
детерминированными, либо вероятностными методами.
Детерминированные методы целесообразно использовать тогда, когда
векторы состояний, принадлежащие к различным классам, не сильно
перемешаны. В этом случае вектор, определяемый в результате обработки текущей
информации прогнозируемого объекта, сравнивается с эталонными
векторами и определяется наибольшая близость к одному из эталонных
векторов. Основными мерами близости, применяемыми при статистической
классификации, являются квадрат расстояния, скалярные произведения,
корреляционные меры, расстояния по Хеммингу и др.
При наличии помех и случайной составляющей образы-объекты различных
классов оказываются существенно перемешанными, что затрудняет
распознавание. В этом случае целесообразно применять вероятностные методы
классификации. Мерой близости при этом является условная вероятность
P(kS/RK) принадлежности диагностируемой БС по параметру kS к А,-му
классу. К методам распознавания при прогнозировании с использованием
статистической классификации относится метод потенциальных функций,
базирующийся на гипотезе о характере функций, разделяющих множества,
которые соответствуют различным образам (классам). Большим
преимуществом метода является то, что к нему можно свести многие известные
алгоритмы распознавания.
В случае использования дискриминантного анализа разделяющие
поверхности определяются скалярными функциями gl(k)} ..., gm(k), где k = {k{,
..., kj - вектор состояния диагностируемой БС. Функции g(k), названные
дискриминантными, выбираются так, чтобы для всех keRx выполнялось
условие gX(k) >gr(k)} Xyr = 1, ...и, Хфг.С помощью дискриминантных функций
можно получить стандартный и удобный для практического использования
390
Глава 4. Обработка и анализ телеметрической информации
метод задания разделяющих поверхностей. Однако для точного
определения функций необходимо иметь полную априорную информацию об
объектах, подлежащих классификации, что невозможно при прогнозировании
таких типов, как БС уникальных систем.
Существенным недостатком всех методов прогнозирования на основе
статистической классификации можно считать обязательное наличие
априорной информации, на основе которой осуществляется установление
временных экстраполяционных связей, то есть необходима выборка данных по
объектам одного типа с объектом, ТС которого необходимо прогнозировать.
Любой математический метод временной экстраполяции включает в себя
эвристические элементы, заключающиеся в разработке математической
модели и анализе результатов прогнозирования. Отсюда и некоторая
степень субъективности, присущая данным методам и в конечном счете
влияющая на конечный результат. Математические методы требуют наличия
четко сформулированной математической модели поведения параметров
ТС прогнозируемой БС.
Выбор и обоснование математической модели является узловым вопросом
данных методов. В большинстве случаев эта далеко не тривиальная задача
требует специальных исследований (натурных испытаний определенного
класса подсистем сложного объекта, моделирования процессов
функционирования и т.д.). Информация о динамике параметров ТС системы может
содержать помехи, вследствие чего задача оценки неизвестных параметров
модели существенно усложняется.
Все математические методы прогнозирования можно представить
разомкнутой системой, на вход которой поступают данные о контролируемом
в настоящий момент процессе изменения параметров ТС, а на выходе
выявляются их прогнозируемые значения. Из-за разомкнутости данной
системы все ошибки на ее входе непосредственно сказываются и на ее выходе,
то есть сказываются на точнЬсти прогноза, несмотря на то, что модель
процесса может быть выбрана правильно и все вычисления осуществляются с
необходимой точностью.
Большинство математических методов (за исключением методов
моделирования физических процессов развития) не способны прогнозировать
скачки значений параметров ТС, то есть резкое качественное изменение
ТС. Также существенным недостатком является необходимость
длительного исследования предыстории функционирования системы для
построения точной прогнозной модели, при этом другого рода информация на
начальном периоде применения уникальной системы по целевому назначению
не используется.
391
Современная телеметрия в теории и на практике
Математические методы пространственной экстраполяции
Прогнозирование параметров состояния в виде временной
экстраполяции характеристик использует в качестве аргумента один параметр -
время. Пространственная экстраполяция связана с прогнозированием в
пространстве характеристик и состоит в оценке значений векторного поля по
отдельным наблюдениям.
Содержательно задачу пространственной экстраполяции характеристик
технического состояния сложного объекта сформулируем следующим
образом. Пусть имеется конечное множество ситуаций - точек в пространстве
ситуаций X, где определены некоторые решения Y. То есть существует
множество векторов {Z}M„, где Z=[X,F], г=1, ..., п. Компоненты вектора X
характеризуют параметры наблюдаемой ситуации (параметры квазипериода
основания прогноза), куда входят параметры ТС системы в момент
наблюдения (либо до выдачи управляющих воздействий), факторы прогнозного
фона и управляющие воздействия (УВ).
Компоненты вектора Y характеризуют прогнозные параметры ТС
системы. Тогда задача пространственной экстраполяции будет состоять в оценке
компонентов вектора У+1 с учетом знания Хп+Х в ситуации Zn+V информация
о которой в косвенном виде содержится в множестве {Z}.=1 n.
Решение задачи прогнозирования в такой постановке может
рассматриваться как результат n-наблюдений неизвестной функции F:
Y = F(X), (4.205)
где F= (yv—>ym) ~ вектор следствия или прогнозных параметров ТС
сложного объекта; X = (xv...jck) - вектор причины или текущих параметров ТС,
факторов прогнозного фона и УВ.
Следовательно, задача построения прогнозной модели сводится к
восстановлению неизвестной векторной функции F векторного аргумента X по
конечному числу п наблюдений. Выбор способа решения зависит от
количества имеющейся информации о восстанавливаемой функции. Если число
наблюдений п достаточно велико по сравнению с размерностью к вектора X,
задачу можно решить применением различных методов аппроксимации.
Однако наибольший практический интерес представляет ситуация, когда
число наблюдений мало, то есть n«k.
Данный случай соответствует прогнозу ТС уникальных и малосерийных
объектов, а также прогнозу редких, аварийных событий серийных изделий.
Одним из методов решения задачи пространственной экстраполяции
редких событий является метод многомерной линейной экстраполяции.
К главным достоинствам метода можно отнести отсутствие необходимости
разработки громоздкой прогнозной модели ТС по результатам наблюдений.
392
Глава 4. Обработка и анализ телеметрической информации
Недостатки метода многомерной линейной экстраполяции заключаются в
линейности экстраполяции следствий Y в пространстве признаков
ситуации, линейности преобразований причинно-следственной зависимости F,
а также в требовании разработки специальных алгоритмов, учитывающих
значимость наблюдаемых ранее ситуаций и трудности учета старения
прецедентов из множества {Z}. , .
Следует заметить, что метод пространственной экстраполяции лежит в
рамках подхода к прогнозированию по математической аналогии.
Методы моделирования процессов функционирования систем
Как правило, выделяют три метода моделирования: физическое,
математическое и имитационное. Физическое моделирование позволяет
воспроизводить функционирование только отдельных элементов и подсистем объекта с
сохранением его физической природы. Имитируя предполагаемые воздействия
на эти элементы, можно прогнозировать их ТС в интересующих условиях.
Данный метод позволяет получить любую недостающую информацию
для построения прогнозной модели, однако в ряде случаев физическое
моделирование невыполнимо. Для уникальных транспортных
конструкций в целом, например, в силу дороговизны и невозможности имитации
ряда факторов реальных условий передвижения физическое
моделирование неосуществимо. Кроме того, физическое моделирование может быть
неосуществимым для ряда уникальных объектов разового действия, так
как факт моделирования их функционирования есть факт их применения
по целевому назначению.
Математическое моделирование предполагает описание с помощью
совокупности соотношений - уравнений, неравенств, логических условий
прогнозных характеристик ТС. Недостатки математического моделирования
(мат. методы прогнозирования) типичны для недостатков методов
временной экстраполяции.
В силу сложности объекта математическая модель функционирования
может быть слишком громоздкой для ее оперативного использования.
Имитационное моделирование применяется в том случае, когда исследуемые
процессы сложны и многообразны настолько, что математическая модель
становится слишком грубым приближением к действительности.
Q помощью имитационных моделей можно получить достоверный прогноз,
если имеется некоторая совокупность реальных исходных данных,
достаточное количество априорной информации для построения структуры
прогнозной модели и не существует эмерджентности в функционировании
объекта, состоящего из множества подсистем.
393
Современная телеметрия в теории и на практике
Логические и структурные методы искусственного интеллекта
Логические и структурные методы прогнозирования рассматриваются
преимущественно в рамках одноименных методов распознавания образов, где
под образами подразумеваются прогнозируемые явления и процессы.
Исключение составляет ряд методов прогнозирования, наиболее
распространенный из которых основан на морфологическом анализе.
Морфологический анализ связан с анализом структурных взаимосвязей между объектами,
явлениями и концепциями. Морфологический подход представляет
собой упорядоченный способ рассмотрения различных возможностей
будущих состояний и получения систематизированной информации по всем
возможным ТС наблюдаемого объекта. Основные этапы
морфологического прогнозирования:
1. Предпрогнозная ориентация. Составление задания на прогнозное
исследование совместно с заказчиком, выбор информационного
массива, определение числа контрольных точек (ретроспективная
информация) и уровня отношений объекта прогнозирования,
описание объекта на языке системы прогнозирования.
2. Проведение поискового прогнозного исследования.
3. Оценка перспективности возможных значений объекта
прогнозирования и выбор наиболее перспективных.
4. Проведение нормативного прогнозного исследования.
5. Выдача и представление результатов прогнозного исследования.
6. Организационные оценки (программный прогноз) и выработка
управляющих решений в системе программно-целевого управления.
7. Построение прогнозного цикла по мере поступления новой
информации с учетом коррекции в предпрогнозной ориентации.
Каждая из ^-характеристик ТС может иметь определенное множество
значений gn, gn,..., g{nV Совокупность характеристик может быть
записана в виде:
leu* §12' •••' §1,71.1'
L&21' §22' "•' 02W2J'
18*1 > 8*2» —' &knkl'
Если в каждом векторе характеристик выделить по одному из элементов
и затем объединить их, то полученное множество значений будет
представлять возможный вариант решения-прогноза.
394
Глава 4. Обработка и анализ телеметрической информации
В морфологическом прогнозировании предполагается использование
пассивных элементов информационного массива - технических текстов
на естественном языке, содержащих качественную и количественную
информацию о предполагаемых событиях в динамике объекта
прогнозирования. Тогда за основу описания динамики ТС объекта будут
приниматься явные реальные определения экспертами ситуаций,
связанных с данным типом объекта, а также сведения о логике работы
элементов его систем из эксплуатационно-технической документации.
Это, в свою очередь, может породить проблемы, относящиеся к
проблемам искусственного интеллекта и связанные с построением систем,
понимающих запросы на естественном языке, построением систем
логического вывода и т.д.
При построении системы прогнозирования в соответствии с
морфологическим подходом возникают ограничения возможности выявления
содержания скачков в развитии явлений, характеризующих ТС объекта. Данные
ограничения связаны с проблемой эмерджентности -- несводимости
свойств системы в целом к сумме свойств ее элементов, так как при
построении вариантов решений относительно прогнозных ТС
предусматривается декомпозиция прогнозирующих свойств наблюдаемой ситуации на
отдельные составляющие и их последующее объединение в возможное
решение - прогноз.
Логические методы прогнозирования используют логические методы
распознавания прогнозируемых явлений и основаны на дискретном
анализе и исчислении высказываний. В общем случае применение
логических методов прогнозирования предусматривает наличие
логических экстраполяционных связей прогнозируемого ТС с наблюдаемыми
ранее событиями, выраженных через систему булевых уравнений. При
этом переменные являются логическими признаками прогнозируемого
ТС, а неизвестные величины - классами прогнозируемых ТС,
Предположим, что множество ТС подразделено на классы Q}, ..., Qm, а для их
описания используются признаки Av ..., Ап. В рамках логического
метода в общем случае можно предположить, что все сведения априорного
характера о классах ТС, выраженные в виде связи между
высказываниями Q и Л, а также в виде зависимостей только между признаками А
или только между классами Q, представлены в форме булевых
соотношений:
а = /1(Ль.~,ЛпУ, Пу->Лу(у4ь...,^«); Li(A\,...,An)->Qh
Fi\A\9—9An> Qb--9Qm)= Hi\A\9—,An\ Qi»-»QW);
Фн(А\,...,ая; Qh...,n«)=/; 4r(A\9...9An)=i9...
. (4.206)
395
Современная телеметрия в теории и на практике
Допустим, что наряду с (4.206) в результате проведения текущих
наблюдений получены данные, касающиеся множества признаков Av ..., Ап,
присущих ТС классов Q,,..., Qm, и что эти данные представлены булевой
функцией G(AV ..., Ап) = /, где / - знак универсально истинной функции. Задача
прогнозирования ТС сложного объекта состоит в том, чтобы определить,
какие выводы можно сделать относительно классов £1,..., £1 на основе об-
1 т
щих сведений априорного характера (4.206) и апостериорной информации
G(A],..., An). В итоге требуется определить неизвестную функцию F(QV ...,
Qw), удовлетворяющую уравнению:
GUv..,A)+F(plv..,Q/w)=/, (4.207)
при ограничениях (4.206).
Подобные логические методы могут быть применены в следующих
условиях:
1. Отсутствие сведений о количественном распределении областей
(ТС) в соответствующих пространствах признаков и наличие лишь
детерминированных логических связей между параметрами
ситуаций, предшествующих будущему ТС.
2. Знание распределений числовых характеристик ТС в
пространстве признаков, с учетом того, что логические зависимости,
связывающие наблюдаемые признаки и классы будущих ТС,
сложны и не поддаются непосредственному анализу.
3. При реальной эксплуатации ряда объектов в условиях
недостатка априорной информации логические методы прогнозирования
могут быть применены в качестве методов экстраполяции в
пространстве признаков подобных ситуаций. Однако в любом случае
их недостатком будет монотонность логического вывода и наличие
значительного элемента эвристики при введении элементарных
понятий и высказываний ПиЛи построении на их основе булевых
соотношений вида (4.206).
4. При практическом построении систем прогнозирования ТС
сложных объектов промышленности используются большие массивы
информации, характеризующие признаки прогнозных ТС. В итоге
возникают ограничения в оперативности применения логических
методов прогнозирования при их реализации на ЭВМ
последовательного типа.
Структурные (лингвистические) методы прогнозирования используют
специальные грамматики, порождающие языки, состоящие из
предложений, каждое из которых описывает принадлежащее к конкретному классу
396
Глава 4. Обработка и анализ телеметрической информации
прогнозных ТС. В рамках данных методов процесс вывода прогнозных
суждений состоит из следующих этапов:
• определение непроизводных элементов - основных элементов
распознаваемых классов, и их отношений для конкретных видов ТС
типичных систем;
• проведение синтаксического анализа предложений,
представляющих наблюдаемые ситуации, с целью установления возможности
порождения некоторой грамматикой имеющееся описание
прогнозируемого ТС.
Для получения грамматики, характеризующей структурную информацию
об изучаемом классе ТС, необходим ее вывод на основе заданного набора
обучающих ситуаций, представленных описаниями структурного тина.
Как правило, данный этап выполняется вручную. Основным достоинством
структурных методов, по-видимому, можно считать возможность
прогнозирования скачков в динамике ТС наблюдаемой системы за счет
формализации и использования дополнительной информации самой различной
природы. Недостатки методов характерны для методов ИИ: трудности
отработки языка описания прогнозируемых классов, извлечения
информации из базы данных, а также сложность прогнозной модели.
В заключение анализа следует заметить, что классификация методов
прогнозирования представляет собой процесс со значительной долей
эвристики и ориентирована на выбор или синтез условно-оптимального
метода (алгоритма) прогнозирования ТС объекта. Результаты анализа
сведены в табл. 4.2, в которой рассмотренные методы проверяются на предмет
соответствия требованиям, необходимым для осуществления
достоверного и оперативного прогноза [6]. Требования сформулированы на
основе анализа типичных подсистем уникальных промышленных установок
как объектов прогнозирования. Характеристики методов рассмотрены но
трехбалльной шкале. Следует заметить, что при применении систем по
целевому назначению не исключена ситуация, когда потребуется
прогноз на совокупность параметров ТС отдельных подсистем, динамика и
оптимальные методы прогнозирования которых лежат вне требований и
характеристик, приведенных в табл. 4.2.
Так, например, некоторые параметры ориентации КА в пространстве могут
быть аналитически спрогнозированы с помощью элементарных
выражений, а прогноз выхода углеводорода в колонне разделения фракций нефти
практически детерминированно зависит от температуры нагревательного
куба. Поэтому предполагается, что требования, выдвинутые методам,
описывают худший вариант ситуации, в которой необходимо получить прогноз
на характеристики системы [6].
397
Суммарный показатель предпочтения
-
-
ст>
6)
о
•ь.
^
ГчЭ
NJ
СЛ
LJ
Возможность аппаратной реализации
методик встроенными средствами в соответствии
с эксплуатационно-техническими требованиями
i
•
+
+
+
+
+ 1
i
i
•
•
Трудности реализации метода с учетом затрат
на разработку и эксплуатацию системы
прогнозирования
1+
i
i
i
1+
1+
i
i
i
i
i
Возможность решения слабо формализован-
ных задач процедуры прогнозирования
+
+
i
i
i
i
i
+
+
1+
+
Возможность учета старения информации
в соответствии с принципом непрерывности
прогнозирования
+
+
i
i
+
+
i
i
i
i
i
Возможность строгой формализации и алго-
ритмизации методик прогнозирования
i
i
+
+
+
1+
'+
1+
1+
+
1+
Возможность прогнозирования
1 не наблюдавшихся ранее событий в динамике ТС
+
+
i
i
i
+
i
+
!+
+
+
Возможность обработки данных,
представленных в разнотипных шкалах
+
+
i
•
i
+
+
+
+
i
+
Нечувствительность к недостатку априорной
информации о динамике ТС
+
+
i
i
i
+
i
1+
+
i
+
Возможность оперативной обработки
[_ информации на ЭВМ последовательного типа
•
i
i
i
1+
i
1+
+
i
i
i
Способность выдавать многопараметрический
прогноз с учетом эмерджентности явлений
i
!+
i
i
+
+
+
+
i
i
i
Требования, предъявляемые к методу
прогнозирования технического
состояния сложного объекта
Индивидуальные
экспертные оценки
Коллективные
экспертные оценки
Аналитическое
прогнозирование
Вероятностное
прогнозирование
Статистическая
классификация
Эвристические
методы
Математические
методы временной
экстраполяции
Математические методы
пространственной
экстраполяции
Математическое
моделирование
Физическое
моделирование
Морфологический
анализ
Вычислительные
методы алгебры
логики
Методы
моделирования
Логические
методы
Структурные
(лингвистические) методы
5*
Я
J3
to
if
о
О
X
§
о
X
о
X
3
о
Qj
о
о
о
I
о
X
Глава 4. Обработка и анализ телеметрической информации
По результатам анализа можно убедиться в предпочтительности
использования подхода пространственной экстраполяции в прогнозировании
параметров ТС болылих систем. Основные недостатки данного подхода:
сравнительно низкая оперативность обработки информации на ЭВМ
последовательного типа, невозможность решения слабо формализованных
задач процедуры прогнозирования сложных объектов и относительно
низкая точность результатов.
Дальнейшее изложение книги в каком-то смысле посвящено компенсации
перечисленных недостатков путем использования нейросетевых
алгоритмов экстраполяции в пространстве признаков состояний сложных
объектов, а также применением комбинированных алгоритмов ИИ.
Современная телеметрия в теории и на практике
ЛИТЕРАТУРА К ГЛАВЕ 4
1. Степкин В. С, Шмыголь С. С. Автоматизированная обработка и
анализ телеметрической информации. - МО СССР, 1980. - 515 с.
2. Белицкий В. И. и др. Телеметрия. - МО СССР, 1984. - 465 с.
3. Дмитриев А. К., Юсупов Р. М. Идентификация и техническая
диагностика. - МО СССР, 1987. - 521 с.
4. Технические средства диагностирования: Справочник / Под общ. ред.
В. В. Клюева -М.: Машиностроение, 1989. - 672 с.
5. Меньшиков В. А. Полигонные испытания. - М.: «КОСМО», 1999. -
237 с.
6. Назаров А. В., Лоскутов А. И. Нейросетевые алгоритмы
прогнозирования и оптимизации систем. - СПб: «Наука и Техника», 2003. - 384 с.
J-
Глава 5.
Стандарты и технологии
современной телеметрии
5.1. КОНЦЕПЦИЯ ТЕЛЕМЕТРИЧЕСКОЙ СИСТЕМЫ
5.1.1. Организаторы CCSDS
Использование стандартов значительно удешевляет разработку и
эксплуатацию сложных технических систем. Объективными причинами
установления стандартов являются:
• сокращение объема проектных работ при проектировании в
рамках стандарта;
• гарантия правильности используемых стандартных проектных
решений, основанная на подтверждении стандарта группой
экспертов в данной области;
• возможность совершенствования и развития системы,
подразумеваемая стандартом.
Помимо улучшения проектных характеристик, применение многоцелевого
подхода и стандартизации вызвано необходимостью и предусматривает
перекрестное обеспечение телеметрируемых систем, принадлежащих одной
организации (стране), системами передачи данных, принадлежащими
другой организации (стране).
Стандартизация привела к развитию в нашей стране двух телеметрических
систем РТС 9 и БРС'4 (условно «медленная» телеметрия промышленных
объектов и «быстрая» — телеметрия, быстро меняющихся параметров).
402
Глава 5. Стандарты и технологии современной телеметрии
Современные телеметрические системы, разрабатываемые в настоящее
время в России, кроме указанных отечественных стандартов,
поддерживают также международные. Это стало особенно актуально после
распада СССР, когда были потеряны наземные телеметрические средства,
расположенные на территориях союзных республик, и стала слишком
дорогой эксплуатация плавающих командно-измерительных пунктов,
раньше совместно обеспечивающих глобальность теленаблюдения.
Кроме того, в условиях наблюдающейся мировой интеграции и при наличии
в России уникальных технологий и средств выведения использование
международных стандартов передачи данных из космоса способствует
развитию промышленности и технологий в нашей стране.
В настоящее время в телеметрии в качестве международных приняты
стандарты консультативного комитета по космическим системам
передачи данных - CCSDS (Consultative Committee for Space Data Systems).
Комитет был создан в 1982 г. решением международного симпозиума по
космическим системам передачи данных, проведенного в США по
инициативе НАСА. Создание комитета CCSDS было вызвано необходимостью:
• обеспечить заинтересованным организациям возможность обмена
технической информацией по разработке и применению стандартов
космических систем передачи данных;
• выявить общие для всех космических систем передачи данных
элементы, стандартизация которых позволит повысить эффективность
выполнения задач космических полетов;
• разработать технические рекомендации, служащие основой для
стандартов, которые позволят создавать максимально гибкие
космические системы передачи данных.
В работе комитета GCSDS могут участвовать на правах членов комитета
все заинтересованные национальные организации по исследованию
космического пространства, выделяющие на нужды комитета определенные
ресурсы. На правах наблюдателей могут участвовать заинтересованные
организации, не выделяющие ресурсов. Все члены комитета CCSDS
объединены одним интересом - разработкой рекомендаций для установления
стандартов на совместные системы передачи данных, операций по
обеспечению полета и использованию результатов полета. В настоящее время
членами комитета CCSDS являются следующие организации:
• Agenzia Spaziale Italiana (ASI) - Итальянское космическое агентство /
Италии;
• British National Space Centre (BNSC) - Британский национальный
космический центр /Великобритания;
403
Современная телеметрия в теории и на практике
• Canadian Space Agency (CSA) - Канадское космическое
агентство /Канада;
• Centre National d'Etudes Spatiales (CNES) - Национальный центр
космической деятельности /Франция;
• Deutsches Zentrum fur Luft- und Raumfahrt e.V. (DLR) - Немецкий
аэрокосмический центр /Германия;
• European Space Agency (ESA) - Европейское космическое
агентство /Европа;
• Institute Nacional de Pesquisas Espaciais (INPE) - Институт
космических исследований /Бразилия;
• National Aeronautics and Space Administration (NASA) - HАСА /США;
• National Space Development Agency of Japan (NASDA) -
Национальное агентство космических разработок Японии /Япония;
• Российское авиационно-космическое агентство /Россия.
На правах наблюдателей в работе комитета участвуют:
• Austrian Space Agency (ASA) - Австрийское космическое
агентство /Австрия;
• Центральный научно-исследовательский институт машиностроения
(ЦНИИМаш) /Россия;
• Centro Tecnico Aeroespacial (СТА) - Центр аэрокосмической
техники /Бразилия;
• Chinese Academy of Space Technology (CAST) - Китайская академия
космических технологий /Китай;
• Commonwealth Scientific and Industrial Research Organization
(CSIRO) - Межнациональная научная и индустриальная
исследовательская организация /Австрия;
• Communications Research Centre (CRC) - Центр исследования
коммуникаций / Канада;
• Communications Research Laboratory (CRL) - Лаборатория
исследования коммуникаций /Япония;
• CSIR Satellite Applications Center (SAC) - Центр применения
спутников CSIR/ЮАР;
• Danish Space Research Institute (DSRI) - Датский институт
космических исследований /Дания;
Глава 5. Стандарты и технологии современной телеметрии
European Organization for the Exploitation of Meteorological Satellites
(EUMETSAT) - Европейская организация эксплуатации
метеорологических спутников /Европа;
European Telecommunications Satellite Organization (EUTELSAT) -
Европейская организация спутников телесвязи /Европа;
Federal Service of Scientific, Technical & Cultural Affairs (FSST&CA) -
Федеральная служба по научным, техническим и культурным
делам /Бельгия;
Hellenic National Space Committee (HNSC) - Греческий
национальный космический комитет /Греция;
Indian Space Research Organization (ISRO) - Индийская
организация космических исследований /Индия;
Industry Canada /Communications Research Centre (CRC) -
Промышленность Канады / центр исследования коммуникаций /Канада;
Institute of Space and Astronautical Science (ISAS) - Институт
космоса и астронартики /Япония;
Институт космических исследований /Россия.
KFKI Research Institute for Particle & Nuclear Physics (KFKI) -
Исследовательский институт элементарных чаЬтиц и ядерной
физики /Венгрия;
Korea Aerospace Research Institute (KARI) - Корейский институт
аэрокосмических исследований /Корея;
MIKOMTEK: CSIR (CSIR) /Южная Африка;
Ministry of Communications (MOC) - Министерство связи /Израиль;
National Oceanic & Atmospheric Administration (NOAA) -
Национальная администрация океана и атмосферы /США;
National Space Program Office (NSPO) - Офис национальной
космической программы /Тайвань;
Space & Upper Atmosphere Research Commission - Комиссия по
исследованию космоса и верхних слоев атмосферы /Пакистан;
Swedish Space Corporation (SSC) - Шведская космическая
корпорация /Швеция;
United States Geological Survey (USGS) - Геологический
обозреватель Соединенных Штатов /США.
405
Современная телеметрия в теории и на практике
Следует отметить, что слово «стандарт» в этом разделе используется в
достаточной степени условно. В России в настоящее время стандарт
разрабатывается, а существует только ГОСТ «Оборудование
радиотелеметрическое». Названные же международными стандарты CCSDS на самом деле
являются рекомендациями комитета CCSDS, которые основаны на
стандартизованной международной организацией по стандартизации модели
взаимодействия открытых систем. Впрочем, согласие с этими
рекомендациями 26-ти организаций из 19-ти стран служит лучшим подтверждением
тому, что они приняты в мире в качестве стандарта.
5.1.2. Понятие телеметрической системы
Целью функционирования телеметрической системы является надежная
и достоверная доставка измерительной информации от удаленных
бортовых источников потребителям, находящимся в космосе или на Земле.
Источниками данных обычно являются научные, инженерные и
вспомогательные датчики или подсистемы объектов различного назначения.
Развитие микропроцессорной техники привело к созданию систем обработки
и передачи данных, в т. ч. бортовых, с большими пропускной способностью
и автономностью и с возможностью комплексирования задач обработки. Этот
факт наряду с современным уровнем развития информационных технологий
и возможностями финансирования позволяет создавать более эффективные
и гибкие телеметрические системы, обладающие большими возможностями
при меньших затратах ресурсов: меньшим энергопотреблением, меньшей
занимаемой полосой частот, меньшей вероятностью ошибки передачи.
Традиционно большая часть ресурсов телеметрических систем, за
исключением сети передачи данных, использовалась для решения определенной
задачи и полностью состояла в ведении определенной организации.
Отсутствие стандартных решений таких задач приводило к тому, что сеть
передачи телеметрических данных «многоразового использования» должна
была выполнять самые низкоуровневые функции по передаче информации,
то есть обеспечивать доставку отдельного измерения или бита.
Целью разработки телеметрических систем CCSDS являлась не только
автоматизация передачи данных в пределах определенной системы, но и
гарантия поддержки бортовых телеметрических систем, принадлежащих
одной организации (стране), наземными телеметрическими системами других
организаций (стран).
Для проектирования таких телеметрических систем в первую очередь
необходима разработка более высокоуровневых услуг по передаче информации,
406
Глава 5. Стандарты и технологии современной телеметрии
больше ориентированных на передачу данных между компьютерами и
типичных для современных коммерческих, военных и других сетей.
Понятие телеметрическая система CCSDS включает две основных
категории: пакетная передача телеметрических данных (пакетная
телеметрия) и кодирование телеметрического канала.
Пакетная телеметрия - это стандартизованный м
высокоавтоматизированный способ передачи данных, упрощающий процесс доставки
потребителям информации от бортовых источников. Она предоставляет механизм,
включающий стандартные структуры данных и протоколы, позволяющие
упростить разработку и расширить возможности телеметрической
системы. Пакетную передачу телеметрических данных можно рассматривать как
два процесса:
• «сквозная» передача наборов данных о прикладных процессах,
протекающих в космосе, к пользовательским распределенным
прикладным процессам, протекающим в космосе или на Земле;
• промежуточная передача этих наборов данных через элементы
систем передачи данных, такие как, например, бортовые системы
передачи данных, радиолинии, станции слежения, центры управления.
Кодирование телеметрического канала - это способ передачи данных по за-
шумленному радиоканалу, позволяющий безошибочно восстанавливать их
на приемной стороне. Дешифровка кодированных данных на приемной
стороне позволяет восстанавливать их с низкой вероятностью ошибки и тем
самым улучшает характеристики канала.
Совместно пакетная телеметрия и кодирование телеметрического канала
обеспечивают надежную и достоверную передачу телеметрической информации.
5.2. МЕТОДИКА ПРОЕКТИРОВАНИЯ ТЕЛЕМЕТРИЧЕСКИХ СИСТЕМ
5.2.1. Методика стандартизации телеметрических систем
Общая концепция
Для проектирования телеметрической системы удобно пользоваться
методикой иерархического представления, позволяющей рассматривать
систему как формализованный набор процедур. Иерархическое представление,
407
Современная телеметрия в теории и на практике
в соответствии с эталонной моделью взаимодействия открытых систем
(Open Systems Interconnect model, OSI) Международной организации по
стандартизации (International Standards Organization, ISO) и
Международного консультативного комитета по телеграфии и телефонии (Consultative
Committee on International Telegraphy & Telephony, CCITT), логически
группирует функции телеметрической системы в уровни и устанавливает
связи между этими уровнями. Таким образом, иерархическое
представление «раскладывает» сложную процедуру телеметрирования
промышленных, научных объектов в наборы сравнительно простых функций,
находящихся в общих архитектурных слоях.
В пределах уровня обмен данными происходит согласно установленным
стандартным правилам, или «протоколам». При этом для каждого уровня
строго определено множество услуг, обеспечиваемых нижним по
отношению к нему уровнем, и аналогично строго определено множество услуг,
предоставляемых данным уровнем верхнему по отношению к нему
уровню. Пока сохраняются межуровневые интерфейсы, любые процессы,
протекающие в пределах уровня, «прозрачны» для других уровней и не
влияют на их работу. Следовательно, любой уровень может быть целиком
изменен или удален разработчиком в соответствии с требованиями
пользователя (заказчика) или технологическими требованиями без нарушения
целостности системы. Если при этом предоставлены интерфейсы
соседним уровням, пользователь может взаимодействовать с системой на
любом из ее уровней.
Таким образом, иерархическое представление является мощным
инструментом разработки гибких структурированных систем, легко
адаптируемых к изменяющимся требованиям или новым технологиям. Эта методика
стандартизации телеметрических систем предполагает:
инкапсуляцию данных источника и формирование таким образом в
реальном масштабе времени автономного «пакета» информации;
коммутирование независимых пакетов от различных источников данных
в общую фреймовую структуру для передачи на приемно-регистрирую-
щую станцию по радиоканалу с помехами;
доставку пользователю пакета источника.
Такая концепция обеспечивает следующие преимущества:
• независимые автономные пакеты;
• фиксированные и стандартные протоколы между источниками
данных на борту и наземным пользователем;
• межведомственная совместимость;
408
Глава 5. Стандарты и технологии современной телеметрии
• оптимальное, реальновременное распределение телеметрических
каналов с использованием механизмов приоритетного
коммутирования;
• практически безошибочный телеметрический канал, получаемый
благодаря использованию помехоустойчивого кодирования;
• более дешевая и быстрая (по сравнению с традиционной
телеметрией) доставка данных пользователям.
Рис. 5.1 иллюстрирует телеметрическую систему, представленную в виде
семиуровневой иерархической модели, построенной по образцу модели OSI.
Следует отметить, что рекомендации комитета CCSDS адресованы только
пяти нижним уровням этой модели.
Уровень
1 Уровень прикладного
1 процесса
. 1
Физическая
величина
~
1 Системный
1 уровень
'
Телеметрические'
данные
~
Уровень
пакетирования
_j
i
Пакет
'
L
Уровень
сегментации 1
_j
i
Сегмент
'
к
Уровень
передачи 1
_j
1
Фрейм
г
i
Уровень 1
кодирования 1
_j
Телеметрический
битовый поток
f
i
Физический 1
уровень 1
i
Радиосигнал
i
Услуги обеспечиваемые уровнем
Изменение физических величин, сбор данных,
анализ прикладных процессов
Преобразование физических величин в наборы
телеметрических данных
Пакетирование наборов телеметрических
данных, для последующей доставки
потребителям
Сегментация длинных пакетированных наборов
телеметрических данных для последующего
мультиплексирования
Мультиплексирование пакетов и сегментов во
фреймы, для последующей передачи по
физическому каналу
Кодирование фреймов для защиты от ошибок
передачи по зашумленнлму физическому каналу
Физическое соединение бортового передатчика
и наземной приемной аппаратуры
Рис. 5.7. Иерархическая модель
телеметрических служб
409
Современная телеметрия в теории и на практике
Уровень пакетирования
В рамках концепции пакетной телеметрии данные о процессах на борту те-
леметрируемого объекта формируются в блоки, называющиеся «исходный
пакет» или «пакет источника». Эти блоки сопровождаются основным
заголовком, содержащим поля идентификации пакета, контроля
последовательности пакетов, информацию о длине пакета и необязательным
конечным полем контроля ошибок. Пакет источника - основной блок данных,
телеметрируемый пользователю с объекта. Он обычно содержит значимое
количество связанных данных от конкретного бортового источника.
Уровень сегментации
Для управления потоком данных и их передачи по каналам связи
предусмотрена возможность сегментации больших блоков данных в меньшие:
пакеты источника (формат 1) или сегменты пакетов (формат 2). При этом
размер поля данных пакета или сегмента определяется интерфейсом с
нижним уровнем.
Уровень фреймов
Фреймы необходимы для достоверной и надежной доставки пакетов
источника или сегментов по телеметрическому каналу к сети передачи данных.
Предполагается несколько вариантов передачи данных. Один из них -
мультиплексирование фреймов в виртуальные каналы. Фрейм начинается
с синхромаркера и имеет основной заголовок. Основной заголовок
содержит поля идентификации фрейма, номера фрейма и поле, описывающее
состояние поля данных фрейма.
Поле данных фрейма может завершаться необязательной областью,
включающей поле операционного управления и поле контроля ошибок. Первое
из них обеспечивает выполнение некоторых функций обмена данными
(например, калибровки бортового времени, подтверждения приема команд
и др.). Поле контроля ошибок позволяет обнаруживать и исправлять
ошибки, которые могут появиться в процессе обработки и передачи данных.
Передача фреймов требует более низкоуровневых услуг, таких как
модуляция/ демодуляция и кодирование/декодирование. ,
Уровень кодирования канала
Так как одно из основных требований, предъявляемых к
телеметрической системе, - безошибочная доставка данных (достоверность передачи),
410
Глава 5. Стандарты и технологии современной телеметрии
для их защиты от ошибок, вызванных шумами радиоканала,
используется кодирование канала. Для защиты данных от шумов физического
канала битовый поток кодируется одним или обоими следующими кодами:
• блочный код Рида - Соломона (255, 233);
• сверточный код (7,12).
Благодаря комбинации этих кодов, канал практически освобождается
от ошибок. Данные, связывающие уровень кодирования канала со
следующим уровнем, - это канальные символы, выводимые кодером, то есть
последовательность информационных битов (битовый поток), в виде которой
представлены защищенные фреймы передачи.
Физический уровень
Канальные символы, поступающие на физический уровень, в частности
на уровень радиоканала, модулируют радиосигнал. Благодаря
кодированию, ошибки, которые возникают в процессе физического
распространения радиосигнала, могут быть обнаружены и исправлены получателем.
Рис. 5.2 иллюстрирует взаимное отображение различных структур
телеметрических данных.
Пакет
Сегмент
Блок кода
Рида-Соломона
Рис. 5.2. Структуры телеметрических данных
СВЯЗЬ ТЕЛЕМЕТРИЧЕСКОЙ И КОМАНДНОЙ СИСТЕМ
В рамках предлагаемой модели удобно рассматривать взаимодействие
систем телеметрии и телеуправления. Оно может пониматься по-разному в
зависимости от условий применения.
411
Современная телеметрия в теории и на практике
Пример «симметричного» взаимодействия систем показан на рис. 5.3. Две
системы работают совместно, гарантируя доставку пользовательских
директив с передающей стороны (Земли) до приемной стороны (бортового
оборудования) и доставку телеметрической информации в обратном
направлении. В этом примере показаны логические связи двух уровней
систем: уровней фреймов (подтверждение получения фрейма) и уровней
пакетирования (подтверждение получения пакета), — дважды замыкающие
контур управления.
Рис. 5.3. Взаимодействие систем телеметрии и телеуправления
Механизм управления потоком данных
Ряд систем передачи данных имеют ограниченную пропускную способность
и ширину полосы частот канала передачи, посредством которого бортовые
412
Глава 5. Стандарты и технологии современной телеметрии
системы наблюдаемых объектов соединяются с системами сбора данных,
находящимися в космосе или на Земле. Когда многочисленные пользователи
совместно используют один канал передачи данных, управление потоком
данных становится процессом, определяющим производительность системы.
Телеметрическая система должна гарантировать своевременную доставку
данных от всех источников, достаточно часто получающих доступ к этому
общему ресурсу (каналу), и управление буферизацией данных источников.
Длинные пакеты источника, получающие монопольный доступ к каналу на
недопустимо длительные для других источников периоды, могут создавать
проблемы в управлении потоком данных, связанные с необходимостью
необоснованно большой буферизации данных источников, для которых
канал недоступен.
5.2.2. Управление потоком данных
Предусмотрено два способа решения проблемы управления потоком данных.
• Формирование виртуальных каналов - механизм, предоставляющий
источнику или группе источников виртуально монопольный доступ
к физическому каналу, ограничивая пропускную способность на
уровне фреймов. Каждый фрейм может быть идентифицирован как
принадлежащий одному из восьми виртуальных каналов. Разбиение
физического канала на виртуальные обычно используемся для разделения
источников или адресатов (получателей) с различными
характеристиками. Например, если бортовая аппаратура содержит
оборудование, генерирующее очень длинные пакеты, и ряд других источников,
генерирующих пакеты меньшей длины, целесообразно выделить 1-му
отдельный виртуальный канал, а остальные мультиплексировать
во 2-й. Виртуальные каналы могут также использоваться для
разделения пакетов, поступающих в реальном масштабе времени, и
информации, поступающей с устройства записи, обеспечивая тем самым
разделение потоков данных, предназначенных разным адресатам.
• Сегментация пакетов источника, при которой очень длинные
пакеты источника, генерируемые прикладными процессами,
разделяются на борту на меньшие пакеты фиксированной длины - сегменты
пакетов. Сегменты пакетов источника можно мультиплексировать
с «короткими» пакетами источника в один виртуальный канал,
обеспечив таким образом источникам данных непосредственный
доступ к этому виртуальному каналу. Для последующего
восстановления пакетов источника на Земле используется информация
из заголовков фреймов и сегментов.
413
Современная телеметрия в теории и на практике
На рис. 5.4 показан поток телеметрических данных различных бортовых
источников, адресованных соответствующим получателям. В верхней
части рисунка изображены источники, генерирующие пакеты источников
и сегменты пакетов. Эти сегменты и пакеты мультиплексируются во
фреймы виртуальных каналов.
ФУНКЦИЯ
Генерация
исходных пакетов
Мультиплексирование исходных
пакетов в фреймы
виртуальных
каналов
Мультиплексирование виртуальных
каналов в главный
канал
Кодирование и
модуляция
Демодуляция и
декодирование
Демультиплексирование
виртуальных каналов
Демультиплексирование пакетов
Распределение
пакетов
соответствующим
потребителям
Источник
Источник
II
Процесс 0
1
а
с
Источник
III
Процесс 2
Процесс 3
Процесс 4
Процесс 5
Процесс 6
Процесс 7
Источник
IV
00
I
&
с
Процесс 9
Процесс 10
Процесс 11
444 А„ 444 4444
I Вирту- [
альный
| канал 0 11
\
у
Виртуальный
канал 1 |
Виртуальный
| канал 2
v т
Главный канал
4
1 Физический канал |
i
1 Физический канал ]
4
Главный канал
4 4 4
Виртуальный
| канал 0 11
HJJJ
Виртуальный
канал 1 |
Виртуальный
| канал 2 |
■ П1 ПИ
ДАННЫЕ
Пакеты
источников
Фреймы
Синхронный
поток фреймов
Радиолиния
Синхронный
поток фреймов
Фреймы
Исходные
пакеты
нК№
I Процесс
1 1 А
| 1 Процесс
1 | В
1 Процесс
1 с
• • •
W\
1 Процесс
[ D
Рис. 5.4. Пример потока телеметрических данных
Фреймы после помехоустойчивого кодирования передаются на приемно-
регистрирующую станцию, где демультиплексируются в виртуальные
каналы, из которых извлекаются сегменты пакетов и пакеты источника. Пакеты
источника доставляются соответствующим получателям с использованием
информации из поля идентификации заголовка пакета. Для доставки
пакетов, время доставки которых ограниченно, используется информация
вторичного заголовка пакета.
Вся полнота преимуществ телеметрической системы CCSDS достигается
реализацией в проекте системы всех рекомендаций. В качестве
альтернативы система может быть построена так, чтобы использовать лишь отдельные
414
Глава 5. Стандарты и технологии современной телеметрии
из уровней предложенной иерархической модели, но при этом должны быть
обеспечены межуровневые интерфейсы. Также рекомендации CCSDS не
препятствуют усовершенствованию телеметрических систем (выходу за
рамки предложенной модели), разрабатываемых различными организациями.
Однако соблюдение рекомендованных стандартов гарантирует
возможность взаимной поддержки среди этих организаций и перекрестное
телеметрическое обеспечение промышленных объектов, приводящее в итоге
к расширению возможностей телеметрирования.
5.3. СТАНДАРТЫ И ТЕХНОЛОГИИ ПАКЕТНОЙ ТЕЛЕМЕТРИИ
5.3.1. Соглашения CCSDS
Рекомендации по пакетной телеметрии применяются различными
организациями - членами CCSDS - для выработки стандартов телеметрических
систем и с целью обмена телеметрической информацией в случае
необходимости поддержки друг друга.
Рекомендации включают всестороннюю спецификацию структур потоков
телеметрической информации, генерируемых на борту и направляемых
к средствам обработки. Рекомендации не определяют архитектуру или
конфигурацию средств обработки, а лишь описывают услуги,
представляемые ими для обработки данных. Они представляют широкие
возможности по форматированию данных, что обеспечивает высокую гибкость
бортовых систем сбора и обработки информации, однако совместимость
этих систем с концепцией пакетной телеметрии CCSDS достигается
обязательной реализацией определенного подмножества всех возможностей
форматирования.
В соответствии с современной практикой передачи данных, данные часто
группируются в 8-разрядные слова, которые называются октетами.
Нумерация октетов в общей структуре начинается с нуля.
В рекомендациях CCSDS по пакетной телеметрии использованы
следующие соглашения:
• Фаза полета - термин, обозначающий период полета, в течение
которого определенные характеристики телеметрической системы не
меняются. Последовательный переход между двумя фазами полета
может привести к прерыванию потока телеметрической информации.
415
Современная телеметрия в теории и на практике
Некоторые характеристики структур данных, определяемые
рекомендациями по пакетной телеметрии, должны оставаться неизменными
в течение фазы полета или во всех фазах полета. В этих случаях для
определения характеристик, которые должны остаться
неизменными (идентификатор прикладного процесса, номер виртуального
канала в главном канале и др.), часто используется термин «статические».
• Октет - для идентификации каждого бита в N-битном поле данных
определен 1-й бит (слева на рис. 5.5). Следующий бит поля данных
размещен непосредственно за 1-м, и т. д. - до N-1-го бита. Если поле
используется для обозначения двоичного значения, его старший бит
должен быть 1-м битом этого поля - «бит 0» на рис. 5.5.
• Неинформативные данные - данные, не несущие никакой
информации, передача которых необходима для работы системы
синхронизации. Комбинация разрядов неинформативных данных не определена.
Бит 0 Бит N-1
N - БИТНОЕ ПОЛЕ ДАННЫХ
Первый передаваемый бит
Рис. 5.5. Соглашение о нумерации битов
Рекомендации по пакетной телеметрии описывают структуры данных,
используемые для транспортировки информации от бортовых источников
наземным потребителям в соответствии со схемой, изображенной на рис. 5.4.
Сущность концепции пакетной телеметрии состоит в том, что данные
многочисленных прикладных процессов, протекающих в телеметрируемых
системах, объединяются в блоки данных, соответствующие источникам,
которые затем передаются по каналу передачи так, чтобы принимающие
средства с высокой надежностью могли восстановить эти блоки из
общего потока сохранением их исходной последовательности.
Для реализации этих функций рекомендации по пакетной телеметрии
определяют две структуры данных источников: структуру фреймов
передачи и процесс мультиплексирования, чередующий пакеты источников
различных прикладных процессов во фреймы.
5.3.2, Пакет источника
Пакет источника, далее называемый также «пакетом», - структура данных,
генерируемая источником информации так, как необходимо для телеметрирования
416
Глава 5. Стандарты и технологии современной телеметрии
заданного процесса. Последовательность данных при этом может быть
переменной или фиксированной длины. Содержание пакета источника, за
исключением заголовка, идентифицирующего источник и характеристики пакета,
полностью зависит от прикладного процесса и реализации процедуры его те-
леметрирования.
Формат пакета источника допускает оптимизацию размера и структуры
набора данных каждого прикладного процесса определенного источника данных
с минимумом ограничений, накладываемых системой передачи. Таким
образом, возможна организация данных каждого источника независимо от других
источников и адаптация к режимам работы телеметрируемых систем.
Заголовок пакета источника содержит идентификатор прикладного
процесса, необходимый для адресации пакета соответствующему получателю,
и информацию о длине пакета, последовательности пакетов и о других
характеристиках пакета. Необязательный вторичный заголовок
предусмотрен для стандартизации передачи меток времени и вспомогательных
данных.
Пакет источника объединяет блок измерительных и вспомогательных
данных бортового прикладного процесса и подлежит передаче от
соответствующего источника одному или нескольким наземным потребителям.
Пакет источника состоит из следующих основных областей:
• 48-битовый основной заголовок пакета (обязателен);
• поле данных пакета переменной длины.
Минимальная длина пакета - 7 октетов, максимальная - 65549 октетов.
Пакет, не несущий информации в поле данных, называется
неинформационным пакетом. Ряд пакетов, последовательно сгенерированных
но одному запросу (по команде), может обозначаться как группа пакетов
источника.
На рис. 5.6 показана структура пакета источника. Ниже описаны поля пакета.
ОСНОВНОЙ ЗАГОЛОВОК ПАКЕТА ИСТОЧНИКА
Обязательный основной заголовок пакета состоит из четырех полей,
расположенных в следующей последовательности:
• номер версии пакета (3 бита);
• идентификатор пакета (13 битов);
• поле управления последовательностью пакетов (16 битов);
• длина пакета (16 битов).
14 Зах.861
417
Современная телеметрия в теории и на практике
Номер версии пакета
Номер версии пакета содержится в битах 0 ч- 2 заголовка. Это
3-разрядное поле идентифицирует пакет как пакет источника и имеет значение
«000».
Номер версии необходим для идентификации пакетов как пакетов
источника или сегментов пакета источника. Остальные возможные значения
этого поля зарезервированы для введения в будущем новых структур
данных.
3-й - 15-й биты первичного заголовка содержат поле идентификации
пакета. Это 13-разрядное поле разделено на три подполя:
• индикатор типа (1 бит);
• флаг вторичного заголовка (1 бит);
• идентификатор прикладного процесса (11 битов).
Идентификатор типа
3-й бит основного заголовка содержит идентификатор типа и имеет
значение «0». Идентификатор типа введен в заголовок пакета в связи с тем,
что для телеуправления CCSDS рекомендует подобную структуру пакета,
и необходим для различия данных телеметрии и телеуправления.
Основной заголовок пакета
Поле данных пакета
-»ы »
Идентификация
пакета
СО Я
X С
Флаг
вторичного
заголовка
пакета
ц\
i1
Контроль
последовательности
пакета
Флаги
группировки
Данные
о длине
пакетов
1?
Данные
источника
1, если
вторичный
заголовок
пристствует,
иначе О
01-
000
первый
пакет
группы
00-
промежуточный
пакет
группы
10-последний
пакет
группы
11-без
группировки
Количество
октетов в
поле данных
пакета
минус 1
3 бита
1бит
1 бит
11 битов
< ►
2 бита
14 битов
перем
2 октета
2 октета
2 октета
. 1... 65536 октетов
Рис. 5.6. Пакет источника
418
Глава 5. Стандарты и технологии современной телеметрии
Флаг вторичного заголовка
4-й бит основного заголовка содержит флаг вторичного заголовка и
указывает на его наличие или отсутствие в пакете. Наличие в структуре пакета
вторичного заголовка индицируется значением «1» флага. Флаг
вторичного заголовка должен оставаться статичным в течение фазы полета. Для
неинформационных пакетов он должен иметь значение «О».
Идентификатор прикладного процесса
Биты 5-15 основного заголовка содержат идентификатор прикладного
процесса. Он должен быть различен для разных процессов, телеметрируемых
по одному главному каналу. Для неинформационных пакетов
идентификатор должен иметь значение «все единицы». Идентификатор назначается
при разработке бортовой информационно-телеметрической системы, при
этом некоторые значения идентификаторов могут резервироваться.
Поле контроля последовательности пакетов
16-разрядное поле контроля последовательности пакетов (биты 16-31)
подразделяется на два подполя:
• флаги группирования (2 бита);
• счетчик последовательности пакетов источника (14 битов).
Флаги группирования
Флаги группирования устанавливаются следующим образом:
• «01» - для первого пакета в группе;
• «00» - для промежуточного пакета, принадлежащего группе;
• «10» - для последнего пакета в группе;
• «11»- для пакета, не принадлежащего группе.
При сегментации пакетов источника флаги группирования используются
как флаги сегментации. Таким образом, группирование и сегментация
пакетов источника взаимно исключают друг друга.
Необходимо отметить, что длина пакетов источника в виртуальных
каналах, по которым также передаются сегменты пакетов, не может превышать
определенного значения.
Предназначение групп пакетов и порядок их группирования не
рассматривается рекомендациями CCSDS.
419
Современная телеметрия в теории и на практике
Счетчик последовательности пакетов
Биты 18-31 содержат счетчик последовательности пакетов, нумерующий
каждый пакет источника конкретного процесса во всей
последовательности его пакетов (пакетов, обозначенных одним идентификатором). Счет
должен вестись непрерывно, и счетчик не должен сбрасываться до достижения
максимального значения - «16384». Назначение счетчика -
восстановление исходной последовательности пакетов источника в возможных случаях
ее нарушения при передаче.
Счетчик обычно используется вместе с кодом времени, так как его значений
может быть недостаточно для однозначного определения исходного
положения пакета в общем потоке пакетов одного источника. Следовательно,
разрешение кода времени должно быть достаточным, чтобы его можно было
использовать вместе со счетчиком последовательности пакетов, то есть код
времени должен увеличиваться хотя бы на единицу за один полный цикл
счетчика последовательности пакетов.
Если счетчик последовательности пакетов будет сброшен до достижения
максимального значения и заново проинициализирован, правильно
восстановить последовательность пакетов будет невозможно, что приведет
к потере информации.
Поле длины пакета
Биты 32-47 основного заголовка пакета представляют значение длины
пакета. Это 16-разрядное поле содержит двоичное значение в диапазоне
от 1 до 65536, равное числу октетов в поле данных. Другие ограничения
на длину поля данных определяются длиной сегмента.
Поле данных пакета источника
Непосредственно за основным заголовком следует обязательное поле данных
пакета. Оно должно включать по крайней мере одну из следующих областей:
• вторичный заголовок пакета (переменной длины);
• поле данных пакета источника (переменной длины).
Если присутствует вторичный заголовок, он следует 1-м в поле данных.
Если поле данных пакета источника отсутствует, вторичный заголовок
обязателен. Наличие или отсутствие вторичного заголовка указывается
флагом вторичного заголовка поля идентификации пакета.
Если вторичный заголовок присутствует, то он состоит из следующих
подполей:
420
Глава 5. Стандарты и технологии современной телеметрии
• только подполя данных вторичного заголовка;
• только подполя кода времени вторичного заголовка;
• подполя кода времени вторичного заголовка и поля данных
вторичного заголовка.
Вторичный заголовок предоставляет определенный CCSDS-способ
размещения вспомогательных данных (время, внутренний формат поля данных
и т. д.) в пакете источника.
Область кода времени вторичного заголовка состоит из целого числа
октетов и содержит код времени в формате, рекомендуемом CCSDS ("Time
Code Formats", Blue Book, CCSDS 301.0-B-2, April 90 или более поздние
издания).
В соответствии с рекомендациями CCSDS, код времени состоит из
необязательной Р-области (преамбулы), идентифицирующей и характеризующей
код, и обязательной Т-области.
Форма представления кода времени статична во всех фазах полета. Если же
допускается изменение характеристик прикладного процесса и,
соответственно, формы представления кода времени, Р-область обязательно должна
присутствовать. Р-область или присутствует, или отсутствует во всех фазах
полета. При ее наличии она должна предшествовать Т-области.
При таких операциях, как архивирование, сортировка, обработка
данных, коррелирование данных источника с другими наборами данных, для
недвусмысленной идентификации пакета счетчик последовательности
пакетов приходится конкатенировать с кодом времени.
Поле данных вторичного заголовка
Поле данных вторичного заголовка состоит из целого числа октетов. Оно
может содержать любые вспомогательные данные, необходимые для
расшифровки или интерпретации информации поля данных пакета источника.
Содержание и формат этих данных не определяется рекомендациями CCSDS.
Поле данных пакета источника
Если поле данных пакета источника присутствует, оно следует
непосредственно за вторичным заголовком пакета (в случае его наличия) или за
полем описания длины пакета. Поле данных пакета источника обязательно,
если отсутствует вторичный заголовок пакета, и не обязательно, если
вторичный заголовок присутствует. Длина поля данных пакета источника
переменна и содержит целое число октетов.
421
Современная телеметрия в теории и на практике
5.3.3. Сегмент пакета
Один из механизмов управления потоком данных - передача длинных
пакетов источника в виде ряда более коротких сегментов пакета. Это
позволяет исключить «захват» канала одним источником. Структура данных,
обеспечивающая этот механизм, - сегмент пакета источника (далее также
«сегмент»).
Процесс сегментации применяется к полю данных пакетов источника.
Сегмент содержит блоки данных из поля данных пакета источника. Для
передачи пакета источника в виде сегментов необходимы два или более
сегмента. Сегмент состоит из следующих полей:
• обязательный заголовок сегмента (6 октетов);
• поле данных сегмента, содержащее:
а) сегменты пакета источника, за исключением последних LSegment
битов;
б) остаток сегментированного пакета источника.
Длина поля данных сегмента 256, 512 или 1024 октета. Сегментация
не применяется к пакетам источника, принадлежащим группе пакетов
источника, и к неинформационным пакетам. Последнее утверждение
означает, что длина неинформационного пакета не может превышать
длины сегмента.
На рис. 5.7 и 5.8 показаны соответственно структура сегмента и пример
сегментации пакета источника.
ОСНОВНОЙ ЗАГОЛОВОК СЕГМЕНТА
Основной заголовок сегмента обязателен и состоит из 3-х полей:
• номер версии (3 бита);
• идентификатор сегментации (13 битов);
• поле контроля последовательности сегментов (32 бита).
Структура данных первичного заголовка сегмента соответствует структуре
основного заголовка пакета источника.
Номер версии
Номер версии содержится в битах 0-2 заголовка и должен иметь
значение «100».
422
Глава 5. Стандарты и технологии современной телеметрии
Поле идентификации сегмента
Поле идентификации сегмента образуют биты 3-15 заголовка. Это поле
идентично по форме и содержанию полю идентификации пакета источника.
Поле контроля последовательности сегментов
32-разрядное поле контроля последовательности сегментов (16-й - 47-й
биты заголовка) делится на 3 подполя:
• флаги сегментации (2 бита);
• счетчик сегментов (14 битов);
• поле остаточной длины пакета (16 битов).
Поле содержит информацию, необходимую для восстановления пакетов
из сегментов пакетов.
к
ersion #
;>
3
100
~ ►
Segment
identification
Type
1
С. HDR.
Flag
ш
1
.й 9
Ql CO
< 8
O.
11
16
Segment
sequence
control
Segment
flags
\jj
2
I packet
ze count
Origina
sequent
14
16
Segment
length
thofthe
I source
remains
smitted)
(Leng
origina
cket which
Л to be tran
CO «
Ql >»
16
ЛА
vY
Segmented
source
paket data
АЛ
vv
2048, 4096
or
8192
Рис. 5.7. Сегмент пакета
Флаги сегментации
Биты 16-й и 17-й заголовка представляют собой флаги сегментации.
Комбинация этих битов интерпретируется следующим образом:
• «01» - сегмент, содержащий 1-й блок поля данных пакета источника;
• «00» - сегмент, содержащий промежуточный блок поля данных
пакета источника;
• «10» - сегмент, содержащий последний блок (остаток) поля данных
пакета источника.
423
Современная телеметрия в теории и на практике
Счетчик последовательности сегментов
18-й - 31-й биты заголовка содержат счбтчик последовательности
сегментов пакета источника. Их назначение соответствует тем же битам заголовка
пакета.
Остаточная длина пакета
Так как длина последнего сегмента пакета может быть неравной значению
LSegment, 32-й - 47-й биты заголовка сегмента несут информацию о
количестве еще не переданных октетов поля данных пакета источника (точнее,
количество непереданных октетов минус один октет). Это значение
включает октеты, входящие в данный сегмент.
Source packet = 2106 octets
РН
2100 Octets
LlV(
|SH
г
'ersion = 000 •
^lagssll •
'Length = 2099'
I I
I First segment I
I 512 Octets I
Version = 100 |
Flags = 01 |
Length = 2099 (Continuation 1
[НИ"
512 Octets
-Version* 100
Flags = 00
Length = 1587
SH
T
Continuation 2
512 Octets
Version = 100
Flags = 00
Length = 1075
|SH
Continuation 3
512 Octets
PH = Primary Header of Source Packet
SH = Segment Header
In this example LSEGMENT = 512 octets,
which leads, for the given Source Packet
Length, to R = 52 octets.
-Version = 100 I
Flags = 00 I
Length = 563 I
Last segment
| SH J 52 Octets |
L Version = 100
Flags = 10
Length = 51
Рис. 5.8. Сегментация пакета - источники
Поле данных сегмента
Непосредственно за полем длины остатка пакета источника следует поле
данных сегмента, содержащее один из блоков поля данных пакета источ-
424
Глава 5. Стандарты и технологии современной телеметрии
ника. Поле данных пакета источника разбивается на блоки без
пропусков данных, перекрытий блоков и заполнений другой информацией.
Длина поля данных имеет значение LSegment, равное 256, 512 или 1024
октета в зависимости от идентификатора длины сегмента в основном
заголовке фрейма передачи, за исключением последнего сегмента, длина
поля данных которого равна длине последнего блока данных поля
данных пакета источника.
5.3.4. Другие типы пакетов
Кроме пакетов источника и сегментов пакетов, непосредственно в поле
данных пакета могут передаваться пакеты трех других типов:
• пакеты сетевого протокола CCSDS (NP);
• пакеты интернет-протокола (IPv4);
• пакеты инкапсуляции.
Сетевой протокол CCSDS (NP) и интернет-протокол (IPv4)
Номер версии: 001 для сетевого протокола и 0100 для
интернет-протокола. Эти значения определены в [X] и [X]. Общая длина: биты 3—15 пакета
сетевого протокола и биты 16-31 интернет-протокола, значение которых
определяет полную длину пакета. Версия: первые три бита инкапсуляци-
онного пакета содержат номер версии пакета. Их значение -«111».
Идентификатор протокола: биты 3-5 определяют протокол, блоки данных
которого передаются. Идентификатор протокола может
использоваться для направления инкапсулированных данных от или к точке доступа
к службе (см. п. 5.4). Комбинация этих битов интерпретируется
следующим образом:
• «000» - загрузка (инкапсулированные данные отсутствуют);
• «100» - блок данных протокола IPv6;
• «111»- произвольно соединенные октеты.
2 3
15
Версия
001
Общая
длина
I
3 4
16
31
Версия
0100
Н
Общая
длина
Рис. 5.9. Пакеты сетевого протокола CCSDS
и интернет-протокола IPv4
425
Современная телеметрия в теории и на практике
Инкапсуляционный пакет (IPv4)
О 2 3 5 6 7 8
...39
Version
111
Protocol
ID
Length
of
Length
Length
Length,
cont'd
Encapsulated
data unit
Рис. 5.10. Инкапсуляционный пакет
Другие возможные значения поля зарезервированы для будущих версий.
Размер поля длины пакета: последние два бита первого октета определяют
длину поля, содержащего значение длины поля данных в октетах:
• «01» - 1 октет;
• «10» - 2 октета;
• «И» - 4 октета.
Два нулевых бита в этом поле означают: 1) поле длины поля данных не
существует, 2) инкапсулированных данных нет, 3) длина пакета
инкапсуляции - один октет. Такие однооктетные самоидентифицирующиеся пакеты
используются для загрузки поля данных фрейма (так как фрейм -
структура фиксированной длины) в случаях, описанных в п. Х.Х., и являются
неинформативными данными.
Поле длины пакета: 0, 1 или 4 октета, содержащие значение полной
длины инкапсуляционного пакета. Хотя такие пакеты вряд ли будут использо:
ваться в Космосе, четырехоктетное поле длины пакета позволяет протоколу
IPv6 Jumbograms размещать в пакете до 4,294,967,296 битов. Поле, в случае,
если оно однооктетное, не должно содержать значений «00000000» - ноль
и «00000001» - единица.
В поле данных инкапсуляционного пакета содержатся
инкапсулированные данные.
5.3.5. Фрейм передачи
Фрейм передачи - структура, позволяющая передавать пакетизированные
данные по зашумленному радиоканалу. Заголовок фрейма передачи (далее
также «фрейм») несет информацию, необходимую наземной системе
передачи данных для того, чтобы направить его соответствующему адресату.
Для данного физического канала в течение всех фаз полета длина фрейма
передачи статична.
426
Глава 5. Стандарты и технологии современной телеметрии
Пакеты источника переменной длины, асинхронно генерируемые
многочисленными прикладными процессами, протекающими на борту КА, для
надежной и достоверной передачи на Землю мультиплексируются в
соответствии с приоритетами источников в синхронный поток кодированных
фреймов передачи.
Основной заголовок фрейма содержит поля, наличие которых позволяет
пакеты источника и/или сегменты пакетов переменной длины
мультиплексировать во фрейм фиксированной длины. Во фрейме может содержаться
несколько коротких пакетов или сегментов или часть длинного пакета,
передаваемого в двух или более фреймах. Всё поле данных фрейма
используется для передачи пакетов или сегментов.
Пакеты и сегменты могут начинаться и заканчиваться в любом месте поля
данных фрейма. Нет необходимости подбирать размеры пакетов и порядок
их следования для формирования фреймов передачи.
В случаях, когда для сохранения синхронизации между передающей и
приемной сторонами при отсутствии данных источников необходимо передать
фрейм, предусмотрен механизм «неинформационных» пакетов
(самоидентифицирующийся однооктетный инкапсуляционный пакет, см. п. 5.3.3).
В заголовке фрейма также содержится информация, необходимая для
извлечения пакетов стандартизованным и независимым от пакетов способом
и для сборки пакетов из сегментов. Кроме пакетов, фрейм может нести
информацию в двух необязательных полях: вторичном заголовке и поле
операционного управления. Вторичный заголовок используется для передачи
данных фиксированной длины, специфичных для конкретного объекта.
Поле операционного управления используется для обеспечения
функционирования системы телеуправления и других систем. Кроме пакетов,
фрейм может нести «конфиденциальную» информацию, то есть
специальную информацию, для которой неприемлемы рекомендации по
структурированию данных.
Таким образом, фрейм обеспечивает передачу следующих структур данных:
• пакеты источника;
• сегменты пакетов источника;
• неинформационные пакеты;
• конфиденциальную информацию.
Фрейм передачи содержит следующие поля:
• основной заголовок (48 битов);
• необязательный вторичный заголовок 16, 24,..., 512 битов;
427
Современная телеметрия в теории и на практике
• поле данных (переменной длины);
• необязательное поле операционного управления;
• поле защиты от ошибок (обязательное, если не применяется код
Рида-Соломона).
Все фреймы с одним номером версии и идентификатором объекта,
передающиеся по одному физическому каналу, составляют главный канал.
В большинстве случаев понятие главный канал идентично понятию
физический канал. Однако в случае, если по одному физическому каналу передаются
фреймы с разными идентификаторами объектов (например, при передаче
через ретранслятор), несколько главных каналов мультиплексируются в один
физический канал. Главный канал объединяет восемь виртуальных каналов.
ОСНОВНОЙ ЗАГОЛОВОК ФРЕЙМА ПЕРЕДАЧИ
Основной заголовок фрейма передачи состоит из пяти полей:
• номер версии фрейма (2 бита);
• идентификатор фрейма (14 битов);
• счетчик фреймов главного канала (8 битов);
• счетчик фреймов виртуального канала (8 битов);
• поле состояния поля данных (16 битов).
Несмотря на то что пакетные телеметрические системы подразумевают
возможность защиты от ошибок на уровне пакетов источника или их
сегментов, для достижения всей полноты их преимуществ необходим
высококачественный канал передачи, сформированный так, чтобы пакетированные
данные могли быть адаптивно вставлены во фрейм. Структура фрейма
передачи изображена на рис. 5.11.
Имеется пять основных функций основного заголовка фрейма передачи:
• идентификация блока данных поля фрейма передачи;
• идентификация объекта;
• мультиплексирование виртуальных каналов в главный канал;
• подсчет фреймов виртуальных каналов и главного канала;
• передача указательной и другой управляющей информации,
необходимой для извлечения из поля данных фрейма пакетов и сегментов
переменной данных.
428
Глава 5. Стандарты и технологии современной телеметрии
Основной заголовок фрейма
СО
2
>s
о
о.
•9-
|1
Is
00
Идентификация
фрейма
*8В
2 бита 10 битов 3 бита 1 бит
Sis
^ э "
f S&
2 октета
= 5
5. (О
■е-*
* в
5 о
II
Р
i
О m
Состояние поля данных фрейма
го
9.1
о о
X О.
& 8
ш о
и. С
го 2
is
1 бит
*—►
1 бит
N—N
о.
О 0D
18
1 бит
4 ►
N
f 8
fi
2 бита
►-So
g f g
11 битов
Вторичный заголовок
I фрейма (не обязателен)
Идентификатор
вторичного
заголовка фрейма
Номер
версии
вторичного
заголовка
фрейма
2 бита
L 1"
Длина
вторичного
заголовка
фрейма
6 бит
ггет
Поле данных фрейма
Данные
вторичного
заголовка
фрейма
до
63
октетов
Прикладные
данные
космического
аппарата
переменное
Поле
операционного
управления
4 Ь
Данные поля
эксплуатационного
управления
4 октета
Поле
контроля
ошибок
Данные
поля
контроля
ошибок
2 октета
Рис. 5.11. Фрейм передачи
Номер версии фрейма передачи
Номер версии фрейма содержится в битах 0-1 основного заголовка
фрейма. Это поле имеет значение «00», что и идентифицирует данный блок
данных как фрейм. Другие возможные значения этого поля зарезервированы
для будущих версий фреймов и в настоящее время не используются.
Идентификатор фрейма
14-разрядный идентификатор фрейма (биты 2-15) делится на три подполя:
• идентификатор объекта;
• идентификатор виртуального канала;
• флаг поля операционного управления.
429
Современная телеметрия в теории и на практике
Таким образом, это поле идентифицирует источник фреймов,
принадлежащий ему виртуальный канал и содержит информацию о формате пакетов.
Идентификатор объекта (например, космического аппарата) (2-й-11-й бит)
назначается секретариатом CCSDS и обозначает аппарат, передающий
фреймы. Одному аппарату может быть назначено несколько
идентификаторов, соответстйующих различным периодам эксплуатации (разработка
объекта, передача моделируемых потоков данных, режим эксплуатации и
т. п.).
12-й - 14-й биты идентифицируют каждый из восьми возможных
виртуальных каналов. Порядок следования фреймов разных виртуальных
каналов в главном канале может меняться.
Флаг поля операционного управления (15-й бит заголовка) указывает на
наличие или отсутствие в структуре фрейма этого поля. Наличие этого
поля идентифицируется значением «1» флага, отсутствие - значением «О».
Флаг поля операционного управления статичен в течение фазы полета для
главного канала или для виртуальных каналов.
Счетчик фреймов главного канала
8-разрядное поле счетчика фреймов (биты 16-23) содержит двоичное
значение порядкового номера фрейма в общем потоке фреймов. Счет
ведется последовательно от 0 до 255. До достижения значения «255»
счетчик не должен быть сброшен. Преждевременный сброс счетчи-ка приводит
к потере информации.
Счетчик фреймов виртуального канала
8-разрядное поле счетчика фреймов виртуального канала (биты 24-31
основного заголовка) служит для обозначения номера фрейма в
последовательности фреймов виртуального канала. Его значение для
виртуальных каналов аналогично значению основного счетчика фреймов для
главного канала.
Поле состояния поля данных фрейма
Это 16-разрядное поле (бит 32-47) состоит из пяти подполей:
• флаг вторичного заголовка (1 бит);
• флаг синхронизации (1 бит);
430
Глава 5. Стандарты и технологии современной телеметрии
• флаг порядка пакетов (1 бит);
• идентификатор длины сегментов (2 бита);
• указатель заголовка 1-го пакета.
Это поле указывает, присутствует ли вторичный заголовок, несет
информацию о типе данных, содержащихся во фрейме, и вместе со счетчиком
фреймов виртуального канала информацию, необходимую для извлечения
пакетов или сегментов из поля данных фрейма.
Флаг вторичного заголовка фрейма
Флаг вторичного заголовка (32-й бит основного заголовка фрейма)
указывает на наличие или отсутствие в структуре фрейма необязательного
вторичного заголовка. Наличие вторичного заголовка индицируется
значением «1» флага, отсутствие - значением «О». Для главного канала флаг
вторичного заголовка должен оставаться статичным в фазе полета.
Флаг синхронизации
Флаг синхронизации (33-й бит заголовка) имеет значение «О», если в поле
данных находятся пакеты источника, сегменты или неинформационные
данные. При передаче во фрейме других данных (конфиденциальной
информации) флаг имеет значение «1». Флаг статичен для виртуального
канала в течение фазы полета.
Исходные блоки данных пакетов или сегментов обычно вставляются в поле
данных фрейма выровненными по границам октетов. Начало
пакета/сегмента может не совпадать с началом поля данных. Начало заголовка
пакета/сегмента в поле данных фрейма указывается значением поля указателя
1-го заголовка.
Если границы октетов не выровнены с границами поля данных, то
передаваемые в структуре фрейма данные рассматриваются как
конфиденциальные.
Флаг порядка пакетов
Флаг порядка пакетов (34-й бит заголовка) при значении «О» флага
синхронизации устанавливается в «О» и может принимать произвольное
значение при значении «1» флага синхронизации. Данный бит зарезервирован
для будущих версий форматов данных.
431
Современная телеметрия в теории и на практике
Идентификатор длины сегмента
Если в данном виртуальном канале поддерживается сегментация пакетов
источника, идентификатор длины сегмента (бит 35-й и 36-й заголовка)
содержит значение длины сегмента:
• «00» - 256 октетов;
• «01» - 512 октетов;
• «10» - 1024 октета.
Если в данном виртуальном канале передаются только несегментирован-
ные пакеты, поле содержит значение «11».
Последний сегмент в поле данных фрейма может быть короче, чем 256, 512
или 1024 октета.
Указатель заголовка 1-го пакета
Указатель заголовка 1-го пакета (биты 37-47) содержит двоичное
значение номера 1-го октета, 1-го в поле данных пакета или сегмента. Все
октеты поля данных последовательно нумеруются начиная с нуля. Положение
в поле данных следующих пакетов или сегментов вычисляется с
использованием информации об их длине, содержащейся в их заголовках. Данный
указатель используется только при значении «0» флага синхронизации.
Если фрейм не содержит заголовков пакетов/сегментов, указатель
устанавливается в «111...И», если во фрейме содержатся только
неинформационные пакеты - «И... 10».
Вторичный заголовок фрейма передачи
Необязательный вторичный заголовок фрейма передачи следует
непосредственно за основным заголовком и индицируется значением «1» флага
вторичного заголовка. Вторичный заголовок состоит из двух подполей:
• поле идентификации вторичного заголовка (8 битов);
• поле данных вторичного заголовка (8,16,..., 504 бита).
Вторичный заголовок связан с виртуальным или главным каналом и имеет
фиксированную длину в связанном канале.
Поле идентификации делится на два подполя:
• номер версии вторичного заголовка (2 бита);
• поле длины поля данных (6 битов).
432
Глава 5. Стандарты и технологии современной телеметрии
Номер версии в настоящее время имеет значение «00», другие возможные
значения зарезервированы на будущее. Информация о длине поля данных
вторичного заголовка необходима для определения начала поля данных фрейма.
Все вторичные данные заголовка содержатся в поле данных вторичного
заголовка.
Длина вторичного заголовка статична для виртуального или главного
канала в фазе полета.
Поле данных фрейма передачи
Непосредственно за вторичным (если он присутствует) или основным
заголовком следует поле данных фрейма. Оно содержит данные любого
из четырех определенных выше типов.
Пакеты и сегменты помещаются в поле данных без промежутков в прямом
порядке их следования. В противном случае передаваемые данные
считаются конфиденциальными и соответственно помечаются.
Если пакетов или сегментов недостаточно для заполнения всего поля
данных, оно заполняется неинформационными пакетами.
Поле операционного управления
Необязательное поле операционного управления занимает четыре октета
поля данных. Его наличие указывается значением «1» соответствующего
флага. Поле операционного управления статично по отношению к данному
виртуальному или главному каналу в течение фазы полета.
1-й бит - это флаг типа поля, принимающий следующие значения:
«0», если поле операционного управления содержит данные «Тип 1», то есть
слово управления командной линии;
«1», если поле оперативного контроля содержит данные «Тип 2».
При значении «1» этого бита следующий бит должен быть установлен в «0»,
если содержание поля определяется разработчиком телеметрической
системы. Значение «0» следующего бита зарезервировано для использования
в будущем.
Поле предназначено для обеспечения некоторых оперативных функций
телеуправления, таких как, например, проверка и калибровка бортового
времени. В настоящее время рекомендации определяют только
использование поля «Тип 1».
433
Современная телеметрия в теории и на практике
5.4. ПОМЕХОУСТОЙЧИВАЯ ПЕРЕДАЧА ТЕЛЕМЕТРИЧЕСКИХ
ДАННЫХ
Под кодированием телеметрического канала понимается специальная
обработка данных перед их отправкой потребителю, позволяющая защитить их
от повреждений, вызванных шумами физического канала.
Сущность помехоустойчивого кодирования заключается во введении на
передающей стороне канала связи определенной избыточности с целью
последующего использования этой избыточности на приемной стороне для
обнаружения ошибок и, если это возможно, исправления обнаруженных ошибок.
Помехоустойчивое кодирование заключается в том, что вместе с k
информационными разрядами по каналу дополнительно передается r^n-k
проверочных символов, позволяющих обнаружить возможные ошибки в и-разрядной
кодовой комбинации.
Таким образом, помехоустойчивый код отличается от обычного кода тем, что
в канал могут быть переданы не все 2" возможных кодовых комбинаций, а
лишь некоторые из них, а именно 2 , обладающие определенным свойством
и называемые разрешенными. Остальные неиспользуемые комбинации,
число которых 2" -2*, называют запрещенными. Коды, которые не только
обнаруживают сам факт ошибки, но и номер разряда кодовой комбинации,
в котором произошла ошибка, называются кодами с исправлением ошибок.
Известно большое число кодов, позволяющих успешно бороться с
различными видами помех. Все эти коды обладают избыточностью, величина которой
в той или иной степени определяет их корректирующие возможности.
Разнообразие помехоустойчивых кодов отображается на рис. 5.12, где показана
их классификация.
Блочными кодами называются коды, в которых каждому сообщению
ставится в однозначное соответствие блок из п символов или блоки с разным
числом символов. В соответствии с этим блочные коды делятся на
равномерные и неравномерные. В практике передачи информации наибольшее
распространение получили равномерные коды с постоянным числом
символов п , что обеспечивает более надежную синхронизацию передающей
и приемной аппаратуры канала связи.
Непрерывными кодами называются такие коды, у которых операции
кодирования и декодирования совершаются непрерывно. Эти коды представляют
собой непрерывную последовательность информационных и проверочных
символов. К непрерывным кодам относятся рекуррентные коды, у которых
значения проверочных символов и их место в кодовой комбинации
определяются по рекуррентной формуле:
434
Глава 5. Стандарты и технологии современной телеметрии
P,v=||UAv [(mod/я), ; = 0,1,К,/-1 (5.1)
Значение правой части (5.1) определяется по modm, что означает, что
после проведения обычных вычислительных операций удерживается лишь
остаток от деления полученной величины на основание кода т (например,
7 по mod 4 дает 3). Осуществление операций по mod m необходимо для
того, чтобы полученные значения символов (3 • принадлежали алфавиту
канала, то есть принимали значения 0,1,К ,/w-l.
Рекуррентное соотношение (5.1) на /-м шаге кодирования группе
символов входной последовательности bf_qyK ,bj9K ,6/Ч5_, ставит в
соответствие / символов кодовой последовательности bi0,K ,£,/_,; на (/ + 1)-м
шаге группе символов 6f. ,,K ,6/+I,K ,bi+s, смещенной на одну позицию,
ставит в соответствие следующие / символов кодовой последовательности
Р/+10 ,К , Р/+1 м и т. д. Таким образом, на каждый символ информационной
последовательности приходится / символов передаваемой кодовой
последовательности.
Правые части рекуррентных соотношений (5.1) представляют как бы
свертку соответствующего участка информационной последовательности,
поэтому эти коды называют также сверто^ными кодами. Непрерывные (сверточ-
ные) коды могут быть как систематическими, так и несистематическими.
Систематические сверточные коды получаются в частном случае, когда для
одного из значений индекса j (например, j = 0 ) коэффициенты в
формуле (5.1) принимают значения:
v0 [1,/i/wv =0
и, соответственно, (3/0 = bi■,. В этом случае передаваемая кодовая
последовательность имеет вид К ^.jpj.pK ;P/fM;6/+I;(3/+1J;K ;(3/+KM;K
Основной положительной особенностью непрерывных (сверточных) кодов
является их способность исправлять групповые ошибки, то есть искажения
нескольких подряд следующих символов при сравнительно простой
кодирующей и декодирующей аппаратуре, строящейся на основе рекуррентных
соотношений типа (5.1).
8 соответствии с рассматриваемой классификацией помехоустойчивых
кодов разделимые коды подразделяются на систематические и
несистематические. Систематическими кодами называются такие коды, у которых
сумма по mod 2 двух разрешенных комбинаций кода дает новую комбинацию
такого же кода.
435
Современная телеметрия в теории и на практике
Несистематические коды этим свойством не обладают. Примерами
систематического кода являются циклические коды (CRC) и коды
Хемминга. Для систематического кода используется обозначение (п, k), где п -
число всех разрядов кодовой комбинации, k - число информационных
разрядов.
Примером несистематического кода является код с контрольным
суммированием, в котором проверочные разряды представляют запись суммы
единиц в кодовой комбинации. Широкое применение в практике передачи
информации нашли систематические блочные коды. Наиболее известны
среди них циклические коды. Коды Хемминга являются разновидностью
циклических кодов, но исторически появились раньше многих других ныне
известных кодов и сыграли большую роль в развитии теории
помехоустойчивого кодирования.
Другой важной разновидностью циклических кодов являются коды Боуза -
Чоудхури -Хоквингема (БЧХ).
Помехоустойчивые коды
Т
Блочные
X
Равномерные
Разделимые
Т
Систематические
i
Циклические
с
Непрерывные
с
1
Неразделимые
1
1
Коды Хемминга
1
| Неравномерные |
1
Несистематические
Рис. 5.12. Классификация помехоустойчивых кодов
Достоинства любых из обсуждаемых подходов к кодированию, выбор их
комбинаций, а также конструкций кодеров и декодеров в данном разделе
не обсуждаются. Применение кодирования при передаче данных по
радиолинии необязательно, однако при его использовании необходимо
руководствоваться следующими рекомендациями.
436
Глава 5. Стандарты и технологии современной телеметрии
Применение только базового сверточного кода со скоростью кодирования
1/2 (далее «сверточный код х/гъ или «сверточный код»), в зависимости
от требований к каналу, может само обеспечить нужную
помехоустойчивость. Для каналов связи, ограниченных по полосе частот и не
допускающих ее увеличения при использовании сверточного кода 1/2, применяется
выбивающий сверточный код, менее расширяющий полосу частот.
Код Рида - Соломона (Reed-Solomon Code, RS-код) также менее
увеличивает полосу частот, чем сверточный код /2} и, кроме того, позволяет
обнаруживать некорректируемые ошибки.
Если допускается использование полосы частот, большей чем полоса
частот, необходимая для передачи данных, кодированных сверточным кодом
или RS-кодом, \южно применять комбинацию сверточного кода (как
внутреннего) с RS-кодом (как внешним). Если допускается использование еще
большей полосы частот, возможно применение турбо-кода.
Для улучшения структуры потока битов и с точки зрения упрощения
синхронизации на приемной стороне рекомендуется применение
псевдорандомизации.
СВЕРТОЧНОЕ КОДИРОВАНИЕ
Базовый сверточный кодер. Применение базового сверточного кода со
скоростью кодирования 1/2 и длиной связки 7 хорошо подходит для каналов
с преобладающим нормально распределенным шумом (гауссовских
каналов). Если этот код применяется с выбиванием (см. п. 5.5.2), достигаются
более высокие скорости кодирования, хотя при этом ухудшается
помехоустойчивость. Декодер сверточного кода наиболее хорошо описывается
декодером максимального правдоподобия (Виттерби).
Примечание. Базовый сверточный код сам по себе не гарантирует
достоверную передачу символов, поэтому в случае применения схем
мультиплексирования, например, с четырехкратной фазовой манипуляцией необходимо
использование псевдорандомизации, если не предусмотрено других
способов рандомизации.
Примечание. Если вследствие зашумленности канала корректирующая
способность декодера окажется недостаточной, на его выходе могут появиться
необнаруживаемые ошибки, поэтому при кодировании сверточным кодом
фреймов передачи или блоков данных виртуального канала для
подтверждения правильности их приема необходима проверка циклическим кодом
CRC, если не используется RS-код, позволяющий обнаруживать
некорректируемые ошибки.
437
Современная телеметрия в теории и на практике
Спецификация базового сверточного кода
CCSDS рекомендует использовать базовый сверточный код со
следующими характеристиками:
1.
2.
3.
4.
5.
Условное обозначение
Скорость кодирования
Длина связки
Образующие многочлены
Инверсия символов
Сверточный код с максимальным правдоподобием (Вит-
терби) декодирования
1/2 бит на символ
7 битов
G-1111001 (1718);G2-1011011 (1338).
На выходе G2
Блок-схема кодера показана на рис. 5.13.
D
S\ |—(-*Ф ►©—>ф-
l t Т t
G,
Ц-Ц1сГ|Л-+у17]--|^
-*+>
с.
Q.
О
V
_4S'
*©—мэ—щ—►€>—►©-f-L*£>J
Рис. 5.13. Блок-диаграмма сверточного кодера
Элемент единичной задержки.
• Для каждого входного бита генерируется два выходных символа,
соответствующих двум положениям переключателя S1:
положению 1 и положению 2.
• При поступлении на вход кодера 1-го входного бита переключа-
ч тель S1 находится в положении 1.
• ® Сумматор по модулю 2. -*£>*-
• Инвертор.
Выходные символы базового сверточного кода 1/2 - это последователь-
ностыС.ОХС.О), Ci(2),C2(2),...
Если используется система модуляции с подавлением несущей NRZ-L или
NRZ-M, выход сверточного кодера может использоваться непосредственно
для модуляции радиочастоты. Если необходимо преобразование
модулирующего сигнала от NRZ-L к NRZ-M, то оно должно быть выполнено до входа
438
Глава 5. Стандарты и технологии современной телеметрии
сверточного кодера. Соответственно, обратное преобразование (на
приемной стороне) должно быть выполнено после выхода декодера.
СВЕРТОЧНЫЙ КОДЕР С ВЫБИВАНИЕМ БИТОВ
Скорость кодирования сверточного кодера (г = 1/2) и фиксированная
длина связки (к = 7) могут быть изменены для уменьшения минимально
необходимой полосы частот. Это изменение достигается выбиванием
битов из выходной последовательности кодера по некоторому правилу Р(г).
Выбивание - это удаление некоторых символов, производимых кодером,
перед передачей. Выбивание битов уменьшает требуемую для передачи
полосу частот, но тем самым ухудшает характеристики канала. Четыре
различных схемы выбивания битов предоставляют выбор большинства
необходимых скоростей кодирования (2/3,3/4,5/6 или 7/8) и соответствующих
уровней коррекции ошибок. На рис. 5.14 изображена схема сверточного
кодера с выбиванием битов.
Примечание. При применении выбивающих схем инверсия символов G2
пропускается, поэтому, если достаточная для работы системы
синхронизации плотность потока битов не обеспечена другими методами, необходимо
применение псевдорандомизации.
Input
rfi
тЧЕг
г
L
Э ►© ИЭ К
I A A j
НИ-
1
+\.
-+Щ-
Г 1
J *V
-HZKIb
Г 1
; G2 K
гЧБ-
Г 1
£>—из
1
Puncture I
(Table 2-1)
О.
О
▲
Рис. 5.14. Блок-диаграмма сверточного кодера с выбиванием битов
Спецификация сверточного кода с выбиванием битов
1.
2.
3.
4.
5.
Условное обозначение
Коэффициенты
Длина связки
Образующие многочлены
Инверсия символов
Сверточный код с выбиванием битов с максимальным
правдоподобием (Виттерби) декодирования
1/2, при выбивании - 2/3, 3/4, 5/6 или 7/8
7 битов
G1-1111001 (171 ОСТ)
G2= 1011011 (133 ОСТ)
Нет.
439
Современная телеметрия в теории и на практике
Структура кода для любой из скоростей кодирования определяется
следующей таблицей:
Правило выбивания:
1 - передаваемый символ
0 - непередаваемый символ
С,: 1 0
1 Сгп
! С,: 101
С2:110
С,: 10101
С; 11010
С,: 1000101
С2:Ш1010
Скорость
кодирования
2/3
3/4
5/6
7/8
Выходная последовательность
0,(1)^(1)0,(2)
С,(1)С2(1) 0X2)0,(3)
С,(1) С2(1) С2(2) С,(3) С2(4) С,(5)
С,(1) С2(1) С2(2) С2(3) С2(4) С,(5) С2(6) С,(7)
Турбо-коды
Турбо-коды — это систематические блочные коды с кодовыми группами
большой длин)ы (сотни-тысячи битов). Широкий класс турбо-кодов
запатентован France Telecom and Telediffusion de France под патентом США 5,
446, 747 и в других странах.
Разработчики систем передачи данных, использующих турбо-код, должны
направлять запросы о лицензиях. Разностное линейное кодирование (то
есть сигнал NRZ-M) не рекомендуется применять после турбо-кодера, так
как программное декодирование требует разностного дискриминатора со
значительной потерей характеристик. Дифференциальное кодирование
перед турбо-кодером не может применяться, так как коды не прозрачны. Это
означает, что фазовые неоднозначности должны быть разрешены при
синхронизации фреймов.
Спецификация турбо-кода
Турбо-кодер представляет собой комбинацию двух простых сверточных
кодеров. На вход кодера поступает фрейм из ^-информационных битов. Два
составляющих турбо-кодер рекурсивных сверточных кодера, каждый из
которых имеет небольшое количество состояний, генерируют проверочные
символы. Вместе с проверочными символами в формировании выходной
последовательности турбо-кодера участвуют незакодированные входные
информационные биты.
Главная особенность турбо-кодера - поразрядное чередование
^-информационных битов перед выходом кодера. Рекомендуется следующая спецификация:
440
Глава 5. Стандарты и технологии современной телеметрии
1.
2.
3.
4.
5.
6.
Тип кода
Число составляющих колеров
Тип составляющих кодеров
Число состояний каждого
составляющего сверточного кодера
Номинальные скорости кодирования
Систематический параллельно-связывающий
турбо-код
2 (плюс незакодированная информация,
делающая код систематическим)
Рекурсивные сверточные кодеры
16
г « 1/2,1/3,1/4 или 1/6
Длины информационных блоков приведены в табл. 5.1. Они выбраны для совместимости
с RS-кодами с различными глубинами чередования.
Из-за необходимости передачи символов завершения бл^ка кода
(определенных в табл. 5.2 как отношение длины информационного блока
к длине блока кода) реальная скорость кодирования несколько меньше
номинальной.
Таблица 5.1. Длины информационных блоков
Длина информационного
блока К , битов
1784 (223x1 октетов)
3568 (223x1 октетов)
7136(223x1 октетов)
8920 (223x1 октетов)
16384
Глубина чередования кода
Рида - Соломона /
1
2
4
5
Неприменимо
Замечания
Для низких скоростей передачи
Для самой большой
помехоустойчивости
Длины передаваемых блоков кода n - k+4/r, соответствующие скоростям
передачи, приведены в табл. 5.2. Далее под термином «скорость
кодирования» всегда понимается номинальная скорость кодирования.
Перестановка символов в турбо-коде.
Перестановка - основная особенность турбо-кодера и декодера.
Перестановка в турбо-коде - это побитовое чередование всего блока данных. В
отличие от посимвольного «прямоугольного» чередования в RS-коде
перестановка в турбо-коде чередует отдельные биты и напоминает беспорядочное
их перемешивание.
441
Современная телеметрия в теории и на практике
Таблица 5.2. Длины кодовых блоков
Длина
информационного блока к
1784
3568
7136
8920
16384
Длина блока кода П
Скорость
кодирования 1/2
3576
7144
14280
17848
32776
Скорость
кодирования 1/3
5364
10716
21420
26772
49164
Скорость
кодирования 1/4
7152
14288
28560
35696
65552
Скорость
кодирования
1/6
10728
21434
42840
53544
98328 1
Перестановка в любом блоке длины k задается переупорядочиванием
целых чисел 1, 2, К , к по следующему алгоритму.
Сначала вычисляется к как к-кхкг. Параметры кх и к2 приведены в
табл. 5.3. Далее для получения номеров перестановок rc(S) вычисляются s,
от s = 1 до s = к . В уравнениях, приведенных ниже, [_х] означает
максимальное целое, большее или равное х, a pq - одно из следующих
простых чисел:
р} = 31; р2 = 37; р2 = 43; р4 = 47; р5 = 53; рв = 59; р7 = 61; ps = 67;
Таблица 5.3. Параметры кода кх и к2
Длина информационного блока
1784
3568
7136
8920
16384
*.
8
8
8
8
*2
223
223*2
223*4
223*5
См. замечание
w = (5-l)mod2
• U-il
[2к2 J
/ = (l9/ + l)mod2^-
442
Глава 5. Стандарты и технологии современной телеметрии
<7 = /mod8 + l
с = (pqj + 2 \т jmod £2
тс(я)=2
Примечание. Указанные параметры в настоящее время изучаются и могут
быть переопределены.
Интерпретация полученных чисел такова: s-й бит входного блока
становится rc(s)-M выходным битом, как показано на рис. 5.15.
• • •
я (к)
• • •
Я (8)
• • •
я(1)
• • •
Вход кодера "а"
к Вход кодера "Ь"
Рис. 5.15. Перестановка в турбо-коде
Прямые и обратные образующие вектора
Выходные последовательности компонентов турбо-кодера определяются
обратными связями сдвиговых регистров компонентов кодера -
«обратными» векторами GO и комбинацией их выходов - «прямыми» векторами G1,
G2hG3(cm.phc.5.18).
• Обратный вектор для всех скоростей кодирования GO = 10011.
• Прямой вектор для обеих составляющих кодера и скоростей
кодирования 1/2 и 1/3 G1 = 11011. При скорости кодирования 1/2 все
символы, кроме символов с выходов G1 обоих компонентов кодера,
выбиваются. Без выбивания скорость кодирования составляет 1/3.
• Прямые вектора для скорости 1/4: G2 = 10101, G3 - 11111, для 1-го
сверточного кодера и G1 - 11011 для 2-го сверточного кодера.
Скорость кодирования на этих выходах без выбивания составляет 1/4.
• Прямые вектора для скорости 1/6: G1 - 11011, G2 - 10101, G3 = 11111
для 1-го сверточного кодера, G3 - 11111 для 2-го сверточного
кодера. Скорость кодирования на этих выходах без выбивания
составляет 1/6. Блок-диаграмма турбо-кодера показана на рис. 5.16.
443
Современная телеметрия в теории и на практике
Каждый входной блок ^-информационных битов помещается в буфер
блоки, й биты читаются из буфера в двух разных порядках для двух
составляющих кодера. На вход 1-го кодера поступают биты в исходном порядке,
на вход 2-го составляющего кодера поступают переставленные биты.
Следующий считываемый бит для входа А определяется простым счетчиком,
а для входа В некоторым правилом перестановки.
outOa
£«
G1
G2
G3
-+Ь—$Э—^Э—*Ы-
-out 1a
-out 2a
-out 3a
fi
Inb
G1
G2
G3
PfeH—Pfe-r
-^Э—*&—■*&—-*tэ4-,
f f
RATE 1/2 -
+-1
5
jj
l\
-out 1b-
-Not used
-out 3b -
• - Take overy symbol -»| D [■► - Single bit delay
о - Take overy other symbol © -Exclusive OR
Составляющие
кодера - это нерекурсивные
сверточные кодеры,
образованные сдвиговыми
регистрами с обратными
связями. Обратные связи
регистров задаются
векторами GO, а прямые
связи - векторами Gl, G2 и
G3. Ключевое отличие
этих кодеров от базового
сверточного кодера - ре-
курсивность, то есть
наличие обратных связей.
Рис. 5.16. Блок-диаграмма турбо-кодера
Спецификация блока турбо-кода
Оба компонента кодера, показанные на рис. 5.16, инициализируются нулями
во всех регистрах. Их полный цикл составляет к + 4 битов, за который они
производят выходной блок кода из (к + 4)/г кодовых символов, где г -
номинальная скорость кодирования. Во время передачи первых г
битов, входные переключатели находятся в положении «вниз», как
показано на рис, 5.14? для загрузки входных данных.
Во время поступления на вход последних четырех битов информационного
блока они Находятся в положении «вверх», замыкая входы элемента
«исключающее или» и тем самым размыкая обратную связь сдвигового
регистра. Вследствие этого через четыре такта регистры заполняются нулями.
444
Глава 5. Стандарты и технологии современной телеметрии
В течение этих четырех тактов кодер продолжает выводить ненулевые
символы кода, в т. ч. кодируемый выход (выход ОА), добавляя таким образом
четыре бита к г информационным битам в блок кода.
Выходы кодеров, как показано в правой части рис. 5.16,
мультиплексируются для выбранной скорости кодирования и формируют блок кода. Для
скорости кодирования 1/3 выходная последовательность образуется выходами
О А, 1А, 1В; для скорости кодирования 1/4 - О А, 2 А, ЗА, 1В, для скорости
кодирования 1/6 - ОА, 1А, 2А, ЗА, IB, 3B. Все эти последовательности
формируются в течение г + 4 тактов.
Скорость кодирования 1/2 достигается выбиванием каждого второго бита
с выходов 1А и 1В в следующей последовательности: первым выбивается
выход 1А, вторым — 1В и т. д. Всего выбивается (г + 4J^2 битов.
Блоки турбо-кода, сформированные из этих последовательностей для
четырех скоростей передачи, изображены на рис. 5.17.
Rate 1/2 Turbo Codeblock
out
Oa
out
1b
out
Oa
T
1st transmitted
symbol
out
Oa
out
1a
out j
Oa
out
1b I
T
Last transmitted
symbol
Rate 1/3 Turbo Codeblock
out
1a
out
1b
out
Oa
out
Oa
T
1st transmitted
symbol
out
Oa
out
1a
out
1a
out
1b I
f
Last transmitted
symbol
Rate 1/4 Turbo (
but
[Oa
out
2a
out
3a
out
1b
out
Oa
out
2a
out
3a
out
1b
• • •
:od€
)bloc
Ж
bJ
out
Oa
out
2a
out
3a
out
1b
out
Oa
out
2a
out
3a
out
1b
1st transmitted
symbol
Last transmitted
symbol
Rate 1/6 Turbo Codeblock
w-
Oa
i
out
1a
out
2a
out
3a
out
1b
out
3b
out
Oa
out
1a
i
• ••
out
2a I
out
3a
out
1b
out
3b
lout
| Oa
out
j 1a
out
12a
out
13a
•• •
[out
11b
out
3b
out
Oa
out
1a
out
2a
out
3a
out
1b
out
3b
t
1st transmitted
symbol
Last transmitted
symbol
Рис. 5.17. Блоки турбо-кода при различных скоростях кодирования
445
Современная телеметрия в теории и на практике
Синхронизация блока турбо-кода
Синхронизация кодера и декодера происходит благодаря наличию в
битовом потоке производимых кодеров синхромаркера, присоединяемого к
каждому блоку турбо-кода (см. п. 5.5.5). Синхромаркер - это определенная
комбинация двоичных разрядов, предшествующая блоку турбо-кода.
Син-хронизатор блоков на приемной стороне ожидает синхромаркер в
течение времени передачи блока кода и синхромаркера. Подле его приема
начинается декодирование блока.
Рис. 5.18 иллюстрирует блок турбо-кода с присоединенным к нему синхро%
маркером. Заметьте, что длина блока турбо-кода обратно пропорциональна
номинальной скорости кодирования.
Rate-Dependent
Attached Sync Marker
Turbo Codeblock
i
32/r
bits
K/r bits
4/r
bits
r = 1/2, 1/3, 1/4 or 1/6 (nominal code rate)
К = Telemetry Transfer Frame Length or Information Block Length
Рис. 5.18. Блок турбо-кода с присоединенным
синхромаркером
Синхронизация фреймов
Синхронизация фреймов или блоков кода необходима для обнаружения их
границ в битовом потоке, извлечения их из потока, последующего
декодирования RS-кода или турбо-кода и последующей обработки фреймов.
Кроме того, этот синхронный прием необходим для синхронизации генератора
псевдослучайной последовательности, если используется
псевдорандомизация и синхронизации декодера сверточного кода.
Синхронизация блоков RS-кода или турбо-кода (или фреймов, если
канал не кодирован) достигается использованием блоков кода
фиксированной длины или фреймов с синхромаркерами между ними. Приемная
сторона входит в синхронизм после распознавания двоичной комбинации
синхромаркера в битовом потоке телеметрического канала.
Распознавание синхромаркера сигнализирует о вхождении в синхронизм и в
дальнейшем проверяется.
Если канал не кодируете^ RS-шдом или турбо-кодом, кодовые символы,
включая синхромаркер, подаются прямо на вход декодера. Если используется
446
Глава 5. Стандарты и технологии современной телеметрии
внутренний сверточный код вместе с внешним RS-кодом, синхромаркер
кодируется внутренним, но не внешним кодом, так как его структура должна
оставаться неизменной.
Кодирующая система, использующая внутренний сверточный код и
внешний RS-код, синхронизируется по синхромаркеру, извлеченному из
битового потока канальных символов (то есть до любого декодирования) или
из последовательности битов, декодированных внутренним кодом (то есть
из области символов RS-кода). Система с турбокодированием
синхронизируется по синхромаркеру, полученному из битового потока канальных
символов, то есть из области символов турбо-кода.
Установлены следующие синхромаркеры:
Скорость кодирования
Без кодирования
1/2
1/3
1/4
1/6
Синхромаркер
1ACFFC1D
034776С7272895В0
25D5C0E8990F6C9461BF79C
034776C7272895B0 FCB88938D8D76A4F
25D5C0E8990F6C9461BF79C DA2A3F31766F0936B9E40863
Длина синхромаркеров для каналов без турбо-кодирования - 32 бита (4
октета), для каналов с турбо-кодированием - 32/г битов ( 4/г октетов).
Синхромаркер предшествует блоку RS-кода и блоку турбо-кода или фрейму,
если канал не кодирован турбо-кодом или RS-кодом. Синхромаркер
следующего блока должен следовать сразу за блоком кода, переданным за
предыдущим синхромаркером, то есть не должно быть никаких битов между ними.
Синхромаркеры выбраны так, что они не являются частью пространства
кодовых данных RS-кода или турбо-кода. Это предотвращает возможную
ситуацию перезаписи 2-го идентичного синхромаркера в поле проверочных
символов, если данные периодически повторяются, например 101010
которая нарушила бы синхронизацию приемной стороны. Также
синхромаркер не подается на вход турбо-кодера или декодера (см. рис. 5.18).
Синхромаркер вложенного потока данных
Если в полях данных фреймов содержатся другие потоки данных
(например, поток фреймов, записанных на магнитную ленту и воспроизведенных
в обратном направлении), могут потребоваться другие структуры
синхромаркеров. Синхромаркер вложенного потока для его отличия от
синхромаркера основного потока установлен следующим: 352EF853.
447
Современная телеметрия в теории и на практике
Псевдорандомизация
Для поддержания битовой (символьной) синхронизации принимаемого
телеметрического потока любая наземная система сбора данных требует,
чтобы входной сигнал имел минимально необходимую плотность потока
битов. Это означает, что для нормальной работы приемника поток данных
должен быть в достаточной степени случайным. Псевдорандомизация -
наиболее предпочтительный метод обеспечения работоспособности всех
комбинаций систем модуляции и кодирования в возможных ситуациях
недостаточной плотности потока битов (длинные последовательности подряд
идущих нулей или единиц).
Если не используются другие способы, гарантирующие битовую
синхронизацию передающей и приемной сторон, использование
псевдорандомизации необходимо. Суть псевдорандомизации состоит в сложении по модулю
двух передаваемых последовательностей со стандартной псевдослучайной
последовательностью (ПСП), то есть в выполнении над ними операции
«исключающее или». Дерандомизация на приемной стороне
осуществляется посредством той же операции. При этом генераторы псевдослучайных
последовательностей передающей и приемной сторон должны быть
синхронизированы.
Наличие или отсутствие псевдорандомизации канального сигнала
должно быть определено для каждого физического канала и априори известно
на приемной стороне.
Если используется псевдорандомизация, то на передающей стороне она
применяется к блокам кода или фреймам после RS или турбо-кодера (если они
используются), но перед сверточным кодированием (если оно используется).
На приемной стороне дерандомизация применяется к данным, полученным
после декодера сверточного кода (если он используется) и синхронизации
блоков кода, но перед дешифровкой RS-кода или турбо-кода.
Конфигурация системы псевдорандомизации передающей стороны
показана на рис. 5.19.
Transfer Frame,
R-S Codeblock. or
Turbo Codeblock
Pseudo-Random
Sequence
Generator
•&
Attached
Sync
Marker
¥
Randomized output
to modulator or
convolutional encoder
(if used)
Рис. 5.19. Система псевдорандомизации
448
Глава 5. Стандарты и технологии современной телеметрии
Синхронизация и псевдорандомизация
Структура синхромаркера оптимальна для целей синхронизации
(обеспечивает достаточную плотность потока битов) и не рандомизируется.
Псевдослучайная последовательность складывается с передаваемой
последовательностью начиная с 1-го бита фрейма или блока кода.
На приемной стороне блоки кода или фреймы дерандомизируются с
помощью такой же ПСП, которая складывается с принимаемой
последовательностью начиная с 1-го бита блока кода или фрейма.
Спецификация псевдослучайной последовательности
ПСП генерируется с использованием следующего многочлена:
h(x)=x* -f-х7 -ьх5 H-jc3 -ь 1.
Генерация ПСП начинается с 1-м битом блока кода или фрейма.
Длительность ПСП 255 битов. Последовательность циклически повторяется до
достижения конца блока кода или фрейма. На рис. 5.20 логическая диаграмма
генератора ПСП.
DATA OUT
(Randomized Codeblock or transfer Frame)
DATA IN
(Codeblock or transfer Frame)
Pseudorandom
sequence
Initialize to an "all ones" state for each Codeblock or
Transfer Frame during ASM period
(+) = Modulo-2 adder ~~Т__Г* = Sin9,e Bjt De,av
(Exclusive OR) L—J
Рис. 5.20. Логическая диаграмма генератора ПСП
15 Зак 861
449
Современная телеметрия в теории и на практике
ЛИТЕРАТУРА К ГЛАВЕ 5:
1. Программа НАС А по стандартизации систем передачи данных:
диапазоны частот и виды модуляции / Warren L. Martin; МО СССР. - № 16/793.
- 10 с. - Proceedings of the International Telemetring Conference, ITC/82,
San-Diego, Ca, September 28-30,1982, p. 853-857.
2. Программа НАСА по стандартизации систем передачи данных:
основные концепции и их содержание / Robert Smylie, Robert Stephens; МО
СССР. - № 14/791. - 15 с- Proceedings of the International Telemetring
Conference, Vol. XIX, April 1983, p. 820-827.
3. Telemetry. Summary of Concept and Rationale, Recommendation CCSDS
100.0-G-l, Issue 1, Green Book, Consultative Committee for Space Data
Systems, December 1987.
4. Packet Telemetry, Recommendation CCSDS 102.0-B-2, Issue 2, Blue Book,
Consultative Committee for Space Data Systems, January 1987.
5. Telemetry Channel Coding, Recommendation CCSDS 101.0-B-2, Issue 2,
Blue Book, Consultative Committee for Space Data Systems, January 1987.
Reference Model of Open Systems Interconnection, International
Organization for Standardization, Draft International Standard DIS-7498,
February 1982.
6. Rice, R.F., and Hilbert, E., US Patent 3988677, October 26, 1976.
7. Morakis, J.C., Discussion of Synchronization Words, NASA Technical
Memorandum 86222, NASA-Goddard Space Flight Center, Greenbelt,
Maryland, May 15, 1985.
8. Procedures Manual for the Consultative Committee for Space Data Systems,
Issue 1, Consultative Committee for Space Data Systems, August 1985.
9. Cager, R., Spacecraft Identification Requirements Analysis, CCSDS Panel
1-C Telecommand Action Item 6.26, June 3-7, 1985.
450
Глава 5. Стандарты и технологии современной телеметрии
10. Telecommmand: Summary of Concept and Service, Report CCSDS
200.0-G-6, Issue 6, Green Book, Consultative Committee for Space Data
Systems, January 1987.
11. Telecommand, Part 2: Data Routing Service, Architectural Specification,
Recommendation CCSDS 202.0-B-l, Issue 1, Blue Book, Consultative
Committee for Space Data Systems, January 1987.
12. Rice, R.F., Channel Coding and Data Compression System
Considerations for Efficient Communication of Planetary Imaging Data,
Technical Memorandum 33-695, NASA-Jet Propulsion Laboratory, Pasadena,
California, June 15, 1974.
13. Rice, R.F., End-to-End Imaging Rate Advantages of Various Alternative
Communication Systems, JPL Publication 82-61, NASA-Jet Propulsion
Laboratory, Pasadena, California, September 1, 1982
14. Rice, R.F., Mission Science Value/Cost Savings from the Advanced
Imaging Communications System, JPL Publication 84-33, NASA-Jet Propulsion
Laboratory, Pasadena, California, July 15, 1984.
15. Miller, R.L., et al., On the Error Statistics of Viterbi Decoding and
the Performance of Concatenated Codes, JPL Publication 81-9, NASA-Jet
Propulsion Laboratory, Pasadena, California, September 1, 1981.
16. OdenwalderJ.P, Concatenated Reed-Solomon/Viterbi Channel Coding for
Advanced Planetary Missions, Final Report, Contract 953866, December 1,1974.
17. Liu, K.Y., The Effects of Receiver Tracking Phase Error on the
Performance of Concatenated Reed-Solomon/Viterbi Channel Coding System,
JPL Publication 81 -62, NASA-Jet Propulsion Laboratory, Pasadena, California,
September 1, 1981.
18. Odenwalder, J.P., et al., Hybrid Coding Systems Study, Final Report,
NASA-Ames Research Center Contract NAS2-6722, Linkabit Corporation, San
Diego, California, September 1972.
451
Современная телеметрия в теории и на практике
19. Perlman, M., and Lee, J.J., Reed-Solomon Encoders - Conventional
vs Berlekamp's Architecture, JPL Publication 82-71, NASA-Jet Propulsion
Laboratory, Pasadena, California, December 1,1982.
20. Tracking and Data Relay Satellite System (TDRSS) Users' Guide,
STDN 101.2, Rev. 5, NASA-Goddard Space Flight Center, Greenbelt, Maryland,
September 1984.
Часть II
Применение телеметрии
Глава 6.
Телеметрия в космической
отрасли
Глава 6. Телеметрия в космической отрасли
6.1. ОСОБЕННОСТИ ИНФОРМАЦИОННО-ТЕЛЕМЕТРИЧЕСКОГО
ОБЕСПЕЧЕНИЯ КОСМИЧЕСКИХ ЭКСПЕРИМЕНТОВ И ОБЪЕКТОВ
РАКЕТНО-КОСМИЧЕСКОЙ ТЕХНИКИ
Расширение перечня и сложности задач, ставящихся перед
ракетно-космическими исследованиями, наметили постоянную тенденцию к росту количества
измеряемой и регистрируемой на борту космических объектов информации,
как предназначенной для контроля и управления бортовыми системами, так и
являющейся результатом научных экспериментов. Из особенностей
применения информационно-телеметрических средств можно выделить следующие.
1. Перемещение объекта в условиях большой удаленности друг от друга
пунктов приема приводит к тому, что при чрезмерном удалении
объекта от приемно-регистрирующей аппаратуры нарушается связь между
бортовыми и наземными радиотелеметрическими средствами и
появляется необходимость изменения способа организации этой связи.
2. Воздействия помех на радиоканал Борт — Земля и бортовые системы
космического аппарата (КА), вызванные электромагнитным
излучением Солнца, прохождением радиационных поясов Земли и
пересечением орбиты изолиний магнитного поля.
3. Наличие жестких требований по надежности функционирования
вычислительных модулей бортовых информационно-телеметрических
систем в неблагоприятных условиях эксплуатации космического
пространства (в первую очередь для КА безконтейнерного исполнения)
накладывает ограничения на состав элементной базы бортовых
вычислительных средств.
4. Наличие противоречий между ростом числа измеряемых параметров
при ограничениях на пропускную способность канала связи снижает
устойчивость, оперативность и достоверность телеконтроля бортовых
систем и информационно-телеметрического обеспечения научных
экспериментов и потому требует тщательного их учета при разработке
принципов применения информационно-телеметрических средств.
5. Необходимость использования одних и тех же
информационно-телеметрических средств на всех этапах эксплуатации бортовой
аппаратуры объектов ракетно-космической техники — подготовки к
применению и управления в полете.
6. Жесткие требования по массе, габаритам и энергопотреблению
бортовых информационно-телеметрических систем (БИТС), характерные
455
Телеметрия в теории и на практике
для космических аппаратов, служат ограничителями некоторых
показателей эффективности БИТС.
7. Проблема передачи все возрастающего объема сведений требует
объединения функций обработки телеметрической информации как для
последующей передачи, так и для использования в системах контроля,
управления и навигации летательным аппаратом.
8. Быстродействие элементов бортового комплекса управления (БКУ),
связанных с обработкой информации на борту КА, должно
обеспечивать решение различных задач в реальном масштабе времени. Данное
требование приводит к необходимости усложнять структуру БКУ в
направлении автономизации функционирования КА. Особенно остро
проблема повышения автономности функционирования стоит перед
разработчиками систем диагностирования межпланетных
космических аппаратов.
Современные разработчики телеметрических систем по-разному решают
проблемы повышения эффективности информационно-телеметрического
обеспечения. Среди основных направлений - универсализация бортовых комплексов,
модульность их структуры, создание адаптивных систем с функциями
самодиагностики и т. д.
6.2. ПЕРСПЕКТИВНЫЕ БОРТОВЫЕ ИНФОРМАЦИОННО-
ТЕЛЕМЕТРИЧЕСКИЕ СИСТЕМЫ
Бортовые информационно-телеметрические системы объектов
ракетно-космической техники не только методологически, но и по существу основных свойств
можно отнести к категории больших систем, основной отличительной
особенностью которых является не столько сложность и разнородность элементов,
составляющих систему, сколько вероятностный, непредсказуемый характер их
поведения во времени [1].
6.2.1. Бортовая информационно-телеметрическая система «Орбита-IV»
Аппаратура БИТС «Орбита-IV» предназначена для решения информационно-
измерительных задач (телеметрия, формирование и ввод информации
бортовым потребителям) на [2]:
ракетах-носителях, разгонных блоках (рис. 6.1), головных блоках,
ракетах авиационного и морского базирования и др.;
космических аппаратах, в том числе и на КА с продолжительным
сроком (до 10-15 лет) активного функционирования.
456
Глава 6. Телеметрия в космической отрасли
Конструктивные решения, принципы построения приборов и другие
технические решения (принципы агрегатирования, контроль функционирования и т. д.)
у обоих вариантов совпадают.
Вариант БИТС для КА (рис. 6.2) отличается:
- применением специального покрытия деталей несущего конструктива,
изготовленных из алюминиевого сплава;
- спец. отбором и аттестацией комплектующих ЭРИ по специальной
программе, утвержденной Главным конструктором аппарата;
- возможностью резервирования: «горячего» с поканальным выбором
наиболее достоверных измерений и «холодного», управляемого по
внешним й внутренним командам;
СЗУ1
ПРЦ
СЗУ1
г т
Межприоорнын интерфейс
Ej
МБУ-Р
—z^—
п
К
^7
Межприоорный интерфейс
ПП
п
SZ.
5Z.
п
ПП
п
МБУ-Р
Рис. 6.1. БИТС для ракет-носителей и разгонных блоков
Обозначения:
К - коммутатор;
ПП - первичные преобразователи;
П - передатчик;
457
Телеметрия в теории и на практике
МБУ-Р - Вторичный распределитель;
МБУ -1 - Центральный формирователь, распределитель;
МПИ - межприборный интерфейс;
СЗУ - Статическое ЗУ 16 Мбайт
- встроенной системой диагностики;
- включением в технологический цикл изготовления БИТС (приборов
и модулей) специальных операций, таких как термоэлектротренировка
аппаратуры в течение не менее 1 % ресурса, термовакуумные
испытания, дегазация и другие виды технологических операций и испытаний,
по требованию Главного конструктора КА.
Прибор МБУ — центральный формирователь телеметрического сигнала
формирует видеосигнал (в реальном времени) для модуляции сигнала передатчика
и обеспечивает функционирование подключенных к нему коммутаторов,
вторичных распределителей (МБУ-Р) и внешних измерительных систем.
Центральный блок обмена с БЦВМ (прибор АФК), или центральный
формирователь телеметрического сигнала — формирует видеосигнал кадра измерительной
информации для обмена с БЦВМ и для модуляции передатчика, обеспечивает
выбор наиболее достоверных измерений по мажоритарным алгоритмам при
трехкратном горячем резервировании.
Статическое запоминающее устройство (прибор СЗУ) обеспечивает
запоминание всего потока информации или программируемой его части по задаваемой
программе или по внешним командам и последующее ее воспроизведение по
внешней команде для передачи по радиолинии на наземный приемный
комплекс.
БИТС «Орбита-IVMO» выполняет следующие функции [2]:
сбор измерительной информации от аналоговых, температурных, тен-
зо-, вибро-, цифровых и дискретных датчиков, цифровой информации
от БЦВМ, поступающей по мультиплексному каналу обмена (МКО),
преобразование этой информации в цифровой код и формирование
кадра передачи данных в структуре системы «Орбита - IVMO»;
выдачу команд абонентам в заранее установленные моменты времени;
запоминание измерительной информации объемом до 16 Мбайт и
последующее ее воспроизведение в различных режимах;
выдачу измерительной информации внешним потребителям по
специальному каналу;
обработку измерительной информации по алгоритмам повышения ее
достоверности и по алгоритмам сжатия для режима
«телесигнализация»;
458
Глава 6. Телеметрия в космической отрасли
передачу телеметрической информации по радиоканалу на приемно-
регистрирующие станции в режимах непосредственной передачи (НП)
и в режиме передачи одновременно непосредственных измерений и
воспроизводимой информации (НП+ВИ), а также в режиме НП и
задержанной на заданное время информации (режим «задержки»).
ПРЦ
kj=d
ГЕРЦ
ПРЦ
СЗУ
F=3
СЗУ
СЗУ
АФКЗ
АФК7
№^
VINT"
АФК1
ш
*#
ъ
л
71
7Т
52
=й
К
К
52
тт
|фф|БЦВМ
Ь=ЙБЦВ^
ЧХ
52
7Y
52
ТУ
52.
52
7Y
5Z
Д>1
v
Датчики
Рис. 6.2. Структурная схема БИТС для КА
Обозначения:
К - коммутатор;
СЗУ - Статическое ЗУ 16 Мбайт;
АФК - центральный формирователь телеметрического сигнала;
МПИ - межприборный интерфейс.
Кроме этого, бортовая аппаратура выполняет ряд вспомогательных функций,
необходимых для решения основных задач, указанных выше, а именно:
стабилизация напряжения и гальваническая развязка от цепей
первичного источника питания;
формирование напряжений питания датчиков;
обеспечение работоспособности важнейших блоков бортовой аппара-
459
Телеметрия в теории и на практике
туры (счетчика времени в центральном формирователе и в блоке
временных команд, а также запоминающего устройства) при просадках
напряжения первичного источника до О В на время до 10 мс;
формирование выходного суммарного телеметрического сигнала в виде
видеокода для взаимодействия с контрольно-испытательной
аппаратурой на различных этапах проведения проверок бортовой аппаратуры
и изделия в целом.
БИТС представляет собой цифровую высокоинформативную
телеметрическую систему, обеспечивающую сбор информации от различных типов датчиков:
аналоговых в шкале (0-6,2) В, температурных (термоЭДС и
термосопротивления), дискретных (типа «да-нет»), тензо- и вибродатчиков, от цифровых систем
типа БЦВМ, выдающих информацию в соответствии с ГОСТ 26765.52-87. Вся
вышеуказанная информация преобразуется в цифровой вид и в едином
цифровом потоке передается но радиоканалу с фазовой манипуляцией несущей (0-
180)° на Землю. БИТС формирует кадр измерительной информации и выдает
его по запросу внешнего потребителя. Максимальная информативность
системы БИТС составляет 3,2 Мбит/с и может при необходимости снижаться до
196 тысяч бит в секунду с двоичной дискретностью оперативным
перепрограммированием прибора МБУ (рис. 6.1) или по внешней команде (на Земле и в
процессе полета изделия). Основной информационной посылкой в выходном
телеметрическом сигнале является блок, состоящий из 12-ти
последовательных бит и называемый словом [2]. В определенных словах первые биты несут
служебную информацию (синхропосылки, низкочастотные маркеры, метки
текущего времени и др.), а все другие биты несут измерительную информацию.
Служебная информация составляет не более 5 % от всей информации системы
БИТС. Телеметрическое слово несет в себе информацию:
одного измерения — для аналоговых, температурных и тензопарамет-
ров;
до 8 измерений для дискретных параметров;
3-х (четырехразрядных), 2-х (шестиразрядных) или одного
(восьмиразрядного) измерения для быстро меняющихся параметров.
Таким образом, БИТС при максимальной информативности (3,2 Мбит/с)
может передать в секунду:
до 262 тысяч измерений аналоговых, температурных, тензопараметров,
сигналов БЦВМ;
более 2 миллионов измерений дискретных параметров;
более 520 тысяч (6- разрядных) измерений быстро меняющихся
параметров;
более 785 тысяч 4- разрядных измерений быстро меняющихся параметров.
460
Глава 6. Телеметрия в космической отрасли
ИТС позволяет практически в неограниченных пределах распределять полную
информативность системы для измерения параметров любого типа при частоте
опроса параметра не менее 4 Гц и не более:
32 Гц для температурных параметров (допускается увеличение частоты
опроса путем запараллеливания 2-х, 4-х и т. д. каналов);
1096 Гц для аналоговых и тензопараметров (с учетом запараллеливания
каналов);
до 45 тысяч 16-разрядных слов для информации МКО;
до 16 кГц для быстро меняющихся параметров (и до 64 кГц с учетом
запараллеливания каналов).
БИТС позволяет принимать информацию от:
более чем 4000 аналоговых и температурных датчиков;
более чем 32000 дискретных датчиков;
до 48 вибродатчиков при частоте их опроса 16 кГц и до 96 вибродатчиков
при частоте их опроса 8 кГц.
БИТС может работать в режимах:
запоминания информации — режим записи информации ЗИ;
передачи непосредственных (текущих) измерений — режим НП;
передачи воспроизводимой с ЗУ запомненной информации — режим
ВИ;
одновременной передачи текущей и воспроизводимой информации
- режим НП+ВИ;
одновременного запоминания информации и передачи текущей и
воспроизведенной информации — режим ЗИ+НП+ВИ;
режиме ускоренного воспроизведения информации с отношением
скорости записи и воспроизведения 1: 2; 1:4; 1: 8; 1:16; 1: 32;
одновременной передачи текущей и задержанной (в «кольцевом» ЗУ)
информации — режим «задержки».
БИТС позволяет гибко строить систему измерений изделия, в широких
пределах варьируя:
количество и типы телеметрируемых параметров (путем набора
необходимого количества коммутаторов соответствующего типа);
частоты опроса параметров;
верхние и нижние частоты среза фильтров и коэффициенты преобразо-
461
Телеметрия в теории и На практике
вания нормализаторов тензо- и вибропараметров;
время задержки информации в «кольцевом ЗУ»;
коэффициент трансформации скорости записи в скорость
воспроизведения ЗУ при ускоренном воспроизведении.
ИТС позволяет изменять параметры системы измерения (частоты опроса,
частоты среза, коэффициенты преобразования, суммарную информативность):
путем оперативного перепрограммирования программ измерений,
заложенных в ПЗУ системы;
путем выбора одной из программ измерений, заложенных
предварительно в ПЗУ системы, выбор может производиться или кроссиров-
кой, или по внешним командам (и том числе и в процессе полета
изделия).
Питание системы осуществляется от источника постоянного тока
напряжением 28±5 В. Источники вторичного питания ИТС гальванически изолированы
от первичного питания. Потребление БИТС зависит от количества и типов
приборов, используемых в системе измерений. Время готовности системы
после подачи напряжения питания — не более 3 с. Время непрерывной работы — до
8 часов.
Для реализации жестких требований к габаритно-массовым характеристикам
БИТС был принят ряд мер конструктивно-технологического характера [2]:
применение больших интегральных схем как универсальных
(однокристальные АЦП, мультиплексоры, операционные усилители, ОЗУ,
ПЗУ и др.), так и специализированных программируемых логических
интегральных схем (ПЛИС) и зарубежных интегральных схем (при
отсутствии отечественных аналогов);
конструктивное оформление большинства микросхем в
малогабаритных стандартных микрокорпусах и применение пассивной
элементной базы в безвыводном исполнении;
применение технологии поверхностного монтажа;
применение многослойных коммутационных печатных плат для
обеспечения межсоединений плотно расположенных выводов.
Общая информативность БИТС может принимать одно из значений: 16384;
32768; 65536; 131072; 262144 измерения в секунду. Под измерением
понимается одно двенадцатиразрядное слово в выходном телеметрическом канале. Для
аналоговых, температурных, тензо- параметров в одном телеметрическом 12-
разрядном слове передается одно измерение. Для дискретных параметров в
одном телеметрическом слове передаются одновременно измерения 8 параметров
(на каждое измерение — 1 бит слова). Для вибрационных параметров в одном
телеметрическом 12- разрядном слове может передаваться:
462
Глава 6. Телеметрия в космической отрасли
1 измерение (8-разрядное);
2 измерения (6-разрядных);
3 измерения (4-разрядных).
Это позволяет снизить информативность системы, выделяемую для передачи
цифровых эквивалентов результатов виброизмерений, за счет некоторого
снижения разрешающей способности измерений. При4 значительной доле
виброизмерений в общем объеме измеряемых параметров это позволяет
значительно снизить долю общей информативности системы, выделяемой для передачи
виброизмерительной информации (или увеличить число телеметрируемых
вибропараметров при одном и том же объеме выделенной для этого
информативности системы). Это позволяет при постоянной общей информативности
системы увеличить количество передаваемых измерений, несколько снижая
при этом их разрешающую способность. Общая информативность расходуется
на передачу измерительной информации о разных типах параметров, имеющих
разные частоты опроса.
Так как различные параметры требуют существенно различающихся частот
опроса, то при равномерном опросе каналов коммутаторов либо неоптимально
используется информативность системы (если опросность каналов в
коммутаторе задавать равной требуемой опросности наиболее активного параметра,
подключенного к данному коммутатору), либо неоптимально используются
каналы (если опросность каналов в коммутаторе задавать равной опросности
наименее активного параметра, а опросность более активных параметров
реализовать запараллеливанием каналов, т. е. на опрос одного параметра требуется
более одного канала).
Для устранения такого неудобства в аппаратуре БИТС «Орбита IVMО» в
локальных коммутаторах (МКС2, МКА2, МКБ1) все каналы разбиты на 4
группы. В каждой группе каналы опрашиваются с одной и той же частотой (/кГ):
fr =— > <6Л>
Nr
где Fr — частота опроса группы;
Nr — число каналов в группе.
Так как все каналы в одной группе (а также все каналы прибора МКТ2)
опрашиваются с одной и той же частотой, то на каналы одной и той же группы
заводятся сигналы датчиков, которые имеют малый разброс требуемых частот
опроса, и выбирается частота опроса каналов в группе равной максимальной
(или средней) частоте опроса параметров в группе.
Если частоты опроса сильно отличаются, то можно использовать
запараллеливание опросов, т. е. для опроса активного параметра использовать 2,4,...каналов
463
Телеметрия в теории и на практике
коммутатора, отстоящих один от другого на равных «расстояниях». При этом
снижается число параметров, которые можно подключить к коммутатору, но
более оптимально используется информативность.
Информативность коммутатора МКТ2 (Ик) равна
Ик = 2 fK, (6.2)
где/я — частота опроса канала.
В коммутаторах МКС2 все каналы разбиты на 4 группы по 32 канала в каждой,
причем одновременно опрашивается по 8 каналов и результаты их измерений
компонуются в одно выходное телеметрическое слово, т. е. информативность
каждой группы каналов прибора МКС2 (Игс) равна:
И с =Л*4, (6.3)
где/х — частота опроса каждого канала в группе.
В коммутаторе быстро меняющихся параметров МКБ 32 канала разбиты на
4 группы по 8 каналов (как бы 4 локальных 8-канальных коммутатора).
Внутри группы каналы опрашиваются с одинаковой частотой. При 6-разрядных
измерениях в группе работают все 8 каналов и опросность каждого равна /р/4,
где/г — частота опроса группы.
При 4-разрядных измерениях в группе работают только 6 каналов, но
опросность каждого канала равна fr /2. При этом происходит общая экономия
информативности в 1,5 раза (считая в телеметрических 12-разрядных словах).
Для оптимального использования информативности на каналы одной группы
следует подключать параметры, требующие одинаковых частот опроса и
одинаковой разрядности. Максимальная частота опроса каналов в группе — 64 КГц
(при 4-х разрядах) и 32 КГц (при 6-ти разрядах). За счет запараллеливания
канала опросность в том и другом случае может быть увеличена вдвое.
Для работы системы в режиме НП+ВИ задержки (т. е. передачи
непосредственных измерений и воспроизведения с ЗУ запомненных ранее измерений)
возможны два варианта:
первый вариант, когда поток измерений НП (Инп) не превышает 131072
изм/с, тогда возможно воспроизводить поток НП и весь запомненный
поток НП, т. к. их сумма не превышает полной информативности
системы;
второй вариант, когда поток измерений НП превышает 131072 изм/с,
в этом случае для передачи запомненной информации остается
информативность Н
зу
И у =262144-#я рЯя , (6.4)
т. е. повторить передачу информации непосредственных измерений через t за-
464
Глава 6. Тйгсметрия в космической отрасли
держки в полном объеме нельзя и следует записывать на ЗУ для последующего
воспроизведения через t задержки только часть информации НП, наиболее
существенную для потребителя.
Количество каналов для каждого /-того типа параметров К. определяется
количеством этих параметров п. и числом запараллеливаемых каналов у. для
измерения скоростных параметров:
Ki = m + yi (б-5)
(считая запараллеливание каналов однократным). Для определения
количества коммутаторов для i-тых параметров необходимо разделить К. на число
каналов в этих коммутаторах, не считая калибровочных каналов, и при дробном
значении результата деления взять ближайшее большее число.
Головной разработчик аппаратурных и программных средств БИТС - ФГУП
ОКБ МЭИ. Головной изготовитель аппаратурных средств БИТС - ОАО
«Ижевский радиозавод». Одним из объектов, на котором осуществляется освоение
производства и установка БИТС «Орбита-IV» является КА «Ямал».
6.2.2. Система телеметрических измерений «ПИРИТ»
Комплекс средств «Пирит» предназначен для использования в летательных
аппаратах различного вида: самолеты, вертолеты, ракеты, космические аппараты.
Средства «Пирит» могут также использоваться для
информационно-вычислительных целей, для организации передачи данных, в качестве элементов систем
управления в составе земных объектов, где к таким средствам предъявляются
требования малых объемно-массовых характеристик, большого ресурса и
невысоких затрат на обслуживание.
Таким образом, технические средства «Пирит» с программируемыми
функциями и программируемыми характеристиками обеспечивают полноту
функциональных свойств создаваемых систем, наращиваемость функциональных
возможностей с целесообразной дискретностью и при необходимости интеграцию
с оборудованием телеметрируемых объектов.
Система телеметрических измерений «Пирит», в состав которой входят пять
программируемых блоков, выполняет следующие функции [4,5]:
- сбор информации о работе систем разгонного блока КА на всех
участках полета и при подготовке к пуску;
- передача информации на наземные измерительные пункты;
- прием и передача гшешнетраекторной информации.
Система бортовых измерений разгонного блока использует принцип
программно-адресного опроса измеряемых параметров с возможностью
программирования режимов сбора и передачи телеметрической информации. Передача
465
Телеметрия в теории и на практике
информации с разгонного блока проводится как на наземные
командно-измерительные комплексы, так и через спутники-ретрансляторы. Для определения
внешнетраекторных параметров используются сигналы радионавигационных
систем «Глонасс» и GPS.
Обобщенная схема БИТС, с учетом изложенных выше принципов построения,
представлена на рис. 6.3, где ПУ — передающее устройство, ОК и РК —
основной и резервный каналы, БСП - блок связи с приемными устройствами, ЩРЦ
— Щит распределения цепей [3].
и д Д
Видадомгха/!
>—ДЩЙ
ипэвш
иомроти
мси
7Г
J ft flT^-lL L-J
Цифровые <K>it»ri
САецивльмыж
Br. и****** 8шс
Рис. 6.3. Структурная схема системы «Пирит»
В подсистему первичных преобразователей медленно меняющихся параметров
(ПСПП ММП) объединены преобразователи параметров, интенсивность
измерений каждого из которых не превышает 800 изм/с.
В подсистему первичных преобразователей быстро меняющихся процессов
(ПСПП) объединены преобразователи параметров, интенсивность измерений
каждого из которых от 2-103 и выше изм/с.
Эти ПСПП приобретают функционально законченный вид при условии
включения в их состав коммутаторов для объединения измеряемых параметров в
потоки сообщений, представленных в цифровом виде. Число параметров,
объединяемых коммутаторами в один поток, определяется, во-первых,
стремлением минимизировать суммарную длину кабельной сети БИТС и, во-вторых,
рациональным распределением пропускной способности системы между ка-
466
Глава 6. Телеметрия в космической отрасли
налами для сбора сообщений о медленно меняющихся и быстро меняющихся
процессах. Статистически полученные значения находятся в пределах 32... 128
для сообщений о медленно меняющихся параметрах и 8...32 для сообщений о
быстро меняющихся параметрах.
Коммутаторы для объединения параметров, представленных в телеметрируе-
мом объекте электрическими сигналами, разделены на два вида: локальные для
сбора аналоговых сигналов (КЛА) и локальные для сбора сигнальных
параметров (КЛС).
Формирователь импульсного питания датчиков (ФПД) используется для
обеспечения пожаро- взрывобезопасности при размещении коммутаторов в пожа-
ро- и взрывоопасных средах и повышает надежность источника питания
датчиков при отказах датчиков и кабельной сети типа «коротких замыканий».
Коммутаторы как самые многочисленные устройства БИТС, во многом
определяющие ее надежность и объемно-массовые характеристики, сконструированы
как коммутаторы с циклическим режимом сбора сообщений и радиальным
выходным интерфейсом.
Циклически объединенные измеряемые параметры в виде последовательного
двоичного кода передаются от коммутаторов и подсистемы ПСПП медленно
меняющихся параметров по радиальным каналам связи в модуль сбора
информации (МСИ), где размещаются и обновляются в памяти текущих значений с
заданной пользователем частотой.
Память текущих значений измеряемых параметров является частью
адресного пространства микроЭВМ, производящей отбор существенных значений по
выбранному пользователем алгоритму. Это могут быть алгоритм циклического
прореживания потока значений с независимо выбранным для каждого
параметра коэффициентом прореживания, предсказатели различных порядков, допус-
ковый контроль, смысловая обработка и т. д. Отобранные существенные
значения измеряемых параметров объединяются в пакеты сообщений со служебным
заголовком, обеспечивающим их независимую транспортировку и обработку.
Готовые для передачи пакеты сообщений могут быть переданы по
мультиплексному каналу обмена (МКО ТМ) в модуль формирования телеметрического
кадра (МФК) для формирования кадра передачи информации по радиолинии
или в модуль долговременной памяти для хранения. Контроллером МКО ТМ
может быть любой из связанных этим каналом модулей, микроЭВМ которого
наименее загружена другими, кроме управления обменом, задачами.
Контроллер мультиплексного канала связи с бортовым комплексом
управления изделия (МКО БКУ) находится в составе бортового комплекса
управления (БКУ), а модули БИТС, связанные с этим каналом, являются оконечными
устройствами. По контроллеру МКО БКУ передаются команды управления
режимами работы БИТС.
467
Телеметрия в теории и на практике
В режиме запроса текущих значений измеряемых параметров МКО БКУ
обеспечивает доступ непосредственно в память текущих значений модуля сбора
информации. Через МКО БКУ может осуществляться и телеметрирование БКУ.
Каждый модуль БИТС имеет четыре независимых канала для организации
МКО ТМ, МКО БКУ или связи с телеметрируемыми системами, если эти
системы выдают информацию в структуре ГОСТ 26.765.52-87. Избыточные
каналы могут использоваться в БИТС для дублирования, резервирования или
троирования мультиплексного канала обмена.
Смысловая часть потоков стандартизированной и специальных структур
преобразовывается в модуле преобразования цифровой информации (МПЦ) в
пакеты сообщений и в структуре мультиплексного канала обмена передается
в модуль формирования телеметрического кадра или модуль долговременной
памяти.
В командно-временном модуле (МКВ) хранятся циклограммы работы БИТС
и переменные программы работы всех перепрограммируемых модулей. В
режиме контроллера командно-временной модуль управляет обменом по МКО
ТМ, синхронизирует таймеры всех модулей и раздает управляющие
воздействия на модули, требующие управления. Внешние для БИТС управляющие
воздействия осуществляются через командно-временной модуль по МКО БКУ
или через специальный интерфейс ввода-вывода данных. Через другой
специальный интерфейс командно-временной модуль может выдавать управляющие
воздействия на элементы БИТС или внешние устройства.
На командно-временной модуль возлагаются также сбор сообщений о
состоянии всех устройств системы, формирование команд включения в работу
резервных устройств, формирование и передача в модуль формирования
телеметрического кадра служебных пакетов данных о состоянии функциональных
устройств системы, конфигурации БИТС и режимах ее работы.
В процессе хранения в модуле формирования телеметрического кадра пакета
служебных сообщений обновляется код текущего времени от таймера модуля
формирования телеметрического кадра в момент размещения пакета на
свободном от информации месте телеметрического кадра и в начале каждой
секунды.
Цифровые отсчеты быстро меняющихся параметров без изменения их
временного положения могут быть переданы в радиоканал. Для этого в ячейке
сопряжения с передатчиком предусмотрено суммирование потоков сообщений о
быстро меняющихся параметрах с потоком, формируемым в модуле формирования
телеметрического кадра.
П ередача непосредственных отсчетов быстро меняющихся параметров в
суммарном потоке возможна при пропускной способности радиолинии 1024 Кбит/с
или 512 Кбит/с. При пропускной способности радиолинии от 256 Кбит/с и
468
Глава 6. Телеметрия в космической отрасли
ниже возможна только передача результатов обработки быстро меняющихся
параметров по заданному пользователем алгоритму. Для этого существует
модуль преобразования быстро меняющихся параметров в медленно меняющиеся
параметры.
Предусмотренные в БИТС изменения пропускной способности радиолинии в
процессе полета производятся изменением частоты считывания накопленной
информации из буферного устройства модуля формирования
телеметрического кадра, управление которым обеспечивает равномерность и непрерывность
потока в синхронно работающей радиолинии.
Щит размножения цепей позволяет упростить конструкцию кабелей, служит
для распределения по системе электропитания и для размещения
соединительных устройств мультиплексного канала обмена.
В БИТС «Пирит» предусмотрено 64 программы, которые могут быть
задействованы во время полета разгонного блока. Каждая программа пишется в
зависимости от динамики процессов на изделии. «Пирит» явился первой в России
системой телеизмерений для ракетно-космической техники, которая
соответствует стандарту CCSDS (см. соответствующую главу). В этом нормативном
документе определены параметры и структура пакетной передачи
телеметрической информации с борта объекта ракетно-космической техники.
Работа «Пирита» аналогична функционированию системы управления с
бортовым компьютером, все блоки связаны друг с другом внешними абонентами
и системой управления. При этом каждый абонент на борту разгонного блока
имеет свой адрес, который выражается в двоичном коде. Это позволило резко
сократить (до 2-х) число проводов и вес бортовой кабельной сети.
На международной космической станции (МКС) вся телеметрическая система
построена также на основе мультиплексного канала связи между модулями. Как
и во всех системах телеметрии, передача информации с борта осуществляется в
течение небольшого времени, для «Пирита», установленного на разгонном
блоке «Бриз-М», время составляет около 20 мин. Это связано с зоной
радиовидимости на территории России. В остальное время передатчик БИТС не работает,
а информация записывается на магнитный носитель. Передача информации,
записанной на запоминающее устройство, происходит только на следующем
витке, когда разгонный блок снова пролетает над территорией России.
469
Телеметрия в теории и на практике
6.2.3. Телеметрическая аппаратура «ОРБИТА-4МТ»
Бортовая радиотелеметрическая система «Орбита-4МТ», функционирует в
кадре приемной станции РТС Орбита-ТМ [6]. БИТС «Орбита-4МТ» (рис. 6.5)
предназначена для решения задач телеизмерений при испытаниях и штатной
эксплуатации объектов космической, ракетной и авиационной техники всех
классов, а также штатной эксплуатации объектов народного хозяйства (ТЭЦ,
нефтеперерабатывающие заводы, топливопроводы и т. д.).
Рис. 6.5. Панель БИТС «Орбита-4МТ»
БИТС «Орбита-4МТ» представляет собой набор агрегатируемых
функционально законченных модулей, выполненных в виде конструктивов,
обеспечивающих моноблочную и поприборную компоновку. Функциональные модули
из состава БИТС «Орбита-4МТ» объединяются в малогабаритную
телеметрическую систему с гибкой структурой. В состав базового (моноблочного) блока
и отдельных приборов могут быть включены любые модули в любой
комбинации.
Состав: центральный формирователь, шинный контроллер, модули
формирования измерительных каналов, вторичный источник питания, радиопередатчик
метрового диапазона.
Модули формирования измерительных каналов обрабатывают сигналы со
следующих типов датчиков:
- аналоговых низкочастотных в шкале 6,2 В;
- аналоговых знакопеременных;
- акселерометров;
- термопар и термосопротивлений;
470
Глава 6. Телеметрия в космической отрасли
- сигнальных и контактных;
- цифровых потоков по ГОСТ 26765.52-87 в режиме монитора,
оконечного устройства и контроллера;
- цифровых параллельных потоков;
- последовательного интерфейса RS-232C.
Выходная мощность передатчика — не менее 3 Вт в диапазоне МИ в составе
базового блока и не менее 10 Вт в виде отдельного прибора. Электропитание — 28
(+5, -4) В. Условия эксплуатации - группа 4 по ГОСТ В20.39.304-76.
Характеристики одной из модификаций («ОРБИТА-4 МТХ»)
Массогабаритные:
- базовый блок «Орбита-4МТХ1»: объем 2,2 куб.дм, масса 2,3 кг;
- коммутатор вибрационный: объем 0,98 куб.дм, масса 1,0 кг;
- коммутатор температурный: объем 0,9 куб.дм, масса 0,95 кг.
Информационные (базовый блок):
- аналоговые каналы — 71;
- сигнальные параметры — 1;
- цифровые параллельные потоки — 2;
- мультиплексный канал по ГОСТ 26765.52-87 — 1;
- последовательный порт RS-232C (для сопряжения с системой траек-
торных измерений «Верхушка»).
Информационные (специализированные приборы):
- коммутатор вибрационный — 8 каналов;
- коммутатор температурный — 32 канала;
- статическое ЗУ — 1...16 Мбайт.
6.2.4. Модификации малогабаритной цифровой телеметрической
системы ТА-932
БИТС ТА-932 (рис. 6.6) предназначена для сбора, обработки, запоминания и
передачи телеметрической информации аналоговых температурных и
контактных датчиков космических аппаратов [7].
471
Телеметрия в теории и на практике
Рис. 6.6. Вид ТА-932 в сборе
Модификации ТА-932 дополнительно обеспечивают:
- параметрический контроль и выдачу сигнала «внимание» при выходе
контролируемого параметра за нормы допуска;
- связь с БЦВМ и передачу их информации через телеметрический
капал.
Передача телеметрической информации возможна по четырем программам
опроса датчиков. Системы могут использоваться для долговременного контроля
за состоянием объекта телеметрирования, передачи данных о состоянии
объекта потребителям информации по их запросам.
В телеметрической системе ТСТК имеются блоки предканальной развязки,
которые обеспечивают контроль гальванически развязанных,источников
питания, цепей пиропатронов и нагревателей, одиночных команд и периодических
импульсных сигналов, напряжений шунтов и наличие гальванических связей
шин питания с корпусом.
Учитывая возможность любого изменения комплектности, заложенную при
её конструировании, систему можно применять в тех отраслях народного
хозяйства, где требуется постоянный контроль за технологическим процессом, за
изменением температуры, давления, за состоянием управляющих и
исполнительных элементов контролируемого оборудования. Данные по модификациям
БИТС ТА-932 представлены в табл. 6.1.
472
Глава 6. Телеметрия в космической отрасли
Таблица 6.1. Основные технические данные вариантов комплектации БИТС
ТА-932
1 Тип системы
1 Число каналов
1 Информативность
в
режиме НП, изм/с
ТА932М1-
2606
не менее
576
1000; 8000
ТА932МЗ
не менее 512
1000; 8000;
32000
TA932MS (SESAT)
температ-264,
цифровых-192, аналогов.-
256, эл. аккум. бат.-120,
служебные каналы-16
1000; 8000
ТСТК
536
1000; 8000
Информативность в режимах, изм/с: 1
запоминание
аналоговой
информации
запоминание
цифровой информации
информативность
при
воспроизведении информации,
бит/с
Масса системы, кг
Энергопотребление системы по
цепи 27 В, Вт
Системы
резервированы,
обеспечивают срок
активного
существования в составе
КА
4000
8000
8000
не более 15
не более 15
не менее 7
лет
4000
4000
1000; 8000;
32000
не более 15
не более 20
не менее 5
лет
4000
4000
8000
не более 21
не более 20
не менее 10 лет
4000
4000
8000
не более 141
не более I
22,5
не менее 5 I
лет в соста-1
веназемно-|
го оборудо-1
вания I
473
Телеметрия в теории и на практике
1 Тип системы
Объект
использования
Стандарт выходной
структуры кадра
ТА932М1-
2606
«Экспресс»,
«ГАЛС» и др.
КИС-С
ТА932МЗ
метрологический
спутник «Метеор-
зм»
КИС-С
TA932MS (SESAT)
сибирско-европейский
спутник связи SESAT
КИС-С
КИС-Ки
ТСТК
аппаратура
предстартового
контроля КА
КИС-С
6.2.5. Телеметрическая система БР-9ЦК-1
Телеметрическая система нового поколения БР-9ЦК-1 (рис. 6.7) на базе
центрального блока предназначена для регистрации информации аналоговых,
цифровых и температурных датчиков, размещаемых на аппаратуре разгонного
блока «Фрегат» с последующей передачей данных через радиолинию [7].
Рис. 6.7. Центральный блокБР-9ЦК-1
Система прошла натурные испытания в составе разгонного блока «Фрегат»
при выводе КА «Амос-2» с положительными результатами, в данное время
проходит модернизацию для применения в составе разгонного блока при стартах
с космодрома в Куру (Французская Гвиана).
Состав системы:
центральный блок ЦБ-4 (масса не более 1,3 кг, потребление не более
0,1 А) - 1 шт.;
локальный коммутатор ЛК-М (масса не более 0,5 кг, потребление не
более 0,08 А) - 2 шт.;
474
Глава 6. Телеметрия в космической отрасли
- система измерения температур СИТ-П (масса не более 0,7 кг,
потребление не более 0,15 А) — 2 шт.;
- комплект ПЗУ (масса не более ОД кг) — 1 компл.;
комплект кабелей (масса не более 0,8 кг) — 1 компл.
Программируемый 64-канальный коммутатор системы измерения температур
СИТ-П предназначен для сбора информации с термодатчиков в резервируемых
телеметрических системах (рис. 6.8).
Рис. 6.8. Внешний вид изделия СИТ-П
Рис. 6.9. Внешний вид изделия ЛК-М
Программируемый локальный коммутатор ЛК-М (рис. 6.9) предназначен для
сбора информации с аналоговых и цифровых датчиков в телеметрических
системах.
Основные технические параметры в модификации ЛК-М приведены
в табл. 6.2.
475
Телеметрия в теории и на практике
Таблица 6.2. Основные технические данные вариантов локального коммутатора
ЛК-М
1
Параметр
Количество аналоговых каналов
Количество цифровых каналов
Цифровой канал СИТ
1 Канал счетчика кадров
Служебный канал ЛК
Канал измерителя температуры ЛК
Рабочий диапазон температур, #С
Габаритные размеры, мм
Масса, кг
Модификация
ЛК-М
64
40
+
+
+
+
ЛК-АЦ
64
20
+
+
+
+
ЛК-А
64 |
-
+
+ I
+
+ I
-50...+50 J
116x110x47,5
0,5
116x110x37,5
0,4 J
116x110x28,5
0,3 |
Производителем ДООО «Ижевский радиозавод» также разработана
малогабаритная радиотелеметрическая система БР-91ЦК-М6. Малогабаритная
телеметрическая система БР-91ЦК-М6 служит для регистрации и передачи
информации о быстро меняющихся параметрах с передачей информации через
радиолинию.
Система обеспечивает передачу телеметрического сигнала с
информативностью 51200 измерений в секунду по автономной радиолинии в дециметровом
диапазоне волн (Д1). Напряжение питания системы в пределах от 23 до 32 В
при пульсациях, импульсных помехах и просадках с амплитудой до 2 В любой
длительности и периодичности.
6.3. ПЕРСПЕКТИВНЫЕ СТАНЦИИ ПРИЕМА И РЕГИСТРАЦИИ
ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ
Основными тенденциями построения современных приемно-регистрирующих
станций являются:
1) Возможность приема и обработки не только радиотелеметрической (в
структуре сигналов сразу нескольких телеметрических систем),
навигационной информации, параметров систем управления, но и сбор
научных данных, получаемых экспериментальными космическими
аппаратами;
476
Глава 6. Телеметрия в космической отрасли
2) Ограничения по массогабаритным характеристикам аппаратуры и
адаптация к пользователю (разработка малогабаритных приемно-ре-
гистрирующих станций с возможностью обслуживания минимальным
числом специалистов).
6.3.1. Малогабаритная приемно-регистрирующая станция МПРС-5
Станция МПРС-5 осуществляет прием, запоминание, отображение и передачу
потребителям ТМИ, поступающей по ВЧ-кабелю, с выхода передатчика
бортовой РТС в структурах всех применяемых в настоящее время бортовых
телеметрических систем: РТС-9, БИТС, БРС [9].
МПРС обеспечивает [9]:
1. Прием радиосигнала, поступающего по ВЧ кабелю с выхода
передатчика изделия или с выхода высокочастотного имитатора сигнала в
диапазонах частот: М - (160 ... 250) МГц, Д1 - (625 ... 650) МГц, ДП- (1000 ...
1050) МГц, S- (2200 ... 2300) МГц, с шагом настройки во всех
диапазонах— 0,1 МГц.
2. Детектирование ВЧ-сигналов с модуляцией ВИМ-АМ; КИМ-ЧМ;
КИМ-ФМ, АИМ/КИМ-ЧМ.
3. Прием и обработку телеметрического сигнала с информативностью
(скоростью):
- при модуляции КИМ-ЧМ, КИМ-ФМ -1024,512, 256,32,16,8 Кбит/с;
при модуляции сигнала АИМ/КИМ-ЧМ - 1280, 640 Кбит/с;
при модуляции сигнала ВИМ-АМ - 25600, 3200 изм/с.
4. Запоминание (регистрацию) полного потока принимаемой
телеметрической информации на винчестере ПЭВМ с последующим
архивированием информации на магнитном, оптическом диске или DVD. Время
непрерывной регистрации сигнала РТС с максимальной
информативностью — не менее 3-х часов, сигналов структуры БРС — не менее 1
часа.
5. Отображение на мониторе ПЭВМ каналов (параметров) ТМИ в темпе
ее поступления (или в темпе работы пользователя) в одном из
заданных режимов: в виде гистограммы («столбиков» — 64 канала одного
локального коммутатора) либо в аналоговом или кодовом виде в
относительных значениях или в процентах относительно калибровочных
значений.
477
Телеметрия в теорией на практике
6. Регистрацию на принтере отдельных выбранных параметров в
ограниченном временном интервале и «твердой» копии экрана.
7. Привязку временных меток к единому времени от сигналов системы
единого времени.
8. Возможность сопряжения с линиями связи, т. е. передачу полного
потока принятой информации потребителям для дальнейшей обработки
в виде последовательного кода как в темпе приема телеметрического
сигнала, так и при воспроизведении записанной информации.
9. Возможность передачу принятой информации на ПЭВМ через адаптер
сопряжения.
10. Тестовый контроль работоспособности по радио- и видеосигналу.
Параметры выходного сигнала в сечении:
выход УОС (СПОИ, рис. 6.10) с платы передачи информации в линию
связи в структуре последовательного кода С1-ФЛ-КИ;
сигналы биполярные, амплитуда импульсов от ± 1 В до ± 3 В
стандартизованы и соответствуют сечениям в действующей телеметрической
аппаратуре;
выход УОС (СПОИ) — параллельный код: уровень ТТЛ.
Электропитание осуществляется от сети переменного тока с напряжением (220
± 10%) В и частотой 50 Гц. Потребляемая мощность не более 600 В А.
В состав аппаратуры входят следующие функциональные модули, каждый из
которых может иметь самостоятельное применение [9]:
а) преобразователь - усилитель сигнала (УПР);
б) блок питания УПР;
в) радиоприемник (РП-ТМ);
г) система преобразования и обработки информации (СПОИ);
д) ВЧ-имитатор (ВЧИ);
е) аттенюатор наборный с затуханием до 50 дБ;
ж) комплект кабелей;
и) комплект эксплуатационной документации по ведомости ЭД;
УПР — сменный одноканальный преобразователь-усилитель сигнала,
рассчитанный на работу в одном из диапазонов волн. Потребитель определяет
количество поставляемых УПР в зависимости от частотных диапазонов бортовых
передатчиков. Аттенюатор устанавливается для регулировки мощности сигна-
478
Глава 6. Телеметрия в космической отрасли
ла на входе аппаратуры при подаче сигнала по кабелю с выхода передатчика
изделия или с выхода высокочастотного имитатора сигнала (ВЧИ).
В СПОИ входят:
устройство обработки сигнала (УОС);
устройство сопряжения (АС);
персональная ЭВМ (ПЭВМ);
оптический дисковод;
принтер;
комплект кабелей;
комплект эксплуатационной документации;
комплект программного обеспечения.
На рис. 6.10 приведена структурная схема МПРС-5, поясняющая
функциональные связи аппаратуры и взаимодействие ее отдельных частей.
ВЧ кабззь
длиной 100-
передатчика
ИЗД2ЛШ
Р =6-SBt.
Рис. 6.10. Структурная схема МПРС-5
Высокочастотный телеметрический радиосигнал поступает с выхода
передатчика изделия или с выхода имитатора высокочастотного телеметрического
сигнала по ВЧ-кабелю на вход преобразователя-усилителя (УПР). Для уменьше-
479
Телеметрия в теории и на практике
ния мощности входного сигнала установлен аттенюатор, величина затухания
которого выбирается с учетом мощности бортового передатчика или ВЧИ и
величины затухания сигнала в соединительном кабеле.
На вход гетеродина преобразователя-усилителя сигнала поступает также
опорное напряжение с выхода приемного устройства РП-ТМ. В
усилителе-преобразователе производится усиление принятого радиосигнала и преобразование его
частоты в единую для всех рабочих диапазонов первую промежуточную
частоту-140 ±50 МГц.
Питание преобразователя-усилителя сигнала осуществляется от блока питания
напряжением 15 В х0,5 А. Сигнал с выхода преобразователя-усилителя
поступает на вход приемника РП-ТМ. Радиоприемное устройство является
универсальным устройством и подключается к преобразователю-усилителю любого
диапазона волн. При помощи клавиатуры, установленной на приемнике,
производится выбор структуры, рабочей частоты и диапазона волн принимаемого
сигнала.
Приемник (РП-ТМ) осуществляет настройку на конкретную частоту
принимаемого сигнала и производит усиление, преобразование, фильтрацию и
детектирование. Управление производится клавиатурой, расположенной на лицевой
панели приемника. Там же имеется табло, отображающее набранное значение
частоты и установленные режимы работы: вид модуляции принимаемого
сигнала и его информативность. Приемник содержит три типа детекторов —
амплитудный, частотный и фазовый. Преддетекторная фильтрация обеспечивает
оптимальные полосы пропускания для сигналов различной информативности.
Приемник имеет автоматическую регулировку усиления глубиной 60 дБ и
автоматическую подстройку частоты в пределах ±150 кГц.
С выхода приемника снимается видеосигнал, который поступает на аппаратуру
СПОИ, на вход устройства обработки сигнала.
В устройстве обработки сигнала производится выделение и формирование син-
хрочастот (символьной, словной, кадровой) в соответствии с
информативностью сигнала и его структурой. Устройство обработки сигнала формирует
структуру параллельного кода и направляет ее в ПЭВМ через адаптер сопряжения
(АС), установленный в слот PCI ПЭВМ.
В устройстве обработки сигнала также формируются метки текущего времени
в принятой структуре последовательного двоичного кода с тактовой частотой и
сфазированные меткой единого времени.
При приеме сигнала «Скут», после преобразования и кодирования, образуется
двухбайтовый параллельный код с частотой 640 кГц.
В СПОИ входит комплект ПЭВМ, обеспечивающий обработку, отображение и
контроль принимаемой информации.
480
Глава 6. Телеметрия в космической отрасли
Адаптер сопряжения (АС) с ПЭВМ, позволяет производить ввод /вывод
телеметрической информации в оперативную память ПЭВМ во всех режимах
работы устройства при различной информативности, в том числе и при приеме
сигналов структуры «Сириус» и «Скут».
Основными задачами, решаемыми специальным программным обеспечением,
установленным на компьютере, являются:
оценка достоверности принимаемой телеметрической информации;
выбор режимов и параметров для обработки в режиме диалога;
отображение в соответствии с командами пользователя
телеметрической информации на экране монитора либо в темпе поступления, либо в
темпе работы пользователя;
представление телеметрической информации выбранных каналов на
экране в одном из заданных режимов (кодовый, аналоговый,
гистограмма);
оцифрованная привязка ко времени отображаемой информации;
обеспечение необходимого сервиса пользователю (перемещение
визира по экрану, сканирование по времени телеметрической информации
при поиске интересующих ситуаций, оптимальное использование
цветов при отображении информации на экране);
контроль качества получаемой телеметрической информации;
обработка телеметрической информации в целях проведения экспресс-
анализа поведения выбранных параметров, например: определение
max и min значений параметров, достижение параметрами заданного
значения, элементы допускового контроля, определение существенных
значений параметров, графическое представление в удобной форме
параметров 3-й ступени коммутации, представление параметров в
значениях физической шкалы (учет калибровочных уровней);
представление результатов обработки на экране в табличном виде;
документирование на лазерном принтере выбранного участка
графической информации в виде копии экрана либо результатов обработки в
табличном виде.
Конструктивно приборы, входящие в МПРС-5, выполнены в виде моноблоков
размером 320x160x290мм в соответствии с евростандартом [9].
Все входящие в них устройства выполняются на двухслойных печатных платах
размером 160x100мм, на которых устанавливаются разъемы DIN41612.
Приборы могут устанавливаться на столах или стеллажах.
Общая масса аппаратуры МПРС-5 не более 65 кг.
16 Зак 861
481
Телеметрия в теории и на практике
6.3.2. Приемно-регистрирующая станция НПРС-9
Присмно-регистрирующая станция НПРС-9 является одним из первых
представителей отечественных телеметрических систем нового поколения и
характеризуется модульным принципом построения, современной элементной базой
и широким использованием аппаратных и программных средств компьютерной
техники в различных трактах аппаратуры, в том числе в основном тракте
регистрации и оперативного представления телеметрической информации [10].
Находясь в составе аппаратуры измерительных пунктов, станция НПРС-9
позволяет заменить комплекс МА-9МКТМ-4. При этом решаются как задачи
приема и регистрации ТМИ, так и задачи первичной обработки и оперативного
анализа телеметрической информации. Ввод в эксплуатацию станции НПРС-9
не требует новых антенных систем, обеспечивая работу с антенным
комплексом МА-9МКТМ-4.
Стыковка станции НПРС-9 с комплексами обработки СТИ-90, «Крым»
обеспечивается по стандартному информационному сечению (магнитограмма
комплексов МА-9МКТМ) без применения специализированной аппаратуры ввода.
Конструктивно станция выполнена в виде приборных стоек и ПЭВМ
индустриального или офисного исполнения, оснащенных источниками
бесперебойного питания. Функциональное и конструктивное исполнение НПРС-9
обеспечивает возможность создания варианта состава станции в зависимости от ее
назначения.
Станция НПРС-9 обеспечивает:
прием телеметрических сигналов в частотных диапазонах 164...250 МГц,
625...64Э МГц, Ю01...1044,5 МГц, вид модуляции ВИМ-АМ, КИМ-ЧМ,
КИМ-ФМ: информативность принимаемого телеметрического
сигнала ВИМ-АМ - 25600, 12800, 6400 и 3200 изм/с; КИМ-ЧМ - 512, 256,
128, 64,32 Кбит/с; КИМ-ФМ, «Пирит» - 512, 256, 128, 64, 32,16,8,4, 2
Кбит/с;
регистрацию принятой телеметрической информации в структурах
РТС-9 (ВИМ, КИМ-Ц, КИМ-А, БИТС) на магнитооптических дисках
ПЭВМ в сопровождении сигналов времени и ее информационный
контроль;
преобразование видеосигналов и формирование потока
телеметрической информации для потребителей (в том числе для старого парка
средств отображения) в структуре соответствующей стандартам Глав-
космоса, стандарту ПСС, информативностью до 1024 бит/с;
формирование кода текущего времени в виде непрерывного счета
секунд или в виде часов, минут и секунд, привязанных к сигналам
службы Единого времени (СЕВ);
482
Глава 6. Телеметрия в космической отрасли
сбор служебной информации, формирование и запоминание
последовательного кода служебной телеметрии, в котором попадается
информация о режимах работы аппаратуры, об углах поворота антенн, о
характеристиках принимаемого сигнала;
формирование и выдачу потока телеметрической информации,
служебной телеметрии и кода текущего времени в широкополосный канал
связи в структуре С1-ФЛ-КИ;
прием, регистрацию и обработку информации, поступающей с выхода
широкополосного канала связи;
воспроизведение зарегистрированной информации и выдачу ее в
широкополосный канал связи и в комплексы обработки;
двухчастотный прием (два потока информации) или 100%-е
резервирование при одночастотном приеме.
Эксплуатационно-технические характеристики и состав станции можно увидет
в PDF-файле, размещенном на сайте издательства www.nit.com.ru.
6.3.3. Комплекс аппаратуры обработки и регистрации цифровой
информации «Литон-3»
Комплекс аппаратуры обработки и регистрации цифровой информации
«Литон-3» предназначен для использования в качестве рабочего места
оператора в распределенной системе приема, регистрации, обработки и отображения
телеметрической информации.
В состав «Литон-3» входят следующие элементы:
персональный компьютер, комплектуемый по заказанной спецификации;
устройство преобразования и коррекции «Литон-3»;
адаптер сопряжения «Литон» (плата установлена в системном блоке
компьютера);
видеомагнитофон;
- устройство гарантированного питания (устанавливается по
дополнительному требованию).
В зависимости от используемого программного обеспечения аппаратура
«Литон-3» может выполнять следующие функции:
- прием сигналов параллельного телеметрического кода систем ВИМ,
КИМ-Ц, БИТС-2, «Пирит» с целью записи и воспроизведения на
серийном видеомагнитофоне стандарта VHS и записи на дисковые
накопители;
483
Телеметрия в теории и на практике
ввод телеметрической информации в персональный компьютер типа
PC AT при записи и воспроизведении;
вывод параллельного кода телеметрической информации в режимах
записи и воспроизведения;
каталогизацию записей и управление,процессом записи и
воспроизведения от ПЭВМ;
прием видеосигнала телеметрических систем КИМ-Ц, БИТС-2,
(ВИМ), «Пирит», преобразование в параллельный код с целью записи,
воспроизведения, выдачи на выход и ввод в ПЭВМ;
формирование структуры наземного времени;
имитацию телеметрического потока;
обработку принимаемой информации по заданным алгоритмам с
печатью в файл или на принтер;
оперативное представление информации в реальном времени с
отображением на экране монитора;
прием сигналов телеметрических систем и их преобразование для
передачи в реальном времени по 10/100 Мбит сетям без применения
адаптивного сжатия;
прием сигналов телеметрических систем и их преобразование для
передачи по малоинформативным каналам связи с использованием
различных алгоритмов адаптивного сжатия информации.
Более подробно о технических возможностях данной аппаратуры можно
ознакомиться в полной версии данной главы, размещенной на сайте издательства
Рис. 6.11. Панель задания конфигурации
484
Глава 6. Телеметрия в космической отрасли
www.nit.com.ru.
Панель задания конфигурации в режиме загружаемой конфигурации имеет
следующий вид (рис. 6.11).
В процессе записи телеметрической информации панель системы имеет
следующий вид (программа WINDLG), представленный на рис. 6.12.
Программа WINDLG позволяет:
конфигурировать систему принимаемого борта;
выбирать конфигурацию видеомагнитофона;
управлять потоком ввода телеметрической информации в компьютер;
устанавливать параметры потока;
контролировать поток телеметрической информации в реальном
масштабе времени;
выводить контролируемые параметры на визуальное графическое
устройство в аналоговом или цифровом виде;
записывать поток телеметрической информации на диск;
управлять видеомагнитофоном (записывать телеметрическую
информацию на видеомагнитофон и воспроизводить);
управлять синхронизатором (выбирать режим синхронизации);
выводить записанные файлы в любом масштабе времени.
Рис. 6.12. Запись ТМИ
485
Телеметрия в теории и на практике
В настоящее время комплекс «Литон-3» успешно работает на северном
космодроме РФ на ракетно-космическом комплексе «Рокот».
6.3.4. Малогабаритный переносной телеметрический комплекс
Малогабаритный переносной телеметрический комплекс (МПТК)
предназначен для приема, накопления и обработки телеметрической информации в
структуре кадров любой из систем «Орбита», БРС-4, РТС-9, «Пирит» [11].
Состав:
- антенный усилитель;
- приемник со схемой автовыбора лучшего из каналов приема информации;
- демодулятор и синхронизатор;
- имитатор тест-сигналов для контроля работоспособности составных
частей МПТК;
- аппаратура управления и контроля, обработки, отображения,
регистрации и воспроизведения телеметрической информации и сигналов
внутренней телеметрии.
Рис. 6.13. Двухканальный вариант
Рис. 6.14. Одноканальный вариант
486
Глава 6. Телеметрия в космической отрасли
Режимы работы:
работа - прием телеметрической информации;
воспроизведение - воспроизведение данных с накоплением ПЭВМ;
автоконтроль - автоматизированный контроль работы комплекса;
проверка - контроль комплекса с участием обслуживающего персонала.
Аппаратура МПТК выполнена на современной элементной базе с широким
использованием программируемых логических схем (ПЛИС), цифровой
обработки сигналов, современных компьютеров [11].
Количество рабочих частот, диапазоны принимаемых волн, а также
возможность приема всех радиотелеметрических систем или только одной из них
оговариваются при заказе на заводе-изготовителе.
Рис. 6.15. Аппаратура МПТК в рабочем состоянии
Технические характеристики можно просмотреть в полной версии главы,
размещенной на сайте издательства www.nit.com.ru:
Для отработки изделий на технических позициях и для приема
телеметрической информации на малых расстояниях по радиоканалу (до 200-300 км) может
быть применен вариант аппаратуры МПТК с одноканальным приемом
информации (рис. 6.14).
6.3.5.Аппаратура приема, регистрации и информационного контроля «Опал-М»
Аппаратура «Опал-М» разработана по техническому заданию КБ «Салют»
[11,15]. Разработка проведена в 1998-1999 гг. коллективом разработчиков НПО
Измерительной техники, ОКБ Ижевского радиозавода и ОКБ Ижевского мо-
487
Телеметрия в теории и на практике
тозавода (рис. 6.16, 6.17).
Рис. 6.76. Переносной вариант исполнения аппаратуры
Целью работы являлось создание универсальной агрегированной аппаратуры,
позволяющей в различных вариантах комплектации обеспечивать как
проведение тестовых проверок систем телеизмерений изделий ракетно-космической
техники в условиях контрольно-испытательных станций
заводов-изготовителей и технических позиций, так и прием, регистрацию, оперативное
представление телеметрической информации на стартовых позициях испытательных
полигонов.
Рис. 6.17. Настольный вариант исполнения аппаратуры
Аппаратура обеспечивает работу с телеметрическими системами БРС-4, РТС-
9Ц и «Пирит». Прием сигналов бортовых телеметрических систем
осуществляется по видеотракту, а также по радиотракту в диапазонах Ml, М2, МЗ, Д1, ДИ,
Д1У со следующей информативностью:
- 320 х 8 Кбит/с (БРС-4);
- 512, 256,128, 64, 32 Кбит/с (РТС-9Ц);
488
Глава 6. Телеметрия в космической отрасли
- 1024, 512, 256,128, 64, 32 Кбит/с («Пирит»).
Принятая информация регистрируется на стандартных накопителях ПЭВМ:
на жестком диске;
оптических дисках;
магнитооптических дисках.
Время непрерывной работы при максимальной информативности - не менее
2-х часов.
Управление аппаратными средствами и информационный контроль
регистрируемой информации осуществляется встроенными компьютерными
средствами, объединенными в локальную сеть под управлением операционной системы
UNIX, что позволяет создавать надежные автоматизированные
информационные системы, эксплуатируемые минимальным составом обслуживающего
персонала.
Конструктивно аппаратура выполнена в переносном (рис. 6.16) и настольном
вариантах исполнения (рис. 6.17) в стандартных 19- дюймовых шасси
индустриальных ПЭВМ (IPC). Вариант комплектации аппаратуры «Опал-М» для
КИС, обеспечивающий работу с системами БРС-4, РТС-9Ц и «Пирит»,
скомпонован в 2-х шасси IPC. Фактически в любом исполнении аппаратура
представляет собой персональный компьютер, где на жестком диске записаны
программы приема, расшифровки и Ьтображения информации.
Предприятием НПО ИТ разработана малогабаритная антенна для аппаратуры
«Опал-М», представляющей собой современную приемную аппаратуру,
занимающую гораздо меньше места по сравнению с комнатой шкафов системы МА-
9МКТМ и позволяющую показывать на дисплее компьютера информацию в
том виде, которая удобна потребителю.
Разработка аппаратуры «Опал-М» была фактически инициирована освоением
и вводом в эксплуатацию БИТС «Пирит». В 2000 г. проведены работы по
приему, регистрации и оперативной обработке ТМИ РТС «Пирит» и «Сириус» на
изделиях «Бриз-М» и «Протон-К» соответственно.
6.3.6. АГРЕГАТИРУЕМЫЕ AHTEHHO-ПРИЕМНЫЕ СРЕДСТВА «МАРС»
Федеральное государственное унитарное предприятие НИИ космического
приборостроения (ФГУП НИИ КП) разработало и освоило производство
комплекса радиопередающих устройств и средств приема и регистрации
радиотелеметрической информации «Марс» по предварительно согласованным
техническим требованиям потребителя.
Агрегатируемые антенно-приемные средства «Марс» и построенная на их
основе станция «Марс-94П» предназначены для приема, запоминания (регист-
489
Телеметрия в теории и на практике
рации) и отображения радиотелеметрической информации бортовых
радиотелеметрических устройств РТС-9 (в кадре РТС-9Ц, БИТС-2, БРС-4 («Скут»),
«Орбита-IVMO» и в кадре типа «пакет»). Состав агрегатируемых средств
предполагает исполнение в стационарном и в подвижном вариантах. Допускается
раздельная поставка средств. Потребитель в процессе эксплуатации по мере
необходимости может самостоятельно осуществлять «наращивание»
используемых средств.
В состав агрегатируемых средств «Марс» входят:
антенные системы метрового и дециметрового диапазонов (Д1, Д2,
Д4);
сменные антенные малошумящие усилители четырех типов
(диапазонов М, Д1, Д2, Д4), общие для всех видов модуляции;
(сменные) приемные устройства (диапазонов М, Д1, Д2, Д4) для
приема сигналов с видом модуляции КИМ-ЧМ, АИМ-КИМ-ЧМ и КИМ-
ФМ;
унифицированные цифровые приемные устройства для приема
информации КИМ-ЧМ, АИМ-КИМ-ЧМ и КИМ-ФМ;
наземный навигационный приемник для определения геодезических
координат для оперативного обеспечения геодезической привязки
антенной системы подвижного приемного пункта (при необходимости).
Регистрация принятой радиотелеметрической информации и «распаковка»
зарегистрированной информации осуществляются на основе использования
средств и ПМО потребителя или с использованием регистратора «Литон-4».
Достоверность регистрации информации на видеомагнитофон в составе
регистраторов «Литон-3» и «Литон-4» - не хуже 1012.
Радиопередающие устройства и антенно-приемные средства (диапазон Д1)
«Марс» в 2000 г. используются при приеме-передаче информации бортовых
радиотелеметрических устройств БР-91ЦКМ (разработки и изготовления ОАО
ИРЗ), установленных на разгонных блоках (РБ) «Фрегат».
Указанные средства приема информации входят в состав системы приема и
обработки информации стартового комплекса (изготовитель НПО им. С. А.
Лавочкина).
6.3.7. Наземная приемно-регистрирующая станция комплекса «Монитор»
Для получения телеметрической информации о состоянии одного или
нескольких космических аппаратов в объеме, необходимом для оценки их
тактико-технических и эксплуатационных характеристик, АО НИИРИ разрабатывает
комплекс средств передачи и приема телеметрической информации «Монитор»
[8].
490
Глава 6. Телеметрия в космической отрасли
Универсальность комплекса, модульная структура его бортовой аппаратуры,
возможность варьирования программами телеизмерений позволяют
использовать его для контроля функционирования широкого класса объектов при их
отработке и эксплуатации.
Выбранные диапазон частот и методы модуляции радиосигналов позволяют
использовать комплекс «Монитор» в рамках международного сотрудничества
в области космической техники.
Составной частью комплекса «Монитор» является информационный комплекс
в составе наземной приемно-регистрирующей станции и комплекс
совмещенной командно-телеметрической радиолинии.
Информационный комплекс предназначен для информационного обеспечения
функционирования радиотелеметрической станции [12] и имеет следующие
функции:
прием и обработка исходных технологических данных из канала связи
или информационной сети;
- ввод и регистрация телеметрического сигнала;
- программное наведение антенной системы;
- визуализация и документирование данных по функционированию
радиотелеметрической станции в процессе работы с космическим
аппаратом;
выдача обработанной предметной и служебной информации в канал
связи или информационную сеть.
Создается в интересах модернизации существующих радиотелеметрических
станций при переходе на новую информационно-элементную базу.
Рис. 6.18. Внешний вид комплекса
Комплекс совмещенной командно-телеметрической радиолинии предназначен
для передачи на космический аппарат команд управления и получения с КА
квитанций о прохождении команд и телеметрической информации,
характеризующей техническое состояние аппаратуры К А [13].
491
Телеметрия в теории и на практике
Комплекс совмещенной командно-телеметрической радиолинии состоит из
наземной станции, бортовой аппаратуры и контрольно-проверочной аппаратуры
для проверки технических характеристик бортовой аппаратуры на
заводе-изготовителе и технической позиции.
Созданный комплекс совмещенной командно-телеметрической радиолинии
позволяет осуществлять управление КАтипа «Микроспутник», КА «Ci4-2» или
другими низкоорбитальными КА. Новизна создаваемого комплекса СКТРЛ
состоит в следующем:
1. Бортовая аппаратура совмещенной командно-телеметрической
радиолинии разработана с использованием электрорадиоизделий высокой
степени интеграции, выпускаемых передовыми фирмами дальнего
зарубежья, что позволяет использовать её на малогабаритных КА типа
« М икроспутник».
2. Комплекс совмещенной командно-телеметрической радиолинии
работает в частотном диапазоне, разрешенном Международным Союзом
электросвязи [13].
6.3.8. Мобильный измерительный пункт РНИИ КП
Мобильный измерительный пункт, разработанный по заказу РКК «Энергия» в
ФГУП РНИИ КН, предназначен для приема, регистрации, отображения,
предварительной обработки и передачи в центр управления полетами (ЦУП)
телеметрической информации в процессе испытаний и эксплуатации различных
изделий ракетно-космической техники. По своим техническим
характеристикам Мобильный измерительный пункт является измерительным средством
нового поколения [24].
Основной задачей, которую позволяет решить пункт, является обеспечение
приема телеметрической информации с изделий ракетно-космической техники
на необорудованных трассах, а также в тех случаях, когда использование
корабельных и самолетных пунктов невозможно по техническим причинам или
нецелесообразно по экономическим показателям.
Учитывая, что в настоящее время эксплуатируется несколько типов бортовых
телеметрических систем и соответственно несколько типов наземных прием-
но-регистрирующих станций, второй важнейшей задачей пункта является
обеспечение приема всей номенклатуры телеметрической информации
одними и теми же средствами. Кроме того, в аппаратуре пункта заложены широкие
возможности по ее дальнейшей модернизации с целью обеспечения испытаний
и эксплуатации перспективных изделий ракетно-космической техники нашей
страны, а также обеспечения совместных международных проектов.
Мобильный измерительный пункт нового поколения в сравнении с функци-
492
Глава 6. Телеметрия в космической отрасли
ональными аналогами, используемыми в РФ, позволяет значительно снизить
затраты на эксплуатацию измерительных средств за счет сокращения их
номенклатуры, отказа от капитального строительства и прокладки технических
коммуникаций. Широкое использование в пункте современных средств
вычислительной техники существенно сокращает затраты на его обслуживание за счет
меньшего числа обслуживающего персонала с одновременным повышением
надежности и качества работы.
Основные преимущества использования мобильного измерительного пункта:
1. Значительно снижаются затраты на эксплуатацию измерительных
пунктов. Для его применения не требуется капитальное
строительство и прокладка технических коммуникаций. Транспортировка пункта
осуществляется с использованием собственных транспортных средств
либо традиционными способами: железнодорожным, авиационным и
морским (речным) транспортом. Численность обслуживающего
персонала - минимальная (2-3 человека).
2. Мобильный измерительный пункт обеспечивает прием
телеметрической информации при испытаниях и эксплуатации изделий ракетно-
космической техники как по телеметрическим радиоканалам, так и по
радиоканалам бортовых командных систем.
3. При создании пункта были использованы новые технические
решения и технологии, которые
позволяют с минимальными
доработками адаптировать
пункт под прием
телеметрической информации
практически любой бортовой
телеметрической системы.
Аппаратура пункта
обеспечивает прием информации
во всех диапазонах волн (М,
Д1, Д2, Д4) со скоростями до
1024 Кбит/с с различными
видами модуляции и типами
структур сигналов.
Рис. 6.19. Мобильный измерительный пункт на двух автомобилях
493
Телеметрия в теории и на практике
4. Технические решения, заложенные в пункт, позволяют с
минимальными затратами проводить работы по его дооснащению до
командно-измерительного. При этом существенной доработки аппаратуры не
требуется.
5. Модульное построение аппаратуры пункта и сохранение в ней
стандартизованных информационных сечений существующих измерительных
комплексов позволяет широко использовать функциональные блоки
пункта (антенные системы (рис. 6.20), приемные устройства,
аппаратуру синхронизации и регистрации телеметрической информации и т. д.)
в составе эксплуатируемых измерительных комплексов для замены
морально устаревшей и выработавшей ресурс аппаратуры. При этом
обеспечивается поддержание работоспособности комплексов, сокращаются
эксплуатационные расходы, расширяются их технические
возможности и повышаются надежность и качество работы.
Рис. 6.20. Антенная система мобильного измерительного пункта
494
Глава 6. Телеметрия в космической отрасли
Основные режимы работы
привязка пункта, ориентация по сигналам систем «Глонасс», GPS;
- программное и ручное наведение антенной системы;
- одновременный прием до 4-х потоков телеметрической информации;
- отображение и контроль принимаемой информации;
непрерывная регистрация информации;
- формирование сокращенных потоков и передача по каналам
спутниковой связи;
прием целеуказаний и телефонная связь с центром управления полетом.
Области применения мобильного измерительного пункта:
ракеты космического назначения: «Зенит», «Союз-2», «Протон»,
«Онега», «Аврора»;
- разгонные блоки;
долговременные орбитальные станции;
транспортные корабли «Союз», «Прогресс»;
низкоорбитальные КА.
6.3.9. Средства сбора и обработки телеметрической информации «Родник»
Комплекс аппаратно-программных средств «Родник» предназначен для
создания систем сбора, регистрации, обработки, анализа, представления и передачи
результатов обработки телеметрической информации в целях обеспечения
испытаний и эксплуатации ракетно-космической техники, а также для
применения в автоматизированных системах управления, в вычислительных центрах
заводов-изготовителей, в системах контроля и диагностики [14].
Рис. 6,21. Внешний вид комплекса (настольный и переносной варианты)
495
Телеметрия в теории и на практике
На базе средств комплекса «Родник» могут создаваться различные
информационно-телеметрические системы для сбора, обработки, анализа, представления
и передачи телеметрической информации на объектах различного назначения:
пристартовых и трассовых измерительных пунктах, на испытательных базах,
вычислительных центрах космодромов и полигонов, вычислительных центрах
главных конструкторов изделий ракетно-космической техники. Особенности
информационно-телеметрической системы «Родник»:
- современная технология и элементно-конструктивная база;
- возможность регистрировать и обрабатывать информацию
различных телеметрических систем, в том числе «Скут», РТС-9, «Пирит»,
«Трал», «Орбита» и их модификаций, автономных регистраторов АРГ-
4, «Мир», «Планета»;
- возможность адаптации к изменениям структуры входных сигналов
без конструктивных доработок путем перепрограммирования
программно-логической матрицы PLM адаптера ввода;
- высокая производительность, достигаемая за счет совместного
использования процессора ПЭВМ и RISC-процессора адаптера ввода;
- сопряжение с широкополосными каналами связи: «Связка», «Примор-
ка» и др.;
- эффективное системное программное обеспечение.
Подробно об аппаратном составе комплекса и прилагаемомо к нему
программном обеспечении вы можете в полной версии данной главы, размещенной на
сайте издательства www.nit.com.ru.
6.4. ИНФОРМАЦИОННО-ТЕЛЕМЕТРИЧЕСКИЕ СРЕДСТВА В
МЕЖДУНАРОДНЫХ КОСМИЧЕСКИХ ПРОЕКТАХ
Особенности реализаций большинства крупных международных космических
проектов характеризуются использованием высокотехнологичного
оборудования для решения различных задач в космосе, из космоса, а также для
осуществления экспериментов за пределами Земли.
Необходимость обеспечения функционирования данного оборудования в
значительной степени сказалась на требованиях, предъявляемых к наземным
станциям слежения, связи и системам передачи данных из космоса. Целью
функционирования телеметрической системы, если таковую можно вообще выделить
из состава телекоммуникационного оборудования того или иного космического
проекта, всегда является надежная и достоверная доставка пользователям,
находящимся в космосе или на Земле, измерительной информации от удаленных
бортовых источников.
496
Глава 6. Телеметрия в космической отрасли
Для отечественных телеметрических систем или телекоммуникационного
оборудования (реже — систем управления КА и процессами на его борту),
используемого в международных проектах, можно выделить ряд особенностей их
построения и способов функционирования:
1. Телеметрические системы, системы контроля и диагностики КА
построены как централизованные иерархические системы, основанные на
встроенных в системы средствах и реализации алгоритмов контроля
и диагностики в бортовом вычислительном комплексе. При этом в
качестве входной информации для систем управления нередко
используются данные систем бортовых измерений, которые в национальных
космических системах традиционно применялись только для передачи
измерений в Центр управления полетом, но не включались в бортовой
контур управления, считаясь ненадежными.
2. Телеметрические системы, превратившиеся, по сути, в системы сбора
и передачи данных, передают информацию о результатах диагностики
оборудования, а также (преимущественно) информацию о научных
экспериментах (за исключением международных связных спутниковых
систем) по одним и тем же выделенным каналам связи. Данный факт
есть следствие стремления осуществить проект с минимальными
экономическими затратами на его разработку и сопровождение.
3. Появление аппаратных средств, основанных на производительных
микропроцессорах, привело к возможности создания систем
передачи данных большей производительности и, следовательно, КА
большей сложности и автономности. Эти факты, наряду с техническим и
финансовым состояниями, требуют создания телеметрических систем
большей эффективности, обладающих большими возможностями и
работающих с меньшими издержками.
4. Принадлежность различных элементов (сегментов) проекта
различным странам, космическим агентствам и организациям, а также
необходимость обмена телеметрической информацией и аппаратной
поддержки друг друга — участников проекта — явились причиной высокой
стандартизации как услуг передачи информации, так и используемого
оборудования.
6.4.1. Телеметрическое обеспечение проектов «Предвестник», «Интербол»,
«Коронас»
Система сбора научной информации предназначена для
информационно-телеметрического обеспечения проектов «Интербол», «Коронас-И», «Коронас-Ф»
(рис. 6.23), «Фотон» и др.
Главными особенностями телеметрической системы (разработанной в
497
Телеметрия в теории и на практике
ИЗМИРАН) является использование современной элементной базы и
применение высокоинтеллектуальных технологий на всех этапах разработки [16].
Назначение ССНИ:
- сбор информации от научной и служебной аппаратуры:
- хранение информации в период отсутствия радиосвязи;
- включение и выключение служебной и научной аппаратуры;
- передача информации по радиоканалу на наземные пункты приема
спутниковой информации;
- прием управляющей информации по командной радиолинии, хранение
и выдача команд на служебные системы и научный комплекс в
заданное время;
- временное обеспечение проводимых измерений.
Для обеспечения необходимой скорости сбора и обработки информации в
ССНИ используется 32-разрядный микропроцессор с тактовой частотой 30
МГц. Для повышения надежности предусмотрено двукратное резервирование
всех систем, причем использование резерва возможно как в «холодном», так и
в «горячем» режимах.
Объем бортовой памяти определяется информационной производительностью
научных приборов и пропускной способностью радиоканала. При скорости
передачи информации 1 Мбит/с за один сеанс связи можно передать -70 Мбайт
информации. Эта величина выбрана в качестве верхнего предела объема блока
памяти. В ССНИ установлено два блока памяти по 32 Мбайт. Для управления
научной аппаратурой используется командная радиолиния с пропускной
способностью 1 Кбит/с.
Функциональная схема ССНИ приведена на рис. 6.22.
Список сокращений:
ТВК - ССД-камера оптического комплекса.
ФТМ-1/2 - фотометры №1 и №2 оптического комплекса.
ФМ-4П - феррозондовый магнитометр.
МЕП-1 - спектрометр высокоэнергетичных частиц.
УНЧ/ОНЧ - волновой комплекс на диапазон частот 0,1 Гц-23 КГц.
ИД-2 - плазменный комплекс.
RFA - волновой комплекс на диапазон частот 0,1-15 МГц.
Трастер - двигатель малой тяги.
498
Глава 6. Телеметрия в космической отрасли
СО- система ориентации.
КСП и КТ - система контроля питания и температуры.
Приводы - система управления приводами.
Т1700-1/2 - телеметрические передатчики №1 и №2.
ПКРЛ-1/2 - приемник командной радиолинии №1 и №2.
НТК - интерфейс ССД-камеры.
БКП - блок коммутации питания.
МК-1/2 - бортовые микрокомпьютеры № 1 и №2.
БП-1/2 - блоки питания №1 и №2.
ЭП-1/2 - блок памяти (32 Мб) №1 и №2.
П1/2/3/4/5 - реле Вкл/Выкл и переключатели.
БС - бортовая сеть (+28 В, -28 В).
ФТМ-Г
ФТМ2
<1>М-Ж
МЕП I
УНЧ-ОНЧ
ИД-2
СОГС
Трз<те^ |
MfMfMVltJ
Tlftm-i
БС
Икп
1
Л)
м:
л л
ГТрсмкссор
и«6»г.г5МГи
ОЗУ • 4 МЛийг
П1У- I М«а»т
Т»ймвр
Э1М
П4
МК-3
Протссбр
туп mi^i
Э1Ы
32 \№«йг
Рис. 6.22. Функциональная схема ССНИ проектов «Интербол», «Коронас-И»,
«Коронас-Ф», «Фотон» и др.
499
Телеметрия в теории и на практике
При поданном электропитании ССНИ может находиться в одном из четырех
основных рабочих режимов [16].
1. Режим записи информации.
2. Режим воспроизведения информации - предназначен для передачи на
Землю записанной в памяти информации. Информация выводится в
том же порядке, в котором записывалась, то есть в хронологическом.
Бортовой компьютер считывает информацию из памяти побайтно,
преобразует каждый байт в последовательность импульсов в соответствии
со способом модуляции и выводит на модулятор передатчика
информацию, начиная со старшего бита. В режиме воспроизведения
информации опрос приборов не производится.
3. Режим непосредственной передачи (НП) - предназначен для передачи
данных с научных приборов, проведения отладочных работ по
проверке работоспособности ССНИ и тракта радиоканала на борту КА, для
настройки аппаратуры наземных приемных пунктов, а также для
привязки бортовой шкалы времени к земному времени. Непосредственная
передача используется в тех случаях, когда требуется длительное
включение передачи данных на Землю без ущерба для записанной в памяти
информации.
4. Режим приема команд. В режиме приема команд выполняется прием
информации по командной радиолинии. Этот режим имеет наивысший
приоритет. ССНИ переходит в него из любого другого немедленно после
обнаружения полезного сигнала от приемника командной радиолинии.
Более подробну информацию можно получить из полной версии данной главы,
доступной на сайте издательства www.nit.com.ru.
6.4.2 Телекоммуникационное оборудование и станции приема
телеметрической ИНФОРМАЦИИ В СИСТЕМЕ «ИРИДИУМ»
Телекоммуникационное оборудование и телеметрические станции системы
«Иридиум» входят в состав ее наземного сегмента. Кроме того, в состав
наземного сегмента входят абонентские терминалы нескольких типов, шлюзовые
станции, станции передачи команд и приема телеметрической информации,
основной и резервные сегменты управления системой и связью, сегмент запуска
[17,18J (рис. 6.23).
Спутниковые терминалы функционируют следующим образом:
1-й спутниковый терминал вступает в связь с KAi; 2-й спутниковый
терминал вступает в связь с KAi+1;
1-й спутниковый терминал после ухода из зоны KAi вступает в сязь с
KAi+2;
500
Глава 6. Телеметрия в космической отрасли
Рис. 6.23. Типы абонентских терминалов системы «Иридиум»
2-й спутниковый терминал после ухода из зоны KAi+1 вступает в связь с
KAi+З и т. д.;
3-й спутниковый терминал находится в резерве и при необходимости
может заменить 1 (2) спутниковый терминал.
Быстродействующий процессор осуществляет идентификацию персонального
терминала, участвующего в связи, и формирует адресацию в направлении
персонального терминала.
Коммутационное оборудование выполняет следующие функции:
передает линейные/адресные сигналы сигнальной системы для начала
и окончания связи;
передает в случае необходимости сигнальную информацию по общему
каналу для начала и окончания связи;
создает тон и оповещение абоненту для индикации условий разговора;
осуществляет цифровую коммутацию сигналов импульсно-кодовой
модуляции между сигналами терминалов каналов;
вычисляет продолжительность сеанса связи и передает счет
пользователю.
Отдельная станция передачи команд на КА и приема телеметрической
информации задеиствуется при нештатных ситуациях, когда использование для этих
целей связных радиолиний системы невозможно.
Передача командной информации на КА и передача с КА телеметрической ин-
501
Телеметрия в теории и на практике
формации осуществляется на низкой скорости 1 Кбит/с, при использовании на
КА ненаправленной антенны с квазикруговой диаграммой направленности.
Для уменьшения влияния быстрого изменения фазы сигнала (за счет
вращения или «кувыркания» КА в случае нарушения его стабилизации)
применяется метод частотной манипуляции с некогерентной обработкой на приеме.
Относительно большой энергетический запас (режим медленнодействия,
направленная наземная антенна) необходим для обеспечения устойчивой работы
в условиях энергетических потерь, обусловленных изрезанностью диаграммы
направленности бортовой антенной системы.
Основные характеристики командной и телеметрической радиолиний предс-
твалены в полной версии данной главы, доступной на сайте издательства
www.nit.com.ru.
Предусматривается следующий алгоритм передачи команд. Каждая исходная
команда шифруется для защиты от постороннего доступа и передается на КА;
после дешифровки команды КА передает проверенные информационные
символы, которые принимаются наземной станцией. Символы дешифрируются,
преобразуются в требуемый вид, зашифровываются и передаются на КА. КА
выполняет команду только после подтверждения своих проверочных
символов.
6.4.3. Аппаратно-программный комплекс приема и накопления
научно-измерительной ИНФОРМАЦИИ ПРОЕКТА «МЕТЕОР»
Данные научно-измерительной аппаратуры КА передаются два раза в
сутки во время сеансов связи (разнесенных примерно на 12 час),
когда КА «Метеор-ЗМ» №1 находится в Московской зоне
радиовидимости [19]. Параметры радиолинии и передаваемого цифрового сигнала
приведены в полной версии данной главы, доступной на сайте издательства
www.nit.com.ru.
Структурно-функциональная схема аппаратно-программного комплекса
показана на рис. 6.24.
Для проведения летных испытаний и последующей эксплуатации
научно-измерительной аппаратуры создан специальный аппаратно-программный комплекс
(АПК-2) для приема, регистрации, обработки и анализа научной информации
[19].
Приемная станция построена на базе мобильного антенного комплекса АК1 -КУ.
Доработанная антенная установка, отвечающая требованиям к стационарному
варианту, установлена под радиопрозрачным укрытием. Антенная установка
включает опорно-поворотное устройство и параболический рефлектор.
Диаметр рефлектора равен 2,6 м. Опорно-поворотное устройство функционирует
по азимутально-угломестной схеме. Помимо антенной системы, приемно-де-
502
Глава 6. Телеметрия в космической отрасли
Рис. 6.24. Структурная схема аппаратно-программного комплекса проекта «Метеор»
кодирующего устройства, в состав приемного комплекса входит персональная
ЭВМ (рабочее место оператора) для управления опорно-поворотным
устройством, отображения расчетных и фактических угловых координат, регистрации
и накопления информации. Наведение антенны и слежение за спутником
осуществляется на основе предварительных расчетов траектории полета по
орбитальным характеристикам.
Узел декодирования, действующий по принципу аппаратной кадровой
синхронизации цифрового потока, восстанавливает последовательность байтов для
их записи на жесткий диск ПЭВМ рабочего места оператора (РМО). Декодер
настроен на формат и структуру кадров СЕЙДЖ-3 (стандарт CCSDS).
Аналогичный принцип формирования кадров заложен во все другие потоки данных
остальных научных приборов. Принадлежность кадра конкретному виду
аппаратуры представляется отдельным байтом (код прибора), и для каждого
прибора предусмотрена своя собственная порядковая нумерация кадров, кодируемая
также отдельным байтом.
Аппаратно-программные средства обработки данных предназначены для обес-
503
Телеметрия в теории и на практике
печения первого этапа переработки зарегистрированных во время сеансов
связи массивов цифровой научной информации. Этот этап завершается
распаковкой массива и формированием файлов, относящихся к разным приборам. Эти
операции выполняются непосредственно по завершении приема и первичной
регистрации в управляющей ПЭВМ рабочего места оператора.
Одновременно осуществляется контроль качества сеанса связи. Суть этой
операции состоит в просмотре выделенных кадров с подсчетом количества сбоев
на заданном шаге осреднения по времени (1 мин), а также в целом за сеанс. При
этом анализируются:
- синхросигналы;
байты кода аппаратуры;
контрольная сумма каждого кадра.
Результаты анализа выводятся на экран монитора и вносятся в файл
статистики сбоев. По ним оформляется протокол качества сеанса связи с КА,
который в течение 30 мин направляется в Центр управления полетом (ЦУ П). Такой
оперативный контроль качества связи с КА особенно необходим на начальном
этапе летных испытаний, когда отрабатываются процедуры оперативного
управления процессом сбора данных. Дальнейшие этапы обработки научной
информации осуществляются на автономных рабочих местах, ориентированных
на работу с данными конкретных приборов автоматизированного рабочего
места радиометра (АРМ) МИВЗА и АРМ спектрометра МСГИ-5ЕИ+КГИ-4С.
Информация СЕЙДЖ-3, регулярно принимаемая в специально выделенных
сеансах связи (на 5 и 11 суточных витках), преобразуется в файл первичных
данных, полученных в очередные сутки (время московское). Аналогично
представляется массив принимаемых два раза в сутки данных прибора-радиометра
МТВЗА.
В рамках этой технологии реализуется полный цикл обработки данных,
накопленных в БНД при штатном режиме работы радиометра. Программное
обеспечение разработано средствами Visual C++.
Более подробную информацию о работе отдельных составляющих и всего
комплекса в целом можно в полной версии главы, размещенной на сайте издатель-
сва www.nit.com.ru.
6.4.4. Телекоммуникационная станция «Славянка»
Телекоммуникационная станция «Славянка» разработана для нужд
образования партнёром Института ЮНЕСКО по информационным технологиям в
образовании — Особым конструкторским бюро Московского энергетического
института (ОКБ МЭИ) [20]. ОКБ МЭИ имеет в своём распоряжении систему
космических телепортов, обеспечивающих доступ во все основные российские
504
Глава 6. Телеметрия в космической отрасли
и международные спутниковые сети, а также располагает арендованными
ресурсами на российских геостационарных ИСЗ. Данные технические ресурсы
использованы при создании внешней коммуникационной среды Института
ЮНЕСКО по информационным технологиям в образовании [21].
Внешняя среда Института представляет собой спутниковую
телекоммуникационную подсеть или спутниковый сегмент (рис.6.25), связанные телепортами
с другими сетями. Основными техническими компонентами этой сети
являются:
Земная станция спутниковой связи «Славянка», используемая в
Фокальных центрах Института ЮНЕСКО;
Станция управления спутниковой сетью связи (Hub Station);
взаимосвязанная система телепортов Центра космической связи ОКБ
МЭИ для доступа в другие коммуникационные сети.
Ресурсы бортовых ретрансляторов российских геостационарных КА с точками
стояния 17° ЗД (LMI), 40° ВД (Горизонт), 103° ВД (Экспресс 2) или других
аналогичных [20].
Рис. 6.25. Фрагмент спутникового сегмента корпоративной сети
Земная станция спутниковой связи «Славянка» относится к цифровым
станциям типа VSAT [21].
Основные характеристики станций семейства «Славянка» и более подробная
информация доступна в полной версии главы на сайте издательства www.nit.
com.ru.
505
Телеметрия в теории и на практике
6.4.5. Информационно-телеметрическое обеспечение проекта
«Воздушный старт»
Текст данного раздела доступен в полной версии главы, размещенной на сайте
издательства www.nit.com.ru.
6.4.6. Применение радиомодемов в космической телеметрии
Текст данного раздела доступен в полной версии главы, размещенной на сайте
издательства www.nit.com.ru.
6.4.7. Комплекс по приему, обработке и представлению телеметрической
информации проекта «Спектр-Рентген-Гамма»
Основу проекта «Спектр-Рентген-Гамма» составляет выведенная на высокую
(рис. 6.35) околоземную орбиту астрофизическая обсерватория («Спектр-РГ»)
общей массой 5,9 тонн, имеющая большой набор научной аппаратуры для
проведения исследований в широком диапазоне длин волн. Обсерватория «Спектр-РГ»
может проводить уникальные научные исследования: мгновенные наблюдения
в широком энергетическом диапазоне источников ультрафиолетовых лучей и
жесткого рентгеновского излучения, тонкую спектроскопию внешних
источников, измерение поляризации, мониторинг всего неба, изучение космических
гамма-вспышек и их послесвечений [26].
Расширенная информация по данному разделу доступена в полной версии
главы, размещенной на сайте издательства www.nit.com.ru.
506
Глава 6. Телеметрия в космической отрасли
ЛИТЕРАТУРА К ГЛАВЕ 6
1. Бортовая телеметрическая аппаратура космических летательных
аппаратов. — М.: Машиностроение, 1977.-208с.
2. Аппаратура информационно телеметрических систем ИТС «Орбита-
IVMO». Краткие сведения. ФГУП ОКБ МЭИ, 2001.-31с.
3. Калашников И.Д. и др. Комплекс средств «Пирит» для построения
информационно-измерительных систем // Приборы и системы
управления, 1993, №9.-с. 1-4.
4. Мыскин В. Отладка «Бриз-М». — Газета «Все для Родины», 1998,
№38.
5. Сборка «Бриз-М» отработана. — Газета «Все для Родины», 1998, №37.
6. Орбита-4ТМ (http://neurocom.webzone.ru/ms/product/orbita.htm).
7. Ижевский радиозавод (ТА-932, БР-91ЦК-Н4) (http://www.irz.ru).
8. ОКР «Хвыля» (http://www.niiri.com.ua/All/Hvilya/Hvilya.htm).
9. Малогабаритная приемно-регистрирующая станция МПРС-5. АИД С.
461271.005 ТО.
10. Приемно-регистрирующая станция НПРС-9. НАИЯ. 463315.002.ЭД.
11. Унифицированная наземная аппаратура приема телеметрической
информации (http://www.telemetria.nm.ru/tl_%201 .htm).
12. Информационный комплекс телеметрической станции (http://www.
niiri.com.ua/Sppti/IC_RTS.htm).
13. ОКР «Хвыля» (http://www.niiri.com.ua/All/Hvilya/Hvilya.htm).
14. Модифицированные аппаратно-программные средства сбора,
регистрации передачи, обработки и представления телеметрической
информации «Родник» (http://www.nppmera.ru/tele.htm).
15. http://www.mosoblpress.ru/yarosl/show.shtml?d_id=777
16. Телеметрическая система проекта ПРЕДВЕСТНИК-Э
(http://www.izmiran.rssi.ru).
17. http://www.tecckom.ru/iridium_about.php
18. http://www.alphatelecom.ru/iridium/
19. http://old.ntsomz.ru/imgcatalog/InfoFiles/m3ref/apparat.htm
20. http://www.e-joe.ru/sod/97/2_97/st067.html
21. Создание внешней коммуникационной среды ИИТО на базе
телекоммуникационной станции «Славянка» (http://www/iite.ru/
507
Телеметрия в теории и на практике
KIEV-blue/gubonin.htm).
22. Егоров К.М. Информационно-телеметрическое обеспечение АРК-КН
«Воздушный старт» (http://www.airlaunch.ru/russian/news/air_cosm.
htp).
23. Карпов А.В. «Воздушный старт - проект нового века» (http://www.
airlaunch.ru/russian/news/air_cosm.htp).
24. http://www.spacecorp.ru/main/abilities-tele/
25. http://www.rodnik.ru/htmls/about_6.htm
26. «Спектр-Рентген-Гамма» — международная орбитальная
астрофизическая обсерватория (http://hea.iki.rssi.ru/SXG/sxg_00/
rus/index.html).
27. Каличев С.А., Бунтов М.В., Чулков И.В. Комплекс по приему,
обработке и представлению телеметрической информации проекта
«Спектр-Рентген-Гамма». Институт космических исследований
(ИКИ) РАН, 2002 (http://lex.iki.rssi.ru/papers/share/dsse/indcx.
html#_Toc4841203#_Toc4841203).
508
Глава 7.
Телеметрия в современной
промышленности и энергетике.
Телемеханика
7.1. ОСОБЕННОСТИ ПРИМЕНЕНИЯ ТЕЛЕМЕТРИЧЕСКИХ СИСТЕМ В
СОВРЕМЕННОЙ ПРОМЫШЛЕННОСТИ И ЭНЕРГЕТИКЕ
Общие положения
Современные промышленные объекты, как правило, характеризуются
сложностью и комплексностью технологических процессов, а также
пространственным разносом отдельных функционирующих блоков и систем
по отношению к центру (центрам) управления. Для такого типа объектов
очевидна необходимость применения соответствующих
автоматизированных систем сбора информации о процессе и оборудовании, замкнутых на
системы контроля и управления.
Система телеметрии совместно с системами и устройствами управления
образует в итоге систему телемеханики, которая способна эффективно решать
как задачу достоверного контроля состояния технологического процесса и
оборудования, так и задачу эффективного управления всем
технологическим комплексом.
В качестве областей применения систем телемеханики целесообразно
указать: химическая, нефтеперерабатывающая и металлургическая
промышленность, атомная энергетика, производство медицинских и фармакологи-
510
Глава 7. Телеметрия в современной промышленности и энергетике
ческих продуктов и материалов и т. п.
Особенностями рассматриваемых систем телемеханики является их
комплексность: множество существенно разнотипных параметров (температура,
давление, уровни, расходы, электрические параметры и т. д.) при их
одновременном группировании по отдельным системам блоков и процессам.
Такая комплексность, как правило, сочетается с широким спектром частотно-
временных характеристик телеметрируемых параметров промышленных
объектов. В результате возникает необходимость локализации
интегральных оценок по группам оборудования и введение локального управления в
отдельных технологических сечениях всего производственного процесса.
Очевидна специфика построения систем телемеханики таких комплексных
технологических объектов, по сравнению «с менее комплексными»
пространственно-протяженными системами дистанционного контроля и
управления. Такими как энергопередающие и энергораспределяющие
системы и сети, нефтегазотранспортные системы, железнодорожный транспорт
и т. п. Эта специфика определяется тем, что вторая группа промышленных
объектов имеет явное доминирование к пространственной протяженности
при достаточной ограниченности типов телеметрируемых процессов и
оборудования.
Именно для комплексных производственных объектов, требующих высокой
точности измерений, разнотипности измеряемых параметров,
пространственной распределенности телеметрируемого (промышленного) объекта и
точности управления, система телеметрии может стать средством
повышения эффективности функционирования и повышения
конкурентоспособности продукции.
Современные мировые тенденции
Все мировые лидеры в этой области активно следят за последними
достижениями в области датчиковой аппаратуры и вычислительной техники,
в частности микропроцессорной. Такие известные концерны, как Assea
Brown Bowery (ABB), Siemens, Westinghouse и другие, постоянно
работают над совершенствованием всех аспектов технологий для телеметрии
объектов. Выпускается большое число рекламных материалов с описаниями
действующих промышленных объектов и применяемых на них системах
телемеханики. Выпускаются демонстрационные версии программных
продуктов. Применяются различные способы внедрения на рынок АСУ ТП и
конкурентной борьбы за выживание.
В разработке концепции и при проектировании системы телемеханики для
промышленных объектов наблюдается устойчивая тенденция на примене-
511
Телеметрия в теории и на практике
ние универсальных аппаратных и программных средств. Универсальность
этих средств сочетается с тенденцией учета особенностей
технологического процесса и специфики оборудования и максимальной адаптации
системы телемеханики к этим особенностям. Конечной целью такого сочетания
универсальности и специализации является максимальная эффективность
функционирования промышленного объекта и его конкурентоспособность.
Критерием оптимальности может служить, например, известный критерий
«эффективность-стоимость».
В связи с общим развитием техники и появлением широкого класса новых
материалов с уникальными свойствами наблюдается явная тенденция
совершенствования датчиковой аппаратуры. Появляются типы датчиков с
возможностями, ранее считавшимися недостижимыми. Мировые
производители датчиковой аппаратуры активно конкурируют на рынке. В
результате разработчики систем телеметрии имеют в своем распоряжении
широкий спектр датчиков с высокими техническими характеристиками, легко и
просто сопрягаемых с блоками сбора, обработки и контроллерами.
В области разработки программных средств также наблюдается
тенденция разработки универсального инструмента, позволяющего специалисту
быстро и эффективно решать проблемы сбора, обработки, представления
информации и управления промышленными объектами, а также
приспособиться к особенностям процесса.
7.2. СИСТЕМА ТЕЛЕМЕТРИИ КАК ИНФОРМАЦИОННАЯ
ЧАСТЬ АВТОМАТИЗИРОВАННЫХ СИСТЕМ УПРАВЛЕНИЯ
ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
Понятие телемеханики
Основным направлением совершенствования управления современными
технологическими процессами в промышленном производстве является
создание автоматизированных систем управления (АСУ ТП). Любой процесс
управления можно представить состоящим из трех этапов:
• сбор информации о процессе и состоянии технологического
оборудования;
• обработка полученной информации и принятие управленческих
решений;
• выработка и передача команд управления.
512
Глава 7. Телеметрия в современной промышленности и энергетике
Если все операции процесса управления осуществляются без участия
персонала, система управления называется автоматической. Если же в
процессе управления при сборе и обработке информации, выработке команд
управления и передаче их на объект управления наряду с техническими
средствами участвует персонал, то система управления называется
автоматизированной.
Современная система управления технологическим процессом
является человеко-машинную системой. Она представляет собой совокупность
методов и средств, обеспечивающих наиболее эффективное выполнение
функций управления на основе использования методов и средств
вычислительной техники. Основным звеном АСУ ТП, несущим информационные и
управленческие функции является система телемеханики.
По определению телемеханика - отрасль техники и техническая наука о
контроле и управлении на расстоянии посредством преобразования
контролируемых параметров и управляющих воздействий в сигналы,
передаваемые по линиям связи. Телемеханика изучает проблемы, связанные
с управлением технологическими процессами пространственно -
распределенных промышленных объектов.
Контроль и управление осуществляется из центра управления, который
может находиться на значительном расстоянии от объекта. Именно поэтому
термин "телемеханика" включает в себя слово "теле". Понятие "механика"
однозначно предполагает механическое перемещение предметов.
На ранних стадиях развития телемеханика действительно была связана
исключительно с механическим воздействием на объекты контроля
(включение-выключение на расстоянии различных электромеханических реле,
контакторов и т.п.). Однако с развитием электронной техники и особенно
с внедрением в контур управления ЭВМ термин "телемеханика" в своем
первоначальном смысле стал достаточно условным.
В мировой литературе в настоящее время широко используется
обобщающий термин TELECONTROL, который удачно объединяет понятия
"управление" на расстоянии и "контроль" независимо от характера воздействия на
объект (механического, электрического или другого). Поэтому в
отечественной литературе часто встречается словосочетание "телеконтроль и
телеуправление", либо применяется традиционный термин "телемеханика",
если иметь в виду его условность в упомянутом выше смысле.
Термин "телемеханика", если под ним понимать телеконтроль
(информационная часть АСУ ТП) и управление, включает в себя более частные понятия,
связанные с функциями телемеханических систем: телеметрия (измерение
и передача данных о значениях непрерывных и сигнальных параметров о
17 Зак. 861
513
Телеметрия в теории и на практике
состоянии управляемого процесса) и телеуправление (телерегулирование)
течением технологического процесса.
SCADA — что это такое?
В последнее время появился сокращенный термин, удачно
объединяющий функции телемеханических устройств в системах управления:
SCADA (Supervisory Control and Data Acquisition), что в дословном
переводе означает: "система сбора данных и оперативного диспетчерского
управления".
Различные SCADA-системы представляют собой комплекс программно-
аппаратных средств, связанных между собой в соответствии с
международным стандартом ОРС в единую систему взаимодействия между
аппаратными и программными компонентами SCADA-системы. Термин ОРС (OLE
for Process Control - Object Linking and Embedding for Process Control)
означает стандартный интерфейс связывания и внедрения объектов для
систем сбора данных и управления.
Применение стандарта ОРС для АСУ ТП обеспечивает универсальный
механизм обмена данными между
• датчиками,
• исполнительными устройствами,
• контроллерами,
• устройствами связи с объектом управления и системами
• обработки и представления технологической информации,
• оперативного диспетчерского управления,
• системами управления базами данных.
Производители аппаратных и программных средств, пользуясь стандартом
ОРС, имеют возможность разрабатывать единственный ОРС-сервер для
обеспечения единственного и наиболее общего способа организации
доступа к данным телеконтроля и передачи в адрес приложений-клиентов других
производителей, поддерживающих стандарт ОРС.
Разработка систем телемеханики (включая программные и аппаратные
средства), позволяющих на их основе создавать современные
SCADA-системы, обеспечивает высокоэффективный уровень современного
производства.
514
Глава 7. Телеметрия в современной промышленности и энергетике
7.3. ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К СОВРЕМЕННЫМ СИСТЕМАМ
ТЕЛЕМЕХАНИКИ
Промышленный объект(ПО) как обобщенный прототип широкого класса
технологических установок и комплексов. Общие положения.
Рассматривая широкий спектр разнотипных технологических установок и
комплексов можно выделить некий обобщенный(ПО), который в
дальнейшем и целесообразно рассмотреть в качестве объекта телемеханики. В
качестве основных характеристик такого ПО можно определитьт следующие:
• Сложность апппаратурно-технологической схемы,
• Многостадийность и разветвленность технологического процесса,
• Использование токсичных и других опасных реагентов,
• Необходимость постоянного мониторинга состояния сырьевых
запасов, отходов и сбросов, а также окружающей среды,
• Требования постоянной оценки предаварийной обстановки на
всем ПО,
• Пространственно разнесенное оборудование,
• Круглосуточный режим работы.
В качестве примеров подобных ПО можно указать химические
комплексные производства, комплексы по переработке отходов, производству
удобрений, установки для производства ароматических веществ,
металлургические комплексы, производства изотопов и т.п.
Изложенные основные характеристики ПО определяют и современный
подход к определению комплекса технических требований к СТ такого ПО.
Функционируя совместно с ПО, СТ должна обеспечить выполнение всех
своих функций с учетом сложности и специфики ПО, причем с
достаточной полнотой, надежностью и воспроизводимостью.
СТ для ПО представляет собой автоматизированную систему телеметрии
(сбора, обработки, представления, архивирования информации и т.п.),
совмещенную с системой управления процессом обогащения и режимами
работы отдельных технологических блоков. Уровень управления и
согласования обеих указанных функций СТ определяется разработчиками ПО:
разработчиками технологического процесса и аппаратурно-технологичес-
кой схемы его реализации. При этом сохраняется основная концепция
построения информационно-аналитической системы, системы управления
515
Телеметрия в теории и на практике
и их объединения в единый комплекс анализа и управления
технологическим процессом любой производительности.
Технические требования к системе управления в данной главе детально не
рассмотрены, так как требуют специальной конкретизации и
формулировки применительно к конкретному процессу и задачам управления. Однако
все возможные требования к системе управления уже практически учтены в
комплексе изложенных требований к СТ. Возникновение дополнительных
специальных требований, например диктуемых спецификой
технологического процесса, как правило не вызовут проблем учета в принципах
построения и реализации СТ.
В практике, часто на предварительном этапе создания нового ПО,
целесообразно разработать макет технологической установки, опытный стенд или
экспериментальный промышленный модуль для экспериментальной
проверки и отработки, снятия рисков невыполнения проекта, а также тренинга
персонала. Для таких случаев также целесообразно использовать СТ.
Однако структуру такой «усеченной» СТ и ее элементную базу следует строить
с учетом всех требований, предъявляемых к современной СТ
полномасштабного ПО. Результаты проведенной экспериментальной работы с
«усеченной» СТ на макетах и стендах учитываются и автоматически
перекладываются на принципы построения СТ полномасштабного ПО. Очевидно,
что при такой стратегии работ переход от «усеченной» СТ к СТ ПО будет
практически осуществлен без качественного изменения структуры системы
и базового состава элементной базы и, естественно, при минимальной
стоимости работ.
Структура СТ ПО, принцип построения и используемая элементная база
должны отвечать современным принципам построения систем телеметрии
и управления технологическими процессами с учетом обеспечения
высокой надежности, достоверности получаемых данных, непрерывности
функционирования и малой скорости морального старения.
С учетом изложенного ниже сформулированы все дальнейшие положения
и требования для обобщенного ПО.
Заметим, что изложенные положения и требования в основном
справедливы как для изучения и отработки режимов на стадии изучения сложных
технологических процессов, практически на любом макете или
экспериментальном стенде (например, в случаях химического изотопного обмена
в колоннах, получения ароматических веществ, очистки методами
дистилляции и ректификации и т.п.), так и для стадии промышленного запуска и
отладки режимов работы промышленного оборудования и его групп.
516
Глава 7. Телеметрия в современной промышленности и энергетике
Задачи системы телемеханики
Система телемеханики в составе оборудования обобщенного ПО как
правило должна решать следующие основные задачи:
• производить сбор и обработку параметров, характеризующих
состояние отдельных блоков и узлов основного и
вспомогательного оборудования, обеспечивающего функционирование групп
базового оборудования;
• обеспечивать своевременную сигнализацию для
предупреждения о возникновении предварийных и аварийных ситуаций и
локализовать место возникновения нарушения режима;
• архивировать обработанные результаты телеметрии в течение
заданного периода времени и представлять их по мере
необходимости в принятом формате отображения;
• обеспечивать автоматическое (а также ручное) формирование
управляющих сигналов для изменения режимов работы
отдельного оборудования и текущих значений параметров в
соответствии с алгоритмом функционирования оборудования и при
возникновении нештатных ситуаций.
Требования к структуре системы телемеханики
Значимые геометрические размеры ПО и особенно многометровая высота
отдельных систем определяют многоуровневую и
пространственно-распределенную структуру построения СТ. При этом структура системы должна
отвечать требованиям современных систем сбора данных и оперативного
диспетчерского управления, представляющих собой
программно-аппаратные комплексы на базе вычислительной и микропроцессорной техники
(Supervisory Control and Data Acquisition System - SCADA-система).
При этом все элементы SCADA-системы должны отвечать требованиям
международного ОРС-стандарта, обеспечивающего совместное
функционирование программных и аппаратных средств в составе SCADA-системы,
независимо от фирм-поставщиков элементов.
Весьма существенным следует признать в этом отношении и влияние
«человеческого фактора»: как с точки зрения трудностей прямого
оперативного обслуживания пространственно разнесенного (например высотного)
оборудования, так и с точки зрения визуального контроля большого
количества (сотни и тысячи) датчиков, обработки и осмысливания поступающей
информации и принятия конкретных решений о конкретных управляющих
517
Телеметрия в теории и на практике
действиях. Традиционно применяемая до сих пор на российских и бывших
советских производствах т.н. система «КИПиА технологического
комплекса или отдельных установок, широко использующая многочисленные
щитовые измерительные и регистрирующие приборы, должна быть признана
как устаревшая во всех отношениях.
Требования к элементной базе
Исходя из требований, предъявляемых к структуре СТ, ее элементная база
должна удовлетворять следующим основным требованиям:
• обеспечивать создание пространственно-распределенной
системы сбора данных;
• обеспечивать магистрально-модульный принцип построения
системы, облегчающей ее адаптацию и модификацию в случае
необходимости коррекции структуры системы;
• отвечать требованиям ОРС-стандарта;
• обеспечивать высокую надежность и оптимальность по
критерию «эффективность-стоимость»;
• обеспечивать функционирование в заданном диапазоне
измеряемых и контролируемых параметров (температура, давление,
уровни электрические параметры и т.п.;
• обеспечивать функционирование в диапазоне заданных внешних
условий эксплуатации, в т.ч. в режиме внештатных ситуаций ;
• обладать достаточной помехозащищенностью, исключающей
получение ложной информации, и исключению помех,
влияющих на работу других частей ПО и на качество питающей
электрической сети.
Требования к программному обеспечению
Система телемеханики, построенная в соответствии с требованиями
SCADA-систем, обуславливает специфические требования,
предъявляемые к программному обеспечению:
• программное обеспечение должно представлять собой
интегрированный комплекс программных средств, включающих в себя
все необходимые для создания современного
человеко-машинного интерфейса (HMI) и SCADA-приложений с поддержкой
ОРС-стандарта;
518
Глава 7. Телеметрия в современной промышленности и энергетике
• комплекс должен работать под управлением Windows 95/98/
NT/2000/XP/Vista/CE и иметь средства обмена данными по
последовательному каналу связи;
• комплекс должен обеспечивать возможность создания
пользовательских приложений, допускающих написание специальных
программ для создания мнемонических схем на экране дисплея
и реализации специфических программ управления;
• программное обеспечение должно обеспечивать динамическое
отображение изменения контролируемых параметров процесса
обогащения и их привязку к физическим каналам ввода-вывода;
• в состав комплекса программных средств должны входить,
программы, обеспечивающие генерацию отчета о текущем
состоянии процесса ректификации, работе отдельных приоритетных
блоков и систем оборудования, архивацию данных телеметрии
и своевременный прогноз, предсказание, обнаружение и
идентификация аварийных и других событий, связанных с
контролируемым процессом и состоянием технического оборудования.
Изложенные требования являются достаточными при разработке
подавляющего большинства СТ. Однако естественно, что особенности некоторых
технологических процессов и применяемого специального оборудования
ПО могут потребовать введения дополнительных. Примерами такого
специального процесса и оборудования могут быть комплекс оборудования
работающий в условиях на шельфовой нефтедобывающей платформе
(специальные условия работы ПО и СТ) или технологический комплекс
специального оборудования по утилизации радиоактивных отходов
(специальные материалы ПО).
7.4. ОСНОВНЫЕ ПРИНЦИПЫ ПОСТРОЕНИЯ СОВРЕМЕННЫХ
СИСТЕМ ТЕЛЕМЕХАНИКИ
7.4.1. Задачи системы телемеханики
Современная СТ ПО представляет собой автоматизированную систему
контроля состояния (и управления) технологическим процессом с
использованием современных методов измерений, средств сбора, обработки,
анализа и представления данных о ходе процесса, архивирования и функций
управления.
519
Телеметрия в теории и на практике
Весь комплекс СТ должен обеспечивать решение следующих основных задач:
• текущий контроль состояния отдельных блоков и узлов
основного и вспомогательного оборудования, обеспечивающего
функционирование ПО;
• текущий контроль параметров процессов в отдельных
технологических сечениях;
• комплексный контроль процесса в отдельных группах
технологического оборудования;
• обеспечение своевременной сигнализации о возникновении
аварийных ситуаций.
По возможности комплекс СТ должен в наиболее полной степени
обеспечивать формирование и выдачу управляющих сигналов для изменения
текущих значений параметров оборудования в соответствии с алгоритмом
функционирования отдельных блоков или всего ПО.
7.4.2. Особенности измеряемых и анализируемых
технологических процессов
Основной анализируемый процесс можно представить в виде некоего
комплексного достаточно сложного технологического процесса. В качестве
примера можно задать перечень следующих групп контролируемых
параметров
а) Пределы изменений параметров непосредственно в технологическом
процессе:
• Температуры - указываются конкретные пределы,
• Давления - указываются конкретные пределы,
• Расхода отдельных реагентов, - указываются конкретные
пределы,
• Уровни некоторых жидких реагентов - указываются конкретные
пределы,
и т.п.
б) Пределы изменений параметров в дополнительном оборудовании:
• Указываются аналогично.
в) Максимальные скорости изменения параметров процессов во времени
520
Глава 7. Телеметрия в современной промышленности и энергетике
в режиме нормального функционирования:
температура
• давление
• уровни и т.п.
г) Максимальные скорости изменения параметров процессов во времени
в режиме аномального функционирования:
• Указываются аналогично.
7.4.3. Система телеметрии
Ядром системы телемеханики должна быть телеметрическая система,
предназначенная для выполнения следующих функций:
• измерение группы параметров, характеризующих состояние
отдельных узлов и деталей, а также по возможности
непосредственно процессов;
• представление результатов измерений в форме, удобной для
дальнейших операций;
• сбора данных о состоянии отдельных блоков и узлов ПО и о
текущих параметрах процесса;
• обработки данных с целью получения информации о состоянии
отдельных узлов ПО и характере протекания процесса в
отдельных его сечениях;
• преобразования результатов обработки к виду,
обеспечивающему оперативное восприятие человеком-оператором информации
о текущем состоянии процесса с помощью дисплея (дисплеев);
ведение архива данных о процессе с целью ретроспективного
анализа хода протекания процессов ПО;
• сигналов, предупреждающих о нарушениях режима и
возникновении аварийной ситуации;
• решения диагностических задач с целью определения и
своевременной локализации места возникновения нарушения режима,
меняющего характер протекания процесса.
• по возможности телеметрическая система также должна
обеспечивать выработку решения об управляющем воздействии в
случае обнаружения тенденции отклонения параметров
процесса от нормы.
521
Телеметрия в теории и на практике
7.4.4. Состав системы телеметрии промышленных
объектов
Для выполнения указанных функций система телеметрии в своем составе
должна иметь:
• набор датчиков, непосредственно воспринимающих параметры
процесса и преобразующих их в электрические сигналы;
• аппаратуру сбора и преобразования этих сигналов для
представления телеметрируемых параметров в размерных величинах;
• аппаратуру отображения с использованием одного или
нескольких дисплеев;
• инженерный пульт для ручного ввода уставок, тарировочных
характеристик датчиков, выдачи управляющих воздействий и др;
• аппаратуру архивирования, обеспечивающую непрерывную
регистрацию обработанных данных в течение заданного периода
времени;
• аппаратуру цветовой, звуковой и световой сигнализации для
предупреждения о возникновении предаварийных и аварийных
ситуаций;
• средства контроля состояния и режимов работы систем
инфраструктуры обогатительного каскада (системы
электроснабжения, водоснабжения, вакуумирования и т.п.);
Система телеметрии должна иметь выход на локальные регуляторы,
предназначенные для управления технологическим процессом. Система
телеметрии также должна вырабатывать сигналы различных блокировок,
отключений и т.п. в случаях возникновения нештатных и аварийных ситуаций.
С целью повышения надежности комплекса и достоверности получаемой
информации и, учитывая специфику процессов, непрерывность и долго-
временность работы ПО и отдельных групп оборудования , должна быть
обеспечена аппаратурная и информационная избыточность, а также
бесперебойность электропитания.
7.4.5. Структура системы телеметрии
промышленных объектов
Исходя из перечисленных функций и предполагаемого состава,
современная система телеметрии должна строится на базе вычислительной техни-
522
Глава 7. Телеметрия в современной промышленности и энергетике
ки с использованием программного обеспечения, позволяющего в полном
объеме реишть специфические задачи телеметрии и обеспечивать решение
смежных задач управления.
Значительные геометрические размеры и протяженность в пространстве
конструктивных элементов ПО определяют многоуровневую и
пространственно-распределенную структуру системы телеметрии.
Существует большое разнообразие вариантов организации и построения
структуры системы телеметрии для такого типа ПО. Однако наиболее
полно структуре построения рассматриваемого варианта ПО отвечает система
телеметрии, удовлетворяющая требованиям SCADA-систем.
Как уже было отмечено ранее, SCADA-система (Supervisory Control and
Data Acquisition System) - система сбора данных и оперативного
диспетчерского управления представляет собой программно-аппаратный
комплекс, создаваемый на базе вычислительной и микропроцессорной техники.
При этом все средства комплекса взаимодействуют на основе стандарта
ОРС (OLE for Process Control). Следует отметить, что независимо от
фирмы-поставщика стандарт ОРС, признанный и поддерживаемый всеми
ведущими фирмами производителями SCADA - систем и оборудования,
обеспечивает совместное функционирование программных и аппаратных
средств, входящих в состав SCADA-системы.
Стандарт ОРС предоставляет разработчику системы телеметрии
технологического процесса возможность выбирать оптимальные для своей
системы компоненты, а не ориентироваться, как раньше, на «монолитные»
решения, предлагаемые тем или иным поставщиком.
Исходя из структуры SCADA-системы, аппаратура системы телеметрии
практически любого промышленного объекта должна быть представлена
на следующих трех уровнях.
• Уровень 1 (датчиковый уровень) - уровень сопряжения с
процессом. На этом уровне находятся датчики и регуляторы,
расположенные на рабочих элементах колонн. Датчики
непосредственно воспринимают параметры телеметрируемого процесса
и преобразуют их физические значения в электрические
сигналы. На регуляторы поступают управляющие сигналы,
обеспечивающие оптимальность ректификационного процесса.
• Уровень 2 (уровень контроллеров) - уровень сбора данных
с каждой колонны (или группы фрагментов колонн). На этом
уровне с помощью микропроцессорных систем
осуществляется программный опрос датчиков, первичная обработка данных
523
Телеметрия в теории и на практике
(фильтрация помех, преобразование аналоговых выходных
значений датчиков в цифровой код, сравнение с уставками в
случае допускового контроля и т.п.). С этого уровня
предварительно обработанные данные по стандартному
последовательному каналу (например, RS-485) передаются на третий уровень.
Кроме того, через этот уровень на регуляторы (исполнительные
механизмы) первого уровня могут поступать управляющие
сигналы.
• Уровень 3 (уровень диспетчерского управления) - уровень
вторичной обработки данных, анализа, отображения и
архивирования параметров процесса. На этом уровне
производится комплексная обработка данных, полученных в основном от
групп оборудования и контрольных сечений
технологического процесса. Предполагается также возможность оперативного
прямого доступа с этого уровня практически любому элементу
любого другого уровня.
Уровень 3 диспетчерского управления используется в основном с целью
получения интегральной оценки качества процесса ПО. Здесь же
осуществляется преобразование информации о текущем состоянии отдельных групп
оборудования и отдельных блоков к виду, удобному для их отображения.
Кроме того, данные, поступающие со второго уровня, подвергаются
дополнительной обработке с целью уменьшения избыточности для компактного
их представления при архивировании. На этом же уровне производится
распечатка (по запросу оператора) как текущих данных о процессе, так и
ретроспективных.
7.4.6. Информационная структура системы телеметрии
промышленных объектов
Предварительный анализ основных показателей условного стандартного
технологического процесса, а также особенности работы отдельных блоков
и узлов ПО, определяют следующий набор датчиков:
• датчики давления (разрежения);
• датчики температуры;
• датчики электрических токов и напряжений;
• датчики уровней (жидкостей);
• датчики веса (объема) и т.п..
524
Глава 7. Телеметрия в современной промышленности и энергетике
Все указанные датчики как правило относятся к группе аналоговых с
точностью преобразования физической величины в электрический сигнал не
лучше 1...2 процентов. Кроме аналоговых датчиков должны также
использоваться и контактные, фиксирующие состояние телеметрируемых
устройств в положениях "включено"-"выключено".
В связи с тем, что построение системы телеметрии на современном
уровне предполагает использование вычислительной и микропроцессорной
техники, в состав телеметрической аппаратуры должны входить аналого-
цифровые преобразователи (АЦП), обеспечивающие кодирование
аналоговых сигналов с датчиков в двоичный код. Для оценки общего количества
телеметрирумых параметров ориентировочно примем, что все отдельные
группы оборудования ПО содержат одинаковое число датчиков.
Условно примем также, что весь комплекс оборудования ПО выполнен в
виде N групп блоков и элементов.
С учётом возможных дополнительных резервных блоков и устройств общее
количество всего оборудования в группах будет на 10% больше.
При этом в каждой группе должно быть определенное число датчиков:
температурных, давления, влажности, уровня и т.п.(в сумме по «к» датчиков в
группе). В итоге для обеспечения телеконтроля всего ПО суммарное число
датчиков должно быть увеличено в 1,Шк раз как минимум
Кроме того, для контроля инфраструктуры ПО необходимо измерять
группу дополнительных параметров, например внешней среды, параметров
отходов. Число таких датчиков контроля внешней инфраструктуры ПО
добавляется к общему количеству датчиков производственного процесса ПО.
Помимо перечисленных групп аналоговых датчиков, в систему
телеметрии должны входить контактные датчики. Если их общееечиелло
обозначить как кк, то Итоговое количество 1,Шк+квн+кк определяет объем и
информационную структуру системы телеметрии. На практике это число
на одного дежурного оператора уровня 3 диспетчерского управления
колеблется от сотен до нескольких тысяч, в зависимости от сложности и
особенностей ПО и динамики технологического процесса.
7.4.7. Выводы
В качестве выводов по данному разделу хотелось бы отметить следующее:
1. Ядро информационно-аналитического комплекса практически для
любого сложного и динамичного технологического процесса и ПО
525
Телеметрия в теории и на практике
целесообразно реализовать в виде системы телеметрии.
2. Система телеметрии ПО должна строится на основе средств
вычислительной и микропроцессорной техники по магистрально-мо-
дульному принципу в виде пространственно -распределенной
системы.
3. Структура системы телеметрии должна соответствовать структуре
SCADA-системы с возможностью использования оборудования,
отвечающего требованиям стандарта ОРС.
4. Общее количество телеметрируемых параметров практически не-
ограничено, однако из практических соображений рекомендуется на
уровне несколько сотен и первых тысяч.
5. Система телеметрии должна быть более детально проработана как
с точки зрения элементной базы, так и с точки зрения сопряжения
со специальных оборудованием ПО, учитывая при этом специфику
процессов, оборудования и всего ПО.
7.5. ЭЛЕМЕНТНАЯ БАЗА И ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ
СОВРЕМЕННЫХ СИСТЕМ
ТЕЛЕМЕХАНИКИ
7.5.1. Выбор и обоснование элементной базы
Основные требования, предъявляемые к элементной базе
Исходя из особенностей технологического процесса и схемы построения
обогатительного каскада, элементная база телеметрической системы
должна удовлетворять следующим основным требованиям:
• обеспечивать магистрально-модульный принцип построения
системы;
• обеспечивать возможность создания
пространственно-распределенной системы;
• отвечать требованиям ОРС-стандарта;
• обеспечивать оптимальность по критерию «эффективность -
стоимость».
526
Глава 7. Телеметрия в современной промышленности и энергетике
Магистрально-модульный принцип обеспечивает построение
телеметрической системы с использованием сменных электронных модулей,
подключаемых к стандартной межмодульной магистрали в базовом
объединительном блоке. При широкой номенклатуре модулей представляется
возможность создания телеметрической системы, оптимальным образом
соответствующей критерию «эффективность - стоимость» и обладающей
способностью к расширению и модернизации.
Пространственная распределенность системы требует использования
полевых промышленных шин (Ethernet, Fieldbus, RS-485, Hart или AS-интер-
фейс) для соединения базовых блоков, что обеспечивает существенное
сокращение кабельной сети и оптимальное пространственное распределение
базовых блоков.
Необходимость удовлетворения требованиям ОРС-стандарта обусловлена
следующим. PC - OLE for Process Control (механизм связывания и
внедрения объектов для сбора данных и управления в системах
промышленной автоматизации) является наиболее общим способом взаимодействия
между различными источниками и приемниками данных, такими как
устройства, базы данных и системы визуализации информации о
контролируемом объекте. ОРС-стандарт обеспечивает интерфейс между
приложениями-клиентами и серверами путем реализации стандартного механизма
связи между источниками данных (серверами) и получателями данных
(клиентами).
Поскольку аппаратные средства разных производителей имеют различные
и притом фиксированные протоколы обмена, архитектура приложений-
клиентов также является уникальной в каждом конкретном случае. Это
приводит к увеличению времени разработки и стоимости системы
телеметрии, а любое изменение, внесенное производителем в устройство или
протокол обмена, требует внесения изменений в функционирующую систему.
Архитектура клиент-сервер, основанная на технологии ОРС, позволяет
решить эту проблему.
В данном случае устройство каждого производителя может иметь
единственный стандартный драйвер, совместимый с ОРС (ОРС - сервер). При
этом приложения, соответствующие спецификации, выработанной для
клиента ОРС (ОРС - клиенты), могут обмениваться с устройствами
любого производителя.
Выбор элементной базы
Существенным при выборе элементной базы телеметрической системы,
527
Телеметрия в теории и на практике
отвечающей приведенным выше требованиям, является выбор фирмы-
производителя, чья продукция реализуется в России. Анализ продукции
как отечественных, так и зарубежных фирм, позывает, что в наибольшей
степени требованиям построения телеметрической системы
практически любого технологического процесса и промышленного объекта отвечает
аппаратура зарубежных фирм таких как: WAGO I/O, Grayhill, Advantech,
Pepperl+Fuchs и Siemens. Продукция этих фирм распространяется и
обеспечивается в России фирмой ПРОСОФТ.
Аппаратура указанных фирм, отвечающая требованиям ОРС-стандарта,
отличается конструктивными, информационными и стоимостными
характеристиками, а также возжностью работы с той или иной полевой шиной.
К настоящему времени наиболее широкое распространение в
пространственно-распределенных системах сбора и обработки данных с
использованием вычислительной и микропроцессорной техники получила
последовательная шина на базе интерфейса RS-485. Поэтому при выборе и
обосновании элементной базы системы телеметрии некоего обобщенного
технологического процесса и соответствующего ПО будем исходить,
прежде всего, из возможности работы аппаратуры с указанным интерфейсом.
С этой точки зрения большой выбор оборудования для построения
системы телеметрии предоставляет фирма Advantech. Фирма выпускает
широкую гамму электронной аппаратуры. В нее входят как различного вида
промышленные рабочие станции и встраиваемые компьютеры, так и
устройства для создания пространственно-распределенных систем сбора
данных и управления. Среди последних для построения системы телеметрии
интерес представляют модули серии ADAM (Advantech Data Acquisition
Modules - модули фирмы Advantech для сбора данных).
В настоящее время выпускается несколько серий таких модулей. Анализ
технических и стоимостных характеристик показал, что оптимальными
характеристиками для построения системы телеметрии некоего
обобщенного технологического процесса и соответствующего ПО обладают модули
серии ADAM-5000, отвечающие требованиям ОРС-стандарта.
Очевидно, что со временем будут появляться более совершенные серии
(например уже вышедшая серия ADAM-6000), которые могут быть также
использованы при разработке и создании систем телемеханики.
Основные сведения об устройствах серии ADAM-5000
Устройства серии ADAM-5000, предназначенные для построения
пространственно-распределенных систем сбора данных и управления, обес-
528
Глава 7. Телеметрия в современной промышленности и энергетике
печивают выполнение следую- щих функций:
• ввод-вывод аналоговых параметров,
• ввод-вывод дискретных параметров,
первичное преобразование информации,
прием команд от удаленной вычислительной системы и
передача в ее адрес преобразованных данных с использованием
интерфейса RS-485 или Ethernet.
Серия ADAM-5000 состоит из базового блока и набора модулей ввода-
вывода. Базовый блок содержит процессор на основе микроконтроллера
80С188 и кросс-платы для подключения модулей ввода-вывода. Базовый
блок выпускается в двух вариантах: с кросс-платой с четырьмя и восьмью
слотами.
Использование модулей серии ADAM-5000 для построения системы
телеметрии обогатительного каскада позволяет обеспечить гибкость
конфигурирования системы и входящих в нее устройств в зависимости от количества
и вида телеметрируемых параметров, а также от расположения
ректификационных колонн. Устройства серии ADAM-5000 могут объединяться в
многоточечную сеть на базе интерфейса RS-485 или Ethernet, управляемую
центральным компьютером. Применение локально устанавливаемых
модулей ввода-вывода позволяет существенно снизить затраты на монтаж, а
также обеспечивает повышенные удобства в процессе обслуживания.
Базовые блоки используют двухпроводную линию для связи с
управляющим компьютером по мультиабонентским сетям на базе интерфейса RS-485
или просто включаются в имеющуюся локальную сеть Ethernet.
Подключение сигналов с выходов датчиков к модулям осуществляется с помощью
фронтального терминального соединителя с винтовой фиксацией,
обеспечивающего возможность оперативного присоединения и повышенные
удобства при обслуживании.
Технические характеристики устройств серии ADAM-5000
Устройства серии ADAM-5000 имеют следующие основные технические
характеристики:
• максимальное количество базовых блоков, объединяемых одной
двухпроводной мультиабонентской линией на базе интерфейса
RS-485, равно 256;
• к модулям одного восьмислотового базового блока может быть
529
Телеметрия в теории и на практике
подано до 128 дискретных или до 64 аналоговых сигналов с
датчиков;
• настройка диапазонов и типов входных аналоговых сигналов
производится с центрального компьютера по той же
двухпроводной мультиабонентской линии на базе интерфейса RS-485
или с помощью переносного компьютера, подключаемого к
отдельному базовому блоку через интерфейс RS-232C;
• протокол обмена строится на базе ASCII-кодов;
• скорость передачи данных до 115 кбод:
• имеется гальваноразвязка по входу/выходу/питанию;
• для исключения зависания программы работы каждый базовый
блок содержит сторожевой таймер (watch-dog);
питание базовых блоков нестабилизированное от +10 до +30В с
защитой от неправильной полярности при подключении
полярности.
• диапазон рабочих температур: от -10 до +70°С.
7.5.2. Выбор и обоснование математического
обеспечения
Основные требования, предъявляемые к математическому обеспечению
Информационно-аналитический комплекс ПО и входящая в его состав
телеметрическая система, построенная базе устройств ADAM-5000, обуслав
ливают специфические требования, предъявляемые к математическому
обеспечению. Основным является требование, заключающееся в том, что
математическое обеспечение должно представлять собой
интегрированный комплекс программных средств, включающих в себя все
необходимое для создания современного человеко-машинного интерфейса
(HMI) и SCADA-приложений с поддержкой ОРС-стандарта. При этом
комплекс должен работать под управлением Windows 95/98/NT/2000/
XP/Vista/CE и иметь средства обмена данными по последовательному
каналу связи.
Комплекс программных средств должен иметь специальную оболочку для
построения пользовательских приложений, исключающих написание
программного кода и сводящего весь процесс разработки к «рисованию» сис-
530
Глава 7. Телеметрия в современной промышленности и энергетике
темы на экране с последующей привязкой к физическим каналам
ввода-вывода. Для построения комплексных систем и организации сложных алгоритмов
обработки данных должна быть предусмотрена возможность разработки
программ с помощью встроенного языка VBA(Visual Basic for Application).
Кроме указанных требований, существенным является цена
математического обеспечения. Сюда входит и цена лицензий на исполнительные
модули интегрированного комплекса, и зависимость этой цены от числа тегов
(входов-выходов) системы.
Исходя из особенностей функционирования ПО, важным требованием
является обеспечение генерации отчета о текущем состоянии
технологического процесса, архивация данных телеметрии и своевременное обнаружение,
идентификация аварийных и других событий, связанных с
контролируемым процессом и состоянием технических средств ПО.
В настоящее время имеется достаточно большое количество программных
средств, отвечающих сформулированным выше требованиям. Например,
Advantech Studio, GeniDAQ(Advantech), Trace Mode (Россия), InTouch
фирмы Wondierware, WinCC фирмы Siemens и GENESIS32 фирмы Iconics.
Сравнительный анализ указанных программных пакетов (по
литературным данным и консультаций со специалистами) показал значительные
преимущества пакета GENESIS32 фирмы Iconics по ряду параметров,
которые следует считать основными и наиболее существенными для
рассматриваемого класса технологических процессов и ПО.
Во-первых, данный пакет обладает компонентностью (в отличие от других
«монолитных» пакетов). Компонентная архитектура позволяет
приобретать только нужные компоненты и на необходимое количество точек
ввода-вывода (тегов). Это обстоятельство позволяет экономить финансовые
средства при лицензировании своих программных компонентов,
количество и состав которых определяются прикладной задачей.
Во-вторых, пакет GENESIS32 по сравнению с другими пакетами имеет
в своем составе мощные и гибкие средства для создания графических
экранных форм с минимальными затратами труда и времени. При этом
пакет содержит обширную библиотеку графических символов (примитивов)
с возможностью ее расширения пользователем.
В-третьих, в пакет входят компоненты, обеспечивающие широкие
возможности для построения различных графических зависимостей
контролируемых параметров, их архивации и генерации отчетов.
В-четвертых, пакет GENESIS32 содержит в своем составе программный
компонент, обеспечивающий обнаружение, фильтрацию и представление
531
Телеметрия в теории и на практике
информации об аварийных событиях.
Все указанные основные преимущества пакета GENESIS32 определяют
целесообразность принять его в качестве математического обеспечения
информационно-аналитического комплекса основных технологических
процессов и ПО.
Описание пакета GENESIS32
Пакет GENESIS32 является комплексом 32-разрядных приложений для
Windows 95/ 98/NT/2000, построенных в соответствии со ОРС-стандар-
том. Пакет GENESIS32 предназначен для создания программного
обеспечения сбора данных и оперативного диспетчерского управления верхнего
уровня систем промышленной автоматизации.
В состав пакета входит также среда разработки и исполнения сценарных
процедур VBA, обеспечивающая возможность разработки части
программного обеспечения средствами Visual Basic for Application для приложений,
входящего в состав в пакет MS Office 2000. Все программные компоненты
реализованы на базе многопотоковой модели и поддерживают технологию
ActiveX.
В состав пакета GENESIS32 входят следующие компоненты (клиентские
приложения), соответствующие ОРС-стандарту:
GraphWorX32,
TrendWorX32,
AlarmWorX32,
ScripWorX32.
Эти компоненты могут заказываться и применяться как в составе пакета,
так и автономно. Кроме того в состав пакета входит большое число
дополнительных приложений и инструментальных средств разработки.
Все приложения, входящие в состав GENESIS32, могут использоваться
бесплатно для разработки проектов. Имеется возможность активизации
временной 30-дневной лицензии, позволяющей создавать и тестировать
проекты любой сложности с неограниченным количеством точек ввода-
вывода (однако, по истечении 30 дней пакет прекращает
функционирование, если не куплена соответствующая лицензия).
Рассмотрим далее более подробно назначение и возможности каждого из
компонентов пакета.
GraphWorX32 является инструментальным средством, предназначенным
532
Глава 7. Телеметрия в современной промышленности и энергетике
для визуализации контролируемых технологических параметров и
оперативного диспетчерского управления, который полностью
соответствует ОРС-стандарту и поддерживает технологии ActiveX и OLE (Object
Linking Embeded).
Основные характеристики GraphWorX32. Наличие инструментов для
создания экранных форм и динамических элементов отображения
• Встроенная среда редактирования сценарных процедур с помощью
VBA
• Динамизация элементов отображения со временем обновления
графической информации 50 мс
• Поддержка шаблонов экранных форм, содержащих наиболее часто
используемые графические объекты
• Возможность взаимодействия с приложениями MS Office (MS Word,
MS Excel, MS Access и др.)
• Наличие обширной и расширяемой пользователем библиотеки
элементов отображения, ориентированных на построение мнемосхем
промышленных объектов
• Наличие встроенного редактора выражений для выполнения
математических, функциональных, логических и других операций над
данными.
TrendWorX32 обеспечивает накопление и представление текущих данных
в виде графических зависимостей от времени. Кроме того, TrendWorX32
является средством архивации накапливаемой информации в базах данных
с возможностью последующего извлечения и представления в виде отчета
или графика.
Основные характеристики TrendWorX32:
• Представление значений контролируемых параметров, получаемых от
серверов ОРС, на графиках различных типов в реальном масштабе
времени. Поддерживаются следующие виды графиков:
• зависимость от времени;
• логарифмическая зависимость от времени;
• гистограмма;
круговая диаграмма;
• зависимость одного параметра от другого.
533
Телеметрия в теории и на практике
• Возможность построения графических зависимостей на основе данных
пользователя с помощью сценариев VBA или внешних приложений
• Архивирование значений контролируемых параметров в базах данных
MS Access, MS SQL Server, Oracle и Microsoft Data Engine (MSDE)
• Вычисление статистических характеристик выборок значений
контролируемых параметров
• Возможность одновременного просмотра текущих и исторических
данных в одной области построения
• Вывод графиков на печатающее устройство
• Генерация отчетов в базах данных и MS Excel
AlarmWorX32 является набором программных компонентов,
предназначенных для обнаружения аварийных событий, оповещения
оператора, приема подтверждений восприятия информации об аварийных
событиях и регистрации информации об авариях в базе данных.
Основные характеристики AlarmWorX32:
• Обнаружение аварийных событий по множеству критериев и
признаков, устанавливаемых пользователем
• Простое оповещение персонала об обнаруженных аварийных
событиях путем прерывистого отображения информации об аварии и
звукового сигнала
• Голосовое оповещение персонала об обнаруженных аварийных
ситуациях
• Оповещение персонала путем автоматического дозвона по
коммутируемым каналам связи (пейджер, e-mail, факс) с передачей
сообщений об аварийных событиях и приемом подтверждений восприятия
от ответственных лиц
• Персональное планирование оповещения для привлечения к
мероприятиям по устранению аварийной ситуации только дежурного
персонала
• Анализ аварийных событий и действий ответственного персонала
• Связь с аппаратными средствами через интерфейсы ОРС
534
Глава 7. Телеметрия в современной промышленности и энергетике
7.6. ЭТАПЫ РАЗРАБОТКИ СОВРЕМЕННЫХ СИСТЕМ ТЕЛЕМЕТРИИ
ДЛЯ ПРОМЫШЛЕННЫХ ОБЪЕКТОВ
Разработка концепции построения системы телеметрии (СТ)
1. Изучение технологического производственного процесса и
инфраструктуры ПО.
2. Выделение принципиальных особенностей процесса и ПО с точки
зрения их учета в концепции и в структурной схеме СТ.
3. Разработка концепции и структурной схемы СТ.
4. Обоснование и выбор элементной базы.
5. Обоснование и выбор программного обеспечения.
6. Разработка варианта «усеченной» СТ для случая проведения
экспериментальных стендовых испытаний оборудования или
технологического процесса.
Предварительная разработка отдельных узлов и блоков СТ, проверка и
отладка и ее элементов.
7. Автономные (лабораторные) проверки исследования характеристик
различных датчиков (температуры, давления, вакуума, уровней,
потоков и т.п.) и согласование характеристик их выходных сигналов
с входными параметрами системой сбора и обработки информации
(вне стенда).
8. Автономные исследование характеристик контактных датчиков.
9. Исследования влияния внешних факторов на точность и
достоверность проводимых измерений в месте размещения ПО (в частности
исследования наводок по сетям питания, уровня электромагнитного
излучения, тряски, шумов и т.п.)
Отработка СТ для случая экспериментального стенда или
технологических испытаний макетов оборудования.
10. Разработка окончательно версии стендового оборудования.
Создание окончательного варианта «усеченной» СТ.
И. Разработка мнемонической схемы для случая «усеченной» СТ ПО.
Для случая отсутствия варианта макетов и стендов такая разработка
делается сразу для ПО.
12. Программирование динамики его работы с отображением на экране
дисплея.
535
Телеметрия в теории и на практике
13. Комплексные исследования (экспериментальная отработка)
характеристик всех датчиков. Тарировка датчиков.
14. Проведение измерений в условиях стандартных режимов рабооты
оборудования.
15. Запуск стенда в режим. Получение результатов измерений
комплексных параметров всех процессов. Согласование работы всех
отдельных блоков и оптимизация разработанной системы сбора,
обработки, представления и архивирования информации.
16. Использование разработанной СТ для целей отработки
технологических режимов работы отдельных блоков и устройств:
а) по отдельным параметрам технологического оборудования,
б) по отдельным типам и типо-размерам исполнения,
в) по группам блоков и устройств в отдельных ветвях процесса,
17. Использование разработанной СТ для моделирования режимов пре-
даварийных и аварийных блокировок и нестандартных ситуаций:
а) по электропитанию,
б) по охлаждению (например конденсаторов) и превышению
давления,
в) по нарушению герметичности отдельных блоков (особенно
для опасных процессов и веществ),
г) по несанкционированным действиям обслуживающего персонала;
д) по др. нештатным режимам, в т.ч. внешним воздействиям.
Перенос данных с «усеченной» СТ для стендового оборудования на
полномасштабную СТ (для всего ПО).
18. Выдача конечных рекомендаций по переносу разработанной
«усеченной» СТ на полномасштабный ПО с учетом выявленных
недостатков, пожеланий, реализации новых возможностей и планов, в
т.ч. для дальнейшего совершенствования ПО и технологического
процесса.
19. Уточнение структуры СТ, размещению, типам и количеству
датчиков, программным средствам.
20. Уточнение мнемонической схемы для ПО. Программирование
уточненного варианта отображений на экране дисплея и
архивирования.
536
Глава 7. Телеметрия в современной промышленности и энергетике
Отработка СТ совместно с элементами управления (телемеханика).
21. Разработка систем управления отдельными блоками или
технологическими сечениями. Экспериментальная отработка на
исполнительных элементах (вне ПО или на моделях).
22. Отработка системы управления отдельными блоками или
технологическими сечениями в комплексе. Оптимизация режимов
управления.
23. Разработка принципиальной электрической (силовой) схемы
управления отдельными блоками или технологическими сечениями ПО в
комплексе.
Формирования принципиальных схем для конечного варианта СТ для
данного ПО.
24. Разработка принципиальной электрической схемы электропитания
всех устройств, задействованных в СТ ПО.
25. Разработка принципиальной схемы системы сбора данных о
текущих параметрах всех процессов ПО. Разработка принципиальной
схемы системы контроля инфраструктуры ПО.
26. Разработка формы протоколов выдачи данных, работы
оборудования и контроля процессов. Разработка и обоснование приоритетов.
Монтаж и запуск систему телеметрии.
27. Монтаж СТ на поэтапно монтируемом оборудовании.
28. Опытная эксплуатация смонтированной системы (ее частей) на
отдельных фрагментах оборудования и в отдельных процессах ПО по
мере его построения и запуска.
29. Разработка предложений по дальнейшей модификации и
усовершенствованию СТ в процессе запуска оборудования ПО.
Окончательного оформления эксплуатационной документации СТ и ПО в
соответствии с действующими ГОСТами и международными стандартами.
537
Для заметок
Глава 8.
Телеметрия в атомной
промышленности
8.1. ОСОБЕННОСТИ СИСТЕМ ТЕЛЕМЕТРИИ В АТОМНОЙ
ПРОМЫШЛЕННОСТИ
Атомная промышленность была и остается одной из самых
высокотехнологичных и наукоемких областей науки и техники в мире. Процессы и
установки в этой отрасли всегда требовали точных и надежных измерений,
эффективной обработки данных, оперативной оценки текущего состояния
и надежного долговременного прогнозирования развития событий.
Полноценное развитие систем телеметрии в российской атомной
энергетике долгие годы сдерживалось ограничениями на использование
комплектующих иностранного производства. Тем не менее прогрессивной тенденцией
80-х гг. следует признать применение магистрально-модульного принципа
построения информационных систем на базе системы КАМАК, широко
распространявшееся в 80-х гг.
Достижения 90-х гг. в области специальной датчиковой аппаратуры,
электроники и компьютерной аппаратуры придали резкий толчок к широкому
применению систем телеметрии (телемеханики) с использованием
материалов и изделий иностранных производителей, в основном США, Японии и
Западной Европы.
Особенности физико-химических свойств и потенциальная опасность
применяемых в отрасли радиоактивных и ядерных материалов требуют соблю-
540
Глава 8. Телеметрия в атомной промышленности
дения строгих необходимых мер и правил при разработке и производстве
всех применяемых информационно-измерительных систем и в первую
очередь систем дистанционного контроля. При этом процедуре сертификации
подвергаются не только отдельные изделия и системы, но и сами
поставщики оборудования для атомной энергетики. Это производится, как
правило, в форме сертификации всего комплекса производства с выдачей
соответствующего сертификата качества. Такие предприятия имеют постоянно
действующую систему менеджмента качества.
Традиционно системы телеметрии в атомной энергетике носят название
системы дистанционного контроля, сбора и обработки данных. В случаях,
если они непосредственно связаны с системами управления, они
превращаются в АСУ ТП.
Можно отметить следующие особенности систем телеметрии в связи со
спецификой процессов и аппаратов этой отрасли:
значительная структурная и функциональная избыточность всех
элементов систем телеметрии на наиболее ответственных и
потенциально опасных установках и аппаратах;
радиационная стойкость датчиковой аппаратуры;
использование групп разнотипных датчиков радиации,
позволяющих измерять разные виды радиоактивных излучений
(рентгеновское, гамма-, нейтронное и др.);
- долговременная надежность датчиков при работе в условиях
одновременного воздействия нескольких факторов;
невозможность в любое время провести калибровку градуировоч-
ных (тарировочных) характеристик датчиков излучений и др.
Целесообразно обозначить следующие направления в атомной
промышленности и энергетике, применение систем телеметрии в которых несомненно
повысит эффективность исследовательских и промышленных установок и
производств (в соответствии со схемой топливного цикла):
- реакторные установки исследовательского и промышленного
типов;
- установки и производства по обогащению урана;
производства ядернога топлива и топливных элементов;
переработка отработавшего ядерного топлива и обращение с
радиоактивными отходами;
541
Телеметрия в теории и на практике
хранение ядерных и радиоактивных материалов;
- долговременное хранение (захоронения) ядерных и радиоактивных
материалов;
производство радиоактивных источников для медицины, науки и
промышленности;
производства стабильных (нерадиоактивных) изотопов;
системы радиоактивного мониторинга, контроля окружающей
среды и др.
Заметим, что в последнее время в связи с борьбой с терроризмом большое
внимание уделяется разработке систем телеметрии, позволяющих
исключить несанкционированное перемещение радиоактивных и ядерных
материалов, особенно на предприятиях, производящих или перерабатывающих
эти материалы.
8.2. СИСТЕМА ТЕЛЕКОНТРОЛЯ УСТАНОВКИ ПРОИЗВОДСТВА
СТАБИЛЬНЫХ ИЗОТОПОВ МЕДИЦИНСКОГО НАЗНАЧЕНИЯ
Современная система управления установками технологических процессов
связанных с производством стабильных изотопов, является
автоматизированной системой. Она предстазляет собой совокупность методов и средств,
обеспечивающих наиболее эффективное выполнение функций управления
оператором на основе использования методов и средств вычислительной
техники.
Основным звеном автоматизированной системы управления
технологическими процессами (АСУ ТП) производства стабильных изотопов
медицинского назначения, несущим информационные и управленческие функции,
является система телемеханики (см. гл. 7).
Технические требования к современным системам телемеханики
производства изотопов
Рассматривая широкий спектр разнотипных технологических установок и
комплексов, можно выделить некий обобщенный промышленный объект,
который в дальнейшем целесообразно рассмотреть и в качестве объекта
телемеханики.
В качестве основных характеристик такого промышленного объекта можно
определить следующие:
542
Глава 8. Телеметрия в атомной промышленности
1. Сложность апппаратурио-технологической схемы.
2. Многостадийность и разветвленность технологического процесса.
3. Использование токсичных и других опасных реагентов.
4. Необходимость постоянного мониторинга состояния сырьевых
запасрв, отходов и сбросов, а также окружающей среды.
5. Требования постоянной оценки предаварийной обстановки на всем
промышленном объекте.
6. Пространственно разнесенное оборудование.
7. Круглосуточный режим работы.
На практике, часто на предварительном этапе создания нового
промышленного объекта, целесообразно разработать макет технологической установки,
опытный стенд или экспериментальный промышленный модуль для
экспериментальной проверки и отработки, снятия рисков невыполнения
проекта, а также тренинга персонала. Для таких случаев также целесообразно
использовать систему телемеханики.
Однако структуру такой «усеченной» системы телемеханики и ее
элементную базу следует строить с учетом всех требований, предъявляемых к
современной системе полномасштабного промышленного объекта.
Результаты проведенной экспериментальной работы с «усеченной»
системой телемеханики на макетах и стендах учитываются и автоматически
перекладываются на принципы построения системы телемеханики
полномасштабного объекта. Очевидно, что при такой стратегии работ переход от
«усеченной» к полнофункциональной системе телемеханики
промышленных объектов будет практически осуществлен без качественного изменения
структуры системы и базового состава элементной базы и, естественно, при
минимальной стоимости работ.
Задачи системы телемеханики производства стабильных изотопов
одя из требований, предъявляемых к структуре системы 1елемеханики, ее
элементная база должна удовлетворять следующим основным
требованиям:
обеспечивать создание пространственно распределенной системы
сбора данных;
обеспечивать магистрально-модульный принцип построения
системы, облегчающей ее адаптацию и модификацию в случае
необходимости коррекции структуры системы;
543
Телеметрия в теории и на практике
Этапы разработки системы телемеханики для варианта промышленного
объекта в виде комплекса тепломассообменных высотных колонн
(изотопный ОБОГАТИТЕЛЬНЫЙ КАСКАД)
Предварительный этап
1. Разработка концепции системы телеметрии и ее привязка к аппаратур-
но-технологической схеме построения проекта обогатительного каскада и
к его внешней инфраструктуре (с учетом комплекса подготовки сырья и
операций с отходами).
Обоснование базовых принципов контроля состояния оборудования и
процессов, а также базовых принципов управления технологическим
процессом и оборудованием (концепция современных SCADA-систем).
2. Обоснование принципов и способов реализации.
2.1. Обоснование выбора элементной базы системы контроля и
управления (системы телемеханики) обогатительным каскадом на
основе сравнительного анализа видов и типов продукции,
предлагаемых отечественными и зарубежными производителями (датчиков,
управляющих устройств, электронных блоков и систем и др.). При
этом выбор производится исходя из требуемого диапазона и
точности измерений:
• для температуры,
• для давления (вакуума),
• для уровней и потоков,
• для тока и напряжения (мощности),
• для др. возможных параметров.
2.2. Обоснование выбора соответствующего программного
обеспечения:
• для датчикового уровня,
• для уровня локальных центров управления (контроллеров),
• для центрального поста контроля и управления.
Этап разработки варианта телеметрической системы для
экспериментального стенда
3. Разработка стенда
3.1. Разработка концепции экспериментального стенда в виде
укороченной насадочной колонны с двумя узлами обращения фаз.
544
Глава 8. Телеметрия в атомной промышленности
3.2. Разработка соответствующей Программы экспериментов (в том
числе измерений) на стенде.
3.3. Разработка «усеченного» варианта системы телемеханики
применительно к разрабатываемому экспериментальному стенду (в
стратегии последующей реализации полномасштабной системы
телемеханики).
4. Изготовление стенда.
4.1. Изготовление, монтаж и запуск технологического оборудования
экспериментального стенда (с конкретными конструктивными
вариантами испарителей, царг, конденсаторов и др.). При этом
одновременно производится монтаж и подготовка всей совокупности
датчиков (и управляющих устройств) в составе монтируемого
технологического оборудования.
5. Изготовление системы телемеханики для стенда.
5.1. Закупка электронных элементов для «усеченной» системы
телемеханики и монтаж совместно с технологическим оборудованием стенда.
5.2. Разработка программного обеспечения для стендового варианта
измерений и управления:
• формирование мнемонической схемы,
• отображение в динамике контролируемых и управляемых
параметров технологического процесса в колоннах обогатительного
каскада,
• архивирование результатов измерений,
• управление в отдельных блоках и устройствах.
5.3. Запуск и отладка всех элементов и составных частей стенда в
комплексе для подготовки к последующему исполнению Программы
испытаний.
Этап работы телеметрической системы в составе экспериментального
стенда
6. Уточнение Программы экспериментов с учетом последних
рекомендаций заказчика.
7. Экспериментальная отработка режимов работы отдельных стендовых
блоков и фрагментов технологического оборудования в соответствии с
уточненной Программой.
• режимы захлебывания,
18 Зак. 861
545
Телеметрия в теории и на практике
• режимы с различными размерами насадки,
• режимы с различными диаметрами колонн (ЦАРГ) и высотами на-
садочных слоев,
• режимы с различным уровнем вакуума,
• режимы работы с тяжелой водой (обогащение по дейтерию),
• отработка методов экспресс-анализа качества разделения.
Накопление и анализ экспериментальных данных в процессе всего
комплекса экспериментов.
8. Исследование методов управления параметрами оборудования и
отдельными сечениями технологического процесса стенда:
• экспериментальная проверка двухпозиционного метода управления
температурой в теплокамере;
• исследование возможности использования программного метода
ПИД-регулирования температуры;
• исследование возможности применения метода
ПИД-регулирования температуры с использованием автономного контроллера;
• сравнительная оценка исследованных методов управления
температурой в теплокамере;
• проверка выбранного метода (методов) управления температурой
при различных конструкциях теплокамер:
- двухконтурных;
одноконтурных (прямого нагрева);
теплокамер с сухими ТЭНами.
Этап анализа работы экспериментального стенда и телеметрической
системы в его составе
9. Анализ результатов экспериментальной проверки функционирования
стенда совместно с телеметрической системой.
9.1. Проверка функционирования комплекса температурных датчиков:
• определение экспериментальных погрешностей измерения
температуры различных элементов ректификациощшх колонн стенда;
• определение корреляционных зависимостей при измерениях
температуры различных элементов ректификационных колонн стенда;
546
Глава 8. Телеметрия в атомной промышленности
• определение оптимального расположения температурных датчиков
на колоннах.
9.2. Проверка функционирования комплекса датчиков давления
(вакуума):
• проверка функционирования комплекса датчиков давления в тепло-
камерах колонн, в испарителях и датчиков разрежения в
конденсаторах колонн;
• определение экспериментальных погрешностей измерения
давления в элементах ректификационных колонн стенда;
• определение оптимального распределения датчиков давления и
разрежения на колоннах;
• определение корреляционных зависимостей при измерениях
давления (вакуума) в различных сечениях ректификационного
оборудования.
9.3. Проверка функционирования других датчиков:
• проверка функционирования выбранной электронной базы и
программного обеспечения системы телеметрии (система ADAM и
программный пакет GENESIS-32).
10. Оформление отчета «Опытная проверка системы телеметрии на
экспериментальном стенде». Выдача окончательных рекомендаций
относительно конечного варианта исполнения телеметрической системы для
полномасштабного обогатительного каскада.
11. Этап разработки окончательного варианта телеметрической системы
для полномасштабного обогатительного каскада:
11.1. Окончательное утверждение блок-схемы телеметрической
системы для обогатительного каскада.
11.2. Согласование Программы запуска телеметрической системы с
Программой запуска обогатительного каскада и ее утверждение.
11.3. Изготовление и запуск телеметрической системы в составе
обогатительного каскада согласно обеим программам.
11.4. Разработка и отладка программного обеспечения для варианта
полномасштабного обогатительного каскада и полной инфраструктуры.
11.5. Подготовка окончательного варианта мнемонической схемы.
11.6. Обоснование "методов многопараметрической стабилизации основ-
547
Телеметрия в теории и на практике
ных параметров различных технологических процессов.
11.7. Окончательная разработка методов и средств управления
процессом и оборудованием:
а) разработка архитектуры локально-централизованной системы
управления пространственно распределенным технологическим
оборудованием;
б) разработка принципов программной реконфигурации локальных
объектов (контроллеров) телемеханики с целью обеспечения
адаптивности универсальной системы телемеханики к конкретным
технологическим процессам;
в) работы по оптимизации разработанной телеметрической системы
применительно к данному обогатительному каскаду.
11.8. Уточнение математической модели ректификационного процесса.
11.9. Уточнение критериев оптимальности.
11.10. Разработка методов измерения расхода малых объемов
жидкостей и пара.
11.11. Предложение по выбору датчиков расхода (10-100 мл/мин).
11.12. Разработка принципов минимизации энергетических затрат при
получении продукта ректификации.
11.13. Расчет минимизации тепловой энергии колонн.
11.14. Разработка метода определения (предсказания) момента
«захлебывания» колонн.
11.15. Доводка конструкции высокоэффективного испарителя для
конкретных вариантов колонн.
Очевидно, что последние восемь пунктов должны учитывать
конструктивные особенности ректификационных колонн.
Работы данного этапа целесообразно планировать исходя из результатов
запуска и получения первых результатов. Однако система телемеханики к
данному этапу практически полностью разработана, запущена и находится
полностью в работоспособном состоянии. Отладке подвергаются только
режимы работы специального оборудования.
Экспериментальный стенд (рис 8.1) представляет собой три одинаковые
укороченные ректификационные колонны. Каждая колонна состоит из:
нижнего узла обращения потока, основу которого составляет испа-
548
Глава 8. Телеметрия в атомной промышленности
ритель,
системы электроподогрева испарителя, обеспечивающей кипение
жидкости в испарителе,
царги в виде трубы, заполненной контактным телом (насадкой),
верхнего узла обращения потока, основу которого составляет
конденсатор,
системы охлаждения конденсатора, обеспечивающей превращение
пара в жидкость,
некоторых дополнительных устройств, обеспечивающих
работоспособность стенда и ректификационных колонн.
По всему телу колонн и обеспечивающих устройств расположены датчики
температуры и давления. В системе электропитания расположены
датчики электрических параметров (ток, напряжение, мощность). Совместно с
системой колонн смонтирована система телемеханики. В ее состав входят
(рис 7.2):
датчики параметров, смонтированные на теле колонн и
вспомогательного оборудования,
устройства преобразования сигналов датчиков в электрические
сигналы требуемого формата (для некоторых типов датчиков),
устройства сбора данных и передачи в персональный компьютер,
персональный компьютер, оснащенный необходимым
программным обеспечением,
устройства управления ТЭНами испарителей.
549
Телеметрия в теории и на практике
Выход в стационарный рабочий режим ректификационной колонны №2
54534РМ 5э.'2:РМ 60910РК" 62058РМ 63?*t 8 РМ 644Э6РМ 6 56 24 РМ 70812РМ 72О0ОРМ
6/25/2003 6/25/2003 6/25/2003 6/25/2003 о/2У2 2003 &/2V2003 6/25/2003 6/25/»» 6/25/2003
Рис. 8.3. Процесс выходы на рабочий режим одной из колонн. Три графика
характеризуют изменения температуры в различных местах колонны. Видна инерционность
прогрева-охлаждения для различных частей и временные задержки разогрева
верхней части, наиболее удаленной от источника разогрева (испарителя).
ЭЛЕКТРИЧЕСКИЕ ПАРАМЕТРЫ ТЭНОВ (форма протокола функционирования ректификационных колонн)
КОЛОННА 1 КОЛОННА 2 КОЛОННА 3
V1
11
W1
^пряжение
рок
мощность
10ЙЛЕР
[сПАРИТЕЛЬ
|акапыватель ТТ-41
|ХДЕНСАТОР _Т1_а
УЗ J. _
w_3j
- LW2
ТЕМПЕРАТУРА В ЭЛЕМЕНТАХ КОЛОНН
КОЛОННА 1 КОЛОННА 2 КОЛОННА 3
T1 111 | тел!
T1_2il
T2.2J
T2_4i
{T2j>i
|T2L8e
T3Ji
fr-J
33J2I
LT2L4I
iT3_5i
|ТОё|
10ЙЛЕР
|СПАРИТЕЛЬ
|Т1_8е
ДАВЛЕНИЕ В ЭЛЕМЕНТАХ КОЛОНН
_ КОЛОННА 1 КОЛОННА 2 КОЛОННА 3
PUf "P2_1
Р5Г2
Ml»
-г.
-
КОЛОННА 2
"1отщ1^Т-_ _}--
—~:А ~
,_ . и.
ь-
-
— --
•:11 М РМ б:»М РМ S ММ РМ • 47.М РМ
■№
-ЧИРЧП
ЧЕ?
юви^н.» 'fgrgft. 'aui1
Рис. 8.4. Табличное представление данных телеизмерений однотипных параметров
сразу в трех колоннах. Бланки графиков временных зависимостей температуры для
любого выбранного фрагмента трех колонн
552
Глава 8. Телеметрия в атомной промышленности
Динамические характеристики процесса нагрева бойлера
ректификационной колонны
Завсимость давления в колонне 1
16 00 16.20 16 40
17 00 17 20 17 40 18 00
Время
18 20 18 40
Рис. 8.5. Представлен процесс изменения давления в испарителе, совмещенный по
времени с процессом управляемого разогрева ТЭНов испарителя
553
Телеметрия в теории и на практике
1 Архивирование данных телеконтроля
ректификационной
Результаты испытаний колонны
Дата
02.07.03
№2
КОЛОННЫ
установлен конус с редкой проволочной путанкой
м^.^ Давление в
Rhauq напР*ж«- Г^Г испари- Давление, Нагрузка, .
0^мя нив, В JE**1 теле мм кПа мл/мин ™
13:41
14:49
15:28
15:35
16:04
16:33
16:51
17:11
17:34
17:44
18:09
18:24
18:53
19:18
19:20
19:27
19:32
19:40
19:48
19:52
20:00
20:05
20:10
20:11
20:13
20:15
20:18
20:20
20:22
20:23
20:25
20:27
20:28
,20:30
20:33
I 20:36
90
90
90
95
95
95
100
100
100
100
104
104
104
115
115
115
115
115
125
125
125
130
130
135
135
135
135
135
135
145
145
145
145
145
145
145
вод.ст
180
180
180
200
200
200
220
220
220
220
239
239
239
265
265
265
265
265
350
350
350
364
364
405
405
405
405
405
405
464
464
464
464
464
464
464
40
42
50
60
60
70
65
65
65
85
85
90
108
115
115
110
143
155
155
165
165
175
195
205
210
205
210
215
225
230
245
260
253
0,39
0,41
0,49
0,59
0,59
0,69
0,64
0,64
0,64
0,83
0,83
0,88
1,06
1.13
1,13
1,08
1,40
1,52
1,52
1,62
1,62
1.72
1.91
2,01
2,06
2,01
2.06
2,11
2,21
2,26
2,40
2,55
2.48
1,34
1,65
1,85
1,85
2,31
2,29
3,4
2,76
4,7
4.7
7,9
6,7
8,44
8,31
14
.мл2
0
114
140
157
157
196
194
289 I
234
399
399
671
569
717
706
1189
I
Рис. 8.6. Вариант представления архивируемых данных.
Глава 8. Телеметрия в атомной промышленности
Нагруаочмая характеристика колонны Mt2
02.07.03
150 200 250 300 360 400 450 500
Мощность, Вт
Рис. 8.7. Экспериментальные и аппроксимированные данные зависимости скорости
выхода готового продукта (ректификации) от мощности нагрева (испарителя).
8.3. КОМПЛЕКСЫ ТЕХНИЧЕСКИХ СРЕДСТВ АСУ ТП АЭС «ВУЛКАН»
И «ВУЛКАН-М»
Выполнение работ по созданию и внедрению автоматизированных
систем управления технологическими процессами (АСУ ТП) промышленных
предприятий, проектированию, изготовлению, испытанию, внедрению и
сопровождению в эксплуатации систем и отдельного оборудования АСУ ТП
атомных и тепловых электростанций, других промышленных объектов, а
также работ по созданию оборудования для этих систем, включая их
разработку, изготовление, поставку, внедрение и сопровождение в эксплуатации,
осуществляется многими производителями. В качестве примера
рассмотрим характеристики оборудования фирмы «Вестрон» в соответствии с ТУ
на комплексы технических средств «Вулкан» и «Вулкан-М» [1].
Информационно-вычислительные системы АСУ ТП АЭС
Информационно-вычислительные системы (ИВС) «Вулкан-ИВК»,
разработанные и поставляемые «Вестроном», предназначены для замены
работающих на энергоблоках ВВЭР-1000 ИВС «Комплекс - Уран 2М» и
УВС «Комплекс Титан-2» и могут быть использованы также для создания
и реконструкции информационно-вычислительных систем энергоблоков
ТЭС и других промышленных предприятий. Информационно-вычисли-
555
Телеметрия в теории и на практике
тельные системы «Вулкан-ИВК» позволяют реализовать требования по
поэтапному замещению функций существующих систем при параллельной
работе систем и суммарном сохранении и расширении функций
заменяемой информационно-вычислительной системы. Возможности технических
средств обеспечивают замену оборудования по принципу «шкаф на шкаф»
с сохранением всех проложенных к шкафам внешних кабельных связей.
Комплекс средств реализован на базе платформы «Вулкан» и находится в
промышленной эксплуатации с 1998 г. Производителем на базе платформ
«Вулкан» и «Вулкан-М» подготовлены решения по реконструкции
информационно-вычислительной системы и системы контроля турбогенератора
(А701) энергоблока №2 Южно-Украинской АЭС с интеграцией
работающей на энергоблоке №2 системы представления параметров безопасности
в единую информационную систему. В информационно-вычислительной
системе «Вулкан-ИВК» реализованы: динамичный графический
интерфейс с оператором с высоким разрешением, без ограничения количества
видеокадров и трендов; неограниченная глубина долговременных архивов
с хранением информации на внешних магнитооптических дисках; мощная
поддержка оператора специальными технологическими расчетами;
возможность гибкой реконструкции и дальнейшего развития систем.
Системы представления параметров безопасности
Системы представления параметров безопасности предназначены для
внедрения на энергоблоках АЭС дополнительно к существующим системам
АСУ ТП. Системы обеспечивают представление информации о состоянии
критических функций безопасности и важных для безопасности
параметров технологических процессов оперативному персоналу с целью
повышения безопасности, надежности и эффективной эксплуатации энергоблоков.
Внедрение систем представления параметров безопасности позволяет
реализовать требования нормативных документов по созданию системы
информационной поддержки оператора и повышению информированности
операторов о состоянии технологического оборудования и энергоблока в
целом.
Системы автоматического регулирования
Одной из наиболее сложных систем управления, разработанных,
изготовленных и внедренных производителем, является многоуровневая и
многорежимная система управления уровнем питательной воды в
парогенераторах [1].
Данная система предназначена для замены работающих на энергоблоках
556
Глава 8. Телеметрия в атомной промышленности
Рис. 8.8. Система управления уровнем питательной воды в парогенераторах
энергоблока №3 Южно-Украинской АЭС
АЭС аналоговых регуляторов подачи питательной воды и уровня в
парогенераторах. Система управления уровнем питательной воды в
парогенераторах обеспечивает поддержание уровня в парогенераторах в заданных
пределах во всем диапазоне изменения тепловых нагрузок парогенератора с
учетом всех режимов работы энергоблока. Также система обеспечивает
высокое качество регулирования, отображение технологических процессов в
удобной форме на операторских станциях, возможность изменения
настроек в процессе работы, архивирование и документирование информации,
непрерывную диагностику системы в реальном времени [1].
Системы радиационного контроля
Системы радиационного контроля на базе платформы «Вулкан» с базовым
ПО VMS предназначены для внедрения на новых энергоблоках или для
замены работающих на энергоблоках АЭС технических средств АКРБ-03 и
АКРБ-08 с внедрением автоматизированного управления пробоотбором и
специальных расчетов радиационного контроля. Системы радиационного
557
Телеметрия в теории и на практике
контроля позволяют реализовать все требования действующих
нормативных документов и рекомендаций МАГАТЭ к системам радиационного
контроля АЭС с учетом различных вариантов поэтапного внедрения [1].
Система радиационного контроля Запорожской АЭС
Система радиационного контроля верхнего (станционного) уровня на базе
платформы «Вулкан» с базовым ПО VMS и специализированных
интерфейсных модулей собственного производства внедрена в 2002 г. на Ровенс-
кой АЭС. В системе радиационного контроля на базе платформы «Вулкан»
реализован удобный графический человеко-машинный интерфейс,
индивидуальная и групповая сигнализация по технологическим параметрам,
поддержка оператора специальными расчетами.
Автоматизированы пробоотбор, управление зайорно-регулирующей
арматурой и калибровки устройств детектирования. Производится непрерывная
автоматизированная диагностика системы и оборудования радиационного
контроля в реальном времени. Системы обладают возможностью гибкой
поэтапной реконструкции и дальнейшего развития [1].
Системы контроля турбогенераторов
Системы контроля турбогенераторов предназначены для замены
аппаратуры контроля А701-3. Системы контроля турбогенераторов обеспечивают
контроль, представление, сигнализацию, архивирование и
документирование технологических параметров турбогенераторов.
В Системах контроля турбогенераторов на базе платформ «Вулкан-М»,
«Вулкан» реализованы эффективные схемные решения по приему
сигналов датчиков термосопротивлений в тяжелых условиях электромагнитных
помех турбогенератора, удобный операторский интерфейс, не требующий
специальных знаний вычислительной техники [1].
Системы регистрации аварийных параметров
Системы регистрации аварийных параметров предназначены для
замены морально и физически устаревших аварийных регистраторов АСУ ТП
ответственных производств с опасными технологическими процессами
(рис. 8.9).
Системы регистрации обеспечивают реализацию требования нормативных
документов по архивированию, документированию и представлению
последовательности срабатываний защит и блокировок, значений параметров
558
Глава 8. Телеметрия в атомной промышленности
технологических процессов и основного технологического оборудования
для дальнейшего анализа аварийных ситуаций. Регистраторы обладают
практически неограниченной глубиной долговременных архивов с
хранением информации на внешних дисках, возможностью оперативного
формирования групп взаимосвязанных параметров для просмотра и
документирования, удобным интерфейсом, не требующим специальных знаний
вычислительной техники, возможностью предварительной обработки
информации для выявления заданных технологических событий [1].
Рис. в. 9. Аварийный регистратор
Программно-аппаратная платформа «ВУЛКАН-М»/«ВУЛКАН»
Программно-аппаратная платформа «Вулкан-М»/*Вулкан» предназначена
для построения широкого спектра управляющих и информационных систем
АСУ ТП различного назначения. Платформа разработана с учетом
современных подходов к проектированию и построению систем, тенденций развития
электроники и программного обеспечения, рекомендаций заказчиков по
обеспечению удобства монтажа, наладки и эксплуатации систем [1].
Основные данные
Узлы верхнего уровня:
КТС
Базовый тип сервера
Магистраль данных
Базовая Операционная система
-Вулкан» (АУИЦ.460600.001 ТУ)
PC совместимая рабочая станция/рабочие
станции Sun
Fast Ethernet, Ethernet
Windoyvs2000/Solaris |
559
Телеметрия в теории и на практике
1 Базовое программное обеспечение
Класс безопасности (для АЭС)
Контроллеры нижнего уровня:
ктс
Базовый тип контроллера
Шина контроллера
Шина ввода-вывода
Магистраль данных реального времени
Базовая Операционная система
! Базовое программное обеспечение
Класс безопасности (для АЭС)
VMS/Accolade
4, 3 (включая мониторы)
«Вулкан-М» (АУИЦ.460800.002 ТУ)
Одноплатная PC в промышленном
исполнении или процессорный модуль WPB
АТ-96
RS-485
RS-485 |
QNX
VMS
3,2 |
Программное обеспечение
Эффективность и надежность систем АСУ ТП, их функциональные
возможности, возможность адаптации базовых программных и аппаратных средств
к требованиям конкретной системы во многом определяются программным
обеспечением, которое обеспечивает:
• работу систем АСУ ТП в условиях жесткого реального времени;
• эффективное использование аппаратных ресурсов систем АСУ ТП
в резервированных и нерезервированных конфигурациях;
• эффективную технологию разработки, отладки и верификации
прикладного программного обеспечения систем АСУ ТП;
• реализацию универсальных функций путем конфигурирования
аппаратных и программных средств.
Модульный принцип построения программного обеспечения позволяет
гибко распределять функции между рабочими станциями и серверами,
специализировать отдельные узлы верхнего уровня для выполнения
ресурсоемких функций или совмещать несколько функций в одном узле, сокращая
количество аппаратуры [1].
560
Глава 8. Телеметрия в атомной промышленности
8.4. ПРИМЕР ОРГАНИЗАЦИИ КАНАЛА СБОРА ТЕЛЕМЕТРИЧЕСКОЙ
ИНФОРМАЦИИ
В России и странах СНГ реализовано множество проектов беспроводных
сетей и линий передачи данных. Многие из них находятся в эксплуатации,
другие на различных стадиях построения.
Компания «Энран Телеком» в тесном сотрудничестве со специалистами
объекта «Укрытие» Чернобыльской АЭС реализовала проект объединения
ЛВС нескольких подразделений в единую сеть [2].
Для резервирования проводного соединения между «АТК ОУ» и 4-м блоком
в реальном времени были использованы высокоскоростной радиоканал на
базе оборудования Breeze LINK-121. Данное оборудование обеспечило
устойчивую передачу (в том числе телеметрических) данных на скоростях до
512 Кбит/с и доказало эффективность и надежность технического решения.
В случае неисправности основного канала передачи данных переключение
на резервный канал происходит автоматически и не требует какого-либо
вмешательства оператора. Линия находится в эксплуатации с сентября
1999 г. 12].
Рис. 8.10. Схема резервного канала АТК ОУ- ЧАЭС
561
Телеметрия в теории и на практике
8.5. СИСТЕМА РАДИОЭКОЛОГИЧЕСКОГО МОНИТОРИНГА
АТОМНЫХ ОБЪЕКТОВ. ПРОЕКТ AM ЕС 1.5-1
Проект АМЕС 1.5-1 «Радиационный контроль на объектах вывода из
эксплуатации и утилизации стратегических атомных подводных лодок —
Применение системы PICASSO» предназначен для создания полномасштабной
системы радиоэкологического мониторинга, состоящей из 15-20
измерительных каналов на объектах Военно-морского флота РФ [3].
Работы по созданию рабочего макета системы мониторинга обеспечивают
решение следующих задач:
• Создание программного обеспечения для управления работой
детекторов и сбора информации.
• Создание программного обеспечения для обработки измерительной
информации.
• Создание программного обеспечения для обмена информацией
между различными частями системы, включая пользовательский
интерфейс PICASSO-AMEC.
• Адаптация приложения PICASSO-AMEC к задачам
радиоэкологического мониторинга и работе в составе
измерительно-информационной системы российского производства.
• Создание электронных устройств для обработки сигналов,
управления детекторами, накопления и передачи данных
(интеллектуальных контроллеров), отвечающих современным требованиям к
измерительным системам с распределенным интеллектом.
• Отработка технологических процессов сбора, передачи по
радиоканалу и представления радиоэкологической информации.
• Разработка основных функциональных и конструктивных
требований к полномасштабной системе радиоэкологического контроля.
Макет системы радиационного мониторинга создан на основе концепции
распределенного интеллекта, которая подразумевает работу детекторов
излучения совместно с так называемыми интеллектуальными контроллерами
(ИК).
Интеллектуальные контроллеры позволяют полностью обеспечивать
работу детектора по заданной программе, обрабатывать данные, хранить
достаточно большие массивы измерительной информации и пересылать их по
562
Глава 8. Телеметрия в атомной промышленности
запросам управляющих компьютеров.
Макет состоит из следующих основных функциональных частей (рис.8.11):
• блоки детектирования;
• устройство обработки сигналов и передачи информации
(интеллектуальный контроллер — ИК);
• радиоканал передачи данных;
• система сбора и обработки данных «REM-2»;
• система визуализации данных мониторинга на основе PICASSO-
АМЕС.
Один измерительный канал предназначен для контроля
мощности дозы с помощью интегрального счетчика. Он состоит из
интегрального детектора БДМГ-08Р на основе газоразрядного
счетчика СИ 22Г и одного канала интеллектуального контроллера ИК [3].
Второй измерительный канал предназначен для индикации превышения
концентрации радиоактивных изотопов в водной среде. Измерительный
блок состоит из сцинтилляционного детектора на базе спектрометрического
кристалла Csl и второго канала интеллектуального контроллера. Оба
измерительных канала управляются одной программой «REM-2» на
центральном компьютере. Программа «REM-2» разработана специально для данной
системы на основе стандартного пакета библиотек Active X для Windows.
Рис. 8.11. Схема макета системы радиационного мониторинга
563
Телеметрия в теории и на практике
Все получаемые данные визуализируются с помощью приложения
«PICASSO-AMEC» в режиме реального времени.
Программа управляет работой интеллектуального контрольного
контроллера. Предварительно обработанные данные поступают по сети на
NT-сервер в систему PICASSO-AMEC
Система PICASSO-3, разработанная норвежскими специалистами в рамках
проекта HRP (Halden Reactor Project), представляет собой мощное
средство для создания пользовательских интерфейсов для отображения
различных технологических процессов в реальном времени [3].
Интеллектуальный контроллер предназначен для осуществления датчиков
ионизирущих излучений в автономном режиме. И К позволяет
периодически запускать цикл измерения, преобразовывать и считывать пришедшие
сигналы, сравнивать скорости счёта с заданными установками, хранить
данные в собственной памяти, передавать данные в систему сбора
информации по радиоканалу или проводному соединению.
Подводный детектор предназначен для измерения радиоактивности водной
среды. Детектор включает в себя измерительный модуль на основе
спектрометрического сцинтилляционого кристалла Csl.
564
Глава 8. Телеметрия в атомной промышленности
ЛИТЕРАТУРА К ГЛАВЕ 8
1. Модули контроля и управления АЭС фирмы «Вестрон».
(http://www.westron.kharkov.ua/index_eng.html).
2. Резервный канал АТК «ОУ» ЧАЭС (www.alvarion.ru/Distributors/
enran.htm).
3. Проект АМЕС 1.5-1 «Радиационный контроль на объектах вывода
из эксплуатации и утилизации стратегических атомных
подводных лодок - применение системы PICASSO». (http://wWw.ibrae.
ru/~lgis/amec/project.htm).
565
Глава 9.
Телеметрия в нефтяной и газовой
промышленности
Средства телеметрии нашли широкое применение и используются уже не
один десяток лет в нефтяной и газовой промышленности. В первую очередь
это связано с удаленностью объектов контроля и жесткими условиями
работы специализированных технических средств бурения: высоким
давлением, температурой и вибрациями. В течение продолжительного времени
в данной отрасли преобладали проводные системы телеметрии. Это было
обусловлено их простотой и надежностью конструкций.
Эксплуатация нефтяных и газовых месторождений, а также
трубопроводных сетей является одной из тех отраслей, г#е несвоевременное получение
информации о нештатной ситуации может привести к крайне неприятным
последствиям, включающим значительные финансовые потери,
повреждение дорогостоящего оборудования и загрязнение окружающей среды. В то
же время прокладка надежных проводных линий связи во многих случаях
затруднена, а постоянное присутствие персонала на некоторых объектах
может оказаться затруднительным. Одним из возможных решений,
позволяющих обеспечить надежную связь с удаленными объектами и уменьшить
количество необходимого для обслуживания персонала, является
использование радиоканала для передачи телеметрической информации и сигналов
управления. Данное решение имеет целый ряд существенных преимуществ
перед проводными системами. В частности, отсутствует необходимость в
дорогостоящих работах по прокладке кабелей (которые и сами по себе
недешевы) к удаленным объектам. Исключается одно из наиболее уязвимых
звеньев, которое может быть легко повреждено, но поиск и устранение
повреждений которого связан со значительными сложностями, особенно при
неблагоприятных погодных условиях. Кроме того, значительно упрощается
оснащение телеметрическим оборудованием мобильных объектов
(например, передвижных насосных станций или дизель-электростанций). Вместе
с тем проводные телемеханические системы прочно удерживают свои
позиции в некоторых важных направлениях отрасли. В данной главе приведено
описание некоторых телеметрических и телемеханических систем, которые
нашли применение в нефтегазодобывающей промышленности.
Развитие телекоммуникационных технологий привело к тому, что наряду
с классическими специализированными телеметрическими системами,
появились сверхбольшие информационно-управляющие системы с большим
количеством опрашиваемых датчиков (тысячи и десятки тысяч). И те, и
другие нашли широкое применение в нефтегазовой промышленности. Це-
Телеметрия в теории и на практике
лесообразно рассмотреть малые и большие телеметрические системы в
отдельности.
9.1. МАЛЫЕ ТЕЛЕМЕТРИЧЕСКИЕ СИСТЕМЫ
9.1.1. Малогабаритная телеметрическая навигационная
система С КАБЕЛЬНЫМ КАНАЛОМ СВЯЗИ МТНСК-1
Малогабаритная телеметрическая навигационная система с кабельным
каналом связи (МТНСК) предназначена для непрерывного измерения
геометрических и геофизических параметров в процессе проводки
горизонтальных стволов при бурении нефтяных скважин и передаче телеметри-
руемых данных на поверхность [1]. МТНСК состоит из глубинного блока,
устройства Контактного сбросного кабеля (УККС) и наземной станции.
В состав глубинного блока входят ориентационный переводник и
немагнитная утяжеленная буровая труба (УБТ), изготовленная из аустепитной
стали, входящие в состав бурильной колонны и расположенные
непосредственно над забойным двигателем. А также блок датчиков и электроники с
ориентирующим пером, обеспечивающим ориентацию и фиксацию блока
датчиков и электроники в ориентационном переводнике во время спуска
телеметрической системы, амортизатором, гасящим ударные и
вибрационные нагрузки, удлинителем, удаляющим блок датчиков и электроники от
магнитных частей забойного двигателя, пружинных центраторов,
удерживающих глубинный блок на оси бурильной колонны, герметичной заделки
кабеля и контактного переводника, обеспечивающего электрический
контакт между глубинным блоком и кабелем.
УККС предназначено для оперативного соединения (разъединения)
кабеля во время наращивания бурильной колонны и состоит из контактного
штыря с посадочным переводником и сбросной муфты. В состав наземной
станции входит лебедка, усилитель с компьютером и блок сопряжения.
Блок датчиков и электроники обеспечивает сбор, усреднение, кодирование
и передачу информации на наземную станцию по одножильному кабелю.
Наземная станция принимает, усиливает и через блок сопряжения
посылает информацию на стандартный компьютер, где информация с помощью
специального программного обеспечения декодируется, обрабатывается,
записывается на магнитный носитель и отображается в удобном для
оператора виде.
568
Глава 9. Телеметрия в нефтяной и газовой промышленности
В табл. 9.1...9.3 представлены некоторые эксплуатационные и
тактико-технические характеристики телеметрической системы МТНСК.
Таблица 9.1.
Диаметр немагнитного УБТ, мм
Диаметр телесистемы по охранному кожуху, мм
Напряжение питания наземного оборудования, В
Гарантийный срок службы
105
42
187-242 В при 50±5 Гц
1 год
Таблица 9.2.
Зенитный угол
Азимут
Угол установки откл о -
нителя
Диапазон измер.,
град
0-180
0-360
0-360
Погрешность,
град
0,1
0,5
1
Разреш. способ.,
град
0,1
0,1
0,1
Таблица 9.3.
Температура, град. С
Давление, Мпа
Вибрация, Гц с ускорением до 30 g
0-120
100
1-200
9.1.2. Телеметрическая система ТМ-ПЭНП
Телеметрическая система ТМ-ПЭНП предназначена для управления,
защиты и контроля технологических параметров электродвигателей
переменного тока, используемых в погружных электронасосах, и контроля параметров
окружающей среды в забое скважины [2].
569
Телеметрия в теории и на практике
Рис. 9.1. Погружной блок
Выполняемые системой телеметрии функции:
• сохранение всех функций контроллера и регистратора;
• непрерывный контроль температуры обмоток электродвигателя,
давления в компенсаторе, вибрации установки;
• непрерывный контроль за температурой и давлением нефти в
скважине;
• возможность набора параметров телеметрии с помощью
дополнительной клавиатуры контроллера;
• передача телеметрической информации по силовому кабелю
питания;
Система состоит из контроллера-ТМ, индуктора, погружного блока и
регистратора.
Основные технические данные представлены в табл. 8.4.
Таблица 9.4.
Глубина погружения погружного блока
Точность замера телеметрических параметров
Период передачи телеметрической информации
Условия эксплуатации
до 2000 м
2%
Юс
погружного блока БП от 0 *С до +85 *С,
блока БП-Т от 0 *С до +125 'С
570
Глава 9. Телеметрия в нефтяной и газовой промышленности
Преимущества системы:
• увеличение ресурса работы двигателя за счет оптимизации режима
работы;
• увеличение добычи нефти;
• непрерывный контроль за работой погружного электрического
насоса;
• предотвращение аварийных ситуаций;
• уменьшение затрат наремонт оборудования;
• уменьшение энергопотребления;
• снижение себестоимости добычи нефти;
• возможность работы в сети управления и сбора информации.
9.1.3. Малогабаритная гироскопическая телесистема
Развитие направленного бурения, в частности большой объем
строительства горизонтальных скважин, обусловил увеличение количества и
разнообразия используемых при проводке скважин телеметрических
навигационных систем. Построение траектории забоя скважины или ствола уже
пробуренной скважины производится на основании замеров угла наклона
и азимута на забое или по стволу скважины. Для измерения угла наклона
достаточно использовать трехосный акселерометр, который измеряет
проекции ускорения свободного падения g на три взаимно перпендикулярные
пространственные оси. Для измерения азимута обычно используется
трехосный феррозонд, который по аналогии с акселерометром измеряет
проекции напряженности магнитного поля земли на три взаимно
перпендикулярные пространственные оси [3].
На основании этих данных после соответствующих вычислений
получают значение азимута и угла наклона в любой точке ствола скважины и его
пространственную траекторию. Очевидно, что таким способом траектория
строится в магнитных координатах, поскольку азимут скважины отсчиты-
вается от направления на магнитный полюс Земли.
Погрешность таких «магнитных» навигационных систем сильно зависит от
наличия вблизи датчиков феррозонда магнитных масс, например
бурильных труб, обсадных колонн и т. п., и в ряде случаев может быть
недопустимой. Например, при зарезке боковых стволов из обсаженных скважин
или при кустовом бурении с морских платформ оперативное управление
571
Телеметрия в теории и на практике
траекторией ствола скважин при помощи таких «магнитных» систем
невозможно. В этих случаях для измерения азимута скважины необходимо
использовать гироскоп, показания которого не зависят от напряженности
магнитного поля Земли.
Рис. 9.2. Схема измерения
Гироскопические телесистемы строятся по двум принципам. Один из них
базируется на свойстве гироскопа сохранять неизменным
пространственное расположение оси вращения ротора гироскопа при любых поворотах
его корпуса. В реальном гироскопе, где ось ротора не свободна, при
повороте его корпуса на ось ротора действует момент сил, измеряя который,
можно «отследить» все повороты корпуса гироскопа и, соответственно,
измерительного забойного блока инклинометра. Имеющийся в забойном
блоке трехосный акселерометр также может «отслеживать» повороты
корпуса, однако не все — азимутальные повороты, то есть те, которые связаны
с изменецием азимута, фиксируются только гироскопом. На этом и
построен принцип измерения траектории скважины гироскопическим
инклинометром: забойный блок с работающим гироскопом и трехосным
акселерометром «протаскивается» по всему стволу скважины, и фиксируются все
повороты корпуса, «отслеживаемые» гироскопом и акселерометром. После
«вычитания» выделяется изменение азимута по всей длине ствола
скважины. Принцип действия такого гироскопического инклинометра
схематически отображен щ рис. 9.3 [3].
572
Глава 9. Телеметрия в нефтяной и газовой промышленности
Рис. 9.3. Схема инклинометра
Чтобы определить абсолютные значения азимута, необходимо обязательно
произвести визирование гироскопа на поверхности. Очевидно, что
необходимость «протаскивания» инклинометра по всей длине ствола и
визирование на поверхности не позволяют его использовать в качестве MWD-сис-
темы.
Для построения MWD-системы используется гироскоп, работающий по
принципу системы North seeking. Такой гироскоп должен «отслеживать»
поворот корпуса, обусловленный вращением Земли. В этом случае
гироскоп представляет собой датчик угловой скорости, измеряющий проекцию
угловой скорости вращения Земли на ось чувствительности гироскопа.
Поскольку угловая скорость вращения Земли — векторная величина, а ее
горизонтальная составляющая направлена строго по меридиану, то по
аналогии с напряженностью магнитного поля Земли от этой составляющей
может отсчитываться географический азимут, как показано на рис. 8.4. Таким
образом, если триаду феррозондов заменить триадой гироскопов, каждый
из которых является датчиком угловой скорости, то такая телесистема
будет измерять географический азимут в любой точке ствола скважины.
Гироскопическая телесистема «Гирокурсор-45» была создана специально
для бурения боковых стволов из обсаженных скважин. С ее помощью
обеспечиваются не только замеры азимута внутри и вблизи обсадной колонны,
но и ориентирование инструмента внутри обсадных колонн в вертикальных
и наклонных скважинах. В телесистеме используется кабельный канал
связи между забоем и поверхностью. Забойный блок на геофизическом кабеле
спускается в колонну бурильных труб, где попадает в специальную
ловушку, расположенную над забойным двигателем. Конструкции ловушки и
забойного блока обеспечивают ориентированную фиксацию забойного блока
относительно отклонителя. На устье кабель выводится из колонны
бурильных труб посредством кабельного переводника, конец кабеля с лебедки
573
Телеметрия в теории и на практике
присоединяется к наземному прибору. Забойный блок в любой момент
может быть извлечен из колонны бурильных труб без подъема инструмента.
В процессе бурения забойный блок телесистемы располагается на забое и
по мере необходимости производится кратковременная остановка
бурения, запускается гироскоп и производится замер азимута. Угол установки
отклонителя и угол наклона скважины измеряют непрерывно в процессе
бурения.
Рис. 9.4. Измерительная схема
В телесистеме «Гирокурсор» удалось сочетать малые габариты наряду с
высокой точностью измерения и достаточной виброустойчивостью
благодаря оригинальному построению измерительной схемы, которая показана на
рис. 8.4. Вместо трех гироскопов в ней используется один, но располагается
он на поворотной платформе. Измерения производятся в четырех
положениях платформы, развернутых относительно друг друга на 90°. Таким
образом, на базе одного гироскопа создан фактически двухосевой датчик
угловой скорости вращения Зецли. При этом удается усилить полезный сигнал
и компенсировать помехи, что позволило обеспечить высокую точность,
используя сравнительно грубый, но зато надежный, недорогой и серийно
выпускающийся гироскоп.
574
Глава 9. Телеметрия в нефтяной и газовой промышленности
Другой отличительной особенностью телесистемы «Гирокурсор» является
непрерывная работа в процессе бурения с периодическим запуском
гироскопа для измерения азимута. В таком режиме ток потребления забойного
блока изменяется в сотни раз, и обеспечение при этих условиях устойчивой
работы телесистемы является отдельной, достаточно сложной проблемой,
которая была решена созданием специального импульсного регулятора
напряжения, входящего в состав наземного блока. Чтобы обеспечить передачу
питания с поверхности в забойный блок и информационного сигнала по
одножильному кабелю, был разработан специальный код, позволяющий
поддерживать устойчивую двунаправленную связь с забойным блоком во всём
диапазоне изменения питающего тока.
Все эти особенности «Гирокурсора» потребовали радикального пересмотра
алгоритмов управления и вычисления и создания специальной программы
для компьютера наземного комплекса. Не вдаваясь в подробности,
необходимо отметить, что новые технические решения, реализованные в «Ги-
рокурсоре», защищены четырьмя патентами РФ. Система «Гирокурсор» в
настоящее время успешно эксплуатируется при зарезке боковых стволов из
обсаженных скважин и последующем контроле и управлении траекторией
их бурения. Основные технические характеристики телесистемы «Гирокур-
сор» представлены в табл. 9.5.
Таблица 9.5.
Габариты внешнего корпуса
Диапазон измерений
Погрешности измерения
Забойная температура
Давление на забое
Габариты наземного блока
Линия связи
Питание (на поверхности)
Потребляемая мощность
- диаметр 45 мм 1
-длина 2,0 м
- азимута 0-360* при угле наклона до 70*
- угла наклона 0-180*
- угла установки отклонителя ± 180*
- азимута ± 1,5"
- угла наклона ± 0,15*
- угла установки отклонителя ± Г
- до 85* С
-до40 МПа1
-120x450x450мм
- одножильный геофизический кабель
- сеть переменного тока 220 Вольт
- не более 50 Вт
1 Возможна дополнительная комплектация корпусом диаметром 50 мм, при этом давление I
на забое -до 70 МПа. I
575
Телеметрия в теории и на практике
9.1.4. Система автоматического регулирования уровня
жидких сред
Система предназначена для автоматического регулирования уровня
жидких и вязких сред (воды, нефтепродуктов, спирта, масел и т. п.) в открытых
емкостях (верхняя часть емкости связана с атмосферой).
Устройство и принцип работы
Система состоит из датчика давления, аналогичного по точностным
характеристикам датчику давления «Силикон», но имеющему другое корпусное
исполнение.
Регулирование уровня производится следующим образом. С помощью
монтажного комплекта датчик давления помещается внутри емкости,
фиксируется на определенной глубине и измеряет давление столба жидкости
(уровень). При достижении уровнем жидкости заданных границ сигнал с
датчика давления поступает на пускатель двигателя насоса, который
включается, если уровень жидкости выше заданного.
Технические характеристики:
Диапазон регулирования уровня, м
Основная погрешность, %
Температурный диапазон эксплуатации, С°
Напряжения питания, В
Потребляемая мощность, ВА, не более
Масса датчика давления, кг, не более
Масса блока питания, кг, не более
95% ресурс, лет, не менее
Датчик давления «Силикон»
Датчик предназначен для измерения абсолютного и избыточного давления
неагрессивных газов и жидкостей. «Силикон» имеет сертификат России по
средствам измерения Ml784 от 16.10.95г., посадочное место, аналогичное
известному датчику «Сапфир», а характеристики надежности на порядок
выше [4]. Технические характеристики:
1,0...15,0
+-1,5
-30...+50
220
200
1,0
0,5
10
576
Глава 9. Телеметрия в нефтяной и газовой промышленности
Диапазон измерения абсолютного давления, кгс/см2
Диапазон измерения избыточного давления, кгс/см2
Погрешность, %
Температурный диапазон эксплуатации, °С
Напряжения питания, В
Выходной сигнал, мА; потребляемая мощность, ВА,
не более
Масса кг, не менее
Наработка на отказ, ч, более
Средний срок службы, лет
9.1.5. Комплекс погружной телеметрии
Комплекс погружной телеметрии предназначен для измерения давления,
температуры и вибрации погружного двигателя, опускаемого в скважину
вместе с насосом, для откачивания различного рода жидкостей. Блок
телеметрии встраивается в головку погружного двигателя, а информация о
состоянии двигателя передается по силовому кабелю питания [5].
Комплекс оснащается двумя типами контроллеров для установки в составе
системы управления. Поставляется как в составе погружного двигателя, так
и автономно.
Основные особенности и преимущества:
сверхмалые размеры блока погружной телеметрии, возможность
установки блока в головку типового погружного двигателя;
простота установки и подключения погружного блока, установка
может быть выполнена в цеху ремонта двигателей
эксплуатирующей организации;
непрерывный контроль за состоянием погружного оборудования и
откачиваемой жидкости;
независимое питание погружного блока;
0,1-1,0
1; 1,6; 2,5; 10; 16; 25
0,5
-50-+80(+125)
16-42
4-20
1,5-3
65000
10
19 Зак. 861
577
Телеметрия в теории и на практике
надежный канал передачи информации;
питание и передача информации по одной жиле кабеля питания
двигателя;
высокая точность измерения параметров;
возможность установки в станции различных производителей.
Основные технические характеристики представлены в табл. 9.6.
Таблица 9.6.
Наименование
Значение
Параметры погружного блока
Диапазон измерения давления на приеме
насоса
Точность измерения давления
Диапазон измерения температуры двигателя
Точность измерения температуры
Диапазон измерения вибрации двигателя X/Y
Точность измерения вибрации двигателя
Габаритные размеры погружного блока
0.1-25МПа
2%
10 ФС-150 *С
2% |
0-5 g
5%
20x190 мм
Параметры наземного блока
Отображение информации для автономного
варианта
Внешний интерфейс
Питание контроллера
Потребляемая мощность
ЖКИ (4x16 символов)
CANBUS или RS-232 / RS-485 (для
автономного варианта)
4 В или 220 В (для автономного варианта)
60 Вт
Использование подобных систем нашло широкое применение в нефтегазо-
578
Глава 9. Телеметрия в нефтяной и газовой промышленности
добывающей промышленности вследствие простоты конструкции и малой
стоимости.
9.1.6. Система быстрой скважинной телеметрии
Система быстрой скважинной телеметрии предназначена для передачи
данных телеизмерений от скважинного прибора управляющему компьютеру
(«вверх») и передачи команд управления в обратном направлении («вниз»)
[6]. Ниже представлена одна из схем организации обмена данными в такой
системе.
Для передачи данных используется квадратурная модуляция с числом
состояний 64, несимметричный дуплекс, частотное разделение каналов. Канал
«вниз» использует поднесущую 16 КГц, канал «вверх» — 48 КГц. Система
передает данные в виде пакетов. Размер пакета в канале «вниз» составляет 6
16-разрядных слов пользовательских данных, в канале «вверх» — 512 слов.
Дополнительно в канале «вверх» передается временная метка пакета, 2х 16-
разрядных слова с временным шагом 1 мс, и данные с двух температурных
датчиков — цифровой и аналоговой плат телеметрии. Достигнутые
скорости обмена на данном этапе составляют (приблизительно): в канале «вниз»
— 6 кбит/с, в канале «вверх» — 200 кбит/с. Система является адаптивной,
автоматически подстраиваемой под изменяющиеся параметры кабеля.
Существует возможность как симметричного (по двум проводам, оплетка
не используется), так и несимметричного (один провод и оплетка)
включения каротажного кабеля. Данные, передаваемые по кабелю, защищены 16-
разрядным циклическим контрольным кодом. Реализована возможность
обнаружения ошибок в канале и повторная передача ошибочных пакетов, в
случае ошибок система автоматически собирает пакеты в правильной
последовательности перед выдачей их управляющему компьютеру
«Нижний» узел телеметрии связан со скважинным прибором через CAN-
интерфейс, реализованный на микросхеме СС750 фирмы BOSH. Система
телеметрии управляет процессом обмена данными со скважинным
прибором посредством отправки прибору команд, запрещающих или
разрешающих выдачу прибором данных. Система периодически контролирует
состояние канала и производит адаптивную коррекцию характеристик кабеля в
автоматическом режиме. При включении питания система входит в связь
также автоматически.
Для связи с управляющим компьютером реализован интерфейс с системой
СИБМАКС, использующий как синхронный, так и асинхронный режим
обмена с генерацией прерывания.
579
Телеметрия в теории и на практике
Конструктивно система представляет собой два узла — узел скважинно-
го прибора (нижний узел) и узел управляющего компьютера (верхний).
Нижний узел состоит из двух плат — платы процессора, выполняющей
цифроаналоговое преобразование, цифровую обработку сигналов и связь
со скважинным прибором, и аналоговой платы, представляющей собой
приемопередатчик аналоговых сигналов. Цифровая плата устанавливается
в охлаждаемый отсек скважинного прибора, аналоговая плата
специальных способов охлаждения не требует. Верхний узел также состоит из двух
плат. Цифроаналоговое преобразование и приемопередатчик объединены
на одной плате, устанавливаемой в систему СИБМАКС, для выполнения
программы DSP телеметрии используется стандартная плата SPPC104 с
процессором ADSP-2185N и логической матрицей АСЕХ. Связь между
платами верхнего уровня системы производится по цифровой шине, обмен с
управляющим компьютером системы СИБМАКС — по шине ISA.
Нижний узел телеметрии содержит 8 буферов по 1 кбайт,
предназначенных для данных, получаемых по CAN-интерфейсу. Если нижний узел по
каким-либо причинам не может выполнять отправку данных (например, в
случае интенсивных помех в канале, разрывов связи в коллекторе и т. д.)
принимаемые данные помещаются во внутренние буфера. При исчерпании
свободного места в CAN-канал отправляется команда «STOP». Данной
командой скважинный прибор информируется о необходимости
приостановить выдачу данных для отправки наверх. Программное обеспечение
скважинного прибора должно корректно обрабатывать эту команду и не
посылать данные в телеметрию при отсутствии свободных внутренних
буферов — такие данные будут потеряны. В случае выдачи прибором данных
на скоростях, близких к максимальной скорости канала «вверх», переход
в режим «СТОП» может возникать периодически вследствие выполнения
телеметрией процедуры повторной передачи пакета при ошибках в канале и
не является признаком неисправности системы. Команда «STOP» выдается
также в случае, когда скважинный прибор передает большой объем данных
(больше 8 Кб) за время, недостаточное для отправки данных наверх. После
восстановления связи и освобождения необходимого количества
внутренних буферов телеметрия отправляет в прибор команду «START». После
получения этой команды прибор может продолжать передавать пакеты в узел
телеметрии.
При формировании пакетов нижний уровень использует следующий
алгоритм. Если канал свободен и поступили данные по CAN-интерфейсу,
поступившие данные помещаются в выходной пакет и немедленно отправляются
наверх.
Если данные продолжают поступать, они помещаются в следующий сво-
580
Глава 9. Телеметрия в нефтяной и газовой промышленности
бодный буфер нижней платы. После заполнения буфера из полученных
данных формируется новый пакет и ставится в очередь для отправки.
Новые данные помещаются в очередной буфер, и процесс повторяется до
исчерпания свободных буферов. После отправки очередного пакета нижняя
плата проверяет наличие сформированных пакетов, и, если очередь не
пуста, наверх отправляется очередной пакет. Если же очередь готовых пакетов
пуста, проверяется наличие данных в текущем буфере. Если буфер не пуст,
из него формируется очередной пакет и немедленно отправляется наверх.
Таким образом, верхний узел телеметрии может получать частично
заполненные пакеты. Достоинством такого алгоритма отправки является то, что
независимо от скорости обмена по CAN и объемов данных, получаемых
от скважинного прибора, минимизируется время доставки наверх каждого
CAN-пакета.
Управляющий компьютер системы СИБМАКС (далее - «хост»)
обменивается данными с верхним узлом телеметрии по шине ISA. Существует два
режима обмена —' синхронный и асинхронный. При синхронном обмене
инициатором служит «хост». Данный режим используется для отправки
команд системе телеметрии. При асинхронном обмене инициатором
служит верхний узел телеметрии, в этом режиме происходит выдача «хосту»
полученных от нижнего узла данных.
При выполнении процедуры обмена с «хостом» в запросе на асинхронный
обмен от «верхнего» узла телеметрии к хосту передается указатель на блок
данных длиной 530 слов.
Данный блок делится на две области: область служебной информации и
область пользовательских данных. Область служебной информации по
смещению 3 содержит 2 16-разрядных слова, которые содержат временную
метку принятого пакета.
Область пользовательских данных представляет собой связанный список.
Первый элемент списка является дескриптором, содержащим размер
первого CAN-пакета. Размер содержится в старших 5 битах дескриптора, в
младших 11 битах содержится тип данных данного элемента списка. Размер
поля данных CAN-пакета задается в байтах, поэтому для вычисления
указателя на следующий элемент связанного списка значение нужно удвоить.
Пакеты с нечеГным числом байтов дополняются нулевым байтом. Нулевой
дескриптор означает конец пользовательских данных. Нулевое смещение
(старшие 5 битов дескриптора) указывает на то, что в данном элементе
списка не содержится пользовательских данных и из скважинного прибора
поступил пакет, содержащий только 11 битов.
Данная система основана на современных технологиях и принципах теле-
581
Телеметрия в теории и на практике
коммуникации и имеет перспективы развития в нефтяной и газовой
промышленности.
9.1.7. Телеметрические системы в процессе бурения
В качестве примера рассмотрим телеметрическую систему «Ориентир».
Простым подключением модуля предоставляется возможность ведения
гамма-каротажа (в режиме реального времени и в режиме с запоминающим
устройством) [7].
Гамма-каротаж основан на изучении естественной радиоактивности
горных пород. Работы проводят с помощью скважинных радиометров разных
марок. Электрические сигналы, пропорциональные интенсивности гамма-
излучения, передаются по кабелю в обычную каротажную станцию, где и
осуществляется их автоматическая регистрация. В результате
гамма-каротажа записывается непрерывная кривая, или диаграмма, интенсивности
гамма-излучения. Величина измеряется в импульсах за минуту или в
микрорентгенах в час (гаммах). Поскольку распад ядер является случайным
процессом, то интенсивность гамма-излучения колеблется около среднего
уровня, испытывая статистические флуктуации. Для их учета применяются
повторные записи с меньшей скоростью проведения наблюдений.
Система, являющаяся частью скважинного бурового комплекса, рассчитана
на применение бурильщиками направленного бурения или операторами по
моторам/турбинам.
Небольшая длина прибора создает минимальные ограничения на
наружный диаметр в бурильной колонне, что делает систему идеально
применимой в горизонтальных и многоствольных скважинах, в скважинах малого
диаметра и при бурении в особо малых радиусах (интенсивность
искривления до 3,3 градус/метр при наращивании и бурении двигателем или до 1,65
градус/метр при роторном бурении).
Система блочной конфигурации мала и компактна, все важнейшие
компоненты подлежат транспортировке вертолетом. Монтаж и испытание
системы очень просты и осуществимы в промысловых условиях в малых
временных интервалах и не требуют многочисленного обслуживающего
персонала.
С коммерческой точки зрения, точность спецификации и дизайна системы
«Ориентир» обеспечивает низкие общие затраты, связанные с ее
использованием и обслуживанием. Это достигается путем сведения к минимуму
количества приборов, необходимых для получения дохода с единицы, и
связанных с этим периодов простоя. Простота системы обеспечивает
невысокий объем затрат на сервисное обслуживание.
582
Глава 9. Телеметрия в нефтяной и газовой промышленности
На рис. 8.5 показана телеметрическая система измерений в процессе
бурения «Ориентир» с вариантами наземной и забойной аппаратуры и
применением гамма-каротажа.
Рис. 9.5. Базовая схема стандартной системы с гамма-каротажем
Блочный характер системы позволяет осуществить демонтаж на отдельные
компоненты, облегчая перевозку и обслуживание. На рис. 9.6 представлен
общий вид передатчика телеметрической системы.
Если не используется гамма-модуль и имеется блок датчиков —
стандартные трехосные магнетометры и акселерометры, а также электроника управ-
583
Телеметрия в теории и на практике
ления, позволяющая производить полную инклинометрию и регулировку
направления в полном диапазоне наклонения 0-180°, то инклинометричес-
кий модуль телесистемы, представленный на рис. 9.7, устанавливается в
нижней части телесистемы.
Рис. 9.6. Бортовой передатчик системы «Ориентир»
Рис. 9.7. Блокинклинометрический
В системе существует:
• Возможность программирования прибора с поверхности.
• Возможность полной инклинометрии, причем можно выбирать
режим передачи: обработанные или необработанные данные.
Необработанные данные передаются, если применяется корректировка на
магнитные помехи бурильной колонны или иную близость
датчиков к магнитным массам.
• Передача параметров качественности съемки, таких как
температура и локальное магнитное поле.
584
Глава 9. Телеметрия в нефтяной и газовой промышленности
• Выбор стандартной или скоростной актуализации данных
положения передней поверхности прибора. Состоит в адаптивном
изменении частоты дискретизации контролируемого параметра
положения передней поверхности прибора.
• Имеется возможность адаптивного перехода системы с магнитного
на гравитационный режим, когда наклонение превышает заданное
значение (по умолчанию — 3е).
Наземная система преобразовывает телеметрическую информацию и
выдает данные на дисплей в виде азимута, наклонения и положения передней
поверхности прибора.
Инженер по MWD-системам может выбирать между обычным
текстуальным дисплеем последней съемки, информацией об изменении
направления или графическим дисплеем, показывающим данные гамма-каротажа.
Информация о последней съемке и о предыдущих изменениях
направления отображается на дисплее. Данные съемки обрабатываются с целью
просчета имеющихся на данный момент координат и истинной
вертикальной глубины и заносятся в базу данных. Данные съемок можно хранить в
формате ASCII или в формате базы данных (DBF) для передачи на другие
компьютерные программы по направленному бурению. Информация о
предыдущих положениях передней части прибора сохраняется в файле
каротажа для последующего анализа, если таковой необходим.
Блок сопряжения системы (SIB) является сердцем системы. Это
мультиплексное приспособление, обрабатывающее первичный сигнал со сква-
жинного прибора и направляющее информацию на ряд периферийных
устройств системы и персональный компьютер. Он содержит устройство
двойной фильтрации и выделения полезного сигнала, искробезопасную
защиту датчика давления и дисплея. Датчики состояния насосов позволяют
отсечь шумы и наводки на сигнал. Этим достигается правильная детекция
и распознаваемость сигналов пульсации от передатчика. Имеется
возможность вывода информации на термальный ленточный самописец SIB,
настройки которого регулируются с ручного терминала.
Портативный компьютер является основным устройством системы. На
портативный компьютер поступает поток данных с SIB. Полученная
информация в виде импульсов преобразуется в значимые цифры. На компьютер также
поступает информация от узла прослеживания глубины (DTU), если ведется
гамма-каротаж. Результаты съемки и остальная информация отображаются
на дисплее и записываются на жесткий диск. Данные съемки и положения
передней части прибора передаются на дисплей буровой установки (RFD).
С целью распечатки последовательности импульсов сигнала и обработанных
данных к персональному компьютеру обычно присоединяется принтер.
585
Телеметрия в теории и на практике
Дисплей на буровой установке (RFD) обеспечивает возможность контроля
за съемкой и данными положения передней поверхности, получаемыми с
инклинометрического прибора и гамма-каротажей, и позволяет
регулировать параметры бурения с целью изменения траектории скважины в
нужном направлении.
Работа передатчика
Передатчик генерирует импульсы для передачи данных из скважины на
поверхность. Структурная схема передатчика представлена на рис. 9.8.
Импульсы создаются путем регулировки открытия и закрытия клапана внутри
передатчика, позволяя малому количеству бурового раствора пройти
изнутри бурильной колонны в затрубное пространство ствола, минуя долото.
Узел Узел источника Регулятор Передатчик
электроники питания A(rSA) питания
ГИС (SEA) исполнительного
механизма
Рис. 9.8. Структурная схема бортового передатчика
Этим создается малая потеря давления внутри бурильной колонны. В
передатчике имеется реле давления, способное обнаруживать, включены или
выключены насосы бурового раствора. Это реле используется для
управления функциями колонны прибора. Регулятор питания исполнительного
механизма регулирует период между открытиями клапана передатчика и
длину импульса в соответствии с инструкциями, получаемыми с узла
электроники. Это позволяет осуществить передачу данных из скважины на
поверхность в виде кодированной последовательности импульсов давления
(рис. 9.9).
Рис. 9.9. Кодированная последовательность импульсов давления в скважине
586
Глава 9. Телеметрия в нефтяной и газовой промышленности
Блок электроники для геофизических исследований имеет стандартные
трехосные магнетометры и акселерометры для замера наклонения (0-180°),
азимута (0-360°) и положения передней поверхности прибора (0-360°) —
отклонителя. Эта секция также имеет микропроцессор, связанный с реле
давления передатчика и регулирующий все функции прибора.
Точную нужную последовательность импульса данных можно задать с
поверхности. Путем включения/выключения насосов бурового раствора в
заданной последовательности оператор может управлять режимами работы и
характеристиками системы телеметрии.
Рис. 9.10. Стандартная гамма-сборка
Забойный прибор гамма-каротажа прикрепляется к стандартной инклино-
метрической сборке телесистемы ниже узла электроники (рис. 9.10).
Имеются его две модификации:
• Стандартный прибор гамма-каротажа. Имеет способность вести
запись данных гамма-каротажа как в реальном времени при бурении,
так и в режиме запоминания в запоминающее устройство — с 16-
секундным интервалом на протяжении свыше 200 часов бурения.
• Прибор гамма-каротажа с записывающим устройством повышенной
вместимости. Имеет способность вести запись данных
гамма-каротажа как в реальном режиме бурения, так и в режиме запоминания с
8-секундным интервалом дискретизации на протяжении более чем
400 часов бурения.
587
Телеметрия в теории и на практике
Гамма-детектор представляет собой высокопрочный узел фотоумножителя
и счетчика. С целью обеспечения прочности и надежности оборудования
гамма-детектор имеет встроенный амортизатор и гаситель вибрации.
Имеются следующие модули для усовершенствования наземной системы.
• Круговой датчик положения вала (или датчик гидростатического
давления на платформах) для контроля положения ведущей трубы
или верхнего привода.
• Датчик нагрузки на крюке для определения, находится ли колонна
в клиньях или нет.
• Узел прослеживания глубины: микропроцессорное устройство,
получающее информацию с глубинного датчика и датчика нагрузки
на крюке и подсчитывающее глубину, на которой находится долото
на данный момент, после чего данные передаются на компьютер с
интервалом в 15 секунд.
• Безостановочный термопринтер обеспечивает как черновую, так и
окончательную распечатку графика на рулонной или веерной
бумаге (для последующего копирования).
Данные каротажа можно также выводить в стандартном формате базы
данных или на дискету.
Основными характеристиками системы являются:
• Универсальность и модульность.
• Общий наружный диаметр 89 мм.
• Система достаточно гибка для использования при бурении в
коротком радиусе. Она рассчитана на искривление до ЗуЗ градус/метр
(1 градус/фут) при скольжении и на 1,65 градус/метр (0,5 градус/
фут) при вращении.
Электромагнитная система
Электромагнитные системы передачи используются в MWD-телесистемах
уже несколько лет. На ранней стадии "своего развития технология MWD-
систем активно развивалась, поскольку обещала обеспечить большую
информативность, чем гидроканальные системы, и обладала большей
износостойкостью. Однако работа таких систем была нестабильной, и существовала
трудность передачи данных в разных породах (поскольку различная порода
588
Глава 9. Телеметрия в нефтяной и газовой промышленности
имеет различное удельное сопротивление). Не было никаких гарантий, что
при использовании таких систем не последует проблем с передачей и
детекцией, несмотря на большую скорость передачи данных, чем у систем с
использованием гидроканала.
На сегодняшний день электромагнитные системы нашли применение в
неглубоких скважинах при наличии аэрированных растворов и при
сбалансированном бурении.
Электромагнитная система использует электрические потенциалы для
передачи данных (рис. 9.11). Низкочастотный сигнал переменного тока
подается на терминалы диполя. Электроды диполя непосредственно
контактируют с породой, которая представляет собой относительно малоомный
проводник. Сильный переменный ток проходит через породы. Некоторая
малая доля этой энергии достигает поверхности, и происходит передача
данных. Необходимо отметить, что сигнал изменяется по амплитуде и
качество детекции импульсов будет зависеть от структуры пород и изменения
положения телесистемы относительно буровой скважины.
На поверхности устанавливаются три электрода высокой проводимости,
которые погружены в почву — два дифференциальных электрода для
сигнала и заземляющий электрод. Электроды присоединены к специальному
обрабатывающему модулю, который расшифровывает переданные данные
и передает информацию к наземной системе. Вся полученная информация
отражается на экране компьютера и пульте буровой установки.
Максимальное гидростатическое давление, при котором используется
данная система, составляет 10-20 атмосфер для стандартного исполнения, 1360
атмосфер для высокоупорного исполнения. Имеются примеры успешного
использования данных систем на глубинах более чем 6000 метров по
вертикали.
Длина телесистемы — от 4,5 метров для стандартной инклинометрической
системы (без гамма-модуля) до 8,0 метров (при использовании гамма-мо-
дуля).
К буровому раствору никаких специальных ограничений не применяется.
Ниже приведены некоторые эксплуатационные характеристики:
• Рабочая температура - от -50 °С до +150 °С.
• Максимальные ударные нагрузки: до 1000 g / 0,5 мс.
• Максимальные вибрационные нагрузки: разнонаправленные — до
20g при частотах 30-300 Гц, однонаправленные — до 30g при
частотах 50-300 Гц.
589
Телеметрия в теории и на практике
Рассмотренные системы построены на основе последних достижений в
сфере телекоммуникаций и широко используются в мировой практике при
контроле объектов нефтегазовой промышленности.
Рис. 9.11. Схема функционирования электромагнитной системы
9.1.8. Сейсморазведка в скважинах глубокого бурения
При проведении бурильных работ применяется аппаратурно-программный
копмлекс регистрации и экспресс-анализа данных скважиннои
сейсморазведки [8]. Модульная программно-управляемая цифровая аппаратура
предназначена для высокочувствительной скважиннои сейсморазведки в
скважинах диаметром от 76 до 340 мм с температурой от -40 °С до -85 °С и
590
Глава 9. Телеметрия в нефтяной и газовой промышленности
давлением до 80 МПа.
Скважинная часть аппаратуры включает скважинные телеметрические
регистраторы, предназначенные для предварительного усиления сигналов от
сейсмических датчиков, аналого-цифрового преобразования, накопления,
временного хранения и передачи цифровой геофизической информации по
двухпроводной линии связи.
Наземная часть аппаратуры содержит:
1. Наземный регистратор, по конструкции аналогичный скважинному
и предназначенному для наземных контрольных наблюдений.
2. Адаптер линии связи, предназначенный для организации обмена
данными по двум двухпроводным линиям связи между
телеметрическими зондами и USB-портом бортового вычислительного
комплекса, а также для управления системой синхронизации
возбуждения.
3. Бортовой компьютер типа Notebook с процессором Pentium,
предназначенный для уйравления работой зондов, оперативного
контроля, сбора и обработки принимаемой геофизической информации.
Основные технические характеристики скважинного телеметрического
регистратора:
Вес приемного модуля 11 кг;
Количество каналов - 3;
Усилие на конце рычага прижимного устройства 85-100 кг;
Конструкция узла сейсмоприемников — трехкомпонентная
ортогональная;
Шаг дискретизации сигналов 0,25, 0,5,1, 2, 4 мс;
Длина регистрируемой сейсмотрассы — 7000 отсчетов;
Мгновенный динамический диапазон 110 дБ;
Количество разрядов аналого-цифрового преобразователя 23 плюс
знак.
С помощью аппаратурно-программного комплекса возможно решение
широкого круга геологических задач:
• Изучение отражательных свойств среды для продольных
поперечных и обменных волн;
591
Телеметрия в теории и на практике
• Изучение скоростной характеристики разреза для волн различных
типов (продольные, поперечные);
• Стратификация сейсмических отражающих горизонтов;
• Изучение околоскважинного пространства и прогнозирование
геологических свойств разреза ниже забоя исследуемой скважины;
• Изучение параметров поляризации и упруго-деформационных
модулей геологического разреза;
Применение подобных систем в нефтегазодобывающей промышленности
имеет актуальность и значимость при разведке глубинных пород.
Резюмируя проведенный обзор современных специализированных
телеметрических систем, можно с уверенностью сказать, что рассмотренные
малые телеметрические системы прочно заняли свою нишу при решении
задачи контроля за состоянием и управлением буровых установок и скважин,
разветвленных систем трубопроводов и транспортных составов, танкеров и
морских буровых вышек и многих других задач, востребованных в
нефтегазодобывающей промышленности.
9.2. БОЛЬШИЕ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЕ СИСТЕМЫ
НЕФТЕГАЗОВОЙ ПРОМЫШЛЕННОСТИ
9.2.1. Автоматизированная система управления
технологическими ПРОЦЕССАМИ УСТАНОВКИ КАТАЛИТИЧЕСКОГО КРЕКИНГА
Процесс каталитического крекинга является основным процессом,
направленным на углубление переработки нефти как за рубежом, так и в России.
Целевым назначением процесса является получение высококачественного
компонента автомобильных бензинов с октановым числом 91-93. При
каталитическом крекинге образуется значительное количество газа, богатого
пропан-пропиленовой и бутан-бутиленовой фракциями (сырье для
производства высокооктанового эфира МТБЭ, алкилата й других ценных
компонентов моторного топлива). Установки каталитического крекинга являются
также поставщиком сырья для производства высококачественного кокса и
завода технического углерода.
Автоматизированная система управления (АСУ) технологическими
процессами (ТП) установки каталитического крекинга предназначена для оп-
592
Глава 9. Телеметрия в нефтяной и газовой промышленности
тимального ведения технологического процесса каталитического крекинга
вакуумных прогонов с целью дополнительного получения светлых
нефтепродуктов, обеспечения безаварийной эксплуатации оборудования установ-
ки [9].
Автоматизированная система телеуправления ТП представляет собой
комплекс программно-технических средств на базе SIMATIC PCS7,
реализующих следующие функции:
• сбор и архивирование оперативной информации о работе
установки;
• контроль аварийных отклонений технологических параметров;
• контроль и управление состоянием технологического
оборудования;
• автоматическая защита и блокировка оборудования;
• управление технологическим процессом;
• расчет технико-экономических показателей;
• регулирование технологических параметров;
• анализ предаварийных ситуаций;
• выдача оперативной информации о ходе технологического
процесса на станциях отображения информации;
• подготовка и обмен информацией со смежными системами
управления;
• диагностика работоспособности технологического оборудования.
Нижний уровень АСУ ТП имеет две подсистемы контроллеров:
• подсистема управления;
• подсистема противоаварийной защиты.
Система ввода/вывода выполнена на дублированных станциях ЕТ200М
и активных гаинных модулях, дающих возможность замены модулей без
отключения питания. Связь между контроллерами и станциями
распределенного ввода/вывода осуществляется на витой паре. Структурная схема
системы представлена на рис. 9.12.
Верхний уровень системы включает в себя два резервированых сервера, две
клиентских операторских станции. Серверы системы имеют следующую
конфигурацию:
593
Телеметрия в теории и на практике
оперативная память 256 Мб;
видеокарта Matrox MSS G200;
два коммуникационных процессора Industrial Ethernet CP1613;
два монитора;
винчестер HDD SCSI 18 Гб;
операционные системы Windows NT 4.0 Server, PCS7 OS Server;
клиентские станции RI 840 SIEMENS;
594
Глава 9. Телеметрия в нефтяной и газовой промышленности
Связь контроллеров с операторскими станциями производится с помощью
Industrial Ethernet - OSM 62ITP. Связь между серверами системы и
клиентами организована по Fast Ethernet со скоростью 10/100 Мб/с. В качестве
линий связи использованы оптоволоконные линии.
Общий объем переменных, используемых в системе отображения,
составляет около 19000. Таким образом, АСУ ТП является мощной
информационно-управляющей системой контроля состояния объектов нефтегазовой
промышленности.
9.2.2. Система автоматизации для узла сепарации нефти
Узел сепарации нефти предназначен для сбора, предварительной
сепарации, учета и перекачки нефти и попутного газа. С части скважин смесь
нефти и газа поступает под собственным давлением, а в остальных
используются погружные насосы. Далее смесь поступает в блочную сепарационную
установку и нефтегазосепаратор, где происходит ее первичная дегазация.
Отделенный газ перегоняется в газосепаратор и роторно-сепараторный
каплеуловитель, а нефть накапливается в буллитах и периодически
откачивается в транзитный трубопровод. Для учета объемов добычи нефти на узле
используется автоматическая групповая замерная установка «Спутник»
на 8 скважин. Для учета объема попутного газа применяется комплексный
датчик с вычислителем расхода [10].
Система обеспечивает:
сбор и обработку аналоговых и дискретных сигналов,
описывающих состояние объекта автоматизации и технологического
оборудования;
контроль и управление насосами перекачки нефти» клапанами,
задвижками, вентиляцией;
архивирование параметров технологического процесса и печать
отчетных форм, в том числе и по групповой замерной установке
«Спутник»;
диагностику каналов дискретного ввода, автоматическое
резервирование систем, отображение текущей и архивной технологической
информации.
Характеристики системы автоматизации:
595
Телеметрия в теории и на практике
количество сигналов ввода/вывода: 120;
- 2 CPU S7-314 (SW Redundancy);
1 станция оператора (WinCC 5.1);
используемая сеть — MPI.
Система автоматизации для узла сепарации нефти построена на основе
современных технологий и является одним из перспективных направлений
применения информационно-управляющих систем в
нефтегазодобывающей промышленности.
9.2.3. Коммерческие проекты нефтегазовой
промышленности С ИСПОЛЬЗОВАНИЕМ СРЕДСТВ ТЕЛЕМЕТРИИ
Контроль за работой газопровода. Для контроля за возможной утечкой газа
и управления насосными станциями осуществляется непрерывный обмен
данными с центральным пультом диспетчера. В качестве линий передачи
часто используются разветвленные кабельные сети. Наряду с крайне
низкой надежностью, обусловленной природными и климатическими
условиями, поддержание кабельного хозяйства в рабочем состоянии связано с
серьезными финансовыми затратами. В связи с этим в настоящее время
наблюдается отказ от использования связных кабелей и тенденция развития
средств передачи данных по радиоканалу. Целесообразность такого
решения также обусловлена наличием радиорелейных линий связи
протяженностью тысячи километров, проложенных вдоль газопроводов. Имеются
интересные технические решения, предусматривающие установку одного
дуплексного радиомодема на каждом узле радиорелейной связи (всего 25
узлов) и 75 полудуплексных модемов на каждой компрессорной станции.
Каждый дуплексный модем обеспечивает обмен данными по заданному
алгоритму с модемами на трех компрессорных станциях, расположенных на
удалении до 50 км. Ввод системы в эксплуатацию позволяет существенно
повысить надежность дистанционного контроля и управления. Цикл
опроса всех контрольных датчиков на заданном участке газопровода занимает
несколько секунд. При этом техническое обслуживание системы сводится
к проверке рабочих параметров и дистанционно выполняемой настройке и
исключает необходимость выезда персонала в пункты установки
оборудования. Временные затраты на выполнение этих работ составляют примерно
30 минут на каждое устройство в год [11].
Контроль и управление компрессорными станциями на автомобильных
шасси. Интересным проектом является внедрение телеметрических средств
596
Глава 9. Телеметрия в нефтяной и газовой промышленности
на компрессорных станциях, установленных на автомобильных шасси и
используемых на обширной территории. Порядок эксплуатации данных
насосных станций предполагает их развертывание в заданном пункте и
пребывание там в течение нескольких суток до заполнения емкостей. Каждая
насосная станция работает автономно и оснащается средствами
автоматической подачи сигнала тревоги и отключения насоса. Контроль за работой
насосных станций осуществляется мобильными группами, связь между
которыми поддерживается по радио. Эти же группы контролируют процесс
заполнения емкостей. В случае обнаружения неисправности мобильная
группа вызывает по радио ремонтную бригаду. Использование средств
телеметрии и телеуправления позволяет организовать автоматический сбор
данных о параметрах работы насосных станций в реальном масштабе
времени и отказаться от использования мобильных групп. Кроме того, это
позволяет существенно сократить время реакции технических групп в случаях
нештатной работы оборудования и выполнения ремонтных работ,
поскольку более полная информация о характере неисправности позволяет
выезжать к месту аварии с набором всех необходимых запасных частей.
Экономический эффект: экономия финансовых средств, связанная с отказом от
использования мобильных контрольных групп и высвобождением
персонала для выполнения ремонтно-восстановительных работ, существенное
сокращение сроков ликвидации аварий, снижение затрат, связанных с
выездами к местам аварий. Развертывание средств обмена данными не требует
дополнительных затрат на организацию новой радиосети и приобретение
новых радиостанций, поскольку данные могут передаваться параллельно с
речевыми сообщениями в уже действующей сети [11].
Контроль за работой аппаратуры и управление мобильными средствами.
Контроль за работой технических средств на нефтяных полях осуществляв
ется с помощью дистанционно удаленных терминалов, которые позволяют
получать данные диагностических проверок и формировать запросы на
проведение технических мероприятий. Имеющиеся системы используют
две радиосети, для передачи речевых сообщений и обмена данными. Первая
радиосеть задействуется для связи между центральным пультом и
мобильными группами технического обслуживания, а вторая — для обмена
данными между центральным пультом и дистанционно удаленными
терминалами. В случае получения сигнала тревоги с центрального пульта отдается
речевое распоряжение на выезд мобильной группы технического
обслуживания. При прибытии к месту аварии производится повторная
проверка работы, результаты которой передаются диспетчеру по каналу речевой
связи. Диспетчер, в свою очередь, производит проверку работы терминала и
передает результаты проверки мобильной группе технического
обслуживания. Поскольку каждый цикл ремонтно-восстановительных работ требует
597
Телеметрия в теории и на практике
проведения многократных проверок, процесс занимает значительное
время. Использование телеметрических средств позволяет организовать обмен
данными в радиосети мобильных групп технического обслуживания и
исключить диспетчера из технологической цепочки. С этой целью
используются мобильные компьютеры, установленные на транспортных средствах
мобильных технических групп. В результате существенно сокращаются
сроки выполнения ремонтно-восстановительных работ и снижается время
реакции на вызов, поскольку сигнал тревоги поступает в адрес группы
технического обслуживания напрямую. Мобильные группы получают более
полную и точную информацию, необходимую для проведения
качественного ремонта. Кроме того, снижаются временные затраты на подготовку
отчетов о проведенных работах и повышается их полнота, поскольку
появляется возможность их подготовки в процессе выполнения работ и передачи на
центральный пульт по каналу связи [11].
Организация обмена данными между морскими буровыми платформами с
передачей телеметрической и навигационной информации от НССНавстар/
GPS. Основные буровые платформы оснащаются аппаратурой спутниковой
связи и подключены к собственной глобальной вычислительной сети.
Платформы меньшего размера не оснащаются такой аппаратурой. Производить
установку аппаратуры спутниковой связи на малых платформах невыгодно.
Целесообразно использовать для обмена данными среднескоростные
модемы. Использование средств передачи данных позволяет организовать обмен
данными между малыми и крупными буровыми платформами и обеспечить
таким образом доступ персонала малых платформ к глобальной
вычислительной сети через аппаратуру спутниковой связи больших платформ. В
результате отпадает необходимость развертывания более дорогостоящей
аппаратуры. Кроме того, предложенное решение ведет к повышению загрузки
и эффективности эксплуатации каналов спутниковой связи.
Контроль за состоянием нефтепровода в арктических районах. Серьезной
задачей, стоящей перед нефтедобывающими компаниями, является
контроль за утечкой нефтепродуктов и обеспечение экологической
безопасности в регионе. Использование средств телеметрии позволяет организовать
контроль с необходимой надежностью и качеством.
Сбор данных о состоянии технических средств и обмен данными между
мобильными ремонтно-восстановительными бригадами. В нефтедобывающей
промышленности при эксплуатации систем и агрегатов, размещенных на
значительной территории, возникает необходимость в организации сбора
данных об их работе и доведении этой информации до
ремонтно-восстановительных бригад в масштабе времени, близком к реальному.
Использование средств телеметрии позволяет успешно решить такую задачу. В связи с
598
Глава 9. Телеметрия в нефтяной и газовой промышленности
достаточно большой оперативной зоной в составе такой системы
необходимо использовать ретрансляторы. Кроме того, применяют транковые
радиостанции, обеспечивающие обмен данными со скоростью 4800 бит/с.
Замена существующей диспетчерско-информационной системы.
Современные средства позволяют организовать обмен данными со скоростью 4800
бит/с и существенно расширить оперативную зону за счет использования
большого количества базовых станций. В ряде проектов рассматривается
вопрос о включении в состав системы многостанционного контроллера,
обеспечивающего автоматическое подключение мобильного пользователя
к ближайшей базовой станции, обеспечивающей лучшие условия работы.
Повышение точности определения границУефтяных разливов. Создание
системы обмена данными между надводными (наземными) и авиационными
средствами, привлекаемыми к проведению операций по ликвидации
последствий аварий, позволяет значительно повысить эффективность и
качество проводимых мероприятий. Система позволяет передавать результаты
аэрофотосъемки на привлекаемые к проведению операции суда в масштабе
времени, близком к реальному, непосредственно с борта ведущего
наблюдение самолета. Передача одного аэрофотоснимка в цифровой форме (объем
около 200К каждый) с борта самолета со скоростью 4800 бит/с занимает 8-
10 минут. При этом обеспечивается обмен речевыми сообщениями по тому
же радиоканалу
Управление железнодорожньсми составами под землей. Существуют и
реализованы проекты дистанционного управления вагонетками, доставляющими
золотоносную руду к подземной дробильной установке на глубине 1,5 км
перед ее подъемом на поверхность. Общая масса состава вагонеток
доходила до 30 тонн, протяженность пути составляла около 500 метров.
Предложенное решение позволило создать надежную систему дистанционного
управления в условиях чрезвычайно высокого уровня шумов, создаваемых
электрическими двигателями локомотива. Впоследствии, после замены
примененных в составе системы программируемых контроллеров на
более совершенные, скорость обмена данными была увеличена с 2400 до 9600
бит/с [11].
9.2.4. Использование телеметрических средств
космических СИСТЕМ В ИНТЕРЕСАХ НЕФТЕГАЗОДОБЫВАЮЩЕЙ ОТРАСЛИ
Сбор телеметрической информации с использованием средств
спутниковой связи может быть незаменимым при эксплуатации стационарных
технологических объектов, расположенных на значительном удалении от
599
Телеметрия в теории и на практике
центров хранения и обработки
информации. Например,
космическая система GlobalAsia
применима как на наземных,
так и на надводных
стационарных объектах независимо от их
типа и расположения, что
является очень удобным для
нефтегазодобывающей
промышленности, в которой имеются
как наземные, так и морские ______„
буровые вышки, находящиеся
на значительном удалении от
основных коммуникационных
узлов и магистралей [12].
Спутниковые терминалы,
предварительно
запрограммированные и установленные
на удаленных объектах с
подключением к источникам те-
леметрической информации
— датчикам, в комбинации с
программным обеспечением
диспетчерского центра,
зарегистрированным в центре
передачи данных оператора,
позволяют осуществлять:
• регулярный сбор
телеметрической
информации путем
непрерывного опроса датчиков,
установленных на удаленном объекте, на предмет их текущего
состояния и периодического получения отчетов об их последнем
состоянии;
• оперативный сбор телеметрической информации путем
незамедлительного получения внеочередных отчетов о последнем состоянии
датчиков, установленных на объекте, в ответ на удаленный запрос с
диспетчерского центра;
• установление условий автоматической активации регулярного
сбора телеметрической информации, таких как программный таймер
600
Глава 9. Телеметрия в нефтяной и газовой промышленности
или отклонение значения текущего состояния датчиков от
критических величин;
• постоянный надзор за текущим состоянием удаленного объекта
путем автоматической обработки и визуализации всей полученной
телеметрической информации на карте-схеме диспетчерского центра;
• удаленное управление сбором телеметрической информации путем
активации/деактивации управляющей программы спутникового
терминала, а также изменения параметров логики ее работы
посредством специальных входящих сообщений — команд
управления;
• дистанционное управление состоянием удаленного объекта путем
управления его электрическими цепями, подключенными к
выходам контроллера абонентского терминала, посредством изменения
текущего состояния таких выходов вследствие специальных
входящих сообщений — команд управления.
Система позволяет осуществлять сбор телеметрической информации с
мобильных объектов. Установленные на транспортных средствах спутниковые
терминалы наряду с процессом слежения позволяют осуществлять
дистанционный контроль текущего состояния грузов и транспорта, например
железнодорожных составов или танкеров с грузом нефтепродуктов.
Спутниковые терминалы, предварительно запрограммированные и
установленные на транспортных средствах, перевозящих нефтепродукты, в
комбинации с программным обеспечением диспетчерского центра,
зарегистрированным в центре передачи данных оператора, позволяют осуществлять:
• регулярное отслеживание местонахождения и параметров
движения транспорта путем непрерывного позиционирования и
периодического получения отчетов о последнем местоположении
транспортных средств;
• оперативное отслеживание местонахождения и параметров
движения транспорта путем незамедлительного получения внеочередных
отчетов о последнем местоположении транспортных средств в ответ
на удаленный запрос с диспетчерского центра;
• установление условий автоматической активации регулярного
отслеживания, таких как программный таймер или нарушение
географического периметра, отклонение дистанции до реперной точки,
отклонение прочих параметров движения от заданных величин;
• постоянный надзор за соблюдением маршрутов и графиков движе-
601
Телеметрия в теории и на практике
ния транспорта путем автоматической обработки и визуализации
всей информации, полученной с транспортных средств, на карте
диспетчерского центра;
• удаленное управление слежением путем активации/деактивации
управляющей программы спутникового терминала, а также
изменения параметров логики ее работы посредством специальных
входящих сообщений — команд управления;
• двусторонний обмен информацией с транспортными средствами
посредством приема/передачи специальных текстовых сообщений;
• дистанционный контроль за текущим состоянием грузов и
транспорта путем получения отчетов о состоянии датчиков,
установленных на транспортном средстве и подключенных к входам
контроллера абонентского терминала;
• дистанционное управление состоянием транспорта путем
управления его электрическими цепями, подключенными к выходам
контроллера абонентского терминала, посредством изменения текущего
состояния таких выходов вследствии специальных входящих
сообщений — команд управления.
Ипользование космических средств позволяет снизить стоимость
эксплуатации средств дистанционного контроля объектов нефтегазовой
промышленности. Это связано с единой тарифной политикой на всей территории
обслуживания и, как следствие, отсутствием эффекта «удорожания при
роуминге», что позволяет системе успешно конкурировать с
аналогичными сервисами на базе сотовых сетей связи. Другой важной особенностью
системы является ее функциональная технологичность, заключающаяся
в возможности программирования контроллера абонентского терминала,
наличии удаленного управления текущими параметрами работы
управляющей программы, возможностью оперативно менять действующие услуги >
связи, выбирать и устанавливать наиболее подходящие для текущих целей
и задач логику и параметры работы системы.
Система GlobalAsia действует через космический сегмент глобальной
подвижной системы спутниковой связи Inmarsat (рис. 9.13). Предварительно
установив канал связи с одним из спутников Inmarsat, спутниковые
терминалы поддерживают постоянное двустороннее соединение с операторским
сегментом системы через наземную станцию спутниковой связи,
соединенную с центром передачи данных посредством выделенного наземного канала.
Диспетчерский сегмент системы GlobalAsia представлен клиентским проа
граммным обеспечением, отвечающим за получение через Интернет ин-
602
Глава 9. Телеметрия в нефтяной и газовой промышленности
формации об удаленном объекте из центра передачи данных, визуализацию
полученной информации, а также за генерацию исходящих на удаленный
терминал запросов и команд.
Рис. 9.13. Общая схема системы GlobalAsia
В целом систему спутниковой связи GlobalAsia выгодно отличают
следующие показатели:
• двусторонняя связь: способность обеспечивать двусторонний канал
спутниковой связи позволяет поддерживать не только контрольные
функции систем слежения и телеметрии, но и функции управления
— прием и соответствующую отработку команд из удаленного
диспетчерского центра;
• глобальное покрытие: передача и прием сообщений может
производиться практически в любой точке земной поверхности — на суше,
на воде и в воздухе (за исключением полярных зон);
603
Телеметрия в теории и на практике
• интеграция с системой GPS: встроенный в терминал GPS-приемник
делает его высокоэффективным и самодостаточным устройством
для определения текущих параметров местоположения удаленного
объекта (географические координаты, скорость и направление
движения, высота над уровнем моря) с их последующей передачей в
диспетчерский центр;
• малый вес и габариты: небольшие размеры и масса спутниковых
терминалов делают их удобными к установке и применению не
только на стационарных, но и на мобильных объектах, таких как
автомобили, корабли, самолеты;
• «встроенный интеллект»: встроенный в терминал
программируемый контроллер управления может быть запрограммирован как на
автоматическую работу в автономном режиме, так и на
полуавтоматическую.
Космический сегмент системы GlobalAsia представлен четырьмя рабочими
и одним резервным геостационарным спутниками Inmarsat третьего
поколения. Формируя перекрывающие друг друга регионы обслуживания (не
считая экстремальные полюсные зоны), каждый из спутников покрывает
одну третью часть земной поверхности и занимает позицию над одним из
четырех океанов для обеспечения непрерывного глобального покрытия
(рис. 9.14).
Рис. 9.14. Зоны покрытия космического сегмента системы GlobalAsia
Спутниковый терминал SAT-201 является абонентским терминалом,
специально разработанным для слежения за мобильными объектами.
Терминал выполнен в виде единого герметичного влагозащищенного
«антенного» блока «внешнего» исполнения, объединившего в себе всенаправленную
спутниковую антенну, приемник GPS, двухсторонний спутниковый модем
604
Глава 9. Телеметрия в нефтяной и газовой промышленности
и программируемый контроллер управления (рис. 8.15).
Рис. 9.15. Общий вид абонентского терминала SAT-201
Терминал оснащен усовершенствованной встроеной антенной, которая
обеспечивает прием/передачу спутникового сигнала при минимальном
угле возвышения 0°над линией горизонта, а также улучшает
характеристики энергопотребления терминала, что значительно увеличивает время его
работы от автономного источника питания [12].
В спутниковом терминале SAT-201 отсутствуют аккумуляторный блок и
зарядное устройство аккумулятора, вход цепи питания от солнечных
батарей и аналоговая выводная часть программируемых портов ввода/вывода,
общее количество которых сокращено до минимума. Отсутствие
высокочастотного антенного кабеля делает SAT-201 удобным для наружной
установки в любом отдалении от источника питания на надэодном, воздушном
или наземном объекте.
Технические характеристики
Габариты: 112 х 46 мм;
Предельная
- температура: -40 °С +70 °С;
- влажность: < 95 % при +40 °С;
вибрация: 5-20 Гц при 1,92 м2/с, 320-500 Гц при 3 дБ;
сотрясение: 300 м/с.
Рабочий диапазон:
- прием - 1525,0 - 1559,0 МГц;
- передача - 1626,5 - 1660,5 МГц;
- прием GPS - 1575,42 +/-1 МГц.
605
Телеметрия в теории и на практике
Отношение «Сигнал/Шум»: > -25 дБ/К при +30 °С.
Время установления канала связи: 8 с.
Скорость передачи данных: - 10 бит/с.
Максимальный размер сообщения: исходящего 84 бита, входящего 1000
битов.
Средняя точность местоопределения: 4 м.
Стандарт интерфейса: RS232.
Скорость двоичной передачи: 9600 бод/с.
Операторский сегмент системы GlobalAsia представляет собой центр
передачи данных, подключенный к глобальной подвижной системе
спутниковой связи Inmarsat на уровне наземных станций спутниковой связи,
поддерживающих стандарт передачи данных Inmarsat D+.
Станции спутниковой связи расположены в западном и восточном
полушариях, тем самым обеспечивая непрерывное глобальное покрытие земной
поверхности (за исключением полярных зон) и связь с космическим
сегментом системы.
Центр передачи данных оператора состоит из трех специализированных
серверов, взаимодействующих между собой в режиме реального времени
посредством SQL-технологии — Информационной базы данных, Сервера
сообщений и Биллинг-центра (рис. 8.16).
Информационная база данных — представляет собой единое
структурированное хранилище данных, которое содержит информацию, используемую
в процессе функционирования Сервера сообщений и Биллинг-центра, а
также в процессе обмена данными между ними.
Сервер сообщений — принимает, передает и обрабатывает информацию,
содержащуюся в сообщениях, организует взаимодействие с диспетчерскими
центрами и станцией спутниковой связи, обеспечивает аутентификацию
пользователей системы — диспетчерских центров, протоколирование и
контроль доступа. Взаимодействие со станцией спутниковой связи
обеспечивается при помощи механизма XML-запросов/ответов через
защищенное HTTP-соединение. При взаимодействии с диспетчерскими центрами
используется уникальный протокол МЕР (Message Exchange Protocol). Вся
информация, используемая в процессе работы сервера сообщений,
хранится в единой информационной базе данных, доступ к которой
обеспечивается с применением SQL-технологии.
Биллинг-центр — отвечает за операции, связанные с обслуживанием лице-
606
Глава 9. Телеметрия в нефтяной и газовой промышленности
вых счетов абонентов: производит тарификацию предоставленных услуг
связи, обеспечивает интерфейс для контроля за состоянием абонентских
лицевых счетов, а также за действующими тарифными планами,
актуальными для абонентских терминалов. Во всех операциях в качестве
хранилища данных используется единая информационная база данных, доступ к
которой обеспечивается с применением SQL-технологии. Наряду с
указанными основными серверами центр передачи данных оператора оборудован
всей инфраструктурой, необходимой для защищенного и бесперебойного
круглосуточного функционирования системы GlobalAsia, включая
резервные каналы связи, автономное электропитание, многоуровневую защиту от
сетевых атак и несанкционированного доступа.
Рис. 9.16. Операторский сегмент системы QtobalAsia
9.2.5. Система сбора телеметрической информации в
автоматизированных ИНФОРМАЦИОННО-УПРАВЛЯЮЩИХ СИСТЕМАХ
Система сбора и отображения телеметрической информации является
одной из основных технологических подсистем в рамках автоматизированных
607
Телеметрия в теории и на практике
информационно-управляющих систем (АИУС) — сложных,
территориально распределенных, производственно-технических комплексов
нефтегазовой промышленности. Система предназначена для обеспечения контроля
технологических параметров производственных объектов и обмена
данными между отдельными пунктами управления. Система должна обладать
рядом важных качеств: оперативность и достоверность получаемой
информации, отказоустойчивость функционирования, наглядность представления
информации и др. [13].
В основе телеметрической системы АС ЕДС лежит программно-технический
комплекс БИГ-ГАЗ, состоящий из унифицированных
программно-технических компонентов. Унификация программно-технических компонентов
(ПТК) обеспечивает такие показатели, как развиваемость,
ремонтопригодность, что в конечном итоге позволяет достичь высокой степени
надежности функционирования системы в целом [13].
Программно-технические компоненты ПТК БИГ — ГАЗ созданы на основе
современной элементной базы, современных информационных технологий
и систем связи. Технологический процесс сбора телеметрических данных в
рамках АС ЕДС организован в соответствии со схемой, представленной на
рис. 9.17.
Структурная схема автоматического сбора информации
Унифицированные компоненты программно-технического комплекса в
свой состав включают:
1. Устройство контролируемого пункта УКП-БИГ.
2. Программный комплекс ПК БИГ O/V.
3. Специализированный информационный сайт АИУС.
Специализированный информационный сайт АИУС предназначен для
отображения телеметрической информации и выполняет следующие
функции:
1. Оперативное отображение сводных данных в рамках всей АИУС.
2. Детальное отображение данных по выбранным объектам контроля
АИУС.
3. Просмотр архивных данных по объектам контроля АИУС за
выбранный период.
4. Отображение данных в табличной и графической форме.
608
Глава 9. Телеметрия в нефтяной и газовой промышленности
Специализированный информационный АИУС-сайт связан с базой данных
SQL-сервера АИУС, формируемой ПК БИГ-O/V. Отображение
телеметрических данных на рабочих станциях пользователей АИУС производится
средствами Internet Explorer. Доступ к сайту организован только в рамках
корпоративной сети АИУС, только выделенным пользователям с
использованием парольной защиты.
Рис. 9.17, Система сбора телеметрических данных
20 Зак 861
609
Телеметрия в теории и на практике
Программный комплекс (ПК) БИГ-O/V представляет собой
унифицированный компонент программной службы сбора телеметрической
информации и ведения баз данных АИУС и предназначен для выполнения
следующих функций [13]:
1. Организация сбора телеметрической информации (настройка
режима и параметров сбора и передачи данных).
2. Формирование управляющих команд для микроконтроллера УКП-
БИГ.
3. Передача управляющих команд на микроконтроллер,
подключенный к СОМ-порту персонального компьютера.
4. Прием показателей измерительных приборов, получаемых по
каналам связи с объектов контроля с микроконтроллера УКП-БИГ,
подключенного к СОМ-порту персонального компьютера.
5. Хранение показаний измерительных приборов в базе данных
(формат mdb), формирование структурированных файлов с
показаниями приборов.
6. Прием и передача структурированных файлов посредством службы
FTP (возможность использования MAPI).
7. Отработка структурированных файлов для хранения в
SQL-сервере.
8. Отображение телеметрической информации на основе технологии
геоинформационных систем.
УКП-БИГ представляет собой контроллер, предназначенный для
обеспечения информационного обмена в гибридных системах телеметрии
(радиоканалы, телефонные каналы, каналы сотовой связи) с широким спектром
командно-измерительных приборов [13].
Рис. 9.18. Контроллер УКП-БИГ
Контроллер обеспечивает выполнение следующих функций:
1. Прием и обработку входных непрерывных и дискретных сигналов.
2. Формирование и прием управляющих команд в соответствии с
610
Глава 9. Телеметрия в нефтяной и газовой промышленности
заданной программой.
3. Управление устройствами обмена данными в соответствии с
программой с возможностью организации режима ретрансляции.
4. Хранение заданных программ информационного обмена.
Контроллер УКП-БИГ предназначен для обеспечения информационного
обмена в гибридных системах телеметрии с вычислителями и
командно-измерительными приборами различного типа [13].
Телеметрия в теории и на практике
ЛИТЕРАТУРА К ГЛАВЕ 9
1. Малогабаритная телеметрическая навигационная система с
кабельным каналом связи МТНСК (http://users.mark-itt.ru/horizo/
text31d.htm).
2. Телеметрическая система ТМ-ПЭН (http://www.td-irz.ru/products/
item.asp?mn=neft&id=tmpen&ln=ru).
3. Ропяной А. Ю. Малогабаритная гироскопическая телесистема: Упр.
траекторией бурения/Вестник Ассоциации буровых подрядчиков,
2001, №1.-с. 38-40.
4. Датчик давления «Силикон-1» (http://ulyanovsk.marketcenter.ru/
content/gds-0-810000802.html)
5. Комплекс погружной телеметрии (http://www.aInas.ru/products/
telem/pogr-telem/),
6. Система быстрой телеметрии (http://www.megasignal.ru/index.
php?topgroupid=*2 &groupid=75&subgroupid=83).
7. Проводка горизонтальных скважин и боковых стволов
забойными телеметрическими системами (http://tpg.rn 10.ru/service.
php?id=38).
8. Иркутскгеофизика (http://www.prompages.ru/search.php7id_
r=4¶m=r).
9. Апробация системы управления установкой каталитического
крекинга нефти на объекте (http://www.asucontrol.ru/news/2003/april/
news-04-27-2003-6.shtml).
10. Система автоматизации для узла сепарации нефти месторождения
«Одопту - Море» (http://www.sms-automation.ru/projects/oiland-
gas/Sakhalin.pdf).
11. Проекты реализованные с использованием радиомодемов (http://
www.rodnik.ru/htmls/s_8_2.htm).
12. GlobalAsia (http://www.globalasia.ru/).
13. Система сбора телеметрической информации (http://www.belinfogaz.
ru/big/products_telemetria_website.php).
612
Глава 10.
Применение телеметрии в
транспортном мониторинге
Применение методов и средств телеметрии в транспортной сфере
базируется на использовании широкого и постоянно развивающегося спектра
телематических услуг: доступа к информационным ресурсам, службам
электронной почты, передачи факсимильных, аудио- и видеосообщений.
В документах Международного союза электросвязи (ITU, International
Telecommunication Union) телематика определяется не просто как
передача голоса или данных, а как некие транзакции в информационном
пространстве. Наиболее динамично рынок телематических услуг развивается в
направлении дистанционного мониторинга (диспетчеризации,
позиционирования, телеконтроля, теледиагностирования) мобильных транспортных
объектов.
10.1. СИСТЕМЫ МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ
Термин «система мониторинга» следует понимать как наблюдение за
состоянием и местоположением мобильного объекта (МО). В некоторых
случаях возможна также и обратная связь — управление состоянием объекта.
В общем случае в системе мониторинга мобильных объектов (СММО) со-
614
Глава 10. Применение телеметрии в транспортном мониторинге
стоянце объекта фиксируется (регистрируется) набором датчиков,
установленных на МО, местоположение определяется с помощью систем
позиционирования, обмен данных с Центром мониторинга (ЦМ) осуществляется
по выбранному (доступному) каналу связи. Основная учетная информация
о мобильном объекте заранее регистрируется в Центре мониторинга.
К основным типам мобильных объектов относятся:
• личный легковой автотранспорт;
• служебный легковой автотранспорт;
• общественный транспорт (автобусы, маршрутные и легковые такси,
троллейбусы);
• спецтранспорт (скорая помощь, инкассаторские машины, транспорт
силовых структур);
• грузовой транспорт общего назначения;
• грузовой специальный транспорт (бензовозы, рефрижераторы,
контейнеровозы и т. д.).
Основные функции системы мониторинга мобильных объектов:
• оперативное оповещение силовых структур о
несанкционированных действиях с МО;
• дублирование оповещения владельцу МО в случае
несанкционированных действий;
• срабатывание тревоги при неправомочной попытке отключить
аккумулятор;
• контроль вскрытия МО;
• контроль включения/выключения зажигания;
• контроль своевременности прихода в центр тестовых сообщений;
• срабатывание тревоги при нажатии водителем тревожной кнопки;
• контроль уровня заряда аккумулятора;
• домашний мониторинг через Интернет за состоянием и маршрутом
МО на электронной карте местности;
• автоматическое привлечение внимания операторов к
инициализированным МО;
• отправка управляющих и технологических команд на МО, вплоть
до принудительной остановки двигателя;
615
Телеметрия в теории и на практике
• отслеживание перемещения группы МО на электронной карте;
• просмотр маршрутов и состояний МО в заданном промежутке
времени;
• последующий анализ ситуаций за счет ведения журналов, в том
числе и действий операторов.
Основными элементами системы мониторинга мобильных объектов
являются:
• система сбора информации (набор датчиков и устройство
обработки, установленные на мобильных объектах);
• система позиционирования (навигационные системы, системы
GSM-позиционирования и т. д.);
• система связи, обеспечивающая передачу данных от мобильного
объекта в Центр мониторинга;
• система обработки, анализа, хранения и отображения поступающей
информации.
10.1.1. Система сбора информации
В состав системы сбора информации входят датчики, тип, количество и
методы их установки. Тип датчиков определяется в первую очередь
функциональным назначением мобильного объекта.
Основные типы применяемых датчиков:
• Триггерные датчики:
о датчики открытия дверей, капота, багажника;
о датчики фиксации удара, изменения объема, разбивания
стекла;
о датчики замка зажигания (пуска двигателя);
о датчики движения;
о тревожная кнопка.
• Уровневые датчики:
о датчики уровня топлива в бензобаке;
о датчики уровня заряда аккумуляторной батареи;
616
Глава 10. Применение телеметрии в транспортном мониторинге
о датчики веса груза;
о датчики уровня транспортируемой жидкости;
о температурные датчики.
• Прочие датчики.
Выбор устанавливаемых датчиков в конечном итоге определяется всей
совокупностью условий эксплуатации конкретного объекта. К примеру, для
инкассаторской машины, оставляемой на ночь на хорошо охраняемой
гаражной закрытой стоянке, можно отказаться от режима «Сторож» и
обеспечивающих этот режим датчиков. Для бензовоза, эксплуатируемого в
автоматизируемой системе заливки и разлива топлива, потребуется установка
соответствующего уровнего датчика и т. д.
Вся информация о состоянии МО автоматически фиксируется из
датчиков в регистры памяти специального контроллера, который тем или иным
способом осуществляет обмен данными с Центром мониторинга. На МО,
помимо датчиков и контроллера, должно быть оборудование передачи
данных, антенна позиционирования и антенна приема/передачи данных
(иногда могут быть совмещенные варианты), а также резервный аккумулятор.
10.1.2. Система позиционирования
Местоположение МО определяется с помощью систем позиционирования,
которые также определяются в каждом конкретном случае использования
системы мониторинга мобильных объектов (СММО).
В системах мониторинга применяют два основных способа: размещение
на МО специальных устройств, определяющих собственные координаты
(спутниковые системы позиционирования), или размещение на МО
устройств, позволяющих определить его координаты извне (системы
навигации с применением радиолокационных методов). Методы радиолокации
достаточно широко известны, и поэтому остановимся кратко только на
первом. Наиболее широко распространенными спутниковыми системами
позиционирования являются системы GPS и «Глонасс».
Глобальная навигационная система GPS (Global Positioning System),
известная также как Navstar (Navigaion System with Time and Ranging —
Навигационная система определения времени и дальности), предназначена
для передачи навигационных сигналов, которые могут одновременно
приниматься во всех регионах мира. Система была разработана по заказу
Министерства обороны США.
617
Телеметрия в теории и на практике
Российская спутниковая навигационная система (СНС) аналогичного
назначения, известная под названием «Глонасс» (Глобальная навигационная
спутниковая система), разрабатывалась по заказу Министерства обороны
России, но сейчас применяется для предоставления навигационных услуг
различным категориям потребителей без каких-либо ограничений.
Системы GPS и «Глонасс» имеют сходную архитектуру.
В очень скором будущем приемники GPS/^Глонасс» станут стандартным
оборудованием автомобилей. Некоторые базовые системы, как, например,
вызов техпомощи и полиции на место аварии, уже начали внедряться
(водитель нажал кнопку — GPS-приемник определил координаты и передал
их вместе с сигналом вызова на диспетчерский центр — и выездная бригада
уже знает, куда ехать). Внедряются также и другие системы, которые
отображают на экране ваше положение и помогают прокладывать маршрут
через лабиринты улиц и дорог. Для контроля передвижения спецавтомобилей
(например, инкассаторских) и для борьбы с угонами начали
использоваться системы, постоянно отслеживающие положение движущегося объекта
на карте местности. На практике обычные GPS-приемники обеспечивают
точность от 20 до 70 м.
10.1.3. Система связи (каналы обмена данными с
мобильными объектами)
Системы на базе геостационарных спутников
Основная масса систем контроля дальних перевозок основана на этом
типе спутников — система Inmarsat, системы OmniTracs и EutelTracs,
система Prodat. В нашей стране реально представлены системы Inmarsat и
EutelTracs.
Система Inmarsat создана в 1979 г. и объединяет около 80 стран,
использующих спутники и наземные станции системы. Система Inmarsat, базируясь
на геостацинарных спутниках, обеспечивает передачу информации на всей
территории земного шара, за исключением приполярных областей. Время
доставки информации в системе — от 5-7 мин. до 15 мин., в зависимости от
организации диспетчерского пункта. Для контроля дальних перевозок
такие сроки доставки информации вполне приемлемы и период обновления
информации о состоянии объекта обычно выбирается 1 час.
Система EutelTracs была реализована в 1992 г. и по всему миру имеет
большое количество эксплуатируемых мобильных терминалов. Так, только в
618
Глава 10. Применение телеметрии в транспортном мониторинге
России зарегистрировано более 300 терминалов. С точки зрения
потребителя эта система имеет схожие характеристики с характеристиками
компонентов системы Inmarsat. Системы используют различные частотные
диапазоны, но их функиональные возможности и состав мобильных
терминалов практически одинаковы. Мобильный терминал в системе EutelTracs
имеет размеры, в 2-3 раза превышающие размеры терминала Inmarsat, но
для установки на грузовые машины это не является препятствием. На
сегодняшний день система работает только до долготы Омска и не покрывает
«правой половины» нашей территории.
Отличие в системе оплаты трафика в системах Inmarsat и EutelTracs в том,
что в Inmarsat оплачивается только фактически переданная информация, а
в EutelTracs присутствует обязательная абонентская плата за
фиксированный объем информации. При редком обмене информацией в системе
выгоднее оплата трафика в Inmarsat, при насыщенном — в EutelTracs.
Системы на базе низкоорбитальных спутников
Нельзя отнести данные системы к системам, в которых можно получить
полноценную услугу. Какие-то еще в проекте, какие-то функционируют
частично, но то, что они будут развернуты в конкретные сроки, сомнений
не вызывает.
На сегодня несколько проектов вышло на финишную прямую. Запущены
спутники, развернуто наземное оборудование, выпускаются
спутниковые терминалы. Практически в полном объеме уже функционирует
система Iridium. Близка к завершению система ORBCOMM, наиболее
ориентированная на передачу телеметрической информации. К сожалению,
ORBCOMM на сегодня не имеет лицензии для работы на территории
России. Основное отличие данных систем от рассматриваемых выше
состоит в том, что их орбитальные группировки состоят из низкоорбитальных
спутников с небольшой высотой орбиты (меньше тысячи километров). Для
потребителя это означает, что спутниковые терминалы будут иметь малые
размеры и невысокие цены.
Система Iridium имеет глобальную зону покрытия за счет большого
количества (66) космических аппаратов. Система предполагает большой
перечень услуг: телефонная связь, передача алфавитно-цифровых сообщений на
пейджер Iridium, переадресация вызова, конференц-связь, передача
факсимильных сообщений, голосовая почта, передача данных со скоростью 2400
бит/с и др. Стоимость спутникового терминала — на уровне $2000, тарифы
в системе ниже нынешних тарифов международной телефонной связи.
Система ORBCOMM предназначается для автоматизированного сбора ин-
619
Телеметрия в теории и на практике
формации о состоянии объектов, предоставления услуг электронной почты,
решения навигационных задач. Система уже эксплуатируется, хотя в ней
присутствуют «временные провалы». Уже имеются в продаже терминалы
GSC 100 (Magellan) стоимостью около тысячи долларов. Недорогие и
компактные терминалы ORBCOMM планируется использовать для контроля
состояния нефтепроводов и других подобных объектов.
Конечно, надо представлять, что за низкоорбитальными спутниковыми
системами большое будущее, но, пока они выйдут на эксплуатационный
уровень Inmarsat, EutelTracks, пройдет несколько лет. Да и геостационарные
системы постараются встретить «низколетов» новыми функциональными
возможностями и снижением расценок.
Системы на базе транкинговой связи
Для потребителя принципиально понимать, что транкинговые системы
могут покрывать значительные площади, позволяя осуществлять «авторо-
уминг» и «автопатчинг». В транкинговых системах за счет связи отдельных
ретрансляторов в единую логическую структуру потребитель избавляется
от необходимости заботиться о переключении радиочастотных каналов при
перемещении в рамках системы.
В мире и в России развернуты и эксплуатируются транкинговые системы
различных стандартов: SmarTrunk, MPT 1327, LTR, SmartZone, ED ACS и
др. Не анализируя причин, отметим, что в нашей стране имеет смысл
рассматривать как базу для построения систем контроля мобильных объектов
системы стандартов МРТ 1327, LTR.
МРТ 1327 — многие фирмы, западные и отечественные, предлагают в
рамках стандарта МРТ 1327 систему связи с использованием SDM (Short Data
Message — служба коротких цифровых посылок). При этом нет явного
конфликта между передачей навигационной информации и голосовых
сообщений, уменьшается время передачи единичной посылки цифровой
информации до долей секунды (если передавать по голосовому каналу, то это время
может быть 2-4 секунды). Но следует также понять, что управляющий
канал нельзя перегружать и, следовательно, систему связи с большим
количеством объектов построить на этом принципе нельзя.
LTR — в системах на базе LTR передача данных идет по голосовому каналу,
так как выделенного управляющего канала в системе нет. Но за счет более
высоких скоростных характеристик, по сравнению с системами стандарта
МРТ 1327, создание AVLS на базе LTR имеет неплохие перспективы.
620
Глава 10. Применение телеметрии в транспортном мониторинге
Системы на базе КВ-связи
Очень много факторов влияет на качество КВ-связи. Но сочетание
достаточного количества резервных радиочастот и современных технологий
позволяет осуществлять передачу данных по КВ-каналу с высокой степенью
надежности и с достаточно высокой скоростью.
Наиболее интересны в этом направлении разработки австралийских фирм
Coden и Barrett. Радиостанции этих фирм имеют встроенный механизм
автоматического поиска канала связи, обеспечивающий решение задачи
нахождения канала наилучшего прохождения сигнала в течение всего сеанса
связи. Для передачи цифровой информации предусмотрен встроенный
модем со скоростью до 2400 бит/с. При невозможности связаться диспетчеру с
объектом слежения напрямую автоматически ищутся варианты связи через
другие транспортные средства системы.
Множество имеющихся каналов передачи данных позволяет выбрать
оптимальный вариант или вообще в некоторых случаях отказаться от передачи.
К примеру, закончив поездку, водитель предъявляет специальное
устройство для считывания из него в компьютер всей накопленной за рейс
информации.
Системы на базе сотовой связи (GSM)
В последнее время для систем мониторинга локального покрытия большую
популярность стали приобретать системы сотовой связи (GSM) и по
голосовому каналу, и по каналу передачи коротких SMS-сообщений [1].
Использование технологий GSM для организации телематических услуг
операторы прорабатывают давно. Оказалось, что с коммерческой точки
зрения наиболее перспективна организация транспортных диспетчерских
служб, основанных на сочетании технологий глобального спутникового
позиционирования GPS/ЧГлонасс» и передачи навигационной и
управляющей информации через сети мобильной связи GSM.
По типу подключения диспетчерских рабочих мест к сети мобильной связи
GSM все ССМО делятся на два больших класса:
• Выделенные системы (например, система «Поиск-2», системы типа
Track Master и т. п.).
• Интернет-системы (например, «Локатор» компании Race
Communications, «Циклон» и т. п.).
При покупке выделенной системы оператор становится полным владель-
621
Телеметрия в теории и на практике
Рис. 10, Т. ССМО как выделенная система
цем всего программно-аппаратного комплекса. Как правило, при этом он
устанавливает у себя в диспетчерском центре насколько компьютеров
(возможно, сервер). С этого момента он платит только за канал связи, как за
использование обычного телефона.
В случае работы с интернет-системами оператор, как правило,
подписывается на услугу доступа к данным. Провайдер этой услуги назначает
ежемесячную абонентскую плату за доступ к его серверу и плату за некоторые
действия пользователя (запрос местоположения аппарата). Помимо этого,
провайдер может потребовать плату за подключение к услуге
(однократную), в которую часто входит стоимость оборудования. Некоторые
провайдеры услуг интернет-слежения допускают подключение только
приобретенного у них оборудования [1].
Интернет-системы позволяют пользователю получить доступ к данным с
любого компьютера, имеющего выход в Интернет. Выделенные системы
несколько более ограниченны в этом плане, так как на компьютер требуется
установить специальное программное обеспечение. Впрочем, современные
интернет-системы также довольно требовательны к мощности компьютера
пользователя и к типу установленного браузера (для которого, как правило,
требуется еще и поддержка Java).
622
Глава 10. Применение телеметрии в транспортном мониторинге
Рис. 10.2. ССМО как интернет-система
Все данные, поступающие в выделенную систему, хранятся в диспетчерском
центре. Никто посторонний не сможет получить к ним доступ (его можно
получить, только взломав локальную сеть компании и базу данных, если
это вообще физически будет возможно). Интернет-системы хранят данные
всех клиентов на собственной системе серверов. Конечно, они хорошо
защищены от хакерской атаки, но если кто-либо узнает пароль и логин
оператора, он получит доступ ко всем данным. К несомненным достоинствам
интернет-систем относится то, что всю заботу по сохранности базы данных
берет на себя провайдер [1].
Системы на базе сотовой связи пока в России представлены не так
глобально, как, например, в Западной Европе. Но все же во многих районах России
этот вариант успешно реализован. Для построения систем мониторинга в
сотовых сетях многие фирмы выпускают оборудование и предлагают
законченные системы.
Первая российская диспетчерская интернет-система WebLocator была
введена в коммерческую эксплуатацию компанией «Мегафон-Москва»
в содружестве с системным интегратором Race Communications. Система
позволяет просматривать маршруты движения автомобилей на экране
компьютера, определять текущее местонахождение транспорта и управлять им.
623
Телеметрия в теории и на практике
Кроме того, можно вести учет и получать статистику параметров
подвижных объектов, что повышает безопасность и скорость перевозок.
Бортовой компьютер системы, расположенный на транспортном средстве,
определяет свои координаты при помощи глобальной спутниковой
системы позиционирования GPS и обрабатывает показатели состояния
подключенных к нему датчиков. Вся полученная информация через каналы GSM
отправляется в информационный центр для последующей обработки и
позиционирования объектов на электронной карте. В результате вся
необходимая пользователю информация становится доступной через интерфейс
Web-сайта системы.
По расчетам разработчиков, использование системы оправданно, если
фирма эксплуатирует более трех автомобилей, а объем ее ежемесячных
грузоперевозок превышает 5 тыс. долл. По опыту использования подобных систем
в других странах, «пустой» пробег машин сокращается на 15-20%, а
уровень дисциплинированности водителей существенно повышается.
В свою очередь, «ВымпелКом» и компания Nexo, предоставляющие услуги
в области телематики, заявили о совместном проекте по выводу на
российский рынок решения AutoConnex. «Мегафон» и «ВымпелКом» обещают
провести дальнейшие усовершенствования системы при переходе на
транспортную среду GPRS. Это позволит проводить мониторинг транспортных
средств и подвижных объектов в режиме реального времени.
МТС развивает собственный проект диспетчеризации транспортных
средств. С этой целью около года назад была создана дочерняя компания
«Мобильные телематические системы позиционирования». В 2002 г. были
запущены первые пилотные проекты. Один из них выполнен для небольшой
транспортной фирмы и действует в пределах автотрассы Москва — Санкт-
Петербург. Второй проект (МТС-П) реализован на базе Зеленоградского
автобусного парка. Однако о полноценном запуске услуги в коммерческую
эксплуатацию пока объявлено не было.
10.1.4. Система обработки, хранения и анализа
поступающей ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ (ДИСПЕТЧЕРСКИЙ ПУНКТ)
Основные функции диспетчерского пункта [1]:
• Получать через программы — терминалы устройств связи — и
архивировать в базе данных информацию от мобильных объектов.
• Отображать на масштабируемой карте географическое
местоположение (адрес), направление, скорость движения мобильных объек-
624
Глава 10. Применение телеметрии в транспортном мониторинге
тов и их состояние на основании информации от датчиков.
• Увеличивать или уменьшать масштаб карты, смещать ее в
произвольном направлении и центрировать в нужной точке.
• Изменять свойства отображения карты, при этом предоставляется
возможность:
- определить цвет нанесения элементов слоя;
- установить признак отображения надписей данного слоя на
карте;
- установить значения нижнего и верхнего предела масштаба, в
рамках которого данный слой будет отображаться на карте при
изменении масштаба просмотра.
• Определять названия географического объекта (улицы, станции
метро, железнодорожной станции и т. п.) по карте.
• Осуществлять поиск географического объекта (улицы, станции
метро, железнодорожной станции и т. п.) по названию.
• Осуществлять автоматический поиск и отображение мобильного
объекта, исчезнувшего из поля зрения диспетчера, по номеру или коду.
• Осуществлять слежение за выбранным мобильным объектом либо
группой мобильных объектов.
• Отображать географические координаты, курс, скорость, состояние
мобильного объекта в текстовом виде.
• Записывать параметры движения мобильных объектов с
возможностью их последующего анализа и воспроизведения
(«проигрывание» архива).
• Отображать «след» (трассу) движения мобильного объекта на карте.
• Запрашивать местоположение и состояние датчиков мобильных
объектов по системе связи.
• Получать, просматривать и заносить в архив изображения,
передаваемые с мобильных объектов.
• Контролировать датчики, установленные на мобильных объектах
(на дверях, в кабине водителя, «Тревожную кнопку» ит.д.),и
дистанционно изменять параметры их работы.
• Осуществлять защиту от несанкционированного доступа к
передаваемым данным.
625
Телеметрия в теории и на практике
• Выводить на печатающее устройство текущее изображение
основного окна карты.
• Контролировать вход, выход и нахождение мобильных объектов на
маршруте и внутри критических зон.
• Решать ситуационные задачи на основе информации, поступающей
от датчиков мобильных объектов, выявлять внештатные ситуации.
• Производить актуализацию информации о ситуации на городских
магистралях (закрытых для движения транспорта улицах,
строительных и ремонтных работах, пробках, изменениях схем
движения).
• Вести журнал действий диспетчера.
10.2. ПРИМЕРЫ СИСТЕМ МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ
10.2.1. Диспетчерская система DAXON-DS
Диспетчерская система радиосвязи на основе программно-аппаратного
комплекса DAXON-DS не является специализированной навигационной
системой. Отличительной чертой диспетчерской системы радиосвязи на
основе программно-аппаратного комплекса DAXON-DS является
комплексное решение задачи по:
• контролю и управлению подвижными объектами;
• защите переговоров от прослушивания (аналого-цифровое или
цифровое маскирование);
• контролю за состоянием различных удаленных объектов;
• ограничению доступа абонентов к радиоканалу ретранслятора;
• определению местоположения мобильных абонентов (для
радиостанций профессиональной серии Motorola).
В основе работы DAXON-DS лежит уникальный цифровой сигналинг
DS-1200, реализованный в модулях и устройствах DAXON для
организации персонального вызова. Сигналинг DS-1200 позволяет объединить в
единую систему связи различные типы радиостанций как Motorola, так и
других фирм-производителей.
626
Глава 10. Применение телеметрии в транспортном мониторинге
Базовые функции диспетчерской системы:
• Мониторинг эфира с отображением на экране монитора компьютера
даты, времени, номера абонента, вышедшего в эфир или пославшего
сигнал тревоги, а также всех запросов диспетчера и ответов
абонентских радиостанций.
• Протоколирование (запись в архивный файл на жесткий диск) даты,
времени, номера абонента, вышедшего в эфир, а также всех запросов
диспетчера и ответов абонентских радиостанций.
• Контроль абонента (радиостанция включена и находится в зоне
действия).
• Блокирование абонента (дистанционный вывод из строя модуля
DAXON).
• Индивидуальный вызов абонента.
• Определение местоположения абонента (для радиостанций,
оборудованных дополнительными устройствами с GPS-приемником).
• Ведение переговоров в закрытом (аналого-цифровое или цифровое
маскирование речи) и открытом режимах.
• Ограничение доступа абонентов к ретранслятору с помощью
контроллера DAXON550.
• Постановка абонента на прослушивание.
• Передача абонентом сигнала тревоги.
Дополнительные функции диспетчерской системы:
• Передача цифровых (статусных) сообщений.
• Групповой вызов абонентов.
• Перекодировка речевого сигнала (дри аналого-цифровом
маскировании) в ретрансляторе с помощью контроллера DAXON550.
• Контроль состояния удаленных объектов с помощью контроллера
DAXON550.
Программно-аппаратный комплекс диспетчерской системы DAXON-DS:
• Персональный компьютер с диспетчерской программой DSS.
• Радиостанция MotorolaОМсконтроллёром-маскираторомБАХОЫ540
или DAXON640 (в зависимости от типа маскирования речи).
627
Телеметрия в теории и на практике
Рис. 10.3. Диспетчерская система DAXON-DS
Системный контроллер предназначен для передачи служебной
информации и ведения диспетчером переговоров в защищенном от прослушивания
режиме (аналого-цифровое маскирование DAXON540 или цифровое
маскирование DAXON640). Устанавливается внутри мобильной радиостанции
Motorola Professional Series GM. Подсоединяется к последовательному
порту компьютера через кабель-переходник.
Контроллер ретранслятора DAXON 550 предназначен для ограничения
доступа абонентов к ретранслятору и осуществляет возможность посылки в
эфир сигналов о срабатывании 4-х различных датчиков, например о
доступе в помещение, вскрытии корпуса ретранслятора, нарушении
температурного режима, пропадании основного электропитания и т. д. Для
дополнительного закрытия радиоканала ретранслятора возможна перекодировка
речевого сигнала.
При подключении к стационарной радиостанции Моторола GM
контроллер DAXON 550 позволяет осуществлять контроль состояния удаленных
объектов.
628
Глава 10. Применение телеметрии в транспортном мониторинге
Типовая диспетчерская система радиосвязи DAXON-DS
Количество частотных каналов — 1.
Закрытие переговоров — аналого-цифровое маскирование (DAXON500).
Общее количество подвижных радиоабонентов — 50:100. Количество
подвижных радиоабонентов, оборудованных GPS-приемниками, — 5:15.
Диспетчерский пункт — 1.
Для диспетчерской программы DSS-2 требуется растровая электронная
карта местности, района (графический файл в формате bmp), которая
поставляется в согласовании с заказчиком. Возможно использование
векторной карты.
Кроме этого, возможности системы в перспективе будут еще шире —
использование цифровых модулей позволит посылать на диспетчерский
пульт, оборудованный компьютером, фотографии с места происшествия,
запрашивать и получать информацию из центральной Базы Данных и
посылать ответную информацию диспетчеру с персонального бортового
компьютера, карманного ПК, PDA и т. п.
Рис. 10.4 Интерфейс программного обеспечения DS-1
629
Телеметрия в теории и на практике
10.2.2. Мониторинг подвижных объектов на базе
радиосвязи и GPS-модемов KGP - 2A/KGP-2B
GPS-модемы KGP-2A (приемник) и KGP-2B (контроллер), представленные
на рис. 10.5, — это простой путь для построения системы автоматического
определения положения подвижных объектов с использованием систем
радиосвязи или просто радиостанций. Система автоматического определения
положения подвижных объектов может использоваться в такси, служеб-
, ном и грузовом автотранспорте. Также система дополнительно позволяет
осуществлять мониторинг датчиков подвижных объектов. Новые модемы
сделают контроль за автотранспортом простым и надежным, обладая
следующими качествами:
• Компактный дизайн.
• Военный стандарт MIL-810 C/D/E.
• Индикаторы режимов работы .
• 16 программируемых портов для подключения внешних датчиков.
• FlashROM для обновления функциональных возможностей.
Контроллер KPG-2B производит циклический опрос каждого приемника
KPG-2A транспортного средства и получение от него данных
местонахождения и состояния датчиков.
Рис. 10.5. GPS-модемы KGP-2A (приемник) и KGP-2B (контроллер)
Связь модемов осуществляется по радиоканалу. Для организации
радиоканалов могут использоваться радиостанции Kenwood: TK-760/TK-860/TK-
780/ТК-880. Эти же радиостанции могут использоваться в системе
голосовой радиосвязи. Таким образом, возможно оснащение GPS-модемами уже
находящихся в эксплуатации систем радиосвязи.
Для работы системы мониторинга может использоваться инфраструктура
транкинговых систем LTR, MPT, Smartrunk II, что значительно может
увеличить зону контроля.
630
Глава 10. Применение телеметрии в транспортном мониторинге
Рис. 10.6. Схема построения системы
10.2.3. Система TrackMaster
Система TrackMaster позволяет обеспечить решение широкого круга задач [2]:
• централизацию управления перевозками;
• оптимизацию работы патрульных и спасательных служб;
• получение информации о происходящем на мобильных объектах и
оперативное принятие решений;
• осуществление централизованного оперативного сбора
информации при помощи подвижных лабораторий на автомобилях,
вертолетах, самолетах и т. д.
Основными элементами системы являются:
• мобильные объекты* оборудованные комплектами TrackMaster Car
(TrackMaster Micro) и абонентским оборудованием систем связи;
• системы передачи данных;
• диспетчерский центр TrackCenter.
Устанавливаемый на объект комплект аппаратуры TrackMaster принимает
сигналы от навигационных спутников и вычисляет координаты объекта с
точностью до 10 метров.
Аппаратура TrackMaster передает местоположение объекта на
диспетчерский центр с помощью различных видов систем связи:
• транковые системы связи (EDACS, LTR, MPT1327 и т. д.);
• сотовые системы связи (GSM, NMT-450);
• космические системы связи (INMARSAT, ORBCOMM, ГОНЕЦ).
631
Телеметрия в теории и на практике
Рис. 10.7. Функциональная схема системы TrackMaster
Диспетчер может контролировать положение всех объектов на электронной
карте программы TrackCenter, контролировать состояние датчиков,
принимать и передавать текстовые сообщения, передавать управляющие
воздействия на объекты, например заблокировать дверь или двигатель [2].
Диспетчерская система TrackCenter
Диспетчерская система позволяет обеспечить централизованное
управление перевозками и оптимизировать работу патрульных и спасательных
служб, получать информацию о происходящем на мобильных объектах и
оперативно принимать решения, производить поиск объектов по
показаниям их навигационных датчиков, осуществлять централизованный
оперативный сбор информации при помощи подвижных лабораторий на
автомобилях, вертолетах, самолетах и т. д.
Отличительные преимущества:
• Возможность одновременного использования нескольких
различных систем связи.
• Контроль большого количества объектов.
632
Глава 10. Применение телеметрии в транспортном мониторинге
• Неограниченная масштабируемость.
• Использование технологий клиент/сервер и Интернет-интра-
нет.
Техническое построение системы
Программное обеспечение работает в среде Windows 95/98/NT. Это
позволяет оператору, эффективно используя преимущества многозадачного
режима и многооконного интерфейса, видеть одновременно несколько
районов карты в выделенных участках экрана (окнах). В каждом окне можно
устанавливать свой участок карты в нужном масштабе и наблюдать за
движением группы объектов. При этом участок карты в каждом окне может
автоматически выделяться таким образом, чтобы все объекты группы
оказались в поле зрения оператора. Оператор может перемещать окна таким
образом, чтобы получилась наиболее удобная общая композиция экрана.
Архитектура программы — клиент/сервер для локальной сети. Это
позволяет использовать серверную программу для сбора данных о положении и
состоянии мобильных объектов от нескольких программ-клиентов,
работающих на том же или других компьютерах локальной сети (под управлением
Microsoft Windows 95/98/NT, Microsoft Windows for Workgroups 3.11 и даже
Microsoft Network Client for DOS) с различными устройствами получения-
передачи данных. Рабочие места диспетчеров используют для получения
данных технологии локальной сети и Интернет-интранет [2].
Использование отдельных персональных компьютеров локальной
компьютерной сети для работы с конкретными системами связи позволяет при
обеспечении надежности работы (получение данных осуществляется
специализированной программой на выделенной ПЭВМ) объединить данные
от различных источников посредством сетевого взаимодействия. При этом
работа диспетчерской программы не зависит от количества и типов
каналов связи, так как взаимодействие связных программ с нею осуществляется
по единому стандартному сетевому протоколу в различных операционных
системах [2].
С устройствами различных систем связи взаимодействуют программы-
терминалы, работающие на разных компьютерах локальной сети. Главный
модуль системы TrackCenter получает и передает информацию с помощью
этих терминалов, общаясь с ними по единому сетевому протоколу.
Добавление новой системы связи сводится к написанию небольшого
драйвера.
Информация о мобильных объектах (координаты, показания датчиков,
633
Телеметрия в теории и на практике
сигналы тревоги, текстовые сообщения) передается на диспетчерские
центры, где сохраняется для последующего анализа. Использование различных
вариантов визуализации этой информации позволяет строить различные
адаптированные к конкретным задачам системы поддержки принятия
решения диспетчером.
В зависимости от объема информации TrackCenter использует для
хранения:
• персональные реляционные базы данных — MS Access, dBase;
• серверы баз данных — MS SQL Server, Oracle;
• распределенные базы данных.
Для передачи информации система TrackCenter может одновременно
использовать несколько различных систем связи и несколько устройств
одной системы связи.
Подсистемы анализа позволяют отображать местоположение подвижных
объектов на электронной карте, выдавать сигналы й справочную
информацию диспетчеру в случае каких-либо происшествий, передавать текстовые
сообщения и оказывать активные воздействия на объекты (блокировка
дверей и двигателя).
Данные, собираемые системой TrackCenter, можно использовать
различным образом: отображать местоположение объектов на электронной карте,
вести табличный учет состояния объектов, подсчитывать статистику
(пройденный путь, время стоянок и т. п.). При этом в локальной сети организации
могут одновременно работать несколько различных программ просмотра и
анализа данных.
При необходимости использования специфических методов обработки
данных они могут быть реализованы в виде дополнительного модуля
просмотра и анализа базы данных.
Картографический материал хранится в стандартном векторном или
растровом формате ГИС, что обеспечивает оперативное внесение любых
необходимых изменений в карту и идентификацию отдельных ее элементов.
Картографическая база данных системы работает с открытыми форматами [2]:
• ГИС «Панорама» (SXF);
• ГИС Arc View;
• ГИС Arclnfo;
• привязанный растр (форматы TIFF, BMP).
634
Глава 10. Применение телеметрии в транспортном мониторинге
При необходимости возможно изготовление картографического материала
в нужных форматах и картографических проекциях согласно пожеланиям
заказчика.
Основные характеристики диспетчерского пункта:
• максимальное количество отслеживаемых потребителей - 50000;
• точность определения координат — менее 100 м;
• точность определения скорости — 10 см/с;
• точность привязки шкалы времени — 1 мкс;
На начальном этапе развертывания диспетчерский центр может
функционировать на одном компьютере, используя одну систему связи.
Состав бортовой аппаратуры. Бортовая аппаратура TrackMaster Micro
состоит из следующих элементов и узлов:
• управляющий модуль, выполненный с использованием
8-разрядного высокопроизводительного микроконтроллера;
• GPS-датчик Yupiter (12 параллельных каналов слежения за
навигационными спутниками) или J8 (8-канальный OEM-модуль) в
комплекте с малогабаритной спутниковой антенной, 12-канальный
ГЛОНАСС+GPS датчик (TrackMaster Micro Pro);
• интерфейсный нуль-модемный кабель;
• кабель питания от бортовой сети автомобиля;
• набор датчиков (контактных: вскрытия дверей объекта,
несанкционированного включения двигателя, кнопка «ТРЕВОГА» и др.,
измерителей аналоговых параметров: температуры, уровня шумов и
др.).
Предусмотрены следующие два режима функционирования БАКУ:
• автономный;
• в составе системы диспетчеризации или мониторинга МО.
В автономном режиме БАКУ решает следующие задачи:
• непрерывный контроль за состоянием установленных на МО
датчиков и управление режимами их работы;
• обработка информации от датчиков и запись её в специальном
формате в БЗУ;
635
Телеметрия в теории и на практике
• обеспечение считывания содержимого БЗУ через внешний
интерфейс RS-232 во внешний накопитель (например, ноутбук);
• выдача управляющих воздействий на внешние исполнительные
устройства (сирена, иммобилайзер, блокировочные замки и т. д.).
В случае использования БАКУ в составе системы диспетчеризации или
мониторинга МО на борту предусмотрена дополнительная установка
связного оборудования для решения задач:
• передачи информации о состоянии объектов в ДЦ;
• приёма управляющих информационных посылок из ДЦ.
Режимы функционирования БАКУ гибко настраиваются в зависимости от
характера стоящих перед пользователем задач. Процесс настройки состоит
в программировании через последовательный интерфейс RS-232
внутренних регистров БАКУ В составе и назначении этих регистров рассмотрены
сбор и обработка данных от датчиков, их упаковка в специальный формат
и выдача в согласованном протоколе (X 25, RDI, MPT1327, GSM,
INMARSAT С, MINI M) в канал связи.
Технические характеристики:
габариты основного модуля (без датчиков) 100x70x30 мм
(100x180x30мм ГЛОНАСС+GPS);
масса не более 0,5 кг;
рабочие температуры -40...+70°С;
напряжение питания постоянного тока 9—15 В;
потребляемый ток в ждущем режиме 100 мкА, максимальный — 250 мА;
количество аналоговых входов — 4 (0—16 В);
количество дискретных входов с оптической развязкой — 4;
программируемые входы/выходы КМОП линии — 2 (1и-1 От А);
выходы на исполнительные устройства - 2 (1нагр=500тА);
точность измерения координат - 10/7 м, скорости - 0,1 /0.05м/с с
вероятностью 0,95 (GPS/(«DiOHacc»+GPS));
время получения первых навигационных данных после включения
GPS-датчика < 1 мин;
объем БЗУ до 1Мб (не менее 16000 маршрутных точек);
точность измерения аналоговых параметров определяется типом и
636
Глава 10. Применение телеметрии в транспортном мониторинге
характеристиками используемых датчиков (по выбору заказчика);
• максимальное удаление контролируемого мобильного объекта от
диспетчерского центра определяется типом и характеристиками
используемых средств связи (требование к средствам связи — наличие
возможности передачи цифровых данных через интерфейс RS-232).
10.2.4. Система мониторинга автотранспорта G4echo
Система мониторинга автотранспорта G4echo предназначена для
фискального контроля движения автомобильного транспорта с использованием
GPS-технологии в режиме off-line.
Каждое транспортное средство в этой системе оборудуется специальным
модулем, в состав которого входит:
• GPS-приемник,
• модуль дистанционной передачи данных Wi-Fi,
• специальный контроллер,
• антенна.
Модуль G4echo монтируется в кабине автомобиля и представлен на рис. 10.8:
Рис. 10.8. Автомобильный модуль G4echo
Этот модуль регистрирует и хранит информацию о перемещениях
транспортного средства, на котором он установлен, в течение длительного
времени. В любой момент, когда транспортное средство прибывает к месту
стоянки, информация автоматически считывается без ведома водителя в
базу данных. Считывание информации осуществляется по радиоканалу
по технологии Wi-Fi (использование этой технологии не требует никаких
разрешений и лицензий) с помощью базового модуля. Базовый модуль
может располагаться вне помещения во влагозащищенном корпусе так, чтобы
в зоне его видимости находилась вся территория автопарка. Если одного
637
Телеметрия в теории и на практике
модуля недостаточно, то количество их может быть увеличено так, чтобы
обеспечить покрытие всей территории автопарка. Зона действия базового
модуля составляет 360° в радиусе 100 м.
Все базовые модули подключаются к любому компьютеру локальной
вычислительной сети предприятия и передают считанную с автомобильных
модулей информацию в единую базу данных системы G4echo (технология
SQL-сервер). В дальнейшем любая информация из базы данных становится
доступной для анализа и получения различных отчетов.
Некоторые из них приведены ниже.
Отчёт 4Путевой лист (Детальный)* позволяет проводить первичный
анализ выполнения водителем транспортного задания (рис. 10.9).
Форма отчета специально приближена к виду применяемых в настоящее
время на предприятиях отчетов ца бумажных носителях, заполняемых
водителями от руки. Простое сравнение отчетов водителя и отчета системы
G4echo позволяет определить, выполнено ли задание, в какое время оно
выполнено и с каким пробегом.
Рис. 10.9. Путевой лист (Детальный)
638
Глава 10. Применение телеметрии в транспортном мониторинге
Рис. 10.10. Интерфейс детального отчета
Отчёт «Детальный по каждому водителю/машине* позволяет узнать: где,
когда и как долго водитель (автомобиль) находился в определённом месте;
сколько пройдено километров; по какому маршруту автомобиль двигался;
где, когда и в каком месте срабатывали подключенные к системе датчики.
Отчёт оформлен в виде таблицы и географической карты. Каждая
остановка в таблице связывается с именем реального объекта, внутри которого она
была. Пользователь имеет возможность создавать базу пользовательских
объектов самостоятельно.
Отчёт «Общий по каждому водителю/машине* позволяет увидеть
результат работы водителя (автомобиля) за интересующий период времени:
суммарный пробег, время в пути, время простоя, максимальную скорость и др.
Отчёт «Общий по группе водителей/машин». Данный тип отчётов
позволяет увидеть результат работы группы водителей (автомобилей) за
интересующий период времени: суммарный пробег, максимальную скорость,
среднюю скорость, отношение времени стоянки к времени простоя и т. д.
Отчёт «Объекты»- позволяет определить, кто из водителей (машин)
находился на интересующем объекте в интересующий период времени.
Формы отчётов можно видоизменять по требованию.
Итак, «Система мониторинга автотранспорта G4echo» дает уникальную
639
Телеметрия в теории и на практике
возможность фискального контроля за транспортным хозяйством.
Позволяет эффективно бороться со всевозможными злоупотреблениями
(«левые» рейсы, приписки по пробегу), отслеживать технологическую
дисциплину, сократить затраты.
10.2.5. Интернет-система диспетчеризации WebLocator
WebLocator— интернет-система диспетчеризации транспорта,
использующая ресурсы сетей сотовой связи и GPS. В системе на современном
уровне решены вопросы разделения прав доступа и информационной
безопасности, используются последние достижения в области связи,
реализуются передовые подходы в области управления транспортом (Fleet
Management) [4].
Схема функционирования
Схема функционирования приведена на рис. 10.11 и осуществляет
следующие функции.
• Определение координат и состояния бортовых датчиков
Расположенный на транспортном средстве бортовой комплект
(БК) определяет свои координаты при помощи глобальной
спутниковой системы позиционирования (GPS), а также
обрабатывает состояние подключенных к нему датчиков.
• Отправка информации в Информационный центр по GSM-сети
Собранную информацию БК отправляет в Информационный
центр (ИЦ) посредством сотовой сети передачи данных (GSM).
• Обработка и размещение информации на веб-сервере
WebLocator. В Информационном центре полученные данные
обрабатываются и размещаются на защищенном веб-сервере,
который доступен пользователям системы WebLocator через
Интернет [4].
Оборудование
В качестве бортовых комплектов может использоваться самое
разнообразное оборудование. Гибкая архитектура ядра системы WebLocator позволяет
быстро адаптироваться под устройства различных производителей, сделав
возможным их подключение. Разработчики WebLocator ведут постоянную
640
Глава 10. Применение телеметрии в транспортном мониторинге
работу по интеграции в систему новых терминалов от ведущих
производителей. К системе могут быть подключены и протестированы линейки
бортовых комплектов и мобильных терминалов производства компаний Benefon
Oyj (Финляндия) и Falcom (Германия) [4].
10.2.6. Информационно-навигационная диспетчерская
система ИНС-КОНТРОЛЬ
Назначение
Система предназначена для управления мобильными объектами
(транспортными средствами) различных служб города, района, области и отдельных
транспортных предприятий [5].
Функции
• Контроль местоположения транспортных средств (ТС) и других
мобильных объектов с диспетчерских пунктов (ДП) и пунктов контроля.
• Централизованное управление ТС.
• Ведение базы данных о местоположении ТС.
• Анализ и статистическая обработка накопленных данных,
формирование отчетов.
21 Зак 861
641
Телеметрия в теории и на практике
Используемая аппаратура позволяет дополнительно реализовать
следующие функции:
• Адресная двусторонняя голосовая связь между ТС и ДП.
• Передача сигналов тревоги с ТС в чрезвычайных ситуациях.
• Контроль технических характеристик ТС, перевозимого груза и
окружающей среды.
Принцип действия
Принцип действия основан на определении местоположения объекта
(транспортного средства) по сигналам спутниковых навигационных систем
GPS и «Глонасс», передаче информации с помощью канала оперативной
связи на диспетчерский пункт и пункты контроля. Координаты
местоположения определяются навигационным приемником, входящим в состав на-
вигационно-связного контроллера, установленного на транспортном
средстве. С помощью программного обеспечения расположение транспортных
средств и контролируемые параметры отображаются на электронной карте
местности на экране диспетчерского компьютера [5].
Зона действия системы ограничена используемым каналом оперативной
связи. Как правило, канал оперативной связи — это УКВ-канал,
предоставленный данной службе или нескольким службам. Альтернативно или
дополнительно может использоваться сотовый или спутниковый канал [5].
Программное обеспечение системы ИНС-Контроль
В рамках системы ИНС-Контроль программа ТТМар2 (рис. 10.14)
выполняется на компьютерах, установленных на диспетчерских пунктах и
пунктах контроля. Программа работает как в локальном, так и в сетевом
вариантах [5].
Таблица 10.1. Технические характеристики программного обеспечения
Операционная система
Сервер баз данных
Тип используемых электронных карт
Windows 98/ME/2000/XP
InterBase v.6.5, Firebird 1.5.1
Maplnfo
642
Глава 10. Применение телеметрии в транспортном мониторинге
Основные функции
В качестве основных функций можно выделить следующие:
Прием информации о транспортных средствах (ТС) от
навигационного контролера..
Отображение положения транспортных средств на мониторе
рабочего места диспетчера на электронной карте местности.
Индикация актуальности навигационных данных.
Быстрое определение местоположения ТС.
Автоматический опрос ТС.
Внеочередной опрос выбранного ТС.
Адресная голосовая связь на выделенном радиоканале с
автоматическим переключением каналов.
Масштабирование и сдвиг карты оператором.
Отрисовка треков движения ТС.
Режим слежения за выбранным ТС.
Запись информации о перемещении контролируемых ТС в базу
данных с возможностью последующего просмотра и анализа.
Формирование статистических отчетов о работе системы.
Доступ к базе данных из внешних пользовательских программ для
реализации специфических алгоритмов обработки.
Автоматическая очистка базы данных от устаревших данных.
10.2.7. Диспетчерская система GPS-контроля
грузоперевозок НАУЦИЛУС
Корпоративная диспетчерская система НАУЦИЛУС с мониторингом
местоположения транспортных средств на базе GPS создана для контроля
маневровых работ и повышения управляемости грузоперевозок ж/д
транспортом, но может применяться и в сочетании с другими транспортными
643
Телеметрия в теории и на практике
средствами (большегрузными автомобилями, автобусами и т. п.) [6].
На транспортное средство устанавливается бортовой контроллер,
определяющий по GPS текущие географические координаты данного транспортного
средства. Эта информация, а также ряд других параметров по радиоканалу
передается в диспетчерский центр, где с помощью современной SCADA-
системы WIZCON осуществляется обработка, хранение, визуализация и
рассылка данных по Интернет/интранет авторизованным клиентам.
Информация дублируется памятью бортового контроллера, так что в
случае обрыва связи с диспетчерской имеется возможность последующего
восстановления базы данных предыстории WIZCON. Контроллер имеет
встроенную поддержку системы ISaGRAF, что дает удобную возможность
перепрограммирования логики [6].
Система может использоваться для любых транспортных средств, на
которых возможна установка бортовых контроллеров с автомобильными
радиостанциями (большегрузное автомобили, автобусы, железнодорожный
транспорт).
Система состоит из стационарного диспетчерского центра и бортовых
комплексов (рис. 10.12).
Диспетчерский центр включает [6]:
• Базовую радиостанцию RP80 фирмы Vertex Standard.
• Связной контроллер.
• Базовый приемник DGPS.
• Сервер со SCADA-системой Wizcon.
Бортовые комплексы содержат:
• Бортовой контроллер СИКОН 167.К40 (включая GPS-приемник и
подсистему ввода-вывода).
• Бортовую радиостанцию VX-2000 фирмы Vertex Standard.
На стороне бортовых комплексов система обеспечивает сбор данных о
местоположении транспортных средств, их текущих эксплуатационных и иных
параметрах (расход топлива и т. п.), передачу их в диспетчерский центр с
одновременным накоплением данных в памяти бортовых контроллеров.
В случае потери связи с диспетчерским центром имеется возможность
передачи всей или части этих данных в базу данных предыстории SCADA-
644
Глава 10. Применение телеметрии в транспортном мониторинге
Рис. 10.12. Обобщенная схема диспетчеризации
системы WIZCON непосредственно из бортового контроллера. Встроенное
ПО бортового контроллера включает целевую задачу ISaGRAF, что
обеспечивает удобное программирование и при необходимости оперативную
перенастройку бортовых контроллеров на любом из 5 стандартных языков
технологического программирования МЭК 61131-3 или на языке
потоковых диаграмм [6].
В диспетчерском центре полученная через радиоканал Информация
передается в SCAD А- систему Wizcon и обрабатывается в реальном времени.
Базовый приемник DGPS (Reference Station) DSR12RS, имеющий 12 GPS-
каналов, дает опорный сигнал, позволяющий получить точность
определения местоположения бортовых комплексов до 3 м. Без него точность падает
до 15-20 м.
Полученные координаты дают возможность представить местоположение
транспортных средств (в данной системе их 12) на мнемосхемах с
различным масштабом и детализацией. Система позволяет также рассчитать
пройденный путь, скорость и другие параметры транспортного средства.
Все контролируемые параметры записываются в базу данных предыстории
системы Wizcon и могут сравниваться с текущими, причем этот
оперативный анализ сразу же визуализируется в виде трендов (графиков, диаграмм).
Критические значения каких-либо параметров, которые контролируются
645
Телеметрия в теории и на практике
системой Wizcon, вызывают автоматическую генерацию и архивацию
тревог/уведомлений, получение которых оператор должен подтвердить [6].
Любые элементы интерфейса оператора в Wizcon, такие как мнемосхемы,
тренды и тревоги, могут быть конвертированы в html-формат и переданы по
сети Интернет/интранет. Все изображения на этих страницах имеют
векторное представление, поэтому передаются в виде компактных Java-аппле-
тов с последующим обновлением при изменении данных для анимации.
Авторизованные клиенты (руководители, бригадиры ремонтников и т. п.),
имея в качестве средства доступа к системе web-браузер, могут получить
через Интернет/интранет всю необходимую им информацию из системы,
подтвердить тревоги, а также осуществить передачу административных
команд (менеджмент). При этом все действия ограничены правами
парольного доступа и могут осуществляться через брандмауэр [6].
10.2.8. Спутниковый комплекс «Эшелон»
Спутниковый охранный комплекс «Эшелон» является
высокотехнологичной программно-ашщратной системой, построенной на основе
беспроводной связи и технологии GPS. Комплекс предназначен для решения
широкого круга задач, связанных с дистанционным сбором и хранением
информации, поступающей от различных устройств и сенсоров,
установленных на удаленных объектах, интерпретацией этой информации с
последующим принятием решений о воздействии на различные исполнительные
устройства, установленные на удаленных объектах [7].
Основным предназначением спутникового охранного комплекса «Эшелон»
является решение следующих задач:
1. Защита транспортных средств от угона и несанкционированного
проникновения.
2. Оперативный поиск и возврат транспортных средств в случае угона.
3. Контроль за передвижением транспортных средств.
4. Защита стационарных объектов от несанкционированного
проникновения, пожара и других аварийных ситуаций.
5. Дистанционный контроль состояния технических и инженерных
систем транспортных средств и стационарных объектов.
6. Дистанционное управление техническими и инженерными систе-
646
Глава 10. Применение телеметрии в транспортном мониторинге
мами транспортных средств и стационарных объектов.
7. Логистика и управление парком коммерческих автомобилей и
специальной техники при помощи корпоративной телематической
системы, построенной на основе комплекса.
В состав комплекса «Эшелон» входит диспетчерский центр и бортовое
оборудование, устанавливаемое удаленно на транспортные средства или
объекты недвижимости.
Бортовой комплекс (БК) для мобильных объектов выпускается под маркой
«Эшелон-М» и построен на базе радионавигационного контроллера серии
101 — новой разработки, пришедшей на смену контроллерам серии 001. Он
предназначен для установки на транспортные средства (легковые и
грузовые автомобили, катера, яхты и суда) в качестве охранной сигнализации,
обеспечивающей предотвращение угонов или оперативный поиск и возврат
транспортного средства в случае, если угон произошел в результате
разбойного нападения [7].
Диспетчерский центр — структурное подразделение компании, отвечающее
за выполнение комплекса мероприятий по мониторингу объектов охраны
и взаимодействие с силовыми структурами. В реальности Диспетчерский
центр представляет собой несколько распределенных по территории
столицы подразделений. Этим мы достигаем максимальной независимости от
форс-мажорных обстоятельств. Все подразделения Диспетчерского центра
имеют многоканальную систему связи, оборудованы устройствами
бесперебойного питания, позволяющими работать автономно до 12 часов, а также
мощной системой безопасности. Весь комплекс рассчитан на
круглосуточную работу со 100%-м дублированием информации каждого подразделения
в реальном масштабе времени.
Функциональные возможности спутникового охранного
комплекса «Эшелон»
Комплекс «Эшелон» обеспечивает:
• Определение текущего местоположения транспортного средства и
его маршрута, мест и времени остановок и стоянок.
• Получение исчерпывающей информации о состоянии
транспортного средства: его скорости, направлении движения, состоянии
бортовых датчиков и Б К.
• Удаленное управление состоянием транспортного средства через
исполнительные устройства, расположенные на борту. В случае угона
647
Телеметрия в теории и на практике
или разбойного нападения предусмотрены алгоритмы локального
и удаленного (оператор в Диспетчерском центре) противодействия
угону.
• Формирование отчетности за различные периоды времени о
состоянии БК и транспортного средства, маршруте и графике движения,
местах и времени остановок и стоянок, состоянии датчиков и
контуров защиты БК.
Бортовой комплекс « Эшелон- М» обеспечивает водителю:
• Функции и сервисные возможности обычной автомобильной
сигнализации высокого класса.
• Возможность непосредственно с брелока управления БК подать
тревожный сигнал при необходимости оказания медицинской или
технической помощи, вызвать представителя страховой компании
или юриста на место ДТП.
В случае срабатывания одного из датчиков, нарушения контура защиты или
при изменении параметров системы в соответствии с установленным
алгоритмом информация о событии направляется в Диспетчерский центр через
беспроводную сеть связи. С этого момента Диспетчерский Центр берет
объект под постоянный контроль и проводит предписанные для сложившейся
ситуации мероприятия, вплоть до организации преследования и
задержания транспортного средства.
Бортовой комплект обеспечивает распознавание и противодействие
попыткам угона с применением средств радиоэлектронной борьбы, не дожидаясь
команды из Диспетчерского центра. В случае, если канал связи БК «Эше-
лон-М» с Диспетчерским центром отсутствует или заблокирован, БК
реализует собственные алгоритмы противодействия угону. Комплекс
реализует алгоритмы распознавания угона с применением разбойного нападения.
Комплекс позволяет реализовывать любые пользовательские алгоритмы
работы, базируясь на комбинации следующих показателей и событий:
- скорость автомобиля и факты ее превышения выше установленных
величин;
- открытие дверей автомобиля и порядок их открытия;
- географические координаты автомобиля, нахождение автомобиля в
определенной зоне/зонах и факты выхода из них, соответствие
маршруту и графику движения;
- величина продольного ускорения автотранспортного средства;
648
Глава 10. Применение телеметрии в транспортном мониторинге
- величина поперечного ускорения автотранспортного средства;
- величина угла поперечного крена;
- информация от любых других датчиков, установленных в
автомобиле.
БК в стандартном исполнении имеет 12 входов (4 АЦП и 8 входов типа
«сухой контакт») и 4 силовых выхода для исполнительных устройств и
блокировок.
Бортовой комплект «Эшелон-М» (БК) состоит из трех функциональных
блоков: блока GPS /Глонасс приемника, блока приемника/передатчика
беспроводной сети передачи данных и процессорного блока. Блок GPS
/«Глонасс» приемника принимает сигналы от спутников GPS (Global
Positioning System — Глобальная Система Позиционирования) или
спутников «Глонасс» и на их основе рассчитывает свои точные географические
координаты, высоту над уровнем моря, скорость и направлении движения.
Процессорный блок обрабатывает сигналы датчиков, подключенных к БК
(например, объемный датчик, датчик разбития стекла, датчик открытия
двери и пр.), и сигналы GPS /»Глонасс» приемника, формирует отчет о
состоянии транспортного средства и передает его на обработку блоку
приемника-передатчика беспроводной сети связи.
В отчете содержатся данные о географических координатах транспортного
средства, его высоте над уровнем моря, скорости и направления движения,
состоянии датчиков и БК (целостности корпуса и антенн, уровнях
радиосигналов, наличии и режиме электропитания).
Блок обеспечивает распознавание и противодействие попыткам угона с
применением средств радиоэлектронной борьбы (РЭБ) и может принимать
решение о противодействии угону без вмешательства оператора
Диспетчерского центра.
Блок обеспечивает распознавание угона с применением разбойного
нападения и обеспечивает реализацию алгоритмов возврата транспортного
средства владельцу. Алгоритмы распознавания ситуации, реализуемые
процессорным блоком, л1огут обновляться и модифицироваться из
Диспетчерского центра.
Вся передаваемая информация и каналы связи БК с Диспетчерским
центром защищены современными средствами криптозащиты. Блок
приемника-передатчика беспроводной сети связи обеспечивает прием и передачу
отчета о состоянии транспортного средства и БК в диспетчерский центр,
используя технологии GSM в режиме передачи данных, спутниковой связи
Inmarsat, Глобалстар, Иридиум, Турайя, УКВ- и КВ-радиосвязи, транкинго-
649
Телеметрия в теории и на практике
вой связи МРТ1325, стандарт ТЕТРА и TETPA-POL. Возможно
одновременное использование двух систем связи в одном БК.
Принцип работы спутникового охранного комплекса «Эшелон»
Принцип работы комплекса «Эшелон» удобно рассмотреть на примере
использования его в качестве спутниковой охранной сигнализации для
транспортных средств. Бортовой комплект, установленный на транспортном
средстве, определяет свои географические координаты, скорость,
направление движения и ряд других параметров при помощи глобальной
спутниковой системы позиционирования GPS, а также обрабатывает состояния
подключенных к нему датчиков.
Рис. 10.13. Общая схема работы спутникового охранного комплекса «Эшелон»
650
Глава 10. Применение телеметрии в транспортном мониторинге
В случае срабатывания одного из датчиков, нарушения контура защиты или
при изменении параметров системы в соответствии с установленным
алгоритмом информация о событии направляется в Диспетчерский центр через
беспроводную сеть связи по защищенному каналу передачи данных. С
этого момента Диспетчерский центр берет объект под постоянный контроль и
проводит предписанные для сложившейся ситуации мероприятия, вплоть
до организации преследования и задержания транспортного средства.
Бортовой комплект обеспечивает распознавание и противодействие
попыткам угона с применением средств радиоэлектронной борьбы, не дожидаясь
команды из Диспетчерского центра. Комплекс реализует алгоритмы
распознавания угона с применением разбойного нападения.
В комплексе «Эшелон» реализованы уникальные алгоритмы:
• распознавания применения средств радиоэлектронной борьбы
(РЭБ);
• распознавания угона в результате разбойного нападения;
• работы в условиях отсутствия канала связи с Диспетчерским
центром.
Бортовой комплект «Эшелон» имеет собственный процессорный блок,
позволяющий устройству противостоять угону с использованием средств
радиоэлектронной борьбы (РЭБ). Алгоритмы работы бортовых комплектов
и комплекса в целом динамически обновляются из Диспетчерского
центра. Для разработки и обновления алгоритмов работы комплекса «Эшелон»
аналитиками компании постоянно проводятся детальные исследования
методов и технических средств, применяемых угонщиками.
Комплекс использует канал связи с транспортным средством на базе
следующих технологий: GSM в режиме передачи данных, спутниковой связи
Inmarsat, Глобалстар, Иридиум, Турайя, УКВ- и КВ-радиосвязи, транкин-
говой связи МРТ1325, стандарт ТЕТРА и TETPA-POL. Возможно
совместное использование двух модулей связи из перечисленных выше в любой
комбинации.
Для определения точного местоположения, скорости и направления
движения комплекс использует следующие технологии: GPS, «Глонасс».
651
Телеметрия в теории и на практике
ЛИТЕРАТУРА К ГЛАВЕ 10
1. http://gpsgsm.ru/texts.php?id:s=63
2. Универсальная система мониторинга TrackMaster. www.
geo-'spectrum.com
3. ИНДЕЛ : Мониторинг автотранспорта, http://www.indel.by/index.
html
4. Что такое WebLocator? http://www.locator.ru/
5. Информационно-навигационная диспетчерская система ИНС-
КОНТРОЛЬ. http://termoteh.ru/soft.gif
6. Диспетчерская система GPS-мониторинга местоположения
транспортных средств, www.nautsilus.ru/articles/applications/dispgps.htm
7. Спутниковый охранный комплекс «Эшелон».
http://www.eshelon.ru/system-5.html
652
Глава 11.
Мониторинг окружающей
среды
Системы мониторинга окружающей среды представляют собой
информационные системы о состоянии окружающей среды, объединяющие в себе
средства сбора первичной информации, в том числе автоматизированные, и
все стадии ее обработки до передачи информации потребителям.
Особенность применения средств телеизмерений в данцдй сфере состоит в
использовании телеметрических систем, сводящих воедино разрозненную
экологическую информацию и обеспечивающих информационную
поддержку всех уровней управления объективными и достоверными данными
для принятия оперативных управленческих решений и определения
стратегии природопользования.
11.1. ОСНОВЫ ИНФОРМАЦИОННЫХ БАЗ СИСТЕМ МОНИТОРИНГА
Общими принципами организации систем мониторинга являются [1]:
• создание постоянно действующей фиксированной на местности
сети опорных пунктов наблюдений (постов, полигонов, стационаров
и пр.) для ведения стандартного (согласованного) комплекса
наблюдений;
654
Глава 11. Мониторинг окружающей среды
• выполнение наблюдений по основным (приоритетным) и
дополнительным (связанным со спецификой выбросов и сбросов) спискам
контролируемых показателей;
• обеспечение методического и метрологического единства
информации путем применения унифицированных методик, технических
средств и т. д., что является гарантией сопоставимости и
кондиционности получаемой информации.
Система мониторинга включает в себя [1]:
1. Медицинский мониторинг.
2. Мониторинг окружающей среды:
• мониторинг атмосферного воздуха;
• мониторинг гидросферы;
• мониторинг земель (почв);
• мониторинг общего содержания атмосферного озона;
• сейсмический мониторинг;
• мониторинг физических явлений (факторов);
• радиационный мониторинг;
• комплексный экологический мониторинг.
3. Биологический мониторинг:
• мониторинг растительности;
• мониторинг животного мира.
4. Импактный мониторинг:
• мониторинг чрезвычайных ситуаций;
• локальный мониторинг.
В свою очередь, некоторые виды мониторинга имеют свою внутреннюю
структуру, подразделяясь на подвиды. Это относится к следующим видам
мониторинга:
• Мониторинг гидросферы, включающий в себя мониторинг
поверхностных вод и мониторинг подземных вод.
• Мониторинг земель (почв), включающий в себя мониторинг
земельного фонда, агропочвенный мониторинг и мониторинг агротехно-
генно загрязненных почв.
655
Телеметрия в теории ила практике
• Радиационный мониторинг, включающий в себя мониторинг
радиоактивного загрязнения атмосферного воздуха, мониторинг
радиоактивного загрязнения поверхностных вод и подземных вод,
мониторинг радиоактивного загрязнения почв, мониторинг радиоактивного
загрязнения объектов жилищно-коммунального хозяйства.
• Мониторинг растительности, включающий в себя мониторинг
лесной растительности, мониторинг луговой растительности,
мониторинг водной растительности, мониторинг растительности
специальных защитных насаждений.
Функции информационно-аналитического центра, входящего в состав
системы мониторинга, можно выделить в три взаимосвязанные подсистемы [1]:
• Анализ и подготовка получаемых данных к включению в состав
информационной базы, задачи которой — проверка полноты и
достоверности информации, ее предварительная обработка и занесение на
магнитные носители.
• Ведение информационной базы, то есть накопление, учет,
обработка, обеспечение сохранности обработанной и достоверной
информации.
• Доведение информации до потребителя, то есть прием и обработка
поступающих запросов пользователей, поиск, выборка и обобщение
данных согласно запросам, выдача информации пользователям в
удобном для них виде.
В содержание логической структуры базы данных каждого вида
мониторинга заложены следующие основные принципы ее построения [1]:
• отражение реально сложившейся зависимости объектов, их
показателей и характеристик;
• обеспечение возможности быстрого поиска показателей по
заданным объектам в различных разрезах;
• хранение информации в стандартизированных форматах, что
обеспечивает возможность оперативной обработки информации и
распечатки выходных форм в необходимом для анализа виде;
• обеспечение минимальной избыточности информации, хранимой в
базе данных, и исключение дублирования показателей;
• возможность расширения базы данных.
Формирование информационной базы мониторинговых данных
происходит при соблюдении следующих требований [1]:
656
Глава 11. Мониторинг окружающей среды
• распределение и хранение информации по утвержденным формам;
• унификация технических средств и программных продуктов,
используемых при ведении баз данных;
• хранение информации, поступающей из нижних информационных
уровней системы мониторинга, в первичном и обобщенном виде;
• обеспечение хранения и выдача запрашиваемой информации как в
виде таблиц, графиков, диаграмм, так и в виде картографического
материала.
11.2. ВЕРТИКАЛЬНАЯ ГРАДИЕНТНАЯ СИСТЕМА СБОРА
ГЕОФИЗИЧЕСКОЙ ИНФОРМАЦИИ
Вертикальная градиентная система сбора геофизической информации
предназначена для геоэкологического мониторинга леса, а также для
получения телеметрических данных об изменении геофизических параметров
по вертикали и во времени в отдельной географической точке исследуемой
местности [2].
Для исследования и контроля тепло-влажностного баланса леса была
разработана и изготовлена вертикальная градиентная система сбора
геофизической информации. Система устанавливается в Карадагском природном
заповеднике на время проведения научных исследований Таврического
Национального университета им. В. И. Вернадского. На территории
Европы имеется только одна аналогичная система, расположенная в Германии.
Отличительные особенности нашей системы сбора геофизической
информации:
• возможность установки в «сложной» горной местности без
специализированных подъемных средств (в том числе, на горных склонах,
покрытых густым лесом);
• автоматизация съема данных с датчиков;
• уменьшенное энергопотребление;
• увеличенная помехоустойчивость (с возможностью периодического
отключения электроэнергии или снижения напряжения питания на
20% без сбоя в функционировании системы и без потери
полученных данных);
• повышенная мобильность;
657
Телеметрия в теории и на практике
• малое число обслуживающего персонала;
• низкая себестоимость [2].
Вертикальная градиентная система сбора геофизической информации,
показанная на рис. 11.1, состоит из:
• двадцатиметровой, телескопической, металлической
измерительной мачты с десятью равноотстоящими уровнями для расположения
геофизических датчиков;
• двенадцати микропроцессорных геофизических станций,
расположенных на измерительной мачте и вблизи нее;
• базового микропроцессорного блока для обеспечения питания
геофизических станций и сбора информации, поступающей с них;
• персонального компьютера для динамического отображения,
первичной калибровки и хранения информации, полученной от
базового микропроцессорного блока.
• Система микропроцессорных j
тэфмшчсских стаций
МГС Х»1
Ml С Ni2
\ Локальная
! сеть
[ МГС Jftl 1
1
{ мгс; *И2
Локальна*
сегь
1кии«ыи б.кж
RS232
Персональный компьютер
Рис. 11.1. Вертикальная градиентная система сбора геофизической информации
Отдельная геофизическая станция включает в себя:
1. Набор датчиков геофизических величин (скорости ветра, температуры,
влажности, отраженной и падающей солнечной радиации, радиационного
баланса).
2. Микропроцессорный измерительный блок, получающий аналоговую
информацию с датчиков, оцифровывающий ее и передающий данные через
658
Глава 11. Мониторинг окружающей среды
локальную сеть в базовый микропроцессорный блок.
3. Микропроцессорный блок, который является промежуточным звеном
между МГС и персональным компьютером, выполняет следующие
функции [2]:
• осуществляет режим работы МГС без компьютера, с записью всей
экспериментальной информации по сети во внутреннее ОЗУ
(большой емкости) базового блока, с последующей периодической
перезаписью информации по системе прерываний в персональный
компьютер;
• выполняет независимый аппаратный контроль функционирования
системы и ее перезапуска по технологии защиты от сбоев Wait Dog
Timer — WDT (с этой целью в базовый блок введен дополнительный
микроконтроллер);
• выполняет роль промежуточного интерфейсного звена защиты
последовательного порта компьютера;
• осуществляет предварительную стабилизацию напряжения питания
МГС.
Персональный компьютер необходим для:
• промежуточной визуализации получаемой информации с датчиков
с целью контроля хода наблюдений;
• записи геофизических данных на внешние носители информации
(типа магнитных - жесткого и гибкого дисководов);
• отображения мгновенной выборки всех данных в период
калибровки экспериментальных датчиков.
Все блоки объединены последовательно в единую систему через локальную
сеть, назначение которой:
• подача электропитания на МГС;
• передаче оцифрованных данных с датчиков по интерфейсу RS232 от
измерительных блоков к базовому;
• передача активного сигнала модуля контроля WDT базового блока
для перезапуска всех измерительных блоков (в случае нарушения
функционирования системы по заданному алгоритму).
659
Телеметрия в теории и на практике
11.3. АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ
СЕЙСМИЧНОСТИ
При разработке месторождений полезных ископаемых, строительстве и
эксплуатации подземных сооружений, плотин и ответственных наземных
объектов особенно остро стоит проблема динамического раз-рушения
массива горных пород или сооружений.
Для обеспечения безопасности работ разработана автоматизированная
система контроля сейсмичности (АСКСМ) в сложных условиях эксплуатации
ответственных промышленных объектов [3].
Наиболее эффективные способы контроля основаны на непрерывной
регистрации микросейсмической эмиссии, контроль которой позволяет с
достаточной точностью описать процесс трещинообразования, определить
координаты, размер и направление каждой трещины. Далее в
локализованных таким образом опасных зонах проводятся организационные и
технические мероприятия, обеспечивающие безопасное ведение работ.
АСКСМ представляет собой распределенную систему длительного
непрерывного действия, целью работы которой является получение полной и
достоверной информации о сейсмических событиях. Цель достигается
параллельным решением на общей базе данных ряда задач:
• сбор и обработка в реальном времени информации о сейсмосо-
бытиях;
• интерактивное редактирование полученной информации;
• полное сохранение результатов обработки и редактирования в
базе данных;
• выборочное сохранение исходных данных на оптических
носителях;
• получение по мере необходимости выходной и учетной
информации о результатах функциониро-вания системы.
Для решения вышеперечисленных задач создан программно-аппаратный
комплекс, который состоит из:
• телеметрических систем сбора сейсмических событий (ТСС);
• подсистемы обработки информации в реальном времени
(ПОИ);
• подсистемы редактирования параметров сейсмособытий
(ПРС);
660
Глава 11. Мониторинг окружающей среды
Рис. 11.2. Схема системы контроля сейсмичности
• подсистемы обобщающего анализа (ПОА).
В состав ТСС входят: центральный управляющий компьютер с GPS-адап-
тером, сервер для хранения архивов сейсмических событий и
телеметрические подсистемы сбора информации ТПС (до 8-и ТПС).
В свою очередь, каждая ТПС включает в себя контроллер телеметрии КТМ,
установленнный в здании сейсмостанции, и до 8-и подземных сейсмопун-
ктов, оборудованных боксами телеметрии и трехкомпонент-ными
сейсмометрами (в каждом сейсмопункте установлен один сейсмометр). Сейсмо-
пункты расположены на расстоянии до 6 км от сейсмостанции и соединены
с ней выделенными двухпроводными линиями связи.
Выбор радиальной структуры с проводными каналами связи обусловлен
топологией объекта, условиями эксплуатации и пожеланиями заказчика.
Для других объектов может быть реализована многоточеч-ная структура.
Каналы связи могут быть проводными, оптоволоконными или беспровод-
661
Телеметрия в теории и на практике
ными (см. ниже тех-нические характеристики системы).
Аппаратура бокса обеспечивает дистанционное приведение выходных
сигналов сейсмометров к нормированному значению, аппаратную
фильтрацию принимаемых входных сигналов, дистанционное управление частотой
среза фильтров, дистанционный контроль напряжений питания,
дистанционную проверку сейсмометров, самодиагностику, привязку сейсмической
информации к всемирному времени, обмен данны-ми с контроллерами
телеметрии.
Синхронизация временной шкалы с всемирным временем с точностью 1мс
обеспечивается через систему GPS. Энергоснабжение бокса
осуществляется через источник бесперебойного питания, обеспечивающий автономную
работу бокса в течение трех суток.
Контроллеры телеметрии, установленные в здании сейсмостанции,
принимают информацию от сейсмопунктов, непрерывно записывают в буфер
волновые формы за последние 3 часа с дискретизацией 1 мс, анализируют
поступающую информацию и формируют запросы на выделение
сейсмических событий центральному управляющему компьютеру и по его
команде записывают фрагменты волновых форм сейсмических событий в файл,
на сетевой диск и т. д.
Центральный управляющий компьютер обеспечивает конфигурирование и
управление сейсмокон-троллеров (поддержка работы до б-и контроллеров
телеметрии), синхронизацию и привязку к всемирному времени, анализ
запросов от контроллеров телеметрии с целью выявления информативных
фрагментов волновых форм сейсмических событий, инициирование
процедуры записи фрагментов волновых форм сейсмических событий на сетевой
диск, протоколирование работы ТСС, управление записью содержимого
кольцевых буферов сейсмоконтроллеров на сетевой диск и т. д [3].
Данные, полученные ТСС, обрабатываются с помощью подсистем
обработки информации в реальном времени (ПОИ), редактирования параметров
сейсмособытий (ПРС) и обобщающего анализа (ПОА).
Выходная документация ПОА является основой для принятия решений о
производстве организационно-технических мероприятий, направленных на
обеспечение безопасности работ или сохранности оборудования. В
частности, на ОАО «Апатит» при обнаружении зон первой степени региональной
удароопасности работы немедленно приостанавливаются, люди из опасной
зоны выводятся.
Внедрение ТСС на сейсмостанции Кировского рудника ОАО «Апатит»
позволило повысить точность выявления опасных пространственно-времен-
662
Глава 11, Мониторинг окружающей среды
ных интервалов, обеспечило требуемую надежность работы оборудования,
позволило сократить расходы предприятия на эксплуатацию оборудования
сейсмостанции, обеспечило возможность интеграции получаемых данных
в систему формирования регионального прогноза для всего предприятия и
региона в целом.
11.4. СИСТЕМА СБОРА, ОБРАБОТКИ И ПЕРЕДАЧИ ДАННЫХ НА
БАЗЕ ПЛАТФОРМЫ MOSCAD
В настоящее время ощущается большая потребность в системах
централизованного сбора телеметри-ческой информации с территориально
распределенных предприятий, в первую очередь связанных с постав-ками
энергоносителей.
Это вызвано необходимостью оперативного получения информации о
поставленных потребителям энергоносителях (газа, электроэнергии, горячей
воды и т. д.) для коммерческого учета и регулирования, а также
оперативного и оптимального регулирования таких поставок и, собственно,
оборудования, обеспечивающего это регулирование (газораспределительных
станций, электрических подстанций и линий электропередачи, насосных
станций и т. д.) [3].
Основными компонентами таких систем автоматизированного сбора
диспетчерской информации и управления являются:
• исполнительные устройства и датчики, в том числе различные
коммерческие вычислители, счетчики, расходомеры
(«интеллектуальные датчики»);
• контроллеры для локальной обработки информации и её
формирования для передачи на диспетчерский пункт;
• программное обеспечение для этих контроллеров;
• сеть для передачи данных;
• каналообразующее оборудование связи для построения такой сети;
• программное обеспечение для обработки информации в
диспетчерском пункте на компьютерах в режиме реального времени и
архивирования этой информации в базах данных;
• программное обеспечение для работы с архивной информацией.
И если для решения задач локальной автоматизации объекта типа котель-
663
Телеметрия в теории и на практике
ной, ГРС, электрической подстанции у разработчиков достаточно большой
выбор отечественных и импортных контроллеров, средств разработки и
программирования, то при построении территориально-распределенных
сетей ситуация на-много сложнее.
Зачастую точки такой сети — объекты автоматизации — не имеют каналов
связи для пере-дачи цифровой телеметрической информации и
информации от средств коммерческого учета энергоносите-лей. В лучшем случае к
этим точкам имеются телефонные линии весьма низкого качества и
надежности, задействованные для оперативной связи. Попытки их
использования для построения систем телемеханики и коммерческого учета
совершенно бесперспективны. Строительство современных систем коммуникаций к
каждому такому объекту нецелесообразно как с экономической, так и с
технической точки зрения.
Проблема решается на оборудовании, спроектированном и разработанном
с учетом функционирования сети по низкоскоростным каналам связи или
радиоканалам. Это требует разработки и применения мощного сетевого
протокола с высокой помехоустойчивостью и достоверностью, а также
специальных методов оптимизации представления и обмена информации
между точками такой сети.
При построении автоматизированных систем на оборудовании MOSCAD
(впрочем, как и на любых других контроллерах) необходимо осуществить
следующие действия:
1. Спроектировать систему, определить и описать решаемые задачи.
Определить топологию сети и коммуникации между точками сети.
2. Выбрать и укомплектовать объекты, подлежащие автоматизации
датчиками, исполнительными устройствами, приводами, средствами
коммерческого учета, источниками основного и резервного питания,
устройствами коммутации, сигнализации, устройствами
отображения и ввода информации (пульты, мнемосхемы, щиты сигнализации
и т. д.), для рабочего места оператора, работающего непосредственно
на объекте. Поддержка контроллерами MOSCAD стандартных
протоколов и возможность программной адаптации под нестандартные
протоколы позволяют применять практически любые
отечественные и импортные компоненты, удовлетворяющие требованиям
заказчика. Стоимость этих компонентов может значительно пре-вы-
шать стоимость контроллеров.
3. Разработать и отладить программное обеспечение, загружаемое в
контроллеры MOSCAD, устанавливаемые на объектах автоматизации.
664
Глава 11. Мониторинг окружающей срвды
4. Спроектировать, разработать и отладить программное обеспечение
реального времени (взаимодействующее непосредственно с
контроллерами сети) автоматизированной системы для установки на
компью-терах диспетчеров системы.
5. Спроектировать и разработать базу данных для архивирования
получаемой информации и про-граммные средства для работы с
информацией, хранящейся в базе данных.
MOSCAD — высокоэффективная платформа для построения систем
автоматического управления тер-риториально-распределёнными
объектами [3].
Оборудование MOSCAD представляет собой один, но чрезвычайно
важный с точки зрения надежно-сти и эффективности работы компонент такой
системы — контроллер с каналами ввода-вывода для под-ключения
датчиков и исполнительных устройств.
Сердцем контроллера MOSCAD является модуль процессора, обладающий
мощными вычислитель-ными, управляющими и коммуникационными
возможностями. Контроллер может принимать управляющие решения
непосредственно на объекте, основываясь как на локальной информации, так и на
информации о системе в целом, полученной от других контроллеров.
Рис. 11.3. Оборудование системы MOSCAD
665
Телеметрия в теории и на практике
Уникальный коммуникационный протокол позволяет использовать при
построении сети низкоскоростные, с невысокой степенью надежности
каналы, в том числе радио, обеспечивая при этом высокую достоверность
передаваемых данных и разрешение сетевых конфлик-тов на уровне
операционной системы.
Модульная конструкция MOSCAD и большой выбор модулей
ввода-вывода позволяет сконфигурировать каждый контроллер в соответствии с
требованиями заказчика. В любой контроллер может загружаться программа
преобразования протоколов, которая позволит интегрировать в общую
систему как новые, так и существующие «интеллектуальные» датчики,
счетчики и измерители.
Для установки модулей ввода-вывода предусмотрены 3-, 6- и 8-слотовые
конструктивы. В 8-слотовых конструктивах может собираться до 63
модулей ввода-вывода с одним контроллером. Неотъемлемой частью MOSCAD
является программный пакет MOSCAD ToolBox для разработки
приложений и конфигурирования контроллеров и сети. Это набор мощных
инструментальных программных средств для PC, которые исполь-зуются для
разработки прикладных программ, компоновки и диагностики системы.
Компания Motorola производит обучение персонала заказчика и
предприятий, осуществляющих проектирование, монтаж и наладку оборудования
для обеспечения качественной установки систем и надежного
функционирования действующих систем. Это оборудование применяется во многих
странах мира для по-строения систем телемеханики, автоматизированных
систем управления, систем оповещения, мониторинга окружающей среды
(в т. ч. радиационного) и т. д. Системы MOSCAD находят применение в
США и Авст-ралии, Южной Африке и Венесуэле, Гонконге и России,
Венгрии и Польше [3].
Эффект от применения системы MOSCAD в системах мониторинга
окружающей среды определяется качеством процедур сбора информации о
радиационной обстановке, метеоусловиях, уровне воды в реках и
водохранилищах и т. д. Оперативная информация о событиях, представляющих
угрозу для населения или промышленных объектов, позволяет принять меры
по предотвращению этих событий или снижению их воздействия [3].
666
Глава 11. Мониторинг окружающей среды
ЛИТЕРАТУРА К ГЛАВЕ 11
1.0 Национальной системе мониторинга окружающей среды Республики
Беларусь.
2. Вертикальная градиентная система сбора геофизической информации
(http://www.ccssu.crimea.ua/tnu/structure/subdivision/nik/potencial/
index.html).
3. Общие принципы построения систем с использованием
оборудования М OS С AD (http://www.global .com.ua/-base/vega/acti vity/datas.
phtml#3#3)
4. Опыт внедрения системы сбора данных и управления на основе
радиомодемов «Невод» (http://www.geolink-consulting.ru/).
667
Группа подготовки издания:
Зав. редакцией компьютерной литературы: М.В. Финков
Редактор: МЛ. Финкова
Корректоры: Е.Е. Кириллов, Н.Б. Сиразитдинова
000 «Наука и Техника»
Лицензия №000350 от 23 декабря 1999 года.
198097, г. Санкт-Петербург, ул. Маршала Говорова, д. 29.
Подписано в печать 7.12.2006. Формат 70x100 1/16.
Бумага газетная. Печать офсетная. Объем 42 п. л.
Тираж 2000. Заказ 861
Отпечатано с готовых диапозитивов в ОАО «Техническая книга»
190005, Санкт-Петербург, Измайловский пр., 29.
Книги ПОЧТОЙ
Издательство «Наука и Техника» принимает заказы на продажу собственной
печатной продукции по почте наложенным платежом. Оплата производится на почте при
получении книг. Для этого Вам необходимо оформить бланк заказа и отправить его нам.
Для жителей России: Для жителей Украины:
192029 Санкт-Петербург, а/я 44, 02166 Киев-166, ул. Курчатова, 9/21,
ООО «Наука и Техника» «Наука и Техника»
тел/факс (812)-567-70-26, 567-70-25 тел/факс (044)-516-38-66
E-mail: admin@nit.com.ru E-mail: nits@voliacable.com
С1 декабря 2006 г. вы можете приобрести книгу из любой
страны по предоплате. Подробности на сайте издательства:
www.nit.com.ru
Заполняйте поля аккуратно большими отдельными буквами.
Информация для приобретения книг почтой частными лицами
1. Фамилия, имя, отчество
2. Почтовый адрес: индекс страна
область город, поселок улица_
дом корпус кв.
телефон ( )
адрес электронной почты (если он у Вас есть): E-mail:
БЛАНК ЗАКАЗА (принимаются ксерокопии)
Автор Название..
Россия
(руб.)
Украина
(грн.)
(»кз.)
Популярная медицина и психология
Серия "Саквояж эскулапа"
Агафонычев Анималотерапия. Усы, лапы, хвост -наше лекарство 65 15 2006..
Бердникова Мир ребенка: развитие психики, страхи, социальная
адаптация, интерпретация детского рисунка 87 19 2007..
Башкирова Ребенок без папы: решение проблем неполной семьи 87 19 2007..
Башкирова Современный ребенок и его проблемы: детский сад,
школа, дом, телевизор, интернет, улица *** *** 2007..
Башкирова 9 месяцев до рождения. Настольная книга будущих мам 87 19 2006..
Безрукова Нос всему голова. Секреты ринологии:
красота, здоровье, обоняние 65 15 2006..
Болотовский Как вырастить ребенка гением. 250 рецептов от педиатров,
психологов, педагогов, диетологов 87 19 2006..
Борисов Стволовые клетки: Правда и мифы 76 17 2006..
Гаврилова Целлюлит: борьба яблока с апельсином
(массаж, гимнастика, диеты, ароматерапия) 65 15 2006..
Жирнова Диеты? Диеты! (120 диет под одной обложкой) 65 15 2006..
Ковпак Как избавиться от тревоги и страха.
Практическое руководство психотерапевта , *** *** 2007..
304...
288...
272...
240...
384...
304...
416 ..
288...
304...
352...
272...
(принимаются ксерокопии)
Кузьмин
Кузнецова
Кузнецова
Лохниски
Марек
Матвеев
Моркес
Подольский
Пономарев
Серогодский...
Сухарев
Юдин
Юдин
Юдин
Серия: П
Бен Лонг
Досталек
Колисниченко..
Серия: С
Колисниченко..
Колисниченко..
Колисниченко..
Мозговой
Смит
Сухарев
Финков
Серии: П
Гургенидзе
Кучеров
., Windows XR Популярный самоучитель Изд. 2-е. перер и дог
...Поиске Интернете: Как искать, чтобы найти
...Установка и переустановка Windows. Изд. 5-е
... 222 проблемы работы на компьютере и их решение
... Самоучитель MS Windows XR Все об использ. и настр. Изд. 2-е
...Печать на ПК слепым десяти пальцевым методом. Изд. 3-е..
...Самоучитель работы на ПК + цветные вклейки, 2-е изд
, Excel 2003 + цв.вклейки. Эффективный самоучитель. Изд. 2-е
Turbo Pascal 7.0. Теория и практика
... Легкий самоучитель работы на ноутбуке + цветные вклейки.
,,. Самоучитель работы на ноутбуке, 3 -е изд. перераб. и доп...
...Самоучитель работы на ноутбуке. Изд. 2-е + цв.вклейки ..
Скачиваем фильмы, музыку и программы из Интернета.
олное руководство
... Цифровая фотография от А до Я.
...TCP/IP и DNS в теории и на практике. Полное руководство...
.. Microsoft Windows Server 2003: Полное руководство
екреты мастерства
..IRC, IRC-каналы, IRC-боты: как пользоваться
и как сделать самому. Избранные технологии Интернета ,,.
..Linux-сервер своими руками. Изд. 4-е перер. и доп
..Rootkits под Windows. Теория и практика профаммирования
" шапок- невидимок", позволяющих скрывать от системы
.. Классика программирования: алгоритмы, языки, автоматы,
С++Мастер-класс. 85 нетривиальных проектов,
.. Интернет. Шаг второй: от пользоват. к профессионалу + CD
..Ноутбук: особенности использования и настройки,
рофи и др.
, Knowledge-технологии в консалтинге и управл.предпр.+ CD .
,, Мультисервисные сети и услуги широкополосного доступа..
..Техническое обеспечение цифровой обработки сигналов
Управл. трафиком и качество обслуживания сети Интернет..
Цена....
Россия
(РУб.)
к. 108 .
..54
..63
..65 ...
.65 ..
.109....
..160 .
..164....
..28 ...
109...
..153 ,
164....
..109,. .
, 175..
..65 ...
..285....
..263....
..252....
..241....
..186....
..219...
..175....
..175....
..193....
..219....
..184 .
..88
..186....
..127
..87 ....
..102 ...
..66 ....
..142 ..
..109 ..
..128
..164 ..
..Цена ...
Украина
(грн.)
... 24 . .
,, , 12 .
14...
15 ...
....39 ...
. ...24
36 ...
37....
6
....24
....34 ..
.. .37
....24
...39 ..
....15 ....
....65
....58
....54
.... 53 ....
....42
....45
....39
....37
....43
....49
....37 ....
.... 17 ....
....41
....18 ....
.... 18 ....
....21 ....
....12 ....
....32 ....
....27 ....
....29 ....
....20 ....
.2005..
..2006.
..2007...
..2005
.2006..
..2006..
..2005...
..2006..
..2006...
..2006 ,.
. 2007...
..2006,
..2007. .
.2007.
..2007 ,.
..2006
..2006...
..2006....
..2006....
..2006....
..2006....
..2006....
..2005....
.. 2006..
..2006....
..2007....
..2006....
..2004....
..2002....
.. 2006 ..
.2003....
.2003....
.2003....
.2000....
.2005....
.2004....
.2004....
.2004....
. Объем
...368 .
... 160...
...128...
...256...
...192...
...224...
. .240...
...624...
...352...
...96
368
. .400...
...544...
...256...
.. 512...
...512...
...272...
...592...
...608...
...784...
...608...
...368...
...752...
...320...
...320...
...272...
...576...
...600...
...768...
...416 ..
... 176...
...400...
...400...
...752...
...432...
...272...
..336...
..384...
Заказ
(принимаются ксерокопии)
, ,
) Автор Название Цена Цена Год Объем |
I Россия Украина
(руб.) (грн.)
Колисниченко Новичок за рулем. Советы психолога, юриста, инструктора. ...83 19 2006 368.
Левенбаум Надо ли худеть? Как стать красивой.
Рецепты, советы, рекомендации 65 15 2006 320.,
Цветкова Кладовая здоровья на вашем столе: фрукты 47 11 2006 240.,
Цветкова Кладовая здоровья на вашем столе: овощи 43 10 2006 208.,
Серия "Кратко о важном"
Башкирова Ждем ребенка. Рекомендации, подсказки, советы 22 5 2006 128..
Бердникова Здоровый малыш (100 практических советов
по уходу за ребенком) 22 5 2006 128..
Башкирова Ваш малыш - это личность (100 практических советов
по воспитанию ребенка) 22 5 2006 128..
Левенбаум Самые популярные Диеты! За и против 22 5 2006 128..
Левенбаум Диеты! Худеем по-вегетариански 22 5 2006 128..
Компьютерная литература
Серия: Компьютерная шпаргалка
Егоров МиниЖелтыестраницы Интернет. Компьютерная шпаргалка.. 18 5 2006 80....
Егоров Поиск в Интернет. Компьютерная шпаргалка 18 5 2006 80....
Золотарева Электронная почта. Компьютерная шпаргалка 18 5 2006 80....
Колосков Microsoft Windows XR Компьютерная шпаргалка 18 5 2006 80....
Кузнецова Microsoft Word 2003: работаем с текстом 18 5 2006 80....
Матвеев Вычисления и расчеты в Excel 2003. Комп. шпаргалка 18 5 2006 80....
Юдин Microsoft Excel 2003: работаем с таблицами 18 5 2006 80....
Серия: Просто о сложном
Алешков Программы-переводчики. Осваиваем сами 54 12 2005 144.
Антоненко Тонкий самоучитель работы на компьютерен цветные вклейки. 87 19 2007 256.
Антоненко "Толстый" самоучитель работы на компьютере, 2-еизд 149 33 2007 544.
Бруга Java no-бьгстрому. Практический экспресс-курс 164 36 2006 384.
Вольский Turbo Pascal 7.0 для студентов и школьников 83 18 2007 224.,
Воробьев Nero Burning ROM 7. Записываем CD и DVD 65 15 ...2007 192.,
Дмитриев Настройки BIOS, 3-е изд., перераб. и доп *** *** 2007 288.,
Егоров Легкий самоучитель работы в Интернете.
Все самое необходимое + цветные вклейки 87 19 2006 256.,
Жарков AutoCAD 2007. Эффективный самоучитель *** *** 2007 608.,
Жарков AutoCAD 2004. Эффективный самоучитель. Изд. 2-е 164 37 2005 560..
Жарков AutoCAD 2005: Эффективный самоучитель 173 39 2005 600..
Жарков AutoCAD 2006: официальная русская версия.
Эффективный самоучитель 186 42 2006 592..
Жарков Создаем чертежи в AutoCAD 2006/2007 быстро и легко 98 22 2007 256..
Золотарева Желтые страницы Интернет 2006: Лучшие русские ресурсы ...94 20 2006 368..
Кадлец DELPHI: Книга рецептов.
Практические примеры, трюки, секреты 164 36 2006 384..
Кальвик Дэвид....3Ds Max 8: осваиваем на практике
создание трехмерных миров + цветные вклейки 197 44 2006 368..
Колисниченко СамоучительРНР5.3-е издание 182 40 2005 576..
Колисниченко Самоучитель LINUX. Установка, настр., использ. Изд. 4^е 175 39 2006 688..
Колисниченко... .Сделай сам комп. сеть. Монтаж, настройка,обслуж. Изд. 2-е... 142 29 2004 448..
Колисниченко Англо-русский толковый словарь компьютерных терминов 83 18 2006 272..
Куприянова Ядерные кнопки. Приемы эффективной работы
с использованием горячих клавиш 43 10 2007 128..